/































































































































































































































































































































Text
УНІВЕРСИТЕТСЬКА БІБЛІОТЕКА
1V0в 2001 році
Заснована І
В. П. ДУБОВИК
І.І.ЮРИК
Затверджено
Міністерством освіти і науки України
як навчальний посібник для студентів
технічних і технологічних спеціальностей
вищих навчальних закладів
Київ
«А.С.К.»
2006
ББК 22.11я73
Д79
Затверджено Міністерством освіти і наїси України
як навчиіьііш'і посібник дія студентів технічн- і техноюгічних
спеціальностей вищих навчальних закладів
Рецензенти: Л.Ф. Баринник д-р фіз.-мат. наук, проф.; В. О. Марченко.
канд. фіз.-мат. наук (Полтавським пед. ін-т): В. Б Рудніщький. д-р фіз.-мат.
наук, проф. (Хмельницький технолог, ін-т).
Дубовик В. П., ІОрик І. І.
Д79 Виша матемагика: Навч. посібн. — К.: А.С.К., 2006. — 648 с: іл. —
Бібліогр.: с. 632-633.— (Університет, б-ка).
ISBN 966-539-320-0.
У посібнику розглянуто питання з таких розділів вищої
математики, як векторна алгебра й аналітична геометрія: диференціальне й
інтегральне числення; функції багатьох змінних; диференціальні рівняння;
ряди; кратні, криволінійні та поверхневі інтеграли.
Теоретичний матеріал відповідає навчальній програмі з курсу вищої
математики і супроводжується достатньою кількістю прикладів і задач.
Особливу увагу приділено прикладній і практичній спрямованості курсу.
Для студентів технічних і технологічних спеціальностей вищих
навчальних закладів.
ББК 22.11я73
Навчаїьне видання
Університетська бібліотека
ДУБОВИК Володимир Панасович
ІОРИК Іван Іванович
ВИЩА МАТЕМАТИКА
Затверджено Міністерством освіти і науки України
як навчальний посібник дія студентів
технічних і технологічних спеціаіьностей вищих навчальних закладів
Редактор Є. Бондарчук
Підписано до друку 28.06.06. Формат 60x84 1/16. Папір офсетний. Друк офсетний.
Гарніі7Р-і літературна. Умовн.-друк. арк. 37,66. Тираж 10 000 (1-й завод 4000). Зам. 6-550.
"А.С.К.", 03057, Київ-57, вул. Петра Нсстсрова, 3, корп. І.
Свідоцтво Дсржкомінформу України ДК № 66 від 29.05.2000.
Висновок державної санітарно-спідсміологічної експертизи
Міністерства охорони здоров'я України № 5.03.02-04/15808 від 12.04.05.
ВАТ «Поліграфкннга». 03057, Київ-57, вул. Довженка, 3.
ISBN 966-539-320-0
© В. П. Дубовик, І. І. Юрик, 2001
© «А.С.К.», 2005, 2006
ВСТУП
Математика — одна з найдавніших наук, що зародилась на
світанку цивілізації. Вона постійно збагачувалася, час від часу істотно
оновлювалася і все більше утверджувалась як засіб пізнання
закономірностей навколишнього світу. Розширюючи і зміцнюючи свої
багатогранні зв'язки з практикою, математика допомагає людству
відкривати і використовувати закони природи і є у наш час могутнім
рушієм розвитку науки і техніки.
Саме нашому часу видаються особливо співзвучними пророчі слова
великого Леонардо да Вінчі про те, що ніякі людські дослідження не
можна назвати справжньою наукою, якщо вони не пройшли через
математичні доведення.
Що ж таке математика? Відповісти на це запитання далеко не
престо, і залежно від рівня математичних знань відповіді будуть дуже
різними. Випускник середньої школи словом «математика»
користується як збірним терміном для позначення арифметики, алгебри та по-
чатків аналізу і геометрії. Студент технічного вузу дізнається, що
існують й інші розділи математики, наприклад аналітична геометрія,
диференціальне та інтегральне числення, диференціальні рівняння
тощо. Для спеціаліста-математика число таких розділів сягає кількох
десятків. Причому кількість ця з часом зростає, тому що розвиток
сучасної математики супроводжується виникненням нових розділів. В
останній третині 20-го ст. у математиці сформувалося уже понад 250
напрямів. Проте перелік їх не відповідає на поставлене запитання.
Загальноприйнятого означення предмета математики немає. У
минулому математику вважали наукою про вимірні величини або числа.
Пізніше виникло означення математики як науки про нескінченні
величини. У сучасний період під математикою розуміють науку про
математичні структури. Таку точку зору започаткувала група
французьких математиків, яка відома під колективним псевдонімом Н. Бурба-
кі [3].
Слід зазначити, що математичні структури — не довільні творіння
розуму, а відбиття об'єктивного світу, нехай нерідко навіть у дуже
абстрактному вигляді. Математика вивчає поняття, одержані шляхом
абстракції від явищ реального світу, а також абстракції від попередніх
З
абстракцій. Абстрактність у математиці не відриває пізнання віддійс-
ного світу, а дає змогу пізнати його глибше і повніше. Абстракції
виникають з реальної дійсності і тому з нею тісно пов'язані. По суті,
саме це зумовлює придатність математичних результатів до
описування різноманітних навколишніх явищ, успіх того процесу, який ми
сьогодні спостерігаємо і який одержав назву математизації знань.
Математичний результат має ту властивість, що він застосовний не тільки
при вивченні якогось одного явища чи процесу, а може
використовуватись і в багатьох інших, які суттєво відрізняються своєю фізичною
природою. Наприклад, одне й те саме диференціальне рівняння у' =
= ky описує характер радіоактивного розпаду, швидкість
розмноження бактерій, зміну атмосферного тиску, процес опріснення розчину,
зміну температури речовини, хід хімічної реакції тощо.
Історію розвитку математики можна умовно поділити на чотири
періоди.
Перший період розвитку математики — період зарсдкення
математики як самостійної дисципліни — почався в глибині тисячолітньої
історії людства і тривав приблизно до 6—5 ст. до н. є. У цей період
формувались поняття цілого числа і раціонального дробу, відстані,
площі, об'єму, створювались правила дій з числами та найпростіші
правила обчислення площ фігур і об'ємів тіл. Так накопичувався
матеріал, на базі якого зародились арифметика та алгебра.
Вимірювання площ і об'ємів сприяло розвитку геометрії, а в зв'язку з запитами
астрономії виникли початки тригонометрії. Однак у цей період
математика не мала ще форми дедуктивної науки, вона являла собою
збірку правил для розв'язування окремих практичних задач.
Другий період—період елементарної математики — тривав від
6—5 ст. до н. є. до середини 17 ст. У цей період математика стає
самостійною наукою з своєрідним, чітко вираженим методом і системою
основних понять. В Індії було створено десяткову систему числення, в
Китаї знайдено метод розв'язування лінійних рівнянь, а
запропонований стародавніми греками спосіб викладу елементарної геометрії на
базі системи аксіом став зразком дедуктивної побудови математичної
теорії на багато століть. У 15—16 ст. замість громіздкого словесного
описання арифметичних дій та алгебраїчних виразів почали
застосовувати знаки додавання, віднімання, знаки степенів, коренів, дужки,
букви для позначення заданих та невідомих величин тощо.
Велике значення в розвитку елементарної математики відіграли
праці грецьких вчених Фалеса, Піфагора, Евкліда, Архімеда,
індійського математика і астронома Аріабхатти, китайського математика
Чжан Дана, італійських математиків Кардано і Феррарі,
французького математика Вієта та багатьох інших вчених.
Третій період — період створення математики змінних величин
(середина 17 — початок 20 ст.). Природознавство і техніка дістали
новий метод вивчення руху і зміни стану речовин —диференціальне та
4
Інтегральне числення. Створився ряд нових математичних наук—
теорія диференціальних рівнянь, теорія функцій, диференціальна
геометрія та інші. Бурхливий розвиток математики в той період
пов'язаний з іменами французьких вчених Р. Декарта, П. Ферма, Ж. Лагран-
жа, англійських математиків Дж. Валліса, І. Ньютона, німецьких
математиків В. Лейбніца, К. Якобі, К. Вейєрштрасса та багатьох
інших учених.
Значну роль у розвитку математики змінних величин відіграли
праці М. В. Остроградського, П. Л. Чебишева та інших російських
та українських вчених [2].
На Україні в цей період відкрито університети в Харкові (1805),
Києві (1834) та Одесі (1865), в яких були математичні відділення чи
факультети.
Четвертий період — період сучасної
математики—характеризується надзвичайно широким застосуванням математики до задач, що
їх висуває природознавство і техніка. На базі їхніх запитів виникає і
бурхливо розвивається ряд нових математичних дисциплін і напрямів:
функціональний аналіз, теорія множин, теорія ймовірностей, теорія
ігор та інші. У розвитку математики цього періоду значну роль
відіграли роботи німецьких математиків Д. Гільберта і Г. Кантора,
французького математика А. Лебега, українських та російських
математиків П. С. Александрова, М. М. Боголюбова, А. М. Колмогорова,
В. М. Глушкова, М. П. Кравчука, Ю. О. Митропольського та багатьох
інших.
Створення всередині нашого століття електронних обчислювальних
машин (ЕОМ) значно розширює можливості математики. Завдяки ЕОМ
математичні методи застосовуються нині не тільки в таких
традиційних науках, як механіка, фізика, астрономія, а й в хімії, біології,
психології, соціології, медицині, лінгвістиці та ін.
У посібнику нумерація рисунків і формул дається автономно в
межах кожної глави. Символи О і • в тексті означають відповідно
початок і кінець доведення теореми чи розв'язання задачі. Для
скорочення запису замість слів «існує», «для довільного» і «слідує»
використовуються відповідно такі логічні символи: З, V, =х
Глава 1
ЕЛЕМЕНТИ ЛІНІЙНОЇ АЛГЕБРИ
Термін «алгебра» походить від назви твору «Альджебр аль-мукаба-
ла» узбецького математика Мухаммеда аль-Хорезмі. Цей твір
містить методи розв'язування задач, що зводяться до рівняннь першого
і другого степенів.
Алгебраїчна символіка була створена в основному в 16—17 ст.
Першим застосував буквенні позначення як для невідомих, так і для
заданих в задачі величин, французький математик Ф. Вієт.
До середини 18 ст. алгебра склалася приблизно в тому об'ємі, який
нині називають елементарною алгеброю.
Однією з основних задач лінійної алгебри є розв'язування систем
лінійних алгебраїчних рівнянь. У зв'язку з вивченням цих систем
виникли поняття визначника та матриці. Побудову загальної теорії
систем лінійних рівнянь було завершено в 19 ст.
| 1. ВИЗНАЧНИКИ
1.1. Визначники другого і третього порядків та їхні властивості
Вираз
Д =
*11 "12
•*22
= а1лси« — аі9а
1Z"21
(1)
називається визначником (детермінантом) другого порядку.
Поняття «визначник» (від латинського determino — визначаю) ввів
В. Лейбніц.
Вираз
Оц Я12 °13
*21
*31
"22 "23
J32 °33
= Оцй^азз + а2іа32*із + аі2агзазі -
— flx2^21^33 — ОяяОяв^і
*23"32и11
(2)
називається визначником (детермінантом) третього порядку.
Символи Of/ називаються елементами визначника, причому перший
індекс і показує номер рядка, а другий індекс / — номер стовпця, на
6
Рис. 1.1
перетині яких стоїть даний елемент. Так, елемент оаз стоїть у другому
рядку і третьому стовпці.
Елементи аи, а22 у визначнику (1) і аи, ам, а33 у визначнику (2)
складають головну діагональ визначника, а елементи а12, а21 і а13, о22,
а31 в тих самих визначниках — побічну діагональ.
Для обчислення визначника другого порядку потрібно від добутку
елементів, що стоять на головній діагоналі, відняти добуток елементів,
розміщених на побічній діагоналі.
Визначник третього порядку обчислюється за правилом
трикутників (рис. 1.1): перші три доданки в правій частині формули (2) є
добутками елементів, що стоять на головній діагоналі і в вершинах двох
трикутників, у яких одна сторона паралельна головній діагоналі.
Аналогічно утворюються доданки зі знаком мінус, де за основу береться
побічна діагональ.
Зауважимо, що елементами визначника можуть бути не тільки чис-
а й алгебраїчні чи тригонометричні вирази, функції тощо.
ла
Приклад
Обчислити визначники:
а)
2 — 41 І cos a sin а І
3 51 | — sin а cos а |
О За формулами (1) і (2) маємо:
2 —4|
а)
= 2.5—(—4) -3 = 22; б)
в)
2
5 -
1
cos a
— sin а
3 4
-2 1
2 3
sin а
cos а
= cos* а + sin2 а —
1; в)
Х2 —З
= 2- (—2) -3 +5- 2- 4 + 3- 1 • 1 — 1- (—2) -4 —І • 2х
З 4
— 2 1
2 З
З = — 10. •
Розглянемо (на прикладі визначників третього порядку) основні
властивості визначників.
1°. Визначник не зміниться, якщо його рядки замінити
відповідними стовпцями:
'її
І «21
*«1
*1»
-»22
2»
Дія І
°23|
•чі
Ю12
їіз
"21
^22
а
21
'31
'8*1
7
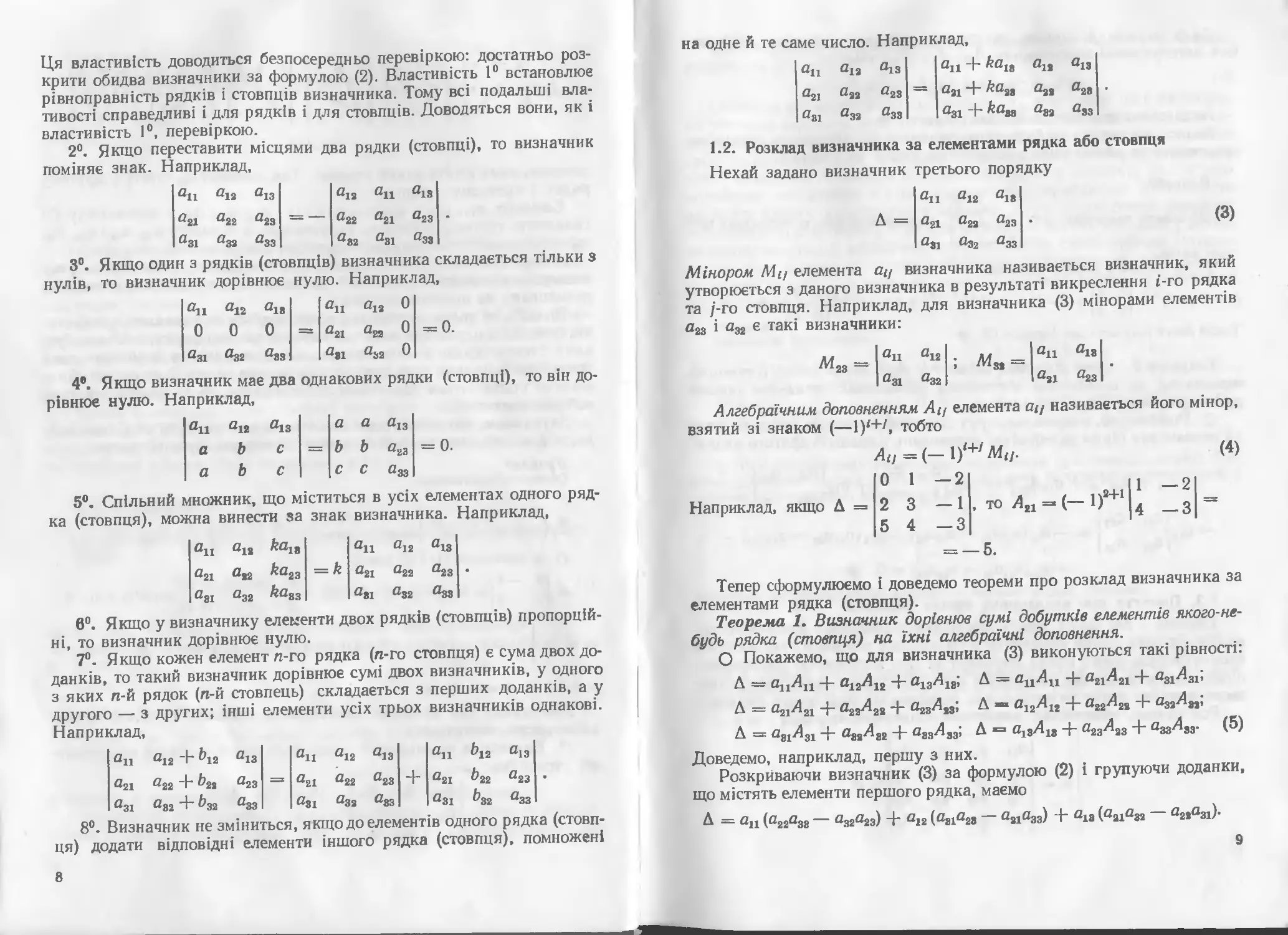
Ця властивість доводиться безпосередньо перевіркою: достатньо
розкрити обидва визначники за формулою (2). Властивість 1° встановлює
рівноправність рядків і стовпців визначника. Тому всі подальші вла-
тивості справедливі і для рядків і для стовпців. Доводяться вони, як і
властивість 1°, перевіркою.
2°. Якщо переставити місцями два рядки (стовпці), то визначник
поміняє знак. Наприклад,
*І1
•*21
*зі
ч»
-»22
<*13
^23
<*33
'11
•*21
*18
3°. Якщо один з рядків (стовпців) визначника складається тільки з
нулів, то визначник дорівнює нулю. Наприклад,
0.
4е. Якщо визначник має два однакових рядки (стовпці), то він
дорівнює нулю. Наприклад,
Оц
0
а3і
а12
0
«32
аи
0
°38
=
Яц
ам
а«і
оіа
аи
QS2
0
0
0
п
а
а
ви
Ь
Ь
°13
с
с
=
а
Ь
с
а
Ь
с
43
Нз
= 0.
5°. Спільний множник, що міститься в усіх елементах одного
рядка (стовпця), можна винести sa знак визначника. Наприклад,
*іі
*21
*8І
а1я
Я32
18
ка
кагз
каяз
= k
"її
"12
^22
«32
в0. Якщо у визначнику елекенти двох рядків (стовпців)
пропорційні, то визначник дорівнює нулю.
7°. Якщо кожен елемент п-го рядка (л-го стовпця) є сума двох
доданків, то такий визначник дорівнює сумі двох визначників, у одного
з яких п-й рядок (п-й стовпець) складається з перших доданків, а у
другого — з других; інші елементи усіх трьох визначників однакові.
Наприклад,
"п
^21
<*31
2а
+ Ь3
«13
^23
«33
*11
"21
«31
*12
•»22
332
*13
■*23
+
*11
"21
ЯЗІ
'12
'22
*13
8°. Визначник не зміниться, якщо до елементів одного рядка
(стовпця) додати відповідні елементи іншого рядка (стовпця), помножені
8
на одне й те саме число. Наприклад,
°п
<hl
Osi
а13
аи
Яза
ЯіЗ
^23
Озз
=
Оц + kalb
аи + kam
Озі + kam
(ht
ait
a8a
«IS
а2з
«33
1.2. Розклад визначника за елементами рядка або стовпця
Нехай задано визначник третього порядку
«її а12 Оц,
Д = azl ам а23 . (3)
азі °зг азз
Мінором Мі/ елемента а.ц визначника називається визначник, який
утворюється з даного визначника в результаті викреслення і-го рядка
та /-го стовпця. Наприклад, для визначника (3) мінорами елементів
02з і аз2 є такі визначники:
М23 =
*11
*31
-42
Af,
*іі
*аі
•*23
Алгебраїчним, доповненням Ац елемента а.ц називається його мінор,
взятий зі знаком (—1)'+/, тобто
At,=(-l)t+'Mt,
0 1 —2
(4)
Наприклад, якщо Д =
2 3—1
5 4—3
= —Б.
, то Atl =» (- 1)!
,2+1
1 —2
4 -З
Тепер сформулюємо і доведемо теореми про розклад визначника за
елементами рядка (стовпця).
Теорема 1. Визначник дорівнює сумі добутків елементів якого-не-
будь рядка (стовпця) на їхні алгебраїчні доповнення.
О Покажемо, що для визначника (3) виконуються такі рівності:
Д = аиАп + a12Alt + a13Aw; д = аіИи + °2 Аі + о31А31;
Д = а2Игі + а22^2я + а2з^»з: Д "" Яіг^к + агАія + <h3An'
А = азИзі + aMAw + аазАяз; Д = al3Au + a23AiS + а^Аз- (5)
Доведемо, наприклад, першу з них.
Розкриваючи визначник (3) за формулою (2) і групуючи доданки,
що містять елементи першого рядка, маємо
Д = ап {a22aM — 032^23) + ^іг (а8іа23 — ааі°зз) + Qis (ваіа82 — а2»°зі)-
За формулою (4) вирази, що стоять у дужках, відповідно
дорівнюють алгебраїчним доповненням Аи, А12, А13, тому
Л = ОцАц + а12Аи + alsAl9.
Аналогічно доводяться й інші рівності, ф
Запис визначника за будь-якою з формул (5) називають розкладом
визначника за елементами відповідного рядка чи стовпця.
Приклад
Обчислити визначник Л =
тього рядка.
О За третьою з формул (5) маємо
1
0
3
2 3
1 2
—1 4
, розкладаючи його за елементами тре-
Д = 3(-І)3+1 І2 3|+(_])(_ 1)3+2 Iі 3| + 4(_і)3+з|1 2
|1 2Г |0 2\ 1 |0 1
Такий самий результат дає формула (2). •
= 9.
Теорема 2. Сума добутків елементів будь-якого рядка (стовпця)
визначника на алгебраїчні доповнення відповідних елементів іншого
рядка (стовпця) дорівнює нулю.
О Розглянемо, наприклад, суму добутків елементів першого
рядка визначника (3) на алгебраїчні доповнення елементів другого рядка:
Яп^аі + аі2^га + Діа^гз аі
«12
а3»
«13
а3з
+ о12
an
<hi
^13
азз
*11
*1Я
— °і8 L „~ І = — ап (°і2а8з — ОізОза) + «га («и^аз — Оіз^зі) —
— а13 (ацйзг — alta3l) = 0. #
1.3. Поняття про визначники вищих порядків
Теорема 1 дає змогу ввести означення визначника довільного
порядку. За означенням визначник п-го порядку дорівнює сумі добутків
елементів будь-якого рядка (стовпця) на їхні алгебраїчні доповнення.
Можна довести, що всі розглянуті вище властивості визначників
третього порядку справджуються для визначників будь-якого порядку.
Розглянемо, наприклад, визначник четвертого порядку
*12
^14
Д =
\<hi агз
*23
*31
■*42
^М
"«І
10
Цей визначник можна розкласти за елементами будь-якого рядка,
наприклад першого:
Д = а11Аи + амА12 + ol3Als
+ аіИі4- (6)
Оскільки всі алгебраїчні доповнення Ац у формулі (6) є
визначники третього порядку, то цією формулою можна користуватись для
обчислення визначника четвертого порядку. Але такий спосіб обчислення
громіздкий: якщо для знаходження визначника четвертого порядку
треба обчислювати чотири визначники третього порядку, то для
знаходження визначника п'ятого порядку вже прийдеться обчислювати
двадцять визначників третього порядку! Тому на практиці спочатку
за допомогою властивості 8° перетворюють визначник так, щоб у
деякому рядку чи стовпці всі елементи, крім одного, стали нулями.
Розкладаючи тоді визначник згідно з теоремою за елементами цього рядка,
дістанемо тільки один доданок, тому що всі інші доданки є добутками
алгебраїчних доповнень на нуль.
Приклади
Обчислити визначники:
1) Дх =
О 1) У першому рядку перетворимо всі елементи, крім першого, на иулі. Для
цього, залишаючи перший і другий стовпці без змін, до третього додамо перший, а
до четвертого — перший, помножений на (—2). Тоді
1 0 0 01
П DtlOXld*
1 0
1 2
—1 3
2 1
шппії»
— 1 2
— 2 0
0 2
— 1 3
; 2) д2 =
2
1
— 2
4
8
7
3
— 5
2
3
3
4
17
1
6
4
2
— 6
7
8
5
2
— 11
9
11
д, =
2—1—2
3—1 4
І 1 —1
Розклавши цей визначник за елементами першого рядка, дістанемо
|2 —І —2"
Ді = і • (-
= —21.
3—1 4
.1 1 —1
2) У першому стовпці перетворимо всі елементи, крім другого, на нулі. Для
цього, залишаючи другий рядок без змін, до першого ридка додамо другий,
помножений на (—2), до третього — перший, до четвертого — перший, помножений иа
(—2), а до п'ятого — четвертий, помножений на (—2). Матимемо
І
Д, =
З
2
— 12
— 1
— 5
4
20
— 5
4
0
2
— 2
— І
— 6
1
2
— 6
— 1
— 7
II
Розкладемо цей визначник за елементами першого стовпця і винесемо за знак
визначника спільний множник 2 з третього рядка і (—1) з четвертого:
да = і . (_ 1)2+' - 2 • (- 1)
1
1
12
— 1
-5 0
10 —1
5 1
— 6 —7
= 2
0 0
4 —5
11 10
6—31
0
— 1
1
— 6
1
— З
1
— 7
Розклавши цей визначник за елементами першого рядка, дістанемо
Д = 2 • (- 1)
1+4.
4
11
6
-5 —1
10 І
-31 —6
= —2
4 —5 —1
15 5 0
— 18—1 0
= 150.
Завдання для самоконтролю
1. Що називається визначником другого порядку?
2. Що називається визначником третього порядку?
3. Сформулювати основні властивості визначників.
4. Що називається мінором і алгебраїчним доповненням?
5. Сформулювати і довести теорему про розклад визначника за елементами
рядка (стовпця). Чому дорівнює сума добутків елементів одного рядка (стовпця) на
відповідні алгебраїчні доповнення іншого рядка (стовпци)?
6. Як обчислюються визначники вищих (четвертого, п'ятого і т. д.) порядків?
7. Обчислити визначники:
— 2
1
б)
2
5
1
3 4
— 2 1
2 3
; є)
6 3 0 3
4 4 2 1
0 4 4 2
7 7 8 5
; є)
3
— 3
5
2
7
— 2
5
6
а)
Д)
8. Розв'язати рівняння:
х2 4 9
а) х 2 З
І 1 1
0. Розв'язати нерівності:
х 0
а) 2 1
4 х
1 2
1 —З
в)
sin2 a cos* а
sin2 Р cos2 Р
= 0;
б)
З
— 1
1
1
3
1
<0;
б)
X Xі 1
1 X X2
Xі 1 X
г)
— 2
6
— З
— 5
= 0.
<1.
5 —2
8 0
З 5
4
— 4
2
В ід повід і. 7. а) 11; б) —1; в) sin (а + Р) sin (а — Р); г) 3; д) —10; є) —216
є) —303. 8. а) 2; 3; б) 0; 2. 9. а) [0; 1]; б) (0; ~|^2).
II
§ 2 МАТРИЩ
2.1. Основні означення
Прямокутна таблиця чисел alf, і = 1, 2, .... т; / = 1, 2, .... л,
складена з т рядків та п стовпців і записана у вигляді
л22
\.ОтІ От2
або А =
Ні
'12
■*22
Оті а„а
аіп
а2п
атп
• О-тп/
називається матрицею. Поняття матриці вперше ввели англійські
математики У. Гамільтон і Д. Келі. Коротко матрицю позначають так:
А = {ац) або А =\ац\,
де aif — елементи матриці, причому індекс і в елементі ац означає
номер рядка, а / — номер стовпця, на перетині яких стоїть даний елемент.
Добуток числа рядків т на число стовпців л називають розміром
матриці і позначають т X п. Якщо хочуть вказати розмір т X п
матриці А, то пишуть Атхп.
Матриця, в якої число рядків дорівнює числу стовпців,
називається квадратною. Кількість рядків (стовпців) квадратної матриці
називається її порядком. Матриця, у якої всього один рядок,
називається матрицею-рядком, а матриця, у якої всього один стовпець,—
матрицею-стовпцем. Дві матриці АтХп = (аі/) та ВтХп = (Ьц)
називаються рівними, якщо вони однакових розмірів і мають рівні
відповідні елементи: a[f = Ьц. Нульовою називається матриця, у якої всі
елементи дорівнюють нулю. Позначається така матриця буквою О.
Як і в визначниках (п. 1.1), в квадратних матрицях виділяють головну
і побічну діагональ.
Квадратна матриця називається діагональною, якщо всі її
елементи, крім тих, що знаходяться на головній діагоналі, дорівнюють нулю.
Діагональна матриця, у якої кожен елемент головної діагоналі
дорівнює одиниці, називається одиничною і позначається буквою Е.
Наприклад, одинична матриця третього порядку має вигляд
П 0 0>
Будь-якій квадратній матриці
А =
*п
*21
0 1
Р о
а13
а22
0 .
1/
... а\п
■ • • а-іп
\ап\ ап2 • • • апп ,
13
аи аіг ••
^81 ^28 " •
an\ a.n.2 • •
то det A =
. Щп
• 0.2П
. ann
0 1
3 5
можна поставити у відповідність певне число, яке називається
визначником (детермінантом) цієї матриці і позначається символом
det A. За означенням
det Л =
Наприклад, якщо
Мз o)'TOdet^ = i: :U"3-
Прямокутна матриця розміром т X п (пф т) визначника не має.
2.2. Дії над матрицями
1°. Операція додавання матриць вводиться тільки для матриць
однакового розміру. Сумою С = А + В двох матриць АтХп = (оц)
і ВтХп = (Ьц) називається матриця СтХп = (с</) =* (at/ + bt/).
Наприклад,
/— 1 2 3\ /3 2 0\_/2 4 3\
\ 1 5 0І + \1 З 4J~\2 8 4/'
2°. Добутком матриці АтХп = (Щ/) на число k (або числа k на
матрицю Атхп) називається матриця Втхп = (/га*/). Наприклад,
/1 2 3v /1 2 3\ /2 4 6\
2-[0 _і -ЗІ^ІО -1 -3J'2 = \0 -2 -6J-
3°. Різниця матриць А — В визначається як сума матриці А і
матриці В, помноженої на —1:
А — В = А + (— 1)В.
Справедливі такі властивості операцій:
а)А+В = В + А — комутативність відносно додавання
матриць;
б) А + (В + С) = (А + В) + С — асоціативність відносно
додавання матриць;
в) А + О — А; А — А = О — роль нульової матриці в діях над
матрицями така, як і числа нуль в діях над числами;
г) а фА) = (еф) А — асоціативність відносно множення чисел;
д) а (А + В) — аА + аВ — дистрибутивність множення на
число відносно додавання матриць;
є) (а + Р) А = аА + f>A — дистрибутивність множення на
матрицю відносно додавання чисел.
4°. Операція множення двох матриць вводиться лише для
узгоджених матриць. Матриця А називається узгодженою з матрицею В,
14
якщо кількість стовпців першої матриці А дорівнює кількості рядків
другої матриці В.
Якщо ця умова не виконується, тобто матриці неузгоджені, то
множення таких матриць неможливе.
З узгодженості матриці А з В не випливає, взагалі кажучи,
узгодженість матриці В з А.
Квадратні матриці одного порядку взаємно узгоджені.
Добутком С = А В матриці АтХ„ = (а/;) на матрицю B„xft =
■= фі/) називається така матриця, у якої елемент сц дорівнює сумі
добутків елементів і'-го рядка матриці А на відповідні елементи /-го
стовпця матриці В:
сц = ацЬи + Oj2&2/ + • • • + а1пЬпі\ С = Стхк = (сц),
і= 1, 2 т; /'= 1, 2, .. . ,k.
Це означення називають правилом множення рядка на стовпець.
Наприклад, щоб визначити елемент см, що стоїть в другому рядку і
четвертому стовпці матриці С = АВ, потрібно знайти суму добутків
елементів другого рядка матриці А на відповідні елементи четвертого
стовпця матриці В.
Приклад
Знайти матрицю С = АВ, якщо:
О а) Матриця Л2х2 узгоджена з матрицею В2хЗ> Т0МУ за означенням маємо
_/І-1+2(—2) 1.2 + 2-0 1-3 + 2(—І) \ /—З 2 І\
V0- 1 + (_1)(_2) 0.2+(-1).0 0 - З + (— 1) (-1)/ І 2 0 і)'
^-"-л^-и; _::з-(_;_з..
З правила множення матриць випливає, що завжди можна
перемножити дві квадратні матриці одного порядку; в результаті
дістанемо матрицю того самого порядку. Зокрема, квадратну матрицю
можна помножити саму на себе, тобто піднести до квадрата; прямокутну
неквадратну матрицю піднести до квадрата не можна.
Операція множення матриць не комутативна, тобто при множенні
матриць не можна міняти місцями множники:
АВ ф ВА.
Наприклад (перевірте):
1 0\/0 0\ /0 0\/1 0\
0 оДі 0/^1 0/U 0/;
15
Для дій 1°—4° над матрицями виконуються такі властивості (sa
умови, що вказані операції мають зміст):
а) (АВ) С = А (ВС)\ б) (аА) В = А (аВ) = а (АВ);
в) (А + В) С = АС + ВС; г) С (А + В) = СА + СВ;
д) А • О = О • А = О; є) АЕ = ЕА = А; є) det (АВ) = det A X
X det 5.
2.3. Обернена матриця
Нехай А — квадратна матриця. Матриця А~1 називається
оберненою до матриці А, якщо виконується умова
АА-1 = А-1 А = Е.
Квадратна матриця А називається виродженою, якщо det A = 0, і
невиродженою, якщо det Л =j£ 0.
Теорема 3. Для існування оберненої матриці А~1 необхідно і
достатньо, щоб матриця А була невиродженою.
ОНеобхідність. Нехай обернена матриця А"1 існує, тоді
АА~ = Е. Застосовуючи правило знаходження визначника добутку
двох матриць, маємо det A • det A~l = 1, тому det А Ф 0.
Достатність. Нехай det А Ф 0, тоді матриця А має обернену
матрицю А~, причому
/•"11 ^21 ■ • ■ ™пі\
^-Wp'. .^ ІЇ.М. (7)
Аіп ...
де Ац — алгебраїчні доповнення елементів а{/ визначника матриці
/ап а12 ... аі„\
А — І °и Qm '"" а2л І (8)
\а„і а„2 ... агах)
Дійсно, добутки АА~1 і А"1 А матриць (7) і (8) дорівнюють
матриці, у якої всі елементи головної діагоналі дорівнюють одиниці (за тео-
16
ремою 1), а всі недіагональні елементи — нулю (за теоремою 2).
Отже, А~1А = А А-1 — Е.
Покажемо, що Л-1 — єдина обернена матриця. Нехай А" — ще
одна обернена матриця, тоді
А-1 = А~1Е = А~1 (АА') = (А~1 А) А' = ЕА" = А'. •
Приклад
Знайти матрицю А-1, обернену до матриці
\ 3 0 І/
О Обчислимо визначник матриці А:
1 2 0
detA= — 1 1 2
З 0 І
1
— 1
З
0 0
З 2
— 6 1
= 15.
Матриця А невироджена, тому обернена матриця знаходиться за формулою
(7). Знаходимо алгебраїчні доповнення всіх елементів даної матриці:
Atl — І
Лпі — •
■^зі _
= 1;
оі
*И Q — I
= — 2;
А2-г —
11 21 1 — 1
10 і|
І2
10 1
12 0
її 2
Складаємо обернену матрицю
1
"ЇВ"
= 4:
А3г
= 7; А13 =
— і; ^23 — —
= — 2; Лзз =
= -3;
= 6;
л-1 =
7
"ЇВ"
1
2
15
1
15
_2_
5
4
15
2
15
_1_
5
Переконуємось, що
1
15
7
15
1
5
2
15
1
15
_2_
5
4
15
2
15
1
5
17
I
15
7
15
1
5
2
~~ 15
1
15
2
5
4
15
2
15
1
5
/12 0
1—112
V 3 0 1
J\ /1 U 0\
2 J = I 0 1 Oj
I/ \0 0 J
2.4. Ранг матриці
Нехай задано матрицю Атхп = Л. Виділимо в матриці Л будь-які
k рядків і стільки ж стовпців, де k — число, не більше чисел т і п,
тобто k ^ min (m, n).
Визначник порядку k, складений з елементів, що стоять на
перетині виділених рядків і стовпців, називається мінором /г-го порядку
матриці А.
Рангом т (А) матриці А називається найбільший з порядків її мі-
норів, відмінних від нуля.
Безпосередньо з означення випливає, що:
1) Ранг існує для будь-якої матриці АтХп, причому
0<>(/4Хтіп(т, п);
2) г (А) = 0 тоді і тільки тоді, коли А = 0;
3) для квадратної матриці л-го порядку ранг дорівнює п тоді і
тільки тоді, коли матриця невироджена.
Ранг матриці можна знайти так. Якщо всі мінори першого порядку
(елементи матриці) дорівнюють нулю, то г = 0. Якщо хоч один з мі-
норів першого порядку відмінний від нуля, а всі мінори другого
порядку дорівнюють нулю, то г = 1. У випадку, коли є мінор другого
порядку, відмінний від нуля, досліджуємо мінори третього порядку. Так
продовжуємо доти, поки не станеться одне з двох: або всі мінори
порядку k дорівнюють нулю, або мінорів порядку k не існує, тоді т =
= k — 1.
Приклад
Знайти ранг матриці
(1 0 — 1 0\
2 0 4 ОІ .
ЗО 6 0/
О Серед мінорів першого порядку (тобто елементів матриці) є відмінні від нуля)
тому r (A) ^ 1.
Оскільки один з мінорів другого порядку
II —II
І2 4І
а всі мінори третього порядку дорівнюють нулю, то г (А) = 2. •
= 6=^=0,
18
Вказаний метод знаходження рангу матриці не завжди зручний,
тому що пов'язаний з обчисленням значного числа визначників.
Простіший метод грунтується на тому, що ранг матриці не змінюється,
якщо над матрицею виконати так звані елементарні перетворення, а
саме [11:
а) переставити місцями два рядки (стовпці);
б) помножити кожен елемент рядка (стовпця) на один і той самий
відмінний від нуля множник;
в) додати до елементів рядка (стовпця) відповідні елементи
другого рядка (стовпця), помножені на одне і те саме число.
Приклад
Знайти ранг матриці
А =
О Виконуючи елементарні перетворення, маємо:
12 2 0 —Г
3—14—2 4
10 8 2
0 —2 6,
0 0 0
—7 —2 —2
— 7 0 8
-7 —2
0 О'
(Знак ~ між матрицями показує, що вони утворюються одна з другої елементарними
перетвореиними і, отже, мають один і той самий ранг). •
Завдання для самоконтролю
1. Що називається матрицею?
2. Як визначаються: сума двох матриць, добуток матриці на число, різниця
та добуток двох матриць?
3. Що називається оберненою матрицею?
4. Сформулювати і довести теорему про існування оберненої матриці.
5. Що називається рангом матриці? Як знаходиться раиг?
19
в. Які перетворення над матрицями називаються елементарними?
7. Пересвідчитись, що
б 0 7\ /1 2 3\ /26
8. Знайти обернену матрицю А ' до матриці
А=\
5
■З
7
9. Знайти ранг матриць:
1 0 2
3 0 6
,б 0
А =
Відповіді. 8. А~1 =~і7Г
9. г(А) = 1, r(fi)=3.
§ 8. СИСТЕМИ ЛІНІЙНИХ РІВНЯНЬ
3.1. Основні означення
Системою т лінійних рівнянь з п невідомими xlt х2,
ється система виду
[ «11*1 + '«12*2 -\ 1" «1п*п = «її
«21*1 + «22*2 + " ' " + «2л*п = Ь2,
«ml*l + «т2*2 ~Ь " " " "Т" «тп*„ — Ьщ-
х„ назива-
(9)
Числа at/, /=1,2, .... /л; / = 1, 2, ..., я біля невідомих
називаються коефіцієнтами, а числа 6, — вільними членами системи (9).
Система рівнянь (9) називається однорідною, якщо всі вільні
члени дорівнюють нулю, і неоднорідною, якщо хоч один з них відмінний
від нуля.
Множина чисел аи а2, ..., ап називається впорядкованою, якщо
вказано порядок слідування цих чисел, тобто вказано, яке з них є
першим, яке другим, яке третім і т. д. Наприклад, якщо впорядкована
трійка чисел, то в запису а, Ь, с число а вважається першим, Ь —
другим, с — третім, в запису Ь, а, с першим є число Ь, другим — число а
і третім — число с.
20
Упорядкований набір п чисел (*?, *§, .... хп) називається
розв'язком системи (9), якщо при підстановці цих чисел замість невідомих
xlt х2, ..., хп усі рівняння системи перетворюються в тотожності. Таку
систему чисел називають також п-вимірним вектором, або точкою
«-вимірного простору (див. п. 2.6, гл. 2).
Система рівнянь називається сумісною, якщо вона має хоча б один
розв'язок, і несумісною, якщо вона не має жодного розв'язку.
Сумісна система називається визначеною, якщо вона має єдиний
розв'язок, тобто існує тільки один набір п чисел х°, Х2, .... х„, який
перетворює всі рівняння системи (9) в тотожності.
Сумісна система називається невизначеною, якщо вона має більше,
ніж один розв'язок.
Дві системи лінійних рівнянь називаються еквівалентними, якщо
вони мають одну й ту ж множину розв'язків. Еквівалентні системи
дістають, зокрема, внаслідок елементарних перетворень даної системи.
Елементарні перетворення системи лінійних рівнянь відповідають
елементарним перетворенням матриці (п. 2.4) за умови, що вони
виконуються лише над рядками матриці.
3.2. Розв'язування систем лінійних рівнянь за формулами Крамера
Нехай задано систему двох лінійних рівнянь з двома невідомими
х і у\
«п* + «ігУ = «і! п„
а21х + а22у = Ь2.
Виконаємо такі елементарні перетворення системи (10): спочатку
помножимо перше рівняння на а22, друге — на —а12, а потім складемо
їх; після цього перше рівняння помножимо на а21, а друге — на —аи
і складемо їх. Дістанемо систему
х (а^а^ — й21й12) = Ьуа22 — Ь2а12;
; у {а11агг — а21а12) = Ь2ап — Ьга21.
Систему (11) можна записати за допомогою визначників:
х • Д = А,.;
[ у • Д = Ду,
ДЄ
(11)
(12)
«11
«21
«12
«22
; а*=
«12
с2і
; Др =
«її
«21
Визначник Д, складений з коефіцієнтів системи (10), називається
визначником системи. Визначники А,, та Ав утворюються з визначника
Д відповідно заміною стовпців при невідомих х тау вільними членами.
2)
При розв'язуванні рівнянь (12) можуть бути такі випадки.
1) Д Ф 0, тоді система (10) має єдиний розв'язок:
х =
У =
_ _^£_
(13)
Формули (13) вперше вивів К. Крамер і вони називаються
формулами Крамера.
2) Д = 0; &хф 0 або Дв=^ 0, тоді система (10) не має розв'язків,
тобто є несумісною.
3) Д = Дж = Д„ = 0, тоді система (10) зводиться до одного
рівняння і має безліч розв'язків, тобто є невизначеною.
Розглянемо тепер систему трьох лінійних рівнянь з трьома
невідомими х, у, г:
[ агіх + а12у + а13г = Ь{,
аах + а22у + а23г = Ь2\
. а3гх + азіУ + сзз2 = b3.
Обчислимо визначники:
(14)
ап агг агз
а21 а2
а31 а3
с,
-'зз
=
Ьг
h
bs
аи
й21
с
f3i
flu
й22
й32
агг
й22
й32
йіз
й28
йзз
Ьг
ь*
ь,
•
; Д„ =
ап
а21
«81
Ьг
h
h
й18
й28
й83
д,=
Якщо визначник системи Д Ф 0, то система (14) має єдиний
розв'язок, який знаходиться за формулами Крамера:
У =
%.
г =
(15)
Доведемо, наприклад, другу з формул (15). Помножимо перше,
друге і третє рівняння системи (14) на алгебраїчні доповнення
відповідних коефіцієнтів при у, тобто на Л12, А2І, Л32, а потім складемо їх:
х (аиА12 + а21А22 + а31Аз2) + у (а12А12 + а2іА22 + а32А32) +
"+" 2 (й13^12 + й23^22 + й33^82) = ^1^12 ~Ь ^2^22 ~Ь ^8^32-
За теоремою 2 вирази в дужках при х і г в цій рівності дорівнюють
нулю, а за теоремою 1 вираз в дужках при у і права частина дорівнюють
відповідно А 1 Д„, тобто Д„ = Д • у.
22
Аналогічно доводяться формули Крамера для знаходження
невідомих х і г. Якщо задано п лінійних рівнянь з п невідомими {п > 3)
( а11х1 + aiaxa +
°21-*1 ~Ь а22*2 ~Ь
+ 02пХп = Ь2,
(16)
апіх1 + ап2х2 + •.. 4- аппхп = Ьп
і визначник системи Д Ф 0, то така система має єдиний розв'язок, який
знаходиться за формулами Крамера, аналогічними до формул (13) і
(15):
хг == ~~д > х2 — д" хп = д • (1')
У випадку, коли визначник системи (14) чи (16) дорівнює нулю,
формули Крамера (15) і (17) не мають змісту. Такі системи, а також
системи, у яких число невідомих не дорівнює числу рівнянь і до яких,
очевидно, формули Крамера теж не можна застосувати, розглянемо
в п. 3.5.
Приклад
Розв'язати системи за формулами Крамера:
а) (2х — у =
(2х — у = 0;
\х + 3у = 7;
б)
О а) Знаходимо визначники Д, Дх, &у
1 З
За формулами (13)
[х— 0 + z = O;
2у — z = 3.
7-а ° -1 , л 2 0
7. Л*= ? 3 =7, Дв = ] =,4.
-4-і. у
14
Д 7 ' " Д 7
б) Розв'язок дістанемо за формулами (15). Маємо
Д =
1 —1 1
2 1 1
0 2 -і|
'-І.Ал
Ау =
= -2, Д2 =
1 0 1
2 б 1
0 3 —11
х=\, у = 2, г=1
0 —1 1
5 1 1
3 2—1
1 —1 0
2 1 5
0 2 3
■-1.
=И.
23
3.3. Матричний запис системи лінійних рівнянь і її розв'язування
Нехай задано систему (16), яка містить п лінійних рівнянь п з
невідомими.
Введемо матриці
а12 •..
А = І й21 й22 • • • й2л І ; X = І ? І \ В =
Kfinl O.n.2
Матрицю А, складену з коефіцієнтів системи (16), називають
матрицею або основною матрицею системи, матрицю X — матрицею з не
відомих, а матрицю В — матрицею з вільних членів. Тоді згідно з
правилом множення матриць систему (16) можна записати одним
матричним рівнянням з невідомою матрицею X:
АХ = В. (18)
Припустимо, що матриця А системи (16) має обернену матрицю А~ ;
помножимо обидві частини рівності (18) на А~ зліва:
А~1АХ = А~'В.
Оскільки А~1А = Е і ЕХ = X, то
Х = А~1В. (19)
Отже, щоб розв'язати систему рівнянь (16), достатньо знайти матрицю,
обернену до матриці системи, і помножити її справа на матрицю з
вільних членів.
Формулу (19) називають матричним записом розв'язку системи
(16) або розв'язком матричного рівняння (18).
Зауважимо, що розв'язок системи рівнянь у матричній формі
можливий лише тоді, коли матриця системи иевироджена.
Приклад
Розв'язати систему рівнянь
(х+2у = 3;
—х + у + 2г = 5;
[Зх + г = —2.
О Маємо (див. приклад п. 2.3)
1 2 4
"ПГ — 15 15
7 1 _ 2
15 15 15
-J_ -L —
5 5 5
В=\ 5 ; /!-' =
24
За формулою (19) знаходимо
Ш-(ї)
Отже, х = —1, у=2,г=\. •
3.4. Розв'язування систем лінійних рівнянь методом Гаусса
Одним з найпоширеніших методів розв'язування систем лінійних
рівнянь є метод послідовного виключення невідомих, або метод
Гаусса. Цей метод запропонований К. Гауссом і грунтується на
елементарних перетвореннях системи рівнянь (п. 2.1).
Нехай маємо систему (9), яка містить т рівнянь і п невідомих.
Очевидно, серед коефіцієнтів аіх хоча б один відмінний від нуля. Якщо ж
Оц = 0, то першим в системі (9) запишемо те рівняння, в якому
коефіцієнт при*! відмінний від нуля. Позначимо цей коефіцієнт через а\і.
Перетворимо систему (9), виключаючи хг в усіх рівняннях, крім
першого. Для цього помножимо перше рівняння на — ^- і додамо до
другого, потім помножимо перше рівняння на Р- і додамо до тре-
тього і т. д. При цьому може статись так, що друге невідоме хг також
не входить в усі рівняння з номером і > 1. Нехай xh — невідоме з
найменшим номером, яке входить в будь-яке рівняння, не рахуючи
першого. Дістанемо систему
й'п*і + • • • + а\пХп = Ь\\
Ct2kXk + • • • + Й2п*„ = &2"» /ОП)
атихк + ••• + атпхп =bm, k>\, а'иФ 0.
Застосовуючи до всіх рівнянь, крім першого, таку саму процедуру
І виконавши ряд елементарних перетворень, дістанемо систему
ап*і + • • ■ + а\пхп = Ь\;
<hkXh + • • • + 02пХп = Ьі,
а3і + • • • + а"3пхп = Ьз, (2 0
ClmlXi + • • • 4" dmnXn — Ьт, йц ф 0, Й2А ф 0.
25
х\
"У
Л)
~ЇЕ~
7
15
__ 1
5
~~ПГ
1
15
2
5
4
~Ї5~
2
15
1
5
Якщо продовжити цей процес, то матимемо систему
І Оп*і+ •■• +~а\пхп =Ь~іі
G2kXh + ••• + 02пХп = їг;
взіХ[ + ... -f взпхп = Ь~3;
{
а„х, +
+ агпхп = Ьт\
0 = Ьг+ї,
(22)
\ 0 = Ьт.
Таку систему рівнянь називають східчастою або трапецієподібною-
Дослідимо цю систему.
1. Якщо система містить рівняння виду 0 = bt і bt =fc 0, то вона
очевидно несумісна.
2. Нехай система (22) не містить рівнянь виду 0 = bt (bt ф 0).
Назвемо невідомі хІУ xh, Xi, ..., xs, з яких починаються перше, друге, ....
r-е рівняння, основними, а всі інші, якщо вони є, вільними.
Основних невідомих за означенням г. Надаючи вільним невідомим довільні
значення і підставляючи ці значення в рівняння системи, з r-го
рівняння знайдемо xs. Підставляючи це значення в перші г — 1 рівнянь і,
піднімаючись вгору по системі, знайдемо всі основні невідомі.
Оскільки вільні невідомі можуть набувати будь-яких значень, система має
безліч розв'язків.
3. Нехай в системі (22) г = п. Тоді вільних невідомих немає,
тобто всі невідомі основні і система (22) має так званий трикутний вигляд :
«іЛ + • • • + «іл*„ = Ь~і,
«22*2 + ■ • • + а2пхп = Ь,
2>
аппХп = К-
З останнього рівняння системи знайдемо хп, і, піднімаючись по
системі вгору, знайдемо всі інші, невідомі. Отже, в цьому випадку
система має єдиний розв'язок.
Зауваження 1. Викладений нами метод послідовного
виключення змінних називають ще алгоритмом Гаусса. Він складається
з однотипових операцій і легко реалізується на сучасних ЕОМ.
Зауваження 2. При розв'язуванні системи лінійних
рівнянь методом Гаусса зручніше приводити до трикутного чи
трапецієподібного вигляду не саму систему рівнянь, а розширену матрицю цієї
системи, тобто матрицю, утворену приєднанням до матриці її
коефіцієнтів стовпця вільних членів. Виконуючи над рядками розширеної
матриці елементарні перетворення, приходимо до розв'язку системи.
26
Приклад
Розв'язати системи рівнянь методом Гаусса:
а)
—х + 2у — 3z = 3;
2х — {/ + 3г = 2;
б)
х + у + г = 1;
2х + у + 2г = \;
* + {/ + Зг=2;
* + Зг= 1;
в)
-x + y + 2z=l;
х + 2у — г = 2;
2х + у — 3г= 1;
х + 5у = 5.
О а) Виконуємо елементарні перетворення над рядками розширеної матриці
даної системи (позначатимемо це символом =>):
/1—12 —1\ /1 —1 2
(\ _1 2 —1
0 1
К0 0
1 _і 2 —1\ /1 -її 2 —Г
І _1 2 —3 3 )=>( 0 1 —І 2
\ 2 —1 3 2 / \0 І —1 4 , ..
Таким чином, система а) еквівалентна системі
х — у + 2г = — 1;
0. х + у — z = 2;
.0- х + 0- у + 0- 2 = 2.
В останньому рівнянні вільний член дорівнює двом, а коефіцієнти при невідомих
дорівнюють нулю (тобто 0 = 2), тому система несумісна,
б) Маємо
\1 0 З 1
(1111
0—10—1
0 0 2 1
0 0 2 1, _ _
Отже, система б) еквівалентна системі трикутного вигляду
х + у + г=1;
—у + 0 - г = — 1
2г = 1;
і має єдиний розв'язок:
1 1
х = — — , J/=1, z = ~2~
27
Отже, система в) еквівалентна систем! трапецієподібного вигляду
(— * + j/ + 2z=l;
1 3j/ + z = З
і має безліч розв'язків. З останньої системи знаходимо
1—-
* = — г.
Таким чином, розв язки системи в) мають вигляд х = -~- f, у = 1 — -=■, z = /, де
t — довільне число (—со < t < — оо).
Зазначимо, що жодну з наведених у цьому прикладі систем не можна
розв'язувати ні за формулами Крамера, ні матричним способом. •
3.5. Однорідна система лінійних рівнянь
Нехай задано однорідну систему т лінійних рівнянь з п невідомими
аихі + а12*2 +
^21-*"! І" ^22-^2 Т"
+ о1пхп = 0;
+ а2пхп = 0;
(23)
І атХх1 + ат2х2 +
+ атпхп = 0.
Ця система завжди має нульовий розв'язок хх = 0, х2 — 0, .... хп =*
= 0, тому що підстановка нулів замість невідомих в кожне з рівнянь
(23) перетворює їх в тотожності. Ненульові розв'язки (якщо вони
існують) системи (23) можна знайти методом Гаусса.
Покажемо, що для однорідної системи трьох рівнянь з трьома
невідомими можна знайти загальні формули, що виражають ненульові
розв'язки через коефіцієнти системи.
Розглянемо систему
'а1х + а2у + 0^ = 0;
V + b2y + bsz = 0;
Ст.х + сгу -г-с3г = 0.
(24)
Якщо визначник системи А =^ 0, то система має єдиний нульовий
розв'язок. Дійсно, визначники Ах = Ау = Az = 0 (один стовпець в
кожному визначнику містить тільки нулі), тому за формулами
Крамера х = 0, у = 0, z = 0.
Покажемо, що коли визначник А = 0, то система (24) має безліч
розв'язків. Розглянемо такі два випадки.
1. Припустимо, що у визначнику А існує принаймні один відмінний
від нуля мінор другого порядку. Нехай, наприклад,
bi Ь2
Ф0.
(25)
28
Візьмемо ті рівняння системи (24), що містять відмінний від нуля
мінор, і запишемо їх у вигляді
\ Ьхх + Ь$ = — bg.
Оскільки визначник (25) системи (26) відмінний від нуля, то за
формулами Крамера
(27)
Де
flt Й2
Ьі Ь2
А,
а2 й3
b, bs
А,=
fl8 flj
bs Ьг
Оскільки z може набувати будь-яких дійсних значень, покладемо г =
= Д • t, де t — довільне дійсне число, тоді з формул (27)
х =
а2
f, у =
Й3 flj
Ьз Ьх
t; z =
flL Йа
h Ь2
t.
(28)
Підставляючи розв'язки (28) у третє рівняння системи (24) і
використовуючи теорему 1, впевнюємося, що формули (28) при будь-якому
t визначають розв'язки однорідної системи (24)..
2. Нехай тепер визначник системи (24) і всі його мінори другого
порядку дорівнюють нулю. Це значить, що коефіцієнти всіх трьох
рівнянь (24) пропорційні, тому система зводиться до одного рівняння з
трьома невідомими. Надаючи двом невідомим довільних значень,
знаходять відповідне їм третє невідоме.
Отже, якщо визначник А однорідної системи (24) дорівнює нулю,
то така система має безліч розв'язків.
а)
Приклад
Розв'язати системи рівнянь:
f х + 2j/ + 3z = 0;
2х + у + г = 0;
х— j/ + 2z = 0;
О а) Визначник системи
Д =
1
2
1
2
1
—1
3
1
2
=
б)
f —х + У— 2z = 0|
х— j/ + 2z = 0;
(2х + у— z = 0.
1
—З
0
Ф0,
тому система а) має єдиний розв'язок: х = 0, у = 0, z = 0.
б) Визначник системи
1-1 1 -21
Д =
-1 2
1 —1
—1 1 2
0 0 0
2 1 1
= 0.
29
тому система б) иевизиачеиа. Всі міиори другого порядку, що містяться у першому
і другому рядках визначника, дорівнюють нулю- Візьмемо друге і трете рівняння
системи:
* — у + 2г = 0;
2х + у — г=*0.
ЦІ рівняння містять відмінний від нуля мінор другого порядку
1 — 11
■»Ь0.
тому за формулами (28) маємо
1—1 2 1
Н і -іИ—* у
І
2 1
—І 2
t = 5t; г—\
[1 —1
t = 3t.
Отже, система б) має безліч розв'язків: * ■
дійсне число. •
|2 1
-t, у = 5t, г= 3/, де t — довільне
3.6. Критерій сумісності системи лінійних рівнянь
Нехай задано систему т лінійних рівнянь з п невідомими:
а11х1 + а12х3 + • • • + а\пхп = 6Х;
й!>1*1 + й22*2 + • • • + а2пХп = Ь2\
(29)
атіхг + а„пхг + • • • + йтпд-„ = Ьт.
Складемо основну матрицю А і розширену матрицю А даної системи:
• а\п'
*11 й1ї ■ • • °ІЧ \ /й11 й12 • • • °1п ^1
і4 =
Й2л бо
*тл "щ/
Вичерпну відповідь на запитання про існування розв'язку системи (29)
дає теорема Кронекера — Капеллі. Наводимо її без доведення.
Теорема 4. Для того щоб система лінійних рівнянь була сумісною,
необхідно і достатньо, щоб ранг її основної матриці дорівнював рангу
розширеної матриці.
Якщо ранг основної матриці дорівнює рангу розширеної матриці і
дорівнює числу невідомих, то система мав єдиний розв'язок.
Якщо ранг основної матриці дорівнює рангу розширеної матриці,
але менший числа невідомих, то система мав безліч розв'язків [І, 9].
Приклад
Дослідити иа сумісність систему рівнянь
( * + 2j,-z=l;
2х — j/ + 2z = 3;
[Зх + у + г = 5.
ЗО
О Оскільки ранг основної матриці т (А) = 2, а раиг розширеної матриці т (А) =
= Ч (перевірте), то задана система рівнянь несумісна. •
Завдання для самоконтролю
1. Що називається системою m лінійних алгебраїчних рівнянь з п невідомими?
2. Яка система лінійних рівнянь називається сумісною; несумісною;
визначеною; невизиаченою? . _
3. Записати формули Крамера. В якому випадку вони застосовуються' Довести
формули Крамера для системи трьох рівнянь з трьома невідомими.
4. У чому полягає метод Гаусса?
5. За яких умов однорідна система лінійних рівнянь має єдиний нульовий
розв'язок: безліч розв'язків?
в. Сформулювати теорему Кронекера — Капеллі.
7. Розв'язати системи рівнянь, користуючись формулами Крамера:
а)
а)
3*і + 2*, + хя = Б;
2*х + 3*8 + *з = 1;
( 2*! + х, + 3*s = 11;
б)
*1+*2 + 2*3+3*4=1;
З*, — *8 — *3 — 2ж4 = —4;
2*! + 3*8 — *з — *4 = —6".
*, + 2*2 + 3*3 — *4 = —4.
8. Розв'язати систему матричним способом:
х1 + хі + 2х3 = —1;
2*, — *8 + 2jts = —і;
4хг + *8 + 4ж, = —2.
9. Розв'язати системи методом Гаусса:
2«і + х, + хя = 2;
*! — 2*8 + *, + *4 = 1;
*, — 2*s + *3 — *4 = —1;
. *, — 2*2 + xs + 3*4 = 3;
б)
*i + 3*2 + xa = Б:
*i 4- *i + 5*, = —7;
I 2*,+3*2 — 3*,= 14.
10. Розв'язати однорідні системи
{
) ( 2x — by + 2г = 0;
x + 4j/ — 3z = 0;
6)
3* + 2y — г = 0;
2x — у + 3г = 0;
. ж + J/ — z = 0.
11. Дослідити на сумісність системи:
а)
х + у+г = 2;
2х — 3у—г= 5;
х + У — z = 7;
б)
2*! — *, + *s — 5*4 = 4;
2xl + xa + 2xa — *4 = 1;
6*, *і + 4*8 — 11*4 = 6.
Відповіді. 7. а) (2; —2; 3); б) (—1; —1; 0; 1). 8. (1; 2; —2). 9. а) х3 =
= —х1 + 2*?, *4 = 1; б) (1; 2; —2). 10. a) (It; 8/; 13/); б) (0; 0; 0). 11. а)
Сумісна; б) несумісна.
31
Глава 2
ЕЛЕМЕНТИ ВЕКТОРНОЇ АЛГЕБРИ
Векторна алгебра — розділ математики, в якому вивчаються дії
над векторами. Векторна алгебра виникла і вдосконалювалась у
зв'язку з потребами механіки і фізики. До 19 ст. величини, що зустрічались
у механіці і фізиці, задавали числом або кількома дійсними числами.
Дальший розвиток фізики показав, що деякі з фізичних величин
набагато доцільніше характеризувати не тільки числом, а й напрямом,
тобто вектором.
Вперше вектори застосував К. Вессель у 1799 р. для інтерпретації
комплексних чисел. Проте справжній розвиток векторної алгебри
розпочався лише в середині 19 ст. і привів до створення нової
математичної дисципліни — векторного аналізу.
Апарат векторного числення ефективно використовується в багатьох
загальнонаукових та інженерних дисциплінах (електро- і
гідродинаміці, теоретичній і технічній механіці, теорії механізмів і машин).
§ 1. ВЕКТОРИ І ЛІНІЙНІ Дії З НИМИ
1.1. Скалярні і векторні величини
Багато фізичних величин повністю визначаються своїм числовим
значенням (об'єм, маса, густина, температура тощо); вони
називаються скалярними. Але є й такі величини, які крім числового значення
мають ще й напрям (швидкість, сила, напруженість магнітного поля
тощо). Такі величини називаються векторними.
Будь-яка упорядкована пара точок А і В простору визначає
напрямлений відрізок, або вектор, тобто відрізок, що має певну довжину
і певний напрям. (Термін «вектор» (від лат. vector — переносник) ввів
у 1848 р. Гамільтон.) Першу точку А називають початком вектора, а
другу В — кінцем вектора. Напрямом вектора вважають напрям від
його початку до кінця.
Вектор, початок якого знаходиться в точці А, а кінець — в точці
В, позначається символом АВ або а. Напрям вектора на рисунку по-
казують стрілкою (рис. 2.1). Відстань між початком вектора а = АВ
і його кінцем називається довжиною (або модулем) вектора і
позначається | а | або | АВ |.
Вектор, довжина якого дорівнює одиниці, називається одиничним.
Одиничний вектор, напрям якого збігається з напрямом вектора а, на-
зивається ортом вектора а і позначається через а0.
Вектор, початок якого збігається з кінцем, називається нульовим
—»
і позначається через о; напрям нульового вектора невизначений, а його
довжина дорівнює нулю.
32
Вектори а і b називаються колінеарними, якщо вони
лежать на одній прямій або на паралельних прямих.
Колінеарні вектори можуть бути напрямлені однаково
або протилежно. Нульовий вектор вважається колінеар- рис 2.1
ним будь-якому вектору Вектори а і b називаються
рівними (а = Ь), якщо вони колінеарні, однаково напрямлені і мають
рівні довжини.
В означенні рівності векторів не передбачено якесь певне
розміщення їх, тому, не порушуючи рівності, вектори можна переносити
паралельно самим собі. У зв'язку з цим вектори в аналітичній
геометрії називаються вільними. Іноді вільність переміщення вектора
обмежується. В механіці, наприклад, розглядаються ковзні і зв'язані
вектори. Прикладом ковзного вектора є вектор кутової швидкості при
обертанні тіла, тому що він може розміщуватися лише на осі обертання.
Прикладом зв'язаного вектора є сила, прикладена до якоїсь точки
пружного тіла, оскільки результат дії сили залежить від точки
прикладання.
Три вектори називаються компланарними, якщо вони лежать в
одній площині або в паралельних площинах. Зокрема, вектори компла-
нарні, якщо два з них або всі три колінеарні. Три вектори
вважаються компланарними також у тому випадку, коли хоча б один з них
нульовий.
1.2. Лінійні дії з векторами
До лінійних дій з векторами належать додавання і віднімання
векторів, множення вектора на число.
—* —» -♦ —»
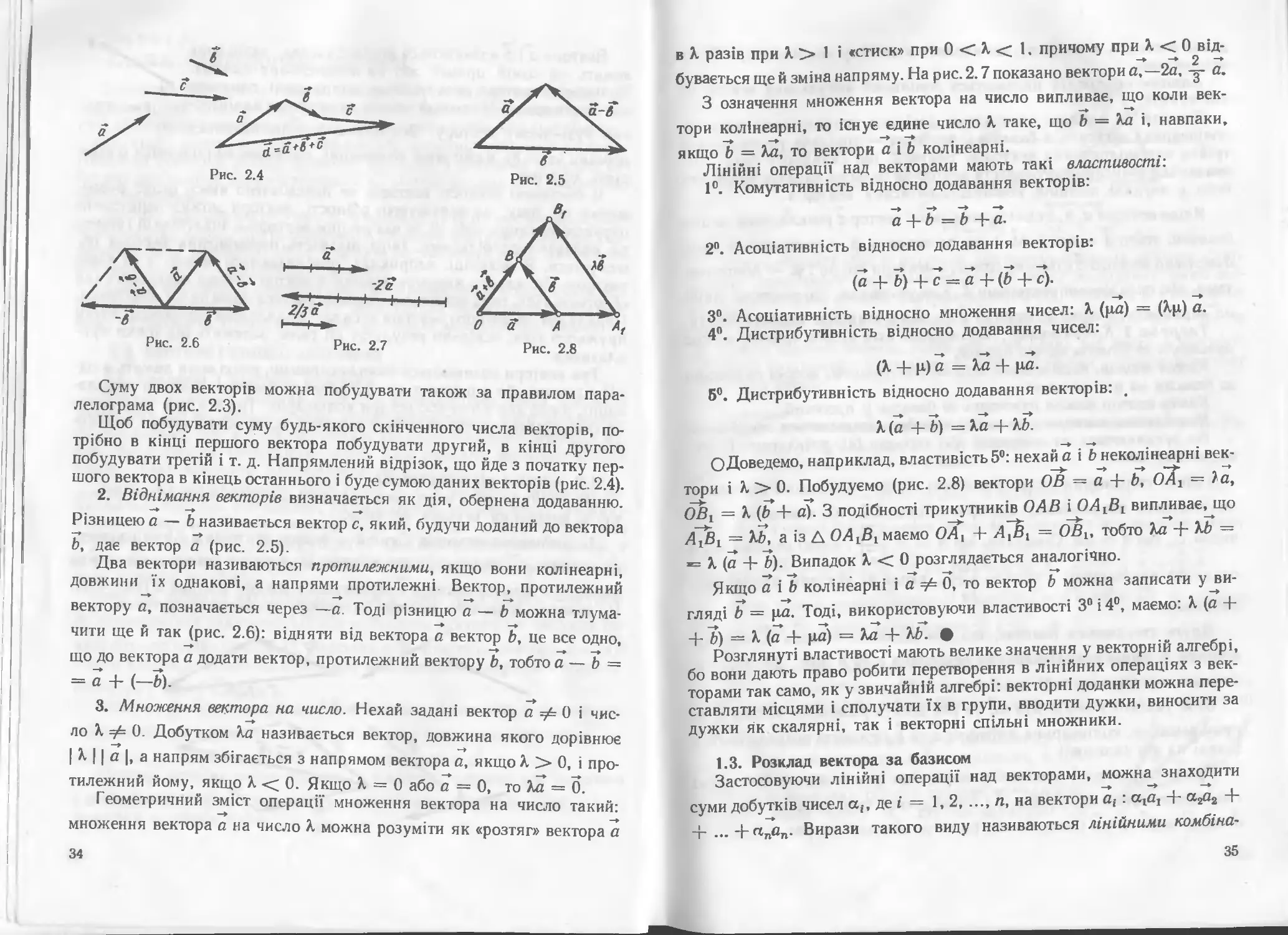
1. Додавання векторів. Сума а + b двох векторів а і b за
означенням є вектор с, напрямлений з початку вектора а в кінець вектора b за
—* —»
умови, що початок вектора b збігається з кінцем вектора а (рис. 2.2).
Це правило додавання вектора називають правилом трикутника.
33
й=а'в*с
Рис. 2.4
Рис. 2.6
Рис. 2.7
Суму двох векторів можна побудувати також за правилом
паралелограма (рис. 2.3).
Щоб побудувати суму будь-якого скінченного числа векторів,
потрібно в кінці першого вектора побудувати другий, в кінці другого
побудувати третій і т. д. Напрямлений відрізок, що йде з початку
першого вектора в кінець останнього і буде сумою даних векторів (рис. 2.4).
2. Віднімання векторів визначається як дія, обернена додаванню.
Різницею а — Ь називається вектор с, який, будучи доданий до вектора
Ь, дає вектор а (рис. 2.5).
Два вектори називаються протилежними, якщо вони колінеарні,
довжини їх однакові, а напрями протилежні. Вектор, протилежний
вектору а, позначається через —а. Тоді різницю а — Ь можна
тлумачити ще й так (рис. 2.6): відняти від вектора а вектор Ь, це все одно,
що до вектора а додати вектор, протилежний вектору Ь, тобто а — Ь =
= а + (-£).
—»
3. Множення вектора на число. Нехай задані вектор а Ф 0 і
число X Ф 0. Добутком Ха називається вектор, довжина якого дорівнює
—* —»
| X 11 а |, а напрям збігається з напрямом вектора а, якщо Я > 0, і
протилежний йому, якщо X <; 0. Якщо X = 0 або а = 0, то Ха = 0.
Геометричний зміст операції множення вектора на число такий:
множення вектора а на число X можна розуміти як «розтяг» вектора а
34
в X разів при X > 1 і «стиск» при 0 < X < 1, причому при X < 0
відбувається ще й зміна напряму. На рис. 2.7 показано вектори а,—2а, -5- а.
З означення множення вектора на число випливає, що коли век-
тори колінеарні, то існує єдине число X таке, що Ь = Ха і, навпаки,
якщо b = Ха, то вектори а і b колінеарні.
Лінійні операції над векторами мають такі властивості:
1°. Комутативність відносно додавання векторів:
а + b = Ь + а.
2°. Асоціативність відносно додавання векторів:
(a + b) + c = a+(b+7).
—* —»
3°. Асоціативність відносно множення чисел: X (ца) = (Хц) а.
4°. Дистрибутивність відносно додавання чисел:
(X + (і) а = Хс -f №■
Б0. Дистрибутивність відносно додавання векторів:
X (с + ~Ь) = Хй + \Ь.
—> —♦
О Доведемо, наприклад, властивість 5°: нехай а і Ь неколінеарні век-
тори і X > 0. Побудуємо (рис. 2.8) вектори ОВ — а + Ь, Оі4х = la,
—V- —► —»
ОВ1 = X (Ь + а). З подібності трикутників ОАВ і ОЛ^ випливає, що
/4^1 = ХЬ, а із Д OAJii маємо ОАх + Л^§, = 0£lf тобто Ха*+ ХЬ =
= X (а + ft). Випадок X < 0 розглядається аналогічно.
—» —» —» —► —*
Якщо й і Ь колінеарні і а Ф 0, то вектор ft можна записати у ви-
гляді b = \ш. Тоді, використовуючи властивості 3° і 4°, маємо: X (й +
+ !>) = X (а + ца) = Ха + U. •
Розглянуті властивості мають велике значення у векторній алгебрі,
бо вони дають право робити перетворення в лінійних операціях з
векторами так само, як у звичайній алгебрі: векторні доданки можна
переставляти місцями і сполучати їх в групи, вводити дужки, виносити за
дужки як скалярні, так і векторні спільні множники.
1.3. Розклад вектора за базисом
Застосовуючи лінійні операції над векторами, можна знаходити
суми добутків чисел а,, де і = 1, 2, ..., п, на вектори at: ata, + a2a2 +
-f- ...+апоп. Вирази такого виду називаються лінійними комбіна-
35
ціями векторів, а числа а,, що входять в лінійну комбінацію,— її
коефіцієнтами.
Базисом на прямій називається довільний ненульовий вектор на
цій прямій.
Базисом на площині називається довільна упорядкована пара не-
колінеарних векторів, а базисом у просторі — довільна упорядкована
трійка некомпланарних векторів. Вектори, що складають базис,
називаються базисними. Розкласти вектор за базисом означає зобразити
його у вигляді лінійної комбінації базисних векторів.
Якщо вектори a, b, c складають базис і вектор d розкладений за цим
базисом, тобто d = ом -+- fib + ус, то числа а, р\ у називаються
координатами вектора d в даному базисі, а вектори <ха, fib і ус —
компонентами, або складовими векторами d. Кажуть також, що вектор d ліній-
—» —» —»
но виражається через вектори а, Ь і с або є лінійною комбінацією їх.
Теорема 1. Коженвектор, паралельний якій-небудь прямій, можна
розкласти за базисом на цій прямій.
Кожен вектор, паралельний якій-небудь площині, можна розкласти
за базисом на цій площині
Кожен вектор можна розкласти за базисом у просторі.
Координати вектора у кожному випадку визначаються однозначно.
Не зупиняючись на доведенні цієї теореми [4], розглянемо її
геометричний зміст.
»-*
Перше твердження теореми означає, що для довільного вектора d,
колінеарного ненульовому вектору а (рис. 2.9, а), знайдеться таке
число а, що d = ом. Очевидно, що а = + j~, якщо вектори а і d
171 И
однаково напрямлені, і а = —Ьтг » якщо ці вектори протилежно
|а|
напрямлені.
Друге твердження означає, що для кожного вектора d, компла-
нарного з двома неколінеарними векторами а та Ь (рис. 2.9, б), зна-
йдуться такі числа а та р\ що d = ом + fib.
-» -» -»
Щоб указати компоненти ом та РЬ, досить розкласти вектор d на
—» —»
суму векторів, колінеарних векторам а та b (згадайте розклад сили у
фізиці на дві складові).
—*
Третє твердження теореми означає, що для кожного вектора d
і некомпланарних векторів a, b і с знайдуться такі числа а, р і у, що
d = ом + fib + ус. Складові ом, fib та ус показані на рис. 2.9, в.
36
еСгй
а
S
fit
iL
Рис. 2.9
Таким чином, базис в просторі дає змогу кожному вектору
однозначно співставити упорядковану трійку чисел (координат цього
вектора) і, навпаки, кожній упорядкованій трійці чисел a, f> і у за допо-
могою базису можна співставити єдиний вектор ом + fib + ус, де
a, b, c — вектори базису, тобто обраний базис дає змогу встановити
взаємно однозначну відповідність між векторами і упорядкованими
трійками чисел.
Приклад
Нехай ABCD — паралелограм, ЛІ і N — середини його сторін (рис. 2.10). Роа-
клйсти вектор DC за векторами а = AM, b = AN.
О 3 трикутників AND і АЛ1В маємо
Ї=аЬ + -^-5Ь, ~a = DC + -2-AD.
Якщо з першої рівності знайти вектор AD І підставити його значення в другу,
дістанемо
a = DC
+-г(ї
■ Щ =
■D'C + -K-b, DC = -
з а—гь-
Отже, якщо базисними векторами є вектори а = AM і Ь = AN, то коордииа-
тами вектора DC в цьому базисі є числа -=- і —s—. •
1.4. Проекція вектора на вісь
Віссю називається напрямлена пряма. Напрям прямої позначають
стрілкою. Заданий на осі напрям вважають додатним, а протилежний
йому — від'ємним. в М Q
Проекцією точки А на вісь и називається
основа Л, перпендикуляра AAlt опущеного з
точки А на дану вісь. Таким чином, проекція Аг
є точкою перетину осі и з площиною, яка про-
ходить через точку А, перпендикулярно до ~/Г Я
ОСІ и. Рис. 2.10
37
u
Рис. 2.11
Рис. 2.12
Нехай у просторі задано вісь и \ вектор АВ. Позначимо через
і4, та Вг проекції на вісь и відповідно початку А і кінця В вектора
АВ і розглянемо вектор А1В1 (рис. 2.11).
Проекцією вектора АВ на вісь и називають додатне число | А1В1 |,
якщо вектор AtBt і вісь и однаково напрямлені, і від'ємне число —
| А1В1 |, якщо вектор AtBt і вісь и протилежно напрямлені. Проекцію
вектора а на вісь позначають так: пр иа. Якщо а =« 0, то вважають,
—►
що при а = 0.
Кутом <р між вектором а і віссю и (або між двома векторами)
називається менший з кутів, на який потрібно повернути один вектор або
вісь, щоб він збігався за няпрямом з другим вектором або віссю: ф =
= (а, и) = (а, и°), 0 <: ф <: п.
У деяких випадках ми будемо вказувати, від якого вектора і в
якому напрямі кут відраховується.
Справедливі такі властивості проекцій.
І. Проекція вектора а на вісь и дорівнює добутку довжини векто-
—»
ра а на косинус кута <р між вектором і віссю, тобто
npu a = a cos у. (1)
О Якщо ф =(а, и) < -g- (рис. 2.12), то при а = | а11 = | а | cos ф.
Якщо ф>-^- (Рис- 2.13), то пр„с = — \at\ = — |a|cos(ji —
— ф) = | а | cos ф.
Якщо ф = -fj-, то формула (1) справедлива, оскільки пр„ а = 0. ф
2°. Проекція суми кількох векторів на дану вісь дорівнює сумі їхніх
проекцій на цю вісь, тобто
Щ>и(а +b -l-c)=npua+npu6 + npBc.
38
(2)
1 - ' '/і
а
Рис. 2.13
Рис. 2.14
О Нехай вектор d = а + b + c (рис. 2.14). Маємо
apud = \dl\ =|a1| + |fc1| —Іс1| = прис4-при6 + пр„с. •
3°. При множенні вектора а на число К його проекція також
помножиться на це число:
при (Ка) = \ при с. (3)
О Нехай ф = (а, и) і ф' = (Ка, и). Якщо \ > 0, то за
формулою (1)
при (Ха) = \\а\ cos ф' = X \ а | cos ф = \ пр„ а;
якщо К < 0, то
npu (Ха) = | Я,й | cos ф' = —Я, | а | cos (п — ф) = X при а. ф
Таким чином, основні властивості проекції вектора на вісь полягають
в тому, що лінійні операції над векторами приводять до відповідних
лінійних операцій над проекціями цих векторів.
Завдання для самоконтролю
1. Що називається: вектором, ортом, нульовим вектором?
2. Які вектори називають рівними, колінеарними, компланарними?
3. Як визначається сума двох векторів, сума кількох векторів, різниця двох
векторів, добуток вектора иа число?
4. Сформулювати властивості лінійних операцій над векторами.
5. Що називається базисом иа прямій, иа площині, в просторі? Сформулювати
теорему про розклад вектора за базисом і з'ясувати її геометричний зміст.
в. Що називається проекцією вектора на вісь? Сформулювати і довести
властивості проекцій.
7. Довести, що при будь-якому розміщенні точок А, В, С справедлива формула
АВ + ВС + СА = 0.
8. У трикутнику ОАВ проведена медіана ОС. Довести, що
б£ = 0,5 (Й + 0%.
39
9. Довести, що умова а+Ь + с=Ое необхідною і достатньою для того, щоб
з векторів а, Ь, с можна було утворити трикутник (аФ 0, Ь Ф 0, сфб).
10. Відомо, що (я, Ь) = 60°, |я| = 5, \Ь | = 8. Показати, що | <Г + ~Ь\ =
•=^Ї29. \~а — 1Г| = 7.
11. Відомо, що (а, Ь) = 120°, | а| = 4. Показати що пр_я = —2.
ь
Вказівка. Кожну вісь можна задати вектором, який лежить на цій осі і має з
нею однаковий напрям. Тому символ пр_, а потрібно тлумачити як проекцію вектора
ь
а на вісь, яка визначається вектором Ь.
і 2. СИСТЕМИ КООРДИНАТ
2.1. Декартова система координат
Розглянемо в просторі точку О і деякий базис, що задається
векторами еи ez, е3 (рис. 2.15).
Сукупність точки і базису називається декартовою системою
координат в просторі на честь французького математика Р. Декарта.
Точка О називається початком координат, а осі, які проходять через
початок координат в напрямі базисних векторів, називаються осями
координат. Перша з них проходить в напрямі вектора еу і називається
віссю абсцис, друга вісь, яка проходить у напрямі вектора е2,— віссю
ординат і третя — в напрямі вектора е3 — віссю аплікат.
Площини, які проходять через осі координат, називаються
координатними площинами.
Всякій точці простору можна співставити вектор ОМ, початок
якого збігається з початком координат О, а кінець — з точкою М. Такий
вектор називається радіусом-вектором точки М відносно точки О. Згідно
з теоремою 1 існують такі дійсні числа xlt x2, xs, що
ОМ = Х& + х2е2 + АГ8?8-
\М(*ґ.*і;*з)
(4)
Координати хг, х2, х3 радіуса-векгора
точки М відносно початку координат
називають декартовими координатами точки
eVye^»
^]/е'
Рис. 2.15
Vjej
с й
с,
*а
Рис. 2.16
40
М в даній системі координат і пишуть: М (хх\ х2; ха). Координата хх
називається абсцисою точки М, координата х2 — ординатою і
координата х3 — аплікатою точки М.
Аналогічно визначаються декартові координати точки на площині
і на прямій. Різниця лише в тому, що точка на площині має дві
координати, а точка на прямій — одну. Таким чином, якщо в просторі
обрано декартову систему координат, то кожній точці простору
відповідає одна упорядкована трійка дійсних чисел — декартові
координати цієї точки. І навпаки, для кожної упорядкованої трійки чисел
знайдеться єдина точка простору, для якої ці числа є декартовими
координатами. Це означає, що обрана тим чи іншим способом декартова
система координат установлює взаємно однозначну відповідність між
точками простору і упорядкованими трійками чисел.
Система координат на площині визначає таку саму відповідність
між точками площини і упорядкованими парами чисел, а на прямій —
між точками прямої і дійсними числами.
2.2. Прямокутна система координат
Очевидно, декартових систем координат можна задати скільки
завгодно. Серед них широко використовується прямокутна декартова
система координат. Щоб визначити цю систему, введемо такі поняття
Упорядкована трійка одиничних попарно ортогональних векторів
називається ортонормованим базисом. Позначають ортонормований
базис через і, j, k, де | і \ = | / | = | k \ = 1, (і, /) = 0'. *) = (*. 0 =
Упорядкована трійка a, b, c некомпланарних вектсрів
називається правою (рис. 2.16, а), якщо з кінця третього вектора с найкорот-
ший поворот від першого вектора а до другого вектора Ь видно проти
годинникової стрілки; в протилежному випадку трійка векторів а,
b, c називається лівою (рис. 2.16, б).
Прямокутною декартовою системою координат (або просто
прямокутною системою координат) називається декартова система
координат, базис якої ортонормований. Прямокутна система координат
називається правою (лівою), якщо її ортонормований базис утворює
праву (ліву) трійку векторів. Надалі користуватимемося правою
системою координат, яка визначається правим ортонормованим базисом:
і, /, k.
Прямокутну систему координат позначають (рис. 2.17) через
Охуг (Ох — вісь абсцис, Оу — вісь ординат, Ог — вісь аплікат), а
координатні площини — через Оху, Оуг, Огх. Вони поділяють простір
41
Mfcva)
Рис. 2.18
на вісім октантів. При зображенні системи координат, як правило,
показують лише осі координат; вектори і, /, k не вказують.
Нехай задана прямокутна система координат Охуг і довільна точ-
—» —►■
ка М (рис. 2.17). Радіус-вектор г = ОМ цієї точки згідно з формулою
(4) записують у вигляді
г = хі + yj + zk, або г = (г, у; г). (5)
Координати х, у, г радіуса-вектора точки М називаються
координатами точки М. Точка М з координатами х, у, г позначається через
М (х; у; г).
З ортогональності базисних векторів системи Охуг випливає, що
координати точки М дорівнюють відповідним проекціям (п. 1.4)
радіуса-вектора цієї точки на осі координат, тобто
х = про* ОМ, y = T\povOM, г = прогОМ, (6)
' визначаються проектуванням точки М на координатні осі (рис. 2.18).
Прямокутні координати точки на площині і на прямій
визначаються таким самим способом, як і в просторі.
Прямокутна система координат Оху на площині задається точкою
О — початком координат і двома взаємно перпендикулярними оди-
1
£
А,
-2-І О І І 3 х
-2
-З
ЬГ'
1 \г х
У
в*
Рис. 2.1»
-а
А
Ю7-
'2 у
42
ничними векторами і, j — базисом системи координат; система
координат на прямій задається точкою О і одиничним вектором». Зрозуміло,
що точка М (х; у) на площині має лише дві координати (абсцису і
ординату), а точка М (х) на прямій — одну.
Приклади
1. На координатній прямій Ох побудувати точки: А^ (3), А, (—'2).
2. У прямокутній системі координат Оху побудувати точки Вх (1; 2), Bt (2; —3),
Bs(-3; 0).
3. У прямокутній системі координат Охуг побудувати точки Сх(1; 2; 3), С, (3;
-2; 3), Cs(-1; -3; -5).
Побудову точок показано иа рис. 2.19, а—в.
2.3. Полярна система координат
Декартова система координат не єдиний спосіб визначати за
допомогою чисел місце знаходження точки на площині. Для цієї мети
використовують багато інших координатних систем.
Найважливішою після прямокутної системи координат є полярна
система координат. Вона задається точкою О, яка називається
полюсом, і променем Ор, який виходить з полюса і називається полярною
віссю. Задаються також одиниці масштабу: лінійна — для
вимірювання довжин відрізків і кутова — для вимірювання кутів.
Розглянемо полярну систему координат і візьмемо на площині
довільну точку М (рис. 2.20). Нехай р = | ОМ | — відстань від
точки О до точки М і ф = (Ор, ОМ) — кут, на який треба повернути
полярну вісь проти годинникової стрілки, щоб сумістити її з
вектором ом.
Полярними координатами точки М називаються числа р і <р.
При цьому число р вважається першою координатою і називається
полярним радіусом, а число ф — другою координатою і називається
полярним кутом. Точка М з полярними координатами р і ф
позначається так: М (р; ф). Очевидно, полярний радіус може набувати
довільних невід'ємних значень: 0 ^ р <; + оо полярний кут вважатимемо
таким, що змінюється в межах 0 ^ ф < 2я. Іноді розглядають кути
Ф, більші від 2л, а також від'ємні кути, тобто такі, що відкладаються
від подярниї осі за годинниковою стрілкою.
Виразимо декартові координати точки М через полярні.
Вважатимемо, що початок прямокутної систе- ^>М
ми збігається з полюсом, а вісь Ох — з полярною ^^^
віссю Ор. Якщо точка М (рис. 2.21) має декарто- ^г
ві координати х і у і полярні р і ф, то >>^ ж
0 Р
х = р cos ф, у = р sin ф, (7) Рис. 2.20
43
V,
0
У
<Лч>
X
•Ґ
\у
1 .'
X
<№
Рис. 2 21
Рис. 2.22
ЗВІДКИ
р = Ух2 + у2 , <p=arctg
(8)
Зауважимо, що друга з формул (8) дає два значення кута ф,
оскільки він змінюється від 0 до 2л. З цих двох значень кута треба взяти те,
для якого задовольняються формули (7). Формули (7) називають
формулами переходу від полярних координат до декартових, а
формули (8) — формулами переходу від декартових координат до полярних.
Приклад
Побудувати точки за полярними координатами: А ІЗ; -£-1 , В = ( 2; JL п |,
C=l4;-g-ji . Дані точки показано на рис. 2.22.
2.4. Перетворення прямокутних координат на площині
При розв'язуванні задач іноді треба переходити від однієї
прямокутної системи до іншої. Виконується такий перехід за допомогою
формул перетворення координат.
Розглянемо перетворення координат на площині.
1°. Паралельне перенесення осей. Візьмемо дві прямокутні декартові
системи координат Оху і OxXY з різними початками координат і
однаково напрямленими осями.
Нехай точки 0{?і M в системі Оху (рис. 2.23) мають відповідно
координати (а; Ь) і (х; у), тоді координати точки М в системі OxXY за-
довільняють рівності
X = х — a, Y = у — Ь. (9)
Формули (9) називаються формулами перетворення координат при
паралельному перенесенні осей. Вони виражають координати точок
в системі OtXY через координати точок в системі Оху.
2°. Поворот осей координат. Нехай на площині задані дві
прямокутні системи координат Оху і OXY, що мають спільний початок
координат, причому система OXY утворена з системи Оху поворотом осей
на додатний кут а (рис. 2.24).
44
у
6k-
Y
Т
о,
І
IX X
і І—
а хх
Рис. 2.23
Знайдемо формули, що виражають координати (х; у) точки М в
системі Оху через координати (X; Y) цієї точки в системі OXY.
Введемо дві полярні системи координат із спільним полюсом О і полярними
осями Ох і ОХ, тоді згідно з формулами (7) маємо
х = р cos (ф + а) = р cos ф cos а — р sin ф sin а = X cos a — У sin а;
у = р sin (ф + а) = р sin ф cos а + р cos ф sin а = Y cos а + X sin а,
звідки
X = xcoscc +ysina, Y = — х sin а -f- у cos а. (10)
Формули (10) називаються формулами перетворення координат при
повороті осей.
Приклад
В системі Оху точка М має координати (2; 4). Знайти її координати в системі
OXY, яка утворюється з системи Оху поворотом на кут я/2.
ОЗа формулами (10) маємо
X'
п п
■■ 2 cos -g- + 4 sin -g- ;
п
= —2.
Y = —2 sin -g- + 4 cos ■ Q
Такий самий результат можна дістати геометрично, побудувавши точку М і системи
координат Оху і OXY.%
2.5. Циліндрична та сферична системи координат
У просторі крім прямокутної системи координат часто вживаються
циліндрична та сферична системи координат.
1°. Циліндрична система координат. Якщо в прямокутній системі
координат Охуг замість перших двох координат х, у взяти полярні
координати р, ф, а третю координату г залишити без зміни, то дістанемо
циліндричну систему координат (рис. 2.25). Координати точки М
простору в цій системі записуються у вигляді М (р; ф; z).
Залежності між прямокутними координатами точки М (х; у; z)
і її циліндричними координатами М (р; ф; z) випливають з формул (7):
Х = рСОЗф, у = рБІПф, Z =Z, (11)
45
де
0<р<+оо, 0<ф<2л, —оо<г<+оо.
Отже, якщо прямокутна і циліндрична системи координат
розміщені так, як на рис. 2.25, то зв'язок між прямокутними і
циліндричними координатами виражається формулами (11).
2". Сферична система координат. У системі Охуг візьмемо точку
М і через цю точку і вісь Ог проведемо площину (рис. 2.26). Нехай
г — відстань від початку координат до точки М; <р — двогранний кут
між площинами Огх і гОМ; 0 — кут між віссю Ог і променем ОМ.
Упорядкована трійка чисел г, ф, в однозначно визначає положення точки
М у просторі. Ці числа називаються сферичними координатами
точки М.
Знайдемо залежність між прямокутними і сферичними
координатами точки М. З прямокутних трикутників ONM і OPN маємо
z = r cos Є,
ТОДІ
ДЄ
P=rsine, Х = рС05ф, 1/ = р5ІПф,
х = г5ІпЄсо8ф, у = rsin6sir^, z = r cos6,
(12)
0<г<+оо, 0<ф<2л, 0<Є<л.
Таким чином, якщо прямокутна і сферична системи координат
розміщені так, як на рис. 2.26, то зв'язок між прямокутними і
сферичними координатами виражається формулами (12).
2.6. Поняття про п-вимірний простір
Як уже вказувалось в п. 2.1, між геометричними векторами і
їхніми координатами у фіксованому базисі існує взаємно однозначна
відповідність. При цьому кожному вектору простору співставляється
упорядкована трійка чисел, кожному вектору, що належить деякій
площині,— упорядкована пара чисел, а кожному вектору, що належить
деякій прямій,— дійсне число, і навпаки.
Mpvffi)
Рис. 2.25
Рис. 2.26
46
Упорядковану трійку чисел називають тривимірним вектором,
а множину всіх тривимірних векторів називають тривимірним
простором і позначають через R3.
Упорядковані пари чисел називають двовимірними векторами, а
числа — одновимірними. Множини двовимірних і одновимірних
векторів називають відповідно двовимірними і одновимірними просторами
і позначають через R2 і /?,.
Узагальнюючи простори /?,, R2, /?3, приходимо до п-вимірного
простору /?„, де п — довільне натуральне число.
Упорядкована множина п дійсних чисел xlt х2, .... х„ називається
п-вимірним вектором х і позначається так: х = (xt; х2, ...; х„).
Множина всіх «-вимірних векторів називається п-вимірним
простором і позначається через Rn. Якщо довільний вектор х = (х{, хг; ...
... ;хп) простору Rn розглядати як радіус-вектор відповідної точкиМ
відносно початку вибраної системи координат, то координати точки М
визначаються як координати цього раді уса-вектора. У зв'язку з цим
n-вимірний простір Rn можна тлумачити також як множину
впорядкованих сукупностей п дійсних чисел.
Простори /?,, R2, R3 є окремими випадками простору R„.\x можна
зобразити геометрично; для п > 3 простори R„ геометрично вже
уявити не можна, проте вони відіграють важливу роль у науці і техніці
П [піклади
1. У системі (9) лінійних рівнянь (гл. 1) кожне рівняння можна розглядати як
(л + П-вимірний вектор, бо воно визначається впорядкованою сукупністю (л + 1)
чисел. Так, перше рівняння визначається вектором
(ап; а12: . . . ; o,n; bj.
2. Розв'язок системи рівнянь з п невідомими є л-вимірним вектором.
3. Кожний рядок матриці А (гл. 1, п. 2.1) є л-внмірним вектором, а кожний
стовпець — m-вимірним. Рядки називають горизонтальними, а стовпці —
вертикальними векторами матриці. Отже, довільну матрицю можна розглядати як деяку
упорядковану сукупність ЇЇ вертикальних або горизонтальних векторів.
2.7. Лінійна залежність векторів
Розглянемо систему з т n-вимірних векторів
а13 а2, .... ат (13)
За означенням вектори (13) називаються лінійно залежними, якщо
рівність
можлива за умови, що хоча б одне з чисел at Ф 0, де і = 1,2, .... т.
Якщо ж рівність (14) можлива лише за умови, що af = etg = ... =
= ат = 0, то вектори (13) називаються лінійно незалежними.
47
Для з'ясування питання про лінійну залежність векторів (13)
кожен із заданих векторів а, = {аи; а2і. ..; апі) і нуль-вектор о =»
= (0; 0; ...; 0) запишемо як матрицю-стовпець, тоді векторну рівність
(14) можна записати у матричній формі (гл. 1, п. 2.2):
'«іі\ /Оіг\ /аїт\ / 0
«•lfl.,!)+«.(flnl+ ••■ +«,
аоо
Оц«і + аі2а2 + • ■ • + аХтат = 0;
а„а, + а22а2 + ... -f c^cc^ = 0;
(16)
ащОї + ап2о.„ + • • • + а„тат = 0.
Маємо лінійну однорідну систему рівнянь (гл. 1, п. 3.5) відносно
невідомих оС|. Якщо система (15) має лише нульовий розв'язок, то
вектори (13) будуть лінійно незалежними. Якщо ж крім нульового система
(15) має ще й ненульові розв'язки, то вектори (13) лінійно залежні.
Наводимо без доведення такі властивості поняття лінійної
залежності [1, 4]:
1) якщо серед векторів (13) є нульовий, то ці вектори лінійно
залежні;
2) якщо вектори (13) лінійно залежні,■ то після додавання до них
одного чи кількох нових векторів дістанемо лінійно залежну систему
векторів;
3) якщо вектори (13) лінійно незалежні, то після відкидання одного
чи кількох векторів дістанемо знову лінійно незалежні вектори;
4) вектори (13) лінійно залежні тоді і лише тоді, коли один з них
є лінійною комбінацією інших;
5) якщо два ненульові тривимірні вектори лінійно залежні, то вони
колінеарні, і навпаки;
6) якщо три ненульові тривимірні вектори лінійно залежні, то
вони компланарні, і навпаки;
7) чотири (і більше) тривимірних вектори завжди лінійно залежні.
Поняття лінійної залежності має досить глибокий зміст і широко
використовується в математиці. Не вдаючись до подробиць, наведемо
такі застосування цього поняття [7].
1°. Всяка упорядкована сукупність лінійно незалежних векторів,
через які лінійно виражається довільний вектор простору,
називається базисом цього простору. Неважко переконатись в еквівалентності
цього означення і означення базисів у просторах Rlt R2, R3.
2°. Максимальне число лінійно незалежних векторів деякого
простору називається його розмірністю. Розмірність простору дорів-
48
нює числу базисних векторів цього простору. Відповідно до цього
означення пряму лінію розглядають як одновимірний простір /?, з
одним базисним вектором; площина — це двовимірний простір Ra,
базис якого містить два вектори і т. п.
3°. Максимальне число лінійно незалежних стовпців матриці
дорівнює максимальному числу її лінійно незалежних рядків, і це число
дорівнює рангу матриці.
Розглянемо систему лінійних рівнянь (9) (див. гл. 1) і зафіксуємо
який-иебудь відмінний від нуля мінор, порядок якого дорівнює
рангу матриці цієї системи. Рівняння, у яких коефіцієнти при невідомих
утворюють обраний мінор, називають базисними. Тоді з твердження
3° випливає такий важливий для практики висновок: система
лінійних рівнянь еквівалентна системі своїх базисних рівнянь.
Приклад
Довести, що вектори а = (1; 2; 3), Ь = (0; 1; 2), с= (1; 3; —1) лінійно
незалежні.
О Розв'яжемо рівняння <х,а + a2ft + а^с = 0. Маємо
/І\ /0\ / 1 \ /0\ | а, + а3 = 0;
«іІ 2 І + а,| 1 І + «зІ 3 ] = (о|або 2ос, + а2 + За3 = 0;
W \2/ \—1/ \0/ ІЗсМ-газ— as = 0.
Оскільки визначник системи відмінний від нуля (перевірте), то система має єдиний
розв'язок а, = 0, о2 = 0, а3 = 0. Отже, задані вектори лінійно незалежні. •
Завдання для самоконтролю
1. Що називається декартовою системою координат?
2. Дати визначення декартовнх координат точки: на прямій; на площині; в
просторі.
3. Визначити прямокутну систему координат. Яка система координат
називається правою: лівою?
4. Довести, що координати точки у прямокутній системі дорівнюють
відповідним проекціям радіуса-вектора цієї точки на осі координат.
5. Охарактеризувати полярну, циліндричну та сферичну системи координат.
6. Довести формули перетворення координат прн паралельному перенесенні
осей координат і прн їхньому повороті навколо осі.
7. Дати поняття л-внмірного вектора і n-внмірного простору.
8. З'ясувати поняття лінійної залежності векторів і сформулювати його
властивості.
9. Довести, що вектори^і= (1; —1; 2),7> = (10; 1; 1) і"с= (2; —1; 6) лінійно
незалежні.
10. Довести, що вектори а= (3; —2; 1), ї = (—1; 1; — 2),"с = (2; 1; —3) і"2 =
—»
= (11; —6; 5) лінійно залежні. Виразити вектор d як лінійну комбінацію векторів
а, Ь, с.
Відповідь, d — 2а — 3ft + с.
49
S 3. ВЕКТОРИ В СИСТЕМІ КООРДИНАТ
3.1. Координати, довжина і напрямні косинуси вектора
Для того щоб операції над векторами звести до операцій над
числами, розглядатимемо вектори в системі координат.
1. Координати вектора. Нехай в прямокутній системі координат
Охуг задано вектор а. Це означає, що в ортонормованому базисі і, /',
k, який задає обрану систему координат, вектор а = ахі + ау\ + azk
(п. 1.3), де числа ах, ау, аг — координати вектора а в цьому базисі.
Але з властивостей проекції (п. 1.4) випливає, що
ах = про» а, ау = про,, а, аг= щ>0г а. (16)
Отже, координати вектора в системі координат Охуг це його
проекції на осі координат.
2. Довжина вектора. Вектор а є діагоналлю прямокутного
паралелепіпеда (рис. 2.27) з вимірами \ах\,\ ау |, | аг |, тому довжина цього
вектора дорівнює
\a\ = Va\ + a\ + £. (17)
Якщо початок вектора а = АВ (рис. 2.28) міститься в точці А (у і,
Уі, Zj), а кінець — в точці В (х2; у2\ г^, то з формул (2) і (16) випливає,
що ах = х2 — х1г аи = у2— ylt аг = га — zlt тобто
АВ = (х2 — Хі, уа — Уї, г2 — г1). (18)
Тоді з формули (17) знаходимо довжину вектора АВ:
АВ= V(x2 - хг? + (у2 - Уі)а + (z2 - Zl)2. (19)
Цією формулою користуються для знаходження відстані між
точками А і В.
3. Напрямні косинуси вектора. Напрям довільного вектора а =
= (ах; ау\ az) визначається кутами а, р, у, які утворює вектор а з
осями координат (рис. 2.27):
-»~ч ^ч. ^^
а=(а, і), Р=(а, /), у = (а, Ті), 0<а, р, у<"-
Косинуси цих кутів називаються напрямними косинусами. Формули
для напрямних косинусів дістаємо з формул (1) і (16):
cosa=-^f cosp=-§-, cosy = -4г-. (20)
\а\ \а\ \а\
50
A(x,;i/t;t,)
%;«й)
Рис. 2.27
Рис. 2.28
Підносячи обидві частини кожної з рівностей (20) до квадрата і
підсумовуючи, з урахуванням формули (17) дістанемо
cos2 a + cos2 P + cos2 у = 1, (21)
тобто сума квадратів напрямних косинусів довільного вектора
дорівнює одиниці.
Приклади
і. Задано точки А (0; —1; 2) і В (—1: 1; 4).
Знайти координати, довжину та напрямні косинуси вектора АВ-
О 3 формул (18), (19) і (20) маємо АВ = (—1; 2; 2); | ~АВ І = /і + 4+ 4 =
1 D 2
= 3; cos a = — -=-, cos p = cos у = -о-. •
2. Чи може вектор утворювати з осями координат кути a = Р = 60°, V =" 30°?
5
О cos2 60° + cos2 60° -f- cos2 30° = -j- Ф 1,
тому згідно з формулою (21) дістанемо на це запитання негативну відповідь. •
3.2. Лінійні дії з векторами. Рівність і колінеарність векторів
1. Дії з векторами. Якщо відомі координати векторів, то лінійним
діям з векторами відповідають відповідні арифметичні дії над їхніми
координатами. Це випливає з властивостей 2°, 3° проекцій (п. 1.4).
Нехай задано вектори а = (ах; аи\ az), b = (bx. by\ bz) і дійсне число Я,,
тоді hi — (Ках; Іау; Каг), а ± b = (ах ± Ьу; ау ± Ьу\ az ± К).
—► —►
2. Рівність векторів. Нехай вектори а = {ах\ ау; аг) та b = (bx;
by, bz) рівні, тобто мають однакові довжини і напрям, тоді з формул
(1) і (16) випливає, що
ах = Ьх, ау = Ьу, аг = Ьг (22)
—► —►
і навпаки, якщо мають місце формули (22), то а = Ь. Отже, всяка
—* —»
векторна рівність виду a = Ь еквівалентна трьом скалярним рівностям
(22).
51
3. Колінеарність векторів. Необхідною і достатньою умовою того,
що вектори а = (ах; ау; аг) та ~Ь = (Ьх, Ьу, Ьг) колінеарні, є пропорціо-
нальність їхніх проекцій:
ах оу аг if)o\
~ьх~=~ьу-^~ьГ- {6)
Дійсно, якщо вектори а і b колінеарні, то існує таке число Я,, що а =
= "Kb, тоді з формул (22) дістаємо рівності ах = УЬХ; ау = КЬУ; аг =
= A,bz, з яких випливають формули (23).
Приклади
1. Знайти вектор а— (ах\ —1; аг), колінеарний вектору Ь— (1; —2; 3).
• —2 З 1 З
О 3 умов (23) маємо -jj— = _ t = ——: ах = -у , flfe = -g- . •
2. Довести, що координати орта а0 вектора а = {ах; ау\ аг) збігаються з
напрямними косинусами даного вектора.
О а° = -^- = —L- (ах; ау, аг) = /_%- . -Лі- . Л*-\ = (cos a; cos 0;
|<Г| |в| Ч«І ' |а| |а| /
cosy)" •
3.3. Поділ відрізка в даному відношенні. Координати центра мас
Нехай задано відрізок АВ точками А (хг\ уж; Zj) і В (х2\ у2\ г2).
Знайдемо на відрізку таку точку М (х; у; г), яка ділить цей відрізок
у відношенні Я,, тобто | AM \ : | MB \ = X. Введемо радіуси-вектори
г, = ОАі = (хі, уа z,), r = ОМ = (х; у, z), r2 = OB = (х2, у2, zj
(рис. 2.29). Оскільки AM = r — rlt MB = ra — г і за умовою AM =
= "кМВ, то г — rt = Я, (г2 — г), звідки г = 1~\ .2 Прирівнюючи
проекції обох частин цієї рівності на осі координат, згідно з
формулами (22) маємо
_ Хі + Х*2 _ Уі + *-Уг _ _ Ч + Ь2 (9.
\ + К ' » ~" 1 + К ' z ~ \ + К " у >
. . Зокрема, координати точки, яка ділить від-
£(*і:Уі}*іі різок АВ навпіл (У. = 1), знаходять за фор-
Ц(*;У;*} мулами
* — 2 ' У — 2
г = -Ції- (25)
Виведемо тепер формули для координат
52
центра мас системи матеріальних точок Мг (хх; уг\ zt). М2 (xt; уг\ z2),...
.... Мп (хп; уп; гп), в яких зосереджено маси mlt m2 тп. Знайдемо
спочатку центр маси Nt (*#,; f/w,; z^,) системи двох точок Мі та М2.
Оскільки центр маси лежить на відрізку MYM2 і ділить його у від-
ношенні Кх ■= —- = \ ', то за формулами (24)
m^t + т^ _ т1у1 + т8у8 _ т^ + m2Zo
(26)
Точка, координати якої обчислюються за формулами (26),
називається центром мас двох матеріальних точок Мх і М2.
Розглянемо тепер систему точок Nj і М3, в яких зосереджено маси
mt + т2 і т3 і знайдемо центр маси N2 (xNt; уцг; zNt) цих точок.
Оскільки Я. = —^— = ' N£x' , то з формул (24) і (26) маємо
v Wi*i + Щх2 + т2дс3 fftii/i + m2y2 -f m^/, „„
__ %z! + /п2га + т3г,
N' т1+тг + т3
Точка, координати якої обчислюються за формулами (27),
називається центром мас трьох матеріальних точок Мь М2, М3.
Методом математичної індукції можна довести, що центр мас
системи п матеріальних точок знаходиться в точці С (хс', ус', 2с), де
п п їх
X тіхі 2 тіУі S. тігі
І=І " " і=.1 - і=1
хс = ^ . Ус = —-п . zc = —тг
і=і і=і і=і
Завдання дл я самоконтролю
1. Як визначаються координати і довжина вектора?
2. Як знайти відстань між точками А (х^, ух; г^ і В (х2; у2; г2)?
3. Що називається напрямними косинусами вектора? Як вони знаходяться?
4. Довести, що напрямні косинуси вектора задовольняють умову coss a+
+ cos2P + cos2 v= 1.
5. Довести, що координатами орта довільного вектора є напрямні косинуси
цього вектора.
6. Як визначаються лінійні операції з векторами, заданими своїми
координатами?
7. Які умови рівності та колінеарності векторів, заданих своїми проекціями?
8. У чому полягає задача про поділ відрізка в даному відношенні?
9. Записати формули для координат точки, яка ділить даний відрізок у даному
відношенні.
53
10. У чому полягає задача про центр мас системи матеріальних точок?
11. Вивести формули для координат центра мас двох матеріальних точок.
12. Відомо, що а = (0; —2; — 3),~£ = (3: 2; 3). Переконатись, що | За + 2Ь*| =
= 7.
13. Відрізок між точками А (2; —3) і В (6; 8) точками С і D поділено на три
рівні частини. Пересвідчитись, що
|0_ 2_ _14_ 13
ХС — з • уС — 3 : *о ~~ 3 • у° ~ 3 *
14. В точках А (—2) і В (7) містяться маси mt = 5 1 m, = 3. Упевнитись, що
центр мас цих точок міститься в точці С |-їг").
і 4. СКАЛЯРНИЙ ДОБУТОК ДВОХ ВЕКТОРІВ
4.1. Означення, геометричний та механічний зміст скалярного
добутку
Скалярним добутком двох векторів а і Ь називається число а • Ь,
що дорівнює добутку довжин цих векторів на косинус кута між ними:
~а-~b = \~a\\b\cosy, (28)
де ф = (а, Ь) — кут між векторами а і Ь.
Якщо хоча б один з векторів а чи Ь нульовий, то за означенням
а • b — 0. Оскільки за формулою (3) | а | cos <р = пр-я, | b | cos ф =
= np-b, то з (28) маємо
а
~а Л = | а | пр-6 = |Ь\ прJT. (29)
Формули (29) виражають геометричний зміст скалярного добутку:
скалярний добуток двох векторів дорівнює добутку довжини одного
вектора на проекцію на нього другого вектора.
З фізики відомо, що робота А сили F при переміщенні матеріальної
—» —»
точки з початку в кінець вектора 5, який утворює з вектором F кут а
(рис. 2.30), дорівнює А = | F 11 S | cos а, або
А = F • S. (ЗО)
Отже, робота дорівнює скаля рному
добутку вектора сили на вектор переміщення.
В цьому суть механічного змісту скалярного
Рис. 2.30 добутку.
54
4.2. Властивості скалярного добутку
У векторному численні величину а ■ b — \ а |; | b \ cos (а, Ь) нази-
вають скалярним добутком векторів а та b тому, що, по-перше, ця
величина є скаляр і, по-друге, має деякі алгебраїчні властивості
звичайного добутку чисел.
Розглянемо три алгебраїчні властивості скалярного добутку.
1°. Комутативна властивість множення:
а • b = b • а.
О За означенням скалярного добутку а • b = | а \ \ b \ cos (a, b)
і* b • а =» | b 11 а | cos (b, а). Оскільки |аЦ6| = |&||а| як
добуток чисел і cos (o, b) = cos (b, а), тому що (а, Ь) — (Ь, а), то а • b =
= b • а. •
2°. Асоціативна властивість відносно множення на число Я,і
(Ал) • b = Я, (а • Ь).
О 3 формул (29) і (3) маємо
(Ка) • ї = \Ь\ пр-(Ха) =Х\Ь\ пр-а = Я, (а • ї). •
3°. Дистрибутивна властивість відносно додавання векторів:
а • (Ь + с) = а • Ь + а • с.
О Згідно з формулами (29) і (2) дістанемо
а • (Ь + с) = | а | пр-> (Ь + с) = | а \ пр-»Ь +
-(- | а | пр-»с = а • b + а - с. •
Ці три властивості обумовлюють глибоку аналогію між векторною
алгеброю і алгеброю чисел. Перша властивість дає змогу міняти
місцями множники, друга — об'єднувати числові коефіцієнти векторних
множників, а третя — розкривати або вводити дужки і виносити за
них спільні скалярні чи векторні множники. Проте аналогія між
скалярним добутком векторів і добутком чисел є неповною. Зокрема,
не існує скалярного добутку трьох і більшого числа векторів; рівність
а ■ Ь = 0 може виконуватись і при ненульових множниках а Ф 0,
^^
b Ф 0, якщо (а, Ь) = -к—, не можна робити висновок, що з рівності
55
a -~b = a ■ c випливає рівність Ь = c навіть коли а Ф 0. Рівність
a ■ b = a • c при а Ф 0 означає, що (a, b— c) = -у- і правильна при
Наведемо геометричні властивості скалярного добутку.
4°. Якщо а ф0 і b Ф0, то а • b > 0, коли кут (а, Ь) — гострий,
і а • b <; 0, коли кут ф = (а, Ь) — тупий.
5°. Скалярний добуток двох ненульових векторів дорівнює нулю
тоді і лише тоді, коли ці вектори взаємно перпендикулярні.
6°. Скалярний квадрат вектора дорівнює квадрату його довжини
а2=Й2, (31)
звідки
\a\=Va2. (32)
Властивості 4°—6° безпосередньо випливають з формули (28).
Приклади
1. 'Знайти скалярний добуток векторів т — 2а — 3ft і n = 4a-f-56, якщо
М=1, Ш = 2, ~(а, bj = -j-.
О Користуючись властивостями 1°—3°, маємо
m • я = (2а — 3ft) ■ (4a + 5ft) = 8а* + 10а -~Ь — 12а-Т — 15ft5 =,
= 8аа — 2л Л — 15ft\
Застосовуючи формули (28) і (31), знаходимо
-. -► 1
т • п = 8 • І2 — 2 • 1 • 2 - -у — 15 • 2« = — 54. •
2. Знайти довжину вектора с = 2а —3ft, якщо | а | = 1, 1 ft | = 4, (а, Ь) =
п
= Т •
О За формулою (32) дістанемо
| 7\ = V~t» = У (2а — З?)» = Уіа* — 12а • 7+ 9ft* = VT24 = 2 УІЇЇ. •
4.3. Вираз скалярного добутку через координати. Кут між
векторами
—» —*
Нехай задано два вектори а = (ах; ау\ aj та b = (bx, by, bj.
Знайдемо їхній скалярний добуток. Використовуючи властивості 1° і 3° ска-
56
лярного добутку, дістанемо
а • Ь = (ахі + aj + azk) ■ (bj + buT+ bji) =
= <*xbj2 + ajjyl- /+ axbj ■ k + aybj ■ J + aybyf +
-f aybj • k -\- azbxk • і + ajojk - / -f- afiJP.
Оскільки і, /, If — попарно ортогональні орти, то і2 •= /2 = k2 = 1,
і ■ / = і • k = J • k = 0, тому
а • b = ахЬя + аД, -f а^. (33)
Отже, скалярний добуток двох векторів, заданих координатами
в прямокутній системі координат, дорівнює сумі добутків їхніх
відповідних координат
Вкажемо на ряд важливих висновків з формули (33).
1. Необхідною і достатньою умовою перпендикулярності векторів
—¥ —+
а = (ах; ау; az) і b = bx; by\ bz) є рівність
axbx -f ayby + ajbz = 0. (34)
2. Довжина вектора а = (ax; ay\ аг) визначається за формулою
I a | = Va\ + а2у + а2г . (35)
Формула (35) випливає з формул (32) і (33). В п. 3.1 цю формулу ми
довели іншим способом.
3. Кут ф = (а, Ь) між векторами а = (ах: ау: аг) та b = [bx; by; bz)
визначається рівністю
—* —¥
rnS m = -Л-UL- ~ , "*»* + °*Ч + °гЬг (36)
lallftl K4+4 + ^V^ + ^ + ^
Ця формула є наслідком формул (28), (33) і (35).
Приклади
1. Обчислити, яку роботу виконує сила F = (2; —1; 4), яка прямолінійно
переміщує матеріальну точку з точки М (—1; 0; 3) в точку N (2; —3; 5).
О За формулами (18) знайдемо вектор переміщення S = MN = (3; —3; 2),
—» —»
тоді за формулами (30) і (33) робота А = F • S = 17. ф
2. Задані вектори а= (2; 0; —2) і ft= (—2; 1; 2). Знайти проекцію вектора
с = 2а + ft на вектор ft.
О Знайдемо координати вектора с:
1 = 2 (2? - 2k) + (— 2? -1- /* -f 2?) = 2? + / — 2fe = (2; 1; — 2).
57
З формул (29). (33) і (35) дістаємо
£.7 2- (— 2) + 1 • 1 + (— 2)-2 _ 7 .
Ь \Ь\ УЧ+1+4 З
3. Трикутник заданий вершинами А (0; — 1; 2), б (—1; —2; 7), С (1; —2: 6).
Знайти його внутрішній кут прн вершині А.
О Користуючись формулами (18) і (36), дістанемо
АВ = (— 1; — 1; 5), Д£= (1; — 1; 4), cos q> = cos (3fl, ~ХЬ) = — »0,91,
9 у 6
9 «25°. «
Завдання для самоконтролю
1. Що називається скалярним добутком двох векторів?
2. У чому полягає геометричний та механічний зміст скалярного добутку?
3. Сформулювати і довести алгебраїчні властивості скалярного добутку.
4. Сформулювати і довести геометричні властивості скалярного добутку.
5. Довести, що скалярний добуток векторів, заданих координатами в
прямокутній системі координат, дорівнює сумі добутків їхніх відповідних координат.
6. Сформулювати і довести необхідну і достатню умову перпендикулярності
двох векторів, заданих координатами.
7. Записати і довести формулу для знаходження кута між векторами, заданими
координатами.
8. Відомо, що | а\ = З, \~Ь | = 4, (а, 6) = 120°. Обчислити:
1) а Л\ 2) а2; 3) (с —?)2; 4) (^7+ 26) • (За— 26).
9. Знайти кут між діагоналями паралелограма, побудованого на векторах а =
= 2Ї— ~и ~Ь= —7+2k.
10. Задано точки А (1; 1; 1) і В (4; 5; —3). Знайти проекцію вектора АВ на вісь,
яка утворює з координатними осями рівні кути.
Відповіді. 8. 1) —6; 2) 9; 3) 37; 4) —61. 9. -£-. 10. V3.
6 5. ВЕКТОРНИЙ ДОБУТОК ДВОХ ВЕКТОРІВ
5.1. Означення і властивості векторного добутку
-» -» —»
Векторним добутком вектора а на вектор b називається вектор с,
який визначається такими трьома умовами:
1) довжина вектора с дорівнює | с \ = \ а \ \ b \ sin ф, де ф = (а, Ь);
2) вектор с перпендикулярний до кожного з векторів а і Ь\
3) якщо с ф 0, то вектори a, b, c утворюють праву трійку векторів
(п. 2.2).
Векторний добуток позначають одним із символів:
с = ахЬ = [ab] = [а х b].
58
ахв
Як
V/
Рис. 2.31
К-.
вха
Рис. 2.32
Розглянемо кілька прикладів.
1. Нехай в точці А (рис. 2.31) прикладена сила F і О — деяка
фіксована точка. Як відомо з фізики, моментом сили F відносно точки О
називається вектор М, довжина якого дорівнює добутку сили на плече
і який напрямлений по осі обертання так, що коли дивитися з його
кінця, то обертання тіла відбувається проти руху стрілки годинника.
Оскільки
|M| = |F|Otf = |F||r|si^ = |?l|o!|sin(?, OA),
—¥
то момент сили F, прикладеної в точці А, відносно точки О
визначається векторним добутком
М = О А х F.
(37)
2. Швидкість v точки Р твердого тіла, яке обертається з кутовою
швидкістю to навколо нерухомої осі І, визначається за формулою Ейле-
ра v = о X г.
3. Якщо електрон, заряд якого дорівнює є, рухається з швидкістю
v в магнітному полі сталої напруги Н, то на електрон діє сила F, яка
визначається за формулою
с
де с — швидкість світла.
Розглянемо алгебраїчні властивості векторного добутку.
1°. Антикомутативність множення:
ах b = — (b x a),
тобто від перестановки множників векторний добуток змінює знак.
Це випливає з того, що вектори а х Ь і b x а мають однакові модулі,
59
колінеарні і трійки векторів (а, Ь, а X Ь) і (а, Ь, b x а) протилежної
орієнтації (рис. 2.32).
2°. Асоціативність відносно скалярного множника Я,:
Ад х Ь = К (а х Ь); а х ХЇ = Я, (а X Ь).
3°. Дистрибутивність відносно додавання векторів:
сх(Ь + £) = ахНохс.
Алгебраїчні властивості векторного добутку дають змогу при
множенні лінійних векторів виконувати дії так само, як з
алгебраїчними многочленами. Проте при виконанні векторного множення
слід пам'ятати, що воно некомутативне: при переставлянні
співмножників знак векторного добутку змінюється на протилежний.
Наведемо геометричні властивості векторного добутку.
4°. Векторний добуток двох векторів дорівнює нулю тоді і лише
тоді, коли ці вектори колінеарні.
5°. Модуль | а X b \ векторного добутку неколінеарних векторів
дорівнює площі S паралелограма, побудованого на векторах а і Ь,
віднесених до спільного початку, тобто
S = | а х Ь |. (38)
6°. Векторні добутки ортів задовольняють такі рівності:
7 х і = j х / = k х k = 0. і х f=k, Jx k = 7,
kx і = /; j x і = — k, k x j = — 7, ix* = -j!
Приклад
Обчислити І (За — V) X (a — Щ |, якщо | а*| = 3, | ~b\ = 4, (a, ~b) = JL .
О (За—7) X (а — 2?) = З £x а) — 6 (ох І) — фх ~а) + 2 фх ї) =
= -6(flXt) 4" 7 ХІ = -5(оХЦ; І — 5 (а х 7) | = 51 <Г] | 7| sin -^- = 5 ■ З X
X 4 • 1 = 60. •
5.2. Векторний добуток двох векторів, заданих координатами
Нехай в прямокутній системі координат задано вектори а = (ах;
аи\ а,) і b = (bx, by; bz). Покажемо, що векторний добуток вектора а
60
на вектор b визначається за формулою
7 *
а х b =
і
ах аи аж
bx by Ьг
(39)
О Використовуючи властивості 1°—3° і 6° векторного добутку і
теорему про розклад визначника (гл. 1, п. 1.2), маємо
а X1 = (a J + aj' 4- а£) X (bj + bj 4- b£) = ахЬх(і X і) 4- ахЬу (7 х
X/) 4- aj>, (ixk) + ajbx (j x 7) 4- ajby (j x J) + ОуЬг (j x 7) +
4- ajbx(kxl) + ajby (7x7) + агЬг(7x7) = {ayb2 — a2by) 7 —
j (ахЬг — aj)x) 4- (axby — aubx) k =
au a2
by b,
bx Ьг
/ +
4-
k =
K
Приклади
1. Знайти площу трикутника, заданого вершинами А (1; 2; 0), В (0; —2; 1),
С(—1; 0; 2).
О Площа трикутника ABC дорівнює половині площі паралелограма,
побудованого на векторах АВ і АС. Оскільки ЛВ=(—1; —4; 1), АС= (—2; —2; 2) і за
формулою (39)
АВхАС =
і j k
— 1—4 1
-2-22
= —6( — 6ft,
то за формулою (38) площа S^ABC = -g-1 АВ X АС | = -у /б* + б8 = 3 \~2. •
2. Знайти момент сили F = (1; —2; 4), прикладеної до точки А (1; 2; 3),
відносно точки В (3; 2; —1).
О Згідно з формулою (37) момент сили М = В А X F. Оскільки ВА = (—2;
0; 4), то
М =
і
2
1
0 4
— 2 4
= 8і -{- 12J + 4k
61
Завдання для самоконтролю
1. Дати означення векторного добутку двох векторів.
2. Сформулювати властивості векторного добутку.
3. Записати і вивести формулу для обчислення векторного добутку двох
векторів, заданих координатами в прямокутній системі координат.
4. Довести, що (а + Ь) X (а — Ь) = 2 (Ь х а).
5. Довести тотожність: (а X Ь)г -+- (а ■ Ь)* = а*Ьг.
в. Знвйти площу паралелограма, побудованого нв векторах а= т— 2л, Ь =
= 2т + Зл, икщо | т | = | п | = 1, (т, л) = -g-.
7. Дві сили fj = (2; 1; 3) і ~Ft — (1; 3; —5) прикладені в точці А (2; —1; —2).
Знайти момент рівнодійної цих сил відносно початку координат.
Відповіді, в. 3,5. 7. 15.
б 6. МІШАНИЙ ДОБУТОК ВЕКТОРІВ
6.1. Означення і обчислення мішаного добутку
—» —»
При множенні двох векторів а і b вище було визначено два види до-
—» —»
бутків: скалярний, результатом якого є число а • Ь, і векторний,
результатом якого є вектор а х Ь.
Множення трьох векторів a, b і с можна виконати різними
способами. Зокрема, можно утворити такі добутки:
(а - Ь) • с, (а х Ь) X с, (а х Ь) ■ 7.
—» —§■
Перший з цих добутків відповідає множенню скаляра а • b на
вектор с і не розглядається. Те саме стосується добутків (а • с) • b та
(Ь • с) ■ а.
Результатом другого добутку є вектор d, який називається
подвійним векторним або векторно-векторним добутком даних трьох
векторів: - _ _ _
d = (а х Ь) х с.
Для знаходження подвійного векторного добутку застосовують
формули
(ах~Ь)хс = (а • с)Ь — {ї■ Г)а;
а х(Ь х с) = (а • с)Ь —(а ■ Ь)с.
Подвійний векторний добуток часто зустрічається у векторному
численні, але певного геометричного змісту не має.
Останній з наведених добутків (а X Ь) ■ с — це скалярний
добуток вектора а X b на вектор с; його називають мішаним добутком
62
векторів а, Ь і с. Цей добуток має чіткий геометричний зміст і широко
використовується в задачах.
Знайдемо мішаний добуток векторів а, Ь, с, заданих координатами:
а — (аж; ау\ аг). Ь = (Ьх; Ьи; Ьг), с = (сх; су; сг).
—» —*
Координати вектора а х b визначаються за формулою (39):
а х Ь
\ЬУ Ьг
\ь„
Ох
ь,
і +
о» а»
k.
Помноживши вектор а х Ь скалярно на вектор с, за формулою
(33) дістанемо
(а х Ь) • с =
Ьх Ьу
С~ Oil
(40)
6.2. Властивості мішаного добутку
1°. Якщо в мішаному добутку поміняти місцями які-небудь два
множники, то мішаний добуток змінить знак, наприклад:
(а х Ь) • с = — с • (Ьха).
Дійсно, якщо в мішаному добутку поміняти місцями два
множники, то це те саме, що у визначнику (40) поміняти місцями два
рядки, а від цього визначник змінює знак.
2°. При циклічній перестановці множників мішаний добуток
не змінюється:
(ах Ь) - с = (Ь х с) • а = (с х а) • Ь.
Справді, при циклічній перестановці міняються місцями два рази
множники, або, що те саме, у визначнику (40) рядок міняється місцем
два рази, а від цього визначник не змінюється.
3°. У мішаному добутку знаки векторного і скалярного добутків
можна міняти місцями:
(а X Т>) • с = а • (Ь X с).
Дійсно, з властивості 2° і комутативності скалярного добутку
маємо
(a xb) • с =(Ь хс) • а = а • (b x с).
У зв'язку з цим мішані добутки (а х Ь) • с (векторно-скалярний
добуток) і а • (Ь X с) (скалярно-векторний добуток) скорочено
позначають так: a be.
63
4°. Модуль мішаного добутку abc
дорівнює об'єму паралелепіпеда,
побудованого на векторах a, b і с,
віднесених до спільного початку:
V =\~аЬ~с\. (41)
О Візьмемо три некомпланарних
—» —» —*
вектори a, b і с і побудуємо на цих
векторах паралелепіпед (рис. 2.33). Об'єм цього паралелепіпеда
V = 5/і,
де S — площа основи, a h — висота. Але S = |а| | b |sin(a. b) =
—» —*
= \a x b\, h
\AA,
Іпр-> _ сІ, тому V = Ia x b\\np_ -cI =
oxfc
= |(a x b) -c\ = \abc\. ф
» >—» -•—•—»
5°. Якщо мішаний добуток abc додатний, то вектори a, b, c
утворюють праву трійку, а якщо від'ємний, то ліву.
О 3 формул (29) випливає, що abc = \а х fc|np_^c. Якщо
a be > 0, то пр-. - с Z> 0 і кут ф = (а х Ь, с) гострий, тобто вектори
а X Ь
а, Ь, с утворюють праву трійку. Якщо abc <с 0, то пр— — с <; 0 , кут
ф = (а X Ь, с) тупий, тому вектори a, b і с утворюють ліву трійку, ф
6°. Вектори а, Ь, с компланарні тоді і тільки тоді, коли їхній
мішаний добуток дорівнює нулю.
— -» -» -»
О Якщо abc = 0, то вектор с перпендикулярний до вектора а X b
—» —*
і лежить з векторами a, b в одній площині. Це означає, що вектори
a, b і с компланарні. Навпаки, якщо вектори a, b, c компланарні, то
можна вважати, що вони лежать в одній площині, тому (а X Ь, с) =
= ~-\ a b с = 0 ф
Властивості 4°—6° виражають геометричний зміст мішаного
добутку трьох векторів.
Приклади
І. Знайти об'єм тетраедра, заданого вершинами А (2; —1; 0), В (5; б; 3), С (3;
2; _2), D (4: 1; 2). _^ _^ _^
О Відомо, що об'єм тетраедра V„BC£), побудованого на векторах АВ, AC, AD,
дорівнює шостій частині об'єму паралелепіпеда, побудованого на цих векторах. То-
64
му за формулою (41) маємо
У=-£-|ЛВ ЙС AD\.
Знаходимо вектори ЙВ = (3; 6; 3), АС = (1; 3; —2), AD = (2; 2; 2).
За формулою (40) дістанемо
3 6 З
V =
1
1 3 —2
2 2 2
1 = 3.
2. Довести, що точки А (0; 1; 2), В (—2; 0; —1) С (—1; 5; 8), D (1; 6; 11) лежать
в одній площині.
О Точки А, В, С, D лежать в одній площині, якщо вектори АВ, AC, AD
компланарні. Знаходимо вектори АВ = (—2; —1; —3), АС = (—1; 4; 6), AD = (1; 5; 9^.
Оскільки мішаний добуток
_2 —1 —З
АВ AC AD =
— і
1
4 6
5 9
= 0,
то за властивістю 6° вектори АВ, АС і Аи компланарні, тому задані точки лежать
в одній площині. •
3. Яку трійку утворюють вектори а, Ь, с, якщо а = (1; 2; 3), Ь = (—1; 0; 2),
7= (1; —2; 5)?
О Оскільки мішаний добуток
1 2 З
abc
= 24>0.
— 1 0 2
1 —2 5
то за властивістю 5° дані вектори утворюють праву трійку. •
Завдання для самоконтролю
1. Що називається мішаним добутком трьох векторів?
2. Як обчислюється мішаний добуток трьох векторів, заданих координатами
в прямокутній системі координат?
3. У чому полягає геометричний зміст мішаного добутку?
4. У чому полягає умова компланарності трьох векторів?
5. Довести, що коли вектори а, Ь, с утворюють праву трійку, то а Ь с> 0, а коли
ліву трійку, то а Ь с < 0.
6. Довести, що об'єм тетраедра дорівнює шостій частині модуля мішаного
добутку трьох некомпланарних векторів, які утворюють ребра тетраедра.
7. Задані вершини тетраедра А (1; 2; 3), В (9; 6; 4), С (3; 0; 4), D (5; 2; 6).
Переконатись, що висота тетраедра, опущена з вершини D, дорівнює ~о-У~2.
8. Довести, що вектори а = (1; 9; — 11), Ь = (—1; 6; —6) Сс = (—2; —3; 5)
компланарні.
9. Довести, що вектори 7= (8; 4; 1), ?= (2; —2; 1), 7= (4; 0; 3) утворюють
ліву трійку векторів.
65
Глава З
ЕЛЕМЕНТИ АНАЛІТИЧНОЇ ГЕОМЕТРІЇ
Аналітична геометрія — це розділ математики, в якому
властивості геометричних об'єктів (точок, ліній, поверхонь, фігур, тіл тощо)
вивчаються засобами алгебри на основі методу координат.
Основоположником аналітичної геометрії вважають Р. Декарта,
який вперше в 1637 р. у своїй книзі «Геометрія» дав чіткий виклад ідеї
методу координат на площині. Р. Декарт запропонував положення
точки на площині відносно заданої системи координат визначати за
допомогою двох чисел—її координат, а кожну лінію на площині
розглядати як множину точок, заданих певною геометричною умовою.
Ця умова записується у вигляді рівняння, яке зв'язує змінні
координати точки, що належить даній лінії, і називається рівнянням цієї
лінії. Такий спосіб дослідження геометричних об'єктів і називають
методом координат.
Наступний важливий вклад в аналітичну геометрію зробив
французький учений Ж.-Л. Лагранж, який вперше в 1788р. у своєму творі
«Аналітична механіка» запропонував положення вектора визначати
за допомогою чисел — його проекцій на координатні осі. Розвиток
ідей Лагранжа привів до створення векторної алгебри.
Метод координат та апарат векторної алгебри широко
використовуються в сучасній аналітичній геометрії.
§ 1. ЛІНІЇ НА ПЛОЩИНІ ТА ЇХНІ РІВНЯННЯ
1.1. Поняття про лінію та її рівняння
Розглянемо рівність
F(x,y) = 0, (\)
яка зв'язує змінні величини х та у.
Рівність (1) називають рівнянням з двома змінними х і у, якщо ця
рівність виконується не для всіх пар чисел х, у, і тотожністю, якщо
вона справедлива для всіх значень х і у. Наприклад, рівності х +
+ у = 0 і х2 + і/2 = 9 є рівняннями, а рівності х + у — (х +
+ у) — 0 та (х + yf — х2 — 2ху — у2 — 0 — тотожностями.
Рівняння (1) називається рівнянням лінії І, яка задана на площині
відносно певної системи координат, якщо це рівняння задовольняють
координати х і у кожної точки лінії / і не задовольняють координати
х і у жодної точки, яка не лежить на цій лінії.
Коли рівняння (1) є рівнянням лінії І, то кажуть, що це рівняння
визначає (або задає) лінію /. Отже, якщо лінія задана рівнянням, то
про кожну точку площини можна сказати, чи лежить вона на цій
лінії, чи не лежить. Якщо координати точки задовольняють рівняння
лінії, то точка лежить на ній, якщо не задовольняють, то не лежить.
66
Лінія, яка задана рівнянням (1) відносно певної системи
координат у площині, є геометричним місцем точок, координати яких
задовольняють задане рівняння.
Змінні х і у в рівнянні (1) лінії І називаються змінними
координатами її точок.
Нехай лінія / відносно системи координат Оху визначається
рівнянням (1). В аналітичній геометрії лінії класифікують залежно від
властивостей цього рівняння. Якщо вираз F (х, у) в рівнянні (1) є
многочленом від змінних х та у (тобто сума скінченного числа
одночленів axkym, де а — сталий коефіцієнт, а показники k і т — цілі
додатні числа або нулі), то лінія, що задається цим рівнянням, називається
алгебраїчною.
Алгебраїчні лінії розрізняють залежно від їхнього порядку.
Степенем одночлена ax*//" називається сума k + m показників при
змінних. Степенем рівняння (1) називається найвищий степінь одночлена,
що входить до його складу. Алгебраїчною лінією n-го порядку
називається лінія, що виражається рівнянням n-го степеня. Порядок
алгебраїчної лінії не змінюється при заміні однієї декартової системи
на іншу.
Лінія, яка не є алгебраїчною, називається трансцендентною. Ми
вивчатимемо лише лінії першого та другого порядків, тобто лінії,
що задаються рівняннями
ах + by -f c = 0 та ах'2 + by2 -f с*У + dx + ey -f f = 0.
Таким чином, лінію на площині можна задати геометрично як
сукупність точок з певними геометричними властивостями і аналітично —
за допомогою рівняння. У зв'язку з цим виникають дві типові для
аналітичної геометрії задачі: скласти рівняння лінії, яка задана
геометрично, і навпаки, встановити геометричний образ лінії, заданої
аналітично. Зазначимо, що в аналітичній геометрії друга задача
розв'язується лише для алгебраїчних ліній першого та другого порядків.
Загальний метод дослідження ліній, заданих рівняннями, дається в
курсі математичного аналізу.
Приклаіи
1. Рівняння у = 2х— 1 визначає на площині пряму лінію.
2. Рівняння Xі — у* = 0 або (х -+- у) (х — у) = 0 визначають дві прямі —
бісектриси координатних кутів.
3. Рівняння х2 + у2 = 0 задовольняє лише одна точка О (0; 0). У подібних
випадках кажуть, що рівняння визначає вироджену лінію.
4. Рівняння ха + у2 + 1 = 0 не визначає ніякого геометричного місця точок,
оскільки для будь-яких значень х та у маємо Xі + у2 + 1 > 0.
1.2. Знаходження рівняння лінії за її геометричними
властивостями
Зупинимося детальніше на задачі про складання рівняння лінії,
ваданої геометрично. Для її розв'язання потрібно встановити геомет-
67
ричну властивість, яку задовольняють лише точки даної лінії, і
записати цю властивість у вигляді рівняння. Таке рівняння пов'язує
вмінні координати точок даної лінії і ті відомі сталі величини, які
геометрично визначають саме цю лінію.
Приклади
1. Скласти рівняння лінії, сума квадратів відстаней кожної точки якої до
точок А (—1; 0) і В (1; 0) дорівнює 4.
О Нехай точка М (х; у) лежить на лінії, тоді за умовою AM1 + ВМг = 4.
Оскільки AM* = (х+ 1)» -т- уа, ВМ* = (* — 1)" + у3, то (* + 1)" + у* + (х — 1)» 4-
+ у* = 4, звідки після спрощень дістаємо шукане рівняння: х* + у* = 1. •
2. Скласти рівняння лінії, кожна точка якої розміщена від точки А (1; 2) в два
рази далі, ніж від точки В (—2; 0).
О Позначимо змінну точку лінії через М {х; у), тоді за умовою AM = 2BM,
тобто
/(*-!)*+to-2)1 = 2^(дс + 2)» + у».
Перетворюючи це рівняння, маємо
3x»+3tf*+ 18*+ 40 4- 11=0. •
1.3. Полярні рівняння лінії
Рівняння Ф (р, ф) = 0 називається рівнянням лінії І в полярних
координатах, або полярним рівнянням, якщо його задовольняють
полярні координати р і ф будь-якої точки лінії / і не задовольняють
координати жодної точки, яка не лежить на цій лінії. Щоб від
полярного рівняння лінії перейти до рівняння (1), потрібно полярні
координати в рівнянні Ф (р, ф) = 0 виразити через декартові (п. 2.3, гл. 2).
Приклади
1. Спіраллю Архімеда називається лінія, описана точкою, що рівномірно
рухається по променю, який сам рівномірно обертається навколо свого початку.
Рівняння спіралі Архімеда (рис. 3.1) має вигляд р = аф, де а> 0 — стала величина.
2. Равликом Паскаля називають криву (рис. 3.2), що задається рівнянням р =
= a cos ф + Ь.
3. Лемніскатою Бернуллі називають криву, що задається рівнянням р =
= а Усов 2ф і має вигляд вісімки (рис. 3.3). У прямокутних координатах рівняння
лемніскати Бернуллі записується складніше: (дга + у2)* — а2 (** — у3) = 0.
4. Трипелюстковою розою називають криву (рис. 3.4), що задається рівнянням
р = a cos Зф.
5. Координатними лініями називають лінії, в яких одна з координат є сталою
величиною. У декартових координатах координатні лінії утворюють два сімейства
прямих, паралельних одній з осей координат (рис. 3.5, а). У полярних координатах
лінії р = const утворюють сімейство концентричних кіл з центром у полюсі, а лінії
Ф'= const — сімейство променів, що виходять з полюса (рис. 3.5, Є).
1.4. Параметричні рівняння лінії
Нехай залежність між змінними х і у виражена через третю змінну
t, тобто
* = *(/), y = y(t). (2)
68
Рис. З.і
Змінна t називається параметром і визначає
положення точки (х; у) на площині.
Наприклад, якщо х = 2< + 1, у = /2, то значенню
параметра t = 3 відповідає на площині точка
(7; 9), тому щох = 2-3+1=7, у = 32 =
= 9.
Якщо / змінюється, то точка на площині
переміщується, описуючи деяку лінію /.
Такий спосіб задання лінії називається
параметричним, а рівняння (2) — параметричними
рівняннями лінії І. Щоб від рівняння (2)
перейти до рівняння (1), потрібно будь-яким способом з двох
рівнянь (2) виключити параметр t (наприклад, з першого рівняння
виразити через х і результат підставити в друге рівняння). Але такий
перехід не завжди доцільний і не завжди можливий, тому доводиться
користуватись параметричними рівняннями (2).
Приклади
1. Розглянемо траєкторію точки кола, яке котиться без ковзання вздовж
нерухомої прямої. Якщо вздовж осі Ох котиться без ковзання коло радіуса /?, то будь-
яка нерухома точка кола описує криву, яка називається циклоїдою (рис. 3.6) і
задається рівнянням
x = R(t — sin/), y = R(\— cos/); — oo</<4-oo.
Якщо параметр /змінюється від 0 до 2л, то дані рівняння визначають першу арку
циклоїди, якщо 2л < / ■< 4л — то другу арку і т. д.
Циклоїда є найпростішою з кривих, які описує на нерухомій площині точка
однієї лінії, що котиться без ковзання по другій лінії.
а>в а=в а<8 / \
У,1
\.у'-const
У.
Ч'СОПЛ
¥=const
Рис. 3.4
Рис. 3.5
69
2. Гіпоциклоїдами (рис. 3.7, а)
та епіциклоїдами (рис. 3.7, б)
називаються криві, які описує точка
кола, яка котиться по нерухомому
колу усередині та ззовні. Вигляд
і рівняння кривих залежать від
відношення радіусів кіл.
Гіпоциклоїда при відношенні
радіусів і : 4 називається астроїдою
(рис. 3.8, а), а епіциклоїда при
відношенні радіусів 1 : 1 називається
кардіоїдою (рис. 3.8, б).
Параметричні рівняння астроїди мають
такий вигляд:
x=Rcas3t, y=Rsinst;
0 < t < 2л.
Кардіоїда задається параметрични-
Рис. 3.7 ми рівняннями
x=2Rcos/(l + cosf), y = 2Rsint (1 -fcos/); 0<г<2л.
Простіше записується полярне рівняння кардіоїди:
p=2fi(l +cos<p).
Усі ці криві широко застосовуються в теорії механізмів.
3. Евольвентною розгорткою кола (від латинського evolvo — розгортати)
називається крива, що задається рівняннями
лс = R(cos/+ /sin 0, у = R (sin t — t cos t); 0</< + oo.
Механічне креслення евольвенти виконується так: на коло туго намотують
гнучку й нерозтяжну нитку, закріплену в точці А (рис. 3.9), і з вільним кінцем М в цій
точці. Відтягуючи нитку за вільний кінець, змотують її з кола; точка М при цьому
описує дугу евольвенти кола, тобто, якщо М —довільна точка евольвенти, то
довжина дуги АВ дорівнює довжині відрізка MB.
Профілі переважної більшості зубців зубчастих коліс окреслені з боків дугами
евольвенти кола.
1,5. Векторне рівняння лінії
—» —>
Лінію можна задати також векторним рівнянням r = r (/), де / —
скалярний змінний параметр. Кожному значенню t0 відповідає ціл-
Рнс. 3.8
Рис. 3,9
70
ком визначений вектор г0 = r (/„) площини. у
Таким чином, якщо параметр t набуває певної
множини деяких значень, то рівняння г =
= /•(/) задає деяку множину векторів. Якщо
від точки 0 (рис. 3.10) площини відкласти
—*- -•
вектори ОМ = г, то геометричне місце точок,
які збігаються з кінцями цих векторів (за
умови, що всі вектори компланарні), визначить на площині деяку
лінію /.
—» —>
Векторному параметричному рівнянню г = т (t) в прямокутній
системі координат Оху відповідають два скалярних рівняння:
х = х(0, y=y(t),
тобто проекціями на осі координат векторного рівняння лінії є її
параметричні рівняння.
Векторне рівняння та параметричні рівняння лінії мають такий
механічний зміст: якщо точка рухається на площині, то вказані
рівняння називаються рівняннями руху точки, а лінія / — траєкторією
точки; параметром / при цьому є час.
1.6. Про залежність рівняння лінії від вибору системи координат
У попередніх прикладах вказувалось, що одну й ту саму лінію
можна задати різними рівняннями. Таким чином, вигляд рівняння
лінії залежить від вибору системи координат або, що те саме, від
розміщення лінії відносно системи координат. Рівняння лінії
змінюється як при переході від однієї декартової системи до іншої, тобто при
перетворенні координат (гл. 2, п. 2), так і при переході від декарто-
вих до будь-яких інших координат (гл. 2, п. 2.5).
У зв'язку з цим виникають такі задачі: як обрати таку систему
координат, у якій рівняння лінії, заданої геометрично, було б
найпростішим, або як замінити систему координат, щоб задане рівняння
лінії спростилось? Подібні задачі ми розглядатимемо при вивченні
ліній другого порядку.
Усе сказане тут про залежність рівняння лінії на площині від
вибору системи координат однаково стосується і рівнянь поверхонь та
ліній у просторі. Про це йтиметься в § 2.
Завдання для самоконтролю
1. Що називається рівнянням з двома змінними? Яка різниця між рівнянням
і тотожністю?
2. Що називається рівнянням лінії на площині?
3. Яка лінія називається алгебраїчною? Що називається порядком
алгебраїчної лінії? Як записуються в загальному вигляді алгебраїчні лінії першого та другого
порядків?
^
" «
-»/
/
к
\w
^^.
—І
71
У
)
fr
і
і
X
а
4. Як знайти рівняння лінії за її геометричними властивостями?
5. Що називається полярним рівнянням лінії? Навести приклади.
6.. Як записуються векторне та параметричні рівняння лінії? У чому полягав
їхній механічний зміст? Навести приклади.
7. Чому вигляд рівняння лінії залежить від системи координат?
8. Побудувати лінії, задані рівняннями в декартових координатах: а) у = 2х +
+ 1; б) Xі + у* = 1; в) у = cos х.
9. Побудувати лінії, задані полярними рівняннями: а) р = 5; б) <р = -£L;
в) р = 2 cos «p.
10. Побудувати лінії, задані параметричними рівняннями: а) х = /— 1, у =
= 2/ + 1; б) х = -g- , у = ta; в) х = 2cos t, y = 2slnt.
11. Точка М рухається так, що під час руху залишається весь час у два рази
ближчою до А (1; 0), ніж до В (4; 0). Скласти рівняння її траєкторії.
12. Скласти рівняння лінії, кожна точка якої рівновіддалена від точки А (3; 0)
і прямої х + 3 = 0.
В ідпЬвід і. 8. Рис. 3.11. 9. Рис. 3.12, 10. Рис. 3.13. 11. х? + у* = 4.
12. у3 = 12л.
72
§ 2. ПОВЕРХНІ І ЛІШІ В ПРОСТОРІ. ЇХНІ РІВНЯННЯ
2.1. Поверхня та її рівняння
Розглянемо співвідношення
F(x,y,z) = 0 (3)
між трьома змінними величинами х, у, г.
Рівність (3) називають рівнянням з трьома змінними х,у,г, якщо
ця рівність не виконується для всіх трійок чисел х, у, г, і тотожністю,
якщо вона справджується при будь-яких значеннях х, у, г.
Припустимо, парою значень х = х0 і у = у0 з рівняння (3)
визначається єдине значення г = г0. Упорядкована трійка чисел х0, у0,
г0 у заданій прямокутній системі координат визначає точку М (х0;
Сукупність всіх розв'язків z рівняння (3), які відповідають певним
значенням х та у, визначає в просторі деяке геометричне місце точок
М (х; у; г), яке називається поверхнею (рис. 3.14), а рівняння (3) —
рівнянням цієї поверхні.
Отже, рівняння (3) називається рівнянням поверхні відносно
заданої системи координат, якщо це рівняння задовольняють координати
х, у, г кожної точки даної поверхні і не задовольняють координати
х, у, г жодної точки, яка не лежить на цій поверхні.
Поверхнею, заданою рівнянням (3) відносно певної системи
координат, називається геометричне місце точок М (х; у; г), координати
яких х, у, г задовольняють дане рівняння.
Якщо вираз F (х; у; г) в рівнянні (3) є многочленом від
х, у, г, тобто сумою скінченного числа одночленів ахкутгр із сталими
коефіцієнтами а і невід'ємними цілими показниками k, m, р, то
поверхня, яка задається цим рівнянням, називається
алгебраїчною.
Неалгебраїчні поверхні називаються трансцендентними.
Порядком алгебраїчної поверхні називається степінь многочлена, яким
задається дана лінія.
Ми розглядатимемо лише алгебраїчні поверхні першого порядку
і деякі алгебраїчні поверхні другого
порядку. Отже, як і лінію на площині, поверхню
в просторі можна задати геометрично і
аналітично. Якщо поверхня задана геометрично,
то виникає задача про складання рівняння
цієї поверхні і, навпаки, якщо поверхня
задана рівнянням, то постає задача про її
геометричні властивості.
Приклад
Скласти рівняння геометричного місця точок, рів-
іювіддален.іх від точок А (1; —і; 2) і В (0; —2; 3).
73
гк
F,(x,\j,z)'L
О Нехай точка М (х; у, г) лежить на заданій
поверхні. Тоді за умовою AM = ВМ, тобто
F2(x,tj,z)*0
Рис. 3.15
(4)
V (х— 1)а + (у + 1)» + (г - 2)2 =
= /(*-0)a + (i/ + 2)a + (z-3)a,
звідки після спрощень дістаємо шукане рівняння
2х + 2у — 2г + 7 = 0. •
2.2. Рівняння лінії в просторі
Лінію / в просторі можна розглядати
як лінію перетину двох поверхонь, або
геометричне місце точок, що знаходяться
одночасно на двох поверхнях; отже, якщо Fг (х, у, г) = 0 і F2 fa. !/•
z) = 0 рівняння двох поверхонь, які визначають лінію / (рис. 3.15),
то координати точок цієї лінії задовольняють систему двох рівнянь
з трьома невідомими:
F! (х, у, z) = 0;
Fа {х, У, z) = 0.
Рівняння системи (4) сумісно визначають лінію / і називаються
рівняннями лінії в просторі.
Лінію в просторі можна розглядати також як траєкторію рухомої
точки. При такому підході лінію в просторі задають векторним
параметричним рівнянням
7=7(/). (5)
Векторному параметричному рівнянню (5) відповідають скалярні
параметричні рівняння
х = *(<), y=y(t), z = z(0
— проекції вектора (5) на осі координат. Таким чином, векторні
рівняння лінії на площині і в просторі мають однаковий вигляд і
однакову суть, а відповідні параметричні рівняння відрізняються лише
кількістю рівнянь, яка залежить від числа базисних векторів на площині
і в просторі.
Приклади
1. Якщо деяка точка М рівномірно рухається по твірній кругового циліндра,
а сам циліндр рівномірно обертається навколо своєї осі, то точка М описує криву,
яка називається гвинтовою лінією.
Радіусом гвинтової лінії називають радіус циліндра, а її віссю — вісь циліндра.
Відстань, на яку зміститься точка вздовж твірної при повному оберті циліндра,
називається кроком гвинта і позначається через h. Щоб вивести рівняння гвинтової
лінії, візьмемо вісь циліндра за вісь Ог, а площину Охг — за початок відліку кута
повороту циліндра (рис. 3.16, а).
Нехай ^NOB = / і М (х\ у; г) — довільна точка гвинтової лінії. Координати
х І у точки М збігаються з координатами точки В (рис. 3.16, б): х = У? cos /, у =
74
Рис. 3.16
Рис. 3.17
•= R sin /, де R — радіус циліндра. Щоб визначити координату z, побудуємо роз-
гортку циліндра NNJ)^ (рис. 3.16, в), в якій NNt= 2nR, NiDt = ND = h,
NB = Rt, BM = z. З подібності трикутників NMB і NDlN1 дістанемо
Rt
2nR
2n
Таким чином, параметричні рівняння гвинтової лінії мають вигляд
h
х = R cos t, у = R sin t, z = —nzr t
-t — -» і,/ -•
або у векторній формі r (0 = R cos / і + R sin // + __ k.
2. Лінія, яка задається рівняннями
f *a + «/" + z» = «2;
Ua+«/a+Px = 0,
утворюється при перетині циліндричної та сферичної поверхонь (§ 7) і називається
лінією Вівіані (рис. 3.17).
Завдання для самоконтролю
1. Що називається рівнянням поверхні?
2. Що називається алгебраїчною поверхнею л-го порядку?
3. Як аналітично задати лінію, яка утворюється при перетині двох
поверхонь?
4. Як аналітично задати лінію, яка є траєкторією рухомої точкн?
5. Упевнитись, що точка А (і; 0; —1) лежить на поверхні Xі + у* + 2г* — 3 =
■= 0, а точка В (1; 2; 0) — не лежить на ній.
6. Пересвідчитись, що точка А (і; 2; 3) лежить на лінії, яка визначається
системою рівнянь
(х* + ху—г* + 6 = 0;
1 х + 2у — Зг + 4 = 0.
7. Вивести рівняння геометричного місця точок, суми відстаней яких від двох
даних точок А (0; 0; —4) і В (0; 0; 4) — величини сталі і дорівнюють І0.
Xі у' г*
Відповідь, 7. —g— +—g— + ~25~ = '■
75
§ 3. ПРЯМА НА ПЛОЩИНІ
3.1. Різні види рівнянь прямої на площині
Пряма на площині геометрично може бути задана різними
способами: точкою і вектором, паралельним даній прямій; двома точками;
точкою і вектором, перпендикулярним до даної прямої, тощо. Різним
способам задання прямої відповідають у прямокутній системі
координат різні види її рівнянь.
Нехай пряма (на площині чи в просторі) проходить через задану
—>
точку М0 паралельно заданому ненульовому вектору s, який
називається напрямним вектором прямої. Пряма має безліч напрямних
векторів, їхні відповідні координати пропорційні. Точка М0 і її
напрямний вектор цілком визначають пряму, тому що через точку М0 можна
провести лише одну пряму, паралельну вектору s. Складемо рівняння
цієї прямої. Позначимо через М (рис. 3.18) довільну точку прямої і
—> —>- —» —>-
розглянемо радіуси-вектори г0 = ОМ0 та г = ОМ точок М0 та М і
вектор М0М, що лежить на даній прямій.
—>. _»-*_» _»_►_►
Оскільки вектори М0М = г — г0 і s колінеарні, то г — r0 = st,
звідки
7=70+1<. (6)
Змінна t у формулі (6) може набувати довільних дійсних значень і
називається параметром, а рівняння (6) називається векторним
параметричним рівнянням прямої.
Векторне параметричне рівняння прямої має однаковий вигляд і
на площині, і в просторі.
Якщо пряма / розглядається на площині і задається точкою
М0 (х0; у0) та напрямним вектором s = (т; п), то, прирівнюючи відпо-
—* —» —»
відні координати векторів г та r0 + st за формулою (6), маємо
х = х0 + ті, у=у0 + nt, (7)
звідки
х — *о У —У о /о\
т ~ п * '
Рівняння (7) називаються параметричними рівняннями прямої, а
рівняння (8) — її канонічним рівнянням.
Зокрема, якщо пряма проходить через точку Ма (х0; у,) паралельно
осі Ох, то її напрямний вектор s = (m; 0), тому рівняння (8) набирає
вигляду
х— *р _ У — Ув .
т 0
76
Як відомо, добуток середніх членів пропорції дорівнює добутку
крайніх членів. Тому маємо {у — у0) т = (х — х0) • 0, звідки у = у0.
Це і є рівняння прямої, яка паралельна осі Ох.
Аналогічно, якщо пряма проходить через точку М0 (х0; у0)
паралельно осі Оу, то її рівнянням є х = х0.
Виведемо рівняння прямої з кутовим коефіцієнтом. Якщо пряма
не перпендикулярна до осі Ох, то рівняння (8) можна записати у
вигляді
У-Уо = -%-(х-х0) або y = JLx + [y0—!Lx9y
Позначивши — = k, у0 £- х = Ь, дістанемо
y — y0=k(x — x0) (9)
або
y = kx+b. (10)
Відношення k = — = tg а, де а — кут, утворений прямою з
додатним напрямом осі Ох (рис. 3.19), називається кутовим
коефіцієнтом прямої, а величина b = у0 х0 — ордината точки
перетину прямої з віссю Оу Якщо пряма проходить через початок
координат, то b = 0 і рівняння такої прямої має вигляд
y = kx. (11)
Рівняння (9) називається рівнянням прямої, яка проходить через
задану точку і має заданий кутовий коефіцієнт, а рівняння (10) —
рівнянням прямої з- кутовим коефіцієнтом.
Рівняння прямої, яка проходить через дві задані точки М1 {хц у-д
та М3 (ха; у2), дістанемо з рівняння прямої, що проходить через точку
—>
Мх і має напрямний вектор s =
Рис. 3,18 Рнс. 3.19
77
Рівняння (12) називається рівнянням прямої, яка проходить через дві
задані точки.
Зокрема, якщо пряма прохо ить через точки А (а; 0) та В (0; Ь),
тобто відтинає на осях відрізки а та Ь (рис. 3.20), то з рівняння (11) маємо
S-U*T+I = '- <13>
Рівняння (13) називається рівнянням прямої у відрізках на осях.
Розглянемо рівняння прямої, яка проходить через задану точку
Мг fa, г/і) перпендикулярно до заданого ненульового вектора п =
= (А: В).
Візьмемо на прямій / довільну точку (рис. 3.21) М (х; у) і введемо
вектор МгМ = (х — Хі, у — уг). Оскільки вектори п і МхМ
перпендикулярні, то їх скалярний добуток дорівнює нулю, тобто
A{x-Xl) + B{y-yJ = 0. (14)
Рівняння (14) називається рівнянням прямої, яка проходить через
задану точку перпендикулярно до заданого вектора.
Вектор п — (А; В) називається нормальним вектором прямої.
Пряма має безліч нормальних векторів. Усі вони паралельні, отже,
їхні відповідні координати пропорційні.
3.2. Загальне рівняння прямої та його дослідження
Усі одержані вище рівняння прямої лінії є рівняннями першого
степеня відносно змінних х і у, тобто лінійними рівняннями. Отже,
рівняння будь-якої прямої, яка лежить в площині Оху, є лінійним
рівнянням відносно х і у.
Покажемо, що правильним буде й обернене твердження: кожне
лінійне рівняння
Ах + Ву + С =0 (15)
з двома змінними х і у визначає на площині в прямокутній системі
координат п яму лінію.
78
Дійсно, якщо (jelt уг) — будь-який розв'язок рівняння (15), то
Ах1+Ву1+С = 0. (16)
Віднімаючи почленно від рівняння (15) рівність (16), дістаємо
А(х-Хі) + В(у-Уі)=0. (17)
Рівняння (17) еквівалентне рівнянню (15) і згідно з формулою (14)
визначає на площині Оху пряму, яка проходить через точку Мі (хи
ух) перпендикулярно до вектора п = (А; В), тобто рівняння (15)
також визначає пряму і називається загальним рівнянням прямої.
Коефіцієнти А і В при невідомих х і у загального рівняння є
координатами її нормального вектора.
Кожне з рівнянь (7) — (14) зводиться до рівняння (15), отже,
кожна пряма лінія задається рівнянням (15), і навпаки, кожне рівняння
(15) визначає на площині Оху пряму. Це означає, що кожна пряма —
це лінія першого порядку, і навпаки, кожна лінія першого порядку
є пряма.
Дослідимо загальне рівняння, тобто розглянемо окремі випадки
розміщення прямої в системі координат Оху залежно від значень
коефіцієнтів А, В і С.
1. Якщо А Ф0, В Ф 0, С ф 0, то рівняння (15) зводиться до
рівняння прямої'у відрізках на осях
—СІ А ^ —СІВ ~ '
тобто пряма перетинає осі координат в точках з координатами І — -=-; 0І
2. Якщо А = 0, то пряма By + С = 0 паралельна осі Ох і
проходить через точку (0; g-j, оскільки нормальний вектор п — (0; В)
прямої перпендикулярний до осі Ох, а координати даної точки
задовольняють рівняння прямої.
3. Аналогічно попередньому, якщо В = 0, то пряма Ах + С = 0
паралельна осі Оу і проходить через точку І — -т-; 01.
4. Якщо С = 0, то пряма Ах -f By = 0 проходить через початок
кпординат, тому що координати точки О (0; 0) задовольняють рівняння
прямої.
5. Якщо А = С = 0, то згідно з попереднім рівняння By = Оабо
у = 0 визначає вісь Ох.
6. Якщо В = С = 0, то рівняння Ах = 0 або х = 0 визначає
вісь Оу.
79
3.3. Кут між двома прямими. Умови паралельності і
перпендикулярності двох прямих
Кут між двома прямими вимірюється кутом між їхніми напрямними
векторами. При цьому слід зазначити, що, вибравши на одній із
прямих напрямний вектор, напрямлений в протилежну сторону,
дістанемо другий кут, який доповнює перший до л.
а) Нехай прямі /j та /2 задано канонічними рівняннями
* — х, _ у—у, . х— х2 _ у — у2
і ф — кут між цими прямими: ф = (llt /g), 0 •< ф < я. Оскільки
вектори S] = (тх; Пі) і Sa = (т2; п£ є напрямними векторами даних пря-
—* —у
мих (рис. 3.22) і ф = (slt s2), то за формулою (36) (див. гл. 2) маємо
—> —*
С05ф= V *2 = ЩЩ + пЛ _ (lg)
І sL | | s31 Уіи» + в»Уія| + і^
—• —»
Якщо прямі /j і /2 паралельні, то вектори Sx і Sg теж паралельні, тому
їхні координати пропорційні, тобто
Jh_=Jh_ (19)
— умова паралельності двох прямих. Якщо прямі /х і /2 перпендикуляр-
■+ —»
ні, то вектори sx і Sjj теж перпендикулярні і їхній скалярний добуток
дорівнює нулю, отже,
т^а + п^а = 0 (20)
— умова перпендикулярності двох прямих.
б) Нехай тепер прямі /х і /2 задані загальними рівняннями А^х +
+ Бхі/ + Сх = 0 і Л2х + В2у + С2 = 0, тоді кут ф між ними
—*
(рис. 3.23) дорівнює куту між їхніми нормальними векторами п^ =
—У
— (Аі, Вг) і л2 = (Л2; В2); тому аналогічно випадку а) дістанемо:
1) формулу для кута ф між прямими /] і /2:
со5ф = ^^А+^ 'В* ; (21)
Va* + b]VaI + b*
2) умову паралельності прямих /х і /2:
-£=тЬ (22)
3) умову перпендикулярності прямих /х і /е:
Л1-Л2 + В1.В2=0. (23)
80
Рис. 3.22
Рис. 3.23
Нехай прямі /х і /2 задані рівняннями з кутовими коефіцієнтами
у = hx + Ьі, «/ = k2x + *>2. де *! = tg а„ fc2 = tg aa — кутові
коефіцієнти, то з рис. 3.24 видно, що
tg а2 — tg ах
tg<P=tg(a2 — ctx) =
1^ф=-
l-t-tgaitga,,
fe2~ ^1
1 + М.
(24)
Зауважимо, що формула (24) визначає кут, на який треба
повернути пряму Іх (проти годинникової стрілки), щоб вона збіглась з прямою
/2. Якщо прямі /х і /2 паралельні, то ф = 0 і tg ф = 0, тому з формули
(24) маємо k2 — &і = 0. Отже, умовою паралельності двох прямих
є рівність їхніх кутових коефіцієнтів:
kx = ft,. (25)
Якщо прямі Іх і /2 перпендикулярні, то ф = 90° і tg ф не існує,
тому що знаменник дробу (24) дорівнює нулю. Таким чином, умова
перпендикулярності прямих має вигляд
ktk2 + 1 = 0 або ft2 = ^—. (26)
«і
Формули (18), (21) і (24) дають змогу визначити один із двох
суміжних кутів, які утворюються при перетині двох прямих. Другий кут
дорівнює я — ф. Іноді вирази справа в цих формулах записують по
модулю, тоді визначається гострий кут між прямими.
і/,
0
1
Ж/
/І
У
\І2
X
Рис. 3.24
81
Приклади.
1. Знайти кут між прямими 3* — \у + 1 = О і 5лг — \2у + 3 = 0.
За формулою (21) маємо
З-5 +(-4)- (-12)
cos <р узі + (_4)а у^ + (_j2)2
<р = arccos0,96.
15 + 48
5- 13
63
= -gB-«0,96,
2. Скласти рівняння прямої, що проходить через точку (—8; 1) паралельно
прямій 2х — у + 7 = 0.
О Приведемо задане рівняння до вигляду (10): у = 2х — 7, отже, кутовий
коефіцієнт прямої k = 2.
Оскільки шукана і задана прямі паралельні, то за умовою (25) їхні кутові
коефіцієнти рівні між собою, тому, скориставшись рівнянням (9). дістанемо у — 1 =
= 2 (х + 8) або у — 2х — 17 = 0. •
3. Медіани ВМ і CN (рис. 3.25) трикутника ABC лежать на прямих х + у = З
і 2х + Зу = 1, а точка А (1; 1) — вершина трикутника. Скласти рівняння прямої
ВС.
О Розв язуючи систему рівняння \ „ знаходимо точку перетину
І 2х+3и = 1,
АО 2
медіан: 0 (8; —5). З відношення-j=j- = -у- = Я, і формул (24) (гл. 2) дістанемо коор-
1 + 2хр г 1 + 2ур 23
дииати точки Р: 8 = ... . —5 = . . . : хр = -ІІ- , уР '
■ —8. Оскіль-
1+2 ' " 1+2
ки точки В 1 С лежать на заданих прямих, то їхні координати задовольняють
задані рівняння. Точка Р ділить відрізок ВС пополам, отже, маємо систему рівнянь
ХВ + ХС „ 23
2 2
Ув + Ус
:-8: хв + ув = 3; 2*с + 3ус=1,
звідки хс=11, Ус = —7. Пряма ВС проходить через точки Р [~к~ '• —81 І
х — 23/2 у + 8
С(11; —7), тому за формулою (12) дістанемо .. gQ/o = 7 . g або 2х-\-у —
-15 = 0. «
3.4. Відстань від точки до прямої
Нехай задано пряму / рівнянням Ах + By + С = 0 і точку
М0 (х0; «/„). Відстань d (рис. 3.26) точки М0 від прямої І дорівнює
модулю проекції вектора МгМ0, де Mt (xx; yj —
довільна точка прямої /, на напрям
нормального вектора п = (А; В). Отже,
|ЛуЙ„-"І _
|п|
_ ІЛхр + буо-М-ВУїІ
V^2 + в2
Рис 3.26 Оскільки Ах1 + Ву± + С = 0, то —Лл^ —
82
d = J np->M гМ01
— Bi/j = С, тому
d = І Ах0 + бу0 + С | (2?.
V^ + fi51
Зауваження. Число d завжди додатне, бо це відстань.
Відхиленням б точки Л10 (*о". Уо) від прямої Ах -+ By + С = 0
називається додатне число б = d, якщо точки М0 і О (0; 0) лежать по різні
сторони від прямої, і від'ємне число б = —d, якщо ці точки лежать по
один бік від неї. З формули (27) випливає, що відхилення
6_ Ахв + ВУв + С
± VA2 + Ва '
де знак знаменника має бути протилежний до знака С.
Приклад
Знайти площу квадрата, дві сторони якого лежать на прямих іх — Зу —10 = 0
і 8* — 6у + 15 = 0.
О Оскільки задані прямі паралельні, то довжину d сторони квадрата можна
знайти як відстань від довільної точки однієї прямої до другої прямої.
Знайдемо яку-небудь точку иа першій прямій. Нехай, наприклад, х= 1, тоді
4 • 1 —Зу— 10 = 0, звідки у = —2. Отже, точка Мп (1; —2) належить першій
прямій.
За формулою (27) знайдемо відстань від точки Л10 до другої прямої:
І8- 1-6 -(-2) + 15| __7_
/8* + (—6)а 2 •
49
Площа квадрата S = сР = —т— . 9
Завдання для самоконтролю
1. Що називається напрямним вектором прямої?
2. Скласти рівняння прямої, яка проходить через задану точку паралельно
заданому вектору.
3. Вивести канонічні та параметричні рівняння прямої на площині.
4. Вивести рівняння прямої з кутовим коефіцієнтом та рівняння прямої, що
проходить через дві точки.
5. Вивести рівняння прямої у відрізках на осях та загальне рівняння прямої.
6. Довести, що всяке рівняння Ах + By + С = 0 визначає на площині Оху
пряму лінію. Дослідити загальне рівняння прямої.
7. Як знайти кут між двома прямими? Сформулювати і записати умови
паралельності та перпендикулярності двох прямих.
8. Вивести формулу для знаходження відстані точки від прямої.
9. Вказати хоча б один напрямний вектор прямої, яка: а) має кутовий
коефіцієнт k\ б) задана рівнянням Ах + By + С = 0.
10. Вказати хоча б один нормальний вектор кожної з прямих у задачі 9.
11. Задано три точки: А (5; 2), В (9; 4) і С (7; 3). Показати, що вони лежать на
одній прямій і написати її рівняння.
12. Знайти кут між прямими х = і 1 2х — у — 1 = 0.
13. Точка А (2; 0) є вершиною правильного трикутника, а протилежна їй
сторона лежить на прямій х + у — 1 = 0. Скласти рівняння двох інших сторін.
83
І4._Скластн рівняння прямих, які знаходяться від точки А (І; —2) на відстані
d = |А20 і паралельні грямій 2х — у — 5=0.
ІБ. Довести, що пряма Зх + 2у — 6=0 перетинає відрізок АВ, де А IV, 1),
В (2; 2).
Відповіді. 9. (1; ft); (В;— А). 10. (ft; —І); (А; В). 12. arccos—^.
У 5
13. х- (2 + \'3)у — 2=0, х— (2 — у'З) j, — 2 = 0. 14. 2* — у — 14 =■ 0, 2х —
У + 6 = 0. 15. Вказівка. Упевнитись, що точки А та В лежать по різні боки від
прямої.
f 4. ПЛОЩИНА В ПРОСТОРІ
4.1. Загальне рівняння площини та його дослідження
Нехай в прямокутній системі координат Oxyz задано площину П
(рис. 3.27) точкою М0 {х0; у0\ z0) і вектором п = (А; В; С),
перпендикулярним до цієї площини. Візьмемо на площині точку М {х; у; г) і
знайдемо вектор М0М = (х — х0; у — у0; г — z0). При будь-якому
положенні точки М на площині П вектори п і М0М взаємно
перпендикулярні, тому їхній скалярний добуток дорівнює нулю, тобто
A(x-xo) + B(y-yo) + C(z-z0) = 0 (28)
або
Ах + By + Cz + D = 0, (29)
де D = — Ах0 — Ву0 — Cz0.
Рівняння (28) називається рівнянням площини, яка проходить
через точку М0 (х0; у0; г„) перпендикулярно до вектора п — (А; В; С),
а рівняння (29) — загальним рівнянням площини.
Вектор п ~ (А; В; С) називається нормальним вектором площини.
Кожна площина має безліч нормальних векторів. Усі вони паралельні
між собою, а їхні координати пропорційні. Отже, всяка площина
в прямокутній системі координат визначається рівнянням першого
степеня.
Покажемо тепер справедливість
оберненого твердження: всяке рівняння першого
степеня
Ах + By + Cz + D = 0 (30)
s трьома змінними х, у і z задає в
прямокутній системі координат Oxyz площину.
Нехай задано довільне рівняння (30) і (х0,
£/о. z0) — будь-який розв'язок цього рівняння,
тобто
Рис. 3.27 Ах0 + Ву0 + Cz0 + D = 0. (31)
84
Віднявши від рівняння (ЗО) рівність (31), дістанемо
A(x~xo) + B{y~yo) + C(z~zo)=0. (32)
Рівняння (32) еквівалентне рівнянню (ЗО) і згідно з формулою
(28) визначає в просторі площину, яка проходить через точку М0 (*о'.
у0\ z0) перпендикулярно до вектора п = (Л; В; С). Отже, рівняння
(ЗО) також визначає площину.
Таким чином, кожне алгебраїчне рівняння першого степеня із
змінними х, у і z є рівнянням площини.
Дослідимо загальне рівняння площини.
1. Якщо в рівняннях (30) D = 0, то воно набирає вигляду Ах +
-f By -f Cz = 0. Це рівняння задовольняє точка О (0; 0; 0). Отже,
якщо в загальному рівнянні площини відсутній вільний член, то така
площина проходить через початок координат.
2. Якщо А = 0, то рівняння (ЗО) набирає вигляду By + Cz +
+ D = 0 і визначає площину, нормальний вектор якої п = (0; В; С)
перпендикулярний до осі Ох. Отже, якщо в загальному рівнянні
площини коефіцієнт при змінній х дорівнює нулю, то таке рівняння
визначає площину, що паралельна осі Ох.
Аналогічно рівняння Ах -f Cz -\- D = 0 визначає площину,
паралельну осі Оу, а рівняння Ах + By + С = 0 — площину,
паралельну Oz.
3. Якщо А = 0, В = 0, С Ф 0, D ф 0, то рівняння (30) набирає
вигляду Cz +D = 0 або z = ^-. 3 випадку 2 випливає, що це
рівняння визначає площину, яка паралельна осям Ох та Оу
(коефіцієнти при х і у дорівнюють 0), тобто площину, паралельну площині
Оху.
Аналогічно площина By + D = 0 паралельна площині Oxz, a
площина Ах -f D = 0 паралельна площині Оуг.
4. Якщо в рівнянні (30) A =D = 0, то площина By + Cz = 0
проходить через вісь Ох. Справді, згідно з попереднім, при D = 0
площина проходить через початок координат, а при А = 0 — паралельно
осі Ох, отже, проходить через вісь Ох.
Аналогічно площина Ах + Cz = 0 проходить через вісь Оу, а
площина Ах + By = 0 — через вісь Oz.
5. Якщо в рівнянні площини А — В — D — 0, то площина Cz =
= 0 або z = 0 збігається з площиною Оху. Аналогічно площина Ах =■
= 0 або х = 0 збігається з площиною Оуг, а площина у — 0 — з
площиною Oxz.
Приклади
І. Скласти рівняння площини, яка проходить через точку М (1; 2; 3) перпеиди-
—»
кулярио до вектора л= (—1; —3; 1),
85
або
О Шукане рівняння знаходимо за формулою (28):
-1 • (х- 1) + (-3) . (у - 2) + 1 ■ (z -3) = 0,
х + 3у~ z — 4 = 0. •
2. Скласти рівняння площини, яка проходить через точку М0 (—3; 4; 5)
перпендикулярно до осі Оу.
О Орт / = (0; 1; 0) перпендикулярний до площини, тому його можна
розглядати як нормальний вектор. Отже, шукане рівняння має вигляд
0- (х-Ь 3) + 1 • (У — 4) +0- (z — 5) = 0 або у = 4. •
4.2. Рівняння площини, що проходить через три точки. Рівняння
площини у відрізках на осях
Нехай на площині П задано три точки: М1 (xx; yt; гх), М2 (х2;
Уі'і z2), Ms {xs; у3; zs), які не лежать на одній прямій. Ці точки
однозначно визначають площину. Знайдемо її рівняння.
Візьмемо на площині довільну точку М (х; у; z) і знайдемо вектори
М±М3 = (х3
Уз—Уі\ г3 —Zi),
МіМ = {х — xs, у — Уі, z— гг), М1М2 = (х2 — х1; у2~Уі, z2 — z1).
Ці вектори лежать в площині /7, тобто вони компланарні.
Оскільки мішаний добуток компланарних векторів дорівнює нулю, то
М^ММЇМіМЇМя = 0 або
х-
Х2 '
■*1
■х1
г — гл
z» — z,
= 0.
(33)
У — Уі
Уг — Уі
Уз —У і
Маємо рівняння площини, що проходить через три точки. Зокрема,
нехай площина відтинає на осях Ох, Оу, Oz відрізки а, Ь, с, тобто
проходить через точки А (а; 0; 0), В (0; Ь; 0) і С (0; 0; с). Підставляючи
координати цих точок у формулу (33) і розкриваючи визначник,
дістанемо
хЬс + уас + zab — abc = 0 або — + -j--{
1.
(34)
Рівняння (34) називається рівнянням площини у відрізках на осях.
Ним зручно користуватись при побудові площини.
Приклади.
і. Написати загальне рівняння площини, що проходить через точки ML (1; 2; 3),
Ма (-1; 0; 2), Мя (-2; 1; 0).
О Підставимо координати точок у рівняння (33):
х—1 у —2 г — З
— 2 — 2 —1
— З —1 —З
0.
86
Рис. 3.29
Розкладемо визначник за елементами першого рядка:
|_2 —II 1 — 2 — 11 1—2—2
(х — 1) \ — (у — 2) +(z — 3)
1 —1—3 —3 — 3 v —3—1
= 0.
Обчислюючи визначники другого порядку, знаходимо шукане рівняння:
(х— 1)5 — (у — 2)3 + (г — 3) (— 4) = 0 або 5х — Зу — 4z + 13 = 0. •
2. Побудувати площину Зх — 2у + 4z — 12 = 0.
О Запишемо задане рівияиня у відрізках на осях. Для цього перенесемо у
праву частину вільинй член і поділимо иа нього обидві частини рівняння:
X
4^—6
+
= 1.
8ВІДКИ о = 4, b = —6, с = 3.
Знаючи відрізки, які відтинає площина иа осях координат, легко побудувати
площину (рис. 3.28). •
4.3. Кут між двома площинами. Умови паралельності і
перпендикулярності двох площин
Нехай задано дві площини П1 і П2 відповідно рівняннями
Ахх + ВіУ + Cxz + D1=0, А2х + В^ + C2z + D2 = 0.
Двогранний кут між площинами вимірюється лінійним кутом,
який дорівнює куту між нормальними векторами nx = (A{; Bt; Q)
і п„ = {А2; В2, С2) цих площин (рис. 3.29). Отже, з формули (36)
(гл. 2) маємо
cos<p
"і ■ п2
AtA2 + В,В2 + CjC,
(35)
1ПіІІ«2І |Л1? + ЙЇ + С2]/\4|-ЬВ22 + С2
Якщо площини Пх і П2 перпендикулярні, то скалярний добуток їхніх
нормальних векторів дорівнює нулю, тобто рівність
ЛИ. + ВД. + СА-0 (З6)
є умовою перпендикулярності площин.
87
Якщо площини /7X і /72 паралельні, то координати нормальних
векторів пропорційні, тобто умовою паралельності площин є рівність
відношень:
■^і __ Ву __ Сх ,gp.
А% og Cg
Приклад
Знайти кут між площинами 2* + у + Зг — 1 = 0 і х + у — г + 5=0.
О За формулою (35) маємо
2 ■ 1 + 1 ■ 1 + 3 • (- 1) п
cos ф = —г —, — = 0,
Y /22+12 +3а }А12+12 + (— І)2
отже, дані площини перпендикулярні, ф
4.4. Відстань від точки до площини
Якщо задане рівняння Ах + By + Cz + D — 0 площини /7 І
точка М0 (х0\ у0'> г0), що не лежить на цій площині, то відстань d від
точки М0 до площини /7 знаходиться за формулою
d = І Ахо + вУо + Сго + DІ /38\
Доведення формули (38) таке саме, як і формули (27).
Приклад
Знайти висоту АН піраміди, заданої своїми вершинами А (—1; 2; —1), В (1; 0і
2), С (0; 1; —1), D (2; 0; —1).
О За формулою (33) знаходимо рівняння площини, що проходить через точки
В, С, D:
|х—1 у — 0 г— 2|
■0,
X— 1
— 1
1
У — 0 г—2
1 —3
0 —3
звідки Здг + бу + z — 5=0.
Висоту АН знайдемо як відстань точки А (—1; 2; —1) від площини BCD за
формулою (38):
З- (-1) +6 -2+1 -(-0-3 5 _
АН =
/З2 + 6а + І2 |^4її
Завдання для самоконтролю
1. Довести, що кожна площина може бути виражена лінійним рівнянням
відносно прямокутної системи координат Охуг і, навпаки, кожне лінійне рівняння з
трьома невідомими х, у і z визначає у просторі площину.
2. Записати і дослідити загальне рівняння площини.
3. Вивести рівняння площини, яка проходить через три точки.
4. Вивести рівияиня площини у відрізках на осях.
5. Як обчислити кут між двома площинами? Які умови паралельності і
перпендикулярності двох площин?
6. Вивести формулу для обчислення відстані від точки до площини.
88
7. Задано точки Мі (І; 2; —1) І Мг (0; 3; 1). Скласти рівняння площини, яка
проходить через точку УИ, перпендикулярно до вектора МіМ2-
8. Скласти рівняння площини, яка проходить через точку А (1; 0; —1)
паралельно векторам о = (5; 0; 1) і Ь = (0; 1; —1).
9. Знайти відстань між площинами 2х — у + 1г + 9 = 0 і Ах — 2« + Аг —
— 21 = 0.
Відповіді. 7. х — у — 2г — 1 = 0. 8. х — by — 5г — 6 = 0. 9. 6,5.
S б. ПРЯМА ЛІШЯ В ПРОСТОРІ
5.1. Різні види рівнянь прямоТ в просторі
Як уже зазначалося в § 3, коли пряма задана точкою і напрямним
вектором, то її векторне параметричне рівняння (як на площині,
так і в просторі) має вигляд (6): r = r0 + st, де т— радіус-вектор
змінної точки М прямої; г0 — радіус-вектор заданої точки М0; s — нену-
льовий напрямний вектор прямої; і — параметр.
Нехай у просторі в прямокутній системі координат задано пряму
точкою М0 (х0; у0; г0) і напрямним вектором s = (m; я; р). Візьмемо
довільну точку М (х; у; г) цієї прямої (рис. 3.30). Тоді аналогічно
тому, як було знайдено формули (7), (8) і (12), дістаємо:
1) параметричні рівняння прямої в просторі:
x = x0 + mt, y=y0 + nt, z=z0 + pt; (39)
2) канонічні рівняння прямої в просторі:
х — *0 _ У —У о _ г —z0 .
т
(40)
3) рівняння прямої в просторі, яка проходить через дві задані точки
Мі (*х; Уі' zi) > Мг (*s*. У* *2):
X — ДСХ
У — Уі
-±:zi1-- (41)
*а — *і Уг — Уі гг —Zl Vі >
У рівняннях (39) — (41) одна або дві координати напрямного вектора
можуть дорівнювати нулю (випадки m = п = р = 0 та х2 — х1 =
— у2 — Уі — %2 — гг = 0 неможливі, бо за озна- zi
ченням s ф 0).
Якщот = 0, пфО, рфО, то напрямний
векторе перпендикулярний до осі Ох, тому
рівняння 1^
У —У о
0 п р
визначає пряму, перпендикулярну до осі Ох.
Рис. 3.30
S=/rtXfr2
Рис. 3.31
Аналогічно рівняння, в яких лише п = 0 або р =■
= 0, визначають прямі, перпендикулярні до осі Оу
або Oz.
Якщо т = п = 0, р ф 0, або m = р = 0, л ^ 0,
або п = /? = 0, т Ф0, то рівняння (40) визначають
прямі, відповідно паралельні осям Oz, Оу, Ох.
Розглянемо тепер випадок, коли пряма в просторі
задається перетином двох площин. Відомо, що дві
непаралельні площини перетинаються по прямій лінії.
Отже, система рівнянь двох площин
A1x + B1y + C1z + D1=0;
A2x + B2y + C2z + D2 = 0, ( '
нормальні вектори яких пг = (Лх; В{, Сх) і п2 = (Л2; В2\ С2) не
колінеарні, визначає в просторі пряму лінію.
Рівняння (42) називаються загальними рівняннями прямої в
просторі. Щоб від загальних рівнянь (42) перейти до канонічних рівнянь
(40), потрібно знайти точку М0 (х0; у0; z0) на прямій і її напрямний
вектор s = (т; п; р). Для знаходження точки М0 одну з її координат,
наприклад, х = х0 беруть довільною, а дві інші визначають із системи
Вхі/ + Сгг = — D1 — A^,
В^у + C2z = — D2 — Л2х0.
R С
Ця система матиме розв'язок за умови, що -^- Ф -^-. Якщо ця умова
порушується, то в системі (42) довільне значення надають змінній
у або змінній z.
Для знаходження напрямного вектора s врахуємо, що нормальні
вектори пг і п2 даних площин перпендикулярні до прямої (рис. 3.31).
Тому за вектор s можна взяти їхній векторний добуток:
Приклад
Звести рівняння прямої
і і k
А1 В1 Сх
Л2 £»2 С2
х + у— г— 1=0;
у + зг + 5 = 0
(43)
і х + у
\ 2х —
до канонічного вигляду,
90
О Знайдемо яку-небудь точку Мв (х„; ув; гв) на даній прямій. Для цього
покладемо в обох рівняннях х = 0 і розв'яжемо систему
( у-г-1=0;
І — y + 3z + 5 = 0,
ввідки z = —2, у = —1. Отже, точка Мв (0; —І; —2) належить даній прямій.
Напрямний вектор s знаходимо за формулою (43):
7 * -, - -
в = і і і = 2« — 5/ — 3k.
2—1 З
Канонічні рівняння заданої прямої мають вигляд
V+1
г+2
— 5
5.2. Кут між двома прямими. Умови паралельності і
перпендикулярності прямих
Нехай прямі Іг і /2 задано рівняннями
х — X; ^ У — Уі г— ?! . х — х2 _ у — Уі г — г2
т1 п, Рі ' т2 ~ П2 ~ р3 '
Кут між цими прямими (рис. 3.32) дорівнює куту ф між їхніми напрям-
—» —►
ними векторами s1 = (m,; /ix; р^ і s2 = (m2; л2; р2), тому аналогічно
з випадком а) п. 3.3 дістанемо:
1) формулу для кута <р між прямими lt і 12.
cos<p
mlm3 + пхп2 + "іРг
un^i Ym\+л?+рі Km2+"і+"і'
2) умову паралельності прямих /х і /2:
_mj_
"і
"2
_£і_
/>2
3) і/жобі/ перпендикулярності прямих /х і /2:
тхт2 + пхп2 + Рір2 = 0.
Приклади
1, Знайти кут ф між прямими
f 2х + у — г— 1 = 0;
\ 2х — у + 3г + 5 = 0
(44)
(45)
і
x = 2t;
y = 2-t;
г = — 2 + 3*.
Рис. 3.32
^^
91
О За формулами (43) і (39) знаходимо напрямні вектори даних прямих: % = (2;
_8; _4) і 7а_= (2; —1; 3).
Оскільки Si ■ ' sa = 0, то <р = 90°. •
2. При яких значеннях mt І л, прямі
х __ у-2 _ г+1
mt 2 4
х+1 _ У+Д д г + 3
— 1 л, —2
паралельні?
О 3 умови (45) маємо
— 1 і
звідки т-і = 2, п% = —1.
— 2
Ші
-2,
= -2,
5.3. Кут між прямою і площиною. Умови паралельності і
перпендикулярності прямої і площини
Кут між прямою / і площиною Я за означенням є кут між прямою
/ і її проекцією на площину /7.
Нехай площина Я і пряма / задані рівняннями
Ax + By + Cz+D=0 і
■Уо
т
Позначимо гострий кут між прямою / (рис. 3.33) і її проекцією Іх
на площину П через <р, а кут між нормальним вектором п = (А; В; С)
площини /7 і напрямним вектором s = (m; n; р) прямої / — через 6.
Якщо Є < 90°, то <р = 90° — Є, тому sin q> = cos Є; якщо ж Є > 90°,
то ф = 9 — 90е і sin ф = —cos 6.
Отже, в будь-якому випадку sin ф = | cos 6 |. Але
cos 6 =
л • s
МИ
Рис. 3.33
Рис. 3.34
92
тому кут між прямою і площиною знаходиться за формулою
-ІПТ '"-7| , \Ат + Вп+С,\ (47
MM VA*+B> + C*Vm* + n> + p' V '
Якщо пряма І паралельна площині П, то вектори п і s перпендику-
лярні, тому п • s = 0, тобто
Am + Вп + Ср = 0 (48)
— умова паралельності прямої і площини.
Якщо пряма / перпендикулярна до площини П, то вектори п і s
паралельні, тому співвідношення
т п р у '
є умовою перпендикулярності прямої і площини.
Приклади
1. Через задану точку М0 (х0; у0; гв) провести пряму І, перпендикулярну до
площи ии П, заданої рівнянням Ах + By + Ся + D = 0.
О Оскільки пряма І перпендикулярна до площини П, то напрямним вектором
прямої /можна взяти нормальний вектор площини П: (рис. 3.34): s = п = (А; В; С).
Тому згідно з формулою (40) рівняння прямої / має вигляд
х — *о _ У —У о — z — г„
~А В— ~С~- #
2. Через задану точку М0 (х0; уа\ г„) провести площину П, перпендикулярну до
прямої /, заданої рівняннями
х — *і _ У — Уі _ z — гх
т n p
О Нормальним вектором"площини П може бути напрямний (рис. 3.35) вектор пря-
мої /: n = s = (m; л; р), тому за формулою (28) рівняння площини П має вигляд
т(х~х0)+п(у — у0)+р(г — г0) = 0. •
3. Через задану точку М0 (х0; у0; г0 )і пряму /, задану рівняннями ——£•_ =
т
= У Уі = — ' , провести площину П.
п р
О Нехай М (х\ у; г) — довільна точка площини П (рис. 3.36), а Мг (хг; уц гг) —
вадаиа точка прямої /. Тоді вектори МхМ0 = (х^ — хх; уа — ух; г0 — гг), МхМ =
= (х — хх; у — ух, г — zt) і напрямний вектор s = (m; n; p) прямої компланарні,
тому рівняння площини П має вигляд
х—хх у —Ух г-гх
Хо — хх Уо — Уі *о — г\
т n p
= 0. •
93
oMn
Рис. 3.36
Рис. 3.35
4. Як розміщена пряма /, задана рівняннями
х = х0 + mt\
у = у0 + "';
відносно площини П, заданої рівнянням Ах + By + Сг + D — 0?
О Підставивши в рівняння площини П замість х, у, г їхні значення з рівнянь
прямої /, дістанемо рівняння
А (х0 + mt) + B (y0 + nt)+C (z0 + pi) +D = 0.
з якого можна визначити те значення параметра /, яке відповідає шуканій точці
перетину. Якщо це рівняиия має єдиний розв'язок, то пряма / перетинає площину П,
якщо безліч розв'язків — пряма / лежить в площині П, якщо одержане рівняння не
має розв'язків, то пряма / паралельна площині П. %
Б. Знайти точку перетину прямих /х і /2, заданих рівняннями
х = *і + mxt;
у = Уі + «і';
Z = *1 + Рі'
і
х = х2 + «а';
У = Уа + V-
2 = г2 + р,,*.
О Нехай М„ (хв\ ув; гв) — точка перетину заданих прямих. При якомусь
значенні t\ параметра f її координати задовольнятимуть рівняння прямої /lt а при
певному значенні і% — рівняння прямої /2, тобто
х„ = *х + тЛ;
Ув = Уі + "і'Г.
z0 = zi + РіЛ»
*0 = Х2 + тїЧ''
У в = Уі + "г'г-.
го = г2 + Рг'г-
Прирівнюючи праві частини цих систем, дістаємо систему трьох лінійних рівнянь
з двома невідомими /х і /2, яку можна розв'язати, наприклад, методом Гаусса. Якщо
ця система має один розв'язок, то прямі перетинаються, якщо безліч розв'язків —
прямі збігаються, якщо система ие має розв'язків, то прямі мимобіжні, ф
6. Знайти відстань заданої точки Ма {хв; Уа'< го) В'Д
прямої /, заданої рівняннями
х — *і = У — Уі = г — Zi
п
Рис. 3.37
О Відстань d від точкн М0 (рис. 3.37) до прямої І
дорівнює відстані між точкою Мв та її проекцією Р на
цю пряму: d = МВР. Щоб знайти точку Р, досить
через точку Мв провести площину П, перпендикулярну
до прямої / (приклад 3), і знайти точку її перетину
г прямою / (приклад 4). #
94
Рис. 3.38
7. Як розміщені прямі
Т =7, + Syt \ Т = Г2 -г- Sj,/?
О Прчмі /, і /2 збігаються, якщо вектори slf s2 і /і — Гг колінеарні (рис. 3.38, о).
Умовою паралельності даних прямих є колінеарність векторів sx і &,
(рис. 3.38, б), тобто S!Xij= 0.
Прямі /х і /2 перетинаються, якщо вектори sx і s2 не колінеарні, а вектори slr Sj
і rt — г2 компланариі (рис. 3.38, в), тобто SjSa (rx — г2) = 0.
> > —» —»
Отже, умова SiS2 (/"і — г£) Ф 0 еквівалентна тому, що прямі /х і /а мимобіжні, ф
—»
8. Довести, що відстань d точки Мв (рис. 3.39) з радіусом-вектором г0 від прямої
/, заданої рівнянням т = /і + s/, визначається за формулою
d =
І SX ftj — т0) |
О Відстань d дорівнює одній з висот паралелограма, побудованого на векторах
s і гх — г0. •
9. Довести, що відстань (рис. 3.40) між мимобіжними прямими (довжина спіль-
його перпендикуляра) /t і ^, заданими рівняннями /■ = r! + Si/ir=rjT sa/,
знаходиться за формулою
1 Мг Сг — '"і) І
** —»
І h X s2|
Рис. 3.40
95
О Відстань d дорівнює відстані між паралельними площинами, в яких лежать
прямі їх і h- Ця відстань, в свою чергу, дорівнює висоті паралелепіпеда, побудованого
на векторах %, s, І га — г,. #
Завдання для самоконтролю
1. Скласти векторне параметричне рівняння прямої, яка задана в просторі
точкою і напрямним вектором.
2. Вивести канонічні та параметричні рівняння прямої в просторі і
рівняння прямої, яка проходить через дві задані точки.
3. Написати загальні рівняння прямої. Як перейти від загальних рівнянь
прямої до канонічних?
4. Як знайти кут між двома прямими в просторі? Написати умови паралельності
і перпендикулярності прямих.
Б. Як знайти кут між прямою і площиною? Які умови паралельності і
перпендикулярності прямої і площини?
6. Довести, що умову, за якої дві прямі
■Уі = г"
і
У —У а
г —г2
т-х «! Рх тг
лежать в одній площині, можна записати у вигляді
|«—*і Уі — Уі Ч — Ч
Р%
= 0.
І ті пі Рі
\ т2 п, ра
7. Довести, що рівняння площини, яка проходить через пряму
х— *і = У —Ух ._ Z — гх
•Пх "і Рі
т,
.. х — ха _ у — уг
паралельно прямій
г — Zo
rrit ij Рг
І х — хх у —Ух г — гх
Шх П-х Рх
., можна записати у вигляді
/По
По
Ра
= 0.
8. Довести, що рівияния площини, яка проходить через пряму
х— х0 _ у —У о
т п
г — г„
перпендикулярно до площини Ах + By + Сг -\- D = 0, можна записати у вигляді
- Ч У — Уо z — го
= 0.
т п р
А В С .
9. Знайти точку, симетричну точці (4; 3; 10) відносно прямої
х—1 _ у —2 __ г— З
10. Знайти точку, симетричну точці (1; 5; 2) відносно площини 2х — у — z +
+ 11 = 0.
В Ід повід і. 9. (2; 9; 6). 10. 3; 7; 4).
96
S в. ЛІНІЇ ДРУГОГО ПОРЯДКУ
6.1. Поняття лінії другого порядку
Як зазначалося в п. 1.1, лінія другого порядку — це множина
точок, координати яких задовольняють рівняння виду
ax* + by2 + cxy+dx + ey+f = 0, (50)
де коефіцієнти a, b, c, d, e, f — дійсні числа, причому хоча б одне з
чисел а, Ь, с відмінне від нуля, тобто а2 + ft2 -\- с2 ф 0. Зокрема, до
ліній другого порядку належать такі лінії: коло, еліпс, гіпербола і
парабола. Виявляється, що множиною точок {х; у) з дійсними
координатами, які задовольняють рівняння (50), може бути не тільки одна
з названих ліній. Рівняння (50) може визначати на площині Оху
також дві прямі, одну пряму, точку або не визначати жодної точки.
Огже, коло, еліпс, парабола і гіпербола задаються рівняннями
другого степеня, але, на відміну від прямої лінії, обернене
твердження неправильне.
Щоб відповісти на запитання, яке геометричне місце точок
визначається рівнянням (50), треба підібрати таку систему координат, в якій
це рівняння спростилось би. Відомо [1], що для всякої лінії другого
порядку існує прямокутна система координат (її називають
канонічною), в якій рівняння (50) має найпростіший або канонічний вигляд.
Ми не займатимемося тут зведенням загального рівняння (50) до
канонічного вигляду, а встановимо і дослідимо лише окремі канонічні
рівняння.
Лінії другого порядку називають також конічними перерізами
через те, що їх можна дістати як лінії перетину кругового конуса з
площиною. Коло утворюється як лінія перетину площини, яка
перпендикулярна до осі конуса і не проходить через його вершину
(рис. 3.41, а); еліпс — лінія перетину площини, яка перетинає всі твірні
конуса, не перпендикулярна до осі конуса і не проходить через його
вершину (рис. 3.41, б); якщо перетнути двопорожнинний конус шю-
Рис. 3.41
97
щиною, паралельною двом твірним, дістанемо гіперболу (3.41, в),
а одній твірній — параболу (рис. 3.41, г).
Лінії другого порядку широко застосовуються в науці і техніці.
Приклади
1. Планети Сонячної системи рухаються по еліпсах, що мають спільний фокус,
в якому -розташовано Сонце.
2. Якщо у фокусі параболи розмістити джерело світла, то промені, відбившись
від параболи, підуть паралельно її осі. На цій властивості грунтується побудова
прожектора.
3. У динаміці космічних польотів використовуються поняття трьох космічних
швидкостей: и, = 7,9 км/с, v., = 11,2 км/с, v3 = 16,7 км/с. Нехай о0 — початкова
швидкість, з якою штучний супутник запускається з поверхні Землі. При
недостатній початковій швидкості v0 < vl супутник обертатися навколо Землі не буде. Якщо
vo = vu то супутник буде обертатися по круговій орбіті, центр якої знаходиться
в центрі Землі. Якщо vt •< v0 < и2, то обертання супутника відбуватиметься по
еліпсу, причому центр Землі знаходитиметься в одному з фокусів еліпса.
Прн »2 ^ "о < ^я супутник долає земне тяжіння і стає штучним супутником
Сонця, рухаючись при цьому по параболі (при и0 = і>2) або по гіперболі (при і>2 < v0 < fg)
відносно Землі. Якщо vB ^ vs, то супутник спочатку долає земне, а потім і сонячне
тяжіння і залишає Сонячну систему.
4. Рух матеріальної точки під дією центрального поля снли тяжіння
відбувається по одній з ліній другого порядку.
6.2. Коло
Колом називають множину точок площини, відстані яких від
заданої точки площини (центра кола) дорівнюють сталому числу
(радіусу).
Щоб вивести рівняння кола, використаємо прямокутну систему
координат Оху; позначимо через 01 (а; Ь) — центр кола, через М (х\
у) — довільну точку площини і через R — радіус кола (рис. 3.42).
Точка М лежить на колі тоді і лише тоді, коли 0гМ = R або
У(х-а)2+(у-Ь)2 = R. (51)
Рівняння (51) і є шуканим рівнянням кола. Але зручніше
користуватись рівнянням, яке дістанемо при піднесенні обох частин
рівняння (51) до квадрата:
(x-a)2 + (y-b)2 = R2. (52)
Оскільки рівняння (52) випливає з рівняння (51), то координати
всякої точки, які задовольняють рівняння (51), задовольнятимуть
також рівняння (52). Проте при піднесенні будь-якого рівняння до
квадрата, як відомо, можуть з'явитися сторонні корені, тобто рівняння
(51) і (52) можуть виявитися нееквівалентними. Покажемо, що в цьому
випадку так не буде. Справді, добувши корінь з обох частин рівняння
(52), дістанемо V (х — а)2 + (у — b)a = ±R. Але в правій частині
знак мінус треба відкинути, бо відстань R > 0. Отже, рівняння (51)
і (52) еквівалентні, тобто визначають одну й ту саму криву — коло.
98
А*
Рис. 3.42
Рис. 3.43
Якщо центр кола міститься в початку координат, то а = Ь — 0
1 рівняння (52) набирає вигляду
X2_j_f/2 = /?2. (53)
Рівняння (53) називається канонічним рівнянням кола. Якщо в
рівнянні розкрити дужки, то дістанемо загальне рівняння кола
х2 + у2 + Ах + Ву + С = 0, (54)
де А = —2а, В = —2Ь, С = а2 + Ь2 — Я2. Отже, коло — лінія
другого порядку.
Рівняння кола має такі властивості.
1°. Коефіцієнти при х2 і у2 рівні між собою.
2°. У рівнянні відсутній член з добутком ху.
Обернене твердження неправильне: не всяке рівняння другого
степеня, яке задовольняє умови 1° і 2°, є рівнянням кола, тобто не всяке
рівняння виду (54) визначає коло.
Приклади
1. Написати рівняння кола, якщо точки А (—1; 4) і В (3; 2) є кінцями його діа-
МЄТПЗ
О Нехай 0t (о; Ь) — центр кола. Тоді АОг = ОіВ, тому за формулами (25)
(гл. 2) маємо
а_*л + *в_ -1 + 3 ^, ь = 3.
а~ 2 2
Оскільки радіус кола R = А0Л = Yl>, то за формулою (52) дістаємо шукане
рівняний: іх _ 1)2 4- (у — З)2 = 5. •
2. Знайти центр і радіус кола д;2 + у2 + 4х — Ьу — 23 = 0.
ф Згрупуємо доданки із змінною х та змінною у і доповнимо одержані вирази
до повних квадратів:
*а + Ах + у2 — Ьу — 23 = 0,
або
(** +■ 4х +■ 4) - 4 + (уа - 6у + 9) - 9 — 23 = 0,
8ВІДКН
(х+ 2)2-Ь (у -З)2 = 36.
Отже, точка (—2; 3) — центр кола, a R = 6 — його радіус. •
3. Показати, що рівняння х» + у2 + 6* — 6у + 19 = 0 не визначає ніякого
геометричного об'єкта.
99
О Перетворимо рівняння
(х*+6х + 9)-9 + (у* — 6tf + ^) — 9+19 = 0
або
(х + 3)* + (у — 3J» = —1.
Оскільки сума невід'ємних чисел не може бути від'ємним числом, то задане
рівняння не задовольняють координати жодної точки площини Оху. ф
4. Арка має форму дугн кола. Знайти довжину / дуги арки, якщо її проліт 1
підйом відповідно дорівнюють 2а і Ь. (Підйом арки дорівнює відношенню її висоти
до прольоту.)
О Введемо систему координат Оху так, як показано на рис. 3.43, де арка MPN —
дуга кола, MO = ON, OP = h = 2ab. В обраній системі координат точкн М, Р
і N мають координати М (—а; 0), Р (0; 2ab), N (а; 0). Нехай Ох (0; у0) і R відповідно
центр і радіус кола, тоді його рівняння має вигляд
Оскільки коло проходить через точки Р і N, то
ЗВІДКИ
(2ab-y0)*^R*; a* + &=~ R1.
(4У+1)а (4Ь'-1)а
к~ 46 ; І "01= 46
Знайдемо центральний кут 2а = ^MO^N, на який спирається дуга арки. Маємо
\Уо\ |4fc*-l| |4fe*-l|
cos a — —£— = 4fcl+1 , тому 2а = 2 arccos 4fcl + { ,
отже,
, ор„ С»"+1)а |Ц»-1|
1" 2Ra = 2b arccos 4У+1 • •
6.3. Еліпс
Еліпсом називають множину всіх точок площини, сума відстаней
яких від двох даних точок цієї площини, які називаються фокусами,
є величина стала і більша від відстані між фокусами. Щоб вивести
рівняння еліпса, візьмемо на площині дві точки Fx і F2 — фокуси еліпса
і розмістимо прямокутну систему координат так, щоб вісь Ох
проходила через фокуси, а початок координат ділив відрізок FXF2 навпіл
(рис. 3.44).
Позначимо відстань між фокусами, яку називають фокальною,
через 2с : FxFa — 2с, а суму відстаней від довільної точки еліпса до
фокусів — через 2а. Тоді фокуси мають такі координати: f\ (—с; 0)
і F2 (с; 0). За означенням 2а >■ 2с, тобто а> с.
Нехай М (х; у) — довільна точка площини. Ця точка лежить на
еліпсі тоді, коли FtM -f- FtM = 2а або
V(x + cf + у* + У(х - cf + у* = 2а. (55)
Це, по суті, і є рівняння еліпса. Щоб спростити його, перенесемо один
100
радикал у праву частину, піднесемо обидві частини до квадрата і
зведемо подібні. Матимемо
a V(x — c)*+y2 = аа — сх.
Піднісши обидві частини цього рівняння ще раз до квадрата та
спростивши вираз, дістанемо х2 (а2 — с2) + а2#2 = а2 (а2 — с2).
Оскільки а > с, то а2 — с2 > 0, тому можна позначити
й2 — са = Ь2. (56)
Тоді рівняння (55) набере вй*гляду
х2Ь2 + с V = а2Ь2
або
*» ■ У*
а2 "•" Ьг
1.
(57)
Можна довести, що рівняння (55) і (57) еквівалентні. Рівняння (57)
називається канонічним рівнянням еліпса. Отже, еліпс — крива
другого порядку.
Встановимо деякі властивості і дослідимо форму еліпса.
1°. Рівняння (57) містить змінні х та у лише в парних степенях,
тому, якщо точка (х; у) належить еліпсу, то йому також належать
точки (—х; у), (х; —у) і (—х; —у). Тому еліпс симетричний відносно
осей Ох та Оу, а також відносно точки О (0; 0), яку називають центром
еліпса. Отже, для встановлення форми еліпса достатньо дослідити ту
його частину, яка розміщена в одному, наприклад в першому,
координатному куті.
2°. В першому координатному куті х > 0, у > 0, тому з рівності
(57) маємо
у—тгУ*
(58)
звідки випливає, що точки А1 (а; 0) та В0 (0; Ь) належать еліпсу,
причому, якщо х збільшується від 0 до а, то у зменшується від b до 0.
Крім того, не існує точок еліпса, у яких х > а, бо вираз (58) при х>а
не має змісту. Таким чином, частина еліпса, розміщена в першому
Уі
М(Х;у)
АгМ
ZhiO)
F2(c,0)
т
Рис, 3.44
В2(0Г6)
Рис, 3.45
101
x=-
Рис. 3.46
координатному куті, має форму дуги
А1В1 (рис. 3.45). Відобразивши цю
дугу симетрично відносно осей Ох та
Оу, дістанемо весь еліпс. Він
вміщується в прямокутник із сторонами 2а
і 2Ь. Сторони прямокутника
дотикаються до еліпса в точках перетину
х=у його з осями Ох і Оу.
Еліпс перетинає осі координат в
точках А1 {а; 0), А2 (—а; 0), Вх (0; Ь),
В2 (0; —Ь). Ці точки називаються
вершинами еліпса.
Величини АхА2 = 2а та ВХВ2 = 2Ь називаються відповідно
великою та малою осями еліпса.
Таким чином, з властивостей 1° і 2° випливає, що всякий еліпс має
дві взаємно перпендикулярні осі симетрії (головні осі еліпса) і центр
симетрії (центр еліпса). Точки, в яких еліпс перетинає головні осі,
обмежують на головних осях відрізки довжинами 2а і 2Ь, які
називаються великою і малою осями еліпса, а числа а та b — великою і
малою півосями еліпса. Весь еліпс вміщується в прямокутник із
сторонами 2а і 2Ь. Сторони прямокутника дотикаються до еліпса в його
вершинах.
3°. Якщо а = Ь, то рівняння (57) набирає вигляду
х2 -\- у2 = а2.
тобто дістаємо рівняння кола. Отже, коло є окремим випадком
еліпса. З формули (56) випливає, що при а — b значення с = 0, тобто
коло — це еліпс, у якого фокуси збігаються з його центром.
Міра відхилення еліпса від кола характеризується величиною є,
яка називається ексцентриситетом еліпса і дорівнює відношенню
половини його фокальної відстані до довжини більшої півосі:
є =
(59)
причому 0 ^ є < 1, оскільки 0 <[ с < а.
З формул (56) і (59) дістаємо
УсР — і
-/і-5-іт=
Отже, якщо є = 0, то b = а, тобто еліпс перетворюється в коло; якщо
є наближається до одиниці, то відношення осей Ь/а зменшується, тобто
еліпс все більше розтягується вздовж осі Ох.
4°. Нехай М {х; у) — довільна точка еліпса з фокусами /•", і F3
(рис. 3.46). Відстані FXM — r± і F2M = r2 називаються фокальними
102
радіусами точки М. Очевидно, г, J- гг = 2а. Прямі х = ± —
називаються директрисами еліпса.
Відношення фокальних радіусів довільної точки еліпса до відстаней
цієї точки від відповідних директрис є величина стала і дорівнює
ексцентриситету еліпса, тобто
^--t
= є. (60)
Приклади
1. Скласти канонічне рівняння еліпса, який проходить через точки Мі (3; 5)
і Ма [4; —У— І, якщо фокуси його лежать на осі Ох симетрично початку координат.
О За умовою координати заданих точок задовольняють рівняння (57):
16 8 9 _4
оа + 96а = '• а2 + b* = '"
Розв'язуючи цю систему рівнянь, знаходимо аа = 18 і Ь2 = 8. Отже, шукане
рівняння має вигляд
Xі U*
-їв--*-*—1- •
2. Скласти канонічне рівняння еліпса, фокуси якого розміщені на осі Ох
симетрично початку координат, якщо відстань між фокусами дорівнює 14, а
ексцентриситет дорівнює 7/9.
О Оскільки 2с = 14, то с = 7. З формул (59) і (56) дістаємо, що а = 9 і 6а = 32.
Отже, шукане рівняння має вигляд
Xа уа
81 + 32 ~ L •
16
3. Довести, що полярне рівняння р = —р о визначає еліпс. Знайти
О — о COS ф
півосі цього еліпса.
О Використовуючи формули (7), (8) (гл. 2), перейдемо від заданого рівняння до
рівняння в прямокутній системі коордянат:
, 16
V* + f = Z •
5 — 3-
V Xа + у2
Далі маємо
5 Ух2 + J/a — Зх = 16, 25 (х2 + у2) = 256 + 96х + 9ха,
16(ж-3)а+25і,а = 400, (*~3)' +~|б~=1-
Враховуючи формули паралельного переносу (гл. 2, п. 2.4), робимо висновок,
що останнє рівняння визначає еліпс з центром у точці (3; 0) і півосями а = 5 і b =
= 4. •
103
6.4. Гіпербола
Гіперболою називається множина всіх точок площини, модуль
різниці відстаней яких від двох даних точок цієї площини, що
називаються фокусами, є величина стала і менша відстані між фокусами.
Позначимо через Fx і Ft фокуси гіперболи, відстань між ними —
через 2с, а модуль різниці відстаней від довільної точки гіперболи до
фокусів — через 2а. За означенням а < с. Щоб вивести рівняння
гіперболи, візьмемо на площині прямокутну систему координат Оху
так, щоб вісь Ох проходила через фокуси, а початок координат поділив
відрізок FtF2 навпіл (рис. 3.44). Точка М (х; у) площини лежить на
гіперболі тоді і лише тоді, коли | MFX — MF21 = 2а або
\У(х + с)2-\- у2 - У(х — с)* + у* | = 2а.
Виконавши ті самі перетворення, що й при виведенні рівняння
еліпса, дістанемо канонічне рівняння гіперболи
де
Ь* = с2 — а2. (62)
Отже, гіпербола є лінією другого порядку.
Встановимо деякі властивості і дослідимо форму гіперболи.
1°. Гіпербола симетрична осям Ох, Оу і початку координат.
2°. Для частини гіперболи, яка лежить у першому координатному
куті, з рівняння (61) дістанемо
y = ±-Vx*-a*. (63)
З рівності (63) випливає, що х ^ а.
Точка Л, (а; 0) належить гіперболі і є точкою перетину гіперболи
з віссю Ох. Гіпербола не перетинає вісь Оу. Якщо х> а, то у > 0,
причому якщо х збільшується, то у також збільшується, тобто якщо
X -*■ +оо, то у -+■ +оо.
Покажемо, що, віддаляючись у нескінченність, змінна точка М (х;
у) гіперболи необмежено наближається до прямої
У = ±х. (64)
Така пряма називається асимптотою гіперболи. Для цього візьмемо
точку N, що лежить на асимптоті і має ту саму абсцису х, що й точка
М (х; у), і знайдемо різницю MN між ординатами ліній (63) і (64)
(рис. 3.47):
MN = — х — — Vx* — a2 = — (x — Vx2 — a2) =
а а а ч '
_ Ь_ (x — Vx* — a*)(x+y Xі— na) ab
~~ " х+У Xі — а* ~~ х + Ух* — а*
104
Звідси, якщо х ->■ +оо, то знаменник теж прямує до +оо, a MN ->-
-у 0, бо чисельник є сталою величиною. Отже, точки М гіперболи,
віддаляючись від точки А± (а; 0) у нескінченність, необмежено
наближаються до прямої (64), тобто ця пряма є асимптотою.
Таким чином, частина гіперболи, розміщена у першому
координатному куті, має вигляд дуги, яка показана на рис. 3.47.
Відобразивши цю дугу симетрично відносно координатних осей, дістанемо вигляд
всієї гіперболи.
Гіпербола складається з двох віток (лівої і правої) і має дві
асимптоти:
ь ь
Осі симетрії називаються осями гіперболи, а точка перетину осей —
її центром. Вісь Ох перетинає гіперболу в двох точках Лх (а; 0) і
А2 (—а; 0), які називаються вершинами гіперболи. Ця вісь
називається дійсною віссю гіперболи, а вісь, яка не має спільних точок з
гіперболою,— уявною віссю.
Дійсною віссю називають також відрізок А^А^, який сполучає
вершини гіперболи і його довжину A±Aa = 2а. Відрізок ВхВй, який
сполучає точки Вх (0; Ь) і Вй (0; —Ь), а також його доЕжину,
називають уявною віссю. Величини а і b відповідно називаються дійсною і
уявною півосями гіперболи.
Прямокутник із сторонами 2а і 2Ь називається основним
прямокутником гіперболи.
При побудові гіперболи (61) доцільно спочатку побудувати
основний прямокутник C^DJDC (рис. 3.48), провести прямі, що проходять
через протилежні вершини цього прямокутника — асимптоти
гіперболи і визначити вершини Лх і Л2 гіперболи.
Рівняння
також визначає гіперболу, яка називається спряженою до гіперболи
(61). Гіпербола (65) показана на рис. 3.48 штриховою лінією. Верши-
105
ни цієї гіперболи лежать в точках В1 (0; Ь) і Вг (0; —Ь), а її асимптоти
збігаються з асимптотами гіперболи (61).
Гіпербола з рівними півосями (а = Ь) називається рівносторон-
ньою, її канонічне рівняння має вигляд
х2 — у2 = о2.
Основним прямокутником рівносторонньої гіперболи є квадрат із
стороною 2а, а її асимптотами — бісектриси координатних кутів.
3°. Ексцентриситет гіперболи визначається як відношення
половини фокальної відстані до довжини її дійсної півосі:
в = -з-- (66)
Оскільки с > а, то є > 1. Крім того, з формул (62) і (66) випливає, що
Отже, ексцентриситет гіперболи характеризує її форму: чим більший
ексцентриситет, тим більше відношення —, тобто тим більше основний
прямокутник розтягується в напрямі осі Оу, а гіпербола відхиляється
від осі Ох; чим ближче ексцентриситет до одиниці, тим більше
основний прямокутник розтягується в напрямі осі Ох, а гіпербола
наближається до цієї осі.
4°. Прямі х = ± —, де а — дійсна піввісь гіперболи, аг — її
ексцентриситет, називаються директрисами гіперболи. Директриси
гіперболи мають ту саму властивість (60), що й директриси еліпса.
Приклади
1. Скласти канонічне рівняння гіперболи, фокуси якої розміщено на осі Ох
симетрично початку координат, якщо дійсна вісь дорівнює 6, а ексцентриситет є =*
5
=у-
О Оскільки 2а = 6, то а = 3. З формул (62) і (66) знаходимо, що Ь = 4.
Xі у*
Шукане рівняння має вигляд —д— — —г=- = 1. •
2. Знайти відстань фокуса гіперболи хг — 8у2 = 8 від її асимптоти.
О Запишемо канонічне рівняння даної гіперболи:
8 — 1 — '■
звідки а = у 8, Ь = і — півосі гіперболи, тому згідно з формулою (64) рівняння
асимптоти має вигляд х — у YH = 0.
З формули (62) знаходимо, що с = 3, тому F± (—3; 0) І F2 (3; 0) — фокуси
гіперболи.
За формулою (27) обчислюємо відстань d від фокуса Ft (або, що те саме, фокуса
f\>) до знайденої асимптоти: d = 1. ф
106
Рис. 3.49
Рис. 3.50
3. На прямолінійному відрізку залізниці розташовано станції А і В, відстань
між якими І. Від заводу N йдуть прямі автомагістралі NA і NB, причому NB <
< NA. Вантаж із заводу N иа станцію А можна транспортувати або по
автомагістралі NB, а звідти залізницею (перший шлях), або безпосередньо по автомагістралі
NA (другий шлях). При цьому тариф (вартість перевезення і т вантажу на 1 км)
залізницею і автотранспортом становить відповідно m і л (я > т), а розвантаження-
завантаження однієї тонни коштує k. Визначити зону впливу станції В, тобто мно-
жіну точок, з яких дешевше доставити вантаж в А першим шляхом, ніж другим.
О Введемо систему координат Оху так, як показано на рис. 3.49, де АО = ОВ.
Знайдемо рівняння множини точок М (х; у), для яких обидва шляхи «однаково
вигідні», тобто таких, що вартість доставки вантажу Sx = r3n + ft + Іт першим
шляхом дорівнює вартості Sa = /уі доставки вантажу другим шляхом
г2л + ft + Itn = гхп, (AM = г-l ВМ = /j).
З цієї умови дістанемо
k + lm .
ra — гг = = const.
Отже, множиною точок, в яких St = Sa, є права вітка гіперболи
6а
= 1,
де а = —5 ■ ^ = "о" V'г — 4аа. Для точок площини, які лежать справа від цієї
вітки, Si < S2, тобто вигіднішим є перший шлях, а для точок, які лежать зліва,—
другий шлях.
Таким чином, права вітка гіперболи обмежує зону впливу станції В, а ліва —
станції А. 9
4. Встановити, що рівняння 16*а — 9у* — (Ах — 54у — 16І = 0 визначає
гіперболу. Знайти її центр і півосі.
О Виділимо повні квадрати відносно х та у:
16 (ха — 4х) — 9 (у* + 6у) — 161 = 0;
16 (х«— 4х + 4 — 4)— 9(уа + 6у + 9— 9) - 161 =0;
16 (х — 2)» — 64 —9(y + 3)a + 81— 161 =0;
16 (х— 2)а — 9 (у + 3)а = 144;
(х-2)* (у + 3)"
16
= 1.
107
Врахувавши формули паралельного переносу, дійдемо висновку, що задане рівняння
визначає гіперболу з центром у точці 0t (2; —3) і півосями а = 3; Ь = 4 (рнс. 3.50). •
6.5. Парабола
Параболою називається множина всіх точок площини, кожна з
яких знаходиться на однаковій відстані від даної точки, яка
називаються фокусом, і від даної прямої, яка називається директрисою і не
проходить через фокус.
Знайдемо рівняння параболи. Нехай на площині задані фокус F
і директриса, причому відстань фокуса від директриси дорівнює р.
Візьмемо прямокутну систему координат Оху так, щоб вісь Ох
проходила через фокус, перпендикулярно до директриси, а вісь Оу ділила
відстань між фокусом F і директрисою навпіл (рис. 3.51). Тоді фокус
має координати F (-у; 0), а рівняння директриси має вигляд х — —|-.
Нехай М (х; у) — довільна точка площини, а відрізки MB і MF —
відстані цієї точки від директриси і фокуса. Точка М тоді лежить на
параболі, коли MB = MF або
]/"(*-4)"+**=*+-f- (67)
Це і є рівняння параболи. Щоб спростити його, піднесемо обидві
частини рівності (67) до квадрата:
х2 — рх + -^- + у2 = х2 + рх + -£- ,
тобто
у2 = 2рх. (68)
Можна довести, що рівняння (67) і (68) рівносильні.
Рівняння (68) називається канонічним рівнянням параболи. Отже,
парабола є лінія другого порядку.
Дослідимо форму параболи. Оскільки рівняння (68) містить змінну
у в парному степені, то парабола симетрична відносно осі Ох. Тому
достатньо розглянути лише ту її частину, яка лежить у верхній пів-
площині. Для цієї частини у )> 0, тому з рівняння (68) дістанемо
у = V2px. (69)
З цієї рівності випливає, що парабола розміщена справа від осі
Оу, тому що при х < 0 вираз (69) не має змісту. Значення х = 0, у = 0
задовольняють рівняння (69), тобто парабола проходить через
початок координат. Із зростанням х значення у також зростає. Отже,
змінна точка М {х; у) параболи, виходячи з початку координат із
зростанням х, рухається по ній вправо і вверх.
Виконавши симетричне відображення розглянутої частини
параболи відносно осі Ох, матимемо всю параболу (рис. 3.52).
108
т-уі
Рис. 3.51
Рнс. 3.52
Вісь симетрії параболи називається її віссю; точка перетину осі
8 параболою—вершиною параболи; число, яке дорівнює відстані
фокуса від директриси,— параметром параболи. Віссю параболи,
заданої рівнянням (68), є вісь Ох, вершиною — точка О (0; 0) і
параметром — число р.
З'ясуємо вплив параметра р на форму параболи. Якщо в рівнянні
(68) покласти х = -у, то відповідні значення ординати у = ± р,
тобто маємо на параболі дві симетричні відносно осі Ох точки (-у; р\ і
1-у; —р\. Відстань між цими точками дорівнює 2р і збільшується із
збільшенням р. Отже* параметр р характеризує «ширину» області, яку
обмежує парабола.
Рівняння у2 = —2рх, х2 = 2ру, х2 = —2ру, у яких параметр р >
> 0 визначають параболи, зображені на рис. 3.53.
Зауваження. Використовуючи властивість 4° еліпса та
гіперболи і означення параболи, можна дати таке загальне означення
кривої другого порядку (крім кола): множина точок, для яких
відношення є відстані до фокуса і до відповідної директриси є величина
стала,— це еліпс (при 0 < є < 1), або парабола (при є = 1) або
гіпербола (при є >■ 1).
прямої х + у — 2 = 0.
знаходимо розв'язки (4; —2)
Приклади
1. Дослідити взаємне розміщення параболи у1-
(у2 = х;
О Розв'язуючи систему рівнянь J _
і (і; 1). Це означає, що пряма перетинає параболу в точках Мі (4; —2), Лїа (1; 1). •
2. В параболу Xі = у У~3 вписано рівносторонніи трикутник так, що одна з
вершин його збігається з вершиною параболи. Знайти сторону трикутника.
О Нехай точка А (дс„; ув) — одна з вершин трикутника. Тоді іншими його
вершинами будуть точки В (—х0; у0) і О (0; 0). Оскільки трикутник рівносторонніи, то
АВ = АО=ВО, звідки 2дс0 = у х% + у%. Розв'язуючи це рівняння разом з рів-
109
Ук !/к Хг-2рі/ У,
Рнс. 3.53
Рис. 3.54
нянням *о = у0 У~3, знаходимо д:0 = 3. Отже, сторона трикутника дорівнює 2дс0 =
= 6. •
3. Струмінь води витікає з конічної насадки з швидкіспо ч0 під кутом а до
горизонту. Нехтуючи опором повітря, скласти рівняння струменя відносно
прямокутної системи координат Оху, вважаючи, що струмінь міститься в площині Оху, точка
0 збігається з вихідним отвором насадки, а вісь Ох проходить горизонтально в
напрямі польоту струменя (рнс. 3.54). Знайти дальність польоту /, висоту підйому h і кут,
при якому дальність польоту найбільша.
О Виділимо в струмені води частинку одиничної маси. Якби на неї не діяла
сила тяжіння, то за час / вона пройшла б шлях, який дорівнює модулю вектора ON =
= (u0/cosa; «„/since), де v0—початкова швидкість частинки.
Під дією сили тяжіння частинка за той же час /пройде шлях, що дорівнює
довжині дуги ОМ. Оскільки снла тяжіння напрямлена вертикально вниз, то радіус-
-*- / Є(2\
вектор частинки має вигляд ОМ = (лг; у) — І vBt cos a; v0t sin a — -5- I, де g —
прискорення снлн тяжіння. Рівняння
х = vBt cos a;
gt2
у = v0t sin a — —2~ ,
— це параметричні рівняння траєкторії польоту частинки. Виключивши параметр
/, дістанемо у = ах — bxa, де
g
a = tga; b = 2 sec2 a.
2v0
Таким чином, траєкторія руху частинки, а отже, і весь струмінь мають форму
параболи. Дальність польоту струменя дістанемо з його рівняння при у = 0, а
висоту підйому — при х = _ :
^о sin 2a v% sin* a
Є 2g
Дальність польоту найбільша, якщо a = 45е. •
6.6. Полярні та параметричні рівняння кривих другого порядку
1. Нехай в прямокутній системі координат рівнянням (53) задано
ПО
Рнс. 3.55
Рнс. 3.56
коло. Якщо ввести полярні координати р і <р так, як указано в п. 2.3
(гл. 2), то рівняння (53) запишеться у вигляді
(р cos ф)2 + (р sin ф)2 = Я2; або р = R. (70)
Це і є полярне рівняння кола з центром у полюсі і радіусом R. Щоб
вивести параметричні рівняння кола, позначимо через t кут між віссю
Ох і радіусом-вектором ОМ довільної точки М {х; у) кола (рис. 3.55).
Точка М (х; у) лежить на колі тоді і тільки тоді, коли
x = Rcost, y = Rs\nt; 0<*<2л. (71)
Рівняння (71) називаються параметричними рівняннями кола.
2. Розглянемо тепер криву /, яка може бути еліпсом, параболою
або правою віткою гіперболи (рис. 3.56).
Нехай F — фокус кривої / (якщо І — еліпс, то F — його лівий
фокус), d — відповідна цьому фокусу директриса, 2d — довжина
хорди, яка проходить через фокус паралельно директрисі, і є —
ексцентриситет кривої /. Введемо полярну систему координат так, щоб
її полюс збігався з F, а полярна вісь Fx була перпендикулярною
до директриси d і напрямлена в бік, протилежний від неї. Тоді згідно
з загальним означенням кривої другого порядку (зауваження п. 6.5)
маємо
MF
Оскільки MF = р, то
= є,
і з рівності (72) дістанемо
MQ
MQ^Qfli+MN = —+ рсовф
(72)
р=-і р- . (73)
г 1 — 8 COS ф
Це і є загальне полярне рівняння кривої І. При 0 < є < 1 рівняння
(73) визначає еліпс, при є = 1 —параболу, а при е> 1 — праву вітку
НІ
гіперболи. Рівняння лівої вітки
гіперболи в обраній полярній
системі має вигляд
— р
1 + є cos <р
Число р в полярних рівняннях
називається полярним параметром
кривої. Для того щоб виразити р
через параметри канонічних
рівнянь (57), (61) і (68) кривої /, до-
Рис. 3.57 сить в це рівняння підставити
координати точки Nt : х = с, у =
= р — для еліпса і гіперболи і х = -|-, у = р — для параболи. Тоді
для еліпса і гіперболи маємо р = —, а для параболи полярний
параметр дорівнює параметру р її канонічного рівняння (68). Рівняння
(73) застосовується в механіці.
Приклад
Яку криву визначає полярне рівняння р =
2 — /2cosq>
О Привівши дане рівняння до вигляду р =
р = 4, є:
V2
1 — _і COS ф
2 т
, дістанемо!
кн
< 1. Отже, задана лінія є еліпс. Знайдемо його півосі. Оскіль-
о- с% І _
,Р=4=-^гіеа = -^- = -^-.тоа = 8 І Ь=4У2- •
Наведемо без доведення параметричні рівняння еліпса і гіперболи
[9]. Параметричні рівняння
х = х0 + a cos t; у = у^ -f b sin t, (a > 0, b > 0, 0 ^ t < 2я)
задають еліпс з центром у точці {х0; ув) і з півосями а і Ь.
Параметричні рівняння гіперболи з центром у точці (х0; у0) і
півосями а і b мають вигляд
х = х0 + a ch t; у = у0 + b sh t, (a > 0, b > 0, — оо < f < + оо),
де ch / і sh tf — гіперболічний косинус і гіперболічний синус (гл. 5,
п. 2.4).
Приклад
Кривошип ОА (рис. 3.57) обертається навколо точки О із сталою кутовою
швидкістю <о і приводить у рух повзун В за допомогою шатуна АВ, причому ОА = АВ =»
= а. Скласти рівняння траєкторії середньої точки М шатуна.
112
О Нехай М (х; у) — середня точка шатуна АВ, ф = Z АОВ, тоді
1 З
х = 0At + АХМХ = О A cos <р + ~о" О A cos rp = -я- a cos ф;
j/ = ЛШХ = MB sin ф = -g- a sin ф.
Оскільки <р = (о/, то
З 1
х = -j- а cos to/; у =~2—а sinto/,
де / — час. Отже, траєкторією середньої точкн шатуна є еліпс. Вилучивши параметр
/, дістанемо його канонічне рівняння:
9 т а" " w
-гаі —
Завдання для самоконтролю
1. Що називається лінією другого порядку?
2. Що називається колом? Вивести рівняння кола з центром у точці Мв (хв; ув)
і радіусом R.
3. Вивести полярне і параметричні рівняння кола.
4. Що називається еліпсом? Вивести канонічне рівняння еліпса.
5. Дослідити форму еліпса, заданого канонічним рівнянням, і побудувати його.
в. Записати полярне і параметричні рівняння еліпса.
7. Що називається гіперболою? Вивести канонічне рівняння гіперболи.
8. Дослідити форму гіперболи, заданої канонічним рівнянням, і побудувати її.
9. Записати полярні і параметричні рівняння гіперболи.
10. Вивести рівняння асимптот гіперболи.
11. Що називається фокальним радіусом, ексцентриситетом і директрисою
еліпса, гіперболи?
12. Що називається параболою? Вивести канонічне рівняння параболи і
дослідити її форму.
13. Записати полярне рівняння параболи. Чому, дорівнює полярний параметр
в полярних рівняннях еліпса, гіперболи і параболи?
14. У чому полягає характерна особливість директрис еліпса, гіперболи і пара
боли? Дати загальне означення цнх кривих.
15. Знайти радіус і координати центра кола
2хі -f 2уа — 12х + У + 3 = 0.
16. Скласти рівняння кола з центром у точці (2; 2), яке дотикається до прямої
З* + у — 18 = 0.
17. Знайти довжину хорди еліпса 4лс2 + 9у2 = 36, яка проходить через його
фокус перпендикулярно до великої осі.
18. Обчислити ексцентриситет еліпса, якщо відстань між його фокусами
дорівнює середньому арифметичному довжин осей.
/ 5
19. Скласти канонічне рівняння гіперболи, яка проходить через точку І — -т- '•
І)
і має асимптоти у = ±2дс.
20. Скласти канонічне рівняння параболи, у якої відстань від фокуса до
директриси дорівнює 12.
113
21. Яку крнву визначає полярне рівняння р :
sin*
19.
Відповіді. 15. 2; (0;-2). 16. (х — 2)* + {у -2)2 = 10. 17.-|-. 18. 0,8.
х2 у2
~Т~~~~4~ = 1- 20. уі = 24х. 21. j/2 = 4(x+l).
§ 7. ПОВЕРХНІ ДРУГОГО ПОРЯДКУ
7.1. Поняття поверхні другого порядку
Поверхнею другого порядку називається множина точок,
прямокутні координати яких задовольняють рівняння виду
ах2 + by2+cz2 + dxy + exz + fyz +gx + hy + kz + 1 = 0, (74)
де принаймні один з коефіцієнтів a, b, c, d, e, f відмінний від нуля.
Рівняння (74) називається загальним рівнянням поверхні другого
порядку.
Поверхня другого порядку як геометричний об'єкт не змінюється,
якщо від заданої прямокутної системи координат перейти до іншої.
При цьому рівняння (74) і рівняння, знайдене після перетворення
координат, будуть еквівалентні.
Можна довести [14], що існує система координат, в якій рівняння
(74) має найпростіший (або канонічний) вигляд.
До поверхонь другого порядку належать, зокрема, циліндричні
та конічні поверхні, поверхні обертання, сфера, еліпсоїд,
однопорожнинний та двопорожнинний гіперболоїди, еліптичний та
гіперболічний параболоїди. Розглянемо ці поверхні та їхні канонічні рівняння.
7.2. Циліндричні поверхні
Циліндричною поверхнею називають поверхню о, утворену
множиною прямих (твірних), які перетинають задану лінію L (напрямну)
1 паралельні заданій прямій / (рис. 3.58). Вивчатимемо лише такі
циліндричні поверхні, напрямні яких
лежать в одній з координатних площин,
а твірні паралельні координатній осі,
яка перпендикулярна до цієї площини.
z\
"fgl
Рис. 3,53
Рнс. 3.59
114
Рнс. 3.60
Розглянемо випадок, коли твірні циліндричної поверхні
паралельні осі Oz, а напрямна лежить в площині Оху.
Нехай задано рівняння
/(х,і/) = 0, (75)
яке в площині Оху визначає (рис. 3.59) деяку лінію L — множину
точок М (х; у), координати яких задовольняють це рівняння. Дане
рівняння задовольняють також координати всіх тих точок N (х; у;
г) простору, у яких дві перші координати х і у збігаються з
координатами будь-якої точки лінії L, а третя координата z — довільна, тобто
тих точок простору, які проектуються на площину Оху в точки
лінії L.
Всі такі точки лежать на прямій, яка паралельна осі Oz і
перетинає лінію L в точці М (х; у). Сукупність таких прямих і є
циліндричною поверхнею о.
Якщо точка не лежить на поверхні о, то вона не може
проектуватися в точку лінії L, тобто координати такої точки рівняння (75) не
задовольняють. Отже, рівняння (75) визначає поверхню о. Таким
115
чином, рівняння / {х, у) = 0 визначає в просторі циліндричну поверхню,
твірні якої паралельні осі Oz, а напрямна L в площині Оху задається
тим самим рівнянням / (х, у) = 0. Ця сама лінія в просторі Охуг
задається двома рівняннями:
f(x,y)=0;
z=0-
Аналогічно рівняння / (х, г) = 0, в якому відсутня зміна у,
визначає в просторі циліндричну поверхню, твірні якої паралельні осі Оу,
а напрямна L в площині Oxz задається тим самим рівнянням / (х, z) =•
= 0; рівняння / (у, г) = 0 визначає в просторі циліндричну
поверхню, твірні якої паралельні осі Ох.
Приклади
1. Поверхня, яка визначається рівнянням х2 + у2 = R2, є циліндричною і
навивається прямим круговим циліндром. її твірні паралельні осі Ог, а напрямною в
площині Оху є коло х2 + У2 — Л2 (рис. 3.60, а).
2. Поверхня, яка визначається рівнянням .£— -f- -^- = 1, є циліндричною і
називається еліптичним циліндром (рис. 3.60, б).
3. Циліндрична поверхня, яка визначається рівнянням — — -2— = 1,
називані2 о2
ється гіперболічним циліндром (рис. 3.60, в).
4. Циліндрична поверхня, яка визначається рівнянням J/2 = 2рлс, називається
параболічним циліндром (рис. 3.60, г).
5. Рівняння гг= 1 —{/ визначає в просторі параболічний циліндр, напрямна
якого в площині Оуг є парабола г2 = 1 — у, а твірні паралельні осі Ох (рис. 3.60, 3).
7.3. Поверхні обертання
Поверхню, утворену обертанням заданої плоскої кривої / навколо
заданої прямої (осі обертання), яка лежить в площині кривої /,
називають поверхнею обертання.
Нехай лінія /, що лежить в площині Оуг, задана рівняннями
F(Y,Z) = 0;
(X, Y, Z — змінні координати точок лінії /, а х, у, z) — змінні
координати точок поверхні).
Розглянемо поверхню, утворену обертанням цієї лінії навколо осі
Oz (рис. 3.61), і знайдемо рівняння поверхні обертання.
Проведемо через довільну точку М (х; у; z) поверхні обертання
площину, перпендикулярну до осі Oz, і позначимо через К і N точки
перетину цієї площини з віссю Oz і лінією /. Оскільки відрізки І Y |,
K.N і KM рівні між собою як радіуси, КР = У, РМ = х, то Y =■
= ± V^x2 -(- у2, крім того, Z = z. Оскільки координати точки N
задовольняють рівняння F (X, Z) = 0, то, підставляючи в це рівняння
116
вамість Y, Z рівні їм величини ± V х2 + у2, г,
дістанемо рівняння
F(±Vx2+y2, z)=0,
(76)
Щ0Х$
яке задовольняє довільна точка М (х; у; z)
поверхні обертання. Можна показати, що
координати точок, які не лежать на цій поверхні,
рівняння (76) не задовольняють. Отже, рівняння
(76) є рівнянням поверхні обертання.
xfistf^—'у Аналогіуно можна скласти рівняння поверхонь
у обертання навколо осей Ох і Оу. Таким чином,
х щоб дістати рівняння поверхні обертання кривої
Рис. 3.61 навколо якої-небудь координатної осі, треба
в рівнянні кривої залишити без зміни
координату, яка відповідає осі обертання, а другу координату замінити на
квадратний корінь із суми квадратів двох інших координат, взятий
Із знаком + або —.
Приклад
Знайти рівняння поверхні обертання еліпсах2 + 4у2 = 4,z = 0 навколо осі Ох,
О У рівнянні еліпса треба залишити без зміни координату х, а замість
координати у підставити в рівняння ± Yy2 + z2:
Xі
х2 + 4 (у2 + z2) = 4 або — + У2 + г2 = 1. •
7.4. Конічні поверхні
Конічною поверхнею називається поверхня, утворена множиною
прямих, що проходять через задану точку Р і перетинають задану
лінію L. При цьому лінія L називається напрямною конічної поверхні,
точка Р — її вершиною, а кожна з прямих, які утворюють конічну
поверхню,— твірною.
Нехай напрямна L задана в прямокутній системі координат
рівняннями
Fl (X, Y, Z) = 0;
.Fa(X.Y,Z) = 0.
а точка Р (х0; у0; z0) — вершина конічної поверхні (рис. 3.62). Щоб
скласти рівняння конічної поверхні, візьмемо на поверхні довільну
точку М {х; у; z) і позначимо точку перетину твірної РМ з напрямною
L через N (X; Y\ Z).
Канонічні рівняння твірних, які проходять через точки N і Р,
мають вигляд
* — *о _ _У_— Уо _ г —z0 (78)
(77)
X
Уо
Виключаючи X, Y і Z з рівнянь (77) і (78), дістанемо шукане
рівняння конічної поверхні.
117
#/XiY;2)
Рнс. 3.62
Рис. 3.63
Приклади
1. Скласти рівняння конічної поверхні з вершиною в точці 0 (0; 0; 0) і з
напрямною L, заданою рівняннями
аа + fca — 1. Z — C.
О Нехай М (де; у; г) — довільна точка конічної поверхні, а N {X; Y; Z) —
точка перетину твірної ОМ і лінії L. Канонічні рівняння твірної ОМ мають вигляд
— = JL = — . Оскільки Z — с, то X = с— , Y = сМ. . Підставляючи ці зна-
X Y Z г z
чення X і Y в перше з рівнянь напрямної L, дістанемо шукане рівняння:
b2z2
у2 г2
а2
При а—Ь напрямною L є коло Xа 4- Y2 — a2, Z = с, а рівняння конічної поверхні
х2 и2 г2 п ,,
має вигляд L-Z— —= 0. Ця поверхня називається прямим круговим ко~
й2 а2 с2
нусом (рис. 3.63).
2. Рівняння конічної поверхні, вершиною якої є точка О (0; 0; 0), а
напрямною — еліпс (рис. 3.64)
має вигляд
9
25
= 0.
Рнс. 3.64
118
і
X
: v
/
-я
б у
7.5. Сфера
Сферою називають множину всіх
точок простору, рівновіддалених від
заданої точки, яка називається центром
кола. Відрізок, що сполучає центр сфери
в її довільною точкою, називається
радіусом сфери.
Візьмемо в просторі прямокутну
систему координат Охуг. Щоб скласти
рівняння сфери з центром у точці 01 (а; Ь\ с)
і радіусом R (рис. 3.65), візьмемо в
просторі довільну точку М (х; у; z).
Точка М належить сфері тоді і лише тоді,
коли OtAf = R, або У(х — а)2 +'""*
*"'"+ {у — Ь)2 + (z — с)2. Це і є рівняння сфери. Для зручності його
ваписують у такому вигляді:
(x-a? + {y-b)2+(z-c)2 = R2. (79)
Зокрема, якщо центр сфери збігається з початком координат,
тобто а = b = с = 0, то рівняння такої сфери має вигляд
x2 + y2+z2 = R2.
Я кщо в рівнянні (79) розкриємо дужки, то матимемо загальне рівняння
сфери
Рнс. 3.65
х2 + у2 + z2 + Ах + By + Cz + D = 0,
(80)
де А = —2а, В = —2Ь, С = —2с, D = а2 + Ь2 + с2 — R2.
Це рівняння має такі властивості.
1°. Рівняння (80) є рівнянням другого степеня відносно х, у і z,
отже, сфера — поверхня другого порядку.
2°. Коефіцієнти при х2, у2, z2 рівні між собою.
3°. У рівнянні відсутні члени з добутками ху, xz, yz.
Проте не всяке рівняння виду (80), яке задовольняє умови 1°—3°,
вображує сферу.
Приклади
1. Знайти центр і радіус сфери, заданої рівнянням
х2 + у2 + г2 + 2х + 4у — 6z — 11 = 0.
О Виділяючи повні квадрати по х, у і z, запишемо задане рівняння у вигляді
(х + 1)2 + (у+ 2)а + (г — 3)г = 25. Отже, точка Ох (—1; —2; 3) — центр сфери
і R = 5 — її радіус. •
2. Рівняння х2 + у2 + г2 + 2х + 4у —6г + 15= Ох або (дт+ 1)а+(у+2)а +
+ (г — 3)а =—1 не визначає ніякого геометричного об'єкта.
7.6. Еліпсоїд
Еліпсоїдом називається поверхня, яка в деякій прямокутній
системі координат визначається рівнянням
х2 , У2
а2 ""■" Ь2
7а
+4г = і-
(81)
119
Рівняння (81) називається канонічним рівнянням еліпсоїда.
Дослідження форми еліпсоїда проведемо методом паралельних перерізів.
Для цього розглянемо перерізи даного еліпсоїда площинами,
паралельними площині Оху. Кожна з таких площин визначається
рівнянням z = /г, де h — довільне дійсне число, а лінія, яка утвориться в
перерізі, визначається рівняннями
Xі
і Л2 и
= і — —; z = h.
(82)
Дослідимо рівняння (82) при різних значеннях h.
X2 U2
1. Якщо І h | > с, с > 0, то —£■ + -тг < 0 і рівняння (82) ніякої
лінії не визначають, тобто точок перетину площини г = h з
еліпсоїдом не існує.
2. Якщо h = ± с, то
X2 Ц2
— + ^- = 0 і лінія (82) вироджується в
точки (0; 0; с) і (0; 0; — с), тобто площини z = с і г = —с дотикаються
до еліпсоїда.
3. Якщо |fc|<c, то —+-гг= 1. де а,
, *?
гх == а ]/ 1 —
/і2
bi = by 1 2~, тобто площина z = h перетинає еліпсоїд по еліпсу
з півосями ах і Ьу. При зменшенні h значення а1 і Ь1 збільшуються і
досягають своїх найбільших значень при h = 0, тобто в перерізі
еліпсоїда площиною Оху матимемо найбільший еліпс з півосями а1 =«
= а, Ь1 — ft.
Аналогічні результати дістанемо, якщо розглядатимемо перерізи
еліпсоїда площинами х = h і у = Н.
Таким чином, розглянуті перерізи дають змогу зобразити еліпсоїд
як замкнуту овальну поверхню (рис. 3.66). Величини a, b, c
називаються півосями еліпсоїда. Якщо будь-які дві півосі рівні між собою,
то триоснии еліпсоїд перетворюється в еліпсоїд обертання, а якщо всі
три півосі рівні між собою,— у сферу.
Приклад
Знайти центр і півосі еліпсоїда, заданого
рівнянням
З*2 + V + 6z2 — 6* + \&у — 36z + 49 = 0.
О Виділяючи повні квадрати відносно
х, у, z, дістанемо
Рис. 3,66
або
З (х — І)2 + 4 (у + 2)2 + 6 (z — З)2 = 36
(*-1)2 , fo + 2)2 . (z-3)
12
(У + 2)2 , JL
Q +
= 1.
120
Отже, даний еліпсоїд має півосі: а = %У~3, Ь = 3, с— J^; його
центр знаходиться в точиі О (\\ —2; 3). ф
7.7. Однопорожнинний гіперболоїд
Однопорожнинним гіперболоїдом називається
поверхня, яка в деякій прямокутній системі координат
визначається рівнянням
*2 , У2
с2 "*" Ь2
с2 1
(83)
Рівняння (83) називається канонічним рівнянням
однопорожнинного гіперболоїда.
Досліджують рівняння (83), як і в попередньому
пункті, методом паралельних перерізів. Перетинаючи
однопорожнинний гіперболоїд площинами,
паралельними площині Оху, дістанемо в перерізі еліпси. Якщо поверхню (83)
перетинати площинами х = h або у = h, то в перерізі дістанемо
гіперболи.
Детальний аналіз цих перерізів показує, що однопорожнинний
гіперболоїд має форму нескінченної трубки, яка необмежено
розширюється в обидва боки від найменшого еліпса, по якому
однопорожнинний гіперболоїд перетинає площину Оху (рис. 3.67).
Приклад
х2 у2 г2
Знайти лінії перетину однопорожнинного гіперболоїда —т— -f- —5-—-rg- =
•= 1 площинами: а) Охг; б) Оху; в) х = 4.
О а) Лінією перетину площини Охг з даним гіперболоїдом є гіпербола
'+ о '
16
1, ^ = 0, або
—Ї6- = 1- * = °-
б) Лінією перетину площини Оху з даним гіперболоїдом є еліпс:
. + -£--
+ 9
2а
16
1, z = 0, або —+— = 1, z = 0.
4"~г 9
в) Лінія перетину площини Jt=43 даним гіперболоїдом є гіпербола:
v2 z2 У2 z2
■+JT—Ї6-=1' * = <*, або-57---4Т = - >• * = 4-
7.8. Двопорожнинний гіперболоїд
Двопорожнинним гіперболоїдом називається поверхня, яка в
деякій прямокутній системі координат визначається рівнянням
— 4-
fc2
1.
(84)
Рівняння (84) називається канонічним рівнянням двопорожнинного
гіперболоїда.
12і
Рнс. 3.68
Рис. 3.69
Метод паралельних перерізів дає змогу зобразити двопорожнинний
гіперболоїд як поверхню, що складається з двох окремих порожнин
(звідси назва двопорожнинний), кожна з яких перетинає вісь Ог і має
форму опуклої нескінченної чаші (рис. 3.68).
Приклад
Скласти рівняння поверхні обертання, утвореної обертанням гіперболи —
4
— -Z— = 1, г = 0 навколо осі абсцис, і визначити вид поверхні.
О Підставивши в рівняння гіперболи замість у вираз ± Yy* + z2. маємо
у* + г»
«Г z2
1, або -Q-+ -q-
Це рівняння двопорожнинного гіперболоїда, який перетинає вісь Ох в точках (2; Оі
0) і (—2; 0; 0) (рис. 3.69). •
7.9. Еліптичний параболоїд
Еліптичним параболоїдом називається поверхня, яка в деякій
прямокутній системі координат визначається рівнянням
+ -к=г,
(85)
що є канонічним рівнянням еліптичного параболоїда. Він має форму
нескінченної опуклої чаші (рис. 3.70). Лініями паралельних перерізів
еліптичного параболоїда є параболи або еліпси.
Приклад
Знайти точки перетину еліптичного параболоїда
з прямою
х — 2
—2~~
* = —+«/'
У+1 z
= —-г = -
10
122
О Запишемо параметричні рівняння даної прямої:
ж =2/+ 2, y = —t—l, z = 4/+10.
Підставимо вирази для х, у, г в рівняння параболоїда і знайдемо ті значення
параметра, які відповідають точкам перетину:
(2/ + 2)2
4< + Ю=^ 4 +(—<—»)': 4f+10 = 2/» + 4/ + 2; /, = —2, f2 = 2.
Підставляючи знайдені значення параметра в параметричні рівняння прямої,
знайдемо точки перетину: ЬЛХ (—2; 1; 2) і Мя (6; —3; 18). •
Рнс. 3.70
Рис. 3.71
7.10. Гіперболічний параболоїд
Гіперболічним параболоїдом називається поверхня, яка в деякій
прямокутній системі координат визначається рівнянням
с2
б2
■г,
(86)
що є канонічним рівнянням гіперболічного параболоїда. Ця поверхня
має форму сідла (рис. 3.71).
Лініями паралельних перерізів гіперболічного параболоїда є
гіперболи або параболи.
7.11. Лінійчаті поверхні
Поверхні, твірні яких є прямі лінії, називаються лінійчатими.
Такими поверхнями є циліндричні та конічні поверхні. Розглянемо
рівняння однопорожнинного гіперболоїда (83) і запишемо його у
вигляді
(++т) (+-Т-)-(' + Т-)('-4") • <87>
Складемо систему рівнянь:
Ч- + -г-*(,+-г)і
х ' (88)
b c k \l a }'
де k — довільний, відмінний від нуля, параметр.
123
Рис. 3.72
Рис. 3.73
При певному значенні параметра k кожне з рівнянь системи (88)
визначає площину, а кожна з систем визначає пряму лінію як
перетин площин.
Якщо перемножити рівняння (88) почленно, то дістанемо
рівняння (87). Тому довільна точка (х; у; z), що задовольняє систему (88),
лежить на поверхні (87). Це означає, що кожна з прямих (88)
повністю лежить на поверхні однопорожнинного гіперболоїда (рис. 3.72).
Отже, однопорожнинний гіперболоїд — лінійчата поверхня. Те
саме стосується і гіперболічного параболоїда (86).
Зазначимо, що однопорожнинні гіперболоїди застосовуються в
будівництві. Спорудження різноманітних висотних веж з
використанням прямолінійних твірних однопорожнинного гіперболоїда поєднує
в собі міцність конструкції і простоту її виконання. Ідея
використання однопорожнинного гіперболоїда в будівництві належить
російському вченому В. Г. Шухову. За проектом Шухова побудована
телевізійна вежа на Шаболовці в Москві. Вона складається з секцій
однопорожнинних гіперболоїдів обертання.
Приклад
х2 ф
Знайти ті прямолінійні твірні гіперболічного параболоїда х = -к-—-=т— ,
які проходять через точку А [4; 2; -g-J .
О Запишемо задане рівняння у вигляді г = (-4- — -|- J І -^- -f- -|-} .
Складемо систему рівнянь
* У .
З — 2 — zfi;
Підставивши координати точки
а + 9 — ь •
124
X \_у Рис. 3.74 Рис. 3.75
З
А в перше рівняння системи, знайдемо k = -у- . Отже, пряма
х _у 3_
З - 2 - 7 z; П4х-2\у—18г = 0;
або {
_х_ _у 7_ l2jc-3«/-14 = 0
З + 2 = 3 •
є однією з тих твірних заданого параболоїда, яка проходить через точку А. Другу
твірну знаходимо аналогічно з системи
х . У и
-3- + -2- = г*;
З — 2 _ k *
Завдання для самоконтролю
1. Що називається поверхнею другого порядку?
2. Довести, що рівняння f (х, у) = 0 задає в просторі циліндричну поверхню,
твірні якої паралельні осі Ог, а напрямна задається тим самим рівнянням.
3. Скласти рівняння поверхні, яка утворюється обертанням лінії, заданої
рівнянням / (у, г) = 0 навколо осі Ог.
4. Як скласти рівняння конічної поверхні, заданої вершиною і напрямною
лінією?
5. Скласти і охарактеризувати рівняння сфери.
6. Що називається еліпсоїдом? У чому полягає метод паралельних перерізів?
7. Що називається однопорожнинним гіперболоїдом? Довести, що в перерізах
однопорожнинного гіперболоїда площинами х = h і у = /і утворюються гіперболи.
8. Що називається двопорожнинним гіперболоїдом? Дослідити перерізи цієї
поверхні площинами г= Н.
9. Що називається еліптичним параболоїдом? Дослідити лінії перетину
параболоїда площинами х = h.
10. Скласти рівняння поверхні, утвореної обертанням лінії у = х навколо осі
Ох. Побудувати поверхню.
11. Яку поверхню визначає рівняння х3—у'2—гг — 4 = 0? Побудувати
поверхню.
12. Яка поверхня визначається рівнянням у = Xі + z1? Побудувати поверхню.
Відповіді. 10. Xі = у2 + z2 (рис. 3.73). 11. Двопорожнинний гіперболоїд
обертання (рис. 3,74), 12. Параболоїд обертання (рис, 3.75).
125
Глава 4
ВСТУП ДО МАТЕМАТИЧНОГО АНАЛІЗУ
Математичний аналіз — це сукупність розділів математики,
присвячених дослідженню функцій методами нескінченно малих. Основи
дано у працях І. Ньютона, Г. Лейбніца, Л. Ейлера та інших
математиків 17—18 ст. Обгрунтування математичного аналізу за
допомогою поняття границі належить О. Л. Коші.
Курс математичного аналізу містить такі розділи: вступ до
аналізу, диференціальне числення, інтегральне числення і теорія рядів.
У 19—20 ст. методами математичного аналізу почали вивчати
складніші математичні об'єкти, ніж функції. Це привело до створення
функціонального аналізу та багатьох інших математичних дисциплін.
§ і. дійсні числа
1.1. Множини. Логічні символи
Поняття множини є одним з фундаментальних у математиці. Воно
належить до понять, яким не можна дати строге означення, тобто до
так званих первісних, які не можна виразити через простіші поняття.
Інтуїтивно множину розуміють як сукупність (сімейство, набір,
зібрання) деяких об'єктів, об'єднаних за певною ознакою чи
властивістю.
Прикладами множин може бути множина деталей, з яких
складається даний механізм, множина шкіл даного міста, множина зірок
певного сузір'я, множина розв'язків даного рівняння, множина всіх
цілих чисел тощо.
Об'єкти, з яких складається множина, називаються її елементами.
Множини позначають великими буквами латинського алфавіту, а їх
елементи—малими. Якщо елемент х належить множині X, то пишуть
х 6 X: запис х £ X або х £ X означає, що елемент х не належить
множині X.
Множина вважається заданою, якщо відома характеристика її
елементів, коли про кожний елемент можна сказати, належить ві«
цій множині чи ні. Так, множині цілих чисел належить число 7, але
не належить число 0.7.
Множина, яка містить скінченну кількість елементів, називається
скінченною. Запис А = [ац а2; ...; ат] означає, що множина А
скінченна і містить т елементів. Множина X = {xt; х2. ...» хп\ ... }, яка
містить нескінченну кількість елементів, називається нескінченною.
Так, множина слухачів в даній аудиторії — скінченна, а множина
трикутників, які можна вписати в дане коло,— нескінченна.
Множина, яка не містить жодного елемента, називається
порожньою і позначається символом 0. Прикладом порожньої множини є
126
множина дійсних коренів рівняння л-апв
х2 + 1 = 0. Нехай задано дві
множини А і В. Якщо кожен елемент
множини А є елементом множини
В, то множину А називають під-
множиною множини В і пишуть
А с В або В гз А («Л міститься
в Ву> або «В містить Л»).
Наприклад, множина натуральних чисел є
підмножиною цілих чисел. Очевид- рнс. 4.1
но, що кожна множина є своєю
підмножиною і порожня множина є підмножиною будь-якої
множини. Якщо множини А і В містять одні і ті самі елементи, тобто А сг
с= В і В с: А, то їх називають рівними і пишуть А »=■= В.
Визначимо деякі операції, які можна виконувати над множинами.
Множину С, яка містить елементи, кожен з яких належить
множині А або множині В, називають об'єднанням (сумою) множин А, В
і позначають С = A (J В (рис. 4.1, а). Отже,
а£А U В & а£А або а£В.
Множину D, що складається з елементів, кожен з яких одночасно
належить множинам А і В, називають перерізом (добутком) множин
А і В і позначають D = А f] В (рис. 4.1, б). Отже, а Є А Л В »
«=> а 6 В і а £ А.
Множину Е, що складається з елементів, кожен з яких належить
множині А і не належить множині В, називають різницею множин
А і В і позначають Е = А \ В (рис. 4.1, в). Отже, а £ А \ В «
« а 6 А і а£В.
Наприклад, якщо
А = {-2; -1;0; 1; 2}, В = {—£-: 0; -і- J і} ,
то
С = А[) В ={-2; -1; ~±;0;~; 1; 2J ,
D = А П В = {0; 1}, Е = А\В = {-2; - 1; 2}.
Нехай Р (х) — деяка властивість числа х, тоді запис {х \ Р (х))
означає множину всіх тих чисел х, для яких виконується властивість
Р (х). Наприклад,
M*2-l =0}={-l; 1}, {jc|*<1,jc>5} = 0.
1.2. Множина дійсних чисел
У курсі вищої математики часто використовують множини,
елементи яких є числа. Такі множини називаються числовими. Назвемо
деякі з них!
127
1) множина натуральних чисел N = {І; 2; ...; п; ...};
2) множина цілих невід'ємних чисел Z0 = {0; 1; 2; ...; п\ ...};
3) множина цілих чисел Z = {0: ±1, ±2; ...; ±п; ...};
4) множина раціональних чисел Q = {plq \р Є 2, <? 6 Л/};
5) множина дійсних чисел R = {х | х = а, аіа2а3 ...}, де a£Z,
щ — цифри десяткової системи числення.
Між цими множинами існує зв'язок:
N<=Z0(=ZczQciR.
Множина дійсних чисел містить раціональні та ірраціональні числа.
Всяке раціональне число є або цілим числом, або скінченним чи
періодичним десятковим дробом. Ірраціональне число — це нескін-
2 1
ченний неперіодичний десятковий дріб. Так.-g- = 0,4; -у = 0,333... —
раціональні числа; \^2 => 1,4142..., я =3,1415 ... —
ірраціональні числа.
Не вдаючись до теорії дійсних чисел [11], зазначимо, що на
множині дійсних чисел завжди виконуються операції додавання,
віднімання, множення і ділення (крім ділення на 0). Корінь непарного
степеня з довільного дійсного числа має одне дійсне значення. Корінь
парного степеня з додатного числа має два значення, які
відрізняються лише знаком. Корінь парного степеня з від'ємного числа на
множині дійсних чисел змісту не має.
Дійсні числа зображають точками (гл. 2. п. 2.2) на координатній
осі або числовій прямій.
Таким чином, між множиною дійсних чисел R і множиною всіх
точок прямої можна встановити взаємно однозначну відповідність.
Це означає, що кожному числу х Є R відповідає певна точка
прямої і, навпаки, кожній точці прямої відповідає певне число.
1.3. Числові проміжки. Окіл точки
Нехай сі b — дійсні числа, причому а < Ь. Розглянемо числові
множини:
[а; Ь] = {х|а<х<Ь}; (а; + оо) = [х\а<.х)\
(a; b] = {х| а <х<Ь}; (—оо: Ь) = {х\х<. Ь};
(а; Ь) = {х | а < х < Ь); [а; + оо) = {х \ а < х);
[а; Ь) = \х | а < х < Ь}; (— оо; Ь] = [х \ х < Ь};
(—оо; +оо) = {х|-,оо<х< +оо}-
Усі ці множини називаються числовими проміжками, причому
[а; Ь] — відрізок (сегмент), (а; Ь), (а; +оо), (—оо; Ь), (—оо; +оо) —
Інтервали, (а; Ь\, [а; Ь), [а; +оо), (—«о, Ь] —півінтервали.
Проміжки [a; b], (a; b), (а; Ь], [а; Ь) називаються скінченними і
позначаються спільним символом (о; Ь); точки а і b називають
відповідно лівим і правим кінцем цих проміжків.
128
Останні з наведених проміжків називаються нескінченними.
Символи —оо і +оо в цих проміжках не треба розглядати як числа; це
символічне позначення процесу необмеженого віддалення точок
числової осі від її початку вліво і вправо. Арифметичні операції над
символами —оо і -|-оо неприпустимі. Вважають, що будь-яке дійсне
число х більше, ніж — оо, і менше, ніж -few: — оо-<х< + оо.
Введемо інтервали, що називаються околами точки. Нехай х0 —
довільне дійсне число. Околом точки х0 називають будь-який інтервал
(a; P), що містить цю точку, тобто а < х0 < р. Так, околами точки
х0 = 1 є інтервали (—0,5; 1,5^, (0; 2) і т. д.
Інтервал (x0 — є; х0 + є), де є > 0, називають г-околом точки
х0, причому точку х0 називають центром, а число є — радіусом околу.
Цей окіл називають досить малим, якщо число є досить мале.
1.4. Модуль (абсолютна величина) дійсного числа
Модулем дійсного числа х називають число | х |, яке визначається
за формулою
Їх, якщо х > 0;
0, якщо х = 0;
— х, якщо х < 0.
Так, | 5 | = 5, | —4 | = 4, | я — 5 | = 5 — п,
х — 3, х>3;
\х — 31 = 0, х = 3;
З — х, х<3.
Геометрично число | х І визначає відстань від початку відліку
0 до точки, відповідної числу х на числовій осі.
Розглянемо арифметичне значення кореня У а2, де a — довільне
дійсне число. Очевидно, що
а, а > 0;
Va? = 0, а = 0;
— а, а<0.
Отже, Va2 = | а |.
Сформулюємо властивості модуля дійсного числа.
1°. Рівні між собою числа мають рівні між собою модулі:
а = Ь=>\а\=\Ь\.
2°. Модуль числа є число невід'ємне:
|х|>0.
3°. Число не більше свого модуля:
129
4°. Протилежні числа мають рівні між собою модулі:
\х\ = \-х\.
5°. Модуль суми двох чисел не більший суми їхніх модулів:
\х+У\<\х\ + \у\.
6°. Модуль різниці двох чисел не менший різниці їхніх модулів:
\х — у\>\х\ — \у\.
7°. Модуль добутку двох чисел дорівнює добутку їхніх модулів:
\х-У\ = \х\\у\.
8°. Модуль частки дорівнює частці модулів діленого і дільника:
х І І*! / п
Т\=Ш' * + °-
9°. Якщо а > 0, то нерівності \х\^а та — а^х < а
рівносильні:
Va>0:|xKa«{x| — c<x<a}.
10°. Для довільного числа а > 0 нерівності | х |> а та х < —а
або х 2> а рівносильні:
(Va>Q:|x|>a)o{x|x< —а або х>а}.
Користуючись поняттям модуля, деякі з наведених вище
проміжків можна записати у вигляді
— a^x^aol—a; a]o|x|<a;
— оо<х< + оо«(— оо; + оо) « | х | < + оо.
Зокрема, є-окіл точки х0 записується у вигляді х0 — є < х <
< х0 + є о (х0 -— є; х„ + є) «» | х — х01 < є; цей самий о/«'/г з eu-
колотою точкою х0 записується так:
0<|х — х0\<е.
Приклад
Розв'язати нерівності: а) | 2х — 3 | < 5; б) (х — 2)а > 9.
О а) За властивістю 9° маємо
—5<2* — 3<5, або — 2<2*<8, або —1<* <4.
Отже, дана нерівність виконується для тих значень х, які належать інтервалу
(—1; 4). _
б) Оскільки /fl«' = | а І, то V (де — 2)» = | х — 2 І і за властивістю 10» маємо
* — 2 :> 3 або х — 2 ^ —3 => х :> 5 або х ^ —1. Таким чином, дана нерівність
справедлива для всіх значень х £ (— оо; —1] у [5; +оо). #
Завдання для самоконтролю
1. Як описати поняття множини? Навести приклади.
2. Записати множний: натуральних чисел, цілих невід'ємних чисел, цілих
чисел, раціональних чисел, дійсних чисел,
130
3. Які множини називаються числовими проміжками?
4. Що називається е-околом точки х0?
5. Який зміст запису А = {х \ Р (х))?
6. Як визначаються об'єднаний, переріз та різниця двох заданих множин?
Навести приклади.
7. Що називається модулем дійсного числа? Який геометричний зміст модуля?
8. Сформулювати властивості модуля дійсного числа.
9. Розв'язати нерівності:
а) | 3* + 1 | < 2; б) (х — 1)» > 9; в) | *» — 5* + 6 | > х" - 5* + 6.
10. Розв'язати рівняння: а) | 2х + 1 | = хг; б) | sin х | = sin *.+ 2; в) | х —
- 1 | + | х — 2 | = 1.
Відповіді. 9. а) 1—1; "H; б) (—оо; — 2)U[4; +оо); в) (2; 3). 10. а) —1;
1+^2; 6)—Y + 2kn, k£Z; в) [1; 2].
\ § 2. ФУНКЦІЯ
' 2.1. Сталі і змінні величини
Величина — одне з основних математичних понять, зміст якого
з розвитком математики змінювався і узагальнювався. Це поняття
настільки широке і всеохоплююче, що його важко визначити. Маса,
сила, тиск, напруга, довжина, об'єм, дійсн? число, вектор — все це
приклади величин. На першій стадії під величиною розуміли те,
І що, виражаючись в певних одиницях (наприклад, довжина в метрах,
маса — в грамах і т. д.), характеризується своїм числовим значенням.
Згодом величинами стали і такі поняття, як число, вектор та інші.
Величини в деякому процесі можуть набувати різних або однакових
числових значень. У першому випадку величина називається змінною,
І у другому — сталою.
Приклади
1. Відношення довжини кола до його діаметра є величина стала для всіх кіл
і дорівнює числу я.
2. Величина х, яка задовольняє умову х Є [0; 1], є змінною величиною.
3. Якщо в різних місцях і на різних глибинах озера вимірювати одночасно тиск
води і її густину, то виявитьси, що тиск — змінна величина, а густину можна
вважати величиною сталою.
У перших двох прикладах стала і змінна величини визначаються
точно. У третьому випадку густина води, хоч і незначно, але
змінюється, тому вона є сталою тільки з певною точністю. В багатьох
реальних явищах можна вка?ати величини, які лише умовно будуть
сталими.
Предметом вищої математики є вивчення змінних величин.
Стала величина вважається окремим випадком змінної: стала —
це така змінна, всі значення якої рівні між собою.
Якщо величина набуває своїх значень дискретно (перервно), то
її називають послідовністю (п. 3.1). Якщо ж змінна величина набуває
неперервних значень, то її просто називають змінною.
131
2.2. Поняття функції
Вивчаючи те чи інше явище, ми, як правило, оперуємо кількома
величинами, які пов'язані між собою так, що зміна деяких з них
приводить до зміни інших.
Такий взаємозв'язок у математиці виражається за допомогою
функції. Цей термін вперше ввів Г. Лейбніц.
Приклади
1. Нехай електричне коло складається з джерела постійної напруги U і
реостата R. При зміні опору R змінюватиметься сила струму. Напруга U — величина стала
(в даному колі), а опір R і струм / — змінні, причому / змінюється залежно від
зміни R за законом Ома: / = _ , тобто сила струму / є функція опору R.
R
2. Під час вільного падіння тіла пройдений шлях S залежить від зміни часу t.
Зв'язок між змінними величинами S і / задається формулою
Si"
С _ -В
15 — 2 •
де g — прискорення при вільному падінні (сгала величина). Величина S залежить
від зміни величини /, тобто шлях S є функцією часу t.
3. Згідно з законом Бойля — Маріотта об'єм газу V та тиск Р при сталій
температурі пов'язані формулою PV = с, де с — деяка стала. Звідси
тобто змінна величина V змінюється залежно від зміни Р, тому об'єм V є функція
тнску Р.
4. Довжина / кола діаметра d визначається за формулою / = Jid, де я — стала
величина. Змінна / залежить від змінної величини d, тобто довжина кола / є функцією
діаметра d.
Спільним у цих прикладах є те, що зв'язок між змінними
величинами описується певним правилом (залежністю, законом,
відповідністю) так, що кожному значенню однієї величини (R, P, t, d)
відповідає єдине значення другої (/, V, S, І).
Дамо тепер означення функції. Якщо кожному числу х з деякої
числової множини X за певним правилом поставлене у відповідність
єдине число у, то кажуть, що у є функція від х і пишуть у = / (*),
х 6 X. Це означення належить М. І. Лобачевському і Л Діріхле.
Змінна х називається незалежною змінною, або аргументом, а
змінна у — залежною змінною, або функцією; під символом /
розуміють те правило, за яким кожному х відповідає у, або ті операції,
які треба виконати над аргументом, щоб дістати відповідне значення
функції
Множина X називається областю визначення функції. Множина
Y усіх чисел у, таких, що у = f (х) для кожного х 6 X називається
множиною значень функції, тобто
y=[y\y = f{x). Vx£X).
132
Іноді у означенні функції припускають, що одному значенню
аргументе відповідає не одне, а кілька значень у або навіть нескінченна
множина значень у. У цьому випадку функцію називають
багатозначною, на відміну від означеної вищ.е_однозначної функції.
Прикладами многозначних функцій є у= ± V х, у = Arcsin x тощо. Надалі
ми розглядатимемо лише однозначні функції.
У ширшому розумінні поняття функції вживається як синонім
поняття відображення множини на множину.
Нехай задано дві непорожні множини X і Y з елементами х Є X
і у £ Y і нехай перетворення / переводить х в у. Тоді це
перетворення / (правило, закон, відповідність, відображення, залежність)
називають функцією і пишуть
X J+ Y аб° /: х -*- Y
(X та Y множини деяких елементів, не обов'язково числові).
У цьому випадку, як і у випадку числових множин X та Y, ці
множини називають областю визначення та множиною значень функції.
Залежно від природи множини X та Y для функції / вживають різні
назви. Так, якщо X та Y — множини дійсних чисел, то кажуть, що
/ — дійсна функція дійсного аргументу; якщо X — множина
комплексних чисел (гл. 7, п. 1.4), a Y — множина дійсних чисел, то / —
дійсна функція комплексного аргументу; якщо X — множина
функцій, a Y — числова множина, то / називається функціоналом.
Порівнюючи означення функції, бачимо, що в першому з них під
функцією у = / (а) розуміють її значення — число у. За другим
означенням функція — це закон або правило /, за яким кожному
елементу х £ X ставиться у відповідність єдиний елемент у £ Y.
Таким чином, за першим означенням поняття функції зводиться до
поняття змінної величини, а за другим —до поняття відповідності.
Іноді поняття функції виражається і через інші поняття (наприклад,
множину). Надалі користуватимемось першим означенням функції.
У курсі математичного аналізу розглядають функції, для яких
область визначення X і множина значень Y складаються з дійсних
чисел. Тому під поняттям «число», якщо не зроблено застереження,
розумітимемо дійсне число.
З означення функції не випливає, що різним значенням аргументу
відповідають різні значення функції. Функція може в усій області
визначення набувати кількох або навіть одного значення. Зокрема,
якщо множина значень функції складається лише з одного числа с,
то таку функцію називають сталою і пишуть у = с.
2.3. Способи задання функцій
Щоб задати функцію у = f (x), треба вказати її область
визначення X, множину значень Y і правило /, за яким для довільного числа
х £ X можна знайти відповідне йому число у 6 Y.
133
У =
Основні способи задання функції: аналітичний, графічний і
табличний.
При аналітичному способі задання функції відповідність між
аргументом і функцією задається формулою (аналітичним виразом),
де зазначено, які дії потрібно виконати над значенням аргументу та
сталими числами, щоб дістати відповідне значення функції. Якщо
при цьому область визначення не вказується, то під останньою
розуміють область існування функції — множину всіх дійсних значень
аргументу, для яких аналітичний вираз має зміст.
Зауваження. Не слід ототожнювати функцію і формулу, за
допомогою якої ця функція задана. Однією й тією формулою можна
задавати різні функції, і навпаки, одна й та сама функція на різних
ділянках її області визначення може задаватись різними формулами.
Так, функції у = х9, х 6 Ю; 1] і у = xa, x 6 (2; 5) — різні, бо вони
мають різні області визначення; функція
2л;—1, х<0;
lgx, x>0
визначена на проміжку (—оо; + оо), але для недодатних і додатних
значень аргументу її задано різними формулами.
Приклад
Знайти області визначення функції:
а) у= /Z^+3x + 4 "' 6)y = lUsin(x-2); в) у = arcsin -^=- ;
г) y = /4^+-j/_JL_ + lg(*-2); д)у = п\.
О а) Х={х\ — x* + 3x + 4>0) = {x\ — 1<*<4} = (— 1; 4);
б) Х= {*|sin(jc — 2)>0} = {*|2(яп+1)<*<(2п+ 1)я + 2};
в) Л = {*'|ІЇ~Ч*£1}П {*і *=^°) = (-«>; -т] и|т: +°°):
г) Х={*|4 —*>0} П М*=И-1} П {*І* —2>0} = (2;4];
д) формула у = пі ставить у відповідність кожному натуральному числу п
число у = пі. Наприклад, якщо п = 3, то у = 31 = 1 - 2-3=6, якщо п = 5, то
«/=51 =1-2.3-4-5= 120. Отже, X = Z0 (вважають, що 0! = 1). •
Ці приклади показують, що областю існування функції можуть
бути досить різноманітні множини: відрізок, кілька або навіть
нескінченна кількість відрізків, дискретна множина точок тощо.
Зазначимо, що задача знаходження множини Y значень
аналітично заданої функції набагато складніша і пов'язана з задачею про
екстремуми функції (гл. 6, п. 6.3).
При графічному способі задання функції у = f (x) відповідність
між змінними х і у задається графіком — множиною точок (х; у)
площини, прямокутні координати яких задовольняють рівність у =
134
= / (х). Залежно від того, яку задано функцію, графік її може
складатись з однієї суцільної лінії, кількох ліній, дискретної множини
точок площини тощо.
Графічним способом задання функції широко користуються при
дослідженнях, пов'язаних з використанням таких самописних
приладів, як барограф (для запису змін атмосферного тиску), осцилограф
(для запису змін електричного струму або напруги),
електрокардіограф (для запису електричних явищ, пов'язаних з діяльністю серця),
термограф (для запису змін температури повітря) тощо. Криві (їх
називають відповідно барограма, осцилограма, електрокардіограма,
термограма), що їх виписують прилади, задають цілком певну
функцію, властивості якої характеризують перебіг того чи іншого процесу.
Графіки функцій можна спостерігати на дисплеях комп'ютерів.
У математиці графіками широко користуються для геометричного
зображення функцій, навіть тоді, коли ці функції задані аналітично.
Якщо функція у — f (х) задана на деякій множині X формулою, то
завжди можна вважати, що їй відповідає певний графік, який
визначає цю функцію геометрично. А якщо функція задана довільним
графіком, то чи можна її задати деякою формулою? Це дуже складне
запитання. Щоб відповісти на нього, потрібно з'ясувати, який зміст має
поняття формули. Якщо функція у = f (x) задана формулою, то ми
поки що вважаємо, що функція у утворюється за допомогою скінченного
числа таких операцій над х, як додавання, віднімання, множення,
ділення, добування кореня, логарифмування, взяття sin, arcsin тощо.
Математичний аналіз дає змогу значно розширити поняття формули.
Зокрема, формулою вважається також і нескінченний ряд, членами
якого є ті чи інші функції, тобто допускається нескінченне число
операцій над цими функціями. За допомогою таких формул більшість
кривих, що зустрічаються на практиці, можна задати аналітично
(гл. 9).
Приклади
1. Графіком функції у = 2п — 3, n£N є нескінченна множина ізольованих
точок "(рис. 4.2), які лежать на прямій у = 2х — 3.
2. Графіком функції у = \ х | є сукупність бісектрис першого і другого
координатних кутів (рис. 4.3).
3. Графіком функції
(Xі — 2, — оо<х<2;
-{'
2, 2<*<+оо,
що задана різними аналітичними внразамн на різних частинах області зміни х, є
сукупність параболи і прямої (рис. 4.4). Стрілка на графіку означає, що точка М (2;
2) ие належить прямій.
4. Функція
-1, *<0:
у = sign х =
0, х = 0;
1, *>0
135
Уі
] , І
І І
Ji2 3 4 х
Рис. 4.2
Рис. 4.4
(читається «сигнум ікс») визначена на всій числовій осі і набуває трьох значень:
—1; 0; 1; X = (—оо; + оо), Y = {—1, 0, 1}. Графік цієї функції зображено на
рис. 4.5.
5. Функція у — -Щ- (рис. 4.6) визначена при х Ф 0 і набуває двох значень:
-1; 1; Х= (-оо; 0)*и (0; +оо): Y = {—1, 1}.
Зауважимо, що в прямокутній системі координат Оху (рис. 4.7)
функцію задає лише така крива /2, яку кожна пряма, що проходить
через точку х £ X паралельно осі Оу, перетинає лише в одній
точці. Область визначення цієї функції —■ відрізок [а; Ь\, який є
проекцією кривої на вісь Ох. Щоб знайти значення функції //„ = / (х0), що
відповідає значенню аргументу х0, потрібно через точку л'0 £ [а;
Ь\ провести перпендикуляр до осі Ох. Довжина цього
перпендикуляра від осі Ох до точки М0 (х0; у0) перетину з кривою, взята з
належним знаком, і є значенням функції в точці х0, тобто у0 = f (х0).
Крива /, не задає функцію.
Табличний спосіб задання функції у — f (x) полягає в тому, що
відповідність між змінними х та у задається у вигляді таблиці.
Табличний спосіб досить часто використовується при проведенні
експериментів, коли задають певну сукупність хг, х2, ...,хп значень
аргументу і дослідним шляхом знаходять відповідні значення
функції: уи у2, .... уп.
Якщо функція задана аналітично, то для неї можна побудувати
таблицю, тобто табулювати функцію. Табулюються, як правило,
функції, які виражаються складною формулою, але часто зустрічаються в
практиці. Такими є, наприклад, таблиці логарифмів, тригонометричні
/
1
Рис. 4.5
Рис. 4.6
136
А Ч
fcn
Рис. 4.7
/ 2 З
Рис. 4.8
.<
таблиці тощо. І тут, як і при графічному заданні функції, виникає
обернене запитання: чи завжди можна від табличного задання
функції перейти до аналітичного, тобто чи можна функцію, задану
таблицею, задати формулою? Щоб відповісти на нього, зауважимо, що
таблиця дає не всі значення функції. Проміжні її значення, які не
входять у задану таблицю, можна знайти наближено за допомогою так
званої операції інтерполювання функції. Тому в загальному
випадку знайти точний аналітичний вираз функції за її таблицею
неможливо. Проте можна побудувати формулу, причому не одну, яка для
значень xit що є в таблиці, буде давати відповідні значення yt функції.
Такі формули називаються інтерполяційними (гл. 5, п. 72).
Останнім часом табличний спосіб широко застосовується у
зв'язку з використанням електронно-обчислювальних машин (ЕОМ), тому
що вихідну інформацію ЕОМ видає у вигляді числових масивів
(таблиць). У зв'язку з цим все більше поширюється і стає одним з
основних четвертий спосіб задання функції — за .допомогою
комп'ютерних програм. Як правило, цим способом задаються такі функції,
які є розв'язками складних математичних задач. Жодним з
попередніх способів подібні функції задати не можна.
Крім розглянутих існують й інші способи задання функції. Так,
функцію можна задати словесним описом залежності між змінними.
Приклади
1. Функцію у задано умовою: кожному дійсному числу х ставиться у
відповідність найбільше ціле число, яке не перевищує х (рис. 4.8). Ця функція, визначена на
множині дійсних чисел, називається цілою частиною х і позначається у = [х] або
у = Е (х) (Е — початкова літера французького слова entier — цілий). Наприклад,
10, 2] = 0, [-2, 5] = -3, [5] = 5 і т. д.
2. Кожному раціональному числу ставиться у відповідність число 1, а
ірраціональному — число 0. Ця функція теж визначена на множині R. Вона позначається
через D (х) і називається функцією Діріхле:
{1, якщо х — раціональне число;
0, якщо х — ірраціональне число.
Графік функції D (х) практично зобразити не можна, бо він складається з точок
прямої у = 1, що мають абсцисами раціональні числа, і з точок прямої у = 0, в" яких
абсциси — ірраціональні числа.
137
2.4. Класифікація елементарних функцій
Основними елементарними функціями називаються такі:
1. Степенева функція у — Xа, а Є R- Область визначення і
графіки цієї функції залежать від значення а (рис. 4.9, а—є).
2. Показникова функція у = а", а > 0, а Ф 1 (рис. 4.10).
3. Логарифмічна функція у = loga x, а~>0, аф\ (рис. 4.11).
4. Тригонометричні функції: у — sin х, у = cos х, у = tg x,
у = ctgx (рис. 4.12, а—г).
5. Обернені тригонометричні функції: у = arcsin х, у = arccos x,
у = arctg х, у = arcctgx (рис. 4.13, а—г).
Графіки основних елементарних функцій треба пам'ятати.
Перетворюючи їх, можна дістати графіки багатьох інших функцій.
Нехай графік функції у = / (х) відомий, розглянемо деякі перетворення
цього графіка.
1. Графік функції у = / (х) + b дістанемо з графіка функції у =
= / (х) паралельним перенесенням останнього вздовж осі Оу на
величину, що дорівнює b (рис. 4.14).
2. Графік функції у = / (х + а) дістаємо з графіка функції у =
= / (х) паралельним перенесенням останнього вздовж осі Ох на
величину, що дорівнює а (рис. 4.15).
3. Графік функції у — cf (х), с Ф0 (рис. 4.16) дістаємо з графіка
функції у = f (х) при 0 < с < 1 за допомогою стискування в — разів
ординат останнього, а при с "> 1 за допомогою розтягування в с разів
138
У,
6
і У=І09а*
V /^~*>і
гК *
J ^N^Cf
Рис. 4.11
його ординат із збереженням відповідних абсцис. Якщо —оо <; с <.
<Z 0, то графік у = cf (x) є дзеркальним відображенням графіка
у = —cf (х) відносно осі Ох (відповідно до випадків —1 < с < 0 і
с<-1).
4. Графік функції у = f (kx), ІгфО дістаємо з графіка функції
у = f (х) при 0 < k <L 1 збільшенням в -г- разів абсцис його точок,
а при 1 < k < +00 зменшенням в k разів абсцис його точок із
збереженням їхніх ординат (рис. 4.17).
Якщо —оо ■< k < 0, то графік у = f (kx) є дзеркальним
відображенням графіка / (—kx) відносно осі Оу.
Введемо арифметичні операції над функціями. Нехай функція
У = f (х) визначена на множині А, а ф (х) — на множині В,
причому переріз цих множин С = А Л В Ф 0. Тоді на множині С можна
визначити суму функцій f (х) + ц> {х). Значення суми в точці х =
= х0 £ С — це число, яке дорівнює сумі / (х0) + ф (*о). Аналогічно
Рис. 4.12
139
У,
0
\*
5Г
2
^s^u=arcctffx
X
г
Рис. 4.13
Рис. 4.14
а>0
yjffx) y=f/k+a)
а<0
Рис. 4.15
y=cf(x),ol
fjx)
cffx),0<c<1
\^ y--cf(x),-1<c<0
y=cf(x),cc-t
у*(*4*>і у
y-f/xj у-фх)
0<H<t
yffa)
-t<K<0
Рис. 4.16
Рис. 4.17
140
можна визначити рїзницю f (х) — ф (де), добуток f (х) ф (х) та част-
/ (х)
ку ' : ' цих функцій (останню за умови, що ф (х) Ф 0, V х € Q.
Над функціями виконують і так звану операцію суперпозиції, або
накладання. Нехай функція у = f (н) визначена на множині А, а
функція и = ф (х) — на множині В, причому для кожного значення
х € В відповідне значення и = <р (я) £ А. Тоді на множині В
визначена функція f (ф (х)), яку називають складеною функцією від х, або
суперпозицією заданих функцій, або функцією від функції.
Змінну и = ф (л:) функції у = / (и) називають проміжним
аргументом, або внутрішньою функцією, а змінну у = f (и) зовнішньою
функцією.
З/
Наприклад, функція у = у sin x є суперпозицією двох
основних елементарних функцій — степеневої та тригонометричної: у —
з,
= |/'и, н£[—1; 1], н = sin х, х £ (—оо; +оо). Складені функції
можна утворювати за допомогою суперпозиції не тільки двох, а й
більшої кількості функцій.
Наприклад, функцію у — 2s,nJC можна розглядати як
суперпозицію трьох функцій:
у = 2и, u£l—l; I], u = smv, v£(— оо; + оо),
v = Xs, х£(—оо; + оо).
Основні елементарні функції, а також функції, утворені за
допомогою формул, в яких над основними елементарними функціями
виконується лише скінченне число арифметичних операцій
(додавання, віднімання, множення, ділення) і суперпозицій, називаються
елементарними.
1 5х2— і
Так, функція у = arccos 1 = є елементарною функцією,
а функції
х2, — оо<хї^1; , х2 , х3 , , х" ,
І2х + 1, 1<х< + оо; z J "
не є елементарними. Неелементарними є також функції п\, sign x,
Е (*), D (х).
Елементарні функції поділяють на такі класи.
1) Функція виду Р (х) = а(,хп + а1гп-1 + ... + a„-tx + an, де
п Є Z0, а0, ах, ..., ап — дійсні числа — коефіцієнти (о0 Ф 0),
називається цілою раціональною функцією, або многочленом (поліномом)
степеня п. Многочлен першого степеня називається також лінійною
функцією, а другого — квадратичною.
2) Функція, що є відношенням двох многочленів
р,г\ _ а0х" + Оі**~' + • • • + ап
«(Х)-Ьих" + ЬіХ"-1+...+Ьт'
141
називається дробовою раціональною функцією, або раціональним
дробом.
Сукупність многочленів і раціональних дробів утворює клас
раціональних функцій.
3) Функція, утворена за допомогою скінченного числа
суперпозицій та арифметичних операцій над раціональними функціями і над
степеневими функціями з дробовими показниками і яка не є
раціональною, називається ірраціональною функцією.
Наприклад, функції у = у -4Фт-; у = V~x + 5 —
ірраціональні.
4) Елементарна функція, яка не є раціональною або
ірраціональною, називається трансцендентною функцією. Це, наприклад,
функції у = sin х, у = 2* + х, у = lg х, у = arctg x тощо.
2.5. Обмежені функції
Функцію f (х), визначену на множині А, називають обмеженою
на цій множині, коли існує таке число М ~> 0, що для всіх х Є А
виконується нерівність І f {х) І ^ М. Таким чином, значення
обмеженої функції не виходять за межі відрізка 1-М; М\. Тому її
графік лежить між прямими у = —М та у = М (рис. 4.18).
Наприклад, функції у = sin х та у = cos x обмежені на всій числовій осі,
бо | sin х | ^ 1, | cos х | ^ 1, х 6 (—то; +то).
Якщо для функцій f (х) або <р (х), визначених на множині А,
існує таке число N, що виконується нерівність f (х) ^ N або ф (х) ^
^ N, то функцію f (х) називають обмеженою зверху, а ф (х) —
обмеженою знизу. Наприклад, функція у = а* на інтервалі (—оо;
+то) обмежена знизу прямою у = 0, але не обмежена зверху;
функція у = —х2 + 4х — 3 (рис. 4.19) обмежена зверху прямою
у = 1, але не обмежена знизу; функція у = необмежена.
Розглядаючи обмеженість функції f (x), ми тим самим
характеризуємо множину значень цієї функції.
у-М
Рис. 4.18
Рис. 4.19
142
2.6. Монотонні функції
Нехай функція f (х) визначена на множині А. Якщо для двох
довільних різних значень хг і х2 аргументу, взятих із множини А, з
нерівності хх < х2 випливає, що:
а) f (Xj) < f (Xa), то функція називається зростаючою;
б) f (*i) ^ f (Xa), то функція називається неопадною;
в) f (*і) > / Wi то функція називається спадною;
г) / (*і) ^ f W, то функція називається незростаючою.
Наприклад, функція у — а" (рис. 4.10) є зростаючою при а >
> 1 і спадною при 0 <.а < 1 на інтервалі (—то; +оо); функція
у = —Xі + 4х — 3 (рис. 4.19) є зростаючою на інтервалі (— оо; 2) і
спадною на інтервалі (2; + °°); функція Е (х) (рис. 4.8) — неспадна.
Зростаючі, незростаючі, спадні й неспадні функції на множині
А називаються монотонними на цій множині, а зростаючі і
спадні — строго монотонними.
Нехай функція не є монотонною в усій своїй області визначення,
але цю область можна розбити на деяке (скінченне чи нескінченне)
число проміжків, які не перетинаються і на кожному з яких
функція монотонна. Такі проміжки називаються проміжками
монотонності функції.
Так, функція у = х2 не є монотонною на всій числовій осі, але
має два проміжки монотонності: (—оо; 0) і (0; +то); на першому
з них функція спадає, а на другому — зростає.
Функції у = sin х і у = cos х мають нескінченну кількість
проміжків монотонності.
2.7. Парні і непарні функції
Нехай функція f (х) визначена на множині А точок осі Ох,
розміщених симетрично відносно точки х = 0, тобто якщо х Є А, то
й —х Є А.
Функцію / (х) називають парною, якщо f (—х) = / (х), х Є А,
і непарною, якщо / (—х) = —f (x), х £ А
Приклади
1. Функція у = — не є парною і не є непарною, бо її область визначення
X -р Z
не симетрична відносно точки х = 0: в точці х = 2 функція визначена, а в точці
х = —2 — не визначена.
9~2 -І- у
2. Функція у = '— має область визначення (—оо; 0) U (0; +оо), снмет-
х
ричну відносно точки х = 0, але не є ні парною, ні непарною, бо
2(— *)* + (— х) 2х* — х , 2х* + х
143
Xі 4- 1
3. Область визначення функції f (х) = І симетрична відносно точки
ха — З
х = 0 (х ф ± V3), і ця функція парна, бо •
и - (~*>" + ' *' + ' ,і \
м х) - (_ х)ї _ 3 _ х2 _ з —; w-
4. Функції у = sin х, у = tg де, у = ctg х — непарні, а у = cos x — парна.
Графік парної функції симетричний відносно осі Оу, а непарної — відносно
початку координат. Крім того, якщо парна чи непарна функція має певну властивість
для додатних значень х, то можна визначити відповідну властивість для від'ємних
значень х. Наприклад, якщо для х > 0 парна функція зростає, то для х < 0 ця
функція спадає.
2.8. Періодичні функції
Функція f (х), визначена на всій числовій прямій, називається
періодичною, якщо існує таке число Т, що / (х -+- Т) = f (x). Число
Т називається періодом функції. Якщо Т — період функції, то її
періодами є також числа kT, де k дорівнює ±1, ±2, .... Найменший
з додатних періодів функції, якщо такий існує, називається основним
періодом функції.
Ми визначили періодичну функцію, задану на всій числовій
прямій. Більш загальним є таке означення.
Функція f (х), визначена на множині X, називається періодичною
на цій множині, якщо існує таке число Т Ф 0, що х -\- Т Є. X і
/ (х + Л = / (*), х£Х.
З означення випливає, що для побудови графіка періодичної з
періодом Т функції досить побудувати її графік на довільному
проміжку довжини Т, а потім продовжити цей графік на всю область
визначення, повторюючи його через кожний проміжок довжини Т.
Приклади
1. Основним періодом функцій у = sin х, у = cos х є число Т = 2л.
2. Функції у = tg х і у = ctg х мають основний період Т = п.
3. Періодом функції у — С (С — стала) є довільне, відмінне від нуля число;
ця функція не має основного періоду.
4. Знайти період функції у — sin (ах + 6), х £ (—оо; +°о).
О Якщо ця функція періодичне , то існує таке число Т Ф0, що
sin {ax + b) = sin (а (х + Т) + Ь),
звідки
2пп
2яп + ах + b = ах + аТ + Ь, Т = —— , n£Z.
Отже, основним періодом даної функції є число Т = •
І« І
Періодичні функції відіграють важливу роль для математичного
опису періодичних явищ, що спостерігаються в природі. Характерною
особливістю цих явищ є періодичне повторення їх через певні про-
144
міжки часу. Прикладами можуть бути рух маятника навколо осі,
рух небесних тіл (планети рухаються по еліптичних орбітах), робота
майже всіх машин і механізмів пов'язана з періодичним рухом (рух
поршнів, шатунів тощо).
2.9. Неявно задані функції
Якщо функція задана рівнянням у = f (x), розв'язаним відносно
залежної змінної у, то кажуть, що функція задана у явній формі або
є явною.
Під неявним заданням функції розуміють задання функції у
вигляді рівняння F (х, у) = 0, не розв'язаного відносно залежної
змінної.
Це рівняння задає функцію лише тоді, коли множина
впорядкованих пар чисел (х, у), які є розв'язком даного рівняння, така, що будь-
якому числу х0 у цій множині відповідає не більше однієї пари (х0,
у0) з першим елементом х0. Так, рівняння 2х -\- Зу — 1=0 задає
функцію, а рівняння х2 -\- у2 = 4 не задає, бо значенню х0 = \^3
відповідає дві пари чисел: (Уз, 1), fl/З, —І).
Довільну явно задану функцію у = f (х) можна записати як
неявно задану рівнянням f {х) — у =0, але не навпаки. Наприклад,
функцію є" — х + У = 0 явно записати не можна, бо це рівняння
не можна розв'язати відносно у. Тому неявна форма запису
функції більш загальна, ніж явна. Неявно задану функцію називають
неявною.
Зауважимо, що терміни «явна функція» і «неявна функція»
характеризують не природу функції, а аналітичний спосіб її задання.
2.10. Обернені функції
Нехай задана функція у = / (х) з областю визначення X і
множиною значень Y. Функція f {x) кожному значенню х0 Є X ставить
у відповідність єдине значення у0 Є Y (рис. 4.20). При цьому може
виявитись, що різним значенням аргументу хх і х2 відповідає одне
й те саме значення функції уу (рис. 4.21). Додатково вимагатимемо,
щоб функція / (х) різним значенням х ставила у відповідність різ-
У,
і L*
Рис. 4.21
145
Рис. 4.22
ні значення у. Тоді кожному значенню
у 6 У відповідатиме єдине значення х 6 X,
тобто можна визначити функцію х — ф (у)
з областю визначення Y і множиною
значень X. Ця функція називається оберненою
функцією до даної.
Отже, функція х — ф (у) є оберненою
до функції у = f (x), якщо:
1) областю визначення функції ф є
множина значень функції f;
2) множина значень функції ф є
областю визначення функції f;
3) кожному значенню змінної у £ Y
відповідає єдине значення змінної х £ X.
З цього випливає, що кожна з двох функцій у = f (х) і х = ф (у)
може бути названа прямою або оберненою, тобто ці функції взаємно
обернені.
Щоб знайти функцію х = ц> (у), обернену до функції у = / (х),
достатньо розв'язати рівняння f (х) = у відносно змінної х (якщо
це можливо). Оскільки кожна точка (х; у) кривої у = f (x) є
одночасно точкою кривої х = ф (у), то графіки взаємно обернених функцій
У — f (*) і х = ф (у) збігаються. Якщо ж додатково зажадати, щоб,
як звичайно, незалежна змінна позначалась через х, а залежна —
через у, то замість функції х = ф (у) матимемо функцію у — ц> (х).
Це означає, що кожна точка М1(х0; у0) кривої у = / (х) стане точкою
Ліг ІУо> хо) кривої у = ф (х). Оскільки в системі координат Оху точки
Мг і Л12 симетричні відносно прямої у = х, то графіки взаємно
обернених функцій у — f (х) і у = ц> (х) симетричні відносно
бісектриси першого і третього координатних кутів (рис. 4.22).
З означення оберненої функції випливає, що функція у = ф {х),
х £ X, у £Y має обернену тоді і тільки тоді, коли ця функція
задає взаємно однозначну відповідність між множинами X і Y.
Таку властивість мають, зокрема, зростаючі функції, оскільки для
них (xj < *а) « (уг < і/а), і спадні функції, тому що для них (хх <
<. Xg) <=> {уг > г/g). Звідси випливає, що будь-яка строго монотонна
функція має обернену функцію. При цьому, якщо пряма функція
строго зростає (спадає), то обернена їй функція також строго зростає
(спадає).
Зазначимо без доведення, що коли функція у = f (x) зростає
(спадає) і неперервна на відрізку la; b], то вона має обернену
функцію, яка зростає (спадає) і неперервна на відрізку If (a); f ф)]
(І/ (Ь); / (a)D I12I.
Приклади
1. Функція у = 2* — 1 мав обернену функцію у = ж ~*~ (рис. 4.23).
146
2. Функція у = я* на множині (—оо; +°о) не має оберненої, тому що вона не є
монотонною; на множині (0; -f-oo) вона має обернену функцію у = Vx, x Є (0; -f-oo)
(рис. 4.24).
3. Функція у = а*, х Є R, у Є (0; + оо) (рис. 4.10) має обернену функцію у —
•= logax, х Є (0; +оо), у є R (рис. 4.11).
4. Функція у = sin х, х 6 R (рис. 4.12, а) не має оберненої; функція у = sin x,
[я я "І
— ~2 ; — має обернену функцію у = arcsin х, х 6 [—1; 1] (рис. 4.13, а).
5. Функція у = cos х, дг Є [0; яі (рис. 4.12, б) має обернену функцію у =
«= arccosx, де Є [—1; 1], у Є [0; я] (рис. 4.13, б).
6. Функція у= arctg х, х 6 (—оо; +оо) (рис. 4.13, в) обернена функції у =
= tg *. * Є —-у; -у . У Є Я (рис. 4.12, в).
7. Функція у = arctg х, х 6 R (рис. 4.13, г) обернена функції у = ctg ж, х Є (0;
я). У ЄЯ (рис. 4.12, г).
2.11. Параметрично задані функції
Нехай задано дві функції
* = ф(0. y=V(t) (1)
однієї незалежної змінної /, визначені на одному й тому самому
проміжку. Якщо функція х = ф (і) строго монотонна, то згідно з
попереднім пунктом вона має обернену функцію t = Ф (х). Тому змінну у
можна розглядати як складену функцію від х : у = ij) (Ф (*)).
Задання функціональної залежності між х і у у вигляді двох
функцій (1) називають параметричним заданням функцій.
Допоміжна змінна t при цьому називається параметром. Всяка
параметрично задана функція (1) визначає на площині Оху деяку криву,
проте не всяка параметрично задана крива (гл. З, п. 1.4) визначає
функцію.
Приклади
1. Рівняння х = R cos t, у = R sin І, І £ [0; п] визначають функцію, оскільки
змінна х = R cos t, t 6 [0; я] строго монотонна. Задана функція визначає півколо
у = У R2 — Xі, розміщене у верхній півплощині, тому що при 0 ^ / < я значення
у = R sin t > 0.
147
2. Рівняння х = a cos3 t, у = а sin» f, 0 < f < -у визначають функцію,
графіком якої є дуга астроїди, що знаходиться у першому координатному куті (рис. 3.8).
Завдання цля самоконтролю
1. Що називається функцією? Навести приклади.
2. Що називається областю визначення та множиною значень функції?
3. Охарактеризувати основні способи задання функції.
4. Які функції називаються основними елементарними функціями?
5. Побудувати графіки таких основних елементарних функцій:
у = х; у = х2; у = х3; у = х~1; у = ах;
у = loga х; у — sin х; х = cos х; у = tg x;
у = ctg х; у = arcsin х; у = arccos х; у = arctg x.
6. Як, маючи графік функції у = f (х), побудувати графік функції у = а/ (Ах +
+ 6)?
7.
8.
9.
Яка функція називається складеною? Навести приклади.
Яка функція називається елементарною?
Як класифікують елементарні функції?
10. Які функції називаються монотонними? Навести приклади.
11. Яка функція називається парною, непарною? Які особливості цих функцій?
Навести приклади.
12. Яка функція називається періодичною? Що називається її основним
періодом? Навести приклади.
13. Як знайти функцію, обернену до даної? За яких умов існує обернена
функція? Навести приклади.
14. Яка функція називається неявно заданою, параметрично заданою?
15. Знайти область визначення функцій:
Зя і
а) y = \rxJr arcsin —^ + ^ (9 ~ x*)> б) У = 'б cos *■
16. Нехай / (х) = (х + 1) (х — І)-1. Довести, що / (х~') = —/ (х).
17. За допомогою перетворень відповідних графіків основних елементарних
функцій побудувати графіки функцій: а) у = sin х + 3; б) у = 3 sin 2х; в) у =
= lg (а: — 1).
18. Довести, що коли кожна з функцій / (х) і ф (х) зростає на інтервалі (а; 6),
то їхня сума / (х) ■+- ф (х) також зростає на цьому інтервалі.
19. Довести: а) функція у = Xі + 2х2, х Є [0; 1] не є ні парною, ні непарною;
б) функція у = х2 + cos х, х Є (—оо; +оо) парна: в) функція у = х3 — 3 sin x,
х 6 R — непарна.
-3S
148
20. Довести, що функція у = sin — неперіодична, а функція у = sin Зх має
2
о:новним періодом число 7" = -s- я .
Відповіді. 15. а) 0; -д- ; б) [2jife — 4г ; 2nk + -^-), k € Z.
17. Див. рис. 4.25, а —в.
§ 3. ГРАНИЦЯ ФУНКЦІЇ
3.1. Числова послідовність
З поняттям числової послідовності ми зустрічались під час
вивчення шкільного курсу алгебри та геометрії. Зокрема, числовими
послідовностями є арифметична прогресія, геометрична прогресія,
послідовність периметрів і площ правильних п-кутників, вписаних у
коло, послідовність площ поверхонь та об'ємів правильних п-гранних
призм, вписаних в циліндр, тощо.
Сформулюємо означення числової послідовності в загальному
вигляді: якщо кожному натуральному числу п Є N за певним
правилом ставиться у відповідність число хп, то множину чисел
(*і> Х2 Хп, . . .}
називають числовою послідовністю (або коротко послідовністю) і
позначають символом [хп\.
Окремі числа х1г х2, ..., хп, ... називають членами або елементами
послідовності: х, — перший член послідовності, х2 — другий і т. д.,
хп — п-й, або загальний член послідовності.
За означенням послідовність містить нескінченну кількість членів,
причому будь-які два з них відрізняються, принаймні, номерами.
Отже, елементи хп і хт при п ф т вважаються різними, хоча як
числа вони можуть бути рівні між собою. Якщо всі елементи
послідовності {хп\ дорівнюють одному й тому самому числу, то її називають
сталою.
Геометрично послідовність зображається на числовій осі у
вигляді послідовності точок, координати яких дорівнюють відповідним
членам послідовності. Можна також зображати послідовність
точками координатної площини Оху, відкладаючи на осі Ох номери членів
послідовності, а на осі Оу — відповідні члени.
Послідовність вважається заданою, якщо вказано спосіб
знаходження її загального члена. Найчастіше послідовність задається
формулою її загального члена.
Очевидно, що всяка функція у = f (я), задана на множи і
натуральних чисел /V, визначає деяку числову послідовність {«/„} з
загальним членом уп = f («)■
149
Числові послідовності можна задавати І так званим рекурентним
(від латинського recurrens — зворотний) способом. Суть його полягає
в тому, що задають кілька членів послідовності і вказують правило,
за яким можна знайти наступний її член.
Іноді числові послідовності задають словесним описом.
Зазначимо, що в загальному випадку задача написання формули
загального члена послідовності не розв'язується, тобто не можна
стверджувати, що для довільної послідовності можна знайти формулу її
загального члена.
Приклади
1. Записати перші п'ять членів послідовності, заданої її загальним членом:
2я+1 п+(— 1)" п
а) хп = —-— ; б) уп = ™w
О Підставляючи у формулу п-го члена послідовно числа 1, 2, 3, 4, 5,
дістанемо :
а) \хі> х2> хз> *4« *&> • • •} = |3» 2 » 3 ' 4* 5 «•••[»
б) {{/і. Уа. У3, Уі, №..--} = «°. 2. 0, 2. 0, . . .} . •
2. Записати перші п'ять членів послідовності [ап], заданої рекурентним
співвідношенням ап = 2=і 5=L , де п = 3, 4 якщо at =1, а2 = 2.
О Згідно з рекурентною формулою маємо
Зад — at 5 Зо3 — аа За4 — а3 4
а3= з = 3 ' а*= 3 — 1. ав— з — 9 '
отже,
( 5 А. \
[alt Oj, Од, а4, а8, . . . } = 11, 2, -g-, 1, g ,...>. •
3. Евклід довів, що множина простих чисел
{2, 3, 5, 7, 11, 13, 17, 19, 23, 29, ... }
нескінченна, тобто прості числа утворюють послідовність. Формула загального
члена цієї послідовності досі не знайдена і навіть невідомо, чи така формула існує.
3.2. Границя числової послідовності. Границя змінної величини.
Єдиність границі
Нехай змінна хп перебігає значення послідовності {хп}, тобто є
дискретною змінною.
Число х0 називається границею послідовності- {хп}, якщо для
довільного числа є >• 0 існує такий номер N = N (є), що при всіх
п> N виконується нерівність
І*» — *оІ<є- (2)
150
Якщо число х0 є границею послідовності {*„}, то пишуть
lim xn=x0, або limxn =x0, хп^х0,
п-*оо
і кажуть, що послідовність {хп), або змінна хп, має границю, яка
дорівнює числу х0 або прямує до х0. Коротко означення границі можна
записати так:
{Ve>03N = N(e):Vn>N=>\xn — x0\<e,)&lim х„=а:0.
п-*оо
Послідовність, яка має границю х0, називається збіжною до х0 (або
просто збіжною). Послідовність, яка не є збіжною, називається
розбіжною.
Розглянемо геометричний зміст границі послідовності.
Нерівність (2) рівносильна нерівностям
—є<хп — х0<є, або х0 — е<хп<х0 + е,
які показують, що елемент хп знаходиться в є-околі точки х0
(рис. 4.26). Тому означення границі геометрично можна
сформулювати так: число х0 називається границею послідовності {хп}, якщо
для довільного є-околу точки х0 існує такий номер N = N (є), що
всі значення хп, для яких п > N, попадають в цей окіл. Поза цим
околом може залишитися хіба що скінченна кількість членів
послідовності [хп].
Приклади
1. Відомо, що lira хп = lim -2+-t—L_ 1 = 2. Нехай є = 0,01.
л->оо л->оо Я2 /
Скільки членів послідовності [хп] лежить поза околом (2 — 0,01; 2 + 0,01) = (1,99;
2,01)?
О Оскільки
І*в-2|'
(-1)"
1
то нерівність \хп — 2 І < 0,01 виконуватиметься при —< 0,01, звідки п> 10.
п2
Отже, поза околом (1,99; 2,01) знаходиться лише 10 членів даної послідовності.
Геометрично це означає, що всі члени послідовності [хп] при п > 10 знаходяться
від точки 2 на відстані, яка менша від 0.01. На рисунку це зобразити ие можна, бо
точки 1,99; 2,01 — кінці околу і нескінченна кількість точок хп, де п > 10, які
лежать в цьому околі, практично зливаються в одну точку, ф
2л— 1
2. Довести, що- lim 0 , „ = 1.
,, . , . f 2n— 1 ) І 2л— 1 І 4
О Нехай {*„} = J-27rTTJ , тоді І*„-1| = |-27Г+з--1| = -2л-+Т-
Задамо довільне число е>0. Нерівність | хп— 1 |<е виконуватиметься, якщо
4 2 3
2„ і о <еі звідки л> —-—~а~ • Позначимо через N найбільше ціле число.
151
± ± JL JLJL Л.
06 4 2 17 5 3
"« 4
X2 *7*5 XS ** X
Рис. 4.26 Рис. 4.27
2 3 /2 3 \
яке не перевищує — —-„- : N = Е І — — ~2~\- Тоді ПРИ вгіх n>N матимемо
2п — 1
|je„ — 1 |<є. Це означає, що lim п ,о = 1. •
п-юо zn і J
3. Довести, що послідовність {cos nn) розбіжна.
О Задана послідовність має вигляд
{-1, +1,-1, +1 (-1)" }.
Вона не має границі, тому що поза довільним є-околом (0 < є < 1) будь-якої точки
числової осі міститься нескінченна кількість членів даної послідовності. •
4. Довести, що послідовність, яка задана загальним членом
"+1
— , л= 1, 3, t>, . . . ,
-J- , я = 2, 4, 6, . ..
не має границі.
О Знайдемо кілька початкових членів послідовності і зобразимо їх схематично
на числовій прямій (рис. 4.27). Для цієї послідовності характерним є те, що при
достатньо великих k значення x2k з парними номерами як завгодно мало відрізняються
від нуля, а значення x2ft ,, з непарними номерами як завгодно мало відрізняються від
одиниці.
За означенням число *0 буде границею послідовності, якщо в будь-якому е-околі
точки х0 знаходиться нескінченна, а за околом — скінченна множина її членів.
Уданому випадку в довільному є-околі (0 <. є < І) нуля міститься нескінченна
множина членів послідовності з парними номерами, а за цим околом знаходиться
нескінченна множина її членів з непарними номерами. Це значить, що число 0 не буде
границею заданої послідовності.
Аналогічно переконуємось, що границею не може бути і число 1. Отже, задана
послідовність розбіжна, ф
Нехай тепер змінна величина х набуває всіх числових значень
деякого скінченного проміжку X, тобто є неперервною змінною, і
нехай точка х06Х або х0 £ X.
Число х0 називають границею змінної х, якщо для довільного
числа є > 0 існує таке значення х', починаючи з якого для всіх
наступних значень х виконується нерівність | х — х0 | < є і пишуть
limx = .Y0 або х-*-х0.
Геометричний зміст поняття границі змінної такий: число х0 є
границею змінної х, якщо для довільного є-околу точки х0 знайдеться
таке значення х', що всі наступні значення змінної х попадають
в цей окіл.
152
Рис. 4.28
Якщо порівняти означення границі послідовності і границі
змінної, то в означенні границі послідовності говориться про номер п
того члена послідовності {*„}, починаючи з якого виконується
нерівність | хп — а'п І <; е, а в означенні границі змінної х йдеться про
числове значення змінної х', тобто про те значення а', починаючи
з якого есі наступні значення змінної задовольняють нерівність | х —
— *о І < є-
Отже, границею змінної величини хе границя довільної
послідовності значень, які ця змінна набуває:
lim х = х0 <=> 1 іт хп == х0 або х -»- х0 о хп -*■ х0.
П-юо п->оо
Як зазначалось в § 1, сталу величину С можна розглядати як
змінну, всі значення якої однакові: х = С.
Границя сталої величини дорівнює цій сталій тому, що
\х — С\ = \С — С\ =0<є.
Із означення границі випливає, що змінна не може мати двох
границь. Дійсно, якби виявилось, що х -»- х0 і х ->- *о (х0 <; хо), то х
має задовольняти відразу дві нерівності:
\Х — А-0|<Є І \Х — А'о|<Е
для як завгодно малого є, а це неможливо, якщо є <; —5_^——
(рис. 4.28).
Цю властивість не треба розуміти так, що всяка змінна
обов'язково має одну границю. Приклади 3 і 4 свідчать, що це не так. Але
якщо змінна має границю, то ця границя тільки одна.
3.3. Нескінченно великі змінні величини
При означенні границі г0 змінної величини х вважалось, що х
змінюється на деякому скінченному проміжку і що х0 — стале число.
Розглянемо тепер змінну, яка набуває всіх значень деякого
нескінченного проміжку X.
Якщо для довільного числа М !> 0 існує таке значення х ,
починаючи з якого всі наступні значення х задовольняють нерівність
| х | > М, то кажуть, що змінна х прямує до нескінченності і пишуть
limx = co або x-voo.
Якщо змінна х -> оо, то її називають нескінченно великою змінною
величиною. Коротко означення нескінченно великої змінної величини
153
можна записати так:
(VM>0 Зх'ЄХ:У|х|>|*'|=Нх|>ЛІ)о1іт* = оо.
Додатна і від'ємна нескінченно великі змінні величини відповідно
визначаються так:
(V М > 0 3 х Є * • V х > х' =>- х > М) о lim х = +«,;
(V М > 0 3 х' Є * '■ V х < х' => х < — М) о lim х =—оо.
Приклади
1. Змінна {д:„} = пі = {1, 2, 6, 24, 120, ...} — нескінченно велика величина,
яка прямує до плюс нескінченності: lim хп — +оо.
П-*оо
2. Змінна {уп} = {—пі) = {— 1, —8, —27, ...} є нескінченно великою
величиною, що прямує до мінус нескінченності: lim уп = —оо.
Л->оо
3. Змінна [гп] — {n2cos лп} = {—1, 4, —9, ...} є нескінченно великою
величиною, у якої необмежено зростає модуль, тому iim z„ = оо-
/1-Х»
4. Змінна величина (*„}={ "+(—')"" |= {0, 2, 0, 4, 0, 6, . . .}
не є нескінченно великою величиною, бо для довільного числа М не існує числа
''6 {'п} такого, щоб при /„> ( виконувалась нерівність /„ > М.
Звертаємо увагу на те, що вираз <« прямує до нескінченності»,
може викликати неправильне уявлення, що х прямує до якогось
числа, в той час як несправді х нікуди не прямує, а лише змінюється
так, що | х | переростає в будь-яке велике додатне число. Те саме
потрібно сказати відносно виразів «границею змінної х є нескінченність»
та «нескінченно велика величина». Говорячи про нескінченно велику
величину, мають на увазі величину змінну, яка нескінченно зростає,
тобто суть нескінченно великої величини зовсім не в її величині або
розмірах, а в характері її зміни.
Користуючись означеннями, можна показати, що сума
нескінченно великої величини і величини обмеженої є величина
нескінченно велика. Символічно це записують так: С + оо = оо.
Сума двох нескінченно великих величин одного знака є
нескінченно велика величина: оо + оо = оо.
На відміну від цього сума двох нескінченно великих величин
різних знаків не завжди буде нескінченно великою величиною, тому ця
сума називається невизначеністю виду оо — оо.
Добуток двох нескінченно великих величин є величиною
нескінченно великою: оо.оо = оо.
Добуток нескінченно великої величини на величину, що більша
за абсолютним значенням деякого додатного числа, також є
.нескінченно велика величина.
Частка двох нескінченно великих величин не завжди є
нескінченно великою величиною, тому дробовий вираз, чисельник і знамен-
154
ник якого нескінченно великі змінні величини, називають
невизначеністю виду —.
оо
Таким чином, з виразами оо, +оо і —оо не можна поводитись
як з числами, бо це не числа, а лише символи, які характеризують
певну змінну величину.
3.4. Границя функції в точці
Припустимо, що незалежна змінна х має границю х0. Розглянемо
зміну функції у = f (x) при х -»- х0.
Нехай функція у = f (х) визначена в деякому околі X точки х0,
крім, можливо, самої точки х0.
Число А називають границею функції у = f (x) в точці х0 (або
при х -*■ а'о), якщо для довільної збіжної до х0 послідовності {хп},
де хп £ X, хп Ф х0, послідовність {/ (хп)} має границю, яка
дорівнює числу А, і записують
lim f(x) = A.
(3)
Отже, якщо для довільних збіжних до х0 послідовностей [хп]
існує одна і та сама границя lim f (xn) = А, то ця границя і буде
П->оо
границею функції f (x) в точці х0.
Якщо ж для деякої хоча б однієї послідовності [хп} хп ф х0,
збіжної до х0, послідовність {f (Xn) границі не має, то функція f {x) не
має границі в точці х0.
Аналогічно функція f {x) не має границі в точці х0, якщо для
двох різних, збіжних до х0, послідовностей {хп} і {хп} відповідні
послідовності {/ (х'п) і {f (Xn) мають різні границі.
Функція f (x) може мати в точці х0 тільки одну границю. Це
випливає з того, що кожна змінна може мати лише одну границю.
Приклади
1. Функція / (х) = х в будь-якій точці х0 числової прямої має границю, яка
дорівнює х0, тому що послідовності {*„} і {/ (*„)} збігаються: lim / (х) = lim x = х„.
х-*х0 *->*(>
2. Функція / (х) = sin — (рис. 4.29), визначена для всіх х Ф 0, в точці х — О
границі не має. Дійсно, візьмемо дві збіжні до 0 послідовності значень аргументу:
f 1 1 1
W — 1 п • 2л • Зл •
/ 2 2 -?—
J- \
• ■ • пп • • • •] ■
2
• (4л— 3) я > •
•)
Очевидно, дс^-^О, хп -*■ 0 і х'п ф 0, хпф 0.
155
Знайдемо відповідні послідовності значень функції:
{/ (х'п)} = {sin пп) = {0, 0 0, . . .},
( (4п —3) л ] f / Зл М
{/(*„)} =|sln 2 J = (s,n( —г")]™!1" • 1. ■■•}.
звідки lim / (д:^) = 0, lim / (х"п) = І. Отже, для двох різних збіжних до нуля послі-
/ї->оо п-»оо
довностей значень аргументу послідовності відповідних значень функції мають різні
границі. Це означає, що lim sin — не існує.
х-*о х
Геометричний зміст границі функції: співвідношення lim f (x) —
х->х0
= А означає, що для всіх точок х досить близьких до точки х0
відповідні значення функції як завгодно мало відрізняються від точки А.
З цим пов'язане друге означення границі. Нехай функція f (x)
визначена в деякому околі X точки х0, крім, можливо, самої точки
х0. Число А називається границею функції в точці х0, якщо для
довільного числа є > 0 існує число б = б (є) > 0 таке, що для всіх
х £ X, які задовольняють нерівність
0 < | х — х01 <б,
виконується нерівність
|/(*)-Л|<є.
Це означення коротко можна записати так:
(Ує>0 3б>0:0<|х — *0|<6=Н/(х) — Л|<є)о1іт f(x) = A.
х-*хв
Геометрично це ілюструється так: число А є границею функції
f {х) при х -> х0, якщо для довільного е-околу точки А знайдеться
б-окіл точки х0 такий, що коли значення аргументу х взяти з
множини (х0 — 6; х0 + б) \ {*оЬ то відповідні значення функції / (х)
лежатимуть в є-околі точки А (рис. 4.30).
Перше означення границі функції базується на понятті границі
послідовності, тому його називають означенням на «.мові послідовнос-
Рис. 4.29
Рис. 4.30
156
тей», або означенням границі за Гейне. Друге означення називають
означенням та мові є — б», або означенням границі за Коші.
Можна показати [22], що ці означення еквівалентні.
Приклад
Довести, що lim (3* + 2) = 5.
JC->I
О Нехай у = Зх + 2 і задано довільне є > 0. Знайдемо б > 0 таке, що для
всіх х, які задовольняють нерівності 0 < | х — 1 | < 6, виконується нерівність
\ у — 5 | < є. Для виконання цієї нерівності необхідно, щоб
8
| Зх + 2 — 5 | < є, або | х — І |< -у ,
звідси б = — . Якщо тепер для довільного 8 > 0 і знайденого б взяти значення х,
що задовольняють нерівності | х — 1 | < б, то
\х— І|<6=>|*— 1 І <; -4- => І Здг + 2 — 5|<є=>|у — 5|<е. •
У наведених вище означеннях границі lim f (x) — А вважалось,
що х прямує до х0 довільним способом: залишаючись меншим від
х0 (зліва від х0), більшим від х0 (справа від х0) чи коливаючись
навколо х0, тобто х -*- х0, набуваючи значень то менших, то більших
від х0 (то зліва то справа від х0), як амплітуда затухаючих коливань
маятника. Проте трапляється, що спосіб наближення аргументу х
до х0 суттєво впливає на значення границі функції. Тому доцільно
ввести поняття односторонніх границь.
Нехай функція у = f (x) (рис. 4.31) визначена в деякому околі
точки х0. Число А називається границею функції у = f їх) зліва (або
лівою границею) в точці х0, якщо для будь-якого числа є > 0 існує
число б = б (є) > 0 таке, що при х £ (х0 — б; х0) виконується нерівність
\f(x)-A\<e.
Число В називається границею функції у = f (x) справа (або
правою границею) в точці х0, якщо для будь-якого числа є > 0
існує число б = б (є) > 0 таке, що при х £ (х0; х0 + б) виконується
нерівність | / (х) — А | <; є.
157
Ліву 1 праву границі функції (рис. 4.31) називають
односторонніми границями і позначають так:
limf(x)-= lim f(x) =/(x0 — 0) = А;
х-*х0 x-*xt—0
ДС<*0
lim f{x) = lim f(x) = f(xo + 0) = B.
x-*xt Jt->Jt,+0
X>Jt,
Якщо x0 = 0, то записують
lim / (x) = lim f (x) = f (—0) = A;
x-*0 x-*—0
лс<0
limf(x) = lim f{x) =/(+0) = B.
x-*0 x-*+0
x>0
Якщо функція у = f (x) визначена на проміжку (а; Ь), то в точці
а може мати зміст лише число f (а 4- 0), а в точці Ь — лише число
ЦЬ-0).
Умова f (х0 + 0) = f (х0 — 0) є необхідною і достатньою [ 10] для
існування границі функції у — f (x) в точці х0:
(f(xo + 0)=f(xo-0) = A)&limf(x) = A.- (4)
х-*х„
Приклади
1. Нехай / (х) = sign х (рис. 4.5), тоді
lira /(*) = — 1, lim f(*) = +l.
х->—0 х-*+0
2. Якщо ф(х)= !—j (рис. 4.32), то
І -f-2 *-«
Ф(1 4-0) = 0, q>(l-0) = l.
3.5. Границя функції при д: ->- оо. Нескінченно велика функція
Ми розглянули поняття границі функції в скінченній точці х0.
Досліджуючи функції, визначені на нескінченних проміжках, часто
доводиться вивчати поведінку цих функцій при як завгодно великих
за модулем значеннях аргументу х, тобто при х-*- оо.
Нехай функція у = f (х) визначена на проміжку (—оо; -|- оо).
Число А називають границею функції f (х) при х -*■ оо і пишуть
lim/(x) = А, якщо для довільного числа є>0 існує таке число
JK->00
М — М (є) > 0, що при | х | > М виконується нерівність
\f(x)-A\<e.
Коротко це означення можна записати так:
<У*>0 3M>0:\x\> M**\f{x) — А\<в)е>1іт f(x) =* А.
158
Рис. 4.33 Рис. 4.34
Геометричний зміст цього означення такий (рис. 4.33). Для
довільного числа є > 0 існує таке число М > 0, що при х 6 (—оо;
—М) або при х£{М; +оо) відповідні значення функції f (x)
попадають в є-окіл точки А, тобто відповідні точки графіка цієї
функції лежать у смузі, обмеженій прямими у = А -\- є і у = А — є.
Знаючи зміст символів х -*■ +со і х-*- —оо, легко
сформулювати означення границі функції для випадків, коли lim f (x) — В
(рис. 4.34) та lim f (х) = С (рис. 4.35).
лс-*+оо
Досі розглядались випадки, коли функція мала границею деяке
число. Розглянемо тепер випадок, коли границею функції є
нескінченність.
Функція у = f (х) при х -»- х0 називається нескінченно великою
(має границю оо), якщо вона визначена в деякому околі точки х0,
крім, можливо, самої точки хв і для довільного числаМ >0 існує таке
число б = б (М) > 0, що для всіх х, які задовольняють нерівності
0 <с | х — х0 | < б, виконується нерівність І f (х) І > М.
Позначення: lim f (x) = оо або / (х) ->- оо при х -*- х0. Геометрично
х-*х„
це означає: яким би великим не було задане число М > 0, точки
графіка функції у = f (x), крім, можливо, точки (х0; f (x0), лежать
зовні смуги, обмеженої прямими у — М і у = —М, якщо значення
х взяті з б-околу точки х0 (рис. 4.36).
Якщо f (x) прямує до нескінченності при х-*- х0 і при цьому
набуває лише додатних (рис. 4.37) або лише від'ємних значень (рис. 4.38),
то
lim f{x) = +°° або lim f(x) —— то.
х-*х0 х-*х„
Функцію f (х), задану на всій числовій прямій, при х -*■ оо
називають нескінченно великою і пишуть lim f (х) = оо, якщо для довіль-
Jt->00
ного числа М > 0 можна знайти таке число N = N (М) > 0,
Що для всіх х, які задовольняють нерівність | х | > N, виконується
нерівність \f(x)\>M (рис. 4.39).
159
у=х$Ш
Рис. 4.39
Рис. 4.40
Рис. 4.41
Зокрема, функція f {х) є нескінченно великою при х -*- со, якщо
lim/(*) =+со, lim f{x)~ — co, lim /;(x) = +oo,
lim f(x) = —co.
X->— oo
Очевидно, всяка нескінченно велика функція в околі точки х0 є
необмеженою в цьому околі. Обернене твердження неправильне: не
160
всяка необмежена функція є нескінченно великою. Проте якщо
функція / (х) має скінченну границю А при х ->■ x0, то ця функція
обмежена при х -v *„. Справді, з означення (3) випливає, що при х ->- х0
| / (*) — А | < є, або
А — е</(л:)<Л + е, звідки |/(х)|<| Л |+є,
а це й означає, що функція / (*) при х -> х0 обмежена. Коли
lim / (х) Ф 0, то при х -> х0 буде обмеженою також функція -r-j-r.
Обернене твердження неправильне: не всяка обмежена функція має
скінченну границю.
Приклад
2*+ 5
1. Довести, що lim = 2.
JC-»oo *
2х -4- 5
О Нехай у = ——— і задано довільне число є > 0. Знайдемо число М (є) >
х
>• 0 таке, що для всіх х, що задовольняють нерівність | х | > М, виконується
нерівність | у — 2 | < є. Остання нерівність виконуватиметься, якщо
5 .1 .15
_2*±5__2
<е, або
2 + -J- — 2|<е, або |-j-|<e,
5 5
8ВІДКИ | х І > — . Нехай М = —-, тоді
5 15 1 І 2*+ 5 І
|*|>Mo|*|> —=» — <е=> j—--2 <e=»Junj/=2. •
2. Довести, що функція у = 2х2 при х -*■ оо e нескінченно великою функцією.
О Візьмемо довільне число М > 0 і знайдемо таке число N = N (М), що для
всіх х, які задовольняють нерівність | х | > N, виконується нерівність І у І > М.
Маємо
\у\>М=>2*>М=>\х]> Y~^~.
Нехай N=vf JL, тоді
V*:|*|>tfo|*|> 1/ 4£-=» *а >-9-=> 2*а > М =» lim 2x* = +оо. •
"2 * х-»оо
3. Функція у = лс3 прямує до —оо при * -»- —оо і до +оо при х -*■ +оо
(рис. 4.40):
lim Xі = —оо, lim ж3 =» +оо.
х->—оо х-*+оо
4. Функція у = sin х обмежена на всій числовій осі. Але при х -*■ оо вона
границі не має.
5. Функція у = х sin х (рис. 4.41) при х -»- со необмежена, але не є нескінченно
великою, тому що вона дорівнює нулю при х = 0, я, 2я, ... . А це означає, що для
Довільного числа М > 0 не можна знайти таке число N, щоб
V*:|*|>N=»|/(*)|>M.
161
3.6. Нескінченно малі величини. їхні властивості
Нескінченно малою величиною називається змінна величина,
границя якої дорівнює нулю.
Зокрема, функція а (х) називається нескінченно малою величиною
(або нескінченно малою функцією) при х -*■ х0 або х -»- оо, якщо
lim а (х) = 0 або lim а (х) = 0.
Х-УХ„ Х-УОО
Можна дати еквівалентне означення на «мові є — б»: функція а (х)
називається нескінченно малою при х -*■ х0 (х -> оо), якщо для
довільного є > 0 існує число б > 0 (М > 0) таке, що для всіх х, що
задовольняють нерівність \х — *0 | •< 6 (| х | > M), виконується
нерівність | а (х) | < є.
Аналогічні означення нескінченно малої величини а (х) при х -*■
-v х0 + 0, х -v х0 — 0 і при х ->- —оо, х -v +оо: в усіх цих випадках
а (х) -* 0.
Приклади
1. Функція у — (х — 2)4 є нескінченно малою величиною при х -*■ 2: Нгп (х —
х-*2
— 2)4 = 0 (рис. 4.42).
2. Функція у = . є нескінченно малою величиною при ж-»-оо: lim у =
= 0 (рис. 4.43).
Розглянемо основні властивості нескінченно малих величин.
1°. Для того щоб число А було границею функції f (х) при х -*■
-> х0, необхідно і достатньо, щоб різниця f (х) — А була нескінченно
малою величиною, тобто
lim / (х) = А « / (х) = А + а (х), де lim а (х) = 0.
х->Ха х->ха
О Нехай lim / (х) = Л, тоді
(Ve> 0 36 = 6(e)>0:0<C|x — х0|<6)=Н/(х) — Л|<в.
Це означає, що величина а (х) = / (х) — Л є нескінченно малою.
162
Навпаки, нехай / (х) = А + а (х), де lim а (х) = 0, тоді
(Ve>0 3fi=fi(e)>0:0<|x —x0|<fi=>-
=На(*)|<е»|/<*)-Л|<е)о1іт/(*) = Л. •
х-*х0
2°. ^««4° функція а (х) — нескінченно мала величина при х -*■ Хо
(а Ф 0), /по функція —J-. є нескінченно великою величиною при х -*■ х0,
а \Х)
і навпаки, якщо функція Р (х) — нескінченно велика величина при
1
х -*■ х0, то g-jY є нескінченно малою величиною при х -*■ х0.
О Нехай а (х) при х -*- х0 є нескінченно малою величиною, тоді
(Ve>0 36>0:0<|x — х0|<б)=^|сс(х)|<е= ' '
«W
тобто функція —j-j- є нескінченно великою при х -> х0. •
Я (*)
Аналогічно доводиться обернене твердження. #
3°. Сума скінченного числа нескінченно малих величин в величина
нескінченно мала.
О Нехай а.! (х) і а2 (х) — нескінченно малі величини при х -*-
->- х0. Це означає, що для довільного числа є > 0 існують числа
бх > 0 і б2 > 0 такі, що для всіх значень х з околу 0 < | х — х01 <
< б! виконується нерівність І ах (х) І < -тр a для значень х з
околу 0 < | х — х01 < б2 справедлива нерівність | а2 (х) | < -|-.
У меншому з цих околів виконуються обидві нерівності!
|аі(*)|<-|-. |««WI<-f"-
Отже, в цьому околі
І «і (*) + а2 (х) |< | о, (х) | + | а2 (х) | < -J- + -J- = є,
тобто сума о^ (х) + а2 (х) двох нескінченно малих функцій є
функція нескінченно мала.
Аналогічне доведення для довільного скінченного числа
нескінченно малих, ф
4°. Добуток обмеженої функції на нескінченно малу є величина
нескінченно мала.
О Нехай функція / (х) обмежена при х -*- х0, а (х) —
нескінченно мала. Тоді для деякого числа М > 0 існує таке число 6а ~>
> 0, що для значень х з околу 0 < | х — х0 | < бх виконується
нерівність | / (х) | ^ М. Крім того, для будь-якого числа є > 0 існує
163
таке число fi2 > 0, що для всіх значень х з околу 0 < | х — х01 <
< fi2 виконується нерівність І а (х) | < -др Для меншого з цих околів
маємо
|/(х)а(х)| = |/(х)||а(х)|<М.-і-=еІ
а це означає, що добуток / (х) а (х) при х -> х0 є нескінченно малою
функцією. •
5°. Частка від ділення нескінченно малої величини на функцію,
яка має відмінну від нуля границю, є величина нескінченно мала.
Доведення цієї властивості аналогічне попередньому.
Зауваження. Частка від ділення двох нескінченно малих величин у
загальному випадку не є нескінченно малою величиною.
Величини Ох (х) = х, а2 (ж) = 2х, а3 (х) = Xі — нескінченно малі при х -*■ 0
гому, що
lim аа (х) = lim Oj (х) =» Ііт а3 (х) = 0.
х->0 х-»0 д;-+0
Маємо
а, (х) 1 ех, (ж) . а. (ж)
тобто границя відношення двох нескінченно малих величин може дорівнювати
деякому числу, нескінченності або нулю. У зв'язку з цим відношення двох нескінченно
малих величин називають невизначеністю виду тг. Те саме стосується добутку
нескінченно малої величини на нескінченно велику величину. Такий добуток
називають невизначеністю виду 0 • оо.
3.7. Основні теореми про границі
У попередніх прикладах ми бачили, що знаходження границі
функції на основі означення досить громіздке. Справді, при
обчисленні границі lim / (x) спочатку треба взяти яку-небудь збіжну до
х-*х0
х0 послідовність {х„} значень аргументу і визначити послідовність
відповідних значень функції {/(*„)}. Знайшовши число А =
= lim/ (х„}, ще треба впевнитись, що / (х) -> А і тоді, коли х -»- х0
хп-*х„
довільним способом.
Наведемо теореми, які значно полегшують знаходження границі
функції. Формулювання і доведення цих теорем для випадків, коли
х -»- со та х -*■ х0, аналогічні.
Теорема 1 (про границю суми, добутку І частки). Якщо кожна
з функцій f (x) та <р (х) має скінченну границю в точці х0, то в цій точці
існують також границі функцій / (х) ± ф (х), / (x) <p (x), ^й^
(остання за умови, що lim <р (х) Ф 0) / справедливі формули
х->х„
lim (/(х) ± Ф (*)) = lim / (х) ± lim ф (х); (б)
Х->Х, Х-ЇХ, Х->Х,
164
lim / (х) ф (х) = lim / (x) lim ф (х); (6)
ж-»х0 х-*хс х-мг0
1іт/(х)
Ит -Щ. = "^ ,. . (7)
х->х„
О Нехай Ііт / (х) = А, Ііт ф (х) = В, тоді за властивістю
Х-УХ0 Х-*Хс
1° (П. 3.6)
f(x) = A +а1(х), ф(х) = В+а2(х), де а1(х)-*0, а2(х)->0
При X-vX0.
Звідси маємо
f{x)±ff(x) = A±B±[al(x)+at{x)}i (8)
/(х)ф(х) = AB + [Aat{x) + Bal(x)+a1{x)a1(x)]\ (9)
/(*) _ А | Ва1(х)~Аа2(х) 1 ,.„.
<р(х) ~ В "f"! Вї + Ва^х) \' Vv>
За властивостями 3°—5° (п. 3.6) вирази в квадратних дужках є
величини нескінченно малі при х -*■ х„, тому, застосувавши до рів-
ностей (8), (9), (10) ще раз властивість 1° нескінченно малих,
дістанемо відповідно формули (5), (6), (7). •
Зауважимо, що доведена теорема справджується для
алгебраїчної суми та добутку будь-якого скінченного числа функцій, які мають
границю в точці.
Наслідки. Якщо lim / (x) існує, то виконуються рівності:
Х->*0
1) lim cf (x) = с lim /(x), сЄ#;
Х-*Х0 Х-УХВ
2) lim [/(x)]n =[lim /(х)]п, зокрема,
*->х0 х->х0
3) lim x" = xS, n£N.
*->х0
Приклади
1. Обчислити Нт (5х2 — 13л: + 5).
х->2
О Використовуючи теорему про границю суми і наслідки 1) —3), маємо
lim (5х2 — 13* + 5) = 5 lim *а — 13 lim х + Нт 5 = — 1. •
х->2 х->2 х->2 х->2
Xі 4- 1
2. Обчислити hm л т
*^І 2х~ 1
О За теоремою про границю частки дістанемо
ііт їх* + І)
Ііт **+' = ~' =2,
*->і 2х— 1 Ііт (2*— 1)
Х-УІ
165
гг я* j_ a
3. Обчислити lim _—, J .
x-*3 *l —9
О Тут теорему про границю частки застосувати не можна, тому що Нт (ж1 —
х->з
0
— 9) =» 0. Крім того, lim (х2 — 5* + 6) = 0, тобто маємо невизначеність виду -jr.
х-*з v
Розкладемо чисельник і знаменник на множники:
jcs — 5* + 6 = (х — 2) (х — 3), Xі — 9 =» (х — 3) (х + 3).
Оскільки при знаходженні границі функцій в точці х = 3 розглядаються
значення х Ф 3, то даний дріб можна скоротити на х — 3, тому
Нт
*-»з
-5* + Є =Нт (*-2)(*-3) „Hm_£z^_ 1 • #
*1— 9 *->з (* — 3)(* — 3) х-+з * + 3 6
4. Обчислити lim — .
х->2 * — 2
О Тут ііт (х — 2) = 0, тому теорему про границю частки застосувати не мож-
х->2
1
. = оо (п. 3.6), то lim .
на. Оскільки х2-*-4 при *-»-2 і lim
х-».2 х — 2 я->2 * — ^
як добуток нескінченно великої величини на обмежену величину, яка не є
нескінченно малою. •
Теорема 2 (про границю проміжної функції). Нехай в деякому
околі точки х0, крім, можливо, самої точки х0, визначені функції
Ф Мі f (х) і *]> (х) І виконуються нерівності
Ф (*)</(*)<*(*)■ (11)
Тоді, якщо функції ф (х) і -ф (х) мають в точці х0 одну й ту саму
границю
lim ф (х) = lim я]; (х) = А, (12)
Х->Х0 *-МСо
то таку саму границю має функція f (x):
\\mf(x) = A.
Х-УХс
О 3 рівностей (12) випливає, що для довільного числа є >■ 0
існують два околи точки х0, в одному з яких виконуються нерівності
— є < ф (х) — А < є, а в
у(х) другому — нерівності —є^
J <if(x) —А ^ є. З нерівно-
/М vfx) стей (11) знаходимо, що
xB-t х„ x0+ff
Рис. 4.44
0 С В
Рис. 4.45
166
Ф (х) — А < f (х) — А < я]) (х) — А, тому в меншому з околів
виконуються нерівності — є < ф (х) ~ А </ (х) — А ^ ф (х) — А < с
(рис. 4 44).
Звідси — є < / (х) — Л < є, тобто lim / (х) = А. •
Теорема3 (про граничний перехід у нерівностях). Якщо в деякому
околі точки х0, крім, можливо, самої точки х0, виконується нерівність
f (х) ;> 0 і існує границя lim f (x) = b, то b > 0.
О Припустимо, що b < 0, тоді при х ->- х0 маємо | / (х) — b | ^
> | Ь | > 0, тому lim [/ (х) — Ь]ф0, тобто lim / {х) Ф Ь. Це супе-
Х-УХц Х-УХ„
речить умові теореми. Отже, b ~^ 0. •
Наслідок. Якщо в деякому околі точки х0, крім, можливо,
самої точки х0, еиконується неріеність f (х) ^ ф (х) і існують
границі
lim f(x), lim ф(х), то lim /(x)>lim ф(х).
Х->Х„ Х->Х0 Х->Х0 *->*,
Теорема4 (про границю монотонної функції). Якщо функція
f (х) монотонна і обмежена при х < х0 або при х >■ х0, то існує
відповідно її ліва границя lim f (х) = f (x0 — 0) або її права границя
х-*х,—0
lim /(*)=/ (*0 + 0).
*->х„+0
Доведення цієї теореми дано, наприклад, в [29].
П/иклад
Довести, що: a) Iimsin* = 0; б) lim sin —- = 0; в) limcos*=l.
ж->0 х->0 2 х->0
О а) Позначимо через х радіанну міру центрального кута кола радіуса 1
(рис. 4.45). Якщо х > 0, то ОА = 1, АС = sin х, АВ = х, 0 < sin x < х. Оскільки
Нт 0 = 0, Нт х — 0, то з теореми 2 випливає, що lim sin x = 0.
*->0 х-у+0 x->-f0
Якщо х < 0, то | sin х | < | х | або — | х | < sin * < | х |, тому lim sin x = 0.
х->—о
Отже,
lim sin x = lim sin * = Hm sin x.
x-y—O Jf->+0 *->0
б) Оскільки sin _£- < | sin * | або — | sin x |< sin _£- < | sin x | і lim sin x =
I 2 | 2 x^.o
•= 0, то lim sin — = 0.
*->o 2
в) Оскільки cos x = 1 — 2 sina _i- , то
limcos*= lim (l — 2sins_L| = 1 — 2 fiim sin_L| =1, •
x-yd x-*0 \ 2 J \i-»0 2 У
167
Завдання для самоконтролю
1. Що називається числовою послідовністю і як її можна задати? Навести
приклади.
2. Що називається границею числової послідовності? Який геометричний зміст
границі?
3. Що називається границею змінної величини?
4. Довести, що коли змінна величина має границю, то ця границя лише одна.
5. Довести, що границя сталої величини дорівнює цій сталій.
6. Яка величина називається нескінченно великою? Сформулювати властивості
нескінченно великих величин.
7. Дати означення границі функції в точці на шові послідовностей і на «мові
є — б».
8. У чому полягає геометричний зміст границі функції в точці? Навести
приклади.
9. Що називається лівою границею функції в точці?
10. Що називається правою границею функції в точці?
11. Що називається границею функції при х -*■ оо?
12. Що називається нескінченно великою функцією?
13. Довести тверження: якщо існує границя lim / (х), то при х -*■ х0 функція
Х-УХ0
/ (х) обмежена; якщо існує границя lim / (х) Ф 0, то при х ->- ж„ функція 1 ,. .•
х-ух„ ' W
обмежена.
14. Які величини називаються нескінченно малими? Сформулювати і довести
властивості нескінченно малих.
15. Сформулювати і довести теореми про границю суми, добутку 1 частки; про
границю проміжної функції; про граничний перехід у нерівностях.
16. Сформулювати теорему про Існування границі монотонної, функції.
17. Довести такі твердження:
1) якщо існує скінченна границя lim / (х) і іігп ф (х) = оо, то lim ' '*' =
Х-УХа Х-*Х0 Х-УХС ф (X)
-0;
2) якщо існує границя lim / (х) Ф 0 і Нт ф (х) = 0, то lim ' *■*' = оо;
х-*хв х-+хс х-ух0 ф (х)
3) якщо Нт / (х) =» оо і існує скінченна границя ііт ф (х), то lim ' **'. =
Х-УХ, Х-УХ0 Х-УХе ф (*)
= оо;
4) якщо Існує границя lim f (х) Ф 0 і lim ф {х) = оо, то lim f (х) ф (х) = оо;
Х->ЛГо Х-УХо Х-*Хв
5) якщо lim / (х) = оо і Існує скінченна границя lim ф (х), то lim [f (x) ±
Х-УХ, Х-УХц Х-УХ,
±ф(х)] = оо;
6) якщо lim f (х) =» lim ф (х) — + °°, (lim f (x) = lim ф(х) = —оо), то
Х-УХ0 Х-УХа Х-УХ„ Х-УХо
Нт [/ (х) + ф (х)1 = +оо, (ііт [/ (х) + Ф (х)) = -оо).
18. Користуючись означенням границі, довести, що
a) Hm jft+j = -і- І б) lim (2* + 1) = 5.
п-ию Б/І — 1 5 х-У2
19. Користуючись теоремами про границі, обчислитиі
■п. х1 — 5* + 6 . л ,Іт х* + 2хі — х-2 .
а) ІІГП 5 Н ' ® ІІГП -^ 5 Г"о •
х-у2 Xа — 2 *-»і Xа — Зх + 2
168
в) Нт -—гуД— ; г) Нт -^- , а Є /?, я Є W.
Відповідь. 19. а) —-L : б) —6; в) 48; г) 0.
4
і 4. ОБЧИСЛЕННЯ ГРАНИЦЬ ФУНКЦІЙ
4.1. Перша важлива границя
Доведемо, що
Нт_!!Е£. = і. (13)
*-»-0 *
О Візьмемо круг радіуса 1 (рис. 4.46) 1 позначимо радіанну міру
кута AOD через х, 0 < х < -^-. Порівнюючи площі трикутників
AOD, BOD і колового сектора AOD, дістанемо
SfcAOD < $сектАСЮ < ОДВООі
ЗВІДКИ
\ АС • OD<4-OD2 • x<-^-OD • £D
або
~Y sin х < -5- х < -у- tg де.
Розділивши останні нерівності на -у sin x > 0, дістанемо
х 1 . ^ sin х ^
К-Д—<—і— або 1>—— >cosx.
^ sin х ^ cos х х
Оскільки Нт 1 = 11 lim cos* = 1, то за теоремою 2 (п. 3.7)
х->0 х-у0
lim -5!°і «= 1. (Н)
Нехай тепер * < 0. Розглянемо функцію/ (х) = -^-j—(рис. 4.47).
Оскільки f (х) =■ / (—х), то
.- Sin X ,. Sin (— X) і. SJnX ! /irv
hm =■ hm y-—L- =r Hm ——- = 1. U°»
x->—0 x x-y+0 ~X x-y+0
З рівностей (14) і (15) дістанемо формулу (13), яка досить
часто використовується при обчисленні границь. Тому її називають
першою важливою границею, ф
Приклади
І
х-уО X
І. Знайти Hm slnkx . k ф0.
169
О Зведемо цю границю до першої важливої границі, поділивши та помноживши
дріб на k:
sin kx
: — = r nm
x->0
lim 5infe* = lim ksinkx = ft lim
2. Знайти lim
x->o
О Маємо
x-*o x x-*o kx
cos 5* — cos 3*
fex-M) kx
= k. •
r2
Hm cos 5* — cos 3x _ 2 jjm sin 4x sin (— x)
x->0 Xі
2iim sin4* lim
-sin* я #
x->0
x->0
tgft*
8. Знайти 11m
x-*o x
О Маємо
tgfc*
lim
x-*0 x
= lim.
sin kx
4. Знайти 11m
x-y
ж->о x cos ft* *->o
lim sinfe* lim
1
x->o cos kx
k. •
2
Q Введемо нову змінну у = х — —- , тоді х = у + -^- 1
пт
л
і (*—rhx=ijzyig[y+Jt-)
— Ит у ctg у --= — ііт —z—
ї->0 ц-уО sin у
cosy =
— 1. •
4.2. Число є. Натуральні логарифми
Розглянемо дві числові послідовності:
w={(i+4f.">1) * ^Н^-гР'»1}
170
Покажемо, що вони мають такі властивості:
і) *п<уП' п> і;
2) змінна хп строго зростав;
3) змінна уп строго спадає.
О Справді, оскільки
#п = Хп (і + —) = Хп + -J- > Хп,
то властивість 1) справедлива.
Властивості 2) і 3) доводяться за допомогою нерівності Коші:
ус, • с2 ... ап^ - ,
ДЄ
[av fla, ..., ап}с[0; +оо), nfN.
Застосуємо цю нерівність до числової множини, яка містить
число 1, а також п чисел 1 -\ :
я
li+4-. 1+-T і+-і-'
де п £ N. Дістанемо
/■•('+4-)<—гп-1і-і+тЬ-«і+-і-Г<
С+^гГ
звідки і випливає властивість 2).
Аналогічно для доведення твердження 3) досить застосувати
нерівність Коші до числової множини, яка містить 1 і п чисел 1 —, де
п Є N, п > 2. •
З властивостей 1) — 3) маємо
*і<*2< ••• <хп<хп+і<Уп+і<Уп< ••• <Уг<Уі> n£N-
Отже, змінна хп зростаюча і обмежена зверху. Тому за теоремою 4
(п. 3.7) вона має границю, яку позначають буквою є (це позначення,
як і позначення числа я, належить Л. Ейлеру);
lim (1 + —У = є. (16)
Змінна уп спадає 1 обмежена знизу, тому границя lim yn також
існує. Оскільки
Уп=Хп+^-, ТО ІІГП0„=Є.
171
Таким чином,
Ї!!(' + -і-Г-!й(,+-*Г-*
причому
Vn^:(1 + i)"<e<(.+i)"+'.
Доведено, що є — ірраціональне число. Більше того, Ш. Ерміт довів,
що є — трансцендентне число, тобто не є коренем ніякого
алгебраїчного рівняння з цілими коефіцієнтами. Його наближене значення
з точністю до 10~15 дорівнює 2,718281828459045.
Число є широко використовується в математиці та її
застосуваннях. Зокрема, показникова функція у = ех за основою є відіграє
важливу роль в теорії механічних коливань, в електротехніці та
радіотехніці. Цю функцію називають також експоненціальною
функцією, або експонентою (від англійського exponential — показниковий),
і позначають так: у = ехр х.
Досить часто доводиться зустрічатись з логарифмами за основою
є. Як відомо, функція у = loga х визначається, якщо а >0, а Ф 1.
Зокрема, якщо а = 10, то у називається десятковим логарифмом числа
х і позначається lg x. Десяткові логарифми були введені Г. Бріггсом.
Якщо а = є, то у називається натуральним, або неперовим (на честь
шотландського математика Дж. Непера — винахідника логарифмів),
логарифмом числа х і позначається In x.
У вищій математиці застосовують в основному натуральні
логарифми, оскільки для них, як побачимо далі, значно спрощується ряд
формул.
Знайдемо зв'язок між десятковими і натуральними логарифмами.
Нехай у = In х, тоді х = єу. Логарифмуючи цю рівність за основою
а, дістанемо log„ x = у log„ e, звідки
І0&* = к^аЄІП*=Мп* =-fc^l0gaX.
Число М = loga e називають модулем переходу від натуральних
логарифмів до логарифмів з основою а. Зокрема, при а — 10 маємо
л1==1ее = іїГйГ~°'4343: -т!г = -ііг = 1п10лї2'3026-
172
Отже, зв'язок між десятковими і натуральними логарифмами
виражаються формулами
lg х = lg e In х = -j^-jo" In x » 0,4343 In x\
In* =-4r lg* = ln iOlgJt» 2,3026lgд:.
Графіки функцій у = lg х та у = In x зображено на рис. 4.48.
4.3. Друга важлива границя
Доведемо, що
lim (l+-L)* = e- (17)
JC->oo
Спочатку покажемо, що
lim (l + -L)*=e. (18)
Нехай х ^ 1 і Е (х) = п, тоді п ^ х <; п + 1; тому справедливі
нерівності
^тг<4-<4^ (і+тЬ-Н'+^М'+іГ- <19>
Якщо *->+оо, то n-voo, тому за формулою (16) маємо
ilm(l-|-
Л "+W Urn 1+ '
П->оо \ П -\- і І
1 ,"+'
1 '
1
П-Уос \ - І" • / ,іт
\ ■ п+1І
1 =Є.
ssO+vP-uiC+xrisiO+v)—
Застосувавши до нерівності (19) теорему 2 (п. 3.7), дістанемо
формулу (18). Тепер доведемо, що
lim (і+ 4-)*-є. (20)
Нехай х < —1. Введемо змінну у = —х, тоді
*->-«> V х І у-*+<х> \ У І у->+°° \ У І
у++т\ у-ч у-у+Л у-ч
= Hm (і + —Х-Лу"' lim (і + —Ц-) = є • 1 = є.
у++»\ ^ У-Ч у^+сК т У-Ч
173
уФІГ
Об'єднавши випадки (18) і (20), дістанемо
формулу (17). Поклавши х = —, маємо
У
І
Ііт(1 +у)у =е.
(21)
-/ 0
Рис. 4.49
Рівності (17) та (21) називають другою
■ важливою границею і широко використовують
при обчисленні границь. Графік функції у =
= 11 Н 1 показано на рис. 4.49.
Зауваження. При обчисленні границь, пов'язаних з числом
є, часто застосовують таке твердження: якщо існують границі
Нт / (х), lim ф (х), причому lim / (х) > 0, то існує також границя
Х-*Ха Х-УХ0 Х-*Х0
Нт / (х)ч>ІХ\ яка обчислюється за формулою
х->х„
Пт <р(х)
lim /(л:)ф(х) = (lim fix))*-*" . (22)
х-*х„ х-ух„
Приклади
(■нг-
О Скористаємось рівностями (17)
1. Знайти lim 11 -|-
JC->oo V X
(22)
. Маємо Нт [ 1 + — Г = Ит І« +
х-»оо \ Ж І \
■—) =
x/k І
Jt
2. Знайти
lim >Л +sin 2x.
х->0
О Скориставшись рівностямн (ІЗ), (21) і (22), дістанемо
і
Urn Y\ -f- sin 2x = lim (1 + sin 2x) x =
х-УО
x-*0
sin2x
lim (i + sin 2x) sin 2x
x-»0
lim
~x-*0
sin 2x
= ea. «
3. Знайти ilm
x->oo
О Маємо
*-»oo\. 2* + 3
/ 2*-l V-5x
l"27T3"i '
V 2x + 3 / *->„ V 2* + 3 j x_»oo \ 2x + 3 /
im |
->oo I
2* + 3
2*+3 —4
= 1
Х-УОО
2* + 3
— 4
„*-*» 2ДГ+3
174
4. Знайти lim (cos 2x)
x->0
О Дістанемо
sin" 3*
Hm (cos 2x) sln'Sx - ilm [1 + (cos 2x — 1)1 sin'3x =
x->0 x->0
1 —2 sin» x sln'x _2_
= Hm[l+(-2sIn**)]'=ni"rF' sln*3* =e x^osin'3* =e~e. •
x->0
5. Багато хімічних реакцій і процесів проходять так, що в кожний момент часу
/ швидкість утворення деякої речовини пропорційна кількості цієї речовини в
заданий момент часу.
Знайти закон, за яким відбувається утворення речовини.
О Нехай щ — кількість речовини в момент часу t = 0 (тобто початкова
кількість речовини). Проміжок часу (0; /) розіб'ємо на п дрібних проміжків:
(*-!■)■ [+■■ 4-)- (-f'4) (^4
Якщо вважати, що протягом кожного а цих малих проміжків часу швидкість
реакції стала, то кількості речовини в моменти часу
_L JL Л *
я я л
відповідно дорівнюватимуть
"»і = "»о + femo = mo(l + ) І
I4a = ml+km1 =т0І1+ 1 І
тз = ma + ftma — = mo І' + І І
я V п ]
тп = тп_1 + fem„_, _ = т0 ^1 + —] .
де ft — заданий коефіцієнт пропорційності. Але за умовою задачі процес утворення
речовини відбувається неперервно. Тому, щоб знайти точну формулу, треба
припустити, що число дрібних проміжків необмежено зростає, а їхня тривалість прямує
до нуля. Звідси для кількості речовини т в довільний момент часу t дістаємо формулу
і = Нт т0 (і -f —)" = m0ekt.
П->оо \ Я /
Це 1 є закон, за яким відбувається утворення речовини. Вій зустрічається при
дослідженні таких процесів, як розклад радію, розмноження бактерій тощо.
Пізніше ми ще повернемось до цієї задачі (гл. 8, п. і.9). •
4.4. Порівняння нескінченно малих функцій. Еквівалентні
нескінченно малі функції
.Дві нескінченно малі функції порівнюються між собою за
допомогою дослідження їхнього відношення. Нехай ах (х) та а% {х) —
175
нескінченно малі функції при х -*■ х0, тобто
І ітс^ (*) = (), Іітаа(х) = 0.
"2 '
x-+xt х-*хе
Введемо такі означення:
1) функції ах (х) і а2 (х) називаються нескінченно малими одного
порядку при х -+ х0, якщо
2) функція ах (х) називається нескінченно малою вищого порядку,
ніж а2 (х) при х -»- х0, якщо
,. а, (х) л
lim 1) = 0;
3) функція ах (х) називається нескінченно малою нижчого порядку,
ніж аа (х) при х -> х0, якщо
lim д, ;■ = оо;
х->х0 «lW
4) функція ссх (х) називається нескінченно малою k-го порядку
відносно а2 (*) при х -> х0, якщо
5) нескінченно малі функції ах (х) та аа (х) називаються
непорівнянними при х ->- х0, якщо в точці х0 не існує границі їхнього
відношення.
Введені означення охоплюють усі випадки, які можуть трапитись
при порівнянні двох нескінченно малих функцій в околі точки х0.
Такі самі правила порівняння нескінченно малих при х-+■ оо, х-+-
-> —оо, х -v +оо та при х -*- х0 ± 0.
Аналогічно порівнюються нескінченно великі величини.
Приклади
1. Функції ах (х) = х, аа (х) = sin 5x нескінченно малі одного порядку при
х -»■ 0, тому що
І- * '
і'™0 sin 5* - 5 *
2. Функція ах (х) = х2 при дг ->- 0 є нескінченно малою вищого порядку, ніж
функція Oj (x) = tg х, тому що
Xі X
llm tgr = Hm ж lim - lim cos д: = 0.
Очевидно, функція a2 (x) =» tg ж при х -*■ 0 є нескінченно малок} нижчого порядку,
НІЖ Otj (х) = Ж*.
176
8. Функція ctj (ж) = 1 — cos 4х при ж -»- 0 є нескінченно малою другого порядку
відносно функції аа (дг) = дг, тому що
1— cos 4* „ 2sina2*
hm -5 = Hm -5 = 8-
х-уО *■ х->0 *■
1
4. Нескінченно малі функції Щ (х) =• х і аа (ж) = дг sin — непорівнянні при
■ 0, тому що
ие існує (див. п. 3.5).
*sin —
lim — = lim sin _
д»0 X x-*0 X
Серед нескінченно малих функцій одного порядку особливу роль
відіграють так звані еквівалентні нескінченно малі.
Функції ах (х) і а2 (х), нескінченно малі при х ->- х0, називаються
еквівалентними нескінченно малими, якщо
hm , : = 1.
Еквівалентність позначається так: ау (х) ~ аа (х).
Розглянемо деякі властивості еквівалентних нескінченно малих
функцій.
Теорема 1. Нескінченно малі аг (х) і аа (х) еквівалентні при х ->
-*> х0 тоді і тільки тоді, коли різниця ах (х) — а2 (х) є нескінченно
малою вищого порядку, ніж кожна з функцій ах (х) та а3 (х).
© Нехай ах (х) ~ а2 (х) при х ->■ x0, тобто
lim 1Щ- = HlT1 J*«^a— і,
ТОДІ
Мдц^ = 1 /,_^ = 1_1іт^М =0
ж-*ж0
Аналогічно
Отже, різниця ах (х) — а2 (х) при х -*■ х0 є нескінченно малою
вищого порядку, ніж «! (х) та а2 (х).
Нехай тепер, навпаки, відомо, що різниця аг (х) — а2 (х) при х ->-
-v х0 є нескінченно малою вищого порядку, ніж ах (х) і ніж аа {х),
тобто
Нп, «і (»)-«,(*) = Hm <*і (*)-«,(*) =
177
Якщо lim *W-?W =0, то llmfl ?Ш = 0, звідки
Hm „'/гч = 1. тобто ax (x) ~ a2 (х) при х ->- x0. Якщо
,іт aiW-OiW = 0 Т0 lim ljb&_ _ Л = 0> Звідки 1іт ЦгЩ. в
= 1, тобто ах (х) ~ а2 (х) при х-+х0. •
Теорема 2. Нехай ах (х) ~ aj (х), а2 (х) ~ аг (х) при х -v х0.
//kujo існує hm *; ; , то існує і lim — і ці границі рівні
*->*„ °ч і*) *-**„ «2 (*)
ліж собою.
О Маємо
lim _^L . llm (^L . ^L . Щ U lim %il x
X lim -4—- Hm -Ц-І. = 1 . lim —Ї-Ї-L.. 1 = Hm -JLLL. «
x->x„ a2 (*) *->*,, a* W x->x0 аг (*) *->*„ aj (*)
Ця теорема дає змогу при знаходженні границі відношення двох
ваданих нескінченно малих функцій кожну з них (або тільки одну)
ваміняти іншою нескінченною малою, яка еквівалентна заданій.
Часто зустрічаються, наприклад, такі еквівалентні нескінченно малі
величини [12]:
sina~a, a->-0; ea — 1 ~a, a-vO;
tg a ~ a, a ->- 0; cP — 1 ~ a In a, a ->- 0;
arcsin a ~ a, та -»- 0; loga (1 + a) ~ a loga e, a -»- 0;
arctga~a, a-»-0; In(1 + a)~a, a-»-0;
1— cosa ^-, a->-0; (1 +a)ft — 1 ~ ka, a->0, k >0.
Зазначимо, що ці еквівалентності досить прото дістати за
допомогою правила Лопіталя (гл. 5, п. 5.3).
Теорема 3. Сума скінченного числа нескінченно малих функцій різних
порядків еквівалентна доданку нижчого порядку.
О Доведемо теорему для двох функцій. Нехай ах (х) ->- 0 і
а, (х) ->- 0 при х -*■ х0, причому ах (х) — нескінченно мала функція
вищого порядку, ніж а2 (х) при х -+■ х0, тобто lim ai (*| = 0, тоді
Х-*Х0 а2 (*)
Ит *(*) + «.М gllm.aLg- + 1,o + lgl,
ж->х0 а» \х> х-*хе аі (*)
отже,
а1(х)+аі(х)^аі{х), х-+х0 •
178
Приклади
sin 8*
1. Знайти Hm . »„ .
х->0 18''*
О Оскільки sin 8* ~ 8дс, tg 2* ~ 2х при * -»- 0, то за теоремою 2 дістанемо
sin 8x 8х
llm_tF2T =1іт"2Г = 4 •
а г> - п arcsin {х — 3)
2. Знайти Hm
хХз *2-4* + 3 '
О arcsin (х — 3) ~ х — 3 прн х -*■ 3, тому
arcsin (*—3) * —З І 1
Hm —-5 і,„ ■ q— = lim -r- 5ГГЗ ГГ = 'lm T Г = ~5" • •
In cos 2x
3. Знайти Hm jj .
О Оскільки In cos 2дс = In (і + cos 2х — 1) ~ cos 2* — 1 при х -*■ 0, то
lncos2* cos2jf—1 ,. — 2sina*
Hm т = hm -j = hm ^ = — 2. •
«-♦0 x x-*o x *-*0
sin6x + xa — 10*s
Знайти lim -
9jt rb
О За теоремою 3 маємо при х -*■ 0
sin 6* + х2 — 10*s ~ sin бл 2х — хь~2х,
тому
sin 6* + хг — l(ks . sin 6* 6
lim g =hm—2^—■=^"=3- •
4.5. Розкриття деяких невизначеностей
Як уже вказувалось, у найпростіших випадках знаходження
границі lim / (х) зюдиться до підстановки у функцію / (х) граничного
х->ха
значення аргументу х0. Але часто така підстановка приводить до не-
визначених виразів. Це такі вирази:
1) відношення двох нескінченно великих величин — невизначе-
оо
ність виду —;
2) різниця двох нескінченно великих величин—невизначеність
виду оо — со;
3) добуток нескінченно малої функції на нескінченно велику —
невизначеність виду 0 • оо;
4) відношення двох нескінченно малих величин — невизначеність
0
виду т;
5) якщо ах (х) -v 0 та аа (х) ->- 0 при х -> х0, то вираз щ* —
невизначеність виду 0°j
179
6) якщо а (х) -> 0, Р (л:) -v оо при х -*■ х0, то вираз ра —
невизначеність виду оо°;
7) якщо / (х) -> 1, р (л:) -> оо при л: -»■ JC0> то вираз /р —
невизначеність виду І00 (це не одиниця в якомусь конкретному степені, а
символ для скороченого позначення границі виразу / , де f-*■ 1,
Операцію знаходження границі у цих випадках називають
розкриттям невизначеності.
Загальний спосіб розкриття невизначеностей дамо в гл. 5, а тут
розглянемо деякі окремі випадки.
1. Невизначеність виду — задана відношенням двох многочленів.
* оо
Приклад
Xі + 2х — 1
Знайти lim
З*4— ха+10*+ 5 ■
оо
О Маємо невизначеність виду —. Поділимо чисельник і значенник дробу на х*:
оо
i + -L-_L
хі + 2х — 1 ^ х3 Xі і
lim п л 5~;—гт>—і—F-=lim = . #
*-><* Зх4-х2+10х + 5 w І , 10 , 5 3 *
Xs Xs X*
Застосований прийом є загальним: щоб розкрити невизначеність
оо
виду —, задану відношенням двох многочленів, треба чисельник і
внаменник розділити на найвищий степінь х у цих многочленах.
2. Невизначеність виду -g- задана відношенням двох многочленів.
Приклад
х» + 2х2 — х — 2
Знайти lim -
О Оскільки
lim (Xs + 2х2 — х — 2) = 0, lim (xa + Зх — 4) = 0,
*->1 лг-»1
о
то маємо невизначеність виду -тг. Щоб розкрити невизначеність, розкладемо
чисельник і знаменник на множники:
*з + 2х2 — х — 2 = (х — І) (х2 + Зх + 2); х2 + Зх — 4 = (х — І) (х + 4).
Маємо
х3 + 2х2—х —2 (х —І)(ха + Зх+2) ха + Зх + 2 6
І£! х»+Зх-4 =]|™ (х-1)(х + 4) = '!" х + 4 =Т"- •
180
Це теж загальний прийом. Скорочення на х — 1 тут можливе, тому
що при визначенні границі lim / (х) = А значення х Ф х0.
х-*хв
Множник х — л:0, через який чисельник і знаменник прямують
до нуля, іноді називають критичним множником.
Таким чином, щоб розкрити невизначеність -g-, задану
відношенням двох многочленів, треба в чисельнику і знаменнику виділити
критичний множник і скоротити на нього дріб. Якщо при цьому
розкладання на множники виявиться утрудненим, то треба розділити
чисельник і знаменник на критичний множник «у стовпчик».
Приклад
5х4 — 3*а + х — 1
Знайти jlrr^ 4х8 + 2ха-3х-1 •
0
О Маємо невизначеність виду -q-. Оскільки ця невизначеність задається
відношенням двох многочленів, то чисельник і знаменник треба поділити на критичний
множник х + 1. Маємо
__5х* —Зха+х —1 х+1
5х* + 5х3 бх8 — бха + 2х — 1;
- — £*! — jj*J 4х" + 2х2 — Зх - 1 І х+1
-5*3-5*' ~ 4х3 + 4х2 4х2-2х-1-
-*\±% -2*2-Зх '
2*'+ 2* ~-2ха-2х
--*-! =ї=і
■*-' ——х-1
0
5х* — Зха + х — 1 = (х + І) (5х3 — 5х2 + 2х — 1);
4х8 — 2ха — Зх — І = (х + 1) (4х2 — 2х — 1);
Бх4 —Зха + х—1 ,,_. 5*3 — 5ха + 2х — 1 13
Т
,"™і 4х3 + 2х2 —Зх—1 -JI™! 4х2 —2х-1 = — б
о
3. Невизначеність виду -^- задана ірраціональними виразами.
Приклади
1. Знайти 11т У** + Б —3 _
*->2 X — 2
О Тут невизначеність -гг, х — 2 — критичний множник. Позбудемось від
ірраціональності в чисельнику. Маємо
Нт УЖ+Б-3 _„„, (V^+~5-3)(/FT5 + 3) _
х->2 х —2 х-»2 (Х — 2) (Ухл + 5 + 3)
дЛ + 5-9 (х-2)(х + 2) 2
= lim . = lim . = -5- . •
х->2 (х — 2) (У х2 + 5 + 3) х-*2 (х — 2) (Ух2 + 5 + 3) 3
181
1,ті^"=й^+і+4=^
Іноді від ірраціональності можна позбутися введенням нової змінної.
2. Знайти:
а) Hm -1 -j ; б) Ііт —і—! .
х->о * х_>о х
О а) Введемо змінну у* = 8 + ха. Якщо х -*■ 0, то у -»■ 2, тому
б) Нехай і/5 = х + 1 тоді
ІЇЇ ЇБ-1 =t!TJi/4 + J'3 + i/, + 24' + 4- 8 '
- 4
Цей самий результат дістанемо з еквівалентності (1 + х) — 1 ~ -s- x. ф
4. Невизначеності виду оо — оо задані ірраціональними виразами.
Приклад
Знайти Нт (У х*+ їх — х).
(У ** + 2*-*) (/^+"2^ + х) 2х
О Нт ,/-... , „ , = Нт
ти , : = ПІП /- _ : =
2
= Нт А ^ =1.#
*->+0о |/ j + J_ + j
5. Невизначеності виду -=- задані виразами, що містять
тригонометричні функції, часто розкриваються за допомогою першої
важливої границі.
Приклад
г, . . tgx — sin*
Знайти Hm r» .
х-»о -*3
sinxf—1 і)
Hm \SE11 L ~llr
1 1
О Hm L£2!i! L «Him cos* = lim_Lz£°±L
*-*° & *-ю x2 х-ю Xі cosx
""i (4-)'
, я, sin I 1
1 — cos x 2 \ 2 / 1
?llm-
x->o
= hm -j = Hm -5 = 2 Hm —-,— = -д- .
x-»0 * x-*0 л х-лО х *
6. При розкритті невизначеності виду 1°° використовують другу
важливу границю.
182
Приклади
Знайти:
в) limtl+Btg»*)0'8'*; 6)Hm(cosx) " .
х-Ю х-»0
1 6t«"ctg.x
О a) Hm(I+5tg»*)5te" > =1ітеЕ'8"с'8" = е«;
х->0 х->0
1 cosх—1 cosx— 1 ~ 2 1
б) limO + fcos*-!))005*-1 *' =Ііте ** =.Цтех' =е 2.#
х-»0 х->0 х-»0
Завдання для самоконтролю
1. Довести:
, . sin* / 1 \л
а) нт——= 1; б) ||т М + -г = «. «є^;
х->0 * п->оо V п І
в) Нт (1 + — )* = є; г) Нт (1 + у)« = є.
2. Як порівнюються між собою нескінченно малі величини?
3. Які нескінченно малі величини називаються еквівалентними?
4. Довести, що 1 — cos 2х ~ 2х2 при х -»■ 0.
Б. Обчислити границі:
Xі — 5*+6 /1 3 \
а)і!3 *2-12^ + 20 : б> [Ні^г-т^-]1
в' ,іт „ , Т : г) Нт _t_ ;
Л»00 Xі + 4 Х->1 |/х _ J
ч sin (а + де)—sin (а — х) lex — sin*
Д) Нт , " ~ ; є) Нт-Ь-—з ;
х-й) * х->0 *^
,' 2х + 3 \*+5 Іп (1 + feje) , eaJC —eP*
х-+оо' *Х-\-1 І х->0 * х->0 *
1 2 1
Відповіді. Б. а) -о-; б) —І; в) І; г) -о-; д) 2cosa; e) -g-; e) є; ж) fe;
в) a —p.
§ 5. НЕПЕРЕРВНІСТЬ ФУНКЦІЇ
З поняттям границі функції тісно пов'язане інше важливе
поняття математичного аналізу — поняття неперервності функції.
Розглянемо графіки функцій / (де) і Ф (х) (рис.4.50). Чим
відрізняються ці графіки? Недвозначну і чітку відповідь на це запитання
дати не так уже й просто. Можна сказати, що графіком функції
/ (де) є суцільна крива (рис. 4.50, а), а функції ф (х) — не суцільна
(рис. 4.50, б). Графік функції / (д:) можна провести, не відриваючи
183
олівець від паперу, а функції
Ф (де) — не можна; при поступовій
зміні аргументу х значення функції
/ (де) також змінюється поступово,
а значення функції ф (де) — не
поступово, у точці х0 здійснюється
стрибок. Усі ці відповіді
правильні, але не досить чіткі для
математичних формулювань. Навіть якби
Рис 4 50 якась із них нас задовольнила, то
як відповісти на таке запитання:
«суцільний» чи «розривний» графік
функції, заданої, скажімо, формулою? Побудова графіка «по точках»
не допоможе, тому що особливу точку х0 можна випадково пропустити
(рис. 4.50, б).
Зрозуміло, що характер графіків функцій / (л:) і ф (х) в точці х0
різний. Кажуть, що функція / (л:) в точці х0 неперервна, а функція
Ф (х) в точці л:с розривна. Переходимо до чітких означень.
5.1. Неперервність функції в точці. Точки розриву
Нехай функція / (л:) визначена в точці л:0 і в деякому -околі цієї
точки.
Функція / (х) називається неперервною в точці х0, якщо границя
функції і її значення в цій точці рівні, тобто
Umf(x)=f(x0). (23)
Якщо порівняти це означення з означенням границі функції
1іт/(л:) = А, то при означенні границі функції число х0 могло
й не належати області визначення функції, а якщо число х0 належало
області визначення, то значення функції / (л:0) в цій точці могло й не
збігатися з границею А.
Таким чином, функція / (л:) буде неперервною в точці х0 тоді і
тільки тоді, коли виконуються такі умови:
1) функція визначена в точці х0 і в деякому околі цієї точки;
2) існує границя Ііт / (л:);
3) границя функції f(x) в точці х0 і значення функції в цій точці х0
збігаються, тобто виконується рівність (23).
Оскільки х0 = ііт де, то формулу (23) можна записати у вигляді
Ііт/(*)=/(Ііт а:) = /(*„). (24)
х->х„ х-*х.
Формула (24) виражає правило граничного переходу: при
знаходженні границі неперервної функції/(де) можна перейти до границі під зна-
184
ком функції, тобто у функцію /(де) замість аргументу х підста-
в йти значення л:0 = Ііт х. Геометричний зміст поняття неперервності
відповідає геометричному змісту границі (23): точки графіка функції
У —f(x) як завгодно близькі до точки (л:0; /(лг0). якщо їхні абсциси
достатньо мало відрізняються від числа х„ (рис. 4.50, а).
«Мовою є — б» неперервність ілюструється на рис. 4.30, де число
А = f (x0).
Можна дати ще одне означення неперервності функції, опираючись
на поняття приростів аргументу і функції.
Нехай числа х0 та х належать області визначення функції у —
•= f (х). Різниця х — дс0 називається приростом аргументу в точці
х0 і позначається через Дл: («дельта х»):
Ах — х — дс0.
Різниця відповідних значень функції / (л:) — / (дс0) називається
приростом функції в точці х0 і позначається через Ау:
Ay = Af = f(x)-f{x0) = f(x0 + Ax)-f(x0).
Очевидно, приріст Ал: може бути додатним або від'ємним числом,
приріст Ау — довільним числом. Запишемо рівність (23) в нових
позначеннях, для чого перенесемо в ній значення / (л:0) в ліву
частину і внесемо його під знак границі. Оскільки умови х-*- х0 і х —
— л:0-»-0 однакові, то рівність (23) набуває вигляду
Ііт (/ (дг) — / (*„)) = 0 або Ііт Ау = 0. (25)
х—jt0-»0 Д*-»0
Рівність (25) і є ще одним означенням неперервності функції, яке
можна сформулювати так.
Функція / (х), визначена в околі точки х0, називається
неперервною в точці х0, якщо її приріст в цій точці є нескінченно малоюфунк-
цією при Ах -»-0.
Часто зустрічається поняття односторонньої неперервності.
Функція / (я) називається неперервною в точці х0 зліва, якщо вона
визначена на півінтервалі (дс0 — є; х0], де є > 0 і Ііт / (*) = / (л:0); якщо
функція / (х) визначена на півінтервалі [л:0; х0 + є) і Ііт / (л:) =
*->х0+0
= / (л:0), то функція називається неперервною в точці х0 справа.
Використовуючи ці поняття та формули (4), можна сказати, що
функція /(л:) буде неперервною в точці х0 тоді і тільки тоді, коли вона
визначена в деякому околі точки х0 і
Ііт /(*)= Ііт f(x) = f(x0). (26)
х-*х„—0 х-їХо+0
Якщо хоча б одна з цих умов не виконується, то функція
називається розривною в точці х0, а сама точка х0 називається точкою
розриву функції.
185
Розрізняють такі види розривів. Якщо для функції f (х) існують
скінченні границі
lim f(x)=f(x0 — 0), lim f(x) = f(x0 + 0),
x-*xt—0 x-*x,+0
причому не всі числа / (х0), f (х0 — 0), / (х0 + 0) рівні між собою, то
розрив в точці х0 називають розривом першого роду, точку х0 —
точкою розриву першого роду. Зокрема , якщо
f(x0-0)=f(xo+0)^f(x0),
то розрив в точці х0 називають усувним, а точку х0 — точкою
усувного розриву. У цьому випадку досить довизначити функцію лише в
одній точці х0, поклавши / (*0) = / (*0 ± 0), щоб дістати функцію,
неперервну в точці л:0. Величину б = І lim / (х) — lim / (де) | назива-
х->*„—0 *->*0+0
ють стрибком функції.
Якщо хоча б одна з односторонніх границь у формулі (26) не існує
або дорівнює нескінченності, то розрив в точці хв називається
розривом другого роду, а сама точка х0 — точкою розриву другого роду.
Приклади
1. Функція / (х) = —-— (рис. 4.47) ие визначена в точці х = 0, але має в цій
точці границю, тому я = 0 — точка усувного розриву; досить покласти / (0) =
sin х
=» lim = 1, щоб функція стала неперервною. Отже, функція
*->о *
sin* x^Q;
/(*) = { *
1, х = 0
є неперервною в точці х = 0.
( Зх», х<1
2. Функція у = \ „ ,; в точці х=\ буде неперервною (рис. 4.51),
U + 2, *> І
тому що функція визначена в точці х = 11 в будь-якому околі цієї точки. Крім того
/(1)=3; lim /(*) = Hm3*a=3; lim / (х) = lim (х + 2) = 3.
х->1—0 х->1 х->1+0 х->1
*<0 х>1
{4 Xі, х < 2
; має в точці х=2 (рис. 4. 52) розрив першо-
1, X ^ £.
го роду: Ііт / (х) = lim (4 — Xs) = 0; Urn / (х) = lim (— І) = — І. Стрибок
х->2—0 х->2 х->2+0 д»2
х<2 х>2
функції в точці х = 2 дорівнює 6 = | — 1 — 01 = І.
4. Функція у = Е (х) (рис. 4.8) має безліч точок розриву першого роду.
б. Функція у = sin — (рис. 4.29) в точці х = 0 має розрив другого роду, тому
що жодна з Односторонніх границь в цій точці ие існує.
в. Функція / (х) = х_ і (рис. 4.53) в точці х = 1 має розрив другого роду,
186
У\
Рис. 4.62
Рис. 4.53
тому що
lim
х-И
*>1
*<1
• сю.
X
7. Функція у = 'а . розривна в точках х = ±1, тому що в цих точках вона
не визначена. Оскільки
Нт у2 " і = — °°. Ііт
х-»_і_о * — ■ - •
X — 1 Х-).-1+0 Х '
Ііт
х->1-0
ха —1
■ оо, Цт
х-*і+о * '
то х = ±1 — точки розриву другого роду (рис. 4.54).
8. Дослідити на неперервність функцію / (х) = 2*+' в точці х = —1.
О Функція не визначена в точці х — —1, тому функція в цій точці розривна.
Щоб визначити характер розриву, знайдемо границі зліва і справа:
і і
lim f(x)= lim 2*+' =0; lim / (x) = lim 2x+l = + ».
x->—1—0 x->—1 x->—1+0 x->—1
x<~ 1 x>—1
Отже, точка х= —1 є точкою розриву другого роду (рис. 4.65). •
Рис, 4.54
187
9. Довести, що функція / (х) — Xs неперервна в будь-якій точці х0 € R.
О Скористаємось другим означенням неперервності. Для довільних значень
хв і Ах маємо
/ (*о) = *о- / ("о + А*) = (*о + А*)8 = *о + 3*оД* + 3*<>A*2 + А*8:
Ау = Д/ = / (х„ + Дх) - / (х0) = Зх^Дх + З^Дж» + Ддс8;
Ііт Ду = Ііт (ЗхЗДх + Зх0Дх2 + Дх3) = 0. •
Дх-+0 Дх->0
Аналогічно можна довести, що кожна основна елементарна функція неперервна
в кожній точці, в якій вона визначена.
5.2. ДІЇ над неперервними функціями. Неперервність
елементарних функцій
Теорема 1. Якщо функції f (х) і <р (де) неперервні в точці х0, то в
цій точці неперервними в функції
f(x)±<p(x), f(x)<p(x), -Ufa- (27)
(остання за умови, що ф (х0) Ф 0).
О Оскільки неперервні в точці х0 функції f (х) і ф (де) мають
границі, що дорівнюють f (х0) і ф (х„), то за теоремою 1 (п/3.7) границі
функцій (27) існують і відповідно дорівнюють / (дс0) ± ф (х„),
f (х )
f (х„) ф (дс0), -^-т-5^. Але ці величини дорівнюють значенням відповідних
Ф 1*о)
функцій. Отже, функції (27) за першим означенням неперервності
є неперервними в точці дс0.#
Доведена теорема справедлива для алгебраїчної суми та добутку
довільної скінченної кількості неперервних в точці х0 функцій.
Теорема 2. Якщо функція и = ф (де) неперервна в точці х„, а
функція у = f («) неперервна в точці и0 — f (х0), то складена функція у =
= / (ф (х)) неперервна в точці х0.
О Для доведення теореми досить встановити, що
Ііт /(ф(х)) = /(ф (*„))•
Оскільки функція « = ф (х) за умовою неперервна в точці х0, то
Ііт ф (де) = ф (х0) = и0,
х-*х0
тобто при х -v Хр значення функції и ->- и0. Тому внаслідок
неперервності функції / (и)
Ііт / (ф (*)) = Ііт /(«) = / («„) = / (<р (дг0)). •
Як відомо (п. 2.4), елементарною називається така функція, яку
можна задати однією формулою, яка містить скінченне число
арифметичних дій і суперпозицій основних елементарних функцій.
188
Оскільки основні елементарні функції неперервні в усіх точках,
в яких вони визначені, то з теорем 1 і 2 випливає така теорема.
Теорема 3. Всяка елементарна функція неперервна в кожній точці,
в якій вона визначена.
5.3. Властивості функцій, неперервних на відрізку
Якщо функція неперервна в кожній точці інтервалу(а, Ь), то вона
називається неперервною на цьому інтервалі.
Функція називається неперервною на відрізку [а; Ь], якщо вона
неперервна на інтервалі (а; Щ і, крім того, неперервна справа в
точці а і зліва в точці Ь.
Приклади
{4 Xі, х < 2;
(рис. 4.52) неперервна на проміжках (— оо;
2) і [2; +оо). В точці х = 2 вона неперервна справа.
2. Функція у = [х] (рис. 4.в) неперервна на кожному з проміжків [л; п + 1),
п £ N. В точках х = п вона неперервна справа.
3. Функція у = Y\ — Xі неперервна на відрізку [—1; 1]. В точці х = —1 вона
неперервна справа, а в точці х =* 1 зліва.
Неперервні на відрізку функції мають ряд важливих
властивостей.
Сформулюємо деякі з них без доведення [12].
Теорема 1. (перша теорема Больцано-Коші). ЯкЩО функція f (x)
неперервна на відрізку [а; Ь] і на його кінцях набирав значень різних
знаків, то всередині відрізка [а, Ь] знайдеться хоча б одна точка х =
= с, в якій функція дорівнює, нулю: f (с) = 0, а < с < Ь.
Геометричний зміст цієї теореми такий (рис. 4.56): неперервна
крива при переході з однієї півплощини в другу, межею між якими
є вісь Ох, перетинає цю вісь.
Теорема 1 застосовується при розв'язуванні рівнянь і лежить в
основі так званого методу половинного поділу (його називають також
методом «вилки»).
Приклад
Довести, що иа відрізку [0; 1] рівняиия х* + х3 — 1 = 0 має корінь, знайти його
з точністю до 0,1.
О Нехай / (х) = Xі 4- х3 — 1. Ця функція неперервна иа всій числовій осі,
а отже, і иа відрізку [0; 1]. Оскільки / (0) = —1 < 0, / (1) ■= 1 > 0, то за теоремою
1 дане рівняння иа відрізку [0; 1] має корінь. Точкою хг =* 0,5 ділимо відрізок [0; 1]
навпіл і знаходимо / (0,5) = —0,81. Оскільки / (1) «= 1, то корінь лежить на
відрізку [0,6; 1].
Точкою ха = 0,75 ділимо відрізок [0,5; 1] навпіл 1 знаходимо / (0,76) = —0,12;
отже, корінь знаходиться на відрізку [0,75; 1].
Точкою х» = 0,875 ділимо відрізок [0,75; 1] навпіл. Оскільки / (0,875) = 0,27 >
і> 0, а / (0,75) < 0, то корінь знаходиться на відрізку [0,75; 0,875]. Прн цьому
0,875 — 0,75= 0,125= -g-, тому, якщо за корінь рівняиия взятн довільне число
189
(в)>0
Рис. 4.56
У
м
т
1Л
о// х2 б х
Рис. 4.68
с £ [0,75; 0,875], то це число буде коренем 8 точністю до -д-. Наступна точка поділу
■ж* — ~2 (0,75 + 0,875) = 0,8125, буде коренем з точністю до -jg-. Отже, 8 точністю
до 0,1 коренем даного рівняння є число 0,81.
Продовжуючи цей процес, можиа suaйти корінь 8 будь-якою наперед заданою
точністю. •
Теорема 2 (друга теорема Больцано — Коші). Нехай функція
неперервна на відрізку [а; Ь] і набуває, на його кінцях різних значень:
f (a) = A, f (Ь) = В, А Ф В. Тоді для довільного числа [і £ (А; В)
знайдеться таке число с £ (а; Ь), що f (c) = [і.
Отже, неперервна функція при переході від одного значення до
другого набуває також всіх проміжних значень.
Зміст теореми 2 ілюструється на рис. 4.57.
Зазначимо, що теорему 1 можна розглядати як окремий випадок
теореми 2: якщо А та В протилежні за знаком, то число \і = 0
лежатиме між числами А та В.
Теорема 3 (Вейєрштрасса). Якщо функція f (x) неперервна на
відрізку [а; Ь], то серед її значень на цьому відрізку існує найменше
і найбільше.
Отже, неперервна на відрізку la, b] функція / (де) досягає на цьому
відрізку найбільшого значення М = max / (х) і найменшого зна-
чення т = min / (де) (рис. 4.58).
Завдання для самоконтролю
1. Дати означення неперервності функції в точці: а) через односторонні границі}
б) через прирости аргументу і функції.
2. Який розрив називається: а) розривом першого роду; б) розривом другого
роду? Навести приклади.
8. Який розрив називається усувним. Навести приклади.
4. Довести, що функція у = sin х неперервна на всій числовій прямій.
5. Довести, що функція у = 22—*
має в точці х = 2 розрив другого роду.
190
2
в. Довести, що функція у =■ '—— має в точці х = 0 розрив першого роду.
1+2Т
2
7. Довести, що функція у = j— має в точці х •= 1 усувний розрив.
8. Сформулювати і довести теорему гро неперервність в точці елементарних
функцій.
9. Яка функція називається неперервною иа проміжку?
10. Сформулювати теореми про властивості функції, неперервних иа відрізку.
Який геометричний зміст цих теорем?
Глава 5
ДИФЕРЕНЦІАЛЬНЕ ЧИСЛЕННЯ ФУНКЦІЙ
ОДНІЄЇ ЗМІННОЇ
Диференціальне числення — розділ математики, в якому
розглядається дослідження функцій за допомогою похідних та
диференціалів.
Деякі задачі диференціального числення розв'язані ще в
давнину. Так, Евклід розв'язав задачу про паралелограм найбільшої площі,
який можна вписати в даний трикутник; Архімед побудував дотичну
до спіралі, що носить його ім'я, а Аполлоній — дотичну до еліпса,
гіперболи та параболи.
Загальні методи диференціального числення розроблено
Ньютоном і Лейбніцем наприкінці 17 ст., але лише в 19 ст. Коші
обгрунтував ці методи на основі теорії границь.
§ 1. ПОХІДНА
Центральне поняття диференціального числення — похідна —
широко використовується при розв'язуванні багатьох задач з
математики, фізики та інших наук, а також при вивченні різних процесів.
Якщо перебіг того чи іншого процесу описується деякою функцією,
то дослідження даного процесу зводиться до вивчення властивостей
цієї функції та її похідної.
1.1. Задачі, які приводять до поняття похідної
1. Задача про швидкість прямолінійного руху. Нехай
матеріальна точка рухається нерівномірно вздовж деякої прямої (рис. 5.1) і за
час t проходить відстань S, що дорівнює відрізку ОМ. Тоді різним
моментам часу t відповідатимуть різні
положення точки М, тобто відстань S
рухомої точки М є деякою функцією часу tiS =
= S (/). Треба знайти швидкість руху
точки М. Рис. 5.1
S(t)
191
Нехай з моменту t пройшов деякий час At (At > 0 — приріст
часу). За час At рухома точка перейде в положення Мх і пройде
шлях, який позначимо через AS (AS — приріст шляху, що дорівнює
відрізку MMi). Отже, за час t + At матеріальна точка пройде шлях
S(t) + AS =S(t + At), тому
AS = S (t + At) — S (f).
Середньою швидкістю vc руху точки за проміжок часу It; t 4- At]
називають відношення приросту шляху до приросту часу»
AS S (t + AQ — S (і)
с А/ — Д<
Середня швидкість залежить від значення At, причому чим менший
проміжок At після моменту часу /, тим точніше середня швидкість
відображає швидкість руху точки у даний момент часу t. Істинну ж
(миттєву) швидкість руху точки дістанемо як границю, до якої прямує
середня швидкість vc при Д/-»-0. Цю границю називають швидкістю
руху точки в момент часу (або миттєвою швидкістю) і позначають
,. .. AS ,. S(r + A') — S(t) ...
v =t lim v. = hm —j-t- = Iim v .; 1-г— . (1)
д/-»о д/->о at д/->о ЛГ
Приклади
1. Знайти середню vc 1 миттєву v швидкості точки, яка рухається рівномірно
прискорено з прискоренням а і з нульовою початковою швидкістю.
О 3 курсу фізики відомо, що для даного випадку закон руху виражається
формулою S = - . Знайдемо приріст шляху AS:
а(* + Д*)2 at3 яД<2
S + AS = ——у—— = — 4- аШ 4- —J—.
Далі маємо
а V + ДО1 в'2 ,,. , вАі2
AS = з> — —зр- = at Аг + —g—
AS аДі
/ аДг \
t>= lim »_ = lim \at + —х— \ = at.
д/->.о \ z '
2. Нехай закон руху точки виражається формулою S = fi + 3f + 1, де S
вимірюється в метрах. Знайти середню швидкість руху на проміжку часу від f0= 1 с
до tx = 5 с і від t0 до tj = 2 с та швидкість в момент часу /„ = 1с.
О Знайдемо приріст шляху AS за проміжок часу А/: •
AS = S (< + ДО — S = [(< + ДО8 + 3 {/ + ДО + І] —
— (і8 -Н Зі + 1) = 3 (<" + 1) Д< 4- З/Аі2 4- Д(3.
192
Середня швидкість за час А/
»с = -дГ = 3 (/■ + І) + ЗгДг 4- Д'2.
Проміжок часу A/t = /j — /0 = 5 — 1 = 4 с, тому
Vc = З (І2 4- О 4- 3 • 1 • 4 4- 42 = 34 м/с.
Проміжок часу Л<2 = /2 — /0 = 2 — 1=1 с, тому
Vc = 3 (Iа 4-1) + 3 • 1 • 1 4 І2 = '0 м/с.
Знайдемо миттєву швидкість в будь-який момент часу /:
V = lim Vc = lim [З (t2 + 1) 4- 3/Л< 4- А'2] = 3 (г2 + ')■
д/-»о
Зокрема, при /, = 1 с маємо
V = З (І2 + О = 6 м/с. •
2. Задача про густину неоднорідного стержня. Розглянемо
тонкий прямолінійний неоднорідний стержень довжини / (рис. 5.2)
і розмістимо його на осі Ох так, щоб лівий кінець стержня збігався
з початком координат (матеріальне тіло називається неоднорідним,
якщо його густина не є сталою, а змінюється від точки до точки).
Позначимо через т масу стержня між точками О і М з координатами
0 і х. Оскільки маса відрізка ОМ залежить від його довжини, то т
є функцією від х:
т =т(х).
Треба знайти густину стержня в точці М. Як і в попередній задачі
крім точки М візьмемо ще точку М1 з координатою х 4- Ах (Ах —
приріст довжини л:) і позначимо через т + Am масу відрізка OMt
(Am — приріст маси, що дорівнює масі відрізка ММ^:
т 4- Am = m (л: 4- Ал:).
Відрізок стержня між точками М і Мх має довжину Ал: і масу
Am = m (д: 4- Ал:) — m (л:).
Середньою густиною ус стержня на відрізку [х; х 4- Ал:] називають
відношення приросту маси до приросту довжини:
Дт т (х 4- А*) — т (х)
Yc ~ Ах ~ ДЇ '
Границю середньої густини ус при Ал: -»- 0 називають лінійною
густиною стержня в точці х і позначають
і- і- Д"1 і-_ tn (х 4- А*)—т (■*) /<-..
у = hm vc = bm — = hm —* т ' ^ . (2)
Д*->0 Дх-»0 ах Д*-»0 ах
Рис. 5.2
193
3. Задача про силу струму. Нехай Q = Q (і) — кількість
електрики, що проходить через поперечний переріз провідника за час t, треба
знайти силу струму в момент часу t. Середньою силою струму /с за
проміжок часу [t; t -f- At] називають відношення приросту кількості
електрики до приросту часу:
, AQ _ Q (t + Ар — Q (0
с Д< ~ Д/
Границя середньої сили струму /с при А/-+0 є сила струму
в момент часу /:
/ = Нш /с = Ііт М- = ton W+W-QW . (3)
4. Задача про теплоємність. Нехай ш = ш (т) — кількість
теплоти, яку дістає тіло при нагріванні його до температури т. Треба
знайти теплоємність тіла при температурі т.
Середньою теплоємністю Сс тіла на проміжку [т; т + Дт]
називають відношення приросту теплоти до приросту температури:
q _ Ао> со (т + Ат) — со (т)
с "~ Дт ~ Дт
Границю середньої теплоємності Сс при Дт -*■ 0 називають
теплоємністю тіла при температурі т:
C=limCc = lim -^-=lim M(T + AT)-MW , (4)
5. Задача про. швидкість хімічної реакції. Нехай N = N (t) —
кількість речовини, що вступає в хімічну реакцію за час /. Треба
знайти швидкість реакції. Середньою швидкістю vc реакції за
проміжок часу It; t -f- At] називають відношення приросту кількості
речовини до приросту часу:
AN _ JV(< + AQ— N (t)
Vc ~ Д< ~ Af
Границя середньої швидкості vc реакції при At ->- 0 є швидкість
реакції в момент часу /:
v = hm vc = lim —rr- = hm —J—T7 LL- . (5)
д/->о д/->о af д/->о ЛІ
6. Задача про дотичну до кривої. Відомо, що дотичною до кола
називають пряму, яка має з колом одну спільну точку. Це означення
дотичної не можна застосувати до незамкнених кривих. Дійсно,
парабола у = Xі має з віссю Оу лише одну спільну точку (0; 0), але
пряма х = 0 не є дотичною до цієї параболи у вказаній точці. З іншого
194
и*і^
Рис. 5.3
Рис. 5.4
боку, пряма у = 1 має безліч спільних точок з кривою у = sin х і є
дотичною до цієї кривої.
Дамо загальне означення дотичної. Розглянемо криву L і на ній
точки М, Мг (рис. 5.3). Пряму ММ1г що проходить через ці точки,
називають січною. Нехай точка Ми рухаючись вздовж кривої,
наближається до точки М. Тоді січна ММ± повертатиметься навколо
точки М, а довжина відрізка ММХ прямуватиме до нуля.
Якщо при цьому і величина кута МХМТ прямує до нуля, то пряму
МТ називають граничним положенням січної ММг.
Пряму МТ, яка є граничним положенням січної ЛШЬ
називають дотичною до кривої L в точці М.
З цього означення випливає, що існування дотичної не залежить
від того, з якого боку точка Мх наближається до точки М. У будь-
якому випадку січна МЛ^ має наближатись до однієї і тієї самої
прямої МТ.
Якщо січна ММ1 наближається до різних прямих (рис. 5.4) або
взагалі не наближається ні до якої прямої, то вважають, що в точці М
дотичної не існує.
Розглянемо випадок, коли крива в прямокутній системі координат
(рис. 5.5) задана рівнянням у = f {х) і має в точці М (х; у) не
вертикальну дотичну. Розглянемо задачу про знаходження кутового
коефіцієнта цієї дотичної. Надамо аргументу х приросту Ах: тоді
значенню х -{- Ах відповідатимуть значення функції у + Ay = f (x +
+ Дл:) і точка Мх (л: + Ах; у + Ау)
на кривій.
Проведемо січну MM і і позначимо
через ф кут, утворений цією січною
з додатним напрямом осі Ох. З
графіка видно, що кутовий коефіцієнт
січної М.Мг дорівнює
tg<p= -
Ay
д*
AM ■
/ (* + Ах)
д*
■М*)
195
Якщо Але -*- 0, то точка М1 прямує до точки М вздовж кривої у =
= f (х), а січна ММи повертаючись навколо точки М, переходить
в дотичну МТ. Кут ф при цьому прямує до деякого граничного
значення а. Отже, кутовий коефіцієнт дотичної дорівнює
tg« = ton tgq, = lim -|f- = lim /C + M-/W . (6)
Д*->0 Д*-М) ax Д*-»0 ax
Розглянуті задачі, незважаючи на різний зміст, приводять нас
до знаходження границь (1) — (6) одного й того самого виду —
границі відношення приросту функції до приросту аргументу.
Цю границю в математиці називають похідною. Переходимо до
точного означення.
1.2. Означення похідної. Механічний, фізичний та геометричний
зміст похідної
Нехай на деякому проміжку (а; Ь) задано функцію у = f (x).
Візьмемо будь-яку точку х 6 (а; Ь) і надамо х довільного приросту
А* такого, щоб точка х -f- Ад; також належала проміжку (a; b).
Знайдемо приріст функції: Ay = f (x -J- А*) — / (*).
Похідною функції у = / (л:) в точці х називається границя
відношення приросту функції Ау в цій точці до приросту аргументу Ах,
коли приріст аргументу прямує до нуля.
Похідна функції у = / (х) в точці х позначається одним із таких
символів:
Таким чином, за означенням
V(х) = lim -^ = lim rv + W-rw (7)
Якщо в деякій точці х границя lim -^- = оо, то похідну /' (л:) в цій
точці називають нескінченною.
Якщо границя hm -£- в деякій точці х не існує, то не існує в цій
точці і похідної /' (л:).
Значення похідної функції у = / (х) в точці х = х0 позначається
одним із таких символів:
П*о); /'(^)U=x0; «/'!*=*„; -^г1
З означення похідної випливає такий спосіб її знаходження. Щоб
знайти похідну функції у = f (х) в деякій точці л:, треба:
1) надати значенню х довільного приросту Ал: і знайти
відповідний приріст функції Ау — [ (х -f- Ал:) — / (л:);
196
2) знайти відношення
Ay /(*+Ах)-/(х) .
Дх ~" Ах •
3) знайти границю цього відношення:
у- = hm _JSL = lim /(«+М-/М .
Якщо ця границя існує, то вона й дорівнює похідній /' (я).
Операція знаходження похідної від функції / (х) називається
диференціюванням цієї функції.
Приклади
1. Знайти похідну функції у = ха: а) в довільній точці х; б) в точці х = 5.
О а) Надамо аргументу х приросту Ддс і обчислимо приріст Ау:
Ну = (х + Дх)2 — Xі = 2хДх + Дх2.
Тоді
Ау ЧхАх + Дх»
~ДТ= Ах = 2х + Дх;
&У
lim -~ = Ит (2х + Дх) = 2х.
&Х-+0 ах Дх-»0
Отже, (х2)' = 2х.
б) Підставивши в загальний вираз для похідної значення х = 5, дістанемо
(*У|Л=Б = 2*|Х=5=2.5=10. •
2. Довести, що функція у = х", х£ R, п£ N має похідну у' = пх"~1.
О Візьмемо довільну точку х і надамо їй приросту Дх. Тоді функція матиме
приріст Ау = (де + Ах)" — х". Застосовуючи до виразу (х + Ах)" формулу бінома
Ньютона
_ і п In—1) „ , п (п—1) In — 2) _ ,
(8)
при а = х, 6 = Дх, дістанемо
„ . л(п—1) „9 л(п — 1)(л — 2) _ ч. .
Ду = пхГ-ІАх + 2| х"_2Дх2 + —* jjp х"_3Д^ -t- • • • + Дх",
&У „і піп— 1) _ 9 піп— 1)(п — 2) „ , „ „ ,
-^ = пхГ-1 + \ х"~2Ах + —і ^ і- х^Дх» + ■ ■ • + Ддс"-1.
Перейшовши в останній рівності до границі при Дх -»- 0, дістанемо
lim 4f- = nx"-1.
Отже,
(х")'=лхп-1. • (9)
Користуючись означенням похідної, розв'язки задач 1—6 п. 1.1
можна тлумачити так.
197
1. Швидкість в даний момент часу— це похідна від пройденого
шляху S (/) за часом t : v = S' (t).
Це механічний зміст похідної. Узагальнюючи, можна сказати:
якщо функція у = f (х) описує деякий фізичний процес, то похідна
у' = f (х) є швидкістю зміни цього процесу. В цьому полягає
фізичний зміст похідної. Інакше кажучи, яку б залежність не відображала
функція у = f (х), відношення -^- можна розглядати як середню
швидкість зміни функції у відносно аргументу х, а похідну /' (л:) —
миттєву швидкість зміни функції.
2. Лінійна густина неоднорідного стержня — це похідна від маси
т (х) за довжиною х : у = т' (х)
3. Сила струму — це похідна від кількості електрики Q (t) за
часом t: I = Q' (*).
4. Теплоємність — це похідна від кількості теплоти со (т) за
температурою т: с = ш' (т).
5. Швидкість хімічної реакції — це похідна від кількості
речовини N (/), що вступила в реакцію, за часом t:x = N' (t).
6. Кутовий коефіцієнт дотичної до кривої у = f (х) в точці
Мо (*о; Уо) або тангенс кута а (рис. 5.6), що утворює дотична до
кривої в даній точці з Додатним напрямом осі Ох,— це похідна /' (л:0)
в цій точці:
fc = tga =f'(x0).
У цьому полягає геометричний зміст похідної.
Знайдемо рівняння дотичної. Оскільки дотична проходить через
точку М0 (х0; у0) в напрямі, що визначається кутом а, то, поклавши
в формулі (9) (гл. 3) k = /' (*„), маємо
У~ Уо=Ґ(х0)(х — х0). (10)
Рівняння (10) називається рівнянням дотичної до кривої у = / (х)
в точці М0 (х0, у0).
Зокрема, якщо функція в точці М0 має нескінченну похідну, то
дотична в цій точці паралельна осі Оу, а її рівняння таке: х = *„.
Нормаллю до кривої називається пряма, що проходить через точку
дотику, перпендикулярно до дотичної.
Оскільки кутові коефіцієнти дотичної і нормалі пов'язані між
собою умовою перпендикулярності ((24), гл. 3), то рівняння нормалі
до кривої у = f (х) в точці М0 (х0; у0) має вигляд
У~Уо = — Г(Хо) (х-х0\ (11)
За допомогою рівняння (10) можна знайти довжину відрізка АМ0
(рис. 5.6), яка називається довжиною відрізка дотичної (як відстань
між точками М0 і С), і довжину відрізка АВ, який називається
198
піддотичною (як відстань між точками А
і В). Аналогічно за допомогою рівняння
(11) знаходять довжину відрізка нормалі
М0С та піднормалі ВС. Ці відрізки часто
зустрічаються в задачах.
Наведемо деякі твердження, які
випливають з геометричного змісту похідної.
Нехай на інтервалі (а, Ь) задано (рис. 5.7)
неперервну функцію f (х). Якщо похідна
/' (хг) при Хі 6 (а, Ь) додатна, то дотична до
графіка функції / (*) в точці (хц, f (x^) утворює з віссю Ох гострий кут.
Якщо похідна f (х2) = 0, то дотична в точці {х2; f (x2)) паралельна
осі Ох: якщо похідна /' (х3) < 0, то дотична до графіка в точці
(xa\ f (xs)) утворює з віссю Ох тупий кут; якщо похідна /' (л:4) не існує,
то в точці (л:4; / (д:4)) не існує й дотичної, тобто графік в цій точці
має злом (кажуть також, що графік має кутову точку); якщо похідна
/' (л:Б) дорівнює нескінченності, то дотична у відповідній точці
графіка паралельна осі Оу. Справедливі й обернені твердження.
Наприклад, якщо дотична до графіка функції у == / (х) в точці (хц f (лгх))
утворює з віссю Ох гострий кут, то /' (*і) > 0; якщо дотична до
графіка в точці (хг; f (хг)) паралельна осі Ох, то /' (л:2) == 0 і т. д.
Такий зв'язок між похідною і дотичною, як і зв'язок між похідною
і швидкістю, допомагає інтуїтивному сприйняттю багатьох
математичних фактів.
Приклади
1. Скласти рівняння дотичної і нормалі до кривої у = Xs в точці А (2; 8).
Знайти довжини відрізка дотичної і піднормалі в цій точці.
О За формулою (9) при п = 3 маємо у' = (де8)' = Зх2, звідки f (2) = 12.
Поклавши в формулах (10) і (11) х0 =2,ув = 8, f (x0) = 12, дістанемо рівняння
дотичної (рнс. 5.8)
і рівняння нормалі
у — 8=12(х — 2)=>12х — у—16 = 0
у _8 = — -^- (х- 2) => х- \2у -98 = 0.
Рис. 5.8
199
Довжину відрізка АВ дотичної знайдемо як відстань між точками А і В.
Координати точки В визначимо з системи рівнянь у = \2х — 16; у = 0 (точка перетину
дотичної і осі Ох). Маємо А (2; 8), В l-g-; ОІ, гому довжина відрізка дотичної
АВ
=і/(2--Г
+ (8-0)" =
VT45.
Поклавши в рівнянні нормалі у = 0, знайдемо xD = 98. Оскільки хс= хА = 2,
то піднормаль CD = 96. •
2. Знайти кути між параболами у = х2, у = ж3 в точках перетину їх.
О Розв'язуючи систему рівнянь у == Xі; у = х3, знайдемо точки О (0; 0) і А (1;
1) перетину даних кривих.
За формулою (9)
(г2)' = 2х, (х3)' <= З*2.
Зазначимо, що кутом між кривими в точці їхнього перетину вважають (за
означенням) кут між дотичними до даних кривих у цій точці. Оскільки при х = 0 ці похідні
однакові (дорівнюють нулю), то це означає, що в точці 0 (0; 0) дотичні мають
однакові кутові коефіцієнти, тобто параболи у = х2 і у = х3 в точці О (0; 0) мають одну й
ту саму дотичну, тому кут між кривими в цій точці дорівнює нулю. Цей самий
результат дістанемо, коли в формулі (9) (гл. 3) покладемо k, = k2 = 0.
Знайдемо кутові коефіцієнти дотичних до даних кривих у точці А (1; 1). Маємо
fe2 — fei !_
І + М2 _ 7 '
звідки ф = arctg-=-. •
*і = 2* |,=, = 2, *2 = З*2 |л=, = 3, tgq> =
1.3. Графічне диференціювання
Наведемо ще одне застосування геометричного змісту похідної.
Графічним диференціюванням називається наближена побудова
графіка похідної у' = /' (х) за даним графіком функції у = f (x).
Нехай задано графік функції у = f (х), х £ [а; Ь] (рис. 5.9).
Розіб'ємо відрізок [а; Ь] точками х0 = а < хх < хг <; ...-< хп-і <
< хп = Ь на п частин і позначимо відповідні їм точки М0, М,, /Ws
М„_і, Afn графіка. В кожній з цих точок проведемо дотичну. Через
точку А (—1; 0)
проведемо паралельні цим
дотичним прямі до перетину
з віссю Оу в точках В0,
Ви В2, ..., В„_,, Вп, тоді
Ув. = У (х0),
Ув, = У (*і),
У в, = У (х2), ....
#в„_,'= П*п-,),
#В„ = У (*п)-
200
Справді, наприклад, з Д ОБ^ маємо
OBt ОВ,
ОА
^=tga1=/'(*i)-
Проведемо через точку Z?! пряму, паралельну осі Ох, а через Mj
пряму, паралельну осі Оу. Точка Nx перетину їх належить графіку
похідної у = У (х), оскільки
Xn, = *1» yN, = /' (*)•
Аналогічно знаходять точки /V0, N2, ..., #п. Сполучивши плавною
лінією всі ці точки, матимемо наближений графік похідної у' — /' (х).
Цей графік тим точніший, чим більше число п поділу відрізка [а;
Ь] на частини.
1.4. Односторонні похідні. Неперервність і диференційовність
Односторонні похідні визначаються за допомогою односторонніх
границь (гл. 4, п. 5.1). Нехай функція f (x) визначена в околі точки х.
Якщо в формулі (7) передбачається, що Ах -»- 0 і Ах > 0, то
відповідну границю (коли вона існує) називають правою похідною від
f (x) в точці х і позначають
f {x) = Jim -%L = Jim Н* + Аж)-/М .
Д*>0 Дх>0
Аналогічно визначається ліва похідна:
г і \ і- ЬУ і- f(x + Ax) — f(x)
f_ (x) = hm -g- = hm /l д'—LLZ— •
Дх-»0 а* Дх->0 адс
Д*<0 Дл;<0
Якщо функція / (х) задана на відрізку la; Ь], то під похідною в
точці а розуміють праву похідну, а в точці Ь — ліву.
З формули (25) (гл. 4) випливає, що коли неперервна функція
f (х) має ліву і праву похідні в точці х і вони рівні, то похідна /' (х)
існує і
/L(*) = r+(*)=/'(*)■ 02)
Якщо ж /L (х) Ф /+ (х), то похідна в точці х не існує. Не існує
похідної і в точках розриву функції.
Як уже зазначалося, похідна може бути як скінченною, так і
нескінченною, залежно від значення границі
ton 42- = п*)-
Надалі під словом «похідна» розумітимемо, якщо не буде
спеціального застереження, лише скінченну похідну.
201
Функція / (х) називається диференційовною в точці х0, якщо в цій
точці вона має похідну /' (х0).
Функцію / (х) називають диференційовною на проміжку, якщо
вона диференційовна в кожній точці цього проміжку.
Приклади
1. Функція у = sin х (рис. 4.15) неперервна і диференційовна иа всій
числовій осі.
2. Функція у = Е (х) (рис. 4.8) в точках х = п має розриви першого роду, тому
в цих точках вона недиференційовна.
3. Функція у = \х\ (рис. 4.3) в точці х = 0 неперервна, але недиференційовна,
тому що порушується умова (12) і похідна не існує. Справді, f'+ (0) Ф /__ (0):
• Л> . |0 + Дх| — 101 Дх
4(0)= lim ^ '—L-L= 11m -д7=1:
Д*>0 Лд>0
.„ , | 0 + ДЖ | — І 0 І , —Дх
/1(0)= lim ^ . ' ' = lim-r—= -l.
Д**0 а* Д*-»0 л*
Дл:<0 Дх<0
4. Функція у = "І?'* (рис. 4.9, є) в точці х = 0 неперервна і має нескінченну
похідну
lim -^ = lim J^E±bl&=lim_i_ = c*.
Тому в точці х «= 0 дана функція є недиференційовною.
Б. Функція # = є'*' в точці х = 0 є неперервною, тому що
Д«/ - / (х + Дх) - / (х) = е!°+л*І - є'0' = е'л*І - 1;
л , lim Ди => lim (е1л*' — 1) = 0.
Оскільки д*->о д*-*о
lim A- lim е1АЖ'-' - l|„i*iL-f '' А*>0;
д*-»о Дх дл-й) Дх Дх-М) Дх 1—1, Дх<0,
то дана функція в точці х = 0 є недиференційовною.
6. Функція у «= є* в точці х = 0 є неперервною і диференційовною, оскільки
lim Ж = lim еЛ*-' = lim Ж = 1.
Дд:->.0 Дх Д*->0 Дх Дх-»0 Дх
Зв'язок між неперервністю функції в точці і диференційовністю
її в цій точці встановлює така теорема.
Теорема. Якщо функція у = f (х) диференційовна в точці х0, то
вона в цій точці неперервна.
О Справді, якщо
Ііт-дТ=П*о),
то за властивістю Г (п. 3.6 гл. 4)
Ж
Дх
202
-Й-=/'(*о)+«,
де а -*- 0 при Ах -*- 0. Тоді Аі/ = if' (х0) + а) Дх -*■ 0 при Ах -v
-*- 0, а це означає, що функція / (х) в точці х0 неперервна. #
Як показують приклади 3, 4, 5, обернене твердження
неправильне: існують неперервні функції, які в деяких точках не є диферен-
ційовними. Крш того, відомі приклади функцій, неперервних на
всій числовій осі і иедиференціиовних в жодній її точці [12]. Таким
чином, неперервність функції в точці є лише необхідною умовою її
диференційовності в цій точці.
Завдання для самоконтролю
1. Дати означення похідної заданої функції.
2. Охарактеризувати символи /' (х), /' (х0).
3. Який геометричний, механічний і фізичний зміст похідної?
4. Як знайти похідну, виходячи з її означення?
5. Довести, користуючись означенням похідної, що
(Зха^-5х + 2)' = 6х —5.
в. Довести, користуючись означенням похідної, що
(х")' = я*""1.
7. Вивести рівняння дотичної і нормалі до кривої у = / (х) в точці М0 (х0; у9).
8. Як знайти довжини дотичної, піддотичної, нормалі і піднормалі,
користуючись рівнянням дотичної і нормалі?
9. Упевнитись, що довжини піддотичної і нормалі параболи у = Xі в точці
А (2; 4) дорівнюють відповідно 1 і 4 ^17.
10. Нехай точка М1 (хх; yj належить кривій у = / (х) і Існує похідна у1 =
= /' (х{) в цій точці Мі. Нехай Т, ST, N, SN— відповідно довжини відрізка
дотичної, піддотичної, відрізка нормалі та піднормалі доданої кривої в точці М^
Довести, що
Оу
У\
Т =
11. Виконати завдання 9 за допомогою формул із завдання 10.
12. Як визначається кут між лініями?
13. Упевнитись, що лінії у— ха і у— х перетинаються під кутом 45е в точці
О (0; 0) і під кутом ф = arctg — в точці А (1; 1).
О
14. Дотична до кривої у = / (х) в точці М0 (х0; «/„) нахилена під кутом 45е.
Чому дорівнює /' (х„)?
15. Дотична до кривої у = f (x) в точці М0 (х0; у0) паралельна осі Ох. Чому
дорівнює f (х0)?
16. Описати спосіб графічного диференціювання.
17. Дати означення правої і лівої похідних функцій в точці. Який зв'язок між
односторонніми похідними і похідною функції в точці? Навести приклад функції,
для якої існує права і ліва похідні в деякій точці, але не існує похідна в цій точці.
18. Упевнитись, що для функції / (х) = е—'*! права похідна /, (0) = —1, а
ліва похідна £__ (0) = І.
19. Дати означення днференційовної функції в точці і на проміжку.
20. Який клас функцій ширший: неперервних в точці х = х0 чн диференційов-
них в цій точці? Навести приклади.
203
б 2. ДИФЕРЕНЦІЮВАННЯ ФУНКЦІЙ
У попередньому параграфі ми знаходили похідні деяких функцій,
виходячи з означення похідної. На практиці функції диференціюють
за допомогою ряду правил і формул.
2.1. Правила диференціювання суми, різниці, добутку і частки
Теорема 1. Якщо функції и = и (х), v = u (х) диференційовні в
точці х, сума, різниця, добуток і частка цих функцій (частка за умови,
що v (х) Ф 0) також диференційовні в цій точці і справедливі такі
формули:
(u±v)' = u'±v'; (13)
(uv)' = u'v + uv'\ (14)
О На основі означення похідної і теореми 1 (гл. 4, п. 3.7) маємо
(и _і_ vy = lim І" (* + А*) ± о (х + А*)1 - І" (*) ± v (х)] =
* — ' - Л»
(v)
Д*->0 Л*
= lim [-ІІ
(х + Ах) — м (де) і; (х + Ах) — ч (х)
А* — А*
,- Ди . ,. Ач , ,
= hm -j— ± hm —- = и ± о ;
(uw)' = lim Ц(* + А*) р(< + АдО —и(дс)»(дг)
Д*->-0
Ах
= ljm (ц М + А"> (" М + Ач) - ц (*) р (*)
л*->о л*
.. Г , , Au , , . Ач , . Au
/ \ і- Аи -. / \ і- Ач . ,. А ,. Au
= v (x) hm -^— + и (х) hm -;г— + hm Ди hm -^г— =
= ш' + u'v + 0 ■ u' = w'u + ми'.
Тут ми скористалися теоремою (п. 1.4) про зв'язок диференційов-
ності і неперервності: оскільки функції и (х) і v (х) диференційовні
в точці х, то вони в цій точці неперервні, тому Ди -*- 0, Ди -*- 0 при
Дх->0
Знайдемо похідну частки:
и (х) + Ди и(х)
v (х) + Ач ч (*)
(4-)'
hm ^
204
_ і- и (х) v (х) + v (х) Аи — v (х) и(х)~и (х) Ач _ t
Д™0 (ч(*) + Дч)ч(*)Д>; -
Аи Дч
- lim "Ац-иАч _ |ітп
'дх^О (ч» + чДч)Лл: д*^о ча + чАи
ч lim -т— — и lim -т—
д*-»о л* д*-*о *" и'ч — ич'
Vі-\- v lim ,Ди ч2 ' w
Дх->0
2.2. Похідні сталої, добутку сталої на функцію, степеневої,
тригонометричних, показникової і логарифмічної функцій
Теорема 2. Якщо у = / (х) = С, де С — стале число, то
f (х) = С = 0. (16)
О Для довільних х і Ах Ф0 маємо / (х) = С, f (х + Дх) = С,
тому Ay = f (х + Ах) — / (х) = 0. Отже,
С = lim -М. = lim -JL = о. #
Д*-»0 Л* Дх->.0 Л*
Теорема 3. Сталий множник можна виносити за знак похідної,
тобто
(Си)'=Си'. (17)
О 3 формул (14) і (16) маємо
(Си)' = С'и + Си' = 0 • и + Си = Си'. •
Теорема 4. Похідну степеневої функції у = Xа, де а — довільне
число, знаходять за формулою
(ха)'=ах°-1. (18)
О Застосувавши еквівалентність (1 + /)а — 1 ~ at при t -*■ 0
(гл. 4, п. 4.3), маємо
/ _Д*_\а
,. Ду ,. (х + Д*)а — *а =хаІіт І + * J
" = 1,т ~£Г = 1ІГП Д>; д~° Дї =
д*
а-
* 1
= Xа Ііт г = аха — = аха_І.
д*_>о Д* *
Формула (18) є узагальненням формули (9). •
Теорема 5. Похідні тригонометричних функцій знаходять за
формулами
(sin*)' =cosx; (19)
(cosx)' = —sinx; (20)
205
«**>'—sir: (21)
(«=«««)'—air- (22)
..... . 2 sin —5— cos x + —5— I
О (sin x)' = lim »°C« + A4—«« = ,im !_^ Li.
lim cos (x H Д-] = cos x,
д*->о V z J
-Д*-»0 Д* Дх-*0 Дх
Дх
sin -
= lim
sin~T~
Дх-»0 Д* Дх-Ю
Дх
sin —5—
оскільки з першої важливої границі випливає, що lim т = 1,
д*-о Л*
а внаслідок неперервності функції cos x
lim cos (х Н—^-) = cos I lim (х -\ £-\ ] = cos x.
Д*-»0 \ z І І Дх-^.0 \ Z І І
Таким чином, формулу (19) доведено. Аналогічно доводиться
формула (20):
„ . І Д* \ . Д*
. , . . — 2sin x+-~- sin —й—
/ „»/ і- COS (X + ЛХ) — COS X ,. \ * ' ^
(cosx) = lim і——jr-1 = lim
д*-»о Д* дх-»о д*
Лх
sin—g—
= — lim т lim sin f x + —к—) = — sinx.
д*-ю _Af_ д*-ю V 2 /
2
Формули (21) і (22) випливають з правила диференціювання частки
і формул (19) і (20):
/і у / sin х V _ (sin х)' cos х — sin х (cos х)' _
^ в І cos х у cos2 х
_ cos x cos x — sin де (— sin x) cos2 x + sin1 x 1
COS8 X COS2 X COS* X *
(cos x)' sin x — cos x (sin x)' 1
sinax sin2x
(а')' = ах Inc. (23)
Теорема 6. Похідну показникової функції у = ах (0 < а Ф 1)
знаходять за формулою
206
О Скориставшись еквівалентністю 0а — 1 ~ a In а при а -»■ 0
маємо
(aO'=lim-^^ = lim^i^iL =
_.. Але In a „, _
= ах lim —т = ах In а. %
Дх-Х) Л*
Наслідок. Похідну функції у = ех знаходять за формулою
(є1)' =е*. (24)
Теорема 7. Похідну логарифмічної функції у = loga х (0 < с ^>
Ф 1) знаходять за формулою
(І0Єа^)'=4І0^Є <25>
О Скориставшись еквівалентністю log„ (1 + t) ~ ґ Ioga e, / -*- 0,
(гл. 4, п. 4.3), дістанемо
Д*-»0 Д* Дї-)-0 Ддс
Cog. х)' = lim loga(*+A?-loga* = Um
Ді-»0
"4 + -T-)
h«.-£dt»i.
і- v * / і- Дх1оеае і , _.
= llm їх =І1Ш хАх =ПГІ0§°Є- •
Наслідок. Похідну функції у = In x знаходять за формулою
(lnx)'=JL' (26>
2.3. Похідна складеної функції
Нехай у = f (и) і м = ф (х), тоді у = f [ф (х)] — складена
функція з проміжним аргументом и і кінцевим х.
Теорема 8. Якщо функція и = ф (х) лш<? похідну ик в точці х, а
функція y = f(u) має похідну уи у відповідній точці и, то складєн а
функція у = f [ф (х)] має похідну ух в точці х і справедлива формула
Ух = y'uu'x- (27)
О Оскільки функція у = / («) диференційовна в точці и, то за
властивістю Г (гл. 4, п. 3.6) маємо
■дГ = f« + а аб° ДУ = #«д" + аДи- (28>
де а -»- 0 при Ди -»- 0.
207
Функція и = <р (х) має похідну и'х в точці х, тому
Аи = ихАх + ахДх, (29)
де at ->- 0 при Ах -*■ 0. Підставивши значення Аи з формули (29)
у формулу (28), дістанемо
Ау = уиихАх + і/цС^Дл; + ихаАх + ас^Дх.
Якщо цю рівність розділити на Ах і перейти до границі при Ах -v
-*- 0, то одержимо формулу (27). •
Згідно з формулою (27) маємо таке правило диференціювання
складеної функції: похідна складеної функції дорівнює добутку похідної
цієї функції по проміжному аргументу на похідну від проміжного
аргументу по кінцевому аргументу. Це правило залишається
справедливим, коли складена функція має кілька проміжних аргументів.
Якщо, наприклад, у = f (и), и = ф (и), v = г|> (х), то
Ух = y'uuvvx. (30)
Зазначимо, що при диференціюванні складених функцій потрібно
чітко уявляти собі, яка з дій, що приводять до значення складеної
функції, є останньою. Та величина, над якою виконується остання
дія, приймається за проміжний аргумент.
Зауваження. (1п|;с|}' =—. Дійсно, нехай х>0, тоді
(ln|x|)'=(lnx)' = JL. Якщо х<0, то (In І л: І)' = (In ( — х))' =»
= _L_(_1) = _L.
—X V ' X
Приклад
Знайти похідні функцій:
а) у = sin3 х; б) у = In tg х3; в) у — 2 *
О а) Для функції у = sin3 x останньою дією є піднесення до кубу, тому
проміжний аргумент и = sin x і у = «*. За формулами (27), (18) і (19) дістанемо
ух = (sin3 х)х = (u3)u v'sin x)x = 3u2cos x — 3 sin2 xcos х.
б) Для функції jr= In tg x3 останньою операцією є взяття логарифма, тому
проміжним аргументом є значення и = tg *s. Проміжним аргументом виразу tg х3 є
ч = *3, тому дана функція має вигляд
у = 1п и, и — tg v, v = д3.
Застосовуючи формули (ЗО), (26), (21) і (18), дістанемо
»;=(in U)'u <tg «>; (г>>; = —. -Е5^1Г. з** -
11. З*2
«= • ■ 3jt2 =
tg v cos2 v sin x3 cos x3 '
208
На практиці проміжні аргументи не виписують, але похідні від них позначають
штрихом. Ось як, наприклад, знаходять похідну функції б):
1 11, З*2
(In tgr>)'=-r^r(tg *Y = -Tg-^ • COsijt? •(*") = sin^cos*3 ■
в) При достатній підготовці похідну знаходять зразу, ие вводячи допоміжних
позначень для похідних від проміжних аргументів:
у-х = рі?^5)» = 2"^" • In 2 - 4" (cos Ьх)~ Т (-sin 5x) ■ 5 =
__ -5 In 2 .2^^ sin Sx ф
З T^cos2 5*
2.4. Гіперболічні функції та їхні похідні
У математиці, будівельній механіці, електротехніці та інших
дисциплінах зустрічаються так звані гіперболічні функції.
Гіперболічними синусом sh х, косинусом ch x, тангенсом th x
і котангенсом cth x називаються функції, які визначаються за
такими формулами:
thx =
shx
sh x
ch x
о* — e—*
chx =
e* +e~
(31)
e" — e
e* + e"
cthx
ch x
e* + e~
sh x
Функції sh x, ch x, th x визначені на всій числовій осі, а функція
cth х визначена для всіх дійсних значень х, крім точки х = 0.
Графіки цих функцій (рис. 5.10) можна побудувати,
використовуючи метод, описаний в п. 2.4 (гл. 4).
Гіперболічні функції зв'язані співвідношеннями, аналогічними
до співвідношень між відповідними тригонометричними функціями,
уі ychu
Рис. 5.10
209
чим і пояснюються їхні назви. Зокрема, справедливі формули
ch2 х — sh2 x = 1;
sh (х ± у) = sh х ch у ± ch x sh у;
ch (х ± у) = ch х ch у ± sh x sh у,
іи / . \ th д: ± th ь
th (х ± у) = -. .. * ;
v і" 1 ± th х th«/
sh 2х = 2 sh x ch x; ch 2x = ch2 x + sh2 x.
Всі ці формули випливають з означень гіперболічних функцій.
Наприклад,
сЬ!,_^ = (^+іИ)!_!^сі)! =
е2* -f 2еУ* + є"2* - (є2* - 2е*е~* + e~2*) 2 .
— 4 * 1'
sh х ch у + ch х sh у = ■е ~~ е
2 2 ' 2
sh(x + «/).
е*+* _ е-х-у
2
Природу цих аналогій з'ясуємо пізніше, коли розглянемо комплексні
ч ісла. За їх допомогою можна буде довільне співвідношення між
тригонометричними функціями перетворити у відповідне співвідношення
між гіперболічними функціями.
Геометрична інтерпретація гіперболічних функцій також
аналогічна інтерпретації тригонометричних функцій. Як відомо (гл. З,
п. 1.4), параметричні рівняння
х = cosf, у =s'mt
визначають одиничне коло х2 + у2 =« 1, причому sin t = MP, cos t =
= OP (рис. 5.11). Параметричні рівняння
x = ch t, у = sh t
задають гіперболу (рис. 5.12) x2 — у2 = 1, оскільки х2 — у2 = ch2 / —
— sh21 = 1, причому
sht=NQ, cht = OQ.
Неважко пересвідчитись, що параметр / в параметричних
рівняннях кола чисельно дорівнює подвійній площі кругового сектора ОА М.
Зазначимо без доведення, що в параметричних рівняннях гіперболи
параметр t також чисельно дорівнює подвійній площі, але не
кругового, а гіперболічного сектора ON А.
210
Рис. 5.11
Рис. 5.12
Теорема 9. Похідні гіперболічних функцій визначаються за
формулами
(32)
(33)
(34)
(sh х)' = ch x;
(chx)' = shx;
О Відповідно до формул (31), (27), (24) маємо
(sh x)' = (е*~е~*)' =* Є*+2Є~* = ch *і
(ch x)' = (""V"^)' = Є*~2Є' = sh х'
ци ху _ / sh* \ (sh *)'ch x — sh x (ch x)'
(35)
chs * —sh»*
1
char
. ., ., / ch x У s\fix —
<cth*> =(-іїїт) = sF
cha x'
x
cha x
1
ch2x *
sh8*
2.5. Похідна оберненої функції. Диференціювання обернених
тригонометричних функцій
Нехай у — f (х) і х = ф (у) — пара взаємно обернених функцій
(гл. 4, п. 2.10). Сформулюємо без доведення теорему про зв'язок між
похідними цих функцій:
Теорема 10. Якщо функція у = / (х) строго монотонна на
інтервалі (а; Ь) і має відмінну від нуля похідну f (x) в довільній точці цього
інтервалу, то існує обернена функція х = ф (у), яка також має
похідну ф' (у), причому
ф'М-Т^з- (36)
211
yffit)
x *slny
Рис. 5.13
Рис. 5.14
Таким чином, похідні двох взаємно обернених функцій обернені
за величиною. Якщо аргумент оберненої функції в формулі (36)
позначити через х, а саму функцію — через у, то дістанемо формулу
для похідної оберненої функції:
Ух = -J- • (37)
Формула (36) має такий геометричний зміст. Нехай крива L
(рис. 5.13, а) задається функцією у = / (х) або оберненою функцією
х — <р (у). Тоді з геометричного змісту похідної випливає, що
«4 = tga; x'=tgp\
1
1
Оскільки а -\- Р = ~y , то tg а — ctg р = -qrjf, звідки ху
Ух
Якщо функція y=f(x) монотонно спадає (рис. 5.13,6), то а =
= -2- + (я — Р), тому tg а = tg ( -j- я — pj = ctg P, що приведе до
того самого висновку.
Теорема 11. Похідні від обернених тригонометричних функцій
знаходять за формулами:
(arcsin x)' =
(arccos х)' == —
(arctg x)'
1
і
1+*8
(arcctg х)'
і +*»
О Доведемо формулу (38). Функція у =
1] є оберненою до функції х = sin у, у Є\ y'' "у"!'
(38)
(39)
(40)
(41)
arcsin х, де х 6 І—1"»
212
X,
1
0
-/
x=cosg
Рис. 5.15
У
І
Рис. 5.16
Рис. 5.17
Оскільки на інтервалі І у- ; -у-] функція х = sin у зростає
(рис. 5.14) і похідна х'у = (sin у)у = cos у > 0, тобто всі умови тео-
1 1
реми 10 виконуються, то за формулою (37) ух =—— = „^ „ , звід-
cos у
1
1
ки (arcsinx)'=cosi/ _y_____- /T_S .
Формула (39) доводиться аналогічно. Функція у = arccos x є
оберненою до функції х = cos у, де t/ 6 [0; я], х 6 1—1; U- Оскільки
на інтервалі (0; я) функція х = cos у спадає і ху = —sin у < 0
(рис. 5.15), то
(arccos х)' = —
sin іу
У1— cos2»/
/г
Доведемо формули (4G) і (41). Функція у ■= arctg x є оберненою до
функції х = tg у, де у 6 (— -у-; -у-), * Є (—оо; + <»)■
Оскільки на інтервалі І—^-; -у-] функція х = tg у зростав
(рис. 5.16) і
і
cos2»/
>0, toy'
■cos'у,
звідки
(arctg x)' = cos2 у
1
1
1 + tga у 1 + *а
Функція у — arcctg х є оберненою до функції х = ctg у, де у £
£ (0; я), х6(—°°; +°°)- Оскільки на інтервалі (0; я) функція
213
x = cigy спадає (рис. 5.17) і
звідки
*у = —шг- то у; = 4- =-sin2у,
(arcctgx)'= - sin^ = --п-іїі^ =—^
2.6. Похідна функції, заданої параметрично
Виведемо формулу для похідної функції у = / (х), заданої
параметрично (гл. 4, п. 2.11)
х = ф (0. У = У (Of а ^ *< Р-
Припустимо, що функція ф (і) на інтервалі (а; Р) задовольняє
всі умови теореми 10, а функція гр (/) на цьому самому інтервалі
має похідну г|/ (t). Тоді існує обернена функція t = Ф (х), яка
має похідну і яку знаходять за формулою (37):
6-4-.бо ф'м=-^.
Функцію у = f (х) можна розглядати як складену функцію у =«
= я|> (0 = я|> (Ф (х)) з проміжним аргументом t = Ф (х), тому за
формулою (27) маємо
Ух = УЇх=^'(і)Ф'(х)=~гЩ-.
Таким чином, похідну функції, заданої параметрично, знаходять
8а формулою
у* х; - Ф'(0 ' ^'
Приклади
1. Знайти ух, якщо х — a cos /, у = a sin f.
О Оскільки *t = —a sin t, yt = a cos /, то за формулою (42) дістанемо
a cos f
»*= -asin/ =-с*б'- •
2. Скласти рівняння дотичної до циклоїди
x=t— sin/, у = 1—cos і
в точці М0 (*0; «/„), яка відповідає параметру / = — ,
О Знайдемо координати точки М0:
r0 = (f-sin 01 JL = -?--l; «/0 = (l-cosOI JL= 1.
214
Jt , sin t
Обчислимо значення похідної ух при t = -g- : ^х п = j cos J я = '•
Г T" Г T"
Скориставшись формулою (10), складемо рівняння дотичної:
у — 1 = 1 • (ж— (т"— О) або jf = x + 2—-^-.
•
3. Знайти піднормаль до кривої
x=fs — 2/ — 2, y = t — 1
в точці УИ0 (2; 1).
О Точці УИ0 (2; 1) відповідає значення параметра t = 2, оскільки «/1<=2 = 1
і ж |<==2 = 2. Обчислимо похідну у'х при f = 2: «/^ |/=2 = -— — = 0,1.
Піднормаль SN знайдемо за формулою SN = | у1у11 (завдання 10 для самоконтролю § 1):
SN= 1.0,1 =0,1. •
2.7. Диференціювання неявно заданої функції
Нехай неявна функція у (х) (гл. 4, п. 2.9) задана рівнянням
F{x,y)~0. (43)
Щоб продиференціювати неявно задану функцію, потрібно взяти
похідну по х від обох частин рівності (43), вважаючи у функцією від
х, і одержане рівняння розв'язати відносно у'. Похідна неявної
функції виражається через незалежну змінну х і саму функцію у.
Приклад
Знайти похідну у1, якщо Xа + уг — 2«/ + Зх = 1.
О Маємо
2х + 2уу' — 2у' + 3 = 0,
«/'(20-2) = -2*-3, у'= 2-^2у ■
Зауважимо, що при диференціюванні другого доданка ми скористалися
правилом диференціювання складеної функції:
(У2)х=(У1)'уУх=2уу'. •
2.8. Логарифмічне диференціювання. Похідна
показниково-степеневої функції
У деяких випадках при знаходженні похідної доцільно задану
функцію спочатку прологарифмувати, а потім знайти похідну як від
неявної функції. Така операція називається логарифмічним
диференціюванням.
Приклад
о - . . - *а(*8+1)Є*
Знайти похідну функції у = — —-т^-==~- .
(де — 1) у 6х-\- о
215
О Цю функцію можна диференціювати за правилом диференціювання частки.
Проте такий спосіб дуже громіздкий. Застосуємо логарифмічне диференціювання.
Маємо
In у = 3 1п х + In (х2 + 1) -f- х — In (х — 1) — ~2 In 1 Зх + 51;
J/ 3_ 2х 1 З
у ~ х + х«+1 +1— х — 1 ~~ 2(3*+5) •
, хЗ(х»+1)е* /3 2х 1 3
У = (х-1))/Зх + 5 1~+*' + ' + '~ х-1 ~ 2(Зх + 5) ••
У розглянутому прикладі похідну можна знаходити двома
способами: за допомогою відомих правил і формул диференціювання і
логарифмічним диференціюванням. Проте існують функції, похідні
яких знаходять лише логарифмічним диференцюванням. Прикладом
такої функції є показниково-степенева функція
У = и\ (44)
де и, v — задані і диференційовні функції від х. Знайдемо похідну
функції (44):
lny=vlnu; — =i»'lnw + w-^—;
у' = и? іи' Inи + v —І = «u"ln« - v' + vuv~lu'.
Отже, похідна показниково-степеневої функції (44) дорівнює сумі
похідної показникової функції за умови, що « = const, і похідної
степеневої функції за умови, що v = const:
(uv)' = uv In u • v' + vuv~lu'. (45)
Приклад
Знайти похідну функції у = xsln 5x.
О За формулою (45) маємо
у, = ^sin 5х
In х • 5cos 5x + sin 5x ■ xsin 5*-' = xsin 5x І5 In xcos 5x + S'^ j
2.9. Таблиця похідних
У попередніх пунктах виведено формули, які дають змогу
знаходити похідні, не користуючись означенням похідної, тобто
диференціювати довільну елементарну функцію, не вдаючись до знаходження
границь.
Зведемо формули в таблицю. Вважатимемо, що м = « (х), v —
= v (х) — диференційовні функції, С — стала величина.
Правила диференціювання:
(и ±v)' = и' ±V, у =/(«), и = и(х)^ух=уии'х;
216
» »
(uv)' = u'v + uv'; y=f(x), х = у(у)=>ух = '
(Cu)'=Cu'; y = y{t), x=x{t)=>y'x=-?L;
\~) = —Si— ; ("") = ""In " • v + vuv~W.
Формули диференціювання:
1. C' = 0;
2. (ua)' = aua~lu', a£R;
3. (a")' = au In a • w', a>0, аф\\
4. (eu)' = euw';
5- <І0&")' = -да-"':
6. (lnw)' =4""';
7. (sinw)' = cosu • u'\
8. (cos u)' = —sin w ■ u';
9. (tgw)' =—!^-w';
v Б ' COS2 U '
io. (ctgw)' = —Л—«';
v ь ' sin2w '
11. (sh u)' — ch u ■ u';
12. (chw)' = shw • u';
13. (th*)'--^*';
14. (cthu)'»--^!,';
15. (arcsinw)' = u';
K 1 — u2
16. (arccos «)' = w';
VI —u2
17. (arctgw)' =T-p?rw';
18. (arcctg a)' = — 1+'ц| w'.
Завдання для самоконтролю
1. Вивести правила диференціювання суми, різниці, добутку і частки двох
функцій. Навести приклади.
2. Вивести правило диференціювання складеної функції. Навести приклад.
3. Дати означення гіперболічних функцій. Чим пояснюється їхня назва? Який
геометричний зміст?
4. Вивести формули для похідних гіперболічних функцій.
217
5. Вивести правило диференціювання оберненої функції.
6. Вивести правило диференціювання параметрично заданої функції. Навести
приклад.
7. Як диференціювати неявно задану функцію? Навести приклад.
8. У чому суть логарифмічного диференціювання? Навести приклад.
9. Вивести формули похідних всіх основних елементарних функцій.
10. Довести методом логарифмічного диференціювання формули:
(ха)' = аха~х; (ах)' = а* 1п а.
11. Проднференціювати функцію:
у = logu v, и= и(х), v=v (х).
Вказівка. Якщо у — logu v, то у = . .
12. Нехай
2*(*+1)з „ х 2х*
ч(4 = у tga sin * + In cos sin *, z (де) = log.,,e.
Упевнитись, що /' (0) = In 2 + 4, u' (0) =0, v' {-^-1 = 0, z' (e) = — — .
13. Нехай x = e-' sin t, у = e' cos Л Довести, що
14. Нехай де1'* + «/2 In x — 4 = 0. Перевірити, що
* І*=е = — 2е
§ 3. ДИФЕРЕНЦІАЛ
Поняття диференціала тісно пов'язане з поняттям похідної, і є
одним з найважливіших в математиці. Диференціал наближено
дорівнює приросту функції і пропорційний приросту аргументу.
Внаслідок цього диференціал широко застосовується при дослідженні
різноманітних процесів і явищ. Будь-який процес протягом достатньо
малого проміжку часу змінюється майже рівномірно, тому дійсний
приріст величини, що характеризує процес, можна замінити
диференціалом цієї величини на даному проміжку часу. Таку заміну
називають лінеаризацією процесу.
Термін «диференціал» (від латинського слова differentia —
різниця) ввів у математику Лейбніц.
3.1. Означення, геометричний та механічний зміст диференціала
Нехай функція у = / (х) диференційовна в точці «х Є [а; Ь], тобто
в цій точці має похідну
¥ (х) =
Дх-»0
п*>~»™-&
218
Тоді з властивості Г (гл. 4, п. 3.6)
-ff- = /'(х) + а, а-*-0 при Дх-v0,
звідки
Ну = р (х) Ах + «Дх. (46)
Перший з доданків лінійний відносно Дх і при Дх -»- 0 та /' (х) Ф 0
є нескінченно малою одного порядку з Дх, тому що (гл. 4, п. 4.3):
limJ^L^/<(,).
Дх-М) ах
Другий доданок — нескінченно мала вищого порядку, ніж Дх, тому
що
Urn а * = lima = 0.
д*->о л* дх-*о
Цей доданок не є лінійним відносно Дх, тобто містить Дх в степені,
вищому від одиниці. Таким чином, перший доданок у формулі (46)
є головною частиною приросту функції, лінійною відносно приросту
аргументу.
Диференціалом dy функції у = / (х) в точці х називається головна,
лінійна відносно Дх, частина приросту функції / (х) в цій точці:
dy=P(x)Ax. (47)
Диференціал dy називають також диференціалом першого порядку.
Якщо у = х, то у' = х' = 1, тому dy = dx = Дх, тобто
диференціал dx незалежної змінної х збігається з її приростом Дх. Тому
формулу (47) можна записати так:
dy = P(x)dx. (48)
Формула (48) дає змогу розглядати похідну як відношення
диференціала функції до диференціала незалежної змінної.
Зауважимо, що коли в точці х0 похідна /' (х0) = 0, то перши й
доданок у формулі (46) дорівнює нулеві і вже не є головною
частиною приросту Ау. Але і в цьому випадку диференціал dy знаходять
за формулою (48).
Геометричний зміст диференціала зрозумілий з рис. 5.18. Маємо
PN = Ay, QN = М N tg а = Дх/' (х) = /' (х) dx = dy.
Отже, диференціал функції f (х) при заданих значеннях х і Дх
дорівнює приросту ординати дотичної до кривої у = / (х) в точці х.
Приріст функції Ау при цьому дорівнює приросту ординати кривої.
Таким чином, заміна приросту функції на її диференціал геометрично
означає заміну ординати АР кривої ординатою дотичної AQ.
Зрозуміло, що така заміна доцільна лише для достатньо малих значень Дх.
219
З'ясуємо механічний зміст
диференціала. Нехай матеріальна точка
рухається за відомим законом S = f (t), де
/ (t) — диференційовна на деякому
проміжку функція. Тоді диференціал цієї
функції dS = /' (0 At при фіксованих
значеннях t і At — це той шлях, який
пройшла б матеріальна точка за час At,
якби вона рухалась прямолінійно і
рівномірно із сталою швидкістю v = /' (t).
Зрозуміло, що фактичний шлях AS
у випадку нерівномірного руху на
відміну від диференціала dS не є лінійною функцією часу At і тому
відрізняється від шляху dS. Проте якщо час At достатньо малий,
то швидкість руху не встигає суттєво змінитись, і тому рух точки на
проміжку часу від t до t + At є майже рівномірним.
Поняття диференціала можна проілюструвати і на інших
прикладах, які розглянуто в п. 1.1. У кожному з них поняття диференціала
набуває конкретного фізичного змісту.
3.2. Властивості диференціала. Інваріантність форми диференціала
Оскільки диференціал функції дорівнює добутку її похідної на
диференціал незалежної змінної, то властивості диференціала можна
легко дістати із відповідних властивостей похідної. Якщо, наприклад,
«і v — диференційовні функції від х, С — стала, то маємо такі
правила знаходження диференціалів:
dC f= 0; d (uv) = vdu + udv;
d(Cu)=Cdu; d(i)»J*-«*L.
d(u±v) = du± dv;
Доведемо, наприклад, четверту формулу. За означенням
диференціала маємо
d (uv) = (uv)'xdx = (u'v + uv') dx =
= vu'dx + uv'dx = vdu + udv.
Особливо важливий висновок випливає з правила
диференціювання складеної функції. Нехай у = / (х) — f (cp (t)) — складена
функція з проміжним аргументом х = cp (t) і кінцевим аргументом
і, причому функції / (*), ф (t) диференційовні в точках х і t. Тоді
існує похідна у\ = y'xX't, а отже, і диференціал
dy = ypt = у/fit = y'xdx. (49)
220
Порівнюючи формули (48) і (49), бачимо, що перший диференціал
функції у = f (x) визначається за однією і тією самою формулою
незалежно від того, чи змінна х є незалежною змінною, чи вона є
функцією іншої змінної.
Цю властивість диференціала називають інваріантністю
(незмінністю) форми диференціала. Проте слід зауважити, що формули (48),
де х — незалежна змінна, і (49), де х — залежна змінна, однакові
лише на вигляд, а зміст їх різний: якщо у формулі (48) dx = А*, то у
формулі (49)
dx = x'(t)dt=£Ax.
3.3. Застосування диференціала в наближених обчисленнях
Як уже зазначалось, приріст Ау функції у = / (х) у точці х можна
наближено замінити диференціалом dy в цій точці: Аг/ » dy.
Підставивши сюди значення Ау і dy, дістанемо
/ (х + Ах) « f (х) + f (х) Ах. (50)
Абсолютна похибка величини Ау — dy є при Ах -»- 0 нескінченно
малою вищого порядку, ніж А*, тому що при /' (х) Ф 0 величини
Ау і dy еквівалентні (гл. 4, п. 4.3):
і. Д«/ і. /' (х) Д* + аДя .
hm -~ = lim v ;, .■— = І.
Оцінка (точність) формули (50) при фіксованих значеннях х та Ах
з'ясована в п. 5.2.
Іноді користуються наближеною рівністю
Пх + Ах)жї(х)- (51)
Якщо функція у = f (х) диференційовна в точці х, то абсолютна
похибка формули (51) наближено дорівнює абсолютній величині
диференціала:
|/(Л + Д*)-/(*)|=|Д0І»|£*0І=|ПХ)ДЛ|.
Відносна похибка формули (51) визначається за формулою
У
dy
У
Приклади
1. Знайти диференціал функції у = In sin 2x: а) при довільних значеннях х
і Д*; б) при х = -^ ; в) при х = -ї. і Ддг = 0,1.
8 8
О а) Користуючись формулою (48), знаходимо
dy = (In sin 2x)' dx = 2 ctg 2xdx;
я
6) dy\ _ n = 2clg-j-dx = 2dx; в) dy
*~ 8
n_=0,2. •
8
|Ддг=о,і
221
2. Порівняти приріст Ay і диференціал dy функції у = ха + 2дса.
О Знаходимо приріст і диференціал функції:
ду = / (х + А*) — / (х) = (х + Ах)3 + 2 (х + Л*)а - (-*3 + 2*я) =
— (З*1 + 4х) Дх + (3* + 2 + Дх) Дх2;
<*і/ = /' (*) Д* = (Зхя + 4х) dx.
Величини Ау і dj/ еквівалентні при Дх ->- 0 і х Ф 0, оскільки dx = Дх і
Д*/ ,. (Зх8 + 4х) Ах + (Зх + 2 + Ах) Дх'
л'Ло ~dV = л™о (з*2 + 4х)дх - '•
Абсолютна похибка | Ау — dy | = | Зх + 2 + Дх | Ах» при Дх -•- 0 є
нескінченно малою другого порядку в порівнянні з Дх, тому що
lim
1Ay-dyL= limi3i±2+MAx1 = |3, + 2|¥=0i
Дх* =''"1 Дх*
Ддг-*0 ах Лх->0
якщо х Ф —— І є нескінченною малою більш високого порядку, ніж другий, коли
Дх-*0 І х-*— JL. •
,008.
3. Довести, що при малих значеннях Дх і х > 0 справедлива формула
, г- Ах
ут+^~|Лк+'2уТ-
_ 1
О Розглянемо функцію / (х) = ух, х Є (0; +°°)- Маємо /' (х) = ,- і
шукана рівність випливає з формули (50). Зокрема, якщо х= 1, то У 1 + Дх »
Ах
*»+ —•
Наприклад,
, 0,08
/1,08 = У1+0,08«1 +—J— =1,04;
/Ї46 = /Ї44 + 2=1/ 1«(і+Тїг) = 121/ H-^-«12'
4. Обчислити наближено arctg 1,05.
О Нехай / (х) = arctg x, тоді за формулою (48) маємо
arctg (х + Дх) « arctg х + (arctg x)' Дх;
Дх
arctg (x + Ах) « arctg x + "f^T^T ■
Якщо
х=1, Дх=0,5, то arctg 1,05 «arctg l+—g- = -^-+ 0,025 «0,811. •
Завдання для самоконтролю
1. Що називається диференціалом функції? Як визначається диференціал
функції через її похідну?
222
2. Який геометричний та механічний зміст диференціала.
3. Який фізичний зміст диференціала в задачах п. 1.1 про густину
неоднорідного стержня; про силу струму; про теплоємність; про швидкість хімічної реакції?
4. Назвати властивості диференціала. У чому полягає інваріантність форми
диференціала?
5. Обгрунтувати формулу для наближеного обчислення значення функції за
допомогою диференціала.
6. Показати, що диференціал І приріст функції у = х3 при х = 1 і Дх= 0,1
відповідно дорівнюють 0,3 і 0,331.
7. Знайти диференціали функцій:
а) у = JL /16 — Xs + 8 arcsin _£_ ; б) у = 3 In ch JL ;
£• 4 3
X2— 1
в) у = arctg j/j cosx x e (0. n). T) arccos
' 1 + COS X X* + 1
8. Користуючись формулою (50), переконатись, що
tg46°« 1,035: arcsin 0,51 «0,513: cos 61° «0,485.
9. Довести формули:
sin (x + Дх) « sin x + Ax cos x;
cos (x + Ax) « cos x — Дх sin x;
" —: "/— . A*
yx+Ax«/x +— , n>2;
я 7x"-i
ea* « 1 + Ax; in (x + Дх) « In x -
Відповіді
7. a) /16 — Xs dx; 6) th-^-dx;
dx — 2xdx
Ax
в) -я— ; r)
2 • ' I*K**+1) "
6 4. ПОХІДНІ ТА ДИФЕРЕНЦІАЛИ ВИЩИХ ПОРЯДКІВ
4.1. Похідні вищих порядків явно заданої функції
Нехай на інтервалі (а; Ь) задана диференційовна функція у =
= / (лг), тоді її похідна /' (х), яку називатимемо ще першою похідною
(або похідною першого порядку), також є функцією від х. Може
трапитись, що функція /' (х) також має похідну на інтервалі (а; Ь) або
в деякій точці лг 6 (а; Ь). Цю останню похідну називають другою
похідною (або похідною другого порядку) і позначають одним із таких
символів:
if f"(y\ -£L *' d 1 йУ \
У > І W. dx2 . djfi , dx {-jyJ ■
Друга похідна має такий механічний зміст. Якщо рух
матеріальної точки відбувається за законом S = / (t), то похідна S', як було
223
dny = d I d"~'y \
dx" ~ dx \ dx"-1 J'
в'ясовано в п. 1.1, дорівнює швидкості точки в даний момент часу:
v = S' = /' (t). Оскільки прискорення — це похідна від швидкості,
то а = v' = S" = /" (0.
Отже, другу похідну можна тлумачити як величину, що
дорівнює прискоренню рухомої точки в даний момент часу.
Похідну від другої похідної, якщо вона існує, називають третьою
похідною, або похідною третього порядку, і позначають так:
,/" f'"(r\ _^!L J.L d і а*У \
У > / W> ахз • dx3 . dx \ dx3 J •
Похідною п-го порядку функції у = f (x) називають першу
похідну, якщо вона існує, від похідної (п — 1)-го порядку:
/■> =0/"-»)' або Г(*) = (Г-" (*))'.
або
І!!
dx"
Похідні порядку вище першого називають похідними вищого порядку.
Починаючи з похідної четвертого порядку, похідні позначають не
штрихами, а цифрами. Порядок похідної береться в дужки для того,
щоб не сплутати його з показником степеня.
Приклади
1. Знайти четверту похідну функції у = хь — 7лса + х— 1.
О Маємо у" = 5л:4 — 14* + 1, у" = 20*3 — 14, у"1 = 60*а, і/4) = 120*. •
2. Знайти похідну n-го порядку функцій:
а) у = е°*; б) у = sin де.
О в) у' = аеах, у" = аЧах, у" = аЧах,
уМ = aV* у<"> = апеах.
б) у = sin x;
у' = cos де = sin І де + "о" І І
/ = cosf* + — j = sin П * +-g-J + "2") =sin У + 2~2-) 1
у" = cos І де + 2^-1 = sin (і х + 2 -g-J +-тг) = sin І* + 3-g-j ;
j/"> = sin
(*+"-?")■
4.2. Похідні вищих порядків неявно заданої функції
Нехай функція у = f (х) задана неявно рівністю F (х, у) — 0.
Диференціюючи цю рівність по х і розв'язуючи одержане рівняння
відносно у', знайдемо першу похідну.
224
Щоб знайти другу похідну, потрібно продиференціювати по х
першу похідну і в одержане співвідношення підставити її значення.
Продовжуючи диференціювання, можна знайти одну за одною
послідовно похідні будь-якого порядку. Всі вони будуть виражені через
незалежну змінну х і саму функцію у.
Приклад
Знайти у", якщо Xі + у3 = 1.
О Продиференціюємо задану рівність по де і знайдемо у':
„.„„.- . 2х
■" -г ^>УУ =v=9 у
Далі маємо
2 у*-х2уу'
о 3 у*
-2 У~2х(--ф)
3 уз
2 3«/8 + З*2 + ха 2 3(*а
= - 9 у* 9
Зі/2 •
2 у — 2ху'
з ^ -
2 Зу3 + 4**
9 «/5
+ ^)+*a 2(3+**)
4.3. Похідні вищих порядків параметрично заданої функції
Нехай функція у = / (лг) задана параметрично р івняннями
x = x{t), y = y(t), де t£(a; P).
Якщо функції х (/) і г/ (f) мають перші похідні, причому лг' (0 =#=
ф0, а х (t) строго монотонна функція, то, як відомо (п. 2.6), першу
похідну знаходять за формулою
dy у'(0
dx х1 (t) *
Якщо функції я (t) і г/ (£) мають похідні другого порядку, то
можна знайти другу похідну від у по х:
(y'x)'t
d*y = (_dy_V 1 _ Wx)t
d*a [ dx )t x' (t) ~ x' (t)
Дійсно, диференціюючи першу похідну за правилом
диференціювання складеної функції і використовуючи похідну оберненої функції,
маємо
<Ру _ Цу_\' _ І dy У / _ l_dy_\ _
d*a -[dx)x [dx)tl*-[dx)t де'
охідну будь-яко
Ql = (d"~xy \
(t) •
Аналогічно знаходять похідну будь-якого порядку п > 2:
d"» / dn-'.v V і
225
Приклад
dny
Зиайтн _ , якщо х = In t, y = fi.
О Маємо
dy _ є*)*'
ЗР;
dx (Ш tft
d*y . 1
■^-jv..
dx"
4.4. Диференціали вищих порядків
Нехай маємо диференційовну на деякому проміжку функцію у =
= / (х), де х — незалежна змінна. Тоді її перший диференціал або
диференціал першого порядку
dy = f'{x)dx (52)
— це деяка функція від х і можна говорити про диференціал цієї
функції.
Другим диференціалом d?y, або диференціалом другого порядку,
називається диференціал від першого диференціала:
d2y = d{dy).
Оскільки dx не залежить від х, то при диференціюванні першого
диференціала dx можна винести ва знак похідної, тому
d?y = d {dy) = d if' (x) dx) = (/' (jc) dx)'x dx = f" (x) dxdx = f (x) dx2.
Тут dx розглядається як єдиний символ (а не як добуток d на х),
тому дужки в степені диференціала dx опускають, {dx)n = dxn:
d2y=f"{x)dx\ (53)
Третім диференціалом d3y, або диференціалом третього порядку,
називається диференціал від другого диференціала:
d*y = d {d2y) = d{f [x) dx2) = Г M dx9. (54)
Ьеренціалом dny, або диференціалом п-го порядку,
ціал від диференціала (п — 1)-го порядку:
dny = d (dn~ly) = /(n) (x) dxn. (55)
Взагалі, п-м диференціалом dny, або диференціалом п-го порядку,
називається диференціал від диференціала (п — 1)-го порядку:
226
Зауважимо, що формули (53) — (55) справедливі лише для
випадку, коли х — незалежна змінна. Дійсно, нехай задано складену
функцію у = / (х), х = х (f). Відомо (п. 3.2), що перший
диференціал має інваріантну форму, тобто рівність (52) виконується як для
випадку, коли к є функцією від t, так і за умови, що х є незалежною
8МІННОЮ.
Виявляється, що диференціали вищих порядків інваріантної
властивості не мають. Покажемо це на прикладі диференціала
другого порядку. Користуючись правилом диференціювання добутку,
маємо:
d2y = d (/' (х) dx) = d (/' (х)) dx + f (x) d {dx) =
= Г (jc) dx2 + f {x) d2x = Г (*) dx2 + f {x) x" (0 dt2;
d?y = f" {x) dx2 + f {x) x" (0 dt2. (56)
Порівнявши формули (53) і (56), переконаємось, що у випадку
складеної функції формула другого диференціала змінюється. Отже,
диференціал другого порядку інваріантної властивості не має. Якщо
виявиться, що х — незалежна змінна, то
d2x = d{dx) = d{l-dx)= dxd{\) = dx • 0 = 0
і формула (56) переходить у формулу (53).
Приклади
1. Знайти d?y, якщо у = sin 2х.
О Скористаємось формулою (54). Оскільки
</' = 2 cos 2х, у" = — 4 sin їх, у"' = — 8 cos 2дс,
то
d?y=— 8cos2*dx2. •
2. Знайти d?y, якщо у = хг, х—Р — 1.
О Застосуємо формулу (56). Оскільки
/ (х) = х\ ]' (х) = 2х, Г W = 2 і *' (0 = 3/а, х" (0 = 6т, то d*y =. 2d*" +
+ 2x6tdP =-- 2 (Zt4ty + 2 (/3 — 1) 6<ttt2 = (30f« — 12/) dt*.
Такий самий результат дістанемо, коли виключимо залежну змінну х і
скористаємось формулою (53):
у = х*, х = <3— 1, тому у=(Р— 1)з = /в_2Р+ 1, у' = №— 6Р, у" =
= 30/*—12/, d2j/=(30/*— I2t)dt*. •
Завдання для самоконтролю
1. Що називається похідною другого порядку від функції у = / (ж)? У чому
полягає її механічний зміст?
2. Що називається похідною п-го порядку?
3. Як знайти похідні вищих порядків від функцій, заданих явно, неявно,
параметрично? Навести приклади.
4. Довести формулу Лейбніца для диференціювання добутку функцій и = и (х)
та V = V (х):
(ии)(п) = u(n)t> + мР-%' + " ("2~ 1} "<n-2V + • ■ • + т(п)
для випадку, коли п = 4,
227
Б. Довести, що другу похідну функції у (х), заданої рівняннями у = у ((), х =•
= х (0. знаходять за формулою
d*y y-(t)x'(t)-y'(t)x"(t)
dx* - (х' (0)s "
6. Що називається диференціалом л-го порядку даної функції?
7. Як знайти диференціал dny, якщо у = f (х) і х — незалежна змінна?
8. Чи мають диференціали вищих порядків інваріантну властивість?
9. Довести формули:
&У = f (x) dx* + f (x) d*x;
&У = Г (*) dx* + З/* (х) dxtPx + f (x) d*x.
10. Знайти похідні другого порядку функцій:
а) у = х In (х + /^+Т) + УА^+Т; б) х* + Зу* = 3;
в) х = arccos 1^7, у = У і — fa.
11. Знайти . з , якщо:
а) і/ = (х* + 1) arctg ж;
б) 2^+^ = 2;
в) л: = cos f, у = sin f.
12. Показати, що функція f/=e*+2e2* задовольняє рівняння у"—би"-f-
-4- 111/ -6j/=0.
18. Довести, що (*")(n> = лі, я Є W; (cos x)(n) = cos (ж + -тр-] .
14. Нехай у = 1 + 3 cos* *. Переконатись, що
i/<"' = 3.2"-,cos(2x+J5L).
1Б. Нехай у = У~\іР х — 4. Переконатись, що
41пх —1п»х—4
*a(ln'* — 4)
16. Довести, що
*У -—„■... ^зД-^а-
б) '
3cosf
sin5 t
~ 3y»
•
dn (sin* x) = 2"-1 sin (ix + "("2 1} ] dxn
Відповіді. 10. a) —— ; б) —^-; в) -4^7=7*.
4 24x
"■ a> (*» + 1)» : б> -~7~ : B)
S 5. ДЕЯКІ ТЕОРЕМИ ДИФЕРЕНЦІАЛЬНОГО ЧИСЛЕННЯ
5.1. Теореми Ферма і Ролля
Те&рема Ферма.
Нехай функція f (х) неперервна на Інтервалі (а; Ь) і набуває свого
найбільшого або найменшого значення у деякій точці с цього
інтервалу. Тоді, якщо в точці с існує похідна /' (с), то /' (с) = 0.
228
О Для визначеності вважатимемо,
що в точці с функція / (х) набуває
свого найбільшого значення (рис. 5.19),
тобто
f(x)<f{c), x£(a; Ь).
(57)
с-Дх с с+Ш
Рис. 5.19
0 маємо
;0, тому f+{c)=* lira fl' + W-HO <0
Оскільки точка с є внутрішньою
точкою інтервалу (а; Ь), то приріст Ах може
бути як додатним, так і від'ємним, а
відповідний приріст функції, як
випливає з умови (57), не може бути
додатним: / (с + А*) — / (с) ^ 0- Звідси при Ах
Kc + bx)-f(c)
Дх
Дх>0
Аналогічно, якщо Ах <; 0, то /_ (с) ^ 0. За умовою похідна існує,
тобто
Мс) = Л(с)=/'(с). (58)
З рівностей (58) за умов /+ (с) < 0 і /1 (с) > 0 випливає, що /' (с) =
= 0. #
Геометричний зміст теореми Ферма зрозумілий з рис. 5.19: якщо
в точці х = с функція / (х) досягає найбільшого або найменшого
значення, то дотична до графіка цієї функції в точці (с; / (с))
паралельна осі Ох.
Теорема Ролля. Якщо функція f (х) неперервна на відрізку [а; Ь],
диференційовна в інтервалі (а; Ь) і на кінцях відрізка набуває
однакових значень } (о) = } (b), то знайдеться хоча б одна точка с 6 (а; Ь),
в якій f (с) = 0.
О Оскільки функція / (х) неперервна на відрізку [а; Ь], то вона
досягає на цьому відрізку свого найбільшого значення М і
найменшого значення т. Якщо М = т, то / (х) = const і /' (х) = 0 в
довільній точці х £ la, b\.
Нехай МФ т (рис. 5.20, а, б, в), тоді хоча б одне із значень М
чи m досягається функцією у внутрішній точці інтервалу (а; Ь), тому
УК
M--f(a)*f(e)
У>.
X-B-U
в х
Li
в X 0
mtf(ahf(e]
ULJU.
a Cf
Рис. 5.20
229
УЬ
4-1—і—LA—*
0\ а с, сг с3 в
Рис. 5.21
що / (а) = / (Ь). За теоремою Ферма похідна в такій точці дорівнює
нулю. •
Геометричний зміст теореми Ролля: якщо функція задовольняє
умови теореми Ролля, то на графіку цієї функції знайдеться хоча б
одна точка, в якій дотична паралельна осі Ох.
Якщо І (а) = / (Ь) = 0, то теорему Ролля можна сформулювати
так: між двома коренями функції лежить хоча б один корінь
похідної. Так, на рис. 5.21 значення х = а і х = Ь — корені функції,
х = сі, х = с2; х = с3 — корені похідної. У зв'язку з цим теорему
Ролля іноді називають теоремою про корені похідної.
Зауваження. Всі три умови теореми Ролля є суттєвими,
тобто якщо хоча б одна з умов не виконується, то теорема Ролля не
справджується також.
Наприклад, функція 1 — | х | (рис. 5.22) неперервна на відрізку
[—1; 1] і має на його кінцях рівні значення /(—1) «= / (1) =0.
Проте не існує жодної точки х 6 [—1; 1], де б f (х) = 0. Це
пояснюється тим, що при х — 0 дана функція недиференційовна.
Для функцій ф (х) = jc2, х б [0; 1]; ф (x) = (*' *ЄІ0; 1); теорема
Ролля не виконується, тому що ф (0) Ф ф (1); функція tJj (jc) на
відрізку [0; 1] розривна.
5.2. Теореми Коші і Лагранжа
Теорема Коші. Якщо функції f (x) і ф (jc) неперервні на відрізку
[а; Ь], диференційовні в інтервалі (а; Ь), причому ф' (х) ф0, х 6
6 (а; Ь), то існує така точка с £ (а; Ь), що
/(*>)-/(a)
Ф (Ь) — ф (а)
О Введемо допоміжну функцію
F{x) = f(x)-f(a)
f'{c)
ф'(С)
(59)
яку можна розглядати на відрізку [а; Ь], бо ф (а) Ф ф (Ь). У
противному разі за теоремою Ролля знайшлася б точка с £ (а; Ь), в якій
ф' (с) = 0, що неможливо, бо за умовою V х £ (а; Ь) : ф' (jc) Ф 0.
230
Неважко пересвідчитись, що функція
F (х) задовольняє всі умови теореми
Ролля. Тому знайдеться точка с £ (а; Ь),
в якій F' (с) = 0 або
Пс>-^$гФ-М-.0,
звідки й випливає формула (59). ф
Теорема Лагранжа. ^кщо функція
І (jc), неперервна на відрізку [а; Ь\, ди-
ференційовна в інтервалі (а; Ь), то всередині цього інтервалу
знайдеться хоча б одна точка с £ (а; Ь), в якій
/(Ь)-/(а)=/'(с)(Ь-а). (60)
О Цю теорему можна розглядати як окремий випадок теореми Коші.
Справді, поклавши у формулі (59) ф (jc) = jc, дістанемо формулу (60). #
Розглянемо геометричний зміст теореми Лагранжа (рис. 5.23).
Запишемо формулу (60) у вигляді
Щ^ -ПО. *<*<*,
тоді
f(b)-f(a)
Ь — а
ВС
АС
= tgo = r(c).
Тобто якщо функція у = / (jc) задовольняє умови теореми
Лагранжа, то на графіку цієї функції знайдеться хоча б одна точка, в якій
дотична до графіка паралельна хорді, що сполучає кінці кривої А (а;
f(a)) і В (Ь; f (b)). Таких точок може бути і кілька, але хоча б одна
завжди існує.
Формулу (60) називають формулою Лагранжа, або формулою
скінченних приростів, оскільки вона виражає точне значення приросту
функції Ay = f (b) — / (а) через похідну в деякій точці с інтервалу
(а; Ь) і скінченне значення приросту аргументу Ajc = b — a; At/ =
= /' (jc) Ax. У теоремі Лагранжа вказується лише на існування
точки с, для якої справедлива формула (60), але використання цієї
теореми у математичному аналізі надзвичайно широке.
Теорема Лагранжа має також і механічну інтерпретацію. Якщо
5 — S (f), t!<i t <. t2,— закон руху матеріальної точки, то відно-
шення —-f-—r-1-^ — Це середня швидкість руху за проміжок часу
'2 — 'і
[t-i, t2]. Теорема Лагранжа стверджує, що в деякий момент часу с 6
6 (ti, t2) миттєва швидкість неодмінно збігається із середньою
швидкістю:
SW-SM ау( с6(, ,а)
'а — Іі
231
*
Іншими словами, серед усіх можливих швидкостей S' (t), t Є
6 Ui, t2], неодмінно знайдеться така швидкість S' (с), що коли її
підтримувати сталою, то за той самий проміжок часу [^; t2] точка
пройде той самий шлях S (f2) — S (*і), що і при русі із змінною
швидкістю S' (t):
S(tt)-S(t1) = S'(c)(t2~t1).
Якщо при цьому русі в деякий момент часу т доводиться
повертати назад, то для цього швидкість потрібно повністю погасити: (S' (т) =
= 0 (теорема Ролляї). Зрозуміло, що ці інтерпретації вірні лише тоді,
коли закон руху S (t) задовольняє умови, які відповідають умовам
теорем Ролля і Лагранжа.
Приклади
1. Довести, що рівняння х' + 7х— 1 = 0 має лише один дійсний корінь.
О Введемо функцію / (х) = х' + 7х — 1. Оскільки / (0) = —1 < 0, а / (1) =
= 7 > 0, то дане рівняння має дійсний корінь х1 6 (0; 1) (гл. 4, п. 5.3). Припустимо,
що існує принаймні ще один корінь х2, тоді f (*і) = / (ха) = 0, причому для визиа-
ченності вважатимемо, що Xj < х2. Отже, на відрізку [хі, х2] функція f (х)
задовольняє всі умови теореми Ролля, тому знайдеться точка с 6 (хі, х2), в якій /' (с) = 0.
Але Vx Є К: /' (х) = 7 (х» + 1) ф 0.
Знайдена суперечність показує, що припущення про існування ще одного кореня
було хибним ф.
2. Чи виконується теорема Ролля для функції f (х) = ха — 6* + 7 иа відрізку
[1; 5]? При якому значенні с?
О Оскільки дана функція неперервна і днфереиційовна прн всіх значеннях
х 6 [1; 5] і її значення на кінцях відрізка [1; 5] рівні між собою (/ (1) = / (5) = 2),
то теорема Ролля на цьому відрізку справджується.
Значення с знаходимо з рівняння f (х) = 2х — 6 = 0, звідки с = 3. •
3. Крнва у = Xі — Ах сполучає точки А (1; —3) і В (4; 0). На дузі АВ знайти
точку М0 (х0; у0), в якій дотична паралельна хорді АВ.
О Функція / (де) = х»— Ах неперервна і диференціовна на відрізку [1; 4].
Тому за теоремою Лагранжа існує точка х0 6 (І". 4), для якої
де /' (де) = 2х — 4. Підставивши відповідні значення, дістанемо
0 — (— 3) _5_ /_5_\ 15
4 і — 2дсо — 4 =**о — 2 * ^° = ' І 2 І = — 4 "
~ 5 15
Отже, точка М0 має координати х0 = -х-, у0 = — —т-. •
4. Для того щоб днфереиційовна на відрізку [а; Ь] функція / (х) була сталою,
необхідно і достатньо, щоб У/ х 6 (a; b): f (х) = 0. Довести.
О Необхідність була доведена в п. 2.2.
Достати ість. Нехай V х 6 (a; b) : /' (де) = 0 і точки xt < xs £ [а; Ь].
Тоді за теоремою Лагранжа
ЗсЄ К; *j) : / (х2) - /(*і) = /' М (*.~*і).
але Vx Є (*і; *г) : f (х) = 0, тому /' (с) = 0. Отже, f(x^—f (xj = 0, або / (xj =
= f (*st).
232
Оскільки xt і де, — довільні точки відрізка [а\ Ь], то V де 6 [я: ЬІ ■ f (х) = с. •
5. Довести, що
arcsinx + arccosx = JL. ж € [— 1; 11.
О Введемо функцію / (х) = arcsin де + arccos x, тоді
y,£(-l;l,:rW-TfL=.__TL=._a
тому з попередньої задачі випливає, що
arcsin де + arccos х = с.
Поклавши в цій рівності х = 0, знайдемо, що с = Л і arcsin х + arccos х = Л .
2 2
Безпосередньо переконуємось, що ця рівність виконується і при х = ±1. ф
6. Оціннтн точність наближеної рівності Ду » dy (п. 3.3).
О Нехай функція / (х) має похідні /' (де), /" (х), де Є [я; Ь]. Візьмемо на Інтервалі
(а; Ь) дві точки: х і х + Д*. тоді за теоремою Лагранжа
Дї/ = / (* + А*) - / (х) = /' (сг) Д*.
де сх лежить між х I х + Ддс.
Диференціал даної функції для значень х і Ддс дорівнює
dy = /' (х) Ддс,
тому
Ay-dy=(f'(cl)-t'(x))Ax.
Застосуємо тепер формулу Лагранжа до різниці перших похідних:
by — dy = (f"(c2)(x-cj)&x,
де с2 лежить між сх і х. Некай ЛІ = max | f (х) І. Оскільки І де — Cj І < Дх, а
xQ[a:b]
І Г (сг) І ^ї М, т0 Дістаємо оцінку
| Ду — dy К ЛІ | Дх |а,
про яку згадувалось в п. 3.3. •
5.3. Правило Лопіталя
У попередній главі ми ознайомились з деякими способами
розкриття невизначеностеи. Розглянемо ще один спосіб, який грунтується
на застосуванні похідних.
Теорема 1. Нехай функції f (x), ф (х) визначені і диференційовні в
околі точки х0, за винятком, можливо, самої точки х0, причому
lim /(х) = lim ф (х) — 0,
х-*-х0 х->х0
і у вказаному околі ц>'(х)фО. Тоді якщо існує границя відношен-
f (х)
ня похідних lim , ' , то існує і границя відношення функцій
х-*х, 4і \Х)
,. /(х) . . ....
Jim ' . :- і ці границі рівні між собою:
х-*хс Ф \Х)
,іт_Ц4- = 1і-^(^
„ І \ І1ГП >^Г
х->х. ФИ х-»дг0 Ф (*)
233
О Вважатимемо, що х0 — скінченне число: | лг0 | < + °°- Дови-
значимо функції / (х) і ф (х) в точці х = х0, поклавши / (х0) = ф (х0) =
= 0. Тоді ці функції будуть неперервні в точці х0. Розглянемо
відрізок [х0; х], що належить даному околу. Функції/ (х) і ф (х)
неперервні на [х0; х], диференційовні на (х0; х) і \/х£(х0\ х) :(Р'(х)Ф®-
Тому за теоремою Коші знайдеться точка с Є (х0; х), для якої
тому що / (х0) = ф (лг0) = 0. Оскільки за умовою lim ,, ■ існує і с -»-
х-мг, Ф W
-у х0, якщо х -v х0, то з рівності (61) маємо
lim m—1ІШ-Ш--ІЇІП-Ш-. •
х-х„ Ф W е-х0 Ф Iе)
Зауваження 1. Теорема справедлива і в тому випадку, коли
jc0 = оо. Дійсно, поклавши х = —, маємо
lim -Щ- = lim —V4- - Hm
lim ґу\\ *\ -ЦЩ-Ш.
*(4-)(-±)
3 ay в аж є н н я 2. Якщо похідні /' (jc) і ф' (х) задовольняють
ті самі умови, що і функції / (х) і ф (х), то теорему 1 можна
застосувати ще раз. При цьому дістанемо
Hm у- = lim '/. \ = lim '„, \-.
х-х. Ф(*> х-»*,, Ф W *->х„ Ф W
Взагалі, теорему 1 можна застосовувати доти, поки не прийдемо
/(п> М
до відношення похідних ' ', яке має певну границю при х-> х0.
Ф1 ' (*)
Цю саму границю матиме й відношення функцій:
*-«. Ф(«) х->х0 Ф(">(*)
Теорема 1 дає змогу розкривати невизначеність виду -^-. Сфор-
оо
мулюємо теорему, яка стосується розкриття невизначеності виду —.
234
Теорема 2. Нехай функції f (х) ї ф (х) визначені І диференційовні
в околі точки хв і в цьому околі
lim / (х) = Hm ф(х) = оо, ф' (дг) Ф0.
х-*х0 х->х0
/' їх) f їх)
Тоді якщо існує границя lim , \ , то існує границя Нт-^-у-^ і
х-*х, Ф \*> х-*х„ Ф \х>
Х->-Х„ Ф(*) Ф W
Цю теорему приймемо без доведення [121.
Виражене теоремами 1 і 2 правило обчислення границь називають
правилом Лопіталя за іменем математика, який опублікував його.
Але це правило відкрив І. Бернуллі, тому правило Лопіталя
називають ще правилом Бернуллі — Лопіталя.
Зауважимо, що правило Лопіталя застосовується лише для роз-
0 . оо п. .
криття невизначеностеи виду -тг- і —, які називають основними. Відомі
ще й такі невизначеності, як 0 • оо, оо — оо, оо°, 1е", 0°.
Покажемо, як ці невизначеності зводяться до основних.
а) Якщо lim / (х) = 0, lim ф (х) = оо, то невизначеність виду
х-*хв х-*х,
0 • оо можна звести до основних так:
nmo[/U)vW] = limt^=-f,
або
!• „, . , ., <. ф ІХ) ОО
xVfix)(p(x)]=iZ-ww=—■
б) Якщо Нт / (х) = Пт ф (х) = оо, то невизначеність виду оо — оо
х-*х, х-*х0
. о
вводиться до невизначеності -=-:
f(x)-mlx)= "*М-"Ч*> .
Г\х) <р(Х) хіПх).Щ(х)
в) Якщо Hm / (х) = lim ф (х) = 0, то
х->х( х-*ха
Um №(х) In f(x))
lira/W^^e'^
х->х0
і невизначеність виду 0° зводиться до невизначеності 0 • оо,
розглянутої вище. Аналогічно розкриваються невизначеності 1" 1 оос.
Таким чином, щоб розкрити невизначеності 0 • оо, оо — оо, 0°,
оо°, 1е", їх треба спочатку звести до основних і лише після цього
застосовувати правило Лопіталя.
235
Приклад
Обчислити границі:
1п* є5*— є2*
a) lim ——; б) Ііт ;
х->+оо •* х->0 х
пх
в) Ііт (2 — х) tg —j— ; г) lim (tg * — sec x);
*-»2 ч я
1
д) Ііт (In ctg *)'« 2х; є) lim (cos 2x) *' ;
х-*0 х-М)
є) Iim(sin2*)tB3j(; ж) Ііт xne-2\ n£N.
Х-»0 х-»оо
О а) Тут невизначенність виду 22., тому за правилом Лопіталя маємо
оо
In* 1/*
lim —— = lim —j— = 0.
Х-»оо * JC-Юв '
б) Маємо невизначенність виду — , тому
е5*_е2х е5*5 —е2*2
11т = Ііт j = 3.
х-»0 х х_у0 '
в) Тут невизначенність виду 0 • оо. Зведемо ії до невизначенності — , післй
чого застосуємо правило Лопіталя:
ії* 2-х — 1 4
Um(2-,)tg-r = Urn —^Г- = "т ' пх п =1Г-
**а *^2 ctg — *^2 — 1/sin"-^-- -4-
г) Маємо невизначеииість виду оо — оо. Зведемо ії до невизначенності — ■
після чого застосуємо правило Лопіталя:
/ sin* 1 \
lim (tg* — sec*) = Urn — =
n „ \ cos x cos x J
2
sin x — 1 cos x
' 1ітя cos* = lim -sin* =°-
д) Тут невизначенність виду оо°. Маємо
Mm (tg 2x)ln In ctg x
lim(lnctgji:)tB2J( = e,r->0
X-*Q
236
Знайдемо границю в показнику. Для цього зведемо дану невизначенність до
виду— , потім скористаємось правилом Лопіталя:
оо
In In ctg *
11m (tg 2x In In ctg x) = [0 • oo] = lim l/tg£x =
= lim
x-*0
x-*0
In Inctgx
ctg 2*
00
00
J *-»
m ■
x-*o
x-»0
— 1/In ctg x 1/ctg x 1/sin' *
— 2/sin2 2*
(2*)«
тому
1 sin*2* 1
_ ^ ХЦ5 sin x cos * In ctg * ~~ 2 J^ * cos* In ctg*
lim (In ctg*)tg2* = e« = 1.
x-»0
= 0,
є) Маємо невизначенність виду Iе", тоді
lim (cos 2x)1"* = є Д"^і-ln cos 2x;
x-*0
1 In cos 2x
lim —5- ln cos 2x = 100 • 0] = lim -5 =•
x-*0 x x-*0
— 2 sin 2*/cos 2x tg 2x
lim „- = — 2 lim —oz— = — 2;
■I*
x-»0
2*
lim (cos 2x) l/x* = e
x-*0
x-M)
2
2*
є) Тут невизначенність виду 0°, тоді
tg зх _ -х-*о
lim tg Зх ln sin 2x
Hm (sin 2*)
x-»0
lim tg 3* ln sin 2x = [0 • 00] = Mm
x-*0
In sin 2x
ctg*
= lim
2 ctg 2*
xl*o — 3/sina3*
2 sina 3*
= —-^-lim-
x-*o
tg2*
2 .. _0xV_
0 x-H> a
= 0.
Um(sin2*),B3x =e°= I.
x-*0
ж) Для розкриття цієї невизначенності правило Лопіталя потрібно застосувати
л разів:
Hm *"е-2* = [ оо • 0] = Hm -55- =
= lim-
Х-Юо
пх
П-1
x->w Є2
*"-•
2е2х
П—2
= — Hm
Х->оо Є"
= -«" Чт
•* х-»оо
(п-1)*'
2е
.2*
-^^ lim *"
2»
—=1—1=
е2х [ оо J
237
n (n
n
-1)("
(«-
-2)
2"
1) (n
2»
. . •
2
2)
• 1
lim-
x->oo
- Um
X->oo
e2*
1
2x
■ =
=
••
nl
2"
0 = 0. •
X->oo Є"~ iff"
5.4. Формула Тейлора
Розглянемо одну з основних формул математичного аналізу, так
звану формулу Тейлора, яка широко застосовується як в самому
аналізі, так і в суміжних дисциплінах. Зупинимося лише на трьох
застосуваннях.
В п. 3.3 ми бачили, що заміна приросту функції її диференціалом
дає змогу утворювати різні наближені формули. Виявляється, що ці
формули можна уточнити, якщо застосувати диференціали вищих
порядків: про це і йдеться у формулі Тейлора.
Формула Тейлора дає змогу розробити простий аналітичний
апарат для обчислення значень функції у = / (х), які відповідають
заданим значенням незалежної змінної х. Зрозуміло, що в тих випадках,
коли функція задається формулою виду у = -~ Зх + 5, значення
обчислюється лише за допомогою чотирьох арифметичних дій. Але
як знайти, наприклад, значення функції у = sin x? Очевидно, цю
задачу найпростіше можна «розв'язати» за допомогою калькулятора.
Але ж калькулятор дає лише відповідь. А питання проте, які він при
цьому виконує дії, залишається відкритим. Формула Тейлора і вказує,
які арифметичні дії потрібно виконати над х, щоб одержати sin x.
Іншими словами, формула Тейлора дає змогу зобразити дану
функцію многочленом, що зручно для складання програм і обчислень цієї
функції на ЕОМ.
Ще одне практичне застосування цієї формули пов'язане з
обробкою числових експериментальних даних. Якщо в результаті
експерименту одержано масив значень (xt; yi), то спочатку будують
графік залежності у = / (х), а потім цю залежність описують
аналітично, причому, як правило, у вигляді многочлена.
Обгрунтування можливості представляти функцію многочленом
дає формула Тейлора.
Теорема. Нехай функція } (х) має в точці х0 і в деякому її околі
похідні до (п + \)-го порядку включно, і нехай х — довільне значення
аргументу із вказаного околу (х Ф л;0). Тоді між точками х0 і х
знайдеться така точка с, що справедлива формула
+ ^Г <* - *о>" + -^ТЩ- <* - ХоТ+1 (62)
(с = х0 + в(х — х0), 0<Є<І).
238
О Позначимо многочлен, то стоїть у правій частині формули (62),
через <р (х, х0):
<р(Х, х0) = f(x0) + -£-&*- {х- х0) + ... + ^sL(x-x0)n. (63)
Його називають многочленом Тейлора степеня п для функції / (х).
Різницю між функціями f (х) і <р (х, jc0) позначимо через Rn (x):
Я„М =/(*) —ф(*.*о)-
Теорема буде доведена, якщо встановимо, що
*» W " (п+ці (* - *о)"+1, (64)
де точка С лежить між точками х0 і х.
Зафіксуємо довільне значення х > jc0 із вказаного околу. По-
вначимо через t величину, що змінюється на відрізку [х0; jc], тобто
хо ^ t ^ х, і розглянемо функцію
F(f) = f(x)~<p(x,t)- (Х-І)П+\*ІЇХ) • (65)
Ця функція задовольняє всі умови теореми Ролля, тому
знайдеться точка с 6 (v> *) Для яко1
F'(c) = 0. (66)
Якщо в функцію (65) підставити значення функції q> (x, і) з
формули (63) і результат продиференціювати по t, то знайдемо
F4t) = -f^L(x-tr+ <"+'H'-0"f«M . (67)
Покладемо у формулі (67) t = с, тоді з рівності (66) дістанемо
;<"+■> (с)
{x-cf+ P. + 0(«-ffi.M „p.
nl v ' ^ (*-*„)"+'
Розв'язуючи це рівняння відносно #n(jt), дістанемо формулу (64). •
Формула (62) називається формулою Тейлора для функції f (x)
в околі точки х0, а вираз (64) для Rn(x) — залишковим членом у
формі Лагранока. Величина Rn (x) показує, яку помилку ми робимо,
замінюючи функцію f (x) її многочленом Тейлора (63).
При цьому формулу (64) можна використати для того, щоб
оцінити величину Rn (x) при х -*• х0 і фіксованому п, а також при п -»-
-V ОО.
239
Формулою Маклорена називають формулу Тейлора (62) при х0 = 0:
t{x)-r(V) + —n-x + —zr-x + ... +—7П— х + („ + і)і х •
(68)
де точка с знаходиться між 0 і х (с = 6х, 0 < 6 < 1).
Подамо формулу (62) через диференціали вищих порядків. Для
цього покладемо в ній х — х0 = Дх, х «= х0 + Дх:
f(x) = f{x0+Ax) = f{x0)+-^-Ax +
+ JlpLAx2+ ... +fl^LAx" + Rn(x). (69)
Оскільки / (х0 + Дх) — / (х0) == Аг/, /(п) (х0) Дх" = (Ту, то
формулу (69) можна записати у вигляді
Д^=Ф + 4г+4г+ ••• +-^ + *.М- (70)
Покажемо, що коли функція /(п+ ' (х) в околі точки х0 обмежена,
то залишковий член Rn (х) при х -»- х0 є нескінченно малою вищого
порядку, ніж (х — х0)п:
*_>*„ (ж-*0)п ж-»,, (ж-*„)"(«+1)1
(1 + 1)1
1 lim/"1+"(c)(x —х0) = 0,
*-»*„
тому що добуток обмеженої величини на нескінченно малу є
величина нескінченно мала.
Таким чином, обриваючи формулу (69) або (70) все далі і далі,
дістаємо все точніші наближені формули: з точністю до величини
Дх8 / (х0 + Дх) ta f (х0) + /' (х0)Дх або Ay « dy (це відомі формули
(п. 3.3) для наближених обчислень за допомогою першого
диференціала); з точністю до величини І Дх |3
/(х + Дх)«/(х0)+Пх0)Дх + -£|г-Дх2 або Ду « dy + -^f-;
s точністю до величини Дх*
/ (х + А*)« / (*„) + f (х0) Дх + L^L Дх2 +
+ _rpLAxs або Ау & dy+ -?£- +
d'y
ЗІ ^ cw ^ ~ -у -, 2, , 31 .
Те саме можна сказати про формулу (62): для тих значень х, для
яких залишковий член Rn (х) достатньо малий, многочлен Тейлора
(63) дає наближене зображення функції / (х).
240
Рис. 5.24
у-\-6+ш>
Многочлени Тейлора дають найкраще наближення функції / (х)
у вигляді многочлена даного степеня поблизу точки х0. Це треба
розуміти так (рис. 5.24): серед усіх многочленів цього степеня, які
збігаються з функцією при х = х0, лише для многочлена Тейлора
величина | Rn (x) | виявляється найменшою.
Із формули (64) видно, що залишковий член Rn (x) може бути малим
навіть при великому відхиленні х від х0, якщо взяти достатньо
великим порядок п многочлена Тейлора, тому що факторіал при
збільшенні п росте швидше степеня.
Приклади
1. Написати формулу Маклорена для функції / (ж) = sin х і оцінити залишковий
член. Побудувати функцію і чотири перших многочлени Тейлора.
О Оскільки (п. 4.1, приклад 2)
/<">(*) = sin (, + -££-),
то
rfn) ,m ■ лп / °- п = 0, 2, 4 2k;
рп' (0) = sin -я- = < j,
2 1(— І)*, л = І, 3, 5 2J5- + 1.
Підставивши значення похідних у формулу (68), дістанемо для функції / (х) = sin x
формулу Маклорена
sin х = х — +
ЗІ ^
(_ і)*-і «М-і
, v— ., (_ 1)4 cos с ■ х2Ь+1
(2k — І)! "*" (2fc + l)l
де с лежить між 0 і х.
Оскільки І cos х І ^ 1, І х І < оо, то для залишкового члена справедлива оцінка
Нехай, наприклад, х€|0; -^-1. Покладемо k = 4, тоді
(хї
ІЯ.МК-ір^
91
< (°-в)В < 0.000005.
У1
241
Це означає, що наближена формула
sin* «
З! 5! 71
[я я 1 ,
— -J-; -т- з точністю до п яти
знаків.
Неважко (за допомогою калькулятора) переконатись, що ця сама формула, але
иа проміжку
- -о-; -п" наближає функцію sin х з точністю до 0,01. На рис. 5.25
показано, як із збільшенням степеня п розширюється «сфера дії» перших трьох
многочленів Тейлора:
віпхх*Р1(х)=х, \Rl{x)\<l£L;
&іпх^Р3(х)=х—£-, |R,(*)|<ijL ;
зіпх«я7М=,-4+-ш~оШ-' |л'МІ<іге-;т-д-
Оскільки функція / (х) = sin х і її многочлени Тейлора є функції непарні, то
на рис. 5.25 зображена лише «половина» графіків. •
2. Знайти формулу Маклорена для функції / (х) = In (І + х).
О Знаходимо значення даної функції і її похідних при х = 0:
/(ж) = Іп(І+*), /(0) = 0;
''<*> = -пЬг- >'<0) = 1:
™—<пЬ*- Г(0) = -.=-П;
Г W = (1 Д)3 . Г(0) = 2= 1.2 = 21;
fM(x)~-—A—t /№{0) = _6=I.2.3 = -3I;
(1+*)*
/<5>(*)=_Ji— , /(5)(0) = 24=1 .2.3-4 = 4!;
(І + *)8
/(п) w = (~ 'Г,' (%~ш • /<n' <°> = <-1)П_1 (п~I)L
(1 + х)п
Підставляючи значення похідних у формулу Маклорена, маємо
1,(1+4-,--і-+4—4-+- + (-|)"~'*п+. с-р-х»^
3. Розкласти за формулою Маклорена функції:
а) / (*) = e*t б) / (ж) = cos*; в) / (х) = (І + ж)а, а Є Я.
242
О Аналогічно до попереднього розв'язання маємо:
Xті , есхп+1
а) е'=1+_±- + -І-+ ... +
21 ^n! ^ (п + І)! '
m « і *а -J- ** J- (-І)*,2* , (-1)*+'cose ***■+* .
б) cos ж = і — — + — • • • + -і—- 4- -^— ;
21 ^ 41 т (2fc)l (2ft + 2)l
в) (l+x)a = l + ax+ *(«-') Ж2+ a(a-l)(g-2) ^ + ...+
4-«(«—О •• • («— »+ 0 -п , а (а— 1) ■ .. (а —п) .. , .а-п-і^п+1 _
пі (w+l)'
4. Знайти многочлен Тейлора для функції / (х) = ех, який зображав би цю
функцію на відрізку [—І; 1] з точністю до 0,001. Обчислити наближене значення є.
О 3 попереднього прикладу маємо
Y% „п ре_л+1
Є*=1+Ж+-£--+ ... +А- +
21 ' яі (п + 1)1
Підберемо таке п, при якому модуль залишкового члена був бн меншим від числа
0,001, маючи иа увазі, що | х | ^ І, число с лежить між 0 І х та ес < є'*' < є:
еУ+' ^ е|жГ+1 «-- є ^ З
|Я„МІ
(п + 1)! ""* (п+І)І ""* <л+1)І <л+1)! '
ІЯі (*)!< ^, =-|-> 0,001; І «4 (*) | <-ij і- > 0,001;
i*«wi<-ow"-r>0,ool: i«.wk-S—4->о.ооі,
Отже, п = 6, тому з точністю до 0,001 справедлива наближена формула
е*»1+* + -£- + — +— + -£- + -£-. «Є[—І; 1].
^ ^^Г ЗІ ^ 41 ^ 51 ^ 6! l J
Якщо в цій формулі покласти, наприклад, х = 1, то матимемо наближене значення
числа є:
е«І + 1+4-+і+4- + -І2Т+-72Т"2'718- #
5. Знайти многочлен Тейлора Ра (х — 1) третього степеня відносно двочлена
* — І для функції / (х) = ffx.
О Маємо
/d)-"^L
по-і-Г
пи = -4
■1 -
2
3
х~
= 1:
|*=і
І,
=
с=1
І .
= -
г
/IV
2
(1) =
(1) =
10
27
- х
80
81
3
X
L
т
L
10
27
:
80
~~8Т
243
Поклавши у формулі Тейлора (62) х0 = І І п = 3, дістанемо
_!_(,_ 1,__2 - »• • Ю ,.. „, 80
3 і 9
де с лежить між І і х, тому
T^=l + -L (*-!)— 2 (*—І)Н — (*-l)3-„ ~tyc(x— I)*,
F 3 і 9 • 2! v т 27 • 3! 81-41 к
Я, (*— 1) = 1 + -і- (*— 1) __^_ (ж— 1)» + -^- (ж— 1)». •
Формулу (62) можна записати у вигляді
/ W = 2 -^- (* - *о)'" + -£?# (х - *оГ+1. (71)
Коли функція / (х) є многочленом />„ (х) степеня п, то похідна
^п"+І) (х) = 0, тому формула (71) матиме вигляд
*-W-£-^^(*-*■>'■ (72)
Ця формула називається формулою Тейлора для многочлена.
Приклади
1. Розкласти многочлен Я3 (х) — 1—2х + Здс* — 4л? за степенями бінома
*+ І.
О Скориставшись формулою (72) при *0 — —1. маємо
Рв(х) = \ — 2х + 3х*—4х*, Ра(— 1) = І0;
Р'3(х)= — 2 + 6х—12х*, Р'3(—1) = — 20;
Р"3 (х) = 6 — 24ж, Яз (— !) = 3°;
Яз*М = -24, Р'3 (-1) = -24,
тому
Я8(ж) = 10 —20 (ж + І) + 15 (х + І)2 — 4 (х + І)8. •
2. Розкласти многочлен Я„ (ж) = (Ь + х)" за степенями х.
О Маємо Р„ (0) = Ьп, PW (ж) = я (л — І) ... (п — і + 1) (Ь + де)"-', тому,
поклавши у формулі (72) Рп (ж) =• (Ь + х)п, х0 = 0, дістанемо відому формулу бінома
Ньютона:
(Ь + х)п = Ьп + rtfc"-1* + " (п~ ї} 6"-V +
+ п(п-\)(п-2) 6n_3jtS + ... + ^ = J "^ fc"-V. « (73)
244
Завдання для самоконтролю
1. Сформулювати і довести теореми Ферма і Ролля.
2. Упевнитись, що функція / (х) = sin х на відрізку [0; п] задовольняє умови
теореми Ролля і що х = -5- корінь похідної /' (ж) = cos х.
3. Чому для функції f (х) = 1 — >Лґ2, * Є [—1; І] не виконується теорема Ролля?
4. Сформулювати і довести теорему Коші.
5. Сформулювати і довести теорему Лагранжа. У чому полягає її геометричний
і механічний зміст?
6. Користуючись теоремою Лагранрка, переконатись, що дотична до кривої
у — х* при х = > 0,25 паралельна хорді, що сполучає точки 0 (0; 0) І А (І; І).
7. Довести за допомогою теореми Лагранжа таке твердження: якщо У/х £ [а;
Ь] : Ф' {*) = F' (ж), то V х Є [ж; Ь]: Ф {х) — F {х) = const.
8. У чому суть правила Лопіталя? Довести відповідну теорему для розкриття
0 _ оо
невизначеності -тг-. Сформулювати теорему для випадку невизначеності -Навести
приклади.
9. Як розкриваються невизначеності 0 • оо, оо — оо, 0°, оос, І00? Навести
приклади.
10. Знайти границі:
X
І — cos 4x хе
а) Ііт 5 ; б) Ііт — — ; в) lim (arcsin ctg x);
х-+0 х *-*оо Ьх + Є х->0
г) Ііт (ж-2 — ctg8*); д) Ііт (л — 2x)cos *;
х->0 п
— / \К_2"
є) Ііт (ctg ж)""; є) lim tgJHL
х-+0 *->! \ 4 /
11. Вивести формули Тейлора і Маклорена.
12. Що характеризує і як використовується залишковий член формули Тейлора?
13. Користуючись многочленом Тейлора, перевірити, що
Xі — 5*3 + 5*2 + х + 2 = (х— 2)* + 3(х — 2)3 — (х — 2)2 — 7(х— 2).
14. Вивести формулу Тейлора для функції / (х) = \ ж при ж0 = 1, п = 3.
15. Вивести формули Маклорена для функцій:
е*. cos х, sin x. In (ж + 1); (1 + х)а.
16. За допомогою формули Маклорена для функції є* обчислити У~е з точністю
до 0,01.
17. З'ясувати походження і оцінити похибку наближених рівностей:
а) cos*«l-_^-, хЄ [О; _5_| ; б) Іп (І + х) я» х- _£-+ £- , жЄ
Є[0; 0,1].
Відповіді. 10. а) 8; б) 0; в) 1; г) ~ ; д) l;e)_L; є) —. 14. 1 +x-ZlL —
З є є 2
_ 7
__ (*-!)» _ (ж-1)3 _ 5с^ (»-1)«. 16. 1,65. 17. а) /?„(*)<!;
б) tfnW ^ 0,001.
245
S 6. ЗАСТОСУВАННЯ ДИФЕРЕНЦІАЛЬНОГО ЧИСЛЕННЯ
ДЛЯ ДОСЛІДЖЕННЯ ФУНКЦІЙ
6.1. Монотонність функції
Теорема 1 (достатні умови строгої монотонності). Якщо функція
f (х) диференційовна на інтервалі (а; Ь) і /' (х) > 0 (/' (х) < 0) всюди,
крім, можливо, скінченного числа точок, в яких f (х) -» 0 на (а; Ь),
то функція f (х) зростає (спадає) на (а; Ь).
О Нехай для визначеності /' (х) > 0 і хг та ха — дві довільні
точки з (а; Ь), причому хг < х2. Тоді на відрізку [х^ х8] виконуються
всі умови теореми Лагранжа, тому
/ (*8) — / (-«і) = /' (с) (*„ — *і), с 6 К; ха).
За умовою /' (с) > 0, ха — хг > 0, тому / (х^ — / (xj > 0 або / (х^ >
> / (хд< тобто функція / (х) на інтервалі (а; Ь) зростає.
Аналогічно доводиться теорема, якщо /' (х) ■< 0. #
Зауваження. Таким самим способом можна довести, що
коли /' (х) ^ 0 (/' (х) ^ 0) на інтервалі (а; Ь), то функція на цьому
інтервалі не спадає (не зростає).
Теорема2 (необхідна умова зростання). Якщо диференційовна на
інтервалі (а; Ь) функція зростає, то f (х) >> 0 на (а; Ь).
О Дійсно, нерівність /' (х) <; 0 неможлива — це суперечило б
теоремі 1. Отже, Vx 6 (а; Ь) : /' (х) > 0. •
Наприклад, функція у = х3 зростає на (—оо; +оо) 1 має
похідну у' = Зха > 0, якщо х Ф 0, і рівну нулю при х = 0.
З цього випливає, що інтервали монотонності можуть відділятися
один від одного або точками, де похідна дорівнює нулю (їх
називають стаціонарними точками), або точками, де похідна не існує.
Точки, в яких похідна дорівнює нулю або не існує, називаються
критичними точками, або критичними точками першого роду.
Не кожна критична точка відділяє інтервали монотонності.
Теорема 2 має такий геометричний зміст. Якщо на інтервалі (а; Ь)
функція / (х) зростає, то дотична до кривої у = / (х) у кожній точці х £
£ (а; Ь) утворює з додатним напрямом осі Ох гострий кут ф або (в
окремих точках) горизонтальна; тангенс цього кута невід'ємний: /' (х) =
*= tg <р ^» 0 (рис. 5.26). Якщо на інтервалі (а; Ь) функція / (х)
спадає, то кут нахилу дотичної тупий, або (в окремих точках) дотична
горизонтальна; тангенс цього кута недодати ий: tg <р = f (x) ^ 0
(рис. 5.27).
Інтервали монотонності можуть відділятися один від одного
точками, де дотична або паралельна осі Ох, або паралельна осі Оу, або
її не існує. Отже, щоб знайти інтервали монотонності функції / (х),
треба:
1) знайти область визначення функції; 2) знайти похідну даної
функції; 3) знайти критичні точки з рівняння /' (х) = 0 та з умо-
246
Рис. 5.27
ви, що /' (х) не існує; 4) розділити критичними точками область
визначення на інтервали і у кожному з них визначити знак похідної.
На Інтервалах, де похідна додатна, функція зростає, а де від'ємна —
спадає.
Приклади
1. Знайти інтервали монотонності функцій:
a) y = arctg*; б) у « х 1п * + Зж; в) у = (2х+ 1) f (х — 2)а.
О а) Областю визначення заданої функції є нескінченний інтервал (—оо; -f-oo).
Похідна у' =
Ф 0 також існує на всій числовій осі, тому критичних точок
1+жа
дана функція не має. Оскільки V х Є (—оо; +оо) : у1 (х) > 0, то функція зростає
на всій області визначення. г
б) Ця функція визначена иа інтервалі (0; +оо). Знаходимо похідну: у = 1п х +
+ 4; знаходимо критичні точки: 1пж + 4=0=>ж= е~4. Інших критичних точок
функція не має, бо похідна існує на всій області визначення.
Розбиваємо область визначення точкою х = е~4 на інтервали і встановлюємо
янак похідної на кожному з них.
Для цього досить визначити зиак похідної в одній довільній внутрішній точці
кожного інтервалу. Маємо
V*6(0; е-*):у'(х)<0,
отже, при х Є (0; є-4) функція спадає;
У*Є(е-4; +о°):у'(х)>0,
отже, при х 6 (є-4; +оо) функція зростає.
в) Область визначення (—оо; +оо). Знаходимо похідну
. '°(*-0
У " 3fJ=2'
Критичні точки: xt = І — похідна дорівнює нулю, х2 = 2 — похідної не існує.
Маємо
V х £ (— оо; 1) : у' (х) > 0 — функція зростає;
V х Є (1; 2): у' (х)< 0 —функція спадає;
V * 6 (2; + оо) : у' (х) > 0 — функція зростає. •
247
2. Довести, що рівняння _— + х — 1 = 0 має лише один дійсний корінь.
5
О Розглянемо функцію / (х) = __ + х — І, х Є (—оо; -f-оо). Оскільки / (0) <
О
< 0, / (І) > 0, то на інтервалі (0; І) функція має принаймні один корінь. Похідна
І' (х) = х* + І > 0, де х Є (—оо; +оо), тому функція зростає на всій області
визначення. Отже, більше одного дійсного кореня дана функція мати не може. •
3. Довести нерівність V х> 0 : 1п (\ 4- х)< * (* + 2) .
2(ж+1)
О Нехай / (ж) = In (1 + х) — * (* + 2) . Оскільки V х > 0 : /' (*) =
(х + 1)»
<0, то функція f(x) на інтервалі (0; + оо) спадає. Отже,
f(x)<f(p)=0=} in (!+*)< *((**f| • •
6.2. Локальний екстремум функції
Точка х0 називається точкою локального максимуму (або мінімуму)
функції / (х), якщо існує такий окіл 0 < І х — х01 <с б точки х0, який
належить області визначення функції, і для всіх х з цього околу
виконується нерівність / (х) < / (х0) (або / \х) >f (хв)). Геометричний
зміст означення зрозумілий з рис. 5.28.
Точки локального (від латинського lokalis — місцевий) максимуму
і локального мінімуму називаються точками локального екстремуму,
а значення функції в цих точках називаються відповідно локальним
максимумом і локальним мінімумом або локальним екстремумом.
З означення випливає, що поняття екстремуму носить локальний
характер в тому розумінні, що нерівність / (х) <; / (х0) (або / (х) >
> / (хо)) може і не виконуватись для всіх значень х з області
визначення функції, але повинна виконуватись лише в деякому околі
точки х0. Отже, не слід плутати локальний максимум з найбільшим
значенням функції (гл. 4, п. 5.3) якого вона може набувати в області
визначення (його називають також абсолютним максимумом).
Локальних максимумів функція може мати кілька, абсолютний максимум
може бути тільки один. Це саме стосується локального і абсолютного
мінімумів. Може статись, що окремий локальний мінімум більший
від деякого локального мак-
^ \ / симуму, тоді як абсолютний
мінімум не перевищує
абсолютного максимуму М
(рис. 5.29). Нарешті,
локальних екстрамумів функція
може досягати тільки у
внутрішніх точках відрізка, тоді
як абсолютні екстремуми мо-
VI
fix)
.і—
Рис. 5,28
W
X
Хв-ії пв Xgtf х
248
жуть знаходитись і в крайніх його точках. З'ясуємо умови
існування локального екстремуму.
Теорема 1 (необхідна умова локального екстремуму). Якиїр
функція f (х) має в точці х0 локальний екстремум і диференційовна в цій
точці, то f (х0) = 0.
О Оскільки за умовою х0 — точка локального екстремуму, то
існує інтервал (х0 — б; х0 + б), в якому значення / (х0) найбільше
або найменше. Тоді за теоремою Ферма /' (х0) = 0. •
Теорема 1 має такий геометричний зміст (рис. 5.29). Якщо точки
*!, х2, х3, х4 — точки локального екстремуму і у відповідних точках
графіка існують невертикальні дотичні, то ці дотичні паралельні осі Ох.
Умова /' (х0) = 0 є необхідною але не достатньою для того, щоб
диференційовна в точці х0 функція мала локальний екстремум.
Це означає, що не всяка точка х0, в якій /' (Xq) = 0, є
екстремальною точкою. Наприклад, функція у = ха (рис. 5.8) має похідну
у = Зх2, що дорівнює нулю в точці х = 0, але не має в цій точці
екстремуму.
Досі розглядались функції, які в точках екстремуму мають
похідну. Проте існують функції, які в точках екстремуму не мають
похідної. Наприклад, функція у = \х\ (рис. 4.3) має в точці х = 0
мінімум, але не має в цій точці похідної. Це зовсім не означає, що кожна
точка, в якій функція не має похідної, обов'язково є точкою
екстремуму. Наприклад, функціям/ = у/Лх(рис.4.9> є) недиференційовна
в точці х = 0 і не має в цій точці екстремуму.
Таким чином, повну необхідну умову локального екстремуму
можна сформулювати так: якщо функція має в точці локальний екстремум,
то ця точка є критичною. Обернене твердження невірне: не всяка
критична точка функції є її екстремальною точкою.
Іншими словами, точки локального екстремуму можуть бути по-
перше, серед точок, в яких /' (х) = 0, і, по-друге, серед точок, в яких
/' (х) не існує.
У зв'язку з цим критичні точки іноді називають точками
можливого екстремуму.
Рис. 5.29
Рис. 5.30
249
Розглянемо критерії, які дають змогу із множини критичних точок
виділити точки максимуму і мінімуму.
Теорема 2 (перша достатня умова локального екстремуму). Нехай
х0 — критична точка функції f (х), яка в цій точці неперервна, і нехай
існує окіл (х0 — б; х0 + б) точки х0, в якому функція має похідну f (x)
крім, можливо, точки х0, тоді:
1) якщо в інтервалі (х0 — 6; х0) похідна f (х) > 0, а в інтервалі
(х0\ х0 + б) похідна f (х) <; 0, то х0 є точкою локального максимуму
функції f (х);
2) якщо в інтервалі (х0 — 6; х0) похідна /' (х) <Z 0, а в інтервалі
(х0; х0 + б) похідна /' (х) > 0, то х0 в точкою локального мінімуму
функції f (х);
3) якщо в обох інтервалах (х0 — 6; х0) і (х0; х0 + 6) похідна f (x)
має той самий знак, то х0 не є екстремальною точкою функції f (х).
Можна ще сказати так: якщо при переході зліва направо через
критичну точку х0 знак похідної /' (х) змінюється з плюса на мінус,
то х0 — точка локального максимуму; якщо знак похідної f (x)
змінюється з мінуса на плюс, тох0 — точка локального мінімуму; якщо
похідна не змінює знак, то в точці х0 екстремум відсутній.
Геометричний зміст теореми 2 ілюструє рис. Б.ЗО.
О Нехай для деякого 6 >0 виконуються умови: V х Є (х„ —
- 6; х0) : /' (х) > 0; V х Є fe *о +"« : /' М < 0.
Тоді на інтервалі (х„ — 6; *о) функція f (х) зростає і / (х) < / (х0)
для всіх х з цього інтервалу, а на інтервалі (х0; х0 — 6) функція / (я)
спадає і / (х) < / (х„) для всіх х з цього інтервалу.
Отже, існує окіл (х0 — 6; х0 + 6) точки х0 такий, що Vx 6 (х0 —
— 6; х0 — 6) \{xtf} : / (х) </ (х0), а це й означає, що х0 — точка
локального максимуму функції.
Випадки 1) і 3) доводяться аналогічно. •
З теорем 1 і 2 випливає таке правило дослідження функції на
екстремум: щоб знайти локальні екстремуми функції / (х), треба:
1) знайти критичні точки функції / (х). Для цього слід розв'язати
рівняння /' (х) = 0 і серед його розв'язків вибрати тільки ті дійсні
корені, які є внутрішніми точками області існування функції; внайти
точки, в яких похідна /' (х) не існує;
2) якщо критичних точок функція не має, то вона не має
і екстремумів. Якщо критичні точки є, то треба дослідити знак
похідної в кожному з інтервалів, на які розбивається область
існування цими критичними точками. Для цього достатньо визначити
знак похідної в якій-небудь одній точці інтервалу, оскільки похідна
може змінити знак лише при переході через критичну точку;
3) за зміною знака /' (х) при переході через критичні точки зліва
направо визначити точки максимумів та мінімумів і обчислити
значення функції / (х) в цих точках. Результати дослідження доцільно
звести в таблицю.
250
Приклад
Знайти локальні екстремуми функції / (х) = у/'хї'е*.
О Область визначення (—то; +оо). Знаходимо похідну f (x) = ~*~ ех.
2 2
Похідна /' (х) дорівнює нулю при х = — — - і ие існує при х = 0. Отжеxt= ,
о З
*а = 0 — критичні точки даної функції. Складаємо таблицю (символами S1 та \
умовно позначається відповідно зростання і спадання функції на інтервалі).
При цьому скористаємось тим, що
/'(-і)>о. /'(--Lj<o,/'(i)>o, /(-_|_j =|/"-l_«о,4, по)=о.
Таблиця
X
fix)
Н~і)
+
2
3
0
«0,4
max
(0: +оо)
\
оо
0
min
+
S
Отже, Ху = — -Q- — точка локального максимуму, утах « 0,4; *2 = 0 — точка
локального мінімуму, ут1п = 0. •
Теорема3 (друга достатня умова локального екстремуму). Нехай
х0 — стаціонарна точка функції f (х), тобто f (x0) =0, і в околі
точки х0 існує друга неперервна похідна, причому f" (x0) Ф 0. Якщо
Ґ (*b) > 0, то х0 — точка локального мінімуму; якщо /" (х0) <; 0, то
х0 — точка локального максимуму.
Приклад
Знайти локальні екстремуми функції
/(*) =
х>
. х2 + 2х— 3.
О Область визначення (—оо; +оо). Похідна f (х) = х2 — Зх + 2.
Розв'язуємо рівняння / (х) = 0:
х" — Зх + 2 = 0, х1 = 1, Хі = 2.
Звідси дістаємо стаціонарні точки: хі = І, ха = 2. Точок, в яких похідна /' (х) не
існує, немає. Отже, стаціонарні точки є єдиними критичними точками даної функції,
тому можна знайти екстремуми за другою достатньою умовою: оскільки /" (х) = 2х —
— З і f (І) < 0, то X! = І — точка локального максимуму, Утах = f (І) = — -=-:
7
/" (2) > 0, тому хг — точка локального мінімуму, ymln = / (2) = — -—. •
о
251
Як бачимо, дослідження функції на екстремум за другою
достатньою умовою простіше, ніж за першою. Однак ця умова застосовна до
вужчого класу функцій. її не можна використати для дослідження тих
критичних точок, в яких перша похідна не існує, а також до тих
стаціонарних точок, в яких друга похідна дорівнює нулю.
Проте іноді той випадок, коли в стаціонарній точці друга похідна
дорівнює нулю, можна дослідити, застосувавши таку теорему.
Теорема 4 (третя достатня умова локального екстремуму). Нехай
в околі стаціонарної точки х0 існує неперервна похідна /(п) (х), причо-
муі{п){х0)фв,
П*о) = /"(*„)= ••• =Г-1)(*о>=0. (74)
Тоді:
1) якщо п — парне і /(П) (х„) < 0, то f (x) має в х0 локальний
максимум:
2) якщо п — парне і f (х„) > 0, то f (x) має в х0 локальний мінімум:
3) якщо п — непарне, то f (x) в х0 локального екстремуму не має.
О Скориставшись формулою Тейлора і взявши до уваги рівності
(74), дістанемо
f{x)-f{xD)=-^-{x-x0)n,
де с лежить між х та х0.
Внаслідок неперервності похідної /(п) (х) робимо висновок, що
існує 6-окіл точки х0, в якому числа /(п) (с) і /<n) (х0) мають однакові
знаки. Тому залишковий член у попередній рівності матиме знак
/<П) (*о). як ПРИ х < хо> так ' ПРИ х ^* *о. якщо число п парне, і
набуватиме двох значень, протилежних за знаком, якщо п непарне,
тобто f (х) — / (х„) <; 0 при /(п) (х0) < 0 і п парному означає, що
х0 — точка локального максимуму; f (х) — / {х0) 2> 0 при / ' (х0) >
> 0 і п — парному означає, що х0 — точка локального мінімуму;
різниця / (х) — / {xj) при /'"' (х0) ф 0 і п непарному має різні
знаки на інтервалах (х0 — 6; х0) та (х0; х0 + 6), тому х0 не є
екстремальною точкою для функції / (х). •
Зазначимо, що теорема 2 є окремим випадком доведеної теореми
і випливає з останньої, якщо покласти п = 2.
Приклад
Дослідити на екстремум в точці х = 0 функцію
/ (х) = є* + е~х + 2 cos х.
О Маємо
f (х) =е* — е_дг — 2sinx, /'(0) = 0;
Г(х)=ех + еГх — 2 cos ж, Г(0) = 0;
252
/"(*)= є* — e-* + 2sin*. Г(0)=0;
/<4) (х) = є* + є-* + 2 cos х, ?4) (0) = 4 > 0.
Отже, задана функція в точці х — 0 має локальний мінімум.
6.3. Найбільше і найменше значення функції
Розглянемо спочатку випадок, коли функція / (х) неперервна на
відрізку [а; Ь]. Як відомо (гл. 4, п. 5.3), така функція досягає своїх
найбільшого і найменшого значень, які називають також
абсолютними екстремумами функції на цьому відрізку і позначають
відповідно М = max / {х), т = min f (x).
Зрозуміло, що для точки х0, де функція досягає найбільшого
значення, може бути лише три можливості:
а) х0 = а, б) х0 Є (а; в), в) х0 = Ь. Якщо х0 6 (а; Ь), то точку х0
потрібно шукати серед критичних точок даної функції. Те саме можна
сказати і про точку, в якій функція набуває найменшого значення.
Отже, щоб знайти найбільше (найменше) значення функції / (х),
яка неперервна на відрізку [а; Ь], треба:
1) знайти критичні точки функції / {х), які належать інтервалу
(а: Ь)\
2) обчислити значення функції / (х) у знайдених критичних
точках і точках а та Ь і серед цих значень вибрати найбільше (найменше).
Нехай тепер функція / (х) неперервна в інтервалі (а; Ь). Така
функція може й не мати абсолютних екстремумів. Про наявність їх
судять з поводження даної функції на кінцях інтервалу (обчислюючи
lim / (x), lim/ (x)) та значення f (x) в критичних точках, які нале-
х->а+0 х-*Ь—0
жать інтервалу (а; Ь).
При розв'язуванні практичних задач буває наперед відомо, що
функція має лише абсолютний максимум або лише абсолютний
мінімум, який досягається у внутрішній точці, відрізка [а; Ь]. Тоді задача
зводиться до знаходження критичних точок, які належать (а; Ь).
Якщо виявиться, що така точка єдина, то вона й буде точкою
абсолютного екстремуму.
Приклади
1. Знайти найбільше і найменше значення функції / (х) — х* — 8дс2 на відрізку
[-1; зі.
О Знаходимо критичні точки заданої функції. Маємо f {х) = 4х3 — Ібх, 4ж* —
— 16* = 0 => *і = —2, хг =0, х3 = 2.
Відрізку [—1, 3] належать точки хг = 0 та х3 = 2. Обчислюємо значення
функцій в цих точках і иа кінцях відрізка:'
f(-D = -7, /(0)=0; Г(2) = -16, /(3)=9.
Отже,
М= max f (х) =9. т= min f (x) =—16. •
—1«*«з —і s*^3
253
2. Завод А потрібно з'єднати шосейною дорогою з прямолінійною залізничною
колією, на якій розміщено місто В. Відстань АС до залізничної колії дорівнює а,
відстань СВ по залізничній колії — /. Вартість перевезень вагової одиниці вантажу
на одиницю відстані дорівнює а — залізницею і Р — по шосе. Як провести шосе
AM до залізниці, щоб вартість перевезень від заводу до міста В була найменшою?
О Вартість у перевезень одиниці вантажу при довільному положенні точки Лі
(рис. 5.31) дорівнює
у = а(1 — х)+$Ух* + а\ 0<х</.
Маємо
Р* / х _а_\
Якщо а ^ Р, то похідна ух зберігає знак мінус, не перетворюючись взагалі в нуль.
Функція у спадає із зростанням х від 0 До П очевидно, що набуває свого найменшого
значення при х = І. У цьому випадку шосе треба починати безпосередньо від міста
В, причому
Якщо а < р, то похідна у'х має єдиний корінь
аа
При хв ^ / цей корінь лежить зовні допустимого для х проміжку або на кінці його,
так що всередині проміжку похідна ух < 0 і ми приходимо до уже розглянутого
випадку. Лише коли а < Р і х0 < / значення х0 визначає положення точки М між В
та С, при якому витрати на перевезення будуть найменшими:
J'ml„=J'|x=x0 = «' + °lAFr^- •
3. З круглої колоди діаметра d треба вирізати стояк, який має прямокутний
переріз і може сприймати найбільше навантаження. Якими повинні бути розміри
стояка?
О Оскільки стояк є елементом конструкції, що працює на стиск, то вій
сприйматиме найбільшу нагрузкутоді, коли площа його поперечного перерізу буде
найбільшою. Таким чином, задача зводиться до визначення прямокутника найбільшої
площі, який можна вписати в круг діаметра d (рис. 5.32). Нехай х і у — сторони
шуканого прямокутника, тоді у = Vd* — ж2, тому площа прямокутника S = S {х) =■
= х Vd2 — Xі, 0 < х < d. Далі маємо
d2 — 2ха . х(2х* — 3d»)
S'(*>= ,,,. ..л/2 : «*(*) = • -•
(di~x2)ili
d
S' (x) = 0 при х = ± —ї= і не існує при х ■
(d2 — ж2)3/2
±d.
М л С
Рис. 5.31
Рис. 5.32
254
Оскільки функція 5 (х) визначена на Інтервалі (0; d), то вона має єдину
критичну точку х =» —т=-. У цій точці S (х) досягає максимуму, тому що S" [~г=) < 0.
A d2
При цьому у ■= _—r, S = —— Отже, найбільше навантаження сприймає квад-
ратний стояк із стороною перерізу, рівною dfY^U. •
4. У чашку, яка має форму півкулі радіуса г (рис. 5.33), опущено однорідний-
стержень АВ довжини /, 2г < 1< Аг. Знайти положення рівноваги стержня.
О Положенню рівноваги сте"ржня відповідає мінімальне значення його
потенціальної енергії, тобто найнижче положення центра його тяжіння О (оскільки
стержень однорідний, то центр тяжіння збігається з його серединою). Позначивши через
ОК перпендикуляр до площини KL, на якій стоїть чашка, зведемо задачу до
знаходження такого кута а — (АВ, ОС) = (АВ, КЦ = (ED, АВ), при якому відрізок
ОК має мінімальну довжину.
Враховуючи, що ED = 2г, АО = ОВ = —-, з Д EAD маємо AD = 2r cos a,
тому 0D = 2r cos а —* Крім того, DC = г — ОК, тоді з Д DCO дістаємо
DC r—OK
8ВІДКИ
2r cos а — ——
2
OK = f(a)=r + J-slna — rsm2a, 0<а<Л-
Тепер залишається знайти те значення кута а, при якому функція / (а) має
мінімум. Оскільки
/' (а) = —- cos а — 2г cos 2а = __ cos а + 2г — 4r cos2 a,
то критичні точки функції / (а) знаходимо з рівняння
4т cos2 a — cos a — 2r = 0.
2
За умовою задачі cos a > 0, тому функція f (a) має лише одну критичну точку:
/ + |А/2 + І28г2
cos a„ = —^r "^
ЇЬг
Знайдений кут ос0 нахилу стержня до площини, на якій стоїть чашка,
відповідає положенню рівноваги стержня, тому що, як неважко упевнитись,
f(cto)= slnao Yl*+ 128/-'>0. •
С. Визначити розміри консервної байки об'єму V, при яких на її
виготовлення піде найменше матеріалу.
О Нехай банка має форму циліндра з радіусом основи т і висотою h. Тоді
повна поверхня банки дорівнює
S = 2л/-2 -f- 2nrh.
255
Оскільки об'єм банки відомий:
V = nr2h, то h = .
яг*
тому
S = S(r) = 2л/-2 + 2л/-.
(-4-Й-
Знайдемо найменше значення функції S (/•):
dS _„/„_. V \ dS
d/-
„.-2(2я+Яи>о-
І2лг
d2S
dr*
Отже, при г = г0 функція S (/-) має мінімум. Це значення найменше на проміжку
(0; +<»), оскільки lim S (г) = оо і lim S (/•) = оо.
Обчислимо висоту
h = _L_ = 2yz_ = 2,.
л/2 У 2л
Таким чином, для того щоб при заданому об'ємі циліндрична банка мала найменшу
повну поверхню, її висота має дорівнювати діаметру.
Аналогічно розв'язується задача, коли банка має форму прямокутного
паралелепіпеда, ф
6. Посудина з вертикальною стінкою висотою h стоїть на горизонтальній
площині (рис. 5.34). На якій глибині треба розмістити отвір, щоб дальність вильоту
води з отвору була найбільшою (швидкість рідини, що витікає, за законом Торрі-
челлі дорівнює |^2g*, де х — глибина розміщення отвору; g — прискорення
вільного падіння)?
О Позначимо через Н відстань отвору в посудині від горизонтальної площини,
а через 1= ОА — дальність вильоту. Тоді / = vt =\f 2gxt, де t — час вильоту води
з отвору иа площину. З курсу фізики відомо, що
Н:
gt2
, звідки t = Y 2(h-*> , (Я = h -х).
тобто
l=l(x)=V2gx]/r 2(h — *) =2Vx(h— x), 0<x<h.
256
Далі маємо
V (х) =
■2х
\x(h-x)
І' (х) = 0 при х = _
Оскільки функція / (х) має тільки одну критичну точку х = -я-, а за умовою задачі
існує таке положення отвору, при якому дальність вильоту найбільша, то ця
критична точка і є шуканою. •
7. З круга радіуса R потрібно вирізати сектор так, щоб з нього можна було
виготовити конусоподібний фільтр з максимальним об'ємом.
О Нехай х — кут вирізаного сектора (рис. 5.35). При х -*■ 0 1 х -*■ 2л об'єм
конуса У -*■ 0, тому на проміжку (0; 2л) існує таке значення х, при якому цей об'єм
найбільший.
При склеюванні сектора утворюється конус, твірна якого дорівнює R, довжина
кола основи дорівнює Rx, радіус основи г = ■ g , висота
h = fR* — r* = JL- /4л2 - Xі
2л
1 об'єм
V (х)= — nr*h = .
v ' З
24л2
Xі /4л2 — х2, 0<ж<2л.
Знайдемо похідну
dV
dx
dV
dx
■ 0 при jcj = 0, x% = —
*(8я2— 3xs)
/4л2 — *2
2л V%
V*
2л/2
/З
Значення xt та *2 лежать Зовні проміжка (0; 2л), тому функція V (х) має єдину
критичну точку х3. Оскільки на проміжку (0; 2л) функція досягає максимуму, то,
не досліджуючи значення xs, можна стверджувати, що йому відповідатиме
найбільший об'єм. •
8. Пряма / ділить площину на два середовища: / і //. В середовищі / точка
рухається з швидкістю vu а в середовищі // — із швидкістю и2. По якому шляху
має рухатись точка, щоб найшвидше дістатися з точки А середовища / в точку В
середовища //?
О Нехай ААг і ВВі — перпендикуляри до прямої І і АА± = a, BBt = fc, Л1В1 =
■= с (рис. 5.36).
Зрозуміло, що як в середовищі /, так і в середовищі // найкоротший шлях
має бути прямолінійним, але шлях по прямій АВ найкоротшим не буде. Отже,
найкоротший шлях складається з двох прямолінійних відрізків AM і MB, причому
Рис. 5.35
Рис. 5.36
257
точка М 6 /. За незалежну змінну х виберемо абсцису точкн М:х = АХМ і знайдемо
час /, за який рухома точка перейде з точки А в точку В:
i-fM- ш + мв - У^ТГ» | Уь' + (с-х)* _TO<x<.foe.
Vi V2 Vi V2
Знайдемо похідні
f W =
Vi VcP + x2 v2Vb2+(c — x)2
a2 b2
vi (oa + x2)3'2 "*" v2 (b2 + (c — x)2)3'2 '
Рівняння /' (x) = 0 розв'язати не можна (для цього треба мати числові дані
задачі), тому дослідимо його.
Оскільки похідні /' (х) і /" {х) існують при всіх значеннях х і f* (х) > 0, то
похідна /' (х) зростає на всьому проміжку (—оо; +оо) і не може дорівнювати нулю
більше одного разу. Але /' (0) <с 0, а /' (с) > 0, тому рівняння /' (х) — 0 має
єдиний корінь дг0, який лежить між О і с (гл. 4, п. 5.3) і якому відповідає єдиний мі-
німум функції / (х). Абсциси х = 0 і х =■ с відповідають точкам Ах і Вь тому точка
М знаходиться між точками At і Bx.
З'ясуємо геометричний зміст знайденого розв'язку. Абсциса х шуканої точкн
М має задовольняти рівняння /' (х) = 0 або
ViVai + x* vtVb2 + (c—x)2 '
звідки
АіМ = MB або slna = _vi_ _
vxAM v2BM sin P v2
Ми дістали відомий з фізики закон заломлення світла: заломлення світла
відбувається так, наче промінь світла обирає найшвидший шлях з точок одного
середовища в точки другого. Цей результат повністю узгоджується з відомим в оптиці
принципом Ферма: із всіх можливих шляхів, які йдуть з А в В, промінь світла
обирає такий, який він проходить за найменший час. •
9. Нехай в результаті однакових і ретельно проведених експериментів
(спостережень) дістали п різних (у зв'язку з неточністю інструментів) значень величини
х : alt c2, ..., с„.
Найімовірнішим значенням х0 величини х вважатимемо те, при якому сума
квадратів похибок найменша. Знайти це значення.
О Сума квадратів похибок виражається функцією
п
fW==(x-a1)2 + (x-aJ2 + ... +(x-an)2 = '2l(x-at)2,
1—1
тому хв знаходиться з умови найменшого значення цієї функції. Маємо
/'(ж) = 2 2(*-с4), /*(*) = 2п>0.
(—1
Прирівнюючи першу похідну до нуля, знаходимо єдину критичну точку
258
якій відповідає найменше значення функції f (х), оскільки lim f (х) = -f оо. Отже,
Х-»±оо
найімовірнішим значенням величини х буде середнє арифметичне наближених
значень о/. •
10. З кулі радіуса R потрібно виготовити циліндр найбільшого об'єму. Які
його розміри?
О Нехай х і у — висота і діаметр циліндра (рис. 5.37), тоді у = YiR3 — Xа,
тому об'єм циліндра
V = V(x) = nR2x-
пх*
, 0<x<2R.
Оскільки V (х) > 0 і при * -•- 0 та х -*■ 2R значення V (х) -»- 0, то існують такі
розміри циліндра, при яких його об'єм буде максимальним.
Далі маємо
V (х) = JiR2 — — пх2, 0<x<2R.
4
2Я/3
На інтервалі (0; 2R) похідна V (х) = 0 лише в точці х = —5—. Т0МУ циліндр
2RV!
матиме найбільший об єм, коли його висота х — —н—• При цьому
.-/^-(JsyLf-SBp..
Отже, шуканий діаметр циліндра має дорівнювати його висоті. •
11. Нехай електрична лампочка рухається вздовж вертикальної прямої ОБ
(рис. 5.38). На якій висоті від горизонтальної площини треба розмістити лампочку,
щоб в даній точці А площини (ОА = а) освітленість була найбільшою.
sin «р
О 3 фізики відомо, що освітленість/ визначається законом / = k 2 ■ Де ^ —
коефіцієнт пропорційності, який залежить від сили світла лампочки; г = ВА —
відстань від лампочки до точки А.
х
Нехай шукана висота ОВ — х, тоді sin <р = —— , тому / = / (х) =
kx
з/2 • причому за змістом задачі дг£(0; + оо). Маємо /' (ж) =
k (а2 — 2*2) „ а
{х2 + а2)
не має.
. Інших критичних точок функція / (х)
259
Оскільки в інтервалі (0; -f-°°) лежить лише одна критична точка ж, = —— f за
умовою задачі існує положення лампочки, при якому освітленість в точці А
найбільша, то шукана висота ОВ = -JL_.
V2
Якби в даній задачі потрібно було ще з'ясувати, чи існує положення лампочки,
при якому освітленість найбільша, то треба було б далі перевірити, що
/"(_^")<0- ;(~Т^г)>0' "т'(*)= Нт/(ж) = 0. •
V У 2 / V > 2 / х->о х-н-оо
12. Газова суміш містить оксид азоту і кисню. Знайти концентрацію кисню,
при якій оксид азоту, який є в суміші, окислятиметься з максимальною
швидкістю.
О Швидкість реакції 2NO -f- 02 = 2N02 виражається формулою v — kx*y, де
х — концентрація NO в будь-який момент часу; у — концентрація Оа; k — стала
швидкості реакції, що не залежить від концентрації реагуючих компонентів, а
залежить лише від температури.
Якщо концентрації газів виразити в об'ємних процентах, то у = 100 — х І v =»
= fexa(100 — х). Далі маємо
vx = k(20Ox — З*2).
Оскільки кфО, то v'x = 0 ПРИ *і = 0 і х» =
З '
<Ро d*v I d*v І
-Sr = ft(200-6x);-S?-Ljti>O: -^L=Xf<0-
Отже, при х = 0 швидкість окислення мінімальна, а при х = _- — максимальна,
о
тобто швидкість окислення оксиду азоту буде максимальною, коли газова суміш
міститиме f/ = 100 — ^- » 33,3 % кисню. •
6.4. Опуклість і вгнутість кривих. Точки перегину
Крива у — f {х) називається опуклою на інтервалі, якщо всі її
точки, крім точки дотику, лежать нижче довільної її дотичної на цьому
інтервалі.
Крива у = / (х) називається вгнутою на інтервалі, якщо всі її
точки, крім точки дотику, лежать вище довільної її дотичної на цьому
інтервалі.
Точкою перегину називається така
точка кривої, яка відділяє її опуклу
частину від вгнутої.
На рис. 5.39 крива у = f (х) опукла
на інтервалі (а; Ь), вгнуїа на інтервалі
(6; с) і точка В (b\ f (6)) — точка
перегину.
Зрозуміло, що в точці перегину до-
260
y*ffa
y-ffr)
а хв х 6
Рис. 5.40
тична перетинає криву, оскільки з одного боку околу цієї точки
графік кривої знаходиться під дотичною, а з другого — над
дотичною.
Позначимо довільну ординату кривої через у, а дотичної — через
Y. Нехай М (х0; (/„) — точка дотику, х0 £ (а; Ь). Тоді означення
опуклості і вгнутості можна записати так: крива у = f (х) опукла
(рис. 5.40) на (а; Ь), якщо
Vx£(a;b), x=£x0:y — Y<0;
крива у = f (х) вгнута (рис. 5.41) на (а; Ь), якщо
У*Є(о;6), хфх0:у~ К>0.
Інтервали опуклості і вгнутості знаходять за допомогою такої
теореми.
Теорема 1. Нехай функція у = f (x) є двічі диференційовною на
(а; Ь), тоді:
1) якиїр f" (х) <с 0, х £ {а; Ь), то крива у = f (х) опукла на (а; Ь);
2) якщо f" (х) > 0, х £ (а; Ь), то крива у = f (х) вгнута на {а; Ь)\
О 3 формули Тейлора і рівняння дотичної маємо
У =/(*„) + Г (*о)(*- *о) + Г(С)(2~'0)2- '
y = f(x0)+f'{xti)(x-x0),
де точка с лежить між х і х0. Віднімаючи почленно ці рівності, діста-
v f (с) (х — jtc)2
немо у — Y — 2 ^— ■
Нехай \/х 6 (о; Ь) : f" (х) < 0. Тоді Ух Є {a; b), x ф х0: у —
— Y < 0, а це й означає, що крива у = f (х) на (а; Ь) опукла.
Аналогічно доводиться теорема для випадку f (х) > 0. #
З теореми 1 випливає, що в точці перегину друга похідна
дорівнює нулю (якщо вона існує). Однак точками перегину кривої у = / (х)
можуть бути також і точки, в яких друга похідна /" (л:) не існує
(наприклад, точка х = 0 кривої / (л:) = Yх).
261
Точки, в яких друга похідна f (х) дорівнює нулю або не існує,
називаються критичними точками другого роду функції/(х). Отже,
якщо х0 — абсциса точки перегину функції / (х), то х0 є критичною
точкою другого роду цієї функції. Обернене твердження неправильне.
Приклади
1. Функція f (х) = х* має другу похідну /" (*) = 12ха, яка дорівнює нулю при
х = 0. Але критична точка, х = 0 не є абсцисою точки перегину даної кривої.
2. Функція у = х3 має критичну точку х = 0, яка є абсцисою точки перегину.
Встановимо достатні умови існування точки перегину.
Теорема 2. Нехай х0 — критична точка другого роду функції f{x).
Якшр при переході через точку х0 похідна f" (х) змінює знак, то точка
(х0; / (х0)) є точкою перегину кривої f (х).
О Нехай, наприклад, існує б-окіл точки х0 такий, що
Vxe(x0-6;x0):f(x)<0;
V*6(*o;*o+6):f (*)>0.
Тоді за теоремою 1 крива у = f(x) опукла на інтервалі (х0 — б; х0)
і вгнута на інтервалі (х0; х0 + б), тобто точка (х0; / (х0)) — точка
перегину.
Якщо похідна /" (х) не змінює знак в б-околі точки х0, то крива
буде в цьому околі або опуклою (при /" (х) < 0), або вгнутою (при
/" (x) > 0). •
Отже, щоб знайти точки перегину кривої, треба знайти критичні
точки другого роду і дослідити зміну знака другої похідної при
переході через ці точки.
Приклади
1. Знайти інтервали опуклості і вгнутості та точки перегину кривих:
а) 1(х) = х* - х + 2; б) / (*) = 2 + (* — 5)5/3.
О а) Область визначення (—оо; -|-оо). Оскільки /" (де) = 20*8 = 0 при х = 0,
то точка х = 0 є критичною точкою другого роду, інших критичних точок ця функція
не має, бо /" (де) існує на всій числовій осі.
Розбиваємо область визначення критичною точкою иа інтервали і досліджуємо
зміну знака другої похідної: якщо х 6 (—°°; 0), то [" (х) ■< 0 — крива опукла:
якщо х 6 (0; +°°). то /"(*)> 0—крива вгнута. Точка (0; 2) — точка перегину
кривої.
б) Область визначення (—оо; -f-oo). Оскільки
10
Г(*)= „з, Ф0
9 у х — 5
і не існує при х = 5, то єдиною критичною точкою другого роду є точка * = 5.
Маємо
V*€ (- оо; 5): Г (х) < 0; V* Є (5; + оо): f" (x) > 0.
Тому крива опукла на інтервалі (—оо; 5) і вгнута на інтервалі (5; -J-oo); точка (5;
2) — точка перегину. •
262
У
/о
а
І
S
ах
У,,
0
ї і
^~9*М
X
!Г*М
І*
Рис. 5.42
У,
0
м
у
№(*)//
У/
ур
/ Q х
//
Х^ 1/^
2. Довести, що верхня частина еліпса —j- -\-
6а
1, 4f>0 опукла (гл. З,
6.3).
О Маємо V*6 (— а; а): у
■ Va* — i
— Ьа
У ='
а ■ ~ (а2 — х2)3/2
Тому верхня частина еліпса є опукла крива (рис. 3.45). •
<0.
6.5. Асимптоти кривої
З поняттям асимптоти ми ознайомились при дослідженні форми
гіперболи (гл. З, п. 6.4). Поширимо це поняття на довільні криві.
Пряма І називається асимптотою кривої, якщо відстань б від
змінної точки М кривої до цієї прямої прямує до нуля, коли точка
М, рухаючись по кривій, віддаляється на нескінченність.
На рис. 5.42 показано.вертикальну (а), горизонтальну (б) і
похилу (в) асимптоти. З означення асимптоти випливає, що для
існування вертикальної асимптоти х = х0 необхідно і достатньо, щоб
lim / (х) = оо, або lim f (x) = оо, або lim / (х) = оо.
*-»Хіі—0 х->хо+0 х->*о
Дійсно, в цьому випадку (рис. 5.42, а)
б=К(х-х0)2 + (/(х)-/(х))2 = |х-х0|-0 при х^х0.
Рівняння похилої асимптоти будемо шукати у вигляді
у = kx -f b. (75)
MP й
Знайдемо k та b. З рис. 5.42, в маємо б = MP, MN = ^— = —?—,
r COS ф COS ф
тому, якщо б -»- 0 при х -*■ оо, то MN -*■ 0, і навпаки. Але MN =
= MQ — NQ = / (х) — (kx + b), тому якщо при х -*- оо пряма (75)
є асимптотою, то
або
lim(/(x) — kx — b) = 0
Jt-yoo
fix)
(76)
limx
x-m»
(-4?--*-4)
263
Тому
lim [Ш- -k Ь~\ = 0, звідки k = lim Ш-. (77)
Ж-»оо \ * Х І Х-»Ов *
Знайшовши k, з рівності (76) дістанемо
b = lim(f(x) — kx). (78)
х-»оо
Отже, якщо існує похила асимптота (75), то k та b знаходяться за
формулами (77) і (78). Навпаки, якщо існують скінченні границі
(77) і (78), то виконується рівність (76), тобто пряма (75) є похилою
асимптотою.
Зауваження 1. Якщо хоча б одна з границь (77) або (78)
не існує, або дорівнює нескінченності, то крива похилої
асимптоти не має.
Зауваження 2. Якщо k = 0, то b = lim / (х), тому у =
= b — рівняння горизонтальної асимптоти (рис. 5.42, б). Оскільки
це рівняння є окремим випадком рівняння (75), то розрізняють не три,
а два види асимптот: вертикальні і невертикальні.
Зауваження 3. Асимптоти кривої у = f (х) при х ->- +оо і
х-> — оо можуть бути різні. Тому при знаходженні асимптот
границі (77) і (78) потрібно обчислювати при х -»- -f оо і при х -v — оо.
Приклад
Знайти асимптоти кривих:
2*а + 5* — 1
а)/(*) = х ' і б)Н*) = *е*.
О а) Знайдемо вертикальні асимптоти. Оскільки / (х) не визначена в точці * = 01
2*2 + 5*^-1 2*2 + 5*+1
lim —\— = +оо, lim = —оо,
я-»—0 * jc-»+0 *
то х = 0 — верти кальна асимптота.
За формулами (77) і (78) шукаємо похилу асимптоту при х -*■ -\-оо:
,. 2*а + 5х+1 „ t , /2ха + 5*+1 п \ г
k= lim '2 =2. b— lim x-—— — 1x =5.
x-»+oo * JT-»+oo \ * /
Пряма у = 2х + 5 є похилою асимптотою даної кривої при х -*■ -f-°°- Неважко
переконатися, що ця пряма є асимптотою і прн х ->■ —оо. Отже, задана крива має
дві асимптоти: х = 0 і // = 2х + 5.
б) Дана крива вертикальних асимптот не має, оскільки не має точок розриву
другого роду.. Далі маємо
k = lim *e = + оо,
JC-H-oo X
264
тому при х-*■-{- оо задана крива асимптоти не має. При * -»- — оо дістаємо
ft= lim JiL_= lim e*=0, b= lim (xex — 0 • *) =
X->—oo X x~*—oo x->—oo
* I °° 1 ,. 1
Отже, при х -»■ —oo крива має асимптоту у = 0. •
lim
■>—оо Є
6.6. Схема дослідження функції та побудова її графіка
Щоб дослідити функцію та побудувати її графік, треба:
1) знайти область існування функції;
2) знайти (якщо це можна) точки перетину графіка з
координатними осями;
3) дослідити функцію на періодичність, парність і непарність;
4) знайти точки розриву та дослідити їх;
5) знайти інтервали мотононності, точки локальних екстремумів
та значення функції в цих точках;
6) знайти інтервали опуклості, вгнутості та точки перегину;
7) знайти асимптоти кривої;
8) побудувати графік функції, враховуючи дослідження, проведені
в п. 1—7.
Якщо графік виявиться не зовсім зрозумілим, потрібно додатково
знайти кілька точок графіка, обчисливши значення функції при певних
значеннях аргументу; бажано також в цих самих точках обчислити
першу похідну, щоб визначити в них напрям дотичної.
Якщо дана функція періодична з періодом Т, то досить
побудувати її графік на відрізку [0; 71, після чого повторити цей графік на
проміжках (пТ; (п + 1) Т), п = ±1, ±2, ...
Якщо функція парна (або непарна), то достатньо побудувати її
графік для х ^ 0, а потім відобразити його симетрично відносно осі
Оу (або відносно початку координат).
Приклад
Дослідити та побудувати графік функції
О 1) Область існування — вся числова вісь, крім точок х = ±1.
2) Якщо х = 0, то у = 0, тому графік перетинає осі координат в точці О (0; 0).
(— х)3 х3
3) Функція не періодична. Оскільки / (— х) = . . »а = — ■ 2 =
— f{x), то функція непарна, тому досліджуватимемо її лише для х^О.
4) Функція в точці х = 1 має розрив другого роду і
lim/ (х) = Т оо.
х-»1±0
265
Б) Похідна
Xі (З — Xs)
Рис. 5.43
У' - (1 _ X2)2
дорівнює нулю при х = 0, х = ± У$ і ие існує в
точках х = ± 1, але останні ие входять в область
визначення, тому критичними точками функції є
ТОЧКИ *! = — \Г§, Хг = 0, *з = |^3.
На інтервалі (0; оо) маємо:
якщо х £ (0; 1), то /' (х) > 0 — функція зростає;
якщо де 6 (1; V$\, то f (х) > 0 — функція зростає;
якщо х 6 (V3; +°°), то У (ж) ■< 0 — функція
спадає; в точці х = |^3 функція має локальний
максимум: утзх = / (Vi) « -2,6.
6) Знаходимо другу похідну:
. їх (Xі + 3)
У - (1 _ ^2)3 •
Похідна /" (х) = 0 при х = 0 і не існує при де = ±1.
Оскільки точки х= ±1 ие входять в область визначення, то х = 0— єдина
критична точка. Маємо:
якщо х 6 (—1; 0). то /" (де) < 0 — крива опукла;
якщо х £ (0; 1), /" (де) >• 0 — крива вгнута;
якщо х 6 (1; -Ь°°), то І* (х) ■< 0 — крива опукла;
точка О (0; 0) — точка перегину.
7) 3 п. 4 випливає, що х = 1 — вертикальна асимптота крішої. Оскільки
J!?. <іД* = - '■ J1?. (-£?-<- 1) *) = 0'
то при x -*- ± оо задана крива має похилу асимптоту у = —х.
8) Враховуючи проведене дослідження і непарність функції, будуємо графік
(рис. 5.43). •
Завдання для самоконтролю
1. Сформулювати і довести достатні умови строгої монотонності функції на
інтервалі.
2. Які точки називаються стаціонарними?
3. Навести приклад функції, у якої критична точка не відділяє інтервали
монотонності, тобто належить інтервалу монотонності.
4. У чому полягає правило знаходження інтервалів монотонності?
5. Знайти інтервали монотонності функцій:
а) / (х) = In {х* + 3); б) / (х) = -j^-p .
6. Що називається точкою локального мінімуму та локальним мінімумом
функції? Чому «локальним»?
7. Що називається локальним екстремумом і чим він відрізняється від
абсолютного екстремуму?
8. Сформулювати і довести необхідні умови локального екстремуму та першу,
другу і третю достатні умови.
9. У чому полягають правила знаходження екстремуму за першою, другою та
тертьою достатніми умовами. Навести приклади.
266
10. Знайти локальні екстремуми функцій:
a) f{x) = xV\ — x*; б) Цх) =
(а:-2) (З-*)
11. Як знайти найбільше та найменше значення функції / (*) на відрізку
[а: Ь]?
12. Довести, що коли х0 — єдина стаціонарна точка функції / (х), х £ (о; Ь),
причому lim / (*) = lim / (х) — 0, f (x0) > 0, то така функція при х = х0 має аб-
х-»а+о х-*ь—о
солютний максимум.
13. Знайти абсолютні екстремуми функції:
у = 3х-х\ *Є[-2; З]-
14. У коиус висотою Н і радіусом R вписати циліндр найбільшого об'єму.
15. Яка крива називається опуклою (вгнутою) на інтервалі?
16. Що називається точкою перегину?
17. Які точки називаються критичними точками другого роду?
18. Чи всяка точка перегину є критичною точкою другого роду? А навпаки?
Навести приклади.
19. Сформулювати і довести достатню умову опуклості (вгнутості) кривої.
Навести приклади.
20. Яка достатня умова того, що критична точка другого роду є абсцисою точки
перегину? Навести приклад.
21. Сформулювати правило знаходження інтервалів опуклості, вгнутості та
точок перегину.
22. Знайти інтервали опуклості та вгнутості і точки перегину кривої у = Здг* —
— 8*3 + 6ха + 12.
23. Що називається асимптотою кривої?
24. Як знайти вертикальну асимптоту? невертикальну?
25. Знайти асимптоти кривої у = 1/
' х — 2
26. У чому полягає загальна схема дослідження функції?
27. Дослідити і побудувати графіки функцій
а) [ (х) ? + 4 ; б) / (*) = \Г х*-2х* .
Xі
Відповіді. 5. а) функція спадає на інтервалі (—оо; 0) і зростає на
інтервалі (0; + то); б) функція зростає на інтервалі (— 1; 1) і спадає на інтер-
Рнс. 5.44
Рио. 5.45
267
валах (-оо; -І) та (І; + ~). 10. а) «,„,,„ = f\ — -p=-j = — —; 4W =■
/ 1 \ 1 / 12 \ 1 Н 2R
= Ч7Т) = "2": б) W = /(—)=-24"- ІЗ- 2: - 18. 14. -з- і -у—
висота і радіус шуканого циліндра. 22. В інтервалах!— °о; -g-J , (1; + оо) крн-
/ 1 \ / 1 335 \
ва вгнута, в інтервалі l-g- ; 1 1— опукла; [-о-; ' 97 1 • ('• '^ — точки
перегину. 25. х=2, {/ = х+1 прн x-*-f-oo; $/ =—х — 1 при х-і—оо.
27. a) 4fmln = f(2) = 3; д; = 0, у= х— асимптоти (рис. 5.44); б) утгх = f (0) =■
/ 4 \ 2
= 0; і/тіп = П_з"І «— 1.1, у = дс—-о-— асимптота, (2; 0) — точка перегину
(рис. 5.4Б).
§ 7. ЗАСТОСУВАННЯ ДИФЕРЕНЦІАЛЬНОГО ЧИСЛЕННЯ
ДО ДЕЯКИХ ЗАДАЧ АЛГЕБРИ, ГЕОМЕТРІЇ,
ТЕОРІЇ НАБЛИЖЕНЬ
7.1. Наближене розв'язування рівнянь
Алгебраїчні рівняння першого та другого степенів (або лінійні та
квадратні рівняння) розв'язуються за формулами, які відомі з
шкільного курсу математики.
Існують формули (так звані формули Кардано) для знаходження
коренів рівняння третього степеня та метод розв'язування рівнянь
четвертого степеня (метод Феррарі). Коли існують формули, які
дають змогу виразити корені рівняння через його коефіцієнти за
допомогою скінченного числа операцій додавання, віднімання, множення,
ділення і добування кореня, то кажуть, що таке рівняння
розв'язується в радикалах.
Майже 300 років вчені намагалися розв'язати в радикалах
рівняння п'ятого степеня, і лише в першій половині 19 ст. Н. Абель і Е. Га-
луа довели, що рівняння вище четвертого степеня в загальному
випадку в радикалах не розв'язуються. Для розв'язування таких
рівнянь застосовують наближені методи. Розглянемо лише ті з них, які
безпосередньо стосуються змісту цієї глави.
Нехай треба розв'язати рівняння
Д*) = 0. (79)
Перед тим як знаходити корені рівняння (79), треба їх відділити,
тобто -визначити такі проміжки (їх називають проміжками ізоляції
кореня), які містять тільки один корінь.
Найпростішим методом ізоляції коренів є графічний. Точки
перетину графіка функції у = / (х) з віссю Ох будуть коренями рівняння
(79). Якщо рівняння (79) можна зобразити у вигляді різниці двох
268
функцій:
/(*) =/і (*)-/•(*) = о,
то /і (х) = /а М> томУ коренями рівняння (79) будуть абсциси точок
перетину кривих у = fl (х) і у = f-t (х).
Приклад
Знайти проміжки ізоляції коренів рівняння
cos х-
■ х -f- 1 = 0.
О Запишемо рівняння у вигляді cos х = х — 1.
Побудувавши графіки функцій Д (х) = cos * та /2 (х) = х — 1, бачимо (рис. 5.46),
шо дане рівняння має єдиний корінь, який лежить на проміжку
ю-
Припустимо, що на відрізку [а, Ь] виконуються такі умови:
1) функція / (х) та її похідні /' (х) і /" (х) неперервні;
2) значення функції на кінцях відрізка мають різні знаки;
3) похідні /' (х) та /" (х) зберігають свої знаки на відрізку
[а; Ь].
Тоді рівняння (79) на (а; Ь) має лише корінь х0, тобто (а; Ь) —
проміжок ізоляції [12] кореня х0. Далі задачу можна розв'язувати
одним з таких методів.
1. Метод «вилки» (метод половинного поділу). Цей метод ми
детально розглядали в гл. 4, п. 5.3, припускаючи, що інтервал ізоляції
наперед відомий.
2. Метод хорд [12]. Припустимо для визначеності, що / (а) < 0,
/ (Ь) > 0 і Vx £ (a; b) : /' (х) > 0. Точку перетину хорди АВ з
віссю Ох позначимо через хх, хх Є {а; х0) (рис. 5.47).
Через точку хг проведемо пряму, паралельну осі Оу, до
перетину з кривою в точці Ах. Сполучивши точки А1 і В хордою, дістанемо
точку х2, х2 Є (хі, х0) і т. д. Можна довести, що ця послідовність
наближених значень {хп} = {х1? х2 хп, ...} прямує до кореня х0.
Аналітичний вираз для
послідовності [хп] одержимо з рівняння хорди уИ
(гл. З, п. 3.1) АВ, яка сполучає точки
A (a; f (а)) і В (Ь;
У-[(а)
f (Ь)ї.
х — а
f(b)-f(a)
Рнс. 5.46
Рнс. 5.47
269
Поклавши у = 0, х = хг, дістанемо
v - п — (Ь—°)/(Д) /от
Число хх називають першим наближенням кореня х0. Обчисливши
значення / (хг), застосовуємо формулу (80) до відрізка [хх; Ь], якщо
/ (*і) < 0 або до відрізка [а; лсх], якщо / (х^ > 0. Дістанемо точніше
друге наближення хг і т. д. Якщо відома точність є, з якою треба
обчислити корінь х0, то процес припиняється, як тільки І хп — хп-\ І <Z
<е.
Приклад
Знайти з точністю до 0,01 корінь рівняння
Xі + х — 1 = 0.
О Нехай / (*) = х3 + х — 1. Оскільки / (0) = —1 < 0, а / (1) = 1 > 0, то на
проміжку (0; 1) є хоча б один корінь. Оскільки V*€ (—оо; -f то): f (х) = Здся +
+ 1 > 0, то крива y=f(x) перетинає вісь Ох лише раз. Отже, (0; 1) — проміжок
ізоляції кореня х0.
Знайдемо перше наближення кореня, поклавши в (80) а = 0, b = І:
(1-щ ■(-!) і
*і - и і _ (_ і) — 2 •
Враховуючи, що M-jj-) = —0,375 <0, /(1)'=1>0, маємо -к-<д(о<1.
Застосувавши формулу (80) до відрізка І тг; І , дістанемо друге наближення
кореня (проміжні обчислення виконуємо а точністю до 0,001):
, ('—а- (-0-375)
** = ~2~ 1 — (0,375) = 0'636-
Оскільки 7 (0,636) = —0,106 < 0, / (1) = 1 > 0, то хв £ (0,636; 1) і формулу (80)
треба застосувати до відрізка [0,636; 1]. Щоб прискорити процес, звузимо цей
відрізок. Обчисливши / (0,7) = 0,043 > 0, дістанемо, що х0 Є (0,636; 0,7).
Застосувавши формулу (80) до відрізка [0,636; 0,7], знайдемо третє наближення
кореня:
л кк (0.7-0.636) (-0,109)
х3 = 0.636 - 0.043-(-0,109) = О'677'
Далі знаходимо f (0,68) = —0,07 < 0, f (0,69) = 0,08 > 0, тому х0 £ (0,68; 0,69)
і s точністю до 0,01 дістаємо наближене значення кореня х0 « 0,68. •
3. Метод дотичних (метод Ньютона). Нехай / (а) < 0,
/(&)>0, VxtiK Ь)іГ(х)>0, Г(х)>0.
Ці умови означають, що функція на кінцях відрізка [а; Ь] набуває
значень, протилежних за знаком, зростає і вгнута (рис. 5.48).
270
Рнс. 5.48
Запишемо рівняння дотичної, що
проходить через точку В і знайдемо точку хх
перетину цієї дотичної з віссю Ох:
У-ї(Ь)=ГФ){х-Ь); ^Ь-Щ-.
(81)
Число х1 вважають першим наближеним
кореня х0. Проводячи після цього дотичну в
точці Bt (хх; f (х^) аналогічно знаходимо друге
наближення кореня х2.
Застосовуючи метод дотичних достатню кількість разів, можна
наближено обчислити корінь з довільною точністю.
Зазначимо, що коли провести дотичну в точці А (рис. 5.49), то
точка х1 не наближається до кореня х0; а віддаляється від нього.
Тому дотичну слід проводити через ту точку, в якій функція і друга
похідна мають однакові знаки.
4. Комбінований метод (рис. 5.50). Застосовуючи на відрізку la,
b] одночасно метод хорд і метод дотичних, знаходимо дві точки
х1 та хІУ що лежать по різні боки від кореня х0, тому х0 £ (хх; х,).
Далі знову застосовуємо метод хорд і метод дотичних, але тепер на
відрізку [Хі, Хх] І Т. Д.
Продовжуємо процес доти, доки не виконуватиметься нерівність
І х„ — хп І < є, де є — задана точність обчислень.
7.2. Інтерполяція функцій. Чисельне диференціювання
Нехай при вивченні деякого явища виявилось, що існує
функціональна залежність між змінними величинами х та у. Функція у —
= f (x) залишається нам невідомою, але внаслідок експерименту
встановлено значення цієї функції у0, ylt .... уп при відповідних
значеннях аргументу х0, хх, ..., хп.
Задача полягає в тому, щоб знайти просту функцію, наприклад
многочлен, який наближено зображував би функцію у = / (х).
Сформулюємо цю задачу точніше.
Нехай на відрізку [а; Ь] задані значення функції у — f (де)
Рис. Б.49
Рис. 5.50
271
У
0
\^J*
III
1 1 1 1
1 | 1 1
Рис. 5.51
\Pn(X)
1
I
1
1 ,
x„ x
в точках a =SC x0 < xt < ... < jc„= 6:
•••./(*п) = Уп-
Треба знайти многочлен n-го степеня
Рп(х)==й0х" + й1хп-1+ ... +
+ q„+iX + а„, (82)
значення якого в точках л:0, хх л:п
збігаються із значеннями функції / (л:), тобто (рис. 5.51)
Pn(xi)=f(xi) = yi, / = 0, 1,2,- ... ,я.
Ця задача називається задачею інтерполяції, многочлен (82) —
інтерполяційним многочленом, а точки х0, xlt ..., хп — вузлами
інтерполяції. Вважаючи інтерполяційний многочлен Рп (х) наближеним
аналітичним виразом для функції у — f (х), тобто / (л:) » Рп (х), ми
можемо знаходити наближені значення функції / (л:) в точках х,
що лежать між вузлами.
Можна показати [5], що задача інтерполяції має єдиний
розв'язок, причому інтерполяційний многочлен має вигляд
Р (у\ — (*—*і) (*— **) • • • (*— *п) ., і
r» W (х0 - х,) (х0 - хг) . . . (х, - хв) У° "•"
і Iх — уо) (■* — *і) ■ • ■ (* — хп) ,. _і_ _і /оо\
(* —*о) (*—*і) ••■ (*—*„_,)
(*п — *о) (*в — *і) ••• (*п — *„-і) У"'
Формула (83) називається інтерполяційною формулою (або
інтерполяційним многочленом) Лагранжа. Зокрема, вона
застосовується в задачі чисельного диференціювання. Ця задача полягає в
тому, щоб за відомою таблицею значень невідомої функції f (x) знайти
значення /' (х). її наближено можна розв'язати так: за
формулою (83) замінити функцію / (л:) інтерполяційним многочленом і
знайти похідну від нього.
Приклад
У точках х0 = 1, хх = 3, хг = 5 відомі значення функції у = f (х) : у0 =» 2,
У\ = ' > 4to = 8- Обчислити наближене значення f (4).
О Маємо
... р . . (х~ *і)(* — *г) , (х —х0)(х —х2)
/ (*) « ^ М - (*0 _ Хі) (*„ _ Ха) У о + {Хі _ ч) {ч _ Хі) Ух +
272
+
(*— *о) (* —*і)
(*2 — Х0)(Х2— Xj)
(*-
+■
(х-3)(*-5)
й- (1—3) (1 —5)
-1)(х-3)
2 +
(х— 1)(х — 5)
(3-1) (3-5)
1 +
(5-1) (5-3)
8.
11
2
тоді /'(х) »2х —
Г(4)«2-4—Т—5". •
7.3. Диференціал довжини дуги
Нехай крива L (рис. 5.52) є графіком функції у = f (x), заданої
на деякому відрізку [а; Ь]. Визначимо довжину дуги кривої.
Візьмемо на кривій L точки М0, Mlt М2, .... М„-\, Мп і сполучимо їх
відрізками. Дістанемо ламану лінію AVMiM2....Mn-iMn> яка вписана
в дугу L. Позначимо периметр цієї ламаної .через Рп.
Якщо існує і не^алежить від способу вписування ламаної
скінченна границя периметра цієї ламаної, коли найбільший її відрізок
прямує до нуля, то крива L називається спрямною, а величина цієї
границі називається довжиною дуги і позначається
/ =
hm
J-
Зафіксуємо на кривій (рис. 5.53) точку М0 (х0; у0), а точку М (х;
у) вважатимемо змінною. Тоді довжина / дуги М0М залежить від
положення точки М і тому є деякою функцією / (х) абсциси цієї точки:
АСм = І (х).
Задачу знаходження функції / (х) ми розглянемо у гл. 7, а тут
знайдемо похідну /' (х) цієї функції.
Надамо х приросту Дх. Тоді дуга / матиме приріст А/ = ММг.
Позначимо через ММх хорду, що стягує цю дугу.
Вважатимемо, що функція у = f (х) та її перша похідна /' (л;)
неперервні на [а; Ь]. Тоді в кожній точці кривої L можна провести
дотичну. Такі криві називають гладкими. Приймемо без доведення
такий геометричний факт: довжини нескінченно малої гладкої дуги
0 лв х х+Дх х
Рнс. 5.53
273
і хорди, що стягує цю дугу, є еквівалентними нескінченно малими
величинами [12], тоді
Д/ ,. MM, ,- MM
/ (х) =1іт-г- = Ііт —^ = h
т
і
Дх->0 Д* Д*-»0 Д* Дх-»0 А*
= lim
- іі?У ■+(-£-)WrTW-
Дж->0 Л*
Для диференціала дуги маємо
dl « /' (л:) dx = ]Л + (у')2 dx, (84)
або
d/ = Vdx2 + dy2.
З останнього виразу випливає геометричний зміст диференціала
дуги (рис. 5.54): dl = МТ, тобто диференціал дуги дорівнює довжині
відповідного відрізка дотичної до кривої в початковій її точці.
Зауважимо, що формула (84) справедлива лише тоді, коли Дл: >
> 0, а якщо Ах <с 0, то dl = —Vdx2 + dy2. Тому в загальному
випадку
\dl\ = Vdx2+dy*. (85)
Якщо крива задана параметрично: х = х (f), у = у (t), то dx =
= х (0 dt, dy = у' (f) dt, тому
\dl\ = V(x'i? + M2dt. (86)
7.4. Кривина плоскої лінії
Однією з особливостей плоскої кривої лінії є її відхилення від
прямої, тобто викривлення лінії. Ступінь відхилення кривої від
прямої або міру викривлення лінії встановлює її кривина.
Розглянемо довільну гладку криву L. Кут а між дотичними до
L в точках А та В називається кутом суміжності дуги АВ (рис. 5.55).
Кут суміжності дає деяке уявлення про
викривлення лінії. Наприклад, якщо дуги
однакової довжини, то більше викривлена
та, у якої кут суміжності більший (рис. 5.56).
Але якщо дуги різні, то один і той самий
кут суміжності може бути у дуг з різним
викривленням (рис. 5.57). Тому для
характеристики викривлення лінії кут
суміжності дуги розраховують на одиницю
х х+Ах л її довжини.
Рис. 5.54 Відношення кута суміжності дуги до
У
Ту
І 1
1 і
274
Рис. 5.55
Рис. 5.56
Рис. 5.57
її довжини називається середньою кривиною і позначається
Аср = ~rzr ■
АВ
У цій формулі 0 =sC a ^ п, тому середня кривина завжди невід'ємна.
Кривиною К, кривої в точці А називається границя (скінченна чи
нескінченна) середньої кривини при прямуванні кінцевої точки В
до початкової точки А:
К = lim /Сер = Hm -^r-.
В-+А В-*А АВ
Радіусом R кривини в точці А називається величина, обернена до
кривини:
К '
Д=-
Таким чином, 0 ^ К ^ °о.
Точка С, що лежить на нормалі до кривої L в точці А на відстані
СА
R = -тг від А в бік вгнутості L, називається центром кривини
кривої в точці А (рис. 5.58), а коло з радіусом R і центром С
називається колом кривини.
Геометричне місце у центрів С кривини плоскої кривої L
називається її еволютою. Сама крива L відносно своєї еволюти називається
евольвентою або розгорткою (від evolvo — розгортати).
Виведемо формулу для обчислення кривини. Нехай лінія L задана
функцією у = / {х), що має неперервну другу похідну.
Проведемо дотичні до кривої в точках А (х; f (х)) та В (х + Ах;
f (x -j- Ах)) і позначимо через а та а + Аа кути нахилу цих дотичних
до осі Ох (рис. 5.59), а довжину дуги АВ — через А/. Тоді за
означенням кривина в точці А дорівнює
„ ,. Аа .. І да І І da І «* І °41
К= І1Щ-ЗГ- = lim -г-р = —тг = —— = г =г ■
275
4W
Рис. 5.58
Оскільки у' = tga, то a=arctg#', тому ос.
1 + (У')2 '
отже,
к =
1
(l + to')2)3/2l
(87)
1 + fo')2 VX+WV
За формулою (87) кривина лінії в деякій точці визначається як
функція абсциси цієї точки. Якщо рівняння лінії задано в
параметричній формі:
х = х (t), у =у (t),
то згідно з формулами (87) і (42)
y"ttx't — У At
К =
((*/)* + (f,)2)
2\3/2
(88)
Приклад
Знайти кривину: а) прямої лінії у = ах + b у будь-якій точці; б) параболи у =
«= *2 у її вершині; а) кола х = R cos t, у = R sin / в довільній його точці.
О а) {/' = а, {/" "= 0, тому за формулою (87) К = 0.
Таким чином, пряма є лінія нульової кривини. Це цілком узгоджується з нашим
безпосереднім уявленням про пряму як невикривлену лінію.
2 І
б) у' = 2х, у" = 2, К= а , ,„
(1 -f-4*2)3/2 _
зокрема, крнвина параболи у її вершині К '= 2,
в) Х{ — — R sin t, У( = R cos /,
xtt = — R cos /, уtt = — Я sin /,
тому за формулою (88) знаходимо
(— R sin /) (— R sin 0
K =
R cos / (— R cos /)
[(— tf sin 0a + (tf cos/)2]3'2
Такий самий результат дістаємо з означення:
_1_
R
К = lim .
= lim .
дд Ь-+А #«
R
Отже, кривина кола в довільній його точці є величиною сталою і оберненою до
радіуса кола. Це також цілком зрозуміло геометрично (рис. 5.60): із збільшенням
276
У
0
{-
V "% у/
J^_^M(x;y;
/ х
Рис. 5.60
Рис. 5.61
радіуса кола його викривлення зменшується Коли радіус кола стає нескінченно
великим, то крнвина останнього стає нескінченно малою, тобто коло «перетворюється»
на пряму лінію. #
Наведемо ще деякі факти, пов'язані з кривиною. Координати
| та т| центра кривини С (g; tj) кривої у = f (x) в точці А (х; у)
знаходять за формулами [24]:
1 = х-
»' (і + (у'У)
Ч = У +
і + (у')2
(89)
Практичне значення їх полягає в тому, що вони дають змогу
будувати кола кривини для довільної точки А (х; у) заданої кривої.
Поблизу точки А дана лінія L прилягає до свого кола кривини
щільніше, ніж до дотичної (рис 5.61). Зокрема, малу дугу кривої,
що містить точку А, можна замінити дугою кола кривини в цій точці
з меншою помилкою, ніж при заміні її відрізком дотичної (п. 7.3).
Знаючи рівняння у = / (х) кривої L, за формулами (89) можна
знайти координати центра кривини залежно від абсциси х, тобто можна
дістати параметричні рівняння еволюти у : g = £ (х), т] = т] (х).
Приклад
Xі
Знайти рівняння еволюти параболи у = -к~.
О Підставляючи значення похідних у' = х, у" — 1 заданої функції у формули
(89), дістанемо параметричні рівняння еволюти
З
І = — X3, Г):
!+1-
Виключивши з цих рівнянь параметр х, дістанемо
Iа =^-(ч-і)3.
Xі
Отже, еволютою параболи у = —к~ є напівкубічна парабола (рис. 5.62). #
Сформулюємо основні властивості еволюти та евольвенти [24]
277
Рис. 5.62
1°. Якщо А — довільна точка евольвенти L, аС — відповідна точки
еволюти у, то пряма АС — є нормаллю до евольвенти L в точці А
і дотичною до еволюти у в точці С (рис. 5.63).
2°. Якщо точка А рухається по евольвенті, то зміна радіуса
кривини дорівнює довжині дуги еволюти між відповідними центрами
кривини (рис. 5.63):
З цих властивостей випливає, що евольвента утворюється
внаслідок розгортання (змотування) натягнутої нитки з контура (звідси
термін «розгортка»), що має форму еволюти (рис. 5.64). Ця операція
розгортання нитки рівнозначна коченню без ковзання прямої лінії
по даній еволюті у; кожна точка такої прямої опише певну
евольвенту.
Звідси зрозуміло, що задана еволюта у має безліч евольвент L.
У той самий час кожна задана лінія L, що розглядається як
евольвента, має лише одну еволюту у. Особливо важливе значення мають
евольвенти для теорії механізмів. Зокрема, профілі переважної
більшості зубців у зубчастих колесах окреслені з боків дугами
евольвенти кола, а евольвентне зачеплення зубчастих коліс є одним з
найпоширеніших і найнадійніших.
7.5. Вектор-функція скалярного аргументу. Дотична пряма і
нормальна площина до кривої в просторі. Застосування у механіці
Відомо, що лінія в просторі може бути задана параметричними
рівняннями
х = х (0, у = у (t), z = 2 (ft, t £ [fi; у. (90)
Кожному значенню параметра t0 £ [^; t2] відповідає певна точка
М (х (/„); у (t0); z (to)) простору. При зміні параметра t точка М описує
в просторі деяку лінію L. Параметр t часто зручно тлумачити як час.
Приклади
1. Рівняння x=Xp + mf, y=y0-\-nt, z = z0 -f- pt — параметричні
рівняння прямої в просторі.
278
2. Якщо точка М рівномірно рухається по твірній
кругового циліндра із швидкістю V, а сам циліндр
рівномірно обертається навколо своєї осі із
швидкістю <о, то внаслідок накладання цих рухів точка М
описує криву, яка називається гвинтовою лінією (гл. 4).
Нехай задана крива (90). Кожній точці
М (х; у; г) цієї кривої відповідає її радіус- —-,
вектор г = ОМ = хі -f у'] + zk. Отже, кож- ^х
ному значенню t £ \t^, t2] відповідає (рис. 5.65)
вектор
7(t) = x(t)?+y(t)f+z(f)k.
Рис. Б.65
(91)
Цей вектор називається вектор-функцією скалярного аргументу,
а рівняння (91) — векторним рівнянням Кривої у просторі. Лінія
L, яку описує кінець вектора r (f), називається годографом вектор-
функції r (t).
Якщо радіус-вектор рухомої точки є функція часу, то годографом
цієї функції є траєкторія руху. Рівняння (91) тоді називають
рівнянням руху точки.
Оскільки задання вектор-функції (91) рівнозначне заданню трьох
скалярних функцій (90), то багато відомих нам понять для скалярних
функцій можна перенести і на вектор-функції. Зупинимось на деяких
із цих понять.
Вектор г0 = х0і + y0j + z0k називається границею
вектор-функції r (t) = х (t) і + у (t) J -f 2 (0 k при / -»- t0, якщо
limx(/) = *0, limy(t) = y0, lim2(0=z0.
<-+t„ *-»<„ <-»■<<>
При цьому записують
limr(0 =r0.
f-w„
Вектор-функція г (і) неперервна в точці t0, якщо вона визначена
—» —*
в деякому околі цієї точки і lim r (t) = r (t0).
<-»*„
Нехай L — годограф (рис. 5.65) вектор-функції r (t). Двом
значенням t і t -\- At аргументу відповідають два значення r (t) і
r (t -f At) вектор-функції і відповідні їм радіус-вектори ОМ та ОМх.
—» —» —*
Вектор Аг = r (t + At) — r (t) називається приростом
вектор-функції r (t) в точці t.
279
Похідна т (f) вектор-функції в точці / визначається рівністю
д/->о ш
Виразимо цю похідну через її проекції:
?(Q = lim4Hlim 'V + W-'U =
д/->о at д/-ю ш
Ііт * (< + д0 Н- У Є + ДО 7+ z (/ + ДО fe*- * (Q Г- </ (/) f- z (Q t
Д/-»0 Д'
= Нт х(< + до-,(0 Г ИтП^ + Д0-і/(0 г
Д/->0 А' Л<-*> А'
д<-»о
Д<
Отже, похідну вектор-фукції (91) знаходять за формулою
? (t) = х' (t) 7+у' (t) J+ z' (t) k. (92)
Основні властивості похідної (гл. 4, § 2) переносяться на вектор-
функції. Але зауважимо, що, диференціюючи векторний добуток гг X
—* —>
X г2, треба слідкувати за порядком множників (гл. 2, п. 5.1): (гх X
-* —», —» —* -♦,
X г2)' — Т\ X г2 + гг X г2. Крім того, властивості, зв'язані з
нерівностями, на вектор-функції не поширюються, оскільки вектори не
можна сполучати знаками нерівності.
З'ясуємо напрям вектора (92). Вектор Аг напрямлено по січній
ММ1 (рис. 5.65). Вектор -jt коленіарний вектору Аг і так само
напрямлений по січній MMV Оскільки при At ->- 0 січна, поверта-
ючись навколо точки М, переходить у дотичну, то вектор r (t)
напрямлений по дотичній до кривої L в точці М.
Користуючись цим, напишемо рівняння дотичної до кривої,
заданої рівняннями (90) у точці М0 (х0; у0; z0), яка відповідає параметру
* = '«:
*о = х (/„), у0 = у (t0), z0=z (t0).
Канонічне рівняння цієї дотичної запишеться у вигляді (гл. З,
п. 5.1)
Х — Х0 _ у— у0 _2_— Z„
m n
280
Оскільки напрямний вектор s = (m; n; p) дотичної колінеарний
вектору г' (t0) = x' (t0) і + у' (t0) } + z' (f0) X, то проекції векторів
s і т (t0) пропорційні:
m=Kx'(t0), n = Ky'(t0), p = Kz'(t0),
де К — коефіцієнт пропорційності. Тоді рівняння дотичної до
просторової кривої (90) матимуть вигляд
*'(<„) y'(t0) z'(t0) ■ W
Як і у випадку плоскої кривої, пряма, що перпендикулярна до
дотичної і проходить через точку дотику, називається нормаллю до
просторової кривої в даній точці. Але на відміну від плоскої, до
просторової кривої можна провести безліч нормалей. Всі ці нормалі лежать
в одній площині, яка перпендикулярна до дотичної прямої. Цю
площину називають нормальною площиною. Використовуючи
перпендикулярність нормальної площини і дотичної, дістаємо (гл. З, п. 4.1)
рівняння нормальної площини
х' (10) (х - х0) + у' (О (у - у0) + z' (t0) (z - z0) = 0. (94)
—> —*
Якщо під t розуміти час, то т' {t) означає миттєву швидкість v точки
в момент часу t і ця швидкість напрямлена по дотичній до траєкторії
руху в бік зростання часу t. Вважаючи v функцією від t: v — v (t),
—* -* —* —»
дістанемо v (t) = ш (/) — прискорення руху. Але v' (t) = r" (t),
тому ш (fl =7" (і) =1)' (t).
Приклад
Знайти рівняння дотичної прямої і нормальної площини до гвинтової лінії
„ ,_ 8/ л
х = у 2 cos /, у = У 2 sin t, z = —— у точці /И0, яка відповідає параметру t0 = -г-.
О Знаходимо координати точки М0 (х0; у0; ув):
,_ я ,_ я 8 я
х0 =V2cos-j-= 1, £г0 = V 2 sin -J- = 1, г0=— • -j~ = 2,
я
а також значення похідних при t = -т-:
і' (0 = VI sin t, x' (-J-) = - 1;
у' (()= VIcos/, W-t-)=1;
8 tn 8
281
За формулою (93) дістаємо рівняння дотичної прямої
х— 1 У— 1 г — 2
—1 — 1 — 8/я •
а за формулою (94) — рівняння нормальної площини:
-1 •(х-1) + 1.(і,_1)+-|-(г-2) = 0>
або
пх — пу— 8г + 16 = 0. •
Розглянемо тепер диференціал і кривину просторової кривої.
Оскільки для достатньо малого значення At довжина вектора Аг
мало відрізняється від довжини А/ дуги ММи тобто
пт
Д/-Ю
Аг І І dr
ЬЛ \~\ dl
= 1, то \dr\ = \dl\.
Звідси випливає формула для диференціала дуги кривої в просторі
\dl\ = \dr\ = \d(xi + yf+ zk)\ =
= | dxT+ dyj + dzk\ = Vdx2 + dy2 + dz2.
Отже,
| dl | = Vdx2 + dy* + dz2. (95)
Для кривої (90) маємо
I dl | = V(*'i? +\y'i? + (*i)2 dt. (96)
Формули (95) і (96) аналогічні формулам (85) і (86). Кривину кривої,
заданої векторним рівнянням (91), знаходять за формулою
К=І?(0хГ»(,)| (97)
\r' (01»
Приклад
Обчислити кривину гвинтової лінії
7(1) = (a cos /) Ґ+ (a sin І) ]*+ (М) <Г
у довільній точці.
О Знаходимо похідні
7' (о =—(о sin t) 7+ (о cos o 7+ **;
7" (0 = — (о cos 0 7— (a sin 0 7.
282
Обчислюємо модулі векторного добутку т' (t) X т" (0 та вектора г' (0:
г' (/) х т" (І) = — asin t a cost Ь = (ab sin /) і — (ab cos I) j +
— a cost —a sin/ 0
К (0 X г* (0 І = J^(ab sin 02 + (ab cos 02 + о4 = a Va? + 6а;
|7'(/)| = /амГь5.
За формулою (97) маємо
a Va* + 6а п
гС =
(/e« + fc«)3 а2 + Ьа •
Таким чином, гвинтова лінія має сталу кривину, ф
Розглянемо деякі застосування вектор-функції та її похідних у
механіці.
-* —»
Якщо закон руху матеріальної точки задано функцією т — т (t),
то швидкість руху точки v (і) = г' (<), а Ц прискорення со (/) =
= 7' (0 = 7" (0, де / — час.
Якщо за параметр t взяти довжину / дуги кривої L (рис. 5.65),
—» —* —*
тобто покласти у формулі (92) / = /, то похідна т = т (/) = г' (/) на-
—* —> —*
прямлена по дотичній до L і, як зазначалося, | т | = 1. Тоді т • х =
= 1, (т • т)' = 2т' • т = 0, звідки випливає, що вектор п = т/
перпендикулярний до вектора т.
—»■ —*
Використовуючи вектори т = -тг- і п =—тг> знайдемо з
рівняння (92) прискорення точки:
—* —*
~* dr dr dl — , -*л і і ' /*\ і dl .
v =-dT = -dT--dT-VT' де »-|о(0І = І'- (0І = -зг;
- da7 dv -* . di dv - , dx d/
ш = "Ж- = "5ГТ + ° IF =-dTT + 1' "ЗГ-ЗГ =
da ~* . , di ~* , о-* і "J",, і da
= ~dTT+v -dT=®T + vn< Де (0 = I to (01 = -^- •
Отже, co = ox + a2n.
Це широко відома в механіці формула, яка дає розклад вектора
прискорення на тангенціальну (тобто напрямлену по дотичній) і
нормальну (тобто перпендикулярну до дотичної) складові.
Завдання для самоконтролю
1. Що називається проміжком ізоляцїї кореня? Як його знайти?
2. Які умови того, що інтервал (а; Ь) є проміжком ізоляції?
283
3. Охарактеризуйте основні методи наближеного розв'язування рівнянь: метод
проб, хорд, дотичних, комбінований метод.
4. У чому суть задачі інтерполяції?
5. Записати інтерполяційні многочлени Лагранжа при п, що дорівнює 1, 2, 3.
6. Як визначається довжина дуги?
7. Вивести формулу для диференціала довжини дуги. Який його геометричний
зміст.
8. Що називається кривиною лінії? Радіусом кривини? Центром кривини?
Колом кривини? Еволютою? Евольвентою?
9. Вивести формулу для обчислення кривини лінії у = / (дг).
10. Як знайти центр кривини?
11. Що називається вектор-функцією та її годографом?
12. У чому полягає механічний зміст вектор-функції?
13. Як знайти Еектор-функції?
14. Вивести рівняння дотичної прямої і нормальної площини до просторової
кривої.
15. Як знайти диференціал просторової кривої? Навести приклад.
16. Як знайти кривину просторової кривої?
17. Обчислити з точністю до 0,001 корінь рівняння sin х -(- х — 1 = 0.
18. Відомі значення функції у (х): ух — А при xx = 0; у2 = 6 при дг2 = 1;
у3 = ю при х3 — 2. Написали многочлен Лагранжа для цієї функції.
19. Знайти кривину кривої у = х3 + х2 + 5 у точці А (0; —5).
20. Знайти радіус кривини кривої у = ch x у довільній точці.
21. Знайти центр кривини кривої х = І2, у = 2Р у точці А (1; —2).
22. Знайти рівняння єеолюти еліпса
х = a cos /, у = b sin І.
23. Знайти рівняння дотичної до кривої r (t) = (і + t2j 4- t3k у точці
(3; 9; 27).
24. Знайти кривину кривої т (І) = е'і + є-'/ + Atk при І = 0.
Відповіді. 17. 0,5110<х0< 0,5111; 18. у =. хг + х + 4; 19. 2; 20. ch«x;
а? — Ь2 о2 — &2 х — 1
21. (—3; —10/3); 22. х = cos3/, у = — £ sin3/; 23. —j— =
__у-9__ z-27 .
- 6 - 27 . -ч. і.
Глава 6
ДИФЕРЕНЦІАЛЬНЕ ЧИСЛЕННЯ ФУНКЦІЙ
БАГАТЬОХ ЗМІННИХ
§ 1. ФУНКЦІЯ, її ГРАНИЦЯ ТА НЕПЕРЕРВНІСТЬ
1.1. Функція багатьох змінних. Означення та символіка
Нехай задано множину D упорядкованих пар чисел (х, у).
Якщо кожній парі чисел (х, у) £ D за певним законом відповідає число
z, то кажуть, що на множині D визначено функцію.г від двох
змінних х і у і записують г = / (х, у).
Наведемо такі приклади: а) площу 5 прямокутника із сторонами
о та і) знаходять за формулою 5 = ab. Кожній парі значень а і Ь
284
відповідає єдине значення площі, тобто S — функція двох змінних:
5 = / (а, Ь);
б) за законом Ома електрорушійна сила Е, сила струму / та опір
R замкнутого електричного кола пов'язані співвідношенням Е — IR.
Тут,£ є функцією змінних / та R: Е = f (У, R).
Змінну г називають залежною змінною (функцією), а змінні х
та у — незалежними змінними (аргументами).
Множину пар (х, у) значень х та у, для яких функція z = f (x,
у) визначена, називають областю визначення цієї функції і позначають
D (/) або D.
Множину значень z позначають Е (/) або Е.
Оскільки кожній упорядкованій парі чисел (х, у) відповідає в
прямокутній системі координат Оху єдина точка М {х; у) площини,
що те саме, точка двомірного простору /?2, і,, навпаки, кожній точці
М (х; у) площини відповідає єдина упорядкована пара чисел (х, у),
то функцію z = f (x, у), де (х, у) £ D, можна розглядати як функцію
точки М і замість z = f (х, у) писати z = / (Af). Областю визначення
D сі R2 функції у цьому випадку є деяка множина точок площини
Оху. Зокрема, областю визначення функції може бути вся площина,
або частина площини, обмежена певними лініями.
Значення функції z = / (х, у) в точці М0 (х0; у0) позначають z0=
= / (*о. Уо) або z0 = / (М0), або z = z \Мо.
Лінію, що обмежує область D, називають межею області
визначення. Точки області, які не лежать на її межі, називаються
внутрішніми. Область, яка містить одні внутрішні точки, називається
відкритою. Якщо ж до області визначення належать і всі точки межі, то
така область називається замкненою.
Функція двох змінних, як і функція однієї змінної, може бути
задана різними способами. Ми користуватимемося, як правило,
аналітичним способом, коли функція задається за допомогою формули.
Областю визначення такої функції вважається множина всіх тих точок
площини, для яких задана формула має зміст.
Приклад
Знайти область визначення D та множину Е значень функцій:
а) г = Xі + У2: б) г = /4-х2 — 4#2; в) z = Г .
Уу2 — х
О а) Вираз х2 + У2 існує і невід'ємний для будь-яких значень х та у. Тому
областю визначення D функції г = х2 + У2 є вся площина Оху, а множиною значень —
проміжок Е = [0; +оо).
б) Область D даної функції — множина тих точок (х; у); для яких вираз
У 4 — х2 — Ау2 має зміст, тобто множина точок, для яких 4 — х2 — іу2 ^ 0.
Щоб зобразити область D геометрично, знайдемо її межу 4 — Xі — 4#2 = 0,
х2 у2
або -£- + —р = 1. Це рівняння визначає в площині Оху еліпс з півосями а = 2 та
6=1. Даний еліпс ділить всю площину на дві частини. Для точок однієї з цих
частин 4 — х2 — іу2 > 0, а для другої 4 — х2 — Ау2 < 0.
285
Рис. 6.2
1 = 4 > 0.
Щоб виявити, яка з частин є областю
визначення даної функції, тобто задовольняє
умову 4 — х2 — 4у2 ^ 0, достатньо
перевірити цю умову для якої-небудь однієї точки,
яка не лежить на еліпсі. Наприклад, точка
О (0; 0) належить області D, тому що 4 — 0
Отже, внутрішніми точками області D даної функції є точки, обмежені еліпсом.
Сам еліпс також належить області, тому що для точок еліпса 4 — х2 — Ау2 = 0.
Це замкнена область (рис. 6.1). Множина значень заданої функції — відрізок Е =
= [0; 2].
в) Область визначення D цієї функції визначається з нерівності у2— х > 0.
Межа області (парабола у2 = х) не належить їй, тобто це відкрита область (рис. 6.2).
Множина значень заданої функції — інтервал Е — (0; +°°).
Функцію двох змінних можна зобразити графічно у вигляді
деякої поверхні. Дійсно, нехай функція z = / {х, у) визначена в області
D. Кожній точці (х; y)£D відповідає певне значення функції z =
= /(*. У)-
Графіком функції z = f (x, у) в прямокутній системі Oxyz
називають геометричне місце точок М (х; у; f (x, у)), проекції яких (х; у)
належать області D. Це геометричне місце точок утворює в
тривимірному просторі /?3 певну поверхню (рис. 6.3), проекцією якої на
площину Оху є множина D.
В аналітичній геометрії уже розглядались поверхні, які є
графіками функцій двох змінних. Нагадаємо деякі з них.
Верхня частина сфери х2 + у2 + z2 = R2 є графіком функції
г = Yr* — х^~.
= - VR2 — х-
Еліптичний
(рис. 3.70).
■У
а нижня и
2 (рис. 3.65).
є
частина — графіком функції z =
параболоїд є графіком функції z
_£_ 4- У
„І Т и
Ь2
Гіперболічний параболоїд є графіком функції
6а
(рис. 3.71).
Побудова графіків функцій двох змінних часто пов'язана із
значними труднощами. Тому для зображення функцій двох змінних
користуються методом перерізів (гл. З, § 7), який полягає у тому, що
поверхню z = f (х, у) перетинають площинами х = х0 та у = у0 і за
графіками кривих z = f (х0, у) та z = / {у0, х) визначають графік
функції z = / {х, у) (рис. 6.4).
286
Можна фіксувати не х чи у, а саму функцію z, тобто перетинати
дану поверхню площинами z = с, де с — довільне число, взяте з
множини Е (f) значень даної функції. При цьому одержимо криву / (х,
у) = с, яку називають лінією рівня (або ізокривою) функції. (Термін
«лінія рівня» запозичений з картографії. Там лінії рівня — це лінії,
на яких висота точок земної поверхні над рівнем моря стала.) Інакше
кажучи, лінія рівня на площині Оху — це проекція кривої, яка
утворюється при перетині поверхні z = f{x, у) площиною z = c.
Будуючи лінії рівня для різних значень с, можна дістати певне уявлення
про графік функції двох змінних (рис. 6.5.).
Приклад
Знайти лінії рівня і побудувати графік функції
1
х2 + 2у2
1
О Лінії рівня z = с знайдемо з рівняння 8 » . = с, де с> 0. Маємо
1 х2 у2
х2 + 2у2 =
= 1,
та 6 =
' (VT)' (і/ї
тобто лініями рівня даної функції є еліпси з півосями с=1/ ——
- Y~2T(рис-бб)-
Ми розглянули поняття функції двох змінних. Узагальнимо його
на випадок трьох і більшого числа незалежних змінних.
Нехай D — деяка множина упорядкованих трійок {х, у, z)
дійсних чисел, тобто точок М {х; у; г) тривимірного простору ^3-
Якщо кожній точці (х; у; z) £D за певним законом відповідає
єдине число и, то кажуть, що на множині D визначено функцію W
від трьох змінних х, у і z, і записують и = / (х, у, z) або и = / (М).
287
Рис. 6.5 Рис. 6.6
При цьому змінна и називається залежною змінною (функцією),
х, у, г — незалежними змінними (аргументами), множина D с
сі R3 — областю визначення функції.
Область визначення функції трьох змінних можна геометрично
зобразити у вигляді деякої частини тривимірного аростору. Але саму
функцію и = f(x, у, г) геометрично зобразити вже не можна, тому
що наш простір тривимірний і четверту координатну вісь для значень
и зобразити неможливо.
Поверхнею рівня функції и = / (х, у, г) називають множину всіх
точок {х; у; z) £D (/), для яких задана функція набуває одне й те
саме значення с £ Е (/):
/ (х, у, г) = с (ізоповерхні).
Приклади
1. Областю визначення функції
и = У 1— л2 —і/2—z2
є куля одиничного радіуса з центром у початку координат. Це замкнена область,
тому що їй належать точки сфери х2 + у* + za = 1 — межі області.
Z2
2. Поверхні рівня функції и = - - визначаються рівнянням х2 + у2 —
Z2
— — = 0, де с>0.
Це сім'я конусів з вершиною в точці О (0; 0; 0).
Лінії і поверхні рівня часто зустрічаються на практиці.
Наприклад, сполучивши на карті поверхні Землі точки з однаковою
середньодобовою температурою або з однаковим середньодобовим тиском,
дістанемо відповідно ізотерми та ізобари, які є важливими даними для
прогнозу погоди.
Якщо число п незалежних змінних більше трьох, то їх частіше
позначають однією буквою, але з різними індексами: хи х2, ..., хп.
Функцію и від цих незалежних змінних можна визначити так. Нехай
288
задано множину D упорядкованих систем (jtlt x2, ...; хп) з п чисел
(п £ N), або, що те саме, множину точок М (хц х2; ...; хп) и-вимірного
простору Rn.
Якщо кожній точці (Хі, х2; ...; хп) 6 D за певним законом
відповідає єдине число и, то кажуть, що на множині D визначено функцію и
від п змінних: хи х2, ..., хп і записують
и = f (xlt x , хп), або и = / (М), М 6 Rn-
Область визначення D цієї функції у випадку п ^ 4 геометрично
зобразити не можна.
Надалі розглядатимемо лише функції двох змінних, тому що
результати для функцій двох змінних легко по аналогії узагальнити
на випадок більшого числа змінних-. Крім того, для функції двох
змінних можна дати геометричні ілюстрації.
1.2. Границя функції багатьох змінних
Введемо поняття 6-околу заданої точки М0 (х0; у0) і поняття
збіжної послідовності точок площини.
Множина всіх точок М (х; у), координати яких задовольняють
нерівність р (М; М0) = V(x — x0f + (у — у0)2 < 6, де р (М;
М0) — відстань від точки М до М0, називається 6-околом точки
М0 (х0\ уQ).
Іншими словами, Ь-окіл точки М0 — це всі внутрішні точки круга
з центром М0 радіуса 8 (рис. 6.7).
Розглянемо послідовність точок Мг (хі, уг), Мг (х2; у2), .... Мп (хп;
уп), яку позначимо символом {Мп}. Послідовність точок [Мп\
називається збіжною до точки М0, якщо для довільного числа є > 0
існує номер N — N (є) такий, що при п> N виконується нерівність
р (М\ Мв) < є. При цьому точку М0 називають, границею
послідовності [Мп] і записують так:
1ітМп =М0 або Мп-+М0 при п->-оо.
п-*оо
Якщо Мп (хп; уп) -* М0 (х0; у0) при п -»- оо, то, очевидно, хп -^ х0,
Уп -+ Уо при п -+ оо.
Тепер розглянемо границю функції двох змінних. її означення
аналогічне означенню границі функції однієї змінної (п. 3.4, гл. 4).
Нехай функція z = f {х, у) задана в деякій
області D і точка М0 {х0; у0) 6 D або М„ (х0; у0) £
£ D, але має таку властивість, що в довільному
6-околі цієї точки міститься хоча б одна точка
множини D, відмінна від М0. Число А
називається границею функції z = f (М) в точці М0,
якщо для довільної, збіжної до М0 послідовності
точок Ми М2 Мп, ... {Мп £D, МпФ М0),
відповідна послідовність значень функції Рис. 6.7
289
/ (Mi). / (М^, .... / (Mn), ... збігається до числа А. При цьому
пишуть: lim / (M) = А або lim / (х, у) = А.
М-*МС х-*ха
У+У°
Наведене означення границі функції називають означенням за
Гєйне або означенням «на мові послідовностей».
Дамо еквівалентне означення границі функції за Коші або
означення «на мові є — 6». Число А називається границею функції z —
— ї Ш) в точці М0, якщо для кожного числа є >• 0 знайдеться число
6 > 0 таке, що для всіх точок М (х; у) £ D, які задовольняють умову
0 < р (М; М0) < 6, виконується нерівність | / (М) — А | < є.
Користуючись означенням границі функції двох змінних, можна
перенести основні теореми про границі для функції однієї змінної
(гл. 4, п. 3.7) на функції двох змінних. Наприклад, правильне таке
твердження.
Теорема. Нехай функції f (M) і g (M) визначені на одній і тій
самій множині D і мають в точці М0 границі В і С. Тоді функції
f(M)±g (М), f (M) g (М), -^-. g № ф 0, мають в точці М0
границі, які відповідно дорівнюють В ± С, В • С,-^-, С ф 0.
Функція z = / (М) називається нескінченно малою в -точці М0
(або при М -»- М0), якщо lim / (М) = 0. Якщо функція z = / (М)
має в точці М границю, яка дорівнює А, то функція а (М) = f (M) —
— А є нескінченно малою в точці М0, тому що lim a (M) =
м-*м„
= lim (/ (М) — А) = 0. Звідси випливає, щофункція/ (М) в околі точки
М0 відрізняється від границі А на нескінченно малу функцію.
Приклад
Знайти границі:
Xі -4- у2 Xі U2
,»о у х2 + у2 + 1 — 1 х^о х + У
у-*о »->о
О а) Якщо М (х; у) -* М0 (0; 0), то р {М; Af0) = Ух2 + «/*-► 0, тому
іьп /* + у\ -.,„ p'OWI + 0
«оУї' + к'+і-і Р-*о (/р»+ і -1) (/рип + і,
х* — у2
б) Нехай / (х, у) = х2 . . . Візьмемо дві послідовності точок: [Мп] =
= {(о; -й"))-*0 ' {Я"}=={(-й-: о)}->0прип->оо, тоді
lim/ (Mn) = lim — =—1; Iim/(P„) = Iim —. = 1.
п-*х> n-»oo I n->oo n-»oo 1
u+ n2 ~W+Q
290
Таким чином, двом різним, збіжним до точки (0; 0), послідовностям точок
відповідають дві послідовності значень функції, які мають різні границі. Отже, дана
функція в точці (0; 0) границі ие має. •
Означення границі функції п змінних при п > 2 аналогічне
означенням границі при п = 2, якщо в и-вимірному просторі ввести таке
поняття 6-околу: Ь-околом точки М0 {х°і\ х°; ...; л£) називається
множина всіх точок М (хх; ха; ...; хп), координати яких задовольняють
нерівності
р (М; М0) = V(Xl - хЧ)2 -f (х, - х§* + • • - + (*п - 42 < 6.
Зокрема, в тривимірному просторі R3 б-околом точки М0 (х0;
у0; z0) є множина всіх внутрішніх точок М (х; у; z) кулі з центром у
точці М0 радіуса 6.
1.3. Неперервність функції багатьох змінних
Поняття неперервної функції багатьох змінних вводиться за
допомогою поняття границі.
Нехай функція z = / (М) визначена на множині D, точка М0 6
£ D і довільний 6-окіл точки М0 містить точки множини D.
Функція z = / (М) називається неперервною в точці М0, якщо
lim /Ш) = /(М0). (1)
М-»М„
У випадку функції двох змінних рівність (1) означає, що коли
точка М (х; у), залишаючись в області визначення D функції z =
= / (*» У)' наближається до точки М0 (х0; у0), то відповідна апліката
/ (Af) поверхні, яка є графіком заданої функції, прямує до аплікати
/ (М0) (рис. 6.8).
Точки, в яких функція неперервна, називаються точками
неперервності, а точки, в яких неперервність порушується — точками
розриву цієї функції.
Наприклад, функція
Х~У Х + УФ0;
(х — у
х + У '
1, Х + У = 0
розривна в точці (0; 0), оскільки lim / (x, у) не існує; функція
х->0
І 1, х = \, у = Ч
розривна в точці (1; 2), оскільки lim / (х, у) = 5, а / (1, 2) = 1.
у-*2
Умові (1) неперервності ножна надати іншого вигляду. Позначимо
Ах = х — х0, Ау = у — у0, Аг = / {х, у) — f (x0, у0). Величини Ах,
291
Ay називають приростами аргументів х
і у, а Аг — повним приростом функції
f (х, у) в точці (л:0; у0). З рівності (1)
дістаємо:
llm(f(x, у) — f(x0, {/„)) = 0
х-*х0
у або
lim Аг = 0. (2)
д*-»о
Рівність (2) дає ще одне означення
неперервності.
Функція / (х, у) називається неперервною в точці М0 (х0; у0), якщо
повний приріст її в цій точці прямує до нуля, коли прирости її
аргументів х та у прямують до нуля.
Функція / (х, у) називається неперервною на множині D, якщо
вона неперервна в кожній точці (х; у) цієї множини.
Наприклад, функція z = xa + у2 неперервна на всій площині
Оху, оскільки повний приріст цієї функції в довільній точці (х0\ у0)
має вигляд
Аг = (х0 + Ах)* + (у0 + Ау)* - (хі + уі) =
= 2х0Д;с + 2у0Ау + Ах2 + Ауг
lim Дг = 0.
л*-»о
Ьу->0
Використовуючи поняття неперервності функції кількох змінних
і відповідні теореми про границі, можна довести, що арифметичні
операції над неперервними функціями і побудова складеної функції
з неперервних функцій приводять до неперервних функцій. (Подібна
теорема для функції однієї змінної наведена у п. 5.2, гл. 4).
Наведемо основні властивості функції г = f (x, у), неперервної в
замкненій і обмеженій області. Ці властивості аналогічні властивостям
неперервної на відрізку функції однієї змінної (гл. 4, п. 5.3).
Попередньо уточнимо ряд понять для множин точок площини, про які
говорилось в п. 1.1.
Множина D точок площини називається зв'язною, якщо будь-які
її дві точки можна сполучити неперервною лінією, яка цілком
належить множині D. Наприклад, круг — зв'язна множина, а множина,
що складається з двох кругів, які не мають спільних точок, не є
зв'язною.
Точка М називається внутрішньою точкою множини D, якщо
існує 6-окіл цівї точки, який цілком міститься у множині D.
292
Множину D називають відкритою, якщо кожна її точка
внутрішня.
Областю (або відкритою областю) називають зв'язну відкриту
множину точок.
Точку М називають межовою точкою множини D, якщо будь-який
її окіл містить як точки, що належать D, так і точки, що не належать
множині D. Множину всіх межових точок області називають межею
області.
Область разом з її межею називається замкненою. Якщо існує
круг скінченного радіуса, який'цілком містить область, то вона
називається обмеженою.
Замкнена область, в якій визначена функція двох змінних, є
аналогом відрізка для функції однієї змінної.
Тепер сформулюємо властивості неперервних функцій двох
змінних в замкненій обмеженій області.
1°. Якщо функція г = f (M) неперервна в замкненій обмеженій
області, то вона обмежена в цій області, тобто існує таке число с >•
> 0, що для всіх точок області виконується нерівність \ f (М) | < с.
2°. Якщо функція z = f (M) неперервна в замкненій обмеженій
області, то в цій області існують точки, в яких функція набуває
найбільшого і найменшого значень.
3°. Якщо функція z = f (M) неперервна в замкненій обмеженій
області D і f (Mx) < с < / (М2), де Ми M2£D, то існує точка
М0(хп\ у0), в якій f (М0) = с. Зокрема, якщо f (Мх) < 0, a f (Мй) >
>■ 0, то в області D існує точка М0, в якій f (M0) = 0.
Завдання для самоконтролю
1. Що називається функцією двох змінних?
2. Що називається областю визначення функції і який Пі геометричний зміст?
3. Що являє собою графік функції г = f (х, у)? У чому полягає метод перерізів?
4. Що називається лінією рівня функції г = \ (х, у)1 Навести приклад.
Б. Дати означення функції трьох змінних, п змінних.
в. Що називається границею функції г = f (М) при М -*■ М0?
7. Що називається поверхнями рівня функції и = f {х, у, z)?
8. Дати означення неперервної функції двох змінних в точці і на множині
точок.
9. Що називається замкненою обмеженою областю?
10. Сформулювати властивості функції г= f (x, у), неперервної в замкненій
обмеженій області.
11. Знайти область визначення D функції
г = У Xі + у2 — 1 + 1п (4 — Xі — у9).
12. Переконатися, що
У*° + 0,-2)»+1-1 |
*_>о х2 + (і/ — 2)2 2
у-*0
ху
13. Довести, що lim 8 , ие існує.
*->-0 * т »
f/->-2
293
14. Дослідити на неперервність функції
а)г = 2х* + 3у; 6)г=х2 + 2У~1 ; в) г = х + у~1 .
^ * *2 + і,* і/» —2*
Відповіді. 11. D — множина точок, що містяться між колами х2 -(- і/2 == '
та jca -f- t/a = 4, причому внутрішнє коло в область D входить, а зовнішнє — ні.
13. Вказівка. Якщо М (ж; у) -*■ О (0; 0) по різних прямих у = kx, то функція г =■
«=■ . , а прямує до різних значень. 14. а) Функція неперервна иа всій площині
Оху; б) функція не визначена і, значить, розривна в точці О (0; 0); в) точки розриву
знаходяться на параболі у2 = 2х.
S 2. ПОХІДНІ ТА ДИФЕРЕНЦІАЛИ ФУНКЦІЇ
БАГАТЬОХ ЗМІННИХ
2.1. Частинні похідні
Нехай функція z = / (х, у) визначена в деякому околі точки
М [х; у). Надамо змінній х приросту Ах, залишаючи змінну у
незмінною, так, щоб точка Мх (х + Ах; у) належала заданому околу.
Величина
A*z =/(* + Ах, y) — f(x, у)
називається частинним приростом функції f (x, у) по змінній х.
Аналогічно вводиться частинний приріст Д„г функції по
змінній у:
Ауг = / (х, у + Ay) — f (х, у).
Якщо існує границя
то вона називається частинною похідною функції f (x, у) в точці
М (х; у) по змінній х і позначається одним із таких символів:
■ Ґ дг_ _а/_.
Zx' Іх' дх ' дх '
fx (х0, у0), f'xU, — частинні похідні по х в точці М0 (х0; у0).
Аналогічно частинна похідна функції f (x, у) по у визначається як
границя
Um 4*1 = 1іт Кх,у + Ьу)-Цх,у)
і позначається одним із символів:
' / дг df
Zy' Г*' ду • ~ду~ •
Згідно з означенням, при знаходженні частинної похідної г„
обчислюють звичайну похідну функції однієї змінної х, вважаючи
294
1=Г(х,Ус)
змінну у сталою, а при знаходженні
похідної zy сталою вважається
змінна*. Тому частинні похідні знаходять
за формулами і правилами
обчислення похідних функцій однієї змінної.
Частинна похідна г'х (або zy)
характеризує швидкість зміни функції
в напрямі осі Ох (або Оу).
З'ясуємо геометричний зміст
частинних похідних функції двох
змінних. Графіком функції г = / (х, у)
є деяка поверхня (рис. 6.9).
Графіком функції г = f (х, у0) є лінія перетину цієї поверхні з
площиною у = у0. Виходячи з геометричного змісту похідної для
функції однієї змінної, дістанемо, що fx (х0, у0) = tg а, де а — кут між
віссю Ох і дотичною, проведеною до кривої г = / (х, Уо) в точці
М0 (*<>; Уо, f (х0,Уо))- Аналогічно f'y (х0, у0) = tg р*.
Для функції и =/ (хи х , хп) п змінних можна знайти п
частинних похідних:
Рис. 6.9
ди
дхг
ди
дх,
ди
дх.
ди
дх„
Де
ди
дх,
= lim
Ах.
Дх,
AxM=f(x1,
xt -\- Axt, xi+i, ... , хп) —f [Xi, x2.
Хп)-
Щоб знайти частинну похідну
ди
дх,
треба взяти звичайну
похідну функції и = f (xlt xit
змінних сталими.
., х„) по змінній Хі, вважаючи решту
Приклад
Знайти частинні похідні функцій:
a) z = х1 + у3 — 2ху2 -+- 5х — 1; б) и = хЧ + arctg -
О Маємо:
дг дг
а> -bT = 2x-W + b -^г = 3у
дх
ди
б) ~ЬТ = 2хг +
ду
х2 + у2
ди
ду
■ 4*У,
х
х* + у»
ди
дг
■ Xі. •
Якщо функція z = / (х, у) задана в області D і має частинні по.
хідні гх, zy в усіх точках (х; у) £ D, то ці похідні можна розглядати
295
як нові функції, задані в області D. Тому має сенс питання про
існування частинних похідних від цих функцій по якій-небудь
змінній в точці (х; у) £D.
п ■ ■ ж - df
Якщо існує частинна похідна по х від функції -^, то н називають
частинною похідною другого порядку від функції f (x, у) по змінній
х і позначають -^ або fxx.
Таким чином, за означенням
дх2
■4(4) ^ г—<&
Якщо існує частинна похідна від функції -^- по змінній у, то
цю похідну називають мішаною частинною похідною другого порядку
д2! "
від функції f (х, у) і позначають , - або fxy.
Отже, за означенням
--S-(4) аб° &-<$
дхду
Для функції двох змінних / (х, у) можна розглядати чотири
похідні другого порядку:
дУ d2f дУ д2/
дх2 * дхду ' дудх ' ду2 '
Якщо існують частинні похідні від частинних похідних другого
порядку, то їх називають частинними похідними третього порядку
функції f (x, у), їх вісім:
ff>f d3f d3f d3f
дк3 ' дх2ду ' дудх2 ' дхдудх '
d3f d3f d3/ d3f
дудхду ' ду2дх ' дхду2 ' ду3 '
Природно поставити запитання: чи залежить результат
диференціювання від порядку диференціювання? Інакше кажучи, чи будуть
рівними між собою мішані похідні, якщо вони взяті по одних і тих
самих змінних, одне й те саме число разів, але в різному порядку?
Наприклад, чи дорівнюють одна одній похідні
-*1- і W або *Lr- і ^L?
дхду дудх дхдудгдх д,х2дудг
У загальному випадку відповідь на це запитання негативна.
Проте справедлива теорема [27], я\у вперше довів К. Г. Шварц.
Теорема (про мішані похідні). Якщо функція f (x, у) визначена
разом із своїми похідними f'x, f'u, fxy, fyx в деякому околі точки Мй
296
(х0; Уo)^ причому похідні fxy та fyx неперервні в точці М0, то в цій
точці
fxy |м„ = fyx \МС.
Аналогічна теорема справедлива для будь-яких неперервних
мішаних похідних, які відрізняються між собою лише порядком
диференціювання.
Приклади
1. Знайти похідні другого порядку від функції
г = х3 — х2у + у*.
О Маємо:
дг д2г
-ш=3х*-2ху, -д1р-=6х-2у,
дг д*г д2г _ &Z _
~ду~ = -х +2у' ду2 ~2, дудх ~ дхду ~ гх- #
2. Нехай
*У(Х*-У*) х*А_и2фО-
»2 , „2 • Х -ТУ ^U-
У 0, х2 + у2 = 0.
Переконатись, що
Ґху(о,о)фГух(0, 0).
О Знаходимо
■У- = \ (*2+уУ ' у
дх
0, х2 + у* = 0,
оскільки
3/(0, 0) .. f(x. 0)-f(0, Q) n
Звідси
df (0, у) dV (0. У) = _,
дх У' дхду '
ау (о, о)
зокрема дхду =-1.
Аналогічно обчислюємо 'д ^— = 1. Отже, для даної функції ^(0, 0) ф
+ f (0, 0), тобто результат диференціювання залежить від порядку диферен-
дудх
диф<
ціювання. Це пов'язано з тим, що похідні /" і Г в точці (0; 0) розривні. •
'ху " ух
2.2. Дифереиційовність функції
Нехай функція z =* f (х, у) визначена в деякому околі точки
М (х\ у). Виберемо прирости Ах і Ау так, щоб точка Мх (х + Ах; у + Ау)
297
належала розглядуваному околу і знайдемо повний приріст
функції в точці М (х; у):
Az = f(x+Ax, y + Ay) — f(x,y).
Функція / (х, у) називається диференційовною в точці М, якщо її
повний приріст в цій точці можна подати у вигляді
Аг = ААх + ВАу + аАх + $Ау, (3)
де А та В — дійсні числа, які не залежать від Ах та Ау, а = а (Ах,
Ау), Р = Р (Ах, Ау) — нескінченно малі при Ах -*■ 0 і Ау ->- 0
функції.
Відомо (гл. 5, п. 1.4) що коли функція однієї змінної диференці-
йовна в деякій точці, то вона в цій точці неперервна і має похідну.
Перенесемо ці властивості на функції двох змінних.
Теорема 1 (неперервність диференційовної функції). Якщо
функція z = f (М) диференційовна в точці М, то вона неперервна в цій
точці.
О Якщо функція диференційовна в точці М, то з рівності (3)
випливає, що lim Az = 0. Це означає, що функція неперервна в точці
Дх-Ю
Д(/->0
ЛІ. •
Теорема 2 (існування частинних похідних диференційовної
функції). Якщо функція z = f (М) диференційовна в точці М (х; у), то
вона має в цій точці похідні fx = fx (х, у) та fy = fy (x, у) і
Аг = f'xAx + fyAy + аДх + РД#-
О Оскільки / (х, у) диференційовна в точці М (х; у), то
справджується рівність (3). Поклавши в ній Ау — 0, Ах Ф 0, дістанемо
Д^г = ААх + а (Ах, 0) Дх.
Поділимо обидві частини цієї рівності на Дх і перейдемо до границі
при Ах -*■ 0:
lim A*z = lim (А + а (Ах, 0)) = А + lim a (Ax, 0) = А.
Д*-»0 А* Дж-»0 Дх-».0
Отже, в точці М існує частинна похідна f'x (x, у) = А. Ааналогічно
доводиться, що в точці М існує частинна похідна Ґу (х, у) = В. ф
Твердження, обернені до теорем 1 і 2, взагалі кажучи,
неправильні, тобто із неперервності функції / (х, у) або існування її частинних
похідних ще не випливає диференційовність. Наприклад, функція
/ (*> У) — V х2 + у2 неперервна в точці (0; 0), але не
диференційовна в цій точці. Справді, границі
Ііш ;(0 + A,o)-mo = Ит і/(о+ах)»+о-о_= ,іт ^
298
не існує, тому не існує й похідної f'x (0, 0). Аналогічно впевнюємося,
що не існує також похідної fu (0, 0). Оскільки задана функція в точці
(0; 0) не має частинних похідних, то вона в цій точці не
диференційовна.
Більше того, відомі приклади функцій 111], які є неперервними
в деяких точках і мають в них частинні похідні, але не є в цих
точках диференційовними.
Теорема 3 (достатні умови диференційовності). Якщо функція
f (х, у) має частинні похідні в деякому околі точки М і ці похідні
неперервні в точці М, то функція f (x, у) диференційовна в точці М.
О Надамо змінним х і у приростів Дх Ф 0, Ау Ф 0 таких, щоб
точка (х + Дх; у + Ау) належала даному околу точки М. Повний
приріст функції
Az = f(x + Ах, у + Ay) — f(x, у)
запишемо у вигляді
Az=U(x + Ax,y + Ay)-f(x,y+Ay)) +
+ lf(x,y + Ay)-f(x,y)]. (4)
Вираз у перших квадратних дужках рівності (4) можна
розглядати як приріст функції однієї змінної х, а в других — як приріст
функції змінної у. Оскільки дана функція має частинні похідні,
то за теоремою Лагранжа дістанемо:
f(x + Ах, у + Ay) — f(x, y + Ay)=*
= /х(х + ЄхДх, у + Ау)Ах, 0<61<1,
f(x,y + Ay) — f(x, y) = f'y(x, у +QiAy)Ay, 0<Єа<1.
Похідні fx та fy неперервні в точці М, тому
lim f'x (x + ЄіДх, у + Ay) = f'x (x, у),
Дх->0
Ьу-*0
lim f'y (х, у + 62дг/) = fy (x, у).
Д*->-0
Д*->0
Звідси випливає, що
/* (х + 6tAx, y + Ay) = f'x (x, у)+а (Ах, Ау),
fy (x, у + QtAy) = fy (х, у) + р (Дх, Ау),
де а (Дх, Ау), р (Дх, Ау) — нескінченно малі функції при Ах -*■ 0
і Ау-+0.
299
Підставляючи ці вирази у рівність (4), знаходимо
Аг = fx {х, у) Ах + f'u (х, у)Ау + а (Ах, Ау) Ах + р (Ах, Ay) Ay,
а це й означає, що функція / (х, у) диференційовна в точці М. •
З теорем 2 і 3 випливає такий наслідок: щоб функція f (x, у) була
диференційовною в точці, необхідно, щоб вона мала в цій точці
частинні похідні, і достатньо, щоб вона мала в цій точці
неперервні частинні похідні.
Зазначимо, що для функції / (х) однієї змінної існування похідної
/' (х) в точці х є необхідною і достатньою умовою її диференційовнос-
ті в цій точці.
2.3. Повний диференціал функції та його застосування до
обчислення функцій і похибок. Диференціали вищих порядків
Нагадаємо, що коли функція z = f (М) диференційовна в точці
М, то її повний приріст у цій точці можна подати у вигляді
Дг = ААх + ВАу + а (Д*, Ау) Ах + Р (Ах, Ау) Ау,
де а (Дх, Ау) -► 0 і р (Ах, Ау) -+■ 0 при Ах -*■ 0, Ду ->- 0.
Повним диференціалом dz диференційовної в точці М функції
г = f/M називається лінійна відносно Дл; та Ау частина повного
приросту цієї функції в точці М, тобто
dz = ААх + ВАу. (5)
Диференціалами незалежних змінних х та у назвемо прирости
цих змінних dx = Ax, dy = Ау. Тоді з урахуванням теореми 2
рівність (5) можна записати так:
Аналогічна формула має місце для диференційовної функції трьох
змінних и = / (х, у, г):
*—£■*+4г*+тг*- m
З формул (6) і (7) може здатися, що повний диференціал du
існуватиме в кожній точці, в якій існують частинні похідні. Але це
не так. Згідно з означенням, повний диференціал можна
розглядати лише стосовно диференційовної функції.
Покажемо, що різниця між повним приростом Дг і диференціалом
dz при Дл; -+■ 0 і Ау -*■ 0 є нескінченно мала величина вищого
порядку, ніж величина р = У Ах2 + Ау-.
Дійсно, з формул (3) і (5) маємо
ton J^L_ = ,im ( «*L + i*L] =0,
UJ/-+0 Aj/->0
300
оскільки функції а, р — нескінченно малі при Ах -*- 0, Ау -*- 0,
а -^- та — — обмежені функції:
Р Р
Дх
Р
Дх
V Лх» + Ду»
У
1 +
Ду2
<і.
Ич<і.
Дх»
Отже, різниця Аг — dz — нескінченно мала величина вищого
порядку, ніж р. Тому повний диференціал називають також головною
частиною повного приросту диференційовної функції. При цьому
виконується наближена рівність Az»dz або
f{x+Ax,y+Ay)^f(x,y) + ^^Ax + ^jLAy. (8)
Ця рівність тим точніша, чим менша величина р. Рівність (8)
широко використовується в наближених обчисленнях, оскільки
диференціал функції обчислюється простіше, ніж її повний приріст.
Покажемо, як за допомогою диференціала можна оцінити
похибку в обчисленнях.
Нехай задана диференційовна функція и = f (xlt x2, ..., хп),
незалежні змінні якої виміряні з точністю Ахи Ах2, .... Ахп. Потрібно
знайти похибку, з якою обчислюється и.
Природно вважати, що ця похибка дорівнює величині
Au=f (*! + Axl7 х2 + Ахе хп + Ахп) — f (xlt x2 хп).
Для малих значень Axt маємо
Аи fsidu =
дї
дх.
А*!
df
бх,
А*2 +
-У-Ах
8В1ДКИ
|AU|<|-g-||A*1|+|-gr||A*,l+ ••• +|-^-|і^І-
Якщо через | А*х, | позначити максимальну абсолютну похибку
амінної xt, то можна дістати значення максимальної абсолютної
похибки | А*и | функції и:
|А'«і-|-£-|і^і + |-Й-|і^.і+- +|-!г|іА^І- (9)
Щоб оцінити максимальну відносну похибку функції и, поділимо
обидві частини рівності (9) на | и | = | / (хи хЛ, .... хп) |:
Ів*и|
Д*и
/х
f-||A%| +
/
|A**2| + |-f-
|Л**»І-
301
f*i д
Оскільки —J-=-^— (In|/1), то
І6*"І=|-а|-(1п|/|)||Д^|+|-^(1п|/|)||Д*А:гІ +
д
+ іїг(,пІЛ)
І АХ І
або |6*и| = |Д*1п|Л|, (Ю)
тобто максимальна відносна похибка функції дорівнює максимальній
абсолютній похибці її логарифма.
Приклади
1. Знайти повний диференціал функції
г = х V-
О Частинні похідні заданої функції гх = Зхгуг і г' = 2х*у є неперервними
функціями на всій площині Оху. Тому диференціал цієї функції на всій площині дорівнює
dz = ЗхгуЧх + 2x*ydy. •
2. Обчислити наближене за допомогою повного диференціала
"•^(тбГ-1)-
О Розглянемо функцію z = arctg [ — — 11 і застосуємо до неї формулу (6),
поклавши х = 2, у = 1, Дх = —0,03, Д# = 0,02:
. / * + Дх \ , / * \ V *
arcteІТ+ліГ~'J«arcte(т-') + »«+(*-»)« д*~ *■ + (*-*>• Аі,;
/2 — 0,03 » / 2 \ 1
arct8 [і +0,02 - •] * агсІЄ (Т " ') + 1+(2-1)» (-0-03) ~
1+(2-1)а
0,02.
Маємо
/ 1,97 \ я
arctg і-роу — 1 ] = -f —0,015 - 0,02 = 0,75. •
3. Період коливання маятника дорівнює Т = 2л у —, де І — довжина маятника,
g — прискорення вільного падіння. Розв'язуючи цю рівність відносно g, дістанемо
4л2/
g = уа ■ Цією формулою користуються для обчислення g в різних точках земної
поверхні, вимірюючи в цих точках величини І і Т. Нехай в результаті вимірювань
дістали / = 50 ±0,01 см, Т= 1,4196 ± 0,0001 с.
Потрібно знайти прискорення вільного падіння g і максимальну абсолютну
та відносну похибки знайденого значення g, вважаючи, що л = 3,1416 ± 0,0001.
302
О Маємо
1п£ = 1п4 + 21пл + 1п/ + 21п7'і
Д»Г = 0,0001, Д*/ = 0,01, Д*л = 0.0001.
Знайдемо наближене значення прискорення:
4-(3.1416)»-50 _9795_см_
g (1,4196)» -»'».» с» .
За формулами (9) і (10) дістанемо максимальне значення відносної і абсолютної
похибок:
2|Д*л| |Д*/| 2|Д»7Ч
|6*g| = |A*lnlgH= 'д +-LT"!-+ г =
2 • 0.0001 0,01 2 • 0,0001 „ „nnj я „. „,
- 3,1416 +-50-+ 1,4196 «0,0004 = 0,04./,,
Д*£ І = І &*ЄІ «= 0,0004 • 979,5 » 0,4 *[.
Отже,
см
g = 979,5±0,4-r.«
Введемо поняття диференціала вищого порядку. Нехай г —
= / (*» У) Функція незалежних змінних jc, у. Повний диференціал цієї
функції, знайдений за формулою (5), називають ще диференціалом
першого порядку. Диференціал другого порядку визначають за
формулою
d*z=d(dz)-
Тоді, якщо функція / (х, у) має неперервні частинні похідні, то
А-<< (■£** + -£-*) "
звідки
d*e=^d** + 2^d^ + -|f-<V. (11)
Символічно це записують так:
л-^ + тИ*-)'»-
Аналогічно можна дістати формулу для диференціала третього
порядкуі
303
Застосовуючи метод математичної індукції, можна дістати формулу
для диференціала n-го порядку:
dnz =d(dn~1z) = [^-dx + -fy-dy)" г. (12)
Зазначимо, що формула (12) справедлива лише для випадку, коли
змінні х і у функції z = / (х, у) є незалежними змінними.
Приклад
Знайти dV, якщо z = е*,+*\
О Послідовно дістаємо
-£- = 2*е"+Л *L = 2y*"+y\ -g- = &**+*■(!+ 2,2),
** = 4хуех'+У. -15- = 2е"+'1 (1 + ад.
а*ду -'-^ • ^
За формулою (11) маємо
d*z = 2е*'+*' 1(1 + 2х2) dx2 + Axydxdy + (1 + 2у2) dj(a]. •
2.4. Похідна складеної функції. Повна похідна. Інваріантність
форми повного диференціала
Нехай z = / (х, у) — функція двох змінних х та у, кожна з яких,
в свою чергу, є функцією незалежної змінної t:
х = х (0, у = у (0,
тоді функція / (х (/), </ (/)) є складеною функцією змінної /.
Теорема. Якщо функції х — х (t), у = у {t) диференційовні в точці
t, а функція z = / (х, у) диференційовна в точці М (х; у), то складена
функція z = f ш(х (t), у (0) також диференційовна в точці t. Похідну
цієї функції знаходять за формулою
dz дг Ах . дг dy ,.nv
ЧГ~ ~ЬТЧГ+ ду ~!Г • ( '
О За умовою теореми
Аг = -^- Ах + ~ Ау + аАх +^Ау,
де а -> 0 та Р -*■ 0 при Дл; -*- 0, Ау ->- 0.
Поділимо Аг на At і перейдемо до границі при At -*- 0:
dz ,. Дг дг <. Ддт . дг «. Ьц , и і- Дх ,
—п- = lim —г-т- = -т— hm -тт + -^— lim -=|- + Hm a hm -т-т- +
.... с ,. Ди dz dx , дг dy , _. dx , n dy
-f-hm В lim -T7-= -я—тт- +-л ^" + 0- -3T- + 0 • -j7- =
д/->о д<-ю д' дх dt дУ dt dt dt
дг dx . дг dy
дх dt "т~ ду dt
304
Аналогічно знаходять похідну, якщо число проміжних змінних
більше двох. Наприклад, якщо и = / (х, у, z), де х ~ х (і), у =
= У (0. z = z (0, то
dw _ би dx . дц dy . ди dz ...
dt ~ дх dt + dy d/ ~і~ дг ді ' (14>
Зокрема, якщо и = f (х, у, z), a у = у (х), г = z (x), то
dM _ ди dx , ди dy . ди dz
dx дх dx ' ду dx ' дг dx '
dx ,
а оскільки —r- = 1, то
dx '
du ди . ди dy . ди dz ..,..
dx ~ дх ^ dy dx + dz dx • ( b>
Цю формулу називають формулою для обчислення повної похідної
І . . . ди \
(на відміну від частинної похідної -з—).
Приклади
dz
1. Знайти —Jjr, якщо г = ха — Зху, де х = 2/, у = /а.
О За формулою (13) дістанемо
dz
-fi- = (2a: — Зу) 2 — Зх2< = (At — 3/а) 2 — 12/» = 8/ — ЇЙ2.
Результат буде такий самий, коли попередньо підставити вамість х та у їхні
вначення, а потім знайти звичайну похідну по /:
dz
г = 4<а — б/3, -gj- = Bt — 18<2. •
2. Нехай и = х* — ху + г2, де у = 2х, г = х3.
О За формулою (15) маємо:
du
-£- = 2х — у — х2 + Зг23х2 = — 2х + 9л*.
Інший спосіб:
н = *а — 2х2 + х» = — jc2 + Xе,
d«
-zr = -2x + 9x8. •
Розглянемо загальніший випадок. Нехай г = f (х, у) — функція
двох змінних х та у, які, в свою чергу, залежать від змінних и, vi
х = х (и, v), у = у (и, v), тоді функція г = / (х (и, v), у (и, v))
є складеною функцією незалежних змінних и та v, а змінні х та у —
проміжні.
Аналогічно попередній теоремі доводиться таке твердження.
305
Якщо функції х (и, v) та у (и, v) диференційовні в точці М^ (и;
v , а функція z = f (х, у) диференціиовна в точці М2 {х (и, о); у {и, v)),
то складена функція f (х (и, v), у (и, v)) диференціиовна в точці
Ml(u; v) і її частинні похідні знаходяться за формулами:
дг дг_ дх , дг ду . дг _ дг дх . дг ду .. л>
ди ~~ дх ди ■" ду ди * ~~dv~ ~ дх dv ~*~ ду dv ' * >
Формули (16) можна узагальнити на випадок більшого числа
змінних. Якщо и = / (х, у, г), де
X = X (Slt S2, S3), у = у (S„ S2l S3), Z = Z (Sb S2, S3),
TO
ди __ ди дх . ди ду , ди дг . і о Ч
dsi ~ дх dsi ' ду dst ' дг дц ' =я ' '
Приклад
Знайти ги і гв, якщо z = Xі In у, де х = — , y = uv.
О За формулами (16) маємо
-fj- = 2х 1п у 4" + "у » = £ (1 + 2 In (їй)).
-^Г = 2*іл«/^--ит) + — ««-^(і-гіпі»). •
Знайдемо диференціал складеної функції. Скориставшись
формулами (16), дістанемо
*--§■*+т*-(т-г-+-5"*-)*+
+ т(-4-* + -*-*)--В-* + -5-*
Отже, диференціал функції z = f (х, у), де х = jc (u, v), у =»
= у (и, о), визначається формулою
dz = -|Ld* + -|^dj/, (17)
де
d* = "i"d" + -І"*, dy = -fg-du + -^-dw.
Порівнявши формули (17) і (6), дійдемо висновку, що повний
диференціал функції z «= / (х, у) має інваріантну (незмінну) фс>РмУ
306
незалежно від того, чи є х та у незалежними змінними, чи диферен-
ційовними функціями змінних ита v. Проте формули (6) і (17) однакові
лише за формою, а по суті різні, бо в формулі (6) dx і dy —
диференціали незалежних змінних, а в формулі (17) dx і dy — повні
диференціали функцій х = х (и, v) та у = у (и, v).
Диференціали вищих порядків властивості інваріантності не
мають. Наприклад, якщо z — f (х, у), де х •= х (и, і»), у = у (и, і»), то
d*z=d(dz) = d(-£-dx + Цд-dy} =
-&*t + *^^ + $W+^**+lfr*V. (18)
Формула (18) відрізняється від формули (11), тому що для
складеної функції диференціали d%x та d2y можуть і не дорівнювати нулю.
Отже, для складеної функції z = / (х, у), де х = х (и, v), у = у (и,
v), формула (11) невірна.
2.5. Диференціювання неявної функції
Нехай задано рівняння
F(x,y)=0, (19)
де F (х, у) — функція двох змінних.
Нагадаємо, що коли кожному значенню х з деякої множини D
відповідає єдине значення у, яке разом з х задовольняє рівняння (19),
то кажуть, що це рівняння задає на множині D неявну функцію у =
= Ф (*)•
Таким чином, для неявної функції у = ф (х), x£D, заданої
рівнянням (19), має місце тотожність
F(х, Ф(х))^0, x£D.
Які ж умови має задовольняти функція F (х, у), щоб рівняння
(19) визначало неявну функцію і при тому єдину? Відповідь на це
запитання дає така теорема існування неявної функції [27].
Теорема. Нехай функція F (х, у) і її похідні Fx (x0, у0) та Fy (x, у)
визначені та неперервні в якому-небудь околі точки М0 (х0, у0) і F (х0,
уп) = 0, a Fy (хе, у0) Ф 0; тоді існує окіл точки Ме, в якому рівняння
F (х, у) ~ 0 визначає єдину неявну функцію у = ф (х), неперервну та
диференційовну в околі точки х0 і таку, що ф (х0) = у0.
Знайдемо похідну неявної функції. Нехай ліва частина рівняння
(19) задовольняє зазначені в теоремі умови, тоді це рівняння задає
неявну функцію у = у (х), для якої на деякій множині точок х має
місце тотожність F (х, у (х)) = 0. Оскільки похідна функції, що
тотожно дорівнює нулю, також дорівнює нулю, то повна похідна
dF n . , .,_. dF dF , dF dy
-£Г = 0. Але за формулою (15) маємо -^ = -57 + -^--^-, тому
307
dF , dF dy f, .
-z —z 7— = 0, звідки
дх ду dx M
і—т- <*»
За цією формулою знаходять похідну неявної функції однієї
змінної. Нагадаємо, що похідну функції, заданої рівнянням (19),
можна знаходити й іншим способом (гл. 4, п. 2.9).
Приклад
dy
Знайти похідну -д— функції у, заданої рівнянням
є* — ех + 2ху = 0.
О Тут F (х, у) = еу — є* + 2ху, F'x = —є* + 2у, Fу = є* + 2х, отже за
формулою (20) маємо
dy -е* + 2у _ е*-2у щ
dx є* + 2х є" + 2х '
Розглянемо рівняння
F{x,y,z) = 0. (21)
Якщо кожній парі чисел х та у з деякої множини відповідає єдине
значення z, яке разом з де та у задовольняє рівняння (21), то це
рівняння задає неявну функцію z = <p (х, у).
Справджується така теорема існування.
Теорема. Нехай функція F (х, у, z) і її похідні Fx (х, у, z), Fu {x,
у, z) та Fz (x, у, z) визначені і неперервні в деякому околі точки
М0{х0; у0; г0), причому F {х0, у0, г0) = 0, a F'z {x0, y0, z0) Ф 0. Тоді
існує окіл точки М0, в якому рівняння (21) визначає єдину функцію
z=*q> (х, у), неперервну і диференційовну в околі точки (х0; у0) і таку.
ЩО ф (х0, у0) = г0.
Знайдемо частинні похідні гх і zy неявної функції z від х та у,
заданої рівнянням (21).
Коли визначаємо zx (або zu), то змінну у (або х) вважаємо сталою,
тому за формулою (20)
дг F х дг _ Fy
дх р' ' ду F
(22)
г
Аналогічно знаходять похідні неявної функції у = у (х^ хіз ...
.... хп), яка задається рівнянням F (xlt х2, -.', хп, у) = 0:
F'
Щ- = у~, / = 1,2 п, ҐуфО.
308
Приклад
Знайти повний диференціал функції г = <р (х, у), якщо
Є* — **{/ + Z + 6 = 0.
О Тут F {х, у, г) = ег-д^ + г + 6, F'x = -2xy, F' = -х\ F' = ег +
+ 1.
Скориставшись формулами (22) і (6), дістанемо
' 2ху ' *' . 2xydx + x*dy
Z*~e*+1 • г*°ег+1 ! Z~ ег+1 •*
Завдання для самоконтролю
1. Дати означення частинної похідної функції двох змінних по одній з ннх.
З'ясувати її геометричний зміст?
2. Як визначають частинні похідні другого і третього порядку від.функції
двох змінних?
3. Сформулювати теорему про рівність других мішаних похідних.
4. Дати означення диференційовності функції г «= / (дг, у).
Б. Довести теорему про неперервність диференційовної функції.
6. Довести теорему про існування частинних похідних диференційовної
функції.
7. Вивести достатні умови диференційовності функції двох змінних.
8. Дати означення повного диференціала функції двох змінних і вказати
формулу для його знаходження. Узагальнити" цю формулу для функції п змінних.
9. Як застосовується повний диференціал функції для наближеного обчислення
її значень?
10. Вивести формули для максимальних абсолютної і відносної похибок
функції двох змінних.
11. Як визначають диференціал n-го порядку?
12. Вивести формули для знаходження диференціала dBz, якщо г = f (х, у) —
функція двох незалежних змінних. Записати формулу для знаходження
диференціала п-го порядку цієї функції.
dz
13. Як знайти похідну —тт- складеної функції г =• f (x (f), у (/))?
14. Що називається повною похідною?
15. Написати формулу для знаходження похідних гх і г , якщо z = f(u, v,
t), де и = и [х, y),v=*v {х, у), t =• t (х, у).
16. У чому полягає інваріантність форми диференціала першого порядку? Чому
цієї властивості не мають диференціали вищих порядків?
17. Сформулювати теореми існування неявних функцій однієї і двох змінних
і вивести правила диференціювання цих функцій.
18. Знайти частинні похідні z'x та zy в точці М0 (1; 1), якщо г = *3 + У* — ХУ-
19. Довести, що функція г = 1п (ха + ху + Уг) задовольняє рівняння: хгх +
/-- У •
20. Показати, що функція г = ух sin — задовольняє рівняння 2хгх +
+ 2уг'у = г.
21. Маємо z = arctg —. Переконатись, що г"ху = гух . В якому випадку ця
рівність порушується?
309
22. Обчислити наближено за допомогою повного диференціала число о= 1,042,03-
23. Показати, що для функції z = Xі + у2 + Зда диференціал третього порядку
d'z = 6 (dx* + dj,8).
24. Нехай z = u -f- t,2, де u = x2 + sin #, v =• In (дг -f- #). Показати, що /^ —
■ гу = 2дс — cos у.
25. Нехай u = i^ i- , де у = 2 sin де, г = cos x.
5
Показати, що повна похідна —j— = є sin x.
26. Довести, що частинні похідні гх і г неявної функції г (х, у), яка зада-
2 , .1.1
на рівнянням za + — = у у* — г2 , задовольняють умову хггх + — z = — .
Відповіді. 18. г^(1, 0 = 2^(1, І) = 2. 22. о«і,08.
f 3. ДЕЯКІ ЗАСТОСУВАННЯ ЧАСТИННИХ ПОХІДНИХ
3.1. Дотична площина та нормаль до поверхні. Геометричний зміст
диференціала функції двох змінних
Нехай задано поверхню
F(x,y, г) = 0. (23)
Точка М0 (х0; у0; г0) належить цій поверхні і функція F (х, у,
г) диференційовна в точці М0, причому не всі частинні похідні в
точці М0 дорівнюють нулю, тобто
\К (М0)? + (F'v (М0)Г + (F'r (Ме)Г ф 0.
Розглянемо довільну криву L, яка проходить через точку М0, лежить
на поверхні (23) і задається рівнянням
jc = jc(0, y=y(t), z = z{t),
де точці М0 відповідає параметр t0.
Оскільки крива лежить на поверхні, то координати її точок
задовольняють рівняння (23):
F{x(t),y(t),z(t))=0. (24)
Диференціюючи рівність (24), маємо
dF _ dF dx , dF _dy_ dF dz _n .„-.
dt ~~dx~ dt 'Г~ду~ dt + дг "dT_U- V°>
Ця рівність показує, що вектори (рис. 6.10)
п = {F'X(M0); F'„{M0); F'2(M0)}, 7= {х'(t0); у'(t0); z'(t0)}
310
ортогональні, причому другий з них є напрямним вектором дотичної
до кривої L у точці М0 (гл. 5, п. 7.5).
Крім того, з рівності (25) випливає, що дотичні до всіх кривих,
які проходять через точку М0 і лежать на поверхні (23), ортогональні
до одного й того самого вектора п. Тоді всі ці дотичні лежать в одній
і тій самій площині, яка називається дотичною площиною до
поверхні в точці М0.
Знайдемо рівняння дотичної площини. Оскільки ця площина
проходить через точку М0 перпендикулярно до вектора п, то її
рівняння має вигляд (гл. З, п. 4.1):
F's (М0) (х - х0) + F[ (М0) (у - уе) + F'z (Mo) (z - г0) «= 0. (26)
Нормаллю до поверхні в точці М0 називають пряму, що
проходить через точку М0 перпендикулярно до дотичної площини в
цій точці.
Оскільки норм-аль проходить через точку М0 і має напрямний
вектор п, то канонічні рівняння нормалі мають такий вигляд (гл. З,
п. 3.1):
*-*° ^-УіУо,^ г~г° . (27)
FX(M0) Fy(Me) FZ[M0)
Якщо рівняння поверхні задано в явній формі z = f (х, у), то,
поклавши F (х, у, г) = / (х, у) — z = 0, дістанемо
F* (М0) = f'x (*о. У о), F'y (М0) = fx (х0, у0), F'z (М0) = -1,
тоді рівняння (26) і (27) наберуть вигляду
£ (*о. Уо) (х — х0) + f'v (х0, у0) (у — у0) — (z — г0) = 0; (28)
х — *о = У—Уп = г —г0 .
t'x(xQ, у0) f'v(x0, у0) — 1
З'ясуємо геометричний зміст повного диференціала функції z =
*= / (х, у)- Якщо в формулі (28) покласти х — х0 = Ах, у — у0 = Ау,
то ця формула запишеться у вигляді
z — z0 = f'x (х0, у0) Ах + f'y (x0, у0) Ау.
Права частина цієї рівності є повним диференціалом функції z =-
= / (х, у) в точці (х0; у0), тому z — z0 = dz.
Таким чином, повний диференціал функції двох змінних у точці
(хо> Уо) дорівнює приросту аплікати точки на дотичній площині до
поверхні в точці М0 (х0; у0; f (x0, у0)), якщо від точки (х0; у0) перейти
до точки (л;0 + Ах; у0 + Ау) (рис. 6.11).
Зауваження 1. Ми розглянули випадок, коли функція (19)
диференційовна в точці М0 і (F; (М0)Г + (Ґу (М0)У + (Fz (М0)Г Ф 0.
311
Рис. 6.10
V. Vу
А(х„}ув)
Рис. 6.11
Якщо ці умови не виконуються в деякій точці (її називають
особливою), то дотична та нормаль в такій точці можуть не існувати.
Зауваження 2. Якщо поверхня (23) є поверхнею рівня для
деякої функції и = и {х, у, г), тобто F (х, у, г) = и (х, у, г) — с -=■ 0,
то вектор
п = {F'x; F'u; Ґг) = [их; и\; и'г)
буде напрямним вектором нормалі до цієї поверхні рівня.
Приклади
1. Написати рівняння нормалі та дотичної площини до еліпсоїда 2дс* + уг + г* =
= 15 в точці М0(1; 2; 3).
О Скористаємось рівняннями (26) і (27). Маємо
F (х, у, t) = 2х* + у* + * — 15; F'x = Ах; Ґу = 2у;
Р'я = 2z; F'x <Л*0) = 4; F'y (AfJ = 4, Ґя (Лу = 6.
Отже, шукані рівняння нормалі та дотичної площини мають вигляд
х — 1 у —2 z—3 ж—1 и —2 2—3
2 ■
4 ™ 4 ~ 6 аио 2 = 2 = 3 '
4 (ж— 1) + А(у — 2) + 6(г— 3) = 0 або 2х + 2у +3z— 15 = 0. •
2. Написати рівняння нормалі та дотичної площини до параболоїда г = Xі +
+ р* в точці М0(1; —2; 5).
О Скористаємося формулами (28) та (29). Маємо
/ (*, у) = ** + і/і; /; (*, у) = 2*;
:2у; f'x(l, -2) = 2; /^(l. —2) 4.
f'y (x, У) •
х—1 0 + 2 г —5
Звідси —я—== ^—=_^ї— — рівняння нормалі, 2х — Ау—г-
няння дотичної площини. •
312
.5 = 0—рів-
Рис. 6.12
3.2. Скалярне поле. Похідна за
напрямом. Градієнт
Область простору, кожній точці М якої
поставлено у відповідність значення деякої
скалярної величини и (М), називають
скалярним полем. Інакше кажучи, скалярне
поле— це скалярна функція и (М) разом
з областю її визначення.
Прикладами скалярних полів є поле
температури даного тіла, поле густини
даного неоднорідного середовища, поле
вологості повітря, поле атмосферного тиску,
поле потенціалів заданого
електростатичного поля тощо.
Для того щоб задати скалярне поле, досить задати скалярну
функцію и (М) точки М і область її визначення.
Якщо функція и (М) не залежить від часу, то скалярне поле
навивають стаціонарним, а скалярне поле, яке змінюється з часом,—
нестаціонарним. Надалі розглядатимемо лише стаціонарні поля.
Якщо в просторі ввести прямокутну систему координат Оху, то
точка М в цій системі матиме певні координати (х; у; z) і скалярне
поле и стане функцією цих координат:
и = и (М) = и (х, у, z).
Якщо скалярна функція и (М) залежить тільки від двох змінних,
наприклад х і у, то відповідне скалярне поле и (х, у) називають
плоским; якщо ж функція и (М) залежить від трьох змінних: х, у і
z, то скалярне поле и (х, у, z) називають просторовим.
Геометрично плоскі скалярні поля зображають за допомогою
ліній рівня, а просторові — за допомогою поверхонь рівня (п. 1.1).
Для характеристики швидкості зміни поля в заданому напрямі
введемо поняття похідної за напрямом.
Нехай задано скалярне поле и (х, у, г). Візьмемо в ньому точку
М (х; у; z) і проведемо з цієї точки вектор /, напрямні косинуси якого
cos a, cos p\ cos у (рис. 6.12).
На векторі / на відстані Д/ від його початку візьмемо точку
Мг (х + Ах; у + Ay; z + Az).
Тоді
Д/ = ЛШХ = VAx2 + Ay2 + Az2.
Обчислимо тепер приріст Atu функції и (х, у, z) при переході від
точки М до точки Mt в напрямі вектора /:
Atu — и (Mj) — и (М).
313
Якщо існує границя відношення —£f- при Д/ -> 0, то цю границю
називають похідною функції и (х, у, z) в точці М (х; у; г) за напрямом
вектора І і позначають -дг, тобто
ди .. Д/м
& д;->о д'
Виведемо формулу для обчислення похідної за напрямом.
Припустимо, що функція и {х, у, z) диференційовна в точці М. Тоді ії
повний приріст в цій точці можна записати так:
Д ги = -g- Д* + -g- Ay + -Ц- Дг + etAx + геАу + еяАг,
де є1, є2, є3 — нескінченно малі функції при Д/ -*- 0.
Оскільки
Ах = Д/ cos а, Ау = Д/ cos р, Дг = Д/ cos у,
то
COS
а + -^- cos р + -|^- cos 7 + Єї cos а + є2 cos (і +
д/ дх ■ бу
+ е3 cos 7-
Перейшовши до границі при Д/ -» 0, дістанемо формулу для
обчислення похідної за напрямом
^-=-|-cosa+-|-cosp+^-cos7. (ЗО)
З формули (ЗО) випливає, що частинні похідні є окремими випад-
—-»■
ками похідної за напрямом. Дійсно, якщо / збігається з одним із
ортів і, і або k, то похідна за напрямом / збігається з відповідною
частинною похідною. Наприклад, якщо І = і, то а = 0, Р = у =
= -^-, тому
ди ди п , ди п , ди я ди
-ЬТ =-oTcos0 -Ь-^ГС08^Г + -aTC0S^- = -ЬТ•
в і *
Подібно до того як частинні похідні их, иу, иг характеризують
швидкість зміни функції в напрямі осей координат, так і похідна
-£- показує швидкість зміни скалярного поля и {х, у, г) в точці М (х,
у, z) за напрямом вектора І.
.. і гін
відповідає значенню швид-
Абсолютна величина похідної -^-
314
кості, а знак похідної визначає характер зміни функції и (х, у, г)
в напрямі / (зростання чи спадання).
Очевидно, що похідна за напрямом /х = —І, який протилежний
напряму /, дорівнює похідній за напрямом /, взятій з протилежним
знаком.
Справді, при змінні напряму на протилежний кути а, р, у
зміняться на я, тому
ди ди . , . . ди ,0 , . , ди , , . ди
Ж = -gfcosia +п) + -^-сов® +л) + -ж-сов(у +п) = w .
Фізичний зміст цього результату такий: зміна напряму на
протилежний не впливає на значення швидкості зміни поля, а тільки на
характер зміни поля. Якщо, наприклад, в напрямі / поле зростає,
то в напрямі lt = —/ воно спадає, і навпаки.
Якщо поле плоске, тобто задається функцією и (х, у), то напрям
—* —*
вектора / цілком визначається кутом a = (/, Ох). Тому, поклавши
в формулі (ЗО) 7 = -2-таР=-^ а, дістанемо
ди ди , ди .
~^г~ = -з- cos a -4- -5— sin a.
dl дх ' ду
Приклад
Знайти похідну функції и = х2 — 2хг + уг в точці А (І; 2; —1) за напрямом від
точки А до точки В (2; 4; —3). З'ясувати характер зміни поля в даному напрямі.
О Знаходимо вектор 1= АВ і його напрямні косинуси (гл. 2, п. 3.1):
-»-»-.-» 1 2 2
/ = і + 2/ — 2k, cos a = -g- , cos P = -g- , cos у = — -g- .
Тепер обчислимо значення частинних похідних у точці А і скористаємось
формулою (ЗО):
— ^ = (2,-2z)|„=4, -.,-^=2^ = 4.
ди І „ . о ди І . ' , 2 / 2 \ 16
"йГІ *U : "И„ = 4""з-+4-Т-2(-т) = ^--
ди
Оскільки —тт- > 0, то задана функція в даному напрямі зростає. #
Нехай задано поле и = и (х, у, г) і точку М (х; у; г). У якому
напрямі / похідна -щ- має найбільше значення? Відповідь на це
запитання має важливе практичне значення і дається на основі поняття
градієнта поля.
315
Вектор, координатами якого є значення частинних похідних
функції и (х, у, z) в точці М (х; у; г), називають градієнтом функції в
цій точці і позначають grad а. Отже,
«™>«--ї-Н"£/+-£-* т
Зв'язок між градієнтом і похідною в даній точці за довільним
напрямом показує така теорема.
Теорема. Похідна функції и (х, у, г) в точці М (х\ у; г) за
напрямом вектора І дорівнює проекції градієнта функції в цій точці на
вектор І, тобто
-§- = nprgradU. (32)
—*
О Нехай ф — кут між градієнтом (31) і одиничним вектором 1° =•
= {cos сс; cos P; cos у) (рис. 6.13), тоді з властивостей скалярного
добутку (гл. 2, п. 4.3) дістанемо
ди ди , ди 0 , Ви
■w = -^ cos а + -^ cos (і + -^- cos Y =
■= (grad u)/°=| grad «| - | Z° 1 cos ф =
•= I grad u | • cos ф = np_^ grad u. •
Зазначимо деякі властивості градієнта.
1°. Похідна в' даній точці за напрямом вектора І має найбільше
значення, якщо напрям вектора І збігається з напрямом градієнта,
причому
1-ж) = 18rad" І = VuT+uJTZ' ■ (33)
\ t" / max
Справді, з формули (32) випливає, що похідна за напрямом
досягає максимального значення (33), якщо cos ф = 1, ф = 0, тобто якщо
напрям вектора / збігається з напрямом
градієнта.
Таким чином, швидкість зростання
скалярного поля в довільній точці є
максимальною у напрямі градієнта. Зрозуміло, що
у напрямі, протилежному до напряму
градієнта, поле найшвидше зменшуватиметься.
Рнс. 6.13 2°. Похідна за напрямом вектора, пер-
316
пендикулярного до градієнта, дорівнює нулю. Інакше кажучи,
швидкість зміни поля у напрямі, перпендикулярному до градієнта,
дорівнює нулю, тобто скалярне поле залишається сталим.
Справді, за формулою (32) -gj- = 0, якщо ф = -^-.
3°. Вектор-градієнт у кожній точці поля и (х, у, z)
перпендикулярний до поверхні рівня, яка проходить через цю точку. Це
твердження випливає з того, що напрямний вектор нормалі до поверхні
рівня и — и {М0), яка проходить через точку М0, має координати
(п. 3.1)
ди І ди І ди І
~в*"|«в' ~%Г\м.' "*"!«.'
4°. Справедливі рівності:
grad (u + v) = grad и + grad v,
grad (Cu) = С grad и, С = const;
grad (uv) = и grad v + v grad u;
v gradu—ugrad v t
grad(-f)
gr ad /(") = ■§- gradu.
О Доведемо, наприклад, третю рівність. Маємо:
д
ду
grad (uv) = -^- (uv)l + -ї- (uv)J+ -|- (uv) 1 =
І ди , dv W./du . dv \~r . І ди dv \ т*
І ди ■?■, ди -* , ди -?\ , І dv Т , dv t , dv -?\ ,
+ и grad v.
Решта рівностей доводяться аналогічно. •
Приклади
1. Знайти значення і напрям градієнта функції и = Xі + у2 + z* — Чхуг в
точці М„ (0; 1; 2).
О Знайдемо частинні похідні н точці М0:
ди
~ЬТ\.. -(2х-2уг)1Мв = -4;
За формулою (81) маємо
gradu|^ 47+27+4?.
317
Отже,
І gradїї |АІо = V(-4)a + 2* + 4» = 6; cosa = --3-, cosp = -3-.
2
cos v = -у . •
2. Знайти найбільшу швидкість зростання поля и = ху — г в точці М0 (І;
2; 3).
О Маємо
~дГ L =_1; gradu|Mo = 2i-fe.
Найбільшу швидкість зростання поля знаходимо за формулою (33)
("Ж") =l2T-"fe|=^5. •
\ v 'max
3.3. Формула Тейлора для функції двох змінних
Як відомо (гл. 5, п. 5.4), якщо функція однієї змінної F (f) має
на відрізку [а; (і] неперервні похідні до (п + 1)-го порядку
включно, то справджується формула Тейлора:
F(f)=F (t0) + F' (У (t - t0) + -Z&L (t -10? +
0<Є<1, *€[«;(}].
Нехай t — t0=At = dt, F (t) — F (t0) = AF (*„), тоді
F{0 (W (*- '0)'' = ^° Co) (ДО' = ^(0 «0) Л' = dlF (t0), і Є N,
тому формулу (34) можна записати у вигляді
AF(t0) = dF(to) + ^^L + .-. + ^- +
+ '7Л°и.ЄА°' °<е<к <35>
В аналогічному вигляді формулу Тейлора можна дістати і для
функції багатьох змінних. Розглянемо функцію двох змінних.
Нехай функція z = / (х, у) в області D має неперервні частинні
похідні до п + 1-го порядку включно. Візьмемо дві точки М0 (х0;
у0) та М1 (х0 + Ах; у0 + Ау) такі, щоб відрізок M0Mt належав
області D.
318
Введемо нову змінну t:
x = x0+tAx, y = y0 + tAy, 0<*<1. (36)
При / = 0 за цими формулами дістанемо координати точки М0,
а при t = \ — координати точки Лїх. Якщо t змінюватиметься на
відрізку [0; 1], то точка М {х0 + іАх; у0 + tAy) опише весь відрізок
М0Мх. Тоді вздовж цього відрізка функція буде функцією однієї
змінної /:
/ (х. у) = /(*„ + tAx; y0 + tAy) = F (t). (37)
Запишемо формулу (35) для функції (37) при t = 0, At = 1:
MW = dFW) + J^&-+ ... +^L + ^J|L. (38)
Обчислимо диференціали, що входять у формулу (38). З рівностей
(36) і (37) маємо-
dF (t) = df (х, у) = f'x (х, у) dx + f'u (х, у) dy = f'x (х, у) Axdt +
+ f'v (x, у) Aydt.
Оскільки dt = At = 1, то
dF (0) = f'x (х0, у0) Ах + fy (x0, y0) Ay = df {x0, у0). (39)
Аналогічно
d2F (t) = d2/ (х, у) = fxx (х, у) dx* + 2f"sy (x, у) dxdy + fuy (x, y) dy\
d*F (0) = [-L- Ax + -L- Ay) f (x0, y0) = d2/ (x0, y0). (40)
Продовжуючи цей процес, знайдемо
d3F(0) + d*f(x0, y0) dnF (0) = dnf(x0, y0),
dn+lF (6) = dn+1f (x0 + 6Д*. Уо + QAy).
Крім того, приріст
AF (0) = F (1) - F (0) = / (Af,) - / (M„) = A/ (x0, y0). (42)
Підставивши вирази (39—42) у формулу (36), дістанемо
Л/(*о. yo) = df(x0, у0)+ *'(*.№) + ... + ^f^ + #„+,,
(43)
^ = ^/fa + ЄЛу + О^ , 0<в< 1. (44)
Формулу (43) називають формулою Тейлора для функції двох
змінних з залишковим членом Rn+i У формі Лагранжа. Цю формулу
319
Рис. 6.14
використовують для
наближених обчислень. Для
різних значень п з формули
(43) можна дістати рівності
для наближеного
обчислення значень функції / (х, у).
^■пйіНРФ Абсолютну похибку цих
І „ наближених рівностей оці-
У нюють через залишковий
член (44).
Формула Тейлора (43)
для функції двох змінних
нагадує формулу Тейлора
(35) для функції однієї змінної. Але насправді, якщо розкрити
вирази для диференціалів у формулі (43), то дістанемо складнішу
формулу, ніж для функції однієї змінної. Наприклад, при п = 1
формула (43) має вигляд:
f(x0+Ax, y0 + Ay) — f(x0, у0) = Ґх(х0, y0)Ax + fB(x0, у0)Ау +
+ •% У«(*> + ЄД*> Уо + 8ДУ)д*2 + 2fxy (*„ + ЄД*. у0 + QAy) АхАу +
+ Ґуу 1*в + 6Д*. Уо + ЄД«/) А«/2]- (45)
3.4. Локальні екстремуми функції двох змінних
Нехай функція z ~ f (х, у) визначена в області D, а точка М0 (х0;
у0) £ D. Якщо існує окіл точки М0, який належить області D і для
всіх відмінних від М0 точок М цього околу виконується нерівність
/ {М) < f (М0) (/ (М) > / (М0)), то точку М0 називають точкою
локального максимуму (мінімуму) функції f (х, у), а число f (М0) —
локальним максимумом (мінімумом) цієї функції (рис. 6.14). Точки
максимуму та мінімуму функції називають її точками екстремуму.
Це означення можна перефразувати так. Покладемо х = х0 + Ах,
У = Уо + ДУ. тоді
/ (х, У) — f (х0, у0) = f{x0 + Ах, у0 + Ау) — f (х0, у0) = Д/ (*0, у0).
Якщо приріст функції Af (х0, у0) < 0 (Д/ (*0, у0) > 0) при всіх
достатньо малих за абсолютною величиною приростах Ах і Ау, то
функція f (х, у) в точці М0 (х0; у0) досягає локального максимуму гтах ~
— ї (хо< Уо) (локального мінімуму z„iin = f (x0, У о))- Інакше кажучи,
в околі екстремальної точки прирости функції мають один і той
самий знак.
Теорема 1 (необхідні умови екстремуму). Якщо функція г = f (х,
у) має в точці (х0; у0) локальний екстремум, то в цій точці
частинні похідні першого порядку по змінних х та у дорівнюють нулю або
не існують.
320
О Нехай (х0; у0) — точка екстремуму. Тоді функція / (х, у0) буде
функцією однієї змінної. Ця функція має екстремум у точці х = х0,
тому її похідна f'x (x0, у0) дорівнює нулю або не існує (гл. 5, п. 6.2).
Аналогічно, розглянувши функцію f (x0, у), дістанемо, що f'a (x0,
Уо) дорівнює нулю або не існує. •
Подібна теорема справедлива для функції п змінних. Точку (х0;
Уо), в якій частинні похідні першого порядку функції f (x, у)
дорівнюють нулю, тобто fx = fy = 0, називають стаціонарною точкою
функції f (х, у).
Стаціонарні точки та точки, в яких частинні похідні не існують,
називаються критичними точками.
Таким чином, якщо функція в якій-небудь точці досягає
екстремуму, то це може статися лише в критичній точці. Проте не всяка
критична точка є точкою екстремуму, тобто теорема 1 встановлює
лише необхідні, але не достатні умови екстремуму. Наприклад,
частинні похідні функції 2 = х2 — у2 (рис. 3.71) дорівнюють нулю в
точці (0; 0). Але ця функція у вказаній точці екстремуму не має,
тому що в досить малому околі точки (0; 0) вона набуває як додатних
(при \ х | > | у |), так і від'ємних (при | х | •< | у |) значень.
Слід зазначити, що в задачах з практичним змістом, як правило,
відомо, що функція має екстремум. Якщо така функція має лише
одну критичну точку, то ця точка і буде точкою екстремуму.
Приклад
Відкритий прямокутний басейн повинен мати об'єм V. Знайти розміри басейну,
за яких на його облицювання піде найменша кількість матеріалу.
О Нехай х — довжина, у — ширина, г — висота басейну, тоді V ■= хуг, звід-
V
КИ г=^У~-
Кількість матеріалу, необхідного для облицювання басейну, визначається
формулою
S = ху + 2уг + 2xz
або
S = S(x, у) = ху + 2у[-]Г + -уУ
Треба знайти мінімум функції S (х, у), якщо х > 0, у "> 0. Знайдемо стаціонарні
точки функції S (х, у). Маємо
2V 2V
S'x(x, у) = У — —г , S'v(x, у)=х — —г\
2V
*—рг=»0; x = y = yW.
321
Отже, функція S (х, у) має тільки одну стаціонарну точку М (^2V; ~J^2V), яка І
є її" точкою мінімуму, бо, згідно з умовою задачі, мінімум функції S (х, у) існує.
Обчисливши відповідне значення г, дістанемо
—i-V».
Таким чнном, басейн повинен мати висоту, рівну -у іУ2У, і квадратну основу із
стороною, рівною "1^2 V. ф
Теорема2 (достатні умови екстремуму). Нехай в стаціонарній
точці М0 {х0; у0) і деякому її околі функція f (x, у) має неперервні
частинні похідні другого порядку. Якщо
Д (*о. Уо) = /хх (х0, у0) fly (х0, у0) — (f"xy (х0, y0)f > 0,
то функція f (x, у) має в точці М0 екстремум, причому максимум
при fхх (х0, у0) < Оі мінімум при fxx (х0, у0) > 0. Якшр А (х0, у0) <
< 0, то в точці М0 функція f {x, у) екстремуму не має.
О Запишемо формулу Тейлора (45) для функції f (x, у) в околі
стаціонарної точки М0. Враховуючи, що fx (х0, у0) = f'y (x0, у0) — 0,
дістанемо:
Д/(*о» Уо)=ї(х0 + Ьх, у0 Ч-Af/) — /(Jc0. «/o) =
= "2Т [їх* (*Ь + ЄДх, у0 + 6Ау) Дх2 + 2f"xy (х0 + ЄДаг, у0 + QAy) AxAy +
+ Гуу (*0 + ОД*, у0 + QAy) Ау% 0 < Є < 1.
У випадку мінімуму для довільних достатньо малих значень | Дл; |
та | Ау | права частина цієї рівності повинна бути додатною, а у
випадку максимуму — від'ємною.
Внаслідок неперервності других частинних похідних для цього
достатньо, щоб диференціал другого порядку в точці М0
d2f (М0) = Г„ (х0, у0) Ах* + 2f'xy (x0, y0) AxAy + f"yy (*„. *о) А«/2
зберігав знак для малих значень | Ах | та | Ді/1.
Введемо такі позначення: А = fxx (х0, у0), В = fXy (х0, у0), С =
= fay (*о. Уо). тоді Д (х0, у0) = АС — В2.
Нехай <р — кут між відрізком М0М — р, де М — точка з
координатами (х0 + Ах; у0 + Ау) і віссю Ох; тоді Ах = р cos ф, Д# =•
= р sin ф, тому при А Ф0 маємо
d2f (М0) = Лрг cos2 ф + 2Вр2 sin Ф cos ф + Ср2 sin2 ф =
= -J- [(A cos ф + В sin ф)2 + {АС — В2) sin2 ф] =
= -^- [(A cos ф + В sin ф)2 + Д (х0, Уо) sin2 q>].
Розглянемо тепер п'ять можливих випадків.
322
1) Нехай Д (х0, у0) > 0 і АІ < 0, тоді cPf (M0) < 0, тому при
досить малих значеннях р приріст Af (x0, y0) <Z 0, тобто функція f (x,
у) має в точці М0 максимум.
2) Аналогічно доводимо, що коли Д (х0, у0) > 0 і А > 0, то
функція / (х, у) в точці М0 має мінімум.
3) Нехай Д (х0, у0) < 0 і А > 0. Якщо з точки М0 рухатись
вздовж променя ф = 0, то d2/ (М0) = рМ > 0. Якщо взяти ф = Фі
таким, щоб A cos фх + В sin фг = 0 або ctg фх = —^-, то
d*f{M0) = -?j-A(Xo «/0)sin29l<0.
Отже, при малих значеннях р приріст Af (x0, у0) в околі точки М0
не зберігає знак, тому ця точка не є точкою екстремуму функції / (х, у).
4) Аналогічно встановлюємо, що коли Д (х0, у0) < 0 і А < 0,
то функція f (x, у) в точці М0 також не має екстремуму.
5) Нехай Д (х0, Уо) = АС — В2 < 0 і А = 0, тоді В ф 0 і
d*f (Мд) = р2 sin ф (2В cos ф + С sin ф).
При досить малих кутах ф знак величини 2В cos ф + С sin ф
збігається із знаком В, тому знак величини d2f (M0) залежатиме від
знака множника sin ф. Але знак величини sin ф змінюється при ф >• 0
і ф < 0, бо sin (—ф) = —sin ф. Отже, в достатньо малому околі
точки М0 знак Д/ (х0, у0) не зберігається, тобто функція f (x, у) в цій
точці екстремуму не має. •
Зауваження.З доведення теореми 2 випливають так звані другі
достатні умови екстремуму: функція / (х, у) має мінімум в
стаціонарній точці М0 (х0; Уо), якщо диференціал другого порядку в цій
точці d2/ (М0) > 0, і максимум — якщо d2/ (M„) < 0.
Можна довести, що другі достатні умови екстремуму справедливі
для функцій довільного числа змінних.
На основі теорем 1 і 2 дістанемо правило дослідження диферен-
ційовних функцій двох змінних на екстремум. Щоб знайти екстремум
диференційовної функції 2 = f (x, у), необхідно:
1) знайти стаціонарні точки функції із системи рівнянь:
lf'x(x,y) = 0;
\fy(x, «/) = 0;
2) у кожній стаціонарній точці (х0; у0) обчислити вираз
Л(*о- Уо) = Гхх(х0, Уо)Гуу(х0, Уо) — (Гхи(х0, Уо)?\
якщо Д (х0, Уо) > 0, то (х0; Уо) — точка екстремуму функції,
причому точка максимуму при }Хх (х0, у0) < 0 і мінімуму при fxx (x0,
Уо) > 0; якщо А (х0, у0) <. 0, то точка (х0; у0) не є точкою
екстремуму функції;
323
3) обчислити значення функції / (х, у) в точках максимуму та
мінімуму.
Якщо Д (х0, Уо) — 0. то ніякого висновку про характер
стаціонарної точки зробити не можна і потрібне додаткове дослідження.
Приклад
Знайти екстремуми функції г = х* + у* — 2хг -\- 4ху — 2уг.
О Знаходимо частинні похідні
г'х^=4(х3 — х+у), гу*=4(у9 + х — у).
Стаціонарні точки функції визначимо is системи:
Xs — х + у = 0,
у* + х-у~0.
Додаючи ці рівняння, знайдемо х8 -)- і/8 = 0, звідки у ■= —х.
Підставляючи у «=■ —х в перше рівняння, дістанемо х* — 2х = 0, звідки
*! = 0, X, = У% Х3 = —УТ, ТОДІ
Уі = 0, й = —/5, уг = У$.
Отже, функція має трн стаціонарні точки:
Мі (0;0), Мш (V2; -У%, Мя (-^2; У%.
Знайдемо величину Д (х, у). Оскільки
f'xx (*• У) = 12*а — 4. fKg (х, у) -.4, 4, (х, у) =- 12^-4,
то
Д (х, у) = 16 (9*V — Зх» — Зі/»).
Обчислимо величину Д (х, у) в кожній стаціонарній точці:
Д (Mj) = 0, Д (Щ = Д (Ліз) = 384 > 0, f"xx (MJ =* fxx (М„) = 20 > 0.
Таким чином, точки М2 та М3 — точки мінімуму. В цих точках zmIn = —8.
У точці Ліі значення Д (MJ = 0, тому теорему 2 застосувати не можна.
Переконаємось, що в цій гочці екстремум відсутній. Дійсно, якщо у = 0, то г = х* —
— 2хг = ха (х2 — 2) < 0 в околі точки Мі. Якщо у = х, то г = 2х* > 0. Отже, в
околі точки Мі значення г можуть бути як додатні, так і від'ємні, а це значить, що
точка Мі не є екстремальною. Відзначимо, що інших екстремумів задана функція
не має, оскільки точки, в яких похідні г і г„не існують, відсутні.
3.5. Найбільше та найменше значення функції
Відомо, що функція г = f (х, у) задана і неперервна в замкненій
та обмеженій області D, досягає в цій області найбільшого і
найменшого значень. У внутрішніх точках області диференційовна функція
може набувати цих значень лише в точках локального екстремуму.
Тому треба знайти всі стаціонарні точки функції, які належать
області D, розв'язавши систему рівнянь (х (х, у) = 0, fy (х, у) = 0,
і обчислити значення функції в цих точках. Потім потрібно дослідити
функцію на екстремум на межі області D. Використовуючи рівняння
324
межі, цю задачу зводять до знаходження
абсолютного екстремуму функції однієї
змінної (гл. 5, п. 6.3). Серед здобутих таким чином
значень функції всередині і на межі області
вибирають найбільше і найменше значення.
Зазначимо, що загального методу
знаходження найбільшого та найменшого значень
для довільної неперервної функції в
замкненій та обмеженій області D немає.
Приклади
1. Знайти найбільше та найменше значення функції г = хгу (2 — х — у) в
замкненій області D, обмеженій прямими х = 0, у — 0, х -\- у = 6 (рис. 6.15).
О Знаходимо стаціонарні точки. Маємо
г'х = ху (4 — Зх — 2у), г'у = х*(2—х — 2у).
Прирівнюючи похідні до нуля і скорочуючи їх на ху та х* (всередині трикутника
ОАВ хфО, уФО), дістаємо систему рівнянь:
4— Зх — 2у = 0;
2 — х — 2у = 0,
звідки х = 1, у = 1/2.
Стаціонарна точка М (1; 1/2) належить області D, тому обчислюємо значення
z (М) = 1/4.
Рівняннями сторін ОВ та ОА трикутника є х = 0 та у = 0, тому значення
функції г = 0 в усіх точках відрізків ОВ і ОА, зокрема г (0) = г (А) = г (В) = 0.
Знайдемо стаціонарні точки на стороні АВ трикутника ОАВ. Рівняння цієї
сторони у = 6 — х, тому г = х2 (6 — х) (2-х — 6 -|- х) = —4х2 (6 — х), 0 ^
sSx<6.
Далі дістанемо
г'х= — 48х+ 12х2 = 0,
звідки Хі =0, х2 = 4. Оскільки у = 6 — х, то yt = 6, у2 = 2.
Знаходимо точки В (0; 6) і С (4; 2) і обчислюємо значення г (С) = —128.
Порівнюючи значення заданої функції в точках А, В, С. О, М, знаходимо
найбільше та найменше значення:
max г = -т- , тіпг = — 128. •
(х.у)Ф * (x,y)(.D
2. (Задача про екстракцію оцтової кислоти s розбавленого бензолом водяного
розчину). Загальний об'єм бензолу V ділиться на три частини: Vl3 Vj, V3 для трьох
послідовних екстрагувань кислоти з водяного шару. За яких умов відбудеться
максимальне вилучення кислоти при екстракції?
О Екстракція (від лат. extraho — витягую, вилучаю) — це розділення суміші
речовин за допомогою розчинника, в якому складові частини суміші розчиняються
неоднаково. її застосовують для одержання чистих речовин в хімічній, а
найчастіше в харчовій (головним чином у цукровій) промисловості.
Нехай х0 — початкова концентрація оцтової кислоти в об'ємі а водяного шару.
Вважатимемо, що при перемішуванні об'єм не змінюється і після кожної екстракції
справджується закон розподілу у = kx, тобто yt = kxu y2 = fex2, ys = kxt, де х —
концентрація кислоти у водяному розчині; k — коефіцієнт розподілу; у —
концентрація кислоти в бензолі, а індекси 1, 2, 3 показують порядковий номер екстракції.
325
З матеріального балансу для першої екстракції дістанемо
а*о = уіУі + ахі = vife*i + ахі>
ЗВІДКИ
х, =■
*1_ a + Vxk •
аналогічно для другої і третьої екстракцій відповідно маємо
Хя =
* _ а + Vtk - (а + Vtk) (о + V2k) •
ахг а?х0
з _ а + V3k ~ (a + Vxk) (a + V2k) (a + V3k) '
Вилучення кислоти для заданої кількості бензолу максимальне при мінімальному
значенні х3. Оскільки asx0 — стала величина, то Xj буде мінімальним, якщо
знаменник и (Vi, V2, V3) = (а + Vxk) (а + Vtk) (а -|- V3k) буде максимальним за
умови, що Vi + Vz + V3 = V.
Виключивши змінну V3, дістанемо задачу на знаходження екстремуму функції
двох змінних:
Оскільки
и IVи V,) = (а + Vtk) (a + V2k) (a-\-Vk— Vxk — V2k).
ди
ди
k(a+ V2k) [(a + Vk- Vxk - Vtk) -(a + V,fe)],
dVz
то із системи рівнянь
ди
= k (a + Vxk) [a + Vk — Vxk — Vzk) - (a + Vtk)],
Wi °" (ft1 (a + V2k) (V - 2V, - V2) = 0,
або <
du U2 (a + V^) (V~V1- 2Vj) = 0
V
маємо Vi = V2 = -g-, тобто функція u (l^, 1/2) ма€ тільки одну стаціонарну точку
І V V \
—; —І, яка і є її точкою максимуму, бо згідно з умовою задачі максимум функції
V
и (Vi, V2) існує. Обчисливши значення V3= V — Vx — Vs = -g-, бачимо, що Vi =
V
= V2 = V3 = -я-. За таких умов відбудеться максимальне вилучення оцтової
кислоти.
Можна показати, що знайдений результат є загальним: для максимального
вилучення речовин при екстракції треба користуватись рівними кількостями
розчинника у вигляді окремих порцій незалежно від того, на скільки частин розділена
загальна кількість розчинника V. ф
326
3.6. Умовний екстремум
Нехай в області D задано функцію z = f (х, у) і лінію L, яка
визначається рівнянням (f(x, y)=0 та лежить в цій області.
Задача полягає в тому, щоб на лінії L знайти таку точку М (х;
у), в якій значення функції f (x, у) є найбільшим або найменшим
порівняно із значеннями цієї функції в інших точках лінії L. Такі
точки М називають точками умовного екстремуму функції f (x, у)
на лінії L. На відміну від звичайного екстремуму значення
функції в точці умовного екстремуму порівнюється із значеннями цієї
функції не в усіх точках області D (чи 6-околу точки М), а лише в
точках, які лежать на лінії L.
Назва «умовний екстремум» пов'язана з тим, що змінні х та у
мають додаткову умову: «р (х, у) = 0.
Рівняння <р (х, у) = 0 називається рівнянням зв'язку; якщо це
рівняння можна розв'язати відносно однієї змінної, наприклад у:
у = і]; (х), то, підставляючи замість у значення і|> (х) у функцію
z = f (х, у), дістаємо функцію однієї змінної z = f (x, г|) (х)).
Оскільки додаткова умова врахована, то задача знаходження умовного
екстремуму зводиться до задачі на звичайний екстремум функції однієї
змінної (гл. 5, п. 6.2).
Проте не завжди можна розв'язати рівняння зв'язку відносно у
чи х. Тоді розв'язують поставлену задачу так.
Розглянемо функцію z = f(x, у), де у = т|з (х), як складену
функцію (гл. 4, п. 2.4). З необхідної умови екстремуму випливає, що в
точках екстремуму
3-і-+-£-£-«• т
У цьому випадку -~ означає похідну неявної функції у, заданої
рівняннями зв'язку ф (а:, у) = 0:
dy _ Ф*
* ф;
тобто
™*-І-+-ї-(~£)-*
'* _ ty
» — * •
Ф* Ф„
Позначивши останні відношення через (—А) (Я, ф 0) (знак мінус
взято для зручності, а саме число А, може мати довільний знак),
знайдемо, що в точці умовного екстремуму виконуються умови
-І = -І = -я, тобто /; + яФ; = о, f +Xq>;-o.
Ф* % " "
327
Отже, стаціонарні точки умовного екстремуму мають задовольняти
систему рівнянь
Ф (х, У) = 0;
(47)
Аналізуючи цю систему, помічаємо, що знаходження умовного
екстремуму функції 2 = f (x, у) звелось до знаходження звичайного
екстремуму функції
F (х, у, X) = f(x, у) + ЯлрОг, у).
(48)
Функція (48) називається функцією Лагранжа, а число Я, —
множником Лагранжа.
Умови (47) є лише необхідними. Вони дають змогу знайти
стаціонарні точки умовного екстремуму. З теореми 2 (п. 3.4) випливає,
що характер умовного екстремуму (достатні умови) можна встановити
за знаком диференціала другого порядку функції Лагранжа: якщо
в стаціонарній точці <PF >0 (d2/7 < 0), то ця точка є точкою
умовного мінімуму (максимуму).
Для функції и = / (х, у, z) з рівняннями зв'язку (Pj (jc, у, г) = 0,
Ф2 (х, У, г) = 0 функція Лагранжа записується у вигляді
Ф(х, у, г, V XJ=f(x, у, г) + Кч>і(х, у, г) + Я,2<р2(х, у, г).
Стаціонарні точки умовного екстремуму знаходяться Із системи
рівнянь
<р, (х, у, г) = 0;
Ч>2 (х, У, 2) = 0;
4+».-$-+*.
-£■+»■-$-+».
-ї-+»>-£+»•
5«р2
дх
ду
дг
= 0;
= 0;
= 0,
а достатні умови існування умовного екстремуму в цих точках можна
визначити за знаком диференціала d20.
Розглянутий метод можна поширити на дослідження умовного
екстремуму функції довільного числа змінних.
328
Приклад
Знайти найбільше значення функції г = ху, якщо х та у додатні і
задовольняють рівняння зв'язку
8 + 2
О Складаємо функцію Лагранжа (48):
1=0.
F (х, у,\) = ху + Ь (-j- + НГ - і) •
Користуючись системою (47), знаходимо стаціонарні точки цієї функціїї
_
8
1=0і
у+К-
■0;
ДО 0, у>0.
звідки х = 2, у= 1, Х= —2. Отже, маємо одну стаціонарну точку М (2; 1; —2),
Щоб визначити характер умовного екстремуму в цій точці, знайдемо за допомогою
формули (18) другий диференціал функції Лагранжа при К = —2:
d?F = — -g- dx2 + 2dxdy — 2dy* + (у — -^-j d*x +(x— 2y) d*y.
Знайшовши з рівняння зв'язку йу (2; 1) = — -к- dx, дістанемо
d?F (M) = — -^-dx2 + 2dx(~ -^-dx\— 2 (— -^ dx\ = — 2d*»<0,
тому точка (2; 1) є точкою умовного максимуму функції г = ху. При цьому zmax =
=» 2.
Цей результат легко перевірити, знайшовши звичайний екстремум функції:
.-*/»-4-
Завдання для самоконтролю
1. Вивести рівняння дотичної площини і нормалі до поверхні, заданої
рівнянням F {х, у, г) = 0.
2. У чому полягає геометричний зміст повного диференціала функції двох
8МІННИХ.
3. Що називається скалярним полем? Дати приклади.
4. Вивести формулу для похідної за напрямом.
5. У чому полягає фізичний зміст похідної за напрямом?
6. Дати означення градієнта скалярного поля. Довести теорему про зв'язок
градієнта і похідної за напрямом.
7. Сформулювати і довести властивості градієнта.
329
8. Написати формулу Тейлора для функції двох змінних, користуючись
диференціалами вищих порядків. Розкрити зміст формули прн п = 0, 1, 2.
9. Дати визначення точки локального екстремуму.
10. Сформулювати і довести теорему про необхідні умови локального екстремуму
функції кількох змінних.
11. Сформулювати і довести теорему про достатні умови локального екстремуму
функції двох змінних.
12. Дати означення і описати спосіб знаходження умовного екстремуму.
13. У якому випадку задачу на умовний екстремум можна звести до задачі на
звичайний екстремум?
14. Знайти рівняння дотичної площини і нормалі в точці (1; 2; 1) до
однопорожнинного гіперболоїда х2 -\- 1у2 — 4z2 = 5.
15. Знайти похідну функції « = у2г — Чхуг + г2 в точці (3; 1; 1) за напрямом
л л
вектора, який утворює з координатними осями кути а = —^, р= -т~.
16. Знайти похідну функції г = In (х2 + у2) в точці М (3; 4) за напрямом
градієнта функції в цій точці.
17. Знайти екстремуми функції z = х3у2 (1 — х — у).
18. Знайти найбільше та найменше значення функції г = х + у в крузі х2 +
19. Знайти умовний екстремум функції г = ху, якщо у + х2 — 3 = 0. Розв я-
затн задачу двома способами: за допомогою функції Лагранжа і як задачу на
звичайний екстремум функції однієї змінної.
х—\ у — Ч г— і
Відповіді. 14. х -f- \у — 4г — 5 = 0, j = ^ = ^ .
15._*=_ 5 + 4/5. ,6.Л.,7.гга> = 2(^;4)-^. и.,1
—1^2. Вказівка. Прн знаходженні стаціонарних точок на межі області
скористатись параметричними рівняннями кола. 19. zmax = 2, zmin = —2.
Глава 7
ІНТЕГРАЛЬНЕ ЧИСЛЕННЯ ФУНКЦІЙ
ОДНІЄЇ ЗМІННОЇ
Інтеграл — одне з центральних понять математичного аналізу
і всієї математики. Воно виникло у зв'язку з двома основними
задачами: 1) про відновлення функції по заданій її похідній; 2) про
обчислення площі, обмеженої графіком функції у = f (х), х £ І а; Ь],
прямими х = а, х = Ь і віссю Ох (подібні задачі дістаємо при
обчисленні багатьох інших величин, наприклад роботи, яку виконує
сила протягом деякого часу, тощо). Термін «інтеграл» ввів Я. Бернул-
лі у 1690 р. Цікаво, що в історії математики цей термін пов'язують
з двома латинськими словами: integro — відновляти та integer —
цілий.
Вказані дві задачі приводять до двох пов'язаних між собою
видів інтегралів: невизначеного і визначеного. Вивчення властивостей
і обчислення цих інтегралів і складають основну задачу інтегрального
числення.
330
Елементи інтегрального числення закладено у працях
математиків Стародавньої Греції. Основні поняття і початки теорії
інтегрального числення, насамперед зв'язок його з диференціальним
численням, а також застосування їх до розв'язування практичних задач,
розроблені в кінці 17 ст. Ньютоном і Лейбніцем. Далі історичний
розвиток інтегрального числення пов'язаний з іменами Л. Ейлера,
О. Коші, Б. Рімана та інших вчених.
§ 1. НЕВИЗНАЧЕНИЙ ІНТЕГРАЛ
Основною задачею диференціального числення є знаходження
похідної /' (х) заданої функції / (х). Одне з можливих фізичних
трактувань цієї задачі — визначення швидкості руху за функцією, яка
задає пройдений шлях за час руху. З практичної точки зору
природною є обернена задача, а саме, визначення пройденого шляху за
відомою швидкістю руху як функцією часу. Більш формально, остання
задача є знаходженням функції f (х) за відомою її похідною /' (х).
Розв'язується ця задача за допомогою невизначеного інтеграла.
1.1. Поняття первісної функції та невизначеного інтеграла
Функція F (х) називається первісною функції f (x) на проміжку
(а; Ь), якщо/7 (х) диференційовна на (а; Ь) і F' {х) = f (х), х £ (а; Ь).
Наприклад: 1) первісною функції /(*) = хй, x£R є функція
F(*) = -?}- (справді, F'(x)= {-\-\ = *г. x^Ry, очевидно, що
первісними будуть також функції F (х) — —$—\- 1, F(x) — -=- + 2
Xs
і взагалі F(x) = -3—+ С, де С — довільна стала, оскільки F' (х) =
- (-£- + CJ = х\ x<:R;
2) функція f (х) = cos х, х £ R має первісну функцію F (х) =
= sin х +- С, бо F' (х) = (sin х + С)' = cos х, х Є R.
Розглянуті приклади показують, що задача знаходження
первісної розв'язується неоднозначно. Інакше кажучи, якщо для функції
f (x) існує первісна F (х), то ця первісна не одна. Виникає запитання:
як знайти всі первісні даної функції, якщо відома хоча б одна з них?
Відповідь дає така теорема.
Теорема. Якщо F (х) — первісна функції f (x) на проміжку (а;
Ь), то всяка інша первісна функції f (x) на цьому самому проміжку
має вигляд F (х) + С.
О Нехай Ф (х) — деяка інша, крім F (х), первісна функції f (х),
тобто Ф' (х) = f (х), х £ {а; Ь). Маємо
V*€(a; b):[<t>{x)-F{x)\' = Ф'(х)-Р (х) = /(*)-/(*) =0,
331
а це означає (гл. 5, п. 5.2, прикл. 4), що Ф(х) — F (х) = С. Отже,
Ф (де) = F (х) + С. •
З цієї теореми випливає, що множина функцій F (х) -\- С, де
F (х) — одна з первісних функції f (х), а С — довільна стала, визначає
всю сукупність первісних заданої функції.
Якщо F (х) — первісна функції f (х) на проміжку (а; Ь) і С —
довільна стала, то вираз F (х) -{- С називається невизначеним
інтегралом функції f (x) на цьому проміжку і позначається символом
J f (x) dx. Таким чином, символ J / (x) dx означає множину всіх
первісних функції f (х).
Знак f, який ввів Лейбніц, називається інтегралом, f (x) dx —
під інтегральним виразом, f (х) — підінтегральною функцією, х —
змінною інтегрування. Отже, за означенням,
\ f (x) dx = F (х) + С, якщо F' (х) = f (x), х£ (а; Ь).
(1)
Операцію знаходження невизначеного інтеграла від функції
називають інтегруванням цієї функції.
З погляду геометрії невизначений інтеграл є множиною кривих,
кожна з яких називається інтегральною кривою і утворюється
зсувом однієї з них паралельно самій собі уздовж осі Оу (рис. 7.1). Щоб
з цієї множини виділити певну інтегральну криву F (х), достатньо
задати її значення F (*0) в якій-небудь точці х0 £ (а; Ь).
З рівностей (1) випливають такі властивості невизначеного
інтеграла.
1°. Похідна від невизначеного інтеграла дорівнює підінтеграль-
ній функції:
({/(*) dx)' = (F (х) + С)' = F' (х) = / (х).
Інакше кажучи, знаки похідної і невизначеного інтеграла
взаємно знищуються. Це природно, бо операції диференціювання та
інтегрування — взаємно обернені. Внаслідок цього правильність
виконання операції інтегрування перевіряється
диференціюванням. Наприклад,
S
sin 2xdx
cos 2x
cos2x
C,
Phc. 7.1
/ cos 2x , „\# . n
( g h C\ =sin2x;
— JL JL *
je3dx = 3e3 +C, (3e3 +C)' = e3;
332
2°. Невизначений інтеграл від диференціала деякої функції
дорівнює сумі цієї функції і довільної сталої:
J dF(x) = ^F' {x)dx = j f(x)dx = F (x) + C.
3°. Диференціал від невизначеного інтеграла дорівнює підінтеграль-
ному виразу:
d^f{x)dx) = ^f(x)dx)'dx = f(x)dx.
4°. Сталий множник можна виносити за знак інтеграла:
\Cf(x)dx^C[f{x)dx.
5°. Невизначений інтеграл від алгебраїчної суми двох функцій
дорівнює алгебраїчній сумі інтегралів від цих функцій:
[ [f (х) ± g (х)] dx - J / (х) dx ± J g (x) dx.
Властивості 4° і 5° перевіряються диференціюванням на основі
властивості 1°. Властивість 5° справедлива для довільного
скінченного числа доданків.
6°. Якщо
^f(x)dx = F(x) + C
і и => <р (х) — довільна функція, що має неперервну похідну, то
^f(u)du = F(u) + C. (2)
О Внаслідок інваріантності форми першого диференціала (гл. 5,
п. 3.2) і властивості 2° маємо
dF (u) = F' (ії) du = f (u) du;
^f(u)du=^dF(u) = F(u) + C. •
Ця властивість (її називають інваріантністю формули
інтегрування) дуже важлива. Вона означає, що та чи інша формула для
невизначеного інтеграла залишається справедливою незалежно від
того, чи змінна інтегрування є незалежною вмінною, чи довільною
функцією від неї, що має неперервну похідну. Таким чином, кількість
інтегралів, які обчислюються (або, як кажуть, «беруться»),
необмежено збільшується. Наприклад, \ x2dx = -^- + С, оскільки l-g- + СІ =
= Xі.
Користуючись інваріантністю цієї формули, одержимо формулу
J u2du = -^- + С, де и = ф [х) — довільна функція, що має неперерв-
333
ну похідну. Зокрема:
J (sin2 х) d (sin х) = -^^- + С,
тобто С sin2 x cos xdx = sin * -\- C;
ftg2*d(tg*)=-^- + C,
тобто ftg2*^- = -^- + C;
J ь cos2 x 3
f ln2jcd(lnx) = -ii^ + C,
тобто
)ln *—= -з- + с-
Природно, виникає запитання: чи для всякої функції існує не-
визначений інтеграл? Негативну відповідь на це запитання дає такий
приклад: нехай
— 1, — l<x<0;
/(*) = 0, * = 0;
1, 0<л:<1.
Покажемо, що функція / (х) на проміжку (—1; 1) не має первісної.
Припустимо протилежне. Нехай існує така функція F (х), що V х £
6 (—І; 1):ґ' (х) = f (x). Тоді з теореми Лагранжа на відрізку [0; *],
0 < х < 1, випливає, що
ЗсЄ(0; х): F(х) — F(0) = F' (с)х = f (c)х = x=>F+(0) = 1
(F+ (0) — права похідна функції F (х). в точці х = 0). Але F+ (0) =
= F (0) = 0. Одержане протиріччя означає, що задана функція
первісної не має.
Цей приклад показує, по потрібна теорема, яка б гарантувала
існування невизначеного інтеграла.
В п. 2.4 буде доведено, що всяка неперервна на проміжку (а; Ь)
функція має на цьому проміжку первісну. У зв'язку з цим надалі
вважатимемо, що підінтегральна функція розглядається дише на
тих проміжках, де вона неперервна.
1.2. Таблиця основних інтегралів
Частина формул таблиці основних інтегралів безпосередньо
випливає з означення інтегрування як операції, оберненої до операції
диференціювання, таблиці похідних і формули (2). Справедливість
інших формул можна перевірити диференціюванням.
334
Інтеграли цієї таблиці називаються табличними. їх треба знати
напам'ять з двох причин. По-перше, мета існуючих методів
інтегрування полягає в тому, щоб звести (перетворити) шуканий інтеграл
до табличного. Отже, табличний інтеграл треба вміти розпізнавати.
По-друге, як зазначено в кінці попереднього пункту, внаслідок
інваріантності кожен табличний інтеграл «породжує» безліч інтегралів,
що легко обчислюються на основі табличного.
Нехай и = и (х) — довільна функція, що має на деякому
проміжку неперервну похідну и' (х); тоді на цьому проміжку справедливі
такі формули:
2. J^ = ln|«| + C.
сс=^-1.
In a
f eudu =:е" -f- C.
f sin udu = — cos u -\- C.
6. f sh udu = ch u + C.
7. f cos udu = sin u -f- C.
8. f ch udu = sh u -f- C.
9. \ tg udu = — In | cos u | + C.
10. f ctg udu = In | sin u | -f- C.
J COS2 U ь '
11
12
du
ch2u
= th u + C.
I
13. C-^-=-ctg« + C.
J sin2« ь '
і
14.
15.
16.
sh2«
du
sinu
du
= — cth u + C.
= ln
= ln
tg-rj + c.
*(t + -t)| + *
335
17. f r du =arcsin-ii- + C-
J Ka2 — u2 о
18-j к,Дл -ini«i+^?JX| + c.
19. f_^. = -Larctg-iL + C.
J a2 + u2 a e a '
on Г du ! i„ " — a I , r
20. 1—5 5- = -K— In j +^-
J u2 — a2 2a u + a j '
21. \Va2 — u2du =-^Уф — u2 + -^-arcsin-£- + C.
22. |К«г + Л гіи = -|"К^г+~Й+-^-1п|" + Ки2 + Л І+С.
1.3. Основні методи інтегрування
Операція інтегрування значно складніша, ніж операція
диференціювання. У диференціальному численні таблиця похідних і правила
диференціювання функцій дають змогу знайти похідну довільної
диференційовної функції. В інтегральному численні таких простих
і універсальних правил інтегрування не існує. Відсутнє, наприклад,
загальне правило інтегрування добутку двох функцій, навіть якщо
первісні кожної з них відомі. Те саме стосується частки двох
функцій і складеної функції. Інтегрування вимагає, так би мовити,
індивідуального підходу до кожної підінтегральної функції.
Основними методами інтегрування є безпосереднє інтегрування,
метод підстановки та інтегрування частинами.
1°. Метод безтіосереднього інтегрування. Обчислення інтегралів
за допомогою основних властивостей невизначеного інтеграла і
таблиці інтегралів називають безпосереднім інтегруванням.
Приклад
Знайти інтеграли:
a) \(2x + Vx+-^-)dx; б) Wcos-|-+sin-|-j dx\
в) І ctg* xdx\ г) \ ■
dx
Sin* X COS'' X
І -
О a) f (2x + V^ + ^=-\dx=2{xdx + [xrdx + 3\x~Tdx = 2^T+
f+i / -т+1 \
+ 0,) + -*! + Ct+3 _L_! +C,U*« + -|-*>G+-|--f*"i +
"5-+1 V--3-+1 /
+ №1 + С, + ЗС.) =- х* + JL х Ух + ±- 1^ + 0.
336
При кожному інтегруванні утворюються проміжні довільні сталі: С,, Ct, С..
Але в підсумку записують лише одну загальну сталу С тому, що коли Сь Са, Cs
— довільні сталі, то 2Сг + Ct + зсз = С також є довільною сталою. Тому надалі
стала С означатиме суму всіх проміжних сталих;
б) Wcos-£- + sin -|-j dx= \ cos»-|- + 2ccs-|-sin-|- + sin2-^-}d* =
= j (1 + sin x) dx = ^ dx + j sin xdx = x — cos x + C;
в) Jctg2xdx=J(-1^-l)dx = J1^<fx-jdx = -ctgx-* + C;
f d* Г sin2x + cos2x f" dx f dx
r' ] sin2xcos2x "= \ sin2xcos»x dx *= \ cos2 x + \ TinT* = tg x ~
-ctgx + C. « J J J
2°. Метод підстановки (заміни змінної). Суть цього методу
полягає у введенні нової змінної інтегрування. Він грунтується на
такій теоремі.
Теорема. Нехай F (х) — первісна функції f (х) на проміжку (а;
Ь), тобто
^f(x)dx = F(x) + C, хЄ(а; Ь),
і нехай функція х = ф (t) визначена і диференційовна на проміжку
(а; Р), причому множина значень цієї функції є проміжок (а; Ь).
Тоді справедлива формула
J f (ф (0) Ф' (0 dt=F(q> (t)) +C, ІЄ (а; р). (3)
О Справді, згідно з правилом диференціювання складеної функції,
маємо
(F (Ф (/)))' = F' (ф (*)) ф' (0 - / (ф (<)) Ф' (t)
і формула (3) випливає з властивості 1° п. 1.1. #
Доведена теорема застосовується, як правило, одним is таких
двох способів:
1) Інтеграл [g{x)dx записують у вигляді
Jtf(*)*f = 5/(ф(*))ф'(*)<Ь.
у якому для функції f відома первісна F; тоді за формулою (3)
j g (х) dx = j / (ф (*)) Ф' (х) dx =» F (ф (х)) + С.
Практично зручнішим є такий запис:
£*(*)<&-р(Ф(*))Ф'(*)<** =
ф(*) = "
ф' (х) dx = du
= §f(u)du = F(u) + C-Fto[x)) + C. (4)
337
2) Інтеграл §g (x) dx зображають у вигляді
Jg(*)d* = Jg(*(0)*'(0*.
де функція х = \1> (0 має обернену функцію t = \\> ' (х) і для
функції g (г[>) г|/ відома первісна G, тоді
^g{x)dx = ^g(^(t)W(t)dt = G(t) + C = G(^(x)) + C. (5)
Зазначимо, що формули (4) і (5) відрізняються «проміжними»
інтегралами:
J/(фМ)ф'(*)<** і \smt)W(t)dt.
У першому з цих інтегралів і формулі (4) йдеться про «введення
функції під знак диференціала»: ф' (х) dx = гіф (х) = du, а в другому
і формулі (5) — про «.виведення функції з-під знака диференціала»:
dx = гігр (0 = г|/ (0 Л.
Спільним у формулах (4) і (5) є зворотний перехід у результаті
інтегрування від змінних и і t до змінної х. Інакше кажучи, після
обчислення невизначеного інтеграла методом підстановки потрібно
від введеної змінної інтегрування перейти до заданої.
Таким чином, при інтегруванні заміною змінної виконуються
підстановки двох видів: и = ф (х) і х = гр (t). Ці підстановки
підбирають так, щоб одержані після перетворень нові інтеграли у формулах
(4) і (5) були табличними, або зводились до відомих. Загальних
методів підбору підстановок не існує. Вміння правильно визначити
підстановку набувається практикою.
Розглянемо приклади на застосування формул (4) і (5), з
найпростішими з них ми уже зустрічались в п. 1.1.
Приклади
1. Знайти інтеграли:
а)
^2ІП;+3)У б) f ?*+£?'* dr. в) J
є" dx
є*— і
О я) Маємо
J Лі.
*+3)s
dx =
u = 21пх + 3
du =2-
du
~Т" =
dx
X
dx
X
і
usdu
Xu« + C = -g-(2In* + 3)« + C.
338
При достатньому вмінні диференціювати і знанні таблиць інтегралів змінну
и у формулі (4) можна не вводити (але мати її на увазі).
б) I nt^xtg-dX = - -ff P+5^ A(3+6d„)—1-Х
X(3 + 5ctg*) +C.
X
-b^r—Hf^"'і
d(e2)
= in
2 "2"
(e )2- 1 (e> - 1
+ C. •
2. Знайти інтеграли:
a) f y=7 dx; -6) C Га" - *2 d*; в) ("
e* +1
+
dx
О а) Маємо
Г xa
-Y-
3 + 3u2 + 3u + 1
U = X— 1
du = dx
x = u + 1
У*2 + а
(" + I)3
■J**
du =
du
= j(u2 + 3u + 3 + -J-)du = -?J-+-|-u2 + 3u +
+ In | u | + C = (* з )3 + -§- (r - 1)2 + 3 (x - 1) + In | x - 1 | + C.
б) f V& —
Xі dx =
x = a sin <
dx = a cos /d<
f = arcsin
u
= (Va2 — a:
i2 sin! t a cos tdt = a2 x
J a2 P a2 / sin 2< \ a2
cos2<d< = —\ (i + C0s2/)d/ = —Ii + й—) + C=-2-(/ + sin/ x
X У1 — sin2 /) + C = _^_(arcsin _£. + sin (arcsin-£-j ]/ 1 —sin2 (arcsin^ l)+
+ C = -K-arcsin -^- -|--4-Va2 — x2 + C.
■•!
dx
W+a
dt'[vW^ + l)dx
dx dt
Vx* +a Yx* + a + x
d£
f d<
m +
+ С = Іп|х+1'х2-{-с| + С
(тут ми застосували підстановку Ейлера, див. п. 1.7). ф
У прикладах б) і в) виведено формули 21 і 18 таблиці інтегралів.
339
3°. Метод інтегрування частинами. Нехай и = и (х), v — v (х) —
функції, що мають на деякому проміжку неперервні похідні. Тоді
(гл. 5, п. 3.2)
d (uv) — udv + vdu, udv = d (uv) — vdu.
Інтегруючи обидві частини останньої рівності, дістанемо
С udv =■ С d (uv) — f vdu,
або
f udv = uv — f vdu. (6)
Формула (б) називається формулою інтегрування частинами.
Вона дає змогу звести обчислення інтеграла ]udv до обчислення
інтеграла І vdu.
Як правило, підінтегральний вираз, який складає добуток udv,
можна розбити на множники и та dv кількома способами. Вміння
подати підінтегральну функцію через и та dv так, щоб інтеграл
справа у формулі (6) був простішим, ніж інтеграл зліва, виробляється в
процесі обчислення інтегралів.
Зазначимо, що під час знаходження функції v за диференціалом
dv вважають, що стала С = 0, оскільки на кінцевий результат ця
стала не впливає. Справді, підставивши v + С формулу (6), маємо:
j ud (v + С) = и (v + С) — [ (v + С) du;
С udv = uv-\-uC— f vdu — Cu = uv — f vdu.
Іноді формулу (6) доводиться застосовувати кілька разів.
Вкажемо деякі типи інтегралів, які зручно обчислювати методом
інтегрування частинами:
1) інтеграли виду £ Р (х) ekxdx, J P (x) sin kxdx, J P (x) cos kxdx,
де Р (х) — многочлен, a k — дійсне число. У цих інтегралах за и
слід взяти множник Р (х), а за dv — вираз, що залишився;
2) інтеграли виду J P (x) In xdx, J P (x) arcsin xdx, J P (x) x
X arccos x dx, I P (x) arctg x dx, де P (x) — многочлен. У цих
інтегралах слід взяти dv = Р (х) dx;
3) інтеграли виду J eax sin $xdx, £ еа* cos fixdx, де а, p* —
дійсні числа. Тут після двократного застосування формули (6)
утворюється лінійне рівняння відносно шуканого інтеграла. Розв'язуючи
це рівняння, знаходять інтеграл.
Приклади
1. Знайти інтеграли
a) С (2х + 1) sfaxdx; б) f х* In xdx; в) [ є* sin2xd*; г) С e^* dx.
340
О а) \ (2х + 1) sin xdx =
' — (2* + 1) cos x — j (—cos x) 2dx = — (2x + 1) cos x + 2 sin x + C;
u = 2x+l, du = 2d*
dv = sin xdx, v = f sin xdx = — cos x
6) fxsIn
xdx
и = In x, du =
dx
X'
dv = x3dx, v = —t—
1 <• . і • f ,dx 1
= T-xMn|x|--rjx«- = Tx
X**ln|*|— -jg-*«-|-Cl
в) I e* sin 2xdx
X \ e* cos 2xdx =
— -4- \ e* sin 2xdx,
u = e ,
du = e*dx
1
dv = sin 2xdx, 0 = — -y cos 2x
и = e*. du = e*dx
= —-ye*cos2.v+lx
do = cos 2xdx, v = sin2*
= — -i-e*cos2x +_Le*sin2x—
і 4
звідки
Jill
e* sin 2*dx = — -y e* cos 2* + -j- e* sin 2* — -j- f e* »in 2xdx.
Дістали рівняння, з якого визначаємо шуканий інтегралі
j ех sin 2xdx = -5- є* (sin 2л: — 2 cos 2х) + С\
г) J eV*dx
x = f»
d* = 2/d/
t = Vx
! f /e'd/ =
и = <, du=*dt
I du = e'd<, t; = e
- J e'd/) = 2e'(/- 1) + C = 2eV* (^_ !) + c
= 2 (fe' —
«> 1
2. Вивести рекурентну формулу для інтеграла /п = і -——, n£N,
, J \х Т " )
О / _- ' Г а' j, _ ' Г«' + а'-*» 1 /Г dx
л "^аї J (x*+aV «■ J (x»+u»)n = а8 У (ж*+аГ-Г
Г ^'d* \_ 1 _ 1 С хЧх
J (х* + а*)п І о1 "-> а" J (х» + аї)'* '
До останнього інтеграла застосуємо формулу (6)і
С x*dx _ Г xdx
341
x, du — d*
'- ~~.\n . ^-yt^ + ^r^^+°a)-2(n_1)U2 + 0y-
xdx
(*2 + a2)"
, ! ,
= 2(и-1)(** + о»)п-1 + 2(я-1) "-"
отже,
x , I 2n-3
'" = 2а»(«-1)(*а + "2)П-1 + flS 2n-2'n-l- U
Формула (7) дає змогу знайти інтеграл /п для будь-якого натурального числа
п> 1. Обчислимо, наприклад, І
(л? + a2)3
Враховуючи, що
Р d* l . * ■ /~
послідовно дістаємо:
1
/, =2ai (jc2 + 02)+~2^~arctg "Т + С:
х 3 ' * 1 л \
4а2 (*а + о*)а + "4^"" (2а2(х2+ аа) + "2^ arctg ~а~) +
4-І + С
Використовуючи викладені тут методи інтегрування, перейдемо
до інтегрування деяких видів функцій. Для цього будуть потрібні
певні відомості з алгебри.
1.4. Поняття про комплексні числа
Комплексним числом називається вираз
z = a+ Ьі, (8)
де а та Ь — дійсні числа, а символ і — уявна одиниця, яка
визначається умовою і2 = —1. При цьому число а називається дійсною
частиною комплексного числа z і позначається а = Re z, a b — уявною
частиною z, Ь = Im z (від французьких слів: reel — дійсний,
imaginable — уявний).
Вираз, що стоїть справа у формулі (8), називається алгебраїчною
формою запису комплексного числа.
Два комплексні числа z = а + Ьі і z = а — Ьі, які відрізняються
лише знаком уявної частини, називаються спряженими.
Два комплексні числа z1 = а1 + bj. і z2 = аг + Ь2і вважаються
рівними (Zjl =• z2) тоді і тільки тоді, коли рівні їхні дійсні частини
і рівні їхні уявні частини: а1 = а2, Ь^ = Ь2.
Комплексне число z = а + Ьі дорівнює нулю (z = а -+- Ьі = 0)
тоді і тільки тоді, коли а = b = 0.
342
Комплексні числа можна зображати на
площині. Якщо користуватись декартовою системою
координат, то число (8) зображається точкою М (а; Ь).
Така площина умовно називається комплексною
площиною змінної z, вісь Ох — дійсною віссю,
а Оу — уявною.
Комплексне число z = а + Ьі при b = 0
збігається з дійсним числом a:z=a-\-0-i = a. Тому
дійсні числа є окремим випадком комплексних, вони зображаються
точками осі Ох.
Комплексні числа z = а -\- Ьі, в яких а = 0,. називаються суто
уявними; такі числа зображаються точками осі Оу.
Полярні координати точки М (а; Ь) на комплексній площині
називаються модулем і аргументом комплексного числа і позначаються
p^\z\=VaT+T2, <p = Argz.
Оскільки а = р cos ф, b = p sin ф (рис. 7.2), то з формули (8)
маємо
z = р (cos ф + і sin ф). (9)
Вираз, який стоїть справа у формулі (9), називається
тригонометричною формою комплексчого числа z = a -f- bi.
Модуль | z | = р комплексного числа визначається однозначно,
а аргумент ф — з точністю до 2лА:
Argz = argz + 2л*. k = 0, ±1, ±2, ...
Тут під Arg z розуміють загальне значення аргументу; на
відміну від нього, arg z — головне значення аргументу, воно знаходиться
на проміжку [0; 2л) і відраховується від додатного напряму осі Ох
проти годинникової стрілки (іноді розглядають і від'ємні
аргументи ф).
Якщо z = 0, то вважають, що | z | = 0, a arg z — невизна-
чений.
Основні дії над комплексними числами zr = al -f bxi та z2 = аг -f-
+ Ьгі, заданими в алгебраїчній формі, визначаються такими рівнос-
тями:
1) гх + Ч = («і + а%) + Фі + Ь2)'';
2) z1 — z2 = (0і — а2) + (bt — b2) і;
3) zi • z2 =(ал — ЬА) + ФУа2 + а,Ь2) і;
,. ji __ ггга _ а^і + ЬгЬ^ агЬу — aybt .
> '- ~ -- ~ „г і h2 "І"
ZjZj a\ + b% flg + Щ
Таким чином, арифметичні дії над комплексними числами
виконуються за звичайними правилами дій над двочленами з урахуванням
того, що і2 = —1.
343
Неважко перевірити, що коли в рівностях 1) — 4) кожне
комплексне число z замінити спряженим 2, то і результати вказаних дій
заміняться спряженими числами. Звідси випливає таке твердження:
якщо Р (х) = а^хп + а^х"-1 + ... + ап — многочлен з дійсними
коефіцієнтами і Р (г) = А + Ві, то
P(z) = A — Bi, (10)
тобто якщо в многочлен замість х підставити спряжені числа г = а -\-
+ Ьі та г = а — ЬІ, то результати цих підстановок також будуть
взаємно спряженими.
Піднесення числа z = а + Ьі до цілого натурального степеня
виконується за формулою бінома Ньютона (гл. б, п. 5.4) з урахуванням
того, що для довільного числа п £ N справедливі рівності
= 1, P+l=,t. *4n+2=-l, iin+li=-L
Приклад
Виконати дії:
а) *і — z„; б) г,гг; в) -^- ; г) (гх)3, де гх = 2 + Зі, г„ = 4 — і.
О а) г1~гї = (2 + ЗІ) —(4-/) = —2 + 4і;
б) гхга = (2 + Зі) (4 — і) = 8 — 2і + 12і — 3is = 11 +10»;
4 гг 2 +Зі (2 +Зі) (4 +і) 5+Ні 5 14
в)!7~ 4-і = (4 —і) (4+і) "" 17 -17+17 М
г) (2 + Зі)3 = 28 + 36і—54 —27і = —46 + 9». •
Розглянемо дії над комплексними числами в тригонометричній
формі. Нехай г1 = рх (cos фх + і sm 4>і)> га = Ра (cos Фа + l sin Ф«)'
тоді
2і2а = РіР» (С08 Фі + * sin Фі) (cos фа + і sin ф2) =
= р!р.2 [(cos ф! cos фа — sin ф! sin ф2) + (sin ^ cos ф2 + cos ф! sin Фа) і] =
-= р!р2 [cos (фх + ф8) + І sin (фх + ф2).
Отже, під час множення комплексних чисел їхні модулі
перемножуються, а аргументи додаються.
Це правило поширюється на довільно скінченне число множників.
Зокрема, якщо всі л множників рівні, то
z" = (р (cos ф + І sin ф))" = р" (cos пф +1 sin шр).
Ця формула називається формулою Муавра.
При діленні комплексних чисел маємо
і = _£l. (cos («Рі — Фі) + і sin (Фі — фа))-
344
"1
р
ч
•а
,
■> /
\J
\|
---Wtfi
Рис. 7.3
Отже, модуль частки двох комплексних чисел
дорівнює частці модулів діленого і дільника;
аргумент частки дорівнює різниці аргументів діленого J£
і дільника.
Розглянемо добування кореня я комплексного
числа. Якщо для даного числа z = p (cos ф +
+ і sin ф) треба знайти число w = V~z = г (соз -ф -|-
+ і sin гр), то за означенням кореня і формулою
Муавра маємо
z = wn = rn (cos лг]> + і sin грл) =» р (cos ф +і sin ф).
Звідси г" = р, пгр = ф + 2лА>, А = 0, ±1, ±2, ... Оскільки г > 0
1 р > 0, то т = |/р, де під коренем потрібно розуміти його
арифметичне значення; тому
"і/р(со8ф + ;зіПф) = ^р(Со8 JL±2=i+ /s,n±±2=l) . (11)
Надаючи k значень 0, 1, 2, .... л — 1, дістанемо л різних значень
кореня. Для інших значень k аргументи відрізнятимуться від
знайдених на число, кратне 2я, тому значення кореня збігатимуться з
уже знайденими.
Приклади
1. Знайти (1 —/Зі)*.
О Запишемо дане число в тригонометричній формі (рис. 7.3)і
г = і _ УЗі, р = ]/і + (— У!)* = 2, cos ф = -і- , «in ф =
5 „І 5 . . 5 \
Ф = -^-п, г= 21 cos -g— я + isin-x- я J .
За формулою Муавра маємо
г" = (1 — V~3t)9 = 2" (cos І5я + I sin І5я) = — 512. «
2. Розв'язати рівняння г* — 1 =« 0.
О Використовуючи формулу (11), дістаємо
«*=1, 1 = cos0 + isinOj
VI
2nk
г = У cos 0 + і sin 0 = cos —-т— + isln
2лй
A = 0, 1, 2, 3.
Поклавши ft рівним 0, 1, 2, 3, знайдемо всі чотири корені даного рівняиняі
гх = cos 0 + і sin 0= 1; г, = cos -к- + і sin -j- = l\
З З
zs = cosn+ islnn = — 1; z4 = cos-j-n + isln-j-n = —і. •
345
Відомо, що показникову функцію з уявним показником можна
виразити через тригонометричні функції за формулою
е'ф = cos ф + і sin ф, (12)
яка була відкрита Ейлером в 1743 р. (див. гл. 9).
З формул (12) і (9) випливає, що всяке комплексне число можна
записати в показниковій формі: z = peiv.
Приклад
Записати в показниковій формі числа:
а
г=1; б)г = —1; в z = 3«; r) г = 1 — і
•■ *Hi+4f
є)г=/і + «.
О а) 1 = cosO + і sin 0 = є0-';
б) — 1 = cos я + і sin я = ега;
/Я Я \ "о"'
в) 3»' = 3lcos —g- -J- »' sin -2~l =3e' ;
_ / 7 7 \ -лі
Г) і _ і = Y2 I cos -j- я + і sin -5- я І = V 2 e4 ;
„ (4+j£.)'-(.*'J-.-4
є)6/ЯП=^2е^24 3 '.*=<>. 1 5.
Формула Ейлера дає змогу з'ясувати причини того зв'язку,
який існує між гіперболічними і тригонометричними функціями
(гл. 5, п. 2.4).
Справді, з формули (12) маємо
звідки
є*' = cos х + і sin х, є *' = cos х — і sin х.
є*' 4- е—*' 1
cos х = -^ = ch xi, sin х =■ — sn xt-
Підставивши замість х значення хі, дістанемо
cos хі = ch х, sin xi = і sh x.
Ці формули дають змогу переходити від довільного
співвідношення між тригонометричними функціями до відповідного
співвідношення між гіперболічними функціями і навпаки. Подібні перетворення
застосовуються при інтегруванні.
Приклад
Виразити coss х, cos3 х та cos* x через косинуси кратних дуг.
346
О Маємо
mt г - і є"" + є-" \2_ е2*' + 2 + е-2*' _ 1 е*хі + е~2хі
і-^Ч-
і і
= -g- cos 2x + -g- ;
C0S3X== є3*'" + Зе'* + 3e~te + є-3*' = J_ е3х' + е~3хі , _3_ _e^J- є"*'
8 4 2 4 2
1 о 3
= —т- cos Зх + —т- cos x;
^,- е^Ч4е2^ + 6 + 4е-2» + е-4^ _
16
= -W [(е« + є—■) + 4 (е2*< + є—) + 6] = -2J* + -2|* + А • .
1.5. Деякі відомості про раціональні функції
Як відомо (гл. 5, п. 2.4), многочленом (поліномом або цілою
раціональною функцією) називається функція
Рп (х) = а0хп + аіХп-х + ■ • • + ап, (13)
де п — натуральне число, яке називається степенем многочлена;
а0, alt ..., ап — коефіцієнти многочлена, дійсні або комплексні
числа; незалежна змінна х також може бути як дійсною, так і
комплексною.
Далі розглядатимемо лише многочлени з дійсними коефіцієнтами.
Коренем многочлена (13) називається таке числове значення
змінної х = х, (дійсне або комплексне), при якому многочлен
перетворюється в нуль, тобто таке, що Рп (хх) = 0.
Теорема 1 (теорема Безу). Остача від ділення многочлена Рп (х)
на різницю х — а дорівнює Рп (а).
О При діленні многочлена п-го степеня на двочлен х — а першого
степеня дістанемо деякий многочлен Р„_| (х) (л — 1)-го 'степеня і
остачу R — певне дійсне число. Тому
Pn(x) = Pn-i(x)(x-a) + R. (14)
Ця тотожність справедлива для всіх хфа (ділення на х — а при
х = а неможливе). Якщо в рівності (14) перейти до границі прй х ->-
-»- а, то дістанемо Рп (а) = R. #
Якщо х1 — корінь многочлена, то згідно з теоремою Безу R =
= Рп (xj = 0, тому
Рп(х) = Рп-і(х)(х — Хі). (15)
Підкреслимо, що рівність (15) має місце лише за умови, що хх —
корінь многочлена Рп (х). У зв'язку з цим виникає запитання: чи
347
всякий многочлен мав корені? Позитивну відповідь на це запитання
дає таке твердження.
Теорема 2 (основна теорема алгебри). Всякий многочлен степеня
п>0 має хоча б один корінь, дійсний, або комплексний.
Приймемо цю теорему без доведення.
З теореми 2 випливає, що многочлен (13) завжди можна записати
у вигляді (15). Неважко помітити (наприклад, з процедури ділення
многочлена Рп (х) на двочлен х — а «в стовпчик»), що старший
коефіцієнт многочлена Рп^ (х), тобто коефіцієнт при хп~1, дорівнює а0.
Якщо степінь многочлена Рп-\ (х) не дорівнює нулю, тобто
Р„_і (х) Ф а0, то до цього многочлена знову можна застосувати
теорему 2. Нехай х% — корінь многочлена Р„_і (х), тоді
Р„_,(х)=Рп_2(х)(дс-х2), (16)
де Р„_2 (х) — многочлен (п — 2)-го степеня із старшим
коефіцієнтом а0.
З рівностей (15) і (16) дістанемо, що
Рп (*) = Рп-г (х) (х — xj (х — х3).
Продовжуючи цей процес, приходимо до такого твердження.
Теорема 3. Всякий многочлен п-го степеня можна подати у
вигляді
PnW^aoix — xJix — Xz) ... (х — хп), (17)
де х1г х2, ..., хп — корені многочлена, а0 — коефіцієнт многочлена
при х".
Вираз (17) називається розкладом многочлена на лінійні
множники. Наприклад,
*з _|_ х2 + 9х + 9 = (х + 1) (х — З»") (х + Зі);
5х4 — 40х3 + 115л2 — Шх + 60 =
= 5(х— 1)(х — 2)(х — 3)(х-4).
Для перевірки цих тотожностей достатньо перемножити їхні праві
частини.
Множники х — Xj у формулі (17) називаються лінійними
множниками. Якщо деякі з лінійних множників однакові, то їх можна
об'єднати і тоді формула (17) матиме вигляд
Рп (*) = а0 (х - */' (х - x2f' (х - хг)Ч (18)
де г — число різних коренів і k1 + k3 + ... + К =■ п.
У цьому випадку корінь хх називається коренем кратності kx або
^-кратним коренем, х2-коренем кратності k2 і т. д. Корінь кратності
одиниця називається простим коренем.
Нехай тепер число а. -\- $і — комплексний корінь многочлена
(13), тобто Рп (а + рі) = 0, тоді з рівності (10) випливає, що спря-
348
жене число а — рі також є коренем многочлена (13). Перемноживши
лінійні множники, що відповідають цим кореням, дістанемо
[де — (а + РОІ їх - (а — Р0] = 1(х - а) — рі] [(х - а) + рі] =
= (х — а)2 — (рі)2 = Xі — 2ха + а2 + р2 = х2 + рх + q,
де р = — 2а, q = а2 + Р2 — дійсні числа.
Таким чином, добуток лінійних множників, що відповідають
взаємно спряженим комплексним кореням, можна замінити квадратним
тричленом з дійсними коефіцієнтами і з від'ємним дискримінантом.
Об'єднуючи у формулі (18) множники із взаємно спряженими
коренями, дістанемо
Рп (х) =а0(х- *і)*' --. (х — xj™(Xі + Plx + 9і)'« ...
... (х2 + psx + q,)\ (19)
де kt (і = 1, 2, .... т— кратності дійсних коренів; 1} (/ = 1, 2, ...
..., s) — кратності комплексно спряжених коренів; kx -\- k2 + ...
— + km + 2 (Zx + /2 + ... -Ь /s) = п — сталі; а0, х,, pJt qs —
дійсні числа, причому р) — Aq} < 0.
Отже, всякий многочлен з дійсними коефіцієнтами можна
розкласти на лінійні та квадратні (з комплексними коренями) множники
з дійсними коефіцієнтами.
Зауваження 1. Якщо многочлен Рп (х) тотожно дорівнює
нулю, тобто дорівнює нулю при довільних значеннях х, Рп (х) зз 0,
то всі його коефіцієнти дорівнюють нулю.
Дійсно, якби а0 Ф 0, то Рп (х) мав п коренів; якби а0 = 0 і ау Ф
Ф 0, то Рп (х) мав би п — 1 корінь і т. д. В умові сказано, що Рп (х)
має безліч коренів, бо V х £ R '• Рп (х) — 0-
Зауваження 2. Якщо многочлени тотожно дорівнюють один
одному, то рівні їхні степені і рівні між собою коефіцієнти при
однакових степенях х.
Дійсно, різниця даних многочленів тотожно дорівнює нулю, тому
8 попереднього зауваження випливає, що всі коефіцієнти цієї
різниці — нулі, тобто коефіцієнти даних многочленів однакові.
Наприклад, якщо ах* + bxs + сх2 + dx + є = 5л;3 — Зх2 + 4, то а = 0,
Ь = 5, с = — 3, d = 0, є = 4.
Р (х)
Відношення двох - , . многочленів Рт (де) і Qn (де) називається
раціональною функцією або раціональним дробом (Рт (х) ^ 0, Qn (x) ^к
Ф0).
Раціональний дріб називається правильним, якщо степінь
чисельника менший степеня знаменника т <. п; в іншому випадку (т^ п)
раціональний дріб називається неправильним.
349
Якщо дріб неправильний, то, виконавши ділення, дістанемо
де Wh (х) і Rp (х) — многочлени &-го і р-го степеня, причому р < п,
R (х)
тобто дріб " . правильний. Наприклад,
х6 + х3 — хг + 1 __ 2 і о 2х2 —6x4 2
..я о« її Л і- О
Елементарними раціональними дробами називаються правильні
раціональні дроби таких чотирьох видів:
і-т^г; "-т^-й' " = 2, Зі •■■:
III. £+" ; IV. М* + " „ , л>2,
де Л, а, М, N, p, q — дійсні числа, а тричлен х2 + рх + q не має
дійсних коренів, тобто р2 — 4<? < 0.
Теорема 4. Нехай знаменник правильного раціонального дробу
розкладено на множники за формулою (19):
Qn(x)=a0(x-a)a ... (x — bf(x' + pjf + q)»... (*« + /x+s)\
тоді цей дріб можна подати у вигляді
R" (*> = л* + ^—+ ••• і ^ І ... +
Qn(x) ~ *-о "г (х-а)»""1 г (х-а)а '
"Т" х-6 Т" (*-6)» п" " 1~ (х-Ь)Р "Ґ
■ ЛІ^ + Л^ Max + JV2 *У + Цц
"І" х*4Р*+<? "*" (x* + px + q)* "•" '" "f" (х2 + рЛ + 9)11 '"
4" rf + te+e "f" (x24'*+s)2 **" '" "•" (x=4Zx4s)v ' K '
де A Ла; fli Bp; M1? TVl .... Мц, Л?ц; Llf Flt .... Lv, /4 —
деякі дійсні числа [12].
Вираз (21) називається розкладом правильного раціонального
дробу на елементарні дроби.
Для знаходження чисел Alt ..., Fv можна скористатись методом
порівнювання коефіцієнтів. Суть його така. Помножимо обидві
частини рівності (21) на Qn (x), внаслідок чого дістанемо два тотожно
рівні многочлени: відомий многочлен Rp (x) і многочлен з невідомими
350
коефіцієнтами Alt ..., Fv. Прирівнюючи їхні коефіцієнти при
однакових степенях х (зауваження 2), дістанемо систему лінійних
рівнянь, з якої визначимо невідомі А1г .... Fv.
Приклад
х1 + 2х* + 5х* — \
Виразити через елементарні дроби дріб , 3 , ,.а .
х\х -\- і)
О За формулою (9) маємо
х* 4 2*3 + 5х8 — 1 А Вх + С Рх + Е
х(х3+1)а = х +хї41 + (*Ч1)' "
Помноживши обидві частини цієї рівності на х (х2 4 ')2. Дістанемо тотожність
Xі 4 2х3 4 5хг — 1 = А (ха 4 1)* + (Вх 4 с) (a» + l)x + (Dx + E)x =
= (А 4 В) х* 4 Сх3 + (2A + B + D)xi + (C+E)x + A.
Прирівнюючи коефіцієнти при однакових степенях у правій і лівій частинах,
дістанемо систему рівнянь
A + B=l, C = 2, 2A + B + D = 5, C+E = 0, А = —\,
розв'язуючи яку,N знайдемо А = —1, В = 2, С = 2, D = 5, Е = —2. Отже,
Xі 4 2*3 + 5х2 — 1 1 2x4 2 5х—2
х (х2 4 О2 = ~ х + х2 4 і + (*г + І)2 " *
Крім методу порівняння коефіцієнтів, користуються також
методом окремих значень аргументу. Нехай після множення обох частин
рівності (21) дістаємо два тотожно рівні многочлени, один з яких —
відомий, а другий з невідомими коефіцієнтами. Надаючи
змінній конкретні значення стільки разів, скільки невідомих
коефіцієнтів, дістанемо систему лінійних алгебраїчних рівнянь, з якої і
визначимо шукані коефіцієнти. Система рівнянь значно спрощується, коли
змінній х надавати значення дійсних коренів знаменника Qn (x).
Іноді зручно скористатись комбінованим методом, тобто деякі з
невідомих коефіцієнтів визначати, надаючи х значення дійсних коренів
знаменника, а інші — визначати методом порівняння.
Приклади
1. Виразити через елементарні дроби дріб
2х —1
х(х— 1)(х — 2) •
О Маємо
2х —1 А_ В С
х(х—1)(х—2) — х + х —1 + х —2 •
їх— \=А (х— \)(х—2) + Вх(х—2)+Сх(х—\).
Якщо в цій тотожності покласти х = 0, то —1 = А (—1) • (—2), звідки А =
1 З
= —-п-; якщо ж = 1, то 1 = —В або В = —1; якщо* = 2, то 3 = 2Сабо С = -*-.
351
Отже,
їх — 1 —1_ 1 З
х(х— \)(х — 2) — 2х ~ х~\ + 2 (* — 2) • •
2. Виразити через елементарні дроби дріб
Xі + 1
хг (* — 1) '
О Маємо
хг + 1 Л В С
хг(х — 1) = х + ха + х — 1 •
Xі + 1 = Ах (х — 1) + В (х — 1) -^ Сха == (Л + С) *а + (Л — В) х — ,4.
Якщо * = 0, то 1 = —В або В = —1; коли х = 1, то 2 = С або С = 2.
Прирівнюючи коефіцієнти при дтг, дістанемо 1 = А + С, звідки Л = —1, бо С = 2; отже,
ха +1 1 1 2
Xі (X— 1) X Xа ~t~ X— 1 •
1.6. Інтегрування раціональних функцій
Раціональні функції складають важливий клас функцій,
інтеграли від яких завжди виражаються через елементарні функції.
Нехай треба знайти
І
Qn (*)
dx.
Враховуючи рівність (20), цей інтеграл можна подати як суму
інтеграла від многочлена і правильного раціонального дробу:
Інтеграл від многочлена знаходять безпосередньо, а інтеграл від
правильного раціонального дробу зводиться за допомогою формули
(21) до інтегралів від елементарних дробів.
Розглянемо ці інтеграли:
J х~а J х—а ' ■ '
ТІ. [—^—-dx = A[(x — a)-nd{x-a) = —=- + С.
X = t s
МІ
dt =
х = і—з f ш у 2; ■
^■)Jr^dx= dx=dt "1(i-i)1+p(«-f)+*
J «.+,-4- J<a+«-T- J"+t-—)
352
Перший інтеграл знаходиться безпосередньо:
f tdt
і г 4' + ?—тг) , p, ,
<* + «'— -4- t* + q — —
а другий є табличним (формула 19 табл.), оскільки за умовою q —
Зауважимо, що підстановка х = t -г- «підказана» тим, що
квадратний тричлен у знаменнику можна записати у вигляді
У загальнішому випадку маємо
ах8 + Ьх + с •= а (х* + — х + -~j =
/ а і о Ь . Ь* , с Ь* \
-((* + -t)'+(-|-^-))-«((x + -t)i=b^.
де ЗТ- = =t ^2- Знак плюс чи мінус береться валежно від
того, якими будуть корені знаменника: комплексними чи дійсними.
3 , . , dx 06ЧИСЛЮ-
4- Ь
ються підстановкою х — і ^— .
IV. Інтеграл виду
7" = t/.^+^ s*dx' P2-^<0, п>2
J (x* + px + q)n
підстановкою х — t g- зводиться до двох Інтегралів!
Перший з цих інтегралів обчислюється безпосередньо, а другий —
за рекурентною формулою (7).
Отже, встановлено, що інтегрування довільної раціональної
функції зводиться до інтегрування многочлена і скінченного числа
елементарних дробів, інтеграли від яких виражаються через раціональні
353
функції, логарифми і арктангенси. Інакше кажучи, будь-яка
раціональна функція інтегрується в елементарних функціях.
Приклади
С 2х + З
1. Знайти інтеграл \ ха ■ 4х + 9 dx.
С 2х + 3 І де = /—2 - 2(< —2) + 3
О ] *» + 4дг + 9 Л- ,^~d2 =J (<-2)« + 4«-2)+9 Л"
(• 2< —1 С 2tdt С dt . „ 1 , і
= J ir+T<"~) І^+б"-) 7ї+Т = 1п((ї + 5)--ргагс1в-р|- =
= ln(x« + 4* + 9) -^^arctg-^p- + C. •
2. Знайти інтеграл /- [ *4 + 2х» + 5ха+1 &
О Оскільки розклад підіитегральної функції на елементарні дроби вже відомий
п. 1.5), то
, СІ 1 2дг + 2 5х — 2 \
)г~+^+г+(^+i)*)dJC=
= — ln|x| + ln(x«+l) + 2arctgx- 2(^ + 1) "M^TIF .
І'
Для обчислення останнього інтеграла застосуємо формулу (7):
dx х _1_
(х"+1)« - 2(ха + 1) +2 arctg* + c.
Отже,
5 х
І = _ In І х І + In (х« + 1) + arctg х — 2 (х« + 1) ~ Xі + 1 + С- •
Іх* + 2
х,_ j dx.
О Під знаком інтеграла маємо неправильний дріб, тому спочатку виділимо його
цілу частину:
х3 — І
Xі + 2
Xі— X3
ха+2
Звідси
хь + 2 х« + 2
=гг = *' + -їгїт
*•
Розклавши правильний дріб на елементарні, маємо
х* + 2 Л Вх + С
х>— 1 ~~ ж—1 "•" ха + х+1 •
ж» + 2 ss /1 (ха + х + 1 + (В* + С) (х — 1) =
» (А + В) х2 + (і4 — В + С) х + (Л — С).
354
Скористаємось комбінованим методом знаходження коефіцієнтів И В І С.
Якщо х = 1, то 3 = Зі4 або А = 1: Л + В = 1, звідки В = 0; А — С = 2, тому С -=
Далі дістанемо
/
■К-+
1
х —1
'+*+! )^=-V+ln|x-l|-j
dx
хг + х + 1
J"
dx
x* + x+ 1
x = i —
dx = dt
<-«+-r
1
di
=Trarctg'
2f
/3
r + c=-
/3
arctg
<■ + ■
2x+ 1
+ c.
Отже,
и-
2 . 2x+l
7=- arctg-—7=— + C.
1.7.
/ = — + in|x-M- y^ ш^ Ys
Інтегрування деяких ірраціональних і трансцендентних
функцій
Насамперед зауважимо, що інтеграли від ірраціональних та
трансцендентних функцій не завжди обчислюються в елементарних
функціях. Розглянемо деякі типи інтегралів, які за допомогою певних
підстановок можна звести до інтегралів від раціональних функцій.
Нехай R (u, v, ..., s) — раціональна функція від вмінних и, v, ...
..., s, тобто така функція, в якій над зазначеними змінними та
дійсними числами виконується скінченна кількість чотирьох
арифметичних дій: додавання, віднімання, множення і ділення.
Наприклад, раціональною відносно змінних и і v e функція
п. . Зи« + 2v — 1
Якщо змінні и та v, в свою чергу, є функціями від х: и = и (х)
і v = v (х), то функція R (u (x), v (х)) є раціональною відносно
функцій и (х) і v (х).
Наприклад, функція
/м-^ + ^ЇЙ1
є раціональною функцією від \гх — 1, ух \ х:
/(х) = Я({/7^~І, Vx, х).
Розглянемо тепер інтеграли від деяких ірраціональних функцій
і покажемо, що в ряді випадків вони зводяться до інтегралів від
раціональних функцій (або, як кажуть, раціоналізуються).
355
1. Інтеграли виду
1*(*Ш Ш>
раціоналізуються підстановкою
ах + Ь
= Л
сх + d
де k — спільний знаменник дробів —, ..., — ■
Дійсно, якщо
ах + Ь
cx + d
і*
= І , ТО X =
b-dtk,dx= *'*"'("*-**> dtt
сГ — а
(сг* — а)"
тобто, х та dx виражаються через раціональні функції від t.
Оскільки, крім того, кожний степінь дробу cx,d виразиться
через цілий степінь t, то підінтегральна функція перетвориться в
раціональну функцію від L
dx
Приклад
Знайти інтеграли:
а) J Vx + Vx : Q J -іУ(2ТТТ)а-^£ЙГГ '
J (*-!)* У х-\
О» j
Vx + Vx
* = /•
dx = Wdt
t-їі
- t + 1 - 7-JT) Л =6 (^—_£. + * - ln|* + 1 |) +C = 2V~X -3fi +
+ 6$G-6In(^+l) + C;
•I
d*
"^(2л: + l)2 — f2x + 1
2x + 1 = * •
'--^
dx=3<»<«
J t*-P J 1-1
t=Y2T+i
= зС(* + і + _L_jd< = А <« + з< + зіп|/-і'і + с = -|. "1У2Т+Т +
+ 3 ^2* + 1 + 3 In I V2x + 1 — 1J + C;
356
-Ь^Кйг-
*+l
dx =
x—l =
(ts — 1)»
2
/3-1
4
_f(P-l)»f(-6<2) ,,,,
J 4 «s_l)2
.{«, —£<. + <;—§-(-£±J_)'+c.
2. Інтегрування диференціальних біномів. Вираз виду хт (а +
+ бх")", Де т, п, р — сталі раціональні числа, а а і b — довільні
сталі числа, називається диференціальним біномом. Справедлива
така теорема Чебишева.
Теорема. Інтеграл від диференціального бінома
\xm(a + bxnfdx
виражається через інтеграл від раціональної функції відносно нової
змінної, якщо:
1) р — ціле число (додатне, від'ємне чи 0) і виконано підстановку
х = ts, де s — найменший спільний знаменник дробів т і п;
2)
т+ 1
ціле число (додатне, від'ємне чи 0) і виконано
підстановку а + Ьхп = f, де г — знаменник дробу р;
3) -^І \- р — ціле число (додатне, від'ємне чи Q) і виконано
підстановку ах-" + b — tr, де r — знаменник дробу р.
В інших випадках інтеграл від диференціального бінома через
елементарні функції не виражається [12].
Приклад
Знайти інтеграл /
4
ГГТУ
*/-
V~x
■dx.
О Оскільки в інтегралі
= f x 2 (1 + x4)3 dx;
1
1
P =
1 m + n
2 4 3
то застосовний другий випадок теореми Чебишева.
2Є2,
357
Маємо
/ =
f»= 1 +*4
х = (ts — 1)«
dx = I2t* {t3 — l)s dt
12 f (P — P) dt = J±. f — 3f» + C =
= _^L(l+V^)7/3-3(l+Vx)T+C. •
3. Інтеграли виду § R (sin x, cos x) dx раціоналізуються
підстановкою t = tg -4-, (—л < x < л), яка називається універсальною.
Дійсно,
sin х
cosx
2tg-f
1 + tga -|-
1 — tga
1 + tg»
2<
1 + P '
1 — t*
l+<2 '
+ i
2
x = 2 arctg /, dx = t , f8 d/,
тому
\ # (sin x, cos x) dx = \ R [l,tt ' і і p j 7
де Ri (t) — раціональна функція від t.
Приклад
Знайти інтеграл \ - .
J sinx+ 1
■dt
= ]'/г1(/)л.
о
і
dx
sin х + 1
■J (i + o
X
Ті
dx = -
1 + /2
2
1 + fa
dt
2dt
1 +
7 + C =
1+tg.
(1-Ha)(-
+ C •
2/
1 +/»
+ 1
Зауважимо, що універсальна підстановка завжди раціоналізує
інтеграл У і? (sin х, cos x) dx. Проте на практиці вона часто приводить
358
до раціональних дробів з великими степенями. Тому в багатьох
випадках користуються іншими підстановками. Наведемо деякі з них.
а) £ R (sin x) cos xdx раціоналізується підстановкою sin x =
= t;
б) J R (cos x) sin xdx раціоналізується підстановкою cos x =
= t;
в) І R (tg x) dx раціоналізується підстановкою tg x =
= t
г) І R (sin х, cos x) dx раціоналізується підстановкою cos x =
«= t, якщо функція R непарна відносно sin x: R (—sin x, cos x) =
= —R (sin х, cos x) або підстановкою sin x — t, якщо функція R
непарна відносно cos x:
R (sin х, — cos х) •= — R (sin x, cos x)
або підстановкою tg х »= t, якщо функція R парна відносно sin x
і cos х одночасно:
R (— sin х, — cos x) = R (sin x, cos x);
д) \ sinm х cos" xdx знаходиться підстановкою sin x «= t, якщо
п — ціле додатне непарне число, або підстановкою cos x = t, якщо
т — ціле додатне непарне число, а також за допомогою формули
пониження степеня
<> 1 + cos 2дг . „ 1 — cos 2x
™„2 . j sm2 x _
" 2 ' 2
якщо т та п — цілі додатні парні числа; коли жтіл — цілі парні
числа, але хоч одне з них від'ємне, то даний інтеграл
раціоналізується підстановкою tg x = t\ така сама підстановка використовується у
випадку, коли m і п — цілі непарні і від'ємні;
є) інтеграли f sin ax cos bxdx, $ sin ax sin bxdx, [ cos ax cos bx x
dx обчислюються за допомогою відомих формул:
sin a cos р — -g- (sin (а — р) + sin (а + Р));
sin а/WjP = -й- (cos (а — Р) — cos (а + р));
cos а cos р = -д- (cos (а — р) + cos (а + Р)).
Приклад
Знайти інтеграли:
а) Г sin j + sin3* dx. Q f sln«XC0S6xdje. B) \ Sin* x cos* xdx.
О а) Оскільки підінтегральиа функція непарна відносно sin x, то скористаємось
підстановкою cos x = і. Звідси
sin2x = 1— cos2* = 1 — t\ cos 2* = 2 cos2*— 1 = 2/2 — 1, dt = — sin xdx.
359
Маємо
f sinx + Sin»x „,__[ (2-/2)d/ f P-2_m = J_[m-
J ЕоІ2^ J 2/2-l J 2/2-1 2 J
__3_ f dt
2 J 21* —
Xlnl V^«**-l
/ 3 ,1 //2-1 , r_ '
In tvj~l + C = ' cos x - V X
1 2 2/2 | //2+1 | 2 2/2
. /2 cos ж + 1
б) f sin4 x cosb xdx = f sin* ж cos* x cos xdx = f sin* де (I — sin2 x)2 cos xdx =
= 1 t = sinx |=Г/«(і_Р)»Л= f (/*_2/» + /8)d/ = -L',s-^-'74-4-'9 +
| d/ = cos xdx | J J t> / »
+ C = — sin» ж — — sin7 x + J- sin9 x + C:
5 7 9
в) I sin2 x cos* xdx = \ (sin x cos x)2 cos2 xdx = \ f s ng * j + C°S *— d* =
= _L f sin2 2xdx + —[ sin2 2xcos 2xdx = _L j '-є054* dx + -1. J sin22xX
Xd(sin2x)=JLx ^-sin4x+-l_sin3 2x4-C. •
4. Інтеграл виду \ R(x,Vax2 + bx + c)dx за допомогою
підстановки x = t g— зводиться до одного з таких інтегралів:
a) J R (/, VF~Tm~*) dt; б) J R (/, Vt*-m*) dt;
в) \R(t,Vm*-t*)dt,
де m^. Неважко переконатись, що за допомогою підстановок
а) t = mtgz, б) t = —™—, в) / = msinz відповідні інтеграли зво
дяться до інтеграла ] R (sin z, cos z)dz.
н Г dx x = sinz I fcosjdL_t c_
Наприклад, ] у==- = dx = coszdz| ~ J ІЬ^ ~^г+С ~
^jin^ с= х_ с
cosz ^і_хг
Необхідно зазначити, що інтеграли виду J" Я (x, Vax2 + Ьх + c)dx
виражаються через раціональні функції також за допомогою так
званих підстановок Ейлера:
1) якщо а > 0, то Уах2 + Ьх + с = ± Va x_ + /;'
2) якщо О 0, то Кал;2 + Ьх + с=х<±Vc;
3) якщо &2 — 4ас > 0, то Ка*2 + Ьх + с = {х — а) *,
де а — корінь тричлена ах2 + to + с [24].
360
Першу підстановку ми використали при розв'язуванні прикладу
2 6), п. 1.3. Покажемо на прикладі застосування другої підстановки.
Приклад
Знайти інтеграл / = \ .
J (1 + х)^1-
X — Xі
Скориставшись другою підстановкою Ейлера, дістанемо
/ =
/1-х — .
■ хі — 1
1 — х — х2 = х2/2 — 2х/ + 1
1 + 2/ 2(1-/-/2) _,
х = , , я . dx = ,. , „,., dt
■ь
-2d/
+ (t + I)2
1 + /2 ■ "Л ~ (1 + і2)2
= — 2arctg (/ + 1) + С = — 2arctg г ' ~л~ Л" Ч" л f ' + С.
х
5. Інтеграл виду ] R (є*) dx раціоналізується підстановкою t =
Уі — х — х2 + х+ і
X
d/
Дійсно, оскільки л: = In t, то d* = -т- і
Приклад
Знайти інтеграл / ■■
О / =
+ 1п|/ —З
dx =
f 2е2*-е*-:
J e2x-2ex-;
= r_^1_1_3_d/ = r/_L _i_x
J /(/ + l)(/-3) ]\t t t-3} ' '^
— e* — 3_
• 3
e* = /
* = In/
d/
/
+ C = In e* + In | e* — 3 | + C = x + In | e* — 3 | + C. *
1.8. Інтеграли, що «не беруться»
Як видно було з диференціального числення, похідна від
довільної елементарної функції є також функцією елементарною. Інакше
кажучи, операція диференціювання не виводить нас із класу
елементарних функцій. Цього не можна сказати про інтегрування —
операцію, обернену до диференціювання. Інтегрування елементарної
функції не завжди знову приводить до елементарної функції.
Подібне спостерігається й для інших взаємно обернених операцій: сума
довільних натуральних чисел є завжди число натуральне, а
різниця— ні; добуток двох цілих чисел завжди є цілим числом, а частка —
ні і т. п. Строго доведено, що існують елементарні функції, інтеграли
від яких не є елементарними функціями. Про такі інтеграли кажуть,
що вони не обчислюються в скінченному вигляді або «не беруться».
361
Наприклад, доведено, що «не беруться» такі інтеграли:
є x'dx — інтеграл Пуассона;
cos x2dx, \ sin x2dx — інтеграли Френеля;
інтегральний логарифм;
dx
In де
COS X
sin де
dx — інтегральний косинус)
dx — інтегральний синус;
\^\ — /г2 sin2 х dx, I k I < 1 — еліптичний інтеграл;
xasmxdx, \ х? cos xdx, \ >f-exdx {а =^0,1,2, ...)
га ряд інших інтегралів.
Вказані інтеграли хоча й існують, але не є елементарними
функціями. В подібних випадках первісна являє собою деяку нову, нееле-
ментарну функцію, тобто функцію, яка не виражається через
скінченне число арифметичних операцій і суперпозицій над основними
елементарними функціями. Неелементарні (або так звані
спеціальні) функції розширюють множину елементарних функцій.
Зрозуміло, що інтеграл, який не обчислювався в класі
елементарних функцій, може виявитись таким, що обчислюється в
розширеному класі функцій.
Таким чином, інтегрування в порівнянні з диференціюванням —
операція набагато складніша. Тому треба твердо володіти основними
методами інтегрування і чітко знати види функцій, інтеграли від
яких цими методами знаходяться. Крім того, виявляється, що треба
розрізняти також інтеграли, які «не беруться». Тому в інженерній
практиці широко користуються довідниками, в яких містяться
докладні таблиці інтегралів, що виражаються через елементарні і
неелементарні функції [2, 19].
Завдання для самоконтролю
1. Що називається первісною даної функції? Навести приклади.
2. Сформулювати і довести теорему про загальний вигляд первісної даної
функції.
3. Що називаєтьси иевизиачеиим інтегралом від даної функції? інтегральною
кривою?
4. Сформулювати теорему про існування первісної.
5. Сформулювати і довести основні властивості невизначеиого інтеграла.
6. У чому суть інваріантності формули інтегрування? Навести приклади.
7. Написати і перевірити диференціюванням таблицю інтегралів.
8. У чому полягають методи безпосереднього інтегруванни, частинами і заміни
змінної? Навести приклади.
362
Г dx
9. Нехай У„ = І д ——^-, л £ Л;, п> 1. Вивести рекурентну формулу для
обчислення цього інтеграла. Записати в явному вигляді значення /ь /2, /з-
10. Що називається комплексним числом? Як записуються комплексні числа
в алгебраїчній, тригонометричній та показниковій формі?
11. Що називається модулем і аргументом комплексного числа? Як вони
знаходяться і який їхній геометричний зміст?
12. Як визначаються дії над комплексними числами в алебраїчній та
тригонометричній формах?
13. Написати і довести формулу Муавра. Навести приклад.
14. Вивести формулу для добування корени з комплексного числа.
15. Записати формулу Ейлера. В чому полягає зв'язок між тригонометричними
і гіперболічними функціями?
16. Сформулювати і довести теорему Безу.
17. Довести теорему про розклад многочлена иа лінійні множники.
18. Записати розклад многочлена иа лінійні множники і квадратні тричлени
з дійсними коефіцієнтами.
19. Який раціональний дріб називається правильним?
20. Які раціональні дроби називаються елементарними?
21. Записати розклад правильного раціонального дробу иа елементарні дроби.
22. Як інтегруютьси елементарні дроби?
23. В чому полягає метод інтегрування раціонального дробу?
24. Навести приклади інтегрування ірраціональних функцій.
25. Як раціоналізується Інтеграл \R (sin де, cos x)dxf Чому підстановка / =
х
= tg -5- називається універсальною?
26. Як обчислюються інтеграли І sin" x cosm xdx?
27. Як обчислюються Інтеграли і sin ax cos bxdx?
28. У якому випадку кажуть, що невизначеиий інтеграл не є елементарною
функцією? Навести приклади.
29. Обчислити безпосереднім інтегруванням:
1) tj(2x*-x+3)dx; 2) f (V* + ^f^) dx<
3) \ (Xі + 3x + 5)10 (2* + 3) dx; 4) f e4 cos * sin xdx;
C хЧх „ f sin x ,
5)]TWW ^)-^rdx-
7) f 41 ; 8) f .
J (1 + *2) arctg x 'J
f dx ; 10) f.
J a2*2 — i2 J
9)
ЗО. Знайти методом підстановки:
5 + 4e*
cos xdx
4 + sin2 де
1) [ ** ■ 2) f 6*«-5*=> + 4*2
„f x+3 r Yl — x2
8)]уз+4,-4,2^ 4>Jt-«*;
363
5)
dx
X2 /і + X2 '
7) V*-V~* dx;
б'/х
J 4 si
dx
.dx.
dx;
10)
і
COS4'3*
sin x + 3 cos x + 5
31. Проінтегрувати частинами:
1) f arcsin xdx; 2) І де2 In xdx;
3) fx arctg xdx; 4) j (де2 + 2x + 3) cos xdx;
Б) I sin (In x) dx; 6) f e2* cos xdx.
32. Знайти інтеграли:
3) f sin4 xdx; 4) £ ctg5 xdx;
5)
5sin:
7+7
COS2 X
dx;
«I
cos 2xsin 4xdx.
Відповіді. 29.1)^- *- + 3x+C; 2) -*_ + -jl xfyx + 3 fc + C;
3) _L (*2 + 3* + 5)» + C; 4) - _L e4 cos ' + C; 5) |/?+T+C;
6) ! + C; 7) ln|arctgx|-fC; 8) -L In (5 + 4ex) + C;
2 cos2 x 4
9)
2ab
In
ax— b
ax + b
+ C; 10) i-arctg (-!І^) + С
30. 1) J- arctg JL±L + C; 2) «• - * + -i- In | 2*2 - x + 1 I + C:
2 2 2 4
3) — J- ^3 + 4x — 4л:2 + — arcsin
' 4 4
2л — 1
+ C; 4)
VT
■ arcsin x-\-C
5)
8) In
2 x
2 \r-s 2 12/-ГЗ
1^ + *' + C; 6) ^ >?=4 - 2 arccos A + C; 7) ±- \Г*- A У F3 + C
^l-x+^l+x
/l—x-/l+*
Ґ~
+ C; 9)
1
+ C;
+ 2
10) 3 (cos x) 3 + -І- (cos x) 3 + C
5
81.
1) xarcsinx-H ^1-x2 + C; 2) _^_ An | x | — _i-j + C;
364
3) *' + ' arctg x - * + C; 4) (*+ l)»sinx+ 2(x+ 1) cos ж + C;
5) _£-(sin(ln|x|)— cos(ln|jf|) + C; 6) -i-e2jC(s«n*+2cos*) + C.
ffi- ,)Т-Тб(^Г+-і-І°І'-2|+-іб|+Т + Т'°"+2l+C!
4)
j:tf£*
4
+ -£^L + ln|sinx|-f-C; 5) ^2arctg№j-) + C;
g j cos 6x cos 2x , q
\2~ 4 + '
9 2. ВИЗНАЧЕНИЙ ІНТЕГРАЛ
2.1. Задачі, що приводять до визначеного інтеграла
1°. Задача про площу криволінійної трапеції. Нехай на відрізку
[а; Ь\ задано функцію^/ •= / (х) > 0. Фігура аАВЬ (рис. 7.4), обмежена
графіком даної функції і відрізками прямих у = 0, х = а, х = Ь,
називається криволінійною трапецією. Обчислити площу S цієї
трапеції.
О Розіб'ємо відрізок [а; Ь] за допомогою точок й,= х(1<х1<а;!<
<; ...<;хп= Ь на п частинних відрізків lxt—\, xt], і •= 1, 2, .... п.
На кожному з цих відрізків візьмемо довільну точку |f Є Ui_i, Xj]
і обчислимо значення / (|4). Тоді добуток / (|г) Ах^ де Axt = xt —
— Xi—i, дорівнює площі прямокутника з основою Axt і висотою
/ (|і), а сума цих добутків — площі ступінчатої фігури і наближено
дорівнює площі криволінійної трапеції:
S»S/(Si)A*i.
Із зменшенням усіх величин Axt точність цієї формули
збільшується, тому природно за площу криволінійної трапеції вважати
границю площ ступінчатих фігур за умови, що максимальна довжина
частинних відрізків прямує до нуля:
S= lim Vf(||)AX|. • (22)
max Д*|->0 ;=j
2°. Задача про роботу змінної сили. Нехай на матеріальну точку
Діє сила F, яка стала за напрямом і неперервно змінюється за
величиною, і нехай під дією цієї сили точка перемістилася вздовж осі
Ох з точки а в точку Ь (а < Ь). Обчислити роботу А цієї сили на
відрізку [а; Ь].
365
Рис. 7.4
О У кожній точці х Є [а; Ь] діє
сила F, яка за умовою є неперервною
функцією від х: F = F (х). Розіб'ємо
відрізок [а; Ь\ точками а = х0 < х^ <
< х2< ... < хп = Ь на п частинних
відрізків [хі-й xt], і = 1, 2, ..., я.
Припустимо, що кожний з частинних
відрізків такий малий, що силу F (х)
на ньому можна вважати сталою і
рівною значенню функції F {х) в деякій
довільно вибраній точці х = It 6
Є [хі-ї, xt): F = F {h). Робота,
виконана цією силою на відрізку [х,-_ь
xth дорівнює добутку F (|і) Axt, де
Ахі = xt — Xf_i. Насправді, на
відрізку [хі-и xt] сила ґ (х) змінюється, тому вираз F Ці) Axt дає
лише наближене значення роботи на цьому відрізку.
Оскільки робота на відрізку [а; Ь\ дорівнює сумі робіт на всіх
частинних відрізках, то
Л«Іґ(|,)Дл:,.
і=і
Ця наближена рівність тим точніша, чим меиші довжини Axt. Тому
природно за роботу сили F {х) на шляху [а; Ь] вважати границю
одержаної суми:
А= lim 2 f (Еі>а*і- • <23>
тих ДіС|->0 f=i
3°. Задача про пройдений шлях.. Нехай точка рухається по прямій
з швидкістю v — v (0, де і; — неперервна функція часу t. Треба
визначити шлях s, який пройде точка за проміжок часу [а; Ь] від
моменту t = а до моменту f = 6 (а < 6).
О Розіб'ємо відрізок [а; Ь] точками а = £0 <*і <'ї< ••• <'п =
= Ь на п частинних проміжків часу [^_ь tt], і — 1, 2, .... п.
Припустимо, що відрізок lti-u tt\ такий малий, що швидкість v (f) при
16 lU-i, tt] змінюється мало. Тоді її можна вважати на цьому
відрізку сталою і рівною, наприклад, v (|(), де |t Є [fr_i, tt]. Це
означає, що рух точки на проміжку [fr_b U\ вважається рівномірним,
тому шлях, пройдений точкою за час Att = U — tt-i, дорівнює
добутку v (It) Att, а шлях, пройдений за час [а; Ь\, виражається
наближеною формулою
:2о(6,)Д*,.
і=1
366
Ця наближена рівність тим точніша, чим менші величини Att.
Тому природно за шлях s вважати границю знайденої суми:
шах Д/.->0
f=l
4°. Задача про масу неоднорідного стержня. Нехай маємо
прямолінійний стержень, який лежить на осі Ох в межах відрізка [а; Ь].
Треба знайти масу т цього стержня, якщо його густина у є деякою
неперервною функцією від х: у = у (х).
О Розіб'ємо стержень на п довільних частин ta—i, xt], і = 1,
2, .... п точками а = х0 < л^ < х2< ... < хп = 6.
Якщо відрізок [л:(_і, xt] достатньо малий, то функція у (х) на
ньому змінюється мало, тому маса частини стержня Axt = xt — Xt—i,
яка відповідає цьому відрізку, наближено дорівнює добутку
у (It) Ах{, де її 6 ІХі„и xt], а маса всього стержня
m»2 Y(Ei)Ax,.
<-і
Точне значення маси знайдемо як границю цієї суми, коли
т= lim 2vGi)A*i- • (25>
Усі розглянуті задачі привели нас до однієї й тієї самої
математичної операції — знаходження границі певного виду сум. Проте
границі (22) — (25) не зовсім звичайні. Справді, суми під знаком
границі залежать не тільки від заданої функції, а й від точок
розбиття Хі, ti і від точок |j. Число точок прямує до нескінченності,
коли довжина максимального частинного відрізка прямує до нуля.
Інакше кажучи, у кожному випадку, тобто для кожної заданої
функції, йдеться про знаходження границі суми нескінченно великого
числа нескінченно малих доданків.
До такої самої математичної операції над функціями приводять
багато інших задач, тому виникає потреба всебічного вивчення цієї
операції, незалежно від конкретного змісту тієї чи іншої задачі.
2.2. Означення та умови існування визначеного інтеграла
Нехай функція у = / (х) визначена на відрізку [a; b], a < Ь.
Розіб'ємо цей відрізок на п довільних частин точками:
а = *о<*і< ••• <xt-.i<ZXt< ••• <Cxn-i<Zxn =b.
Сукупність точок х0, хг хп позначимо через т і назвемо т-
розбиттям відрізка la, b].
367
На кожному частинному відрізку [х,_і; х{\, і = 1, 2, ..., п,
візьмемо довільну точку 1,1 Є ІХі-і; xt] і побудуємо суму
°„=i/(UAxt, (26)
де Axt = Хі — Xt—\ — довжина відрізка ІХі-й xt].
Сума (26) називається інтегральною сумою функції f (x), яка
відповідає т-розбиттю відрізка la; b\ на частинні відрізки і даному
вибору проміжних точок \і.
Геометричний зміст інтегральної суми: якщо / {х) ^ 0, то число
а„ дорівнює площі ступінчатої фігури (рис. 7.4), тобто сумі площ п
прямокутників з основами Axj і висотами f(tt).
Позначимо через Я, довжину найбільшого частинного відрізка
т-розбиття і назвемо його діаметром цього розбиття:
X = Я, (т) = max Axt.
1<1<л
Якщо Існує скінченна границя інтегральної суми (26) при X. ->•
-»- 0, яка не залежить ні від т-розбиття, ні від вибору точок It, то
ця границя називається визначеним інтегралом функції f (x) на від-
ь
різку [а; Ь] і позначається символом f / (х) дх. Отже, вгідно з ОЗНа-
ЧЄННЯМ,
\f(x)dx = UmJif{li)Axl. (27)
£ *->о і=\
У цьому випадку функція / (х) називається інтегровною на відрізку
[а; Ь]. Числа а і b називаються відповідно нижньою і верхньою
межею інтегрування; функція / (х) називається підінтегральною
функцією; f{x)dx — підінтегральним виразом; х — змінною
інтегрування; [а; Ь] — проміжком іні іегрування.
Повертаючись до задач J. 2.1 на основі рівностей (22) — (27),
можна сказати, що:
1) площа S криволінійної трапеції, обмеженої прямими у = 0,
х = а, х = Ь і графіком функції у = / (х) > 0, дорівнює визначеному
інтегралу від цієї функції:
ь
S = [/(x)dx. (28)
а
У цьому полягає геометр чний зміст визначеного інтеграла:
визначений інтеграл від невід'ємної функції чисельно дорівнює площі
відповідної криволінійної трапеції;
368
2) робота А змінної сили F (х), яка дів на відрізку [а; Ь],
дорівнює визначеному інтегралу від сили:
ь
А = j F (х) dx\ (29)
а
3) шлях s, пройдений точкою за проміжок часу від t = а до t =
= b, дорівнює визначеному інтегралу від швидкості v (f):
ь
s = \v(t)dt. (ЗО)
а
Ця формула характеризує фізичний зміст визначеного інтеграла;
4) маса т неоднорідного стержня на відрізку la; Ь] дорівнює
визначеному інтегралу від густини у (х):
ь
m=^y(x)dx. (31)
а
В означенні визначеного інтеграла функція / не обов'язково
неперервна і невід'ємна на [а; Ь]. Це означення не підтверджує також
існування визначеного інтеграла для будь-якої функції /, визначеної на
[а; Ь]. Воно лише говорить про те, що коли границя інтегральної
суми існує для заданої на [а; Ь] функції / і при довільному
розбитті т відрізка [а; Ь\ і довільному виборі точок |( вона одна і та сама,
то ця границя називається визначеним інтегралом функції / на
відрізку [а; Ь].
Слід також мати на увазі, що коли кажуть, що функція / інтег-
ровна на [а; Ь], то розуміють, що існує скінченна границя (27), і ця
границя не залежить ні від способу розбиття відрізка [а; Ь\ на
частинні відрізки [хі—й Xt], ні від вибору проміжних точок |j в кожному
8 НИХ.
Сформулюємо умови інтегровності функції [12].
Теорема 1 (необхідна умова інтегровності). Якщо функція f (x)
інтегровна на відрізку [а; Ь], то вона обмежена на цьому відрізку.
Слід зазначити, що обернене твердження неправильне: існують
функції, які обмежені на відрізку, але не інтегровні на ньому.
Прикладом такої функції є функція Діріхле:
D( \_Я> ЯКЩ° х — раціональне;
(О, якщо х — ірраціональне.
Ця функція на відрізку [0; 1] є обмеженою: \D (х) | ^ 1, але не
інтегровною. Справді, якщо на кожному частинному відрізку за
369
проміжні точки £,- взяти раціональні числа, то з формули (26)
випливає, що сума о„ = 1, а якщо £( — ірраціональні числа, то а„ = 0.
Це означає, що величина границі інтегральної суми, побудованої
для функції D {х), залежить від вибору точок £(. Тому функція
Дірі хле не інтегровна на [0; 1].
Теорема 2 (достатня умова інтегровності). Якщо функція f (x)
неперервна на відрізку [а, Ь], то вона інтегровна на цьому відрізку.
Умова неперервності функції є достатньою умовою її
інтегровності. Однак це не означає, що визначений інтеграл існує лише для
неперервних функцій. Клас інтегральних функцій значно ширший.
Так, існує визначений інтеграл від кусково-неперервних функцій,
тобто функцій, які мають скінченне число точок розриву першого
роду. Це стверджує така теорема.
Теорема 3. Якщо функція f (х) обмежена на відрізку la; b] і
неперервна в ньому скрізь, крім скінченного числа точок, то вона
інтегровна на цьому відрізку.
Більше того, справедлива така теорема [9].
Теорема 4. Всяка обмежена і монотонна на відрізку функція
Інтегровна на цьому відрізку.
Ця теорема значно розширює клас інтегровних функцій,
оскільки монотонна функція може мати не лише скінченну, а й нескінченну
кількість точок розриву першого роду.
Надалі, як правило, розглядатимемо лише неперервні функції.
2.3. Властивості визначеного інтеграла
1°. Величина визначеного інтеграла не залежить від позначення
змінної інтегрування:
ь ь ь
\f(x)dx=\f(t)dt = \f(z)dz тощо.
а а а
Інтегральна сума (26), а отже, і її границя (27) не залежать від
того, якою буквою позначено агрумент функції f. Це й означає, що
визначений інтеграл не залежить від позначення змінної
інтегрування.
ь
Визначений інтеграл \f(x)dx введений для випадку, коли а ■<
а
<; Ь. Узагальнимо поняття інтеграла на випадки, коли а = Ий>
■>ь.
2°. Визначений інтеграл я однаковими межами інтегрування
дорівнює нулю:
а
r/(x)dx=0. (32)
370
3°. Від переставлення меж інтегрування інтеграл змінює знак
на протилежний:
J/(x)dx=-|/(*)dx. (33)
а Ь
Властивості 2° і 3° приймають за означенням. Відзначимо, що ці
означення повністю виправдовує наведена далі формула Ньютона —
Лейбніца (п. 2.4).
4°. Якщо функція f {x) інтегровна на максимальному з відрізків
la; b], [a; c], [c; b], то справедлива рівність
J/(*)d* = J/(x)d* + J/(*)d* (34)
а а с
(аддитивність визначеного інтеграла).
О Припустимо спочатку, що a <Z c <Zb. Оскільки границя
інтегральної суми не залежить від способу розбиття відрізка la; Ь\ на
частинні відрізки, то розіб'ємо [а; Ь\ так, щоб точка с була точкою
розбиття. Якщо, наприклад, с = хт, то інтегральну суму можна
розбити на дві суми:
п т п
2/(!і)Д*і = 2/(&і)Д*і+ 2 /(Єі)Д*і.
1=1 і=1 1=т+1
Переходячи в цій рівності до границі при X -*■ 0, дістанемо
формулу (34).
Інше розміщення точок а, Ь, с зводиться до вже розглянутого.
Якщо, наприклад, а < Ь < с, то за формулами (34) і (33) маємо
с Ь с
<jjf{x)dx = ^f(x)dx + ^f(x)dx;
а а Ь
Ь с с с Ь
J f(x)dx = f f(x)dx — <\f(x)dx = j /(x)dx + J f(x)dx. •
а а Ь а с
На рис. 7.5 показано геометрично цю властивість для випадку,
коли / (х) > 0 і а<іс <; Ь: площа трапеції аАВЬ дорівнює сумі
площ трапеції аАСс і сСВЬ.
Зауваження. Нехай / (х) — знакозмінна неперервна
функція на відрізку [а; Ь], де а <; Ь, наприклад, \/х£[а; а] [} 1(5; Ь]:
••f(x)<^0 і Vx£(a; В): / (х) > 0 (рис. 7.6).
Скориставшись аддитивністю та геометричним змістом інтеграла,
дістанемо
Ь а Р Ь
\f{x)dx = J/(x)d* + j/(x)dx+J/(x)dx = —Si + S,—S„
a a a Р
де Slt S2, Ss — площі відповідних криволінійних трапецій.
371
Рис. 7.6
Отже, в загальному випадку, з погляду геометрії визначений
інтеграл (27) при а < Ь дорівнює алгебраїчній сумі площ відповідних
криволінійних трапецій, причому площі трапецій, розміщених над
віссю Ох, мають знак плюс, а нижче осі Ох — знак мінус. Якщо а >
> Ь, то все формулюється навпаки.
Зазначимо, що площа заштрихованої на рис. 7.6 фігури
виражається інтегралом
ь
^\f(x)\dx = S1 + S2 + SB.
а
5°. Сталий множник С можна винести за знак визначеного
Інтеграла:
ь ь
\Cf(x)dx = C^f(x)dx.
(35)
О Дійсно,
[Cf(x)dx = \imjt Cf(li)Axt =
а
п Ь
= СІітЕ/(Бі)А*і=СГ/(*)Же.
я.-*о ,=і J
6°. Визначений інтеграл від суми інтегровних функцій
дорівнює сумі визначених інтегралів від цих функцій:
О DO
J (f(x)+g(x))dx = І f{x)dx + ^g{x)dx.
а а а
О Для довільного т-розбиття маємо
2 (/ (6і) + є (Еі)) Дх, = І / (S,) л*г + І s (h) а*і-
t=i f=i <=i
(36)
372
Звідси, переходячи до границі при X = X (т) -»- 0, дістанемо
формулу (36). Ця властивість має місце для довільного скінченного
числа доданків.
Властивості 5° І 6° називаються лінійністю визначеного
інтеграла.
7°. Якщо всюди на відрізку [а; Ь\ маємо f (х) ^ 0 (а <; Ь), то
ь
j/(x)dx>0 (37)
а
(збереження знака підінтегральної функції визначеним інтегралом).
О Оскільки
/(£*)> 0, Д*, = *, — *£_і >0, і ч= 1,2, .... п,
то будь-яка інтегральна сума і її границя при Я, -v 0 теж
невід'ємна. •
8°. Якщо всюди на відрізку la; b] маємо f (x) ^g (х) {а < Ь), то
ь ь
\f(x)dx^g{x)dx (38)
а а
(монотонність визначеного інтеграла).
О Оскільки g{x)~^f (x), то з нерівності (37) маємо
J te (*)-/(*))<**> о.
Використовуючи властивість 4°, дістаємо нерівність (38). •
Якщо / {х) > 0 і g (х) > 0, то властивість 8° можна зобразити
геометрично (рис. 7.7): площа криволінійної трапеції аА^Вф не менша
площі криволінійної трапеції аА2В2Ь.
9°. Якщо функція f {х) інтегровна на відрізку [а; Ь] {а <; Ь), то
І/м
dx
<[\t(x)\dx.
а
(39)
О Застосовуючи формулу (38) до
нерівності
-l/WK/W<l/W|,
дістаємо
ь ь ь
-J|/(*)|d*<J/(x)dx<j|/(x)|dx,
а а а
звідки й випливає нерівність (39). •
УІ
0
А/
А2
р^гМ
шШ,
а- і
Н
ві
S X
Рис. 7.7
373
10°. Якщо Vx Є [а; Ь\ : \ f (х) |< C, то
J/(x)dx <C(ft^a). (40)
а
О Скориставшись формулами (39) та (35), дістанемо
ь ь ь
[f(x)dx <f |/(x)|dx<Cjdx.
а а о
Звідси й одержуємо нерівність (40), оскільки
Ь п
fdx = IimS 1 • А*і=6 — а- • (41)
J *,-*0 (=1
a
11°. Якщо т І М — відповідно найменше і найбільше значення
функції f (х) на відрізку [a; b\ (a < ft), то
ь
i(ft — a)<j/(x)dx<M(fc — a) (42)
ті
(оцінки інтеграла по області).
О За умовою Vx6[a; ft]:
тому з властивості 7° маємо
jmdx«^J/(x)dx<J Mdx.
Застосовуючи до крайніх інтегралів формули (35) і (41), дістаємо
нерівність (42). •
Якщо / {х) > 0, то властивість 11° ілюструється геометрично
(рис. 7.8): площа криволінійної трапеції аАВЬ не менша площі
прямокутника аАхВф і не більша площі прямокутника аА^Вф.
12°. Якщо функція f (х) неперервна на відрізку [а; Ь], то на цьому
відрізку знайдеться така точка с, що
ь
J/(x)dx = /(c)(ft-a) (43)
а
(теорема про середнє значення функції).
О Якщо функція / (х) неперервна на відрізку, то вона досягає
свого найбільшого значення М і найменшого значення т. Тоді з
оцінок (42) дістанемо (якщо а < ft)
, ь
m^FZZF^f(x)dx^M.
374
Покладемо
Оскільки функція / (х) неперервна на відрізку [a; ft], то вона набуває
всі проміжні значення відрізка [т; М\ (п. 5.3, гл. 4). Отже, існує
точка с 6 [a; ft] така, що / (с) = \і, або
Кс) = -ггн-J/(*)<**.
(44)
ввідки й випливає дана властивість.
Для випадку, коли а> ft, приводимо ті самі міркування для ін-
а
теграла j / (х) dx, а потім, переставивши границі, приходимо до по-
ь
передньої формули. •
Рівність (44) називається формулою середнього значення, а
величина / (с) — середнім значенням функції на відрізку [a; ft].
Теорема про середнє значення при / (х) ^ 0 має такий
геометричний зміст (рис. 7.9): значення визначеного інтеграла дорівнює площі
прямокутника з висотою / (с) і основою ft — а.
Термін «середнє значення функції» добре узгоджується з такими
фізичними поняттями, як середня швидкість, середня густина,
середня потужність тощо. Якщо, наприклад, у формулі (44) інтеграл
означає пройдений шлях за проміжок часу [a; ft] (п. 2.2), то середнє
значення / (с) означає середню швидкість, тобто сталу швидкість,
при якій точка, рухаючись рівномірно, за той же проміжок часу
пройшла б той самий шлях, що і при нерівномірному русі із
швидкістю / (t).
13°. Якщо змінити значення інтегровної функції в скінченному
числі точок, то інтегровність її не порушиться, означення інтеграла
при цьому не зміниться.
Рис. 7.8
375
Ця властивість дає змогу говорити про інтеграл f / (x)dx навіть
а
тоді, коли функція / (x) не визначена в скінченному числі точок
відрізка [а; Ь]. При цьому в цих точках функції можна надати цілком
довільних значень і величина інтеграла не зміниться.
2.4. Інтеграл із змінною верхньою межею. Формула Ньютона —
Лейбніца
Нехай функція / {х) неперервна на la; b], тоді вона інтегровна на
будь-якому відрізку [а; х] с [а; Ь\, тобто для довільного х £ [а; Ь]
х
існує інтеграл f / {f)dt. (Оскільки визначений інтеграл не залежить
а
від змінної інтегрування, то ми позначили ЇЇ через t, щоб не плутати
з верхньою межею х.) Заданий інтеграл, очевидно, є функцією від
х. Позначимо цю функцію через Ф (х):
®(x) = ^f{t)dt (45)
а
і назвемо інтегралом із змінною верхньою межею.
Геометрично (рис. 7.10) при f (х) >0 функція Ф {х) дорівнює
площі заштрихованої криволінійно трапеції. Розглянемо основну
властивість функції Ф {х).
Теорема 1. Похідна визначеного інтеграла із змінною верхньою
межею по верхній межі дорівнює значенню під інтегральної функції
для цієї межі:
0'{x) = -£-[[f(t)dt)=f{x). (46)
О Надамо аргументу х функції (45) приросту Ах, тоді,
враховуючи аддитивність інтеграла, дістанемо
Ф(х + Ах)="^Xf(f)dt~\if(t)dt+ { f{t)dt =
а а х
= Ф{х)+" ff(t)dt,
я
звідки
ж+Дх
ДФ=Ф(х + Дх) — Ф(х)= J f(f)dt.
376
Застосовуючи до цього інтеграла
теорему про середнє значення,
знайдемо, що
ДФ = / (с) {х + Ах — х) = / (с) Д*.
де точка с знаходиться між х і х + А*-
Отже,
Ф'М-Ніп**-
д*-*о
= Пт
Дж->0
/ (с) А*
Якщо Ах
ції / маємо
0, то х -\- Ах-
<- хіс
lim /(c).
Д*-»0
Ф'-М
lim /(c)
Ах-»-0
х, тому а неперервності функ-
Hm/(c) =/(*). •
З доведеної теореми випливає важливий наслідок:
Для всякої неперервної на відрізку [а; Ь\ функції f (x) існує пер
вісна функція. При цьому однією з первісних функцій є визначений
інтеграл (45).
О Справді, оскільки функція F (х), яка задовольняє умову F' (х) =
= / (х), є первісною функції / {х), то, згідно 8 формулою (46),
функція Ф (х) є первісною. Але будь-яка Інша первісна F (х)
функції / (х) може відрізнятися від Ф (х) лише на сталу С: Ф (х) =
•= F (х) + С, х £ [а; Ь\, тому
^f(x)dx = F(x)+C = jf(t)dt, де Є [о; 6].
(47)
Теорема 1 розкриває глибокий зв'язок між невизначеним та
визначеним інтегралами. Крім того, вона дає змогу встановити простий
метод обчислення визначених інтегралів, минаючи громіздкі
операції підсумовування і перехід до границі. Цей метод грунтується на
такій теоремі.
Теорема 2. Якщо F (х) є якою-небудь первісною від неперервної
функції f (x), х£ [а; Ь\, то справедлива формула
^f(x)dx = F(b)-F(a). (48)
а
Ця фзрмула називається формулою Ньютона — Лейбніца.
О Нехай F (х) — деяка первісна функції / (х). Оскільки Інтеграл
(45) є також первісною, то згідно з формулою (47) маємо
^f(t)dt = F(x) + C.
377
Поклавши в цій рівності х =» а, з формули (32) дістанемо
\f{t)dt = F {а)+С = 0, звідки С = — F (а),
а
тому
J/(/)df = F(*)-F(a).
Зокрема, при х =* b дістаємо формулу (48). •
Різницю F (Ь) — F (а) умовно позначають символами F (х)$,
або [F {х)]а, тому формула Ньютона — Лейбніца записується ще й
так:
ь ь ь
\f(x)dx = F(x) ; \)f{x)dx^\F(x)t
а а а
Формула Ньютона — Лейбніца дає практично зручний спосіб
обчислення визначеного інтеграла: визначений інтеграл від
неперервної функції дорівнює різниці значень довільної її первісної, обчисле:
них для верхньої і нижньої меж інтегрування.
Зазначимо, що формула (48) сама по собі не розв'язує ні задачі
знаходження первісної, ні задачі обчислення границі інтегральних сум.
її цінність полягає в тому, що вона встановлює зв'язок між цими
задачами.
Формула Ньютона — Лейбніца значно розширює область
застосування визначеного інтеграла, тому що дає загальний метод для
розв'язування різноманітних практичних задач. Безпосередні ж
обчислення визначеного інтеграла за формулою (27) не дозволили створити
такого методу. Ще геніальний давньогрецький мислитель Архімед
розв'язав задачу знаходження площі параболічного сегмента
методом, що нагадує обчислення границь інтегральних сум. Потім
протягом декількох століть математики таким самим способом
розв'язали багато окремих задач, але лише в 17 ст. Ньютон і Лейбніц
показали, що обчислення визначеного інтеграла від довільної
неперервної функції зводиться до відшукання її первісної. Наприклад,
І
і
2 х*
x*dx = -г
^ ]*_ 15_.
4 4 — 4 '
Г {2х — sin x) dx = (хг -4- cos x) |" =
о
= (я2 + cos я) — (О2 + cos 0) = я2 — 2;
378
f *+arctg* Av 1 fd (!+*«) , 3\ $
+J" arctg xd (arctg x) = 4 In (1 + x*) |J +
о
+ 4-arete-*ft—I-(in2+-£-).
I I
J I
L-U
C, C2 В x
Рис. 7.11
Зауваження І. Теорема З (п. 2.2) стверджує існування
визначеного інтеграла від кусково-неперервної функції, яка має
скінченне число точок розриву першого роду. Обчислення інтеграла
від такої функції можна провести на основі властивостей інтеграла 4°
і 13° (п. 2.3).
На рис. 7.11 зображено графік кусково-неперервної функції,
заданої на відрізку [а; Ь]. Вона інтегровна на [а; Ь\ і
jM*)dx = J/(x)dx + J/(x)dx + J/(x)d*.
Приклади
(ех, 0 ^ * < 1; 2
, ' . "^ ^ „ Обчислити Г / (х)
о
1, 1<ж<2.
1 2
dx.
О Маємо f / {х) dx = f e*d* + [ dx = є* Ц, + *|2 = і
о б і
2. Обчислити
n
r_ C cosxdx
~ J /l—sin2"*
О Шдінтегральна функція / (x) ие визначена в точці х = -ж- Розіб'ємо відрізок
[0, я] на два: 10. "о" І Ч "£> я • На першому відрізку довияначимо неперервно
функцію / (х): нехай / l-g- J = 1 І оскільки / J-j- — 01 = 1), тоді
л
2
/1 = J f(x)dx=^dx = x\0 =-£
379
На другому відрізку покладемо / l-g-1 = —1 [оскільки f І-у + °) = —1)1 знову
дістанемо інтеграл від неперервної функції / (х) = —1; х£ -я-, я :
л
2
Таким чином, / = /і + /а = 0. #
Зауваження 2. Обчислення визначеного інтеграла від ку-
сочно-неперервної функції можна проводити безпосередньо також
за допомогою формули, аналогічної формулі (48). Для цього дамо
розширене означення первісної.
Функція F (х) називається первісною функції / (х) на відрізку
[а, Ь\, якщо:
1) F (х) неперервна на [а; Ь\;
2) F' (х) =• / {х) в точках неперервності / (х).
Очевидно, для неперервної функції це означення первісної
збігається із загальноприйнятим. Крім того, справедливе таке
твердження:
Кусочно-неперервна на відрізку la; b] функція має первісну на
цьому відрізку в розумінні розширеного означення; однією з первіс-
х
них є функція F (х) = Г / (і) dt і справедлива формула Ньютона —
а
Лейбніца:
$f(x)dx = F(b)-F(a).
а
2
Наприклад, С sign xdx = | х |Li = 1, оскільки за розширеним
—і
означенням функція / (х) = sign х на [—1; 2] має первісну F (х) =
2.5. Методи обчислення визначених інтегралів
При обчисленні визначених інтегралів, як і невизначених,
широко користуються методом заміни змінної (або методом підстановки)
і методом інтегрування частинами.
Теорема 1. Нехай виконуються умови:
1) функція f (х) неперервна на відрізку [а; Ь\;
2) функція х = ф (t) і її похідна х' = ф' (і) неперервні на
відрізку [а; р];
380
3) ф (а) = а, ф (р) = Ь \ V t Є (а; р): а < <р (0 < Ь.
Тоді справджується рівність
[f{x)dx = \l(4(t))4'(t)dt. (49)
а а
О Оскільки функція / (х) неперервна на la; b], то вона має
первісну. Позначимо її через F (х), х 6 la; b], тоді з теореми про заміну
змінної в невизначеному інтегралі випливає, що функція F (ф (/))
буде первісною функції / (ф (/)) ф' (t), t Є [а; р]. Застосувавши формулу
Ньютона — Лейбніца, маємо
J f(x) dx = F (b) - F (a); j / (q> (/)) Ф' (/) dt =
a a
= F(q>(P))-F(q>(a))=F(&)-F(a). •
Формула (49) називається формулою заміни змінної ("або
підстановки) у визначеному інтегралі.
Зауваження 1. Якщо при обчисленні невизначеного
інтеграла заміною х = ф (t) у первісній функції необхідно було від
змінної / повернутися до змінної х, то при обчисленні визначеного
інтеграла замість цього треба змінити межі інтегрування. Нижня межа
а знаходиться як розв'язок рівняння а = ф (t) відносно невідомого
t, а верхня межа р — з рівняння b = ф (t).
Якщо функція ф {t) не монотонна, то може статися, що ці рівняння
дадуть кілька різних пар а і р, які задовольняють умови теореми 1.
В цьому випадку можна взяти будь-яку з таких пар.
Зауваження 2. Часто замість підстановки х =» ф (/)
застосовують підстановку / = гр (х). У цьому випадку нові межі
інтегрування визначаються безпосередньо: a = гр (а), Р = і|) (Ь). Проте
тут слід мати на увазі, що функція х = х (і), обернена до функції
гр (f), має, як і раніше, задовольняти всі умови теореми 1. Зокрема,
функція х (t) в межах інтегрування має бути означеною
неперервно диференційовною функцією t і при зміні t від а до Р змінна х (t)
має змінюватися від а до Ь.
Найзручніше виконувати заміну л:о:ютонно диференційовними
функціями. Такі функції гарантують однозначність як прямої, так
і оберненої функцій.
Приклади
а
1. Обчислити інтеграл \ Ya1 — лса dx.
0
О Нехай х = a sin./. Переконуємось, що ця функція задовольняє всі умови
теореми 1, причому якщо х =0, то 0 = a sin t, звідки / =0; якщо х = а, то а = a sin t.
381
звідки /="?•■ Отже. « = О, Р = -g". (Ця функція ие є монотонною, тому існують
й інші парн розв'язків, які задовольняють умови теореми 1 і можуть бути межамиї
О = 2я, Р = —; а = -2я. Р = Г тощо j
Далі маємо
я
2
U —
f Va* — х* dt = f |/"aa — a« sin2 t a cos tdt =
0 0
— —
2 а 2
= a*f cos2fd/=?5Lf (l+cos2/)d/ =
о о
-т(«+тНІ?
2. Обчислити інтеграл
і—
2
О Нехай W — 1 = /, звідки a = /е° — 1 =* 0, Р =>Vn 5 — 1 = 2. Отже,
якщо х змінюється від 0 до 1п 5, то нова змінна t змінюється від 0 до 2. Функція
х = In (t1 4- 1), обернена до функції / = V є* — 1, на відрізку [0; 2] є монотонною
2/
і неперервною разом з похідною х = .2 . . на цьому відрізку. Маємо
2 2
С (<« + 1 і ■ 2tdt f Pdt
о о
2
= 2j(l-7qrT)d/ = 2(<-2arctg^)|[ = 4-„. «
о
3. Чи можна обчислити підстановкою х = sin t інтеграл
2
f х 3/\ —ха dx.
о
О Ні, тому що.змінні < на проміжку (—оо; +<») відповідає змінна х не на
відрізку [0; 2], а на відрізку [—1; І] (| sin х | < 1). •
4. Довести, що
а а
J f(x)dx=2^Hx)dx,
—а О
382
коли / (де) — парна функція;
а
\ f (х) Ах = 0, коли / (х) — непарна функція.
—а
О Маємо
а 0 а
j /(x)dx=j / (х) dx + { / (х) Ах.
—а —а 0
У першому інтегралі виконаємо підстановку х = —/:
0 0 а о
J / (х) dx = - j / (- /) dt = J / (- 0 dt = J / (- x) dx.
—a a 0 0
Далі дістаємо
pa a a
j" / (x) dx = j / (- x) dx + j / (x) dx = j (/ (- x) + / (x)) dx.
—a 0 0 0
Якщо функція парна, то / (—х) + / (х) = 2/ (х), а якщо непарна, то / (—х) 4-
+ / (х) = 0. •
Знайдені формули дуже корисні. Можна, наприклад, зразу, не виконуючи
обчислень, сказати, що
а л
\ x3cosxdx = 0; f sin5 x cos* xdx = 0;
—о — n
n
2
\ Xі sin" xdx = 0 тощо.
я
' 9
Теорема 2. Якщо функції и = и (х) і v = v (х) мають на
відрізку la; b\ неперервні похідні, то справедлива формула
ь ь
[ udv = uv \а — С vdu. (50)
а о
О Оскільки функція uv є первісною функції (uv)' = u'v -f- uv',
то за формулою Ньютона — Лейбніца дістанемо
f (u'v + uv') dx = uv |*.
Скориставшись лінійністю визначеного інтеграла (п. 2.4),
дістаємо формулу (50). ф
Формула (50) називається формулою інтегрування частинами
визначеного інтеграла.
383
Всі зауваження відносно формули (6) інтегрування частинами
невизначеного інтеграла переносяться і.на формулу (50).
Приклади
Обчислити інтеграли:
Я'
4
а) [х\пх dx: б) С х arctg xdx; в) J sin Y~x dr,
J n 0
r) J sin" xdx, « = 0, 1,2
О a) [*ln xdx ■■
1
u = lnx, du = xdx I , »
rfu = — dx, v = .-g" « l
4
I u= arctg x, A» = *djc
6) $xarctg*dx = dM = T-jL?-dx> « = -T
= -4p arctg ж lo —
-(гт?"-І-1('-гтїг)'"Т-
0 °
JI'
4
в) J sin /'
= 2 -/cos t \f + J
і п l
(x — arctg x) |0 =-4-— 2
I, tf- „_,«! 2r I u = <, do = sin MM
a* = ^fai I 0
; tdt = 2;
2
n—' x sin xdx =
r) /n = f sin" xdx = J-sin" '*si
0 0
dv = sinxdx\ ^_sinn-\xcosx |т" +(n-l) J si
в = — cos x I 0
м = sin" ' x,
n—2
du = (n — 1) sin"-2 ж cos xdx,
!n-z x cos2 xdx = (n — 1) X
J sin— x (i _ sin» x) dx = (. - 1) j sin""2 xdx - («- 1) J sin" xdx
°Отже. /„=(«-О/n-2-(»-l)0/- звідки
384
Дістали рекурентну формулу, за якою Інтеграл /„ послідовно зводиться до
Інтеграла
j (sinx)°dx=-|-
о
або до інтеграла
Наприклад,
Р І—
/і= \ sin xdx = —C0SJCL2 *=1-
о
я
2
J1 Я
sin2 xdx = -5- /0 = — ;
0
я
р 2 2
/, = І sin3 xdx = -5- /1 = -5- ;
о
зі
Г . , 3 Зя
Л = ) sin4 xdx = -3- /» = -yjj- .
о
Методом індукції можна довести, що
(2fe —1) 11 я (2fe) Ц
'2*= (2fc) 11 ' 2 ' '2А+1= (2ft + 1) II *
(Символ nil означає добуток натуральних чисел, які не перевищують п і однієї
з ним парності.)
Так,
л
2
1 . З • Б • 7 я 35я
Г.о. 1 • 3 • 6 • / я
/,= \ sln4dt 2.4.6.8 -g
256
С 2.4-6.8 128
/, = J sin» tdt = ,.3.5.7.9 ЗЇГ ' •
о
2.6. Невласні інтеграли
В п. 2.2 ми ввели визначений інтеграл як границю інтегральних
сум, передбачаючи при цьому, що відрізок інтегрування скінченний, а
підінтегральна функція на цьому відрізку обмежена. Якщо хоча б
одна з цих умов порушується, то наведене вище означення визначе-
385
ного Інтеграла стає неприйнятним: у випадку нескінченного проміжку
інтегрування його не можна розбити на п частинних відрізків
скінченної довжини, а у випадку необмеженої функції інтегральна сума
явно не має скінченної границі. Узагальнюючи поняття визначеного
Інтеграла на ці випадки, приходимо до невласного інтеграла —
інтеграла від функції на необмеженому проміжку або від необмеженої
функції.
1°. Невласні інтеграли з нескінченними межами інтегрування
(невласні інтеграли першого роду).
Нехай функція / (х) визначена на проміжку la; +oo) і інтег-
ровна на будь-якому відрізку [а; Ь], де —оо ■< а <Ь <+ оо. Тоді, якщо
Існує скінченна границя
lim
*->+оо
а
[f{x)dx, (51)
її називають невласним інтегралом першого роду І позначають так:
+0О
йх. (52)
\т
Таким чином, за означенням
+оо *
С / (х) dx = 1 im f / (x) dx. (53)
J ft-*+oe J
a a
У цьому випадку інтеграл (52) називають збіжним, а підінтегральну
функцію / (х) — інтегровною на проміжку [а; +оо).
Якщо ж границя (51) не існує або нескінченна, то інтеграл
(52) називається також невласним, але розбіжним, а функція
/ (х) — неінтегровною на [а; + оо).
Аналогічно інтегралу (53) означається невласний інтеграл на
проміжку (—оо; Ь\:
ь ь
\ f(x)dx=* lim f f{x)dx. (54)
J a-»—ся J
—00 a
Невласний інтеграл з двома нескінченними межами визначається
рівністю
{ / (х) dx= J / (х) dx + ff(x) dx, (55)
—00 —00 e
де c — довільне дійсне число. Отже, інтеграл вліва у формулі (55)
існує або є абіжним лише тоді, коли є вбіжними обидва інтеграли
386
справа. Можна довести, що інтеграл,
визначений формулою (55), не залежить
від вибору числа с.
З наведених означень видно, що
невласний інтеграл не є границею
інтегральних сум, а є границею означеного
інтеграла із змінною межею інтегрування.
Зауважимо, що коли функція / (х)
неперервна і невід'ємна на проміжку
[а; +00) і коли інтеграл (53) збігається,
то природно вважати, що він виражає площу необмеженої облаеті
(рис. 7.12).
Приклад
Обчислити невласний інтеграл або встановити його розбіжність!
+оо 0
а) \ і і л '• б) \ cos 2xdx;
J 1 + jt2 ■
1
+00
м
-f оо +оо
в) f exdx: r) f -^-, atR.
0 1
О а) За формулою (53) маємо
dx
-я —
+оо Ь
С dx C dx Л
1 т+їг=JS,.) тт* = и-цй* * і. -
1 1
It П П
= lim (arctg b — arctg і) = -=- — -7- = -7- ,
Ь->+оо £ * 4
Отже інтеграл а) збігається,
о о
cos 2xdx = lim \ cos 2xdx = Urn
M
sin 2x
~2~
■■ JLlim(sinO—sin2a)=
2 a-*—00
1
- lim sin 2a.
a->—00
Оскільки ця границя не існує при а
+оо *
С e*dx= lim e* if
•І h-*-
в) І e*dx= Urn
б' ь->+~6
Ь-*+оо
оо, то Інтеграл б) розбіжний.
= lim (еь — е°) = -f 00.
Ь-*+оо
Отже інтеграл в) розбіжний.
г) Якщо а = І, то
+оо Ь
С dx С dx к
\ —- = lim \ —- = Umln*l* = Hm (Inb — Ід 1) - +».
387
Якщо а Ф І, то
С dx , С dx , х1~а »
J ха b->+ooJ Xа ь^+со1—а |і
1 і
= -пЬг 1іт (fr1-" — і) = |^г=^г- • «>•••
т Ц-оо, а<1.
Отже інтеграл г) є збіжним при а > І І розбіжним при а ^ І. ф
У розглянутих прикладах обчислення невласного інтеграла
грунтувалося на його означенні. Проте у деяких випадках немає
необхідності обчислювати інтеграл, а достатньо знати, збіжний він чи
ні. Наводимо без доведення деякі ознаки збіжності.
Теорема 1. Якщо на проміжку [а; +°°) функції f (х) і g (х)
неперервні і задовольняють умову 0 <! / (х) ^.g (x), то із збіжності
інтеграла
fg(x)dx (56)
їх
випливав збіжність інтеграла
\ f(x)dx. (57)
а
а із розбіжності інтеграла (57) випливав розбіжність інтеграла
(56).
Наведена теорема має простий геометричний зміст (рис. 7.13);
якщо площа більшої за розмірами необмеженої області є скінченне
число, то площа меншої області є також скінченне число; якщо
площа меншої області нескінченно велика величина, то площа більшої
області є також нескінченно велика величина.
Приклад
Дослідити иа збіжність інтеграли:
, xdx С 2 + sin х + In x
») \ ,г * , е » І 77= dx-
V& + 5 ' J V*
І 2
О *) Оскільки V* € [І; +оо):
0<?т<"і"
і інтеграл 1 —j- збігається, то sa теоремою 1 заданий інтеграл також збіга-
J 4г-
еться,
388
б) Цей інтеграл розбігається, бо V* Є У і
Є [2, +оо):
2 + sinjt + lnjt 1
——" >-Г7^->0
V'x
ЛГх
f dx
і Інтеграл \ —г=- розбігається, ф
2
Теорема 2. Якщо існує границя
Рис. 7.13
= k, 0<fe< + oo, (f(x)>0, g(x)>0),
то інтеграли (56) і (57) або одночасно обидва збігаються, або
одночасно розбігаються.
Ця ознака іноді виявляється зручнішою, ніж теорема 1, бо не
потребує перевірки нерівності 0 <; / (х) ^ g {х).
Приклад
Дослідити на збіжність інтеграл
J
+ 0О
dx
О Оскільки інтеграл \ х,
1
х1 + 2
збігається І
In-
lim
X*+l
1
= Ніл
Х-»+оо
Ч^ЖГІ. и- -ZH
Jt-»+oo
-І.
то заданий інтеграл також збігається. •
В теоремах 1 і 2 розглядались невласні інтеграли від
невід'ємних функцій. У випадку, коли підінтегральна функція є знакозмін-
ною, справедлива така теорема.
Теорема 3. Якщо інтеграл f \f(x)\dx збігається, то збігається
а
й інтеграл f f(x)dx.
Приклад
Дослідити на вбіжиість інтеграл
1 + 3sin*
dx.
389
О Тут підінтегральна функція знакозмінна. Оскільки
1 +3sinjt
<4~і \-h~dx=2-
+5°
то заданий інтеграл збігається.
Слід зауважити, що із збіжності інтеграла Г / (х) dx не випливає,
а
взагалі кажучи, збіжність інтеграла f \f(x>\dx. Ця обставина ви-
а
правдовує такі означення.
+0О
Якщо разом з інтегралом f f(x)dx збігається й інтеграл
а
Г \f(x)\dx, то інтеграл f f(x)dx називають абсолютно збіжним,
а а
а функцію / (х) — абсолютно інтегровною на проміжку [а; + оо).
+оо -|-оо
Якщо інтеграл f f(x)dx збігається, а інтеграл f | / (jc) | djc роз-
а а
бігається, то інтеграл f f(x) dx називають умовно (або неабсо-
а
лютно) збіжним.
Тепер теор"ему 3 можна перефразувати так: абсолютно збіжний
інтеграл збігається.
Отже, для знакозмінної функції викладені тут міркування дають
змогу встановити лише абсолютну збіжність інтеграла. Якщо ж
невласний інтеграл збігається умовно, то застосовують більш глибокі
ознаки збіжності [11].
Приклад
Дослідити на збіжність інтеграл
С sin ах
] p + 3p dx (а; ЬфО).
О Оскільки
Г dx ' і- , х
о" 2*
я
І0<
sin ax
Р + Xі
1
Ь» + х* '
390
+0О
то за теоремою 3 Інтеграл
І І sin ax І
dx збігається.
Отже, збігається, причому абсолютно, і заданиА інте-
. sin ax
грал, а функція / (х) = ■■, , , на проміжку [0; -|- «>)
є абсолютно інтегровною. %
2°. Невласні інтеграли від необмежених
функцій (невласні інтеграли другого роду).
Нехай функція / (х) визначена на
проміжку [а; Ь). Точку х = Ь назвемо особливою
точкою функції f (x), якщо / (х) -*■ то при
х -*- b — 0 (рис. 7.14). Нехай функція / (х)
інтегровна на відрізку [а; Ь — є] при довільному є > 0 такому, що
b — г>а\ тоді, якщо існує скінченна границя
ь—е
Hm С f(x)dx, (58)
Е-Й) J
а
її називають невласним інтегралом другого роду і позначають так:
I'M
dx.
Отже, за означенням
Ь—е
[f{x)dx = \\m [ f{x)dx.
(59)
(60)
У цьому випадку кажуть, що інтеграл (59) існує або збігається.
Якщо ж границя (58) нескінченна або не існує, то інтеграл (59) також
називають невласним інтегралом, але розбіжним.
Аналогічно якщо х = а — особлива точка (рис. 7.15), то
невласний інтеграл визначається так:
ь ь
[f(x)dx = lim f f(x)dx.
J 8-»0 •}
a+t
Якщо / (х) необмежена в околі якої-небудь внутрішньої точки с0 Є
Є (а; Ь), то за умови існування обох невласних інтегралів \f(x)dx і
а
Ь
J / (x) dx за означенням покладають (рте. 7.16).
Ь с, Ь
J/(x)Ae = $f(x)dx+ [f(x)dx.
а а с,
391
a a+5 в
Рис. 7.15
СЛ с„с*€г 6 X
Рис. 7.16
Нарешті, якщо а та Ь — особливі точки, то за умови існування
с Ь
обох невласних інтегралів j / (х) dx і \f (х) dx за означенням покла-
а с
дають
\f(x)dx = \f(x)dx + $f(x)dx,
а а с
де с — довільна точка інтервалу (а; Ь).
Приклад
Обчислити невласні інтеграли:
2 і
Г dx С dx
о о
2 2-е
С dx ,. (* dx
x p-e
lim arcsin -к- =
e-»o ^ |o
2-е
lim arcsin-
Отже, інтеграл а) збіжний,
б) Якщо а Ф 1, то
1
і-
T«" = ІІШ. 1-а =
JC Є-»0 ' |Є
1-а
lim(l—е1_а)
е->0
Якщо .а= 1, то
l-f-oo, а>1.
1
J
dx
= Hm In * |' = — Hm In є = + оо.
е-И-0
е-»+0
Таким чином, Інтеграл б) збігається при 0 < а < 1 і розбігається при а ^ 1,
392
Сформулюємо тепер ознаки збіжності для невласних інтегралів
другого роду.
Теореми 4. Якщо функції f (x) і g (jc) неперервні на проміжку [а;
Ь), мають особливу точку х = Ь і задовольняють умову 0 ^ / (х) ^
ь
^g(x), то із збіжності інтеграла Jg (x)dx випливає збіжність
а
Ь Ь
інтеграла j / (х) dx, а із розбіжності інтеграла \ f (x) dx випливав
а а
Ь
розбіжність інтеграла \ g (x) dx.
а
Приклад
І
С dx
Дослідити на збіжність Інтеграл \ —т= — .
J Vx + 5x*
о
О Заданий інтеграл збігається, бо
У*Є(0; 1]:0<-7=——-<-
і
Г dx
І збігається Інтеграл \ —-7=^ , #
J V*
о
Теорема 5. Нехай функції f (x) ig (x) на проміжку [а; Ь) неперервні,
додатні і мають особливість в точці х = Ь, тоді якщо існує
границя
fix)
g{x)
ь ь
х-+ь В \Х)
то інтеграли f f(x)dx t \g(x)dx або одночасно збігаються, або
а а
одночасно розбігаються.
Приклад
Дослідити на збіжність Інтеграл \ ■
1
dx
sin* '
о
О Функції f (х) — . та g (х) = —- мають особливість в точці х = 0.
5111 X X
_ . , / (х) , х r dx .
Оскільки lim . . = lim —rr— = 1, і Інтеграл \ —— розбігається, то заданий
х^о В \х> л-»о sinx J *
інтеграл також розбігається. #
393
Теорема 6. Якщо х = Ь — особлива точка функції, f (х) і інтеграл
ь ь
\ І / (х) І dx збігається, то інтеграл \ f (x) dx також збігається.
Приклад
2
С cos х
Дослідити на збіжність інтеграл \ _,. ах.
J ?*-•
1
О Заданий інтеграл збігається, тому що
2
cos х І І . „
^ .. і збігаєть-
yj=\ |*» -рТ=Т
ся інтеграл \ і3/ dx,
ї
Ь
1
2.7. Наближене обчислення визначених інтегралів
Нехай треба обчислити визначений інтеграл І = \ f (х) dx, Де
а
J (x) — неперервна на відрізку la; b] функція. Якщо можна знайти
первісну F (х) від функції / (х), то цей інтеграл обчислюється за
формулою Ньютона — Лейбніца: І = F (Ь) — F {а). Якщо ж
первісна не є елементарною функцією, або функція / (х) задана графіком
чи таблицею, то формулою Ньютона — Лейбніца скористатись вже
не можна. Тоді визначений інтеграл обчислюють наближено.
Наближено обчислюють визначений інтеграл і тоді, коли первісна
функція F (х) хоч і є елементарною, але точні ЇЇ значення F (Ь) і F (а)
дістати не просто.
Наближені методи обчислення визначеного інтеграла здебільшого
грунтуються на геометричному змісті визначеного інтеграла: якщо
/ (х) ;> 0, то інтеграл / дорівнює площі криволінійної трапеції,
обмеженої кривою у = f (х) і прямими х = а, х = Ь, у = 0.
Ідея наближеного обчислення інтеграла полягає в тому, що
задана крива у = f (х) замінюється новою лінією, «близькою» до заданої.
Тоді шукана площа наближено дорівнює площі фігури, обмеженої
зверху цією лінією.
1°. Формули прямокутників. Нехай треба обчислити визначений
ь
інтеграл \{ (х) dx від неперервної на відрізку la; b] функції / (х).
Поділимо відрізок [а; Ь\ на п рівних частин точками
xh — а -\ ^— k, k = 0, 1, ... , п,
394
аж*о "і *г х„.,х„=6 X
Рис. 7.17
' а=*е *і *г *„-і хПЧ X
Рнс. 7.18
І знайдемо значення функції / (х) в цих точках:
ї (*о) = У0, f (*!> = УХ f (хп) = уп.
Замінимо задану криволінійну трапецію, (рис. 7.17) ступінчатою
фігурою, що складається з п прямокутників. Основи цих
прямокутників однакові і дорівнюють ~а , а висоти збігаються із значеннями
у, в початкових точках частинних інтервалів. Площа ступінчатої
фігури і буде наближеним значенням визначеного інтеграла:
$/(*)
dx
Ь — а
(Уо+Уі+ ••• +Уп-і) =
Ь — а
п—1
2/<**)• <61)
*=0
Якщо висоти прямокутників є значення yt в кінцевих точках
частинних інтервалів (рис. 7.18), то
J'W
dx :
-L^-(yl+y*+ ••• +</„) = -^- £/(**)• (62)
*=і
Можна довести, що похибка наближеної формули зменшиться,
якщо висотами прямокутників взяти значення функції в точках сь =
xk—i + xk
= 2 (середини відрізків Ufc_i, xh]), (рис. 7.19); тоді
J,W(u»-i=-.j,p=£i.)
n «—1
(63)
Формули (61) — (63) називаються формулами прямокутників.
2°. Формула трапецій. Замінимо криву / (х) не ступінчатою
лінією, як у попередньому випадку, а ламаною (рис. 7.20), сполучивши
сусідні точки (xt, Уі). Тоді площа криволінійної трапеції наближено
дорівнюватиме сумі площ прямокутних трапецій, обмежених зверху
відрізками цієї ламаної.
395
Рнс. 7.19
а--х0 х, к2 *„., хл--е х
Рис. 7.20
Площа к-і трапеції дорівнює ^
Ь — а
, де ук-і і Ук —
основи трапеції, a xh — хь-і =
ь
її висота. Тому
Ь — а І у0 + Уп
^
Ь~а
2п
+ У1+У2 +
п-І
+ Уп-І^І
f(a)+f(b)+2
■-і \
і=і У
(64)
Формула (64) називається формулою трапецій.
З9. Формула Сімпсона. Під час виведення формули трапеції
криву, яка є графіком функцій у = / (х), замінювали ламаною лінією.
Щоб дістати точніший результат, замінимо цю криву іншою кривою,
наприклад параболою.
Покажемо спочатку, що через три різні точки Л^ (хг; yj,
Мя (x2; y2), М3 {х3',Уз), які не лежать на одній прямій, можна провести
лише одну параболу у = ах2 + Ьх + с.
Справді, підставляючи в рівняння параболи координати заданих
точок, дістанемо систему рівнянь:
визначник якої
х\ хх
1
2 ,
*2 Х2 1
Х% Хв 1
axl + bxi 4-е =у1г
ах\ + bx2+c = уа,
ах\ + Ьх3 + с = у3,
(*а — *і) (*в — *г) (*з — *і) Ф °.
(65)
S96
Рнс. 7.21
оскільки числа хг, xt, xs за умовою різні. Отже, ця система має
єдиний розв'язок (п. 3.2, гл. 1), тобто коефіцієнти a, b і с параболи
визначаються однозначно.
Зокрема, розв'язуючи систему (65) для точок А (—A; y^t В (0;
Уг), С (Л; Уз), Дістанемо
Уі+Уе — 2yt
2h*
Ь =
Уз~Уі
2ft
У*
Знайдемо площу S криволінійної трапеції, обмеженої параболою,
яка проходить через точки А, В, С, і прямими х = —А, х = h І
у — 0 (рис. 7.21):
S= ^аї+Ьх + с^-^+^ + сх)^-
= 4 (2яА2 + 6с) = ± (Уі + уа- 2уш + Ьуг) = 4- G/i + *У* + У,)-
(66)
Розглянемо тепер криволінійну трапецію аМіМ^Мф, обмежену
кривою у = / (х) (рис. 7.22). Якщо через точки Mlt Mt і Ма цієї
кривої провести параболу у = ах2 + Ьх + с. то за формулою (66)
ь
\т
dx:
Ь — а
(Уі + 4f/E + Уа)-
(67)
Однак, якщо відрізок la; b] досить значний, то формула (67)
даватиме велику похибку. Щоб збільшити точність, розіб'ємо відрізок
[a; b] на парне число 2л однакових частин, а криволінійну
трапецію — на п частинних криволінійних трапецій.
Застосовуючи до кожної з цих трапецій формулу (67), дістанемо
Ь — а
j / (x) dx » —g^— (i/o + 4#і + yt)\
397
j / (x) dx x —g^— (yt + Ay3 + yd);
b — a
f (X) ax x
«2n
J / (X) (ІХ Я» 6п° (Ї/2П-2 + 4f/2n-l + 02л)-
*2л—2
Додамо почленно ці наближені рівності:
* Ь —
^f(x)dxtt —^-[{У0 + У2п)+2(Уі+Ул+ ••• +У2П-ІЇ +
а
+ 4(Уі+Уз+ ••• +0аі-і)]=»
6-а
6п
ІП—2 П—1
/ (а) + / №) + 2 2 / (^+г) + 4 2 / (**+>)
m=0 ft—О
(68)
Ця формула називається формулою парабол або формулою Сімпсона.
Формули (61), (62), (63), (64) і (68) називаються квадратурними.
Різницю між лівою і правою частиною квадратурної формули
називають її залишковим членом і позначають через Rn (/). Абсолютна
похибка \R„ (f)\ квадратурної формули, очевидно, залежить від
числа п — кількості частинних відрізків, на які розбивається
відрізок інтегрування la; Ь]. Наведемо формули, які дозволяють, по-
перше, оцінювати абсолютні похибки квадратурних формул, якщо
задано п, і, по-друге, визначати число п так, щоб обчислити заданий
інтеграл з наперед заданою точністю [5].
Якщо функція / (х) має на відрізку la; b] неперервну похідну
/' (х) і Vx £ la; b] : \ f (x) | ^ Mlt то абсолютна похибка наближених
рівностей (61) — (64) оцінюється формулою
\RJf)\<Ml{ta)t ■
Для функцій / (х), які мають другу неперервну похідну і Ух £ \а\
ЬІ '\Г (х)\ ^.Мя, виконується нерівність
\Rn(f)\<M\bo7^-
12л*
яка справедлива для формул прямокутників і трапецій.
Абсолютна похибка в наближеній рівності (68) оцінюється
формулою
і*.</>і«;^Й?£.
398
Якщо функція / (х) має на відрізку \а; Ь] четверту неперервну
похідну і V* € la; b] : |/IV (x) | < Mit то для формули Сімпсона
справедлива оцінка:
1#п(/)К *288^«° •
Приклади
1
1. Обчислити інтеграл / = І V 1 + ж4 dx.
о
О Це інтеграл від біноміального диференціала, якиА в елементарних функція»
ие обчислюється. Обчислимо його наближено. Розіб'ємо відрізок [0; її на 10 рівних
частин точками к0 = 0, хх = 0,1, хг = 0,2 х9 = 09, х10 = І.
Знайдемо значення функції f (х) = V1 + *4 в цих точках:
/ (*о) = 1. / (*і) = 1,00005, /(ж,,) = 1,00080,
/ (де,) = 1,00404. / (xd) = 1,01272, / (хБ) = 1,03278,
/ (xt) = 1.06283, f (x,) = 1,11360, і (х8) = 1,18727,
/ (де,) = 1,28690, /(*,„) = 1,41421.
За формулою прямокутників (61) маємо
1
1 * То" і1{х°] + ' {Хі) +'(*•>+•■• + /(*•)) = 1.06990.
2х*
Оскільки /' (х) = , І Мх = max /' (х) = У~2, то залишковий член
V 1 + ** о<дг<і
формули прямокутників
|/?1о(/)|<"ТГТо"=0,03536-
Отже, / = 1,06990 ± 0,03536.
За формулою трапецій (64) дістанемо
1 * "20" V W + f f*»J + 2/ («і) + ••• + 2/ (ж,)) = 1.09061.
2х3 їх* + 3)
Оскільки /" (х) = г =- і М2 = max f їх) = 2^, то залишковий член
У(І+дс*)8 о<х<і
формули трапецій
|Яіо(Л І< 122V^t ~ 0,00236.
Отже, / = 1,09061 ± 0,00236.
За формулою Сімпсона (2п = 10)
1 ""ЗО" (/ W + ' <*»> + 2/ (*а) + 2/ (*«) + ••• + 2/ (х„) + 4/ (*J +
+ 4/ І*,) + • • • + 4/ (де,)) = 1,08949.
Оскільки/iv W =- 12(1 Jg+Sxl., м4 = max |/lv (ж) | < 15У%
то залишковий член формули Сімпсона
l*itf)l< ^\і < 0.000012.
Таким чином, / — 1,08949 ± 0,00002, тобто формула Сімпсона значно точніша
формули прямокутників і формули трапецій. •
2. На скільки частин треба розбити відрізок [1; 2], щоб за формулою прямокут-
s
ииків обчислити інтеграл \ _^. = In 2 з точністю до 0,001?
І х
1 2
Оскільки дли функції / (х) = — маємо 0 < /* (ж) = —у- ^ 2, якщо ж 611;
2|. то
2 1
Якщо взяти л = 12, то Нц = "ggf" > 0,001; якщо л= 13, то Rlt < с . 169 ™
= -Ї0І4-<°.001-
Отже, щоб за формулою прямокутників обчислити заданий інтеграл з точністю
до 0,001, достатньо відрізок [1; 2] розбитв на 13 рівних частин. •
Завдання для самоконтролю
1. У чому полнгае задача про площу криволінійної трапеції; роботу снлиі
шлях; масу?
2. Що називається визначеним інтегралом? Виразити за допомогою
визначеного інтеграла поняття, названі в попередньому запитанні.
3. Сформулювати теорему про існування визначеного інтеграла,
4. Сформулювати і довести властивість:
ь ь ь
J (CJ [х) + С2 ф (*)) dx = Ct^f (х) dx + С, J ф (де) dx.
а а а
8. Сформулювати і довести властивості адднтнвності і збереження знака
визначеного інтеграла.
6. Сформулювати, довести 1 геометрично проілюструвати теорему про оцінку
інтеграла.
7. Сформулювати, довести і геометрично проілюструвати теорему про середна
значення.
8. Сформулювати і довести теорему про похідну від Інтеграла із змінною
верхньою межею.
9. Записати і довести формулу Ньютона — Лейбніца.
10. У чому полягає метод інтегруваннн частинами у визначеному інтегралі?
11. У чому полягає метод заміни змінної у визначеному інтегралі?
12. Що називається невласним інтегралом першого роду? Навести приклад.
13. Що називається невласним інтегралом другого роду? Навести приклад.
14. Сформулювати ознаки збіжності невласних інтегралів.
15. Вивести формули прямокутників, трапецій і парабол для наближеного
обчислення визначених інтегралів.
400
16. Обчислити інтеграли:
я
1 3 є2
a) f x*rxdx; б) f jt3 /ха — 1 dx; в) Г cos In xdx;
0 1 I
,■ dx r dx
r) ) 3 + 2 cos x '• д) J (xa + l)a •
0 —l
17. Обчислити невласні інтеграли або довести їх розбіжність:
1 +оо +оо 1
а) і ytt '• б) 1 іттг1 B) J*5"1*** r>fln*<*-
0 8 0 0
І
18. Знайти наближене значений \ — = In 2 г* 0,69315 аа формулами
прямокутників, трапецій і Сімпсона (я = 10).
л
Відповіді. 16. а) 1 ?-; б) ШХ* ; в) е2~1 ; г) * ; д) * +
є 15 2 -уГЬ 4
1 л
-\-~2~- '7- а) 1; б) -т-; в) розбіжний; г) —1,
і 3. ДЕЯКІ ЗАСТОСУВАННЯ ВИЗНАЧЕНОГО ІНТЕГРАЛА
Існує дві основні схеми застосування визначеного інтеграла.
Перша схема, або так званий метод інтегральних сум, базується
на означенні визначеного інтеграла. Шукана величина спочатку
наближено зображається у вигляді інтегральної суми, а потім точно
виражається через границю цієї суми або через визначений інтеграл.
Цим методом ми користувалися для розв'язування задач п. 2.1.
Друга схема, або так званий метод диференціала, полягає в тому,
що спочатку складається диференціал шуканої величини, а сама
шукана величина знаходиться інтегруванням цього диференціала
у відповідних межах. Особливо широко метод диференціала
застосовується в диференціальних рівняннях (гл. 8).
Розглянемо застосування визначеного інтеграла до розв'язування
деяких геометричних і фізичних задач.
3.1. Обчислення площ плоских фігур
Як уже зазначалось (п. 2.2), якщо на відрізку [а; Ь] функція у =
= f (х) неперервна 1 f (x) ^ 0, то площу криволінійної трапеції,
обмеженої кривою у = f (х) і прямими х = а, х = Ь, у = 0 (рис. 7.4),
внаходять за формулою
ь
S = ^f(x)dx. (69)
401
У
0
І
у--Ш^
ЛЩ||§
У'ТЇЇГ^і
)В,
"2.
є ,
X
в*
Рис. 7.23
Часто буває, що фігура, площу якої треба знайти, не є
криволінійною трапецією. Якщо f (х)< 0 на [а; Ь], то фігура аА&Ь лежить
під віссю Ох (рис. 7.23). Площа цієї фігури дорівнює площі
криволінійної трапеції аА2ВгЬ, яка обмежена зверху кривою — / (х) ^ 0;
тоді за формулою (69) маємо
ь
S = — [f{x)dx. (70)
Формули (69) і (70) можна об'єднати в одну:
= $!/(*)!
dx.
(71)
Ця формула залишається справедливою, якщо функція / (х) на
відрізку [а; Ь] скінченне число разів змінює знак (рис. 7.24):
с й Ь Ь
S = \f{x)dx-$f(x)dx + lf(x)dx = $\f(x)\dx.
а с d a
Якщо треба обчислити площу фігури і41і42В2Б1 (рис. 7.25), то за
формулою (69)
ь ь ь
S = f А, і*) dx - { h (x) dx = { (/s (x) - /і (*)) dx, (72)
\i*RM
uk
J I U—
er б c d x
Phc. 7.26
402
тобто площу фігури, обмеженої кривими у = fx (x) та у = /2 (х) і
прямими х = а та х = b за умови, що ft (х) ;> ft (x), знаходять за
формулою (72).
Якщо плоска фігура має складнішу форму (рис. 7.26), то прямими,
паралельними осі Оу, її треба розбити на скінченну суму (різницю)
криволінійних трапецій. Тоді площа фігури дорівнюватиме
алгебраїчній сумі площ утворених трапецій.
Розглянемо випадок, коли криволінійна трапеція обмежена кривою,
ваданою параметрично:
х = х (0;
y=y(t), a<*<p\
де х (t), у (t) — неперервні функції, які мають на відрізку [а; р]
неперервні похідні х' (t) та у' (t). Тоді якщо х (t) на відрізку [а;
р] є монотонною, причому х (а) = а, х (Р) = Ь, то для обчислення
площі криволінійної трапеції досить в інтегралі (69) зробити заміну
вмінної х = х (t), dx = x' (f) dt. Дістанемо формулу
Р
S = \y(t)x'(t)dt. (73)
а
Тепер розглянемо плоску фігуру ОАВ, обмежену кривою, заданою
в полярній системі координат неперервною функцією р = р (ф) і
променями ф = а і ф = р (рис. 7.27). Таку фігуру називають
криволінійним сектором.
Обчислимо площу 5 сектора ОАВ. Розіб'ємо відрізок [а; р]
точками
а = Фо < Фі < • • • < фг—і < Фі < • • ■ < фл-і < фп = Р
на відрізки [q>f_i; ф|] і на кожному з них візьмемо довільну точку
£і 6 Wi—u Фіі- Елемент ASj площі, обмеженої кривою р (ф) і
променями ф = ф,_і та ф = фі, наближено дорівнює площі кругового
сектора, обмеженого тими самими променями і дугою кола радіуса
Р (6,):
А5г « -$■ Р2 <Ю Афі. Афі=фі —фі_і-
п J
Сума У -s- р2 (£,-) Аф| дорівнює площі ступінчатого сектора і є
/=і *
Інтегральною сумою для функції -,-ргІф) на відрізку [а; Р], тоді
природно вважати, що
lim
5= lim -і- 2Р2(^Аф/ = 4-Ср2(Ф)^Ф.
max Aipj-M) •* ~і * і
403
Отже, площа криволінійного сектора обчислюється за формулою
5=-^р2(ф)Жр-
(74)
Приклади
1. Знайти площу фігури, обмеженої примою у=х\ параболою у = 2— Xі
(рис. 7.28).
О Знайдемо абсциси точок перетину даних ліній Розв'язуючи систему рівнянь
у = 2 — х\
р = 2-
дістанемо Хі = —2, х2 = 1. Це і є межі інтегрування.
За формулою (72) знаходимо площу:
S= \(<2-x*>-x)dx=\2x-—-—)\_a = -T.*
2. Знайти площу фігури, обмеженої еліпсом
х = a cost, y~bsint, 0^<^2л.
Оскільки еліпс симетричний відносно обох координатних осей, то шукана площа
дорівнює почетверенній площі фігурн, яка знаходиться в першій чверті. За
формулою (73)
о о
S = 4 С 6 sin t (—a sin t) dt = —Aab fsin2<d( =
r r 1—cos2/ / sin 2< \ I
= Aab \ sin2 tdt = Aab I ^ dt = 2ab U ~ —2— = паЬш *
3. Обчислити площу, обмежену «трипелюстковою розою» р = a cos Зф
(рис, 3.4).
Рис. 7.27
404
О Знаходимо площу півпелюстни «рози» І множимо на шість. Тому за формулою
— JL
б б
S-e.-f j(acoS3q»«d<p=3fl' j.'+cosey ^ д
З / sin 6Ф \ |1
8.2. Довжина дуги
Як відомо (п. 7.3, гл. 5), диференціал dl довжини дуги гладкої
кривої, заданої функцією у = f (х), а ^ х ^ Ь, знаходять за
формулою dl = У\ -+- (/' (х))2 dx. Тому довжина дуги
б
l=$Vl+(f'(x))*dx. (75)
а
Якщо крива задана параметрично: х «= х (і), у = у (ґ), а < ґ ^ Р,
то dl - V(x* (О)2 + W Ш dt, тому ЇЇ довжина
Р
l = $V(x'(t)r+(y'(t))2dt. (76)
а
Нехай тепер гладка крива задана рівнянням р = р (ф), а ^ ф ^ Р,
в полярних координатах. Якщо в рівностях х = р cos ф, у = р sin ф
параметром вважати кут ф, то
а;,, = р'cosф — рsinф, уч = р' sin ф + р cos ф І у х* -\-у'* =
тому з формули (76) знаходимо
' = J V?T7dq>. (77)
а
Довжину дуги гладкої просторової кривої, заданої рівняннями
х = х (ґ), у = у (г), г = z (г), а < ґ < Р,
обчислюють за формулою, аналогічною формулі (76):
з
405
Приклади
1. Знайти довжину дуги параболи у — -к- від точки О (0; 0) до точки А І і; -g-J.
О Оскільки у' = х, 0 < д; ^ 1, то за формулою (75) одержимо
і
/ = j 1^1 + *2 d* = (-£- /1 + *« + 4" In I * + V і + *а |j
= 4-(/2 + 1п(1+/2)). •
2. Знайти довжину однієї арки циклоїди (рис. 3.6):
*=o(f — sinf), y*=a(\— cost), 0<;*<;2л.
О Скористаємося формулою (76):
о
І = С /(а(1 — cos О)2 + (a sin 0s dt = С 1 / 4а2 sin2 -g- d< »
о or
= 2а I sin -5- df = — 4a cos -5-І =8a. •
oJ 1°
3. Знайти довжину кардіоїди (рис. 3.8, б): р = a (1 + cos Ф)-
О Змінюючи полярний кут від 0 до я, одержимо половину шуканої довжини.
Тому за формулою (77) маємо
я я
І = 2 Г Уа* (і + cos ф)а + a2 sin2 ф а"ф = 2а f /2 + 2 cos ф d<p =
о о
п
= 4а \ cos-?- dq> = 8а sin -SL = 8а. •
J 2 2 |о
3.3. Об'єм тіла
Нехай треба знайти об'єм тіла, якщо відомі площі S перерізів
цього тіла площинами, перпендикулярними до деякої осі, наприклад
Ox:S = S (х), а < х ^ Ь (рис. 7.29).
х x+dx
Рнс. 7.29
Рис. 7.30
406
Перетнемо тіло двома площинами, які проходять через точки х
та х + dx, перпендикулярно до осі Ох. Тоді утворену між перерізами
фігуру можна вважати циліндром з основою S (х) і висотою dx, тому
диференціал об'єму dV =• 5 (x)dx, і якщо х змінюється від а до Ь,
то об'єм тіла
ь
V = \S(x)dx. (78)
а
Формула (78) називається формулою об'єму тіла за площами
паралельних перерізів.
Розглянемо, зокрема, об'єм тіл обертання. Нехай криволінійна
трапеція обмежена зверху графіком неперервної функції у — f (x),
а ^ х ^ Ь. Якщо цю трапецію обертати навколб осі Ох, то
утвориться просторова фігура, яка називається тілом обертання (рис. 7.30).
Оскільки площа паралельного перерізу S = щ2 = nf2 (x), то,
згідно з формулою (78), об'єм тіла, утвореного обертанням даної трапеції
навколо осі Ох,
ь
Vx = n\f*(x)dx. (79)
а
Якщо криволінійна трапеція обмежена графіком неперервної
функції х = ф (у) > 0 і прямими у = с, у = d, x = 0, то об'єм тіла,
утвореного обертанням даної трапеції навколо осі Оу, знаходять
ва формулою
й
Vy = n\<f(y)dy. (80)
с
Приклади
1. Знайти об'єм еліпсоїда (рнс. 3.66)
Xs у' _г*
аа + ь* + са = 1.
О У перерізі еліпсоїда площиною, паралельною площині Оуг на відстані х
від неї, утворюється еліпс
у2 г% х2 у* z
8 півосями Ьг = ьЛ/ І — ——, с1 = с\/ 1 ——— Площа такого еліпса (п. 4.і)
г а* 'а2
дорівнює
S(х) = яі^і =nbc (і — -^г) ,
407
тому за формулою (79) маємо
а
v-„tej(i—5-)«u"-f,Mfa-
—*а
х Зокрема, якщо а= Ь — с= R, еліпсоїд
перетворюється в кулю, і в цьому випадку
V =-g-n/?S. «
Рис 7 ЗІ
2. Знайти об'єм тіла, утвореного обертанням
параболи у = х* на проміжку 1 ^ х ^ 2 навколо: а) осі Ох; б) осі Оу.
О За формулами (79) 1 (80) маємо
* |2
Vx = п \ x*dx = п
і 5 і
і '
4
31л
і 5л
3.4. Площа поверхні обертання
Нехай крица, задана неперервною функцією у = f (х) ^ 0, а ^
^ х ^ Ь, обертається навколо осі Ох. Перетнемо поверхню обертання
двома площинами, які проходять через точки х та х -f dx,
паралельно Oyz. Замінимо утворену між перерізами фігуру чрізаним конусом,
твірна якого дорівнює dl = V1 + y'2dx, а радіуси основ дорівнюють
/ (х) та f (х + dx) (рис. 7.31). Якщо висота конуса dx досить мала,
то площа dQ бічної поверхні цієї фігури дорівнює площі бічної
поверхні зрізаного конуса, тобто маємо диференціал площі [5]
dQ = 2nf(x)\/~l +y'2dx.
Інтегруючи, знайдемо всю площу поверхні обертання:
Q = 2n^f(x)Vl+r2(x)dx.
(81)
Приклад
Обчислити площу поверхні частини параболоїда, утвореного обертанням навколо
осі Ох параболи //2 = 2х, де 0 ^ х ^ 4.
О Маємо
= /2ж, у'=-~; Уі+у'*=У-
V2.
+ 2х
2х
408
8а формулою (81) знаходимо
* . *
Q = 2л £ У2х у ' + 2* dx = 2я [ VTT^xdx =
2 „ "Ги 52п
= Т"(1+2^)2 |о =—з— • •
S.3. Обчислення роботи
Нехай під дією сили F = F (х) матеріальна точка рухається
вздовж прямої лінії. Якщо напрям руху збігається з напрямом сили,
то, як відомо (п. 2.1), робота А, виконана з цією силою при
переміщенні точки на відрізок [а; Ь], обчислюється за формулою
ь
А = \ F (x) dx. (82)
а
Приклади
1. Обчислити роботу, яку треба затратити, щоб тіло маси m підняти а поверхні
Землі вертикально вверх на висоту h, якщо радіус Землі дорівнює R.
О Згідно з ваконом Ньютона, сила F притягання тіла Землею дорівнює
с тМ
F = Y —і-.
де Лі — маса Землі; у — гравітаційна стала; х — відстань від центра тіла до центра
Вемлі. Покладемо сталу утМ = k, тоді F (х) = kx~2, де R ^ х ^ R + ft. При х •=
k
= R сила F (R) дорівнює вазі тіла Р = mg, тобто т^- = Р, звідки k = PR\
F (*) = PR4~2. За формулою (82) маємо
Л = />/?* (' x-2d* = . PRh -
R+h
2. Яка робота виконується під час стискання гвинтової пружини на 5 см, якщо-
для стискання пружннн на І см внтрачаєтьсн снла 4 Н. Стнск гвинтової пружннн
пропорційний прикладеній снлі.
О Сила F і стискання х за умовою пропорційні: F = kx, де k — стала. При х •=
•= 0,01 м, F = 4 Н, тому з рівності 4 = k • 0,01 знаходимо k = 400, отже F (х) =
•= 400 х, 0 ^ х ^ 0,05. Тому за формулою (82) маємо
0.05
:400
б
f xdx = 0,5 Дж.
3. Нехай у циліндрі з рухомим поршнем (рис. 7.32) знаходиться деяка
кількість газу. Припустимо, що цей газ розширився і пересунув поршень вправо. Яку
роботу виконує при цьому газ?
О Нехай sx і s2 — початкова і кінцева відстані поршня від лівого дна циліндра;
s — шлнх, на який перемістився поршень; р — тиск газу на одиницю площі
поршня; Q — площа поршня. Оскільки вся сила, що діє на поршень, дорівнює pQ, то
409
*л
і х Рис. 7.33
Рис. 7.32
виконана прн виштовхуванні поршня робота А виразиться інтегралом
А = f pQds.
s,
Позначаючи об'єм даної кількості газу через V, дістанемо, що V = Qs.
Переходячи в інтегралі від змінної s до нової змінної V, виразимо роботу через об'єм:
V,
А = [ pdV,
де V* 1 У2 — початкове і кінцеве значений об'єму V.
Зокрема, якщо йдеться про ізотермічний процес розширення газу, то, згідно
~ " Маріотта, pV = С (С = const) і тоді робота
з законом Бойля
с„і
Якщо розглядається адіабатичний процес розширений ідеального газу, то за
законом Пуассоиа маємо pVk = С, де k > 1 — характерна для кожного газу стала.
Звідси р = CV~*, тому робота
V,
v,
KdV
\ — k
,у«-* _ v\~\
4. Знайти роботу, яку необхідно затратити, щоб викачати рідину з конічного
резервуара, оберненого вершиною вннз. Радіус і висота конуса дорівнюють
відповідно R і Н.
О Вважатимемо елементарний шар рідннн, що знаходиться на глибині х,
циліндром, який має висоту dx і радіус у (рис. 7.33). Тоді вага dP пього шару дорівнює
dP = ygdV = ygnyMx, де у — густина рідини, g — прискорений вільного
падіння, dV — об'єм циліндра. З подібності трикутників AOD і CBD знаходимо у:
тому
R
У
" =
dP:
Н
Н -х •
nygR*
- н*
У =
-(//-
R
Н
-хУ
(Н-
dx.
-*).
410
Елементарна робота, яку необхідно затратити,
щоб підняти цей шар рідини на висоту ж, дорівнює
dA = dPx =
nygR*
Н*
(Н — х)г xdx, тому
Л =
nygR*
Н»
Іш-**.--*™.
тиску рідини на верти-
3.6. Обчислення
кальну пластину
Як відомо, тиск рідини на горизонтальну
площадку, занурену в рідину, визначається
за законом Паскаля: тиск Р рідини на площадку дорівнює її площі
5, помноженій на глибину занурення ft, густину рідини у і на
прискорення вільного падіння g:
Р= yghS.
Якщо в рідину занурити не горизонтальну площадку, то її різні
точки лежатимуть на різних глибинах і цією формулою користуватись
не можна. Проте якщо площадка дуже мала, то всі її точки лежать на
майже одній глибині, яку вважають за глибину занурення
площадки. Це дає змогу знайти диференціал тиску на елементарну площадку,
а потім тиск на всю поверхню.
Приклад
Знайти тиск рідини на вертикально занурений в рідину півкруг, діаметр якого
дорівнює 2R і знаходиться на поверхні рідннн.
О Нехай елементарна площадка знаходиться на глибині х (рис. 7.34). Вважаючи
її прямокутником з основою 1у і висотою dx, знайдемо за законом Паскаля
диференціал тиску:
dP «- ve* • 2»d* = 2Y£* VR2 — Xі dx.
Звідси
R з
l« 2
P=2Yg j xVRa-x> dx = --l-yg(R*-x»)2 |J
о
Завдання для самоконтролю
R*gy.
1. Охарактеризувати дві основні схеми застосування визначеного Інтеграла
до розв'язування практичних задач.
2. Як обчислити площу плоскої фігури в системі декартових координат?
полярних координат? у випадку лінії, заданої параметричними рівняннями?
3. Як обчислити довжину дуги кривої в системі декартових координат?
полярних координат? у випадку, коли крнва задана параметричними рівняннями?
4. Способом інтегральних сум вивести формулу для обчислення об'єму тіла sa
площами його паралельних перерізів.
5. Вивести формули для об'ємів тіл обертання.
6. Способом інтегральних сум вивести формулу для обчислення площі поверхні
обертання.
411
7. Знайти площі фігур, обмежених заданими лінінми:
а) ху = 20, Xі + У* = 41, х > 0, у > 0;
б) х = a cos3 t, у = a sin3 <;
в) р2 = 2 cos 2<p.
8. Знайти довжини дуг кривих:
а) у = in *, |л3 < х < >л8;
б) х = є' cos f, j/ = er sin /, 0 < / ^ in n;
в) р = a sin <p.
9. Еліпс Xі + 4#а = 4 обертається навколо осі Ох. Знайти об'єм тіла обертання.
10. Фігура, обмежена однією аркою циклоїди х = a (t — sin /), у = а (1 — cos ()
і віссю Ох, обертається навколо осі Ох. Знайти об'єм тіла обертання.
11. Дуга синусоїди у = sin х, 0 ^ х ^ я обертається навколо осі Ох. Знайти
поверхню обертання.
12. Яку роботу треба затратити, щоб розтягнути пружину на 4 см, якщо
силою в 1 Н вона розтягується на і см?
13. Знайти роботу, яку потрібно затратити, щоб викачати воду з резервуара,
який має форму напівциліндра, радіус якого R, а висота а.
14. Знайти тиск води на вертикальну пластину, що має форму рівнобічної трапе»
ції, менша основа якої дорівнює q і лежить на поверхні рідини. Більша основа
трапеції дорівнює Ь, а висота h.
15. Знайти масу стержня довжиною 100 см, якщо лінійна густина стержня
змінюється за законом y= (20jc + 0,15х2) г/см, де х — відстань від одного з кінців
стержня.
16. Швидкість точки змінюється за законом v ■
пройде точка за проміжок часу [0; 101?
41 .9 4
Відповіді. 7.
■ arcsln ■
+
З
ln-g-;
4- 1)). 12. 0,08 Дж. 13.
-їг+»,пт
8п
З
2 1
-TygaR\ 14. -g
(100 -f 80 м/с. Який шлях
Зло*
б) ^—; в) 2. 8. а) 1 -Ь
б) ^(я-І): в) па. 9. -^-. 10. 5па\ 11. 2л (/5 + In (/2 -f
ygh?(a+2b). 15. 150 кг. 16. 1400 м.
§ 4. ІНТЕГРАЛИ, ЗАЛЕЖНІ ВІД ПАРАМЕТРІВ.
ГАММА І БЕТА-ФУНКЦП
4.1. Інтеграли, залежні від параметрів
Розглянемо функцію / (х, у) двох змінних, визначену для всіх
х б [а; Ь] і всіх у з деякої множини У. Якщо при кожному
фіксованому значенні у 6 У функція f (x, у) інтегровна на відрізку [а; Ь\,
то визначений інтеграл
ь
(83)
є функцією параметра у.
Крім того, від параметра може залежати не тільки підінтегральна
функція, але й межі інтегрування, тобто
Ь(у)
ny)=\f{x,y)dx. (84)
а(у)
412
Інтеграли виду (83) і (84) називаються інтегралами, залежними від
параметра. Ці інтеграли можуть бути і невласними.
Теорія інтегралів, залежних від параметрів, має не тільки
теоретичне, але й практичне значення. Не маючи змоги викласти цю
теорію детально, розглянемо лише неперервність, диференціювання
та інтегрування інтеграла (83) по параметру [12] та наведемо приклади.
Теорема 1. Якщо функція f (x, у) визначена і неперервна як
функція двох змінних у прямокутнику а ^ х ^.Ь, с ^ у ^ d, то
інтеграл (83) неперервний по параметру у на відрізку [с; d].
Приклад
я
Довести, що інтеграл / (у) = \ є*" sin xdx неперервний по параметру у для всіх
0
y£R-
О Оскільки функція f (х, у) = еху sin х неперервна при О^х^я, — оо < // <
< + оо, то заданий інтеграл, згідно з теоремою 1, неперервний по у прн довільному
значенні у 6 R-
До такого самого висновку можна прийти, обчисливши інтеграл. Інтегруючи
частинами, дістанемо
я я
І ІУ)=[ e*'v sin xdx = — еху cos x\" + у С еху cos xdx = є"* + 1 —
о о
л
— у* С txy sin xdx.
о
Отже,
/(ir) = eW+l-|rVU0. f(y)= *"*+} .
уЯ+ 1
Звідси й випливає неперервність інтеграла / (у) прн будь-якому дійсному значенні
параметра у. •
Розглянемо тепер диференціювання інтеграла по параметру.
Теорема 2. Якщо функція f (х, у) і її похідна f'y (x, у) —
неперервні по х і у при а^х ^ b, c^y ^d. то V у Є [с; d] справедлива
формула
l'y(y)=(U(х, У)dx) = Jfy(x, у)dx. (85)
\а їй а
Формула (85) називається формулою Лейбніца. Якщо така
формула допустима, то кажуть, що функцію (83) можна диференціювати
по параметру під знаком інтеграла.
Приклад
я
8найтн похідну /' (у), якщо / (у) = І е*у sin xdx.
о
413
О Маємо f (х, у) = еху sin x, f (х, у) =~хе*у sin x. Оскільки функції / (ж,
У) і /' (*. У) неперервні для довільних значень х і у, то має місце формула (85).
диференціюючи підінтегральиу функцію по у та інтегруючи частинами, дістаємо
о
Пропонуємо переконатися, що таким самим буде результат, якщо спочатку
обчислити інтеграл / (//), а потім знайти похідну по у. •
З'ясуємо умови, за яких функцію (83) можна інтегрувати по
параметру у під знаком інтеграла.
Теорема 3. Якщо функція f {х, у) неперервна по х і у при а <
^.x^b, a^yt^d, то справедлива формула
J ($/(*. y)dx\dy = l\lnx. y)dy\dx,
або
\dy\f(x, y)dx=[dx\f{x, y)dy. (86)
1 J>
Приклад
Їх» ха
—. dx, деО<а<Ь.
In х
о
О Введемо в прямокутнику 0 <; х < 1, а <; jf < 6 функцію f (я, у) = х".
Умови теореми 3 дотримані, тому, згідно з формулою (86), дістанемо
Ь і 16
£ dy f Xуйх = J d* [ *«%,
або
звідки
Отже,
414
Ь 1
ґ х dx.
1
J
In jc
*"-*°.<і* = 1п|і,+ І/|*=1п|і'+1
In* .*...„ і fl+1
о
Сформулюємо тепер аналоги теорем 1—3 для залежних від
параметра невласних інтегралів. Для цього введемо поняття рівномірної
вбіжності невласних інтегралів.
Нехай функція / (х, у) визначена і неперервна при всіх х £ la;
-f oo) і всіх у g Y.
ь
Якщо V у Є Y існує скінченна границя lim [f (x, y)dx = І (у),
Ь->+оо J
а
то вона називається невласним інтегралом, збіжним відносно
параметра у, і позначається так:
+оо Ь
'(«/)= f /(*. y)dx=lim U(x, y)dx. (87)
, J 6-H-oo J
1 a a
Інтеграл (87) називається рівномірно збіжним відносно у £Y,
якщо для довільного числа е>0 знайдеться незалежне від у число
В (є) таке, що при"Ь > В (є) і V у 6 У виконується нерівність
+О0
J fix, y)dx <e.
ь
Одна з достатніх умов рівномірної збіжності формулюється так.
Теорема 4. Нехай функція f (х, у) неперервна по х при х £ la; -f- oo).
Якщо існує функція ф (х, у), яка інтегровна по х на проміжку la:
-f- oo) і задовольняє при V х g la; + oo) і V у g Y нерівності
\f{x, f/)|<q>(x, у),
то інтеграл (87) збігається рівномірно відносно параметра у.
Для рівномірно збіжних відносно у інтегралів (87) справедливі
такі теореми.
Теорема 5. Якщо функція f {x, у) визначена і неперервна як
функція двох змінних при а ^ х ^ + оо і с ^ у^ d і інтеграл (87)
збігається рівномірно відносно у Є [с; d], то:
1) інтеграл (87) неперервний по параметру у g [c; d]\
2) справедлива формула
й +оо +00 d
\dy { f{x, y)dx= J dx\f {x, y)dy; (88)
c a a c
3) якщо, крім того, похідна f'u (x, у) неперервна по обох змінних
+00
при х Є la; -f ool і у £ lc; d], а інтеграл j f'u (x, y)dx збігається
а
рівномірно відносно у Є lc; d], то\/ у £ lc; d] виконується рівність
(+оо у +»
] fix, y)dx) =. { fuix, y)dx. (89)
о Jy ш
415
Таким чином, при виконанні умов теореми 4 можиа, зокрема,
переставляти два інтеграли, з яких один має нескінченний проміжок
Інтегрування, а другий — скінченний. Проте в багатьох випадках
доводиться переставляти інтеграли, в яких обидва проміжки
інтегрування є нескінченними, тобто користуватися формулою
-|-СО +СО +00 +°° '
J йУ \ fix, y)dx= J dx J f(x, y)dy. (90)
c a a c
Обгрунтування формули (90) — справа досить складна, проте
для одного класу функцій має місце таке твердження.
Теорема 6. Нехай f (х, у) — невід'ємна і неперервна по х£[а,
+О0
4- оо) і у Є [є; + оо) функція, і нехай функція І (у) = ) f (х, у) dx
а
неперервна по у Є [с; + оо), а функція І {х)= J / (х, у) dy неперервна
с
по х£ [а; + оо). Тоді якщо існує один з інтегралів (90), то існує й
другий, і ці інтеграли рівні.
Приклади
+оо
І. Обчислити інтеграл Пуассона / = І е~x'dx.
о
О Застосовуючи підстановку х = Ш, де и > 0 — денка стала, дістанемо
+«.
/ = и J e-u,t,dt.
о
Помноживши обидві частини цієї рівності на е—u і інтегруючи по параметру
и від 0 до -Ь оо. маємо
-J-oo +оо +оо +«> +°°
/ \ e-u'dM= /•=. J e-"W j e-"""df = { du J «e-u,«+">d<.
0 0 0 0 0
Оскільки підінтегральна функція f (u, f) задовольняє умови теореми 6, то,
згідно з формулою (90), дістаємо
-)-оо 4-°° +00
J._f«j<-—_4.$-i£r--f.
0 0 0 ^
Враховуючи, що / >■ 0, знаходимо
о
Зазначимо, що невизначений інтеграл \ е~х* dx в скінченному вигляді не іи-
тегруєтьсн (п. 1.8). Наведемо ще один такий інтеграл,
416
2. Обчислити інтеграл І —-— dx,
о
О Розглинемо інтеграл
/Q,) = f J!"M_Ar. дег/>0.
oJ *
Формальне застосування формули (89) приводить до розбіжного інтеграла
оо
V cos (xy) dx,
о
тобто ця формула для інтеграла / (у) не виконується. Тому введемо множник є-**
і розглянемо інтеграл
оо
І (У, ft) = {e~** slnl*y) dx, де *>0, j/>0.
о
Для цього інтеграла формула (89) виконується, оскільки виконуються всі
умови теореми 5: підінтегральна функція / (х, у) = е~*ж sln ^xy' і її частинна по-
X
хідна fy (х, у) = е— kx cos (ху) неперервні по х і у при х > 0 і у~^>0, а інтеграл
оо
І е— * cos (*{/) dx збігається рівномірно відносно j/ за теоремою 4, бо V у € [0,
0
09
-f- оо): | е~** cos (ху) | <; є-** і інтеграл f e~kxdx збігається (п. 2.6).
о
Отже,
оо
k
і'у (У, k) = ^ є-** cos (xy) dx =
-0 J/2 + *2 *
Інтегруючи цю рівність по у в межах від 0 до у, дістанемо
ІІУ. k) = arctg -j-.
Інтеграл / (у) утворюється з / (у, k) прн k -»- +• 0:
оо
/ Цг) - Г Jl£i^Ldx= Iimarctg ±. = JL,
ОО
зокрема, прн у = 1 маємо \ dx = _iL . т
і х 2
4.2. Гамма- і бета-функціТ
Ці функції відіграють важливу роль у різних розділах
математики. Через них, зокрема, виражаються багато визначених інтегралів,
417
для яких відповідні невизначені інтеграли в елементарних функціях
не обчислюються.
Бета-функція. або інтеграл Ейлера першого роду, визначається
формулою
і
В(а, p) = Jxa-,(l— xp~ldx, а>0, р>0. (91)
о
Можна довести, що для всіх а. £ (0, + оо) і р £ (0, + оо)
інтеграл (91) збігається. Варто зазначити, що відповідний невизначений
інтеграл \ х? (1 — jc)P—» dx, згідно з теоремою Чебишева (п. 1.7),
виражається через елементарні функції лише в окремих випадках.
Отже, бета-функція не є елементарною.
Гамма-функцією, або інтегралом Ейлера другого роду,
називається інтеграл
т
Г(а)= ] *"-'e-*dx, а>0. (92)
о
Покажемо, що невласний Інтеграл (92) при а > 0 збігається.
Маємо
+оо 1 -f-oo
f „a-^-xdx = f j^-'e-'dx + f x?*r-lerxdx.
0 0 1
Перший інтеграл в правій частині цієї рівності збігається, бо
і і
0 < J x^-^-'dx < j x«-*dx = —.
о oa
Другий інтеграл також збігається. Справді, якщо п — довільне
натуральне число- таке, що п > а — 1, то
+оо +оо
0< J xa-1e-*djc< J xn-,e-*djc< + °°,
і і
в чому можна пересвідчитись, обчислюючи останній інтеграл
частинами і враховуючи, що
Urn -4" = 0. *Є#-
Х-¥+4» Є
Отже, інтеграл (92) при a > 0 збігається і визначає деяку функцію,
яку і називають гамма-функцією Г (а).
Обчислимо значення Г (а) при а £ N. Якщо а = 1, то
+оо
Г(1) = $ e-*d*=l. (93)
о
418
/ г з и *
Рис. 7.35
Нехай п + 1 Є N. Інтегруючи частинами, ді- ГЩ
станемо
Г(л + 1) =
= І xne-*dx = — lim —— + л \ ^-^—"dx,
5 ь-н-°° є* о - з
звідки
Г(л+1) = лГ(л). 194)
З рівностей (93) і (94) випливає, що V п g N:
Г(п+ 1) = л!
Таким чином, гамма-функція для цілих
значень п g N виражається через л!. Проте вона
визначена і для нецілих додатних значень аргументу, тобто продовжує
факторіальну функцію з дискретних значень аргументу на
неперервні- Гамма-функція не є елементарною функцією. Графік цієї функції
зображено на рис. 7.35. Властивості гамма-функції досить добре
вивчені і значення її протабульовані в багатьох довідниках, наприклад
в [19].
Наводимо без доведення формулу Стірлінга для гамма-функції:
а—1 6(a)
Г(а) = У"2^а 2 є 12 ,
де a > 0 і 0< В (а) •< 1. Якщо в цій рівності покласти а = п і
помножити її на л, дістанемо
n| QQ>
n\ = V2nnnne и , л>1, 0<Є(л)<1. (95)
Бета- і гамма-функції пов'язані між собою співвідношенням
Va>0, VP>0:B(a, p) =-LM^M. . (96)
Приклади
1. Знайти rl-g-j .
О Згідно з формулою (96), при a = P = -n~ маємо
«•(тМ-ї--т)-f і-4 <>-«>"
dx =
-2Syi-(l-ig—««іп(і-адй = я.
отже
.г(4-)-У=.
419
2. Обчислити інтеграл Ейлера—Пуассона Г е—*'dx.
о
О Враховуючи результат попереднього прикладу, дістанемо
+СО
І*
о
-x'dx =
C = V7
dx =
dt
2 VI
2 J 2 \ 2 У 2
dx
J ax
cTB"
наближено при а = 3, p = -5- .
через бета-функцію 1 обчислити його
О Маємо
1-
dx
+ *a)p
* = У
dx = JLy«
а
—і
dy
+? -L_i
1Г J *" (l+f,rPd0 =
= ~5~B(4"' P_4")' »>0. op>l.
Зокрема, при a = 3 і Р = — згідно s формулою (96) дістанемо
+00
] /г+^=ігв("з",т~"г)=-гв(-з-. т)
=J_4rHii^2,
Завдання для самоконтролю
■(т++)
676 •5-666!« 2,604.
1. Які інтеграли називаються інтегралами, залежними від параметра?
2. Сформулювати теореми про неперервність, диференціювання та інтегрування
інтеграла, залежного від параметра.
3. Дати означення гамма-функції Г (а).
4. Довести, що Г (п -)- І) = п!, п Є N.
Б. Дати означення бета-функції Є (a, р). Як пов'язані між собою бета- та
гамма-функції?
в. Довести, що
+00
J sin*
xdx>
Ьг+1)
Вказівка. Скористатись підстановкою sin x = У"7.
420
7. Довести, що
B(a> P)= J (1+*)а+В ' К>0, Р>0,
о
Вказівка. Скористатись підстановкою х = у (1 — у)~1.
Глава 8
ЗВИЧАЙНІ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ
При дослідженні різноманітних процесів та явищ, що містять
елементи руху, часто користуються математичними моделями у
вигляді рівнянь, до яких, крім незалежних величин і залежних від них
шуканих функцій, входять також похідці від шуканих функцій. Такі
рівняння називають диференціальними (термін «диференціальне
рівняння» введений у 1576 р. Лейбніцем).
Диференціальне рівняння називається звичайним, якщо
невідома функція є функцією однієї змінної, і диференціальним рівнянням
у частинних похідних, якщо невідома функція є функцією багатьох
змінних. Надалі, говорячи про диференціальні рівняння, матимемо
на увазі лише звичайні диференціальні рівняння.
§ 1. ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ ПЕРШОГО ПОРЯДКУ
1.1. Загальні поняття та означення. Задача Коші. Геометричний
вміст диференціального рівняння
Диференціальним рівнянням першого порядку називається
рівняння виду
F(x, у, у') = 0, (1)
яке зв'язує незалежну змінну х, невідому функцію у = у (х) та її
похідну у'.
Рівняння (1) може не містити явно х або у, але обов'язково має
містити похідну у' (у протилежному випадку воно не буде
диференціальним рівнянням).
Диференціальне рівняння (1), нерозв'язне відносно похідної у',
називають неявним диференціальним рівнянням. Якщо рівняння (1)
можна розв'язати відносно у', то його записують у вигляді
у'=Нх,У) (2)
і називають рівнянням першого порядку, розв'язаним відносно
похідної, або рівнянням в нормальній формі. Ми, в основному,
розглядатимемо саме такі рівняння.
421
Рівняння (2) можна записати ще й так:
-£- = f(x, у) або — f(x, y)dx + dy=0.
Помноживши останнє рівняння на деяку функцію Q (х, у) Ф 0,
дістанемо рівняння першого порядку, записане в диференціальній
формі:
Р (х, y)dx+Q {х, у) dy = 0, (3)
де Р (х, у) і Q (х, у) — відомі функції. Рівняння (3) зручне тим, що
змінні х та у в ньому рівноправні, тобто кожну з них можна
розглядати як функцію другої. Приклади диференціальних рівнянь виду
(1), (2) і (3):
ху' + у2 — 1 = 0; у'=2х — у\ (x — 3y)dx + xydy=0.
Знаходження невідомої функції, що входить в деференціальне
рівняння, називають розв'язанням або інтегруванням цього
рівняння. (Якщо не виникатиме напорозумінь, замість терміну
«диференціальне рівняння» іноді використовуватимемо термін «рівняння».)
Розв'язком диференціального рівняння (2) на деякому інтервалі
(а; Ь) називається диференційовна на цьому інтервалі функція у =
= ф (х), яка при підстановці в рівняння (2) обертає його в тотожність
по х на (а; Ь), тобто
V х6(а; Ь):Ф'(х)з»/(*, ф(х)).
Наприклад, функція у = х In x, x £ (0; -f- oo), є розв'язком
рівняння ху' — х — у = 0. Дійсно, підставляючи цю функцію та її
похідну у* = \пх + 1 в дане рівняння, дістаємо тотожність
х(Іпх+ 1) — х — *Іпл: = 0; *6(0; + °°)-
Неважко переконатися, що розв'язком даного рівняння є також
функція у = х In х + Сх, де С — довільна стала. Надаючи С
довільного дійсного значення, щоразу дістаємо розв'язок даного
рівняння, тобто маємо нескінченну множину розв'язків.
Графік розв'язку диференціального рівняння називається
інтегральною кривою цього рівняння.
Відповідь на запитання про те, за яких умов рівняння (2) має
розв'язок, дає така теорема Коші [26].
Теорема 1 (про існування і єдиність розв'язку). Нехай функція
f (x, у) і її частинна похідна fy (x, у) визначені і неперервні у
відкритій області G площини Оху і точка (х0; у0) £ G. Тоді існуєєдиний
розв'язок у = ф (х) рівняння (2), який задовольняє умову
у =у0 при х = х0, тобто <р (х0) = у0. (4)
Ця теорема дає достатні умови існування єдиного розв'язку
рівняння (2).
422
Н
Рис. 8.1
Геометрично теорема Коші стверджує, що через кожну точку {х0;
у0) g G проходить єдина інтегральна крива. Якщо зафіксувати х„ і
змінювати у0, не виходячи при цьому з області G, то діставатимемо
різні інтегральні криві. Це наочно показує, що рівняння (2) має
безліч різних розв'язків (рис. 8.1).
Умову (4), згідно з якою розв'язок у = ф (х) набуває наперед
задане значення у0 в заданій точці х0, називають початковою умовою
розв'язку і записують так:
У\х~*о = Уо або У{х0) = Уо-
(5)
Задача знаходження розв'язку рівняння (2), який задовольняє
початкову умову (5), називається задачею Коші. З погляду геометрії
розв'язати задачу Коші — це означає виділити з множини
інтегральних кривих ту, яка проходить через задану точку (х0; у0).
Точки площини, в яких не виконуються умови теореми Коші
(наприклад, / (х, у) або fy (х, у) в цих точках розривні), називаються
особливими. Через кожну з таких точок проходить кілька
інтегральних кривих або не проходить жодної.
Розв'язок диференціального рівняння, в кожній точці якого
порушується умова єдиності, називають особливим розв'язком.
Графік особливого розв'язку називають особливою інтегральною
кривою. Щоб з'ясувати її геометричний зміст, введемо поняття
обвідної.
Нехай задано рівняння
Ф (х, у, С) = 0,
(6)
де х, у — змінні декартові координати, а С—параметр. Це рівняння
визначає сім'ю кривих, які залежать від одного параметра, або, як
часто кажуть, однопараметричну сім'ю кривих.
Лінія L називається обвідною однопараметричної сім'ї кривих
(6), якщо вона в кожній своїй точці дотикається до однієї з кривих
і якщо в різних точках вона дотикається до різних кривих (рис. 8!2).
423
Виявляється, що особлива інтегральна крива геометрично є
обвідною сім'ї інтегральних кривих диференціального рівняння,
визначених його загальним розв'язком.
Приклади
1. Рівняння у' = 2х має безліч розв'язків у = Xі + С (рис. 8.3) — це сім'я
парабол. Права частина рівняння задовольняє умови теореми Коші иа всій
площині Оху. Це означає, що через кожну точку площини проходить лише одна
інтегральна крива.
2. Рівняння у1 = -М- має безліч розв'язків у = Сх (рис. 8.4) — це сім'я прямих,
X
що проходять через точку (0; 0). Права частина рівняння задовольняє умови теореми
Коші, якщо х Ф 0. Тому через кожну точку, яка не лежить на осі Оу, проходить
єдина інтегральна крива (пряма). Точка (0; 0) — особлива, через неї проходить
бгзліч інтегральних кривих. Особливими будуть також точки (0; {/„), де у0 Ф 0.
Через ці точки не проходить жодної інтегральної кривої.
3. Рівняння}/' = Yy маєсім'ю інтеграіьних кривих, парабол, у = l-g- + СІ
Крім того, очевидно, що це рівняння має також розв'язок у в 0. Цей розв'язок
особливий, бо функція/ = т=- при у и 0 розривна. Пряма у = 0 дотикається до
ч 2 V у
сім'ї парабол і є її обвідною (рис. 8.2).
Розглянуті приклади показують, що диференціальне рівняння
може мати нескінченну множину розв'язків або сім'ю інтегральних
кривих. За певних умов з цієї сім'ї можна виділити єдину криву,
яка проходить через задану точку. У зв'язку з цим дамо означення
частинного розв'язку диференціального рівняння.
Нехай права частина диференціального рівняння (2) задовольняє
в області G умови теореми Коші".
Функція у =! ф (х, С), яка залежить від аргументу х і довільної
сталої С, називається загальним розв'язком рівняння (2) в області
G, якщо вона задовольняє дві умови:
1) функція ф (х, С) є розв'язком рівняння при будь-якому
значенні сталої С з деякої множини;
2) для довільної точки (х0; у0) £ G можна знайти таке значення С =
= С0, що функція у = ф (х, С0) задовольняє початкову умову:
ф(*о> Со) = Уо-
Частинним розв'язком рівняння (2) називається функція у =
= ф (х, С0), яка утворюється із загального розв'язку у = ф (х, С)
при певному значенні сталої С = Сп.
Якщо загальний розв'язок диференціального рівняння знайдено
в неявному вигляді, тобто у вигляді рівняння ф (х, у, С) = 0, то
такий розв'язок називають загальним інтегралом диференціального
рівняння. Рівність ф (х, у, С0) = 0 у цьому випадку називають
частинним інтегралом рівняння.
424
Рис. 8.3 Рис. 8.4 Рис. 8.5
Дамо геометричне тлумачення рівнянню (2). Нехай G — множина
точок площини Оху, в яких задані і неперервні функції / (х, у) і
/' (х, у) і нехай точка Mx (д^; у\) £ G. Підставивши координати точки Мх
в праву частину рівняння (2), знайдемо значення похідної в цій
точці:
У'\м, =/(*і, ух).
Якщо через точку Mt проходить інтегральна крива рівняння (2),
то з геометричного змісту похідної маємо у' \Ml = tg alt де ах —
кут між дотичною до інтегральної кривої в точці Мі і додатним
напрямом осі Ох. Тому точці Мі (хг; Уі) рівняння (2) ставить у
відповідність значення кута
ох = arctg (у' \м,) = arctg/ &; у і).
Аналогічно точці Ма (х2; £/2) рівняння (2) ставить у відповідність
напрям
а2= arctg f(xa; y2).
Отже, кожній точці М (х; у)£ G диференціальне рівняння (2)
ставить у відповідність значення кута
а = arctg f(x, у),
тому рівняння (2) геометрично задає так зване поле напрямів. На
рис. 8.5 це поле зображено стрілками (іноді поле напрямів зображають
маленькими відрізками). Кожній точці М (х; у) £ G відповідає певна
стрілка з кутовим коефіцієнтом tg a = f (x, у). Зрозуміло, що
практично ми можемо побудувати лише кілька стрілок, але можна уявити,
що стрілки проведені в кожній точці області G.
Розглянемо тепер інтегральну криву рівняння (2). Оскільки
напрям дотичної до інтегральної кривої в даній точці збігається з
напрямом поля в цій точці, то геометрично задачу інтегрування
425
диференціального рівняння можна тлумачити так: знайти такі криві,
напрям дотичних до яких збігається з напрямом поля у відповідних
точках.
Таким чином, з погляду геометрії рівняння у' = / (х, у) визначає
на площині поле напрямів, а розв'язок цього рівняння —
інтегральну криву, яка в кожній своїй точці дотикається до поля напрямів.
Знаючи поле напрямів диференціального рівняння, можна
наближено побудувати його інтегральні криві. Для того щоб полегшити
побудову поля напрямів, користуються методом ізоклін. Ізокліною
називається крива на площині Оху, в кожній точці якої дотичні до
інтегральних кривих мають один і той самий напрям. Отже, усі
інтегральні криві, які перетинають ізокліну, в точках перетину
нахилені до осі Ох під одним і тим самим кутом. Звідси походить і назва
«ізокліна» — лінія однакового нахилу.
Очевидно, для диференціального рівняння (2) рівняння ізокліни,
яка відповідає кутовому коефіцієнту у' = а = const, має вигляд
/(*, у) =а.
Різним значенням а відповідають на площині Оху різні.ізокліни.
При цьому напрям кожної ізокліни визначається кутом а = arctg а.
Приклад
Знайти поле напрямів диференціального рівняння у' = Xі + у3 і інтегральну
криву, яка проходить через точку 0 (0; 0).
О Ізоклінами тут буде сім'я концентричних кіл х* ■+- у* = а, а ^ 0. При а = -п",
наприклад, ізокліною є коло Xі 4- {/а = , напрям поля цієї ізокліни визначається
кутом arctg — я> 26°. Якщо а = 1, маємо ізокліну х1 + у* = 1, напрям поля якої
визначається кутом arctg і = 45* і т. д. При а = 0 дістанемо Xі -f- J/2 = 0. Цьому
рівнянню відповідає єдина точка О (0; 0), тобто ізокліна містить лише одну точку.
Напрям поля в цій точці збігається з додатним напрямом осі Ох. Щоб зобразити
інтегральну криву, через початкову точку О (0; 0) проводимо криву, яка б в кожній
своїй точці мала напрям поля, тобто дотикалась до відповідної стрілки. •
Переходимо тепер до розв'язування диференціальних рівнянь
першого порядку. Якщо задачу про знаходження всіх розв'язків
диференціального рівняння вдається звести до обчислення скінченного
числа інтегралів і похідних від відомих функцій і алгебраїчних
операцій, то кажуть, що диференціальне рівняння інтегрується в
квадратурах (або зводиться до квадратур). Зрозуміло, що далеко не
всяке диференціальне рівняння, яке інтегрується в Квадратурах, має
розв'язок, який виражається через елементарні функції. Більше
того, дуже часто диференціальне рівняння не можна проінтегрувати
не тільки в елементарних функціях, а й у квадратурах. Проте
існують окремі типи диференціальних рівнянь, для яких це можливо.
426
Розглянемо такі рівняння. На жаль, клас інтегровних в квадратурах
диференціальних рівнянь надзвичайно вузький.
1.2. Диференціальні рівняння з відокремлюваними змінними
Рівняння виду
</' = /(*)ф(</). (7)
де / (х) і ф (у) — задані і неперервні на деякому інтервалі функції,
називається диференціальним рівнянням з відокремлюваними
змінними.
Права частина рівняння (7) являє собою добуток двох множників,
кожен з яких є функцією лише однієї змінної. Щоб розв'язати рівняння
(7), треба відокремити змінні. Для цього замінимо у' на -р-, поділимо
обидві частини рівняння (7) та ф (у) (вважаємо, що ф (у) Ф 0) і
помножимо на dx, тоді рівняння (7) запишеться у вигляді
it==nx)dX- (8)
Диференціальне рівняння виду (8), в якому множник при dx
є функцією, яка залежить лише від х, а множник при dy є функцією,
яка залежить лише від у, називається диференціальним рівнянням
з відокремленими змінними.
Оскільки рівняння (8) містить тотожно рівні диференціали, то
відповідні невизначені інтеграли відрізняються між собою на сталу
величину, тобто
Jw-J/W*+C-
Таким чином, рівняння (7) розв'язано в квадратурах.
Диференціальне рівняння (7) є окремим випадком рівняння виду
fl(x)4>l(y)dx + f2(x)(p2(y)dy = 0. (9)
Для відокремлення змінних у цьому рівнянні досить обидві його
частини поділити на функцію фх (у) /2 (х). Зауважимо, що при
діленні обох частин рівняння (7) на ф (у) можна загубити деякі розв'язки.
Дійсно, якщо ф (у0) = 0, то стала у = у0 є розв'язком рівняння (7),
оскільки перетворює це рівняння в тотожність. Цей розв'язок може
бути як частинним, так і особливим.
Аналогічне зауваження стосується коренів функцій ^ (у) та
/а (х) у рівнянні (9).
Приклади
1. Розв'язати рівняння
(х + xy*)dx-(y+yx*)dy = 0.
О Оскільки це рівняння можна записати у вигляді
х(\ + у*) dx- у (1 + х*) dy = 0,
427
то воно є рівнянням з відокремлюваними змінними. Поділивши обидві його частини
на (1 + Xі) (1 + уа) ф 0, дістанемо рівняння з відокремленими змінними:
х у 2xdx 2ydy
TT^dX~T+yTdy = ° аб° 1 + х* = 1+j,» ■
інтегруючи останнє рівняння, маємо
In (і + х2) = In (1 + Уг) + 1п | С І. СфО.
Потенціюючи, дістаємо загальний інтеграл заданого рівняння:
1 4- Xі
2. Розв'язати рівняння
(W* + І?) dx + (х2 — х*у) dy = 0.
О Перетворимо ліву частину рівняння:
y*(x+\)dx+K*(l-y)dy = 0.
Поділивши обидві частини цього рівняння на функцію х*у2 Ф 0, дістанемо рівняння
з відокремленими змінними
х+ 1 1 — у
—^— dx + —-і— dy = 0,
інтегруючи яке, знаходимо загальний інтеграл
f х+1 С І — У „ „
\—^~dx + \—^-dy = C, СЄЯ,
або
звідки
або
4*|--^--^--in|i/|=c,
in -±-
У
х+У
ХУ
Рівняння ху = 0 має розв'язки х = 0 і у = 0, тому прямі х = 0 та у = 0 є
інтегральними кривими даного рівняння. Вони не утворюються із загального
інтеграла ні при якому значенні С. Отже, розв'язки х=0та{/=0є особливими і Їх
слід виписувати додатково до загального інтеграла. •
3. Знайти частинний розв'язок рівняння (1 + ж2) dy + ydx = 0, який
задовольняє початкову умову у (0) = і.
О Відокремимо змінні і проінтегруємо дане рівняння:
dy . dx _ C dy . f <**_
.2 — ^i
dj/ dx C dy C
i + x=
In | p |-f-arctg x = C.
428
Дістали загальний інтеграл. Використовуючи
початкову умову, знайдемо сталу С:
In 1 -f arctg 0 = С, авідки С = 0.
Підставивши знайдену сталу в загальний
інтеграл, дістанемо шуканий частинний розв'язок:
in | у | -)- arctg х = 0, звідки у = e~arct**. #
4. Знайти криву, яка проходить через точку
(1; 2), коли відомо, що у кожній точці кривої
відрізок дотичної, який міститься між осями
координат, ділиться точкою дотику навпіл.
О Нехай М {х: у) — довільна точка шуканої
кривої у = / (х). Запишемо рівняння дотичної, проведеної до цієї кривої в точці М:
Y-y=y'(X-x),
де (X; Y) — довільна точка дотичної (рис. 8.6).
Оскільки за умовою AM = MB, то ОС = СВ, звідки OB »= 20C, тобто
абсциса X точки В дорівнює подвоєній абсцисі х точки С. У точці В дотична перетинає
вісь Ох, тому з рівняння дотичної при у = 0 дістанемо абсцису X точки В:
У
У' '
Х = х —
Дістаємо рівняння х — ——
2х.
Відокремивши змінні і проінтегрувавши це рівняння, матимемо загальний роз-
С 2
в язок у = — За умовою у (1) = 2, звідки С =■ 2, тому у = — — рівняння
шуканої кривої. •
Розглянемо тепер рівняння
у' =f(ax + by + c), (10)
де a, b, c — задані числа, і покажемо, що заміною
и = ах+Ьу + с (П)
рівняння (10) зводиться до рівняння з відокремлюваними змінними.
Справді, диференціюючи рівність (11) по х, дістанемо -£- —
~ а-\- b —т- , тому згідно з (10) маємо рівняння —т- — a -f bf (u),
у якому при а-\- bf(u)¥=0 відокремлюються змінні:
du ,
а + bf (u) ~аХ-
Інтегруючи це рівняння і замінюючи и на ах + by + c, дістанемо
загальний інтеграл рівняння (10).
Якщо а + bf (х) = 0, або, що те ж саме, -£- = 0, то, згідно з
рівністю (11), рівняння (10) може мати розв'язки ах + by + с = С.
429
Приклад
Розв'язати рівняння у' = (х + у)я.
О Покладемо н = х 4- у, тоді
du dy du
-dT = l + -dT- аб° -dT-l + u*-
f
звідки t і ф = dx.
інтегруючи це рівняння, знаходимо arctg u = х 4- С, тобто arctg (x 4- у) ~
*= х 4- С — загальний інтеграл заданого рівняння. Інших розв'язків це рівняння
не має, бо 1 + иа ф 0. •
1.3. Однорідні диференціальні рівняння
Функція / (х, у) називається однорідною функцією п-го виміру
відносно змінних х та у, якщо для довільного числа / Ф 0
виконується тотожність
f(tx, ty)=tnf(x. у).
Наприклад, функція f (х, у) = х2 — Ьху — однорідна функція
другого виміру, оскільки
/ (tx, ty) = (tx)* - 5 (tx) (ty) = t* (Xі - Ьху) = Pf (jc; y);
функція f(x, y) = —^ однорідна функція нульового виміру,
І ху
оскільки
f(tx, ty) = Щ=Ш. = '-^ - -^ = W*. Ю-
Диференціальне рівняння
y'-f(x,y) (12)
називається однорідним, якщо функція / (де, у) є однорідною функцією
нульового виміру.
Очевидно, рівняння виду
Р(х, y)dx + Q(x, y)dy = 0 (13)
буде однорідним тоді і тільки тоді, коли функції Р (х, у) і Q (х, у)
будуть однорідними функціями одного й того самого виміру.
Покажемо, що однорідні рівняння зводяться до рівнянь з
відокремлюваними змінними підстановкою
у=их, (14)
де и — невідома функція: и = и {х).
Якщо функція (14) є розв'язком диференціального рівняння (12) 1
dy , du du ., . ., с.
~dT = u + x~dr ' то u+x-dT = f(x' "х)- (15)
430
f
За умовою / (х, у) — однорідна функція нульового виміру, тобто
/ {tx, ty) == / (х, у). Поклавши в цій тотожності у = их і / = —,
дістанемо / (х, их) = f (1, и), тому рівняння (15) набирає вигляду
и + *-ЗГ =■/(!. "). (16>
Це рівняння з відокремлюваними змінними. Якщо / (1, и) — иф 0.
то, відокремлюючи змінні, дістаємо рівняння
du dx
/(1. и) — и —~х~''
проінтегрувавши, знайдемо
{{и%_и=Іп\х\ + С.
Підставимо після інтегрування замість и відношення — і дістанемо
інтеграл рівняння (12). Якщо / (1, и) — и = 0, то рівняння (16)
запишеться у вигляді
du „
х -т— = 0.
dx
У цьому випадку рівняння (12) і (13) можуть мати ще розв'язки у =
.= Сх (х Ф 0) та х = 0 (у ф 0).
Приклади
1. Розв'язати рівняння
, х»4-Уа
У = $х' •
О Права частина цього рівняння є однорідною функцією нульового виміру, тому
що
/ ('х, (у) = —jjtxj* = —2*» = ' (х- у)-
Отже, диференціальне рівняння є однорідним. Застосувавши підстановку у = их,
дістанемо загальний інтеграл даного рівняння:
1 + "* і + и2
хи' + " = 2 : *" = 2 ~ "'
(и—1)' du (и— 1)а
«' = J 5 *Т7= 2 :
2du dx Г 2du Г
(ц_1)а = х : J («-!)• =J
dx
х
-7Г^Г = 1п|х|4-1п|С|; —-р = 1п|Сх|;
-г-'
2-t
2х
= ln|Cx|; Cx = e*-',
х —у
431
При відокремленні змінних ми ділили на х І на
(м — І)2, що можливо при х Ф 0 та иф \. Точки, в
яких х=0, не входять в область визначення правої
частини заданого рівняння, тому пряма х=» 0 не може
бути інтегральною кривою цього рівняння.
Нехай и = 1, тобто у = х. Функція ух
перетворює дане рівняння в тотожність, тому є його
розв'язком. Цей розв'язок є особливим і його слід
вказувати додатково до знайденого інтеграла. •
2. Знайти криву, яка проходить через точку (1; 0),
якщо відомо, що трикутник, утворений віссю Оу,
дотичною до кривої в довільній її точці і радіусом-векто-
ром точки дотику, рівнобедрений, причому основою
його є відрізок дотичної від точки дотику до осі Оу.
О Нехай y=f(x) — шукана крива. Проведемо дотичну МА в довільній точці
М (х; у) кривої до перетину з віссю Оу (рис. 8.7).
За умовою ОМ= ОА. Відрізок ОМ = VXі + у*, а відрізок ОА знайдемо як
ординату У точки А з рівняння дотичної
Y-y=y'{X-x);
Рис. 8.7
при X = 0 маємо ОА
У
звідки у'= —
загальний інтеграл:
- І'х* + {/2
У-
■ у'х. Дістали рівняння У Xі + уг = у — у'х.
. Це однорідне рівняння. Поклавши у = их, дістанемо
du
u'x+u = u—Vl + u*; -7-x = —V\ + u:
du
V\ +u2
Ax
x
In I u + fl + и» I = — In I x I + In I C I;
u + vnr& = -r •• y + Vx* + Vа
Використавши початкову умову у (1) = 0, знайдемо С = 1. Отже, рівняння шуканої
кривої має вигляд у + \ *z + у2 = 1. •
Розглянемо тепер рівняння, які можна звести до однорідних.
Нехай маємо рівняння виду
(17)
' \ аах+Ьау + с2 ]
де аи Ьь clt a2, b2, с2 -— задані сталі.
Якщо Д = агЬ2 — a2bt = 0, то підстановкою г = а^х + Ьху + сх
рівняння (17) зводиться до рівняння'з відокремлюваними змінними.
Якщо Д Ф 0, то можна зробити таку заміну змінних х = и + а,
у = v + р\ що в лінійних функціях зникнуть вільні члени, тобто
виконуватимуться рівності
atx -f- bty + Сі = atu + btv, і = 1, 2.
Після такої заміни рівняння буде однорідним.
432
Приклад
х + Чу + 1
Розв'язати рівняння у' = а, і— і .
О Для цього рівняння А = 1-1 — 2 • 2 = —З Ф 0, тому, поклавши х = и -(-
+ а, р = и -)- р, дістанемо
. йу dv
dx = du, dy = rfvi j,' = -^ = -^ і
dp u + 2o + (a -f 2p + 1)
du — 2u + v + (2a-)-P— 1) •
Сталі а і р доберемо так, щоб
I a + 2p + 1 = 0;
I 2a + p — 1 = 0.
Розв'язуючи цю систему, знайдемо a =» 1, р = —і, тому заміною змінних х = и +
+ 1, у = v — 1 задане рівняння зводиться до однорідного:
dv u + 2v
du ~~ 2u -f- v '
За допомогою підстановки v =- uz знаходимо загальний інтеграл цього
рівняння: (v — и)3 = С (и + и), С > 0. Звідси, враховуючи, що к= х—1, ч= j/-f
+ 1, дістанемо загальний інтеграл заданого рівняння
(у — х+ 2)3 = C(x + j,). «
1.4. Лінійні диференціальні рівняння
Лінійним диференціальним рівнянням першого порядку
називається рівняння виду
y' + p(x)y=f(x), (18)
де р (х) if (x) — задані і неперервні на деякому проміжку функції.
Термін «лінійне рівняння» пояснюється тим, що невідома
функція у і її похідна у' входять до рівняння у першому степені, тобто
лінійно.
Є кілька методів інтегрування рівняння (18). Один з них (метод
Бернуллі) полягає в тому, що розв'язок цього рівняння шукають
у вигляді добутку
у= uv, (19)
де и = и (х), v = v (х) — невідомі функції х, причому одна з цих
функцій довільна (але не рівна тотожно нулю).
Знаходячи похідну у' = u'v -f uv' і підставляючи значення у
та у' в рівняння (18), дістанемо
u'v+u(v' + p(x)v)=f(x).
Користуючись довільністю у виборі функції v (х), доберемо її
так, щоб
v'+p(x)v = 0; (20)
433
ТОДІ
и'о =/(*). (21)
Розв'яжемо ці рівняння. Відокремлюючи в рівнянні (20) змінні
та інтегруючи, знайдемо його загальний розв'язок:
-£ = — P(x)v; -^-= — р (х) dx;
ln|i>|= — ^p(x)dx+\n\C1\; v = C1e~$Plx)dx, C^O.
Візьмемо за v який-небудь частинний розв'язок рівняння (20),
наприклад
0=е-і*х)Л (22)
Знаючи функцію v, з рівняння (21) знаходимо функцію и:
du = f(x)eSPlxydxdx;
u = \f(x)Jp{x)dxdx + C. (23)
ікції (22) і (23) в (19), знаходимо заг;
у = uv = є"***" (j f(x) JPlx)dxdx + С)
Підставляючи функції (22) і (23) в (19), знаходимо загальний
розв'язок рівняння (18)
Приклади
1. Знайти загальний розв'язок рівняння
у sin 2х
О Це лінійне рівняння виду (18), в якому
1 , sin 2x
-. IW-
Нехай у = ілі, тоді у' = u'v + uv'. Маємо
Р(х) = — . f(x) =
sin 2x
uv sin 2х ( v \
u'v+ uv' + -j- = ; u'v + u lv' + — I =
v sin 2x
Доберемо функцію v так, щоб и' Н = 0; тоді u'v = —-—- Інтегруючи перше з
цих рівнянь, дістаємо
dv dx 1
"7Г" = ~ ~х~ '• ta І » І = — І" І * І: v = ~х~ •
Підставивши значення v у друге рівняння, дістанемо
1 sin 2х cos 2х
и' — = — ; du = sin 2xdx; u = — g— + С»
434
після чого знайдемо загальний розв'язок
y=,uv = — [С— -2"cos 2jc) . •
2. Знайти розв'язок рівняння р' + 2ух = 2л:, який задовольняє умову у (0) =
= 2.
О Поклавши р = uv, у' = u'u + uv', матимемо:
u'v + uv' + 2uvx = 2дс; u'v ~\-u{v' + 2vx) = 2дс;
dv dv
4x- = -2vx; —
v' + 2vx = 0; -^7" = — 2vx; -7— = — 2xdx; » = e-**;
du
2*:
t; -j£- = 2xe**; « = f 2xex'dx = e*' -f C.
Загальний розв'язок даного рівняння
y = uv= Се_дг,+ 1.
Знайдемо значення сталої С, при якому частинний розв'язок «вдовольняє задану
початкову умову!
2 = Се°+ і. звідки С= 1.
Отже, шуканий частинний розв'язок має вигляд у = е~х + 1. •
1.5. Рівняння, які зводяться до лінійних. Рівняння Бернуллі та
Ріккаті
Розглянемо класи рівнянь, які за допомогою певних перетворень
можна звести до лінійних.
Iе. Рівняння виду
У ~ P(y)x + Q(y) • (ZV
де Р (у), Q (у), R (у) — задані функції, R {у) Ф 0, можна звести до
лінійних, якщо х вважати функцією, ay — аргументом: х = х (у);
тоді з рівностей (24) і у'хх'у = 1 (п. 2.5, гл. Б) дістанемо лінійне
рівняння відносно х:
■%- + <v(y)x=f{y), даф&)в-4(§-- /ДО-тщ"'
Розв'язок цього рівняння шукаємо у вигляді х = и (у) v (у).
Приклад
Розв'язати рівняння (2ху + у*) dy — dx — 0.
О Оскільки
f 1
У' = Щ+у3 •
то маємо рівняння виду (24). Якщо х вважати функцією у, то відносне х це рівняння
стає лінійним:
х' — 2ух = у*.
435
Розв яжемо це рівняння:
х = uv; u'v + uv' — 2uvy — р3;
dv
u'v + u (v' — 2vy) = y3; v' — 2vy = 0; —- = 2ydy;
In 11) | = y* + ln|C|; u = e*'*; -^-e^ = y*; du = y*z-«'dy;
u=\ у^-У'йу =~y\ y^-y*dy* = - 4" e_"* <! + **> + C;
2е. Рівняння виду
fy{y)y' + P(x)f(y)=q(x), (25)
де /, p, q — задані функції, заміною z = f (у) зводиться до лінійного
відносно змінної г:
z' + p(x)z=q(x). (26)
Справді, якщо z = f (у), де у = у (х) — невідома функція, то
dz df dy t' і \ '
~dy~ — ~dy ~dx~ ~ '"(У'У '
тому рівняння (25) набирає вигляду (26).
3°. Рівнянням Бернуллі називається рівняння виду
У' + P(x)y=q(x)ya, аеЯ.афО-.І. (27)
(Рівняння (27) запропонував у 1695 р. Якоб Бернуллі, а в 1697 р.
його брат Йоганн Бернуллі це рівняння розв'язав.)
Очевидно, при а = 0 це рівняння —лінійне, а при а = 1 —з
відокремлюваними змінними. Припускаючи у Ф 0, а Ф 0, а Ф 1,
поділимо рівняння (27) на у*, тоді матимемо рівняння виду (25):
Таким чином, заміною z = yl~a рівняння Бернуллі зводиться
до лінійного рівняння. Проте на практиці розв'язок рівняння
Бернуллі зручніше шукати методом Бернуллі у вигляді у = uv, не
зводячи його до лінійного рівняння. Слід зазначити, що при а > 0,
крім розв'язку у = uv Ф 0, рівняння Бернуллі має розв'язок у ==
= 0.
Приклад
Розв'язати рівняння (Xі In у — х) у' — у = 0.
О Перетворимо рівняння:
, У
у ~ хЧпу—х •
436
звідки ух' + х = ха 1п у, або
X X2
Маємо рівняння Бернуллі відносно змінної х = х (у). Знайдемо його розв'язки
uv In у
х = uv; u'v + uv' -f- = и2ч2 •
У
(v \ In u dv v di
* + ТГ*"мі Sy- + -y- = 0-' S
du 1 1 In у du In у
In у dv v dv dy 1
,1 *- • -=— J- = П- = ._ —2- ; v =
У У
dy у уг у ' ua уг "'
1
X — UV ■■
"- 1+In j,-Cf ' *-««- l+lny-Cj, • •
4°. Рівняння виду
y' + p(x)y+q(x)y* = r(x), (28)
де p (x), q (x), r (x) — задані функції, називається рівнянням Ріккаті.
Якщо р, q, r — сталі числа, то це рівняння інтегрується
відокремленням змінних:
3-=* + С.
J r—py—,
Коли q (х) = 0, рівняння (28) стає лінійним, а у випадку г (х) = 0 —
рівнянням Бернуллі. У загальному випадку рівняння (28) не
інтегрується у квадратурах. Проте якщо відомий його один частинний
розв'язок у1 = у1 (х), то заміною у = у1 + z рівняння Ріккаті зво
диться до рівняння Бернуллі.
Приклад
Розв'язати в квадратурах рівняння у' + 2у (у — х) = 1.
О Задане рівняння є рівнянням Ріккаті. Неважко пересвідчитись, що функція
у = х — розв'язок цього рівняння, тому заміна у = х + z зводить його до
рівняння Бернуллі:
l+z' + 2(jt + z)(x + z-x) = l
або
г' + 2гх = — 2г2.
Далі маємо
г = uv; u'v -J- uu' -J- 2uvx = — 2u2u2;
«'о + u (v' + 2ox) = — 2u2i>»;
du di< „ , _,,
-jjjj- = — 2wt: -jj- = — 2*dx; о = e * ;
—r e * = — 2uae ■" ; — —s- = 2e Ac;
dx " u* '
« = (2 [e-x'dx + c)_l; г = uv = е~**{2 j e-*"dx + c)
437
—1
отже, розв'язком даного рівняння є:
у = х; j, = x + 2 = Jt + e-*,(2Je-*,dx+c)_1. «
1.6. Рівняння в повних диференціалах. Інтегруючий множник
Рівняння виду
P(x,y)dx + Q(x,y)dy = 0 (29)
називається рівнянням у повних диференціалах, якщо його ліва
частина є повним диференціалом деякої функції и {х, у), тобто
Р (х, y)dx + Q(x. y)dy = du (x, у) = -§£-dx + -g-dy.
У цьому випадку загальний інтеграл рівняння - (29) має вигляд
и (х, у) = С, де С — довільна стала. Для того щоб рівняння (29)
було рівнянням в повних диференціалах, необхідно і достатньо,
щоб
№<*йп*%іД. (зо)
З'ясуємо методику інтегрування рівнянь в повних диференціалах.
Якщо для рівняння (29) умова (ЗО) виконується, то невідома функція
и (х, у) задовольняє рівності
■Щ- = Рі*.У). (3D
-^-=Q(x,y). (32)
Інтегруючи рівність (31) по х, визначимо функцію и (х, у) з
точністю до довільної диференційовної функції ф (у):
и{х,у) = \Р(х, y)dx = F(х, у) + <р{у), (33)
де F (х, у) — первісна функції Р (х, у) по х. Диференціюючи
рівність (33) по у і враховуючи (32), дістаємо рівняння для знаходження
функції ф (у):
Інший спосіб розв'язування рівняння в повних диференціалах
наводиться в п. 3.9 (гл. 10).
Приклад
Розв'язати рівняння
(3jf + 2ху + 2х) dx + (бху + xl + 3)dy = 0.
О У даному випадку
Р (х, у) = Зу2 + 2ху + 2х, Q (х, у) = Ьху + Xі + 3.
438
Оскільки
— = &у + 2х.
то ліва частина заданого рівняння є повним диференціалом деякої функції и (х, у),
причому
-£-^Зу* + 2ху + 2х, -£- = вху + х* + 3. (34)
Інтегруючи, наприклад, перше з рівнянь (34) по х (вважаючи у сталою), маємо
и (х, у) = Зху* + х*у + х2 + ф (У), (35)
де ф [у) — довільна диференційовна функція у.
Диференціюючи рівність (35) по у, згідно з другим рівнянням (34), дістанемо
ди dm
-^ = 6xj, + х' + -£■ - бху + *» + З,
dq>
тобто —г— = 3, звідки ф [у) = Зу -f- Сь тому
и (х, у) = Зху* + х*у + Xі + Зу + Ct.
Отже, загальний інтеграл ваданого рівняння виражається рівністю
Зху* + х*у + х» + Зу = С. т
Таким чином, рівняння в повних диференціалах інтегрується
досить просто. У зв'язку з цим виникає питання, а чи не можна
множенням на певний множник ц (x, у) довільне рівняння в
диференціальній формі (3) звести до рівняння в повних диференціалах?
Виявляється, що за певних умов це цілком можливо.
Функція (J. (х, у) називається інтегрувальним множником
рівняння (29), якщо після домножування на неї цього рівняння воно
стає рівнянням у повних диференціалах. Можна довести, що всяке
диференціальне рівняння першого порядку, яке задовольняє умовам
теореми Коші, має безліч інтегрувальних множників.
Розглянемо методи знаходження інтегрувальних множників [і (х,
у). Загального методу знаходження функцій li (а:, у) немає. їх можна
внайти лише в деяких окремих випадках. Складемо рівняння для
інтегрувальних множників. Якщо (j. = (j. (х,. у) — інтегрувальний
множник рівняння (29), то рівняння P\idx -f Qiidy = 0 є рівнянням у
повних диференціалах. Тому, згідно з умовою (30), маємо
тобто
д (Рц) _ д ((?ц)
ду дх
*%+'■%->£■+**•
439
ЗВІДКИ
p.
ду ^ дх
або
Р д» О * ulд0- дР \
р dlnp. q аіпц _ dQ _ дР .„„.
ду дх ~ дх ду ' *■ '
Отже, щоб дістати інтегрувальний множник, треба знайти який-не-
будь частинний розв'язок рівняння (36). Це рівняння є
диференціальним рівнянням з частинними похідними відносно невідомої
функції \і (х, у). У загальному випадку задача знаходження \х (х, у) "з
рівняння (36) значно складніша, ніж розв'язування самого рівняння
(29).
Розглянемо два випадки, коли рівняння (36) спрощується і
інтегрувальний множник рівняння (29) можна знайти. Припустимо,
що рівняння (29) має інтегрувальний множник, який залежить лише
відх, тобто ц = \л (х); тоді в рівнянні (36) —-Л^- = 0 і для
знаходження \і матимемо звичайне диференціальне рівняння
din [і
Ах
■7 (■£--&)• <37>
з якого однією квадратурою визначається In ц, а потім і \і.
Зрозуміло, що рівняння (37) має зміст лише в тому випадку, коли вираз
\ /dp 8Q\
-рг /-з ^~\ не залежить від ц, а залежить лише від х.
Q \ ду ду )
. 1 І дО дР \ . .
Аналогічно якщо вираз -р-і-~ -^—і залежить лише від у і не
залежить від х, то інтегрувальний множник є функцією однієї змінної
у і його знаходять з рівняння
^--M-S-tt)- <м>
Про інші способи побудови інтегрувального множника можна
довідатись з [35].
Приклад
Розв'язати рівняння (х2!/2 — 1) dx -\- 2x3ydy = 0.
О Маємо
дР
Р(х,у) = х*уг-\, -0у- = №у\
Щ
0_(х,у)=;2х*у, -^-=6x*i/.
Оскільки рівність (ЗО) не виконується, то задане рівняння не є рівнянням у пов-
\ І дР dQ\ — 4x*y 2
них диференціалах. Проте -q- і -д— — ~^~) = 2х3ц = ~ ~' тому РШНЯНІІЯ
440
має інтегрувальний множник, який залежить лише від х. Складаємо рівняння (37) і
розв'язуємо його:
d in u 2 С
—571 = -"Г : >П|і = —2Іп|х| + ІЩС|; (і=-^-, СФО.
Візьмемо інтегрувальним мложником функцію |і = —j- і помножимо обидві
частини заданого рівняння на цей множник. Дістанемо рівняння в повних
диференціалах
(--4)
dx + 2xydy = 0.
Розв'язуючи це рівняння (див. попередній приклад), «найдемо, що загальний
інтеграл заданого рівняння має вигляд
1.7. Диференціальні рівняння, нерозв'язувані відносно похідної.
Рівняння Лагранжа і Клеро
Нехай маємо рівняння виду
F (х, у, у') = 0, (39)
яке важко або неможливо розв'язати відносно похідної у'.
Розглянемо деякі інтегровні в квадратурах класи таких рівнянь.
1°. Нехай рівняння (39) залежить лише від у':
Ґ(У')=0. (40)
Якщо алгебраїчне рівняння F (х) — 0 має хоча б один дійсний
корінь х = k, то рівняння (40) має загальний Інтеграл
f^J-O, (41)
де С = довільна стала.
Справді, оскільки рівняння у' = k інтегрується: у = kx + С,
то, підставивши k = -^— в (40), матимемо рівність (41). Можна
показати, що рівняння (40) особливих розв'язків не має.
Приклад
,з .%
Розв'язати рівняння у +«/ +і/ — 3 = 0.
О Оскільки алгебраїчне рівняння х3 + хг + х — 3=0 має дійсний корінь
х = 1, то, згідно з (41), загальний інтеграл заданого рівняння має вигляд
\3 / ., г\2
(l=£; + (l=£)"+(l=£)-,.t
2°. Нехай рівняння (39) не залежить від х:
F (у, у') = 0. (42)
441
Якщо ввести параметр t, то рівняння (42) можна замінити двома
рівняннями:
такими, що
Тоді
8ВІДКИ
0 = Ф(О. У'=У№, <€['.»; <і].
/г(Ф(0.*(0)«іО, /ЄІ'ої 'її-
dx = -%- = -£&-*.
У Ф (0
G-Л + С.
>(0
Таким чином, шукані Інтегральні криві визначаються
параметричними рівняннями
Приклад
і. -і
Розв'язати рівняння у 3 + («/') 3 = 1.
О Нехай у =■ cosa t, у' = sin3 t. Далі маємо
<fy —3 cos» * sin Ш
* = "7" " ШЧ Sctg-fttt,
дс = —3 ^ctgafttt = 3< + 3ctg* + C.
Отже, параметричні рівняння шуканих інтегральних кривих мають вигляд
* = 3f+3ctgf + C, у = cos8/. •
Зокрема, якщо рівняння (42) можна розв'язати відносно у: у _
= Ф (і/'). то за параметр зручно взяти у'. Справді, якщо у" = /, то
у = ф (0, тому
Отже,
' (0 <«
=Р?
+ С, y = tp(t)
— параметричні рівняння інтегральних кривих.
Прикмід
Розв'язати рівняння у У у' — 1 = 2 — у'.
О Розв'яжемо рівняння відносно у і покладемо у" = ft
2— f
442
Далі дістанемо
_Jy___ м _ і
У' ~~ 2. ' УТ^Ї
2 (t - 1) 2
Знаходимо параметричні рівняння інтегральних кривих:
1 „ 2 — t
* = ,/і г +С- У = -
Параметр f тут легко виключити. Для цього з першого рівняння визначимо
1
* = ' + (х — С)я
і підставимо в друге рівняння. Знайдемо загальний розв'язок заданого рівняння:
3°. Нехай рівняння (39) не залежить від у:
F(x,y') = 0. (43)
Як і в попередньому випадку, можна ввести параметр і замінити
рівняння (43) двома рівняннями:
* = ф(0. /=Ф(0. «Є ['о! М.
такими, що
^(Ф(0. ф(0) = 0, *Є№»;*іЬ
Тоді дістанемо
dy = y'dx = y{t)<f>'(t)dt.
Отже, інтегральні криві визначаються, параметричними рівняннями
x = <p(t), y = lap(t)<p'(t)dt + C.
Зокрема, якщо рівняння (43) легко розв'язується відносно х:
х = ф (у'), то за параметр беруть t/ = t. Тоді dy = /ф' (t) dt, звідки
4°. Рівняння виду
у=х<р(у') + у(у').. (44)
де ф, т|) — відомі функції, називається рівнянням Лагранжа.
Зокрема, якщо q> (у) = у", то рівняння (44) набирає вигляду
у = ку'+Цр\у') (45)
і називається рівнянням Клеро.
443
Введемо параметр t = у', тоді рівняння (44) запишеться так:
У = *Ф(0 + ф(0- (46)
Диференціюючи (46) по х, дістанемо
* = Ф(0+(*Ф'(0+Ф'(О)-|г. <47>
або
звідки
ґ-ф(0=(*ф'(0+Ф'(0) Л
dx
(' - ф (0) -^jf = V (0 + Ф' (0- (48)
Рівняння (48) є лінійним відносно невідомої функції х = х (і).
Розв'язуючи його, знайдемо загальний розв'язок х — х (t, C), який
разом з рівнянням (46) визначить шукані інтегральні криві.
Переходячи до рівняння (48), ми ділили обидві частини рівняння
(47) на —. При цьому можуть загубитись розв'язки, для яких —г- =
= 0, тобто t = const. Вважаючи t сталою, бачимо, що рівняння (47)
задовольняється лише в тому випадку, коли t є коренем рівняння
t — ф (/) = 0. Отже, якщо рівняння t — ф (0 = 0 має дійсні корені
t — tit то знайдені вище розв'язки рівняння (44) треба доповнити
розв'язками у = хф (f,) + ф (tt). Якщо ці розв'язки не
утворюються з загального ні за яких значень довільної сталої, то вони є
особливими розв'язками.
Розглянемо рівняння Клеро. Поклавши у' = t, дістанемо
у = xt + ц (t). (49)
Диференціюючи рівність (49) по х, маємо
Якщо — == 0, то t = С, тому з (49) маємо загальний розв'язок
рівняння (45):
у = Сх + яр (С). (50)
Якщо х + т|)' (t) = 0, то дістаємо частинний розв'язок у
параметричній формі:
* = — Ф'(0. y = xt+^(t): (51)
Можна довести, що рівняння (51) — особливий розв'язок рівняння
Клеро, а саме, рівняння обвідної сім'ї прямих (50).
444
Приклад
Розв'язати рівняння у = ху' — у .
О Маємо рівняння Клеро. Загальний розв'язок, згідно з (50), має вигляд у =
= Сх — Са.
Особливий розв'язок заданого рівняння дістанемо з (5і): {/= xt — І1, х= 21,
звідки у = —т—. Це рівняння обвідної сім'ї прямих у ■■
Сх — Са
1.8. Наближене розв'язування диференціальних рівнянь методом
Ейлера
Ми розглянули деякі класи диференціальних рівнянь, які
інтегруються в квадратурах. Є ще кілька малопоширених типів рівнянь,
які можна розв'язати. Проте більшість рівнянь не інтегруються в
квадратурах. Такі рівняння розв'язують наближеними методами.
Ознайомимось з найпростішим із них — методом Ейлера.
Нехай треба знайти розв'язок диференціального рівняння
У' = fix, у)
з початковою умовою у (х0) = у0. Припустимо, що права частина
даного рівняння задовольняє умови теореми Коші про існування і єди-
ність розв'язку. Тоді на деякому відрізку [х0; Ь] існує єдиний розв'я-
8ок у = у (х), який задовольняє дану початкову умову (рис. 8.8).
Розіб'ємо відрізок [х0; Ь] точками х0 < х1 <z х2 <■■■<. хп = Ь
на п рівних частин. Нехай xt — x,_j = Ах, і = 1, 2, ..., п.
Позначимо через Уі наближені значення розв'язку в точках xt і проведемо
через точки Хі прямі, паралельні осі Оу, і послідовно виконаємо такі
однотипні операції. Підставимо значення х0 та у0 у праву частину
даного рівняння і обчислимо кутовий коефіцієнт у' = / (х0, у0)
дотичної до інтегральної кривої в точці (х0; у0). Для знаходження
наближеного значення у1 шуканого розв'язку замінимо на проміжку
(х„; хх) інтегральну криву відрізком її дотичної в точці (х0; у0). При
цьому дістаємо у1 — у0 = / (х0, у0) fo — х0), звідки yt -= у0 +
+ f (х0, Уо) &Х.
Підставляючи значення хх та у1 в праву частину даного рівняння,
обчислимо кутовий коефіцієнт у'~ f (xv У)) дотичної до інтегральної
кривої в точці {хх; ух). Замінивши на відрізку [хх; х2] інтегральну
криву відрізком дотичної, знаходимо наближене значення розв'язку
уг в точці х2: y3 — yx = f (*!, уЛ) (xt —
— kJ, звідки Уі = Уі + f (xlt yj Ax то- #.
що. Таким чином, наближено
інтегральна крива побудована у вигляді ламаної
лінії, яку називають ламаною Ейлера,
а метод її побудови — методом
Ейлера. Наближені значення yt розв'язку
в точках Хі обчислюють за формулою
Уі = */*—і + / (хі-і, Уі-\) А*, яка є Рис. 8.8
ttotti
445
основною розрахунковою формулою методу Ейлера. Точність цієї
формули тим вища, чим менша різниця Ах.
Існують і інші наближені методи розв'язку задачі Коші [35].
1.9. Деякі застосування диференціальних рівнянь першого порядку
Як уже говорилося, в різних сферах людської діяльності характер
задач, які зводяться до диференціальних рівнянь, та методику
розв'язування їх можна схематично описати так. Відбувається деякий
процес, наприклад, фізичний, хімічний, біологічний. Нас цікавить
певна функціональна характеристика даного процесу, тобто залежність
від часу, температури тіла, яке охолоджується, або кількості
речовини, яка утворюється в результаті хімічної реакції, або кількості
бактерій, які вирощуються за певних умов. Якщо повна інформація
про хід цього процесу є достатньою, то можна спробувати побудувати
його математичну модель. У багатьох випадках такою моделлю буде
диференціальне рівняння, одним із розв'язків якого і є шукана
функціональна залежність.
Таким чином, перший етап розв'язування задач з практичним
змістом закінчується складанням диференціального рівняння для
шуканої функції. Це творча і найважча частина розв'язку, тому що
не існує універсального методу складання диференціальних рівнянь.
Кожна задача потребує індивідуального підходу, який грунтується
на знанні відповідних законів (фізичних, хімічних, біологічних)
і вмінні перекладати задачу на умову математики. Математична
зрілість інженера характеризується в основному тим, наскільки
правильно він може математично формулювати практичні задачі, які
пов'язані з його спеціальністю.
Якщо задача зведена до диференціального рівняння, методи
розв'язування якого відомі, то другий етап розв'язку, тобто
інтегрування рівняння, не викликає утруднень.
Розглянемо кілька конкретних прикладів.
Приклади
1. (Про розмноження бактерій.) У сприятливих для розмноження умовах
знаходиться деяка кількість NB бактерій. Знайти залежність збільшення числа бактерій
від часу, якщо швидкість розмноження бактерій пропорційна їхній кількості.
dN
О Позначимо через N (і) кількість бактерій в момент часу /. Тоді —тг —
швидкість розмноження за умовою
dN
-5r = fe/V. k>0.
Коефіцієнт k залежить від виду бактерій та умов, в яких вони знаходяться. Його
визначають експериментально. Інтегруючи знайдене рівняння, дістаємо його
загальний розв'язок: N — Се . З умови N (0) = N0 знаходимо С = W0, тому
N = NBek'. •
446
2. (Про радіоактивний розпад.) Експериментально
встановлено, що швидкість радіоактивного розпаду речовини
пропорційна її кількості в даний момент часу. Вказати закон
зміни маси речовини від часу, якщо при t = 0 маса речовини
дорівнювала пц.
О Нехай m = m (t) — маса речовини в момент часу t.
За умовою
dm
пСа
dt
= — km, k >0, m (0)
де k — коефіцієнт пропорційності. Знак мінус береться
тому, що з часом кількість речовини зменшується.
Розв'язуючи знайдене рівняння, дістаємо, що m = m0e . •
3. (Про охолодження тіла.) Згідно із законом Ньютона,
швидкість охолодження тіла пропорційна різниці між температурою тіла і
температурою навколишнього середовища.
О Відомо, що нагріте до температури Т0 тіло помістили в середовище,
температура якого стала і дорівнює Тг (Т0 > /J. Знайти залежність температури тіла від
часу.
О Нехай в момент часу t температура Т тіла дорівнює Т (<)• За умовою
dT
dt
= _fe(T — 7\), k>0; Г(0):
(знак мінус вказує на зменшення температури). Відокремлюючи змінні та інтегруючи,
маємо
„-А*.
Г = Г1 + (Г0-Г1)е-
-ft/
Т = Т± + Се-
4. (Про витікання рідини з циліндра.) Циліндричний резервуар, у дні якого в
отвір, заповнено рідиною Знайти час <„, за який рідина витече з резервуару, якщо
висота стовпа рідини дорівнює Н, радіус циліндра — г, площа отвору — S.
О Скористаємось законом Торічеллі, згідно з яким для малих отворів швидкість
витікання рідини знаходять за формулою v = Vlgh, де h — висота стовпа рідини
иад огвором, g — прискорення сили тяжіння.
Нехай у момент часу t висота рідини дорівнювала h і за час dt зменшилась на
dh. Вважаючи, що протягом часу dt швидкість витікання була сталою і дорівнювала
V2gh, знайдемо об'єм dv рідини, яка витікла за час dt: dv — Svdt = S Y2ghdt
(рис. 8.9).
З іншого Соку, рівень рідини понизився на dh, тому dv = —nr'dh. Прирівнюючи
елементарні об'єми, дістаємо диференціальне рівняння
звідки
Інтегруючи, маємо
SVr2ghdf = — nr'dh,
dh
dt =
я/*
SV2g Vh '
2nr* _
Vh + C.
SV2g
З умови h (0) = H знаходимо сталу С =
2я/-»
SVTg
Vh, тому
2я/-« ,_ ._
447
Ця формула виражає залежність часу t від висоти стовпа рідинн ft. Поклавши h = 0,
знайдемо час, за який витече вся рідина:
2лг» У~Н
/Н яг» -|/""2/Г
2b = S У 8
S\ 2g
5. (Про хімічну реакцію.) Внаслідок хімічної реакції між речовинами А та В
масами а та b утворюється третя речовина С. Встановити залежність маси цієї
речовини від часу, якщо швидкість реакції пропорційна добутку реагуючих мас.
О Нехай х = х (t) — кількість речовини С, яка утворилась за час t після почат-
dx
ку реакції. Тоді —г- — швидкість утворення речовини С (швидкість реакції).
at
За умовою
-£- = k(a-x)(b-x), *(0)=0,
де k > 0
стаємо:
коефіцієнт пропорційності. Відокремлюючи змінні та інтегруючи, ді-
ах
■kdt
(х-а)(х-Ь)
1п|д: — а| — 1п|дг — &|
х — а
х — Ь
а х — а
З початкової умови С = — , тому ^
Iі 1 \ dx
k(a — b)t + ln\C\;
pft(o-»l
ЗВІДКИ
х (0 = ab ■
1 —є'
ІЦа-т
Ь — ае
*(о-Ь)/
8. (Про розчин солі.) У резервуарі знаходиться а літрів водяного розчину солЬ
причому в розчині міститься 6 кілограмів солі. У деякий момент часу вмикається
пристрій, який неперервно подає в резервуар т літрів чистої водн за секунду і
одночасно забирає в нього щосекунди п літрів розчину (т > п). При цьому рідина
неперервно перемішується. Як змінюється з часом кількість солі в резервуарі?
О Як відомо, концентрацією с даної речовини називається її кількість, яка
міститься в одиниці об'єму. Якщо концентрація рівномірна, то кількість речовини
в об'ємі v дорівнює cv.
Нехай x=x(t) — кількість солі, яка залишилася в розчині після того, як
пристрій працював / секунд. Кількість суміші в резервуарі в цей момент буде а +
+ (т — п) і, тому концентрація
а + (т — п) t
За час dt з резервуару витікає ndt літрів
розчину, який містить ncdt кілограмів солі.
Тому зміна dx кількості солі в резервуарі
характеризується рівнянням
—dx = ncdt, або —dx ■
nxdt
а -\- (m — n) t
448
Це І є шукане диференціальне рівняння. Відокремлюючи змінні та інтегруючи, ді-
ГТІІІА11Л
станемо
*(<)=C(a+(m— n)t)
Сталу С визначимо з початкової умови х (0) = Ь:
п—т
Ь=Сап-т, С = Ьат~п.
Отже, кількість солі в резервуарі змінюється за законом
x(t) = bam~n (a + (m — n)t)n-m . «
7. (Про силу струму.) Треба знайти залежність сили струму і від часу k в
контурі, який має електрорушійну снлу 8Г, опір R та Індуктивність L, де 9, R, L — сталі.
О Згідно s законом Ома, маємо
di
L-аг + да-вг.
Розв'язуючи це лінійне рівняння заміною і = uv, дістанемо загальний розв'язок
— — / <g
t(t)=Ce L +-R~,
де С — довільна стала. При t = 0 маємо і (0) = 0, тому С = — _ . Отже,
і\
'(0="fl-(l-e L ).
Звідки видно, що сила струму при t-*- + оо наближається до свого стаціонарного зна-
чення і0 = — . ф
R
8. (Про форму дзеркала.) Знайти форму дзеркала, яке збирає в одну точку
пучок променів, які падають на нього паралельно, коли відомо, що форма його поверхні
є поверхнею обертання.
О Виберемо прямокутну систему координат так, щоб промені були паралельні
осі Ох, а точкою, в якій збираються відбиті промені, була точка О (0; 0) (рнс. 8.10).
Нехай у = ф (х) — рівняння осьового перерізу дзеркала площиною Оху; М (х; у) —
точка падіння променя / на дзеркало; Af — точка перетину дотичної ВМ з віссю
Ох. Тоді за законом відбивання Z.NM.0 = ZBMI = а, тому Z.MOP = 2а. Оскільки
tg а = у', і- = tg 2а = _ 7~мТ ' т0 кРива У ~ Ф (■*) задовольняє
диференціальне рівняння
2*/' У
1-У'2 ~ * '
Розв'язуючи його відносно у', дістанемо два однорідних рівняння:
у. = -х + У** + У3 , у. = -X — V1F+P
449
За допомогою у = их знаходимо розв'язок першого рівняння:
Це рівняння в площині Оху визначає сім'ю парабол, симетричних відносно ос! Ох,
фокуси яких знаходяться в точці 0.
Оскільки форма поверхні дзеркала є поверхнею обертання, то, фіксуючи сталу С
1 обертаючи параболу навколо осі, дістаємо шукану поверхню у вигляді параболоїда
обертання:
j,* + z» = 2c(*+-2-). •
Завдання для самоконтролю
1. Що називається диференціальним рівнянням першого порядку?
2. Що називається розв язком диференціального рівняння?
3. Сформулювати теорему Коші про існування та единість розв'язку рівняння
першого порядку.
4. Дати означення загального І частинного розв'язків диференціального
рівняння першого порядку. У чому полягає геометричний зміст цих понять?
5. Що таке особливий розв'язок диференціального рівняння? Який його
геометричний зміст?
6. У чому полягає геометричний зміст рівняння
У' = / (х. У)?
7. Дати означення рівняння з відокремлюваними змінними. Як воно
розв'язується?
8. Дати означення і описати інтегрування однорідного рівняння першого
порядку.
9. Дати означення лінійного рівняння першого порядку та викласти метод його
Інтегрування.
10. Навести рівняння, звідні до лінійних, та викласти методи їх інтегрування.
11. Дати означення рівняння Бернуллі. Як воно розв'язується?
12. Дати означення рівняння Ріккаті. Як його розв'язати, коли відомо
частинний розв'язок?
13. Що називається рівнянням в повних диференціалах? Як воно розв'язується?
14. Що називається інтегрувальним множником? Описати найпростіші випадки,
коли він легко знаходиться.
15. Як інтегруються рівняння F (у') = 0, F (х, у') = 0, F (у, у') = 0,
нерозв'язні відносно похідних?
16. Яке рівняння називається рівнянням Лагранжа і як воно інтегрується?
17. Яке рівняння називається рівнянням Клеро і як воно інтегрується?
18. Описати метод Ейлера наближеного інтегрування рівняння 1/ = f (х, у),
19. Розв'язати рівняння:
a) (y*—xy*)dx + (x* + yx*)dy = 0; б) (у — х) dx + (х + у) dy = 0; в) (х —
-х*)у' + (2х*—1)у = х»; г) у' + ху = xsy»; д) у* (1 + у") = 1; є) у = 2ху" -
20. Знайти криву, яка проходить через точку (4; 2), якщо довжина піддотичної
в кожній її точці дорівнює подвоєній абсцисі цієї точки.
21. Знайти криву, піднормаль якої у кожній точці є середнє арифметичне
координат цієї точки.
22. Через який час температура тіла знизиться до 30 °С, якщо температура
повітря 20 °С і тіло за 20 хв охолоджується від 100 до 60 °С?
450
23. За який час витече вода через отвір площею 0,5 сма на дні конічної лійки
висотою 10 см і кутом при вершині 60°?
Вказівка. Швидкість v витікання води з отвору, що знаходиться на відстані h
від поверхні, знаходиться за формулою v = 0,6 Ylgh, Reg — прискорення снли
тяжіння.
ВідповІдІ.Ю.а) *~[уУ +1п-у = С; б) у* + 2ху — Xа = С; в) у = х +
+ С*уТ^7»: г) 0»(** + 1 + Сех') = і; д) (х — С)я+уі=1, y = ±U є) * =
С 2 2С f*
""рГ + Т'' у = -Г + -Г.іфО;уш=0. 20. у=У~х. 21. (* - у)* (х + 2у) =
в: С. 22. 60 хв. 23. 12,5 с.
і 2. ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ ВИЩИХ ПОРЯДКІВ
2.1. Основні поняття і означення. Задача Коші
Розглянемо диференціальні рівняння, які містять похідні вищих
порядків. Порядок найвищої похідної невідомої функції, що
входить у диференціальне рівняння, називається порядком цього
рівняння. Зокрема, диференціальне рівняння л-го порядку має вигляд
F(x,y,y', ..,yln)) = 0, (52)
де х — незалежна змінна; у — у (х) — невідома функція; F —
відома функція.
У рівняння п-го порядку (52) похідна л-го порядку ут має
справді входити, тоді як наявність у ньому решти змінних, тобто х,
У, ••» Уп~'. необов'язкова.
Рівняння (52), не розв'язане відносно старшої похідної у<п\
навивається неявним диференціальним рівнянням.
Нормальним або явним диференціальним рівнянням п-го порядку
називається рівняння (52), розв'язане відносно і/*"):
УІП)=Ї(Х,У,У' У(П-\ (53)
Розглядатимемо в основному саме такі рівняння.
Розв'язком рівняння (53) на деякому інтервалі (а; Ь) називається
п разів неперервно диференційовна на цьому інтервалі функція q> (x),
яка при підстановці в дане рівняння обертає його в тотожність по
х Є (а; Ь), тобто
V х Є (а; Ь): Ф(п) (х) = /(х,ф (х), q>' (x), ..., 4TJl) (ж)).
Графік розв'язку диференціального рівняння (52) або (53)
називається його інтегральною кризою.
Для диференціальних рівнянь вищих порядків, як і для рівнянь
першого порядку, розглядається задача Коші або задача з початковими
умовами. Для рівняння (53) ця задача ставиться так: серед усіх
розв'язків рівняння (53) знайти такий розв'язок у = у (х), х £ (о; Ь),
451
який при х = х0 Є (а; Ь) задовольняв такі умовні
У (х0) = у0, у' (х0) =у'0, ... , у^~1) (Х0) » уК~1\
або
У U-ж. = У» У U=x„ =у'о J/(n~1) |*=,. = ЛІГ0. (54)
Дв {/о» Уо. •••» f/o*-0—довільні наперед задані дійсні числа.
Умови (54) називають початковими умовами рівняння (53).
Зокрема, для рівняння другого порядку
y"=f(*,y,y') (55)
початкові умови при х = х0 мають вигляд
У \х=х0 = Уо, У' \х=х, = УО- (56)
Існування і единість розв'язку задачі Коші визначаються такою
теоремою Коші.
Теорема 2. Якщо функція f (x, у, у', ..., у'"-1)) і її частинні
похідні по аргументам у, у', ...,у^п~1) неперервні в деякій відкритій області
G cz Rn+i, то для всякої точки (х0, у0, у0, .... Уо"~1)) 6 G існує єдиний
розв'язок у = у (х) рівняння (53), який задовольняв початкові умови
(54).
Приймемо дану теорему без доведення. Слід звернути увагу на
те, що в цій теоремі мова йде про единість розв'язку в (п +
^-вимірному просторі: інакше кажучи, единість розв'язку рівняння (53)
з умовами (54) на відміну від диференціального рівняння першого
порядку не означає, що через задану точку (х0; у0) проходить лише
одна інтегральна крива рівняння (53). Так, для рівняння (55)
единість розв'язку з умовами (56) означає, що через точку (х0; у0)
проходить лише одна інтегральна крива рівняння (55) з кутовим
коефіцієнтом дотичної в цій точці, який дорівнює tg о ■= уо (рис. 8.11).
Проте через цю точку можуть проходити й Інші інтегральні криві,
але з іншим нахилом дотичної.
Нарешті, зупинимось на поняттях загального та частинного
розв'язку рівняння (53). Як ми вже бачили, загальний розв'язок
рівняння першого порядку знаходиться за допомогою операції
інтегрування і містить одну довільну сталу. В загальному випадку
розв'язок диференціального рівняння п-го порядку знаходиться в
результаті п послідовних інтегрувань, тому загальний розв'язок рівняння
(53) містить п довільних сталих, тобто має вигляд
у = ф (х, Clt С2, .... С„). (57)
Якщо загальний розв'язок знаходиться в неявній формії
0(xtCltCv .... С„)=0, (58)
то його називають загальним інтегралом рівняння (53).
452
Х<7 X
Частинний розв'язок або частинний інтеграл у. -.
знаходять із загального, якщо у співвідношенні (57) * У'/'
або (58) кожній довільній сталій Clt С2, ..., С„
надати конкретного числового значення. З погляду
геометрії загальним розв'язком рівняння (53) є п-
параметрична сім'я інтегральних кривих, залежних
від п параметрів Clt С2, ..., С„, а частинний
розв'язок — окрема крива з цієї сім'ї.
Зауважимо, що не кожний розв'язок рівняння
(53), який містить п довільних сталих, є загаль- Рис- 8-11
ним розв'язком. Розв'язок (57) диференціального
рівняння (53), який містить п довільних сталих, називається
загальним розв'язком, якщо можна знайти такі єдині сталі Q = С10, Сй =
= С20, .... С„ = С„0, що частинний розв'язок у = ф (х, С10, С20, •••
...,С„о) задовольняє початкові умови (54).
Таким чином, розв'язати (проінтегрувати) диференціальне
рівняння п-го порядку — це означає: 1) знайти його загальний
розв'язок; 2) із загального розв'язку виділити частинний розв'язок, який
задовольняє початкові умови, якщо такі умови задані.
2.2. Диференціальні рівняння п-го порядку, які інтегруються в
квадратурах
Рівняння п-го порядку інтегруються в квадратурах дуже рідко.
Розглянемо деякі класи таких рівнянь.
1°. Рівняння виду
У{п)=ї(х). (59)
де / (х) — задана неперервна функція, інтегрується в квадратурах.
Справді, записавши це рівняння у вигляді
-А- (у"-») = / (Х) або d О/"-1») = f (х) dx
та інтегруючи, дістанемо
У1"~1)= $f(x)dx + Clt
де Сг — стала інтегрування.
Аналогічно знайдемо
d{yln-2)) = (jif(x)dx + C1)dx,
ввідки
у1п~2' = J (J / wdx)dx + ci*+c*:
d (y*-*) = ($ ($ f (x) dx) dx + C,x + Cf) dx,
l/n-3> = { (J (\f (x)dx)dx)dx + 4"*2 + Cax + Ct,
453
де Clt С2, C3 — сталі Інтегрування. Продовжуючи далі, після п
інтегрувань знайдемо загальний розв'язок рівняння (59):
У = И* • • Ш / Mdx)dx) . ..)dx +
Сі п—1 , C» п—2 і і /~>
+ 7^гїут* +-J^WTX + ••• + с»-
Приклади
1. Знайти загальний розв'язок рівняння у*4> = cos 2х.
О Послідовно дістанемо
у" = f cos 2xdx + Сг = -L sin 2x + Сц
у' = W-L sin 2x + сЛ d* + Ca = — _L cos 2* + ClX + Cs;
y' = f (-_L cos 2x+ СіД;+ C2) d* + Ca = - -Lsin 2* + -^L *■ + Ca* + C8;
*= \ (~ ~rsin 2x+"T" **+c*x+Cs)d*+c*=
«= "cos 2*+-§-*•+-£_*■ H-C^ + C^ •
lb 0 Z
2. Матеріальна точка маси т падає вертикально під дією сили земного тяжіння.
Знайти закон руху точки, якщо в початковий момент часу точка мала швидкість v0.
Падіння вважати вільним, тобто опором середовища знехтувати.
О Нехай S = S (f) — шлях, який пройшла точка за час t; —— = v, =
at dt*
— W — відповідно швидкість і прискорення руху. На тіло діє сила Р = mg, де g —
прискорення вільного падіння. Тоді за другим законом Ньютона
d к daS
mw = И або = g.
di*
Маємо диференціальне рівняння виду (59) відносно невідомої функції S (f). Згідно
з умовою задачі початкові уьови мають вигляд
S(0)=0, JSM. = v(0)=vB.
at
Послідовно інтегруючи, дістанемо
*±- = gt + Cu S^JP+CJ + C,.
at z
Скориставшись початковими умовами, знаходимо Сх = v0, C2 = 0. Таким чином,
дістаємо відомі з фізики формули для швидкості і шляху при вільному падінні тіла:
v = gt + v0, S = -^L + V- •
454
2°. Розглянемо рівняння виду
F(x,y(n)) = 0. (60)
Якщо задане рівняння можна розв'язати відносно «/<"), то маємо
вже розглянутий випадок 1°. Припустимо, що рівняння (60) можна
розв'язати відносно де:
* = 1(уЛ (61)
Якщо покласти ую = t, то рівняння (61) набере вигляду х = / (0,
звідки dx = f (t)dt. Підставляючи значення yW і dx у тотожність
d {t/-n~l)) = if™ dx, дістаємо
d (yln-l)) = tf (0 dt, yln~l) = J //' (0 dt + Cx. (62)
Інтегруючи рівняння (62) тим самим методом, що й рівняння (59),
і враховуючи щоразу, що dx = f (t) dt, дістанемо розв'язок рівняння
(60) в параметричній формі.
Приклад
Розв'язати рівняння (У)8 + Зу" — х = 0.
О Маємо
у" = t, x=t*+3t, dx= (3<а + 3) dt;
y'= J/(№ + 3)Л + С1=^_ <« + _|. ti + C,;
dy = (4 '4 + 4"<a+Cl)dx = (4 '*+4 'a+Cl) (3'a+3) dt=
=з (-1-,e+4fi+(Ci+4)fl+Ci)dt;
Отже, загальний розв'язок даного рівняння у параметричній формі має вигляд
x=t* + 3t, y=_JLi'+_g_<* + (cl + _3r)r' + 3C1< + C3. •
2.3. Диференціальні рівняння, які допускають пониження порядку
Одним з методів розв'язування диференціальних рівнянь вищих
порядків є метод пониження порядку. Суть його полягає в тому, що
за допомогою відповідної заміни змінної дане диференціальне
рівняння зводиться до рівняння нижчого порядку.
Розглянемо два типи диференціальних рівнянь, які допускають
пониження порядку.
1°. Нехай задано диференціальне рівняння виду
F{x,yik\f+l) іГ)=0, (63)
455
яке не містить явно шуканої функції. Порядок такого рівняння можна
понизити, якщо за нову невідому функцію z = г (х) взяти найнижчу
із похідних даного рівняння, тобто покласти «/<*> = z; тоді у*+! == ?',
v(*+2) __ z"^ ^ уіп) — 2<п-*)і ТОМу дістаємо рівняння
F(x,z,z' z(n-ft))=0.
Таким чином, порядок рівняння понижується на k одиниць. Окремим
випадком рівняння (63) є рівняння
F(W-1>, */<">) =0,
яке за допомогою нової змінної z — у(п_1), z' = у<п) зводиться до
рівняння першого порядку:
F (х, z, z') = 0.
Якщо для цього рівняння вдається знайти загальний розв'язок z =■
= z (д:, CJ, то приходимо до рівняння i/O-d = z (x, CJ виду (59),
яке інтегрується в квадратурах.
Приклади
1. Розв'язати рівняння у" + Зі/ = є .
О Покладемо г= у', тоді г' = у" і маємо лінійне рівняння першого порядку
відносно невідомої функції г = г (х):
г' + 3z = е2х.
Розв'язавши це рівняння, знайдемо z (х) = Схе х -(- —- е2х, тоді у' = ^е- х -f-
5
+ —-е2х, звідки
5
</ = —|-e-3'+-fe2' + C2. «
2. Тіло маси m падає вертикально з деякої висоти без початкової швидкості. При
падінні тіло зазнає опору повітря, пропорційного квадрату швидкості тіла. Знайти
закон руху тіла.
О Нехай S = S (t) — шлях, пройдений тілом за час t від початку руху — =
at
= а. —— = w — швидкість і прискорення руху. На тіло діють силн: Р = mg — вага
dt%
тіла (в напрямі руху) і F= to? = fe|___ І — опір повітря (проти напряму руху).
J2 0 / J p \2
За другим законом Ньютона маємо: mw = Р — F або т і—r. = mg — k 1 І ,
де k > 0 — коефіцієнт пропорційності.
Маємо диференціальне рівняння другого порядку, яке не містить явно невідомої
функції S (<). Згідно з умовою задачі дістаємо такі початкові умови:
S (0) = 0. dS(0) = v (0) = 0.
456
Покладемо —— = v, тоді —— = —~ і дістаємо рівняння
at dP at
mJ!L=mg-kv* або -!?-JlL = a*-v*,
at k dt
де a» = JUS- .
k
Відокремлюючи змінні та інтегруючи, знаходимо
dv k j. 1 , a + v ., , n
— = — dt, In —X— = kt ■+■ Cv.
a2 —t>» tn 2a a — v
Оскільки v (0) •= 0, то Ci — 0; тому In a + ° = 2akt , звідки
a — t) m
akt akt
e m +e m
Таким чнном, для визначення невідомої функції S (/) маємо рівняння
dS
dt
Інтегруючи, дістанемо
S =-?L Inch і/Ж< + С,.
fe r m
Оскільки S (0) = 0, то Са = 0; тому шуканий закон руху має вигляд
. a th і/\*І-*.
У т
S(0=-^lnchl/iS_<
к r m
2°. Розглянемо диференціальне рівняння виду
F(y,y' */п)) = 0, (64)
яке не містить явно незалежної змінної х.
Рівняння (64) допускають пониження порядку на одиницю.
Справді, покладемо у' =•* z, де (на відміну від попереднього випадку)
новою невідомою z є функція від у : z = z (у), тоді за правилом
диференціювання складеної функції маємо:
«"==— == — -^- =—z=z'z
у dx dy dx dy y '
тобто порядок другої похідної понизився на одиницю.
Аналогічно дістаємз
у'" = 4г (г>) = Чу~ ^г> іт =г (v + (г">2)
тощо. Методом індукції можна довести, що порядок усіх наступних
похідних також понижується на одиницю.
4Б7
Таким чином, від рівняння (64) л-го порядку приходимо до
рівняння
F(y,z,z' аг1"-1») =0
(п — 1)-го порядку.
Окремим випадком рівняння (64) є рівняння
F(y.y',!T)=0, (65)
dz
яке підстановкою у = z, у" = -^ z зводиться до диференціального
рівняння першого порядку:
F [у- z-ikz)=°-
Приклади
1. Розв'язати рівняння уу" — 2 («/')* = 0.
О Маємо рівняння виду (65). Поклавши
у' = г. </•=-£-z.
dy
дістанемо
уг-¥- — 22» = 0 або г(у——2г) = 0.
dy \ dy J
Це рівняння розпадається на два:
8 = 0. yJ%L 22 = 0.
dy
З першого маємо у' = 0, звідки у = С. У другому рівнянні відокремлюються зміннії
ЛЗ_ = _™У_. in | г | = 2 In | і/| + In | Сх |, 2 = Сх^, СіЧь0.
Оскільки г= , ^ , то
dx
«L = <v. 4- = ctdx, —L = clX + cf.
Замінивши Сі на —Сх, С2 на —Cj, знайдемо другий розв'язок даного рівнянняі
_ 1
У ClX+Ct '
Отже, задане рівняння має розв'язки
1
у=С та у = -
2. Задана про другу космічну швидкість. Знайти найменшу швидкість, з якою
потрібно кинути тіло вертикально вгору, щоб воно не повернулось на Землю, Опором
повітря знехтувати.
458
О Позначимо через М 1 т відповідно масу Землі І масу тіла. Згідно закону
тяжіння Ньютона, сила F притягання, що діє на тіло, дорівнює F = ft , де г —
га
відстань між центром Землі і центром маси тіла; k — гравітаційна стала.
Враховуючи, що иа тіло діють лише снла інерції і сила тяжіння, запишемо
диференціальне рівняння руху тіла:
dfl r» dt*
Знак мінус беремо тому, що з часом швидкість руху зменшується, а це означає,
що прискорення від'ємне.
Знайдене диференціальне рівняння не містить аргументу t, тобто це рівняння
виду (65). Розв'яжемо його з початковими умовами: r = R, - — = v0 при t = 0,
at
де R — радіус Землі; ч„ — швидкість
Покладемо —— = v (/") = v, тоді
at
d*r _ dv
dt2 dt
де v — швидкість руху тіла.
кидання.
_ dv dr dv n
dr dt dr '
Підставляючи ці величини в рівняння, дістаємо
dr
= -kJL.
r*
Відокремлюючи змінні та інтегруючи, знаходимо загальний розв'язок цього
рівняння:
2 '/• т 1
Згідно з початковими умовами на поверхні Землі v (R) = ti0, тому
г _ 4 kM
^1 S- Б~ •
Підставивши знайдене значення Ct в загальний розв'язок, дістанемо —д— =
-*М4--т-)-—
kM І 4 kM \ п
-т-+[——іг)>0'
За умовою задачі вихід тіла Із гравітаційного поля Землі означає, що г -*■ оо при
kM . .
t -*■ оо. Оскільки -*■ 0 при г -»- оо, то одержана нерівність виконуватимегься
для довільного г лише у випадку, коли
о§ kM ^- , 2^ 2kM
—— ^ 0 або їй > —-— .
2 tf ° R
459
Із закону тяжіння випливає, що прискорення вільного падіння дорівнює
На поверхні Землі г = R, тому
,И-Л_™
Отже, швидкість кидання повинна задовольняти нерівність
.3 ^ 2kM = 2gR або ^ > ^2ІІГ.
Оскільки g ="981 см/с2, Я = 63 • ІО7 см, то найменша швидкість кидання, яка
забезпечить вихід тіла із гравітаційного поля Землі (друга космічна швидкість),
дорівнює v0 = V 2gR = 11,2 . 105 см/с =11,2 км/с. •
Завдвння для самоконтролю
1. Що називається диференціальним рівнянням n-го порядку? Як визначити
порядок диференціального рівняння?
2. У чому полягає задача Коші для диференціального рівняння n-го порядку?
3. Сформулюйте задачу Коші і теорему про існування та єдиність розв'язку
для рівняння у" = / (х, у, у').
4. Що називається загальним розв'язком рівняння n-го порядку? Як знайти його
окремий розв'язок?
5. Як інтегруються рівняння і/п) = / (х) та F (х, і/"') = 0?
в. У чому суть методу пониження порядку диференціального рівняння?
7. Як звести до рівнянь першого порядку рівняння / (х, у', у") = 0 та
/ (У. if. УІ = 0?
8. Розв'язати рівняння:
а) У'" = (х™2)ь . якщо у (0) = 1, у' (0) = 2, у" (0) = - 1;
б) У" + у' tg х = sin 2х; в) у'" = (у")*; г) 2 («,')* = ({/-!) /•
Відповіді. 8. а) у^——^-—^.x* + ^-x + -^-;6)y = -x-
-^-sin2x4-C1smx + Cll; в) y=(x+Cj\n\x + C1\ + Cix + C3; г) (*-f-Cx) ({,-
- І) = С2.
б 3. ЛІШЙШ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ
ВИЩИХ ПОРЯДКІВ
3.1. Основні означення і поняття
Рівняння виду
Ь0(х)Уіт + Ь1{х)у(п-1)+ ••• +Ьп(х)у = <р(х), (66)
де Ь0 (х), Ьх (х), ..., Ьп (х), ф (х) — задані функції, називається
лінійним диференціальним рівнянням n-го порядку.
460
Термін «лінійне рівняння» пов'язаний з тим, що рівняння (66)
містить невідому функцію у = у (х) і всі її похідні лише в першому
степені.
Функції bt (x), 1=0, 1, ..., п, називаються коефіцієнтами даного
рівняння, а функція ф (х) — його вільним членом. Якщо вільний член
Ф (х) тотожно дорівнює нулю, то рівняння (66) називається
однорідним, якщо ф (х) ф 0, то рівняння (66) називається неоднорідним.
Коефіцієнт Ь0 (х) ф 0 в своїй області визначення, бо в противному
разі рівняння (66) не було б рівнянням n-го порядку. Поділивши дане
рівняння на Ь0 (х), дістанемо
У(п) + аЛх)у(п-п+ ••• +an{x)y = f{x), (67)
де
«lW~J$. /-1.2, ....»: /<*)--£§-.
Таким чином, диференціальне рівняння виду (66) завжди можна
ввести до виду (67). У зв'язку в цим ми надалі розглядатимемо лише
такі рівняння.
Якщо в деякому інтервалі (а; Ь) (скінченному чи нескінченному)
коефіцієнти at (х) і вільний член / (х) — це неперервні функції, то
рівняння (67) при будь-яких початкових умовах
V (*о) = V» У' (х0) - Уо f/(n_1) (*„) = yV~l\ x0 б (а; Ь), (68)
має єдиний розв'язок, який задовольняє ці умови.
Справді, записавши рівняння (67) у вигляді «/<"> •= f (х) — а1 (х) X
X £/<"—')—... — ап (х) у, бачимо, що воно задовольняє всі умови
теореми 2. Можна довести, що розв'язок рівняння (67), який задовольняв
умови (68), існує і єдиний на всьому інтервалі (а; Ь) (для рівняння
(66) умови теореми 2 можуть не виконуватись в тих точках, де Ь0 (х) =
*= 0).
Надалі вважатимемо, що коефіцієнти І вільний член рівняння
(67) на деякому інтервалі (а; Ь) є неперервними функціями.
3.2. Лінійні однорідні диференціальні рівняння другого порядку
Розглянемо лінійне однорідне рівняння другого порядку
у" + а1(х)у' + а2(х)у-=0 (69)
і встановимо деякі властивості його розв'язків.
Очевидно, одним з розв'язків рівняння (69) є{/ = 0. Цей розв'я-
вок називають нульовим або тривіальним. Надалі під задачею розв'я-
еання однорідного диференціального рівняння розумітимемо задачу
відшукання Його нетривіальних розв'язків.
461
Теорема 1. Якщо функції у1 (х) та у2 (х) — розв'язки рівняння
(69), то розв'язком цього рівняння є також функція
У = СіУі(х) + С2у2(х), (70)
де Clt Ca — довільні сталі.
О Підставивши функцію (70) в рівняння (69), матимемої
Cd/Ї (*) + С2у2 (х) + ах (х) (Сху\ (х) + С2у2 (х)) +
+ й2 (х) (Сіі/і (х) + С2у2 (х)) =
= Q [уі (х) + аг (х) у\ (х) + а2 (х) уг (х)] +
+ С2 \у2 (х) + аг (х) у\ (х) + аа (х) уг (х)].
Оскільки ух (х) та у2 (х) — розв'язки рівняння (69), то вирази в
квадратних дужках тотожно дорівнюють нулю, а це означає, що функція
(70) є розв'язком рівняння (69). #
Функція (70) містить дві довільні сталі і є розв'язком рівняння
(69), тому природно виникає запитання: чи неєрозв'язок (70)
загальним розв'язком рівняння (69)? Щоб відповісти на це запитання,
введемо поняття лінійної залежності і лінійної незалежності функцій.
Функції уг (х) і у2 (х) називаються лінійно незалежними'на
проміжку (а; Ь), якщо тотожність
а-\Уі(х)+о.2у2(х) = 0, (71)
де аи а2 — дійсні числа, справджується тоді і тільки тоді, коли
ах = а2 = 0.
Якщо хоча б одне з чисел ах чи а2 відмінне від нуля і виконується
тотожність (71), то функції уі (х) і у9 (х) називаються лінійно
залежними на проміжку (а; Ь).
Неважко переконатись, що функції у± (х) і у2 (х) тоді і тільки
тоді лінійно залежні на проміжку (а; Ь), коли існує таке стале число
К, що для всіх х Є (а; Ь) виконується рівність
■jJ§- = *. тобто у1(х) = ^,(х).
Інакше кажучи, дві функції тоді і тільки тоді лінійно залежні,
коли вони пропорціональні. Наприклад, нехай у1 (х) = х, у2 (х) =
«= 2х, Уз (х) = х2, тоді функції у1 (х)та у2 (х) лінійно залежні, а ух (х)
і у3(х)— лінійно незалежні:
№ = і= co„s.; ££=4*co„st.
Якщо ух = у! (х) та у3 = у3 (х) — функції від х, то визначник
Уі Уг
У\ 4/2
= УіУз — УіУз
462
називається визначником Вронського або вронскіаном цих функцій
1 позначається символом W (уи у2) або W (х).
Теорема 2. Якщо функції уу (х) та у9 (х) — диференційовні і
лінійно залежні на проміжку (а; Ь), то визначник Вронського на цьому
проміжку тотожно дорівнює нулю.
О Нехай, наприклад, в тотожності (71) ах Ф 0, тоді уг = — — у»;
тому
V х£(а;Ь): W(yltya) =
а,
—£ у* у*
а, ' #
-- У2 У2
= 0.
Теорема 3. Якщо функції уг (х) та у9 (х) — лінійно незалежні
розв'язки рівняння (69) на проміжку (а; Ь), то визначник Вронського
цих функцій в жодній точці даного проміжку не дорівнює нулю.
О Доведемо теорему методом від супротивного. Припустимо, що
існує точка х0 £ (а; Ь), в якій W (х0) = 0.
Складемо систему рівнянь:
(Мі (*о) + КУт. (*о) = 0, (?2)
\КУі(х0) + КУ2(х0) =0,
де Я,г, Я,2 — невідомі числа, а ух (х), у2 (х) — розв'язки рівняння (69).
Оскільки визначник системи (72) W (х0) = 0, то вона має ненульо-
вий розв'язок. Позначимо його через аг, а2 (серед чисел alf a2 хоча
б одне число відмінне від нуля) і введемо функцію
Y(x) =аіУі(х)+а2у2(х).
Ця функція за теоремою 1 є розв'язком рівняння (69), причому,
вгідно з системою (72), задовольняє початкові умови
Y(xo) = 0, К'(лд = 0. (73)
Проте функцією, яка задовольняє і рівняння (69), і початкові умови
(73), є також функція у (х) =» 0. Оскільки для диференціального
рівняння (69) виконуються всі умови теореми Коші про існування і
єдиність розв'язку, то розв'язки Y (х) та у = 0 збігаються, тобто
аіУі (*) + а2у2 (х) == 0.
Ця рівність означає, що розв'язки ух (х) та у2 (х) є лінійно залежні
на проміжку (а; Ь). Дійшли суперечності. Отже,
Vx£(a;b): \Р(х)фО. •
З теорем 2 і 3 випливає такий критерій лінійної незалежності
розв'язків диференціального рівняння: для того щоб розв'язки
ух (х) та у3 (х) рівняння (69) були лінійно незалежними на заданому
463
проміжку, необхідно і достатньо, щоб визначник Вронського не
дорівнював нулю хоча б в одній точці даного проміжку.
Тепер ми можемо дати відповідь на поставлене раніше запитанні.
Встановимо умови, за яких функція (70) буде загальним розв'язком
рівняння (69).
Теорема 4. (Про структуру загального розв'язку однорідного
рівняння.) Якщо функції уі (х) і yt (x) — два лінійно незалежні на
проміжку (а; Ь) розв'язки рівняння (69), то функція
У = С1у1(х)+СіУі(х), (74)
де Сі і С8 — довільні сталі, є його загальним розв'язком.
О Згідно з теоремою 2 функція (74) є розв'язком рівняння (69)
за будь-яких значень сталих Сх і Са. Щоб довести, що цей розв'язок
загальний, покажемо що з нього можна виділити такий єдиний
частинний розв'язок, який задовольняє довільно задані початкові умови
У (*о) = #о. У' (Хо) = Уо' (75)
де х0 є (а; Ь).
Підставивши початкові умови (75) в рівність (74), дістанемо
систему лінійних алгебраїчних рівнянь:
СіУ! (Х0) + Ctya (Хо) = #0,
Сіу[(х0)+Сау'2(х0) =уо,
в якій Сх та С2 — невідомі числа. Визначником цієї системи є
визначник Вронського W (х0). Оскільки ух (х) та у3 (х) — лінійно
незалежні функції, то згідно з теоремою 2 W (x0) *fi 0, тому дана система
має єдиний розв'язок С1 = С10 і С3 = С80. Розв'язок у = С10Уі (х) +
+ С20г/2 (х) і є тим частинним розв'язком рівняння (69), який
задовольняє початкові умови (75). #
Як уже говорилося, далеко не всяке диференціальне рівняння
другого порядку розв'язується в квадратурах. Те саме стосується
лінійного рівняння (69) із змінними коефіцієнтами аг (х) і а2 (х).
Проте якщо відомий один части чний розв'язок рівняння (69), то можна
знайти і загальний його розв'язок.
Теорема 5. Якщо відомий який-небудь частинний ненульовий
розв'язок рівняння (69), то це рівняння розв'язується в квадратурах.
О Нехай ух = ух (х) — ненульович розв'язок рівняння (69).
Покладемо у = ууг, де г — невідома функція від х, тоді у' *= у\г + у^,
у" = у[г + 2y\z' + У*?- Підставляючи значення у, \f та у* в рівняння
(69), дістанемо
{у\ + аі (х)4/1 + а, (х) Уі}г + (2у\ + а1 (х) уг) г + ухгя = 0.
Оскільки у1 — розв'язок рівняння (69), то вираз у фігурних дужках
464
дорівнює нулю, тому останнє рівняння набирає вигляду
(2y'i+a1(x)y1)z' +Уіг" = 0-
Покладемо г' = и (х), де и — нова невідома функція від х.
Приходимо до рівняння з відокремлюваними змінними:
и'Уі + (2у[ + йі (х) yd u = 0.
Маємо
du 2y'l+a1(x)yl с -fcewx
— = * ' "-If*
Оскільки z' = u та у = ухг, то
с і —£fli(*)<<*
У = СіУі \ —г є dx + C2ylt
де С1 і С2 — довільні сталі. •
Приклади
1. Довести, що функції ух = є2* і уа = е~2х є лінійно незалежними розв'язками
рівняння у" — 4у = 0. Знайти загальний розв'язок цього рівняння.
О Підставляючи функції уі та р2 в задане рівняння, впевнюємося, що кожна з них
обертає рівняння на тотожність, отже є його розв'язком. Оскільки "1 =* е4х Ф
Уг
•£ const, то функції ух та у% — лінійно незалежні. Тоді, згідно з теоремою 3,
загальний розв'язок цього рівняння запишеться у вигляді у = Схе2* + С2е—2х, де Сі,
С2 — довільні сталі. •
2
2. Розв'язати рівняння у" + —— у' + у = 0, яке має частинний розв'язок
sin х
О Згідно з теоремою S покладемо у = yLz, тоді матимемо рівняння z'[2#J +
2 \
Н—— уі І + до" = 0. Підставимо замість у^ його значення і розв'яжемо відносно
функції г:
,[ xcosx — sin* 2sinx\
г'(2 р +—^-) +
Sln x -
—-— z" = 0;
d
2г' cos x + z'sin x = 0; 2z' cos x + -JZ~ (z') sin x = 0;
dz' cos* , . C, „
— = -21ПГГ^ г =~^T- * = c,-clCtg*.
_ sin* _ _ ,
Отже, у = Уіг = ——- (C, — Cx ctg x). «
465
3.3. Лінійні неоднорідні рівняння другого порядку
Розглянемо тепер неоднорідне лінійне рівняння другого порядку
/ +Сі (*) У + Сі (*) »«/(*). (76)
де ах (х), а2 (х), f (х) — задані і неперервні на (а; Ь) функції.
Лінійне однорідне рівняння
У" + а1(х)у' + аа(х)у=0, (77)
ліва частина якого збігається з лівою частиною неоднорідного
рівняння (76), надалі називатимемо відповідним йому однорідним
рівнянням.
Теорема (про структуру загального розв'язку неоднорідного
рівняння). Загальним розв'язком рівняння (76) є сума його довільного
частинного розв'язку і загального розв'язку відповідного однорідного
рмняння (77).
О Нехай у* (х) — частинний розв'язок рівняння (76), а у (х) —
— Схух (х) + Cgi/a (х) — загальний розв'язок рівняння (77).
Переконаємось, що функція
у(х) = у*(х)+у(х) (78)
— розв'язок рівняння (76). Підставляючи функцію (78) в рівняння
(76), дістанемо
У*" М + 7 (х) + а, (х) (у*' (х) + 7 (х)) + а2 (х) (у* (х) + у (х)) =
= {у*" {х) + а, (х) у* (х) + а2 (х) у* (х)) +
+ [7 (*) + «1 (*) 7 (*) + а2 (X) У (X)] =f(x).
Оскільки вираз у квадратних дужках дорівнює нулю, а у
фігурних— функції f (х), то функція (78) є розв'язком рівняння (76).
Покажемо тепер, що функція (78) — загальний розв'язок
рівняння (76). Для цього доведемо, що з розв'язку (78) можна дістати
розв'язок рівняння (76), який задовольняє задані початкові умови
У (х0) = #о. У' (х0) = Уо, (79)
де х0 6 (а; Ь).
Підставивши умови (79) у функцію (78), дістанемо систему рівнянь
СіУі (*о) + Q/a (*0) =Уо—У* (*о);
СіУі (х0) + С2у2 (х0) =у'о+ у* (х0),
де Си С2 — невідомі.
Визначником цієї системи є визначник Вронського W (х0) для
функцій ух (x) та уц (х) в точці х0. Оскільки ці функції лінійно
незалежні, то W (х0) Ф 0. Отже, система має єдиний розв'язок С1 = С10
і С2 = С20. Таким чином, дістали розв'язок у = С10ух (х) + С20уг (х)-\-
+ у* (х) рівняння (76), який задовольняє початкові умови (79). •
466
З теореми випливає, що для знаходження загального розв'язку
рівняння (76) потрібно знайти який-небудь його частинний
розв'язок, а також загальний розв'язок відповідного однорідного рівняння.
Обидві ці задачі є складними. Проте якщо відомий загальний
розв'язок однорідного рівняння (77), то частинний розв'язок рівняння (76)
можна знайти, скориставшись так званим методом варіації довільних
сталих, який належить Лагранжу.
3.4. Метод варіації довільних сталих
Нехай
У(х)=СіУі(х)+С2у2(х) (80)
— загальний розв'язок однорідного рівняння (77), відповідного
рівнянню (76). Замінимо у формулі (80) сталі Сх і С2 невідомими
функціями Сх (х), С2 (х) і підберемо ці функції так, щоб функція
У = С1(х)Уі(х)+С2(х)у2(х) (81)
була розв'язком рівняння (76). Знайдемо похідну
У' = С\ (х) ух (х) + С, (х) у[ (х) + С'2 {х) у2 (х) + С2 (х) у'2 (х).
Накладемо на С1 (х) і С2 (х) умову, щоб
С[ (х) У! (х) + С2 (х) у2 (х) = 0. (82)
З урахуванням умови (82) похідна у' набере вигляду
у' ^С1(х)у\(х)+С2(х)у2(х).
Знайдемо Другу похідну
у" = С[ (х) у\ (х) + Сі (х) ух (х) +
+ С,(х)&(х) + Сл(х)у1(х).
Підставивши значення у, у', у" в рівняння (76), дістанемо
Сі (х) [у\ (х) + Сі {х) у\ (х) + а2 (х) ух (х)} +
+ С2 (х) [у"2 (х) + а, (х) у2 (х) + а2 (х) у2 (х)] +
+ С[ (х) у\ (х) + & (х) у'2 (х) = / (х).
Оскільки ух (х), у2 (х) — розв'язки однорідного рівняння (77),
то вирази в квадратних дужках дорівнюють нулю, а тому
С'і (х) у\ (х) + С2 (х) у2 (х) = / (х). (83)
Таким чином, функція (81) буде тоді частинним розв'язком
рівняння (76), коли функції Сх (х) та Ся {х) задовольнятимуть систему
467
рівнянь (82) і (83):
JC' (х) Уі (х) + С'2 (х) у% (х) = 0; (84)
\С\ (х) у\ (х) + С2 (х) у'і (х) = / (х).
Визначником цієї системи є визначник Вронського W (х) для
лінійно незалежних розв'язків у1 (х) та у% (х) рівняння (77), тому W (х)Ф
Ф 0. Тоді система (84) має єдиний розв'язок Q = ф (х) та С2 = tf (x),
де ф (х) і г|) (х) — деякі функції від х. Інтегруючи ці функції,
знаходимо Сх (х) та С2 (х), а потім за формулою (81) складаємо частинний
розв'язок рівняння (76).
При знаходженні частинних розв'язків може стати корисною
наступна теорема.
Теорема (про накладання розв'язків). Якщо права частина
рівняння у" + ах (х) у' + а2 (х) у = і (х) дорівнює сумі двох функцій: f (x) =
•= /і (х) + h (*)> а Уі (х) та У* М — розв'язки рівнянь
у" + а1(х)у' -\-a2(x)y = f1(x) та у" + а1 (х)у' + а2{х)у = /а(х),
то функція у = ух (х) + у2 (х) буде розв'язком даного рівняння.
О Дійсно,
У\ П + у\ (х) + «і (х) (у[ (х) + у'2 (х)) + а2 (х) (Уі {х) + у2 (х)) =
= У\ (х) + й! (х) у\ (х) + а2 (х) у1 (х) + у'і (х) + at {x) у\ {х) +
+ а2 (х) у2 (х) = /і (х) + h (х) = / (х). •
Це означає, що коли можна знайти розв'язки рівнянь, правими
частинами яких є окремі доданки заданої правої частини, то можна
дуже просто — у вигляді суми розв'язків — знайти розв'язок
даного рівняння.
Приклади
1. Рівняння у" + 4у = * має частинний розв'язок ух = —г-, рівняння у" + 4де =
є*
= є* — розв'язок #2 = . Знайти частинний розв язок рівняння
5
у" + 4х = х + ех.
О Згідно 8 теоремою шуканий розв'язок має вигляд
У = Уі + Уа = -т- +
4 5
2. Знайти загальний розв'язок неоднорідного рівняння
У" + *У = cos2x • якщ0 У — Сіsin 2х + С» cos 2x
загальний розв'язок відповідного однорідного рівняння,
468
О Запишемо частинний розв'язок даного рівняння у вигляді
у = Сх (*) sin 2х + Са (х) cos 2x.
Для знаходження невідомих функцій Сі (х) та С, (х) складемо систему рівнянь виду
С[ sin 2х + С3 cos 2х = 0;
1
2С, cos 2х — 2С, sin 2x
і сил аа — £и« ані і.х = п— ■
1 2 COS 2х '
Розв'язуючи цю систему, знайдемо С[ = -у- , С'2 = — -у- tg 2x. Інтегруючи,
дістаємо
С 1 х f 1 1
сі = \ ~2~ dx =• ~2~. сі = — \ ~2~ 1б 2xdx = ~ In lc°s 2дг|.
Запишемо частинний розв'язок даного рівняння:
X 1
у* = -jj- sin 2* + — cos 2х In І cos 2х |.
Отже,
х І
{/ = Сх sin 2х + С8 cos 2дг + "у sin 2* + -^- cos 2x in | cos 2x \
— загальний розв'язок даного неоднорідного рівняння.
Таким самим буде результат, якщо під час інтегрування Cj та Cj ввести довільні
сталі Сі та С2:
Ci = -jr+Clf С.^^-ІпІсозг^І + С,,;
{/ = І -тг + CJ sin 2* + l-j- in | cos 2х \ ■+■ С2] cos 2x =
х І _
= -у sin 2дг + — cos 2дг In | cos 2х | + Сх sin 2дг + С» cos 2дг. #
Завдання для самоконтролю
1. Що називається лінійним диференціальним рівнянням л-го порядку?
2. Що називається лінійним однорідним рівнянням другого порядку?
3. Що називається визначником Вронського для функції ух (х) та уа (дг)?
Сформулювати і довести властивості визначника W (уі, (/2).
4. Сформулювати і довести теорему про структуру загального розв'язку
лінійного однорідного диференціального рівняння другого порядку.
5. Як знайти загальний розв'язок лінійного однорідного рівняння другого
порядку, якщо відомий його частинний розв'язок?
в. Сформулювати і довести теорему про структуру загального ровв'язку лінійного
неоднорідного диференціального рівняння другого порядку.
7. У чому полягає метод варіації довільних сталих?
8. Довести, що функція у = Схе + С&Г~2ж, де Сі, Ct — довільні сталі, є
загальним розв'язком рівняння у" — 4у = 0.
Вказівка. Перевірити виконання умов теореми З,
469
з
9. Довести, що функція у = Сх sin х + С2 cos х — -«- х cos x є загальним
розв'язком рівняння
у" + у = 3 sin х.
Вказівка. Перевірити виконання умов теореми 5.
10. Задано рівняння (1 — Xі) у" — 2ху" + 2у = 0. Переконатись, що функція
у=хг частинним розв'язком Іцього рівняння, і знайти його загальний розв'язок.
11. Задано рівняння у" — у= х. Пересвідчитись, що функція у = Сіє-* + С&х,
де Сі, С2 — довільні сталі, є загальним розв'язком відповідного однорідного
рівняння, і методом варіації довільних сталих знайти загальний розв'язок даного рівняння.
Відповіді. 10. у = Сі* + С8 (— In '+*± і) ■ 11. у = С1<еГх +
+ С2е*-х.
§ 4. ЛІНІЙНІ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ
ІЗ СТАЛИМИ КОЕФІЦІЄНТАМИ
Як уже зазначалося, основною задачею в диференціальних
рівняннях є знаходження їхнього загального розв'язку. Ця
задача найповніше вивчена для лінійних рівнянь із сталими
коефіцієнтами.
4.1. Лінійні однорідні рівняння другого порядку із сталими
коефіцієнтами
Розглянемо лінійне однорідне рівняння другого порядку
!Ґ + РУ'+ЧУ=0. (85)
де р, q —дійсні числа.
Ейлер запропонував шукати частинні розв'язки цього рівняння
у вигляді
у = є*', (86)
де k — стала (дійсна чи комплексна), яку треба знайти. Підставивши
функцію (86) в рівняння (85), дістанемо
є** (k2 + pk + q) = 0.
Оскільки ef" ф 0, то
ki + pk + q = 0. (87)
Отже, якщо k буде коренем рівняння (87), то функція (86) буде
розв'язком рівняння (85). Квадратне рівняння (87) називається
характеристичним рівнянням диференціального рівняння (85).
Позначимо корені характеристичного рівняння через kx і k2.
Можливі три випадки:
І. &! і k2 — дійсні і різні числа {kx Ф ka);
II. kx і k2 — комплексні числа (А>1>2 = а ± р/);
III. kxi kt — дійсні і рівні числа (£х = k2);
Розглянемо кожен випадок окремо.
470
I. Корені характеристичного рівняння дійсні і різні: £х Ф k2.
У цьому випадку частинними розв'язками рівняння (85) є функції
Уг = e*>*. у2 = є*'*.
Ці розв'язки лінійно незалежні, тому що при £х Ф kt
Jl. = e&t-kjx ф const.
У»
Згідно з теоремою 4 (п. 3.2) загальний розв'язок рівняння (85)
знаходять за формулою
у = СіЄ*-* + С2е*.'. (88)
II. Корені характеристичного рівняння комплексно-спряжені:
Ах = а + р/, k2=a — р7.
Підставивши значення £х та k2 у формулу (86), знайдемо розв'язки
у1 = е<а+Р'>*, у2 = е<а-Р'>*.
За формулою Ейлера
є1* = cos ф + / sin ф
маємо
е(сН-ео* = е« . е'Р* = еа* (cos р* + і sin px);
є«*-ро* = е<" • е-'Р* = еах (cos Px — і sin Px).
Зауважимо, що коли функція г (х) = и (х) + iv (x) є розв'язком
рівняння (85), то розв'язками будуть також функції и (х) та v (x)
Дійсно, підставивши функцію г (х) в рівняння (85), дістанемо:
и" + xfi + p(u'+ v'i) +q(u+ vi) = 0,
або
(ия + ри' + qu) + і (v" + pv' + qv) = 0.
Остання тотожність можлива, коли вирази в дужках дорівнюють
нулю (гл. 7, п. 1.4). Це означає, що функції и та v— розв'язки
рівняння (85). Згідно з цим зауваженням частинними розв'язками
рівняння (85) є функції
Уі = еах sin р*. у2 = еадг cos р#.
Ці розв'язки лінійно незалежні, оскільки
УХ ea*SillB* to/ l
= —zi—£— = 4 fix ф const,
У і ea*cosP* Ьґ
тому загальний розв'язок рівняння (85) запишеться у вигляді
у = еах (Сі sin р* + С8 cos px). (89)
471
III. Корені характеристичного рівняння дійсні і рівні: kx = fe2 =
= k. За формулою (86) дістанемо один з розв'язків:
у = є**.
Другий розв'язок шукатимемо у вигляді ул = це**, де и — невідома
функція від х. Знайшовши у2 і у\ та підставивши їх у рівняння (85),
дістанемо
(u* + 2u'k + uk*) ekx + p(u' + uk) ek* + qmkx = 0,
або
u" + (2k + p) u' + (k* + pk + q)u =0.
Оскільки k — корінь рівняння (87), то ks -f pk + Я =» 0 і за теоремою
Вієта 2ft =. —р, тому 2k + р =- 0 і ц" =* 0, звідки u »= Сгх + С2,
де Сх, Са — довільні сталі. Поклавши Сх = 1, С2 = 0 (нас цікавить
який-небудь розв'язок и (х) & 0), знайдемо другий частинний
розв'язок рівняння (85):
у2 = хе**.
Розв'язки ух та і/а—лінійно незалежні, тому загальний розв'язок
рівняння (85) має вигляд
у = е**(С1 + С2х). (90)
Приклади
1. Знайти загальний розв'язок рівняння
{,"-Б{/' + 6{, = 0.
О Складемо характеристичне рівняння ft2 — 5fe + 6 = 0 і знайдемо його корені
fei = 2, fe2 =■ 3. За формулою (88) шуканий розв'язок має вигляді
у-с^х+с^". •
2. Розв'язати рівняння
О Характеристичне рівняння ft* + 4ft + ІЗ = 0 має комплексні корені fcj 2 =*
= —2 ± Зі. Загальний розв'язок дістанемо ва формулою (89):
у = e~2* (Q sin 3* 4- Cj cos Зх). •
3. Знайти розв'язок рівняння у" -f- 6#' + 9^=0, який задовольняє початкові
умови у (0) =» 0. {/' (0) = 2.
О Знайдемо спочатку загальний розв'язок. Характеристичне рівняння ft* -f-
+ 6fc + 9 =» 0 мав корені ki = fe2 = —3. За формулою (90) маємо загальний
розв'язок у =- е~3д: (Сх + Сах).
Скористаємось початковими умовами. Оскільки
У' = — Зе~3д: (сі + <V) + С2е-3\ то { ^= °* „
звідки Сі =0, С8 = 2.
Знаходимо шуканий розв'язок: у *» 2xe~Sx, •
472
4.2. Неоднорідні диференціальні рівняння другого порядку із
сталими коефіцієнтами. Рівняння із спеціальною правою частиною
Розглянемо неоднорідне диференціальне рівняння
!Ґ+РУ'+ЧУ~Пх), (91)
де р, q — задані дійсні числа, / (х) ^ 0 — задана функція,
неперервна на деякому проміжку (а, Ь).
Згідно з теоремою п. 3.3, загальний розв'язок такого рівняння
являє собою суму частинного розв'язку рівняння (91) і загального
розв'язку відповідного однорідного рівняння. Загальний розв'язок
однорідного рівняння ми вже знаходити вміємо, тому розглянемо
детальніше питання про знаходження частинного розв'язку
неоднорідного рівняння.
Насамперед слід зазначити, що частинний розв'язок неоднорідного
диференціального рівняння (91) можна знайти в квадратурах методом
варіації довільних сталих (п. 3.4). Проте для рівнянь із спеціальною
правою частиною частинний розв'язок можна знайти значно простіше,
не вдаючись до операції інтегрування.
Розглянемо деякі з таких рівнянь.
І. Нехай права частина в рівнянні (91) має вигляд
f(x) = eaxPn(x), (92)
де а — дійсне число, Рп (х) — могочлен степеня п.
Можливі такі випадки:
а) число а не є коренем характеристичного рівняння
& + pk + q = 0. (93)
Тоді диференціальне рівняння (91) має частинний розв'язок виду
у* = Qn (х) є™ = (А0 + Ахх + • • • + Апхп) еах, (94)
де А0, Ах, ..., Ап — невизначені коефіцієнти.
Справді, підставляючи функцію (94) в рівняння (91), після
скорочення на е"х дістанемо
Q"„ (х) + (2а 4- Р) & (х) + (ai+pa+q) Qn (x) в Рп (х), (95)
де Qn {х) — многочлен степеня п — 2, Qn (х) — многочлен степеня
п — 1, a Qn (х) і Рп (х) — многочлени степеня п. Таким чином, зліва
і справа в тотожності (95) стоять могочлени степеня п. Прирівнюючи
коефіцієнти при однакових степенях п, дістанемо систему п 4- 1
лінійних алгебраїчних рівнянь, з якої визначимо п + 1 невідомих
коефіцієнтів А і многочлена Qn (x).
Не зупиняючись далі на доведеннях (див. [241), вкажемо форму,
в якій потрібно шукати частинний розв'язок рівняння (91), залежно
від виду правої частини / (х) цього рівняння;
473
б) якщо число а збігається з одним коренем характеристичне го
рівняння (93), тобто є простим коренем цього рівняння, то частинний
розв'язок рівняння (91) треба шукати у вигляді
у* = xQn (х) е<"; (9G)
в) якщо число а є двократним коренем рівняння (93), то
частинний розв'язок рівняння (91) шукають у вигляді
y* = x2Qn(x)e™. (97)
Об'єднаємо випадки а) — в): якщо права частина рівняння (91)
має вигляд (92), то частинний розв'язок цього рівняння треба шукати
у вигляді
у* = xre™Qn (x),
де Qn (x) — многочлен з невизначеними коефіцієнтами того самого
степеня, що й многочлен Рп (х), аг — число коренів
характеристичного рівняння, які дорівнюють а. Якщо а не € коренем
характеристичного рівняння, то приймаємо г = 0.
II. Нехай права частина в рівнянні (91) має вигляд
/ (х) = е<" (Рп (х) cos р* + Rm (х) sin px), (98)
де Рп (х) — многочлен степеня п, Rm (x) — многочлен степеня т;
а та р — дійсні числа. (Функція (92) є окремим випадком функції
(98) і утворюється з неї при Р = 0).
Частинний розв'язок рівняння (91) треба шукати у вигляді
у* = ХГЄОХ (Qs (х) cos px + ^ (х) sin р^ (ggj
Де Qs (х) та £„ (х) — многочлени степеня s з невизначеними
коефіцієнтами; s — найвищий степінь многочленів Rm (x) та Рп (х), тобто
s = max (n, m); r — число коренів характеристичного рівняння, які
дорівнюють а + р7.
Зокпема, якщо права частина рівняння (91) має вигляд
f(x) = Л cos р* + Б sin р*. (100)
де А, В — відомі дійсні числа, то частинний розв'язок цього
рівняння треба шукати у вигляді
у* =xr(acos$x+bsinf>x), (101)
де а, Ь — невідомі коефіцієнти; г — число коренів характеристичного
рівняння (93), які дорівнюють Рі.
Зауваження. 1. Шукані многочлени Qn (x) у формулах (94),
(96) і (97) мають бути повними, тобто містити всі степені х від 0 до
п, незалежно від того, чи повним є заданий многочлен. Рп (х). Те саме
стосується многочленів Q3 (x) та Ls (x) у формулі (99), причому
невизначені коефіцієнти при одних і тих же степенях х у цих
многочленах повинні бути, взагалі кажучи, різними.
474
Зауваження 2. Якщо права частина рівняння (91) є сумою
декількох різних за структурою функцій виду (92) або (98), то для
відшукання частинного розв'язку потрібно використати теорему про
накладання розв'язків (п. 3.4).
Зауваження 3. Використаний метод підбору окремого
частинного розв'язку рівняння (91) можна застосовувати лише для
певних диференціальних рівнянь, а саме для лінійних рівнянь із сталими
коефіцієнтами і з спеціальною правою частиною виду (92) або (98).
В інших випадках частинний розв'язок треба шукати методом
варіації довільних сталих.
Приклади
1. Розв'язати рівняння у" — 2у' + у = 2х + 3.
О Характеристичне рівняння ft2 — 2k + I = 0 мае_корені kx = fc2 = 1, тому
вагальннй розв'язок однорідного рівняння має вигляд у (х) = є* (Сг + С2х).
Оскільки правою частиною даного рівняння є функція виду Рх (х) е°'ж, причому а = 0,
аф fei, а.Ф ka, то за формулою (94) частинний розв'язок шукаємо у вигляді у* =
= Qi (*) е° х> тобто у* = А + Вх, де А і В — невідомі коефіцієнти. Знайшовши
похідні у*' = В, у*" = 0 і підставивши їх у рівняння, дістанемо
— 2В + А + Вх = 2х + 3.
Прирівнюючи коефіцієнти при однакових степенях, дістаємо систему рівнянь
І В = 2;
І — 2В + А = З,
звідки В = 2, А = 7. Отже, частинний розв'язок даного рівняння має вигляд у* =
= 7 + 2дг, тому
У=~У(*) + У* М = є" (Сі + С,*) +2х + 7
шуканий загальний розв'язок. •
2. Розв'язати рівняння у" — Зу' + 2у = 8е3*.
О Характеристичне рівняння k* — 3k + 2 = 0 має корені fej = 1 і k2 = 2,
тому загальний розв'язок однорідного рівняння має вигляд у = Qe* + С2е2ж.
Оскільки правою частиною даного рівняння є функція виду Р0 (х) е3ж, причому
а = 3, а Ф ku аф fe2, то частинний розв'язок шукаємо у вигляді
у* = Q0 (x) е3дг, тобто у* = Ае3х,
де і4 — невідомий коефіцієнт.
Знайшовши похідні (у*)' = ЗИе3ж, (у*)" = 9Ле3* і підставивши їх у рівняння,
дістанемо
9Ле3* — 9Ие3д: + 2.4е3* = Be3",
звідки А = 4, тому у* = 4e3j( — частинньїй розв'язок даного рівняння, а у =
= de* + C2e2* + 4e3x — його загальний розв'язок. •
3. Розв'язати рівняння
у" + 9у = (54х*+1)е3х.
О Характеристичне рівняння ft2 + 9 = 0 має корені kl2 = ±3і, тому у =
= Сі cos 3* + С2 sin Зх — загальний розв'язок відповідного однорідного рівняння.
475
Права частина даного рівняння має вигляд Ра (х) є8*. Оскільки а = 3, аф ku
а Ф кг, то частинний розв'язок шукаємо у вигляді у* = Q2 (х) є3*, тобто
у* = (А + Вх + Сх2) є3*,
де-Л, В, С — невідомі коефіцієнти. Знайшовши похідні {у*)' та (у*)" і підставившій
їх в дане рівняння, дістанемо після зведення подібних членів і скорочення на є3*:
18С*2 + (18В + 12С) х + (18Л + 6В + 2С) = 54х2 + І.
Звідси
18С=Б4;
18В + 12С=0;
18Л + 6В + 2С=1,
7_
А = ,о § В =3 -~ z, C = о,
отже, у* = ІЗх2— 2х -4- -jg-] є3*— частинний розв'язок даного рівняння, а у =»
7 *
= Сх cos Зх + С2 sin Зх +1 Зх2 — 2х 4- "Та") е3* — загальний розв'язок. •
4. Розв'язати рівняння у" — 2у' — ty = (х + 2) є .
О Характеристичне рівняння k* — 2k — 3 = 0 має корені kj_ = —1, ft2 = 3,
тому загальний розв'язок однорідного рівняння має вигляд у = Схе~х + С2е3ж.
Оскільки правою частиною даного рівняння є функція виду Рх (х) е3х, причому
а = 3 = ft2, а. Ф klw тобто а = 3 є простим коренем характеристичного рівняння,
то згідно з формулою (96) частинний розв'язок треба шукати у вигляді у* =
= xQi (x) е3х, а саме:
у* = х (А + Вх) е3дг,
де А, В — невідомі коефіцієнти.
Знайшовши (у*)' та (у*)" і підставивши у*, (у*)' і (у*)" в дане рівняння, після
спрощень знаходимо
8Вх + 2В + 4 А = х + 2.
Далі маємо
'8В=1;
,2В + 4Л = 2, В =4". Л = -щ-
у* = |-о~х2+ .g xle3*—частинний розв'язок даного рівняиия; у = С1е~х -f-
+ І Са -f- "в- ** + ""їй" * І с3л — загальний розв'язок. •
5. Розв'язати рівняння у" + 4// = 5 sin 2x.
О Характеристичне рівняння ft2 + 4 = 0 має корені A] 2 = ±2і, тому загальний
розв'язок відповідного однорідного рівняння має вигляд # = Сі sin 2х + С2 cos 2x.
Права частина даного рівняння / (х) = 5 sin 2х = 5 sin 2х + 0 • cos 2x є функцією
виду (100), де А = 0, В = 5, Р = 2. Крім того, число р/ = 2і збігається з одним із
коренів характеристичного рівняння, тому згідно з формулою (101) частинний
розв'язок шукаємо у вигляді
у* = х (a cos 2х + b sin 2x),
476
і:
де о, Ь — невідомі коефіцієнти. Знайшовши похідні (у*)' та (у*)" І підставивши
(у*)" та у* в дане рівняння, після спрощень дістанемо
— 4о sin 2x + 4Ь cos 2x = 5 sin 2*.
Прирівнюючи коефіцієнти при sin 2х і cos 2х в лівій і правій частині цієї
рівності, анаходнмо систему рівнянь
(— 4а = б;
1 4Ь = 0,
5 5
звідки а — ——т- , fc = 0. Отже #* = — -т-хсоз2д:— частинний розв'язок да-
_ 5
ного рівняння, а у = у + у* = Сх sin 2* + Q cos 2* — -т~ * cos 2х — загальний
розв'язок. •
в. Знайти розв'язок рівняння у" — 2у' + у = Зех + 2х + 3, який задовольняє
початковим умовам: у (0) = 3, у" (0) = —і.
О Характеристичне рівняння ka — 2k -4- 1 = 0 має корені fex = Л2 = 1, іому
загальний розв'язок відповідного однорідного рівняння має вигляд у = є* (Ct +
+ Сах). Права частина рівняння є сумою двох різних за структурою функцій f1 (х) =»
«= Зе* та /2 (х) = 2х + 3, тому за теоремою про накладання розв'язків частинний
розв'язок даного рівняння дорівнює у* = ^ + #2- де 4*і та #2 — частинні
розв'язки рівнянь у" — 2у' + у= Зе* та у" — 2t/ + у = 2х + 3 відповідно.
Частинний розв'язок першого з цих рівнянь шукаємо у вигляді у* = Xі Ае",
оскільки г = 2 (число коренів характеристичного рівняння, які збігаються з а = і,
дорівнює 2). Підставивши у\, {у\У, (у\)" в перше рівняння, після спрощень знайдемо
2Л ■= 3, тому
Частинний розв'язок другого рівняння шукаємо у вигляді уJ = А + Вх,
•відки {/J = 2х + 7 (див. приклад і). Отже,
У = У + У* +У*2 = еж (сх + С2х + -J" **) + 2х + 7
— загальний розв'язок даного рівняння.
Знайдемо частинний розв'язок, який задовольняє задані початкові умови.
Продиференціюемо загальний розв'язок:
у' = ех (сх + С2 + С8х + Зх + -|- х2) + 2.
Підставивши в загальний розв'язок і його похідну початкові умови х = 0, у=* $•
у' = —1, дістаємо систему рівнянь
(^ + 7=3;
ІС1 + Сї + 2=-1,
звідки Сх = —4, С2 = 1. Отже,
у = еж l-g- *2 + х — 4J 4- 2* + 7
— шуканий розв'язок. •
477
{!
7: Розв'язати рівняння у" + у = igx
О Характеристичне рівняння ft2 + І = 0 має корені ft, 2 = ±/, тому # =
= Сі sin д: + С2 cos х — загальний розв'язок відповідного однорідного рівняння.
Права частина рівняння / (х) = tg x не є функцією спеціального виду (92) або (98),
тому частинний розв'язок даного рівняння методом підбору шукати ие можна
Знайдемо цей розв'язок методом Лагранжа. Складемо систему виду (84) і
розв'яжемо її:
[С, sin х + С2 cos х — 0;
ІCj cos x — C2sin х = tg x,
C,=sinx, C2= — cosx .
Інтегруючи, дістанемо
C± = V sin xdx = — cos x -f- Cj-,
Г sin2* _, f 1— cos** .
C*=-)-^rrdx = -) cosx d* =
= - J ~co7x~ + J cos xdx = ~~ In te("r + "T") + sin*+C2,
де Clt C2 — довільні сталі. При Сі = С2 = 0 дістанемо частинний розв'язокі
{/* = — sin х cos x -f- (sin x — In 1 tg ("2- + -4~) I cos *.
тоді
y= , sin x + C2cosx — cos x In 1 tg I—+ — J
— загальний розв'язок даного рівняння. •
4.3. Лінійні диференціальні рівняння п-го порядку
Застосуємо методи знаходження розв'язків диференціальних
рівнянь другого порядку до рівнянь вищих порядків. Не зупиняючись
детально на теорії (див. [26]), сформулюємо необхідні твердження і
розглянемо приклади.
Нехай маємо лінійне диференціальне рівняння л-го порядку
у^+аіУіп-1)+ ... + апу = 0, (102)
де аь а2, ..., ап — сталі дійсні числа.
Характеристичним для рівняння (102) називається алгебраїчне
рівняння л-го степеня виду
kn + aik"-l+ ... +an-lk + an = 0, (103)
де k — невідоме дійсне чи комплексне число.
Як відомо (гл. 7, п. 1.5), рівняння (103) має п коренів. Позначимо
ці корені через ki, k2, .... kn.
478
Теорема. Кожному простому кореню k рівняння (103) відповідає
частинний розв'язок є** рівняння (102), а кожному кореню k
кратності т> 1 відповідає т частинних розв'язків видує**, xekx. ...,xm-1efcx.
Кожній парі а ± fii простих комплексно-спряжених коренів
рівняння (103) відповідає два частинних розв'язки є0* sin fix та є0" cos fix
рівняння (102), а кожній парі а ± fit комплексно-спряжених коренів
кратності р > 1 відповідає 2р частинних розв'язків виду
є0" sin fix, xe°"sinBx, ... , хр-'є0" sin fix;
eax cos fix, x'eax cos fix, ... , xp-leax cos fix.
Загальна сума кратностей всіх коренів рівняння (103) дорівнює л,
тому кількість всіх частинних розв'язків рівняння (102), складених
згідно з цією теоремою, дорівнює л, тобто збігається з порядком
рівняння (102). Позначимо ці частинні розв'язки через уи у2, .... уп.
Можна показати, що знайдені частинні розв'язки є лінійно незалежними,
і загальний розв'язок рівняння (102) знаходиться за формулою
У = С1у1 + С2уі+ ... +СпУп. (104)
Нехай тепер задано неоднорідне рівняння n-го порядку
Уіп) + «і*/"-" + ••• +в„-іУ' + апу = /(*). (105)
де alt а2, ...,ап — сталі дійсні числа, / (х) Ф 0 — неперервна на
деякому проміжку функція.
Як і для рівнянь другого порядку, загальним розв'язком рівняння
(105) є функція
У = У (х) + у* (х),
де у (х) — загальний розв'язок відповідного однорідного рівняння
(102), а у* (х) — частинний розв'язок рівняння (105).
Побудову загального розв'язку у (х) рівняння (102) з'ясовано.
Проаналізуємо знаходження частинного розв'язку у* (х). Якщо права
частина / (х) рівняння (105) є функцією спеціального виду (98), то
частинний розв'язок цього рівняння треба шукати за формулою (99).
Якщо права частина / (х) не є функцією виду (98), то для знаходження
у* (х) застосовують метод варіації довільних сталих. Стосовно
рівняння (105) суть цього методу така.
Нехай функція (104) є загальним розв'язком відповідного
однорідного рівняння (102). Знаходимо частинний розв'язок рівняння (105)
за тією ж формулою (104), вважаючи, що величини Сх, С2, ..., С„ —
функції від х, тобто покладемо
у*(х) = С1(х)у1+Сі(х)уі+ ... +Сп(х)уп, (106)
де Ct (х), С2 (х), ..., Сп (х) — невідомі функції.
479
Складемо систему рівнянь
С'\Уі + С'оу2 + • ■ • + С'пуп = 0,
С\у\ + С2у2 + • ■ • + Спу'п = 0,
с[уГ2) + с'2УГ2)+ •■• + с;</Г2) = о,
cWri} + c'2y{rl)+ ••- +cW"-l)^f(x). .
Розв'язуючи цю систему, знаходимо похідні d (х), і = 1, 2, ..., п,
а потім інтегруванням і самі функції С; (х). Якщо взяти всі сталі
інтегрування рівними нулю і підставити функції Ct (x) в рівність (106),
то матимемо частинний розв'язок рівняння (105); якщо у рівність (106)
підставити функції Сг (jc) + Ct, де Q — довільні сталі, то зразу
дістанемо загальний розв'язок.
Приклади
1. Розв'язати рівняння (/ * + 4і/3) = 0.
О Характеристичне рівняння kb + 4k3 = 0 має корені kx = k3 = fcs = 0, ft4 =
= 2/, fc5 = —2/. Згідно з теоремою маємо частинні розв'язки: у^= 1, у.2 = х, уя = **,
і/4 = cos 2х, у,, = sin 2x. Загальний розв'язок даного рівняння знаходимо за
формулою (104):
у = С1 + Сіх + Csx2 -f С4 cos 2х -f Сь sin 2х. •
2. Знайти розв'язок рівняння у" — 2у" + у' = 4 (sin ж + cos jc), який
задовольняє початкові умови у (0) = 2, *(0) = 2, (/" (0) = —1.
О Маємо неоднорідне лінійне рівняння третього порядку. Характеристичне
рівняння ks — 2k2 -j- k = 0 має корені kx = 0, k3 = 1, fc3 = 1. Загальний розв'язок
відповідного однорідного рівняння має вигляд у = Сг + (С2 + С3л:) є . Правою
частиною даного рівняння є функція виду (100), де А = В = 4, р = 1. Оскільки
число 1 • і = і не є коренем характеристичного рівняння (г = 0), то окремий
розв'язок шукаємо у вигляді (101):
у* = a cos * + Ь sin х,
та, Ь — невідомі коефіцієнти. Знайшовши похідні у*', у*" і підставивши їх у дане
рівняння, після спрощень дістанемо
2а cos х -f- 2b si n x = 4 cos x -f- 4 sin ж,
звідки а = fc = 2, тому #* = 2 cos x -f- 2 sin x — частинний розв'язок неоднорідного
рівняння, а
у = 0 + #• = С, + (Са -f- С» є* + 2 (sin jc -f- cos x)
— загальний розв'язок. Продиференціювавши його двічі, знайдемо
у1 = (Са + С8 (1 -f *)) є* -f 2 (— sin x -f cds*);
у' = (C2 + Cs (2 + x)) e* — 2 (cos jc + sin x).
Скориставшись початковими умовами у (0) = 2, у' (0) = 2, #" (0) = —1, дістанемо
480
систему рівнянь:
[Сі + с. + 2-а,
Cs-f-C,-f-2=2,
[C„-f-2C,-2=.-l,
звідки Сі = 1, Cs = —1, Са = 1. Отже, шуканий розв'язок має вигляд
у = 1 -f- {х — 1) є* + 2 (cos jc -f sin jc). •
3. Задача про биття вала. Для швидкого обертання тонкого і довгого"вала
характерне, як показує досвід, таке явище: прн збільшенні кутової швидкості ш вона
досягає такого значення ш = tOj, при якому вал не зберігає прямолінійної форми,
а починає, як кажуть, бити; якщо і далі збільшувати швидкість ш > сі^, то биття
спочатку припиняється, а потім знову виникає прн ш = <ва > (Oj тощо. Швидкості
ч>і, ша, ... називають критичними швидкостями обертання вала. Обчислити ці
швидкості.
О Відомо [7J, що величина у прогину вала, закріпленого в точках х = 0 і х =■= /,
задовольняє рівняння
d*y Ptf
Е,-ах*- = —У'
де £ — коефіцієнт пружності; / — момент інерції поперечного перерізу вала;
Р — вага одиниці довжини вала і g — прискорення сили тяжіння.
Поклавши
V:
Рш'
gEI '
дістанемо рівняння
Його характеристичне рівняння ft4 — q* = 0 має корені ±q, ± qi, тому загальний
розв'язок даного диференціального рівняння має вигляд
У = Ctf*" -f- Сге~*х -f- С„ cos qx -f- C4 sin qx.
На кінцях вал закріплено, тому маємо початкові умови
у<0) = у" № = у (Ц = у" (І) = 0.
які приводять до системи рівнянь
Сх + С„ + С, = 0;
С.+С^-С^ 0;
С,е<" + С„е-0/ + С8 cos ql -f С4 sin ql = 0;
C,e0' -f- Cae-0/ — C„ cos 9Z - C4 sin ql = 0.
Розв'язок Сг = C2 = Cs = C4 = 0 цієї системи відповідає випадку, коли вал
зберігає прямолінійну форму: у = 0.
Знайдемо тепер ті значення q, для яких система рівнянь має ненульові розв'язки.
З перших двох рівнянь маємо Cj = —С2, С3 = 0. Підставляючи ці значений в останні
два рівняння, дістаємо Сі = Са = Cs = 0, С4 sin 9/ = 0. Оскільки С4 ;£ 0, то sin ql =
= 0, звідки
1
ПП
q = —r-, n£N.
481
Скориставшись значенням q, знайдемо шукані критичні швидкості:
Завдання для самоконтролю
1. Що називається лінійним однорідним диференціальним рівнянням дру.ого
порядку із сталими коефіцієнтами?
2. Яке рівняння називається характеристичним? Як його знаходять?
3. Який вигляд має загальний розв'язок лінійного однорідного рівняння
другого порядку із сталими коефіцієнтами, якщо корені характеристичного рівнянияі
дійсні і різні? рівні? комплексні?
4. У чому полягає метод підбору частинного розв'язку диференціального
рівняння з правою частиною виду
/ (де) = е°" (Рп (х) sin р* + Rm (х) cos pjc),
де Рп (х), Rm (х) — многочлени; а, Р — дійсні числа?
Розглянути випадки і навести приклади, якщо:
а) / (де) = Де0"; б) f (х) = A sin р* + В cos р*; в) / (х) = Рп (*); г) / (*) =
= Рп (х) є0*; ц) / (х) = Рп (х) sin р* + Rm {x) cos р*; є) / (x) = eax (A sin p* +
+ В cos p*).
Б. Для яких диференціальних рівнянь застосовний метод підбору?
6. Як знаходиться загальний розв'язок лінійного однорідного рівнниня л-го
порядку із сталими коефіцієнтами?
7. Як знайти частіший і загальний розв'язки неоднорідного диференціального
рівняння л-го порядку із сталими коефіцієнтами?
8. Знайти загальні розв'язки однорідних рівнянь:
а) У" — 7У' + бу = 0; б) у" + V 4- 29у = 0; в) у' + 2у' + у = 0; г) t/v -
— ІЗу" + 360 = у: д) yv +fV = 0.
9. Знайти загальні розв'язки неоднорідних рівнянь:
а) у" — 2у' + у= Xа; б) у" -f- у = sin*— 2е_лг; в) у" + 4у = хsin 2x; г) у" ~
2
-20 = -^г(*а-1); в) ylv + у" = х* + х.
10. Знайти частинні розв'язки рівнянь, які задовольняють задані початкові
умови:
а) у" - Щ1 + 25у = 0,у (0) = 0, у' (0) = 1; б) у" - Ау" + Зу = є5*, у (0) = 0.
у" (0) = 9; в) у™ + у' = 0, у (0) = 2, j,' (0) = 0, у" (0) = -1; г) у" - у' = -3*" +
+ 6,^(0)= 1,і/'(0)= 1,4"(0)= 1.
Відповіді. 8. а) 0 = С,е* -f С,е6*; б) у = е~2* (Сх sin 5* + Са cos 5х);
в) у = е-*(С1 + Са*); г) y = C1eix + Cae-3x+Cse2x+Cit-2x;!Oy=C1+Ctx +
+0^ +Ctsln3x + Cr,cos3x.S. a)y=(Cl + Ctx)ex + x9 + 6x» + 18* + 24; 6) j/=
= C!COS де + Cssinx — є-* —~~2~cos *; в) У—уСі—_o_)cos2jc + ICi! +-7g-)sin 2x;
t)y=СіЄ^* + Сге-^~2х —і-; д) у = Сг + Са* + С3 cos * + С4 siп * - х* + -g-+
+ -J2" Ю. а) 0 = *е5*; б) # =-g-(є* + 22е3х + є5*); в) j, = 1 -)- cos x; г) 0 =
= є* + *».
482
§ б. ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ КОЛИВАНЬ
Лінійні диференціальні рівняння другого порядку широко
використовують при вивченні явищ, пов'язаних з різноманітними
коливаннями.
Нехай у деякому середовищі вздовж осі Ох рухається матеріальна
точка масою т. Припустимо, що на цю точку діють такі сили: сила
/, = —ах (а > 0 — коефіцієнт відновлення), яка намагається
повернути точку до початку координат; сила опору середовища /2 = —Ьх
(Ь > 0 — коефіцієнт опору); зовнішня сила /8 = / (х), напрям якої
збігається з напрямом осі Ох.
Задача полягає в тому, щоб знайти закон х = х (t), за яким
рухається точка. Скориставшись другим законом Ньютона, запишемо
диференціальне рівняння руху
тх" = —Ьх' — ах + /(/)
або
х" + 2hx' + а*х = ф (t), (107)
де
2Л = А, <о* = -2-, ф(0=-М_.
т т ' * \ і т
Якщо ф (t) ф 0, то диференціальне рівняння (107) називають
рівнянням вимушених коливань, а при ф (t) = 0 — рівнянням вільних
коливань.
Зауважимо, що рівняння виду (107) описують механічні
коливання вантажу на пружній ресорі (коливання залізничних вагонів,
автомобілів тощо), малі коливання математичного чи фізичного маятника,
вертикальні та бортові коливання корабля, електричні, звукові та
багато інших коливань.
5.1. Вільні гармонічні коливання
Розглянемо рівняння вільних коливань
х" + 2hx' + (Лс = 0 (108)
Це однорідне диференціальне рівняння другого порядку із сталими
коефіцієнтами. Характеристичне рівняння № + 2hk + и2 «= 0 має
два корені: kifi = —h ± \^h2 — со2. Можливі три випадки.
1°. Коефіцієнт опору більший за коефіцієнт відновлення: h > и,
тоді загальний розв'язок рівняння (108) має вигляд
х = Cie-(h-Yft=&)t _|_ C2e-",+V'^:^r>'.
Графік його за певних початкових умов показано на рис. 8.12, з
якого видно, що ніяких коливань не відбувається, х (t) -*■ 0 при t -*■
-*- +0О, тобто матеріальна точка прямує до рівноваги. Такий рух
називають аперіодичним затухаючим рухом.
483
Пояснити це можна тим, що вплив сили опору, яка гальмує рух,
настільки переважає вплив сили відновлення, яка викликає рух, що
рух затухає раніше, ніж матеріальна точка перейде положення
рівноваги.
2°. Коефіцієнт опору дорівнює коефіцієнту відновлення: h = go,
тоді загальний розв'язок рівняння (108) має вигляд (рис. 8.13)
х = е-м(С1 + С20-
Такий рух також називається аперіодичним. Він не відрізняється від
попереднього в тому розумінні, що х (0 ->- 0 при t -*■ + °°-
3°. Коефіцієнт опору менший від коефіцієнта відновлення: h «<
< to, тоді загальний розв'язок рівняння (108) має вигляд
х = e~w(Cjsin VV — h21 + C2 cos Vvf^h? t). (109)
Поклавши
Cx= A cos ф0, C2 = A sin ф0, и0 = \ґ(и2 — Л2,
перетворимо розв'язок (109) до вигляду
х = Ае~мsin (и0/ + ф0). (ПО)
Тепер уже точка справді здійснює коливання — так звані затухаючі
гармонічні коливання. Величина А називається початковою ампліту-
дою, (о0 = у to2 — /і2 — частотою, Т — періодом, а ф0
—початого
новою фазою затухаючих гармонічних коливань.
Якщо коефіцієнт опору h = 0, то
х = A sin (at -\- ф0), (111)
тобто матеріальна точка виконує звичайні гармонічні коливання.
У випадку, коли h Ф 0, амплітуда коливань дорівнює Аег~ш і, на
відміну від звичайних гармонічних коливань, не є сталою величиною:
Ае~м ->■ 0 при t -*■ +оо. Отже, точка прямує до рівноваги, але не
монотонно, як в попередніх випадках, а коливаючись навколо
положення рівноваги з поступово затухаючими амплітудами.
x(t)>
Рио, 8,13
484
*/У*
Рис. 8,12
Схематичний графік затухаючого гармонічного коливання (при
Фп = 0) зображено на рис. 8.13.
Значення сталих Сх і С2 у формулі (109) або А і ф0 у формулі (ПО)
визначаються з початкових умов — початкового відхилення точки і її
швидкості.
5.2. Вимушені коливання. Резонанс
Нехай в рівнянні (107) зовнішня сила ц> (t) ф. 0, тоді рух точки
описуватиметься лінійним неоднорідним диференціальним рівнянням
другого порядку із сталими коефіцієнтами. Загальний розв'язок
цього рівняння в квадратурах можна знайти методом варіації довільних
сталих.
Розглянемо випадок, коли рух відбувається в середовищі без опору
і на коливальну систему діє періодична зовнішня сила ф (/) = //Х
X sin coj/, тоді рівняння (107) набирає вигляду
х" + а2х = Н sin щи (112)
Загальним розв'язком цього рівняння є сума загального розв'язку
х (t) відповідного однорідного рівняння і якого-небудь частинного
розв'язку х* (0 рівняння (112). _
З формули (111) випливає, що загальний розв'язок х (t) = А X
X sin \wt -j- ф0). Щоб знайти частинний розв'язок х* (t),
розглянемо два випадки.
1°. Нерезонансний випадок: припустимо, що и Ф щ, тобто
частота зовнішньої сили відмінна від частоти вільних коливань. Оскільки
число icoj не збігається з коренями ±іь> характеристичного рівняння
ft» _|_ ш2 _ of TO згідно з формулою (101) частинний розв'язок треба
шукати у вигляді
х* (t) == a cos ю^ + b sin и^.
Знайшовши коефіцієнти а та Ь відомим способом (п. 4.2), дістанемо
х* It) = 5-sin (лЛ,
w соа — а\
тоді загальний розв'язок рівняння (112) має вигляд
WJ
х = A sin (и/ + ф0) -\ =- s'n иі'-
(В1 — COj
Таким чином, частинний розв'язок х* (і) визначає коливання
точки, зумовлене зовнішньою силою, загальний розв'язок х (t) — вільні
коливання, а загальний розв'язок х (t) — коливальний рух, що
утворюється внаслідок складання двох коливань з різними частотами ю і
(!>!. У випадку, коли и та tux близькі за величиною, матеріальна точка
виконує коливання з великою сталою амплітудою.
485
2°. Резонансний випадок: нехай тепер ю = tOj, тобто частота
зовнішньої сили дорівнює частоті вільних коливань. Оскільки ісл1
збігається з коренем ш характеристичного рівняння, частинний
розв'язок треба шукати у вигляді
х* (t) = t(a cos at + b sin at).
Ht
Знаходячи коефіцієнти а та b, дістанемо розв'язок x* (t) = ^— X
x cos cat, тому загальний розв'язок рівняння (112) має вигляд
Ні
x[t) = A sin (at + ф0) к- cos ш*-
З цієї формули випливає, що, як і в попередньому випадку,
маємо коливальний рух, який утворюється внаслідок складання двох
коливань, але з однаковими частотами. Другий доданок загального
розв'язку показує, що амплітуда коливань необмежено зростає при
необмеженому зростанні часу t, тобто матеріальна точка через деякий
час виконуватиме коливання з дуже великою амплітудою, навіть
якщо амплітуда Н зовнішньої сили зовсім мала. Це явище називається
резонансом. Отже, резонанс при коливальному русі настає у тому
випадку, коли частота вільних коливань збігається з частотою
зовнішньої сили. Резонанс відіграє важливу роль у техніці і фізиці. Кожне
пружне тіло (наприклад, будь-яка споруда) має свою певну власну
частоту коливань, яка залежить лише від властивостей тіла. Уявімо, іцо
це тіло під дією зовнішньої сили виводиться із стану рівноваги. Якщо
настає явище резонансу, то дія сили, яка б мала вона не була, може
призвести до руйнування коливальної системи. Тому при
проектуванні різноманітних споруд (будівель, машин, мостів, літаків, кораблів
тощо) особливу увагу звертають на розрахунки міцності споруди,
пов'язані з резонансом. Резонансом пояснюється добре відоме з досвіду
явище, коли невелике «розкачування» пружного тіла (скажімо, моста)
викликає його руйнування.
Завданий для самоконтролю
1. Нехай математичний маятник довжиною / і вагою Р = mg, відхилений від
вертикального положення на кут <р, вільно коливається в середовищі без опору.
Довести, що для малих кутів <р диференціальне рівняння руху маятника має вигляд
d\
lm ~W + mfi<p = °-
2. Електричне коло складається з генератора змінної електрорушійної сили
Е (/), резистора з опором Я катушки індуктивності з самоіндукцією L і конденсатора
з ємністю С. Довести, що диференціальне рівняння коливання заряду q на
конденсаторі має вигляд
Л,1_І,А f (0
dt2 "+" L dt + LC ~ L '
486
3. Коливання корабля навколо поздовжньої осі називається бортовою качкою.
Рівняння малих коливань має вигляд
d2<p
'-dW+Pa(P = 0-
де / — момент інерції: Р — вага корабля: а — відстань від поздовжньої осі до центра
судиа; <р — кут відхилення корабля від горизонтального положення.
Нехай <р (0) = <р0, <р' (0) = 0. Довести, що амплітуда коливань корабля
дорівнює <р0.
4. Нехай коливання точки в середовищі з опором описується рівнянням
х' -f 2hx' -f т*х = sin /.
Довести, що закон руху має вигляд
1 / 2ft \
§ в. СИСТЕМИ ДИФЕРЕНЦІАЛЬНИХ РІВНЯНЬ
У багатьох науково-технічних задачах буває потрібно знайти не
одну, а зразу кілька невідомих функцій, які пов'язані між собою
кількома диференціальними рівняннями. Сукупність таких рівнянь
утворює систему диференціальних рівнянь.
Приклади
1. Нехай матеріальна точка маси т має криволінійну траєкторію руху в просторі.
Потрібно визначити закон руху точки, тобто залежність координат х, у, г від часу /,
коли на неї діє сила F.
Коли
7=Г(0 = (ж; у;г)
—радіус-вектор рухомої точки, то її швидкість і прискорення знаходяться за
формулами (гл. 5, п. 7.5):
7=? (0 = (*': у'; г'), w=? (і) = (х"; у": г").
Сила F, під дією якої рухається точка, взагалі кажучи, є функцією часу,
координат точки і проекцій швидкості на осі координат: F = F (t,r,r'). Тому згідно з
другим законом Ньютона диференціальне рівняння руху точки має вигляд
т7* = ?(/,7,7').
Це векторне рівняння еквівалентне системі трьох скалярних рівнянь:
Ітх" = Fx ('. *. у, г, х', у', г'),
тУ" = Ру ('. *. У. г. х', у', г'),
тг" = Ft (t, x, у, г, х', у', г').
Наведені диференціальні рівняння утворюють систему трьох диференціальних
рівнянь другого порядку відносно трьох невідомих функцій х = х (/), у = у (/), г = г (/).
487
ТІ*
І о —
о^о-
du
Рис. 8.14
2. Розглянемо два електричних
контури. Припустимо, що ці
контури знаходяться в
електромагнітному зв'язку: зміна струму в одному
контурі індукує електрорушійну
силу в другому (рис. 8.14).
З фізики відомо, що за певних
умов індукована напруга в першому
di->
контурі дорівнює — а —S-, а в дру-
dt
гому — а ЛІІ-, де а — коефіцієнт взаємної індуктивності, it = ir (/), /а = /а (/) —
dt
сила струму відповідно в першому і другому контурах. Якщо в обох контурах
відсутня зовнішня електрорушійна сила, то зміна струму в контурах
регулюватиметься диференціальними рівняннями:
1 Р
£-1*1 + #і«'і + -Q- ] iidt + аі2 = 0;
о
1 /
Va + #2*2 + ~с~ \ 'arf' + ш'і = °.
о
або, після диференціювання по /,
W\ + Ki'i + -Q- h + ail = °!
L/2 + Rai2 + -£— і, + ai\ = 0.
Дістали систему лінійних диференціальних рівнянь другого порядку із сталими
коефіцієнтами відносно двох невідомих функцій її (0 та »а (/).
Розглянемо деякі найпростіші системи диференціальних рівнянь.
У цьому параграфі незалежну змінну позначатимемо буквою t, а
невідомі функції — через Хі (t), ха (і), ..., хп (t), або (якщо їх не більше
трьох) через х (і), у (t), z (t).
6.1. Нормальні системи рівнянь
Нормальною системою диференціальних рівнянь називається
система виду
dxi
ДІ —'її ('» Xlt Х2, • • • ' Хп)'
~т* /а \^* хі> Х2> ■ • ■ і хп)і
(113)
dx,
dt
— In ('> Xl' Xg' • • • t Хп)г
488
або
Xk = Ffi\*t xi* x2* • • • і xn)t ft = 1, ^, • • • » ft-
Іншими словами, якщо в лівій частині рівнянь системи (80) стоять
похідні першого порядку, а праві частини рівнянь зовсім не містять
похідних, то така система називається нормальною. Розв'язком
системи (113) називається сукупність функцій xt (t),x2(t), ..., хп (/), які
задовольняють кожному з рівнянь цієї системи.
Важливість вивчення саме нормальної системи випливає з того,
що до неї в багатьох випадках зводяться системи і рівняння вищих
порядків. Наприклад, система другого порядку
х'=2х' + у' — х + у;
у"=у' + х
введенням нових змінних х' = и, у' = v, х" = и', у" = v' зводиться
до нормальної системи
х' = и;
У' = v;
и' = їй + v — х + у\
v' =и + х.
Таким самим способом — введенням нових змінних — всяке
диференціальне рівняння n-го порядку, розв'язане відносно старшої
похідної, зводиться до еквівалентної нормальної системи п рівнянь
першого порядку.
Справді, нехай задано рівняння n-го порядку
4м =/('. У' У' У{п~Х))-
Покладемо
У =* Х1% у' = Ха, ... , ^"-D = Хп,
тоді
У — Х\ = Х2і У = Х2 = Xs, ... і j/ = Хп—\ = Хп> У = Хп.
Дістали нормальну систему
Х[ = Xj-fi. і = І, 2, ... , п— 1; Хп.= f (і. х±, Хі ... » хп),
еквівалентну заданому рівнянню.
Покажемо, що можливий і зворотний перехід: нормальну систему
рівнянь можна замінити одним рівнянням, порядок якого дорівнює
числу рівнянь системи. Нехай задана нормальна система (113). Про-
диференціюємо по / будь-яке, наприклад, перше рівняння:
*«і = JVi_ , J>b_ j£i_ , Jh_ J*t_ , . ЛЬ- dxn
dp dt + dxj, dt "t" dxa dt "t" ~ дхп ~ЗГ'
489
Підставивши в цю рівність значення похідних хи х2, .... хп з
системи (113), дістанемо
Х\ = /"J (t, Xj, Л"3, . . • і Хп).
Аналогічно знаходимо похідні до n-го порядку включно:
dFa , dFt dxx , . dF3 dx„
Xi
di
2_ і dFt dxy ,
дхп di
— rgV* Xlt Xa, . . . , *„),
л[ — Г n \£t Xj, Хф • • ■ , XnJ.
Дістаємо систему рівнянь
X\ = /і (і, Д^і» Я2, • • • • -tfnji
Лі = i*2(*t X-^j ДГ2» • • • і *vj),
(114)
х\ — * п (*> -^і» -^аі ■ • • . Хп).
Якщо з перших п — 1 рівнянь системи (114) знайти (коли це
можливо) змінні
х2 = Фа if, *i. *ь
*з == Фзи> хі' х\<
yC<-l)4
„(1-1)4
І *1 і.
(115)
J"-l>\
*л = фп(Л *1. Xl, ... , xf 1})
і підставити їхні значення в останнє рівняння, то одержимо рівняння
n-го порядку відносно змінної Хі.
х\п)=Ф(і, xlt х\ х\п'\ (116)
Нехай
*! = *,(/, С„ С2 Сп) (117)
(де Сь С2, .... С„ — довільні сталі) — розв'язок рівняння (116). Про-
диференціювавши його п — 1 разів і підставивши значення похідних
Х\, хи ..., х\п~) в рівняння (115), дістанемо
■*2 = Т2 ('і ^1' ^2 ^п)'
Х8=,Ф8(^ Q> Q> ••• > СП)і (118)
гп = г]зп(<, С„ С2 Сп).
Можна довести, що сукупність функцій (117), (118) буде загальним
розв язком системи (114).
490
Для нормальної системи (114) справджується теорема Коші про
існування і єдиність розв'язку: якщо в деякій області G функції fh (t, xlt
хг, .... хп), k = 1, 2, ..., п, системи (114) неперервні разом з усіма
своїми похідними -тг-^-' l,k — 1,2,..., п, то для будь-якої точки (t0, x10, ...
.... хп0) g G існує єдиний розв'язок л:, (t), x2 (t), ..., хп (І), який
задовольняє початкові умови:
хі (^о) = *іо> х2 Co) — xw • ■ ■ > хп (^о) = *по-
Для інтегрування системи (114) можна застосувати метод, за
допомогою якого ця система була зведена до рівняння (116). Цей метод
називають методом виключення змінної.
Приклади
1. Розв'язати систему рівнянь
dx v і
-1г = -7х + у;
dv
-f=-2x-5y.
О Продиференціюємо перше рівняння-
х" = - 7х' + у'.
Підставимо в це рівняння значення похідної у' із другого рівняння системи:
х" = — 7х' + {—2х—5у).
Знайшовши з першого рівняння значення у = х' + 7х і підставивши його в знайдене
рівняння, дістанемо
*"+ 12*' -Ь 37* = 0.
Маємо лінійне однорідне рівняння другого порядку із сталими коефіцієнтами.
Інтегруючи його, одержуємо
* = є-6' (Сх cos / + Са sin t).
Оскільки у = х' + 7х, то
у = — 6е-6' (^ cos / + Са sin /) + е~" (— С, sin / + Ся cos /) +
-J- 7е~6' (Сх cos / + Са sin /) = е~6' ((С! + Са) cos t + (Ca — CJ sin Q.
Отже, загальний розв'язок даної системи має вигляд
* = є-6' (Сі cos / + Са sin 0.
у = е~6' ((Сх + С%) cos t -f (С2 — О sin t). •
6.2. Системи лінійних диференціальних рівнянь із сталими
коефіцієнтами
Нехай задана нормальна система лінійних диференціальних
рівнянь із сталими коефіцієнтами. Для зручності обмежимося трьома
491
рівняннями
-jf = ^x + a$ + asz;
-^- = bxx + b^ + V:
dz
-#- = Cix -r с^ -f- csz,
(119)
де аг, bf, Cj — сталі. Цю систему методом виключення змінних завжди
можна звести до одного лінійного однорідного рівняння третього
порядку із сталими коефіцієнтами. Розглянемо ще один метод
розв'язування системи (119).
Шукатимемо окремі розв'язки системи у вигляді
х = aekt у = ре*', z = у&
м
(120)
де а, р, у, k — невизначені сталі, які треба знайти.
Підставивши функції (120) в систему (119) і скоротивши на
множник є*' ф 0, дістанемо
ka = ага + а20 + asy\
[ ky = ер + ф + csy,
або
(а, — k) а + а2р + а3у = 0;
\bia + (b2-k)p + b3y=0; (121)
сіа + сгР + (cs — k) у = 0.
Дістали алгебраїчну однорідну систему лінійних рівнянь. Щоб ця
система мала ненульові розв'язки, необхідно і достатньо, щоб
визначник системи дорівнював нулю (гл. 1, п. 3.5):
с
Ь.
as
с, — k
0.
(122)
ь1 L2 ^S
Розкривши визначник, дістанемо алгебраїчне рівняння третього
степеня відносно k, яке називається характеристичним рівнянням
системи (119).
Розглянемо випадок, коли рівняння (122) має три дійсні різні
корені ki, k2, ka. Для кожного з цих коренів запишемо систему (121) і
визначимо невідомі al3 Plt Yi; сса. Ра. Уз- аз, Рз. їз-
Можна довести, що загальний розв'язок системи (119) має вигляд
х = С^е*»' + C2a2ek^ + Саа3е*»'; •
у = СхріЄ*.' + C2p2eV -f СзР8е*>'; (123)
[ г = ClYle*.' + С2Їае*.' + CsYse*.'.
492
Випадки, коли рівняння (122) має кратні або комплексні корені,
складніші, і ми їх не розглядатимемо. У зв'язку s цим зауважимо, що
характеристичне рівняння (122) системи (119) збігається з
характеристичним рівнянням диференціального рівняння третього порядку,
до якого зводиться система (119). Таким чином, якщо відомі корені
рівняння (122), то завжди можна знайти загальний розв'язок
рівняння третього порядку, до якого зводиться система (119), а потім і
загальний розв'язок самої системи (119).
Отже, незалежно від структури коренів характеристичного
рівняння, систему (119) завжди можна розв'язати, якщо тільки відомі ці
корені.
Завдання для самоконтролю
1. Що називається нормальною системою диференціальних рівнянь?
2. У чому полягає метод виключення змінних?
3. Що називається характеристичним рівнянням нормальної системи лінійних
рівнянь із сталими коефіцієнтами?
4. Розв'язати системи:
■)
б)
dx 0
-^-=х-у; *(0) = 1, 4,(0)'
dt
dy
dt
+ Зж = sin t\
dx
-jf + y = cos t\
в)
dx
dt
dy
dt
dz
= У + «I
= Jt-f-г;
= Qe"'
C„e-
+ Cae~3'
+ Cae2<
У =
t Z = —
І dt
Відповідь. 4. a) x = cos t — sin t, y = cos t; б) х
= Cte-' + 3Cae-3' -f cos t\ в) x = Cxe-' + Cse2', у =
- (Ct -f- Cs) e~'+ Cae»
Глава О
РЯДИ
Ряди досить широко використовуються в математиці, особливо при
Дослідженні різноманітних технічних проблем, пов'язаних з
наближеним інтегруванням диференціальних рівнянь, обчисленням вначень
Функцій та інтегралів, розв'язуванням трансцендентних та
алгебраїчних рівнянь тощо.
493
Найпростіший ряд— суму членів нескінченної геометричної
прогресії — вперше ввели вчені Стародавньої Греції, зокрема Архімед
застосував такий ряд до обчислення площі параболічного сегмента.
Систематично рядами почали користуватись, починаючи з 17 ст.,
проте теорія рядів була створена лише в 19 ст. на основі поняття
границі в роботах К. Гаусса, О. Коші та багатьох інших учених.
і 1. ЧИСЛОВІ РЯДИ
1.1. Основні поняття та означення. Геометрична прогресія.
Гармонічний ряд
Нехай задано послідовність дійсних чисел
{«п}= ("і. «2. ••• . "„• ••■}•
Рядом називають вираз
Цьому виразу ми не приписуємо ніякого числа, тому що нескінченне
число додавань виконати не можна. Для кожного п£ N покладемо
Sn = щ + и2 + •■• + ип.
Число ип називається га-м членом, а число Sn — п-ю частинною
сумою ряду (1).
Якщо послідовність частинних сум {5„} збіжна і llm Sn = S, то
П->оо
число S називається сумою ряду (1), а ряд називається збіжним.
Символічно це записується так:
00
S = І*! + U, + • • • + Un+ • • • = 2 ""•
п=1
Якщо послідовність [Sn] скінченної границі не має, то ряд (1) наз: -
вається розбіжним.
Приклади
Дослідити на збіжність ряди:
оо
а) 1 + 1+ ... +1+ ... =2 1";
л—1
б) 1- 1 + 1-1+ ... +(_1)"-1+ ... =£ (-І)""1;
її °°
В> ТТ2' + ~2Тз"+ ••• + я(п+1) + — -£ и(я+1) »
ОО
г) a + aq + aq'+ ... + aq"'1 + ... =2 <4"~\ а*=°:
п—1
494
11 4-ї-4- V-L
О а) Розглянемо частинну суму S„ = 1 + 1 + ... + 1 = я. Оскільки llm S„ ■
п=
п-»оо
= llm я = оо, то ряд а) розбіжний.
я-»ов у
б) Випишемо послідовність частинних сум:
Sx = 1. S, = 0. Sa = 1. S« = 0 Sj^, = 1. S2n = 0.
Ця послідовність границі не має, тому ряд б) розбіжний.
в) Знайдемо суму
1 1 1_ 1
S"= 1-2+ 2-3 + 3-4 + n(n+l) =
= 1
П+1 '
Оскільки HmSn = llm (і —-—г-р) = 1, то ряд в) збіжний і сума йо-
л->со п-*оо \ П Т ' /
го S= 1.
г) Це геометрична прогресія з першим членом а і знаменником q. Точніше було
б сказати — ряд, складений з членів геометричної прогресії. Проте для стислості
ряд г) далі називаємо геометричною прогресією. При q Ф 1 маємо
Sn = a + aq + • • • + aqn~l =
а (1 — qn) _ а _ 4
Я
1 —q \ — q 1 — 9
HmSn= . , якщо \q\< 1; UmSn = оо, якщо \q\> 1.
л-»оо ' V n-*oe
Отже, при І q | < 1 ряд г) збіжний, а при | q | > 1 — розбіжний. Якщо q = 1,
то матимемо а+ а + ... + а + ...; lim Sn = lim an = оо, тобто ряд розбіжний.
л->оо л->оо
Якщо q = —1, то матимемо ряд а — а + а — а + ...; S„ = а при непарному л
1 Sn = 0 при парному п, тобто Hm S„ не існує, тому ряд розбіжний.
п-*оо
Таким чином, геометрична прогресія збіжна при | q | < 1 і розбіжна при | q | > 1.
д) Цей ряд називається гармонічним. Покажемо, що він розбіжний.
Відомо (гл. 4, п. 4.2), що { 1 + —1 < є, л Є N, звідси
л1п(і + -М<1; |>1п "д ; — >1п(л+1) — Inn,
тобто,
1>1п2— In 1;
~2->1пЗ— In 2;
495
1
-д->1п4—ІпЗ;
— >іп(л+ 1) —Inn.
Додаючи почленно ліві і праві частини нерівностей, дістанемо S„ > In (п + 1)-
Оскільки iim in (п + 1) = оо, то lim S„ = оо. Отже, гармонічний ряд розбіж-
п-*со п-»оо
НИЙ. О
1.2. Найпростіші властивості числових рядів
Розглянемо деякі властивості збіжних рядів.
ОО ОО
Г. Якщо ряд 2 ип збіжний і має суму S. то ряд 2 С«„ також
л—1 п=1
збіжний і сума його дорівнює, CS (С = const). Іншими словами, збіжний
ряд можна множити почленно на одне і те саме число.
п
О Нехай Sn =«! + «„ + ... + ип = 2 "й.
А=1
оп = Сиі + Си2+ ... +Cun=cj^uh=CSn
*-і
— частинні суми даних рядів. За умовою limS„ = S, тому limo„ =
Л-»ео П->оо
оо
= UmCSn=CS. Отже, ряд £ Сип збіжний і сума його дорів-
"-~ „=,і
нює CS. •
2°. Збіжні ряди можна почленно додавати та віднімати, тобто
оо оо
якщо ряди 2 "п ' 2 v" 3^жні і мають суми відповідно S та а, то збіж-
п—1 л=1
оо
ними є також ряди 2 («„ ± vn) t сули їх дорівнюють S ± о.
п=1
О Нехай
л л оо
sn = 2 "ft> °n = 2 yft- s« = 2 ("* ± yk)
ft=l A—l A—l
— частинні суми відповідних рядів.
Оскільки Sn = Sn±on і за умовою limSn = S, Iimon=o, то
л-»оо п-»оо
limSn = lim(Sn±crJ = S±cr. •
Л-*оо л->оо
3е. //а збіжність ряду не впливав відкидання або приєднання до
нього скінченної кількості членів.
496
О Нехай Sn — частинна сума ряду (1), Ст — сума т відкинутих
членів (число членів п взяте таким великим, що всі відкинуті члени
містяться в Sn), о„-т — сума членів ряду, які містяться в Sn і не
містяться в Ст, тоді Sn = Ст + a„_m; lim Sn = Ст + lim а„_т. Згідно
із знайденою рівністю, границі в лівій і правій частинах одночасно
існують або не існують, тобто ряд (1) збіжний (розбіжний) тоді і тільки
тоді, коли збіжний (розбіжний) ряд без т його членів. •
Розглянемо ряд (1) і покладемо
оо
Гп = Un+i + Un+2 + ■ • • = 2 "*•
А=л+1
Величину гп називають п-м залишком ряду (1), ЇЇ можна
розглядати як суму ряду, який утворюється з ряду (1) після відкидання перших
п його членів.
Якщо ряд збіжний і lim Sn = S, то rn = S — Sn і limrn=0.
л-*оо л-»оо
Справедливе і більш загальне твердження.
4°. Ряд (1) збіжний (розбіжний) тоді і тільки тоді, коли збіжний
(розбіжний) довільний його залишок.
Ця властивість є наслідком властивості 3°
оо
5°. (Необхідна умова збіжності ряду.) Якщо ряд 2 ипзбіжний, то
п=і
lim ип = 0.
Л-ЮО
О Нехай S — сума заданого ряду, тоді lim Sn*=S і limSn—1 =
П-*оо п->оо
п—\
= S, де S„_, =2 «ft- Проте un=Sn — Sn-u тому limun=0. •
A=l "-*~
Умова lim un = 0 є тільки необхідною для збіжності ряду, але не
П->оо
достатньою. Це означає, що існують розбіжні ряди, для яких ця умова
виконується.
6°. (Достатня умова розбіжності ряду.) Якщо lim un Ф 0, то
оо
ряд 2 ип розбіжний.
л=1
Дійсно, якби даний ряд був збіжний, то за властивістю 6е його
загальний член прямував би до нуля при п -*■ оо, що суперечить умові.
Приклади
Дослідити на збіжність ряди:
оо оо л оо
а) І7Г: б) L~^+2-; в) 1*г-
л»=1 л=1 л=1
497
О а) Тут виконується необхідна умова збіжності:
lim un = lim —j=- = 0,
«->оо л->оо У ТІ
проте ряд розбіжний. Дійсно,
1 1 лГ
■ = л -гт=- = У п.
т /й -" /й
тобто S„ > У~п, звідки lim Sn = оо. Отже, ряд а) розбіжний.
л-»о©
б) Тут виконується достатня умова розбіжності:
2л 4- 1
Hmu„=llm , „ = 2^0,
ГС-»0О Л-»ос Т'
тому ряд б) розбіжний.
в) Ряд збіжний як геометрична прогресія із знаменником q = ,
Таким чином, якщо lim u„ = 0, то ніякого висновку про збіжність чи розбіж-
л->оо
оо
ність ряду 2 "я зробити не можна.
л=1
Потрібне додаткове дослідження, яке виконується за допомогою достатніх умов
збіжності ряду. Якщо ж lim un Ф 0, то ряд розбіжний.
л-»оо
1.3. Знакододатні ряди. Достатні ознаки збіжності
При дослідженні на збіжність знакододатних рядів, тобто рядів
з невід'ємними членами, найчастіше користуються такими достатніми
умовами (ознаками) збіжності, як ознаки порівняння, ознаки Д'Алам-
бера і Коші та інтегральна ознака Коші.
Теорема 1 (ознаки порівняння). Нехай задано два ряди з
невід'ємними членами
Щ + «а +••■+«„+••• • «п>0. (2)
V! + va+ ... +vn+ •.., w„>0, (3)
і для всіх п виконується нерівність
»n<vn. (4)
Тоді, якщо ряд (3) збіжний, то збіжний і ряд (2). Якщо ряд (2)
розбіжний, то розбіжний і ряд (3).
О Нехай ряд (3) збіжний і
sn = 2 "*. °» = 2 vh
*=і *~і
— частинні суми рядів (2) і (3).
498
оо І ■
і) 2 аяп~1 '
£і\ (розбіжний при \q\^ її
Оскільки ряд (3) збіжний, то існує границя lim an — а його ЧаС-
^І-» оо
тинних сум. Члени ряду (3) невід'ємні, тому ап ^ о. Але тоді з
нерівності (4) випливає, що Sn ^ о„ <Г о, тобто послідовність {S„|
частинних сум ряду (2) обмежена зверху. Крім того, члени ряду (2)
невід'ємні, тому частинні суми не спадають. Тоді за теоремою 4 (гл. 4,
п. 3.7) послідовність {Sn} має границю, тобто ряд (2) збіжний. Якщо
ж ряд (2) розбіжний, то ряд (3) також розбіжний, бо коли б ряд"(3) був
збіжний, то за тільки що доведеним ряд (2) теж був би збіжним, а це
суперечить умові. •
Зауваження 1. Ознаки порівняння можна застосовувати і
тоді, коли нерівність (4) виконується не для всіх членів рядів (2)
І (3), а починаючи з деякого номера N. Це випливає з властивості 3 .
Зауваження 2. При дослідженні рядів за допомогою ознак
порівняння необхідно знати, які ряди збіжні і які розбіжні.
Для порівняння часто користуються рядами:
збіжний при |<7|<;1,
розбіжний при \q\~^
9\ V* ' (збіжний при а>1,
~ п™ [розбіжний при tx^l.
Перший з цих рядів, як відомо, називається геометричною
прогресією. Другий з рядів називається рядом Діріхле, або узагальненим
гармонічним рядом. Його ми дослідимо пізніше. Зокрема, при а = 1
дістанемо гармонічний ряд
1+-І-+-Г+•■■+-£-+■■• -її.
п=1
який, як відомо, розбіжний.
Приклад
Дослідити на збіжність ряди:
оо } °° 1
^ХТГЗ5"'' б) S Іп(я+1)'
№>1 П=1
О Застосовуємо ознаки порівняння.
оо
а) Оскільки ^<~^7Г . «= •• 2, .. . , і ряд V —— збіжний як гео-
п • З З ^" З
Л="1
метрична прогресія Із знаменником q = -5_<1, то ряд а) теж збіжний.
б) Оскільки 1п - ^ ^ > п_|_ t , п = 1, 2, ... і ряд -£■ + -3" + • • ■ +
+' ■ < -f- ■•• розбіжний як гармонічний, то ряд б) також розбіжний, •
499
Теорема 2 (гранична ознака порівняння). Якщо задано два ряди
з додатними членами
«і + "а + ■ - • + и» + ■ • • > (5)
»і -г- »9 -г- • • • + »„ -г- • • • . (6)
причому існує скінченна, відмінна від нуля границя
lim -^- = а (а Ф О, аф оо),
то ряди або одночасно збіжні, або одночасно розбіжні.
О Нехай lim — = а Ф 0, тоді для довільного є > 0 (візьмемо є <;
vn
<Z а) знайдеться такий номер N = N (є), що для всіх п > N
виконується нерівність І —— а <е, звідки
(a — e)vn<un<z(a + є) vn. (7)
Якщо ряд (5) збіжний, то з нерівності (7) і теореми 1 випливає, що ряд
£ (а — є) vn також збіжний. Тоді, згідно з властивістю Г, ряд (6)
л=1
збіжний.
Якщо ряд (5) розбіжний, то з нерівності (7), теореми 1 і властивос-
оо
ті Г випливає розбіжність ряду 2 (а + є) vn l РЯДУ Ф)- Аналогічно,
якщо ряд (6) збіжний (розбіжний), то збіжним (розбіжним) буде і ряд
(5). •
Приклад
Дослідити на збіжність ряди:
оо оо
а> Ste-Sr» б) Х!-^-•
л=І п=\
О Застосуємо граничну ознаку порівняння,
л
*8~3я~
а) Оскільки lim = ф 0 і гармонічний ряд розбіжний, то ряд
п->оо І З
л
а) також розбіжний.
о» / оо
б) Порівняємо цей ряд із збіжним рядом \ •—$-1 Це ряд вигляду \ —£ »
П=1 V П=1
600
де се = 2> 1 І:
/ 2л + 1 1 \ 2я» +1*
Отже, даний ряд збіжний. •
Теорема 3 (ознака Д'Аламбера). Якщо для ряду з додатними
членами
"і + "а + ' • • + ип + • • • (8)
існує границя lim "+ = /, тої
Л-*оо Пп
1) ряд збіжний при І < 1;
2) ряд розбіжний при І > 1.
О 1) Нехай lim "+1 = І <z 1, тоді для довільного е>0 існує
П-»оо Un
такий номер N = N (є), що для всіх n~>N виконується нерівність
І и„,, І
І „ ' NBi
або
/-е<-^±і-</-Ье. (9)
Оскільки І < 1, то є > 0 можна вибрати так, щоб число ? »= / +
+ є ■< 1. Тоді з правої частини нерівності (9) дістанемо
и ,.
—^—<q, un+i<qun, n>N.
Надаючи п значень N + 1, N -\- 2, .... з останньої нерівності маємо
«лч-2 < uN±iq;
Un+з < "w+2<7 < "w+i72;
«w+4 < uN+3q < uw+i9s,
тобто члени ряду
"ЛЧ-2 + -«W+3 + UN+t + • • • (Ю)
менші відповідних членів ряду
uN+lq -\- uw+i9a -Ь «лч-і<78 -+-••••
Цей ряд збіжний як геометрична прогресія із знаменником q (0 < 7 <
<С 1), тому за ознакою порівняння ряд (10) також вбіжний. Ряд (8)
501
утворюється з ряду (10), якщо до останнього приєднати N -\- 1 член иг,
«2, ..., un+i. Тому за властивістю 3° (п. 1.2) ряд (8) збіжний.
2) Нехай І > 1. Візьмемо є > 0 так, щоб / — є > 1, тоді з лівої
частини нерівності (9) випливає, що ип+\ > ип, п > N, тобто члени
ряду зростають із зростанням їхнього номера. Тому lim ип ф 0 і ряд
л-»оо
(8) розбіжний (властивість 6°). ф
Зауваження 1. Якщо lim ■ = оо, то ряд (8) розбіжний,
л_»оо і
бо існує номер N такий, що "+1 >• 1 при n>N.
"л-4-І
Зауваження 2. Якщо lim ——- = 1, то ряд може бути як
П->оо Un
збіжним, так і рсзЗіжним. У цьому випадку ряд треба дослідити за
допомогою інших ознак.
Приклад
Дослідити иа збіжність ряди:
оо оо оо
т-і Л1 гі ПІ т-і Л
а) L -уг: б) 2j "7": в) L "ЯГ ■
П=І П=І П=1
О Скористаємося ознакою Д'Аламбера:
а) lim —— = Нт +1 = 11т ^ = _2"<1'
заданий ряд збіжний.
"л+і (п+1)!-2" 1
б) lim_jt_elini L_L_>_= lim(n+1) = 00>
л->оо "n n-»oo m • £ " n-»oo
отже, ряд розбіжний.
"n+i in + l)n+l • л! , (л + 1)"
в) lim + = lim v T = lira „ = lim
n->oo "n Л-юо Л (Л -(- 1)1 п-»оо Л n-»oo
e> 1;
ряд розбіжний. •
Теорема4 (ознака Коші). Якщо для ряду (8) з додатними членами
Існує границя lim у/ ип = 1,то цей ряд збіжний при І < 1 і розбіжний
П-»оо
при І > 1.
О Нехай lim Vип = /. Це означає, що для довільного числа є > 0
л-»оо
існує номер N = N (є), такий, що
(Vu^ — /|<е, п->#,
або
/ —е<ї/й^</+е, л>#. (11)
502
Припустимо, що І < 1. Виберемо число є > 0 так, щоб / + є =
•= g < 1, тоді з нерівності (11) маємо
\/ип<1 + в = q або un<qn, n>N.
я
Оскільки ряд 2 Яп збіжний як геометрична прогресія із знаменни-
n=N+\
ком <7 (0 < 9 < 1), то s нерівностей ип ■< q" за ознакою порівняння
оо
ряд 2 "п збіжний. Тоді збіжним буде і ряд (8), який утворюється з
оо
ряду 2 "п приєднанням до нього N членів: ии u2, ..., ww.
n=iV+I
Нехай / > 1. Візьмемо число в > 0 так, щоб число І — є = р >
> 1, тоді з нерівності (11) випливає, що у ип > І — є = р > 1, або
ип ">■ \, п > N, звідки lim un =£ 0. Отже, ряд розбіжний (властивість
я->оо
6°). •
Приклад
Дослідити на збіжність ряди:
оо оо
Л=1 Ч П=1
О Застосуємо ознаку Коші.
я ,— 4л
а) lim|/u„=lim , . = 4>1,
л-юо п-»оо Т1
тобто заданий ряд розбіжний.
б) lim yjT = Hm sin -5— = 0 < 1,
тобто заданий ряд збіжний. •
Теорема 5 (інтегральна ознака Коші). Нехай задано ряд
/(1)+/(2)+ ••• +/(л)+ ••• =f An), (12)
л=1
члени якого є значеннями неперервної, додатної і монотонно спадної
функції f (х) на проміжку [1; +<х>). Тоді ряд (12) збіжний, якщо збіж-
+ СО
ний невласний інтеграл \ f (x) dx, І розбіжний, якщо цей Інтеграл роз-
і
біжний.
503
sin"-^-
Зл
у-
0
■
$
)
К!
_\
£
2
s~\
&
3
s
s^;
5^
п
In X
Рис. 9.1
нюють /(1),/(2), .
/(2) +/(3)+ ••
або
звідки
О Розглянемо криволінійну
трапецію, обмежену кривою у =
= / (х) і прямими х = 1, х = л,
у = 0 (рис. 9.1). Площа її дорівнює
інтегралу Іп = ] / (х) dx.
і
Впишемо в цю трапецію і
опишемо навколо неї ступінчаті
фігури, утворені з прямокутників,
основами яких є проміжки [1; 21, [2;
ЗІ, -.., in— 1; пі, а висоти дорів-
.., f (я — 1), f (я), тоді
+ /(«)</»</(!)+/(2)+ ••• +/(л-1)
Sn-f(l)<ln<Sn-f(n),
S„</(1) + /».
Sn>f(n) + ln,
(13)
(14)
де S„ — частинна сума ряду (12).
Нехай інтеграл f f(x)dx збіжний. Це означає, що існує гра-
і
п
ниця Iim/„= Mm f f(x)dx = I.
л->оо л-»оо J
Оскільки / (х) > 0, то послідовності {Sn} та {/„} зростають із
зростанням п і послідовність {/„} обмежена зверху своєю границею: /„ <
< /. З нерівності (13) випливає, що Sn </ (1) 4- /, тобто
послідовність {Sn} обмежена.
Таким чином, монотонно зростаюча послідовність {Sn} обмежена
зверху, а тому має границю (гл. 4, п. 3.7). Отже, ряд (12) збіжний.
+«.
Нехай тепер інтеграл [ f(x)dx розбіжний, тоді Іігп /п = оо
і з нерівності (14) випливав, що ряд (12) теж розбіжний. •
Приклад
Дослідити на збіжність ряди (див. п. 1.3)і
а) У
2л
ла+3'
. і *,*
п=1
Б04
О Застосуємо інтегральну ознаку Коші.
2х
а) Візьмемо функцію f (х) = ^а , 3 , де Є [ 1; + оо), тоді матимемо ряд
CO
2 яїТз = /(•) + /(4+ ••■ +/(")+ ••• -
л=1
Розглянемо невласний інтеграл
-J-oo +оо
С Г %xdx
Цей інтеграл розбіжний, тому і даний ряд розбіжний.
1 °°
б) Візьмемо функцію f (*)=•=—^-, jc Є [1; + оо), о>1, тоді 2 / (п) =
х п=І
00 1
= у —— . Обчислимо невласний інтеграл:
п=\
+00-
j/Wrf,= j-^ = .,m
1 і
. h1—a
lira
ft-м» > -«
І і — а 1 — а '
Ь-юо \ і — <* i — u. «,— 1*
Невласний інтеграл збіжний при а > 1, тому заданий ряд при а> 1 теж збіжний.
Розбіжність ряду при а •< 1 випливає з того, що в цьому разі —— ^— . Гармо-
па п
нічний ряд розбіжний, тому за ознакою порівняння заданий ряд, при а < 1 теж
розбіжний. Таким чином, узагальнений гармонічний ряд збіжний при а >. І і
розбіжний при а ^ І. •
1.4. Ряди, в яких знаки членів строго чергуються. Ознака Лейбніца
У попередньому пункті ми розглянули ряди з додатними членами.
Ряди з недодатними членами можна досліджувати аналогічно,
оскільки від знакододатних вони відрізняються множником —1, який на
збіжність ряду не впливає.
Розглянемо тепер ряд, знаки членів якого строго чергуються,
тобто ряд, довільні два сусідні члени якого мають різні знаки:
и1 — щ + и3-иі+ -•■ +(_і)"-»И|1+ .... (15)
де ип > 0, п = 1, 2,.... Цей ряд досліджується на збіжність за
допомогою такої достатньої ознаки.
505
Теорема 1 (ознака Лейбніца). Ряд (15) збіжний, якщо:
1) «п+і <«„, л= 1, 2, ... ; (16)
2) 1іти„ = 0. (17)
При цьому сума ряду додатна і не перевищує першого його члена.
О Розглянемо частинну суму з парним числом членів:
S2n = щ — и2 + us — u4 + • • • + "гч-і — "гп =
= {Щ — U2) + (U3 — U4) 4" • • • + ("2п-І — U2n).
З умови (16) випливає, що кожна різниця в дужках додатна, тому
5гп > 0 і послідовність {S2„} зростає із зростанням п. Крім того,
S2n = "і — [(«2 — «з) + («4 — "б) + • " " + («2П-2 — U2n-l) — U2„] < Их,
тобто послідовність обмежена зверху.
Отже, послідовність [S2n] монотонно зростає і обмежена, тому мав
границю. Нехай lim S2n = S, тоді S ^ ux.
Обчислимо границю сум з непарним індексом. Враховуючи умову
(17), маємо
lim S2n+1 = lim (S2n 4- изп+1) = S-f-0=S.
П->оо П-»оо
З рівностей
HmS2n = limS2n+1 = S
n->oo n->oo
випливає, що ряд (15) збіжний і сума його 5 ^ uv •
Зазначимо, що до рядів, знаки яких строго чергуються, належить
також ряд
-и1 + "2-"3 + "4-и5+ ••• +(—1)"и»+ •■-. «»>0. (18)
Якщо для такого ряду виконуються умови 1) і 2), то він збіжний, його
сума S від'ємна і задовольняє нерівність | S | ^ щ.
Таким чином, для рядів (15) і (18) ознака Лейбніца формулюється
так: якщо модуль л-го члена ряду (15) чи (18) із зростанням п спадає
і прямує до нуля, то ряд збіжний, причому модуль його суми не
перевищує модуля першого члена.
Ряди (15) і (18), для яких виконується ознака Лейбніца,
називаються рядами лейбніцевого типу.
Наслідок. Абсолютна похибка від заміни суми збіжного
ряду (15) його частинною сумою не перевищує модуля першого з
відкинутих членів ряду, тобто
ІS — Sn К ип+1.
Інакше кажучи, модуль л-го залишку гп збіжного ряду (15) не
перевищує модуля (л 4* 1)_го члена цього ряду, тобто
Б06
Дійсно, залишок збіжного ряду (15)
гп = (-1)" ив+1 + (-1)в+1- "„+2 4- • • •
— це збіжний ряд, члени якого строго чергуються. За доведеним
абсолютна величина його суми не перевищує абсолютної величини
першого члена, тобто | г„ | ^ ип+і-
Цей наслідок широко використовується при наближених
обчисленнях.
Приклад
Довести, що ряд
(-1)"-1 !
— A3 — R3 + 193 Ifi3 +
Zj (4л)а — 43 — 8» т 123 — 16з
П=1
збіжний і знайти його суму з точністю до 0,001.
О Очевидно, всі-гри умови ознаки Лейбніца виконуються: 1) знаки членів
даного ряду строго чергуються; 2) модулі його членів монотонно спадають; 3) л-й член
ряду прямує до нуля при п -»■ оо. Отже, ряд збіжний 1 має певну суму S.
Для того щоб обчислити цю суму з точністю до 0,001, треба взяти стільки його
членів, щоб перший з наступних членів був за модулем менший від 0,001. Тоді весь
валишок ряду, починаючи з цього члена, буде менший від 0,001. У даному разі маємо
-#- = -бГ> 0.001; -83- = -бЇ2->0>001:
-Ї2Г- = І728-<0'001'
тобто, щоб знайти суму даного ряду з точністю до 0,001, досить залишити перші два
члени ряду, а решту відкинути. Таким чином,
S« S, = -£5- — "8з- = "б4~ — ~5Ї2~ Яі0.015- •
1.5. Знакозмінні ряди. Абсолютна і умовна збіжності
Ряд називається знакозмінним, якщо серед його членів є як
від'ємні, так і додатні. (Зрозуміло, що розглядається випадок, коли ряд
містить нескінченну кількість додатних членів і нескінченну кількість
від'ємних членів.)
Розглянуті в попередньому пункті ряди, в яких знаки чергуються,
є, очевидно, окремим випадком знакозмінних рядів.
Візьмемо довільний знакозмінний ряд
"і 4- «2 4- • • ■ + «„ + • • • , (19)
де числа «{ можуть мати довільний знак. Одночасно розглянемо ряд,
утворений з модулів ряду (19):
КІ+|"2І4- ••■ -Г-КІ+ ••• • (20)
Для знакозмінних рядів справедлива така ознака збіжності.
507
Теорема. Якщо ряд (20) збіжний, то збіжний і ряд (19).
О Покладемо
КІ + ип=2Рп. К|-"п = 2<7„.
тоді 0 <; рп <І | ип |, 0 ^ qn <І | ип | для довільного п £ N.
За умовою ряд (20) збіжний, тому з останніх нерівностей і ознаки
ОО 00
порівняння випливає, що ряди \] рп і 2^птакож збіжні. Оскільки ип=
п=1 л=1
= рп — qn, то, згідно з властивістю 2° (п. 1.2), ряд (19) теж збіжний. #
Ця теорема показує, що при дослідженні на збіжність знакозмін-
них рядів можна користуватися ознаками збіжності знакододатних
рядів.
Приклад
Дослідити на збіжність ряд
sin a sin 2а sin па
[з + 2s + ""' 4" пі + *• ■ »
де а — довільне дійсне число.
О Складемо ряд з модулів членів заданого ряду
| sin а | | sin 2а | |sin/za|
[з + 2s + ■•• + -^ + ••' .
ОО
І sin па І 1 ^-і 1
Оскільки -g ssj з ' РЯД / ~гіГ~ збіжний як узагальнений гармо-
п=і
нічний (п. 1.3), то за ознакою порівняння ряд з модулів збіжний, тому збіжний
і заданий ряд. •
Зауважимо, що доведена теорема дає лише достатню умову
збіжності і не є необхідною умовою збіжності знакозмінного ряду,
оскільки існують знакозмінні ряди, які є збіжними, а ряди, утворені з мо-
~ (—і)"
дулів їхніх членів, розбіжні. Наприклад, ряд 2 збіжний за
п=1 п
ОО j
ознакою Лейбніца, а ряд 2 —. утворений з модулів його членів, роз-
п 1
п=1
біжний. У зв'язку з цим всі збіжні ряди можна розділити на
абсолютно збіжні і умовно збіжні.
Знакозмінний ряд (19) називають абсолютно збіжним, якщо ряд
(20), утворений з модулів його членів, є збіжним.
Якщо ж ряд (19) збіжний, а ряд (20), утворений з модулів його
членів, розбіжний, то ряд (19) називають умовно збіжним. Так, ряд
2 —— е абсолютно збіжним, а ряд V {zzll — умовно збіжним.
508
Зазначимо, що розмежування рядів на абсолютно і умовно
збіжні є досить істотним. Справа в тому, що абсолютно збіжні ряди мають
цілу низку важливих властивостей скінченних сум, тоді як умовно
збіжні ряди таких властивостей не мають. Наприклад, абсолютно
збіжні мають переставну властивість: будь-який ряд, утворений за
допомогою перестановки членів абсолютно збіжного ряду, також
абсолютно збіжний і має ту саму суму, що і заданий ряд.
Умовно збіжні ряди переставної властивості не мають, тому що від
перестановки їхніх членів може змінитися сума ряду і навіть
утворитись розбіжний ряд.
1.6. Поняття про числові ряди з комплексними членами
Нехай z„ = хп + іуп, п = 1, 2, ...— послідовність комплексних
чисел (гл. 7, п. 1.4). Комплексне число а -\- ib = c називають
скінченною границею послідовності [гп), якщо для довільного числа є > 0
існує номер N = N (є) такий, що | гп — с \ <С є для всіх п > N і
записують lim z„ = с.
П-»оо
Послідовність, яка має скінченну границю, називають збіжною,
а послідовність, яка не має скінченної границі — розбіжною.
Зв'язок між границею послідовності комплексних чисел {z„} = \хп -f- іуп)
та границями послідовностей дійсних чисел {хп} і {уп} встановлює
така теорема: для того щоб послідовність {zn} мала скінченну границю
с = а + іЬ, необхідно і достатньо, щоб послідовності \хп) та {уп}
мали скінченні границі, які дорівнюють відповідно а та Ь.
Вираз виду
Zt + z2+ ... +гп+ ... =J г«« (21)
де z„ = хп 4- Іупу п = 1, 2, ...— комплексні числа, називають
числовим рядом з комплексними членами.
Суми S1 = z1, S2 = zl + zs Sn = zl 4- z2 +■•■+ zn
називають частинними сумами ряду (21).
Ряд (21) називають збіжним, якщо збіжна послідовність {Sn} I
розбіжним, якщо ця послідовність розбіжна.
Введемо тепер ряди з дійсними членами:
*і+*а+ ••• +*„4- ■•• =;£*„. (22)
Уі + Уш+ ••• +уп+ ■•■ =2 Уп (23)
І побудуємо їхні частинні суми
Х„ = *!+*■+ ••• +*„, Yn=yl+yi+ ... +уп\
тоді Sn = Хп + iYn і справджується така теорема.
609
Теорема 1. Для того щоб ряд (21) був збіжним до числа S = X -f-
+ iY, необхідно і достатньо, щоб ряди (22) і (23) були збіжними
відповідно до чисел X і Y
При дослідженні на збіжність рядів з комплексними членами
користуються також такою достатньою ознакою збіжності.
Теорема 2. Якщо ряд, утворений з модулів членів ряду (21)
S l*n| = |Zll + l*,|+ ••• +М+ ••••
Л=І
&е І гп І = К *п + Уп, збіжний, то збіжний, причому абсолютно, І
ряд (21).
Приклад
Дослідити на збіжність ряди:
«їда» ->іт-
п=\ п=І
О а) Розглянемо відповідні ряди з дійсними членами
•о j °° /_1)"
п=1 і=і
Перший з них є збіжним як геометрична прогресія із знаменником q = — •< 1,
а другий збігається за ознакою Лейбніца. Отже, за теоремою 1 даний ряд збіжний.
б) Розглянемо відповідні ряди з дійсними членами
оо оо
2j 2л2 + 3 ' її 2я2 + 3 •
п=1 п=\
За допомогою, наприклад, інтегральної ознаки Коші можна переконатись, що
перший з цих рядів збіжний, а другий розбіжний. Отже, за теоремою 1 даний ряд
розбіжний.
в) Скористаємось теоремою 2. Складемо ряд з модулів членів даного ряду:
п=1 ' ■ п=1
Л=І
Цей ряд збіжний, бо є геометричною прогресією, у якої знаменник q = J_— <
о
< 1. Отже, даний ряд абсолютно збіжний.
Завдання для самоконтролю
1. Що називається числовим рядом? Що називається загальним членом ряду?
Навести приклади,
510
2. Який ряд називається збіжним? Що називається його сумою? Який ряд
навивається розбіжним? Навести приклади.
3. Сформулювати і довести необхідну ознаку збіжності ряду. У чому полягає
найпростіша достатня ознака розбіжності? Навести приклади.
4. Сформулювати і довести такі достатні ознаки збіжності: ознаки порівняння
граничну ознаку порівняння; ознаки Д'Аламбера і Коші; інтегральну ознаку Коші!
Для яких рядів застосовні ці ознаки?
5. Сформулювати і довести ознаку Лейбніца. Для якого ряду застосовна ця
ознака?
6. Чому не можна досліджувати за ознакою Лейбніца на збіжність ряд
м п(п+і)
V (-U 2 J_ _L 1 • •
—> п 1— 2 + 3 + 4 — 5 ~~~6~ + "" ?
п=1
7. У чому полягає наслідок із ознаки Лейбніца?
8. Сформулювати і довести достатню ознаку збіжності знакозмінного ряду.
9. Який ряд називається абсолютно збіжним? Який ряд називається умовно
■біжним? Навести приклади.
10. Який ряд називається рядом з комплексними членами? Сформулювати
ознаки збіжності такого ряду.
11. Дослідити на збіжність ряди з додатними членами:
оо оо оо
Sn+1 уі 1 ^ "+1
5л+3 : Q 2j 2" + n : B) 2j 5" J •
п=1 п=1 п=І
оо оо оо
г)£тж: д) £?йї: е) І -ігтї-)"1
п=1 п=1 п=1
2п—1
Ж) 2j я In2 я : S) 2j (я+ 1)1
п=2 п=\
12. Довести, що дані ряди збіжні, І обчислити їхню суму з точністю до 0,01«
а
(-1)"+' ~ (-!)"+'
[) 2. он)» : б) L ~Ті—
л=1 п=1
13. Дослідити на абсолютну і умовну збіжність знакозмінні ряди:
а> l Vn • б) L (2я+і)" : в) ^ ~*~-
Л=1 4=1 л=1
14. Дослідити на збіжність ряди з комплексними членами:
v n' + isinn ^ І (2+і) і \" v (—1)" л + І
а> L —"ЇЇ : б) ІД 4 ) ; в> 1 Зя* + І •
4 = 1 П=1 Л=1
Відповіді. 11. а), г), д) — розбіжні; інші — збіжні. 12. а) 0,31; б) 0,62.
13. а) — умовно збіжний, б), в) — абсолютно збіжні. 14. а) — розбіжний, б) —
абсолютно збіжний, в) — умовно збіжний.
511
I 2. СТЕПЕНЕВІ РЯДИ
2.1. Функціональні ряди. Поняття рівномірної збіжності. Ознака
Вейєрштрасса
Перейдемо тепер до вивчення функціональних рядів, тобто рядів,
членами яких є не числа, а функції, визначені на деякій множині Бі
оо
«і(*)+«■(*)+••■ + «„(*)+.•• -2 «»(*)■ (24)
Якщо взяти довільне число х0 £ Е і в ряді (24) покласти х = х0, то
дістанемо числовий ряд
"і(*о) + М*о)-Ь ••• +М*о)+ •" = 2 "„(*„)- (25)
п=1
Цей ряд може бути як збіжним, так і розбіжним. Якщо ряд (25) є
збіжним, то точка х0 називається точкою збіжності функціонального ряду
(24). Якщо ж ряд (25) є розбіжним, то точка х0 називається точкою
розбіжності ряду (24).
Множина всіх точок збіжності функціонального ряду називається
областю його збіжності. Область збіжності функціонального ряду
може або збігатися з множиною Е, на якій визначені члени ряду, або
становити деяку частину цієї множини.
Частинна сума функціонального ряду є функцією від х і
визначається за аналогією з числовими рядами:
S„ (х) = иг (х) + иа (х) + ■.. +ип(х).
У кожній точці х, яка належить області збіжності ряду (24), існує
скінченна границя lim Sn (x) = S (*), яку називають сумою ряду (24)
л-юо
і пишуть
S (х) = «і (*) + "з (*) + ••• +ип(х) +
Функція S (х) визначена в області збіжності функціонального ряду.
Якщо функціональний ряд (24) збіжний до функції S (х), то різниця
гп (х) = S (х) — Sn (x) називається п-м залишком ряду:
Гп (Х) = Un+l {X) + «„+2 (X) +
Зрозуміло, що для всіх значень х з області збіжності ряду
Mm rn(x) — 0.
П->оо
Відомо, що сума скінченного числа неперервних функцій є
функцією неперервною. Крім того, суму скінченного числа функцій можна
почленно диференціювати та інтегрувати. Виявляється, що ці
властивості не завжди виконуються для сум нескінченного числа функцій,
612
Рис. 9.2
тобто для функціональних рядів. Проте ці властивості зберігаються
для так званих рівномірно збіжних рядів.
Функціональний ряд (24) називається рівномірно збіжним на
множині D, якщо для довільного числа є > 0 існує таке число N = N (є),
яке залежить лише від є і не залежить від х, що для всіх п > N і для
всіх х Є D виконується нерівність І гп (х) І < є.
Розглянемо поняття рівномірної і нерівномірної збіжності
функціонального ряду з погляду геометрії.
Нехай Sn {х) — це п-а частинна сума, a S (х) — сума ряду (24).
Візьмемо довільне число є 2> 0 і побудуємо криві S (х), S (х) + є і
S (х) — є (рис. 9.2). Останні дві криві утворюють смугу шириною 2е.
Якщо ряд (24) рівномірно збіжний на проміжку (а; Ь) до функції S (х),
то можна знайти номер N = N (є), починаючи з якого для всіх п 2>
> N графіки частинних сум Sn (x) розмістяться на всьому проміжку
(а; Ь) всередині смуги 2е (рис. 9.2, а).
Практично це означає, що суму S (х) на проміжку (а; Ь) можна
наближено, з наперед заданою точністю, замінити однією і тією самою
частинною сумою Sn (x):
S(x)^Sn(x), х£(а;Ь).
Якщо ряд нерівномірно збіжний на проміжку (а; о), то такого номера
не існує: графіки частинних сум Sn (x) виходять за межі смуги 2е
(рис. 9.2, б). При цьому збільшення числа доданків в сумах Sn (x) не
забезпечує введення їхніх графіків в смугу 2є. Це означає, що для
різних значень х £ (а; Ь) обчислення суми 5 (х) за допомогою
певної частинної суми Sn (x) з однією й тією самою точністю неможливе.
Таке обчислення можна виконати (бо ряд збіжний і гп (х) -*■ 0), але
для різних значень х треба буде брати різні частинні суми, тобто різне
число членів п в сумах Sn (x).
Рівномірно збіжні функціональні ряди мають ряд важливих
властивостей. Сформулюємо деякі з них без доведення.
1°. Сума членів рівномірно збіжного на деякому проміжку ряду
неперервних функцій є функція, неперервна на цьому проміжку.
513
2°. Якщо на відрізку [а; Ь] функціональний ряд (24) рівномірно
збіжний і члени ряду неперервні на [а; Ь), то його можна почленно
інтегрувати в межах (а; (ї), де (а, Р) с [а; Ь]:
В р / ™ \ ™ р
fS(x)dx=( (2 u„(*))dx=2 («„(*)<**•
J J\n=1 / «_,J
3°. Якщо функціональний ряд (24) збіжний на відрізку [a; b], a
його члени мають неперервні похідні ип (х), х (j [а; 6], п — 1, 2
ео
причому ряд ^ «'„ (*) рівномірно збіжний на la; Ь], то заданий ряд
можна почленно диференціювати, тобто
Таким чином, всі збіжні функціональні ряди поділяються за
характером збіжності на рівномірно збіжні і нерівномірно збіжні.
Рівномірно збіжні ряди мають ряд властивостей, які дають змогу
ефективно використовувати їх при наближених обчисленнях. У цьому
полягає практична перевага рівномірно збіжних рядів перед
нерівномірно збіжними.
Для дослідження функціонального ряду на рівномірну збіжність
користуються такою достатньою умовою рівномірної збіжності.
Теорема (ознака Вейєрштрасса). Функціональний ряд (24)
абсолютно і рівномірно збіжний на відрізку [а; Ь\, якщо існує знакодо-
датний збіжний числовий ряд
£ ап (26)
такий, що
|«n(*)l<aB, V*g[a;H n = I,2 (27)
О 3 умови (27) і ознаки порівняння випливає, що ряд (24) є
абсолютно збіжним у довільній точці х Є [а; Ь]. З абсолютної збіжності
ряду (24) дістанемо абсолютну збіжність його залишку. Маємо
\rn(.x)\ = \uri+l(x)+un+2(x)+ ... |<
<|ип+і(*)І +\ип+2(х)\+ ••• <ач+і+ап+1+ ■■• =/?„.
Але залишок ряду (26) /?„-*- 0 при п ->- оо, тому для довільного є >
2> 0 існує незалежний від х номер N = N (є) такий, що Rn < є при
п> N. Тоді для всіх п> N і х £ [а; Ь] виконується нерівність
І г„ (х) І < є. •
514
Приклади
1. Знайти область збіжності функціонального ряду
1 1 І
О Кожен член ряду визначений на множині R \ 0. На цій множині ряд є
геометричною прогресією Із знаменником q = , тому при | q І = — < І або І х І >
х І дг І
>• 1 заданий ряд збіжний. Отже, (—оо: —1) U (І; +оо) — область збіжності цього
ряду. •
2. Дослідити иа рівномірну збіжність ряд
sin х sin їх sin пх
~n~ + ~2~+ ••• + ~hT~ + •■• •
О Скорист іємось ознакою Вейєрштрасса. Оскільки при —оо<лс<+ооіпЄЛР
sin пх
п\
ОО
і
ПІ
збіжний (за ознакою Д'Аламбера), то заданий функціональний ряд абсолютно І
рівномірно збіжний иа всій числовій осі. •
3. Знайти суму ряду
х+2х*+ ■■■ +пхп+ ■■■ , \х\<-% .
О Оскільки при І х І < -g- і п Є N виконується нерівність І пх" І < —— і ряд
оо
2 <j^ збіжний, то за ознакою Вейєрштрасса ряд 1 + 2х + З*2 -+- 4лс3 + ... рівномірно
п=і
збіжний при | х | < Цей ряд утворюється почленним диференціюванням
геометричної прогресії
1+х + х* + х* + х*+ ••• =JZTX-' I'K-g-.
За властивістю 3° рівномірно збіжних рядів маємо
d , d І ї \ 1
-*Г(1+* + ** + *ї + *4+"->=-57(т=7І' І*І<Т-
або
1+2*-И** + 4*з+ ... =-^-^, І*|<-2-,
8ВІДКИ
х (1 + 2х + З*2 -(- 4х3 +) •■• = х + 2х* + Зх3 + 4х* + ••• =
" (і-х)* ' І*І<Т- •
515
2.2. Поняття степеневого ряду. Теорема Абеля. Інтервал та
радіус збіжності степеневого ряду
Степеневим рядом, називається функціональний ряд вигляду
оо
а0+а1х+ашх* + ••• +апхп+ ••■ =2м". (28)
де а0, аи ..., ап, ...— дійсні числа, які називаються коефіцієнтами
ряду.
Степеневим рядом за степенями двочлена х — х0, де х0 — дійсне
число, називають функціональний ряд вигляду
оо
а0 + а1(х — х0)+ ..- + ая(х — х0)п + ••• = 2 ап(х — х0)п. (29)
Ряд (29) заміною змінної х — х0 = t зводиться до ряду вигляду
(28), тому надалі розглядатимемо лише степеневі ряди вигляду (28).
Всякий степеневий ряд вигляду (28) збіжний в точці х = 0 до
суми S = а0. Тому область збіжності степеневого ряду завжди містить
принаймні одну точку. Детальніші відомості про область збіжності
ряду (28) дістанемо з наступної, дуже важливої в теорії рядів
теореми.
Теорема Абеля. Якщо степеневий ряд (28) збіокний при х = х0 Ф 0,
то він абсолютно збіжний для всіх значень х, що задовольняють
нерівність | х | < | х01.
Якщо при х = хг ряд (28) розбіжний, то він розбіжний всюди, де
І * І > U І-
О Оскільки за умовою ряд (28) збіжний в точці х0, то збіжним є чис-
ео
ловий ряд у апх%, отже, апх% ->- 0 при п ->- оо. Звідси випливає, що
послідовність \апХо) обмежена, тобто існує таке число М, що
|a„x(?KM, n = 0, 1,2, .-..
Враховуючи, що для | х | < | х0 | величина q = МИ < 1. маємо
\апхп\ = \апХо\
хо
<М<Л л= 0,1,2,
Тобто модуль кожного члена ряду (28) не перевищує відповідного члена
збіжної геометричної прогресії. Тоді за ознакою порівняння при | x | <
< | х01 ряд (28) абсолютно збіжний.
оо
Нехай тепер ряд 2 апх1 розбіжний, при х = хг. Тоді ряд (28) буде
розбіжним і для всіх х, що задовольняють нерівність І х І > І хх \.
Справді, якби припустити, що він збіжний в якій-небудь точці х, що
516
Чх,І
*яд збіжний
о
а
/х,І
РяВ
рюііжний
Рис
задовольняє цю нерівність, то за
доведеним він був би збіжним і в
точці хи бо І xt І < І х |. А це
суперечить тому, що в точці xt ряд
розбіжний. •
Теорема Абеля характеризує
множини точок збіжності та
розбіжності степеневого ряду. Дійсно,
якщо х0 — точка збіжності ряду (28),
то весь інтервал (— | х0 |; | х0 |) заповнено точками абсолютної
збіжності цього ряду (рис. 9.3, а). Якщо хг — точка розбіжності ряду (28),
то вся нескінченна напівпряма (—оо; — |хх|)зліва від точки — \xt\
і вся нескінченна напівпряма (| хг |; + оо) справа від точки | хх \
(рис. 9.3, б) складається з точок розбіжності цього ряду.
Отже, для області збіжності степеневого ряду можливі три
випадки: 1) ряд (28) збіжний лише в точці х = 0; 2) ряд (28) збіжний при всіх
х 6 (— °°; + оо); 3) існує таке скінченне число R £ (0; + оо), що при
| х | < R степеневий ряд абсолютно збіжний, а при | х \ ~> R —
розбіжний (рис. 9.4).
Число R називають радіусом збіжності степеневого ряду, а
інтервал (—R; R) — інтервалом збіжності.
Вкажемо спосіб визначення радіуса збіжності степеневого ряду.
Складемо ряд із модулів членів ряду (28):
2 к*"|.
Припустимо, що існує границя
І а , ,хп+1
Jim "+1
апх-
urn
п+1
|*|= І.\х\ф0,хф0.
Згідно з ознакою Д'Аламбера, ряд (28) є абсолютно збіжним при
L\x | < 1, або | х\ < -£-, і розбіжним при L \ х | > 1, або | х | >-тг—
Отже, інтервал І j-; -j-\ є інтервалом абсолютної збіжності ряду
(28), а число
(30)
*-т
: ІІГП
п-»оо І
— його радіусом збіжності.
"п+1
-/? О д\Рядрез$іжний
Інтервал збіжності
ЬУІ
Аналогічно скориставшись ознакою Коші, можна встановити, що
Я-Hm^. (ЗІ)
П-»ооп
Зауваження 1. Неважко переконатись, що коли
L = Iim|-^±i =0 або L = lim^=0,
то ряд (28) є абсолютно збіжним на всій числовій осі. У цьому разі
вважають R = + °°- Якщо ж L — оо, то R = 0, і степеневий ряд має
лише одну точку збіжності х = 0.
Зауваження 2. Питання про збіжність ряду при х = ± R
(на кінцях інтервалу збіжності) розв'язується для кожного ряду
окремо. Таким чином, область збіжності степеневого ряду може
відрізнятись від інтервалу (—R; R) не більше ніж двома точками х = ± R.
Зауваження 3. Радіус збіжності ряду (29) визначається за
тими самими формулами (30) і (31), що і ряду (28).
Інтервал збіжності ряду (29) знаходять з нерівності | х — х01 <
< R, тобто має вигляд (х0 — R; х0 + R).
Зауваження 4. На практиці інтервал збіжності
степеневого ряду часто знаходять за ознакою Д'Аламбера або ознакою Коші,
застосовуючи їх до ряду, складеного з модулів членів ваданого ряду.
Приклад
Знайти область збіжності рядів:
*" , V (* + 3>"
п=0 п=0 п=0 п=1
О Скористаємося формулою (ЗО).
a) R = Нт -^- = Нт (" "Г. = lim (л + 1) =со.
п->оо І л+1 І п->оо "' п->оо
Отже, даний ряд абсолютно збіжний на всій числовій осі.
б) R=s Um 1^1 lim £ e lim ((jlPU,
ч-»оо І °П+1 1 fl-»oo („ _|_ I)n+1 П-»оо \ Л + 1 / Л + 1 / Є
X0=0.
тобто даний ряд збіжний лише в точці х = 0.
І ап І 2л -(-З
І UTl І ■*'/* "Т" **
отже, (—1; 1) інтервал збіжності даного ряду. Дослідимо збіжність ряду на кінцях
інтервалу. При х = —1 маємо числовий ряд
L 27Г+Т=1—Г+ 5 - 7 + '•■•
п=0
518
який є збіжним за ознакою Лейбніца. При х = 1 дістаємо ряд
п=о
І , і І 1
2л+1 -1 + Т + "5~+Т" +
який є розбіжним за ознакою порівняння з гармонічним рядом. Таким чином,
областю збіжності даного ряду є проміжок [—і: 1).
г) Скористаємось ознакою Д'Аламбера. Для даного ряду маємо
їй .= І* + 3|" |* + 3|"+' .
lim
Л-»оо
lim
І * + З Г+1 па
п І л->оо (Л + 1)» | * + 3 |"
= |, + 3|nlhn-^r = |, + 3|.
За ознакою Д'Аламбера ряд буде абсолютно збіжним, якщо І х + 3 | < 1,
звідки — і < х + 3 < 1, або — 4 < х < —2. Таким чииом, (—4; —2) — інтервал
збіжності даного ряду і R = 1 — його радіус збіжності.
Дослідимо збіжність цього ряду на кінцях інтервалу збіжності.
При х = —4 маємо ряд
£ (-4 + 3)" £ (-1)"
Zj я»
1=1 П=1
-І
який є збіжним за ознакою Лейбніца.
При х = —2 дістаємо узагальнений гармонічний ряд
у (-2 + 3)" £ 1
2j я» •
п=1 л=І
який також збіжний (а = 2 >• 1). Отже, областю збіжності даного ряду є відрізок
[-4; -2]. •
2.3. Властивості степеневих рядів
1°. Степеневий ряд
а0 + ахх + а2х2 + • • ■ + апх" + • ■ •
абсолютно і рівномірно збіжний на будь-якому відрізку І—р; р], який
цілком міститься в інтервалі збіжності (—R; R).
О За умовою р < R. Візьмемо точку х0 £ (р; R). За теоремою Абеля
ряд $] І а„Хо | збіжний. Для довільної точки х £ [—р, р] виконується
нерівність І апхп | < | апХо |, тому за ознакою Вейєрштрасса ряд (28)
абсолютно і рівномірно збіжний. #
З цієї властивості і властивостей 1°—3° функціональних рядів
(п. 2.1) випливають такі твердження.
519
2°. Сума степеневого ряду (28) неперервна всередині його інтервалу
збіжності.
3°. Якщо межі інтегрування а та р лежать всередині інтервалу
збіжності (-R; R) ряду (24), -то на відрізку [а; рЧ цей ряд можна по-
членно інтегрувати.
Зокрема, якщо ряд (28) інтегрувати по відрізку [0; х], де | х | < R,
то в результаті дістанемо степеневий ряд, який має той самий
інтервал збіжності, що і ряд (28); при цьому, якщо S (х) — сума ряду (28):
оо
S {х) = 2 впХп, то
л=0
х о» ж
CS(x)dx = 2 [ anx"dx.
0 0
4°. Якщо ряд (28) має інтервал збіжності (—R; R), то ряд,
утворений диференціюванням ряду (28), має той самий інтервал
збіжності (-R; R); при цьому, якщо S (х) — сума ряду (28), то
оо
S' (х) = S папхп-\ хЄі—R; R).
Таким чином, ряд (28) на відрізку [0; х\, | х | < R, можна
інтегрувати і диференціювати скільки завгодно раз в будь-якій точці х 6 (—R; R).
При цьому інтервалом збіжності кожного ряду є той самий інтервал
(-Я; Я).
Сформульовані властивості степеневих рядів широко
використовуються в теоретичних дослідженнях і наближених обчисленнях.
Приклад
Знайти суму ряду
у (-0"*2"+1 . у<г.
Zj 2л+і » І*І"=-1'
О Позначимо суму даного ряду через S (*), тоді
оо
S'(*) = V (— І)"ж2п =1 — jea+Je* — Jte-h -*• •
n=0
Цю суму можна розглядати як геометричну прогресію з першим членом а = 1 і
знаменником q = —Xі. Знайшовши суму прогресії, дістанемо
Інтегруючи цю рівність на відрізку [0; х\ с: (— 1; 1), маємо
хх х
Js'(*)d* = j(i-*a+ ••• + (-U"*2n + •••>d*=$7T^",
0 0 0
520
8ВІДКИ
п=0
= arctg*, U|<l. •
2.4. Ряд Тейлора
Досі ми вивчали властивості суми заданого степеневого ряду.
Вважатимемо тепер, що функція задана, і з'ясуємо, за яких умов цю
функцію можна подати у вигляді степеневого ряду і як знайти цей ряд.
Нехай функція / (х) є сумою степеневого ряду
f(x) = a0 + ai(x-x0)+ ... + ап(х — х0)п + ... (32)
в інтервалі {х0 — R; х0 + R). У цьому разі кажуть, що функція / (х)
розкладена в степеневий ряд в околі точки х0 або за степенями х — х0.
Знайдемо коефіцієнти ряду (32). Для цього, згідно з властивістю 4°
(п. 2.3), послідовно диференціюватимемо ряд (32) і підставлятимемо
в знайдені похідні значення х = х0:
f(x) = a0 + a1{x — x0) + ai{x — x0)2+as{x — x0)9 +
+ а4(х —х0)* + ... +ап(х-х0)п+ ... , /(*„) = а0;
/' (х) = 1 . 0і + 2аа (х — х0) + За3 (х - х0)а + 4а4 {х - х0)* +
+ ••• +пап{х — х,у-1+ ■■■ , f'{x0)=l.ai;
Г(х)= 1 •2а2 + 3.2а8(х-х0) + 4.3а4(х-*0)г +
+ ... +п{п-1)ап(х-х0)п-2+ ... , /"(х0) = Ь2а2;
Г(х) = 3.2. 1а3 + 4.3.2а4(х — х0) + ••• +
+ п{п-1){п-2)ап(х-х0)п~3 + ••• , Г(*о) = 1 -2-За3;
/iv(x) = 4-3.2.1a4+ -•■ +п{п~ 1)(п — 2)(л — 3) X
Х(х-х0)п-4+ ....
/,v (х0) = 1 • 2 • З • 4а4;
Г(х) = п(п— 1)(п — 2) ... 2- іап+(п+ \)п{п~ 1) ...
2а„+і(х —х0)+ ••• ,
Г (*0) = 1. 2-3. ... .(п~1)пап.
Звідси знаходимо коефіцієнти
а„-Нх) а =х. /,(дСс) a -ZWL п І™ М
521
Підставивши значення цих коефіцієнтів у рівність (32), дістанемо
f(x)=f(x0)+-^-(x-x0) + -^i-{x-x0f + ... +
Ряд
f^0) + -^-(X-X0)+JlpL(x-Xof+ ... + £?Jf>L{X-
-х0)п+ ■•• (33)
називається рядом Тейлора функції f (x). Отже, доведено таку теорему.
Теорема 1. Якщо функцію f (х) в інтервалі (х0 — R; х0 + R)
можна розкласти в степеневий ряд, то цей ряд єдиний і є рядом Тейлора
даної функції.
Нехай тепер / (х) — довільна нескінченне число разів диференці-
йовна функція. Складемо для неї ряд (33). Виявляється, що сума ряду
(33) не завжди збігається з функцією / (х). Інакше кажучи, ряд (33)
може збігатися до іншої функції, а не до функції / (х), для якої його
формально складено. Встановимо умови, за яких сума ряду (33)
збігається з функцією / (х).
Теорема 2. Для того щоб ряд Тейлора (33) збігався до функції f (х)
в інтервалі (х0 — R; х0 + R), тобто
/W=/(x0) + -^L(x~xQ) + -^-(x-x0)2+... +
+ -^Г-(х-Хо)П+ •■•
необхідно і достатньо, щоб в цьому інтервалі функція мала похідні
всіх порядків і залишковий член її формули Тейлора прямував до нуля
при п -+■ оо для всіх х з цього інтервалу:
Mm Rn (x) =0, х £ (х0 - R; х0 + R). (34)
П->оо
О Відомо (гл. 5, п. 5.4), що для функції, яка має похідні всіх
порядків, справедлива формула Тейлора
/M = /(*o)+XJrL(*-*o)+ •■• +-^— (x-4)n + Rn{x), (35)
Де
Rn{*)= f{n+i)%++\\XrXo)) (х-х0)п+\ 0<Є<1, (36)
— залишковий член формули Тейлора у формі Лагранжа.
522
Якщо позначити п-у частинну суму ряду (33) через Sn (x), то
формула (35) матиме вигляд
f(x) = Sn(x) + Rn(x). (37)
Нехай / (х) — сума ряду (33), тобто
iimS„ (*) = /(*).
п-»оо
тоді з формули (37) випливає умова (34). Навпаки, якщо виконується
умова (34), то з формули (37) випливає рівність lim Sn (x) = / (х).#
Таким чином, функцію / (х) можна розкласти в ряд Тейлора в
інтервалі (х0 — R; x0 -f- R) тоді і тільки тоді, коли виконуються такі
умови: 1) вона має похідні всіх порядків; 2) залишковий член формули
Тейлора (36) прямує до нуля при п -*■ 0 і всіх х £ (х0 — R; х0 + R).
Безпосередня перевірка цих умов нерідко виявляється непростою
задачею. Доведемо теорему, яка дає досить прості достатні умови
розкладання функції в ряд Тейлора.
Теорема 3. Якщо функція f (х) в інтервалі (х0 — R; x0 -\- R) має
похідні всіх порядків та існує число М > 0 таке, що
\f{n){x)\<M, x£{x0-R; x0 + R), n=0,l,2 (38)
де f ) {.x) = f (x), то функцію f (x) можна розкласти в ряд Тейлора.
О Відповідно до теореми 2 досить перевірити умову (34). В силу
нерівностей (38) залишковий член формули Тейлора (34) задовольняє
нерівність
|ЯЛ*)І< („+,), \x-x0\n+l, xe(x0-R; x0 + R), /i = 0,l,2
Побудуємо степеневий ряд
V м і х — *0 Г+'
Оскільки
„ti, <»+«'
(39)
(40)
HmJ^L-lhn "І«-*Г"С + і)і Hjc-Xo,lim_» о<1.
„-»» un п-юо (n+2)\M\x-xe\n+l ' °'„_>,* n + 2 ^
то за ознакою Д'Аламбера ряд (40) збіжний на всій числовій осі.
Для збіжного ряду
,. ,. Mix — *0|n+I n
1ітии=1іт ' =0,
п->оо п-»оо V" Т Ч1
тоді з нерівностей (39) знаходимо
lim#n(*) = 0, x£{x0-R; x0 + R). ф
523
2.5. Розкладання елементарних функцій в ряд Маклорена
Рядом Маклорена функції f (х) називають степеневий ряд по
степенях х, який можна дістати з ряду (38) при х0 = 0:
т+іа* + _™ *+ ... +.££U.+ .- . (4і)
З п. 2.4 випливає таке правило розкладання функції в ряд: щоб
функцію / (х) розкласти в ряд Маклорена, потрібно:
а) знайти похідні f (х), /" (х), .... /" (х), ...;
б) обчислити значення похідних в точці х = 0;
в) записати ряд Маклорена (41) для даної функції і знайти
інтервал його збіжності;
г) визначити інтервал (—R; R), в якому залишковий член формули
Маклорена Rn (х) -> 0 при п -*- оо.
Якщо такий інтервал існує (він може відрізнятись від інтервалу
збіжності ряду (41)), то в цьому інтервалі функція f (x) і сума ряду
Маклорена збігаються:
f(x)=tiO) + -qP-x+rVLx*+ .- +4р-*«+ - •
Розглянемо ряди Маклорена деяких елементарних функцій (вони
часто використовуються і тому їх варто запам'ятати):
е* = 1+-тп + ііг+ ••• +іп"+ •■■• *€(-°°; +°°); (42)
_ _**
х — х 3|
X3 , Xі Xі , І
(2л + І) 1
+ ... , *Є(-оо; + оо); (43)
1 X* . X* Xі . - і
cosx = i___+^—-ЗГ+ ... +
1 J=-l)--— + ... , х € (- оо; + оо); (44)
^ (2л) !
(і+^у"=і + -п-*+ m{Vl) ^+т(т~з!(т~2) *з+ ■•• +
+ m(m-l) ..^ (т-л+1)хП+ _ ^ ^^ xg(_1; 1); (45)
1 =1+jc+jc2+ ••• + х" + .... л:Є(—І! 1); (46)
1 — д:
И
1п(1+х) = х-4- + ^ *Т+ •■• +
524
+ (-і)(п-"^-+ .... *Є(-і; і];
і ** Xі X7
arctgx=x з"+4 У"+ ••• +
+ (-*> -£+Т + "• ' *Є[-1; і].
Доведемо формули (42) — (48).
О 1. Нехай f(x) = є*. Маємо:
а) Г (х) = е*. /і 6 #; б) Г' (0) = 1, п = 0, І, 2, ...
„1-M+-S.+...+-£+...-і;*.;
л=0
(47)
(48)
Я = lim
П->оо
"«+1
= lim (n + 1}' = lim (п + 1) = оо,
отже, знайдений ряд збігається в інтервалі (— оо; + оо);
г> |Г(*)|<ем<е* *Є(-Я; Я),
тому за теоремою 3 (п. 2.4) функцію є* можна розкласти в степеневий
ряд на довільному інтервалі (—R; R) с (—оо; + оо), а отже, і на
всьому інтервалі (—оо; оо). Формулу (42) доведено.
2. Нехай / (х) = sin x. Дістанемо:
а) /'(*) = cosx = sin (* + -j-);
f(X) = — sin x = sin (x + 2 -^-);
Г(ї) = — cos* = sin 'x + 3-^-) ;
f™(x) = sm(x+n^-), n£N;
( 0, n -. 0, 2, 4, 6, ... j
— I, /1 =3, 7, 11, ... ;
,+ 1, n = 1, 5, 9, ... ;
6)r(0)=sin/iJL =
В>*-Іт+Іг
»n ,.2n+l
■■■+(-1)" f + ... - V(-D"*^;
^ v ' (2л+ l) | ^ Zj (2n + 1) ! '
I an+\ І „-♦оо (2л + Dl
г) \Ґ (х)\ = | sin (х + п \ І ^ 1 < 2, х £ (- оо; + оо), „ =
= 0, 1, 2, ..., тобто формулу (43) доведено.
525
3. Нехай / (х) = cos x. Формулу (44) можна довести так само, як і
формулу (43). Проте це можна зробити значно простіше, продиферен-
ціювавши почленно ряд (43)
4. Нехай / (х) = (1 + х)т, те/?. Маємо:
а) /' (*) = т (1 + х)т-\ Г (*) = т (т - 1) (1 + х)т~2
fln)(x)=m(m— 1) ... (т-/і+1)(1 + х)т~п, n£N;
б) /(п) (0) = т (т — 1) ... (т — п + 1), л Є АГ;
в) і+тх+ "0яа-'} *' + т<т-;{(т-2) х°+ ..■ +
оо
. т (т — 1) . . . (т—п+ 1) , V w(m—1) ... (т —n+1) v„.
л! ' AJ лі
п=0
Я = Ііт —^
П->оо | Cn-f
п+1
Нт т(т — 1) ... (т-л+1)(л-г-1) '
п-*оо І лі т (т — 1) ... (т — л + 1) (т — п)
= 1,
= 1іт
П->оо
тобто знайдений ряд збіжний в інтервалі (—1, 1). Доведення, що на
цьому інтервалі lim Rn (х) = 0, опускаємо.
п->е»
Ряд (45) називають біноміальним. Якщо m 6 N дістаємо відомий
розклад двочлена, який називають біномом Ньютона (гл. 5, п. 5.4).
Збіжність біноміального ряду в кінцевих точках інтервалу (—1; 1)
залежить від числа т.
Ряд (45) збіжний до функції (1 + х)т в таких випадках:
при т ^ 0, якщо х £ І—1; П;
при —1 < т < 0, якщо х 6 (—І; 1];
при т ^ —1, якщо х 6 (—1; 1)-
Приймемо ці твердження без доведення.
5. Нехай / (х) = _ . Формулу (46) виводимо трьома
способами: користуючись правилом розкладання функції в ряд; застосувавши
формулу (45) і поклавши в ній т — —1 і —х замість х; розглядаючи
ряд 1 + х + х2 + ... + хп f ... як геометричну прогресію, перший
член якої дорівнює одиниці, а знаменник q = х. Відомо (п. 1.1), що
даний ряд збіжний при | х | < 1 і сума його дорівнює (1 — х)—1.
6. Не зупиняючись на деталях, зазначимо, що коли у формулі
(46) покласти —х замість х, а потім —х2 замість х і знайдені ряди про-
інтегрувати, то дістанемо розклад в степеневий ряд функції In (1 + х)
і функції arctg х (формули (47), (48)). ф
Ряди (42) — (48) використовуються при знаходженні степеневих
рядів для інших функцій.
Приклади
1. Розкласти в ряд функцію / (х) = х1 In (1 — х3).
526
О Поклавши у формулі (47) — дг» замість х. маємо
ta(i-*> = -**—* - * -^--... . *€І-і; і);
2 З
*4n(l-*») = _*»_ * _ * _£ ... , ,ЄІ_,: _,). т
4 О Л
2. Розкласти в ряд по степенях х функцію / (х) = —/
О Поклавши у формулі (45) — *■ замість х, при т — — -^ дістанемо
1 1 1-3
1-3-5 ... (2л-1) 2„ . _
+ 2:4-6 ... 2л +■■•• *М І. і). Ш
3. Розкласти в ряд по степенях х функцію / (х) = arcsin x.
О Інтегруючи знайдений в попередньому прикладі ряд в межах від 0 до х,
І х І < 1, дістанемо
arcsin х = х + — - + _! — — U ... +
+ ЬЗ ... (2л-1) **•+'
+ 2 • 4 ... 2г. 2л+Г + -'- *€(_1' °-
Можна довести, що ця рівність справедлива І в точках х — ±1. •
2.6. Наближені обчислення за допомогою степеневих рядів
1°. Наближені обчислення значень функцій. Нехай треба обчислити
значення функції / (х) при х = х0. Якщо функцію / (х) можна
розкласти в степеневий ряд в інтервалі (—R; R) і х0 £ (—R; R), то точне
значення / (х0) дорівнює сумі цього ряду при х = х0, а наближене —
частинній сумі S„ (х„). Похибку | / (х0) — Sn (Xo) | можна знайти,
оцінюючи залишок ряду гп (х0). Для рядів лейбніцевого типу
І Гп Uo) І = І "п+І (*0) + Un+2 у*0) + Un+3 (Х0) + ... І < І Un+I (X0) |.
Для знакозмінних і знакододатних рядів величину гп (х0), як
правило, оцінюють так:
К (*„) | ^ | ип+1 (х0) | + | ип+2 (х0) | + | ип+3 (х0) | + • • • <
<а1 + а2 + а3+ ••■ =S,
оо
Де 2 ah — певний знакододатний збіжний ряд, сума якого 5 легко
обчислюється (наприклад, геометрична прогресія), і для якого
К-нО^Ка!, К+2(х0)Ка2, |ип+3(х0)|<а3, •••.
527
Приклад
Обчислити з точністю до 0,001:
а) значення sin 18°; б) число є.
О а) Скориставшись формулою (43) при х = 18° або х = -гг маємо
sin 18° = sin-JL =_5_ _ "3 + пЬ п1 ■
10 10 10s • 3 1 106 • 5! 107 • 71
Дістали ряд лейбніцевого типу. Оскільки
-£г > 0,001, ———> 0,001, —— < 0,001,
10 10» • ЗІ 106 • 51
то з точністю до 0,001 маємо
sin 18° » JL. — 5! ta 0,309.
10 103 • ЗІ
б) Підставивши в ряд (42) х = 1, знайдемо знакододатний ряд
е= 1 + _!_ + _!_ + _!_+ ••• +—L-+ ....
II ^ 21 Т ЗІ ^ ТлІТ
Оцінимо л-й залишок цього ряду:
1 +, ' , + , ' +, ' +
(л+1)! (л + 2)1 (л+3)! (л + 4)!
= » /[ ■ 1 ■ 1 і 1 , \
(п+\)\ \ "•" л + 2 ^ (п + 2)(л + 3) ~і"(л + 2)(л+3)(ч + 4)~1" ' *'/
(1+~dn-+ („+!)• +W+"") =
(л + 1)1
1 1 1
(л+1)І 1 ~" піл
л+1
Залишається підібрати найменше натуральне число л, щоб виконувалась
нерівність -jjpjj- < 0,001.
Неважко обчислити, що ця нерівність виконується при л ^ 6, тому з точністю
до 0,001 маємо
e«l + l + _L+J_ + _L + -J-w 2,717. •
21 ЗІ 41 51
2°. Наближене обчислення визначених інтегралів. Нехай потрібно
х
знайти інтеграл F (х) = f/ (x) dx, який або не виражається через
а
елементарні функції, або складний і незручний для обчислень.
Якщо функцію / (х) можна розкласти в степеневий ряд, що рівномірно
збігається на деякому відрізку, то для обчислення заданого інтеграла
можна скористатись властивістю про почленне інтегрування цього
528
ряду. Похибку обчислень визначають так само, як і при обчисленні
значень функцій.
Приклад
Т
Обчислити з точністю до 0,001 інтеграл \ e~x'dx.
о
О Формула Ньютона — Лейбніца тут не застосовна, тому що первісна від
е—*' в елементарних функціях не виражається.
Скориставшись рядом (42), маємо
е_х' = 1 — — + — — — + . . . .
11 Т 21 ЗІ ^
Цей ряд рівномірно збіжний на всій числовій.осі, тому його можна почленно
інтегрувати на будь-якому скінченному сегменті, зокрема на відрізку J 0; -g-1:
_1_ J_
з з
—х«
І
.Н II ^ 21 ЗІ т І
о
= Г-їїітт+"2гЬ"_зггт+ •••)Іо3 =
= 1 1 І 1 1 I
Т II • 3 • 3s 2! • 5 • З6 31 • 7 ■ 3е
Дістали ряд лейбніцевого типу. Оскільки
-Li»0 001 ' — 1 >0.001. ' = !—< 0,001,
Т ' П-З-З3 81 -*"•""'• 21 • 5 • 3Б 2430
то з точністю до 0,001 маємо
о
Як уже зазначалось, первісна F (х) для функції / (х) = є-** не є елементарною
функцією. Проте ії легко знайти у вигляді степеиевого ряду, проінтегрувавши ряд
для функції е—** в межах від 0 до х:
,w_{V<,_j(,-^.+4-5-+..-)*-
о о
529
3°. Наближене інтегрування диференціальних рівнянь. Якщо
інтегрування диференціального рівняння не зводиться до
квадратур, то для наближеного інтегрування можна скористатись
рядом Тейлора.
Нехай треба знайти частинний розв'язок у (х) рівняння
У'=П*.У), (49)
який задовольняє початкову умову у (х0) = у0.
Припустимо, що шуканий розв'язок рівняння (49) в околі точки х0,
в якій задані початкові умови, можна розкласти в ряд
У{*)= Уі*ь) + jL$Lix- хо) +-^-(*-*о)2 + ••• +
+ J^rLix-Xo)n+ ■•• - (50)
Нам треба знайти у (х0), у' (х0), у" (х0),.... Значення у (х0) = у0
задано початковою умовою. Щоб знайти похідну у' (х0) = уо, в рівнянні
(49) треба покласти х = хв, у — у0.
Похідну у" (х0) = уо знаходимо диференціюванням рівняння (49)
по х:
y = fi(x.y,y'). (51)
поклавши в цьому рівнянні х — х0, у = у0, у' — у0.
Продиференціювавши рівняння (51) і поклавши х — х0, у = у0,
У' = Уо, у" = Уо, Дістанемо у'" (х„) — Уо і т. д. Процес або
обривається на деякому коефіцієнті, або завершується знаходженням
загального закону побудови коефіцієнтів.
Зауваження 1. За формулою (50) можна знаходити
наближений розв'язок рівняння будь-якого порядку:
yW = f(x,y,y' у1"'1)
з початковими умовами
У (*„) = Уо, У' (*о) = Уо, • - - . У'"-1' (*о) = Уо~1)-
Зауваження 2. Питання про те, за яких умов розв'язок
диференціального рівняння можна шукати у вигляді ряду Тейлора (50),
а також яка похибка цього розв'язку, ми не розглядаємо.
Приклад
Знайти три перших (відмінних від нуля) члени розкладу в ряд розв'язку рівняння
а) у" = ху' + у, у (0) = 0, у' (0) = 1;
б) у' = х* + у*, у (1) = -1.
530
О а) Шукаємо розв'язок у (х) у вигляді ряду Маклорена:
ую-¥т+Х&-» + -!Ур-*+ - + Л°1*»+ ....
Тут у (0) = 0, у' (0) = 1. у" (0) = 0 ■ 1 + 0 = 0.
Послідовно диференціюючи дане рівняння, дістанемо
у'" = у' + ху" + у' = 2у' + ху", у" (0) = 2;
</,v = 2у" + у" + ху'" = Зу" + ху", y,v (0) = 0;
yV = Зі/'" + У" + ху™ = V + xy,v, <Д (0) = 8.
Підставляючи знайдені похідні в ряд Маклорена, дістаємо шуканий розв'язок
у (х) х _1_ х + — х3 + — Xі = х + — - + -?— .
У 1! т ЗІ 51 3 15
б) Шукаємо розв'язок у (х) у вигляді ряду Тейлора:
ytx) = y(l) + £B-tx-l) + jQV іх-\)* + ••• + У'"',(1) (х- !)"+••••
1! 2! пі
Маємо
у(1) = -1. у' (!) = !" + (- І)3 = 0; у" = 2х + 3у*у', -у" (1) = 2;
у" = 2 + 6// («,')" +-3//У. </'" (1) = 8.
Отже,
2 ,_ пі , 8 , мз і л-іг— П* -І- А- <х— \\3.
</(*)^-1 + _|_(*-1)* + _1_(*_1)3 = _1+(х_!)* + _^(х_1)3. •
2.7. Рівняння і функції Бесселя
Рівняння Бесселя має вигляд
*У + *#' + (х2 — v2) у = 0, v = const. (52)
До цього рівняння зводиться багато задач математичної фізики,
небесної механіки тощо.
Шукатимемо розв'язок рівняння (52) у вигляді ряду
У = х" f а***- (53)
4=0
Диференціюючи ряд (53) двічі і підставляючи значення у та у' в (52),
дістанемо
оо
2 akxk+p ((k + Pf + Xі — v2) = 0.
ft=0
Прирівнюючи до нуля коефіцієнти при однакових степенях х,
дістаємо систему рівнянь
*p:0o(p2-v2)=0;
xp+1:M(/>+l)2-v2) = 0;
531
xp+2: a2 {{p + 2f - v2) + a0 = 0; (54)
X***: a, ((p + 3)»-v«)+<*! = ();
*p+*: ah ((p + kf - v2) + a*_2 = 0;
Вважатимемо, що а0 Ф 0, тоді з першого рівняння (54) дістанемо,
що р = ± v.
Нехай р = v ^ 0, тоді з другого рівняння (54) знаходимо, що а, =
=■ 0, тому і всі коефіцієнти з непарними індексами дорівнюють нулю:
ОїА+і = 0. Далі
On an
а, = —
а. =■
(v + 2)* — Vs 2! (v + 1) *
о, ап
(v + 4)2 — vs 24(v+ 1) (v+2) • 1 • 2 ' (55)
пи (-1)4
2Jftfc! (v + !) (v + 2) ... (v + k)
При р =—v так само знаходимо
a2ft+1 = 0, a2k = -=j (-')Ч . (56)
22*fe!(— v+ 1) (— v + 2) ... (— v + ft)
З формул (53) і (55) дістанемо розв'язок рівняння (52) при р — vi
у (-1)*^+* .„.
У = flo /і —5ї 5 ■ (57)
" °£0 22ftfe! (v + 1) (v + 2) .. . (v + k)
Введемо гамма-функцію Ейлера (гл. 7, п. 4.2)
оо
Г(р)= \€-xxp~ydx (p>0).
6
Відомо, що функція Г (р + 1) = р Г (р) і для цілих значень р >
> 0 маємо Г (р -\- \) = р\. Для від'ємних р функція Г (р)
визначається інакше, але властивість Г (р -f- 1) = рГ (р) зберігається.
Якщо взяти довільну сталу
1
а° ~ 2vr (v + 1) '
то розв'язок (57) запишеться так:
" (" Ч'\Т) (58)
г ik-i- \\ г іь л-v-i. п "
532
у= /v(x)=J
/ \2A+v
^n r(k+\)T(k + v+\)
Коли /з = — v. a0 = 2_Vr _у——, то з (53) і (56) аналогічно
дістанемо ще один розв'язок рівняння (52):
і/ = J_v(х) = 2j^T(fe+l)r(fc-v+l) • (59)
Функції «/v (*) і J-v (х) називаються функціями Бесселя першого
роду порядку v і —V відповідно. Ряд (58) збіжний при х £ (— оо; + оо), а
ряд (59) V* Ф 0. Якщо v не ціле число, то функції Jv(x) і
/_v(^лінійно незалежні, тому що їхні ряди починаються з різних степенів х.
Загальний розв'язок рівняння (52) у цьому разі має вигляд
Коли v — ціле число, то /_v (х) = (—l)v^v {x), тобто функції (58) і
(59) лінійно залежні.
Другий частинний розв'язок у цьому випадку шукають у вигляді
/Cv (х) = /v {х) In x + x~v S bhxk.
ft=0
Підставляючи цей вираз у рівняння (52), визначають коефіцієнти Ьь.
Функція Kv (x) з визначеними коефіцієнтами Ьь помножена на
деяку сталу, називається функцією Бесселя другого роду v-го порядку.
Загальний розв'язок рівняння (52) матиме вигляд
у = С^Лх)+С2КАх)-
Приклад
Розв'язати рівняння Бесселя при v = 0 : у" + —^- + у = 0.
О 3 формули (57) знайдемо один частинний розв'язок:
'■«-jH#-(+r-
Другий частинний розв'язок треба шукати у вигляді
оо
Ke(x) = J0(x)lnx + J\ bkxk.
Можна показати, що
К.(*) = /оМІп*+-5ґ- щг[-т) (І + 4-) +
Загальний розв'язок заданого рівняння має вигляд
533
2.8. Поняття про степеневі ряди в комплексній області. Формули
Єйлера
Ряд виду
a0+a1(z — г0)+а2{г — г0)г + ■•• +
+ an(z-z0)n +
= 2 М*-*„)", (60)
де z = х -\- іу — комплексна змінна, z0, a0, alt а2, .... ап, ...— сталі
комплексні числа, називається степеневим рядом в комплексній
області.
При z0 = 0 з ряду (60) дістанемо ряд за степенями z
а0 + axz + GjZ2 + • • • + anz" + •■■ = 2 «n2"-
(61)
Збіжність рядів (60) та (61) відповідно в точках z = z0 та z = 0
очевидна. Під час дослідження цих рядів на збіжність в інших точках
комплексної площини користуються теоремою Абеля. Сформулюємо її.
Теорема. Якщо ряд (61) збіжний в точці z = z0 Ф 0, то він
абсолютно збіжний і при всіх значеннях г, для яких \ z | <; | z0 |.
Якщо ряд (61) розбіжний в точці z = zlt то він розбіжний і при
всіх значеннях z, для яких \z\>\z1\.
Доведення цієї теореми таке саме, як і для степеневих рядів в
дійсній області (п. 2.2). Розглянемо геометричне тлумачення теореми
Абеля для ряду (61). Оскільки для змінної 2 = х -}- іу значення | 2 | =
= Ух2 + У2, то нерівність І 2 І < І z0 |, або х2 -+- у2 < | z0 |2, у
комплексній площині означає сукупність точок z, які містяться всередині
круга радіуса | z01 з центром у початку координат (рис. 9.5).
Аналогічно нерівність | г | > | гг | геометрично означає сукупність
точок г комплексної площини, які лежать поза кругом радіуса | zx |
з центром у початку координат. Отже,
якщо 20 — точка збіжності ряду (61), то
цей ряд буде абсолютист збіжним у всіх
внутрішніх точках круга | z | < | z0 |.
Якщо zl —точка розбіжності ряду (61),
то цей ряд буде розбіжним у всіх точках,
поза кругом | z [ > | г1 \.
-ш. З теореми Абеля випливає існування
* такого числа R, що для всіх | г | < R
степеневий ряд (61) збіжний, а при
| z | > R розбіжний.
Круг радіуса R, де 0 < R < -f- то,
з центром у початку координат,
всередині якого степеневий ряд (61) абсолютно
Рис. 9.5 збіжний, а зовні якого розбіжний, на-
534
вивають кругом збіжності цього ряду, а число R — радіусом
збіжності. Якщо ряд (61) збіжний лише в точці z = 0, то вважають R = 0,
а якщо ряд (61) збіжний в усій площині, то R = + оо.
Круг збіжності ряду (60) матиме центр в точці z = z0. Радіус
збіжності рядів (60) і (61) можна знаходити так само, як і для рядів з
дійсними числами (п. 2.2). На межі круга збіжності, тобто в точках z, де
| z | = R, залежно від конкретних випадків ряд може бути як
збіжним, так і розбіжним. Всередині круга збіжності ряд (61) має
властивості, аналогічні властивостям степеневих рядів дійсної змінної.
Сума степеневого ряду в крузі його збіжності є деякою
комплексною функцією комплексної змінної z; такі функції називаються
аналітичними.
Приклад
°° гп
ДОСЛІДИТИ Иа ЗбІЖНІСТЬ Степеневий рЯД \ /- ■ і\2 •
л=1
О Оскільки
Ilm
л->оо
.. І Z |"+'(Я+ І)1 , .
п->оо \2\ (П -j- Z)*
то за ознакою Д'Аламбера ряд збіжний у крузі | z \ < 1.
При | z | = 1 маємо збіжний ряд, оскільки ряд
V_L__ J- _L
2j (п + l)a ~ ' + 22 + 23 + '- - •
n=0
є збіжним (узагальнений гармонічний ряд, в якому а = 2 > 1). Отже, областю
збіжності заданого ряду є значення г, для яких | г | ^ 1. •
За допомогою рядів в комплексній області узагальнимо поняття
показникової та тригонометричних функцій на випадок комплексної
змінної та доведемо формули Ейлера, які уже зустрічались в п. 1.4
(гл. 7).
Розглянемо розклад в степеневий ряд функції є* (п. 2.5):
ех = 1 + тг + 4г + ■ ■ * + -яг + ■"• • хЄ<~°°: + то)- (62)
Якщо дійсну змінну х замінити комплексною змінною z, матимемо ряд
1 + -гг+-!г+ •■•+■&+ •••• <63>
Оскільки
tf = lim 1-^-1= Hm (n+.l)l =Hm (n + 1) = oo,
n->oo | Un+l I n->oo "' n-nx>
535
то ряд (63) є абсолютно збіжним на всій комплексній площині.
Позначимо його суму через ег. Отже, за означенням для довільного
комплексного числа
ег = 1 +-ІГ+-2Ї-+ "• +іґ+ ••• > М<°°- <64)
Сума ряду (64) є комплексною функцією комплексної змінної г.
Аналогічно визначаються тригонометричні функції
z3 гь п z2n+l
sinz=z__+_ +(-*) (2в+і), + ••• . М<°°!
(65)
cosz==l_-£- + -£l- +(_1)"_^_+ .... \г\< + 00.
(66)
Між показниковою функцією ez і тригонометричними функціями
sin z і cos z існує простий зв'язок. Підставимо в ряд (64) значення іг
замість z і згрупуємо окремо доданки, які містять множник і і які цього
множника не містять:
с„_, , « , ('«>" , ОЧ» , «*>' і («*>6 , («)в ,
с * 1 11 1 21 ' ЗІ г 41 ' 51 ' 61 '
. , . . z za . г3 . г* . . z* z» . г1
1 1 1 ' 11 21 ' ЗІ ' 41 ■ 1 ' 51 61 І_71
/і г* , 2і г» . \ . ./ z3 . z6 г7
^І1 21 1 41 61 ' ' j 1 Ч2 ЗІ ' 51 71
Порівнюючи ряди в дужках з рядами (65) і (66), дістаємо
е'г = cos z + і sin z.
(<*)7
71
-+••
+ -
І
1
•)
(67
Аналогічно, підставляючи в ряд (64) замість z значення —іг, дістаємо
e-'z = cos z — і sin z. (68)
Формули (67) і (68) називаються формулами Ейлера. Якщо почлен-
но додати (відняти) рівності (67) і (68), то матимемо іншу форму
запису формул Ейлера:
е'г+е~'г . е'г-е-'г
cos z = —^2 > sin г = 27 "
Завдання для самоконтрол
ю
1. Який ряд називається функціональним? Що називається областю його
збіжності?
2. Який функціональний ряд називається рівномірно збіжним? Дати геометричне
тлумачення рівномірної та нерівномірної збіжності.
3. Сформулювати і пояснити властивості рівномірно збіжних рядів.
4. Сформулювати і довести ознаку Вейерішрасса.
5. Який ряд називається степеневим? Сформулювати 1 довести теорему Абеля,
536
в. Навести приклади степеневих рядів, радіус збіжності яких: 1) R = 0; 2) R =
■= +оо; 3)0< R<+oo.
7. Сформулювати і пояснити властивості степеневих рядів.
8. Що називається рядом Тейлора для функції / (*)? Як знайти коефіцієнти ряду
Тейлора?
9. Сформулювати і довести теорему про необхідні і достатні умови, за яких
сума ряду Тейлора функції f {х) збігається з цією функцією.
10. Який ряд називається рядом Маклореца. Розкласти в ряд Маклорена
функції: є*, sin х, cos х, (1 + х)т. In (1 + х), arctg x.
11. Як наближено обчислити значення функції за допомогою степеневого ряду?
Вказати способи оцінки залишку ряду. Навести приклади.
12. У чому полягає метод інтегрування функцій за допомогою рядів? Навести
приклади.
13. У чому полягає метод інтегрування диференціальних рівнянь за допомогою
рядів? Навести приклади.
14. Що називається степеневим рядом комплексної змінної?
15. Сформулювати теорему Абеля для степеневого ряду комплексної змінної z
і довести формули Ейлера.
16. Дати визначення функцій є2, sin z, cos z комплексної змінної z і довести
формули Ейлера.
17. Знайти область збіжності ряду:
a) f є—; б)2 І""*.
V^ COSH* Vі . . ,. .
18. Довести, що ряди > — та > „аі^ рівномірно збіжні на
п=1 п=1
ій числовій осі.
оо 0
19. Довести, що радіус збіжності ряду N (~я~) п' *" Д°РІВНЮЄ R *=
п=і '
20. Знайти область збіжності ряду:
а)І (2л-.,^^ : ^ 3- + І '
21. Показати, що
1) lnJ/ASf = |i((-l)"+12"+l)4. *Є(-Г"-+Т).
22"-1
2)
1—cos 2л у nn-i_fL_JE хсі—оо; +оо)
п=1
22. Обчислити "1^130 з точністю до 0,0001.
23. Обчислити з точністю до 0,001:
1/2 0.1 І/З
f arctgх л м Г Ш(1+«) _ ї dx_
а) —ї—"* « J х ' B)J YT+
•J п П
537
24. Знайти чотири відмінні від нуля члени розкладу в степеневий ряд розв'язку
диференціального рівняння:
а) у' = у' 4- *\ у (0) = 0,5; б) / = (у'Р + ху, у (1) = 1. у1 (1) = 0.
25. Розв'язати рівняння Бесселя у"-{-у' — + у = 0.
26. Знайти круг і радіус збіжності ряду
а) 1 ~2^+Т : б> 2j „■ (і + о« •
п=0 n=l T '
Відповіді. 17. а) (0; +оо); б) (є-1; є). 20. а) [ — J_L ; JlL] ;
б) [1; 3). 22. 3/Ш = у' 125 + 5 = 5 (І + -^) «5,0658. 23. а) 0,409; 6)0,098;
1 х X2 Xs (X І)8
в) 0,333. 24. а) у = -у- + -у + -g- + -у^- + ... ; б) у = 1 + 2 +
(х^І)3 , (х — І)4
+ 6 + 8 + ••• • 26- а)ІгІ<1. Д= 1;б)|г-»|<Ґ2, /? = К2
§ 3. РЯДИ ФУР'Є
3.1. Гармонічні коливання
У природі і техніці дуже поширені процеси, які через певні
проміжки часу повторюються. Такі процеси називаються періодичними.
Прикладами періодичних процесів можуть бути механічні та
електромагнітні коливання, періодичні рухи в теорії пружності, акустиці,
радіотехніці, електротехніці тощо.
Моделюються періодичні процеси за допомогою періодичних
функцій. Нагадаємо, що функція / (х) називається періодичною (гл. 4, п. 2.8)
з періодом Т > 0, якщо вона визначена на всій числовій осі і для неї
виконується рівність f (х -\- Т) — f (х), х (j R-
Періодична функція х = f (t) зображає періодичний рух, або
коливання точки, що має в момент часу / координату х.
Найпростішим коливанням є просте гармонічне коливання, яке,
як відомо (гл. 4, п. 2.8), задається функцією
x(/) = asin(co/ -г-Фо). />0. (69)
де а — амплітуда коливання; со — циклічна частота; ф0 — початкова
фаза. Основним періодом функції (69) є Т = —; тобто одне повне ко-
■ *. .2л
ливання відбувається за проміжок часу—.
Функція (69) (та її графік) називається простою гармонікою.
Просту гармоніку зображає також функція
х (/) = A cos at + В sin со/. (70)
538
Дійсно,
х (/) = A cos со/ + В sin со/ = V А* + В2 [■
В \
У/р + В* Sln аІ) = а sin И + Фо).
а = VA* + В\
Sin фо,
в
COS CO/ +
COS ф0.
Va* + ва ° Va* + в»
Коливання, утворені внаслідок накладання кількох простих
гармонік, називають складними гармонічними коливаннями. Наприклад,
функція
Ф(0 =а15іп(/+ф1) + а25іп(2/ + ф2)+ ••• + а„ sin (л/+ Фп)
задає складне гармонічне коливання і є результатом накладання п
простих гармонік. Перша з цих гармонік має період 2л, друга 2 (
третя =- і т. д., л-а — , тому загальний період Т функції ф (/) до-
рівнює 2я.
Графік складного гармонічного коливання, яке складається з
кількох простих гармонік, може значно відрізнятися від графіків цих
гармонік.
Приклад
На рис. 9.6 суцільною лінією показано графік функції
sin Зх sin 5x
S (де) = sin де + —jj + g ,
яка є сумою трьох простих гармонік (штрихові лінії 1. 2, 3): a) sin де; б)—~— ;
sin 5*
в) —5 •
Таким чином, накладанням простих гармонік можна дістати
різноманітні періодичні коливання, які зовсім не схожі на прості
гармонічні коливання.
Природно, постає обернена задача: чи не можна періодичний рух,
еаданий деякою періодичною функцією, подати як суму простих гар-
539
монік? Виявляється, що цього взагалі кажучи, зробити не можна,
якщо обмежитися скінченною сумою простих гармонік. Якщо ж ввести
нескінченні суми простих гармонік, тобто тригонометричні ряди, то
практично кожну періодичну функцію можна розкласти на прості
гармоніки.
3.2. Тригонометричний ряд Фур'є. Коефіцієнти Фур'е
Ряд виду
-у- + Cj cos x + bx sin x -f- aa cos 2x + b2 sin 2x + • • • +
eo
+ ancosnx + bnsinnx + ••• = -%- + 2 (ancosnx + bns\nnx) (71)
називається тригонометричним рядом, а дійсні числа с0, ап,
Ьп (п = 1, 2, ...) — його коефіцієнтами. Вільний член в сумі (71)
для зручності записують у вигляді -4 .
Припустимо, що ряд (71) на відрізку [—л; л] рівномірно збіжний
до функції / (х):
©о
/ (я) = —jf- + 2 (fln cos "* + bn sin nx). (72)
^ n=l
Оскільки члени ряду (71) є неперервними функціями, то його сума
/ (х) є також неперервною функцією (п. 2.1). Проінтегрувавши почлен-
но ряд (72) на відрізку [—л; л] дістанемо
л Я то / я я \
\ / (a:) dx = \ -у- dx + 2j і \ а„ cos "^^ + 1 bn sin /ixdx І,
-п • —я "=і \—п —я /
ля я
^f(x)dx=, ^-^-dx=a0n, flg = 4- j/(*>«**. (73)
—я —я —я
ОСКІЛЬКИ
я л
] cos nxdx = 0, j sin nxdx = 0.
—я —я
Помножимо обидві частини рівності (72) на cos kx і проінтегруємо
одержаний ряд почленно на відрізку [—л; л]:
л я
] / (х) cos kxdx = -^- ] cos kxdx +
—п —я
+ 2 сп і cos nA! cos £->cdx + &„ \ sin пх cos fe*d* ) • (74)
»->\ -я -л /
540
—п
звідки
Проте
п п
J cos ftjfdjc =0, ] cos nx cos focd» =0, k=f=n,
—я —я
я
\ cos kx sin rued* == 0,
—я
тому з рівності (74) при k = n дістанемо
я я
\ / (х) cos nxdx = ап ^ cos2 nxdx = апп;
—я —я
я
ап = — J / (х) cos гшіат, n =» 1, 2, .... (75)
—я
Аналогічно, помноживши рівність (72) на sin kx і
проінтегрувавши почленно на відрізку [—я; л], знайдемо
я
Ьп == — j /W sin njed*i n = 1, 2 (76)
—л
Нехай / (х) — інтегровна функція на відрізку [—я; я]. Числа а0, ап,
Ьп, які визначаються формулами (73), (75), (76), називаються
коефіцієнтами Фур'є функції f (x). Тригонометричний ряд (71),
коефіцієнтами якого є коефіцієнти Фур'є функції / (х), називають рядом Фур'є
цієї функції і записують
то
f (х) ~ -%- + 2 (on cos nx + bn sin па:). (77)
Знак відповідності ~ означає, що інтегровній на відрізку [—л; л]
функції f (x) поставлено у відповідність її ряд Фур'є.
Аналогічне явище спостерігалось і для рядів Тейлора (п. 2.4).
Доведений вище результат можна тепер сформулювати так.
Теорема 1. Якщо функцію f (х) можна подати на відрізку І—л; л]
у вигляді рівномірно збіжного на цьому відрізку тригонометричного
ряду (76). то цей тригонометричний ряд єдиний і є рядом Фур'є для
функції f (х).
З'ясуємо умови, за яких знак відповідності у формулі (77) можна
замінити знаком рівності, тобто, за яких ряд Фур'є функції є збіжним
і має своєю сумою саме функцію / (я).
Теорема 2 (достатня умова подання функції через її ряд Фур'є).
Нехай періодична функція f (х) з періодом 2л є кусково-монотонна і
обмежена на відріжу [—л; л]. Тоді ряд Фур'є функції f (x) є збіжним на
всій числовій осі. Сума S (х) знайденого ряду дорівнює значенню функції
541
Уі
\АММ±
-Я 0\ X 31 X
Рис. 9.7
f (х) в усіх точках неперервності функції f (x); якщо х0 — точка
розриву функції f {x), то
S(х0) = f<*o-Q) + H*o + 0) t
тобто сума ряду Фур'є в точці х0 дорівнює середньому арифметичному
односторонніх границь функції f (х) в цій точці; в кінцевих точках
відрізка [—л; л] сума ряду Фур'є набуває значень
S(-n)=S(n)= /(-* + 0) + /(я-0) .
Приймемо цю теорему без доведення.
Зауваження 1. Якщо ряд Фур'є збігається до функції 5 (х),
то ця функція 2л-періодична, бо такими є всі члени ряду (72). Тому,
якщо ряд (72) збіжний до функції f(x) на відрізку [—л; л], то він
збігатиметься до цієї самої функції на всій числовій осі (—оо; + оо); при
цьому / (а: + 2л) = / (а:). Отже, функцію, задану на відрізку [—л; л] та
періодично продовжену на всю числову пряму, можна подати через
суму ряду Фур'є.
Зауваження 2. При періодичному продовженні функції f (x),
х Є [—л; л] на всю числову вісь знайдена функція буде або
неперервною в точках ± (2п — 1) л, п £ N, або розривною в цих точках.
Неперервність можлива лише, якщо / (л) = / (—л) (рис. 9.7).
У цьому разі сума ряду Фур'є дорівнює S (± (2п — 1) л) = / (л) =
= f (—л). Якщо ж / (л) Ф f (—л), то ми можемо залишити без зміни
значення функції на проміжку (—л; л] і періодично з періодом 2л
продовжити її на всю числову вісь.
При цьому в точках ± (2/г— 1) л, п Є N, можуть виникнути точки
розриву першого роду (рис. 9.8), в яких сума ряду Фур'є дорівнює
5 (± (2л - 1) л) = -і- (/ (л) + / (-л)).
Зауваження 3. Для довільної інтегровної 2л-періодичної
функції ф (х) виконується рівність (рис. 9.9)
п а+2я
] (p(x)dx = ] <p(x)dx
—л а
для будь-якого числа а £ (—оо; +оо). У зв'язку з цим коефіцієнти ря-
542
ду Фур'є можна знайти, обчислюючи інтеграли (73), (75), (76) по
довільному відрізку, довжина якого дорівнює періоду, тобто
а+2Я а+2п
а0 = іг J f(x)dx, an = — J f(x) cos nxdx,
a a
a+2n
bn=-^- j f{x) sin nxdx.
a
У випадку, коли 2л-періодична функція задана на проміжку [0; 2л],
ці формули спрощують задачу знаходження коефіцієнтів ряду Фур'є.
Зауваження 4. Умови, які накладаються на функцію f (x)
при розкладі її в ряд Фур'є, значно простіші, ніж при розкладі її в
степеневий ряд. Дійсно, якщо функція розкладається в ряд Тейлора,
то вона на всьому інтервалі збіжності є не тільки неперервною, а й
скільки завгодно разів диференційовною. Для розкладу функції в ряд
Фур'є у цьому зовсім немає потреби. Згідно з теоремою 2, достатньо,
щоб лише функція була неперервною або навіть мала на відрізку
скінченне число точок розриву першого роду.
З цього випливає, що клас функцій, які можна подати рядом Фур'є
значно ширший, ніж клас функцій, які можна подати рядом Тейлора.
Зауваження 5. Якщо функція / (а:) розкладається в ряд Фур'є,
то частинні суми 5„ (х) цього ряду (по аналогії з многочленами
Тейлора їх називають многочленами Фур'є) дають змогу знайти наближення
цієї функції
п
f (х) я» Sn (х) = -%- + S («й cos kx + bh sin kx).
z k=l
Похибка цієї формули зменшується зі збільшенням числа п.
Проте оцінити цю похибку набагато складніше, ніж для многочленів
Тейлора, і ми цим займатися не будемо.
Приклади
1. Розкласти в ряд Фур'є 2я-періодичну функцію:
а) f(x)=n + x, *Є(— "І "1 (Рис- 9-Ю);
[ 0, — Ж х < 0;
б) ц (х) = \
\х, 0<х<я (рис. 9.11).
543
я>
'/V
-Ж CD
2Н
%
■r.
Л
5% X
#4
'ЛГЛ.
'А7А7Л
Рис. 9.Ю
-2Г -X О Я 2Ж ЗХ
Рис. 9.11
О Задані функції кусково-монотонні на проміжку (—я: п], тому їх можна
зобразити рядом Фур'є. Отже, задача зводиться до знаходження коефіцієнтів Фур'є.
а) Маємо
и = х + л dv = cos nxdjc
du — dx v = .— sin nx
n
sin nx —
І—я
I? l ? І (я + х)а
°о=1Г \tlx)dx = lr \in + x)dx~— 2
—n —я
я j я
c„ = — \ / (x) cos nxdx = — \ (x + n) cos «xdx =
—я
= ~(JL±!L
n \ n
— — I sin nxdx\ =0;
—я
П . П
bn = — I / (x) sin nxdx — — I (x + я) sin nxdx
—я
я ^ n
1 2л (—1)"
= 2л:
u = x + я du = sin nxdx
du = dx v — — .— cos nx
n
Х+Я
cos nx
+
+-M
cos nxdx = — ~r- •
Jl
■it (-»■
"+1.
Підставивши знайдені коефіцієнти в ряд (72), дістанемо
Є-IV
п+1
/(х) = я + 2 £-J—{ sin
п=1
Ця рівність справедлива для всіх точок неперервності заданої функції, тобто при
х ф ± (2п — 1) я, п Є N. У точках ± (2л — 1) я сума ряду Фур'є дорівнює я (пів-
сума односторонніх границь в цих точках).
Зазначимо, що задана періодична функція / (х) збігається з функцією у = я + *
лише на проміжку (—я; я], а зовні проміжку (—я; я] ці функції різні.
544
cosnx In (_ і)" — 1
fln: п і і - і і """ |о пп'
if? г , \ xcosnx |n (_ n"+i
»п = 1Г І * ° " sinn*d* + J * sinnxdx ) йп~|0 п~
б) Знаходимо коефіцієнти Фур'є функції <р (х):
[ ° " \
, = ■— І \ 0 • cos nxdx + \ х cos nxdx J =
■ I x sin nxdx I
о У
Отже, ряд Фур'є заданої функції має вигляд
«Ц-Г+Іі^іігіГ' ^snx + -bi)lsinnx) =
л—1
я 2 / cos х cos3x cos5x \
-Т-1Г[~F~+~з^~+ —5*~ + —} +
/sinx sin2x sin3x \
+ (-і—2-+—3— -)■
Знайдений ряд збіжний до функції <р (х) при всіх х Ф ± (2п — 1) я, п Є N.
я
У точках х = ± (2п — 1) я сума ряду дорівнює -g-.
Зауважимо, що якби
0, — я<х<0;
х, 0^х<я,
Фі (*) =
\, «-±«.
то знайдений у цьому прикладі ряд Фур'є був би збіжним до <j>! (х) на всій
числовій осі. •
3.3. Ряд Фур'є для парних і непарних функцій
Нехай функцію/1 (х) можна подати на відрізку [—зх; л] рядом Фур'є.
Покажемо, що обчислення коефіцієнтів цього ряду спрощується,
якщо функція / (де) є парною, або непарною.
Якщо функція / (х) парна, то її ряд Фур'є має вигляд
/W = 4-+2flncosnx, (78)
я я
a0 = -L\f(x)dx, an = J- $ f(x) cos nxdx. (79)
п=1
де
545
Рис. 9.12
Якщо функція / (х) непарна, то її ряд Фур'е має вигляд
00
f(x) = 2 bnsinnx,
п=1
Де
bn=-jrU{x)s™nxdx-
(80)
(81)
О Для доведення формул (78) — (81) зазначимо спочатку, що
коли функція ф (х) інтегровна на відрізку [—/; /], то (гл. 7, п. 2.5)
[ Ф (jc) dx •= 2 j" ф (х) dx, (82)
-/ а
якщо ф (х) парна (риє. 9.12, а) 1
\<p(x)dx = 0, (83)
-/
якщо ф (х) непарна (рис. 9.12, б).
З формул (82) і (83) дістаємо формули (79) і (81). •
Зазначимо, що ряди (78) і (80) відображають характер функції/ (а:)
Ряд Фур'є для парної функції містить лише косинуси (парні функції),
а ряд Фур'е для непарної функції містить лише синуси (непарні
функції).
Приклад
Розкласти в ряд Фур'е 2я-пер1одичні функції
а) f (х) = І х |, —п < х ^ я (рис. 9.13);
б) ф (х) = {
І 1, Os^x<jt (рис. 9.14).
О Задані функції є кусково-монотонні, тому можуть бути розкладені в ряди
Фур'е.
іЧ
'К/К/К/К/К/К
-да -to f. sk 5x x
Рис. 9.13
(/ xLJar йГх
Рис, 9.14
646
а) Оскільки функція / (х) парна, то, користуючись формулами (78) і (79),
дістанемо
2 ? 2 У
а°= аг)} (х) йх=тг \*d*=я;
2 f 2 У
fl^ = — ] / (*) cos nxdx = — J ж cos nxdx =
2 I xsh
~ n у n
о о
nx cos nx \ In 2
+ _^~)|o=^r((-1)':-1):
2 ~ (_!)"_ 1
1=1
я 4 / cos x cos 3x cos5x \
= ~2 ІГрТ»-+ з2 + —5* + •■•)■
Ця рівність виконується на всій числовій осі, тому що задана функція неперервна
для всіх дійсних значень х.
б) Функція ф (х) непарна, тому, згідно з формулами (80) і (81), маємо
2 Г 2 (•
Ь„ = — \ Ф (х) sin nxdx = ~zr \ sin лхах =
о о
= -4г cos nx I? =-^ «-!>"-1);
2 ^ 1 —(—1)" 4 /sinx sin3x sin5x \ оіч
ч>М=-їг2 7T-^sin^ = — (-Г- + -1— + —5—+ "•)• <84>
п=1
Ця рівність справедлива у всіх точках хЄ (—°°*. + °°). крім точок розриву.
В точках розриву х = 0, ±я, ±2я, ±3я, ... сума знайденого ряду дорівнює нулю. •
3.4. Ряд Фур'є для ^-періодичної функції
Нехай функція f (х) визначена на відрізку [—/; /] має період 2/
(/-довільне додатне число) і є на відрізку [—/; /] кусково-моногонною.
Розкладемо її в ряд Фур'є. Виконаємо заміну змінної за формулою
х = JL і розглянемо функцію ф (/) = / І—) •
Ця функція, визначена на відрізку [—я; я] і кусково-монотонна на
ньому.
Розкладемо функцію ф (/) на відрізку [—л; п] в ряд Фур'є:
©о
Ф (0 = -4" + Е (а„ cos nt + Ьп sin nt), (85)
547
: — ) ф (0 dt, ап = -і- £ ф (0 cos ri/d/,
—я —л
п
^n = i~ \<p(t)s\nntdt. (86)
ях ,, я
Повернемось до змінної х. При t =—т-, dt = -r-dx формули
(85) і (86) набирають вигляду
/М= Tf-+ £ kcos-^ + bns\n^-) , (87)
І І
a0 = -r- )f(x)dx, ап = -j- ) / (х) cos -^- dx,
—і -/
і
ft„=|j/Msin^-^. (88)
-/
Ряд (87) і є рядом Фур'є для функції / {х) з періодом 21.
Коефіцієнти цього ряду знаходять за формулами (88). Зауважимо, що всі
теореми, які справджуються для рядів Фур'є 2я-періодичних функцій,
зберігаються і для рядів Фур'є 2/-періодичних функцій. Зокрема,
справедливими залишаються достатні умови для розкладу функції в
ряд Фур'є (п. 3.2), зауваження про можливість обчислювати
коефіцієнти ряду Фур'є, інтегруючи її по довільному відрізку, довжина
якого дорівнює періоду (п. 3.2), а також особливості рядів Фур'є для
парних і непарних функцій (п. 3.3).
Приклад
Зобразити рядом Фур'є функцію (рис. 9.15)
/(*)=**, -1<х<1, f(x+2) = f(x), х€(-оо; +оо).
О Ця функція неперервна на всій числовій осі, париа і має період 21 = 2, тому
її можна подати через ряд Фур'є вигляду (87). Враховуючи, що задана функція парна
і І — І, згідно з формулами (87) і (88), маємо
a0 = -L[f(x)dx = 2^x*dx=±; fln = _?_[/(*) cos-^
0 0 0
nnx .
dx =
-Л
1
x2 cos nnxdx =
u = x2 dv = cos nnxdx
du = 2xdx v = —— sin nnx
nn
= 2 І Л— sin nnx i— [ x sin nnxdx I = — —— \
І ЛП ' JW J І ПП J
\ 0/0
x sin nnxdx =
548
*»
a
Рис. 9.15
du = dx v
dv = sin nnxdx
1
ПП
cos nnx
+-Ч'
nn J
cos nnxdx =
ix
ягл2
nn I
cos nnx IJ
X
nn
4(-l)"
n2n»
cos nnx |{, +
/>n = 0i
/W--J- + -
(-1)"
cos nnx =
+
n* [
cos nx
n=l
cos 2ях
+
cos3nx
l2
+
cos inx
~ 2і ~ Зг
(—oo<x< + oo). •
3.5. Ряди Фур'є для функцій заданих на відрізку
■)■
[0; І] або на
відрізку [а; Ь]
Нехай треба розкласти в ряд Фур'є функцію f (x) задану на
відрізку [0; Л. Ми можемо довільним способом продовжити функцію f (x) на
відрізок [—/; 0], але так, щоб утворена на відрізку [—/; Л нова
функція збігалась з функцією / (а:) при х 6 [0; І] і була
кусково-монотонною (покладемо, наприклад, F (х) = 0 при х 6 І—/; 0) і F (х) = / (х)
при х Є [0; Л).
Розклавши функцію F (х) в ряд Фур'є на відрізку [—/; Л, дістанемо
шуканий ряд функції / (а:) при х 6 Ю; Л. Зокрема, функцію / (х) можна
продовжити парним способом на відрізок [—/; 0] (рис. 9.16). Тоді
графік функції F (х), х 6 І—/; Л буде симетричним відносно осі Оу, а її
L X
Рис. 9.16
У
-І 0
V
1 А
1 г
і X
Рис, 9,17
549
Рис. 9.18
ряд Фур'е міститиме лише косинуси. Якщо ж / (а:) продовжити на
відрізок І—/; 0] непарним способом (рис. 9.17), то графік функції F (х),
х 6 І—/; Л буде симетричним відносно точки х = 0, а її ряд Фур'е
міститиме лише синуси.
Таким чином, якщо функцію / (х), яка задана на відрізку [0; /]
можна розкласти в ряд Фур'е, то таких рядів існує безліч. Особливо
важливими для застосування є розклади функції f (x) в ряд синусів і ряд
косинусів.
Коли функція / (а:) задана на відрізку [а; Ь], де а < Ь, 0 < | а |,
b | < оо, то задача подання такої функції через ряд Фур'е зводиться
до розглянутої вище.
Приклад
Розкласти в ряд Фур'є по синусах функцію f (х) =
0.
0<х<-5-,
< X <Я.
О Продовжимо функцію / (*) непарним способом на проміжок [—я; 0), а потім
знайдену функцію продовжимо періодично на всю числову вісь (рнс. 9.18).
Користуючись формулами (80) і (81), маємо
п о /
Ьп = І / (х) dx = — І \ х sin nx dx + І 0 ■ sin nxdx
-м-
о
xcosnx
пп \
sm-j-j;
sin nx \ |л/2 2 / я пп 1
+ ~*~ )|о =-h-(~n-cos~+~*
■ = -*-У (jlcos ™ +-L-sln ™)slnr« =
2 / sin х я sin Зх я sin Ьх я .
= —І іа — -2~sin2x — —з»—+-4"Sin4x+ —р—— -g-sin6x +
М*)
■)
Ця рівність справедлива у всіх точках х Є [0; я], крім точки х = -jp в якій сума
ряду дорівнює ~т, а значення функції / і "о" І = 0' Ряд є збіжним на всій числовій осі
550
до 2я-пер!одичноТ функції
F(x) =
я я
х» — 2 < * < ~2~ і
п ^ ^ я я
0, —"<*<--g-, -g- <х< я;
я п
4 • *—± 2 •
Зокрема, якщо в ряді Фур'е покласти х = -у. дістанемо відомий ряд
_я_ _ _2_ / Jl_ 1 1 \
4 — я (1+ З* + Б» + 7а + "")>
- я2 111
або -g- = 1 + -gjp -f- -трг + -jr +•••••
3.6. Комплексна форма ряду Фур'е
Нехай
/ (*) = -2й- + 2 (Qn cos nxr + bn sin nxr);
»:=1
я n
ao = -j- J f (x) dx, an = -i- f / (a:) cos nxdx;
—n -1я
1 я
6n = — f / (x) sin nxdA:, n = 1, 2, ....
—Л
Застосувавши формули Ейлера (п. 2.7), дістанемо
cn cos nx + bn5\nnx — спеСпх + с-пе~1пх,
— ип
а„ — ib„
С-п
°п + '&„
(89)
З формул (89) і (91) маємо
я „
сп = -g^- J / (*) (cos пат — / sin яхт) d* = -^ £ / (*) e~lnxdx.
Зокрема,
—я
п я
c_n = -gj J /(a;) (cos /гл: -f- і sin па:) dx; = -g— j /(a:) e'^dx.
(90)
(91)
(92)
(93)
(94)
551
Враховуючи формули (90) і (93), запишемо ряд (89) у вигляді
/(*) = с0 + 2 (сп^пя + с-„е-""),
п=1
або
f(x) = £ спе'»'. (95)
п=—eo
Коефіцієнти цього ряду, згідно з формулами (92) і (94), можна
записати у вигляді
сп = 4г J f(x) e-tnxdx, n = 0, ± 1, ± 2 (96)
—л
Рівність (95) називають комплексною формою ряду Фур'е, а числа сп,
знайдені за формулою (96) — комплексними коефіцієнтами Фур'е.
Аналогічно можна анайти комплексну форму ряду Фур'є на
відрізку [-/; Л:
■\-ео ІППХ
/(*) = 2 ^е"1"";
2(
П=-—оо
/ — ІППХ
I f(x)e ' dx, n = 0, ±1, ±2 (97)
—/
Члени цього ряду с„е ' називають гармоніками, коефіцієнти
пп ,
сп — комплексними амплітудами гармонік, а числа ап = —, (п =
= 0; ±1, ±2, ...) — хвильовими числами функції
/М= 2 спе1"п*.
п^—оо
Сукупність хвильових чисел називається спектром. Якщо ці
числа відкладати на числовій осі, то дістанемо дискретну множину
точок. Відповідний цій множині спектр називають дискретним
спектром.
Приклад
Написати ряд Фур'е в комплексній формі для функції f (ж) з періодом 21=2,
якщо
0. — К х < 0;
/W = (l, 0<*<1.
552
О За формулами (97) маємо
1
1
е~1тх
2іпп
о 2іпп
— 1 [ = cos (— пп) + І sin (— пп) — і t = (—1)"—!
2лп 2пп 2пп
Оскільки задана функція кусково-моиотонна, то у всіх точках неперервності
цієї функції справедлива рівність
П=—ОО '
+ 1-ЗЇГ- + —3JT-) + (-5ir- + —on"j+ "'і- *
3.7. Ряд Фур'е за ортогональною системою функцій
Нехай на відрізку la; b] задано нескінченну систему функцій
Фі(*)> ФаМ> ■■■ > Ф„М (98)
Якщо для довільних пф k
ь
ІФ„(*)ф*(*)4х = 0, (99)
а
а для п = k
ь
\yl{x)dx = %n, 0<Я„<оо, п = 1, 2 (100)
а
то система функцій (98) називається ортогональною на відрізку la; b].
Приклади
1. Система функцій
1, cosx, sin*, cos2*, sin 2x cosn*, sin nx, . ..
ортогональна на відрізку [—л; я].
2. Система функцій
1, cosx, cos2x cosn*, ...
ортогональна иа відрізку [0; я].
3. Система функцій
пх пх 2пх 2ях ппх ппх
1, cos -у- , sin —j- , cos —-.— , sin —-.— , . . ., cos —j— , sin —j— ....
ортогональна на відрізку [—/; /].
553
4. Системи функцій
лх 2ях міх
1. cos — , cos —j— cos —j—
nx 2jix nnx
Sin -J— , sin -. sin ;
ортогональні на відрізку [0; I].
5. Система функцій
slnnx, sln2x, ... , sinnx
ортогональна на відрізку [0; я].
Рекомендуємо читачеві упевнитись в цьому самостійно, обчисливши для кожної
з наведених систем Інтеграли (99) і (100).
6. Не варто думати, що властивість ортогональності мають лише системи
тригонометричних функцій.
Побудуємо систему [Рп (х)} ортогональних многочленів. Розглянемо систему
функцій
і,*,*2 *" — 1^х<1. (101)
Перші дві функції ортогональні на відрізку [—1; 1]:
1
де*
S
»а
= 0,
—І
1 ■ xdx = ■
—і
тому покладемо Р0 (х) = 1, Рх (х) =■ х. Проте х« вже не ортогональний 1, тому що
1
1 2
і 3
—1 З
Отже, Ра (х) Ф Xі; візьмемо Ра (х) як лінійну комбінацію перших трьох функцій
системи (101) 1. х, х2, тобто покладемо Р2 (х) = ах* + Ьх + с. Підберемо
коефіцієнти а, Ь, с так, щоб многочлен Ра (х) був ортогональним до многочленів Р0 (х) і
Р\ (х), тобто
або
звідки
\ Pi (*) Л> (*) dx = 0, [ Р„ (х) Pj (x) dx = 0,
-1 Іі
1 і
f (ах2 + Ьх + с) dx = 0, f (ах2 + Ьх + с) xdx = 0,
-1 Л
/ ах8 fc*« \ II 2
I-J- + -jT+ cxl = -g- а + 2c = 0, а = — 3c;
bxs ex2 \ |l 2
+ -3-+-2-)|_f—5-» = o. *~o.
Отже, P2 (x) = —3cx2 + c «= c ( 1 — Зх»), де с — довільна стала.
Підбирають її, як правило, так, щоб Ра (І) = 1;
с(1-3- 12) = 1, c = -~y, тому Ра (х) = -у (3x2 - 1).
554
Многочлен Р3 (х) шукатимемо як лінійну комбінацію перших чотирьох функцій
системи (101): Р3 (х) = ах8 + Ьх2 + сх + d. Із системи рівнянь
1 і
J Р8 (х) Р0 (х) dx = 0; j Р8 (х) Рх (х) dx = 0;
—1
{ Р8 (х) Pa (x) dx = 0; Р8(1) = 1
«находимо, що
5 . 3
Ря (х) =-%-х*—~2 *•
Аналогічно будуємо
Р4 (х) «= -g- (35х4 — ЗОх2 + 3); Рв (х) = — (63хв — 70х^ + 15х)
і т. д. Ці многочлени ортогональні на відрізку [—1; 1]. Вони називаються
многочленами Лежандра І широко використовуються в математиці 1 фізиці [13].
Послідовність Дій ортогоналізації, подібну до тієї, яку ми
виконали над системою функцій (101) на відрізку [—1; 1], можна повторити
для довільної системи лінійно незалежних функцій на довільному
інтервалі, якщо інтеграли від квадратів цих функцій на взятому
інтервалі є збіжними.
Нехай функція / (х) розкладається в ряд за функціями
ортогональної системи (98)
К*) = 2*»ф»М- (Ю2)
п=1
Вважатимемо ряд (102) рівномірно збіжним на відрізку [а; Ь\.
Визначимо коефіцієнти сп. Помножимо обидві частини рівності (101) на q>„ (x)
і результат почленно проінтегруємо. Враховуючи рівності (99) і (100),
дістанемо
б ь
J / (*) ф„ (х) dx = сп $ q>« (x) dx,
ввідки
ь
$f(x)tpn(x)dx
с„=і
ь
І <РІ (*) dx
(103)
Ряд (102) називаються рядом Фур'є функції f (x) за системою
ортогональних функцій (98), а коефіцієнти сп цього ряду, обчислені за
555
формулами (103) — коефіцієнтами Фур'е функції f (х) за системою
функцій (98).
Ряди Фур'е за системами ортогональних функцій (їх називають ще
узагальненими рядами Фур'є) використовуються при розв'язуванні
багатьох практичних задач, зокрема задач математичної фізики.
Завдання для самоконтролю
1. Який ряд називається тригонометричним? У чому полягає задача про
зображення функції рядом Фур'е?
2. Вивести формули для коефіцієнтів Фур'є функції f (х), х 6 [—я; я].
3. Сформулювати достатні умови для зображення функції рядом Фур'е.
4. Вказати особливості рядів Фур'є для парних і непарних функцій і вивести
відповідні формули.
5. Написати ряд Фур'є і вивести формули для його коефіцієнтів, якщо функція
/ (х) задана на відрізку [—/; /].
6. Як можна розкласти в ряд Фур'є функцію, задану иа відрізку [0; я] або
[0; /]?
7. Записати ряд Фур'е в комплексній формі. Вивести формули для коефіцієнтів
цього ряду.
8. Яка система функцій називається ортогональною? Навести приклади.
9. У чому полягає задача про зображення функції рядом за ортогональною
системою' Як знайти коефіцієнти цього ряду?
10. Зобразити рядом Фур'е 2я-періодичні функції:
*)Пх) = \—Т- *Є(-я:0);
И. *Є[0; я];
б) { {х) = 2х — 3, х 6 [— я; я).
11. Розкласти в ряд за косинусами функцію
f (х) = -j- — -|- , х Є (0; я].
12. Розкласти вряди Фур'є за синусами і за косинусами функцію/ (х)= х — -я-,
задану на півперіоді (0; 2].
13. Зобразити комплексною формою ряду Фур'е 2я-періодичну функцію
( 0. — я < х < 0;
І е~х, 0 < х < п.
14. Довести, що система функцій
пх лх 2пх 2пх Зпх Зпх
1, cos —7— , sin —г- , cos —-,— , sin —-.— , cos —j— , sin —j— , . , ,
ортогональна на відрізку [—/; I].
oo
Відповіді. 10. a) /(*)=' +J.Y sln(2n+l)x , 6) f =
4 я £o 2n+l
= -з + 4£(-іГ_!ІЕ^. »-M*) = 4-£ ""ff+'i* - «WW-
n=l n=0
556
4 n2 Zj n2 2 ' l n* -J n8
n=l n=l
J«L. із. м*)= У і^=^
X sin "'" «« "-* - * " ' ■»-•/- J !2_ Jnx
~5R i+rfi
n=—oo
§ 4. ІНТЕГРАЛ ТА ПЕРЕТВОРЕННЯ ФУР'Є
В п. 3.2 було показано, що всяку кусково-монотонну функцію,
визначену на довільному скінченному проміжку, можна розкласти в ряд
Фур'є, тобто зобразити нескінченною сумою простих гармонік. Чи не
можна дістати такий самий розклад на гармоніки чи подібний до
нього для неперіодичних функцій, заданих на нескінченному проміжку
(—oo; -f-oo)? Виявляється, що це можна зробити за допомогою
інтеграла Фур'є.
4.1. Інтеграл Фур'є
Нехай неперіодична кусково-монотонна функція / (х) задана на
нескінченному проміжку (—оо; +оо), абсолютно інтегровна на ньому,
тобто
+ 00
j \f(x)\dx = Q< oo. (104)
—oo
Тоді на довільному скінченному проміжку (—/; /) цю функцію можна
розкласти в ряд Фур'є (87). Підставляючи в цей ряд значення
коефіцієнтів а0, ап, Ьп, з формул (89) дістанемо
-/ "=! — /
+ / (t) sin ant sin anx) dt =
= 4" J/(0tf + -j- І \f{t)cosan(t-x)dt, (105)
—/ n=1 —/
де a„ = -^ хвильові числа функції / (x). Позначимо
«n+i —a„ = -r- = Aa~-
я
T
Тоді формула (105) набере вигляду
f(*)=-2T U{t)dt+1T 5 f/(0cosaB(*-x)
dt
Ao„. (106)
557
Перейдемо у цій формулі до границі при / -»- +оо. Оскільки / (х)
не залежить від /, то
і-» 4-°»
З умови (104) випливає, що перший доданок у правій частині
формули (106) прямує до нуля при / -»- +оо:
Hm -L- f/(*)#< lim-і- C|/WH<Hm-|- = 0.
Вираз у квадратних дужках формули (106) при довільному
фіксованому / є функція від ап:
J / (0 cos ап (t — х) dt в Ф (ап),
тому
f(x) = -L\im 2| flf(0cosan(/-*)flWn =
Знайдена сума нагадує інтегральну суму для функції ф (а), де а £
Є (0; +оо). При досить великих значеннях / величина Aan = -т- стає
дуже малою, а спектр хвильових чисел — дуже щільним. Якщо / ->■
-► +°°. то Аа„ -»- 0, тобто хвильові числа ап набувають всіх
можливих значень від 0 до +оо; дискретний спектр хвильових чисел став
неперервним, тому природно сподіватись, що
або
■ ТО J ™
/ (х) = — Hm 2 Ф Ю Лап = 7Г 1 ф (a) da
f(x)=±-j( ^ f(t)cosa(t — x)dt\da. (107)
Знайдений інтеграл називається інтегралом Фур'е для функції f (x),
Фурье дістав його у 1811 р.
Точного доведення цієї формули ми не наводимо. Зазначимо лише,
що формула (107) справедлива для всіх точок х, в яких функція/ (х).
неперервна. Якщо ж х0 — точка розриву, то
"я"If f f(0cosa(f — x0)dt\da=±
(*0 + 0) + /(*o-0)
2
558
Отже, коли функція / (х) визначена і
абсолютно інтегровна на числовій осі і
кусково-монотонна на довільному скінченному
проміжку, то для неї існує інтеграл Фур'е.
У точках неперервності функції f (x)
виконується рівність (107), а в точках
розриву даної функції інтеграл Фур'є дорівнює середньому
арифметичному її односторонніх границь.
Запишемо інтеграл Фур'є в іншому вигляді:
1-*,
0
і
Рис. 9.19
X
fv)
К+ос
і.
f (t) cos (at — ах) dt 1 da
X cos axda -f-
Введемо позначення
то /+a
-НІ J
0 \—«
-if I
0 \—ос
1 Sil
f(t) cos atdt
f(t) sin atdt] sin axda
)-
(108)
. +» +TO
Л(а) = ^- J f(t) cos atdt, В (a) = ^- J f{t) sin atdt, (109)
тоді
/ (x) = f (Л (a) cos ax + В (a) sin ax) da.
(110)
Інтеграл Фур'є у формулі (ПО) подібний до ряду Фур'є: знак суми
ряду Фур'є замінено знаком інтеграла, коефіцієнти о„ та Ьп ряду
замінено функціями А (а) та В (а). По аналогії з рядом Фур'е кажуть, що
формула (110) дає розклад функції / (х) на гармоніки з частотами а, що
неперервно змінюються від 0 до +оо. Закон зміни амплітуд залежить
від а і визначається формулами (109).
Приклад
Зобразити Інтегралом Фур'е функцію
1. 0<х<1;
/(х)= 0,5, х = 0, х=1;
.0, х<0, х>1.
О Ця функція кусково-монотониа на будь-якому скінченному відрізку [—/; /],
оскільки складається з трьох неперервних частин (рис. 9.!9):
/(х) = 0, —оо<х<0; /(*) = 1, 0<х<1; f (x) = 0, 1<*<+оо.
Вона також абсолютно інтегровна на всій числовій осі:
+оо о 1 4-°°
J \f(x)\dx = (" 0-dx+\dx+ f 0-dx=l<oo.
Б59
Отже, таку функцію в точках її неперервності можна подати через інтеграл Фур'е.
Згідно з формулою (107) маємо
,<*-}r,i{j"«-**)'—k-]j!!i4=*-t—
І f sina(l — х)-f-sinscx 2 °r 1 a a (1—2*)
= 1Г] a da = lTjirs,n"2-COs 2 *»■
о о
У точках розриву х = 0 та * = І інтеграл Фур'е дорівнює
/ (* - 0) + / (* + 0) _ J_
2 - 2 '
Таким чином, знайдений інтеграл Фур'е зображає дану функцію на всій числовій
осі. Зокрема, якщо х = 0, то дістанемо
/(0)
звідки
_ 1 2 Г 1 . a cs If sin a
_ 2 = "ЇГ J "STs,n ^~ cos "2" rfa = "ЇГ J —ЕГ~ dot-
f sin a n
о
Ми обчислили інтеграл, який за формулою Ньютона — Лейбніца не обчислю-
, . ... sin*
вться, оскільки первісна від функції —-— не виражається через елементарні
функції (гл. 7, п. 1.8).
4.2. Інтеграл Фур'е для парних і непарних функцій
Припустимо, що функція / (х) парна, тоді функція / (0 cos at
також парна, а функція / (t) sin at непарна. Тому формула (108) набере
вигляду
оо /оо \
/ (х) = -|- П f / (0 cos atdt cos axda. (Ill)
Аналогічно, якщо / (x) непарна функція, то
ос /оо \
/(х) =-|- Г І [f(t)&\natdt\ sin axda. (112)
Скориставшись виразами (109), запишемо інтеграли (111) і (112) у
вигляді:
оо
/ (х) = f A (a) cos axda; (113)
о
оо
/(*)= f B(a)sinaxda. (114)
560
0и
^
-/
х
Рис. 9.20
Таким чином, якщо / (х) парна
функція, то вона зображається інтегралом
Фур'є вигляду (111) або (112). Якщо
ж / (х) непарна функція, то її
зображення інтегралом Фур'є має вигляд
(112) або (114).
Коли функція / (де) задана лише на
проміжку (0; +оо), то її можна
продовжити на проміжок (—оо; -f-oo)
різними способами, зокрема парним або непарним. Це означає, що таку
функцію можна зобразити різними інтегралами Фур'є, зокрема
інтегралами (111) або (112).
Зазначимо, що інтеграли Фур'є (113) і (114) аналогічні відповідним
рядам Фур'є (78) і (80) для парних і непарних функцій.
Приклад
Зобразити інтегралом Фур'е функцію
f(x) =
О Ця функція задана на всій осі і кусково-монотонна на довільному скінченному
відрізку [—І; І], оскільки складається з двох неперервних частий і має один розрив
першого роду при х = 0 (рис. 9.20).
Переконаємось, що / (*) абсолютно інтегровна:
є"*,
-е*.
0.
0 < * < + оо;
— оо < х < 0;
х = 0.
+оо
+оо
С \t(x)\dx= \ exdx + j e-*dx =
DO OO 0
0 b
= Hm \ e*dx + lim f e~xdx =
Ь->+о.
= Hm ex\°a— lim е-л|£=2<<
a-*—oo 6-»+oo
Отже, задану функцію можна зобразити інтегралом Фур'е. Оскільки ця функція
непарна, то за формулою (112) маємо
оо /оо \
(х) = — f І \ е~' sin atdt J sin axdt.
о \o /
Інтегруючи частинами, знаходимо
j e-' sin atdt = a — aa I e~' sin atdt; \ e—' sin atdt = ■. , а .
Б61
Таким чином,
оо
2 С a sin ах
/{Х) = 1Г) 1+а» da' *Є(-°°; +°°).
4.3. Інтеграл Фур'є в комплексній формі. Перетворення Фур'є.
Нехай функція / (х) зображується інтегралом Фур'є за формулою
(ПО). Скориставшись формулами Ейлера, дістанемо
оо
/ М = j (A (a) cos ах + В (a) sin ax) da =
о
7 І л . > etax 4- е~іах р'ах р—tax \
= J (i4fa) -I—ti +В(а) J—:=і Jda =
оо
= 4" J (04 (а) - / В (а)) е'« + (Л (а) + іВ (а)) є-'»*) da. (115)
о
Введемо позначення F (ос) = (А (а) + /В (а)) я. Згідно з формулами
(109) дістанемо
_ +." +~
f(°0 = ] f(t) (cos at — i sin at) dt= f f(t)e~ta(dt. (116)
Аналогічно ~°°
+ 00
я (A (a) + і В (a))= j / (t) etatdt = F(-a), (117)
—-oo
Враховуючи формули (116) і (117), запишемо інтеграл (115) у
вигляді
f {х) = "ST j" (/7 (а> е'°" + F (~ а>е~"")da- (П8)
о
Перетворимо інтеграл від другого доданку, виконавши заміну змінної
а = —р:
+°° —оо
j Z^— a)e-'°«da =— І /=4P)e'&*dp =
о б
о о
= J F(P)e'^dp= J F(o)e'«dx,
ОО -ІОО
тоді формула (118) набере вигляду
і +°°
/(*) = -27Г J F (a) е'°^а- (] ]9)
562
З формул (116) 1 (119) випливає, що
/ W - "5Г J И" / (0 e-'a'dA e"»da. (120)
—оо \—оо J
Права частина формули (120) називається інтегралом Фур'є в
комплексній формі для функції / (х).
Функція F (а), яка визначається формулою (116), називається
перетворенням Фур'є функції f (x); в свою чергу, функція / (де),
зображена формулою (119), називається оберненим перетворенням Фур'є для
функції F (а).
Якщо функція / (х) парна (або задана на проміжку (0; +оо) і
продовжена на всю числову вісь парним способом), то з формул (111)
маємо
f(x) = у — С Fc (a) cos axda,
Де
Ma) = /4- J/(0cosa*dZ.
о
Аналогічно для непарної функції (або при непарному продовженні)
з формули (112) дістанемо
/(*) = j/JL J FS(a) sin axda, де Fs(a)= ]/' \- J f(t)sinatdt.
о d
Функції Fc (ос) і Fs (a) називаються відповідно косинус-перетворен-
ням і синус-перетворенням Фур'є для функції f (x).
Функції F (a),Fc (a), Fs (ос) називають також спектральною
щільністю функції J (х). Теорія перетворень Фур'є широко
використовується для розв'язування багатьох практичних задач. Існують
таблиці перетворень Фур'є, в яких наведено відповідні пари функцій / (х)
і F (ос).
Приклад
Зобразити інтегралом Фур'є в комплексній формі функцію
Є*, 0<*<оо;
/(*)= 0, — со<*<0;
. 0,5, х = 0.
О За формулою (116) знайдемо перетворення Фур'є заданої функції
F (a) = f / (0 е-*в'Л = j е-'е-'а'<« = j e-'«+'a>d< = -РР5-.
563
Комплексна форма (120) інтеграла Фур'є у даному разі має вигляд
—оо
Завдання для самоконтролю
1. Що називається інтегралом Фур'є?
2. Назвати достатні умови для зображення функції інтегралом Фур'є.
3. Записати інтеграл Фур'є для парних і непарних функцій.
4. Чим схожі інтеграл Фур'є і ряд Фур'є? У чому їх суттєва відмінність?
5. Записати інтеграл Фур'є в комплексній формі.
6. Що називається перетворенням Фур'є? Оберненим перетворенням Фур'є?
7. Що називається косинус- і синус-перетворенням Фур'є?
cos х, *f0; у ,
8. Зобразити інтегралом Фур'є функцію f (х) =
0, х € 0; \ .
0. Зобразити інтегралом Фур'є функцію / (х) = {'
10, *с(і; + °°)і
продовживши її на проміжок (— оо; 0) парним способом.
10. Знайти спектральну щільність перетворення Фур'є функції" / (х) =
(1, UI<1:
І0, 1*|>1.
+00
1 Р / cos а* ла since* / . ла \\
Відповіді. 8.f(x) = — \ (-рг^Г cos— + | _ аі М"п —— «J j ««.
о
+°°
п „ г 2 ґ sin a cos ха . , „ , , ,„ _ , .
хфО, хф-j- 0. /(*) = — da, хФО, хф\. 10. F (а) =
о
sin a
= 2а ■
Глава 10
КРАТНІ, КРИВОЛІНІЙНІ
ТА ПОВЕРХНЕВІ ІНТЕГРАЛИ
Узагальнимо на функції декількох змінних основні ідеї і методи
інтегрального числення функцій однієї змінної (гл. 7).
8 1. ПОДВІЙНИЙ ІНТЕГРАЛ
1.1. Задачі, що приводять до поняття подвійного інтеграла
1°. Задача про об'єм циліндричного тіла. Нехай маємо тіло,
обмежене зверху поверхнею г = / (х, у) ^ 0, знизу — вамкненою обмеже-
564
ною областю D площини Оху, з боків — циліндричною поверхнею,
напрямна якої збігається з межею області D, а твірні паралельні осі Ог
(рис. 10.1) Таке тіло називають циліндричним.
Обчислимо його об'єм V. Для цього довільним способом розіб'ємо
область/)на п частин£>,-, які не мають спільних внутрішніх точок, і
площі яких дорівнюють ASt, і = 1, 2, ..., п. У кожній області Dt
виберемо довільну точку Рі (£,-; t)j), знайдемо значення функції в-цій
точці / (£ь Ці) і обчислимо добуток f (£,, п,) AS«- Цей добуток дорівнює
об'єму циліндричного стовпчика з твірними, паралельними осі Ог,
основою D, і висотою / (Pt) = / (5,-, г)|). Усього таких стовпчиків є п, і
сума їхніх об'ємів
1=1
(1)
наближено дорівнює об'єму циліндричного тіла V « Vn. Це набли
ження тим точніше, чим більше число п і чим менші розміри областей
Dt. Назвемо діаметром d (G) замкненої обмеженої області G найбільшу
відстань між двома точками межі цієї області. Позначимо через X
найбільший з діаметрів областей D,-: К = max d (D,-). Тоді природно об'єм
lsjfsgn
даноготіла визначити як границю суми (1) при А, —*- 0:
l/ = liml/n=lim ^/(Еі.Чі)Д5,.
А.-+0 Х-»0 i=^J
(2)
2°. Задача про масу пластини. Нехай маємо плоску неоднорідну
матеріальну пластину, формою якої є область D (рис. 10.2). В області
D задана неперервна функція у = у (х, у), яка визначає густину
пластини в точці (х; у). Знайдемо масу т пластини. Для цього довільним
способом розіб'ємо область D на частини Diy які не мають спільних
внутрішніх точок, і площі яких дорівнюють ASiy і = \,2, ..., п.
УІ
Рис. 10.2
565
У кожній області Dt візьмемо яку-небудь точку Р, (£(, tj,) і знайдемо
густину в цій точці:
V(pi)=V(h.i)i)-
Якщо розміри області Dt достатньо малі, то густина в кожній точці
(х\ у) 6 Dt мало відрізнятиметься від значення у (Р,). Тоді добуток
V (Я/) ASj наближено визначає масу тієї частини пластини, яка
займає область D,, а сума
mn=fty(l„r]l)ASi (3)
є наближеним значенням маси т всієї пластини. Точне значення маси
дістанемо як границю суми (3) при К -*■ 0:
л
/7i = ]immn = Hm УуЙг. T],)ASf. (4)
Таким чином, різні за змістом задачі ми звели до знаходження
границь (2) і (4) одного й того самого виду. Можна навести ще ряд задач
з фізики і техніки, розв'язання яких приводить до обчислення
подібних границь. У зв'язку з цим виникає потреба у вивченні
властивостей цих границь, незалежно від змісту тієї чи іншої задачі. Кожна
така границя називається подвійним інтегралом. Дамо точні означення.
1.2. Поняття подвійного Інтеграла. Умови його існування та
властивості
Нехай функція z = f (х, у) визначена в замкненій обмеженій
області D cz Ra. Вважатимемо, що межа області D складається із
скінченного числа неперервних кривих, кожна з яких визначається функцією
виду у = f[x) або х = ф (у).
Розіб'ємо область D на п частини D,, які не мають спільних
внутрішніх точок і площі яких дорівнюють AS/, і = 1,2, .... п. У кожній
області Dt візьмемо довільну точку Р{ (£4; %) і утворимо суму
К = І / №ь чі)AS" (5)
яку назвемо інтегральною сумою для функції г = f (х, у) по області
D. Нехай Я, = max d (DA — найбільший з діаметрів областей D,
Якщо інтегральна сума (5) при Я -*- 0 має скінченну границю, яка
не залежить ні від способу розбиття області D на частині області Dit
ні від вибору точок Р, в них, то ця границя називається подвійним
інтегралом і позначається одним із таких символів:
П f (*• У)dS аб° И f(*' у)dxdy-
D D
566
Таким чином, за означенням
\\f(x, у)dxdy = lim 2 /(Еі. ті/) AS,. (6)
D ^"*° 1=1
У цьому випадку функція / (х, у) називається інтегровною в області
D; D — областю інтегрування; х,у — змінними інтегрування; dS (або
dxdy) — елементом площі.
Звернемося до задач п. 1.1. Якщо границі в рівностях (2) і (4)
існують, то з цихрівностей і формули (6) дістаємо формули для
обчислення об'єму циліндричного тіла
V = \\f(x,y)dxdy (7)
D
та маси пластинки
m = ^y(x,y)dxdy. (8)
D
Якщо у формулі (7) покласти / (л:, у) н= 1, (х; у) € D, то дістанемо
формулу для обчислення площі S області D:
S = J [ dxdy. (9)
D
Рівності (7) і (8) розглядають відповідно як геометричний та
механічний зміст подвійного інтеграла, якщо підінтегральна функція
невід'ємна в області D.
Теорема (достатня умова інтегровності функції). Якщо функція
f (x, у) неперервна в замкненій обмеженій області D, то вона інтегровна
в цій області.
Є ще й інші умови існування подвійного інтеграла, але надалі ми
вважатимемо, що підінтегральна функція / (х, у) в області
інтегрування D є неперервною.
Порівнюючи означення подвійного інтеграла (6) та означення
визначеного інтеграла
[f(x)dx = \imj^f(l,)^xi,
а * *
бачимо, що конструктивно ці означення цілком аналогічні: в обох
випадках розглядається деяка функція /, але в першому випадку це
функція однієї змінної, визначена на одновимірній області — відрізку
[а; Ь] <г Ri, а в другому — це функція двох змінних, визначена у
двовимірній області D c R2. В обох випадках область визначення
розбивається на частини, в кожній з яких береться довільна точка і в ній
знаходиться значення функції. Після цього знайдене значення функції
667
множиться на міру відповідної частини області визначення. У
випадку однієї змінної такою мірою була довжина Axt відрізка [xt; х,+1], a
у випадку двох змінних — площа hSt області D, cr D. Наступні
кроки знову однакові: утворюються інтегральні суми і знаходяться їхні
границі, коли міра частин області визначення прямує до нуля.
Пізніше ми побачимо, що за цією самою схемою будується і потрійний
інтеграл, тільки мірою області там є об'єм.
У зв'язку з цим, властивості подвійного інтеграла аналогічні
відповідним властивостям визначеного інтеграла. Сформулюємо ці
властивості. (Рекомендуємо читачеві повторити матеріал п. 2.3 гл. 7,
довести ці властивості самостійно і дати їм геометричну інтерпретацію.)
1°. Сталий множник можна винести за знак подвійного інтеграла:
^Cf (х, у) dxdy = c\[f(x,y)dxdy, C = const.
D D
2°. Подвійний інтеграл від суми двох функцій дорівнює сумі
подвійних інтегралів від цих функцій:
J J \f (х, y)±g (х, у)] dxdy = ^f{x,y) dxdy ± [ J £ (x, y) dxdy.
D 'D 'D
Ця властивість має місце для суми довільного скінченного числа
функцій.
3°. Якщо в області D функція f (х, у) &z 0, то
\\f(x,y)dxdy^0.
D
4°. Якщо функції f (x, у) і g (x, у) визначені в одній і тій самій
області D і f (x, y)^g (x, у),
j f / (х, у) dxdy > J J g (де, у) dxdy.
D D
5°. (Адитивність подвійного інтеграла.) Якщо область
інтегрування функції f (х, у) розбити на області Dx і Ds, які не мають спільних
внутрішніх точок, то
И f(x' У)ахаУ = И f (*> У)&cdy + Л/(*. V)dxdy.
D D\ D,
Ця властивість називається адитивністю подвійного інтеграла і
справедлива для довільного скінченного числа областей, які
складають область D і не мають спільних внутрішніх точок.
6°. (Оцінка подвійного інтеграла) Якщо функція- неперервна в
обмеженій замкненій області D, яка має площу' S, то
mS < j" J / (х, у) dxdy ^ MS,
568
де т і М — відповідно найменше і найбільше значення підінтеграль-
ної функції в області D.
7°. (Середнє значення функції.) Якщо функція f (x, у) неперервна
в замкненій обмеженій області D, яка має площу S, то в цій області
існує така точка (х0; у0), що
Величину
Jf / {х, у) dxdy = f(x0, y0) S.
D
f(x0,y0)=-j^f(x,y)dxdy
називають середнім значенням функції f (х, у) в області D.
1.3. Обчислення подвійного інтеграла
Обчислення подвійного інтеграла за формулою (6) як границі
інтегральної суми, так само як і у випадку визначеного інтеграла,
пов'язане із значними труднощами. Щоб уникнути їх, обчислення
подвійного інтеграла зводять до обчислення так званого повторного
інтеграла — двох звичайних визначених інтегралів.
Покажемо, як це робиться. Припустимо, що при (де; у) Є D функція
/ (х, у) > 0. Тоді, згідно з формулою (7), подвійний інтеграл виражає
об'єм циліндричного тіла (рис. 10.3) з основою D, обмеженого зверху
поверхнею z = f (х, у). Обчислимо цей об'єм за допомогою методу
паралельних перерізів (гл. 7, п. 3.3):
ь
V = J S (х) dx. (9')
а
де S (х) — площа перерізу тіла площиною, перпендикулярною до осі
Ох, г х — а тг х<= Ь — рівняння площин, які обмежують дане тіло.
Перед тим, як обчислювати площу зробимо певні припущення
відносно області D.
Jr
щ
1 Ш)
Щ
їм .
Рис. 10.3
а х в х
Рис. 10.4
569
Припустимо спочатку, що область інтегрування/)обмежена двома
неперервними кривими у = ф, (х) та у = <ра (ж) і двома прямими х ==«
= а та х = 6, причому фх (х) < ф2 (х) для всіх х 6 (а; Ь) (рис. 10.4).
Проведемо через точку (ж; 0), де х Є {а; Ь), пряму, паралельну осі
Оу. Ця пряма перетинає криві фх (х) та фа (ж) в точках сх і с2, які
називатимемо відповідно точкою входу в область D і точкою виходу з о&
ласті D. Ординати цих точок позначимо відповідно «/вх та у»т, тоді
Увх = Фі (х), уви* = ф2 (х).
Визначена таким чином область називається правильною в напрямі
осі Оу. Інакше кажучи, область D називається правильною в напрямі
осі Оу, якщо довільна пряма, яка проходить через внутрішню точку
області D паралельно осі Оу, перетинає межу області не більше, ніж
у двох точках.
Знайдемо тепер площу 5 (х). Для цього проведемо через точку
(ж; 0; 0) площину, перпендикулярну осі Ох (рис. 10.3). У перерізі цієї
площини і циліндричного тіла утворюється трапеція CjAfjAfjCg.
Апліката z = / (ж, у) точки лінії М]М2 при фіксованому х є функцією
лише у, причому у змінюється в межах від увх = ф] (х) до і/внх = Фа (ж).
Площа S (х) трапеції c^MiMfa дорівнює визначеному інтегралу
*ВИЯ Фі(*)
S(x)= j" zdy = j f (x, у)dy.
Уьх 4>iW
Підставивши знайдене значення S (ж) у формулу (9') і враховуючи
формулу (7), дістанемо
Ь /Ф.<*) \
{{/(*. y)dxdy= П J f(x,y)dy\dx,
D а \ф,(*) /
або в зручнішій формі
Ь ф,(л)
J J7 (ж, у) dxdy = J dx J / (ж, і/) dy. (10)
'd a <p',(x)
Це і є шукана формула для обчислення подвійного інтеграла. Праву
частину формули (10) називають повторним інтегралом від функції
/ (х, у) по області D. У повторному інтегралі (10) інтегрування
виконується спочатку по змінній у (при цьому х вважається сталою), а
потім по змінній х. Інтеграл по змінній у називають внутрішнім, а по
змінній х — зовнішнім. У результаті обчислення внутрішнього
інтеграла (в межах від 9j (ж) до фа (ж)) одержуємо певну функцію від
однієї змінної ж. Інтегруючи цю функцію в межах від а до Ь, тобто
обчислюючи зовнішній інтеграл, дістаємо деяке число — значення
подвійного інтеграла.
Зауваження 1. Наведені геометричні міркування при
одержанні формули (10) можливі у випадку, коли / (ж, у) ^ 0, (ж; у) 6 D.
570
Проте формула (10) залишається справедливою і в загальному
випадку. Строге доведення цієї формули ми опускаємо.
Зауваження 2. Якщо область D обмежена двома
неперервними кривими ж = % {у), х — i]3a (у) і двома прямими у -= с, у ■= d
(с < d), причому я|>х (у) ^ -фв (у) для всіх у £(с; а), тобто якщо область
D правильна в напрямі осі Ох (рис. 10.5), то справедлива формула
Ц f(x, у) dxdy =Jd«/ J f(x,y)dx. (11)
Тут внутрішнім є інтеграл по змінній ж. Обчислюючи його в межах від
tyi (у) Д° ^а (у) (ПРИ цьому у вважається сталою), дістанемо деяку
функцію від однієї змінної у. Інтегруючи потім цю функцію в межах від
с до d, дістанемо значення подвійного інтеграла.
Зауваження 3. Якщо область D правильна в обох напрямах,
то подвійний інтеграл можна обчислювати як за формулою (10), так
і за формулою (11). Результати матимемо однакові.
Зауваження 4. Якщо область D не є правильною ні в
напрямі осі Ох, ні в напрямі осі Оу (тобто існують вертикальні і
горизонтальні прямі, які, проходячи через внутрішні точки області, перетинають
її межу більше, ніж у двох точках), то таку область необхідно
розбити на частини, кожна з яких є правильною областю у напрямі Ох чи
Оу. Обчислюючи подвійні інтеграли по правильних областях і
додаючи результати (властивість адитивності), знаходимо шуканий
подвійний інтеграл по області D. Для випадку, зображеного на рис. 10.6
область D обмежена еліпсами ж2 + -^- = 1,-т—h -jg- =* 1 і прямою
З \
ж = -j-J, при інтегруванні в напрямі осі Оу маємо
J $/ (*. У) dxdy = J J f{x, у) dxdy + J { / (ж, у) dxdy + { j" f (ж, у) dxdy.
D D, D, D,
У напрямі осі Ох тут потрібно було б обчислити повторні інтеграли по
семи областях.
Зауваження 5. Повторні інтеграли в правих частинах
формули (10) і (11) називаються інтегралами з різним порядком
інтегрування. Щоб змінити порядок інтегрування, потрібно від формули (10)
перейти до формули (11), або навпаки.
У кожному конкретному випадку, залежно від виду області D та
підінтегральної функції / (ж, у), треба обирати той порядок
інтегрування, який приводить до простіших обчислень.
Зауваження 6. Правильну в напрямі осі Оу область D
коротко позначатимемо так:
D = {фі (ж) ^ у ^ ф2 (ж), а < ж ^ Ь}.
571
Рис. І0.5
Аналогічно
D = M>i(j/X*<4>ife). с:
— область правильна в напрямі осі Ох.
Приклади
1. Обчислити подвійні інтеграли:
Рис. 10.7
\y^d)
(* + 2#) dxdy, якщо область D обмежена параболами у=х3, х = у2;
D
б) П xyadxdy, якщо область D міститься в першій чверті і обмежена лініями
D
х= 0, у= х, у= 2
у
■х»;
в) \ і е * dxdy, якщо область D обмежена прямими у = х, у= 0, * = 1.
D
О а) Область інтегрування D зображено на рис. 10.7. Ця область правильна
у напрямі як осі Оу, так і осі Ох. Для обчислення даного інтеграла можна
користуватись як формулою (10), так і формулою (І І), бо функція f (х, у) = х + 2у неперервна
в усій площині Оху і, зокрема, в області D.
Область D правильна в напрямі осі Оу, тобто
D= [Xі <У <Vx, 0<*<1),
тому за формулою (10) маємо
і VI
jj (* + 2у) dxdy = j" dx J (x + 2у) dy =
D 0 хг
і v; і JL
0 x' 0
б) Область інтегрування D зображено на рис. 10.8. Оскільки функція / (х, у) =
= ху1 неперервна в даній області, то для обчислення заданого подвійного інтеграла
можна скористатися як формулою (10), так і формулою (11).
572
Область правильна в напрямі осі Оу, тобто
£>={*<j/<2 — *», 0<*<І),
тоді за формулою (10) маємо
1 2-х* і
[ С xy^dxdy = f dx j xyMy = j" x -^- P-*' dx =
D OX 0
=4- $(* (2 - *2>s - **>d*=- 4" S <2 - *?d <2 - **> - -r 1*4d*="ж
0 0 0
Обчислимо цей Інтеграл іншим способом, користуючись формулою (II). Область D
є правильною в напрямі осі Ох, але її треба розбивати на дві частини D± і D2, оскільки
лінія ОАВ, на якій містяться точки виходу з області, задається двома різними
рівняннями. Маємо
Яі= (0<*<J/. 0<j/< 1};
DS = {0<*<V2 — j/. I<j/s$2};
C f xy2dxdy = f f xyHxdy + f f xy4xdy =
1 j, 2 V"^ J
0 0 'O °
dy +
, P . «• IV2-» f «,* Г(2-у)у» 1 11 67
+ )y~T\0 dy = )—dy+) 2 ^ = ~Ю" + "24" = _Г20"-
1 0 1
Очевидно, при обчисленні цього інтеграла вигідніше користуватися формулою (10).
в) Область інтегрування D зображено на рис. 10.9. Ця область правильна в обох
напрямах, але обчислити даний інтеграл можиа лише за формулою (10).
Якби ми застосували формулу (11), то нам треба було б обчислювати Інтеграл
_v_
І є х dx, який, як відомо (гл. 7, п. 1.8), в елементарних функціях ие обчислюється.
Отже,
Л_ \ х jj_ 1 Л-, ! є 1
[ ( є х dydx =[dx f є " dy = f хе " Г dx = f * (є — 1) dx = —g— . «~
D 0 0 0 0
2. Змінити порядок інтегрування у повторному інтегралі
1 є*
/ = І dy J / (х, у) dx.
о о
О Тут потрібно перейти від повторного інтеграла виду (11) до Інтеграла
ВИДУ (Ю).
Область інтегрування D обмежена лініями: у = 0, у = 1, х = 0, *=е" або
у = In х (рис. 10.10). Якщо внутрішнє інтегрування провести по у, а зовнішнє —
573
Рис. 10.8 Рис. 10.9 Рис. 10.10
по *, то задану область D треба розглядати як правильну в напрямі осі Оу. Оскільки
лінія, на якій містяться точки входу в область, задана двома різними рівняннями,
то дану область треба розбити иа дві частини Dx і Da. Маємо
Ді = {0<(/<1, 0<*<1);
£>а={Іп*<«/<1, 1<*<е};
11 є 1
1 = і dX J f {Xt У) dy + 1 dx J ' {X> У) dy- #
0 0 1 In*
1.4. Заміна змінних у подвійному інтегралі. Подвійний інтеграл у
полярних координатах
Нехай функція / (де, у) неперервна в деякій замкненій і обмеженій
області D, тоді існує інтеграл
І = \\f{x,y)dxdy.
6
Припустимо, що за допомогою формул
х-=х(и, v), y = y(u,v) (12)
ми переходимо в інтегралі / до нових змінних и та v. Вважатимемо,
що з формул (12) однозначно можна визначити и та v:
и = и(х,у), v = v(x,y). (13)
Згідно з формулами (13), кожній точці М (де; у) 6вставиться у
відповідність деяка точка М* (и; v) на координатній площині з
прямокутними координатами и і v. Нехай множина всіх точок М* {и; v)
утворює обмежену замкнену область D*. Формули (12) називаються
формулами перетворення координат, а формули (13) —формулами
оберненого перетворення.
Справедлива така теорема.
Теорема. Якщо перетворення (13) переводить замкнену обмеокену
область D в замкнену обмежену область D* і є взаємно однозначним, і
якщо функції (\2) мають в області D* неперервні частинні похідні
574
першого порядку і відмінний від нуля визначник
дх дх
J(u,v)
ди
ду_
ди
dv
ду_
dv
(14)
а функція f (х, у) неперервна в області D, то справедлива така формула
заміни змінних:
f j / (лг, у) dxdy = J [ f (x (u, v), у (и, v)) | J (u, v) | dudv. (15)
D Ь*
Функціональний визначник (14) називається визначником Якобі
або якобіаном.
Таким чином, виконуючи заміну змінних в інтегралі / за
формулами (12), ми маємо елемент площі dxdy в координатах х, у замінити
елементом площі | J (u, v) | dudv в координатах и, v і стару область
інтегрування D замінити відповідною їй областю D*.
Розглянемо заміну декартових координат х, у полярними р, ф за
відомими формулами х =• р cos <р, у = р sin <p. Оскільки
J (р, ф) =
= р. \ПР> Ф)І=Р.
cos ф — р sin ф
sin ф р cos ф
то формула (15) набирає вигляду
\\ f (х, У)dxdy = §1 /(р cosф, р sinф)ргірЛр, (16)
де область D задана в декартовій системі координат Oxy, a D* —
відповідна їй область в полярній системі координат.
Зауваження 1. У багатьох випадках формулу (16) доцільно
застосовувати тоді, коли підінтегральна функція або рівняння
границі області D містить суму х% + у2, оскільки ця сума в полярних
координатах має досить простий вигляд:
х* + у2 = р2 cos2 Ф + р2 sin2 ф = р2.
Зауваження 2.
Якщо область D (рис. 10.11,
а) обмежена променями,
які утворюють з полярною
віссю кути а та Р (а ■< Р)
і кривими р = fi (ф) та
Р = Ра (ф) (Рі (ф) ^ Ра (Ф)Ь
tj полярні координати
області D* змінюються в
межах р! (ф)< р < ра (ф),
575
а ^ ер ^ р (рис. 10.11, б). Тому формулу (16) можна записати у
вигляді
)] fix, y)dxdy = ] dq> J / (p cos q>, p sin ф) pdp. (17)
D о р,(ф)
Зауваження 3. Якщо область D охоплює початок координат,
тобто точка О (0; 0) є внутрішньою точкою області D, то
р(ф)
J J /1*. У) dxdy = \ dy j / (р cos q>, p sin ф) pdp,
'd бо
де р (ф) — полярне рівняння межі області D.
(18)
Приклади
1. Обчислити інтеграл V V (6х — Зу) dxdy, якщо область D — паралелограм,
D
обмежений прямими х+у= 1, х+у=2, 2х — у = 1, 2* — {/= 3 (рнс. 10.12).
О Безпосереднє обчислення цього інтеграла надто громіздке, тому що як в напрямі
осі Ох, так і в напрямі осі Оу область D треба спочатку розбити на три області, а
потім обчислювати три подвійних інтеграли.
Виконаємо таку заміну змінних: х + у = и, 2х — у = v, тоді прямі * + у = 1
та х + «/ = 2 в системі Оху переходять в прямі и = 1 та и = 2 в системі Otuv
(рис. І0.13), а прямі 2х — у — І та 2* — у = 3 відповідно в прямі к = 1 та к = 3.
Таким чином, область D (паралелограм) переходить у системі Ojim в прямокутник
D*. Далі маємо
/ (и, v) =
дх
ди
ду_
ди
х + у =
2х — у
дх
dv
ду_
dv
1
x = -^-(u + v);
_1_ _1_
З З
_2_ _J_
З З
—т- і'^і-г-
За формулою (15)
Jj (6* —30^= ^/б-_і-(и + к)-3--і-(2и — v)\-Lduuv =
■4-W
3wfo = 4. •
2. Обчислити І І УЧ — ха — у2 dxdy, якщо D — круг радіуса R = 2 з центром
у початку координат.
576
О Оскільки межа області D в полярних координатах задається рівнянням
ps cos2 ф + ра sin2 ф = 4 або р = 2, то за формулою (18) маємо
2л 2 2л 2
(Т /4 — (Xі + у2) dxdy =\ d<p\V4 — P2pdp = — -і- \ гіф \ (4 —р2) 2 х
2л
о о
і 6л
3. Обчислити І \VXі + у2 dxdy, якщо область D обмежена колами Xі + у* = 2х,
D
Л? _f- уз = 4х (рис. 10.14).
О Знайдемо рівняння межі області D в полярних координатах: ра cosa ф +
+ ра sina ф = 2р cos ф, звідси р = 2 cos ф — полярне рівняння малого кола;
аналогічно знаходимо, що р = 4 cos ф — полярне рівняння великого кола. Якщо кут ф
змінюватиметься в межах від —Д- до -5_, то змінна р матиме межі від 2 cos ф до
4совф. Отже, за формулою (17) маємо
я/2 4 cos «р
я/2 4 cos ф л/2
\XVW+y~2dxdy = f d<p \ p2dp = J -|-
4 cos ф
2 cos ф
dtp =
56
n/3
\
—n/3
-n/2
COS* ф^ф =
2 cos ф
n/2
56
—л/2
V (1 — sin2 ф) d (sin ф) ■
—я/2
3 \ * 3 Л-л/2
224
1.5. Застосування подвійних інтегралів до задач геометрії
1°. Площа плоскої фігури. Якщо в площині Оху задана фігура, що
має форму обмеженої замкненої області D, то площа S цієї фігури
знаходиться, як відомо (п. 1.2), за
формулою (9):
J ] dxdy.
V
0
1
II
я
/
«м
а
І
2
V=3
V'l
U
Рис. 10.12
Рис. 10.13
Рис. 10.14
577
2°. Об'єм тіла. Об'єм циліндричного тіла, твірні якого паралельні
осі Ог і яке обмежене знизу областю D площини Оху, а зверху —
поверхнею z = f(x, у), де функція / (л:, у) неперервна та невід'ємна в
області D, знаходиться за формулою (7) (п. 1.2):
V = ^f(x,y)dxdy.
D
3°. Площа поверхні. Якщо поверхня а, задана рівнянням
z ■=/(*,#), (19)
проектується на площину Оху в область D (рис. 10.15) і функції / (х, у),
fx (х, у), fy (x, у) неперервні в цій області, то площу Q поверхні а
знаходять за формулою
Q = [f V\ +fx\x, y)+f"u(x, y)dxdy.
D
(20)
О Виведемо цю формулу. Розіб'ємо довільним способом область D
на п частин D,, які не мають спільних внутрішніх точок і площі яких
дорівнюють AS,, і = 1, 2,.... п. У кожній частині D, візьмемо точку
Pt (їй ті/); на поверхні а їй відповідатиме точка Mt (£,; т],; £,), де £, =
= / (її, *]/)• Через точку М{ проведемо дотичну площину П, (гл. 6,
п. 2.1):
£ (її, Лі) {х - It) + fy (It, %) (У - %) - (z - С,) = 0.
На площині Пі виділимо ту її частину, яка проектується на
площину Оху в область D,. Позначимо цю частину дотичної площини через
Oj, а її площу — через До,. Складемо суму
п
2 До,. (21)
Границю Q суми (21), коли найбільший з діаметрів областей D,
прямує до нуля, назвемо площек поверхні (19), тобто за означенням
покладемо
п
Q = lim 2 До,. (23)
К-Ю (=1
Обчислимо цю границю. Оскільки область а,, яка має площу До,,
проектується в область D, з площею AS{, то AS, = До, cos yit де у, —
кут між площинами Я, та Оху (рис. 10.15), тому До, = A,S<
' cos у,
Але гострий кут у, дорівнює куту між віссю Ог і нормаллю л до до
тичної площини, тобто куту між векторами А =* {0; 0; 1) та /г =«
578
ут
*\
а,
rv
~1/
-та*
W
У,
/х-уО
f а"
Рис. 10.15
х*у2-2у
Рис. 10.16
{—/*(5і. Лі): -fy (її, тії): П- За формулою (36) (гл. 2)
1
cosy,
V *'*'<&• Чі> + ^а «,.Чі)+і
Отже,
до, = і/" /;а в,, ті,)+/;■ (е„ і,,) + ias,.
Підставляючи значення До, в (23), дістаємо
Q = Нш І jA/V(£„ і],)+/;«(£„ ч,) + 1 AS,.
Під знаком границі маємо інтегральну суму, складену для неперервної
в області D функції У f/ (х, у) + f'ya (х, у) + 1. Ця функція інтегров-
на в області D, тому границя у формулі (23) існує і дорівнює
подвійному інтегралу (20). ф
Приклади
1. Знайти площу фігури, обмеженої лініями * = у* — 2у, х — у = 0 (рис. 10.16).
О Знайдемо ординату точок перетину даних ліній. Із системи
{::
х = у' — 2у;
у-0
маємо у = у2 — 2у, уі= Q, yt=* 3.
За формулою (9) знаходимо
з у з з
S = (J dxdy = J dy J dx = ^(У-У* + 2y)dy = J (3y-y*)dy = 4.5. •
'D 0 *•—2y 0 0
2. Знайти об'єм тіла, обмеженого циліндром у =■« хг та площинами 2=0, z =
= 2 —j/ (рис. 10.17, о).
579
О Областю!) тут є параболічний сегмент (рис. 10.17, б), тому D = {** ^ # < 2;
- VT ^ * ^ УТ?}. За формулою (7) маємо
V2
2
І dX\(2-
-V2
X"
-y)dy =
V2
і (*-
-V2
-f)l
dx =
V2
I (4—+«)<—Ч?--
-V2
3. Знайти частину площі конуса г = \^х* + у', яка вирізається циліндром
х* + у* — 2дс=0 (рис. 10.18, а).
О Із рівниння конуса маємо
X . У
Областю D тут є KpyF jc2 4- у* — 4.x — 0 або (де — 1)* + у* = 1 (рнс. 10.18, б). За
формулою (20) маємо
де S = я — площа круга радіуса 1. Дійсно, перейшовши до полярної системи
координат (див. п. 1.4, приклад 3), маємо
x = pcos<p, t/=psin(p;
dxdy = pdpdcp, _JL<q,<JL,
ТОДІ
Я/2 2 cos Ф я/2
Q=}/2 j" d«p j pd<p = /2 f -5-[Є"Ф
—Я/2 0 —я/2
d<p ■■
п/2
я/2
2/2 \ cos* 9^9 = 21^2 \ _L (1 + cos 2<р) dip = nV$
—Я/2 —Я/2
Рис. 10.17
Рнс. 10.18
580
1.6. Застосування подвійного інтеграла до задач механіки.
1°. Маса пластини. Нехай на площині Оху маємо матеріальну
пластину, яка має форму обмеженої замкненої області D, в кожній
точці якої густина визначається неперервною функцією у = у (х, у).
Як відомо (п. 1.2), маса такої пластини визначається за формулою (8):
т = Ц У (х. У) dxdy.
2°. Центр маси пластини. Статичні моменти. Нехай матеріальна
пластина в площині Оху має форму області D; густина пластини в
точці М {х; у) дорівнює у {х, у), де у (х, у) — неперервна функція в
області D. Розіб'ємо область D на частини Dt (і = 1, 2, ..., п), виберемо в
кожній з них довільну точку Pt (£,; т],) і наближено вважатимемо, що
маса ті частини Dt дорівнює "у (|,, т],) AS,, де AS, — площа області Dt.
Коли вважати, що кожна з цих мас зосереджена в точці Pt (£,; т^) £ D,
то пластину можна розглядати як систему цих матеріальних точок.
Тоді координати хс та ус центра маси пластини наближено
визначатимуться рівностями
п п
2 £,Т (£,-, V AS, 2 Ч,Т (Б,, т)г) AS,
2 У(1Г r^AS, 2 V (Е|. Ч|) AS,
Щоб знайти точні значення координат, перейдемо в цих формулах до
границі при Я, = max d (D,) -*■ 0. Тоді інтегральні суми перейдуть у
подвійні інтеграли і координати центра маси пластини
визначатимуться формулами
И ху (х, у) dxdy ]і уу (х, у) dxdy
Хс = А? ; ус =° 4? • (24)
J і Y (*. У) dxdy JJ Y (*. У) dxdy
D D
Величини
мі/ = )§ ху(х, у)dxdy; Мх = ]\ уу{х, у)dxdy (25)
D D
називаються статичними моментами пластини відносно осі Оу
та Ох.
Враховуючи формули (8), (24) і (25), координати центра мас можна
записати у вигляді
_Му. __ Мх
хс— т '• Ус — —=г- •
581
Якщо пластина однорідна, тобто має сталу густину у0, то в формулах
(8), (24) і (25) слід покласти у (х, у) = у0.
3°. Моменти інерції пластини. Відомо, що момент інерції
матеріальної точки відносно деякої осі дорівнює добутку маси точки на
квадрат її відстані від цієї осі, а момент інерції системи матеріальних
точок відносно однієї і тієї самої осі дорівнює сумі моментів інерції
всіх точок системи.
Нехай матеріальна пластина має форму області D у площині Оху,
а неперервна функція у = у (х, у) визначає густину в кожній точці
цієї пластини. Розіб'ємо область D на частини Dt, площі яких
дорівнюють ASt (і = 1, 2, ..., п), і виберемо в кожній з цих частин довільну
точку Pt (іі\ г]і). Замінимо пластину системою матеріальних точок з
масами mt = у (£,-, г|г) ASt. Якщо пластину розглядати як систему цих
матеріальних точок, то моменти інерції пластини відносно осі Оу та
відносно Ох наближено визначатимуться за формулами
І у « 2 lh (h, r\t) ASt; Ix « 2 Л?ї (h, Ці) AS,-
i=l i=l
Перейшовши до границі в кожній із сум при Я, = max d (Dt) -»- 0, ді-
l^(<gn
станемо точні формули для обчислення моментів інерції розглядуваної
пластини відносно координатних осей:
1x = \\y2y(x,y)dxdy, Iy = \\x*y{x,y)dxdy. (26)
D D
Знайдемо момент інерції /0 пластини відносно початку координат.
Враховуючи, що момент інерції матеріальної точки (х; у) з масою т
відносно початку координат дорівнює т (х3 + у2), аналогічно
дістаємо, що
h = \\(x*+y*)y{x,y)dxdy. (27)
D
Приклади
1. Знайти масу пластини D, обмеженої лініями у = 0, х + у — 2, у = хг,
якщо густина пластини в кожній точці (х; у) дорівнює у (х, у) = ysx (рнс. 10.19).
О Оскільки D = {У~у ^ х ^2 — у, 0 ^ у ^ 1}, то за формулою (8) маємо
уГу
і і
m=\[y(x,y)dxdy='\dy f xyUx = {у* -*- Р y_dy =
-J(-14Ci:—f)*-I(*--r*,+-f)*-fr-*
о о
2. Знайти центр маси однорідної пластини (у= 1), обмеженої кривою у ■■
= cos х, — -5. < х < -І та віссю Ох (рнс. 10.20).
582
У* y=xz
\\
V
0
^с
'Ч1
Рис. 10.19
У ,
1
г-о Ж.
yt °
Рнс
шг*х
W/ZVk
2 Ч.
. 10.20
Рис. 10.21
О Внаслідок симетрії пластини відносно осі Оу маємо хе = 0. Для
знаходження уе скористаємось другою з формул (24). В даному разі D = 10 ^ у ^ cos x.
2"К тому маємо
я/2 со» х я/2
Mx=<\{\yy(x,y)dxdy= С dx Г ydy= Г ***** dx=*
-і<*<
—Я/2
-П/2
+ cos 2х) dx = — ;
4
ffl
-П/2
п/2 сої х я/2
= і dx І dy = \ cos xdx = 2; ус
ІИ,
8
—Я/2 0 —я/2
Отже, центр маси даної пластини міститься в точці 10; -я-1. •
3. Знайти момент інерції Ія пластини D, обмеженої прямими у = 0, х + у = 1,
у — х= 1, якщо густина в кожній точці пластини дорівнює ординаті цієї точки
(рис. 10.21).
О Оскільки D = [у — 1 < х < 1 — у, 0 < і/ < 1},y (x, у) = у, то за
першою з формул (26) маємо
1 \-у і
/,=»jdy J і/ЗДу = | (2v» — 2y*)dy=0,l. •
0 у—1 0
Завдання лля самоконтролю
1. Сформулювати задачу про об'єм циліндричного тіла.
2. У чому суть задачі про масу пластини?
3. Що називається подвійним інтегралом від функції {(х, у) по області D?
4. Сформулювати достатню умову існування подвійного інтеграла.
б. Перерахувати властивості подвійного інтеграла.
583
6. Яка область D називається правильною в напрямі осі Оу? Вивести формулу для
обчислення подвійного інтеграла по такій області.
7. Записати формулу для обчислення подвійного інтеграла по області D у
випадку, коли ця область правильна в напрямі осі Ох.
8. Сформулювати теорему про заміну змінних у подвійному інтегралі.
9. Чому дорівнює якобіан у полярних координатах?
10. Як обчислюється подвійний інтеграл у полярних координатах за допомогою
п івторного?
11. Вивести формули для обчислення об'єму циліндричного тіла, площі плоскої
фігури та площі поверхні.
12. Вивести формули для обчислення маси, статичних моментів та моментів
інерції пластини.
13. Обчислити інтеграли:
3 5 і їу
a) j" dy j" (x + 2y)dx; 6) ^dy j xydxdy.
—З у—4 0 y—l
14. Змінити порядок Інтегрування в інтегралах:
1 V"2x—** і 1—У
a) j* dx j / (х, у) dx; б) J dy f / (x, y) dx.
0 0 0 _^"iZJi
16. Обчислити подвійні інтеграли, перейшовши до полярних координат:
a) J dx J уі-х*-уЧу', 6) j di/ J (x» + j,») dx.
0 0 0 0
16. Знайти площу фігури, обмеженої лініями у = 0, у=х, х1 + у* — 2х.
17. Знайти об'єм тіла, обмеженого поверхнями ха + у* = Зде, z = V 9 — х2 — у*,
г=0.
18. Обчислити площу частини поверхні параболоїда 2г = ха + #а, яка
вирізається циліндром х* + уг = 1 -
19. Знайти координати центра маси верхньої половини однорідного круга х* +
+ *» - 9.
ха і/а
20. Обчислити момент інерції пластини, обмеженої еліпсом — + Л— = 1,
4 9
відносно: а) осі Оу; б) початку координат.
1 1
Відповіді. 13. а) 50.4; б) -IL . 14. a) f dy J / (х, у) dx;
0 і—Vb=7«
о VI—*' і і—*
б) J dx J / (х, у) dy + J dx J / (x, i/) dx. 15. a) JL ; б) 2я. 16. Jl +
—10 0 0
+ _L. 17. 6(3n —4). 18. J- я (2 /2—1). 19. xe = 0; & = -i-. 20. a) 6n;
2 3 л
39
6) -g-n.
584
S 2. ПОТРІЙНИЙ ІНТЕГРАЛ
У попередньому параграфі ми розглянули поняття подвійного
інтеграла від функції двох змінних. Визначимо інтеграл від
функції трьох змінних—так званий потрійний інтеграл.
2.1. Поняття потрійного інтеграла. Умови його існування та
властивості
Схема побудови потрійного інтеграла така сама, як і звичайного
визначеного інтеграла та подвійного інтеграла.
Нехай функція и = f (х, у, г) визначена в обмеженій замкненій
області G с R3. Розіб'ємо область G сіткою поверхонь на п частин
Gj, які не мають спільних внутрішніх точок і об'єми яких дорівнюють
AVt, і = 1,2, ...,п. У кожній частині Gt візьмемо довільну точку
Рі (It, Чи Сі) і утворимо суму
£/<£і.Ч„С,)ДУ„ (28)
і=і
яка називається інтегральною сумою для функції f (x, у, z) по області
G. Нехай Я, = max d (Gt) — найбільший з діаметрів областей G;.
Якщо інтегральна сума (28) при К ->- 0 має скінченну границю, яка
не залежить ні від способу розбиття області G на частини Gj, ні від
вибору в них точок Ри то ця границя називається потрійним інтегралом
і позначається одним із таких символів:
\[\f(x,y,z)dV, або \\\ f(x, у, z)dxdydz.
в О
Таким чином, за означенням
в *-»0 (=і
де / (лг, у, г) — функція, інтегровна в області G; G — область
інтегрування; х, у і z — змінні інтегрування; dV (або dxdydz) — елемент
об'єму.
Якщо по тілу G розподілено масу з об'ємною густиною Y = Y (-*> #> z)
в точці (х; у; z) £ G, то маса т цього тіла знаходиться за формулою
т = Щу(х, у, z)dxdydz. (ЗО)
G
Формула (30) аналогічна формулі (8) і може розглядатись як
механічний зміст потрійного інтеграла, коли підінтегральна функція
невід'ємна в області G. Якщо всюди в області покласти / (х, у, z) = 1, то
585
з формули (29) випливає формула для обчислення об'єму V тіла G:
V = \\[dxdydz. (31)
в
Потрійний інтеграл є безпосереднім узагальненням подвійного
інтеграла на тривимірний простір. Теорія потрійного інтеграла
аналогічна теорії подвійного інтеграла, тому в більшості випадків ми
обмежимося лише формулюваннями тверджень і короткими
поясненнями.
Теорема (достатня умова інтегровності функції). Якщо функція
f (x, у, z) неперервна в обмеженій замкненій області G, то вона в цій
області інтегровна.
Властивості потрійних інтегралів.
1°. Сталий множник можна винести за знак потрійного інтеграла:
[\\Cf(x,y,z)dV = c\\[f{x,y,z)dV.
G О
2°. Потрійний інтеграл від суми кількох інтегровних функцій
дорівнює сумі потрійних інтегралів від доданків:
Ш {fix, У, г) ± <р(*. у, z))dV= J J J /(*, у, z)dV + $ j$ <p(*. y, z) dV.
G Ьв
3°. Якщо в області інтегрування f (х, у, z) !> 0, то
l^f{x,y,z)dV^0.
о
4°. Якщо функції f (х, у, z) та <р (х, у, z) визначені в одній і тій самій
області G і f {х, у, г) !> <р (х, у, г), то
\\[f(x,y,z)dV>\\\^{x,y,z)dV.
G 0
5°. (Адитивність потрійного інтеграла.) Якщо область
інтегрування G функції f (x, у, z) розбити на частини Gx і G2, які не мають
спільних внутрішніх точок, то
J J J / (x, y,z)dV=\^f (x, y.z)dV + [^f {x, у, z) dV.
0 0, O,
6°. (Оцінка потрійного інтеграла.) Якщо функція f (x, у, z)
неперервна в обмеженій замкненій області G, яка має об'єм V, то
mV^\\\f(x,y,z)dV^MV,
о
де ті М — відповідно найменше і найбільше значення функції f (x, у, z)
в області G.
586
7°. (Середнє значення функції.) Якщо функція f (x, у, z) неперервна
в обмеженій замкненій області G, яка має об'єм V, то в цій області
існує така точка (х0; у0; z0). що
\[\f(x,y,z)dV = f(x0,y0,z0)V.
Величина
/(*„. у0, ге) = -у- { j J f(x, у, z)dV
а
називається середнім значенням функції f (x, у, z) в області G.
2.2. Обчислення потрійного інтеграла
Як і у випадку подвійних інтегралів, обчислення потрійного
інтеграла зводять до обчислення повторних, тобто до інтегрування по
■кожній змінній окремо.
Нехай область D обмежена знизу і зверху поверхнями z = zx (x, у)
і z = z2 [x, у), а з боків циліндричною поверхнею, твірні якої
паралельні осі 0z. Позначимо проекцію області G на площину Оху через
D (рис. 10.22) і вважатимемо, що функції г, {х, у) і za (x, у) неперервні
в D. Якщо при цьому область D є правильною, то область G
називається правильною у напрямі осі Ог. Припустимо, що кожна пряме,
яка проходить через кожну внутрішню точку іх; у;0) 6 D паралельно
осі 0г, перетинає межу області G у точках М і N. Точку М назвемо
точкою входу в область G, а точку N — точкою виходу з області G, а
їхні аплікати позначимо відповідно через гвх і гвих. Тоді гвх = z1 іх,у),
гВИх = z2 іх, у) і для будь-якої неперервної в області G функції / (х, у, z)
має місце формула
j J J / іх, У, г) dV = J J dxdy ' ( f{x, у, z) dz. (32)
О D zjx.y)
Зміст формули (32) такий. Щоб обчислити потрійний інтеграл, тре-
Zt(*,jrf)
ба спочатку обчислити інтеграл f / (х, у, z)dz = / (х, у) по змінній z,
zi(*,id
вважаючи х та у сталими. Нижньою межею цього інтеграла є
апліката точки М входу zBX = zx іх, у), а верхньою — апліката гВИх = г2 (х, у)
точки виходу N. Внаслідок інтегрування дістанемо функцію / (х, у)
від змінних х та у.
Якщо область D, наприклад, обмежена кривими у = фх (х) і у =
= Фг (х) (а ^ Ь), де ф! іх) і ф2 (х) — неперервні функції, тобто
G=« [z^x, t/)<z<t/2(;c, у), ф!(х)<у<ф2(д), й<а;<6},
то, переходячи від подвійного інтеграла \\ І іх, у) dxdy до
повторно
587
ного (п. 1.3), дістанемо фор-
Z'V*/^ мулу
Wf(x,y,z)dV =
Рис. 10.22
Z~Z/x,l/J ь ф,(л г,іх.ц)
= j dx j dy j x
xf(x,y,z)dz, (33)
яка зводить обчислення
потрійного інтеграла до
послідовного обчислення трьох
визначених інтегралів.
Порядок інтегрування може бути
й іншим, тобто змінні х, у і z
у правій частині формули (33)
за певних умов можна міняти місцями.
Якщо, наприклад, область G правильна в напрямі осі Ох:
G = {хі(у. z)^x^xa(y, z), і|і(у)<г<(іи(Й, c^y^d},
де хх (у, г), х„ (у, г), ^ (у), г|з2 [у) — неперервні функції, то
й фі(у) х,(у,г)
\\ j /(*> У. i)dxdydz = Jdjf | dz j f(x, y, z)dx.
О с iMjrt x,iy,z)
Зокрема, якщо областю інтегрування є паралелепіпед:
G = {q<;t<fcf c<#<d, *<z</},
то
J j J /(*, у, z)dv = f d* j dy { /(x, у, z)dz. (34)
O art
У цьому разі інтегрування виконується в будь-якому порядку,
оскільки область G правильна у напрямі всіх трьох координатних осей
Ox, Oy, Oz.
Приклади
1. Обчислити потрійний інтеграл \ \\ (х+ у+ г) dxdydz по області G обмеженій
С
площинами * = 0, де = 1,^=0, у = 1, г = 0, !•= 1.
О Оскільки область інтегрування О — паралелепіпед: О = {0 ^ х ^ 1,
® ^ У ^ '. 0^г^ 1},тоза формулою (34) маємо
1 1 1
J J j (* + У + г) d*d«/<fe = j d* J <fv J (x + j, + z) dz =
O 0 0 Q
588
і і
о о \ / |o о
\f(*+*+i)d*=S(**+4+i-)
1
=J(* + i)d* = -L.#
0
2. Обчислити потрійний інтеграл III zdxdydz, якщо
Рис. 10.23
область G обмежена площинами х = 0, і/ = 0, г=0, x+i/-f-z — 1 = 0 (рис. 10.23)
О Область G проектується на площину Оху в 'трикутник D = (0 ^ х ^ 1,
0<{/< 1 — х}.
Оскільки гвх = 0, а гвих = 1 — х — у, то за формулою (33) маємо
і і— х 1-х—у 1 і—*
f f f zdxdydz = Г dx [ dy f zdz = -L J dx f (1 — x — ^«di/ =«
О 0.00 00
1 1-х 1
= _ ' jdx j (l-x-i/)ild(l-x-i/) = -i-f (l-x)3dx =
0 0 0
J- I1--!-
— — 24 f,_*> j0 — 24 ' •
2.3. Заміна змінної в потрійному інтегралі
Заміну змінної в потрійному інтегралі виконують за таким
правилом: якщо обмежена замкнена область G взаємно однозначно
відображається на область G* за допомогою неперервно диференційовних
функцій х = х (и, v, w), у = у (м, v, w), z = z (u, v, w), якобіан / в області
G* не дорівнює нулю:
дх дх дх
ди dv dw
J =
ду ду ду
ди dv dw
dz
ди
dz dz
dv dw
Ф0,
і f (x, y, z) — неперервна в G, то справедлива формула
Ш/(*« у' г)dxdydz = \\\f(x(u, v, w), y(u, v. w),z(u,v,w))x
о в*
х ІJI dudvdw. (ЗБ)
На практиці найуживанішими є циліндричні та сферичні
координати. Прн переході від прямокутних координат х, у, z до циліндрич-
589
WW;
Рис. 10.24
Рис. 10.25
них р, ф, z (рис 10.24), пов'язаних з х, у, г співвідношеннями
х = р cos ф, у = р sin ф, z = z,
0<Ір<+оо, 0^ф<2я, — oo<z<+oo,
якобіан перетворення
J =
|—рБІПф СОБф 0
рСОБф БІПф 0
0 0 1
= —р.
З формули (35) дістаємо потрійний інтеграл у циліндричних
координатах:
Ш f(x> У> z) dxdydz = J J )f (P cos Ф> P sin ф, z) pdpdqjdz. (36)
G G»
Назва «циліндричні координати» пов'язана з тим, що координатна
поверхня р = const e циліндр, прямолінійні твірні якого паралельні
осі Ог
При переході від прямокутних координат х, у, г до сферичних р, ф,
8 (рис. 10.25), які пов'язані з х, у, г формулами (гл. 2, п. 2.5)
х = р sin Є cos ф; у = р sin Є sin ф; z = p cos Є;
0<Р< + °°; 0<ф<2л; 0<6<л,
якобіан перетворення
sin б cos ф рсовОсовф —рзіпбвіпф
У= sin 0 sin ф рсоБбвіпф рвіпбсоБф | = pz sin в.
cos Є — psin6 0
590
З формули (35) знаходимо потрійний інтеграл у сферичних
координатах:
))\ї(х'У> z)dxdydz = Щ / (р sin Є cos ф, р sin Є sin ф, рсозв) X
a G»
X pгsin0dpdфd0. (37)
Назва «сферичні координати» пов'язана з тим, що координатна
поверхня р = const є сферою. При обчисленні потрійного інтеграла в
циліндричних чи сферичних координатах область G*, як правило, не
будують, а межі інтегрування знаходять безпосередньо за областю G,
користуючись геометричним змістом нових координат. При цьому
рівняння поверхонь гх (х, у) та za (x, у), які обмежують область G,
записують в нових координатах.
Зокрема, якщо область G обмежена циліндричною поверхнею х2 +
+ у* == R2 та площинами z = a, z = b, a <; b, то всі межі
інтегрування в циліндричній системі координат сталі:
2я Я Ь
f (х, у, z) dxdydz = f dip f pdp f / (p cos ф, р sin ф,г) dz
0 0 a
1 не з ;1нюються при зміні порядку інтегрування. Те саме буде у
сферичних координатах у випадку, коли G — куля: х2 + у2 + za ^ .ft2,
або кульове кільце. Наприклад, якщо G — кульове кільце з
внутрішньою сферою х2 + у2 + z2 = г2, то рівняння цієї сфери в сферичних
координатах має вигляд
(р sin Є cos ф)2 + (P sin Є sin ф)2 + (р cos Є)2 = г2,
або
(р sin Є)2 (cos2 ф + sin2 ф) + (р cos Є)2 = г2,
звідки р = т. Аналогічно р = R — рівняння зовнішньої сфери, тому
JJ [/(*. У' z)dxdydz =
а
2Я Я /?
= f сїф f sin 0d0 f / (р sin 6 cos ф, р sin 0 sin ф, р cos 0) p2dp.
0 0 r
У випадку, коли G — куля (x2 + У2 + z3 ^ R2), в цій формулі слід
покласти г = 0. Інших яких-небудь загальних рекомендацій, коли
варто переходити до тієї чи іншої системи координат, дати неможливо. Це
залежить і від області інтегрування, і від підінтегральної функції.
Іноді треба написати інтеграл в різних системах координат і лише після
цього вирішити, в якій з них обчислення буде найпростішим.
Ш
591
Приклади
1. Обчислити потрійний інтеграл \ \ Iz^a? 4- у* dxdydz,
а
якщо область G обмежена площинами y=G,z=0,z=2
і циліндром ха + у2 = 2х (рнс. 10.26).
О Введемо циліндричні координати
X = р COS ф, у = р Sin ф, 2 = Z.
Оскільки в циліндричній системі координат х* + у* = р*.
у а рівняння кола дса + 4а = 2дг, яке лежить в основі циліндра,
має вигляд р = 2 cos ф, то за формулою (36) маємо
))) г Ух2 -b у2 dxdydz = \ ] | zp*dpd<pdz,
а*
Рис. 10.26
де
Тому
G» = І0їїр<2со5ф, О^ф^-2", 0<г<2І,
Я/2 2 cos Ф 2
С Г f г Ух% + у2 dxdydz = \ dtp f p2dp f zdz ■■
л/2 2 cos Ф л/2 л/2
2 f -£l d(p = — f cos3 <pd<p = Ц- f (1 — sin2 ф) d (sin ф) =
sin3 ф \ |я/2 _ J32_
~ 9
lb I .
= -3- ^sin ф - - 3
2. Обчислити потрійний інтеграл
J j] Ух^+Ір+І? dxdydz, де G — куля .ж2 + у2 + г3 < 1.
О
О Перейдемо до сферичних координат:
ж = р sin G cos ф, і/ = р sin G sin ф, z = p cos 6.
Оскільки підінтегральна функція Ух2 + У2 + *2 = Р > 0 < Ф < 2я, 0 <: G < я,
0 ^ р ^ 1, то за формулою (37) дістаємо
2л л і
С С Г Ух* + y* + z2 dxdydz = ( dtp f sin 0d6 f p3dp =
G
2л Л
Ял
0 0
я
0
2Л
«= _L f dtp \ sin 8dG = JL f (—cos Є) dtp = _L £ 2d<p = я. •
0 0 0 0 0
2.4. Деякі застосування потрійного інтеграла
1. Обчислення об'ємів. Якщо деяке тіло є обмеженою і замкненою
областю G, що має об'єм V, то згідно з формулою (31)
К= Jfjdxdf/dz. (38)
592
32.астосування в механіці. Нехай G — обмежена замкнена
область простору Я3, яку займає деяке матеріальне тіло з густиною у =
= у (*, У, г), де у (*, У. г) — неперервна функція в області G, тоді:
а) маса цього тіла
т = Ш уdV- <39)
а
б) моменти інерції /„ І у, Iz тіла відносно коорлшатних осей Ох,
Оу, Oz відповідно дорівнюють
^Ш^'+г2)^; (40)
а в
Моменти інерції 1Ху, Іхг, Іух тіла відносно координатних площин
Оху, Охг, Оуг обчислюються за формулами
7** = Ш «W 7« = Ш у"ум (4»)
О G
о
Момент інерції тіла відносно початку координат
Io-llUx2+y2+z2)ydV' <42)
в) статичні моменти Мху, Mxz, Муг тіла відносно координатних
площин Оху, Охг, Оуг обчислюються за формулами
м*> = f И z^Kl М" = Ш «^ ^ = JИ *ї^ї (43)
G G О
г) координати хс, ус, гс центра маси тіла визначаються за
формулами
х = туг _ _0 .
G
Ус_ *" "Ют"' '" « ~Ш^'
о о
593
/п
Доведення формули (38), як уже зазначалось,
випливає з означення потрійного інтеграла:
\l\dxdydz = lim S ЛУ,- = lim V = V.
С Я->0 (=1 Х-*0
Доведення формул (39) — (44) аналогічні
доведенням відповідних формул для матеріальної
пластини (п. 1.5). Пропонуємо читачеві
виконати їх самостійно.
Приклади
1. Знайти об'єм тіла, обмеженого поверхнями 2г =
= Xі + у*, г =« 2 (рис. 10.27).
О Дане тіло обмежено знизу параболоїдом 2г = х» + у*, зверху площиною
г «= 2 і проектується в круг Xі + уг ^ 4 площини Олсу. Використовуючи циліндричні
координати, знаходимо рівняння параболоїда г = £—. За формулою (38) маємо
Рнс. 10.27
2л
2л
= 4Я.
V = Щ d*rfi/d2 = j гіф j pdp j dz = | dv j p /2- J* j dp
G 0 0 p»/2 0 0 V /
2. Знайти центр маси однорідної півкулі G, обмеженої поверхнями г =
•= /Я* — Xі — у\ z = 0.
О Координати хс— ус= 0, тому що півкуля симетрична відносно осі Ог.
За третьою з формул (44) при у (х, у, г) = 1 маємо
Щ zdxdydz Щ zdxdydz
а а
я/2
ш ******
G
2л
Я/?3
2л/?8
f sinGcosGde f d«p f psdp = ?_ . J_ . 2л • _5!_= 4-tf.
J J j? 2ntf3 2 4 X
При обчисленні Інтеграла в чисельнику ми скористалися сферичними
координатами. Значення Інтеграла в внамечннку записали не обчислюючи, як об'єм півкулі.
Отже, центр маси даної півкулі роз ііщено в точці 10; 0; — R). •
Завдання для самоконтролю
1. Дати означення потрійного інтеграла.
2. Сформулювати достатню умову існування потрійного Інтеграла.
3. Сформулювати властивості потрійного інтеграла.
4. Як обчислюється потрійний інтеграл в прямокутних координатах?
5. Як обчислюється потрійний інтеграл в циліндричних координатах? Навести
приклад області, для якої меж; інтегрування в циліндричних координатах сталі.
6. Як обчислюється потрійний інтеграл в сферичних координатах? Навести
приклад області, для якої межі інтегрування в сферичних координатах сталі.
7. Внвестн формулу для знаходження об ему тіла за допомогою потрійного
інтеграла.
594
8. Вивести формулу для знаходження маси тіла.
9. Вивести формули для знаходження моментів інерції тіла.
10. Вивести формули для знаходження координат центра маси тіла.
11. Обчислити потрійні інтеграли:
а) і її xayazdxdydz, де область G обмежена площинами х = 1, х = 3, у = 0,
"■(?
V = 2, г = 2, г = 5;
б) f f f (де* + уг) dxdydz, де область G обмежена поверхнями г = 2, х* 4- у* = 2г:
О
в) і і \ У "-г + і/а + га dV, де область G обмежена сферою х* + у* + г* = г.
с
12. Обчислити об'єм тіла, обмеженого поверхнями г = Vх* + у*, г — х* + Уг-
13. Знайти масу куба, ребро якого дорівнює 1, якщо густина ного в точці (де;
у: z) дорівнює у (х, у, z) = х + у -\- z.
14. Знайти координати центра маси однорідного тіла, обмеженого площинами
г= 0, у= 1, у= 3, *+2z= 3.
15. Обчислити момент інерції відносно осі Ог однорідної піраміди, обмеженої
площинами х = 0, у = 0, z = 0, х + 2у + Зг — 6 = 0.
2 16л 1 ,„1 ,„ З
Відповіді. 11. а) 242-j- ; б) -j- ; в) -^ я. 12. -g- я. 13. -g- a*.
14. /і; 2; -g") . 15. 27.
S 3. КРИВОЛІНІЙНІ ІНТЕГРАЛИ
Узагальнимо поняття визначеного інтеграла на випадок, коли
областю інтегрування є деяка крива. Такі інтеграли називаються
криволінійними. Розрізняють два види криволінійних інтегралів:
криволінійні інтеграли першого роду і криволінійні інтеграли
другого роду.
3.1. Поняття криволінійного інтеграла першого роду (по довжині
Дуги)
Нехай у площині Оху задано гладку чи кусково-гладку криву Ав
(рис. 10.28) і на цій кривій визначено обмежену функцію / (х, у).
(Неперервна крива х = х (/), у = у (t) називається гладкою на відрізку
а ^ / ^ Р, якщо функції х (і) та y(t)
мають на цьому відрізку неперервні у.
похідні х (t) та у' (t), які одночасно
не дорівнюють нулю. Якщо
неперервна крива складається із скінченного
числа гладких кривих, її називають
кусково-гладкою.) Розіб'ємо криву АВ
точками А = А0, Av ..., Лп_ь Ап =
=В на п довільних частин, на
кожній окремій дузі y4j_ii4| виберемо Рис. 10.28
595
яку-небудь точку Mt (|г; г|г), і = 1, 2, ..., п і складемо суму
л
2/«і.Чі)Д'і. (45)
(=і
де Д/4 —довжина дуги A(^\At. Сума (45) називається інтегральною
сумою для функції f (х, у) по кривій АВ. Нехай Я, = max Д/г — най-
більша з довжин окремих дуг Ai-iAt.
Якщо при Я, ->- 0 інтегральні суми (45) мають скінченну границю,
яка не залежить від розбиття кривої АВ і вибору точок Мг, то цю
границю називають криволінійним інтегралом першого роду (або
криволінійним інтегралом по довжині дуги) від функції / (х, у) по кривій АВ
і позначають \ / (х, у) dl.
АВ
Таким чином, за означенням
U(x,y)dl = limflf(h,r]i)Ali. (46)
АВ Я.-*0 (=1
Якщо границя (46) існує, то функція / (х, у) називається інтегровною
на кривій АВ, сама крива АВ — контуром інтегрування, А —
початковою, а В — кінцевою точками інтегрування.
Зведемо криволінійний інтеграл першого роду до визначеного
інтеграла. Для цього на кривій АВ приймемо за параметр довжину дуги
/, яка відраховується від точки А до довільної точки кривої АВ. Тоді
рівняння кривої АВ можна записати у параметричній формі: х = х (/),
У = У (Оі 0 ^ І ^ L, де L — довжина кривої АВ. При цьому
функція / (х, у) визначена на кривій АВ, перетворюється у складену
функцію однієї змінної — параметра І:
f(x,y) = f(x(l),y(l)), 0</<L.
Позначимо через lt значення параметра /, яке відповідає точці At, a
через т4 — яке відповідає точці Mt, тоді сума (45) матиме вигляд
п
X fix (Ті), у (ті)) Мі, (47)
/—і
де Д/г = lt — lt—и li-i ^ Tj ^ h- Сума (47) є інтегральною сумою
для визначеного інтеграла від функції / (х (/), у (І)) на відрізку [0; L].
Оскільки суми (45) і (47) рівні між собою, то рівні і відповідні їм
інтеграли:
[f(x,y)dl = \f(x{l),y(l))dl. (48)
596
Формула (48) ие тільки зводить кри- z 4 ffc.yl
волінійний інтеграл до звичайного, але
й доводить існування криволінійного
інтеграла для функції / (х, у), яка
неперервна на кривій АВ. Крім того, з
формули (48) випливає, що властивості
криволінійного інтеграла першого роду
аналогічні властивостям визначеного
інтеграла (гл. 7), тому ми навіть не
будемо їх формулювати. Зауважимо лише,
що за означенням криволінійного інтеграла Alt — довжина дуги,
тому завжди Д/г > 0. У визначеному ж інтегралі
Рис. 10.29
[f(x)dx= Jim 2/(8і)Д*і
J max А*/-»-0 /=1
<49)
величина Axt може бути як додатною, так і від'ємною. У зв'язку з цим
Ь а
^f(x)dx = — ^f(x)dx, але J f(x, y)dl = j f(x, y)dl,
a b АВ ВА
тобто межі інтегрування в криволінійному інтегралі першого роду
завжди треба брати від меншої до більшої.
Розглянемо фізичний зміст криволінійного інтеграла першого роду.
Якщо вздовж неоднорідної матеріальної кривої АВ розподілено масу
т з лінійною густиною у (х, у), то
т
= lim 2 у (It, г\і) Мі = і у (*- У) d/-
Я.-*0 (=1 АВ
тобто з фізичної точки зору криволінійний інтеграл першого роду від
невід'ємної функції вздовж деякої кривої дорівнює масі цієї кривої.
Криволінійний інтеграл першого роду має також і геометричний
зміст.
Якщо визначений інтеграл (49) при / (х) ^ 0 визначає площу
криволінійної трапеції, то криволінійний інтеграл (46) при f (х, у) !> 0
чисельно дорівнює площі частини циліндричної поверхні, твірні якої
мають довжину f (x, у) і паралельні осі Ог, а напрямна збігається з
кривою АВ на площині Оху (рис. 10.29). Зокрема, якщо АВ — не
крива, а відрізок [а; Ь], (а < Ь), що лежить на осі Ох, то / (х, у) =■ / (х, 0) =
= / (х), Alt =. Axt, і формула (46) перетворюється у формулу (49) —
циліндрична поверхня «вирівнюється» і стає криволінійною трапецією,
тобто криволінійний інтеграл першого роду стає звичайним
визначеним інтегралом.
597
Якщо покласти f (x, у) = 1, то площа циліндричної поверхні
чисельно дорівнюватиме довжині дуги А В, тому довжину L дуги АВ
можна знайти за формулою
L- [dl.
АВ
3.2. Обчислення криволінійних інтегралів першого роду
Формула (48), яка зводить криволінійний інтеграл до звичайного,
є не зовсім зручною для обчислення, бо не завжди можна легко
знайти рівняння кривої АВ у вигляді х = х (І), у = У (І), де / — довжина
дуги. Спростимо цю формулу.
Нехай крива АВ задана рівняннями х — х (t), у = у (t), t £ [а; р],
причому значення а відповідає точці А, а значення р — точці В.
Вважатимемо, що функції х (t) і у (t) разом з похідними х' (t) і у' {t)
неперервні на відрізку la; p], а функція / (х, у) неперервна вздовж
кривої АВ. Для довільної точки М (х (і); у {t)) довжину дуги / кривої AM
можна розглядати як функцію параметра t: І — І (t), тоді
t
Z = JK(x'(T))» + (y'(T)^dT.
о
Звідси, згідно з правилом диференціювання визначеного інтеграла по
верхній межі, маємо
dl = W (О)'+ &'('))' dt.
Виконуючи заміну змінної І = І (t) у правій частині формули (48),
маємо
\f(x,y)dl=[f(x(l),y(l))dl =
= $f(x (0. У (0) Vx'2 (0 + УЛ (t) dt. (50)
a
Зокрема, якщо крива АВ в декартових координатах задана
рівнянням у = у (х), а ^ х ^ Ь, де функція у {х) неперервна разом із своєю
похідною у' (х) на відрізку [а; Ь], то формула (50) набирає вигляду
*
J f(x,y)dl = ^f(x,y(x))V l+y'2(x)dx. (51)
АВ а
Якщо крива АВ задається рівнянням х = х (у), с ^ у ^ d і функції
х {у) і х' (у) неперервні на відрізку [с; d], то
d
f / (х, у) dl = f / {х (у), у) Y1 + х'2 [у) dy. (52)
АВ с
698
Досі ми вважали, що криволінійний інтеграл першого роду
розглядається для плоскої кривої АВ. Знайдені результати легко
перенести на випадок просторових кривих.
Нехай функція / (х, у, z) визначена та неперервна на просторовій
кривій АВ, яку задано рівняннями х = х (і), у = у (f), z = z(t), a^
< t ^ p, де функції л: (0, У (0. z (0 та х' (0і У' (0, г' (І) неперервні
на відрізку [а; р]. Тоді існує криволінійний інтеграл \ / {х, у, z) dl
АВ
і справджується формула
{ / {х. y,z)dl = \f (х [t), у {t), z {l))V(x'(t))a+(y'(t))* + (z'(t))*dt (53)
АВ a
Приклади
1. Обчислити криволінійний інтеграл і (д: — у) dl, де АВ — відрізок прямої
АВ
З
у = -т- х від точки А (0; 0) до точки В (4; 3).
3 З
О Скористаємось формулою (51). Оскільки у = — х, а у' = —, 0 ^ х ^ 4, то
4 4
АВ 0 0
2. Обчислити криволінійний інтеграл і (2г — У xa 4- у2) d/, де L —дуга кривої
L
х = t cos t, y=tslnt, г= t, 0 < t < 2я.
Q Оскільки де' (0 = cos f — / sin t, y' (t) = sin t + t cos t, z' (t) = 1, d/ =
= l^f8 + 2 d/, то за формулою (53)
2л
j (2г — Vx* + і/а) d/ = J (2/ — /(<cos /)» + (/ sin /)*) V"<»+Td/ =
L 0
2л 2л І
= f < ^2 4- 2d/ = ' f (<* + 2) г d (/a + 2) = UlA. ((1 + 2n*) 2 — 1). •
о о
3.3. Застосування криволінійного інтеграла першого роду
1. Застосування в геометрії. Нехай у площині Оху задано кусково-
гладку криву А В замкнену чи незамкнену і на цій кривій визначено
неперервну функцію / {х, у), тоді:
а) площу Р циліндричної поверхні, визначеної функцією z = f(x, у),
знаходять за формулою
Р= \f{x,y)dl\ (54)
АВ
599
б) довжину L кривої АВ визначають за формулою
L = J dl. (55)
АВ
2. Застосування в механіці. Нехай вздовж неоднорідної
матеріальної кривої L розподілено масу з лінійною густиною у (х, у), тоді:
а) маса кривої L обчислюється за формулою
т = J у (х, у) dl; (56)
L
б) координати хс, ус центра маси кривої L знаходяться за
формулами
S ху (*. у) dl \yy (х, у) dl
L Му І Мх
ly(x,y)dl пг ' У" <sy(x.y)dl т ' (5 )
L L
де Мх, Му — статичні моменти кривої L відносно осей Ох і Оу;
в) моменти інерції 1Х, Іу, /0 кривої L відносно осей Ох, Оу і початку
координат відповідно дорівнюють
U=$y*y(x.y)dl; Iv = $x*y(x,y)dl; I0 = Ux2 + y2)y(x,y)dl. (58)
L L L
У випадку, коли крива однорідна, тобто має сталу густину у0, у
формулах (56) — (58) слід вважати у (х, у) = у0. Наприклад, треба
знайти момент інерції Іх відносно осі Ох однорідної (у0 = І) дуги кола
х = 2 cos /, у — 2 sin /, яка міститься в першій чверті.
Скориставшись першою з формул (58), матимемо
_я_ л
2 2
/х= J уЧІ = 4 [ sin4V4sm2t + 4cos4dt = 8 \ l~c°s2t dt = 2я.
L 0 0
Формули (54), (55) випливають з геометричного змісту
криволінійного інтеграла першого роду (п. 3.1).
Формули (56) — (58) можна довести тим самим методом, яким були
знайдені відповідні формули для матеріальної пластини (п. 1.6).
Формули (55) — (58) можна записати і для випадку, коли підін-
тегральна функція розглядається на просторовій кривій.
3.4. Поняття криволінійного інтеграла другого роду (по
координатах). Фізичний зміст
Криволінійний інтеграл другого роду визначається майже так
само, як інтеграл першого роду. Нехай у площині Оху задано гладку чи
кусково-гладку криву АВ (рис. 10.30) і на цій кривій визначено об-
600
межену функцію Р (х, у). На відміну від інтегралів першого роду
вважатимемо криву напрямною лінією, у якої точки А та В є відповідно
початковою та кінцевою точками. Розіб'ємо криву АВ точками А =
= А0, Alt Аг, ..., і4,_], At, ..., Ап = В на п довільних частин, на
кожній частинній дузі Ai^At виберемо точку Mt (|4; і],), і = 1, 2, ..., п
і складемо суму
S^fo.ThJAx,, (59)
f=i
де A*j — проекція вектора Ai_^At на вісь Ох.
Відмінність сум (45) і (59) очевидна.
Якщо при Я. =max Alt-*- 0 інтегральні суми (59) мають скінченну
границю, яка не залежить ні від розбиття кривої АБ, ні від вибору точок
Mt, то цю границю називають криволінійним інтегралом від функції
Р (х, у) по координаті х вздовж кривої А В і позначають j P (ж, у) dx.
АВ
Таким чином,
J P (х, у) dx = lim J P d„ т),) Ах,. (60)
АВ ^->0 f=l
Аналогічно вводиться криволінійний інтеграл від функції Q (х, у) по
координаті у:
f Q(x,y)dy = Um'2lQ(tt, ч,)Ди, (61)
де Ауі — проекція вектора А^іА на вісь Оу (рис. 10.30). Суму
J P(x,y)dx+ f Q(x,y)dy
АВ АВ
називають криволінійним інтегралом по координатах або
криволінійним інтегралом другого роду від функцій Р і Q по кривій АВ і
позначають символом
J P(x,y)dx + Q(x,y)dy.
АВ
Функції Р (ж, у) і Q (х, у) іноді позначатимемо через Р і Q, а
криволінійний інтеграл записуватимемо у вигляді \ Pdx + Qdy.
АВ
Для того щоб дати фізичну інтерпретацію криволінійного
інтеграла другого роду, розглянемо задачу про роботу змінної сили на криво-
601
Xi-i X{
Рис. 10.30
ХІ-t XI
Рис. 10.31
лінійному шляху. Нехай матеріальна точка М (х; у) під дією змінної
сили F = Pi + Q/, де Р = Р (х, у), Q = Q {х, у) — проекції сили на
осі Ох та Оу, рухається на площині Оху вздовж кривої ВС. Треба
обчислити роботу А сили F при переміщенні точки М з точки В в точку
С (рис. 10.31).
Розіб'ємо криву ВС точками В = В0, ВХі .... Bt_u В,, ..., Вп = С
на п частин і на кожній окремій дузі Bi—\Bt візьмемо довільну точку
Мі (£,; тіі), і — 1, 2, ..., п. На цю точку діє сила F (М,) = Р (М,) і +
—>
+ Q (Mt) j. Роботу AAt, яку виконує ця сила при переміщенні точки
>• -» -»
по вектору Ві_хВ1 = Ах,і + Ауі]' можна знайти за допомогою
скалярного добутку
ДЛ, = ?(М,) ■ BZiB, = Р(1„ ц,)АХі + Q(g„ і,,) АУі.
—*
Ця робота наближено дорівнює роботі змінної сили F при
переміщенні матеріальної точки по дузі В<_іВ, довжиною Д/,.
Робота сили вздовж усієї ламаної В0, В1г ..., Bt_i, Bit ..., Вп
дорівнює
п п
Ап = 2іР (Б„ у],) Ах, + 2 Q Ці, г,,) Ду,.
t=i і=і
Цей вираз дає наближене значення шуканої роботи А. Перейшовши
до границі при Я, = max А/, -»- 0, знайдемо точне її значення:
А = Піп (j Р (Б„ ті,) Дж, + 2 Q (Ь. її,) А«/і) = J ЯЖс + <#«/• (62)
Отже, з погляду фізики криволінійний інтеграл другого роду вздовж
деякої кривої дорівнює роботі змінної сили при переміщенні
матеріальної точки вздовж цієї кривої.
602
3.5. Обчислення та застосування криволінійного інтеграла
другого роду
Зведемо криволінійний інтеграл другого роду до визначеного
інтеграла. Нехай крива АВ задана параметричними рівняннями х = х (t),
у = у (/), а <; t <; р\ де функції х (t) та у (t) на відрізку [а; рЧ
неперервні разом із своїми похідними х' (t) та у' (і), причому точці А
кривої відповідає параметр а, а точці В — параметр р\ Припустимо, що
функція Р (х, у) неперервна на кривій АВ, тоді за означенням
f P (х, у) dx = lira 2 Р <£і. Чі) Л*і- (63)
ав и>і-і
Але, згідно з формулою Лагранжа,
Дх, = xt — *£_і = х (ti) — х (tt_i) =
= де' (т,) (/, — /|_і) = ж' (т,) Af„ т, Є [/,_і; *,].
Виберемо точку (£г; т),) так, щоб £, =» ж (т,), т|, = і/ (т,). Тоді
інтегральна сума у формулі (63) набере вигляду
^P(x(xt),y(xt))x'(r,)Att.
Це інтегральна сума для функції Р (х (t), у (f)) x (t) на проміжку [а; рЧ,
тому
Р
J P (х, у) dx = J P (х (/), у (0) х' (0 Л. (64)
АВ а
Аналогічно доводяться формули
р
і Q (*, у) dy = J Q (ж (0,«/ (0)«/' (0 dt; (65)
/IB a
I" P(x, y)dx + Q(x,y)dy = \ [P(x(t), у(0)ж'(0 + Q (* (0, «/(0)У'(01#•
Зокрема, якщо крива і4В задана рівнянням у = у (х), а <: х ^ Ьі
де функція # (х) і її похідна у' (х) неперервні на проміжку [а; Ь], то
з формули (66) дістанемо
ь
\ P{x,y)dx+Q{x,y)dy=\[P(x, у(х)) +Q{x,y(x))у (х)]dx. (67)
АВ а
603
Аналогічно, якщо крива АВ задана рівнянням х = х (у), с ^ у <
<; d, причому функції х (у) та у.' (у) неперервні на проміжку [с; d], то
d
J Р(де, *) Же + Q (х, у) <fo - Г [Я(* («/),«/)х' (і/) + Q{x(у), у)]dy. (68)
АВ с
Поняття криволінійного інтеграла другого роду можна поширити
й на просторові криві. Нехай функції Р {х, у, z), Q (х, у, г), R (х, у, z)
визначені і неперервні на просторовій кривій АВ, яку задано
рівняннями
* = *(/), y = y(t), 2 = г(0, а<*<р\
де функції х (t), у (t), z (t) і їхні похідні х (/), у' (І), z (t) неперервні
на проміжку [а; р]. Тоді існує криволінійний інтеграл
) Р(х, у, z)dx+Q(х, у, z)dy + R(х, у, z)dz
АВ
і справджується формула
[ Pdx + Qdy + Rdz = { [Р (х (/), y(t),z (0) х' (f) +
(69)
АВ а
+ Q(x (f), у (і), z (і)) у' (t) + R (х (f), у (/), z (/)) г' (/)] dt.
Формули (64) — (69) використовуються для обчислення
криволінійних інтегралів. З цих формул випливає, що криволінійний інтеграл
другого роду має властивості, аналогічні властивостям визначеного
інтеграла.
На відміну від криволінійного інтеграла першого роду
криволінійний інтеграл другого роду залежить від напряму шляху
інтегрування і при зміні цього напряму змінює свій знак:
\ Pdx + Qdy = — [ Pdx + Qdy.
АВ
У
d
C
0
P
"Шштм
1 !
а в x
Рис. 10.32
BA
Це пов'язано з тим, що "при зміні напряму
руху по кривій, змінюються знаки
проекцій Дх, і Ау, в сумах (60) і (61).
Часто доводиться розглядати
криволінійні інтеграли по замкненому контуру,
тобто контуру інтегрування, в якому
початкова та кінцева точки збігаються (мова
йде про замкнені контури без точок само-
перетину).
Для замкненого контура існує лише
два напрями обходу: проти стрілки
годинника (додатна орієнтація контура) та за
604
стрілкою годинника (від'ємна орієнтація контура). Іншими словами,
контур вважається додатно орієнтованим, якщо при його обході
область, обмежена цим контуром, залишається зліва. Криволінійний
інтеграл по додатно орієнтованому контуру L позначають так:
j>P(x,y)dx + Q(x,y)dy.
L
Розглянемо два застосування криволінійного інтеграла другого
роду.
1°. Обчислення площі плоскої фігури. Нехай на площині (рис. 10.32)
задана правильна (п. 1.3) область
Я = {{/і (*)<«/<«/*(*). а<х<Ь).
Межу області D, тобто криву PNQM, позначимо через L і
вважатимемо додатно орієнтованою. Розглянемо інтеграл — ф ydx і зведемо його
до визначених інтегралів:
— &ydx = — (\ ydx— J ydx\= J ydx— ( ydx =
L \MQN NPM I NPM MQN
b b
= ^y2(x)dx — $yl(x)dx = S,
a a
де S — площа області D.
Отже, площу S правильної області D, обмеженої кривою L,
знаходять за формулою
S = — ф ydx. (70)
L
Аналогічно можна довести, що
S = §xdy. (71)
Додаючи формули (70) і (71) почленно, дістаємо ще одну формулу для
обчислення площі:
S=-\-j>xdy-ydx. (72)
2°. Обчислення роботи. Нехай сила F = Р (х, у) і + Q (х, у) j
виконує роботу А при переміщенні матеріальної точки вздовж
кривої L, причому функції Р (х, у) і Q (х, у), неперервні на кривій L;
тоді, як відомо (п. 3.4),
А = $ P (х, у) dx + Q (х, у) dy. (73)
L
605
Приклади
1. Обчислити криволінійний інтеграл ф xydx-\- dy, де L — замкнений контур,
І
утворений лініями у = Xі, у ~ 1, х = 0 (рис. 10.33).
О Застосовуючи адитивність криволінійного інтеграла, маємо
(р xydx + dy = J *i/rfx + di/ + j Jti/dx + di/ + J x#dx + dy.
L OA AB BO
З рівняння у = x2 лінії ОЛ дістаємо dy — 2xdx, тому
і
f x^d* + dj, = Ґ (*3dx + 2xdx) = JL ;
о» о
з рівняння у — 1 лінії ЛВ дістаємо dy = 0, тому \ xydx -\- dy = \ xdx = — -к-\
ав і
о
з рівняння х = 0 лінії ВО дістаємо dx = 0, тому і xydx + dy = \ dy = — lj
БО
2. Знайти площу області, обмеженої еліпсом х = a cos t, у = a sin Л
О За формулою (72)
S = -і- ф xdi/ — ydx = -L f (я cos / • b cos / + fcsin / • a sin t) dt =
L 0
2л 2n
= J^_ f (cos» / + sin" tydt = _^_ f dt = лаб. •
о о
3. Знайти роботу сили F = і/дм + (j/+ x) / при переміщенні матеріальної точки
по прямій у = х із точки О (0; 0) в точку В (1; 1).
О За формулою (73)
і і
А = f yxdx + (у + х) dy = f {хЧх + (х + х) dx) = (" (жа + 2*) dx = — . »
ов о о
4. Обчислити криволінійний інтеграл Г #*dx + 2x#di/ від точки А (0; 0) до точки
АВ
В (1; 1) по лінії: а) у = х; б) у = х8; в) у = |Ле*(рис. 10.34).
О Маємо:
і
а) у = х, dy = dx; f уЧх + 2xydy = f (x2 + 2x2) dx = 1;
606
УгХ2
Рис. 10.34
б) у = х2, dy = 2*dx;
f y*dx + 2xydy = f (x4 + 2x ■ x2 ■ 2x) dx = 1;
AB о
в) у = Vx, dy = —
3
1 . 2
dx;
f y4x + 2xydy= Ux3 +2x- x3 ■-L x 3]dx=H*3+-?-x3]dx=l. #
5. Обчислити криволінійний інтеграл 1 ydx + 2dy від точки А (0; 0) до точки
ав
В (І; 1) no кривих а), б), в), які задані в прикладі 4:
І
О a) J ydx + 2dy= j(x + 2)dx=-|-:
АВ 0
І
б) С ydx + 2dy = С (х2 + 2 • 2x) dx == —;
AB 0
1 / — - —\
в) j ydx + 2dy= j(x3 + -§_* 8]dx = JJL. •
Зазначимо, що в прикладі 4 інтегрування по трьох різних кривих, що сполучають
одні й ті самі точки, дає один і той самий результат. У прикладі 5 інтегрування по
таких самих кривих дає різні результати. Причина цього з'ясована в п. 3.8.
3.6. Зв'язок між криволінійними інтегралами першого і другого
роду
Позначимо через а та р кути, які утворює з осями координат
напрямна дотична до кривої АВ у точці М (х; у) (рис. 10.35). За
додатний напрям дотичної беремо той, який відповідає напряму руху точки
по кривій від А до В. Враховуючи геометричний зміст диференціала
функції (гл. 6, п. 3.1) та диференціала дуги (гл. 5, п. 7.3), маємо
dx — cos cull, dy = cos fid/. (74)
607
Замінюючи в криволінійних інтегралах
другого роду dx та dy їхніми значеннями
(74), перетворимо ці інтеграли в
криволінійні інтеграли першого роду:
Рис. 10.35
j P(x,y)dx = ) Р (х, у) cos adl;
лв ав
J Q(x,y)d*= J Q(x, y) cos $dl;
IB V AB
{ Pdx + Qdy= { Яcosadl + Qcospd/.
AB
AB
AB
(75)
Формули (75) виражають криволінійні інтеграли другого роду
через криволінійні інтеграли першого роду і встановлюють зв'язок між
ними. При зміні напряму руху точки по кривій формули (75) не
змінюються, оскільки при цьому змінюють знак dx, dy, cos a, cos р\
3.7. Формула Гріна
Формула Гріна зв'язує подвійний інтеграл по області D3
криволінійним інтегралом по межі L цієї області. Вона широко
застосовується у математичному аналізі.
Доведемо цю формулу для правильної області, контур якої
обмежений гладкими чи кусково-гладкими кривими.
Теорема. Нехай D — деяка правильна область, обмежена
замкненим контуром L, і функції Р (х, у) і Q (х, у) неперервні разом із
своїми частинними похідними -^- і -^ в цій області. Тоді справджується
формула Гріна
i№-w)dxd!'-§pdx+Q*'-
(76)
дх ду
б L
О Нехай область D = {уг(*)<у<ух(х), а<л:<Ь} (рис. 10.32)
обмежена додатно орієнтовним контуром L — межею MPNQM.
Покажемо, що
\\»Ldxdy = -§Pdx. (77)
D L
Для цього зведемо подвійний інтеграл до повторного, виконаємо
інтегрування по змінній у і до знайдених визначених інтегралів
застосуємо формулу (67):
Ь уж(х) Ь
D * a Ul(x)
ІіМ*>
dx =
УМ
608
= $ IP (х, У2 (х)) - Р (х. у, (х))) dx=\p (х. уг (х)) dx -
а а
— §Р(х, yi(x))dx= J P(x,y)dx— J P(x,y)dx =
NPM
NQM
= — J P(x,y)dx
MPN
J P(x,y)dx
NQM
■ (j) Pdx.
L
Аналогічно, вважаючи, що область D правильна в напрямі осі Ох:
D — іхі (у) ^ х ^ х2 (у), с ^ у ^ d}, можна впевнитися, що
Н-§-**'=Ф№
(79)
Ук
Якщо від рівності (79) віднімемо рівність (78), то дістанемо
формулу (76). •
Зауваження 1. Ми вважали, що область D правильна.
Формула Гріна буде справедливою і для довільної області, яку можна
розбити на скінченне число правильних
областей. Нехай, наприклад, область С(рис. 10.36)
складається з двох правильних областей: Dx i£>2.
Запишемо формулу (76) для кожної з цих
областей і складемо почленно знайдені результати.
Зліва матимемо подвійний інтеграл по всій
області D, а справа — криволінійний інтеграл
по межі цієї області, оскільки криволінійний
інтеграл по допоміжній (середній) кривій
береться двічі в протилежних напрямах і при
додаванні взаємно знищується.
Зауваження 2. З формули Гріна легко
дістати формули для обчислення площі плоскої
фігури: якщо у формулу (76) підставити Р
немо формулу (70); якщо Р = 0, Q = х
Приклад
Обчислити криволінійний інтеграл / = ф (х — 2у) dx + (х + у) dy, де і —
L
коло: ж» + у9 = R2,
а) безпосередньо; б) за формулою Гріна.
О а) Скористаємось параметричними рівняннями кола:
* = R cos /, у = R sin t, 0 sg t < 2л.
Рис. 10.36
-у, Q = 0, то діста-
■ формулу (71).
609
Тоді dx = — R sin tdt, dy = R cos tdt, тому
2n
/ = f l(R cos / — 2R sin 0 (— V? sin 0 + (R cos t + V? sin 0 R cos /J d/ =
о
2л 2л
= R1 f (1 + sin» /) dt = V?» f /l+_L(l— cos 20) d/= 3n/?s.
о о
б) Такий самий результат дістаємо за формулою Гріна:
Р = х-2у, Q=x+y, ^.=-2,4^=1:
ду дх
1 = ії І^Г - -fr)*** =3 И **» =3л/?2- •
D D
3.8. Умови незалежності криволінійного інтеграла від форми
шляху інтегрування
Як уже зазначалось (п. 3.5, приклади 4 і 5), значення
криволінійного інтеграла може залежати від того, якою саме кривою сполучено
крайні точки шляху інтегрування, а може і не залежати. Якщо
значення криволінійного інтеграла залишається однаковим по всіх
можливих кривих, які сполучають кінцеві точки кривої інтегрування, то
кажуть, що криволінійний інтеграл не залежить від форми шляху
інтегрування.
З'ясуємо умови, за яких існує така незалежність. Нагадаємо, що
однозв'язною називають область, межа якої складається з однієї
замкненої без точок самоперетину неперервної кусково-гладкої кривої.
На рис. 10.37 показано: а — однозв'язну область; б — двозв'язну
область; в — тризв'язну область.
Теорема 1. Нехай функції Р (х, у) І Q (х, у) визначені і неперервні
разом із своїми частинними похідними -^- і -^ в деякій замкненій
однозв'язній області D. Тоді наступні чотири умови еквівалентні
тобто виконання якої-небудь однієї з них тягне за собою виконання
останніх трьох:
1) для довільної замкненої
кусково-гладкої кривої, що належить області D,
ф Pdx + Qdy = 0;
2) для довільних двох точок М та N
області D значення інтеграла
J" Pdx + Qdy
MN
610
не залежить від форми шляху інтегрування, який лежить в
області D;
3) вираз Pdx + Qdy є повним диференціалом деякої функції,
визначеної в області D. Іншими словами, існує така функція F (х, у),
визначена в області D, що
dF = Pdx + Qdy;
4) в усіх точках області D виконується рівність
^і - дх ■ <8°)
0 Доведемо теорему по схемі 1 => 2 =>■ 3 =>■ 4 =ф- 1, тобто покажемо,
що з першої умови випливає друга, з другої — третя, з третьої —
четверта, а з четвертої — знову перша. Цим еквівалентність всіх умов
буде доведена.
1 =>2. Нехай MQN і MPN — дві довільні криві, які належать
області D, сполучають точки М і N (рис. 10.38) і утворюють в сумі
замкнену криву L = MPNQM. Згідно з першою умовою,
тому
або
6 Pdx + Qdy = { Pdx +Qdy + [ Pdx .+ Qdy = 0,
L MPN NQM
j Pdx + Qdy =- { Pdx + Qdy,
MPN
NQM
j" Pdx +Qdy = \ Pdx + Qdy,
MPN MQN
тобто друга умова виконується.
2=s- 3. Нехай інтеграл 1 Pdx -f- Qdy не залежить від форми кри-
MN
вої, яка сполучає точки М та JV, а залежить лише від точок М і N.
Якщо точку М зафіксувати: М = М (хв; у0), то цей інтеграл буде
деякою функцією F (х, у) координат х
та у точки N (x, у): У
(81)
Рис, 10.39
611
Покажемо, що повний диференціал функції (81) збігається з під-
інтегральним виразом:
dF = Pdx + Qdy. (82)
Для цього достатньо показати, що в кожній точці N області D
існують частинні похідні, причому
^r=P(x,y),-^- = Q(x,y). (83)
Оскільки функції Р (х, у) і Q (х, у) за умовою неперервні bD, to з (83)
випливатиме диференційовність функції F (х, у) і рівність (82).
Доведемо, наприклад, що ~ ±= Р {х, у). Приріст AXF дорівнює
(рис. 10.39)
AxF = F(x+Ax,y) — F(x,y) =
= J Pdx + Qdy— j Pdx + Qdy= \ Pdx + Qdy.
MC MN NC
За другою умовою інтеграл не залежить від форми кривої, тому
шлях від N до С можна вважати прямолінійним; тоді
Х+&Х
AXF = [ Pdx + Qdy =» J Pdx = J Pdx.
NC NC x
Застосовуючи до останнього інтеграла теорему про середнє (гл. 7,
п. 2.3), дістанемо
AXF = Р(х + вАх, у) Ах, 0<Є<1,
звідки
Jg—P(x + e&x,y). -£ =іігпо^£ =р(х,у),
оскільки за умовою функція Р (х, у) неперервна. Аналогічно доводи-
др
мо, що -д- = Q (х, у). Отже, умова 3 виконується.
З => 4. Нехай існує функція F (х, у), (х; у) Є D, така, що dF = Pdx +
+ Qdy, тоді Fx = Р, Fy = Q, і за теоремою про змішані похідні Р'у =
= Fxv = F„x — Qx, тобто дістали рівність (80).
4=> 1. Нехай виконується четверта умова і L — довільна
замкнена кусково-гладка крива, яка належить області D і обмежує деяку
область D*. Застосовуючи до області D* формулу Гріна (це ми можемо
зробити, бо область D — однозв'язна) і враховуючи четверту умову,
дістанемо
О* L
612
Зауваження 1.3 еквівалентності умов 1—4 доведеної
теореми випливає, що умови 3 і 4 є необхідними і достатніми умовами, за
яких криволінійний інтеграл не залежить від форми шляху
інтегрування. Проте для застосувань найбільш зручною, необхідною і
достатньою умовою є рівність (80).
Зауваження 2. Аналогічна теорема справедлива для
криволінійних інтегралів другого роду вздовж просторових кривих. Для
її формулювання введемо поняття поверхнево-однозв'язної області.
Тривимірна область G називається поверхнево-однозв'язною,
якщо на будь-який кусково-гладкий замкнений контур, який належить
області G і не має точок самоперетину, можна «натягнути плівку», яка
повністю належить області G. Поверхнево-однозв'язними областями є
куля, еліпсоїд, многогранник і т. д., неоднозв'язною — тор («бублик»).
Теорема 2. Нехай функції Р (х, у, z), Q (х, у, z); R (х, у, z),
неперервні разом зі своїми похідними першого порядку в поверхнево однозв'язній
області. Тоді еквівалентні такі твердження:
1) для довільної замкненої кусково-гладкої кривої L, що належить
області G,
$■
Pdx + Qdy + Rdz = 0;
L
2) криволінійний інтеграл
\ Pdx + Qdy + Rdz
АВ
не залежить від форми кривої інтегрування, яка сполучає точки А та
В і лежить в області G;
3) вираз Pdx + Qdy + Rdz є повним диференціалом деякої
функції и (х, у, z), визначеної в області G;
4) в усіх точках області G виконуються рівності
дР^ dQ_ . dQ_ _dR_ . dR __ дР_ (Я
ду ~ дх ' дг ду ' ~д~х~ ~~ дг ' (аЯ>
Приклади
1. Пояснити результати інтегрувань у прикладах 4 і 5 (п. 3.5).
О У прикладі 4 (п. 3.5) значення криволінійного інтеграла І y'dx + 2xydy
АВ
не залежить від форми шляху інтегрування, бо виконувться рівність (80); дійсно:
дР dQ
Р=у*; Q=2^;-¥=-^- = 2i/.
тому результати інтегрувань а), б), в) були однакові.
У прикладі 5 (п. 3.5) рівність (80) не виконується, тому значення інтеграла
залежить від форми контура інтегрування. •
2. Обчислити криволінійний інтеграл і (х* — у*) dx — 2xydy no довільній кри-
АВ
вій, яка сполучає точки А (0; 0)та В (1; 1),
613
О Перевіримо виконання рівності (80):
Я-*-Л Q —** -£~-£—*■
Отже, значення інтеграла не залежатиме від того, якою кривою сполучено точки
А (0, 0) та В(\, 1).
Обчислимо інтеграл по прямій у = х, яка сполучає ці точки; тоді
§(x*-y*)dx — 2xydy = — 2ҐлгМ* = — -|-. *
АВ о
3.9. Інтегрування повних диференціалів. Первісна функція
Нехай в деякій однозв'язній області D функції Р (х, у) і Q (х, у)
та їхні частинні похідні -^— і -^- неперервні, причому 4£- = -SQ-.
Зафіксуємо точку Af0 (х0, і/0) і розглянемо функцію
<*;»>
F{x,y)*= J Pdx + Qdy. (85)
Тоді, згідно з п. 3.8, повний диференціал цієї функції
dF = Pax + Qdy. (86)
Проте, як і для функцій однієї змінної, існує нескінченна кількість
функцій двох змінних, для яких вираз (86) є повним диференціалом;
всі такі функції визначаються формулою и (х, у) + С, де и (х, у) —
яка-небудь з них, а С =• const. Кожну з цих функцій називають
первісною для повного диференціала (86). Оскільки функція (85) —
первісна, то
J Pdx + Qdy = u(x,y)+C. (87)
Поклавши х = х0, у = ув, дістанемо С = и (х0; у0), тому
(*;у)
J" Pdx + Qdy = u (х, у) — и (х0, у0).
Зокрема, при х = xlt у «= уг маємо
і*і1У,)
j Pdx +Qdy = u (xlt уг) — u (x0; y0). (88)
(*0:sio)
Формулу (88) називають формулою Ньютона — Лейбніца для
криволінійного інтеграла від повного диференціала.
Розглянемо спосіб знаходження первісної. Оскільки
криволінійний інтеграл (87) не залежить від форми шляху інтегрування, то для
614
знаходження первісної и (х, у) досить було б обчислити цей інтеграл
по довільній лінії, яка сполучає точки М0 та М. Проте виявляється,
що найзручніше інтегрувати по ламаній лінії, яка сполучає точки М0
і М так, що сторони ламаної паралельні осям координат.
Обчислимо, наприклад, криволінійний інтеграл (87) від точки М„
до точки М по ламаній MUNM (рис. 10.40). На відрізку M0N у = і/0,
dy = 0, а на відрізку NM х = const, dx = 0, тому з формули (87)
маємо
и (х, у) = [ Р(х, y0)dx + J Q(x, y)dy + C,
(89)
де перший визначений інтеграл обчислюється при сталому значенні
у = у0, а другий — при сталому значенні х.
Аналогічну формулу дістаємо при інтегруванні по ламаній М^РМ
(рис. 10.40):
* у
и(х, y) = \P(x,y)dx + $Q(x0, y\dy + С. (90)
Формули (89) і (90) дають змогу знайти первісну. Початкову точку
(*о'. Ув) в чнх формулах треба вибирати так, щоб підінтегральні
вирази якомога спрощувались.
Зауваження 1. Якщо за формулою (89) або (90) знайти
первісну и (х, у), то за формулою Ньютона — Лейбніца (88) можна
обчислити інтеграл від повного диференціала. Проте на практиці
простіше виконати інтегрування по ламаній лінії, яка сполучає точки
(*о! Уо) і (хі'< Уі) так. Щ° сторони ламаної паралельні осям координат.
Зауваження 2. Якщо для диференціального рівняння
P(x,y)dx + Q(x,y)dy = 0
виконується рівність (80), то таке рівняння називається
диференціальним рівнянням у повних
диференціалах. Загальний інтеграл
цього рівняння и (х, у) ~Сможна
знайти за формулою (89) (гл. 8, п. 1.6).
і-
М0(*о,Уо) Н(*,Уо)
10,40
Рис. 10.41
615
Зауваження 3. Формула для знаходження функції трьох
змінних по її повному диференціалу du = Pdx + Qdy + Rdz має
вигляд
хуг
и (х, y,z) = \P (х, //„. г0) dx + J Q (х, у, у0) dy + J R (х, у, г) dz. (91)
*о Co z°
Вона виводиться аналогічно формулі (89) при обчисленні
КРИВОЛІНІЙНІ^)
ного інтеграла J Pdx + Qdy + Rdz no ламаній М^М^М
(x0;|/0;z0)
(рис. 10.41). Ще дві подібні формули можна дістати при інтегруванні
по ламаних AfyV^M та Лї0Рг/уИ.
Приклади
1. Обчислити інтеграл
(2;1)
/= [ (х2 + 2ху — у*) dx + (Xі — 2ху + у*) dy.
(0;0)
О Даний інтеграл не залежить від шляху інтегрування тому, що справджується
рівність (80):
р = л:г + 2ед — у2, Q = *2 — 2*і/ + і/2;
дЯ 50
— =2,-2*, -£=2х-2у.
дР dQ
тобто -д— = -¥- на всій площині Оху. Виконаємо інтегрування по ламаній ОАВ
(рис. 10.42). На відрізку ОА : у = 0, dy = 0, 0 ^ х sg 2; на відрізку ЛЯ : * = 2,
йх = 0, 0< і/sS І. Отже;
2 І
/ = f *2ах + J (4 — 4j, + у2) dy = 5. «
о о
2. Впевнитись, що вираз
(4-+-fM-f--*-)*
є повним диференціалом деякої функції і знайти цю функцію.
О У даному разі функції
1 1 2 х
Р = -1Г+Т- Q = T"
Jf
ар
У неперервні разом з частинними похідними -^т- =*
9*^ І *?
і = — —т- , --J1- = — —«- на всій площині Оху,
А у> • ду уг
n/nJj і •АгТї ї* крім точки О(0; 0). Оскільки рівність (80) викону-
U(UHJ) f\g,UJ X етьсЯі т0 даний вираз є повним диференціалом дея-
Рис. 10.42 кої функції и (х, у). Для знаходження функції
616
и (х, у) скористаємося формулою (89), де (х0; у0) — деяка фіксована точка,
наприклад (1; 1) (не можна брати х0 = 0, у0 = 0, бо в точці (0; 0) функції Р [х, у) та Q (х, у)
не визначені):
« їх. у) = ) Я (х, \)dx+ JQ(x, y)+C =
і і
-i(-T + ')*+f(T-F")*+c-
1 І
= (In І х |+ де) |f + (2 In І у | + ~ \ І* + С =
-= 1п І х І + 2 In I V І + ~- + Сж,
де Сі = С — 1 — довільна сталі. •
Завдання для самоконтролю
1. Що називаєтьси криволінійним інтегралом першого роду? У чому полягає
його геометричний і фізичний зміст?
2. Як обчислюється криволінійний інтеграл першого роду за допомогою
визначеного інтеграла, якщо рівияния контура інтегрування задані в параметричній
формі? Довести відповідну формулу.
3. Як обчислюється криволінійний інтеграл пер.шого роду, коли рівняння лінії
інтегрування задано у вигляді у = у (х) або х = х (у)?
4. Як за допомогою криволінійного інтеграла першого роду обчислити площу
циліндричної поверхні та знайти довжину дуги?
5. Як за допомогою криволінійного інтеграла першого роду знайти центр маси
та моменти інерції матеріальної кривої відносно осей координат?
6. Що називається криволінійним інтегралом другого роду? У чому полягає
його фізичний зміст?
7. Як обчислюється криволінійний інтеграл другого роду за допомогою
визначеного інтеграла? Довести відповідні формули.
8. Як за допомогою криволінійного інтеграла другого роду обчислити площу
плоскої фігури?
9. Як обчислити роботу змінної сили при переміщенні матеріальної точки вздовж
заданої кривої?
10. У чому полягає зв'язок між криволінійними інтегралами першого та другого
роду?
11. Написати і довести формулу Гріна.
12. Сформулювати і довести теорему про незалежність криволінійного інтеграла
від форми шляху інтегрування.
13. Записати формулу Ньютона — Лейбніца для криволінійного інтеграла від
повного диференціала.
14. Як обчислити криволінійний інтеграл від повного диференціала?
15. Як знайти функцію и (х, у) по її повному диференціалу?
16. Знайти координати центра маси однорідної (у0 = 1) дуги циклоїди х = a [t —
— sin t), у = а (1 — cos t), 0 < / sg 2л.
17. Знайти площу, обмежену астроїдою
х = a cos3 /, у = a sin3 t, 0 ^ / < 2п.
18. Яку роботу виконує сила F — ухі -+- уг] + xzk при переміщенні матеріальної
точки по відрізку АВ прямої, де А (0; 1; 2), В (1; 2; 3)?
617
19. Обчислити криволінійний інтеграл <£ (—х2у) dx + xy2dy (де L — коло
L
х* -\- у* = р?у. а) безпосередньо; б) за допомогою формули Гріна.
(2;1)
С ydx — xdy
20. Обчислити \ -j .
(і:2>
21. Довести, що вир із (З*2 — 2ху + у2) dx — (** — 2ху + Зу2) dy є повним
диференціалом деякої функції і знайти цю функцію.
(4 \ з 1 З
л; -g-fl) . 17. -g- па2. 18. 6. 19. -^-nR*. 20. -j- ,
21. xs — у» + ху2 — х2у + С.
§ 4. ПОВЕРХНЕВІ ІНТЕГРАЛИ
При розв'язуванні різних задач часто доводиться розглядати
функції, визначені на деякій поверхні. Такими функціями є, наприклад,
густина розподілу електричних зарядів на поверхні провідника,
поверхнева густина маси, розподіленої на поверхні, швидкість рідини,
що протікає через задану поверхню, освітленість поверхні тощо.
У цьому параграфі ми розглянемо інтеграли від функцій, заданих на
поверхні — це так звані поверхневі інтеграли.
4.1. Поверхневі інтеграли першого роду
Поверхневі інтеграли першого роду є узагальненням подвійних
інтегралів.
Нехай в точках деякої кусково-гладкої поверхні а визначена
обмежена функція / (М) = / (х, у, z). (Поверхня називається гладкою,
якщо в кожній її точці існує дотична площина і при переході від точки
до точки положення цієї дотичної площини змінюється неперервно.
Поверхня, яка складається із скінченного числа неперервно
сполучених гладких поверхонь, називається кусково-гладкою.) Розіб'ємо
поверхню о на п довільних частин о, без спільних внутрішніх точок
(рис. 10.43); нехай До, — площа, а diam (о,) — діаметр частини
поверхні а,, і = 1, 2, ..., п. У кожній частині а, виберемо довільну
точку М, (£,; т),-: £,) і складемо суму
п
2/&.Т]/; Є/) До-,- (92)
Цю суму називають інтегральною сумою для функції f (x, у, z) по
поверхні а.
Якщо при Я. = max diam (cr,) -»- 0 інтегральні суми (92). мають
скінченну границю, яка не залежить ні від способу розбиття поверхні
а, ні від вибору точок М,, цю границю називають поверхневим
інтегралом першого роду від функції / (х, у, z) по поверхні а і позначають
[[/(*, У, 2) do.
а
618
Таким чином, за означенням
1 J/(ж. у, z)da = limV /(£,, rj, £,)Да,. (93)
У цьому разі функція / (х, у, z) називається інтегровною по поверхні
а, а поверхня а — областю інтегрування.
Якщо функція / (х, у, z) неперервна на поверхні а, то вона інте-
гровна по о.
Обчислення поверхневого інтеграла першого роду зводиться до
обчислення подвійного інтеграла.
Нехай гладка поверхня а, задана рівнянням z = z (x, у),
проектується на площину Оху в область D. Припустимо, що функція/ (х, y,z)
неперервна на поверхні а, а функції z (x, у), z'x (x, у), z'y (x, у)
неперервні в області D.
Внаслідок розбиття поверхні а на частини а, область D
розіб'ється на частини S,, які є відповідними проекціями частин а, на площину
Оху (рис. 10.44). Якщо AS, — площа області S,, Аа, — площа
поверхні а,, то (п. 1.5)
Да, = Vl + zl (Ь. Лі) + гі*«і, тц) AS,,
тому інтегральну суму (92) можна записати у вигляді
2 fib. Лі. Єі)Да,= 2 f&' Ч" г(^"' 1'» Х
і=\ '=1
X V1 + z'l (l„ ті,) + z'y (Е„ ті,) AS,, (94)
Права частина цієї рівності є інтегральною сумою для функції
f{x, у, z{x,y))Vl +z' + z'y, (x; у)ЄО,
тому з рівностей (93) і (94) випливає, що
Рис. 10.43 Рис. 10.44
619
Формула (95) виражає поверхневий інтеграл першого роду через
подвійний інтеграл по проекції поверхні о на площину Оху.
Аналогічно можна дістати формули, що виражають інтеграл по
поверхні о через подвійні інтеграли по її проекціях на площини Охг
та Oyz. Якщо поверхня о задається рівнянням у = у (х, г) або х =
= х (у, г), то
JJ /(х, У, z) da = J{ /(л:, у (х, г), г) V 1 + у'І + у'І dxdz.
J J / (х, у, z) da = j" j / (де (у, z), y,z)V 1 + x* + x'l dydz,
дї Dxz та Dyz — проекції поверхні о на координатні площини Охг та Oyz
відповідно.
Якщо у формулі (93) покласти / (х, у, z) = 1 на поверхні о, то
дістанемо
P=^da, (96)
о
де Р — площа поверхні о, тобто за допомогою поверхневого інтеграла
першого роду можна обчислювати площі поверхонь.
Переходячи у формулі (96) до подвійного інтеграла, дістаємо
відому формулу (20) (п. 1.5).
Крім того, поверхневі інтеграли першого роду застосовують при
обчисленні маси, координат центра маси, моменту інерції
матеріальної поверхні з відомою поверхневою густиною розподілу маси.
Виведення відповідних формул по суті не відрізняється від виводу
аналогічних формул для матеріальної пластинки (п. 1.6).
Якщо на кусково-гладкій поверхні о розподілено масу з
поверхневою густиною у = у (jc, у, z), то:
а) маса матеріальної поверхні
т = J J ТС*> У> z)d">
а
б) координати центра маси поверхні:
Xc = -^Myz = -L$\xyda; yc=±Mxz = ±^yydo;
о а
Z' = -^Mxy = ±.$\zyda,
а
де Myz, Мхг, Мху — статичні моменти поверхні о відносно площин
Oyz,Oxz,Oxy;
620
в) моменти інерції поверхні відносно осей координат і початку
координат:
/х = И (І/2 + z2) ydo; І у = J J (*2 + z2) yda;
а а
!* = И <** + У2) У^ ;о = И (Xі + у* + г2) yda.
о а
Приклад
Знайти момент інерції відносно осі Ог частини однорідної (у ■= 1) поверхні
г— х2 + у2 (рнс. 10.27), яка відтинається площиною г = 1.
О Знаходимо
г'х*=2х, гу=2у, V 1 + *1 + 2'у = V\ + 4** + V.
Момент інерції
Іг = j j (** + ^) do = j J (х* + f/a) ^ І + 4** + V <г*Л/.
О D
Проекцією D поверхні а на площину Ojh/ є круг ха + і/2 ^ 1. Переходячи до
полярних координат, маємо
Іг = j d<p j ^ITV PS<*P = -f- ("J- ^5 + -J-) •
оо
Останній інтеграл знайдено заміною змінної: 1 + 4р2 = /2. •
4.2. Поверхневі інтеграли другого роду
Введемо поняття сторони поверхні. Візьмемо на гладкій поверхні
о довільну точку М, проведемо в ній нормаль п певного напряму і
розглянемо на поверхні о довільний замкнений контур, який виходить
з точки М і повертається в точку М, не перетинаючи при цьому межі
поверхні о. Переміщатимемо точку М по замкненому контуру разом
з вектором п так, щоб вектор п весь час залишався нормальним до о.
При обході заданого контура ми можемо повернутися в точку М з тим
самим або з протилежним напрямом нормалі.
Якщо у довільну точку М поверхні о після обходу довільного
замкненого контура, розміщеного на поверхні о, який не перетинає її
—»
межу, ми повертаємось з початковим напрямом нормалі п, то поверхню
називають двосторонньою.
Якщо при обході деякого контура напрям нормалі змінюється на
протилежний, то поверхню називають односторонньою.
Прикладами двосторонніх поверхонь є площина, сфера, довільна
замкнена поверхня без самоперетинів, довільна поверхня, задана
рівнянням 2 = / (х, у), де / (х, у), f'x (x, y\ f'y (x, у) — функції,
неперервні в деякій області D площини Оху.
621
Рис. 10.45 Рис. 10.46 Рис. 10.47
Прикладом односторонньої поверхні є так званий лист Мебіуса
(рис. 10.45). Модель цієї поверхні можна дістати, якщо прямокутну
полоску паперу ABCD, перекрутивши один раз, склеїти так, щоб
точка А збігалась з С, а точка В —з D.
Двосторонню поверхню називають орієнтовною, а вибір певної її
сторони орієнтацією поверхні. Напрямивши в кожній точці замкненої
поверхні нормаль всередину об'єму, обмеженого поверхнею,
дістанемо внутрішню сторону поверхні, а напрямивши нормаль зовні
поверхні — зовнішню її сторону. Надалі розглядатимемо двосторонні
поверхні. Односторонні поверхні неорієнтовні.
Нехай о — орієнтовна (сторона уже обрана) поверхня, обмежена
контуром L, який не має точок самоперетину. Вважатимемо за
додатний той напрям обходу контура L, при якому спостерігач, розміщений
так, що напрям нормалі збігається з напрямом від ніг до голови при
русі, залишає поверхню зліва від себе (рис. 10.46). Протилежний
напрям обходу називається від'ємним. Якщо змінити орієнтацію
поверхні на протилежну, то додатний і від'ємний напрями обходу
контура L поміняються місцями.
З'ясуємо тепер поняття поверхневого інтеграла другого роду.
Нехай о — гладка поверхня, задана рівнянням z = / {х, у) і
R (х, у, г) — обмежена функція, визначена в точках поверхні о.
Зорієнтуємо поверхню о. Розіб'ємо її довільно на п частин. Позначимо
через Dj проекцію і-ї частини поверхні ог на площину Оху, а через AS; —
площу Ь|, взяту із знаком плюс, якщо обрана зовнішня сторона
поверхні о, і із знаком мінус, якщо обрана внутрішня сторона поверхні
о. Виберемо в кожній частині ot довільну точку Mt (£4; иу, £4) і
складемо суму
п
2 R (Si. Чі. Сі) AS,. (97)
і=і
Вираз (97) називається інтегральною сумою. Нехай X =
= max d (ог) — максимальний діаметр поверхонь ot.
1<(<л
622
Якщо при К -v 0 інтегральні суми (97) мають скінченну границю,
яка не залежить ні від способу розбиття поверхні а, ні від вибору
точок Mt, то цю границю називають поверхневим інтегралом другого роду
і позначають так: J J R {х, у, г) dxdy. Отже, за означенням
а
\[R{x, у, г)dxdy = limУ R(Si, Ч„ Сі) AS,. (98)
V *->° і=і
З означення поверхневого інтеграла другого роду випливає, що
при зміні сторони поверхні на протилежну інтеграл змінює знак, бо
змінює знак ASj.
Поверхню о можна також проектувати на координатні площини
Oxz та Оуг, Тоді матимемо ще два поверхневі інтеграли J J P (х, у, г) X
о
х dxdr, \\ Q (х, у) dydz, де Р (х, у, г), Q (х, у, г) — функції, визна-
о
чені в точках поверхні о.
Оскільки dxdy = cos yda, dxdz = cos pdo, dydz = cos ado
(рис. 10.47), де da — елемент площі поверхні a, a, p\ у — кути між
нормаллю до поверхні о та осями Ох, Оу, Ог відповідно, то
справедливі такі формули:
J J P (х, у, z) dydz = j J P {х, у, z) cos ado;
J 5 Q (х, у, г) dxdz = J j[ Q (x, у, г) cos $do;
J J R (х, у, г) dxdy — \ \ R (х, у, z) cos yda.
На практиці найпоширенішими є поверхневі інтеграли, які
об'єднують усі названі, тобто
[ [ Pdydz + Qdxdz + Rdxdy = [ [ (Р cos a + Q cos p" + R cos y) da. (99)
V °
Якщо, наприклад, вектор F = Pi + Qj + Rk є швидкість рідини,
то кількість /7 рідини, яка протікає через поверхню о за одиницю
часу, називається потоком вектора F через поверхню о і знаходиться за
формулою 124]:
П = ^(Pcosa + Qcosp + Rcosy)da.
а
623
В цьому полягає фізичний зміст поверхневого інтеграла другого
роду. Зрозуміло, коли вектор F має іншу природу, поверхневий
інтеграл має інший фізичний зміст.
Формула (99) виражає загальний поверхневий інтеграл другого
роду через поверхневий інтеграл першого роду.
Поверхневі інтеграли другого роду обчислюються за допомогою
подвійних інтегралів.
Нехай функція R (х, у, z) неперервна в усіх точках гладкої
поверхні о, яка задана рівнянням г — z (х, у), (г, у) Dxy, де область Dxy —
проекція поверхні о на площину Оху. Виберемо верхню сторону
поверхні о, де нормаль до поверхні утворює з віссю Ог гострий кут, тоді
ASt > 0, і = 1, 2, ..., п. Оскільки zt = z (£,, т^), то суму (91) можна
записати у вигляді
л п
2 Я iSi. Лі. Сі) А$і = 2 R (Si. Лі. z (Si. Лі) AS,. (100)
і=і і=і
У правій частині рівності (100) міститься інтегральна сума для
функції R (х, у, z (х, у)). Ця функція неперервна в області Dxy, тому
інтегровна в ній.
Перейшовши в рівності (100) до границі при h -*■ 0, дістанемо
формулу
\\ R(x, у, z)dxdy = ] J R{x,y, г{х, y)dxdy,
a Dxy
яка виражає поверхневий інтеграл другого роду по змінних х і у
через подвійний. Якщо вибрати нижню сторону поверхні (нормаль до
поверхні утворює з віссю Ог тупий кут), то одержаний подвійний
інтеграл беруть із знаком «мінус», тому
\\ R{x, у, z)dxdy = ±\\ Я(х,у, z(x,y))dxdy. (101)
Аналогічно
J J P (х, у, z) dydz = ±^P(x(y,z),y,z)dydz; (102)
О Dyz
\\Q{x, у, z\dxdz = ± \\ Q(x, y(x, z), z)dxdz. (103)
У формулі (102) гладку поверхню о задано рівнянням х = х (у, z),
а у формулі (103) — рівнянням у = у (х, z). Знак «плюс» беремо у
цих формулах тоді, коли нормаль до поверхні утворює відповідно з
віссю Ох, з віссю Оу гострий кут, а знак «мінус» — коли тупий кут;
Dyz, Dxz, — проекції поверхні о на площини Оуг та Охг відповідно.
624
Для обчислення загального інтеграла (99) використовують
формули (101) — (ЮЗ), проектуючи поверхню а на всі три координатні
площини. Таким чином,
j| P (х, у, z)dydz + Q {х, у, z) dxdz + R (х, у, г) dxdy =
о
= ± J $ P(x{y, z), у, z)dydz ± $$ Qi*. ff (*. z), z)dxdz±
Dyt D„
±^)R{x,y,z(x,y))dxdy.
Правильність вибору°знаків перед подвійними інтегралами можна
перевірити за допомогою формули
- ф'/+ qfyj + Ф>
" = ± ./ ,. ,. =5"•
V Ф* + Чу + Фі
яка визначає одиничний нормальний вектор до поверхні ф (х, у, г) =
= 0. Подвійний знак у цій формулі відповідає двом сторонам
поверхні о. З формули (99) випливає, що знак перед подвійним інтегралом
збігається із знаком відповідного напрямного косинуса нормалі п:
cos a = cos (л, Ох) = ~п° - і; cos P = cos (it, Оу) = п° - };
cos у = cos (п, Ог) = п° • k.
Якщо поверхня о неоднозначно проектується на яку-небудь
координатну площину, то цю поверхню розбивають на частини, а інтеграл
(99) — на суму інтегралів по одержаних частинах поверхні о.
Приклади
1. Обчислити поверхневий інтеграл другого роду
/ = f f xz*dxdy + xdydz + dxdz,
a
де о —зовнішня сторона сфери Xі + у2 + za = 1, розміщена в першому октанті.
О Нехай Dx , D Dxz — проекції заданої поверхні на координатні площини.
Це чверті кругів з центром у початку координат і радіусом 1; тоді
л/2 1
[[xz*dxdy = [[ *(1 — х2 — y*)dxdy = ^ dq> j p2cos cp (1 — р2) dp = -
Dx о о
2
15
№ xdydz =[^1—у* — z*dydz^ Jdq>£/l-pVP= £-;
625
zh zk
2
0
\ 2J
1 X -1 0
У
У\
-1
/ X
ХУ
Рис. 10.48
2. Обчислити інтеграл
1 = J J \~У + ~2~І dydZ + xdxdz ~ zdxdy"
якщо о — зовнішня сторона трикутника, утвореного перетином площини 2х —
— 2у + г — 2 = 0 з координатними площинами (рис. 10.48).
Знайдемо проекції поверхні а на координатні площини:
Dxy=U - 1 ^«/<0, 0<*<І);
D„= {OsSz ^ 2-2*, 0=^*^1};
Dyz={0^z^2 — 2y, -l^//<0}.
Визначимо нормальний вектор п° до поверхні 0:
ф (х; у, z) = 2x — 2y+z — 2;
Оскільки
Фх=2. Ф* 2- Ф;=І. п° = -?-Г- 2 Г+ ' ?.
cos а = cos (л, Ох) = л° -7= -А > 0, cos р = cos (іГ, ~Оу) = л« -7=
О
= — -=- < 0, cos у = cos (л, 0z) = _L > 0,
" 3
то перед подвійними інтегралами у формулах (101) і (102) треба брати знак «плюс»,
а перед подвійним інтегралом у формулі (103) — знак «мінус». Отже,
0 2-2j, і 5-2*
7 J ^ 1 (-2-(2-z + 2y)-y+-^-)^-Ux j xdz +
~' ° 0 0
1 0
+ \dx \ (2x — 2y — 2)dy = 7.
о і—і
4.3. Формула Остроградського — Гаусса
Формула Остроградського — Гаусса встановлює зв'язок між
поверхневим інтегралом по замкненій поверхні і потрійним інтегралом
626
по просторовій області, обмеженій цією
поверхнею. Ця формула є аналогом
формули Гріна, яка, як відомо,
встановлює зв'язок криволінійного
інтеграла по замкненому контуру з подвійним
інтегралом по плоскій області,
обмеженій цим контуром.
Нехай замкнена область G обмежена
замкненою поверхнею о, причому знизу
та зверху обмежена гладкими
поверхнями о1 та о2, рівняння яких г = гх (х, у)
та z = г2 (х, у) (рис. 10.49). Припустимо,
що проекцією області G на площину
Оху є область D. Нехай в області G
визначено неперервну функцію R (х, у, z), яка в цій області має непе-
dR
рервну похідну -^—.
Розглянемо потрійний інтеграл
гДх.Ф
^-^-dxdydz = ^ dxdy J -^-dz = ^R-(x,y,z2(x,y))dxdy-
D *і(*.Л)
— \\ R(x.y,z1(x,y))dxdy.
У правій частині цієї рівності перший подвійний інтеграл
запишемо за допомогою поверхневого інтеграла по зовнішній стороні
поверхні о2, а другий подвійний інтеграл — по зовнішній стороні поверхні
а і. Враховуючи кути між нормаллю п та віссю Oz, дістаємо
Ш "IT dxdydz = Н R {х> у' z) dxdy + 11^{х' Уг Z) dxdy
С а, о,
= \\ R{x, у, z)dxdy.
(104)
-^- неперервні в області G, можна дістати формули:
Аналогічно, припустивши, що функції Р (х, у, z), Q (х, у, г), —^,
і області G, можна дістати формули:
^-¥Ldxdydz = ^Р(х, у, z)dydz, (105)
6 а
f(T-J^- dxdydz =[[q{x, у, z)dxdz.
(106)
627
Додавши почленно рівності (104), (105) і (106У, дістанемо ф-рмулу
Ш ("ї"+"S"+-ж-) d*d^d2=Я Pd^d2+Qdxdz+^^(іо7)
с о
яку називають формулою Острог рейнського — Гаусса. Ця формула
справедлива і для довільної області G, яку можна розбити на скінченне
число областей, для яких виконуються рівності (104) — (106).
За допомогою формули Остроградського — Гаусса зручно
обчислювати поверхневі інтеграли по замкнених поверхнях.
Приклад
Обчислити поверхневий інтеграл / = J \ x%dydz + Zydxdz — 2zxdxdy, де
о
а — зовнішня сторона піраміди, обмеженої площинами х = 0, у = 0, z = 0, х +
+ у + z — 1 = 0 (рнс. 10.23).
О Скористаємось формулою (10):
Р = х\ Q = Зу, Я = — 2zx; -0L. = 2х, JQ- = З, JB- = - 2х;
дх ду дг
1 1-Х \—Х—у
І = С f f (2* + 3 — 2х) dxdydz = З Г f Г dxdydz = ( Аг f A/ C dz = _L . #
о о о о о
4.4. Формула Стокса
Формула Стокса встановлює зв'язок між поверхневим і
криволінійним інтегралами. Нехай о — поверхня, задана рівнянням г —
= z (х, у), причому функції z (х, у), zx (x, у), zy (x, у) — неперервні в
області D — проекції поверхні о на площину Оху; L —контур, який
обмежує о, а / — проекція контура L на площину Оху, тобто / —
межа області D.
Виберемо верхню сторону поверхні о (рис. 10.50). Якщо функція
Р (х, у, z) неперервна разом із своїми частинними похідними першого
порядку на поверхні о, то справедлива формула
§ Р (х, у, 2) dx = ДО (-^ cos р - -g- cos Y) da. (108)
L a
О Перетворимо криволінійний інтеграл, який міститься у лівій
частині рівності (108). Оскільки контур влежить на поверхні а, то
координати його точок задовольняють рівняння г = г (х, у), і тому значення
функції Р (х, у, z) в точках контура L дорівнюють значенням функції
Р (*. yt z (х, у)) у відповідних точках контура /. Звідси випливає, що
ф Р (х, y,z)dx = Sp (x, у; z (х, у)) dx.
628
Застосовуючи до знайденого інтеграла формулу z
Гріна, дістанемо
(§)Р(х, y,z(x,y))dx =
і
Тут підінтегральна функція дорівнює частинній
похідній по у від складеної функції Р (х, у, рНС- ю.вд
z (х, у)).
Оскільки о — верхня сторона поверхні, тобто cos у > 0 (у —
гострий кут між нормаллю п до поверхні о і віссю Oz), то нормаль має про
екції —г'х, —г'у, 1. Але напрямні косинуси нормалі пропорційні
відповідним проекціям, тому
cos р — г-
cos у
= Zy,
тоді
-Шж+^Н=-Ш-
дР дР cos P
ду дг cos у
-1 dxdy =
—И(-£-~т-£«і>К
Отже,
§ Р(х, у, z)dx = $(■%-«*$—??-ю* у)do.
Аналогічно можна довести, що при відповідних умовах
справедливі формули:
§ Q (х, у, z) dy = ДО [Щ- cos у - -§ cos a) da; (109)
L а
§ R{х, у, z)dz = ^(-^-сова—£-сов$)do. (ПО)
Додаючи почленно рівності (108), (109) і (ПО), дістаємо формулу
$ Pdx+Qdtf + Rd2= ДО [(-^—"f-)cosa +
629
яка називається формулою Стокса. За допомогою формули (99), яка
пов'язує поверхневі інтеграли першого та другого роду, цю формулу
можна записати так:
§ № + <й, + № - jJ (-f- —І-) фь +
Формула Стокса дає змогу обчислювати криволінійні інтеграли по
замкнутих контурах за допомогою поверхневих інтегралів.
Приклад
Обчислити за допомогою формули Стокса інтеграл / = ф x2ysdx + dy + zdz,
L
де L — коло ха + у2 = 1, z = 0, а поверхня 0 — верхня сторона напівсферн х2 -f-
+ у2 4- 2а = 1, г > 0, і обхід кснтура L здійснюється в додатному напрямі.
О Оскільки
ас? _ дР __оЛ,а. dR _ dQ __. ая а/? _п
—— — ох у , —-——— и, —-— — —-—= о,
ох ду ду дг дг дх
то за допомогою формули Стокса (111) дістаємо
2л 1
' = — 3 \ \ x2y2dxdy = — З j \ x2y2dxdy = — 3 \ dy \ p» cos2 <p sina (pdp = —
о Dxy 0 0
2л 1 2л
— _ \ Ар І р» cos2 ф sins tfdp = —_1_ \ sina :
'2фйф-—J-.
0 0 0
З формули Стокса випливає, що коли виконуються рівності
dQ дР dR dQ дР dR
dx dy dy дг * dz dx
(112)
то криволінійний інтеграл по довільному просторовому замкненому
контуру L дорівнює нулю:
(f> Pdx + Qdy + Rdz = 0. (113)
L
А це означає, що в даному випадку криволінійний інтеграл не
залежить від форми контура інтегрування.
При виконанні умов (112) або (113) підінтегральний вираз
Pdx + Qdy + Rdz
є повним диференціалом деякої функції и {х, у, z). Знайти цю функцію
можна за формулою (91).
630
Завдання для самоконтролю
1. Що називається поверхневим інтегралом першого роду? Як обчислюється
такни інтеграл?
2. Які поверхні називаються двосторонніми?
3. Що називається поверхневим інтегралом другого роду?
4. Як обчислюється поверхневий інтеграл другого роду?
5. У чому полягає зв'язок між поверхневими інтегралами першого та другого
роду?
6. Записати і довести формулу Остроградського — Гаусса.
7. Записати і довести формулу Стокса.
8. Знайти координати центра маси однорідної напівсферн х2 4- у' + za = R2,
г>0; v= 1.
0. Обчислити поверхневий інтеграл другого роду І V zdxdy + xdxdz 4- ydydz,
а
де о — зовнішня сторона трикутника, утвореного в перетині площини х — у -{- z = 1
з координатними площинами.
10. Обчислити за формулою Остроградського — Гаусса поверхневий інтеграл
f f xdydz + ydxdz + (1 — z) dxdy, де а — зовнішня сторона повної поверхні конуса
z2 = х2 4- у2, 0 ^ z ^ Н.
11. Обчислити за формулою Стокса криволінійний інтеграл ф y2dx — x2dy 4-
L
+ z2dz, де L — замкнений контур, утворений прн перетині параболоїда 1 — у =
= х2 4 г2 з координатними площинами.
Bidnoeidi, 8. (0; 0; -g- r\ ■ 9. —~Y- 10- "з" nHS- u- — "зо" •
СПИСОК РЕКОМЕНДОВАНОЇ
І ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
1. Беклемьииев Д. В. Курс аналнтической геометрии и линейной алгебри.— М. і
Наука, 1987.— 320 с.
2. Бронштейн И. Н., Семендяев К. А. Справочннк по математнке для инженеров
и учашихся втузов.— М. : Наука, 1986.— 544 с.
3. Бурбаки Н. Очеркн по историн математики.— М. : Изд-во нностр. лит., 1963.—
151 с.
4. Бугров Я- С, Никольский С. М. Злементн лннейной алгебри и аналнтической
геометрии.— М. : Наука, 1983.— 228 с.
5. Бугров Я- С, Никольский С. М. Дифференцнальное и интегральное нечисленне.—
М. : Наука, 1988.— 431 с.
6. Бугров Я- С., Никольский С. М. Дифференциальньїе уравнения: Кратнне интег-
раль. Ряди.— М. : Наука, 1989.— 464 с.
7. Самойленко А. М., Кривошея С. А., Перестюк Н. А. Дифференциальньїе
уравнения.— К. : Вища шк., 1989.— 384 с.
8. Головина Л. И. Лннейная алгебра и иекоторьіе ее прнложения.— М. : Наука,
1985.— 392 с.
9. Давидов М. О. Курс математичного аналізу: В 3 ч.— К. : Вища шк., 1990—
1992.— Ч. 1.— 383 с; Ч. 2.— 366 с; Ч. 3.— 359 с.
10. Дадаян А. А., Дударенко В. А. Алгебра и геометрия.— Минск : Вьішзйш. шк.,
1989.— 288 с.
11. Дадаян А. А., Дударенко В. А. Математический анализ.— Минск : Вьшізйш.
шк., 1990.—428 с.
12. Дороговцев А. Я- Математический анализ: Справ, пособне.— К. : Вища шк.
Головное изд-во, 1985.— 527 с.
13. Арсенин В. Я. Методи математической фнзики и специальньїе функции.— М :
Наука, 1984.—383 с.
14. Ильин В. А., Позняк 3. Г. Аналитическая геометрия.— М. : Наука, 1988.—
224 с.
15. КудрявцевЛ. Д. Курс матема ического анализа: В 3 т.— М. : Вьісш. шк., 1988.
16. Кудрявцев Л. Д. Краткнй курс математического анализа.— М. : Висш. шк.,
1989.—583 с.
17. Кудрявцев В. А., Демидович Б. П. Краткий курс вьісшей математики.— М. :
Наука, 1989.— 656 с.
18. Мантуров О. В. Курс вьісшей математики.— М. : Висш. шк., 1991.— 448 с.
19. Корн Г., Корн Т. Справочннк по математике.— М. : Наука, 1984.— 831 с.
20. Математическая знциклопедня: В 5 т.— М. : Сов. знцикл., 1977—1985 —
Т. 1.— 5.
21. Мантуров О. В., Матвеев Н. М. Курс висшей математики.— М. : Висш. шк.,
1986 399 с.
22. Овчинников П. Ф., Лисицьш Б. М., Михайленко В. М. Вьісшая математика.—
К- : Вища шк. Головное изд-во, 1989.— 679 с.
23. Овчинников П. Ф.. Яремчук Ф. П., Михайленко В. М. Висшая математика.—
К. : Вища шк. Головное изд-во, 1987.— 552 с«
632
24. Пискунов Н. С. Дифференцнальное и интегральное нечисленне для втузов :
В 3 т.— М. : Наука, 1985.—Т. 1—3.
25. Федорчук В. В. Курс аиалнтической геометрии и линейной алгебри.— М. :
Изд-во Моск. ун-та, 1990.— 329 с.
26. Федорюк М. В. Обькновенние дифференциальнье уравнения.— М- : Наука,
1985.—447 с.
27. Шкіль М. І., Колесник Т. В. Вища математика.— К. : Вища шк. Головне вид-во,
1986.—512 с.
28. Шкіль М. І., Колесник Т. В., Котлова В. М. Вища математика.— К. : Вища шк.
Головне вид-во, 1985.— 391 с.
29. Щипачев В. С. Вьісшая математика.— М. : Вьсш. шк., 1991.— 479 с.
30. Шестаков А. А., Мальииева И. А., Полозков Д. П. Курс висшей математики.—
М. : Висш. шк., 1987.— 320 с.
ІМЕННИЙ ПОКАЖЧИК
Абель Нільс Хенрік (1802—1829) — норвезький математик
Александров Павло Сергійович (1896—1982) — російський математик
Аріабхатта (біля 476—550) — індійський математик, астроном
Архімед (біля 287—212 до н. є.) — грецький вчений
Безу Етьєнн (1730—1783) французький математик
Бернуллі Йоган (1667—1748) — швейцарський математик
Бернуллі Якоб (1654—1705) — швейцарський математик, родоначальник знаменитої
династії вчених Бернуллі, серед яких було вісім математиків і механіків
Бессель Фрідріх Вільгельм (1784—1846) — німецький астроном математик
Боголюбов Микола Миколайович (1909—1992) — російський математик
Больцано Бернард (1781—1848) — чеський математик
Бріггс Генрі (1561—1630) — англійський математик
Бурбакі Нікола — псевдонім, під яким група математиків виступила із спробою
дати систематичний виклад сучасної математики на основі аксіоматичного методу
Валліс Джон (1616—1703) — англійський математик
Вейерштрасс Карл (1815—1897) — німецький математик
Вессель Каспар (1745—1818) — датський математик
Вівіані Вінченцр (1622—1703) — італійський математик, фізик
Вієт Франсуа (1540—1603)—французький математик
Вронський ІОзеф (1776—-1853) — польський математик
Галуа Еваріст (1811 —1832) — французький математик
Гамільтон Уііьям Роуан (1805—1865) — ірландський математик
Гаусе Карл (1777—1855> — німецький математик
Гейне Генріх Едуард (1821—1881) — німецький математик
Гільберт Давид (1862—1943) — німецький математик
Глушков Віктор Михайлович (1923—1982) — російський математик
Грін Джордж (1793—1841) — англійський математик, фізик
Д'Аламбер Жан Лерон (1717—1783) — французький математик, механік
Декорт Рене (1596—1650) — французький математик, філософ
Діріхле Лежен Петер Густав (1805—1859) — німецький математик
Евклід (біля 340—287 до н. є.) — давньогрецький математик
Ейлер Леопард (1707—1783) — швейцарський математик, механік, фізик
Ерміт Шарль (1822—1901) — французький математик
Кантор Георг (1845—1918) — німецький математик
Кардано Джероламо (1501—1576) — італійський математик
Келі Артур (1821—1895) — англійський математик
Клеро Алексіє Клод (1713—1765) — французький математик
Колмогоров Андрій Миколайович (1903—1990) — російський математик
Коші Огюстен Луї (-1789—1857) — французький математик
Кравчук Михайло Пилипович (Ґ892—1942) — український математик
Крамер Габриель (1704—1752) — швейцарський математик
Лагранж Жозеф (1736—1813) — французький математик, механік
634
Лебег Анрі (1875—1941) — французький математик
Лежанр Адріен Марі (1752—1833) — французький математик
Лейбніц Вільгельм (1646—1716) — німецький математик
Леонардо да Вінчі (1452—1519) — італійський художник, скульптор, вчений
Лобачевський Микола Іванович (1792—1856) — російський математик
Лопіталь Гійом Франсуа (1661 —1704) — французький математик
Митропольський Юрій Олексійович (р. н. 1917) — український математик
Мебіус Август Фердинанд (1790—1868) — німецький математик
Не/іер Джон (1550—1617) — шотландський математик
Ньютон Ісаак (1642—1724) — англійський математик, фізик
Остроградський Михайло Васильович (1801—1862) — російський і український
математик
Паскаль Етьен (1583—1651) — французький математик, батько Паскаля Блеза
(1623—1662) — французького математика, фізика
Піфагор (біля 580—500 до н. є.) — давньогрецький математик
Ріккаті Джакопо Франческо (1676—1754) — італійський математик
Ролль Мітель (1652—1719) — французький математик
Сімпсон Томас (1710—1761) — англійський математик
Стірлінг Джеймс (1692—1770) — шотландський математик
Стокс Джорж (1819—1903) — англійський фізик, математик
Тейлор Брук (1685—1731) — англійський математик
Тбррічеллі Еванджеліста (1608—1647) — італійський фізнк, математик
Фалес (біля 625—548 до н. є.) — грецький вчений
Ферма П'єр (1601—1665) — французький вчений
Феррарі Людовіко (1522—1565) — італійський математик
Френель Огюстен Жан (1788—1827) — французький математик, фізик
Фур'є Жан Батист Жозеф (1768—1830) — французький математик
Чебишев Пафнутій Львович (1821 —1894) — російський математик
Чжан Цан (2 ст. до н. є.) — китайський математик
Шварц Герман (1843—1921) — німецький математик
Якобі Карл (1804—1851) — німецький математик
ПРЕДМЕТНИЙ ПОКАЖЧИК
Абсциса 41
Амплітуда гармонік комплексна 552
Апліката 41
Асимптота гіперболи 104
Аргумент 131
— комплексного числа 343
— проміжний 141
Базис 36
— ортонормованин 41
— простору 48
Біном диференціальний 357
Вектор 32
— п-вимірний 47
— прямої 76, 78
Вектори лінійно залежні (незалежні)
47
Величина змінна 131
— нескінченно велика 153
— нескінченно мала 162
— скалярна 32
— стала 131
Вершина гіперболи 105
— еліпса 102
— поверхні конічної 117
Визначник Якобі 575
Вираз підінтегральний 368
Віднімання векторів 34
Відрізок (сегмент) 128
Відстань від точкн до прямої 82
Відхилення точки від прямої 83
Вісь гіперболи 105
— дійсна 343
— еліпса 102
— координат 40
— полярна 43
— уявна 343
Властивості гіперболи 104
— градієнта 316
— добутку векторного 50, 60
мішаного 63
скалярного 55, 56
— інтеграла 568, 586
— еліпса 101
— модуля дійсного числа 129
— невизначеного інтеграла 332
— неперервних функцій двох змінних
293
— нескінченно малих величин 162
— рівняння кола 99
Гармоніка 538, 552
Гіпербола 104
— рівностороння 106
— спряжена 105
Гіперболоїд 121
Градієнт функції 316
Границя змінної 152
— послідовності 150
— функції в точці 155, 156, 289, 290
друга важлива 174
перша важлива 169
права (ліва) 157
Графік 134, 286
Густина стержня 193
Директриса гіперболи 106
Диференціал функції 219
другий (другого порядку) 226, 303
л-й (n-го порядку) 226, 304
повний 300
— — третій (третього порядку) 226, 303
Диференціювання функції 197
графічне 200
— — логарифмічне 215
Діаметр розбиття відрізка 368
Добуток векторів 54, 58, 62
— множин 127
Довжина вектора 50
— відрізка дотичної 198
— відрізка нормалі 199
Додавання векторів 33
Дотична до кривої 195
Дріб раціональний 142, 349
— елементарний 350
— правильний (неправильний) 349
636
Елемент площі 567
— об'єму 585
Еліпс 100
Еліпсоїд 119
Експонента 172
Ексцентриситет гіперболи 106
— еліпса 102
Інваріантність форми диференціала 221
Інтеграл визначений 368
— Ейлера 418
— еліптичний 368
— залежний від параметра 413
— збіжний (розбіжний) 386, 390, 415
— із змінною верхньою межею 376
— криволінійний 596, 601
— невизначений 332
— невласний другого роду 391
збіжний відносно параметра 415
першого роду 386
— повторний 570
— подвійний 566
— потрійний 585
— Пуассона 362
— рівняння загальний 424, 452
частинний 424, 453
— Френеля 362
— Фур'є 558
Коефіцієнт прямої кутовий 77
— рівняння 461
— ряду 516
— Фур'є 541, 552, 556
Коливання складні гармонічні 539
Колінеарність векторів 52
Коло 98
Контур інтегрування 596
Конус прямий круговий 118
Координати вектора 36, 50
— точки 40, 45, 67
Координатна площина 40
Корінь многочлена 348
Косинус інтегральний 362
Крива гладка 595
— інтегральна 332, 422, 423, 451
— кусково-гладка 595
Круг збіжності ряду 535
Кут між вектором і віссю 38
двома площинами 87
двома прямими 80, 91
кривими 200
прямою і площиною 93
Ламана Ейлера 445
Лемніската Бернуллі 68
Лінеарізація процесу 218
Лінія алгебраїчна 67
— Вівіані 75
— координатна 68
— рівня функції див. ізокрива
— трансцендентна 67
Логарифм інтегральний 362
— числа 172
Матеріальне тіло 193
Межа інтегрування верхня (нижня).368
— області визначення 285
Метод виключення змінної 491
— диференціала 401
— інтегральних сум 401
— окремих значень аргументу 351
— пониження порядку 455
— порівнювання коефіцієнтів 350
Многочлен степеня п 141
— Тейлора 239
— Фур'є 543
Множина відкрита 293
— зв'язна 292
— значень функції 132, 133
— порожня 126
— скінченна (нескінченна) 126
— числова 127
Множник інтегрувальний 439
— критичний 181
— Лагранжа 328
— лінійний 348
Модуль дійсного числа 129
— комплексного числа 343
Напрямна конічної поверхні 117
Напрямні косинуси вектора 50
Неперервність одностороння 185
Нерівність Коші 171
Нормаль до кривої 198
— до поверхні 311
Обвідна сім'ї кривих 423
Об'єднання множин 127
Область визначення функції 132, 133,
285
Задача Коші 423, 451
— про биття вала 481
— про другу космічну швидкість 458
Змінна залежна 132
— інтегрування 368, 567, 585
— незалежна див. аргумент
— неперервна 152
Зміст інтеграла визначеного 368, 369
потрійного 585
криволінійного 597, 601
— похідної 198
Значення функції середнє 375, 569, 587
637
— відкрита 285, 293
— замкнена 285, 293
— збіжності ряду 512
— інтегрування 567, 585
— існування функції 134
— обмежена 293
— правильна в напрямі осі 570
Одиниця уявна 342
Означення границі за Гейне 157,
290
Коші 157, 290
Окіл точки 129, 130
Ордината 41
Парабола 108
Параболоїд 122, 123
Паралельне перенесення осей 44
Параметр 76
— функції 147
Первісна функції 144
Перетворення Фур^є 563
Період функції 144
Півінтервал 128
Піввісь гіперболи 105
— еліпса 102
— еліпсоїда 120
Підмножнна 127
Підстановки Ейлера 360
Площа поверхні 578
Площина дотична до поверхні 311
— комплексна 343
Поверхня 73
— алгебраїчна 73
— другого порядку 114
— конічна 117
— лінійчата 123
— обертання 116
— трансцендентна 73
— циліндрична 114
Поворот осей координат 44
Поле напрямів 425
— скалярне 313
Полюс 43
Порядок алгебраїчної поверхні 73
— рівняння 451
Послідовність 131
— збіжна 151, 289
— розбіжна 151
— числова 149
Похідна функції 196
— вищого порядку 224
— друга (другого порядку) 223, 269
— за напрямом 314
— ліва (права) 201
— л-го порядку 224
— перша (першого порядку) 223
— частинна 294, 296
Початок координат 40
Правило Лопіталя 235
Приріст аргументу 185, 292
— функції 185, 292, 294
Проекція 37, 38
Проміжок інтегрування 368
— монотонності функції 143
— числовий 128
Простір 47
Прямокутник гіперболи основний 105
Равлик Паскаля 68
Радіус збіжності ряду 517, 535
— околу 129
— сфери 119
Резонанс 486
Рівність векторів 51
Рівняння базисне 49
— Бернуллі 436
— в повних диференціалах 438
— гіперболи 104, 112
— гіперболоїда 121
— диференціальне 421, 427, 433, 451,
460
— дотичної до кривої 198
— еліпса 100, 101, 112
— еліпсоїда 120
— звичайне 421
— зв'язку 327
— кола 99, 111
— коливань 483
— Клеро 443
— кривої загальне полярне НІ
— Лагранжа 443
— лінії 66, 69, 74
— однорідне (неоднорідне) 430, 461
— параболи 108
— параболоїда 122, 123
— площини 84, 86
— поверхні 73, 114
— прямої 76, 77, 78, 79, 89, 90
— Ріккаті 437
— сфери 119
— характеристичне диференціального
рівняння 470, 478
Розв'язок диференціального рівняння
422, 451
загальний 424, 453
нульовий (тривіальний) 461
особливий 423
частинний 424, 453
Розклад многочлена на множники 348
Розкриття невизначенності 180
Розмірність простору 48
Розрив функції 186
638
Ряд біноміальний 526
— гармонічний 495
— Діріхле 499
— збіжний 494, 513, 508
— знакозмінннй 507
— лейбніцевого типу 506
— Маклорена 524
— розбіжний 494
— степеневий 516, 534
— Тейлора 522
— тригонометричний 540
— Фур'є 541, 555
Сектор криволінійний 403
Сннус інтегральний 362
Система диференціальних рівнянь 488
— координат 40, 41, 43, 45, 46
— функцій ортогональна 553
Сім'я кривих 423, 453
Січна 195
Спіраль Архімеда 68
Степінь 67
Стрибок функції 186
Сума інтегральна 368, 566, 585, 596
— множин див. об'єднання множин
— ряду 494
Суперпозиція функцій 141
Сфера 119
Табличний спосіб задання функції 117
Твірна поверхні конічної 117
Теорема Абеля 516
— алгебри основна 348
— Безу 347
— Больцано — Коші 189, 190
— Вейерштрасса 190
— про граничну ознаку порівняння 500
достатні умови днференційовності
299
достатню умову інтегровності 370,
567, 586
існування частинних похідних 298
необхідні умови
днференційовності 299
необхідну умову інтегровності 369
неперервність диференційовної
функції 298
середнє значення функції 374
структуру загального розв'язку
неоднорідного рівняння 466
— Ролля 229
— Ферма 228
— Чебишева 357
Тіло циліндричне 565
Точка екстремуму 320, 327
— збіжності (розбіжності) ряду 512
— критична 321
— множини внутрішня 292
— — межова 293
— неперервності функції 291
— розриву функції 185, 186, 291
— стаціонарна 321
— функції особлива 391
Трапеція криволінійна 365
Умова екстремуму 323
— збіжності ряду необхідна 497
— паралельності
двох площин 88
двох прямих 80, 91
прямої і площини 93
— перпендикулярності
двох площин 88
двох прямих 80, 91
прямої і площини 93
— розбіжності ряду достатня 497
— розв'язку початкова 423
Форма запису комплексного числа 342,
343
— ряду Фур'е комплексна 552
Формула для обчислення повної
похідної 305
— Ейлера 346
— заміни змінної у визначеному
інтегралі 381
— інтегрування частинами 340, 383
— Лагранжа (скінченних приростів) 231
— Лейбніца413
— Маклорена 240
— Муавра 344
— Ньютона — Лейбніца 377
— об'єму тіла за площинами
паралельних перерізів 407
— Сімпсона (парабол) 398
— Тейлора 238, 244, 319
— трапецій 396
Формули Ейлера 536
— інтерполяційні 137
— оберненого перетворення 574
— перетворення координат 44, 45, 574
— прямокутників 395
Функції еквівалентні 177
— лінійно залежні 462
— непорівнянні 176
— одного порядку 176
Функціонал 133
Функція аналітична 535
— багатозначна 133
— Бесселя 533
— бета (гамма) 418
639
— внутрішня 141
— д іференційовна 202, 298
— Діріхле 137
— експоненціальна 172, 176
— елементарна 141
— зовнішня 141
— зростаюча (незростаюча) 143
— інтегровна 368, 386, 390, 557, 567.
596
— ірраціональна (раціональна) 142
— квадратична 141
— Лагранжа 328
— лінійна 141
— монотонна 143
— неінтегровна 386
— непарна (парна) 143
— неперервна
в точці 184, 185, 291, 292
на множині 292
— нескінченно велика 159
— нескінченно мала 162, 176, 290
— неспадна (спадна) 143
— неявна 145
— обернена 146
— обмежена 142
— однозначна 133
— однорідна л-го виміру 430
— параметрично задана 147
— періодична 144, 538
— підінтегральна 368
— розривна в точці 185
— складена 141
— трансцендентна 142
— ціла раціональна 141, 347
Центр кола 119
— мас двох точок 53
— околу 129
— симетрії еліпса 102
Циліндр 116
Ціла частина змінної 137
Частина комплексного числа дійсна
(уявна) 342
Число комплексне 342, 343
— хвильове 552
Швидкість руху точки 192
— хімічної реакції 194
ЗМІСТ
Вступ З
Глава 1. Елементи лінійно? алгебри 6
§ 1. Визначники . . .' 6
1.1. Визначники другого і третього порндків та їхні властивості 6
1.2. Розклад визначника за елементами рядка або стовпця 9
1.3. Поняття про визначники вищих порядків 10
Завдання для самоконтролю 12
§ 2. Матриці ІЗ
2.1. Основні означення 13
2.2. Дії над матрицями 14
2.3. Обернена матриця 16
2.4. Ранг матриці 18
Завдання для самоконтролю 19
§ 3. Системи лінійних рівнянь 20
3.1. Основні означення 20
3.2. Розв'язування систем лінійних рівнянь за формулами Крамера .... 21
3.3. Матричний запис системи лінійних рівнянь і її розв'язування 24
3.4. Розв'язування систем лінійних рівнянь методом Гаусса 25
3.5. Однорідна система лінійних рівнянь 28
3.6. Критерій сумісності системи лінійних рівнянь ЗО
Завдання дія самоконтролю 31
Глава 2. Елементи векторної алгебри 32
§ І. Вектори і лінійні дії з ними .... ... 32
1.1. Скалярні і векторні величини 32
1.2. Лінійні дії з векторами 33
1.3. Розклад вектора за базисом 35
1.4. Проекція вектора на вісь . . 37
Завдання для самоконтролю 39
§ 2. Системи координат 40
'2.1. Декартова система координат 40
2.2. Прямокутна система координат 41
2.3. Полярна система координат 43
2.4. Перетворення прямокутних координат на площині 44
2.5. Циліндрична та сферична системи координат 45
2.6. Поняття про л-внмірний простір 46
2.7. Лінійна залежність векторів 47
Завдання для самоконтролю 49
§ 3. Вектори в системі координат 50
3.1. Координати, довжина і напрямні косинуси вектора 50
3.2. Лінійні дії з векторами. Рівність і колінеарність векторів 51
641
5.1. Неперервність функції в точці. Точки розриву 184
5.2. Дії над неперервними функціями. Неперервність елементарних функцій 188
5.3. Властивості функцій, неперервних на відрізку 189
Завдання для самоконтролю 190
Глава 5. Диференціальне численнії функцій однієї змінної 191
§ 1. Похідна 191
1.1. Задачі, які приводять до поняття похідної 191
1.2. Означення похідної. Механічний, фізичний та геометричний зміст
похідної 196
1.3. Графічне диференціювання 200
1.4. Односторонні похідні. Неперервність і диференційовність 201
Завдання для самоконтролю 203
§ 2. Диференціювання функцій 204
2.1. Правила диференціювання суми, різниці, добутку і частки .... 204
2.2. Похідні сталої, добутку сталої на функцію, степеневої,
тригонометричних, показникової і логарифмічної функцій 205
2.3. Похідна складеної функції 207
2.4. Гіперболічні функції та їхні похідні 209
2.5. Похідна оберненої функції. Диференціювання обернених
тригонометричних функцій 211
2.6. Похідна функції, заданої параметрично . 214
2.7. Диференціювання неявно заданої функції 215
2.8. Лтііифмічне диференціювання. Похідна показниково-степеневої
функції 215
2.9. іаіміщи похідних 216
Завдання для самоконтролю . . 217
§ 3. Диференціал 218
3.1. Означення, геометричний та механічний зміст диференціала 218
3.2. Властивості диференціала. Інваріантність форми диференціала .... 220
3.3. Застосування диференціала в наближених обчисленнях 221
Завдання для самоконтролю 222
§ 4. Похідні та диференціали вищих порядків 223
4.1. Похідні вищих порядків явно заданої функції 223
4.2. Похідні вищих порядків неявно заданої функції 224
4.3. Похідні вищих порядків параметрично заданої функції 225
4.4. Диференціали вищих порядків 226
Завдання для самоконтролю 227
§ 5. Деякі теореми диференціального числення 228
5.1. Теореми Ферма і Ролля 228
5.2. Теореми Коші і Лангранжа 230
5.3. Правило Лопіталя 233
5.4. Формула Тенлора 238
Завдання для самоконтролю .... 245
§ 6. Застосування диференціального числення для дослідження функцій 246
6.1. Монотонність функції .... 246
6.2. Локальний екстремум функції 248
6.3. Найбільше і найменше значення функції 253
6.4. Опуклість і вгнутість кривих. Точки перегину 260
6.5. Асимптоти кривої 263
6.6. Схема дослідження функції та побудова її графіка 265
Завдання для самоконтролю 266
§ 7. Застосування диференціального числення до деяких задач алгебри,
геометрії, теорії наближень 268
7.1. Наближене розв'язування рівнянь 268
7.2. Інтерполяція функцій. Чисельне диференціювання 271
644
7.3. Диференціал довжини дуги 273
7.4. Кривина плоскої лінії " 274
7.5. Вектор-функція скалярного аргументу. Дотична пряма і нормальна
площина до кривої в просторі. Застосування у механіці 278
Завдання для самоконтролю 283
Глава в. Диференціальне числення функцій багатьох змінних 284
§ 1. Функція, її границя та неперервність 284
1.1. Функція багатьох змінних. Означення та символіка 284
1.2. Границя функції багатьох змінних 289
1.3. Неперервність функції багатьох змінних 291
Завдання для самоконтролю 293
§ 2. Похідні та диференціали функції багатьох змінних 294
2.1. Частинні похідні 294
2.2. Диференційовність функції 297
2.3. Повний диференціал функції та його застосування до обчислення
функцій і похибок. Диференціали вищих порядків 300
2.4. Похідна складеної функції. Повна похідна. Інваріантність форми
повного диференціала 304
2.5. Диференціювання неявної функції ,,,,., 307
Завдання для самоконтролю 309
§ 3. Деякі застосування частинних похідних 310
3.1. Дотична площина та нормаль до поверхні. Геометричний зміст
диференціала функції двох змінних 310
3.2. Скалярне поле. Похідна за напрямом. Градієнт 313
3.3. Формула Тейлора для функції двох змінних . 318
3.4. Локальні екстремуми функції двох змінних 320
3.5. Найбільше та найменше значення функції 324
3.6. Умовний екстремум 327
Завдання для самоконтролю 329
Г л а в а 7. Інтегральне числення функцій однієї змінної 330
§ 1. Невнзначений інтеграл 321
1.1. Поняття первісної функції та невнзначеного інтеграла 331
1.2. Таблиця основних інтегралів 334
1.3. Основні методи інтегрування 336
1.4. Поняття про комплексні числа 342
1.5. Деякі відомості про раціональні функції 347
1.6. Інтегрування раціональних функцій 352
1.7. Інтегрування деяких ірраціональних і трансцендентних функцій . , 355
1.8. Інтеграли, що «не беруться» 361
Завдання для самоконтролю 362
§ 2. Визначений інтеграл 365
2.1. Задачі, що приводять до визначеного інтеграла 365
2.2. Означення та умови існування визначеного інтеграла 367
2.3. Властивості визначеного інтеграла 370
2.4. Інтеграл із змінною верхньою межею. Формула Ньютона — Лейбніца 376
2.5. Методи обчислення визначених інтегралів 380
2.6. Невласні інтеграли 385
2.7. Наближене обчислення визначених Інтегралів 394
Завдання для самоконтролю 400
$ 3. Деякі застосування визначеного інтеграла 401
3.1. Обчислення площ плоских фігур 401
645
3.2. Довжина дуги .... 405
3.3. Об'єм тіла . 406
3.4. Площа поверхні обертання 408
3.5. Обчислення роботи 409
3.6. Обчислення тиску рідини на вертикальну пластину ... ... 411
Завдання для самоконтролю 411
§4. Інтеграли, залежні від параметрів. Гамма-і бета-функції . . 412
4.1. Інтеграли, залежні від параметрів 412
4.2. Гамма- і бета-функції 417
Завдання для самоконтролю 420
Глава 8. Звичайні диференціальні рівняїні 421
§ 1. Диференціальні рівняння першого їй ряхку .421
1.1. Загальні поняття та означення. Задача Коші. Геометричний зміст
диференціального рівняння 421
1.2. Диференціальні рівняння з відокремлюваними змінними 427
1.3. Однорідні диференціальні рівняння . , 430
1.4. Лінійні диференціальні рівняння 433
1.5. Рівняння, які зводяться до лінійних. Рівняння Бернуллі та Ріккаїі 435
1.6. Рівняння в повних диференціалах. Інтегруючий множник 438
1.7. Диференціальні рівняння, нерозв'язувані відносно похідної. Рівняння
Лагранжа і Клеро 441
1.8. Наближене розв'язування диференціальних рівнянь методом Ейлера 445
1.9. Деякі застосування диференціальних рівнянь першого порядку . . 446
Завдання для самоконтролю 450
§ 2. Диференціальні рівняння вищих порядків ... 451
2.1. Основні поняття і означення. Задача Коші 451
2.2. Диференціальні рівняння л-го порядку, які інтегруються в квадратурах 453
2.3. Диференціальні рівняння, які допускають пониження порядку . . . 455
Завдання для самоконтролю 460
§ 3. Лінійні диференціальні рівняння вищих порядків 460
3.1. Основні означення і поняття 460
3.2. Лінійні однорідні диференціальні рівняння другого порядку 461
З.Ч Лінійні неоднорідні рівняння другого порядку 466
3.4. Метод варіації довільних сталих . . ... 467
Завдання для самоконтролю 469
§ 4. Лінійні диференціальні рівняння із сталими коефіцієнтами .... 470
4.1. Лінійні однорідні рівняння другого порядку із сталими коефіцієнтами 470
4.2. Неоднорідні диференціальні рівняння другого порядку із сталими
коефіцієнтами. Рівняння із спеціальною правою частиною 473
4.3. Лінійні диференціальні рівняння л-ro порядку 478
Завдання для самоконтролю ' 482
§ 5. Диференціальні рівняння коливань 483
5.1. Вільні гармонічні коливання 483
5.2. Вимушені коливання. Резонанс 485
Завдання для самоконтролю . 486
§ 6. Системи диференціальних рівнянь 487
6.1. Нормальні системи рівнянь . ... 488
6.2. Системи лінійних диференціальних рівнянь із сталими коефіцієнтами 4S1
Завдання для самоконтролю 493
Глава 9. Ряди 493
§ 1. Числові ряди 494
1.1. Основні поняття та означення. Геометрична прогресія. Гармонічний
ряд 494
1.2. Найпростіші властивості числових рядів . , , , 496
646
1.3. Знакододатні ряди. Достатні ознаки збіжності 498
1.4. Ряди, в яких знакн членів строго чергуються. Ознака Лейбніца , . . 505
1.5. Знакозмінні ряди. Абсолютна і умовна збіжності ... 507
1.6. Поняття про числові ряди з комплексними членами 509
Завдання для самоконтролю 510
§ 2. Степеневі ряди •. 512
2.1. Функціональні ряди. Поняття рівномірної збіжності. Ознака Вейєр-
штрасса _ 512
2.2. Поняття степеневого ряду. Теорема Абеля. Інтервал та радіус збіжності
степеневого ряду 516
2.3. Властивості степеневих рядів ... ... «1У
2.4. Ряд Тейлора 521
2.5. Розкладання елеуентарних функцій в ряд Маклорена 524
2.6. Наближені обчислення за допомогою степеневих рядів 527
2.7. Рівняння і функції Бесселя 531
2.8. Поняття про степеневі ряди в комплексній області. Формули Ейлера. . 534
Завдання для самоконтролю 536
§ 3. Ряди Фур'є 538
3.1. Гармонічні коливання f ojO
3.2. Тригонометричний ряд Фур'є. Коефіцієнти Фур'є 540
3.3. Ряд Фур'є для парних і непарних функцій 545
3.4. Ряд Фур'є для 2/-періоднчної функції 547
3.5. Ряди Фур'є для функцій, заданих на відрізку [0; /] або на відрізку [а; Ь] 549
3.6. Комплексна форма ряду Фур'є 551
3.7. Ряд Фур'є за ортогональною системою функцій 553
Завдання для самоконтролю 556
§ 4. Інтеграл та перетворення Фур'є 557
4.1. Інтеграл Фур'є . . 557
4.2. Інтеграл Фур'є для парних і непарних функцій . . 560
4.3. Інтеграл Фур'є в комплексній формі. Перетворення Фур'є 562
Завдання для самоконтролю 564
Глава 10. Кратні, криволінійні та поверхневі інтеграли 564
§ 1. Подвійний інтеграл 564
1.1. Задачі, що приводять до поняття подвійного інтеграла 564
1.2. Поняття подвійного інтеграла. Умови його існування та властивості 566
1.3. Обчислення подвійного інтеграла 569
1.4. Заміна змінних у подвійному інтегралі. Подвійний інтеграл у полярних
координатах 574
1.5. Застосування подвійних інтегралів до задач геометрії 577
1.6. Застосування подвійного інтеграла до задач механіки 581
Завдання для самоконтролю . . 583
§ 2. Потрійний інтеграл 585
2.1. Поняття потрійного інтеграла. Умови його існування та властивості 585
2.2. Обчислення потрійного інтеграла 587
2.3. Заміна змінної в потрійному інтегралі 589
2.4. Деякі застосування потрійного інтеграла • 592
Завдання для самоконтролю 594
§ 3. Криволінійні інтеграли 595
3.1. Поняття криволінійного інтеграла першого роду (по довжині дуги) 595
3.2. Обчислення криволінійних інтегралів першого роду 598
3.3. Застосування криволінійного інтеграла першого роду 599
3.4. Поняття криволінійного інтеграла другого роду (по координатах).
Фізнчннй зміст 600
3.5. Обчислення та застосування криволінійного інтеграла другого роду 603
647
3.6. Зв'язок між криволінійними інтегралами першого і другого роду 607
3.7. Формула Гріиа 608
3.8. Умови незалежності криволінійного інтеграла від форми шляху
інтегрування 610
3.9. Інтегрування повних диференціалів. Первісна функція 614
Завдання для самоконтролю 617
§ 4. Поверхневі інтеграли 618
4.1. Поверхневі інтеграли першого роду 618
4.2. Поверхневі інтеграли другого роду 621
4.3. Формула Остроградського — Гаусса 626
4.4. Формула Стокса 628
Завдання для самоконтролю 631
Список рекомендованої і використаної літератури 632
Іменний покажчик 634
Предметний покажчик 636
Відділ професійної книги та літератури
для вищої школи видавництва "А.С.К."
Пропонує:
• Понад 5000 найменувань літератури із різних галузей знань для студентів,
викладачів, фахівців усіх напрямів виробничої, комерційної та наукової
діяльності
• Гнучку систему знижок
Здійснює:
• Комплектування бібліотек
• Гуртові поставки книг із країн СНД за замовленням клієнтів
• Доставку гуртових партій клієнтам
• Поставку книг на реалізацію
Запрошує до співпраці:
• Авторів
• Бібліотеки
• Бібколектори
• Вищі та середні спеціальні навчальні заклади
• Книгарні
• Книготорговельні організації та приватних розповсюджувачів
Наша адреса: 03057, М.Київ, вул. Желябова, 2, к.101
Тел/факс: (044) 456-20-65; тел.: (044) 456-43-62, 441-77-70, 241-90-87
E-mail: askbooks@iptelecom.net.ua