/

























































































































































































































































Author: Максимов Г.Ю.
Tags: регулирование и управление машинами, процессами космонавтика космическая техника наука и техника
Year: 1980




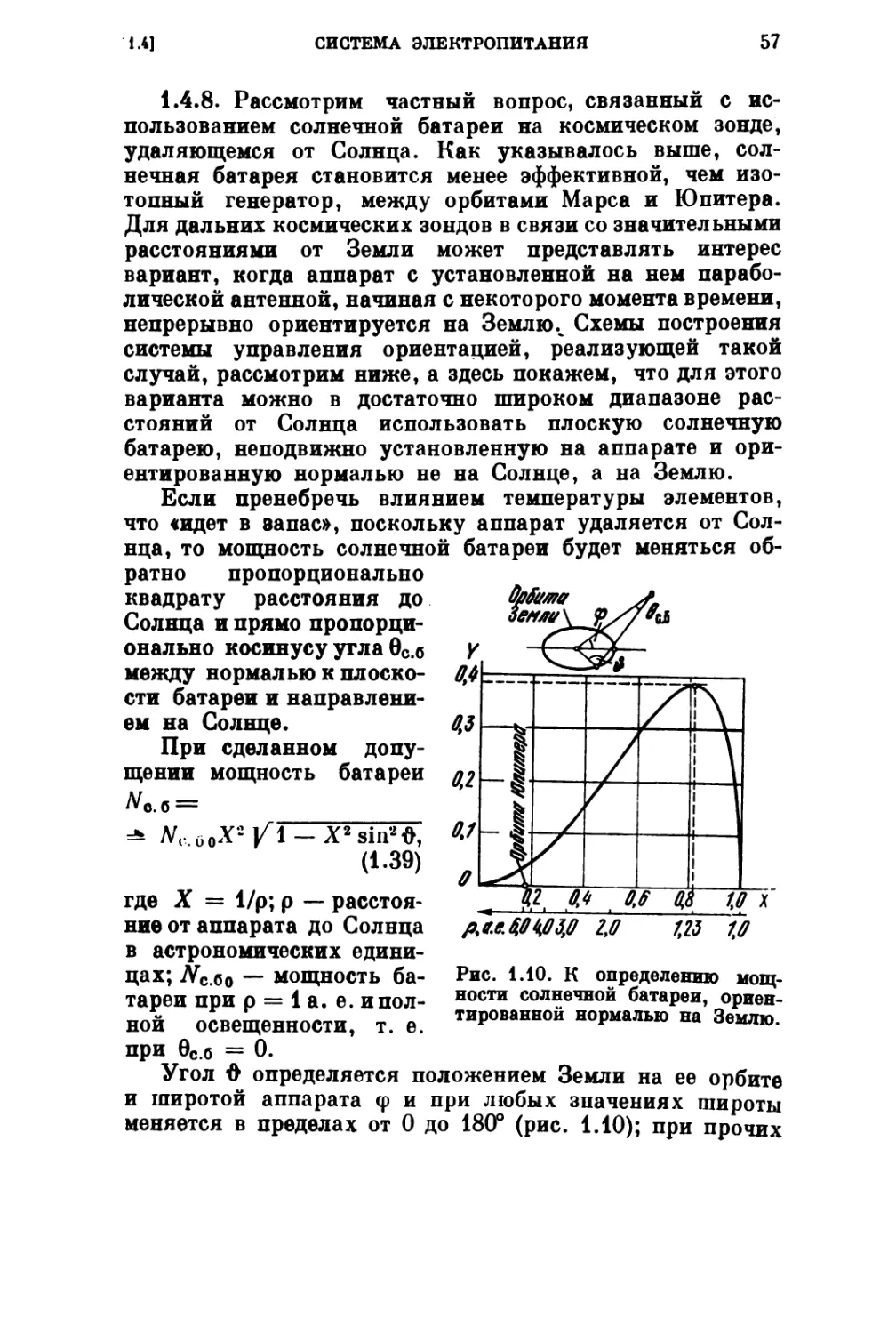
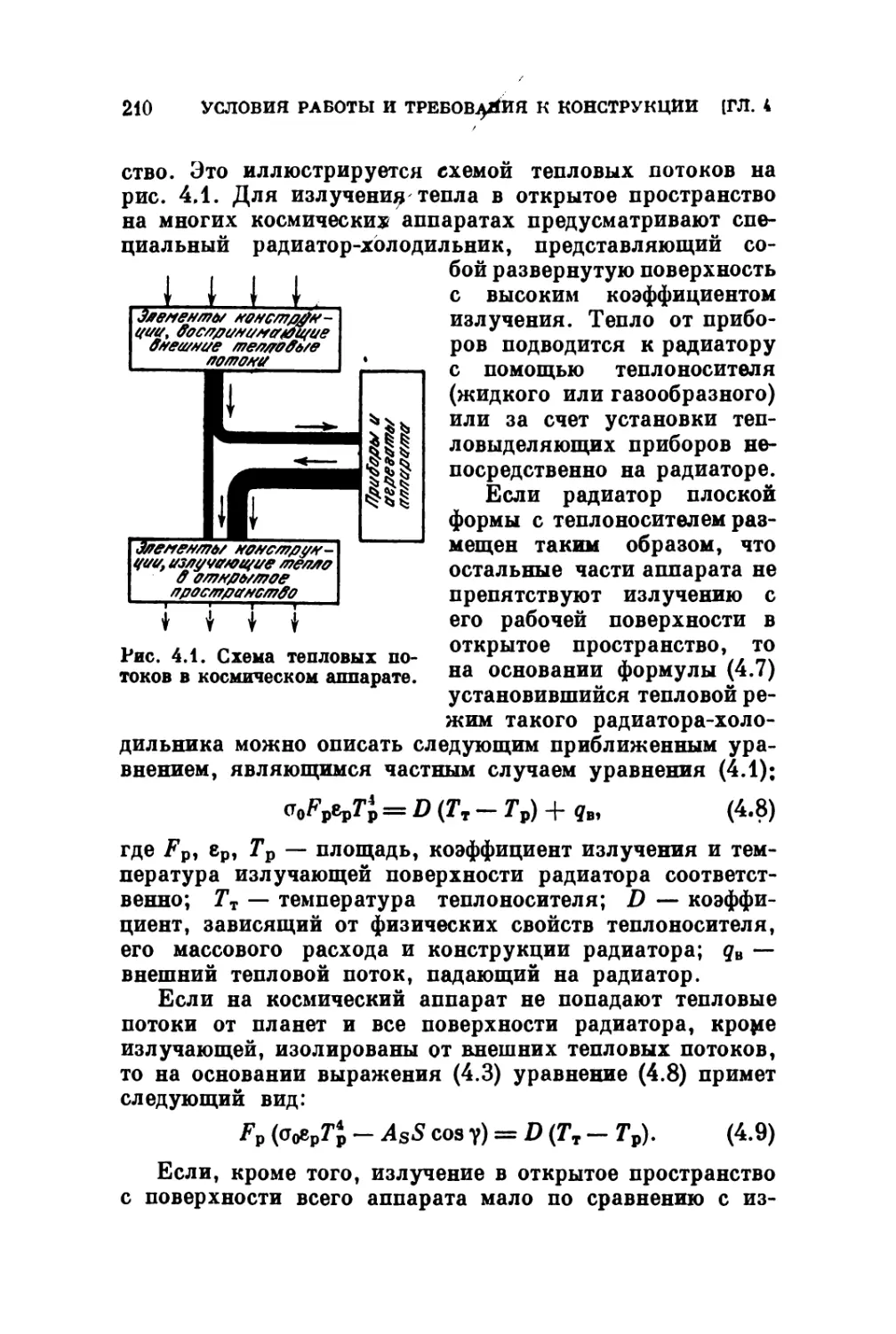
Text
Г Ю. МАКСИМОВ
ТЕОРЕТИЧЕСКИЕ
ОСНОВЫ
РАЗРАБОТКИ
КОСМИЧЕСКИХ
АППАРАТОВ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1980
39.62
М 15
УДК 62-50
Максимов Г. Ю. Теоретические основы разработки кос-
мических аппаратов.— М.: Наука. Главная редакция физико-ма-
тематической литературы, 1980.— 320 с.
В книге наложены физико-механические основы разработки
автоматических космических аппаратов. Даются предпосылки для
выбора параметров основных бортовых систем, к которым отнесены
радиотелеметрическая система, система электропитания, система
управления ориентацией и бортовые антенны. Освещены основы
разработки компоновки и конструкции. В частности, проанализи-
рованы особенности разработки негерметичных отсеков с аппара-
турой. Значительное внимание уделено вопросам управления кос-
мическими аппаратами в полете. В заключительной главе дается
вариант алгоритма рационального проектирования космического
аппарата. Книга предназначена для инженеров и научных работ-
ников, занимающихся разработкой космических аппаратов, а так-
же для студентов, изучающих основы космической техники.
Илл. 50, библ. 27.
Глеб Юрьевич Максимор
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАЗРАБОТКИ
КОСМИЧЕСКИХ АППАРАТОВ
М.» 1980 г., 320 стр. с илл.
Редактор Ю. Г. Гуревич
Технический редактор Е. В. Морозова
Корректор Я. Д. Дорохова
ИБ № 11034
Сдано в набор 24.10.79. Подписано к печати 26.03.80. Т-07869.
Бумага 84X108»/и, тип. М 1 Обыкновенная гарнитура.
Высокая печать. Условн. печ. л. 16,8. Уч.-изд. л. 17,31.
Тираж 1800 екз. Заказ № 2588. Цена книги 2 р. 90 к.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
2-я типография изд-ва Наука»
121099, Москва, Г-99, Шубинский пер., 10
3I9Q2_042
М 05з(02р§б 167’80- 3607000000
,£) Издательство «Наука*.
Главная редакция
Физико-математической
литературы, 1980
ОГЛАВЛЕНИЕ
Предисловие............................................ 5
Введение............................................... 9
ГЛАВА 1
СОСТАВ КОСМИЧЕСКОГО АППАРАТА И ОСНОВНЫЕ
СЛУЖЕБНЫЕ СИСТЕМЫ
1.1. Научная и служебная аппаратура. Состав и назна-
чение служебных систем................................ 17
1.2. Радиотелеиетрическая система..................... 24
1.3. Бортовые антенны................................. 33
1.4. Система электропитания........................... 40
глава г
ОРИЕНТАЦИЯ КОСМИЧЕСКОГО АППАРАТА
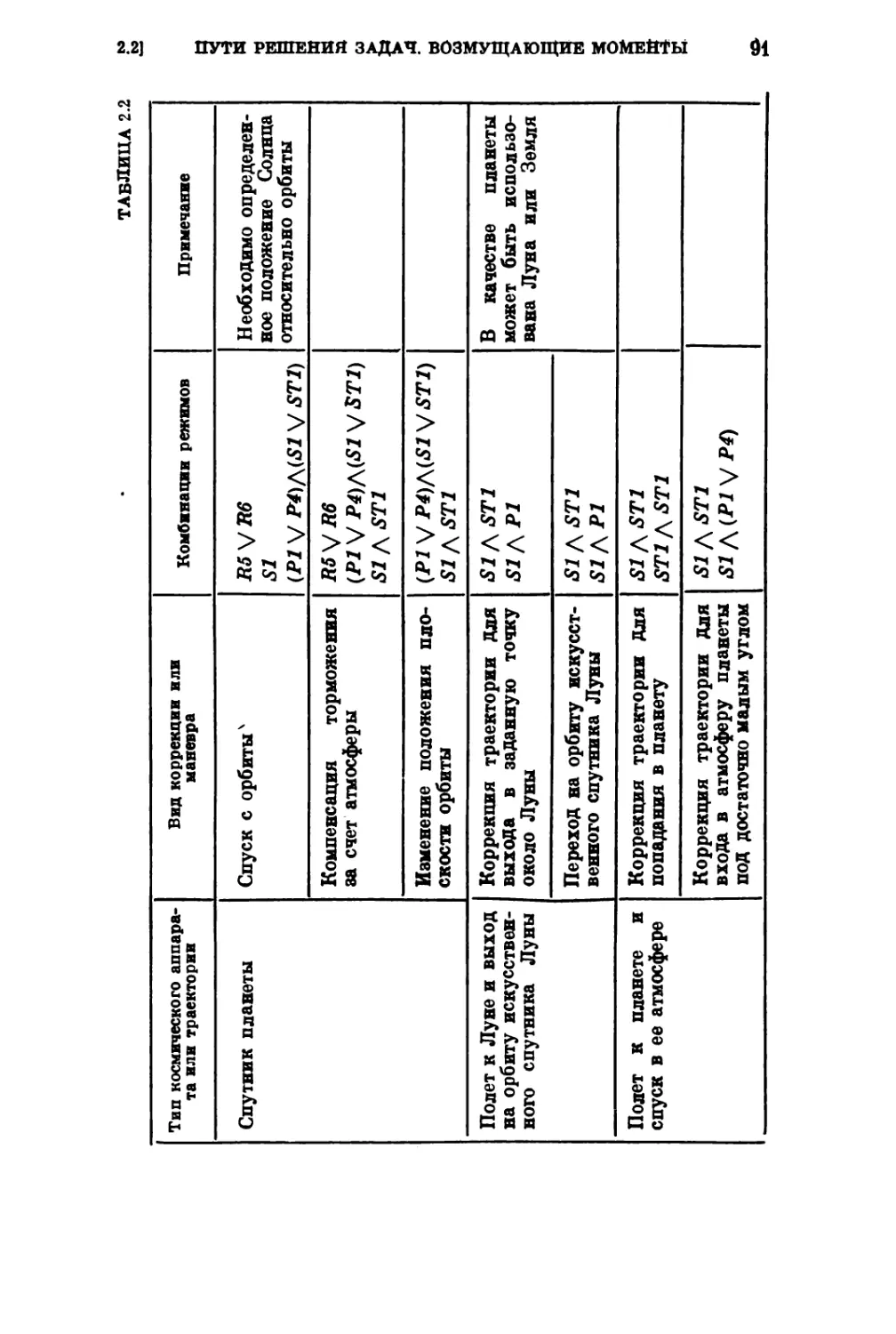
2.1. Главные задачи и основные режимы ориентации . . 62
2.2. Пути решения некоторых задач ориентации. Возму-
щающие моменты........................................ 69
2.3. Солнечно-звездная ориентация..................... 99
ГЛАВАJ
УПРАВЛЕНИЕ БОРТОВЫМИ СИСТЕМАМИ.
ВЗАИМОДЕЙСТВИЕ КОСМИЧЕСКИХ АППАРАТОВ
3.1. Понятия о логике работы и логике взаимодействия
бортовых систем...................................... 116
3.2. Использование БЦВМ для управления............... 134
3.3. Сочетание бортовых и наземных средств управления 153
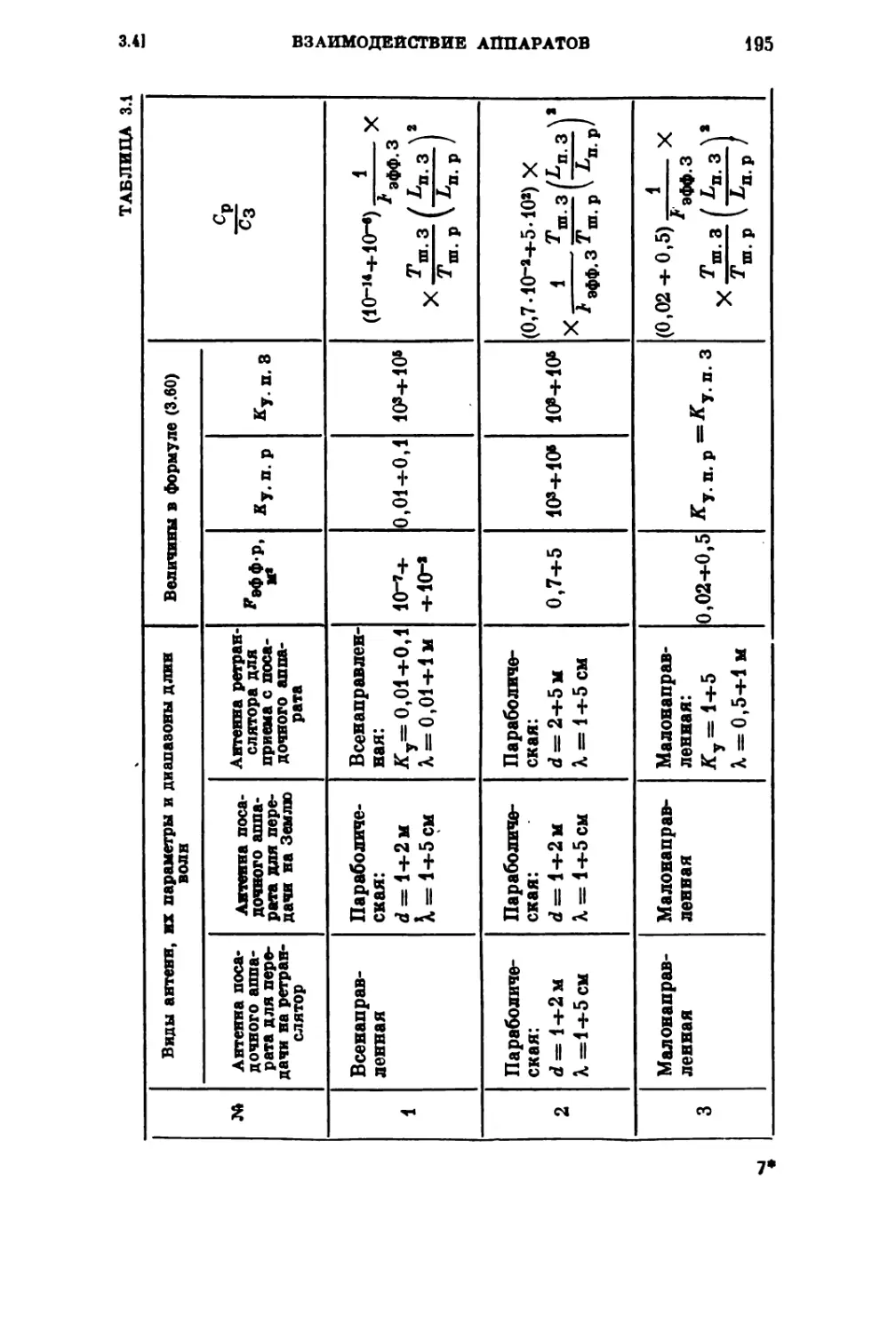
3.4. Взаимодействие космических аппаратов............ 176
ГЛАВА 4
ОБЕСПЕЧЕНИЕ УСЛОВИЙ РАБОТЫ ПРИБОРОВ
И CHCTEBf •
ОСНОВНЫЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
4.1. Некоторые определения и основные требования к ком-
поновке и конструкции.................................. 198
4.2. Обеспечение заданных температур и принципы термо-
регулирования ......................................... 203
4.3. Газовая среда в герметичных отсеках............... 217
4.4. Особенности разработки негерметичных отсеков . . . 233
1
k ОГЛАВЛЕНИЙ
4.5. Обеспечение работы системы управления ориентацией 249
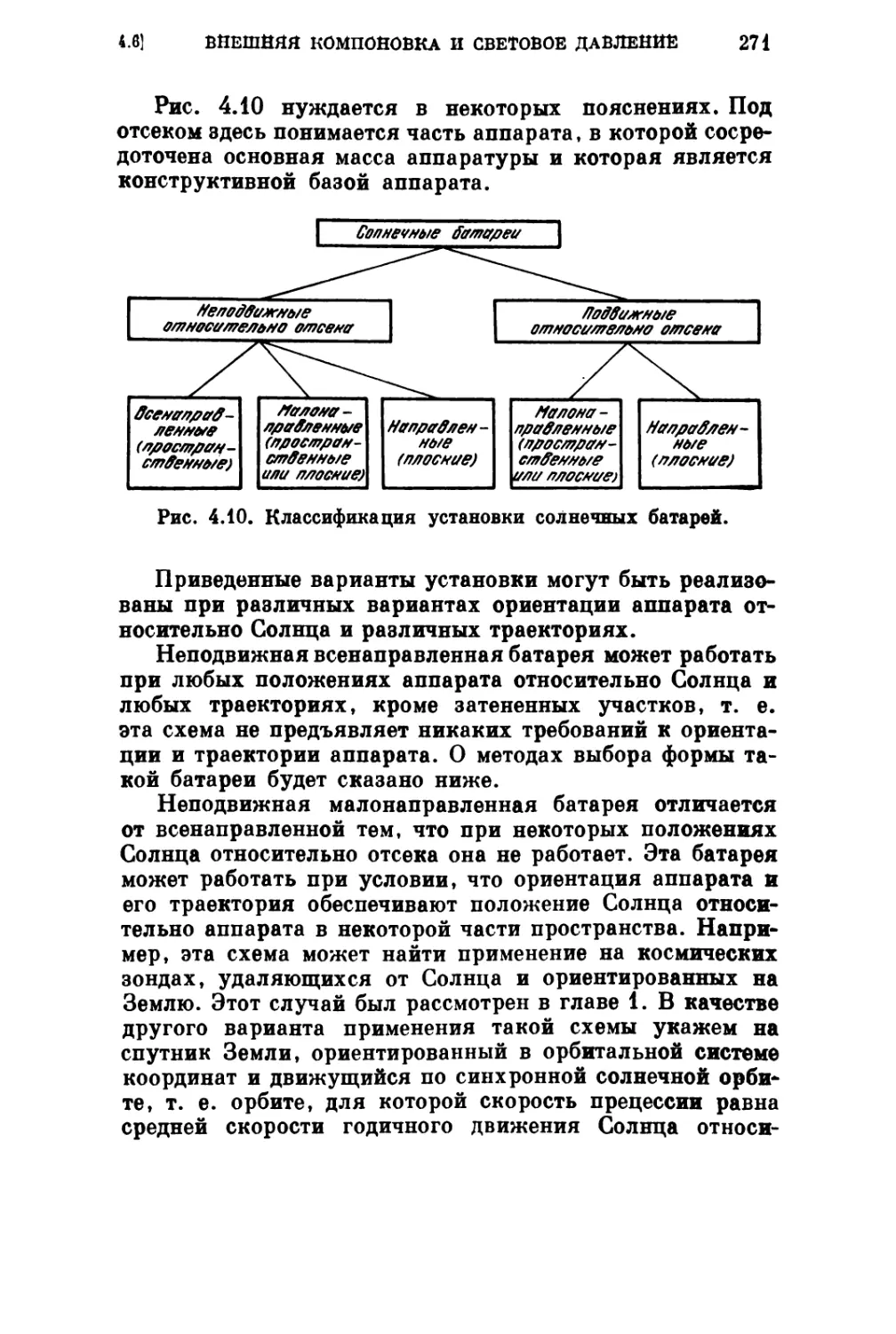
4.6. Внешняя компоновка космического аппарата. Опреде-
ление сил и моментов от светового давления .... 266
ГЛАВА 5
ПОСТАНОВКА ЗАДАЧИ О РАЦИОНАЛЬНОМ
ПРОЕКТИРОВАНИИ КОСМИЧЕСКИХ АППАРАТОВ
5.1. Понятие о процессе проектирования.............. 292
5.2. Вариант алгоритма рационального проектирования 310
Литература.......................................... 319
ПРЕДИСЛОВИЕ
Космическая техника существует уже более двадцати
лет — с момента запуска в Советском Союзе первого ис-
кусственного спутника Земли. Этот период ознаменовался
такими выдающимися техническими достижениями, как
полет человека в космос, посадка на Луну автоматических
научных станций, стыковка в космосе кораблей, экспеди-
ции астронавтов на Луну, непосредственное изучение
планет Солнечной системы автоматами и т. д. Развитие
космической техники позволило сделать ряд крупных на-
учных открытий, таких, например, как открытие поясов
радиации около Земли, определение параметров атмосферы
Венеры и Марсаt открытие солнечного ветра, обнаружение
рентгеновских и гамма-источников во Вселенной. Кроме
того, в настоящее время является общепризнанным, что
космическая техника не только увеличивает объем фунда-
ментальных знаний об окружающем нас мире, но и прино-
сит непосредственную пользу. Спутники связи, метеороло-
гические спутники Земли и спутники для изучения при-
родных ресурсов, запущенные в различных странах, под-
тверждают это положение.
Параллельно с развитием космической техники появ-
ляются и развиваются новые разделы науки и техники:
теория полета, теория управления движением центра
масс, теория и средства управления ориентацией, теория
навигации, магнитные системы управления и др. Однако
почти отсутствуют работы, посвященные созданию косми-
ческого аппарата как некоторого единого целого, в кото-
6 ПРЕДИСЛОВИЕ
ром функционирование почти любой системы или прибора
зависит от работы других систем, приборов и конструкции
аппарата.
Вместе с тем с необходимостью такого комплексного
рассмотрения сталкиваются разработчики всех без исклю-
чения космических аппаратов. При определении парамет-
ров и характеристик отдельных систем, приборов и агре-
гатов, разработке электрических схем и приборов управ-
ления аппаратом, создании программы работы и, наконец,
при управлении аппаратом в полете с Земли неизбежно
приходится понимать, анализировать и создавать связи
различного рода между отдельными системами космиче-
ского аппарата, а также учитывать зависимость работы
систем от траектории аппарата и его конструкции. Это тем
более необходимо, если в процессе проектирования стре-
миться к тому, чтобы некоторые критерии, такие, как,
например, надежность аппарата, время его функциониро-
вания, масса научной аппаратуры и др., были близки к эк-
стремальным значениям.
Настоящая книга представляет собой попытку комп-
лексного изложения основных вопросов разработки авто-
матических космических аппаратов. В соответствии с этим
в ней наибольшее внимание уделено связям между пара-
метрами отдельных служебных систем, траекторией поле-
та, конструкцией и программой работы. Кроме того, в кни-
ге рассмотрены некоторые проблемы управления космиче-
скими аппаратами в полете, понятия о логике работы и
логике взаимодействия бортовых систем и приборов,
поскольку этим вопросам, по мнению автора, не уделено
должного внимания в существующих работах.
Сведения об отдельных системах даются в минимальном
объеме. То, что читатель может найти в отечественной
литературе, в книге не приводится. Исключение состав-
ляют лишь немногие вопросы, без изложения которых
было бы непонятно существо материала.
ПРЕДИСЛОВИЕ
7
Процесс создания космического аппарата, как и любой
другой машины или прибора, включает в себя расчетные
работы, поиск наилучших конструктивных и схемных ре-
шений и экспериментальную проверку принятых решений
на лабораторных и опытных .образцах и макетах. В данной
книге в основном рассматриваются расчетные работы и
исследования, а не конструктивные и экспериментальные
проблемы.
Главная цель книги — подготовить читателя к реше-
нию конкретных инженерных задач, возникающих при
создании автоматических космических аппаратов, и дать
представление о комплексном проектном подходе к разра-
ботке таких аппаратов. Следует заметить, что почти все
затронутые в книге вопросы имеют отношение и к пило-
тируемым космическим аппаратам, поскольку в последних
многие процессы протекают в автоматическом режиме.
Однако пилотируемые аппараты имеют ряд особенностей
и в управлении, и в составе служебных систем, и в газо-
вой среде гермоотсеков, и в конструкции. Эти особенности
в книге не рассматриваются.
Предполагается, что читатель уже знаком с общими
проблемами космонавтики, основами теории полета кос-
мических аппаратов и принципами управления ориента-
цией (см., например, [18, 19, 22, 26]).
Кроме того, предполагается знакомство читателя с ос-
новами космической техники. Поэтому в книге отсутствует
описание существующих аппаратов. Описание же перспек-
тивных компоновочных схем без привязки к конкретным
требованиям, траектории и параметрам аппарата имело бы
слишком фантастический характер и расходилось бы с глав-
ной за дачей* книги — изложением принципов разработки,
а не конкретных технических, тем более конструктивных,
предложений.
В заключение подчеркнем, что в книге не рассматри-
вается полет космического аппарата с работающими дви-
ПРЕДИСЛОВИЕ
Ь
гателями на участках выведения на траекторию и на участ-
ках спуска на Луну и планеты, а также не рассматривает-
ся полет в атмосфере Земли и планет. Об участках полета
с работающими двигателями говорится только в связи
с маневрами и коррекциями траектории.
Автор отдает себе отчет в том, что первая попытка не
может не иметь существенных изъянов. Поэтому все заме-
чания и пожелания будут приняты автором с благодар-
ностью.
Автор выражает глубокую признательность Б. В. Рау-
шенбаху, Б. П. Скотникову, Н. К. Смирнову и М. И. Ге-
расимовой за ценные советы и замечания, а также
Ф. В. Цетлину, А. А. Дашкову, и Н. И. Колесовой,
взявшим на себя труд по предварительному просмотру
отдельных разделов книги.
ВВЕДЕНИЕ
В книге рассматриваются космические аппараты, функ-
ционирующие вне атмосферы Земли и планет после окон-
чания работы двигателей последней ступени ракеты, выво-
дящей аппарат на орбиту искусственного спутника Земли,
на траекторию полета к Луне или на гелиоцентриче-
скую траекторию.
Существуют различные варианты классификации кос-
мических аппаратов. Остановимся на некоторых из них.
Классификация по траекториям. В зависимости от
траекторий космические аппараты можно разделить на
спутники Земли; лунные аппараты, траектории которых
приходят через сферу действия Луны; межпланетные ап-
параты с траекториями, проходящими через сферы дейст-
вия планет; космические зонды, летящие по гелиоцентри-
ческим траекториям, не проходящим вблизи планет Сол-
нечной системы. В свою очередь лунные аппараты могут
различаться в зависимости от траекторий вблизи Луны:
траектория, обеспечивающая спуск и посадку на поверх-
ность Луны, орбита искусственного спутника Луны, траек-
тория пролета около Луны. Межпланетные аппараты име-
ют существенно различные траектории в зависимости от
планеты или планет назначения и от схемы движения око-
ло планеты — аналогично лунным аппаратам. Среди
космических зондов следует различать зонды, приближаю-
щиеся к Солнцу или удаляющиеся от Солнца, и зонды,
выходящие из плоскости эклиптики. Возможен вариант,
когда для получения нужных характеристик траектории
зонда используются гравитационные поля некоторых
планет. Здесь представляют интерес, в частности, вариант
использования гравитационного поля Венеры для прибли-
жения зонда к Солнцу и вариант использования поля
Юпитера для выхода зонда из плоскости эклиптики или
полета к дальним планетам. Использование гравитацион-
10
ВВЕДЕНИЕ
ного поля некоторых планет для изменения параметров
гелиоцентрической орбиты, или гравитационный маневр,
позволяет при той же ракете выведения получить боль-
шую начальную массу аппарата по сравнению со случаем,
когда аналогичные параметры его траектории получаются
без применения гравитационного маневра.
Классификация по назначению. По назначению косми-
ческие аппараты можно разделить на аппараты, решаю-
щие прикладные задачи, и аппараты, предназначенные
для научных исследований. Научные космические аппара-
ты в свою очередь можно различать в зависимости от науч-
ных задач и объектов изучения. Например, аппараты для
исследования Солнца, Луны, планет, космического про-
странства вне ллоскости эклиптики, инфракрасных источ-
ников и др.
Среди космических аппаратов, решающих прикладные
задачи, стоит различать спутники связи, метеорологиче-
ские спутники, спутники Земли для изучения природных
ресурсов и т. д.
Классификация по обитаемости. Космические аппара-
ты могут быть пилотируемые, автоматические и посещае-
мые, основной режим которых — автоматическая работа.
Возможен вариант, когда аппарат, предназначенный для
полета космонавтов, в целях отработки запускается в ав-
томатическом режиме.
В первой главе даются определения научной и служеб-
ной аппаратуры космического аппарата, приводится пе-
речень возможных служебных систем и содержатся сведе-
ния об основных системах — радиотелеметрической, элек-
тропитания и бортовых антеннах. Эти системы выделены
как основные потому, что они имеются на всех без исклю-
чения космических аппаратах. Главное внимание уделяет-
ся не техническим данным этих систем, а принципам выбо-
ра их параметров и характеристик и связям с другими си-
стемами, траекторией и конструкцией аппарата. В главе
приведен один из вариантов методики выбора мощности
генератора электроэнергии и емкости химической батареи
для системы электропитания. Приводятся расчетные фор-
мулы для определения температуры солнечной батареи и
рассматриваются принципы выбора параметров солнеч-
ной батареи для межпланетных аппаратов и зондов, рабо-
тающих при различных значениях удельной солнечной
ВВЕДЕНИЕ
11
энергии. Кроме того, анализируется вариант применения
плоской неподвижной солнечной батареи на космическом
зонде, удаляющемся от Солнца и непрерывно ориентируе-
мом на Землю.
Значительное место отведено в книге ориентации косми-
ческих аппаратов в пространстве. Для ориентируемых ап-
паратов, а таких сейчас подавляющее большинство, тре-
бование обеспечения заданной ориентации накладывает
существенный отпечаток на компоновочную схему аппара-
та, его конструкцию и программу работы. Во второй главе
рассматриваются некоторые задачи ориентации, дается
понятие об основных режимах и приводится перечень
этих режимов. Там же содержатся анализ различных пу-
тей решения задач ориентации и некоторые методы опре-
деления необходимых точностей. Особое внимание уделяет-
ся наведению остронаправленной антенны на наземный
пункт приема информации и проведению коррекций и ма-
невров. Указанные вопросы имеют отношение и к системе
управления ориентацией, ответственной за сам процесс
наведения и стабилизации осей аппарата в пространстве,
и к другим системам аппарата, к его траектории и кон-
струкции, т. е. являются теми комплексными вопросами,
которым и посвящена данная книга.
В космической технике получила достаточно широкое
распространение солнечно-звездная ориентация, когда одна
из осей аппарата направлена на Солнце, а другая на звез-
ду. Подобная ориентация используется, в частности, для
коррекции траектории и для наведения остронаправлен-
ной антенны. Во второй главе рассматриваются различ-
ные схемы датчиков системы солнечно-звездной ориента-
ции и приводятся.соотношения, необходимые для выбора
параметров такой системы.
Выбор схемы датчиков системы ориентации тесно свя-
зан с компоновкой аппарата и его траекторией. Это и оп-
ределило включение указанного материала в книгу.
Изучение вопросов управления космическим аппара-
том, отыскание наилучших способов управления и созда-
ние программы работы входят в процесс разработки аппа-
рата. Вопросы управления существенно влияют на надеж-
ность космического аппарата, удобство его эксплуатации
и характеристики бортовых приборов. Управление, как
правило, осуществляется бортовыми средствами, для чего
12
ВВЕДЕНИЕ
часто предусматривают специальную систему управления
комплексом бортовой аппаратуры, и наземными средства-
ми управления, предназначенными для передачи на борт
дискретных команд и числовых данных. Правильное соче-
тание наземных и бортовых средств управления является
необходимым условием создания космического аппарата.
Вопросам управления посвящена третья глава. В этой
главе, в частности, дается представление о логике работы
и взаимодействия бортовых систем, иллюстрируемое при-
мером из работы системы управления ориентацией, а также
объясняются такие понятия, как сеанс, дежурный режим,
бортовое время.
Поскольку в последние годы на борту космических
аппаратов все больше начинает применяться цифровая
вычислительная техника, в третьей главе рассматривает-
ся использование бортовых вычислительных машин для
решения отдельных задач управления. В связи с тем, что
в последнее время большое внимание уделяется проведению
на космических аппаратах технологических эксперимен-
тов, требующих невесомости, в этой же главе выводятся
соотношения, позволяющие оценить степень невесомости
на борту аппарата, и в порядке постановки задачи пред-
лагается метод уменьшения уровня массовых сил в месте
установки технологического оборудования.
Взаимодействие бортовых и наземных средств управ-
ления особенно важно при проведении сеансов работы,
время начала которых должно быть точно выдержано, но
неизвестно заранее, до окончательного определения фак-
тической траектории. К таким сеансам, в частности, отно-
сятся сеансы коррекции траектории, если коррекция осу-
ществляется при сравнительно больших значениях тяги
двигательной установки, и сеансы около планеты. В треть-
ей главе выводятся соотношения, необходимые для плани-
рования операций по управлению началом сеансов указан-
ного типа. Здесь рассматриваются различные схемы рабо-
ты бортового программного устройства с учетом возможно-
сти временного выхода из строя наземной аппаратуры и
неблагоприятных метеорологических условий в районе
расположения наземного пункта. В этой же главе анали-
зируются некоторые методы закладки на борт уставок.
Сравнивают эти методы по величинам вероятностей за-
кладок правильных и неправильных чисел.
ВВЕДЕНИЕ
13
Если имеется несколько космических аппаратов, вы-
полняющих одну задачу, то при решении вопросов управ-
ления необходимо исследовать различные варианты вза-
имодействия этих аппаратов между собой. В третьей главе
приводятся примеры комплексов космических аппаратов
и рассматриваются различные аспекты взаимодействия
аппарата, работающего на поверхности планеты или уча-
стке спуска (посадочного аппарата), с аппаратом, проле-
тающим около планеты или находящимся на орбите
искусственного спутника этой же планеты. В данном слу-
чае взаимодействие аппаратов выражается в том, что
информация с посадочного аппарата передается не непо-
средственно на Землю, а на аппарат, находящийся на
орбите спутника, или аппарат, пролетающий мимо пла-
неты. На этих аппаратах информация может либо сразу
ретранслироваться на Землю, либо предварительно за-
поминаться. Такая ретрансляция информации может
оказаться целесообразной для увеличения временных
интервалов возможной радиосвязи, уменьшения объема за-
поминающего устройства, увеличения надежности посадоч-
ного аппарата и, наконец, для увеличения скорости пере-
дачи информации или уменьшения мощности передатчика.
В книге приводятся соотношения, позволяющие оценить
необходимость ретрансляции информации для получения
тех или иных указанных эффектов.
Для того чтобы приборы, установленные на космиче-
ском аппарате, могли правильно функционировать, нужно
обеспечить определенные условия для их работы. Под
условиями работы будем понимать: размещение одних
приборов относительно других, относительно открытого
космического пространства и элементов конструкции
аппарата, температурные режимы приборов и их элемен-
тов, газовую среду внутри приборов и вокруг них. Для
системы управления ориентацией и системы управления
движением важны также следующие вопросы: защита
оптических датчиков от световых помех и возможных за-
грязнений, малые угловые перемещения одних приборов
относительно других и двигательной установки, а также
выполнение некоторых требований к эллипсоиду инерции
и к положению главных осей инерции относительно гео-
метрических осей.
Эти проблемы освещаются в четвертой главе. Посколь-
ку обеспечению теплового режима космических аппаратов
посвящен ряд отечественных работ, в книге описаны толь-
ко общие вопросы обеспечения заданного температурного
режима приборов и конструкции. Приведенные соотно-
шения в основном носят качественный характер и пред-
назначены для пояснения принципов терморегулирования
и роли конструктивных мероприятий. Конкретные вари-
анты схем терморегулирования и методики расчета этих
схем и их отдельных элементов в книге отсутствуют.
Для многих космических аппаратов характерно ис-
пользование герметичных отсеков с газовой средой для
размещения в них основной массы приборов. Это облег-
чает обеспечение заданных температурных режимов при-
боров и их элементов и уменьшает коэффициенты трения
в трущихся парах механизмов. Однако в ряде случаев
герметизация отсека приводит к увеличению массы кон-
струкции, необходимости установки осушителей и услож-
нению технологии подготовки аппарата к пуску. Кроме
того, для космических аппаратов с длительным временем
существования может стать существенной метеоритная
опасность. Для герметичных отсеков пробой оболочки
приводит к уменьшению давления газа внутри отсека и
может вызвать изменение условий работы некоторых
приборов из-за уменьшения давления и возрастания
температуры тепловыделяющих элементов. Для не герме-
тичных отсеков попадание в отсей метеорита опасно только
при разрушении некоторых электрических цепей или
элементов. При наличии резервирования вероятность
такого повреждения может оказаться ниже, чем вероят-
ность пробоя герметичного отсека. Разработка негерме-
тичного отсека имеет ряд особенностей по сравнению с гер-
метичным. Методы учета этих особенностей изложены
в четвертой главе. Там же даются некоторые предложения
по улучшению условий работы приборов в негерметичном
отсеке.
Существенное место в процессе разработки космиче-
ского аппарата занимает выбор его компоновочной схемы.
В той же главе даются определения внутренних и внешних
приборов, внутренней и внешней компоновок аппарата и
излагаются главные требования к компоновке. Основное
внимание уделяется солнечным батареям как наиболее
распространенному генератору электроэнергии, их клас-
ВВЕДЕНИЕ
15
сификации и методам выбора формы, а также определению
сил и моментов от светового давления. Приводятся фор-
мулы для оценок этих сил и моментов, соотношения, не-
обходимые для обработки экспериментально полученных
индикатрис рассеяния, и предлагается методика опреде-
ления сил и моментов от светового давления, если извест-
ны только типы индикатрис рассеяния.
Последняя, пятая глава является по существу заклю-
чением. В ней еще раз говорится о связях между парамет-
рами отдельных систем космического аппарата и о зависи-
мости этих параметров от характеристик траектории, про-
граммы работы и конструкции. Указанные связи, чтобы
отличить их от электрических связей, названы физиче-
скими. Этот термин является чисто условным. В послед-
ней главе приведены примеры физических связей. Там же
говорится о процессе проектирования космического аппа-
рата и вводится понятие о рациональном проектировании.
Объясняются технический смысл и математическая поста-
новка задачи о рациональном проектировании. Рацио-
нальное проектирование требует, чтобы в основу разра-
ботки проекта был положен некоторый общий критерий,
к экстремальному значению которого нужно стремиться
при сравнении различных вариантов вновь разрабатыва-
емого космического аппарата. В пятой главе приводятся
и объясняются некоторые критерии, с которыми могут
встретиться разработчики аппаратов. Очевидно, что
частные критерии, используемые при создании отдельных
бортовых систем, не должны противоречить принятому
общему критерию. В книге приводится один из вариантов
алгоритма рационального проектирования. Этот алгоритм
основан на сочетании интуитивного творческого процесса
поиска наилучших проектных решений по компоновочной
схеме, бортовым системам и программе работы (первый
этап) со строгой оптимизацией некоторых найденных на
первом этапе вариантов аппарата (второй этап). Указан-
ные варианты названы опорными. Для оптимизации
опорных вариантов приходится решать задачу отыскания
условного экстремума функции многих переменных, изме-
няющихся в заданных интервалах. В качестве уравнений
связи используются соотношения между основными пара-
метрами бортовых систем, некоторыми конструктивными
параметрами аппарата, а также параметрами, определяю-
16
ВВЕДЕНИЕ
щими программу работы. Кроме того, уравнения связи
должны содержать ограничения и требования, вытекаю-
щие из технического задания на разрабатываемый аппарат.
В пятой главе показано, что при выполнении некоторых
условий задача оптимизации опорных вариантов может
быть сведена к частному случаю задачи линейного про-
граммирования.
В последние годы появляется все больше работ, по-
священных использованию цифровых вычислительных
машин в процессе проектирования различных сложных
систем, в частности летательных аппаратов (см., напри-
мер, [17]). Предложенный в настоящей книге алгоритм
рационального проектирования предполагает использо-
вание современной вычислительной техники только на
втором этапе проектирования — при оптимизации най-
денных опорных вариантов. Применяя какие-либо машин-
ные методы оптимизации состава и структур служебных
систем, а также машинные методы поиска и оптимизации
компоновочных схем аппарата, можно несколько рацио-
нализировать и первый этап проектирования — отыска-
ние опорных вариантов. Однако в любом случае останется
этап проектирования, основанный на творческой интуи-
ции разработчиков, на их инженерном искусстве.
ГЛАВА 1
СОСТАВ КОСМИЧЕСКОГО АПППАРАТА
И ОСНОВНЫЕ СЛУЖЕБНЫЕ СИСТЕМЫ
1.1. Научная и служебная аппаратура.
Состав и назначение служебных систем
1.1.1. Космический аппарат создается для решения
определенной задачи или некоторого комплекса задач.
Эти задачи в первую очередь определяют схему полета
аппарата. Под схемой полета понимают траекторию или
орбиту с ее основными характеристиками и основные про-
цессы, протекающие на борту и «привязанные» к опреде-
ленным участкам траектории. Для решения задач, стоя-
щих перед космическим аппаратом, необходимо наличие
на борту приборов или систем, которые выполняют неко-
торые функции, специфические для данного аппарата.
В число этих функций могут входить научные исследова-
ния космического пространства и астрономических объек-
тов, метеоразведка, исследование земных природных ре-
сурсов, ретрансляция радио- и телепередач, осуществле-
ние телефонных переговоров и т. д. Ниже эти функции
будем называть научными, задачами, а соответствующую
аппаратуру — научной аппаратурой.
Схема полета и научные задачи, выполняемые борто-
вой аппаратурой, определяют место космического аппа-
рата в каком-либо из вариантов классификации.
Если иметь в виду весь комплекс бортовой аппаратуры,
то следует выделить приборы и системы, не выполняющие
непосредственно научные задачи аппарата, но без которых
невозможно решение космическим аппаратом этих задач.
Иногда указанные приборы и системы, а также функции,
выполняемые ими, называют служебными или обслу-
живающими, подчеркивая этим их вспомогательное
назначение.
В свою очередь некоторые из служебных систем при-
сутствуют на всех без исключения активных космических
аппаратах. При этом, естественно, имеется в виду наиме-
нование и назначение системы, а не ее технические харак-
18
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
теристики, которые, как правило, различны у различных
аппаратов. К указанным системам отнесем системы: радио-
телеметрическую, электропитания и антеннофидерных
устройств. Эти системы будем называть основными слу-
жебными системами космического аппарата.
Остальные служебные системы, подробно перечислен-
ные ниже, на некоторых аппаратах могут отсутствовать.
В частности, функции системы управления комплексом
бортовой аппаратуры могут выполняться временным уст-
ройством, входящим в радиотелеметрическую систему и
осуществляющим включение и выключение бортовых
приборов по «жесткой» временной программе. Конечно,
это возможно только на простейших космических аппара-
тах. Система управления ориентацией отсутствует на не-
ориентируемых аппаратах.
Подчеркнем, что термин «основные служебные системы»
ни в коей мере не умаляет значения остальных систем,
а введен только для удобства дальнейшего изложения.
1.1.2. В настоящее время комплекс бортовых прибо-
ров и устройств, выполняющих служебные функции,
принято делить на следующие системы:
система управления комплексом бортовой аппаратуры,
обеспечивающая работу этого комплекса по заданной вре-
менной программе в соответствии с заданной логикой
взаимодействия бортовых систем и приборов;
радиотелеметрическая система, обеспечивающая прием
и дешифровку на борту необходимых команд управления
и числовых данных, сбор, хранение, предварительную
обработку и передачу на пункты приема телеметрической
и телевизионной информации, траекторные измерения;
система электропитания, снабжающая приборы и уст
ройства аппарата электроэнергией;
система антенно-фидерных устройств, обеспечивающая
радиоизлучение в пространство и прием высокочастотных
радиосигналов; в эту систему входят собственно антенны,
коаксиальные кабели и волноводы, переключающие и
фильтрующие устройства;
система управления ориентацией, предназначенная
для создания требуемой ориентации аппарата в простран-
стве. Ориентация необходима для выполнения ряда науч-
ных исследований, обеспечения нормальной работы сол-
нечных батарей, сообщения аппарату тормозных, коррек-
t.l] СОСТАВ И НАЗНАЧЕНИЕ СИСТЕМ 19
тирующих и других импульсов, проведения автономных
навигационных измерений, фотографирования некоторых
астрономических или земных объектов и, наконец, для
наведения остронаправленных антенн на пункт приема;
система управления движением центра масс и стаби-
лизации углового положения аппарата во время работы
двигателей; система функционирует при коррекциях тра-
ектории и маневрах, спуске на планеты и подъеме с по-
верхности планет;
система сближения и стыковки;
двигательные установки для маневров, коррекции,
спуска с орбиты, посадки на планеты и подъема с планет,
а также создания управляющих моментов, необходимых
для ориентации и стабилизации аппарата;
система автономной навигации;
система терморегулирования, необходимая для под-
держания заданного температурного режима приборов и
конструкции;
приборы и устройства, обеспечивающие спуск и по-
садку на поверхность планеты или Земли всего космиче-
ского аппарата или его части (спускаемого или посадочно-
го аппарата);
приборы, необходимые для пеленгации и обнаружения
спускаемого аппарата после приземления.
Приведенный перечень систем нуждается в следующих
пояснениях:
а) для простейших космических аппаратов система
терморегулирования может выродиться в комплекс компо-
новочных и конструктивных мероприятий, заключающихся
в определенном размещении приборов, выборе оптических
коэффициентов, установке специальных теплоизолирую-
щих материалов и правильном креплении приборов к кон-
струкции аппарата;
б) вместо двигательных установок можно себе пред-
ставить подвижные или неподвижные элементы конструк-
ции, световое давление на которые создает моменты и
силы, необходимые для управления ориентацией или из-
менения траектории. Кроме того, в некоторых случаях
может оказаться естественнее средства для создания упра-
вляющих моментов включать в систему управления ори-
ентацией или считать отдельной системой. В этих случаях
указанные средства вместе с соответствующими блоками
20
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
автоматики иногда называют подсистемой или системой
исполнительных органов;
в) возможны варианты, когда некоторые функции
одной системы выполняются другой системой. Например,
если в систему управления комплексом бортовой аппара-
туры входит цифровое вычислительное устройство, то
в ряде случаев можно поручить этому устройству решение
отдельных задач ориентации или решение навигационных
задач; или для наведения антенн на пункт приема могут
использоваться радиопеленгационные устройства, входя-
щие в радиотелеметрическую систему;
г) для упрощения изложения в перечне служебных
систем приведена единая радиотелеметрическая система,
комплексно решающая все перечисленные задачи. Это
необязательно, некоторые из этих задач могут решаться
различными, достаточно автономными системами (напри-
мер, система сбора и обработки телеметрической информа-
ции, аппаратура командной радиолинии, система траек-
торных измерений и т. д.);
д) в выделении антенно-фидерных устройств в отдель-
ную систему содержится некоторая условность. Дело
в том, что на борту может присутствовать несколько
антенн, обеспечивающих работу различных радиосредств,
иногда даже разрабатываемых различными организа-
циями. Но всегда антенны тесно связаны с компоновкой
и конструкцией аппарата, и характеристики антенн су-
щественно зависят от места их установки. Кроме того,
возможно влияние антенн друг на друга. Поэтому выде-
лением антенн в отдельную систему подчеркивается лишь
необходимость комплексного рассмотрения всех антенн
аппарата на стадии разработки его проекта.
1.1.3. Работа всех систем космического аппарата кон-
тролируется в полете. Этот контроль в первую очередь
необходим для управления комплексом бортовой аппара-
туры как по командам с Земли, так и по командам от бор-
товых приборов, осуществляющих управление. Кроме
того, контроль функционирования аппарата и его систем
необходим для определения правильности принятых при
разработке аппарата решений. Последнее особенно важно
на стадии так называемых летно-конструкторских испыта-
ний аппарата. Для указанного контроля непрерывно или
периодически осуществляется измерение ряда параметров,
1.1J
СОСТАВ И НАЗНАЧЕНИЕ СИСТЕМ
21
характеризующих работу системы, ее отдельных приборов
и агрегатов. Эти измерения определяют информационные
потоки, идущие от всех систем на ра диоте леметрическую’си-
стему и систему управления комплексом бортовой аппара-
туры.
В процессе функционирования космического аппарата
от системы управления бортовым комплексом поступают
команды управления к отдельным системам. Кроме такого
централизованного управления обычно имеет место и
автономное управление отдельными системами, осуще-
ствляемое приборами, входящими в состав этих систем.
Кроме того, для работы систем, приборов и агрегатов
необходимо электропитание.
Таким образом, взаимодействие отдельных систем
космического аппарата между собой осуществляется через
обмен информационными потоками, обмен командами управ-
--------- Передача аафаряацаа
---------Элен/пролаталае
---------Упрадлелаа
Рис. 1.1. Структурная схема космического аппарата.
ления и обеспечение электрической энергией отдельных
приборов и агрегатов. Эти связи реализуются кабельной
сетью аппарата. Для иллюстрации сказанного на рис. 1.1
представлена условная структурная схема космического
аппарата.
Поскольку все системы аппарата размещены на неко-
торой общей конструктивной базе и их работа подчинена
единой цели — выполпению данным космическим аппара-
22
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
(ГЛ. 1
том определенных задач, то кроме рассмотренных электри-
ческих связей существуют и другие виды взаимодействия
между системами. Для пояснения этого рассмотрим не-
которые примеры. От точности наведения электрической
оси остронаправленной антенны на пункт приема, зави-
сящей от характеристик системы ориентации, зависит в
свою очередь коэффициент усиления антенны, а следова-
тельно, и мощность передатчика, которая необходима
для передачи заданного объема информации за определен-
ное время.
Если в качестве генератора электроэнергии использу-
ется плоская солнечная батарея, то ее работоспособность
зависит от работы системы управления ориентацией, обес-
печивающей ориентацию нормали к плоскости батареи на
Солнце или заданный закон движения нормали относитель-
но направления на Солнце.
От работы системы терморегулирования так же, как
и от работы системы электропитания, зависит нормальное
функционирование всех приборов и агрегатов аппарата.
Параметры отдельных систем могут зависеть и от
программы работы аппарата и от его траектории. Напри-
мер, от номинальной траектории, точности траекторных
измерений, осуществляемых с помощью радиотелеметри-
ческой системы, и от программы проведения этих измере-
ний зависит время определения фактической траектории
межпланетного аппарата, а следовательно, и время прове-
дения коррекции. От времени проведения коррекции в
свою очередь зависит модуль корректирующей скорости,
а следовательно, и необходимый запас топлива.
Наконец, работа систем, а значит, и их основные па-
раметры могут существенно зависеть от внешней и внутрен-
ней компоновок и от конструкции аппарата. В качестве
примера укажем на бортовые антенны. Характеристики
бортовых антенн определяются их формами и размерами,
которые в свою очередь зависят от того, какие антенны
можно разместить на данном космическом аппарате, и от
схемы ориентации. От характеристик антенн существенно
зависят основные параметры радиотелеметрической си-
стемы.
Связитрассмотренного типа между отдельными систе-
мами, а также^между системами, траекторией, програм-
мой работы и^конструкцией космического аппарата ус-
t.l]
состав и Назначение систем
23
ловно назовем физическими связями. Примеры таких свя-
зей будут рассмотрены в последующих главах книги.
1.1.4. В каждой системе аппарата можно выявить ряд
параметров, характеризующих не только саму систему, но
и ее зависимость от других систем, траектории, програм-
мы работы, назначения аппарата и его конструктивных
данных. Такие параметры назовем основными параметра-
ми системы. Иногда основные параметры называют вы-
ходными, подчеркивая этим, что стыковка данной системы
с другими системами и данным аппаратом осуществляется
именно по этим параметрам. Именно поэтому в техниче-
ском задании на разработку системы задаются основные
параметры. Слово «параметр» здесь нужно понимать в обоб-
щенном смысле. Параметр может быть числом, но может
быть и названием режима, видом модуляции, оптической
схемой и т. д. Множество основных параметров систем
обозначим (Cm>n), где т — номер системы, ап — номер
параметра.
Аналогично траекторию и программу работы космиче-
ского аппарата можно характеризовать некоторыми мно-
жествами параметров (Г{) и (Pj) соответственно. При этом
параметры траектории обычно совпадают с ее характери-
стиками в общепринятом баллистическом смысле. Напри-
мер, орбиту искусственного спутника Земли можно опре-
делить двумя параметрами, характеризующими ее форму
и удаление от центра Земли в момент выведения, тремя
параметрами, от которых зависит положение начальной
орбиты, а также временем выведения. Программа работы
в простейшем случае может характеризоваться периодом
между сеансами связи и длительностью этих сеансов.
Используя введенные обозначения и считая условно
конструкцию аппарата в качестве одной из бортовых си-
стем, физические связи, имеющие место для данного кос-
мического аппарата, можно определить условными урав-
нениями следующего вида:
^[(^.П)ДЛ),(Р;)1=О, ....к,
где к — число уравнений, которые могут быть записаны
для разрабатываемого аппарата.
Общую начальную массу космического аппарата, а
также значения его массы на отдельных участках полета
будем считать основными параметрами конструкции.
24
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
Многочисленные связи между системами, траекторией,
программой и конструкцией, характерные для современ-
ных космических аппаратов, усложняют космический ап-
парат и в какой-то мере понижают его надежность. Однако
детальный анализ этих связей и изменение основных па-
раметров одних систем за счет изменения параметров дру-
гих систем, траектории и программы работы могут улуч-
шить некоторые общие характеристики аппарата, такие,
как, например, начальная масса, масса научной аппара-
туры, объем полезной информации, получаемой с помощью
данного аппарата, надежность, затраты, сроки подготов-
ки и т. д. Это следует из того, что указанные общие харак-
теристики определяются в конечном итоге основными па-
раметрами систем, параметрами траектории и программы
работы и конструктивными характеристиками.
При разработке проекта нового космического аппарата
должно быть уделено особое внимание физическим связям
отдельных систем между собой, а также с траекторией,
программой работы и конструкцией. Зависимости между
основными параметрами, аналогичные приведенной выше,
по возможности должны быть конкретизированы и иссле-
дованы.
1.2. Радиотелеметрическая система
1.2.1. В этом параграфе объясняются главные задачи
радиотелеметрической системы и даются основные зави-
симости, связывающие некоторые основные параметры
этой системы с траекторией космического аппарата, его
программой работы, характеристиками наземного пункта
приема информации и с бортовыми антеннами.
Остановимся подробнее на задачах радиотелеметриче-
ской системы. При этом подчеркнем, что под радиотеле-
метрической системой здесь понимается единый бортовой
радиотехнический комплекс приборов и устройств, сов-
местно с наземными средствами решающий все перечис-
ленные в предыдущем параграфе задачи.
Телеметрическая и телевизионная информация может
включать в себя данные научных систем и приборов и,
кроме того, обязательно содержит так называемую слу-
жебную информацию о работе всех без исключения борто-
1.2]
РА ДИОТЕ .НЕМЕТРИЧЕСКАЯ СИСТЕМА
25
вых систем. На основании этой информации можно судить
о текущем состоянии аппарата и в случае необходимости
с помощью командной радиолинии корректировать про-
грамму работы аппарата и режимы функционирования от-
дельных приборов.
Относительно приема на борту числовых данных нуж-
но заметить, что они могут оказаться необходимы для
корректировки временнбй программы работы, например
для проведения некоторых операций в зоне невидимости
аппарата с наземных измерительных пунктов, что исклю-
чает возможность непосредственного управления этими
операциями. В этом случае указанные числовые данные
являются так называемыми уставками бортового времен-
ного устройства. Для некоторых вариантов космического
аппарата необходима передача на борт уставочных дан-
ных, или уставок, для проведения коррекции движения,
поскольку эти данные могут быть получены только после
определения фактической] траектории’ на Земле или на
борту. В’состав указанных данных, например, могут вхо-
дить углы поворота трубок оптических приборов, опре-
деляющих направление вектора корректирующей скоро-
сти, и настройка интегратора продольных ускорений,
которым определяется модуль указанного вектора.
Траекторные измерения включают в себя измерение
дальности L от наземных пунктов до аппарата, радиальной
скорости dL/dt и угловых координат. Эти данные исполь-
зуются для определения фактической траектории аппарата,
знание которой необходимо для коррекции движения, про-
ведения маневров (таких, как, например, переход на ор-
биту спутника планеты, торможение для спуска, сближе-
ние с другим аппаратом), привязки данных научных ис-
следований и, наконец, для расчета целеуказаний на-
земным средствам, осуществляющим связь с аппаратом.
В состав целеуказаний обычно входят эфемериды, т. е.
угловые координаты в функции времени, и величины ра-
диальной скорости, необходимые для внесения поправок
на доплеровское изменение частоты. Не останавливаясь
на этом подробнее, отметим, что в силу погрешностей
определения фактической траектории, связанных с ошиб-
ками измерений и неточным знанием внешних сил, дей-
ствующих на аппарат, траекторные измерения проводят-
ся регулярно в течение всего полета.
26
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
наземных измерительных
Рис. 1.2. Схема сопровож-
дения космического аппа-
рата в полете.
На рис. 1.2 представлена схема сопровождения полета
наземными средствами, типичная для современных кос-
мических аппаратов. На схеме приняты следующие обоз-
начения: КА — космический аппарат; НИП — комплекс
пунктов, осуществляющий при-
ем телеметрической информации
(ТЛМ) и ее обработку, траек-
торные измерения (ТИ) и по-
дачу на борт команд управле-
ния (КУ); ВЦ—-вычислительный
центр, ответственный за опре-
деление фактической траекто-
рии и выдачу целеуказаний
(Ц); ЦУ — центр управления,
в котором проводится анализ
текущего состояния бортовых и
наземных средств и осуществ-
ляется принятие оперативных
решений по управлению аппа-
ратом. Иногда вычислительный
центр совмещают с центром уп-
равления, что позволяет ис-
пользовать одну и ту же вы-
числительную технику и для
расчета траектории и для автоматизации анализа и при-
нятия решений по управлению. Комплекс, объединяю-
щий НИП, ВЦ, ЦУ и необходимые линии связи, называют
наземным командно-измерительным комплексом управле-
ния,
1.2.2. Надежность и качество двусторонней радиосвя-
зи с наземными пунктами в первую очередь определяется
такими основными характеристиками радиолинии, как
пропускная способность, или информативность линии
(скорость передачи информации), и помехоустойчивость,
т. е. способность радиолинии передавать информацию с
требуемой точностью и достоверностью при наличии
внешних помех и собственных шумов приемных устройств.
Эти характеристики зависят не только от приборов радио-
телеметрической системы, но и от характеристик назем-
ного пункта, параметров бортовых антенн и дальности
до приемного пункта. Для иллюстрации этого запишем
уравнение радиосвязи по радиолинии «борт — Земля»
1.21
РАДИОТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА
27
(1.1)
в следующем виде:
рс 5аЛРА'у
где
л _ эфф 0 Т? ________ Ау(Л‘
А “ 4ллтш ’ эфф0 ~ 4л
Рс/Рш — отношение сигнал/шум на входе приемника; Р —
мощность излучения бортового передатчика; к — посто-
янная Больцмана; L — расстояние от аппарата до прием-
ного пункта; Тт — суммарная температура шумов назем-
ного пункта; А/ — ширина полосы пропускания; Kyfh
Ку — максимальный коэффициент усиления наземной и
коэффициент усиления бортовой антенн соответственно;
^эффо — эффективная площадь наземной антенны; к —
длина волны; £0 — коэффициент, учитывающий поляри-
зационные потери и потери в антенно-фидерном тракте
приемного пункта: £а ~ коэффициент, учитывающий по-
тери в атмосферах Земли и планет и зависящий от харак-
теристик атмосфер и длины волны.
Для пояснения укажем, что эффективная площадь
антенны есть отношение мощности, поступающей на
вход приемника, к плотности потока излучения, падающе-
го на антенну.
Для качественного приема и расшифровки информа-
ции, поступающей с космического аппарата, величина
Рс/Рш должна превышать некоторое пороговое значение
(Рс/Рш)пу зависящее от вида принимаемой информации,
параметров аппаратуры, ширины полосы пропускания и
метода выделения полезного сигнала.
Поскольку речь идет о передаче информации с борта
на Землю, то главным показателем этого процесса являет-
ся скорость передачи информации (в бит/сек), которую
можно получить на данном участке полета космического
аппарата. Указанная скорость передачи информации С
связана с шириной полосы пропускания соотношением
С = B&f, (1.2)
где В — функция вида кодирования передаваемой инфор-
мации.
Величина А/, которая может быть реализована в ра-
диотелеметрической системе на данном участке полета,
28
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
определяется соотношением (1.1), если в него вместо pjpn
подставить указанное выше пороговое значение.
Рассмотрим некоторый временной интервал, внутри
которого параметры А и Р мыкав считать постоянными.
Если Lmax и ^Tymin — экстремальные значения соответ-
ствующих величин, взятые на указанном интервале, то
на основании формул (1.1) и (1.2) будет справедливым сле-
дующее выражение для скорости передачи информации,
реализуемой на этом временном интервале:
С= В^-РК^Ы- , (1.3)
X^*max (PdPul )п
где х — коэффициент запаса.
Отметим, что поскольку для большинства антенн ко-
эффициент усиления определяется углом между элек-
трической осью антенны и направлением на пункт приема,
то величина С может меняться за счет колебательного
движения аппарата и антенны относительно центра масс
и движения центра масс по траектории. Влияние движе-
ния центра масс на коэффициент усиления антенны будет
иметь место в случаях, когда отсутствует наведение ан-
тенны на пункт приема.
Интервал времени, в течение которого работает пере-
датчик, назовем сеансом связи и на основании (1.3) запи-
шем формулу для объема информации Qc, переданной за
один сеанс:
Qc
^max (PdРт )п
(1.4)
где — длительность сеанса.
Если в течение всего, времени работы передатчика
радиотелеметрическая система работает в п последователь-
ных режимах, то общий объем информации, переданной
за весь сеанс, будет равен
Х [(/’c/PuiWi
1.2.3. Соотношение (1.4) связывает объем передава-
емой информации, параметры наземного пункта, характе-
1.2)
РАДИОТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА
29
ристику бортовой антенны, дальность до аппарата и
время сеанса.
^Остановимся на некоторых^величинах, входящих в
это соотношение. Объем информации, который необходимо
передать в данном сеансе, определяется назначением
космического аппарата и местом сеанса в общей программе
работы. При выборе характеристик радиотелеметрической
системы объем информации должен быть задан на раз-
личных участках полета.
Как следует из соотношения (1.4), для различных
космических аппаратов заданный объем информации мо-
жет^быть передан при различных величинах мощности
передатчика, длительности сеанса, коэффициента усиле-
ния антенны и параметра Л, определяемого характери-
стиками наземного пункта.
Мощность передатчика, входящая в формулу (1.4),
для различных космических аппаратов может меняться
от долей ватта до сотен ватт, причем отсутствуют особые
трудности в создании мощных бортовых передатчиков.
Ясно, что более мощный передатчик позволяет быстрее
передать заданный объем информации или при той же
скорости передачи иметь менее эффективные бортовые
и наземные антенны. Уменьшение эффективности бор-
товых антенн существенно упрощает конструкцию ап-
парата и уменьшает его массу, а использование более
простых наземных антенн уменьшает стоимость эксплу-
атации. Однако увеличение мощности передатчика, как
правило, приводит к увеличению массы передатчика и
его электропотребления, а также к увеличению этих же
параметров системы терморегулирования. Поэтому с
точки зрения уменьшения массы передатчика, массы
системы электропитания и системы терморегулирования
космического аппарата выгодно иметь мощность пере-
датчика как можно меньшую. Отсюда ясно, что мощность
передатчика — это один из основных параметров радио-
телеметрической системы, который может быть выбран
только в результате комплексного анализа проектных
параметров аппарата.
Длительность сеанса тс, входящая в формулу (1.4),
определяется условиями видимости аппарата с наземных
пунктов, запасами рабочего тела или электроэнергии,
необходимыми для ориентации антенны на пункт приема, и
30
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
(ГЛ. 1
общей программой работы. На последнем остановимся
подробнее. Для некоторых космических аппаратов на
отдельных участках полетаможет^оказаться существен-
ным не только объеМ-Переданной информации, но и время
передачи. Например, для аппаратов, преднаэаченных
для^посадки на поверхность планеты, важно передать
научную_и служебную информацию до начала участка
торможения в атмосфере, так как после посадки радиоли-
ния спускаемого аппарата будет занята передачей ин-
формации о планете. В то же время для этих же косми-
ческих аппаратов на участке перелета от Земли к планете
в пределе возможен случай, когда передатчик работает
непрерывно, в течение ряда суток. Очевидно, что это
возможно при наличии на Земле нескольких пунктов
приема и при соответствующей компоновке аппарата,
позволяющей сочетать работу антенн и генератора электро-
энергии, если последний для своей работы требует ориен-
тации на Солнце. При непрерывной работе передатчика
вместо соотношения (1.4) удобнее анализировать формулу
(1.3), приравняв величину С потоку информации от слу-
жебных систем и научных приборов на данном участке
полета. При этом, естественно, отпадает необходимость
иметь на борту устройство, запоминающее информацию
между сеансами. Как следует из приведенных выше фор-
мул, в рассматриваемом предельном случае необходимая
мощность передатчика получается минимальной.
1.2.4. Рассмотрим влияние параметров радиолинии
на емкость химической батареи, необходимую для про-
ведения сеанса связи. Бели электропотребление бортовой
аппаратуры в сеансе в основном определяется электропо-
треблением передатчика, а мощность генератора электро-
энергии существенно меньше электропотребления ап-
паратуры сеанса, то емкость химической батареи Ес
будет приближенно равна Ртс/Пп, где т)д — коэффициент
полезного действия передатчика. При этом на основании
соотношения (1.4) найдем
р X^max (PcJPm )ц Фс
°~ ВАКушХп пп
Поскольку величина т)п обычно остается постоян-
ной при изменении мощности излучения в несколько
раз, то формула (1.6) показывает, что в рассмотренном
1.2]
РАДИОТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА
31
случае емкость химической батареи не зависит от мощно-
сти передатчика при изменении последней в широких
пределах и определяется в основном заданным объемом
информации, который необходимо передать в сеансе,
коэффициентом усиления бортовой антенны, дальностью
и характеристиками наземного пункта.
1.2.5. Остановимся на надежности радиолинии и всей
радиотелеметрической системы. Эта система является
одной из основных служебных систем, к которой предъяв-
ляются особые требования по надежности. И здесь дело
не только в том, что с помощью радиотелеметрической
системы решается главная задача большинства космиче-
ских аппаратов — передача полезной информации. Су-
щественно также, что эта система, как указывалось
выше, сообщает о работе других систем и при возникно-
вении аварийных ситуаций позволяет выявить причины
аварии и устранить ее последствия в полете, если это
возможно. К тому же в рассматриваемом случае совме-
щенной радиолинии устранение этих последствий также
осуществляется через радиотелеметрическую систему. Если
же авария такова, что аппарат не может выполнить глав-
ную задачу, то только на основе анализа телеметриче-
ской информации возможно разработать комплекс эф-
фективных мероприятий по повышению надежности сле-
дующих модификаций аппарата.
Особая роль радиотелеметрической системы связана
со спецификой космического полета — невозможностью
непосредственного исследования аппарата после серьез-
ной аварии.
К сказанному нужно добавить, что надежность ра-
диосвязи зависит не только от приборов радиотелеметри-
ческой системы, но и от ориентации, электропитания и
траектории аппарата.
Традиционные методы обеспечения высокой надеж-
ности системы сводятся к отысканию наилучших схем-
ных решений, применению горячего и холодного резер-
вов отдельных узлов и блоков, отбору элементов, к тща-
тельной отработке системы на Земле с максимальным
приближением условий испытаний к реальным эксплуа-
тационным условиям.
К нетрадиционным методам, характерным для радио-
телеметрической системы, можно, в частности, отнести:
32
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. i
использование кроме основных антенн, служащих
для штатной работы, дополнительных всенаправленных и
малонаправленных антенн, коэффициент усиления кото-
рых мало или совсем не зависит от работы системы упра-
вления ориентацией и которые способны передать’’мини-
мально необходимый объем служебной информации и
принять команды, предназначенные для «лечения» ап-
парата в аварийных ситуациях:
использование автономных источников электропитания
для передачи аварийной или особо важной информации;
применение аварийной автономной командной радио-
линии;
дублирование наземных средств приема информации
и передачи команд.
Следует отметить, что в отличие от других бортовых
систем совершенство радиотелеметрической системы опре-
деляется не только техническим уровнем разработки и
изготовления бортовых приборов, но и характеристиками
наземных средств, предназначенных для приема инфор-
мации и передачи управляющих команд и числовых дан-
ных.
1.2.6. В заключение параграфа перечислим основные
характеристики радиотелеметрической системы, которые
необходимо учитывать при разработке проекта аппарата
и при стыковке этой системы с остальными (эти характе-
ристики можно считать основными параметрами*системы
в указанном выше смысле):
состав и точность траекторных измерений;
число каналов, схема опроса и методы кодирования
телеметрической информации;
параметры телевизионной системы, например скорость
передачи кадра и число элементов в кадре;
количество дискретных команд, которое способна при-
нять система, бортовые временное задержки и стабиль-
ность этих задержек, время передачи одной команды;
количество и разрядность чисел, принимаемых с
Земли;
Требования к бортовым антеннам и фидерным уст-
ройствам для радиолиний «борт — Земля» и «Земля —
борт»;
выходная и потребляемая мощности’всех передающих
устройств;
1.3]
БОРТОВЫЕ АНТЕННЫ
33
поблочный состав и масса;
электропотребление во всех режимах для заданных
диапазонов напряжения;
допустимые температуры на корпусах приборов и
специальные требования к системе терморегулирования
аппарата, например необходимость установки вентиля-
торов около отдельных блоков системы или жидкостного
охлаждения, этих блоков;
требования к газовой среде в случае размещения ча-
сти аппаратуры в герметичных отсеках.
1.3. Бортовые антенны
1.3.1. Остановимся вначале на основных определениях
применительно к радиолинии «борт — Земля», необхо-
димых для разъяснения требований к бортовым антеннам.
Допустим, что в некоторой прямоугольной системе ко-
ординат, жестко связанной с аппаратом, направление от
аппарата на пункт приема характеризуется углами фх и
фа, причем эти углы выбраны так, что они могут опреде-
лить произвольное положение пункта относительно указан-
ной системы. Тогда для мощности излучения, создава-
емой излучающей антенной, можно записать выражение
Л\ = ЯЛФ1, <р2), (.)
где F (фр ф2)— непрерывная функция углов фх и ф2;
Н — некоторый коэффициент, не зависящий от введенных
углов.
Функция F (фх, ф2) характеризует диаграмму направ-
ленности антенны. Коэффициентом направленного дей-
ствия D антенны в данном направлении, характеризуе-
мом углами ф10, Ф20» называют отношение мощности,
излучаемой антенной в данном направлении, к средней
по всем направлениям мощности.
Согласно определению и формулы (*)
р _ (ф10, ф20) ,
^Г(Ф1, ф2)^
где интеграл берется по всей сфере единичного радиуса с
центром в начале координат. Если D = 1 при любых
углах ф10, ф20» то такую антенну называют ненаправлен-
2 Г. Ю. Максимов
34
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
(ГЛ. 1
ной. Коэффициентом полезного действия антенны т]а
называют отношение
____
Па— ро ,
где Ре — полная излучаемая во всех направлениях мощ-
ность; Ро— подводимая к антенне мощность.
Наконец, под коэффициентом усиления антенны К7 в
данном направлении понимается отношение мощности,
подводимой к ненаправленной антенне, к мощности,
подводимой к данной антенне, при условии, что напря-
женность поля в месте приема одинакова для обеих антенн
и коэффициент полезного действия гипотетической нена-
правленной антенны равен единице.
Очевидно, что коэффициент усиления зависит от кон-
кретных значений углов <Pi, <р2 и характеризует выигрыш
по подводимой к антенне мощности. В отличие от вели-
чины D коэффициент усиления учитывает коэффициент
полезного действия антенны.
Введенные величины связаны формулой
ЛГу = РЛа.
1.3.2. Бортовые антенны космических аппаратов с
точки зрения требований, которые они предъявляют к
системам аппарата, удобно разделить на три класса:
всенаправленные, малонаправленные и остронаправлен-
ные. Под всенаправленными будем понимать антенны, в
диаграмме направленности которых отсутствует доста-
точно четко выраженный максимум, а также отсутствуют
длительные по углу и глубокие провалы. Коэффициент
направленного действия таких антенн заключен в пре-
делах от 0,01 до 0,1. Для этих антенн характерна значи-
тельная изрезанность диаграммы и они не трубуют даже
грубой ориентации аппарата на пункт приема. Отметим,
что изрезанность диаграммы всенаправленных антенн в
основном определяется влиянием на диаграмму внешних
элементов конструкции аппарата, на что следует обратить
внимание при определении места установки антенн.
Поскольку точный расчет диаграммы направленности та-
ких антенн практически невозможен, место установки
антенны и ее конструкция окончательно проверяются па
специальном антенном макете аппарата.
1.3]
БОРТОВЫЕ АНТЕННЫ
35
. 1.3.3. Малонаправленные антенны имеют диаграмму
направленности, заключенную только в части простран-
ства. Как правило, их диаграммы менее изрезаны. Коэф-
фициент направленного действия в рабочих углах за-
ключен в пределах от 0,1 до 5. Малонаправленные антенны
требуют, чтобы аппарат
хотя бы одной осью был
ориентирован в простран-
стве, так как вне рабочих
углов коэффициент направ-
ленного действия близок
к нулю. Эти антенны по-
Рис. 1.3. Схема плоской непод-
вижной солнечной батареи.
лучили, в частности, при-
менение на орбитальных
отсеках межпланетных ав-
томатических аппаратов с
плоской неподвижной солнечной батареей, нормаль к
которой Ns (рис. 1.3) непрерывно, в течение всего полета,
ориентирована на Солнце с некоторой максимальной
ошибкой 6s- Указанный случай характерен тем, что во
время приема меняются и рабочие углы антенн, и даль-
ность от Земли до аппарата. Поэтому остановимся на
этом варианте подробнее.
Предположим, что положение других осей аппарата
произвольно, т. е. возможно вращение вокруг нормали
Рис. 1.4. Зависимость даль-
ности L и угла у0 Солнце-
аппарат—Земля от времени
полета.
Ns- В этом случае естествен-
но потребовать, чтобы диаг-
рамма направленности антен-
ны была близка к телу вра-
щения с осью симметрии,
чараллельной нормали Ns.
Сечение диаграммы направ-
ленности плоскостью, прохо-
дящей через ось симметрии,
будем характеризовать зави-
симостью Ку (у), где у — угол
между осью симметрии и на-
правлением на приемный
пункт.
Для выбора малонаправ-
ленной антенны необходимо иметь зависимости угла у0
Солнце — аппарат — Земля и дальности L до Земли от
2
36
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
времени полета. На рис. 1.4 приведен пример таких за-
висимостей. Величины требуемых коэффициентов уси-
ления антенны можно определить по формуле
v (Рс/Рщ )ц /п
лу°— %АР со>
(1.7)
где Со — скорость передачи информации, которую же-
лательно иметь или в течение всего полета, или на отдель-
ных участках; — коэффициент запаса.
Формула (1.7) получена на основании соотношений
(1.1) и (1.2). Если построить зависимость А’уо(То) в прямо-
угольных координатах и на этот же график нанести ди-
аграммы направленности антенн различных вариантов,
то легко проанализировать пригодность того или иного
варианта. Может оказаться, что заданная скорость пе-
Рис. 1.5. К выбору ма-
лонаправленных антенн
для аппарата с плоской
солнечной батареей.
редачи информации Со не может
быть реализована на некоторых
участках полета, т. е. Ку < Ху0.
Поскольку из (1.1) и (1.2) следу-
ет, что величина С пропорциональ-
на коэффициенту усиления, то
реализуемая скорость передачи
информации определится как
С = Соф~. (1.8)
луо
Для того чтобы учесть ошиб-
ку ориентации, нужно около сред-
ней кривой 1Суо(т) (рис. 1.5) пост-
роить полосу шириной 26s вдоль
оси у и в дальнейшем анализе
принимать во внимание «худшую»
границу полосы.
Если на кривой КУ0(у) отме-
тить времена полета, то можно
определить, на каких участках
траектории приемлема та или иная
скорость передачи информации. Из
рис. 1.5 следует, что на участках 12 и £3—tK скорость
Со не обеспечивается антенной с диаграммой Ку(у).
Отметим, что при отсутствии ошибки ориентации скорость
Со не обеспечивалась бы только на участке t4—tK>
1.3]
БОРТОВЫЕ АНТЕННЫ
37
Кроме рассмотренного случая использование мало-
направленных антенн возможно, в частности, на аппа-
ратах, работающих на планетах, если конструкция этих
аппаратов гарантирует их определенное положение на
поверхности. Наконец, малонаправленные антенны мо-
гут быть применены на участках спуска на планеты на
парашютах или двигателях, так как наличие этих средств
также гарантирует с некоторой точностью известное
Рис. 1.6. Влияние точки прицели-
вания на характеристики антенны.
заранее положение оси антенны в пространстве. При
выборе антенн для этих случаев необходимо учитывать
разброс координат точки посадки или точки входа в
плотные слои атмосферы планеты, а также возможность
изменения углов между осью аппарата и направлением
на Землю на границах поля рассеивания за счет измене-
ния точки прицеливания. Сказанное понятно из схемы,
приведенной на рис. 1.6.
1.3.4. Остронтравленюле антенны — это антенны с четко
выраженным максимумом диаграммы направленности и
шириной диаграммы по половинной мощности не более
нескольких градусов. Эти антенны требуют ориентации
электрической оси антенны на пункт приема. Коэффициент
направленного действия таких антенн — от десятков до
десятков тысяч. Различают остронаправленпые антенны с
диаграммой направленности, неизменно ориентирован-
ной относительно конструктивных баз антенны, и мно-
гоэлементные электрически управляемые антенны.
38
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
У последних максимум диаграммы направленности может
быть направлен на пункт приема без изменения ориен-
тации аппарата и без поворота антенны относительно
корпуса. Отметим, что за счет большого количества эле-
ментов (излучателей или приемников) такие антенны
обладают повышенной надежностью. Возможен вариант,
когда одна антенна имеет несколько облучателей. Вклю-
чение того или иного облучателя изменяет направление
максимума диаграммы направленности, т. е. направление
электрической оси антенны.
Ниже рассмотрим более детально остронаправленные
параболические антенны. К настоящему времени нако-
плен достаточный опыт по разработке и эксплуатации
таких антенн на космических аппаратах.
Максимальное значение коэффициента направленного
действия параболической антенны определяется формулой
Лтах=л«Лр (1.9)
где А?р — коэффициент использования поверхности рас-
крыва параболоида; d — диаметр антенны; X — длина
волны.
Аналогично (1.1) можно ввести понятие об эффектив-
ной площади бортовой антенны ГЭфф
*у тах^а
4л ’
где Ку тах — максимальное значение коэффициента уси-
ления, соответствующее величине Dmax- При этом коэф-
фициент кр выражается через /’эфф формулой
Z. ^эфф
^а 4
Для проектных расчетов можно принимать/ср = 0,5 4-0,6.
Зависимость коэффициента направленного действия от
угла 0 между направлением на точку приема и эле-
ктрической осью антенны дается следующей формулой:
Р = ЯтахГ(-у-), (1.10)
где Г (Od/X)— непрерывная дифференцируемая функция.
1.3]
БОРТОВЫЕ АНТЕННЫ
39
Для проектных расчетов в работе [16] была предло-
жена следующая аппроксимация этой функции:
где 0О,б — значение угла 0, при котором D = DmaT/2;
а = 0,69. Угол 0ОЛ определяется соотношением
6о.б = ь4’ <1Л2)
где Ъ — коэффициент, зависящий от формы и конструкции
облучателя и от отношения диаметра антенны к фокусно-
му расстоянию параболоида (обычно b = 0,5 ч-0,7).
На основании (1.9)—(1.12) получим следующую за-
висимость для коэффициента усиления параболической
антенны:
Яу = Т)алг*рехр ’ (1ЛЗ)
где Ла — к.п.д. антенны.
Анализ выражения (1.13) показывает, что величина
Ку имеет четко выраженный максимум при заданном
угле 0 и изменении диаметра антенны d. Значение па-
раметра d/X, при котором Ку достигает максимального
значения при заданном угле 0, определяется формулой
(4Ц=тк- <1Л4>
тогда
, _ л2т]аА- ДО
<1-15)
Минимальное значение коэффициента усиления антенны
Ку min в формуле (1.3) соответствует максимальному зна-
чению угла 0 или, что то же самое, максимальной ошибке
наведения электрической оси антенны на пункт приема
да. Эта величина определяется совершенством системы
управления ориентацией и конструкции аппарата (см.
главу 2) и в некоторых случаях является заданной при
разработке аппарата. Для таких случаев целесообразно
диаметр параболической антенны выбирать оптимальным
в Соответствии с формулой (1.14), положив в ней 0 = да,
так как это дает определенный выигрыш в величине Ку.
40
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
13.5. В настоящее время имеется большое разнообра-
зие конструктивных схем бортовых антенн. Основные
данные бортовых антенн, содержащие их геометрию,
область применения и характеристики, можно найти, в
частности, в [8].
1.4. Система электропитания
1.4.1. Система электропитания предназначена для по-
лучения и аккумулирования на борту электроэнергии,
преобразования ее и распределения между системами,
приборами и агрегатами космического аппарата. Эта си-
' стема включает в себя источник^ электроэнергии, сред-
ства автоматики, ответственные за нормальное функцио-
нирование системы на всех участках полета в штатных и
аварийных ситуациях, и элементы конструкции аппарата,
необходимые для размещения источников электроэнергии.
Источники электроэнергии можно разделить на две
группы: химические батареи и генераторы электроэнергии.
1.4.2. В качестве химических батарей имеют приме-
нение батареи из никель-кадмиевых, серебряно-цинковых
и серебряно-кадмиевых аккумуляторов.
В табл. 1.1. приведены некоторые данные серебряно-
цинковых и никель-кадмиевых аккумуляторов.
Серебряно-кадмиевые аккумуляторы занимают проме-
жуточное положение между вариантами, приведенными
в таблице.
Указанные в таблице данные определяют области при-
менения батарей из этих аккумуляторов. В некоторых слу-
чаях, может оказаться целесообразным применение на од-
ном аппарате различных батарей. Например, если про-
граммой полета предусматривается проведение нескольких
разнесенных по времени и напряженных по емкости сеан-
сов, то для этого может быть использована серебряно-
цинковая батарея. Небольшие же по емкости, но частые
сеансы могут обеспечиваться никель-кадмиевыми аккуму-
ляторами. В промежутках между сеансами и те и другие
батареи могут заряжаться одним генератором.
Выбор типа химической батареи для космического
аппарата проводится с учетом программы работы и графика
электропотребления в течение всего полета, а также
с учетом конструктивных особенностей аппарата. В слу-
1.41
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
41
ТАБЛИЦА 1.1
Тип аккумуля- тора Удельная энергия, Вт-ч/кг Преимущества Недостатки
Серебряно- цинковые 60-120 Большая удель- ная энергия Малое тепловы- деление Выделение водо- рода и кислоро- да (при переза- ряде) Малое количест- во циклов за- ряд-разряд (до 10-300) Ограничения по допустимым по- ложениям при перегрузках
Никель-кад- миевые герме- тичные 20-40 Отсутствие газо- выделений Большое число циклов заряд- разряД (до 2000) Любое положе- ние при пере- грузках Малая удельная энергия Большое тепло- выделение
чаях, когда выбрать тип батареи на основании качествен-
ного анализа невозможно, необходимы достаточно под-
робный расчет и выбор характеристик нескольких вари-
антов системы электропитания с различными батареями
и оценка массовых и прочих затрат по аппарату в целом.
После этого может быть проведен детальный анализ и окон-
чательный выбор варианта.
Промышленность выпускает ряд аккумуляторов и эле-
ментов, равных по напряжению, но различных по емкости
и соответственно по размерам и массе. Для получения
нужного напряжения отдельные аккумуляторы или эле-
менты соединяются в последовательные цепи. Иногда для
получения нужной емкости соединяется параллельно не-
сколько таких цепей.
1.4.3. Переходя к генераторам электроэнергии, остано-
вимся только на двух вариантах, наиболее распростра-
ненных в настоящее время.
42 СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ [ГЛ. 1
Фотоэлектрические генераторы (сол-
нечные батареи). Удельная мощность около Земли при
максимальной освещенности и при нормальной темпера-
туре составляет 50—120 Вт/м2. В качестве основного ма-
териала для элементов солнечной батареи используется
кремний или арсенид галлия, последний сохраняет работо-
способность до более высоких температур. В качестве ос-
новных характеристик, которые необходимо принимать
во внимание при разработке солнечной батареи, системы
электропитания и конструкции аппарата, следует учиты-
вать: удельную мощность при некоторой номинальной
температуре; изменение мощности при отклонениях темпе-
ратуры от номинальной; диапазон рабочих температур;
ьЩссу элементов; вольт-амперную характеристику и изме-
нение ее основных параметров — тока короткого замы-
кания и напряжения холостого хода при изменении осве-
щенности и температуры; оптические коэффициенты (Аз
и е) элементов и, наконец, критичность к частичным затем-
нениям площади и к радиации. Отметим, что эти характе-
ристики нужны на различных этапах проектирования.
Радиоизотопные генераторы. Удель-
ная мощность сильно зависит от полной выходной мощно-
сти, температуры корпуса, примененного изотопа, меро-
приятий по безопасности и находится в пределах от 2 до
50 Вт/кг. Срок службы в основном определяется периодом
полураспада изотопа. Главными недостатками являются
высокие температуры корпуса, радиационная опасность,
трудности регулирования процесса генерирования элек-
трической энергии. В качестве преимуществ следует ука-
зать на отсутствие требований к ориентации аппарата
и независимость мощности от расстояния до Солнца. Для
космических аппаратов в первую очередь важны следую-
щие характеристики этих генераторов: масса и мощность;
температура корпуса; период полураспада изотопа; виды
и интенсивности излучений; вольт-амперная характери-
стика; прочность корпуса при аварийных ситуациях, в
частности при входе в плотные слои атмосферы Земли со
скоростями, возможными для данного аппарата; коэффи-
фициент полезного действия, определяющий количество
активного вещества, необходимое для получения потреб-
ной мощности. От последнего параметра существенно за-
висит стоимость генератора.
1.4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
43
Из других возможных вариантов генератора электро-
энергии укажем на топливные элементы, атомные реак-
торы, термоэлектрические и термоэлектронные генера-
торы, использующие энергию Солнца, и др.; сведения об
этих генераторах можно найти в специальной литературе.
Правильный выбор генератора электроэнергии для
космического аппарата может существенно улучшить
характеристики аппарата,так как тип и параметры электри-
ческого генератора влияют не только на систему электро-
питания, ее массу и надежность, но и на систему управле-
ния ориентацией, конструкцию аппарата, надежность
работы всего электронного оборудования и программу
работы. Сравнение различных вариантов и выбор наиболее
целесообразного типа генератора можно осуществить толь-
ко при разработке конкретного космического аппарата,
так как результаты выбора существенно зависят от схем-
ных и конструктивных решений, найденных при разра-
ботке проекта.
Например, для межпланетных аппаратов и зондов
плоская солнечная батарея, непрерывно ориентирован-
ная на Солнце, начинает проигрывать в массе изотопному
генератору между орбитами Марса и Юпитера. Однако
дополнительная установка солнечных концентраторов мо-
жет значительно расширить область применения солнеч-
ных батарей, хотя и потребует решения целого ряда кон-
структивных проблем, а также увеличения точности ориен-
тации на Солнце или всего аппарата, или концентратора
с солнечной батареей.
1.4.4. Первые космические аппараты не имели генера-
торов электроэнергии, а только химические батареи. В на-
стоящее время в системе электропитания, как правило,
используются генераторы, так как при этом время функ-
ционирования существенно увеличивается. Химические
батареи нашли применение только как дополнение к гене-
ратору, необходимое в тех случаях, когда программа ра-
боты предусматривает редкие, но большие по мощности
нагрузки на систему электропитания, из«за которых не-
целесообразно увеличивать мощность генератора. Хими
ческая батарея может оказаться необходимой также на
тех участках полета, где солнечная батарея не может ра-
ботать, например в тени Земли или при нарушениях ори-
ентации аппарата на Солнце.
44
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
В соответствии со сказанным остановимся на выборе ос-
новных параметров системы электропитания, имеющей в
своем составе и генератор электроэнергии, и химическую
батарею.
На первом этапе проектирования космического аппа-
рата и системы электропитания нужно определить потреб-
ную энергию или емкость химической батареи и мощность
генератора. Если типы батареи и генератора не очевидны,
то эти расчеты должны быть проведены для различных
вариантов. Для указанной цели необходимо иметь график
потребляемой мощности по времени полета (рис. 1.7).
Рис. 1.7. Зависимости потребляемой мощности Р и мощности ге-
нератора 7Vr от времени полета.
Поскольку рассматривается случай с химической бата-
реей, то этот график будет иметь участки, где потребляе-
мая мощность выше мощности генератора. Эти участки на-
зовем сеансами. Интервалы времени, на которых мощность
генератора превышает потребляемую и где может проис-
ходить заряд химической батареи, назовем дежурным ре-
жимом. Отметим, что в общем случае при принятой тер-
минологии деление на сеансы и дежурный режим зависит
от уровня мощности генератора. Действительно, когда
некоторый сеанс отличает от дежурного режима только
большая потребляемая мощность, увеличением мощности
генератора можно данный сеанс «перевести» в дежурный
режим.
1.4)
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
45
Допустим, что некоторый i-й сеанс состоит из nt режи-
мов длительностью Xtj, в каждом из которых электропот-
ребление Ри (j — номер режима). Если длительность се-
анса обозначить через т/, то расход энергии за этот сеанс
et выразится формулой
ni 'i+xi
где N? (0 —мощность генератора электроэнергии; 0 — вре-
мя начала i-ro сеанса.
Для анализа динамики работы системы электропитания
удобно ввести следующие обозначения: Et — энергия,
накопленная в химической батарее к началу i-ro сеанса;
Aj — остаток энергии в химической батарее после прове-
дения i-ro сеанса; Ео — номинальная емкость химической
батареи, т. е. емкость, которую может отдать батарея при
ее первом разряде после полного заряда.
Допустим, что величина £0 определяет максимальный
заряд батареи, при превышении которого отдаваемая ем-
кость не будет превышать Ео. Хотя возможен случай,
когда величина максимально допустимого заряда будет
изменяться в процессе эксплуатации, ограничимся сделан-
ным допущением. Очевидно, что Et Ео, т. е. накопление
электрической энергии в дежурном режиме будет происхо-
дить либо до начала следующего сеанса, либо до момента,
когда величина Et станет равной номинальной емкости
Ео. После этого или начнется перезаряд, или специальная
автоматика прекратит заряд батареи.
С учетом сказанного можно записать
^ = min k_i+T)x.e $ Pn.v(t)]dt,E0} , (1.17)
где Ti — длительность i-ro дежурного режима, предше-
ствующего i-му сеансу: Рдр — электропотребление i-ro
дежурного режима; т)х.б — коэффициент полезного дей-
ствия химической батареи по мощности.
Допустим, что перед выведением на траекторию хими-
ческая батарея полностью заряжена и способна отдать
емкость, равную номинальной, если, конечно, токи раз-
46
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
ряда находятся в допустимых для данной батареи преде-
лах. Кроме того, для определенности предположим, что
сразу после выведения и начала функционирования ап-
парата начинается первый сеанс, т. е. первый дежурный
режим отсутствует. При сделанных допущениях можно
записать следующие формулы:
Д1 = Eq — ^i,
Аг == — ^2»
(1.18)
Ас -
где с — общее количество сеансов; Et — рассчитывают-
ся по формулам (1.16) и (1.17) соответственно.
Условием для выбора номинальной емкости химиче-
ской батареи, а следовательно, выбора ее «размера» будет
требование, чтобы в течение всего полета химическая ба-
тарея не разряжалась ниже некоторого допустимого уров-
ня, т. е. чтобы в ней всегда оставался некоторый запас
энергии. В противном случае напряжение на шинах си-
стемы электропитания может стать ниже допустимой
величины. С другой стороны, если программа работы и гра-
фик электропотребления учитывают аварийные ситуа-
ции и вариации программы, то с точки зрения массы си-
стемы электропитания нецелесообразно иметь неоправ-
данные запасы емкости химической батареи. На основа-
нии сказанного запишем следующее условие для выбора
номинальной емкости химической батареи:
min
где i = 1, . . ., с; ах.б — максимально допустимая глубина
разряда химической батареи, определяемая ее типом и ус-
ловиями эксплуатации (количеством циклов заряд-разряд,
температурой и т. д.).
Для некоторых вариантов химической батареи возмо-
жен случай, когда величина ах.б зависит от времени эк-
сплуатации, т. е. от номера сеанса, для которого величина
Af минимальна, а также от величин разряда и заряда
Ei в предыдущих сеансах.
Выше мощность генератора электроэнергии опреде-
лялась функцией Это не очень удобно, так как из-
(1.19)
1.4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
47
менение мощности генератора по времени полета может
определяться не только параметрами самого генератора,
но и конструкцией космического аппарата, его ориента-
цией и траекторией полета. Поэтому мощность генератора
представим в виде
Nv(t) = Nrfv(t\ (1.20)
где Nr — постоянный параметр, характеризующий гене-
ратор для разрабатываемого косшгческого аппарата.
Для изотопного генератора под NT удобно понимать его
мощность в момент начала функционирования аппарата
или при окончании сборки генератора. Для плоской сол-
нечной батареи 2Vr — мощность в момент выхода на орби-
ту, но при нормальной освещенности батареи. Для неори-
ентированной— или ориентированной частично солнечной
батареи под Nr можно понимать мощность при некотором
определенном положении Солнца относительно аппарата.
Функция /г(0 может определяться только временем
полета и типом генератора — для изотопного генератора;
ориентацией аппарата относительно Солнца, расстоянием
до Солнца, радиацией и попаданием в тень планеты или
Земли — для солнечной батареи; расходами топлива —
для топливных элементов.
Для заданных типа генератора, схемы ориентации и
программы работы, а следовательно, для_известной функ-
ции /г (i) каждому значению параметра АГг будет соответ-
ствовать определенная величина потребной номинальной
емкости удовлетворяющая условию (1.19). Качествен-
ная зависимость Eq(Nt) представлена на рис. 1.8.
Сделаем несколько замечаний по поводу этой зависи-
мости. Если отсутствуют участки полета, где генератор
электроэнергии не может работать, то при увеличении
мощности генератора выше некоторой величины 7Vrmax
отпадает необходимость в химической батарее и кривая
Eq (?Vr) сливается с осью Nr (кривая а). Это, например,
может иметь место для изотопного генератора. Если же
указанные участки полета имеют место (например, полет
искусственного спутника планеты, снабженного солнеч-
ными батареями, в тени планеты), то даже при неограни-
ченном увеличении мощности генератора невозможно
принять емкость химической батареи меньше некоторой
величины £omin, необходимой для обеспечения работы аппа-
48
СОСТАВ П СЛУЖЕБНЫЕ СИСТЕМЫ
(ГЛ. 1
ратуры на этих участках (кривая 6). При уменьшении мощ-
ности генератора возможны два случая. Если время
активного существования аппарата невелико, то уменьше-
ние мощности до нуля требует возрастания емкости ба-
тареи до некоторой конечной величины fomax (кривая в).
Если же время существования аппарата значительно, то
Рис. 1.8. К выбору емкости батареи Ео и мощности генератора Nr,
может оказаться, что при приближении мощности гене-
ратора к потреблению дежурного режима участки с под-
зарядом батареи начнут исчезать, а саморазряд химиче-
ской батареи, имеющий место для всех типов батарей, не
позволит обеспечить работу аппаратуры в течение дли-
тельного времени только за счет предварительного заряда
батареи на Земле. В этом случае при уменьшении мощно-
сти генератора кривая Eq(Nt) будет асимптотически стре-
миться к прямой Nr = jVrmtn (кривая г). _
Поскольку при анализе зависимости ЕОЛ^(Г) приняты
заданными тип генератора и тип батареи, определяющие
в основном надежность работы этих приборов в условиях
конкретного полета, то единственным, если не считать
стоимости, критерием для выбора величин и £0 яв-
ляется масса системы электропитания. В данном случае
важна суммарная масса генератора и химической батареи
А^с.эп’ Очевидно, что при неограниченном возрастании
мощности генератора суммарная масса, начиная с неко-
торого момента, начнет неограниченно возрастать за счет
массы генератора. При уменьшении мощности генератора
возможно также неограниченное возрастание массы си-
М]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
40
стемы энергопитания (для кривой г). При этом функция
Л^с.эп Ш обязательно будет иметь минимум. Возможен
также случай, когда при уменьшении мощности генера-
тора до нуля масса примет некоторое конечное значение
(для кривой в), В любом случае анализ зависимости
Л?о.эп (^г) позволит сделать однозначный выбор основных
параметров системы электропитания.
Для космических аппаратов с длительным временем
существования^! разнообразной программой работы выбор
величин Ео и 7Vr по изложенной методике весьма сложен.
Выбор этих величин иногда можно упростить, рассматри-
вая только наиболее напряженный по расходу энергии се-
анс и не учитывая возможности постепенного накопления
или расхода емкости на соседних участках программы.
В этом случае можно принять
0х.б£о = тах {^}, / = !,...,с. (1.21)
Если наиболее напряженный сеанс имеет индекс т, то
мощность генератора может быть определена из условия
t
т
Пх.б $ [Nr(t)-Pa.PWt = E0. (1.22)
Следует отметить, что мощность генератора, полученная
из условия (1.22), должна быть проверена для других уча-
стков программы, так как на участках, менее напряжен-
ных с точки зрения электропотребления сеансов, величина
функции /г (0 может оказаться меньше, чем для сеанса
с индексом т. Кроме того, сеансы с меньшими расходами
энергии могут следовать друг за другом чаще, и, следова-
тельно, для восстановления емкости может потребоваться
более мощный генератор.
Заметим также, что все изложенное предполагало за-
данной программу работы аппарата. В некоторых слу-
чаях может оказаться необходимым после анализа полу-
ченных параметров системы электропитания и оценки
массовых затрат скорректировать программу и повторить
выбор параметров. Коррекция программы может включать
в себя перестановку некоторых сеансов, увеличение про-
межутков между ними, разделение одного напряженного
сеанса на несколько более коротких и т. д.
50
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
1.4.5. Остановимся на зависимости удельной мощно-
сти солнечной батареи от расстояния до Солнца. Простое
описание этой зависимости в ряде случаев упростило бы
выбор параметров солнечной батареи. В частности, для
аппаратов с достаточно однородной программой, вклю-
чающей в себя проведение типовых, почти одинаковых,
сеансов в течение длительного времени, параметры сол-
нечной батареи должны выбираться для того участка
полета, на котором удельная мощность батареи мини-
мальна.
Удельная мощность солнечной батареи межпланетных
аппаратов и космических зондов в первую очередь опре-
деляется освещенностью и температурой элементов. Рас-
смотрим это подробнее для варианта плоской солнечной
батареи, непрерывно ориентированной на Солнце своей
нормалью и не имеющей тепловых контактов с конструк-
цией аппарата.
Для определения температуры элементов 7\ запишем
уравнение баланса тепла для солнечной батареи, имеющей
вид металлической панели, на которой смонтированы фо-
тоэлементы: *
s [FaAsa + (F - Fa) Л8к] = GoT’J 1^э8э +(F- F3) ек + FeK.T],
(1.23)
где S — удельная солнечная энергия, падающая на ба-
тарею; F — полная площаль панели с элементами; —
суммарная площадь элементов; Лз3, 8э — коэффициент
поглощения солнечной энергии и коэффициент излучения
поверхности элементов; Лзк> ек — то же для конструкции
лицевой стороны панели; ек.т — коэффициент излучения
тыльной стороны панели; сг0 — постоянная Стефана —
Больцмана.
Здесь принято, что температура фотоэлементов равна
температуре остальной конструкции. Уравнение (1.23)
можно использовать и для случая, когда фотоэлементы
смонтированы на сетке с большим коэффициентом пропу-
скания. Для этого варианта нужно положить F9 = F,
а в качестве ек.т принять коэффициент излучения на тыль-
ной стороне элемента.
Из уравнения баланса найдем
Tl = Wy^S, (1.24)
1.4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
51
где
w = 1«/ 1 (>3/f)(Asa-As,<) + ^~
|/ ”0 (^Хвэ-е^ + ^к + ^.т)
Мощность солнечной батареи можно представить в виде
Afc.6=^F8-^-[l-i|3(T1-7’oo)b (1-25)
где 2Voo — мощность единицы площади элементов (удель-
ная мощность) при некотором значении солнечной энер-
гии 500 и номинальной температуре Тоо; гр — коэффици-
ент, учитывающий изменение удельной мощности при из-
менении температуры.
Отметим, что формула (1.25) справедлива, когда вели-
чина Т\ находится в диапазоне рабочих температур эле-
ментов. На основании формул (1.24) и (1.25) запишем
N F
N0.6=-^p-n(S), (1.26)
где
п (S) = (14- ^Гоо) S - $WS y^S.
Если в формуле (1.20) под понимать мощность сол-
нечной батареи при выходе на траекторию при нормаль-
ной освещенности, то связь функции п (5) с функцией
/г (t) определяется следующей очевидной формулой:
= (1-27)
где 5Н — удельная солнечная энергия в точке выхода на
траекторию.
Легко видеть, что величина NQQn (S)/SQQ является
удельной мощностью солнечной батареи для текущего
значения солнечной энергии S. Поэтому для отыскания
участка полета, на котором удельная мощность батареи
минимальна, необходим анализ функции п (S) на интер-
вале [5min, *$maxL Границы указанного интервала опре-
деляются траекторией полета данного космического ап-
парата.
Из формулы (1.26) следует, что функция п (5) имеет
вид, указанный на рис. 1.9, причем характерные точки
этой функции Sx и 52 определяются следующими выраже-
52
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
ниями:
Рис. 1.9. Зависимость относитель-
ной мощности п солнечной ба-
тареи от солнечной энергии S.
S. = 45’- U-28)
На границах интервала [5min, Smax] необходимо про-
верить, находятся ли значения температуры элемен-
тов солнечной батареи внутри рабочего (допустимого
для элементов) диапазона
температур. Если не на-
ходятся, to или принятая
конструктивная схема ба-
тареи, определяемая коэф-
фициентами в формуле
(1.23), или указанный ин-
тервал солнечных энер-
гий — недопустимы. От-
метим также, что с этой
точки зрения функция n(S)
при приближении к нулю около точки теряет физи-
ческий смысл. Поэтому этот участок кривой на рис. 1.9
изображен штриховой линией.
Анализ функции n(S) показывает, что она может до-
стигать минимального значения только на одной из гра-
ниц интервала [5т|П, 5maxL а следовательно, для косми-
ческих зондов и межпланетных аппаратов с программой,
состоящей из однородных сеансов, следующих через рав-
ные промежутки времени, критичным с точки зрения
мощности солнечной батареи может быть либо начало,
либо конец полета. Этот результат не зависит от того,
удаляется или приближается аппарат к Солнцу, и опре-
деляется только структурой формул (1.24) и (1.25). Для
решения вопроса о том, какая из указанных точек
окажется расчетной для выбора солнечной батареи, необ-
ходимо знать величины £min и 5тах, коэффициент запол-
нения панели солнечной батареи элементами FJF, опти-
ческие коэффициенты элементов и конструкции и пара-
метр ф в формуле (1.25).
1.4.6. Линейная зависимость удельной мощности сол-
нечной батареи от температуры фотоэлементов в формуле
(1.25) сохраняется до некоторой температуры Тщах- При
увеличении температуры свыше Ттах зависимость стано-
вится резко нелинейной, а при ее превышении на
20—30 *С батарея практически теряет работоспособность.
MJ
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
53
Для температуры плоской солнечной батареи, не име-
ющей тепловых контактов с конструкцией аппарата,
была получена формула (1.24), однако в основу вывода
этой формулы было положено допущение, что температу-
ра фотоэлементов равна температуре панели, на которой
они установлены. Такое приближение позволило прове-
сти простой анализ зависимости удельной мощности ба-
тареи от солнечной энергии и для этой цели было оправ-
дано. Для определения работоспособности и характеристик
фотоэлементов может оказаться необходимым учет пере-
пада температур между наружным слоем фотоэлемента
и конструкцией панели. Для некоторых вариантов кон-
струкции элементов и их крепления этот перепад темпера-
тур может достигать десяти и более градусов и в отдель-
ных случаях может оказаться критичным из-за разности
линейных расширений элементов, крепежа и панели.
С учетом сказанного выведем более общую формулу для
расчета температуры фотоэлементов. Обозначим темпе-
ратуру наружного слоя фотоэлементов через Гх, а тем-
пературу конструкции панели через Та. В случае, когда
фотоэлементы закрыты пластинками из прозрачного ма-
териала, уменьшающими эрозию и действие радиации,
под будем понимать температуру поверхности защиты.
Уравнение баланса тепла для всей панели с элементами
будет иметь вид
S [^эЛзэ + (F — Fq) 4Sk] =
= do эвэ^ 1 “Ь (F Fq) вкТа FeK.TT{], (1.29)
где обозначения соответствуют формуле (1.24).
Кроме того, пренебрегая тепловыми утечками с тор-
цев фотоэлементов, можно записать следующее урав-
нение:
= 8 А 8э - а0е9Г{, (1.30)
где г — суммарное тепловое сопротивление от наружной
поверхности защиты элемента до поверхности панели.
Если это сопротивление состоит из т параллельных слоев,
толщина каждого из которых Ц и коэффициент тепло-
проводности то
r=‘SW (1.31)
i=l
54
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
(ГЛ. 1
Правая часть уравнения (1.30) представляет собой
разность теплового потока от Солнца, поглощенного еди-
ницей поверхности элемента, и потока, излученного этой
поверхностью. Левая часть — тепловой поток, прохо-
дящий от наружной поверхности элемента к панели или
обратно (в зависимости от знака правой части). Совмест-
ное решение уравнений (1.29) и (1.30) определит инте-
ресующую нас температуру Tv Рассмотрим приближен-
ное решение этих уравнений. При = Т2 уравнение
(1.29) имеет элементарное решение [формула (1.24)], ко-
торое обозначим То. В большинстве случаев — Т2
Ти что дает возможность искать решение уравнений
(1.29) и (1.30) в виде
+ (1.32)
где 6Т << То.
Подставляя формулу (1.32) в уравнение (1.29) и про-
водя линеаризацию относительно малых величин б Г и
Тх — Т2, а также учитывая, что То — решение уравне-
ния (1.29) при Tt = Т2, получим связь между величинами
6Г и Tj - Г2 в виде
(133>
Подставляя формулу (1.32) в уравнение (1.30), после
линеаризации получим
4-(Г1 - Т»)« SASa - о0еа (Tj + 4Tjdf). (1.34)
Совместное решение уравнений (1.33) и (1.34) дает
АТ ’ аоеэ^о)г /л
дТ =-----------. (1.35)
1 - (?-£s) eK + ?eK.T +
где
0 (> 8К "Ь ^®К.Т + ^эеэ а°
Формулы (1.32), (1.33) и (1.35) определяют величины Тх
и Т2.
Как следует из приведенных формул, варьируя опти-
ческие коэффициенты конструкции и коэффициент запол-
1.41 СИСТЕМА ЭЛЕКТРОПИТАНИИ 55
нения площади солнечной батареи элементами F3/F,
можно в широких пределах изменять температуру эле-
ментов. Для не очень больших значений S выбором ука-
занных величин можно добиться выполнения требования
7\ < Гтах- В частности, для аппарата, летящего к Вене-
ре, это требование можно выполнить даже для кремния,
но при этом необходимо иметь FJF х 0,6. Такой метод
выполнения требования T±<Z Тшдл назовем пассивным
охлаждением. Однако возможности пассивного охлажде-
ния не безграничны. Покажем это, используя приближен-
ную формулу (1.24). Так как обычно (4s3 — 4вк)/(8э —
— ек) > 4sK/(eK + ек.т)»то легко видеть, что коэффициент
W в формуле (1.24) не может быть меньше величины
[4sK/tfo (ек + ек.т)]1/<‘ При этом получим следующую оцен-
ку для величины солнечной энергии, удовлетворяющей
указанному выше условию:
S < (Лах Ек т. (1.36)
^Зк
Принимая 8к + 8к.т < 1,8 и Авк > 0,2, найдем, что
при Тщах = 120 °C S < 12000 Вт/м2, а при Ттах = 200 °C
S < 24 700 Вт/м2. Полученные значения солнечной энер-
гии отвечают приближению к Солнцу на 0,34 а. е. и на
0,24 а. е. соответственно.
Отметим, что реально достижимые значения солнечной
энергии при пассивном охлаждении окажутся существен-
но меньше полученных, так как будут определяться раз-
мерами солнечной батареи, необходимыми для получения
нужной мощности генератора. Кроме того, если фотоэле-
менты смонтированы на сетке, то, как выше указывалось,
в формуле (1.23) нужно принять F3 = F, т. е. в этом слу-
чае возможности пассивного охлаждения сводятся только
к выбору оптических коэффициентов.
При некоторых вариантах компоновки солнечная ба-
тарея может испытывать тепловое влияние конструкции
аппарата. Особенно это имеет место для всенаправленных
солнечных батарей, которыми приходится закрывать боль-
шую часть поверхности корпуса. Для таких случаев при
тепловом расчете солнечной батареи должно быть учте-
но это влияние. Последнее может проявиться в появлении
дополнительных тепловых потоков от корпуса аппарата,
56 СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ 1ГЛ. 1
уменьшении теплового излучения с тыльной стороны
батареи и т. д.
1.4.7. Рабочий диапазон температур солнечной батареи
ограничен и минимально допустимой температурой, ко-
торая зависит от материала фотоэлементов, их конструк-
ции и средств крепления к панели. Минимально допусти-
мые температуры лежат в диапазоне от —100 до —250°C.
Следует иметь в виду, что понижение температуры ниже
допустимого уровня может приводить к необратимым
изменениям. Если плоская солнечная батарея непрерыв-
но ориентирована на Солнце, то при уменьшении солнеч-
ной энергии ниже некоторого уровня начинает падать
удельная мощность и, естественно, температура элементов.
Как правило, при удалении от Солнца такая батарея
раньше потеряет эффективность (по сравнению с другими
генераторами электроэнергии) из-за падения удельной
мощности, чем из-за понижения температуры ниже ми-
нимально допустимой. Поэтому проверка на минималь-
ную температуру должна проводиться для тех участков
полета, на которых освещенность солнечной батареи
резко уменьшается либо из-за попадания в тень Земли
или планеты, либо из-за поворотов аппарата.
Для оценки минимальных температур рассмотрим ох-
лаждение изолированной* плоской солнечной батареи, не
освещенной Солнцем. При этом допустим, что температу-
ра батареи во всех ее точках одинакова и равна Т (t).
Такое предположение несколько занижает температуру
элементов, т. е. «идет в запас», поскольку, как правило,
поверхность освещенных фотоэлементов имеет темпера-
туру более высокую, чем остальная конструкция бата-
реи. Для рассматриваемого случая можем записать
СолМс б = - ОоТ* (Гэеэ + (F - F.) ек + FeKT], (1.37)
где Сс.б» АГс.б — соответственно средняя удельная тепло-
емкость и масса солнечной батареи.
После интегрирования уравнения (1.37) получим
Т = + Сс3^--[Р98Э 4- (F - Fa) 8К + /’8К.Т],
(1.38)
где Тп — начальная температура батареи.
1.4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
57
1.4.8. Рассмотрим частный вопрос, связанный с ис-
пользованием солнечной батареи на космическом зонде,
удаляющемся от Солнца. Как указывалось выше, сол-
нечная батарея становится менее эффективной, чем изо-
топный генератор, между орбитами Марса и Юпитера.
Для дальних космических зондов в связи со значительными
расстояниями от Земли может представлять интерес
вариант, когда аппарат с установленной на нем парабо-
лической антенной, начиная с некоторого момента времени,
непрерывно ориентируется на Землю. Схемы построения
системы управления ориентацией, реализующей такой
случай, рассмотрим ниже, а здесь покажем, что для этого
варианта можно в достаточно широком диапазоне рас-
стояний от Солнца использовать плоскую солнечную
батарею, неподвижно установленную на аппарате и ори-
ентированную нормалью не на Солнце, а на Землю.
Если пренебречь влиянием температуры элементов,
что «идет в запас», поскольку аппарат удаляется от Сол-
нца, то мощность солнечной батареи будет меняться об-
ратно пропорционально
квадрату расстояния до
Солнца и прямо пропорци-
онально косинусу угла 0с.б
между нормалью к плоско-
сти батареи и направлени-
ем на Солнце.
При сделанном допу-
щении мощность батареи
^о.б =
=* JVc.ooXs/l-X’sm»0,
(1.39)
где X = 1/р; р — расстоя-
ние от аппарата до Солнца
в астрономических едини-
цах; ДГс.б0 — мощность ба-
тареи при р = 1 а. е. и пол-
ной освещенности, т. е.
при 0с.б = 0.
Угол О определяется положением Земли на ее орбите
и широтой аппарата ср и при любых значениях широты
меняется в пределах от 0 до 180° (рис. 1.10); при прочих
Рис. 1.10. К определению мощ-
ности солнечной батареи, ориен-
тированной нормалью на Землю.
58
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
равных условиях чем ближе этот угол к 90°, тем меньше
мощность солнечной батареи. Поэтому в формуле (1.39)
примем с запасом О = 90° и рассмотрим функцию Y =
= Х2У1 — X2. На рис. 1.10 представлена эта зависи-
мость. Все реальные значения величины ЛГс.б/^с.бо будут
выше приведенной на рисунке кривой. Диапазон рассто-
яний от Солнца, в котором применим рассматриваемый
вариант ориентации солнечной батареи, легко опреде-
ляется, если известно минимально допустимое для данного
аппарата значение мощности батареи. Для орбиты Юпи-
тера, соответствующей р » 5,5 а. е., Y = 0,0325. Кстати,
при таком расстоянии до Солнца мощность батареи, ори-
ентированной на Солнце, составляла бы 0,0331 от значе-
ния мощности на орбите Земли, т. е. на орбите Юпитера
практически безразлично, ориентируется батарея на Сол-
нце или на Землю. Максимум кривой Y (X) соответству-
ет X = sin 0с о = 0,817, или 0Сб ~ 55°. При этом р ж
ж 1,23.
1.4.9. Выше под мощностью генератора электроэнергии
понималась мощность, отдаваемая химической батарее и
приборам аппарата, т. е. полезная мощность. Она зависит
от вольт-амперной характеристики генератора и положе-
ния рабочей точки на этой характеристике, определяющей
напряжение и ток генератора. Рабочая точка в свою оче-
редь определяется электрической схемой, характеристи-
ками входящих в нее элементов и электропотреблением
приборов аппарата. Естественно, что в общем случае по-
лезная мощность меньше максимальной, зависящей от
параметров самого генератора. Общий анализ усложняет-
ся тем, что и вольт-амперная характеристика, и положение
на ней рабочей точки могут меняться в течение полета.
Связанное с этим изменение полезной мощности, строго
говоря, должно быть учтено функцией /г (t) в формуле
(1.20).
Выбор характеристик системы электропитания может
осуществляться последовательными приближениями. На
первом этапе проектирования полную мощность генерато-
ра, определяющую его геометрию и массу, а также пара-
метры химической батареи можно выбрать, учитывая
указанные выше факторы, только в виде некоторого коэф-
фициента запаса, величина которого должна быть опреде-
лена из опыта разработки аналогичных аппаратов. Далее
1.4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
59
необходимо определить номинальное значение напряже-
ния, проанализировав потребности всех бортовых систем и
приборов, и составить электрическую схему генератора и
всей системы электропитания, в результате чего будут оп-
ределены вольт-амперная характеристика генератора, на-
пряжения и токи в системе. При этом нужно учитывать
возможные изменения вольт-амперной характеристики и
нагрузок в полете. В дальнейшем необходимо провести про-
верочный расчет системы и, если это окажется необходи-
Рис. 1.11. Вольт-амперная характеристика солнечной батареи
и электрическая схема системы электропитания.
мым, скорректировать основные параметры генератора и
химической батареи, тем более, что к этому времени обыч-
но удается уточнить график электропотребления за счет
уточнения программы полета и данных отдельных прибо-
ров и систем.
Рассмотрим вопросы, связанные с вольт-амперной ха-
рактеристикой и выбором рабочей точки, на примере сол-
нечной батареи. На рис. 1.11 изображены типовая вольт-
амперная характеристика солнечной батареи и упрощен-
60
СОСТАВ И СЛУЖЕБНЫЕ СИСТЕМЫ
[ГЛ. 1
ный вариант электрической схемы системы электропита-
ния (их.х — напряжение холостого хода; 1к.з — ток корот-
кого замыкания). Отметим, что напряжение холостого
хода в основном зависит от температуры и слабо зависит
от освещенности, причем при возрастании температуры
напряжение убывает. Ток короткого замыкания, наоборот,
мало зависит от температуры, а в основном определяется
освещенностью, причем при увеличении последней воз-
растает.
Из формулы Nr = uir легко получить следующее усло-
вие для определения точки А (и0, гго) на характеристике,
в которой отдаваемая генератором мощность максималь-
на:
при этом
d*r \ {го
du /о и0 ’
Л^гтах = Ио^го.
(1.40)
Из этого условия вытекает простое правило определе-
ния указанной точки для случая графического задания
вольт-амперной характеристики, основанное на том, что
для точки A (u0, iro) треугольник ОАВ на рис. 1.11,
сторона которого АВ касательна к характеристике, яв-
ляется равнобедренным.
С точки зрения максимального использования площади
солнечной батареи выгодно было бы выбрать параметры
системы электропитания таким образом, чтобы номиналь-
ная рабочая точка была как можно ближе к точке А (и0,1^).
Однако для приведенной на рис. 1.11 схемы напряжение
на шинах системы равно напряжению на клеммах химиче-
ской батареи, которое определяется зарядными и разряд-
ными кривыми батареи для различных нагрузок (кривые
g и /). Поэтому неизбежен разброс напряжения Ди за счет
изменения нагрузки и вида работы батареи. Это обстоя-
тельство, а также изменение вольт-амперной характери-
стики за счет изменения солнечной энергии, могут приве-
сти к недопустимому падению тока солнечной батереи. Из
этих соображений для приведенной на рис. 1.11 характе-
ристики целесообразно выбрать рабочую точку на ее по-
логой части (точка С). Если реальная характеристика бу-
дет заключена между указанными на рисунке, то полез-
ная мощность будет заключена в пределах u2i’P2 Агг
1-4]
СИСТЕМА ЭЛЕКТРОПИТАНИЯ
61
^141, а максимальный разброс тока солнечной батареи
не будет превышать Air.
Соответственно коэффициент использования солнечной
батареи будет меняться от (uaira)/(uoiro) до
Необходимо подчеркнуть, что вольт-амперная харак-
теристика солнечной батареи и ее основные параметры и*.*
и г’к.з зависят от электрической схемы соединения отдель-
ных фотоэлементов батареи или их групп. Варьируя эту
схему, можно получить при той же максимальной мощно-
сти, определяемой площадью, освещенностью и темпера-
турой элементов, параметры вольт-амперной характери-
стики, лучше всего соответствующие выбранному номи-
нальному значению напряжения, его разбросу и уходам
самой характеристики за счет различных факторов. Отме-
тим также, что здесь не рассматриваются более сложные
схемы системы электропитания с применением современ-
ных средств автоматики.
1.4.10. В качестве основных мероприятий, повышаю-
щих надежность электропитания приборов и агрегатов
аппарата, можно указать на средства, ограничивающие
заряд химической батареи за счет применения датчиков
ампер-часов или датчиков давления для никель-кадмиевых
герметичных аккумуляторов, и на средства, выключаю-
щие часть нагрузки (например, передатчик или научную
аппаратуру) при понижении напряжения на шинах систе-
мы ниже допустимого уровня. Первые из указанных
средств могут оказаться необходимыми для обеспечения
длительной нормальной работы аккумуляторов. Потреб-
ность во вторых диктуется необходимостью сохранения
в работоспособном состоянии основных систем аппарата,
таких, как командная радиолиния, бортовая система уп-
равления, система управления ориентацией и т. д. Нали-
чие указанных средств необходимо учитывать при разра-
ботке программы и логики работы аппарата.
Выше говорилось о необходимости выбора номиналь-
ного значения напряжения. Однако потребности приборов
аппарата в электропитании характеризуются не только но-
минальным значением напряжения, но и стабильностью
напряжения, частотой (для переменного тока), уровнем
помех по цепям питания ит. д. Некоторые из средств, обес-
печивающих эти характеристики, могут входить в систему
электропитания, другие — в состав системы-потребителя.
ГЛАВА 2
ОРИЕНТАЦИЯ КОСМИЧЕСКОГО АППАРАТА
2.1. Главные задачи и основные режимы
ориентации
2.1.1. Ориентация космического аппарата в простран-
стве необходима, в частности, для решения следующих за-
дач:
обеспечение максимальной освещенности плоских жест-
ко установленных на корпусе солнечных батарей;
наведение остронаправленных антенн на пункты при-
ема информации и передачи команд;
осуществление маневров и коррекций траектории;
обеспечение измерений, необходимых для автономной
навигации;
проведение научных и прикладных исследований (ис-
следование планет и астрофизических объектов, изучение
природных ресурсов Земли и т. д.).
С первой задачей отечественная космическая промыш-
ленность столкнулась при создании межпланетных аппа-
ратов, предназначенных для полета к Венере и Марсу.
Эти аппараты потребовали использования бортового гене-
ратора электроэнергии мощностью 100—200 Вт. Очевидно,
что в качестве такого генератора могла быть использована
солнечная батарея. До этого уже был создан аппарат
«Луна-3», осуществивший фотографирование обратной сто-
роны естественного спутника Земли. На этом аппарате
была успешно испытана всенаправленная солнечная бата-
рея, не требовавшая для своей работы непрерывной ориен-
тации на Солнце. Однако элементарный анализ показы-
вал, что использование этого принципа для межпланет-
ных аппаратов, при существенно больших мощностях
генератора, привело бы к недопустимому для предпола-
гавшейся ракеты выведения увеличению массы. Кроме
того, использование всенаправленной солнечной батареи
затруднило бы обеспечение теплового режима. Поиски
лучшего решения привели к созданию экономичной систе-
2.1]
ЗАДАЧИ И ОСНОВНЫЕ РЕЖИМЫ
63
мы постоянной ориентации на Солнце и плоской солнечной
батареи, нормаль к которой ориентировалась на Солнце
в течение всего полета. Всенаправленные солнечные ба-
тареи, не требующие ориентации на Солнце, имеют приме-
нение и в настоящее время, но на сравнительно простых
космических аппаратах.
Необходимость в наведении остронаправленных антенн
на пункт приема для некоторых космических аппаратов
не требует пояснений и вытекает из сказанного в главе 1.
Маневры предназначены для запланированных изме-
нений траектории космических аппаратов, таких, как,
например, торможение для спуска с орбиты искусствен-
ного спутника на планету, переход на орбиту спутника
с межпланетной траектории, изменение положения пери-
центра и апоцентра орбиты спутника и т. д. Частным слу-
чаем маневра можно считать и спуск аппарата с помощью
реактивных двигателей на планету, лишенную атмосферы,
или Луну.
Коррекции траектории иногда бывают необходимы для
устранения ошибок траектории, возникших, например,
из-за погрешностей выведения или воздействия на аппарат
возмущающих сил.
Под автономной навигацией понимается определение
элементов орбиты или координат центра масс аппарата
в некоторой системе координат в функции времени с по-
мощью измерений, осуществляемых с борта самого аппара-
та. Автономная навигация необходима в случаях, когда
определение траектории с помощью радиосредств, о кото-
рых говорилось в главе 1, не может обеспечить выполнение
задач полета. Последнее может иметь место, если точность
радиоизмерений недостаточна, или вследствие дефицита
времени на данном участке полета, поскольку определение
траектории с нужной точностью на базе радиосредств
требует достаточно большого объема измерений.
2.1.2. Методы ориентации космических аппаратов
можно разделить на три группы.
Первая группа — так называемые активные методы
ориентации. В этих методах для определения отклонений
конструктивных осей аппарата от заданных в простран-
стве направлений и угловых скоростей используются
специальные датчики или, как их часто называют, чувст-
вительные элементы. Для создания управляющих момен-
ОРИЕНТАЦИЯ
[ГЛ. 2
64
тов, возвращающих аппарат к заданному положению по
определенному закону, применяются или реактивные дви-
гатели, или гиростабилизирующие устройства, т. е. только
бортовые средства. Возможен вариант, когда гироскопи-
ческие устройства являются и чувствительными элемен-
тами, и источниками управляющих моментов.
Вторая группа — пассивные методы. Эти методы для
целей ориентации используют какие-либо внешние полез-
ные моменты. При этом определенным выбором внешней
формы аппарата и распределением его внутренних масс
добиваются статической устойчивости, т. е. такой зависи-
мости внешних моментов от углов отклонений осей аппа-
рата от заданного положения, при которой внешние мо-
менты стремятся уменьшить отклонения и вернуть аппа-
рат к исходному положению. Для космических аппаратов,
использующих для ориентации эти методы, имеют приме-
нение следующие внешние моменты; аэродинамические,
моменты сил светового давления, гравитационные момен-
ты и моменты от взаимодействия аппарата с внешним маг-
нитным полем. К пассивным нужно отнести и метод гиро-
скопической ориентации за счет вращения всего аппарата.
Третья группа — смешанные методы. Здесь так же,
как и в методах первой группы, используются специаль-
ные чувствительные элементы, а для создания управляю-
щих воздействий применяются внешние моменты, знак и
величина которых изменяются по заданному закону или
перемещением масс, или поворотом относительно корпуса
некоторых элементов конструкции. К смешанным методам
можно отнести и случаи, когда для устранения угловых
отклонений используются активные методы, а для умень-
шения угловых скоростей — внешние моменты.
Иногда для улучшения характеристик пассивных ме-
тодов ориентации может оказаться целесообразным ис-
пользование каких-либо механических, гидравлических
или электрических устройств, например демпферов, аэро-
динамических щитков, специальных проводников с то-
ком и т. д.
Подробное изложение и анализ различных методов
ориентации можно найти в [18]. Теоретический анализ
отдельных методов содержится также в [4, 5, 10].
2.1.3. Из-за больших времен функционирования косми-
ческих аппаратов для их ориентации в пространстве не-
2.1]
ЗАДАЧИ И ОСНОВНЫЕ РЕЖИМЫ
65
возможно использовать в качестве чувствительных элемен-
тов только гироскопические устройства, сориентированные
нужным образом на Зёмле или на участке выведения. Для
ориентации необходимы внешние ориентиры или полез-
ные внешние моменты в указанном выше смысле. Исклю-
чение составляют космические аппараты, грубая гироско-
пическая ориентация которых в инерциальной системе
координат сохраняется за счет придания им вращения
сразу после выведения на орбиту, и, естественно, неориеи-
тируемые аппараты. Количество внешних ориентиров или
полезных моментов для космического аппарата сравни-
тельно невелико, поэтому перечисленные выше задачи
ориентации, несмотря на их разнообразие, могут быть ре-
шены комбинацией конечного числа некоторых основных
режимов. Под основным режимом здесь понимается уста-
новившийся режим активной, пассивной или смешанной
ориентации одной оси аппарата на некоторый внешний
ориентир. Основные режимы могут быть сведены к сле-
дующим:
ориентация на Солнце;
ориентация на звезды (под последними понимаются и
собственно звезды в астрономическом смысле, и любые
точечные, но достаточно яркие объекты, например плане-
ты, их спутники, астероиды, при достаточно больших
расстояниях от них до аппарата);
ориентация на планеты как объекты, имеющие доста-
точно большие угловые размеры, видимые с аппарата
(например, Земля, Луна, собственно планеты или их
спутники при близком пролете около них);
ориентация по вектору скорости около планеты за
счет использования ионных или аэродинамических эф-
фектов;
использование магнитного поля планеты в сочетании
с собственным электрическим или магнитным полем аппа-
рата;
ориентация по местной вертикали около планеты за
счет использования ее гравитационного поля.
В каждом из указанных режимов можно выделить ва-
рианты, отличающиеся друг от друга диапазонами элект-
ромагнитного излучения или физическими явлениями,
используемыми для реализации данного режима. Напри-
мер, датчик ориентации некоторой оси аппарата на пла-
3 Г. Ю. Максимов
66 ОРИЕНТАЦИЯ [ГЛ. 2
нету может работать или в оптическом, или инфракрасном
диапазоне, а также в радиодиапазоне, используя собст-
венное радиоизлучение планеты или искусственные радио-
сигналы (радиопеленг). Ориентация на Солнце может быть
построена или на основе оптического датчика, или на ис-
пользовании момента светового давления.
ТАБЛИЦА 2.1
Основная характеристика * режима Варианты режима (исполь- зуемый диапазон или явле- ние) Условное обозна- чение режима
Ориентация на Солнце Оптический диапазон Радиоизлучение Световое давление S1 S2 S3
Ориентация на звезду (точечный источник) Оптический диапазон Радиоизлучение — естест- венное или искусствен- ное (радиопеленг) ST1 ST2
Ориентация на планету (объект с конечными види- мыми размерами) Оптический диапазон Радиоизлучение — естест- венное или искусственное Инфракрасный диапазон Р1 Р2 Р4
Ориентация по вектору скорости около планеты Ионные эффекты Аэродинамические эффек- ты R5 R6
Ориентация по местной вертикали за счет 1 грави- тационного поля планеты — G
Использование магнитного поля — ' м
В табл. 2.1 приведены перечисленные основные ре-
жимы, некоторые из вариантов этих режимов, а также ус-
ловные обозначения, которые будут использованы в по-
следующем.
2.1] задачи и ОСНОВНЫЕ РЕЖИМЫ 6?
Необходимо сделать несколько пояснений по поводу
использования введенных основных режимов.
1. Для более строгого разделения внешних ориенти-
ров на планеты и звезды можно предложить следующий
критерий. Если максимальная ошибка ориентации, т. е.
максимальное отклонение некоторой оси аппарата от
заданного положения, больше чем угловой диаметр ориенти-
ра, видимый с аппарата, то данный ориентир можно счи-
тать точечным источником, или условно «звездой», незави-
симо от того, осуществляется ориентация на центр ориен-
тира или его край. Примером «звезды» такого рода может
быть Земля для космического аппарата, удалившегося от
нее на достаточно большое расстояние, например на не-
сколько миллионов километров. Для системы ориентации
этот ориентир ничем не отличается от настоящей звезды
с тем же видимым блеском и спектром излучения. Если
указанное выше условие не выполняется, то ориентир
нужно считать «планетой».
2. Режим R5 применим для достаточно низкого спут-
ника Земли, движущегося на высоте 200—300 км над ее
поверхностью. Этот режим не может обеспечить точность
ориентации лучше нескольких градусов. Главным источ-
ником ошибок здесь являются широтные, сезонные и су-
точные флуктуации характеристик ионосферы Земли и за-
висимость этих характеристик от состояния Солнца. Ис-
пользование этого режима около других планет станет
возможным только по мере накопления информации об
ионосфере этих планет.
3. Режим R6 нашел пока применение для аппаратов,
спускающихся на поверхность планет, обладающих до-
статочно мощной атмосферой.
4. Поскольку под основным режимом понимается ори-
ентация одной оси аппарата, то возможны комбинации не
более чем двух режимов, работающих одновременно,
например S1 Д ST1. Комбинация двух режимов обеспе-
чивает уже трехосную ориентацию аппарата. При этом
обычно управление вокруг двух осей осуществляется по
одному режиму с использованием одного из ориентиров,
а удержание аппарата от вращения вокруг третьей оси,
направленной на ориентир этого режима, производится
с использованием другого режима и другого ориентира.
В этом случае второй режим используется не полностью.
3*
68
ОРИЕНТАЦИЯ
[ГЛ. 2
Для иллюстрации изложенного введем связанную с ап-
паратом прямоугольную систему координат XYZ с началом
в его центре масс. Положения датчиков ориентации, не-
обходимых для реализации двух основных режимов в этой
системе, будем характеризовать векторами и 3%, сов-
падающими с нейтральными осями датчиков, понимая под
последними оси симметрии соответствующих зон нечув-
ствительности. Ввиду малости размеров аппарата по
Рис. 2.1. Связь поворотов <рх, qy, <р2 с отклонениями направлений
на ориентиры от осей симметрии и Nt датчиков.
сравнению с расстояниями до ориентиров бее малейшего
ущерба для строгости анализа векторы N\ и ЛГ2 можно
провести через центр масс. Оси координатной системы
XYZ проведем так, чтобы ось X совпадала с вектором 2Vrlt
а ось Y была расположена в плоскости векторов и АГ2.
В результате получим схему, изображенную на рис. 2.1.
Рассмотрим малые элементарные повороты фх, фу, фг
системы XYZ вокруг ее осей. За исходное примем поло-
жение, при котором векторы и А% направлены на со-
ответствующие ориентиры. Непосредственно на рисунка
получим связь отклонений векторов и ЛГ2 от направле-
ний на ориентиры с элементарными поворотами (на ри-
сунке новые положения осей координат и векторов 2ГХ и
изображены штриховыми линиями):
Ф1 ~ Фу» Фа фг» фз ж фх sin А,
где фп ф2, фз — отклонения векторов и от направ-
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
69
лений на ориентиры в плоскостях XZ, XY и Z№2 соответ-
ственно; Л — угол между векторами и JV2.
Отсюда следует, что угол между направлениями на
ориентиры, используемые в двух одновременно работаю-
щих режимах, не должен быть близок к нулю. В против-
ном случае поворот аппарата вокруг одного из направлений
на большой угол будет вызывать малый угол откло-
нения второго ориентира от оси его датчика и, следова-
тельно, будет затруднено получение нужной точности
ориентации аппарата. Очевидно, что в случае применения
одновременно двух основных режимов сигналы от соот-
ветствующих датчиков поступают в единый логический
блок системы управления ориентацией, где и вырабаты-
ваются соответствующие управляющие сигналы на испол-
нительные органы, создающие необходимые моменты.
5. Удобство использования введенного понятия основ-
ного режима заключается в том, что каждый из указанных
режимов (или их комбинация) определяет типы соответ-
ствующих чувствительных элементов, требования к их
установке и в некоторых случаях требования к форме
аппарата и распределению внутренних масс. Поэтому
облегчается выбор схемы ориентации аппарата при раз-
работке его проекта и упрощается описание этих схем и
характеристик аппарата, необходимое при анализе раз-
личных вариантов.
6. Перечисленные в табл. 2.1 режимы могут включать-
ся как на длительное, так и на короткое время с после-
дующим запоминанием ориентации на гироскопических
устройствах или с помощью бортовой цифровой вычисли-
тельной машины и датчиков угловых скоростей [18].
2.2. Пути решения некоторых задач ориентации.
Возмущающие моменты
2.2.1. Обеспечение максимальной освещенности плос-
кой солнечной батареи чаще всего решается режимом 51,
причем в качестве оси ориентации должна быть выбрана
ось аппарата, параллельная нормали к солнечной бата-
рее. Наиболее естествен этот режим для межпланетных
аппаратов, большую часть времени полета освещенных
Солнцем. В этом случае для нормальной работы солнеч-
ной батареи достаточно одноосной ориентации, так как
70
ОРИЕНТАЦИЯ
[ГЛ. 2
вращение вокруг этой ориентированной на Солнце оси
не приведет к изменению освещенности батареи. Если же
в качестве ориентира используется не Солнце, то необ-
ходима трехосная ориентация аппарата. Единственным
исключением будет редкий случай, когда угол между на-
правлением на Солнце и на ориентир близок к 180°.
С учетом сказанного рассматриваемая задача может быть
также решена, например, комбинацией режимов ST1
и Р1 вблизи планеты или комбинацией двух режимов
ST1 при ориентации на две различные звезды, если аппарат
находится далеко от Земли и планет. Однако, если такие
схемы ориентации не нужны для решения других задач,
они вызовут неоправданные усложнения аппарата, во-
первых, из-за движения Солнца относительно любых
других ориентиров и, во-вторых, из-за того, что другие
ориентиры имеют яркость существенно меныпую, чем
Солнце. Движение Солнца относительно звезд и планет
потребовало бы или поворотов оптических труб *), или по-
ворота солнечной батареи относительно аппарата, причем
последнее противоречит постановке рассматриваемой за-
дачи ориентации. Повороты оптических труб усложняют
оптический датчик ориентации и затрудняют его разме-
щение на аппарате из-за необходимости защиты датчика
от попадания солнечных лучей.
К этому нужно добавить, что обычно ориентация сол-
нечной батареи на Солнце осуществляется в течение всего
полета, а следовательно, этот режим ориентации должен
быть особо надежным и экономичным с точки зрения рас-
ходов рабочего тела и электроэнергии. Высокой экономич-
ности и надежности легче добиться от простого солнечного
датчика, чем от более сложных звездных или планетных.
Задачу ориентации солнечных батарей можно решить и
пассивной гироскопической ориентацией всего аппарата,
которая осуществляется предварительной ориентацией на
Солнце и приданием аппарату вращения вокруг,.нормали
к солнечной батарее. При этом должны быть выполнены
условия устойчивости этого вращения. Несмотря на за-
манчивую простоту и экономичность, этот способ имеет
*) Здесь и ниже под поворотами оптических труб понимаются
угловые смещения нейтральных осей датчиков, реализуемые или
механическими поворотами соответствующих оптических элемен-
тов, или специальными электрическими сигналами.
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
71
ограниченное применение из-за движения Солнца отно-
сительно звезд. Иногда гироскопическую ориентацию
применяют в качестве режима, дублирующего активный
режим. Дублирование может оказаться целесообразным
в случаях непредвиденных сбоев на тех участках полета,
на которых отсутствует радиосвязь с аппаратом. Под сбоем
здесь понимается выход Солнца из некоторой зоны дат-
чика, называемой зоной наличия. Перед вращением аппа-
рат снова должен найти Солнце по автономной программе,
заложенной в его систему управления. В следующем после
сбоя сеансе можно провести анализ причин потери Солнца
и решить, оставить ли аппарат в режиме гироскопической
ориентации или возобновить активный режим. Подроб-
нее эти вопросы будут рассмотрены ниже, при анализе
логики управления космическим аппаратом.
Заканчивая рассмотрение задачи ориентации солнеч-
ных батарей, остановимся на потребной точности этой
ориентации. Поскольку мощность солнечной батареи
пропорциональна освещенности, а последняя, как из-
вестно, пропорциональна косинусу угла между нормалью
к плоскости батареи и направлением на Солнце, то отно-
сительная потеря мощности батареи bNc^/Nc,6 за счет
ошибки ее ориентации на Солнце 6s выразится формулой
<2Л>
/vc.6 z
Не приводя подробных вычислений, укажем, что сум-
марная ошибка расчета мощности солнечной батареи
по времени полета за счет погрешности знания солнечной
энергии, ошибок прогноза радиационной обстановки и
температуры фотоэлементов иэ-эа уходов в полете опти-
ческих коэффициентов достигает нескольких процентов.
Следовательно, как видно иэ формулы (2.1), ошибка ори-
ентации + (5—10)°, приводящая к ошибке мощности
0,4—1,5%, заметно не увеличит незнание истинной мощ-
ности батареи. Если на космическом аппарате установлены
малонаправленные4' антенны, использующие режим ори-
ентации на* Солнце’(см. главу 1), то в некоторых случаях
для такого аппарата может возникнуть необходимость
увеличения точности рассматриваемого режима до
± (1-2)°.
72
ОРИЕНТАЦИЯ
[ГЛ. 2
Следует отметить, что увеличение точности любого из
указанных режимов ориентации, как правило, приводит
к увеличению расходов рабочего тела или электроэнергии,
усложнению датчиков и усложнению юстировочных ра-
бот. Поэтому нежелательно увеличение точности ориен-
тации, если это не диктуется задачами данного космиче-
ского аппарата.
2.2.2. Перейдем к рассмотрению другой задачи ориен-
тации — наведению остронаправленных антенн. Очевид-
но, что для решения этой задачи наиболее естественно
использовать радиопеленгационную систему, наводящую
антенну непосредственно на пункт приема информации,
т. е. использовать режимы ST2 или Р2 в зависимости от
дальности до планеты, на поверхности которой размещен
пункт приема. При этом достаточно одноосной ориентации
электрической оси антенны.
Если по техническим причинам радиопеленгационпый
режим не может быть реализован на данном космическом
аппарате, то необходимо проанализировать варианты на-
ведения антенны, использующие другие режимы из ука-
занных в таблице 2.1. Предварительно нужно сделать
следующее замечание. Диаграмма направленности антен-
ны обычно характеризуется углом 0Ot5 между электриче-
ской осью антенны и направлением, вдоль которого коэф-
фициент направленного действия вдвое меньше, чем на
оси (см. главу 1). Примем, что максимальная ошибка на-
ведения оси антенны на приемный пункт ба должна быть
меньше угла Оо,6 или в крайнем случае равна этому углу.
С учетом сказанного рассмотрим два варианта взаимного
расположения космического аппарата и планеты, на ко-
торой находится пункт приема информации (рис. 2.2).
В первом варианте видимый с аппарата угловой радиус
планеты ап, угол 0О,5 и максимальная ошибка ориентации
оси антенны ба удовлетворяют неравенству
6а + Цщ 0о,5- 4 (2.2)
В этом варианте для наведения оси антенны на пункт,
произвольно расположенный на поверхности планеты,
достаточно ориентации этой оси на центр планеты.
Здесь целесообразно различать два случая. В первом
планета с пунктом приема информации может быть ис-
пользована как ориентир. При этом в зависимости от рас-
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
73
стояния до планеты и диапазона, в котором работает дат-
чик ориентации, могут быть применены следующие ва-
рианты режимов:
ST1\/P1\/P4.
В данном случае достаточно иметь одноосную ориен-
тацию. Режимы Р и Сне указаны по той причине, что рас-
сматриваемый] вариант, когда выполняется условие
Рис. 2.2. Взаимное расположение планеты и космического аппа-
рата в задаче наведения антенны.
(2.2), имеет место, как правило, на таких высотах над пла-
нетой, на которых эти режимы мало эффективны. Во вто-
ром случае, когда планета с пунктом приема информации
не может быть использована как ориентир (из-за больших
расстояний или из-за близкого расположения планеты
к Солнцу), необходимы, как правило, трехосная ориен-
тация аппарата и программные повороты относительно
корпуса либо антенны, либо чувствительных элементов
системы ориентации. В этом случае могут представлять
интерес следующие сочетания основных режимов:
ST1/\ST1,
S1Д ST1,
(Р1\/ Р4)/\(S1\/ ST1).
(2.3)
Естественно, что здесь под режимами Р понимаются
режимы ориентации не на планету с пунктом приема,
так как тогда мог бы быть реализован более простой пер-
вый случай. Заметим, что для межпланетных аппаратов
и
ОРИЕНТАЦИЯ
[ГЛ. 2
и дальних зондов наибольший интерес представляет
вариант S1 Д ST1, который будет подробно рассмотрен
ниже.
Второй вариант взаимного положения аппарата и пла-
неты будет иметь место, когда неравенство (2.2) не выпол-
няется, т. е. при
ба 4" 6о,5* (2*4)
Если выполняется условие (2.4), то уже недостаточно
ориентации оси антенны на центр планеты и нужно ис-
пользовать какие-либо два режима, совместно обеспечи-
вающие трехосную ориентацию аппарата. Когда известно
движение пункта относительно ориентиров, то наведение
антенны обеспечивается так же, как во втором случае
первого варианта, т. е. программными поворотами антен-
ны или чувствительных элементов. Если антенна установ-
лена на аппарате неподвижно, то возможны следующие
варианты ориентации:
ST1/\ST1. 1
S1Д ST1,
(P1VP4)/\(S1VST1), (2.5)
(R5\/ R6) /\S1,
6Д51. J
Отметим, что режимы R6 и G являются пассивными,
а следовательно, они требуют определенного положения
аппарата относительно вектора скорости или местной
вертикали. Это значит, что при использовании этих ре-
жимов антенна должна поворачиваться по программе
относительно аппарата. Следует обратить внимание на то,
что режимы с использованием Солнца в качестве ориен-
тира не могут быть применены на теневых участках ор-
биты. Отметим также, что приведенные выше варианты
не содержат сочетании режимов R со звездной'ориента-
цией. Это не случайно, поскольку ошибка ориентации
по вектору скорости может достигать нескольких граду-
сов, что затрудняет поиск звезды. Иметь же специально
для осуществления этого поиска еще один датчик, напри-
мер солнечный, вряд ли целесообразно. Вообще говоря,
рассмотренные варианты с использованием трехосной
ориентации и программным поворотом антенны или чув-
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
75
ствительных элементов достаточно сложны для космиче-
ских аппаратов, пролетающих близко от планеты, хотя бы
из-за необходимости программных поворотов, которые
в общем случае будут различны при каждом пролете ап-
парата в зоне видимости пункта приема. Эти программные
повороты несколько упрощаются для стационарных спут-
ников, находящихся практически над одним и тем же
районом планеты, за счет периодических коррекций ор-
биты.
Сложность рассмотренных вариантов требует внима-
тельного анализа их необходимости при разработке кон-
кретного космического аппарата. В некоторых случаях
может оказаться целесообразным расширить диаграмму
направленности антенны, соответственно увеличив мощ-
ность бортового передатчика, для того чтобы не изменить
скорость передачи информации. При этом существенно
упростится система управления ориентацией, так как
при достаточно большом увеличении угла 0О,5 и прежних
значениях других двух углов станет выполняться усло-
вие (2.2) и окажется возможной ориентация на центр пла-
неты, рассмотренная выше.
2.2.3. Остановимся на точности наведения антенны
на пункт приема информации. Довольно часто использу-
ется требование, чтобы ошибка наведения не превышала
угла 0О|б, 470 и принималось выше при рассмотрении раз-
личных вариантов наведения антенн. Это достаточно
условное требование вытекает из тех соображений, что
коэффициент запаса х в формуле (1.3) обычно принимают
равным 5—10. При этом уменьшение коэффициента на-
правленного действия антенны в два раза за счет ошибок
ориентации считается еще допустимым. Угол 0О,5 как
главный показатель ширины диаграммы направленности
рассчитывается или определяется экспериментально в про-
цессе разработки остронаправленной антенны, т. е. эта
величина известна при проектировании аппарата. С дру-
гой стороны, чрезмерное повышение точности нецелесо-
образно из-за усложнения системы ориентации и из-за
того, что диаграмма остронаправленной антенны имеет
максимум при 0 = 0, а следовательно, около этого мак-
симума коэффициент направленного действия незначи-
тельно меняется при малом отклонении оси антенны.
Для параболической антенны, по-видимому,можно при-
76
ОРИЕНТАЦИЯ
[ГЛ. 2
пять, что максимально допустимая ошибка наведения оси
антенны 6а должна находиться в пределах
да = (0,5-н 1,0) 00,5. (2.6)
Если использовать аппроксимацию диаграммы направ-
ленности параболической антенны, приведенную в гла-
ве 1, то этому будет соответствовать следующий диапазон
значений коэффициента направленного действия антен-
ны:
D = (0,9-г-0,5) Dmax.
Такой подход к определению точности наведения до-
пустим для антенны с заданными характеристиками.
Напомним, что угол 0О,5 зависит от диаметра параболи-
ческой антенны и длины волны. Если указанная выше
точность не может быть реализована, а реализуется толь-
ко некоторая величина 6а, большая чем 6а, определенная
условием (2.6), то тогда для обеспечения точности 6а
целесообразно выбрать антенну с диаметром, для кото-
рого коэффициент направленного действия или коэффи-
циент усиления максимален. Эта задача была рассмотрена
в главе 1.
2.2.4. В некоторых случаях потребная точность ори-
ентации может быть определена более строго. Рассмотрим
два таких случая. В первом из них будем считать задан-
ной из условий радиосвязи величину гарантированного
коэффициента усиления параболической антенны Ку,
соответствующую максимальной ошибке наведения оси
антенны на пункт приема информации 6а. Для приведен-
ной в главе 1 аппроксимации диаграммы направленности
величина 6а, реализующая заданное значение Ку, опре-
деляется формулой (1.13), если ее разрешить относитель-
но 0 и затем принять 6 = 6а. На рис. 2.3 представлены
кривые 6а (dA), Для различных значений ЛГу/т]а< при
лйр = 5, b = 0,61, о = 0,69. Из приведенных графиков
следует, что величина 6а имеет четко выраженный мак-
симум, величина которого легко определяется известными
методами с помощью выражения (1.13):
max — Л&
1/2VL
V "КУ
(2-7)
2.21
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
77
Соответствующий диаметр антенны определится фор-
мулой
(2.8)
Заметим, что формулы (2.7) и (2.8) могут быть получены
и непосредственно из выражений (1.14) и (1.15).,
Очевидно, что для рассматриваемой задачи, когда
задана величина Ку, имеет смысл выбирать величину ба
Рис. 2.3. Зависимость допустимой ошибки наведения параболи-
ческой антенны да от параметров d/X и А7у/т]а.
по формуле (2.7), поскольку точность ориентации должна
выбираться настолько низкой, насколько это допустимо
для данного космического аппарата. Как следует из
рис. 2.3, если точность ориентации, определяемая форму-
лой (2.7), не может быть реализована, то это приведет
к уменьшению величины Ку относительно заданного зна-
чения, причем изменение диаметра антенны не может
улучшить положение. Если оптимальная точность реали-
зуется, но диаметр, рассчитанный по формуле (2.8), не
может быть принят из массовых или геометрических
соображений, то можно, несколько уменьшив угол ба,
сохранить заданную величину Ку, что соответствует
движению вдоль кривой 6а (d/X) в сторону уменьшения
d/X. Если же увеличение точности нежелательно, то при-
дется уменьшить величину Ку, перейдя по прямой
6а = const на кривую 6а (d/X), соответствующую мень-
шему значению ЛГу/т)а.
2.2.5. Точность наведения параболической антенны
также может быть достаточно строго определена, если рас-
78
ОРИЕНТАЦИЯ
[ГЛ. 2
смотреть затраты на поддержание ориентации оси антенны
на пункт приема. Из всех средств создания управляющих
моментов в активном режиме установившихся колебаний
остановимся только на случае, когда управляющие мо-
менты создаются за счет работы реактивных двигателей.
Предположим, что система исполнительных органов ра-
ботает таким образом, что при угловых отклонениях ап-
парата, соответствующих границам зоны нечувствитель-
ности датчиков, управляющие импульсы моментов, воз-
вращающие аппарат внутрь этой зоны, создаются за счет
кратковременного включения реактивных двигателей.
Из анализа работы системы управления ориентации (см.
[18]) следует, что при достаточно малых возмущающих
моментах средний расход массы реактивных двигателей
обратно пропорционален половине зоны нечувствительно-
сти системы ориентации <р0, т. е. для указанных случаев
имеем
= (2.9)
<Ро '
где М' — средний расход массы; Аг — коэффициент, за-
висящий от параметров системы управления ориентацией,
моментов инерции аппарата и характеристик системы ис-
полнительных органов.
Формула (2.9) справедлива при равных зонах нечув-
ствительности по различным каналам управления.
Введем понятие относительной скорости передачи
информации С', под которой будем понимать отношение
скорости передачи информации С к среднему расходу
массы М’. Чем больше величина С", тем больше может
быть передано информации при заданном запасе рабочего
тела или тем меньше потребный запас рабочего тела при
заданном объеме передаваемой информации. Как следует
из формулы (1.3), скорость передачи информации С за-
висит от максимальной ошибки наведения электрической
оси антенны на пункт приема информации 6а, так Ъсак
эта ошибка при прочих равных условиях определяет
гарантированное значение коэффициента усиления ан-
тенны Arymtn. Из предыдущего рассмотрения различных
методов наведения антенны ясно, что в этом процессе
участвуют различные приборы и механизмы, размещенные
в различных местах космического аппарата.
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
79
В общем случае можно записать
ба = фо + Д, (2.10)
где Д — максимальное рассогласование между средним
положением электрической оси антенны в процессе уста-
новившихся колебаний и направлением на пункт приема.
Формула (2.10) предполагает худший с точки зрения
величины ба случай, когда колебания аппарата проис-
ходят в плоскости, проходящей через направление на
пункт приема и направление, определяющее среднее по-
ложение электрической оси антенны. Необходимо также
отметить, что максимальная ошибка системы ориентации,
определяемая углом <р0, задается еще на стадии разра-
ботки этой системы. Если во время установившихся коле-
баний возвращение аппарата внутрь зоны нечувствитель-
ности осуществляется, как выше указывалось, импуль-
сами моментов и если возмущающие моменты достаточно
малы, то колебания аппарата происходят с амплитудой,
равной углу <р0. Заметим, что Д является ожидаемым мак-
симальным значением некоторой случайной величины.
Хотя вероятность достижения величины Д незначительна,
при определении допустимых скоростей передачи инфор-
мации [величины XymiQ в формуле (1.3)] следует прини-
мать во внимание именно эту величину. Поскольку обыч-
но скорость передачи информации меняется в полете дис-
кретно с достаточно большим шагом, то ухудшение энер-
гетического потенциала радиолинии из-за неправильной
оценки величины ба и уменьшения коэффициента усиле-
ния антенны может привести к тому, что запланированная
на данном участке полета скорость передачи информации
не будет реализована.
Величина Д в зависимости от принятого метода наведе-
ния может зависеть от следующих факторов:
ошибки определения электрической оси антенны;
ошибки юстировки электрической оси антенны отно-
сительно конструктивных баз чувствительных элементов
системы ориентации или антенны, принимающей радиопе-
ленгационные сигналы;
неучтенные деформации конструкции в полете, приво-
дящие к дополнительным угловым рассогласованиям меж-
ду осью антенны и осями чувствительных элементов систе-
мы ориентации;
80
ОРИЕНТАЦИЯ
[ГЛ. 2
погрешности расчета необходимых программных по-
воротов антенны или чувствительных элементов;
погрешности осуществления необходимых програм-
мных поворотов (предполагается, что скорости этих поворо-
тов существенно меньше угловых скоростей аппарата в ре-
жиме установившихся колебаний).
Из соотношений (1.3), (1.13) при 0 = 6а и (2.9), (2.10)
следует, что интересующая нас величина С определяется
выражением
С'==В1Фо(4УвхР [--S(4)2(<po+Д)»], (2.11)
где коэффициент Вг не зависит от d/k и <р0.
Рассматривая выражение для С как функцию двух
переменных d/X и <р0, найдем экстремум этого выражения.
Для этого определим частные производные функции
у = СЧВХ по указанным переменным:
[1-2фо(фо+Д)-^-(4) ] х
Хехр[-4(4)2(фо + Д)2], (2-12)
д (d/X) = 2 (т)4,0 t1 — р’ (т) (<fo + х
X ехр [— 4 (4)2 (ф» + д)’] ’ (2ЛЗ)
Приравнивая выражения (2.12) и (2.13) нулю и решая их
совместно (отбрасывая при этом решения, не имеющие фи-
зического смысла), найдем, что в точке
d d _ Ь
к ~ к ~ гдуТ ’
фо = фо = А
(2.14)
выполняются необходимые условия экстремума.
Для анализа выполнения достаточных условий и ха-
рактера экстремума вычислим значения вторых Производ-
ных функции у (d/k, ф0) в точке (2.14). В результате по-
лучим
д*у 3d» д*у _ 4Д
“^5 8Д»ае ’ d(d/k? ~ е >
д*у Ъ
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
81
Кроме того, для точки (2.14) найдем значение определителя
д*у д2у
д (dll)* д (d/A.) д<рф
d(d/k)dyQ
Ь*
Проведенные вычисления показывают, что в точке (2.14)
функция Cf (d/k, ф0) достигает максимального значения.
Таким образом, если для данного космического аппарата
целесообразно стремиться к большому значению относи-
тельной скорости передачи информации С", то половина
зоны нечувствительности датчиков системы ориентации и
диаметр параболической антенны должны выбираться
в соответствии с формулами (2.14). При этом может ока-
заться, что угол ф0 не может быть технически реализован,
а реализуется только некоторый угол ф0 > ф0. В этом
случае можно найти диаметр параболической антенны,
реализующий максимум величины С' при ф0 = Фо» из
выражения (2.13), если приравнять его нулю и разрешить
относительно d/k. В результате этого для оптимального
диаметра антенны получим выражение (1.14), если в по-
следнем положить 0 = ф0 + Д. Этого следовало ожидать,
так как выражение (1.14) реализует максимум коэффици-
ента усиления при заданном отклонении направления на
пункт приема от электрической оси антенны, а максимум
коэффициента усиления при этом соответствует макси-
мальному значению и относительной скорости передачи
информации.
Гораздо больший интерес представляет случай, когда
точность ориентации, характеризуемая условием ф0 = Д,
реализуется, но диаметр параболической антенны, опреде-
ляемый первой формулой (2.14), не может быть реализо-
ван. Обозначим реализуемый диаметр через естественно
принять, что d < d. Полагая в формуле (2.12) d == 3,
приравнивая полученное выражение нулю и разрешая от-
носительно ф0, получим следующую формулу для опти-
мальной точности ориентации:
*»1=4|Хда+2-г(тГ ~А]- <2Л5>
82
ОРИЕНТАЦИЯ
[ГЛ. 2
Легко видеть, что поскольку по предположению d/k <
< d/X, a d/X = д/2Д^о, то величина ф01, определяемая
выражением (2.15), всегда больше Д, т. е. если технически
реализуется точность ориентации равная Д, то реализует-
ся и величина ср01, оптимальная при заданном диаметре
параболической антенны, меньшем, чем диаметр, рассчи-
танный по первой формуле (2.14). Верно и обратное: если
Э/Х > Ъ/2^У о, то фо1 < Д- На этом можно закончить раз-
бор вариантов задания точности ориентации. Приведенные
примеры уже показывают, что в ряде случаев совместный
анализ вопросов наведения остронаправленных антенн на
пункт приема и вопросов радиосвязи может привести
к улучшению характеристик аппарата.
2.2.6. Рассмотрим еще одну задачу ориентации — осу-
ществление маневров и коррекций траекторий космиче-
ских аппаратов. Под коррекцией будем понимать исправ-
ление траектории, необходимое для решения задач полета.
Потребность в таком исправлении может возникать или
из-за ошибок выведения на траекторию, или из-за дейст-
вия на аппарат возмущающих сил, или, наконец, из-за
ошибок исполнения предыдущих коррекций. До прове-
дения коррекции необходимо определить фактическую
траекторию космического аппарата [13а].
Под маневром будем понимать плановое изменение
траектории, которое необходимо даже в случае, если ап-
парат выведен на траекторию без ошибок. В качестве
примеров укажем на спуск с орбиты искусственного спут-
ника планеты и на переход с орбиты спутника планеты на
межпланетную траекторию. Некоторые маневры так же,
как и коррекция, проводятся после определения фактиче-
ской траектории аппарата. Проведение маневров или
коррекций требует приложения к центру масс аппарата
каких-либо дополнительных внешних сил. Наибольшее
распространение получило применение для этой цели
бортового реактивного двигателя, хотя принципиально
возможно использование и таких сил, как световое давле-
ние или аэродинамические силы для низкого спутника
планеты.
Рассмотрим движение центра масс аппарата в неко-
торой прямоугольной системе координат Х1ХгХ3, близкой
к инерциальной, для случая, когда в качестве указанной
выше силы используется сила тяги реактивного двигате-
2.2] ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ 83
ля. Уравнение движения в этой системе запишем в виде
M^-p = R + Q, (2.16)
где М — масса аппарата; р — радиус-вектор центра масс
относительно начала координат; It —- сила тяги двигате-
ля; Q — равнодействующая всех остальных сил, дейст-
вующих на аппарат.
Поскольку нас интересует изменение параметров тра-
ектории, то процесс коррекции или маневра удобно рас-
сматривать относительно так называемого невозмущенного
движения, т. е. движения аппарата при отсутствии силы
тяги.
Уравнение невозмущенного движения, характеризуе-
мого вектором р0, будет иметь следующий вид:
М^-ро = Оо- (2.17)
Вычитая уравнение (2.17) из (2.16) и обозначая Др =
— р — р0, получим
М^-Др = Ж + «?-Оо). (2.18)
Начальными условиями при решении уравнения (2.18)
будут
t.= 0, Др = 0, -^-Др = О. (2.19)
Рассмотрим наиболее распространенный случай, когда
вектор Q зависит только от координат аппарата. При этом
иногда проекции вектора Q — Qo на оси системы коорди-
нат удобно выразить формулами
aQx aQx aQx
(Q - =-з^ Дал + Дх, 4- Дх8 +
+ -r^r-M + i^-AxxAxs +
1 А А
где Qxi — проекции вектора Q на оси координат; &xt =
— х19; £ = 1,2,3; частные производные вычисляют-
84
ОРИЕНТАЦИЯ
[ГЛ. 2
ся для невозмущенного движения; xt и xiQ берутся для
одного и того же момента времени.
Рассмотрим вначале вариант, когда время работы дви-
гателя настолько мало, а ускорение силы тяги настолько
велико, что изменения координат несущественны и
вектор Q — Qq в уравнении (2.18) можно не учитывать,
т. е. принять | Q — Qo |<С 1-®1* При этом для большин-
ства вариантов маневров и коррекции изменения коорди-
нат в конце работы двигателя практически не влияют на
последующее движение. На это движение в основном влияет
изменение вектора скорости ДР. Принимая ДР = -^-Др
и Q —• Qq = 0, из уравнения (2.18) получим следующее
выражение для определения вектора ДР
ДГ = J -g-df, (2.20)
где и tK — время начала и окончания работы двигателя
соответственно.
Скорость аппарата в момент выключения двигателя
определится как Р (tK) = VQ (tK) + ДР, где Ро (tK) —
скорость невозмущенного движения в момент времени tK.
Процесс изменения траектории планируется и рассчи-
тывается заранее, но после определения фактического дви-
жения аппарата. При этом определяется требуемый вектор
изменения скорости ДРТ. Введенную выше систему коор-
динат Х1ХгХ9 расположим так, чтобы ось Хг была парал-
лельна вектору ДРт,и на эти координатные оси спроекти-
руем уравнение (2.20):
1к Д^=$ j * И
t9 *к Rx , —— dt, м ’ ► (2.21)
д Rx -^-di, ч
где Rxi, Rxf, Rx9 — проекции силы тяги на оси координат.
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
85
Естественно потребовать, чтобы величина AVxt была
как можно ближе к модулю вектора AFT, и величины ДKv2
и ДУх> были как можно меньше. Так называемые «боко-
вые» скорости ДУх, и ДУх>, а также величина ДУх1 —
— | AFT| являются погрешностями коррекции или ма-
невра. Как следует из формул (2.21), эти погрешности
уменьшаются при уменьшении проекций вектора тяги на
оси Х2 и Х3. Следовательно, необходима точная установка
оси двигателя параллельно вектору AFT и поддержание
этого положения во время работы двигателя. Естествен-
но, что установка оси двигателя может быть осуществлена
определенной ориентацией конструктивных осей аппарата
относительно некоторых внешних ориентиров. Отметим
также, что в рассматриваемом случае, когда несущест-
венны изменения координат аппарата за время работы
двигателя и справедливы формулы (2.21), чем ближе рас-
положен вектор тяги к вектору ДРТ, тем с меньшими затра-
тами рабочего тела будет получен заданный вектор ДРТ.
Таким образом, с точки зрения уменьшения погрешностей
процесса и затрат рабочего тела система управления ориен-
тацией должна обеспечивать выполнение требования
-|вГ=ТП^Г=сми‘- (222)
Во Дремя работы двигателя могут иметь место возму-
щения, возникающие из-за эксцентриситета силы тяги
относительно центра масс и из-за непараллельности линии
действия тяги и оси аппарата, выставленной вдоль векто-
ра ДРТ перед включением двигателя. Первый из этих
факторов приводит к появлению возмущающего момента,
а второй — к возникновению проекций /?х, и Ях«. Даже
при идеальной установке конструктивных осей аппарата
относительно внешних ориентиров до включения двига-
теля указанные факторы приводят в конечном итоге
к ошибке в реализации вектора AFT, определяющего из-
менение траектории. Эта ошибка существенно зависит
не только от исходных конструктивных ошибок, но и от
способа управления аппаратом во время работы двигате-
ля, которое в общем случае включает измерение угловых
рассогласований, измерение вектора ускорения силы тяги
и управление по заданному закону положением центра
86
ОРИЕНТАЦИЯ
(ГЛ. 2
масс аппарата. В силу ряда особенностей этого процесса
по сравнению с управлением ориентацией обычно его на-
зывают стабилизацией аппарата и управлением движени-
ем центра масс. Отметим, что указанный процесс по су-
ществу ничем не отличается от стабилизации и управления
движением центра масс ракет на активных участках полета
и анализу его посвящено достаточное количество специаль-
ных работ.
В рассматриваемом варианте осуществления коррекций
и маневров, когда они характеризуются только вектором
ДРТ и имеют место сравнительно большие ускорения,
в качестве чувствительных элементов, используемых для
стабилизации аппарата, наибольшее применение получили
гироскопические устройства, так как на их работу мало
влияют вибрации двигателя и упрощается измерение век-
тора ускорения. При этом гироскопические устройства по
существу запоминают исходное положение аппарата отно-
сительно внешних ориентиров, заданное системой управле-
ния ориентацией. Использование этих устройств в качест-
ве чувствительных элементов и переход с системы ориен-
тации на систему стабилизации начинаются непосредст-
венно перед включением двигателя или перед поворотами
аппарата относительно исходного положения, если эти
повороты осуществляются с помощью гироскопических
устройств. Заканчивая разбор варианта с малым временем
работы двигателя, сделаем два замечания.
Условие относительной малости модуля вектора Q — Qo
дает предпосылки для выбора силы тяги двигателя. Дейст-
вительно, слишком малая величина тяги может привести
к существенному увеличению времени работы двигателя.
При этом может оказаться уже невыгодным простейший
закон управления ориентацией (2.22). С другой стороны,
чрезмерное увеличение тяги невыгодно из-за возрастания
массы двигательной установки. Совместный анализ этих
факторов и создает условия для обоснованного выбора
силы тяги.
Следует отметить также, что относительная малость
отклонений координат Дх2 может не сопровождаться ма-
лостью относительных скоростей Д±; = — if0. Напри-
мер, при увеличении высоты перицентра орбиты спутника
выгоднее всего увеличить скорость в апоцентре орбиты.
При этом, если орбита имеет достаточно большой эксцент-
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
87
риситет, приращение скорости может оказаться суще-
ственно больше скорости в апоцентре невозмущенной
орбиты.
Вернемся к уравнению (2.18). Если изменение траек-
тории достигается длительным воздействием на аппарат
ускорения силы тяги, то изменения координат аппарата
могут оказаться настолько существенными, что вектором
Q — Qo в уравнении (2.18) пренебречь будет нельзя.
В этом случае изменение траектории уже невозможно
характеризовать только вектором ДР и нельзя утверждать,
что всегда будет выгоден случай R/ | R | = const. В зави-
симости от конкретного варианта маневра или коррекции
может быть найден оптимальный с точки зрения расходов
рабочего 1ела и точности закон изменения по времени
единичного вектора R/ | R |. Управление ориентацией
аппарата, необходимое для реализации указанного опти-
мального закона, здесь может осуществляться в некоторых
случаях без использования гироскопических устройств,
а с помощью внешних ориентиров (тем более, что из-за
длительной работы двигателя могут оказаться недопусти-
мыми уходы гироскопических устройств).
Таким образом, для обоих рассмотренных вариантов
перед включением, а иногда и во время работы двигателя
необходима ориентация конструктивных осей аппарата
на некоторые внешние ориентиры, относительно которых
известно невозмущенное движение космического аппарата.
2.2.7. Рассмотрим особенности осуществления коррек-
ций и маневров на некоторых примерах.
1. Простейшим маневром является торможение спут-
ника для спуска его на планету, когда в качестве ориен-
тира выбирается вектор скорости спутника. В этом случае
достаточно одноосной ориентации по вектору скорости
оси аппарата, параллельной оси двигателя. Правда, этот
вариант не применим, если нужно добиться высокой
точности спуска, так как при направлении тормозного
импульса по вектору скорости точность спуска сильно за-
висит от ошибок ориентации, и, кроме того, ориентация
по вектору скорости с помощью режимов R5 или R6 (см.
табл. 2.1) обычно довольно грубая. Гораздо целесообраз-
нее для повышения точности спуска направлять тормозной
импульс под углом 30—40° к направлению — F в сторону
Земли [22]. Но при этом уже невозможно ограничиться
88
ОРИЕНТАЦИЯ
(ГЛ. 2
ориентацией одной оси аппарата по вектору скорости
спутника.
2. Существенно более сложным случаем является кор-
рекция траектории межпланетного аппарата, когда вели-
чина и направление вектора корректирующей скорости
ДРТ определяются только после измерения и расчета
фактической траектории, причем в большинстве случаев
необходимо предусматривать любое положение в прост-
ранстве вектора корректирующей скорости. Ориентиры,
используемые для ориентации аппарата, известны, как
правило, заранее, так как от них существенно зависят
конструкция и размещение датчиков системы управления
ориентацией. Возможен только переход на другие ориен-
тиры того же типа, например на другие звезды. Однако
указанная смена ориентиров не может обеспечить любое
положение вектора корректирующей скорости. Произ-
вольное положение этого вектора, а следовательно, произ-
вольное положение в пространстве и вектора тяги может
быть обеспечено или поворотами чувствительных эле-
ментов датчиков до начала поиска ориентиров, или пово-
ротом гироскопических устройств, обеспечивающих ста-
билизацию относительно осей аппарата при работе двига-
теля, или, наконец, поворотом двигательной установки
в кардановом подвесе. Заметим, что поворот двигатель-
ной установки, очевидно, должен осуществляться таким
образом, чтобы при любом положении двигателя или дви-
гателей вектор тяги проходил через центр масс аппарата
или был близок к этому положению. Это требование созда-
ет большие конструктивные трудности, и поэтому вариант
с поворотом двигательной установки не получил приме-
нения.
Если коррекция осуществляется при сравнительно ма-
лых временах работы двигателя, то, как было показано
выше, повороты аппарата должны быть закончены до
включения двигателя, так как в противном случае будут
иметь место потери рабочего тела. Если же должен быть
реализован заданный оптимальный закон изменения еди-
ничного вектора JR/1 R |, то повороты аппарата должны
проводиться во время работы двигателя. Величины пово-
ротов вычисляются и задаются соответствующим бортовым
устройством заранее, но после определения фактической
траектории и вектора корректирующей скорости.
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
89
Определение потребного вектора корректирующей ско-
рости может осуществляться на Земле на основе радиоиз-
мерений траектории; при этом необходимые повороты и
величина корректирующей скорости передаются на борт
аппарата в определенном коде. Указанные расчеты могут
проводиться также и бортовой цифровой вычислительной
машиной в случае, когда для расчета потребного вектора
корректирующей скорости используются данные автоном-
ных навигационных измерений.
Повороты конструктивных осей аппарата до включе-
ния корректирующего двигателя могут осуществляться
и самой системой управления ориентацией с помощью бор-
товой цифровой вычислительной машины и датчиков уг-
ловой скорости [18]. При этом величины поворотов зада-
ются в машинной программе.
От того, как обеспечивается произвольное положение
вектора корректирующей скорости, существенно зависят
состав, характеристики и размещение системы управле-
ния ориентацией и системы стабилизации аппарата. На-
пример, если это обеспечивается поворотом чувствитель-
ных элементов оптических датчиков, то датчики получа-
ются достаточно сложной конструкции, но зато сущест-
венно упрощаются гироскопические устройства. Причем
в этом случае поле зрения оптического датчика должно
быть равно полусфере, а иногда требуется установка двух
таких датчиков, что, естественно, создает определенные
трудности при их размещении. С другой стороны, повороты
с использованием гироскопических устройств усложняют
их, увеличивают электропотребление и массу, но при
этом существенно упрощаются сами датчики ориентации
и их установка на аппарате, так как уменьшаются число
и диапазоны поворотов чувствительных элементов, а сле-
довательно, резко сокращаются поля зрения.
Вообще для аппаратов рассматриваемого в данном
примере класса с произвольным вектором корректирую-
щей скорости выбор схем построения системы управления
ориентацией и системы стабилизации является одним из
главных вопросов при разработке проекта. Из сказанного
выше следует, что для правильного выбора указанных схем
необходимо проанализировать и компоновку аппарата,
и массовые затраты, и вопросы электрообеспечения, и,
наконец, надежность аппарата в целом. Ниже, в 2.3, рас-
90
ОРИЕНТАЦИЯ
[ГЛ. 2
смотрены различные варианты схем построения оптиче-
ских датчиков, обеспечивающих произвольную ориента-
цию осей аппарата при помощи двух ориентиров — Солн-
ца и звезды.
3. В качестве последнего примера рассмотрим случай,
когда коррекция траектории осуществляется без поворо-
тов чувствительных элементов или гироскопических уст-
ройств, т. е. при неизменной ориентации вектора тяги от-
носительно внешних ориентиров. При этом различное кор-
ректирующее воздействие на траекторию достигается оп-
ределенным выбором момента включения двигателя и,
конечно, величины корректирующей скорости или вре-
мени работы двигателя. Представителем таких случаев
может быть спутник с постоянной ориентацией одной из его
осей на Солнце. Если параллельно этой оси установлен
двигатель малой тяги, то, меняя время включения и дли-
тельность его работы, можно получить различные изме-
нения орбиты. При этом в зависимости от положения Солн-
ца относительно орбиты некоторые изменения будут, ко-
нечно, затруднены или невозможны. В частности, если
Солнце приближается к плоскости орбиты, то становится
невозможным изменение положения орбиты в простран-
стве, а если Солнце расположено близко к нормали к плос-
кости орбиты, то изменение перигейного и апогейного
расстояний потребует слишком больших затрат рабочего
тела. Отметим, что установка двигателя малой тяги в не-
которых случаях может позволить производить его выклю-
чение непосредственно по командам с Земли, что сущест-
венно упрощает бортовой комплекс аппаратуры.
2.2.8. В качестве основных режимов ориентации для
коррекций и маневров могут найти применение все ре-
жимы, указанные в табл. 2.1. В зависимости от назначе-
ния космического аппарата и этапа его полета использу-
ются один или два режима одновременно соответственно
для одноосной или трехосной ориентации аппарата.
В табл. 2.2 приведены некоторые комбинации основ-
ных режимов, которые могут быть использованы для кор-
рекций или маневров различных космических аппаратов.
2.2.9. Относительно точности ориентации, необходи-
мой для осуществления маневров и коррекций, нужно за-
метить, что допустимые погрешности этой ориентации оп-
ределяются типом космического аппарата, его траекторией,
ТАБЛИЦА 2.2
Тип космического аппара- та или траектории Вид коррекции или маневра Комбинации режимов Примечание
Спутник планеты Спуск с орбиты4 R5 \JR6 S1 (Р1 v P*)A(W V ST1) Необходимо определен- ное положение Солнца относительно орбиты
Компенсация торможения за счет атмосферы R5\J R6 (Р1\/ P4)/\(S1\J STI) si д STi
Изменение положения пло- скости орбиты (P1\J P4)/\(S1\J STI) si a STi
Полет к Луне и выход на орбиту искусствен- ного спутника Луны Коррекция траектории Для выхода в заданную точку около Луны SI Д STI Slf\Pl В качестве планеты может быть использо- вана Луна или Земля
Переход на орбиту искусст- венного спутника Луны SI /\ STI S1/\P1
Полет к планете и спуск в ее атмосфере Коррекция траектории Для попадания в планету si a STi STia STi
Коррекция траектории Для входа в атмосферу планеты под достаточно малым углом si Д STi S1/\(P1\/P4)
[Я ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕЙТЫ
92
ОРИЕНТАЦИЯ
[ГЛ. 2
вариантом коррекции или маневра и временем проведения
этих операций. В зависимости от указанных факторов до-
пустимая погрешность ориентации может меняться на
один или даже два порядка. Например, если для спуска
с орбиты искусственного спутника иногда достаточно точ-
ности ориентации нескольких градусов, то для проведе-
ния коррекции межпланетного аппарата, необходимой
для попадания в заданную окрестность планеты, ошибка
ориентации не должна превышать нескольких угловых
минут, а в некоторых случаях — долей угловой минуты.
На втором случае остановимся несколько подробнее.
Допустим, что коррекция межпланетной траектории
осуществляется при достаточно больших ускорениях силы
тяги, когда изменение траектории полностью характери-
зуется вектором корректирующей скорости ДКТ. Необ-
ходимая величина модуля этого вектора, от которой зависит
расход рабочего тела, определяется фактическим откло-
нением нескорректированной траектории около плане-
ты и производными этого отклонения по проекциям век-
тора корректирующей скорости на оси некоторой системы
координат. Очевидно, что в общем случае, чем ближе
к планете проводится коррекция, тем производные мень-
ше, а следовательно, тем больше при заданном отклоне-
нии фактической траектории потребное значение модуля
корректирующей скорости. С другой стороны, уменьше-
ние производных благоприятно с точки зрения уменьше-
ния влияния ошибок проведения коррекции на точность
попадания. Кроме того, при более позднем проведении
коррекции увеличивается объем траекторных измерений
и, следовательно, уменьшаются ошибки определения фак-
тической траектории.
В некоторых случаях положение осложняется тем, что
нужно не только попасть в заданную окрестность планеты,
но и осуществить это попадание в заданное время земных
суток, если прием информации с аппарата около планеты
осуществляется одним или двумя наземными пунктами.
В противном случае прием информации станет невозмож-
ным. Здесь мы сталкиваемся с задачей, которую в теоре-
тическом плане можно назвать стратегией коррекций
межпланетного аппарата. Решение этой задачи осуществ-
ляется при каждом пуске аппарата такого типа. Не оста-
навливаясь на затронутых вопросах подробнее, так как
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
93
они относятся к теории полета, укажем только, что иногда
при проведении одной коррекции не удается найти ком-
промиссного решения между точностью попадания и за-
тратами рабочего тела и приходится проводить две или
более коррекций траектории. При проведении двух кор-
рекций первая проводится около Земли для грубого уст-
ранения промаха, а вторая является как бы чистовой,
предназначенной для осуществления попадания в задан-
ный район около планеты с нужной точностью и проводя-
щейся при сравнительно небольших затратах рабочего
тела.
Проведение двух и более коррекций предъявляет до-
полнительные требования к системе управления ориента-
цией и системе стабилизации, так как вызывает увеличе-
ние ресурса этих систем и многократное изменение в поле-
те величин указанных выше поворотов чувствительных
элементов датчиков или гироскопических устройств. Это
обусловлено тем, что при проведении нескольких коррек-
ций характеризующие их векторы ДЕТ отличаются друг
от друга.
2.2.10. Не останавливаясь подробно на других зада-
чах ориентации, отметим только, что, как правило, для
решения этих задач так же, как и для проведения манев-
ров и коррекций, необходима ориентация аппарата отно-
сительно внешних ориентиров. Для этой цели могут быть
использованы некоторые из основных режимов, указан-
ных в табл. 2.1, или их комбинации. В настоящее время
существует большое разнообразие вариантов проведения
автономных навигационных измерений и схем наведения
научных приборов. При этом для научных исследований,
в зависимости от их характера и используемых приборов,
необходимые точности наведения могут меняться от не-
скольких градусов (для получения фотоснимков полного
диска планеты) до нескольких угловых секунд (например,
для изучения Солнца или исследования тонких астрофи-
зических эффектов). Иногда получение высокой точности
ориентации аппарата в целом оказывается затруднитель-
ным из-за недостаточной жесткости конструкции или боль-
ших затрат рабочего тела. В эуих случаях может оказаться
целесообразным установка научных приборов, требую-
щих высокой точности наведения, на специальную авто-
номно стабилизированную платформу, наводящуюся на
ОРИЕНТАЦИЯ
[ТЛ. 1
04
объект исследования независимо от движения самого ап-
парата. Однако допустимые углы поворота такой плат-
формы обычно ограничены, и поэтому система ориента-
ции и в этом случае должна обеспечивать некоторую за-
данную ориентацию корпуса аппарата в пространстве
с угловыми ошибками, не превышающими максимальных
углов поворота платформы, и с угловыми скоростями
несколько меньшими, чем максимально допустимые ско-
рости поворота платформы относительно корпуса.
2.2.11. Рассмотрим решение нескольких задач ориен-
тации на одном космическом аппарате. В некоторых слу-
чаях эти задачи должны решаться последовательно по
времени полета, например ориентация солнечных батарей
на Солнце в течение всего времени полета и кратковремен-
ное нарушение этой ориентации во время проведения кор-
рекций траектории. Последовательное решение различ-
ных задач ориентации на одном аппарате всегда принци-
пиально возможно, но, конечно, приводит к усложнению
системы ориентации и в общем случае к увеличению ее
массы. Другим, более сложным, случаем является одно-
временное решение нескольких задач, например ориента-
ция солнечных батарей межпланетного аппарата на Солн-
це и остронаправленной антенны на Землю. Совмещение
двух и более задач ориентации может быть достигнуто дву-
мя путями.
1. Выбор двух основных режимов, совместно обеспе-
чивающих трехосную ориентацию аппарата, и специаль-
ная компоновка агрегатов, требующих определенной ори-
ентации. При этом некоторые задачи решаются не иде-
ально, а с ошибками, допустимыми для данного аппарата.
В качестве примера можно указать на приведенный выше
вариант коррекции орбиты спутника при малой тяге, ког-
да оси двух двигателей, расположенных под углом 180°
друг к другу, параллельны нормали к солнечной батарее,
ориентированной на Солнце. Вторым примером может
служить аппарат, предназначенный для перелета к Мар-
су. Для траектории такого аппарата характерно сравни-
тельно малое изменение угла Солнце — аппарат— Земля
на значительном участке полета около Марса. Это позво-
ляет специальной установкой солнечной батареи и остро-
направленной антенны, а также выбором двух каких-ли-
бо режимов, обеспечивающих трехосную ориентацию, на-
2.2]
ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ
95
пример режимов S1 Д ST1, добиться на указанном участ-
ке совмещения режима точной ориентации оси антенны
на Землю с грубой ориентацией нормали к солнечной бата-
рее на Солнце. Если угол Солнце — аппарат — Земля на
интересующем нас участке меняется на Ду, то при пра-
вильной установке солнечной батареи и соответствующих
поворотах чувствительных элементов датчиков ошибка
ориентации солнечной батареи на Солнце не будет пре-
вышать Ду/2. Обычно можно принять Ду = 20 30°, при
этом потери мощности солнечной батареи не превысят
2—4%, что безусловно допустимо.
2. Установка агрегатов, требующих наведения на не-
который ориентир, на подвижной платформе. Эта плат-
форма может быть автономно стабилизированной, если
потребная точность ее наведения выше, чем точность ори-
ентации корпуса аппарата, или может поворачиваться
но программе, если это позволяет точность ориентации
всего аппарата. В качестве примера укажем на аппарат,
пролетающий около планеты. На платформе может быть
установлена научная аппаратура, изучающая планету,
в то время как корпус аппарата при этом ориентируется,
например, на Солнце и на звезду.
Следует сказать, что решение различных задач ориен-
тации на одном космическом аппарате неразрывно связа-
но с компоновкой аппарата и выбором основных режимов
ориентации. Совмещение различных задач ориентации
при минимально возможных массовых затратах и без
понижения надежности аппарата в целом является, пожа-
луй, одной из самых трудных и ответственных проблем,
с которой сталкиваются разработчики космического ап-
парата.
2.2.12. Существенное, а иногда и определяющее влия-
ние на расход массы, необходимой для поддержания за-
данного ориентированного положения в пространстве,
оказывает величина возмущающего момента. Под послед-
ним понимается момент, стремящийся повернуть аппарат
относительно заданного ориентированного положения.
Как правило, величины возмущающих моментов не за-
висят от параметров системы управления ориентацией,
а определяются внешней и внутренней компоновками ап-
парата, его траекторией, наличием на борту движущихся
масс, негерметичностью агрегатов и отсеков и т. д.
96
ОРИЕНТАЦИЯ
[ГЛ. 2
Рассмотрим главные источники возмущающих момен-
тов, действующих на космический аппарат.
Аэродинамические силы. Моменты от аэродинамиче-
ских сил определяются в первую очередь высотой полета
над Землей или планетой, скоростью движения относитель-
но планеты и формой космического аппарата.
При определении аэродинамических моментов, дей-
ствующих на спутники Земли, необходимо учитывать,
Рис. 2.4. Зависимость аэродинамических коэффициентов от мест-
ного угла атаки плоской площадки.
что плотность верхней атмосферы, определяющая величи-
ну аэродинамических сил, а следовательно, и моментов,
существенно зависит от солнечной активности, геомаг-
нитной возмущенности верхней атмосферы, сезона и по-
ложения точки на орбите, в которой рассчитываются мо-
менты, относительно Земли и Солнца. Методика расчета
плотности верхней атмосферы Земли, учитывающая все
перечисленные факторы, содержится в [27]. Там же дают-
ся рекомендации по расчету аэродинамических коэффи-
циентов элементарной площадки. Эти рекомендации были
использованы при расчете зависимости аэродинамических
коэффициентов С*, Су от местного угла атаки (рис. 2.4).
2.2] ПУТИ РЕШЕНИЯ ЗАДАЧ. ВОЗМУЩАЮЩИЕ МОМЕНТЫ 97
Указанные коэффициенты определяются следующими из-
вестными выражениями:
С - Х
х“ FpV2/2 ’
С - Y
FpVa/2 ’
где X, Y — составляющие аэродинамической силы, дей-
ствующей на элементарную площадку (параллельная и
перпендикулярная к скорости набегающего потока соот-
ветственно); р — плотность атмосферы; V — скорость по-
тока; F — площадь элементарной площадки.
Коэффициенты Сх, Су определены для круговых орбит
высотой над поверхностью Земли 600 и 700 км и для двух
значений среднего уровня индекса солнечной активно-
сти Fo. Под индексом солнечной активности понимает-
ся интенсивность солнечного радиоизлучения на волне
10,7 см.
Как следует из приведенных на рис. 2.4 графиков,
для приближенных расчетов можно учитывать только ко-
эффициент Сх.
Расчет аэродинамических моментов сводится к опре-
делению плотности атмосферы в данной точке траектории,
нахождению аэродинамических сил, действующих на все
элементарные плоские площадки, и порожденных ими
моментов относительно осей спутника, и, наконец, к сум-
мированию элементарных моментов по всей поверхности,
на которую набегает поток.
Уменьшить аэродинамические моменты можно либо
увеличением высоты полета космического аппарата над
поверхностью Земли или планеты (если это допускается
назначением аппарата), либо специальным выбором внеш-
ней компоновки.
Заметим, что максимальные высоты над Землей или
планетой, на которых еще нужно учитывать аэродинами-
ческие моменты, определяются величиной полезных уп-
равляющих моментов, создаваемых системой исполни-
тельных органов и системой ориентации, а также разме-
рами и формой аппарата. Для Земли эти высоты лежат
в пределах 200—1000 км.
Гравитационные силы. Моменты за счет гравита-
ционных сил, или гравитационные моменты, возни-
4 Г. Ю. Максимов
98
ОРИЕНТАЦИЯ
(ГЛ. 2
кают из-за того, что различные точки космического аппа-
рата расположены на различных расстояниях от центра
притяжения и гравитационные силы, приложенные к этим
точкам, не параллельны друг другу. Гравитационные
моменты относительно главных осей инерции определяют-
ся разностями главных моментов инерции и ориентацией
эллипсоида инерции относительно местной вертикали.
Абсолютная величина гравитационного момента прямо про-
порциональна постоянной тяготения планеты, около ко-
торой находится космический аппарат, и обратно пропор-
циональна кубу расстояния до центра притяжения. Вы-
вод и анализ выражений для гравитационного момента
содержится в работе [18]. В этой же работе делается вывод
о том, что роль гравитационного момента возрастает при
увеличении размеров аппарата.
Световое давление. Рекомендации по расчету моментов
от светового давления содержатся в главе 4. Здесь только
укажем, что эти моменты определяются расстоянием до
Солнца, внешней компоновкой космического аппарата,
оптическими характеристиками наружных поверхностей
и положением аппарата относительно направления на
Солнце.
Для спутников Земли, находящихся на удаленных ор-
битах, в частности на геостационарной, и для межпла-
нетных аппаратов на трассе Земля — планета момент от
светового давления является единственным постоянным
внешним моментом, действующим на аппарат.
Из других источников возмущающих моментов ука-
жем на истечение газов и жидкостей из герметичных отсе-
ков' и агрегатов за счет штатных и аварийных утечек,
магнитные поля Земли и планет, около которых находит-
ся космический аппарат, удары метеоритов и на движущие-
ся внутри аппарата массы.
Анализ возмущающих моментов, действующих на кос-
мический аппарат, а в некоторых случаях и осуществле-
ние мероприятий по уменьшению этих моментов являются
необходимыми в процессе проектирования нового аппара-
та. Эти работы должны проводиться параллельно с раз-
работкой системы управления ориентацией и системы ис-
полнительных органов, создающих полезные управляю-
щие моменты.
2.31
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
99
2.3. Солнечно-звездная ориентация
2.3.1. В этом параграфе рассматриваются различные
схемы солнечно-звездной ориентации, поскольку от этих
схем существенно зависит размещение приборов ориента-
ции на космическом аппарате. Кроме того, на примере
солнечно-звездной ориентации хорошо прослеживаются
связи параметров приборов ориентации с характеристика-
ми траекторий.
Трехосная ориентация, основанная на совместном ис-
пользовании двух основных режимов — ориентации на
Солнце и ориентации на звезду,— получила широкое при-
менение в космической технике для коррекции траекто-
рий, наведения остронаправленной антенны и направле-
ния осей научных инструментов в заданную точку небес-
ной сферы.
Особенно удобным оказался этот метод ориентации
для дальних космических зондов и межпланетных аппа-
ратов на трассе полета от Земли до планеты, так как от-
сутствие тени Земли и планет позволяет использовать сол-
нечно-звездную ориентацию без временных ограничений.
Кроме того, Солнце как наиболее яркий из всех внеш-
них оптических ориентиров удобно использовать для пред-
варительной ориентации аппарата и поиска других ориен-
тиров. В случае солнечно-звездной ориентации один и тот
же солнечный датчик может служить и для основного ре-
жима, и для предварительной ориентации, и для поиска
звезды.
Переходный процесс от произвольного положения в
пространстве к установившемуся режиму ориентации на
Солнце и звезду может содержать следующие операции:
успокоение аппарата, поиск Солнца и ориентация од-
ной из осей на Солнце;
вращение аппарата вокруг оси, ориентированной на
Солнце, для поиска звезды;
остановка вращения после попадания звезды в поле
зрения звездной оптической системы;
переход на повышенную точность ориентации на Солн-
це и звезду.
Очевидно, что осуществление поиска звезды и устано-
вившегося режима трехосной солнечно-звездной ориента-
ции возможно только в том случае, еслй угол между оп-
100
ОРИЕНТАЦИЯ
[ГЛ. 2
тическими осями звездной и солнечной систем равеи’углу
между направлениями аппарат — Солнце и аппарат —
звезда. Этот угол зависит от характеристик траектории
и положения аппарата на траектории в данный момент
времени. На рис. 2.5 представлены основные углы, опре-
Рис. 2.5. Основные углы, ха-
рактериэующие взаимное по-
ложение направлений на зве-
зду (ST) и космический ап-
парат (Л).
деляющие взаимное положе-
ние звезды и аппарата отно-
сительно плоскости эклипти-
ки, для зондов и межпланет-
ных аппаратов на трассе пе-
релета от Земли к планете
(Фа, фвг — широта аппарата
и звезды соответственно;
ДХ — разница долгот аппара-
та и звезды; ysr — угол меж-
ду направлениями аппарат —
Солнце и аппарат — звезда;
i — наклонение плоскости ге-
лиоцентрической орбиты ап-
парата к плоскости эклиптики; До—долгота аппарата
относительно линии восходящего узла гелиоцентрической
орбиты).
Формулы сферической тригонометрии дают следующие
соотношения для расчета угла у st»
COS у ST = — sin ф8Г sin фд — COS фят COS фд cos ДХ,
tg фА=^18ШЛо.
(2.23)
Наклонение плоскости орбиты i обычно не превышает
нескольких градусов, если не иметь в виду аппараты, спе-
циально предназначенные для выхода из плоскости эклип-
тики. Поэтому в большинстве случаев для звезд, которые
используются в качестве опорных, |i| <|ф8т|. Угол ДХ
определяется временем выхода аппарата на гелиоцентри-
ческую орбиту и его положением на этой орбите, угол
Фа — положением аппарата на орбите и ее наклонением.
Очевидно, что —|г| < фд < |«|- Из рис. 2.5 и соотно-
шений (2.23) можно найти, что для любых времен пуска
и любых положений аппарата на гелиоцентрической ор-
бите экстремальные значения угла ysT будут равны:
Ysr min = | фят I — | i h
Vst max = 180 ysT min*
(2.24)
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
101
В табл. 2.3 приведены приближенные экстремальные
значения угла узт Для некоторых ярких звезд при не-
скольких значениях наклонения орбиты, а также
эклиптические широты <psr и звездные величины этих
звезд V.
ТАБЛИЦА 2.3
Опорные звезды Канопус Сириус Вега
Tsr —75’40' —39’40' 61’50'
пи —0,73 —1,45 0,04
1 = 0 75’40' 39°40' 61’50'
104’20' 140’20' 118’10'
i = 2° 73’40' 37’40' 59’50'
106’20' 142®20' 120’10'
i = 4° 71’40' 35’40' 57’50'
108®20' 144’20' ,122’10'
Из табл. 2.3 ясно, почему звезда Канопус получила
широкое распространение в качестве опорной звезды для
системы солнечно-звездной ориентации: большая яркость
этой звезды и сравнительно малый диапазон изменения
угла узт, приводящий к малым углам поворотов в звезд-
ной системе, упрощают звездный датчик и делают его уни-
версальным для весьма широкого класса космических
аппаратов. Кстати отметим, что случай |г| =0 соответ-
ствует использованию солнечно-звездной ориентации на
орбите искусственного спутника Земли и на траекториях
лунных аппаратов.
2.3.2. В § 2.2 указывалось, что для осуществления
коррекции траектории иногда необходимо иметь возмож-
ность направлять ось двигательной установки в любую
или почти в любую точку пространства. Такая же задача
102
ОРИЕНТАЦИЯ
[ГЛ. 2
может возникнуть при научных наблюдениях и при на-
ведении остронаправленной антенны. Там же говорилось,
что наведение некоторой связанной оси аппарата в задан-
ную точку небесной сферы может быть осуществлено либо
за счет программных разворотов аппарата на гироскопи-
ческих устройствах относительно исходного положения,
задаваемого системой управления ориентацией с помощью
внешних ориентиров, либо за счет поворотов оптичес-
ких труб датчиков ориентации относительно связанных
осей. Первый случай с точки зрения конструкции опти-
ческих датчиков и их размещения на аппарате является
простейшим. Он требует только, чтобы угол между ося-
ми чувствительности соответствующих оптических систем
был равен углу между ориентирами. При этом одна из
систем может быть неподвижна относительно корпуса,
а вторая иметь ограниченные повороты, например для
отслеживания угла ysr в случае солнечно-звездной ори-
ентации. Более сложным является второй случай, когда
заданное положение в пространстве достигается за счет
соответствующих поворотов оптических труб. С другой
стороны, для некоторых вариантов космических аппара-
тов этот случай может оказаться предпочтительнее пер-
вого хотя бы потому, что использование гироскопических
приборов связано с увеличением электропотребления и
ограничено их ресурсом. В частности, по этим причинам
невозможно использование гироскопических устройств
для длительного наведения остронаправленной антенны.
С учетом сказанного остановимся на наиболее общем слу-
чае — наведении какой-либо оси аппарата в любую точ-
ку небесной сферы за счет поворотов оптических труб
в системе солнечно-звездной ориентации.
Рассмотрим связанную с корпусом аппарата прямо-
угольную систему координат XYZ и допустим, что ось X
нужно направить в заданную точку небесной сферы. Здесь
возможны различные варианты, отличающиеся схемами
датчиков, величинами поворотов труб и размещением дат-
чиков на аппарате.
Как указывалось выше, для реализации солнечно-
звездной ориентации необходимо только, чтобы угол ме-
жду осями солнечной и звездной труб был равен углу ме-
жду направлениями на Солнце и опорную звезду. Пред-
положим, что в исходном положении, т. е. при отсутствии
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
103
Рис. 2.6. Вариант схемы на-
ведения оси X в заданную
точку пространства.
поворотов, плоскость, проходящая через оси солнечной
и звездной труб (плоскость STS на рис. 2.6), совпадает
с координатной плоскостью YZ, а ось солнечной трубы
направлена по оси Z. Обозначим единичные векторы,
направленные вдоль оптических осей солнечной и звезд-
ной труб, соответственно че-
рез В и ВТ (см. рис. 2.6).
Допустим, что эти векторы
неподвижны в пространстве,
и рассмотрим, какими пово-
ротами координатных осей
можно направить ось X в
любую точку пространства.
Очевидно, что эти повороты,
но с противоположными зна-
ками будут определять пово-
роты соответствующих опти-
ческих труб относительно
осей, связанных с корпусом
аппарата.
В соответствии со сказанным введем два поворота ко-
ординатной системы относительно исходного положения,
изображенного на рис. 2.6: первый поворот на угол
вокруг оси Y и второй на угол а2 вокруг исходного по-
ложения оси Z. Новое положение оси X на рис. 2.6 обоз-
начено Х2. Из рис. 2.6 следует, что если —180°
180°, а —90° а2 90°, то ось X может занять любое
заданное положение в пространстве. Указанные повороты
определяют следующие повороты в солнечно-звездной
системе ориентации: поворот плоскости STS вокруг оси
Y на угол от 0 до ±180° и поворот этой же плоскости на
угол от 0 до ±90° вокруг линии пресечения повернутой
плоскости STS с координатной плоскостью XZ, или, что
то же самое, вокруг нового вектора В — оси солнечной
трубы. При этом угол ysr между векторами В и ВТ не
меняется.
Легко заметить, что для того чтобы ось X могла быть
направлена в любую точку пространства, нужно, чтобы
конец вектора ВТ мог занимать любое положение в полу-
сфере, содержащей координатные оси X, Z и + У, а конец
вектора В — любое положение на окружности, плоскость
которой параллельна координатной плоскости XZ. От-
104
ОРИЕНТАЦИЯ
[ГЛ. 2
метим, что на полусфере звездной трубы остается неис-
пользованной область около оси Y с угловым расстоянием
от этой оси, равным (90° — у st)- Однако при использова-
нии Канопуса в качестве опорной звезды эта область от-
сутствует. Если же иметь в виду изменение в полете уг-
ла между векторами 8 и ST для отслеживания угла у§т
по траектории или для смены опорных звезд, то необходи-
мость полной полусферы обзора для звездной трубы ста-
новится очевидной. Очевидно также, что для изменения
угла между векторами 8 и ST необходим еще один поворот
и соответственно еще один привод в звездном датчике.
Принятые выше повороты ап а2 целесообразны в том
случае, когда солнечная и звездная трубы объединены
в один датчик. При этом удобство поворотов ап а2 со-
стоит в том, что поворот звездной трубы в плоскости STS
не связан с углами а2, т. е. углы апа2 и угол между
Рис. 2.7. Варианты поворотов, обеспечивающих обзор полусферы*
осями звездной и солнечной труб являются независимыми.
Если же солнечный и звездный датчики разделены, то
принятая выше схема поворотов может оказаться нецеле-
сообразной. В процессе разработки конструкции звезд-
ного датчика может получить предпочтение другая
схема поворотов. Естественно, что вывод о необходимости
полусферы для звездной трубы останется справедливым
и для других схем поворотов. В качестве примера на
рис. 2.7 изображены два варианта схемы поворотов трубы,
обеспечивающих обзор полусферы.
Покажем, что рассмотренный вариант наведения оси X
в любую точку пространства не единственный. Для этого
допустим, что в соответствии со сказанным выше звезд-
ная труба может занимать любое положение на полусфере
ST, а солнечная — на окружности S (рис. 2.8). Предпо-
ложим, что ось X занимает некоторое заданное положение
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
105
в пространстве, когда введенные выше векторы занимают
положение ВТ\ и S1. Не меняя угла между этими векто-
рами, повернем их вокруг оси X на угол 90°. При этом
повернутся на 90° плоскости, содержащие ось X и век-
торы ST и S (эти плоскости заштрихованы). Направление
поворота выберем так, чтобы после поворота вектор ВТ
остался в пределах той же полусферы. Новые положения
Рис. 2.8. Преобразование солнечно-звездного датчика.
Вид с нощи оси + X
векторов на рис. 2.8 обозначены через 8Тг и 8г. Ясно,
что поскольку указанный поворот осуществлен вокруг
оси X, то направление этой оси в пространстве не изме-
нилось, изменились только положения звездной и сол-
нечной труб в системе координат XYZ. Мысленно осуще-
ствляя указанные повороты для разнообразных положе-
ний звездной и солнечной труб, можно прийти к выводу,
что изображенной на рис. 2.8 схеме эквивалентна схема,
в которой солнечная труба занимает любое положение
на окружности, параллельной координатной плоскости
XY. Новое положение окружности солнечной трубы на
рис. 2.8 изображено штриховой линией.
Если во всех предыдущих рассуждениях и построениях
векторы В и ВТ поменять местами, то получатся варианты,
в которых зона размещения солнечной трубы будет полу-
сферой, а звездной трубы — кругом, параллельным ко-
ординатной плоскости XZ или XY, Различные варианты
схем солнечных и звездных датчиков, обеспечивающих
наведение оси X в любую точку пространства, представ-
лены на рис. 2.9. Приведенные варианты могут исполь-
106
ОРИЕНТАЦИЯ
|ГЛ. 2
зоваться при любых значениях угла ysr от 0 до 180°, хотя
углы, близкие к 0 или к 180°, из-за потери точности и воз-
можных засветок звездной системы имеют только теоре-
тический интерес.
Анализируя рис. 2.6, можно заключить, что каждый из
представленных на рис. 2.9 вариантов может быть видо-
изменен таким образом, что полусфера превратится в пол-
ную сферу, а круг — в половину круга.
1 2 3 4
Рис. 2.9. Варианты схем солнечных и звездных датчиков.
Варианты на рис. 2.9 эквивалентны в том смысле, что
все они обеспечивают наведение оси X аппарата в любую
точку пространства. Однако с точки зрения конструкции
датчиков и, что для нас особенно важно, размещения на
аппарате эти варианты существенно отличаются друг
от друга.
Бели представить себе практическую реализацию рас-
смотренных вариантов, то легко заметить существенную
разницу между вариантами 1 или 2, с одной стороны, и
вариантами 3 или 4, с другой. Первые из указанных ва-
риантов характерны наличием полусферы обзора для звезд-
ной оптической системы. Это создает определенные труд-
ности в компоновке аппарата из-за высокой чувствитель-
ности звездной системы к засветкам. Однако эти варианты
удобны тем, что когда аппарат находится в режиме сол-
нечно-звездной ориентации Солнце относительно корпуса
занимает довольно определенное положение. Не остана-
вливаясь на этих вопросах подробно, укажем только,
что для этих вариантов упрощается создание системы тер-
морегулирования, поскольку радиационные поверхности
этой системы можно разместить с обеих сторон аппарата
и избежать прямого попадания солнечных лучей на радиа-
торы.
Для вариантов 3 и 4 безусловно проще конструкция
звездного датчика. Однако если, исходя из условий ра-
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
107
боты аппарата, желательно иметь не освещенный Солнцем
плоский радиатор системы терморегулирования, то такой
радиатор может быть размещен на аппарате только один.
Все сказанное относительно связей системы ориентации
с системой терморегулирования безусловно имеет место
только для таких космических аппаратов, для которых
режим солнечно-звездной ориентации является постоян-
ным или почти постоянным, т. е. когда основное время
полета аппарат находится в этом режиме. В частности,
это может иметь место, когда такой режим используется
для длительной ориентации остронаправленной антенны,
неподвижно установленной на корпусе аппарата. Сделан-
ные замечания показывают, что более детальный анализ
приведенных выше вариантов солнечно-звездной ориен-
тации неразрывно связан с вопросами внешней компонов-
ки аппарата.
В плане сравнения вариантов, приведенных на рис. 2.9,
нужно обратить внимание на следующее. Выше говори-
лось, что в случае применения солнечно-звездной ориен-
тации солнечный датчик естественно использовать и для
основного режима ориентации, и для поиска Солнца, а за-
тем и звезды. Наиболее простой способ поиска Солнца
заключается в' создании специальной поисковой зоны
в солнечном датчике. Если угловая величина этой зоны
составляет несколько более 180°, то после закрутки аппа-
рата . вокруг соответствующей оси обязательно наступит
момент, когда Солнце окажется внутри указанной зоны.
Дальнейшие операции сводятся к гашению угловой ско-
рости закрутки и к передвижению Солнца внутри поиско-
вой зоны до заданного положения. Для вариантов 1 и 2
серединная линия поисковой зоны может быть совмещена
с окружностью S или ее частью. При этом упрощается
конструкция солнечного датчика.
Отметим, что оптическая схема варианта 1 соответ-
ствует схеме солнечно-звездного датчика, установленного
на первых отечественных аппаратах типа «Венера». На
этих аппаратах режим солнечно-звездной ориентации ис-
пользовался для коррекции траектории.
2.3.3. Система солнечно-звездной ориентации, пост-
роейц^я на рассмотренных выше принципах,' обладает из-
вестной универсальностью, так как нрнмдна практически
для любых~траекторий. Однако не для всех космических
108
ОРИЕНТАЦИЯ
[ГЛ. 2
аппаратов, для которых требуется наведение какой-либо
оси аппарата в заданные области небесной сферы, такая
система окажется целесообразной. Допустим, например,
что для коррекции траектории некоторого межпланетного
аппарата или зонда используется гироскопическая си-
стема, способная задать нужное направление оси двига-
тельной установки в пространстве. Как выше указывалось,
для ориентации аппарата перед коррекцией возможно
применение простейшего варианта солнечно-звездной
системы, содержащей солнечную и звездную трубы, одна
из которых установлена неподвижно. Если же потребо-
вать, чтобы эта же солнечно-звездная система обеспечи-
вала наведение на Землю жестко установленной на корпу-
се параболической антенны, то указанная простейшая
схема непригодна, так как только изменением угла между
солнечной и звездной трубами невозможно в общем слу-
чае навести жестко установленную антенну на Землю в ре-
жиме солнечно-звездной ориентации. Для пояснения это-
го и иллюстрации зависимости схемы солнечно-звездной
ориентации от параметров траектории рассмотрим под-
робнее, как можно навести остронаправленную антенну
на Землю с помощью солнечно-звездной ориентации. При
этом под звездой будем понимать собственно звезду в аст-
рономическом смысле этого слова.
На рис. 2.10 центр системы координат XqYqZq совме-
щен с центром Солнца S. Ось Хо проходит через центр
Земли, обозначенный на рисунке Г. Ось Уо направлена
к северному полюсу эклиптики, ось Zo дополняет систему
до правой. Таким образом, плоскость XqZq совпадает с
плоскостью эклиптики. Вторая координатная система
XYZ связана с центром масс аппарата, причем плоскость
XZ совпадает с плоскостью, в которой размещены Солнце 5,
Земля Т и космический аппарат А, а ось X направлена от
аппарата к центру Земли. Предполагается, что ось остро-
направленной антенны параллельна оси X, а солнечно-
звездная система выполнена по схеме варианта 1 (см.
рис. 2.9). Этим и определяется выбор связанных осей.
Переход от системы XqYqZq к системе XYZ можно осу-
ществить следующими последовательными операциями:
поворотом системы X0Y0Z0 вокруг оси Хо на угол ме-
жду плоскостью, содержащей направления Солнце —
Земля и Солнце — аппарат, и плоскостью эклиптики
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
109
(на рис. 2.10, б этот угол обозначен /); в результате этого
получится система Х01У01201, координатная плоскость
X01Z01 которой совпадает с плоскостью XZ*
Рис. 2.10. Взаимное положение Земли (Г), космического аппара-
та (Л) и Солнца (S).
параллельным переносом системы Хо1УО1^о1 Д° сов"
мещения ее начала с центром космического аппарата —
получим систему Х02У02^02’»
поворотом этой системы вокруг оси У02 до положения,
при котором новая ось X будет проходить через центр
Земли; этот поворот осуществляется на угол q (см.
рис. 2.10, а).
Из треугольника SAT (см. рис. 2.10, а) можно полу-
чить следующее соотношение для определения угла q:
1 — Р СОЗ Рт
cos q = — - - -- ,
уЧ + р« —2рсозрт
где Рт — угол между направлениями Солнце — Земля
и Солнце — аппарат; р — расстояние от аппарата до
Солнца в астрономических единицах.
110
ОРИЕНТАЦИЯ
[ГЛ. 2
Кроме того, на основании рис. 2.10, б и формул сфе-
рической тригонометрии запишем формулы для расчета
углов I и Рт:
*'=-££• <2-26>
1^=7ЁГ- <2'2’>
Значения углов <рд и Кд ясны из рис. 2.10, б. Углы <рд
и А,д, а также расстояние до Солнца р считаем известными
для любого момента времени из расчета траектории.
. Проводя последовательные преобразования коорди-
натных осей в соответствии с указанными выше опера-
циями перехода, получим следующие формулы преоб-
разования:
X =x0cos q — yosinZsing + z0cosZsing — рсоз(Рт + g),
у = y0 cos I + z0 sin Z,
z = — xosing — y0sinZcosg + z0cosZcosg+ psin(pT+ g). (
(2.28)
Обозначая через exo, ey0, ez0 орты соответствующих
координатных осей, на основании рис. 2.10, б нетрудно
получить следующее выражение для единичного вектора
ST, направленного от Солнца к опорной звезде, в системе
координат ХоУо£о:
SIT = (cos Ф8Т COS Xst) вх9 + (sin <pST) +
+ (— cos <pST sin Xst) ezo» (2.29)
где фзт и Xst — эклиптические координаты опорной звез-
ды, причем угол Xsr отсчитывается от направления на Зем-
лю (см. рис. 2.10, б).
Аналогичное выражение будет иметь место и для еди-
ничного вектора А, направленного от Солнца к аппарату:
А = (cos фА COS Хд) еХо + (sin фд) еУо + (— cos фд sin Хд) eZo.
(2.30)
Поскольку связанная с аппаратом ось X параллельна
оси антенны, то для наведения этой антенны на Землю
с помощью солнечно-звездной ориентации необходимо,
чтобы оси солнечной и звездной труб были расположены
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
111
параллельно векторам —-Л_= S и ST соответственно, а
координатные оси X, У, Z были связаны с осями Хв,
У о» преобразованием (2.28). Для этого нужно знать
проекции указанных векторов на оси координатной си-
стемы XYZ и реализовать эти проекции соответствующи-
ми поворотами солнечной и звездной труб. Из сказанного
и рис. 2.10 ясно, что в общем случае необходимо иметь
три поворота: два ^ля звездной трубы и один для солнеч-
ной в плоскости XZ. Очевидно, что это характерно для
принятого варианта солнечно-звездной системы (варианта 1
на рис. 2.9). Для других из указанных на рис. 2.9 вариан-
тов количество поворотов не изменится, но изменится их
геометрический смысл. _
Проекции единичных векторов ST и S на оси X, У, Z
можно определить, подставляя соответствующие проек-
ции этих векторов на оси Хо, Уо, Zo из выражений (2.29)
и (2.30) в преобразование (2.28). В результате этого для
вектора ST получим следующее выражение в системе
XYZ-.
ST = (cos <psr cos Xst cos q — sin <psr sin I sin q —
— cos <psr sin Xst cos I sin q) e* +
+ (Sin <psr COS Z — COS фз? Sin Xsr Sin Z) +
+ (— cos <psr cos Xgr sin q — sin <psr sin I cos q —
— cos <psr sin Xsr cos Z cos g) eg, (2.31)
где e^, ву, eg — орты координатной системы XYZ.
Аналогичное выражение получим и для вектора S
в системе XYZ, имея в виду, что S = — А:
S = (sin фд sin I sin q — cos фд cos Хд cos q +
+ cos фд s^i Хд cos I sin q) e* +
+ (cos фд sin Хд sin I — sin фд cos Z) e-p +
+ (cos фд cos Хд sin q + sin фд sin I cos q +
+ cos фд sin Хд cos I cos q) eg. (2.32)
Легко обнаружить, что в выражении (2.32) множитель
при е? в силу выражения (2.26) равен нулю. Этого следо-
вало ожидать, так как вектор S лежит в плоскости XZ
и, следовательно, перпендикулярен к оси У.
112
ОРИЕНТАЦИЯ
[ГЛ. 2
Необходимо сделать одно замечание. Как следует из
рис. 2.10 и выражения (2.31), проекция вектора ST на ось
Y может быть отрицательна, т. е. множитель при е*
в выражении (2.31) будет меньше нуля. При этом вектор
ST окажется расположенным под плоскостью XZ. В част-
ности, это будет иметь место при I < 90° и при исполь-
зовании в качестве опорной звезды Канопуса или Сириуса,
так как эклиптические широты этих звезд отрицательны.
В указанном случае, чтобы не увеличивать область об-
зора звездной системы, необходимо повернуть аппарат
вместе с солнечным и звездным датчиками вокруг оси X
на 180°. При этом, как следует из рис. 2.10, а, чтобы со-
хранить солнечно-звездную ориентацию и направление
оси антенны на Землю, нужно знаки проекций векторов S
и ST на оси Y и Z изменить на обратные.
2.3.4. Проанализируем полученные в п. 2.3.3 выраже-
ния. Поскольку проекция единичного вектора ST на ось У
равна косинусу угла между этим вектором и осью У, то,
обозначая этот угол через уу, на основании выражения
(2.31) запишем
COS Уу = sin фят COS 7 — COS фат Sin Xst sin /. (2.33)
Угол уу определяет часть полусферы обзора звездного
датчика, которая необходима для наведения антенны на
Землю. Примем вначале, что I = 0, т. е. движение проис-
ходит в плоскости эклиптики. Тогда из формулы (2.33)
получим очевидное соотношение
Ту = 90° — фзт-
Допустим теперь, что угол I настолько мал, что можно
в формуле (2.33) положить cos 7 = 1, sin I = I. Принимая
Ту = 90° — фзт + 61? где | 6i | I ФзтЬ на основании
выражения (2.33) найдем, что ж 7 sin XsT и, следова-
тельно,
Уу ж 90° — фвт + 7 sin Xst, (2.34)
Поскольку Xst зависит от времени выхода аппарата на
гелиоцентрическую орбиту и положения на этой орбите, то
для любых времен пуска можно записать
Уу^(90°-ф8т)±|7|. (2.34')
2.3]
СОЛНЕЧПО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
ИЗ
Из выражений (2.26) и (2.34') следует, что при доста-
точно малых выходах аппарата из плоскости эклиптики
(фд) и достаточно больших угловых расстояниях от Земли
до аппарата (кА) угол уу близок к величине 90° — фзт-
В частности, если в качестве опорной звезды используется
Канопус, то, как следует из табл. 2.3 и сделанного заме-
чания относительно поворота датчика на 180°, угол уу
близок к 15°. Другими словами, для некоторого класса
космических аппаратов, характеризуемого малыми зна-
чениями угла и большими значениями угла Хд, для на-
ведения остронаправленной антенны на Землю с помощью
солнечно-звездной ориентации необходима сравнительно
небольшая область обзора для звездной трубы. В частно-
сти, это может быть конус с осью, параллельной оси У,
и углом полураствора, близким к углу 90° — | фвт I-
, 2.3.5. Рассмотрим другой случай, когда угол уу близок
к 90°. Из выражения (2.33) следует, что уу = 90° при
<2-35>
Соотношение (2.35) является условием того, что косми-
ческий аппарат находится в плоскости, содержащей Солн-
це, звезду и'Землю, или, что то же самое, условием того,
что вектор ST лежит в плоскости TSA (см. рис. 2.10, а).
Сказанное следует из сопоставления формул (2.35) и (2.26).
Таким образом, если за счет движения аппарата и Земли
в какой-то момент времени аппарат окажется в плоскости,
содержащей Солнце, звезду и Землю, то в этот момент угол
Уу станет равным 90°. Естественно, что это может про-
изойти только для определенного класса траекторий.
Из сказанного следует, что при пересечении аппаратом
указанной плоскости вектор ST в системе координат
XY2 переходит из верхней полусферы датчика в нижнюю
или наоборот. Если звездный датчик имеет только полу-
сферу обзора, содержащую положительную ось У, то не-
обходим переворот аппарата вокруг оси X, который мож-
но осуществить, изменив углы установки солнечной и
звездной труб так, как это указывалось выше. Если в мо-
мент перехода вектора ST из одной полусферы в другую
осуществляется передача информации через остронаправ-
ленную антенну, то сеанс передачи должен быть прерван
114
ОРИЕНТАЦИЯ
(ГЛ. 2
на время, необходимое для изменения углов установки
труб и повторного поиска звезды. Отсюда следует, что мо-
мент пересечения аппаратом плоскости, содержащей Солн-
це, звезду и Землю, для некоторых схем солнечно-звездной
ориентации является своеобразной особой точкой на тра-
ектории аппарата. Возможность встречи с такой особой
точкой необходимо учитывать при выборе схемы солнечно-
звездной ориентации и при составлении программы ра-
боты космического аппарата.
2.3.6. Приведем некоторые соображения о поиске
опорной звезды. Нетрудно рассчитать, что твердая сфери-
ческая частица, расположенная на расстоянии 1 м от объ-
ектива, при расстоянии от Солнца 1 а. е. может создать
на объективе такую же освещенность, как и звезда нуле-
вой величины, если диаметр частицы имеет порядок сотых
долей миллиметра. Отсюда ясно, насколько чувствительна
звездная система ко всякого рода световым помехам, воз-
никающим около аппарата.
Если частица, подобная указанной, попадет в поле
зрения звездной трубы во время поиска звезды, то может
произойти так называемая ложная ориентация аппарата.
В результате заданный режим ориентации не будет осу-
ществлен, что в лучшем случае приведет к дополнительным
затратам рабочего тела на ориентацию и к необходимости
коррекции программы, а в худшем — к невыполнению
задач полета. Последнее, в частности, может случиться,
если ложная ориентация произошла перед коррекцией,
вследствие чего корректирующий импульс скорости будет
сообщен не в том направлении, которое необходимо для
исправления траектории. Эта аварийная ситуация — одна
из самых тяжелых для космического аппарата. Действи-
тельно, практически невероятно, чтобы ложная ориента-
ция оказалась близкой к заданной, поэтому в результате
ложной коррекции, с одной стороны, будет зря израсхо-
довано топливо корректирующего двигателя, а, с другой
стороны, потребность в этом топливе станет больше, так
как ложная коррекция увеличит отклонение траектории.
Для уменьшения вероятности ложной ориентации при-
меняют различные способы. В частности, эти способы мо-
гут основываться на малой вероятности того, что угол
между направлениями аппарат — Солнце и аппарат —
ложный ориентир будет достаточно длительное время
2.3]
СОЛНЕЧНО-ЗВЕЗДНАЯ ОРИЕНТАЦИЯ
115
совпадать со значением угла у st для опорной звезды. При
этом логика поиска звезды может строиться на осуще-
ствлении нескольких оборотов поиска вокруг направле-
ния на Солнце и сравнении освещенностей от различных
ориентиров, попавших в поле зрения звездной системы на
различных оборотах. Если, например, в течение времени,
превышающего время одного оборота, звездная система
зарегистрировала два ориентира с близкой освещен-
ностью, то вероятность того, что оба ориентира являются
одной и той же нужной опорной звездой, весьма велика.
Возможность построения такой логики поиска основана
на том, что угловая скорость вращения аппарата при по-
иске задается системой управления ориентацией, и по-
этому, хотя и с некоторой ошибкой, заранее известно вре-
мя одного поискового оборота.
Из сказанного ясно, что современные средства авто-
матики позволяют построить бортовую систему поиска
и обнаружения звезды таким образом, чтобы практически
исключить возможность ложной ориентации за счет ча-
стиц, случайно попавших в поле зрения звездного датчика.
Ложная ориентация может иметь место и в том случае,
когда на том участке траектории, на котором должен осу-
ществляться поиск звезды, оказалось два или более ори-
ентира с близкими звездными величинами и близкими уг-
лами у st- Такого рода ложную ориентацию легко избе-
жать, введя запрет на поиск звезды на таких участках
траектории. Если же изменение времени начала звездной
ориентации нежелательно, что, например, может иметь
место при коррекциях траектории, то целесообразно еще
при разработке звездной системы заложить в нее возмож-
ность ориентации на различные звезды с разными звезд-
ными величинами и разными углами у st- Возможность
выбора опорной звезды среди нескольких вариантов мо-
жет обеспечить проведение звездной ориентации на любом
участке траектории.
ГЛАВА 3
УПРАВЛЕНИЕ БОРТОВЫМИ СИСТЕМАМИ.
ВЗАИМОДЕЙСТВИЕ космических аппаратов
3.1. Понятия о логике работы и логике
взаимодействия бортовых систем
3.1.1. Автоматический космический аппарат содержит
комплекс бортовых систем, приборов и агрегатов, пред-
назначенных для выполнения задач полета.
Деление всей аппаратуры космического аппарата на
системы достаточно условно. Чаще всего под системой по-
нимают группу приборов и устройств, предназначенных
для решения определенного круга задач, например систе-
му управления ориентацией. В отдельных случаях систе-
мой считают приборы, поставляемые одной организацией,
хотя эти приборы могут участвовать в решении различных
задач.
При полной централизации управления понятие си-
стемы может потерять всякий смысл. В этом случае вся
бортовая аппаратура может состоять из вычислительной
машины, коммутационного силового блока, химических
источников тока, генератора электроэнергии, приемных
и передающих устройств и группы датчиков.
С точки зрения управления каждая из бортовых си-
стем характеризуется различными режимами работы и со-
стоянием резерва. Поясним это примерами. Для системы
управления ориентацией могут иметь место следующие
режимы: поиск Солнца, поиск звезды, установившийся
режим солнечно-звездной ориентации, режим закрутки
и т. д. Для системы электропитания: режим заряда хими-
ческой батареи, названный в первой главе дежурным режи-
мом, режим разряда батареи и режим питания от наземных
источников на стартовой позиции. Одним из режимов ра-
боты системы может быть проверка ее работоспособности
или диагностика, если такая операция предусмотрена
программой.
3.1]
ЛОГИКА РАБОТЫ
117
Относительно состояния резерва заметим, что в систе-
мах могут иметься дублирующие приборы, части прибора
или отдельные элементы в приборах. Очевидно, что сте-
пень использования дублирующих приборов или их эле-
ментов в текущий момент времени является важной
характеристикой данной системы, так как от нее
зависит решение, которое необходимо принять назем-
ной оперативной группе или бортовой системе управле-
ния.
Кроме того, работа системы может зависеть от внешних
факторов или от состояния аппарата в целом. Сюда можно
отнести положение аппарата на орбите или траектории,
положение внешних ориентиров относительно корпуса,
схему соединения отсеков, если в полете меняется их вза-
имное положение, и т. д. Например, если спутник Земли
снабжен активной системой ориентации на Солнце, содер-
жащей два дублирующих друг друга датчика Солнца, то
эта система должна получить извне или выработать сама
сигнал определенного вида при попадании спутника в тень
Земли. Если этого не предусмотреть, то попадание в тень
будет воспринято системой как выход из строя одного из
датчиков или как воздействие возмущения. Указанная
ситуация может вызвать включение поиска Солнца с ис-
пользованием резервного датчика, что в свою очередь
может привести к ненужным расходам рабочего тела или
электроэнергии. Для некоторых систем роль внешнего
фактора может играть время, если от него зависит работа
системы.
Изменение режимов работы системы и переход на дуб-
лирующие приборы или элементы приборов осуществляют-
ся по специальным командам, которые могут поступать на
систему от других систем аппарата, от приборов той же
системы и по командам с Земли или с других космических
аппаратов. Команды могут подаваться в виде постоян-
ных напряжений на некоторых контактах внешних со-
единений или в виде импульсов напряжений, или в
виде замыкания или размыкания цепей приборов
данной системы, или, наконец, в виде закодированных
сообщений.
Аналогично данная система может выдавать команды
и сообщения на другие системы. Команды, которыми обме-
ниваются системы, иногда называют командами взаимного
118
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
управления, чтобы отличить их от команд, передаваемых
с Земли по командной радиолинии.
3.1.2. Режимы работы отдельных систем некоторых
космических аппаратов могут следовать друг за другом
в определенной последовательности или вообще может
существовать только один режим их работы. Переключе-
ние с одного режима на другой в этом случае может осу-
ществляться от бортового временного устройства, рабо-
тающего по так называемой жесткой программе, либо по
командной радиолинии, либо по изменению некоторых
физических параметров в самой системе. Жесткие про-
граммы могут формироваться еще на Земле и определять-
ся схемами соответствующих бортовых устройств, а могут
корректироваться или изменяться целиком в полете по
командной радиолинии.
На более сложных аппаратах отдельные режимы ра-
боты и отдельные системы могут включаться не обязатель-
но в строгой последовательности. Включение того или ино-
го режима какой-либо системы может осуществляться в за-
висимости от этапа полета, состояния этой и других систем,
различных аварийных ситуаций, результатов, получен-
ных с помощью научной аппаратуры, и, наконец, в зави-
симости от фактической траектории космического ап-
парата.
В этом случае включение и выключение отдельных ре-
жимов и систем, а также переход на дублирующие ком-
плекты может происходить по командной радиолинии, по
командам взаимного управления и по командам, форми-
руемым в самих системах.
Естественно, что включение некоторых режимов может
происходить не при всяких условиях. Могут существо-
вать запреты на включение отдельных режимов и разре-
шения на включение других при некоторых ситуациях
в данной системе, в других системах или во вне аппарата.
При этом иногда запреты могут иметь категорический ха-
рактер,^. е. при отдельных ситуациях их включение мо-
жет приводить к авариям. В других случаях некоторые
режимы могут не рекомендоваться, так как их включение
приведет к дополнительным затратам рабочего тела илй
электроэнергии, снижению надежности и т. д. В последнем
случае эти режимы должны включаться в «крайнем слу-
чае», когда нет другого выхода.
3.1]
ЛОГИКА РАБОТЫ
119
Указанная условность включения тех или иных режи-
мов и отдельных систем или правила их включения, реа-
лизуемые электрическими схемами систем, программами
и командами взаимного управления, может быть названа
логикой работы систем и логикой взаимодействия борто-
вых систем и приборов. Под логикой работы и взаимодей-
ствия будем понимать те возможности управления, кото-
рые заложены в системах - в их электрических схемах
и программах. В понятие логики работы целесообразно
включить и временные последовательности включения
и выключения отдельных режимов, приборов и устройств,
если эти последовательности реализуются бортовыми уст-
ройствами. Иногда это подчеркивается тем, что вместо
термина «логика работы» используют более развернутый
термин «программа и логика работы» системы или комп-
плекса бортовой аппаратуры. Близко к понятию логики
работы и взаимодействия бортовых систем лежит понятие
алгоритмов управления. Однако если логика работы реа-
лизуется схемами и программами работы отдельных си-
стем и системой управления аппарата в целом и в этом
смысле является незыблемой для данного аппарата, то
алгоритмы управления — понятие более широкое, так как
оцо включает в себя не только логику и программы работы
систем, но и правила пользования этими средствами в тех
или иных ситуациях. Отсюда следует, что для тех уча-
стков полета, на которых аппарат работает полностью
в автоматическом режиме, без вмешательства с Земли, по-
нятия логики работы и алгоритмов управления совпадают.
Логика работы и взаимодействия бортовых систем,
а также алгоритмы управления определяются задачами
данного космического аппарата, его траекторией, соста-
вом, характеристиками и режимами работы бортовых
систем. Логика работы существенно зависит и от сочета-
ния бортовых и наземных средств управления. Этим воп-
росам посвящен § 3.3.
Логика работы и алгоритмы управления разрабаты-
ваются параллельно с разработкой внутренней и внешней
компоновок и согласованием технических заданий на от-
дельные системы, приборы и механизмы вновь создавае-
мого космического аппарата. Весьма существенно, чтобы
одновременно с разработкой логики и алгоритмов управ-
ления оценивалась их техническая реализуемость и на-
120
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
|ГЛ. 3
дежность бортовых средств, необходимых для их осуще-
ствления.
Логика работы может описываться словами и диаграм-
мами, условными электрическими схемами, на языке
алгебры логики илина некоторых машинных языках. Есте-
ственно, что последний способ является обязательным, ес-
ли для анализа логики работы бортовых систем предпола-
гается использовать ЭВМ.
3.1.3. Для иллюстрации понятия о логике работы рас-
смотрим некоторый гипотетический аппарат, основным ре-
жимом ориентации которого на отдельных этапах полета
является совмещенный режим солнечно-звездной ориента-
ции его связанных осей. Допустим, что ориентация какой-
либо оси на Солнце осуществляется с помощью двух опти-
ческих солнечных датчиков — основного и дублирующего,
а удержание аппарата относительно этой оси — двумя
звездными датчиками. Допустим также, что во всех дат-
чиках имеются так называемые воны наличия Солнца или
звезды, т. е. при ориентации аппарата с нужной точностью
относительно Солнца и звезды последние находятся внутри
указанных зон наличия. Предположим, кроме того, что
поиск Солнца и звезды осуществляется так, как описано
в главе 2, и что поиск и приведение Солнца в зону наличия
осуществляются теми же датчиками Солнца. Допустим
далее, что имеется режим гироскопической пассивной ори-
ентации, когда аппарату сообщается вращение вокруг
одной из осей, а система ориентации выключается.
Таким образом, каждый из звездных датчиков может
работать в следующих режимах:
1) датчик выключен;
2) датчик включен и находится в состоянии ожидания
звезды (режим поиска);
3) датчик включен и звезда находится в зоне наличия,
при этом выдаются электрические сигналы, зависящие от
угловых отклонений направления на звезду от некоторой
нейтральной оси, линии или зоны (режим поддерживания
ориентации).
Эти режимы взаимно исключают друг друга, т. е. мо-
жет существовать только один из этих режимов. Кроме
того, при попадании звезды в зону наличия датчика вто-
рой режим должен переходить в третий, а при пропа-
дании звезды из зоны наличия, третий режим перехо-
3.1]
ЛОГИКА РАБОТЫ
121
дить во второй. Отметим, что приведенный перечень ре-
жимов не является единственно возможным. Можно себе
представить, в частности, некоторый промежуточный
режим между вторым и третьим, являющийся режимом
приведения звезды из грубой зоны наличия в рабочую зону
поддерживания ориентации. Нас интересует не обсужде-
ние различных вариантов построения датчиков, а пример
логики работы, поэтому остановимся на приведенном ва-
рианте.
Для солнечных датчиков существуют режимы работы:
1) датчик выключен;
2) датчик включен и находится в состоянии ожидания
Солнца (режим поиска Солнца);
3) датчик включен, Солнце находится в зоне приве-
дения, выдаются электрические сигналы, зависящие от
углового расстояния Солнца от зоны наличия (режим
приведения);
*4) датчик включен, Солнце находится в зоне нали-
чия, выдаются сигналы, зависящие от отклонений направ-
ления на Солнце от нейтральной оси (режим поддержива-
ния ориентации).
Здесь, так же как и у звездного датчика, не могут су-
ществовать одновременно два и более режимов и второй
режим переходит в третий, а третий в четвертый в зави-
симости от положения Солнца.
3.1.4. Рассмотрим вариант логики работы системы при
аварийных ситуациях. В исходном положении работают
первые комплекты солнечного и звездного датчиков соот-
ветственно в четвертом и третьем режимах. Допустим, что
в некоторый момент времени из зоны наличия солнечного
датчика исчезает Солнце. Если через некоторое заданное
время отсчитываемое от момента потери Солнца, Солн-
це продолжает отсутствовать, но имеется наличие звезды
в звездном датчике, то первый датчик выключается,
а включается второй, дублирующий, датчик Солнца. Ре-
жим работы этого датчика зависит от положения Солнца.
Когда Солнце находится в зоне наличия, то продолжается
режим стабилизации, но на втором датчике. Если Солнце
находится в зоне приведения, то включается третий ре-
жим. При исчезновении звезды из зоны наличия, что
наиболее вероятно, звездный датчик переводится во вто-
рой режим. Возвращаясь к солнечному датчику, заметим,
122
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
что одновременно с его включением в третьем режиме на-
чинает измеряться время. Если по прошествии некоторого
временного интервала Т2 Солнце не оказалось в зоне на-
личия, то датчик выключается и включается режим зак-
рутки, после окончания которого выключается вся система
ориентации. Если же до окончания времени Т2 Солнце ока-
залось в зоне наличия, то включается четвертый режим и
при отсутствии звезды в зоне наличия одновременно на-
чинается поиск звезды и отсчет времени Т3. Если до окон-
чания этого времени звезда оказывается в зоне наличия,
то продолжается нормальный режим солнечно-звездной
ориентации. Отсутствие звезды в течение времени Т3
равносильно сигналу «сбой звездного датчика», о котором
будет сказано ниже. Если после включения второго датчика
Солнце не оказалось ни в зоне наличия, ни в зоне приведе-
ния, то включается второй режим этого датчика, а аппа-
рату сообщается вращение, необходимое для поиска Солн-
ца. Одновременно с этим начинает отсчитываться время Т4,
необходимое для контроля за процессом поиска Солнца.
Если до окончания времени Т4 Солнце оказалось в зоне
приведения, то сразу начинается третий режим приве-
дения с отсчетом времени Т2 по изложенной выше логике.
Если же через время Т4 Солнце не оказалось в зоне при-
ведения, то осуществляется режим закрутки с последую-
щим выключением системы ориентации.
После восстановления солнечно-звездной ориентации
на втором комплекте солнечного датчика первый ком-
плект остается «под подозрением». Если через какое-то
время снова происходит сбой Солнца, но во втором дат-
чике, то сразу осуществляется закрутка аппарата, после
чего вся система ориентации выключается. Включение
этой системы в будущем возможно только по командной
радиолинии после соответствующего анализа на Земле.
При этом подачей соответствующих команд можно поиск
Солнца и звезды включать при различных сочетаниях ком-
плектов датчиков.
Выше был разобран случай, когда через некоторое
время 7\ Солнце продолжает отсутствовать в зоне нали-
чия, а звездный датчик работает. Это может произойти из-
за нарушения работоспособности солнечного датчика.
Возможен другой случай, когда в течение времени 7\
исчезнут из своих зон наличия и Солнце и звезда. Наиболее
ЛОГИКА РАБОТЫ
123
3.1]
вероятно, что это явится следствием некоторого возмуще-
ния, поэтому целесообразно включить режим успокоения
и после уменьшения угловых скоростей по всем осям ап-
парата начать поиск Солнца, а затем и звезды на тех же
комплектах датчиков. При этом каждый из этапов поиска
нужно подстраховывать контролем окончания этого этапа
через заданное время. При невыполнении какого-либо из
этапов поиска за это время нужно осуществлять переход
на дублирующие датчики Солнца или звезды аналогично
разобранному выше случаю.
Из сказанного вытекает, что система управления ком-
плексом бортовой аппаратуры должна запоминать ава-
рийные ситуации и состояние резервов. С другой сторо-
ны, должна быть предусмотрена возможность вмешатель-
ства по командной радиолинии в действия бортовой
системы управления, поскольку наиболее полный ана-
лиз может быть осуществлен на Земле.
Возвращаясь к рассматриваемому гипотетическому
аппарату, рассмотрим случай, когда произошел «сбой
звезды», т. е. звезда исчезла из зоны наличия звездного
датчика, а Солнце находится в зоне наличия. В этом слу-
чае нужно тот же звездный датчик переключить на вто-
рой режим (режим поиска) и сообщить аппарату вращение
вокруг оси, направленной на Солнце. Если через некото-
рое время Т3 звезда не окажется в зоне наличия, то необ-
ходимо выключить первый датчик и включить второй, не
останавливая вращения аппарата и снова начиная от-
счет времени Т3. Наконец, если и на втором датчике звезда
не появится через указанное время, то нужно выключить
второй звездный датчик, остановить вращение аппарата
вокруг солнечной оси и остаться только в режиме солнеч
ной ориентации до очередного сеанса связи и проведения
анализа на Земле. Если же на первом или втором комплек-
тах звездного датчика звезда окажется в зоне наличия до
окончания времени Т3, то должно быть прекращено вра-
щение аппарата, а соответствующий датчик должен быть
переключен в режим стабилизации (третий режим). При
этом, как говорилось выше, система управления и борто-
вая телеметрия должны запомнить, какой из звездных
датчиков оказался работоспособным.
Разобранный пример логики работы системы управ-
ления ориентацией показывает, что словесное описание
124
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
этой логики получается довольно громоздким. Именно
в связи с этим все чаще прибегают к использованию диа-
грамм, таблиц или изложению логики работы на специаль-
ных языках.
На рис. 3.1 представлен один из вариантов изображе-
ния диаграммы поиска Солнца и звезды и переключения
Рис. 3.1. Диаграмма поиска Солнца и звезды.
режимов солнечного и звездного датчиков. Схема поиска
на диаграмме соответствует схеме, описанной в главе 2,
а номера режимов и индексы контрольных времен приня-
ты такими же, как и при описании логики работы системы
управления ориентацией в аварийных режимах. Недос-
татком представленной схемы является то, что она соот-
ветствует безаварийному процессу поиска ориентиров.
Для описания логики работы при авариях необходимы
словесные пояснения, аналогичные приведенным выше.
3.1]
ЛОГИКА РАБОТЫ
125
Допустим, что для записи логики работы системы
ориентации используется язык FORTRAN. В этом слу-
чае каждому комплекту солнечного и звездного датчиков
можно присвоить свой идентификатор, например ISD1
и ISD2 соответственно для первого и второго комплектов
солнечного датчика, ISTDJ и ISTD2 — для звездных
датчиков. Значения идентификаторов, выраженные целы-
ми числами, могут означать режимы работы соответст-
вующих датчиков. Пользуясь приведенными идентифи-
каторами, можно, в частности, считать, что ISD1 = 2 оз-
начает работу первого комплекта солнечного датчика
во втором режиме, a ISD1 = 4 — в четвертом. Кроме
того, необходимо ввести идентификаторы для обозначения
положений Солнца и звезды относительно своих зон при-
ведения и наличия. Например, если идентификатор IS
означает положение Солнца, то при IS = 1 Солнце на-
ходится в зоне наличия, при IS = 2 — в зоне приведе-
ния, а при IS — 3 не находится ни в той, ни в другой зоне.
Для описания логики работы достаточно, по-видимо-
му, применения арифметических и логических операто-
ров присвоения и различных вариантов операторов IF
и GO ТО.
Отметим, что разобранный пример относится только
к логике поиска Солнца и звезды и логике перехода на
дублирующие комплекты датчиков. Кроме этого, для нор-
мального функционирования системы управления ориен-
тацией должна быть разработана и реализована в борто-
вых приборах логика работы системы в отдельных режи-
мах. Под последней понимаются правила формирования
управляющих силовых воздействий на аппарат в зависи-
мости от угловых отклонений связанных осей аппарата от
направлений на внешние ориентиры, угловых скоростей,
ускорений, интегралов угловых отклонений и т. д. При-
меры логики работы системы ориентации в различных ре-
жимах можно найти в [5, 18].
3.1.5. Как правило, на борту космического аппарата
работает одновременно несколько систем, например си-
стема управления ориентацией, система электропитания,
радиотелеметрическая система в режиме приема команд
с Земли и записи телеметрических данных, некоторая
научная аппаратура и т. д. Эти системы могут работать
по своим автономным программам и алгоритмам, но могут
126
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
и обмениваться командами взаимного управления. На
работу систем влияют внешние факторы, состояние ап-
парата в целом и этап полета. Все это создает достаточно
сложную картину функционирования космического ап-
парата, затрудняющую создание системы t управления
комплексом бортовой аппаратуры, близкой^к оптималь-
ной. Поэтому естественно стремление упростить анализ и
синтез системы управления. Одним пз путей упрощения
является разделение комплекса всей бортовой аппарату-
ры на системы и подсистемы, как правило, объединяющие
приборы и устройства, решающие одну задачу или узкий
круг задач. Таким образом, разделение на системы и под-
системы это, как правило, деление по функциональному
признаку. Наряду с этим пользуются и другим методом
упрощения анализа и построения схем. Здесь имеется в
виду разделение всего процесса работы космического ап-
парата на сеансы и дежурный режим. Под дежурным
понимают режим функционирования бортовой аппара-
туры, продолжающийся большую часть времени актив-
ного существования, из которого аппарат может быть
переведен в любой другой режим подачей команд с Земли
или от автономной системы управления. Наиболее ^асто
в дежурном режиме работают система управления ориен-
тацией, система электропитания и некоторые другие си-
стемы, указанные выше.
Иногда приходится вводить несколько вариантов
дежурного режима. Переход от одного варианта режи-
ма к другому осуществляется в зависимости от этапа
полета или при некоторых аварийных ситуациях.
Приведенный выше в качестве примера режим за-
крутки аппарата при выходе из строя оптических солнеч-
ных датчиков может сопровождаться выключением час-
ти научной аппаратуры для экономии электропитания и
является вариантом дежурного режима.
Для того чтобы из дежурного режима можно было
перевести аппарат в любой другой режим работы, как
правило, непрерывно работают командная радиолиния и
система управления бортовой аппаратуры. Если на борту
имеется ЦВМ, осуществляющая анализ и управление по
заложенным в нее программам, то это устройство должно
работать непрерывно в течение всего полета, а следова-
тельно, и в дежурном режиме.
3.1]
ЛОГИКА РАБОТЫ
127
Под сеансом понимается сравнительно кратковремен-
ная работа группы систем. В зависимости от назначения
аппарата может предусматриваться несколько различных
сеансов. В каждом сеансе имеется своя, характерная для
данного сеанса программа и логика работы отдельных
систем и логика их взаимодействия.
Как примеры укажем на следующие возможные сеансы:
передача с борта на Землю телеметрической и теле-
визионной информации;
коррекция траектории;
торможение и посадка на планету или на Землю;
автономная навигация;
работа научной аппаратуры.
Из группы сеансов иногда целесообразно выделить
подгруппу типовых сеансов, т. е. таких, которые более
или менее периодически повторяются в течение всего по-
лета. Из приведенного перечня к таким сеансам могут
относиться, например, сеансы передачи информации, кор-
рекции траектории, автономной навигации.
С другой стороны, некоторые сеансы во время полета
аппарата должны проводиться только один раз, например
сеанс торможения и посадки на планету.
В некоторых случаях отдельные сеансы могут совме-
щаться друг с другом. Ясно, что если два каких-либо сеан-
са всегда совмещаются, то их целесообразно объединить
в один сеанс. Так же как и дежурный режим, программа
проведения сеанса не является незыблемой. Могут иметь
место варианты проведения отдельных сеансов в зависи-
мости от этапа полета, состояния бортовой аппаратуры
и полученной на борту информации от научных при-
боров.
Еще больше чем деление на системы, деление на сеан-
сы и дежурный режим является условным. Поскольку это
деление вводится для удобства анализа и создания систе-
мы управления бортовой аппаратурой, оно существенно
зависит от схемы полета, характеристик и особенностей
работы отдельных систем и даже от опыта работы разра-
ботчиков данного космического аппарата. Введение сеан-
сов и дежурного режима в программу и логику работы уп-
рощает бортовые электрические схемы и сокращает коли-
чество команд в командной радиолинии, так как по одной
команде на начало сеанса включается целая группа си-
128
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
стем и приборов. Кроме того, при этом становится более
простым контроль в полете за расходом рабочего тела си-
стемы ориентации и расходом электроэнергии, так как эти
расходы для всех типовых и одиночных сеансов и дежур-
ного режима могут быть определены на Земле в процессе
испытаний каждого летного экземпляра аппарата.
Отметим также, что деление на дежурный режим и
сеансы в некоторых случаях упрощает управление ап-
паратом с Земли, что немаловажно, так как при этом умень-
шается состав оперативных групп, появляется реальная
возможность автоматизации процесса управления и сок-
ращается время на обработку служебной телеметрической
информации.
3.1.6. Для того чтобы отдельные системы могли функ-
ционировать в соответствии с заданной логикой их рабо-
ты в нормальных и аварийных ситуациях, на приборы, и
агрегаты систем должны подаваться команды. При пода-
че команд управления должны учитываться режимы ра-
боты данной системы и остальных систем и состояние ре-
зервов.
Под управлением комплексом бортовой аппаратуры бу-
дем понимать процесс, включающий подачу на системы
или формирование внутри самих систем команд управле-
ния, а также получение от систем информации о прохож-
дении команд, их работе, резервах и состоянии аппарата
в целом, поскольку в состав некоторых систем могут вхо-
дить приборы, определяющие это состояние.
В процесс управления комплексом нужно также вклю-
чать выдачу на отдельные системы данных, необходимых
для ее работы. К этим данным, в частности, могут отно-
ситься временные метки, серии импульсов для поворота
некоторых устройств на заданные углы, опорные напря-
жения, закодированные сообщения и т. д. Кроме того, в
процесс управления комплексом бортовой аппаратуры
иногда целесообразно включать и вычисления некоторых
исходных данных для управления. В частности, это мо-
жет относиться к обработке бортовых навигационных из-
мерений и вычислению на их основе установочных дан-
ных для системы управления движением при коррекциях
траектории.
Отметим, что термин «комплекс бортовой аппаратуры»
употребляется для того, чтобы подчеркнуть взаимосвя-
3.1]
ЛОГИКА РАБОТЫ
129
занность всех систем аппарата и невозможность управ-
ления одной системой, «не обращая внимания» на другие.
При рассмотрении способов управления комплексом
бортовой аппаратуры необходимо выделить следующие три
метода управления:
по командной радиолинии с Земли;
автономно — приборами отдельных систем или цен-
тральной системой управления аппаратом;
с борта других космических аппаратов.
Поскольку управление по командной радиолинии тре-
бует использования таких устройств, как бортовые ан-
тенны, приемники, дешифраторы команд и других при-
боров, специфических для радиотелеметрической системы
или бортового радиокомплекса, то обычно управление по
командам с Земли системами аппарата осуществляется
через радиотелеметрическую систему или через централь-
ную систему управления аппаратом. Очевидно, что это
относится и к управлению с других космических аппа-
ратов.
Управление по внешним относительно космического
аппарата командам, т. е. по командной радиолинии с
Земли, необходимо в тех случаях, когда основной анализ
состояния бортовой аппаратуры, нужный для принятия
решений об изменении режимов работы бортовых систем,
осуществляется на Земле. В настоящее время все без ис-
ключения космические аппараты используют этот метод
управления в большей или меньшей степени.
Если космический аппарат не всегда виден с наземных
пунктов управления, то вне так называемых зон видимости
неизбежно приходится прибегать к автономному управ-
лению. У простых аппаратов это управление сводится к
включению и выключению отдельных приборов по жест-
кой временнбй программе. У более сложных космических
аппаратов автономное управление реализует логику ра-
боты систем и их взаимодействия, а также анализ и про-
гноз состояния систем и вычисление ряда исходных дан-
ных. Хотя расширение функций автономного управления
неизбежно приводит к увеличению массы бортовой ап-
паратуры и электропотребления, к этим методам управ-
ления приходится прибегать не только из-за невидимости
аппарата с наземных пунктов на некоторых участках тра-
ектории, но и для уменьшения загрузки этих пунктов.
5 Г. Ю. Максимов
130
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
Кроме того, при больших расстояниях до аппарата время
распространения радиосигнала не может обеспечить до-
статочно оперативного управления, которое иногда не-
обходимо для отдельных этапов работы. Время распро-
странения сигнала от Земли до аппарата равно
т» 3,3-!()-•£ [с], (3.1)
где L [км1 — расстояние до аппарата.
Для аппаратов, летящих к Марсу, максимальное рас-
стояние составляет (200 ч- 300) *10® км, соответственно
т ж (И ч- 16,5) мин, а для Юпитера это время состав-
ляет 55 мин.
В качестве примеров, когда автономное управление
целесообразно, укажем на два случая.
Если искусственный5 спутник Земли имеет в своем со-
ставе посадочный отсек, который следует опустить в задан-
ный район Земли, то тормозной двигатель нужно включить
в определенной точке траектории. До и после включения
двигателя необходимо в заданной временной последова-
тельности осуществить целый ряд операций, в частности
ориентацию аппарата, отстыковку электрических разъе-
мов, отделение посадочного отсека и т. д. Если участок
траектории, на котором нужно начать торможение, на-
ходится вне зоны видимости наземных пунктов управле-
ния, то начало заданной временной последовательности
операций, необходимых для спуска отсека, можно осу-
ществить только по команде от автономной системы уп-
равления. При этом, поскольку время спуска опреде-
ляется уже после выхода на орбиту, время Выдачи ко-
манды должно быть заложено по командной радиолинии
в бортовое программное устройство заранее в виде не-
которой временнбй уставки.
Необходимо отметить, что даже если указанный уча-
сток траектории находится в зоне видимости наземных
пунктов, включение и выключение подготовительных опе-
раций можно осуществлять автономной системой управ-
ления, оставляя за командной радиолинией выдачу ко-
манды на начало указанной временнбй последовательности.
Это делается для повышения надежности проведения этих
операций и более точной их временной привязки.
В качестве второго примера укажем на космический
аппарат, выводимый на орбиту искусственного спутника
3.1 j ЛОГИКА РАБОТЫ 131
Марса. Для получения орбиты спутника с заданными пара-
метрами точность прогноза траектории подлета к Марсу,
полученная на основе радиоизмерений, может оказаться
недостаточной, и тогда приходится прибегать к использо-
ванию системы автономной навигации. Если, кроме того,
в этой системе измеряются углы между направлениями на
Солнце и на центр Марса, то для повышения точности
определения траектории на базе этих измерений нужно
проводить измерения вблизи от планеты. При этом может
остаться мало времени на обработку результатов измере-
ний и введение этих данных в систему управления движе-
нием при маневре, если эти операции осуществлять на
Земле. Это связано с большим временем распространения
радиосигналов от Земли до Марса. В подобных случаях
целесообразно проведение необходимых вычислений по-
ручить автономной системе управления и для этой цели
включить в состав системы управления бортовую цифро-
вую вычислительную машину.
По поводу распределения функций управления между
центральной системой управления и приборами управ-
ления отдельных систем заметим, что даже в простейшем
случае, когда все приборы аппарата работают по жестким
временном программам, необходимо согласование этих
программ с возможностями системы электропитания и
средств терморегулирования аппарата. Кроме того, пото-
ки служебной и научной информации, которые должны
быть переданы по радиотелеметрической системе, необ-
ходимо согласовать с пропускной способностью этой си-
стемы. Хотя такое согласование осуществляется еще при
разработке космического аппарата, оно является про-
образом тех функций, которые приходится решать в полете
центральной системе управления аппаратов, обладающих
различными средствами дублирования, сложной логикой
работы отдельных систем и средствами управления по
командной радиолинии.
Таким образом, поскольку практически у всех косми-
ческих аппаратов имеются служебные системы, обслужи-
вающие все без исключения приборы и агрегаты, то даже
при минимальной централизации управления необходимы
контроль и своевременное вмешательство в работу от-
дельных систем для обеспечения работоспособности слу-
жебных систем аппарата. В наиболее простом случае
5*
132
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
контроль осуществляется системой электропитания и за-
ключается в выключении пиковых или сеансовых нагру-
зок при падении напряжения на шинах этой системы ниже
минимально допустимого уровня.
В наиболее сложном и, по-видимому, перспективном
случае централизация управления комплексом бортовой
аппаратуры может вылиться в установку единой бортовой
цифровой вычислительной машины, решающей все без
исключения логические и арифметические задачи, необ-
ходимые для управления аппаратом.
При разработке нового космического аппарата вопрос
о степени централизации управления решается в зависи-
мости от задач, стоящих перед данным аппаратом, имею-
щихся средств управления, надежности и массовых огра-
ничений.
• Управление космическим аппаратом с борта другого
аппарата оказывается иногда необходимым для комплек-
сов космических аппаратов. Под последними будем пони-
мать группу аппаратов, решающих какую-либо одну
задачу. Например, несколько метеорологических спут-
ников Земли, находящихся на различных долготах гео-
стационарной орбиты, посадочный аппарат на поверхности
Марса и аппарат на орбите искусственного спутника пла-
неты, группа спутников Земли, решающих одну комплекс-
ную научную задачу, и т. д.
Обмен командами, а иногда и информацией между кос-
мическими аппаратами, входящими в комплекс или систе-
му аппаратов, может оказаться необходимым для синхро-
низации их работы, ретрансляции информации, получен-
ной на борту одного аппарата, через другой аппарат и,
наконец, для ретрансляции команд управления с Земли,
когда некоторые из аппаратов комплекса находятся вне
зон видимости наземных пунктов.
3.1.7. Остановимся на частном вопросе, связанном
с управлением дальними космическими зондами и межпла-
нетными аппаратами. Рассмотрим один из наземных пунк-
тов управления и приема информации, осуществляющих
сопровождение аппарата в полете. Для этого пункта кос-
мический аппарат каждые земные сутки будет восходить,
кульминировать и заходить относительно местного гори-
зонта в моменты времени tB, tK и t3. Качественная зависи-
мость угла места ф аппарата от времени полета во время
3.1)
ЛОГЙКА РАБОТЫ
133
видимости из данного пункта представлена на рис. 3.2.
В геоцентрической системе координат аппарат переме-
щается относительно Солнца и звезд, поэтому время между
соседними кульминациями будет не равно ни средним
солнечным, ни звездным суткам. Только для очень удален-
ных аппаратов их собственное движение относительно
Рис. 3.2. К выбору бортового времени.
звезд будет незначительным и указанный промежуток
времени станет приближаться к звездным суткам. Ска-
занное объясняет, почему на рис. 3.2 кривые зависимости
средних солнечных времен восхода, захода и кульминации
от времени полета не параллельны оси абсцисс. Потребуем,
чтобы некоторые бортовые приборы, например передат-
чики и телеметрические устройства, периодически вклю-
чались автономной системой управления и чтобы во время
их работы аппарат был виден с наземного пункта под
углами места, превышающими некоторый предельный
угол ф0. Для этого нужно, чтобы ход бортовых часов,
ответственных за указанные включения, отличался от
хода земных часов, работающих в среднем солнечном
времени. В противном случае требование видимости аппа-
рата из наземного пункта во время приема информации
будет достаточно быстро нарушено, и придется периоди-
чески корректировать времена включения указанных
приборов.
134
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
|ГЛ. 3
Если обозначить через изменение средних солнеч-
ных времен кульминации аппарата за земные сутки (см.
рис. 3.2), то изложенное выше требование будет выпол-
нено, если длительность так называемых бортовых суток
Т’борт» отсчитываемых бортовыми часами, будет связана
с длительностью средних солнечных суток Гт соотно-
шением
Уборт — ГС.С (3*2)
где ТбОрт, Гс.с» А* выражаются в средних солнечных еди-
ницах времени.
• В общем случае величина Д? не остается постоянной
во время полета аппарата, однако часто ее можно прини-
мать постоянной и равной Д?о. Выбирать величину Д£о
нужно таким образом, чтобы за время полета моменты
автономного включения и выключения приборов попадали
в зону видимости наземного пункта сопровождения при
заданной длительности включения тс. Схема выбора ве-
личины AZ ясна из рис. 3.2.
Для траекторий полета к Марсу и Венере величина
Д£о = 3-н4 мин.
Отметим, что приведенное в качестве примера требо-
вание об автономном включении аппаратуры в зоне види-
мости наземного пункта может иметь практическое значе-
ние для аварийного включения сеанса передачи служебной
телеметрической информации при временнбм непро-
хождении на борт команд. В этом случае промежуток
времени между двумя аварийными автономными сеансами
выбирается достаточно большим (5, 10, 15 или более
суток), причем каждое включение сеанса по командной
радиолинии может отменять одно очередное автономное
включение.
3.2. Использование БЦВМ для управления
3.2.1. За последние годы цифровые вычислительные
машины стали все шире применяться в различных обла-
стях науки и техники. Бортовые цифровые вычислитель-
ные машины стали использоваться и в системах управ-
ления ракет, и на борту космических аппаратов. Это свя-
зано, с одной стороны, с повышением эксплуатационных
характеристик БЦВМ и, с другой стороны, с усложнением
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
135
космических аппаратов, расширением их задач и увели-
чением времени активного существования. По-видимому,
процесс внедрения цифровых вычислительных машин
в космическую технику будет продолжаться и в будущем.
Использование БЦВМ в системах управления косми-
ческих аппаратов дает следующие преимущества:
возможность решения на борту сложных логических
и арифметических задач, таких, как, например, навига-
ционные задачи, обработка информации и т. д.;
использование для решения различных задач на раз-
ных этапах полета одной и той же аппаратуры только за
счет смены программы;
возможность сравнительно простого изменения логики
и алгоритмов управления комплексом бортовой аппара-
туры при модификациях аппарата, а также при подго-
товке аппарата к пуску и в полете;
перспективы создания самонастраивающихся борто-
вых систем управления, оптимальных для реальных усло-
вий полета и учитывающих информацию, полученную на
борту;
возможность использования одной и той же БЦВМ
для управления космическим аппаратом и управления
ракетой-носителем на участке выведения.
Естественно, что перечисленные преимущества могут
быть реализованы в случае, если для управления исполь-
зуется достаточно совершенная вычислительная машина
и если эта машина решает на борту бблыпую часть логи-
ческих и арифметических задач. Почти все из указанных
преимуществ приводят к большей автономности космиче-
ского аппарата, увеличению его надежности и живучести
и расширению его функций.
Большая автономность космического аппарата в свою
очередь уменьшает загрузку наземных средств управле-
ния и контроля и повышает оперативность управления,
особенно для дальних аппаратов.
Вместе с тем для каждого вновь разрабатываемого
космического аппарата целесообразность использования
БЦВМ в системе управления комплексом бортовой аппа-
ратуры и ее место в контуре управления должны быть
специально исследованы. Неправильное решение этих во-
просов может привести к неоправданному увеличению
массы служебных систем аппарата.
136
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
3.2.2. Возможность использования БЦВМ в системе
управления комплексом бортовой аппаратуры опреде-
ляется следующими основными характеристиками маши-
ны: скоростью вычислений и проведения логических опе-
раций, объемом запоминающего устройства, надежно-
стью, электропотреблением, массой и габаритами.
Скорость вычисления определяется числом разрядов
в машинном коде, способом передачи чисел и выполнения
операций над ними, числом и типом команд, принципом
управления операциями, временем выполнения каждой
команды и т. д. У современных БЦВМ скорости вычисле-
ния характеризуются следующими величинами: время
сложения — единицами микросекунд, умножения и де-
ления — десятками микросекунд, обращения к памяти —
десятыми долями микросекунды.
Запоминающие устройства БЦВМ обычно состоят из
постоянного (ПЗУ), оперативного (ОЗУ) и внешнего
(ВЗУ) запоминающих устройств. В ПЗУ хранятся коды
программ, констант, подпрограмм, микропрограмм и
другая неизменяемая информация. ОЗУ предназначено
для хранения операндов. ВЗУ является резервом для
ПЗУ и ОЗУ. У современных машин емкость запоминаю-
щего устройства доходит до нескольких десятков тысяч
слов [23].
Надежность можно характеризовать средним временем
наработки на один отказ. С учетом резервирования оно
у современных машин доходит до 50 000 ч [8].
Спецификой БЦВМ является то, что машина при про-
ведении арифметических и логических операций поль-
зуется числами, записанными в машинном коде. В про-
цессе работы в машину поступает информация (представ-
ленная непрерывным способом или дискретным) в виде
кодов. В связи с этим входные устройства БЦВМ содержат
блоки преобразования кодов входных сигналов в машин-
ный код и блоки, обеспечивающие преобразование в этот
код непрерывных сигналов.
Так как машина управляет работой отдельных систем,
сообщает этим системам данные, необходимые для их ра-
боты, и передает данные в радиотелеметрическую систему
для последующей передачи их на Землю, то выходные
устройства БЦВМ должны содержать преобразователи
информации и кодов управляющих сигналов,
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
137
Очевидно, что при правильном согласовании характе-
ристик отдельных систем с входными и выходными уст-
ройствами машины может быть достигнуто уменьшение
суммарных массы, габаритов и электропотребления
систем аппарата и БЦВМ, а также может быть уменьшен
объем кабельных связей между приборами.
Необходимо отметить, что если к предполагаемому
сроку пуска некоторого вновь разрабатываемого косми-
ческого аппарата нельзя рассчитывать на БЦВМ с нуж-
ными характеристиками надежности, то целесообразно
рассмотреть варианты неполного использования машины
в системе управления комплексом бортовой аппаратуры.
Здесь возможны следующие варианты.
1. БЦВМ работает не непрерывно в течение всего
полета, а на тех участках, на которых она особенно необ-
ходима, например на участке выведения — для управле-
ния ракетой-носителем, в сеансах астронавигационных
измерений — для вычисления уставок для коррекций и
маневров, во время коррекций и маневров — для стаби-
лизации и управления движением центра масс.
2. В центральной системе управления и в отдельных
системах имеются приборы, обеспечивающие выполнение
некоторого минимально необходимого круга задач дан-
ного полета при полном или частичном выходе из строя
БЦВМ. В некоторых случаях может оказаться, что все
задачи полета выполняются без БЦВМ, но с потерей не-
которых преимуществ, имеющих место при ее использо-
вании. В частности, выход БЦВМ из строя может при-
вести к увеличению загрузки наземных пунктов управ-
ления, уменьшению точности определения орбиты и, как
следствие, к проведению дополнительных сеансов для
радиоизмерений или к дополнительным коррекциям.
3.2.3. Остановимся на отдельных задачах, которые
могут решаться на борту космического аппарата с помо-
щью БЦВМ, и на требованиях к ней с точки зрения реше-
ния этих задач. Некоторые из рассмотренных задач, как,
например, автономная навигация и обработка служебной
и научной информации, достаточно полно освещены
в литературе, отдельные задачи излагаются ниже в поряд-
ке постановки.
В главе 4 при рассмотрении вопросов обеспечения ра-
боты системы управления ориентацией говорится о влия-
13#
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
|ГЛ. 3
нии на работу этой системы деформаций конструкции
• аппарата. Главными источниками нежелательных дефор-
маций являются изменения давления в герметичных отсе-
ках, которые невозможно предусмотреть на Земле, и ва-
риации температурных полей по элементам конструкции.
Там же говорится о том, что, если указанные деформации
были бы известны, их можно было бы учесть перед очеред-
ными коррекциями и маневрами в виде некоторых попра-
вок к установочным данным в системе ориентации и систе-
ме управления движением.
Можно принять, что деформации посадочных мест
приборов, от точности взаимного положения которых зави-
сит точность проведения коррекции или маневра, пропор-
циональны давлению в гермоотсеке. Тогда
Ai = A-i(p — ро), (3.3)
где А; — деформации посадочных мест относительно по-
ложений, которые они занимали при установке приборов
или при их юстировке, или относительно расчетных де-
формаций при некотором среднем давлении; р — давление
в отсеке во время учета, деформаций; р0 — давление, со-
ответствующее исходным или расчетным деформациям;
kt — коэффициенты пропорциональности.
Коэффициенты kt определяются при наземных испыта-
ниях отсека и вместе с величиной р0 могут быть записаны
в ПЗУ машины. Алгоритм внесения поправок в систему
ориентации или систему управления движением сводится
к следующему:
перед очередным сеансом коррекции или маневра изме-
рение давления в отсеке в одной, двух или трех точках
и их осреднение, т. е. определение величины р;
вычисление р — р0;
определение величин А; по формуле (3.3);
вычисление поправок к уставочным данным;
выдача поправок в систему управления ориентацией
или систему управления движением;
выдача в радиотелеметрическую систему значений р
и поправок к уставочным данным.
Четвертая и пятая операции зависят от схемы системы
ориентации и системы управления движением. В случае,
когда направление вектора корректирующей скорости
определяется угловым положением оптических труб, ука-
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
139
ванные поправки пропорциональны величинам А,, а про-
цесс выдачи поправок может сводиться к выдаче на шаго-
вые моторы соответствующих датчиков серий импульсов,
количество которых пропорционально величинам Ар
В более сложном случае количество импульсов может
определяться линейной функцией от нескольких значе-
ний Ар
Выдача в радиотелеметрическую систему значений р
и величин поправок необходима либо непосредственно
перед коррекцией или маневром, либо, если отсутствует
видимость аппарата или резерв времени, после коррек-
ции — для контроля и анализа на Земле, а также для
принятия решения о дальнейшей программе работы.
Изложенный алгоритм применим тогда, когда можно
пренебречь изменением давления в отсеке за время между
моментом измерения давления и моментом разарретиро-
вания гироскопического устройства или включения дви-
гателя. Если предполагается существенное изменение дав-
ления за это время, необходимо его измерить несколько
раз в фиксированные моменты времени и, аппроксимировав
зависимость давления от времени некоторым полиномом,
экстраполировать значение давления на нужный момент
времени. Методы такой экстраполяции достаточно хорошо
известны, поэтому на них останавливаться не будем.
Для оценки загрузки машины при решении рассмот-
ренной задачи можно принять i < 5, р — pQ < р3, где
р8 — давление заправки отсека, Af < 30 угл. мин. Точ-
ность расчета величин Дь по-видимому, должна быть
5—20 угл. сек. Если поправки выдаются в виде серии
импульсов на шаговые моторы оптических датчиков,
допустимая погрешность определения Дг будет равна
половине шага соответствующего мотора.
Алгоритм учета в полете температурных деформаций
конструкции сложнее и зависит от реальной конструкции,
так как эти деформации не могут быть определены каким-
либо одним параметром. Теоретически здесь возможны
следующие варианты:
измерение в полете температур в ряде точек и, опи-
раясь на результаты экспериментов в земных условиях,
определение поправок к уставочным данным;
для вычисления поправок использование результатов
измерений поверхностных деформаций или напряжений
140
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
в ряде точек элементов конструкции с помощью тензо-
датчиков;
установка на борту специальной системы, непосредст-
венно определяющей повороты посадочных мест или ба-
зовых поверхностей отдельных приборов друг относитель-
но друга.
В первом и во втором случаях определение взаимных
перекосов посадочных мест, а следовательно, и поправок
к уставочным данным можно свести к вычислению ряда
линейных выражений. Может оказаться целесообразным
иметь некоторую избыточность в измерениях температур
или напряжений, что, конечно, усложнит алгоритм вычи-
слений, но уменьшит влияние ошибок измерений. Главная
трудность в реализации первого и второго способов не
в сложности вычислений на борту аппарата, а в большом
объеме экспериментов на Земле и их тщательной обра-
ботке. В процессе этих экспериментов нужно создать
различные тепловые условия для аппарата в целом из
числа тех, которые могут иметь место в полете, и для каж-
дого из этих вариантов условий определить полд темпе-
ратур или напряжений по элементам конструкции и
деформации посадочных мест. В итоге обработки
результатов всех экспериментов должны быть найдены
зависимости деформаций посадочных мест от температур
или напряжений в характерных точках.
Третий из указанных способов исключает необходи-
мость в большом объеме экспериментов и упрощает алго-
ритм вычислений, так как предполагает измерение тех
деформаций и перекосов, которые прямо влияют на точ-
ность проведения коррекций или маневров. Однако этот
способ требует установки на борту специальной системы.
Отметим, что в последнее время все шире начинают
использоваться в конструкции композиционные материа-
лы. Некоторые из них, обладая более высокой удельной
прочностью, чем алюминиевые сплавы, имеют коэффициент
линейного температурного расширения более чем на поря-
док меньший, чем указанные сплавы, в связи с чем может
вообще отпасть необходимость учета температурных
деформаций.
3.2.4. При решении задач обеспечения заданных тем-
пературных диапазонов приборов и конструкции косми-
ческого аппарата иногда возникает необходимость
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
141
применения активных средств терморегулирования. Допу-
стим, что состояние этих средств характеризуется неко-
торым параметром Q. Таким параметром может быть угол
поворота жалюзи, меняющих эффективную площадь ра-
диатора или нагревателя, положение перепускного кла-
пана, изменяющего соотношение расходов хладагента
и теплоносителя, проходящих через теплообменники, на-
пряжение на электроподогревателе и т. д. В главе 4
более подробно рассмотрены различные средства повыше-
ния и понижения температуры. В простейших случаях
параметр Q может принимать два дискретных значения,
в более сложных может быть непрерывной функцией неко-
торых температур. В настоящее время используется в ос-
новном закон регулирования, по которому параметр Q
является функцией одной температуры в какой-либо
характерной точке. Однако даже в герметичном отсеке,
где создается принудительная циркуляция газа, темпера-
тура в одной точке недостаточно полно характеризует
температурный режим всех приборов отсека. Еще менее
совершенен такой метод регулирования в негерметичном
отсеке, если в качестве регулируемой температуры исполь-
зуется температура радиатора. Это связано с тем, что
к температуре радиатора близки только температуры при-
боров, расположенных рядом с радиатором.
Более совершенной является система терморегулиро-
вания, в которой параметр Q является функцией темпера-
тур в различных точках аппарата, причем вид этой функ-
ции в свою очередь определяется режимом работы, т. е.
тем, какие приборы включены на данном этапе полета и
каковы их тепловыделения. В общем случае такой закон
регулирования можно представить в виде
Q = Q [^*1, j (^1 ЛД ^2, j (7*2 ^2,о)» • • •» ^я, — Tnt о)],
(3.4)
где Ti — текущие температуры в характерных точках;
Т{ 0 — опорные температуры, при которых параметр Q
принимает некоторое фиксированное значение; kitj —
коэффициенты, зависящие от номера точки г, в которой
измеряется температура, и номера режима /.
Поскольку от времени полета иногда зависят ориен-
тация аппарата и внешние тепловые потоки, то соотно-
142
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
шение (3.4) может содержать время. Так как число ре-
жимов конечно, то в ПЗУ вычислительной машины
должна быть заложена матрица || ||. Алгоритм термо-
регулирования сводится при этом к измерению 7\, отыс-
канию нужного столбца матрицы ||А^j || в зависимости от
режима работы, умножению элементов столбца на (7\ —
—7\0), вычислению параметра Q и установке используемого
средства терморегулирования в соответствии со значением
этого параметра.
Использование изложенного метода терморегулиро-
вания может привести к сужению температурных диапа-
зонов отдельных приборов, что может вызвать увеличение
их надежности и уменьшение массы.
В главе 4 будет говориться о том, что для обеспечения
заданного температурного режима аппарата важно зна-
ние коэффициента поглощения солнечной энергии As
на некоторых поверхностях. Однако величина этого коэф-
фициента плохо прогнозируется. Можно себе предста-
вить возможность измерения As в полете на некоторых
контрольных образцах и учет этих измерений при* опре-
делении параметра Q или при включении некоторых
дополнительных средств терморегулирования в случае,
когда значение этого коэффициента превышает некоторый
заданный уровень. Наиболее простым и надежным мето-
дом определения As в полете является измерение тем-
пературы на контрольных образцах, достаточно хорошо
изолированных в тепловом отношении от конструкции
аппарата. Для повышения точности определения коэф-
фициента можно измерять температуры не только па
контрольном образце, но и на элементах конструкции,
соединяющей элемент с остальными частями аппарата. При
использовании БЦВМ обработка результатов измерений,
по-видимому, не представит затруднений.
Особенностью задач терморегулирования является то,
что для их решения не требуется большая скорость вычи-
слений, так как из-за тепловой инерции конструкции и
приборов скорости изменения температур достаточно
малы. Допустимое время от начала измерения температур
до приведения средств терморегулирования в нужное
состояние может составлять от одной минуты до не-
скольких минут в зависимости от характеристик рас-
сматриваемого аппарата.
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
143
Из изложенного выше вытекает, что реализация ал-
горитма терморегулирования требует достаточно большого
объема экспериментальных работ на Земле. Для опреде-
ления вида функции (3.4) и матрицы ||А\,;|| необходимо
проведение серии испытаний теплового макета аппарата в
условиях, максимально приближенных к реальным ус-
ловиям полета. Такие испытания должны быть проведены
для всех режимов работы аппаратуры и для всех возмож-
ных внешних тепловых условий.
В перспективе, при улучшении эксплуатационных
характеристик бортовых машин, может возникнуть за-
дача отыскания вида функций (3.4) и коэффициентов
k\tj в полете. Однако это уже относится к области самона-
страивающихся систем управления и требует специаль-
ных исследований.
3.2.5. В последние годы начала развиваться новая
область науки и техники — космическая технология,
использующая некоторые специфические свойства ко-
смического полета для реализации ряда технологических
процессов. Главным свойством космического полета,
важным для технологии, является невесо-
мость, имеющая место на борту космических
аппаратов. Однако на борту космических
аппаратов отсутствует полная невесомость.
Остановимся на этом подробнее.
Рассмотрим движение материальной точ-
ки т относительно спутника, центр масс
которого движется по орбите, близкой к
круговой. Допустим вначале, что связанная
с корпусом спутника прямоугольная систе- 3 3
ма координат. XYZ идеально ориентирова- определе-
на в орбитальной системе, т. е. ось Y на- нию степени
правлена по нормали к орбите, а ось X — невесомости,
против орбитальной скорости спутника (рис.
3.3) . При этом угловая скорость вращения
системы XYZ вокруг оси, проходящей через центр Земли
и параллельной оси Z, будет равна угловой скорости
центра масс спутника относительно Земли
(3.5)
где р — постоянная тяготения Земли; г0— радиус орбиты.
144
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
Уравнение движения точки т во вращающейся си-
стеме координат XYZ запишем в следующей форме:
^•=--^|3-г + 2ГхЙо + |йо|’г, (3.6)
где г — радиус-вектор точки т относительно центра
Земли.
Первый член в правой части уравнения (3.6) опреде-
ляет гравитационное ускорение, действующее на точку тп,
второй — ускорение Кориолиса, третий — центробежное
ускорение.
Принимая, что движение происходит только в плоско-
сти ХУ, запишем уравнение (3.6) в проекциях на оси
X и У. Имея в виду также, что £2х = Йу = 0, найдем
5- = - (У + Го) + nJ (У + Го) - 2П0 £,
(3-7)
Г2 = X2 + (у + г0)2.
Так как размеры спутника малы по сравнению с ве-
личиной г0, разложим первые члены правых частей урав-
нений в ряды около точки х = у = 0. Кроме того,
учтем соотношение (3.5), являющееся условием движе-
ния центра масс по круговой орбите. В результате по-
лучим следующие приближенные уравнения движения
точки:
_ 90 dy
dt* — dt »
_ 3И ,, 90 dx
dt* ~ -3 У ~dT •
* Л
(3.8)
Принимая, что скорость рассматриваемой точки относи-
тельно корпуса спутника мала, и замечая, что p/r2 = g =
= goR2/rt, где g и g0 — ускорение силы притяжения на ор-
бите и на поверхности Земли соответственно, R — радиус
Земли, найдем, что d2x!dt2» 0, а
= <39>
Соотношение (3.9) определяет «степень весомости» на
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
145
борту спутника, двигающегося по круговой орбите и
идеально ориентированного относительно орбитальной
системы координат. Для г0 = 6670 км и у = 1 -н 10 м
будем иметь
-^^•»(0,5н-5,0) 1О'в.
Уменьшить величину (Pyldt* можно, только увели-
чивая радиус орбиты или уменьшая координату у. Если
для заданной орбиты и определенной компоновки спут-
ника величина d*yldt2 получается больше допустимой с
точки зрения проведения некоторых технологических
процессов, то можно предложить следующий способ.
К корпусу спутника в направлении +У или —Y (в зави-
симости от расположения технологического оборудования)
прикладывается некоторая сила Р, линия действия ко-
торой проходит через центр масс спутника. При этом
нетрудно заметить, что для того чтобы ускорение, созда-
ваемое этой силой, устраняловеличину d*yldt\ направление
приложения силы Р должно совпадать с направлением
ускорения d*yldt\
С учетом сделанного замечания получим следующую
формулу для силы Р:
P = 3-*-gM, (3.10)
где М — масса спутника. При действии этой силы величи-
на d*yldt\ определяемая выражением (3.9), станет равной
нулю. Реальные ускорения, действующие на материаль-
ную точку в системе координат XYZ, будут определяться
отклонениями орбиты от круговой, точностью выдержи-
вания величины Р, а также точностью знания массы спут-
ника и положения его центра масс.
Обратим внимание на то обстоятельство, что сила Р
является силой, возмущающей орбиту. Покажем, что
это возмущение пренебрежимо мало. Поскольку нево-
змущенная орбита круговая, воспользуемся уравнениями
для приближенного расчета отклонений от круговой
орбиты, полученными в работе [22]. При условии что
начальные отклонения отсутствуют, а сила Р направлена
по радиусу-вектору, для анализа возмущенного движения
146
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
запишем следующее уравнение:
Д?+(^-)'Дг=£. (3.11)
где Дг — отклонение радиуса-вектора орбиты от невозму-
щенного значения; Т — период обращения по невозмущен-
ной круговой орбите.
Интегрируя уравнение (3.11) при начальных условиях
Дг0 = Дг0 = 0, найдем
Из (3.12) и (3.10) после преобразовании получим сле-
дующее выражение для максимального отклонения от
круговой орбиты:
Дгтах = ву. (3.13)
Приведенный приближенный расчет показывает, что
возмущения орбиты за счет приложения к корпусу спут-
ника силы, компенсирующей величину d^j/dt2, имеют
только периодический характер и эти возмущения можно
не учитывать при расчете орбиты.
Заметим, что, используя известный метод оскулирую-
щих элементов, можно также получить, что возмущаю-
щая сила, направленная по радиусу-вектору орбиты,
в первом приближении приводит только к периодическим
возмущениям эксцентриситета и углового положения
перигея относительно узла, т. е. не вызывает так назы-
ваемых вековых возмущений большой полуоси орбиты.
Изложенный способ понижения «степени весомости»
при идеальной ориентации спутника Земли не предъяв-
ляет никаких особых требований к системе управления
аппаратом. Все управление сводится к своевременному
включению и выключению микродвигателей, создающих
силы Р. Если на борту имеется несколько технологических
установок, требующих большой степени невесомости,
и если их координаты существенно отличаются друг от
друга, то может возникнуть необходимость включения
различных двигателей или дискретного изменения тяги
одного двигателя.
Другое дело, если аппарат совершает колебательные
движения относительно орбитальных осей. В этом случае
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
147
ускорение точки т будет зависеть не только от координаты
у и радиуса-вектора орбиты, но и от характеристик коле-
бательного движения. Рассмотрим это подробнее.
Если корпус спутника и связанная с ним система ко-
ординат ХУ2 совершают колебательное движение в
плоскости XY относительно орбитальной системы, ко-
торое характеризуется некоторым углом е(0 между осью
Y и местной вертикалью, то, приняв, что этот угол мал,
и добавив в уравнения (3.8) проекции центробежного и
касательного ускорений, получим следующие уравнения:
^- = «|в(ОГ + уё(О.
л го (3-14)
^.= _Жв(П + у[^- + 8(П*]’.
Здесь, как и ранее, принято, что dx/dt = dy/dt= О,
т. е. ускорения Кориолиса отсутствуют. Если г0 « 6670 км,
то второй член в квадратных скобках в выражении для
d*yldt* становится соизмеримым с первым членом при
| ё (t) | ж 0,1°/с. Если | s (t) | << 0,1°/с, то влияние центробеж-
ных ускорений за счет колебательного движения спут-
ника можно не учитывать. Если х^О, то центробежное
ускорение может создать 'нежелательное ускорение
d*x/dt\ что возможно в случае, когда спутник имеет
форму, вытянутую вдоль вектора орбитальной скорости.
При колебаниях спутника относительно орбитальной
системы можно, как и при идеальной ориентации, увели-
чить степень невесомости, прикладывая к корпусу со-
ответствующие силы. Однако в этом случае управление
существенно усложняется, так как закон изменения
проекций указанных сил на оси X и Y определяется
законом изменения угла е(£)» который заранее неизвестен.
Если на борту имеются средства, измеряющие угол
е через промежутки времени, существенно'меныпие одного
периода колебаний спутника, то при наличии БЦВМ
можно провести анализ закона изменения угла e(t), т. е.
определить 1(f) и ё (t), и, опираясь на знание этих величин
в функции времени, осуществлять управление работой
микродвигателей, компенсирующих величины d*x/dt* и
d*yldt*. По существу речь идет о создании на борту про-
граммы работы этих двигателей. Программа может по-
148
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
риодически корректироваться на основании повторных
измерений s(f), t(t) и i(t) или по некоторым процессам,
происходящим в системе управления ориентацией.
В частности, возможен вариант, когда на основании изме-
рений углов отклонения корпуса определяются некото-
рые типовые программы P(t) работы отдельных двига-
телей, а включение этих программ осуществляется по
алгоритму, связанному с алгоритмом управления ориен-
тацией корпуса. При этом типовые программы должны
быть реализованы на борту только в случаях, когда
величины | ё (t) | и | е (f) | превышают некоторые предельные
значения, определяемые максимально допустимыми для
данного технологического процесса ускорениями. Эти
предельные значения могут быть определены из уравне-
ний (3.14) и введены в память машины. В ряде случаев
может оказаться возможным осуществлять включение
микродвигателей на некоторое время при постоянных тягах
или изменять тяги на некоторые дискретные величины.
Отметим, что теоретически возможно включение и из-х
менение тяг двигателей производить одновременно с изме-
рением е (0 и е (0, однако поскольку для измерения этих
величин требуется некоторое время, то в этом случае мо-
гут иметь место нежелательные запаздывания при вклю-
чении двигателей и, как следствие, импульсы ускорений.
Отметим также, что если для ориентации спутника
используются микродвигатели, создающие моменты от-
носительно центра масс, то в уравнениях (3.14) могут по-
явиться дополнительные члены, определяющие ускорения
от этих двигателей. Однако этого не произойдет, если уп-
равление ориентацией осуществляется парами сил.
Таким образом, для проведения на борту спутника,
ориентированного в орбитальной системе координат, тон-
ких технологических процессов, требующих высокой сте-
пени невесомости, также может потребоваться бортовая
вычислительная машина и достаточно сложное управление
работой специальных микродвигателей.
3.2.6. Другой областью применения бортовых вычис-
лительных машин, имеющей для некоторых космических
аппаратов большое практическое значение, является опре-
деление параметров движения аппарата на базе навига-
ционных измерений. Здесь могут иметь место следующие
задачи:
3.2]
ИСПОЛЬЗОВАНИЕ БЦВМ
149
оптимальное планирование навигационных измерений,
использующих как наземные, так и бортовые средства,
т. е. определение состава и количества измерений и рас-
пределение по времени измерений различными средст-
вами;
обработка результатов автономных навигационных из-
мерений и на их базе подготовка бортовых систем к оче-
редной коррекции или маневру.
Первая задача применительно к БЦВМ, по-видимому,
имеет только перспективное значение, поскольку опти-
мальное планирование должно строиться на основе всех
имеющихся данных об аппарате и наземных средствах.
Эти данные в наиболее полном объеме имеются только на
Земле и вряд ли целесообразно передавать их на борт ап-
парата для того, чтобы там осуществлять планирование.
Кроме того, решение этой задачи, как правило, не требует
большой оперативности. Задача оптимального планиро-
вания навигации на борту может возникнуть при стрем-
лении к полной автономности аппарата, что в некоторой
мере противоречит главной задаче большинства совре-
менных автоматических космических аппаратов — пере-
даче максимального объема полезной информации на
Землю.
Вместе с тем на некоторых этапах полета или при от-
дельных аварийных ситуациях необходимость решения
(хотя бы в ограниченном объеме) первой задачи может воз-
никнуть. Точные и приближенные алгоритмы решения
задачи об оптимальном планировании навигационных из-
мерений достаточно полно освещены в работе [3].
Вторая задача приобретает актуальность в тех случаях,
когда при обработке результатов автономных навигаци-
онных измерений на Земле может быть потеряна точность
или надежность этих измерений, а также, если для обра-
ботки на Земле и передачи данных на борт отсутствует
необходимый резерв времени. Типичным случаем, когда
решение второй задачи может оказаться необходимым,
является переход на орбиту искусственного спутника
Марса. В этом случае могут измеряться углы между нап-
равлениями на центр Солнца и на центр Марса или угло-
вой диаметр планеты в нескольких точках траектории. Эти
углы могут сравниваться со значениями, соответствую-
щими расчетной траектории, а последующие вычисления
150
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
проводиться уже с соответствующими разностями или
вариациями углов. В результате линеаризации уравне-
ний движения в вариациях для вычисления параметров,
определяющих положение и величину вектора скорости,
необходимого для перехода на орбиту спутника, могут
быть получены достаточно простые выражения относи-
тельно вариаций углов. Количество параметров, подле-
жащих вычислению, равно трем: два параметра опре-
деляют положение вектора скорости, а третий — модуль
этого вектора. Здесь так же, как и в других задачах, ис-
пользующих экспериментальные данные, измерения мо-
гут проводиться с некоторой избыточностью. Это растя-
гивает по времени процесс измерений и усложняет алго-
ритм вычислений, но позволяет уменьшить влияние слу-
чайных ошибок измерений.
3.2.7. Кратко остановимся на некоторых других за-
дачах, для решения которых также необходима БЦВМ.
1. Предварительная обработка на борту служебной и
научной информации и управление работой систем аппа-
рата в зависимости от результатов этой обработки. В про-
стейшем случае в результате предварительной обработки
в радиотелеметрическую систему могут вводиться для
последующей передачи на Землю только изменения па-
раметров служебных и научных систем и приборов. В бо-
лее сложных случаях можно себе представить экстраполя-
цию или прогнозирование поведения некоторых парамет-
ров на основе уже измеренных значений и соответствую-
щее изменение режимов работы отдельных приборов.
В некоторых случаях может оказаться целесообраз-
ным изменение частоты опроса телеметрической системы
по различным каналам в зависимости от скорости изме-
нения соответствующих параметров.
2. Обеспечение автономной работы космического аппа-
рата на отдельных этапах полета. Для этого в память
БЦВМ должны закладываться программа работы и алго-
ритмы управления для очередного этапа. Программа и ал-
горитмы определяются на Земле на основании получен-
ной с борта информации, прогноза траектории и ожидае-
мой загрузки наземных пунктов управления. Этот способ
может оказаться эффективным для дальних космических
зондов с большими временами функционирования — до
нескольких лет и для аппаратов, программа работы кото-
3.2)
ИСПОЛЬЗОВАНИЕ БЦВМ
451
рых существенно зависит от полученной информации, на-
пример для аппаратов, предназначенных для изучения
природных ресурсов Земли, метеорологической обстанов-
ки, службы Солнца, и т. д.
Очевидно, что указанная задача может быть решена
и без помощи БЦВМ, однако при этом возникнет необхо-
димость иметь на борту достаточно сложное программно-
временное устройство и несколько электронных блоков,
реализующих различные варианты логики работы.
3. Управление движением при маневрах, коррекциях
и посадке на поверхность планет. В процессе работы дви-
гателя необходимо решать две задачи: стабилизацию угло-
вого положения аппарата около заданных программных
законов изменения по времени углов, характеризующих
это положение, и стабилизацию движения центра масс.
В результате решения этих задач вектор скорости аппа-
рата в конце работы двигателя должен занять определен-
ное положение в пространстве и иметь заданную величину.
Задача управления движением космического аппарата при
работе его двигательной установки по алгоритмам управ-
ления и приборному обеспечению практически совпадает
с задачей управления ракетой-носителем (см., например,
123]). Отличие может состоять лишь в том, что система
управления движением космического аппарата иногда до-
полнительно решает задачу, не свойственную системам
управления ракет-носителей,— установку корпуса аппа-
рата в некоторое исходное положение.
4. Управление ориентацией вращающегося космиче-
ского аппарата. Для стабилизации оси вращения в про-
странстве необходимо периодически измерять положения
осей относительно внешних ориентиров и сообщать аппа-
рату вращательные импульсы в определенные моменты
времени, зависящие от угловой скорости вращения, поло-
жения осей и эллипсоида инерции аппарата.
5. Создание бескардановых систем управления ориен-
тацией. В этих системах БЦВМ, используя показания при-
боров, определяющих составляющие угловой скорости
аппарата, интегрирует кинематические уравнения угло-
вого движения. В результате вычисляются утлы, харак-
теризующие положение аппарата относительно некото-
рого исходного положения. Периодическая коррекция
этих вычислений может осуществляться по показаниям
152
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
датчиков, определяющих положение аппарата относитель-
но внешних ориентиров. Таким образом, в бескардановых
системах БЦВМ заменяет гиростабилизированную плат-
форму. Преимущества и возможные применения указан-
ных систем изложены в работе [18].
Отметим, что использование БЦВМ в системе управ-
ления ориентацией позволяет находить оптимальный
для данного состояния аппарата закон управления, не-
обходимый для придания аппарату заданного положения
в пространстве или для поддержания заданной ориента-
ции.
6. Осуществление фильтрации сигналов чувствитель-
ных элементов системы управления ориентацией, что мо-
жет привести к повышению точности работы системы и к
снижению требований к уровню помех.
7. Проведение проверок аппаратуры, прогноз и рас-
познавание отказов в системах, автономная замена аппа-
ратуры при отказах. Осуществление этих функций на
борту космического аппарата приводит к повышению на-
дежности выполнения аппаратом его главных задач
и уменьшению длительности нежелательных перерывов
в работе отдельных систем. Это объясняется тем, что при
отсутствии автономного прогноза отказов на борту отказ
в каком-либо приборе обнаруживается или на Земле после
расшифровки телеметрической информации, или, в луч-
шем случае, после выявления на борту результата отказа.
Например, если поиск Солнца и звезды осуществляется
по логике, изложенной в § 3.1, то отказ звездного датчика
будет обнаружен только после фиксации отсутствия звезды
в поле зрения звездного датчика через заданное время от
начала поиска звезды. Очевидно, что прогноз отказов по-
зволит заранее подготовить к работе работоспособный при-
бор и сократить время поиска звезды в аварийной ситу-
ации.
В заключение отметим, что если на борту космического
аппарата имеется БЦВМ, то в ряде случаев может ока-
заться целесообразным поручить этой машине полную
или частичную реализацию логики работы и взаимодей-
ствия систем аппарата. Использование для решения логи-
ческих задач БЦВМ, а не системы управления, построенной
на большом количестве релейных или радиоэлектрон-
ных элементов, может иметь то преимущество, что появ-
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
153
ляется возможность оперативного изменения логики ра-
боты при подготовке аппарата к пуску и в полете, о чем
говорилось выше. Один из методов использования БЦВМ
для решения логических задач, возникающих при управ-
лении комплексом бортовой аппаратуры, изложен в [15].
3.3. Сочетание бортовых и наземных средств
управления
3.3.1. Управление современными космическими аппара-
тами строится на сочетании автономных бортовых средств
управления с управлением с Земли. Управление с Зем-
ли может включать в себя:
передачу на борт команд управления;
коррекцию или установку программы работы бортовой
аппаратуры на основе анализа телеметрической информа-
ции или при изменениях в схеме полета; в простейшем
случае это закладка в бортовое программное устройство
одной временной метки или выбор какой-либо метки из
циклически повторяющихся, в более сложных — отправ-
ка на борт заданной временной последовательности команд
с различными адресами;
отправку на борт уставочных данных и закодиро-
ванных сообщений, необходимых для проведения на борту
некоторых запланированных операций; это могут быть
данные для установки оптических труб системы управле-
ния ориентацией в заданное положение, настройка интег-
ратора продольных ускорений на определенную величину
кажущейся скорости и т. д.; указанные данные и сообще-
ния могут определяться на Земле на основе прогноза
траектории или на основе информации, полученной от
бортовых систем;
закладку в память БЦВМ алгоритма управления ком-
плексом бортовой аппаратуры на очередной этап полета.
Наряду с этим космический аппарат должен обладать
большей или меньшей автономностью, т. е. способностью
функционировать в течение какого-то промежутка времени
без участия наземных средств управления и контроля.
Рассмотрим случаи, когда необходима автономность кос-
мического аппарата.
1. Аппарат находится вне зон видимости с наземных
пунктов наблюдения, оснащенных аппаратурой управ-
154
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
ления данным аппаратом. Время или интервал видимости
аппарата с данного пункта, а также количество таких ин-
тервалов в течение суток определяются траекторией, ко-
личеством пунктов и их географическими координатами.
Идеальные условия видимости имеют место для геоста-
ционарного спутника, так как он непрерывно виден под
углами места, превышающими 10°, с пунктов, размещен-
ных внутри круга на поверхности Земли радиуса
~7950 км и с центром в подспутниковой точке. Близкие
к наихудшим условия видимости будут для низкого спут-
ника Земли при наличии одного пункта наблюдения.
В этом случае аппарат может наблюдаться только на трех-
четырех витках в сутки при интервале видимости не-
сколько минут. Возможен случай, когда в течение суток
и даже месяцев аппарат не наблюдается с данного пункта.
Очевидно, это будет тогда, когда модуль алгебраической
разности склонения аппарата и географической широты
пункта превышает л/2. Для межпланетных аппаратов и
космических зондов чаще всего используются стационар-
ные пункты наблюдения, поэтому для них зоны видимости
известны до пуска. Для некоторых спутников Земли воз-
можно применение передвижных пунктов, в частности
плавучих средств. Для таких случаев возможна коррек-
ция зон видимости в процессе функционирования аппа-
рата.
2. Время распространения сигнала и характеристики
процессов, происходящих на борту, таковы, что управ-
ление по командам с Земли или использование расчетов,
проведенных на Земле, не обеспечивает необходимой опе-
ративности, т. е. своевременного вмешательства в работу
бортовых средств или своевременной подготовки этих
средств к проведению запланированных операций. При-
меры таких случаев приведены в § 3.1. Ниже будет сфор-
мулирован критерий, когда управление по командам
с Земли невозможно.
3. Загрузка наземных пунктов работой с другими кос-
мическими аппаратами или профилактическими рабо
та ми.
4. Временный выход из строя аппаратуры наземного
пункта или обслуживающих данный пункт, средств,
а также экстремальные метеорологические условия, пре-
пятствующие нормальному функционированию пункта.
3.3)
СОЧЕТАНИЕ БОРТОВЫХ И ЙАЗЕМЙЫХ СРЁДСТВ
155
Заметим, что первый и четвертый случаи требуют ав-
тономности аппарата только тогда, когда процессы, ко-
торыми необходимо управлять и к которым нужно под-
готавливать бортовую аппаратуру, нельзя перенести на
другое время. К таким процессам, в частности, относятся
некоторые варианты коррекций траектории, переход на
орбиту спутника планеты, посадка на Луну или планеты,
включение научной аппаратуры при пролете около пла-
неты, оперативное изучение заданного географического
района Земли со спутника вне зон видимости с наземных
пунктов и т. д.
На рис. 3.4. схематично изображена типовая диаграмма
распределения по времени работы бортовых средств
управления и управления с Земли. Поскольку на борту
~Радо/ла , л
бортойых средств
улра0леж/я
УлрсМленае
с Земли
Рис. 3.4. Распределение по времени работы различных средств
управления.
всегда работает хотя бы небольшая часть аппаратуры, то
бортовые средства управления и контроля работают
непрерывно. В отличие от этого управление с Земли
осуществляется эпизодически. При этом, как следует из
сказанного выше, времена участков, на которых происхо-
дит управление с Земли, равны или меньше интервалов
видимости аппарата с наземных пунктов. Длительность
и распределение по времени этих участков зависят от
траектории и схемы полета, состава служебных и науч-
ных систем и наземных средств управления и контроля.
3.3.2. Допустим, что на борту должны быть проведены
два связанных друг с другом процесса, которые обозна-
чим В1 и В2. Связь между этими процессами определя-
ется условием, чтобы процесс В2 начинался только после
того, как процесс В1 закончится некоторым событием С1.
На рис. 3.5 представлены диаграмма проведения процессов
и события Al, Cl, А2, определяющие начало и окончание
этих процессов. На диаграмме указаны также время
156
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
протекания процесса В1 и время ^ci >A2 между окончанием
этого процесса и началом следующего.
Допустим, кроме того, что время заранее неизве-
стно и определяется исходным состоянием систем аппарата
или его положением в пространстве. Известен только
диапазон возможных значений этого времени.
Если процесс В2 начинается по команде К2, подава-
емой с наземного пункта,
то эта команда может быть
выдана только после полу-
чения на Земле информации
о том, что событие С1 про-
изошло. В результате полу-
чим, что при управлении с
Земли
^С1-*А2 =
= 2т +
^тлм + ТХ + ^2 + Т3,
(3.15)
где т — время распростра-
нения радиосигнала; тТЛм —
время формирования телеметрического сигнала о том,
что событие произошло; тх — время, необходимое для
расшифровки телеметрического сигнала на Земле и при-
нятия решения; т2 — время формирования команды К2
на начало процесса В2; т8 — суммарное время расшифров-
ки команды К2 на борту и исполнения этой команды.
В зависимости от параметров радиолинии и степени
автоматизации процесса обработки телеметрической ин-
формации на Земле сумма всех времен в правой части
равенства (3.15) за исключением времени 2т может сос-
тавлять от нескольких миллисекунд до нескольких минут.
Величина т определяется формулой (3.1) и, как указы-
валось, для дальних космических аппаратов может дохо-
дить до десятков минут.
Очевидно, что для данного космического аппарата на
определенном этапе его полета существует некоторое
максимально допустимое время £ci->A2* Если это время
обозначить через Г, то критерий допустимости управления
с Земли началом процесса В2 в рассмотренном случае
будет иметь вид
2т + ттлм + Ti + т2 + т3<^ Г. (3.16)
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
157
Однако если событие С1 (см. рис. 3.5) просто реги-
стрируется бортовой аппаратурой, то даже при выполнении
условия (3.16) управление процессами, аналогичными В1
и В2, осуществляют автономными средствами. При этом
не только сокращаются времена проведения сеансов, в
которых имеются такие процессы, но и уменьшается за-
грузка наземных пунктов сравнительно элементарными
операциями.
G другой стороны, может оказаться, что для регист-
рации наступления события С1 необходим достаточно
сложный анализ состояния бортовых систем и аппарата
в целом, который не может быть осуществлен бортовыми
средствами. В этих случаях приходится так строить схему
полета и программу работы, чтобы условие (3.16) выпол-
нялось не за счет левой части неравенства, а за счет уве-
личения максимально допустимого времени Т, и в процесс
управления включать наземные средства. Необходимость
в этом может возникнуть и тогда, когда регистрация собы-
тия С1 осуществляется с некоторой вероятностью, т. е.
для получения полной гарантии наступления этого собы-
тия недостаточно бортовых средств контроля, а нужно
использовать большой объем служебной телеметрической
информации.
В последнем случае иногда прибегают к следующему
приему. Процессами на борту управляют автономными
средствами, т. е. событие С1 регистрируется бортовой
аппаратурой, и процесс В2 проводится независимо от
Земли. Параллельно с борта на Землю отправляется
телеметрическая информация и там осуществляется пол-
ный анализ. Если в результате этого анализа выясня-
ется, что событие С1 на самом деле не имело место, то по
команде с Земли останавливают проведение сеанса и
после принятия соответствующих мер, например пере-
хода на дублирующие бортовые средства, сеанс повторяют.
Очевидно, что этот прием допустим, если имеется необ-
ходимый резерв времени.
Из сказанного ясно, что для правильного сочетания
автономных средств управления с управлением с Земли
должны быть тщательно проанализированы все возмож-
ные аварийные ситуации на борту и на Земле. С этим
анализом неразрывно связаны выбор бортовых средств
управления и окончательная программа и логика работы.
158
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРаТОЙ [ГЛ. 3
В качестве примера связанных друг с другом борто-
вых процессов можно указать на разобранный выше слу-
чай солнечно-звездной ориентации. В этом случае под
процессом В1 можно понимать вращение аппарата вокруг
оси, направленной на Солнце, для поиска звезды. Собы-
тие С1 — попадание звезды в зону наличия звездного
датчика. Процесс В2 — остановка вращения и стабили-
зация относительно Солнца и звезды по алгоритмам
системы управления ориентацией. Кстати, в этом примере
возможна ложная ориентация на звезду по причинам,
рассмотренным в конце § 2.3. Если режим солнечно-
звездной ориентации предшествует переходу на стабили-
зацию по гироскопическим устройствам и включению
двигателя в сеансе коррекции, то резерв времени на допол-
нительный анализ, как правило, отсутствует. Поэтому
стараются уменьшить вероятность ложной ориентации.
В частности, иногда используют метод, указанный в § 2.3,
т. е. режим поиска звезды считают законченным (событие
С1 на рис. 3.5) только после двукратного попадания
звезды в зону наличия датчика или настраивают датчик
на достаточно узкий диапазон звездных величин, что
также уменьшает вероятность появления ложного сигнала
«наличие звезды».
Отметим, что разобранный выше случай двух зависи-
мых процессов на борту является типичным. По существу
вся программа работы космического аппарата состоит
из последовательности таких процессов. В большинстве
случаев на борту аппарата протекает одновременно не-
сколько последовательностей процессов, например работа
системы терморегулирования, системы ориентации и радио-
телеметрической системы. Взаимосвязь этих последо-
вательностей процессов осуществляется в соответствии
с логикой работы и взаимодействия систем. Очевидно,
что вмешательство Земли возможно в работу любой
находящейся на борту системы, что потенциально увели-
чивает загрузку пунктов управления и контроля и за-
ставляет по возможности увеличивать автономность кос-
мического аппарата.
3.3.3. Рассмотрим совместное управление космиче-
ским аппаратом с помощью бортовых и наземных средств
на примере включения сеансов, которые должны быть
проведены в определенном месте траектории в заданный
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
159
интервал времени, причем моменты начала этих сеансов
определяются на Земле только после пуска*).
Характерным в этом отношении является сеанс кор-
рекции траектории межпланетного космического аппарата
или космического зонда. Момент включения этого сеанса
и характеристики вектора корректирующей скорости
неизвестны до выхода на траекторию, а определяются
только в полете после определения фактической траекто-
рии аппарата. Поскольку от правильности проведения
коррекции может зависеть выполнение задач пуска, то
надежность включения сеанса в заданный момент времени
приобретает особо важное значение.
Другим примером сеанса, который нужно включить в
определенный, но неизвестный до пуска момент времени
может быть сеанс около планеты межпланетного аппарата.
В таком сеансе в зависимости от назначения и состава ап-
парата возможны, в частности, следующие операции:
включение программы работы научной аппаратуры,
предназначенной для изучения планеты;
заданная ориентация аппарата;
включение программы движения относительно корпуса
аппарата платформы с научной аппаратурой;
подготовка к переходу на орбиту искусственного
спутника планеты или к отделению спускаемого аппарата.
Нетрудно понять, что от своевременного включения
этого сеанса в еще большей мере чем от сеанса коррекции
траектории зависит выполнение задач полета. Если
сеанс коррекции, проводящийся далеко от планеты,
можно повторить (хотя бы с дополнительными затратами
рабочего тела), то припланетный сеанс или его включение
повторить уже нельзя: аппарат либо уйдет на большие
расстояния от планеты и станет невозможным проведение
качественных научных исследований, либо войдет в
плотные слои атмосферы планеты в неподготовленном
для «мягкой» посадки виде и разрушится.
Очевидно, что методики включения указанных сеансов
одинаковы, поэтому ниже будем говорить о включении
просто сеанса, понимая под этим сеансы рассмотренного
типа.
*) Результаты этого раздела получены совместно с А. Г. Труб-
никовым.
160
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
Необходимо сделать одно замечание. Управление ра-
ботой аппаратуры в сеансах, аналогичных сеансу коррекции
и припланетному сеансу, обычно осуществляется автоном-
ными средствами. Главным средством при этом является
бортовое программное устройство, выдающее команды
на включение и выключение бортовых систем и приборов
в строгой временной последовательности. Может возник-
нуть вопрос о том, что если на §орту имеется временнбе
устройство, от которого зависит выполнение задач полета,
то нельзя ли этому же устройству поручить и включение
самого сеанса, поскольку при этом вероятность невы-
полнения задач полета существенно не увеличится. Други-
ми словами, имеется ли необходимость дублирования рабо-
ты временного устройства в части выдачи им команды
на начало сеанса наземными средствами? Действительно,
включение сеанса может быть осуществлено тем же про-
граммно-временным устройством, которое ответственно и
за программу проведения сеанса. Однако, как правило,
эти операции реализуются различными блоками этого
устройства, причем выход из строя одного блока не обя-
зательно связан с выходом из строя другого блока. Это
обусловлено тем, что в процессе сеанса команды выдаются
с интервалами от долей секунды до минут, а команда
на начало сеанса должна быть выдана через сутки или
месяцы после старта. Кроме того, здесь рассматриваются
сеансы, время проведения которых становится известным
только после прогнозирования траектории, следователь-
но, для того чтобы временнбе устройство выдало коман-
ду на начало сеанса, необходимо после прогнозирования
траектории заложить с Земли в это устройство соответ-
ствующую программу. Поскольку Земля все равно уча-
ствует в управлении, естественно попытаться продубли-
ровать команду на включение сеанса от программного
устройства командой с Земли.
С другой стороны, в силу большой ответственности
проведения сеанса в заданное время осуществлять его
включение только по команде с Земли явно нецелесо-
образно, особенно при наличии на Земле одного пункта,
способного выдать эту команду. В момент времени,когда
необходимо выдать команду на начало сеанса, может
отсутствовать видимость аппарата из наземных пунктов
управления, и, кроме того, нельзя исключить из рас-
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
161
смотрения возможность выхода из строя наземной аппара-
туры или появления экстремальных метеорологических
условий в указанный момент времени.
Обратим внимание на то, что если речь идет о вклю-
чении припланетного сеанса, то предшествующими этому
сеансу коррекциями можно скорректировать не только
координаты аппарата около планеты, но и время при-
лета к планете. Однако эта дополнительная коррекция
времени в общем случае сопряжена с дополнительны-
ми расходами топлива и поэтому к ней прибегают
тогда, когда без нее нельзя обойтись. К таким случа-
ям, в частности, относится припланетный сеанс с непо-
средственной передачей информации о планете на Землю
или сеанс посадки на планету, если не используется прин-
цип ретрансляции.
На основании сделанных замечаний запишем по-
следовательность операций, необходимых для вклю-
чения сеансов рассматриваемого типа:
1) траекторные измерения, прогнозирование траек-
тории и определение времени начала сеанса;
2) закладка в бортовое программное устройство про-
граммы включения сеанса в заданное время;
3) выдача на борт одной или нескольких команд
управления, разрешающих проведение сеанса от борто-
вого программного устройства или запускающих борто-
вую программу;
4) выдача с Земли на борт команды на непосредственное
начало сеанса (при наличии такой возможности).
Поскольку последняя операция может быть не выпол-
нена из-за отсутствия видимости аппарата или выхода
из строя наземной аппаратуры, то обязательно проведе-
ние первых трех операций. Так как существует вероятность
выхода из строя наземной аппаратуры или наличия экст-
ремальных метеорологических условий в любое время
полета, то указанные операции должны быть проведены
независимо от этих аварийных ситуаций. Это можно осу-
ществить при соответствующем планировании операций,
если допустить, что наземная аппаратура может быть
восстановлена после выхода ее изг строя, а также, что
экстремальные метеорологические условия, делающие не-
возможным нормальную работу наземных пунктов, носят
временный характер. Для составления плана работы
Ь Г. Ю. Максимов
162
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
необходимо знание характеристик ремонтоспособности
наземной аппаратуры и максимально возможного времени
существования неблагоприятных метеорологических
условий для конкретных наземных пунктов.
3.3.4. В качестве характеристики ремонтоспособно-
ности наземной аппаратуры можно принять макси-
мальное время восстановления аппаратуры после ее
выхода из строя т^ах- Согласно [25], случайная вели-
чина — время, затрачиваемое на восстановление работо-
способности радиоэлектронной аппаратуры, подчиняется
распределению Эрланга, которое является частным
случаем у-распределения. При этом плотность распре-
деления вероятности равна
<р (*)=-£• ех₽ (-тг)> (3.17)
где М — математическое ожидание случайной величины —
времени восстановления.
Если потребовать, чтобы время восстановления не
превышало величину т^ах с вероятностью 0,997 (анало-
гично вероятности отклонения на За от математического
ожидания при нормальном распределении), то для рас-
пределения Эрланга нужно принять Тшах = 4М.
Известно, что для указанного распределения наи-
лучшей статистической оценкой математического ожида-
ния является среднее арифметическое [25]. Поэтому
к
<318>
i—1
где — время, затраченное на обнаружение и устранение
i-ro отказа; к — число отказов.
На основании предыдущих работ с космическими
аппаратами для данного наземного пункта управления
по приведенным формулам можно определить величины М
и т^ах и принять их при планировании операций по вклю-
чению сеанса. Аналогично на основании анализа метео-
рологической обстановки в районе расположения наземного
пункта можно определить максимально возможное время
существования неблагоприятных метеорологических усло-
вий В ЭТОМ районе Т^ах*
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
163
Таким образом, можно считать, что если наземный
пункт должен отправить на борт сообщение или передать
дискретную команду в некоторый момент времени tOl
то с учетом возможности выхода из строя аппаратуры,
последующего ее восстановления и метеорологической
обстановки это можно осуществить в момент времени tp,
причем
*о tp + ттах + ттах«
(3.19)
3.3.5. Планирование проведения второй и третьей
операций зависит от схемы работы бортового программного
устройства. В качестве
примеров рассмотрим сле-
дующие варианты схем
(рис. 3.6).
Вариант № 1 (рис.
3.6,а). В бортовом програм-
мном устройстве фиксиру-
ется еще при настройке
прибора некоторое время
^п1Гт Временная уставка
Туст, закладываемая на
борт в полете, прибавляет-
ся к этому времени. Если
на борт подана разрешаю-
щая команда Хр, то сеанс
включается через время
nni:i И- ^уст» прошедшее от
некоторого нулевого мо-
мента. В качестве нуле-
вого момента может быть
выбран Момент старта или
момент отделения косми-
ческого аппарата от раке-
ты-носителя. В нулевой
момент времени осуществляется запуск бортового про-
граммного устройства по некоторому электрическому
сигналу. Если момент времени Jmtn + туст ©Щв не наступил
Захладха
ус/ладха
Захладха
ус/ладха
ИГ"
. За хладна
ycmaffxa
| teaxc
L t
о)
ГЦ ryGT
Гр
6)
t
уст
___| Ьеанс \
1
В)
Варианты схем работы
бортового программного устрой-
ства.
Рис. 3.6.
и не выдана разрешающая команда, то величина уставки
может быть изменена. Для реализации такой возмож-
ности и предусматривается разрешающая команда.
6*
164
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
Вариант №2 (рис. 3.6,6). Бортовое^программное
устройство отсчитывает некоторые циклические метки
Mt, Af/+i, . . следующие через равные промежутки
времени тц. Временная уставка туст прибавляется
к той из меток, перед которой была принята на борту
разрешающая команда А'р. Сеанс начинается в момент
(л+1)тц +Ьст» где п — число циклических меток, прошед-
ших от нулевого момента до прихода на борт разреша-
ющей команды. Для удобства расчетов величина тц может
быть выбрана равной целому числу суток. В этом варианте
программное устройство несколько проще чем в первом,
так как от него не требуется расчета больших времен
(а только интервалов тц) и не нужен счет этих интервалов.
С другой стороны, во втором варианте разрешающая
команда должна быть обязательно выдана внутри одного
из интервалов тц, что требует выбора величины этого
интервала с учетом величин Тщах и т£ах. В первом же
варианте команда Кр может быть выдана в любой момен т
интервала туСт«
Вариант №3 (рис. 3.6,а). Нулевым моментом, от
которого отсчитывается туст, является момент приема
на борту разрешающей команды К^. Сеанс начинается
в момент £к +^уст» где — время приема на борту раз-
решающей команды. Здесь максимальное время, отсчиты-
ваемое программным устройством,— это максимальное
значение уставки. Для этого варианта характерно, что
в ошибку времени начала сеанса входит ошибка во вре-
мени выдачи команды Кр. Если из-за необходимости вос-
становления аппаратуры пункта и метеорологических
условий приходится переносить время выдачи этой коман-
ды, то нужно изменять и величину уставки туст.
Для рассмотренных вариантов программного устрой-
ства найдем условия выбора времен закладки уставок
и выдачи разрешающих команд, а также требования к
параметрам этого устройства. Для первого варианта таки-
ми параметрами являются и туСттах» Для второго —
тц, для третьего — тусттах. Кроме того, поскольку заклад-
ка уставок в программное устройство может быть осу-
ществлена только после окончания прогнозирования
траектории и определения времени сеанса, представляет
интерес определение требований к времени окончания
прогнозирования, исходя из необходимости иметь запас
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
165
времени на закладку уставок и восстановление назем-
ной аппаратуры при выходе ее из строя. Время оконча-
ния прогнозирования является важным параметром про-
граммы полета, от которого зависит объем и распределе-
ние по времени траекторных измерений, на базе которых
осуществляется расчет траектории и прогнозирование.
Для различных схем работы программного устройства тре-
бования к времени окончания прогнозирования различны.
Введем следующие обозначения:
£п — время окончания прогнозирования траектории и
определения начала сеанса;
t3 — время начала закладки уставки в бортовое про-
граммное устройство;
т3 — длительность процесса закладки уставки;
tK — время выдачи разрешающей команды;
fc — время начала сеанса;
Т3 — период видимости аппарата из наземного пункта
управления;
тв — интервал видимости.
Все времена tt отсчитываются от нулевого момента
в указанном выше смысле.
Величины Тъ и тв указаны на рис. 3.7, причем ниже
принято, что для двух соседних интервалов видимости
величины тв одинаковы.
Для упрощения анализа
допустим, что управление
аппаратом осуществляется
одним наземным пунктом.
Использование двух пун-
ктов будет оговариваться
особо.
Рис. 3.7. Характеристики видимо-
сти аппарата из наземного пункта
управления.
расчетной траекторией ап-
Отметим, что до пуска
известен только диапазон
^cmaxL Этот Диапазон
определяется номинальной
парата и матрицей ошибок в конце участка выведения.
3.3.6. Рассмотрим вначале первый вариант схемы
работы бортового программного устройства. Для этого
варианта закладка уставки на борт должна закон-
читься до момента
Предположим, что выбран некоторый момент начала
закладки уставки t3. Естественно допустить, что
166
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
этот момент находится внутри какого-либо интервала
видимости. Рассмотрим далее случай, когда в момент
t3 вышла из строя аппаратура наземного пункта, а
после ее восстановления наступили неблагоприятные
метеорологические условия. В этом случае на основании
(3.19) начало закладки уставки придется перенести в
худшем случае на величину Ттах+Ттах- Однако в момент
^з+^тах+^тах может отсутствовать видимость аппарата,
из-за чего, опять же в худшем случае, момент начала
закладки уставки придется перенести еще на время
Тв — тв (см. рис. 3.7). При этом допускается, что в
течение этого дополнительного времени ожидания, а
также в течение интервала т3 наземная аппаратура
остается исправной, а метеорологические условия благо-
приятными. В результате получим, что время до момента
начала закладки уставки с Земли на борт вместо t3
станет равным
t3 = t3 + ДГ,
где ДТ = Tmax+Tmax+T’p — тв. При этом закладка у став-
ки в бортовую аппаратуру закончится в момент
^3 = ^3 + тз +
где Tj — время распространения радиосигнала для мо-
мента t3.
Так как момент t3 должен предшествовать моменту
то отсюда найдем условие для выбора времени
начала закладки уставки
^mhi Т3 Тх.
(3.20)
В свою очередь один из параметров программного
устройства Tmin определяется из условия, чтобы для
самого раннего (из возможных) времени начала сеанса
kmin между ^miYn и tc можно было подать на борт разре-
шающую команду Кр, С учетом времени на восстановле-
ние аппаратуры, метеоусловий и видимости это дает
^min= min (3-21)
Так как tn < t3, то на основании (3.20) и (3.21) по-
лучим следующее условие для определения времени
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
167
окончания прогнозирования:
*с min — 2Д7* — Т3 — Tj.
(3.22)
Если выполнено требование (3.21), то всегда можно
найти такой благоприятный момент для выдачи раз-
решающей команды чтобы эта команда пришла на
борт до времени tc.
Остается определить максимальное значение уставки
Тустшах* Очевидно, что Туст max — tc max — £щ1п« Поэто-
му на основании (3.21) найдем
^усттах = (^с max — min) 4~ . (3.23)
Отметим, что приведенные соотношения справедливы
при т3тв и т3 <С max (ттах» ^тах)- В большинстве случаев
это имеет место для межпланетных аппаратов и косми-
ческих зондов.
Может оказаться, что время окончания прогнози-
рования траектории, определенное из условия (3.22),
недостаточно для определения времени начала сеанса с
необходимой точностью. Если не удается улучшить
качество наземной аппаратуры, т. е. уменьшить величину
т£1ах» то единственным выходом может оказаться исполь-
зование еще одного наземного пункта для управления.
Фактически это явится дублированием наземной аппара-
туры и с точки зрения самой аппаратуры, и с точки
зрения метеорологических условий, если второй пункт
достаточно удален от первого. При этом, если пункты
разнесены по географической долготе, улучшатся и
условия видимости. Для таких двух пунктов кривые види-
мости будут состоять из двух серий кривых, сдвинутых
друг относительно друга на разницу долгот. На рис. 3.7
кривые для второго пункта показаны штриховыми
лилиями.
3.3.7. Для второго варианта программного устройства
закладка уставки туст должна закончиться до цикли-
ческой метки, предшествующей началу сеанса. На осно-
вании этого и с учетом восстановления аппаратуры,
метеорологических условий и видимости получим сле-
дующее условие для определения t3:
t Мхц — ДГ — т3 — ть
(3.24)
168
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
где 7V — целое число интервалов тц, размещаемых во
временном промежутке tQ.
При этом, если уставка закладывается на борт в
последнем интервале тц, разрешающая команда ЛГР должна
быть подана сразу же после окончания закладки уставки
на Земле.
Для определения тц учтем, что в данном варианте
разрешающая команда должна выдаваться обязательно
в последнем до начала сеанса интервале тц. Следовательно,
если иметь в виду один пункт управления и потребовать,
чтобы эта команда была выдана независимо от выхода
из строя наземной аппаратуры, метеорологических
условий и видимости, то для выбора тц получим условие
тц>ДТ. (3.25)
Диапазон величин уставок определяется величиной тц:
О Ту Тц. (3.26)
Время прогнозирования траектории tn определится
условием tn < t3 и выражением (3.24) при tc = kmiiu
т. е. .
^ш1пТц — ЬТ — т3 — Ti, (3.27)
где Лиш соответствует kmin-
3.3.8. Третий вариант программного устройства
характерен тем, что в нем отсчет [уставки туст начи-
нается от момента прохождения на борт разрешающей
команды Кр. Поэтому резрешающую команду целесооб-
разно выдать сразу после окончания процесса за-
кладки уставки, по возможности точнее выдержав
момент ее выдачи, поскольку от этого зависит точность
начала сеанса. Следовательно, в этом варианте указанные
выше вторая и третья операции совпадают.
Время начала закладки уставки t3 определяется сле-
дующим очевидным условием:
t3 < tc - ДГ - т3 - М - тп (3.28)
где Д£ — время от окончания процесса закладки уставки
до момента выдачи команды К$.
Время прогнозирования траектории ta определится
этим же выражением, если в него подставить tn вместо t3
и k ф1п вместо k*
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
169
Величина уставки равна
^уст = (3.29)
где ~ расчетное время приема на борту команды ЛГР.
При этом
г3 = гк_Тз- Д^-Тр (3.30)
Из (3.28) — (3.30) следует, что
туст>ДТ. (3.31)
Этому условию должно удовлетворять значение мак-
симально возможной уставки в бортовом программном
устройстве. Остановимся на этом подробнее. Допустим,
что после определения времени tc назначен момент ta,
удовлетворяющий условию (3.28). Тогда определяются
время tK из соотношения (3.30) и величина уставки по
формуле (3.29). Если в момент не удалось начать
закладку уставки из-за выхода из строя аппаратуры
или метеорологических условий, то осуществляется
перенос этого процесса на время, не превышающее
величину ДТ. Поскольку при выборе времени t3 условие
(3.28) было выполнено, то при переносе и закладка
уставки, и следующая за ней выдача команды К9 смогут
быть осуществлены до начала сеанса. При этом, конечно,
при переносе должна быть изменена и величина уставки,
исходя из нового расчетного времени выдачи команды Лр.
Если же в намеченный ранее момент t3 наземный
пункт работает нормально, то естественно провести все
намеченные операции по плану, без переноса. При этом
величина уставки будет удовлетворять неравенству (3.31).
Очевидно, что возможности программного устройства
должны допускать проведение плановой операции, а
это и означает, что максимальная уставка в этом устрой-
стве должна быть выбрана в соответствии с условием (3.31).
3.3.9. Описанные выше варианты схем бортового
программного устройства представлены для иллюстрации
методов управления началом сеанса на основе бортовых
и наземных средств. Вполне естественно, что приведен-
ные варианты не являются единственными и допускают
модификации.
В частности, в варианте № 1 разрешающая команда
может выдаваться до момента но после закладки
170
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
уставки. В том же варианте можно себе представить
подвариант, в котором предусматривается возможность
закладки уставки после ^п, но, конечно, до момента
начала сеанса.
Из сказанного выше следует, что при сравнении
различных вариантов бортового программного устройства
следует учитывать требования к времени окончания
прогнозирования траектории, диктуемые этими вариан-
тами, необходимую точность времени начала сеанса и
наземные средства управления и контроля, в частности
количество пунктов, их географическое размещение и
параметры наземной аппаратуры, в первую очередь
максимальное время восстановления.
Масса и надежность бортового программного устрой-
ства существенно зависят от схемы его работы и траек-
тории аппарата, поскольку от этих факторов зависит
время непрерывной работы устройства.
Например, приведенный выше вариант № 3 отличается
от других вариантов тем, что для него время работы
минимально. Действительно, устройство такого типа
может быть включено непосредственно перед началом за-
кладки уставки, что может оказаться существенным для
дальних космических аппаратов.
При сравнении различных вариантов программного
устройства необходимо также учитывать надежность
бортовых систем и приборов, от которых зависит прием
на борту команд и уставок.
3.3.10. Необходимо сделать еще одно замечание,
имеющее непосредственное отношение к сочетанию бор-
товых и наземных средств управления.
Любое бортовое программное устройство имеет погреш-
ность отсчета времени, связанную с нестабильностью
генератора, задающего исходную частоту. Относитель-
ная нестабильность задающего генератора лежит в
пределах 10-7 — 10~9 в зависимости от типа генератора
и методов его терморегулирования. Погрешность от-
счета времени влияет на ошибку времени, начала сеан-
са тем больше, чем большее время отсчитывается про-
граммным устройством. В этом смысле приведенные
выше первый и второй варианты программного уст-
ройства существенно проигрывают третьему вари-
анту.
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
171
Для уменьшения влияния нестабильности задающего
генератора на время начала сеанса применяют различные
приемы. Укажем, в частности, на следующие:
фиксация на борту моментов выдачи программным
устройством некоторых маркерных временных меток и
передача этих данных па Землю по радиотелеметриче-
ской системе; на основании этих данных определение
реального хода бортового программного устройства и
внесение поправки в расчет уставок;
по маркерным временном меткам программного
устройства включение каких-либо характерных процессов
на борту, которые легко фиксируются на Земле; сопо-
ставление времени фиксации этих процессов с расчет-
ным значением и определение реального хода программно-
го устройства; для этой цели можно использовать, в
частности, включение бортового передатчика;
подачей на борт специальной команды в заранее
выбранный момент времени «сброс бортового программно-
го устройства на нуль»; после прихода на борт этой
команды отсчет времени бортовым устройством начи-
нается сначала и тем самым с нуля начинается накоп-
ление погрешности.
3.3.11. При сочетании бортовых и наземных средств
управления космическим аппаратом важную роль
играет процесс передачи на борт всевозможных уставок.
Эти уставки необходимы для коррекции или форми-
рования программы работы программного устройства,
задания вектора корректирующей скорости, установки
в заданные положения оптических труб системы управ-
ления ориентацией и т. д.
Рассмотрим процесс передачи на борт уставки,
состоящей в последовательной закладке N разрядов
некоторого двоичного числа, определяющего вели-
чину этой уставки.
В зависимости от методов, применяемых для умень-
шения вероятности приема на борту ошибочного числа,
возможны различные методы закладки уставок.
В простейшем случае (первый метод) за истинное
значение каждого двоичного разряда принимается зна-
чение, принятое и расшифрованное бортовой аппара-
турой. Если при этом допустить, что процессы закладки
каждого разряда независимы, то вероятность правиль-
172
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
ной закладки всего числа, состоящего из N разрядов,
будет, очевидно, равна
Л1=(1-до)* (3.32)
а вероятность неправильной закладки, когда хотя бы
в одном разряде имеется ошибка,
= 1 — (1 — go)w, (3.33)
где д0 — вероятность ошибки при закладке на борт
одного двоичного разряда.
3.3.12. Возможен более сложный процесс передачи
на борт числа (второй метод), при котором каждый
двоичный разряд закладывается на борт М раз и за
истинное значение данного разряда принимается то
значение (нуль или единица), которое было принято
на борту не менее чем т раз, причем М—нечетное и
m = (М + 1)/2.
Процесс закладки на борт одного двоичного разряда М
раз будем рассматривать как серию М последовательных
независимых испытаний. Под событием будем понимать
закладку на борт неправильного значения разряда ровно
ц раз. Если считать, что вероятность д0 закладки оши-
бочного значения разряда постоянна при всех М заклад-
ках, то для определения вероятности ошибочной заклад-
ки одного разряда ровно ц раз можно воспользоваться
биномиальным распределением [12], которое дает
дм.ц— ц|(м_ц)1
В рассматриваемом методе закладки правильное
значение разряда будет принято на борту в случае,
если ошибка закладки не повторилась более чем М — т
раз или если правильный разряд был принят на борту
т или более раз. Следовательно, вероятность закладки
на борт правильного значения разряда будет равна
Г2 = 9м, о 4" 9 м, 1 + 9 м, а + • • • + 9м, м-ш* (3.35)
Вероятность правильной закладки на борт всех N
разрядов определится формулой
= г". (3.36)
Так как здесь возможны только два события —
закладка на борт правильного числа, значения всех
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
173
разрядов которого безошибочны, и закладка непра-
вильного числа, в котором имеется ошибка хотя бы в
одном разряде,— то вероятность закладки неправильного
числа будет равна
& = 1 - (3.37)
где R2 рассчитывается по формулам (3.34) — (3.36).
При М = 3, т = 2 («2 из 3»)
га = 1 — 3gS + 2gJ, |
J <3'38)
При M = 5, m = 3 («3 из 5»)
(3.38')
3.3.13. Рассмотрим еще один метод закладки уставок
(третий метод). В этом случае на борт передается каждый
разряд нужного двоичного числа к раэ. После этого
(или параллельно с закладкой) на борту осуществля-
ется сравнение всех переданных значений данного
разряда. Если произошло совпадение этих значений
при всех к закладках, то это значение разряда счита-
ется истинным и используется для образования числа.
В противном случае на Землю передается сообщение
о том, что закладка не удалась, и весь процесс повторя-
ется. Считая, как и прежде, что процессы закладки
каждого разряда при всех повторениях независимы,
запишем выражение для вероятности правильной за-
кладки одного разряда к раз:
г3=(1-до)*. (3.39)
Вероятность того, что на борт будут правильно пере-
даны все N разрядов, будет равна
fl3=(l-go)Aw (3.40)
При вычислении вероятности закладки неправиль-
ного числа нужно иметь в виду, что в данном методе под
закладкой всего числа понимается событие, состоящее
в том, что в каждом разряде произошло совпадение"всех
значений этого разряда при всех А:, закладках. В против-
174 УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ [ГЛ. 3
ном случае закладка всего числа или одного разряда
прерывается.
Вероятность совпадения всех значений одного разря-
да при к закладках вычисляется по выражению
Р = (1 ~ ?о)* + Яо-
Первый член в правой части определяет вероятность
закладки правильных значений к раз [см. (3.39)1, вто-
рой — вероятность закладки только неправильных зна-
чений.
Вероятность того, что указанное выше совпадение
произошло при закладке всех разрядов, будет равна
Р= [(1-?•)* + ?№. ' (3.41)
По существу это вероятность того, что произошла заклад-
ка на борт всего числа, правильного или неправильно-
го. Это событие возможно в двух следующих случаях:
произошли совпадения во всех разрядах и заложено
правильное число;
совпадения имели место, но число неправильное, т. е.
хотя бы в одном разряде все к раз было передано непра-
вильное значение этого разряда.
Отсюда следует, что интересующая нас вероятность
второго случая определится как разность выражения
(3.41) и вероятности первого случая, определяемой выра-
жением (3.40). Таким образом, вероятность закладки не-
правильного числа при использовании метода поразряд-
ного сравнения равна
Q3= [(1 - go)* + - (1 - q0?N. (3.42)
При к = 2
(?;=(! — 2g0 + - (1 - доГ,
В'3=(1-д0)^-
при к = 3
(?з = (1 — 3g0 + 3go)N — (1 — Qo)3N\
в'3= (1 - q0)3N.
(3.43)
(3.43')
3.3.14. Сравним варианты «2 из 3» (М = 3, т — 2) и
♦3 из.5» (М = 5, тп = 3) второго метода с простейшим ме-
3.3]
СОЧЕТАНИЕ БОРТОВЫХ И НАЗЕМНЫХ СРЕДСТВ
175
тодом. Для упрощения выкладок сопоставим между собой
вероятности безошибочной закладки одного разряда
Используя формулы (3.38), найдем отношения
и rJ/rj, имея в виду, что = 1—qQ. Выполнив деление,
получим
1 + д0—2gJJ,
^=l + go + ^-9g3o + 6^
(3.44)
Анализ этих выражений показывает, что при 0 < д0 <
< 0,5 отношения больше единицы, т. е. в указанном диа-
пазоне значений д0 второй метод обеспечивает более высо-
кую вероятность правильной закладки уставок.
Для количественной оценки разложим выражения для
Q при N = 16 в ряды в окрестности qQ = 0. В результате
иайдем
^1=16(go-7.5g3 + 35g?
^ = 48g?+-..,
= 160gJ + ...
(3.45)
При g0 < 10“a в круглых скобках первого выражения
можно не учитывать второй и третий члены. Тогда
^2 __п ^2 __
— 3g0, ~1О(?о.
Отсюда следует, что если < Ю 2, то при переходе от
первого метода закладки к варианту «2 из 3» второго мето-
да ошибка закладки уменьшается более чем в 30 раз, а при
переходе к варианту «3 из 5» — более чем в 108 раз.
Сравним второй и третий методы закладки уставок.
Найдем отношение вероятностей закладок правильных чи-
сел. Используя выражения (3.36), (3.38), (3.43), после пре-
образований получим
176
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
Легко видеть, что эти отношения всегда больше еди-
ница при 0 < g0 < 1. Следовательно, при переходе от
второго к третьему методу закладки вероятность закладки
правильного числа уменьшается. Однако, как вытекает
из предыдущих рассуждений и выкладок, это не означает,
что третий метод не может дать преимуществ в отношении
уменьшения вероятности закладки неправильного числа.
Раскладывая выражение для Q3 в ряд в окрестности
д0 = 0, получим, что при g0 < 10"3 можно пользоваться
формулой
(?з~
Сравнив это выражение с формулами (3.45), найдем
Qi ~ 1 Qi_________1
Qi ~ 3 ’ Qi ~ ’
Отсюда следует, что третий метод при к = 2 и при ма-
лых значениях д0 (< Ю~8) выгоднее второго метода при
варианте «2 из 3» и хуже этого же метода при варианте
«3 из 5». Однако численное сравнение третьего метода при
к = 2 со вторым методом при варианте «3 из 5» показыва-
ет, что третий метод дает существенное уменьшение веро-
ятности неправильной закладки при д0 > 0,07.
В заключение заметим, что, как следует из приведен-
ного приближенного анализа, выгодность того или иного
метода передачи чисел существенно зависит от ожидаемой
вероятности ошибки при закладке на борт одного двоич-
ного разряда, т. е. величины д0.
Кроме того, выбор метода передачи чисел определяется
и тем, что для данного космического аппарата важнее —
максимальная вероятность закладки правильной уставки
или минимальная вероятность неправильной закладки.
Это зависит от назначения и схемы полета аппарата и ха-
рактеристик бортовых и наземных средств.
3.4. Взаимодействие космических аппаратов
3.4.1. Взаимодействие отдельных космических аппара-
тов между собой возможно тогда, когда имеется группа
или комплекс аппаратов, решающих одну задачу. Для та-
ких групп характерно, что они управляются по единому
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
177
плану и программы их работы согласованы друг с другом
при разработке, при подготовке к пуску или в полете.
В ряде случаев отдельные космические аппараты, вхо-
дящие в комплекс, обмениваются между собой командами
управления и информацией. Этот обмен может быть обя-
зательным для выполнения задач полета, но может быть и
средством повышения надежности, т. е. использоваться
только при некоторых аварийных ситуациях.
Космические аппараты, входящие в комплекс, могут
существовать как отдельные единицы на всех этапах по-
лета, начиная со старта ракеты-носителя, или могут функ-
ционировать отдельно только на некоторых этапах полета,
а на других являться как бы одним аппаратом.
Перечислим некоторые из вариантов космических ком-
плексов.
I. Группа метеорологических спутников, расположен-
ных на геостационарной орбите таким образом, чтобы могли
наблюдаться все районы земного шара кроме полярных.
Если каждый из таких спутников передает информацию на
свой пункт приема, то связи между спутниками могут быть
минимальными или вообще отсутствовать. Если же пунк-
ты приема информации расположены так, что некоторые
спутники находятся вне зон видимости приемных пунк-
тов, то необходима межспутниковая связь, что существенно
усложняет бортовую аппаратуру. В данном варианте ми-
нимальное количество спутников равно трем, так как
с борта каждого спутника наблюдается область'земного
шара, несколько меньшая его половины.
II. Группа спутников, одновременно осуществляю-
щих измерения некоторых физических параметров в раз-
личных точках магнитосферы Земли. В этом варианте
связи между спутниками могут отсутствовать, особенно
если в составе их аппаратуры имеются устройства, запо-
минающие информацию вне зон видимости приемных пунк-
тов. Управление всеми спутниками осуществляется по
единой общей программе, поскольку необходимость вклю-
чения той или иной научной аппаратуры на одном спутни-
ке зависит от результатов измерений, полученных на дру-
гих спутниках.
III. Космический аппарат на орбите спутника планеты
или на пролетной траектории (соответственно орбитальный
или пролетный аппарат) и посадочный аппарат, работаю-
178
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
щий на поверхности планеты или на участке спуска на пла-
нету. Здесь под пролетной понимается траектория, прохо-
дящая вне атмосферы планеты. На аппарат, движущийся
по такой траектории, планета оказывает только гравита-
ционное влияние. В зависимости от функций, выполняе-
мых аппаратами, их взаимодействия и схем полета возмож-
ны различные подварианты этого комплекса. Укажем
на некоторые из них.
1. Аппарат, предназначенный для функционирования
на орбите или пролетной траектории, и посадочный аппа-
рат на трассе полета Земля — планета представляют одно
целое. Разделение происходит только около планеты, после
чего посадочный аппарат переходит на траекторию спуска,
а оставшаяся часть либо продолжает двигаться по преж-
ней траектории, являющейся пролетной, либо совершает
маневр и переходит на орбиту искусственного спутника
планеты. Во втором случае траектория движения исход-
ного аппарата иногда может быть выбрана такой, чтобы
с нее можно было совершить спуск на планету, что умень-
шит необходимые затраты рабочего тела на переход спус-
каемого аппарата на траекторию спуска.
Взаимодействие аппаратов может осуществляться в ра-
боте по единой программе при изучении планеты различ-
ными методами, в использовании орбитального или пролет-
ного аппарата для ретрансляции информации с посадоч-
ного аппарата либо в передаче команд управления на по-
садочный аппарат через орбитальный или пролетный.
Ретрансляция может оказаться целесообразной для
увеличения скорости передачи информации, запоминания
информации на орбитальном аппарате в случае, когда та-
кое запоминание трудно осуществить на посадочном аппа-
рате, или в случае, когда на данном временном интервале
радиосвязь Земли с посадочным аппаратом невозможна,
а с орбитальным или пролетным — возможна.
2. При использовании орбитального или пролетного
аппарата для ретрансляции может оказаться полезным
включение передающей аппаратуры посадочного аппарата
осуществлять по командам с орбитального или пролетного
аппарата.
3. Разделение орбитального и посадочного аппаратов
происходит после выхода на орбиту искусственного спут-
ника планеты и определения района планеты, благоприят-
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
179
ного для посадки. Взаимодействие аппаратов после разде-
ления может осуществляться так же, как и в первом под-
варианте.
4. Выведение на межпланетную траекторию орбиталь-
ного и посадочного аппаратов осуществляется различными
ракетами (двухпусковая схема). На трассе полета Земля —
планета, на поверхности планеты и на орбите спутника оба
аппарата существуют раздельно. После пребывания на по-
верхности планеты отсек посадочного аппарата стартует
с планеты и после выхода на орбиту спутника стыкуется
с орбитальным аппаратом. Возможен случай, когда после
этого орбитальный аппарат совершает маневр перехода
с орбиты спутника на трассу планета — Земля. В данном
подварианте основное взаимодействие аппаратов дикту-
ется обеспечением процесса стыковки. В частности, для
обеспечения выхода стартующего с планеты отсека в ма-
лую окрестность около орбитального аппарата может
оказаться целесообразным команду на старт подавать не
с Земли или от временного устройства, а с орбитального
аппарата.
Ниже рассмотрим подробнее только вопросы взаимодей-
ствия посадочного аппарата на планете или участке спуска
с орбитальным или пролетным аппаратом, в основном об-
ратив внимание на ретрансляцию информации.
3.4.2. Рассмотрим использование принципа ретрансля-
ции информации через орбитальный или пролетный аппа-
рат при временной невозможности радиосвязи между на-
земными пунктами и посадочным аппаратом на последнем
участке спуска и непосредственно после посадки. Здесь
нужно обратить внимание на получение служебной инфор-
мации о протекании процессов спуска и посадки. Дело
в том, что если эти процессы проходили ненормально, то
при отсутствии радиосвязи с Землей и с пролетным или ор-
битальным аппаратом установить причины аварии на этих
участках уже не удастся.
Для решения поставленной задачи сформулируем об-
щие условия возможности радиосвязи между космическим
аппаратом и наземными пунктами управления. Очевидно,
что радиосвязь возможна при одновременном выполнении
следующих двух условий.
1. Имеется радиовидимость аппарата из наземных пунк-
тов. Применительно к посадочному аппарату, работающе-
180
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
(ГЛ. 3
му на участке спуска или на поверхности планеты, это
условие в свою очередь выполняется, если планета нахо-
дится в зоне видимости хотя бы одного наземного пункта
и если планета не экранирует аппарат.
2. Земля находится в зоне действия бортовых антенн.
Предположим, что планета имеет достаточно плотную
атмосферу и спуск на ее поверхность на последнем участке
осуществляется на парашюте. Примем, что область работы
бортовых антенн имеет вид кругового конуса с углом при
вершине уа и с осью, параллельной оси X связанной си-
стемы координат. Допустим также, что при идеальном
спуске и идеальной посадке на горизонтальную площадку
ось X совпадает с местной вертикалью. В этом случав оба
условия радиосвязи для одного наземного пункта сводятся
к следующим требованиям:
а) фи фо»
б) при ф < 90° ф < уа/2 — б,
при яр>90° ip<va/2 —д и — 1) -
где фп — угол места планеты для данного наземного пунк-
та; фо — предельный минимально допустимый угол места;
ф — угол между направлениями из центра планеты на
Землю и на посадочный аппарат; S — угол между осью X
аппарата и местной вертикалью (ошибка посадки или
ошибка ориентации при спуске); h — высота точки на-
хождения посадочного аппарата над поверхностью плане-
ты; R — радиус планеты.
Требования (3.47) предполагают, что ось X может за-
нимать любое положение на конусе, ось которого направ-
лена по местной вертикали, а угол при вершине равен 26.
’Рис. 3.8 поясняет приведенные требования для случаев
ф”<^ 90° и ф > 90° (соответственно индексы 1 и 2).
Если условия (3.47) не выполняются, а орбитальный
или пролетный аппарат попадает в зону действия бортовых
антенн посадочного аппарата, то имеет смысл рассмотреть
вариант ретрансляции информации через указанные аппа-
раты. При этом если орбитальный или пролетный аппарат
имеет возможность радиосвязи с посадочным аппаратом,
но не имеет такой возможности по отношению к наземно-
му пункту, например из-за невыполнения требования
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
181
(3.47а), то возможен вариант с запоминанием информации
на борту этих аппаратов. Если же у них имеется возмож-
ность радиосвязи с Землей, то необходимость в запомина-
нии отпадает.
В качестве примера на рис. 3.9 изображена схема дви-
жения пролетного и посадочного аппаратов. Допустим, что
в точке Р осуществляется разде-
ление и изменение вектора ско-
рости посадочного аппарата,
после чего один из аппаратов
проходит мимо планеты, а дру-
гой осуществляет посадку в
точке Линия А — А парал-
лельна вектору скорости F№ от-
носительно планеты (F^ — ско-
рость на таком расстоянии от
нее, где гравитационное поле
планеты еще не влияет на дви-
жение аппаратов). Положение
линии А — А относительно на-
правлений на Солнце и на Зем-
лю определяется в основном
номинальной траекторией аппа-
рата на трассе полета Земля —
планета. Для траекторий, близ-
ких к оптимальной, т. е. обес-
Ряс. 3.8. К определению
условий радиосвязи.
почивающих максимальную мас-
су аппарата при заданной ракете выведения, положе-
ние линии А — А вполне определенно. Однако за счет
коррекций траектории можно осуществлять парал-
лельный перенос вектора F^. Поскольку поле рассеива-
ния траекторий существенно больше диаметра планеты,
то такой параллельный перенос практически не связан
с дополнительными массовыми затратами на коррекцию.
Легко заметить, что при указанном переносе вектора Fw
будут меняться положение точки посадки на планете, ус-
ловия радиосвязи между посадочным аппаратом и Землей и
условия освещения в месте посадки. Очевидно, что если
вектор F^ перемещать параллельно самому себе вокруг
линии А — А по окружности, то характеристики траекто-
рий посадочного^и пролетного аппаратов относительно
планеты не будут меняться, а точка посадки будет переме-
182
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
щаться на планете также по окружности, лежащей в
плоскости, перпендикулярной к линии Л — Л, и с центром
на этой линии. Два возможных положения точки посадки
П1 и П2 показаны на рис.
3.9.
В некоторых случаях
выбором положения век-
тора Foo можно добиться
обеспечения условий ра-
диосвязи между посадоч-
ным аппаратом и Землей и
условий освещения, необ-
ходимых для исследования
планеты. Однако иногда
перемещением вектора F®
нельзя обеспечить выпол-
нение указанных условий
радиосвязи. Это может
иметь место, если зонадей-
Рис. 3.9. Схема движения посадо- ствия антенн посадочного
иного и пролетного аппаратов аппарата имеет вид кону-
относительно планеты. са, показанного на рис. 3.9.
В таких случаях необхо-
димо применить ретрансляцию служебной информации о
протекании процессов спуска и посадки через пролетный
аппарат. Перенос вектора F^ при этом может улучшить
условия радиосвязи между пролетным аппаратом и Землей
и иногда позволит избежать запоминания указанной ин-
формации. Для приведенной на рис. 3.9 упрощенной кар-
тины движения радиосвязь между посадочным и пролет-
ным аппаратами возможна, если во время спуска и посад-
ки пролетный аппарат находится на участке траектории
Р — С. Не останавливаясь на этом подробнее, скажем
только, что условия радиосвязи между посадочным аппара-
том на участке спуска и при посадке и пролетным аппара-
том можно выполнить при соответствующем выборе точки
разделения и вектора дополнительной скорости, которая
должна быть сообщена посадочному аппарату после разде-
ления для обеспечения посадки на планету.
Включение передающей радиоаппаратуры посадочного
аппарата может осуществляться по тем же командам, по
которым осуществляются отдельные этапы спуска. Если
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
183
спуск сопровождается интенсивным нагревом в атмосфере
планеты, то включение этой аппаратуры должно быть
осуществлено после прохождения области плазмы, пре-
пятствующей радиосвязи. В этом случае включение радио-
аппаратуры может быть осуществлено одновременно с вве-
дением в действие парашютной системы, если такая система
используется для спуска, или с включением двигателей
после окончания процесса аэродинамического торможения.
3.4.3. Допустим, что процессы спуска и посадки за-
кончились нормально и посадочный аппарат находится
на поверхности планеты, а
кусственного спутника.
Рассмотрим правую прямо-
угольную систему коорди-
нат Хп^п с центром в
центре масс планеты. Ось
Zn этой системы направим
по оси вращения планеты,
а две другие оси зафик-
сируем относительно звезд.
Такое положение возмож-
но, поскольку прецессия
полярных осей всех планет
Солнечной системы незна-
орбитальный — на орбите ис-
Рис. 3.10. Углы, определяющие
положение посадочного аппарата
и направление на Землю.
чительна и ею можно для наших целей пренебречь.
Во введенной системе координат направления на по-
садочный аппарат и на Землю определим двумя парами
углов ап, Рп и аз, 0з соответственно (рис. 3.10).
Предположим, что зона действия бортовых антенн по-
садочного аппарата представляет собой конус с осью, на-
правленной по местной вертикали, и углом при вершине,
равным уа- В случае остронаправленной антенны это пред-
положение равносильно допущению, что антенну можно
направить в любую точку пространства при углах места,
превышающих 90° — уа/2. Для малонаправленной антен-
ны, жестко установленной на корпусе аппарата, и при ус-
ловии, что положение аппарата относительно оси, совпа-
дающей с местной вертикалью, неопределенно, угол уа
связан с углами уа и S [см. (3.47)] очевидным соотношени-
ем Та = уа — 2S.
Используя введенные обозначения и имея в виду ма-
лую величину радиуса планеты относительно расстояния
184
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
от планеты до Земли, условие нахождения Земли в зоне
действия бортовых антенн можно записать в следующем
виде:
sin 0п sin 0з + cos0ncos03sinansina3 +
+ cos 0П cos 0з cos an cos a3 > cos . (3.48)
Левая часть этого неравенства является скалярным про-
изведением единичных векторов, направленных из цен-
тра планеты на Землю и на посадочный аппарат.
В условии (3.48) угол 0П постоянен и равен широте
точки расположения посадочного аппарата. Угол ап
определяется выражением
Од ==? (Хдо Оц£( (3.49)
где Одо — значение угла а в момент посадки; Рп — уг-
ловая скорость вращения планеты.
Углы аз и 0з определяются относительным движением
Земли и планеты и являются заданными функциями
времени.
Заменяя неравенство (3.48) на соответствующее урав-
нение и находя его корни, можно определить временные
интервалы [^, [^, ,. . ., внутри которых Земля
находится в зоне действия бортовых антенн, т. е. выпол-
няется второе из приведенных выше условий радиосвязи,
и отсутствует экранирование планетой. Другими словами,
необходимым условием радиосвязи с посадочным аппа-
ратом в некоторый момент времени t является соблюдение
неравенства
(3.50)
где i — номер интервала.
Если в приведенных рассуждениях поменять местами
планету и Землю, а вместо посадочного аппарата иметь
в виду наземный пункт наблюдения, то аналогично мож-
но определить интервалы видимости планеты из некото-
рого А-го пункта, которые обозначим [#д, йд1,
_
Допустим, что имеется к наземных пунктов, равно-
ценных с точки зрения управления и приема информации.
Тогда радиосвязь между посадочным аппаратом и хотя
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
185
бы одним из к наземных пунктов возможна в некоторый
момент времени t, если существуют] такие целые числа
i, j и к А*, для которых
/ п f и
(3.51)
На рис. 3.11 представлена условная диаграмма рас-
пределения интервалов [#, #1 и для
двух наземных пунктов. Очевидно, что для этой диаграм-
^2 Интервалы нихолгде-
о Г"Г"" ' 1 -м* жми & зоне
дейслМия дорого-
дь/х антенн
ti4 2/? 7
д S_____Интервалы диди-
ности планеты из
первого лунн/ла
^2 fyz
Чг
Яитердалы диди-
мое/пи планеты аз
Старого лунита
Интервалы дозном--
____нои радиосвязи
лосадоаноео аппа-
рата с наземными
3 ЛУЛ'Л'ЛИГЛИ'
___. Янтердалы Розмонт-
нои радиосвязи
о ордиталоно/м
аппаратом
Рис. 3.11. К определению интервалов возможной радиосвязи.
мы условия радиосвязи выполняются в интервалах
2jr.11 и 1*в.2» *н.21» причем первый интервал обеспечивает-
ся вторым наземным пунктом, а второй — первым.
Если около планеты обращается по орбите искусствен-
ного спутника орбитальный аппарат, то в общем случае
будут существовать интервалы возможной радиосвязи
посадочного аппарата и с орбитальным аппаратом. По-
скольку эти интервалы определяются аналогично тому,
как находятся зоны наблюдения за спутником Земли из
наземных пунктов, мы на этом останавливаться не будем.
Отметим только, что для этой цели условием (3.48) поль-
зоваться нельзя, так как расстояние от центра планеты
186
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
до орбитального аппарата может оказаться существенно
больше расстояния от орбитального аппарата до поса-
дочного.
На рис. 3.11 изображен один из вариантов сочетания
интервалов возможной радиосвязи с орбитальным ап-
паратом код, с интервалами возможной радиосвязи
с наземными пунктами, описанными выше. Заметим, что
при разработке программы работы с посадочным аппа-
ратом должно быть учтено время распространения радио-
сигналов. За счет времени распространения возможные
времена начала передачи информации и подачи команд
управления не будут совпадать с временами tRti на
рис. 3.11 и могут сократиться длительности интервалов
возможной радиосвязи.
3.4.4. Предположим, что посадочный аппарат дол-
жен выполнять одноразовые исследования, время про-
ведения которых несущественно, например исследования
грунта планеты. В этом случае начало программы иссле-
дований можно выбрать так, чтобы момент окончания
программы оказался внутри какого-либо из интервалов
возможной радиосвязи с наземными пунктами. При этом
результаты исследований могут быть переданы на Землю
сразу же после их получения. Если на борту посадочного
аппарата имеется запоминающее устройство, то исследо-
вания могут быть проведены раньше, а во время очеред-
ного интервала радиосвязи можно передать запомненную
информацию.
Если до очередного интервала радиосвязи с наземны-
ми пунктами имеется интервал радиосвязи с орбитальным
аппаратом, то следует рассмотреть, целесообразно ли
передавать результаты одноразовых исследований на пла-
нете непосредственно, а не ретранслировать их через
орбитальный аппарат.
Применение принципа ретрансляции, с одной стороны,
приводит к понижению надежности из-за использования
орбитального аппарата для передачи информации, а с
другой стороны, к повышению надежности передачи, так
как увеличение времени пребывания на планете увели-
чивает вероятность появления отказов в аппаратуре.
В связи с этим для определения целесообразности при-
менения ретрансляции можно воспользоваться теорией
надежности,
3.41
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
187
Поскольку и посадочный и орбитальный аппараты
состоят из групп приборов, работающих различное вре-
мя в течение общего времени функционирования аппа-
ратов, то вероятности безотказной работы этих аппаратов
за время функционирования t могут быть выражены функ-
циями
Вп (тп, 1, тп, 2» • • •» тп, т) — для посадочного аппарата, |
ь т02» • • •» ТО т') — для орбитального аппарата, J
(3.52)
где — суммарное время непрерывной работы i-й груп-
пы приборов; / = п, 0;
Для определения целесообразности ретрансляции ре-
зультатов одноразовых исследований через орбитальный
аппарат нужно оценить величину
= Вп (^0,1» ^П.о) Go,l» ^п.о» ^С» ^О.з)
— (^R, 1» ^и» ^п.з)» (3.53)
где t'Qtl и tR^ соответствуют рис. 3.11; £и — время прове-
дения исследований; £п.о — время передачи результатов
исследований на орбитальный аппарат; tc — время от
момента получения информации на борту орбитального
аппарата до начала передачи ее на Землю; £0.з — время
передачи информации по радиолинии орбитальный ап-
парат — Земля; tn.3 — время передачи информации по
радиолинии посадочный аппарат — Земля.
Если ДВ>0, то рентрансляция целесообразна для
передачи одноразовых исследований. Отметим, что <
< Jr, i» так как в противном случае не имеет смысла рас-
считывать величину ДВ, поскольку и так ясно, что ре-
трансляция нецелесообразна, если для ее реализации
требуется большее время ожидания.
Приведенные рассуждения о надежности справед-
ливы при условии, что для передачи информации на ор-
битальный аппарат и непосредственно на Землю исполь-
зуется одна и та же аппаратура. Случай, когда для ука-
занных целей применяются различные радиотелеметри-
ческие системы и различные бортовые антенны, будет
разобран ниже.
3.4.5. Предположим, что программой работы поса-
дочного аппарата предусматривается проведение неко-
188
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
торых исследований при различных суточных и сезонных
условиях на планете. К таким исследованиям могут от-
носиться, в частности, метеорологические наблюдения,
измерения освещенности и т. д.
Если частота следования интервалов возможной ра-
диосвязи посадочного аппарата с наземными пунктами
или орбитальным аппаратом мала, например период
следования этих интервалов больше длительности пла-
нетных суток, то проведение исследований невозможно
осуществлять по командам, подаваемым с Земли или с
орбитального аппарата. Также невозможна и непосред-
ственная передача результатов исследований. В этом
случае для проведения исследований соответствующие
приборы могут включаться периодически на сравнитель-
но небольшое время по командам от бортового программ-
ного устройства. Результаты измерений придется записы-
вать в бортовом запоминающем устройстве с последую-
щим воспроизведением этой информации в интервалах
радиосвязи.
В рассматриваемом случае наличие орбитального ап-
парата, интервалы возможной радиосвязи с которым
следуют чаще, чем интервалы радиосвязи с Землей, и
использование ретрансляции могут привести к уменьше-
нию потребного объема запоминающего устройства на бор-
ту посадочного аппарата, что может оказаться существен-
ным ввиду обычно жестких массовых лимитов на прибо-
ры этого аппарата.
Для численной оценки целесообразности использова-
ния орбитального аппарата в качестве ретранслятора
можно предложить величину £, равную
$ = . (3.54)
тахт (tR р tR 2 — tR р . . .)
Числитель этого выражения представляет собой мак-
симальный промежуток между интервалами возможной
радиосвязи с орбитальным аппаратом за некоторое время
Г, в течение которого нужно провести исследования рас-
сматриваемого типа, знаменатель — то же, но примени-
тельно к радиосвязи с наземными пунктами.
Если величина £ близка к единице, то не имеет смысла
использовать ретрансляцию. Если же это отношение
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
189
существенно меньше единицы, то нужно оценить, не
уменьшится ли значительно надежность передачи инфор-
мации при ее ретрансляции через орбитальный аппарат.
Если надежность не уменьшится ниже некоторого до-
пустимого уровня, то ретрансляция целесообразна. Прав-
да, при отсутствии возможности иметь на посадочном
аппарате запоминающее устройство с емкостью, необхо-
димой для передачи нужной информации без орбитального
аппарата, вероятно придется вводить ретрансляцию и
при понижении надежности передачи.
Отметим, что здесь, как и выше, передача информации
по линии орбитальный аппарат — Земля может осуще-
ствляться одновременно с ее получением с борта посадоч-
ного аппарата, если выполняются условия радиосвязи
и ориентация аппарата обеспечивает работу бортовых
антенн. Если же это невозможно, то придется указанную
информацию запоминать на борту орбитального аппара-
та. В последнем случае также необходимо проанализи-
ровать, что выгоднее — иметь запоминающее устройство
на орбитальном аппарате или увеличить емкость анало-
гичного устройства на посадочном аппарате.
3.4.6. В последнем рассмотренном случае использо-
вание ретрансляции могло привести к уменьшению объе-
ма запоминающего устройства посадочного аппарата. Воз-
можен вариант, когда на посадочном аппарате по неко-
торым причинам вообще нельзя установить запоминающее
устройство, а задачи исследования планеты требуют
запоминания информации. В качестве примера укажем
на задачу исследования сейсмической активности Венеры.
С одной стороны, для решения этой задачи необходимо
постоянное дежурство некоторой части аппаратуры в
течение достаточно длительного времени, с другой сторо-
ны, высокая температура этой планеты (около 500°С)
может привести к тому, что создать достаточно надежное
запоминающее устройство, работающее в этих условиях,
окажется невозможным. На первом этапе таких иссле-
дований возможно удастся создать только сравнительно
маломощный передатчик и простейший датчик сейсми-
ческой активности, каким-либо способом модулирующий
сигнал этого передатчика.
В этом случае из-за ограничений в радиосвязи и малой
мощности передающего устройства естественно исполь-
190
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
Рис. 3.12. Эллипти-
ческая орбита искус-
ственного спутника
планеты.
зовать орбитальный аппарат для приема сигналов с по-
садочного аппарата, запоминания полезной информации
и последующей передачи ее на Землю. Орбита искусст-
венного спутника при этом должна быть выбрана таким
образом, чтобы суммарное время всех интервалов воз-
можной радиосвязи посадочного аппарата с орбитальным
было достаточно близко к полному времени функциони-
рования этих аппаратов. Очевидно,
что идеальным случаем является
расположение посадочного аппарата
под апоцентром орбиты искусствен-
ного спутника (точка В на рис.
3.12). Для иллюстрации влияния
параметров орбиты на время радио-
связи рассмотрим именно такой слу-
чай. Допустим, что радиосвязь воз-
можна , если угол места орбитально-
го аппарата относительно точки, в
которой находится посадочный ап-
парат, превышает некоторый угол
фо» т. е. когда спутник находится на
дуге ADE эллиптической орбиты (см. рис. 3.12).
Не учитывая вращения планеты, определим относитель-
ное (к периоду обращения спутника) время отсутствия
радиосвязи. При сделанном допущении радиосвязь от-
сутствует, когда спутник находится на дуге АСЕ. На
основании известных формул эллиптического движения
относительное время отсутствия радиосвязи определится
следующим выражением:
Eq -- € SID Eq
Л д
(3.55)
где е — эксцентриситет эллиптической орбиты;
Ео = 2 arctg (]/"tg А);
Оо — истинная аномалия точки А (см. рис. 3.12).
Для определения угла рассмотрим треугольник
АВО, из которого найдем следующее соотношение:
ГО __ _ cos Фо
R cos (ф0 — Фо) *
(3.56)
3.4]
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
191
где го — величина радиуса-вектора орбиты в точке А;
R — радиус планеты.
Подставляя в соотношение (3.56) зависимость
__ 1 4 с
Г° г л 14-е cos *
где Гл — величина радиуса-вектора орбиты в перицентре,
найдем
—К cos (Оо — фо) = 1 + е cos Оо» (3.57)
где
Я cos ф0
Разрешая выражение (3.57) относительно О0» получим
Фо = ф 4- arccos (—, (3.58)
где
А = У К2 + е2 4- 2еК cos ф0,
. . К sin ф0
зтф = —А^'
. К cos фо 4 е
СО8ф=----—.
т А
Формулы (3.55) и (3.58) опреде-
ляют искомую величину т]. Отме-
<7 Пг/Р
Рис. 3.13. Зависимость
относительного времени
отсутствия радиосвязи с
орбитальным аппаратом
т] и относительной вели-
чины радиуса-вектора
орбиты в апоцентре га/Я
от эксцентриситета ор-
биты е при гя/Я = 1,1
и фо =10°.
тим, что, как следует из этих
выражений, относительное время
отсутствия радиосвязи зависит
только от эксцентриситета орби-
ты е, угла фо и отношения rnIR.
На рис. 3.13 представлена за-
висимость величины т] от эксцен-
триситета орбиты, рассчитанная
при rn/R = 1,1 и ф0 = 10°. На этом
же рисунке построена зависимость относительной величины
радиуса-вектора орбиты в апоцентре ra/R от эксцентриси-
тета для rn/R —1,1. Эта величина определяется известной
формулой
ra _ гл 1 4 е
К ~ Н 1-е '
(3.59)
192
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
Из графика на рис. 3.13 следует, что для получения
малых значений параметра ц необходима достаточно уда-
ленная от планеты орбита искусственного спутника
(большие значения га/Н).
3.4.7. Использование орбитального или пролетного
аппарата в качестве ретранслятора может оказаться це-
лесообразным не только из-за временного невыполнения
условий радиосвязи или для уменьшения объема запоми-
нающего устройства посадочного аппарата. В некоторых
случаях ретрансляция информации с посадочного аппа-
рата через орбитальный или пролетный аппарат может
оказаться выгодной с точки зрения увеличения энерге-
тического потенциала радиолинии.
Это обусловлено тем, что расстояние от посадочного
аппарата до пролетного или орбитального существенно
меньше расстояния до Земли, а также тем, что возмож-
ности размещения на борту посадочного аппарата антенн
с большими коэффициентами усиления, запоминающих
устойств и передатчиков с большой выходной мощностью,
как правило, меньше, чем для орбитального и тем более
для пролетного аппарата (поскольку на посадочном ап-
парате необходимо разместить топливо для торможения,
парашютные устройства или двигатели, тепловую защиту,
посадочные и амортизирующие устройства и т. д.).
Второе из указанных обстоятельств особенно прояв-
ляется в так называемых двухпусковых схемах, когда
посадочный аппарат и орбитальный или пролетный аппа-
рат выводятся на межпланетные траектории двумя
ракетами. В этом случае для всех планет Солнечной си-
стемы аппарат, пролетающий мимо планеты, будет иметь
массу, существенно большую чем посадочный аппарат
после посадки, поскольку для реализации пролетной
траектории затраты массы необходимы только для коррек-
ции траектории, причем практически такие же, как и для
реализации посадочной траектории. Для некоторых пла-
нет, например для Марса, это же соотношение будет иметь
место и для орбитального аппарата, если орбита искус-
ственного спутника достаточно удалена от планеты и
для получения этой орбиты не нужны значительные рас-
ходы массы.
Изложенные соображения показывают, что в зависи-
мости от бортовых средств, используемых для передачи
3.4] ВЗАИМОДЕЙСТВИЕ АППАРАТОВ 193
и приема радиосигналов на борту аппаратов, применение
ретрансляции может дать или выигрыш или проигрыш в
скорости передачи информации.
Рассмотрим два варианта использования ретрансля-
тора.
1. Информация с посадочного аппарата передается
на ретранслятор, где запоминается и передается на Зем-
лю в последующих сеансах связи. Этот вариант может
найти применение в случаях, когда нужно передать дан-
ные о быстроменяющихся процессах, а запомнить эту ин-
формацию невозможно из-за отсутствия запоминающего
устройства нужной емкости или из-за необходимости в
непосредственной передаче, например при передаче слу-
жебной информации о процессах спуска и посадки, о чем
говорилось выше.
2. Информация с посадочного аппарата передается
через ретранслятор непосредственно на Землю. При этом
скорости передачи информации с посадочного аппарата
на ретранслятор и с последнего на Землю равны.
Для определения целесообразности применения пер-
вого варианта сравним возможные скорости передачи
информации с посадочного аппарата на ретранслятор
Ср и непосредственно на Землю Сз. Очевидно, что вари-
ант может оказаться целесообразным, если только Ср >
> Сз, так как в противном случае усложнение программы
работы и снижение надежности передачи информации,
связанные с использованием ретранслятора, будут не-
оправданы.
На основании формул, приведенных в главе 1, запи-
шем
^эфф.р ^ш.З ^у.п.р / ^п.З V ZQ
С3 ~ ^эфф.З Лп.р S.n.3 Ьп р ) ’
где /'’эфф.р, Т^эфф.з— эффективные площади антенн ретран-
слятора и наземного пункта соответственно; Тш.з» Гш.р—
температуры шумов соответственно наземного пункта и
приемного тракта ретранслятора; ЛГу.п.р, Л^у.п.з—коэффи-
циенты усиления антенн посадочного аппарата при пе-
редаче на ретранслятор и на Землю соответственно; £п.р,
Ln.3—расстояния от посадочного аппарата до ретранслято-
ра и до Земли.
7 Г. Ю. Максимов
194
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. 3
В формуле (3.60) принято, что мощности бортовых
передатчиков, используемых для сравниваемых радио-
линий, одинаковы, так как эти мощности в основном
определяются массовыми и энергетическими ограниче-
ниями посадочного аппарата. Кроме того, принято, что
величины (рс/рш)п (см. главу 1) и коэффициенты запаса
также одинаковы.
Для иллюстрации влияния характеристик бортовых
антенн на величину в таблице 3.1 приведены-не-
которые варианты антенн, их характеристики, диапазоны
длин волн и величины в формуле (3.60), зависящие от
этих параметров. Характеристики антенн рассчитаны по
формулам главы 1. При расчете величин в формуле (3.60)
взяты экстремальные сочетания параметров антенн и
длин волн.
Во втором варианте антенн для наведения острона-
правленных антенн посадочного аппарата и ретрансля-
тора необходимо использовать радиопеленгационные си-
стемы, поскольку малые относительные размеры аппара-
тов и неопределенность их взаимного положения затруд-
няют применение других средств наведения.
Допустим, что Тш.з = Тш.р> Ьп.з = 300-10® км, £п.р =
= 104 км и /’эфф.з =Ю3 м2. Тогда для третьего варианта
антенн найдем C^IC^ = 2-104-т-0,5-10®, т. е. здесь вы-
годно применить ретрансляцию. Однако для первого
варианта при тех же значениях остальных параметров
С^1Сз =10"8н-1, и ретрансляция нецелесообразна.
С другой стороны, третий вариант антенн при Гш.з =
= 50К, Тш.р = 300 К, Ьп.з = 100-10® км, ЬП.Р = 10® км
и ^эфф.з = 5-103 м2 дает Ср1Сз =0,7 ч- 17, т. е. в этом
случае ретрансляция информации может оказаться уже
выгодной.
Как следует из приведенной таблицы и примеров,
в зависимости от характеристик бортовых антенн, назем-
ных средств приема и баллистических данных величина
Ср/Сз может быть как меньше, так и существенно больше
единицы. Поэтому для решения вопроса о целесообраз-
ности применения первого варианта ретрансляции для
вновь разрабатываемого космического аппарата необхо-
дим соответствующий детальный анализ, в котором дол-
жны быть учтены массовые, энергетические, конструк-
тивные и другие ограничения.
ТАБЛИЦА 3.1
№ Виды антенн, их параметры и диапазоны длин волн Величины в формуле (3.60) ср Сз
Антенна поса- дочного аппа- рата для пере- дачи на ретран- слятор Антенна поса- дочного аппа- рата для пере- дачи на Землю Антенна ретран- слятора для приема с поса- дочного аппа- рата ₽еффр, м» *у.п. р ку. п. 3
1 Всенаправ- ленная Параболиче- ская: d = 1+2м к = 1+5 см Всенаправлен- ная: Ку= 0,01+0,1 Х = 0,01+1м 10-’+ +10"* 0,01+0,1 10»+10» (10-’«+10-«) —?— х ^эфф.З Тт - / L„ - ш. з f п. з 1 А \ Г ‘ / Л Ш. р ' п. р /
2 Параболиче- ская: d = 1+2 м X =1+5 см Параболиче- ская: с?=1+2м X = 1+5 см Параболиче- ская: d = 2+5 м X = 1+5 см 0,7+5 10»+10* 10»+10» (0,7-10-2+5. IO») X 1 о о \ 2 ш. о I п. a I эфф.3 ^ш. р ' "^п. р/
3 Малонаправ- ленная Малонаправ- ленная Малонаправ- ленная: Ху=1+5 X = 0,5+1 и 0,02+0,5 Ку. п. р “*^у. п. 3 (0,02 + 0,5)—!— X ?эфф.З ^ш. 3 ( 3 3 ^ш. р \ ^п.р /
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
196
УПРАВЛЕНИЕ И ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
[ГЛ. Ь
Рассмотрим второй вариант использования ретрансля-
ции — передачу информации с посадочного аппарата че-
рез ретранслятор непосредственно на Землю без проме-
жуточного запоминания. Покажем, что анализ этого ва-
рианта сводится к предыдущему.
Обозначая через Ср.з возможную скорость передачи
информации с ретранслятора на Землю и используя пре-
жние обозначения, основное условие реализации второго
варианта получим в виде
Ср = Ср.з. (3.61)
Если Ср < Сз, то выполнение условия (3.61) приведет
к неравенству Ср.з < Сз, т. е. к потере в скорости пере-
дачи информации, и, следовательно, второй вариант рет-
рансляции технически нецелесообразен.
С другой стороны, если Ср > Сз, то для выполнения
условия (3.61) должно быть выполнено требование Ср.з >
> Сз. Это требование, как правило, выполнить легко,
так как массовые, энергетические и другие проектные
возможности создания высокоинформативной радиолинии
у ретранслятора шире, чем у посадочного аппарата.
В качестве общего вывода можно сказать следующее.
Если анализ траекторий, программы работы и возмож-
ностей радиотелеметрических и антенных систем посадоч-
ного аппарата и ретранслятора показывает, что Ср > Сз,
то могут оказаться целесообразными оба варианта ретран-
сляции. Если же Ср Сз, то ретрансляция может ока-
заться выгодной только для повышения надежности как
аварийная радиолиния.
3.4.8. Как указывалось, если информация с посадочного
аппарата передается не непосредственно на Землю, а
ретранслируется через орбитальный или пролетный ап-
парат, то это может привести к уменьшению надежности
передачи, поскольку для получения на Земле этой инфор-
мации необходима безаварийная работа и посадочного
аппарата, и аппарата, который используется как ретран-
слятор. Однако если ретрансляция используется наряду
с непосредственной передачей (одновременно или после
запоминания), то в этом случае надежность получения
информации на Земле может увеличиться.
Это связано с тем, что всегда ретранслятор располо-
жен существенно ближе к посадочному аппарату, чем
3.4)
ВЗАИМОДЕЙСТВИЕ АППАРАТОВ
197
паземный пункт. Поэтому для передачи информации на
ретранслятор можно использовать другую радиотелеме-
трическую систему и другие антенны с меньшим коэффи-
циентом усиления, чем у используемых для непосредст-
венной передачи на Землю. Естественно, что для этого
на посадочном аппарате должны иметься массовые и энер-
гетические резервы. При этом ретрансляцию информации
можно рассматривать как дублирование основной радио-
линии.
Однако, даже если имеются массовые и энергетические
резервы на посадочном аппарате и имеется космический
аппарат, который можно использовать как ретранслятор,
необходимо проанализировать, на что истратить указан-
ные резервы — на установку дополнительной дублирую-
щей радиолинии и антенной системы для ретрансляции
или на увеличение надежности основной радиолинии за
счет установки дополнительных дублирующих приборов,
увеличения выходной мощности передатчика и соответ-
ственно коэффициента запаса и т. д.
Из проведенного рассмотрения различных областей
применения ретрансляции информации с посадочного
аппарата через другие космические аппараты следует,
что при разработке проектов космических аппаратов,
которые имеют возможность взаимодействия с другими
аппаратами, желательно исследовать различные аспекты
такого взаимодействия с учетом особенностей траекторий,
массовых ограничений, энергетики и надежности работы
аппаратуры. В результате этих исследований могут быть
найдены проектные решения, улучшающие характеристи-
ки разрабатываемого аппарата.
ГЛАВА 4
ОБЕСПЕЧЕНИЕ УСЛОВИЙ РАБОТЫ ПРИБОРОВ
И СИСТЕМ.
ОСНОВНЫЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
4.1. Некоторые определения и основные
требования к компоновке и конструкции
4.1.1. Автоматический космический аппарат в конст-
руктивном отношении представляет собой комплекс при-
боров и агрегатов, установленных на некоторой общей
конструктивной базе и соединенных общей кабельной
сетью.
Часть приборов космического аппарата для своего
функционирования не требует непосредственного контакта
с космическим пространством. Это, в частности, приборы
радиотелеметрической системы, химические батареи, элек-
тронные блоки системы управления ориентацией, система
управления бортовыми приборами, система управления
движением и т. д. Как правило, такие приборы отделяют
от открытого пространства какой-либо оболочкой или
экраном, что облегчает обеспечение заданного темпера-
турного режима приборов. Группу указанных приборов,
размещенных на отдельной конструктивной базе и отде-
ленную от открытого пространства общей оболочкой или»
экраном, назовем условно отсеком.
В составе любого космического аппарата имеются,
кроме того, приборы и агрегаты, требующие для своего
функционирования непосредственного контакта с откры-
тым пространством. К таким приборам и агрегатам отно-
сятся антенны, оптические датчики системы управления
ориентацией, двигательные установки, солнечные батареи,
некоторые научные приборы и др. Эти приборы и агрега-
ты назовем внешними. К внешним нужно отнести и такие
приборы и агрегаты, которые должны быть удалены от
основной массы приборов для устранения нежелательных
взаимных влияний. Примером агрегата такого рода яв-
ляется изотопный генератор электроэнергии, который
приходится удалять от отсека с другими приборами из-за
4.1]
ТРЕБОВАНИЯ К КОМПОНОВКЕ И КОНСТРУКЦИИ
199
радиационной опасности и высоких температур корпуса
генератора.
В наиболее простом случае космический аппарат мо-
жет состоять из одного отсека, форма которого не меняется
в течение всего полета. Более сложные аппараты могут
состоять из двух и более отсеков, отделяющихся друг от
друга или меняющих взаимное расположение на некото-
рых этапах полета.
Относительное размещение, форма и размеры отсеков,
а также расположение отдельных внешних приборов и
агрегатов будем называть внешней компоновкой аппарата.
Размещение приборов внутри какого-либо отсека назовем
его внутренней компоновкой.
Так как в конкретном аппарате должны быть разме-
щены вполне определенные приборы, то внешняя и внут-
ренняя компоновки неразрывно связаны друг с другом.
Хотя некоторые общие характеристики внешней компо-
новки, такие, как, например, число отсеков и схема их
разделения, иногда определяются только назначением
и схемой полета космического аппарата.
Внешняя и внутренняя компоновки являются исход-
ными данными для выпуска рабочей документации и, как
правило, входят в состав эскизного и технического проек-
тов. В процессе создания аппарата разработка внешней
и внутренней компоновок может начинаться сразу после
определения схемы полета и состава бортовых систем.
4.1.2. Перечислим основные требования, которым дол-
жна удовлетворять внешняя компоновка космического
аппарата и внутренняя компоновка отдельных отсеков.
1. Состав отсеков и их относительное размещение
должны обеспечивать решение задач, поставленных перед
аппаратом. Поясним это требование на примерах. Если
задачей аппарата является доставка на поверхность плане-
ты научной станции, то, поскольку спуск па планету всег-
да связан с массовыми затратами на торможение, на стан-
ции должны быть размещены только приборы и агрегаты,
необходимые для работы станции на поверхности планеты
и для ее спуска и посадки. Приборы, которые нужны толь-
ко на участке перелета от Земли к планете назначения,
целесообразно разместить в специальном отсеке, отделяе-
мом от станции перед входом в плотные слои атмосферы
планеты или перед торможением на двигателях.
200
УСЛОВИЯ РАБОТЫ II ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Аппарат «Луна-9», с помощью которого на Луну была
доставлена автоматическая лунная станция, состоял из
двигательной установки с отсеком управления для кор-
рекции траектории и торможения около Луны, автомати-
ческой лунной станции, отделявшейся от отсека управле-
ния около поверхности Луны после окончания процесса
торможения, и двух боковых отсеков, отделявшихся пе-
ред началом торможения. Такая относительно сложная
схема аппарата определялась жестким массовым лимитом
на весь аппарат и стремлением доставить на поверхность
Луны максимально возможное количество научной аппа-
ратуры и химических батарей, необходимых для работы
этой аппаратуры.
2. Внешняя компоновка аппарата должна допускать
его установку на ракете, выводящей аппарат на траекто-
рию или орбиту. В большинстве случаев космический аппа-
рат создается применительно к определенной, уже про-
шедшей летные испытания ракете. При этом естественно
стремление свести к минимуму доработки ракеты.
Стыковка аппарата с ракетой включает установку ап-
парата на ракете с помощью специальной рамы или крон-
штейнов; подключение электрических связей, необходи-
мых в ряде случаев для контроля и управления аппаратом
на стартовой позиции и участке выведения; обеспечение
возможности обслуживания аппарата после его соедине-
ния с ракетой. Космический ашшарат рассчитывается
и проверяется на линейные, вибрационные, ударные и
акустические нагрузки от работающей ракеты, а также
на транспортные и подъемные нагрузки, которые дейст-
вуют на ракету вместе с аппаратом.
После выведения на траекторию космический аппарат
обычно отделяется от ракеты выведения, для чего преду-
сматривается специальная система отделения.
3. Внешняя компоновка, в частности форма отсеков
и их размеры, должны обеспечивать минимальную массу
конструкции аппарата за счет выбора наилучшей силовой
схемы, воспринимающей нагрузки на участке выведения,
и сокращения размеров отсеков и конструктивных эле-
ментов, соединяющих между собой отдельные агрегаты
и отсеки.
4. Размещение внешних приборов и агрегатов должно
гарантировать их нормальное функционирование, т. е.
4.1]
ТРЕБОВАНИЯ К КОМПОНОВКЕ И КОНСТРУКЦИИ
201
отсутствие попадания элементов конструкции в поля зре-
ния оптических датчиков, отсутствие газящих элементов
около приборов, чувствительных к собственной атмосфере
аппарата, и т. д.
Наиболее «капризны» к размещению на аппарате чув-
ствительные оптические датчики системы управления ори-
ентацией. Особое внимание должно быть уделено установ-
ке всенаправленной солнечной батареи, которая должна
работать при любом положении Солнца относительно ап-
парата, если для данного аппарата принята именно такая
схема генератора электроэнергии.
5. Для некоторых космических аппаратов может ока-
заться важным иметь минимальные момент и силу от све-
тового давления или иметь определенную зависимость
момента от углов отклонения аппарата от направления
на Солнце. Очевидно, что этого можно добиться опреде-
ленной внешней компоновкой и выбором внешних покры-
тий, от которых зависят коэффициенты поглощения сол-
нечной энергии и индикатрисы рассеивания элементов по-
верхности, а следовательно, и характеристики светового
момента. О методах расчета этих характеристик будет
сказано в § 4.6.
6. Внешняя компоновка должна гарантировать мини-
мальные моменты от силы тяги двигательной установки,
предназначенной для изменения траектории аппарата,
так как эти моменты вызывают ошибки в сообщении аппа-
рату дополнительной скорости, необходимой для коррек-
ции траектории или маневра. Для этого нужно, чтобы
линия действия тяги двигательной установки проходила
достаточно близко от центра масс аппарата. Это требова-
ние должно выполняться при любом количестве топлива
в баках.
7. Внешняя компоновка должна обеспечивать простое
обслуживание аппарата при его испытаниях и подготовке
к пуску. Здесь имеется в виду удобство доступа к техно-
логическим электроразъемам, заправочным устройствам,
люкам для установки осушителей и т. д., а также возмож-
ность проведения регулировочных и юстировочных работ
с отсеками в целом и с внешними приборами и агрегатами.
8. В отдельных случаях необходимо выполнить не-
которые специальные требования к эллипсоиду инерции
аппарата. Одним из таких случаев является режим пас-
202 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
сивиой гироскопической стабилизации, рассматриваемый
в § 4.5. В качестве другого примера укажем на гравита-
ционную стабилизацию, подробно исследованную в ра-
боте [4]. Требования к эллипсоиду инерции аппарата яв-
ляются по существу требованиями к его внешней компо-
новке.
9. Внутренняя компоновка отсеков, т. е. взаимное
размещение приборов и их установка на общей конструк-
тивной базе и относительно общей оболочки, в первую
очередь должна обеспечивать нормальную работу этих
приборов. Здесь имеется в виду отсутствие недопустимых
взаимных влияний одних приборов на другие — тепловых,
электростатических, магнитных, высокочастотных и др.,
а также уменьшение потерь в связях между приборами.
10. При размещении приборов внутри отсеков необхо-
димо исходить из требования обеспечения минимальной
массы конструкции этих отсеков, а также минимальной
массы низкочастотных и высокочастотных связей между
приборами. Под массой конструкции понимается масса
конструктивных баз (рамы или платы), на которых уста-
новлены приборы и агрегаты, масса оболочки отсека и
масса крепежных элементов. Отсюда и из предыдущего
требования следует, что внутреннюю компоновку целе-
сообразно начинать после разработки, хотя бы предвари-
тельной, электрической схемы соединений приборов и
схемы антенно-фидерных устройств.
11. Внутренняя компоновка должна позволять доста-
точно простую замену приборов, а также проведение ре-
гулировочных и юстировочных работ с отдельными при-
борами после их установки па общую конструктивную
базу.
Относительно формы отсеков космических аппаратов
нужно заметить, что если некоторый отсек предназначен
для движения в плотных слоях атмосферы Земли или пла-
неты, то форма и центровка этого отсека определяются,
исходя из требований обеспечения устойчивости и управ-
ляемости такого движения и малой массы тепловой защи-
ты. Если же отсеки не предназначены для движения в
плотных слоях атмосферы, то форма этих отсеков может
быть совершенно произвольной, лишь бы обеспечивалось
выполнение перечисленных выше требований и внутри
отсеков можно было разместить необходимую аппаратуру.
4.2]
ПРИНЦИПЫ ТЕРМОРЕГУЛИРОВАНИЯ
203
Из сказанного следует, что форма отсека является сво-
бодным параметром, варьируя который можно добиться
оптимизации некоторых общих характеристик аппарата,
таких, как общая масса, количество научной аппарату-
ры, информативность, стоимость и т. д. При этом очевид-
но, что отдельный отсек не должен рассматриваться изо-
лированно от всего аппарата. При уменьшении массы од-
ного отсека может возрасти масса конструкции, соединяю-
щей данный отсек с остальными отсеками и агрегатами.
Перечисленные требования к внешней и внутренней
компоновкам и вытекающие из них общие требования
к конструкции аппарата достаточно очевидны и, по-ви-
димому, не требуют дополнительных пояснений. При раз-
работке компоновки и конструкции космического аппара-
та, кроме перечисленных, необходимо учитывать также
требования обеспечения заданных температурных диа-
пазонов для приборов и агрегатов. Система терморегули-
рования, если она предусматривается составом аппарата,
может обеспечить выполнение этих требований только
совместно с целым рядом компоновочных и конструктив-
ных мероприятий. Этим вопросам посвящен следующий
параграф.
Кроме того, при разработке внешней компоновки, вы-
боре количества и толщин экранов или оболочки, отде-
ляющих внутренние приборы от открытого пространства,
а также при выборе материалов и наружных покрытий
этих экранов или оболочки необходимо учитывать опас-
ность пробоя их метеоритами и возможность эрозии наруж-
ных поверхностей за счет пыли, микрометеоритов, атмос-
феры и других факторов.
4.2. Обеспечение заданных температур
и принципы терморегулирования
4.2.1. Для анализа факторов, влияющих на температу-
ры приборов, агрегатов и их элементов, рассмотрим неко-
торый гипотетический космический аппарат, состоящий
из приборов и агрегатов, установленных на общей конст-
руктивной базе, и функционирующий в открытом прост-
ранстве, вне атмосфер планет *). Построим в аппарате
♦) Среди работ, в которых рассматривается тепловой режим
аппаратов, функционирующих на Луне и планетах, можно указать
204
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
условную замкнутую поверхность F. Эта поверхность мо-
жет охватывать один элемент какого-либо прибора, цели-
ком один прибор или агрегат, группу приборов или весь
космический аппарат. Допустим, что внутри объема, ог-
раниченного поверхностью F, содержится N элементов.
Под элементом будем понимать такую часть рассматривае-
мого объема, температуру которой можно характеризо-
вать некоторой средней величиной Т*. Ясно, что выбор
поверхности F, а также элементов, ограниченных этой
поверхностью, достаточно условен и зависит от глубины
исследования температурного режима.
В общем случае температура поверхности F будет не-
прерывной функцией координат в некоторой системе,
с помощью которых можно однозначно описать положение
любой точки на этой поверхности. Указанную зависимость
условно запишем в виде Т (F).
Для объема, ограниченного поверхностью F, справед-
ливо уравнение
N dT
7Г = дн’ (4Л)
где 7\, q, m* — средняя температура, теплоемкость и
масса А-го элемента внутри рассматриваемого объема;
qR — результирующий поток тепла, подводимый к объе-
му или отводимый, от него (соответственно величина qR
будет положительной или отрицательной).
Величину qR можно представить в виде суммы
L
9r = Qi + 9в + 9с — 9™ (4-2)
<—i
Где qt — тепловыделения источников тепла, заключенных
в рассматриваемом объеме (число таких источников L);
дв — суммарный тепловой поток, подводимый к объему
из открытого пространства; дс — суммарный тепловой
поток, подводимый или отводимый от объема за счет его
тепловых контактов с соседними приборами, агрегатами
или конструкцией аппарата, а также с газом, наполняю-
щим отсек (для герметичных отсеков); qH — тепловой
поток, излучаемый с поверхности F в открытое простран-
ство.
4.2]
ПРИНЦИП^ ТЕРМОРЕГУЛИРОВАНИЯ
205
Очевидно, что q3 и ди равны нулю, если данный объем
не граничит с открытым пространством. Отметим также,
что величины q^ qB и ди не зависят от температур прибо-
ров и элементов, не заключенных в рассматриваемый
объем. Величина qc существенно зависит от этих темпера-
тур.
Рассмотрим составляющие результирующего теплово-
го потока qn.
4.2.2. Внешние тепловые потоки, попадающие в рас-
сматриваемый объем из открытого пространства и харак-
теризуемые членом q3 в уравнении (4.2), определяются
потоком энергии Солнца, падающим на поверхность F,
а также тепловыми потоками от планеты за счет ее собст-
венного излучения и за счет отраженной планетой солнеч-
ной энергии.
Тепловой поток от Солнца, поглощенный некоторой
плоской поверхностью, равен
q3s = AgSf cos у, (4.3)
где Лв — коэффициент поглощения солнечной энергии
поверхностью; S — полное количество солнечной энер-
гии, падающей на единичную площадку, помещенную под
прямым углом к направлению на Солнце; / — площадь,
освещенная Солнцем; у — угол между внешней нормалью
к поверхности и направлением на Солнце.
Если поверхность, освещенная Солнцем, не плоская,
то выражение (4.3) должно быть записано для элемента
поверхности; полная энергия определится при этом ин-
тегрированием по всей поверхности. Если рассматривает-
ся некоторый прибор, освещенный Солнцем, то величины
f и у зависят от геометрии прибора и его установки на ап-
парате, а также от ориентации аппарата в пространстве.
Здесь необходимо пояснить, что / зависит от ориентации
аппарата потому, что при некоторых положениях Солнца
относительно аппарата часть или вся поверхность прибо-
ра, имеющая контакт с открытым пространством, может
быть затенена корпусом аппарата или соседними прибо-
рами.
Относительно величины S нужно заметить, что над
атмосферой Земли при среднем расстоянии от Земли до
Солнца эта величина соответствует так называемой
206 УСЛОВИЯ РАБОТЫ И ТРЕБОВАЛИ^ К КОНСТРУКЦИИ [ГЛ. 4
солнечной постоянной, которая равна [1]
50 = f = 1,Й60- 10е эрг/(см8-с).
Среднее расстояние от йемли до Солнца равно большой
полуоси земной орбиты и носит название астрономической
единицы. Эта величина равна 1,495979-1013 см [1].
Величина S определится формулой
$ = (4.4)
где р — расстояние от аппарата до Солнца в астрономи-
ческих единицах.
Поскольку расстояние от спутника Земли до центра
Земли пренебрежимо мало по сравнению с расстоянием
от Земли до Солнца, то величина S в этом случае будет
практически зависеть только от положения Земли на ее
орбите.
Учитывая сказанное и используя известные формулы
эллиптического движения, для спутников Земли можно
записать
S = So(l+^±)!, (4.5)
где е — эксцентриситет земной орбиты; О — истинная ано-
малия, т. е. угол между направлениями от Солнца к пе-
ригелию орбиты и от Солнца к Земле.
Так как Земля проходит через перигелий своей орби-
ты в начале января, то с точностью, достаточной для теп-
ловых расчетов, можно принять О [град] = т [сут], где
т — время, прошедшее от 1 января текущего года.
Из (4.5) следует, что если принять 5 = SOl то макси-
мальная относительная ошибка в определении величины
S будет приближенно равна 2е или 3,4% (е » 0,0168).
В некоторых случаях этой ошибкой можно пренебречь
и считать 5 = 50-
Коэффициент As в формуле (4.3) зависит от свойств
поверхности, освещенной Солнцем,— ее материала и об-
работки. Иногда для получения нужных значений этого
коэффициента на поверхность наносят специальное по-
крытие. В зависимости от свойств поверхности значение
As может меняться от 0,08 до 0,95. Необходимо обратить
внимание на то, что для многих материалов и покрытий
4.2] ПРИНЦИПЫ ^ТЕРМОРЕГУЛИРОВАНИЯ -207
\
значение этого коэффициент^ оказывается нестабильным.
По данным, полученным на отечественных и зарубежных
космических аппаратах, иногда значение коэффициента
As увеличивается в полете от 0,1—0,2 до 0,3—0,4. При-
чины этого явления до конца не выявлены.
В ряде случаев для уменьшения поглощения тепловой
энергии Солнца часть внешней поверхности аппарата за-
крывают специальной изоляцией. Наибольшее распрост-
ранение получила изоляция, состоящая из серии экра-
нов с малыми коэффициентами излучения, так называемая
экранно-вакуумная тепловая изоляция (ЭВТИ). В каче-
стве материала экранов часто используют полиэтилен-
терефталатную пленку толщиной 5—15 мкм с напылен-
ным на нее слоем алюминия для уменьшения коэффициен-
та излучения.
Относительно энергии, падающей на поверхность F
от планет и также характеризуемой членом qB в уравне-
нии (4.2), заметим, что эта энергия определяется харак-
теристиками планеты, в частности ее расстоянием от Солн-
ца, положением орбиты аппарата относительно термина-
тора планеты, расстоянием от аппарата до планеты, ори-
ентацией относительно местной вертикали и вектора
скорости, размещением данного участка поверхности на
аппарате и его геометрией. Методы расчета тепловых пото-
ков, падающих на аппарат от планет, изложены в специ-
альной литературе, посвященной теплообмену космиче-
ских аппаратов с внешней средой (см., например, [11}).
Отметим, что часть собственного излучения планеты, по-
глощаемая внешней поверхностью аппарата, зависит от
коэффициента излучения этой поверхности, а поглощен-
ная часть солнечной энергии, отраженной планетой, опре-
деляется тем же коэффициентом 4s, от которого зависит
и непосредственно поглощенная энергия Солнца. Это свя-
зано с тем, что температуры планет Солнечной системы
близки к температурам космических аппаратов, а также
с тем, что при отражении солнечной энергии от планеты
спектральное распределение этой энергии практически
совпадает с солнечным, во всяком случае с той точностью,
которая необходима для тепловых расчетов космическо-
го аппарата.
4.2.3. Тепловые контакты рассматриваемого объема
с соседними элементами аппарата определяются тремя
208 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
факторами: излучением, теплопроводностью и вынужден-
ной конвекцией. Последней фактор имеет место для гер-
метичных отсеков и длц случаев, когда рассматриваемый
объем охлаждается идй нагревается с помощью какого-
либо специального теплоносителя — жидкого или газо-
образного.
В соответствий с этим для величины qc в уравнении
(4.2) можно записать
1(F)
9с = ${3 4il7’i-7’(F)l}dF +
F i=l
J(F)
+ J{S ^[Tj-P(F)]}dF. (4.6)
F >=1
В выражении (4.6) под Tt и Tj понимаются температу-
ры внешних по отношению к рассматриваемому объему
элементов, имеющих с этим объемом тепловые контакты.
Количество таких элементов, обозначенное через I и J,
в общем случае зависит от рассматриваемого элемента по-
верхности F, что характеризуется записью 1(F) и J (F).
Оба интеграла в выражении (4.6) берутся по всей поверх-
ности F, причем первый интеграл определяет тепловые
потоки, подходящие к рассматриваемому объему или от-
водимые от него за счет теплопроводности или вынужден-
ной конвекции, а второй определяет теплообмен излуче-
нием.
Коэффициенты и Bj не зависят явно от температур
и определяются следующими факторами:
геометрией рассматриваемого объема и расположением
относительно него окружающих приборов и агрегатов
аппарата;
тепловыми контактами в местах крепления приборов
и агрегатов, если поверхность F совпадает с соответствую-
щими стыковочными поверхностями; тепловые контакты
или контактные сопротивления в свою очередь зависят от
материала и обработки контактирующих поверхностей,
а также от давления контакта;
свойствами (материалом, обработкой, покрытием) на-
ружных поверхностей приборов, совпадающих с грани-
цей рассматриваемого объема; от этих свойств зависит
коэффициент излучения б;
4.21
ПРИНЦИПЫ Ф^РМОРЕГУЛИРОВАНИЯ
209
физическими характеристиками и скоростями теплоно-
сителя или газа отсека, имеющего контакт с исследуемым
объемом.
Неявная зависимость коэффициентов At и Bj от тем-
пературы Т (F) и Tj содержится, кроме того, в зави-
симости коэффициентов излучения от температуры, а так-
же в зависимости от температуры коэффициентов тепло-
отдачи между рассматриваемым объемом и .теплоносителем.
Отметим, что коэффициенты Bj зависят не только от рас-
положения внешних приборов и агрегатов относительно
исследуемого объема, но и от коэффициентов излучения
поверхностей этих приборов и агрегатов.
Таким образом, коэффициенты и В/ в выражении
(4.6), определяющие величину qc, зависят от конструк-
ции аппарата и его отдельных приборов, а также от ком-
поновки приборного отсека.
4.2.4. Тепловой поток, излучаемый с поверхности F
в открытое пространство, выражается формулой
ди = о0 f e(F)P(F)dF, (4.7)
где сг0 — постоянная Стефана — Больцмана:
сг0 = 5,66956-10"6 эрг/(см2-град4-с) [1];
е — коэффициент излучения элемента поверхности (для
абсолютно черного тела е = 1); Т (F) — абсолютная
температура элемента поверхности.
Интеграл в выражении (4.7) берется по всей поверх-
ности Fx, которая представляет собой часть полной по-
верхности F исследуемого объема, с которой происходит
излучение в открытое пространство. Таким образом,
Fx F. В соответствии с принятыми выше обозначения-
ми, если некоторая часть полной поверхности F излучает
в открытое пространство и на нее попадает излучение
от других элементов аппарата, то указанную часть по-
верхности нужно учесть только в составляющей дс. Если
же некоторая часть полной поверхности излучает в от-
крытое пространство и на нее попадает внешний тепловой
поток, то эту часть поверхности необходимо учесть и
в члене ди, и в члене qB [см. (4.2) и (4.6)].
4.2.5. В космических аппаратах единственным путем
для отвода тепла является излучение в открытое простран-
210 УСЛОВИЯ РАБОТЫ И ТРЕБОВ^МИЯ К КОНСТРУКЦИИ (ГЛ. 4
ство. Это иллюстрируется схемой тепловых потоков на
рис. 4.1. Для излучение тепла в открытое пространство
на многих космических аппаратах предусматривают спе-
циальный радиатор-холодильник, представляющий со-
бой развернутую поверхность
с высоким коэффициентом
излучения. Тепло от прибо-
ров подводится к радиатору
с помощью теплоносителя
(жидкого или газообразного)
или за счет установки теп-
ловыделяющих приборов не-
посредственно на радиаторе.
Если радиатор плоской
формы с теплоносителем раз-
мещен таким образом, что
остальные части аппарата не
препятствуют излучению с
его рабочей поверхности в
открытое пространство, то
на основании формулы (4.7)
установившийся тепловой ре-
жим такого радиатора-холо-
дильника можно описать следующим приближенным ура-
внением, являющимся частным случаем уравнения (4.1);
OoFpCpTp = D (Тт — Тр) + дв, (4.8)
цш, Зес/цшяилнг&щие
_______лотом________
Зяенен/пь/ юю/щм-
цш, iwrgwMHqi/e темо
&
tit
» ; 1 ।
fill
Рис. 4.1. Схема тепловых по-
токов в космическом аппарате.
где Fp, ер, Тр — площадь, коэффициент излучения и тем-
пература излучающей поверхности радиатора соответст-
венно; Тт — температура теплоносителя; D — коэффи-
циент, зависящий от физических свойств теплоносителя,
его массового расхода и конструкции радиатора; дв —
внешний тепловой поток, падающий на радиатор.
Если на космический аппарат не попадают тепловые
потоки от планет и все поверхности радиатора, кроре
излучающей, изолированы от внешних тепловых потоков,
то на основании выражения (4.3) уравнение (4.8) примет
следующий вид:
Л> (аоврТр - AsS cos ?) = D (Гт - Гр). (4.9)
Если, кроме того, излучение в открытое пространство
с поверхности всего аппарата мало по сравнению с из-
4.12]
ПРИНЦИПЫ ТЕРМОРЕГУЛИРОВАНИЯ
211
лучением радиатора, что имеет место, когда вся поверх-
ность аппарата кроме радиатора достаточно хорошо изо-
лирована от внешнего пространства, то выражение в
правой части уравнения (4.9) равно суммарному тепло-
го
выделению всех приборов аппарата У д,. В этом случае
i=l
из уравнения (4.9) можно получить формулу для расчета
площади радиатора
Fv ж-----. (4.10)
VpTj-^cosr
Рассматриваемый вариант радиатора с теплоносителем
предполагает наличие в приборных отсеках теплообмен-
ников, с помощью которых тепло от приборов передается
теплоносителю. В этом случае температура радиатора
Гр должна быть несколько ниже максимально допусти-
мой температуры приборов Гщах, т. е.
Гр=Гтах-ДГ1-ДГ2, (4.11)
где ДГ1Э ДГ2 — перепады температур, необходимые для
передачи количества тепла, равного 519»» от приборов
i=i
к теплоносителю и от теплоносителя к поверхности ра-
диатора.
Lo
Зная величину 517i» можно по известным формулам
4=1
оценить величины А7\ и ДГа для предполагаемых схем
теплообменников и радиатора, свойств теплоносителя и
его расхода. После этого, задаваясь величинами Гщах,
ер, Лз, S и у, можно по формуле (4.10) в первом прибли-
жении определить необходимую площадь радиатора-хо-
лодильника для космического аппарата рассматриваемо-
го типа.
4.2.6. Возвращаясь к уравнению (4.1), заметим, что
это уравнение позволяет качественно проанализировать
влияние основных факторов на тепловой режим косми-
ческого аппарата. Для численных расчетов это уравнение
можно использовать только в отдельных частных случаях,
например для тепловых расчетов достаточно изолирован-
212
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
ных от остального аппарата приборов и агрегатов или
для элементов, тепловой режим и контакты с окружением
которых можно характеризовать одной температурой.
Для полного анализа температур элементов и прибо-
ров, ограниченных поверхностью F, необходимо знать
не только температуры всех приборов и агрегатов ап-
парата, окружающих эту поверхность, но и распределе-
ние температур по поверхности Т (F) и связь между тем-
пературами элементов [(см. (4.1)].
Связь между температурами элементов внутри рас-
сматриваемого объема и зависимость этих температур
от температур Т (F) на его границе определяются из
решения так называемой внутренней задачи. Внутренняя
задача сводится к исследованию некоторой системы урав-
нений, определяющей распределение температур внутри
указанного объема. Эта система может в простых случаях
превратиться в систему алгебраических уравнений, а
в более сложных может содержать уравнения в частных
производных, когда для решения внутренней задачи не-
обходимо исследовать распределение температур по эле-
ментам конструкции.
В наиболее простом случае, когда работоспособность
прибора или агрегата и его тепловой контакт с окружа-
ющей средой и приборами можно характеризовать сред-
ней температурой, внутренняя задача имеет элементар-
ное решение Т\ = Т (F) = Тср.
Для полного анализа температурного режима всего
космического аппарата необходимо записать уравнение,
аналогичное уравнению (4.1), для аппарата в целом и
систему уравнений, определяющих температурные связи
между всеми характерными элементами аппарата. Такая
система уравнений получается чрезвычайно громоздкой
даже для простейших космических аппаратов и потому
обычно используют те или иные приближенные методы
анализа.
В качестве первого приближения часто рассматривают
установившиеся режимы, т. е., полагая в уравнении (4.1)
dT^/dt = 0, записывают его для аппарата в целом и для
отдельных характерных приборов, групп приборов и эле-
ментов. Решая полученную систему уравнений, находят
соответствующие средние температуры для различных
режимов работы аппарата. Рассмотрим это подробнее.
4.2]
ПРИНЦИПЫ ТЕРМОРЕГУЛИРОВАНИЯ
213
4.2.7. В уравнение (4.1), записанное для аппарата
Ьо
в целом, войдет суммарное тепловыделение Эта
4—1
величина обычно не остается постоянной в течение всего
полета и определяется программой работы аппаратуры.
Внешние тепловые потоки, поглощаемые поверхностью
аппарата и отдельными приборами, зависят от ориента-
ции аппарата относительно Солнца и планеты и от сол-
нечной энергии (см. п. 4.2.2). Эти факторы также могут
меняться во время полета. Соответственно будут различ-
ны и средние установившиеся температуры приборов,
их групп и отдельных элементов. Анализируя схему поле-
та и ориентации, а также программу работы аппарата,
можно выявить режимы перегрева и переохлаждения,
т. е. такие сочетания условий работы из числа допустимых,
при которых характерные температуры аппарата могут
принимать соответственно максимальные и минимальные
значения.
Если окажется, что полученные в результате такого
анализа диапазоны изменения температур шире допусти-
мых для соответствующих приборов, агрегатов и элементов,
то необходимо терморегулирование. Под последним по-
нимается осуществление определенных мероприятий, по-
вышающих или понижающих температуры в характерных
точках по определенному закону.
Рассмотрим некоторые из вариантов терморегулиро-
вания, способных изменять температуру приборов, агре-
гатов или газа отсеков.
1. Наиболее распространенным средством является
изменение радиационных свойств радиатора-холодиль-
ника, в частности за счет применения жалюзи. Под по-
следними понимаются устройства, закрывающие неко-
торые участки радиатора с высоким значением коэффи-
циента излучения элементами конструкции, имеющими
малое значение этого коэффициента. Для оценок эффектив-
ности подобных устройств иногда 'удобно ввести поня-
тие эффективного коэффициента излучения радиатора
еЭфф, который на основании формулы (4.7) определяется
выражением
WU =Г $ 8 (F) (F) dF, (4.12)
fp
214
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
где Гр.ср — среднее значение температуры наружных
элементов радиатора, Fp — площадь радиатора.
Как следует из выражений (4.7) и (4.12), при увели-
чении или уменьшении еЭфф и неизменном потоке тепла,
излучаемого радиатором^ соответственно будет уменьшать-
ся или увеличиваться и его средняя температура. При
этом будет меняться и температура элементов аппарата,
имеющих тепловой контакт с радиатором.
В качестве аналогичного варианта можно указать на
изменение площади радиатора. Этого можно добиться,
в частности, секционированием радиатора и включением
в работу или выключением некоторых секций. Наиболее
просто это осуществляется для радиаторов с теплоно-
сителем установкой специальных перепускных клапанов.
2. На космических аппаратах, на которых режим пе-
реохлаждения соответствует недопустимо низким тем-
пературам, иногда применяют специальные солнечные
нагреватели, т. е. поверхности, освещаемые Солнцем и
имеющие высокое значение коэффициента As- Для таких
случаев может оказаться целесообразным в качестве
средства терморегулирования использовать изменения ха-
рактеристик солнечного нагревателя, аналогичные сред-
ствам изменения свойств радиатора (см. п. 1).
3. Если на космическом аппарате установлен радиа-
тор-холодильник или солнечный нагреватель, или оба
этих агрегата и если используются жидкостные или га-
зообразные теплоносители, то средством терморегули-
рования может служить изменение расходов теплоноси-
телей через теплообменники, расположенные в прибор-
ных отсеках, и через радиатор или нагреватель.
Если на аппарате установлены и радиатор и нагрева-
тель, то для увеличения эффективности терморегулиро-
вания можно одновременно изменять расход через радиа-
тор и нагреватель таким образом, что при увеличении
расхода через радиатор расход через нагреватель умень-
шается и наоборот. Очевидно, что этого можно добиться
и для двух различных теплоносителей (двухконтурная
система) и для одного теплоносителя, проходящего через
нагреватель и радиатор-охладитель.
4. В качестве способов, повышающих температуру,
можно указать на электрические подогреватели или на
создание тепловых контактов между приборами и агре-
4.2]
ПРИНЦИПЫ ТЕРМОРЕГУЛИРОВАНИЯ
215
гатами, температуру которых необходимо повысить, и
изотопными источниками тепла. Здесь необходимо отме-
тить, что изотопные источники тепла применяют в тех
случаях, когда из-за условий работы данного аппарата
использование солнечных нагревателей оказывается не-
возможным. В частности, это может иметь место для ко-
смических зондов, удаляющихся от Солнца.
5. Для понижения температуры могут найти приме-
нение следующие способы:
испарение какого-либо вещества в открытое простран-
ство;
включение холодильных устройств, например эле-
ментов Пельте;
использование так называемых тепловых аккумуля-
торов, т. е. устройств, содержащих вещества, которые
при достижении определенной температуры поглощают
тепло. В качестве таких веществ, в частности, могут при-
меняться вещества с большой теплотой плавления.
В качестве регулируемого параметра обычно исполь-
зуют температуру в какой-либо точке аппарата. При
достижении верхней или нижней границы заданного тем-
пературного диапазона включаются или выключаются
средства терморегулирования. Для этого используются
средства измерения температуры, а также усилительные
и преобразующие устройства. Могут иметь место и более
сложные законы регулирования, например учитывающие
скорость изменения температуры. Возможен вариант,
когда температуры измеряются в нескольких точках ап-
парата, а регулирование осуществляется либо по среднему
значению температуры в указанных точках, либо по экстре-
мальному значению. В последнем случае средства пони-
жения температуры включаются при достижении хотя
бы в одной из точек верхнего допустимого значения, а
средства повышения — при достижении нижнего допусти-
мого значения. Еще более сложные методы регулирова-
ния были обсуждены в главе 3. При любом законе управ-
ления температурой пределы регулирования выбираются
так, чтобы температуры всех ответственных за работо-
способность аппарата элементов не выходили за границы
допустимых диапазонов.
В некоторых случаях система терморегулирования
может не содержать средства измерения температур, а
216
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
также усилительных и преобразующих устройств. В ча-
стности, это может иметь место при использовании испа-
рительной системы или аккумуляторов тепла, если тем-
пературы соответствующих фазовых переходов близки
к максимально допустимой температуре приборов. В не-
которых системах терморегулирования нашли применение
биметаллические элементы, являющиеся одновременно
и измерителем температуры, и приводом.
При выборе схемы системы терморегулирования глав-
ными критериями являются ее масса, электропотребле-
ние и надежность, так как эта система является одной из
немногих систем космического аппарата, функционирую-
щих в течение всего времени полета.
Отметим, что на космическом аппарате могут присут-
ствовать приборы или группы приборов, температуры
которых не регулируются общей системой терморегули-
рования. Это имеет место в тех случаях когда указанные
приборы имеют слабые тепловые контакты с остальны-
ми частями аппарата. Тепловой режим таких приборов
обеспечивается только конструктивными мероприя-
тиями.
4.2.8. Выше говорилось о том, что даже в негерметич-
ных отсеках обычно имеется оболочка или экраны, раз-
мещаемые между приборами и открытым пространством.
С точки зрения теплового режима это диктуется сле-
дующими соображениями:
наличие оболочки, на которой может быть установле-
на тепловая изоляция, уменьшает внешние тепловые
потоки, попадающие на приборы, а следовательно, осла-
бляет зависимость температур приборов от факторов,
влияющих на эти потоки (ориентация, расстояние от
Солнца и т. д.);
наличие общей оболочки позволяет не предъявлять
требований к отдельным приборам в части обеспечения
нужных значений коэффициента поглощения солнечной
энергии As на поверхностях приборов;
общая оболочка в некоторой мере выравнивает поле
температур внутри отсека, способствуя передаче тепла
от прибора к прибору (в отдельных случаях это может
оказаться целесообразным); это выравнивание имеет ме-
сто за счет теплопроводности оболочки и переизлучения
через нее.
4.3]
ГАЗОВАЯ СРЕДА
217
4.3. Газовая среда в герметичных отсеках
4.3.1. В некоторых космических аппаратах ряд при-
боров и агрегатов размещают в герметичных отсеках,
в которых имеется газовая среда. Герметизация отсека,
как правило, вызывает увеличение массы конструкции
и кабельной сети за счет установки герметизирующих
фланцев с уплотнением и герметичных электрических
разъемов, а также за счет увеличения толщины оболочки
по сравнению с толщиной защитного экрана негерметич-
ного отсека. Несмотря на это, в ряде случаев гермети-
зация отсека может оказаться целесообразной из-за того,
что наличие газовой среды облегчает обеспечение задан-
ного температурного режима приборов, уменьшает коэф-
фициенты трения и износ в трущихся парах механизмов
и приближает условия эксплуатации отдельных серийных
электрорадиоэлементов к земным условиям, примени-
тельно к которым эти элементы были разработаны и
испытаны.
Газовая среда в герметичных отсеках характеризуется
давлением и содержанием газов и паров. От давления
газовой среды зависят деформации корпуса отсека, коэф-
фициент теплопроводности газа и коэффициенты теплоот-
дачи от приборов к газу. Кроме того, при понижении дав-
ления ниже некоторого уровня возможно возникновение
электрических газовых разрядов в высоковольтных це-
пях отдельных приборов.
Состав газа также влияет на коэффициенты теплопро-
водности и теплоотдачи, а кроме того, может влиять на
работоспособность некоторых приборов и механизмов,
имеющих трущиеся пары.
Состав газа, наполняющего отсек, удобно разделять
на основной состав и примеси. Под основным составом
будем понимать газы, которыми заправляются герметич-
ные отсеки, а под примесями — дополнительные газы
и парй, выделяющиеся из аппаратуры и конструкции
после окончательной заправки, а также компоненты,
являющиеся следствием неполной очистки газов, которы-
ми заправлены отсеки.
При выборе основного состава газа в отсеках автома-
тических космических аппаратов руководствуются сооб-
ражениями нормального функционирования приборов и
218
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
агрегатов, расположенных в отсеке, и обеспечения тепло-
вого режима.
Обычно используют для заправки нейтральные газы,
чаще всего азот. Иногда при заправке добавляют неко-
торое количество других газов или паров. В частности,
можно указать на следующие возможные добавки:
гелий — для более быстрого и точного определения
степени герметичности отсека;
водяные пары — в случаях, когда ожидаемое влаго-
выделение аппаратуры невелико, а с точки зрения функ-
ционирования приборов необходима достаточно большая
влажность;
кислород — для улучшения работы трущихся пар
механизмов.
Ниже рассмотрим возможные примеси, в первую оче-
редь водяные пары, поскольку они присутствуют в лю-
бом герметичном отсеке.
4.3.2. Содержание водяных паров в газовой среде,
как известно, можно определять либо относительной
влажностью газа ф при некоторой температуре, либо
температурой точки росы Тр, либо, наконец, массой во-
дяных паров, содержащихся в единице объема отсека,
т. е. так называемой абсолютной влажностью D.
Точка росы — это такое сочетание температуры, дав-
ления и содержания водяных паров в единице объема отсе-
ка, при котором может происходить конденсация водяных
паров. При достижении смесью газа с водяным паром
значения температуры точки росы парциальное давление
водяных паров становится равным давлению насыщен-
ного пара и при наличии центров конденсации происхо-
дит образование водяных капель. При определенном дав-
лении смеси температура точки росы Тр связана с абсо-
лютной важностью D однозначным соотношением. Прямую
и обратную зависимости удельного содержания водяного
пара от температуры точки росы соответственно обо-
значим
D = D(TP), TP = TP(D). (4.13)
В табл. 4.1 приведена зависимость удельного содер-
жания водяных паров D и давления насыщенных паров
от температуры точки росы при давлении в отсеке, равном
атмосферному. Следует отметить, что эта зависимость
43]
ГАЗОВАЯ СРЕДА
219
ТАБЛИЦА 4.1
Гр, °C Давление насыщен- ных паров, мм рт. ст. D, г/м» гр, °C Давление насы- щенных паров, мм рт. ст. D, г/м»
-90 0,07- IO"3 0,Ц.10-з —5 3,015 3,25
-85 0,18.16-3 0,25.10-« 0 4,58 4,85
—80 0,42-10“3 0,60.10-з 5 6,55 6,8
-75 0,95-Ю-з 1,31.10-з 10 9,22 9,4
-70 1,97.10-з 2,77.10-з 15 12,8 12,8
-65 4,2-Ю-з 5,56.10-з 20 17,5 17,2
-60 8,2.10-з 10,9.10-з 25 23,8 23,0
-55 16,3-10-3 20,9.10-3 30 31,8 30,2
-50 29,7-Ю-з 38,1-10-3 35 42,2 39,4
—45 54,5.10-з 67,7.10-з 40 55,4 51,0
—40 95,8.10-з 0,118 45 71,9 65,3
—35 0,169 0,201 50 92,6 82,6
-30 0,293 0,337 55 118 104
-25 0,476 0,552 60 149 129
—20 0,777 0,888 65 188 160
-15 1,24 1,38 70 234 196,5
—10 1,95 2,15 75 239 240
сравнительно мало меняется при изменении давления в
отсеке. Для практических расчетов данными табл. 4.1
можно пользоваться при давлениях 700—2000 мм рт. ст.,
т. е. давлениях, характерных для большинства герметич-
ных отсеков.
Допустим, что в некотором объеме смесь газа с водяным
паром имеет температуру Т, а содержание водяного пара
соответствует температуре точки росы Тро. Очевидно,
что Тро < Т.
Используя функции (4.13), относительную влажность
(в процентах) рассматриваемой смеси газа с паром можно
определить формулой
<р=-т^-100%- (4-14)
Если известна относительная влажность смеси <р и
температура Т, то температура точки росы в объеме опре-
делится выражением
Л.о=Гр[тагЛ(П]. (4.15)
220
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Состояние насыщения в рассматриваемом объеме харак-
теризуется условием ф = 100% или Т = TPQ. Если в от-
секе имеются элементы конструкции с температурой ниже
или равной температуре точки росы газовой смеси, то
на поверхности этих элементов возможно образование
водяных капель. В случаях, когда поверхности указан-
ных элементов смачиваемые, на этих поверхностях воз-
можно образование водяных пленок, а при дальнейшем
понижении температуры — и льда.
Содержание водяных паров в газовой среде влияет
на процесс высыхания приборов, материалов и элементов,
находящихся внутри отсека, и на коэффициент трения
в трущихся парах, причем увеличение содержания паров
замедляет или совсем останавливает процесс высыхания
и уменьшает коэффициент трения.
С другой стороны, при увеличении влажности газа
может возникнуть конденсация влаги на элементах кон-
струкции при выполнении приведенных выше условий.
Особую опасность это представляет для оптических
устройств, например иллюминаторов. Кроме того, появление
влаги на отдельных приборах может изменить сопротивле-
ние изоляции или вызвать другие нежелательные изме-
нения в работоспособности приборов и агрегатов. Выбор
допустимого диапазона содержания водяних паров в
приборном отсеке осуществляется еще на стадии разра-
ботки проекта космического аппарата, так как этот диа-
пазон определяет целый ряд конструктивных и техноло-
гических мероприятий. Для пояснения рассмотрим при-
чины появляния влаги в отсеке и возможные мероприя-
тия по обеспечению заданного диапазона влажности.
Появление водяного пара в герметичном отсеке может
быть обусловлено наличием водяного пара в газе, которым
заправляется отсек, или выделением влаги из приборов,
агрегатов, кабелей и элементов конструкции, находящих-
ся в отсеке.
Если необходимо иметь минимальное количество во-
дяных паров в отсеке, то при заправке стремятся исполь-
зовать наиболее сухие газы. Обычно, если не применять
специальных мер, можно рассчитывать на заправку газом,
имеющим температуру точки росы от —50 до —55 °C, так
как наиболее распространенные в космической технике
газы для заправки имеют такие параметры влажности.
4.3]
Газовая среда
221
Выделение влаги из приборов, агрегатов и элементов
конструкции имеет место в любом космическом аппарате.
Заранее прогнозировать это выделение затруднительно,
так как оно зависит не только от конструкции отсека,
материалов, приборов и кабелей, но и от условий хранения
элементов конструкции и приборов, а также от условий
сборки. Предварительная, до сборки или до заполнения
сухим газом отсека, сушка приборов и агрегатов пред-
ставляется мало целесообразной хотя бы потому, что эф-
фективность сушки существенно зависит от температуры, а
нагрев приборов выше 60 ч- 70°С, как правило, не до-
пускается. Сушка же при нормальной температуре
требует достаточно длительного выдерживания прибо-
ров и кабелей в атмосфере сухого газа или в вакуу-
ме, что удлиняет процесс подготовки аппарата к
пуску.
Для иллюстрации характера влаговыделения из при-
боров, кабелей и конструкции приведем данные о выде-
лении влаги в специально собранном экспериментальном
отсеке с электронной аппаратурой и кабелями. Полный
объем отсека составлял 740 л, свободный объем, т. е.
объем газа в отсеке, 630 л. В отсеке был установлен на
пружинные весы в сетке влагопоглотитель — хлористый
кальций СаС12 (ГОСТ 4460—48) в количестве 230 г, актив-
но поглощающий пары воды. Степень сушки хлористым
кальцием соответствует парциальному давлению водя-
ных паров 1,3 мм рт. ст. или температуре точки росы
—14 °C. Периодически регистрируемое увеличение веса
поглотителя определяло влаговыделение в отсеке. На-
блюдение за показанием весов осуществлялось через ил-
люминатор в корпусе отсека. Перед установкой на весы
хлористый кальций был обезвожен прокалкой при тем-
пературе 180—200 °C в течение четырех часов. Перед
окончательной заправкой отсека азотом с точкой росы
—15 °C до давления 900 мм рт. ст. отсек подвергался
сушке вакуумированием при 300 мм рт. ст. в течение
пяти часов. Эксперимент проводился в течение 30 сут
при комнатной температуре. В процессе эксперимента
точка росы газа изменялась в пределах от —17 до —13 °C.
Результаты эксперимента представлены на рис. 4.2. Как
следует из рис. 4.2, выделение влаги после заправки от-
сека составило около 90 г за 30 сут, причем спустя 20 сут
222 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
после начала эксперимента влаговыделение упало с 6-
10 г/сут до 2,4—1,2 г/сут.
Следует подчеркнуть, что приведенные эксперимен-
тальные данные влаговыделения можно использовать
только для оценки порядка ожидаемого выделения влаги,
причем если объем вновь проектируемого отсека отлича-
ется от использованного в эксперименте, то приведенные
Рис. 4.2. Влагопоглощение СаС12 по времени в экспериментальном
отсеке.
выше значения влаговыделения нужно умножить на
отношение У/740, где V [л] — полный объем отсека.
Это правило основано на допущении, что количество
выделяемой влаги пропорционально суммарной массе
приборов, а также на том, что плотность аппаратуры в
приборных отсеках достаточно стабильна (0,5 — 0,6 кг/л).
Отметим, что подготовка космического аппарата к
пуску обычно сопровождается изготовлением и испыта-
нием ряда макетов и экспериментальных аппаратов —
теплового, технологического и др. Некоторые из этих
макетов оснащаются приборами, агрегатами и кабелями,
идентичными летным образцам или близкими к ним.
Если для данного космического аппарата требования
к влажности газа в герметичных отсеках достаточно же-
сткие, то, по-видимому, целесообразно проведение экспе-
риментов по определению влаговыделения с использо-
ванием одного из указанных макетов.
Выше отмечалось, что выделение влаги из аппаратуры
существенно зависит от влажности газа в отсеке. Поэтому
если в отсеке отсутствует специальный влагопоглотитель,
4.3)
ГАЗОВАЯ СРЕДА
223
то влажность газа будет возрастать, стремясь к неко-
торому пределу. Очевидно, что при некоторых условиях
эта предельная влажность может оказаться достаточно
высокой (предельное значение влажности газа в отсеке
может быть определено только экспериментально).
Если предельная влажность окажется выше макси-
мальной допустимой величины, то необходимы специаль-
ные мероприятия по уменьшению влажности газа. В ка-
честве таких мероприятий можно указать на следую-
щие:
вымораживание влаги на отдельных элементах кон-
струкции или специальных агрегатах системы терморегу-
лирования, имеющих достаточно низкую температуру;
адсорбция водяных паров на силикагеле, активном
глиноземе, цеолитах и т. п.;
использование химических поглотителей типа хлори-
стого кальция, едкого натрия, едкого кали и др.
Перечисленные способы уменьшения влажности ха-
рактерны тем, что при их применении практически невоз-
можно получить абсолютную влажность ниже некоторого
предела, который носит название эффективности сушки
или степени сушки. В частности, при вымораживании
температура точки росы смеси газа с паром не может быть
ниже температуры самой холодной поверхности в отсеке.
Эффективность сушки при применении различных адсор-
бентов и химических поглотителей указана в табл. 4.2.
ТАБЛИЦА 4.2
Поглотитель или адсорбент Температура точки росы (°C), соответствующая остаточному ко- личеству влаги
Хлористый кальций СаС1а Едкий натрий NaOH Силикагель SiOa*H2O Едкое кали КОН Активная окись алюминия А12О3.НаО Активный глинозем Цеолиты —14 -19 —52 —58 -64 -64 —60 + —70
224 ’ УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
Эффективность сушки влагопоглотителей можно ис-
пользовать для поддержания абсолютной влажности
в отсеке в заданном диапазоне.
Если используется химический поглотитель типа хло-
ристого кальция, то его влагоемкость или активность,
определяющая количество влаги, поглощаемое единицей
массы вещества, почти не зависит от влажности осушен-
ного газа. При этом можно получить в отсеке достаточно
стабильную влажность, близкую к величине эффектив-
ности сушки. Для хлористого кальция это было подтвер-
ждено при указанных выше испытаниях эксперименталь-
ного отсека. При температуре точки росы, близкой
к —14 °C, влагоемкость хлористого кальция была не
менее 50%.
Активность многих адсорбентов существенно умень-
шается при уменьшении влажности газа, и для получения
значений влажности, близких к указанным в таблице 4.2,
необходимы достаточно большие количества адсорбента.
В этом смысле особый интерес представляют цеолиты,
активность которых при низкой влажности существенно
выше, чем других адсорбентов. В частности, для цеолитов
марок Na А, СаА, NaX, СаХ активность составляет 12—
16% при температуре точки росы около —70 °C. Правда,
указанные величины реализуются при скорости газа, про-
ходящего через цеолит, равной 1,2 л/мин на каждый 1 см2
сечения осушителя.
Характеристики влагопоглотителей можно найти в спе-
циальной литературе, например в [7, 20]. Однако следует
указать на то, что для окончательного выбора состава и
количества влагопоглотителя, а также конструкции осу-
шителя необходима экспериментальная проверка на маке- *
тах. Это связано с тем, что реальная влагоемкость осу-
шителя, диапазон влажности газа в отсеке, которая
будет иметь место в полете, и отсутствие насыщения влаго-
поглотителя зависят от скорости газа, проходящего через
осушитель, его конструкции, методов отбора тепла от
осушителя, графика выделения влаги аппаратурой отсека
и т. д. Влияние всех перечисленных факторов невозможно
учесть аналитически. Имеющиеся в литературе эмпири-
ческие данные по выбору влагопоглотителей относятся
к промышленным установкам, и их затруднительно исполь-
зовать в космической технике хотя бы^потому, что в этих
4.8]
ГАЗОВАЯ СРЕДА
225
установках обычно применяют принудительную прокачку
газа через влагопоглотитель.
Отметим также, что в промышленных установках, как
правило, осуществляют периодическую регенерацию ад-
сорбента, что существенно увеличивает срок работы этих
установок. На борту автоматического космического аппа-
рата осуществление регенерации усложнило бы аппарат
и увеличило бы его массу. В связи с этим трудно ожидать,
что регенерация адсорбента окажется целесообразной на
небольших автоматических аппаратах.
Следует отметить, что установка осушителя в прибор-
ный отсек создает некоторые технологические особенно-
сти, а именно: необходимо устанавливать осушитель не-
посредственно перед заправкой отсека сухим газом и
хранить осушитель в герметичной укупорке до его уста-
новки в аппарат, для того чтобы устранить возможность
контакта влагопоглотителя с влажным атмосферным
воздухом.
Возможен вариант, когда влагопоглотитель снабжа-
ется специальным механизмом, вскрывающим его уже
после установки в отсек и после заправки отсека сухим
газом. В этом случае ценой усложнения конструкции
влагопоглотителя упрощаются технологические операции
по подготовке аппарата.
Из сказанного вытекает, что поддержание влажности
в герметичном приборном отсеке на достаточно низком
уровне может явиться сложной задачей. Поэтому при
разработке нового космического аппарата целесообразно
проанализировать возможности повышения допустимой
влажности в отсеке. В первую очередь нужно рассмот-
реть пути увеличения температуры холодных элемен-
тов, на которых может конденсироваться влага. В ча-
стности, для иллюминаторов возможны следующие меро-
приятия, увеличивающие температуру внутренних сте-
кол:
установка дополнительного наружного стекла для
уменьшения теплового излучения иллюминатора в откры-
тое пространство;
нанесение на стекла прозрачных пленок, уменьшаю-
щих коэффициент излучения;
нагрев стекол иллюминатора за счет их дополнитель-
ного обдува теплым газом отсека или электроподогрева.
8 Г. Ю. Максимов
226
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Радикальным решением проблемы влажности является,
конечно, переход к негерметичному приборному отсеку
и установка в нем аппаратуры, способной функционировать
в вакууме.
4.3.3. Другие примеси (кроме водяных паров) в газо-
вой среде отсека существенно зависят от размещенной
в нем аппаратуры и конструктивных материалов. В част-
ности, если в отсеке установлена батарея из серебряно-
цинковых аккумуляторов, то в газовой среде отсека при-
сутствует водород, выделяемый этими аккумуляторами
при их разряде. Если указанная батарея работает и в ре-
жиме заряда, то возможно выделение кислорода. В случае
применения такой батареи смесь газов в отсеке должна
быть проверена на взрывобезопасность с учетом возмож-
ных примесей в заправочных газах и выделения кислорода
из аппаратуры и конструкции.
Источниками примесей в газовой среде отсека могут
явиться агрегаты и магистрали системы терморегулиро-
вания, если в этой системе используются теплоносители.
Примеси в газовой среде герметичного отсека могут
повлиять на работоспособность находящейся в отсеке
аппаратуры и вызвать образование пленок конденсата
на отдельных наиболее холодных элементах конструкции
и приборов, что в свою очередь может отрицательно по-
влиять на работу аппаратуры.
Остановимся на последнем случае. Допустим, что за
счет негерметичности отдельных приборов, агрегатов и
магистралей, содержащих жидкости или газы, к некото-
рому моменту активного существования аппарата в отсек
выделилось тп паров какого-либо вещества. Парциальное
давление этих паров в отсеке определится выражением
где Я — универсальная газовая постоянная; Т — сред-
няя температура газа в отсеке; цп — молекулярный вес
паров; Vc — свободный объем отсека.
Предположим, что в отсеке имеется некоторая поверх-
ность с температурой То, выпадение конденсата паров на
которой недопустимо. Если упругость рассматриваемых
паров при температуре То обозначить рн.п (То), то с уче-
том (4.16) условие отсутствия нежелательного конденсата
4.3]
ГАЗОВАЯ СРЕДА
227
на указанной поверхности выразится следующим нера-
венством:
Рн п (^о>
7ПП
пт
(4.17)
Если условие (4.17) выполнить невозможно, то необ-
хидима установка в отсеке специального поглотителя.
Следует отметить, что если упругость паров мала, то на
основании (4.17) вероятность выпадения конденсата будет
весьма высока, однако количество конденсата может ока-
заться ничтожно малым. В этом случае до принятия реше-
ния об установке поглотителя желательно оценить макси-
мально допустимое количество конденсата и реальное
количество паров, которое может сконденсироваться
к концу активного существования аппарата.
4.3.4. Кроме содержания газов и паров газовая среда
герметичных отсеков характеризуется давлением. Как
указывалось выше, от давления зависят коэффициенты
теплопроводности и теплоотдачи, масса и деформации
корпуса отсека и работоспособность отдельных приборов,
в частности коэффициенты трения в трущихся парах
и износ этих пар. Более подробно эти вопросы будут рас-
смотрены ниже при изложении особенностей разработки
негерметичных отсеков. Здесь только укажем на то, что
в случаях, когда принимается решение о герметизации
данного приборного отсека, условия эксплуатации се-
рийных электрорадиоэлементов стараются приблизить
к «земным» условиям, что несколько упрощает выбор и
согласование этих элементов и избавляет от необходимо-
сти эти элементы переиспытывать.
Указанные соображения приводят к тому, что в боль-
шинстве случаев давление заправки герметичных отсеков
выбирают близким к атмосферному. При этом, чтобы ком-
пенсировать возможные утечки и избежать внешнего дав-
ления на оболочку, когда наружное давление превышает
внутреннее, давление заправки выбирают несколько
большим нормального атмосферного давления. Обычно
давление заправки лежит в пределах 900—2000 мм рт. ст.
В некоторых случаях для уменьшения массы корпуса
может оказаться целесообразным во время полета давле-
ние в герметичном отсеке иметь ниже атмосферного, на-
пример 100—400 мм рт. ст. Низкие давления в отсеке
8*
228
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
могут сочетаться с плоской формой оболочки, что иногда
необходимо из условий компоновки. Подобная схема была
использована на космическом аппарате «Луна-9», доста-
вившем на Луну автоматическую станцию. На этом
аппарате на участке выведения два отсека, имевших
форму параллелепипедов, сообщались с атмосферой. При
достижении наружным давлением величины 100—200 мм
рт. ст. специальные клапаны закрывали отсеки и делали
их герметичными в течение всего остального времени
полета до Луны.
Если в герметичном отсеке отсутствует система под-
держания заданного давления, то давление в отсеке в не-
который момент времени определится выражением
Р — Ро -£~ — Api + Др«» (4.18)
1 о
где ро» — давление и температура газа сразу после
заправки; Т — температура газа в рассматриваемый мо-
мент времени; Арх — падение давления в отсеке за счет
утечек; Дра — натекание из емкостей, находящихся вну-
три отсека.
Величина Ар2 в формуле (4.18) обычно существенно
меньше изменений давления за счет температуры и за счет
утечек из отсека. Это вызвано тем, что емкости с газом,
как правило, не размещают внутри герметичного отсека.
Возможно присутствие внутри отсека емкостей с жидко-
стями, например теплоносителем системы терморегули-
рования, для которых обеспечить высокую герметичность
емкостей и магистралей существенно проще, чем для газа.
Величину Арх рассмотрим более подробно. Допустим,
что в отсеке имеется небольшое отверстие. Утечку газа
через отверстие принято в вакуумной технике определять
потоком газа Q, равным произведению давления в отсеке
на объемный расход, равный в свою очередь произведению
скорости истечения из отверстия на площадь отверстия.
Считая газ в отсеке идеальным, запишем для него уравне-
ние состояния
pVc = MTRT, (4.19)
где р, Л/г» Т — давление, масса и температура газа в не-
который момент времени; Vc — свободный объем отсека;
4.3]
ГАЗОВАЯ СРЕДА
229
R — газовая постоянная смеси газов, наполняющих
отсек.
Принимая температуру газа в отсеке постоянной и
дифференцируя по времени уравнение состояния (4.19),
найдем
VC^-=RT^±. (4.20)
Поскольку объемный расход газа представляет собой
отношение массового расхода dMTldt к плотности газа
р = p/RT, то, имея в виду уравнения (4.19) и (4.20),
получим следующие выражения для величины Q:
е = = (4.21)
где W и / — скорость истечения и площадь отверстия со-
ответственно.
Если в корпусе отсека имеется п отверстий, то суммар-
ный расход массы через все отверстия будет равен
(dMr \ _ /<ШГ\
\ л /х 2j \ л Ji ’
Тогда на основании уравнения состояния и соотно-
шений (4.21) получим
-£=-17-(/,-22)
где Qt — утечка, или поток, газа через i-e отверстие;
Qe — суммарная утечка иэ отсека.
Величину утечки обычно измеряют в мкм рт. ст. л/с.
Для пояснения физического смысла этой размерности
укажем, что если в отсеке со свободным объемом 1 л имеется
течь 1 мкм рт. ст.*л/с, то это означает,что через 1 с после
заправки давление в отсеке уменьшится на 1 мкм рт. ст.
Утечку определяют экспериментально после окончатель-
ной сборки отсека. В чертежах задают предельно допусти-
мое значение суммарной утечки. Отсек признается год-
ным к летным испытаниям, если фактическая величина
утечки, определенная после сборки, не превышает ука-
занное в чертежах значение. При назначении предельно
230
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
допустимой величины утечки экспериментально или по
аналогии с другими конструкциями определяют ожида-
емые утечки через отдельные элементы отсека, такие, как,
например, гермовводы, иллюминаторы, стыковочные
шпангоуты, собственно оболочку и т. д., а также через
места стыковки этих элементов. Естественно, что величина
суммарной утечки, определенная по отдельным элемен-
там, должна обеспечивать величину давления в конце
функционирования аппарата, допустимую с точки зрения
работоспособности аппаратуры данного отсека.
Обычно для герметичных отсеков средней сложности
и массой 100—1000 кг величина Qz составляет 0,1 —
1,0 мкм рт. ст.-л/с. При Qz = 0,2 и Vc = 100 л уменьше-
ние давления в отсеке через год полета составляет
~104 Н/м2. Кстати, такое же изменение давления будет
иметь место при изменении температуры газа в отсеке на
20 °C при давлении и температуре заправки соответствен-
но 1,5-105 Н/ма и 300 К.
Чтобы определить величину в выражении (4.18)
как функцию времени полета, что необходимо для прогно-
зирования давления в отсеке, нужно кроме величины
утечки, замеренной на Земле после окончательной сборки,
знать характер истечения газа из отверстий. Как крайние
случаи рассмотрим молекулярное истечение, когда длина
свободного пробега молекул в канале велика по сравне-
нию с сечением канала, и истечение, когда объемный рас-
ход пропорционален давлению в отсеке.
В первом случае, как известно, поток газа пропорцио-
нален давлению в отсеке, т. е. объемный расход постоя-
нен. При этом на основании (4.21) можно записать следу-
ющее выражение (р = р')'.
г°-зг=~тт* <5-23’
где и ро — суммарная утечка, замеренная на Земле,
и давление в отсеке, при котором определена эта вели-
чина.
Чтобы условия определения суммарной утечки макси-
мально приблизить к летным, обычно давление в отсеке,
при котором определяют утечку, делают близким или
равным давлению в отсеке после окончательной заправки,
а испытания проводят в барокамере.
4.3]
ГАЗОВАЯ СРЕДА
231
Интегрируя выражение (4.23), найдем формулу для
давления в отсеке в функции времени:
р = р0ехр . (4.24)
Поскольку время от окончательной заправки отсека
газом до момента выведения аппарата на орбиту мало по
сравнению с временем активного существования аппарата,
то в формуле (4.24) под t можно понимать время от указан-
ного момента выведения.
Для случая истечения, когда объемный расход про-
порционален давлению в отсеке, на основании выражений
(4.21) можно записать (р = р”)
у №_______
V° * - р! р '
Интегрируя это выражение, получим
!' =----%-' 0-25)
‘ + -SA‘
Из формул (4.24) и (4.25) следует, что значение давле-
ния в отсеке лежит в интервале [р', р*], т. е.
ехр (- < -2- <------. (4.26)
\ Л с / Ро ,
1 + PoVc ‘
Раскладывая выражения (4.24) и (4.25) в ряды по степе-
ням Qbf/poV& получим, что ряды совпадают до первых сте-
пеней включительно. При значениях утечки, характер-
ных для современных космических аппаратов, во многих
случаях с достаточной для практических целей точностью
можно ограничиться только членом разложения с первой
степенью величины Q^t/p0VG. При этом формула для ве-
личины Др! в выражении (4.18) не будет зависеть от харак-
тера течения через отверстия и примет следующий про-
стой вид:
Apx^^EU. (4.27)
232
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
4.3.5. В заключение коротко остановимся на методах
герметизации отсеков. Эти методы сводятся к примене-
нию специальных низкочастотных и высокочастотных
электрических гермовводов, к уменьшению числа разъем-
ных соединений, использованию в неразъемных соеди-
нениях сварки, тщательному расчету и изготовлению
разъемных соединений, в частности соединений отдель-
ных частей корпуса отсека между собой. Кроме того,
герметизация отсека повышает требования к технологии
изготовления отдельных конструктивных элементов отсе-
ка и их контролю.
В применяемых гермовводах, как правило, исполь-
зуется стекло, в которое ввариваются электрические
контакты.
В разъемных соединениях в качестве уплотняющих
прокладок наиболее широкое применение получили рези-
новые прокладки. Смысл уплотнения резиной заключа-
ется в том, что вследствие эластичности резина при
определенной величине деформации заполняет микронеров-
ности, имеющиеся на поверхностях фланцев. При пра-
вильном расчете и изготовлении резинового уплотнения
утечки через фланец определяются в основном проница-
емостью самой резины.
Основные правила конструктивного выполнения флан-
цев с резиновым уплотнением следующие:
уменьшение высоты резиновой прокладки в резуль-
тате деформации должно быть в пределах от 30 до
50%;
конструкция фланцев по возможности должна позво-
лять их затяжку до контакта металлических поверхностей;
при этом может быть достаточно точно рассчитана дефор-
мация резины, так как разброс величины деформации
будет определяться только допусками на изготовление
деталей фланцев; если выполнить это требование невоз-
можно, то затяжка фланцев должна осуществляться мо-
ментным ключом;
размеры пазов и канавок для резиновых прокладок
должны выбираться таким образом, чтобы после стягива-
ния болтов паз был заполнен резиной не менее чем на
95%; при этом форма и размеры прокладок рассчитывают,
исходя из условия неизменности объема резины при де-
формации;
4.4] НЕГЕРМЕТИЧНЫЕ ОТСЕКИ 233
резиновая прокладка должна быть защищена от воз-
действия солнечных лучей и от контакта с маслами и орга-
ническими растворителями.
Кроме того, при разработке герметичного соединения
с резиной должны быть учтены допустимые для принятой
марки резины температурные условия, так как при слиш-
ком низких или слишком высоких температурах [резина
теряет свои герметизирующие свойства.
Наряду с резиновыми имеют применение прокладки
из мягких металлов — свинца, алюминия и т. д.
4.4. Особенности разработки негерметичных
отсеков
4.4.1. В большинстве случаев масса конструкции гер-
метичного отсека больше, чем негерметичного. К этому
нужно добавить, что при длительных временах активного
существования, характерных для современных космиче-
ских аппаратов, приходится считаться с метеоритной опас-
ностью. Особенно это важно для дальних космических
зондов, работающих в тех областях Солнечной системы,
которые еще мало изучены и поэтому оценки метеорит-
ной опасности весьма приближенны. Попадание же до-
статочно крупного метеорита в герметичный отсек мо-
жет привести к его разгерметизации и вызвать сущест-
венное уменьшение давления в отсеке.
Кроме того, конструкция негерметичного отсека, как
правило, проще и технологичнее герметичного, в связи
с чем время на изготовление и испытания космического
аппарата с негерметичными отсеками затрачивается мень-
ше, чем аппарата с герметичными отсеками. Наконец,
следует отметить, что если в негерметичном отсеке имеются
приборы системы управления ориентацией аппарата, тре-
бующие взаимного углового согласования, то исчезает
один из источников ошибок этого согласования, связан-
ный с деформацией корпуса при изменениях давления
в отсеке. Подробнее эти вопросы освещены в § 4.5.
С другой стороны, разработка негерметичного отсека
имеет свои особенности. Если их не учесть на самой ран-
ней стадии разработки космического аппарата и предна-
значенных для него приборов и механизмов, то это может
привести к увеличению массы аппаратуры и средств,
234
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
обеспечивающих заданный температурный режим, по
сравнению с герметичным отсеком.
Для большей наглядности при анализе указанных осо-
бенностей разработки негерметичных отсеков предполо-
жим, что некоторый отсек космического аппарата, содер-
жащий электронную аппаратуру, механизмы и средства
поддержания теплового режима, разработан и испытан
применительно к давлению в отсеке, близкому к нормаль-
ному атмосферному давлению. Допустим, далее, что дав-
ление в этом отсеке упало до нескольких миллиметров
ртутного столба или ниже, и рассмотрим, как это повлияет
на работу аппаратуры. Очевидно, что уменьшение давле-
ния в отсеке вызовет или может вызвать следующие изме-
нения:
изменится тепловой режим приборов и элементов вну-
три негерметичных приборов вследствие уменьшения ко-
эффициента теплопроводности газа в отсеке и исчезнове-
ния вынужденной конвекции, если при наличии давления
отвод тепла от элементов и приборов осуществлялся за
счет этой конвекции;
увеличатся коэффициенты трения в трущихся парах
механизмов и увеличится износ этих пар;
увеличится испарение конструктивных материалов и
смазок, а также влагоотделение из аппаратуры;
появится вероятность возникновения электрических
газовых разрядов в высоковольтных цепях отдельных
приборов; •
если в некоторых приборах и агрегатах имеются гер-
метичные полости, то увеличатся нагрузки на стенки этих
полостей и их деформации.
Кроме того, как уже указывалось, некоторые серийные
электрорадиоэлементы, установленные в приборах, ока-
жутся в условиях, отличных от тех, применительно к ко-
торым они были разработаны и испытаны. Это обстоятель-
ство может потребовать пересогласования условий работы
этих элементов и дополнительных испытаний.
Ниже рассмотрим перечисленные изменения и поста-
раемся наметить пути доработки аппаратуры и конструк-
ции, при осуществлении которых резкое уменьшение ве-
личины давления в отсеке не привело бы к увеличению
массы аппаратуры и средств терморегулирования и
к уменьшению надежности их работы.
4.4]
НЕГЕРМЕТИЧНЫЕ ОТСЕКИ
235
4.4.2. При анализе изменений внутреннего теплового
режима приборов все приборы герметичного отсека удоб-
но разделить на три группы. Первую группу, которую
назовем группой А, будем характеризовать тем, что для
нормального функционирования элементов таких прибо-
ров в герметичном отсеке необходима вынужденная кон-
векция. Тепловыделяющие элементы этих приборов уста-
навливаются снаружи их корпусов или корпуса делаются
с отверстиями для пропускания в приборы газа отсека.
Обычно приборы этой группы устанавливаются около
вентилятора отсека или в газовом потоке либо снабжа-
ются индивидуальными вентиляторами. Типичными пред-
ставителями приборов этой группы являются выходные
каскады передатчиков радиотелеметрической системы
дальних космических аппаратов и спутников связи, по-
скольку тепловая мощность, рассеиваемая такими пере-
датчиками, может составлять от десятков ватт до несколь-
ких киловатт.
Очевидно, что приборы группы А в негерметичном
отсеке работать не смогут. Применительно к негерметич-
ному отсеку эти приборы должны быть переработаны
таким образом, чтобы тепловые потоки от тепловыделяю-
щих элементов передавались на корпус прибора и места
крепления прибора к конструкции отсека только излуче-
нием и теплопроводностью конструктивных элементов.
Одним из способов является установка тепловыделяющих
элементов непосредственно на общий радиатор аппарата
или на некоторую поверхность, которая сама может слу-
жить индивидуальным радиатором данного прибора.
Как следует из выражения (4.7), площадь плоского
радиатора Fpt необходимая для излучения мощности N,
равна
fp=^- <4-28>
При N = 1000 Вт, е = 0,9 и температуре радиатора, рав-
ной 50 °C, Fp= 1,9 м2, а при температуре 100 °C Fp=l м2.
В случае установки тепловыделяющих элементов не-
посредственно на радиатор может вызвать некоторые за-
труднения равномерное распределение тепла, выделя-
емого элементами, установленными на радиатор, на всю
площадь радиатора, так как приведенные оценки пред-
236
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
полагают постоянную температуру по площади радиатора.
Эта цель может быть достигнута либо применением теп-
ловых труб, либо увеличением толщины стенки радиатора
и выбором для него материала с минимальной величиной
р/Х (под р и X понимаются соответственно плотность и ко-
эффициент теплопроводности материала). Отметим, что
при разработке конструкции радиатора, по площади ко-
торого распределяются тепловыделяющие элементы, имеет
смысл рассмотреть переменную толщину радиатора.
Закон изменения толщины по площади может быть найден
из решения вариационной задачи, в которой функциона-
лом является масса радиатора.
Вторая группа приборов Б характеризуется тем, что
для функционирования этих приборов в герметичном
отсеке используется какая-либо жидкостная система
охлаждения, состоящая из насоса, трубопроводов и теп-
лообменников, отбирающих тепло от элементов или сте-
нок прибора для передачи его с помощью теплоносителя
на радиатор аппарата. Частным случаем такой системы
является использование тепловых труб, передающих тепло
от тепловыделяющих элементов к радиатору. Очевидно,
что если тепло от элементов прибора к теплообменнику
передается только излучением или теплопроводностью,
то на работу приборов этой группы практически не вли-
яет давление газа в отсеке.
Наконец, рассмотрим наиболее интересную, с нашей
точки зрения, третью группу приборов В. Приборы этой
группы для нормальной работы в герметичном отсеке
не требуют вентиляции или принудительного охлаждения
жидкостью внутренних полостей. Отвод тепла от тепловы
деляющих элементов к стенкам и местам крепления при-
бора осуществляется за счет теплопроводности конструк-
ции, на которой установлены эти элементы, за счет излу-
чения и теплопроводности газа, наполняющего отсек,
а следовательно, и прибор. Здесь необходимо подчерк-
нуть, что поскольку рассматривается случай, когда во
внутренних полостях прибора отсутствует вынужденная
конвекция, то в приборах третьей группы газ, наполня-
ющий прибор, участвует во внутреннем тепловом режиме
только за счет теплопроводности. Это связано с тем, что
в космическом аппарате ускорения возникают только
за счет работы системы ориентации и так называемых
4.4]
НЕГЕРМЕТИЧНЫЕ ОТСЕКИ
237
приливных эффектов*) и обычно не превышают 10”8g,
гДе g — ускорение силы тяжести на поверхности Земли.
Следовательно, естественная конвекция, привычная в зем-
ных условиях, на космических аппаратах практически
отсутствует. Она может появиться лишь в кратковремен-
ных периодах включения тормозных, корректирующих
или маневренных двигательных установок, а также при
движении аппаратов на участках спуска на поверхность
планеты и участках выведения.
Приборы группы В — это в основном электронные
приборы с тепловыделениями от долей ватта до несколь-
ких ватт. В большинстве космических аппаратов эти при-
боры составляют основную массу аппаратуры.
Рассмотрим один и тот же прибор, принадлежащий
к группе В, в условиях герметичного отсека с давлением,
близким к атмосферному, и в условиях отсека, в котором
газ полностью отсутствует. При этом допустим, что тем-
пературы стенок прибора в обоих случаях одинаковы.
Очевидно, это допущение справедливо при условии, что
конструкция и методы терморегулирования в герметичном
и негерметичном отсеках различны. Для герметичного
отсека, пренебрегая излучением, запишем тепловой поток,
идущий от некоторого тепловыделяющего элемента при-
бора к стенке, в следующем виде:
1 t 1 / \
q' = (т;л - Т„) (, (4.29)
где Тэч и Тст — температуры элемента и стенки; Хк,
/к, LK — соответственно средние коэффициент тепло-
проводности, сечение и длина конструктивного моста,
соединяющего тепловыделяющий элемент со стенкой при-
бора; Хр, /г, — то же для столба газа, соединяющего
элемент со стенкой.
Необходимо отметить, что выражение (4.29) весьма
условно. Для реальных приборов тепловые мосты между
*) Под приливными понимаются ускорения в связанной с ап-
паратом системе координат, возникающие за счет того, что радиусы-
векторы, проведенные из центра притяжения к частям аппарата,
не совпадают с радиусом-вектором центра масс. Вследствие этого
силы притяжения, действующие на различные части аппарата,
отличаются по величине и направлению (подробнее см. § 3.2).
238 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
элементом и стенкой будут выражаться гораздо более
сложными формулами. Однако, в данном случае нас
интересует не конкретный тепловой расчет прибора, а
оценка возрастания температуры элемента] при разгер-
метизации отсека.
Для прибора без газовой среды аналогично выражению
(4.29) запишем
(4.30)
Принимая q' = g", так как рассматривается один и тот
же прибор, из выражений (4.29) и (4.30) найдем
ДГ = ТэЛ - т:л = 21 « {т'ъя _ Тст). (4.31)
ЛК *К
Принимая, далее, /г » /к, £к ж £г, рассматривая в
качестве конструктивных материалы, обладающие низкой
теплопроводностью [такие, как пенопласты, асбест и др.,
у которых Хк = 0,05-7-0,1 Вт/(м«К)], а также принимая
в качестве газа в герметичном отсеке азот с Хг =
= 0,023 Вт/(м-К), найдем
АТ<0,5(Т;л-Тст).
В реальных приборах часть тепла от элемента переда-
ется на стенку излучением. За счет излучения величина ДТ
будет меньше полученной. Проведенная оценка показы-
вает, что при разгерметизации отсека нет оснований
ожидать значительного возрастания температур тепло-
выделяющих элементов в приборах группы В. Дора-
ботки прибора, которые в случае необходимости могут
уменьшить величину ДГ, достаточно очевидны. Это исполь-
зование конструктивных материалов с большей тепло-
проводностью, создание специальных тепловых мостов
от элементов к стенкам и местам крепления прибора,
заливка прибора и т. д.
Выше предполагалось, что при переходе к негермети-
чному отсеку теплопроводность газа внутри прибора
исчезает. Это требует уточнения. Как следует~из кинети-
ческой теории газов и экспериментов, при понижении
давления газа его теплопроводность остается неизменной
до давления, при котором длина свободного пробега
4.4]
НЕГЕРМЕТИЧНЫЕ ОТСЕКИ
239
Рис. 4.3. Зависимость коэффици-
ента теплопроводности газа Хг
от давления р при различных
соотношениях длины свободного
пробега молекул Л и характер-
ного размера Lr (Lrl < £г2 < £гз).
молекул становится соизмеримой с характерным размером
сосуда Lr. Только в области давлений, где длина свобод-
ного пробега больше характерного размера, коэффициент
теплопроводности уменьшается пропорционально умень-
шению давления. Зависи-
мость коэффициента тепло-
проводности газа от его
давления предствлена на
рис. 4.3, где принято, что
(4.32)
Здесь q — количество теп-
ла, передаваемое от эле-
мента через газовый про-
межуток в единицу време-
ни; LT и /г — длина и се-
чение газового промежут-
ка соответственно; ДГг —
разница температур на
концах газового проме-
жутка.
Применительно к при-
бору под размерами газового промежутка нужно понимать
размеры свободного пространства между тепловыделяю-
щими элементами и соседними с ними частями конструк-
ции или стенкой прибора. Обозначим через £Гт1пи£гтах
соответственно минимальное и максимальное значения
указанных размеров в приборе. Длина свободного пробега
молекул А и давление газа р, как известно, связаны со-
отношением
рЛ = Ь,
(4.33)
где b — величина, постоянная для каждого газа (для
азота b ~ 4,5*10"’ мм рт.ст. *см).
Из соотношения (4.33) и рис. 4.3 следует, что если
р > b/LP rniп, то Хг = Хго, где Хг0 — коэффициент теплопро-
водности газа при нормальном давлении. В частности,
при Lrmin = 0,5 см теплопроводность азота не уменьшает-
ся до давления ~ 10"а мм рт.ст. Другими словами, ес-
ли за счет естественного или специально организованного
240 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
/
газовыделения внутри такого прибора и малой прони-
цаемости его стенок давление внутри не будет опускаться
ниже 10'2 мм рт.ст., то этот, прибор в негерметичном
отсеке будет работать так же/как и в герметичном. Есте-
ственно, что имеются в виду приборы третьей группы.
С другой стороны, если давление внутри прибора
удовлетворяет условию р<^Ь/ЬТ1ЛЛ^ то коэффициент тепло-
проводности уменьшаемся пропорционально величине дав-
ления внутри прибора.
4.4.3. Выше при анализе внутреннего теплового ре-
жима прибора предполагалось, что прибор имеет стенки
и места крепления к основной конструкции отсека. Суще-
ствование прибора как некоторой достаточно автономной
в конструктивном отношении сборочной единицы имеет
место в средних и крупных космических аппаратах.
В таких аппаратах отдельные приборы и агрегаты разра-
батываются, испытываются и поставляются различными
организациями, и достаточная автономность этой аппарату-
ры представляет определенные организационные удобства.
Однако для небольших космических аппаратов массой
до 100—200 кг наличие стенок и мест крепления отдель-
ных приборов может вызвать неоправданное увеличение
массы аппарата. Этотем более становится нецелесообразным,
если аппарат в целом разрабатывается одной организа-
цией, использующей при этом только серийные электро-
радиоэлементы. В указанных случаях выгодно рассматри-
вать космический аппарат как единый прибор. При этом
все, что говорилось выше о приборе в негерметичном
отсеке, непосредственно относится и к такому прибору-
аппарату. В отличие от обычного прибора все стенки
прибора-аппарата имеют непосредственный контакт с
открытым пространством. Некоторые из этих стенок или
все могут являться радиационными поверхностями, от-
ветственными за излучение тепла в открытое пространство.
Поэтому при разработке такого прибора должно быть
уделено особое внимание созданию хороших тепловых
контактов между тепловыделяющими элементами и стен-
ками, служащими для излучения тепла.
4.4.4. Остановимся на вопросах обеспечения теплового
режима приборов в негерметичном отсеке, понимая под
прибором некоторую автономную единицу, имеющую
стенки и места крепления к конструктивным базам отсека.
-4.4]
ЦЕГЕРМЕТИЧНЫЕ ОТСЁКИ
241
Очевидно, что при этдм задача обеспечения теплового ре-
жима приборов сводится к созданию достаточных тепловых
мостов между стенками и местами крепления прибора и
радиационными поверхностями аппарата или нагреватель-
ными элементами. Поскольку речь идет о негерметичном
отсеке, то указанные тепловые контакты определяются
практически только теплопроводностью конструктивных
элементов и излучением.
Наиболее эффективным средством отвода тепла от
прибора является установка прибора непосредственно на
радиатор аппарата. Поскольку ус-
тановка прибора осуществляется
через его места крепления, то
представляет интерес сравнить теп-
ловые потоки через места крепле-
ния к радиатору и излучением.
Для этого рассмотрим схему на
рис. 4.4. Под местами крепления
будем понимать два ребра шири-
ной а, длиной 6 и высотой С. Из-
лучение от прибора на радиатор
происходит с площади АС. При
этом все остальные стенки прибо-
ра будем считать изолированными
от аппаратуры отсека. Темпера-
Рис. 4.4. Схема для
сравнения тепловых по-
токов за счет излучения
и за счет теплопровод-
ности мест крепления.
туру радиатора обозначим через
Тр, а температуру стенки прибора, обращенную к’радиа-
тору, через Тх. При указанных допущениях тепловой
поток от прибора к радиатору, передаваемый излучени-
ем, будет равен
(4.34)
где 8 — приведенный коэффициент излучения; размеры А
и С — в метрах.
Разлагая это выражение в ряд по степеням отношения
(Тг — Тр)/Тр, найдем
/ Тп \3 Q Л71 Т
ди«0,227ЛСе(-кь) + (4.35)
где ДТ = Т\ — Гр.
242 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К НОНСТРУКЦИИ [ГЛ. 4
При Тр > 273 К и ДТ 30 °C второй член в квад-
ратных скобках не превышает 16,5%, и поэтому для
дальнейших оценок примем
/ Тп \з
9и = 0,2274Се кЛ ДТ.
\ /
(4.35')
Тепловой поток от прибора к радиатору, передава-
емый по ребрам, определится формулой
qK= (4.36)
где X — коэффициент теплопроводности материала ре-
бер.
На основании формул (4.35) и (4.36) получим
0,113
(4.37)
При А < 0,3 м, 8 < 0,9, 6 < 30 мм, а> 2 мм, X > 125
Вт/(м*К) (алюминиевые сплавы) иГр< 323 К (50 °C) най-
дем, что ди/дх <0,125. Отсюда следует, что для большинства
приборов тепло к радиатору передается в основном через мес-
та крепления непосредственным тепловым контактом. При
этом, как указывалось выше, существенную роль играет
хороший тепловой контакт между местами крепления
прибора и поверхностью радиатора, зависящий от обра-
ботки контактирующих поверхностей и давления кон-
такта.
Оценим теплопроводность прибора в целом как эле-
мента конструкции отсека. Такая задача может возник-
нуть в случаях, когда тепло от некоторых приборов
передается на радиационную поверхность через другие
приборы. Обратившись к рис. 4.4, найдем тепловой
поток, проходящий через прибор в направлении стрелки.
Принимая, что температуры в каждом сечении прибора,
перпендикулярном к стрелке, одинаковы и что платы в
приборе расположены так, как указано на рисунке,
для теплового потока можно записать следующее выра-
жение:
g = (FX)np-^5p.
(4.38)
U]
КЕГЕРМВТИЧНЫЕ ОТСЕКИ
243
Здесь
(FX)np = 2бс (-4 4* С) Хл -{ С%АУ-а 4" С (1 4—??”) ЛХГ,
где Хм,Хп,Хг — коэффициенты теплопроводности материала
стенок, материала плат и газа соответственно; Сх —
суммарная толщина всех плат.
При 6С = 1 мм, С^/С = 0,5, А = 0,2 м, С = 0,2 м,
Хм = 125 Вт/(м-К), Хп = 0,2 Вт/(м-К), что соответствует
текстолиту, и Хг = 0,023 Вт/(м-К), что соответствует
аэоту при p^>b/Lrmiu, найдем
2бс (Л 4- С) Хм = 0,127 Вт - м/К,
С2ДХп = 0,004 Вт-м/К,
С fl 4- -S-) ЛХГ = 0,00046 Втм/К.
\ о /
В этом случае (Fk)np 0,13 Вт-м/К, что соответствует
при q = 5 Вт и В = 100 -н 200 мм перепаду температур
на приборе 4—8 °C. Приведенный пример показывает, что
при параметрах, близких к принятым в расчете, сравни-
тельно небольшие тепловые потоки могут быть переданы
через приборы. При этом основную роль в передаче тепла
играют металлические стенки прибора.
В качестве общего замечания нужно отметить, что
в герметичном отсеке обычно создается общая циркуляция
газа, в результате чего за счет вынужденной конвекции
осуществляется выравнивание температур отдельных при-
боров. При этом влияние компоновки аппаратуры в отсеке
на тепловой режим отдельных приборов не столь сущест-
венно. Важно только, чтобы тепловыделяющие приборы
не оказывались в застойных зонах, где скорость движения
газа недопустимо мала, и чтобы обеспечивался обдув
тепловыделяющих элементов приборов группы А.
В негерметичном отсеке роль компоновки аппаратуры
чрезвычайно возрастает, поскольку, как вытекает из при-
веденных примеров, главным фактором, определяющим
передачу тепла на радиационные поверхности аппарата,
является теплопроводность элементов конструкции от-
сека. Поэтому правильное распределение аппаратуры от-
носительно радиационных поверхностей и выбор формы и
размещения радиаторов (так же, как и выбор формы отсе-
244
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
ка) могут привести к существенному уменьшению массы
конструкции. К этому нужно добавить, что выбор~разме-
щения радиационных поверхностей зависит от схемы ори-
ентации аппарата и диапазона изменения удельной сол-
нечной энергии. Например, если разрабатывается меж-
планетный зонд, приближающийся к Солнцу, то для него
критичен режим перегрева, и поэтому радиатор целесо-
образно разместить так, чтобы он не освещался Солнцем,
если, конечно, схема ориентации аппарата допускает
такое размещение. О влиянии схемы ориентации на разме-
щение радиационных поверхностей аппарата некоторые
замечания были высказаны выше при обсуждении солнеч-
но-звездной ориентации.
Отметим еще одно обстоятельство, характерное для
обеспечения теплового режима негерметичного отсека.
В связи с особой ролью теплопроводности конструктивных
элементов аппарата большое значение приобретает выбор
материалов, имеющих значительные коэффициенты тепло-
проводности при малых значениях плотности. Как извест-
но, коэффициент теплопроводности металлов существенно
зависит от малых добавок к основному металлу и от терми-
ческой обработки. Например, алюминиевые сплавы при
различной термообработке имеют коэффициент теплопро-
водности от НО до 210 Вт/м-К. Очевидно, что при разра-
ботке космического аппарата с негерметичными отсеками
выбору материалов должно быть уделено особое внимание.
4.4.5. Ранее говорилось об увеличении коэффициентов
трения и износа в трущихся парах механизмов, работа-
ющих в вакууме. Это связано с тем, что на чистой поверх-
ности металла атомы кристаллической структуры легко
вступают в соединение с веществами, содержащимися
в окружающей среде, что приводит к образованию на
поверхности металла прочных пленок окислов и других
соединений. Наличие этих пленок уменьшает величины
коэффициентов трения и защищает трущиеся поверхности
от износа. В глубоком вакууме пленки испаряются и не
восстанавливаются. Процесс испарения усиливается за
счет повышения температур в местах контакта, также
являющегося следствием вакуума. При испарении пленок
начинается так называемое чистое трение, сопровождаю-
щееся глубинным вырыванием массы в трущихся парах.
Последнее происходит за счет сваривания в микрокон-
IM] ^ГЕРМЕТИЧНЫЕ ОТСЕКИ 245
тактах. В результате перехода к чистому трению коэффи-
циенты трения существенно увеличиваются. Возрастание
коэффициентов трения при переходе к вакууму различно
для различных металлов и пленок, присутствующих на
поверхности металлов в нормальных условиях. По данным
работы [13] переход к чистому трению увеличивает коэф-
фициент трения в 2—3 раза. По данным других исследо-
ваний влияние вакуума еще больше.
Влияние пониженного давления на трение и износ
может быть существенно уменьшено за счет применения
специальных твердых покрытий на трущихся поверхно-
стях, использования вакуумных смазок с малой скоростью
испарения (низким давлением насыщенных паров) и под-
бором материалов трущихся пар. Широкое применение
получили твердые покрытия и жидкие смазки различной
консистенции на основе дисульфита молибдена.
Следует отметить, что в настоящее время существует
обширная литература, посвященная этим вопросам, и
достаточно большое количество экспериментальных дан-
ных. Отечественный и зарубежный опыт эксплуатации
механизмов космических аппаратов в вакууме показывает,
что механизмы могут работать в условиях пониженного
давления, однако необходимо уделить внимание выбору
мероприятий, обеспечивающих их нормальное функцио-
нирование. Иногда для улучшения условий работы при-
меняют частичную герметизацию объема, в котором рабо-
тает механизм, и создание микроклимата в этом объеме.
4.4.6. Остановимся на испарении конструктивных мате-
риалов и смазок в вакууме. Потеря массы с единицы пло-
щади испаряющегося материала в единицу времени может
быть определена по формуле [6]
М' = 5,833 • 10"1ри.п ]Л’ <4‘39>
где М' — потеря массы, г/см2*с; рнп — давление насы-
щенных паров при температуре Т, мм рт. ст.; р — моле-
кулярный вес; Т — температура поверхности, К.
Иногда вместо величины М' удобнее пользоваться тол-
щиной испарившегося слоя в единицу времени Г, равной
где р — плотность материала.
24G
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Формула справедлива при испарении в достаточно
глубокий вакуум. Этой формулой можно пользоваться
для чистых металлов, так как для давления насыщенных
паров металлов при различных температурах имеются
точные данные (см., например, [6]). При определении испа-
рения органических веществ и сложных сплавов формулой
(4.39) пользоваться затруднительно, так как для них
отсутствуют точные данные о давлении паров и молекуляр-
ном весе, а кроме того, на испарение многих сложных мате-
риалов влияют малые примеси, содержащиеся в материа-
ле, и формула (4.39) становится несправедливой. Поэтому
испарение органических веществ, как правило, зависит
не только от их номинального состава, но и от технологии
изготовления данного вещества. Состав же и технология
изготовления органических веществ, имеющих применение
в космической технике, очень разнообразны. Лучше
всего пользоваться экспериментальными данными об испа-
рении именно тех материалов, которые применены в кон-
кретном космическом аппарате. Данными, содержащими-
ся в многочисленных литературных источниках, можно
пользоваться только для определения порядка ожидае-
мого испарения.
Укажем, что для различных органических конструк-
тивных материалов величины испарения в вакууме могут
отличаться на 2—3 порядка. Например, испарение стек-
лотекстолита АГ-4С при нормальной температуре состав-
ляет примерно 0,01 мм/месяц, а у асботекстолита некото-
рых марок может доходить до 1,8 мм/месяц.
Необходимо отметить, что для конструкции космиче-
ского аппарата могут быть выбраны материалы, испарение
которых не повлияет на их работу в конструктивных уз-
лах и деталях даже при функционировании аппарата
в течение нескольких лет. Однако испарение материалов
может существенно повлиять на атмосферу около косми-
ческого аппарата. Последнее может оказаться важным
для работы научных приборов, оптических устройств и
радиосредств. В этом смысле наличие в космическом
аппарате негерметичных отсеков создает дополнительные
источники газообразования за счет материалов, содержа-
щихся внутри этих отсеков. Заметим, что в настоящее
время вопросы, связанные с собственной атмосферой
космического аппарата, изучены недостаточно.
4.4]
НЕГЕРМЕТИЧНЫЕ ОТСЕКИ
247
Данные о влиянии на испарение материалов давления
газов и паров около испаряющейся поверхности содер-
жатся в [6]. Согласно этим данным, при давлении 1 мм рт.
ст. скорость испарения многих материалов практически не
отличается от скорости испарения в вакууме Л/о. При дав-
лении 70—80 мм рт. ст. скорость испарения мало отличается
от скорости испарения при
нормальном давлении и
составляет 10"2—10“3 от
скорости испарения при
1 мм рт. ст. На рис. 4.5
представлена зависимость
скорости испарения таких
материалов от давления.
Нетрудно показать, что
в негерметичном отсеке
давление будет ниже 1 мм
рт. ст., и поэтому для оце-
Н'
Рис. 4.5. Зависимость скорости
испарения материала М' от дав-
ления окружающей среды.
нок испарения внутри отсека и определения его роли в
создании естественной атмосферы аппарата можно поль-
зоваться данными об испарении материалов в глубоком
вакууме.
4.4.7. В заключение параграфа рассмотрим некоторые
вопросы, связанные с возникновением электрических
разрядов в газе отсека. Если в некотором приборе имеются
два электрода, разделенные газовым промежутком, то
при некоторой разности электрических потенциалов
между электродами могут возникнуть электрические раз-
ряды, аналогичные тем, которые происходят в ионных
приборах. В последних различают темный разряд, нор-
мальный и аномальный тлеющие разряды, дуговой разряд
и коронный. Наиболее опасными для прибора являются
дуговой и коронный разряды. С появления коронного
разряда начинается пробой газового промежутка и резко
возрастают токи в некоторых цепях прибора. При этом
может выйти из строя сам прибор, а также могут произой-
ти нарушения в работе автоматики аппарата и системы
электропитания.
Указанные процессы определяются разностью потен-
циалов между электродами или проводами, разделенными
только газовым промежутком, давлением газа в этом про-
межутке, формой электродов и расстоянием между ними.
248 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Кроме того, попадание в отсек частиц высоких энергий
может ускорить наступление этих процессов.
Согласно правилу Пашена, при данных материале и
форме катода и данном газе пробивное напряжение газо-
вого промежутка является функцией произведения давле-
ния газа на расстояние между электродами. Эта зависи-
мость имеет минимум, определяющий минимальное напря-
жение, которое может привести к пробою.
Расчетный анализ всех факторов, от которых зависит
явление газового разряда и пробоя, очень сложен. Слож-
ность теоретического исследования этих явлений в усло-
виях негерметичного отсека усугубляется тем, что давление
газа между электродами или проводами может зави-
сеть не столько от давления в отсеке, сколько от микроат-
мосферы около этих электродов. Например, электродами
могут явиться отдельные контакты электрических разъ-
емов. В этом случае газовый промежуток между электро-
дами определяется зазорами между отдельными частями
разъема, имеющими размеры порядка долей миллиметра.
Очевидно, что давление в зазорах будет отличаться от
давления в отсеке.
На основании литературных и некоторых эксперимен-
тальных данных опасным для возникновения газовых
разрядов следует считать диапазон давлений от 0,1 до
30 мм рт. ст. Наиболее радикальным средством борьбы
с газовыми разрядами является включение аппаратуры,
имеющей высоковольтные цепи, после того, как давление
в отсеке станет ниже опасной для данного отсека величины.
Максимально допустимое значение давления в отсеке и
время от старта до момента достижения этого давления
могут быть определены экспериментально на одном из
макетов отсека с аппаратурой, близкой к штатной.
Чтобы указанное время не было слишком большим,
желательно не иметь около опасных электродов частично
герметичных полостей со своей микроатмосферой. Очевид-
но, что этого всегда можно добиться несложными кон-
структивными мероприятиями.
Наконец, отметим, что, по-видимому, явление газового
электрического разряда для герметичного отсека является
более опасным, чем для негерметичного. Действительно,
в первом случае аварийная разгерметизация отсека может
привести к тому, что в процессе истечения газа через
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
249
отверстие давление в отсеке пройдет через опасный диа-
пазон и возникнет вероятность пробоя. Во втором случае
любое непредвиденное изменение в конструкции отсека
приведет к тому, что или момент достижения безопасного
давления наступит раньше ожидаемого, или величина
давления станет еще меньше, что только уменьшит веро-
ятность опасного газового разряда.
4.5. Обеспечение работы системы управления
ориентацией
4.5.1. Решение задач ориентации космического аппа-
рата обеспечивается различными бортовыми приборами и
механизмами. К ним в первую очередь нужно отнести
чувствительные элементы, сигналы которых являются
функциями угловых отклонений связанных осей аппарата
от направлений на ориентиры и угловых скоростей. Кро-
ме того, для управления работой устройств, создаю-
щих управляющие моменты, необходимы на борту логи-
ческие приборы или специализированная вычислитель-
ная машина. Указанные приборы и механизмы назы-
вают системой управления ориентацией. Иногда в
эту систему включают и некоторые вспомогательные
устройства, обеспечивающие работу других приборов,
например электрические преобразователи и т. п. На не-
которых космических аппаратах к системе управления
ориентацией относят и подсистему, обеспечивающую созда-
ние управляющих моментов, которую иногда называют
системой исполнительных органов.
Даже идеальное решение всех теоретических и техни-
ческих вопросов, связанных с расчетами, разработкой и
испытанием приборов системы управления ориентацией,
не обеспечит решение задач ориентации с необходимой
точйостью. Здесь дело не только в .обеспечении нормаль-
ного теплового режима, электропитания и управления
приборами системы,— в решении этих вопросов приборы
системы ориентации не имеют особой специфики по срав-
нению с другими приборами и механизмами космического
аппарата. Дело в том, что конечной задачей рассматрива-
емой системы является определенная ориентация с задан-
ной точностью конструктивных геометрических осей
аппарата, а следовательно, решение этой задачи зависит
250
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
не только от совершенства приборов, но и от конструктив-
ных особенностей аппарата.
4.5.2. В большинстве случаев система управления
ориентацией имеет в своем составе оптические чувстви-
тельные элементы. При размещении этих элементов на
аппарате необходимо выполнить требования по отсутст-
вию световых помех и экранирования чувствительных
элементов конструкцией аппарата. Как говорилось выше,
в случае использования звездной системы требования осо-
бенно жесткие. Не останавливаясь на этих вопросах под-
робно, так как их анализ является предметом специальных
исследований, перечислим некоторые способы защиты
оптических датчиков.
1. Установка па объективы датчиков защитных бленд.
2. Покрытия с малым коэффициентом отражения на
элементах конструкции, расположенных близко от полей
зрения оптических систем.
3. Установка специальных щитков на корпусе аппа-
рата, препятствующих попаданию света Солнца в объек-
тивы несолнечных датчиков.
4. Если датчики размещены в герметичном отсеке
или загерметизированы, то необходимо принятие мер,
препятствующих запотеванию стекол объективов или
иллюминатора, расположенного между объективом дат-
чика и свободным пространством. Эти вопросы рассмот-
рены в § 4.3, посвященном газовой среде гермоотсеков.
5. Устранение газящих поверхностей около объекти-
вов, так как стекла из-за высокого коэффициента излуче-
ния (е^0,9), как правило, холоднее окружающих эле-
ментов конструкции и некоторые продукты газообра-
зования могут конденсироваться на стеклах.
6. Специальные мероприятия, обеспечивающие отсут-
ствие пыли около аппарата. Источником пыли, в частно-
сти, может служить экранно-вакуумная тепловая изоля-
ция, если между экранами проложена стекловуаль.
7. Выбором опорной звезды и программой работы обе-
спечение достаточно больших углов между направлением
на звезду и направлением на Солнце. Обычно считают,
что этот угол должен быть больше 20—25°.
8. Компоновка оптических датчиков и двигателей
системы исполнительных органов, а также двигателей для
коррекций и маневров таким образом, чтобы продукты
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
251
истечения из двигателей, способные создать световые по-
мехи, не попадали в поля зрения датчиков.
Относительно последнего обстоятельства нужно заме-
тить, что некоторые продукты истечения из сопел двига-
телей способны создавать световые помехи за счет твердых
частиц или догорания, или, наконец, флуоресценции этих
продуктов под действием солнечного излучения. Отметим,
что при выборе системы исполнительных органов опреде-
ляющим может явиться не масса этой системы с запасами
рабочего тела, а «загрязнение» среды около аппарата про-
дуктами истечения реактивных двигателей. «Загрязнение»
может оказаться нежелательным не только для датчиков
ориентации, но и для научной аппаратуры. В частности,
по указанной причине научная космическая станция США
«Скайлэб» в качестве рабочего тела использовала сжатый
азот.
Если чувствительная оптическая система расположена
за плоским или сферическим иллюминатором, освещенным
Солнцем, что, в частности, может иметь место при разме-
щении за этим же иллюминатором солнечного датчика,
то появляются особо жесткие требования к чистоте и
качеству стекла иллюминатора. Это связано с тем, что
даже точечные загрязнения или оптические неоднородно-
сти в стекле рассеивают солнечный свет, часть которого
может попасть в объектив чувствительной оптической
системы.
В связи с изложенным отметим, что установка на кос-
мическом аппарате чувствительных оптических систем,
в частности звездной, требует проведения специальных
светотехнических расчетов. Для некоторых аппаратов
сложной формы может оказаться недостаточным расчет-
ный анализ световых помех. В этих случаях потребуются
экспериментальная проверка и специальное оборудование.
4.5.3. Остановимся на требованиях к жесткости кон-
струкции. Такие требования появляются в тех случаях,
когда отдельные приборы системы ориентации размещены
в различных частях аппарата, а по условиям их работы
базовые поверхности или оси одного прибора должны быть
параллельны или перпендикулярны к базовым поверхно-
стям или осям другого. Под базовыми поверхностями
будем понимать поверхности некоторых внешних кон-
структивных деталей, относительно которых установлены
252 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
с нужной точностью внутренние элементы прибора, ответ-
ственные за его точностные характеристики. За базовые
выбираются такие поверхности, которые являются сты-
ковочными или на которые можно установить юстировоч-
ные приспособления.
В качестве осей выбираются воображаемые линии,
связанные с конструктивными элементами, или оси, про-
ходящие через специальные риски, нанесенные на корпусе
прибора. В простейшем случае в качестве одной из осей
может служить линия, соединяющая центры отверстий
в основании прибора, служащих для стыковочных болтов,
шпилек или штифтов. Часто для приборов, которые дол-
жны быть установлены относительно других с ошибками,
не превышающими нескольких угловых минут или мень-
ше, в местах крепления приборов к элементам конструк-
ции аппарата монтируются регулировочные механизмы,
с помощью которых можно менять положение приборов
относительно указанных элементов и, следовательно,
относительно геометрических осей аппарата. Это дела-
ется в тех случаях, когда точность изготовления не может
обеспечить установку приборов с допустимыми погреш-
ностями и приходится прибегать к юстировочным работам.
Деформации конструкции в полете приведут к тому,
что параллельность и перпендикулярность указанных
выше базовых поверхностей или осей различных приборов
будет нарушена, что приведет к ухудшению работы систе-
мы управления ориентацией или к невыполнению задач
этой системой.
В качестве примера остановимся на случае, когда перед
включением двигателя коррекции управление ориента-
цией передается от оптических датчиков гироскопическим
устройствам. Последние запоминают положение, которое
имели роторы этих устройств в момент разарретирования.
Любое рассогласование между осями роторов и осями
оптических датчиков приведет к тому, что вектор коррек-
тирующей скорости отклонится от требуемого положения
на величину, равную указанному рассогласованию.
Очевидно, что опасными являются непрогнозируемые
деформации конструкции. Известные заранее деформации
можно учесть при взаимной юстировке приборов либо
при расчете необходимых поворотов оптических труб или
программных поворотов на гироскопических устройствах,
*.5]
работа системы ориентации
253
если для обеспечения заданной ориентации геометриче-
ских осей аппарата необходимы такие повороты. Второй
случай, в частности, имеет место, если система управления
ориентацией должна обеспечить произвольное положение
в пространстве вектора корректирующей скорости.
Рассмотрим причины деформаций конструкции косми-
ческого аппарата. Эти причины удобно разделить на сле-
дующие три группы:
1) вибрационные, линейные и ударные перегрузки,
действующие на аппарат при его выведении на траекторию,
за счет работы двигателей, а также срабатывания меха-
низмов разделения ступеней ракеты или аппарата и по-
следней ступени;
2) избыточное давление, действующее на корпуса
герметичных отсеков;
3) температурные деформации.
Хотя нагрузки первой группы не действуют на участ-
ках, где работает система ориентации, они могут вызывать
деформации, не исчезающие при снятии нагрузок, т. е.
так называемые остаточные деформации. Если конструк-
ция допускает такие деформации, то последние рассчи-
тываются или определяются экспериментально на опыт-
ных образцах с тем, чтобы учесть ожидаемые остаточные
деформации при юстировке приборов или при расчете
необходимых поворотов оптических труб. При этом дол-
жна быть проанализирована возможная точность опреде-
ления ожидаемых остаточных деформаций, так как ошиб-
ки в определении этих величин будут вызывать ошибки
в работе системы ориентации.
Если все силовые элементы конструкции работают
в зоне упругих деформаций, то необходимость в указан-
ном анализе отпадает.
Для некоторых конструкций может иметь место сле-
дующее явление. При первом нагружении конструкция
деформируется, причем часть деформаций остается при
снятии нагрузки. При последующих нагружениях кон-
струкция деформируется уже только упруго, т. е. дефор-
мации исчезают при снятии нагрузки. Это, в частности,
иногда происходит с некоторыми сварными рамами и,
по-видимому, является следствием технологических де-
фектов сварки отдельных деталей рамы. В результате
этих дефектов появляются слабые элементы, разрушаю-
254
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
щнеся или приобретающие остаточные деформации при
первом нагружении. При последующих нагружениях ос-
новные нагрузки уже начинают воспринимать более проч-
ные элементы конструкции, работающие в упругой зоне.
Поскольку расчетный анализ указанного явления
очень сложен, то в этих случаях может оказаться целе-
сообразным имитация реальных нагрузок на всех изго-
товленных образцах, предназначенных для летных вари-
антов аппарата. Естественно, что эти нагружения должны
проводиться до установки точных приборов системы ори-
ентации или до юстировочных работ. Какие перегрузки
должны при этом имитироваться (вибрационные, ударные
или линейные), определяется при испытаниях опытных
образцов.
Для иллюстрации влияния давления в герметичном
отсеке на точность ориентации обратимся к случаю кор-
рекции траектории. Если юстировка приборов проводится
Рис. 4.6. Размещение двигательной установки/, гироскопическо-
го устройства 3 и оптического датчика 4 на корпусе аппарата 2.
при отсутствии избыточного давления в отсеке, то в поле-
те, когда на корпус будет действовать полное внутреннее
давление, появятся деформации корпуса, которые могут
привести к рассогласованию осей приборов, от которых
зависит точность положения вектора корректирующей
скорости.
На рис. 4.6 условно показана схема размещения дви-
гательной установки 1, гироскопического устройства 3
и оптического датчика 4 на корпусе герметичного отсека 2.
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
255
Для приведенной схемы опасны деформации герметич-
ного корпуса за счет внутреннего давления, приводящие
к поворотам плоскости А — А опор гироскопического
устройства относительно плоскости Б — Б опор оптиче-
ского датчика. В частности, отклонение от перпедикуляр-
ности указанных плоскостей непосредственно переходит
в отклонение вектора корректирующей скорости от его
расчетного положения. Допустим, что гироскопическое
устройство измеряет так называемое боковое ускорение,
т. е. проекцию ускорения силы тяги двигателя на пло-
скость, перпендикулярную к направлению, которое под-
держивается гироскопическим устройством. Если линия
действия тяги перпендикулярна к плоскости В — В опор
двигательной установки, то непараллельность плоскости
В — В плоскости А — А вызовет дополнительные боко-
вые ускорения, с которыми придется справляться системе
управления движением и которые приведут к дополни-
тельным ошибкам в векторе корректирующей скорости.
Величины этих ошибок существенно зависят от схемы и
параметров системы управления движением и стабилиза-
ции, а также от метода создания управляющих воздей-
ствий (см. [5]).
Так как увеличение жесткости конструкции в общем
случае связано с увеличением массы, что нежелательно
для любого космического аппарата, то стараются найти
такие компоновочные и силовые схемы, которые позво-
ляли бы без увеличения массы конструкции уменьшить
влияние деформаций корпуса на рассогласование прибо-
ров системы ориентации и управления движением. Одним
из путей является установка датчика гироскопического
устройства и двигателя на одном достаточно жестком ос-
новании. В этом случае повороты этого основания как
целого относительно корпуса не приведут к ошибкам
в положении вектора корректирующей скорости. При
указанных поворотах может появиться только дополни-
тельный эксцентриситет силы тяги относительно центра
масс аппарата и, как следствие, дополнительный возму-
щающий момент, действующий на аппарат. Однако влия-
ние этого фактора может быть существенно уменьшено
выбором параметров системы стабилизации.
Другим способом уменьшения влияния давления внут-
ри отсека на положение вектора корректирующей ско-
256 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
рости является по возможности более точный учет реаль-
ного давления и соответствующих деформаций для ожи-
даемых времен проведения коррекций. Учет известных за-
ранее деформаций может быть осуществлен указанными
выше способами. Иногда может оказаться целесообразным
проведение юстировочных работ в отсеке с избыточным
давлением на корпус, равным ожидаемому, хотя при этом
усложняется технология подготовки аппарата к пуску
и увеличивается время этой подготовки. В качестве при-
мера использования такого способа можно указать на
случай, когда давление внутри отсека в моменты прове-
дения коррекций известно заранее достаточно точно, но
деформации корпуса существенно зависят от технологи-
ческих особенностей изготовления каждого экземпляра
отсека. В этом случае данные о величинах деформаций,
определенные на опытных образцах или расчетом, нельзя
использовать при юстировке приборов летного экземпля-
ра аппарата или при расчете необходимых поворотов
оптических труб перед проведением коррекций и
приходится проводить юстировку приборов в каждом
летном образце отсека при давлении, равном ожидае-
мому.
В § 4.3 были рассмотрены факторы, от которых зави-
сит давление в герметичном отсеке. Там было показано,
что давление газа в отсеке в основном определяется утеч-
ками из отсека, температурой газа и временем полета.
Зная для данного аппарата ожидаемый температурный
режим в отсеке и величину фактической суммарной утеч-
ки, замеренной на Земле, можно по формулам § 4.3
оценить давление для предполагаемых времен проведе-
ния коррекций или маневров.
Однако следует иметь в виду, что размеры отверстий
в отсеке могут не оставаться постоянными в течение всего
полета. В частности, размеры могут несколько измениться
после участка выведения, когда на отсек действуют боль-
шие нагрузки. Кроме того, формулы § 4.3 выведены без
учета метеоритной опасности. Поэтому давление в отсеке
для некоторого момента времени может быть определено
только приближенно. Разброс реального давления около
этой расчетной величины должен быть специально иссле-
дован для каждого конкретного космического аппарата.
При этом может оказаться, что ожидаемый разброс дав-
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
257
ления и соответствующий разброс величин деформаций
будут больше, чем это допустимо для приборов ориен-
тации.
Наконец, следует отметить, что юстировка приборов
под давлением, рассчитанным по формулам § 4.3, может
повысить точность работы системы ориентации в том
случае, когда коррекция или маневр проводится один
раз в течение всего полета или когда между различными
коррекциями или маневрами имеется достаточно малый
временной промежуток. В противном случае разница
давлений в моменты времени, соответствующие различным
коррекциям, может оказаться больше, чем разница дав-
ления заправки и давления в момент проведения первой
коррекции или маневра. При этом, естественно, юстиров-
ка под давлением частично потеряет смысл.
В тех' случаях, когда деформации корпуса за счет
давления значительны, а априорный учет реального дав-
ления с необходимой точностью невозможен, может ока-
заться целесообразным следующий путь. На опытном
экземпляре отсека или на каждом летном экземпляре
экспериментально определяются деформации корпуса для
нескольких значений давления. Перед каждым проведе-
нием коррекции или маневра определяются и передаются
на Землю данные о давлении газа в отсеке. После этого,
используя результаты наземных экспериментов, можно
внести соответствующие поправки в расчет необходимых
поворотов оптических труб или программных поворотов,
выполняемых с помощью гироскопических устройств.
Если такие расчеты проводятся на Земле, то реализация
изложенного метода не требует усложнения бортовой
аппаратуры. Если же эти расчеты осуществляются бор-
товыми приборами, то внесение поправок на величину
фактического давления в отсеке потребует некоторого
усложнения программы бортовой вычислительной машины
и, возможно, увеличения ее памяти для запоминания зави-
симости деформаций корпуса от давления. Подробнее этот
вопрос освещен в главе 3.
В качестве третьей причины, вызывающей деформации
конструкции, выше указывались температурные дефор-
мации. Эти деформации возникают в тех случаях, когда
температуры элементов конструкции в полете отличаются
от температур при сборке аппарата. Температурные
9 Г. Ю. Максимов
258
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
деформации зависят от конфигурации и размеров элементов
конструкции, коэффициентов линейного расширения ма-
териалов этих элементов и температурных полей.
Так же, как и в случае давления в гермоотсеках, эти
деформации можно учесть при юстировке приборов или
при расчете необходимых поворотов, но для этого нужно
достаточно точно знать температурные поля на тех уча-
стках полета, где должна функционировать система
управления ориентацией.
Для оценки порядка величин температурных деформа-
ций рассмотрим круглую пластину диаметром d и толщи-
ной 6. Допустим, что в исходном положении, когда вся
пластина имеет одинаковую температуру, поверхность ее
плоская. Если в полете появился перепад температур по
толщине пластины ДТ, то появится угол ф между пло-
скостями, касательными к поверхности пластины в ее центре
и с краю, который можно оценить по формуле
си/ДТ
46 ’
(4.40)
где а — коэффициент линейного расширения материала.
Если перепад температур А Г обусловлен только
тепловым потоком, проходящим через пластину вдоль
нормали к ее поверхности, то А776 = g/Х, где q —
тепловой поток, а X — коэффициент теплопроводности ма-
териала. При этом формула (4.40), примет вид
(4.41)
Если принять, что тепловой поток q равен солнечной
энергии, падающей на единицу поверхности пластины, то
Формулы (4.40) — (4.42) позволяют сделать оценки
температурных деформаций пластины при различных
причинах возникновения перепада температур на ее
поверхностях. В частности, если d = 1000 мм, 6 = 20 мм,
а = 2-10‘* и АТ = 10°C, то ф^Ю угл. с. Если же
перепад температур обусловлен только потоком солнечной
энергии, проходящим через пластину, то при S == So=
= 0,14 Вт/сма, а = 2-Ю"5, X - 2 Вт/(см К) и d = 1000 мм
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
259
угол ф составит только около 10 угл. с даже при As = 1.
Приведенные оценки показывают, что температурные
деформации существенно зависят от методов терморегу-
лирования конструкции.
4.5.4. Как указывалось в главе 2, для некоторых косми-
ческих аппаратов может оказаться целесообразным в
качестве аварийного дублирующего режима использо-
вать режим пассивной гироскопической стабилизации.
Иногда этот режим называют режимом закрутки.
Для реализации режима закрутки одна из осей аппа-
рата нужным образом ориентируется в пространстве,
после чего создается вращение вокруг этой оси. Естествен-
но, что режим может использоваться в тех случаях,
когда такое движение является устойчивым, т. е. малые
возмущения, приводящие к изменениям проекций угловой
скорости на связанные оси, не вызывают значительных
отклонений геометрической оси, вокруг которой осу-
ществлено вращение, от ее первоначального положения.
Известно, что если в аппарате имеются жидкие массы,
то устойчивым вращением в указанном выше смысле
является вращение вокруг главной оси инерции аппарата,
относительно которой момент инерции максимален. Иде-
альным случаем является точная ориентация оси макси-
мального момента инерции и создание вращения только
вокруг этой оси. Однако геометрические оси аппарата,
как правило, не совпадают с главными осями инерции.
Даже если аппарат спроектирован таким образом, что
его форма и размещение всех агрегатов и приборов обес-
печивают в чертежах динамическую симметрию относи-
тельно геометрических осей, реальные массы агрегатов
и приборов имеют некоторый разброс относительно зна-
чений, указанных в чертежах, что вызывает отклонение
главных осей инерции относительно геометрических.
В работе [18] исследовано влияние расхождения ука-
занных осей и показано, что при этом усложняется управ-
ление и увеличивается расход рабочего тела или энергии.
Здесь для нас существенно то, что поскольку чувствитель-
ные элементы и исполнительные органы, ответственные
за ориентацию в пространстве и вращение, установлены
относительно геометрических осей, то несовпадение гео-
метрических и главных осей инерции приведет к тому,
что кроме угловой скорости вокруг оси максимального
260 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
главного момента инерции появятся угловые скорости
вокруг других главных осей.
Перед закруткой аппарата относительно геометри-
ческой оси, близкой к максимальной главной оси инерции,
гасятся угловые скорости относительно других осей.
Этот процесс, естественно, осуществляется с ошибками,
которые также приводят к появлению угловых скоростей
вокруг других осей инерции.
Введем главные центральные оси инерции аппарата
ХГУГИГ. Главные моменты инерции относительно этих
осей обозначим соответственно через Л, В, С. Проекции
Рис. 4.7. Основные кине-
мати ческие параметры,
характеризующие сво-
бодное движение аппа-
угловои скорости на указанные
оси после окончания процесса
закрутки обозначим соответствен-
но через р0, д0, г0.
Если пренебречь моментами,
действующими на аппарат, т. е.
считать движение свободным, то
во время гироскопической ста-
билизации вектор кинетического
момента аппарата будет оставать-
ся постоянным. В начале свобод-
ного движения, т. е. в момент
окончания процесса закрутки, этот
вектор имеет составляющие Лр0,
Вд0> Сг0 по осям ХгУг£г соответ-
ственно. На рис. 4.7 изображена
рата. эта система координат в указан-
ный момент времени (G — вектор
кинетического момента). В процессе дальнейшего дви-
жения оси связанной с аппаратом системы ХгУг2г пе-
ремещаются в пространстве.
Предположим, что С В А и закрутка осуще-
ствлена вокруг оси Zr. При этом Ро*^го и го» так
как возникновение составляющих угловой скорости р0
и 9о является следствием несовпадения главных централь-
ных осей инерции с геометрическими осями и ошибок
успокоения аппарата перед закруткой вокруг оси Zr.
Качество режима гироскопической стабилизации опреде-
ляется максимальным отклонением оси Zr от ее первона-
чального положения. На рис. 4.7 некоторое текущее
положение оси Zr обозначено через Zr (t), а угол между
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
261
вектором G и этой осью —0(/). Угол между текущим
положением оси Zr(t) и ее начальным положением обо-
значим через е. Очевидно, что
в <0(0+во, (4.43)
где 0О — угол между вектором кинетического момента G
и начальным положением оси Zr в момент окончания
процесса закрутки.
Угол 0О определяется следующим соотношением:
> . V (Ар,)*+ (Вд9>*
'°- щ;
(4.44)
Для расчета угла 0 (t) необходимо исследовать свобод-
ное движение аппарата. Если пренебречь влиянием жид-
ких масс и считать различными все главные моменты
инерции аппарата, то будет иметь место случай Эйлера—
Пуансо.
Для упрощения анализа рассмотрим раздельно влияние
угловых скоростей р0 и q0 на величину 0 (t). Вначале поло-
жим ?0 = 0» Ро =#= 0, г0 0, 0 = 0Р Тогда угол 0Х (Г)
определится выражением [14]
cos 0i (t) =
1 — № sn т
ЖЖ"
(4.45)
где
(рЛ* А(В-А) .
\ Го / О (G — В) ’
т — линейная функция времени; sn — эллиптическая
функция Якоби.
Функция sn т периодическая и меняется в диапазоне
от —1 до +1. С учетом этого и используя выражение
(4.45), можно получить формулу для максимального
значения угла 0Х (t):
Sin 0! щах =
ав (<; — /1)
. (4. 46)
Соотношение (4.45), а следовательно, и (4.46) спра-
ведливы при условии, что (pQ/rQ)2A(B — А)/С(С — В) < 1.
Если это условие не выполняется, то угол 0i(i) выражается
через другую эллиптическую функцию Якоби сп т. Не
262
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
приводя выкладок, укажем, что в последнем случае
угол 0Х(О может достигать величины л/2, т. е. этот случай
для гироскопической стабилизации практического зна-
чения не имеет.
Используя соотношения (4.43), (4.44), (4.46) и прини-
мая р0<< го, tg0o = 0О, Sin0lmax = Oimax, можно по-
лучить следующую оценку для угла е:
е<8Ь (4.47)
где
Формулу для можно использовать не только для
оценки угла отклонения оси ZP от исходного положения,
но и в качестве критерия сравнения различных компоновоч-
ных схем аппарата, использующего режим гироскопической
стабилизации. Действительно, чем меньше множитель при
р0/г0 в формуле (4.47х), тем меньше максимально возмож-
ное значение угла отклонения оси Zr при заданном воз-
мущении вокруг оси Хт.
Проанализируем выражение (4.47 ). Так как В> А,
то А/С A/В i. Непосредственно из (4.47х) следует,
что при увеличении отношения А /В от А /С до 1 величина
ei/(p0/r0) монотонно уменьшается при любом значении A/С.
При приближении А/В к А/С рассматриваемая величина
неограниченно возрастает. Следовательно, при любом соот-
ношении между максимальным и минимальным моментами
инерции выгодно средний момент инерции иметь как
можно ближе к минимальному, т. е. приближаться в
динамическом смысле к симметричному волчку. С другой
стороны, при заданном отношении A IB величина ^/(рсАо)
тем меньше, чем меньше отношение AIC. Таким образом,
для уменьшения максимально возможного отклонения оси
Zr от исходного положения при действии возмущения
вокруг оси Хт целесообразно иметь круговой эллипсоид
инерции, возможно более сплюснутый по оси Zr. Для
иллюстрации сказанного и практических оценок па рис. 4.8
представлены зависимости величины от отно-
шения А /В при различных значениях А /С.
4.51
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
263
Заметим, что из всех тел правильной геометрической
формы с равномерным по объему распределением масс
наименьшую величину отношения A/С имеют круговой
цилиндр и круговой тор при
достаточно больших отноше-
ниях диаметра к высоте для
цилиндра и расстояния от оси
симметрии до центра образу-
ющего круга к радиусу этого
круга для тора. Для этих тел
А/С -> 0,5 и соответственно
ё1/(ро/го) -> 1.
Рассмотрим вариант, когда
Ро =0, g0=#= 0, Го 0, 0 = 02,
т. е. действует возмущение вок-
руг оси среднего момента инер-
ции. Как и в первом случае,
используем общие соотношения
Эйлера — Пуансо.
В результате получим
sin 02 щах —“
Рис. 4.8. Зависимость мак-
симально возможного от-
клонения оси аппарата ₽i
от главных моментов инер-
ции А, В, С.
(4.48)
Так как в рассматриваемом варианте формула (4.44) дает
tg0o = f-^-, (4.49)
то Ogmax = 00*
Из (4.43), (4.48) и (4.49) следует, что
где
е^е2,
(4.50)
Таким образом, при возмущении вокруг оси Кг для
получения малых отклонений оси Zr необходимо, чтобы
средний момент инерции был возможно меньше максималь-
ного. Это требование не противоречит выводам, получен-
ным выше при анализе возмущепия вокруг оси Хт.
264
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
4.5.5. В большинстве случаев для работы системы уп-
равления ориентацией используются реактивные двигате-
ли, создающие управляющие моменты. Если в качестве
основных исполнительных органов используются гироси-
ловые стабилизаторы, то при наличии возмущающих мо-
ментов приходится предусматривать так называемый ре-
жим разгрузки. Во время разгрузки включается какой-ли-
бо источник внешнего момента. В качестве этого источника
могут использоваться либо внешние силовые поля, напри-
мер магнитное, либо система реактивных двигателей. Оста-
новимся на вопросах размещения реактивных двигателей
системы исполнительных органов относительно связанных
осей аппарата.
Наиболее экономный с точки зрения количества дви-
гателей и простой по логике работы вариант размещения
Рис. 4.9. Варианты размещения реактивных двигателей системы
исполнительных органов. .
двигателей представлен на рис. 4.9, а, на котором система
координат XYZ связана с конструктивными базами аппа-
рата, а ее начало расположено близко к центру масс.
В этом варианте всего шесть реактивных двигателей, одна-
ко он имеет тот недостаток, что в процессе движения аппа-
рата относительно центра масс могут появиться силы, дей-
ствующие на центр масс и способные возмущать траекто-
рию. Если заданная ориентация поддерживается только
за счет работы реактивных двигателей, а на аппарат дей-
ствует достаточно большой по величине возмущающий мо-
мент, то схема размещения двигателей, представленная
на рис. 4.9, а, приведет к тому, что на центр масс аппарата
4.5]
РАБОТА СИСТЕМЫ ОРИЕНТАЦИИ
265
будут периодически действовать силы одного направления
(см. [5, 18J). Если возмущающий момент является случай-
ной величиной, то эти силы могут оказаться нежелатель-
ными. В частности, это нежелательно, когда требуется
высокая точность прогноза траектории. Схема размеще-
ния двигателей, изображенная на рис. 4.9, а, имеет еще
один недостаток. Если центр масс аппарата не совпадает
с началом системы координат XYZ, что может иметь место
за счет ошибок сборки и разброса масс приборов и агрега-
тов, то при включении одного из двигателей могут возни-
кать моменты не только вокруг нужной оси, но и вокруг
других осей. Это может привести к удлинению переходных
процессов и увеличению расходов рабочего тела.
Вариант, представленный на рис. 4.9, б, не имеет от-
меченных недостатков, так как управляющие моменты
создаются парами сил. В частности, несовпадение центра
масс с началом системы координат не вызовет ненужных
моментов. Эти моменты могут появиться только при пере-
косах осей чувствительности датчиков относительно осей
XYZ. Последнее, естественно, может иметь место и для ва-
рианта, указанного на рис. 4.9, а. В варианте на рис. 4.9, б
уже 12 реактивных двигателей. Возможны и промежуточ-
ные варианты размещения, когда относительно одних
осей управляющие моменты создаются парами, а вокруг
других осей силами.
Из сказанного следует, что количество и размещение
реактивных двигателей, необходимых для управления
ориентацией аппарата, зависят от требований к точности
прогнозирования траектории и случайных возмущающих
моментов.
В частности, если конструкция аппарата исключает
возможность появления больших возмущающих моментов,
то независимо от требуемой точности прогноза траектории
может оказаться приемлемым вариант размещения двига-
телей, представленный на рис. 4.9, а. Это следует из того,
что при малых возмущающих моментах движение вокруг
центра масс будет симметричным относительно заданного
направления и возмущающее влияние управляющих сил
на траекторию может оказаться малым, поскольку на
центр масс аппарата будут периодически действовать силы
противоположных направлений.
266
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
4.6. Внешняя компоновка космического аппарата.
Определение сил и моментов от светового
давления
4.6.1. В § 4.1 под внешней компоновкой понималось
относительное размещение, форма и размеры отсеков,
а также расположение внешних агрегатов и приборов. Под
внешними понимались такие приборы и агрегаты, которые
для своего функционирования требуют непосредственного
контакта с открытым пространством.
В данном параграфе будут рассмотрены наиболее часто
встречающиеся внешние приборы и агрегаты, основные
характеристики некоторых из них, важные для внешней
компоновки, и вопросы, связанные со световым давлением,
действующим на аппарат. Из внешних агрегатов наиболь-
шее внимание будет уделено солнечной батарее.
Вначале сделаем несколько общих замечаний о роли
внешней компоновки при разработке аппарата. Несмотря
на то, что автоматический космический аппарат представ-
ляет собой комплекс приборов и агрегатов и основное зна-
чение имеет их нормальное функционирование и взаимодей-
ствие друг с другом, немаловажную роль играют и общие
конструктивные вопросы, в первую очередь внешняя ком-
поновка аппарата. От нее в значительной степени зависит
масса конструкции, а следовательно, при заданной общей
массе, определяемой возможностями ракеты выведения и
траекторией, и масса аппаратуры, которую можно размес-
тить в аппарате. Кроме того, от внешней компоновки зави-
сят динамические характеристики аппарата в целом, опре-
деляющие запасы рабочего тела для ориентации, количест-
во и характеристики механизмов, вопросы обеспечения
заданного температурного режима, кабельные и фидер-
ные связи между приборами, программы работы аппарата
в целом и отдельных приборов, а также электрическая
схема соединений приборов и агрегатов.
При правильной организации работ по созданию нового
космического аппарата разработка внешней компоновки
осуществляется параллельно с разработкой логики взаи-
модействия систем и приборов и определением требований
к аппаратуре.
Образно говоря, когда аэродинамика и гравитационное
поле не участвуют соответственно в движении и ориента-
4.6] ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ 267
ции аппарата, то летать и функционировать в космическом
пространстве может любая «компоновка», но при недоста-
точном внимании к ней общие характеристики аппарата,
такие, как масса, информативность, надежность и стои-
мость, будут далеки от оптимальных значений.
Если весь аппарат или его часть осуществляет движе-
ние в плотных слоях атмосферы Земли и планет, то система
управления этим движением зависит от аэродинамиче-
ских и динамических характеристик этой части.
Наконец, если на данном аппарате используется гра-
витационная стабилизация, то необходимо выполнить оп-
ределенные требования к пространственному распределе-
нию масс аппарата, т. е. также требования к внешней
компоновке.
Несмотря на большое разнообразие космических аппа-
ратов, созданных к настоящему времени, для них харак-
терно сравнительно небольшое число внешних агрегатов
и приборов, определяющих внешнюю компоновку.
К внешним агрегатам и приборам, наиболее часто
встречающимся в космических аппаратах, относятся:
приборные отсеки или рамы с приборами;
спускаемый или посадочный отсек для космического
аппарата, часть которого возвращается на Землю или до-
ставляется на поверхность планеты;
антенны;
генераторы электрической энергии;
двигательные установки, предназначенные для осу-
ществления коррекций или маневров траектории, а также
для создания управляющих моментов;
датчики системы управления ориентацией, использую-
щие внешние оптические ориентиры в инфракрасной, ви-
димой или ультрафиолетовой частях спектра;
агрегаты системы терморегулирования;
научная аппаратура, предназначенная для решения
Целевых задач данного космического аппарата.
4.6.2. Все спускаемые или, как их иногда называют,
посадочные отсеки или аппараты можно разделить на две
группы.
Первая группа включает в себя отсеки, использующие
аэродинамические силы при спуске. Поскольку вход в ат-
мосферу планеты, как правило, происходит со скоростью,
превосходящей первую космическую, то спускаемые отсе-
268
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
ки этой группы должны иметь тепловую защиту, предо-
храняющую аппаратуру и конструкцию от чрезмерного
иагрева при прохождении плотных слоев атмосферы.
Тепловая защита может оставаться на отсеке после по-
садки, но может и отделяться от него перед окончатель-
ным торможением и посадкой на поверхность.
Для окончательного торможения и посадки на поверх-
ность планеты нашли применение парашютные системы,
специальные двигатели мягкой посадки и комбинации
этих средств. Очевидно, что внешняя форма и размеры
спускаемого отсека определяются (кроме характеристик
планеты, на которую осуществляется посадка) скоростью
входа в атмосферу и схемой посадки, т. е. средствами,
обеспечивающими окончательное торможение и посадку на
поверхность, и последовательностью работы этих средств.
Движение в плотных слоях атмосферы может осуществ-
ляться либо без использования подъемных аэродинамиче-
ских сил (так называемый баллистический спуск), либо
с использованием таких сил. В последнем случае в спускае-
мом аппарате должна присутствовать специальная система,
управляющая его движением в плотных слоях атмосферы.
Спуск с использованием подъемных аэродинамических
сил позволяет уменьшить перегрузки при торможении и
осуществить более точную, чем при баллистическом спу-
ске, посадку в заданный район планеты или Земли.
Из различных форм спускаемого отсека с тепловой за-
щитой, использующего аэродинамическое торможение,
укажем на сферическую и коническую формы, получив-
шие достаточно широкое применение. Кроме того, возмож-
но применение самолетных форм, в которых присутствуют
несущие плоскости. В последнем случае спускаемый аппа-
рат приобретает способность достаточно широкого манев-
ра для выбора места посадки. Такие схемы, по-видимому,
целесообразны только для пилотируемых кораблей. Срав-
нивая сферическую и коническую формы спускаемых
отсеков, отметим, что сферическая форма пригодна только
для баллистического спуска, и для нее сравнительно легко
обеспечить статическую аэродинамическую устойчивость.
Коническая форма при соответствующем управлении
может обеспечить спуск в атмосфере с использованием
аэродинамических подъемных сил и тем самым получение
указанных выше преимуществ такого спуска.
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
269
Вторая группа включает в себя спускаемые отсеки, не
использующие для спуска аэродинамические силы. Отсеки
этой группой находят применение для планет, лишенных
атмосферы, и Луны, а также для планет со слабой атмос-
ферой, например Марса. В состав таких отсеков обяза-
тельно входят двигательные установки, с помощью кото-
рых осуществляются торможение и посадка. В частном
случае это может быть одна двигательная установка, рабо-
тающая в различных режимах. Форма отсеков второй
группы определяется не столько самим участком спуска,
сколько работой аппаратуры отсека после посадки.
Отсек, работающий па поверхности планеты, является
самостоятельной автоматической станцией. Примерами
таких станций являются станция «Луна-9», совершившая
первую мягкую посадку на Луну, и станция «Викинг»,
с помощью которой были впервые проведены обширные и
длительные научные исследования на поверхности Марса.
Вопросы разработки подобных станций выходят за рамки
настоящей книги. Для интересующихся этими проблемами
укажем, в частности, работу [2]. Здесь отметим только, что
если в состав космического аппарата входит спускаемый
отсек, принадлежащий к первой или второй из указанных
выше групп, то до начала разработки внешней компоновки
должны быть определены основные геометрические и мас-
совые характеристики этого отсека. При этом специфика
спускаемых отсеков первой группы состоит в том, что по-
скольку они закрыты тепловой защитой, то среди внешних
агрегатов космического аппарата, как правило, должен
присутствовать радиатор или нагреватель, обеспечиваю-
щий температурный режим аппаратуры спускаемого отсе-
ка вне атмосферы. Для спускаемых отсеков второй группы
подобный радиатор может входить в конструкцию самого
отсека или вообще отсутствовать, поскольку стенки отсека
имеют контакт с открытым пространством.
Отметим также, что если часть космического аппарата
доставляется на Землю или на поверхность планеты, то
в составе аппарата должны присутствовать механизмы от-
деления этой части, разрывные электрические разъемы
и, если применен радиатор с жидким теплоносителем, спе-
циальные разъемы трубопроводов. Для этих устройств
должны быть найдены соответствующие места во внешней
компоновке аппарата.
270
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
4.6.3. В качестве генераторов электрической энергии
рассмотрим радиоизотопные генераторы и солнечные ба-
тареи, о которых говорилось в первой главе.
При размещении радиоизотопных генераторов на кос-
мическом аппарате необходимо учитывать их радиацион-
ное и тепловое влияние на остальную аппаратуру и кон-
струкцию. Для уменьшения этого влияния генераторы
часто удаляют от приборного отсека на некоторое расстоя-
ние, для чего используют специальные штанги или фермы.
Из-за необходимости размещения аппарата на ракете
выведения иногда приходится эти конструктивные элемен-
ты делать складными.
Нужно отметить, что для некоторых видов радиоизо-
топного генератора может оказаться необходимым прину-
дительный обдув генератора для уменьшения температу-
ры корпуса в земных условиях, когда температура окру-
жающего воздуха может достигать 40 °C или более. В этих
случаях при установке генератора на аппарат необходимо
предусмотреть возможность принудительного обдува при
транспортировке на стартовую позицию и на самой пози-
ции, а также защиту от набегающего потока на участке
прохождения ракетой плотных слоев атмосферы.
Для космических зондов, удаляющихся от Солнца,
может представлять интерес рассмотрение возможности
использования тепла, выделяемого изотопным генерато-
ром электроэнергии, для подогрева остальной аппаратуры.
Передача тепла от генератора к приборному отсеку может
осуществляться излучением или тепловыми трубами.
Естественно, что первый метод может быть реализован
только при близком размещении генератора от отсека, что
возможно при допустимом облучении аппаратуры отсека.
Изложенные общие рекомендации по размещению изо-
топного генератора электроэнергии на космическом аппа-
рате могут быть конкретизированы при разработке опреде-
ленного аппарата. Данные генератора, которые необхо-
димо при этом учитывать, перечислены в первой главе при
рассмотрении системы электропитания.
4.6.4. Солнечные батареи в качестве генератора элек-
троэнергии в настоящее время получили широкое распро-
странение. На рис. 4.10 представлен один из вариантов
классификации установки солнечных батарей на космиче-
ском аппарате.
4.6)
ВЙЕШЙЯЯ КОМПОЙОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
271
Рис. 4.10 нуждается в некоторых пояснениях. Под
отсеком здесь понимается часть аппарата, в которой сосре-
доточена основная масса аппаратуры и которая является
конструктивной базой аппарата.
Рис. 4.10. Классификация установки солнечных батарей.
Приведенные варианты установки могут быть реализо-
ваны при различных вариантах ориентации аппарата от-
носительно Солнца и различных траекториях.
Неподвижная всенаправленная батарея может работать
при любых положениях аппарата относительно Солнца и
любых траекториях, кроме затененных участков, т. е.
эта схема не предъявляет никаких требований к ориента-
ции и траектории аппарата. О методах выбора формы та-
кой батареи будет сказано ниже.
Неподвижная малонаправленная батарея отличается
от всенаправленной тем, что при некоторых положениях
Солнца относительно отсека она не работает. Эта батарея
может работать при условии, что ориентация аппарата и
его траектория обеспечивают положение Солнца относи-
тельно аппарата в некоторой части пространства. Напри-
мер, эта схема может найти применение на космических
зондах, удаляющихся от Солнца и ориентированных на
Землю. Этот случай был рассмотрен в главе 1. В качестве
другого варианта применения такой схемы укажем на
спутник Земли, ориентированный в орбитальной системе
координат и движущийся по синхронной солнечной орби-
те, т. е. орбите, для которой скорость прецессии равна
средней скорости годичного движения Солнца относи-
272 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
тельно Земли. Очевидно, что в приведенных примерах по-
ложение Солнца относительно батареи не остается посто-
янным — Солнце перемещается в некотором телесном
угле относительно батареи. По этой причине указанный
вариант и назван малонаправленным.
Неподвижная направленная установка характерна тем,
что для всех частей батареи ее освещенность близка к мак-
симальной. Эта схема применима при постоянной ориен-
тации одной из связанных осей аппарата на Солнце на
тех участках траектории, на которых батарея должна ра-
ботать.
Относительно формы солнечной неподвижной батареи
заметим, что в направленном варианте батарея, естест-
венно, плоской формы и всякое отклонение от плоскости
приведет только к потерям мощности. Во всенаправлен-
ном варианте форма батареи обязательно пространствен-
ная. Для малонаправленного варианта в ряде случаев
может оказаться целесообразным некоторые части батареи
расположить под углом друг к другу. Это может дать вы-
игрыш в мощности при некоторых положениях Солнца.
Если Солнце движется относительно аппарата не равно-
мерно, то можно получить некоторый выигрыш и в вели-
чине средней интегральной мощности.
Обращаясь к вариантам подвижной установки, отме-
тим, что в общем случае эти варианты меньше зависят от
схемы ориентации и траектории, чем неподвижные. Для
того чтобы освещенность всей батареи была близка к мак-
симальной, форма ее должна быть плоской, а повороты
относительно отсека должны быть такими, которые поз-
волили бы направить нормаль к батарее на Солнце при
всех положениях отсека в пространстве, определяемых
схемой его ориентации и траекторией. Этот вариант на
приведенной схеме назван направленным. Для этого
варианта в зависимости от схемы ориентации аппарата и
его траектории нужны повороты батареи или вокруг одной
оси отсека, или вокруг двух. Очевидно, что при произ-
вольном положении Солнца относительно отсека направ-
ленный вариант не может быть реализован даже при двух
поворотах, так как при некоторых положениях Солнца
отсек будет затенять хотя бы часть батареи.
Вариант подвижной малонаправленной установки от-
личается от направленного тем, что для него существуют
4.6)
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
273
бата-
зави-
интервалы времени, в которых освещенность части
реи меньше максимальной или даже равна нулю. В
симости от схемы ориентации аппарата, его траектории и
допустимой потери мощности форма такой батареи может
быть как плоской, так и пространственной. В данном ва-
рианте так же, как и в направленном, нужны повороты от-
носительно одной или двух осей. Заметим, что в некоторых
случаях подвижная малонаправленная антенна может
оказаться приемлемой при любых положениях Солнца от-
носительно отсека вследствие того, что за счет соответст-
вующих поворотов и при определенном размещении частей
батареи относительно отсека некоторые части могут быть
всегда освещены.
Относительно закона движения батареи заметим, что
ее движение может быть'или непрерывным, или дискрет-
ным. В частном случае для некоторых вариантов траекто-
рий и схем ориентации движение батареи может выро-
диться в ее периодические перемещения из одного край-
него положения в другое.
Обратим внимание на то, что на схеме (см. рис. 4.10)
отсутствует вариант подвижной всенаправленной установ-
ки, так как целесообразность такого варианта представ-
ляется сомнительной.
£ Заканчивая обсуждение различных схем установки
солнечной батареи, заметим, что в подвижном и неподвиж-
ном малонаправленных вариантах
имеет смысл рассмотреть целесообраз-
ность использования двусторонней
солнечной батареи, т. е. батареи, у
которой рабочими являются обе сто-
роны. При этом могут упроститься по-
вороты батареи и уменьшиться ее пло-
щадь. Однако в этом случае масса
единицы площади батареи станет
больше.
4.6.5. Остановимся на принципах
выбора формы всенаправленной сол-
нечной батареи. Допустим, что в неко-
торой системе координат ХУ Z, жестко
сом отсека, направление на Солнце определяется единичным
вектором 8. Положение этого вектора будем характеризо-
вать углами as и Ps (рис. 4.11). Предположим далее, что
Рис. 4.11. К расчету
всенаправленной сол-
нечной батареи.
связанной с корпу-
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
274
всенаправленная солнечная батарея состоит из плоских
граней, на которых смонтированы фотопреобразователи.
Угловое положение некоторой i-й грани относительно
системы координат XYZ определим вектором парал-
лельным внешней нормали к этой грани. Вектор N't и
углы ait Р/, характеризующие его положение, показаны
на рис. 4.11.
Угол yit определяющий освещенность i-й грани, мо-
жет быть найден из следующего очевидного выражения:
cos Yi = cos р< cos сц cos ps cos as + cos Pt sin a< cos ps sin as +
+ sin Pi sin Ps. (4.51)
Введем понятие эффективной площади солнечной бата-
реи Т^эфф (as, Ps) с помощью соотношения
Г /„ R \ N <as’ вз) /А г
рэфф (as, Ps) =---дг---, (4.52)
где N (as, Ps) — мощность, отдаваемая батареей при по-
ложении Солнца относительно отсека, характеризуемом
углами as, Ps; No — мощность единицы площади той же
батареи при максимальной освещенности.
В данном случае влияние температуры граней на мощ-
ность батареи не учитывается. Эффективная площадь
батареи может быть рассчитана по формуле
n(as, Ps>
/'’эфф (as, Ps) = 3 (Pi — A) cos Yi, (4.53)
i
где n (as, Ps) — число граней, для которых у < 75 Y —
предельное значение угла у, Д° которого справедлив закон
пропорциональности мощности величине cos у; — коэф-
фициент, учитывающий изменение мощности единицы
площади отдельных граней; — полная площадь i-й
грани; ft — часть площади i-й грани, затененная элемен-
тами конструкции аппарата и соседними гранями.
Грани, для которых Д- > Ft, не должны учитываться
в формуле (4.53). Очевидно также, что величины Ft опре-
деляются только формой и размерами солнечной батареи,
а fi — внешней компоновкой аппарата, формой батареи
и углами as, Ps.
Наиболее сложным в расчете эффективной площади
является определение величин Если грани ограничены
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
275
прямыми линиями, то определение этих величин может
быть осуществлено аналитически. Если же грани криво-
линейны, то более простым может оказаться графический
способ или моделирование.
Находя величину (as, Ps) для диапазона углов
as = 0 н- 360° и Ря = —90° н- +90° или as = 0 -н
н- 180° и 0я = 0 -и 360°, получим эффективную пло-
щадь батареи для любых положений Солнца относитель-
но аппарата. В системе координат (^Яфф, as, Ps) эта за-
висимость будет иметь вид некоторой поверхности. За
счет затенений и конечного числа плоских граней ука-
занная зависимость неизбежно будет иметь провалы ве-
личины /^эфф. Соответствующее самому глубокому провалу
значение эффективной площади обозначим /гЭфф1П|п. По
определению, всенаправленная батарея должна обеспе-
чивать космический аппарат электроэнергией при любых
положениях Солнца. Поэтому на основании соотношения
(4.52) мощность батареи должна быть определена как
== Л^о^эфф min- (4.54)
Если величина 7V не обеспечивает работу системы
электропитания аппарата, то нужно или изменить форму
и размеры солнечной батареи и повторить расчет, или,
если провал величины соответствует малой области
углов as, Ps,He обращать на него внимания, а принимать
мощность, реализуемую в более обширной области ука-
занных углов. Однако второй путь предполагает извест-
ной вероятность нахождения Солнца в различных обла-
стях пространства относительно аппарата. Если оценить
эту вероятность трудно, то второй путь сопряжен с опре-
деленным риском. Напомним, что мы пока не предпола-
гаем известным движение Солнца относительно аппарата,
так как в этом случае нужно говорить уже о малонаправ-
ленной батарее. Эти вопросы будут рассмотрены ниже.
Относительно выгодности той или иной формы все-
направленной батареи заметим, что с точки зрения массы
и стоимости солнечной батареи, по-видимому, выгоднее
будет такая форма, для которой зависимость /'’эфф (as,
Ps) будет ближе к плоскости, перпендикулярной к оси
^эфф- Действительно, если предполагать неизвестной ве-
роятность нахождения Солнца при различных углах,
то в соответствии со сказанным программа работы дол-
276
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
жна строиться на основании минимальной мощности ба-
тареи. При этом увеличение мощности при некоторых
углах может оказаться неиспользованным, а за нее при-
шлось расплачиваться лишней массой. Если же минималь-
ная мощность оказалась недостаточной для выполнения
задач полета и были увеличены все линейные размеры
батареи без изменения углов, то форма поверхности
^эфф («я, Ps) не изменилась, а вся поверхность переме-
стилась вверх по оси /’эфф. При этом для некоторых зна-
чений углов солнечная батарея окажется переразмерен-
ной.
Наконец, отметим, что анализ различных форм все-
направленной батареи существенно упрощается, если
форма батареи близка к телу вращения относительно од-
ной из осей аппарата. При этом эффективная площадь
будет зависеть только от одного угла, определяющего
положение Солнца в плоскости, проходящей через ось
симметрии солнечной батареи.
4.6.6. Допустим теперь, что для неподвижной бата-
реи движение Солнца относительно аппарата известно.
В этом случае имеет смысл рассматривать малонаправ-
ленную или направленную батарею. Направленная ба-
тарея может быть реализована в случае, когда аппарат
ориентирован на Солнце и движение Солнца относитель-
но отсека определяется только ошибками ориентации.
При этом очевидно, что батарея должна быть плоской
формы.
Остановимся на малонаправленном варианте батареи.
Так как в этом случае движение Солнца известно, поло-
жим, что углы as и Ps — заданные функции времени.
Если, как и для всенаправленной батареи, принять,
что батарея состоит из плоских граней, то будут справе-
дливы соотношения (4.51) — (4.53). Эффективная пло-
щадь и углы у/ при этом будут функциями времени. Пред-
положим, что функция /'’эфф (0 имеет период Т, т. е.
(* + Т) = ГЭфф (t).
Поскольку движение Солнца относительно отсека опре-
деляется движением аппарата относительно центра масс
и"траекторией, то в большинстве случаев имеет место
указанная периодичность. Функция /'’□фс (0 в течение
одного периода может обращаться в нуль. Причем, в
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
277
отличие от функции F9$q (as, Ps), это может происходить
не только за счет нарушения условия у V или затене-
ния всех граней элементами конструкции, но и из-за
теневых участков траектории, где аппарат вообще не
освещен Солнцем. Это, в частности, может иметь место
для искусственных спутников планет. Отметим, что те-
невые участки орбиты нужно учитывать при анализе
функции F^(t) тогда, когда период наступления тени
не превышает существенно периода обращения Солнца
относительно аппарата. Когда период вращения спут-
ника относительно центра масс существенно меньше пе-
риода обращения или времени между участками тени,
функция /’эфф (0, а следовательно, и форма малонаправлен-
ной батареи должны быть рассмотрены только на светлых
участках орбиты. Укажем в качестве примера на два
случая, когда это справедливо. Первый случай — ги-
роскопическая пассивная ориентация вращением на от-
носительно низких орбитах. Второй — спутник на гео-
стационарной орбите, ориентированный в орбитальной
системе координат. При этом Солнце обращается вокруг
аппарата с периодом одни сутки, поскольку угловая
скорость спутника равна угловой скорости Земли, а пе-
риод наступления теневых участков — 6 месяцев, так
как тень наступает, когда Солнце находится в плоскости
экватора, т. е. в точках весны и осени.
Имея функцию для заданных формы и разме-
ров батареи и период этой функции Т, нужно определить
две характерные величины: минимальное значение функ-
ции /’эфф mtn на^ интервале Т и среднее интегральное
значение функции /’эфф за период Т, определяемое выра-
жением
М-Т
эфф = /’эфф (^)
t
Если период функции /’эфф (О больше периода тени,
то при определении минимального значения нужно рас-
сматривать только «светлые» участки.
В зависимости от схемы системы электропитания и
программы работы аппарата может иметь значение или
минимальная мощность солнечной батареи, или средняя
интегральная мощность. Поскольку в соответствии с
278 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
(4.52) мощность батареи пропорциональна эффективной
площади, то при анализе различных форм малонаправ-
ленной батареи нужно учитывать Л’эфф т1п или ^эфф. Ино-
гда при анализе формы батареи удобно рассматривать
коэффициент эффективности ЛЭфф, который определим
выражением
*8фф = -^, (4.55)
где Fz — суммарная площадь всех граней.
Если применена двусторонняя батарея, то в выраже-
ние (4.55) вместо F% нужно подставлять 2Fz. Масса сол-
нечной батареи примерно пропорциональна величине
Fx, или
Mc^^mc^F^ (4.56)
где тс— масса единицы площади батареи.
Из (4.52), (4.55) и (4.56) получим
"с. б*
<4-57)
где ЛГ — средняя интегральная мощность солнечной ба-
тареи. _
Из (4.57) следует, что при заданной величине N чем
больше коэффициент эффективности, тем меньше масса
батареи. Следовательно, в качестве критерия при анализе
различных форм можно пользоваться величиной А:Э(1Ф.
4.6.7. В качестве примера рассмотрим двустороннюю
солнечную батарею, состоящую из двух одинаковых
плоских граней, изображенную на рис. 4.12, и допустим,
что Солнце движется в плоскости рисунка с постоянной
угловой скоростью (о вокруг батареи. Относительное
положение граней будем характеризовать углом причем
предположим, что этот угол меняется в пределах от О
до 90°. Очевидно, что эффективная площадь будет при
этом периодической функцией времени с периодом, рав-
ным 2л/о. Из приведенных выше формул следует, что
среднее интегральное значение эффективной площади
можно находить для каждой грани отдельно, а затем
эти значения просуммировать. При этом, конечно, необ-
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
279
ходимо учитывать затенение одной грани другой гранью.
Поскольку рассматриваемая схема симметрична, можно
найти среднюю интегральную площадь только для гра-
ни ABt а затем удвоить полученный результат.
Вначале рассмотрим случай, когда х > Y- При этом
внутренняя сторона грани АВ перестанет работать из-за
Рис. 4.12. Вариант схемы двусторонней малонаправленной солнеч-
ной батареи.
того, что £удет нарушено условие у < у раньше, чем
начнется затенение этой грани гранью ВС, т. е. затенение
учитывать не нужно.
Среднее интегральное значение эффективной площади
наружной стороны грани АВ за период определится как
V/®
н Ao г 1 л F sin у
F^i=-25F J COS(0^_ —
-V/co
(4.58)
где F — площадь одной грани.
Здесь и ниже принято, что для рассматриваемой сто-
роны грани момент t = 0 соответствует положению Сол-
нца, при котором у = 0 для данной стороны. Направле-
ние отсчета углов у показано на рис. 4.12 (на рисунке
Ух — значения этих углов при рассмотрении наружной
стороны грани, у2 — внутренней). Поскольку затенение
отсутствует, то такое же значение/^фф будет иметь место
и для внутренней стороны этой грани. Суммируя все
площади и принимая, что для наружных сторон £ = 1,
а для внутренних £ =/= 1 (см. (4.53)), найдем
н 2 (1 + £) F sin у /д KQ4
^эфф =-------------• (4.5У)
280 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЙ К КОНСТРУКЦИИ [ГЛ. 4
Полученное выражение не содержит угла х» что есте-
ственно, так как грани не затеняют друг друга.
Рассмотрим далее случай, когда х < 7* При этом не-
обходимо учитывать затенение. Для наружной стороны
грани АВ затенение отсутствует и среднее интегральное
значение площади определяется формулой (4.58). Для
внутренней стороны нужно рассмотреть два участка:
при изменении угла у от —у Д° X и от X Д° +7 или Д° мо"
мента, когда тень от грани ВС перекроет всю внутрен-
нюю сторону грани АВ. Какое из этих событий произой-
дет раньше — зависит от углов у и х- Затененная часть
грани АВ определяется участком DB (см. рис. 4.12),
который в свою очередь легко определяется из треуголь-
ника DBC*.
DB = ВСх)- . (4.60)
cosy ' 7
Из этого выражения следует, что отношение затенен-
ной площади к полной площади грани равно sin (у —
— X)/cos у. Среднее значение эффективной площади вну-
тренней грани АВ найдем следующим образом:
X/® Тп/®
= J cosort di + [1- cosort di}.
-X/® X/®
(4.61)
Условие перекрытия тенью от грани ВС всей внутрен-
ней стороны грани АВ определяется из треугольника
АВС (см. рис. 4.12) или из выражения (4.60), если при-
нять DB = ВС. Указанное событие имеет место, если у =
= 45° + х/2. Следовательно, угол уп находится следую-
щим образом:
Тп =
У для
45° 4- для
?<45°+ 4Ь
?>45с +А.
(4.62)
Проведя вычисления в правой части выражения (4.61),
просуммировав средние значения эффективной площади
для всех граней и приняв, как и выше, 5 = 1 для внеш-
4.6J
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
281
них сторон граней и 5 1 для внутренних, найдем
1) т<45° + -у,
р 2 (1 + £) F sin у Ft,.. ..
/%<и>=------------ - [1 - Соз (у - х)];
2) т>45° + -|-,
(4.63)
Сравнивая формулы (4.63) с (4.59), можно заметить,
что, когда X < у, средняя эффективная площадь полу-
чается меньше, чем при х > У- Отсюда следует, что
для рассматриваемого варианта малонаправленной сол-
нечной батареи желательно иметь х > У» причем в диапа-
зоне 1у, 90°] величина угла х несущественна.
Заканчивая рассмотрение вопросов, связанных с уста-
новкой солнечной батареи на космическом аппарате, от-
метим, что схема анализа различных форм и поворотов
малонаправленной подвижной батареи принципиально
не отличается от изложенной схемы. Только при опреде-
лении величины эффективной площади в функции времени
нужно учитывать, кроме движения Солнца относительно
отсека, еще и движение солнечной батареи относительно
того же отсека. Для этого необходимо углы и fy, опре-
деляющие положение нормали к i-й грани (см. рис. 4.11)
относительно системы координат XYZ, считать функция-
ми времени. Естественно, что движение батареи относи-
тельно отсека может повлиять’и~на*п лоща ди затененных
участков ft.
Отметим также, что если функция /^фф (t) не перио-
дическая, то неизбежно придется анализировать эту функ-
цию на протяжении всего активного полета аппарата.
282
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
4.6.8. Кратко остановимся на других внешних прибо-
рах и агрегатах, влияющих на внешнюю компоновку и
указанных в начале параграфа.
В первой главе говорилось о том, что на космических
аппаратах имеют применение всенаправленные, малона-
правленные и остронаправленные антенны. Там же были
приведены некоторые формулы для остронаправленной
параболической антенны, определяющие, в частности,
ширину диаграммы направленности этой антенны. Очевид-
но. что точность неподвижной установки параболической
антенны должна быть существенно меньше ширины диа-
граммы. Для малонаправленных и всенаправленных ан-
тенн необходимые точности установки намного меньше,
чем для остронаправленных, и определяются также ши-
риной диаграммы и влиянием на эту диаграмму элемен-
тов конструкции и других внешних приборов и агрегатов.
Антенны, применяемые на космических аппаратах, весь-
ма разнообразны по форме и размерам. Некоторые дан-
ные антенн можно найти в специальной литературе,
однако конкретный выбор антенн для вновь разрабаты-
ваемого аппарата всегда является предметом специаль-
ных исследований, которые проводятся параллельно с
разработкой внешней компоновки. Очевидно, что эти ра-
боты невозможно проводить независимо друг от друга.
Общие требования к установке антенн достаточно яс-
ны. Это — непопадание элементов конструкции в зоны
радиоизлучений, обеспечение заданной точности установ-
ки и минимальная масса элементов крепления антенн.
Кроме того, желательно, чтобы антенны располагались
достаточно близко к соответствующим передающим и
приемным устройствам для уменьшения потерь в высоко-
частотных трактах.
В ряде случаев приходится использовать подвижные
малонаправленные и остронаправленные антенны.
Различные варианты размещения на аппарате двига-
телей, необходимых для создания управляющих моментов.
былитрассмотрены в § 4.5. Там же^были перечислены не-
которые*способы защиты”оптических" датчиков. Эти спо-
собы имеют непосредственное отношение к внешней ком-
поновке космического аппарата.
рггО двигательных установках, предназначенных для
коррекций и маневров, в главе 2 говорилось, что сущест-
4.6)
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
283
вуют два типа таких установок: так называемые двигате-
ли малой тяги, в процессе работы которых меняется не
только скорость, но и координаты центра масс аппарата,
и двигатели со сравнительно большими значениями тяг.
При работе двигательных установок второго типа часто
можно пренебрегать изменением координат аппарата, а
учитывать только изменение скорости. Применительно
к внешней компоновке существенно то, что иногда в ка-
честве двигателей малой тяги можно использовать управ-
ляющие двигатели системы ориентации. В этом случае
эти двигатели должны быть так размещены на аппарате,
чтобы при включении некоторых из них создавалась ре-
зультирующая тяга, проходящая через центр масс ап-
парата. Из схем, изображенных на рис. 4.9, для этой
цели пригоден только вариант б.
Из агрегатов системы терморегулирования во внешней
компоновке могут участвовать радиатор, нагреватель,
воспринимающий солнечную энергию, экраны, защищаю-
щие элементы конструкции от Солнца, и экранно-ваку-
умная тепловая изоляция.
По поводу научной аппаратуры следует заметить, что
эта аппаратура чрезвычайно разнообразна и разнообразны
способы ее установки на космическом аппарате. С точки
зрения требований к установке научной аппаратуры в
качестве примеров можно указать на следующие вари-
анты.
1. Установка аппаратуры, обеспечивающая достато-
чно низкие температуры. Это, в частности, имеет место
для чувствительных элементов приборов, работающих
в инфракрасной области спектра. Указанное требование
приводит к необходимости создания специальных радиа-
ционных холодильников, удалению чувствительных эле-
ментов от отсека с аппаратурой и к установке изоляции
от внешних потоков тепла. Эти мероприятия, обычно на-
зываемые пассивными, при условии их тщательной реа-
лизации могут обеспечить получение температур порядка
нескольких десятков градусов Кельвина. При необхо-
димости получения более низких температур приходится
прибегать к использованию жидких газов или холодиль-
ников, потребляющих электроэнергию.
2. Установка чувствительных элементов на большом
расстоянии от приборного отсека для уменьшения маг-
284 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
нитных, радиационных, электрических и других помех.
Для этой цели применяют раздвижные штанги или фермы.
3. Размещение приборов на подвижной относительно
отсека платформе. Это может оказаться целесообразным,
в частности, при наблюдении планеты с пролетной траек-
тории, когда ориентация приборного отсека определяется
требованиями обеспечения электроэнергией аппаратуры
или передачи информации.
4.6.9. Выше говорилось, что для некоторых ко-
смических аппаратов при разработке внешней компо-
новки нужно учитывать силы и моменты от светового
давления. Это, в частности, необходимо для космических
зондов и межпланетных аппаратов, так как указанные
силы и моменты для них являются основными внешними
воздействиями, кроме, конечно, гравитационных полей,
действующих на движение центра масс аппарата.
Величина силы светового давления dp, действующей
на элементарную площадку dF, определяется формулой
dP = w Уi + (1 — As)2 + 2 (1 — As) cos 2y cos у dF, (4.64)
где w — плотность световой энергии:
SQ — количество световой энергии, падающей в единицу
времени на единичную площадку, расположенную пер-
пендикулярно к солнечным лучам, при расстоянии до
Солнца, равном большой полуоси земной орбиты (см.
§ 4.2); р — расстояние от аппарата до Солнца в астроно-
мических единицах; с — скорость света; As — коэффи-
циент поглощения солнечной энергии поверхностью; у —
угол между внешней нормалью к площадке dF и направ-
лением на Солнце;
^- = 4,6.10-» Н/м2.
Угол v между силой dP и нормалью к площадке (рис.
4.13) можно найти из выражения
sin V
sin v = — ---- ----. (4.65)
У 1 т (1 - + 2 (1 - /ls) cos 2у
4.6)
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
285
Вывод формул (4.64) и (4.65) имеется в [9]. При выводе
принималось, что часть светового потока, не поглощен-
ная поверхностью площадки, отражается этой поверх-
ностью зеркально. Ниже будет обсуждено это допущение
и дано обобщение приведенных формул.
Рис. 4.13. К определению сил светового давления.
Для расчета силы и моментов, действующих на аппа-
рат, нужно просуммировать все элементарные силы и
порождаемые ими элементарные моменты вокруг свя-
занных осей по всей освещенной поверхности аппарата.
При этом иногда может оказаться более удобным пред-
ставить полную силу светового давления, действующую
на элементарную площадку, в виде векторной суммы двух
сил dPx и dP2 (см. рис. 4.13). Сила dPt параллельна све-
товому потоку и по величине равна
dPi = wAsdF cos у. (4.66)
Сила dP2 направлена по нормали к поверхности и
определяется выражением
dP2 = 2w (1 - As)dF cos2 у. (4.67)
Спроектировав силы dP, dPx и dPa на плоскость пло-
щадки и на нормаль к ней, легко убедиться в том, что
проекции, полученные из выражений (4.64), (4.65), и
выражений (4.66), (4.67), определяются одними и теми
же формулами. Это доказывает тождественность обоих
представлений.
286 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
Рис. 4.14. Основные типы
индикатрис рассеяния.
Формулы (4.66) и (4.67) удобны тем, что при пользо-
вании ими отпадает необходимость в вычислении угла v.
С помощью этих выражений легко сравнивать различные
варианты внешней компоновки и покрытий поверхнос-
ти (As) с точки зрения сил и моментов от светового дав-
ления.
Выше говорилось о том, что формулы (4.64)—(4.67)
получены в предположении зеркального отражения пло-
щадкой dF части световой энергии, падающей на пло-
щадку и равной [(1 — As) cos y]50dF/p2. В действитель-
ности такой случай имеет мес-
то в основном у хорошо отпо-
лированных металлических по-
верхностей. Отражающие свой-
ства поверхностей обычно оп-
ределяют индикатрисой рассея-
ния, характеризующей распре-
деление отраженной площадкой
энергии в различных направ-
лениях. Индикатрисы очень
разнообразны и в общем случае
зависят от свойств поверхности и угла падения световых
лучей на площадку у. Согласно [24], различаются следу-
ющие четыре группы поверхностей и соответственно ин-
дикатрис рассеяния (рис. 4.14):
«матовые», диффузно отражающие, у которых инди-
катриса практически не зависит от угла у (рис. 4.14, а);
«глянцевитые», дающие размытое зеркальное отра-
жение, проявляющееся в резком повышении яркости в
направлении зеркально отраженного луча (б);
«иссеченные», у которых индикатриса вытянута вдоль
падающего луча в сторону источника света (в)\
«смешанные», имеющие два максимума яркости в на-
правлении на источник света и в направлении зеркально
отраженного луча; для таких поверхностей характерны
значительные неровности с зеркальными участками (г).
Допустим, что для данной площадки dF известна
индикатриса рассеяния, изображенная на рис. 4.13 в виде
кривой I (£и). Количество световой энергии, отраженное
площадкой в направлении, характеризуемом углом £и,
внутри угла будет равно к! (£и)^и, где к — некото-
рый коэффициент пропорциональности. Полная энергия,
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
287
(4.68)
(4.69)
(4.70)
отраженная площадкой dF, будет равна
dE=[k J
—Л/2
С другой стороны, эта энергия равна
dg = [^(1-ls)C03.y.]d F.
L р* J
Приравнивая выражения (4.68) и (4.69), найдем
Sa(i — As) cosy
*=—та—
л/2
где Qi = J /(^и) с?Еи—периметр индикатрисы.
—Л/2
Количеству световой энергии, отраженной площадкой
dF в направлении £и внутри угла будет соответство-
вать сила светового давления
d (dp') = _ ‘?о(1;р^)С09? [7 &) <^-1 dF. (4.71)
Эта сила направлена по вектору — I (£и).
Проектируя выражение (4.71) на оси X и Y (см. рис.
4.13) и интегрируя, найдем
dp'x = - I >s) [ 1 (Wsin Ь du] cos у
I 1 -Л/2
, ( *$о (1 — ^q) Г У2 1
dPY=-j s) [ /(£и)cosMk] cosy
* —Л/2
(4.72)
Величины dPx и dPу определяют только часть свето-
вого давления, порожденную отраженной энергией. Для
определения полной силы светового давления заметим,
что сила давления за счет поглощенной энергии опреде-
ляется выражением (4.66), а сила за счет попадания энер-
гии [(1 — As) cos y]50dF/p2 на площадку равна 1(1 —
— A s) cos y]50dF/p2c. Обе указанные силы параллельны
направлению светового потока. Проектируя эти силы на
288
УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ (ГЛ. 4
оси X и Y и суммируя результаты с выражениями (4.72),
окончательно получим
1 _ j
dPx---->{ -QT $ ЛЬ)»|»Ь*+
—л/а
4- sin y"j cos у"| dF,
^ = --^-{[-0^ $ 7(1и)соз£ж^и +
—л/а
4- cos у cos у}dF.
(4.73)
Поскольку индикатриса I (£и) часто зависит от угла
падения у и так как для определения сил и моментов,
действующих на аппарат, необходимо просуммировать
величины светового давления по всем поверхностям,
находящимся под разными углами друг к другу и облада-
ющими разными индикатрисами, то расчет получается
сложным. К этому нужно добавить, что до расчета сле-
дует определить индикатрисы рассеяния или подобрать
их из имеющихся для аналогичных материалов и покры-
тий. Поэтому изложенной точной методикой, по-видимому,
целесообразно пользоваться для проверочных расчетов.
На стадии разработки внешней компоновки, когда может
возникнуть необходимость анализа различных внешних
форм с точки зрения световых воздействий, желательно
определить хотя бы грубо характеристики наружных
поверхностей и для расчетов пользоваться приведенными
выше приближенными формулами. Для этого может
помочь указанная на рис. 4.14 или какая-либо другая
классификация индикатрис. Б частности, если индика-
триса ожидается вида б, то можно пользоваться фор-
мулами (4.66)^и (4.67). Если — вида в, то для оценок в
некоторых случаях применимы следующие выражения:
cos» dF, |
SP, = O. J <4-74’
*Если поверхность достаточно близка к «матовой»,
4.в]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
289
то, принимая I (£и) = const, из выражений (4.73) найдем
dPx — — Рт- sin у cos у) dF,
ГZ / 1-л/ \ 1 (4-75)
dPy = — |—у (2 —4- cosylcos у IdF.
Рис. 4.15. К расчету
моментов светового дав-
ления, действующих на
аппарат.
Наконец, если имеет место четвертая из указанных
выше групп индикатрис и если форма космического ап-
парата должна обеспечивать минимальные значения мо-
ментов светового давления, то можно рекомендовать сле-
дующий способ: определить моменты применительно к
остальным трем группам, воспользовавшись последова-
тельно выражениями (4.66), (4.67), (4.74), (4.75), и при-
нять для оценки наихудший результат.
4.6.10. В некоторых случаях желательно силы и мо-
менты светового давления использовать в качестве по-
лезных воздействий на космический аппарат. Тогда вне-
шняя компоновка и свойства поверхностей аппарата дол-
жны по возможности обеспечивать получение заданных
зависимостей момента светового
давления от положения аппарата
в пространстве.
Для иллюстрации влияния
внешней компоновки на зависи-
мость момента светового давления
от положения аппарата относи-
тельно Солнца рассмотрим услов-
ную схему аппарата, представлен-
ную на рис. 4.15. На этой схеме
плоские поверхности 1 и 2, пер-
пендикулярные к плоскости рисун-
ка, являются основными конст-
руктивными элементами, от кото-
рых зависит момент светового дав-
ления. Площадь каждой из рас-
сматриваемых поверхностей обозначим через F, а рас-
стояние от геометрического центра поверхности до точ-
ки пересечения поверхности со связанной с аппаратом
осью X — через I. Остальные обозначения ясны из рис.
4.15. Допустим, что ось X отклонилась на угол а от на-
правления на Солнце, и вычислим суммарный момент от
сил светового давления относительно центра масс. 10
10 Г. ю. Максимов
290 УСЛОВИЯ РАБОТЫ И ТРЕБОВАНИЯ К КОНСТРУКЦИИ [ГЛ. 4
(4.76)
Вначале предположим, что поверхности 1 и 2 погло-
щают всю энергию Солнца, т. е. для них As = 1. Этот
случай близок к варианту, когда роль указанных повер-
хностей играют солнечные батареи. При As = 1 силы
светового давления параллельны направлению на Солн-
це и на основании (4.66) равны: Fw cos (е + а) для по-
верхности 1 и Fw cos (е — а) — для поверхности 2,
Моменты этих сил относительно центра масс соответ-
ственно будут равны
М! = Fwl (А — В) cos (е + а),
= — Fwl (А + В) oos (е — а),
где
А = cos а cos е, В = (sin е + j sin а.
Сложив выражения для Мг и М2, после преобразования
получим
М = — Fwa (cos е + sin 2е^ sin 2а. (4.77)
Из формулы (4.77) следует, что при отклонении ап-
парата на угол а возникает восстанавливающий момент,
стремящийся уменьшить величину этого угла. При е = 0
наличие восстанавливающего момента связано с «перед-
ней» центровкой аппарата; действительно, если бы точка
О лежала выше центра масс (см. рис. 4.15), то при малых
значениях е момент светового давления был бы «опроки-
дывающим». Из выражения (4.77) также следует, что при
увеличении угла е величина восстанавливающего момен-
та возрастает при изменении угла е от нуля до значения,
определяемого выражением
sin; = -|-('|/32 + (-2-y _ . (4.78)
При а <С I ё ж 45° и \М|max » Fwl I sin 2а|. Срав-
нивая это значение модуля момента со значением при е =
= 0, получаемым из выражения (4.77), найдем
|Af|wax _ I (4.79)
1*4=0 ” ° '
Таким образом, при а I наличие «стреловидности»
в установке поверхностей существенно увеличивает зна-
чение восстанавливающего момента.
4.6]
ВНЕШНЯЯ КОМПОНОВКА И СВЕТОВОЕ ДАВЛЕНИЕ
291
Рассмотрим далее случай, когда поверхности 1 и 2
зеркально отражают всю солнечную энергию, т. е. для
них As = 0. При этом силы светового давления направ-
лены по нормалям к соответствующим поверхностям и
их величины определяются формулой (4.67). Опуская
выкладки, запишем выражение для суммарного момента,
действующего на аппарат в этом случае:
М = — 2Fwl ^1 + -^-sine) sin2esin2a. (4.80)
Здесь момент также восстанавливающий, однако это
имеет место только при 8^0.
Разобранный пример указывает на существенное влия-
ние положения поверхностей, участвующих в создании
момента светового давления, на характеристики этого
момента.
В качестве примера использования сил светового дав-
ления для создания полезного внешнего момента укажем
на космический аппарат, для которого предусмотрен
режим пассивной гироскопической ориентации в прост-
ранстве. Бели бы отсутствовал внешний момент, то после
закрутки аппарата вокруг устойчивой (в динамическом
смысле) оси эта ось достаточно долго сохраняла бы неиз-
менным свое положение относительно звезд. При этом за
счет движения центра масс аппарата отосительно Солнца
условия его освещения непрерывно менялись бы за счет
изменения угла между осью вращения и направлением на
Солнце. Допустим,что указанный аппарат выполнен по схе-
ме, представленной на рис. 4.15. Легко заметить, что при
повороте такого аппарата вокруг оси X на 360° момент
сил светового давления, стремящийся повернуть ось X
к Солнцу, будет меняться от максимального значения,
соответствующего положению на рис. 4.15, до нуля и сно-
ва до максимального значения. При этом возникнет пре-
цессионное движение оси X вокруг направления на Солн-
це. При соответствующем выборе скорости закрутки во-
круг оси X можно добиться того, что в процессе движения
центра масс аппарата относительно Солнца угол между
осью X и направлением на Солнце не будет превышать не-
которой величины и изменения условий освещения аппара-
та могут оказаться в допустимых пределах.
10е
ГЛАВА 5
ПОСТАНОВКА ЗАДАЧИ О РАЦИОНАЛЬНОМ
ПРОЕКТИРОВАНИИ КОСМИЧЕСКИХ АППАРАТОВ
5.1. Понятие о процессе проектирования
5.1.1. Процесс проектирования космического аппарата
включает в себя выбор траектории, определение состава
и основных параметров его систем, разработку внешней
и внутренней компоновок, определение состава и основных
характеристик бортовых антенн, составление программы
работы — общей и в отдельных сеансах. Кроме того, по-
скольку определение основных параметров систем и тре-
бований к системе управления, а также составление про-
граммы работы невозможно без понимания логики работы
отдельных систем и их взаимодействия, то решение этих во-
просов должно быть включено в процесс проектирования.
Параллельно с указанными работами осуществляется
разработка бортовых систем, отдельных агрегатов, меха-
низмов и узлов аппарата. Как правило, процесс проекти-
рования сопровождается проверкой принятых решений на
лабораторных и опытных образцах и макетах самого аппа-
рата и его отдельных приборов и агрегатов.
С точки зрения специализации инженерных работ
в процессе проектирования космического аппарата про-
водятся конструкторские и расчетные работы, разработка
логических и электрических схем и разработка программ
расчетов и анализов на ЭВМ. Расчетные работы, в частно-
сти, включают:
проектные и проверочные прочностные расчеты;
расчеты масс, моментов инерции, положения центра
масс и положения главных осей инерции;
тепловые расчеты;
расчеты внутренних и внешних возмущающих момен-
тов, действующих на аппарат;
расчеты по газовой среде герметичных отсеков;
оценки вероятности метеоритного поражения и эрозии
наружных повёрхностей, определение необходимости в
специальных мерах по защите (дополнительные экраны,
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
293
увеличение толщины оболочек, выбор более стойких по-
крытий и т. д.);
оценки предполагаемых доз радиации для приборов,
стекол, покрытий и элементов конструкции из неметал-
лических материалов;
динамические исследования, имеющие целью опреде-
лить требования или проверить жесткость конструкции
с точки зрения устранения нежелательного влияния од-
них механических приборов на другие и на работу системы
ориентации;
баллистическое проектирование;
расчеты по системе электропитания, системе ориента-
ции и др. системам.
Если процесс проектирования привязать к принятым
для любого изделия этапам разработки, то этот процесс
должен охватывать разработку и согласование техниче-
ского задания на данный космический аппарат, разработку
технического предложения, эскизного и технического про-
ектов.
Очевидно, что в процессе проектирования космиче-
ского аппарата должны быть согласованы между собой
основные параметры отдельных систем, характеристики
траектории, программа работы и конструкция аппарата.
5.1.2. Предыдущие главы были в основном посвящены
выявлению и анализу физических связей. Перечислим
главные с этой точки зрения результаты:
скорость передачи информации по линии «борт —-
Земля» зависит, в частности, от дальности аппарата до на-
земного пункта, коэффициента усиления бортовой антен-
ны и выходной мощности передатчика;
от выходной мощности передатчика зависит его масса
и электропотребление;
от электропотребления передатчика зависят емкость хи-
мической батареи, необходимая для проведения сеанса
передачи информации, и потребная мощность генератора
электроэнергии, используемая для подзаряда химической
батареи;
коэффициент усиления бортовой параболической ан-
тенны определяется ее диаметром и точностью наведения
электрической оси антенны на пункт приема;
точность наведения электрической оси антенны опре-
деляется точностью ориентации всего аппарата (при не-
294
Национальное проектирование
[ГЛ. 5
подвижной установке или если антенна поворачивается
по программе) и рассогласованием между датчиками ори-
ентации и осью антенны, а рассогласование зависит
от внешней компоновки аппарата, точности изготовле-
ния элементов конструкции и точности юстировочных
работ;
диаметр параболической антенны зависит от допусти-
мой массы антенны и ее размещения на аппарате;
размещение антенны на аппарате существенно опре-
деляется его внешней компоновкой, т. е. формой и разме-
щением отдельных отсеков и внешних приборов и агре-
гатов;
от точности ориентации оси антенны, жестко установ-
ленной на аппарате или поворачивающейся по программе,
зависит расход рабочего тела или электроэнергии, необ-
ходимых для осуществления ориентации;
длительность сеанса передачи информации зависит от
объема информации, который нужно передать в сеансе,
и от скорости передачи;
интервалы между сеансами передачи информации опре-
деляют емкость, а следовательно, и массу бортового за-
поминающего устройства;
при импульсном управлении реактивными двигателя-
ми расход рабочего тела, необходимого для ориентации
аппарата, зависит от точности ориентации, величины воз-
мущающего момента, удельной тяги и плеч управляю-
щих двигателей, минимальной величины импульса и мо-
ментов инерции аппарата;
моменты инерции аппарата в первую очередь опре-
деляются общей его массой и внешней компоновкой;
минимальная величина импульса и удельная тяга оп-
ределяются двигательной установкой, используемой для
ориентации, ее пневмогидравлической схемой и величиной
тяги;
от логики и программы работы отдельных систем и ло-
гики их взаимодействия зависят надежность космическо-
го аппарата, т. е. вероятность выполнения аппаратом
задач полета, состав и масса бортовых средств управ-
ления;
программа и логика работы зависят от характеристик
траектории аппарата или траекторий нескольких аппара-
тов, совместно решающих одну задачу;
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
295
5.1]
запасы рабочего тела, необходимого для проведения
коррекций траектории, и потребные точности коррекций
определяются номинальной траекторией, матрицей оши-
бок в конце участка выведения, стратегией коррекций,
т. е. их количеством и распределением по траектории,
удельной тягой двигательной установки, составом и
точностью траекторных измерений и количеством назем-
ных пунктов для приема информации;
масса конструкции и бортовой кабельной сети зави-
сит от внешней и внутренней компоновок аппарата и от
того, герметичны или негерметичны его отсеки, а также
от состава приборов, степени централизации управления,
программы и логики работы;
от состава и параметров бортовых радиосредств, схемы
ориентации аппарата и его внешней компоновки зависят
состав и характеристики бортовых антенн;
суммарная площадь и масса солнечной батареи, если
она используется в качестве генератора электрической
энергии, зависят от электропотребления аппаратуры,
программы работы, траектории, схемы ориентации аппара-
та, его внешней компоновки и варианта солнечной батареи
(всенаправленная, малоиаправленная и т. д.);
от внешней компоновки аппарата и оптических харак-
теристик наружных поверхностей зависят характеристики
сил и моментов светового давления; в некоторых случаях
моменты светового давления можно использовать как по-
лезные моменты и за счет этого уменьшить расходы рабо-
чего тела или электроэнергии на ориентацию аппарата.
5.1.3. Исследование физических связей в процессе
проектирования необходимо, во-первых, для указанного
выше согласования основных параметров бортовых си-
стем между собой, с траекторией, программой работы
и конструкцией и, во-вторых, для отыскания некоторых
оптимальных с какой-либо точки зрения проектных ре-
шений в части*сочетания основных параметров и харак-
теристик аппарата. Первая из этих задач безусловно ре-
шается при разработке любого проекта. При большой
стоимости, характерной] для современных космических
аппаратов, и применяющихся'в настоящее время'методах
контроля и испытаний трудно себе представить, чтобы
в выведенном на траекторию аппарате оказались несогла-
сованными параметры некоторых систем или чтобы кон-
296
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
(ГЛ. S
струкция не обеспечила работу некоторых приборов. Такие
случаи чрезвычайно редки. По существу, согласование
основных параметров систем между собой, с характери-
стиками траектории и конструкцией и является проекти-
рованием в обычном смысле этого слова.
Вторая из указанных задач — отыскание оптимальных
сочетаний параметров и характеристик—гораздо сложнее
первой и решается далеко не всегда. Это объясняется в ос-
новном сложностью подобных исследований. Приведенный
выше список физических связей, несмотря на свою непол-
ноту и иллюстративный характер, уже дает представление
о сложности отыскания оптимальных сочетаний пара-
метров.
Эта сложность усугубляется тем, что существенное
влияние на параметры систем, массовые и другие харак-
теристики аппарата оказывают его внешняя и внутренняя
компоновки.
Многообразие форм космических аппаратов, связанное
с небольшим количеством ограничений на внешнюю фор-
му большинства из них, существенно затрудняет форма-
лизацию процесса отыскания наилучшей внешней компо-
новки. Многие из требований к компоновке, которые об-
суждались в главе 4, практически не поддаются записи
в математической форме. Поэтому в большинстве случаев
компоновка аппарата оказывается результатом интуитив-
ного творческого мышления проектантов и в этом смысле
является предметом инженерного искусства, а не строгого
анализа.
Для того чтобы избежать выбора случайного варианта,
иногда поручают разработку компоновки нескольким спе-
циалистам, после чего осуществляют выбор наилучшего
варианта. Но и в этом случае выбор варианта зачастую
проводится на основе интуиции руководителя работ,
а следовательно, в этом выборе подсознательно участвуют
личные вкусы, стремление упростить анализ и последую-
щие работы и другие соображения, не всегда приводящие
к оптимальному или близкому к оптимальному варианту.
В то же время недостаточно продуманный выбор внеш-
ней компоновки может привести к завышенным значениям
моментов инерции аппарата, увеличению массы бортовой
кабельной сети, ухудшению характеристик бортовых
антенн, усложнению технологии и т. д.
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
297
В качестве примера того, к чему может привести не-
оптимальное сочетание параметров, обратимся к рис. 2.3.
Допустим, что для данного космического аппарата доста-
точно иметь Лу/т]а = 1000. Как следует из графиков на
рис. 2.3, при d/X = 25 ошибка наведения оси антенны мо-
жет составлять ±1,8°, что соответствует максимуму за-
висимости 6а (^у/Ла)« Предположим, что анализ, на основе
которого рассчитаны кривые на ри^. 2.3, не проведен
и указанные зависимости отсутствуют. Тогда имеется ве-
роятность того, что параметр d/k будет выбран далеким
от оптимального, например равным 17. При этом диаметр
параболической антенны может оказаться меньшим, чем
в оптимальном случае, но зато потребная точность наве-
дения существенно возрастет, что может привести к ус-
ложнению системы управления ориентацией. Еще большей
ошибкой будет выбор параметра d/A = 50-4- 60, так как
при этом возрастет диаметр параболической антенны
и увеличится необходимая точность ориентации. С другой
стороны, если нужно иметь ХуЛ]а = Ю 000, то, как сле-
дует из того же рисунка, при изменении d/1 от 60 до 100
потребная точность наведения антенны практически остает-
ся постоянной. Следовательно, в этом случае диаметр ан-
тенны может выбираться на основе других соображений.
В рассмотренном примере учтены только параметры
антенны и системы ориентации и поэтому для выявления
оптимального сочетания параметров достаточно элемен-
тарного анализа. Если учесть зависимость параметров
всех систем от траектории аппарата, его программы ра-
боты и конструкции, то анализ существенно усложнится.
Несмотря на это, не требует доказательств желательность
отыскания оптимального сочетания основных параметров
систем, программы работы, характеристик траектории
и конструктивных данных аппарата в процессе проекти-
рования. Тем более, что в настоящее время, по-видимому,
все организации, занимающиеся разработкой космиче-
ских аппаратов, имеют в своем распоряжении достаточно
совершенную вычислительную технику, способную ре-
шать сложные вычислительные и логические задачи.
Если в процессе разработки проекта космического
аппарата достаточно глубоко анализируются физические
связи, характерные для данного аппарата, и в проекте
реализуются оптимальные или близкие к оптимальным
298
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
[ГЛ. 5
сочетания параметров и характеристик, то такое проек-
тирование назовем рациональным. Если данный аппарат
создан на основе рационального проектирования, то не-
которые его характеристики, которые были приняты в ка-
честве критериев, будут близки к экстремальным значе-
ниям.
Естественно, что в процессе рационального проекти-
рования аппарата нельзя добиться идеального сочетания
всех его параметров и характеристик, реализующих аб-
солютный экстремум некоторого критерия. Это невоз-
можно хотя бы потому, что нельзя себе представить рас-
смотрение всех возможных вариантов внешней и внутрен-
ней компоновок. Рациональное проектирование только
приближает разработчиков к идеальному варианту.
Отметим, что в некоторых работах применительно к
летательным аппаратам, в частности к космическим,
используется термин оптимальное проектирование. Под
оптимальным проектированием понимается отыскание не-
которых оптимальных характеристик аппарата, таких,
как, например, распределение масс ступеней ракеты, за-
кона изменения тяги двигателей и т. д. При этом ряд пара-
метров и характеристик принимается заданным. В част-
ности, принимается заданной компоновочная схема ап-
парата.
В данной книге в понятие проектирования вложен чи-
сто технический смысл, т. е. под проектированием пони-
мается процесс создания проекта космического аппарата,
а не решение отдельных, хотя и безусловно важных, воп-
росов. При этом, как говорилось выше, определить и тем
более реализовать строго оптимальные значения всех
параметров и характеристик аппарата практически не-
возможно. Поэтому вместо термина «оптимальное проек-
тирование» используется более строгий термин «рацио-
нальное проектирование». Этим термином подчеркивает-
ся еще и то, что в процессе рационального проектирования
не все параметры и характеристики находятся в резуль-
тате строгого решения экстремальных задач, по обяза-
тельны детальный анализ всех физических связей и обосно-
ванный выбор параметров и характеристик аппарата,
включая и его компоновку.
Для осуществления рационального проектирования
необходимо определить некоторые критерии, к экстре-
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
299
мальным зпачениям которых нужно стремиться при оты-
скании сочетаний параметров и характеристик космиче-
ского аппарата. Эти критерии определяются задачами,
которые ставятся перед данным космическим аппаратом,
или техническим заданием на аппарат, определяющим его
назначение и условия эксплуатации.
В силу большого разнообразия космических аппаратов
невозможно перечислить все критерии, с которыми могут
столкнуться их разработчики. Ниже обсудим некоторые
из возможных критериев.
5.1.4. Для некоторых космических аппаратов критерием
может служить масса научной аппаратуры, которую до-
пустимо установить на данном аппарате. В простейшем
случае задается траектория и ракета выведения, опре-
деляющие общую массу Mq аппарата, которую можно вы-
вести на данную траекторию. В этом случае масса научной
аппаратуры AfH.a будет равна
ЛГна = Л/о — Л/сс, (5.1)
где Мс.с — суммарная масса служебных систем, кон-
струкции и бортовой кабельной сети, необходимой для
обеспечения работы этой аппаратуры.
Для межпланетных полетов характерна зависимость
массы аппарата, выводимого заданной ракетой на траек-
торию, обеспечивающую встречу с планетой назначения,
от даты старта и времени полета до планеты. Эта зависи-
мость определяется из решения баллистической задачи.
Если иметь в виду определенную схему перелета, обеспе-
чивающую близкие к минимальным времена полета, то
можно говорить только о зависимости величины Мо от
отклонения даты старта от некоторой оптимальной даты.
Эта зависимость при величинах отклонений не более
10—20 сут обычно может быть представлена в виде
(5-2)
где — масса аппарата при старте в оптимальную дату;
&t—отклонение даты старта от оптимальной (в сутках); а—
коэффициент, определяемый из решения баллистической
задачи.
Величина Д£ назначается, исходя из анализа возмож-
ных ошибок в реализации программы подготовки данного
аппарата к старту. В некоторых случаях около данной
300
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
(ГЛ. 5
оптимальной даты предполагается запуск двух аппаратов.
При этом величина должна допускать возможность под-
готовки и запуска этих аппаратов.
Таким образом, в рассматриваемом простейшем слу-
чае, когда заданы траектория или достаточно узкий диа-
пазон траекторий и ракета выведения, задача рациональ-
ного проектирования сводится в математическом плане
к минимизации суммарной массы служебных систем, кон-
струкции и бортовой кабельной сети. При этом начальную
массу аппарата Л/о можно считать заданной величиной.
Здесь мы исходим из предположения, что чем больше
масса научной аппаратуры, тем научная ценность косми-
ческого аппарата выше. По-видимому, при тщательном и
обоснованном выборе научных задач это предположение
справедливо.
Изложенный подход к рациональному проектированию,
когда ищется минимум суммарной массы служебных си-
стем при заданной траектории и ракете выведения, пред-
полагает, что масса служебных систем не зависит от массы
научной аппаратуры. Такой подход имеет весьма огра-
ниченное применение, так как в большинстве случаев мас-
са средств терморегулирования, средств кодирования,
обработки и передачи информации, системы электропита-
ния и системы ориентации зависит от массы научной ап-
паратуры, ее назначения и программы работы.
Для тех случаев, когда величину Мс,с в соотношении
(5.1) нельзя считать не зависящей от величины Л/Н.а»
вместо указанного соотношения иногда можно записать
следующее:
Мн.а + /с.с(Мн.а) = Л/0— Л^с.с» (5.3)
где Мс.с — суммарная масса служебных систем и кон-
струкции, не зависящая от массы научной аппаратуры;
/с.с (AfH.a) ~ дополнительная масса служебных систем и
конструкции, необходимая для обслуживания научной
аппаратуры и зависящая от ее массы, состава и программы
работы.
Здесь возможны различные методы решения задачи
о рациональном проектировании. В частности, можно
искать минимум величины Л/с с в выражении (5.3), а полу-
ченную в результате этого величину Мя,л + /сс (Л/н а) Раз"
делить на массу собственно научной аппаратуры и допол-
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
301
нительную массу служебных систем и конструкции
/с.с(Л^я.а^ Если функция /с с (ЛГн.а) достаточно проста, то
соотношение (5.3) можно разрешить относительно вели-
чины AfHa, т. е. найти выражение вида
Мн.а = ^(Л/0, М?,с). (5.4)
В этом случае можно искать максимум непосредственно
величины AfH.a-
Указанный метод решения задачи в некоторых случаях
может оказаться недостаточно строгим. Дело в том,
что функция/с с (Afn.a), характеризующая увеличение массы
служебных систем и конструкции, необходимое для функ-
ционирования научной аппаратуры, зависит, как правило,
от параметров систем терморегулирования, ориентации,
электропитания (вида генератора и типа аккумуляторной
батареи), диапазона частот радиотелеметрической системы
и от компоновки аппарата. Если заранее, до начала расчет-
ного анализа, указанные параметры и компоновку опре-
делить невозможно, то воспользоваться соотношением
(5.4) при рациональном проектировании нельзя, так как
для его получения необходимо знать конкретный вид
функции /с.с(Л^н.а)» а он, по предположению, определяется
неизвестными пока вариантами служебных систем.
Искать же минимум величины с в выражении (5.3),
т. е. не принимать во внимание массу научной аппаратуры,
также может оказаться нестрогим, так как отброшенные
в процессе такого проектирования варианты служебных
систем могут дать меньшую величину fcc (AfH.а)» чем выб-
ранные варианты. Кроме того, возможен случай, когда
вид функции /с.с (AfH.a) зависит от программы научных ис-
следований, которая в свою очередь определяется вели-
чиной AfH.a-
Более строгим, хотя и более трудоемким, является
другой метод решения задачи, когда для всех вариантов
служебных систем и компоновок определяются и масса
научной аппаратуры, и ее состав, и программа работы,
которые могут быть реализованы на данном космическом
аппарате при заданном ЛГ0. Здесь для каждого из вари-
антов служебных систем и компоновок проводятся по
существу полная или почти полная разработка проекта
и окончательное согласование основных параметров всех
бортовых систем и характеристик аппарата. Как правило,
302 РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ [ГЛ. 5
в этом случае рациональное проектирование приходится
вести последовательными приближениями. При этом со-
отношением типа (5.4) можно иногда пользоваться для
решения некоторых частных задач. Например, для сис-
темы электропитания, состоящей из солнечной батареи
определенной схемы и химического аккумулятора кон-
кретного типа, функция /с.с (AfH.a) может быть без труда
конкретизирована, если возможно задаться зависи-
мостью среднего электропотребления научной аппара-
туры от ее массы.
В последнем из рассмотренных методов решения за-
дачи рационального проектирования за критерий прини-
мается уже не масса научной аппаратуры, а программа
научных исследований или работ, проводимых с помощью
данного космического аппарата. Наилучшим следует при-
знать тот вариант аппарата, для которого эта программа
является наиболее полной с какой-либо точки зрения,
т. е. в данном случае еще необходим специальный критерий
Оценки различных программ научных исследований.
В качестве такого критерия оценки различных программ
может быть, в частности, выбран объем научной инфор-
мации, переданной с борта аппарата за время полета.
Отметим для иллюстрации сказанного, что теорети-
чески возможен случай, когда из двух вариантов косми-
ческого аппарата окажется лучшим не тот, у которого
масса научной аппаратуры больше, а тот, у которого
эта масса меньше, но зато допустимо большее электро-
потребление научной аппаратуры, за счет чего программа
научных исследований окажется более полной.
5.1.5. В качестве возможного критерия следует указать
на надежность вновь проектируемого космического ап-
парата. В некоторых случаях могут быть заданы траекто-
рия или орбита, ракета выведения, состав и характеристи-
ки научной аппаратуры, а также программа работы этой
аппаратуры. Траектория и ракета выведения в свою очередь
определяют начальную массу аппарата.
Надежность может быть выражена вероятностью вы-
полнения основной задачи, под которой здесь нужно
понимать работу научной аппаратуры по заданной про-
грамме, в частности в течение заданного времени. Это время
иногда называют временем функционирования аппарата
или временем активного существования.
5.11
ЩЁСС ПРОЕКТИРОВАНИЯ
303
Для численной оценки под надежностью следует по-
нимать вероятность безотказной работы аппарата за опре-
деленное время, понимаяупод отказом такое состояние
бортовых систем и приборе^, при котором дальнейшее
функционирование научной аппаратуры делается невоз-
можным. Для расчета вероятности можно пользоваться
аппаратом теории надежности.
Обозначив вероятность безотказной работы аппарата
за заданное время tQ через В и воспользовавшись обозна-
чениями первой главы, можно записать
В = В[(Ст>Л), (Л), (Pj), ГоЬ (5.5)
где (Ст|Л)—конечное множество основных параметров си-
стем; т — номер системы; п — номер параметра; (Т<) —
множество параметров, определяющих траекторию аппа-
рата; (Pj) — множество параметров, определяющих про-
грамму работы.
Среди множества параметров систем могут быть такие,
которые однозначно определяются составом и характе-
ристиками научной аппаратуры и ее программой ра-
боты. Остальные параметры — свободные, их выбор и
является результатом рационального проектирования.
Аналогичное замечание можно сделать относительно
параметров (7\) и (Ру). Например, если проектируется
искусственный спутник Земли с заданной высотой круго-
вой орбиты и заданным наклонением, то свободным пара-
метром остается время выведения на орбиту. Этот пара-
метр определяет положение орбиты относительно Солнца
и звезд и может быть выбран таким образом, чтобы обес-
печивалась максимальная надежность работы системы уп-
равления ориентацией в начале движения по орбите, в
частности при поиске и захвате опорных ориентиров.
Следует отметить, что сама величина вероятности
безотказной работы аппарата несущественна. Эта вели-
чина используется только как критерий при анализе
различных проектных решений. Если же техническим
заданием задается величина надежности Во, то в процессе
рационального проектирования должно учитываться
условие В Во.
Вероятность безотказной работы аппарата определя-
ется надежностью его отдельных систем. Надежность
системы в свою очередь определяется задачами, решаемыми
304 РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ [ГЛ. 5
/
данной системой, программой ее работы и общей массой
системы, так как чем больше ^асса, тем большее число
резервных элементов и приборов может быть использовано
в данной системе. В связи с $тИм в рассматриваемой задаче
особую важность приобретает распределение масс по
отдельным служебным системам аппарата. Возможен
случай, когда это распределение масс ищется как резуль-
тат решения задачи отыскания экстремума величины В.
В частности, может быть задана вероятность решения
данной задачи, а минимизироваться должно количество
космических аппаратов, предназначенных для решения
задачи. При этом, если научная аппаратура должна
решать несколько задач, причем несущественно, решаются
эти задачи при одном пуске или при нескольких пусках,
то при сравнении различных вариантов проектных
решений целесообразно определять не только вероятность
выполнения всех задач при одном пуске, но и вероятности
выполнения отдельных задач. Это связано с тем, что при
сделанных предположениях количество .аппаратов, решаю-
щих все задачи с заданной вероятностью, будет зависеть
от указанных вероятностей. Необходимые для этого соот-
ношения могут быть получены на основе известных законов
и формул теории вероятностей.
Отметим, что минимальное количество аппаратов со-
ответствует минимальной стоимости решения данной за-
дачи или минимальному времени выполнения всей прог-
раммы.
В качестве критерия возможно использовать и время
функционирования аппарата при надежности, не меньшей
некоторой заданной величины. Такой критерий возможен
в тех случаях, когда космический аппарат выполняет не-
которые задачи непрерывно в течение всего полета. В ка-
честве примеров укажем на спутники связи, метеороло-
гические спутники, аппараты, предназначенные для на-
блюдения за Солнцем, и т. д.
5.1.6. Для некоторых космических аппаратов крите-
рием может служить один из параметров траектории.
Как пример рассмотрим космический зонд, использующий
гравитационное поле Юпитера для выхода из плоскости
эклиптики или приближения к Солнцу. Если не иметь
в виду движение с малыми тягами, то максимальный вы-
ход из плоскости эклиптики (или минимальное расстояние
5-1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
305
от Солнца после пролета около Юпитера) тем больше
(или соответственно меньше), чем больше скорость аппа-
рата относительно Земли в конце участка выведения.
Следовательно, при заданной ракете выведения указан-
ные параметры будут достигать максимального или ми-
нимального значения при минимальной начальной массе
аппарата.
Отметим, что вариант полета (максимальный выход
из эклиптики или максимальное приближение к Солнцу)
определяется схемой пролета около Юпитера, т. е. фак-
тически последними до Юпитера коррекциями траектории.
Задача, таким образом, сводится к минимизации на-
чальной массы аппарата при заданной массе научной ап-
паратуры. Во втором случае задача усложняется тем, что
при приближении к Солнцу растут тепловые потоки и не-
обходимо рассматривать различные способы защиты при-
боров и конструкции от недопустимого нагрева.
Заканчивая рассмотрение различных критериев, от-
метим, что для любого вновь проектируемого космическо-
го аппарата можно найти критерий, который должен быть
положен в основу рационального проектирования.
5.1.7. При разработке космического аппарата прихо-
дится иметь дело с рядом ограничений и требований, ко-
торые необходимо учитывать в процессе проектирования.
Рассмотрим некоторые из них.
1. Главным требованием к вновь разрабатываемому
космическому аппарату является назначение аппарата:
спутник Земли на низкой орбите, предназначенный для
изучения природных ресурсов; спутник связи на геоста-
ционарной орбите; межпланетный аппарат, предназначен»
ный для доставки научной станции на поверхность ка-
кой-либо планеты; космический зонд для изучения кос-
мического пространства вне плоскости эклиптики и т. д.
2. Если заданы ракета выведения и траектория, то
начальная масса аппарата не должна превышать некото-
рой величины, которую можно считать заданной при раз-
работке проекта. Этот случай был разобран выше при
рассмотрении критериев.
Установка аппарата на заданной ракете выведения
требует, чтобы габаритные размеры аппарата не выходи-
ли за некоторые пределы. Иногда для выполнения этого
требования некоторые из внешних приборов и агрегатов
306
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
[ГД. 5
приходится размещать на раскладывающихся или разво-
рачивающихся элементах конструкции. В этих случаях
указанные приборы и агрегаты занимают рабочее положе-
ние после отделения аппарата от ракеты выведенияг К по-
добным приборам и агрегатам относятся такие, которые
имеют значительные габариты (например, солнечные ба-
тареи и антенны) или которые в рабочем положении долж-
ны быть удалены от основной массы приборов. К послед-
ней группе относятся некоторые научные приборы, на-
пример датчики магнитометра.
3. Выше при рассмотрении критериев говорилось, что
для некоторых космических аппаратов может быть задана
масса научной аппаратуры, однако не всегда могут быть
заданы ракета выведения и траектория, которые опреде-
ляют начальную массу аппарата. Очевидно, что при не-
которых значениях начальной массы аппарата обеспечить
работу научной аппаратуры заданной массы невозможно.
В таких случаях приходится переходить на другую раке-
ту выведения либо уменьшать массу научной аппара-
туры.
4. Может быть задана не только масса научной аппа-
ратуры, но и ее характеристика и программа работы. При
этом появляются требования к служебным системам ап-
парата: к системе терморегулирования — в части излу-
чения через радиатор тепла, выделяемого научной аппа-
ратурой; к радиотелеметрической системе — в части обеспе-
чения передачи научной информации; к объему приборного
отсека для размещения в нем научной аппаратуры задан-
ных объема и конфигурации входящих в нее прибо-
ров.
5. Для геостационарных спутников специальным меж-
дународным соглашением введено ограничение на выход-
ную мощность бортовых передатчиков. Если для такого
спутника нужно обеспечить заданную скорость передачи
информации, то необходимо иметь достаточно высокие ко-
эффициенты усиления бортовых антенн, что в свою оче-
редь может потребовать увеличения точности наведения
антенн и соответственно увеличения расхода рабочего те-
ла или расхода электроэнергии.
6. Часто при разработке нового космического аппара-
та ориентируются на уже имеющиеся наземные пункты
управления и приема информации. Это создает определен-
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
307
ные ограничения на программу работы аппарата и его
траекторию.
Ряд ограничений и требований, которые должны быть
учтены при проектировании космического аппарата, мож-
но представить как фиксированные значения некоторых
основных параметров систем, параметров траектории и
программы работы или как предельно допустимые значе-
ния некоторых из этих параметров. В указанных случаях
ограничения и требования должны быть выражены в виде
некоторых констант в уравнениях, определяющих физи-
ческие связи. В отличие от других величин, которые мо-
гут входить в эти уравнения, константы не меняются
в процессе анализа различных вариантов проектных ре-
шений.
Ограничения и требования к вновь разрабатываемому
космическому аппарату и в первую очередь его назначе-
ние выражаются не только в виде констант в уравнениях
физических связей, но и в наличии или отсутствии тех
или иных уравнений и в форме самих уравнений. Это ес-
тественно, так как состав и технический смысл основных
параметров систем, параметров траектории и параметров
программы работы зависят от схем построения бортовых
систем, структуры программы работы и схемы полета.
Указанные параметры существенно зависят от назначения
аппарата и ряда ограничений и требований. Следова-
тельно, от назначения аппарата, ограничений и требо-
ваний к нему зависят и уравнения физических связей,
выражающие взаимозависимость всех перечисленных выше
параметров.
Кроме того, наличие частных ограничений и требова-
ний сужает круг рассматриваемых в процессе проекти-
рования основных параметров систем, параметров тра-
ектории, программы работы и даже компоновочных схем.
При этом некоторые уравнения физических связей не бу-
дут иметь решения при наличии в этих уравнениях конс-
тант, определяющих частные ограничения и требования.
5.1.8. Из сказанного следует, что в процессе рацио-
нального проектирования должны быть рассмотрены урав-
нения и неравенства, определяющие физические связи,
характерные для аппаратов данного назначения или типа,
и ограничения и требования к данному аппарату. В эти
выражения будут входить некоторые константы.
308
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
(ГЛ. 5
Указанные уравнения и неравенства запишем в виде
( = 0,
Фг1(Ст,п), (Г<), (Л)1[>Оэ (5.6)
где п = 1, 2, . . 2Vm; Nm — количество основных пара-
метров m-й системы, т = 1, 2, . . ., М\ М — количество
бортовых систем; i = 1, 2, г = 1, 2, . . Я; j =
= 1, 2, . . J.
Используя введенные обозначения, для общего числа
всех основных параметров можно записать следующее
выражение:
м
Ns= 3 ЛГш + /4-Л (5.7)
т=1
К уравнениям и неравенствам (5.6) нужно добавить
уравнение, определяющее зависимость выбранного кри-
терия К от параметров (Ст>п), (Г/), (Ру), т. е.
К = К[(Ст,п). (7\), (Р;)]. (5.8)
В общем случае в выражения (5.6) и (5.8) может входить
время.
Если все выражения (5.6) являются уравнениями и
R<Nt,
то задача отыскания оптимальных значении параметров
сводится к нахождению условного экстремума функции
многих переменных. Соотношения типа (5.6) при этом яв-
ляются уравнениями связей.
Если же часть соотношений (5.6) является неравенст-
вами, то задача нахождения переменных (С™, n), (Г/) и
(Ру), минимизирующих величину /С, носит название зада-
чи линейного или нелинейного программирования в зави-
симости от вида функций К и Ф.
Целью рационального проектирования является соз-
дание проекта аппарата, для которого величина выбран-
ного критерия близка к максимальному или минимальному
значению. При этом должны быть рассмотрены и различные
компоновочные схемы, и различные схемы ориентации,
и различные методы создания управляющих и корректи-
рующих сил и т. д. В зависимости от вариантов проект-
ных решений будет меняться вид функций Ф и К. Сле-
5.1]
ПРОЦЕСС ПРОЕКТИРОВАНИЯ
309
довательно, рациональное проектирование сводится к ис-
следованию функции К при уравнениях связей (5.6) для
различных вариантов вновь проектируемого космическо-
го аппарата.
Отыскание оптимальных значений параметров для
одного варианта записи функций Ф и К назовем частной
задачей рационального проектирования. По существу это
задача оптимизации некоторого частного варианта косми-
ческого аппарата.
5.1.9. В отдельных случаях анализ физических свя-
зей, характерных для некоторого варианта космического
аппарата, позволяет найти оптимальные сочетания части
параметров, что упрощает решение задачи рационально-
го проектирования. Математически это означает, что из
системы (5.6) можно выделить подсистему, содержащую
только часть параметров, и найти некоторый частный кри-
терий, зависящий от этой части параметров и не противо-
речащий общему критерию К. Задачи такого типа можно
назвать частными оптимальными задачами проектирова-
ния космического аппарата.
В качестве примера оптимизации одного параметра
укажем на оптимальную параболическую антенну, рас-
смотренную в главе 1. Допустим, что имеется законченный
проект аппарата, имеющего в своем составе остронаправ-
ленную параболическую антенну. По формуле (1.14) най-
дем оптимальный диаметр параболической антенны и
сравним его с диаметром антенны, принятым в проекте.
Если окажется, что принятый диаметр больше оптималь-
ного, то независимо от назначения данного аппарата и
требований к нему имеет смысл изменить диаметр антенны
и сделать его равным оптимальному. Действительно, полу-
ченное при этом увеличение коэффициента усиления ан-
тенны полезно, даже если не изменять параметры радио-
телеметрической системы, так как увеличит коэффициент
запаса радиолинии. Уменьшение же массы антенны, свя-
занное с уменьшением ее диаметра, также целесообраз-
но для любого космического аппарата.
Если же принятый в проекте диаметр антенны оказал-
ся меньше оптимального, то для решения вопроса о це-
лесообразности увеличения диаметра необходим более
глубокий анализ, в результате которого должно быть вы-
яснено, можно ли за счет увеличения коэффициента уси-
310
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
(ГЛ. 5
ления антенны уменьшить массу аппарата на величину,
превышающую увеличение массы антенны за счет возрас-
тания ее диаметра. В данном случае в анализ придется
включить радиотелеметрическую систему, систему управ-
ления ориентацией, компоновочную схему аппарата и,
возможно, программу работы.
Отметим, что выявление и решение оптимальных за-
дач рассмотренного типа может представлять и самостоя-
тельный интерес независимо от общей задачи рациональ-
ного проектирования хотя бы потому, что решение этих
задач может оказаться существенно проще, чем решение
общей задачи.
При решении указанных оптимальных задач в качест-
ве критериев, в частности, можно использовать массу или
надежность системы или группы систем или приборов,
если уменьшение массы этой группы не приводит к умень-
шению надежности аппарата, а увеличение надежности
не приводит к увеличению массы. Это связано с тем, что
увеличение надежности системы или группы систем уве-
личивает надежность аппарата в целом, что целесообраз-
но для любого аппарата. Уменьшение же массы группы
систем или приборов позволит либо увеличить массу на-
учных приборов аппарата, либо увеличить надежность
за счет дополнительного резервирования и увеличения
запасов рабочего тела для ориентации, коррекции и ма-
невров, либо улучшить некоторые параметры траектории.
В качестве еще одного частного критерия можно указать
на информативность радиолинии «борт — Земля», так
как это также целесообразно для любого космического
аппарата.
5.2. Вариант алгоритма рационального
проектирования
5.2.1. Перед изложением варианта алгоритма рацио-
нального проектирования сделаем ряд допущений, касаю-
щихся уравнений и неравенств (5.6). По существу эти до-
пущения определяют некоторый класс космических аппа-
ратов. для которого они справедливы и для которого бу-
дет предложен вариант алгоритма.
1. В соотношения (5.6) входят только уравнения, не-
равенства отсутствуют. Это обосновывается тем, что для
5.2]
ВАРИАНТ АЛГОРИТМА
311
многих космических аппаратов неравенства, вытекающие
из требований к аппарату и ограничений, могут быть заме-
нены уравнениями. В частности, если требуется, чтобы
начальная масса аппарата не превышала заданной вели-
чины, определяемой траекторией и ракетой выведения,
то при анализе различных вариантов аппарата и отыска-
нии его оптимальных параметров можно принять, что на*
чальная масса аппарата MQ равна максимально допусти-
мой величине Afomax минус некоторый запас АЛ/, т. е.
— Леошах (1
ЛМ \
^Отэх)
Величина относительного запаса массы AAf/Af0 тах
в зависимости от сложности и новизны разрабатываемого
аппарата и его систем может быть принята в пределах
0,1—0,2. Для межпланетных аппаратов и зондов, как
указывалось в § 5.1, должен быть еще учтен запас массы
на отклонение даты старта от оптимальной.
Аналогичные рассуждения можно привести и для слу-
чая, когда задана минимально допустимая надежность ап-
парата, и в соотношениях (5.6) принять, что надежность
аппарата равна этой величине с некоторым запасом, кото-
рый может исчезнуть на стадии рабочего проектирования.
2. Не рассматриваются процессы спуска и посадки на
поверхность Земли и планет, а также процессы взлета
с планеты и участки работы на поверхности Луны и пла-
нет. Если в составе космического аппарата имеются отсе-
ки, предназначенные для работы на указанных участках,
то принимается, что эти отсеки могут рассматриваться
отдельно от аппарата, доставляющего их к планете, как
самостоятельные аппараты или научные станции. Связи
таких отсеков с доставляющим их аппаратом достаточно
очевидны, они определяются массой отсеков, внешней
компоновкой аппарата, электрическими связями и т. д.
В частности, если задачей данного аппарата является до-
ставка на планету назначения некоторой посадочной стан-
ции, то в качестве критерия проектирования может быть
принята масса этой станции, так как чем ее масса больше,
тем более полно и качественно будут решены задачи пус-
ка. Естественно, что при этом конкретная разработка
станции может быть начата после определения ее началь-
ной массы. Возможна и параллельная разработка отдель-
312
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
[ГЛ. 5
ных отсеков и основного аппарата и стыковка параметров
последовательными приближениями. Подробнее эти воп-
росы не рассматриваются в настоящей книге.
3. В уравнения (5.6) не входит явно время я все па-
раметры являются постоянными. Соответственно в число
этих уравнений не входят дифференциальные уравнения.
Это допущение справедливо в тех случаях, когда имеющие-
ся на отдельных этапах полета участки с работающими
двигателями «стянуты в точки», т. е. эти участки характе-
ризуются только модулями скоростей, которые необходи-
мы для коррекций и маневров траектории. Как следует
из главы 2, это допущение может быть оправдано при дос-
таточно больших тягах двигательной установки.
Если некоторые параметры, входящие в уравнения
(5.6), зависят от времени, например масса аппарата или
его моменты инерции за счет израсходования топлива на
коррекции, маневры или процесс ориентации, то в таких
случаях время может входить в качестве констант, полу-
ченных на основании этапа баллистического проектиро-
вания. Например, в уравнения (5.6) могут входить члены
т1г и mt2. где т — средний секундный расход рабочего
тела на ориентацию аппарата, который является одним
из варьируемых параметров системы управления ориента-
цией, зависящим от моментов инерции, плеч управляющих
двигателей, возмущающих моментов и т. д., a и t2 —
константы, определяющие времена каких-либо характер-
ных точек на траектории полета.
4. Среди варьируемых параметров отсутствуют па-
раметры и характеристики траектории аппарата. Тем са-
мым предполагается, что выбор схемы полета, основных
параметров траектории, а также определение требований
к аппарату с точки зрения реализации необходимой траек-
тории осуществлены заранее, до определения параметров
систем, компоновки и программы работы. Проведение та-
кого этапа работ, который иногда называют баллистиче-
ским проектированием, часто может быть начато сразу
после получения технического задания на данный косми-
ческий аппарат. В тех случаях, когда имеется зависимость
параметров траектории от параметров некоторых систем,
а последние не могут быть определены заранее, до комп-
лексного исследования параметров аппарата, придется
пользоваться методом последовательных приближений.
5.2]
ВАРИАНТ АЛГОРИТМА
313
Баллистическое проектирование — это самостоятельная
область проектирования космических аппаратов.
В результате баллистического проектирования долж-
ны быть определены характеристики траектории, началь-
ная масса аппарата, которую можно вывести на эту траек-
торию заданной ракетой выведения, характеристические
скорости, диапазоны времен проведения коррекций и ма-
невров, требования к законам управления положением
вектора тяги во время коррекций и маневров и необходи-
мые точности и, кроме того, все необходимые для разработ-
ки системы управления ориентацией и программы работы
данные, такие, как, например, углы между возможными
оптическими ориентирами и времена видимости аппарата
из наземных пунктов.
Следует отметить, что на этапе баллистического проек-
тирования может возникнуть необходимость решения
сложных вариационных задач, многоточечных краевых
задач и т. д. Некоторые из таких задач исследованы в ра-
боте [21].
5. Количество уравнений связи (5.6) меньше числа
варьируемых параметров. Если это допущение не выпол-
нено, то задача выбора оптимальных параметров не может
быть решена, так как не остается свободных парамет-
ров для минимизации критерия К. Скорее всего это озна-
чает, что не выявлены все свободные параметры, и необ-
ходимо пересмотреть и состав параметров, и вид функ-
ций К и Ф.
При сделанных допущениях задача нахождения опти-
мальных параметров сводится к нахождению условного
экстремума функции многих переменных К при уравне-
ниях связи (5.6). При этом в уравнения (5.6) и в крите-
рий К будут входить в качестве варьируемых параметры
систем аппарата, параметры, характеризующие его ком-
поновку и конструкцию, параметры, определяющие прог-
рамму работы.
5.2.2. Выше говорилось, что вид функций Ф и К зави-
сит от вариантов проектных решений, в частности от ком-
поновочной схемы, схемы ориентации, схемы построения
и функционирования отдельных бортовых систем и т. д.
Это не позволяет свести процесс проектирования к ре-
шению одной математически строго поставленной задачи.
Эту сложность можно преодолеть следующим образом.
314
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
(ГЛ. 5
Допустим, что на каком-то этапе проектирования най-
ден вариант аппарата и программы, удовлетворяющий
всем требованиям и ограничениям. Этот вариант аппарата
назовем ояорнылс. Предположим, что он характеризуется
параметрами (Cm,n) и (Pj) 1см. (5.5), (5.6)], которые назо-
вем исходными. Эти параметры будут удовлетворять урав-
нениям типа (5.6), учитывающим физические связи и ог-
раничения, характерные для найденного варианта аппа-
рата.
Очевидно, что состав и технический смысл параметров
аппарата, а следовательно, структура выражений типа
(5.6) и входящие в них константы не будут меняться при
изменениях параметров внутри некоторых интервалов
около значений (Ст,п) и (Р7). Для указанных интервалов
каждого параметра введем следующие обозначения:
[Cm.n, Ст, п], [Л;, Р~]. (5.9)
Для удобства изложения ниже под опорным будем по-
нимать вариант, характеризуемый интервалами изменения
параметров (5.9).
Оптимизация опорного варианта сводится к отыска-
нию значений параметров (Cm,n) и (Лу), лежащих внутри
интервалов (5.9) и реализующих максимальное или ми-
нимальное значение критерия К при выполнении уравне-
ний типа (5.6), записанных для опорного варианта.
Подчеркнем, что границы интервалов (5.9) определя-
ются из условия применимости выражений (5.6) для всех
значений параметров, лежащих внутри этих интервалов,
причем их границы должны быть заранее определены для
рассматриваемого опорного варианта.
5.2.3. Если имеется несколько опорных вариантов
аппарата, то для каждого из них может быть составлена
система соотношений (5.6) и из условия применимости
этих соотношений найдены границы изменения параметров
(5.9). После этого, используя тот или иной математический
аппарат, можно осуществить оптимизацию вариантов и
найти для них экстремальные значения критерия К. Срав-
нение между собой значений К позволит выбрать наилуч-
ший с точки зрения принятого критерия вариант аппарата
со своими оптимальными параметрами. На этом можно счи-
тать законченным процесс рационального проектирования.
5.2]
ВАРИАНТ АЛГОРИТМА
315
Может оказаться, что решение полной задачи на
экстремум критерия К как функции всех основных пара-
метров аппарата даже для одного опорного варианта ока-
жется слишком трудоемким процессом. В этих случаях
придется разбивать задачу на ряд частных задач и поль-
зоваться частными критериями, о которых говорилось
выше.
Весьма существенно, чтобы при разработке вариантов
максимально использовался опыт создания и эксплуата-
ции аналогичных космических аппаратов. Квалификация
разработчиков опорных вариантов имеет при этом перво-
степенное значение. Однако следует иметь в виду, что
вновь создаваемый космический аппарат может не иметь
прообразов и прототипов. В таких случаях обязателен
достаточно широкий просмотр возможных опорных вари-
антов.
Изложенный путь рационального проектирования, ко-
нечно, не отрицает процесс интуитивного творческого мыш-
ления. Этот процесс проявляет себя в предложениях и раз-
работках опорных вариантов, а также в баллистическом
проектировании.
необходимо отметить, что при проектировании лю-
бого космического аппарата приходится принимать во
внимание соображения, связанные с технологическими
возможностями, с возможностью заказа приборов и обо-
рудования смежным организациям, со стоимостью и
др. При реализации процесса рационального проектиро-
вания указанные соображения должны учитываться при
разработке опорных вариантов и при назначении границ
интервалов изменения параметров (5.9;.
В некоторых случаях вариант ракеты выведения может
не задаваться техническим заданием и не выявляться доста*
точно легко на этапе анализа этого задания. В этих слу-
чаях может оказаться необходимым весь процесс рацио-
нального проектирования или его часть провести для раз-
личных вариантов ракеты выведения. Здесь под ракетой
выведения понимается первая или первая и вторая сту-
пени некоторой базовой ракеты, а также дополнительные
ступени, необходимые для выведения на траекторию вновь
разрабатываемого космического аппарата.
В качестве параметров, характеризующих внешнюю
компоновку опорного варианта аппарата, следует выби-
316
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
[ГЛ. 5
рать такие параметры, которые влияют на характеристи-
ки и параметры бортовых систем, массу конструкции и
эллипсоид инерции (например, размеры, определяющие
площадь плоской солнечной батареи, и размер, определяю-
щий ее положение относительно каких-либо базовых по-
верхностей; диаметр параболической антенны; размеры,
определяющие приборный отсек, и т. д.). Очевидно, что
количество параметров должно быть минимальным, чтобы
излишне не усложнять общую экстремальную задачу.
В частности, если площадь солнечной батареи может быть
найдена из анализа системы электропитания, как это было
описано в главе 1, то в число параметров, характеризую-
щих внешнюю компоновку, нужно включить только от-
ношение сторон батареи, так как от этого отношения мо-
гут зависеть моменты инерции аппарата, масса батареи
и момент светового давления. Вообще нужно заметить,
что определение состава параметров, подлежащих варьи-
рованию на этапе решения экстремальной задачи, весьма
ответственная операция. Минимизация общего количе-
ства параметров осуществляется только на базе интуиции
разработчиков и на основе решения частных проектных
задач на этапе разработки опорных вариантов.
5.2.4. С точки зрения объема вычислений наибольшую
сложность представляет этап нахождения оптимальных
параметров и экстремальных значений критерия К для
всех опорных вариантов. Для каждого опорного варианта
эта задача состоит в исследовании на экстремум функции
К (xi, х2, . .., xNz) (5.10)
при уравнениях связей
Фг (*Ь *2, . . . , XNz,) = 0, (5.11)
где г = 1, 2, . . ., Я; Я, — см. (5.6) и (5.7);
Хк х£, к = 1, 2, . . ., N%\ хк, Хк соответствуют гра-
ницам интервалов изменения параметров (5.9).
Существуют различные методы решения этой задачи.
Во-первых, можно попытаться с помощью уравнений
(5.11) исключить часть параметров Хк и исследовать на
безусловный экстремум функцию К уже N% — Я пере-
менных.
Если это затруднительно, то можно применить метод
множителей Лагранжа, т. е исследовать на экстремум
5.2]
ВАРИАНТ АЛГОРИТМА
317
функцию
_ R
ф = к + 2 хгфг.
г=1
В этом случае искомые оптимальные параметры и
множители Хг находятся из необходимых условий суще-
ствования внутреннего максимума или минимума функ-
ции Ф
А = 1, 2, Ns (5.12)
и уравнений (5.11).
Однако следует иметь в виду, что максимальное или
минимальное значение функция Ф может принимать при
значениях параметров, соответствующих границам интер-
валов (5.9). В таких случаях условия (5.12) не применимы.
В настоящее время получили применение различные
численные методы отыскания экстремума, реализуемые
на ЭВМ, как, например, методы случайного поиска,
метод наискорейшего спуска и т. д.
При сравнительно небольшом числе параметров возмо-
жен и простейший в методическом плане способ перебора
всех возможных комбинаций параметров. В пользу этого
способа говорит то обстоятельство, что все варьируемые
параметры имеют четкий физический смысл. Следовательно,
при разработке опорных вариантов можно определить
не только интервалы изменения параметров, но и техни-
чески целесообразные минимальные шаги их изменения,
связанные с возможной точностью реализации этих пара-
метров на последующих стадиях разработки и изго-
товления аппарата и его систем.
Укажем на еще один возможный путь решения экстре-
мальной задачи, основанный на том, что варьируются пара-
метры некоторого опорного варианта аппарата. Допустим,
что этот вариант характеризуется некоторым множеством
параметров (2 к), которые выше были названы исходными.
Можно попытаться линеаризовать функции К и Ф, раз-
ложив их, например, в ряды Тейлора около точки
(^,^2, • • •» и оставив только члены первой степени
относительно вариаций параметров
Дхк = — 2*.
318
РАЦИОНАЛЬНОЕ ПРОЕКТИРОВАНИЕ
|ГЛ. 5
Допустимость такой линеаризации всегда можно
установить, зная, что xi х& xj, где х'ц и х£ —
границы интервалов изменения параметра х^, и задаваясь
максимально допустимой ошибкой величины критерия К.
В результате линеаризации получим
"г
= = (5.13)
где К = К (£х, Я2, . . ., ^z); х£ — < ДхА. < х£ — Zk.
Вместо уравнений связей (5.11) при этом получим
систему линейных уравнений
ЭФ1 А . | ЭФ| А ________ Л
^гЛ;Г14'--- + ^-д^=0’
^Фр . ^Ф|» А Л
Дхх + ... + Ax«s= 0.
(5.14)
В выражениях (5.13) и (5.14) все частные производные
вычисляются в точке (Jx, £2, ...» £jvz). Исключая часть
параметров с помощью уравнений (5.14), найдем для Д/С
соотношение вида
n2-r
Д/С = 2J е^Дхр (5.15)
tei
Это — уравнение гиперплоскости в многомерном прост-
ранстве (Дхх, Дх2, . . ., Дхлг_к, Д^). Следовательно,
величина ДАТ может принимать наибольшее или наимень-
шее значение только на границах интервалов изменения
величин Дх<.
Таким образом, в указанном случае нахождение опти-
мальных сочетаний параметров Дх; сводится к вычислению
величины &К для всех возможных сочетаний границ
интервалов изменения Дх/ и выбору комбинации, реа-
лизующей максимум или минимум величины Д/С.
Отметим, что изложенный способ решения является
частным случаем задачи линейного программирования.
ЛИТЕРАТУРА
1. Аллен К. У. Астрофизические величины. — М.: Мир, 1977.
2. Андреянов В. В., Артамонов В. В., А т м а-
новИ.Т., БерезинВ. И., Ж у к и н В. М., Тро-
ши н В. С., Черенков В. Б. Автоматические планетные
станции.— М.: Наука, 1973.
3. Б а ж и н о в И. К., Почукаев В.Н. Оптимальное плани-
рование навигационных измерений в космическом полете.— М.:
Машиностроение, 1976.
4. Белецкий В. В. Движение спутника относительно центра
масс в гравитационном поле.— М.: МГУ, 1975.
5. Гаушус Э.В. Исследование динамических систем методом
точечных преобразований.— М.: Наука, 1976.
6. Гейнце В. Введение в вакуумную технику. Т. I.—М.:
Госэнергоиздат, 1960.
7. Д е ш м а н С. Научные основы вакуумной техники.— М.:
ИЛ, 1950.
8. Инженерный справочник по космической технике.— М.: Воениз-
дат, 1977.
9. К а р ы м о в А. А. Определение сил и моментов сил светового
давления, действующих на тело при движении в космическом
пространстве.— Прикладная математика и механика, 1962,
т. XXVI, вып. 5.
10. К о в а л е н ко А. П. Магнитные системы управления кос-
мическими летательными аппаратами.— М.: Машиностроение,
1975.
11. К о з л о в Л. В., Н у с и н о в М. Д. и др. Моделирование
тепловых режимов космического аппарата и окружающей его
среды.— М.: Машиностроение, 1971.
12. Кордовский Х.Б. Приложение теории вероятностей в
инженерном деле.— М.: Физматгиз, 1963.
13. К р а г е л ь с к и й И. В. Трение и износ.— М.: Машгиз,
1962.
13а. Кубасов В. Н., Дашков А. А. Межпланетные полеты. —
М.: Машиностроение, 1979.
14. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика.
Т. I: Механика.— М.: Физматгиз, 1958.
15. Л упичев Л. Н., ХодаревЮ.К., Ш а м а и о в И. В.
Метод использования управляющих ЦВМ в системе управления
бортовой аппаратурой космических аппаратов.— В кн.: Ма-
тематические методы моделирования в космических исследо-
ваниях.— М.: Наука, 1971.
320
ЛИТЕРАТУРА
16. Максимов Г. Ю. Некоторые задачи, связанные с установ-
кой на космическом аппарате остронаправленной параболи-
ческой антенны.— Космические исследования, 1968, т. VI,
вып. 5.
17. Мишин В. П., Осин М. И. Введение в машинное проек-
тирование летательных аппаратов.— М.: Машиностроение,
1978.
I 18. Раушенбах Б. В., Токарь Б. Н. Управление ориента-
I дней космических аппаратов.— М.: Наука, 1974.
19. Р у п п е Г.’В ведение в астронавтику.— М.: Наука, т. I, 1970;
т. II, 1971/
। 20. Справочник по физико-техническим основам криогеники.—
М.: Энергия, 1973.
! 21. Тарасов Е.В. Алгоритм оптимального проектирования
I летательного аппарата.— М.: Машиностроение, 1970.
22. Т и х о н р а в о в М. К., Б а ж и н о в И. К., Г у р ко О. В.,
|М а к с и м о в Г. Ю., ЯцунскийИ. М. Основы теории
полета и элементы проектирования искусственных спутников
Земли.— М.: Машиностроение, 1974.
! 23. X и т р и к М. С., Ф е д о р о в С. М. (ред.). Динамика си-
I стем управления ракет с бортовыми цифровыми вычислительны-
I ми машинами.— М.: Машиностроение, 1972.
। 24. ШТа р о н о в В. В. Свет и цвет.— М.: Физматгиз, 1961.
25. Ш и ш о н о к Н. А., Репкин В. Ф., Барвинский
В Л. Л. Основы теории надежности и эксплуатации радио-
г электронной техники. — М.: Советское радио, 1964.
26. Эльясберг П. Е. Введение в теорию полета искусствен-
с ных спутников Земли.— М.:1 Наука, 1965.
27. Модель верхней атмосферы для баллистических расчетов.—
ГОСТ 22721-77.]
Э
Р
в< /
ш
В(
М4
ВЦ
ИЦ
ля
ча*