/





















































































































































































































































































































































































































































































































































































































































































Author: Суслов Г.К.
Tags: физика механика теоретическая механика государственное издательство технико-теоретической литературы
Year: 1946



Text
Г. К. СУСЛОВ
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
ИЗДАНИЕ ТРЕТЬЕ ПОСМЕРТНОЙ
ИОД РЕДАКЦИЕЙ
проф. Н. Н. БУХГОЛЬЦА и В. К. ГОЛЬЦМАНА
Допущено Всесоюзным Комитетом по делам
высшей школы при СНК СССР в качестве
учебника для университетов
О ГИ 3
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ТЕХНИКО-ТЕОРЕТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1846 ЛЕНИВГРАД
ПРЕДИСЛОВИЕ РЕДАКТОРОВ
Книга «Основы аналитической механики» покойного профессора Одес-
Одесского Университета Г. К. Суслова, названная в настоящем издании «Тео-
«Теоретической механикой», представляет собой весьма полный и системати-
систематический курс этой дисциплины, отличающийся от других аналогичных
сочинений общим стилем, трактовкой материала и методикой изложе-
изложения. Автор книги является продолжателем русской школы механиков-
аналитиков Остроградского и Бобылёва, и -Сто изложение носит ярко вы-
выраженный аналитический характер. Истоки этого направления восходят
к Лагранжу, к его бессмертному творению «Mecanique analytique».
Книга содержит следующие разделы: теорию векторов, кинематику,
динамику частицы, динамику системы частиц и статику; далее, интег-
интегрирование уравнений динамики, динамику твёрдого тела и теорию
удара.
Теория векторов, помещённая в начале в качестве введения, пред-
представляет собой подробное изложение геометрии системы скользя-
скользящих векторов. Кинематика точки и абсолютно твёрдого тела содержит
обширный и интересный материал; автор уделяет много места исследова-
исследованию движения в криволинейных координатах, а также геометрической
картине движения абсолютно твёрдого тела. Изложение динамики также
отличается полнотой и глубоким анализом; особенно подробно автор оста-
останавливается на аналитическом исследовании различных типов связей, что
является характерной особенностью его курса. Весьма интересна глава,
посвященная общим началам (принципам) механики, где автор даёт до-
достаточно полное систематическое изложение принципов Даламбера, Гаусса,
Гамильтона, Лагранжа и принципа Гельмгольтца, который можно наши
только в мемуарной литературе.
Статика излагается после динамики и начинается с принципа возмож-
возможных перемещений; затем следует обстоятельное изящное исследование
вопроса о равновесии нитей и геометрическая теория равновесия, в ко-
которой автор даёт основные положения элементарной статики на базе гео-
геометрии скользящих векторов.
Далее следует интегрирование уравнений динамики, где кроме подроб-
подробного и оригинального изложения теории последнего множителя Якоби,
даются некоторые интересные интерпретации главной и характеристиче-
характеристической функций.
Особенное развитие в книге Г. К. Суслова получила динамика
твёрдого тела; нет ни одного трактата или курса по теоретической ме-
механике, где бы этот отдел был изложен с такой, почти исчерпывающей,
полнотой. Кроме классических интегрируемых случаев движения твердого
тела вокруг неподвижной точки автор излагает ещё некоторые случаи,
III
допускающие частные интегралы (случаи Гесса и Бобылёва-Стеклова), а
также и некоторые примеры на движение неголономных систем.
Из приведённого краткого обзора содержания и отличительных осо--
бенностей книги Г. К. Суслова видно, что этот курс является од-
одним из наиболее полных по содержанию систематических курсов теоре-
теоретической механики, изложенным на высоком теоретическом уровне и
обладающим выдающимися научными достоинствами. Аналитическая стро-
строгость, полнота и ясность изложения, большое количество подробно разо-
разобранных примеров и наличие материала, отсутствующего в других систе-
систематических курсах, делают книгу Г. К. Суслова очень ценным пособием
для студентов университетов, аспирантов и лиц, специально изучающих
теоретическую механику, вследствие чего переиздание этой книги-является
существенно необходимым.
Ввиду' того, что книга Г. К. Суслова «Основы аналитической меха-
механики» написана около сорока лет тому назад, при переиздании её потребова-
потребовалась некоторая переработка в соответствии с современными методами и науч-
научной терминологией; эта переработка в основном свелась к следующему.
Во-первых, изменено название книги: вместо «Основы аналитической
механики» дано название «Теоретическая механика», что с точки зрения
современной терминологии более отвечает содержанию книги. Затем, в
изложение введены символы и операции векторного исчисления. В связи
с этим вводная глава о векторах дополнена элементами векторной алге-
алгебры и анализа. Переход на векторное изложение вызвал некоторые
изменения в изложении кинематики, общих теорем динамики, динамики
твёрдого тела и теории связей. Там, где это оказалось возможным сде-
сделать без нарушения стиля автора, терминология и обозначения приведены
в соответствие с ныне употребляемыми. Уточнены некоторые доказатель-
доказательства и устранены встречающиеся иногда редакционные недосмотры и ше-
шероховатости текста. Переработано приложение «Третий закон Ньютона»;
имеющиеся здесь положения частично включены в гл. XIV «Основные
законы механики». Кроме того, исправлены ошибки в вычислениях, встре-
встречающиеся в некоторых примерах, а также несколько увеличено число
чертежей (вместо 122 дано 155).
Н. Бухгольц \
В. Гольцман
ЧАСТЬ ПЕРВАЯ
ОСНОВЫ ВЕКТОРНОЙ АЛГЕБРЫ И АНАЛИЗА
I. СВОБОДНЫЕ ВЕКТОРЫ
1. Скалярные и векторные величины. Векторы. Равенство век-
векторов. Единичные векторы. При изложении теоретической механики
посюянно приходится пользоваться определениями и теоремами того от-
отдела математики, который носит название теории векторов. Поэтому
прежде всего познакомимся с основными положениями этой теории, огра-
ограничиваясь лишь крайне необходимым.
В физике мы всшечаем два типа величин, скалярные и векторные.
Скалярной называется величина, которая может быть выражена одним
действительным числом. Векторной величиной называется такая вели-
величина, которая может быть изображена вектором, т. е. направленным
отрезком прямой, и которая обладает некоторыми дополнительными свой-
свойствами, излагаемыми в последующих параграфах. Если вектор характе-
характеризуется только длиной и направлением и не связан с какой-либо опре-
определенной» прямой линией или точкой, он называется свободным; век-
вектор, связанный с прямой, по которой он направлен, называется сколь-
скользящим; наконец, если вектор связан с точкой своего приложения, он
называется п р и л о ж е н ным, или неподвижным. Точки, ограничиваю-
ограничивающие вектор, носят особые названия, одна называется началом векгора,
другая концом его. Направление вектора
идег от начала к концу. На чертежах на-
направление вектора обыкновенно обозначают
стрелкой; в формулах векторы печатают жир-
жирным шрифтом, в письме употребляют обыкновен-
обыкновенный шрифт, но над буквами ставят чёрточки; Фш. 1.
иногда векторы обозначают также двумя бук-
буквами с чертой, причём буква, означающая начало, ставится впереди.
Так, векторы, изображённые на фиг. 1, в тексте обозначаются одним из
следующих способов"
Точки А, С и Е служат началами, В, D и F— концами. Для обозначе-
обозначения длины вектора (или, как иначе говорят, его модуля, или его
численного значения) ставят вертикальные чёрточки по бокам
или вместо жирного шрифта пишут обычным (светлым) шрифтом, а если
векторы были обозначены буквами с чёрточками, то просто опускают
чёрточки; так, в отношении вектора а, изображённого иа фиг. 1, можно
писать
\а\ = \а\ = а = \АВ\=АВ.
1 Г. к. Суслов I
Векторы, направленные противоположно рассматриваемым (фиг. 1), при-
принято обозначать одним из следующих способов:
— а = — а = — АВ=ВА,
— с =—c= — E:F = FE.
Очевидно, | —а| = |а| = а и т. д.
Два вектора одинаковой длины, лежащие на параллельных прямых и
одинаково направленные, называются равными. Это положение вытекает
из данного выше определения вектора: действительно, в определении за
наиболее существенные элементы вектора признаны только его длина и
направление. Равенство векторов обозначается тем же знаком =,
что и алгебраическое равенство; так, в отношении векторов а и с (фиг, 1)
можно написать
Два вектора, равные по длине, лежащие на параллельных прямых, но
противоположно направленные, называются противоположными. Два
вектора, лежащие на параллельных (в частности совпадающих) прямых,
независимо от того,' направлены они в одну сторону или в противопо-
противоположные стороны, называются ко л линеарным и.
Произведением вектора а на скаляр т называется вектор Ь, по сво-
своему численному значению равный та и направленный одинаково с векто-
вектором а, если т положительно, и противоположно вектору а, если т от-
отрицательно. Это соотношение можно записать одним из следующих спо-
способов:
и > «.
о = та, а=—о,
т
b a 1
— JJI, ~г~ =^ —.
а Ь т
Заметим, что указанное в последней строке деление коллинеар-
ных векторов является единственным случаем деления, которое встре-
встречается в векторной алгебре.
Вектор, по направлению совпадающий с данным вектором и по чис-
численному значению (по модулю) равный единице, называется единич-
единичным вектором данного вектора, или его ортом. Единичный вектор обо-
обозначается той же буквой, что и данный вектор, но с ноликом в виде
показателя степени; таким образом, единичный вектор вектора а есть а0.
При помощи единичного вектора всякий вектор может быть представлен
как произведение модуля на единичный вектор:
а = аа°. A.1)
2. Проекция вектора на ось. Координаты вектора. Вектор а нам
вполне известен, если мы знаем его модуль а и направление прямой, на
которой он лежит, т. е. три косинуса а, р, у углов, образуемых этой
прямой с прямоугольными осями координат Oxyz
/\ /\ у\
a = cos(jt, a), p = cos(^, а), у = cos (г, а).
Отсюда видно, что вектор определяется тремя независимыми яруг от
друга величинами: действительно, между косинусами а, р, у существует
соотношение
Заметим, что задание модуля а и двух косинусов, например а и fS, не
определяет вектора однозначно: из выше приведённого соотношения
найдём для третьего косинуса у два значения, отличающиеся друг от
друга знаками, и, следовательно, одним и тем же значениям а, р и а
соответствуют два вектора, симметрично наклонённые к плоскости О'ху.
Величины, определяющие векгор, носят наз-
название координат вектора. Всего удобнее
принять за координаты вектора его проекции
на оси координат. Познакомимся вообще с по-
понятием о проекции вектора на ось. Осью назы- А, ^ — l
вается прямая, на которой определено направ- 8
ление. Проекцией вектора а на некоторую ось Фиг. 2.
/ (фиг. 2) называется отрезок А'В', ограничен-
ограниченный проекциями начала и конца вектора а на эту ось, причём этот
отрезок измеряется в тех же единицах, что и сам вектор, и ему
приписывается знак -(- или —, смотря потому, совпадает или нет на-
направление А'В' с направлением оси /. Из этого определения видно, что
проекция вектора есть скалярная величина, равная произведению модуля
вектора на косинус угла между направлением оси и направлением Еек-
тора:
/\
a,= np,a=acos(/, a). A.2)
В частности, для указанных выше проекций вектора а на оси координат
имеем выражения:
/\
ax = acos(x, a) = да,
/\
ay — acos{y, a) = a$,
/\
az=acos (z, a)=ay.
Отсюда получаем для модуля вектора формулу
Очевидно, задание вектора его проекциями однозначно. Заметим, что если
два вектора, а, и а2, равны, т. е. аг = а2, то
аи = агх> а1у—а2у, au = a2z;
если же эти векторы противоположны, т. е, а1 = — а», то
3. Сложение и вычитание векторов. Разложение вектора на
составляющие. Положим, нам даны п векторов: ах, а2, ..., ап. По-
Построим из произвольной точки О вектор а[, равный вектору ах (фиг. 3);
из конца вектора а'х построим вектор а'2, равный а2, из конца а'2 век-
3
тор a'3i равный а3, и так далее, кончая вектором а'п (на фиг. 3 взято
й = 6). Вектора, имеющий начало в начале вектора а\ и конец в конце
вектора а'п, называется суммою векторов ах, а2, ..., ап, а сама про-
произведённая нами операция — сло-
сложением векторов. Сложение обозна-
обозначается знаком -J-; таким образом, при
выше указанных обозначениях мы
имеем
0 = 0,4-02+ ¦••+«»¦
Это формальное определение суммы
векторов имеет своё обоснование во
многих законах природы, например, пру
сложении сил, при сложении скоростей
и др. Если многоугольник, составленный
из вектором av а.г, ..., ап, ока-
окажется замкнутым, то говорят, что с>м-
ма векторов ах -j- a2 -j- ... -j- an равна
нулю.
Как частный случай сложения век-
торов отметим, что сумма двух век-
векторов представляет собой диагональ
параллелограмма, стороны которого равны слагаемым векторам (фиг. 4):
а = АВ )
фи
Так как, с другой стороны,
а = AD -}-
= а2
av
то
Фи! . 4.
таьим образом, сложение двух векторов коммутативно, т. е. их сумма не
зависит от порядка, в котором взяты слагаемые.
Тем же свойством коммутативности обладает и
сложение произвольного числа векторов. Дейст-
Действительно, общая сумма всех векторов не изме-
изменится, если чы несколько рядом стоящих слагаемых
заменим их суммой; так, слагаемые a'v a'4, а'ь
могут быть заменены их суммой Ь (фиг. 3). Сдела-
Сделаем такую замен_\ д-ш двух рядом стоящих векторов, например, а!2 и а'^,
по предыдущему с>мма их и не зависит от порядка слагаемых; следова-
следовательно, и общая сумма а не меняется от перестановки двух смежных
слагаемых. Если же в ряду каких-нибудь элемеьтов мы имеем право пере-
переставить два рядом стоящие, то, как известно, повторяя этот приём, мы
можем разместить этементы ряда в таком порядке, в ьакоч нам
угодно; следоватеаьно, на сумму произвольного числа векторов порядок
слагаемых вовсе не влияет.
Отметим следующее важное свойство суммы векторов как видно иэ
фиг. 5, проекция суммы векторов равна (алгебраической) сумме их про-
4
екций. Поэтому векторное равенство
влечёт за собой следующие три скалярные:
A.4)
Операция, при помощи которой по данной сумме и одному слагае-
слагаемому отыскивается другое слагае-
слагаемое, носит название вычитания.
Пусть а — данная сумма (фиг. 6),
Фиг. 5.
Фи1. 6.
Ъ—данное слагаемое и с — искомое слагаемое, т. е.
Ъ + с = а.
Мы, очевидно, получим искомое слагаемое С, если к вектору а прибавим
вектор АВ =—Ь, противоположный вектору Ъ;
с = а-\-( — Ь). A.5)
Вычитание векторов обозначается знаком —; таким образом, мы имеем
с = а — Ь. A.6)
Выражения A.5) и A.6) обнаруживают, что в векторных равенствах мы
можем переносить члены из одной части в другую по тому же правилу,
как- и в скалярных. Векторное равенство A.6) равносильно трём ска-
скалярным:
Заметим ещё следующее свойство операций, называемых сложением
и вычитанием векторов: если все векторы, над которыми производится
операция, увеличим или уменьшим в од-
одно и то же число раз, то и вектор,
получающийся в результате операции
(т. е. сумма или разность), увеличится
или уменьшится в то же число раз, но
направления своего не изменит. Это вы-
вытекает из подобия фигур, при помощи А
которых производится построение для
данных векторов и для векторов, увеличен-
увеличенных или уменьшенных. Так, например,
пусть из вектора АВ мы вычли вектор Л С (фиг. 7); разность представилась
вектором AD. Если же вместо векторов АВ л АС мы возьмём в полтора
5
раза меньшие векторы АВ' и АС, то разность AD' будет в подтора
раза меньше прежней разности AD; в то же время она будет коллинеарна
с ней, как это следует из подобия треугольников ABD и AB'D'.
Вычитание векторов представляет собой частный случай операции
более общего характера, носящей название разложения вектора.
Разложить данный вектор—эго значит представить его как сумму не-
нескольких векторов, называемых его составляющими. Условия, при
которых производится разложение, могут быть крайне разнообразны.
Всего чаще даются направления составляющих. Если число данных на-
направлений превышает три, задача становится неопределённой. Когда на-
направлений, но лежащих в одной плоскости, три, составляющие векторы
будут рёбрами параллелепипеда, диагональю которого служит данный
иектор. При двух данных направлениях задача возможна лишь в том
случае, когда эти направления лежат в одной плоскости с данным векто-
вектором, и тогда искомые составляющие будут
сторонами параллелограмма, диагональю кото-
которого служит данный вектор.
Остановимся подробнее на разложении не-
некоторого вектора а по трём координатным
осям (фиг. 8). Пусть проекции этого векто-
вектора на оси соответственно равны ах, ау, аг.
Введём в рассмотрение единичные векторы
координатных осей (или так называемые ор-
ты координатных осей), т. е. векторы, по
модулю равные единице и направленные по
осям координат; назовём их соответственно Xй, у0, 2°. Тогда, очевидно,
для вектора а мы сможем написать следующее выражение:
у> + «уг<>. A.7)
Фиг. 8.
В частно.м случае, если вектор, а измеряется в линейных единицах
и имеет начало в начале О координат, а конец в некоторой точке А
(ср. фиг. 8), он называется радиусом-вектором точки А. В этом
случае проекциями вектора, очевидно, будут координаты х,у, z точки Л;
поэтому, называя самый радиус-вектор буквой г,
мы будем иметь
r= xx°-\-yy°-{'ZZ0. A.8)
ч 4, Произведения двух векторов. В вектор-
-i» ном исчислении рассматривают два вида умножения
векторов: скалярное и векторное.
а) Скалярное произведение двух
векторов а и Ь, обозначаемое а-b, есть про-
bcosQ
Фиг. 9.
изведение модулей этих векторов на косинус угла между ними, т. е.
а ¦ Ь = ab cos (а, Ь).
A.9)
Можно также сказать, что это есть произведение модуля одного из век-
векторов на проекцию другого на направление первого (фиг. 9):
а ¦ Ь = ab cos (о, b) = ab cos б = aba = abb.
A.10)
Если один из перемножаемых векторов, например второй, является еди-
единичным вектором, то скалярное умножение даёт проекцию первого век-
вектора на направление второго;
a-bo = ab. A.11)
В частности, для проекций вектора на оси координат мы можем написать:
Заметим следующий важный частный случай скалярного произведения:
если а _[_ Ь, то
о.6=0. A.12)
Скалярное произведение двух одинаковых множителей обозначается как
квадрат вектора: очевидно, а-а = а2= а-acosO0, т. е.
Ф = аг. A.13)
Выпишем все возможные случаи скалярного перемножения ортов
прямоугольных координатных осей; на основании формул A.12) и A.13)
имеем
л л у у б 1, I
yo.zo=zZo.xo==xQ.yo = o. j yl-1 I
Скалярное произведение векторов имеет свойства, аналогичные свой-
свойствам произведения скаляров. Так, согласно формуле A.9) имеет место
аереместительный (коммутативный) закон, т. е.
а • Ь = Ъ ¦ а.
Далее, скалярное умножение обладает свойством распределительности
(дисгрибутивности) по отношению к сложению:
[а-\-Ь)-с = а-с-\-Ь'С\ A-15)
это следует из формул A.10) и A.4); в самом деле,
(a -j- b) • с = (а -\- Ь)с • с = асс -\- Ъсс = а • с -\- Ь • с.
Наконец, как это непосредственно следует из формулы A.9), имеет
место сочетательный (ассоциативный) закон по отношению к умножению
на скаляр:
(па) ¦ Ь = п(а-Ь).
В то же время между скалярным умножением векторов и обычным
умножением скаляров существует глубокое различие. Так, не существует
скалярного произведения более чем двух векторов, а, следовательно,
нельзя говорить об ассоциативном законе для векторных множителей.
Далее, не существует деления как действия обратного екалярному умно-
умножению: в самом деле, если известно произведение и один из сомножи-
сомножителей, то этого ещё недостаточно для однозначного, определения другого
сомножителя. Действительно, если
а- х = а,
(О
прах=~, A.16)
и, следовательно,
или
х = ±а + с, A.17)
й2 ' ' у '
где с — произвольный по длине вектор, перпендикулярный к а (фиг. 10).
В заключение выведем важную формулу, выража-
x^s- | ющую скалярное произведение а ¦ b двух векторов че-
через их проекции на оси прямоугольной системы коорди-
а°~~а s—* иат- Согласно формуле A.7) имеем
Ь = Ъхх° -|- Ь у0 -\- b2г°.
Перемножим эти равенства. Опираясь на распределительный закон A.15)
и на формулы A.14), мы получим:
(X • О = й О ~-\— п О -4— пи. \ 1. 1о)
Отсюда ^находим следующее выражение косинуса угла между двумя
векторами:
В частном случае, если векторы а и 6 взаимно перпендикулярны, из
последней формулы получаем:
б) Векторное произведение двух векторов, обозначае-
мог аХ6, есть вектор, модуль которого равен произведению модулей
дх, перемножаемых векторов на синус угла между
ними, а направление его перпендикулярно к
1,-Г ~д / плоскости, определяемой перемножаемыми век-
]/< , / / торами (фиг. 11); при этом вектор аХб на-
а ' правлен так, что наблюдателю, смотрящему с
Фиг и конца вектора аХбна перемножаемые векторы
а и 6, кажется, что для кратчайшего совмеще-
совмещения первого множителя со вторым его нужно вращать против движения
стрелки часов. Непосредственно из определения* векторного произведения
следует, что мотуль векторного произведения численно равен площади
параллелограмма, построенного на перемножаемых векторах:
|аХ6| = пл ОАВС.
Далее, очевидно
аХй = - ЬУа, A.21)
т. е. векторное умножение не обладает свойством переместительности.
Сочетательность относительно умножения на скаляр, очевидно, имеет
место:
(па)ХЬ = п(аХЬ).
8
Точно также имеет место распределительность по отношению к сложению:
A.22)
Для доказательства построим параллелепипед OEFGJKLM на векторах
а. Ь, С (фиг. 12). Через произвольную точку А ребра OJ проведём под
прямым углом к этому ребру сечение ABCD. На сторонах АВ и AD
этого сечения поместим векторы а! и &', как указано на чертеже. За-
Заметим прежде всего, что
аХс = а'Хс,
= Ь'Хс, I A.23)
С другой сюроны, векторы а'Хс, Ь'Хс и [а'-\- Ь')Хс лежат в одной
пюскости (в плоскости ABCD), соответственно перпендикулярны векю-
рам а\ Ь' и а' -\-Ь' и пропорциональны
им по длине. Следовательно, поскольку
а', Ь' и а' -\- Ь' образуют стороны и
диагональ параллелограмма, а'Хс,'Ь' Хс
II (а' -{-Ь')Хс также образуют стороны ¦?
и лиагонзль параллелограмма, г. е.
ta' -f- Ь') Xс = а' X с + 6' X с.
Огсюда на основании соотношений A.23)
следует, что и
т. е. распределительный закон доказан.
Заугетим, что в частном случае, когда
перемножаемые векторы а и Ь коллинеарны,
их векторное произведение равно нулю.
С другой стороны, если перемножаемые
векторы взаимно перпендикулярны, модуль
их векторного произведения равен произведению их модулей. На основании
этих замечаний нетрудно выписать следующую таблицу векторных произ-
произведений ортов прямоугольных осей координат:
= у х У = 2° X 2° = О,
0 = у, х°Ху°-
--zu.
A.24)
Выразим теперь векторное произведение аХЬ двух векторов через
их проекции на оси прямоугольной системы координат. Имеем
а = ахх°
b =
azz°
Перемножив эти равенства и приняв во внимание соотношения A.22),
A.24) и A.21), мы получим:
а X Ь = {ауЬг - azby) & + (аА ~
+ («А ~ ЙА> г°-
Это выражение может быть также записано в форме определителя:
х° у0
аХЬ =
ах ау
A.26)
Из формулы A.25) видно, что проекции векторного произведения на оси
координат имеют выражения:
пу UZ
ьг ьх
A.27)
Векторное умножение двух векторов подобии скалярному не обладает
однозначной обратимостью. Действительно, если
аХх = Ь,
то
(фиг. 13), где С—произвольный скаляр, а вектор d перпендикулярен
t пчоскости, в которой лежат tseKiopw a
и Ь, и удовлетворяет соотношению
Перейдя в последнем равенстве к могу-
ляы, имеем
ad=b. A.28)
Фиг. 13. '
Для определения вектора с принимаем
в соображение, что он направлен одинаково с векторным произведением
ЬХа; поэтому можем написать
где k—подлежащий дополнительному определению скалярный коэффи-
коэффициент. Перейдя и здесь к мбдулям, получаем:
d=kba
или, после умножения на а,
ad=kba2.
Отсюда на основании соотношения A.28) находим:
Выполнив подстановки, получаем окончательно следующее выражение
для вектора х:
10
В заключение этого параграфа укажем формулу, связывающую
между собой скалярное и векюрное произведения двух векторов и про-
произведение их модулей, а именно:
A.30)
Справедливость её станет очевидной, если выразить скалярное и вектор-
векторное произведения, стоящие в левой части, через модули сомножителей
и соответственно через косинус и синус угла между ними. Соотношение
A.30), выраженное через проекции входящих в него векторов, носит
название тождества Л а г р а н ж a (Lagrange):
(аа + а/у+«а>2 + («А - ЙА>2 + <аА - «А)8 + («А
«А
= («л + < + О (*2* + Ь\ + Л2г). A.31)
5. Произведения трёх векторов, а) Рассмотрим сперва векторно-
скалярное произведение трёх векторов, т. е. произведение типа а-FХс).
Здесь имеется в виду, что сначала векторно перемножаются векторы Ь
и С, а затем их произведение скалярно множится на вектор a. Tasc как
в ином порядке производить дейсшия, указанные точкой и крестиком,
было бы нельзя, то скобки, обозначающие порядок действий, в записи
векюрно-скалярного произведения могут быть опушены:
а-(ЬХс) = а-ЬХс,
Выразим произведение а-ЬХс через проекции перемножаемых век-
векторов; согласно формулам A.18) и A.27) имеем
a • 6Хс = й,
или
с' Ьс
+
ЬХс =
ay
к
К ьх
Сг Сх
X X
A.32)
Из представления векторно-скалярного произведения в виде определителя
вытекают следующие его свойства:
1) если в векторно-скалярном произведении два какие-либо множителя
коллииеарны, то произведение равно нулю;
2) в векторно-скалнрном произведении допустима циклическая пере-
перестановка множителей, т. е.
а-ЬХс-
b -сХа =
A.33)
о
Так как модуль векторного произведения ЬХс
численно равен площади параллелограмма, постро-
построен.юго на векторах бис, то векторно-скалярное
произведение а-ЬХс, очевидно, численно равно
объёму параллелепипеда, построенного на векторах
а, Ь и с (фиг. 14), причём этот объём считается
положительным, если угол между векторами а и
ЬХс острый (как на чертеже), и отрицательным, если этот угол тупой.
Можно также сказать, что произведение а-ЬХс численно равно ушесте-
ушестерённому объёму тетраэдра О ABC, построенного на векторах а, Ь, с, С этой
точки зрения выше указанные два свойства векторно-скалярного произ-
произведения приобретают простой геометрический смысл.
11
б) В заключение рассмотрим векторно-векторное произве-
произведение трёх векторов аХ{ЬХс). Согласно основному определению
векторного произведения двух векторов произведение йХFХс) векто-
векторов а и ЬХс перпендикулярно к вектору ЬХс; следовательно, оно
лежит в плоскости векторов Ь и с и потому может быть представлено
в форме
X \b-\-\ic, A.34)
где 1 и д — неизвестные пока скалярные множители. Для того, чтобы
их определить, умножим сперва уравнение A.34) скалпрно на некоторый
вектор с', лежащий в плоскости векторов b и с и пер-
/ пендикулярный к вектору с (фиг. 15); так как с'-с = 0,
^ то мы получим:
4 Ь - с'-[аХ(ЬХс)] = Хс'-Ь.
Переставив циклически сомножители векторно-скдлярного
Фиг 15. произведения, стоящего в левой части, будем иметь:
а-[(ЬХс)Хс'] = 1с'-Ь. A.35)
Произведение, стоящее в квадратных скобках, может быть вычислено не-
непосредственно: его модуль равен be sina • с'= с (с1 • Ь), и оно направлено
по вектору с, следовательно, оно равно с(с'-Ь), Уравнение A.35)
может быть теперь переписано так:
(а-с)- (с' ¦ Ь) = 1с' ¦ Ь.
Отсюда мы находим:
\=га-с.
Аналогично, умножив уравнение A.34) скалярно на некоторый вектор 6',
перпендикулярный Ь, мы получим:
откуда после циклической перестановки множителей в левой части при-
придём к уравнению
a-[(bXc)Xb'] = iib' с.
Выражение в квадратных скобках равно -- Ь (Ь' • с), и, следовательно,
последнее уравнение даёт
}л —— а- Ь.
После подстановки полученных значений \ и \i в формулу (К34) при-
приходим к окончательному результату
= b(a-c)— c(a-b). A.36)
И. СКОЛЬЗЯЩИЕ ВЕКТОРЫ
6. Определение скользящего вектора. Векторы эквивалентные
и прямо противоположные. Скользящим вектором, в отличие от
вектора свободного, называется вектор, лежащий на данной пря-
прямой; последняя называется основанием вектора. Два скользящих
вектора равной длины и одинакового направления, лежащие на общем
основании, носят название эквивалентных, или равносильных. Два
скользящих вектора равной длины, лежащие на одном и том же
12
h
Фиг. 16.
основании, но противоположно направленные, называются прямо про-
противоположными.
7. Координаты скользящего вектора. Для определения скользящего
вектора надо задать модуль вектора и его направление, а также положе-
положение прямой, на которой он расположен. Это можно сделать раатичными
способами. Например, скользящий вектор а
определится однозначно, если за координаты возь-
возьмём три проекции его ах, ау, аг на координат-
координатные оси и две координаты х0, у0 следа Ао ос-
основания вектора на координатной плоскости
Оху (фиг. 16). Таким образом, число незави-
независимых координат скользящего вектора равно
пят и.
В последующем изложении мы будем задавать
скользящий вектор п шестью координатами:
тремя проекциями ах, а^, аг вектора а на коор-
координатные оси и тремя проекциями хд, уд, zA радиуса-вектора гА какой-
либо точки А, лежащей на основании вектора (иначе говоря, тремя
декартовыми координатами точки А). Эту точку мы большей частью бу-
будем выбирать в начале вектора а и будем её тогда называть точкой при-
приложения вектора. Сущность излагаемого способа задания скользя-
скользящего вектора а состоит, очевидно, в том, что скользящий вектор а
определяется двумя свободными векторами а и гд; последние назы-
называются векторными координатами скользящего вектора а.
Так как число выбранных нами координат ах, ау, аг; хд, уА, гд пре-
кышает на единицу число независимых координат вектора, то или эти
¦координаты связаны некоторым уравнением, или одна из них остаётся не-
неопределённою. Очевияш, в нашем случае имеет место второе обстоятель-
обстоятельство; одной из координат точки, лежащей иа основании вектора а, мы
можем дать произвольное значение. Так, векторы
а, гА и а, г или соответственно координаты
ах, в„, аг; хА, уд, гд B.1)
и
ах, аг аг; х, у, г B.2)
определяют один и тот же скользящий вектор
а, если вектор г—гд пропорционален вектору
а (фиг. 17), т. е. если
^ = т, B.3)
Фиг. 1
гд^ т—произвольный скаляр; в проекциях последнее соотношение может
быть записано следующим образом:
х~ х А У ~уд г — zA
B.4)
"х "-у "г
Ясно, что при переходе от некоторой системы значен ш коорди-
координат B.1) к системе значений B.2) можно одной из величин х, у, г дать
произвольно выбранное значение; нельзя лишь изменять той из них, ко-
которой в выражении B.4) соответствует знаменатель, равный нулю. Пусть,
13
например, система B.1) следующая:
1,2,3; 1,2,3.
Дадим нотой координате г в система B.2) значение 0; тогда согласно
соотношению B.4) новые координаты B.2) будут следующие:
1,2,3; 0,0,0.
Если же положить г =—6, то получим:
1,2,3; -2,-4, -6
и т. д. Координаты эквивалентных векторов всегда могут быть сделаны
одинаковыми. Заметим, что уравнения B.3) и B.4) при текущих г и
х, у, z соответственно представляют собой уравнения основания в век-
векторной и координатной формах.
8. Момент скользящего вектора относительно точки (полюса).
Моментом Lo скользящего вектора а относительно точки, или полюса, О
(фиг. 18) называется векторное произведение радиуса-вектора гА, прове-
проведённого из точки О к началу А данного вектора, на этот вектор а, т. е.
Согласно формуле A.26) на
стр. 10 момент вектора от-
относительно точки может быть
выражен в форме определи-
определителя
х° у0 2°
Фиг. 18.
ГАх ГАу ГАг
а, а., а,
B.6)
ГАу ГАг
B.7)
Следовательно, проекции момента Lo на оси координат равны
LOi:= Гах Гау
ах ау
Если точка О, относительно которой берётся моменг, является началом
координат (как на фиг. 18), то гЛх=хА, rAy=yA, rAz = zA, и форму-
формулы B.6), B.7) переходят в следующие:
B.8)
B.9)
Если же момент нужно взять относительно точки С с координатами
хс, ус, zc (фиг. 19), то, очевидно, в формулах B.6), B.7) надо положить
ГЛх = *А — *С> ГЛу=УА-Ус rAz = ZA~ZC- B-10>
Как и всякое векторное произведение, момент Lo вектора а численно
14
Уа
йу
ZA
, Lo,-
Х0
ХА
аг
г
У°
Уа
ау
ах
zo
ZA
az
)
9
XA
Уа
равен площади параллелограмма, построенного на векторах г и а (фиг. 18).
Можно также сказать, что модуль момента равен произведению модуля а
вектора а на плечо h, при этом плечом мы называем длину перпенди-
перпендикуляра, опущенного из полюса на основание вектора. Из формулы
B.6) легко получаем выражение для модуля момента через проекции
векторов гА и а:
lo=\f{
V \
ау "г
Очевидно, эквивалентные векторы имеют равные, а прямо противопо-
противоположные векторы — противоположные моменты относительно любой точки.
Если момент вектора равен нулю, то или сам вектор равен нулю, или
момент берётся относительно точки, лежащей на основании вектора.
Выведем п заключение важную формулу, связывающую момент ?^
вектора а относительно «старого» полюса О с моментом Lc этого же
вектора относительно некоторого «нового» полюса С, заданного по отно-
отношению к полюсу О радиусом-вектором гс (фиг. 19); имеем
Lq = О А х в = (ОС ~j~ С А) ха = ОС )(о-]- СА х а = гс X а ~\~ 1~с,
откуда
Lc = L0—rcxa- B.12)
9. Момент скользящего вектора относительно оси. Докажем пред-
предварительно, что проекция момента Lo вектора а относительно точки О на
какую-либо ось z\ проходящую через точку О (фиг. 20), равна проекции
на ту же ось момента Lo< вектора а относительно
любой другой точки О' той же оси, т. е., что
Для доказательства проведём плоскость (s), пер-
перпендикулярную оси z, и спроектируем вектор а
на эту плоскость. Назвав а угол, образуемый
вектором Lo с осью Oz, имеем:
L0, = \rX a|cosa = 2 пл Д OABcosa —
= 2пл АО.А.В-
" 1 l l
Фиг. 20.
последнее равенство написано на том основании,
что двугранный угол между плоскостями (s) и ОАВ равен углу между
перпендикулярами Oz и Lo к этим плоскостям, т. е. равен тоже а. Так
как величина проекции ОА1В1 не зависит от положения точки О на оси, то
Установив это свойство, мы можем ввести следующее определение: мо-
моментом вектора а относительно оси / называется проекция на
эту ось момента данного вектора относительно любой точки О оси:
mom;a = (mom0a),. B.13)
В частности, моментами вектора а относительно координатных осей
являются проекции на эти оси момента вектора относительно начала
15
координат [см. формулы B.9)]:
mom x a = (mom0 а)х =
mom
\уа—{тотоа) =
тотг а = (гаогао а)г -
Уа
V
ZA
аг
ХА
ах
ZA
аг
ХА
пх
Уа
B.14)
Аналогичные формулы получим для моментов вектора а относительно осей
х', у', г', параллельных осям координат и проходящих через точку хс.
Ус гс [см- формулы B.10)]:
У л-Ус za-zc
momA-' a =
B.15)
л~хс У а-Ус
В заключение найдём аналитическое выражение для
Фиг. 21. момента вектора а относительно оси / (фиг. 21), если
заданы:
1) проекции ах, а , аг вектора а,
2) координаты хд, уд, гд точки его приложения,
3) координаты xg, yg, zg точки Б, лежащей на оси /,
4) направляющие косинусы а, |5, у оси I.
Иначе говоря, мы считаем, известными векторы а, гД, гв и единичный
вектор 1° оси /, имеющий проекциями a, (S, у. В соответствии с фор-
формулами B.13), B.5), A.11), A.32) последовательно получаем:
la = [momBa]t=[BAXa]t=[(rA —
т. е.
тога,а =
B.16)
10. Задание скользящего вектора его проекциями и его момен-
моментами относительно координатных осей. Вместо того чтобы задаты
скользящий вектор а двумя свободными векторами а и гА (фиг. 18) или,;
иначе говоря, проекциями ах, а: , az вектора а на координатные оси U
координатами хд, уА, zA точки его приложения, мы можем определить
его двумя другими свободными векторами, а именно, свободным векто-
вектором а и вектором, равным моменту Lo скользящего вектора а относи-
относительно начала координат, т. е. следующими шестью скалярными величи-
величинами: тремя проекциями вектора а
и тремя его моментами
ау, а2
относительно координатных осей. Число координат вектора снова на еди-
16
иицу превышает число его независимых координат; следовательно,
между ними должна существовать некоторая зависимость. Эту зави-
зависимость нетрудно найти, если составить скалярное произведение вектора а
на его момент Lo; имеем
= а
Ха).
Но векторно-скалярное произведение, содержащее два одинаковых мно-
множителя, как известно, равно нулю; поэтому мы получаем:
а • Lo =
ayL
Oy
ог = 0.
B.17)
Это и есть искомая зависимость. Геометрически она выражает перпенди-
перпендикулярность вектора с к своему моменту Lo относительно точки О.
От прежней системы координат а, гд скользящего вектора а к новой
системе a, Lo легко перейти с помощью соотношения B.5); имеем
L0 = rAX a,
или
Уа
ZA XA
*А У А
lx ay
Эти же уравнения служат и для обратного перехода, только одной из
координат точки приложения вектора нужно при этом дать значение, вы-
выбранное по произволу.
11. Взаимный момент двух векторов. Взаимным моментом двух векторов
а и Ь называется произведение модуля одного из векторов на момент другого
относительно оси, служащей основанием первому и
совпадающей с ним по направлению (фиг. 22). Обозна-
Обозначив взаимный • момент векторов а и Ь символом
mom \a, Ь), имеем, следовательно,
тога (о, Ь) = а тотв Ь. B.18)
Докажем прежде всего упоминаемое в определении
свойство взаимности, т. е. покажем, что
Фиг. 22.
тога (а, Ь) = тот (ft, а).
Выразим для этого тот (а, Ь) через векторы а, Ь и
через вектор АВ, идущий от начала первого вектора к началу второго. В
С01ласии с формулами B.13), B.5) и A.11) получаем:
mom (a, b) = a moraa Ь = а {АВ X Ь)>а°,
ИЛИ
Точно так же находим:
mom (а, Ь) = а • АВ X Ь,
mom (ft, а) = b • В А X л.
B.19)
Но в силу правила A.33) о циклической перестановке сомножителей векторно-
скалярного произведения мы можем написать
так как
то
2 Г. К. Суслов
а X АВ= -
a,
17
свойство взаимности доказано. Заметим, что в частном случае, если векторы
а и Ь эквивалентны, их взаимный момент равен нулю.
Формула-B.19) в соответствии с геометрическим смыслом векторно-скаляр-
ного произведения показывает, что взаимный момент двух векторов численно
равен ушестерённому объёму тетраэдра, построенного на данных векторах как
на противоположных рёбрах; при этом объёму тетраэдра приписывается знак
в прежде указанном смысле (§ 5, а).
Выразим взаимный момент векторов а и b через проекции этих векторов
и через координаты их точек приложения А и В. На основании формул B.19)
и A.32) .мы можем написать
mom (а, &) =
иу
В — ХА У В— У А гВ — ¦
bx by bz
Чтобы придать полученному определителю более симметричный вид, преобра-
преобразуем его прежде всего о определитель 4-ю порядка; имеем
10 0 0
mom (а, Ь) =
0 ах ау
0 хв-хА Ув—У
0 Ьх Ьу
Прибавим теперь к элементам 2-го, 3-го и 4-го столбцов элементы первого
столбца, соответственно умноженные на хд, Ул> za< и после этого приложим
преобразованную первую строку к третьей; мы получим тогда окончательное
выражение:
mom (a, &) =
0
|0
У А «А
_ «у аг
хв Ув zn
b* bv b,
B.20)
Выразим ещ,5 взаимный момент тога (а, Ь) скользящих векторов аи b через
их другие координаты4 а именно, через а и ft, и моменты JJ-q ' и Lq рассма-
рассматриваемых векторов относительно некоторой точки О (начала координат). Заме-
Заменим для этого в формуле B.19) вектор АВ через разность Гв — Г?, мы тогда
получим:
mom (а, &) = а • АВХЬ = а • (г в — гА) X Ь =
т. е.
тога (а, Ъ) = а • L{Q)jrb • iSq\ B.21)
Выразив в правой части скалярные произведения через проекции векторов, мо-
можем также написать
mom (а, Ь) = a
Чу^Оу '
III. СИСТЕМЫ ВЕКТОРОВ
12. Система свободных векторов. Главный вектор. Координаты
системы. Совокупность п свободных векторов а,, а2, ..., ап, объеди-
объединённых каким-либо признаком, мы будем называть системой свобод-
свободных векторов. Вгктор а, представляющий собой сумму данных
векторов,
п
носит название главного вектора системы. Проекции главного век-
1S
тора ах, а , аг называются координатами системы; эти величины
характеризуют собой систему свободных векторов. Из определения опе-
операции сложения векторов вытекает, что главный вектор, не зависит от
положения осей координат.
13. Система скользящих векторов. Главный вектор. Главный
момент. Координаты системы. Совокупность п скользящих векторов
аг, а2, ..., ап, объединённых каким-либо признаком, называется систе-
системой скользящих векторов. Так как каждый скользящий векторе,
характеризуется двумя свободными векторами а., и ?сь = гпот0а„,
то система скользящих векторов равносильна двум системам свободных
векторов, Поэтому система скользящих векторов характеризуется не
одним, а двумя главными векторами: главным вектором а системы с,
(у=1, 2, ..., п) и главным вектором LQ системы Low (v= 1, 2, . .., я).
Первый векюр сохраняет своё название главного вектора си-
системы векторов с^, а второй называется главным моментом
системы относительно точки О. Координаты ах, а , az, Lox,
Loy, Loz этих двух векторов называются координатами системы
скользящих векторов.
Так как
п п п
а — 2 #» и Lo— 2 LO4 = 2 г*Х.ау,
11 = 1 V=I 4 = 1
то согласно формулам A.4) и B.14) координаты системы следующим
образом зависят от координат отдельных векторов:
Lox= 2 {У а-г — г^у),
п
v— I
п
^Ог— ^-J ^-*4j> У^х)-
14. Зависимость координат системы от выбора полюса. Если
вместо начала координат возьмём за полюс точку С, определяемую ра-
радиусом-вектором гс, то главный вектор с останется без изменения, а
главный момент Lc относительно нового полюса, вообще говоря, не будет
равняться прежнему главному моменту Lo, так как сами суммируемые
моменты Lo-, изменятся и обратятся в некоторые новые моменты Lei •
Действительно, по теореме B.12) момент Lc вектора с, Относительно
точки С следующим образом выражается через его момент Lot относительно
точки О:
Z. — ? — г X я
Li Оч Сч /х v>
где
гс=ОС.
2* 1»
Отсюда суммированием находим:
^Г1 Г ^П
здесь
v=l
представляют собой соответственно главные моменты системы относительно
полюсов С и О, а второе слагаемое правой части может быть преобра-
преобразовано следующим образом:
— 2 гс Х«ь=-гсХ2а,=-гс X а.
Таким образом, мы окончательно получаем:
Lc=L0— rcXa,
или, что то же,
C.2)
C.3)
Это соотношение может бить истолковано в том смысле, что главный
момент системы относительно некоторого
нового полюса С равен сумме главного
момента относительно старого полюса О
и момента главного вектора относительно
нового полюса С в предположении, что
главный пектор приложен в старом полюсе
О. Пусть, например, Lo есть главный
момент системы относи [ельно полюса О
(фиг. 23), а — главный вектор системы,
. 23. СО X о— момент вектора а, приложенного
к точке О, относительно полюса С. Тогда
главный момент Lc системы относительно полюса С будет равен сумме
векторов Lo и СО X я> как показано иа чертеже:
\
Из доказанного соотношения C.2), между прочим, вытекает, что гео-
геометрическим местом потюсов С с геометрически равными главными мо-
моментами Lc служит прямая, параллельная главному вектору системы:
в самом деле, вектор гс К а не будет изменяться, если конец вектора гс
перемещать параллельно вектору а.
15. Инварианты системы скользящих векторов. Мы видели, что
главный вектор а системы скользящих векторов не зависит от того, от-
относительно какого полюса мы вычисляем главный момент L. Поэтому глав-
главный вектор а называют инвариантом системы относительно измене-
изменения полюса.
Другим инвариантом является, как мы сейчас покажем, скалярное
произведение a-L главного вектора на главный момент. Д1Я доказатель-
доказательства будем исходить из формулы C.2), выражающей главный момент
относительно произвольного полюса С через главный момент относительно
некоторого полюса О:
Lc = L0 — rcX а.
20
Умножив обе части этого равенства скалярно на главный вектор а, мы
получим:
а • Lc = а • Lo — о • гсХ о,-
Здесь векторно-скаляриое произведение а-ГсУСа> как содержащее два
одинаковых множителя, равно нулю; поэтому окончательно получаем:
aLc = aL0; C.4)
следовательно, инвариантность скалярного произведения главного вектора
на главный момент доказана. Если а=^=0, то равенство C,4) может быгь
поделено на а, и тогда ми получим:
а . а .
или а с ' ~а
Согласно формуле A. И) на стр. 7 это равенство означает, что проек-
проекция главного момента системы на направление главного вектора не за-
висиг от положения полюса; для любого полюса эта проекция равна
пр„ L= . (^.5)
а
16i Центральная ось системы скользящих векторов. Разложим
главный момент Lo системы относительно полюса О на составляющий
г (а)
вектор Lq по направлению главного
вектора о и на составляющий век-
вектор Lq° по направлению, перпендику-
перпендикулярному к главному вектору (фиг. 24),
Перемена полюса, как показывает
формула C.4), влияет лишь на со-
составляющий момент Lo< перпенди- tt
кулярный к главному вектору. По- /
смотрим, нельзя ли выбрать полюс С /
так, чтобы этот составляющий мо- i
мент обратился в нуль. Тогда, оче- / |
видно, главный момент Lc относительно
этого полюса будет иметь наимень-
наименьшую из всех возможных величину,
именно L{o\ и по направлению сов-
совпадёт с главным вектором а. Отсту-
Отступим от плоскости, содержащей век-
векторы а и Ив\ по перпендикуляру ОС
Фиг. 24.
к ней на расстояние ОС^=-
притом в такую сторону, чтобы наблю-
наблюдателю, находящемуся в точке С, переход от вектора а к вектору LQ
(по кратчайшему пути) представлялся происходящим против движения
часовой стрелки. Тогда точка С и будет искомым полюсом. Действительно,
по предыдущему [формула C.3)] главный момент Lc для полюса С полу-
получится, как сумма момента Lo и момента К= СО X а вектора а относи-
относительно полюса С. Этот момент по модулю равен
21
и по направлению противоположен L(o'. Следовательно, сумма векторов
Lo и К даст только вектор Lc, равный вектору l}$, что мы и желали,
получить.
Полюсов, подобных С, бесконечное множество; все они лежат на пря-
прямой СС, проходящей через выше построенною точку С и параллельной
главному вектору (см. § 14). Прямая эта носит название центральной
оси системы скользящих векторов. Уравнение центральной оси можно
написать, опираясь на построение, выполненное в предыдущем параграфе
(фиг. 24). Радиус-вектор г произвольной точки М оси, очевидно, может
быть выражен следующим образом:
,
где переменный скалярный параметр т равен отношению векторов——¦
Чтобы выразить вектор ОС через главный вектор а и главный момент Lo,
заметим, что этот вектор направлен одинаково с векторным произведе-
произведением а X Lo и, следовательно, может быть представлен в виде
~OC = ka X Lo;
скалярный коэффициент k можно определить из условия, что длина от-
резка ОС равна ; на этом основании имеем
a
или
sin(a,Z,0)=--;
а так как Lo sin (a, Lo) = L($\ то окончательно получаем:
Возвращаясь к выражению вектора г, можем теперь написать
или
ах Lo
Это и есть уравнение центральной оси в векторной форме. Полученное
уравнение показывает, что центральная ось— это прямая, параллельная
вектору а и проходящая через точку, определённую радиусом-вектором
• 5~^"- В проекциях на оси координат уравнение C.6) будет иметь вид
х ау^Ог az^Oy у azL Ox axL Oz г ^_х
ax ay
где
— -C.7)
Уравнение центральной оси можно также искать, исходя из того ус-
условия, что для точек центральной оси главный момент является минималь-
22
ним. Пусть а попрежкему главный вектор системы, Lo — её главный
момент относительно начала координат, г—радиус-вектор некоторой
точки М центральной оси и L — главный момент относительно этой то i-
ки. По формуле C.2) имеем для этого момента выражение
следовательно, если координаты точки М обозначить х, у, z, то квадрат
модуля главного момента будет равен
Желая определить координаты х, у, z полюса так, чтобый главный момент
для него был наименьшим, мы должны искать минимум функции L2 от
трёх переменных х, у, г. По известным правилам приравниваем нулю
частные производные по этим переменным; получаем
az (LOy — Шх + Хйг) ~ «у (LOz — Хау + УаХ) = 0.
\ — at{Lox — yat^-zalf) = 0, C.8)
z + уахау.
ay (LQx — уаг -\- zay) — ax (LOy — zax -\- xaz) — 0.
Перпое уравнение можно преобразовать следующим образом:
xaz-\- хау — aylOz + azLQy = zaxa
2
Прибавим к обеим частям полученного уравнения хах и перепишем его
в следующем виде:
G-uL,Qg — z^Оv *^"^х —— У^у I ^^z
li- * й- '
где положено
а2 = ах —|- йу -J— аг.
К аналогичному виду приведём также второе и третье уравнения C.8):
xax-r-yay + zaz
,, zLpx x0z n
У
Последние три уравнения можно теперь записать в виде равенства отно-
отношений
й- а'1 Ф
ах ~~ ау az
Мы получили уравнение центральной оси в той же форме C.7), что и
при предыдущем выноде.
17. Распределение главных моментов в пространстве. На осно-
основании предыдущего мы молсем составить себе ясное представление о там,
как расположены в пространстве главные моменты окою различных полю-
полюсов. Мозуль главного момента Lq относительно точки О, отстоящей от
центральной оси на расстоянии CO = d (фиг. 24), по § 14 представится
так:
23
следовательно, геометрическим местом полюсов, для которых главные мо-
моменты по модулю равны между собой, но могут отличаться по направле-
направлению, является круговой цилиндр, ось которого совпадает с центральной
осью системы. Каждая из образующих этого цилиндра служит геометри-
геометрическим местом полюсов с геометрически равными моментами. Моменты,
построенные для точек какого-либо ортогонального сечения этого цилиндра,
расположены по прямошнейным образующим некоторого однополостного
гиперболоида вращения. Окружность, образующая рассматриваемое орто-
ортогональное сечение, служит линией сужения гиперболоида.
Тангенс угла <р, под кото-
которым главный момент Lo на-
наклонён к центральной оси, вы-
выражается так:
ad
Фиг. 25.
следовательно, главный момент
по мере удаления полюса от оси
стремится стать перпендикуляр-
перпендикулярным к оси.
В заключение рассмотрим,
как меняется направление глав-
--- ных моментов для полюсов, ле-
лежащих на прямой, перпенди-
перпендикулярной к центральной оси
в данной на ней точке. Пусть СС — центральная ось системы (фиг. 25),
а и Lc — главный вектор и главный момент для точек на этой оси и
пусть прямая СА перпендикулярна к СС'. Главный момент La относи-
относительно некоторой точки А этой прямой выразится диагональю АЕ прямо-
прямоугольника ABED, у которого сторона AD геометрически равна i"c, a
сторона АВ=а- С А; плоскость'прямоугольника перпендикулярна к С А.
Для другой точки А' на той же прямой СА главный момент La> также
будет диагональю соответствующего прямоугольника A'B'E'D', причём
A'D' = LC и А'В'=аСА'. Очевидно,
АВ __СА .
А В1 СА1'
следовательно, линия СВВ', а потому и линия GEE' — прямые. Из ска-
сказанного вытекает, что главные моменты, построенные для точек прямой СА,
лежат на прямолинейных образующих гиперболического параболоида,
определённого прямыми СА и GE.
До сих пор мы предполагали, что ни главный вектор, ни главный
момент для точек центральной оси не равняются нулю. Если главный
вектор — нуль, то для всех полюсов главные моменты равны между со-
собой. Если главный момент для точек на центральной оси равен нулю,
то главные моменты для всех остальных точек перпендикулярны к цен-
центральной оси, т. е. угол (р, о котором выше была речь, равен —.
18. Построение Понселе. Мы можем найти положение центральной оси,
если система скользящих векторов задана своими координатами. Но изложен-
изложенный способ задания системы, конечно, не единственный; способов задания су-
существует бесчисленное множество. Например, система будет вполне опреде-
24
лена, если известны три главные момента её относительно трёх данных точек.
Мы рассмотрим изящный геометрический приём, данный Понселе (Poncelet),
для отыскания в этом случае центральной оси. Предварительно заметим, что
если известны направления главного вектора АВ=а и главного момента
АС =1а Для какого-ниоудь полюса А
(фиг. 26), то легко найти плоскость, в
которой должна лежать центральная
ось. По § 16 искомая прямая парал-
параллельна главному вектору и встречает
перпендикуляр AD, восставленный в
точке А к плоскости CAB; следователь-
следовательно, эта прямая лежит в плоскости Р, про-
проходящей через АВ и перпендикулярной
к плоскости CAB. Теперь задачу нашу
легко решить. Направление главного
вектора характеризуется тем, что проек-
проекция на него любого главного момента.
имеет постоянную величину; следова-
следовательно, если для произвольной точки как
вершины построим тетраэдр с боко-
боковыми рёбрами, геометрически равными
тр?м данным моментам, то высота
этого тетраэдра, опущенная нз той
же вершины, и даст искомое направ-
направление. Затем по предыдущему с по- фиг 26
мощью двух полюсов строим две пло-
плоскости, содержащие центральную ось; пересечением их и будет искомая прямая.
19. Эквивалентные системы скользящих векторов. Системы
прямо противоположные. Системы, эквивалентные нулю. Две сис-
системы скользящих векторов называются эквивалентными между собой,
если они имеют соответственно равные главный вектор и главный момент
для любого полюса. Для этого необходимо и достаточно (§ 6), чтобы
у них оказались соответственно равными главный вектор и главный момент
для одного только полюса.
Система скользящих векторов, у которой главный вектор и главный
момент равны нулю, называется эквивалентной нулю. Примером
такой системы может служить система двух прямо противоположных
векторов.
Две системы скользящих векторов, у которых главные векторы и
главные моменты противоположны для любого полюса, называются систе-
системами, прямо противоположными друг другу. Чтобы это обстоятель-
обстоятельство имело место, необходимо и достаточно, чтобы таким свойством обла-
обладали главный вектор и главный момент для одного какого-либо полюса.
Если в данной системе векторов все векторы заменим прямо противополож-
противоположными, то, очевидно, новая система векторов будет прямо противоположна
прежней.
Если из двух или нескольких систем вектороз составим одну слож-
сложную систему, то главный вектор и главный момент сложной системы
для какого-нибудь полюса будут соответственно равняться сумме глав-
главных векторов и главных моментов отдельных систем относительно
того же полюса. Отсюда вытекает, что если к какой-либо системе векто-
векторов присоединить систему, эквивалентную нулю, то новая сложная система
будет эквивалентна прежней. Соединение двух прямо противоположны*
систем даёт систему, эквивалентную нулю. Наоборот, если систему, экви-
25
валентную нулю, разделить на две, то получатся две прямо противополож-
противоположные системы.
Если две системы S] и S2 скользящих векторов таковы, что сложная
система из с?, и системы, прямо противоположной S2, или, наоборот,
из S2 и системы, прямо противоположной Sv эквивалентна .нулю, то
системы Sx и S2 эквивалентны друг другу.
20. Простейшие системы скользящих векторов. Один вектор.
П&ра векторов. Наиболее простой системой скользящих векторов является
система, состоящая только из одного вектора. Другая простая система
потучится, если мы возьмём два
скользящих вектора Р и Р', равные
по модулю, лежащие на параллельных
основаниях АВ и CD и противополо-
противоположно направленные (фиг. 27). Такая
система носит название пары век-
векторов. Главный вектор для пары
обращается в нуль, а потому (§ 17)
главный момент пары не зависит от
положения полюса. Мы его просто
будем называть моментом/-пары.
Обозначим г вектор, соединяющий
в каком-нибудь направлении точки
приложения векторов пары, например от О к Е. Непосредственно видно,
что если при вычислении главного момента L пары взять за полюс
точку О, то главный момент равен векторному произведению вектора г
на тот из векторов пары (вектор Р), к началу которого направлен вектор
г. Итак, момент пары равен
= rXP.
C.9)
Модуль момента пары, очевидно, равен произведению модуля одного из
векторов пары на расстояние h между основаниями, т. е. на так назы-
называемое плечо пары:
L=hP. (ЗЛО)
По направлению момент пары перпендикулярен к плоскости пары, т. е.
плоскости, содержащей векторы пары, и идёт в ту сторону от неё, от-
откуда наблюдатель видиг векторы стремящимися повернуть плечо пары против
движения часовой стрелки. Пары, имеющие равные моменты и лежащие
в одной плоскости, эквивалентны между собой. Точно так же пары, ле-
лежащие в параллельных плоскостях, эквивалентны между собой, если
равны их моменты.
21. Замена данной системы векторов простейшей, ей эквивалент-
эквивалентной, при инвариантах, отличных от нуля. Введение в рассмотрение
эквивалентных систем даёт нам возможность заменять одни системы век-
векторов другими, более простыми или более удобными в каком-либо отно-
отношении. Так, например, система, состоящая нз нескольких векторов с
общей точкой приложения, может быть заменена одним вектором, равным
сумме данных векторов и приложенным к той же точке.
26
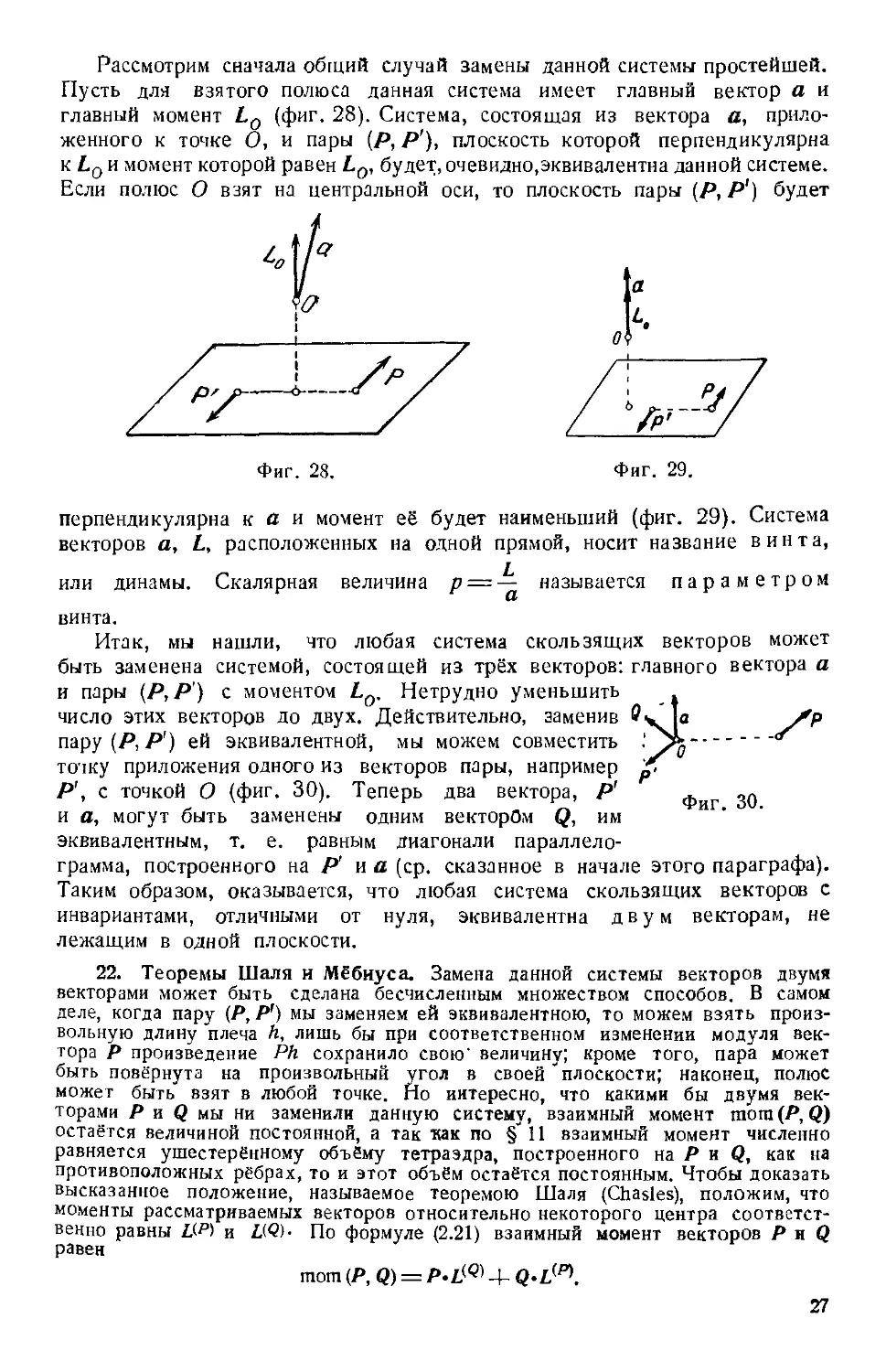
Рассмотрим сначала общий случай замены данной системы простейшей.
Пусть для взятого полюса данная система имеет главный вектор а и
главный момент LQ (фиг. 28). Система, состоящая из вектора а, прило-
приложенного к точке О, и пары (Р, Р'), плоскость которой перпендикулярна
к Lo и момент которой равен Lo, будет, очевидно,эквивалентна данной системе.
Если полюс О взят на центральной оси, то плоскость пары (Р, Р') будет
Фиг. 28.
Фиг. 29.
перпендикулярна к а и момент её будет наименьший (фиг. 29). Система
векторов a, L, расположенных на одной прямой, носит название винта,
ж
параметром
или динамы.
Скалярная величина р==— называется
а Хр
Фиг. 30.
винта.
Итак, мы нашли, что любая система скользящих векторов может
быть заменена системой, состоящей из трёх векторов: главного вектора а
и пары (Р,Р') с моментом LQ. Нетрудно уменьшить
число этих векторов до двух. Действительно, заменив 0ч
пару (Р, Р') ей эквивалентной, мы можем совместить
точку приложения одного из векторов пары, например
Р', с точкой О (фиг. 30). Теперь два вектора, Р'
и а, могут быть заменены одним вектором Q, им
эквивалентным, т. е. равным диагонали параллело-
параллелограмма, построенного на Я' и о (ср. сказанное в начале этого параграфа).
Таким образом, оказывается, что любая система скользящих векторов с
инвариантами, отличными от нуля, эквивалентна двум векторам, не
лежащим в одной плоскости.
22. Теоремы Шаля и Мёбиуса. Замена данной системы векторов двумя
векторами может быть сделана бесчисленным множеством способов. В самом
деле, когда пару (Р, Р') мы заменяем ей эквивалентною, то можем взять произ-
произвольную длину плеча Л, лишь бы при соответственном изменении модуля век-
вектора Р произведение Ph сохранило свою' величину; кроме того, пара может
быть повёрнута на произвольный угол в своей плоскости; наконец, полюс
может быть взят в любой точке, по интересно, что какими бы двумя век-
векторами Р и Q мы ни заменили данную систему, взаимный момент гаога(Я, Q)
остаётся величиной постоянной, а так пак по § 11 взаимный момент численно
равняется ушестерённому объёму тетраэдра, построенного на Р и Q, как на
противоположных рёбрах, то и этот объём остаётся постоянным. Чтобы доказать
высказанное положение, называемое теоремою Шаля (Chasles), положим, что
моменты рассматриваемых векторов относительно некоторого центра соответст-
соответственно равны L(P) и L(Q)- По формуле B.21) взаимный момент векторов Р и Q
равен
mom (P, Q) = P.L(Q) -V- Q-L{P).
27
Это выражение можно преобразовать следующим образом:
тога (Я, Q) = (Я+ Q)-(
действительно, по раскрытии скобок, кроме прежнего выражения, появятся
два слагаемые
каждое из которых согласно формуле B.17) равмо нулю как произведение век-
вектора на его момент. Но Я-f-Q есть главный вектор а системы и Iip)-\-UQ) ^
efe главный момент L. Следовательно,
тога (Я, Q) — a-L,
т. е. взаимный момент равен второму инварианту системы, что и доказывает
теорему.
Если данная система состоит из п векторов ач с моментами Z., относи-
относительно некоторого центра, то можно показать, что взаимный момент тех двух
векторов Я, Q, которые эквивалентны системе, равняется сумме взаимных мо-
моментов всех векторов системы, т. е.
я, л
mom (Я, Q) = 2 mom <а« V (v Ф V-Y>
4=1,A=1
здесь значки v, ц в каждом слагаемом различны, так что число членов суммы
ff iff \\
есть ——~ -. Для доказательства этого положения преобразуем следующим
образом выражение B.21) для взаимного момента:
mom (/>, <?) = />.?«?> -i-Q.L^ = (P + QHL^p) + L{Q)) = J a, • 2 К
Выбросив в последнем выражении все произведения с одинаковыми индексами,
как равные нулю, можем написать
п, л
mom (P, Q) = j (a
Выражение в скобках представляет как раз взаимный момент векторов а„, а^\
таким образом, как мы и желали получить,
п, л
mom (Я, Q)= 2 mom(av, а^) {у Фу).
Доказанная теорема носит название теоремы Мёбиуса (Mobius).
23. Замена системы векторов простейшей, если хотя бы один
инвариант равен нулю. Мы видели, что в общем случае, когда инва-
инварианты отличны от нуля, т. е. когда
система эквивалентна двум векторам, не лежащим в одной плоскости.
Теперь рассмотрим случаи, когда какой-либо из инвариантов обращается
в нуль.
Если а = 0, то и второй инвариант а ¦ L становится нулём. Так как
главный вектор системы — нуль, то система нли эквивалентна нулю, или
эквивалентна паре С моментом L, равным главному моменту системы;
последний в данном случае не зависит от положения полюса.
28
Пусть теперь
афО, a-L = O. C.11)
Нетрудно видеть, что написанные выражения представляют условия, не-
необходимые и достаточные для того, чтобы данная система была эквива-
эквивалентна одному вектору. Если система может быть заменена одним векто-
вектором, то для полюсов, лежащих на основа-
основании этого вектора, главный момент L си-
системы дотжен обращаться в нуль, а, значит, „ п, уК
для рассматриваемых полюсов и произведение
a-L = 0. Но поскольку это произведение
является инвариантом, оно равно нулю так-
также и для всех других точек. Итак, условия
C.11) необходимы. Докажем, что они также
достаточны. Если L=-0, это очевидно само Фиг. 31.
собой. В противном случае из равенства
нулю скалярного произведения а • L следует, что главный момент L пер-
перпендикулярен к главному вектору а (фиг. 31). Отступив в этом случае
от полюса О по перпендикуляру к плоскости {a, L) в соответственную
сторону на расстояние ОС—— (см. § 14), мы найдём полюс С, для
которого главный момент обратится в нуль, и, следовательно, система
окажется действительно эквивалентной одному вектору а' = а, приложен-
приложенному к точке С.
24. Плоская система векторов. Система, у которой все векторы
лежат в одной плоскости, называется плоской. Главный момент такой
системы относительно любого центра, расположенного в её плоскости,
перпендикулярен к этой плоскости, а главный вектор лежит в самой
плоскости. Следозательно, второй инвариант системы равен нулю и, по
§ 23, система эквивалентна или одному вектору, или паре, или нулю.
25. Система параллельных векто-
векторов. Центр системы. Пусть все векторы
Oj, a2, ...,ап системы параллельны не-
некоторому направлению к, характеризуемому
единичным вектором и0 (фиг. 32). Будем
обозначать проекции векторов системы на
направление и индексом и. Тогда коорди-
координаты некоторого v-ro вектора системы
получат выражение
Фиг. 32.
Lo, — г, X йвд«о = я7аг, X о»,
где Lo-, есть момент вектора ау огноситель-
но точки О (начала координат). Следовательно, главный вектор и главный
момент относительно точки О соответственно равны:
а-
29
Составим выражение для второго инварианта; имеем
a-Lo={ 2 в,в «°- 2 я^Д Хи°;
\v = l / \м=] /
но векторно-скалярное произведение при наличии двух коллинеарных мно-
множителей равно нулю (см. § 5, а), следовательно,
Мы видели (§ 23), что если второй инвариан! ранен нулю, то
система векторов или приводится к пулю, или к паре, или, если главный
вектор а системы отличен от нуля, к одному вектору, равному векто-
вектору о. В нашем случае последнее обстоятельство имеет место при условии
2
Вектор, эквивалентный системе, имеет в эюм случае выражение
как видим, он параллелен векторам системы.
Найдём на прямой, служащей оснопапием этого вектора (т. е. па
центральной оси системы), точку, независимую от общего направления
вексоров; иначе говоря, найдём на основании вектора а такую точку С
(фиг. 32), которая не изменит своего положения, если, опавив все век-
векторы а,, параллельными между собой, повернуть их на один и тот же
угол около их точек приложения: искомая точка носит название центра
системы параллельных векторов. Согласно формуле C.2) главный
момент Lc относительно точки С, заданной радиусом-вектором гс, выра-
выражается через главный момент Lq относительно начала координат сле-
следующим образом:
Lc =- Lo — rc X а = I 2) а,„гА X и0 — гс X
/ п
XB0-Bifl|B
Так как точка С лежит на основании того вектора а, который эквива-
эквивалентен всей системе векторов, io Lc = 0, и для определения вектора гс
мы получаем уравнение
¦ я л \
= 1 " С м=] ™У
Множитель в скобках не зависит от общего направления и0 векторов
системы, а так как этот множитель не может быть коллинеарным с век-
вектором и0 произвотьного направления, то равенство нулю рассматриваемого
векторного произведения потучается за счёт юго, что этот множитель
равен нулю. Итак,
п л
¦^i ^ а О
30
Отсюда для радиуса-вектора гс центра С системы получаем выражение
гс~
C.12)
или, в проекциях на оси координат,
л:с—-
л
2
1=1
Ус = -
п
"V1
п
,1,
C.13)
Если все параллельные векторы а, направлены в одну сторону, то в по-
последних формулах, очевидно, вместо ача везде мижно писать аг
Мы обнаружили инвариантность точки С
относительно направления векторов ач системы.
Положение этой точки по отношению к точкам
приложения /и, векторов а, не зависит также
от выбора системы координат. В самом деле,
при переходе от системы координат Охуг к:
некоторой новой системе координат O'x'y'z'
(фиг. 33) радиусы-векторы г„ в правой части
выражения C.12) придётся преобразовать по
Ф°РМУЛе г=г' + & Фиг-33-
где г\ — радиусы-векторы точек приложения векторов av в новой системе
коэраинат и & — радиус-вектор начала О' новых осей по отношению
к старой системе. Но тогда по той же формуле преобразуется и левая
часть выражения C.12); действительно,
л
1
ж
¦+•
¦у а -V а
Отсюда и видно, что центр С системы векторов а„ места своего по отно-
отношению к точкам приложения векторов ач не переменил.
IV. ВЕКТОР-ФУНКЦИИ
26. Вектор-функция. Годограф. Производная от вектора по ска-
скалярному аргументу. Если модуль и направление вектора а зависят от
значений, принимаемых какими-либо переменными t, и, v, w, то вектор а
называется векторной функцией этих переменных или, короче,
вектор-функцией. Мы ограничимся здесь рассмотрением вектор-
функций только от одной независимой переменной t:
a = a(t).
31
Проекции такого вектора, очевидно, тоже представляют собой некоторые
функции от t:
Если из какого-либо неизменного полюса О станем строить векторы,
равные рассматриваемому переменному 'вектору а (фиг. 34), то геометри-
геометрическим местом концов этих векторов будет некоторая кривая И, носящая
название годографа вектора а. Очевидно, выражения
представляют собой уравнения годографа в параметрической форме, если
за полюс О взято начало координат. Когда вектор, не изменяя своего
направления, меняет только свой модуль, годографом служит отрезок
прямой. Если вектор, сохраняя постоянным свой модуль, меняет только
направление, годографом является сферическая кривая. Годограф будет
плоской кривой, если проекция вектора на
некоторое неизменное направление постоянна.
Возьмём два значения независимой пе-
, ременной: t и t-\-&t. Пусть вектор-функция
^5 принимает для них значения аи а-{-1а
(фиг. 34)w Вектор Да называется прираще-
приращением вектора а, соответствующим прира-
приращению Д^ независимой переменной t. Рассмот-
Да
рим вектор, равный отношению гт-: этот
вектор направлен одинаково с вектором Да.
Изучим его предел в предположении, что
приращение независимой переменной стремится к нулю. Если такой
предельный вектор существует, то он называется производной от
вектора а по переменной / и обозначаете^ -тт. Таким образом,
Произведение производной вектора на дифференциал независимой пере-
переменной называется дифференциалом вектора:
da = Ttdt.
В частном случае параметр t может быть временем; тогда для обозначе-
обозначения производной, кроме вышеуказанного, употребляется также точка:
-? = о. Впрочем, в этой главе, там где это не будет вызывать недора-
недоразумений, мы будем иногда для краткости письма обозначать точкой про-
производную по аргументу t независимо от его физического смысла.
Мы видим, что производная от вектор-функции вводится так же, как
производная от скалярной функции. Если а = const., т. е. если вектора
постоянен и по модулю, и по направлению, производная равна нулю:
— — 0. Нетрудно было бы также распространить на вектор-функции
32
целый ряд правил формального дифференцирования. .В частности, легко
доказать следующие формулы:
f(^ Xg. D.2)
Формула Тейлора (Taylor) также остаётся верной для векторов:
Интересная формула получится, если продифференцировать равенство
а-а = а"-.
Применяй к левой части формулу D.1), мы после сокращения на 2 получим:
a-da~ada. D.4)
В заключение выразим производную от вектора а через производные
от его проекций на оси неподвижной системы координат; имеем:
а = ajc0 -\- ауу° 4- агга,
откуда
^ в + й/. D-5)
т. е. производная вектора по скалярному аргументу есть вектор, проекции
которого равны производным от проекций дифференцируемого вектора
по ro.iy же аргументу. Аналогично имеем для производной и-го порядка
d"a = d" °х х<> -L <" аУ У° A- d" аг г° D 61
at~ dt ' йГ dt '
27. Производная от единичного вектора. Разложение производ-
производной вектора на радиальную и трансверсальную. Докажем, что про-
производная а0 от единичного вектора о0 (если она не равна нулю) перпен-
перпендикулярна к дифференцируемому вектору. Действительно, мы имеем:
отсюда согласно формуле D.1) находим:
2оО. во = о,
следовательно,
fl°J_fl°. D.7)
Дифференциал единичного вектора, конечно, тоже перпендикулярен к еди-
единичному вектору.
К этому результату можно "прийти также геометрическим путём. Пусть
а0 и а0-(-Да0 соответственно положения единичного вектора, отвечаю-
отвечающие значениям t и t-\-id независимой переменной (фиг. 35), и пусть
Д-f — угол между ними. Поскольку как ОА, так и ОВ численно равны
3 Г К. Суслов 33
единице и, следовательно, Д ОАВ равнобедренный, угол между а0 и
Д«°, или, что то же, между а0 и -?г- равен ^ — -^. При предельном
переходе Д/ —>* О угол Дя также будет стремиться к нулю, оi куда сле-
следует, что вектор а0, равный lim -т-т , будет перпендикулярен к а0.
л/-*о at
Рассмотренное геометрическое построение позволяет также вычислить
модуль производной единичного вектора. В самом деле, основание ] Да01
равнобедренного треугольника ОАВ раино
откуда
I a° I =
Да0
¦ г = lim
= lim 2-
sin
Д<р io
\
Aip
буквой to (этот предел, вообще говоря,
Обозначим предел отношения
- а9
не равен производной ~ от угла со по переменному t, так как для век-
вектора, который не остаётся параллель-
параллельным неподвижной плоскости, вообще не
/ / существует такого угла <р, который бы
/ / определял его положение); мы, следо-
, в вательно, нашли, что
О |eO| = lim^ = <o. D.8)
Назовём теперь буквой р° единичный
вектор, перпендикулярный а0 и на-
направленный одинаково 'с а°. Тогда,
объединяя результаты D.7) и D.8), мы
можем написать
D.9)
или
Фиг. 35.
В частном случае, если вектор а0
a = a>/»o. D.10)
с у, р остаётся параллельным неподвижной
плоскости, эта формула переходит в более простую
а° = ур<>, D.П)
причём здесь уже под р° нужно подразумевать вектор, перпендикуляр-
перпендикулярный а0 и направленный в сторону возрастания угла <р (т. е. в сто-
сторону положительного отсчёта этого угла).
Переменный вектор a = a(t) изменяется, вообще говоря, по модулю
и по направлению. Интересно отдельно охарактеризовать быстроту его
34
изменения в том и другом отношении. Для этого представим прежде
всего вектор а как произведение модуля на единичный вектор:
а = аа°.
Взяв производную от обеих частей, мы найдём:
или, на основании D.10),
а = аа° ~j- aa°,
а = аа° -\- аюр°.
D.12)
Первое слагаемое правой части, очевидно, направлено по самому вектору
а и потому носит название продольной, или радиальной, состав-
составляющей; оно характеризует быстроту изменения модуля вектора; если век-
вектор постоянен по модулю, радиальная составляющая равна нулю, и, следова-
тельно, производная а или равна нулю, или перпендикулярна к а; второе
слагаемое перпендикулярно к вектору а и называется поперечной,
или трансверсалыюй, составляющей; оно характеризует быстроту
поворота вектора. Если вектор не меняется по направлению, транснер-
сальная составляющая равна нулю, и, следовательно, производная а или
равна нулю, или коллинеарна с а. Из формулы D.12) видно, что во-
вообще \а\ ф а, а значит, и \da\^=da, т. е. модуль дифференциала,
вообще говоря, не равен дифференциалу модуля вектора.
28. Геометрический смысл первой и второй производных вектора.
Фор_мула кривизны кривой- Заметим прежде всего, что приращение Да
вектора служит хордой его годографа (фиг. 34). Пусть длина дуги го-
годографа от некоторой его точки до конца вектора а, измеренная в тех
же единицах, что и вектор а, есть s. Называя Д.? длину дуги, стяги-
стягиваемой хордой Да, мы получаем для модуля производной выражение
т. е.
da
dt'
— itm
Да
дТ
4
da
dt
iim
==
Да
ds
dt
ДТ
= l •
ds
dt
D.13)
как следствие получаем:
\da\ = \ds\. D.14)
С другой стороны, поскольку предельным направлением секущей (при
неограниченном сближении точек её пересечения с кривой) является ка-
йа
сательная, мы можем утверждать, что производная — направлена по ка-
касательной к годографу вектора а. Назвав т° единичный вектор касатель-
касательной, направленный в сторону отсчёта длин дуг, мы можем оба резуль-
результата объединить в записи:
D.15)
da ds-0
dt dt
В частном случае, если независимой переменной служит длина дуги s
годографа, мы получаем:
*? ==*>,' D.16)
35
т. е. производная вектора по дуге годографа равна единичному вектору
касательной.
Пусть в дальнейшем рассматриваемый вектор а есть радиус-вектор
г текущей точки кривой, заданной векторным уравнением
r = r(s).
Формула D.16), применённая к радиусу-вектору точки, даёт
S=^°' <4Л7>
т. е. производная от радиуса-вектора по дуге кривой равна единичному
вектору касательной.
Продифференцировав вторично уравнение D.17), мы получим
ставлена как
Согласно формуле D.9) правая часть этого равенства может быть пред-
i-r^-v° (фиг. 36); здесь lim -Л есть предел", к которому
стремится отношение угла Д:р
''Г' между двумя касательными к со-
соответствующему приращению
длины дуги \s-AA', т.е. это
есть кривизна А кривой; v°
представляет собою единичный
вектор главной нормали;
действительно, вектор lim -г-
перпендикулярен к касательной
Фиг: 36.
и, кроме того, Дт° лежит в плос-
плоскости, проходящей через каса-
касательную AT и параллельной
касательной А'Т' в соседней точке кривой; предельным положением
этой плоскости при А'—>А является так называемая сопри-
соприкасающаяся плоскость; нормаль же, лежащая в соприкасающейся
плоскости и направленная в сторону вогнутости кривой, называется глав-
ной нормалью. Итак,
ds
= 4/0,
а следовательно, и
ds*'
D.18)
D.19)
т. е. вторая производная от радиуса-вектора по дуге годографа равна
кривизне, умноженной на единичный вектор главной нормали. Введя ра-
радиус кривизны р
= —-, мы можем также написать
ds
vO
' P
D.20,
D 21)
36
Выразив радиус-вектор г через его проекции, т. е. положив
г= ххй т\-уу° -\- zz°,
и перейдя к модулям векторов в формуле D.19), мы получим следую-
следующее выражение для кривизны:
29. Проекции производной вектора на неизменное и подвижное
направления. Согласно формуле A.11) проекция вектора а на направ-
направление, заданное единичным вектором и0, имеет, следующее выражение:
Применив это правило к производной вектора а, мы получаем:
Если и0 = const., то правая часть равенства может быть представлена как
~-т-(а-и°), что, в свою очередь, равно -т- пр„оа. Поэтому мы окончательно
получаем:
npuog = ^np«oa, D.23)
т. е. проекция производной вектора на неизменное направление равна
производной от проекции вектора на это направление. Если же само на-
направление и0 меняется в зависимости от значений независимого перемен-
переменного t, предыдущее выражение заменится другим. В этом случае
i,a.«.) -%¦* + .¦%.
и потому
da „ d , „. rf«°
Т. е.
da d ^ du° ,. o.4
=тп^'а-а-ч1- D-24)
жтч1
30. Интеграл от вектора по скалярному аргументу. Если вектор
Ь равен производной от вектора а, т. е.
•Ж = Ь< <4-25>
то вектор а называется неопределённым интегралом от Ь, что обозна-
обозначается следующим образом:
^dt. D.26)
Как и в области скалярного переменного, неопределённый интеграл D.26)
содержит в себе произвольную аддитивную постоянную, т. е. если Fit)
означает какую-либо одну из функций а, удовлетворяющих уравнению
0.25), то общее выражение функций а, ему удовлетворяющих, будет
a = F{f)-\-c, D.27)
где с — произвольный постоянный вектор.
37
Определённым интегралом в пределах от t0 до t называют разность
соответствующих значений неопределённого интеграла
D.28)
Разрешим последнее уравнение относительно a {t); мы найдём:
D.29)
В пспученном выражении для неопределённого интеграла a(t) роль про-
произвольного постоянного играет значение a(t0), которое придают этому
интегралу при некотором значении аргумента t = t0.
На определённый интеграл D.28) можно также смотреть, как на пре-
предел некоторой суммы, а именно:
где iif4 = tfv + 1—14 »tnJrX~—t. Доказательство последней формулы совер-
совершенно такое же, как для скалярных функций; поэтому мы на нём не
останавливаемся. Каждая из приведённых в этом параграфе векторных
формул, разумеется, эквивалентна трём скалярным формулам; так, если
то
dt, ау = \ Ьу dt, az = [ bz dt
и т. д.
31. Производная системы скользящих векторов. Обратился те-
теперь к некоторой системе S скользящих векторов. Пусть её координаты,
т. е. главный вектор и главный момент относительно некоторого непо-
неподвижного полюса О (начала координат}, соответственно равны аи Lo. Мы
это будем изображать символическим равенством
Если векторы системы являются функциями одной независимой пе-
переменной t, то функциями той же самой переменной будут и коор-
координаты (a, Lo ) системы. Рассмотрим два значения независимой переменной,
t и f-\-At; пусть соответствующие значения координат системы будут
(с, Lo) и (с-[-До, lo +Л?о)-
Очевидно, система (Дс, Д?о) представляет собой такую систему, которая,
будучи приложена к системе (a, Lo), даёт систему (a-j- Да, Lo -\-ALo). На-
Назовём систему (Да', \Lo) приращением системы .S и обозначим её &S.
Разделим координаты системы AS на приращение At независимой пере-
переменной и перейдём к пределу, устремив приращение At независимой
переменной к нулю. Тогда мы потучнм систегиу (a, Lo), которая назы-
называется производной от данной системы 5 и обозначается следующим
образом:
S = (a,L0).
38
Итак, система S имеет своим главным вектором и главным моментом про-
производные от главного вектора и главного момента данной системы.
32. Зависимость координат производной системы от изменения
положения полюса. В предыдущем параграфе при введении понятия о
производной от' системы скользящих векторов существенной была пред-
предпосылка, что полюс О мыслился как неподвижный. Посмотрим, как нужно
обобщить заключительную формулировку параграфа, если полюс, относи-
относительно которого берётся главный момент, меняет своё положение. Пусть
этот полюс обозначен буквой А. Согласно теореме C.2) на стр. 20 но-
новые координаты a, LA рассматриваемой системы скользящих векторов сле-
следующим образом связаны с её старыми координатами a, LQ:
S = (a, LA) = (a,L0 — rAX а).
Составим выражение для производной системы S, имея в виду, что коор-
координаты производной системы равны производным от координат основной
системы, вычисленным в предположении неизменности полюса; мы полу-
получим:
S=(a,L0 — rAXa). D.30)
С другой стрроны, найдём производную от главного момента системы ЪА\
мы имеем
LA=jt(L0 — rAXa) =L0 — rAxd — 'rAXa. D.31)
Сравнивая выражения D.30) и D.31), мы приходим к следующей тео-
теореме:
S=('a,LA + rAXa). D.32)
Полюс, радиус-вектор которого численно и по направлению равен гА,
всего естественнее назвать производным полюсом от полюса А,
определяемого радиусом-вектором гА. Тогда формулу D.32) словами мо-
можно будет выразить так: главный вектор производной системы равен
производной от главного вектора основной систему; главный момент про-
производной системы равен сумме производной от главного момента основ-
основной системы (относительно полюса А) и момента относительно начала
координат главного вектора системы, приложенного к производному по-
полюсу от полюса А. Указанный поправочный член обращается в нуль,
если производный полюс для данного значения независимой переменной
t попадает в начало координат или если радиус-вектор гА производного
полюса коллинеарен с главным вектором а системы.
Если вместо системы скользящих векторов мы имеем только один
скользящий вектор, то всё сказанное выше остаётся в силе, только слова
«главный вектор и главный момент» должны быть заменены словами
«скользящий вектор и его момент».
Часть вторая
КИНЕМАТИКА
ОТДЕЛ I
КИНЕМАТИКА ТОЧКИ
V. КОНЕЧНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ ТОЧКИ
(ЗАКОН ДВИЖЕНИЯ ТОЧКИ)
83. Введение. Предмет теоретической механики. Со времени
Ньютона (Newton) вся совокупность наук, занимающихся исследованием
явлений материального мира, называется натуральной философией, или
естествознанием. К естественным наукам относится и теоретическая меха-
механика, изучающая законы движения тел и называемая ещё иначе анали-
аналитической механикой. Необходимо при этом заметить, что теоретическая
механика ограничивается рассмотрением так называемых механических
движений, т. е. движений одних материальных тел относительно других
материальных тел. Механическое движение представляет собой наиболее
простую и вместе с тем весьма распространённую форму существования
и проявления материи; поэточУ понятны то огромное значение теоретической
механики среди естественных наук и та исключительная роль, коюрую
аанимают её многочисленные приложения в области техники.
В теоретической механике, кроме понятия о движении, вводят ещё
понятие о силе; сила е,сть внешний фактор, изменяющий движение тела. Тот
отдел механики, в котором движение изучается вне зависимости от сил,
обусловливающих данное движение, называется по Амперу (Ampere)
кинематикой. Здесь рассматриваются пространственные соотношения и их
изменения, совершающиеся с течением времени. Другими словами,
кинематика есть не что иное, как геометрия, в которой независимой
переменной служит время. Движущийся объект в кинематике важен лишь
по своей форме и по своему положению; это объект геометрический:
точка, линия, поверхность, тело или совокупность'их.
Часть механики, изучающая движение тел в связи с теми силами,
которые это движение изменяют, носит название кинетики. Кинетика
разделяется на статику и динамику. В первой говорится об условиях,
при которых тела, подверженные действию приложенных к ним сил, будут
оставаться в покое; во второй изучается движение материальных тел
под действием сил. Динамика разрешает две основные задачи: прямая
состоит в том, что по данному движению нужно найти силы; обратная
задача позво!яет найти движение, если известны силы и так называемые
начальные данные, т. е. положения и скорости частиц в некоторый
момент времени.
В нашем изложении мы придерживаемся такого порядка: начинаем
с кинематики, разделив её на кинематику точки и кинематику твёрдого
40
тела; затем переходим к динамике, подразделив её также на два круп-
крупных отдела: динамику материальной частицы и динамику системы. Статику
мы рассмотрим в конце динамики как частный случай общего учения
о движении и силах.
Более мелкие почразделения будут проведены в процессе изложения,
причем в соо!ветствующих местах будут изложены и объяснены термины,
вве пенные в настоящем параграфе.
34. Движение. Непрерывную совокупность (геометрическое место)
каких-либо тождественных между собой геометрических объектов усло-
условимся называть средой, а каждый отдельный геометрический объект,
ВХ0 1ЯШИЙ в состав совокупности,— элементом среды. Под геометри-
геометрическим объектом мы разумеем точку, линию, поверхность, тело или
собрание их в конечном или бесконечно большом числе. Например, линей-
линейчатая поверхность представляет собой непрерывную совокупное^ прямых
линий (образующих) или непрерывную совокупность точек; следовательно,
эта поверхность как среда может иметь своим этементом прямую или точку.
Размеры среды могут быть как конечные, так и бесконечно большие.
Под движением данного геометрического объекта в данной среде
разумеется последовательное с течением времени совпадение этого объекта
с тождественными ему элементами среды. Такое определение движения
имеет смысл лишь в том случае, если мы сможем определить положение
отдельных тождественных между собой элементов среды. Это достигается
выбором определённой системы отсчёта, т. е. некоторой системы тел (гео-
(геометрических элементов среды), относительно которых и пронехотдт движение.
Например, о движении точки по прямой мы сможем зактючшь лишь тогда,
когда изменяется положение рассматриваемой точки относительно некоторой
фиксированной точки на прямой; движение точки при этом состоит
в том, что она последовательно совпадает с различными точками прямой.
Таким образом, о движении можно говорить при условии, если мы
имеем: 1) то, что движется, 2) среду, в которой происхозит движение,
и 3) определённую систему отсчёта, относительно которой и рассматри-
рассматривается движение.
Так, движение прямой по линейчатой поверхности состоит в-последо-
в-последовательном совпадении её с образующими поверхности; движением точки
по той же поверхности называется переход её из одной точки поверхно-
поверхности в другую; при этом мы принимаем, что указан способ (система отсчёта),
которым определяется положение движущейся прямой или движущейся
точки относительно поверхности.
Один и тот же геометрический объект может двигаться одновременно
в двух или более средах; точно так же в одной и «той же среде одно-
одновременно могут двигаться два или более объекта.
Среда, в которой происходит движение, вообще говоря, должна
иметь по крайней мере одним измерением больше, чем движущийся
объект; но если то, что движется, мы рассматриваем как непрерывную
совокупность геометрических объектов, имеющих меньшее число измере-
измерений, то среда может иметь столько же измерений, сколько их имеет и
сам движущийся объект. В таком случае движением называется после-
последовательное с течением времени совпадение элементов одной среды (той,
Которая движется, или подвижной) с элементами другой среды (той,
8 которой происходит движение, или неподвижной). Так, две налагаю-
41
щиеся линейчатые поверхности могут двигаться одна по другой, если на
них смотреть как на непрерывные совокупности прямых линий или
точек.
В дальнейшем мы ограничимся изучением движений в среде трёх
измерений, притдм среде неограниченных размеров, имеющей своим
элементом точку. Когда расстояния между точками среды не изменяются
с течением времени, то среда носит название неизменяемой, или неизмен-
неизменной; в противном случае она называется изменяемой, или деформирую-
деформирующеюся. Так как за основной элемент у нас взята точка, то движущи-
движущимися объектами будут точка, система нескольких точек или некоторая
непрерывная совокупность их, т. е. среда одного, двух или трёх измере-
измерений (линия, поверхность, тело).
Движение в среде деформирующейся вам не придётся разбирать,
поэтому в последующем изложении термин «среда» без эпитета будет
означать среду неизменную. Иной раз, по общепринятому обычаю, мы
будем употреблять и выражение «движение в пространстве»; слово
«пространство» будет тогда означать опять- неизменную среду, элементом
которой служит точка
Простейшим из подлежащих нашему рассмотрению движений несом-
несомненно служит движение одной точки. Для точки, собственно, следовало
бы рассмотреть и движение её в средах одного и двух измерений (по линии
и по 1юверхности), но мы оставляем это в стороне, так как такие
движения являются частным случаем движения в трехмерной среде.
Обстоятельства, сопровождающие движение точки в трёхмерной1 среде,
и излагаются в кинематике точки.
В дальнейшем изучается/ движение более сложных геометрических
объектов, чем точка. По предыдущему, движением такого объекта в
трёхмерной среде называется последовательное с течением времени
совпадение точек этого объекта с точками среды. Движение какого-либо
объекта считается известным, если мы й состоянии найти движение любой
точки его в рассматриваемой среде. Какими данными определяется дви-
движение геометрического объекта, зависит от его состава и свойств.
Наиболее просто находится движение одного только непрерывного объекта
и притом неизменного Вида. За такой объект мы берём трёхмерную
неизменную среду, иначе — неизменяемую систему точек, или твёрдое
тело в кинематическом смысле. Изложение обстоятельств движения твёр-
твёрдого тела в неизменяемой трёхмерной среде и составляет предмет кине-
кинематики твёрдого тела. Движений более простых объектов неизменного
вида, например системы точек, находящихся на постоянном расстоянии
друг от друга, неизменной линии или поверхности, мы подробно не
касаемся, так как эти движения представляют собой лишь частные случаи
движения твёрдого тела.
35. Единицы длины я времени. Для того чтобы иметь возможность
выражать пространственные соотношения числами, необходимо условиться
в выборе единицы длины; за единицу длины обыкновенно принимается
один сантиметр, т. е. сотая часть длины эталона метра, сделанного фран-
французским механиком. Борда. (Borda) в 1795 г. и хранящегося в Севре
(Sevres) близ Парижа (Paris). Этот эталон имеет длину, приблизительно
равную одной десятимиллионной части четверти парижского меридиана
(эталон короче её на 0,08 -'мм).
42
В кинематике пространственные соотношения приводятся в связь
с течением времени. Понятие о пространстве, так же как и понятие
о времени, являются наиболее общими понятиями, с которыми оперирует
любая из естественных наук, в том числе и механика. Мы не будем
входить в философский анадйз этих основных понятий. Для наших целей
будет достаточным указать на то, что под термином пространство в механике
Ньютона понимается обычное трёхмерное пространство Евклида (EoxXiSfr;).
Что же касается понятия времени, то мы постулируем возможность такай
арифметизации течения времени, при которой установленная одновременность
каких-либо событий не зависела бы ни от природы событий, • ни от
системы отсчёта, относительно которой наблюдаются события. Время, про-
протекшее между двумя событиями, называется промежутком времени.
Граница между двумя смежными промежутками времени носит название
момента времени. Только что указанная арифметизация течения
времени устанавливает соответствие между моментами времени и
действительными числами независимо ни от самих событий, ни от системы,
в которой наблюдаются события. Определённое таким образом время назы-
называется абсолютным временем, а сама, арифметизация — идеальной.
Физическое измерение времени является лишь приближённым осуще-
осуществлением такой идеальной арифметизации течения времени. Основанием
физической арифметизации течения времени является видимое вращение
небесного свода вокруг некоторой прямой, называемой осью мира. Равным
углам поворота небесного свода мы приписываем равные промежутки
протекшего времени. Промежуток времени, в течение которого небесный
свод совершает одно обращение относительно Земли, носит название
звездных суток. Звёздные сутки являются исходной астрономической
единицей времени.
В гражданской жизни звёздные сутки в качестве основной единицы
времени неудобны, потому что начало суток при- этой единице может
приходиться последовательно на любое время дня и ночи. Чтобы избежать
это неудобство, в гражданской жизни в качестве исходной единицы вре-
времени употребляется среднее годовое значение солнечных суток: под
солнечными сутками понимается промежуток времени между двумя после-
последовательными прохождениями Солнца через меридиан данного места на
земной поверхности. Солнечные сутки зависят от годового движения
Земли относительно Солнца, поэтому приходится брать среднегодовое
значение сочнечных суточ. За практическую единицу времени берётся
обыкновенно секунда среднего времени, т. е. 'и^ средних солнечных
суток, что составляет окочо -с1 fi4 nn звёздных суток. Момент, с которого
начинается счёт времени, называется начальным моментом. Время до
начального момента считается отрицательным.
36. Радиус-вектор точки и координаты точки. Точка кинемати-
кинематическая ничем не отличается от геометрической. По предыдущему, то-жа
движется в данной среде, если она в различные моменты времени совпа-
совпадает с различными точками среды. Та точка -среды, с которой в рассма-
рассматриваемый момент совпадает движущаяся точка, называется положением
точки в среде. Если положение точки не меняется со временем, то она
находится в паког относительно среды. Мы будем рассматривать лишь
43
непрерывное движение точки, т. е. такое, при котором точка для двух
бесконечно близких моментов времени занимает два бесконечно близких
положения.
Конечно, чтобы говорить о движении ючки в среде, мы должны
уметь отличать точки среды одну от другой или, что'то же, должны
уметь определять положение точки относительно среды. Величины, анали-
аналитически определяющие положение точки в среде, носят название коорди-
НЛ1 ТОЧКИ.
а) Радиус-вектор точки. Положение любой точки М может быть
определено с помощью её векторной координаты, или рад и у с а -
ве ктора г; радиус-вектор проводится из некоторой точки О, принятой за
начало, к данной точке М и, если он известен по модулю и по направлению,
он однозначно определяет положение точки М* Задание самого радиуса-ве-
радиуса-вектора г осуществляется указанием его координат, т. е. тех скалярных парамет-
параметров, которые его определяют. Эти скалярные параметры являются в то же
время и координатами точки М.
б) Декартовы координаты. За скалярные координаты точки Ж
(ж значит, и'Определяющего её радиуса-вектора г) можно взять три рассто-
у яния её от трёх неизменно связанных со
средой взаимно перпендикулярных плоско-
плоскостей ху, yz, zx, называемых, коорди-
координатными (фиг. 37).
Координатные плоскости своим пересе-
пересечением дают три взаимно-перпендикулярных
прямых х,у, г, называемых координатными
осями. Точка О их встречи носит назва-
название начала координат. Каждой оси
координат даётся определённое направле-
направление. Мы всегда будем предполагать, что
направления • осей выбраны следующим
образом: пусть наблюдатель стоит вдоль
направление идёт от . его нОг к голове, а сам
оси Ох; тогда направление оси Оу
А
г]
0
/
да
Я
V
Фиг. 37.
оси
он
Oz, причбм её
смотрит по направлению
идет от правой руки к левой; такая система осей называется правой.
В каждой координатной плоскости различаются две стороны — лицевая
и изнанка. Лицевая сторона обращена туда, куда идёт направление
координатной оси, перпендикулярной к рассматриваемой плоскости: так
на фиг. 37 плоскость Oyz обращена к нам свогй лицевой стороной.
Расстояние точки М от плоскости Oyz обозначается буквой х, от
Ozx — буквой у и от Оху — буквой г; числа, выражающие длины этих
расстояний, считаются положительными или отрицательными, смотря по
тому, какая сторона координатной плоскости обращена к точке — лицевая
или изнанка. Указанные координаты называются прямоугольными прямо-
прямолинейными, или ортогональными декартовыми. Радиус-вектор ' г точки
следующим образом выражается через прямоугольные декартовы коорди-
координаты точки и через единичные векторы координатных осей:
г=XXй -\-уу° + гг°. E.1)
Среда4о которой мы говорим, является средою неизменною; кроме того, оси
Oxyz неизменно связаны со средой. Поэтому координаты точек среды
44
постоянны, а значит, постоянно и расстояние d между любыми двумя
точками (xvyvzx) и_ (х2,уг,г2): квадрат эгого расстояния, очевидно,
выражается форм/лой
(г, - гх)\ E. 2)
Координатные плоскости Oyz, Ozx и Оху
могут быть также взаимно не перпендикулярны
(фиг. 38); в этом случае за координаты х,у,г
точки М принимают косоугольные проекции
её радиуса-вектора г, т. е. расстояния от точки
М до координатных плоскостей по прямым,
параллельным осям координат. Такая система
называется косоугольной прямолиней-
прямолинейной, или косоугольной декартовой. Фиг. 38.
Формула E.1), выражающая радиус-вектор через
декартовы координаты, очевидно, сохраняет свой вид и в косоугольной
системе".
в) Коо-рдинатьг точки общего вида. За координаты точки
мы можем принять любые три функции
Ч\=Чх{х, У, z), q2 = q2(x,y,z), qs — qa(x,y,z) E.3)
от декартовых координат, если только этими уравнениями х, у, z опре-
определяются как функции от qv qt, qsi т. е.
x = x(qvq2,q3), y=±y(qv qv qa), z = z(qv qt, q3); E.4)
таким образом, ни одно из уравнений E.3) не должно противоречить
другим и не должно быть следствием других.
Положим какую-нибудь координату, например qv равной постоянной Сх\
тогда мы получим уравнение некоторой поверхности
называемой координатной. Если постоянной Сх станей давать всевоз-
всевозможные значения, для которых поверхность остаётся действительной, то
получим семейство координатных поверхностей, соответствующих
координате qv Всего таких семейств будет три, по числу координат.
Положение точки и рпределяется как пересечение трёх координатных
поверхностей различных семейств. Если при любом положении точки три
координатные поверхности, через неё проходящие, взаимно ортогональны,
то система координат называется ортогональной.
Если положить две координаты, например д2 и qt, равными постоян-
постоянным, то получим, вообще говоря, кривую линию, являющуюся пересече-
пересечением двух координатных поверхностей различных семейств, именно,
42 (¦*. У< z) = сг. 9В (¦*' У' z) == св-
'"Эта линия называется координатной линией qx\ вдоль этой линии
меняется только значение координаты <?,. Положительным направлением
координатной линии считается то, в котором значения соответственной
координаты возрастают. Через каждую точку пространства проходят три
координатные линии; если система координат ортогональная, то эти линии
45
будут взаимно ортогональны. Так как координатные линии, вообще
говоря, являются кривыми линиями, то система координат общего вида
qv д2, gs называется также системой криволинейных координат.
Система трёх касательных, проведённых в рассматриваемой точке М
к координатным линиям в положительных направлениях, называется систе-
системой о^ей криволинейных координат, соответствующей взятой точке.
Единичные векторы этих осей, иначе называемые о р т а м н координатных
осей, обозначаются
В декартовой системе координат координатными поверхностями, оче-
очевидно, будут плоскости, параллельные основным плоскостям Oyz, Ozx,
Оху. Координатными линиями будут прямые, параллельные осям Ох, Оу,
Oz, и они же будут служить координатными осями, срответсгвующими данной
точке.
Выразим единичные векторы д®, q®, q^ осей криволинейных коорди-
координат через единичные векторы jc°, _у°1 гй декартовых ортогональных коор-
координат. Будем исходить из того,- что радиус-вектор г точки является
функцией её координат qv д^, qs, т. е.
дг
рассмотрим частную производную ч—, т. е. производную, вычисленную
в предположении, что из независимых переменных qv gs, ^s меняется
только qv Производная вектора по скалярному аргументу направлена по
касательной к его годографу в сторону возрастания аргумента; следо-
дг
вательно, вектор з— направлен по касательной к координатной линии gv
т. е. по координатной оси qv Разделив этот вектор на его модуль,
мы получим единичный вектор того же направления, т. е. искомый вектор
q\. Проведя аналогичные рассуждения по отношению к двум другим
координатам, мы придём к следующим однотипным формулам:
дг_
Ч* = -ТГГ (*= 1.2,3). E.5)
Выразив радиус-вектор г через декартовы координаты при помощи
соотношения
г = ххй -\-ууа + гг°,
мы можем эти формулы переписать так:
о= ддв -*-<»?. ^дЯз („=1,2,3). E.6)
Теперь нетрудно найти косинусы углов между декартозычи всями и
осями криволинейных координат в данной точке. Для этого нужно соста-
46
вить скалярные произведения соответствующих единичных векторов. Так,
например, согласно формуле E.6) мы имеем
дх
Выполнив аналогичные вычисления для остальных углов, объединим ре-
результаты в следующей таблице косинусов:
v°
У0
dx
dr
dy_
dqi
dr
dz
dr
dqi
«s
dx
dq*
dr
dv
dr
дг_
dr
dqi
«S
dx
dr
t
dr
дг
dr
*
E.7)
Установим условия ортогональности системы криволинейных коорди-
координат. В случае ортогональности мы, очевидно, имеем
или согласно формуле E.5)
dr dr n , , .
l^-a^^0 (°Ф$
E-8)
для всех отличных между собой индексов аир. Выразив последнее ска-
скалярное произведение в виде суммы произведений одноимённых проекций
сомножителей, мы можем также написать
а* а* \dydy , dz dz
«
E.9)
Остановимся подробнее на двух системах криволинейных координат,
особенно часто применяемых в механике.
г) Цилиндрические координаты. В цилиндрической системе
(фиг. 39) за координаты точки М принимают: 1) её расстояние z от
плоскости Оху, 2) её расстояние р от оси Oz и 3) двухгранный угол <р
между плоскостью Ozx и плоскостью, проходящей через ось Oz и точку
М. За положительное направление отсчёта угла со будем считать направ-
47
ление против движения часовой стрелки, если смотреть со стороны поло-
положительною направления оси Oz.
Коо.щинатиые поверхности z = const, представляют собой семейство
плоскостей, параллельных плоскости Оху; поверхности р = const, явля-
являются семейством круговых цилиндров с обшей осью
(осью Oz). огсюда — само название «цилиндри-
«цилиндрическая система»; наконец, поверхности f = const.
— это семейство плоскостей, проходящих через
ось Oz. Очевидно, цилиндрическая система — система
ортогональная.
Координатными линиями z являются прямые,
параллельные —оси Oz, координатными линиями р —
прямые, перпендикулярные оси Oz, и коорди-
координатными линиями <р — окружности с центрами на
оси Oz На фиг. 39 показаны также для некоторой
точки М координатные оси и их единичные векторы
фиг# 39. Выразим радиус-вектор г точки М через ей
цилиндрические координаты подобно тому, как в
формуле E.1) это было сделано по отношению к декартовым коорди-
координатам; имеем _
г= рро 4- zz°. E.10)
Наконец, выпишем соотношения между прямоугольными декартовыми и
цилиндрическими координатами тоцш; очевидно,
_ y = ?siny z=z; EЛ1)
р— V ^
Если с помощью цилиндрических координат определяется положение
точки на плоскости Оху, т. е. если координата z для всех точек "равна
нулю, то система координат называется полярной
д) Сферические координаты. В сферической системе (фиг. 40)
за координаты точки М принимаются 1) «почнрный радиус», т. е. длина
г радиуса-вектора г точки, «дотгота» у, т. е.
двухгранный угол между плоскостью Ozx («плос-
(«плоскостью первого меридиана») и плоскостью, прохо-
проходящей через ось Oz и точку М, и 3) «широ-
та> 1>, равная углу между плоскостью Оху («пло-
(«плоскостью эквэтора») и радиусом-вектором г точки.
Пою кигелышм направпеиием отсчёта угла ']> яв-
является направление от плоскости Оху в сторону
по южительного направпения оси Oz; yroi ф
тс тс
мокет принимать значения от — ^ ао о • ин°гда
вместо широты ф упофебляют в ка 1естве коортя-
наты так называемое «доюшение до щиро1ы»,
т. е. угол zOM.
Координатные поверхности r= const, представляют собой семейство
концентрических сфер (откуда самое название «сферическая Система»);
поверхности ^ = const, являются семейством плоскостей, прохо шщих че-
48
Фиг. 40.
рез ось Oz; наконец, поверхности ф — const,.— это семейство круговых
конусов с общей вершиной О. Сферическая система, очевидно, тоже
ортогональна.
Координатными линиями г являются прямые, выходящие из точки О,
координатными линиями <р — окружности с центрами на оси Ог (так на-
называемые «параллельные круги») и координатными линиями ф— окруж-
окружности, имеющие общий центр О и лежащие в плоскостях, проходящих
через ось Oz («меридианы»). На фиг. 40 показаны также для некоторой
точки М координатные о^и и их единичные векторы г°, <р°, ф°.
Радиус-вектор г точки очень просто выражается через её сфериче-
сферическую координату г, а именно,
г = /т°. E.12)
Напишем также соотношения между прямоугольными декартовыми и
сферическими координатами точки; имеем
г =
у = /• cos ф sirup, г = гзшф; \
г2, to = aretg ?-, ф = arcsin -. \ <5-13)
X Г )
37. Конечные уравнения движения точки (закон движения точ-
точки). Траектория. Когда точка движется в среде, то её радиус-вектор г
ие остаётся постоянным, а является некоторой функцией времени t:
следовательно, и координаты qv q2, ga будут функциями времени:
Написанные уравнения называются конечными уравнениями движения то i-
ки, или законом движения точки в координатной форме; задание этих
уравнений вполне определяет движение точки в данной среде. Геометри-
Геометрическое место точек среды, с которыми движущаяся точка совпадает в
различные моменты времени, носит название траектории, описываемой
точкой в среде. Уравнения движения E.14) представляют собой в то же
время уравнения траектории в параметрической форме. Чтобы написать
уравнения траектории в форме, содержащей в качестве переменных лишь
координаты тачек, т. е. не параметрические уравнения траектории, нужно
исключить время t из уравнений движения E.14); тогда мы получим:
?2. 9s) —°-
В некоторых случаях представляется удобным задавать координаты
то жи как функции от длины s дуги траектории, а самую величину s за-
задавать как фуницню времени t:
9l = 4As)< 9-i = 9i(s)' 9s = 9&(s)< s = s{t). E.15)
Длина дуги траекторий отсчитывается здесь от точки с координатами
01 @). Яг @), дв @), притом положительное направление идёт в ту сторону
траектории, где лежат точки, для которых аргумент s .бочьше нуля.
Последнее из уравнений E.15) носит название уравнения движения, или
4 Г к. Суслов 49
закона движения в естественной форме. Каким образом от закона
движения в координатной форме E.14) перейти к закону движения в
естественной форме E.15), мы увидим впоследствии (§ 41). Возможность
же такой замены ясна сама собой.
Пример I. Даны уравнения движения точки в декартовых прямоугольных
координатах
Найдём уравнения траектории; исключением t получаем:
X — g__y—$_z — т _
а ь с '
таким образом, траекторией является прямая, проходящая через точку («, f>, тI
косинусы углов её с осями координат пропорциональны а, Ь и с.
Пример 2. Даны уравнения движения в тех же координатах
х = a sin at'COS at; .у = J sin? «f, z = с cos at.
Чтобы найти уравнения траектории, разделим сперва эти равенства соответст-
соответственно па а, Ь и с, возведён в квадрат и сложим; мы получим:
затем разделим третье уравнение на с, возведём его в квадрат и сложим со
вторым уравнением, предварительно разделённым на Ь\ мы получим:
Таким образом, траектория представляет собой пересечение эллипсоида с пара-
параболическим цилиндром.
Пример 3. Даны уравнения движения в цилиндрических координатах
Находим уравнение траектории
9 — а—*— ?_У —Т
а Ъ с '
Если а = 0, — это винтовая линия на цилиндре радиуса г = а; шаг этой винто-
винтовой линии равняется —2it Если й=0, получается архимедова спираль; если
с = 0 — прямая.
Пример 4. Даны уравнения движения в сферических координатах:
Находим уравнение траектории
г—а _У — Р_Ф —
a fr с
Если е = 0, — это архимедова спираль
а , Ьа — яЗ ,
Пример 5. Примером задания движения в естественной форме moi ут слу-
служить следующие уравнения движения точки по окружности радиуса R:
x = Rcos^-; y = Rsm-j^; z — 0, s¦ = a -f bt -f- ct\
50
VI. СКОРОСТЬ ТОЧКИ
38. Перемещение точки. Скорость точки. Проекции, скорости на
оси декартовых координат. Радиус-вектор движущейся точки, прове-
проведённый из какого-либо неподвижного полюса (например, начала коорди-
координат), изменяется с .течением времени по модулю и по направлению, т. е.
он является вектор-функцней времени (§ 26). В таком случае траектория
точки служит годографом этого вектора. Хорда траектории mm', соеди-
соединяющая два положения шит' точки для моментов tut', называется
перемещением точки за промежуток времени Д^ = ^'—t; перемеще-
перемещение представляет собой приращение Дг радиуса-вектора, соответствующее
приращению времени Ы. Отношение приращения Дг радиуса-вектора к
соответствующему приращению Д? времени называется средней ско-
ростью » за промежуток времени Д/:
Дг
Предел этого отношения в том предположении, что ? неограниченно при-
приближается к t, или, что то же, производная по времени от радиуса-век-
радиуса-вектора точки называется скоростью V точки в момент t:
• = j? = r F.1)
Как всякая векторная производная, вектор v = r направлен по каса-
касательной к годографу вектора г, т. е. скорость направлена по касатель-
касательной к траектории и притом в ту сторону, в которую происходит движе-
движение. Согласно формуле D.15) на стр. 35 мы "имеем следующее выраже-
выражение скорости через длину дуги траектории и единичный вектор касатель-
касательной:
v='sr*. F.2)
Следовательно, модуль скорости равен
f=l4 F,3)
Если скорость v постоянна по направлению, траектория — прямая.
Если скорость постоянна по модулю, т. е.
v = const. = а,
движение называется равномерным. Если за положительног направле-
направление отсчёта расстояний принять направление движения, то из формулы
F.3) в этом случае вытекает следующий закон движения:
F.4)
здесь s0 — так называемое начальное расстояние, т. е. длина дуги, соот-
соответствующая положению точки для момента ^ = 0. 'Из закона равномер-
равномерного движения выводим:
т. е. для равномерного движения скорость численно равняется длине дуги
траектории, проходимой точкой в единицу времени.
4* 51
Скорость как производная tjo времени от радиуса-вектора представ-,
ляет собой величину, не однородную с радиусом-вектором, т. е. длиной.
Её размерность выражается символом
И =7=- F-5)
Единицей скорости служит. см/сек. т. е. за единицу скорости принимается
скорость—«сантиметр в секунду среднего времени». В равномерном движении
точка с такой скоростью проходит в единицу времени единицу длины, т. е. в се-
секунду среднего времени проходит один сантиметр. Символ F.5) указывает, как
размер единицы скорости меняется в зависимости от размеров единиц
длины и времени, а именно, величина единицы скорости прямо пропорци-
пропорциональна величине единицы длины и обратно пропорциональна величине
единицы времени. Так, скорость — «метр в секунду» в 100 раз больше
принятой нами единицы, скорость «миллиметр в секунду» в 10 раз мень-
ше, а скорость «сантиметр в минуту» составляет ~ этой величины.
Мы знаем, как радиус-вектор точки выражается через её декартовы
координаты:
Отсюда на основании формулы F.1) мы получаем следующее выражение
скорости в декартовых координатах:
Следовательно, для проекций скорости, для её модуля и для направляю-
направляющих косинусов мы-имеем формулы
cos(jk, v)— -?-, cos (.у, р)=~-, cos(*. «) = -?-.
Аналогичным путём можно получить выражение скорости в цилиндри-
цилиндрических координатах. Согласно формуле E.10) на стр. 48, мы имеем:
отсюда мы дифференцированием получаем:
~ +^г°4 г'г°>
но согласно теореме D.11) на стр. 34 мы имеем ро = (р(р°; кроме того,
так как 2°=--const., то г° = 0; на этом основании окончательно полу-
получаем:
v = рр» + ?П° + zz°; F.8)
следовательно, проекции-скорости на оси цилиндрических координат и
модуль скорости соогеетственно равны
«,= р. «, = рт. *.=*. \ F9)
*=Кр"-т PV + *1- J
52
Пример 6. Даиы уравнения движения
x — at-\-a, y=bt +
Найдём проекции и модуль скорости; имеем
таким образом, движение оказывается прямолинейным и равномерным.
Пример 7. Даны уравнения движения точки в плоскости г = 0:
х = a cos <at, у = a sin v>t.
Очевидно, траекторией движущейся точки является окружность х2
Найдём скорость; имеем
vx = x = — atasintat, vy=y = a<acostat, v=a<a,
т. е. движение круговое равномерное.
-Пример 8.* Даны уравнения движения
х = a Sin at cos ft, у = a sin at sin ft, z=zacosat.
Найдём скорость:
vx = aa cos at cos $t — a $ sin at sin jtf,
fj, = йа COS at Sin f№ -|- fffi Sin at COS ft,
vz = — aa sin at;
39. Проекции скорости точки на неподвижное и подвижное на-
направления. Станем рассматривать проекцию Мх движущейся точки М
на ось Ох; эта проекция одновременно с ¦ точкой М будет двигаться в
той же среде, причём скорость её [по формуле F.6)] будет иметь выра-
выражение хХ°. Сравнивая его с выражением v = лгле0 -j- уу° -j- zz° скорости
точки М, мы видим, что скорость проекции точки М на ось х равна со-
составляющей (по той же оси) скорости точки М. То же, очевидно, имеет
место для ортогональной составляющей скорости по любому неподвижному
направлению, характеризуемому единичным вектором в0; это подтвер-
подтверждается также формулой D.23) на стр. 37, которая в применении
к радиусу-вектору г выглядит так:
— —и
или
Пусть теперь направление в0 подвижное. Тогда по теореме D.24) на
стр. 37 мы найдём:
v-it° = — (г-в°)— г-и°. F.10)
Здесь в° = <ор°, где р° _|_в° и @ = Iim д|; со характеризует быстроту,
с которой поворачивается направление в0; поэтому вектор в0 называется
поворотной скоростью направления в0.
Пример 9. Даны уравнения движения точки
;e=asinatcos JW, у = a sin at sin jit, z=acosat.
Найти проекцию скорости точки на подвижное направление и0, определяемое
53
следующими косинусами углов с осями координат:
sin y cos }t, sin y sin p<, cos y,
где а, а, р и y — постоянные величины. Заданные направляющие косинусы рав-
равны проекциям единичного вектора в0, поэтому имеем
в0 = sin y cos pN*o -}- sin y sin pNy -\- cos y»z°
и, следовательно,
в° = — p sin y sin pf •*" + p sin y cos pNJA
Далее, получаем:
r«a°==;e(ao),e-r-.У («%•+-¦* (и°)г== я c°s(af — i),
В результате подстановки этих результатов в формулу F.10) приходим к от-
ответу:
пр л» = — aasia(at — y).
40. Выражение скорости в криволинейных координатах. Косо-
Косоугольные и ортогональные проекции скорости на оси криволиней-
криволинейных координат. Скорость согласно определению равна производной
радиуса-вектора но времени:
Чтобы выразить скорость в криволинейных координатах, вычислим эту
производную по правилу дифференцирования сложной функции, имея
в виду, что радиус-вектор г движущейся точки может рассматриваться
как функция её криволинейных координат qx, g2, qs, а последние
являются некоторыми функциями времени t:
r=r(gv qt, qs),
@ (
На этом основании имеем
дг • , dr ' I dr ' f6 124
Возвысив это равенство в квадрат, мы получим согласно теореме A.13)
на стр. 7 выражение для квадрата модуля скорости:
о=3, р=3
где индексы аир пробегают независимо друг от друга все значения от
1 до 3. В случае ортогональной системы координат согласно формуле E.8)
на стр. 47 сохраняются лишь члены с одинаковыми индексами, и полу-
полученное выражение упрощается:
Если радиус-вектор г выразить через декартовы координаты, то послед-
последние формулы перепишутся так: в общем случае
о=3, р=3
54
в случае же ортогональной системы
Исходя из формул F.12) и E.5), нетрудно также получить разложе-
разложение скорости по осям криволинейных координат; действительно, так как
согласно формуле E.5)
то
дг
1
дг
\дг
Я
0
Чо,
202 +
F.17)
Коэффициенты при единичных векторах в правой части представляют
собой проекции скорости, притом, вообще говоря, косоугольные, на оси
криволинейных координат; мы запишем это кратко следующим образом:
E=1,2,3).
F.18)
Составим также выражение для ортогональной проекции скорости на
координатную ось qa. Для этого нужно скорость v скалярно умножить
на единичный вектор #J оси; имеем
но из выражения F.12) скорости мы непосредственно усматриваем, что
it = -i?L; F.19)
поэтому имеем
dr dv d-{l)
1 . z=: <r,. ——- =
т. e.
•о • — = ¦
F.20)
следовательно, для ортогональной проекции скорости мы получаем выра-
выражение
т
it
(а=\, 2,3),
F.21)
В частном случае, если система криволинейных координат ортогональ-
ортогональная и, следовательно, квадрат скорости вычисляется по формуле F.14),
выражения F.18) и F.21) совпадают.
55
Формула F.17) допускает следующее истолкование. Умножим обе
её части на dt. Тогда, вспомнив, что согласно формуле F.2)
мы получим:
dqx
Мы здесь имеем разложение элементарного перемещения dsT° по осям
криволинейных координат. Обозначив скалярные коэффициенты при еди-
единичных векторах в правой части соответственно dsit ds2, dsa, можем
написать
d, to=:fifs1^J4"^2^2 4*ds%q\. F.22)
Таким образом, полное элементарное пере-
перемещение точки равно сумме трёх её элемен-
элементарных перемещений вдоль координатных
осей (фиг. 41).- Эта формула интересна в
том отношении, что проекции (косоугольные)
dsx, ds2, dsa элементарного перемещения
dsi° на оси криволинейных'координат обыч-
обычно могут быть легко найдены геометрическим
путём. Зная их, по формуле F.22) можем
найти само элементарное перемещение dsz°
и путём деления его на dt — скорость V. Точно
так же, исходя из выражений для dsv ds2, dss, нетрудно найти квад-
квадрат элементарного перемещения, как квадрат диагонали параллелепипеда
со сторонами \dst\, \ds2], \dsa\, а именно:
ds* = ds] -f ds\ + ds\ + 2ds2dSi cos (e^fg) +
-f- 2ds3dsl cos (q?v qf) -f- 2dstds2 cos (q®, q^}.
Делением на dt% можем теперь найти квадрат скорости:
Фиг. 41.
Нетрудно усмотреть тождественность формул F.13) и F.23).
Пример 10. Найдем квадрат скорости в цилиндрических координатах,
а также проекции скорости на оси цилиндрических координат. Положим ?i— p,
02= у, дг = z. Тогда в соответствии с формулой E.1) и первой строкой соот-
соотношений E.11), мы получим
F.24)
F.25)
дг
до
= 1,
дг
— ?>
дг
дг
следовательно, формула F.16) даёт
отсюда по формуле F.21) найдём проекции скорости:
»Р=р. f<f=p?. «*=«;
56
таким образом, мы получили те же результаты F.9), которые ранее были най-
найдены непосредственным дифференцированием радиуса-вектора. Выражения F.25)
легко также получить из геометрических соображений.
Пример 11. Найдём скорость в сферических координатах. Пусть q\ = r,
<?3=f. 4s —k- Тогда согласно формулам E.1) и E.13) мы получим:
= 1,
= / cos <|>,
= г.
Отсюда по формуле F.16) мы найдём:
v* = /-г -f- fi cos* <f> ¦ f2 4- лф. F.26)
Теперь по формуле F.21) вычислим проекции скорости:
vr='r, t-tp = /-cos<j-.j, г-ф=л|. F.27)
Эти проекции могли бы также легко быть найдены из геометрических сообра-
соображений.
41. Переход от закона движения точки в координатной форме
к закону движения в естественной форме. Чтобы от координатной
формы задания движения, т. е. от уравнений
?i = ?,@. ft = ?»('). ?. = ?.('). F.28)
перейти к естественной форме [см. формулы E.15) на стр. 49], посту-
поступаем следующим образом. Из формулы F.3) мы имеем
Модуль скорости v здесь должен быть вычислен по формуле F.13),
а знак берётся в соответствии с выбором положительного направления
отсчёта дуг траектории. Взяв квадратуру, получим s как функцию
времени, т. е. закон движения в естественной форме:
5 = 4: \vdt.
Произвольная постоянная здесь определится, когда выберем начало отсчёта
дуг; если за начало примем точку дл (t0), g2 (t0), qB (t0), то будем иметь
s = ± \vdt.
to
Исключив с помощью этого уравнения время из уравнений F.28), полу-
получим всю систему уравнений E.15), представляющих задание движения
точки в естественной форме:
42. Определение движения точки, если известна её скорость.
Погонная линия. В предыдущем мы видели, как находится скорость по
данному движению; теперь скажем несколько слов об обратном вопросе:
как определить движение, если задана скорость. Рассмотрим сначала про-
простейший случай, когда скорость задана как вектор-функция времени:
v=v(t).
Искомое движение будет определено, если мы найдём радиус-вектор г
57
движущейся точки как вектор-функцию времени. Так как "=^*i т0 Ра"
диус-вектор г найдётся интегрированием (§ 30):
Задача наша неопределённая: существует бесконечное множество движе-
движений, удовлетворяющих заданному условию в отношении скорости. Если
какое-либо значение неопределённого интеграла в последнем выражении
обозначим rt(t), то одно из искомых движений мы получим, положив
произвольную постоянную интегрирования равной Сх; пусть точка, совер-
совершающая движение по этому закону, названа Мх и её радиус-вектор
обозначен гх\ тогда
Некоторое другое движение, которое мы назовём движением точки М2
с радиусом-вектором га, будет отличаться от первого значением постоян-
постоянной интегрирования; пусть
Вычтя почленно два полученные уравнения движения, находим;
тг /"j = Cs — С,.
Это равенство говорит, что вектор МхМг, соединяющий одновременные
положения точек /Wj и М2, постоянен как по модулю, так и по напра-
направлению. Следовательно, во всех искомых движениях точки описывают
тождественные траектории, и все траектории получаются из одной какой-
нибудь, если каждой" точке последней дать одно и то же перемещение.
Так, для рассмотренных нами двух траекторий перемещение это равняется
С2 - С,.
Задача о нахождении закона движения по данной скорости станет
вполне определённой, если мы зададим также начальное положение
точки, т. е. её радиус-вектор г0 для некоторого момента t0. Тогда закон
движения примет вид
t
Пример 12. Пусть скорость точки задана своими проекциями
v х = a sin a* cos $t, vy = b sin at sin ft, vz =^cos at
и пусть в момент f = 0 точка находится в начале координат. Найдём закон
движения. Имеем
[
J
0
t
J
0 -
t
0B
_ ь
2
аа
а
t
а
2
-Р
COS (а 4
а +
t ь
2
?
3ltl(.
а
а
2
+ Р
COS (a -
a —
t
- f)t
58
В более сложных случаях проекции скорости могут быть заданы как
функции не только времени, но и координат точки, причём координаты
точки могут быть и криволинейные. Тогда, вообще говоря, мы будем
иметь три уравнения, связывающие три неизвестные функции времени
01. 02. 03:
* * * л
/l@1> 02> 03" 01> 02> 9з> *) — '
Л@1> 02» 08» 01- 02- 03'*) = °;
/8@1> 02- 03. 01- 02- 03>О = 0-
Вопрос о нахождении закона движения сводится к интегрированию этой
системы трёх совместных дифференциальных уравнений первого порядка.
Три интеграла системы будут заключать в себе три произвольные постоян-
постоянные. Для определённости решения опять нужно задать ещё так называе-
называемые начальные условия, например положение точки для момента t = t0.
К такому типу относятся, например, задачи о так называемых погон-
погонных линиях, или линиях бегства. Мы рассмотрим для примера простейшую
из них: определить траекторию точки А, у
движущейся в плоскости с постоянной по
модулю скоростью V, причём эта скорость
всегда направлена на точку В, равномерно
движущуюся в той же плоскости по пря-
прямой с данной скоростью и. Примем траек-
траекторию точки В за ось х и направление о
скорости и за положительное направле- *
ние этой оси (фиг. 42). Заметим, что, *иг- 42>
когда точка В была на бесконечности в
отрицательном направлении оси Ох, скорость точки Л должна была быть па-
параллельна этому отрицательному направлению; когда точка В уйдёт в поло-
положительном направлении в бесконечность, скорость точки А станет параллель-
параллельной положительному направлению оси х; следовательно, для некоторого про-
промежуточного момента точка А должна занимать такое положение Ао, для
которого скорость её перпендикулярна к оси Ох. Касательную к искомой
траектории в этой точке Ао и примем за ось Оу. В гот момент, когда
точка А находилась в Ао, по условию задачи, точка В должна была быть
в начале О координат; следовательно, если А и В изображают одновре-
одновременные положения точек и если время считать с того момента, когда
точка А была в положении Ао, то, вследствие равномерности обоих движений,
мы получим w
AA- — °e = t. F.29)
Далее, из треугольника ABC легко найти, что
Поделив почленно последние равенства, найдём:
dx — ut-\-x .„ „n.
_ = _Г_. F.30)
59
Исключим t из уравнений F.29) и F.30), при этом обозначим дугу А0А
через s, а отношение скоростей — через е; тогда мы получим:
Продифференцируем обе части этого уравнения, приняв за независимую
переменную у, мы получим:
Так как ds* = dx*- -\- dу2, то производную, стоящую в левой части, можно
заменить выражением —I/ 1 —|— Г —— J ; знак минус перед радикалом
следует взять потому, что с увеличением у длина дуги s уменьшается.
После указанной подстановки последнее уравнение перепишется так:
d"-x
с1у d?uу
Проинтегрировав это уравнение, мы найдём:
Пусть расстояние ОА0—а; тогда произвольная постоянная Сг легко най-
найдётся, если заметим, что для точки Л-, мы имеем
'--¦ в-*
с.1едовагелыю,
s In a -f Сх = О,
а поточу предыдущее равенство даёт
(У_У ^?_|_ ,/ 1 \fiiy'
\ а) dy'V '\Tv)'
Приравняв друг другу обратные величины, мы найдём:
(Z\~'= — -f- \/ \Л-( — У
Из этих двух уравнений следует, с одной стороны, что
dy \ a
а с другой, что
2
Предыдущее уравнение тотчас же интегрируется: есди е не равно еди-
60
нице, то мы получим:
.!-¦
а если е = 1, то получим:
Определив произвольные постоянные из того условия, что дг=О для
У = а, мы найдём уравнения траекторий в окончательном виде:
1 -
__ у __.
при ? ф: 1:
при ? = 1:
Заметим, что расстояние между точками А и В равно
г. е. по формуле F.31)
5
Когда е^»1, ось л: служит асимптотой траектории, притом для е^> 1
расстояние между точками беспредельно возрастает с приближение») у
к нулю, а для ?=1 оно стремится к пределу -^ . Когда е<М,то тра-
траектория пересекает ось дг-ов, и здесь обе точки А и В встречаются.
43. Обобщение понятия о скорости. Скорость линейная, обоб-
обобщённая, угловая, секторная. Если какая-либо величина зависит от вре-
времени, то часто производную от
неё по времени называют скоро-
скоростью, прибавляя к этому названию
соответственный эпитет. Так, ско-
скорость, нами раньше рассмотрен-
рассмотренную, называют иногда скоростью
линейной, так как она связана
с производной по времени от дли-
длины линии или дуги траектории.
Производную по t от какой-либо
криволинейной координаты q назы-
называют скоростью обобщённой. Если
какой-либо угол, например, сфе-
сферическая координата ф, изме-
изменяется во времени, то производ-
производная от этого угла по t называется ?
иногда угловой скоростью.
Рассмотрим точку, движущуюся
по некоторой кривой (фиг. 43).
Пусть в момент временив эта точка находится в положении Ли пусть за
промежуток времени Д/ она проходит дугу АВ. Рассмотрим треугольник
61
Фиг. 43.
ОАВ. Его площадь, очевидно, равна -^-|гХДг|, сама же векторная
величина — г X Д*" даёт, как говорят, ори е нти ров а н ну ю площадь
этого треугольника. Изучим предел 5, к которому стремится отношение
рассматриваемой ориентированной площади к промежутку времени Д^
при условии, что этот промежуток стремится к нулю; имеем
или
S = ^rXv. F.32)
Векторная величина S носит название секторной скорости точки
относительно центра О. Когда точка А движется по своей траектории,
то геометрическим местом её радиуса-вектора служит некоторая кони-
коническая поверхность с вершиной в О; можно сказать, что секторная
скорость характеризует быстроту, с которой радиус-вектор г ометает
эту поверхность.
Как показывает формула F.32), удвоенная секторная скорость равна
моменту скорости. Таким образом, свободные векторы v и 2S могут рас-
рассматриваться как координаты скользящего вектора v, приложенного к
движущейся точке А (§ 10).
Исходя из формулы F.32), нетрудно получить выражения для проек-
проекций секторной скорости на оси декартовой системы координат, или так
называемые секторные скорости точки относительно координатных осей;
имеем
Sx = -^(yz—zy), Sy = -j (zx~ xz), 5г=у(х_у—ух). F.33)
Особенно интересно выразить секторную скорость относительно оси Oz
в цилиндрических координатах. Как видно на фиг. 43,
,. плОА'В' da
•*,= 1»п—^—= TV
где а = ппОА0'А'; а так как дифференциал площади da имеет в по-
полярных координатах выражение -х- р2 d'-o, то окончательно мы получаем:
S^= ipV F.34)
Если точка движется в плоскости (плоскости Оху), то проекцию 5г
её секторной скорости на ось, перпендикулярную плоскости (ось Oz),
обычно просто называют секторной скоростью точки относительно начала
координат.
Конечно, все рассмотренные в этом параграфе скорости сходны между
собой лишь по названию и, вообще говоря, являются величинами разно-
разнородными. Так, например, единицей угловой скорости служит 1/сек.; едини-
единицей секторной скорости см2/сек; ни одна из этих единиц не однородна
с единицей линейной скорости, т. е. с см\сек.
62
VII. УСКОРЕНИЕ ТОЧКИ
44. Ускорение точки. Проекции ускорения на оси декартовых
координат. Пусть движущаяся точка в некоторый момент времени t на-
находится в положении А и имеет скорость v (фиг. 44), За промежуток
времени Д^ пусть точка прошла по
своей траектории отрезок дуги
АВ = Дз и пусть скорость её в
новом положении есть v-\-\v.
Отношение приращения скорости
Д© к соответствующему прираще-
приращению времени Д^ носит название
среднего ускорения точки
за данный промежуток времени:
G.1)
А
Предел этого отношения при условии, что промежуток времени стремится
к нулю, называется ускорением w точки в данный момент времени:
Как видно из определения, можно также сказать, что ускорение является
производной от скорости по времени и, значит, второй производной от.
радиуса-вектора точки:
w — v=r. G.2)
Размерность ускорения выражается символом [w] = ™™*, ¦ Единицей ус-
ускорения служит 1 см/сек2.
Чтобы составить себе представление о том, как ускорение располо-
расположено по отношению к траектории точки, примем прежде всего во вни-
внимание, что среднее ускорение даср лежит в плоскости, прохочятей через
касательную Ах в данной точке и параллельной касательной в соседней
точке В. Ускорение w в данный момент есть предел среднего ускорения,
а предельным положением выше указанной плоскости является так на-
называемая со п ри к а с а ющаяся плоскость. Следовательно, ускоре-
ускорение лежит в соприкасающейся плоскости траектории и притом, как это
видно из фиг. 44, оно направлено в сторону вогнутости траектории.
Исходя из формулы G.2), легко потучить выражение ускорения в
непот,вижной декартовой системе координат. Действительно, так как
г=хх°-\-уу0-\-zz°, то мы имеем
— хх° -f-уу°
G.3)
Отсюда мы помучаем следующие формулы дпя проекций ускорения, для
его модуля и для его направляющих косинусов:
¦ X,
W
,=У, wz — z, w = y х
COS (X,W) = —, COS (у, W) = ?-, COS (Z, W) ¦= —.
G.4)
63
Пример 13. Дан закон движения
x = a^ + bxt + cb y = a^ +
найдем ускорение; имеем
= у =
Как видим, ускорение постоянно и по модулю, и по направлению.
Пример 14. Точка движется по следующему закону:
х = a sin \ cos ft, y~a sin \ sin $t, г = а cos X;
найдём ускорение; имеем
следовательно, модуль ускорения равен
и ускорение направлено по перпендикуляру, опущенному из движущейся точки
на ось г.
45. Девиация; Пусть точка М, определённая радиусом-вектором г,
описывпет некоторую криволинейную траекторию МйМ^ (фиг. 45) и ну_сть
другая точка Т равномерно движет-
движется по касательной Мй1\ с той же
скоростью ч>, которую точка М име-.
ла в положении Мо. Пусть обе точки
одновременно проходят через поло-
положение Мй. По истечении промежутка
времени Д* точка М приходит в по-
положение Ж, на своей траектории, а
точка Т — в положение Тг на каса-
Фиг. 45. тельной. Найдём вектор Т1М1, характе-
характеризующий отклонение точки от рав-
равномерного прямолинейного движения. Имеем
r.yW^AV^-yV,; G.5)
далее, в силу равномерности движения точки 7 перемещение /M07"j равно
перемещение же М0М^ находим как разность радиусов-вектороп точек
Мх и Мо; эту разность мы разложим по формуле Тейлора; имеем
или
w
Подставив результаты в формулу G.5), получаем:
Пусть теперь промежуток времгни \t является бесконечно малым первого
порядка. Тогда вектор TXMV вычисленный с тошостью до бесконечно
малых второго порядка включительно, носит название девиации точки.
Таким образом, девиация равна
d — jWM^. G.6)
Как видим, девиация по направлению совпадает с ускорением.
46. Годограф скорости точки. Станем проводить из начала О коор-
координат векторы OV, равные скорости v движущейся точки М (фиг.4б):
Г = г-„ Opj = »„...
Тогда геометрическое место точек V, или, что
то же, траектория подвижной точки V, бу-
будет годографом вектор-функции v(t). Кривая
эта впервые была рассмотрена английским
учёным Гамильтоном (Hamilton); её геометри-
геометрические свойства наглядно представляют закон
изменения скорости со временем.
Обозначим радиус-вектор и декартовы коор- Фиг. 46.
динаты точек /И и V соответственно через
(г; х, у, z) и (р; S, j), $). Тогда согласно определению годографа
найдём '
р = «, G.7)
т. е.
Исключив из последних трёх уравнений время t, потучим уравнения
годографа в форме, содержащей лишь координаты $, ij, С его точек.
Определим скорость и движения точки V по годографу. Согласно опре-
определению скорости мы имеем
и — р = v = w,
т. е.
Последнее соотношение выражает тот факт, что скорость движения
точки V по годографу геометрически изображает ускорение toikh M в
её движении по траектории.
Пример 15. Пусть дан закон движения точки М
тогда уравнения движения точки V будут следующие:
5 = 0, 1) = », t = 2gf-[-e;
следовательно, годографом скорости служит прямая
5 = 0, „ = ».
Пример 16. Дан закон движения точки М
х = a sin X cos \t, y=a sin ) sin $t, z=.a cos i.
Находим уравнения движения точки V:
5 = — apsinlsin р<, 7) = я?sin)cosр*, С = 0;
следовательно, годограф скорости есть окружность
5 Г К Суслов 65
Пример 17. Определим годограф скорости точки М, если она описывает
коническое сечение с постоянной секторной скоростью вокруг фокуса этого
сечения. Плоскость траектории, или орбиты точки, примем за плоскость Оху;
уравнение орбиты в полярных координатах, отнесённое к фокусу F и полярной
оси Fx, будет
Р .
?
здесь р — параметр, а е
? 1 -f- ^ COS q> '
эксцентриситет орбиты;
как известно,
У
для
Фиг. 47.
Фиг.
эллипса, е — 1 для параболы, <? > 1 для гиперболы (фиг. 47, 48, 49). Постоянство
секторной скорости согласно формуле F.34) на стр. 62 выразится так:
Р2?
i = A, G.8)
p" ? A + e cos ?J
где А — некоторая постоянная (так
называемая постоянная площадей).
Если за начало декартовых ко-
координат взят фокус F, ось Fx совпа-
совпадает с осью орбиты, а ось Fy ей
перпендикулярна, то } равнения дви-
движения точки М{х, у) будут
__ /> sin <р
1 -\-е cos <p'
1 4- е cos »'
движения точки V (конца
здесь if — функция времени, которую
надо определить, проинтегрировав
уравнение G.8). Интересно, что годо-
годограф можно найти и не производя
этого интегрирования. Действитель-
Действительно, по формулам G.7) уравнения
вектора я) следующие:
/? sin у •
_ • _р (cos <p -f ё) <р
у A + е cos if *
Подставляем сюда
A 4" ? COS IfK '
значение if из уравнения G.8); получаем:
А А,
? = sin се; 7) = — (cos ф
то мы придём к уравнению годографа
Если теперь отсюда исключить
7
Годограф оказывается окружностью, пересекающей ось Fx, когда е <С 1, касаю-
касающейся оси /ч*:, когда г = 1, и лежащей вне оси Ле, когда е У \: все эти три
случая изображены на фиг. 47, 48 и 49.
66
47. Проекции ускорения точки на неподвижное и подвижное
направления. Воспользовавшись формулой D.23) на стр. 37, мы можем
написать следующее выражение для проекции ускорения на неподвижное
направление, характеризуемое единичным вектором й°:
G.9)
т. е. в этом случае проекция ускорения равна производной от проекции
скорости. Если же напраачение и0 подвижноэ, то но формуле D.24)
на стр. 37 получаем:
WU° = ~(V'U°)—V'U0, G.10)
где в0 — поворотная скорость направления и0.
Пример 18. Даны уравнения движения "точки
х = a sin at cos jtf, у = a sin at sin $t, г = a cos at.
Найти проекцию ускорения точки на подвижное направление, определяемое
следующими косинусами углов с осями координат:
sin p cos \t, sin p sin Ц, cos p,
где р, р — постоянные величины. Заданные направляющие косинусы равны
проекциям единичного вектора а0, поэтому можем написать
и, следовательно,
а°= — Рsinp sin jM-*°-{- psin/?sin $t-y°.
Далее имеем '
V¦ U° = Ох (Я»),4- *V (»°)у + Vг (И°)г = - аа Sin (erf -
i u%= ap2sln/»sin at.
Отсюда по 4ормуле G.10) получаем:
Прв„Я> = — Да2 COS (of— р) — of2 Sin/P Sin at.
48. Проекции ускорения точки на оси естественного трёхгран-
трёхгранника. Вспомним выражение F.2) скорости чере^ производную по времени
от расстояния s по траектории и через единичный вектор т° касательной
к траектории:
v = st°.
Продифференцируем по времени обе части этого равенства; имеем
Здесь v есть ускорение w точки; производная т° согласно формуле D.20)
на стр. 36 может быть.преобразована следующим образом:
•j Л» Л^_<^_ ^_'
~dt Us It p s'
где р — радиус кривизны траектории и v° — единичный вектор главной
нормали. Таким образом, мы получаем:
да = ,^0-[--">0- G.П)
5* 67
Первое слагаемое правой части носит название касательного, или
тангенциального, ускорения; второе называется нормальным,
или центростремительным, ускорением.
Касательная т, главная нормаль v и бинормаль р (т. е. нормаль к со-
соприкасающейся плоскости) образуют так называемый естественный
трёхгранник. Согласно формуле G.И) проекции ускорения на оси
естественного трёхгранника имеют следующие выражения:
w —g w _«! w -=0 G 12)
Отсюда для модуля ускорения и для тангенса угла между главной нор-
нормалью и ускорением получаем формулы:
G.14)
В частном случае, когда положительное направление отсчёта расстояний s
по траектории совпадает с направлением движения, имеем s=:-\-v, и,
следовательно, во всех выше приведённых формулах можно вместо s пи-
писать I1.
Касательное ускорение характеризует быстроту изменения скорости по
модулю. Если движение равномерное, т. е. т/ = const., касательное уско-
ускорение всё время равно нулю. Кроме того, касательное ускорение де-
делается равным нулю в те моменты времени, когда производная v модуля
скорости проходит через нуль, например, когда скорость проходит
через экстремум. Нормальное ускорение зависит от кривизны траектории
и потому характеризует быстроту изменения скорости по направлению.
Если движение прямолинейное, нормальное ускорение всё время равно
нулю. Кроме того, нормальное ускорение делается равным нулю, когда
кривизна— траектории проходит через нуль, что имеет, например,
место в точках перегиба траектории.
Если проекция ускорения на касательную постоянна, т. е.
wT = s — s0, G.15)
движение называется равнопеременным, или равноускоренным.
В этом случае мы, очевидно, имеем следующие закон скорости и закон
движения:
, G.16)
где ноликами отмечены значения соответствующих величин при / — 0.
49. Проекции ускорения точки на оси криволинейных координат.
Чтобы получить проекцию wq ускорения на координатную ось qa, нужно
ускорение да скалярно умножить на единичный вектор qi соответствую-
68
щей оси; согласно формуле E.5) на стр. 46 имеем:
дг
Выражение это можем переписать так:
WQ,==
Согласно формуле F.20) на стр. 55 мы имеем
дг д(^
G.18)
Для преобразования второго члена в квадратных скобках возьмём сперва
полную производную по времени от части й производной -*—, имея
в виду, что она, как и радиус-вектор г, зависит от времени посредством
промежуточных переменных qv q2, qs; имеем
d дг д2г • i д2г ¦ , d2r • ,- . „.
G.19)
dt
dqldgt
dq d9s
С другой стороны, если от скорости v — ¦*— qx -f- ч— q2 -\- -^- qs возьмём
частную производную по qv то получим:
+/+ {7щ
Правые части выражений G.19) и G.20) одинаковы; следовательно,
функции, стоящие в левых частях, равны между собой. Обобщив резуль-
результат на другие две координаты, можем вообще написать
?*!=!! @= 1,2,3).
dtdq dq K >
G.2Ц
Отсюда находим:
или, что то же,
ddr
dtdq,
;— эя.
dqe
G.22)
Подставив результаты G.18) и G.22) в формулу G.17), приходим
К следующему выражению для проекции ускорения:
G.23)
-ЧР].-,.«
69
Относительно полученных формул G.23) мы можем сделать следующее
замечание: при замене в выражениях для ускорения декартовых коорди-
координат криволинейными можно ограничиться преобразованием к новым пере-
переменным одного только дифференциального выражения первого по-
порядка, именно с2, тогда как непосредственный переход от одних формул
для ускорения к другим требовал бы преобразования дифференциальных
выражений второго порядка.
Пример 19. Для цилиндрических координат формулы G.23) при прежних
обозначениях дают
Пример 20. Аналогично для сферических координат находим
wT = г — г cos^ ¦ ф ¦ f- — г\2.
G.24)
G.25)
50. Секторное ускорение. Производная от секторной скорости 5
точки называется секторным ускорением W:
S=W. G.26)
Выразим секторное ускорение W через ускорение да точки. Так как
согласно формуле F,32) на стр. 62
^^ * rsiQ * COS
G.27)
то
но произведение гХг» равно нулю вследствие коллинеарности сомножи-
сомножителей, а
V — W, G.28)
поэтому
W=yrXw, G.29)
т. е. удвоенное секторное ускорение точки относительно некоторого
центра равно моменту ускорения точки относительно этого центра.
51. Скорость и её момент как координаты некоторого скользя-
скользящего вектора. Рассмотрим скользящие векторы г» и да, соответственно
равные скорости и ускорению движущейся точки и к ней приложенные.
Координатами этих скользящих векторов соответственно служат свободные
векторы v, тот0г» и да, momo«> (§ 10). Согласно формулам G.27) и
G.29) мы имеем
2S и
Поэтому, сопоставляя формулы G.28) и G.26), мы видим, что производ-
производной от скользящего вектора v (в смысле § 31) является скользящий
вектор да.
70
52. Вывод закона Ньютона из законов Кеплера. В виде прило-
приложения выше полученных результатов решим следующую задачу: точка
движется согласно первому и второму законам Кеплера (Kepler), т. е.
описывает коническое сечение с постоянной секторной скоростью относи-
относительно фокуса этого сечения; определить модуль и направление ускорения.
Подобно тому, как это было сделано в примере 17 на стр. 66,
условия задачи можно выразить уравнениями
^ G-30)
р2а--=Л. G.31)
Выпишем выражения проекций ускорения на оси полярных координат
[формулы G.24)]:
w = р — p'f2, G.32)
Вторая из этих формул ввиду постоянства секторной скорости сразу
даёт w = 0, т. е. ускорение проходит через начало координат (через
фокус траектории). Постараемся теперь выразить w в функции коорди-
координат движущейся точки; имеем
v dt d? ' dt '
или согласно соотношению G.31)
p = jP . 4- = _ Л lilJ : G.34)
далее,
¦• dp dp d» #
?~~dt ~dj' di'
отсюда на основании формул G.34) и G.31) мы находим
1
G.35)
Подставив теперь значения ср и р из формул G.31) и G.35) в выра-
выражение G.32), мы получим следующую формулу для проекции ускорения
на координатную ось р при движении точки с постоянной секторной
скоростью относительно начала координат:
Осталось вычислить вторую производную —w з > из уравнения G.30)
71
fj ecosy J 1_
находим:
и, следовательно,
Л*
Р pft
Таким образом, оказывается, что ускорение направлено к фокусу (об
этом говорит знак минус в выражении полученной проекции), и модуль
его обратно пропорционален квадрату расстояния точки от фокуса. Изло*
женнзя задача впервые была решена Ньютоном (Newion).
S3. Ускорения точки второго и высших порядков. Составив про-
производную от ускорения точки по времени, мы получим вектор
да = v = г,
называемый ускорением второго порядка. Продолжая таким об-
обра зим дифференцировать далее, можем получить ускорение любого (я-j- 1)-го
порядка:
dt"
Проекциями этого вектора на оси неподвижных декартовых координат,
очевидно, будут
Подробнее рассматривать свойства ускорений высших порядков мы не
будем.
ОТДЕЛ II
КИНЕМАТИКА АБСОЛЮТНО ТВЁРДОГО ТЕЛА
VIII. КООРДИНАТЫ ТВЁРДОГО ТЕЛА. КОНЕЧНЫЕ УРАВНЕНИЯ
ДВИЖЕНИЯ (ЗАКОН ДВИЖЕНИЯ)
54. Твёрдое тело. Движения прямое и обращенное. Твёрдым телом
в кинематическом смысле, или неизменяемой системой точек, как мы уже
видели (§ 34), называется трёхмерная неизменная среда, элементом ко-
которой служит точка. Под движением твёрдого тела в данной среде ра-
разумеется последовательное совпадение точек тела с различными точками
среды. Движение твёрдого тела нам известно, если мы в состоянии опре-
определить движение любой его точки. Термины «твёрдое тело в кинемати-
кинематическом смысле» и «неизменяемая среда» — синонимы; поэтому вместо
слов «движение твёрдого тела в данной среде» можно сказать «движе-
«движение одной неизменяемой среды в другой».
Если движущаяся среда имеет конечные размеры и, следовательно,
ограничена некоторой поверхностью, то мы всё-таки будем предполагать,
72
что эта среда может быть продолжена и за свои границы, так что в лю-
любом месте мы можем найти точку, принадлежащую взятому твёрдому
телу.
Итак, пусть среда А движется в среде В, т. е. точки а среды А
совпадают последовательно с различными точками b среды В. Тогда,
с другой стороны, и точки b среды В переходят из одних точек а в дру-
другие, т. е. среда В движется в среде А. Таким образом, движение не-
неизменяемой среды носит всегда двойственный характер: когда одна среда
движется в другой, то и, наоборот, вторая движется в первой. Эти два
движения, вообще говоря, различны между собой, и одно из них назы-
называется прямым, а другое обращенным. Какое из двух движений считать
прямым, какое обращенным, зависит вполне от нашего произвола. Так,
станем рассматривать две неизменяемые среды, частями которых служат,
с одной стороны, объём Луны, а с другой, объём Земли; тогда, если
движение лунной среды в среде, неизменно связанной с Землёй, примем
за прямое, то обращенным движением, неизбежно сопровождающим пер-
первое, будет движение земной среды в лунной.
55. Координаты твёрдого тела. Эйлеровы углы. Прежде всего
займёмся координатами твёрдого тела, т. е. величинами, определяющими
положение одной неизменяемой среды в
другой. Вообразим в данной движущей-
движущейся среде 2 систему прямоугольных декар-
декартовых осей Л?г|С, неизменно связанную с
этой движущейся средой (фиг. 50); таким
образом, точки среды 2 отличаются одна от
другой своими кобрдинатами ?, j], С по
отношению к взятой системе коорди-
координат, но во времени эти координаты по-
постоянны. Далее, точки той среды S, в ко-
которой происходит движение, отнесём так-
также к некоторой системе декартовых коор-
координат Oxyz, неизменно связанной с этой,
средой S. Систему Л?г|* принято называть"
для краткости подвижной, или от но-
Фиг. 50.
сительной, а систему Oxyz—неподвижной, или абсолютной.
Положение твёрдого тела 2 в среде S нам будет известно, если мы
Сможем указать положение любой точки его ji ($, т), С) или той точ-
точки т (х, у, z) среды S, с которой точка р. совпадает. Другими словами,
надо найти зависимость между координатами ?, I], ( и х, у, z одной
И той же точки по отношению к лвум различным системам осей. Для
Этого выразим прежде всего радиус-вектор г точки т относительно
Системы Oxyz через радиус-вектор р той же точки относительно системы
i45r,C и через радиус-вектор гА точки А; имеем
г = гА+~? (8.1)
или, введя единичные векторы осей,
хх° +уу° + zz° = хАх<> + УдУ0 + *4*° + & + ЧЧ~° +W5. (8.2)
Умножим обе части этого равенства скалярно сперва на х°, потом на _у°
и затем на z°. Чтобы облегчить запись результатов, введём при этом
73
следующую таблицу косинусов углов между осями координат:
X
У
z
%
«и
«21
«31
«12
«32
«32
Г
а»
Й2Э
«ая
В результате мы получим:
Аналогично, умножив равенство (8.2) последовательно на
получим обратные формулы:
-<*21 (У ~Уа)+ asi(z — za)>
(8.3)
(S.4)
о, С0, мы
(8.5)
Важно заметить, что по формулам (8.4) и (8.5), если в них поло-
положить хл=уд =zA =0, преобразуются также проекции произвольного
вектора. Это следует иэ того, что проекция вектора на ось численно
равна разности координат его концов. Таким образом, если
а =
то
(8.6)
(8.7)
(8.8)
«с
Полагая в формуле (8.6) последовательно а равным х°, у0, г",
?", rj°, С" и принимая каждый раз во внимание соотношения (8.7) или (8.8),
мы получим следующие соотношения между единичными векторами ко-
координатных осей:
(8.9)
(8.10)
74
Так как обе наши системы координат ортогональные, то, возвысив
равенства (8.9) в квадрат и, с другой стороны, попарно перемножив их,
мы получим следующие шесть зависимостей между косинусами а^.
13
«31 + «32 + «33 = ! > «Н«21 + «12«
(8.П)
Если те же действия произвести над равенствами (8.10), то, вместо
равенств (8.11), мы получим следующие шесть, им равносильных:
(8.12)
a + a=
Представляет интерес получить явные выражения для каждого из
косинусов а , через остальные. Для этого примем во внимание, что каж-
каждый из единичных векторов координатных осей равен векторному произ-
произведению двух других, например:
х® — v^ X z®
На основании формул (8.9) это соотношение может быть записано сле-
следующим образом:
^23
«31 «32 «33
©тсюда получаем искомые выражения косинусов:
я2[ а22 а9
а22 агз
азг азз
а23 «21
азз «si
а21 й22
«31 «32
(8.13)
Словом, если составить определитель из косинусов а ,, выписанных в том
ре порядке, что и в таблице (8.3), т. е. написать
KJ-
а21 а,
22
а32 а
*в каждый косинус будет равен своей адъюнкте (алгебраическому до-
имнению). Разложив определитель | a J по элементам какой-либо строки
¦яи столбца, мы получаем отсюда, как следствие, что по численному
значению этот определитель равен единице:
Ы = 1- (8-14)
Выражения (8.4) показывают, что положение твёрдого тела опреде-
определяется двенадцатью величинами: тремя координатами хд, уд, гА так на-
намываемой основной точки, или полюса, и девятью косинусами а^. Но мы
Е;ели, что между этими косинусами существует шесть зависимостей
И) или (8.12). Следовательно, независимых координат твёрдого
а имеется всего шесть. За такие координаты мы можем принять
75
xA, yA, zA и любые три косинуса, одновременно не входящие в какое-либо
из соотношений (8.11) или (8.12).
Вместо трёх таких косинусов обыкновенно берут три угла, носящие
название углов Эйлера. Построим из начала А подвижных осей си-
систему осей AXYZ, параллельных осям неподвижной системы Oxyz
(фиг. 51). Пусть Луестъ линия пересечения плоскостей AXYu Л?>): это так
называемая л и н и я узлов. Уг-
Углами Эйлера называются сле-
следующие углы:
1) угол собственного враще-
вращения <р = _^уЛ$,
2) угол прецессии ф= /XЛу,
3) угол нутацииЬ = ? ZAZ.
Движение, обусловленное
изменением угла <р собственного
вращения, называется собст-
собственным вращением тела.
Если при эюм меняется только
угол <р. то происходит враще-
вращение вокруг оси Л?, называе-
называемой поэтому осью собствен-
собственного вращения.
Фиг, 51. Движение, обусловленное
изменением угла ф прецессии,
называется п ре це с сие й. Если при этом меняется только угол ф, то
происходит вращение вокруг оси Аг, называемой поэтому осью прецессии.
Движение, обусловленное изменением угла & нутации, называется
нутацией. Если при этом меняется только угол &, то происходит вра-
вращение вокруг оси Лу, называемой поэтому осью нутации.
Направления отсчёта углов Эйлера указаны на чертеже стрелками.
Общее правило для Определения этого направления такое: пусть наблю-
наблюдатель стоит по соответственной оси вращения, причём ось идёт от ног
к голове; тогда для него углы будут отсчитываться справа налево.
Выразим через углы Эйлера косинусы а углов между осями Oxyz
(или им параллельными осями AXYZ) и осями Airfc. Для этого заметим,
что система AXYZ может быть приведена в совмещение с системой Л?>]С
путём следующих трёх последовательных вращений:
1) поворотом вокруг оси AZ на угол <j> переводим сперва систему
AXYZ в положение AyY'Z, где ось AY' лежит в плоскости AXY и по-
повёрнута относительно оси Л К на угол <j>;
2) поворотом вокруг оси Лу на угол & переводим систему AyY'Z
в положение Лу§?, где ось Л5 перпендикулярна оси Лу и лежит в пло-
плоскости Л?7); наконец,
3) поворотом вокруг оси Л С на угол <р переводим систему Л^8С в по-
положение Л?>)С.
Назовём координаты какой-либо точки ji тела в системах
AXYZ, AyY'Z, Лу&С и Л?г,С
соответственно
X, Y, Z; л:,, yv zx; xv y2,
76
Тогда по формулам преобразования (8.4)
написать:
мы сможем последовательно
l 2 2 p — rjsincp,
yl=yicosb— 22sin9, y2 = ? sin cp -\- 7) cos cp,
i9{9 t
г
Y= xxsin
Выполнив эти подстановки, мы свяжем координаты XYZ непосредственно
с координатами ?, 7), С; сравнив же полученные результаты с формулами
(8.3), мы придём к следующим выражениям для косинусов а углов между
осями AXYZ и Л$г,С:
ап = cos ф cos tp — sin ф sin tp cos 9,
an = sin ф cos cp -{- cos ф sin tp cos 9,
aSi = sin tp sin 9,
a12 = — cos ф sin tp — sin ф cos tp cos ft,
a22 = —sin ф sin cp -{- cos ф cos cp cos 9, } (8.15)
sin 9,
я,з= sin ф sin 9,
a23 = — cos ф sin 9,
a88 = cos 9.
Заметим, что наиболее просто выражаются косинусы углов, в которых
одной из сторон является ось Z или ?.
Предыдущие формулы можно получить непосредственно с помощью
сферической тригонометрии. Для этого нужно описать из точки А, как
нз центра, сферу единичного радиуса (фиг. 51) и рассматривать каждый
раз сферический треугольник, вершины которого образуются пересече-
пересечением сферы с двумя осями, угол между которыми отыскивается, и линией
узлов. К образованному сферическому треугольнику следует применить
«формулу косинуса
cos a = cos b • cos с -f- sin b • sin с -cos Л,
ще a, b, с обозначают стороны, а А, В, С—-противоположные им углы
|ферического треугольника; в нашем случае сторона а является дуговой
Шрой угла, заключённого между рассматриваемыми осями координат,
к, например, для отыскания а,3 рассматриваем треугольник BCD; очевидно,
=Х, С; имеем
Цнгсюда
cos яЬ = cos BC cos СЪ -\- sin ВС sin CD cos /_ BCD;
an = cos ф • 0 -|- sin ф • 1 • sin 9 = sin ф • sin 9,
Щ е. мы получили прежний результат.
56. Поступательное движение тела; Если твёрдое тело движется.
1В, по крайней мере, очна из шести координат его
ХА' У A' ZA> Ь Ф. 9
меняется с течением времени. Тогда равенства (8. 4) служат при посто-
ных ?, iq, С уравнениями прямого движения, т. е. уравнениями дви-
ения любой точки (?, 7], С) в среде 5; равенства же (8. 5) при иосто-
х, у, z будут уравнениями движения обращенного, т. е.
сравнениями движения любой точки (х, у, z) в среде 2.
Рассмотрим сначала тот случай движения твёрдого тела, когда три
эйлеровых угла не изменяются; пусть
xA = xA(t), УА=УЛ{*), zA = zA(t);
(f) = const., ф = const., § = const.
Как видно из формул (8.15) и (8.4), уравнения движения любой точки ц
будут
x = xA(t) + Cx, y=yA(t)-\-Cy, z = zA(t)-\-Cz,
или, в векторной форме,
r = rA(t) + C, (8.16)
где Сх, Су, Сг, а значит, и С — постоянные. Для другой точки ji: тела
мы имели бы
ri = rA(t)-\rCv
где постоянный вектор С,, вообще говоря, отличен от прежнего. Вычтя
почленно полученные два уравнения движения, мы найдём:
т. е. прямая, соединяющая любые две точки ц и ц, тела, во всё время
движения остаётся параллельной своему первоначальному направлению.
Такого рода движение носит название поступательного. Траектории
всех точек тождественны между собой и лишь параллельно смещены
одна по отношению к другой. Поэтому при изучении поступательного
движения тела можно ограничиться рассмотрением движения одной какой-
либо его точки.
Как показывают уравнения (8.5), обращенное движение тоже посту-
поступательное. Выберем направления осей Л?т]С в теле так, чтобы было
ср=ф = & = 0;
тогда будут соблюдаться равенства
«U — «22 = ffS3 = * >
а прочие косинусы будут равны нулю. В таком случае равенства (8.5)
нам дадут:
$=—*„@+с;, n = -yA{' l
или, в векторной форме,
где Cj, CT|I Се и С —снова постоянные. Мы видим, что траектории об-
обращенного движения тождественны с траекториями прямого, только опи-
описываются движущимися точками в противоположных направлениях.
57. Движение тела вокруг неподвижной точки; Положим теперь,
что
хА = const., .y/1 = const., zA = const.;
тогда точка А остаётся в покое. В этом случае движение тела называется
движением вокруг неподвижной точки, или полюса Л. Оче-
Очевидно, обращенное движение будет также движением (тела S) вокруг
неподвижной точки А.
78
Из точки А, как центра, построим произвольным радиусом в обеих
средах по сфере; сферу в среде 2 назовём а, а сферу в среде S назовём
s. Ясно, что в рассматриваемом случае движения сфера а будет скользить
по сфере s. Траекторией любой точки ц тела будет некоторая сфериче-
сферическая кривая. Пусть прямая, соединяющая полюс А с рассматриваемой
точкой (х, встречает сферу а в точке v: траектория точки ji, очевидно,
подобна траектории точки v, причём, центром подобия служит точка А, а
Аи.
коэффициентом подобия является отношение -~. Поэтому при рассмотрении
движения твёрдого тела вокруг неподвижной точки мы можем ограничиться
изучением движения сферы а по сфере s, или, как говорят, движения
сферической фигуры по сфере.
58. Движение тела параллельно плоскости. Кардановы дви-
движения прямое и обращенное. Если в случае движения твёрдого тела
вокруг неподвижной точки А эта точка уходит в бесконечность, семейство
концентрических сфер а, а также и s обращается в семейство параллель-
параллельных плоскостей, и мы получаем так называемое движение тела парал-
параллельно плоскости. В этом случае движения точек, лежащих на
пзрпендикуляре к семейству параллельных плоскостей, тождественны
между собой. Все траектории лежат в параллельных плоскостях, и можно
ограничиться рассмотрением движения одной какой-либо подвижной пло-
плоскости по соответственной неподвижной. Поэтому,
иначе, такое движение называется движением пло-
плоской фигуры в её плоскости. Очевидно,
обращенное движение обладает теми же свойствами.
Уравнения движения тела примут для рассмат-
рассматриваемого случая вид, отличный от уравнений
движения вокруг неподвижной точки. Пусть за
плоскость Оху взята нами одна из плоскостей, па-
параллельно которым происходит движение (фиг. 52). . „
Соответственную подвижную плоскость примем за "
плоскость A&i. Тогда оси Oz и Л? будут всегда Фи15- 52-
параллельны. Положение осей А?щ в плоскости Оху
вполне определится координатами хА, уА начала и углом <р> образуемым
осью Л$ с осью Ох. По формулам (8.4) и (8.5) на стр. 74 мы находим,
что координаты х, у и $, г) произвольной точки ц связаны следующими
уравнениями:
х = х .4- % cos (о — r.sini ,
А ' ' ' ' v (8.17)
— yA)sinb
= -(*-*„)sin+
Движение фигуры вполне определено, если нам даны следующие
функции:
xA = xA(t), yA=yA{t), ip = (p(*).
В этом случае уравнения (8.17) представляют собой уравнения
Движения некоторой произвольной точки фигуры, а чтобы получить урав-
уравнения движения какой-либо точки тела, лежащей вне плоскости Оху,
79
надо к предыдущим уравнениям прибавить лишь указание на значение
координаты z точки, которое, очевидно, остаётся постоянным во время
движения: z = const.
Пример 21. В виде примера рассмотрим так называемое карданово
движение, т. е. такое движение плоской фигуры в её плоскости, когда дне
точки фигуры перемещаются по двум взаимно перпендикулярным прямым. При-
Примем эти Прямые за оси Ох и Оу (фиг. 53). Пусть точка Af, (#,, у,) движется по
оси Ох, а точка М2(х2, у,) по оси Оу. Неизменное расстояние между точками
Мг и М2 назовём 2/?. Удаление точки Мг от начала
координат не может превышать 2/?; следовательно, мы
можем положить
x1 = 2Rcosf, Ух = 0,
где
f /=/«
х есть некоторая функция времени. Так как
Фиг. 53. то Уравнениями движения точки М^ будут
х^ = 0, j/2 = 2/?sin/.
За начало А подвижных осей выбираем середину отрезка М1М2: в таком
случае
xA = Rcosf, yA = R sin f.
Если ось Ai направим по АМЬ то
Т = (С5) = 2*-/ЛМ?10.
а так как
то
? = 2я—/.
Уравнения (8.17), выражающие закон движения произвольной точки фигуры,
примут тогда вид
* = (/? +8) cos /+т) sin/,
у = (/? — -о) sin/ 4- т] cos/.
Если исключить из этих уравнений функцию /, то найдём уравнение тра-
траектории произвольной точки фигуры: разрешив сначала уравнения относительно
cos/ и sin/, получаем:
{R S) (
возводим эти выражения в квадрат и складываем:
Г(/? — 5) х — *ц/Р + [(/? + 5) У — Т1*Р = W8 — 52 — ч8)*;
после очевидных преобразований, наконец, получаем:
[(/? — SJ 4- тJ] *з _ 4/?i)*j/ 4- [(/? 4- ?J 4- Т12] У2 = W2 — 52 — I2J. (8-19)
При постоянных Е, т\ это уравнение изображает траекторию точки в пря-
прямом движении; при постоянных х, у оно становится уравнением траектория
обращенного движения. В отношении прямого движения сразу замечает, что
траекторией служит кривая второго порядка. Для определения её пида состав-
составляем дискриминант уравнения; имеем
Д = [(Е - /?J 4- т?} № + ЯJ +121 - «V =-(/?•- 5? - т&.
Для точек, не лежащих на окружности
80
дискриминант Л отрицателен, следовательно, траекторией служит эллипс. Для
точек, л'ежащих на указанной окружности (эта окружность проходит через
точки Mlt M2 и О), эллипс вырождается в две совпадающие прямые
Траекторией обращенного движения, как видно ив уравнения (8.19), является
некоторая кривая четвертого порядка; она носит наввание улитки Паскаля
(Pascal). Мы убедимся, однако, в том, что это
действительно улитка Паскаля не из уравнения
(8.19), а из рассмотрения геометрических особен-
особенностей обращенного движения. В обращенном
движении стороны прямого угла хОу всегда
проходят через две неподвижные точки М\ и М2
(фиг. 54). Вершина прямого угла О описывает
окружность, диаметром которой служит отрезок
WjAlj. Возьмбм какую-либо точку Р на стороне
угла на расстоянии ОР=а от его вершины
и изучим её геометрическое место. При выше-
вышеописанном движении прямого угла хОу точка
Р всегда будет находиться на луче, проходя-
проходящем через постоянную точку Mt окружности, и её Фиг. 54.
расстояние (считая по лучу) от окружности
будет постоянным (равным а). Этим свойством как раз и определяется улитка
Паскаля. Нетрудно написать её уравнение в полярных координатах: если за
начало координат принять точку Мх и за полярную ось прямую МхМг, то
иди
? = М1О+ОР,
р = 27? cos <j> -f- a-
Исследуем теперь траекторию некоторой точки Q, лежащей где-лиэо не на
сторонах угла хОу. Проведём прямую QOy-i и диаметр ц^. Угол POQ
постоянен; следовательно, и длины дуг М^ и Af2|i2 постоянны, а потому точки
y-i и |х2 неподвижно). Таким образом, в отношении точки Q повторяется то же,
что мы имели в отношении точки Р, и, следовательно, мы убеждаемся, что тра-
траекторией любой точки Q плоскости Оху будет улитка Паскаля.
Рассмотренное вами прямое движение имеет приложение в приборе,
называемом эллиптическим циркулем, а обращенное послужило основной идеей
|Шпарата Леонардо да Винчи (Leonardo da Vinci) для вычерчивания овалов.
59. Центр и ось конечного вращения. Пояожение плоской фигуры
ц её плоскости полностью определяется положением двух её точек или от-
отрезка, их соединяющего. Рассмотрим два полбжения некоторого отрезка:.
* А2В2 (фиг. 55). Из середин С и D отрезков
и ВХВ2 восставим к этим отрезкам пер-
ИДикуляры СК и DK. Точка К пересечения
перпендикуляров, очевидно, обладает тем
свойством, что
Так
как, кроме того, по условию
i = A2B2, то
^Теперь ясно, что если отрезок AJ}^ повернуть около точки К на угол
AtKA2, то он совпадёт с отрезком А2Вг.
Точка К называется центром конечного вращения. Центр К
уходит в бесконечность лишь в том случае, когда векторы А^А2 и В.В2
6 Г. К. Суслов 81
равны между собой; тогда, следовательно, отрезок AXBS переводится из
первого положения во второе поступательным перемещением.
Из этих элементарных соображений вытекает, что всякое движение
плоской фигуры в её плоскости можно представить себе как последова-
последовательность поворотов на бесконечно малые углы вокруг центров, соответ-
соответствующих каждым двум бесконечно близким положениям фигуры.
Если речь идёт о плоскопараллельном движении тела (а не только
плоской фигуры), то во всех вышеприведённых формулировках вместо
«центр вращения» следует говорить «ось вращения», причём следует
подразумевать ось, проходящую через точку К перпендикулярно к пло-
плоскости, параллельно которой происходит движение.
Сказанное о движении плоской фигуры в её плоскости легко распро-
распространить и на случай движения сферической фигуры по сфере. Повторим
предыдущие построения, заменив лишь прямые линии дугами больших
кругов. Тогда мы убедимся, что на сфере всегда существуют две
диаметрально противоположные точки Л", и К2, для которых
Сферические треугольники /\К1А1В1 и Д КХА2В2 конгруентны; поэтому,
если, оставив точки Л", и Д неподвижными, мы повернём сферу а на
двухгранный угол A1K1KZA2, то все точки сферического отрезка АХВХ
совместятся с соотвгтетвенными точками отрезка А2В2. Значит, вообще
тело, имеющее одну неподвижную точку О, может быть переведено из
некоторого первого положения во второе путём поворота вокруг некото-
некоторой оси K-fiK2- Ось эта называется осью конечного вращения.
Отсюда мы выводим, что всякоз движение твёрдого тела около непо-
неподвижной точки можно рассматривать как последовательность поворотов на
бесконечно малые углы вокруг осей, со-
соответствующих каждым двум бесконеч-
бесконечно близким положениям тела. К заклю-
заключу 1 чениям о бесконечно малых вращениях
мы впоследствии придём иным путём.
60. Общий случай движения
твёрдого тела. Перейдём теперь к
общему случаю движения твёрдого тела,
когда все шесть координат его меняют-
меняются со временем:
При введении углов Эйлера (фиг. 56)
мы пользовались вспомогательными ося-
Фиг. 56. ми AXYZ, имеющими с осями А?т?
(связанными с телом) общее начало А и параллельными неподвижным осям
Oxyz. Кроме сред 2 и S, соответственно связанных с системами Aj-rfc и
Oxyz, представим себе ещё промежуточную среду Р, неизменно свя-
связанную с осями AXYZ. Мы видам, что среда Р движется в среде 5
поступательно: все её точки перемещаются так же, как полюс А; среда
82
.же 2 движется по отношению к бредеРвокруг точки Л, как вокруг непо-
неподвижной. Такой способ рассмотрения движения тела 2 называется разложе-
разложением его движения на поступательное вместе с точкой Л и на
движение вокруг точки А, как вокруг неподвижной.
Подобное разложение может быть сделано бесконечным множеством
способов: за полюс А можно взять любую точку тела 2. Заметим, что
от перемены полюса, вообще говоря, изменится поступательная часть
движения, т. е, движение среды Р в среде S, но функции ш (/), ф (t),
&(t), выражающие движение тела 2 относительно среды Р, от того, ка-
какая точка взята за полюс, отнюдь не зависят. Это следует из того, что
две системы соответственно параллельных осей, связанных с телом 2,
именно, Л$7]? и Л'$'т]'?\ образуют с осями AXYZ и A'X'Y'Z', парал-
параллельными осям Oxyz, соответственно равные эйлеровы углы.
В независимости функций y(f), ty(t), b(t) от выбора полюса можно
убедиться и аналитически. Согласно формулам (8.4), если за полюс взята
точка А(хА, уА, zA), уравнения движения любой точки М (х, у, z)
напишутся так:
[ (8.20)
Применим их к точке В, которую мы впоследствии возьмём за новый
полюс; имеем
Ув =
Произведём соответственное вычитание уравнений (8.21) из уравнений
(8.20); оставив в левой части лишь величины х, у, z, мы получим:
)
У=Ув + «2, E - ?в) + «22 A - Ив) + ап (С - Св). (8.22)
j
Введём теперь в качестве осей, связанных с телом, новые оси 55'tj'C',
параллельные прежним осям Л$/]?; на основании формул преобразования
координат
е=ея+?, ч=ча-Ьч'. с=св+:'
мы можем уравнения (8.22) переписать так:
aI,C'1 )
| (8-23)
z =zB-\ a31S' +л32
Сравнивая уравнения (8.20) и (8.23), мы видим, что перемена полюса не
сказалась на направляющих косинусах а , а следовательно, и на функциях
.?, Ф, ••
6* 83
IX. СКОРОСТИ ТОЧЕК ТВЁРДОГО ТЕЛА
61. Скорости точек тела, движущегося поступательно. Продиффе-
Продифференцировав по времени формулу, выражающую закон движения произ-
произвольной точки тела в предположении, что тело движется поступательно,
мы найдём:
т. е. в поступательном движении скорости всех точек тела между собой
равны. Отсюда, конечно, не следует, что если в какой-нибудь момент
времени скорости всех точек тела между собой равны, то движение
тела поступательное; в этом случае лишь говорят, что тело имеет мгно-
мгновенную поступательную скорость.
62. Скорости точек. тела, движущегося вокруг неподвижной
точки. Мгновенная угловая скорость тела. Поместим в неподвижной
точке тела начала неподвижной системы координат Oxyz и системы ко-
координат O?tj?, неизменно связан-
связанной с телом (фиг. 57). Тогда ради-
радиусы-векторы г и р произвольной
точки М тела, проведённые из
начала О неподвижной и подвиж-
подвижной систем координат, будут
между собой равны:
Выразим в этой формуле радиус-
вектор р через координаты ?, ц, С
точки; мы получим:
м
х
Фиг. 57. г=& + ^
Дифференцированием этого равен-
равенства мы найдём скорость <о точки; при этом примем во внимание, что
координаты ?, 7j, С точки не зависят от времени, а единичные векторы
?°, гД ?° являются функциями времени; имеем
Умножив обе части равенства на единичный вектор ?°, найдём теперь
проекцию скорости на ось О\:
"г
(9.1)
Для преобразования полученного выражения воспользуемся следующими
вспомогательными соотношениями: во-первых, из равенства ?0-?°=1 вы-
вытекает соотношение
е».5» = 0; (9.2)
кроме того, так как $°.г|°^=0, то ?°• г,° -(- ?°• г(° = 0 и, следовательно,
84
С помощью равенств (9.2) и (9.3) выражение (9.1) можно преобразовать
так:
fo.go jo.^o
1
(9.4)
Циклической перестановкой в дополнение к этому равенству получаем:
(9.5)
7о goS== V-C0 С0-5°
Введём теперь обозначения
С
ч°-
С°
?о
¦С°
6
¦5»
1
*
(9.6)
и рассмотрим вектор
Тогда соотношения (9.4) и (9.5) можно будет переписать так:
4
или, в векторной форме,
(9.7)
^=«Хр (9.8)
[см. формулы A.27) на стр. 10]. Полученное равенство носит название
формулы Эйлера, а векторная величина о) называется мгновенной угло-
угловой скоростью тела. Эпитет «мгновенная» отмечает, что на-
названный вектор характеризует распределение скоростей точек тела лишь
для отдельно взятого момента времени. Для другого какого-либо мо-
момента вектор (о, вообще говоря, будет иным и по модулю, и по направ-
направлению. По формуле (9.8) нетрудно установить размерность угловой
скорости; очевидно, [а>]= . Единицей угловой скорости служит 1 •
Найдём геометрическое место точек, скорости которых в данный мо-
момент времени равны нулю. Как видно из формулы (9.8), уравнение иско-
искомого места в системе O?ijC будет
«Хр~=0. _ (9.9)
Полученное выражение говорит, что векторы р и ш коллинеарны; иначе
это может быть записано так:
р"=Х(оО (9.10)
или, в скалярной форме,
! = ^-=Д. (9.11)
Мы видим, что искомое геометрическое место представляет собой пря-
прямую, проходящую через неподвижную точку тела. Найденная прямая
называется мгновенной осью вращения.
83
Это название оправдывается тем, что движение твёрдого тела за
бесконечно малый промежуток времени Ы, начиная от момента t, кото-
которому соответствует вектор со> будет вращением вокруг рассматриваемой
прямой. В этом можно убедиться следующим образом. Рассмотрим про-
извольну.ю плоскость А, связанную с телом и проходящую через прямую
(9.10). Радиус-вектор какой-либо точки М, лежащей в этой плоскости,
имеет выражение _ _
рл=Дв>о+jit«, (9.12)
где т°—произвольный единичный вектор, определяющий выбор, плоскости;
всегда можно считать, что т° удовлетворяет условию т°.о>°=0. Очевид-
Очевидно, \ и is. являются проекциями вектора рж на орты и0 и т°. Найдём
скорость точки М. По формуле (9.8) мы имеем
что вследствие коллинеарности векторов со и со0 даёт
За промежуток времени 8^ точка М придёт в цовое потожение М', оп-
определяемое с точностью до бесконечно малых высшего порядка' радиусом-
вектором
F (^f«XT»W). (9.13)
Сопоставляя выражения (9.12) и (9.13), мы приходим к заключению, что
выше рассмотренная плоскость А за время 5^ приходит в некоторое но-
новое положение А', /юпрежнему содержащее прямую (9.10); это можно
сразу увидеть, если в уравнениях (9.12) и (9.13) положить ц=0. Таким
образом, плоскость А, а вместе с ней и всё твёрдое тело поворачивается
за промежуток времени Ы на некоторый угол §<р вокруг прямой (9.10).
Найдём указанный угол 8^ между плоскостями А и А'. Он, очевидно,
равен углу между векторами т° и т° -|- w X т° tt. Поэтому мы имеем
=in
х *"° *п\ _
|то[
Ограничившись бесконечно малыми первого порядка, мы получим
S? = со Ы.
Следовательно,
Последнее выражение показывает, что модуль угловой скорости является
пределом отношения угла поворота тела к соответствующему промежутку
времени при условии, что этот промежуток времени стремится к нулю
(ср. сказанное о бесконечно малых вращениях в § 59).
Условимся помещать вектор со на мгновенной оси вращения. Этот
скользящий вектор будет полностью характеризовать мгновенное кинема-
кинематическое состояние тела в отношении скоростей его точек. Согласно
выше сказанному, скорость какой-либо точки тела перпендикулярна к
плоскости, содержащей данную точку и мгновенную ось, и по модулю
86
равна произведению со • на расстояние h точки от оси; при этом для
наблюдателя, стоящего вдоль вектора со и смотрящего на точку, скорость
точки кажется направленной справа налево. Можно также сказать, что
скорость v некоторой точки М равна моменту вектора со относительно
этой точки М.
В неподвижной системе координат Oxyz скорость v точки, очевидно,
имеет те же выражения, что и в подвижной системе OZrfi; это следует
из равенства радиусов-векторов г и р; таким образом, наряду с фор-
формулой (9.8) мы имеем _
v = a>Xr. (9.14)
Для проекций скорости v будем иметь следующие выражения:
х у
(9.15)
В
Отсюда так же, как и в подвижной системе, получаем уравнение мгно-
мгновенной оси вращения
»Хг=0, (9.16)
или, в скалярной форме,
-=ii=-. (9.17)
и>х а>у тг х
Если вектор со разложен на несколько составляющих, то скорость
какой-либо точки тела равняется сумме тех скоростей, которые эта точка
получила бы от каждой составляющей в отдельности: это следует из фор-
формулы (9.14) в силу свойства распределительности векторного умножения
гго отношению к сложению [формула A.22) на стр. 9].
В частном случае, если тело, кроме точки О, имеет ещё некоторую
вторую неподвижную точку О', говорят, что оно вращается вокруг
неподвижной оси 00'. В этом
случае траекториями точек тела
служат окружности с центрами на
оси вращения, а угловая скорость со
расположена на неизменном основа-
основании 00'.
63. Относительная (локальная)
производная вектора. Пусть Oxyz
и OqTjC — соответственно неподвиж-
неподвижная и подвижная системы координат
с общим началом О и пусть со —
мгновенная угловая скорость системы
Ozrfc по отношению к системе Oxyz
(фиг. 58). Пусть, далее, а — не-
некоторый переменный вектор, являю-
являющийся функцией времени: a = a(t).
Вектор а, вообще говоря, меняется
как по модулю, так и по направле-
направлению, причём можно говорить об изменении его направления как по от-
отношению к неподвижным осям Oxyz, так и по отношению к подвижным
осям О&7)?. Производная по времени от вектора а, характеризующая
87
Фиг. 58.
быстроту его изменения в неподвижной системе Oxyzt называется абсо-
абсолютной производной и обозначается -гг или а; до сих пор мы имели
дело только с абсолютными производными векторов. Производная от век-
вектора а, представляющая быстроту его изменения в подвижной системе 0%т?,
называется относительной, или локальной, производной и обозна-
da ~
чается -^- или а.
Установим связь между, этими производными. Пусть в некоторый мо-
момент времени t вектор а занимает положение ОА, а в момент времени
t -\- Д< — положение ОВ. Отметим, кроме того, на чертеже положение ОС
вектора а, которое он занял бы в момент времени t-\-&t, если бы он был
неизменно связан с подвижной системой OSrjC (на чертеже указано поло-
положение системы О?г/С только в момент времени (, когда её мгновенная
угловая скорость равна ю). Очевидно ЛВ = Да есть абсолютное прира-
приращение вектора а за промежуток времени Л?, CB = hfa является его
относительным приращением в подвижной системе OSijj;, и АС=кеа
есть та часть изменения вектора а в неподвижной системе Oxyz, кото-
которая вызвана перемещением вектора а вместе с подвижной системой О$7)?.
На фиг. 58 непосредственно усматривается, что между указанными при-
приращениями имеет место следующее соотношение:
Разделим обе части этого равенства на Д^ и перейдём к пределу,
устремив промежуток времени Д/ к нулю; тогда слева мы получим аб-
абсолютную производную а, а первое слагаемое правой части даст отно-
относительную производную а; второе же слагаемое правой части, lim-ff,
очевидно, численно и по направлению будет равно скорости той точки А
подвижной системы O&fi, которая совпадает с концом вектора а. Но
эта скорость может быть выражена при помощи формулы (9.14) Эйлера, и,
таким рбразом, мы получим:
lim-г? = ш X е-
>о а'
Окончательно мы придём к следующему выражению абсолютной
производной через относительную производную и через мгновенную угловую
скорость подвижной системы координат:
а— c-f-шХв- (9.18)
Важно заметить, что если бы подвижная система 0%г?, двигалась от-
относительно неподвижной поступательно, то производные от вектора а
были бы в обеих системах одинаковы. Но в этом случае угловая ско-
скорость со равнялась бы нулю, и, таким образом, оказывается, что формула
(9.18) остаётся верной и для рассматриваемого случая. Наконец, приняв
во внимание, что в общем случае движения системы Ob\Z, это движение
может быть разложено иа поступательное и на движение вокруг точки О,
88
как неподвижной, мы убеждаемся, что формула (9.18) имеет общее зна-
значение.
Выразим относительную (локальную) производную а через проекции
вектора а на оси подвижной системы. Для этого продифференцируем
«локально» равенство
Локальность дифференцирования правой части найдёт своё отражение в
том, что единичные векторы ?°, г,0, С0 подвижной системы будут трак-
трактоваться, как постоянные; на дифференцировании же скаляров а^, а , «с
локальность, конечно, не отразится. Таким" образом, мы получим:
а='а^ 5» + а,ч° f «c^°- (9-19)
Теперь нетрудно записать формулу (9.18) в проекциях на оси под-
подвижной системы O&j]"; на основании соотношения (9.19) мы находим:
Эти соотношения можно было бы также получить из теоремы о проекции
производной вектора на подвижное , направление [формула D.24) на
стр. 37]. Согласно этой теореме мы имеем, например, для проекции про-
производной на ось ? следующее выражение:
Но производная ?° как скорость конца вектора ?° может быть выражена
при помощи формулы Эйлера
Поэтому вычитаемое в предыдущей формуле может быть преобразовано
следующим образом [см. формулу A.32) на стр. 11]:
3, —«Vc-
1 О О
Окончательно мы получаем:
и т. д., т. е. прежний результат (9.20).
Пример 22. В качестве приложения изложенной теории найдём выраже-
выражения производных по времени от направляющих косинусов д^ через проекции
угловой скорости подвижной системы координат на оси неподвижной системы.
Для этого применим теорему (9.18) к вектору $°; мы получим:
Так как вектор 5° в системе ОЬ\? не изменяется, то ?°:=0; следовательно,
|о=ШХТ°. (9-21)
89
Спроектируем это равенство на ось х; при этом вспомним, что согласно фор
муле (8.10) на стр. 74 мы имеем:
поэтому мы получим:
ап = ayzSI — шгв21.
Аналогично получаются производные остальных косинусов. Выпишем ре-
результат:
аН = «>j,«3I " "V21. а\Ъ ~ ">yaS2 — ">га1Ъ «13 — и>уаЬЬ
i а та = <вгя13
У У «sb = тхЛгз j
Нетрудно подметить общую структуру этих, формул: если индексы х, у, г
у угловой скорости соответственно заменить числами I, 2, 3 и условиться под
числом в скобках понимать его наименьший положительный вычет по модулю,
равному 3, то можно написать
«!« = % + 1) д(н. +2), ¦> — *V + 2) д(|* + 1), г
Заметим, что формулу (9.21) можно было бы получить также из равенства
(9.8), переписав его сперва в форме
_ _ ~р = иХ~Р
и положив затем о = 5°.
Пример 23. Найдём теперь выражения производных по времени от на-
направляющих косинусов «(j.v через проекции угловой скорости на оси подвижной
системы. Для этого мы приложим формулу (9.18) к вектору х°; мы найдём:
Так как вектор х? в неподвижной системе Oxyz не меняется, то его абсолют-
абсолютная производная х° равна нулю; следовательно,
Спроектируем это равенство на ось 5, причём примем во внимание, что по фор-
формуле (8.9) на стр. 74 мы имеем
На этом основании мы при проектировании получим:
Подобным образом мы пайдйм н остальные соотношения и в результате придбм
к раденстрам-
[ (9.23)
Общая структура этих формул такова;
*V ~ "с + 2) п ч, (И- + I) ~~ Ш(> + I) av-, (v +
причём индексы I, 2, 3 у угловой скорости соответственно означают х, у, г,
а числа в скобках должны быть заменены их наименьшими положительными
вычетами по модулю, равному 3.
90
64. Проекции угловой скорости на неподвижные оси координат
и на оси координат, неизменно связанные с телом. Наиболее пря-
прямой путь для получения выражений проекций угловой скорости через
эйлеровы углы заключался бы в использовании формул (9.6) на стр. 85,
единичные векторы ?°, гД ?° здесь следовало бы выразить через направ-
направляющие косинусы по формулам (8.10) на стр. 74, а направляющие ко-
косинусы—через эйлеровы углы по формулам (8.15) на стр. 77. Однако,
во избежание длинных вычислений мы выведем требуемые выражения
иным путём. А именно, мы определим шх, со , шг из каких-либо трёх урав-
уравнений (9.22). Естественнее выбрать такие уравнения, чтобы косинусы,
стоящие в левых частях, проще выражались через эйлеровы углы по фор-
формулам (8.15) на стр. 77. Возьмём, например, следующие три уравнения.
Займёмся сперва последним уравнением; подставив значения косинусов,
мы после очевидных сокращений получим:
6 = ах cos ф -\- о) sin ф. (9.25)
Теперь преобразуем второе уравнение (9.24); имеем
cos ср sin 8 • ср -J- sin cp cos 0 • 6 = cos y(ax sin ф — со cos ф) -f-
-f- Sin tp COS & ((Oj, COS ф -j- 0)у Sin ф),
или, на основании соотношения (9.25) и после сокращения на cos со,
sin &• а = cousin ф — со cos ф. (9.26)
Наконец, первое уравнение (9.24) перепишется так:
соэфвшЭ-ф t втфсоэд-О — со> cos & -f- агcos ф sin 9. (9.27)
Разрешив теперь систему уравнений (9.25), (9.26) относительно шх, ш
и затем найдя сог из уравнения (9.27), мы получим следующие формулы
для проекций угловой скорости со на оси неподвижной системы коорди-
координат:
wx= sin ф sin &• ср-[-со5ф- &, \
@у = — COS ф Sin » =f + Sin ф ¦ », > <9-28)
(ог == ф —j— cos O-cp. J
Сопоставив полученные формулы с выражениями для направляющих
косинусов (8.15) на стр. 77, а также с фиг. 57 на стр. 84, мы ма-
мажем их переписать так:
шх = ф cos (л°Лг°) -\- v cos(a;0,'/4C5) + » cos (x°Cf),
юу=§ cos (У>Лг°) -f- (p cos (/Гс"°) + » cos [у°Г^),
юг=6cos(z°, Xй) -f-cp cos(г0,^) -Ь Ьcos (г°, f).
Отсюда мы заключаем, что мгновенная угловая скорость со может быть
91
следующим образом представлена как сумма трёх слагаемых:
м = (р? + Ф*° -f »f°, (9.29)
где С0, г° и у0 — единичные векторы осей OS, Oz и Оу. Составляющие
(р?&, Фяг° и 0у° соответственно называются угловыми скоростями собствен-
собственного вращения, прецессии и нутации.
Частным случаем движения твёрдого тела вокруг неподвижной точки,
как известно, является его вращение вокруг неподвижной оси. Если осью
вращения служит одна из осей ОС, Oz или Of, то соответственно изме-
изменяется один из углов Эйлера, :р, ф или О, и соответственными угловыми
скоростями являются срС°, фг° или 0у°. Пользуясь формулой (9.29),
мы как бы разлагаем движение твёрдого тела вокруг неподвижной точки
на три вращательных движения.
Проекции а>?, со а>с угловой скорости со на оси системы О?»]С, неиз-
неизменно связанной с телом, всего быстрее получить, спроектировав на эти
оси обе части равенства (9.29). При этом при нахождении проекций вто-
второго слагаемого на оси ? и 7j можно применить так называемое двойное
проектирование, т. е. сначала спроектировать <J)z° на плоскость O?jj, a
затем уже соответственно на оси ? и tj; остальные проекции найдём не-
непосредственно; в результате мы получим:
а>5 := sin у sin 0 • ф -f- cos со • Ь, )
со = coscp sin &• ф — sin (p. 4, \ (9.30)
Формулы (9.29) и (9.30) носят название кинематических уравнений
Эйлера.
Пример 24. Положим, что движение твёрдого тела вокруг неподвижной
точки задано уравнениями
где &о и k — постоянные. Найдём проекции угловой скорости <о на неподвиж-
неподвижные оси координат и на оси, неизменно связанные с телом; по формулам (9.28)
и (9.30) мы получаем
1лу = — &sin60cos /-/t юг=:
<fl? = Sin % Sin &/•/, «^ = Sin 60 COS kf-f, Ю,. =(&-[-COS 60)./\
65. Скорости точек тела в общем случае движения тела. Мгно-
Мгновенная винтовая ось. Пусть снова Oxyz — неподвижная система ко-
координат (фиг. 56 на стр. 82), AXYZ — вспомогательная подвижная
система с началом в некоторой точке, или полюсе, А тела и осями, па-
параллельными осям неподвижной системы, и, наконец, Л?г]С — подвижная
система, неизменно связанная с телом. Радиусы-векторы г и р некоторой
точки тела и радиус-вектор гА начала подвижной системы связаны соот-
соотношением
г=гА + р. (9.31)
92
Продифференцировав это равенство, найдём выражение скорости произ-
произвольной точки тела:
Производные от векторов взяты здесь в системе Oxyz; однако, производ-
производную р будет удобнее понимать как производную в системе AXYZ,
что допустимо ввиду поступательности движения последней. В таком слу-
случае производная р, как скорость тела с неподвижной' точкой, может
быть выражена по формуле (9.8) Эйлера, и последнее равенство пере-
перепишется так:
« = «д+«Хр. (9-32)
Отсюда в проекциях на подвижные оси A^rf, получаем:
(9.33)
проекции vAi, vAr, va^ скорости точки А на подвижные оси выражаются
здесь через её проекции хА, уА, гА на неподвижные оси с помощью фор-
формул (8.8) на стр. 74:
(9-34)
Подставив в уравнение (9.32) значение р из формулы (9.31), мы получим
выражение скорости точки в неподвижной системе Oxyz:
v = vA+~«>X(r — rA), (9.35)
или, в проекциях,
(9.36)
Скорость v произвольной точки тела оказывается равной сумме двух
скоростей; при этом слагаемое vA, общее для всех точек тела и равное
скорости полюса Л, носит название поступательной скорости, а второе
слагаемое, со X pi или ш X (г — гА)> называется мгновенной вращательной
скоростью по отношению к системе AXYZ. Соответствующая мгновенная
ось вращения, служащая основанием вектора со, проходит через полюс А
и имеет в подвижной системе Ab\Z уравнение
шХр = О, (9.37)
или, в проекциях,
А=^=1. (9.38)
Ш5 шт1 ШС
93
В неподвижной системе Oxyz уравнение оси будет
тХ(г — гА) = 0, (9.39)
или, в проекциях,
* — *а У —Уа z — za (9 40)
и>х и>у и>г '
Формулы (9.32) или (9.35) могу г быть истолкованы в том смысле,
что скорость v произвольной точки тела равна главному моменту (отно-
(относительно этой точки) системы скользящих векторов, координаты которой
относительно точки А равны ш и ^ (§ 13).
Скорость любой точки тела можно разложить на поступательную
и вращательную бесчисленным множеством способов, так как полюсом А
может служить всякая точка твёрдого тела. При замене одного полюса А
другим поступательная скорость Va, вообще говоря, переменится, но
мгновенная угловая скорость, как первый инвариант системы векторов (§ 15),
не изменит ни модуля, ни направления. Останется постоянным и скаляр-
скалярное произведение угловой скорости на поступательную, равное второму
инварианту системы:
со ¦ Фд= const. (9-41)
Постоянной, следовательно, будет также проекция поаупателыюй ско-
скорости на угловую или, что то же, на мгновенную ось данного полюса:
пр—VA = const.
Среди бесконечного множества параллельных между собой мгновенных
осей различных полюсов выделяется одна, так называемая централь-
центральная, или винтовая, ось. Точки, на ней лежащие, характеризуются
наименьшим главным моментом v* и, следовательно, имеют наименьшую
скорость; при этом если эта скорость не равна нулю, то она направлена
вдоль оси (§ 16). Напишем уравнение винточой оси в подвижной системе
Airfc. Согласно формуле C.6) на стр. 22 имеем
- «X v а
^- = т, (9.42)
или, в проекциях,
(9.43)
Чтобы написать уравнение винтовой оси в неподвижной системе Oxyz,
приведём сперва систему (со, ч>а) главного вектора и главного момента
относительно полюса А к началу координат. Согласно формуле C.2) на
стр. 20 новый главный момент будет иметь выражение
Теперь пишем уравнение винтовой оси снова по формуле C.6) на стр. 22:
^* —
94
Упрощаем следующим образом второй член в числителе:
«X (!'л+''аХи) = »Х^+и X (Г4Х«>);
ио по формуле A.36) на стр. 12 мы имеем
поэтому уравнение винтовой оси принимает вид
f — Г А ~5
(9.44)
где т' — новый скалярны.» параметр, равный т—^~. Нетрудно напи-
написать уравнение (9.44) в скалярной форме:
*-**—*-* У-Ул--*-*-&
= ZA ., МД • <9'45>
Название «винтовая» ось дано потому, что в частном случае движе-
движения, когда угловая и поступательная скорости и и г»* остаются постоянными,
траекториями точек тела служат винтовые линии. Чтобы убедиться в'
этом, возьмём винтовую ось за ось Oz, за полюс примем некоторую точ-
точку А на этой оси и в ней поместим начало координат. Тогда
шх==ау = 0, a> = a>ez°= const., ха=Уа=О, Va = zaz° — const.
Уравнения (9.36) теперь дают
х = — уи>г, у = хыг, z = const.= zQ, (9.46)
причём ноликом в качестве нижнего индекса мы будем помечать значе-
значение соответствующей величины при i = 0. Проинтегрировав последнее
уравнение, мы найдём
* = V + *o- (9-47)
Далее, исключив из первых двух уравнений (9.46) ш2, получим:
хх-\-уу= 0;
интеграл этого уравнения следующий:
? & (9.48)
Наконец, умножим первое из уравнений (9.46) на —у, второе на х
и сложим их; мы получим:
ху —ух = (х
95
этому уравнению можно придать следующий вид:
проинтегрировав его, мы получим:
-со/ (9.49)
Если ввести цилиндрические координаты [формулы E.11) на стр. 48], то
интегралы (9.48) и (9.49) перепишутся так;
Р = Ро> <Р — ?<> = <»/¦ (9.50)
Исключив теперь из уравнений движения (9.47) и (9.50) время t и при-
приняв во внимание равенство отношений -9-=^-, мы получим следующие
уравнения траектории:
со
т. с. траекториями точек тела действительно являются винтовые линии.
Отношение р=~, измеряемое единицами длины, называется пара-
метром винта. Перемещение h точки вдоль оси z за время, в тече-
течение которого угол (р возрастает на 2тг, носит название шага вин-
винтовой линии. Очевидно,
откуда
А=2тг|р
т. е. траекториями точек тела в рассматриваемом случае движения яв-
являются винтовые линии одного и того же шага.
Тот же результат в отношении траекторий точек тела получился бы
в более общем случае, когда 1>а и со сохраняют лишь постоянное на-
направление и постоянное отношение
~=р = const,
ш
Пример 25. Дан закон движения тела:
Найдём уравнение винтовой оси в неподвижной и в подвижной системах
координат. Имеем для неподвижной системы
my= — &sin60cos/>/, <o2 = (ll -[-* cxss 90)/,
96
следовательно, уравнение винтовой оси, согласно формуле (9.45), будет
x-\-mcosf v-\-msmf z
k sin % sin / — k sin i>0 cos / 1 -|- A cos l>0 '
где
@ +
Для подвижной системы имеем прежде всего
ш- = sin »0 sin kf-'f, u>T= sin 60 cos kf-f, <йс = {k-{-cosb0)'f,
находим затем по формулам (9.34) проекции скорости точки А на подвижные
оси:
-f a2ly'A + aB1'zA = &cos%sinkf-'f,
+ апУА + апгд -& cos %coskf-f,
vAr= awx'A -f anyA + д83 гА — — Ь sin »„-/.
Наконец, по формуле (9.43) пишем уравнение винтовой оси:
\ -\- (I COS Й^ Т) — p. Sin kf С
sin »0 sin kf sm 90 cos kf к. -f cos »0 '
где
SA-t-fecos&o)
66. Скорости точек тела, движущегося параллельно плоскости.
Мгновенный центр скоростей. Обратимся теперь к тому частному слу-
случаю движения твёрдого тела, когда угловая скорость со постоянна по на-
направлению, a m-VA, т. е. второй инвариант (9.41) системы скоростей, во
всё время движения равняется нулю. В рассматриваемом случае скорости
точек тела остаются перпендикулярными к некоторому неподвижному
направлению, т. е. мы имеем дело с движением тела параллельно плос-
плоскости (§ 58). Скорости точек на винтовой оси в рассматриваемом слу-
случае равняются нулю и, следовательно, в каждой плоскости тела, пер-
перпендикулярной к этой оси, одна из точек — пересечение винтовой оси с
плоскостью — находится в так называемом мгновенном покое, т. е. имеет
скорость, равную нулю.Эта точка носит название мгновенного цен-
центра скоростей рассматриваемой плоскости.
Мы видели, что скорость произвольной точки тела в общем случае
его движения выражается в неподвижной и подвижной системах форму-
формулами (9.35) и (9.32):
v = vA-\-*X{r-rA), (9.51)
*=«^-}-вХ|р. (9.52)
Напрчвим оси Oz и ЛС параллельно угловой скорости со; тогда при
написании последних формул в проекциях, т. е., иначе говоря, формул
(9.36), (9.33; и (9.34) следует положить
гА=0; au=cos!p, ап = — sin щ,
a2l = sin у, а„
7 Г. К Суслов
Выполнив подстановки, найдём тогда, что проекции скорости на непод-
неподвижные оси равны
vx=xA — (y-yA)y, vy = yA-T-(x—xA)y, v2 = 0; (9.53)
проекции скорости на оси, неизменно связанные с телом, имеют выражения
^ — ха cos V — У a cos ? —' I?- 1
^=-^,sin(?+^c0S? + *P- 1 (9.54)
г/с = 0. J
Мгновенный центр скоростей Р какой-либо плоскости можно найти
из условия, что его скорость равна нулю: z>p=0. Назвав радиус-вектор
мгновенного центра скоростей в подвижной системе рр, получаем поэтому
на основании формулы (9.52) для его определения следующее уравнение:
о=^ + «х7р.
Умножим обе части этого уравнения векторно ка со; применив ко вто-
второму слагаемому правой части известную теорему о векторно-векторном
произведении, находим
0 = w X "ОА + ш (« • vA) — ррсоа.
Так как и _j_ vA, то отсюда мы получаем:
т. е. для нахождения мгновенного центра скоростей нужно скорость не-
некоторой точки А фигуры повернуть на 90° в сторону вращения фигуры
и на полученном луче отложить отрезок, главный —. В неподвижной си-
системе радиус-вектор мгновенного центра скоростей, очевидно, выразится
следующим образом:
гр=г„ + ^^-. (9.56)
Спроектировав векторные равенства (9.56) и (9.55) соответственно на
неподвижные и подвижные оси, мы получим следующие выражения для
координат мгновенного центра скоростей:
хр=кхл~*?-, ур = уд+^; (9.57)
?
хА3^1±^^-. (9.58)
f ?
Интересно заметить, что если при написании формул (9.51) и (9.52)
за полюс А взять мгновенный центр скоростей фигуры, т. е. положить
юА — 0, то мы получим; .
v = ш X (г — гА) и V = со X Р-
Сравнивая эти выражения с формулой (9.8) на стр. 85, мы виднм, что
скорости точек плоской фигуры в каждый момент времени таковы, как
будто фигура вращается вокруг мгновенного центра скоростей, как не-
98
подвижной точки. В частности, заметим, что дрямая, соединяющая мгно-
мгновенный центр скоростей с какой-либо точкой фигуры, нормальна к тра-
траектории этой точки. Это даёт возможность построить мгновенный центр
скоростей, если известны (не параллельные между собой) направления
скоростей двух точек фигуры.
П р и м ер 26. В кардановом движении (§ 58) получаются такие выражения
для координат мгновенного центра скоростей:
(9.59)
(9.60)
X. ЦЕНТРОИДЫ. АКСОИДЫ
67. Центроиды. Мы уже видели раньше, что движение плоской фи-
фигуры в её плоскости можно рассматривать, как непрерывную последова-
последовательность поворотов на бесконечно малые углы вокруг соответственных
мгновенных центров (§ 59). При этом мгновенный центр скоростей в раз-
различные моменты времени совпадает, вообще говоря, с различными точками
как неподвижной плоскости, так и плоскости, неизменно связанной с дви-
движущейся фигурой; следовательно, он движется в обеих плоскостях. Тра-
Траектории мгновенного центра скоростей в неподвижной и подвижной пло-
плоскостях называются соответственно н е-
подвиж-ной и подвижной цен-
центроидами. Уравнениями движения
мгновенного центра скоростей в этих пло-
плоскостях служат соответственно равен-
равенства (9.57) и (9.58); поэтому уравнения
центроид мы найдём исключением вре-
времени из каждых двух названных ра-
равенств.
Подвижная центроида вместе с дви-
движущейся фигурой перемещается в не-
неподвижной плоскости. Для исследова-
исследования движения мгновенного центра»
скоростей напишем прежде всего соот-
соотношение между радиусами-векторами гр Фиг. 59.
и Рр мгновенного центра скоростей в
неподвижной и подвижной системах координат (фиг. 59). Если гд — ра-
радиус-вектор начала А подвижной системы, то, очевидно,
Продифференцируем это равенство по времени, при этом выразим по
формуле (9.17) на стр. 87 абсолютную производную рр вектора рр через
его относительную производную рр; имеем
XPp- <10Л)
Заменим в последнем слагаемом правой части радиус-вектор рр его вы-
7* 99
ражением по формуле (9.55); тогда это слагаемое преобразуется так:
м х рр——^— ^ '
но (О'Я!д = 0 вследствие перпендикулярности этих векторов; поэтому мы
получаем:
шхр~Р=—vA=—rA.
Подставив этот результат в формулу A0.1), мы находим, что
т. е. скорости vp перемещения мгновенного центра скоростей в непо-
неподвижной и подвижной плоскостях равны между собой как по направлению,
так и по модулю (не следует, конечно, смешивать этих скоростей со
скоростью точки фигуры, совпадающей в данный момент с мгновен-
мгновенным центром скоростей, последняя равна нулю в силу самого определе-
определении понятия мгновенного центра скоростей). Первое обстоятельство говорит
о том, что обе центроиды во всё время движения касаются друг
друга. Равенство численных значений скоростей означает, что подвижная
центроида катится по неподвижной без скольжения. В самом
деле, пусть mP = su jiP=a соответственно дуги неподвижной и по-
подвижной центроид, отсчитываемые от точек т и д, которые в момент
^=0 совпадали с точкой касания центроид. Умножив равенство A0.2)
на dt и перейдя в обеих его частях к модулям векторов, мы, согласно
формуле D.14) на стр. 35, получим
ds = dz.
Проинтегрировав это уравнений и учтя начальные данные, мы найдём, что
что и доказывает высказанное положение.
Если вместо прямого движения мы станем рассматривать обращенное, то
центроиды только поменяются ролями: неподвижная станет подвижной и
наоборот.
Пример 27. Для карданова движения (§ 58) по формулам (9.57) и (9.58)
находим соответственно следующие уравнения неподвижной и подвижной
центроид:
обе кривые — окружности; подвижная в два раза меньше неподвижной и лежит
внутри неё.
Эти заключения мы могли бы вывести и элементарным путём, пользуясь
тем замечанием, что прямая, соединяющая мгновенный центр с какой-либо точ-
точкой подвижной фигуры, нормальна к траектории этой точки. Мы знаем, что
кардаково движение получается тогда, когда две точки фигуры, Mi и М3, дви-
движутся по двум взаимно перпендикулярным прямым Ох и Оу. Пусть попреж-
нему расстояние М-М^ равно 2R. Восставив перпендикуляры к прямым Ох и
Оу в точках Мх и М2, мы получим мгновенный центр Р как их пересечение.
Так как в отношении расстояния ОР имеет место равенство OP— MlMi = 2Rl
то, очевидно, неподвижной центроидой является окружность с центром О и
радиусом 2/?. Далее, угол МХРМ2 — прямой; следовательно, подвижной цент-
центроидой служит окружность, построенная на отрезке MiM2, как на диаметре.
100
Пример 28. Пусть имеется антипараллелограмм ААхВгВ (фиг. 60), т. е.
четыреугольник, противоположные стороны которого равны и пересекаются.
Укрепим неподвижно одну из сторон, например, одну из ббльших, АВ; тогда
другая ббльшая сторона А-[ВХ смо-
сможет двигаться вполне определённым
образом в плоскости антипараллело-
антипараллелограмма. Найдём для неё центроиды.
Траектории точек Л, и В, —окруж-
—окружности с центрами А и В; следова-
следовательно, мгновенный центр Р скоро-
скоростей лежит на пересечении прямых
ААХ и ВВХ. Из равенства треуголь-
треугольников АРВ и А\РВЛ следует-
РА—РВ = АА1 = const.,
поэтому неподвижной центроидои яв-
является гипербола с фокусами А и В.
Далее,
фиг
следовательно, подвижная центрои-
центроида — также гипербола, конгруентная
с предыдущей и имеющая фокусами
точки Аг и Вх.
Если закрепим неподвижно меньшую сторону ЛЛЬ то, как легко увидеть,
при движении стороны ВВХ центроидами будут два конгруентных между собой
эллипса с фокусами соответственно в точках А, А] и В, Въ
68. Аксоиды твёрдого тела, движущегося вокруг неподвиж-
неподвижной точки. Когда твёрдое тело движется вокруг неподвижной точки О,
то мгновенная ось вращения (§ 62), перемещаясь как в самом теле, так
и в неподвижной среде, описывает в этих средах две конические поверх-
поверхности, носящие названия подвижного и неподвижного аксои-
дов. Уравнения этих поверхностей найдутся, если исключить время из
двух уравнений (9.17) на стр. 87 для неподвижного аксоида и из двух
уравнений (9.11) на стр. 85 для подвижного. Подвижной аксоид, будучи
неизменно связан с движущимся телом, вместе с ним перемещается в про-
пространстве. Две рассматриваемые конические поверхности в каждый момент
времени имеют общую образующую, являющуюся мгновенной осью вра-
вращения для взятого момента. Движение подвижного аксоида происходит
так, что он катится по неподвижному без скольжения. Другими
словами, оба конуса во всё время движения касаются друг друга по об-
общей образующей; кроме того, любая точка мгновенной оси за один и
тот же промежуток времени проходит по обеим поверхностям пути оди-
одинаковой длины. Чтобы убедиться в сказанном, достаточно показать, что
скорости произвольной точки мгновенной оси в двух движениях, в непо-
неподвижной среде и относительно движущегося тела, между собою равны.
Пусть Р—произвольная точка мгновенной оси вращения и пусть гр
и рр—её радиусы-векторы, проведённые из неподвижной точки О тела
в неподвижной среде~и в движущемся теле; очевидно,
Продифференцируем последнее равенство по времени, при этом выразим
абсолютную производную р вектора рр через его относительную производ-
101
ную рр[по формуле (9.18) на стр. 88]; имеем
Второе слагаемое правой части, ввиду коллинеарности перемножаемых
векторов, равно нулю, и следовательно, мы получаем:
Таким образом, действительно, скорости перемещения точки Р в непо-
неподвижной и подвижной средах одинаковы, что доказывает высказанные выше
положения.
Пример 29. Если неподвижная точка твёрдого тела помешена в начале
координат и движение тела задано уравнениями
<t=kf(t)t <!>=/(*), 9 = &0,
где &о и k—постоянные, то уравнения мгновенной оси в абсолютных и отно-
относительных координатах напишутся следующим образом:
х у _ z
к sin Ьй sin /
- к sin 90 cos/
sin 9e sin A/ sin 0o cos kf k-\-cosba'
Исключил время, найдём уравнения аксоидов, неподвижного и подвижного:
СО
= 0,
В рассматриваемом примере оба ак-
соида — конусы вращения.
Пример 30. Взаимное распо-
расположение конических поверхностей,
являющихся аксоидами, может быть
весьма разнообразным. Например,
если станем рассматривать-движение
Земли, пренебрегая нутацией и при-
принимая в соображение лишь суточное
вращение и прецессию, то распо-
расположение аксоидов будет такое, как
показано на фиг. 61. Здесь О —
центр Земли, ось OZ направлена по
оси эклиптики к северному полюсу
эклиптики; ось 01 идёт к северному
полюсу Земли; угол между угловой
скоростью прецессии ф Z0 и угловой
скоростью собственного вращения
ф С составляет к—S, где 8 есть угол наклонения эклиптики к экватору, приблизи-
приблизительно равный 23°27'17Г'; угол растворения подвижного аксоида равняется при-
приблизительно 0",01.
§ 69. Изгиб поверхности. Закручивание поверхности. Прежде
чем перейти к рассмотрению аксоидов для общего случая движения твёр-
твёрдого тела, остановимся на некоторых теоремах, относящихся к теории
поверхностей. Возьмём на данной поверхности F (х, у, z) = 0 произволь-
произвольную точку М (фиг. 62) и координаты её обозначим х, у, z. Касатель-
Касательную плоскость к поверхности в этой точке назовём Р, а единичный век-
вектор-положительной нормали поверхности обозначим «° (за положительное
102
Фиг. 61.
направ пение нормали принимается то, в котором функция F(x, у, г) воз-
возрастает). Продвинемся от точки М по поверхности к некоторой другой
точке Мх с координатами xv ул, zy Касательную плоскость в этой
точке назовём Ру а единичный вектор нормали п\. Проведём на
поверхности через точки М~ тл Мх какую-либо
кривую; длину дуги ММХ обозначим 8о, а еди-
единичный вектор касательной к этой дуге в точ-
точке М назовём о0. Чтобы получить касательную
плоскость Рх, нам надо будет повернуть плос-
плоскость Р на некоторый угол 8ф около оси,
совпадающей с линией пересечения плоскости Р
и Ру Отложим от точки М вектор, по модулю
равный отношению у и направленный перпендикулярно
Фиг. 62.
п° и п
поверхности, притом в ту сторону, откуда
нормалям
переход от
направления п° к направлению, параллельному п® (по кратчайшему пути),
представляется происходящим против движения часовой стрелки. Введён-
Введённая нами величина называется средним изгибом поверхности
на дуге MMV Очевидно, средний изгиб равен
_ _ Ц пп х и?
^~Тв sin 8ф '
Изгибом 0 поверхности в точке М по направлению сг°
называется предел предыдущего выражения при неограниченном прибли-
жении точки Мх к точке М по дуге ММХ.
о = hm -5
или, так как Hm -т4т =11,
A0.3)
Найдём выражение изгиба через частные производные функции
F (х, у, z) и через величины, характеризующие направление о0. Выпи-
Выпишем выражения единичных векторов нормалей поверхности в точ-
точках М и Мг; имеем
где
103
Формула (Ю.З) теперь примет внл
0= lim
Мч-Mi
_o о о
F' F F'
1 x ' у \z
к
,
A0.4)
Чтобы облегчить переход к пределу, разложим каждую из функций
F'x, F', F'z в ряд Тейлора по возрастающим степеням разностей
Ьх = хх— х, Ьу=ух—у, bz = z^—z, являющихся проекциями ве-
вектора ММХ; имеем
dy
не выписанные члены содержат вторые и высшие степени приращений
Ьх, by, bz и при последующем переходе к пределу дадут нули. Вставим
полученные выражения в определитель формулы A0.4), вычтем из третьей
строки вторую и отнесём делитель Ьз к элементам преобразованной
третьей строки; таким образом, первым элементом третьей строки будет
dF'x Ъх dF'xly dF'xlz
дх 5з ду 8а дг 8о ' *'
где Sj есть совокупность членов первого и высших порядков малости
относительно вектора ММу После перехода к пределу отношения
Ьх ov 1г
Y > Т > Та дадУт к°с™усы углов направления з° с осями координат,
т. е. jc°-o°, у°-з°, г° • о0. Заметим теперь, что сумма произведений част-
частных производных некоторой функции ш (х, у, z) на косинусы углов на-
направления а0 с осями координат носит название производной по
направлению а0 и обозначается ¦?-, т. е.
-L^^JL xO.jO J^ll. yO.jO J^^f. gO .gO_ A0.5)
Возвращаясь к изучаемому выражению, мы сможем, следовательно, ре-
dF
зультат перехода к пределу записать как —т—; действительно, согласно
формуле (Ю.5), мы имеем
dF'x - dFx _ dF'x - dF'x
Произведя аналогичные преобразования со вторым и третьим элементами
!04
третьей строки, мы придём к следующему выражению для изгиба по-
поверхности в точке М по направлению а0:
у" z°
F' F
do da da
A0.6)
Пусть теперь уравнение поверхности задано с помощью явной
функции
z = z(x,y).
Будем употреблять следующие обозначения производных:
dz dz d%z d"-z rPz
»=з-, <7 = -j-; /¦=-3-5. s=-
r dx 7 ay ax2
дх ду'
dJL
Так как, вместо функции F мы теперь имеем функцию z (х, у) — z, то
элементами второй строки определителя в формуле A0.6) будут р, q, —1.
Элементы третьей Строки преобразуются следующим образом:
df7' dp
da
dp dx dp dy
+ -5- -г- = ГХ'
da
Таким образом, для изгиба мы получим формулу
х° у0
Р Ч
rx' -f sy' sx' -f /У
— 1
о
A0.7)
где Д2= 1 _
Основание вектора 0 называется осью изгиба. Изгиб повэрхности
можно рассматривать как угловую скорость при движении касательной
плоскости по поверхности, но рассчитанной не на единицу времени, а на
единицу длины.
Разложим изгиб Ь на две составляющие: по тому направлению а0,
по которому мы продвигались по поверхности, и по направлению g°,
ему перпендикулярному. Последнее направление, конечно, лежит в каса-
касательной плоскости, потому что, как это видно из предыдущих рассуж-
рассуждений, сам вектор 9 лежи г в касательной плоскости. Положительное
направление вектора g° мы выберем так, чтобы векторы a0, g° и еди-
единичный вектор и0 положительной нормали к поверхности составляли пра-
правую систему, т. е. чтобы выполнялось равенство
?0 — п<>ХЯ A0.8)
Проекцию 9„ изгиба .на направление вектора а0 мы назовём з а к р у ч и-
105
ванием поверхности по данному направлению з°, а проекцию 9
чистым изгибом по направлению <з°.
Так как
> (Ю.9)
то из формулы (Ю.7) мы получаем:
t). A0.10)
Что касается проекции 9 , то ясно из геометрических соображений,
что по абсолютной величине она равна кривизне "нормального сечения
поверхности, проведённого через вектор а0,
_ (
| у I '¦- '¦ ¦ -—' t
Подтвердим это аналитическим путём. Мы имеем
A0.11)
отсюда, последовательно применив формулы A0.8), A. 32) на стр. 11
и (Ю.7), мы находим
sx'-j-ty' — (гаг' + ^У) p{sx'-\-ty') — q{rx'
Р Я
х1 У px'+q/
Вычтем из третьего столбца определителя первый столбец, умноженный
на р, и второй, умноженный на q\ мы получим:
sx' -f- ty' — (rx' ~|- sy') 0
P Я —д2
*' У 0
или
Qg= 4" (rx'2 + 2s*'y- -f ty'").
От этого равенства с помощью формулы D.21) на стр. 36 нетрудно
перейти к выражению 0 через единичный вектор v° главной нормали
1
и кривизну — той кривой на поверхности, для которой вычислялись про-
производные х', У, z'; имеем
1
rfV
В частности, если за указанную кривую взять нормальное сечение через
вектор а0, то мы получим указанное выше соотношение A0.11).
106
70. Закручивание линейчатой поверхности вдоль образующей.
Направим ось Ох по одной из прямолинейных образующих поверхности;
тогда для точек этой оси мы будем иметь:
Л dx . dy dz A
0 = 0, -т—=1, -^- = — = 0;
r do da Ua
кроме того, мы получим 6^=0, так как касательная плоскость может
лишь вращаться около образующей; заметим далее, что так как произг
водная р равна нулю для всех точек оси Ох, то для этих точек также
и г:=0; Закручивание поверхности вдоль оси Ох по формуле A0.10)
выразится следующим образом:
s A0.12)
Пусть наша поверхность развёртывающаяся. Дифференциальное урав-
уравнение развёртывающейся поверхности, как известно, имеет вид
отсюда вытекает, что для всякой точки образующей. Од; вследствие ра-
равенства /-=0 также s^=Q; поэтому в силу равенства A0.12) мы нолу-
чаем 6д = 0; т. е. плоскость, касательная к развёртывающейся поверх-
поверхности в какой-либо точке на образующей, касается поверхности вдоль
всей образующей.
Положим теперь, что данная поверхность косая. Возьмём начало ко-
координат на линии сужения поверхности, а ось Оу направим по кратчай-
кратчайшему расстоянию между образующей Од: и образующей, ей бесконечно близ-
близкой; следовательно, плоскость Оху будет теперь касательной к по-
поверхности. Пусть уравнения любой другой образующей следующие:
z^ax+a, y = bx-\-$, A0.13)
где а, Ь, а, $ — функции некоторого параметра X. Если образующей,
совпадающей с осью Ох, соответствует значение параметра Хо, то для
него а = Ь = а=:$ — 0. Уравнения проекции на плоскость Оху смежной
образующей напишутся так:
где штрихом обозначены производные по X. По условию ось Оу совпа-
совпадает с кратчайшим расстоянием между Ох и смежной образующей;
следовательно, проекция этой смежной образующей параллельна оси Ох\
отсюда вытекает, что для X = Хо мы имеем
Первое из уравнений A0.13) можно рассматривать как уравнение самой
косой поверхности, если представим себе, что параметр X выражен в функ-
функции от х и у из второго уравнения. В этом предположении мы получаем
из первого уравнения
= a-ir(alx-\-a')~;
дх'
107
но из второго уравнения мы имеем
следовательно,
Продифференцировав последнее равенство по у, мы находим:
Ту'
в то же время дифференцированием по у второго из уравнения A0.13)
мы получаем:
1 I ' /тif
следовательно,
д_ (а'х-}-«'\
Даём А частное значение Хо; тогда видим из предыдущего, что для
всех точек образующей Ох производная .у принимает постоянное значение:
постоянная ^ носит название параметра распределения. Можно
было бы показать, что ^ равняется пределу отношения кратчайшего рас-
расстояния Р'оГл между смежными образующими к тангенсу a'd\ угла между
ними.
Обозначим через а угол между осьюz и нормальюМN поверхности в
2 какой-либо точке М на оси Ох, или,
что то же, угол касательной пло-
плоскости Р в рассматриваемой точке с
плоскостью Оху (фиг. 63); тогда на
основании формулы A0.12) можем на-
0 писать:
N,
Фиг. 63.
COS2» I ""V>
отсюда, проинтегрировав, получаем из-
известную формулу
tg со = — /, A0.14)
где / — расстояние точки на образующей от начала координат, т. е. от
точки встречи образующей с линией сужения.
Пример 31. Определим параметр распределения касательных плоскостей
по образующей однополостного гиперболоида вращения. Имеем уравнение по-
поверхности
103
Пишем уравнения пары образующих, встречающих ось Ох:
У «
х = а; — = z?—.
2 С
Косинус угла нормали поверхности с осью Ох в какой-либо точке (а, у, г)
на взятых образующих имеет выражение
1
cos у = ¦
-V
Jl + il
отсюда находим:
1 f&y* . д2
если же примем во внимание уравнения образующих, то получим:
]
с% т
следовательно,
1
= :?: — .
С
Таким образом, искомый параметр оказывается равным мнимой полуоси
поверхности.
71. Аксоиды твёрдого тела в общем случае движения. Положим
теперь, что твёрдое тело движется произвольным образом. Винтовая ось,
вообще говоря, будет менять своё положение; в своём движении внутри
тела и в неподвижной среде она опишет две линейчатые поверхности,
носящие названия подвижного и неподвижного аксоидов. Аксо-
Аксоиды в каждый момент будут иметь общую образующую, а именно вин-
винтовую ось тела для данного момента. Покажем, что эти две поверхности
касаются друг друга вдоль всей общей образующей. Возьмём какую-
либо точку Р йа этой образующей; её радиусы-векторы в неподвижной
и подвижной системах координат пусть будут гр и рр; радиус-вектор
начала А подвижной системы обозначим гд. Очевидно,
Продифференцируем по времени обе части этого равенства, при этом по
отношению к вектору рр применим формулу относительной производной;
мы получим:
Слева мы имеем скорость точки Р в неподвижной системе координат;
обозначим её Up. Последнее слагаемое правой части, рр> представляет
собой скорость точки в подвижной системе координат; обозначим эту
скорость через ар. Наконец, rA-{-® x рР есть скорость точки тела, сов-
совпадающей в данный момент времени с точкой Р винтовой оси; назовём
эту скорость vp. Итак,
Vp = vp + ap. A0.15)
Так как вектор vp, как скорость точки тела, лежащей на винтовой оси,
может быть направлен только параллельно общей образующей аксоидов,
109
то последнее равенство говорит, что три прямые, а именно, общая обра-
образующая аксоидов, касательная к неподвижному аксоиду и касательная
к подвижному аксоиду, лежат в одной плоскости. Другими словами,
касательные плоскости к неподвижному и подвижному аксоидам совпа-
совпадают друг с другом для любой точки на их общей образующей, что
мы и желали доказать. Далее, умножив обе части равенства A0.15)
скалярно на произвольный единичный вектор а0, перпендикулярный к винто-
винтовой оси, мы получим:
U=npaoii. A0.16)
Таким образом, движение подвижного аксоида представляет собой его
качение по неподвижному аксоиду, притом качение, сопровождаемое
скольжением вдоль общей образующей, как это видно из равенства
A0.16).
Припомним теперь геометрические теоремы относительно линейчатых
поверхностей, приведённые в § 70. Две произвольно взятые линейчатые
поверхности, вообще говоря, не могут служить аксоидаш; из того об-
обстоятельства, что аксоиды должны касаться друг друга вдоль всей общей
образующей, вытекают следующие соотношения между поверхностями
и их положением друг относительно друга:
1. Поверхности должны быть или обе развёртывающиеся, или обе
косые.
2. Если поверхности обе косые, то они должны иметь одинаковые
параметры распределения по общей образующей; линии сужения должны
иметь общую точку на этой образующей и в этой точке касательные
плоскости должны совпадать.
3. Если поверхности обе развёртывающиеся, то рёбра возврата должны
касаться общей образующей в одной и той же точке, — иначе качение
сопровождалось бы скольжением по направлению, перпендикулярному
к образующим.
Мы видим, что движение подвижной поверхности по неподвижной во
всех случаях вполне определённое. Если вместо прямого движения станем
рассматривать обращенное, то аксоиды только поменяются своими ролями:
подвижной станет неподвижным и наоборот.
При мер 32. Для движения, рассмотренного нами в примере 25 на стр. 96,
уравнение винтовой оси в неподвижной и подвижной системах координат будут
следующие:
x + mcosf_ y + msiaf __ г
A sin »0 sin/ — — Asm 90cos/~ i + *cos90' v '
где
_ 8A (A -f- cos »0)
m
A018)
sm»osinA/ sin 9o cos kf &4-cos&0'
где
_ 8A -j-Acos&p)
*~ !-|-2A:cos9o + k2'
Найдём уравнение неподвижного аксоида. Время t, входящее в уравнение
винтовой оси посредством функции /, мы исключим следующим образом: из
ПО
первых двух отношений A0.17) прежде всего находим
т= — [xcosf-\-ysmf). A0.19)
Далее, возвышаем все отношения A0.17) в квадрат и затем пишем, что отно-
отношение суммы двух первых предыдущих членов к сумме последующих равно
последнему отношению. Тогда, пользуясь равенством A0.19), найдём:
1
где
__ т (I -f k cos 90) _ 8 ik +cos f>0) A -\- k cos Щ
C~~ It sin ft0 ~ sin »0 A -f 2* cos i»0 + ?2) •
Совершение таким же пут?!м из уравнений A0.18) получим уравнение под-
подвижного аксоида:
?' + ц» Р.
.2 «г? *
где
.}) 8 (& -f~cos &o) (! 4- /fe cos i°0)
Обе поверхности — однополостные гиперболоиды вращения. Параметры
распределения по образующим у них одинаковы, так как одинаковы мнимые*
полуоси: c = c-t (§ 70).
XI. УСКОРЕНИЯ ТОЧЕК ТВЁРДОГО ТЕЛА
72. Ускорение произвольной точки твёрдого тела. Теорема Рй-
вальса. Для получения ускорения w какой-либо точки М твёрдого тела
нужно продифференцировать по времени выражение (9.32) иа стр. 93
для скорости точки; имеем
v = vA -f- со X р
и, следовательно,
Первое слагаемое правой части, равное ускорению wA полюса А и,
следовательно, общее для всех точек твёрдого тела, носит название по-
поступательного ускорения (фиг. 56 на стр. 82).
Множитель со во втором члене, представляющий собой производную
по времени от угловой скорости со, называется угловым ускоре-
ускорением; мы его будем обозначать через в. Размерностью s будет
[е] = 2* Единицей углового ускорения служит 1 ——2. Численно и по
направлению г, очевидно, равно скорости конца вектора <о в его движении
по годографу. Это общее правило дли нахождения производной от век-
юра является истолкованием формулы D.15) на стр. 35. Очевидно, как
угловая скорость <о, так и угловое ускорение s характеризуют движение
111
твёрдого тела по отношению к системе осей AXYZ, движущихся по-
поступательно вместе с полюсом А. Возвращаясь к выражению для уско-
ускорения да точки тела, заметим, что второе слагаемое, т. е. еХр, носит
название вращательного ускорения; в дальнейшем мы его будем
обозначать
При преобразовании третьего слагаемого, <оХр, примем прежде
всего во внимание, что вектор р, как производная радиуса-вектора р,
равен скорости точки в системе AXYZ и потому может быть представлен
как со X р; таким образом,
соХр —соХ(соХр).
Применив здесь к правой части известную формулу преобразования
векторно-векторного произведения [формулу A.36) на стр. 12J, мы по-
получим;
(о X р = со (со • р)—- рсо2,
илн, если вынести иJ за скобку,
w X р=^ со3 [со0 (со0 • р) —- р].
Заметим, что со°-"р представляет собой проекцию вектора р на мгновен-
мгновенную ось вращения для полюса Д (фиг. 64);
следовательно, вектор со0 (со0 • р) равен
со0(о0 • р) =АС,
а разность векторов, стоящая в квадратных скоб-
скобках, есть
со°(оГ0-"р) — ~р = ВСс=— р.
Мы видим, что слагающая соХр ускорения пер-
перпендикулярна к мгновенной оси вращения для
полюса А и направлена от точки В к оси; эта составляющая назы-
называется осестремительным ускорением:
w°- = — со2/?.
Таким образом, окончательно получаем:
w = wA-j-wB? -f woc,
(ИЛ)
где
_ _
wsp = s X p,
а осестремительное ускорение может быть представлено в одной из сле-
следу юш их форм:
«;ос_щ^ _ ШХ(шХ р) = ш(со.р) — рсо2= — со2р; (П.2)
если тело имеет неподвижную точку и полюс А совмещён с ней, то
можно также написать
woc = со X v.
Формула A1.1) говорит, что ускорение какой-либо точки твёрдого тела
равняется сумме ускорений поступательного, вращательного и осесгреми-
тельного: в этом состоит теорема Рйвальса (Rivals).
112
73. Проекций ускорения точки твёрдого тела на неподвижные
оси координат. Пусть, как и прежде, Охуг — система неподвижных
осей координат, AXYZ — система осей, им параллельных и движущихся
(поступательно) вместе с полюсом А, и A&fi — система осей, неизменно
связанных с тблом. Спроектировав обе части векторн-ого равенства A1.1)
на ось Ох, мы получим:
Здесь, очевидно,
Далее,
но
и поэтому
Для нахождения проекций осестремительного ускорения воспользуемся
его выражением в форме
woc = о) (<о ¦ р) — pw2.
Спроектируем обе части этого равенства на неподвижную ось Ох и,
кроме того, выразим скалярное произведение м-р через проекции со-
сомножителей; мы получим:
Аналогично получаются проекции ускорения на оси Оу и Oz. Собрав
результаты, найдём
V= *А
A1.3)
где
о ^ I 2 , 2
0J = @ х -\- tity -j- <*г.
74. Проекции ускорения точки твёрдого тела на оси, неизменно
связанные с телом. Как и при проектировании на неподвижные оси,
прежде всего из равенства A1.1) получаем:
отЕ = wA* --(- w'f -\- w0'.
Проекции ускорения точки А на подвижные оси находим по формулам
(8.8) на стр. 74:
wAi = аихА -f а,1Ул + аи *а и т- Д-
8 Г. К. Суслов 113
При проектировании вращательного ускорения примем прежде всего
во внимание, что абсолютная производная и от угловой скорости равна
её относительной производной со в системе Abfc, так как поправочный
член в данном случае принимает вид со X со, т. е. он равен нулю [см.
формулу (9.18) на стр. 88]. Следовательно, угловое ускорение s
выражается в системе Л?Г(С так же, как и в системе Oxyz:
?== со,
или
Г= а> ^ \- юуу° 4- 1огг°= со"еГ° -} со*7° -\- а>?°.
Поэтому для проекций вращательного ускорения получаем выражения,
аналогичные прежним:
wBf=<o? — ш^ и т. д. .
Выражения прежнего типа мы получаем и для проекций осестреми-
тельного ускорения:
¦иг?С = о)? (сое? -(- «Vi 4®?) — ?<°г и т- Д-
Собрав результаты, и выписав в порядке круговой перестановки формулы
для проекций ускорения на две другие оси, мы получим:
¦и», = a lsxA+aisyA
где
(О2 = CO? 4 CO^ -f СО?.
75. Мгновенный центр ускорений. Приравняем правую часть вектор-
векторного равенства A1.1) к нулю. Тогда мы получим уравнение-для радиуса-
вектора р„ такой точки Q твёрдого тела, ускорение которой в рассмат-
рассматриваемый момент равно нулю. Эта точка носит название мгновенного
центра ускорений. Рассмотрим указанное уравнение, определяющее
положение мгновенного центра ускорений Q относительно системы осей
неизменно связанных с телом, написав его в следующем виде:
Предположим сперва, что SXi^O. Очевидно, в этом случае можно
разложить на составляющие по направлениям векторов <о, t к со X е:
р Q = aco
где а, Р н у необходимо определить из условия (Н.5). Подставив по-
последнее выражение рд в уравнение A1.5), мы получим:
-\- 0г 4 У» X 1)=0.
Выполнив приведение подобных членов, мы найдём:
wA —
114
Для определения a, J и { умножим последнее уравнение скалярно на
векторы ш, г и <о X I". В результате мы получим:
®*Щ= «д -г"- РI» х б |2=о,
Ж 1|2=^. 0.
Отсюда легко найти а, [5 и у. Окончательно для радиуса-вектора р^
мгновенного центра ускорений мы получим следующее выражение:
(юшXi-f й!(*'/йM- (дад-ёI+(дад-Щ)«Хв|. (П.6)
Для того, чтобы определить положение мгновенного центра в системе
Oxyz, необходимо выразить г^ через ~р„ по формуле
Выражение (И.6) найдено нами в предположении юХг^О; в этом
случае существует, следовательно, один вполне определённый мгновенный
центр ускорений.
Если теперь написать формулу Ривальса A1.1), приняв за полюс А
мгновенный центр ускорений Q, то мы получим для ускорения любой
точки тела для данного момента времени выражение
w = eXp—и1/»; (И.7)
таким образом, остались лишь4 две составляющие вектора ускорения —
вращательное и осестремительное ускорения; такую картину мы имели
при движении твёрдого тела около неподвижной точки, когда последняя
была взята за полюс.
Рассмотрим теперь случай, когда a>Xi = 0. Очевидно, соотношению
«Xf=0 в самом общем случае можно удовлетворить, положив
где т° — единичный вектор, коллинеарный с а> и ё. Мы изучим лишь
случай, когда X и р. одновременно не равны нулю. Если уравнение при
этом допускает решение относительно р«, то, как легко обнаружить,
между wA и "т0 должна существовать зависимость:
дад.т°=0; (И.9)
к последнему соотношению мы придём, если уравнение (И.5) помножим
на 'г0 и воспользуемся формулой A1.8), а также свойствами векторно-
скалярного произведения (см. § 5, стр. 11). На основании выражений
A1.8) уравнение для радиуса-вектора р^ примет вид
Q) + Х2то (хо. pQ) _ ).2pQ = о, (П.Ю)
причём, как было сказано, имеет место условие A1.9).
8* 115
Искомый вектор р^ можно заменить суммой трёх векторов, коллине-
арных "с т°, wA и т° X wA
p<? = at0 + Pwl4 + Yt°XwA. (li.ii)
Уравнение A1.10) при подстановке A1.11) обращается в следующее:
wA + |х.(р"то X wA — twA) -\- ей2 т« — X2 (аГт° -\- $wA -f- ут° X дад) = 0.
Отсюда мы получаем.
ад — произвольно.
Поскольку X и ц одновременно не равны нулю, система A1.12) допускает
следующее решение относительно р и у:
На основании равенств A1.8) полученные выражения могут быть запи-
записаны следующим образом:
Р ~ ег _f- о>4 ' Т "^ t* +о>4 '
Окончательное выражение для радиуса-вектора р„ имеет вид
-1-(Г-т°) 1°X«юЛ. (П.13)
Таким образом, в рассматриваемом случае мы имеем геометрическое
место мгновенных центров ускорений, а именно, прямую, параллельную
векюру ш (или I); эта прямая носит название мгновенной оси
ускорений.
Соотношения (П.8), а также зависимость A1.9) всегда осуществляют-
осуществляются при плоскопараллельном движении. Следовательно, в этом движении
будет существовать и мгновенная ось ускорений,
определяемая уравнением A1.13). Случай, когда
'IJ ' <о и ё одновременно равны нулю, нами оставлен
в стороне. Остановимся подробнее на плоско-
паралелльном движении. Пусть плоскость Оху
перпендикулярна к угловой скорости ш (или ?).
" ~ ~ Напишем выражение для ускорения произвольной
Фиг. 65. точки М, лежащей в этой плоскости, приняв за
полюс точку Q, в которой плоскость Оху пересе-
пересекается с мгновенной осью ускорений (фиг. 65). Так как ускорение этой
точки равно нулю, то на основании формулы A1.1), а также A1.2) мы
находим
W = FX р— <о2р;
при этом
Т#ВР i= ?0 Woc = Cl)°Q.
Г' г>
и, следовательно,
w = рУ s2 -\- вL, A1.14)
116
т. е. модуль ускорения точки тела пропорционален её расстоянию от
мгновенной оси ускорений. Составим выражение для тангенса угла р.
между ускорением w точки М и вектором MQ, соединяющим её с мгно-
мгновенной осью ускорений; мы имеем
тля ^р есть угол вращения тела (§ 58); таким образом, угол, образуемый
ускорением любой точки тела с перпендикуляром, опущенным на мгно-
мгновенную ось ускорений, одинаков для всех точек тела.
ОТДЕЛ III
СЛОЖНОЕ ДВИЖЕНИЕ
XII. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
76. Движения точки абсолютное, и относительное. Движение
переносное. Представим себе, что точка М движется одновременно в
двух неизменяемых средах S и 2, Положение точки М в этих средах
пусть определяется с помощью систем осей Oxyz и Л$)]С, неизменно
связанных с этими средами. Среды 5 и 2 движутся одна в другой.
Если движение среды 2 в среде 5 указано как основное, то движение
точки М в среде 2 называется относительным, а движение её
в среде .У—абсолютным, или сложным; движение же среды 2
в среде 5 называется переносным. Наоборот, когда движение
среды S в среде 2 дано как основное, то движение точки М в среде S
будет относительным, а движение её в среде 2 абсолютным. Очевидно,
если движение переносное в первом случае примем за п р я м о е, то пе-
переносное во втором случае будет обращенным. Таким образом,
злзисит от нашей точки зрения, которое из двух движений точки М
назвать абсолютным, которое относительным.
В дальнейшем изложении условимся считать основным движение
среды 2 в среде 5. Обозначим, как и раньше, г, р и г А соответственно
абсолютный н относительный радиусы-векторы точки и абсолютный радиус-
вектор начала А системы А&? (иногда называемого полюсом). Пусть,
далее, х, у, z и ?, у), С — абсолютные и относительные декартовы ко-
координаты точкиМихА, уА, гд, ап, а12, .,., аза — абсолютные координаты
среды 2 (§ 55). Между указанными величинами, как известно, имеются
следующие соотношения:
г = г„ + р-, A2.1)
? = г — гд, A2.2)
или, в координатной форме:
^ )
A2 3)
117
Z = au(x—xA)-\-a21 (у —уА) 4- «gi (z — zA),
ri = a12{x — xA)-\-a22(y—yA)-\-aB2{z — zA), \ A2.4)
4 «18 \л лд) -|-3V' SA'^aBS\z ZA>'
Выписанные формулы позволяют находить связь между тремя выше
упомянутыми движениями. Формула A2.1) или, что всё равно, формулы
A2.3) решают вопрос об определении абсолютного движения по данным
относительному и переносному. По формулам A2.2) или, что \о же, A2.4)
находится относительное движение точки по данным абсолютному и
переносному. Определить переносное движение по абсолютному и отно-
относительному движению одной только точки, вообще говоря, невозможно,
так как положение твёрдого тела определяется шестью независимыми
координатами и, следовательно, движение задаётся шестью функциями
времени, а уравнений A2.3) у нас всего три.
Пример 33. Пусть движение среды ? есть движение вокруг неподвижной
точки О (начала координат) по закону
хА=Уа=2а = Ь ?=?('). Ф = /('), Э^Э0;
относительное движение точки М пусть дано уравнениями
S = R cos kf(t), Ч| = — R sin kf(t), C = 0.
Найдём абсолютное движение. По формулам (8,15) на стр. 77 и формуле A2.3)
настоящего параграфа получаем следующий закон движения:
x—Rcosf, _y = /?sin/, г = 0;
таким образом, абсолютной траекторией является окружность
Пример 34. Пусть среда S совершает плоскопараллельное движение по
закону
а абсолютное движение точки пусть дано уравнениями
x = D cos f(t), y = Dsinf(t), г = 0.
Найдём относительное движение. Применив формулы A2.4) или, лучше, фор-
формулы (8.S8) на стр. 79 для плоскопараллельиого движения, получим:
Z = (D — R)cos2f, !) = (?>-Я)sin2/, С = 0;
следовательно, относительной траекторией будет окружность
77. Зависимость между скоростями точки в абсолютном и отно-
относительном движениях. Продифференцируем по времени обе части равен-
равенства A2.1); при этом, поскольку вектор р отнесён к подвижной системе,
выразим его абсолютную производную через его относительную произ-
производную [по формуле (9.18) на стр. 88П; мы получим:
где ше есть угловая скорость в переносном движении, т. е. угловая ско-
скорость системы 2 относительно системы S. Слева мы имеем абсолютную
скорость va; первое слагаемое правой части представляет собой ско-
скорость vA начала подвижной системы координат; последнее слагаемое
118
является относительной скоростью <ог; таким образом.
Обратим теперь внимание на то, что сумма первых двух членов правой
части, vA -\- ше X р, согласно формуле (9.32) на стр. 93, равна скорости
той точки подвижной среды 2, которая в рассматриваемый момент совпа-
совпадает с движущейся точкой М.- Эта скорость называется переносной
скоростью точки М, и мы её обозначим ч>е. Окончательно, следовательно,
получаем
т. е. абсолютная скорость точки равна сумме скоростей относительной и
переносной.
Тот же результат можно получить геометрическим путём. Движущаяся
точка М описывает в теле ? относительную траекторию ММХМ^ (фиг. 66).
Эта неизменно связанная с телом ? кри-
кривая движется вместе с ним в среде 5. Раз-
Различные точки М, М , М.?, ..., в которые „
движущаяся точка приходит в моменты г
времени t, tv t2, ..., перемещаются в среде
? по некоторым траекториям MM', M^M'V
МгМ'2,... Таким образом, точка М в
моменты времени t, tv tv ... будет в среде
5 занимать положения М, М\ , М'2, ..., и
её абсолютная траектория ММ\М'^ .. . пере-
пересекает диагонально сеть, образованную с
одной стороны различными положениями
относительной траектории в среде S, т. е. ММг,
М'М[, М"М'2 .. .,с другой — траекториями тех фиг* 66-
точек М, М[, М'2 этой линии, с которыми
движущаяся точка М совпадает в моменты времени t, tv t2, • • • Рассмот-
Рассмотрим ближе элементарный четыреугольник ММ'М'^М^^ этой сети, соответ-
соответствующий промежутку времени bi^=^tx—t. Соединим прямыми точки
М, М', М'} и дополним полученный треугольник до параллелограмма
ММ'М\М0. Очевидно, вектор кга — ММ\ представляет собоЯ абсолютное
перемещение точки за промежуток времени M = tl — t. Вектор Дге —ЛГЛГ
есть перемещение той точки траектории, которая совпадает с движущейся
точкой в момент времени t. Наконец, вектор krr=MM0 равен относи-
относительному перемещению М'М[ точки, отмеченному на том положении тра-
траектории, которое она занимает в момент времени t^ = t-\- Lt. Непосред-
Непосредственно из чертежа усматриваем, что
Разделим обе части равенства на Д^ и перейдём к пределу, устремив
промежуток времени Д^ к нулю. Тогда слева мы получим абсолютную
скорость va точки, которую она имеет в момент времени t, первое сла-
слагаемое правой части даст переносную скорость ve, а второе — относитель-
относительную скорость vr для того же момента t: последнее обстоятельство сле-
119
дует из того, что предельным направлением для ММ0 будет касательная
к относительной траектории в точке М. Таким образом, высказанное по-
положение доказано:
78. Зависимость между ускорениями точки в абсолютном и отно-
относительном движениях. Поворотное ускорение. Теорема Кориолиса.
Как мы видели в гл. XI, ускорение точки твердого тела определяется
приёмом более сложным, чем скорость (за исключением случая поступа-
поступательного движения тела). Поэтому и связь между ускорениями абсолют-
абсолютным и относительным не будет столь простой, как для скоростей. Продиф-
Продифференцировав по времени равенство (Г2.5), прежде всего получаем:
. A2.7)
Здесь »п = «>десть абсолютное ускорение точки М; затем г^^и^
ускорение начала подвижной системы координат; we = se является угловым
ускорением в переносном Движении, т. е. угловым ускорением системы 2
относительно системы 5. Выразим абсолютные производные р и г»,, через
соответствующие относительные производные; это естественно сделать,
поскольку сами векторы р и <от отнесены к подвижной системе координат;
имеем
ог= <Зе X vr + ч>г—Ъв X vr -f wr,
где wr есть относительное ускорение точки. Подставив все эти резуль-
результаты в формулу A2.7), мы получим:
Wa = WA + ёе Х Р + б« Х E. X Р + Vr) + 5, X Vr
или, если раскрыть скобки и соединить одинаковые члены,
<wa = wA f e,
Первые три слагаемые в правой части согласно формуле A1.1) на стр.
112 представляют собой ускорение той точки подвижной среды 2, кото-
которая в рассматриваемый момент совпадает с движущейся точкой М; это
ускорение называется переносным ускорением точки М и обозначается we.
Дачее следует относительное ускорение tvr. Наконец, последний член
2uigXz»r носит название добавочного, или поворотного, ускорения, илиуско-
pehHa Кориолиса (Coriolis); мы его будем обозначать tvc. Таким образом,
мы получили следующую теорему (теорему Кориолиса) об ускорении
точки в сложном, или абсолютном, движении:
где
<вос = 2Ше X vr,
120
т. е. абсолютное ускорение точки равняется сумме ускорений аереносного,
относительного и поворотного. Важно заметить, что в следующих случаях
поворотное ускорение обращается в нуль:
1) если u)g = 0; например, если переносное движение—поступательное;
2) если ©г=0;
3) если <ов || vr, т. е. если угловая скорость в переносном движении
и относительная линейная скорость коллинеарны. Легко получить проекции
поворотного ускорения на подвижные оси координат; по правилам проек-
проектирования векторного произведения находим:
та = 2 ^ — ше&)> «с, = 2 (»«<? — °>,А wcc = 2 (©^ — u>J).
В справедливости теоремы Кориолиса можно убедиться и из геометриче-
геометрических соображений (фиг. 67). Движущаяся точка М за бесконечно малый про-
промежуток времени Д? переместится по относительной траектории в точку М'\
С
ve At
Фиг. 67.
за то же время точка твёрдого тела, совпадавшая с точкой /И, передвинется
по своей траектории в положение Му Построим скорости vT и т>е отно-
относительного и переносного движений и отложим на них длины MR и ME,
соответственно равные vrAt и veAt. Если бы переносное движение было
поступательное, то относительная траектория и неизменно с нею связанный
вектор MR заняли бы положения МгМ2 и МХВ, параллельные первона-
первоначальным. Но вследствие наличия вращательной части переносного движения
вектор МХВ повернётся около мгновенной оси Млй полюса М1 на неко-
некоторый бесконечно малый угол Д<р^=о)?Д^, где ше есть мгновенная угло-
угловая скорость теаа для рассматриваемого момента. Абсолютная скорость <va,
ио предыдущему, изобразится диагональю параллелограмма, построенного
на ife и vr; следовательно, вектор МА, расположенный по диагонали па-
121
раллелограмма MRAE, равняется va№. Если соединим прямыми точку А
с M'v Е с /Vfj и R с А1Г, то получим девиации для движений абсолют-
абсолютного, переносного и относительного (§ 45):
Далее, непосредственно из чертежа видно, что
или
АМ[ = ЛВ + ВС +- СМ»,
A2.9)
вектор СМ'Х здесь можно было заменить на ВМ2 — §г, так как по модулю
они равны и в пределе параллельны. Теперь вспомним, что девиация сле-
следующим образом вмражается через ускорение [формула G.6) на стр. 65]
2
Поэтому равенство A2.9) после умножения на -^ перепишется так:
Таким образом, теорема Кориолиса доказана.
Пример 35. Пусть среда S неизменно соединена с плоскостью земной
орбиты, а среда 2-е Землёй. За полюс А (начало подвижной системы коорди-
координат) возьмём какую-нибудь
точку на земной поверхности,
расположенную на данной ши-
широте t[> (фиг. 68). По горизон-
горизонтальной плоскости Н, проходя-
проходящей через точку Л, пусть дви-
движется некоторая точка ц с
относительной скоростью vr и
абсолютным ускорением, рав-
равным ускорению точки А, т. е.
равным поступательной части
своего переносного ускорения.
Определим проекцию на плос-
плоскость Н относительного уско-
ускорения точки |i.
ф со Угловая скорость системы
S равна угловой скорости Зем-
Земли й и направлена параллельно
земной оси с юга на север; по модулю она равна
1
Q = ^—--^ — 0,0000729 -
86164,09 сек. ср. вр.
Если точка ц не удаляется от положения А на значительное расстояние, то
по малости й осестремительной частью переносного ускорения, пропорциональ-
пропорциональной из, мы можем пренебречь. Далее, вращательное ускорение равно нулю,
так как й постоянна (прецессию и нутацию в расчёт не принимаем). При таких
обстоятельствах всё 'переносное ускорение сводится к одной поступательной
части. Выпишем формулу, выражающую теорему Кориолиса:
В условиях нашей задачи члены wa и we взаимно уничтожаются, и, следова-
следовательно, относительное ускорение направлено противоположно поворотному и
равно ему по модулю:
\2%
следовательно, их проекции на горизонтальную плоскость равны между собой,
т. е.
Для определения проекции wcfl воспользуемся построением, указанным на
фиг. 68. Пусть точка А находится в северном полушарии. Пусть AN—мгновен-
AN—мгновенная осыюлюса А, направленная параллельно оси Земли с юга на север и, следова-
следовательно, наклонённая к горизонту на угол, равный широте места ф. Далее, отло-
отложим от точки А вектор АЕ, равный относительной скорости точки ц. Тогда
поворотное ускорение изобразится вектором ЕС, перпендикулярным к плоско-
плоскости ANE и идущим так, как показано на чертеже (относительное ускорение
направлено в противоположную сторону); при этом
ЕС =2Qvrsm/_ EAN.
Проведём вертикальную плоскость ANB (плоскость меридиана точки А) и вер-
вертикальную плоскость EBN, перпендикулярную к АЕ. Интересующая нас проек-
проекция wcff имеет выражение
wcfI=2Qvrsin /_ ?MjVcos/ CEB = 2Qvrsin /_ EANsln / BEN;
но
поэтому окончательно получаем:
A2.10)
Таким образом, оказалось, что ортогональная горизонтальная составляющая
относительного ускорения перпендикулярна к относительной скорости, напра-
направлена для' северного полушария в правую сторону и по модулю пропорцио-
пропорциональна относительной скорости и синусу широты места.
Результат A2.10) можно иначе получить применением векторной алгебры.
Действительно, мы имеем
где Я0 —единичный вектор радиуса Земли, проведенного к точке А, Подставив
сюда известное выражение поворотного ускорения и воспользовавшись затем
формулой преобразования векторио-векторного произведения, мы находим1
wCH= 2 | /?о X C X *г) I =2 1^(*0-^) - fV«°-Sj I;
ао R°-vr = 0 вследствие перпендикулярности эгих векторов, а /?°Й = Й sinф,
так что окончательно мы получаем:
т. е. мы пришли к прежнему выражению A2.10).
ХШ. СЛОЖНОЕ ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА. РАЗЛОЖЕНИЕ
ДВИЖЕНИЙ ТОЧКИ И ТВЁРДОГО ТЕЛА
79. Движения твёрдого тела абсолютное и относительное. Движе-
Движение переносное. Пусть твёрдое тело Т движется одновременно в двух
средах 5 и 2. Положение тела относительно этих сред определяется при по-
помощи трёх систем координатных осей (фиг. 69): системы Oxyz, неиз-
неизменно связанной со средой S, системы BXYZ, неизменно связанной с 2,
и системы Л?г)С, неизменно связанной с*7\ Среды ^ и 2 движутся одна
в другой. Если движение среды 2 в среде 5 дано как основное, то
движение тела в среде 2 называется относительным, а движение его
123
в среде S—абсолютным (или сложным); движение же среды 2 в среде 5
называется переносным. И здесь опять зависит от нашей точки зрения,
какое из двух движений тела Т назвать относительным и какое абсолют-
абсолютным. В одном случае переносным движением служит движение 2 в S,
в другом — обращенное движение, т. е. движение 5 в 2. В дальнейшем
мы принимаем за переносное движение движение
среды 2 в среде 5.
Положение среды 2 в среде 5 определяется
двенадцатью координатами:
В> У В' В' ^11' 12' • " •' 33'
Характер этих координат нам уже известен (§ 55).
Подобным образом для тела Т координатами отно-
относительно среди S, или абсолютными, служат не-
некоторые двенадцать величин:
Фиг. 69. *А, уА, zA\ an, ахг, ..., ass,
а координатами Т относительно, 2, или относительными, будут
X , У , Z ; с , с а, ..., с
Здесь значения символов для косинусов удобно представить при помощи
нижеследующих схем:
A3.1)
Выразим абсолютные координаты тела Т через его относительные ко-
координаты и через координаты промежуточной среды 2. Будем исходить
из соотношения между радиусами-векторами точек А и В (фиг. 69):
ОА = ОВ-{-~ВА. A3.2)
Умножим последовательно это равенство скалярно на х°, у0, г°; вспомним
при этом, что проекции вектора (в данном случае вектора В А) преобра-
преобразуются с помощью таблицы направляющих косинусов так же, как коорди-
координаты точки при совпадающих началах координатных осей [формулы (8.7)
на стр. 74]; в результате получим следующие три соотношения:
A3.3)
Чтобы теперь выразить абсолютные направляющие косинусы aav через
относительные с^ и через косинусы Ь^ промежуточной системы 2 отно-
относительно основной системы S, выпишем выражения абсолютных единичных
векторов л0, у0, г°, с одной стороны, через относительные единичные
векторы |°, rf, ?°, с другой, — через единичные векторы Л, К0, Z0 про-
124
X
У
Z
й\\
Я 22
я32
:
«23
X
У
Z
X
hi
hi
Y
»и
hi
hi
Z
*13
*23
633
X
Y
Z
6
cn
<1
1
Си
C22
I
Cn
CVi
с%ъ
межуточной системы; кроме того, последние векторы также выразим через
относительные единичные векторы; имеем
л° = в„5° 4 вх*Ч°+ «»?*. У = ---. *° = ..., ('3.4)
x° = buX0-^bl2Y°^bnZ\ / = •¦¦- *° = - -. С3-5)
i + , M
Все эти равенства написаны на основании выше сделанного замечания
о преобразовании проекций вектора. Заменим теперь в равенствах A3.5)
векторы Л, Y°, Z0 по формулам A3.6). В результате мы выразим л°, у0, z°
через ?°, Г|°, ?° и, сравнив полученные функции с уже имеющимися вы-
выражениями A3.4), получим следующие соотношения:
а12 = Ьх ,СJ -f *12^22 + *13С32'
а13 =*1гс13 + bnbn -\- bucSi.
Выполнив аналогичные преобразования с векторами у0 и 2°, мы получим
остальные шесть формул:
Общая структура всех этих выражений следующая:
Введём определители из направляющих косинусов, выписанных в том
же порядке, как в таблицах A3.1); обозначим их соответственно через
Соотношение A3.7) показывает, что между этими определителями имеет
место зависимость
причём для получения элементов a v определителя в левой части, опреде-
определители, стоящие в правой части, следует перемножать по правилу «строки
первого на столбцы второго». Формулы A3.3) и A3.7) отвечают на по-
поставленный вопрос о выражении абсолютных координат тела через отно-
относительные и через координаты промежуточной среды 2.
Чтобы выразить относительные координаты через абсолютные и через
координаты среды 2, разрешим уравнение A3.2) относительно В А; мы
получим:
ВА = ОА - Ш.
Умножив последовательно это равенство скалярно на Л, К0, Z0, мы по-
лучим теперь:
ХА = Ьи (ХА - Хв) + *21 (У А ~ У В) + *8i (ZA - ZB)> }
УА=Ьх2{хА — хв) + Ь^(уА—ув}-\-Ь^(гА — гв), \ A3.8)
ZA = ЬП (ХА - Хв) +'*83 (УЛ ~УВ) + *33 BД - Zb)' J
125
Чтобы получить выражения для косинусов с , воспользуемся тем же
приёмом, каким были получены формулы для а : выражаем |°, rjo, ?о
непосредственно через х°, у0, гй, а также обходным путём через А, К0, Z0.
Сравнив результаты, мы получим зависимость
^ = |V,v A3.9)
Эти соотношения отвечают следующему перемножению определителей
(опять по принципу «строки первого на столбцы второго»):
где символом I^J обозначен определитель, полученный из \b J вза-
взаимной перестановкой строк и столбцов.
Чтобы выразить, наконец, координаты промежуточной системы 2 через
абсолютные и относительные координаты тела Т, пишем равенство A3.2)
в виде
и проектируем его па оси основной системы; мы получим формулы
A3.10)
|-*.»»V
В дополнение к этим равенствам аналогично предыдущим двум случаям
напишем выражения для направляющих косинусов:
з
^ = 2 <wv; A3.11)
это соотношение соответствует перемножению определителей
Итак, формулы A3.3), A3.7) решают вопрос о нахождении абсо-
абсолютного движения тела Т по данным относительному и переносному;
выражения A3.8), A3.9) определяют относительное движение по
данным абсолютному и переносному; по последним равенствам A3.10),
A3.11) находится переносное движение по данным абсолютному и от-
относительному.
Пример 36. Рассмотрим случай, когда и абсолютное, и относительное
движения твёрдого тела происходят параллельно плоскости. Заметим, что если
оси Oz, BZ, лС направлены перпендикулярно тем плоскостям, параллельно ко-
которым происходит движение, а все три начала координат О, В, А находятся
в одной из этих плоскостей, то
Пусть абсолютное движение даио уравнениями
хА = R cos 2/, уА = R sin 2/,
eu=:cos2/, els = — sin 2/, a21 = sin2/, a2,
где f=f{t) — произвольная функция времени. Относительное движение пусть
126
будет
ХА — Rx cos/, YA = — Rx sin/,
Гц = COS/, ti2=Sin/, С 21 = Sin/, С2з —COS/.
Найдём переносное движение. По* формулам A3.11), A3.10) получаем:
*u:=cos3/, *12 = —sin3/, b2i = ?'"*f и —-«-а*-
80. Зависимость между поступательными и угловыми скоро-
скоростями твёрдого тела в абсолютном, относительном и переносном
движениях. Пусть ропрежнему Oxyz, BXYZ и A&fc—соответственно
абсолютная система координат, огноситель- с
ная система координат и система координат,
неизменно связанная с телом (фиг. 70).
Пусть «И1, vf и vf —соответственно аб-
абсолютная, переносная и относительная
скорости произвольной точки М тела.
Каждая из этих скоростей может быть
разложена на поступательную (или ско-
скорость полюса) и на вращательную, обу-
обусловленную мгновенным вращением тела у^
вокруг оси, проходящей через полюс *
Принимая в абсолютном, переносном и от- Фиг- ^"<
носитсльном движениях за полюсы соответственно некоторые ючки С, Е
и D, мы можем поэтому, согласно формуле (9.32) на стр. 93, написать:
Здесь нижние индексы а, е, г означают, что речь идёт соответственно
об абсолютной, переносной и относительной скоростях. Верхние индексы
указывают на точку, о скорости которой говорится; в частности, ©<Е),
переносная скорость точки Е тела, по смыслу этого понятия есть абсо-
абсолютная скорость точки Е подвижной системы BXYZ. Так как абсолют-
абсолютная скорость любой точки равна сумме скоростей переносной и относи-
относительной, то из написанных выше равенств вытекает следующее:
V(Q _j_ ща X Ш = «plf> -f ше X Ш -f vW -f wr ><: DM .
Предположим теперь, что в рассматриваемый момент времени полюсы
С, Е, D совпадают, и, следовательно, СМ = ЕМ = DM; тогда, так как
прздыдущее равенство справедливо для произвольной точки М тела,
то оно распадается на следующие два:
<> A3.12)
Итак, мы доказали, что если полюсы для абсолютного, переносного и
относительного движений совпадают, то
1) поступательная скорость тела в абсолютном движении равна сумме
поступательных скоростей в движениях переносном и относительном;
2) угловая скорость в абсолютном движении равна сумме угловых
скоростей в движениях переносном и относительном.
127
В заключение важно заметить, что оговорка о совпадении полюсов
не имеет значения для второй теоремы, так как выбор полюса не
влияет на модуль и направление мгновенной угловой скорости (§ 65).
В частном случае, когда для данного момента времени <off-j-<i)r=0,
т. е. переносная и относительная угловые скорости образуют пару угло-
угловых скоростей, тело в абсолютном движении
будет в рассматриваемый момент времени иметь
только мгновенную поступательную скорость,
т, е, в данный момент скорости всех точек тела
будут равны между собой. Если во всё время
движения ае-\-&г=0, то во всё это время
абсолютное движение будет поступательным. Тот
факт, что при <вв-{-5>г = 0 в абсолютном дви-
движении будет существовать лишь поступатель-
Фиг. 71. ная скорость, является следствием теоремы
A3.13); но в этом легко убедиться и непо-
непосредственно (фиг. 71). Для произвольной точки М тела переносная и от-
относительная скорости имеют выражения
следовательно, абсолютная скорость точки равна
<оа = ve 4- vr = <5е X Ш + с», ХШ.
Заменив здесь шг на —о>в и вынеся общий множитель <ае за скобку, мы
получим:
va = aeX(EM — RM).
Но
ЕМ — RM^ER = r,
следовательно,
т. е. скорости всех точек действительно одинаковы и равняются моменту
пары угловых скоростей [ср. формулу C.9) на стр. 26].
81. Разложение движений точки и твёрдого тела. Разложение
скорости и ускорения точки, угловой скорости тела. Представим
себе несколько неизменяемых сред Sv S2,...,Sn и точку М, движу-
движущуюся в них. Пусть нам даны движения среды Sx в среде S2, среды
S2 в среде Sz, ..., среды Sn_x в среде Sn. Тогда, по предыдущему,
зная относительное движение точки Л1 в среде Sv мы можем найги её
абсолютное движение в среде S2 (§ 76); определив таким образом отно-
относительное (с новой точки зрения) движение точки М в среде Sv мы
найдём затем её абсолютное движение в среде ?в и т. д., до абсолют-
абсолютного движения в среде Sn включительно. Наоборот, по данному движе-
движению точки М в среде Sn можно последовательно определить её отно-
относительные движения в средах ?„_,, ^п_2, ... до Sl включительно. Такой
способ рассмотрения движения точки М в среде Sn носит название раз-
разложения её движения на относительное в среде S^ и на л—1 перенос-
переносных движений: движение 5, в Sv S2b Ss, ..., Sn_l в Sn. Движение точки М
в среде Sn называется тогда сложным, или составным, а остальные
движения — составляющими. Скорость точки М в движении относи-
128
тельно среды S1 мы обозначим ©^ переносную скорость точки М от дви-
движения среды Sj в среде S2, т. е. скорость соответствующей точки среды
Sv совпадающей с точкой /И, при движении среды Sx в 52, назовём ©2,
аналогично — переносную скорость точки М от движения среды S2 в среде S3,
т. е. скорость соответствующей точки среды St при движении среды S2 в
среде S3, мы обозначим через vs; наконец, обозначим через <va пере-
переносную скорость- точки М от движения среды Sn_l в среде Sn, т., е.
скорость соответствующей точки среды Sn_l при её движении в среде Sa,
а абсолютную скорость точки М в- среде Sn назовём ». По теореме
A2.6) на стр. 119 абсолютная скорость точки М в-среде S2 будет равна
<vl -\- <о2', абсолютная скорость в Ss представится суммой предыдущей
скорости vx-\-v% и скорости v3 и т. д., так что окончательно получится
* = », + «,+ ...+*.. {13.14)
Скорость v точки, как известно, является величиной векторной, а вся-
всякий вектор мы можем представить как сумму нескольких векторов той
же размерности. Поэтому составляющие вектора v скорости должны изо-
изображать некоторые скорости. Если одну из этих составляющих, например.
vv считать относительной скоростью точки М в среде Sv тогда осталь-
остальные составляющие можно рассматривать, как переносные скорости точки М,
соответствующие движениям одних сред в других. Например, составляю-
составляющую vk можно рассматривать, как переносную скорость точки М от дви-
движения среды Sft_, в среде Sk, т. е. как скорость относительно среды Sk
той точки среды Sk_v которая в данный момент совпадает с точкой М.
Равенством A3.14) и пользуются обыкновенно для того, чтобы дать кине-
кинематический смысл составляющим разложенного вектора скорости. Так,
мы видели раньше (§ 38), что скорость v точки М относительно среды,
связанной с осями Oxyz, равна сумме векторов хх°, уу°, zz°, парал-
параллельных соответственным осям Ox, Oy, Oz, т. е.
v~xx*4-yy°-{-zzo. 0,3.15)
Представим себе теперь, что наша точка М движется по прямой AM,
параллельной оси Ох, со скоростью хх° (фиг. 37 на стр. 44), прямая
AM движется поступательно в плоскости АВМ со скоростью уу° па-
параллельно оси Оу и, наконец, плоскость" АВМ движется поступательно
параллельно оси Oz со скоростью zz°. Тогда хх° будет скорость точки
М относительно прямой AM; уу<> будет переносная скорость движения
прямой AM относительно плоскости АВМ, иначе, это будет скорость той
точки прямой AM, которая совпадает с движущейся точкой М; zz°
будет переносная скорость движения плоскости АВМ относительно среды
Oxyz. Само собой понятно, что приведённое толкование равенства
A3.14) не единственное; таких толкований можно дать много; например,
скорости хх°, уу°, zz° мы можем рассматривать, как скорости относи-
относительно одной и той же среды Oxyz трёх проекций Мх, М , Мг нашей
точки М на координатные оси [ср. формулу F.2)' на стр. 51].
Для ускорений точки в сложном движении и в движениях составляю-
составляющих равенство,' подобное формуле A3.14), будет иметь место только
в случае, если все переносные движения поступатель-
9 Г. К. Суслов 129
н ы е (между тем как для скоростей в таком ограничении нужды не
было); действительно, последовательно применяя в рассматриваемом случае
теорему Кориолиса [формула A2.8) на стр. 120], мы получим:
w = «г, -f w2 -f- ... + wn. A3.16)
Мы видели раньше [формула G.3) на стр. 63], что ускорение w
точки представляется следующей суммой:
Этой формуле можно дать такое же истолкование, какое мы выше при-
привели для скорости точки. Действительно, мы можем сказать, что хх° есть
относительное ускорение точки в её движении по прямой AM (фиг. 37
на стр. 44); уу<> есть переносное ускорение точки М от поступатель-
поступательного движения прямой AM по плоскости ABM; zz*> является перенос-
переносным ускорением точки /И от поступательного, движения плоскости АВМ.
Рассуждения, подобные предыдущим, можно применить и к твёрдому
телу. Пусть твёрдое тело Г движется в среде Sv среда S% в среде S2,
S2 в Sb, ...,?„,_, в Sn. Тогда абсолютное ижепие Т в среде S4 раз
лагается на относительное движение в среде Sx и п — 1 переносных
движений: движение среды 6*, в Sit 5г в Sa, ..., ^„_j B $„¦ Оставим
в стрроне поступательные скорости, так как теорема A3.12) справедлива
лишь при совпадении полюсов и в этом случае не даёт ничего нового,
а лишь повторяет сказанное о движении точки. Положим, что шг есть
мгновенная угловая скорость тела 7* в среде Sl п>2 — угловая ско-
скорость переносного движения Sx в S2, <5Э —угловая скорость S2 в
«S'B, ...,шя—угловая скорость 5Я_, в $а, наконец, 3 -мгновенная угловая
скорость тела Т в среде Sg. Тогда, применяя последовательно теорему
A3.13), найдём:
» = «,+©,+'•••+«„¦ A3.17)
Этим равенством пользуются, как и равенством A3.14), для разложе-
разложения угловых скоростей тела на составляющие. Так, например, мы видели,
что при движении твёрдого тела вокруг неподвижной точки его мгновен-
мгновенная угловая скорость й равняется сумме трёх угловых скоростей, <р С0,
&7°, фг°, соответственно направленным по осям ,(Х, Оу< Oz [формула,
(9.29) на стр. 92]. / Положим теперь; что твёрдое тело вращается с угло-
угловой скоростью ipj« в среде 5t,tpefla S%—с угловой скоростью &у° в сре-
среде S2 и, наконец, 52 — с угловой скоростью фг° в среде, соединённой
с осями Oxyz. Тогда разложение ю на векторы ср^о, &у°> Фг° будет собой
представлять не только весьма удобное геометрическое построение, но
получит и кинематический смысл: абсолютная угловая скорость <о твёр-
твёрдого тела по теореме A3.13) теперь выражена через относительную
угловую скорость iff" и переносные угловые скорости &у° н
ЧАСТЬ ТРЕТЬЯ
ДИНАМИКА ЧАСТИЦЫ
ОТДЕЛ I
ДВИЖЕНИЕ СВОБОДНОЙ МАТЕРИАЛЬНОЙ ЧАСТИЦЫ
XIV. ОСНОВНЫЕ ЗАКОНЫ МЕХАНИКИ
82. Материя. Масса. Плотность. В кинематике мы говорили о дви-
движении геометрических объектов, теперь перейдём к рассмотрению движе-
движения вещественных, или материальных, тел. Материя — понятие первоначаль-
первоначальное; оно, как наиболее общее выражение для объективно существующей
реальности, не мои<ет быть определено путём сведения его к более про-
простым (более общим) понятиям; поэтому можно говорить только о свой-
свойствах материи. Прежде всего материя обладает протяжённостью и на-
находится в состоянии движения, которое является основным свойством
материи.
Кроме того, всё материальные тела тяготеют друг к другу; к деталь-
детальному исследованию этого тяготения мы вернёмся в дальнейшем (§ 112);
здесь же отметим, что непосредственным результатом взаимного тяготе-
тяготения тел, наблюдаемых на Земле, является их вес. Вес тела измеряется
с помощью прибора, называемого динамометром. Существенным в
устройстве динамометра является пружина, могущая деформироваться в
той или иной степени в зависимости от величины веса тела. По вели-
величине деформации пружины мы можем судить о величине веса тела, при-
причём большей деформации соответствует больший вес. Таким образом, мы
можем сравнивать веса не только очнородных, но и различных по своему
составу тел.
Необходимо заметить, что вес р тела, измеренный каким-нибудь
динамометром, существенно зависит от места на земной поверхности, где
происходит измерение. Это наблюдаемое изменение в весе тел, вообще
говоря, мало.
С другой стороны, Галилеем (Galilei) установлено, что все материальные
тела, свободно падающие в пустоте в данном месте земного шара, приобре-
приобретают одно и то же ускорение g относительно Земли. Величина уско-
ускорения g для различных мест земной поверхности различна. Сопоставляя
вес тела и величину ускорения тела при свободном его падении на
Землю, мы приходим к следующему экспериментально установленному
факту: отношение величины веса тела, измеренного в данном месте, к
величине ускорения свободного .падения тела, измеренного в том же
месте, является постоянной величиной, т. е. указанное отношение ^ не
9* 131
зависит ни от состояния тела, ни от места наблюдения. Эта постоянная
величина называется весомой массой тела.
Поскольку весомая масса тела пропорциональна весу тела и, кроме
того, вес тела, составленного из нескольких тел, равен сумме весов
составляющих тел, весомая масса может быть принята за меру количеств/
материи в каком-либо теле.
Под массой тела пока мы будем понимать весомую массу
тела. В ближайших параграфах мы рассмотрим ещё другое понятие,
именно,—инертную массу тела.
За единицу массы принимается грамм, т. е.' одна тысячная массы эта-
эталона килограмма, хранящегося в Севре (Sevres) близ Парижа. При изгото-
изготовлении этого эталона (Le Kilogramme prototype des Archives} имели в виду
сделать массу его равной массе кубического дециметра воды при
4° Цельсия (Celsius); но позднейшие измерения обнаружили, что эта цель
не была достигнута: масса кубического дециметра воды составляет
1 000, 013 грамма.
Отношение массы тела к его объёму называется средней плот-
плотностью тела. Если в различных частях какого-либо тела вырезать
одинаковые объёмы, то, вообще говоря, массы в этиу, схемах будут раз-
различны. Возьмём какую-либо точку А внутри объёма, занятого телом, и
построим замкнутую поверхность 5 так, чтобы точка А лежала на этой
поверхности или внутри её. Пусть объём, ограниченный поверхнбетью S,
будет Аи, а масса, заключенная в этом объёме, Д/и, Рассмотрим предел
отношения -г— в том предположении, что поверхность 5 стягивается в
точку А. Если этот предел а существует, то он называется плотностью
тела в точке А:
,. Am
s = hm т—
Величина а является, вообще говоря, функцией координат точки А; если
для всех точек внутри тела плотность а имеет одно и то же значение,
то тело называется однородным. Размерность плотности" выражается
, 1 масса г. „ , , г
символом [<п= «-• единицей плотности служит 1 —5.
1 ' длина3 см"
83. Количество движения тела. Изменение движения. В гео-
геометрическом смысле материальное тело мы можем рассматривать, как
тр&хмерную деформирующуюся среду (§ 34). Поэтому движение данного
тела может быть крайне разнообразно. В настоящей главе мы будем
говорить исключительно о простейшем возможном движении тела, а
именно, о том, когда тело движется поступательно (§ 56). Тогда все
точки тела имеют для каждого момента времени одну и ту же скорость,
одно и то же ускорение. Общие всем точкам тела скорость и ускорение
мы будем в дальнейшем называть для краткости скоростью тела и уско-
ускорением тела.
Пусть тело движется поступательно со скоростью <о. Если масса тела
равна т, то произведение то называется количеством движения
тела. Количество движения — величина векторная, совпадающая по направ-
направлению со скоростью. Производная по времени от количества движения,
133
— (mv), носит название изменения движения: mutatio motus no
dt
Ньютону (Newton). Эта производная при условии постоянства т, очевидно,
равняется произведению массы на ускорение и, следовательно, по направлению
совпадает с ускорением (§ 44); мы ограничимся изучением те* случаев,
когда масса т остаётся постоянной. Размерности количества движения и
изменения движения выражаются следующими символами:
, , масса-длина Yd , .1 масса-длина
время2
г, .• г ем
Единицей количества движения служит 1 .
С0л
84. Сила. Одно и то же тело может двигаться самыми разнообразными
способами; характер движения тела зависит не только от самого тела, но
и от внешних условий. Эти внешние условия, заставляющие тело изме-
изменять своё движение, мы называем силами. Ввести в механику силы,
как и другие основные понятия, мы можем не иначе, как с помощью
ряда положений и определений, как бы суммирующих исторический
опыт и наблюдения. Впервые с достаточной полнотой эти основные опре-
определения изложены Ньютоном (Newton) под названием axiomata sive leges
niotus в его «Philosopbiae naturalis principia mathematica» в 1687 г. г).
Мы не будем касаться современных взглядов на основания мехаиики, развивае-
развиваемых в так называемой теории относительности, и в дальнейшем
будем держаться близко к Ньютону, пользуясь лишь при изложении бо-
более употребительными теперь терминами.
85. Первый закон Ньютона (закон инерции). Прежде всего необ-
необходимо условиться о том' признаке, по которому мы узнаём, что сила дей-
действует на.данное тело, или, как говорят, сила приложена к данному
телу. Простейшим из движений тела, бесспорно, служит движение поступа-
поступательное, прямолинейное и. равномерное; скорость такого движения по-
постоянна по модулю и направлению и, следовательно, ускорение равно нулю.
Частным случаем этого движения будет покой тела относительно рас-
рассматриваемой среды. Мы принимаем, что такого рода движение тело
может совершать само по себе, без действия на него силы, а следова-
следовательно, если тело совершает движение со скоростью, переменной по
модулю или направлению, т. е. движение с ускорением, отличным от
нуля, то не иначе, как при действии на него некоторой силы.^ Другими
словами, действие силы на тело обнаруживается существованием ускоре-
ускорения в движении тела. Принятое нами условие, или определение, носит
название первого закона Ньютона. Первый закон изложен Ньютоном так:
«Corpus omne perseverare in statu suo quiescendi vel movendi unifor-
miter in directum, nisi quatenus illud a vlrlbus impressis cogitur statum
suum mutare>, т. е. «всякое тело сохраняет своё состояние покоя или
прямолинейного и равномерного движения, если только приложенные к
нему силы не побуждают его изменить своё состояние:».
i) Есть русский перевод акад. А. Н. Крылова: Ис. Н ь ю т о и, Математиче-
Математические начала натуральной философии, Известия Николаевской морской акаде-
академии, вып. IV и Y, Петроград, 1915—1916, а также в трудах акад.» А. Н. Кры-
Крылова, т. IV, Москва, 1936.
183
86. Второй закон Ньютона (об ускорении и силе). Закон па-
параллелограмма сил. Первый закон Ньютона даёт нам возможность обна-
обнаружить, приложена ли к данному телу сила или нет: если тело движется
с ускорением, то сила приложена; если нет ускорения, нет и силы. По-
Посмотрим теперь, как сравнить между собой величины двух сил. Силы
могут отличаться одна от другой, во-первых, тем, что они приложены к
телам с различными массами; во-вторых, тем, что они сообщают телам
различные ускорении. Две силы, сообщающие телам с равными массами
равные ускорения, мы признаем равными, так как для различения их не
имеем основания.
Положим, что некоторое тело с массой т имеет в рассматриваемый
момент ускорение да. Разделим массу тела на п равных частей, и
пусть каждая из иих будет равна т', так что т = я/га'. Тогда про одно
и то же явление — движение тела массы- т с ускорением W — мы можем
сказать, что или к телу массы т приложена сила F, сообщающая ему уско-
ускорение w, или что if n телам с массами т' приложены п. ревнмх гтежду
собой сил F', сообщающих каждому телу с массой т' tq же ускоре-
ускорение W. Отсюда естественно принять, что сила F в п раз'больше силы F',
или, что
Р fit /1 . t v
т. е. силы, сообщающие различным массам равные ускорения, прямо про-
пропорциональны массам.
Ускорение тела представляет собой величину векторную; следова-
следовательно, мы можем рассматривать это ускорение как (геометрическую)
сумму двух или более векюров и в этом смысле условно можем говорить,
что тело данной массы имеет, вместо одного, одновременно два-, три или
более ускорений (§ 81). Распространим то же условие и на силы, т. е.
примем, что на тело может одновременно действовать несколько сил, при-
причём ускорения, сообщаемые телу этими силами, должны в сумме давать
наблюдаемое ускорение тела.
Положим сперва, что одно и то же тело массы т от двух сит F
и F" соответственно получает коллинеарные между собой ускорения да'
и w", и пусть w"=ntv'. Тогда, по предыдущему, мы можем предста-
представить себе, что во втором случае на массу от действует ие одна сила
F", а п равных между собой сил /, сообщающих каждая ускорение w\
Силы /и Г мы считаем равными, так как они равным массам сообщают
равные ускорения. Отсюда следует, что F' = nF" или
?=?. <14-2>
т. е. силы, сообщающие телам с равными массами различные ускорения,
пропорциональны этим ускорениям.
Сравним теперь две силы: F1 и F2, сообщающие телам с массами
тх и т2 соответственно ускорения w^ и w2. Рассмотрим ещё третью
силу Fq, сообщающую телу с массой т3 ускорение wv Тогда, согласно
формуле A4.1), сравнение сил F1 и Fo даёт
134
с другой стороны, по формуле A4.2)
Перемножив эти равенства, получим:
A4.3)
т. е. силы, сообщающие телам с различными массами различные ускоре-
ускорения, относятся между собой, как произведения соответственных масс на
ускорения.
Ускорение является результатом действия силы на массу и пред-
представляет собой, как было сказано, величину векторную; поэтому мы при-
принимаем, что сила также'может быть изображена вектором, совпадаю-
совпадающим по направлению с ускорением и при этом, согласно формуле 0 4.3),
пропорциональным произведению массы на ускорение. Развивая высказан-
высказанное нами раньше положение о совместном действии нескольких сил на
данное тело, мы можем теперв сформулировать это положение так: если
тело движется с ускорением, то безразлично, сказать ли, что на него
действует одна сила или совместно несколько сил, приложенных к одной
и той же точке тела, если только (геометрическая) сумма последних
равна предыдущей силе. Сумма нескольких сил, приложенных к одной
и той же точке тела, носит название равнодействующей силы.
Если за единицу силы принята сила, которая единице массы (грамму)
сообщает единицу ускорения (сантиметр в секунду), то по формуле
A4.3) мы найдём:
F= mw, A4.4)
т. е. численное значение силы выразится как произведение чисел, пред-
представляющих собой численные значения массы и ускорения. В этом случае
единица силы носит название дины. Размерность силы выражается сим-
масса-длина „ ,
волом s . Единица силы — дина следующим образом выра-
время2
жается через основные единицы:
. , , г см
1 дина = 1
сек2 '
Из всего сказанного вытекает, что сила характеризуется: 1) точкой при-
приложения, 2) модулем и 3) направлением. •
Высказанные нами положения о модуле,- направлении и совместном
действии сил изложены Ньютоном в его втором законе и примечании
(Corollarium) к этому закону. Второй закон говорит: «Mutationem motus
proportionalem esse vi motrici impressae et fieri secundum lineam rectam,
qua vis ilia imprimitur», т. е. «изменение движения (§ 83) пропор-
пропорционально приложенной силе и происходит в направлении силы». В при-
примечании к этому закону говорится о совместном действии сил: «Corpus
viribus conjunctis diagonalem parallelogrammi eodera tempore describere
quo latera separatis», т. е. «от совокупного действия (двух) сил тело
описывает диагональ параллелограмма в течение того же времени, как и
135
стороны его при действии сил порознь». Положение о совместном дей-
действии сил обыкновенно называется законом параллелограмма сил.
Заметим, что равенство A4.4) является математической записью как
второго, так и первого законов Ньютона; оно носит название основ-
основного уравне-ния динамики.
Вернёмся к уравнению A4.2), которое можно переписать в форме
pi р"
w' w"
Мы видим, что отношение величины силы к величине сообщённого си-
силой ускорения для данного тела является постоянным, не зависящим ни
от характера действующей силы, ни рт состояния движения тела. Это
отношение определяет и н е р т н у ю массу тела. Численные значения
инертной массы и весомой массы для одного и того же тела на основании
формулы A4.4), а также определения весомой массы равны между собой;
В дальнейшем мы не будем делать различия' между весомой и инертной
массами тела.
87. Третий закон Ньютона (о действии и противодействии).
Первый закон Ньютона учит нас, как узнать, приложена ли сила к
телу; второй указывает модуль и направление силы. Третий закон говорит
о важном свойстве взаимодействуя тел, а следовательно, и об источнике
каждой силы. Дело в том, что искать причину изменения скорости какого-
либо тела мы можем лишь в том, что около движущегося тела находятся
ещё и другие тела. Если бы рассматриваемое тело было единственным и
вполне изолированным в мире, то мы не имели бы никаких оснований до-
допускать, что движение его изменяется. Даже само движение не имело бы
тогда никакого физического значения; конечно, можно было бы вооб-
вообразить бесчисленное множество гипотетических сред, в которых двига-
двигалась бы рассматриваемая масса, но любое из таких движений было бы
геометрическим построением» а не физическим явлением. Явлением
физическим может быть лишь движение тела относительно другого тела,
иначе товоря, движение среды, геометрически связанной с одним телом,
относительно среды, связанной с другим телом. Но когда у нас имеется
хотя бы два тела, то joKe возможно предполагать, что различие в, их
взаимном положении может влиять на движение тел относительно друг
друга. Поэтому закон о взаимодействии и об источнике сил должен быть
таков, чтобы уже и для двух тел он давал вполне законченный результат.
Мы принимаем, "что источником силы F, действующей на тело массы т,
служит некоторое другое TeVio с массой mv на которое действует сила Fv
равная по модулю, но прямо противоположная силе F:
р — р.
силу F называют действием, а силу F1 — противодействием.
Ньютон сфромулировал третий закон так: «Actioni contrariam semper et aequa-
lem esse reactionem, sive corporum duorura actiones in se mutuo semper
esse aequales et ;n partes contrarias dirigi», т. е. «действие всегда равно
136
и противоположно противодействию, или действия двух тел друг на
друга всегда равны и прямо противоположно направлены».
Высказанный закон подразумевает, что речь идёт о силах, действую-
действующих на частицы бесконечно малых размеров. Иначе нельзя было бы
говорить о прямой- противоположности действия и противодействия, так
как точек приложения сил было бы бесчисленное множество. Когда силы
приложены к телам, занимающим конечные объёмы, надо предварительно
разбить мысленно эти тела на бесконечно малые элементы и затем уже
группировать силы по признаку «действие и противодействие» и, таким
образом, искать источники для сил, действующих на элементарные тела.
Закон о действии и противодействии заканчивает собой тот ряд опре-
определений или условий, с помощью которых вводится в механику понятие
о силе. Мы придерживались изложения Ньютона, причём основным по-
понятием служило у нас понятие о материи или массе, и из него, с по-
помощью понятий о времени и пространстве, мы получили, как производное
понятие, силу. Можно было бы итти обратным путем и взять, за основ-
основное понятие силу, тогда понятие о массе можно было бы ввести с по-
помощью ряда условий, подобных выше приведённым.
88. Движение' массы Относительно другой массы. В §_ 86 мы
упомянули, что механическое движение может лишь пониматься как движе-
движение одного тела относительно другого; определим точнее, что мы
подразумеваем под таким движением. Геометрическим образом, связанным
с представлением о теле, служит трёхмерная среда (§ 34). Если тело
абсолютно твёрдое, т. е. такое, что расстояние между любыми двумя
точками в нём остаётся постоянным, то среда, ему соответствующая, бу-
будет неизменяемой; для тела деформируемого и среда будет деформируе-
деформируемой. В первом' случае среду легко распространить и за границы объёма,
занятого самой массой. Поэтому не трудно определить, что называется
движением какого-либо тела, абсолютно твёрдого или деформируемого,
относительно другого абсолютно твёрдого тела: это есть движение некоторой
неизменяемой или деформируемой среды, соответствующей движущемуся
телу, в неизменяемой среде, связанной с абсолютно твёрдым телом. Если
же тело А, относительно которого мы желаем рассмотреть движение
другого тела В, будет деформируемым, то под движением тела В отно-
относительно А, соответствующим данному моменту, разумеется движение
тела В относительно тела А, затвердевшего в той конфигурации, которую
оно имело в рассматриваемый момент. Таким образом, и здесь нам
придётся иметь дело лишь с движением в неизменяемой среде.
XV. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ЧАСТИЦЫ. ИХ ИНТЕГРАЛЫ
89. Материальная частица. Когда тело движется поступательно,
можно ограничиться изучением движения одной какой-нибудь точки этого
тела, приписав ей массу, равную массе всего тела. Такая точка, заменяю-
заменяющая собой тело, носит название материальной точки, или частицы. Вместо
того, лтобы говорить о теле, движущемся поступательно под действием
силы F, можно говорить о движении материальной частицы, к которой
137
приложена та же сила F. Материальная частица характеризуется не только
своими координатами, как точка геометрическая или кинематическая, но
и своей массой, т. е. массой того тела, движение которого она пред-
представляет.
Деформируемое тело может двигаться самым произвольным образом,
но мы всегда будем предполагать, что движения бесконечно близких то.-
чек тела различаются бесконечно мало. Поэтому, если разделить движу-
движущееся тело какими-либо поверхностями, например координатными, на бес-
бесконечно малые по объёму элементы, то можно принять, что эти элементы
движутся поступательно, и, следовательно, каждый из ннх может быть
заменён материальной частицей с бесконечно малой массой. Таким обра-
образом, и общий случай движения деформируемого тела сводится к рассмот-
рассмотрению движения совокупности материальных частиц.
Динамика частицы изучает движение одной материальной частицы,
или точки, под действием заданных сил. Рассмотрение движения совокуп-
совокупности материальных тастиц с конечными или бесконечно малыми массами
составит предмет динамики системы.
90. Дифференциальные уравнения движения частицы. Основное
уразнение динамики
F, A5.1)
очевидно, эквивалентно трём скалярным уравнениям, являющимся проек-
проекциями уравнения A5.1) на какие-либо три оси. Эти уравнения носят наз-
название дифференциальных уравнений движения матери-
материальной частицы. Так, если спроектировать уравнение A5.1) на оси
декартовых координат, то оно заменится следующими тремя уравнениями:
A5.2)
В общем случае криволинейных координат мы получим:
= F.
A5.3)
(а=1, 2, 3),
где F — проекция на соответствующую координатную ось qa равнодей-
равнодействующей F сил, действующих на частицу [см. формулу G.23) на
стр. 69]. Так, например, для цилиндрических координат дифференциаль-
дифференциальные уравнения движения запишутся следующим образом [см. формулы
G.24) на стр. 70]:
р dt
rrl'z
= Ft
A5.4)
133
Подобным образом для сферических координат [см. формулы G.25)
на стр. 70] мы найдём:
m(r— /-cos2<]) ¦ (p2 — rty2)=Fr,
m d , a 2 l " \ f
/¦cos <j> dt^ i t/ 9»
т7П (r2& ~ r sin * cos
A5.5)
Наконец, если спроекгируем обе части основного уравнения динамики
на оси естественного трёхгранника, т. е. касательную, главную нормаль
и бинормаль траектории, то, согласно формулам G.12) на стр. 68, полу-
получим:
ms=FT,
?f=F,, A5.6)
О =/*,,
где 7%, /%, /^—проекции равнодействующей сил, действующих на час-
частицу, на упомянутые три направления.
Сила, аействующая па частицу, может зависеть от времени, положе-
положения частицы и её скорости, т. е. в уравнениях A5.3) величины F явля-
являются функциями времени, координат н первых производных от координат
по времени:
производных от координат второго и высших порядков обычно не вводят
аргументами в функции F . Таким образом, равенства A5.3) представ-
представляют собой систему трёх дифференциальных1 уравнений второго порядка
относительно трёх функций времени q3, где о=1, 2, 3.
В динамике различают две основные задачи. В так называемой пря-
прямой задаче по данному закону движения
требуется найти действующую на частицу силу F. Решение прямой за-
задачи не представляет никаких затруднений: дифференцированием находим
ускорение частицы, или его проекции vog^, а затем по формулам A5.3)
находим проекции Fq силы.
В обратной задаче известными являются- сила /•"= F(t, r, V) и
«начальные данные>, т. е. радиус-вектор г0 и скорость vQ точки в не-
некоторый момент времени t0; иначе говоря, заданы проекции F я силы
в функциях выше перечисленных аргументов и координаты q^ и их первые
производные ^о Для некоторого значення независимого переменного t=t0;
треб>ется найти закон движения г= г(t) (или, что равносильно q^=qa{t),
где о== 1,2,3). Таким образом, решение обратной задачи требует инте-
интегрирования дифференциальных уравнений движения.
91. Интегралы дифференциальных уравнений движения. Приёмы
интегрирования системы дифференциальных уравнений излагаются
в курсах анализа, — мы ограничимся здесь замечаниями самого общего
характера. Так как дифференциальные уравнения движения представляют
139
a
d
d
an*
0, 9V
<'. Qv
ft. 9
ft. Я
В' ?1.
??> Qv
v Qv
Qv
<7b) = °.
ft)=°>
собой уравнения второго порядка относительно трёх неизвестных функций
qv qv qs, то самые общие выражения для искомых функций времени
будут содержать шесть произвольных постоянных. Для получения таких
общих выражении мы в большинстве случаев пойдём нижеследующим
путём. Положим, что систему A5.3) нам удалось заменить следующей,
ей равносильной (две системы уравнений мы называем равносильны-
равносильными тогда, когда каждая из них является следствием другой):
A5.7)
Последняя система в свою очередь, очевидно, равносильна следующей:
"Pi (*» ?i> ft. ft. ?i» ft. ft) =* cv
?2 (*i Qv Qv ft> Qv Qv Qs) =x ^a>
где Cv C2, Сй—произвольные постоянные. Равенства A5.8) н подобные
им, т. е. такие, в которых некоторая функция от времени, координат
и скоростей равниется произвольному постоянному н которые справедливы
в силу дифференциальных уравнений движения, носят название первых
интегралов дифференциальйых уравнений движения.
Допустим далее, что и систему A5.8) мы сумели свести к ей равно-
равносильной того же типа, что и система A5.7), т. е. к такой:
rfi'Tl''1 Qv Qv 9s> ^l> *-2> ?в)==0>
d
01Чз(*> 9v Qv 9s_> cv Cv Q)=°-
Эта система равносильна следующей:
'Ф«С Qv Qv q]> Cv Cv CM) = Clt 1 A5.9)
Ф1С QvQv 9V Clf.C,, C4) — C6. \
Полученные равенства и подобные им, т. е. содержащие время, коорди-
координаты, произвольные постоянные и не заключающие в себе ско-
скоростей и также справедливые в силу дифференциальных уравнений дви-
движения, носят название вторых интегралов уравнений движения.
Онн определяют три функции </,, q2, qs, зависящие от времени йот шести
независимых произвольных постоянных:
^ - /ф. *щ Г-* f> Г-* Г-t /^*\\
"l VI Vt- 1 V 1 ,Lr2' '"в1 41 6' -6/' I
9t = 9i(t, Clf C2) C3, C4, C5, Ce), A5.10)
140
Эта система функций носит название общего решения данной си-
системы дифференциальных уравнений. Равенства A5.10) служат общим
выражением закона движения, или конечных уравнений движения, со-
соответствующих заданным дифференциальным уравнениям.
Итак, дифференциальные уравнения определяют целый класс движений,
отвечающих данной силе. В том, что самые обшие выражения для коорди-
координат, получаемые из дифференциальных уравнений движения, должны за-
заключать в себе шесть произвольных постоянных, мы можем убедиться и
без помоши анализа при помощи следующих кинематических соображений.
Дифференциальные уравнения движения определяют собой в любой момент
модуль и направленне ускорения движущейся частицы; следовательно, если
мыв какой-либо данный момент tOt называемый начальным, дадим
движущейся частице произвольное положение и сообщим ей произвольную
скорость, то, зная ускорение, сумеем найти скорость и положение этой
частицы для момента tlt смежного с начальным, Приняв этот момент t1
за начальный, тем же пут?м определим скорость и положение частицы для
момента tv бесконечно мало отстоящего от-tfj, и т. д.; таким образом,
вообще говоря, мы сумеем найти скорость и положение частицы для любого
момента, следующего за начальным или предшествовавшего ему. Другими
словами, мы определим движение частицы при любом начальном положе-
положении и при любой начальной скорости, а это н значит, что мы ввели
шесть произвольных постоянных.
Давая соответственные значения этим постоянным, мы заставим нашу
движующуюся частицу в данный момент пройти через данное по-
положение с данной скоростью. Если данный начальный момент
назвать t0, данные начальные координаты частицы — gl0, q20, qs0, а данные
начальные скорости — <71в, qi6, qa0, то по формулам A5.10) соответст-
зующие значения произвольных постоянных Cv Cs, ..., Св, определятся,
как корни уравнений
i,...,Cg), \
А ?ао = ?(' СС) ? = ?# CC) I
Выражения* A5.10)', если в них произвольные постоянные заменены
некоторыми частными значениями, например из уравнений A5.11), носят
название частного решения системы дифференциальных уравне-
уравнений движения. Таким образом, решение задачи об определении движе-
движения по заданной силе и по начальным данным приводится к* нахождению
некоторого частного решения уравнений движения.
Интегрирование системы дифференциальных уравнений, т. е. нахожде-
нахождение её общего решения, можно также представить себе . выполненным
иным путём. Дело в том, что всякая система я дифференциальных урав-
уравнений второго порядка может быть заменена системой 2л уравнений
первого порядка. Соответствующее преобразование в нашем случае
осуществляется тем, что к уравнениям A5.3) мы добавляем три следующие;
&=?. („=1,2,8). A5.12)
На систему уравнений A5.3) и A5.12) можно теперь смотреть, как на
141
систему шести уравнений первого порядка относительно шести
неизвестных функций времени qv qv qs, qv q2, qs. Интегрирование этой
системы будет закончено, если нам удастся найти шесть её независимых
первых интегралов
Y,(*. 4v Я*> Ча> Яу ?2- 4z)~Av
Y2(^ 4V ?2> ?8- ?1- 42' Чв) = А2,
где Av ..., Ае — произвольные постоянные. Действительно, из написан-
написанных равенств мы тогда определим:
2 \^» р ^2' " ' *» "бЬ
-, т It А А А \ •
"в—та \4) "р "й1 * ¦ •> Лс/>
при этом должно оказаться, что
как этого требуют уравнения A5.12).
В заключение остановимся на следующем свойстве си/стемы диффе-
дифференциальных уравнений (Г5.3): квадрат скорости v* является функцией
второй степени относительно Обобщённых скоростей q3 ; следовательно,
производные ч. ' будут линейными функциями от скоростей qa ; отсю-
отсюда мы делаем вывод, что левые части уравнений A5.3) содержат вторые
производные лишь линейным образом.
XVI. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ СВОБОДНОЙ МАТЕРИАЛЬНОЙ
ЧАСТИЦЫ
92: Условия прямолинейности движения. В предыдущей главе мы
рассмотрели дифференциальные уравнения движения материальной частицы
под действием заданных сил, когда движение этой частицы ничем не
стеснено, не ограничено никаким заранее данным условием, или, как
говорят, когда частица свободна. Теперь мы займёмся рассмотрением
простейшего случая движения свободной материальной частицы, а именно
того, когда эта частица движется прямолинейно. Если одну из координатных
осей, например Ох, направим параллельно рассматриваемой траектории,
то уравнения этой траектории будут:
у = const., z = const.,
142
а следовательно, по формулам A5.2) на стр. 138, мы найдём:
^ = 0. ^ = °. A6.1)
т. е. равнодействующая должна иметь постоянное направление, парал-
параллельное траектории. Но этого условия недостаточно: действительно, при
его соблюдении два последние уравнения движения A5.2) будут
что по интегрировании даёт
где a, b, a, P — произвольные постоянные. Условимся всегда обозначать
начальный момент через t6, начальные координаты частицы через х0, у0, z0,
начальные проекции скорости через х0, Уо, za. Тогда предыдущие равен-
равенства дадут:
отсюда видим, что траектория будет прямой, параллельной оси Ох, лишь
тогда, когда
у„=0, го = О. A6.2)
Таким образом, согласно равенствам A6.1) и A6.2), свободная материальная
частица описывает прямую линию тогда н лишь тогда, когда сила,
приложенная к ней, имеет постоянное направление и начальная скорость
параллельна этому направлению.
В дальнейшем при изучении прямолинейного движения мы будем
принимать траекторию за ось 'Ох, и потому всегда будет у 7=2 = 0;
следовательно, нам можно .будет ограничиться исследованием одного
только уравнения
mx = Fx, A6.3)
где
Fx=Fx(t,x,x).
93. Движение под действие^ силы, зависящей лишь от времени.
Когда данная сила зависит только от времени, т. е. когда
задача о прямолинейном движении частицы решается весьма просто. Инте-
Интегрируя уравнение A6.3). и определяя произвольную постоянную по началь-
начальным данным, находим
t
, тх — тх0 -\- \-f(t) dt.
t
Интегрируя ещё раз,'получаем окончательно:
t t
тх — тхо=тхо (t — t0) + \<И {j f(t) dt j. A6.4)
Пример' 37. Прямолинейное движение весомой ча-
частицы. Если ось х направлена вертикально книзу, а ускорение силы "тяжести
143
обозначим через g, то уравнение движения будет
т'х = mg\
следовательно, по формуле A6.4) имеем
Если лго>О, то С самого начала движения (с момента t0) частица падает
х0 *о
вниз. Если *о<О, то до момента t = t0 , т. е. до высоты х = л:0 — ^<
частица движется кверху и затем падает книзу.
94. Движение под действием силы, зависящей лишь от поло-
положения частицы. Когда сила зависит только от положения частицы,
т. е.
то закон движения частицы находится с помощью двух квадратур. Умножаем
почленно уравнение A6.3) на тождество
тогда обе части уравнения обратятся в полные дифференциалы:
xxdt=f(x)dx
или
xdx-= f{x)dx.
Следовательно, интегрируя, найдем:
где С—произвольная постоянная, а <р (х) = \ / {х) dx. Разрешив полу-
полученное уравнение относительно х, будем иметь
или
dx
отсюда, интегрируя, находим:
где В — новая произвольная постоянная. Полученное равенство и опреде-
определяет х как функцию от t и двух произвольных постоянных; последние,
как мы знаем, могут быть выражены через начальные данные.
Пример 38. Прямолинейное двн'жение частицы под дей-
действием силы притяжения к неподвижному центру, прямо
пропорциональной расстоянию. Возьмём центр притяжения за начало
координат. 'Тогда, если коэффициент пропорциональности примем равным кгт,
то для модуля силы F будем иметь выражение
144
где г—расстояние от частицы до начала координат. Иначе говоря,
F=±№mx, A6.5)
причём должно взять верхний знак, если х > 0, т. е. частица находится на
положительной половине оси х, и нижний знак, если х < 0, т. е. находится
на отрицательной половине оси х. Сила F направлена к началу координат;
следовательно,
cos (x, F) — =р !; A6.6)
верхний знак надо взять, когда х > 0, а нижний, когда х < 0. Объединив фор-
формулы A6.5) и A6.6), получим для проекции силы выражение
Fx = —№mx,
которое не зависит от того, где частица находится, на положительной или на
отрицательной половине оси х. Дифференциальное уравнение движения частицы
напишется, следовательно, так:
тх = —k'-mx,
или, по сокращении па т,
Умножаем обе части этого уравнения на х и интегрируем указанным выше спо-
способом; получаем:
Произвольную постоянную С определяем из начальных условий:
Найденный интеграл можно записать так:
или
х2 = №{а- — х2), A6.8)
где положено
kW=zxo-{-№xo. A6.9)
Из выражения A6.8) сразу видно, что наибольшее удаление частицы от притя-
притягивающего центра не может превышать а. Разрешая теперь уравнение A6.8)
относительно х и разделяя переменные, получаем:
Vcfi — х"-
=±kdt. A6.10)
Знак -f- здесь следует брать для той стадии движения, когда dx > 0, т. е.
когда частица движется в сторону возрастания х, и знак —, когда он
движется в обратном направлении. Пусть fj, <2>^з> *4> • •¦ — Ряд последовательных
моментов, когда частица меняет направление своего движения, при этом пусть
в промежутке tx^t^t^ будет dx > 0. Тогда получим следующие выражения
для интеграла уравнения ( 6.10):
при f!<t<<2 arcsin — =
X
при t^ts^t^ arcsin — = —
при t% sg <-s? tt arcsin — = kt -f- Тз4
и т- Дм Ti2> T23, hi здесь постоянные интегрирования. Напишем эти произволь-
Ш Г. К. Суслов М5
ные постоянные в форме
T23=1t — T23.
и разрешим предыдущие уравнения относительно х; получаем:
при 12 sg t sg ?g x = a sin (?f -|- f 23),
при fa < t e? <4 л: = a sin (tt 4- T34).
Между произвольными постоянными y12, -f23, -f34,... должна существовать такого
рода зависимость, чтобы все функции х переходили без разрывов и плавно
одна в другую па границах интервалов, т. с. при t = t2, ts, f4l... Иначе гсоря,
мы требуем, что^ы общее решение х всюду обладало непрерывной первой проич-
водной. Это получится, если все постоянные положить равными между собой.
Назвав их общее значение t, мы можем, таким образом, выразить общее реше-
решение нашего дифференциального уравнения в единой форме:
Важно заметить, что с одинаковым прагшм мы могли бы это общее решение напи-
написать в виде
x = acos(kt-\-S). A6.12)
Между произвольными постоянными | и S, очевидно, имеет место соотношение
Движение, определяемое уравнением A6.11), называется простым гармо-
гармоническим колебательным движением. Частица колеблется около, центра
притяжения; наибольшее отклонение её от центра равно а и называется ампли-
амплитудою. Величина k называется угловой частотой, аргумент синуса,
W-[~fi носит название фазы колебаний, f называется начальной
фазой. Гармонические колебания служат примером движений периоди-
периодических, т.е. таких, в которых движущаяся частица в моменты времени,
отстоящие друг от друга на постоянный промежуток т (называемый пери-
периодом), занимает одно и то же положение и имеет одну н ту же скорость.
В нашем случае период равен
т=у. A6.13)
Величина,, обратная периоду колебаний, носит название ч а ст о т ы колеба-
колебаний; частота, .очевидно, равна числу колебаний в одну секунду и выражается
формулой
N=k- (lfU4>
Постоянные интегрирования а и у в общем интеграле ('6.11) легко могут
быть выражены через начальные данные. Из уравнения A6.9) сразу получаем:
а=]/
A6л5>
Для определения y найдём сперва скорость частицы в функции от времени,
для чего продифференцируем уравнение A6.11); имеем
A6.16)
146
Теперь положим в уравнениях A6.11) и A6.16)
t := t$ =¦ О, X = Xq, X = JTqJ
тогда получим:
х0 = a sin f, \
} A6.17)
jto= а? cos f. j '
Разделив первое из этих равенств па второе, найдём уравнение, определяющее
начальную фазу:
tgY^^2; A6.18)
двойственность при определении f по тангенсу устраняется анализом знака
синуса или косинуса по уравнениям A6.17).
Закон движения A6.11) можно представить в такой форме, что постоянные
интегрирования будут явно выражены через начальные данные. Для этого при-
применим к правой части формулу синуса суммы и воспользуемся соотношениями
A6.17); в результате мы получим:
х — дг0cos kt~\——sinkt, A6.19)
к
Рассматривая выражения A6.13), A6.14), A6.15) и A6.18), мы замечаем, что
период и частота колебаний не зависят от начальных данных, а амшштулз и
начальная фаза зависят.
Если бы мы пожелали представить графически, как изменяются с течением
времени координата х движущейся частицы, а также проекции её скорости
й ускорения, причём абсцисса изображала бы собой время, а ордината соответ-
соответственно координату х или проекции скорости и ускорения, то мы получили бы
кривые линии, называемые синусоидами. Этими синусоидами часто поль-
пользуются в физике, когда речь идйт о гармоническом колебательном движении.
Пример 39. Прямолинейное движение частицы под дей-
действием1 силы отталкивания от неподвижного центра, пря-
прямо пропорциональной расстоянию. Берйм начало координат в центре
отталкивания. Тогда совершенно так, как в предыдущем примере, убедимся,
что в рассматриваемом случае
если коэффициент пропорциональности взять равным №т. Следовательно,
дифференциальное уравнение напишется так:
тх = k2mx.
Проинтегрировав его, мы получим:
Пусть при f = ?0 мы имеем х=х0 и х=х0. Определив произвольную постоянную
С по этим начальным данным, мы найдём:
'xi='x\ — №x\^-№xi. A6.20)
Пусть положительное направление оси х параллельно начальной скорости;
тогда х0 > 0, а потому, разрешив последнее уравнение относительно хй и раз-
разделив переменные, мы должны перед радикалом взять знак -(-; имеем
dx
- — kdt.
откуда, проинтегрировав, найдём:
V i
In
Ю* 147
Выразим произвольную постоянную В через начальные данные:
Подставив значение В в предыдущее уравнение, найдём:
х+
у ур
-*u). A6.21)
Произпедя теперь потенцирование, можем написать:
A8.22)
у ж ~ х°+х"' = {х° + -*-) еШ~'о)-
Приравняв обратные величины, получим:
1
что, после упрощения, дает
г — дго+ -К* = \ ^о- ~f ) e-ku-k). A6.23)
Сложив уравнения A8.22) и A6.23), найдем:
1
нли
дг = д:0 ch k (t — g + Ц- sh * « — t0). A6.24)
г?
Постоянная х\ — №х\ может быть больше нуля, меньше нуля и равна нулю.
Разберем все эти три случая.
1) Пусть х\ — k2x^>Q. Как показывает выражение A6.20), скорость в этом
случае не обращается в нуль и, следовательно, движение происходит всё время
в одном направлении, а именно, в положительном направлении оси х, так как
по условию, хй > 0. Следовательно, если частица в твоём начальном положении
была на положительной половине оси х, т. е. х0 > 0, то она с постоянно воз-
возрастающей скоростью будет все время удаляться от центра отталкивания, при-
притом неограниченно, как видно из формулы A8.24). Если же хо<О, т. е. началь-
начальное положение находилось на отрицательной половине оси х, то частица сначала
приближается к центру отталкивания и её скорость уменьшается, пока не достигнет
своего минимума V х\ — №х\ в тот момент < = х, когда она пройдёт через центр
отталкивания .г = 0. Значение т определится из уравнения A6.21):
Vx2 —
' х 0
1 0
— |п
6
В дальнейшем скорость всё возрастает, и частица уходит в бесконечность в
положительном направлении оси х: в этом всего легче убедиться, если пред-
148
ставить закон движения A6.24) в форме
) *-" "Л» — l0l" \ '1
и принять во внимание, что
x — xochk(t—to)-\ 1-4-P- ihk[t—to)\ A6.25)
L «*о
lim thk(t— <0)=l.
/-«о
2) Пусть теперь *q — *2л:д < 0. Из формулы A6.20) мы видим, что наимень-
наименьшее возможное абсолютное значение координаты х есть
l*Ui=|/ -^o-^p: A6.26)
для этого значения | х | скорость обращается в нуль. Если хй > 0 то, как видно
и* формулы A6.24), частица с возрастающей скоростью удаляется в бесконеч-
бесконечность в положительном направлении оси х. Если же х0 < 0, то движущаяся
частица сперва с убывающей скоростью приближается к центру отталкивания
на минимальное расстояние A6.26) и, как это следует из формул A6.20) и A6.2.),
достигает его в момент времени
, ^_ 1, Е
T=fo-|-— In
к
/гх0 + хй
Затем частица с возрастающей скоростью уходит в бесконечность в отрица-
отрицательном направлении оси х: это сразу видно из уравнения движения A6.25).
3) Пусть, наконец, дг0 — АРх^ = 0. Здесь могут быть два случая; или
л-0 — Ал:в = 0 или х -\- кхо = 0. В первом случае из формулы A6.24) мы видим,
что частица с возрастающей скоростью уходит в бесконечность в положитель-
положительном направлении оси х (тан как х0 одного знака с хй, которое положительно).
Во втором случае на основании формулы A6.25) заключаем, что частица асим-
асимптотически приближается к центру отталкиванич 'с отрицательной стороны.
95. Движение под действием силы, зависящей лишь от скорости
частицы. Когда сила зависит только от скорости, т. е.
/% = /(*).
тогда в уравнении
mx=f{x) A6.27)
die
заменяем х через ~тт; мы получаем:
md'x ..
—— •= at;
fix)
отсюда, проинтегрировав, находим:
A6.28)
где А — произвольная постоянная. Допустим, что из этою уравнения мы
сумеем найти х как функцию от t-\-A, т. е.
или, иначе,
dx=${t-\-A)dt.
Тогда, проинтегрировав, найдём
что и решает задачу.
Когда из уравнения A6.28) нельзя найти х, как явную функцию
времени, можно поступить так: умножаем почленно уравнение A6,26) на
тождество xdt=> dx; получаем:
тх xdt = mx dx=f(x) dx,
или
mxdx
отсюда находим:
= ах',
^ A6.29)
где С — произвольная постоянная. Пусть из этого уравнения мы можем
найтн х, как явную функцию х:
I
следовательно,
проинтегрировав вторично, находим:
dx
1(х-\-су
это уравнение определяет х, как функцию времени и произвольных по-
постоянных С и D.
Наконец, если уравнения A6.28) н A6.29) относительно х не реша-
решаются известными приёмами, то мы можем сохранить оба эти уравнения,
„л j) так как второе определяет х как функцию от х-, а
0 до первое даёт зависимость х от времени.
Пример 40. Прямолинейное движение
весомой частицы в среде, сопротивляю-
сопротивляющейся пропорционально первой степе-
степени скорости. Направим ось х вертикально книзу
(фиг. 72). Тогда, если g — ускорение силы тяжести
и f— сила сопротивления, то
X тх = mg + /cos (x, /). A6.30)
По условию сила сопротивления пропорциональна пер-
Фиг. 72. BOg степени скорости, следовательно,
та Л
тд
A6.31)
если для удобства коэффициент пропорциональности возьмём равным кгт.
Верхний знак надо взять, когда х > 0, т. е. частица падает вниз (фиг. 72,я), а
нижний, когда х < 0, т. е. частица брошена кверху (ф|"Г. 12,Ь). Но сила сопро-
сопротивления всегда противоположна направлению движения частицы, следова-
следовательно,
cos(.*C/) = =pl; A6.32)
здесь надо взять верхний знак, когда х > 0, и нижний, когда х < 0. Объединяя
150
выражения A6.31) и A6.32), мы сможем уравнение движения A6.30) переписать
в следующем виде:
"х = g— k*'x;
это уравнение справедливо независимо от того, в каком направлении движется
частица. Заметим, что уравнение движения сохранило бы свой вид для двух
направлений при всякой силе сопротивления,. пропорциональной нечётной
степени скорости. Разделив переменные, дадим полученному уравнению вид:
g— k?x
отсюда, проинтегрировав, найдём:
In (g— №х) = — k4-\- In С,
или
g— &'х=Се~ш.
Произвольную постоянную С определим из начальных условий: пусть при
tf=t,) = 0 имеем х=хв н х = х<,', тогда
и, следовательно,
После вторичного интегрирования и определения произвольной постоянной
найдём:
Таким образом, движение частицы асимптотически приближается к равноиер-
ному со скоростью ~г, не зависящей от начальных условий. Положение дви-
движущейся частицы при t весьма большом мало отличается от того, которое она
занимала бы, если бы, выйдя из начального положения х = ^о4"^—TJ > дви"
г
галась равномерно со скоростью -^.
П р и м е р 41. П р я м о л и н е й н о е движение весомой частицы
вереде, сопротивляющейся пропорционально второй сте-
степени скорости. Направим ось х вертикально книзу. Тогда уравнение дви-
движения при обозначениях предыдущего примера будет
mx—mg+fcos{x, f).
В настоящем случае f=k2mx2, если коэффициент пропорциональности равен
Шт. Что же касается косинуса угла (х, f), то по предыдущему
причем верхний знак надо взять для движения вниз, а нижний для движения
вверх. Таким образом, мы получаем для движения вниз уравнение
x
а для движения вверх
x
Одно уравнение переходит в другое при помощи замены к на Ы, где! =УЛ-- 1.
Будем интегрировать уравнение A6.33). Умножив обе части на dt, полч-
чим:
151
отсюда, проинтегрировав, найдём:
,np±4
У g—kx
Положив to~O, определяем произвольную постоянную С:
с== •/?
следовательно, найденный первый интеграл можно переписать так:
-k'x V~g—kx\
Разрешив это уравнение относительно х, найдем;
или
x = ^1К j-sh ^ VI t + ^i0 ch A VI t
k Y~hky~t + k$kVt
Приступая к вторичному интегрированию, замечаем, что числитель правой части
с точностью ло постоянного множителя равен производной от знаменателя; по-
поэтому, разделив в уравнении A6.35) переменные, можем написать:
— 1 d {Vkth k YJt 4- kxij sli k Vgt)
— 1 d {V
Отсюда, проинтегрировав и выразив произвольное постоянное через на"а1ыше
данные, получаем:
х = хо+- infchkVIt+^shkVgt). A6.36)
к2 \ У g I
Из закона скорости A6.35) видно, что движение частицы асимптотически при-
VI
ближается к равномерному со скоростью !—?-, не зависящей от начальных ус-
условий.
Чтобы получить закон движения при движении снизу вверх, подставляем в
формуле A6.36) вместо k величину Ы\ имея в виду известные формулы
ch?/ = cos2 и shzi — t sinz,
получим:
х = ха + - inlcoskVgt —^±sinkygt). A6.37)
А2 V Vg I
В этом движении скорость частицы станет равной нулю в момент
1 , / kxo\
т = —= arctg -pS=
"Vg \ Vg)
следовательно, с этого момента надо пользоваться формулой A6.36), причём
х0 надо заменить значением правой части выражения A6.37) для <=т, а х0 по-
положить равным нулю.
152
Пример 42. В виде примера иа второй приём интегрирования уравнения
движения A6.27) решим такую задачу: весомая частица брошена кверху с на-
начальной скоростью vt, и движется в среде, сопротивляющейся пропорционально
второй степени скорости; определить, с какой скоростью а точка вернётся в
первоначальное положение. Сначала движение определяется дифференциальным
уравнением A6.34)
Умножив его почленно на тождество xdt — dx, мы получим после очевидных
преобразований:
х dx ,
т =dx\
отсюда, проинтегрировав, мы найдём:
ln(g + A2*') = 2A»j:-f-C1. A6V38)
Если начало координат поместим в начальном положении частицы, т. е. поло-
положим лг0 = О, то для определения постоянной интегрирования С мы получим
уравнение
06-39)
Вычтя почленно равенства A6,38) и A6.39) и произведя потенцирование, мы по-
получим следующий закон скорости при движении частицы вверх:
Из этого уравнения мы найдём координату хл той точки, в которой скорость
движущейся частицы обратится в нуль; полагая л: = 0, имеем
S— е2И*х, A6.40)
Теперь найдём связь между скоростью и положением частицы при её дпи-
жении вниз; для этого заменим в уравнении A6.38) № на —№\ т»гда получим:
1п(?— Рх*) — — 2*алг + С,. A6.41)
Произвольную постоянную определяем, замечая, что при Л' = 0 координата дг
имеет значение х\\ таким образом,
1п?=—2#*i +Са. A6.42)
Почленным вычитанием уравнений A6.41) и A6.42) исключим С2; мы получим:
гг Ь2 у-2
Л 2_?_ =
g
Скорость и, с которой частица вернётся в начало координат, найдётся, если
в последнем уравнении положим х — 0; таким образом,
или, на основании равенства A6.40),
g — *2«2_
g
Отсюда окончательно находим:
??=: -
V
153
XVII. ПРОСТЕЙШИЕ СЛУЧАИ КРИВОЛИНЕЙНОГО ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ЧАСТИЦЫ
96. Исследование криволинейного движения частицы, сводя-
сводящееся к задаче о нескольких прямолинейных движениях отдельных
точек. Если равнодействующая сил, приложенных к движущейся частице,
такова, что
Fx = fxV, х, х),
Fy = A(t, У, У),
то, очевидно, каждое из уравнении движения
mx = Fx = fx(t, х, х),
my = Fy = A(t, У, У),
mz = Fz = /s(t, z, г)
может быть проинтегрировано независимо от других, и, следовательно,
задача о движении рассматриваемой частицы сводится к решению трёх
задач о прямолинейном движении трёх точек, именно, проекций движу-
движущейся частицы на оси координат. Простейшие из таких движений
мы и рассмотрим в настоящей главе.
97. Криволинейное движение весомой частицы. Направим ось z
вертикально кверху, ускорение силы тяжести обозначим через g; тогда урав-
уравнения движения будут
тх=0, ту = 0, mz = — mg.
Непосредственно проинтегрировав их и определив произвольные постоян-
постоянные, получаем
x = xo-\-xo(t—t0);
У= \{
Исключив время, находим уравнения траектории:
У— Уо=^-(х — х0),
Возьмём начало координат в начальном положении частицы, тогда
ло:=.Уо = 2:о —0; плоскость Oyz проведём через направление началь-
начальной скорости; в таком случае будет хй = 0; угол начальной скорости
v0 с осью у (угол возвышения) обозначим через а, причём а считаем
от оси у-ов к положительному направлению оси z (кверху). Тогда
предыдущие уравнения траектории примут вид
х=р. 2 = tga.^_g_. A7Л)
154
Как видим, траекторией служит вертикальная парабола, обращенная
выпуклостью кверху.
Положим, что данная материальная частица представляет собой ар-
артиллерийский снаряд, движущийся в безвоздушном пространстве; решим
такую задачу: найти угол возвышения, под которым надо пустить сна-
снаряд из начала координат с данной начальной скоростью для того, чтобы
он попал в данную точку (rj, С) плоскости Oyz.
Положив в уравнении A7.1) .y = J] и z=? и решив его относи-
относительно tga, мы найдём для tga два значения:
ч
Таким образом, мы можем довести снаряд до назначенной цели по двум
траекториям (настильной и навесной). Но для того, чтобы за-
задача была возможна, данная точка (т\, С) должна лежать внутри параболы
Для точек, лежащих на этой параболе, обе траектории, настильная
и навесная, сливаются в одну.
98. Притяжение частицы неподвижным центром прямо пропор-
пропорционально расстоянию. Поместим притягивающий центр в начале ко-
координат. Тогда, если г — радиус-вектор частицы, то сила F, к ней при-
приложенная, будет иметь выражение
Следовательно, по сокращении на от, получаем такие уравнения дви-
движения:
x — — k2x; y = — k2y; z=—&z.
Общий интеграл первого уравнения был уже нами найден [см. фор-
формулу A6.19) на стр. 147]:
Аналогично получим интегралы второго и третьего уравнений:
у =у0 cos kt -f- ^- sin kt,
z = z0 cos kt-\--?- sin kt.
A7.3)
Направим ось х так, чтобы она проходила через начальное положение
частицы; в таком случае будет уй = 20 — 0; кроме того, проведём пло-
плоскость Оху через направление начальной скорости; тогда будет zo = O,
и уравнения A7.2) и A7.3) примут вид
x = x0coskt-\-Qsinkt, y=^f-s\nkt, 2 = 0.
Последнее уравнение показывает, что траектория, которую описывает
155
частица, будет плоская кривая. Чтобы исключить время из первых двух
уравнений, разрешаем их сперва относительно sin kt и cos kt:
sltikt?; cosk x
Уо Хй ^ Уо
найденные выражения возвышаем в квадрат и складываем; получаем:
+4
Это — уравнение кривой второго порядка, отнесенное к центру; составив
дискриминант Д, убеждаемся, что он отрицателен:
9 9 ' • 9
о-^о Уо
Таким образом, траекторией служит эллипс, центр которого лежит
в притягивающем полюсе.
99. Отталкивание частицы неподвижным центром прямо про-
пропорционально расстоянию. Берём опять начало координат в центре
отталкивания; тогда подобно тому, как это было сделано в предыдущем
параграфе, приходим к уравнениям:
х = k?x; у = k?y; z = kPz.
Общий интеграл первого^ уравнения мы уже находили [формула A6.24)
на стр. 148]:
при условии, что ^0 = 0. По аналогии имеем для других координат
z ~ zoch kt -\- -~- sh kt.
Проведём ось Ох через начальное положение частицы тогда будет
yo = zo=:O; плоскость Оху проведём через начальна10 скорость, в таком
случае будет zo = O; уравнения движения примут вид
у=к. sh kt,
2 = 0.
Отсюда, проведя исследование подобно тому, как это было сделано
в предыдущем параграфе, лег'ко убеждаемся, что траекторией служит
гипербола с центром в отталкивающем полюсе:
156
XVIII. ОБЩИЕ ЗАКОНЫ ДИНАМИКИ: ЗАКОН ИЗМЕНЕНИЯ
КОЛИЧЕСТВА ДВИЖЕНИЯ, ЗАКОН ИЗМЕНЕНИЯ КИНЕТИЧЕСКОГО
МОМЕНТА, ЗАКОН ИЗМЕНЕНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
100. Закон изменения количества движения и кинетического
момента материальной частицы. Напишем основное уравнение динамики:
mw — F. A8.1)
В силу постоянства массы величина mw, стоящая здесь в левой части,
может быть представлена как производная по времени от количества
движения two (§ 83), т. е.:
?(mv) = mw. A8.2)
С другой стороны, мы видели, что производная от скользящего вектора,
равного скорости v частицы, есть скользящий вектор, равный её уско-
ускорению w (в смысле § 51). Вследствие равенства A8.2) таким же обра-
образом между собой связаны количество движения mv и величина mw,
т. е. согласно равенству A8.1) количество движения и сила. По-
Поэтому мы можем утверждать, что, во-первых, производная по вре-
времени от количества движения частицы равна силе
±
A8.3)
и, во-вторых, производная по времени от момента количе-
количества движения, или так называемого кинетического момента
ч а ст и ц ы относительно некоторого центра, равна моменту силы
относительно того же центра:
§-t(rXmv)=rXF. A8.4)
Для количества движения, кинетического момента и момента силы
мы в дальнейшем часто будем употреблять обозначения:
K=mv, A8.5)
равенства A8.3) и A8.4) в этих обозначениях перепишутся так:
G = L. A8.8)
Первое положение называется законом изменения количе-
количества движения, второе носит название закона изменения ки-
кинетического момента. В справедливости этих положений можно
убедиться и непосредственно: формула A8.3) получается сопоставле-
157
яием равенств A8.1) и A8.2); для доказательства соотношения A8.4)
достаточно выполнить фактически дифференцирование, указанное в левой
части: в самом деле,
аервое слагаемое в правой части равно нулю вследствие коллинеар-
коллинеарности сомножителей ~ и ото, множитель же ^ (ото) во втором слагае-
слагаемом в силу уравнения A8.1) равен силе F; таким образом, действи-
действительно,
l(r
Формулы A8.3) и A8.4) нетрудно записать в проекциях на оси де-
декартовых координат; соответственно имеем
?Fx, ±(my)=Fy, ^(mz) = Fz A8.9)
== xFy—
(,18.10)
Каждое из последних трёх равенств говорит, что производная по
времени от кинетического момента относительно не-
некоторой оси равна моменту силы относительно той же
оси.
Закону изменения количества движения можно дать другую форму.
Умножив уравнение A8.7) на dt, получим;
dK = Fdt. A8.11)
Проинтегрируем левую и правую части в соответствующих друг другу
пределах /f0, К и t0, f, будем иметь
A8.12)
векторная величина Fdtносит название элементарного импуль-
с а силы, а интеграл I Fdt называется импульсом силы за
i
промежуток времени (t0, t). Таким образом, мы доказали, что
дифференциал количества движения равен элементар-
элементарному импульсу силы, а приращение ко-.ичества движе-
движения за некоторый промежуток времени равно импульсу
силы за этот промежуток времени. Формулы A8.11) и A8.12)
158
нетрудно записать в проекциях на оси координат:
d(mx)=Fxdi, d(my)=Fydt, d{mz)=i
i
mx — mx0 =
my — my0 = \ F dt,
mz
z — mz0 = \ F dt.
A8.13)
Заметим, что направление импульса, вообще говоря, отлично от на-
направления силы F. Если сила постоянна, т. е. F= const., направление
импульса совпадает с направлением силы, потому что тогда
Закону изменения кинетического момента тоже часто дают другую
форму. Заметим, что кинетический момент частицы равен удвоенному
произведению её массы на секторную скорость [ср. формулу F.32) на
стр. 62]:
G = rXmv = 2mS. A8.14)
На этом основании формулы A8.8) и A8.10) можно переписать так:
2mS = L A8.15)
и
2mSx = Lx, 2т S— L, 2т Sz= Lz, A8.16)
т. е. удвоенное произведение массы частицы на её сек-
секторное ускорение (относительно некоторого полюса или относительно
Оси) равно моменту действующей на частицу силы (соот-
(соответственно относительно того же полюса или той же оси). Так как сек-
секторная скорость представляет собой быстроту ометания некоторой площади,
то эту форму закона изменения кинетического момента часто на-
называют теоремой площадей. Третье из равенств A8.16) особенно
просто записывается в цилиндрических координатах [см. формулу F.34)
на стр. 62]:
m~(.f^) = Lz. A8.17)
В заключение заметим, что, сравнивая равенство A8.8) с выражением
скорости частицы через её радиус-вектор, т. е. с формулой
мы можем дать закону изменения кинетического момента следующую
кинематическую интерпретацию: скорость точки, чертящей годограф
кинетического момента частицы около неподвижного полюса, численно и
по направлению равна моменту (относительно того же полюса) силы, дей-
действующей на частицу. Это положение известно под названием теоремы
Резаля (Resal).
159
101. Интегралы количества движения. Если во всё время движения
действующая на частицу сила равна нулю,
F=~cw7t. = 0,
то, как видно из уравнения A8.3), количество движения частицы остаётся
постоянным:
mv = c, A8.18)
или, в проекциях:
A8.19)
Таким образом, в рассматриваемом случае закон изменения количества
движении даёт один векторный, или, что всё равно, три скалярных пер-
первых интеграла дифференциальных уравнений движения частицы (§ 91).
Если во всё время движения проекция силы на какую-либо ось ос-
остаётся равной нулю, например,!
F^™ const. -=0,
то мы получаем один скалярный первый интеграл
Необходимо заметить, что так как масса частицы предполагается по-
постоянной, то в случае постоянства количества движения то или его про-
проекции тох и скорость v частицы или соответственно её проекция vx также
постоянны.
102. Интегралы кинетического момента (интегралы площадей).
Пусть сила, действующая на частицу, такова, что её момент относитель-
относительно начала координат во всё время движения равен нулю:
Сила, обладающая этим свойством, называется центральной силой,
точка, относительно которой момент равен нулю, — центром силы, а
движение, .совершаемое под действием такой силы, — центральным
движением. В рассматриваемом случае, как видно из уравн A8-8),
кинетический момент относительно начала координат остаётся постоянным:
G = rXmv = C. A8.20)
Следовательно, постоянными будут и кинетические моменты относительно
всех трёх осей координат:
Gy = m {z'x — xz)=Cy, \ A8.21)
Gz=m{xy—yx) = C2 J
Таким образом, в случае центральной силы закон изменения кинетиче-
кинетического момента даёт один векторный, или, что то же, три скалярных
первых интеграла дифференциальных уравнений движения частицы.
Согласно равенству A8.14), полученные интегралы A8.20) и A8.21)
говорят о том, что в случае центральной силы имеет место постоянство
секторной скорости частицы относительно начала координат, а следова-
160
тельно, и относительно трёх координатных осей:
S = §;, A8.22)
*Х = Ъ Sy-k' *.= Ь П8.23)
эти выражения носят название интегралов площадей. Третье из
равенств A8.21) особенно удобно записывается в цилиндрических коор-
координатах:
f у = const. A8.24)
Следует заметить, что в изучаемом нами случае кинетический момент,
а значит, и секторная скорость постоянны не только относительно
осей координат, но также относительно любой оси Ои, проходя-
проходящей череч начало координат. Действительно, пусть и0 — единичный век-
вектор этой оси. Тогда секторная скорость относительно этой оси равна
Из последнего выражения видно, что наибольшую секторную скорость
частица имеет относительно оси, совпадающей с вектором C=G. Наи-
Наименьшая по абсолютной величине секторная скорость, именно, равная
нулю, соответствует осям, лежащим в плоскости, перпендикулярной к
направлению G.
В случае центрального движения легко получить и один второй
интеграл уравнений движения (§ 91). Действительно, запишем уравнение
A8.20) в форме
С~г X mv
и умножим обе его части скалярно на радиус-векгор г. Правая часть,
как векторно-скалярное произведение, в котором два сомножителя колли-
неарны, будет равна нулю (§ 5, а), и мы получим:
С-г=0, A8.25)
или
О. A8.26)
Геометрически этот второй интеграл изображает плоскость, в которой
располагается траектория, или, как иначе говорят, орбита движущейся
частицы. Итак, траекторией частицы, совершающей движение под действи-
действием центральной силы, является плоская кривая, расположенная в пло-
плоскости, проходящей через центр силы и перпендикулярной к кинетиче-
кинетическому моменту . G: последнее следует из уравнения A8.25), так как
C=G. Сама плоскость служит геометрическим местом осей, относительно
которых секторная скорость частицы равна нулю.
Положим теперь, что сила, приложенная к материальной частице, во
всё время движения пересекает некоторую прямую постоянного направле-
направлении. Примем эту прямую за ось Oz; тогда будем иметь Z._, = const. = 0,
а следовательно, согласно равенствам A8.21), мы в этом случае получим
один первый интеграл:
Ох=т{ху—ух)=Сг,
11 Г.К.Суслов 161
т. е. кинетический .момент частицы относительно оси z постоянен. Полу-
Полученное соотношение, разумеется, можно записать как интеграл площа-
площадей:
Допустим, что существуют два интеграла кинетического момента и
что, например,
Ly = L, = const. = 0,
Тогда, вспомнив, что L — rXF, будем иметь равенство:
Умножим обе его части векторно на z°; справа получим нуль, а левую
часть прообразуем по известной формуле векторно-векторного произве-
произведения трёх векторов [формула A.36) на стр. 12]; будем иметь:
или
Умножив последнее равенство векторно на г, получим:
zrXF=0.
Исключая из рассмотрения уже изученный случай г X F= 0, когда су-
существует три интеграла кинетического момента, видим, что единственным
случаем, когда из интегралов A8.21) существует только два интеграла,
является тот, когда z.= 0, т. е. когда частица движется в плоско-
плоскости Оху.
103. Зависимость между интегралами количества движения и
кинетического момента. Интегралы A8.18) и A8.-20), т. е.
c = mv \
и \ A8.27)
C=rXmv, )
получающиеся в некоторых случаях' из законов изменения количества
движения и кинетического момента, не являются независимыми между со-
собой. Действительно, почленно перемножив скалярно равенства A8.27),
мы получаем соотношение
с-С=0,
или, перейдя к проекциям,
^ + 'А+:А=0. A8.28)
Основываясь на геометрическом смысле констант с и С, легко можно
было бы показать, что других зависимостей между ними не существует.
Если, вместо интегралов A8.27), иметь в виду эквивалентные им скаляр-
скалярные интегралы A8.19) и A8.21), то можно высказать следующее поло-
положение: между шестью первыми интегралами A8.1,9) и A8.21) суще-
существует одна зависимость A8.28). Следовательно, законы изменения
количества движения и кинетического момента могут дать пять незави-
независимых первых интегралов. Шестой независимый интеграл, как мы увидим,
даёт в некоторых случаях закон изменения кинетической энергии.
162
104. Закон изменения кинетической энергии. Возьмём основное
уравнение динамики
mw = F
и умножим его скалярно на dr; мы получим:
mw-dr = Fdr.
Преобразуем левую часть этого равенства; имеем
mw- dr= m j-(- dr—m dv Yt = m dv •*> — d ( -j- ) = flf(~ ' '
На основании этого результата предыдущее уравнение можно переписать
так:
(?f) = F-dr. A8.29)
Величина ^Щ-, т. е. половина произведения массы частицы на квад-
рат её скорости называется кинетической энергией частицы или, по
Лейбницу (Leibnitz), живой-силой. Мы будем обозначать'её буквою 7":
^ A8.30)
Скалярное произведение силы на элементарное перемещение, т. е.
Fdr=F \'dr | cos {F^dr) = F\ ds\ cos {F?v),
косит название работы силы на элементарном перемещении
или, короче, элементарной работы силы. Элементарную работу
мы будем обозначать d'A:
d'A = Fdr;. A8.31)
штрих у буквы d ставится для того, чтобы показать, что элементарная
работа, вообще говоря, не является полным дифференциалом некоторой
функции. Выразив скалярно% произведение F-dr через проекции сомно-
сомножителей, можно элементарную работу представить ещё в следующем
виде:
d'A = Fxdx-\-Fydy-\-Fzdz. A8.32)
С помощью введённых обозначений равенство A8.29) перепишется
так:
dT=d'A, A8.33)
т. е. дифференциал кинетической энергии частицы ра-
равен элементарной работе действующей на неё силы.
В этом и состоит закон изменения кинетической энергии частицы в диф-
дифференциальной форме.
Если мы проинтегрируем равенство A8.33) между пределами, соот-
соответствующими некоторым двум моментам /0 и t, то получим:
Т— 70 = Д A8.34)
где То и Т— значения кинетической энергии частицы в моменты t0 и t,
а буквой А обозначен криволинейный интеграл от F-dr, соответствую-
соответствующий промежутку времени (t0, t) и взятый по пути следования частицы;
11* 163
если начальное и конечное положения частицы соответственно обозначить
Во и В, то, следовательно,
А= j F-dr. A8.35)
Величина А, таким образом определённая, носит название работы
силы F на пути В0В. Равенство A8.34) выражает закон изменения
кинетической энергии частицы в интегральной (или конечной) форме и
говорит, что приращение кинетической энергии частицы
за некоторый промежуток времени равно работе дей-
действующей на неё силы за тот же промежуток времени.
Размерность работы выражается символом
¦¦ .-, длина8-масса
' ' время8
Единицей работы, а следовательно, в силу равенства A8.34) и еди-
единицей кинетической энергии частицы служит эрг. Зависимость эрга от
основных единиц следующая:
см2 г
1 эрг = 1 дина см = 1
"сек2
105» Выражение работы силы через её импульс. Напишем урав-
уравнение, выражающее закон изменения количества движения частицы [см.
формулы A8.5) и A8.12)]:
— щой = \ Fdt.
i
то й
i
Умножим это равенство скалярно на v и на vQ; получим:
t
Fd^- v,
= \
i
l \0
i
Сложим эти равенства и результат поделим на 2; тогда найдём:
imfl mv\ С *>a-\-v
~2~~~ 2 === ] ' *'* 2 ' * A8.36)
или, на основании теоремы A8.34),
b± A8.37)
таким образом, работа силы за какой-либо промежуток времени равняется
скалярному произведению импульса силы за тот же промежуток времени
на полусумму начальной и конечной скоростей. Эта теорема принадлежит
лорду Кельвину (Kelvin).
164
106. Силовая функция. Интеграл энергии. Потенциальная энергия.
Положим, что сила, действующая на материальную частицу, такова, что
проекции её на координатные оси могуг быть представлены как частные
произзодные по соответственным координатам от некоторой функции ко-
координат U(х, у, г), называемой в этом случае силовой функцией;
т. е. пусть
F ы ди ди
х дхл У ду г dz v '
В этом случае элементарная работа силы становится полным дифферен-
дифференциалом этой функции координат; действительно, по формуле A8.32)
имеем
% % %dz. A8.39)
или, в других обозначениях,
F-dr=dU. A8.40)
Уравнение A8.33) теперь принимает вид
dT=dU
и приводит к первому интегралу дифференциальных уравнений движения,
называемому интегралом энергии, а именно,
T=U+h, A8.41)
где h— произвольная постоянная.
Равенствами A8.38) на силу F накладываются некоторые ограничения.
Чтобы получить их в явном виде, вспомним, что если у функции нескольких
переменных существуют непрерывные вторые частные производные, то
их значения не зависят от порядка дифференцирования. Отсюда соответ-
соответственным дифференцированием равенств A8.38) и последующим прирав-
приравниванием левых частей получим следующие соотношения:
dFy_dFz dFz__dFx dFx_dFy MR42.
~3J-^' SF—ЗГ' ~ду~~дх • AЬЛЛ)
Мы доказали необходимость условий A8.42) для существования силовой
функции. Можно было бы показать, что эти условия являются также и
достаточными.
Вместо силовой функции U иногда рассматривают так называемую
потенциальную функцию V, связанную с силовой функцией
зависимостью
V=—U.
Как видно из равенств A8.38),* силовая функция, а следовательно, и по-
потенциальная функция определяются с точностью до произвольного посто-
постоянного -слагаемого. Потенциальная функция с фиксированной константой
носит название потенциала. Однозначная потенциальная функция
иначе называется потенциальной энергией частицы. Сила, удов-
удовлетворяющая условию A8.38), называется потенциальной силой.
Введя потенциальную энергию, можно уравнение A8.41) -переписать
так:
T+V=h. A8.43)
165
Сумму кинетической и потенциальной энергии называют полной ме-
механической энергией частицы: уравнение A8.43) Выражает собой
постоянство механический энергии частицы и носит назва-
название закона сохранения механической энергии. Силы, при которых имеет
место закон сохранения механической энергии, носят название консер-
консервативных сил.
Заметим, что работа силы, имеющей однозначную силовую функцию,
зависит лишь от начального и конечного положений Bq и В материаль-
материальной частицы и вовсе не зависит ни от промежуточных её положений, ни
от закона её движения; действительно,
и
А= [ F-dr=
fa
или
A = U{x,y,z)—U(xo,yo,zo), A8.44)
если x0, y0, z0 и x, y, z — координаты частицы в её начальном и ко-
конечном положениях BQ и В., Из выражения A8.43) мы, кроме того, ви-
видим, что всякий раз, когда частица проходит через какое-нибудь ироиэ^
вольно выбранное данное положение, она имеет в нём одну и ту же кине-
кинетическую энергию, а значит, и одно и то же численное значение скорости.
107. Силы, направленные по прямым, соединяющим частицу
с некоторыми неподвижными центрами, и зависящие лишь от рас-
расстояния частицы от этих центров. Одним из самых важных примеров
сил, имеющих силовую функцию, служат силы притяжения или отталки-
отталкивания частицы от неподвижных центров пропорционально некоторой
функции расстояния. Пусть г — радиус-вектор некоторой частицы М,
а г,— радиус-вектор неподвижной частицы Mv, которая действует на
частицу М с некоторой силой F4, направленной вдоль прямой MJVI и
по своей величине зависящей от расстояния рч = h\,J\H. Для силы Fy м"*
очевидно, можем написать следующее выражение:
где tpv(p4) — заданная функция расстояния р,, а р°—орт вектора1 рч=ч
При выбранном направлении вектора р„ сила Z7, будет силой отталкива-
отталкивания или силой притяжения, смотря по тому, будет ли <bv (pv) ^> 0 или
Чч(?-»)<С.®- Иначе выражение A8.45) можно написать следующим
образом:
Если центров, подсобных М^, имеется всего п, то равнодействующая F
сил, приложенных к частице М, будет
Отсюда для элементарной работы равнодействующей мы получаем выра-
выражение
166
Теперь заметим, что
Продифференцировав это равенство, мы находим:
(г — г,) • dn=^ pv • dp,.
Следовательно, элементарная работа равнодействующей может быть выра-
выражена так:
Если теперь неопределённый интеграл \ 0v(pv) dp, обозначим через Ф„(р,),
т. е. положим
то, очевидно, получим:
d'A = d% Ф„
v=-i
и, следовательно, силовая функция U будет иметь выражение:
U= Ф -(- const. A8.46)
Если центры М, притягивают по ньютонову закону, то по выше ска-
сказанному имеем
C?v(Pv)= 2 •
Pv
где mv— массы, сосредоточенные в центрах Afv, а № — множитель пропор-
пропорциональности; следовательно,
и силовая функция равна
=# X — +const-
Если центры притягивают прямопропорционально расстоянию, то можно
положить
?, (р»)=
отсюда
Ф, = — Ь2Щ pv^Pv = — ~9 т^2,-\-const.,
и, следовательно,
л
Для сил отталкивания пропорционально расстоянию мы нашли бы:
л
167
Как предельный случай от выше изученных может рассматриваться
постоянная сила F=c; а именно, в том случае можно считать, что ча-
стииа М находится под действием единственной силы, проходящей через
некоторый це^тр Mo, причём последний удалился в бесконечность.
Впрочем, нетрудно непосредственно подсчитать, что если
F=c,
то
U'= с • г + const.,
где г—радиус-вектор точки с координатами х, у, z.
В частности, если речь идёт о силе тяжести, действующей на ча-
частицу массы т, а ось z направлена вертикально вверх, то в той мере,
в какой мы силу тяжести можем считать постоянной, силовая функция
имеет выражение
U= — m>z-f const. A8.48)
Следовательно, потенциальная энергия весомой частицы в этом случае
равна
V=mgz + const. D8.49)
408. Функция точки. Поверхность уровня. Градиент. Силовая и
потенциальная функции для материальной частицы принадлежат к числу
так называемых функций точки, т. е. функций, значения которых
зависят от положения частицы, т. е. от радиуса-вектора - г, или,
иначе говоря, от её трёх координат х, у, z. В порядке обобщения мы
теперь будем считать, что рассматриваемая функция точки может также
зависеть явно от времени t. Таким образом, если иам дана какая-либо
функция точки <р (х, у, z, t), то каждой точке пространства (или каждому
радиусу-вектору) и каждому моменту времени соответствует некоторое
значение этой функции. Часть пространства, состоящая из всех точек,
в которых функция ср 'принимает определённые вещественные значения,
называется поле,м функции <р; так, например, дг\я функции
<p=|/j?a — х2—у2~^г'^ полем служит объём шара радиуса, равного
R, с цгнтром в начале координат. Если функция <р не содержит вре-
времени (, поле называется стационарным.
Геометрическим местом точек, для которых функция tp для данного
момента времени имеет одно и то же значение С, служит поверхность
Ф (х, у, z, t) = С,
называемая поверхностью уровня дли данной функции (р. Всё
поле функции <р надо представлять себе заполненным Аепрерывным мно-
множеством бесконечно-близких друг к другу поверхностей уровня.
В каждой точке поля можно построить вектор, тесно связанный с
данной функцией, а именно вектор, проекции которого на координатные
оси соответственно равны частным производным " от данной функции
jp, g^, =5=. 9toj вектор носит название градиента функции tp и
обозначается grad tp; следовательно, по сказанному,
gadf^tf+^y+S*0- A8.50)
168
Почленно умножив это равенство скалярно на тождество
dr = dx -xb + dy-yo-^dz-z0,
мы получаем:
или
A8.51)
grad ср • dr = 8cp, A8.52)
если &р обозначить полный дифференциал функции ср, вычисленный в пред-
предположении4 неизменности времени t. В частном случае стационарного
поля, очевидно,
grad ср • dr = d'o. A8. 53)
Равенства A8.52) или A8.53), как эквивалентные исходному равенству
A8.50), могут также служить определением понятия градиента.
Из равенства A8.50) мы видим, что по модулю градиент равен
Это выражение часто обозначают по Ламе (Lam!) Дхср и- называют
дифференциальным ' параметром первого порядка
функции ср:
grad(f
109. Производная от функции точки по данному направлению. Про-
Проведём через взятую на поверхности уровня точку М (х, у, z) какую-нибудь
кривую (фиг. 73). Касательная к ней в точке М пусть характеризуется
единичным вектором s°. Возьмём на этой кривой
другую точку М'{х-{тА.х, у-{-\у, z-\-Lz) и
Длину дуги ММ'-< обозначим Д$.- Если точка М
не принадлежит к числу особенных точек функции
<р, то- значение (р-|~ Дер этой функции в точке Л!',
вычисленное для того же момента, при бесконечно
Малом' As будет-бесконечно мало отличаться от её
значения ср в точке М. Рассмотрим предел отно-
ШеЧ?*Я Зл в том предположении, что точка М'
неограниченно приближается к М; этот предел,
если он существует, носит название производной от функции ср
по направлению s° и обозначается через —¦; в частном случае,
когда функция ср не зависит от времени, пишут также ~. Таким обра-
образом,
iv ,. 4»
т1 = lim —- .
"тОбы вычислить этот предел, заметим, что согласно теореме Тейлора
(Taylor) приращение Дер функции ср равно
169
где е — члены высшего порядка малости относительно As; поэтому
или, после перехода к пределу,
if df dx ,df dy df dz
$s dx ds dy ds dz ds *
что можно написать также в виде
Это равенству может также служить формальным определением про-
производной от скалярной функции <р (je, у, z, t) по направлению s°; с таким
определением этого понятия мы уже встречались [формула A0.5) на
стр. 104]. Имея в виду дальнейшие приложения, заметим, что аналогич-
аналогичным образом вводится производная от векторной функции а(х, у, z, t)
по направлению s°; именно,
«о
если функция а не зависит от времени, то ^здесь также вместо =-
da
пишут -т- .
Примем теперь во внимание, что «частные производные, стоящие в пра-
правой части формулы A8.55), являются проекциями градиента, а скалярные
произведения—проекциями единичного вектора s° на координатные оси;
на этом основании равенство A8.55) можно написать в. следующем виде:
v^=:grad ^ • s . (8.56)
Таким образом, производная от функции точки по данному направлению
равна проекции градиента на это направление.
Из последней теоремы вытекают следующие свойства градиента.
Пусть в качестве вектора s°, в направлении которого берётся производ-
производная, взят единичный вектор т°, расположенный в касательной плоскости
к поверхности уровня. Так как для всех точек поверхности уровня функ-
функция <р имеет одно и то же значение, то производная -Л в рассматривае-
рассматриваемом случае равна нулю, и потому
grad tp • т° = 0; A8.57)
следовательно, градиент перпендикулярен к касательной плоскости, или,
иначе говоря, направлен по нормали к поверхности уровня. Заметим, да-
далее, что производная г^ положительна, если функция <р возрастает в
направлении s°, и отрицательна, если функция <р убывает; отсюда мы
находим, что градиент направлен по нормали к поверхности уровня в
сторону возрастания функции (р, т. е. совпадает с так называемым по-
положительным направлением нормали к поверхности уровня. На осно-
170
ваши сказанного получаем следующее выражение для единичного век-
вектора »° положительной нормали:
Igrad^
Igradipl l '
Кроме того, формула- A8.56) при s°=n° даёт
|j = |grad<p|, A8.59)
т. е. производная от функции точки по положительной нормали поверх-
поверхности уровня равняется модулю г адиента. Отсюда для самого градиента
получаел выражение
Наряду с производной от функции точки по данному направлению
вводят иногда понятие о дифференциале функции по данному направле-
направлению; этЪ делается так же, как в отношении дифференциала функции
одного независимого переменного: именно, полагают
$<р=|?&?. A8.60)
Понятие о дифференциале по данному направлению позволяет смотреть
на производную Л, как на отношение величин &р и is. С этой точки
OS
зрения формула A8.59) допускает следующую геометрическую интерпре-
интерпретацию. Станем строить семейство поверхностей у = С таким образом,
чтобы параметры их возрастали всегда на одну и ту же величину, т. е.
чтобы iC или, что то же, &р. для всяких двух соседних поверхностей
было одним и тем же. Тогда, как показывает формула A8.59), градиент
по своей абсолютной величине будет обратно пропорционален расстоя-
расстоянию in между смежными поверхностями. - В этом состоит теорема
лорда Кельвина (Kelvin).
Если построим семейство кривых, ортогональных к прверхностям
уровня, то, по доказанному, касательные к этим кривым определят собой
направления градиента в каждой точке области. Дифференциальные урав-
уравнения рассматриваемых кривых мы получим, если выразим коллинеар-
коллинеарность элемента dr кривой и градиента; следовательно,
gradtp х rfr=0,
или, согласно формуле A8.50), в скалярной форме:
dx dy dz
дх ду dz
Пример 43. Рассмотрим функцию точки частного вида, когда она зави-
зависит- только от расстояния точки" от начала координат, или, иначе говоря,
от Модуля её радиуса-вектора; т. е. пусть
г«* , f=_^
171
Поверхностями уровня в этом случае, очевидно, будут концентрические шаро-
шаровые поверхности, а линиями, им ортогональными, прямые, проходящие через
начало координат.
Найдем градиент функции у (г). Воспользуемся формулой A8.50), причём
частные производные будем вычислять по правилу дифференцирования слож-
сложных функций, принимая за промежуточное, переменное расстояние г; имеем
/дг ^..дг дг
или
--^-r*. A8.61)
110. Свойства силовой функции как функции точки. Приложим
всё сказанное в предыдущих параграфах к силовой функции. Градиент
от силовой функции, очевидно, представляет »собой силу, которая была
бы приложена к движущейся частице, если бы она занимала рассматри-
рассматриваемое положение в поле силовой функции":
f= gradf/. A8.62)
Отношение этой силы к массе частицы называется напряжением
поля в рассматриваемой точке. Если масса частицы равна единице,
то напряжение поля численно равно модулю силы, т. е. равно
производной от силовой функции по направлению положительной нормали
к соответственной поверхности уровня. Вообще производная от силовой
функции по какому-либо направлению равна проекции на это направ-
направление силы, с которой действует поле на массу, находящуюся в рассмат-
рассматриваемой точке поля. Когда построено семейство поверхностей уровня, то по
теореме лорда Кельвина напряжение поля там больше, где поверхности
уровня гуще, теснее расположены друг относительно друг а. Кривые,
ортогональные к поверхностям уровня, носят в случае силового поля
название силовых линий, так как, по предыдущему, касательные
к ним определяют собой направление силы или напряжения поля.
Пример 44. Рассмотрим расположение поверхностей уровня для двух
сил F% и Fi, действующих на частицу М, если эти силы постоянны по модулю
и имеют своими источниками некоторые два неподвижные" центра Ах в Л2.
Назовём k2 общее значение модулей сил:
и разберём отдельно следующие четыре случая:
1) обе силы, Fi и F?,— силы притяжения (фиг. 74),
2) обе силы — силы отталкивания (фиг. 75),
•3) сила Fx— сила отталкивания, сила Ft—сила притяжения (фиг. 76),
4) сила Fx— сила притяжения, сила F* — сила отталкивания (фиг. 77).
Обозначим радиусы-векторы частицы М, проведённые из центров Ах и Л?, со-
соответственно гх и г2; тогда в первом случае будем иметь для сил F\ и Ft сле-
следующие выражения:
„ __ ыго _ *2fi _ _ А»г8
Ъ--^, —. Л- J--
Отсюда вытекает такое выражение для дифференциала силовой функции:
Но на основании формулы D.4) на стр. 33
rt • dri =.r\dr\ и r2 ¦ dr 2 =
172
поэтому
и, следовательно, в первом случае:
Подобным образом найдём в остальных случаях:
3) и=кЦг,-
4) и = кЦ-г{
Постоянные интегрирования мы везде положили равными нулю, так как их
численное значение не играет роли при разыскивании семейства поверхно-
поверхностей уровня.
Как видим, поверхностями уровня в первых двух случаях служат софокус-
ньге эллипсоиды вращения вокруг прямой А^А^. Фокусы совпадают с центрами
сил. Если расстояние между ними обозначить 2с, то в первом случае параметр
Фиг. 74.
Фиг. 75.
.поверхностей уровня, т. е. та константа С, которая входит в уравнение U = C
Поверхности, изменяется от —оо (бесконечно большая сфера) до —2с№ (отре-
(отрезок А^Аг); во втором случае границами изменения параметра служат -j-2e?2
(отрезок АХА? и -|- «о (бесконечно большая сфера).
В последних двух случаях поверхностями служат софокусные двухполост-
ные гиперболоиды вращения вокруг оси АгА^, причем каждой полости каждой
¦ген1
л
Фиг. 76.
поверхности соответствует своё значение-параметра. В обоих случаях параметры
Изменяются от —2е?2 до-|-2с?г. Нулевому значению параметра соответствует
йдахкость, перпендикулярная к А^А% и делящая А^АЪ пополам. Граничному зна-
$мнш —2е?2 параметра в третьем случае соответствует полупрямая, идущая
;^т центра Ах влево, в четвертом случае—г полупрямая, идущая от Л2 вправо.
173
Значению -|-2е?г параметра в третьем случае соответствует полупрямая от Лг
вправо, а в четвёртом от А\ влево.
На фигурах 74—77 изображены меридиональные сечения рассмотренных
поверхностей плоскостью УЦЛ2Л1 Стрелками указаны направления, в которых
параметры поверхностей уровня возрастают. Силовыми линиями в разобранных
примерах будут плоские кривые, лежащие в меридиональных плоскостях, а
именно, кривые второго порядка, „софокусные с меридианами поверхностей
уровня.
XIX. ЦЕНТРАЛЬНЫЕ ОРБИТЫ
111. Движение частицы под действием центральной силы, зави-
зависящей лишь от расстояния. Сила, имеющая своим источником непо-
неподвижный центр (т. е. проходящая через этот центр), называется цен-
центральной. Для матЕРнальной частицы, находящейся под действием
центральной силы, мы всегда можем написать интеграл кинетического
момента [формула A8 2.0) на стр. 160]
O = rXmv=C, A9.1)
а также вытекающий из него' второй интеграл [формула A8.25) на
стр. 161]
Ст=0. A9.2)
Первой интеграл говорит о постоянстве кинетического момента Q, а зна-
значит* и секторной скорости
S = ±. A9.3)
При этом постоянны не только кинетический момент и секторная ско-
скорость относительно центра силы, но также и относительно любой оси,
проходящей через центр силы (§ 102). Из всех этих осей максимальной
секторной скорости соответствует ось, совпадающая по направлению
с кинетическим моментом О: относительно этой оси секторная скорость
равна
с О \rxv\ rot/o sin (r0, v0) nQ,,
Второй интеграл,
0, A9.5)
выражает тот факт, что траекторией частицы служит плоская кривая,
плоскость которой перпендикулярна к кинетическому моменту G = C.
Проекции Сх, Су, Cz этого вектора тесно связаны с Геометрическими
элементами траектории. Так,
Сг
представляет собой косинус угла наклонения плоскости орбиты к пло-
плоскости Qxy. Далее, положив в уравнении A9.5) координату z равной
174
нулю, мы получим уравнение прямой, являющейся следом плоскости ор-
орбиты на плоскости Оху:
зту линию в астрономии обыкновенно называют линией узлов. Из
написанного уравнения вытекает, что
есть тангенс угла узловой линии с осью Ох (т. е. с некоторым постоян-
постоянным направлением в плоскости Оху).
Совместим теперь ось Oz с направлением кинетического момента О
и станем относить движение частицы к полярным координатам р, tp
в плоскости Оху. Интеграл A9.4) напишется в этих координатах сле-
следующим образом [см. формулу A8.24) на стр. 161]:
m($),vo) = A, A9.6)
где ноликами (внизу) помечены начальные значения соответствующих
величин и
Покажем, что если центральная сила является функцией только рас-
расстояния между центром и движущейся частицей, то вопрос о движении
частицы решается с помощью двух квадратур. Действительно, пусть
где /(р), очевидно, есть проекция F силы F на орт р°. Тогда в соответ-
соответствии с формулами A8.45) и A8.46) на стр. 166 и 167 найдём следую-
следующее выражение для силовой функции:
U(?)=\/(?)d?. A9.7)
Напишем интеграл энергии:
Выразим здесь скорость в полярных координатах [формула F.24) на
стр. 56] и положим
тогда, сократив уравнение на массу, найдём:
P2 + pY = 2Z(p) + 2W, A9.8)
где Н — четвёртая по счёту произвольная постоянная (первые три — это
проекции вектора G —С).
Исключив время из уравнений A9.6) н A9.8), найдём дифферен-
дифференциальное уравнение траектории. С этой целью замечаем, что
<р заменяем везде его значением из уравнения A9.6); тогда уравне-
175
ние, A9.8) нам даст:
или
-'- =?*?=_= <*,. A9.10)
г
Отсюда, проинтегрировав, находим уравнение траектории в конечном
виде:
АН ¦ п. A9Л1)
здесь Гв — пятое по счёту произвольное постоянное. Возвращаясь к ра-
равенству A9.6), получаем теперь на основании соотношения A9.10) сле-
следующее дифференциальное уравнение:
:=dt.
Отсюда интегрированием находим:
где С6 — шестое произвольное постоянное. Мы нашли зависимость р от
времени, что и заканчивает нашу задачу.
112. Движение под действием притяжения по закону Ньютона.
Пусть сила F—сила притяжения, обратно пропорциональная квадрату
расстояния. Тогда, поскольку сила F противоположна единичному век-
вектору р°, имеем
и, следовательно, силовая функция согласно формуле A9.7) рагна
Дифференциальное уравнение A9.9) траектории примет теперь вид
причём постоянные 2Н и А согласно соотношениям A9.8) и A9.6) сле-
следующим образом выразятся через начальные условия:
1Н-^vi —, Л = pQZ'o sin (рц, t>u). A9.13)
Введём вспомогательное переменное
z = -; A9.14)
176
тогда из уравнения A9.12) получим:
\dfj ' А '
или
Введём, кроме того, новое постоянное е с помощью соотношения
Легко убедиться, что сумма, стоящая слева, не отрицательна и что, сле-
следовательно, е — величина действительная. В самом деле, из равенств
A9.13) получаем:
Из соотношения A9.16) вытекает, что
2// = ?j («»-!),
и, следовательно, если
^<0, Н = 0, Я>0,
то соответственно
в<1, е=\, в>1.
Возвращаясь к уравнению A9.15), можем теперь написать:
Л* V А >
С уравнением этого типа мы уже имели дело в главе о прлмолинейном
движении частицы [уравнение A6.10) на стр. 145]; написав его общее
решение в форме A6.12), указанной на стр. 146, найдём в нашем
случае
z — -j = -j e cos {m -f СБ),
где СБ, как и в уравнении A9.11), — пятое по счёту произвольное по-
постоянное. Возвращаясь к старому переменному р и полагая
получаем искомое уравнение траектории в следующем виде:
Р==1+есте( +С-)- A9.18)
Это—уравнение кривой второго порядка, отнесённое к фокусу. Постоян-
Постоянная е представляет собой эксцентриситет кривой, а р — её параметр;
Для эллипса и гиперболы соответственно имеем
р = аэ(\—е*) A9.19)
а
р = а,(е*—\), A9.20)
^2 г. К. Суслов 177
где а3—большая полуось эллипса, а аг—действительная полуось ги-
гиперболы.
При <р= — С6 полярный радиус р, очевидно, имеет наименьшее зна-
значение. В астрономии, если речь идёт о движении планеты или кометы
около солнца, точку на орбите, наименее удалённую от солнца, назы-
называют перигелием и её угловую координату ц обыкновенно обозна-
обозначают (рп. Очевидно, С5 = — (ря. Угол
= ? — <?„ A9.21)
представляющий собой угловое расстояние планеты от перигелия, носит
название истинной аномалии.
Чтобы окончить задачу о движении частицы, остаётся определить за-
зависимость истинной аномалии ф от времени. Из уравнения A9.6) мы
находим:
= A dt;
заменив здесь А по формуле A9.17), р по формуле A9.18), а <р всюду
по формуле A9.21), мы придём к уравнению
A9.22)
вместо <Ь введём новую переменную jj, положив
r] = tgi-; A9.23)
следовательно,'
Левая часгь уравнения A9.22) преобразуется тогда следующим образом:
2
/in 241
A+*со8ф)[1+* + A*)ч] A+е) A+^) ^ '
где
Рассмотрим отдельно случаи, когда траекторией служит парабола,
эллипс и гипербола.
1) Для параболы 1е=1; следовательно, у = 0, и согласно ра-
равенствам A9.22) и A9.24) мы получаем:
отсюда интегрированием находим:
Произвольная постоянная т равна значению времени / в момент прохож-
прохождения частицы через перигелий, т, е. когда d).= 0.
178
Обратимся к случаям, когда у отлично от нуля. Прежде всего заме-
замечаем, что ^
1+* _> + ^+'-Т_1 1 , т —1 1
и, следовательно,
f(l+n2)tfr,_l Г rfn т-1 Г rfr,
J A -h тч»Я "~ т J I Ч- т^2 ^ 7~ J A + Y-i2J • ( • '
Второй интеграл в правой части можно свести к первому. С этой целью
применим к первому интегралу формулу интегрирования по частям;
имеем
Г ^ — Э 1_2 Г
J 1+ТГ12 1+VJ^ J
A
Прибавив и вычтя в числителе последнего интеграла единицу, можем
написать:
Г dt\ т) 1-2 Г dri 2 Г
J 1+ТЧ» 1+Y^i2" J l + W2 J
J J A
Отсюда мы имеем
Г dr\ \_ Tj . \_ Г
J(l + ™2J~~ 2 1+YTl2" 2 J 1
Теперь выражение A9.26) принимает вид
Г
J
(I + ТП2J 2Т l+TTl2 2f
Воспользовавшись этим равенством, а также равенством A9.24), мы
можем следующим образом записать интеграл уравнения A9.22*):
где произвольная постоянная т опять представляет собой время прохож-
прохождения частицы через перигелий (в этот момент vj = 0). Так как
т-1_ 2е „ Г+1 2
_____ >¦¦— И ________ ______
то предыдущее равенство мы можем переписать следующим образом:
2) Для эллипса <?<^1> следовательно, у^>0, а поэтому
+ yt,2 /
Введём новую переменную /, положив
/Yi^tg^; A9.28)
12* 179
2т) 2 . / / 1 . ,
—¦— =¦—==. sin — cos —= -7= sin/;
Ут 2 2 Ут
мы имеем, следовательно:
/=2arctg(K7i).
поэтому уравнение A9.27) переходит в следующее:
= (/ — в sin/).
Заменим здесь р и у их выражениями A9.19) и A9.25); тогда, после
сокращения на A—е3)"Ч мы придём к следующему окончательному ре-
результату для случая движениа частицы по эл-
эллиптической орбите:
-jj-.(t — x)—f—e sin /.
п I'
Величина / называется в астрономии
эксцентрической аномалией. Не-
Нетрудно указать её геометрический смысл.
Проведём из центра О эллипса, служащего
орбитой частицы М, окружность радиуса,
равного большой полуоси аэ орбиты (фиг. 78).
Продолжим ординату ВМ точки М до пере-
пересечения с этой окружностью в точке Е. Со-
Фиг. 78.
единим точку М с фокусом F эллипса, а точку Е с его центром О. Как мы
знаем, угол (])= ^_BFM называется истинной аномалией точки М; по-
покажем, что угол е = /_ВОЕ равен её эксцентрической аномалии /.
Действительно, мы имеем
FB -= OB — OF,
или
р cos ф = аэ cos е — аэе;
с другой стороны, из уравнения эллипса в полярных координатах, если
принять во внимание соотношение A9.19), следует:
аэ A - е*,
Р 1 _)-е cos ф
Почленно поделив последнее уравнение на предыдущее, мы получим-
, A 4 е cos i) (cose — е)
Отсюда мы находим:
е -f- cos <[>
COS ? — :—™ if ,
1 -\~е cos ф
или, после перехода к половинным углам,
180
Согласно формулам A9.23), A9.25) и A9.28) такое же выражение имеет
эксцентрическая аномалия /; таким образом, действительно
е=/.
3) Для гиперболы е~^>\, и, следовательно, у<С^; поэтому инте-
интеграл уравнения A9.27) находим' так:
J 1 _|_ TTJ 2 Y— т 1
2V—1 1 -У—1
Если теперь положить
то окажется, что
1-tgf
l *T 1
' *6 2
Подставив эти выражения в уравнение A9.27), находим:
Пользуемся снова формулой A9.25) для у и, кроме того, заменяем р
•его выражением A9.20); тогда после сокращения на (<?2—\K1> мы по-
получим для случая гиперболической орбиты следующий окончательный
результат:
ПЗ. Формула Бине. В заключение настоящей главы покажем, как
в общем "случае, зная центральную силу F и массу т частицы, пользуясь
интегралом площадей, получить дифференциальное уравнение второго
порядка для орбиты.
". Мы уже видели, как в случае постоянства секторной скорости выра-
выражается проекция ускорения частицы на координатную ось р [формула
G.36) на стр. 71]:
причём Л.есть так называемая постоянная площадей, равная
А = p2i.
Так как проекция силы на ось р равна F =mwa, то отсюда мы полу-
181
чаем следующее выражение для силы:
Г / 1 \ л
F=—~\ \?/Л-±\ A9.29)
Это и есть формула Бине (Binet). Она чаще всего служит для опреде-
определения закона изменения силы по данному уравнению центральной орбиты,
но может быть применена и к решению обратного вопроса.
Пример 45. Пусть частица движется под действием центральной силы-
по логарифмической спирали. Найдём закон притяжения или отталкивания,
есл!1 действующий центр находится в асимптотической точке кривой. Имеем
уравнение траектории
р = аеЩ,
где а и \— некоторые постоянные. Вычисляем вторую производную от —:
dy* a p
Подставляем результат в уравнение A9.29); находим:
Р ро , Г
Таким образом, сила оказывается притягивающей и обратно пропорциональной
кубу расстояния.
Пример 46. Найдём орбиту частицы в случае её притяжения к некото-
некоторому центру по закону тяготения Ньютона. В рассматриваемом случае мы
имеем для силы выражение
k"-m
Следовательно, формула A9.29) даёт такое дифференциальное уравнение
орбиты:
(т)
1 А2
Т р ~ А*'
df Т р
Общим решением этого линейного дифференциального уравнения служит
функция
1 ft2
— — d cos <р + C2sin <p + -р,
где Q и С2-произвольные постоянные. В другой форме это решение можно
записать так:
где D и Е — новые произвол.ьные постоянные. Решив последнее уравнение от-
относительно р, мы получаем:
А2
таким образом, искомой орбитой оказывается коническое сечение с фокусом
в центре силы.
182
ОТДЕЛ И
ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ
ЧАСТИЦЫ
XX. ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
НЕСВОБОДНОЙ ЧАСТИЦЫ
114. Геометрические связи, удерживающие и неудерживающие.
Материальная частица называется свободной тогда, когда она может
занимать произвольное положение в пространстве. Если же заранее дано
то геометрическое протяжение, в пределах которого должна двигаться
рассматриваемая частица, тогда самую частицу называют несвобод-
несвободной, а условия, стесняющие её свободу, геометрическими связями.
Данное геометрическое протяжение может быть объёмом, поверхностью
или линией.
Пусть несвободная частица не может покидать данного объёма.
Поверхность, ограничивающая этот объём, может, вообще говоря, быть
подвижной и иметь переменную форму, т. е. быть деформирующейся;
поэтому в общем случае уравнение её в декартовых координатах имеет
вид
/(*, у, г, 0 = 0. B0.1)
Мы условимся раз навсегда так писать это уравнение, чтобы
для возможных положений частицы левая часть его была неотрицатель-
неотрицательной, т. е. равной нулю или положительной; тогда аналитическим выра-
выражением для рассматриваемой связи, наложенной на материальную частицу,
служит равенство, соединённое с неравенством Следующего вида:
/(*, у, г, t)^0. B0.2)
Связь такого рода носит название связи неудерживающей.
Когда частица движется по границе объёма, т. е. по поверхности B0.1),
нн^че говоря, когда левая часть выражения B0.2) остаётся равной нулю,
говорят, что связь находится в состоянии напряжения или что связь
действует. Когда частица сошла во внутрь объёма, т. е. когда левая
часть выражения B0.2) стала больше нуля, говорят, что связь ослабла
или не действует.
Пример 47. Пусть частица может двигаться лишь по поверхности и
внутри сферы радиуса /? с центром в начале координат. Такая связь имеет
выражение
/?2 — дг2 —У — л2 2s 0.
Если же частица может двигаться только по поверхности и вне сферы,
То связь будет иметь выражение
Дг2+У + -г2 —
Пример 48. Связь вида
(х - «Q» (у -
а* ' № ~ С2
говорит, что частица должна двигаться по поверхности или внутри эллипсоида,
Центр которого движется прямолинейно и равномерно со скоростью,
183
равной по модулю У a2 -f- р3 -f- "Г2; оси этого эллипсоида возрастают пропорци-
пропорционально времени; следовательно, он увеличивается, оставаясь себе подобным.
Когда частица должна двигаться по данной поверхности, то
общим типом выражения связи будет равенство
/(*, у, z, /) = 0, B0.3)
служащее уравнением этой поверхности. Время войдёт явно, если данная
поверхность подвижная или деформирующаяся. Связь, выражаемая равен-
равенством B0.3), называется связью удерживающей.
Пример 49. Уравнение
где А, В, ..., F — некоторые постоянные, требует, чтобы частица'не покидала
подвижной плоскости. Плоскость эта, оставаясь параллельной своему началь-
начальному положению, т. е. двигаясь поступательно, удаляется равномерно ускорен-
ускоренно от своего начального положения
Ах + By + Сг + F — 0.
Если частица не может покидать некоторой кривой, то обстоя-
обстоятельство это выразится двумя равенствами:
fl(x, у, г, 0 = 0,
/ш(х, У. г, t) = 0.
Время не войдёт явно, когда данная кривая неподвижна и неизменного
вида. Так как рассматриваемая связь выражается двумя равенствами
типа B0.3), то говорят, что в этом случае частица подчинена .двум
удерживающим связям.
Пример 50. Уравнения
показывают, что частица вей время остаётся на окружности. Центр этой
окружности совершает гармоническое колебательное дгижение, а радиус периоди-
периодически изменяется от нуля до R.
Рассматривать одновременно три удерживающие связи не
представляет никакой необходимости. Действительно, пусть эти связи
будут:
f1(x,y,z,t) = 0, /t(x,y,ztt) = 0t ft(n,y,z,t) = 0. B0.5)
Если между левыми частями написанных уравнений не имеет места за-
зависимость вида
? (Л. Л»/•.') = 0, B0.6)
то поверхности B0.5) пересекаются в одной или нескольких отдельных
точках (вещественных или мнимых); следовательно, положение движущейся
частицы или определяется для каждого момента времени (хотя, может быть,
и не вполне однозначно) одними геометрическими условиями, или же ча-
частица не может одновременно лежать на всех поверхностях B0.5). Когда
же существует зависимость вида B0.6), то при /х:=0 и /о = 0 из неё
вытекает либо /8 = 0, либо /8 = ф(^), где t|» (t) — функция, неравная то-
тождественно нулю. В первом случае связь /3=0 была бы следствием свя-
184
зей /t = 0 и /2 = 0, а во втором случае связь fs — 0 противоречила бы
первым двум.
Пример 51. Левые части уравнений
г —,
fs = (x - af +(y - af + (z -a? -3a* =
удовлетворяют соотношению
/з — /l + 2яЛ — /?(/? — 2а cos а) = 0.
Следовательно, при а = — /?sec« эти связи могут быть заменены двумя; при
другом значении а связи будут противоречивыми.
В отношении неудерживающих связей следует заметить, что
приходится иногда рассматривать одновременно две, три и более связей,
а именно, в том случае, когда объём, предоставленный для движения мате-
материальной частицы, ограничен поверхностью, не имеющей единого аналити-
аналитического выражения.
Пример 52. Связи
д-2 _}- yi -J- г2 — /?2 cos2a > 0, /?2 — л:2 — У* — г2 > 0
-оставляют для движения частицы объём между двумя концентрическими сфе-
сферами радиусов R и Rcosa.
П р име р 53. Связи
4/?г_д-г
1. ^Г
COS3 a Sin2 а
предоставляют для частицы объём, ограниченный кусками сферы и эллипсоида.
Две одновременно действующие связи, удерживающая и He-
удерживающая, предоставляют для .движения частицы некоторую огра-
ограниченную часть поверхности.
Пример 54. При связях
г — R cos а :зг 0
материальная частица может двигаться по поверхности шарового сегмента с вы-
высотой/? A —cos о).
Пример 55. При связях
2+2 + 2— /?2— 0,
/?2 COS2 a— Z1 25 0
частица движется по сферическому поясу с высотой 2 /?cosa.
Число неудерживающих связей и здесь может быть более одной,
если граница поверхности состоит из нескольких линий, аналитически отличных
одна от другой.
Пример 56. Связи
позволяют частице двигаться лишь по поверхности равностороннего равно-
равноугольного сферического треугольника (с тремя прямыми углами).
185
Связь, в аналитическое выражение которой время t явно не входит,
называется склерономной, или стационарной; в противном слу-
случае связь называется реономной, или нестационарной.
115. Условие, налагаемое на скорость несвободной частицы
удерживающей связью. Пусть материальная частица находится на
удерживающей связи B0.3)
f(x,y,z,t) = 0.
Возьмём от обеих частей этого уравнения полную производную по вре-
времени, принимая во внимание, что в левую часть время t входит как явно,
так и посредством координат х,у, z\ мы получим:
Вспомнив выражение для градиента функции [формула A8.50) на стр. 168],
мы можем это выражение переписать так:
g = grad/-tf+f = O. B0.8)
Разрешим это уравнение относительно v, воспользовавшись формулой
A.17) на стр. 8; мы получим:
д1
где с—произвольный вектор, перпендикулярный вектору grad/. Таким
образом, связь /= 0 накладывает ограничение лишь на составляющую
скорости вдоль градиента функции / как видно из последнего выражения,
проекция скорости на градиент равна
д1
v д±
Что же касается составляющей скорости в плоскости, перпендикулярной
градиенту, то она может быть вполне произвольной. Если -J- =. 0, т. е.
связь склерономная, равенство B0.8) даёт
grad f-v = 0, B0.9)
т. е. в те моменты времени, когда скорость не равна нулю, она перпенди-
перпендикулярна к градиенту
v _L grad /.
Полученное условие очевидно: оно требует, чтобы скорость частицы, движу-
движущейся по неподвижной поверхности неизменного вида, лежала в плоско-
плоскости, касательной к этой поверхности.
116. Условие, налагаемое на ускорение несвободной частицы удер-
удерживающей связью. Взяв полную производную по времени от уравнения
186
B0.7), мы получим:
или
^ = grad/-w + D2f=0, B0.10)
где символом D2f обозначена совокупность членов со вторыми частными
производными в предыдущем равенстве. Разрешив это уравнение относи-
относительно W [по формуле A.17) на стр. 8], получим:
где с — произвольный вектор, перпендикулярный к градиенту. Таким
образом, как и в отношении скорости, связь /=0 налагает ограничение
лишь на составляющую ускорения по градиенту функции /: проекция
ускорения на градиент равна
Составляющая же ускорения в плоскости, перпендикулярной к градиенту,
не зависит от вида уравнения ^20.3) удерживающей связи.
Относительно состава выражения D2f заметим, что оно содержит в
себе члены трёх родов: в одни проекции скорости входят во второй
степени, другие содержат их линейным образом и, наконец, третьи сво-
свободны от проекций скоростей. Когда 37 — 0> т- е. связь склерономная,
члены последних двух категорий отсутствуют, и ?J/ обращается в
квадратичную однородную функцию проекций скоростей. Заметим, что по
внешнему виду условие B0.10) не изменится в рассматриваемом случае,
не в пример тому, как это было с условием B0.9) относительно скорости.
117. Условия, налагаемые на скорость и ускорение несвободной
частицы иеудерживающей связью. Положим теперь, что свобода
материальной частицы стеснена неудержизающей связью B0.2). Когда
связь эта ослаблена, т. е.
f(x,y,z,t)>0,
то частица движется внутри предоставленного ей объёма. В этом случае, она,
очевидно, может иметь произвольную скорость и произвольное
ускорение, и, следовательно, на эти векторные величины никаких огра-
ограничений не наложено. Пусть теперь связь в некоторый момент t ещё
действует, но затем приходит в ослабение, т. е.
/@ = 0, f(t-\-M)>0, B0.11)
где М — произвольно малая положительная величина; функцию fit) мы
попрежнему рассматриваем как сложную функцию времени t, т. е. за-
187
висящую от времени, во-первых, явно и, во-вторых, неявно посредством
координат x,y,z. Чтобы найти ограничения, наложенные в нашем слу-
случае на скорость и ускорение частицы, разложим функцию /(/) в ряд
Тейлора близ данной точки t; имеем
B0.12)
где е3 — совокупность членов третьего и высших порядков относи-
относительно Д^. На основании условий B0.11) получаем отсюда"
2*+зГт+-.>°- B0ЛЗ)
Разделив теперь обе части этого неравенства на М и перейдя к пре-
пределу М—Ц), найдём, что
или, согласно формуле B0.8),
Если поверхность не деформируется и неподвижна, т. е. 3i = 0, то вы-
выведенное условие переходит в следующее:
grad/-i?>0. B0.16)
Существенно заметить, что в случае знака неравенства произ-
производные в формулах B0.13), B0.14) и B0.15), а также в тех, которые
из них получатся как следствие, следует понимать лишь, как так назы-
называемые правые производные, и, следовательно, они накладываюг ограниче-
ограничение лишь на скорость, с какою частица покидает связь, а не на скорость,
с которою она приходит на связь: это следует из того, что само нера-
неравенство B0.13) написано в предположении Д1^>0.
Если для момента t производная ^^>0> то по неравенству B0.13)
d.4
никаких заключений о второй производной -г~ сделать нельзя, и, следо-
следовательно, ускорение частицы остаётся вполне произвольным. Если же
т? = 0, то, деля неравенство B0.13) на Д^2 и переходя к пределу Д?—> 0,
мы получаем (для правой второй производной) условие
"g>0, BS.17)
или, согласно формуле B0.10),
grad / на -\- D.J^ 0. B0.18)
В заключение заметим, что если бы момент / не был моментом схода
частицы с поверхности
f{x,y,z,t) = 0,
138
то для любого положительного \t, не превышающего некоторой границы,
было бы также
Отсюда, основываясь на разложении B0.12), мы делаем вывод, что в этом
случае
для любого k.
118. Реакция удерживающей связи. Идеальная связь. Мно-
Множитель связи. Пусть на несвободную материальную частицу, находя-
находящуюся на удерживающей связи
f(x,y,z,t) = O, B0.20)
действует сила F. Если бы частица была свободной, то по основному
уравнению динамики мы имели бы
F. B0.21)
Однако, в рассматриваемом случае ускорение частицы должно удовле-
удовлетворять условию B0.10), т. е.
g = grad/.«, + D2/=0. B0.22)
Поэтому, если равенства B0.21) и B0.22) не противоречат друг другу,
то из них вытекает следующее ограничение для силы:
-f _|-В2/=0. B0.23)
Но нетрудно видеть, что тогда уравнение B0.20) служит одним из инте-
интегралов уравнения движения B0.21), и мы, следовательно, имеем дело
с частным случаем движения ' свободной частицы, а не с движением ча-
частицы по связи. Действительно, если уравнение B0.21) умножить на
erad/
, то получим:
gradf-F
=s———
что на основании соотношения B0.23) даёт
отсюда, проинтегрировав, находим:
где а и р — произвольные постоянные. Таким образом, равенство B0.20)
является частным интегралом уравнения движения B0.21) при а={$ = 0.
Если этот случай оставить в стороне, то соотношение B0.22) не
выполняется, а потому уравнение B0.21) противоречит условию B0.20).
Выйти из такого затруднения мы можем, лишь приняв, что уравнение
189
B0,21) несправедливо в настоящем случае: кроме силы F, на рассматри-
рассматриваемую частицу должна действовать некоторая другая сила R, обязанная
своим происхождением присутствию связи и потому называемая реак-
реакцией связи на частицу. Такой взгляд не противоречит третьему закону
Ньютона, так как мы не иначе можем представить себе связь, как при-
приспособление, соединяющее одну массу с другой. Следовательно,
источником реакции, действующей на движущуюся частицу, б^дет
та масса, с которой она связана кинематическим образом. Реакция
связи иначе называется пассивной силой. Силы, не принадлежащие
к числу реакций связей, называются приложенными, или актив-
активными. Итак, уравнение движения B0.21) необходимо заменить сле-
следующим:
F-\-R. B0.24)
Посмотрим, насколько сила R определяется по уравнению B0.20).
Умножением уравнения движения B0.24) скалярно на grad/ получаем:
grad f-tnw = grad f-F-\- giad /• R.
Так как условие B0.22J теперь должно быть выполнено, то отсюда
получаем:
grad/-/?= — grad/-/7—
Разрешив это уравнение относительно R по формуле A.17) на стр. 8,
находим:
_ grad/-
К | grad/P
где с — произвольный вектор, перпендикулярный к grad f. Оказывается,
что если нам дано лишь уравнение связи B0.20) и неизвестно, как на
деле осуществлена связь, то определённой функцией от t, г, v является
одна лишь составляющая реакции по градиенту функции, выражающей
связь, или, что то же, по нормали к поверхности B0.20). Обозначив эту
нормальную составляющую реакции буквою N, можем, следовательно,
написать:
дг gradf-F+mD<J . .
N~~ 1 grad/12 grad/- (<Ю.2Ь)
Отсюда проекция нормальной реакции на градиент, или, что всё равно,
на положительную нормаль поверхности /= 0, равна:
N"~ I grad/1
Выражению B0.25) часто придают форму
где
s_ giadf-F+mD2f
x— T^dT •
190
Скалярный множитель пропорциональности \, вообще говоря, переменный,
носит название множителя связи. Если ).^>0, нормальная реакция
направлена одинаково с градиентом, т. е. в сторону возрастания функ-
функции /, исходя от поверхности /—0; если i < 0, нормальная реакция
направлена в сторону убывания функции /, исходя от поверхности /=0.
Что же касается составляющей с реакции в плоскости, перпендикулярной
к градиенту, то для нахождения её уравнение B0.20) нам ничего не даёт.
Выделим специальный класс связей, которые вполне определяются
своей аналитическою формой, т. е. уравнением B0.20), и, следовательно,
не дают реакции в плоскости, перпендикулярной к градиенту. Такие
связи называются идеальными. Поскольку реакция идеальной св;.зи
состоит из одной своей нормальной составляющей, мы можем написать
для неё следующее аналитическое выражение:
R—N=lgvadf, B0.28)
где 1 имеет выше указанное значение.
Если желают изучить движение частицы по неидеальной связи, то,
кроме уравнения связи, должен быть известен закон, которым определяется
составляющая реакция в плоскости, перпендикулярной к градиенту. Закон
этот обыкновенно выподится из наблюдений и опытов над физически
осуществлёнными связями; пример тому мы увидим, когда будем говорить
о движении частицы по шероховатой поверхности, т. е. с трением.
119. Дифференциальные уравнения движения частицы, подчи-
подчинённой идеальной удерживающей связи. Если частица принуждена
двигаться в соответствии с идеальной связью
f(x,y,z,t) = 0, B0,29)
то на основании выражений B0.24) и B0.28) мы можем её уравнение
движения записать в следующем виде:
mw=F-\-N,
или
mw=F-{-lgiadf. B0.30)
В проекциях на оси координат мы получаем, следовательно, такие диф-
дифференциальные уравнения:
тх = Рх + \д±, my = Fy + ).d^, mz = F2 + \d±. B0.31)
Мы видим, что уравнения B0.29) и B0.31) представляют собой систе-
систему четырёх уравнений с четырьмя неизвестными функциями времени
х, у, z и X. Интегрирование этой системы ведётся обыкновенно сле-
следующим путём. Прежде всего исключаем неизвестную функцию X, для
чего можно использовать её выражение B0,27)
} Q 32
А— ]grad/|2 • VV-aZ>
Когда эту величину 1 вставим в правые части уравнений B0,31), то
получим систему трёх уравнений второго порядка относительно трёх
неизвестных функций времени х, у и г. Интегрирование этих уравнений
191
приведёт нас к выражениям для х, у, z, содержащим шесть произволь-
произвольных постоянных: Cv С,, ..., С6; но, как нетрудно увидеть, в рассмат-
рассматриваемом случае независимых постоянных имеется только четыре.
В самом деле, умножив уравнение движения B0.30) скалярно на grad/,
мы, при найденном значении B0.32) для X, найдём как следствие из
этого уравнения, что
giadf-w— — D.J,
т. е.
Следовательно,
где аир — произвольные постоянные. Если в левую часть последнего
равенства вставим полученные значения х, у, z, то а и [$ должны
оказаться функциями от С,, С2, .. ., С6:
а = а (С,1, Сг, . . ., С„), р = р (Ср С2, .. ., Q.
Д.м получения уравнения B0.29) мы должны положить
следовательно, независимых постоянных среди С,, С2, ..., С6, действи-
действительно, останется только четыре. Причина того, что мы почучили сперва
шесть постоянных, заключается, конечно, в том, что для исключения X
мы воспользовались не самим уравнением B0.29) связи, а тем выраже-
выражением B0.27) для X, которое вытекает из второй производной B0.22) от
уравнения связи.
Пример 57. Пусть весомая частица массы т принуждена оставаться на
связи
ах + by -f сг + d — 0, B0.33)
причём ось z направлена вертикально вверх, а я, Ь, с, d — постоянные. Диф-
Дифференциальные уравнения движения будут следующие:
тх = la, ту — \Ь, тг — — mg -(- ^с-
Определяем 1 по формуле B0.32); находим:
Вставив полученное значение X в дифференциальные уравнения движения,
получаем:
тх — i^a, ту = \ф, тг = —
Эти уравнения имеют своими интегралами следующие выражения:
192
Чтобы найти соотношения между произвольными постоянными С], С2, ..., cfi,
принимаем в соображение, что полученные выражения для х, у, z должны
тождественно удовлетворять уравнению гвязи B0.33); выполнив подстановку и
приравняв в полученном выражении нулю коэффициенты при t в первой сте-
степени и свободный член, найдём следующие две зависимости:
Наконец, определяем реакцию по формуле B0.28); имеем
Как видно из выражения для ), всегда'имеет место условие Хос > 0; поэтому
проекция реакции на ось г положительна: Rz > 0, т. е. она направлена
в сторону, обратную направлению силы тяжести.
120. Реакция неудерживающей связи. Дифференциальные
уравнения движения частицы, подчинённой идеальной неудерживаю-
неудерживающей связи. Положим, что свобода частицы массы т стеснена неудер-
неудерживающей связью
f(x,y,z,t)^0. B0.34)
Пусть к частице приложена сила F. Если /^> 0, т. е. частица находится
внутри объёма, ограниченного поверхностью /=0, то на её ускорение
никакого ограничения не наложено (§ И 7), и, следовательно, её уравне-
уравнение движения будет такое же, как и для свободной частицы:
miv = F. B0.35)
Ускорение частицы не может быть произвольным только тогда, когда она
движется по самой границе /=0 объёма и притом когда -^ = 0; в та"
ком случае ускорение должно удовлетворять условию B0.17) или, что
то же, B0.18):
gf ^O. B0.36)
Написанное соотношение не будет противоречить уравнению движения
B0.35), если сила F такова, что
8rad^'yr + Z?,/^0; B0.37)
тогда частица всё время будет двигаться как свободная. Если же
^-f-ZV^O, B0.38)
то подобно предыдущему мы примем, что к правой части уравнения
B0.35) присоединяется реакция /?; при этом, если ускорение частицы,
получаемое ею от совокупного действия сил F и R, не сводит её со
св>13и, то должны соблюдаться условия B0.19):
/=»• ?=•>• 2=»-
13 Г. К. Суслов 193
Полагая связь идеальной, мы для её реакции попрежнему будем иметь
выражение
где
._ grad f.F+mD2f
i ^Т~—
Из сказанного выводим, что в качестве уравнения движения частицы,
подчинённой идеальной неудерживающей связи, приходится брать либо
уравнение B0.35), либо следующее:
mw = F-\-1 grad /. B0.40)
Легко определить критерий, указывающий, когда надо брать уравнения
одного типа, когда другого. Из сравнения выражений B0.38) и B0.39)
видим, что для неудерживающей связи множитель реакции должен быть
неотрицателен:
т. е. неудерживающая связь может оказывать реакцию лишь по положи-
положительному направлению нормали поверхности, или градиента функции /.
Следовательно, уравнение B0.40) действительно, пока множитель л со-
сохраняет неотрицательное значение; при этом частица при действии силы F
удерживается связью /=0. Если же множитель I, обратившись в нуль
(для этого случая оба типа уравнений совпадают), затем становится
отрицательным, то с этого момента надо пользоваться уравнением B0.35).
Таким образом, план решения вопроса о движении частицы, подчинён-
подчинённой неудерживающей связи, следующий. Прежде всего по начальным
данным г0, г^, или, иначе, х0, у0, г0, х0, ус, z0, смотрим, соблюдены ли
для начального момента t=t0 условия:
/=о, d/t = o, *>о.
Если хотя одно из них не выполнено, берём уравнение типа B0.35). Ког-
Когда все условия удовлетворены, обращаемся к уравнению B0.40). Инте-
Интегрируя его так же, как и в случае удерживающей связи (§ 119),
находим х, у, п, I как функции времени:
Исследуем, не может ли функция X (t) обратиться в нуль и затем стать
отрицательной. Если }, (t) всегда неотрицательна, т. е. положительна
или нуль, задача кончена; если же /[(t) обращается в нуль для момента
t — tv а затем становится отрицательной, то уравнение B0.40) годится
лишь для промежутка времени от /0 до /г С момента tл надо уже брать
уравнение B0.35) и интегрировать это уравнение при начальных усло-
условиях:
Может случиться, что частица, движущаяся как свободная, т. е. по
уравнению B0.35), снова попадёт на связь, и, значит, координаты её
194
обратят / в нуль. Тогда может произойти явление, называемое ударом:
именно, скорость частицы может измениться мгновенно. Как определить
это изменение, увидим впоследствии. Во всяком случае, к новой скорости
в конце удара мы должны отнестись, как к одному из новых начальных
данных. Таким образом, следует продолжать исследование движения,
переходя от уравнения одного типа к уравнению другого, пока не исчер-
исчерпаем, если сможем, все моменты, для которых или X обращается в нуль,
или происходит удар.
121. Дифференциальные уравнения движения частицы, под-
подчинённой4 двум связям. Положим, что рассматриваемая ' частица под-
подчинена двум связям:
/1(x,y,z,t) = 0, /2(x,y,z,t) = 0. B0.41)
Принимая, что обе связи идеальные, получаем по § 119 следующее
уравнение движения для взятой частицы:
=F+- Xlgrad/, -fX2grad/3, B0.42)
или, в проекциях,
B0.43)
Написанные уравнения B0.43) содержат пять неизвестных функций
времени: х, у, г, Хх, Х2; для нахождения этих функций мы имеем пять
уравнений {20.41) и B0.43).
Интегрирование ведётся тем же путём, как и для одной связи.
Прежде всего из уравнений B0.43) исключаем неизвестные функции X,
и Х2 с помощью уравнений
Ж = 0' Ж-0' <20-44>
являющихся следствием уравнений B0.41). В раскрытом виде эти ра-
равенства представятся так:
grad/,.» + ?>,/! = 0,
Подставив сюда значение w из выражения B0.42), получаем для
определения X, и Х2 такие уравнения:
X, |grad/, |? + Х2gradД • grad Д = — grad fx-F—m />,Д, 1
X, grad/,-grad Д-f X21 grad Д |* = —grad/2-f-mD3/2. j> \? ло>
Определитель Д этих уравнений может быть представлен в следующем
виде:
Д = | grad /, |«. | grad Д |2 - (grad Д . grad Д)*,
или, согласно формуле A.30) на стр. 11,
A=|grad/, Xgrad/2|2;
13* 195
если же векторное произведение, стоящее в правой части, выразить
через проекции сомножителей и затем воспользоваться обычным обозначе-
обозначением функциональных определителей, то получим:
ду
dft
ду
dfx
dz
<%
dz
2
|_
dfx
dz
dfi
dz
«Vi
~dx
dh
дх
2
1
dfx
дх
<Vi
dx
¦dj
dft
ду
или
d{y>z)
Из этого равенства заключаем, что Д может равняться нулю лишь в том
случае, когда каждый из функциональных определителей, стоящих в пра-
правой части, равен нулю. Но из того, что
следует, что функции /t и /2 связаны некоторым соотношением, содер-
содержащим кроме этих функций, быть может, ещё" те переменные, которые
отсутствуют в знаменателе рассматриваемого определителя, т. е. х и р.
ф1(/1,/г,*,/) = 0. B0.46)
Аналогично из равенства нулю двух остальных функциональных опре-
определителей следует, чте существуют некоторые соотношения
Ф,(Л,/...У.') = О, фв(/1,Л,г,/) = 0. B0.47)
Одновременное существование этих трёх соотношений говорит о том,
что между функциями Д и /2 существует соотношение, не содержащее
явно переменных х, у, z, т. е. соотношение вида
Ф(/1,Л,О=О; B0.48)
действительно, ми придём к такому соотношению, если, определив x,y,z
из уравнений B0.46), B0.47), вставим их в одно из уравнений B0.41).
Но соотношение B0.48), если / действительно явно в него входит,
говорит о том, что свят /, = 0 и /3 = 0 противоречат друг другу; если
же t в равенство B0,48) явно не входит, то из него следует, чго свя-
связи /t = 0 и /2 = 0 являются одна следствием другой.
Если исключим из нашего рассмотрения эти случаи, то определитель Д
будет отличен от нуля, и, следовательно, мы всегда сможем из уравне-
уравнений B0.45) определить ).х и Х2 как функции от аргументов х, у, г,
х, у, z, t. Подставив найденные выражения в правые части уравнений
B0.43), мы получим систему трёх уравнений второго порядка относи-
относительно неизвестных функций х, у, z. Интегрирование этих уравнений
приведёт нас к выражениям для х, у, z, содержащим шесть произвольных
постоянных: Cv С2, ..., Q. Нетрудно увидеть, что независимыми между
ними будут только две. Действительно, умножив уравнение B0.42) ска-
лярно на grad/j, мы, при найденных из уравнений B0.45) значениях
lj и 12, получим как следствие из этого уравнения первое из уравнений
196
B0.44). Тем же путём выведем из уравнения B0.42) и второе уравнение
B0.44). Таким образом, в числе интегралов рассматриваемой системы
будут следующие два:
B0.49)
Постоянные a,, fS]? а2, [52 будут некоторыми функциями от С,, С2, ..., С6.
Но чтобы уравнения B0.49) совпадали с уравнениями B0.41) заданных
связей, мы должны положить
а,=0, рх = 0, а2 = 0, р2 = 0,
что и даёт четыре зависимости между Cv С2, .-., Се; таким образом,
независимых постоянных действительно останется только две. Когда одна
нз связей или обе неудерживающие, ход решения будет тот же, что
и в § 120.
XXI. ДВИЖЕНИЕ ЧАСТИЦЫ ПО АБСОЛЮТНО ГЛАДКОЙ
ПОВЕРХНОСТИ
122. Дифференциальные уравнения движения частицы по поверх-
поверхности. Уравнение движения материальной частицы по абсолютно гладкой
поверхности
f{x, у, г, /) = 0 B1.1)
в общем виде уже было найдено нами в § 119. А именно, если F— рав-
равнодействующая активных сил, приложенных к частице, а N — реакция
поверхности (направленная по её нормали), то
mw = F-\-N, B1.2)
где
а множитель связи \ имеет значение
'~ Igrad/p "•
Посмотрим теперь, как можно видоизменить и упростить уравнение
движения B1.2) в том случае, когда поверхность неизменна и неподвижна,
т. е. когда в уравнение B1.1) время явно не входит, и оно имеет вид
f(x, у, z) = 0. B1.3)
Очень удобно бывает пользоваться такой системой координат, чтобы
Поверхность B1.3) была одной из координатных поверхностей, а коорди-
координатные линии, ей соответствующие, т. е. координатные линии того семей-
семейства, которые её пересекают, были к ней ортогональны (§ 36). Пусть
*i» 9г> 9з — такая система координат и пусть поверхность B1.3) предста-
представляется в этой системе уравнением
<73-а3 = 0, B1.4)
где ав — некоторая постоянная. Реакция поверхности будет направлена
197
по координатной оси qb и, следовательно, даст нули в проекциях на оси
qx и <72. Поэтому уравнения движения частицы в криволинейных коорди-
координатах [формулы A5.3) на стр. 138] в соответствии с уравнением B1.2)
напишутся так:
= Fa
= Fn
B1.5)
Первые два уравнения B1.5) вовсе не содержат реакции, а потому если
нам интересно лишь движение частицы, то мы можем ограничиться
этими двумя уравнениями и вовсе не принимать во внимание третьего.
При этом первые два уравнения B1.5) содержат только две неизвестные
функции времени, q1 и д2, так как qs, по условию B1.4), равно постоян-
постоянному аь. Интегралы этих уравнений будут содержать четыре произ-
произвольных постоянных, как это и следует
из § 119. Третье уравнение понадобится
нам в том случае, когда мы пожелаем
найти величину реакции N.
Можно также отнести уравнения
движения частицы к следующим по-
подвижным осям, имеющим начало в дви-
движущейся частице (фиг. 79): к касатель-
касательной Ох к траектории, направленной в сто-
сторону движения, оси Og, ей перпенди-
перпендикулярной и расположенной в касатель-
касательной плоскости, и оси On, направленной
по положительной нормали к поверхности. Положительное, направление
оси 0^ выбирается так, чтобы оси 6т, Og, On образовывали правую
систему (§ 36,). Чтобы спроектировать уравнение движения B1.2) на ука-
указанные три направления, напишем его в форме
Фиг. 79.
где р — радиус кривизны траектории, а т° и v° — единичные векторы
касательной и главной нормали к траектории (§ 48). Последовательно
умножая это уравнение скалярно на единичные векторы т°, go, пй осей
0~, Og, On, получаем отсюда:
mv =/7T,
B1.6)
193
В целях дальнейшего преобразования этих уравнений, изучим произведе-
произведено
ние сомножителей — • и0, входящих в левую часть третьего уравнения.
На основании формул D.20) на стр. 36 и A8.58) на стр. 171 имеем
^о о rf7o grad/ _
р '" ^ ds '
P ds |grad/| I grad/|
в соответствии с ранее принятыми обозначениями (§ 109), символом -р
здесь обозначены производные по направлению, определяемому единичным
вектором s°; в настоящем случае этим вектором служит единичный вектор
касательной т°. Согласно свойству A8.58) на стр. 171
t°-grad/=0,
и потому предыдущее выражение перепишется так:
d
Правая часть этого равенства, а значит, и левая, зависит лишь от поло-
положения точки на поверхности и от направления касательной. Отсюда мы
заключаем, что для всех кривых на поверхности, проходящих через дан-
данную точку и имеющих в ней общую касательную, справедливо соотно-
соотношение
= const.;
следовательно, в частности, если кривые имеют в данной точке также
общую соприкасающуюся плоскость, то они имеют в этой точке один и
тот же радиус кривизны.
Если заметить, что для нормального плоского сечения поверхности,
_ у\
проведённого через рассматриваемую касательную, угол (т°, и0) рав-
Ьяется нулю или я, а радиус кривизны нормального сечения обозначить р„,
то последнее равенство можно заткать следующим образом:
—^- = -4- —, B1.8)
откуда
os(v«, я»), B1.9)
т. е. радиус кривизны произвольной кривой, проведённой на поверхности,
по своей абсолютной величине равен проекции на её соприкасающуюся
плоскость радиуса кривизны нормального сечения, имеющего с данной
кривой общую касательную. В этом состоит теорема Менье (Meusnier).
Знак плюс или минус следует брать, смотря по тому, совпадает положи-
положительное направление нормали поверхности с направлением главной нор-
нормали нормального сечения или оно ему противоположно.
Произведению — • g°, входящему во второе уравнение B1.6), мы
придадим вид, аналогичный выражению B1.8); именно, мы положим
199
выбрав знак таким образом, чтобы это уравнение удовлетворялось поло-
положительным значением pg. Величина р„, таким образом определённая, иосит
название радиуса геодезической кривизны кривой. Иначе
можем написать:
? = ±?gCos^Cg°). B1.10)
Равенства B1.9) и B1.10) допускают следующую геометрическую интер-
интерпретацию. Отложим на главной нормали кривой отрезок О А = р и про-
проведём в плоскости Ong через точку А прямую, перпендикулярную к ОА.
Эта прямая отсечёт на прямых On и 0^- отрезки
ОВ=?п и OC=pg.
Величина, обратная радиусу геодезической кривизны, т. е. —, называется
геодезической кривизной. Для геодезической кривизны может
быть получено следующее выражение:
J_ , *о 0 . cos(Ag°) '
или, согласно формуле D.21) на стр. 36,
1 \~а&'
pg lgrad/|
Отсюда нетрудно получить выражение геодезической кривизны также
в декартовых координатах:
ds* dzJ + \ds3 dy ds* dx
Формула B1.11) показывает, что геодезическая кривизна обращается
в нуль, если _
Кривая, у которой это свойство имеет место во всех точках, т. е. кривая,
у которой главная нормаль всегда совпадает с нормалью поверхности,
носит название геодезической линии (отсюда произошло и назва-
название «геодезическая кривизна»: она является мерой отклонения кривой от
геодезической линии).
Пользуясь сделанными замечаниями, мы можем переписать уравне-
уравнения B1.6) следующим образом:
-4- ^ = РТ' I
±m^=-"/V | B1.12)
— m7n"~ """ "' >
200
В заключение этого параграфа остановимся на следующем геометри-
геометрическом вопросе. Как показывает формула B1.8), величина ——, вычи-
вычисленная для некоторой кривой на поверхности, только знаком может
отличаться от кривизны нормального сечения, имеющего ту же касатель-
касательную. Введём обозначение
и будем называть &М кривизной поверхности в данной точке вдоль дан-
данной касательной. Поставим вопрос, как эта кривизна изменяется с поворо-
поворотом единичного вектора т° касательной, или
какова кривизна для различных нормальных се-
сечений поверхности в рассматриваемой точке. Со-
Согласно формуле B1.7) имеем
¦с0--р-grad/
, <,ч dsB J
/1
Фиг. 80.
Поместим в данной точке О поверхности верши-
вершину прямоугольного трёхгранника Oxyz (фиг. 80),
причём ось Oz направим по положительной нормали On поверхно-
поверхности, а направление оси Ох оставим пока произвольным в касательной
плоскости. Введём обозначение:
Так как
т"о — х° cos 8 -\- у0 sin О
то интересующая нас кривизна имеет следующую структуру.
№ = kn cos2 6 -f 2kn cos 9 sin 6 -f /s22 sin2 ft, B1.13)
причём коэффициенты k v являются функциями только координат точки.
Исследуем производную —ттг-; имеем
Если
db
-= — (ku — k22) sin 20 -f- 2kl2 cos 26.
TO
-^ const. =0,
и, следовательно, кривизна А'г) поверхности во всех направлениях одна и
та же. Точки поверхности, в которых это имеет место, называются шаро-
шаровыми, или омбилическими. Если
производная . обращается в нуль только при
& *11— *22
201
Этому уравнению удовлетворяют два значения угла б, отличающиеся друг
от друга на у. При этом, по соображениям непрерывности, одно из
них даёт максимум кривизны &<т), другое— минимум. Направим по найден-
найденным направлениям координатные оси Ох и Оу. Так как теперь уравне-
уравнение B1.13) должно удовлетворяться значениями 6 = 0 и 8 = -|, то но-
новый коэффициент kl2 должен быть нулём. Поэтому, назвав новые значения
двух других коэффициентов соответственно kx и А2, мы, вместо выраже-
выражения B1.13), получим следующее:
sin26. B1.14)
2
Полагая 6 = 0 и 9 =-о , видим на основании предыдущего, что А, и А
соответственно равны максимальному и минимальному значению кривиз-
кривизны AW; А, и &2 называются главными кривизнами поверхности
в данной точке, величины
1 1
0, = . ¦ , И О, = ¦
называются главными радиусами кривизны, направления век-
вектора т°, в которых кривизна экстремальна,—главными направле-
направлениями, а нормальные сечения, им соответствующие, — главными
сечениями. Соотношение B1.14) остаётся, конечно, справедливым и
для шаровых точек, только в этом случае обе кривизны, А, и А2, одина-
одинаковы. Теорема, выражаемая формулой B1.14), принадлежит Эйлеру.
123. Интеграл кинетического момента (интеграл площадей). Если
попрежнему F— сила, приложенная к частице, движущейся по поверх-
поверхности,
/(*, у, z) = 0,
и
mw = F-{- \ grad /
— уравнение движения частицы, то закон изменения кинетического мо-
момента для этой частицы запишется так (§ 100):
Член с множителем \ представляет собой момент реакции. Для того
чтобы этот момент относительно какой-либо оси, например оси z, обра-
обратился в нуль, необходимо соблюдение условия
Система обыкновенных уравнений, соответствующая этому уравнению
с частными производными, будет
dx dy dz
Эта система имеет очевидные интегралы:
202
Следовательно, / представляет собой произвольную функцию от х*-\-у2 и z.
Другими словами, данная поверхность должна быть поверхностью
вращения вокруг оси г. Справедливость полученного вывода ясна и гео-
геометрически: нормаль к поверхности вращения всегда лежит в одной пло-
плоскости с осью вращения. Итак, если при движении частицы по поверх-
поверхности вращения вокруг оси z момент приложенной к частице силы F
относительно оси вращения равен нулю, то мы получаем интеграл кине-
кинетического момента относительно этой оси:
(rXmv)z = const. B1.15)
124. Интеграл энергии. Закон изменения кинетической энергии
(§ 104) в применении к частице, движущейся по идеально гладкой по-
поверхности, даёт уравнение
d (~\ = F-dr-j-lgxauf-dr.
Но
gradf-dr = gudf-v dt,
или, на основании формулы B0.8) на стр. 186,
df
-© = — ff.
Поэтому закон изменения кинетической энергии перепишется следующим
образом:
(^)F.dr-%dt B1.16)
Последний член в правой части представляет собой элементарную работу
реакции. Если
%
т. е. поверхность неизменна и неподвижна, эта работа обращается в нуль.
Если, кроме того, элементарная работа приложенной силы F является
полным дифференциалом, т. е.
F-dr = dU,
то из уравнения B1.16) мы получаем интеграл энергии в том же виде,
как и для свободной частицы (§ 106):
T = U+h, B1.18)
где h — произвольная постоянная.
Заметим, что в силу условия B1.17) уравнение поверхности имеет вид
f(x, у, г) = 0,
и, следовательно, каждая из координат служит функцией только двух
остальных. Рассмотрим, например, z как функцию от х и у, т. е. пусть
z = z(x, у),
и обозначим;
дг дг
203
Р дх ' q ~ ду *
Тогда элементарная работа получит выражение
F dr =Fxdx\ Fy dy ±Fzdz = (Fx + pFz) dx + (Fy -\- qF,) dy.
Здесь независимых переменных только две. Поэтому, чтобы элементарная
работа представляла собой полный дифференциал, теперь необходимы не
три условия A8.42) на стр. 165, как для свободной частицы, а только
одно
В заключение обратим внимание на то, что если мы для частицы,
движущейся по поверхности, нашли интеграл кинетического момента отно-
относительно некоторой оси (интеграл площадей) и интеграл энергии, то мы
имеем все независимые друг от друга первые интегралы дифференци-
дифференциальных уравнений движения рассматриваемой частицы; действительно,
закон движения частицы по поверхности содержит четыре независимых
произвольных постоянных (§ 119); следовательно, независимых первых
интегралов имеется два (см. также § 103),
125. Сферический маятник. Рассмотрим движение весомой частицы
по неподвижной сфере. Выберем начало координат в центре сферы и
ось Oz направим вертикально вверх (фиг. 81). Тогда, если R — радиус
сферы, уравнение связи (удерживающей) в декартовых координатах имеет
вид
Х2 _|_ yi _|_ Z2 _ #2 _ 0
и в цилиндрических
f -j- z^R*. B1.19)
Сферу можно рассматривать как поверхность вра-
вращения около любого из диаметров, а сила тяже-
тяжести даёт относительно вертикали момент, равный
нулю. Поэтому для рассматриваемого движения
имеет место интеграл B1.15) кинетического момента
относительно оси Oz
(гХ mv)z= const.
В цилиндрических координатах интеграл запишется следующим образом:
если произвольную постоянную обозначить Л [формула A8.24) на стр. 161],
fy — A. B1.20)
Кроме того, в настоящем случае справедлив также интеграл энергии, так
как сфера неподвижна, а сила тяжести является силой потенциальной.
Силовая функция силы тяжести имеет при выбранном направлении оси z
выражение
U = — т gz-\- const.
[формула A8.48) на стр. 168]; поэтому интеграл B1.18) энергии напи-
напишется так:
™* h. B1.21)
Постоянная интегрирования h, очевидно, следующим образом выражается
204
через начальные данные:
mVn
B1.22)
Если в уравнении B1.21) выразить скорость в цилиндрических координа-
координатах [формула F.9) на стр. 52] и сократить уравнение на массу, то мы
получим:
p2 + pV+^2=— 2& + н> B1.23)
rr h
где//=-.
Исключим теперь с помощью уравнения связи B1.19) из интегралов
B1.20) и B1.23) координату р и её производную р; имеем
р2=/?2_^2; B1.24)
отсюда
рр = — zi,
и, следовательно,
^L=. B1.25)
С помощью выражений B1.24) и B1.25) интегралы B1.20) и B1.23)
приведутся к виду
i )
Из этих уравнений мы теперь исключим <р; тогда получим для z диффе-
дифференциальное уравнение
z2=Q(z), B1.27)
где Q(z) обозначен многочлен:
Исследуем сперва движение частицы для случая, когда её начальные
данные удовлетворяют условиям
и, следовательно, А^фО. Дадим в многочлене Q(z) аргументу z значения:
— R, z0, -\-R, -j- oo . Нетрудно увидеть, что
Отсюда мы заключаем, что все три корня многочлена Q(z) — действитель-
действительные: один из корней, С, всегда положителен и больше /?; два другие,
zl и гг, лежат в промежутке (—R, -|-^)' причём
Разложив многочлен Q(z) на множители, мы можем, вместо выражения
B1.27), написать:
i« = ^ (г-S) (* — *,) (* — *„). B1.28)
205
Согласно уравнению B1.19) связи переменная z может изменяться лишь
между —R и R. Так как, кроме того, квадрат проекции скорости, z2, не
может быть отрицательным, то z вынуждено оставаться на выше указан-
указанном меньшем отрезке:
Отсюда следует, что траектория частицы должна быть заключена между
двумя параллельными кругами
z = zx и z —z2;
она последовательно касается каждого из них, так как в эти моменты
(и только в эти моменты) производная z обращается в нуль.
Дальнейшее аналитическое исследование движения в общем случае
приводит к выражениям координат через эллиптические функции времени.
Мы остановимся лишь на том частном случае, когда
гх=гй=г0.
При этом условии уравнение ,B1.27) упрощается следующим образом:
Правая часть последнего равенства отрицательна для любого z, по абсо-
абсолютной величине меньшего R и отличного от z0; поэтому единственно
возможное значение для z, при котором скорость частицы имеет действи-
действительное значение, будет
г = const. =20;
тогда мы получим:
z'= const. = 0.
Это значит, что частица перемещается но параллельному кругу, совершая
так называемое движение кругового конического маятника;
название происходит от того, что если маятник реализован с помощью гру-
грузика, подвешенного на нити, то в рассматриваемом случае движения нить
описывает круговой конус. Определим для изучаемого движения закон
изменения угла (р. Прежде всего из второго из уравнений B1.26) при
2 = 0 находим:
^ B1-29>
Теперь примем во внимание, что z0 служит кратным корнем многочлена
Q(z); следовательно, для z=z0 должна обращаться в нуль и производ-
производная от Q(z) no z; выполнив соответствующие вычисления, получим:
Определив из этого уравнения 2// и подставив в выражение B1.29),
найдём:
отсюда
206
где <р0 есть значение ср для момента @. Знак минус под радикалом в по-
последних выражениях говорит о том, что движение частицы по закону
кругового конического маятника возможно лишь при отрицательных зна-
значениях z, т. е. в нижней половине сферы.
Пусть теперь в начальный момент выполнено хотя бы одно из условий:
|*о1=Я. <Ро = °-
Тогда, как видно из уравнения B1.20), постоянная А площадей равна
нулю, и, следовательно, или
2 = const. =
т. е. частица находится в покое, или
ср = const. = 0,
т. е. имеет место движение частицы по меридиану. Это движение будет
изучено в следующей главе.
Возвращаясь к общему случаю движения сферического маятника, по-
поставим вопрос о реакции N сферы. Согласно формуле B0.26) на стр. 190
имеем
JV«— Igrad/J
Так как
то
grad / — 2 {хх° + уу° + zz°)
и
|grad /| = 2Ух^Ту?+^2 = 2#:
далее в соответствии с обозначениями, введёнными в формуле B0.10) на
стр. 187, находим:
i
наконец, мы имеем
F— — mg z°,
и следовательно,
grad / ¦ F= — mg-2z.
Собрав результаты, получаем:
(
™п— R ¦
Как видим, при z <^0, т. е. в нижней части сферы, всегда Nn<^0 и,
следовательно, реакция направлена к центру сферы; в верхней части сферы
реакция может быть направлена и к центру и от центра, в зависимости
от величины скорости. С помощью интеграла энергии B1.21) нетрудно
представить реакцию в функции одной лишь координаты г; выразив
сперва в этом интеграле постоянную h через начальные данные по фор-
формуле B1.22) и подставив затем найденное из этого интеграла значение
w2 в выражение реакции Nn, мы получим:
126. Движение по инерции. Приложим уравнения B1.6) на стр. 198
к решению задачи о движении частицы по неподвижной поверхности без
207
действия активных сил. При F= 0 первое из этих уравнений даст
откуда v = const. =т>0, т. е. движение частицы равномерное. Из второго
уравнения вытекает, что
°
т, е. траектория -— геодезическая линия. Третье уравнение даёт величину
реакции:
N= mA
?п
Пример 58. Рассмотрим движение частицы, к которой не приложено
активных сил, по цилиндру вращения, радиус ортогонального сечения которого
равен /. Геодезической линией на цилиндре служит винтовая линия. Пусть ка-
касательная к ней образует с плоскостью ортогонального сечения цилиндра угол а.
Тогда уравнения траектории в цилиндрических координатах будут:
Р = Ро = Л z~ zo = l-tg<i(<t~- <р0).
Одно из главных сечений поверхности в любой её точке, очевидно, идёт по об-
образующей, а другое — ортогонально к образующим; Следовательно, главные
радиусы кривизны равны оо и /. По известной теореме Эйлера [формула B1.14)
на стр. 202] кривизна — нормального сечения, проходящего через касательную
, cos'я
к винтовой линии, будет, следовательно, равна —.— , а потому для реакции
имеем выражение
C
127. Движение по конусу вращения. В виде примера на приложе-
приложение уравнений типа B1.5) на стр. 198 займёмся задачей о движении ча-
частицы М по конусу вращения. Поместим в вершине конуса начало сфе-
сферической системы координат г, <р, <Ь и ось <? = у направим по оси вра-
вращения конуса (фиг. 82а). Тогда данный конус
станет одной из координатных поверхностей: если
2а — угол при вершине конуса, то уравнение
этой поверхности будет
ф — (|~а)=0. B1.30)
Левые части уравнений движения возьмём из фор-
формул A5.5) на стр. 139, положив в них Ф = ~—с;
тогда получим:
т {г— г sin2 а-ц*) = Рг,
т sin a d „•, „
№ F
B1.31)
Фиг. 82а. — mr sin a cos а • (р2 — /="ф -\- Л?ф. '
Движение частицы определяется лишь первыми двумя из этих уравне-
уравнений; третье понадобится тогда, когда пожелаем найти реакцию N.
I0S
Положим, что приложенная к частице сила F направлена по оси ко-
конуса и зависит лишь от расстояния г, т. е. пусть
Fr = F sin a. = mf (r); F4 = F cos у —О-
Тогда второе из уравнений B1.31) даст нам интеграл площадей:
г*у = А, B1-32)
где А — произвольная постоянная. Так как поверхность, по которой дви-
движется частица, неподвижна, то имеет место также интеграл энергии
а _1_ А ' 2 2 9(Ь I \ -Л- 9Н B1 33\
где
Ф (/•) = $/(/•) Л-
[см. формулы B1.18), F.26) на стр. 57, A8.46) на стр. 167].
Оба первые интеграла движения нами найдены; интегрирование закон-
закончится двумя квадратурами. А именно, исключив ср из уравнения B1.33)
с помощью соотношения B1.32), получим диф- м
ференциальное уравнение для г, решаемое "
квадратурой; найдя г как функцию времени,
новой квадратурой определим <р из уравнения
B1.32). Q-
Представим себе, что взятый конус развёр-
развёрнут на плоскость. Пусть образующая ОВ, ле-
лежащая в плоскости Ozx (фиг. 82а), заняла на
плоскости положение О0В0 (фиг. 826), а какая-либо точка М на конусе
с координатами г, <р поместилась в положение Мо. Точку Мо иа плоско-
плоскости будем определять полярными координатами р и 8, т. е. расстоянием
точки Мо от О0, и углом прямой О0М0 с прямой О0В0. Заметим, что
при развёртывании конуса дуга РМ параллели с радиусом г sin а обра-
обратится в дугу РоМа окружности радиуса р и при этом длины дуг не изме-
изменятся, т. е.
Но дуге РМ соответствует центральный угол <р, а дуге Р0Мй — угол 6;
следовательно,
пр sin a = рб.
Теперь уже легко получить зависимость между координатами точки М
на конусе и координатами её изображения на развёртке, т. е. точки Мо:
r=p; <psina=6, B1.34)
Когда частица М движется по конусу, её изображение Мо перемещается
по плоскости. Интегралы движения B1.32) и B1.33) при помощи соот-
соотношений B1.34) переходят в следующие интегралы движения для точ-
точки Мо:
fb = Au, р2
если
г. К. Суслов 209
Сравнивая эти уравнения с формулами A9,6) и A9.8) на стр. 175, мы видим,
что они представляют собой интегралы площадей и энергии для уравнений
движения частицы по некоторой центральной орбите. Таким образом, в рас-
рассматриваемом случае задача о движении частицы М по коиусу сводится к за-
задаче о движении частицы Мо по плоскости под действием центральной силы.
Когда решена последняя задача, соотношения B1.34) дают возможность
перейти к первой. Геометрически этот переход представляется так: раз-
разрежем плоскость по прямой О0В0, заставим край её О0В0 совпасть с об-
образующей ОВ и станем навёртывать плоскость на конус; тогда те точки
конуса, с которыми будет совпадать в различные моменты времени ча-
частица Мо, и будут служить соответственными положениями частицы М.
•Может случиться, что такое навёртывание придётся повторить бесконечное
множество раз, т. е. придётся представить себе, что плоскость как бы
состоит из бесчисленного множества плёнок, непрерывно переходящих
одна в другую по прямой OqB0 и образующих как бы некоторую винто-
винтовую поверхность вокруг точки О0. Нетрудно сообразить, что такого рода
приведение к задаче на плоскости возможно для движения по всякой
развёртывающейся поверхности, если только сила проектируется на по-
поверхность по образующей и при развёртывании не изменяется.
XXII. ДВИЖЕНИЕ ЧАСТИЦЫ ПО АБСОЛЮТНО ГЛАДКОЙ КРИВОЙ
128. Дифференциальные уравнения движения частицы по кривой.
Положим, что частица движется по кривой пересечения поверхностей
f1 = (x,y,z,t)=0, f%(x,y,z,t) = 0. B2.1)
Уравнение её движения для общего случая нами уже найдено в § 121,
а именно, если F—равнодействующая приложенных к частице сил, а
N-—реакция кривой, то
^N, B2.2)
при этом реакция N имеет выражение:
,. B2.3)
где каждый из множителей связей \ определяется из уравнений B0.45)
на стр. 195.
Посмотрим теперь, как можно упростить и видоизменить уравнение
движения в том случае, когда данная кривая неизменна и неподвижна,
т. е. когда её уравнениями служат
f1(x,y,z)=s0, ft(x,y,z) = 0. B2.4)
Прежде всего, умножив уравнение B2.3) скалярно на единичный век-
вектор т° касательной к траектории, находим:
N • ? = Ь, grad /, • ? + *» grad A • *> = 0. B2.5)
т. е. реакция кривой лежит в её нормальной плоскости. Выберем теперь
такую систему координат qv q2, qt, чтобы данная кривая была одной из
210
координатных линий, ортогональной к соответственному семейству коорди-
координатных поверхностей; пусть уравнения её будут
q2 — a2 — 0, qs—/a3 = O, B2.6)
где а2, as — некоторые постоянные. По свойству B2.5) реакция N в
проекции на ось qx даст нуль. Поэтому уравнения движения частицы
в координатах qv q2, qB [формулы A5.3) на стр. 138] в соответствии
с уравнением B2.2) напишутся так:
= F.
дг
dgx
m
дг
dg*
m
dr
Vdt
Vd
Vat
\dd
Vdt
dgx
(?)
(?)
dga
dgi J
Щ
dgi -1
dgt J
=F«2+N<
91
= Fa, + Ua
B2.7)
Движение частицы вполне определяется первым уравнением, содержащим
только одну неизвестную функцию времени qx: величины q2 и qs даны
уравнениями B2.6). Интегрирование введёт две произвольные постоян-
постоянные, как это и следует из § 121. Остальные два уравнения служат лишь
для определения реакции N.
Можно также отнести движение частицы к осям естественного трёх-
трёхгранника, т. е. к подвижным осям, имеющим начало в движущейся ча-
частице и направленным по касательной От к кривой, по её главной нор-
нормали Ov и по бинормали OJ2. Тогда, сопоставляя уравнения A5.6) на
стр. 139 с уравнением движения B2.2) настоящего параграфа, найдём:
B2.8)
И здесь опять первое уравнение вполне определяет движение частицы.
Оно содержит одну неизвестную функцию времени, а именно, длину s
дуги кривой, определяющей положение частицы относительно какой-ни-
какой-нибудь точки кривой. В отношении левой части это очевидно. В отноше-
отношении правой это следует из того, что сила F является в общем случае
функцией времени, положения и скорости частицы, т. е. имеет вы-
выражение
F=F(t,r,v);
поэтому в силу уравнений B2.4) связи она может рассматриваться как
14* 211
функция от t, s и s; действительно,
<О — — — — '
а потому
F=F(t,s,'s). B2.9)
Второе и третье уравнения определяют реакцию N.
В том случае, если частица движется по плоской кривой и сила F
лежит в её плоскости, мы можем ограничиться первыми двумя уравнени-
уравнениями B2.8), так как третье из них в этом случае говорит лишь об оче-
очевидном факте, что вся реакция кривой идёт по главной нормали:
129. Интеграл энергии. Закон изменения кинетической энергии
частицы (§Я04), в случае её движения по данной кривой, согласно урав-
уравнениям B2.2) и B2.3) пишется так:
d -^- — F-dr-\-\ grad/, ¦ dr \- hgrad f^-dr. B2.10)
С другой стороны, дифференцированием уравнений B2.1) связей мы по-
получаем:
^f = 0, s-gradA + f = 0.
Поэтому, вместо уравнения B2.10), мы можем написать
Последние два члена выражают собой элементарную работу реакции N
кривой. Если кривая неизменна и неподвижна, т. е.
dt—" и Ж ' {МЛ*)
то эта работа обращается в нуль. Пусть, кроме того, сила F не зависит
явно от времени и скорости, а только от положения частицы, т. е.
F--F(r), B2.13)
Тогда элементарная работа будет полным дифференциалом; действительно,
на основании соотношения B2.9), имеем
где
U=^f(s)ds. B2.14)
Таким образом, при соблюдении двух выше указанных условий B2.12)
и B2.13) мы получаем из закона изменения кинетической энергии
B2.10) интеграл энергии
"^-~U.\.h, B2.15)
где h — произвольная постоянная.
212
130. Движение весомой частицы по циклоиде. Рассмотрим дви-
движение весомой частицы в вертикальной плоскости по циклоиде, обращен-
обращенной вершиной вниз (фиг. 83). Поместим начало О координат в вер-
вершине циклоиды, ось Ох направим гори зонта пьно вправо, ось Оу вер-
вертикально вверх. Введём вспомога-
вспомогательный угол <р между радиусом
СА производящего круга, направ-
направленным вертикально вниз, и ради-
радиусом СМ, проведённым к движу-
движущейся частице М. Тогда, если
R — радиус производящего круга
и при <р = 0 частица М находи-
находилась в начале координат, пара-
параметрические уравнения циклоиды
напишутся так:
-costp). /
*-z
Рассматриваемая кривая неподвижна, а активная сила (сила тяжести)
обладает силовой функцией:
U= — m gy -\- const.
Поэтому, по предыдущему параграфу, мы имеем интеграл B2.15)
энергии
mfl_
2 ~'
B2.17)
Чтобы выразить произвольное постоянное через начальные данные, напи-
напишем последнее уравнение для начального момента; имеем
mvX
B2.18)
Почленно вычтя равенство B2.18) из B2.17) и сократив результат на
массу, мы получаем:
v* = v*-2g(y-y0), B2.19)
или
о2 = vl-f 2gR (cos<p - cos <p0). B2.20)
Введя длину s дуги кривой и преобразовав правую часть с помощью
формулы синуса половинного угла, можем последнее уравнение перепи-
переписать в виде
(S)' () B2.2П
B2.22)
С другой стороны, элемент ds дуги кривой равен
ds2= dx2 -f dy2;
а так как согласно уравнениям B2.16)
dx—R(\ -f- costp) d<o, dy = R sin <p d'-o,
ds г= 2/? s A -f cos a) rftp2 ^= 4/?2 cos2 -' df,
213
т. е.
ds = 2/? cos -?d<p:
при извлечении корня мы берём только знак плюс, так как ограничи-
ограничиваемся изучением движения частицы по одной арке циклоиды, в пределах
— тг ^ щ 5^ я. Проинтегрируем последнее уравнение, приняв за начало
отсчёта дуг першину О циклоиды; мы получаем:
B2.23)
Теперь интегралу B2.21) энергии можем дать вид
\dtj "о
или
ds
где положено
Проинтегрировав это уравнение по способу, изложенному в применении
к уравнению A6.10) на стр. 145, находим:
где у — произвольная постоянная.
Движение частицы по циклоиде, оказывается, является гармоническим
колебательным движением; амплитуда колебания равна а; период колебаний
равен
•VI ¦¦
как видим, он не зависит от начальных условий; такого рода периодическое
движение называется изохронным. Заметим также следующую особен-
особенность изучаемого движения. Пусть
Тогда закон движения примет вид
S -—- Sq COS
Следовательно, движущаяся частица достигнет вершины О циклоиды
(в этой точке s = 0) по истечении времени п1/ — от начала движе-
движения. Мы видим, что этот промежуток времени не зависит от начального
положения частицы. Это свойство движения называется таутохрон-
ностью. Иначе можно сказать, чтаесли мы поместим несколько весомых
частиц в различных точках М, М1У М2,... кривой и одновременно предо-
предоставим им соскальзывать с нулевыми начальными скоростями, то все они
встретятся в вершине О циклоиды в один и тот же момент.
214
С помощью вариационного исчисления можно доказать, что разобран-
разобранное нами движение обладает ещё одним интересным свойством: оно
брахистохронное. Это значит, что из всех кривых, соединяющих
две точки, расположенные в одной вертикальной плоскости, циклоида
отличается тем свойством, что падение весомой частицы по ней совер-
совершается в наикратчайшее время.
Возвращаясь к общему случаю движения весомой частицы по циклоиде,
определим реакцию N кривой. Для этого нужно составить второе из
уравнений B2.8):
Чтобы спроектировать активную силу F (в данном случае силу тяжести
mg) на главную нормаль, найдём сперва угол (jc°, т°) между осью х
и касательной Мх к кривой; имеем согласно выражениям B2.22)
следовательно,
(jco^o) = .t. B2.25)
Таков же, очевидно, угол между главной нормалью и осью у. Поэтому
Кроме того, отсюда следует, что главная нормаль проходит через точку Р,
в которой производящая окружность касается прямой BD, по которой
она катится. Радиус кривизны ищем по известной формуле:
fa''"
\ху—ух I
Выполнив вычисления, находим:
р = 4/? cos -|-, B2.26)
т. е.
Произведя соответствующие подстановки, получаем теперь из уравнения
B2.24):
4#cos-*-
A
или, вставив значение ^2—(т^Г из Ф°РМУЛЫ B2.21),
т
— (-ft)
4/? cos ^
215
131. Элементарные свойства эллиптических интегралов и функций.
Прежде чем перейти к решению задачи о математическом маятнике,
выведем элементарным путём некоторые простейшие свойства эллиптических
интегралов и функций. Интеграл
Ф
в = /\(Ф) = Г -¦_-d? , B2.27)
0
где параметр k—правильная положительная дробь, называется элли-
эллиптическим интегралом 1-го рода. Рассматривая его как
функцию от верхнего предела, прежде всего замечаем, что
Fk (Ф + *) = П (Ф) + ^ (*)• B2-28)
Действительно, если для сокращения ¦ положить
Дгр = 1/ — Л;а sin2 «p, B2.29)
то можно написать:
о
в последнем интеграле сделаем замену переменной интеграции, положив
cp = rr-j-6; тогда
1
ф
d? rdO
Подставив этот результат в предыдущее равенство, приходим к требуе-
требуемому соотношению B2.28).
Докажем, далее, что
Fk{—<b)z= — F(^)t B2.30)
т. е. что функция Fk — нечётная относительно аргумента <р. Берём
интеграл
С d't
5)
и делаем в нём замену переменной, положив а> = — 6; тогда находим:
-Ф ф
¦ rf$__ fdi
Дв I Д9 '
о
что по обозначениям B2.27) и B2.29) и доказывает соотношение B2.30).
Дадим теперь в формуле B2.30) ^аргументу ф значение j ; по-
получаем:
откуда, по свойству B2.30),
216
Величина Fb [-тг\ носит название полного эллиптического
интеграла 1 -го рода и обычно обозначается буквой К:
$ут*Щ B2-31)
о
Последовательно прилагая к функции Fk(ty) формулу B2.28), легко
находим:
B2.32)
где п — целое число (положительное или отрицательное).
Обратимся снова к равенству B2.27). Верхний предел ф интеграла,
рассматриваемый как функция от самого значения интеграла u = Fk,
носит название амплитуды и обозначается так:
ф = am (Fk) = am и. B2.33)
На основании формулы B2.30) заключаем, что
ат(— и) = — аши. B2.34)
Далее видим, что когда аргумент и увеличивается на 2пК, то. по свой-
свойству B2.32), ф увеличивается на пи:
am (и 4- 2n/Q = am и -f- «тт. B2.35)
На основании указанного сейчас свойства амплитуды, она относится к так
называемым псевдопериодическим функциям от своего аргумента с перио-
периодом 2К.
Функции
sin ф = sin am и,
cos ф = cos am к,
Дф = Дати= Y\ — k2 sin2 am a
будут чисто периодическими функциями от и: первые две с периодом 4/f
а последняя с периодом 2/С. Сказанное ясно из свойства B2.35).
132. Математический маятник. Задачей о математическом маятнике
называется задача о движении весомой частицы М по вертикальной
окружности. Возьмём начало координат в центре окружности и направим
ось Оу вертикально кверху (фиг. 84). Если радиус окружности равен R,
то уравнение её будет:
— R2 = 0. B2.36)
Движение определяется интегралом энергии в форме B2.19) на
стр. 213:
Этому интегралу мы дадим вид
v*=2g{$-y), B2.37)
где
217
Легко указать значение постоянной 8. Уравнение у = 8 принадлежит тому
горизонтальному уровню, до которого поднялась бы наша весомая частица,
если бы она была брошена из своего начального положения со скоростью
va вертикально кверху. Действительно, если началу движения (у=у0)
соответствует момент ( = 0, то уравнение прямолинейного движения
частицы в этом случае было бы следующее:
Отсюда проекция скорости равна
следовательно, она обратится в нуль в момент т = — ; а в этот момент
частица и достигнет уровня
Значения, принимаемые постоянной В, определяют собой характер
движения частицы: как увидим, когда уровень у=$ пересекает окруж-
окружность B2.36), движение колебательное; когда уровень у=$ касается
окружности B2.36), движение асимптотическое; наконец, когда уровень
_y=jj проходит выше окружности B2.36), движение прогрессивное,
т. е. совершается всё время в одну сторону. Разберём последовательно
все эти три случая.
1. Уровень у=$ пересечёт окружность B2.36), если
В этом случае мы можем положить
где
B2.39)
0<y<tt. B2.40)
ПрЯ этом угол у будет тупой или острый, в зависимости от знака р.
Введём полярные координаты р и <р, приняв за полярную ось верти-
вертикаль, опущенную из центра окружности вниз. Тогда будем иметь:
у = — R cos (p.
Отсюда становится ясным геометрический смысл величины у: это есть
значение полярной координаты <р частицы при её положении на уровне
_у=р. Интеграл B2.37) с помощью найденного соотношения и фор-
формулы B2.39) можно переписать так:
или
= ± 2 |/|(dnti-«ln«i).
B2.41)
B2.42)
Сопоставляя это уравнение с выражением B2.40), усматриваем, что всегда
имеет место следующее соотношение:
218
При |<р| = у производная ~. проходит через нуль, меняя каждый
раз знак.
Произведём в уравнении B2.42) замену переменной, положив
где
sin-|-=sm-| sin<J>,
ItKf
B2.43)
Легко указать геометрическое значение новой переменной ф. Из нижней
точки А окружности, по которой движется частица М, радиусом
=2R sin-^-
опишем
вспомогательную
окружность РВ (фиг. 84). Уровень РР1 будет
тогда уровнем у=$; действительно,
АР
is oir»
2
¦tn LAPP _ 2 _
Sln 2 ~~ ЛО ~
откуда следует, что
; sinY •
в силу соотношения B2.39), это как раз
то, что требовалось доказать. Возьмём,
далее, произвольное положение частицы М на
окружности, соединим точку М с верхней фкг 84
точкой С окружности и продолжим эту
прямую до встречи в точке В с окружностью РВ. Соединим точки В и А;
тогда угол ABC и будет равен ^
в самом деле, угол АСМ—^
АВ = АР — 2R sin -^-; следовательно,
Sin тр
.-, Sin тр
Лп ? ABC = sin ±.^2 = i=si
Дифференцированием соотношения B2.43) находим:
2 sin -I cos f
i
B2.44)
Подставив выражения B2.43) и B2.44) в уравнение B2.42), получаем:
= = l/I& B2.45)
— Sin3 7J- Sin2 ty
*\
В этом уравнении в соответствии с выражением B2.42) знак плюс сле-
следует брать для того промежутка времени, когда угол ср возрастает от
219
—Y до у [в это время ф, как видно из формулы B2.43), возрастает от
— ~2 до "г"]' и знак МИНУС> когда 9 убывает от f до — у (а Ф соот-
соответственно убывает от у до — у).
Чтобы проинтегрировать это уравнение и найти закон движения
частицы, рассмотрим ряд таких последовательных промежутков времени,
чтобы в течение каждого из них частица двигалась в каком-либо одном
направлении. Пусть
в момент t0 имеем ф = О,
и т. д.
Для промежутка {to,t^i уравнение B2.45) нужно взять с плюсом.
Интегрируя левую и правую части между соответствующими друг другу
пределами @, ф) и (toj), получаем, употребляя обозначение B2.45):
р ,фч—i/~JHt—tb), B2.46)
или
/% (ф) = и, B2.47)
где положено
ft = sin 1-й |/"-|. (*-*„)= в. B2.48)
Отсюда, в частности, для момента /т согласно формуле B2.31) получаем
соотношение
"г (*, - t0)- B2.49)
Решив уравнение B2.47) относительно ф, находим согласно формуле
B2.33):
ф=ати. B2.50)
Переходим к следующему1 интервалу. (tv t2). Уравнение B2.45) те-
теперь берём с минусом. Употребляя сокращённое обозначение B2.29), по-
получаем для произвольного момента t в интервале (tvt2):
- (U_
J
Преобразовываем следующим образом левую и правую части этого
равенства:
220
Решив это уравнение относительно второго члена левой части, получаем
на основании предыдущего:
Отсюда находим:
ф = am (—и + 2/0,
или, на основании теорем B2.35) и B2.34),
ф = — am и + тт. B2.51)
Рассуждая аналогичным образом, мы бы для следующего интервала
(?2, ?3) получили:
4) = am и— 2тг, B2.52)
и т. д. Все законы движения B2.50), B2.51), B2.52), ... можно за-
записать в единой форме, если вместо самой функции (J) рассмотреть её
синус; именно, на основании обычных тригонометрических формул приве-
приведения находим для любого момента времени t:
sin ф = sin am и.
Отсюда уже нетрудно с помощью соотношения B2.43) перейти снова
к полярной координате <р; получаем:
sin ^ = sin "о" • sin am и.
Итак, движение частицы -— колебательное периодическое, с амплитудой у
для угла у и периодом
B2.53)
последнее следует из формул B2.35) и B2.49). Четверть периода, оче-
очевидно, равна промежутку времени, в течение которого частица, выходя-
выходящая из некоторого положения с нулевой начальной скоростью, достигает
евоего равновесного положения <р = 0. Формула периода показывает, что
движение математического маятника не изохронное и не тауто-
таутохрон н о е: период колебания зависит от начальных условий (от у).
Разложим подинтегральную функцию в выражении B2.53) в ряд
по формуле бинома Ньютона; примем во внимание известную формулу
Валлиса (Wallis):
" Y "-r — 2-4. ..2k 2 '
'о
тогда мы легко найдём:
Я У ?|_ l"/ Sm "^ V2^5j Sm ~2 ' V2^4-6y "" 2 '
221
Как видим, движение близко к изохронному при небольших разма-
хах, т. е. при малом у: тогда имеем для периода приближённую фор-
формулу:
m i
B2.54)
2. Уровень у = p коснется окружности B2.36), если
п п.
Тогда интеграл B2.37) в полярных координатах представится так:
Отсюда
cosf
B2.55)
Проинтегрировав, получаем:
In
tg —
если моменту t = to соответствует значение угла щ
написать:
и —<р
= ;р0. Иначе можем
= tg
Когда ^ беспредельно возрастает, то при верхнем знаке угол со стремится
к пределу -f-тг, а при нижнем знаке к пределу —я. В обоих случаях
весомая частица асимптотически приближается к верхней точке С окруж-
окружности (фиг. 84 на стр. 219). Так как при этом производная-^, являясь
непрерывной функцией времени, вместе с тем не достигает нуля во время
движения, то знак в уравнении B2.48) следует выбирать соответственно
знаку производной' -^ в начальный момент.
3. Уровень У—$ пройдёт выше окружности B2.36), когда
В таком случае мы можем принять
Интеграл B2.37) в чрлярных координатах теперь будет иметь вид
222
или
если
Знак в выражении B2.56) зависит лишь от знака начального значения
производной -j- и сохраняется во всё время движения, так как -~ яв-
является непрерывной функцией времени, а подрадикальнам величина всегда
отлична от нуля.
Проинтегрировав уравнение B2.56), находим согласно формуле
B2.27):
если t = t0 соответствует значению <р = 0- Отсюда
где
±
Так как -^ не меняет своего знака, движение частицы прогрессивное,
т. е. идущее без остановок в одну и ту же сторону. Всю окружность
точка пробегает за промежуток времени:
это видно из последних двух равенств и из формулы B2.35).
Займёмся теперь определением величины реакции окружности на ча-
частицу. Положим сначала, что, например, маятник представляет собой
весомую частицу, подвешенную на нити. Тогда уравнение рассматриваемой
неудерживающей связи согласно условию о написании знака неравенства,
установленному в § 114, будет
f=R2— л2 — у>0. B2.57)
Реакцию находим по формуле
W=Xgrad/, B2.58)
где
Х_ gradf-F+mD,/ (92 ^
[см. выражение B0.27) на стр. 190]. Выполняя вычисления, имеем
grad /= — 2хх° — 2уу°,
223
далее, вспомнив сокращённое обозначение, введённое в формуле B0.10)
на стр. 187, получаем:
D2/= — 2х* — 2 у = — 2v\
наконец, имеем
grad / • F— — mg-(—2y) = 2mgy.
Собрав результаты, находим:
заменив здесь v2 его значением из интеграла энергии B2.37) на стр. 217,
получаем:
/2 о
<22-60>
Из интеграла B2.37) мы заключаем прежде всего, что всегда
_У<р. B2.61)
'Остановимся, далее, сперва на случае, когда {5г?0. При этом уело-
еии согласно равенству B2.61) во всё время движения ^ [5—у^О.
Т. е., когда маятник при своих качаниях не ставит нить выше её горизон-
горизонтального положения, 1 всегда неотрицательна, и, сле-
следовательно, частица не может сойти со связи (§120);
другими словами, нить всегда натянута.
2 2
Когда р > 0, но у р < #, уровень .у = -jt P
(фиг. 85) пересекает окружность в некоторых точках
Р и Pv Лишь только весомая частица в своём
движении дойдёт до одной из этих точек, \ обра-
обращается в нуль и при дальнейшем движении стано-
становится отрицательной; следовательно, здесь' нить осла-
ослабляется, а частица сходит со связи и движется по
параболе PQ, пока в точке Q снова не придёт на связь.
2 2
Когда Р^>0 и при том -^ р ^ /?, уровень у — -^ р проходит выше
2
окружности или касаясь её; следовательно, у всегда не больше -^ р,
о
а потому, как видно из выражения B2.60), а всегда неотрицательна,
и, значит, во всё времд движения нить натянута.
Если окружность позволяет частице произвольно удаляться от центра,
например, когда весомая частица катится по обручу с наружной стороны,
то уравнение связи по условию § 114 будет:
Как ясно из формулы B2.59), новое значение множителя \ будет только
знаком отличаться от прежнего; т. е. теперь
Следовательно, движение частицы по связи возможно только в том слу-
224
чае, когда соолюдеио условие
так как, кроме того, при движении частицы по связи всегда y*^.R, то
Если в последнем выражении имеет место лишь
2
знак неравенства, то уровень у=—$ пересекает
окружность в некоторых точках Q и Q, (фиг. 86).
Движение возможно лишь по дуге сегмента QCQ1.
В точках Q и Qj, когда скорость направлена книзу,
весомая частица сходит со связи и дальше падает по
параболе.
Во всех рассмотренных случаях, когда связь находится в напряжении,
реакция связи согласно формуле B2.58) по модулю равна
N=4? -S-B —
XXIII. ДВИЖЕНИЕ ЧАСТИЦЫ ПО СВЯЗЯМ С ТРЕНИЕМ
133. Законы трения. До сих пор мы принимали, что связь оказы-
оказывает реакцию по прямой, служащей основанием градиента функции
/=0 (§ 118); эта реакция по направлению вполне определялась, когда
нам было дано аналитическое уравнение связи. Но может случиться, что
связь оказывает реакцию на материальную частицу также и в плоскости,
перпендикулярной к градиенту; тогда законы, управляющие такой реак-
реакцией, не могут быть найдены только из аналитической формы связи,
а должны быть определены из других источников, например, при помощи
наблюдений и опыта; другими словами, реакции такого рода представляют
собой, собственно говоря, заданные силы. К ним принадлежит и так на-
называемая' си л а трения. Законы, трения относятся к взаимодействию
двух тел, соприкасающихся друг с другом и движущихся друг относи-
относительно друга; принимая, что материальная частица представляет собой
весьма малое тело, мы можем результаты опытов над трущимися телами
приложить и к материальной частице. Когда движение частицы по данной
поверхности или линии сопровождается трением, то поверхность или ли-
линия называются шероховатыми. Законы трения для материальной
частицы, находящейся на неподвижной шероховатой поверхности, сле-
следующие:
1) в случае движения сила тренин направлена прямо противоположно
скорости частицы; при этом модуль силы трения равняется kN, где k —
некоторая постоянная, называемая коэффициентом динамического трения,
а /V— модуль нормальной реакции поверхности;
2) когда частица находится на поверхности в покое, сила трения
равняется по модулю и противоположна по направлению ортогональной
составляющей от равнодействующей приложенных к частице сил взятой
15 г. к. Суслов 225
в касательной плоскости к поверхности; при этом по своей величине сила
трения не может превышать k^N, где ks — некоторая постоянная, назы-
называемая коэффициентом статического трения, а N—модуль нормальной
реакции связи.
Для частицы, находящейся на шероховаюй кривой, предыдущие за-
законы изменяются так:
1) в случае движения сила трения всегда направтена по касательной
к кривой прямо противоположно скорости точки; при этом модуль
силы трения равняется kN, где k— коэффициент динамического трения,
а N—модуль нормальной реакции кривой;
2) когда частица находится в покое на кривой, то сила трения равна
по модулю и прямо противоположна по направлению ортогональной со-
составляющей от приложенных к частице сил, взятой по касательной к
кривой, но не может быть больше, чем k^N, где kx — коэф-
коэффициент статического трения, а N—модуль нормальной реакции.
Угол, тангенс которого равен коэффициенту трения, называется
углом трения.
134. Дифференциальные уравнения движения частицы по ше-
шероховатой поверхности. Пусть уравнение данной поверхности есть
f(x, у, г) = 0. B3.1)
Тогда по предыдущему уравнение движения частицы массы т будет:
mta = F-| Igrad/—k \\ \ • |grad/| • — ,
или, в проекциях на оси декартовых координат:
B3.2)
Если же отнести уравнения движения к касательной От к траеьггорш,
оси Qg, ей перпендикулярной и тоже лежащей в касательной плоскости,
и к нормали On поверхности, т. е. к тем подвижным осям, которыми
мы пользовались при написании формул B1.12) на стр. 200, то при
тех же обозначениях мы получим:
kN,
B3.3)
п
±т
Z- —
«2_
Рп~~
F
п
в первом уравнении проекция — kN силы трения на касательную От
к траектории всегда отрицательна, потому что при написании этою
уравнения предполагалось, что касательная проведена в сторону дви-
движения частицы (это нашло своё отражение на знаке левой части
уравнения).
226
135. Движение весомой частицы по шероховатой наклонной
плоскости. Пусть данная плоскость наклонна к горизонту на угол а.
Взяв начало О координат на плоскости, направим ось Ох горизонтально
по этой же плоскости, а ось Оу проведём книзу по линии главного
гСката, т. е. перпендикулярно к линиям пересечения данной плоскости
горизонтальными; ось Oz направим перпендикулярно к плоскости под
острым углом к вертикали, идущей вверх. Рассмотрим движение весомой
частицы по взятой наклонной плоскости, предполагая, что последняя
шероховата. При выбранных осях уравнение плоскости будет:
z = 0. B3.4)
Уравнения движения в данной задаче напишутся так:
= — k\~ ;
ту — mgsm а — к\ — ;
v
B3.5)
пи — — mg cos a -j- X.
Из уравнения B3.4) связи и из последнего уравнения B3.5) находим:
\ = mg cos a. B3.6)
Подставив это значение \ в первые два уравнения B3.5) и сократив на
Массу, получаем:
•• _ *gcos а ¦
л X.
V
Для сокращения письма полагаем:
gsina = Y> &gcosa±=AY
откуда
K=kz\%a.. B3.7)
При таких обозначениях уравнения движения перепишутся следующим
образом:
*=-**!. \
V ) B3.8)
Обозначим через 'f угол скорости v с осью Ох, т. е. положим:
; y-=vs\af. B3.9)
Тогда окажется
dv
du . i ct<?
y = 4fSm?-{-v cos <p ^.
15* 227
Подставив эш выражения в уравнения B3.Э), найдём:
dv . d<t ,,
~т- cos 'f — v sin 9 j- = — л у cos if.
dt
dv
dtp , , .
!p-i = у A — л sin <p).
Определяем отсюда производные ~ и -^:
B3.10)
Исключив dt, выводим из этих уравнений следующее:
Проинтегрировав его, находим:
In v = — In cos <p -f ЛЧп tg ^ — -|) + In 2C,
где С— произвольное постоянное. Отсюда получаем
v=2C - — . B3.11)
COS tp х '
Пусть
тогда
«?=-|~2arctg7if B3.14)
и, следовательно, согласно выражению B3.11)
(I -fi2)=:C(r,/f-1+r1A:+1). B3.15)
Кроме того, из уравнения B3.13) вытекает, что
Определим теперь ^ из уравнения B3.10), мы получим для него на
основании равенств B3.15), B3.16) и B3.12) такое выражение:
228
следовательно,
где ?,—произвольная постоянная.
Чтобы окончить задачу, остаётся ещё найти хну как функции от 7j.
На основании уравнений B3.9), B3.12), B3.33), B3.15) и B3.17) по-
получаем;
dx = v cos cp dt = — — г,2* A -f Is)
<y = v sin 'f Л = — —
Отсюда, проинтегрировав, находим:
где л, и у1 — произвольные постоянные.
Пусть постоянная К, согласно формуле B3.7) равная Actga, больше
нчи равна единице;
А">1. B3.21)
Тогда видим, что v согласно формуле B3.15) обращается в нуль одно-
одновременно с к). Случится это согласно формуле B3.18) в момент t = tv
когда, как это видно из формул B3.19) и B3.20), частица придёт в по-
положение х = х1% У=уу Нормальная реакция JV связи согласно уравне-
уравнениям B3.6) и B3.4) равняется по модулю
/V= | \ || grad/| = mgzo% a,
проекция же активной силы, т. е. силы тяжести на плоскость, равна
/Mjg sin а; следовательно, согласно условию B3.21) имеет место соотно-
соотношение
ms, sin a
N
= tga
поэтому движущаяся частица, дойдя до положения (xvyt), останется
ц нём в покое; иначе говоря, в момент t — t{ движение приостановится.
Если
то для 7)=г0 находим: t—oo, _y=oo, а х — х{; следовательно, дви-
движение не прекращается, и траектория имеет асимптоту, параллельную
оси Оу.
Наконец, при условии
азижение происходит безостановочно, и траектория асимптоты не имеет.
229
136. Движение частицы по шероховатой поверхности по инер-
инерции. Положи\(, что материальная частица движется по шероховатой ио-
перхности без приложенных сил. Применив к мей уравнения типа B3.3),
находим;
mv =— kN; — = 0; — = N.
?g ?n
Второе уравнение определяет собой траекторию; она оказывается геоде-
геодезической линией, как и для гладкой поверхности. Исключив из первого
и третьего уравнений реакцию N, имеем
dv №-
Замечаем, что vdt = ds, если ds есть элемент дуги траектории; сле-
следовательно,
2vdv_ ds
Отсюда интегрированием находим:
v*=Ce J '-,
где С— произвольная постоянная. Выразив её через начальные данные,
получаем
2 -7k [ ds
если v0 есть начальная скорость, соответствующая длине дуги s0.
137. Дифференциальные уравнения движения частицы по uie-
роховатой кривой. В § 128 были выведены уравнения движения ча-
частицы по абсолютно гладкой кривой, отнесённые к осям естественного
трёхгранника [формулы B2.8) на стр.211]. Вели кривая шероховатая, то,
кроме нормальной реакции, возникает сила тренин, направленная по ка-
касательной к траектории противоположно скорости частицы. Следовательно,
уравнения движения частицы по шероховатой кривой напишутся следую-
следующим образом:
B3.22)
В случае, когда кривая плоская и приложенная к частице сила F лежит
в её плоскости, то из последнего уравнении можно усмотреть, чю Л/, = О,
т. е. вся нормальная реакция N направлена по главной нормали кривой.
138. Движение весомой частицы по вертикальной шероховатой
циклоиде. Воспользуемся теми же обозначениями, что и при изучении
движения весомой частицы по абсолютно гладкой циклоиде (стр. 213,
230
§ 130, фиг. 83). Найдём, как будет скатываться весомая частица, на
чиная от некоторого начального положения s0 > 0, если начальная ско-
скорость её гг0 = О. На основании формулы B2.25) на'стр. 215 уравнения
движения B3.22) предыдущего параграфа напишутся для разбираемого
случая следующим образом:
т s = — mg sin -|- -\- kN, )
sj \ B3.23)
my = — m^cos -| -j- N. J
Исключив реакцию N и сократив на массу, получим отсюда:
s= - s2 — g ( sin -? — A cos |- j .
Выше были выведены формулы для длины дуги О/И = 5 и радиуса
кривизны р циклоиды [формулы B2.23) на стр. 2L и B2.26) на стр. 215]:-
Вставив эти выражения в предыдущее уравнение и введя, кроме того,
угол трени-' (§ 133), т. е. положив
k = tgii,
мы получим:
•• sin,'|- 4- р)
Введём новую переменную ф, положив
Ф = |-Я; B3.24)
тогда предыдущее уравнение по разделении на cos (i перепишется так:
— соэф-ф + й 5шф-ф +зтф-ф2 + 2&со8 ф-ф2—&2 sm ф• ф2 == g ,, sinf
Умножим обе части уравнения на е~ **; после этого уравнение нетрудно
будет привести к виду
Относительно функции е-**5шф это—линейное однородное уравнение
с постоянными коэффициентами. Его общее решение может быть написано
в виде
<?-*+ sin ф = A cos (у* + р),
где А и р—произвольные постоянные, а
Y 2созн У R'
Так как, по условию, в начальный момент (при / = 0) скорость частицы была
равна нулю, то постоянная [5 тоже равна нулю. Следовательно, закон
231
движения в окончательной форме запишется так:
e~W sin <J) = А соз 'ft.
П о истечении времени
от начала движения частица придёт в положение <]>=0, причем произ-
производная ф будет в этот момент времени иметь значение — Лу. Промежу-
Промежуток времени Т, а также то положение частицы на циклоиде, для которого
ф —О, не зависят от начального положения частицы; ' следовательно,
движение обладает свойством таутохронности в отношении поло-
положения ф = 0.
Заметим, что точка на циклоиде, для которой ф=0, является гра-
границей зоны возможного равновесия частицы (в предположении одинако-
одинаковости коэффициентов статического и динамического трения). Действительно,
по формуле B3.24) для этой точки -|-=д и, следовательно, N и случае
покоя согласно формуле B3.23) равняется w^cosja; проекция же актив-
активной силы F=mg на касательную по абсолютной величине равна mg sin д.
Как видим, отношение этой величины к нормальной реакции как раз
равно коэффициенту трения:
что по § 133 и доказывает высказанное положение.
ОТДЕЛ III
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
XXIV. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ЧАСТИЦЫ
139. Основное уравнение динамики относительного движения
материальной частицы. Положим, что рассматриваемая материальная
частица М массы т движется одновременно в двух средах S и 2, и
пусть движение среды 2 в среде S нам дано как основное; тогда дви-
движение частицы М в среде 2 называется относительным, а в среде 6'—
абсолютным. Движение среды 2 в среде .S служит для частицы М пере-
переносным движением. В § 76 било показано, как найти относительное
движение, если известны движения абсолютное и переносное. Но можно
также и непосредственно определить относительное движение итериро-
итерированием дифференциальных уравнений этого движения. Чгобы составить
эти уравнения, припомним, что положение частицы М в среде 2 опре-
определяется посредством координат S, i], ?, взятых относительно осей Л$т)С,
неизменно связанных с этой средой, и, следовательно, искомые уравне-
уравнения будут содержать в себе ?, tj, ? как неизвестные функции времени.
Положение же системы А%г? определяется координатами хд, уА, zA её
начала А относительно осей Oxyz, связанных со средой S, и направляю-
232
щими косинусами alv an, ..., аз3 осей /IStjC осносителыю осей Oxyz.
Эти величины должны быть даны как функции времени.
Согласно основному уравнению динамики абсолютное ускорение w
частицы следующим образом связано с приложенной к ней силой F:
mw = F. B4.1)
С другой стороны, абсолютное ускорение по теореме Кориолиса
равно сумме ускорений относительного, переносного и поворотного, или
ускорения Кориолиса [формула A2.8) на стр. 120]:
w = wr-\-we-\-wc, B4.2)
причём
«. = wa + ё, X р + пв X К X р), B4.3)
юс = 2«ГвХ»г. B4.4)
в этих формулах а>в и ев обозначают угловую скорость и угловое уско-
ускорение среды 2 относительно среды 5 (иначе говоря, переносные угловые
скорость и ускорение), а г»г—скорость частицы УЙ относительно среды 2
(т. е. её относительную скорость). Подставив выражение B4.2) для w
в основное уравнение B4.1) и оставив слева лишь член, содержащий
относительное ускорение, мы получим:
mwr—F-\-{ — mwe)-\-{ — mwc). B4.5)
Это выражение носит название, основного уравнения динамики
относительного движения. Векторная величина — tnwe называет-
называется переносной силой инерции, а — mwc — кориолисовой
силой инерции; заметим, что обе силы инерции направлены проти-
противоположно соответствующим ускорениям. Всё выражение в правой части
равенства B4.5) называют относительной силой Fr. Как видим,
основное уравнение динамики относительного движения отличается от
основного уравнения динамики абсолютного движения наличием в правой
части сил инерции, переносной и кориолисовой.
Если подвижная среда 2 совершает поступательное движение, при-
причём одна из её точек (а значит, и все остальные) движется прямолиней-
прямолинейно и равномерно, то
<w= wc = const. = 0,
и, следовательно, уравнение B4.1) остаётся верным и для относитель-
относительного движения. Системы отсчёта, для которых справедливо осно-
основное уравнение B4.1), называются инерциальными. В инерциаль-
ной системе материальная частица, к которой не приложена сила (сила F),
движется инерциально, т. е. прямолинейно и равномерно (или, как
частный случай, находится в покое). Примером неинерциальной системы
может служить Земля.
Очевидно, основное уравнение динамики B4.1) не может дать способ,
который бы позволил отличить одну инерциальную систему от другой,
233
ибо любое механическое явление (движение материальных тел) описывает-
описывается одним и тем же уравнением во всех инерциальных системах.
Запишем основное уравнение динамики относительного движения в
проекциях на оси Acjfc, неизменно связанные с подвижной средой 1;
иначе говоря, нтпишен дифференциальные уравнения относительного
движения свободной материальной частицы в относительных декартовых
координатах.
При проектировании члена, содержащего переносное ускорение we,
вспомним, что переносным ускорением частицы М называется ускорение
той точки подвижной среды 2, с которой частица М в данный момент
времени совпадает. Поэтому проекции переносного ускорения находятся,
как проекции ускорения точки твёрдого тела [формулы A1.4) на стр. 114].
Проекции кориолисова ускорения легко найти, исходя из его выражения
B4,4). На основании этих замечаний пишем:
ml=FK- m [wAK -|- uj,— aAr{ + о>еЕ (<олЦ-аГ1ц +»,?)- So»'] —
B4.6)
ml = Fz- m[v>M + »^ — »в1|Ч «>t<(«иЧ-ь\Л + ц
где
™Ai — °u*a Л' а*3>А Л- ъ1}гА,
Если частица не свободна, а подчинена связи
/(а, и, с, о = о.
то уравнение B4.4) перейдёт в такое:
/я«>л = F-\- (— mwe) -\- (—mwc) -f- X grad /. B4.
В правых частях уравнений B4.6), следовательно, добавятся члены
df df df
Когда связей не одна, а две, а именно:
/,E, ij, С, 0 = 0. /»(;, Ч. ;, /) = 0,
к правой части уравнения B4.5) присоединится член
/,-fX2grad/a.
Соответствующие члены добавятся и в правых частях уравнений B4.6).
Интегрирование уравнений относительного движения ведётся тем же
путём, как и уравнений абсолютного движения.
234
140. Обобщённый интеграл энергии. Пусть сила, приложенная
к частице, обладает стационарной силовой функцией (не зависящей от
времени), т. е. пусть
F=grad?/(S, ij, С).
Пусть, далее, переносное движение частицы является вращением по-
подвижной среды 1 вокруг некоторой оси с постоянной угловой скоростью:
о)в= const.,
сопровождаемым поступательным движением этой оси с некоторой по-
постоянной (по модулю и направлению) скоростью. Пусть, наконец, частица
подчинена некоторой связи /(?, 7), ?)=0, явно ^не содержащей времени
и благодаря этому обладающей свойством:
Покажем, что при этих условиях из уравнения движения B4.7) можно
получить интеграл, аналогичный интегралу энергии. Для доказательства
умножим уравнение B4.7) скалярно на vr; мы получим:
mwr-vr= F-vr — mwe'Vr— mwc-vr-\- lgradf-vr. B4.9)
Займёмся отдельно преобразованием каждого члена этого уравнения.
1) Имеем:
dvr d (mvlr\ d (mvl\
здесь -т. есть символ относительной производной (§ 63); последний член
равенства приписан на том основании, что в отношении скалярной вели-
величины, каковою в данном случае является г», —f2, операции относитель-
относительного и абсолютного дифференцирования тождественны.
2) На том же основании имеем
gxauU-To __dU _dU
г at ~~ dt ~ dt '
3) Для преобразования третьего слагаемого положим прежде всего,
что полюс А, о котором идёт речь в формуле B4.3) для переносного уско-
ускорения, взят на оси переносного вращения; тогда по условию теоремы
будем иметь тол = 0;'а так как, кроме того, по условию а)г= const.,
то переносное ускорение получит выражение
we =~а>еХ Ц, Х~р)-
Поэтому мы найдём
— mwe-vr = — тюе X (йе X "?)• vr,
или, по правилу циклической перестановки множителей векторно-скаляр-
ного произведения [формула A.33) на стр. 11],
aie X ?).^Х^;
235
это выражение на основании предыдущих замечаний иначе можно записать
так:
- mwe • vr=ft [- |(
4) На основании формулы B4.4) имеем
— m<wc -vf = — 2тЪе X vr ¦ vr,
или, ввиду одинаковости двух множителей полученного векторно скаляр-
нот произведения,
— mwc •vr = 0.
5) Для преобразования произведения \gradf-vr применим формулу
B0.8) на стр. 186 и формулу B4.8); имеем
Xgrad/•«;,= —1%=0.
Собрав результаты, мы получим, вместо уравнения B4.9), следующее;
B4.10)
Отсюда, проинтегрировав, находим:
т.ч. ._ .,
где h—произвольная постоянная. При юг = 0 мы получаем отсюда
обычный интеграл энергии; поэтому выражение B4.10) и носит название
обобщённого интеграла энергии.
141. Движение свободной весомой частвцы по отношению
к вращающейся Земле. В виде примера на относительное движение
рассмотрим движение весо-
весомой материальной частины
М по отношению к вращаю-
р , ^< л шейся Земле. Начало О аб-
^ <*- /Ъ^ \ .. - солютной системы коорди-
координат Охуг мы поместим в
центре Солнца, а направ-
~п_ ления её осей каким-нибудь
образом неизменно свяжем
с направлениями на «непо-
«неподвижные» звёзды. Относи-
Относительную систему координат
НЦС мы неизменно свяжем
с Землёй.
Проанализируем, какие
силы приложены к нашей
материальной частице М (фиг. 87). Во-первих, на частицу действует сила
Z7! притяжения к Земле. Эта сила направлена приблизительно к центру
В Земли и является равнодействующей всех сил ньютонианского притя-
притяжения, с которыми на частицу М действуют частицы земного шара.
Кроме того, на частицу М действует сила F2 ньютонианского притя-
притяжения к Солнцу. Ввиду громадности расстояния d=OB от центра О
226
Фиг. 87.
Солнпа до центра В Земли сравнительно с земным радиусом мы примем,
что эта сила параллельна прямой ОВ, соединяющей центры Солнца и
Земли, и по модулю равна
р. , t?i\ffi
2— W•
где тх—масса Солнца, т—масса частицы и k — так называемая гра-
гравитационная постоянная, численно равная силе притяжения между двумя
материальными частицами, массою в 1 г каждая, при расстоянии между
ними в 1 см. Притяжением частицы М другими небесными телами мы
будем пренебрегать.
Чтобы учесть теперь переносные силы инерции, примем во внимание,
что, во-первых, центр Земли обращается по своей, орбите вокруг Солнца
и, во-вторых, Земля совершает суточное вращение вокруг своей оси SN,
сохраняющей приблизительно постоянное направление по отношению к
абсолютным осям Охуг. Постоянная угловая скорость й этого вращения
по модулю равна
Q = 1 —оборот = 0,0000729 1- .
звёзд, сутки сек. ср. вр.
Ввиду малости & мы в дальнейших вычислениях будем пренебрегать
членами, зависящими от в2, если только коэффициенты при них не очень
велики, например, не содержат радиуса Земли.
От первого движения мы имеем поступательную часть переносного
ускорения. Соответствующая часть переносной силы инерции направлена
параллельно линии центров ОВ Солнца и Земли (от Солнца к Земле) и
по модулю равна
Р, = mwB,
где wB — ускорение центра Земли. Это ускорение, очевидно, по модулю
равно
F» km.
а потому для силы Я, мы имеем выражение:
Р =k m'm .
i fft
От суточного вращения Земли мы имеем осестремительное ускорение:
вращательное ускорение равно нулю ввиду постоянства угловой скоро-
скорости Q. Соответствующая осестремительному ускорению часть переносной
силы инерции называется центробежной силой инерции: она
направлена по радиусу DM параллельного круга и подмодулю равна
Ф2 = mpQ2,
где р обозначает расстояние частицы М от оси вращения SN.
Наконец, имеется ещё кориолисова сила инерции, равная
Ф3 = — 2тп Xvr.
Как видим, силы F2 и Я, взаимно уничтожаются. Далее, силы
Fj и Ф8 мы заменим их равнодействующей Р:
237
Эта сила носит название силы
частицы называется ускорением g
тяжести, а
силы тяжести:
т '
её отношение к массе
Прямая, служащая основанием силы Р, называется отвесной
ил.1 вертикальной. Угол ф, составляемый ею с плоскостью ЕЕ эк-
экватора, называется географической ши-
широтой места наблюдения. Плоскость, перпен-
перпендикулярная отвесу и проходящая через точку
его пересечения с поверхностью Земли, назы-
называется плоскостью горизонта.
Мы ограничимся изучением движения ча-
частицы М в некоторой небольшой области сра-
сравнительно с разнеРами Земли, притом распо-
расположенной близ земной поверхности. В этом
смысле мы будем считать постоянными уско-
ускорение силы тяжести g и широту ф частицы
во время её движения. Начало А системы
координат Л$г)С мы поместим в начальном
положении частицы (фиг. 88), ось AZ, напра-
направим но вертикали вверх, ось Аг^ по каса-
касательной к параллельному кругу на восток, ось А$, следовательно, в пло-
плоскости меридиана на юг.
Уравнение движения B4.5) напишется в нашем случае (после сокра-
сокращения на массу) следующим образом:
wr—g— 2QXvr. B4.И)
Непосредственным интегрированием находим его первый интеграл:
Дальнейшее точное интегрирование затруднительно, поэтому мы восполь-
воспользуемся следующим приближённым приёмом. Только что найденное значе-
значение vr вставим в исходное дифференциальное уравнение B4.11), причём
отбросим члены, содержащие U2; тогда мы получим:
«V=g — 2Q X vro — 2U х gt.
Дважды проинтегрировав это уравнение, мы найдём закон движения;
или, в проекциях на оси выбранной системы координат:
B4Л2)
238
Как видим, в общем случае проекция ускорения частицы на вертикаль,
зависит от начальных условий. Траектория частицы — не плоская
кривая.
Если весомая частица падает с нулевой начальной скоростью, то за-
закон движения будет таков:
р — 3 - i ^2 t ,
или, в координатной форме,
Траектория лежит в плоскости, перпендикулярной меридиану. Частица
пааает не по вертикали, а даёт уклонение к востоку: это видно из того,
что координата ч\ во всё время движения за исключением начального
момента положительна.
Когда частица брошена вертикально кверху, то
и из уравнении B4.12) мы находим:
? = 0, Ч = 8- ^
Движение опять происходит в плоскости, перпендикулярной мериди-
меридиану. Проекция скорости частицы на вертикаль пройдёт через нуль в мо-
момент tx = — , и тогда ордината частицы будет равна уI = — -^-
т. е. частица будет отклонена к западу. Частица снова упадёт на го-
горизонтальную плоскость ;=0 в момент tt=lh и будет тогда иметь
g
ординату
г =2т = — 4 ^о900^
3 ?р
т. е. частица опять будет иметь смешение к западу.
142. Маятник Фуко. Задача о маятнике Фуко (Foucault) может быть
сформулирована так: определить относительное движение весомой мате-
материальной частицы М по сфере радиуса R, неизменно связанной с
вращающейся Землёй. Мы ограничимся исследованием малых движений
частицы около её нижнего положения равновесия на сфере, т. е. таких
движений, когда приращение 1R радиуса-вектора частицы по отношению
к его значению в равновесном положении, а также скорость <ог части-
частицы остаются по модулю малыми. Приближённые уравнения движения
весомой частицы мы напишем с точностью до членов второго порядка
малости включительно относительно |Д#| и \vr |.
Для исследования движения воспользуемся декартовой системой ко-
координат, начало А которой поместим в центре сферы, по которой движется
239
частица М, а оси направим так же, как в задаче предыдущего параграфа
(фиг. 88). Отдельно эта система координат изображена на фиг. 89.
С декартовой системой координат свяжем цилиндрическую с той же осью
Л! и с полярной осью, совмещённой с осью А (фиг. 89).
Согласно § 139 при составлении уравнений от-
относительного движения несвободной частицы долж-
должны быть учтены активные силы, переносная сила
инерции, кориолисова сила инерции и реакции свя-
связей. В нашем случае равнодействующая активных
сил и переносной силы инерции, как и в преды-
предыдущем параграфе, равна mg (фиг. 89). Корио-
Кориолисова сила инерции (не показанная на чертеже)
равна
I
—/га = о.
Реакция связи равна
Фиг. 89. Где
или, в цилиндрических координатах,
/= р2 -\- С2 — R2 = 0. B4.13)
Сила N, очевидно, направлена противоположно радиусу AM сферы.
Применим прежде всего к частице М закон изменения кинетического
момента относительно оси ЛС [формула A8.17) на стр. 159]; имеем
d
т — (
B4.14)
Моменты силы mg и реакции N относительно оси ЛС равны нулю; сле-
следовательно, L^ равно моменту относительно оси ЛС кориолисовой силы
инерции. Для вычисления последнего вспомним, что момент силы относи-
относительно оси равен проекции на эту ось момента силы относительно
произвольной точки на оси; поэтому имеем
к = [ R X (—2тП X »,)] • С0 = — 2т R X (Q X »г) • С0-
Применяя известную формулу преобразования векторно векторного произ-
произведения, получаем отсюда
Но R-z>r — 0, так как R_j_vr, a ©r-C° = C; поэтому
/ —- От Т1?. О (од 1 с;\
OopJTMMcsi теперь к ураниснию связи B4.13). Разрешив его относитель-
относительно С и применив формулу бинома Ньютона, находим.
отк) да
B4.17)
г— Ра
240
С другой стороны, радиус-вектор R частицы М выражается следующим
образом через её цилиндрические координаты:
/?=ppO-f-Ko. B4.18)
Перемножаем равенства B4.17) и B4.18); сохранив в произведении ма-
малые не выше второго порядка, находим:
Подставив последнее выражение в формулу B4.15), получаем:
Z.c = — 2т рр С0 • й — — 2/иЙ sin ф pp.
Уравнение B4.14), выражающее закон изменения кинетического момента,
после сокращения на массу, следовательно, перепишется так:
-(р2^)= — 2^sin ф-рр.
Проинтегрировав это уравнение, получаем:
р2<? = — Qsin$.p2-f-C, B4.19)
где С—произвольная постоянная.
Теперь напишем для нашей частицы обобщённый интеграл энергии
B4.9), поскольку выполнены нее условия, когда он имеет место; имея
в виду, что радиус-вектор частицы обозначен нами через R, найдём:
| • B4.20)
Угловая скорость переносного вращения в нашем случае равна
кроме того, по формулам B4.16) и B4.17), выписывая лишь малые не
выше 2-го порядка, находим:
U= — mg:-\-const. = — Щ?*-\- C(>nst. -f ...
Вставив эти выражения с сохранением мялых не выше 2-го порядка в ин-
интеграл B4.20) и отбросив, кроме того, член с квадратом угловой ско-
скорости Земли, получим:
! 2" B4.21)
Изучим теперь движение проекции М' частицы М на пло-
плоскость Л;т]. Отнесём это движение к подвижным осям Az'tf,
вращающимся равномерно вокруг оси А* от юга к западу
с угловой скоростью, по модулю равной йsin ф (фиг. 90). ** фиг. до.
Совместим с осью As! полярную ось системы полярных
координат р, 6. Угол а между осями А$ и ЛЗ', очевидно, имеет выражение
а = /_Ы" =— Qsin $¦(-{-с,
гДе с — некоторая постоянная; поэтому координаты <р и 0 точек М и М'
связаны между собой следующей зависимостью:
<р = 0 — Q sin ф • t -j- с.
16 Г. К. Суслов 241
Отсюда дифференцированием находим:
<р = б — Qsinty. B4.22)
Подставив это выражение для <р в уравнения B4.19) и B4.21), мы при-
приведём их к следующему виду:
р'-б = С, B4.23)
рз _j_ pa @2 _ 2Qsin ф-б + fiz sin2 40 = — | P2 + ^f •
Второе уравнение, если воспользоваться равенством B4.19), можно запи-
записать так:
рз _|_ рФ=- *у + 2«, B4-24)
где положено:
= CQ sin
Сравнивая интегралы B4.23) и B4.24) с формулами A9.6) и A9.8)
на стр. 175, мы видим, что точка М' на подвижной плоскости А%т\'
описывает центральную орбиту, соответствующую силовой функции:
По формуле A8.61) на стр. 172 определяем градиент этой функции:
grad U= — k2m p^>.
Следовательно, точка М' движется так, как будто бы она находилась
под действием силы притяжения к центру А, прямо пропорциональной
расстоянию. Мы знаем (§ 98), что в этом случае орбитой будет эллипс
с центром в точке А, Произвольной постоянной С можно всегда распо-
распорядиться так, чтобы координатные оси Л?'т)' совпадали с осями эллипса.
В частном случае, когда ()О—О, т. е. согласно формуле B4.22)
эллипс обращается в отрезок прямой 0 = const. Если скорость точки М
относительно Земли была в начальный момент равна нулю, т. е. если
?о = °> ро = °.
постоянные интегралов B4.23) и B4.24) определятся так:
С = ЙЕшф-р2, 2/У = А?р2 -4- pg Й2 sin3 ф.
На этом основании по исключении б из интегралов уравнений движения
легко получить:
ptpS==A«(p2_pS)(p._p2)f
где положено
flslni
Pi = ft»-Л*-
Отсюда мы заключаем, что для рассматриваемого случая максимумом и
минимумом р, или, что то же, полуосями эллипса, служат
й sin •!>
Ро и Ро—Г— •
ЧАСТЬ ЧЕТВЁРТАЯ
ДИНАМИКА СИСТЕМЫ ЧАСТИЦ
ОТДЕЛ I
ГЕОМЕТРИЯ МАСС
XXV. ЦЕНТР МАСС
143. Механическая система материальных частиц. Собрание ма-
материальных частиц (в конечном или бесконечно большом числе) мы будем
называть механической системой материальных частиц,
если движение каждой из них в отдельности зависит от движения и
положения остальных частиц. Прежде чем- заняться разбором того, каким
образом движение одной материальной частицы или массы влияет на дви-
движение других, мы посвятим две главы так называемой геометрии
масс, т. е. рассмотрим свойства некоторых геометрических образов,
тесно связанных с распределением масс в пространстве.
144. Координаты центра масс. Пусть мы имеем и материальных
частиц с массами
mv т2, .... wv, ..., тп,
положения которых определены радиусами-векторами
проведёнными из некоторой точки О. Каждой из этих частиц поставим в
соответствие новый вектор wvrv, равный произведению массы частицы на
её радиус-вектор. Возьмём сумму R этих векторов:
л
R= mxrx 4- т2г2 + ... + 'V\ + • • • + mfn = 2
рассмотрим также общую массу М всех частиц:
а
М = т1-)-т2-\-. ..-!-«„ + .. .-\-т„= 2 т,
•* ~ i
Разделим вектор R на М; найденный таким путём вектор
rc=lrn1-- B5.J)
16* 243
примем за радчус-вектор (из прежнего начала) некоторой точки С и эту
точку назовём центром масс, или центром инерции данной системы
частиц. Спроектировав обе части равенства B5,1) на оси х, у, z системы
координат Охуг (прямоугольной или косоугольной), получим следующие
формулы для координат хс, ус, гс центра масс:
п н п
2 т-,у-, 2 от^
xc=~ , yc = ~ , zc=y-f± . B5.2)
2 m-' 2 m* 2j mw
Равенства B5.1) и B5.2) равносильны следующим:
я
2
B5.3)
mvjcv, Myc= 2j т.У > Mzc— 2j
Правые части написанных здесь иыражений соответственно называются
статическими моментами системы частиц относительно начала координат
и плоскостей Oyz, Ozx, Oxy. Из формул B5.3) видно, что
1) статический момент системы относительно ее'центра масс равен нулю;
2) статический момент системы относительно плоскости, в коюрой
лежит центр масс, равен нулю.
Заметим, что формулы B5.1) и B5.3) могут быть распространены и
на системы, содержащие частицы с фиктивными отрицательными массами
(например, пластины с вырезами); только тогда суммирование нужно
понимать в алгебраическом смысле, т. е. брать массы с их соответствен-
соответственными знаками.
145. Центр масс как центр системы параллельных векторов.
В § 25 мы познакомились с понятием о центре системы параллельных
векторов как точке, лежащей на основании вектора, эквивалентного
системе, и инвариантной по отношению к повороту векторов системы на
произвольный угол (с сохранением параллельности). Нетрудно убедиться,
что центр масс представляет собой центр системы параллельных векторов,
направленных в одну сторону и пропорциональных массам частиц. Дей-
Действительно, при указанном условии следует в формуле C.12) на стр. 31
положить
после этого она станет тождественной с формулой B5.1) предыду-
предыдущего параграфа. Если масса понимается в обобщённом смысле, указанном
в конце предыдущего параграфа, высказанное положение нужно изменить
в том отношении, что векторы, соответствующие отрицательным массам,
должны направляться противоположно векторам, соответствующим поло-
положительным массам.
146. Простейшие свойства центра масс. Из определения центра
масс вытекают как следствия следующие его свойства:
1) Положение центра масс зависит лишь от распределения масс в
пространстве и вовсе не зависит от выбора системы осей координат. Дей-
Действительно, в предыдущем параграфе было показано, что центр масс
244
есть центр системы параллельных векторов ач = от,и°, пропорциональных
массам частиц; но положение последнего не зависит от выбора
системы координат, как это было доказано в § 25.
2) Если материальные частицы неизменно связаны друг с другом, то
и центр масс этих частиц находится от них на неизменных расстояниях.
Действительно, любому движению неизменяемой системы относительно
каких-либо осей соответствует некоторое определённое обращенное дви-
движение этих осей относительно неизменямой системы, а в этом обращенном
движении, как мы сейчас видели, центр масс остаётся вместе с системой
частиц неподвижным.
3) Если массы расположены симметрично относительно какой-либо
плоскости, то их центр масс лежит в этой плоскости. Для доказатель-
доказательства возьмём плоскость симметрии за плоскость Оху; тогда в сумме
я
Vm^, каждой массе тч с координатой г, соответствует равная масса
•«=1
т =т, с координатой г^ =— г„, за исключением тех масс mv, которые
лежат в самой плоскости' симметрии, но для таких масс гч=0. Следо-
л
вательно, в нашем случае V mvz,= 0, а потому по формуле B5.2)
v = l
и гс = 0, т. е. центр масс действительно лежит в плоскости симметрии.
4} Если массы расположены симметрично относительно двух плоско-
плоскостей, то центр масс лежит на линии их пересечения.
5) Если массы расположены симметрично относительно трёх плоско-
плоскостей, то центр масс лежит в точке их встречи. Оба эти положения не-
непосредственно вытекают из свойства 3).
6) Если данную систему масс разобьём на несколько групп, то поло-
положение центра всех масс найдётся, если определим центры масс отдельных
групп, каждому такому центру припишем массу, равную сумме масс,
входящих в состав соответственной группы, и затем определим общий
центр масс этих воображаемых частиц. Пусть, например, имеется система
из iV масс /я, и мы её разделили на трн группы: в первой группе имеет-
имеется пг масс, а именно, mv m2, ..., тПх, во второй группе пг масс
mni+i, тП1+г, ..., тщ+п, и, наконец, в третьей группе я8 *масс
»!„,+„,+ !, ..., mN. Радиусы-векторы центров масс наших групп назо-
назовём соответственно Гс,, rCj и Гс,\ радиус-вектор центра масс всей си-
системы пусть будет попрежнему гс. Обозначим, кроме того, Mv M2, Мг
и М соответственно суммы масс частиц в отдельных группах и во всей
системе. Выпишем по формуле B5.3) выражения для статических момен-
моментов относительно начала координат для всех групп и для всей системы;
имеем
N
Последнее равенство может быть переписано так:
245
"или, на основании предыдущих равенств,
Mrс — М,гСл -f Mfa -f МцГа,
что и доказывает высказанное положение.
Иной раз представляется удобным рассматривать данную систему масс
как часть некоторой другой, большей системы. Пусть, например, данная
си'стема из и масс входит как часть в систему N=n-\-n] масс. Тогда
положение центра масс данной системы найдём, рассматривая её как
сложную из N положительных масс и я, отрицательных. Аналитически
в справедливости сказанного убеждаемся так. Обозначим центры масс
рассматриваемых групп, содержащих и, и, и N масс, соответственно С,
С, и С", а их радиусы-векторы rc, rCi и гс- Тогда по предыдущему
имеем
ля N N
rc S"v= »'/\. rCl s (—«,)= S (-"Vv).
l l я|1 i = n + l
Припиитм точке С" положительную массу ^ mv, а точке С, отрица-
v=si 1
«1
тельную массу— 5] т^. Тогда общий их центр масс будет иметь
v=n4-l *
радиус-вектор р, удовлетворяющий следующему уравнению:
N N \_ N
Соединяя здесь отдельные суммы, можем написать:
_ я а я
что и даёт
7) Центр масс двух материальных частиц лежит на прямой, их сое~
диняюще!, и делит расстояние между этими частицами обратно пропорцио-
пропорционально их массам. Это непосредственно вытекает из формулы B5.1),
применённой к данному случаю; действительно, имеем
г — ?1Г' + т^ .
С ГП\ -+• Щ '
поместив начало координат в центр масс С, получаем отсюда:
= О,
т. е. векторы г{ и гг коллинеарны, а это и значит, что данные две ча-
частицы и точка С лежат на одной прямой. Наконец, из последнего ра-
равенства видим, что отношение модулей векторов гх и г2 равно
Г\
что требовалось доказать.
243
147. Формулы для координат центра масс непрерывно-протяжён-
непрерывно-протяжённых тел. Когда массы расположены непрерывно, то суммы в выраже-
выражениях B5.1)' и B5.2) заменяются интегралами.
1) Пусть имеем непрерывное материальное тело. Разделим его коор-
координатными поверхностями на бесконечно малые объёмы; пусть масса
внутри какого-либо элемента объёма равняется dm. Тогда масса тела
представится тройным интегралом I I \ dm, а радиус-вектор и декартовы
координаты центра масс найдутся по формулам:
г _
'С
V if j '
причём интегралы распространяются по всему объёму, занятому телом.
Обыкновенно в предыдущие выражения вводят плотность а тела в
данной точке (§ 82). Тогда dm = adv, если dv — элемент объёма, и
вместо предыдущей формулы мы получаем:
Если элементарный объём dv выражен в декартовых координатах, то
находим отсюда:
Г Г Г зх dx dy dz
х = ТГТ~7~— и т д
если же он выражен в сферических координатах, то
J f for3 cos <f cos2 <|> dp d'f
J'J J'
xc = TT7—; , .. , ,, и т. д.
В первом случае плотность а должна быть известна как функция от х,
у, z, во втором случае — как функция от л, (р м ф.
Когда тело однородно и, следовательно, плотность его постоянна, то
можно вынести в выражениях B5.4) пложосгь а за знаки интегралов и
на ноё сократить дробя; таким образом, из равенства B5.4) исчезает всякий
след массы; потому принято говорить для сокращения, что эти формулы
дают координаты центра масс данного объёма (вместо того, чтобы
говорить— центра масс однородного тела, заполняющего данный объём).
2) Всякая масса должна непременно занимать некоторый объём,
но иной раз приходится условно говорить о массах, распределённых по данной
поверхности или по данной линии. Такого рода распределение масс мы
принимаем как некоюрое вспомогательное геометрическое построение,
или подразумеваем при этом, что одно, либо два измерения рассматри-
рассматриваемых масс настолько малы, что мы считаем себя в праве не принимать
их в расчёт.
а) Пусть масса распределена по поверхности. В таком случае берём
иа этой поверхности точку А и строим контур, вырезывающий из поверх-
поверхности часть её Д5 так, чтобы точка А была или внутри контура, или на
нём. Пусть масса части поверхности AS равна Дт (собственно речь идёт
о массе весьма тонкого материального слоя на поверхности А5\ если поверхно-
247
стная масса имеет реальное значение). Затем рассмотрим предел отношения
Д/я
IS
в том предположении, что контур стягивается в точку А. Если этот
предел
,. Дга
ijj = Iim -^
существует, то он носит название поверхностной плотности в точке А.
Из равенства B5.5) вытекает, что dtn^a^-dS, если dS есть элемент
поверхности. Масса всей поверхности представится двойным интегралом
f [dm = I la, dS. Радиус-вектор и декартовы координаты центра масс
материальной поверхности найдутся по формулам:
% = !f4»" B5-5)
Если поверхность задана уравнением
то последние формулы могут быть переписаны так:
хс~Тг и т. д.,
где р = -5-, ^=д" • Плотность ал должна быть известна как функция
хну.
б) Наконец, когда массы распределены по данной линии (т. е. когда
два измерения тела весьма малы), радиус-вектор и декартовы координаты
центра масс этой материальной линии выразятся через обыкновенные оп-
определённые интегралы:
fsr ds Г»5 xds
rc = \ ; xc=J и т. д., B5.6)
/fwt
где ds —> элемент дуги, а о2 = -г- называется линейной плотностью. Если
кривая задана уравнениями
у=у(х), z = z{x) •
и плотность оя известна как функция от х, то последние формулы удобно
писать в виде
JV+ *+?
хп = ^ — и т. д.
Если плотность а, или а2 постоянна, она пропадает из формул
B5.5) и B5.6), и мы получаем вь/раження для координат центра масс
данной поверхности или линии (как для сокращения говорят).
148. Центры масс некоторых линий и площадей.
Пример 59. Центр масс дуги о кр у ж ноет и. Пусть дуга АВ
окружности радиуса /? описана из центра О и пусть центральный угол АОВ
248
ранен 2i (фиг. 91). Центр масс С дуги АЯ, очевилно, лежит на Сиссектрисе
OD этого угла. Направим по ней ось Ох. Абсцисса центра масс определится по
формуле B5.6):
_J xds
Хс~]7Г~-
ВвелРм полярные координаты, приняв OD за полярную ось. В таком случае
ds — Rd f, f = /?cosf, а потому
J" R1 cos <p dy
R sin a _ R-2Rs\na. (радиус)-(^орда)
« ~ 2Ra (дуга)
B5.7)
Пример 60. Центр масс контура треугольника. Центры
масс сторон треугольника ABC, очевидно, лежат в их серединах а, Ь, с (фиг. 92).
Следовательно, общий центр масс сторон В А и
ВС лежит на отрезке ас, а именно, в точке к,
делящей его на части, обратно пропорциональные
длинам сторон ВА и ВС; таким образом,
ka _ЯЛ
kc~ ВС'
Но ВА=2Ьа, ВС — 2Ьс\ значит,
ka
kc:
ba
Тс-
Отсюда следует, что прямая bit, на которой,
очевидно, должен лежать центр масс О контура
треугольника ABC, является биссектрисой угла
аЬс. Таким же образом можно показать, что точ-
точка О лежит иа биссектрисах двух других углов
треугольника аЬс, т. е. она является центром
круга, вписанного в этот треугольник.
Пример 61. Центр масс площади треугольника. Разделив
площадь треугольника прямыми, параллельными одной из его сторон, на бес-
бесконечно тонкие полосы и заметив, что центр масс каждой такой полосы лежит
в ей середине, мы заключаем, что. пентр масс площади треугольника находится
в точке встречи трёх медиан. Иначе, центр масс площади треугольника
лежит на медиане в расстоянии двух третей её от вершины.
Пример 62. Центр масс сектора. Центр масс бесконечно тон-
тонкого сектора ММ'О с углом растворения rf«p лежит в
о
точке, отстоящей, по примеру 61, от точки О
на -^- R
(фиг. 91). Отсюда вытекает, что центр масс сектора АОВ
совпадает с центром масс дуги, описанной из точки О
2
радиусом Оя = -5- R- Поэтому по формуле B5.7) находим:
5 R
2_
Хс~ 3
2_ (радиус)-(хорда)
~ 3 дуга
Пример 63. Центр масс сегмента. Дополняем сегмент ADBEA
треугольником ОВА до сектора (фиг. 91); тогда, воспользовавшись свойством
центра масс, указанным в конце п. 6 § 146, легко находим:
4 _ sin* a
—sin2«
249
Пример 64. Центр масс п лошади трапеции. Искомый центр С
должен лежать на линии EF, соединяющей середины параллельных сторон
(фиг. 93). С "Другой стороны, если диагональю АО разделить трапецию на два
треугольника ABCJ и ADU, то ясно, что искомая точка должна лежать на
прямой KL, соединяющей центры масс
д ? ff К, и L этих треугольников. Пусть AD = а,
ВО — b, тогда легко показать, что
FC
СЕ''
а-\-2Ь
~'Ъ-\-2а'
ус-
Фиг. 93.
О
мов.
149. Центры масс некоторых объб-
з.
Пример 65. Пусть имеем сплошное
однородное тело, ограниченное двумя плос-
плоскими параллельными основаниям-и и такой боковой поверхностью, что
плошадь сечения её какой-либо плоскостью, параллельной основаниям, выражается
целой квадратичной функцией от расстоя-
расстояния между плоскостью сечения и одним
m оонопаний (фиг. 94). Пусть пло-
площадь нижнего основания,тела ранна Ра,
nepxiiei о — Яг; плошадь среднего сече-
сечения, т е. равноотстоящего от верхнего и
нижнего оснований, пусть будет Р{\
расстояние центра масс тела от нижнего
основания назовем *с, высоту тела — А;
тогда можно показать, что
. zc =Р." + !0 ¦ B5.8)
Примем плоскость нижнего основания
за плоскость Ovv; по условию плошадь
Р како1 о-либо сечения тела плоскостью,
параллельной Оху, выразится так:
z\ B5.9)
Фиг. 94.
гле а, Ь, с — некоторые постоянные,
a z — расстояние плоскости сечения от нижнего основания. Из последнего ра-
равенства вытекает, что
??; />,=« + »*
B5.10)
По предыдущему имеем
гс:
А
= 1 \zPdz,
если v означает объем данного тела. Подставив сюда Р из выражения B5. 9),
проинтегрировав и воспользовавшись соотношениями B5. 10), находим:
гс=^-(за ±2bh -f- — с№} =^~ (Р, +2Pt). B5.11)
С другой стороны,
B5.12)
250
равенства B5.11) на B5.12), мы и получим соотношение B5.8). Дока-
Доказанная теорема имеет много приложений: с её помощью можно определить
положение центра масс тела, ограниченного поверхностью второго порядка или
некоторой многогранной поверхностью.
Пример 66. Центр масс конуса. Площадь Q какого либо сечения
конуса плоскостью, параллельной его основанию, представляется так (фиг. 95):
если г означает расстояние плоскости Q от вершины Л конуса, Л—высоту
конуса, Qq — площадь основания. Эта формула показывает, что в рассматрива-
рассматриваемом случае приложима теорема примера 65. Поэтому, принимая вершину Л
за сечение с площадью, равной нулю, и замечая,
что плошадь Qi среднего сечения равна -т Qq, лег-
легко находим:
: о
q
т. е. гс=-дН. Так
h ~zc
как, кроме того, искомый центр
прямой, соединяющей
масс, очевидно, лежит на
вершину А с центром масс основания, то поло-
положение искомой точки найдено.
Пример 67. Иентр масс полуэлли-
полуэллипсоида, отрезанного одной из главных
плоскостей Пусть дан эллипсоид
i'+"? + -=!
г,? I hi I -2
Фиг.
(фиг. 96.), и мы желаем определить центр масс половины этого эллипсоида, от-
отрезанной той главной плоскостью, которая проходит чере! среднюю и малую
полуоси b ц с. Сечение эллипсоида какой-либо плоскостью, отстоящей на рас-
расстоянии 5 от главного сечения с площадью г. be, будет эллипс, представляе-
представляемый уравнением
Следовательно, площадь Р этого сечения будет
B5.13)
Фиг. 96.
Мы видим, что условия теоремы примера 65 опять выполняются. Заметив, что
по формуле B5.13) площадь Р среднего сечения равна -г я be, легко находим:
Пример 68. Пусть боковая поверхность у тела, рассмотренного в теореме
примера 65, многогранная. Тогда сечение этой поверхности плоскостью, па-
пара тле 1ьпой основаниям, булет некоторый многоугольник. Вершины многоуголь-
многоугольника служат тиками встречи ребер боковой поверхности с пересекающей
и юскогтью. Пусть нижнее основание лежит в плоскости Оху, а уравнения
како| о-либо ребра пусть будут
B5.14)
Разобьём многоугольник, образовавшийся в сечении, на треугольники; если
251
XXVI. МОМЕНТЫ ИНЕРЦИИ
151. Момент ннерцви относительно точки. Моментом инерции
данной системы материальных частиц относительно данной точки, илн
полюса, называется сумма произведений масс частиц на квадраты их рас-
расстояний от взятого полюса. Пусть данный полюс О служит началом
координат; радиус-вектор частицы с массой wv и координатами x^ytizt
обозначим rv; тогда, если число частиц равно я, момент инерции JQ дан-
данной системы относительно полюса О представится так:
Jo=2 тЛ = 2 «Л ^ + X+Ф B6.1)
Для масс, распределённых сплошным образом, сумма в этом выражении заме-
заменится интегралом, распространённым на объём, занимаемый массами:
где а—плотность, a dv-^ элемент объёма, Из определения момента
инерции относительно точки следует, что он представляет собой вели-
величину неотрицательную; он може! обратиться в нуль только в случае
единственной частицы, совпадающей с полюсом.
Найдём зависимость между моментом инерции JQ системы относи-
относительно произвольного полюса О и её моментом Jc относительно центра
масс. Рассмотрим произвольную частицу системы, имеющую массу ту;
обозначим её радиусы-векторы, провед&нные из полюсов О и С, соответ-
соответственно rv и pj вектор ОС назовём гс; тогда
и, следовательно,
Jo = 2 ms\ = 2 m, (rc+ pvJ = ( 2 «») 4 + 2rc • 2 '«,P, + 21», ?.
V V V у ч
Здесь 2mv есть масса всей системы частиц; мы её обозначим М;
сумма2от»Р» представляет собой статический момент системы относи-
ч
тельно центра масс и потому равна нулю (§ 144); наконец, последнее
слагаемое равно моменту инерции Jc системы относительно центра масс.
Игак, мы получили:
т. е. момент инерции системы относительно любого полюса равняется её
моменту инерции относительно центра масс, сложенному с моментом
инерции самого центра масс относительно взятого центра, если примем,
что масса центра масс равна массе всей системы.
Выражению для Jc легко можем дать иной вид. Для этого рассмотрим
тождество
253
+i; 2
-,=1 v = ] |i=v
координаты кершин к?кого-либо из них рарны ха, уя, xb, yb, хс, ус, то площадь
его равна половине абсолютной величины определителя:
У а 1
Уь 1
Ус '
Если сечение сделано на высоте г, то из выражений B5. 14) ясно, что площадь
треугольника, а следовательно, и площадь Р многоугольника, образованного
в сечении, представится целой квадратичной функцией от г:
P=A + Bz + Cz*. B5.15)
Таким образом, теорема примера 65 применима и в рассматриваемом случае,
если только формула B5. 15) юдится для сечения на любой высоте, т. е. если
боковые ребра идут, не прерываясь от верхнего основания до нижнего.
Приложив полученный результат к полной пнр.шиде, находим, что ей
центр масс отстоит от основания на четверти высоты пирамиды.
150. Теоремы Паппуса-Гюльдена. Непосредственно пользуясь выра-
выражениями для координат центра масс данной кривой или данной площади,
легко убеждаемся в справедли-
справедливости следующих двух теорем
Панну ca-FKMbAeHa(Pappus-Guldin):
1) Если плоскую кривую по-
повернуть на некоторый угол вокруг
какой-либо оси, лежащей в плос-
плоскости кривой и её не пересе-
пересекающей, то величина площади
части поверхности вращения, опи-
описанной кривою, равняется длине
кривой, умноженной на длину
пути её центра масс С.
2) Если какую-либо замкнутую плоскую фигуру повернуть на неко-
некоторый угол вокруг оси, лежащей с ней в одной плоскости, но не встре-
встречающей её контура, то объём .части тела вращения, описанного фигу-
фигурой, равняется произведению величины площади фигуры на длину пути её
центра масс С.
Действительно, площадь полоски, описанной элементом ds кривой АВ
при повороте её на угол \у, равна x&'f-ds (фиг. 97); следовательно, вся
площадь S, описанная кривой АВ, если AB==s, будет иметь выражение
Фиг. 97.-
= Д? \
х ds =
¦ s.
Для доказательства второй теоремы рассмотрим элемент abde пло-
плоской фигуры ABDE (фиг. 98): если его площадь обозначить dS, то
объём, им описанный при повороте фигуры на угол Ду, будет xkf-dS;
следовательно, весь объём v, описанный фигурой ABDE, если площадь
её обозначить через S, будет равен
: Д<р f f х dS = A<pxc
252
i-де Последняя сумма распространяется па все члены, в которых v< jjl.
Если р^ попрежнему есть радиус-вектор v-ой частицы, проведенный из
центра масс, то из этого равенства мы получаем:
я—1 я
где pv|i—расстояние между массами mv и т^.
152. Момент инерции относительно оси. Моментом инерции
данной системы материальных частиц относительно некоторой оси назы-
называется сумма произведений масс частиц на квадраты их расстояний от
взятой оси, т. е. если момент инерции относительно оси и мы обо-
обозначим через Уаа, а расстояние частицы с массой /«„ от этой оси че-
через ру, то
л2х; Bб2>
Из этого выражения видим, что момент инерции относительно оси есть
величина неотрицательная; он может обратиться в нуль лишь в том слу-
случае, когда все материальные частицы расположены на прямой, совпадаю-
совпадающей со взятой осью. Если массы расположены непрерывно, то в выраже-
выражении момента инерции вместо суммы получим интеграл
=Л $a?4v' B6-3)
где а—плотность, a dv— элемент объёма.
Иной раз приходится рассматривать моменты инерции масс, располо-
расположенных по поверхностям или по линиям (ср. § 147). Конечно, как и в
главе о центре масс, такое расположение масс следует рассматривать как
вспомогательное геометрическое построение или принимать, что одно или
два измерения объёма, заполненного массами, настолько малы, что мы
считаем себя в праве не принимать их в расчёт. Для масс, распределён-
распределённых по поверхности, тройной интеграл B6.3) заменится двойным:
где а, — поверхностная плотность, a dS—элемент поверхности. Для масс
линейных имеем обыкновенный определённый интеграл:
где а2— линейная плотность, a ds — элемент дуги той кривой, по кото-
которой распределены массы.
153. Зависимость между моментами инерции относительно па-
параллельных осей. Для того чтобы найти зависимость между моментами
инерции относительно параллельных осей, сравним момент инерции J от-
относительно какой-либо оси АА' с моментом инерции J c тех же масс oi-
носительно оси СС, параллельной АА', но проходящей через центр
масс С рассматриваемых масс; расстояние между этими осями пусть бу-
будет d. Поместим начало координат в центре масс С (фиг. 99), ось z
направим по осп СС, а плоскость Суг проведём через ось АА'; обозна-
обозначим расстояния материальной часпшы Mt от осей СС и АА соответ-
соответственно через р, и р„, а угол отрезка СМЧ с осью у назовём ipv. Из тре-
треугольника СММ имеем
Умножив полученное выражение на массу wv частицы и просуммировав
его по всем частицам, получим:
я , л л я
По определению имеем
^ входящая в послед-
далее,
я
"VI ля
V—I
Я
есть масса всей системы; наконец, сумма Zj
нее слагаемое, р.жна нулю как статический момент относительно пло-
плоскости, проходящей через центр масс (§ 144};
я
Следовательно, равенство B6.4) перепишется так:
J=J(:+M- d\ B6.5)
т. е. момент инерции системы частиц относительно
некоторой оси равен моменту инерции системы от-
относительно параллельной оси, проходяшей через ?
црнтр масс, сложенному с моментом инерции центра
масс относительно данной оси в предположении,
чго его масса равна массе всей системы. Доказанное положение носит
название теоремы Гюйгенса-Штейнера (Huygl^ens-Steiner).
Из доказанной теоремы легко вывести соотношение между моментами
инерции J и У( относительно любых параллельных осей АА' и А1А1'; дей-
действительно, для момента У, имеем по теореме B6.5)
,
если d, означает расстояние между осями АА' и СС; йычтя послед-
последнее равенство из равенства B6.5), получим искомую зависимоаь:
j—j]==M- (d* — d\).
Т54,_Зависимость между моментами инерции относительно осей,
проходящих через данную точку. Произведения инерции. Эллипсоид
инерции. Сравним теперь между собой моменты инерции некоторой
снаемы чалии относительно осей, проходящих через одну и ту же
235
точку. Берём эту точку за начало декартовых осей Охуг (фиг. 100).
Пусть направление произвольной оси Ои характеризуется единичным век
тором
и0 == ах* + ру
величины а, р, Y> очевидно, являются направляющими косинусами этой
оси. Радиус-вектор какой-либо частицы М^ с массой /«„ обозначим г„
а расстояние этой частицы от оси и назовём pv Момент инерции си-
системы частиц относительно оси Ои имеет выражение
м
но
[см. формулу A-30) на стр. 11]. Выразив здесь
векторное произведение через проекции сомно-
сомножителей, получаем.
h = 0\Y — z№ + (^ — *vY)s + КР—^K,
Фиг. 100.
или, если расположить выражение по степеням косинусов,
9l = (yl 4- г!) а*
Умножим это равенство на /nv и просуммируем по всем частицам системы.
Введём обозначения:
B6.6)
в результате мы получим:
Величины Jxx J ]гг представляют собой моменты инерции рассматри-
гг р
ваемой системы'частиц относительно осей Ох, Оу и Ог. Величины J
J2x, Jxy соответственно носят название
г,
y произведений инерции, или
центробежных моментов инерции относительно осей у и г, г и х,
х и у; в обозначениях произведений инерции, когда эго почему-либо
удобно, мы будем ставить индексы и в обратном поря же, иными слова'ми,
Jxy=Jvx и т. д. В случае непрерывно распределённых масс все суммы
B6.6) заменяются интегралами по типу формулы B6.3). Получен-
Полученное нами выражение B6.7) показывает, что если мы знаем три момента
инерции и три произведения инерции относительно координатных осей,
то сумеем вычислить моменты инерции относительно любой оси, проходящей
через начало координат.
Чтобы нагляднее выразить зависимость величины момента инерции от
направления оси, употребим следующий геометрический приём. Отложим
от начала координат по направлению взятой оси вектор г, длина которого
обратно пропорциональна корню квадратному из соответственного момента
инерции, т. е. пусть
+ B6.8)
V Juu
где / — некоторая постоянная, определяющая масштаб построений, и най-
найдём геометрическое место конца этого вектора. Обозначим координаты
конца построенного нами вектора х, у, z; тогда
*= ' а, у^-^Ь * = ~f=Y- B6.9)
У Jan У Juu У •'аи
Если теперь умножим обе части равенства B6.7) на -г- и воспользуемся
соотношениями B6.9), то легко найдём:
J,S2 + -V2 + Jz^ — 2Jy*yz — 2JzSX - 2Jxvzy = P. B6.10)
Мы видим, что геометрическим местом конца построенного вектора слу-
служит некоторая центральная поверхность второго порядка. Как видно из
формул B6.8) и B6.7), поверхность эта не может иметь бесконечно удалён-
удалённых точек за исключением того случая, когда все материальные частицы
лежат на прямой, проходящей через взятый полюс. В последнем случае,
как легко показать, поверхность B6.10) обращается в цилиндр вращения.
При всяком другом расположении масс рассматриваемая центральная по-
поверхность, следовательно, может быть только эллипсоидом; поэтому она
и носит название эллипсоида инердаи, соответствующего взятому полюсу.
Собственно говоря, данному полюсу соответствует бесчисленное множество
подобных друг другу эллипсоидов инерции, отличающихся один от другого
значениями постоянной /; иногда из семейства этих подобных поверх-
поверхностей выделяется как представительница та, уравнение которой в каком-
либо отношении пишется наиболее просто; так, если принять 1=1, то
уравнение эллипсоида инерции представится в таком виде:
2 - 2Jyjz- 2J,xzx- 2JxyXy=l. B6.11)
Если за оси координат возьмём направления главных диаметров, или
осей поверхности B6.10), то уравнение эллипсоида напишется следующим
образом:
следовательно, вместо формулы B6.7) мы в этом случае будем иметь:
+ '-T'- B6.13)
Из возможности привести уравнение эллипсоида инерции к виду
B6.12) мы заключаем, что через любой полюс всегда проходят три та-
такие взаимно перпендикулярные оси, что для них произведения инерции
обращаются в нули. Эти оси носят название главных осей инерции
для взятого полюса, а моменты инерции, им соответствующие, называются
главными моментами инерции для данного полюса. Когда за по-
полюс взят центр масс, то эллипсоид инерции, главные оси и главные мо-
17 г. К. Суслов 257
менты инерции соответственно называют центральным эллипсо-
эллипсоидом, главными центральными осями и главными цен-
центральными моментами инерции.
Когда радиус-вектор г, проведённый из центра эллипсоида к точке,
лежащей на его поверхности, приходит в совпадение с одной из осей
эллипсоида, его модуль г, как известно, принимает стационарное значе-
значение, т. е. для этих положений
dr=0;
при совпадении с большей и меньшей осями трёхосного эллипсоида г
соответственно проходит через максимум и минимум, при совпадении со
средней осью г проходит через так называемый минимакс. На основании
формулы B6.8) отсюда, как следствие, вытекает, что и момент инер-
инерции Jm относительно каждой из главных осей инерции принимает стацио-
стационарное значение. При этом, когда эллипсоид инерции для взятого полюса
трёхосный, го все три главные момента инерции различны и один из них
имеет наибольшее, а другой наименьшее значение среди моментов инерции
относительно всех других осей, проходящих через взятый полюс. Когда
эллипсоид инерции для взятого полюса представляет собой поверхность
вращения, го два из главных моментов инерции становятся равными, при-
причём попрежнему момент инерции относительно любой другой (не главной)
оси, проходящей через данный полюс, содержится между двумя нерав-
неравными друг другу главными моментами инерции. Наконец, когда эллипсоид
инерции обращается в сферу, все моменты инерции относительно осей,
проходящих через данный полюс, равны между собой.
Заметим, что не всякий эллипсоид может служить эллипсоидом инер-
инерции. Пусть главные моменты инерции так располагаются по своей вели-
величине, что
тотда во всяком случае
это видно из формул B6.6), поскольку
так как в уравнении B6.12) коэффициенты Jxx Jyy Jzz обратно пропор-
пропорциональны квадратам полуосей поверхности, то отсюда заключаем, что
эллипсоид
$+i + i=l B6Л4>
при
может служить эллипсоидом инерции лишь при условии
i + ^>^- <26.15)
155. Радиус инерции. Гирационный эллипсоид. Выражению для
момента инерции J ма1ериальной системы дают иногда, следующий вид:
J—Mf,
258
где м— масса всей системы. Из размерности величины У нетрудно за-
заключить, что р представляет- собой длину. Длинй эта носит название
радиуса, или плеча, инерции данных
масс по отношению ко взятой оси. Радиусы
инерции относительно главных осей назы-
называются главными. Если уравнение B6.10)
эллипсоида инерции отнесём к главным диа-
диаметрам, дадим постоянной /2 значение М и
введём главные радиусы инерции а, Ь, с,
т. е. положим
то получим:
а2х2-\-b2y2-\-c2z2 = \. B6.16)
Кроме эллипсоида инерции, роль в меха-
механике играет и другая поверхность, носящая фи| |(J1
название гирационного эллипсоида.
Получается она из эллипсоида инерции ' следующим построением. Берём
на эллипсоиде инерции
/ = У ххх2 -j- Jyyy2 -j- Jzzz2 — /2 = 0 B6.17)
произвольную точку т,.определяемую радиусом-вектором
и строим в этой точке касательную плоскость (фиг. 101). На эту
плоскость опускаем из центра* О эллипсоида перпендикуляр OD — 8 и
производим инверсию точки D относительно сферы произвольного ради-
радиуса R, т. е. на том же луче OD откладываем вектор Од=^р, по мо-
модулю равный
р=х-
Геометрическое место точки р. и будет искомой поверхностью. Для полу-
получения её уравнения заметим, что|
следовательно,
откуда
/?*|grad/l
r-grad/ *
g
r..grad/*
Выразив все входящие в это равенство векторы через их проекции, по-
получим соотношение
следовательно,
17*
259
Вставив эти значения х, у, г в уравнение B6.17) и опустив в оконча-
окончательном результате индекс р., мы получим уравнение искомой поверхности
в виде
JXX Jyy 'ZZ '
Если преобразование, посредством которого мы из эллипсоида инер-
инерции получили гир'ационный эллипсоид, применить к последнему, то снова
получится эллипсоид инерции; вследствие этого оба эти эллипсоида на-
называются взаимными. Если радиус инверсии R взять равным единице,
то эллипсоидом, взаимным с эллипсоидом B6.16), будет следующий
S+S+S=1- <26Л9>
156. Эллиптические координаты. Прежде* чем перейти к изучению
распределения главных осей инерции в пространстве, познакомимся с той
системой криволинейных координат, которая носит название эллиптиче-
эллиптической. Рассмотрим равенство
^+*4i+3TT-1=s0. B6-20)
Когда \ имеет постоянное значение, а х, у, г представляют собой теку-
текущие координаты, то это равенство служит уравнением некоторой цен-
центральной поверхности второго порядка. Если же дадим х, у, г какие-
либо постоянные значения, то оно обращается в кубичное уравнение от-
относительно \, имеющее, как сейчас убедимся, три действительных корня.
Пусть
c2<Z>2O2. B6.21)
Обозначим Q(k) левую часть уравнения B6.20):
QW^^b + PT-x + ^TT-1- <26-22>
Положим \ = — аг-\-вг, где s2 — сколь угодно малая положительная ве-
величина. Тогда знак всего выражения Q(k) будет зависеть от знака пер-
первого члена и, следовательно, будет
Положив, далее, \ = — № — s2, найдём, что
Из этих неравенств заключаем, что между —а2 и —Ь2 уравнение
Q(k) = O имеет, по крайней мере, один действительный корень; обозна-
обозначим его \v Дав теперь X значения — Аа-|-ег и затем —с2 — еа, убеж-
убеждаемся, что
следовательно, уравнение Q(\) = 0 имеет действительный корень ),2 меж-
между — Ь2 и —са. Наконец, положив Х = — с2-\-е2 и Х = -|-оо, видим,
что
т. е. третий действительный корень \ лежит между —с2 и -{ со-
Итак, корни уравнения Q(X) можно расположить в таком порядке:
_<га<Х,<-^<*2<-<2<08< + «>- B6.23)
Три уравнения:
%^1 = 0' B6'24)
1-0' <26-25>
дают нам три центральные поверхности второго порядка, проходящие че-
через данную точку. Если примем во внимание неравенства B6.21) и
B6.23), то увидим, что первая из них будет двухполостным гиперболои-
гиперболоидом, вторая — однополостным, третья — эллипсоидом. Так как между
квадратами полуосей этих поверхностей имеют место соотношения
—е* = \ (/==1> 2> 3)'
то все три поверхности софокусны с основным эллипсоидом:
Величины \v \2< \ можно принять за три криволинейные координаты
данной точки, определяемой декартовыми координатами х, у, г. Всякой
точке будет соответствовать своя система значений этих координат. На-
Наоборот, давши некоторые значения величинам Хр \ и Xs, мы можем опре-
определить положение точки, впрочем, не однозначно, потому что поверх-
поверхности B6.24), B6.25) и B6.26) пересекаются не в одной, а в восьми
точках. Координаты X, \, \в носят название эллиптических.
Когда величина \х проходит систему значений между —а2 и —№,
двухполостный гиперболоид B6.24) изменяется от плоскости Oyz до той
части плоскости Огх, которая * лежит по положительную сторону гиперболы
<г=*-ёг=*-1=0' B6'27>
т. е. той части плоскости, координаты любой точки которой обращают
левую часть уравнения B6.27) в положительную величину. Когда вели-
величина Х2 проходит систему значений между —Ь и —с2, однополостный
гиперболоид B6.25) изменяется от гиперболической пластинки, лежащей
в плоскости Ozx по отрицательную сторону гипербозы B6.27), до той
части плоскости Оху, которая лежит по положительную сторону эллипса
Наконец, когда величина ).s проходит систему значений от —с2до-(-оо,
эллипсоид B6.26) изменяется от эллиптической пластинки, лежащей в
плоскости Оху и представляющей собой место точек, лежащих по положи-
положительную сторону эллипса B6.28), до сферы бесконечно большого радиуса.
Обе кривые B6.27) и B6.28) лежат во взаимно перпендикулярных
плоскостях, проходят соответственно одна через фокусы другой и пред-
представляют собой геометрические места тех точек, для которых две эллип-
261
хические координаты равны между собой: для гиперболы B6.27) имеем
) =18, а для эллипса B6.28) Х2 = Х8.
Докажем, что эллиптическая система координат представляет собой
систему ортогональную. Координатные поверхности B6.24), B6.25),
B6.26) встречаются ортогонально, если соблюдены условия
grad/1.grad/s = O, giad/2.grad/3 = 0, grad/s.grad/, =0. B6.29)
Если мы вычтем уравнение B6.25) из B6.24) и полученный результат
сократим на Х2 — Хр то найдём:
+ U ^
^ | ?? п ое,^п\
к)(Ь* + X,) "Г («¦ + к) <е» + X,) — U> ^ • '
а это равенство и будет первым из условий B6.29), выраженным в ска-
скалярной форме. То же можно показать относительно каждой из других
двух пар координатных поверхностей.
Чтобы выразить декартовы координаты явным образом через эллипти-
эллиптические, снова обращаемся к уравнениям B6.24), B6.25) и B6,26).
Исключив из них сперва одну из координат, например г, получим:
(с* — аЦ х1 , (с2-ft3) у2 _ .
+ + к) № + Ч) ~ '
(сг— 6г).у2 .
) *
(аз 4- ).2Ха2 + У "I" (б2 + h)(*2 + ^а)
Исключив теперь отсюда у2, получим первое из искомых выражений:
подобным образом найдём и остальные:
Если принять во внимание неравенства B6.21) и B6.23), то нетрудно
увидеть, что подрадикальные выражения здесь всегда положительны.
В заключение выведем некоторые вспомогательные формулы, которыми
нам придётся впоследствии воспользоваться. Прежде всего заметим, что
равенство B6.22) можно переписать так:
Q (I) ¦ (tz2 -fl) (Ь2 + М ^ + *) = — 0- — \) (^— \) (^ - \)- B6.34)
Действительно, с одной стороны, корнями уравнения Q(X) = O служат
\v ).2 и ),, а с другой стороны, если все четыре члена выражения Q (к)
привести к общему знаменателю
(а*+ *)
то коэффициент при высшей степени X в числителе будет равен отрица-
отрицательной единице, что мы и имеем в правой части. Из равенства B6.34)
вытекает, что
Н-
262
Найдём теперь значение производной —-тг для X —Хх. Нетрудно
видеть, что
м
где через М обозначены члены, не обращающиеся в бесконечность для
Х=Х1. Дав X значение \v находим отсюда:
С другой стороны, из выражения B6.22) имеем
/^_<?Q) хг . уг . z*
\ д\ 1к=к, {аЦ-\)* ' (ft^-HiJ ' (С2+Х,J •
Введя для | 4М обозначение Ц, мы получаем, следовательно,
такое соотношение:
-. B6.35)
юа + li)(*3 + h)(c* + \)
К этой формуле, очевидно, могут быть присоединены ещё две:
B6.36)
B6.37)
157. Распределение главных осей инерции в пространстве. Зай-
Займёмся теперь решением следующего вопроса: как по данным главным
центральным моментам инерции каких-либо масс и по данным направле-
направлениям главных центральных осей инерции
найти момент инерции тех же масс отно-
относительно любой оси, а также опреде-
определить направления главных осей инерции
для любого полюса.
Возьмём центр масс С за начало
декартовых координат и совместим
координатные оси с главными централь-
центральными осями инерции (фиг. 102). Пусть
моменты инерции относительно осей
Сх, Су, Сг будут соответственно
J%x, Jyy, Jгг. Берём произвольный по-
полюс К с радиусом-вектором
пусть через него проходит ось Ки, определяемая единичным вектором
Искомый момент инерции относительно оси Ки обозначим Уяя, а момент
инерции относительно оси Си', ей параллельной и проходящей через на-
263
чало координат, т. е. иентр масс, пусть будет J'm. Тогда по теореме
Гюйгенса [см. формулу B6.5) на стр. 225)] имеем
B6.38)
где М—масса всей системы частиц, a d—расстояние между осями Ки
и Си'. Для квадрата этого расстояния получаем следующее выражение:
d2 = г\ — (rk ¦ «V = (rk X «<>)а =
или
г*
С другой стороны, по формуле B6.13) мы имеем
Ju>e> = Jxxa' + Jj3 + Jaf- B6.39)
Введём обозначения:
J% = J~+MМЛ-*®- )
Bб-40>
B6.41)
тогда, объединив полученные результаты, мы можем, вместо формулы
B6,38), написать
B6.4 2)
Эта формула и определяет по нашим данным искомый момент инерции Jaa.
Направления главных осей инерции для полюса К можно найти из
условия стационарности момента инерции Jm относительно каждой из
этих осей. Формула B6.42) выражает момент инерции У^ в функции"
переменных a, {J, у, но последние связаны между собой очевидным соот-
соотношением
По известной теореме математического анализа, когда исследуемая функ-
функция принимает стационарное значение, её частные производные пропор-
пропорциональны частным производным от функции, выражающей Связь между
переменными. Поэтому в нашем случае, называя множитель пропорцио-
пропорциональности У, мы имеем
на 1 ®f dJitti у of O"tiu r У
да дч ' ар dp' ^т di'
напишем эти равенства в развёрнутом виде и перенесём все члены в
левые части; в результате мы получим:
B6.43)
Условием, при котором эта система однородных уравнений, удовлетво-
удовлетворяется значениями a, JS, у, не равными нулю одновременно, является ра-
равенство нулю определителя системы:
/ *| J J к) /(*)
us ху хг
J(k) у,*) J J(k)
At
= 0. B6.44)
Это выражение называется вековым уравнением, и введённый нами
множитель У является его корнем. В высшей алгебре доказывается, что
если коэффициенты векового уравнения действительны (что в нашем слу-
случае имеет место), то все корни его также действительны. С другой сто-
стороны, если равенства B6.43) умножим соответственно на а, ф, у, затем
сложим и сравним результат с выражением B6.42), то убедимся, что
У представляет собой одно из искомых стационарных значений функции
Уаа. Следовательно, корни У,, У2> Л векового уравнения B6.43) служат
главными моментами инерции для полюса К; соответствующие этим кор-
корням направления главных осей инерции определяются косинусами av, PN, yv,
где v = 1, 2, 3; их значения найдутся из уравнений B6.43), если туда
вместо У вставим соответствующий корень Уч'.
Чтобы уяснить, по какому закону меняются направления главных осей
инерции для различных точек пространства, преобразуем уравнения
B6.43) к другому виду. Первое из них, если вернуться к прежним обо-
обозначениям B6.40) и B6.41), можно теперь написать так:
Прибавим к обеим частям Mx'yt^ введём радиусы инерции, положив
единичный вектор рассматриваемой главной оси инерции назовём
радиус-вектор точки К назовём попрежнему
наконец, для сокращения письма обозначим
г\-?'.=\; B6.45)
тогда после очевидных преобразований мы получим:
я»-г*
Подобным образом найдём из остальных двух уравнений выражения
<26-47>
Умножив последние три равенства соответственно на xk, yk, zk, сложив и
выполнив сокращение, мы получим:
265
что мы короче запишем так:
/Лхк, Ук, г„) = 0.
С другой стороны, умножив эти же равенства соответственно над;0, у0, z°
и сложив, получим;
М* + * + *
или
B6.49)
Выражение B6.48) показывает, что через взятый полюс проходят гри
поверхности -го порядка, соответствующие значениям -v= 1, 2, 3 и со-
фокусные с центральным гирационным эллипсоидом B6.19)
Параметры этих софокусных поверхностей связаны с главными моментами
инерции для полюса К соотношениями B6.45), которые можно перепи-
переписать так:
^='2-$- B6-5°)
Из соотношения B6.49) ыы усматриваем, что направления главных осей
инерции для полюса К совпадают с нормалями к трём выше упомянутым
софокусным поверхностям; при этом согласно /формуле B6.48) нормаль
к эллипсоиду служит осью наименьшего, а нормаль к двухполостному
гиперболоиду осью наибольшего момента инерции (§ 156).
Когда главные центральные моменты инерции J xx, J , Jгг не равны
между собой, то эллипсоид инерции и для полюса К будет, вообще го-
говоря, трёхосный; эллипсоид инерции для полюса К обратится в поверх-
поверхность вращения, лишь когда точка К лежит на одной из кривых B6.27)
или B6.28). В предельном случае b—>с эти кривые пересекаются
в точках оси х с координатами
причём это единственный случай, когда рассмагриваемие кривые имеют
обшие точки; сами кривые при этом соответственно превращаются в о\-
резки оси х:
| х\ 52 У а2 - Ь2 и | х\ s? Va2 - b2.
Таким образом, эллипсоид инерции обращается в шар лишь для двух
полюсов и притом только тогда, когда центральный гирационный эллип-
эллипсоид является яйцевидным эллипсоидом вращения (а не сфероидом) с
полуосями
а~^>Ь^=с.
Упомянутые два полюса лежат в таком случае на оси вращения гираци-
ошгого эллипсоида на расстояниях от центра масс, равных (при принятом
масштабе) уа2 — Ь2.
В заключение заметим следующее. Как показывают формулы B6.4 6)
и B6.47), проекции вектора «5 являются линейными функциями проекций
266
вектора rk. Обозначим || Дч [| матрицу рассматриваемого преобразования
о
Zlll. О О
AJI =
о
о
Принято говорить, что вектор иР получается аффинным преобразованием
из вектора rk при помощи матрицы || Д, || ; в записи это выглядит так:
эта векторная формула эквивалентна трём выше приведённым скалярным.
158. Момент инерции относительно плоскости. Моментом инерции
данной системы материальных частиц относительно плоскости называется
сумма произведений масс частиц на квадраты их расстояний от рассмат-
рассматриваемой плоскости. На основании этого определения мы имеем следую-
следующие выражения для моментов инерции относительно координатных пло-
плоскостей:
В случае масс, расположенных сплошным образом, мы" вместо сумм, полу-
получаем интегралы:
Для момента инерции относительно плоскости можно было бы доказать
теорему, аналогичную теореме Гюйгенса [формула B6.5) на стр. 255]:
J=JcJrMd*.
Из выражений для моментов инерции относительно начала координат,
осей координат и плоскостей координат видно, что они связаны между
собой следующими соотношениями:
-/пл. *У—
B6.51)
Если массы расположены в плоскости (в плоскости Оху), то как част-
частный случай последней формулы мы имеем
у«+Ууу = У«' B6-52)
или, как говорят, сумма двух экваториальных моментов инерции относи-
относительно взаимно перпендикулярных осей равняется полярному моменту
инерции относительно точки их пересечения.
159. Вычисление моментов инерции. Как было показано в преды-
предыдущем параграфе, мы сумеем вычислить момент инерции данной системы
материальных частиц относительно данной оси, если нам известны глав-
267
ные центральные моменты инерции и направления главных центральных
осей инерции. В некоторых случаях направления главных осей могут
быть указаны непосредственно.
а) Если массы расположены симметрично относительно некоторой пло-
плоскости (или лежат в одной плоскости), то для полюсов на этой плоско-
плоскости одна из главнвГх осей инерции направлена по перпендикуляру к пло-
плоскости симметрии; иначе говоря, всякая линия, перпендикулярная к пло-
плоскости симметрии, будет главной осью. Действительно, возьмём начало
координат в произвольной точке плоскости симметрии, а эту плоскость
примем за плоскость Оху; тогда в суммах
я л
vz —~ ^L ^v.V v^v» zx ^j ^v?v.?v
каждой массе /я, с координатами лу, _у*. г, будет соответствовать, по
условию, равная масса т^—тч с координатами хч, уч~гч, за исклю-
исключением масс mw, лежащих в самой плоскости симметрии; но для таких
масс г,, = 0. Следовательно, в нашем случае
а потому по формуле B6.10) уравнение эллипсоида инерции для начала
координат (которое помешено в произвольной точке плоскости симметрии)
будет
J,** + -V2+-V2 - 2-V.v=''.
т. е. otb Ог служит осью этого эллипсоида или, что то же, главной
осью инерции.
6} Если массы имеют три взаимноперпендикулярные плоскости сим-
симметрии, то линии встречи этих плоскостей служат главными центральными
осями инерции [ср. свойство 5), § 146].
Когда пользуются декартовой системой координат, то большей ча-
частью вычислять непосредственно приходится лишь моменты инерции от-
относительно координатных плоскостей, а затем уже с помощью формул
B6.51) получают выражения для моментов инерции относительно осей
координат.
Если плотность системы масс постоянна, то её выносят за знак инте-
интеграла и вычисляют сперва оставшееся выражение, или так называемый
геометрический момент инерции (момент инерции объёма, по-
поверхности или линии); умножив полученный результат на плотноаь, по-
получают требуемый момент инерции: в отличие от геометрического его
называют физическим.
Пример В9. Геометрический момент инерции площади
прямоугольного треугольника относительно одного из
катетов. Примем вершину А за начало координат, а ось х направим по ка-
катету АС (фиг. 103). Тогда, если длины катетов ВС и АС • соответственно обо-
обозначим а и Ь, то уравнение прямой АВ будет
а
а потому имеем
- » ь ь
аЧ
_.
ИЛИ
J —
Jxx— 6 •
где S —площадь треугольника.
Пример 70. Геометрический момент инерции площади
косоугольного треугольника относительно одной кз сю-
сюров. Пусть высота треугольника ABC равна СС'= Л (фиг. 104 и 105); тогда, рассма-
рассматривая данный треугольник как сумму (фиг. 104) или разность (фиг. 105) двух
а Ь С
Фиг. 103.
Фиг. 104.
А 8 С
Фиг. 105.
прямоугольных треугольников АСС и ВСС, легко найдем, если S — площадь
данного 1 ре угольника, что искомый момент инерции относительно основания
А В равняется -g- .
Пример 71. Главные центральные геометрические мо-
моменты инерции площади эллипса, лежащего в плоскости
Оху и заданного уравнением
Вычисляем:
Jxx = 4
da
S
Вводим новую переменную <р, положив у = Ь sin <p; тогда
У 7
os2 yrfip = об3 [
S
5
4 '
или, если S — площадь эллипса,
Подобным образом найдём:
Следовательно, по формуле B6.52)
4 "
rfrj" 4 "
269
Когда a=b=R, т. е. эллипс превращается в круг радиуса/?, то
Jxx — Jyy — 4 > zz 2
Пример 72. Главные центральные геометрические момен-
моменты инерции прямоугольного параллелепипеда, стороны
которого соответственно равны 2а, 26, 2с. Направляя оси, х, у, z
параллельно сторонам 2а, 2Ь, 2с и называя Qx площадь сечения, перпенди-
перпендикулярного оси х, и V— объем параллелепипеда, имеем
аналогично
_ Vifl
"'пл. гх — з • /пл. ху
Отсюда по формуле B6.51) находим:
VW + c*) _У{с* + а*) _У(д*+ь*)
Jxx — з^ ' УУ — з ' ** — 3 * B6.53)
Для куба а ^Ь=.с, и, следовательно,
j -j -j -2Va*
Jxx — Jyy — Jiz — з •
Чтобы получить геометрический момент инерции стержня длиньЛ2с отно-
относительно оси z, ему перпендикулярной и проходящей через его середину,
можно взять третью из формул B6.53) и положить в ней Ь = 0, а вместо V
поставить 2а; тогда мы получим:
. 2а'
/
Пример 73. Главные центральные геометрические мо-
моменты инерции кругового цилиндра радиуса R и высоты Н.
Поместим начало координат в центре цилиндра и ось z направим по его оси!
Так как элемент объёма в цилиндрических''координатах равен dp-pdy-drz, то
я
Т 2* r
где К —объём цилиндра. Далее
J =J A-J J —J 4-У
XX ^"^ DJL Xy ~ •'ПД. ZXt yy ПЛ. Xy 1 JRS. ytt
отсюда, так как по соображениям симметрии Jxx~Jyr имеем
/гх — 2 = "*ил- *у ^ 2 ~ *'пл> ху ~^"
но
н
окончательно получаем:
Пример 74. Главные центральные геометрические мо-
моменты инерции эллипсоида
Вычисляем сперва момент инерции относительно плоскости Oyz; назвав Qx пло-
площадь сечения, параллельною плоскости Oyz и отстоящего от неё на х, и V —
объём эллипсоида, находим:
i
по формуле B5.13) на стр. 251 имеем
подставив это выражение в предыдущую формулу, получаем:
Апа^Ьс Уа2
•Л.Л. уг — 15 — ~ *
Подобным образом находим:
V№ W2
Лш. гх == g > Лгл. ху == "Т~~ •
Следовательно,
К(й2-
Jxx g i Jvv 5 • гг —
Если а = Ь = с= R, т. е. эллипсоид обращается в шар радиуса /?, то
Пример 75. Дан однородный параллелепипед со /\ \ в.
сторонами 2а, 2а, 26 (фиг. 106); исходя из результатов f ^-Л-^
примера 72, определить для середины К ребра ИS глав- \/ / к
ные геометрические моменты инерции и направления *-/
главных осей инерции. Назвав V объём параллелепипеда, / Za A
имеем х
'Za
Jxx — Jyy— з ' zz ~ ~Т~'
далее, по формулам B6.40) и B6.41), заменив массу М объёмом V, находим:
Составляем уравнения B6.43), определяющие направляющие косинусы av, |iv, f,
главных осей инерции полюса К; положив для краткости письма •/„ = ——,
имеем
271
Вековое уравнение после развертывания определителя примет вид
Dаа -(- Ь2 — т,)а Bа2 — т„) — 9а* Bа1 — т„) = 0.
Отсюда находим:
Ti = 2fl3, т2== 7аЗ + *\ TS = e2 + *s-
Следовательно, главные моменты, инерции для полюса К равны
Л-
. Л= з• •/з~з •
Косинусы a,, (!,,, у, находим из уравнений B6.54), последовательно полагая
у= I, 2, 3. Если ранг овреДелителя системы я однородных уравнений с я
неизвестными равен я—1 (что имеет место в нашем случае), то, как известно,
нетривиальные решения (т. е. не равные нулю одновременно) находим, написав,
что неизвестные пропорциональны соответственным адъюнктам определителя
системы. На этом основании мы находим
;ч_?!_-Т1 ti — Ъ. I» "A — h — ^A.
0 0 ~" 1 ' 1 —1 О1 1 1 — 0 '
Если, кроме того, мы примем во внимание, что сумма квадратов косинусов
равна единице, то окончательно получим:
«. = о, _ h = o, Ti=fi;
Разумеется, в данном примере направления главных осей инерции для полюса К
можно было бы также найги непосредственно из соображений симметрии.
ОТДЕЛ II
ОСНОВНЫЕ ПОЛОЖЕНИЯ ДИНАМИКИ СИСТЕМЫ.
УРАВНЕНИЯ ДВИЖЕНИЯ. ЗАКОНЫ ДИНАМИКИ
XXVH. СВОБОДНЫЕ И НЕСВОБОДНЫЕ МАТЕРИАЛЬНЫЕ
СИСТЕМЫ. СВЯЗИ
160. Свободная и несвободная материальные системы. Связи
конечные и дифференциальные. Собрание материальных частиц в ко-
конечном или бесконечно большом числе мы назвали системой материаль-
материальных частиц, или, короче, материальной системой, если движение каждой
из частиц зависит от движения остальных (§ 143). Когда частицы си-
системы в любой момент могут занимать произвольное положение и иметь произ-
произвольные скорости, система называется свободной. В этом случае движе-
движение какой-либо частицы свободной системы связано с движением
остальных только потому, что приложенная ко взятой частице сила за-
зависит от положения или скоростей других частиц системы. Так, например,
три материальные частицы, о которых сказано только, что они взаимно
притягиваются по ньютонову закону, составляют свободную материаль-
материальную систему.
272
Если частицы материальной системы в произвольно выбранный момент
не могут занимать произвольного положения или не могут иметь в этот
момент произвольных скоростей, то такая система носит название несво-
несвободной. Условия, налагаемые на движение несвободной системы, назы-
называются связями этой системы. В рассматриваемом случае движение ка-
какой-либо частицы несвободной системы связано с движением остальных
не потому только, что приложенная ко взятой частице сила может зави-
зависеть от положения или движения других частиц системы, но и потому,
что во всё время движения системы должны удовлетворяться те уравне-
уравнения или неравенства, которые аналитически выражают связи системы.
Связи системы бывают двух родов: одни связи не позволяют системе
в данный момент занимать произвольное положение; другие связи не до-
допускают только, чтобы точки системы в данный момент имели произ-
произвольные скорости. Связи первого рота мы будем называть
конечными, или геометрическими, связи второго рода — д и ф ф е-
р е и циа л ь н ы м и, или кинематическими. Если связи не зависят
явно от времени, т. е. накладывают ограничения на положения и скорости частиц
системы, одинаковые для любого момента времени, то они называются ста-
стационарными, или склерономными; в противном случае связи на-
называются не стационарными, или реономными.
161. Конечные удерживающие связи. Возможное положение
системы. Конечная связь называется удерживающей, если она аналити-
аналитически выражается некоторым уравнением между координатами частиц
системы и временем. Пусть рассматриваемая система состоит из п мате-
материальных частиц. Какую-либо частицу обозначим /яч) а координаты её
л7, у^, zv. В таком случае, если система подчинена а конечным связям,
то координаты частиц системы должны удовлетворять а уравнениям вида
&¦¦•'*«*+* Г*) = 0, ) B71
v= 1,2,3 л; а=1,2,...,а. j [ '¦ >
Всякое положение системы, для которого координаты частиц удовлетво-
удовлетворяют этим уравнениям, называется возможным для данного мо-
момента t.
Пример 76. Материальная система, все частицы которой находятся друг
от друга на неизменных.расстояниях, носит название неизменяемой си-
системы. Неизменяемая система в случае непрерывного распределения массы
называется твёрдым телом в динамическом смысле, или аСсолютно твёр-
твёрдым телом (о твёрдом теле в кинематическом смысле см. § 54) Пусть неиз-
неизменяемая система состоит из трёх частиц; тогда связи системы выразятся
уравнениями:
Д = (АГ2 - Xzf + (У1 - Уь? + (*1 - *8K - 4 = °- '
Л = (*з — *iJ + (.Vs — ЛJ + (г8 — г\У— 4'=°' B7.2)
/в = In - х2? + (Л - Л)« + («1 - ztf - /?2 = О,
где 1М означает постоянное расстояние между частицами т^ и mv.
Пример 77. Пусть система состоит из четырёх частиц г^, т2, Щ, tnit
связанных тем условием, что объём тетраэдра, имеющего вершины в частицах
системы, возрастает пропорционально времени. Аналитически указанная связь
выразится уравнением
*
1 л
1 л
1 л
1 л
'а Уг
'8 J'3
Ч У4
B7.3)
18 г. к. Суслов 273
где а и Ь — некоторые постоянные. Этот пример иллюстрирует конечную рео-
номную связь.
Пример 78. Пусть система состоит из п материальных частиц, движу-
движущихся в плоскости
ах 4- by -\- cz-\-d — 0.
В этом случае связи, которым подчинена система, выразятся уравнениями
/„ = ялг„ 4- Ьуч 4-«»+ d — °. B7-4)
а = у=г1,2 п.
162. Градиент конечной связи в данной точке. Напишем по-
подробно уравнение B7.1) одной из связей данной системы
/. (xvyv 2V хг,у„ 22,..., xv у„ *v л?и, уп, zn, t) = 0. B7.5)
Вообразим, что мы закрепили неподвижно все частицы системы за
исключением частицы mv; тогда все координаты, кроме трёх, x^y^z^,
станут постоянными, и написанное уравнение представит собой ту изме-
изменяющуюся с течением времени поверхность, на которой должна оста-
оставаться частица mv. Вектор, имеющий своими проекциями частные произ-
производные -J-2-, J*, -/s, мы будем называть дифференциальным параметром
связи, или градиентом функции /„, выражающей связь, или, короче,
градиентом связи /а в точке /и, и обозначать gradv/a. Таким образом,
grad/. = ^ хо + ^ у° + ^ z\
Модуль этого вектора иногда называют дифференциальным параметром
первого порядка от связи в данной точке и обозначают Д'"), т. е. .
По своему направлению градиент в данной точке, очевидно, совпадает с поло-
положительной нормалью к поверхности B7.5).
Пример 79. Для первой из связей B7.2) примера 76 имеем следующие
градиенты в точках ть тг и т3:
grad2 Д = 2 [(лг2 — хъ) хО 4- (Уч, — У»)У0 + (г2 — *s) г°] = 2 (г2 — rt),
grad3 Д = —2 [(дг2 — х3) дг° 4" (^а — J's)^° + (гг ~ гз)«°] = —2 (г2 — г3),
где г2 и г3 — радиусы-векторы частиц т2 ит3 (фиг. 107). Следовательно,
эти градиенты направлены в противоположные стороны по прямой, соединя-
соединяющей точки т2 и ms, и по модулю оба равны 2/23.
Пример 80. Рассмотрим один из градиентов связи B7.3) примера 77,
например, градиент в точке т\. Имеем
т,
gradx/= —
Определители в этом выражении по абсолютной вели-
Фиг. 107. чине, очевидно, представляют собой соответственно
проекции удвоенной площади S, грани m2m3mi на
плоскости Oyz, Ozx и Оху (фиг. 108). Поэтому, назвав ftj единичный вектор
высоты, опущенной из вершины тх на противоположную грань, мы получим
274
1
1
1
Уг
Ун
У*
*ч
"г
г*
х°—
1 г2
1 zs
1 z,
х%
Xg
Xi
У-
1 ЛГо
1 ^з
1 X.
Уг
Уз
при том порядке нумерации вершин, который указан на фиг. 108:
или
Аналогичные выражения найдём и для других вершин, так что вообще можно
написать:
gradv/ = 2SX (»= 1,2,3,4).
Таким образом, в каждой из рассматриваемых четырех точек градиент со-
содержит столько единиц длины, сколько единиц площади содержится в удво-
удвоенной противолежащей грани, а по направлению
он совпадает с высотой, опущенной из данной точки
на противоположную грань. Поверхностями типа
B7.5) будут в данном примере плоскости, прове-
проведенные через вершины тетраэдра параллельно про-
противоположным граням.
Пример 81. Все отличные от нуля градиенты
связей B7.4) равны между собой и направлены пер-
перпендикулярно к той плоскости, в которой происходит
движение системы.
163. Условие, налагаемое удерживающей
конечной связью на скорости частиц систе-
системы. Нетрудно показать, что рассматриваемые
нами связи налагают ограничения не только на поюжение, но и на ско
роста частиц несвободной системы. В самом деле, уравнения B7.1)
должны соблюдаться в любой момент t, следовательно, во всё время
движения системы левые части уравнений B7.1) должны равняться по-
постоянным (а именно, нулю). Отсюда непосредственно вытекает, что пол-
полная производная любого порядка по времени от левых частей наших
равенств должна равняться нулю. В частности, если возьмём первую
производную, то получим равенства, ограничивающие скорости частиц
системы:
Фиг. 108.
v=l
или
B7-6)
B7.7)
Мы видим, что ограничению подлежат лишь составляющие скоростей
частиц по соответственным градиентам связей; составляющие же ско-
скоростей в плоскостях, перпендикулярных к градиентам, остаются совер-
совершенно произвольными. Когда уравнение связи не содержит явно времени,
то условие для скоростей примет вид
B7.8)
Пример 82. Применим выведенное условие B7.7) для скоростей частиц
к первой из связей B7.2) ^примера 76 на стр. 273. На основании результатов
18* 275
примера 79 на стр. 274 имеем
з
Поделим это равенство на [г2 — rs| и введи* обозначение
.ог, —
/2°ч, очевидно, представляет собой единичный вектор направления т9т3. Выше
написанное равенство преобразуется в следующее:
**А= «»• •/&.
Мы доказали важную теорему: проекции скоростей концов не-
неизменяемого отрезка на направление этого отрезка равны
между собой.
Пример 83. Условие для скоростей частиц, рассмотренных в примере 77
(стр. 274) и подчиненных связи B7.3), напишется при обозначениях примера 80
(стр. 275) следующим образом:
Пример 84. Каждая из связей B7.4) (стр. 274) требует, чтобы выполня-
выполнялось очевидное условие
где и0 орт нормали плоскости ах -f- by -f- cz-f-d = 0.
164. Условие, налагаемое удерживающей конечной связью на
ускорения частиц системы. Взявши вторую производную по времени от
уравнения B7.1), мы получим равенство, выражающее собой условие
для ускорений частиц системы:
вдесь для сокращения символом DJ^ обозначена следующая сумма:
276
Заметим, что если связь /а не зависит явно от времени, то выражение
D2/a будет однородной функцией второй степени от проекций скоро-
скоростей д:7, _уч гч, так как в этом случае последние две строки в выраже-
выражении B7.10) обращаются в нуль. Введём градиенты связи; тогда равен-
равенство B7.9) мы сможем переписать так:
0. B7.11)
Это равенство показывает, что ограничению подлежат лишь составляю-
составляющие ускорений частиц по соответственным градиентам связей, а состав-
составляющие в плоскостях, перпендикулярных к градиентам, остаются совер-
совершенно произвольными.
Пример 85. Для первой из связей B7.2) примера 76 на стр. 273 условие
B7.11) выразится так:
(Г! — Г,) •(»! — W,) + (t>! — Ф2)а == 0.
165. Удерживающие дифференциальные связи. Дифференциаль-
Дифференциальные связи не позволяют частицам системы в данный момент и в данном
положении иметь произвольные скорости. Аналитически удерживающие
дифференциальные связи выражаются уравнениями:
<р„(. . Л, у„ iv> ...,/) = 0 (v= I, 2, ..., п; р = 1, 2 b).
Мы ограничимся в дальнейшем изучением.лишь линейных дифферен-
дифференциальных связей, т. е. дифференциальных связей, аналитические выражения
которых содержат скорости лишь линейно: уравнения таких связей имеют,
следовательно, вид
Ь =¦-¦ ? (ДC^ + Я$Я + В&Я)+ ?>(,== 0, B7.12)
l
где В®>, В<$\ В®)} -^з — некоторые функции от времени и координат.
Если ввести в рассмотрение векторы
= В(^х° -4- ВЩо _J_ В(?)го _. _!ё хо i Jlvo _L Ji 2°,
w -Г vy> "Г чг д^ ~ду/ ~ д^
то предыдущему выражению можно придать вид, аналогичный условию
B7.7), налагаемому на скорости частиц конечной связью, а именно:
<РР=? BV).v4 + D, = 0. B7.13)
4 = 1
Векторная величина 0® носит название векторного параметра рассматри-
рассматриваемой дифференциальной связи.
Пример 86. Примером линейной дифференциальной связи может служить
связь, выражаемая уравнением
п
2 j ^-D = 0, B7.14)
277
где D — некоторая постоянная. Эта связь, очевидно, требует, чтобы сумма ки-
кинетических моментов частиц системы относительно оси Oz оставалась постояг
ной. В векторной форме уравнение рассматриваемой связи напишется так:
2
где
Следовательно, каждый из векторов а, по модулю равен
т. е. расстоянию частицы тч от оси Ог, а направлен он по перпендикуляру
к плоскости, проходящей через ось Oz и частицу mv.
166. Связи интегрируемые и неинтегрируемые. В том случае,
когда левая часть равенства B7.12) может быть прн помощи некоторого
множителя обращена в полную производную от некоторой функции по
времени, рассматриваемая дифференциальная связь равносильна некото-
некоторой конечной связи, содержащей произвольную постоянную. В самом
деле, пусть существует такая функция jx отвремени н координат, что для
неё
^' аП — —?
где ф является некоторой функцией от t, xv у„ г^\ тогда от умноже-
умножения на jj. равенство B7.12) примет вид
Проинтегрировав это уравнение, мы получим:
Ф» = Тр. B7.16)
где Уз — произвольная постоянная. Равенства B7.12) и B7.16) вполне
равносильны друг другу, так как каждое из них является следствием
другого. -
Дифференциальные связи, допускающие интегрирующий множитель ц,
мы будем называть и нтег р.нру емым и связями, в отлнчие от дру-
других, неннтегрнруемых связей, для которых множитель ц нельзя
найтн. Примером неинтегрнруемой связи может служить связь B7.14).
Конечные связи, а также дифференцнальные интегрируемые связи иначе
называются гол он ом н ы м н; дифференциальные неинтегрируемые связи
называются неголономными.
Пример 87. Пусть частицы системы подчинены п связям вида
*Л — У-г*:* = 0 (v = 1, 2,.... л).
Эти связи могут быть выражены в конечной форме; действительно, левая часть
278
каждого уравнения связи обращается в полную производную по умножении
на [1= ; мы получаем:
откуда, проинтегрировав, находим:
где у, — произвольная постоянная. Иначе можем написать:
Следовательно, связи требуют, чтобы каждая частица систещл двигалась
в плоскости, проходящей через ось Oz; при этом углы наклонения этих плоскостей
друг к другу и к плоскости Огх произвольны.
Пример 88. Связь, выражаемая уравнением
тоже может быть выражена в конечном виде; действительно, уравнение связи
можно написать так:
Проинтегрировав, находим отсюда:
где у — произвольная постоянная. Рассматриваемая связь требует, следова-
следовательно, чтобы расстояние между частицами т\ и т2 равнялось У ct2-f- y.
167. Условие, налагаемое удерживающей дифференциальной
связью на ускорения частиц системы. Продифференцировав по вре-
времени уравнение связи B7.13), мы получим условие для ускорений частиц
системы, подчинённой этой дифференциальной связи, а именно:
CLX „ л л
Мы видим, что, как н в случае условия для скоростей, ограничению под-
подлежат лишь составляющие ускорений частиц системы по векторным па-
параметрам Bf> связи, а составляющие в плоскостях, перпендикулярных
к ним, остаются произвольными.
168. Неудерживающие связи. Рассмотренные нами связи, выражае-
выражаемые равенствами типов B7.1) и B7.13), называются связями удерживаю-
удерживающими. Связи, выражаемые аналитически неравенствами вида
/«(¦**> Л. z,< *) > 0, B7.18)
п
<Ра = 2 ^ ' wv + ^а > °> B7-!9)
носят название связей неудерживающих. Когда левые части этих
выражений положительны,говорят,что связь ослабл ена, или иначе, что
система сошла со связи; когда левые части — нули, говорят, что связь
279
действует, или находится в напряжении, или, иначе, что система лежит
на связи.
Чтобы установить условия, накладываемые неудерживающими связями
на скорости и ускорения частиц системы, выведем два вспомогательных
равенства. Заметим, что левые части выражений B7.18) и B7.19) могут
рассматриваться как сложные функции времени, т. е. зависящие от вре-
времени как явно, так и неявно посредством координат и их производных.
Дадим времени t некоторое положительное приращение Д^ и разложим
функции fa(t-\-At) и y${t-\-&t) в ряды по возрастающим степеням М;
мы получим:
§Д* + ^^ + е„ B7.20)
где е3 и 7J соответственно обозначают члены третьего и второго поряд-
порядков относительно №. Существенно заметить, что поскольку Д/ мы всегда
будем предполагать положительным, то производные от функций /а и <р?,
фигурирующие в этих разложениях, следует понимать как так называе-
называемые правые производные, т. е. вычисленные в предположении Lt—»¦ 0
при Д^>0.
Если связи /а и (рр ослаблены, т. е.
Л>о,
то, как видно из разложений B7.20) и B7.21), мы не можем сказать
ничего определённого про производные функций /а и <рз по времени, так
как функции /а и срз могут в этом случае возрастать, убывать или сохра-
сохранять постоянное значение.
Если система движется в соответствии со связями /„=0 и <p3 = 0 и
момент t не является моментом схода системы с этих связей, то при
любом М, не превосходящем некоторой границы, левые части равенств
B7.20) и B7.21), а значит, и правые будут равны нулю. Следовательно,
в этом случае будут для момента t соблюдаться равенства:
для любого s. Выведенные условия нахождения системы на связях необхо-
необходимы и достаточны. Как на необходимые лишь условия можно указать н.°
следующие:
¦с о ^ О d f* О
Этими равенствами налагаются вполне определённые ограничения на скорос-
скорости и ускорения частиц системы [ср. формулы B7.7), B7.11), B7.13),B7.17)].
280
Пусть теперь момент t является моментом схода системы со связи /а
или ср.. Это значит, что, во-первых,
Л(') = о, ?„(*) = о
и, во-вторых, для любого положительного Дг^, не превышающего некото-
некоторой границы,
Сопоставив эти неравенства с разложениями B7.20) и B7.21), находим,
чго для момента / должны соблюдаться неравенства:
% ^ B7.23)
5^ B7.24)
Эти неравенства справедливы при сколь-угодно малом положительном
Д^; поэтому из первого неравенства, в частности, вытекает, что
^^0. B7.25)
Такое условие накладывается конечной связью на скорости частиц в мо-
момент, когда система покидает связь. Условие, накладываемое в этот мо-
момент на скорости дифференциальной связью, как уже было указано,
состоит в том, что
Если в момент схода системы с конечной связи /а имеет ме*сто неравен-
неравенство ~jf~^>®> т°> как видно из выражения B7.23), вторая производная
-ttj2 может иметь любой знак, т. е. в этом случае связь не налагает ни-
никаких ограничений на ускорения-частиц. Если же-^ = 0, то, поскольку
неравенство B7.23) имеет место при сколь-угодно малом положитель-
положительном Д^, из него как следствие вытекает условие:
Ц^.О. B7.26)
Аналогичными соображениями из равенства B7.24) можно вывести, что
для дифференциальной связи <рв в момент схода системы со связи всегда
Таковы условия, налагаемые связями на ускорения частиц в момент ослаб-
ослабления связей [ср. формулы B7.11) и B7.17)].
Пример 89. В качестве примера на неудержнвающую конечную связь
рассмотрим связь, выражаемую неравенством
где с —постоянная, а p^ = (xv — x,+1J + (yv— y^+xf-\-(z^ — zv+1K, и сумми-
281
рование распространено на все значения v от 1 до л; при этом xa+i = x-j, yn+i =y\,
зп+1 = z\. Такую связь мы получим, если представим себе материальные ча-
частицы системы в виде бесконечно малых бусинок, нанизанных на нерастяжимую
замкнутую нить длины с. Заметим, что для рассматриваемой связи поверхно-
поверхностями типа B7.5) будут эллипсоиды вращения.
XXVIII. ВОЗМОЖНЫЕ И ВИРТУАЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
И СКОРОСТИ. ВАРИАЦИИ КООРДИНАТ
169. Возможные скорости системы. Положим, что данная несвобод-
несвободная материальная система, состоящая из п частиц, подчинена а конеч-
конечным связям
/Л-.-.*». У* zv> •••,, 0>°
¦и b дифференциальным связям
В таком случае (§ 168) скорости частиц системы должны удовлетворять
/г-\- b условиям:
B8.1)
grad,/. + ^>0 (a=l,2,..., a),
= %&?>•*,+D^O (Р=Ь2 6).
л
2
v=l
Заметим при этом, что между числом частиц п и числом связей a -J- b
должна существовать зависимость
Действительно, если бы между числом частиц п и числом связей a -j- b
существовала зависимость
Ъп = а-\-Ь,
то связи в состоянии напряжения полностью определили бы скорости ча-
частиц системы; в случае существования неравенства
3/j<o-f A
и независимости уравнений связей мы имели бы противоречащие друг другу
связи.
Всякая совокупность скоростей ©v, удовлетворяющих условиям B8.1),
при данном, возможном для рассматриваемого момента, положении си-
системы носит название системы возможных скоростей частиц материальной
системы, или, короче, возможных скоростей системы. Для сво-
свободной системы любая совокупность скоростей является возможной; при этом
скорости, которыми обладают частицы системы в её действительном дви-
движении, составляют одну из систем возможных скоростей. Если система
несвободная и псе связи удерживающие, условия B8.1) представляют
собой систему а-\-Ь линейных уравнений, связывающих Зл неизвестных
хч> У-,' гч- Как выше было указано, Зи^> а-\- Ь; следовательно, Зи — а—b
282
проекций скоростей могут быть взяты вполне произвольно. Если какие-
нибудь из связей неудерживающие, их уравнения заменится неравенствами,
и произвол в отношении возможных скоростей станет ещё шире. Скорости
частиц несвободной системы в её действительном движении несомненно
представляют собой одну из систем её возможных -скоростей.
170. Возможные перемещения системы. Частица /я„, имеющая
в рассматриваемый момент времени скорость »v, совершит за бесконечно
малый промежуток времени At по направлению скорости v4 бесконечно
малое перемещение
Дг„=г\Д*. B8.2)
Величина Дг, представляет собой в то же время бесконечно малое прира-
приращение радиуса-вектора rv частицы за промежуток времени At. Совокупность
бесконечно малых перемещений частиц системы, соответствующих неко-
некоторой системе возможных скоростей её частиц, носит название воз-
возможного перемещения системы. Согласно соотношениям B8.1) и
B8.2) возможные перемещения частиц несвободной системы в случае
удерживающих связей связаны а -|- b уравнениями:
а),
B8.3)
v=I
Если некоторые связи неудерживающие, соответствующие равенства за-
заменяются неравенствами; так что в общем случае условия, наложенные
на возможные перемещения, имеют вид
gradj. • Дг,+ ^ь Л/ > 0 (а «= 1, 2 а).
B8.4)
Для свободной системы любая совокупность бесконечно малых переме-
перемещений частиц является возможной. В случае несвободной системы мы
получим все её возможные перемещения, исходя из условий B8.3) или
B8.4), подобно тому, как это было сделано в конце предыдущего пара-
параграфа в отношении возможных скоростей. Те бесконечно малые переме-
перемещения, которые частицы свободной или несвободной системы совершают
за бесконечно,малый промежуток времени при её действительном движе-
движении, несомненно должны составлять одну из систем во'зможных переме-
перемещений. Действительное бесконечно малое перемещение, а также соот-
соответствующий ему промежуток времени мы в отличие от возможного
перемещения Дг,,, совершаемого за промежуток времени At, будем соот-
соответственно обозначать a?rv и dt.
171. Виртуальные перемещения и скорости. Вариации коорди-
координат. Положим, что рассматриваемая несвободная система в данный момент
времени t занимает положение Ао и радиус-вектор её частицы те, равен
г,. Сообщим частицам системы какие-либо возможные перемещения Дгу
(фиг. 109); эти перемещения переведут систему из положения Ао в но-
283
вое положение А, бесконечно близкое к Ао. Если все связи удержи-
удерживающие, взятые возможные перемещения частиц будут связаны а-\-Ь
уравнениями B8.3). Коэффициенты в этих уравнениях будут соответство-
соответствовать моменту t и положению Ао.
Сообщим теперь нашей системе -частиц для того же её положения Ао
и для того же момента t какую-нибудь другую систему возможных пере-
перемещений Д'/\, причём пусть промежуток времени At, за который совер-
совершаются обе системы перемешений, один и тот же. Новая система
возможных перемещений будет удовлетворять а-\-Ь уравнениям того же
вида, как равенства B8.3), а именно:
= 0 (a=l,2, ...,
B8.5)
? = 0 <p=l, 2
Соответственные коэффициенты в уравнениях B8.3) и B8.5) будут
одинаковы, так как они относятся к одному и тому же моменту t и
_ одному и тому же положению Ао. Вторая система воз-
ьр \<5г„ можных перемещений Д'гу переведёт систему частиц
й,°^ —^ из положения Л^ в некоторое положение Л', бесконечно
" близкое к Ао и к А.
Фиг. 109. Рассмотрим теперь ту систему бесконечно малых
перемещений SrV) которые нужно сообщить частицам
тч взятой материальной системы, чтобы перевести её из положения А
в положение А'. Эти перемещения называются виртуальными и,
очевидно, равны разностям выше рассмотренных возможных перемешений:
й/\=Д'/\ — Д/\ . B8.6)
Другими словами, можно сказать, что если каждый член Д/\ какой-либо
системы возможных перемещений мы сложим с соответственным членом
системы виртуальных перемещений §rv , то получим снова некоторую
систему возможных перемещений Д'г, :
Соотношение B8.6) устанавливает не кинематическую, а лишь
геометрическую связь между двумя возможными перемещениями
Дгу, Д'л. и виртуальным перемещением Ьгч. Оно выражает геометри-
геометрически переход от одного возможного перемещения к другому;
поэтому виртуальное перемещение нужно себе представлять совершаю-
совершающимся независимо от времени соответственно состоянию связей в дан-
данный момент. Эта особенность обнаруживается в уравнениях, которым
должны удовлетворять виртуальные перемещения частиц. Эти уравнения
мы получим на основании выражения B8.6) путём соответственного
вычитания равенств B8.3) и B8.5), а именно, мы найдём:
2 grad,/..*/•,= О (а=1,2 а),
B8.7)
^0 @=1,2,...,
284
Сокращённо эти уравнения записывают так:
if, —0, b<fp = O. B8.8)
По отношению к радиусу-вектору г» виртуальное перемещение 8г, назы-
называется его вариацией, точно так же, как проекции виртуального пере-
перемещения Ьх^, S_yv, Ьг^ называются вариациями координат *v, .У,, г, ча-
частицы. Левая часть первого из уравнений B8 8) представляет собой
вариацию функции /в в предположении, что t является неварьируемым
переменным. Во втором уравнении B8.8) символ Ь употреблён лишь для
придания ему единой формы с первым уравнением.
Положим теперь, что какие-нибудь из связей, например /„ и ср^,
стали неудерживающими. Сообщим опять системе частиц, находящейся
в положении Ао, две системы возможных перемещений, Дл, и A'rv, соот-
соответственно переводящих её из положения Ао в положения А и А'. При
этом опять предположим, что промежуток времени kt один и тот же для
обеих систем возможных перемещений. Согласно условиям B8.4) эти
перемещения связаны соотношениями:
0, ? Bf • Дг, + D?M > 0, B8.9)
п
0. B8.10)
Если обе системы возможных перемещений сводят систему частиц со связи
и, следовательно, во всех формулах надо сохранить знак неравенства, тогда
видно, что на виртуальные перемещения irv, переводящие систему из положе-
положения А в положение А', связи /а и ср„ никаких ограничений не налагают:
виртуальные перемещения могут быть таковы, как будто этих связей вовсе не
существует. Но пусть хотя одна из систем возможных перемещений, на-
например Arv, оставляет систему частиц на связях. Тогда в формулах B8.9)
надо сохранить знак равенства, т. е. мы имеем
^ и = о, ?в?).Ьгч + />,Д* = 0.
Вычтя написанные выражения из уравнений B8.10) и вспомнив обозначе-
обозначения B8.6) и B8.8), находим:
§Л>0. typ>0. B8.11)
Таким образом, при неудерживающих связях под виртуальными пере-
перемещениями можно понимать такие бесконечно малые перемещения, ко-
которые, будучи сложены с возможными перемещениями, оставляющими
систему на связях, дают снова возможные перемещения, причём эти
последние могут или оставлять систему на связях, или сводить её со
связей. С этой точки зрения, если какая-нибудь из связей неудерживаю-
щая, соответствующее ей уравнение для виртуальных перемещений надо
или заменить одним из неравенств B8.11), или вовсе отбросить.
Сравнивая уравнения для виртуальных перемещений с уравнениями,
которым должны удовлетворять для того же момента и того же положе-
285
явно
ния системы возможные, а значит, и действительные перемещения, мы
видим, чтя виртуальные перемещения, вообще говоря, не служат возмож-
возможными перемещениями. Если, однако, конечные связи системы не зависят
от времени (т. е. -?& = 0), а в уравнениях дифференциальных свя-
связей отсутствуют коэффициенты D^, геометрическое различие между
виртуальными и возможными перемещениями исчезает.
Если все связи конечны, то о виртуальных перемещениях системы
можно составить себе понятие ещё иначе. Рассмотрим два одновременные
возможные бесконечно близкие положения системы. Радиусы-векторы
и декартовы координаты частиц в первом положении пусть будут
Л>> "^v> Уч' ^1<
а во втором
Пусть сперва связи удерживающие; тогда согласно формуле B7.1) на
стр. 273 эти координаты должны удовлетворять условиям:
/.(¦¦¦W,.«, ') = 0,
/„(.•¦.*,+<*,.Л + *Л.*,+«У 0 = 0B=1,2,..., а). B8.12)
В том и другом уравнениях время t имеет одно и то же значение. Разло-
Разложив левую часть второго уравнения в ряд по степеням §лгу, §yv, Szv,
находим с точностью до малых второго порядка, что
Приняв в расчёт первое из уравнений B8.12), получаем отсюда:
или, в других обозначениях,
л
2grad, /a.Sr, =0.
Таким образом, векторы Srv представляют собой те бесконечно малые
перемещения, которые должны совершить частицы системы, чтобы из
одного возможного для данного момента t положения перейти в другое,
также возможное, т. е. §rv есть виртуальное перемещение.
Если какая-нибудь из связей, например /а, неудерживающая, то
вместо равенства B8.12) получаем неравенства:
/«(•• •*,>Л.-г.. .-..') 5* О,
Л(...*, + а*„л + *.У,.*,-т &„..., *)>0. B8.13)
Разложение по степеням Ъхч, Ъуч, Szv теперь даёт:
286
Сказать что-либо определённое о знаке второго слагаемого мы в состоя-
состоянии только тогда, когда в выражении B8.13) надо сохранить лишь знак
равенства, т. е. когда в момент времени t связь находится в напряжении.
В этом случае, как и раньше, имеем
2
Следовательно, при неудерживающих связях виртуальные перемеще-
перемещения §rv представляют собой те бесконечно малые перемещения, которые
должны совершить частицы системы для того, чтобы перейти из одного
возможного для данного момента положения, лежащего на всех связях,
в другое, бесконечно близкое и также возможное, причём последнее
может и не лежать на неудерживающих связях.
Связь, допускающая произвольное виртуальное перемещение системы,
как абсолютно твёрдого тела, называется внутренней. Связь, не
обладающая этим свойством, называется внешней. Геометрическая
разность двух возможных скоростей частицы называется виртуаль-
виртуальной скоростью. Очевидно, виртуальные скорости частиц системы
должны удовлетворять уравнениям, которые получаются из уравнений
B8.7), если в них вместо виртуальных перемещений §г» подставить
виртуальные скорости v* частиц системы.
XXIX. УРАВНЕНИЯ ДВИЖЕНИЯ СВОБОДНОЙ
МАТЕРИАЛЬНОЙ СИСТЕМЫ
172. Уравнения движения свободной материальной системы.
Пусть система состоит из л частиц /яу; массу каждой частицы обозначим
той же буквой /nv, а равнодействующую сил, к ней приложенных, Fr
Написав для каждой из частиц основное уравнение динамики (§ 86), мы
получим уравнения движения рассматриваемой системы в векторной фор-
форме, а именно:
mfmv = F4 (v=l, 2, ..., п). B9.г)
В проекциях на оси декартовой системы координат получаем отсюда
следующие уравнения движения:
Я K=F*y> тЛ = р,г (v = 1, 2, ...,я). B9.2)
Аналогично, спроектировав основное уравнение динамики на оси криво-
криволинейной системы координат общего вида, мы находим [ср. формулу
A5.3) на стр. 138]:
*|'?) 01
ч"'|=/\0 (v=l,2, ..., л; 0=1,2,3). B9.3)
Интегрирование системы дифференциальных уравнений второго порядка
вида B9.2) или B9.3) введёт 6л произвольных постоянных. Значения
этих постоянных определятся, если будут заданы начальные положения
287
и начальные скорости частиц системы, т. е. их положения и скорости
в некоторой момент времени tz=t0.
173. Примеры на движение свободной системы.
Пример 90. Найдём движение материальной системы, состоящей из п
частиц, притягивающих друг друга прямо пропорционально произведениям масс
на взаимные рагстояния (фиг. 110). Пусть гч и г^ —соответственно радиусы-
векторы частиц тч и т^, проведённые из начала О неподвижной системы
координат Oxyz, а ?2 — множитель пропорциональности. Тогда сила F4fU с ко-
которой частица т^ притягивает частицу тч, будет равна
^2>' / а равнодействующая У7, всех сил, действующих на частицу
/rf wzv, получит выражение
суммирование здесь распространяется на все значения индекса ц от 1 до п, так
как лишний член суммы для [i = > гам собой обращается в нуль. Пишем
уравнения движения системы в векторной форме B9.1); имеем
п
m,w4 — № V т^т, {г^—гы) (> = 1, 2 п\ B9.4)
Интегрирование этой системы п уравнений поведём следующим образом. Про-
Просуммируем уравнения по индексу v; мы получим:
п пп
2 »»„»„=** 2 2'vm»v-'>.).
v=l v=l |i = l
Сумма, стоящая в правой части, очевидно, равна нулю, так как для каждого ей
члена, отличного от нуля, например члена k2mpmq{rp—r9), который получается
при [1 = р, у = q, всегда найдётся равный по абсолютной величине и противо-
противоположный по знаку член №гПдГПр{Гд—гр), соответствующий v-=~-g, ч=р.
Следовательно,
Дважды проинтегрировав,это уравнение, находим:
где а н (! — произвольные постоянные. Левая часть последнего уравнения
представляет собой статический момент системы относительно начала коор-
координат:
п
тле.М означает полную массу системы, а г^ — раднус-вектор её центра масс С
[см. формулу B5.3) на стр. 244]. На этом основании полученный нами интеграл
уравнений движения перепишется так:
мы видим, что центр масс системы движется прямолинейно и равномерно.
Чтобы кончить интегрирование, рассмотрим движение системы по отноше-
отношению к среде, движущейся поступательно вместе с центром масс С. Свяжем
288
с этой средой систему осей C?j?, параллельных основным осям Oxyz\ радиусы-
векторы частиц, проведенные из точки С, будем называть р^. Имеем очевидные
соотношения:
Подставим этн выражения в уравнение движения B9.4) частицы тч н займ5мся"
отдельно преобразованием левой и правой частей уравнения. Находим."
но согласно формуле B9.5) мы имеем гс = 0; поэтому из предыдущего ра-
венстьз после его умножения на массу мы получаем:
Далее, имеем
п п
г " / п
как известно, статический момент системы относительно ей центра масс равен
т
нулю (§ 144), т. е. 2 т,лРм. —0; поэтому предыдущее равенство дайт:
и.=1
л
A* J] mu mv (r^ — /¦„)= — А»/я,Л1>",.
Собрав результаты, мы приходим к следующему уравнению относительного
движения частицы тч\
это — уравнение движения частицы, притягиваемой центром масс С системы
с силой, прямо пропорциональной произведению масс /nv н М на нх взаимное
расстояние. Как известно (§ 98), траектория частицы
от, представляет собой в этом случае эллипс с центром
в точке С.
Пример 91. Пусть свободная материальная си-
система состоит из л частиц, отталкивающих друг друга
прямо пропорционально произведениям масс на их
взаимные расстояния. Задача о движении этой системы
решается совершенно так же, как предыдущая. Отно-
сительнымн траекториями частиц системы будут гипер-
болы с общим центром в центре масс системы.
Пример 92. Изучим движение свободной матери- х
альной системы, состоящей нз двух частиц т\ и т2, *ИГ- '"•
взаимно притягивающихся по закону Ньютона
(фиг. 111). Отнесем систему к неподвижным декартовым координатам Oxyz так
же, как это было сделано выше в примере 90. Тогда при прежних обозначе-
обозначениях мы получим следующие уравнения движения наших двух частиц:
—
I ' 1 '2
I 1 2
Сложением этих уравнений убеждаемся, что центр масс С частиц движется
прямолинейно и равномерно; действительно,
т^х -\- /л2я>2 = 0,
19 г. к. Суслов 289
следовательно,
ТП\Т\ -\- ТП4Г2 = №г q = a/ -|- р,
где а и р — произвольные постоянные. Опять обратимся к рассмотрению движе-
движения системы относительно осей С?т)С, движущихся поступательно вместе
с центром масс С системы. Как и в примере 90, имеем:
После подстановки этих значений уравнение движения B9.6) одной из частиц,
например первой, перепишется так:
?-1^,. B9.7)
Для преобразования правой части этого уравнения воспользуемся формулой,
выражающей то обстоятельство, что статический момент системы частиц отно-
относительно её центра масс равен нулю (§ 144); применительно к нашим двум
частицам имеем
Иначе можем записать:
b- = -5L, B9.8)
Pi — «2
нлн, взяв производную пропорцию,
где М = тх-\-тг есть сумма масс частиц. Из последнего уравнения находим:
М .
1 = — — ?ь
Подставив этот результат в уравнение B9.7), получаем:
mi ?r
где 3?=?l. Из написанного уравнения вытекает, что относительное движение
Pi
частицы Wj протекает так, как будто она притягивается к центру С силой,
обратно пропорциональной квадрату расстояния от центра. Следовательно,
относительной траекторией частицы тх служит коническое сечение с фокусом
в центре масс С (§ 112). Из уравнения B9.8) видно, что траектория частицы тг
подобна траектории частицы ть и центр подобия находится в точке С.
Интересно, кроме осей CW, движущихся поступательно вместе с центром
масс С, взять оси m^XYZ, движущиеся поступательно вместе с частицей mit
и рассмотреть относительное движение частицы тх относительно этих осей.
Обозначим раднус-вектор частицы ти проведённый из частицы тъ через R,
(фиг. 111). Очевидно,
поэтому нз уравнения B9.9) получаем:
„ М -
Как видим, получается траектория, подобная траектории частицы тх в системе
С^, т. е. опять коническое сечение. Фокусом его является точка т2. Итак,
траектория частицы т^ вокруг С, т? вокруг С, тх вокруг от2 и, очевидно, от2
вокруг mi — подобные между собой конические сечения; отношения подобия
для них равны т^:тл : М ; М.
290
XXX. РЕАКЦИИ СВЯЗЕЙ. УРАВНЕНИЯ ДВИЖЕНИЯ НЕСВОБОДНОЙ
МАТЕРИАЛЬНОЙ СИСТЕМЫ В ДЕКАРТОВЫХ КООРДИНАТАХ
(УРАВНЕНИЯ ЛАГРАНЖА ПЕРВОГО РОДА)
174. Возможные ускорения несвободной системы. Положим, что
данная материальная система, состоящая из п частиц mv подчинена
а конечным удерживающим связям
/«(*,.>,.*»» ^ = ° (v"=l,2,..., я; 0=1,2,..., в) (ЗОЛ)
и b дифференциальным удерживающим связям
ь = i *?' •v* +°?=° ^=] >2 *>• (зо-2)
v=l
В этом случае, как мы видели (§ 164,167), ускорения частиц системы
связаны условиями:
2 grad7 /..»,+ /у.= О C0.3)
v=l
v=l V = l
Всякую систему ускорений дау, удовлетворяющих для данного мо-
момента времени уравнениям C0.3) и C0.4) при условии, что соответ-
соответствующее положение системы, а также соответствующие ему возмож-
возможные скорости частиц системы удовлетворяют уравнениям C0.1) и
C0.2), мы будем называть системой возможных ускорений частиц
системы.
Наоборот, такую совокупность значений ю,, которые для данного
момента времени и данных положения системы и её скоростей не удов-
удовлетворяют хотя бы одному из выше приведённых равенств C0.3) и
C0.4), а также C0.1) и C0.2), мы будем для краткости называть
системой невозможных ускорений.
Если какая-нибудь связь, например /„ или ^„, неудерживающая, то
всё сказанное изменится только в том отношении, что соответствующий
знак равенства в выражениях C0.1)—C0.4) перейдёт в знак 3*.
175. Реакции удерживающих связей. Идеальные связи. Предста-
Представим себе, что к частицам /и, взятой несвободной системы приложены
данные силы F, . Если бы система была свободной, то согласно основному
уравнению динамики ускорение частицы т, нашлось бы по формуле
mjw, = Fv. C0.6)
Может случиться, что определённые таким образом ускорения дадут
систему возможных ускорений; тогда легко показать, что уравнения
данных связей представляют собой частные интегралы уравнений дви-
движения, и, следовательно, мы имеем дело не с движением несвободной
системы, а с частным случаем движения свободной системы.
291
В самом деле, пусть силы F-, таковы, что
!1"^^0- C0-7)
v= 1
Умножим уравнения C0.5) на —gradv/a и сложим их; тогда мы получим:
п п
grad,/.- Wj= X ^grad,/.-/',,
V = 1 v= 1
или на основании уравнения C0.6), после переноса D2fa в левую часть,
2 grad,Д.»,+ /),/.=<>.
» = 1
Левая часть этого уравнения представляет собой вторую производную
по времени от функции/, [см. формулу B7.11) на стр. 277];
таким образом, мы получили, как следствие из уравнений движения,
равенство
*2/._ О
IF— •
Отсюда мы заключаем, что уравнения движения- имеют следующий
второй интеграл:
где Аа и На—произвольные постоянные. Если уравнения движения C0.5)
умножим^ на и сложим, то совершенно таким же способом убедимся,
что они имеют первый интеграл:
Теперь видно, что уравнения связей действительно представляют со-
собой в рассматриваемом случае частные интегралы уравнений движения
рассматриваемой свободной системы при значениях произвольных посто-
постоянных А^=0, //а=0, Л'р:=О. Если указанный случай оставить в сто-
стороне, то ускорения se»v, сообщаемые системе приложенными силами Fit
будут относиться к числу ускорений невозможных. Чтобы эти ускорения
системы стали возможными, необходимо допустить, что присутствие связей
является причиной проявления некоторых добавочных сил, действующих
на частицы системы. Эти добавочные силы называются реакциями
связей. Эффектом совокупного действия на материальную систему
приложенных сил и реакций и является появление у частиц системы
таких ускорений, которые не противоречат равенствам C0.3) и C0.4),
т. е. ускорений возможных. Такой взгляд находится в полном соответ-
соответствии с нашим представлением о том, что источником сил служат мате-
материальные тела, потому что связи так или иначе реализуются всегда
с помощью некоторой системы материальных приспособлений. Если реак-
292
цию, приложенную к частице mv, обозначим Л,, уравнения движения
несвободной системы в отличие от уравнений C0.5) напишутся следующим
образом:
/и,*», =/%+#, (v=l, 2,... , л). C0.8)
Введённые нами реакции #v охарактеризованы пока лишь тем, что-
ускорения w^, стоящие в левых частях написанных уравнений, составляют
систему возможных ускорений, т. е. удовлетворяют а-\-Ь уравнениями
C0.3) и C0.4). Таким образом, мы имеем а-\-Ь уравнений для опреде-
определения Зи неизвестных проекций реакций R^x, R^y, /?vz. Так как всегда
3n^>a-\-bt то эта задача неопределённая. Важно, однако, заметить,
что задача станет вполне определённой для случая, когда сумма элемен-
элементарных работ всех реакций на любом виртуальном перемещении системы
равна нулю; удерживающие связи, оказывающие реакции такого типа,
носят название связей идеальных. Чтобы доказать высказанное поло-
положение и вместе с тем найти выражения для реакций идеальных связей,
поставим вопрос несколько иначе. Напишем выражение для суммы эле-
элементарных работ ЬА№ всех реакций на некотором виртуальном •• переме-
перемещении системы и приравняем его нулю:
3/4'^='2 #,-8г„=0. C0.9)
v = 1
Найдём, при каких значениях реакций R., имеет место это свойство
элементарной работы. Если бы перемещения §/\ были вполне произвольны,
то указанному равенству' можно было бы удовлетворить, лишь положив
все реакции равными нулю:
/?v = 0 .(v=l, 2 п)\ C0.10)
в самом деле, в силу произвольности перемещений можно было бы
все их, кроме какого-либо одного,' например йгх, положить равными
нулю; тогда уравнение C0.9) превратилось бы в следующее:
отсюда ввиду произвольности направления Ьг% следовало бы, что
Повторив это же рассуждение относительно всех других реакций /?„, мы
бы и пришли к утверждению C0.10). Но виртуальные перемещения ?rv,
как известно, связаны условиями B8.7) или B8.8) на стр. 284 и 285:
4 = 1
= 0 (o==l,2, ...,a), C0.11)
4 = 2 ^-^=0 (Р=1, 2, ...,*). C0.12)
v = l
Иначе говоря, некоторые Зл — а — b проекции перемещений, или, что то же,
вариаций координат Ьхч, 8yv, 5zv, могут быть выбраны произвольно, а осталь-
остальные a -j- b будут их функциями, определяемыми только что написанными
уравнениями. Первые называются независимыми вариациями,
а вторые зависимыми. Выразив зависимые вариации через независимые
293
н вставив полученные выражения в уравнение C0.9), мы опять будем в нём
иметь^ проекции лишь одних независимых перемещений. Приравняв, по
предыдущему, коэффициенты при них нулю, мы найдём Зл— а — b за-
зависимостей между проекциями реакций RH. Вместе с ранее указанными
а-\-Ь уравнениями C0.3) и C0.4) получается, таким образом, Зл урав-
уравнений с Зга неизвестными R4X, Ryy, R^2.
Для симметрии исключение зависимых вариаций координат произво-
производится обыкновенно по так называемому способу множителей, а именно,
умножают каждое из уравнений C0.11) на произвольный пока множи-
множитель— }.„ и каждое из уравнений C0.12) на произвольный множи-
множитель— fipj затем прибавляют все эти равенства к уравнению C0.9);
тогда получается уравнение
J; /?, • §г, - J} хм - pg ф?=о.
Сгруппировав члены по виртуальным перемещениям 5rv частиц, мы
сможем это уравнение переписать так:
2 {Ч - 2 Uradv/a- S^Bf} • «r? = 0; C0.13)
v=l V o=l p v J
отсюда, если выразить все векторы через их проекции, мы получаем:
{(^
+(«.,-11. f; - ?
Произвольными пока множителями \л и jip распорядимся теперь так, чтобы
коэффициенты при а-\-Ь зависимых вариациях координат обратились
в нули. Тогда в последнем уравнении останутся лишь члены с независи-
независимыми вариациями. Коэффициенты при них должны быть равны нулю;
в противном случае, как выше было разъяснено по поводу уравнения
C0.9), это равенство не сможет быть справедливым при любых значе-
значениях независимых вариаций координат. Другими словами, коэффициенты
при а -\- b зависимых вариациях нули потому, что мы так подобрали зна-
значения а-\-Ь множителей \а и (i^, а коэффициенты при независимых ва-
вариациях,— потому, что иначе левая часть уравнения C0.14) не может
быть всегда нулём. С формальной стороны, как видим, различие между
зависимыми и независимыми вариацийми пропадает и для удовлетворения
уравнения C0.14) или, что всё равно, уравнения C0.13), надо прира-
приравнять нулю подряд все коэффициенты, не разбирая, какие вариации
зависимые, какие независимые. Таким путём находим следующие выраже-
294
ния для реакций:
S| (v=l,2,...,«). C0.15)
В суммах в правой части каждое слагаемое, очевидно, представляет
собой действие одной какой-либо связи на данную частицу тч. Эти силы,
следовательно, равны
/?(«> = Xagrad,/0 и R?) = hB№. C0.16)
Входящие в выражения реакций а-\-Ь величин Ха и jip носят название
множителей связей. Число этих множителей как раз соответствует
числу уравнений C0.3) и C0.4), определяющих возможные ускорения.
Таким образом, мы опять убеждаемся, что задача о нахождении реакций
системы с удерживающими идеальными связями является задачей опреде-
определённой. Может лишь явиться сомнение, всегда ли мы в состоянии опре-
определить множители \ и jjl^ так, чтобы коэффициенты при зависимых
вариациях стали нулями; ведь для этого нужно, чтобы определитель Д из
(а -\- ЬJ коэффициентов при \ и jjl^ был отличен от нуля. Чтобы изучить
поведение этого определителя, введём прежде всего следующие единооб-
единообразные обозначения координат:
таким образом, в новых обозначениях координаты частиц системы будут
?х, ?2,.. ., ?3я. В соответствии с этим положим:
В^. C0.18)
Обозначим, кроме того, производную ~ через /„ и заметим, что
Примем сперва за зависимые вариации первые а-\-Ь вариаций коор-
координат SSj, 5S2, .... ^a+i,' т0ГДа определитель, о котором идёт речь,
будет иметь выражение
JA_j4..._^^Pl__^i_... J?L-t (зо.2О)
где v,, v2,... , va+b—каждый раз какие-либо различные числа из ряда
1, 2,.. . , а-\-Ь. Пусть этот определитель нуль. Тогда возьмём за зави-
зависимые вариации 8S2, 3§8,..., 5;a+ft+1 и т. д., пока не переберём всех
сочетаний координат. Если окажется при этом, что все определители ти-
типа C0.20) нули, то, как известно, между функциями /а и <р, должна
существовать зависимость типа
П(Л. v sv 0 = 0,
явно не содержащая скоростей. Но в таком случае из того, что
вытекает, или что <Pft = 0, или что (pft = ^4Ev, t), т. е. что срй есть от-
299
личная от нуля функция координат и времени. В первом случае связь <pft
служит следствием остальных, во втором случае она противоречит
остальным. Конечно, такие случаи исключаются из нашего рассмотрения.
Исходя из выражения C0.15) для реакций идеальных удерживающих
связей, легко обратно прийти к свойству C0.9), т. е. можно показать,
что элементарная работа этих реакций на любом виртуальном переме-
перемещении равна нулю. Для этого умножим каждое из равенств C0.15) на
§г, и сложим их; мы получим:
jC0>21)
Отсюда согласно формулам C0.11) и C0.12) мы для элементарной ра-
работы реакций находим значение
ЗЛ<я>= 2 /?v-J/\ = 0. C0.22)
176. Реакции идеальных неудерживающих связей. Представим
себе теперь, что одна из связей, например /а, стала неудерживающей.
Тогда соответствовавшее этой связи уравнение C0.3) для возможных
ускорений согласно § 174 заменится неравенством
JjeratU.-w^ + ZV.^O. C0.23)
Рассмотрим частицу mv и обозначим через S4 равнодействующую задан-
заданных сил, действующих на эту частицу, и всех реакций, кроме реакции
связи /„. Может случиться, что ускорения, сообщаемые силами S, части-
частицам /я,, будут сами по себе удовлетворять указанному условию C0.23),
т. е. будет справедливо неравенство
Тогда, следовательно, связь /. никакой реакции не окажет, и уравнения
движения рассматриваемой системы напишутся так, как будто бы этой
связи вовсе не было, т. е.
/я, то, =S, (v=l, 2,... , п). C0.24)
Но если будет иметь место неравенство
C0.25)
ускорения, сообщаемые силами S,, станут ускорениями невозможными.
Для того чтобы перевести эти ускорения из невозможных в возможные,
мы допускаем, что неудерживающая связь /а оказывает реакцию. Мы бу-
будем называть неудерживающие связи /„ и <р8 идеальными, если, как и в
случае удерживающих связей, их действия на частицу тч, соответст-
соответственно имеют выражения C0.16):
296
где X^Hjijj — множители связей. В рассматриваемом случае, когда неудер-
живаюшей является связь /а, мы, вместо уравнений C0.24), будем, сле-
следовательно, иметь такие уравнения движения:
/я,«», =SV + Xegrad,/Cl (v=l, 2,... , п). C0.26)
Мы принимаем, что неудерживающая связь оказывает лишь такую реак-
реакцию, чтобы система могла при известных условиях оставаться на связи,
а отнюдь не такую, которая сводила бы систему со связи. Следователь-
Следовательно, в соответствии с равенствами B7.22) на стр. 280 реакция R<f> связи
/а может быть отличною от нуля лишь при условии
л
.J = У, gradv f •w * -+- Dnfa = 0.
v=l
Заменив здесь w^ его значением из уравнения C0.26) и разрешив полу-
полученное уравнение относительно множителя \а, мы найдём для него сле-
следующее выражение:
п
1
— . C0.27)
V 1
Уравнения C0.26), на основании которых выведена эта формула, спра-
справедливы, когда
v= 1 *
при этом в случае знака равенства в этом выражении реакция связи /а
равна нулю, и уравнения C0.26) и C0.24) сливаются. Отсюда мы за-
заключаем, что множитель \ не удерживающей связи должен быть не от-
отрицателен:
Ха5з0; C0.28)
когда связь перестаёт действоват ь, он обращается в нуль. Для неудержи-
вающей дифференциальной связи <р. ^ 0 рассуждения наши от слова до
слова остались бы те же самые.
В предыдущем параграфе, говоря об удерживающих связях, мы на-
называли эти связи идеальными, если сумма элементарных работ всех реак-
реакций на любом виртуальном перемещении равнялась аулю. При этом для
реакций идеальных связей мы получили выражения C0.16). Посмотрим,
как в этом отношении обобщается понятие об идеальности связи в слу-
случае неудерживающей связи. В качестве аналитического выражения для
реакций неудерживающих связей мы сохранили формулу C0.16). По-
Поэтому и для элементарной работы реакций неудерживающих связей на
некотором виртуальном перемещении получается прежнее выражение
•C0.21):
St Л • «Л = а2 >-, «/. + 2 Jipty„;
297
но, сравнивая правую часть этого выражения с неравенствами B8.11)
на стр. 285, мы вместо равенства C0.22) получаем отсюда для неудер-
живающих связей равенство, соединённое с неравенством
п
М<*>= 2 & • Srv >0. C0.29)
Таким образом, для идеальной связи сумма элементарных работ реакций
равна нулю на любом неосвобождающем виртуальном' перемещении си-
системы и больше нуля на любом её освобождающем виртуальном переме-
перемещении. Необходимо при этом заметить, что в случае освобождающего
виртуального перемещения написанное выражение представляет собий
элементарную работу реакций лишь в условном смысле, а именно, если
предположить, что на протяжении всего перемещения реакции сохраняли
своё первоначальное значение. В этом смысле мы и будем понимать в
дальнейшем выражение C0.29), когда будем на него ссылаться. В отно-
отношении же возможных освобождающих перемещений условие C0.29)
даёт только указание на соотношение между направлениями пере-
перемещений и реакций, но не на работу реакций. Работа реакции идеальной
неудерживающей связи на каком-угодном возможном перемещении всегда
равна нулю. Действительно, когда возможные перемещения оставляют си-
систему на связи, тогда реакции, вообще говоря, отличны от нуля, и по-
поэтому X,, ^ 0, jLtp ^з= 0, но зато перемещения их точек приложения подчи-
подчинены условиям B8.11) на стр. 285 со знаком равенства:
Когда же взятое перемещение сводит систему со связи, т. е.
тогда соответственные реакции обращаются в нуль, и, следовательно,
Движение несвободных систем с идеальными связями представляет
собой схему весьма часто наблюдаемых движений масс: примером может
служить качение друг по другу твёрдых тел, ограниченных гладкими по-
поверхностями. Введением идеальных связей из механики не исключается,
конечно, рассмотрение связей не идеальных. Нужно только, если пожелаем
исследовать движение системы с не идеальными связями под действием
данных приложенных сил, кроме аналитической формы свйзей (т. е. их
уравнений), иметь ^щё некоторые добавочные условия о реакциях, притом
в достаточном числе. Таким образом, например, решаются все задачи о
движений тел с трением.
177. Уравнения движения несвободной системы в декартовых
координатах (уравнения Лагранжа первого рода). На основании най-
найденных нами выражений C0.15) для реакций связей уравнения движения
C0.8) несвободной системы, подчинённой а конечным и b дифференци-
дифференциальным удерживающим связям C0.1) и C0.2), напишутся так:
а Ь
m,w, =F. + 2 ^grad,/.+ 2 V-^f '(v= h 2, .... «), C0.30)
ot^^ 1 P~~* 1
298
или, в проекциях на оси координат:
/и.
/Mv
C0.81)
а=1 8 = 1
(v=l, 2, .... л).
Уравнения эти носят название уравнений несвободного движения с мно-
множителями, или уравнений Лагранжа первого рода. Система уравнений
C0.1), C0.2) и C0.31) содержит Зп-\-й-{-Ь неизвестных функций вре-
времени *v, уч, г,, Х„, |х3, т. е. как раз столько, сколько имеется уравнений1.
Интегрирование рассматриваемой системы уравнений ведётся следую-
следующим путём. При помощи уравнений C0.3) и C0.4) исключаем неизвест-
неизвестные множители связей Х„ и ц^. С этой целью вставляем в эти уравнения
w, из уравнений C0.80); мы получим тогда систему а-\-Ь уравнений,
линейных относительно всех множителей \ и tt0:
... -f
-f ...
а+Ь,
C0.32)
Исследуем, каково зйачение определителя | а | этой системы уравнений.
Употребляя обозначения C0.17) и C0.18) и основываясь на равенствах
C0.19), легко видеть, что коэффициенты а —а Имеют следующую
структуру:
1 дКди
v=1
а, q>a;
Следовательно, определитель | а | может быть представлен как сумма
квадратов определителей (a-J-?)-ro порядка вида:
д(Л,/а. ...,/а, Уь Уг,.... Ы
где v,, v2, ... , va+6 — различные между собой числа из ряда
299
1,2, ...,3л. Число таких определителей, очевидно, равно числу С?+*
сочетаний из Зл элементов по а-\-Ь. Определитель \apq\ может обра-
обратиться в нуль лишь тогда, когда каждый из упомянутых функциональных
определителей равен нулю. Но в таком случае между функциями
/а и <Ря существовала бы зависимость
П(Л> <р„. е* о=о,
явно не содержащая скоростей, что в нашем случае исключается (ср. за-
замечание в конце § 175). Итак, определитель \<*pq\ системы уравнений
C0.32) отличен от нуля, и потому из этих уравнений \ и jjl,
определяются как функции от t, jcv, j/v, гу, ху, уч, zv. Подставив
полученные таким способом выражения для Ха и jj^ в уравнения C0.31),
мы получим систему Зл дифференциальных уравнений второго порядка
относительно Зл неизвестных функций времени jcv, _yv, zr Интегрирование
этой системы введёт 6л произвольных постоянных С (р=1, 2, ... , 6л).
Независимых между этими постоянными будет только 6л — 2а — Ь. Дей-
Действительно, множители \ и jjl^ определены так, чтобы удовлетворялись
равенства C0.3) и C0.4). Обратно, из уравнений C0.31)- при найденных
значениях множителей \х и jjlr все а-\-Ь равенств C0.3) и C0.4) выте-
вытекают как следствия (ср. § 119 и 121). Отсюда мы заключаем, что система
дифференциальных уравнений C1.31) имеет а вторых и b первых инте-
интегралов вида
Произвольные постоянные Аа, На, К$ будут, конечно, функциями посто-
постоянных С . Так как система движется в соответствии со связями C0.1) и
C0.2), то надо положить
Аа=0, На=0, /Г?=0,
что и даёт 2а-\-Ь зависимостей между постоянными С ; следователь-
следовательно, произвольных, или - независимых, между ними останется только
6л — 2а — Ь.
Интегрирование уравнений C0.81) весьма затруднительно. Обыкно-
Обыкновенно закон движения несвободной материальной системы находят при
помощи интегрирования уравнений других типов, с которыми мы позна-
познакомимся впоследствии. Уравнениями с множителями и в особенности ра-
равенствами C0.32) пользуются лишь для определения реакций связей.
В самом деле, когда движение системы найдено, т. е. ху, _yv. zv,
*V' У*-> г" известны как функции времени, из уравнений C0.32) легко
найти все множители \ и д?, и, следовательно, по формуле C0.15) мо-
можно определить реакции в функции времени.
Когда некоторые из связей неудерживающие, ход интеграции уравне-
уравнений C0.31) намечается следующий. Прежде всего по начальным данным
• • » • * .
t = t()i х* = ЯчО) Уч = УуО, Z^ = Zvo, X., = Х^о, У,=У-Л, Z, = Zm
смотрим, соблюдены ли для начального момента t = t0 условия
/.= 0, ^f = 0, \^0 и срр = О, др^О C0.33)
300
для всех неудерживающих связей. Если условия C0.33) выполнены для
всех связей, то обращаемся к интегрированию уравнений вида C0.31) со
всеми множителями связей. Если же для некоторых неудерживающих
связей не соблюдается какое-либо из условий C0.33), то в уравнениях
C0.31) надо положить соответствующий множитель Ха или juip равным
нулю,- т. е. вовсе отбросить члены, содержащие такие множители, и
интегрировать укороченные уравнения C0.31). В том или другом случае,
т. е. после интеграции уравнений типа C0.31) или укороченного типа,
определяем *v, j/v, zv, Xa, ]x? как функции времени:
Затем исследуем, не может ли какая-либо функция \ ({) или yip (t) с те-
течением времени обратиться в нуль и затем стать отрицательной. Если
\а (t), улр (/) не принимают отрицательных значений, задача кончена. Если
же для какого-либо момента t^=tx одна или несколько функций
\ @> I1? @< обратившись в нуль, затем становятся отрицательными, то
найденные нами интегралы уравнений движения годятся лишь для проме-
промежутка времени от t0 до ty Чтобы найти дальнейшее движение, надо
интегрировать уже укороченные уравнения, не содержащие членов с мно-
множителями, принимающими отрицательные значения; при этом за на-
начальные данные надо будет взять
Затем надо снова произвести исследование функций, определяющих после
новой интеграции величины Ха и ц? ¦ Может случиться также, что систе-
система, не лежавшая на какой-либо неудерживающей связи, например /а,
снова придёт на неё, т. е. наступит момент, когда окажется /а=г=0. То-
Тогда может произойти явление, называемое ударом, т. е. скорости то-
точек системы могут измениться мгновенно. Как определить эти изменения,
увидим впоследствии. Во всяком случае к новым скоростям после удара
мы должны отнестись, как к новым начальным данным н так продолжать
наше исследование и переход от уравнений одного типа к уравнениям
другого типа, пока не исчерпаем, если сможем, все моменты, когда или
какие-либо из множителей \ или цз становятся отрицательными, или ко-
когда ослабленная связь приходит в состояние напряжения.
XXXI. ОБЩИЕ ЗАКОНЫ ДИНАМИКИ: ЗАКОН ИЗМЕНЕНИЯ
КОЛИЧЕСТВА ДВИЖЕНИЯ, ЗАКОН ИЗМЕНЕНИЯ КИНЕТИЧЕСКОГО
МОМЕНТА, ЗАКОН ИЗМЕНЕНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
178. Закон изменения количества движения систолы (закон" дви-
движения центра масс). Уравнения движения несвободной системы, рас-
рассмотренные нами в предыдущей главе, имеют вид
m,o>v=/\ + #» (v=l, 2 л). C1.1)
Здесь F4 и /?v соответственно означают равнодействующую активных сил
301
и равнодействующую реакций, приложенных к частице пи,. Просуммируем
равенство C1.1) по всем частицам системы; мы получим выражение:
2 2
Займёмся отдельно изучением левой и правой частей этого равенства.
Выражение, стоящее в левой части, может быть следующим образом
выражено через скорости частиц системы:
п п п
Произведение wzvz>« мы в своё время назвали количеством движения А\
частицы пи, (§ 100):
А, = /и„ z>v.
Величина А", равная сумме количеств движения всех* частиц системы, но-
носит название количества движения системы:
Количество движения системы весьма просто выражается через скорость
её центра масс С:
v=l v = l
где М есть масса всей системы, а гс — радиус-вектор её центра масс
[см. формулу B5.3) на стр. 244, относящуюся к статическому моменту
системы]; таким образом, количество движения системы равно количеству
движения её центра масс в предположении, что в нём сосредоточена
масса всей системы:
K. = Mvc. C1.3)
л
Сумму 2^*» активных сил системы можно представить в более про-
стом виле, если разделить активные силы на внутренние и внеш-
внешние: будем называть данную активную силу внутренней и обозначать Ff),
если она представляет собой действие на частицу /и, других частиц рас-
рассматриваемой материальной системы; если же данная сила* является силой,
с которой на частицу /и, системы действуют массы, не принадлежащие
к системе, мы эту силу будем называть внешней и обозначать Т7^). По
третьему закону Ньютона все внутренние силы системы можно сгруппи-
сгруппировать по признаку «действие» и «противодействие». Каждые две такие
силы будут действовать вдоль одной и той же прямой и в сумме будут
давать нуль. Отсюда мы приходим к заключению, что равны нулю, во-
первых, сумма всех внутренних сил, или их главный вектор FW, и, во-
вторых, сумма моментов, или главный момент JbQ всех внутренних сил от-
относительно произвольного центра О, т. е.
2 /%') —о,
v=l
302
C1.4)
На основании первого свойства мы можем сумму всех активных сил, вво-
вводящую в равенство C1.2), заменить суммой, или главным вектором F^,
одних лишь внешних активных сил:
Обратимся ко второму слагаемому правой части, т. е. к сумме, или
главному вектору, всех реакций:
*=.?*,.
v = l
Этот вектор, очевидно, равен нулю для свободной системы, т. е. когда
никаких связей вообще нет. Но, кроме свободной системы, существует
ряд других систем, когда он равен нулю. В случае идеальных связей
(§ 175) достаточным признаком обращения в нуль главного вектора реак-
реакций служит то обстоятельство, 4то связи допускают произвольное посту-
поступательное виртуальное перемещение системы. Действительно, для любого
виртуального перемещения сумма элементарных работ реакций идеальных
связей равна нулю:
C1.5)
¦»=!
при этом для поступательного перемещения множитель 8rv один и тот же
для всех частиц, и потому он может быть вынесен за знак суммы, т. е.
мы имеем
отсюда в виду произвольности 8г, находим:
2*,=°.
4 = 1
что мы и хотели доказать.
Представляется также интересным разделить реакции связей, подобно
активным силам, на внутренние и внешние (§ 171). Если внутренние свя-
связи идеальны, сумма RW их реакций равна нулю:
/?«¦)= 2/?@ = 0;
v=i
это вытекает из выше изложенного, потому что внутренние связи, допу-
допуская виртуальные перемещения системы как свободного абсолютно твёр-
твёрдого тела, тем самым допускают и её произвольные поступательные вир-
виртуальные перемещения. Если же внутренние связи не идеальные, то,
оставаясь в рамках выше приведённых определений, мы ничего не сможем"
сказать о сумме их реакций. Действительно, мы до сих пор базировались
на определении связи при помощи уравнений между координатами, их
производными и временем. Как известно, такой аналитический образ связи
303
полностью определяет её реакции лишь в случае, если связь идеальна
(§ 175). Чтобы получить полное представление о реакциях не идеальной
связи, нужно, как было указано, кроме уравнения иметь некоторые доба-
добавочные сведения о связи; например, нужно знать, каким способом связь
реализована. Так, если мы можем указать те массы, которые являются
источниками данных реакций, то можно разбить связи на внутренние и
внешние по тому же признаку, как мы разделяли активные силы на
внутренние и внешние, С последней точки зрения, конечно, ясно, что
сумма реакций внутренних связей всегда равна нулю, независимо от того,
идеальны связи или не идеальны. В нашем общем исследовании в насто-
настоящей главе мы ограничимся установлением тех свойств несвободного дви-
движения, которые вытекают из аналитического определения связей. В част-
частности, говоря о внутренних связях, мы будем придерживаться определения
этого понятия, данного в § 171. Реакции внешних связей и их сумму
в отличие от внутренних связей мы в дальнейшем будем помечать индек-
п
сом (е), т. е. соответственно будем писать $?> и #<*)= 2/??*•
»=|
На основании предыдущих рассуждений равенство C1.2) в общем
случае можно переписать так:
К =/*') + &, C1.6)
т. е. производная по времени от количества движения
системы равна сумме главного вектора внешни-х актив-
активных сил и главного вектора реакций. Это предложение но-
носит название закона изменения количества движения механической системы
в дифференциальной форме. Если внутренние связи рассматриваемой си-
системы идеальны, то производная от количества движения
равна сумме внешних активных и пассивных сил (ре-
(реакций):
* = *•> + *'>. C17)
Если все связи системы идеальны и притом допускают произвольные по-
поступательные виртуальные перемещения (например, когда связи только
внутренние) или если система свободная, т. е. никаким связям вообще не
подчинена, производная от количества движения равна главному вектору
одних активных внешних сил:
K = F<eK C1.8)
Основываясь на зависимости C1.3), формулу C1. 6) можно предста-
вить в следующем виде: Mwc = M + R, C1.9)
где wc есть ускорение центра масс. Эта форма закона изменения коли-
количества движения известна под названием закона движения центра масс
системы. Сравнивая полученное выражение с основным уравнением дина-
динамики A4.4) на стр. 135, можем сказать, что центр масс системы дви-
движется, как материальная частииа, масса которой равна массе системы и
к которой приложены главный вектор внешних активных сил и главный
вектор реакций. В выше разобранных частных случаях C1.7) и C1.8)
получаем:
304
Все выведенные формулы нетрудно записать в проекциях на оси де-
декартовых координат.- Так, вместо векторных равенств C1.6) и C1.9) со-
соответственно получаем:
в случае же R = 0 имеем
Mxc = Я*>, Мус = fW Мгс = F'eJ.
Умножив обе части равенства C1.6) на dt, мы приведём закон изме-
изменения количества движения в дифференциальной форме к новому вицу,
который нам впоследствии пригодится; а именно, мы получим:
dt, C1.10)
т. е. дифференциал количества движения системы равен сумме элемен-
элементарных импульсов (§ 100) главного вектора внешних активных сил н
главного вектора реакций. Проинтегрировав это уравнение в соответству-
соответствующих друг другу пределах (t0, t) и .(Ко, К), найлём:
интегралы, стояние в правой части равенства, соответственно пред-
представляют собой импульсы сил /="(') и R за промежуток времени (tQ, t).
Мы получили закон изменения количества движения в интегральной, или
конечной, форме: приращение количества движения системы за некоторый
промежуток времени равно сумме импульсов главного вектора внешних
сил и главного вектора реакций за тот же промежуток времени.
179. Интегралы количества движения. Закон сохранения дви-
движения центра масс. Когда каждый из векторов fW и R обращается
в нуль или, вообще, когда их сумма равна нулю, тогда равенство C1.6)
даёт
к=о.
Отсюда вытекает, что в рассматриваемом случае количество движения
системы постоянно (по модулю и направлению):
К = с, C.1.11)
где с — произвольная постоянная векторная величина; в проекциях послед-
последнее равенство записывается так:
Кх = сх, Ку = сг Кг=сг.- C1.12)
Таким образом, в случае FW -\-R=0 закон количества движения даёт
20 г. к. Суслов 305
один векторный, или три скалярных первых интеграла дифференциальных
уравнений движения системы. Эти интегралы носят название интегра-
интегралов количества движения Вспомнив выражение C1 3) для коли-
количества движения, мы можем интеграл C1 11) переписать в виде
vc = c', C1.13)
где с'=-т>; как видим, скорость центра масс постояннт, т. е. он дви-
движется прямолинейно и равномерно, или, как говорят, инерциально.
Это положение известно под названием закона сохранения дви-
движения центра масс.
Нетрудно убедиться, что в рассматриваемом случае, когда сумма
главного вектора внешних сил и главного вектора реакций равна нулю,
т. е.
существуют также вторые интегралы уравнений движения, один вектор-
векторный, или три скалярных; действительно, проинтегрировав уравнение C1.13),
мы находим.
где с" — новая произвольная постоянная; в проекциях получаем:
Построим для какого-нибудь полюса, например начала О координат,
годограф переменного с течением времени вектора К. Если сумма
/?(«) _f_ # внешних активных сил и реакций перпендикулярна оси Ох и,
следовательно, справедлив первый из интегралов C1.12), то рассма-
рассматриваемый годограф будет плоской кривой, и плоскость её будет пер-
перпендикулярна оси Ох. Когда сумма векторов FW _|_ /? параллельна
оси Oz и, следовательно, выполняются два первые равенства C1.12), го-
годограф вектора К будет отрезком прямой, параллельной оси Oz. Нако-
Наконец, когда Я** -(-/?= О и, следовательно, имеют место все три инте-
интеграла C1.12), или, иначе говоря, соблюдается закон сохранения движе-
движения центра масс, рассматриваемый годограф вырождается в точку.
180. Закон изменения кинетического момента. Умножим обе части
уравнения C1.1) векторно на радиус-вектор г, частицы; приняв во вни-
внимание, что
§- (rvX mvwv) =
г,Хт,ю, = г, X ?(«,»„) =^(/\Xj
мы получим
at'
Просуммировав это равенство по всем частицам системы, найдём:
rvX/?v. C1.14)
Кинетический момент частицы mv относительно начала координат О
обозначим Оо/, моменты активной силы /\, и реактивной R4 обозначим
306
соответственно LOv и #Ov. Сумма кинетических моментов всех частиц,
иначе называемая кинетическим моментом системы, будет в даль-
дальнейшем обозначаться Оо:
C1.15)
п
Относительно суммы моментов всех активных сил 2 rvX/% заметим, что
v = l
в силу свойства C1.4) она равна сумме моментов, или главному мо-
моменту IS? одних внешних активных сил, т. е.
Сумму моментов или главный момент реакций обозначим Но:
2
v=l м=1
Этот момент равен нулю для свободной системы, а также в тех случаях,
когда реакции всё время проходят через неподвижный центр О (начало
координат) или когда они приводятся к силам такого вида. Указанные случаи,
конечно, не единственные. Достаточным признаком того, что главный
момент реакций относительно данного центра обращается в нуль, служит
то обстоятельство, что связи системы идеальны и допускают в числе
виртуальных перемещений вращения вокруг произвольной оси, проходя-
проходящей через этот центр. В самом деле, раз связи идеальные, то сумма
элементарных работ реакций на любом виртуальном перемещении равна
нулю:
2*,.«r,=o. C1.16)
Если направление оси, проходящей через точку О, задано единичным
вектором со0, расположенным на этой оси, поворот системы вокруг этой
оси на бесконечно малый угол &р может быть изображён вектором §:рсо0;
при этом перемещения ёг„ частиц выразятся через вектор &рш° так же,
как скорости vH частиц через угловую скорость со, т. е.
Подставим это выражение в уравнение C1.16) и произведём цикличе-
циклическую перестановку сомножителей векторно-скалярного произведения но
формуле A-32) на стр. 11; затем вынесем множитель Ьо за знак суммы;
получим:
X г, = tyu0. 2 г<X /?v = S(o5° • Но = 0;
v = l v=l ч = 1
отсюда, ввиду произвольности &ссо0 получаем:
20* 307
что мы и желали показать. Указанному свойству удовлетворяют, напри*
мер, внутренние связи, если они идеальны (§ 171):
действительно, допуская перемещения системы как абсолютно твёрдого
тела, внутренние связи, в частности, допускают её произвольное враща-
вращательное перемещение.
Равенство C1.14) мы теперь сможем переписать так:
до=^ + Яо; C1.17)
т. е. производная по времени от кинетического мо-
момента системы, взятого относительно некоторого
центра, равняется сумме главного момента внешних
активных сил и главного момента реакций относи-
относительно того же центра. В этом и состоит закон изменения ки-
кинетического момента системы. Если внутренние связи системы идеальны,
то в последнем равенстве вместо главного момента Но всех реакций
можно поставить главный момент Н^ реакций одних внешних связей:
Go=L$-{-H%. C1.18)
Если все связи системы идеальны и допускают произвольные вращатель-
вращательные перемещения вокруг осей, проходящих через центр О моментов
(например, когда связи только внутренние), или если система свободная,
производная от кинетического момента равна главному моменту одних
активных внешних сил:
GO = L%\ C1.19)
Момент вектора относительно точки, спроектированный на некоторую
ось, проходящую через эту точку, как известно, иначе называется мо-
моментом вектора относительно данной оси. Поэтому, спроектировав ра-
равенства C1.17), C1.18) и C1.19) на оси координат, мы должны будем
в соответствующих формулировках слова «момент относительно центра»
заменить словами «момент относительно оси». Уравнение C1.17) в про-
проекциях на оси декартовых координат будет выглядеть следующим об-
образом
или, в более подробной записи,
п п п
п п п
it Ё «, (*v *. - *к) -=Е (-/"? - *s$)+Е (*,я„ - *.#«).
l l l
v=l v=l v=l
п
181. Интегралы кинетического момента (интегралы площадей).
Закон сохранения кинетического момента. Когда каждый из момен-
308
тов LQ и HQ обращается в нуль или когда хотя бы только их сумма
равна нулю, тогда равенство C1.17) даёт
до=0.
Отсюда вытекает, что в рассматриваемом случае кинетический момент
системы постоянен (по модулю и направлению):
ОО=С, C1.20)
где С — произвольная постоянная векторная величина; в проекциях на
оси координат последнее равенство записывается так:
0о,= СЛ, 0Oy=Cv, ООг = Сг. C1.21)
Таким образом, в случае L$ -\- HQ = 0 закон изменения кинетического
момента даёт один векторный, или три скалярных первых инте-
интеграла дифференциальных уравнений движения системы. Эги интегралы
носят название интегралов кинетического момента. Свойство
кинетического момента, выражаемое интегралом C1.20), называют зако-
законом сохранения кинетического момента.
Кинетический момент частицы /mv, как известно, равен удвоенному
произведению её массы на секторную скорость [формула A8.14) на
стр. 159]:
Оо, = г,ХтЛ = 2и,5О1.
На этом основании выражение C1.20) можно переписать так:
2i>vSOs = C. C1.22)
Эта форма интеграла кинетического момента называется интегралом
площадей. Итак, если ?$-\- Но=0, сумма произведений масс частиц
на их секторные скорости относительно начала О координат постоянна.
Постоянной будет, конечно, и сумма произведений масс на проекции
секторных скоростей на любую ось Ои, характеризуемую единичным
вектором и0; это непосредственно усматривается из того равенства, ко-
которое получается из интеграла C2.22) путём его умножения на и0:
Правая часть, а следовательно, и левая проходит через максимум при
цо __ qo^ Иначе говоря, если мы станем следить за проекциями частиц тн
на различные плоскости, проходящие через начало координат, то увидим,
что радиусы-векторы проекций частиц, движущихся в плоскости, перпен-
перпендикулярной к кинетическому моменту Оо, ометают в сумме наибольшие
площади за единицу времени. По этой причине плоскости, перпендику-
перпендикулярные к кинетическому моменту, называются плоскостями максимума
площадей; иначе их называют неизменными плоскостями
Лапласа (Laplace); уравнение семейства этих плоскостей, очевидно,
следующее:
Оо-г = Ъ C1.23)
309
или, в скалярной форме,
где у — произвольная постоянная.
Построим из какого-либо полюса, например, начала координат О,
годограф переменного с течением времени вектора Go. Если главный
момент активных сил и реакций системы относительно неподвижной оси
Ох обращается в нуль, то мы будем иметь один интеграл пло-
площадей 0Ох = Сх, и рассматриваемый годограф будет плоской кривой,
расположенной в плоскости, перпендикулярной оси Ох. Когда главный
момент активных сил и реакций системы обращается в нуль относительно
двух координатных осей, например осей Ох и Оу, мы будем иметь два
интеграла площадей: ООх = Сх, 0Оу = Су, и годограф будет отрезком
прямой, параллельной оси Oz. Наконец, когда выполняется закон сохране-
сохранения кинетического момента, т. е. имеют место все три интеграла C1.21),
рассматриваемый годограф вырождается в точку.
182. Теорема Якоби. Для того случая, когда материальная система
состоит всего из двух частиц тх и т2, Якоби (Jacobi) дал закону со-
сохранения кинетического момента следующую
геометрическую форму. Пусть тх ит, — частицы
системы, vx и z>2 — их скорости, G, и G2—
их кинетические моменты относительно начала
координат (фиг. 112). Тогда кинетический мо-
момент О системы представится диагональю парал-
параллелограмма, построенного на векторах G, и G2.
Фиг. 112. По условию вектор О постоянен по модулю
и по направлению. Плоскости, проходящие соот-
соответственно через начало координат и скорости vx и v2, назовём Р и Q.
Плоскость Р, очевидно, перпендикулярна к вектору G,, a Q к G2; сле-
следовательно, каждая из эгих плоскостей перпендикулярна к плоскости
параллелограмма, построенного на векторах G,, G2; линия их пересечения
ОА также перпендикулярна к плоскости этого параллелограмма, а значит,
и к постоянному направлению вектора G. Итак, оказывается, что три
плоскости, Р, Q и плоскость, проведённая через точку О перпендикулярно
к кинетическому моменту G, пересекаются по одной прямой. Другими
словами, геометрическим местом прямых встречи плоскостей Р и Q, про-
проведённых через начало координат и скорости движущихся частиц, служит
неизменяемая плоскостей Лапласа.
183. Объединение законов изменения количества движения и
кинетического момента системы в один закон. Если вспомнить опре-
определение геометрической производной or системы скользящих векторов
(§ 31), то оба закона, закон изменения количества движения C1.6) и
закон изменения кинетического момента C1.17), можно соединить в один.
Действительно, обозначим буквой 5 систему векторов /mvz>v, т. е. количеств
движения частиц материальной системы,и буквойЕ систему векторов F^ 4 /?v,
т. е. приложенных к этим частицам внешних активных сил и реакций.
Система 5 для неподвижного полюса О (начала координат) характе-
характеризуется своим главным вектором К, т. е. количеством движения мате-
материальной системы, и своим главным моментом Go, т. е. кинетическим
моментом системы относительно полюса О. Система 2 для того же по-
310
люса характеризуется своим главным вектором F^-^-^-R и главным мо-
моментом Lfi-\-Ho внешних активных сил и реакций:
S=(K,OO), 2 = (Я«> + /?, L$ + Ho). C1.24)
Согласно выше сказанному производная но времени от системы скользя-
скользящих векторов, равных количествам движения частиц системы, эквивалентна
системе скользящих векторов, равных внешним активным силам и реак-
реакциям материальной системы, т. е.
.9 ==53- <31-25)
В этом и состоит общее выражение закона изменения количества движе-
движения системы и закона изменения её кинетического момента.
Посмотрим, какое обобщение получат эти законы, если за полюс бу-
будет взята некоторая движущаяся точка А с радиусом-вектором гд. В этом
случае, вместо формул C1.24), мы для систем 5 и S будем иметь выра-
выражения:
^ = (к, аА), 2=</=v>+r, Lf+нА).
Производная S от системы S в случае подвижного полюса должна быть
составлена по формуле D.32) на стр. 39, т. е. мы имеем
S=(K, QA-i-rAXK) = (K, GA+vAXK).
Следовательно, уравнение C1.25) теперь распадается на следующие два:
K=F^-\-R, C1.26)
QA + vA XK=l$ + НА. C1.27)
Как видим, подвижность полюса сказывается лишь на выражении за-
закона изменения кинетического момента. Посмотрим, не найдётся ли, од-
однако, такой подвижной полюс А, для которого закон изменения кинети-
кинетического момента пишется так же, как для неподвижного полюса. Согласно
сказанному в § 32 для этого необходимо и достаточно, чтобы векторное
произведение вектора гА, т. е. радиуса-вектора полюса, производного от
данного, на главный вектор системы, т. е. на К, равнялось нулю, т. е.
чтобы соблюдалось условие
vAXvc = 0. C1.28)
Необходимость и достаточность этого условия могут быть также непо-
непосредственно усмотрены из сопоставления уравнений C1.17) и C1.27).
Найденное условие, например, выполняется, если скорость полюса А
коллинеарна со скоростью центра масс. Как частный случай отметим, что
искомым полюсом может служить сам центр масс. Из бесчисленного мно-
множества других подвижных полюсов, для которых закон изменения кине-
кинетического момента пишется так же, как для неподвижного полюса, ука-
укажем следующий: соединим центр масс С с произвольной неподвижной
точкой В и на прямой СВ возьмём точку А так, чтобы всегда было
ВА ,
т=. const.
Как нетрудно увидеть, точка А будет удовлетворять условию C1.28).
311
Остановим наш выбор на центре масс С и подтвердим сказанное
о нём непосредственными вычислениями. Возьмём систему осей C$tj?,
параллельных осям неподвижной системы Oxyz, движущихся поступа-
поступательно вместе с центром масс С. Обозначим радиусы-векторы частицы от„
в старых и новых осях соответственно г, и ру, а радиус-вектор центра
масс С в старых осях назовём гс. Очевидно,
Вставив это выражение радиуса-вектора гу в формулу C1.14), мы най-
найдём:
п
X г с X «Л +й!"Р,Х «Л =
п
Е,хл;. C1.29)
v=l v=! -, —1 v=l
Первое слагаемое левой части уничтожается здесь с первым и третьим'
слагаемыми правой части; в самом деле, произведя указанное в первом
слагаемом дифференцирование, мы получаем:
п п п
jt 2, гс X "W = vc X 2, «,», + гс х X «»«V
v=l v=l v = l
n n
hd 2 "^v== ¦^"c и ПОТОМУ выражение осХ У "^v"» как произведе-
v=l v = l
нне коллинеарных множителей равно нулю; с другой стороны, согласно
формуле C0.8) на стр. 292 мы имеем
значит, действительно, справедливо равенство
я п п
3?Е ^X^.^S 'cX/^ + E rcX/?v.
v=l v = l v=l
На этом основании вместо уравнения C2.23), мы получим следующее:
sE E E (З1.зо)
ИЛИ
dc = L[$-\-Hc, C1.31)
где буквами Ос, I<f и Нс обозначены кинетический момент системы
и главные моменты внешних активных сил и реакций относительно центра
масс С; внутренние активные силы не вошли по тем же основаниям, как
и при выводе формулы C1.17). Полученное равенство подтверждает
высказанное положение о том, что закон изменения кинетического мо-
момента системы остаётся справедливым, если за полюс, или центр, моментов
взят центр масс С.
312
184. Закон изменения кинетического момента системы в её отно-
относительном движении вокруг центра масс. Интересно заметить, что-
закон изменения кинетического момента будет верен и для относитель-
относительного движения системы вокруг центра масс, или, точнее, для движения
системы относительно осей С$7]?, движущихся поступательно вместе
с центром масс. Для доказательства выразим в равенстве C1.31) абсо-
абсолютную скорость z>, частицы через её переносную и относительную ско-
скорости; переносной скоростью, очевидно, будет скорость vc центра масс»
а относительную скорость мы обозначим г>^; следовательно,
Кинетический момент вс преобразуется поэтому следующим образом:
°с = 2 Pv X «Л ^ 2 Р\ X «,*с + S Pv X m,vW;
НО
2 р,
потому что статический момент V /и,р, системы относительно её
центра масс равен нулю (§ 144); второе же слагаемое представляет
собой кинетический момент системы в её движении относительно осей
С?г?; мы его обозначим G<?>; выполнив подстановку, получим:
др=1& + Нс, C1.32>
т. е. теорема доказана.
Следует заметить, что равенства C1.17) и C1.32) отнюдь не тож-
тождественны. Так, может случиться, что закон сохранения кинетического
момента будет соблюдаться в движении относительном и не будет спра-
справедлив для движения абсолютного, или наоборот. Пусть, например, дан-
данная система состоит из весомых частиц; тогда к каждой частице её т^
приложена сила m^g постоянного направления. Такая система сил экви-
эквивалентна одной силе, именно, весу Mg системы, приложенной к центру
масс. Поэтому если рассматриваемая материальная система свободная, то
закон сохранения кинетического момента выполняется для относительного
движения вокруг центра масс; но он не будет, вообще говоря, спра-
справедлив для движения абсолютного. Даже, если закон сохранения кинети-
кинетического момента соблюдается для обоих движений, абсолютного и относи-
относительного, всё-таки постоянные во времени векторы Go и О?> будут, во-
вообще говоря, различны и по модулю, и по направлению; точно так же
неизменные плоскости Лапласа для движений абсолютного и относи-
относительного будут в общем случае отличаться по своему направлению.
185. Закон изменения кинетической энергии. Вернёмся к уравне-
уравнениям движения несвободной системы C0.8) на стр. 292:
(v=l, 2, .... и).
Умножим скалярно каждое из этих уравнений почленно на тождество»
V4dt = dr ,;
313
-f
мы получим:
Левую часть преобразуем следующим образом:
mjo,, • w^dt = m^- dv^ — mji ~^ = d * .
На этом основании последнее равенство перепишется так:
Просуммировав это уравнение по всем частицам системы, мы найдём:
Будем пользоваться следующими обозначениями:
П
/\(г) > Р . /if
C1.33)
= 2
v=l
Величина Т носит название кинетической энергии системы;
d'AC) и d'AW представляют собой соответственно элементарные работы
всех активных и всех реактивных сил, причём штрихи у буквы d постав-
поставлены для того, чтобы показать, что, вообще говоря, указанные элемен-
элементарные работы не являются полными дифференциалами. С помощью
введённых обозначений последнее уравнение перепишется так:
dT= d'AW + d'AW), C1.34)
т. е. дифференциал кинетической энергии равея сумме
элементарных работ активных
состоит закон изменения кинетической
форме.
Проинтегрируем выражение C1.34)
некоторому промежутку времени (i0, t);
значения кинетической энергии системы
ложим, кроме того:
сил и
энергии
реакций. В этом
в дифференциальной
в пределах, соответствующих
при этом пусть То и Т будут
моменты времени t0 и t. По-
Попод знаками сумм здесь стоят криволинейные интегралы от элементар'
ных работ и каждый из них берётся по пути ВУоВ^; существенно заме-
314
тнть, что эти интегралы, вообще говоря, зависят не только от началь-
начального и конечного положений fiv0 и Bv частиц, но и от закона движения
частиц по траекториям В^ОВГ Выражения А<Ъ и А№ представляют собой
соответственно работы активных сил и реакций на рассматриваемом пе-
перемещении системы. С помощью введённых обозначений результат инте-
интегрирования выражения C1.34) запишется так:
7— Тй=
т. е. приращение кинетической энергии системы равно
сумме соответствующих работ активных сил и реак-
реакций. В этом состоит закон изменения кинетической энергии в
конечной, или интегральной, форме.
186. Интеграл энергии. Закон сохранения энергии. Консерватив-
Консервативные системы. Исследуем подробнее выражение для элементарной работы
реакций. Для этого вставим в третью формулу C1.33) значение/?v из равен-
равенства C0.15) на стр. 294; мы получим:
(
1 \az=\
Примем во внимание, что dr^^vydt, и, кроме того, переменим порядок
суммирования в последнем выражении; тогда мы найдём:
2 (bdt 2
Воспользуемся теперь условиями, которым подчинены скорости z>v частиц
несвободной системы, а именно, формулами B7.7) на стр. 275 и B7.13)
на стр. 277; тогда элементарную работу реакций мы сможем выразить
следующим образом:
о ь
Отсюда мы заключаем, что если выполняются равенства:
f=° (-=1.2..-.-).} C1.з6,
D?=0 (P = l, 2, ...,Ь) }
для всех значений индексов а и р, т. е. если конечные связи не содер-
содержат явно времени, а дифференциальные связи однородны относительно
скоростей, то элементарная работа реакций на действительном переме-
перемещении обращается в нуль. Существенно заметить, что для того, чтобы
последнее обстоятельство имело место, нет необходимости, чтобы коэф-
коэффициенты Bf> дифференциальных связей не заключали в себе явно вре-
времени: нужно лишь, чтобы было Do=0. Когда элементарная работа ре-
реакций равна нулю, закон изменения кинетической энергии выражается
следующим уравнением:
dT=d'A(FK (SI.37)
315
т. е. дифференциал кинетической энергии равняется
элементарной работе активных сил системы.
Пусть теперь, кроме того, активные силы имеют силовую функцию U,
зависящую только от координат; иначе говоря, пусть существует такая
функция U от координат, что каждая активная сила /*v является её гра-
градиентом в точке, определяемой радиусом-вектором гу, т. е.
Ъ* C1.38)
(v=l,2, .... п).
В таком случае элементарная работа активных сил станет полным диф-
дифференциалом; действительно,
или
d'AW = dU. C1.39)
Подставив этот результат в уравнение C1.37) и проинтегрировав его,
мы получим так называемый интеграл энергии
T=U-\-h, C1.40)
где h—произвольная постоянная. Если силовая функция является одно-
однозначной функцией координат, её значение с обратным знаком называется
потенциальной энергией системы. Обозначив последнюю бук-
буквой V, имеем, следовательно:
V=—U. C1.41)
Интеграл энергии C1.40) теперь принимает следующую форму:
T-\-V = h. C1.42)
Сумма кинетической и потенциальной энергии называется полной меха-
механической энергией системы; интеграл энергии в форме C1.42)
выражает закон сохранения механической энергии системы. Если в по-
последнее равенство ввести начальные данные, г. е. значения То и Vu ки-
кинетической и потенциальной энергии для некоторого начального момента
времени, то его можно переписать так:
T—T0 = — {V—V0);
отсюда мы видим, что при наличии силовой функции, однозначно зави-
зависящей от одних только координат частиц, приращение кинетической
энергии, а следовательно, и полная работа сил системы зависят лишь
от начального и конечного положений системы; эта работа равна умень-
уменьшению потенциальной энергии системы.
Материальные системы, к которым прилагается закон сохранения ме-
механической энергии, носят название консервативных систем. Сле-
Следовательно, если для связей системы соблюдаются условия C1.36), а
для активных сил условие C1.38), причём функция U зависит только от
координат и притом однозначно, то система консервативна.
316
Пример 93. Найдём силовую функцию для случая, когда п частиц тч
системы взаимно притягиваются с силами, зависящими от расстояния между
частицами. Пусть /я, и т^ — какие-либо две частицы рассматриваемой системы
и пусть г„ и г,,. — радиусы-векторы частиц, а лЧ|Л — расстояние между ними;
очевидно,
r^ = |r,-rtt|. C1.43)
Назовём <pv(i модуль силы притяжения между частицами тн и т^; тогда сами
силы, с которыми эти частицы действуют друг на друга, получат выражения:
Тч ~1 V' |л ~~ 1' Jy."""* Г v v 'fi/*
Сумма элементарных работ d'A^ этих сил выразится так:
<*'Аш =/v-^rv + /u>flfrn = — — (г* — rv)d <rv — rj;
на основании формулы D.4) на стр. 33 с применением обозначения C1.43) мы
находим отсюда:
d'A^ = — fmdr4fl.
Следовательно, элементарная работа d'A всех сил системы получит выра-
выражение:
л, п
V=sl, A = 1
По формуле C1.39) находим отсюда искомую силовую функцию
1
V5=l,|l5=l'
Если бы" Силы, действующие между частицами, были не силами притяже-
притяжения, а силами отталкивания, это бы сказалось лишь на изменении знаков
у коэффициентов ipw, а следовательно, и силовой функции. Если бы частицы
системы притягивались или отталкивались неподвижными центрами, силовую
функцию можно было бы искать так же, как и в разобранном примере.
187. Закон изменения кинетической энергии для относительного
движения системы вокруг центра масс. Введём опять, кроме непо-
неподвижной системы осей Oxyz, систему осей C&rjC, движущуюся поступа-
поступательно вместе с центром масс С. Движение материальной системы отно-
относительно этих осей будем ради краткости называть движением относи-
относительно (или вокруг) центра масс. Обозначим радиусы-векторы частицы mv
в старых и новых осях соответственно г, и pv, а радиус-вектор центра
масс С в старых осях назовём гс. Скорости частицы mv и кинетическую
энергию системы в старых и новых осях" обозначим соответственно
•Фч) Т и vn, Tr: скорость центра масс С в старых осях назовём vc.
Так как
то
Поэтому кинетическая энергия системы относительно неподвижных осей
аюжет быть преобразована следующим образом:
V = l V = l Y = l »=1
317
Назвав М массу всей системы, имеем
2 ™, = м-, 2 «л,
v=l v=l
последнее равенство имеет место потому, что в относительном движении
центр масс С всё время совпадает с началом координат и, следователь-
следовательно, пребывает в покое относительно системы OSjjC .На основании последних
равенств выражение для кинетической энергии приобретает вид
Mv'i
Т=-^+Тг, C1.44)
т. е. кинетическая энергия системы равна сумме кинетической энергии
её центра масс в предположении, что в нём сосредоточена масса всей
системы, и кинетической энергии системы в её движении относительно
центра масс. Эта теорема принадлежит Кёнигу (Koenig).
Преобразуем теперь выражение элементарной работы к новым коор-
координатам. Имеем
поэтому
= 2 W + **> • drc + 2 <^ + *,) <?. C1.45)
V = l V = I
Подставив выражения C1.44) и C1.45) в уравнение C1.28)," мы получим-
j+ E 2I C1.46)
Согласно закону движения центра масс (§ 178) последний движется как
материальная частица, в которой сосредоточена масса всей системы и
к которой приложены все действующие на систему силы. Поэтому
к центру масс, как и ко всякой частице, применим закон изменения ки-
кинетической энергии, т. е. мы имеем
Mv'i A
Заметим, кроме того, что второе слагаемое правой части в уравнении
C1.46) представляет собой сумму элементарных работ активных и реак-
реактивных сил системы в её движении относительно центра масс; введём
для этих работ обозначения:
d'A<p=2 ^ • rfp» и
v=l » = 1
Произведя почленное вычитание равенств C1.46) и C1.47) и приняв во
внимание последние обозначения, мы получим:
318
т. е. в движении системы относительно центра масс,
как и в абсолютном движении, дифференциал кинети-
кинетической энергии равен сумме элементарных работ всех
активных сил и реакций.
Пример 94. Пусть связи системы, состоящей из п частиц otv, удовлет-
удовлетворяют условиям C1.36), а главный вектор реакций равен нулю: #=0; пусть,
кроме того, силовая функция U однозначна и зависит только от разностей коор-
координат. Покажем, что в этом случае закон сохранения энергии имеет место
не только в абсолютном движении системы, но и в её движении относитель-
относительно йентра масс. Не ограничивая общности, можно считать, что силовая функ-
функция имеет вид
U = U(x^ — xb Уч—Уъ ^ — гг) (v = 2, 3,..., п). C1.48)
Это следует из того, что разность между координатами любых частиц может
быть выражена через разности между каждой из этих координат и координа-
координатой какой-нибудь другой, частицы, например частицы т^.
Найдём выражения для проекций активных сил F4 иа оси неподвижной системы
координат, например на ось Ох. Для » = 2, 3, ... п, мы получаем:
_dU _ дЦ д (лг, — jc,) _ дЦ
проекция же силы Ft равна
dU
F = ^ =
1Х дХ
Отсюда суммированием находим:
22
Так как тот же результат, очевидно, получится для двух других осей, то, зна-
значит, не только главный вектор реакций, но и главный вектор активных сил
равен нулю:
F = 0.
Следовательно, для рассматриваемой системы соблюдается закон сохранения
движения центра масс, т. е.
C1-49)
Напишем теперь уравнение, выражающее закон сохранения энергии нашей
системы в абсолютном движении. При этом для кинетической энергии возьмём
формулу C1.44) Кёнига, а в отношении силовой функции воспользуемся тем
обстоятельством, что согласно условию разбираемого примера она может быть
представлена в форме
U = U{x^ — xc, у., —у о 2v — гс) = ^(^. ^v. Q.
т. е. в виде зависимости от одних лишь относительных координат частиц
[С'% пояснение к формуле C1.48)]. В результате мы получим:
Mvl
или, согласно равенству C1.42),
Tr + [-U) = H,
где //—новая произвольная постоянная. Найденное равенство подтверждает
высказанное вначале положение.
319
XXXII. УРАВНЕНИЯ ДВИЖЕНИЯ НЕСВОБОДНОЙ СИСТЕМЫ
В ОБОБЩЁННЫХ КООРДИНАТАХ. УРАВНЕНИЯ ДВИЖЕНИЯ
В НЕЗАВИСИМЫХ КООРДИНАТАХ (УРАВНЕНИЯ ЛАГРАНЖА
ВТОРОГО РОДА)
188. Преобразование уравнений связей к обобщённым коор-
координатам. В главе XXX были выведены уравнения движения несвободной
системы, подчинённой а конечным связям
/.(*,. Л> *v *) = ° (v = l. 2, .... в; а=1, 2, .... а)
и b дифференциальным связям
2ef'.fl, + fl, = 0 @=1,2,...,*).
vr=l р
Зти уравнения имели вид
«,«,=Л + 2 *.g"d/. + 2 ^ЛР) C2.1)
(v=l, 2 я).
Введём для сокращения письма новые обозначения, положив
53v-2' -У. "iv —
C2.2)
кроме того, станем вместо mv писать
тз,_2, W3v—1 или тзу C2.3)
с тем расчётом, чтобы индексы у т и ? были одинаковы. Уравнения ко-
конечных и дифференциальных связей в новых обозначениях напишутся так:
/.(?,, /)р=0 (v=l, 2,-..., Зл; а = 1, 2, .... а), C2.4)
Зл
2Я?,'?,+?>э=0 (р=1, 2, .... А). C2.5)
Уравнения движения C2.1) примут вид
(v=l, 2, .... Зл).
Представим себе, что из k первых уравнений C2.4) связей, т. е.
уравнений
/, = 0, /а = 0, .... Д = 0, C2.7)
320
мы выразили ft первых координат $г ?2, ..., ?А в функции остальных
3/1 — k координат SA+1, SA+2. •••! ^зп и вРемени ^ пусть
5, = ^. ')• Ъ = ЫК> 0, .... 5* = 5*EИ. О C2.8)
Само собой разумеется, что как функции /а, так и координаты ?v могут
быть пронумерованы в произвольном порядке; поэтому под ft первыми
уравнениями C2.7) и ft первыми координатами ?, подразумеваются ft
произвольно выбранных уравнений и координат, допускающих выше из-
изложенное разрешение. Если выражения. C2.8) мы вставим в уравнения
C2.7), то левые части этих уравнений, очевидно, тождественно обра-
обратятся в нули; мы получим:
^E,, ?„, t) = 0, /2(fx, ?„, t) = 0, .... Д($х, 5,, t) = 0, C2.9)
причём
а индексы i и и принимают значения:
¦Л=1,2, ..., ?; п = А+1, * + 2 3/1.
Введём теперь вместо * = 3/г — k декартовых координат &к, где
n = k 4- 1, ft + 2, ...,3л, такое же число * каких-либо других координат qa,
где о=1, 2, ..., s, называемых в отличие от декартовых обобщён-
обобщёнными, или криволинейными; при этом мы для общности положим,
что в уравнения, связывающие новые координаты с прежними, может
явно входить время, т: е.
S*+, = 5*+ifa.. ')• 5*+2 = 5*+*(?.. 0. •••¦ 6,„ = ?,„(?., О C2.10)
(а = 1, 2, .... s).
В таком случае и первые k координат ?v в силу соотношений C2.8)
обратятся в некоторые функции от qa и t:
^ = ^{qa, t), Z2 = Z2(q,, t), ..., ^=^(qe, t) C2.11)
(j=l, 2, 3, ..., s).
Само собой разумеется, что тождественные равенства C2.9), ко-
которые выполнялись при произвольных значениях для ?][, где
n = k-{-\, k-\-2, ..., З/i, будут удовлетворены тождественно и в
том случае, когда вместо $к будут вставлены функции C2.10). Иначе
говоря, левые части уравнений C2.7), т. е.
обратятся тождественно в нули, если вместо всех координат ?v мы соот-
соответственно вставим их выражения C2.10) и C2.8) через координаты q, и
время t; эти тождества будут иметь вид
а =1, 2, .... ft; x=l, 2, ..., ft;
3«; <J=1, 2, ..., s.
Так как написанные выражения представляют собой тождества, то и
21 г. К. Суслов 321
производные от левых частей по qz или по t тождественно равны нулю;
т. е. мы имеем
Что же касается остальных а — k уравнений конечных связей, то после
введения координат q, они обратятся в некоторые уравнения между qa и t:
W?..') = о. Л+.(?..Д==о, ,.., /в(?в.')=о C2ЛЗ)
(о=1, 2, s).
Важно остановиться на следующем частном случае. Пусть конечные
связи C2.4) системы не содержат явно времени; пусть, кроме того,
время явно не входит в выражения декартовых координат ?п при выра-
выражении их через обобщённые координаты qa , что, очевидно, всегда возможно
осуществить: мы будем предполагать это всегда выполненным в слу-
случае связей, не содержащих явно времени. Тогда и в выражениях осталь-
остальных декартовых координат через обобщённые, т. е. координат $х, время
тоже явно не будет содержаться. Следовательно, время не будет явно
содержаться и в выражениях C2.13) связей в обобщённых координатах.
Итак, можно считать, что если
—~—~—'¦>,'**'—— = 0 (п = 1, 2, ..., а),
то
?Mft, 4i, ...,Qs)=zQ (v=l, 2, .... 8я) C2.14)
УЖ ^...,1s) = 0 (a=lf 2 а)>
Чтобы преобразовать к новым координатам дифференциальные связи
продифференцируем по времени уравнения C2*10) и C2.11); имеем
&^ + ll (v = 1' 2 Зй)- C2Л5)
Мы получили зависимость между старыми и новыми скоростями, как мы
для краткости будем называть производные от координат по времени.
Кстати заметим, что для того, чтобы из этих уравнений по заданным
значениям старых скоростей t, можно было находить новые, или обоб-
обобщённые, скорости qa, функции ?V==SV(<?!,, t) должны предполагаться та-
такими, чтобы все Cs3a определителей вида
одновременно не обращались в нули. Вставив выражения C2.15) в ра-
равенства C2.5), мы получим следующие уравнения:
2 «f.?.+«p=o (Р=1« 2. ••• *). C2-16)
0=: 1
322
где
3n 3n
v=l 4° v=l
Как видим, уравнения для скоростей получились опять линейные, как
и в декартовых координатах.
Итак, новые координаты qa числом s — 3n— k связаны а — k урав-
уравнениями C2.13), а их производные qz подчинены а — k-\-b линейным
уравнениям: а—k уравнениям, которые получаются дифференцированием
по времени уравнений C2.13), т. е. уравнениям
Ъд^^ = о (a==kJr]t k + % ..., а) C2.1В)
и дополнительно b уравнениям C2.16).
Пример 95. Пусть материальная система состоит из одной частицы,
движущейся по поверхности эллипсоида
Выразив из этого уравнения координату г через х и у, находим:
Введём вместо х и у новые координаты qx и дъ положив
х = at sin qx cos q<t, у = bt sin qisiaq^,
тогда для z найдём выражение
z = ± ct cos q\.
Если эти значения х, у, z вставим в уравнение эллипсоида, то левая часть его
тождественно обратится в нуль. Точно так же легко проверить формулу
C2.12); например, для <7i имеем
dqx ~~ аЧ* ' dqx ~*~ Ь*Р ' dqx "*~ сНг ' dqx'
или, если х, у, z выразить через qx и q%
df 2at sin q, cos q» _, , 2bts\nqx sin a, , .
j^ = аЧ* —-e<cc»?iCos^H ^—2?«cosft sin?,-f-
+ (
Пример 96. Пусть неизменяемая система состоит из двух частиц
т1 и тъ находящихся на расстоянии /12. Шесть декартовых координат ча-
частиц тх и т2 связаны одним уравнением:
/= (хх - лг2)г+(Л - У"У + (*i - ггJ -1\\ = 0;
следовательно, одна из координат является функцией остальных пяти. Из этих
пяти координат мы оставим без замены три координаты хх, ух, гл, частицы
тх< а вместо остальных двух декартовых координат системы введём два угла
f и ф, определяющие направление вектора /л1/л2 = /12:
/\ /\ /\
cos(.r, /12) = sin cp cos ф, cos(j>, /12) = sin <p sin 6, cos (г, /12)=cos<p.
21* 323
Как видим, ? есть угол вектора /12 с осью Ог, а <|> — угол между ортогональной
составляющей вектора 112 в плоскости Оху и осью Ох. Все шесть декартовых
координат частиц системы следующим образом выражаются через пять коор-
координат хъ уъ zh if, <!>:
Эти шесть выражений удовлетворяют уравнению связи тождественно.
Пример 97. Положим теперь, что неизменяемая система состоит из трёх
частиц т\, /л2, Щ, не лежащих на одной прямой. Ес\ли расстояния между ча-
частицами соответственно равны /м, /и, /12, то уравнения связей, которым под-
подчинена система, напишутся следующим образом:
C2.19)
/s = (Xi - х# + (Л - ЛJ + (*1 - *2J - /?2 = 0. J
Введем, кроме неподвижных осеРгОхуг, оси ^4StiC, неизменно связанные с рас-
рассматриваемой системой частиц; при этом плоскость Alrfc совместим с плоскостью,
содержащей частицы. Пусть относительные координаты частиц будут
Si, ii. 0; 5г, t\s, 0; Es, ч8, 0;
они, очевидно, являются постоянными и удовлетворяют равенствам:
C2.20)
За новые координаты системы частиц ть ть ms мы примем те шесть величин,
которыми определяется роложение осей AbiZ, а именно, координаты хА, уА, zA
начала А осей и эйлеровы углы <р, ф. Ь (§ 55). Абсолютные координаты частиц
системы выражаются через эти шесть величин с помощью формул (8.4) иа стр.74,
которые в данном случае напишутся так:
C2.21)
х2 — хА + ап
У\ =Уа + «21
коэффициенты а^ являются направляющими косинусами .осей системы АЬ\С,
их значения видны из таблицы (8.3) иа стр. 74, а через эйлеровы углы они
выражаются с помощью формул (8.15) на стр. 77. Нетрудно убедиться, что вы-
выражения C2.21) тождественно удовлетворяют уравнениям связей C2.19): для
этого нужно принять во внимание зависимость C2.20) между относительными
координатами, а также соотношения (8.12) на стр. 75 между направляющими
косинусами.
К трём взятым частицам можно прибавить сколь угодно много других,
неизменно с ними связанных, и это не потребует введения добавочных обоб-
обобщённых координат для определения положения системы; иначе говоря, коор-
координаты любой точки неизменяемой системы или твердого тела могут быть пред-
представлены как функции шести величин: хА, уА, zA, f, ф, 9. Действительно,
относительные координаты добавляемых частиц будут постоянны, а абсолютные
выразятся по формулам (8.4) на стр. 74, как и координаты частиц /и1( ть ms.
Уравнения связей для новых частиц запишутся в той же форме, что и для
частиц тх, тъ т$ и, очевидно, как и для частиц mlt mit ms, будут тождественно
324
удовлетворяться, если декартовы координаты частиц выразить через обобщён-
обобщённые координаты системы.
Переходя к примерам на системы с неинтегрируемыми дифференциальными
связями, заметим, что движение таких систем почти исключительно изучают
с помощью соответственным образом выбранных обобщённых координат дя, а не
в декартовых координатах, почему излагаемый метод в данном случае приоб-
приобретает особо важное значение.
Пример 98. Пусть твёрдый шар радиуса а принуждён катиться без сколь-
скольжения по плоскости (фиг. 113). Плоскость качения примем за плоскость Оху
неподвижной системы координат, причём
ось Oz направим в ту сторону от этой
плоскости, в которой находится шар. С ша-
шаром неизменно свяжем систему осей АЪ&%
совместив её начало с центром шара. За
координаты рассматриваемой системы примем,
как и в предыдущем примере, декартовы
координаты точки А и три эйлеровых
угла, т. е.
Ха, У а, г а, <Р, Ф, а-
Запишем уравнения связей. По условию ско- Фиг. 113.
рость vB точки касания В равна нулю; с
другой стороны, согласно формуле (9.32) на стр. 93 скорость точки В
следующим образом выражается через скорость vA полюса А и мгновенную
угловую скорость <о тела:
vg = vА ~\- ч) X АВ.
Следовательно, мы имеем зависимость:
О — V А -\- о) X АВ.
Спроектировав это равенство на оси координат, находив:
О л * | л ' /Qrt ОО\
У . @®и У Л "Т* A1Л . л- \OZ.??)
Последнее уравнение интегрируется и даёт конечную связь
эта связь ЕЫражает то обстоятельство, что центр шара движется в плоскости,
параллельной плоскости качения и отстоящей от неё на расстоянии, равном
радиусу шара. В первых двух уравнениях C2.22) выразим- проекции угловой
скорости через эйлеровы углы по формулам (9.28) на стр. 91; тогда мы получим
хА-\-
У а + а (sin Ф sjn 9 • «р + cos ф •&) = ().
Это — два уравнения дифференциальных неинтегрируемых связей типа C2.5).
Пример 99. Пусть два твёрдых тела соединены весьма длинной гибкой
нитью, не поддающейся кручению (фиг. 114);
¦такую нить можно осуществить, если взять
ц'епь, составленную из ряда сочленений, извест-
известных под именем шарниров Кардано-Гука (Carda-
no-Hook). Найдём уравнение связи,' которой
подчинены рассматриваемые тела. Координаты
первого тела пусть будут хъ У\, гъ <рь ф^ 9Ь
а второго х2, Уь zit <p2) фг, 92- При этом две
системы подвижных осей выберем так, чтобы оси
A 4С
и /42Со совпадали с касательными в концах
б
Фиг. 114.
2
нити и обе были направлены к внутренней
части нити, как показано на чертеже. Связь,
очевидно, требует, чтобы проекции угловых скоростей тел на оси Л^ и /42С2
были равны по абсолютной величине и противоположны по знаку, т. е. чтобы было
Пр ;!«)! _f- Пр ;2(й2 = 0.
325
Отсюда по формулам Эйлера (9.30) на стр. 92 находим искомое уравнение связи
Ifi + cos 9, • <р", + |, + cos Эг • 'ъ = 0.
Полученное уравнение, очевидно, не интегрируется, так как даже не содержит
производных 9, и 9S.
189. Уравнения движения несвободной системы в обобщён-
обобщённых координатах. Пусть система отнесена к координатам qa, введённым
в предыдущем параграфе, и подчинена а—?k конечным связям C2.13) и
Ъ дифференциальным связям C2.16). Преобразуем уравнения движения
C2.1) к координатам <?„¦
Предварительно выведем несколько вспомогательных формул. Во-пер-
Во-первых, заметим, что скорости qa входят в правую часть формулы C2.15)
линейно; поэтому из этой формулы вытекает следующее соотношение:
А=—. C2.23)
Далее, вычислим полную производную по времени от частной производ-
производной -^ ; приняв во внимание, что эта производная, как и сама функция ?„
зависит от времени как явно, так и неявно посредством координат
Я\> "?2>- • •> Я if мы найдём:
Яо "Г
dt dq. — ^ dq,dq0 Яо "Г dqjSt ¦
С другой стороны, возьмём от Sv, исходя из выражения C2.15), част-
частную производную по qo; мы получим:
A = v J^-o -i-k.
dg0 Z*dqodqa4?~ dtdq/
p=i
Сравнив правые части двух последних выражений и приняв во внимание,
что если существуют непрерывные вторые частные производные, то
порядок дифференцирования не влияет на их значения, мы приходим
к равенству:
^^i = |ii. C2.24)
dtdqa dq, K '
Наконец, напишем выражение для кинетической энергии Т системы
в обозначениях C2.2) и C2.3); мы, очевидно, получим:
Зп
г=^Х< C2-25)
4 = 1
Возвращаясь к уравнениям движения C2.1*), умножим каждое из них на
-^ и возьмём сумму полученных равенств по индексу v; мы найдём:
'in in Зл а Зп Ь
326
Преобразуем сначала левую часть; мы можем написать:
1л ¦Зл <п
Воспользовавшись равенствами C2.23) и C2.24), находим:
'п Чл (в
наконец, если вспомним выражение C2.25) кинетической энергии, то
получим:
'in
m'id^L=:AK.— iL, C2.27)
dq0 * dt dqa dq.
Первую сумму правой части уравнения ,C2.26) обозначим Qa:
Ъп
v=I Ч"
Чтобы уяснить механическое значение величины Qo, заметим, что Q, пред-
представляет собой коэффициент при вариации соответствующей координаты да
в выражении элементарной работы активных сил системы на её произ-
произвольном виртуальном перемещении; действительно, обозначив эту работу
&4<л (в отличие от элементарной работы d'Aif) на действительном пере-
перемещении), мы, согласно второй формуле C1.33) на стр. 314, можем
написать:
ЬАО = 2 ^v • К = 2 (FJx, + Pviy, + FJz,),
vz=1 v=l
или, в обозначениях C2.2),
Зп
WF>='2lXj&i>; C2.29)
а так как
то
Зл *
переменив здесь порядок суммирования, получаем:
или
s
= X QM°> C2 30
0=1
327
это мы и хотели показать. Практически при вычислении коэффициентов Qo
задаются каждый раз таким виртуальным перемещением системы, чтобы
изменялась какая-либо одна координата qa; тогда, обозначив SA^F) соот-
соответствующую элементарную работу, получим
QM. (з=ь2 s).
Имея в виду аналогию между выражениями элементарной работы C2.29)
и C2.30) в декартовых и обобщённых координатах, величины Qg назы-
называют обобщёнными силами, хотя в отношении размерности эти
величины, вообще говоря, не однородны с силами. Когда активные силы /^
имеют силовую функцию U, т. е. когда
тогда и обобщённые силы получают аналогичные выражения; действи-
действительно,
Зл Зп
или
Q, = g? (o=l, 2, ...,s). C2.31)
Обратимся ко второму слагаемому правой части уравнения C2.26).
Изменив порядок суммирования и затем разбив все члены на две группы,
мы можем представить это слагаемое в следующем виде:
За a а Ъп a k a
Но согласно формуле C2.12) первая сумма в последнем выражении равна
нулю; поэтому окончательно сохраняется только а—k слагаемых, и мы
получаем:
in
Наконец, последний член уравнения C2.26), если изменить порядок
суммирования и применить обозначение C2.17), преобразуется следующим
образом:
Зп * ft Зл b
fZ C2.33)
Объединив всё сказанное, мы на основании выражений C2.27), C2.28),
C2.32) и C2.33) можем уравнения движения C2.26) написать в таком
виде:
328
Вместе с k — а уравнениями конечных связей C2.13) и Ъ уравнениями
дифференциальных связей C2.16) это — система s-j-a — k-\-b уравнений
с таким же числом неизвестных функций qv q2, . . ., qs; \k+v \+г, . . -Ла;
ji,, ji2, . .., ]ib. Чтобы уяснить себе порядок интегрирования этих уравне-
уравнений, необходимо сперва проанализировать выражение для кинетической
энергии. Вставив в формулу кинетической энергии C2.25) значения ско-
росгей C2.15), мы получим:
Зл Зл
Отсюда мы видим, что кинетическую энергию можно представить как со-
совокупность членов второго, первого и нулевого измерений относительно
скоростей qa, т. е.
— ^ 2 \~ 1 ~т~ ^ о> (о^.оо)
здесь
0^=1, р=1 0=1
где коэффициенты а , а„ и с следующим образом зависят от координат
и времени:
Зл Зл Зл
ор ^ РО
Впрочем, в частных случаях коэффициенты могут от времени и не зави-
зависеть, хотя бы выражения декартовых координат через обобщённые и со-
содержали явно время. Если конечные связи C2.13) системы явно не со-
содержат времени, то в силу условий C2.14) мы будем иметь:
т. е. кинетическая энергия будет однородной квадратичной формой от
обобщённых скоростей:
S, 1
\ Z <*М- C2.38)
Относительно самой квадратичной формы Т2 должно заметить, что её
определитель \аа \ не может обращаться в нуль. Для доказательства
рассмотрим сначала вышеуказанный частный случай, когда вся кинети-
кинетическая энергия состоит лишь из члена Т2. В этом случае удвоенная ки-
кинетическая энергия может быть представлена в виде:
27 = 27\, = <?, (а, ,<?, -f а12?2 + • • ¦ + auq\) +
329
Если допустить, что определитель |ао0| для данного значения / обра-
обращается в нуль, то оказалось бы возможным удовлетворить уравнениям
=0,
значениями q\, не равными нулю одновременно. Между тем, кинетическая
энергия, как видно из её выражения C2.25), обращается в нуль, только
когда все скорости ^ равны нулю; но если все ?„ равны нулю, то соглас-
согласно формулам C2.15) и C2.14) и все qc "равны нулю (ср. сказанное об
определителе уравнений на стр. 322). Обратимся к общему случаю, когда
среди производных -^ есть отличные от нуля. Рассмотрим, кроме данного
движения системы, при котором декартовы координаты частиц выража-
выражаются через их обобщённые координаты с помощью формул:
?„ = ?,(?„, /) (v=l,2, ..., Зп; 0=1,2,...,*),
некоторое вспомогательное движение тех же частиц: это вспомогательное
движение пусть определяется, во-первых, тем, что декартовы координаты ?v
зависят явно только от обобщённых координат qa, но не от времени, и,
во-вторых, в некоторый произвольно заданный момент времени tu коорди-
наты S, и их производные j-^ во вспомогательном движении принимают
те же значения, что и в данном основном движении. Этим условиям
в отношении вспомогательного движения, очевидно, можно удовлетворить
бесчисленным множеством способов. Как видно из формулы C2.35), ки-
кинетическая энергия во вспомогательном движении в рассматриваемый мо-
момент времени / будет равна члену Г2 в выражении кинетической энергии
основного движения. В соответствии с тем, что выше было установлено для
частного случая движения, мы отсюда делаем вывод, что и в общем случае
определитель |аз | квадратичной формы 7\, должен быть отличен от нуля.
Из формулы C2.35) мы получаем следующие выражения для произ-
дТ
водных —-:
(а= 1,2, ...,*).
Отсюда мы заключаем, что обобщённые ускорения qa входят в уравне-
уравнения C2.34) линейно: эти уравнения могут быть представлены в виде
я,г?1-}-Яа2?2+•••+«„<?, +Л, = 0 @=1,2, ...,*), C2.40)
где величины А-а являются функциями времени t, координат qz, скоростей
qa и множителей \а и jju.
Интегрирование системы уравнений C2.40), C2.13), C2.16) на-
надо вести следующим путём. Прежде всего исключаем неизвест-
неизвестные нам множители \ n jip. С этой целью дифференцируем по два
330
раза уравнения C2.13) конечных связей и по разу уравнения
C2.16) дифференциальных связей. Таким образом, находим а—k-\-b
так называемых условных уравнений, содержащих линейно ускорения q^.
Из уравнений C2.40) определяем ускорения qa как линейные функции
множителей связей: это всегда возможно в силу вышесказанного об
определителе \ат\. Вставляем найденные значения для ускорений в услов-
условные уравнения и получаем а — k-\-b уравнений, линейных относительно
неизвестных \а и ji3. Из этих уравнении и определяем множители Ха и ji^
как функции от t, qa, q^. В отношении последних уравнений можно было
бы сделать те же заключения, что и относительно уравнений C0.32) на
стр. 299, только вычисления теперь будут значительно сложнее. Подста-
Подставив найденные для множителей значения в уравнения C2.40), мы получим
систему s уравнений, содержащих только время t и s неизвестных функ-
функций времени qo с их первыми и вторыми производными по времени. Инте-
Интегрирование такой системы совокупных уравнений введёт 2s произвольных
постоянных (ср. § 177); из них независимыми останутся только
N=2s— 2a-{-2k — b. C2.41)
190. Независимые координаты системы. Число степеней свободы
системы без неинтегрируемых дифференциальных связей. Положим,
что рассматриваемая система не имеет вовсе дифференциальных неинтегри-
неинтегрируемых связей (Ь = 0). Допустим, далее, что выбранные нами коорди-
координаты qa таковы, что все конечные связи системы, если они существуют,
удовлетворяются тождественно, т. е. &=0. Тогда величины qa носят
название независимых координат системы, а число их s называется
числом степеней свободы данной материальной системы без не-
неинтегрируемых дифференциальных связей (т. е. голономной). Можно
также сказать, что независимыми координатами называются независимые
между собой параметры, определяющие положение системы. Так, говорят,
что свободная материальная частица имеет три степени свободы; частица,
принуждённая оставаться на данной поверхности, имеет две степени сво-
свободы; свободное твёрдое тело, т. е. тело, не подчинённое никаким внеш-
внешним связям, имеет шесть степеней свободы (см. примеры 76 на стр. 273 и
97 на стр. 324); неизменяемый отрезок (пример 96 на стр. 323) обла-
обладает пятью степенями свободы и т. д.
191. Уравнения движения системы в независимых координатах
(уравнения Лагранжа второго рода). Если неинтегрируемые диффе-
дифференциальные связи отсутствуют и координаты qa независимы, т. е. Ь — 0
и fe = 0, то уравнения движения C3.34) принимают вид:
Эти уравнения известны под названием уравнений Лагранжа второго рода.
Они представляют собой систему s обыкновенных уравнений второго по-
порядка с s неизвестными функциями времени qv q2, ...,qr Все 2s про-
произвольных постоянных, которые введутся при интегрировании этих урав-
уравнений, будут согласно формуле C2.41) независимы друг от друга. Инте-
Интегрирование уравнений Лагранжа в независимых координатах представляет
собой кратчайший путь для решения вопроса о движении рассматриваемой
331
системы, т. е. для нахождения координат qa системы в функции времени;
при этом способе число дифференциальных уравнений минимально и равно
числу степеней свободы системы. Если же мы желаем знать не только
движение системы, но и реакции связей, то мы должны дополнительно
обратиться к уравнениям с множителями типа C2.6) или C2.34). Движе-
Движение системы будет нам уже известно; следовательно, все координаты и
скорости системы будут известными функциями времени, а потому в урав-
уравнениях C2.6) или C2.34) будут неизвестными лишь множители Х7, вхо-
входящие в эти уравнения линейно. Множителей ji, в этих уравнениях не
будет, так как неинтегрируемых дифференциальных связей у рассматри-
рассматриваемой системы нет. Определив множители связей, мы по формуле C0.16)
на стр. 482 найдём и реакции связей.
В частном случае, когда активные силы обладают силовой функцией ?/,
уравнения движения C2.42) можно упростить. В этом случае согласно
формуле C2.31) мы имеем
<?.=^гв- C2-43>
Кроме того, так как функция U не зависит от скоростей, то
dT_=d(T+U) 3
дд, дда ¦
На основании формул C2.43) и C2.44) уравнения C2.42) после пере-
переноса всех членов в левую часть могут быть переписаны так:
= 0 (e==1, 2 ,}. C2.45)
f
dt дд0 dqa
Сумма Т-\-U кинетической энергии и силовой функции носит название
лагранжевой функции, или кинетического потенциала,
и обозначается буквой L:
L — T-\-U. C2.46)
Если силовая функция однозначна, то —?/= V есть потенциальная энер-
энергия системы, и, следовательно,
L = T— V, C2.47)
т. е. лагранжева функция равна превышению кинетической энергии над
потенциальной. Введя лагранжеву функцию, мы можем уравнения C2.45)
переписать так:
1^4 —— = 0 (з=1,2, ...,*); C2.48)
dt dq, dqa
это и есть та более простая форма уравнений Лагранжа второго рода,
которую они принимают при наличии у активных сил силовой функции.
Пример 100. Рассмотрим систему, состоящую из двух весомых частиц,
соединённых неизменяемым стержнем. Массы частиц пусть' будут ml и т^.
Ось Ог мы направим параллельно начальному положению тхтг стержня, а по-
постоянные углы, составляемые ускорением силы тяжести g с осями координат,
обозначим а, р, -у- Система имеет пять степеней свободы. За независимые ко-
координаты системы мы примем координаты Xq, \>q, zq её центра масс и два угла
<р и ф: первый угол пусть определяет наклон стержня к оси Ог, второй—на-
второй—наклон ортогональной составляющей стержня в плоскости Оху к оси Ох. Как из-
332
вестно, центр масс двух частиц делит расстояние между ними на два отрезка
а и Ъ, обратно пропорциональные массам частиц (§ 146, п. 7, стр. 246):
a nin
Т=щ' C2'49>
Декартовы координаты частиц выразятся через независимые координаты си-
системы следующим образом:
хх = хс 4- о- sin ? • cos ф,
дгз = хс — b sin if. cos <[>,
Ух = ус + a sin if -sin <[>,
Уг=*Ус — ь sin?-sinф,
Zi — Zq 4- a COS <p,
Z-i z= 2(; — ft COS if.
Продифференцировав эти равенства, найдём:
A:1 = ^c4-acos cp-cos<J>-cp — a sin <p -зшф-ф.
дг2 = дгс — ft cos cp • cos <|> • if 4~ b sin f • >in i/ • ф,
Л = Jc + a cos ?.sin ф• ip 4-e sin ip-cos ф-ф, ^ C2.50)
_V2= Ус — b cos e-sin ф-if — b sin (р-
г, —гс — a sin ?."?,
Вычислим кинетическую энергию системы. Имеем
или, на основании формул C2.50) и C2.49),
Т= j К«1 + и») (*с С С
где для сокращения буквой 7 обозначен момент инерции системы относительно
центра масс, т. е.
7
Активные силы, приложенные к системе, имеют силовую функцию U. Легко
находим, что
U=g(ml4-m%)(xc cosa-\~yccos}+zc cosi).
Уравнения движения C2.48) напишутся так:
xc = gcosa, jyc = ,gcos?, "rc = ^cosY,
'ip — sin f cos cp • ф'а = 0, ^ (У sin2 ? • ф) = 0. C2.51)
Первые три уравнения могут быть непосредственно проинтегрированы и дают:
хс = ^cos а • — 4- xcot + хсо,
Ус=^ cos Р • j + У cot 4-jvco.
-2rC = 5rC0S T • -Tj- 4- •
значком 0 мы условимся обозначать начальные значения соответственных функ-
функций времени, т. е. их значения для t = 0. Из последнего уравнения C2.51) вы-
вытекает:
7sin2 ip-ф = const. = У sin2 уо-фо=: 0,
333
так как по условию ifo = O; следовательно, или <f> = 0 или у = <ро = О. В послед-
последнем случае стержень движется поступательно; в первом случае ф = ф0. При
этом условии предпоследнее уравнение C2.51) даёг <р=0, откуда следует:
Т =
Это выражение содержит как частный случай выше полученный результат
<р = <р0. Таким образом, движение системы вполне определено.
Если мы пожелаем найти реакцию стержня, то должны обратиться к урав-
уравнениям с множителями связи, например, в декартовых координатах. Уравнение
связи и уравнения движения с множителем связи для частицы т\ напишутся
в этом случае так [см. формулы C2.4) и C2.6)]:
Л = (*1 ~ xtf + (л - ytf + (г1 - zif - (fl + Ъ? = 0.
mi"yi = migcos р + 2Х(ух —у2),
2Х (zx — г2).
Чтобы определить А, возьмём хотя бы последнее из этих уравнений. Заменив
в нём Zy и гг их выражениями в функции времени, мы получим для \ такое
вначение:
>—
Отсюда находим, что реакция /}г, действуюшая на частицу т\, имеет выражение;
/?1 = 1 grad,/=-
откуда
192. Приведение уравнений Лагранжа второго рода к системе
уравнений первого порядка. Система * совместных уравнений второго
порядка C2.42) относительно s неизвестных функций времени может
быть заменена системой 2s совместных уравнений первого порядка,
содержащих 2s неизвестных функций времени. С этой целью мы обра-
обратимся к уравнениям C2.40) и выразим множители X, и ji9, входящие
в величины Аа, через qa, q3 и t, так, как это было указано выше; затем
решим полученные таким образом уравнения относительно ускорений qa;
тогда мы придём к уравнениям вида
q. = Р. V, д„дв) @=1,2,8,..., s), C2.52)
где Ря (t, qa, qa) являются некоторыми функциями указанных в скобке
аргументов. Вместо s величин qa станем теперь рассматривать 2s неиз-
неизвестных функций времени
'
Эти 2s функций будут связаны друг с другом и с временем следующими
2s уравнениями:
d'qx __ d'qi __ __ dq^___ dch_dq^__ _dqs_dt ^,2 52,)
P\ Pt " ' Ps k\ Яг "' k, 1 '
Когда нам удастся отыскать 2s первых интегралов этой системы
слд'.'д.'Ъ = с, (v = i, 2, ...,2s),
334
где Cv—произвольные постоянные, то из полученных таким путём 2s
уравнений мы сможем определить qa и qa как функции Cv и t:
при этом в соответствии с уравнениями C2.53) должно, конечно, ока-
оказаться, что
dt *<>•
Задача о движении системы будет вполне решена.
193. Уравнения движения Якоби для консервативной системы.
Пусть данная материальная система без неинтегрируемых дифференциаль-
дифференциальных связей консервативна: пусть связи её не зависят явно от времени,
а активные силы имеют однозначную силовую функцию U, зависящую
только от координат. При выполнении первого условия, как мы видели
(§ 189), систему можно отнести к таким независимым координатам, чтобы
кинетическая энергия системы представилась однородной функцией второй
степени от скоростей с коэффициентами, не зависящими явно от времени.
Обобщённые силы, являющиеся частными производными от силовой функ-
функции, тоже в нашем случае не содержат явно времени. Следовательно,
время явно не войдёт и в выражение лагранжевой функции, а также
в уравнения движения C3.42) или C2.48) и в те функции, которые
мы в предыдущем параграфе обозначили Ра. Поэтому, когда систему
уравнений C2.48) мы заменим системой уравнений первого порядка
C2.53), то первые 2s отношения окажутся свободными от t. Благо-
Благодаря этому обстоятельству интегрирование системы C2.53) можно
упростить. Отбрасываем последнее отношение у и вместо системы 2s
уравнений интегрируем систему 2s— 1 уравнений:
а4\ __ d.q<i _^?с_ djh dq^ __^9> C2 54}
^i P% ' ' ps 4x 4t ' 4s '
Пусть мы нашли 2s—1 первых интегралов этой системы:
сх(Я,*Я.) = <к ft =1.2, ...,25-1).
С помощью этих уравнений определим 2s—1 из величин q^ и qa, как
функции от одной из них, например qv и произвольных постоянных Сх:
Теперь примем во внимание и последнее отношение в ряду C2.51); берём
уравнение
4х
и вставляем сюда вместо qt его выражение через qx и Сх; мы получаем
dt= —
335
отсюда находим квадратурой время /:
14- т = Г-г-^1—, C2.55)
где т — произвольное постоянное, дополняющее число постоянных Сх до 2s.
Таким образом, в рассмотренном случае интегрирование системы 2s урав-
уравнений свелось к интегрированию 2s — 1 уравнений и к нахождению одной
квадратуры.
Теперь припомним, что для консервативной системы мы знаем наперёд
овдн интеграл уравнений движения, а именно, интеграл энергии [C1.40)
на стр. 316]:
T=U+h. C2.56)
С его помощью мы можем в уравнениях C2.54) исключить одну из пе-
переменных, например qv выразив её как функцию от остальных и посто-
постоянной h:
Тогда, вместо системы уравнений C2.54), придётся интегрировать следую-
следующую систему 25 — 2 уравнений:
dq« _ d'qz __ _ da, __Лдг __dq2 _ __dQs C2 57)
Pt Pi '" Ps °> Яг " ' Я, '
Здесь в выражениях Р2, ...,PS везде, вместо qx, вставлена функция со.
Таким образом, полная система интегралов уравнений движения состоит
из 2s—2 интегралов системы C2.57), интеграла энергии C2.56) и инте-
интеграла C2.55), получающегося квадратурой.
Система 2s—2 уравнений первого порядка C2.57) может быть за-
заменена системой s — 1 уравнений второго порядка. С этой целью пре-
преобразуем уравнения C2.42), введя в них независимую переменную qv
вместо t. Выпишем уравнения C2.42), начиная со второго, при этом вы-
выразим в них обобщённые силы через силовую функцию по формуле C2.31);
имеем
Прежде всего замечаем, что для всякого а имеет место соотношение
^ = ^=Ч\ (о = 2,3 s), C2.59)
где qz, следовательно, означает полную производную от qz no q . Затем
в выражении C2.38) для кинетической энергии вынесем множитель q\ за
скобку; мы получим:
или, в сокращённой записи:
T = q\G, C2.60)
336
где функция О зависит только от qv qv ..., qt и производных д"а:
°=4 {«„ + Ч.Й + 2W'3+W? + 2ах<Я\ + 2в18?; fli +...}. C2.61)
Отсюда найдём:
(?Г (jy (?ff. . да
— =—r-4^ = 9i—r» C2.62)
и
"??г. C263)
аг
Вставим в интеграл энергии C2.56) выражение Т по формуле C2.60);
из полученного уравнения найдём:
^^ C2-64)
Формулы C3.62) и C3.63) перепишутся так:
д'ч, ~~~\
дТ U +
dq ~ G
/ U-j-h
' а '
h да
'dq-
за
C2.66)
Производная по времени г~ на основании соотношений C2.65) и
dtdq,
C2.64) преобразуется так:
dtdq, 4'dq,dqa
Ед-°\ C267)
dq')' ' '
О ад1\У О. dq,'
Подставив выражения C2.67) и C2.66) в уравнения C2.58), находим:
+1 d {
G dq.y]/ О
/Ё
U+]i. dO\ U+fidO dU __
О ' dq'J О dq. dq,~
Умножив все члены на — у „ , мы получим:
yu-j-fi
do\_ t У1Т+Ъ^да \_
dq'J 2 /G ' dq, 2
y
Введём функцию
P==VO(U-\-h);
тогда окончательно придём к уравнениям:
J-^-^ = 0 (a = 2, 8
dqx oqa dqa
dq
C2.68)
C2.69)
Эти уравнения были выведены Якоби (Jacobi) l). При интегрировании
этой системы введутся 2s — 2 постоянных; кроме того, постоянная h со-
содержится уже в интеграле кинетической энергии; последняя постоянная т
!) Якоби, Лекции по динамике, ГОНТИ, 1936; лекция 6-я.
22 г. К. Суслов
337
прибавится, когда по формуле C2.64) возьмём квадратуру:
C2-70)
После интеграции системы уравнений C2.69) мы будем в состоянии опре-
определить все геометрические свойства движения системы, и только зависи-
зависимость координат от времени останется неизвестной, пока не будет взята
квадратура C2.70).
ГТример 101. Рассмотрим движение весомой частицы в вертикальной
плоскости. Плоскость, в которой происходит движение, берём за плоскость
Ovz и ось Oz направляем вертикально вверх. Если масса частицы равна еди-
единице, то её кинетическая энергия и силовая функция будут соответственно
равны:
r=i(^ + i«), U = ~gz,
где g — ускорение силы тяжести. За независимую переменную принимаем г,
т. е. положим дг — z\ тогда мы получим:
Т= I Р A +У2),
где У = —. Отсюда по формулам C2.61) и C2.68) находим:
G=: IП 4-У2), Р= -|= V(-
Рассматриваемая система имеет две степени свободы E = 2), следовательно,
уравнений типа C2.69) будет только одно:
?_ дР_дР==0
dz ду' ду
дР
Р не содержит у следовательно^ -г- =0, и предыдущее уравнение непосред-
непосредственно интегрируется; мы получаем:
dy'~L'
дР
где С — произвольная постоянная. Вычислив производную , ,, находим:
f
V2 у
у i+У2
откуда
^=Д=у-^-м.' <32JI)
где
Проинтегрировав это уравнение, получаем уравнение траектории
My:
g
где В — новая постоянная.
Чтобы найти зависимость координат от времени, обращаемся к квадратуре
C2.70); имеем
'4A+-У2)
Z -dz.
V-gz
338
Обратимся к формуле C2.71); из неё вытекает следующее равенство:
следовательно,
отсюда находим:
g
Этим задача интегрирования уравнений движения заканчивается.
XXXIII. СОЮЗНОЕ ВЫРАЖЕНИЕ КИНЕТИЧЕСКОЙ ЭНЕРГИИ.
УРАВНЕНИЯ ГАМИЛЬТОНА
194, Обобщённые иншульсы. Союзное выражение кинетической
энергии. Самые обшие уравнения движения несвободной системы в обоб-
обобщённых координатах и при наличии как конечных, так и дифференци-
дифференциальных связей были даны нами в формуле C2.34) на стр. 328. Интегрирова-
Интегрирование этой системы уравнений второго порядка всегда может быть заме-
заменено интегрированием системы вдвое большего числа уравнений, но
первого порядка. Для этого нужно прежде всего исключить множители
связей приёмом, указанным в конце § 189, и привести уравнения к виду
C2.40)- на стр. 330. Затем следует разрешить эти уравнения относи-
относительно ускорений qa, т. е. представить эти ускорения как функции вре-
времени, координат и скоростей подобно тому, как это было сделано при
написании формул C2.52) на стр. 334:
Отсюда можно перейти к уравнениям:
dq'\ dq\ dqs dqr dqs dt ,„..
____ t-s-j; T~~' ( ]
сделав это совершенно так же, как и при выводе формулы C2.53)
на стр. 334.
Полученные уравнения заключают в себе 2s неизвестных функций
времени qa и qa. Вместо 5 последних функций qe удобнее ввести в рас-
рассмотрение функции ра, линейно связанные с ними такими уравнениями:
P, = f, C3.2)
или, подробнее,
Р. = aoi Ь + «.»?«+..•+ й« Я, + а, C3.3)
[ср. формулу C2.39) на стр. 330]. По аналогии с декартовыми коорди-
координатами, для которых по формуле C2.25) на стр. 326
дТ i
22* 339
величины ро называются обобщёнными импульсами. Решив уравнения
C3.3) относительно скоростей qa, получаем:
Я. = *.Л + »аР, + ¦¦•+ basPs + *,. C3.4)
Найдём соотношения между коэффициентами аа и А . Согласно форму-
формулам C2.37) на стр. 329 определитель Д, составленный из коэффициен-
коэффициентов а , является симметрическим. Обозначим Аа адъюнкту элемента аа.
Тогда, очевидно, будем иметь
b =^ss = 4e? = A
«Р Д Д 9"'
Если в выражения C3.4) вставим значения C3.3) для ра, то правые
части должны тождественно обратиться в qa, а потому между коэффи-
коэффициентами ая?, b , ac, ba должны иметь место соотношения:
* ( 0, если
bB-\- 2j chPak==:^- C3.6)
Соотношения C3.5) и C3.6) вытекают также из свойства адъюнкт ABf
определителя Д. Если, наоборот, значения C3.4) для qa вставим в вы-
выражения C3.3), то правые части должны тождественно обратиться в ра;
отсюда опять получаются соотношения C3.5), а также следующие:
Всякая функция <р от координат q^ скоростей да и времени t в силу
уравнений C3.4) может быть преобразована в функцию <р от t, да и им-
импульсов рв:
? (А ?^ ?.) = ? С ?^ л);
дугою над буквой <р мы отмечаем, что зависимость <р от аргументов
?, ^, /7о, вообще говоря, совсем не та, какова была раньше в отноше-
отношении аргументов t, qz, q3. Когаа в какой-либо функции скорости при по-
помощи уравнений C3.4) заменены импульсами, мы будем говорить, что
взято союзное выражение этой функции; так, <р служит союзным выра-
выражением функции (р. Переменные t, qa, qv называются лагранжевыми
переменными, а переменные /, q0, pQ — каноническими.
Рассмотрим, каково будет союзное выражение кинетической энергии
системы. Мы видели, что кинетическая энергия Т в общем случае мо-
может быть представлена как сумма однородных функций второй, первой
и нулевой степени относительно скоростей [формула C2.35) на стр. 329];
7'=7-,+ 71+7i, C3.7)
где
c=l,f = l 0=1
340
Рассмотрим сумму:
Вспомним известную теорему Эйлера об однородных функциях: если
функция ю(ну), где v=l,2,...,n, однородна относительно аргумен-
аргументов kv, и притом степень её однородности равна k, то
п
v=l
На этом основании предыдущее равенство может быть переписано так:
Прибавим к обеим частям этого равенства сумму 7", —(- 2 7~0; тогда
справа согласно равенству C3.7) получится 27", и, следовательно, для
кинетической энергии мы можем написать выражение
S
0=1
Вставим сюда значения C3.4) для qa; тогда, обозначив Т союзное выра-
выражение кинетической энергии, мы найдём:
S, S i S
(
0=1, р==1 а=1 а=1 р —1 * в=1
Переменив в третьем слагаемом правой части порядок суммирования,
мы можем второе и третье слагаемые соединить в одно следующее:
1
1(
0 = 1 р=1
по свойству C3.6) эта сумма обращается в нуль. Таким образом, иско-
искомое союзное выражение кинетической энергии будет:
Т= Г2 -|- 7Ь,
где
0=1, р = 1 0=1
Как видим, союзное выражение кинетической энергии не содержит вовсе
членов, линейных относительно обобщённых импульсов.
Пример 102. Для декартовых координат Е„ введённых в § 188
с помощью формул C2.2), импульсы будут иметь выражение
Л —m»s;
341
следовательно, союзное выражение кинетической энергии будет
?=4У^. C3.9)
Пример 103. В сферических координатах г, яр. 4> кинетическая энергия
имеет выражение
Т= у m (?> + /4 '
поэтому импульсы будут
рх = mr, р% = i*\, pi = mrl cos2 Ф • <р2;
следовательно, союзное выражение кинетической энергии напишется так:
Пример 104. Рассмотрим эллиптические координаты (§ 156) и найдём ки-
кинетическую энергию и efi союзное выражение.. Возвысим в квадрат равенства
B6.31), B6.32), B6.33) на стр. 262, прологарифмируем их и затем продифферен-
продифференцируем; мы получим:
2dx d\ , d\z
-+¦
X — «2_f_ij "г a? + U^ a*+\3 •
2dy _ d\ dlt , dh
у — P + i, "t- Ьч + i2 ¦+- b% + ^ <
2dz _ rf<2 rfX2 din
г — c« 4- \ + c2 4- )ij + c« 4- X, •
отсюдайлг24-'0'24-а(г21 причём воспользуемся обозначениями B6.35),
B6.36), B6.37) на стр. 263, а также соотношениями B6.30) на стр. 262;
-мы найдём:
\ 4- ф\\ 4-
Отсюда для кинетической энергии получим следующее выражение:
Теперь определим импульсы; имеем
Со'юзное выражение для кинетической энергии получается следующее:
Пример 105. Рассмотрим материальную систему, движущуюся в пло-
плоскости и состоящую из двух частиц т^(хъу{) и «2(je2, j/2). имеющих равные
массы /я; частица пц пусть при этом остаётся на прямой
в другая пусть связана с ней стержнем, длина которого равна а. Число сте-
степеней свободы системы равно двум. За независимые координаты выберем х\
н угол if, который стержень mi«2 образует с осью Ох. Тогда
лг1 = д;1, ,y1 = /i, лг2 = дг! 4-в cos f, уъ = It -\- a sm f.
342
Продифференцировав эти равенства, находим:
Отсюда получаем для кинетической энергии такое выражение:
х\ \- —
= х\ -\- — «V — я sin i
Здесь в соответствии с обозначениями C3.7) имеем
тг = *i 4- -J eV — а sin ?'
7\ = а/ cos у ¦ if.
Для импульсов получаем следующие выражения:
Pi = 2jti — a sin ip • if,
/72 = — a sin <p ¦ atj -f- «2|p -f- a/ cos ip.
Решив эти уравнения относительно скоростей, находим:
Х
os^) ~~ ai Sin ' 'C0S ?)>
(a i ip -f- 2/>2 — lal cos ip).
Чтобы составить союзное выражение кинетической энергии, воспользуемся
равенством C3.8); имеем
2f = Plx\ 4-ft? 4- П + 2Г0 =
¦[efip\4-2аsin 9-/^р24-2/^ — a2/sin<f cos ip• p\ — 2fl/cosip-p2] 4-
После упрощений найдём:
+ 2a sin '
195. Теоремы Донкина. Уравнения Гамильтона. Канонические
уравнения. Прежде чем приступим к замене скоростей импульсами в
системе уравнений C3.1), выведем некоторые вспомогательные теоремы,
полученные впервые Донкином (Donkin) '). Пусть мы имеем некоторую
функцию X от независимых переменных jco(a=l, 2, 3,.. .,s); рассмотрим
новые переменные уа, следующим образом связанные с прежними:
дХ дХ дХ дХ ,„„ ,оч
.Если из этих 5 уравнений возможно определить переменные хя как
функции от переменных у (р= 1, 2,.. .,s), т. е.
Philos. Trans., 1854.
343
то, оказывается, все ха в свою очередь выражаются как частные произ-
производные от некоторой функции У, зависящей от переменных у-.
В самом деле, из равенств C3.12) вытекает, что
0=1
Прибавим к обеим частям этого равенства выражение
мы получим:
2 *&.+dX=2 w*.+*ж>.
о=) о=1
ИЛИ
2 2 j.-dx=d ( 2 *•?.-* V
0=1 О=1 \ 0=\ )
Отсюда ясно, что выражение
2 *&.
0=1
представляет собой полный дифференциал функции Y, определяемой
равенством
0=1
таким образом, соотношения C3.13) доказаны. Кроме того, мы видим»
что обе функции А и У следующим образом связаны друг с другом:
а-+г=2*л- C3-14>
0=1
Написанное равенство станет тождественным лишь тогда, когда обе части
выражены только через переменные ха или только через переменные уа.
Положим теперь, что функция X содержит,, кроме переменных ха,
ешё другие переменные ?а в произвольном числе. Тогда эти переменные,
вообще говоря, войдут как параметры в уравнения C3.12), а следователь-
следовательно, и в функцию Y. Сравним между собой производные от функций X и Y
по этим переменным. Продифференцируем равенство C3.14) по ?в, пред-
предположив, что все переменные выражены через переменные ха; имеем
Х
Согласно равенству C3.13) члены, содержащие символы 2, уничтожаются,
и, следовательно, мы получаем:
дХ— дУ /ЧЧ1Ч\
Жа=—Щ' <ЗЗЛ5)
344
Пример 106. Пусть функция X равна
тогда
у, =
Отсюда получаем:
х —
Функцией К, очевидно, служит
У = 2
Соотношение C3.14) напишется так:
Отсюда получаем следующие значения частных производных j, и ^:
дХ
dY— УУ\У-Уъ — г v v
таким образом, равенство C3.15) выполняется.
Положим теперь, что функцией X служит кинетическая энергия 7"
рассматриваемой материальной системы, а за переменные ха взяты ско-
скорости qa; тогда переменными уя будут импульсы р'.
Согласно теоремам C3.13) и C3.14) из этих уравнений вытекает, что
?о = §|. (ЗЗЛ7)
где фунция Ф равна
здесь скорости qa должны быть, конечно, выражены через импульсы.
В выражение кинетической энергии Т, кроме скоростей, входят ещё ко-
координаты qg; при этом согласно формуле C3.15) мы имеем
Г=-?- (ЗЗЛ8)
Обратимся к уравнениям C2.34) на стр. 328; предположим, что
множители связей уже выражены через переменные t, qa, qa; тогда в со-
соответствии с формулами C3.16) и C3.18) эти уравнения можно будет
переписать так:
345
Дугой мы попрежнему обозначаем, что для соответственных функций
должно быть взято союзное выражение. Когда к s уравнениям C3.19)
присоединим ещё s уравнений C3.17), а именно,
^ = — (а =1,2 s) C3 20)
то и получим искомую систему 2s уравнений первого порядка относитель-
относительно 2s неизвестных функций времени qa и р7. Выведенные уравнения
C3.19) и C3.20) н называются уравнениями Гамильтона (Hamilton).
Когда координаты qa независимы, т. е. когда вместо общих уравне-
уравнений C2.34) иа стр. 328 мы имеем уравнения Лагранжа второго рода
C2.42) на стр. 331, гамильтонова система уравнений принимает вид
C3.21)
х^ I
dt
Пусть силы имеют силовую функцию, хотя бы зависящую явно от
времени, т. е. пусть в согласии с формулой C2.31) иа стр. 328 имеет
место равенство
где ?/=?/(gf<], (). Так как U ие зависит от скоростей, а следовательно,
и от импульсов, то, кроме того, мы имеем соотношение
В результате, вместо уравнений C3.21), мы можем написать:
dp,^_ <?Ф . дЦ __ д(Ф — Ц)
~ dqidq~
dt~ dq,idqt~ dqa '
^Ф ^Ф dU_ д (Ф — U)
др др dpi др
-T—U=H, C3.22)
@=1,2,...,*). C3.23)
Уравнения Гамильтона, записанные в этой форме, носят название кано-
канонических уравнений.
Когда рассматриваемая нами материальная система консервативна,
т. е. активные силы имеют однозначную силовую функцию, зависящую
только от координат, и конечные связи тоже не зависят явно от времени,,
функция Н принимает весьма простой вид. В этом случае кинетическая
энергия согласно формуле C2.38) на стр. 32S представляется однородной
346
Если положить
то предыдущие
dt
др.
U=
др0 с
уравнения примут вид
dp.
~dt =
dt -
дН
дН ч
W.' 1
J
функцией второй степени от скоростей; следовательно, по теореме
Эйлера мы имеем
На этом основании для Н по формуле C3.22) получается следующее
выражение:
Н=Т — и, C3.24)
т. е. Н есть союзное выражение полной энергии системы [см. формулу
C1.41) и C1.42) на стр. 316]. Другими словами, союзное выражение
интеграла энергии будет
H = h. C3.25)
ОТДЕЛ III
ОБЩИЕ ПРИНЦИПЫ МЕХАНИКИ
XXXIV. ДИФФЕРЕНЦИАЛЬНЫЕ ПРИНЦИПЫ
196. Предварительные замечания. В общем курсе динамики системы
изложены так называемые законы динамики, т. е. некоторые об-
общие теоремы, указывающие, как изменяются скорости частиц системы в
зависимости от данных активных сил н от реакций связей. Это были, за-
закон изменения количества движения, закон изменения кинетического мо-
момента н закон изменения кинетической энеогии. Каждая такая теорема в
частном предположении об активных силах н реакциях систе"мы может
непосредственно привести к интегралам уравнений движения: к закону
сохранения количества движения (или сохранения движения центра масс),
к закону сохранения кинетического момента, к закону сохранения энер-
энергии. Но зато, вообще говоря, ни один из названных законов не в состо-
состоянии заменить собой всей совокупности уравнений движения системы.
Другими словами, движение системы в общем случае не может быгь
вполне охарактеризовано одним каким-либо из упомянутых законов.
Те общие положения, которыми мы желаем теперь заняться и кото-
которые носят название принципов, или начал, отличны от законов
динамики. Конечно, и принципы выражают собой некоторые свойства
движения системы, но ни один из них не даёт интегралов уравнений
движения, хотя бы при частных свойствах сил системы, если все вели-
величины, входящие в выражение начала, сохраняют своё общее значение.
Зато, с другой стороны, каждый принцип вполне характеризует движе-
движение системы и эквивалентен всей системе дифференциальных уравнений
движения, т. е. из каждого принципа соответственные уравнения движе-
движения могут быть выведены как следствия.
Все принципы по форме своей разделяются на две категории: на
принципы дифференциальные и интегральные. К первым относятся:
принцип Даламбера (D'Alembert), принцип виртуальных перемещений
[принцип Лаграижа (Lagrange)J, принцип наименьшего принуждения. Все
347
дифференциальные принципы представляются дифференциальными равен-
равенствами или неравенствами. Ко вторым принадлежат: принцип стационар-
стационарного действия в форме Гамильтона (Hamilton), принцип стационарного
действия в форме Лагранжа, принцип Гельмгольца (Helmholtz). Все
интегральные принципы выражаются свойствами некоторых интегралов.
Принципы первой категории более общего характера: они прилагаются
к системам со связями как конечными, так и дифференциальными, причём
последние могут быть интегрируемыми и неинтегрируемыми. Принципы
второй категории несправедливы для систем с неинтегрируемыми диф-
дифференциальными связями, т. е. они верны только для голономных систем.
Законы движения получаются из принципов как следствия, если сде-
сделать частные предположения о тех произвольных величинах, которые
заключаются в выражениях принципон.
197. Принцип Даламбера. Вернёмся к уравнениям движения несво-
несвободной системы (§ 177), подчинённой а конечным связям
A(*,.J\.V)>° (a =1,2,...,а) C4.1)
и b дифференциальным связям типа
?з = 2 Bf-v,+ D^0 @=1,2,..,*).
•v=l
Если все связи находятся в напряжении, то уравнения движения могут
быть записаны в таком виде:
п Ь
/\ — я,», + 2 К??Ч/,+ 2|isfif = O (v = 1,2,.... л). C4.2)
о=1 4=1
Пусть, как и прежде (§ 171), Srv обозначает вариацию радиуса-век-
радиуса-вектора г, частицы /и„, т. е. виртуальное перемещение этой частицы. Если все
связи — удерживающие, вариации Srv должны удовлетворять условиям:
*Л= 2
;-' } C4.3)
*^=2fiv(W-^=s0 (P= 1,2 ft). J
Если же которые-нибудь из связей неудерживающие, например /а и tpp, то
и условия, которым подчинены вариции, заменятся следующими:
§/о>0, 5t?3>0; C4.4)
при этом знак равенства должен ставиться в случае неосвобождающих
перемещений, а знак «больше» — в случае освобождающих.
Вспомним также, что множители связей \ и р.$ для неудерживающих
связей не могут быть отрицательными, т. е.
348
Умножим каждое из уравнений C4.2) скалярно на Srv и после этого
возьмем сумму всех уравнений; при этом в окончательном результате
переставим порядки суммирований в третьем и четвёртом слагаемых; по-
получим:
2 (/=,-mvw, ) • §rv + ?\Jtfa + 2 1*з Stpp = 0. C4.5)
v=1 а=1 P=I
Если все связи удерживающие, то, согласно формулам C4.3), члены, со-
содержащие множителей связей, обратятся в нуль; если хотя бы некото-
некоторые связи неудерживающие, упомянутые члены с множителями, в силу
соотношений C4.4), или нули, или положительны. На основании сказан-
сказанного из выражения C4.5) следует, что для системы с удерживающими
связями справедливо равенство
п
2 (Л — и», »,)•&¦, = 0, C4.6)
v=l
а для системы, у которой хотя бы некоторые связи неудерживающие,
имеет место равенство, соединённое с неравенством
2(F, —mv«;v).Sr,<0; C4.7)
V = I
знак равенства должен ставиться в случае неосвобождающих виртуальных
перемещений и знак «меньше» в случае освобождающих. Формулы
C4.6) и C4.7) представляют собой аналитическое выражение принципа
Даламбера (D'Alembert). По причинам, которые будут разъяснены
ниже (§ 198), величина /^ — mv«\ называется потерянной силой.
Мы видим, что сумма элементарных работ потерянных сил на любом
виртуальном перемещении соответственно равна нулю нли не положи-
положительна, смогря по тому, будут ли все связи удерживающие или среди
них есть и иеудерживающие. Впоследствии (§ 198) принцип Даламбера
мы выразим в иной форме. Уравнение C4.6) называют общим урав-
уравнением механики.
Мы вывели принцип Даламбера как следствие из уравнений движения
C4.2). Можно поступить обратно: принять за исходное положение прин-
принцип Даламбера и из него получить как следствие уравнения движения
C4.2). Допустим сперва, что система подчинена удерживающим связям:
Л=°. %=° B=1,2 а; 0=1,2 Ь),
и пусть, следовательно, соблюдается равенство C4.6). Если бы все вир-
виртуальные перемещения §г, частиц были произвольны, т. е. система была
свободной, то равенству C4.6) можно было удовлетворить, лишь поло-
положив:
F4— myw, = 0 (v=l,2,...,n);
это и были бы уравнения движения свободной материальной системы.
Но у рассматриваемой несвободной системы виртуальные перемещения
стеснены условиями C4.3); следовательно, только Зл—а—b проекций
перемещений, или, что то же, вариаций координат, произвольны, или
независимы, остальные же являются их функциями. Для исключения ва-
349
риаций координат мы воспользуемся тем же приёмом, который примени-
применили в § 175. А именно, умножим каждое из равенств C4.3) соответ-
соответственно на некоторые множители \ и jjtg и прибавим их после этого к
равенству C4.6); мы вернёмся к равенству C4.5):
2 (Л —«>«\)-*\ + 2и/. + 2 Из§<Рз=О. C4.8)
l 01
2 (Л >\)\ + 2и. + 2
В более подробной записи, расположив члены по вариациям координат
и перейдя к обозначениям C2.2) на стр. 320, мы получим:
з» а ь
2/*, - '«v 'к+2 v^+ р2 *> адь=о. C4.9)
Введёнными а-\-Ь неопределёнными множителями распорядимся теперь
так, чтобы коэффициенты при зависимых вариациях координат, число
которых также равно а -(- Ь, обратились в нули; тогда у нас останутся
лишь члены с независимыми вариациями координат, а следовательно,
коэффициенты прн них также должны быть нулями, иначе последнему
равенству нельзя было бы удовлетворить при любых значениях этих
независимых вариаций. Мы видим, что опять, как и в § 175, формально
исчезает различие между зависимыми н независимыми вариациями коорди-
координат; приходится коэффиценты при всех вариациях приравнивать нулю.
Выполнив указанные действия, мы от выражения C4.8) вернёмся к
уравнениям C4.2^. т. е., исходя из принципа Даламбера C4.6), мы действи-
тепьно получили дифференциальные уравнения движения системы.
Когда между связями системы есть и неудерживающие, рассуждения
придётся несколько видоизменить. В рассматриваемом случае выражение
принципа Даламбера имеет вид C4.7), а вариации координат подчинены
условиям C4.4). Дадим сначала системе какое-либо неосвобождающее
премещение. Тогда, согласно формулировке принципа Даламбера, в фор-
формулах C4.7) и C4.4) следует сохранить лишь знак равенства. Отсюда
тем же путём, как и для удерживающих связей, мы приходим к урав-
уравнениям движения C4.2). Теперь заметим, что коэффициенты при вари-
вариациях координат в уравнении C4.9) не зависят от этих вариаций; сле-
следовательно, нуль в правой части уравнения C4.9), или, что то же, урав-
уравнения C4.8), получится и при освобождающем перемещении. Но так как
в выражении C4.7) в рассматриваемом случае следует взять знак равен-
равенства, соединённого с неравенством, то мы отсюда получаем следующее
добавочное условие:
Пусть мы сперва дали системе такое виртуальное перемещение, что в
ослабление пришла только одна связь /а; тогда в левой части последнего
неравенства сохранится лишь один член \Jbfa, откуда, ввиду положитель-
,ности множителя Ь/а, мы должны сделать вывод, что \ неотрицательно.
Повторив это рассуждение в отношении остальных множителей неудер-
живающих связей, приходим к общему результату, что все эти множи-
множители должны быть неотрицательны. При этом условии, следовательно,
имеют место уравнения движения C4.2). Заметим, что вышеприведён-
350
ные неравенства для множителей связей вполне соответствуют тем, ко-
которые были установлены в § 176.
Раз из принципа Даламбера вытекают дифференциальные уравнения
движения системы, то и общие законы динамики (гл. XXXI) могут рас-
рассматриваться как его следствия. Для некоторых специальных классов
связей общие законы динамики могут быть выведены н непосредственно
из выражения C4.6) принципа Даламбера, причём в той суженной
формулировке, в какой они будут выражены, в них, как и в уравнение
Даламбера C4.6), будут входить только активные силы системы.
Рассмотрим сначала случай, когда связи допускают виртуальное
поступательное перемещение системы в некотором направлении s°, т. е.
пусть перемещения Ьг. всех частиц могут быть выбраны одинаковыми:
§г„ = §s.s° (v=l, 2, .... л). C4.10)
Покажем, что производная Kt от проекции количества движения системы
на это направление равна проекции R'f* главного вектора внешних актив-
активных сил на это же направление, т. е. что для указанного направления
справедлив закон изменения количества движения (в приведённом сужен-
суженном смысле). Для доказательства вставим выражение C4.10) для Ьг, в
формулу C4.6). Сократив полученное уравнение на &s, мы можем
результат записать в следующем виде:
V= I
Отсюда, так как внутренние силы в сумме попарно дают нули, получаем:
Это равенство и выражает закон изменения количества движения.
Если связи допускают виртуальное вращательное перемещение системы
вокруг некоторой оси Oz, то в отношении этой оси справедлив закон
изменения кинетического момента применительно к активным силам:
производная Ог кинетического момента равна главному моменту Z.*e> внеш-
внешних активных сил. В самом деле, основываясь на формуле (9.14) иа
стр. 87 для скорости V-, частицы вращающегося тела, мы можем написать
следующее выражение для виртуального перемещения частицы в рас-
рассматриваемом нами случае:
где Ъа. есть бесконечно малый угол поворота системы вокруг оси Oz.
На этом основании уравнение C4.6) после преобразований векторно-
скалярных произведений и других очевидных упрощений даёт:
v = l v=l
Моменты внутренних сил в сумме дают попарно нули; поэтому из послед-
последнего уравнения и получается выражение закона изменения кинетического
момента:
Gz=Lf.
351
Пусть теперь конечные связи системы явно не зависят от времени,
а дифференциальные связи однородны относительно скоростей. Покажем,
что в этом случае справедлив закон изменения кинетической энергии для
активных сил, т. е. дифференциал кинетической энергии dT равен элемен-
п
тарной работе активных сил 2 ¦'V^'V ^ самом деле, в указанном слу-
V = 1
чае действительное перемещение принадлежит к числу виртуальных
(§ 171); поэтому в равенстве C4.6) можно положить
После этого тем же способом, каким закон изменения кинетической
энергии был выведен в § 185, мы получаем:
п
сП= %<Fv-drr
Вообще, всякому преобразованию уравнений движения C4.2) соответ-
соответствует определённое преобразование выражения C4.5). В виде примера
покажем ещё, как из равенства C4.5) вывести уравнения Лагранжа
2-го рода C2.42). Перейдём в равенстве C4.5) к обозначениям C2.2)
на стр. 320; имеем
2 (Л, —1иД)№, = 0. C4.11)
V = 1
Пусть все связи системы конечны. Вместо ?„ введём s новых координат
qa, независимых между собой, положив
е„ = 5„(?„.') (v=l,2 Зга; а=1, 2,...,s).
По условию, уравнения связей C4.1) после подстановки этих функций
обращаются в тождества; следовательно, наряду с переменными qa
и вариации их bq0 вполне произвольны. В выражении C4.11) в соответ-
соответствии с последним равенством положим:
s
о = 1
тогда мы получим;
о =1 •» = 1 м= 1
Далее, имеем
Ъг Зп Зл
*~л v v d*Jt dt *~* у v дд§ ^~* v v dt dq^ '
Теперь таким же путём, каким были получены формулы C2.23) и C2.24)
на стр. 326, находим:
d</t d'q^ dt dqa dqa '
352
Предыдущее выражение на этом основании перепишется так:
Зп
Припомним, наконец, обозначение C2.28) на стр. 327:
Зл
!>>§¦=<?.¦ C4-14)
1 = i ч"
На основании соотношений C4.13) и C4.14) уравнение C4.12) примет
вид
Отсюда ввиду независимости вариаций §^„ мы выводим:
dt дд, dqa Vo ''
Т. е. мы получили уравнеиия Лагранжа 2-го рода.
198. Принцип виртуальных перемещений. Под положением равно-
равновесия данной материальной системы мы разумеем такое её положение,
в котором рассматриваемая система может неопределённое время оста-
оставаться в покое. Не при всяких активных силах и ие при всяких связях
система может иметь положения равновесия. Чаще всего приходится
искать положения равновесия в случае, когда ни активные силы, ни
связи не зависят явно от времени.
Если система находится в состоянии равновесия, то скорости частиц
всё время равны нулю; следовательно, их ускорения также равны
нулю:
wv = 0 (v=l, 2 л).
Подставив эти значения ускорений в формулы C4.6) н C4.7), выражаю-
выражающие принцип Даламбера, мы приходим к выводу, что в положении
равновесия системы сумма-элементарных работ актив-
активных сил на любом виртуальном перемещении должна
равняться нулю в случае удерживающих связей и дол-
должна равняться нулю или быть меньше нуля, если среди
связей есть неудерживающие, т. е. соответственно
2 /v*4 = o
Найденный частный вид принципа Даламоера носит название прин ципа
виртуальных перемещений; на нём основан самый общий приём
нахождения положений равновесия системы. В дальнейшем мы подробно
23 Г. К. Суслов 353
займёмся принципом виртуальных перемещений; сейчас же мы упомянули
о нём лишь для того, чтобы с его помощью дать статическую форму
принципу Даламбера.
Предварительно обратим внимание на следующее. Пусть тиу — неко-
некоторая частица системы (фиг. 115) и пусть /^ — равнодействующая
приложенных к ней активных сил. Если бы частица была свободной, то
от этой силы она получила бы ускорение —. Но на самом деле уско-
ускорение и», частицы будет иное, а именно,
такое, какое сообщается ей равнодей-
равнодействующей S4 активной силы /^ и реак-
реакции /?v связей
где
Сила S, называется эффективной си-
Фиг. 115. л°й- Введём в рассмотрение вектор-
векторную величину </v, равную по модулю
эффективной силе и ей противоположную по направлению; эта фиктивная
сила носит название даламберовой силы инерции:
J = — 5 = — in w
Разность />v между активной силой и эффективной силой, или, что то
же сумма активной силы и даламберовой силы инерции, называется
потерянной силой'
= /?,-я»,»,. C4.16)
Вернёмся к соотношениям C4.6) и C4.7), выражающим принцип Даламбера.
Если в них ввести потерянные силы, то они перепишутся так:
2 лЧ. ()
если все связи удерживающие, и
2 Л-*г,<0, C4.18)
v=l
если среди связей есть неудерживающие. Написанные формулы представ-
представляют собой выражение принципа виртуальных перемещений для системы,
находящейся под действием потерянных сил Таким образом, действи-
действительно, принципу Даламбера дано статическое выражение, сумма элемен-
элементарных работ потерянных сил (или, что то же, активных сил и сил инер-
инерции) на любом виртуальном перемещении равна нулю или меньше нуля.
Можно также сказать, что потерянные силы уравновешива-
уравновешиваются реакциями связей. Этим хотят сказать, что если бы актив-
активные силы и связи системы перестали изменяться со временем и мы
вместо активных сил приложили к частицам системы потерянные силы, а
частицы системы остановили, то система осталась бы в покое. К этому
354
утверждению можно также прийти, рассматривая фнг. 115. Действительно,
сумма потерянной силы и реакции для каждой частицы равна нулю:
/>v+#v = 0 (v=l,2, .... п). C4.19)
При высказанных условиях относительно неизменяемости со временем
активных сил и связей отсюда вытекает, что частицы системы не получат
ускорений, а следовательно, останутся в покое, если их скорости равнялись
нулю. Если в последнее равенство вставить выражение потерянной силы
по формуле C4.16), то мы получим иную формулировку принципа
Даламбера:
A=0 (v=i.2 п),
т. е. активная сила, реакция и сила инерции уравнове-
уравновешиваются для каждой частицы системы.
В последней формулировке основного уравнения динамики частицы не
нужно забывать, что движение частицы происходит под действием только
силы Sv. Что же касается даламберовой силы инерции, то она нами
введена с целью представить основное уравнение динамики частицы
в форме уравнения уравновешивающейся системы сил, действующих на
отдельную частицу, т. е. в форме уравнения статики. Этим чисто матема-
математическим приёмом достигается возможность перенесения математических
методов решения задач статики на задачи динамики. Поскольку даламбе-
рова сила инерции не входит в разряд действительно приложенных
к частице сил, она является фиктивной силой.
Принцип виртуальных перемещений получился у нас, как частное
следствие из принципа Даламбера. Обратно, если принцип виртуальных
перемещений принять за исходную истину, из него как следствие полу-
получается принцип Даламбера. Действительно, согласно формуле C4.19)
потерянные силы и реакции находятся в равновесии, а потому сумма их
элементарных работ на любом виртуальном перемещении равна нулю.
Но сумма элементарных работ реакций сама по себе равна нулю.
Следовательно, равна нулю сумма элементарных работ потерянных сил,
а это и есть, как мы видели, одно из выражений принципа Даламбера.
Таким образом, в нашем распоряжении два пути к получению уравне-
уравнений движения несвободной системы. Один путь тот, которым мы шли,
а именно, сначала были составлены выражения для реакций связей, затем
были написаны уравнения движения несвободной системы, а из них уже были
получены как следствия принцип Даламбера и принцип виртуальных пе-
перемещений. Другой путь был бы следующий: за основное положение
принимается или выводится из какого-либо иного определения или условия
принцип виртуальных перемещений; следствием из него служит принцип
Даламберл, а уже из последнего выводятся уравнения движения несво-
несвободной системы и выражения для реакций связей. Оба пути одинаково
законны и правильны; в обоих необходимо исходить из некоторого основ-
основного положения, явно или скрыто введённого в рассуждения. У нас,
например, таким основным положением служит условие C0.9) на стр. 293
о работе реакций идеальных связей. Когда мы будем говорить подробнее
о принципе виртуальных перемещений, а также о доказательствах, данных
некоторыми авторами этому предложению, то ещё раз вернемся к затро-
затронутому вопросу и укажем, какие в приведённых доказательствах положе-
23* 355
ния приняты в качестве основных. Заметим ещё здесь, что не только
принцип Даламбера или принцип виртуальных перемещений можно попо-
жить в основу динамики несвободной системы; за исходную точку может
быть принят любой из принципов, с которыми мы познакомимся в после-
последующем изложении, например принцип Гамильтона. В пределах прило-
приложимости данного принципа может быть построена вся соответственная
динамика, например в случае принципа Гамильтона динамика систем без
неинтегрируемых дифференциальных связей.
199. Принцип Гаусса, или принцип наименьшего принуждения.
К принципу Даламбера тесно примыкает принцип Гаусса (Gauss), или
принцип наименьшего принуждения. Рассмотрим произ-
произвольную материальную систему, подчинённую идеаль-
идеальным связям, конечным и дифференциальным. Пусть
частица mv системы в момент времени / находится
в положении Afv н имеет скорость t»v и ускорение «)v
(фиг. 116). Если бы на частицу /»v не действовали
никакие силы, то за некоторый малый промежуток
времени Lt она бы совершила перемещение
Если бы на частицу действовала только активная сила Г„ она за тот же
промежуток времени М совершила бы некоторое другое перемещение
V; при этом вектор Д„В„ как девиация частицы в этом движении
(§ 45) имел бы выражение
2, тпн
где ?л есть ускорение, сообщаемое частице силой Fr Пусть, далее, под
действием активной силы /\ и реакции связей /?s частица в, действитель-
действительности совершает за промежуток времени At перемещение /WvCv. Тогда
вектор Л„СУ есть девиация частицы в действительном движении н потому
он равен
Наконец, пусть AfvDv есть произвольное, отличное от AfvC, возможное
перемещение частицы за промежуток времени Д?, т. е. перемещение,
допускаемое связями, вообще говоря, изменяющимися (§ 170).
Векторы fivCv и Bv?>y представляют собой отклонения частицы mv от
свободного движения, которые она получает за промежуток времени \t
при действительном движении и при вышеуказанном возможном движении.
Эти отклонения связаны между собой следующим образом:
вД=ва + сД.
Отсюда мы имеем
~% d Д B/V од.
Умножив это равенство на массу /иу частицы и взяв затем сумму полу-
полученных равенств для всех частиц системы, мы найдём.
2 тДД= 2 "*A^-t- S /иДА2 + 22 /и»В^С,-ОД. C4.20)
4=1 v=l v = 1 ч = 1
356
Нетрудно убедиться, что последняя сумма в правой части равна нулю.
Действительно, вектор C\D^, как разность между возможным и действи-
действительным (т. (е. тоже возможным) перемещениями, представляет собой
некоторое виртуальное перемещение §rv частицы.
С другой стороны, вектор BVC, может быть представлен следующим
образом
ВД = ЛД-ЛД = ^(.,-?)=-|?л. C4.21)
где Рч есть потерянная сила частицы tkv [cm. формулу C4.16)]. На осно-
основании этих двух выражений, а также на основании принципа Даламбера
в форме C4.17) и C4.18) мы получаем:
Знак неравенства здесь может появиться только в том случае, если на
виртуальном перемещении системы пришли в ослабление такие связи,
которые не пришли в ослабление на действительном перемещении (ср.
§ 171). Иными словами, связи, приходящие в ослабление на действительном
перемещении, не должны вовсе приниматься в расчёт. Как следствие
нз равенства C4.20), мы теперь получаем такое соотношение:
2 шДД2> 2"*Д^- C4:22)
»=1 »=i
Доказанное неравенство и приводит к принципу Гаусса.
Рассматривая отклонение частицы от свободного движения, Гаусс
принимает за меру этого отклонения так называемое принуждение
Z,, т. е. следующую величину, пропорциональную квадрату отклоне-
отклонения ВС:
Под принуждением системы понимается сумма принуждений
ее частиц. Назвав принуждения системы в действительном и выше упо-
упомянутом возможном движениях соответственно Z и Z', мы имеем,
следовательно:
Сопоставив эти выражения с неравенством C4.22), мы заключаем, что
Z<Z\
т. е. в любой момент времени для. истинного движения, сравнительно
с кинематически возможными движениями, принуждение имеет наимень-
357
шее значение; движения, с которыми мы сравниваем истинное движение,
должны быть не только согласными с теми же связями, при которых
происходит истинное движение, но должны характеризоваться теми же
исходными положениями частиц и теми же начальными скоростями. В этом
и состоит принцип Гаусса.
На основании формулы C4.21) принуждение может быть представ-
представлено в следующем виде:
или, в декартовых координатах (§ 187),
Из условия минимальности принуждения для действительного движения
следует, что первая вариация принуждения равна нулю; при эгом, сопасно
формулировке принципа, вариироваться должны лишь ускорения. Таким
образом, мы получаем:
Зл .. ..
bZ= 2 (Л",— m,&„)&?„= 0; C4.23)
вариации ускорений связаны здесь соотношениями
Зл
(а =1,2, ...,а),
C4.24)
зл
эти условия вытекают из равенств C0.3) и C0.4) на стр. 291, если
опять-таки иметь в виду, что вариируются только ускорения.
Мы вывели принцип Гаусса из принципа Даламбера, который сам
получается из уравнений движения. Можно, обратно, показать, что из
принципа Гаусса вытекают уравнения движения системы.
Интересно отметить, что при этом не будет необходимости предпо-
предполагать дифференциальные связи линейными относительно скоростей, как
мы это делали до сих пор. При выводе мы ограничимся рассмотрением
систем с удерживающими связями. Итак, пусть на систему наложены
конечные и дифференциальные связи
/.(?,.0 = 0 (а =1,2 а), C4.25)
<РВМ,.') = ° (?=1.2, •••*). C4.26)
и пусть справедливо равенство C4.23). Продифференцируем дважды
по времени уравнения C4.25) и один раз уравнения C4.26), а затем
провариируем полученные равенства в отношении ускорений; мы тогда
придём к соотношениям типа C4.24), но только записанным без знака
858
неравенства:
Зя
(^й?, = 0 (а =1,2, ...,«), C4.27)
V = 1 V
Зл -,
= 0 (P=l,2 b). C4.28)
Исключив теперь вариации ускорений из уравнений C4.23), C4.27) и C4.28)
способом неопределённых множителей,,которым уже не раз пользовались,
мы придём к уравнениям движения:
В предыдущих главах частные производные -тг обозначались В^.
В силу линейности дифференциальных связей эти производные предпо-
предполагались независящими от скоростей. В настоящем выводе это ограниче-
ограничение устранено.
XXXV. ИНТЕГРАЛЬНЫЕ ПРИНЦИПЫ
200. Прямой и окольный пути материальной системы. Прежде
чем перейти к рассмотрению принципов второй категории, условимся в
некоторых терминах. Выберем два возможных положения Ло и А\ взя*
той материальной системы (§ 161). Одно из них, например Ло назовём
начальным, другое, Л, —'конечным. Допустим, что возможно
так подобрать скорости частиц системы в положении Ло, чтобы она в
своём дальнейшем движении под действием данных сил прошла через положе-
положение Л1. Совокупность траекторий, которые описывают различные частицы
системы в её движении из начального положения в конечное, назовём
прямым путём системы, ведущим из Ло в Av Пусть частица /и„ си-
системы занимает в Ло положение т^, а в /1, по-
положение /Mvi; соединим точки тчо и тч\ какой-
либо кривой Кч , бесконечно близкой к траекто-
траектории частицы /mv. Совокупность всех таких кривых
Кч мы назовём окольным путём системы из
положения Ло в положение Аг, если только час-
частицы системы могут перемещаться каждая по
соответственной кривой Кч без разрушения связей
Пример 107. Пусть система состоит из трёх
весомых частиц- щ, тъ /я8, соединённых неизменяемыми
стержнями (фиг. 117). Положим, что из положения Ай
в положение А1 система может быть переброшена фИГ- ]]7.
поступательным движением по параболам /я10 отц,
/я2о "*2i> m80 Щ\- Тогда совокупность этих трёх
парабол будет прямым путём системы из положения Ао в положение А{.
Проведем кривые Aj, Ki, A^, обозначенные на чертеже пунктиром, бесконечно
близкие к параболам и тоже начинающиеся в точках /я10> /я2о. mso и кончаю-
кончающиеся в точках т1ъ тгъ /я31. Совокупность трёх кривых К\, Кч, К% составит
окольный путь, если вершины треугольника /яь т2, тв можно будет продви-
продвинуть по этим кривым из Ао в Ai без гжатия, разрыва или гнутия стержней.
359
201. Принцип стационарного действия в форме Гамильтона.
Положим, что данная материальная система голономная, т. е. не имеет
неинтегрируемых связей (§ 166), и что, следовательно, все её связи
можно считать конечными. Допустим, кроме того, что активные силы,
приложенные к системе, имеют силовую функцию U (которая может со-
содержать явно время). Тогда за уравнения движения рассматриваемой
системы можно принять уравнения движения в независимых координа-
координатах qt в форме C2.48) на стр. 332:
ш^-wr0 @=1'2 s)' CоЛ)
где L есть так называемая лагранжева функция, равная сумме кинети-
кинетической энергии и силовой функции:
L=T-\-U.
Возьмём два такие возможные положения системы Ло и Av которые
могут быть соединены прямым путём (§ 200). Пусть переход системы
по этому пути из Ао в Л, совершается в течение промежутка времени
t\ — 4>> где А> и ^i—те моменты времени, в которые система занимала
положения Ай и Av Рассмотрим инте: рал
W=\Ldt C5.2)
и сравним значение этого интеграла для движения системы по прямому
пути со значением, которое он принимает для движения по какому-либо
окольному пути, ведущему из того же начального положения Ай в то
же конечное положение Av причём предположим, что переход системы из Ао в
А1 по любому окольному пути начинается и кончается одновременно с ла-
чалом и концом движения по прямому пути, т. е. все окольные движения имеют
одни и те же начальные, а также одни и те же конечные моменты дви-
движения, соответственно совпадающие с начальным и конечным моментами
при движении системы по прямому пути. Тогда окажется, что значение
интеграла W для прямого пути по отношению к значениям его для околь-
окольных путей будет стационарным; иначе говоря, первая вариация инте-
интеграла C5.2) для прямого пути равняется нулю. При вариировании не-
необходимо будет принять во внимание все вышеуказанные ограничения:
1) связи системы не должны быть нарушены (§ 200);
2) все окольные движения начинаются одновременно в момент t9 и
кончаются также одновременно в момент t^, в эти же моменты начинается
и кончается движение по прямому пути;
3) начальное и конечное положения системы должны быть одни и те
же для всех путей.
Целость связей будет обеспечена, т. е. связи не будут разрушены, если
мы станем вариировать только независимые координаты, так как эти ко-
координаты именно и выбраны таким образом, что уравнения связей вы-
выполняются тождественно; например, как бы мы ни изменяли координаты
ql и д2 частицы в примере 95 на стр. 323, эта частица не покинет эл-
эллипсоида; точно так же произвольное изменение шести координат твёр-
твёрдого тела не нарушит относительного расположения частиц этого тела
360
и т. д. Если мы примем, что пределы t0 и tt интеграла C5.2) не под-
подлежат вариированию, то тем самым продолжительность перехода для всех
движений будет сделана одинаковой Наконец, в силу третьего условия
не должно вариировать координаты системы в её предельных положениях
Ло и Ау Приняв во внимание всё сказанное, возьмём вариацию от фун-
функции W; имеем
Ь W = i\L dt = \ Ы dt=\Y* \ *&' + \ ? ^ tq, dt. C5.3)
Для преобразования первого слагаемого последней строки заметим,
что в случае, когда время не вариируется, вариирование и дифференци-
дифференцирование по времени коммутативны. Действительно, называя qa варииро-
ванное значение функции да, имеем
Взяв от обеих частей равенства производные, находим:
На этом основании получаем:
\г)„ dt 4°
dL
Г-
По условию при t = tu и t = tx вариации bqa координат равны нулю;
поэтому имеем
м
На основании сказанного выражение C5.3) для вариации функции W
можно представить в следующем виде:
C5.4)
Так как движение по прямому пути совершается в соответствии с урав-
уравнениями C5.1), то подинтегральная функция в последнем выражении
равна нулю; следовательно, мы доказали, что
t,
Доказанное иами свойство интеграла C5.2) и составляет сотержание
принцип^ Гамильтона (Hamilton). Сам интеграл W обыкновенно назы-
называют действием по Гамильтону и самому принципу дают такое выраже-
выражение, гамильтоново действие по прямому пути из данного
начального положения системы в данное конечное по-
положение имеет стационарное значение по сравнению с
действиями по окольным п у тя м, иду щи ми между теми же
361
положениями, если переход системы по всем путям со-
совершается в один и тотжепромежутоквремени^, — г,
причём tu — общий для всех путей начальный момент, a tx — обший для
всех путей конечный момент времени.
Мы доказали принцип Гамильтона, исходя из уравнений движения
C5.1); наоборот, если принять принцип Гамильтона за исходное поло-
положение или вывести его из какого-либо другого принятого нами положе-
положения, то уравнения движения C5.1) можно получить из рассматриваемого
принципа как следствие. В самом деле, примем, что в равенстве C5.4)
§W=0; тогда интеграл, стоящий в правой части этого равенства, дол-
должен быть нулём. Но так как интервал интегрирования произволен, то
для этого должно равняться нулю подинтегральное выражение. Наконец,
ввиду независимости вариации bqq коэффициент при каждой вариации в
отдельности должен быть нулём. Итак, из обращения в нуль первой ва-
вариации действия по Гамильтону при вышеупомянутых условиях выте-
вытекают как следствие уравнения движения C5.1).
Пример 108. Легко убедиться непосредственно в том, что принцип Га-
Гамильтона не прилагается к системам, подчинённым неинтегрируемым дифферен-
дифференциальным связям. В виде примера станем искать стационарное .значение дей-
действия по Гамильтону для материальной частицы массы т, находящейся под
действием сил, имеющих силовую функцию U, и подчиненной связи
4 = Ai + B'y+-Cz'=0, C5.5)
где А, В, С являются функциями от координат х, у, г взятой частицы. По
правилам для нахождения условной вариации нам придётся приравнять нулю
первую вариацию интеграла
w=\ (z. 4-,1 ?) л,
где |i — некоторый множитель. Таким образом, мы имеем
Ш = & \i— l*'i+y'l-\-zi)-\-U-\-\L(Ax + By+Cz)\ dt = Q. C5.6)
Произведя вариирование, находим:
t,
[{т(хо'х-\-у Ьу-\-г &г)-\-Ш+ у.('х&А -\-ylB-\-za
to
-\-С&'г)\ dt — O.
Рассмотрим члены, в которые входит множителем Ь'х, имеем
(тх
h
ах =\(тх + |1Л) — dt =
(т'х -|- \iA) Ъх —
Подобным же образом преобразуем члены, содержащие Ьу и 8г. Тогда, вместо
362
выражения C5.6), получим следующее:
Члены вне знака интеграла равны нулю, так как начальное и конечное поло-
положения частицы остаются при вариировании неизменными; обращение же в
нуль подинтегральной функции приводит нас к таким уравнениям:
dU .dy. •• /• (дА дВ\ • (дС дА\\ .
-^ — А — — тх ~ а. \у -з j- ) — 2 [ з -г- г = О,
дх dt К \ду дх) \дх dzl>
дс\ • 1дА
)Х \
~Ыг d~t ^ I \dx dz) \ dz dy)l~~ '
Полученные уравнения совпадут с уравнениями движения материальной части-
частицы, т. е. с уравнениями:
тх = -з—\-^А, ту = -г- + ш, /яг = -^- + )С,
ол oj/ ог
если положим 1= — -^и если, кроме того, имеет место равенство отношений:
_ У _
дВ _ дС д?_<?А_ дА__д^'
дг ду дх дг ду дх
Подставив выражения скоростей из этой пропорции в уравнение C5.5) связи,
чы придём к соотношению
дА_6В\
дг) ~ \ду дх)
а это, как известно, есть условие, при выполнении которого связь C5.5) яв-
является интегрируемой.
Принцип Гамильтона по отношению к построению системы динамики
может играть ту же роль, с соответственными ограничениями, как и
принцип Даламбера. Приняв принцип Гамильтона за основное положе-
положение, мы можем вывести из него уравнения движения любой несвободной
системы без неинтегрируемых связей, а следовательно, получить выра-
выражения и для реакций связей.
Если начальное и конечное положения системы Ао иАг выбраны произ-
произвольно, то может случиться, что их вовсе нельзя соединить прямым путём;
но в общем случае между данными двумя положениями можно провести не-
363
сколько отличных друг от друга прямых путей, конечно, таких, чтобы
движение по ним происходило в течение одног о и того же промежутка
времени. Когда два положения Ло и Л, таковы, что могут быть соеди-
соединены бесконечно близкими между собой прямыми путями, то эти поло-
положения называются сопряжёнными кинетическими фокусами. Когда связи
системы не зависят явно от времени, то можно показать, что гамильтоново
действие по взятому прямому пути будет минимумом относительно действий
по окольным путям (с одинаковыми начальными и конечными моментами
времени, если конечное положение \АХ удалено ог начального Ло не да-
далее ближайшего кинетического фокуса, сопряжённого с Ло'). Например,
для движения одной материальной частицы по сфере без приложенных
сил действие будет минимальным, пока конечное положение на прямом
пути (большом круге сферы) не дойдёт до точки, диаметрально противо-
противоположной начальному положению.
202. Принцип стационарного действия в форме Лагранжа.
Движение консервативной системы без неинтегрируемых связей, как мы
видели (§ 193), геометрически вполне определяется интегралом энергии
T=U+h C5.7)
и системой совокупных уравнений в независимых координатах
где
q'a = j*, P = yG{U+h), X35.9)
а функция О следующим образом связана с кинетической энергией:
T=qiG.
В этом случае зависимость движения от времени находится при иимиш»
квадратуры из уравнения
C5.10)
Составим выражение для полной работы количеств движения всех ча-
частиц рассматриваемой системы на каком-либо пути, соединяющем два
взятых положения Ло и Л,. Вообще работой данного вектора на данном
пути называется величина, которая формально вычисляется так же, как
работа силы Так как количество движения какой-либо частицы массы т^
совпадает по направлению с её элементарным перемещением, то для элемен-
элементарной работы количеств движения имеем следующее выражение:
где •oi есть скорость частицы тч, a ds^ — дифференциал дуги её траек-
траектории Полная работа 5 на пути из положения Ло до положения Л,
') См. Д Бобылёв. О начале Гамильтона или Остроградского и о начале
наименьшего действия Лагранжа, Прил. к LXI т. Зап. Ак. Наук.
ЗЬ4
представится интегралом
S = \ 2 m^dsj
но так как ds^^=v^dt, то можно также написать:
И.)
6'= { 2Tdt. C5.11)
(А,)
Полученный интеграл 5 носит название действия по Лагранжу. Сравним
действие по Лагранжу по прямому пути, ведущему из Ао в Av с дей-
действием по какому-либо окольному пути между теми же положениями,
предположив, что окольное движение происходит при той же началь-
начальной энергии h, как и прямое движение; тогда окажется, что действие по
прямому пути по отношению к действиям по окольным путям будет
иметь стационарное значение. Иначе говоря, первая вариация интеграла
C5.11) для прямого пути равняется нулю. При вариировании необходимо
будет помнить, что:
1) связи системы не должны быть нарушены; 2) движения прямое и
окольные должны происходить с одной и той же начальной энергией;
3) начальное и конечное положения Ао и Ах для всех путей одни и
те же.
Предварительно преобразуем несколько интеграл C5.11), заменив в
нём переменную интеграции t переменной q} при помощи соотношения
C5.10); имеем
(Л,)
или, согласно выражениям C5.7) и C5.9),
S = 2^ Pdqv C5.12)
где <7,0 и <7П представляют собой те значения, которые принимает коор-
координата qx для положений Ао и Ау Условия вариирования 1) и 3) те
же, что и для принципа Гамильтона; мы удовлетворим им, вариируя
лишь независимые координаты и оставляя неизменными координаты началь-
начального и конечного положений Ао и Ау Наконец, по условию 2) постоянная
h, входящая в состав функции Р, вариированию не подлежит. Итак, мы
имеем
= 2 ] bPdb = 2
причём штрихами попрежнему обозначены производные по координате qv
т. е.
365
Выполним следующее вспомогательное преобразование:
Чп 9" Яи
Г дР ,. ,, Г дР > dq. , Г дР afoo
\ —i °q<,d<7i = \ ~~.• ° dqx = \ —,—^ dq^ =
1 дР «. г' rf dP j, ,
dqz " J dqy dq,
?10 «10
На этом основании выражение для вариации bS действия перепишется
так:
«5.18,
Индексы О и 1 показывают, что соответственные величины относятся к
положениям Ао и Ау По условию 3) в отношении вариирования члены
вне знака интеграла пропадают. Далее, прямое движение происходит в
соответствии с уравнениями C5.8); поэтому интеграл в правой части вы-
выражения C5.13) равен нулю. Таким образом, для прямого пути мы по-
получили
8S 0
Доказанное свойство интеграла 5 и составляет содержание принципа
Лагранжа (Lagrange): действие по Лагранжу по прямому пути между
данными двумя положениями консервативной системы без неинтегрируе-
мых связей имеет стационарное значение по отношению к действиям по
окольным путям между теми же положениями, если движения по прямому
и окольным путям совершаются с одной и той же начальной энергией.
Принцип Лагранжа мы вывели из уравнений движения C5.8); обратно,
приняв этот принцип за исходное положение, мы можем совершенно так
же, как это было сделано для принципа Гамильтона, получить из него
как следствие уравнения движения C5.8). Подобно предыдущим прин-
принципам и принцип Лагранжа может быть положен в основание динамики,
точнее, в основание динамики консервативных систем без неинтегрируе-
мых связей (т. е. голономных).
Можно показать, что действие по Лагранжу по взятому прямому пу-
пути будет минимумом относительно действий по окольным путям при оди-
одинаковых значениях начальной энергии, если конечное положение Ах удалено
от начального положения Ао не дапее ближайшего кинетического фокуса,
сопряжённого с Л о (см. заключительные указания в § 201). В отделе
«Интегрирование уравнений динамики» мы ещё вернёмся к этому во-
вопросу.
203. Принцип Гельмгольтца. Гельмгольтц (Helmholtz) показал, что
принцип Лагранжа может быть распространён на неконсервативные си-
системы (без неинтегрируемых связей) при том условии, что приложенные
366
силы не зависят от скоростей и имеют силовую функцию, хотя бы и со-
содержащую явно время1). Уже при выводе выражений для реакций
связей (§ 175) мы упоминали о том, что уравнения связей должны за-
заключать в себе координаты связанных друг с другом масс: это следует
из того, что источником всякой силы, в том числе и реакции связи, мо-
может служить лишь некоторая масса. Подобным образом и силовая функ-
функция зависит от координат действующих друг на друга масс. Если дви-
движение некоторых из этих масс заранее известно в зависимости от вре-
времени, то в выражения связей или силовой функции войдёт явно время.
Условимся называть неконсервативную материальную систему, движе-
движение частиц которой зависит от масс, не входящих в состав системы, н е-
замкнутой, а массы, входящие в состав её, внутренними; массы,
связанные с внутренними массами или действующие на них, но не вхо-
входящие в систему, — внешними. Расширенную систему, состоящую из
указанных внутренних и внешних масс, назовём соответствующей замк-
замкнутой системой. Допустим, что эта замкнутая система консервативна.
Допустим, кроме того, что её положение определяется такими независи-
независимыми координатами q3 (о=1, 2 s), что первые г из них опреде-
определяют положение вышеуказанной незамкнутой системы, а остальные
s—г известны в функции времени:
?P=<7PW fp = /4-l, #•+2, ...,*). C5.14)
Обозначим кинетическую энергию и силовую функцию рассматриваемых
замкнутой и незамкнутой систем соответственно Т, U и Tv Uy Оче-
Очевидно, между этими величинами существуют соотношения:
7"= 7,+ ?(*), и=иг + ф(*), C5.15)
где шиф являются функциями только времени. Время, вообще говоря,
войдёт явным образом также в 7^ и ?/,. Согласно формулам C2.42) и
C2.43) на стр. 331 и 332, уравнения движения замкнутой системы будут:
d дТ дТ. dU . , 9 . „с ,Rv
— —: — = — o=l,2,...,s). C5.16)
dt dq, dqa dg.
Если в эти уравнения вместо координат и скоростей q? и q вставить со-
соответственные функции времени по формулам C5.14), то первые г урав-
уравнений примут вид
Остальные уравнения C5.16), числом s — г, или обратятся в тождества,
или будут следствиями уравнений C5.17); это следует из того, что
функции C5.14) являются частными интегралами уравнений C5.16).
Окольные пути, о которых идёт речь в принципах Гамильтона и
Лагранжа, подчинены лишь тому условию, чтобы совокупность траекто-
траекторий, входящих в их состав, допускала переход системы по ним без раз-
разрыва связей. Поэтому в применениях принципов ничто не мешает нам при-
принять, что некоторые из окольных траекторий частиц совпадают с траек-
!) Н. Н е 1 m h о 11 г: Zur Qeschichte des Princips der kleinsten Action, Abh ,
Bd. Ill, 249—262.
367
ториями прямого пути. Воспользовавшись этим замечанием, приложим
принцип Лагранжа к замкнутой системе, заключающей в себе рассматри-
рассматриваемую неконсервативную систему. Допустим, что элементы движения
внешних масс не вариируются и, следовательно, траектории их совпадают
с соответственными траекториями прямого пути. Тогда вариации s — г
координат qp будут равны нулю во всё время движения от начального
положения системы Ло до конечного Л,:
Ч = 0 (? = г+\, г+2 s). C5.18)
Условие неизменности начальной энергии будет теперь, согласно формуле
.C5.15), иметь вид
S/j = S7"-§i/=S7 — §i/,=0; C5.19)
это следует из того, что время, входяшее явно, не должно варииро-
в а т ь с я, если движение внешних масс оставляется таким, каким оно
было в прямом движении. Между тем скорости внутренних масс, а сле-
следовательно, и дифференциал dt могут ва риироваться, если того
требует условие C5.19) 1). Таким путём мы и приходим к формулировке
принципа, данной Гельмгольтцем для неконсервативной незамкнутой си-
системы. Следовательно, принцип Гельмгольтца для незамкнутой системы
является непосредственным следствием принципа Лагранжа, приложенного
вышеуказанным способом к замкнутой системе, заключающей в себе
как часть данную незамкнутую.
Самые вычисления при выводе принципа Гельмгольтца можно произ-
произвести следующим образом. За независимую Переменную интеграции вы-
выберем некоторую величину Ь, отличную от времени; пусть Ь принимает
значения 60 и 6t для начального и конечного положений системы Ло и
А у Примем во внимание, что кинетическая энергия Т является однород-
однородной функцией скоростей внутренних масс qa (о= 1, 2, ... , г) и ско-
скоростей внешних масс q (p==A-(-l, /--j-2, ..., s). Интеграл C5.11),
выражающий действие по Лагранжу и подлежащий вариированию, мо-
может быть написаи так:
вариация его будет иметь вид
9, 9,
1 rf0 I flfO * *
Положим
*° ~ db ' *р == Ж •
тогда будем иметь:
C5.21)
1) См. Helmholtz, Abh. Bd. Ill, 256—Г.
368
где О есть однородная функция второй степени от ?а и S . Из написан-
написанного равенства вытекают следующие
дО d§ дТ дО /дГв\ 2 ^7* „ п
=—г, — — ) =—• C5 22)
д?„ dt dqa dqa \dt j dq.
Из того же выражения C5.21) имеем
%= \%> C5 23)
откуда
Ь— = —-р=^ЪО -р=ЪТ; C5 24)
db 2\ГЫ 2TVT v '
здесь
так как, согласно формуле C5.18), dq? = O, а следовательно,
Подставив выражения C5 24) и C5 25) в равешпво C5 20), мы найдём
в,
SS = 2 ^ ЬТ dt-]-
Но согласно формуле C5 23), мы имеем
_ 9,
Тда MJh [db dG di4°
[ л/*Тда
так как при неизменности положений Ао и Аг члены вне знака инте'
грала обращаются в нуль Отсюда на основании соотношения C5 22)
получаем
Далее, на основании равенств C5 23) и C5 22) имеем
I ,/Г dG * ,fl [fdHydG. dt ,, I дТ . rf/
Сумма остальных интегралов в празой части выражения C5 26) имеет в
силу соотношения C5 23) следующее значение
6, 9, _ 8,
24 г к Суслов 369
но по условию неизменности энергии C5.19) последний интеграл может
быть преобразован следующим образом:
здесь вариация силовой функции в силу равенств C5.18) имеет значение:
0=1
Подставив найденные выражения в равенство C5.26), получаем:
l^dq,dqa dtdq
Заменим теперь координаты q и скорости д соответственными функциями
времени по формулам C6.14); тогда в силу соотношений C5.15) произ-
производные от U и Т перейдут в производные от ?/, и Tv и, следовательно,
мы получим:
J -+ ^ - - ^ WO-
Отсюда или следует, что
в силу уравнений движения C5.17), или же, наоборот, из равенства ну-
нулю вариации действия 5 вытекают эти уравнения движения C5.17).
204. Применение принципов. Рассмотренные нами принципы применяются
главным образом, для получения уравнений движения (в частном случае, равно-
равновесия) произвольных несвободных материальных систем. В виде примера выве-
выведем с помощью принципов Даламбера и Гамильтона уравнение движения для
твёрдого тела, вращающегося вокруг неподвижной прямой. Примем эту прямую
за ось 02 неподвижных осей координат Oxyz и за ось ОС подвижных осей OSrjif,
неизменно связанных с телом. За обобщённую координату тела примем угол if>
между осями Ох и О?. Возьмём сперва принцип Даламбера; имеем
л
2 (^v — 0М»,)-8/\ = 0.
i= 1
Основываясь на формуле (9.14) на стр. 87 для скорости с, частицы вращаю-
вращающегося тела, мы можем следующим образом выразить виртуальное перемеще-
перемещение irv частицы через бесконечно малый угол поворота S? тела
С другой стороны, ускорение и», частицы вращающегося тела, согласно теореме
A1.1) на стр. 112, имеет выражение-
«>, = «X /\ - <*Vi. = ?*» X /\ — <Р2/\
(Ср. фиг. 64 на стр. 112). Вставив эти значения &rv и «>v в уравнение Далам-
370
бера и воспользовавшись правилом циклической перестановки сомножителей
«екторно-скалярного произведения, мы получим:
2
v=l
Сократим уравнение на не равный нулю множитель 8<р и выполним умножение
на z°. Имеем прежде всего
где Ly есть главный момент внешних сил относительно сси Ozi далее, нахо-
находим:
л л
2<0. Ч^ ffi f YBtVf )=гИ. ^ tn [Z^T^ Г (Z° -г )] —
»=1 v=l
л л
^1 .2 2. V1 2 7
— Zj *< ' v — гч' == ^j "'v/'v — >'гг>
V =1 V= 1
где Jzz есть момент' инерции тела относительно оси Oz; наконец,
что, впрочем, и без вычислений ясно из чертежа. В результате мы получим сле-
следующее дифференциальное уравнение вращения твёрдого тела вокруг непо-
неподвижной оси:
4" — Jtz9 — °- C5.27)
Пусть теперь внешние силы имеют силовую функцию U, хотя бы содержа-
содержащую явно время. Основываясь на равенстве C1.39) на стр. 316, которое может
служить определением силовой функции, мы находим:
л я
или
dU—L^df. C5.28)
Следовательно, уравнение C5.27) преобразуется к следующему виду:
d- ./„<р = 0. C5.29)
Применим теперь к выводу того же уравнения принцип Гамильтона. Мы
имеем
l\Ldt = Q, C5.30)
где
Для вращающегося твёрдого тела кинетическая энергия равна
24* 371
а силовая функция определяется уравнением C5.28). Произведём указанное в
формуле C5.30) вариирование, имеем
Член вне знака интеграла равен нулю по условию вариирования; следовательно,
равен нулю интеграл, а значит, и подинтегральная функция (ввиду произволь-
произвольности интервала интегрирования). Таким образом, мы приходим к прежнему
результату C5.27):
ОТДЕЛ IV
СТАТИКА
XXXVI. РАВНОВЕСИЕ СИСТЕМЫ. ПРИНЦИП ВИРТУАЛЬНЫХ
ПЕРЕМЕЩЕНИЙ. УСТОЙЧИВОСТЬ РАВНОВЕСИЯ
205. Положения равновесия. Условия в отношении активных сил
и связей систем, могущих быть в равновесии. Статикой назы-
называется тот отдел динамики, который рассматривает условия равновесия
материальных систем. Под положением равновесия данной мате-
материальной системы, находящейся под действием данных сил, мы разумеем
такое положение системы, в котором она может неопределённое время
оставаться в покое относительно данной системы отсчёта. Разбе-
Разберём, какого характера должны быть связи системы, а также и силы,
приложенные к ней, для того, чтобы система могла иметь положения
равновесия. Примем, что система состоит из п материальных частиц и
отнесена к декартовым осям координат Oxyz. Тогда положение какой-
либо частицы массы /и, определится радиусом-вектором
Обычно приходится исследовать положения равновесия систем, когда ак-
активные силы и связи не зависят явно от времени; дифференциальные свя-
связи должны быть, кроме того, однородны относительно скоростей, так как
покой должен быть одним из возможных состояний системы. Таким обра-
образом, активные силы и конечные и дифференциальные связи имеют следу-
следующий вид:
/а =Л (О > 0.
(О
я
(v=l, 2, ... , п; а—1, 2 а; 0 = 1,2 *);
C6.1)
372
при этом, так как связи явно от времени не зависят, то
^ = 0 (а=1, 2, ... , а), \
, } C6.2)
с<Рз 0(8 12 ?)
Для рассматриваемой системы возможные перемещения совпадают с вир-
виртуальными (§ 170) и подчинены следующим а-\-Ь условиям:
я ^
*/«= Ъ grad,/a-Srv>0 (а=1, 2 , а),
4=1 ( C6.3)
В уравнениях C6.1) и C6.2) знак равенства ставится в случае удержи-
удерживающих связей и знак равенства, соединённый со знаком неравенства, в
случае неудерживающих связей.
206. Уравнения равновесия. Уравнения движения рассматриваемой
нами несвободной системы, согласно формулам C0.8) на стр. 292, напи-
напишутся так:
m^o4 — f4-\-R, (v=l, 2, ... , п), C6.4)
причём реакции Rv связей (связи предполагаются идеальными) имеют вы-
выражения:
а Ь
Л,== 2 ^gTadv/„-[- 2 V-J$^- C6.5)
ec=l 3=1 V
Если какая-нибудь связь, например /а или <р3, неудерживающая, то мно-
множитель её не может быть меньше нуля (§ Г76):
К > 0, ц > 0. C6.6)
Вспомним, далее, что элементарная работа удерживающих идеальных свя-
связей на любом виртуальном перемещении равна нулю [см. формулу
C0.22) на стр. 296]:
П
М«>=2ДЛ = 0. C6.7)
v=1
Если же среди связей есть неудерживающие, эта работа имеет выраже-
выражение C0.29) на стр. 298:
а
ЬАЧ*>= 2 /?v-*>\2sO; C6.8)
v=l
она равна нулю дпя неосвобождаюших перемещений и больше нуля для
освобождающих перемещений. В § 176 было указано, какое различие
существует между эпементарной работой реакций на освобождающем
виртуальном и на освобождающем возможном перемещениях системы.
Сделаем здесь ещё одно существенное замечание. Рассмотрим дей-
действительные перемещения, которые совершают частицы системы с неудер-
живаюшей связью /а^0 из состояния покоя. Если система была в по-
373
кое, то направление перемещения какой-либо частицы её /иу совпадает
с направлением её ускорения w^ в рассматриваемый момент. Ограниче-
Ограничение, налагаемое связью /,5-0 на ускорения частиц, согласно формуле
B7.26) на стр. 281, в рассматриваемом случае будет
л
§f = Xgradv/a •«*,>(); C6.9)
действительно, при условии C6.2) выражение D^fa в формуле B7.10)
на стр. 276 представляется однородной функцией второй степени от
скоростей и, если система находится в покое, это выражение равно
нулю. При этом, если исключить случай прерывного изменения ускоре-
ускорения, знак неравенства в формуле B7.26), а следовательно, и в фор-
формуле C6.9) нужно ставить только в том случае, если какие-либо связи
уже находятся в состоянии ослабления; для момента схода системы со
связи формула C6.9) справедлива лишь со знаком равенства. Отсюда
вытекает, что если действительные перемещения Srv частиц системы
из состояния её покоя удовлетворяют неравенству
то множитель связи \, равняется нулю уже для начального положения
системы. Другими словами, на действительном перемещении из покоя
множитель \ не может изменяться скачком, как это возможно для вир
туального перемещения. Всё сказанное нами остаётся без изменения,
если неудерживающей связью будет дифференциальная связь, напри-
например <р„.
Уравнения движения C6.4) непосредственно дают такие условия рав-
равновесия системы:
= 0 (v=l, 2,...,n). C6.10)
Действительно, если система в рассматриваемом положении может неопре-
неопределённое время оставаться в покое, то скорости её частиц, оставаясь
равными нулю, не должны изменяться, т. е. ни одна из частиц не должна
иметь ускорения, что и выражают уравнения C6.10). Нетрудно видеть,
что уравнения C6.10), необходимые для равновесия системы, будут
вместе с тем и достаточны, если соблюдены условия в отношении актив-
активных сил и связей, указанные нами в § 205. В самом деле, когда силы F^,
приложенные к частицам системы, не зависят явно от времени и когда
связи системы имеют выражения C6.1), то и множители Ха, д» не будут
явно содержать времени: это видно из уравнений C0.32) на стр. 299.
Следовательно, и реакции #v не будут явно зависеть от времени. Поэтому
если условия C6.10) выполняются для одного какого-либо момента, то
они будут выполнены и всё время, т. е. система будет находиться
в покое.
К уравнениям C6.10) можно было бы притти и другим, более длин-
длинным путём. А именно, станем искать условия, при которых кинетическая
энергия Т системы может оставаться неопределённое время равной нулю.
Для этого необходимо, чтобы одновременно с кинетической энергией обра-
обращались в нуль и все производные от кинетической энергии по времени.
374
Мы остановимся несколько на указанном приёме, чтобы но поводу него
сделать одно замечание. Имеем
f=
-{?,-{-R,J+ Y.m4v4-w, = O. C6.12)
Равенство C6.11) не даёт нам возможности сделать лакие-либо заклю-
заключения о поведении сил в положении равновесия, так как правая его
часть обращается в нуль уже вследствие'того, что в положении равно-
равновесия скорости z»v частиц равны нулю. Это и понятно, потому что кине-
кинетическая энергия не может быть отрицательной, и нулевое значение
является для неё или постоянным нулевым значением, или служит для
неё минимумом. Было бы ошибочно, если бы мы вздумали оперировать
с равенством C6.11) следующим образом. Умножим его на bt; тогда,
положив
найдём:
п п
?j v v I ?j ^v v •
v — I v— 1
Так как v^ — возможные скорости, то Srv — возможные перемещения,
а для рассматриваемой системы они в то же время являются и виртуаль-
виртуальными перемещениями. По свойству C6.7) вторая сумма в последнем
равенстве есть нуль, и мы как бы получаем условие для активных сил
в положении равновесия, а именно:
Из найденного таким образом уравнения нельзя получить никакого за-
заключения о силах, находящихся в равновесии, так как в на, ем случае,
по предположению,
§r, = ^ = 0 (v = 1, 2 п),
и предыдущее равенство является тождеством.
Обращаемся к уравнению C6.12), вытекающему из равенства нулю
второй производной от кинетической энергии. Из этого уравнения при
s»v — О мы действительно получаем как следствие уравнения ^36.10).
Можно было бы показать, что при вышеуказанных условиях относи-
относительно активных сил и связей из уравнений C6.10) вытекает, что при
v4 = 0 все производные от кинетической энергии по времени обращаются
в нуль, и, следовательно, система находится в покое.
375
207. Принцип виртуальных перемещений. Вернёмся к уравнениям
равновесия C6.10). Умножим каждое из них скалярно на виртуальное пере-
перемещение Srv частицы и затем сложим все уравнения. Если принять во
внимание свойства C6.7) и C6.8) идеальных связей, то мы получим:
i/V§rv*e0; C6.13)
т. е. для положения равновесия сумма элементарных
работ активных сил системы н(а любом её виртуаль-
виртуальном перемещении равна нулю или отрицательна: она
равна нулю, если связи удерживающие или если они неудерживаюшие,
но данное перемещение неосвобождающее; она отрицательна, если пе-
перемещение освобождающее. В этом, как мы знаем t§ 198), и состоит
принцип виртуальных перемещений. Мы его получили как
необ'ходимое следствие уравнений равновесия C6.10).
Покажем теперь, что принцип виртуальных "перемещений даёт не
только необходимое, но и достаточное условие равновесия системы. Всего
проще и быстрее в этом можно убедиться, исходя из закона изменения
кинетической энергии (§ 185). По этому закону элементарное прира-
приращение кинетической энергии равно сумме элементарных работ активных
сил и реакций связей:
Положение равновесия системы характеризуется тем, что в этом по-
положении система длительно находится в состоянии покоя; иначе, в поло-
положении равновесия кинетическая энергия системы из нуля не может сде-
сделаться положительной величиной, т. е. не может увеличиться. Следова-
Следовательно, достаточным условием равновесия является требование, чтобы для
любого возможного перемещения системы из рассматриваемого положе-
положения правая часть предыдущего равенства была равна нулю. Но сумма,
выражающая элементарную работу реакций идеальных связей, всегда
равна нулю на неосвобождающем виртуальном перемещении и больше
нуля на освобождающем: следовательно, достаточным условием равно-
равновесия служит неравенство:
Для рассматриваемых нами связей возможные и виртуальные перемеще-
перемещения совпадают (§ 205), и полученное неравенство выражает собой прин-
принцип виртуальных перемещений: активные силы на любом виртуальном
перемещении из положения равновесия должны давать работу, равную
нулю или отрицательную. Если все связи системы удерживающие, то
высказанное достаточное условие равновесия следует формулировать как
равенство
376
Действительно, в этом случае каждой системе виртуальных перемещений
соответствует система прямо противоположных перемещений, также вир-
виртуальных; но тогда, если бы работа сил на первом перемещении не
была равна нулю, а была отрицательной величиной, то на втором пере-
перемещении она стала бы положительной, что недопустимо.
Докажем теперь аналитическим путём, что неравенство C6.13), выра-
выражающее принцип виртуальных перемещений, служит достаточным усло-
условием равновесия системы. Для этого мы покажем, что уравнения равнове-
равновесия C6.10) являются следствием этого выражения. Перейдём к обозна-
обозначениям C2.2) на стр. 320. Пусть сперва все связи удерживающие, т. е.
имеют вид:
2 Я(Д = 0-
C6.14)
C6.15)
Тогда условие C6.13) перепишется так:
Зл
C6.16)
Вариации SSV координат связаны здесь а -\- b соотношениями:
in
*/« = 2|f?» = 0 (<z=I,2, ...,a),
Зл
5(р. = V 68vS?v = 0 (Р = 1, 2, ..., b).
C6.17)
Повторим рассуждения § 177 и 197. Умножим каждое из . равенств
C6.17) соответственно на множители \а и д* и прибавим полученные
выражения к равенству C6.16); тогда мы получим уравнение
Зл а
» = 1 а=1
2 Дч^З^^^'
Р = 1
или, что то же,
Зл
C6.18)
6-' 9>
Теперь а-\- b множителей X,, и д3 подберём так, чтобы коэффициенты
при а-\-Ь зависимых вариациях §?v обратились в нули. Тогда другие
коэффициенты будут нулями ввиду независимости оставшихся вариаций.
В результате мы получим уравнения
C6.20)
a=i
Если примем во внимание формулы C6.5), то увидим, что эти уравнения
только обозначениями отличаются от уравнении C6.10).
377
Если все или некоторые связи неудерживающие, условия C6.16) и
C6.17) заменяются следующими:
Зл
У*А<0. C6.21)
-1,2,..., а) 1 C622)
= 1,2,...,*). )
8<рв>0 @ = 1,2,...,*)
В числе виртуальных перемещений системы будут и неосвобождаюшие;
для них все эти три выражения будут справедливы со знаком равенства,
и следовательно, можно будет полностью повторить вывод, относящийся
к удерживающим связям: все коэффициенты при вариациях 8$у в уравне-
уравнении C6.19) должны быть нулями. Но эти коэффициенты не зависят от
вариаций координат, т. е. они останутся нулями и в случае освобождаю-
освобождающих перемещений. Иначе говоря, в случае освобождающих перемещений
останется равной нулю левая часть уравнения C6.19), или, что го же,
уравнения C6.18). Отсюда в силу неравенства C6.21) мы получаем доба-
добавочное условие:
а=1 ч 3 = 1
из него для неудерживаюших связей • вытекают неравенства:
К^О, ji?>0; C6.24)
действительно, для системы возможны такие перемещения, для которых
все неравенства C6.22) обращаются в равенства за исключением одного
какого-нибудь, например 8/а^>0; в таком случае из выражений C6.22)
н C6.23) мы получим:
Неравенства C6.24) для множителей вполне соответствуют тем, что были
получены в § 176.
В том, что принцип виртуальных перемещений C6.13) представляет
достаточные условия равновесия, можно убедиться ещё иначе. Допу-
Допустим сначала, что все связи системы удерживающие и что, следовательно,
силы, приложенные к системе в данном положении, удовлетворяют усло-
условию C6.13) со знаком равенства, т. е.
|]/v8rv=0. C6.25)
Допустим, что, несмотря на выполнение этого условия, система, помещён-
помещённая в рассматриваемое положение без начальных скоростей, всё-таки
в покое не остаётся, а приходит в движение. Приложить непосред-
непосредственно равенство C6.25) к этому движению системы и вывести заклю-
заключения относительно сил мы не имеем права, так как тогда сделаем
ошибку такого же характера, как и та, на которую было указано в конце
предыдущего параграфа. В самом деле, рассматрш аемое движение начи-
начинается из покоя, и, следовательно, в начальный момент все скорости г>,
равны нулю, за счёт чего и получится нуль в выражении элементарной
378
работы. Поэтому или надо предварительно показать, что выражение для
работы на виртуальном перемещении, а также условные уравнения для
перемещений сохраняют свой вид и для перемещений из покоя (иначе
говоря для перемещений второго порядка относительно 8t), или обойти
эту трудность нижеследующим приёмом, предложенным Аппелем (АрреП).
Из того обстоятельства, что система начала двигаться, мы выводим сле-
следующие заключения: а) частицы системы, по крайней мере некоторые,
имеют ускорения; б) так как движение происходит из состояния покоя,
то существуют такие виртуальные перемещения системы, которые по
направлению совпадают с вышеупомянутыми ускорениями. Заставим
теперь систему совершить именно это перемещение, т. е. сообщим её
частицам соответственные виртуальные скорости, конечно, отличные от
нуля. По сказанному, направления перемещений частиц совпадут тогда
по направлению с силами; следовательно, работа сил на этих переме-
перемещениях будет непременно положительной, т. е. для взятого перемещения
мы найдём:
отсюда по условию C6.7) идеальности связей, мы получим:
что противоречит условию C6.25).
Положим теперь, что некоторые из связей неудерживающие, т. е.
работа активных сил на вирг.уальных перемещениях или нуль, или отри-
отрицательна:
2 F. ¦ К *?. 0. C6.26)
v:=1
Пусть опять активные силы выполняют это условие для всякого вир-
виртуального перемещения из данного положения и пусть всё-таки система,
помешенная в эго положение без начальных скоростей, не остаётся
в покое, а приходит в движение. Мы опять не имеем права непосред-
непосредственно приложить условие C6.26) к этому движению, а только из су-
существования упомянутого движения выводим, что частицы системы имеют
ускорения и что существуют виртуальные перемещения, направленные
по этим ускорениям. Сообщаем частицам системы как раз эти виртуальные
перемещения с начальными скоростями, отличными от нуля; тогда работа
всех сил, приложенных к системе, будет положительна:
11{Р,^К)-^>0. C6.27)
v = l
Но сумма элементарных работ реакций в рассматриваемом случае равна
нулю:
2/?v.Srv^0; C6.28)
это следует из того, что она в настоящем случае выражает работу
реакций на возможном перемещении, последняя же, по сказанному
379
выше (§ 176), всегда равна нулю; можно также указать, что взятое
возможное перемещение совпадает по направлению с действительным
перемещением из состояния покоя, а следовательно, множители Ха и у.^
не могут иа этом перемещении изменяться скачком, т. е. они равны нулю
(§ 205). Из выражений C6 27) и C6.28) мы выводим неравенство
которое противоречит условию C6.26). Достаточность таким образом
доказана.
Принцип виртуальных перемещений получился у нас как следствие
уравнений движения C6.4). Раньше, в § 198, мы уже упоминали о том,
что можно итти обратным путём — вывести из принципа виртуальных пе-
перемещений принцип Даламбера, а уж отсюда притти к уравнениям дви-
движения C6.4). Но при таком построении динамики надо или считать прин-
принцип виртуальных перемещений за основное положение, или доказать
этот принцип, исходя из какого-либо другого положения, принимаемого за
основное. Было сделано много попыток дать 'вполне строгое доказатель-
доказательство принципа виртуальных перемещений, но подобно тому, как при
установлении уравнений C6.20) (т. е. точнее говоря, при выводе выра-
выражений для реакций) нельзя обойтись без некоторого основного определе-
определения или условия (о реакциях идеальных связей), точно так же всякое
доказательство рассматриваемого принципа скрыто или явно заключает
в себе подобное же условие или допущение по отношению к связям
специального характера, а потому, строго говоря, доказательством, т. е.
сведением лишь на раньше признанные истины, названо быть не может.
Для примера мы рассмогрим в общих чертах ещё два доказательства
принципа виртуальных перемещений- доказательства Лагранжа и Ампера
(Ampere).
Прежде всего остановимся на доказательстве или, лучше сказать,
той гениальной иллюстрации, которая была дана принципу виртуаль-
виртуальных перемещений Лагранжем. Пусть на данную систему, состоящую из
материальных частиц с массами тх, т2, ¦¦-, тп, действуют силы
/*",, Fv..., Fn. На чертеже принято я =4 (фиг. 118). Допустим,
что все силы F4 по модулю соизмеримы друг с другом и что общая
мера их р содержится в каждой силе чётное число раз:
Fv = 2Avp, C6.29)
где &v — целое число. Устраиваем следующий механизм. Возьмём ча-
частицу mv поместим в ней подвижный бесконечно малый блок Mv а по
направлению силы Fv приложенной к частице тг, поместим другой
бесконечно малый неподвижный блок Л^; соединим эти два блока
нитью в полиспаст таким образом, чтобы действие полученного поли-
полиспаста на массу mv если натяжение нити станет равным р, могло заме-
заменить собой действие силы /*,. Для этого необходимо, чтобы число нитей
между блоками Мг и Nt равнялось 2kx. Конечно, предполагается, что
в блоках нет трения и нить абсолютно гибкая. От неподвижного блока Nx
проводим нить к неподвижному блоку ЛГ2, который лежит на направле-
направлении силы F%, приложенной к частице /и2. В /и2 снова помещаем подвижный
380
блок М2 и здесь опять устраиваем полиспаст с 2k2 нитями между бло-
блоками. От N2 переходим к /Vs и т. д., пока не обойдём всех частиц системы.
Нить от последнего блока Nn переводим на неподвижный блок К и
затем на най укрепляем груз р. Тогда везде натяжение нити станет
равным р, и следовательно, теперь можем отнять от системы силы Fv,
заменив их грузом р и описанной системой полиспастов. Примем, что
система под действием груза р будет в равновесии в том случае, когда
груз р при всяком виртуальном перемещении системы или остаётся
К
IV,
М,
Фиг. 118.
в покое, или поднимается. Пусть частица mv совершает виртуальное
перемещение 8г„; тогда каждая нить полиспаста A1vjVv укоротится на
Су' _v ; если cos(/;v)Srv) станет отрицательным, то эта величина своим
абсолютным значением выразит удлинение нити. Таким образом, от сово-
совокупных перемещений всех частиц груз опустится на
По сказанному для равновесия необходимо, чтобы эта величина была не
положительна, т. е. чтобы выполнялось условие:
п
У. ^F-br^O.
Умножив это неравенство на р и воспользовавшись соотношением C6.29),
мы находим:
что и выражает собой принцип, виртуальных перемещений.
Оставляя в стороне все другие неточности доказательства, обратим
внимание лишь на то,' что в основании рассуждений лежит допущение,
что натяжение нити везде одно и то же; иначе говоря, устанавливается
381
условие об идеальности связи, осуществляемой с помощью нерастяжи-
нерастяжимой нити.
Более точное доказательство Ампера (-Ampere) состоит в следующем.
Рассмотрим систему п частиц тг, /и2,-.«, т„, к которым соответственно
приложены активные силы Fv F2, .. ., Fn. Допустим сперва, что наша
система имеет одну степень свободы. Следовательно, каждая частица т^
может перемещаться лишь по некоторой определённой кривой sv и каж-
каждому положению частицы mv соответствует вполне определённое поло-
положение других частиц системы (фиг. 119).
Соединим частицы тх и т2 системой двух неизменных стержней
т1М12 и М12т2, соединённых между собой шарниром М12. При этом
длины стержней подберем таким образом, чтобы для рассматриваемого
положения частиц ms и т2 стержни тхМ-^ и М12т2 соответственно
не лежали в нормальных плоскостях кривых st и s2. Геометрическим
местом точки М12, отвечающим всем возможным положениям частиц тх
и т2 на кривых Sj и s2, служит некоторая поверхность 212. Когда
частицы ffZj и т2 движутся соответственно по кривым sx и s2, шар
нир М12 описывает некоторую кривую
"¦""' s12, лежащую на поверхности Е12.
При этом мы будем предполагать,
что каким-либо способом осуще-
осуществлено такое положение, что шар-
S нир М12 может описывать только
какую-нибудь одну вполне определён-
определённую кривую s12 из всех возможных
кривых. Мы будем также считать.
Фиг. 119. что при движении- шарнира Л112
стержни щМ^ и М12т2 не устанав-
устанавливаются по нормалям кривой s12: этого всегда можнно достигнуть
соответствующим подбором длин стержней.
Совершенно таким же образом частицы т2 и тв соединим стерж-
стержнями т2М2ь и M2&mz, частицы т3 и /и4 соединим стержнями m3Msi и
/И34/и4 и т. д. Наконец, последнюю частицу т„, которая может переме-
перемещаться по кривой sn, соединим стержнем тпМ с точкой М, которая
может перемещаться- по некоторой кривой s, лежащей на поверхности 2;
длина стержня должна быть выбрана так, чтобы он не становился по
нормали ни к одной из кривых sn и s. Систему m1M12m2M23ms.. .mnM,
полученную из данной сисгемы т1т2. . .тп путём указанного соедине-
соединения её частиц стержнями, мы будем называть производной системой,
а самую последовательность частиц, соединённых стержнями, будем
называть цепью.
Движение или покой точки М на кривой s, очевидно, повлечёт за
собой движение или покой всей системы. Найдём условие, при котором
система частиц под действием заданных сил F^ будет находиться в покое.
Приложим к частице т1 и шарниру М12 по направлению стержня mxMvt
две такие равные но модулю и противоположно направленные силы Q12
и R12, чтобы равнодействующая сил Fx и Q10 легла в нормальную пло-
плоскость кривой sv Предполагается, что силы Q12 и R12 уравновеши-
уравновешиваются реакциями стержня тгМ12, т. е. что реакции концов неизменяе-
неизменяемого стержня равны по модулю и прямо противоположны. Назовём ради-
382
усы-векторы частицы т1 и шарнира Мп соответственно гх и г,8; тогда
из неизменяемости длины стержня мы получим соотношение
(г,— г12J = const.
Отсюда вытекает следующая зависимость между виртуальными переме-
перемещениями частицы т1 и шарнира М12:
(г, —г12).(8г,—8г12) = О.
Сила Q12 идёт по направлению вектора М1а1я1=:Г) — г[2; поэтому из
последнего равенства вытекает следующее:
Qi2-(Sri — 8г1а)=0,
или
Но по условию
поэтому вместо предыдущего равенства мы можем написать:
<?12 • 8г, = — /?12 • Ьгх2. C6.30)
С другой стороны, равнодействующая сил Ft и Q12 нормальна к вир-
виртуальному перемещению Sr, частицы nty
Отсюда, согласно равенству C6.30) мы получаем:
/71-8г1=/?|2-8г,2, C6.31)
т. е. виртуальная работа силы Fv приложенной к частице mv равна
виртуальной работе силы #12, приложенной к шарниру М12.
Рассмотрим теперь следующее звено цепи, т. е. стержень Мпт2.
Приложим к частице т2 и шарниру /И,2 по направлению стержня Мпт2
две такие равные по модулю и противоположно направленные силы Q21
и R2i, чтобы равнодействующая сил Я]2 и Я21 легла в нормальную пло-1
скость кривой • s1!?; очевидно, виртуальная работа сил, действующих
на шарнир /И12 со стороны соединённых шарниром стержней, при пере-
перемещении шарнира по кривой s12 равна нулю:
Из условия неизменяемости стержня т^Мп мы находим:
/?21-(Sr, — 8r12) = 0.
Из двух последних равенств мы получаем:
#12 • 5Г,2 = — Л2,*Г„ = — /?21§Га.
Но
поэтому
#12 • ^Г12 = @21 ' ^Г2-
Использовав равенство C6.31), мы найдём:
Fx-brx = Q2l-br%. C6.32)
Рассмотрим телерь звено т2М2&.
383
Приложим к частице т2 и шарниру M2S две равные по модулю и
противоположно направленные силы Q28 и #23 при условии, чтобы виртуаль-
виртуальная работа всех сил, действующих на частицу пг2 (заданных и прило-
приложенных в результате построения), была бы равна нулю Тогда мы по-
получим:
F2 ¦ Ьг2 + Q21 • oV2 + <?2з' К = 0• C6.33)
Кроме того, на основании неизменяемости длины стержня т2М23 мы имеем
соотношение, аналогичное равенству C6.30):
Q23.5r2 = — /?238г23. C6.34)
Уравнение C6.33) при использовании равенств C6.32) и C6.34) даёт
Л • Sri + ^ • *Ъ = R.Jr26 C6.34')
Продолжая подобное построение, мы, наконец, придём к последнему
стержню тпМ, соединяющему частицу тп с точкой М, радиус-вектор
которой равен г м- Если Q и R обозначают соответственно силы, при-
приложенные к частице пгп и точке М, тогда вместо равенства C6.34') мы
получим:
2 Л-*г„^ Rbr- C6.35)
Точка М будет находиться в движении или в покое в зависимости от
того, будет ли сила R отлична от нуля или равна нулю. Поэтому для
равновесия системы частиц необходимо и достаточно, чтобы выполнялось
равенство
Если данная система имеет не одну, а несколько степеней свободы,
то, очевидно, условие, выведенною нами, должно быть соблюдено для
всякой группы виртуальных перемещений системы; иначе вышло бы, что
система не осталась бы в равновесии, когда мы стесним её свободу
связями так, чтобы единственными виртуальными перемещениями системы
остались те, которые входят в состав рассматриваемой группы.
Как видим, и доказательство Ампера основывается на допущении или
условии об идеальности связи, осуществляемой неизменяемым стержнем.
208. Применение принципа виртуальных перемещений к опре-
определению положений равновесия системы. Заметим предварительно,
что задача о разыскании положений равновесия системы с дифференциаль-
дифференциальными связями является, вообще говоря, неопределённой. Действительно,
мы найдём положения равновесия системы, если из уравнений C6.20)
определим знлчения Зя координат частиц системы; но в эти уравнения
входят ещё а-\-Ь неизвестных множителей \а и jju, между тем как до-
добавочных уравнений C6.14) между координатами имеется всего а, потому
что для положений равновесия все скорости равны нулю, и уравнения
C6.15) обращаются в тождества. Таким образом, Ь величин из Зл а-\-Ь
неизвестных остаются неопределёнными. Если же дифференциальные связи
отсутствуют F = 0), то, вообще говоря, решая систему Зп-\-а уравне-
384
ний C6.20) и C6.14) с З/i-f й неизвестными ?v, \, мы определим одно
или несколько отдельных положений равновесия, и лишь в частных
случаях окажется, что положения равновесия непрерывным образом пере-
переходят одно в другое.
Пусть система отнесена к обобщённым координатам qz (а= 1,2,..., s),
подчинённым а-\-Ь уравнениям (§ 188):
/.(?.) = » A = 1.2 «),
|^.-о «. = ¦.» Я
Тогда, согласно формуле C2.30) на стр. 327, принцип виртуальных пере-
перемещений выразится равенством
0=1
C6-38)
Примем во внимание, что виртуальные перемещения bqg связаны, согласно
уравнениям C6.37), a -t b условиями:
о=1
2
<r=l
Отсюда совершенно таким же путём, каким для декартовых координат
были получены уравнения C6.20), мы придём к уравнениям:
а ь
1=0 (°=1'2 s). C6.39)
Полученные уравнения равновесия вполне согласуются с уравнениями
движения C2.34) на стр. 328; действительно, кинетическая энергия Т
системы в рассматриваемом нами случае представляется однородной функ-
функцией второй степени относительно скоростей (§ 188), и, следовательно,
левые части уравнений C2.34) для положения равновесия тождественно
равны нулю. И здесь, конечно, задача о равновесии может быть опре-
определённой лишь при отсутствии дифференциальных связей.
Наконец, когда все связи конечные и система отнесена к незави-
независимым координатам qz (§ 190), то все bqz будут вполне произволь-
произвольными, а потому из равенства C6.39) вытекают следующие уравнения
равновесия:
Qa = 0 (о=1,2,..., s).
Этот результат вполне согласуется с уравнениями Лагранжа второго
рода C2.42) на стр. 331.
Пример 109. Рассмотрим две частицы щ и пг2, лежащие иа поверхности
эллипсоида
25 г. к. Суслов 385
и взаимно притягивающиеся или отталкивающиеся прямо пропорционально рас-
расстоянию. Найдём их положения равновесия.
Назовём координаты частиц соответственно xv ylt гх и х2, у%, г2. Тогда сило-
силовая функция U будет иметь выражение'
U=~ {(*, - д:2J4-СУ, -ytf 4-(г, - г2K1, C6.41)
где постоянная k отрицательна для сил притяжения и положительна для сил
отталкивания. Принцип виртуальных перемещений дает равенство-
k { (a-j — х2) $xt — %х2) -{- (ух — у2) (&у-\ — °У2) ~\-(zi — z<>) (Ьгл — oz2)} = 0. C6.42)
Согласно уравнению C6.40), виртуальные перемещения системы ограничены
условиями:
" Cj .УтЬу! . z1lz1 п
Д2
¦ Уг^Уг , г2§г2 _
"Г й2 "Г С2 — »•
Умножим первое из этих уравнений на 1^, второе иа >2 и прибавим их к урав-
уравнению C6.42). Приравняв затем нулю коэффициенты при вариациях координат,
мы получим следующие уравнения равновесия'
C6.43)
К этим шести уравнениям надо прибавить еще два, а именно;
Из первой пачы уравнеиий C6.43) следует, что или
хг = х% = 0,
или определитель этих уравнений должен быть нулём, т. е.
иначе последнее уравнение можно записать так:
Х,J + *д8(I4-I!) = 0. C6.44)
Подобным образом другие уравнения дают или
или
X1J-f^2(>l + ^ = 0, C6.45)
а также или
Zl = z2=0,
или
Х1Х2 + йсз^14-Хг) = 0. C6.46)
Если я2, б2 и с8 не равны между собой, то уравнения C6.44), C6.45) и C6.46)
могут быть совместны лишь при условии-
386
что влечёт за собой равенства
X, = Хо = 0.
В таком случае из уравнений C6.43) мы находим-
т. е. частицы /га, и /га2 совпадают, но могут занимать произвольное положение
на эллипсоиде. Найденные положения равновесия, заполняющие собой всю
поверхность эллипсоида, назовем положениями равновесия первого рода.
Если Xj-f-^г не нуль, то из трёх равенств C6.44), C6.45) и C6.46) может
выполняться только одно, например первое. Тогда
У\ — yi—zl = z2 = 0,
а потому
Xi =- а, х-,= — я,
или
Х\= — а, х2 = а,
т. е. частицы располагаются на концах оси эллипсоида, равной 2а. Предполо-
Предположение
хх=хг = :? a
мы отбрасываем, так как оно возвращает нас к положениям равновесия пер-
первого рода. Множители \ь Х2 оказываются теперь равными каждый 2ka2.
Подобным образом найдём еще' четыре положения равновесия второго
рода:
0 b Ь
Если b = c, то и положений равновесия второго рода бесконечное множество:
они лежат на экваторе эллипсоида; абсциссы частиц имеют значения x]'=x%=0.
Наконец, для a — b — с положения равновесия второго рода покрывают собой
всю поверхность эллипсоида.
Пример ПО. Найдём условия равновесия свободной неизменяемой си-
системы, или свободного твердого тела. Пусть к частице от, твёрдого тела,
определённой радиусом-вектором г„ приложена активная сила /\; тогда со-
согласно принципу виртуальных перемещений, условие равновесия твёрдого тела
выразите? равенством
л
2/\-2г, = 0. C6.47
Чтобы найти общее выражение для виртуального перемещения Sr, частицы
твёрдого тела, вспомним выражение (9.32) на стр. 93 для скорости произ-
произвольной частицы от, тела в общем случае его движения, имеем
"v=»4 + »X7,, C6.48)
где *Од есть скорость некоторой точки А тела (так называемого полюса
pt — радиус-вектор частицы /я,,, проведённый из начала А подвижной системы
координат, движущейся поступательно вместе с точкой А тела, и ш — угло-
угловая скорость тела по отношению к этой системе кооолинат. Умножим равен-
равенство C6.48) на it, где it — бесконечно малый промежуток времени Произве-
Произведение v^t будет представлять собой возможное перемещение частицы m.t,
а при тех связях, с которыми мы имеем дело (мы рассматриваем свободное
твёрдое тело), возможные перемещения частиц совпадают с их виртуальными
перемещениями огу. Пусть за рассматриваемый промежуток времени it тело
повёртывается на угол 8а вокруг мгновенной оси. Имеем
Предыдущее равенство на этом основании перепишется так:
^^Гд + ^Хй- C6.49)
Подставив это выражение для or, в уравнение <36.47) и воспользовавшись
25-" 387
правилом циклической перестановки сомножителей векторно-скалярного про-
произведения, мы приведём это уравнение к виду
или _
/?-Sr/,-f-Z./,.oH8a = 0, C6.50)
где F есть главный вектор сил, а /,л—их главный момент относительно
точки А. Если твёрдое тело свободно, то перемещения ЬгА и ~~шЧа независимы
между собой. Это ясно из геометрических соображений, но может быть также
обосновано тем, что Ьгд и и>°8а можно выразить через вариации независимых ко-
координаты твёрдого тела. Таковыми, как известно, могут служить декартовы
координаты хА, уА, zA полюса А и эйлеровы углы ?, ф, & (§ 190). Мы имеем
следующие зависимости:
(„Sf — x°<oxit 4-y>iay
Далее, из уравнений (9.28) на стр. 91 путём их умножения на It мы получаем:
taxlt = sin ф sin O-Sy -f-cos ф- S&,
wyit = — cos^sind-Sy -(-sinф• S9,
<az&t — Siji -(- cos &• if.
= sin Э.
Определитель этих уравнений равен:
sin ф sin Э costji 0
— cos 4> sin & sin ф 0
cos & 0 1
Он, вообще говоря, отличен от нуля; следовательно, из независимости вариа-
вариаций эйлеровых углов следует независимость проекций вектора и>Ча. Отсюда,
сравнивая вышеприведённые выражения векторов 1гА и шЧа через их проек-
проекции, мы убеждаемся, что сами эти векторы независимы между собой. По этой
причине уравнение C6.50) распадается на следующие два:
т. е. условия равновесия свободного абсолютно твёрдого тела состоят в том,
что равны нулю главный вектор приложенных сил и их главный момент отно-
относительно произвольного центра А. Другими словами, система скользящих
векторов, изображающих силы, должна быть эквивалентной нулю (§ 19).
Пример 111. Найдём условия равновесия твёрдою тела, имеющего
одну неподвижную точку. Примем неподвижную точку за полюс А. Тогда из
уравнения C6.50) мы получим следующие условия равновесия:
т. е. главный момент приложенных сил относительно неподвижной точки дол-
должен равняться нулю.
Пример 112. Найдём условия равновесия твёрдого тела с неподвижной
осью вращения. Примем эту ось за ось Az неподвижной системы коорди-
координат Axyz. Тогда, если в уравнении C6.49) все векторы выразить через их
проекции, слева останется только один член LAzif, и уравнение приведётся
к следующему:
т. е. главный момент приложенных сил относительно оси вращения равен нулю.
Пример 113. Найдём условия равновесия твёрдого тела, опирающегося
тремя точками на абсолютно гладкую плоскость. Примем, что плоскость опоры
параллельна плоскости Оху, а ось Oz направим в ту сторону, куда тело может
сходить с плоскости. Тогда мы будем иметь:
388
Рассмотрим сначала те перемещения, которые оставляют систему на связи,
т. е. при которых 8гл = 0; тогда из уравнения C6.50) найде'м следующие
условия равновесия:
т. е. главный вектор приложенных сил должен быть нормален к плоскости
опоры, а главный момент их параллелен этой плоскости. Так как связь
zA= const.— неудерживающая, то сюда присоединяется ещё условие
т е.
главный вектор сил не должен отрывать тело от опорной плоскости.
209. Определение положений равновесия при силах, имеющих
силовую функцию. Пусть система отнесена к обобщённым координа-
координатам qa\ принцип виртуальных перемещений для таких координат согласно
формуле C6.38) имеет выражение:
2 QA=°-
0=1
Если силы имеют силовую функцию, то, согласно формуле C2.43) на
стр. 332, мы имеем
и, следовательно, предыдущее равенство можно переписать так:
Мы видим, что разыскание положений равновесия сводится в рассматри-
рассматриваемом случае к определению условий, при которых первая вариация
силовой функции U обращаетса в нуль; другими словами, положения
равновесия совпадают с теми положениями системы, для которых силовая
функция имеет стационарное значение. Для независимых координат при-
придётся искать абсолютное стационарное значение функции U; если же
координаты связаны условиями, то стационарное значение функции U
будет относительным. Если силовая функция однозначна и, следовательно,
существует потенциальная энергия V= — U, всё сказанное о стацио-
стационарности значения U в положении равновесия может быть также отне-
отнесено и к потенциальной энергии V.
210. Устойчивое и неустойчивое равновесие. Критерий устой-
устойчивости. Положения равновесия различаются по характеру движения,
которое может совершать рассматриваемая система в соседстве с этими
положениями. Если система, при достаточно малом начальном отклонении
от положения равновесия и при достаточно малой начальной кинетиче-
кинетической энергии, во всё время своего последующего движения будет нахо-
находиться так близко от положения равновесия, как нам угодно, то поло-
положение равновесия называется устойчивым, точнее — положением
устойчивого равновесия. Всякое же другое положение равнове-
равновесия, не удовлетворяющее приведённым условиям, называется неустой-
неустойчивым. Для консервативных систем Лежеи-Дирнхле (Lejeune-Dirichlet)
дал следующее достаточное условие устойчивости: если силовая
389
функция в положении равновесия имеет максимум (или соответственно
потенциальная энергия — минимум), то это положение устой-
устойчиво. В самом деле, пусть силовая функция U, зависящая от коорди-
координат системы <7„. имеет в положении равновесия максимум U, причём пусть
координаты системы принимают в этом положении значения qa. Если мв
станем аргументам функции U, т. е. координатам qo, давать значения,
всё более и более отличающиеся от qa, то сначала функция U будет
убывать, но в общем случае это убывание может не продолжаться бес-
беспредельно; после того как силовая функция U, уменьшаясь, дошла до
некоторого значения С,, меньшего U, она может снова начать увеличи-
увеличиваться или это значение ?/, может оказаться особым для функции,
например, начиная с этого значения функция U становится многозначной
или претерпевает разрыв непрерывности. Таких значений ?/, может най-
найтись бесконечное множество; выберем из них наибольшее и положитель-
положительную разность U—?/, обозначим через Е2, т. е. пусть
если же функция U для всех значений независимых переменных, отлич-
отличных от qa, имеет значения, меньшие чем U, то пусть L/, есть её значе-
значение, отвечающее некоторой произвольной системе значений дс. Допуская
непрерывность изменения функции U, мы можем всякое значение 0 ме-
между U и ?/j представить следующим образом:
U=U — e2, C6.51)
где
Выведем рассматриваемую систему из положения равновесия и предо-
предоставим ей двигаться под действием активных сил и реакций связей.
Пусть при этом в начальном положении силовая функция имеет значение
U—Uo. Начальное положение выберем так, чтобы ?/0 было больше
U — ?2, т. е., как говорят, чтобы ?/0 лежало в области максимума U;
тогда согласно равенству C6.51), мы будем иметь
и0 = О—4. C6.52)
Но движение консервативной системы происходит согласно с интегралом
энергии C1.40) на стр. 316, т. е.
T=U-\-h.
Если постоянную h здесь выразить через начальные данные, то мы можем
stot интеграл переписать так.
Согласно формуле C6.52) мы отсюда получаем:
Г=и— t/ + ?o
Так как кинетическая энергия 7 системы является величиной не отрица-
отрицательной, то написанное равенство требует, чтобы выполнялось следующее
условие:
д—и**й-\-Т0. C6.53)
390
Если теперь начальную кинетическую энергию мы выберем столь малою,
чтобы имело место неравенство
то во всё время движения системы силовая функция U не выйдет из
области максимума U; при этом из выражения C6.53) ясно, что всегда
можно так подобрать величины s0 и 70, чтобы U оставалось сколь угодно
близко к U, т. е. чтобы система в своём движении так мало удалялась
от положения равновесия, как нам угодно. Таким образом, действительно,
существование максимума U является достаточным условием для
устойчивости положения равновесия системы.
Пример 114. Легко проверить, что. положения равновесия, найденные
нами в примере 109 на стр. 385, соответствуют относительным стационарным
значениям силовой функции. Действительно, силовой функции C6.41) в этом
примере можно дать выражение-
J! \
гае г12 есть расстояние между рассматриваемыми частицами. А это расстояние
как раз принимает стационарное значение, когда частицы совпадают или когда
они располагаются на концах какой-либо из осей эллипсоида.
Пример 115. Определим положения равновесия системы весомых
частиц. Направим ось Oz вертикально кверху; тогда проекции силы /\, при-
приложенной к какой-либо частице массы /я„, будут:
где g есть ускорение силы тяжести; следовательно, для силовой функ-
функции U но формуле C1.39) на стр. 316 мы получим следующее выражение:
отсюда находим:
п
U = — g 2 m^z4 4- const. = — Mgzc 4- const., C6.54)
где через zc обозначена координата центра масс системы. Си-
Система будет, следовательно, находиться в равновесии в таких
положениях, для которых при всевозможных виртуальных пере- 0к
мещениях системы будет соблюдаться условие: ! ^?
и
с ' Фиг. 120.
т. е. для которых центр масс не будет смещаться по вертикали.
В этом состоит принцип Торичелли (ТогпсеШ). Если при этом для рассматри-
рассматриваемого положения центр-масс будет лежать ниже, чем для смежных возмож-
возможных положений системы, то это положение равновесия будет устойчивым.
Пример 116. Весомая однородная квадратная пластинка ABCD может
вращаться в вертикальной плоскости около своего угла А (фиг. 120). К бли-
ближайшему углу квадрата В привязана нить, перекинутая через блок Е и натя-
натягиваемая грузом Q. Бесконечно малый блок Е расположен вертикально над углом
Л в расстоянии, равном стороне квадрата. Величина груза Q относится к весу Р
пластинки, как \:У~2. Найти положения равновесия системы1).
Система имеет только одну степень свободы, и положение её вполне
определяется углом НАС=у между вертикалью АН, направленной книзу,
и диагональю АС. Центр масс квадрата лежит в точке О на пересечении диа-
l) Math. Tripos, 1855.
391
гоналей АС к DB. Если сторону квадрата положим равной а и примем, что
ось z направлена вертикально кверху, а начало координат совпадает с А, то
координата zc центра масс квадрата будет
а
zr — — cos ?•
С другой стороны, координата zq груза Q выразится по условию задачи так:
Ф
Zq = u — I-{-2а sin-jr-,
если обозначим через / длину нити QEB, а через ф угол ЕАВ. По формуле
C6.54) силовая функция для рассматриваемой системы будет иметь выражение
U = —=. a cos <р — а -{-/ — 2а sm —- -)- const.
Но между углами ? и ф имеется следующее соотношение:
y-f- Z СЛй-)-ф = 1с, или ? -)- ф = — тт.
Поэтому силовая функция может быть представлена в виде
U = -^=. \l — а — 2я sin |-+ a sin (ф — ^-) 4-const.
/2 L 2 V 4'J '
Приравняв нулю производную от U по ф, имеем:
dU Ра ( ф /, я\^, 2Ра 1 / г i\ 1 /Зф it \ „
— _ _ JL- \ cos-i — cos I ф )\ = -= sin— ^ I sin— — 1=0.
dt? — V2\ 2 \ A)) V2 2 V 4 2 ) 2 \ 2 4 /
Отсюда получаем четыре положения равновесия:
PU Ра (\ ф /, rU
- - =—z=- < —SHI-*- Sin ( ф \\ .
l У V2 ^2 2 V 4 j)
Вычислим вторую производную от ?/'
dHJ
d.
Для найденных выше значений ф получим.
/dW\ Ра ! 1 - , it\^n /*Pf/\ Pa rt
( I =-= I—sin —4-sin—) >0, I = ^=sin—<
\d^J1 V2 \2 12^ 6/ \d^j, 2УТ 4
/d4J\ Pa bn^- (d?U\ ЪРа к ^ .
I ) = r= sin — < 0, = —— sin — > 0.
\йф2/3 2/2 12 иФ2Л 2/2 4
Следовательно, второе и третье положения равновесия устойчивы.
XXXVII. РАВНОВЕСИЕ СТЕРЖНЕВЫХ МНОГОУГОЛЬНИКОВ
И НИТЕЙ
211. Нитевые и стержневые многоугольники. Услови'я их равно-
равновесия. Система материальных частиц, из которых каждая соединена не-
нерастяжимыми нитями или неизменяемыми стержнями с двумя другими, но-
носит название замкнутого нитевого или стержневого многоугольника.
Е^чи же две крайние частицы не связаны друг с другом и, следовательно,
392
каждая из них соединена лишь с одной из частиц системы, то много-
многоугольник называется разомкнутым. Обозначим через /и„ массу какой-
либо частицы системы; радиус-вектор этой частицы пусть будет г„. При-
Примем, что индекс v может принимать значения v = 0,1,..., я, т. е. пусть
число частиц равно п-\-\. Активную силу, приложенную к частице тч,
назовём F4. Рассмотрим условия равновесия данного многоугольника под
действием сил F4, причём предположим, что силы /\, даны по модулю и
направлению и не зависят от положения частиц т.,. Все последующие
рассуждения будут вестись в этом предположении. Принцип виртуальных
перемещений даёт нам следующее условие равновесия:
C7.1)
v=0
при этом для стержневого многоугольника мы должны сохранить лишь
знак равенства. Если многоугольник замкнутый, то уравнения я-}-1 свя-
связей системы будут:
/п_ьп = ^„_1,„
I *¦„! г„ I 5* О,
C7.2)
Здесь каждая из постоянных 1Н ч+1 равна длине соответственного звена,
т. е. длине нити или стержня между двумя частицами. Конечно, для
стержней надо знаки неравенства отбросить. Когда многоугольник разом-
разомкнут, связей будет только я, а именно, последнее из уравнений C7.2),
выражающее связь между крайними частицами т0 и тп, тогда отсут-
отсутствует. Провариировав каждое из уравнений связей C7.2), мы получим
условия для виртуальных перемещений системы:
0.
C7.3)
Для замкнутого многоугольника v = 0, 1, 2,..., я, причём индекс я надо
заменить нулём; для разомкнутого многоугольника v = 0, 1,...,я ¦—1.
Из выражений C7.1) и C7.3) способом, изложенным в § 207, выводим
следующие уравнения равновесия для замкнутого многоугольника:
— I
'л,0
\ro-rn\
Г,. — Г
— X..
г — г
1—1
Г — Г
ля-1,п Т7~
I л
п-1
= о,
= 0.
= 0.
C7.4)
393
Величины Х„ v+1 представляют собой множители связей. В настоящем
случае эти множители по своей абсолютной величине равняются модулям
соответственных реакций /?Л,+ 1: это следует из формулы C0.16) на
стр. 295, так как градиенты' связей C7.2) по численным значениям ра-
равны единицам; итак,
Уравнения равновесия разомкнутого многоугольника будут иметь вид
ri ri —1
р > г"~гд-1 —
" л-1л 1гг| ~
C7.5)
Уравнения C7.4) числом Зп-\-3, если их записать в проекциях, будут
содержать в себе 4я-|-4 неизвестных: Зя-|-3 координаты и п-\-\ мно-
множителей связ'ей. К этим уравнениям, если связи не ослаблены, надо при-
присоединить ешё л —|— 1 уравнений связей C7.2). Следовательно, повиди-
мому, число уравнений равно числу неизвестных. Но если мы сложим по-
почленно все уравнения C7.4), то получим:
S ^ = 0. C7.6)
Это уравнение свободно от координат частиц (см. выше заме-
замечание о силах FJ и выражает собой условие только относительно задан-
заданных сил: оно требует, чтобы главный вектор заданных сил равнялся нулю.
Легко понять, почему это условие должно быть выполнено. В самом
деле, представим себе, что многоугольник затвердел в своём положении
равновесия; от этого, очевидно, равновесие не нарушится, а для неизме
няемой системы одним из условий равновесия как раз является равен-
равенство C7.6). Векторное уравнение C7.6), конечно, эквивалентно трём
уравнениям в проекциях. Итак, оказывается, что 4я-|- 4 неизвестных надо
определить из 4/г —|— 1 уравнений. По исключении п -\- 1 множителей связей,
Зп -{- 3 координаты будут связаны лишь Зя уравнениями, так что три
координаты могут принимать произвольные значения. ДруЕими словами,
одной из вершин многоугольника можно дать вполне произвольное поло-
положение. Если бы какой-нибудь из множителей Ху v+I оказался отрицатель-
отрицательным (т. е. связь была ослаблена), то соответственное уравнение связи
надо было бы заменить неравенством, и тогда, конечно, неопределенность
стала бы ещё большей.
Заметим, между прочим, что каждые три взаимно уравновешиваю-
уравновешивающиеся силы, /; /?,_, , и /f,iV+I, приложенные к частице mv, должны
лежать в одной плоскости.' А так как направление реакций /?v v+1
совпадает с направлением соответственных звеньев, то, следовательно,
сила F4 с двумя звеньями, mv_j тн и пгч от,,.,, лежит в одной плоско-
394
сти. Легко проверить это; пусть через точки m^_v /га,, тч+1 проходит плос-
плоскость Оху, т. е. пусть zv_j =2V ^=2? +| =0; тогда из уравнений равно-
равновесия вытекает, что /\г = 0.
Всё сказанное о Замкнутом многоугольнике относится с небольшими
изменениями и к разомкнутому. Число уравнений C7.5) между координа-
координатами и реакциями равно в координатной записи 3/Z-J-3, а неизвестных
имеется 4я -(- 3: а именно, Зя -(- 3 координаты и п реакций. Зато и добавочных
авнений связей мы имеем всего я, так как последнее из уравне-
й C7.2) отсутствует. Из уравнений C7.5) опять выводим равен-
bq C7.6) и, следовательно, убеждаемся, что положение одной из ча-
иц, например т0, может быть выбрано произвольно. Кроме того, ча-
Ь) ^
Фиг. 121.
метим, что крайние звенья многоугольника совпадают по направлению о
силами, приложенными к крайним частицам: это непосредственно видно
из первого и последнего уравнений C7.5).
Когда разомкнутый многоугольник плоский, т. е. когда все данные
силы /^ параллельны одной и той же плоскости, то для определения
формы равновесия такого многоугольника с большим удобством приме-
применяется графический приём. Мы уже видели выше, что положение одной
из вершин многоугольника, например крайней частицы т0, можно вы-
выбрать произвольно. Отметим на фиг. 121,а положение этой частииы, а
также силу Р$, к ней приложенную. Обратимся к звену /и0 mv Оно дол-
должно, по сказанному выше, иметь направление, совпадающее с силой Fo;
при этом, если многоугольник стержневой, то сила может итти по напра-
направлению как от то к mv так и в обратную сторону, а если многоуголь-
многоугольник нитяной, то лишь от т1 к т0, т. е. так, как показано на чертеже.
Огложнв в построенном направлении длину /01 звена тотх, получим вер-
395
шину многоугольника mv Теперь заметим, что реакции ROl и Rl0, соот-
соответственно приложенные к частицам т^ и т1, имеют выражения
/?0] = Fo, °Ю == 1 == *0>
следовательно, в точке mi две уже известные нам силы, именно, Fx
и R10, уравновешиваются реакциею Rl2 второго звена. Построим равно-
равнодействующую Sl сил F} и /?t 0 и определим модуль и направление реак-
реакции R[ 2. Само звено т1т2 опять может для стержневого многоуголь-
многоугольника иметь направление, совпадающее с реакцией Rl 3, или ему противо-
противоположное, а для нитевого только одно совпадающее, которое и построе-
построено на чертеже. Отложив длину 112 звена т1 т2, найдём вершину т2.
Продолжая поступать таким образом, мы, очевидно, сумеем построить
все звенья многоугольника; при этом для последнего, (п -{- 1 )-го, звена должно
оказаться, что его направление совпадает с силой Fn. Возьмём произ-
произвольный полюс О (фиг. 121,6) и из него, как из начала, начнём строить
многоугольник сил Fo, Fv..., Fn; т. е. пусть О/0 = /70, /0/х = Fv.. .,
fn_ifn = Fn. По свойству C7.6) многоугольник О/0/1.. .fn обязательно
замкнётся, и, следовательно, трчка /п совпадёт с полюсом О. Нетрудно
сообразить, что векторы О/0, Ofv ... , О/„ представят собой реакции
#о, 1 ^1,а> ¦ • •> ^„-1 „ соответственных звеньев. В самом деле, реакция
Яо г как мы видели, равна силе Fo, < т. е. выражается вектором О/0;
реакция R2 1 служит суммой сил /?t 0 и Fv т. е. выразится вектором
Of у и т. д. до реакции Rn_u „, которая по предыдущему должна рав-
равняться силе Fn и, следовательно, выразится вектором fn_xfn. Таким
образом, если построен многоугольник сил ОД /2. ../„_,, то мы можем
тотчас же построить и положение равновесия нитяного многоугольника, а
также графически определить натяжения звеньев. Между обеими диа-
диаграммами можно вывести также другие любопытные соотношения, которые
и легли в основание одного из отделов прикладной механики, носящего
название графической статики.
212. Уравнения равновесия свободной нити. Представим себе, что
звенья стержневого многоугольника становятся бесконечно малы, и, следо-
следовательно, при постоянной конечной длине периметра число вершин его
безгранично возрастает. При этом предполагается, что силы, приложенные
к вершинам, будут также бесконечно малы, но что главный вектор сил
остаётся величиной конечной (т. е. не бесконечно малой). Тогда в пре-
пределе, вместо многоугольника, мы получим некоторую материальную гиб-
гибкую нерастяжимую нить, по которой распределены приложенные
силы. Относительно сил допустим, что они распределены по нити не-
непрерывно, т. е. что силы, действующие на две бесконечно близкие точки
нити, бесконечно мало отличаются друг от друга. Прежде чем перейти
к разбору условий равновесия таких материальных нитей, заметим, что
сами бесконечно малые силы неудобно непосредственно вводить в анализ.
Вместо сил мы введём следующие величины, тесно с ними связанные.
Возьмём какой-либо отрезок нити В'В", а на этом отрезке или на
границе его некоторую точку В (фиг. 122). Пусть длина отрезка В'В"
будет As. Найдём главный вектор F сил, приложенных к В В". По усло-
условию, при конечности As этот вектор сам будет конечным. Кроме вектора
р
F рассмотрим теперь вектор -г-. Представим себе теперь, что точки *В'
396
и В' стремятся совпасть с В; тогда отношение -г- примет неопределён-
неопределённый вид. Допустим, что отношение это имеет некоторый определённый
предел Ф, т. е. пусть
ф = lim ~ .
В таком случае вектор Ф "носит название силы, приложенной к
точке В и отнесённой к единице длины ниш. В самом деле, если бы от-
отрезок В' В" стал равным единице (одному сантиметру), если
бы он спрямился и наложился на касательную к нити в точке
В и если бы по всему этому отрезку силы были распре-
распределены так, как по нити в соседстве с точкой В, то главный
вектор таких сил равнялся бы Ф. Обозначим бесконечно
малый элемент нити, содержащий точ«<у В, через ds; тогда, Фиг. 122.
по предыдущему, сила, приложенная к этому элементу, будет
иметь значение (&ds. Величина Ф не однородна с силой по размерности:
„ s. дина грамм
единицей Ф служит не дина, а = ,— „ .
J см (секунда^
Чтобы найти условия равновесия гибкой нерастяжимой нити B^BV
обратимся к принципу виртуальных перемещений, причём для общности
предположим, что нить разомкнутая. Тогда, если обозначим через ЬАк
виртуальную работу сил Fo и Fv приложенных к началу Во и концу Вх
нити, то получим согласно предыдущему
= 0, C7.7)
где интегрирование должно быть распространено на всю длину Во В1
нити. За положительное направление отсчёта дуг считаем направле-
направление Во В1. Уравнения связей рассматриваемой системы мы запишем в
форме, аналогичной уравнениям C7.2):
const. — ds — 0. C7.8)
Число таких связей равно числу элементов нити. Провариируем каждое из
уравнений C7.8), умножим на соответственный множитель и сумму
полученных выражений 'прибавим к уравнению C7.7); тогда мы найдём:
%Ak + С Ф-Srds— j ).8ds=0. C7.9)
Конечно, и второй интеграл распространён на все элементы, т. е. на
всю длину В0В1 нити.
Назовём т° единичный вектор касательной к дуге BqB^ в некоторой
данной её точке; тогда мы найдём:
bds = Ь (т° • dr) = 8т» • dr +"т° • Ыг=т° • dbr,
так как произведение 8т°-й?г равно нулю ввиду перпендикулярности
сомножителей. Терерь второй интеграл формулы C7.9), если применить
интегрирование по частям, может быть преобразован следующим образом:
397
Г Ш$ = Г hfi • dbr= \Ц ¦ Ьгх — ^Зг0 — Г 1
в, в, в^ТГ, в„ в.
здесь значки 0 и 1 показывают, что значения соответственных величин
надо взять для концов Во и Вх нити. Подставим последний результат в
равенство C7.7) и, кроме того, выпишем в нём полностью элементарную
работу ЬАк; мы получим:
+ V$) • Sr° -f {Fx -
+ j (Ф +
ir) ds = 0. C7.10)
По тем же соображениям, что и при выводе уравнений равновесия C6.20)
из равенства C6.19) на стр. 377, мы должны приравнять нулю коэффи-
коэффициенты при всех вариациях как вне знака интеграла, так и в подинтег-
ральном выражении. Тогда подинтегральная функция даст нам следующее
уравнение равновесия для внутреннего элемента нити:
= 0; C7.11)
члены же вне интеграла дадут граничные условия:
Ро+1Т1 = О, C7.12)
^_Х# = 0. C7.13)
Как видно из вывода, Fo и Fy представляют собой силы, а Ф—силу, от-
отнесённую к единице длины. Из сопоставления уравнений C7.11), C7.12)
и C7.13) с уравнениями C7.5) ясно, что hf представляет еобой ту силу»
которую надо было бы приложить по положительной касательной в лю-
любой точке В HHfn, если бы мы нить разрезали в этой точке и пожелали,
чтобы её часть BqB осталась в равновесии. Эта сила называется натя-
натяжением нити в данной, точке. За положительное направление натяже-
натяжения, следовательно, принимается направление BqB\ — положительного
отсчёта дуг. Сказанное с особенной ясностью выступает в формулах
C7.12) и C7.13), так как обе силы Fo и Fv приложенные к концам
Во и Вг нити, очевидно, направлены по касательным к ней, притом пер-
первая в отрицательную сторону, а вторая — в положительную-. Нетрудно
записать уравнения C7.11), C7.12) и C7.13) в проекциях на оси декар-
декартовой системы координат; имеем
C7.14)
Ф,+¦?(*?) =0,
x~ds\ ds)
Предположим теперь, что один из концов нити, например Во, не
свободен и должен лежать на данной поверхности:
<р{х,у,г) = 0. C7.15)
398
Тогда вариация 5г0 радиуса-вектора конца Ао нити окажется подчинённой
условию:
dS O
Умножим это равенство на некоторый множитель д0 и приоавим к урав-
уравнению C7.10). Тогда вместо уравнения C7.12) мы получим следующее
уравнение равновесия конца Во нити:
В частном случае, если к концу Во не приложена активная сила, т. е.
F0~0, мы из последнего уравнения получаем, что или
или
То J! grad !p0,
т. е. касательная в конце Во нити нормальна к поверхности C7.15).
Если бы конец Во нити был принуждён лежать на данной кривой
r—r(a), C7.1b)
где а—длина дуги этой кривой, то вариация $г0 выразилась бы через
вариацию 8а следующим образом:
Поэтому вместо уравнения равновесия C7.12) мы бы нашли:
Если F0 = 0, то отсюда вытекает, что либо Хо = 0, либо (¦j-l . т° — 0,
т. е. или начальное натяжение нити нуль, или начальная касательная
нити нормальна к кривой C7.16).
Наконец, если конец Во нити неподвижно закреплён, то вариация его
радиуса-вектора равна нулю, 8го = О, и, следовательно, условие C7.12)
вовсе отпадает. Подобно только что рассмотренным граничным условиям
для конца Вй нити могут быть заданы граничные условия и для второго
конца В1 нити или же одновременно для обоих концов Во и Bv
Вернёмся к уравнению C7.11) и произведём указанное в нём диф-
дифференцирование. Согласно формуле D.20) на стр. 36 мы имеем
где v° — единичный вектор главной нормали кривой, по которой распо-
расположена нить, а р — её радиус кривизны. Следовательно, уравнение
C7.11) перепишется так:
ф_|_ _^о _|__vb==o. C7.17)
Спроектировав это равенство на касательную, главную нормаль и бинор-
бинормаль к кривой, по которой расположена нить, и обозначив Фт, Фу, ф_/
399
проекции вектора Ф на эти направления, мы получим:
Ф< + ?==0' ф> + Ар = 0. Ф„=0. C7.18)
Эти три уравнения эквивалентны уравнениям C7.14). Последнее из них
говорит, что нить располагается таким образом, что в любой её точке
соприкасающаяся плоскость проходит через активную силу. Аналогия
выведенных уравнений с уравнениями движения материальной частицы
очевидна сама собой.
213. Интегрирование уравнений равновесия свободной нити. От-
Относительно интегрирования уравнений равновесия C7.14) или равносиль-
равносильных им уравнений C7.18) мы можем сделать такие замечания. Отнесённая
к единице длины сила Ф может зависеть от положения элемента ds на
нити и в пространстве, а также и от направления этого элемента; поэтому
мы имеем:
ф=ф>, г, т°).
Не надо при этом забывать, что | т° | = 1, что в записи в проекциях даёт:
YY 1 147 1Q\
Из сказанного мы заключаем, что вопрос о форме равновесия свободной
нити решается при помощи четырёх дифференциальных уравнений C7.14)
и C7.19), заключающих в себе четыре неизвестные функции от s, a
именно, х, у, z и \. Уравнения эти второго порядка относительно
х, у, z и первого относительно X. Кроме того, между первыми про-
производными функций х, у, z по 5 мы име*ем соотношение C7.19), свобод-
свободное от всяких произвольных постоянных. Следовательно, число произволь-
произвольных постоянных в самом общем решении рассматриваемых уравнений
должно равняться шести; т. е. интегралы будут иметь вид
х = х{s, Cv ..., С6),
y=y{s, Cv С„),
z = z(s, Cv ..., С„),
\г=Цз, С,, ..., С„),
где Cv C2, ..., Се—произвольные постоянные. Эти постоянные опре-
определятся, если мы зададим для некоторого, так называемого начального
значения переменного s, например s0, положение элемента нити, т. е.
/dx\ (dy\ ldz\
х0, Уо, z0, его направляющие косинусы^^,^^, l^j и величину
натяжения 10 нити на этом элементе; уравнения для определения постоянных
будут следующие:
x3 = x(s0, Cv ...,Ce), yo = y{so, Cv .... Ce), zo = z{soCv ..., Ce),
X0=X(s0, Cj, ..,Ce), x'0 = x'(s0,Cv ...,Ce), y'0=y'{s0, Cv ...,Ce);
штрихами обозначены производные по s.
Можно также задать длину нити / и положения двух её концов,
Во (х0, у0, z0) и Вх (xv yv гг). Пусть начало отсчёта дуг совпадает с точ-
точкой Во; тогда so = O, a st = / и, следовательно, шесть постоянных
400
C'v .. ., Ce определятся из уравнений:
хо = х(О,С1 Св),у0=у(р, С„ ...,Ce).zQ = z{0,Cv ...,Св),
*! = *(/, С,, ...,Св), уг=уA,Сг ...,С„), г,=г(/, С,, . . .. Q.
Когда отнесённая к единице длины сила Ф не зависит or s, тогда
можно взять одну из координат, например х, за независимую переменную.
В таком случае уравнение C7.19) обращается в тождество, а три урав-
уравнения C7.14) будут второго порядка относительно функций у, z и
первого относительно \. Поэтому в общее решение войдут пять
произвольных постоянных:
у=у(х, Dv Л3, ...,Db), г=*г(х, Dv ...,Dt), l = \(x, Dv ..., Ds),
где Dj,...,D5 — произвольные постоянные. При помощи первых двух
интегралов мы сумеем выразить и длину дуги s как функцию от х и
Dv ..., D5, если выберем определённое начало отсчёта дуг.
s = s(x, Dv ...,D5).
Когда нам будут даны длина нити / и положения её концов Во (х0, у0, z0)
и Вх (xv yv 2J, то постоянные найдутся из пяти уравнений:
Уо = У{хо> Di Di)' го = 2{хо, Dv ..., D6),
y1=y{xvDl D.o), zl=z{xvDv ...,Db),
l = sl — s0 = s{xl,Dv . . ., Db) — s (*0, Dv ...,D.).
214. Связь между задачей о форме равновесия нити и задачей
о движении материальной частицы. Положим, что силы, приложенные
к нити, имеют силовую функцию, т. е. пусть
Ф —grad U(x, у, z).
В этом случае уравнение C7.11) можно переписать так:
gTadU-{-~{W)=0 C7.20)
Умножим это равенство на т°; мы получим:
dU
.лагаемое равно
второе слагаемое преобразуем следующим образом:
Согласно формуле A8.56) на. стр. 170, первое слагаемое равно — •
ds •
ds v ' dsv ' ds ds
это справедливо, так как т° - т° = 1, а — т° • 1т0 = 0 ввиду перпендику-
перпендикулярности сомножителей. Таким образом, мы приходим к уравнению
ds ~ ds
Отсюда интегрированием находим:
Х = у — и,
где у—произвольная постоянная.
26 г. К. Суслов 401
При помощи этого интеграла уравнению C7.20), по умножении его
на X, можно дать такой вид:
X |j (at0) = — I grad U= (U— у) grad U,
или
x|-(Xx°) = grad P, C7.21)
где положено
С другой стороны, уравнение движения свободной материальной частицы
массы т, движущейся в поле сил, имеющих силовую функцию Uv
имеет вид:
=giad Uv
Преобразуем следующим образом ускорение w частицы:
»=l(S?)=i(§'°)-S=^<*)-
На этом основании предыдущее уравнение можно переписать так:
f^(OT°)=^gradt/1. C7.22)
Полученное равенство представляет собой дифференциальное уравнение
траектории. Если его записать в проекциях на оси декартовых коорди-
координат, мы будем иметь четыре неизвестные функции от s, именно, х, у,
z, v. В силу свойства |т°| = 1 первые трн из них связаны соотношением
Сравнение уравнений C7.21) и C7.22) показывает, что две задачи, а
именно, задача о равновесии нити и задача о движении материальной
частицы, аналогичны. На самом деле, оба уравнения совпадают, когда
Следовательно, если и начальные условия в той и другой задачах будут
одинаковы, то совпадут и интегралы. Итак, если сила, отнесённая к еди-
единице длины и действующая на элемент материальной нити, является
градиентом функции U, то кривая, по которой располагается нить, то-
тождественна с траекторией свободной материальной частицы, к которой
приложена сила, имеющая силовую функцию
где т — масса частицы; при этом начальное положение частицы должно
совпадать с началом Во нити и начальная скорость vg частицы должна
быть не только направлена по начальной касательной к нити, но и быть
численно равной начальному натяжению Хо, т. е.
402
где Uo есть начальное значение функции U. Из сказанного вытекает,
что многие положения, доказанные для движения материальной частицы,
могут быть перенесены с соответственными изменениями на вопросы о
равновесии нитей. Так, например, пусть нить находится под действием
центральных сил, и пусть
U=U(r),
где г есть расстояние элемента нити от некоторого неподвижного центра,
например начала координат. Тогда задача о равновесии нити сводится
к задаче о центральной орбите (гл. XIX) под действием силы с силовой
функцией
Отсюда мы непосредственно заключаем, что поставленная задача всегда
решается квадратурами и что формой равновесия служит некотороя пло-
плоская кривая, плоскость которой проходит через центр силы. Затем
теорема о постоянстве секторной скорости для статической задачи фор-
формулируется так: момент натяжения относительно центра силы по всей нити
есть величина постоянная.
Пример 117. Определим форму равновесия нити, если сила, действующая
на единицу её длины, является градиентом функции
где г — есть расстояние точки от начала координат. Искомая кривая служит
центральной орбитой для сил с силовой функцией:
Если постоянная у равна нулю и k > 0, то нить расположится по гиперболе с цен-
центром в начале координат (§ 99).
215. Цепная линия. Определим форму равновесия свободной весомой
однородной нити. Направим ось Оу вертикально кверху; тогда мы будем
иметь:
Фж=Фг = 0, Фу=-к& C7.23)
где g— ускорение силы тяжести, а к — постоянная линейная плотность
нити (§ 147). Уравнения C7.14) примут вид
f (x?)=0, ±(\%)-kg=0, 1(И/)=0. C7.24)
ds \ ds I ds \ ds j ь ds \ ds J v '
Проинтегрировав последнее уравнение, найдём:
l^f= const. C7.25)
Если плоскость Оху проведём через начальную касательную к нити, то
будем иметь:
\dsjo
поэтому, согласно соотношению C7.25), для любой точки нити также
будет иметь место равенство
йг — О-
26* 403
следовательно, вся нить лежит в плоскости Оху. Интегрируем первое из
уравнений C7.24); получаем:
р, C7.26)
as
где А — произвольная постоянная. С помощью этого равенства второе
из уравнений C7.24) перепишется так:
d fldy\_d (.dy dx\_d (.dy\__
te {kds~) —Та \ dx " d~s ) — ds [Л dxJ — Rg'
или
Ady' = kgds,
где для краткости положено:
dx~~y
Берём координату л; за независимую переменную; тогда, вместо прежнего
уравнения, найдём:
где
Полученное уравнение легко сводится к квадратурам; перепишем его так:
А = kgy'dx;
теперь проинтегрируем уравнение; находим:
к 1+_У ^= я > (oi.zi)
г \ s А ' v '
здесь В — произвольная постоянная.
Вводим новую переменную, положив
. kgy+B ,O, ОСП
Тогда
у dx kg dx '
Подставляем это выражение в равенство C7.27) и преобразуем получеь
ное уравнение в такое:
У"ГJ — 1
Берём квадратуру
где а — произвольная постоянная. Переходим от логарифмов к показа-
показательным функциям:
Ч+1/ЧГЗТ=в^(*+")- C7.29
404
Приравниваем обратные величины.
1
= 4— Vrf— \—е
,
У П'г 1
Сложив равенства C7.29) и C7.30), получим:
-?(*+«>
C7.30)
71 = Т
kg,
Переходим здесь от ij к прежнему переменному у с помощью соотноше-
соотношения C7.28); найдём
Чтобы привести уравнение кривой к простейшему виду, перенесём
начало координат, не изменяя направления осей; для этого устанавливаем
нижеследующие зависимости между прежними координатами х, у и но-
новыми X, У:
C7.31)
Заметим ещё, что в силу соотношения C7.26) размерность постоянной А
та же, что и 1, т. е. дина, а постоянная^, согласно формуле C7 23),
однородна с силой, отнесённой к единице длины (§ 214); поэтому отно-
д
шение г— представляет собой некоторую длину; мы её обозначим через а.
Тогда уравнение рассматриваемой кривой будет:
X
а
Полученная кривая носит название цепной линии. Геометрические
свойства её общеизвестны.
Натяжение X нити можно определить из уравнения C7.26); имеем
dX ' »
отсюда по формуле C8.27) находим:
1 — B + kgy,
или, согласно соотношению C8.31),
l = kgY.
Итак, оказывается, что натяжение в какой-
либо точке нити равняется весу отрезка нити,
равного по длине ординате Y выбранной точки,
однородная весомая нить ABCDE (фиг. 123), перекинутая через бес-
бесконечно малые блоки В и D, будет в равновесии, если крайние, вися-
висящие вертикально, куски ВА и DE нити как раз доходят до оси ОХ.
216. Параболическая цепь. Как пример на равновесие нити под
действием сил, зависящих от направления элемента нити, рассмотрим
405
Фиг. 123.
Отсюда
вытекает, что
следующую задачу: определить форму равновесия нити под действием
сил постоянного направления, но таких, что модуль силы, приложенной
к рассматриваемому элементу, пропорционален синусу угла между эле-
элементом и направлением сил. Постоянное направление сил выберем за
отрицательное направление оси Оу; тогда, по условию, будем иметь:
где k-—некоторая постоянная. Уравнения равновесия C7.14) в настоящем
случае будут:
йзУ da) ds\ ds) ^ V \da) ^\ds) I ^ щ
Интеграл последнего уравнения будет
« dz ,
к -r- = const.;
ds
он показывает, что если плоскость Оху провести через начальную каса-
касательную, т. е. положить
то все элементы нити будут лежать в плоскости Оху; действительно,
в этом случае для любой точки нити будет соблюдаться равенство
g = 0. C7.33)
Случай I = 0 не вносит в этом отношении исключения, так как тогда,
согласно второму из уравнений C7.32), мы получим -^-=—- z=0, т. е.
ds as
нить расположится по оси Оу.
Проинтегрировав первое уравнение C7.32), находим:
1% = А, C7.34)
где А — произвольная постоянная. Второе ич уравнений C7.32), согласно
равенству C7.33), теперь станет таким:
Иначе можно написать:
dx\ dx' ds ) "ds Is '
Отсюда получаем, или
?=••
406
т. е. нить представляет собой прямую, параллельную оси Оу, или, со-
согласно равенству C7.34),
dx\ dx)
Проинтегрировав это уравнение, найдём:
где В и С— новые произвольные постоянные. Из полученного уравнения
видим, что нить располагается по параболе с осью, параллельной постоян-
постоянному направлению сил. Такую параболическую форму принимает, напри-
например, цепь, поддерживающая с помощью вертикальных штанг висячий
горизонтальный мост.
217. Равновесие нити, лежащей на гладкой поверхности. Когда
нить не свободна, а лежит на данной поверхности
f(x,y,z) = 0, C7.35)
тогда виртуальное перемещение 8г её элемента связано условием:
grad/-5r=0. C7.36)
Условий этих, конечно, столько, сколько элементов в нити. Как было ска-
сказано, поверхность мы считаем гладкой, иначе говоря, связь C7.35) при-
принимаем за идеальную (§ 175). Для вывода уравнений равновесия нити
согласно сказанному в § 207 поступим следующим образом: умножим
каждое из равенств C7.36) на множитель jids; составим сумму такиУ
произведений для всех элементов нити В0В1, т. е. напишем интеграл
\ ii grad f-brds,
распространённый на всю длину ВЪВХ нити; прибавим этот интеграл
к выражению C7.9), представляющему собой виртуальную работу актив-
активных сил и сил натяжения; мы получим:
ЬАк-\- \ ф-Srds — \\bds-\- \ ngtadf-brds = O.
B0Bi BoB, В„В,
Преобразуем интеграл \ Ibds совершенно так же, как это было сделано
в § 212, и затем- приравняем нулю коэффициенты при вариациях в под-
интегральной функции. Тогда мы найдём следующие уравнения равно-
равновесия для внутренних элементов нити
Ф + ~ Otf>)+jigrad/=0. C7.37)
Члены вне знака интеграла, подобно тому, как это имело место в § 211,
дают граничные услови-i равновесия для концов нити; на разборе этих
условий мы останавливаться не будем. Приняв во внимание размерность
членов уравнения C7.37), легко устанавливаем, что jigrad/ представляет
407
собой реакцию поверхности, отнесённую к единице дли-
н ы нити.
Напишем равенство C7.37) в проекциях на оси декартовых координат;
имеем
C7.38)
C7.39)
C7.40)
Присоединив к ним уравнения C7.35) и C7.19), т. е.
f(x,y,z) = 0,
dsJ ' \dsJ ' \ds/¦
мы получили всего пять уравнений с таким же числом неизвестных функ-
функций от переменного s, именно, x,y,z,\,\i. Рассматриваемые уравнения
являются уравнениями второго порядка относительно x,y,z, первого
относительно 1 и нулевого относительно р.. Заметим, что координаты
и их первые производные должны удовлетворять трём уравнениям, сво-
свободным от произвольных постоянных, а именно, уравнениям C7.39) .и
C7.40) и тому, которое получается из первого из них дифференцирова-
дифференцированием по длине дуги, т. е. уравнению
df df dx . df dy , df dz
ds dx ds ' dy ds ' dz ds
C7.41)
Поэтому число произвольных постоянных в самом общем решении будет
равняться четырём, т. е. интегралы будут иметь вид:
у . Wo С С \ \
y=y(s,Cv . ..,С4),
z = z(s,Cv . ...С4),
\ = ~k(s С С )
li^li(s, Cv . . ., С4).
Постоянные Cv . . ., С4 определятся, если зададим для некоторого значе-
значения s = s0 положение начального элемента нити я его направление,
т. е., например, лг0, v0 и (т~) • а также величину натяжения 10 на этом
\ ds у о
элементе; z0 найдётся тогда из уравнения C7.39), а (-т-)ои (zr) опре-
\ (ZS / \ US / q
делятся из уравнений C7.40) и C7.41). Уравнения для определения
постоянных будут следующие
Уо =У (so, Cv . .., С4),
408
Можно также задать длину нити / и положения двух её концов, Во{хо,уо)
и Bl(xvy1) Пусть начало отсчёта дуг совпадает с точкой Во; тогда
so = O, a Sj=/, и, следовательно, четыре постоянные определятся из
уравнений
xo = x{O,Cv Ct), yo=y(O,Cv .,C4),
дс,=дс(ЛС1, . .,С4), yl=y(l,Cv. ,C4).
Когда силы не зависят от s, тогда можно взять за независимую перемен-
переменную одну из координат, например х. В таком случае одно из добавочных
уравнений, а именно, уравнение C7 40), обращается в тождество, а три
уравнения C7.38) будут второго порядка относительно у, z, пер-
первого относительно 1 и нулевого относитечьно \i В общее решение
войдут три произвольных постоянных Dv D2, Ds
y = y(x,DltDt,D),
z = z(x,DvD2,D3),
l = l(x,DvD2,Ds),
lL=lL(x,DvDvDt).
При помощи первых двух интегралов мы найдём и длину дуги, если
выберем начало отсчёта, т е. мы получим
s — s{x, Dv D2, Dg).
Когда нам будут даны длина нити / и положения её концов, т. е. хо,уо
и xltyv то постоянные определятся из уравнений.
yo=y(xo,D1,D2,Ds),
yl=y{xvDvD2,DB),
l = l(xv Dv D2, Ds) - I (x0, Dv Da, Dt).
Вернёмся к равенству C7.37) и произведём указанное в нём диф-
дифференцирование Так же, как и при выводе уравнения C7 17), мы
получим.
$+^^° + yvO + ^grad/=:O, C742)
где х° и v°—единичные векторы касательной От и главной нормали Ov
в данной точке кривой, по которой расположена нить Пусть, кроме
того, On есть положительная нормаль поверхности /=0, a Og—перпен-
Og—перпендикуляр к От и Опг проведённый так, чтобы оси От, Og, On образо-
образовывали правую систему (§ 122). Спроектируем уравнение C7.42) на эти
оси, для чего умножим его скалярно на соответствующие единичные
векторыт0, g°, n°; мы получим:
^°
C7.43)
На основании сказанного в § 122 эти уравнения могут быть переписаны
409
следующим образом:
Ф +
Ф,±-=0, C7.45)
Ф„ dr — + М I grad /| = 0 .
В этих формулах р, р^, рп представляют собой соответственно радиус
кривизны кривой и радиусы её геодезической и нормальной кривизны.
Когда активные силы, отнесённые к единице длины, являются гра-
градиентом некоторой функции U(x,y,z), то по формуле A8.56) на
стр. 170 мы можем написать:
На этом основании из уравнения C7.44) следует:
us * ds
us * ds '
или
U-\-l= const. C7.46)
Пример 118. Определим форму равновесия нити, расположенной на
гладкой поверхности, если нанее не действуют никакие другие силы, кроме
реакции поверхности. Так как Ф = 0, то из уравнения C7.45) следует, что или
> = const. = >0 = 0,
т. е. нить не натянута и её форма произвольна, или ¦— = 0, т. е. нить pacno-
лагается по геодезической линии поверхности. Как видно из уравнения C7.46),
натяжение нити во всех её точках одно и то же:
\ = const. = \.
XXXVIII. ГЕОМЕТРИЧЕСКАЯ ТЕОРИЯ РАВНОВЕСИЯ
218. Основные положения геометрической статики. Эквивалент-
Эквивалентные системы сил. Принцип виртуальных перемещений представляет
собой самый общий приём для нахождения положений равновесия мате-
материальных систем. Но во многих случаях оказывается возможным вывести
условия равновесия при помощи чисто геометрических соображений;
в особенности такое геометрическое исследование удобно, когда положе-
положение равновесия системы известно заранее и ищутся лишь условия для
приложенных сил. Исходным пунктом геометрической статики служат
условия равновесия свободного твёрдого тела, найденные нами в при-
примере НО на стр. 387. система скользящих векторов, изображающих
активные силы, должна быть эквивалентной нулю, т. е. главный вектор F
и главный момент Lo этой системы должны обращаться в нуль для лю-
любого полюса О:
F=0, Lo = 0. C8.1)
Если в данной системе сил заменим все силы равными им по модулю
и прямо противоположными по направлению, то новую систему
мы для краткости будем называть системой, прямо противоположной нер-
410
воначальной. Две системы сил S, и S2 мы назовём эквивалентными, если
сложная система, составленная из Sr и системы, прямо противоположной
S2, или, наоборот, из S2 и системы, прямо противоположной Sv будучи
приложена к твёрдому телу, оставляет его в равновесии. По сказанному,
система сил, приложенных к твёрдому телу и находящихся в равновесии,
изображается системой скользящих векторов, эквивалентной нулю; следо-
следовательно, по установленному выше определению, эквивалентные системы
сил изображаются эквивалентными же системами скользящих векторов.
Отсюда вытекает, что любая теорема из теории векторов, касающаяся
эквивалентных систем, находит своё толкование в статике твёрдого тела.
Так, например, в общем случае (при инвариантах, отличных от нуля) си-
система сил, приложенных к твёрдому телу, эквивалентна одной результи-
результирующей силе (равной главному вектору) и одной результирующей паре
(с моментом, равным главному моменту системы). При частном выборе
полюса, а именно, если он взят на центральной оси, результирующая
сила и плоскость результирующей пары перпендикулярны друг к другу.
Эквивалентные системы сил сообщают точкам твёрдого тела одни и те же
ускорения, но реакции связей, им соответствующие, при одном и том же
кинематическом состоянии тела, вообще говоря, будут различны.
Рассмотрим теперь произвольную деформирующуюся материальную
систему в положении равновесия; легко видеть, что как вся система
в целом, так и любая произвольно выбранная часть её должны удовле-
удовлетворять условиям C8.1) равновесия твёрдого тела. Заметим предварительно,
что прибавление новой связи не может нарушить равновесия системы;
в самом деле, прибавление связи стесняет простор для выбора виртуаль-
виртуальных перемещений системы; следовательно, виртуальные перемещения
системы с добавочной связью входяг, как частная система, в состав вир-
виртуальных перемещений для системы без добавочной связи; а потому, если
активные силы не давали работы на любом из виртуальных перемещений
при отсутствии добавочной связи, то они не дадут работы и на виртуаль-
виртуальных перемещениях при наличии этой связи. Отсюда вытекает, что любая
материальная система обязана в своём положении равновесия подчиняться
всем условиям, найденным для твёрдого тела, так как равновесие этой
системы не должно нарушиться и в том случае, если бы система затвер-
затвердела. Прилагая условия равновесия твёрдого тела сначала ко всей си-
системе, а затем к соответственно выбранным частям её, мы можем таким
путём найти все те условия относительно приложенных сил, которые для
нас интересны. Вообще говоря, для полного решения задачи о равновесии
деформирующегося тела нам пришлось бы разбить его на, бесконечно
малые элементы, т. е. повторить указанный приём бесконечное множество
раз; в результате мы вернулись бы к основным уравнениям C6.10)
на стр. 374; но часто случается, что, приложив указанный метод к двум,
трём или более, но всё-таки к конечному числу частей системы, мы уже
сможем найти всё, что нам нужно.
219. Примеры на определение положений равновесия и нахождение
реакций.
Пример 119. Два одинаковых весомых стержня АВ и АС (фиг, 124)
связаны шарниром в точке А и помешены в вертикальной плоскости, причём
концами В и С они опираются на горизонтальную подставку. Чгобы удержать
стержни от падения, концы В к С привязаны одинаковыми нитями к середин-
серединным точкам D и Е противоположных стержней. Найти отношение натяжения
411
А
n,
нити к весу одного стержня, если угол между каждым из стержней и гори-
горизонтом равен б.
Рассматриваемая материальная система плоская, к ней приложены силы
Ог, О<, — веса стержней, Tlt Th Тъ ^—реакции нитей; Nt, Л^ —реакции под-
подставки и, наконец, «!, и, — реакции шарнира на правый и левый стержни. Мы
принимаем, что-
1) натяжение постоянно вдоль нити, и следовательно,
7^=7^, Т2=т'.г; C8.2)
2) подставка гладкая, т. е. реакции её N± и N2 направлены вертикально,
3) реакции шарнира щ и и2, по симметрии, идут горизонтально и равны
друг другу по модулю.
Кроме" того, по условию
По сказанному выше система скользящих векторов, изображающих силы,
приложенные к покоящейся материальной системе, должна быть эквивалентной
нулю; при этом не важно, рассматривается ли система в целом или данная си-
система частиц является частью некоторой другой системы. Воспользовавшись
этим положением, возьмём сначала в нашем примере всю систему и выразим,
что главный вектор всех сил и главный момент их равны нулю. Проекции глав-
главного вектора возьмём на оси Вх и By,
указанные на чертеже; за полюс выбе-
выберем точку В. Угол между каждой из
нитей и горизонтом назовём <?, длину
каждого стержня обозначим 2/; тогда
получим следующие равенства:
пг — п2 = О,
/V, + Щ — 2G = 0,
4N2l cos 6 — AGl cos 6 = 0.
Во всех этих уравнениях взаимно уни-
уничтожались попарно равные по модулю
и прямо противоположные силы Tt, T^
и Т2, Т2. Полученные равенства непо-
непосредственно Дают:
Фиг. 124. Л^ = iV2 = G. C8.3)
Рассмотрим теперь часть системы, именно, правый стержень АС; на него
действуют силы nv Оъ N2, T\, Т2. Опять выражаем, что система векторов,
изображающих эти силы, эквивалентна нулю. Направления осей проекций
оставляем прежние; за полюс берём точку А. Таким образом, получаем:
пх — Т[ cos у — Т2 cos <f = 0,
N2 -f T[ sin <р — G — T2 sin у = 0,
iVj -2/ cos б — Gl cos 6 — t[ -2/ sin F — f) — T2¦ 21 sin (в — <p) = 0.
Второе из составленных уравнений, согласно равенству C2.3), даёт:
следовательно, на основании равенства C8.2) имеем
cos 6
Из уравнения моментов выводим:
Т _
G"~4sin(8— tp)"
С другой стороны, пользуясь треугольником BDC, легко находим:
412
C8.4)
откуда
= T*i
C8.5)
Если теперь исключим из уравнений C8.4) и C8.5) угол ?, то найдём искомое
отношение
Приме р 120. Однородный весомый, гладкий стержень ABC длиной 2«
опирается концом А на внутреннюю поверхность неподвижной полусферической
чаши, диаметр которой меньше длины стержня и равен 1г (фиг. 125); в точке В
стержень опирается о край чашки. Определить положение равновесия стержня,
если диаметр ВВ' чаши горизонтален *).
Обозначим угол наклона стержня к горизонту буквой б. На стержень дей-
действуют три силы: вес его О и реакции чаши: ^ на конец А и Л^ на точку В.
Первая реакция направлена к центру О, а вторая нормальна к АС. Система
трёх векторов, Nly N2 и О, эквива-
эквивалентна нулю; следовательно, все три
вектора должны быть параллельны
одной плоскости, иначе их главный
вектор не мог бы равняться нулю. В
настоящем случае все три силы дол-
должны даже лежать в одной плоскости,
так как их точки приложения лежат
на одной прямой АС. Таким образом,
оказывается, что стержень может
быть в равновесии лишь в одной из
диаметральных и вертикальных плос- фиГ 125
костей сферической чаши: в диаме-
диаметральной плоскости лежит сила А^, в вертикальной — сила G. Пусть эта плос-
плоскость совпадает с плоскостью чертежа. Направления осей проекций оставляем
те же, которыми мы пользовались в предыдущем примере, а за полюс берём
точку В. Тогда мы получим следующие уравнения:
Nj cos 26 _ N2 sin 8 = 0,
Nt sin 28 4- N2 cos 6 — G = 0,
G Br cos б — a) cos 6 — Nx-2r cos б sin 8 = 0.
Из первых двух уравнений определяем Л^:
А
Подставив это значение
равновесия:
Отсюда получаем:
в последнее уравнение, находим следующее условие
в cos б —2r cos 26 = 0. C8.6)
Легко проверить полученный результат: стержень весомый, следовательно,
согласно принципу Торичелли (пример 115 на стр. 391) положение равновесия
соответствует стационарному значению координаты ук центра масс К стержня; но
yK = Brcosb — e) sin 6,
откуда
Ьук = — (в cos 8 — 2r cos 26) 86.
Положив
мы снова получаем уравнение C8.6).
^Walton, A collect, of problems, 1876, p. 69, ex. 19.
413
П ример 121. Приложим ещё геометрический метод к определению усло-
условий равновесия гибкой нерастяжимой нити (§ 212). Здесь уже придётся разбить
систему на бесконечно малые элементы и рассматривать равновесие каждого
элемента как материальной частицы (§ 218). Пусть ВВ' представляет собой_ беско-
бесконечно малый элемент нити ds (фиг. 126). Элемент этот находится под действием
трёх сил: активной силы Ф ds, где Ф — сила, рассчитанная на единицу длины
(§ 212), и затем двух реакций S и S', представляющих действие на взятый эле-
элемент соседних элементов нити. Согласно условию
равновесия, имеем
' — O. C8.7)
Силы S и S' весьма просто выражаются через
натяжение нити в точке В. В § 212 мы условились
принимать за положительное направление натяже-
натяжения направление отсчёта дуг по кривой, а_ самое
натяжение представлять в форме Хт°, где 4° есть
единичный вектор касательной.Таким образом, вели-
Фиг. 126. чина Xf° нами рассматривается как функция длины
дуги s, отсчитываемой от некоторой точки на
кривой. Пусть в нашем случае ВВ' есть направление отсчёта дуг.
Если натяжение нити в точки В есть )т°, то в точке В' оно будет \У> + d Aт°).
Кроме того, на основании сказанного о направлении натяжения мы имеем
5 = —w, S' = Гт° + а &»).
Подставив эти выражения в равенство C8.7), мы приведём уравнение равнове-
равновесия нити к следующему виду:
Тот же результат мы получили ранее другим способом [см. формулу C7.11)
на стр. 398].
220. Понятие о винте. Координаты винта. Всякой системе сколь-
скользящих векторов соответствует в общем случае некоторая определённая
прямая — центральная ось, обладающая тем свойством, что для любого
полюса, лежащего на ней, главный вектор а и главный момент L си-
системы совпадают по направлению друг с другом и с этой осью (§ 16).
Отсюда видно, что система векторов может быть геометрически пред-
представлена совокупностью двух векторов, главного вектора и главного
момента, лежащих на общем основании (центральной оси). Такая сово-
совокупность двух векторов народном основании носит название винта.
Главный вектор а называется амплитудой винта, а отношение глав-
главного момента L к главному вектору а (когда они коллинеарны)—
параметром р винта:
P=^={W- <38-8)
В частных случаях главный момент или главный вектор могут ока-
оказаться нулями, тогда параметр винта становится нулём или бесконеч-
бесконечностью. Необходимо заметить, что параметр винта представляет собой
всегда некоторую длину, безразлично, что бы ни изображали собой
скользящие векторы — будут ли это силы, скорости, количества движе-
движения и т. Д. Поэтому измерения скользящих векторов системы, представ-
представленной данным винтом, даются лишь измерением его амплитуды: для
сил амплитуда будет однородна с диной, для количеств движения —
„ грамм-сантиметр
с единицей ^у^—^ и т. д.
414
Винт часто задают шестью координатами: модулем амплитуды,
параметром и теми четырьмя величинами, которыми даётся положение
его основания, или оси; при этом, однако, направление амплитуды на её
основании остаётся неопределённым. Гораздо удобнее задавать данный
винт Sx радиусом-вектором гх полюса, т. е. какой-либо точки на цент-
центральной оси, амплитудой ах и параметром /?х. Зто значит, что мы за-
задаём винт семью скалярными координатами; гхх, гху, гхг; ахх, а , ахг, р%.
Одной из координат rxv,r, r%z можно при этом дать произвольное значение.
Главный момент системы, эквивалентной данному винту, относительно
какого-нибудь полюса короче называется просто моментом винта
относительно этого полюса. Нетрудно заметить, что если винт Sx
задан вышеупомянутыми координатами, а радиус-вектор полюса равен р(,
то момент Мч винта относительно полюса будет иметь выражение:
А1,=Лах + (г,—Р,)Хв,- C8.9)
221. Взаимный коэффициент двух винтов. Винты, взаимные
друг с другом. Система сил F4, приложенных к частицам тч твёрдого
тела, изображается системой скользящих векторов; следовательно, по
сказанному выше, она может быть представлена некоторым в,интом 5,
с координатами (rv av pj. Назовём pv радиус-вектор частицы /rev, a F
главный вектор сил F4; тогда амплитуда 2
а
, и главный момент
2
винта
(фиг.
127) выразятся следующим образом:
?,=/>,«,= 2 (pv —гг)Х^; C8.11)
1
2
v —1
есть
точки B
, j _^~ радиус-вектор точки av произ-
произвольно выбранной на центральной оси.
С другой стороны, кинематическое
состояние твёрдого тела в любой момент
характеризуется системой угловых скоростей
Фиг. 127.
v, т. е. также не-
некоторой системой скользящих векторов, а следовательно, и некоторым
винтом S2 с координатами (г2, а2, р2). Амплитуда а2 этого винта пред-
представляет собой угловую скорость w тела в рассматриваемый момент,
а главный момент Z,, равен скорости v2 одной из точек fi2 центральной оси;
г2 есть радиус-вектор этой точки; таким образом,
п
Отсюда, согласно формуле C8.9), мы получаем следующее выражение
для скорости г>ч точки mv тела:
*>ч = *>ч + (Г2 — ?,) X w = /V» + (г2 — pv) Xi. C8.12)
Вычислим теперь ту элементарную работу ЬА, которую совершат
приложенные к телу силы Fv на бесконечно малом перемещении, соот-
соответствующем промежутку времени Ы. Искомая работа представится так:
415
иЛи, согласно формулам C8.10) и C8.12),
Применив к последнему слагаемому известную теорему о циклической
перестановке сомножителей векторно-скалярного произведения и заменив
п
2 pv X Fv его значением из равенства C8.11), мы получим:
v = l
ЬА = Ы [р2F- w -f- F- г2 X <о + р, /=¦• w -f- w • ^ X F],
или
оЛ =3^ш [(/?, {-p2)Fo-uu^-h-FuXaol
где
А = г,-гя.
Выражение, стоящее в прямых скобках, носит название взаимного
коэффициента k12 двух винтов; элементарная работа, которую мы
искали, имеет, следовательно, выражение:
bA = kl2F-<s>U. C8.13)
Пусть полюсы fij и В2 выбраны так, что вектор h идёт по кратчайшему
расстоянию между осями винтов Sy и S2; тогда, назвав ш угол между
амплитудами винтов, получим для взаимного коэффициента такое выра-
выражение:
2)cos<o — A sin ср. C8.14)
Когда движение по винту S2 является единственно возможным для
тела, то по принципу виртуальных перемещений (§ 207) силы, характе-
характеризуемые винтом Sj, будут в равновесии, если взаимный коэффициент
винтов Sj и S2 обращается в нуль;
k12 = (pl-\-p2)cosv — /z-sin<p = O; C8.15)
это видно из формулы C8.13). Два винта, удовлетворяющие условию
C8.15), называются взаимными. Мы видим, что параллельные винты
(щ = 0) взаимны тогда, когда параметры их равны по абсолютной вели-
величине, но противоположны по знаку; винты, перпендикулярные друг к
другу f tp = — J, взаимны тогда, когда они пересекаются, т. е. когда
h=Q; наконец, пересекающиеся винты (/z = 0) взаимны, когда они или
перпендикулярны друг к другу, или имеют равные по абсолютной вели-
чи-не, но противоположные по знаку параметры.
222. Цилиндроид Болла. В заключение рассмотрим одну поверх-
поверхность, имеющую большое значение в теории винтов. Возьмём систему
двух винтов i?j и S2 и найдём третий винт S, эквивалентный их сово-
совокупности, или результирующий винт. Если, оставляя без изменения осно-
основания и параметры, станем менять амплитуды первых двух винтов, то
третий, изменяя своё положение, опишет некоторую линейчатую поверх-
поверхность третьего порядка, названную по имени английского ученого, её
открывшего, цилиндроидом Болла (Ball). Мы увидим, что эта
поверхность играет при сложении винтов ту же роль, какую играет
плоскость при геометрическом сложении двух векторов с общей точкой
416
приложения. Уравнение цилиндроида можем получить следующим образом.
Пусть координаты винтов Sv S2 и S соответственно равны
rv av рх; г2, а2, р2; г, а, р.
Если две системы скользящих векторов эквивалентны, то равны их глав-
главные векторы и их главные моменты относительно произвольного центра
(например начала координат); поэтому мы имеем
fl = «i + «2> C8.16)
ар -{-rXa — alp1-{-a2p2-{-rlXax-\-r2X.a2. v '
Первое равенство говорит, что амплитуда результирующего винта равна
сумме амплитуд составляющих винтов; второе равенство представляет
собой уравнение основания результирующего винта;
как видим, основания всех грех винтов параллельны
одной и той же плоскости [ср. формулу A.29) на
стр. Ю]. Для упрощения последнего уравнения
отнесём его к следующей системе координат (фиг.
128): ось Ох пусть совпадает с основанием первого
винта, а ось Oz направлена по кратчайшему рас-
расстоянию h между первым и вторым винтами; угол,
образуемый направлениями винтов, пусть будет ш
Тогда уравнение C8.16) перепишется так:
ар -{- г X а = ахрх -{- а$г -)- hXa2.
Разрешим это уравнение относительно г [см. формулу A.29) на стр. 10]»
мы получим:
(Pi— Л)«1Х«2 + («Г
Фиг. 128.
¦-{-та,
где т—переменный скалярный параметр. Мы видим, что основание ре-
результирующего винта пересекает ось Oz и расположено параллельно пло-
плоскости Оху. В проекциях на оси координат последнее равенство даёт
x=:(al-\- аг cos <p) т,
i
(Pi—
у + h (ахаг cos y-f-a'ij)
а\-\-а\-\-2ахаг cos <?
Исключив из этих трёх уравнений параметр т и отношение амплитуд
?i, мы получим уравнение геометрического места оснований результн-
рующего винта, т. е. уравнение цилиндроида Болла:
У \(Рг— Р\\х sin у — у cos <?) -f- h (x cos ? + у sin у)]
* +3
Перейдя к новым осям координат O'XYZ, повёрнутым относительно
старых вокруг оси Oz на соответственным образом подобранный угол и
параллельно смещённым вдоль оси Oz, можно это уравнение привести к
виду
z=k- XY
где К — постоянная, зависящая от
дроида изображён на фиг. 129.
27 Г. К. Суслов
г h и ср. Общий вид цилин-
417
Если построен цилиндроид, проходящий через два данных винта Sj
и S2, то для того, чтобы найти их результирующий винт S, поступаем
следующим образом: откладываем амплитуды а1 и а2 на основаниях вин-
винтов St и S2 таким образом, чтобы начала векторов а1 и а2 находились
на оси Oz; проектируем затем амплитуды на плоскость Оху и находим
их сумму а; через построенный вектор а и ось Oz проводим плоскость;
Фиг. 129.
линия пересечения её с цилиндроидом и даст основание результирующего
винта.
Остаётся найти выражение для параметра р результирующего винта.
На основании формул C8.8) и C8.16) имеем
_ (aiPi -4- Д2Р2 + /-1X «1 + * X а2) • (oi -f а?)
Р— («i4-«sJ
Отсюда, применяясь к обозначениям на фиг. 128, получаем:
где kj2 — есть взаимный коэффициент винтов S, и S2 [формула C8.14].
XXXIX. РАВНОВЕСИЕ СИСТЕМ С ТРЕНИЕМ
223. Равновесие материальной частицы на шероховатой поверх-
поверхности. Если частица т находится в покое на шероховатой поверхности,
то нормальная реакция N поверхности равна по модулю и прямо проти-
418
воположна составляющей Fnn° от равнодействующей активных сил F по
нормали к поверхности, а сила трения ф равна по модулю и прямо про-
противоположна составляющей FTx° активных сил в касательной плоскости к по-
поверхности (фиг. 130); при этом сила трения по модулю не мо-
может быть больше чем kxN, где kx— постоянная, называемая
коэффициентом статического трения, а N —
модуль нормальной реакции (ср. § 133). Вместо коэффициента
kx часто вводят так называемый угол трения цр положив
A1 = 1g|i1. C9.1)
Таким образом, в
случае равновесия мы имеем
Ф ,
Фиг. 130.
Если назвать <р угол между активной силой 'F и её нормальной состав-
составляющей, то мы отсюда получаем;
или
<Р«?Щ; C9.2)
т. е. при равновесии угол между активной силой и её нормальной состав-
составляющей не должен превышать угла трения.
Высказанное положение может быть проиллюстрировано следующими
геометрическими соображениями (фиг. 131). Построим конус, приняв
точку т за вершину, нормаль тп поверхности —
за ось конуса и положив угол растворения конуса
равным углу трения ji]t Этот конус носит название
конуса трения для шероховатой поверх-
поверхности. Из формулы C9.2) вытекает, что для
равновесия частицы на поверхности необходимо,
чтобы равнодействующая F активных сил лежала
внутри конуса трения. Если поверхность удержи-
удерживающая, то безразлично, внутри какой полы конуса
проходит сила F; ее пи же поверхность -неудержи-
вающая, то от конуса трения надо сохранить лишь
одну полу, идущую в ту сторону, куда частица не
может сойти. Например, если частица может
сходить с поверхности в направлений тп, то
конус трения должен состоять лишь из полы L'm.
Аналитически вопрос о разыскании положе-
положений равновесия частицы разрешается следующим
уравнение данной поверхности есть
f(x,y.z) = 0. C9.3)
Тогда, если п° — единичный вектор нормали поверхности, то косинус угла <р
между активной силой F и её нормальной составляющей Fji® получит
выражение:
образом. Пусть
или,
27*
cos (с = | Z70 •«° |,
согласно формуле A8.58) на стр. 171,
/,|grad/, .
419
С другой стороны, для угла трения мы имеем
С0
Поэтому на основании формулы C9.2) мы получаем следующее условие
равновесия:
Положений равновесия оказывается, вообще говоря, бесконечное множе-
множество; они заполняют собой некоторую часть поверхности. Если в выра-
выражении C9.4) сохраним только знак равенства, то полученным уравнением
совместно с уравнением C9.3) определится кривая на поверхности, слу-
жашая границей области равновесия. Для точек на рассматриваемой
кривой сила F совпадает с одной из образующих конуса трения. Обычно
при решении задачи сначала находят эти предельные положения равно-
равновесия, а затем с помощью неравенства C9.4) определяют, какие части
поверхности заполнены положениями равновесия и где равновесие невоз-
невозможно. Когда поверхность неудерживающая, то к условию C9.4) при-
присоединяется ещё следующее:
/7-grad/<0;
оно выражает собой то обстоятельство, что активная сила должна с
положительной нормалью составлять тупой угол (ср. § 114).
Пример 122. Найдём положения равновесия весомой частицы на шерохо-
шероховатом эллипсоиде
Х2 V2 Z2_
-ф-Г Ь +Г2-'
предполагая, что ось Ог направлена вертикально вверх. Имеем
F= —mgz\
поэтому формула C9.4) даёт по выполнении сокращений следующее выраже-
выражение:
Приняв во внимание уравнение эллипсоида, легко убеждаемся, что положения
равновесия лежат внутри цилиндра
Если данный эллипсоид — поверхность удерживающая, положения равновесия
заполняют две области, если же—неудерживающая, то только одну — либо
верхнюю, либо нижнюю.
420
224. Равновесие материальной частицы на шероховатой кривой.
Пусть материальная частица находится на кривой АВ в положении т
(фиг. 132). Построим из точки т, как вершины, конус вращения LmL'
с осью по касательной тт и с углом растворения J/_xmL = — — p.v
где jij — угол трения. Такой конус носит название конуса трения
для шероховатой кривой. Из формулы C9.2) видно, что для равновесия
частицы необходимо, чтобы активная сила F
лежала вне конуса трения. Положений
равновесия частицы имеется, вообще говоря,
бесконечное множество; они сплошь запол-
заполняют некоторую часть кривой. Для пре- фиг- 132.
дельных положений равновесия сила F сов-
совпадает с какой-либо образующей конуса LmL'. Аналитически вопрос
о разыскании положений равновесия разрешается следующим образом.
Пусть уравнение данной кривой представлено в форме зависимости
радиуса-вектора текущей точки от длины s дуги кривой:
г = г(*).
Тогда, если т° есть единичный вектор касательной, синус угла между
активной силой F и нормальной плоскостью кривой получит выражение
С другой стороны, для синуса угла трения мы имеем выражение
ki
Поэтому на основании формулы C9.2) мы получаем следующее условие
равновесия:
^ C9.5)
F>
Знак равенства здесь соответствует предельным положениям равновесия.
Поэтому, написав последнее выражение со знаком равенства, выразив
через s все входящие в него величины и вычислив его корни, мы
тем самым найдём предельные положения равновесия. Затем мы обра-
обратимся к неравенству C9.5) и с его помощью легко определим, какие
части кривой между предельными положениями заполнены положениями
равновесия и на каких участках кривой равновесие невозможно.
Пример 123. Найдём положения равновесия весомой материальной ча-
частицы на шероховатой циклоиде, ось которой вертикальна, а вершина обра-
обращена книзу. Поместим начало О координат в вершине циклоиды, ось Ох
направим горизонтально вправо, ось Оу вертикально вверх (фиг. 83 на
стр. 213). Тогда, если радиус производящего круга равен R, уравнения кривой
будут:
x = R(f -4- sin <p),
.у = Я A-cosT).
421
Отсюда легко найти, что угол между касательной к кривой в данной точке и
горизонталью равен —¦ [ом. формулу B2.25) на стр. 215]. Длина дуги s, отсчи-
отсчитываемая от начала координат, выразится следующим образом [см. формулу
B2.23)на стр. 214]:
s — AR sin -|-.
Вычисляем F • —; имеем
ds
dr „ dx , p dy „ dy dy . у
Выражение C9.5) принимает в нашем случае следующий внд;
1ак как
y=R(l-ws4) =
л*
то, следовательно, частица будет находиться в равновесии лишь при
_±_
!+*?¦
*?
т. е. когда частица будет находиться над вершиной не выше чем на 2R
225. Равновесие материальных систем с трением. Уже для од-
одной материальной частицы, как мы видели, задача о равновесии при
существовании трения становится неопределённой, и всё дело сводится,
собственно говоря, лишь к нахождению границ для положений равнове-
равновесии. Ещё с большей неопределённостью мы встретимся при разыскании поло-
положений равновесия материальных систем с трением. Конечно, и для систем
придётся вычислять лишь крайние, предельные положения, но, кроме того,
здесь появляется новый источник неопределённости, а именно во мно-
многих случаях само направление сил трении неизвестно и должно быть
найдено. Так как направление динамического трения вполне опреде-
определяется скоростями точек системы, то мы иногда можем избежать ука-
указанной выше неопределённости двояким путём. Для этого мы или
должны будем знать, каким движением система дошла до положения
равновесия, и тогда мы будем в состоянии определить те силы трения,
которых как раз было достаточно, чтобы задержать систему в покое;
или, наоборот, мы будем искать те силы трения, при которых система
может снова перейти из покоя в движение.
Пример 124. Для примера рассмотрим решение следующег о вопроса;
пусть твёрдое тело опирается п точками m, (v=l, 2,3,..., п) на шероховатую
плоскость и находится под действием заданных сил; требуется найти величины
сил трения в точках ту, т2, .. , т„, если тело при произвольно малом увеличе-
увеличении заданных сил придёт в движение по плоскости. Выбираем шероховатую
плоскость за плоскость Оху (фиг. 133); пусть главный вектор приложенных
сил есть F, а главный момент относительно начала координат равен Lq.
Уже вычисление нормальных реакций Ny, N2,..., Na плоскости в точках
422
ЩЩ, ..., тп поведё-т при п > 3 к неопределённости, так как для нахождения
этих сил мы имеем лишь три уравнения (ср пример 113 на стр. 388)-
г=0, LOx+
C9.6)
2
4 = 1
Мы не станем останавливаться на том, как на основании сообрлкений из тео-
теории упругости можно обойти эту неопределённость, и прямо допустим, что
вычислить силы #„ мы сумели.
По условию твёрдое тело готово начать своё движение по плоскости.
Из кинематики известно, что такое движение состоит из ряда вращений
около некоторых мгновенных центров Положение мгно-
мгновенного центра вращения для начального движения
обозначим через С; он может или занимать отдельное
положение от всех точек mv, или совпадать с одной
из них Разберём оба эти случая в отдельности
Пусть мгновенный центр С не совпадает ни с
одной из точек mv. Сила трения Фч, приложенная к ка-
какой-либо точке mv, перпендикулярна к радиусу-вектору
pv, проведённому от точки С к точке тч, и имеет выра-
Жение - ..._„.._„ Фиг. 133.
где со0 есть единичный вектор той угловой скорости, которая возникла бы
при нарушении равновесия. Выражаем условия равновесия, т. е. пишем, что
равны нулю главный вектор всех сил и их главный момент относительно
полюса С;
:0, C9.7)
2
v=l
C9.8)
где гс — радиус-вектор полюса С [см. формулу C.2) на стр. 20]. Проектируем
уравнение C9 7) на оси Ох и Оу и уравнение C9.8) на ось Oz, тогда в допол-
дополнение к уравнениям C9.6) мы получим следующие три уравнения-
C9.9)
= 0;
здесь
C9 10)
C9.11)
Верхний или нижний знак берется в зависимости от того, стремятся активные
силы привести тело во вращение по направлению против движения часовой
стрелки или по часовой стрелке. Полученные уравнения позволяют определить
положение мгновенного центра вращения С, а также выражают условие, ко-
которому должны быть подчинены активные силы.
В том случае, когда центр вращения С совпадает с одной из опорных
точек, например точкой т^, уравнение C9.10) заменится следующим:
2?
V* =
где
- .V2;
C9.12)
423
штрих у з'ака суммы означает, что суммирование распространяется на все
значения v, кроме v=|i. Что же касается до уравнений C9.9), то они примут
вид:
^O. C9.13)
Здесь Ф^ и Ф^у обозначают проекции на оси координат неизвестной нам
силы трения Ф приложенной к точке т^ и удерживающей эту точку в покое.
Должно заметить, что если сила Фа, вычисленная по уравнениям C9.12), ока-
окажется по модулю больше fti-Л^, то предположение о том, что центр враще-
вращения С совпадает с точкой wv, должно быть отброшено как неверное.
Ход решения задачи будет следующий. Сначала пытаемся найти значе-
значения хс, ус, удовлетворяющие уравнениям C9.9) и C9.10). Если это не удастся,
обращаемся к уравнениям C9.12) и C9.13), Причём перебираем все точки
т^ (|л= 1, 2,'..., п) и отбрасываем те решения, для которых не соблюдается
условие
Задача, нами рассмотренная, совпадает со следующей: определить поло-
положение оси, перпендикулярной к шероховатой плоскости, так, чтобы активные
силы и силы трения давали около неё возможно наименьший момент. В самом
деле, положение оси вполне даётся координатами xq, Ус следа её С на шеро-
шероховатой плоскости. Главный момент Lq сил относительно искомой оси выра-
выражается по предыдущему так
vr=r 1
Наименьшее значение Lc соответствует тем значениям Х& ус, для которых
производные
dLc dLc
дхс' дус
обращаются в нуль или бесконечность. В первом случае мы возвращаемся
к уравнениям C9.9), а во втором случае какое-либо рч должно обратиться
в нуль, т. е. согласно формуле C9.11) полюс С совпадает с одной из точек тч.
Когда наименьшее значение Lc равно нулю, задача возможна, и тело под
действием приложенных сил будет в равновесии; если наименьшее значение Lc
положительно, тело в равновесии быть не может; наконец, если наименьшее
значение Lc отрицательно, тело будет в равновесии даже и в том случае,
когда силы трения не достигли ещё своих предельных значений.
Пример 125. Найдём наименьший вертикальный момент сил, который
в состоянии сдвинуть с места весомый стол, Стоящий на шероховатой горизон-
горизонтальной плоскости на трёх ножках и оказывающий ими одинаковые давления
на плоскость.
Пусть точки mh m2, ms изображают проекции ножек стола на горизон-
горизонтальную плоскость (фиг. 134а). Из уравнений C9.6) легко находим, что давле-
давления ножек на плоскость, или реакции плоскости на ножки, будут
если Р — вес стола. Так как по условию проекция главного вектора прило-
приложенных сил_на горизонтальную плоскость равна нулю, то и сумма предельных
сил трения Фь Ф2, Ф8 должна быть нулём. Реакции Nh N2, N3 равны между
собой; значит, силы трения по модулю тоже равны между собой:
по направлению они, следовательно, параллельны сторонам некоторого равно-
равностороннего треугольника, а перпендикулярные к ним радиусы-векторы pi, p2, pj,
проведённые из мгновенного центра вращения С, должны образовать друг
424
с другом углы в -=- я. Отсюда вытекает следующее решение задачи: на двух
о
2
сторонах треугольника строим по сегменту, вмещающему угол в-=-it; пересе-
пересечение дуг этих сегментов и дайт искомый центр С. Зная положение точки С,
из уравнений C9.10) при Fx = Fy = 0 определяем искомый момент L.
Если треугольник тхтгтъ тупоугольный и его тупой угол равен или
2
больше -д- я, то дуги сегментов, о которых вьцце была речь, внутри треуголь-
3
ника не пересекутся. В этом случае центр С, очевидно, совпадёт с вершиной
т-
Фиг. 134а.
Фиг. 1346.
тупого угла треугольника. Пусть вершиной такого угла служит точка т\
(фиг. 1346); тогда сила трения Фъ удерживающая точку mi в покое, должна
быть направлена _прямо противоположно сумме других двух сил трения, Ф2 и Ф8.
Главный вектор ф2, в этих сил по модулю равен
если a=^m2/niOT8. Так как aSsyir, то условие C9.14) выполняется.
226. Равновесие нити на шероховатой поверхности. Когда по-
поверхность
f{x,y,z) =
C9.15)
на которой находится материальная нить, шероховатая, то сила трения,
отнесённая к единице длины и приложенная к элементу нити ds, рав-
равняется по модулю
(см. обозначения § 217). Сила трения лежит в касательной плоскости
к поверхности C9.15). Уравнения равновесия C7.43) на стр. 409 заме-
заменятся следующими:
^ + Ф. + ^х^, I grad /1 cos ср = 0,
j v"-^° + Ф?
sin <p = 0,
здесь <р — угол между силой трения и касательной От к нити.
425
Рассмотрим случай, когда активные силы отсутствуют, т. е. ф = 0:
тогда последние уравнения равновесия перепишутся так:
C9.16)
V»
Исключив нз последних двух уравнений ji,|grad/|, мы находим:
нли, если ввести угол трения,
dr tg (v°, n°) -|- tg}!, • sin <p = 0;
/\
следовательно, угол (v°, я0) между главной нормалью кривой, по ко-
которой располагается нить, и нормалью к поверхности должен быть чис-
численно меньше угла трения.
Исключив из равенств C9.16) jijgrad/l и <р, мы получим уравнение
где рп — радиус кривизны нормального сечения. Отсюда находим следу-
следующую формулу для натяжения нити:
где С—произвольная постоянная. Если нить расположена по геодезиче-
/\
ской линии поверхности, то tg(v°, я«) —0, и тогда натяжение вычис-
вычисляется по формуле
ОТДЕЛ V
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ДИНАМИКИ
XL. ПОСЛЕДНИЙ МНОЖИТЕЛЬ ЯКОБИ
227. Предварительные замечания. В предыдущем было изложено,
как следует писать уравнения движения материальной системы, подчинён-
подчинённой идеальным связям (§ 175): были рассмотрены уравнения, отнесённые
к декартовым координатам (§ 177) и к обобщённым координатам
(§ 189), в частности, к независимым координатам (§ 191). Было также
показано, какими уравнениями можно заменить названные совокупные
уравнения, если система консервативна (§ 193), и, наконец, к каким урав-
426
нениям они сводятся при переходе к союзным выражениям входящих в них
функций (§ 195). Теперь мы перейдём к выводу некоторых теорем, относя-
относящихся к интегрированию перечисленных нами уравнений движения. В особен-
особенности обратим внимание на связь между системой обыкновенных дифферен-
дифференциальных уравнений и соответственным уравнением в частных производ-
производных В своём изложении мы будем, главным образом, останавливаться на
тех положениях, которые так или иначе иллюстрируют свойства движения,
и пропустим почти всё то, что служит собственно для преодоления ана-
аналитических трудностей интеграции.
228. Множитель системы уравнений. Пусть мы имеем систему
уравнений
*? ^? *? D0.1)
?
S
где Xv Къ ..., Хя — данные функции переменных xv хъ ..., xs.
Интегралом системы D0.1) называется всякая функция / от хи х2, .. ., xs,
дифференциал которой тождественно обращается в нуль в ситу уравне-
уравнений D0.1); другими словами, функция / для значений переменных, свя-
связанных соотношениями D0.1), сохраняет постоянное значение. Таким об-
образом, если / есть интеграл системы D0.1), то
в силу уравнений D0.1). Поэтому условие, необходимое и достаточное
для того, чтобы функция / служила интегралом системы D0.1), выражает-
выражается так:
к к ? 0: D0.2)
здесь символ К (/) введён для сокращения. Если функции Д, /2, ..., /j
являются интегралами системы D0.1), т. е. если в согласии с соотноше-
соотношением D0.2) имеют место равенства
*(/,)=<>, АГ(Л)=О *(/,) = 0, D0.3)
то и любая функция тг (/,, /2, .. ., /,) от данных интегралов также будет
интегралом; это вытекает из соотношений D0.3) и из равенства
к (я) - II к (/,) + - K(U) 4-.. • + щ к (/,).
Данная система D0.1) может иметь только (s—1) независимых друг
от друга интегралов fv /2, ..., /8_,, всякий же другой интеграл / пред-
представляется функцией от независимых. В самом деле, приложив условие
D0,2) к функциям /, /j, /2, . . . , /3_х, мы находим:
427
А эти равенства при Xv X2, ..., Xg, отличных от нуля, могут выпол-
выполняться лишь тогда, когда определитель
All. dfs-i^U,h,---,fs~i) =
D0.4)
дхг
д ¦
дх2
dfi
., X
¦
df
¦ dxs
df\
¦dxs
обращается в нуль, что и доказывает выше сказанное.
Если адъюнкту определителя D0.4), соответствующую элементу
v^-, обозначить через А,, то условие для обращения R в нуль можно
написать так:
Равенства D0.2) и D0.5) равносильны: оба выражают собой условие,
необходимое и достаточное для того, чтобы функция / была интегралом
системы D0.1). Поэтому из сравнения равенств D0.2) и D0.5) мы за-
заключаем, что должна существовать такая функция М, чтобы выполнялось
соотношение
л л л
D0.6)
— = — •= ... = — = Л1.
Xj Х^ Xs
Эта функция М носит название множителя системы совокупных уравне-
уравнений D0.1). Если умножим на М левую часть уравнения D0.2), то со-
согласно формулам D0.6) и D0.5) получим тождество
229. Дифференциальное уравнение для множителя. Нетрудно по-
показать, что между адъюнктами Av A2,
ное соотношение
А. имеет место тождествен-
D0.8)
Прежде всего заметим, что левая часть нашего равенства — линейная и
однородная функция вторых производных от функций /,, /2, ..., fg_v
причём эти производные входят исключительно в форме
dxfdxa
D0.9)
где значки р и о различны. Для нахождения коэффициента при произ-
производной D0.9) обратим внимание на то обстоятельство, что производная
эта может встретиться лишь в двух членах суммы D0.8), а именно в
дА.
428
Но каждая из адъюнкт Ар и А, может быть представлена так:
Л4„
дх:^ Tdh ' dxi ~r """ "^ T5/L ' 5Г.
.дд:, йлг5 длг0 ддг,
<?Л„ (?/. , <?Л„ df, , , д/4. <?/. , , аА„
\ х9 дд& ' дх, * '" ~* д ^fn ' дх0 ~т~
" дхр дх дхр
Следовательно, искомый коэффициент будет равен
дАо , дА„
дх.
Но, с другой стороны, сами адъюнкты Af и А, выражаются как произ-
производные от определителя R [формула D0.4)], т. е.
dR . dR
Ё1 dL
дх, _ дх,
Поэтому рассматриваемому коэффициенту мы можем дать вид
1_
дх,
по основному свойству определителя это выражение равно нулю. Итак,
коэффициент при любой производной тина D0.9) в выражении D0.8)
равен нулю и, следовательно, искомое равенство D0.8) доказано.
Подставив в равенство D0.8) значения адъюнкт А, из соотношений
D0.6), мы придём к следующему уравнению, которому должен удовле-
удовлетворять множитель рассматриваемой системы уравнений D0.1):
или
„ дМ , „ дМ , , ,, дМ
Разделим обе части последнего уравнения на МХ1 и с помощью системы
уравнений D0.1) заменим отношения -^- через -т-?; тогда вместо равен-
равенства D0.11) мы получим следующее:
?г? D0Л2)
где положено
dXs ..« .„
429
В уравнении D0.12) с помощью прямых букв d обозначена полная произ-
производная по х,, причём х2, .. , хя принимаются за функции от Xj, опре-
определяемые из системы уравнений D0.1), или, что то же, за s—1 не-
независимых первых интегралов этих уравнений. Когда система D0.1) про-
проинтегрирована, т. е. все s — 1 её независимых первых интегралов
найдены, множитель М определится из уравнения D0.12) квадратурой.
Но в частных случаях для уравнений определённого типа можно бывает
найти множитель М, прежде чем интеграция кончена. Так, например,
если отношение -р- представляет собой функцию одного перемен-
то уравнение D0.12) допускает следующее очевидное решение:
М = е-!* <*•> «**¦. D0.14)
В ещё более частном случае, когда сумма S, выражаемая формулой
D0.13), обращается в нучь, вместо выражения D0.14) мы имеем реше-
решение М — const., например:
Af=l. D0.15)
Когда известны два значения Мх и М2 для множителя, то отноше-
отношение тг будет интегралом системы D0.1). В самом деле, пусть согласно
формулам D0.11) и D0.13) мы имеем
Умножим первое равенство на Mit второе на Мх и вычтем одно из дру-
другого, мы получим:
бМ1 ЯЛ дМЛ I Y (ля дМ1 Ml d
отсюда по делении на М$ мы находим:
*. к
а это согласно формуле D0.2) доказывает, что -г^ есть интеграл си-
системы D0.1).
Справедливо и обратное предложение: произведение из какого-либо
значения Мо множителя М на интеграл системы D0.1) само служит мно-
множителем. Убедиться в этом можно непосредственной подстановкой рас-
рассматриваемого выражения в уравнение D0.11).
430
Введём в систему D0.1) вместо xv x2, ..., ха новые переменные
У\, У г, • ¦ ¦ . Ун Тогда по формулам D0.1) и D0 2) для о = 1, 2, ... , s
мы получим
<*Ь. = д-1*_(_dJ± *1Ь?4- 4-^-—s =
dx-, дхх "• длг2 d^ "Г • ' • I jjj^ " d^
- -i-X дуЛ 1
Отсюда мы видим, что система D0.1) в новых переменных напишется так:
где
У. = К[У.)- D0 17)
Если в преобразованных уравнениях D0.16) сохранить для коэффи-
коэффициентов Ко их выражения D0.17) (а не брать каких-либо величин, им
пропорциональных), го, как легко показать, выражение К if) останется ин-
инвариантным и для новой системы D0.16). В самом деле, так как
ТО
s
р-=1 рг=1 р=1
отсюда согласно формуле D0.17) мы получаем:
|". D0.18)
что и доказывает наше предложение
Между прочим, из равенства D0.18) вытекает, что интеграл системы
уравнений D0 1), будучи преобразован к новым переменным, служит
интегралом системы уравнений D0 16)
Теперь мы можем докавать следующее весьма важное свойство мно-
множителя М, если известно значение Мй множителя М для системы D0 1),
то мы найдём множитель для системы D0.16), полученной выше упомя-
упомянутым способом при преобразовании системы D0.1) к новым переменным,
если Мй умножим на определитель
д (xlt х2, , xs)
д (Л, У г, ¦ • , ys)'
431
Действительно, так как Мо по условию является множителем системы
D0.1), то согласно равенству D0.7) мы имеем
/и W(f\ ^(/, /l. • ,fs-V\
moK\J) — 6{x —r\
и yxlt x%,.. , xs)
где /j, /2, ... , fa_x—независимые интегралы системы D0.1), а также
и системы D0.16). Умножим обе части предыдущего тЬждества на опре-
определитель
д{хи х2, ..., xs)
Тогда по теореме об умножении определителей мы найдём:
<?(ЛА, ..А-,) dixuxit ..., xs)_d(f, /,, ¦ , fs
д(хъ хъ..., xsi д{У!,Уъ .... yj д{У1,Уг,---, Уа)
Отсюда мы видим, что величина
M,=M0-dJlXl>x" ¦¦¦'Xs) D0.19)
обладает тем свойством, что тождественно удовлетворяет соотношению
как мы видели, операция, обозначенная символом K(f), может быть от-
отнесена к системе D0.16); отсюда согласно формуле D0.17) вытекает,
что Мх является множителем системы D0.16).
230. Последний множитель Якоби. Допустим, чти мы нашли s—2
независимых первых интегралов /lt /2, . ..,/,_2 системы D0.1); введём
их как новые переменные, т. е. пусть новые переменные уъ уъ ...,ys
будут связаны с прежними хъ х2, ..., xs такими уравнениями
.У, =/р -Уг = /«. ¦¦-, У*-2 = /*-2, ys-i=Xs-uys=^xs. D0.20)
Тогда согласно условию D0.2) мы будем иметь'
К{Ул) = КШ = • • ¦ =*<Л-а) = 0;
следовательно, в силу равенств D0.17) мы получим следующую преоб-
преобразованную систему:
1
где Ys—\ и Ys, как легко видеть, прежние выражения Xs—\ и Xs, из
которых только переменные х,, х2,.. .,xs исключены при помощи урав-
уравнений D0.20).
Для полного интегрирования системы D0.21) к очевидным её s — 2
интегралам Ух = const., y2— const., ..., ys_? = const, надо прибавить
ещё интеграл уравнения
Ys dys_, — Ks_, dys =r 0.
Уравнение это заключает в себе лишь две переменные: ys_x и у s; ин-
интегрирующий эйлеров множитель ц названного уравнения должен быть
432
таков, Чтобы выражение
у. Y, dys-t — |л Ys-\ dys
было полным дифференциалом, т. е. чтобы выполнялось равенство
d(y.Vs-\) . д (y.Vs) _ 0
Сравнивая полученное условие с общим типом D0.10) уравнения для
множителя системы совокупных уравнений, мы видим, что множитель си-
системы D0.21) как раз и может служить интегрирующим множителем
нашего последнего уравнения. Поэтому выражение D0.19), составленноз
для функций D0.20), т. е.
м д(хъхг , xs)
или, что то же,
и носит название последнего множителя, или, по имени Якоби
(Jacobi), последнего множителя Якоби.
Итак, оказывается, что если известно хотя одно частное значение
для множителя системы уравнений D0.1), определяемого уравнением
D0.10) или D0.11), то полное интегрирование системы D0.1) требует на-
нахождения лишь s—-2 независимых интегралов, последнее же интегриро-
интегрирование сводится к квадратуре.
Пример 126. Пусть имеем обыкновенное дифференциальное уравнение
второго порядка
0x1=^*' У]- DX23)
Заменим его системою уравнений первого порядка, введя переменную
То1да мы получим:
dy' dy dx
T^j) = y = T- D0-24)
Уравнение D0.12) для множителя теперь будет
din УИ „
и, следовательно, оно допускает решение
Л*о=1.
Поэтому, если мы найдём хотя один интеграл
Ф( х, у,у') —const.
системы D .24) и с помощью его исключим у' из уравнения
dy—y'dx = 0,
то полученное1 таким образом уравнение согласно формуле D0.22) будет иметь
интегрирующий множитель
28 г к. Суслов 433
Действительно, в настоящем случае определитель, входящий в формулу
D0.22), равен
<?(<[>, .у, x)__dj/
д(у',у,х) ду1'
Рассмотрим частный случай; пусть дано уравнение
соответствующая ему система уравнений первого порядка
dy' dy _dx
у у1 1
допускает интеграл
ф = У2 — j/2 = const. = 2f. D0.25)
Следовательно, уравнение
dy —У dx = Q
имеет по выше сказанному своим интегрирующим множителем функцию
J__J_
W
где согласно равенству D0.25) мы имеем
у = =t |/т + У*.
<*.У
djc
И действительно, выражение
представляет собой полный дифференциал.
231. Приложение теории последнего множителя Якоби к урав-
уравнениям динамики в независимых координатах. Применим полученные
результаты к уравнениям движения. Положим, что все связи рассматри-
рассматриваемой материальной системы конечны (§ 161), а приложенные к ней
силы не зависят явно от скоростей; тогда гамильтоновы уравнения дви-
движения будут следующие [формула C3.21) на стр. 346]:
dt dq\ dqs dpi dps
dpi dps dgi i dqs ^s
при этом согласно предположению о силах мы имеем
Qe=Q,=/(*, <?,, <?2> •••> ?,)• D0.27)
В уравнении D0.12) для множителя системы D0.26) сумма 5 будет та-
такова:
0=1 0=1
отсюда мы видим, что
о —U,
так как согласно, равенству D0.27)
434
Но в таком случае, как мы видели, за множитель системы можно при-
принять единицу: MQ=\. Следовательно, если для системы D0.26) мы
знаем 2s—1 независимых первых интегралов, то последний, 25-ый, най-
найдём с помощью квадратуры.
Пусть время t явно не входит в знаменатели отношений D0.26), т. е.
пусть ни уравнения связей системы, ни проекции приложенных сил не
зависят явно от времени; тогда оставим сперва без внимания отношение
у и займёмся интегрированием следующей системы 2s—1 уравнений:
<*?i ctq2 dqs dpx dps u() 9Q.
dpl dp2 dPs dqx+Ql dqs+Qs
Сумма 5 и для этой системы согласно равенству D0.28) обращается в
нуль; следовательно, и новая система допускает множителем единицу;
поэтому для полного интегрирования её надо знать не все 2s-—1
интегралов, а только 2s-—2; последний же интеграл найдётся квадра-
квадратурой. После того как система D0.29) проинтегрирована, время t вве-
дётся квадратурой:
*=$. D0-30)
dpi
дФ
где из знаменателя ^— должны быть исключены q2, qs, ...,qv
ор\
ръ р2, ..., ps при помощи найденных 2s-—1 интегралов системы D0.29).
Итак, в указанном случае полный процесс интегрирования системы D0.26)
заключается в нахождении 2s-—2 первых интегралов и двух квад-
квадратур.
Если материальная система консервативна, то уравнения D0.26) со-
согласно формулам C3.23) на стр. 346 упрощаются и приводятся к канони-
каноническому виду
D0.31)
dt dqi dq%
1 дН дН
др^ dp*t
Тогда система
D0.29)
dqx_
дН~~
dqs
дН
Ws
примет
dpi
' дН
вид
dp\
dp2
дН
дН
дН
D0.32)
один из интегралов этой системы нам известен наперёд, а именно, ин-
интеграл энергии [формула C3.25) на стр. 347]:
Н = Н. D0.33)
Таким образом, полное решение вопроса о движении консервативной си-
системы с 5 степенями свободы (§ 191) и без дифференциальных неинтегри-
руемых связей требует нахождения лишь 25-—3 первых интегралов
уравнений движения, отличных от интеграла энергии; когда эти интегралы
отысканы, дело интегрирования закончится двумя квадратурами.
28* 435
Если, кроме того, одна из координат, например qs, обладает тем
свойством, что явно не входит в функцию Hf т. е. когда
з?=°« <4034)
система D0.31) допускает ещё один очевидный интеграл
ps = const. =y.
А так как переменная qs входит лишь под знаком дифференциала, то
отношение
dqs
дН
из системы D0.32) можно откинуть и принять в соображение лишь си-
систему из 2s — 3 уравнений
дН • дН — дН ~~ дН ' \™-"^
д Р\ dps—\ dq\ dqs—i
где всюду ps заменено постоянною у. Один из интегралов системы
D0.35), а именно, интеграл энергии D0.33), известен наперёд; следо-
следовательно, полнэе интегрирование этой системы требует знания ещё только
2s—5 интегралов; тогда последний интеграл системы, Bs — 3)-ий,
найдётся квадратурой. Возвратимся теперь к пропущенному уравнению
dps dpi
в нём 2s — 3 величин ри р2, ...,/;,_,, q2t qs, ...,<7s-i должны быть
исключены при помощи 2s — 3 выше упомянутых интегралов, а рс
везде заменено постоянною у. Ясно, что при нахождении qs дело сво-
сводится к квадратуре
дН
Наконец, время t введётся квадратурой D0.30), где теперь Ф = И. Таким
образом, в указанном случае процесс интеграции заключается в разы-
разыскании 2s — 5 интегралов и нахождении трёх квадратур.
232. Приложение теории последнего множителя к уравнениям
несвободного движения, содержащим множители связей. Задача
интегрирования уравнений несвободного движения, содержащих множи-
множители связей, значительно сложнее подобной же задачи, относящейся к
уравнениям в независимых координатах; тем не менее, теория последнего
множителя Якоби может и здесь оказать свою помощь. По предыдущему,
для того чтобы упомянутая теория могла быть приложена с пользою,
нужно знать наперёд, до окончания интеграции, хотя одно значение мно-
множителя данной системы. Во избежание длинных выкладок- мы ограничимся
436
нахождением множителя для уравнений Лагранжа первого рода в том
случае, когда неинтегрируемые связи отсутствуют, а силы не зависят
явно от скоростей.
Пусть взятая материальная система подчинена а связям
М*„ л. *v> ') = о, /2=о, ..., /в=о
(v=l, 2, ..., я).
Если к частице массы тч с координатами хч, уч, zv приложена сила Ft,
имеющая проекции F^x, Fvy, /\г, то уравнения движения системы, согласно
формулам C0.31) на стр. 229, будут:
т„.
чу
<У.
(v=l, 2,3, ...,«). D0.36)
Для упрощения письма преобразуем эти уравнения к новым перемен-
переменным ?v, положив
Кроме того, введём следующие обозначения:
Тогда вместо системы D0.36) мы будем иметь
>=1, 2, 3 Зл); D0.37)
при этом уравнения связей перепишутся так:
М&™ 0 = 0, /,(?,, *) = 0 /.E,, 0 = 0. D0.38)
Множители Хо должны быть исключены из уравнений D0.37) при по-
помощи уравнений
~7fn == ^* j^o == 0; . . .; wTif== 0- D0.39)
Выпишем подробно какое-либо одно из них; имеем
где в соответствии с обозначением B7.10) на стр. 277 положено:
in Зл Зл
437
Заметим при этом, что имеет место следующее равенство:
При нахождении множителей связей Хо надо в уравнения D0.39) вместо
?, подставить их значения из равенств D0.37); тогда мы получим сле-
следующую систему уравнений:
Зп
D0.41)
v=rl
Зп
здесь обозначено:
Зп
v=l
Зп
D0.42)
Система уравнений второго порядка D0.37) равносильна такой системе
уравнений первого порядка:
"•Зл
1
D0.43)
Уравнение для множителя этой системы уравнений по формуле D0.12)
будет следующее:
D0.44)
Зп
где
Но по условию силы не содержат скоростей; следовательно,
а потому
Зл а -, ,„
D0.45)
438
Последнюю сумму мы постараемся выразить иначе. С этою целью возь-
возьмём производные по Sv от обеих частей уравнений D0.41), причём будем
помнить, что от скоростей зависят лишь множители \ и выражения ?>г/а.
Если воспользуемся формулою D0.40), то получим ряд равенств:
Ъж1
Определим отсюда производную -——; имеем
А — 2V/? "i
D0.46)
здесь буквою R обозначен определитель
[ЛАКАЛ] ••¦ [A/J
о_ [ЛЛПЛЛ] ••¦ [/,/„]
[АЛ] [АЛ] • ¦ • [/а/а]
а через /?-, — адъюнкта этого определителя, соответствующая элементу
[/»/„]; при этом, так как опрецелитель симметричный, то мы имеем
Rp = Ra?. D0.47)
Умножим теперь каждое из выражений D0.46) на -^ и возьмём суммы
по индексам а и v; мы получим:
За
*-^" (
Но в сумме, стоящей справа, можно без изменения её значения переста-
переставить индексы р и а, т. е. мы имеем
а а За а а За
Если же воспользоваться ещё равенством D0..47), то правую часть р?-
венства D0.48) можно представить так:
а а Зл - - , - .
9г 2* \Ж,пдЕ~т~Ж<ПЖ,)г
439
это выражение согласно формуле D0.42), очевидно, равняется
R ?* ?*кь> dtuV^— Rdt~~ dt '
Итак, по формуле D0.45) искомая сумма S равна
с din R
*— w;
уравнение D0.44) принимает вид
d\nM d\nR ____ п
~di 1Г — и>
и мы из него выводим
что вполне согласуется с формулой D0.14).
XLI. ТЕОРЕМА ЯКОБИ-ПУАССОНА
233. Лемма. Пусть функция / содержит 25 переменных xv х2, ...,
Обозначим Л (f) результат следующей операции над этой функцией:
A{f)==A AL_^_A df+ V=y\AjM_ {41Л)
" 1 dxi ' 2 дх2 ' п 2' йдг,с *-; " дха v '
коэффициенты Av A2, ..., A2s пусть являются функциями переменных
xv x2, . .., x2s. Пусть В (/) означает подобную же операцию:
здесь Bv B2, . . ., B2s—некоторые другие функции тех же 25 аргу-
аргументов.
Далее, произведём операцию, соответствующую символу A(f), над
выражением D1.2) и результат обозначим А [В (/)]; мы получим:
2л 2S
С другой стороны, операцию, соответствующую символу В (/), произве-
произведём над выражением D1.1) и результат обозначим В[А(/)], т. е. пусть
2л
2s is 2л 2s
— У У АВ d2f -lVVb^^ i41 41
440
Рассмотрим теперь разность функций D1.3) и D1.4), т. е.
D1.5)
Лемма, которую мы хотели доказать, состоит в том, что полученное вы-
выражение не содержит вовсе вторых производных функции /; это следует
из того, что коэффициенты при этих производных в обоих выражениях
D1.3) и D1.4) одинаковы.
234. Скобки Пуассона. Изменим обозначения независимых перемен-
переменных; пусть
составим для двух функций <р и ф от этих аргументов выражение, но-
носящее название скобок Пуассона (Poisson)
Z-U. др. дра dqj ^
Если считать, что скобки Пуассона представляют собой результат неко-
некоторой операции нал какою-либо одной из функций <р или ф, то ясно само
собою, что эти скобки подходят под тип выражений, рассмотренных в
предыдущей лемме.
Скобки Пуассона обладают следующими очевидными свойствами:
(срф) = — (фер); (<р<р) = О; (ш, — ф) = — (<?ф). D1.7)
Далее, положим, что функции со и ф содержат ещё параметр t; тогда
235. Тождество Пуассона. Возьмём три какие-нибудь функции
/, со, ф переменных qv q2, ...,qv, /»,, р2, ...,р^ и составим из них
пуассоновы скобки:
/ D1.9)
Затем, в свою очередь, составим новые скобки:
(//,); (W)); (фф,).
В таком случае мы будем иметь тождественно:
или, согласно равенствам D1.9):
(/ (?Ф)) + (? (ф/)) + (Ф (/?)) =0. D110)
Чтобы убедиться в этом, заметим предварительно, что по самому составу
скобок D1.6) каждый член левой части равенства D1.10) представляет
собой производную второго порядка от какой-либо из трёх взятых функ-
функций /, ср или ф, умноженную на некоторый коэффициент. Остановимся
441
на членах, содержащих производные от /. Такого рода члены могут поя-
появиться лишь в выражении
которое по свойству D1.7) скобок можно переписать так:
(<?(*/)) — (Ф (?/))• D1-11)
Но, как было уже упомянуто, скобки Пуассона подходят под тип выра-
выражений D1.1) и D1.2); следовательно, если операцию над какой-аибо
функцией F, соответствующую процессу составления скобок (ср, F), мы
обозначим через A (F), а операцию (ф/7) через В (F), то вместо выраже-
выражения D1.11) мы сможем написать
A[B(f)] — B[A(f)].
А такое выражение, как мы видели, не содержит вовсе вторых производ-
производных от /. Таким же точно образом убедимся, что левая часть равенства
D1.10) не может заключать в себе и вторых производных от ср и ф, т. е.
что вообще все члены взаимно уничтожаются и что выражение, стоящее
в левой части, тождественно равно нулю.
236. Теорема Якоби-Пуассона. Пусть мы имеем систему канониче-
канонических уравнений:
dgx d(h_ d<h dpi dp2 dps d? . -_
дН дН_ Ш дН_ _dtf _дН 1 " v ж" ^'
др1 др2 dps ~ dq, dq2 dqs
Тогда условие, при котором функция / служит интегралом этих уравне-
уравнений, согласно формуле D0.2) на стр. 427 и формуле D1.6) на стр. 441,
напишется так:
?==0 D1ЛЗ>
Положим, что мы нашли два интеграла системы D1.12):
cp=const., tj> = const.; D1.14)
в таком случае выражение ,
J v (срф) = const. D1.15)
также служит интегралом уравнений D1.12). Эта теорема была впервые
доказана Пуассоном, но истинный смысл её раскрыт Якоби. Для доказа-
доказательства заметим, что если ср и Ф—интегралы системы D1.12), то со-
согласно формуле D1.13) справедливы равенства
5 ^ = 0. D1.16)
Но по тождеству Пуассона D1.10) мы имеем
? О. D1.17)
С другой стороны, из формул D1.16) и D1.7) вытекают равенства:
442
Следовательно, тождество D1.17) можно переписать так:
или, согласно формуле D1.7):
в силу соотношения D1.8) мы отсюда получаем:
Это равенство согласно формуле D1.13) и доказывает нашу теорему.
Итак, зная два интеграла, ср и ф, уравнений D1.12), мы можем диф-
дифференцированием получить третий, а именно, интеграл D1.15). Комби-
Комбинируя этот последний с первыми двумя, выведем четвёртый, пятый и т. д.
Может показаться, что для полного интегрирования системы канонических
уравнений D1.12) достаточно, таким образом, найти только два интегра-
интеграла,— все остальные можно получить дифференцированием. Но дело в том,
что указанный приём не всегда приводит к цели, интеграл, происшедший
от комбинаций двух данных, может оказаться не новым, а функцией уже
известных • интегралов или даже просто постоянною. Как справедливо за-
заметил Якоби, только в том случае мы можем надеяться вывести из дан-
данного интеграла, комбинируя его с другими, всю цепь интегралов данной
системы, если этот интеграл принадлежит специально взятой системе; ин-
теграаы же, общие нескольким системам уравнений, очевидно, в конце
концов должны приводить к выше упомянутым иллюзорным резуль
татам *).
Пусть, например, уравнения D1.12) являются системою уравнений
движения консервативной системы; тогда функция Н не зависит явно от
времени, и данные уравнения, как легко непосредственно убедиться,
допускают интеграл энергии
H = h.
Пусть, кроме того, известен ещё один интеграл уравнений движения,
не зависящий явно от времени: ср = const. Тогда по формуле D1.13)
имеем тождественно
Итак, комбинация любого интеграла уравнений движения консерватив-
консервативной системы, не содержащего явно времени, с интегралом энергии
никогда не приводит к'новому интегралу, а даёт тождественный ре-
результат.
Если же интеграл ср содержит явно время, то по формуле D1.13) мы
получаем:
х) Jacobi,' Vorlesungen fiber Dynamik, Vorl. XXXIV. Damit nSmlich ein Inte-
Integral mit irgend elnem zweiten combiniert nach und nach alle Integrale liefere,
muss es ein solches sein, welches dera besonderen Problem eigenthumlich ange-
hurt. Русский перевод: Якоби, Лекции по динамике, ГОНТИ, 1936.
443
следовательно, в этом случае производная от <р по времени может
служить новым интегралом, если, конечно, она не обратится в постоян-
постоянную или в функцию уже известных интегралов.
Пример 127 Рассмотрим движение системы, состоящей из двух мате-
материальных частиц масс тг и /я, с координатами хъ у1г г1 и хъ у2, г2. Частицы
эти пусть взаимно притягиваются прямо пропорционально расстоянию, причём
множитель пропорциональности пусть равен с2. Полагаем
*i= <7i. Уу-=Чъ ^~q?; x? — qb уг-=<75. *г — д6;
ръ т, г, = р3; т2х? — р4, пцу* = ръ,
Тогда по формуле C3.24) на стр. 347 найдём для функции И такое выражение:
Н = Ш {\ +й + > +
следовательно, уравнения движения будут следующие'
^7i_j»i_. ^?_5_Л_ ^9ч_?з ^j_?t- ^ — fb- dq<!> — Рв •
Написанные уравнения имеют следующие очевидные интегралы (интегралы
сохранения движения центра масс):
А + Рл = Ct; Р-> + Рь— С
Затем имеем ещё два интеграла (интегралы сохранения кинетического момента
в относительном движении):
-«-($-?)*-«>-'•
Составив из последних двух интегралов скобку Пуассона, найдем новый
интеграл
Дальнейшее комбинирование полученных интегралов новых результатов не
даёт. Снова, обратившись к уравнениям, легко находим интеграл
t 2
/я, /я2//
где
^2 __ у2 ( I L
Условимся для краткости называть интегралы по постоянным, им соответст-
соответствующим. Комбинация интеграла С, с первыми тремя интегралами: Clt C2, С3,
даёт иллюзорные результаты, а комбинация с интегралом С4 приводит к новому
интегралу
444
Составив скобки из 68 и Съ, находим:
Но нетрудно сообразить, что полученный интеграл должен представлять собой
следствие интегралов С4> СБ, 66, 67 и Cs В самом деле, левые части пере-
перечисленных интегралов зависят лишь от шести разностей:
_А Р± ?i Рь_ ?s ^6
/TZj /7?2 ffZj ^2 ] "^2
Ч\ — Чк> 42 — Чь' Яъ — Че\
поэтому, если бы все шесть интегралов были независимы друг от друга, то
из них вытекало бы, что выше приведённые разности постоянны, между тем
как данные уравнения допускают интеграл вида
*- — Е± \ sln U — ) to, —
И, действительно, как легко убедиться, между названными интегралами имеет
место следующее тождественное соотношение
где для сокращения левые части интегралов обозначены соответствующими
постоянными.
Кроме интеграла С8, легко найдём ещё три следующие:
^лЧг 4" ^2*?4 — ^(pi 4" Р4) ^^ ^io>
т\Яъ 4 тг4ъ ~~ t (Рн 4 Ре) — (*\ъ
Интегралы С1г С2, ..., С12 и составляют полную систему двенадцати независи-
независимых интегралов уравнений движения.
Нами было замечено, что если интеграл содержит явно время, то частная
производная от него по времени также будет интегралом. Сказанное легко
проверить на интегралах С9, С,о, Си и С12 Действительно, если мы возьмем
производную от интеграла С9 и приравняем её произвольной постоянной -у,
то получим выражение
1 cos U -f- ^2 {q\ — ifi) sin It = f,
являющееся тоже интегралом уравнений движения данной системы Этот инте-
интеграл, конечно, является функцией выше найденных Независимых интегралов:
он связан с ними соотношением
Заметим в заключение, что интегралы сохранения кинетического момента
в абсолютном движении, т. е.
РхЧъ - Р2<?1 4- Р*Чъ — РьЯа, = Ч,
РчЯъ — РгПг + РьЧъ — Р&Чь — Н<
также являются, конечно, функциями от Q С12; так, например, мы имеем
445
XLII. ГЛАВНАЯ ФУНКЦИЯ ГАМИЛЬТОНА В НЕЗАВИСИМЫХ
КООРДИНАТАХ. ХАРАКТЕРИСТИЧЕСКАЯ ФУНКЦИЯ
237. Главная функция Гамильтона в независимых координатах.
Рассмотрим материальную систему, не имеющую вовсе неинтегриру-
емых связей (§ 166). Такая система всегда может быть отнесена к не-
независимым координатам qa (§ 190); пусть число их равно s. Положим
далее, что приложенные к системе силы /^ обладают силовой функцией
U (х„ у„ 2V, t), т. е. могут быть представлены в форме
относительно силовой функции мы при этом предположим, что она может
явно содержать время t. Если сумму кинетической энергии Т системы
и силовой функции U мы обозначим L, т. е. положим
L=r+U,
то уравнения движения системы согласно формуле C2.48) на стр. 332
смогут быть написаны в следующей форме:
1 i4-^ = 0 (e = l,2,...,s). D2.1)
at дЧя дд, v » . . ; кг
Уравнения первого порядка, союзные уравнениям этой системы, по
приведении к каноническому виду пишутся так [формулы C3.23)
на стр. 346]:
at дд.
<42-2>
входящая в эти уравнения функция Н согласно формуле C3.22) на
стр. 346, может быть выражена следующим образом:
H=iiPJ.— T-U, D2.3)
3=1
где Т есть союзное выражение кинетической энергии.
Вспомним далее, что действие по Гамильтону W (§ 201) представ-
представляется интегралом
W=^Ldt, D2.4)
to
взятым по прямому пути (§ 200) от некоторого начального положения
системы, соответствующего моменту t0 и координатам qao, до некото-
некоторого конечного, соответствующего моменту t и координатам qa. Если
движение системы нам известно, т. е. если мы знаем конечные уравне-
уравнения движения
Ч. = ЧЛ*,Сх, С2,...,С2п), D2.5)
где СХ,С2, ¦ ¦ ¦ ,С2п—-произвольные постоянные, то интеграл D2.4) легко
вычисляется. Для этого нужно прежде всего определить произвольные
446
постоянные Cj, С2, ..., С2п как функции от начальных координат qao и
начальных скоростей д^ из системы 25 уравнений
?., = ?«, Со, Ср С8, ... ,С2я), |
?Л = ?.о('о,С1,С2, -.,С2я). )
Вставив найденные отсюда значения для СХ,С2 С2п в уравнения
D2.5), мы выразим все координаты qa как функции от 2s-|-2 аргу-
аргументов t, t0, qZo, qa;.
qe = qAt,t0,qM'qJ (a =1,2,..., s). D2.7)
От тех же аргументов будут зависеть производные дя от координат по вре-
времени:
i°=7t = '*• <'• 'о, ?.„, ?..) (в = 1, 2, .... в). D2.8)
Подинтегральная функция в выражении D2.4) зависит от t, qz и дя; сле-
следовательно, в силу уравнений D2.7) и D2.8) она представится функцией
от тех же 2s -f- 2 аргументов t, t0, q^ qoj а потому, выполнив указанное
в формуле D2.4) интегрирование, мы в функции тех же аргументов вы-
выразим и действие W:
W=W(t,to,q^qJ. D2.9)
Но из равенств D2.7) вытекает, что начальные скорости q^, вообще го-
говоря, можно выразить как функции от t, t0, q0, qa\
ia. = KV,to,q.,qH) («=1,2 s). D2.10)
Следовательно, и само действие W можно, если желаем, рассматривать
как функцию 2s-\-2 аргументов: начального и конечного моментов
t0 и t, а также начальных и конечных координат qao и qay т. е.
W=W(t,to,q,,q?). D2.11)
Действие по Гамильтону, выраженное в такой форме, т. е. как
функция времени, координат и некоторых постоянных параметров, носит
название главной функции. За переменные аргументы этой функции
обыкновенно принимаются время t и координаты qa, отвечающие конеч-
конечному моменту. Поэтому, если мы, например, на том же прямом пути
вместо прежнего начального положения системы возьмём какое-либо
другое, то к главной функции прибавится только некоторая постоянная,
равная действию от нового начального положения до прежнего.
238. Производные главной функции. Чтобы раскрыть механиче-
механический смысл производных от главной функции, составим выражение для
вариации действия W, рассматривая это действие согласно формуле
D2.9) как функцию времени и произвольных постоянных q^ и q^. Вари-
ирование функции W и происходит вследствие изменения этих постоян-
постоянных параметров. Формально нам придётся повторить вычисление § 201,
но смысл вариирования будет совсем иной. Исходя из выражения D2.4)
и принимая во внимание, что пределы интеграла не содержат произволь-
447
ных постоянных, мы получаем:
Ho
следовательно,
-^ bq, dt
d
Преобразуем первую сумму, приняв во внимание, что
Интеграция по частям даёт
Таким образом, мы получаем:
dqa
^0 ^0
Но движение системы происходит сообразно с уравнениями D2.1); по-
поэтому последнее уравнение переходит в следующее:
»^=2Л»?.-2Л.^... D2.13)
0=1 0=1
где ра и р в соответствии с формулой C3.2) на стр. 339 означают
импульсы в моменты t и tOt т. е.
®.=^- D214)
В формуле D2.13) вариации bqa, собственно говоря, следовало бы заме-
заменить выражениями
9°
Но, если с помощью формулы D2.10) 5 аргументов qa^ выразить через
аргументы qal т. е. если действие W рассматривать "в форме D2.11),
то выражение D2.13) как раз даст дифференциал главной функции при
условии, чго время мы будем считать постоянным. Другими словами,
полный дифференциал dW главной функции D2.11) представится так:
d^bt. D2.15)
448
Параметр t0 мы считаем данной фиксированной величиной, как было уже
упомянуто выше. Но ведь в указанном смысле мы имеем
tw^+t^^- D2Л6)
Вычитанием равенств D2.13) и D2.16) мы находим:
^ fdW \, . Л ( dW
отсюда вследствие-независимости друг от друга вариаций bq3 и $qz мы
получаем:
i!r=P, D2.17)
дя.
D2.18)
Выведенные 25 равенств дают зависимости между {, qat ра и 2s по-
постоянными qoa и р ; следовательно, эти равенства подходят под тип
уравнений D2.5) и тех, которые получаются из них дифференцированием
по времени. Другими словами, равенства D2.17) и D2.18) представляют
собой полную систему интегралов системы уравнений D2.2). Если же
систему канонических уравнений D2.2) мы заменим ей равносильной
системой D2.1), то равенства D2.17) дадут группу первых, а равенства
D2.18) — группу вторых интегралов уравнений движения. Система инте-
интегралов D2.17) и D2.18) полная, потому что уравнения эти разрешены
относительно независимых друг от друга величин/?3 и /?ао, и, следовахельно,
ни одно из названных равенств не может быть следствием других.
Пример 128. Рассмотрим движение весомой частицы массы, равной еди-
единице, в вертикальной плоскости. Если ось г направить вертикально вверх, а ось
у расположить горизонтально, то уравнения движения частицы будут
у = 0; г= — g;
эти уравнения имеют очевидные интегралы
i^, D2.19)
если мы примем, что to = O. Действие W по формуле D2.4) выразится так:
о о
После интеграции мы найдём для действия в форме D2.9) следующее выра-
жение:
= \'у\ * + -j* о t - gzot - ?zot* + i- g»fi.
Исключив отсюда с помощью уравнений D2.19) начальные скорости, мы полу-
получим главную функцию
и7=г2Т°/"~-УоJ+27(г"~г°J~У(г + г(')- Lg4K D20)
29 г. К. Су лов 449
Так как для рассматриваемого примера импульсы совпадают со скоростями,
то уравнения D2.17) и D2.18) примут следующий вид:
у-=*=ул
239. Дифференциальное уравнение Якоби-Гамильтона для глав-
главной функции в частных производных. Из выражении D2.4) для W
вытекает следующее значение полной производной по времени от этой
функции:
dW__.
dt
С другой стороны, на основании равенства D2.17) мы имеем:
dW_ dW -^dW dq, dW
dW
Приравняв друг другу найденные два значения производной -г, мы най-
дём:
dW
i
если все скорости qa мы выразим через импульсы ро, т. е. составим
выражение, союзное предыдущему, то согласно формуле C3.22) на
стр. 346 мы получим отсюда следующее уравнение:
Вместо импульсов р подставим теперь в согласии с формулой D2.17)
производные з—. Тогда выражение D2.21) примет вид
Отсюда мы видим, что составленная нами главная функция служит инте-
интегралом уравнения в частных производных D2.21) и притом полным интегралом,
если за всеми •s-f-l постоянными tOt дя0 сохраним произвольные значения
или если к значению W, найденному для какого-либо частного численного
значения t0, прибавим произвольную постоянную так, чтобы число всех
постоянных стало равным s-p 1. Последнее мы можем сделать потому,
что уравнение D2.21) содержит только производные, а не самую функ-
функцию W.
Таким образом, если нам известно движение системы, т. е. интегралы
системы уравнений D2.1) или D2.2), то мы сумеем составить и полный
интеграл уравнения в частных производных D2.21) тем путём, как было
объяснено выше. Наоборот, найдя полный интеграл уравнения D2.21),
можно, как сейчас увидим, тотчас же написать и полную серию инте-
интегралов для системы уравнений D2.1) или D2.2). Следовательно, две
450
задачи — интегрирование системы уравнений D2.1) или D2.2) и интегри-
интегрирование уравнения в частных производных D2.21)—вполне равносильны.
Как было уже замечено выше, уравнение D2.21) не содержит
самой неизвестной функции, а только производные от неё. Поэтому
к любому решению W данного уравнения может быть прибавлена про-
произвольная постоянная Ьо и сумма W-\-bQ будет снова решением. По-
Постоянную Ьо для краткости будем называть аддитивной. Полный инте-
интеграл уравнения D2.21) должен содержать в себе, кроме аддитивной
постоянной д0, ещё 5 независимых произвольных постоянных bv Ьъ..., Ьч.
Пусть нам известен такой полный интеграл W; положим
где с,, с2, ..., cs — новые произвольные постоянные. Покажем, что си-
система уравнений D2.22) в соединении с уравуниями
?F — рь d^L=zp^ ...,|i?z=/7s D2.23)
представляет собой полную серию 2s интегралов системы уравнений D2.2).
Заметим предварительно, что если найденный интеграл подставим в ле-
левую часть уравнения D2.21), то получим, по условию, тождественно
нуль, а потому и производная от этой левой части по любому аргументу,
входящему туда, будет также нулём. Для доказательства высказанного
положения надо показать,тчто уравнения D2.2) являются следствием ра-
равенств D2.22) и D2.23) С этой целью продифференцируем каждое из
равенств D2.22) по времени; мы получим 5 уравнений типа
= 0 (о=1,2,...,*). {42.24)
С другой стороны, продифференцируем по Ьа уравнение D2.21) в том
предположении, что туда подставлен найденный интеграл; при этом не
dW dW
будем упускать из виду, что только производные -*- и г— = рв могут
заключать в себе произвольные постоянные; имеем
• - . _1? _ о (о=1,2
или, согласно формулам D2.23),
~=0 («=1,2, ...,*).
Сравнивая выражения D2.24) и D2.25), мы видим, что s производных
dqa дН
-jj и s производных з— служат корнями одной и той же системы 5
линейных уравнений. А потому, если только определитель Д этих уравне-
уравнений не обращается в нуль, мы заключаем отсюда, что
dgp дН
di^dF.1 <42-26>
29* 451
это и составляет первую половину тех равенств D2.2), которые мы желали
получить. Упомянутый определитель равен
iV+ d*w
Ь%' ' ' dqsdbs
JL(dJ?\ A(?E\
^gj ' db2{ dgJ-'-dbXdgJ-
„ . , dW
если а обращается в нуль, то между производными ^— должно сущест-
существа
вовать соотношение, свободное от произвольных постоянных bv Ьъ ...,bs
вида
¦(<¦*-?)=*
но тогда W служит решением не только уравнения D2.21), но и выше-
dW
написанного, в котором отсутствует производная -s— ; а этого быть не
может, так как функция
W=f(t, qz, bv *„...,*.) + Ьй D2.27)
лишь тогда будет полным интегралом уравнения D2.2), когда для исклю-
исключения 5 -f-1 постоянных bo,bv Ьг, .. ., bs надо принять в расчёт все s-\- 1
уравнений
д W df_ d_W д? dW df_ dW df_
полученных из выражения D2.27) дифференцированием по всем аргумен-
аргументам t и qo.
Для вывода второй половины уравнений D2.2) продифференцируем
по времени равенства D2.23); мы получим:
ltdqjrd^Jq~,~dT- D2-28)
С другой стороны, опять продифференцируем уравнение D2.21), но те-
теперь по аргументу qa; мы найдём:
d*W , дН , 4*<Ш дррп
Но согласно формулам D2.23) и на основании уже доказанных нами ра-
равенств D2.26) мы можем предыдущее выражение переписать так:
дН ¦ y 9p
~г ~r Z*dgdge ' at
сравнение этого равенства с равенством D2.28) и даёт уравнение
dt ддя •
Таким образом, высказанное положение доказано во всех своих частях.
452
Нетрудно убедиться, что интеграл уравнения D2.21) представляет со-
собой попрежнему действие по Гамильтону. Действительно, из уравне-
уравнения D2.21) следует
Но в силу формул D2.23), а также равенства C3.22) на стр. 346 мы
имеем:
dW ^ А
0=1 Ч" 0=1
Отсюда обратно следует равенство
t
W= [ L dt.
К
Пример 129. Для движения, рассмотренного в примере 128 на стр. 449,
уравнение D2.21) напишется так'
dW . 1 fdWy , 1 fdW\2
Легко убедиться, что составленное нами раньше выражение D2.20) для W
удовлетворяет этому уравнению. Полный интеграл уравнения D2.29) мы найдём,
заметив, что левая часть этого уравнения не содержит переменных t и у; по-
поэтому мы вправе положить
dW . dW ,
lt=H ~dy-=b*
Но тогда из уравнения D2.29) мы получим:
и, следовательно, искомый полный интеграл равен
W= b0 + bxt + b2y -1 VYg (- * - Щ^) . 142.30)
Интегралы системы уравнений
}=0, z= — g
по формулам D2.22) и D2.23) напишутся так:
Пример 130. Для системы, состоящей из п частиц с массами т) и отне-
отнесённой к декартовым координатам, уравнение D2.21) согласно формуле C3.9)
на стр. 342 будет
dt ' 2Lt 2m
453
Пример 131. Для сферических координат г, f, ф, определяющих поло-
положение частицы массы т, уравнение D2.21) согласно формуле C3.10) на стр. 342
примет такой вид:
<W J ( fdWy , 1 fdWY , 1 fdWy
at •" 2/
Пусть масса частииы равна единице, а силовая функция имеет выражение
U = —, т. е. начало координат притягивает частицу по закону тяготения
Ньютона. Тогда последнее уравнение представится так:
dt + 2 \ dr ) + 1r> \d<? )
Переменные t и ф явно не входят в уравнение; поэтому полагаем
где ft] и Ьг — постоянные. В таком случае наше уравнение в частных произ-
производных можно переписать так:
2 V dr ) + r* \ 2 V dv ) + coS2 f / r °1'
Если мы теперь положим
где b$ — новая постоянная, то к найденным уже значением частных производ-
производных главной функции присоединятся ещё два:
dW /2*2 2*, dW ,/2A 2ft, .
следовательно, полным интегралом будет
240. Характеристическая функция Гамильтона. Положим, что
данная материальная система консервативна; тогда по формуле C3.25)
на стр. 347 одним из интегралов уравнений движения служит интеграл
энергии
H = h. D2.32)
Интегрирование уравнений движения консервативной системы можно
вести по плану, изложенному в § 193, т. е. сначала определить геомет-
геометрическую сторону движения, проинтегрировав систему уравнений Якоби
C2.69) на стр. 337, а затем квадратурой ввести время [формула C2.70)
на стр. 337]. Из такого хода решения ясно, что одна из произвольных
постоянных, скажем t0, может входить в интегралы движения не иначе,
как составною частый двучлена (t — tQ). Обозначим главную функцию
D2.4) для нашего движения через W и рассмотрим новую функцию S,
связанную с W следующим образом:
S=W-\-H{t—t0). D2.33)
454
С помощью интеграла D2.32) можно вовсе исключить время из правой
части равенства D2.33). В самом деле, постоянная h является функцией
ПОСТОЯННЫХ 9,0 И ?40:
постоянная t0 согласно сказанному выше сюда входить не будет. Если с по-
помощью уравнений типа D2.10), которые в настоящем случае имеют вид
Ям = Я,о (* — * о- Я
исключить из предыдущего выражения для h начальные скорости, то мы
получим:
h = h{t —10, qg, qg0).
Когда найденное отсюда значение t—10 мы подставим в равенство
D2 33), то и получим .S как функцию от qQ, а также постоянных qa0 и А:
S^S(qa,qa0, h).
Функция S, выраженная таким образом, носит название характе-
характеристической функции. Выше было указано, что главная
функция является особой формой действия по Гамильтону. Подобно этому
характеристическая функция представляет собой особую форму действия
по Лагранжу. Действительно, по определению D2.33), если принять во
внимание уравнение D2.32), мы имеем
отсюда согласно равенству D2.4) мы находим:
/ t t
S= \Ldt-\-h \dt= \ (L-\-h)dt.
"t i i
Ho
L—T-\-U
и
h=T—U\
следовательно,
t
S~^2Tdt. D2.34)
Время из этого интеграла должно быть исключено с помощью уравне-
уравнения D2.32). Припомнив сказанное в § 202, мы видим, что функция .S
представляет собой не что иное, как выраженное соответственным обра-
образом лагранжево действие.
Составить выражение для характеристической функции с помощью
интеграла D2.34) можно ещё и таким путём. Согласно формуле C5.12)
на стр. 365 функция S может быть представлена интегралом
=?2^ Pdqv
<7io
Воспользовавшись интегралами системы уравнений Якоби C2.69) на стр. 337,
455
выразим теперь с помощью формул C2.68) и C2.61) на стр. 337 подин-
тегральную функцию Р через независимую координату qx и произвольные
постоянные и затем возьмём квадратуру; тогда мы получим:
qxo,q0i>,q'zo,h), D2.35)
где а =2, 3, .. .,s, a q'g^=№A [см. формулу C2.59) на стр. 336].
Если теперь постоянные q'^ с помощью интегралов уравнений движения
мы выразим как функции от qvq^,,---,qs,qxu,qiu,-.-.,qsa,h и подставим
в полученное выражение для S, то найдём искомую характеристическую
функцию. Все отличие второго приёма от первого состоит в том, что мы
в последнем случае исключаем время t из интеграла D2.34) прежде,
чем производим самое интегрирование.
Соотношение D2.33) между характеристической и главной функци-
функциями устанавливается из следующих простых соображений. Когда мате-
материальная система консервативна, то в уравнение D2.21) для главной
функции время t явно не входит, так как оно не входит явно в функцию Н. Поэ-
тому при интегрировании уравнения D2.21) можно принять производную -,-.-
равною некоторой постоянной величине а; тогда интеграл уравнения D2.21)
будет иметь вид W=ai -\~R, где R есгь функция только координат qa
и произвольных постоянных, удовлетворяющая притом уравнению
0. D2.36)
Отсюда мы заключаем, что разность W—at = R не зависит от вре-
мени; далее, мы имеем: а = -^т-; но из равенства D2.21) следует, что
dW
—п-= — /У, а в силу интеграла энергии справедливо уравнение /У = А;
следовательно,
а = — h. D2.37)
Таким образом, мы приходим к следующему выражению для функции R:
R= W—at= W-\-ht= W-\-Ht;
эта функция отличается от S лишь на постоянную.
Свойства характеристической функции вполне аналогичны свойства!,
главной функции. Провариировав равенство D2.33), мы получаем:
Коэффициент при Ы согласно равенствам D2.21) и D2.32) равняется
нулю; сравнивая коэффициенты при прочих вариациях, мы находим:
dS_ dW__ j)S_ dW_m \
Wa~<>9e' dgm— dqj I D238)
456
Отсюда с помощью равенств D2.17) и D2.18) мы устанавливаем сте-
дующие значения для производных от характеристической функции:
D2.39)
Если в функции Н импульсы ра заменить по формуле D2.39) производ-
производными -г—, то получится уравнение в частных производных, которому
удовлетворяет характеристическая функция и которое заменяет собою
уравнение D2.21) для главной функции:
Если вспомнить равенство D2.37), то нетрудно увидеть, что последнее
уравнение представляет собою не что иное, как уравнение D2.36).
Таким образом, если найден полный интеграл уравнения D2.40), со-
содержащий 5—1 произвольных постоянных bv b2, ¦ • •, t>s—\ (не считая ад-
аддитивной), то на основании соотношений D2.22), D2.23), D2.38) и D2.39)
можно утверждать, что равенства
Тп=(~^ D2.43)
где с,, с2,.. .,Cj_i — новые постоянные, дают полную систему интегра-
интегралов уравнений движения данной материальной системы.
Заметим здесь, что полную систему интегралов уравнений движения
Якоби C2.69) на стр. 337 представляют 2s — 2 уравнения
j*S ^S _dS \
di>1 l дЬч- dl>s~l \ D2.44)
Действительно, импульсы ра согласно формуле C3.3) на стр. 339 для
консервативной системы являются однородными линейными функциями
от скоростей: все постоянные аа равны нулю; следовательно, ряд отно-
отношений
Px-P-i-- • •'• Ps
содержит в себе только координаты qo и производные
[см. обозначения C2.59) на стр. 336]. Если же перейти к уравнениям
457
Лагранжа D2.1), то добавочными интегралами будут служить ингеграл
энергии //г=А или любой из интегралов D2.42) и уравнение
§=<-<••
заменяющее собой квадратуру.
Пример 132. Рассмотрим снова движение весомой частицы массы т = 1
в вертикальной плоскости (см. пример 128 на стр. 449). Припомнив найденное
в этом примере значение D2.20) главной функции W, мы находим-
Чтобы получить характеристическую функцию, надо из правой части этого
выражения исключить t с помощью уравнения D2.32); последнее уравнение сог-
согласно сказанному в примере 129 на стр. 453 имеет Для рассматриваемого случая вид
2Л = yl + г\ + 2ffl0 = (У~/оJ + {Z ~*^ + g (z + г0) + Ц-, D2.46)
или
D м& 4- — jV2 = 0 D2 47)
S S*
если положить
Воспользовавшись равенствами D2.46) и D2.48), выражение D2.45) можно ви-
видоизменить так-
D2.4Я)
2h- ё(г-г0)-
Далее, решив уравнение D2.47) относительно t2, мы получим-
Р = i-(M ±fM2 <- №\ = \(У~ М -± N nzY М — TVJ. D2.50)
g2\ I g2\ /
или
t= — (ум + N ± УМ — N). D2.51)
Подставив выражения D2.50) и D2.51) в равенство D2.49), мы найдём:
HV rt УМ-N) BМ :
или
S = ~ {[М -f N)'k rfc (M - Nf>>). D2.52)
Вставив сюда значения М и N по формулам D2.48), мы получим:
S = з^ {[2А - g{z -f *ь> + ?V (У ~ У»J + (^ - *0JГ ±
± [2А - g{г 4- г0) - g V(y - УоJ + (* - «oJ"]*'" ^• D2.53)
Найдём характеристическую функцию вторым способом. Вычисляем дей-
действие по Лагранжу; по формуле C5.12) на стр. 365 имеем
5 = 2 ^ Pdqx. D2.54)
458
При вычислении этого интеграла воспользуемся результатами, полученными
в примере 101 на стр. 338:
4= Vrgz + Л) A + /2Т. D2.55)
В том же примере было доказано равенство C2.72)
где /I2 — произвольная постоянная; эта постоянная, как легко видеть, следую-
следующим образом зависит от начальных условий:
'2
А) Y^-Тг • D2-57)
Подставив выражения D255) и D256) в равенство D2.54), находим:
г,
Для облегчения интегрирования вводим новую переменную, положив
Мы получаем:
_с _
5= ~ ^РI(^ + А2)^ = ~ ^" {I(С8 ~ ^ + Л2 (С - <«>}• D2-58)
где обозначено
В примере 101 на стр. 338 мы имели следующий интеграл уравнений движе-
движения:
I Г» ш_^_ "#1 "I/
у ~~ g я
Если постоянную В мы выразим через начальные условия, то получим:
2/4 _ „
у — у0 = (С — 10). D2.59)
С другой стороны, из очевидного равенства
мы при помощи зависимости D2.59) находим:
С 4- Со = 2/4 г^г° . D2.60)
Кроме того, тождество
даёт нам в силу соотношений D2.59) и D2.60) следующее равенство:
2А — g (г -f г0) —2А2=8 •("У8Т2'Уо^ 4^2 ^~г°^;
459
это уравнение служит для определения постоянной А2 как функции от у, г,
у0, z0 и Л, так как в силу равенства D2.57) очевидно, что вместо исключе-
исключения у0 мы можем исключить величину А, являющуюся функцией у'о. Решив на-
написанное уравнение относительно А3 и вспомнив обозначения D2.48), мы находим-
D2611
Приняв во внимание равенства D2.59) и D2.60), мы сможем выражению D2.58)
для S дать вид
\. О /
48/J f ¦
(У—.Vi
Подставив сюда значение для А из равенства D2.61), мы полечим для характе-
характеристической функции прежнее выражение D2.52)
%
Составим выражения для некоторых производных от S. Имеем по фор-
формуле D2.43) для <о = °
дА~~ (УМ-Ь-N =t Ум — N) = t, D2.62)
an g
что совпадает с выражением D2.51). Затем по второй из формул D2.39) полу-
получаем-
dS е (У М 4-N ip УМ — N)
ajo = -- Ж 1У-Уо) = -У<} D2.63)
но из уравнения D2.62) мы находим-
УМ ±N± VM — N 2N
на этом основании равенство D2.63) даёт:
-т-=¦>"¦•
Это соотношение мы имели в первой из формул D2.19). Применим вторую из
формул D2.39) к координате г0, имеем
— = (У М -4- Л^ rt ум —N) —
ozq 2 2N
отсюда по формулам D2.62) и D2.64) находим-
[ср. вторую из формул D2.19)].
Уравнение с частными производными D2.40) напишется так:
т(^)"+т(ё)*= "**+*• D2-65)
460
Из выражения D2.52) имеем:
ду~ 2N
следовательно, левая часть равенства D2.65) равна
или, согласно первому из равенств D2.48),
другими словами, выражение D2.52) служит интегралом уравнения D2.65).
Если уравнение D2.65) мы проинтегрируем непосредственно, то найдём
такой полный интеграл:
о,. ,2,3
D2.66)
Равенства D2.41), 'D2.42) и D2.43) легко проверить; например, имеем:
Пример 133. В примере 131 на стр. 454 нами была найдена главная
функция для частицы массы /и = 1, притягиваемой к началу координат по за-
закону Ньютона [формула D2.31 )|. С помощью равенства D2.37) на стр. 454
легко теперь составить характеристическую функцию; получаем:
ХИН. ГЛАВНАЯ И ХАРАКТЕРИСТИЧЕСКАЯ ФУНКЦИЯ ДЛЯ
НЕСВОБОДНОГО ДВИЖЕНИЯ В КООРДИНАТАХ, СВЯЗАННЫХ
УСЛОВНЫМИ УРАВНЕНИЯМИ
241. Предварительные замечания. Вопрос об определении движения
несвободной материальной системы без неинтегрируемых связей может
быть решён двояким путём: или интегрированием уравнений движения,
содержащих множители связей, а именно уравнений Лагранжа первого
рода (§ 177), когда система координат декартова, и уравнений, аналогич-
аналогичных названным, когда система координат произвольная (§ 189), или инте-
интегрированием уравнений Лагранжа второго рода в независимых координа-
координатах (§ 191). Последние уравнения быстрее и непосредственнее приводят
к цели: в них число переменных доведено до надлежащего минимума,
поэтому и произвольных постоянных интеграции появляется наименьшее
число. Интегрирование уравнений с множителями значительно сложнее:
число переменных в них превышает необходимое, а потому и число про-
произвольных постоянных интеграции больше, чем нужно для искомого дви-
движения (§ 119, 121, 177, 189). Но зато движение системы определяется
461
этими уравнениями полнее: становятся известными не только движение
систему, но и реакции, оказываемые связями на систему во всё время
движения.
В предыдущей главе мы видели, что интегрирование системы уравне-
уравнений в независимых координатах может быть заменено интегрированием
одного уравнения в частных производных. Естественно возникает вопрос,
нельзя ли и для уравнений движения с множителями установить подоб-
подобную же связь с некоторым уравнением в' частных производных; при
этом можно, конечно, заранее ожидать, что, с одной стороны, интегра-
интеграция этого уравнения в частных производных введёт лишние постоянные,
а с другой — даст что-либо имеющее отношение к реакциям связей. Ре-
Решением поставленного вопроса мы и займёмся в настоящей главе-
242. Главная функция в координатах, связанных условными
уравнениями. Пусть положение материальной системы определяется ко-
координатами <7з, причём о=1, 2, ...,s, и пусть система эта подчинена а
дифференциальным интегрируемым связям вида
> + f = O <«=«,, 2,....«). D3.1)
В конечной форме уравнения этих связей следующие:
fa = C» D3-2)
где Са — произвольные постоянные, а функции /я зависят от аргументов qo ut.
Полезно с самого же начала заметить следующее. Ввиду произвольности
постоянных Са всем координатам qa системы можно придать произволь-
произвольные значения, т. е. дифференциальные связи D3.1) не налагают ограни-
ограничений на положение системы. Можно считать, что положение системы оп-
определяется s-\-a параметрами qa, Ca, связанными между собою соотно-
соотношениями D3.2), причём параметры Са не зависят ог времени. Уравнения
движения рассматриваемой материальной системы в соответствии с фор-
формулой C2.34) на стр. 328 напишутся так:
dtdqa dqo Ve
Пусть силы, приложенные к системе, имеют силовую функцию U, кото-
которая может содержать явно время. Согласно формуле C2.31) на стр. 328
мы имеем
Введём, кроме того, лагранжеву функцию
L=T+U.
Уравнения движения приведутся тогда к виду
462
±g j\le lJi,2,...,*). D3.3)
dt dqa dq ?. • д
Как известно, множители Х„ определяются как функции от скоростей,
координат и времени при помощи уравнений
:0. D3.4)
dt*
Система уравнений первого порядка, союзных уравнениям D4.3), согласно
формулам C3.19), C3.20) и C3.22) на стр. 345 и 346 напишется так:
~di = dpa'
D3.5)
dt
Множители \, союзные множителям \, служат корнями уравнений, союз-
союзных уравнениям D3.4). Так как уравнения, союзные уравнениям D3 1),
будут
s
У , pr-s/3 Ь "з^г := 0, D3.6)
то уравнения, союзные уравнениям D3.4), будут иметь вид
D3.7)
Здесь через Ф„ обозначена функция аргументов ра, qa и t. Если в урав-
уравнения типа D3.7) вместо производных -^ подставить их выражения из
уравнений D3.5), то мы и получим а уравнений для определения а мно-
множителей \а как функций от рв, q3 и t.
Интегралы системы уравнений D3.3) или D3.5) в силу равенств D3.1)
или D3.2) содержат в себе 2s — а произвольных постоянных (§ 189), а именно,
2s — 2а постоянных Av А2, ..., Ais_u, введённых интеграцией), да ещё а
постоянных С„ С2, ..., Са. Следовательно, конечные уравнения движе-
движения будут иметь вид
qQ=qa{t, Av Q (Y=l,2, ...,2s —2a; 0=1,2, ..., a). D3.8)
Действие по Гамильтону W от некоторого начального положения си-
системы, соответствующего моменту t0 и координатам q^, до некоторого
конечного положения, соответствующего моменту t и координатам qz,
выражается интегралом
^ D3.9)
и
Для вычисления этого интеграла прежде всего определяем произвольные
постоянные Ау и Са конечных уравнений движения D3.8) по начальным коор-
координатам qa и начальным скоростям qa. Заметим здесь, что только s — а
начальных скоростей <?0о могут быть заданы произвольно, остальные же а
463
скоростей определяются как функции от t и qa из уравнений D3.1), кото-
которые должны быть соблюдены и для начального момента. Таким образом, 2s — а
уравнений для вычисления произвольных постоянных согласно равен-
равенствам D3.8) будут следующие:
?..= *. Co. Av C«). Я* = Я?$» А С„)
(а=1,2, .... s; р=1, 2, ...,s-a).
Подставив полученные значения для Av Ca в уравнения D3.8), мы вы-
выразим все координаты и скорости qK и оп как функции от 25 — а-\-2
аргументов t, t0, qao, q?;.
Як = Я, V, t0, qao, qp), qT = qK (t, t0, qaa, q?) D3.11)
@=1,2, ...,s; p=l, 2, ..., s — a).
Само собою понятно, что и выражение D3.9) для W в силу равен-
равенства D3.11) представится как функция тех же 2s—a-j-2 аргументов:
W= W(t, tOt qao, qp)
(ff=l, 2, ..., s; p=l, 2, ..., s — a); D3.12)
подробно соответствующее рассуждение было проведено в § 237. Но из
выражений D3.10) и D3.8) вытекает, что s — а начальных скоростей
можно, вообще говоря, выразить в виде функций от t, t0, q^ o3. Сле-
Следовательно, и саму величину W можно, если пожелаем, рассматривать
как функцию от 2s-\-2 аргументов t, t0, qo, q^. Только не следует за
бывать, что не все эти аргументы произвольны, а именно, между 2s-\-2
аргументами в силу соотношений D3.2) имеют место а зависимостей вида
/«(?.. ')—/,(?„ 'о) = О; (а=1, 2, .... в); D3.13)
таким образом, независимых аргументов имеется только 2s — а -\-2; в чис-
число этих независимых аргументов мы будем включать t, t0, qz (a = 1, 2, ..., s).
Действие W, выраженное таким образом, может быть по аналогии со
свободным движением названо главной функцией для несвободного
движения.
243. Производные главной функции. Чтобы раскрыть механиче-
механический смысл производных главной функции, составляем опять по примеру
§ 238 выражение для вариации bW, рассматривая W по формуле D3.12)
как функцию от t и 2s — а постоянных q^ и <7Ро- Считаем t0 данной
фиксированной величиной; так как пределы интеграла D3.9) не зависят
от произвольных постоянных, по которым мы вариируем, то находим:
t t
to
Отсюда совершенно так же, как в § 238, получаем:
464
Интеграл в правой части равенства с помощью уравнений движения
D3.3) преобразуем так
Последняя суТима равна
поэтому, произведя интегрирование по частям, мы получаем:
?i
'о
о a t
где положено
S.a = —^\.dt. D3.16)
Но как бы мы ни меняли произвольные постоянные, равенства D3.1)
должны быть выполнены; следовательно,
>^ = 0; D3.17)
приняв во внимание тождество
d . * dfa
мы убеждаемся в силу равенства D3.17), что последний интеграл в вы-
выражении D3.15) равен нулю; следовательно, равенство D3.14) нам дает
E^>t^ ?^(^J^ D8.,8,
Значок нуль отмечает, -что соответсгвенной переменной дано начальное
значение (для t=t0).
Если в функции W аргументы q^ мы заменим аргументами ^,> т0
выражение D3.18) представит собою вариацию функции W, взятую в этом
смысле,а также в предположении, что t не изменяется Но, как мы видели,
аргументы да и д^ не независимы друг от друга, а подчинены равенствам
D3.13); следовательно, вариации их bqa и bqai связаны условиями
30 г К Суслов 465
других ограничений на них не наложено, так как равенства D3.2), как
уже отмечалось, оставляют qa независимыми. Положим, что с помощью
уравнений D3.13), а величин q^ например <?l0, q.>0, ...,qa^, исключены
из W; тогда оставшиеся 2s — а аргументе будут уже независимыми, и,
следовательно, в выражении
S S
все вариации совершенно произвольны. Для исключения зависимых вариа-
вариаций bqxu, bq20 bqm из правой части равенства D3.18) мы восполь-
воспользуемся способом множителей. Каждое из равенств D3.19) умножим на
некоторый множитель Ва и затем прибавим почленно к равенству D3.18);
мы получим:
а=1
S
Очевидно, мы можем а множителям Ва дать такие постоянные значения,
чтобы коэффициенты при а зависимых вариациях обратились в нули. Далее,
По смыслу равенства D3.16) величина Ла была определена как неопреде-
неопределённый интеграл, в котором произвольной постоянной приписано какое-то
определённое значение. В состав этого интеграла мы теперь включим и
постоянное слагаемое В,,, сохранив за интегралом обозначение Аа; тогда
предыдущее равенство можно будет переписать так:
{!> $ _, k
Сравнивая теперь это выражение с равенством D3.20), мы выводим сле-
следующие соотношения:
^ @=1.2,...,,), D3.22)
Должно заметить, что равенства D3.23) справедливы и для р= 1, 2, ..., а,
так как для этих значений индекса р и левая, и правая часть обращаются
в нули. Равенства D3.22) и D3.23) дают 2s — а зависимостей между s
координатами qeJ s импульсами рс, s — а постоянными <?„, s — а постоян-
постоянными р л и а постоянными Av Если присоединить сюда ещё а равенств
D3.1) Р°в их союзной форме" D3.6), то 2s уравнений D3.22), D3.23) и
D3.6) представят собою полное число равенств, определяющих движение
материальной системы: действительно, с их помощью мы можем найти
в форме D3.8) все координаты </, как функции от времени и от 2s — а
упомянутых выше произвольных постоянных. Множители Ла, фигурирующие
46В
в равенствах D3.22), ввиду зависимости их от множителей Лагранжа в
форме интегралов D3.16) всего естественнее назвать и мпу л ьс ивнымн
множителями связей.
244. Уравнение в частных производных для главной функции.
Из выражения D3.9) для W мы получаем:
W = L <43-24)
Но, если принять во внимание равенство D3.22), то можно написать:
dW йГ , у dW • dW_\ V ' i V \ V df* '
Отсюда по формуле D3.1) мы получаем:
d_W_dW,y ¦ у к dfa
dt — dt ~\- Zm РЯ. — Zi К -щ •
0=1 a==1
Сравнивая это выражение с равенством D3.24), мы видим, что найденное
в предыдущем параграфе выражение для W служит интегралом следую-
следующего уравнения в частных производных:
Согласно формуле C3.22) на стр. 346 это уравнение можно переписать
так:
Ж-t *.% + "=*. D3-25)
где в функции Н импульсы р должны быть выражены по формулам D3.22)
dW .
через частные производные ,-г- и множители Л^ сами же импульсивные
множители должны быть выражены как функции от t, qa и -к— с помощью
равенств D3.6), куда вместо импульсов предварительно подставлены их
выражения D3.22).
Докажем теперь обратное предложение. Пусть имеем уравнение в ча-
частных производных ( 43.25), составленное так, как было объяснено
выше, и пусть мы знаем полный интеграл W этого уравнения, содержа-
содержащий s произвольных постоянных Ьъ Ь2, . .., bs, кроме аддитивной; положим
щ = с, (а=1, 2, ...,*), D3.26)
где са — новые произвольные постоянные; тогда эти уравнения в соедине-
соединении с 5 уравнениями D3.22), т. е. уравнениями
30* 467
представят собою интегралы системы уравнений
В равенствах D3.27) множители Ла служат корнями а уравнений типа
D3.6) и, следовательно, являются функциями от t, qa, j- . Из уравнений
',43.29) множители -^ должны быть исключены при помощи уравнений
^г = °- D3.30)
Для доказательства высказанного положения заметим предварительно, что
если в уравнение D3.25) мы вставим значение для W, то оно обратится
в тождество. Точно так, же и равенства D3.6) тождественно становятся
нулями, если вместо множителей Ло вставить их значения. Продифферен-
Продифференцируем каждое из равенств D3.26) по времени; мы получим:
!fe = o (o=l, 2, .... s). D3.31)
Продифференцировав теперь уравнение D3.25) по ЬаУ мы найдём:
?", dt дЪ + & dp * db — °-
dbjit ?", dt дЪ. + & dp, * db
Но из равенства D3.27) следует, что
дА—_fL_v d.bdS
db,— d9odb0 ^dqpdb/
При этом всюду принято в соображение, что ^ и т-а от постоянных Ьа
не зависят. Из предыдущих двух выражений мы получаем:
?±хдрр dbad9ri ~xdba\dt
или, в силу равенства D3.6),
S
-5T-J7+Y1 |^ = 0. D3.32)
Из равенств D3.31) и D3.32) мы заключаем, что
это следует из того, что если взятое решение для W является полным
468
интегралом, то определитель
^ — Щ \dqJdTi\dq2J ' ' ' dT,\dqs
не может равняться нулю (§ 239).
Чтобы доказать второй ряд формул D3.29), продифференцируем по
t равенства D3.27); мы получим:
У 2
Hi — dtdqa~T~ ^ dq,dq0 dt ^ dt dq,
У Л У ^- d± У А */в D3 34)
~ к К h dq°dq*dt ~ к К ^ D3-34)
к h dq°dq*dt к
Продифференцировав ещё равенство D3.25) по qa, мы найдём:
_v ^L — У дА ^?4-У — dii I д~—
h did* ^dt' д? к ф'dq dq
Но из равенства D3.27) мы имеем
<><}, ~~ dq,dqp ^ ддв dqp
следовательно,
_yл ^_Va у ^г/а дн
Сложив полученное выражение с равенством D3.34) н приняв во внимание
соотношения D3.6) и D3.33), мы придём к уравнению
dt dqa ?- dt ' dq,'
что мы и имели в виду получить.
Остаётся только показать, что множители -— исключаются с помощью
уравнений D3.30). По условию импульсивные множители удовлетворяют
уравнениям D3.6). Если мы продифференцируем теперь уравнения D3.6)
по времени, то н получим искомые уравнения для производных от Ла; это
будут, очевидно, как раз уравнения D3.7), союзные уравнениям D3.30).
Если в уравнения D3.30) или D3.7) подставить производные ~~ из ра-
равенств D3.29) и затем решить полученные уравнения относительно -^f ,
то эти величины определятся как функции только от pQ, qz, t и не будут
содержать произвольных постоянных Ьв; это следует из структуры коэф-
коэффициентов уравнений D3.7).
469
Пример 134. Пусть плоскость Оуг вертикальна, причём ось Ог направ-
направлена по вертикали вверх. Рассмотрим в этой плоскости движение двух весомых
частиц масс mi и т2, имеющих координаты (ylt г^ и (у2, г2) и подчинённых
связям
— y2) (yt — у2) + (гг — z2) (гг — г2) = 0.
истемы
ыми ко
Myc=m1y1-j-m2y2,
Будем определять положение системы координатами ус, гс, т\, <р, следующим
образом связанными с декартовыми координатами частиц:
г1 — г,
¦П=У1—Уъ V = arctg -' ,
У\ Уъ
причём
М = т1-{- т2.
Уравнения связей в этих координатах запишутся так;
ус = Clt I) sec f — С2, D3.35)
где С1( С2 — произвольные постоянные.
Конечными уравнениями движения типа D3.8) для нашей системы будут
следующие:
Vc—Cv гС= — ^Y + Att+A2; i\ = C,cos(Ait + Ai); D3.36)
Кинетическая энергия Т системы для взятых координат представится так:
T ^^ *). D3.37)
Силовая функция равна
U
Таким образом, лагранжева функция L = T-\-U в силу уравнений D3.36) вы-
выразится следующей функцией времени:
L = мцЧ* - 2MgAtt +±MA\- MgA, + »
Если положим <0 = 0, то для действия W найдём выражение
^ D338)
Входящие сюда постоянные следующим образом выражаются в функциях на-
начальных и конечных координат системы:
Al = + %; А2
ci = УЫ С2 = Чо sec ?0. D3.39)
Уравнения D3.13) будут следующие:
= 0. D3.40)
Подставив значения D3.39) постоянных в равенство D3.38) и исключив две
начальные координаты с помощью равенств D3.40), мы составим искомое вы-
выражение для W. Первым уравнением D3.40) даже не придётся воспользоваться,
так как функция D3.38) не содержит уже сама по себе С1=^уо>. Итак, мы
приходим к следующему выражению для главной функции:
Первые члены этой формулы вполне согласуются с выражением D2.20) на
стр. 449, что понятно само собою. Чтобы проверить хотя бы одно из равенств
470
dW
D3.23), вычислим, например, производную -^—; мы получим:
"То
fi VI/ /77/77 ГО П
-т- = тг- I2 sec2 f • -—r^ = const.,
df0 M T t
как это очевидно из последнего из равенств D3.36).
Составим теперь уравнение в частных производных D3.25). По формуле
D3.37) импульсы связаны с соответственными скоростями равенствами
^ec2 т (ч -f- in tg ?-?) =/
sec2 т (т) tg ? • л + I2 sec* ».?) =Pi.
С помощью этих уравнений функция Н представится так:
Уравнения D3.7) для взятого случая принимают простой вид
Л = 0; А = 0. D3.42)
Равенства D3.27) в соответствии с формулами D3.35) напишутся так:
^IF dW , . dW
— = Pl + K, j^ = P2, g^ = A + A.eecf, -щ = Pi + Л2„ tg f sec f.
Первое и третье из этих равенств в силу соотношений D3.42) примут вид
dW д п dW
Окончательно мы получим следующие выражения для ямпульсов через частные
производные:
А=0; Р2 = Ш-с, ft = 0; A = __,,tgf—-;
следовательно, искомое уравнение D3.25) напишется так:
<ПГ . 1 /dW\* ,1/1.1
Легко проверить, что функция D3.41) служит интегралом написанного
уравнения. Чтобы непосредственно найти полный интеграл этого уравнения,
dW
заметим предварительно, что производная -х— и переменная / вовсе в него не
входят; следовательно, данное уравнение можно разбить на несколько других,
а именно:
dW dW I (dW dW,
Ь * — -3- COS» — Т] Sin» -s—) =?o,
dt l dzc г Ti\
1 fdWy 1 / 1 M 2
где blt bv 63 — произвольные постоянные. Из этих равенств легко находим
полный интеграл
D3.43)
471
245. Число произвольных постоянных. Мы видели (§ 242,) что при
решении вопроса о движении рассматриваемой системы с помощью обык-
обыкновенных дифференциальных уравнений интегралы уравнений движения
заключают в себе 2s—1а произвольных постоянных Av если не считать
постоянных Сл, которые входят в конечные уравнения связей D3.2). Между
тем, если систему уравнений заменить одним уравнением в частных про-
производных D3.25), найти полный интеграл этого уравнения и затем напи-
написать интегралы уравнений движения в форме D3.26), то в окончательный
результат войдут 2s произвольных постоянных, а именно: s постоянных Ь3
(кроме аддигивной) должен содержать полный интеграл уравнения D3.25),
да ещё s новых постоянных со появятся в правых частях уравнений D3.26).
Это кажущееся противоречие в двух методах мы и постараемся себе
уяснить в настоящем параграфе. Для сокращения вычислений ограничимся
рассмотрением лишь декартовых координат, хотя заключения справедливы
и для обобщённых координат 1).
Итак, пусть система из п материальных частиц с массами тч отнесена
к декартовым координатам хч, уч, ?„, где v=l, 2, 3 п. Введём
обозначения § 188, положив
а также
тогда кинетическая энергия примет вид
in
Т—1 V « C2
Пусть на систему наложены а связей D3.2):
/.(?».') = С. (а=1, 2, ...,в; v='l, 2, ...,3л). D3.44)
В таком случае уравнение D3.25) будет иметь вид
где U— силовая функция, а множители At, Л2, ..., кп согласно форму-
формулам D3.6) и D3.27) найдутся из а уравнений
д-Ь + [ В%] = A, [A/J + А2 [A/J + ... + Ae [/yj D3.46)
(а=1,2 а);
квадратные скобки здесь употреблены в смысле
ИВ]=|ДЦ. «43.47,
Нетрудно показать, что число переменных в уравнении D3.45) можно
уменьшить на а. Для этого введём в функцию W вместо St, Se, ..., &д
') См Г. С у с л о в, Об уравнениях с частными производными для несво-
несвободного движения, СПБ, 1888.
472
новые независимые переменные fv /2, ..../я, т. е. станем рассматривать
W не как функцию от ?,, ?2 53л, а как функцию от /,, /2, ..., /а,
5а+], $а+2, ..., ?3л. Тогда, как увидим, в уравнение D3.45) вовсе не
войдут производные or W по /а, и, следовательно, эти последние величины
можно считать при интегрировании за постоянные. Функцию W, выражен-
выраженную в новых переменных, станем обозначать через V. В таком случае
мы будем иметь:
dW
Of. . dV . .
dt
dt '
D3.48)
Уравнения D3.46) для импульсивных множителей принимают вид
(а=1, 2, ...,в);
здесь в согласии с формулою D3.47) применено обозначение
Если мы теперь положим
А. =
Д.,
D3.50)
го множители да будут удовлетворять уравнениям
Ц} + I Vfa] = Hi [Ш + Jul2 [Д/.] + ... + jia [/a/J D3.51)
(а=1, 2, ...,в),
т. е. они выразятся, как линейные однородные функции от производ-
dV
ПЫХ 4J-.
Подставив выражения D3.48) и D3.50) в уравнение D3.45), мы убе-
dV
димся, что производные -тт- везде уничтожатся, и в результате получится
уравнение
а а а
in a
1 v^ J fdV V dfA2
473
Если воспользоваться теперь для упрощений уравнениями D3.51), то
с помощью символов D3.47) и D3.49) предыдущее уравнение можно
переписать так.
Ж-lt blk + iW-it *.№]-U=0. D3.52)
Как было сказано, величины /j,/2, ••-,/„ могут быть приняты при инте-
интегрировании за постоянные; поэтому к найденному полному инте| ралу
уравнения D3.52), который мы обозначим через Ф и который должен
заключать в себе Зл — а произвольных постоянных, кроме аддитивной,
мы можем прибавить произвольную функцию от этих величин. В качестве
такой функции мы возьмём выражение
где ba, bv ..., ba—произвольные постоянные, необходимые для того,
чтобы наше решение было полным интегралом также и уравнения D3.45).
Эта добавочная часть даёт согласно формуле D3.26) а интегралов урав-
уравнений движения
Л = С1> Л = «s, •••. & = ««•
Отсюда мы видим, что а постоянных са совпадают с постоянными Са в
уравнениях D3.2). С другой стороны, равенства D3.50), т. е.
указывают, что другие а постоянных Ьа совпадают с теми постоянными,
которые могут быть присоединены к импульсивным множителям Ла. Ска-
Сказанное выше и определяет значение тех лишних 1а произвольных посто-
постоянных, о которых была речь в начале параграфа.
Пример 135. Вернёмся к примеру 134 на стр. 470 и рассмотрим найден-
найденный там полный интеграл D3.43). Согласно соотношениям D3.35) эта форма
интеграла вполне согласуется с изложенным в настоящем параграфе.
Пример 136. Уравнением D3.52) можно пользоваться не только в том
случае, когда между переменными существуют зависимости, но и тогда, когда
известны некоторые интегралы уравнений движения и желательно, пользуясь
ими, уменьшить число переменных. Покажем, например, как воспользоваться
законом сохранения движения центра масс для уменьшения числа переменных.
В рассматриваемом случае известными интегралами будут:
п
л
/2 '=~ Лл ^v^v — CyJVlt ^^ О^»
v=l
л
/s = Zj m"zi ~~ czMt — С3,
причём
474
Исключим координаты дг1, уг, гг, заменив их переменными Д, /2, /3; тогда мно-
множители [ij, ц_, Из найдутся из уравнений D3.51):
dV
х=2 "Ух
х—2
Уравнение D3.52) примет вид
dv I y« l fdvy i y< i
Ж 2 &"&**) 2 &"
2
— f/ = 0. D3.53)
Здесь в функцию U надо вместо х\ подставить
п
-J^ mxx%)
х=2 '
D3.54)
и аналогичные выражения надо подставить вместо у1 и гх. То неудобство, что
теперь в функцию U входит явно время, легко устраняется, если вместо
хх> ух, z% мы введём новые переменные ?х, т)х, ?х с помощью соотношений
* = «+с< + й= Л = Ч + ^ + Й: г = : + с/ + й D355)
Обозначив искомую главную функцию, выраженную в новых координатах, опять
через W, мы получаем-
dV__dW dV _dW dV__dW
дхх <?5, ' дух дт\х' dz% д?х'
n n n
dV д\Х/ угу dW у dW y» dW.
поэтому уравнение D3.53) перепишется так:
п
здесь в выражение функции С/время уже более не входит, если, конечно, с са-
самого начала заданная функция I/(xlt ylt2j, x,, y2, z2, ...) зависела только от
координат. Действительно, для того, чтобы имел место закон сохранения дви-
движения центра масс, функция U должна зависеть лишь от разностей координат:
то|да силы, действующие на различные частицы, будут в сумме давать нуль.
475
Но разности старых координат следующим образом выражаются через новые
координаты:
если ни х, ни у не равны единице; если же только х отлично от единицы, то
1 x—2
последнее соотношение вытекает из того, что согласно формулам D3.54) и
D3.55) мы имеем
п
То же самое можно сказать и относительно прочих координат. Таким образом,
действительно, силовая функция, выраженная в новых координатах, не со-
содержит явно времени.
246. Характеристическая функция. Пусть ни (однозначная) силовая
функция U, ни уравнения связей не содержат явно времени t; в этом
случае материальная система консервативна, и одним из интегралов
уравнений движения служит интеграл энергии
H = h. D3.56)
Если, пользуясь этим интегралом, мы из функции
S = W-\-H(t—t0)
исключим время, то и получим характеристическую функцию (§ 240). Мы
укажем здесь лишь на основные свойства названной функции, не оста-
останавливаясь ни на доказательствах этих свойств, ни на связи её с лагран-
жевым действием, так как иначе нам пришлось бы повторить-почти слово
в слово весь § 240.
Когда функция 5 выражена через s координат qa, относящихся к
конечному моменту времени t, s — а координат q , относящихся к на-
начальному моменту t0, и постоянную h, тогда частные производные её удов-
удовлетворяют равенствам
dS
D3.57)
dh
Импульсивные множители Ла служат корнями уравнений D3.6), которые
в настоящем случае имеют вид
причём сюда вместо импульсов надо подставить их выражения из уравне-
уравнений D3.57).
476
Составленная нами функция S служит решением уравнения в частных
производных D3.56). Для получения этого уравнения надо в выражении
dS
функции И импульсы ра заменить частными производными-р из равенств
D3.57), причём импульсивные множители в этих уравнениях должны быть
предварительно выражены как функции тех же частных производных с по-
помощью уравнений D3.58). Преобразованное таким образом уравнение
D3.56) заменяет собой в нашем случае уравнение D3.25). Когда найден
полный интеграл 5 этого уравнения, содержащий s—1 произвольных
постоянныхbv b2, ...,bs_v кроме аддитивной, то интегралы уравнений
движения даются s равенствами D3.57) и s нижеследующими равенствами:
~ — с (о=1, 2, ..., 5—1).
db '
О
где с„ и /0 — новые произвольные постоянные.
XLIV. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ХАРАКТЕРИСТИЧЕСКОЙ
ФУНКЦИИ
247. Поверхности равного действия. Теорема лорда Кельвина.
Рассмотрим движение свободной материальной частицы под действием
снл, имеющих силовую функцию, и составим для этого движения харак-
характеристическую функцию S. Если движение отнесено к декартовым коорди-
координатам, то функция S найдётся как полный интеграл уравнения D2.40) на
стр. 457, которое в настоящем случае будет иметь вид
2т
здесь т—масса частицы, U—силовая функция, h — начальная энергия.
Полный интеграл написанного уравнения будет содержать в себе две
произвольные постоянные ?,, Ьъ кроме аддитивной.
Уравнения
dS dS
где Cj, c2 — новые произвольные постоянные, представляют собой инте-
интегралы уравнений движения; в настоящем счучае равенства D4.1) служат
уравнениями тех двух поверхностей, пересечение которых даёт траекторию
частицы.
Дадим постоянным bv b2 какие-либо частные значения; тогда уравне-
уравнения D4.1), при переменных сх и с2, определят некоторую конгруэнцию
траекторий. Под конгруэнцией разумеется семейство кривых, зави-
зависящее от двух произвольных параметров; таким образом, через каж-
каждую точку пространства, вообще говоря, проходит одна или несколько,
но конечное число кривых конгруэнции. В частном случае, когда значения
постоянных Ьх и ?2 определены из того условия, чго все траектории D4.1) про-
проходят через произвольно выбранную нами постоянную точку т0 (х0, у0, г0),
477
упомянутое выше семейство траекторий называется пучком траек-
траекторий, выходящих из этой точки /га0.
Уравнение
S = С D4.2)
при произвольном значении параметра С определяет семейство не-
некоторых поверхностей, носящих название поверхностей равного действия.
В самом деле, если, например, для частного случая пучка траекторий
к левой части уравнения D4.2) прибавить такую постоянную, чтобы для
точки т0 параметр С принимал значение 0, то для всякой другой точки
значение С будет равняться величине лагранжева действия по пути, сое-
соединяющему 1Щ СО ВЗЯТОЮ ТОЧКОЮ. j
Равенства D2.39) на стр. 457 для декартовых координат принимают
вид
dS ¦ dS • dS • _
-Е—=^тх, -3— = /ray, -5— = tnz. D4.01
ox ay * аг
Из них вытекает соотношение
dS dS dS ¦ ¦ • . ^ . . ^ ч * . , я ч
¦%-: 1-: -j- = х :у: z = cos (x, v):cos (у v):cos (z, v), D4.4)
ox oy oz \ 1 " \ /
где через v обозначена скорость движущейся частицы в том месте, где
её траектория встречает взятую поверхность равного действия. Так как
вектор v направлен по касательной к траектории, то из равенства D3.4)
мы выводим, что семейство поверхностей равного действия D4.2) орто-
ортогонально к соответственной конгруэнции траекторий D4.1). В криволи-
криволинейных координатах равенство D4.4) и, следовательно, условие ортого-
ортогональности согласно формуле D2.44) на стр. 457 выражается так:
dS dS dS _
¦3—.*т—¦•s—==sPi'PvP9- D4.5)
dq\ dqi oqb ri r-z rs \ 1
Нетрудно заметить, что всё вышеизложенное представляет собою
в сущности повторение сказанного в § 108: для этого нужно лишь обра-
обратить внимание на то, что согласно равенству D4.3) скорость v служит
градиентом функции точии — S(x,y, z, ЬгЬг), т. е.
, S (х, у, z, Ьъ Ь$
Изложенная нами геометрическая интерпретация равенств D4.5) носит
название теоремы лорда Кельвина (Kelvin). Она может быть распростра-
распространена на произвольное число координат, если ввести в рассмотрение соот-
соответствующее многомерное пространство. Пусть положение какой-либо кон-
консервативной системы определяется 5 координатами qv q2,...,qs; составим
характеристическую функцию 5 для движения этой системы. Функция S
служит полным интегралом уравнения D2.40) на стр. 457 и содержит в
себе ^—1 произвольных постоянных bv Ь2,..ц bs_v кроме аддитивной.
Система равенств
— — с — — с dS —с D46)
478
где с,, с2, ...,cv_, — новые произвольные постоянные, представляет собой
совокупность интегралов уравнений движения для данной системы. При-
Примем, чго совокупность координат qv Йъ ¦ ¦ ¦ >QS определяет собой гюложе
ние точки в пространстве 5 измерений. Тогда, если произвольным пара-
параметрам blt bn,-.., bs_! мы дадим какие-либо частные значения, то система
равенав D4.6) представит семейство одномерных многообразий (т. е.
линий) в этом пространстве s измерений. Система многообразий D4.6),
т. е. траекторий системы, опять будет конгруэнцией, так как через каж-
каждую точку (</,, q<i,..-, (/Л рассматриваемого многомерного пространства
пройдёт, вообще говоря, одна или несколько, но во всяком случае конечное
чисю траекторий. Станем одновременно с конгруэнцией D4 6) рассмат-
рассматривать семейство многообразий 5 — 1 измерений
S(qv gt,..., qs, bv b2,..., *,_,) = С, D4 7)
где С — произвольный параметр; соотношение D2.44) на стр. 457, а
именно:
dS dS dS
''' /v/v•/*
показывает, что конгруэнция траекторий ортогональна к семейству D4.7)
многообразий равного действия.
Пример 137. В примере 128 на стр. 449 и примере 132 на стр. 458 мы
рассматривали движение весомой материальной частицы единичной массы в вер-
вертикальной плоскости Oyz. Для характеристической функции мы нашли выраже-
выражение D2.66), а именно:
Уравнение семейства траекторий будет следующее:
dbi y V § V
2h-b]
или
2h —b\
т. е. это 6yieT семейство парабол. Система кривых равного действия D4.2)
представится в нашем случае следующим уравнением:
?(*-
2Н-Ь\У
как видим, это — семейство полукубических парабол, ортогональное к выше
найденному семейству траекторий.
В найденных уравнениях 6j имеет некоторое фиксированное частное значе-
значение, а С и с-1 являются произвольными параметрами. Для ^ = 0 обе группы
кривых обращаются в семейства прямых, параллельных осям координат. Выбе-
Выберем теперь параметр Ь^ так, чтобы все траектории выходили аз начала коорди-
координат; тогда, опираясь на формулу D2.53) на стр. 458, мы получим следующее
уравнение семейства линий равного действия:
[2А - ёг + gVy^T^V' ± [2Л -gz-gVW+^P = С.
479
Найдём уравнение соответственного пучка траекторий. Из формулы D4 8)
видно, что если траектория проходит через начало координат, то постоянная
6] связана с координатами у, г некоторой её точки следующим уравнением
T-,/ .. . 2A-*f
Отсюда мы находим
46J (у2 -\- г2) — \Ъ\у1 BЛ — gz) -f- g'ty4 ¦= 0, D4 9)
или
?у2 -I- 2ЬЬ ——2уъ\ ^2h — b\ • D4-10)
Но из того же равенства D4.8) следует
/Т, /~2k —b{
W ~2?-i;
отсюда мы получаем:
Подставив это значение Ьг в уравнение D4.10), мы найдём уравнение пучка
траекторий
gy2 + 2z(hiz V№ — g?c*) = ;t 2?с1У D4.11)
Равенство D4.10) является также уравнением пучка траекторий, проходящих
через начало координат, но только с другим переменным параметром 6,
248. Минимум лагранжева действия. Положим, что координата-
координатами консервативной системы с s степенями свободы служат величины
</,, д2,... ,д\,; силовую функцию обозначим через U, кинетическую энергию —
через Т и начальную энергию — через h. Выберем два каких-либо поло-
положения системы: одно начальное Ао, другое конечное А}. Тогда действием
по Лагранжу (§ 202) называется интеграл
S= \ 2Tdt D4.12)
(*„>
взятый по пути, ведущему от положения Ао в /ц. Согласно формулам
C5.12) на стр. 365 и C5.9) на стр. 364, написанный интеграл может
быть представлен в форме
5=2 J yo(u+h) dqy D4.13)
Здесь переменной интеграции служит та координата qv которую мы ус-
условились считать за независимую; кинетическая энергия Т и функция G
имеют выражения
r==i ? Wp. D4-14)
о = 1,р = 1
О = у X atJ'1» D4Л5)
0=1, 0=2р
480
причём символами g0' обозначены производные -р-", так что в частном слу-
случае при а=1 мы имеем ^='1. Величины ql0 и qn представляют собой
значения независимой переменной ql для начального и конечного положе-
положений /40 и Ау
Сравнивая значение интеграла S, взятого по прямому пути между Ао
и Аг (§ 200), со значениями того же интеграла, но взятого по какому-
либо окольному пути, идущему между теми же положениями и проходи-
проходимому системой с той же начальной энергией А, мы убедились, что пер-
первая вариация интеграла 6* для прямого пути обращается в нуль (§ 202).
Теперь же, пользуясь результатами предыдущих глав, мы пойдём дальше
и покажем, что значение интеграла D4.13) для прямого пути служит ми-
минимумом по отношению к значениям его для смежных, окольных путей, если
только положения Aq и Л, не удалены друг от друга далее известного
предела.
Характеристическая функция S для рассматриваемого движения слу-
служит интегралом уравнения D2.40) на стр. 457, т. е. уравнения
H = h, D4.16)
причём в левой части здесь импульсы р3 исключены с помощью равенств
'. = ?' <44Л7>
Согласно формуле C3.24) на .стр. 34 уравнение D4.16) можно пере-
переписать так:
f{w,)=u+k- D4Л8)
ж / dS \
Здесь под символом / I -т— ] мы yoiOBHMtn подразумевать союзное выра-
жение кинетической энергии Т(ра), куда по формуле D4.17) вместо им-
импульсов подставлены производные -^—. Подобным образом через ^(coj мы
будем обозначать выражение для кинетической энергии системы Т(qa)t
если туда вместо скоростей qa подставлены какие-либо другие аргументы
ш^, т. е. в соответствии с формулой D4.14) мы будем писать
Wf <44ЛЭ>
при этом надо помнить, что по свойству кинетической энергии функция
Т(юа) может быть нулём только тогда, когда все аргументы шя стали
нулями. В рассматриваемом нами случае кинетическая энергия Т является
однородной функцией второй степени относительно скоростей; следо-
следовательно, по теореме Эйлера об однородных функциях мы имеем
D4.20)
о=>
31 Г. К. Суслов 481
Скорости связаны с импульсами уравнениями C3.3) на стр. 339, при-
причём свободные члены az в этих уравнениях следует положить равными
нулю, ввиду однородности функции Т; таким образом, мы имеем:
<44-21>
Из формул D4.20) и D4.17) мы выводим соотношение
\^ dS' dS
согласно уравнению D4.18) мы отсюда получаем:
Обозначим через 8 полный интеграл уравнения D4.18), содержащий s—1
произвольных постоянных bv b2, • • - Ж— i, кроме аддитивной. Тогда по
предыдущему мы получим:
2? (?)=?=* ("+*>• <44-22>
Частную производную -тт- назовём 8П; напишем s — 1 равенств
в, = в, (тг = .1, 2, ..., 5— 1), D4.23)
где ск—новые постоянные; согласно формулам D2.41) на сгр. 457 эти
равенства будут интегралами уравнений движения рассматриваемой
системы; а потому мы получки:
Интеграл S, минимум которого мы желаем рассмотреть, согласно ра-
равенствам D4.13) и D4.14) мы можем представить так:
s, ?
' [U —J— ft) У, CL UQ uO . yt'Tt&O}
Введём вместо переменных qv q2, .. ., qs новые переменные 8, 0,,..., 8,_ti
полагая при эгом, что существуют производные -4* и -^; мы получим:
S, S S — 1 S—1, S— 1
^i^ op Va *р ' ~1 jmJ л л 1 ^J op о р> \ /
0=1, р=,1 л=1 0=1, р = 1
где
5^ . <ЧЧ
0=1, р=1
0=1,р = 1
482
Рассмотрим очевидные равенства:
дЬ dq, . дЬ dqt , , дЬ aqs
^' <?8 "Г
введём обозначение
л V-L..^x 4429)
будем, кроме того, под ф0 подразумевать адъюнкту последнего определи-
теля, соответствующую элементу -*—, т. е. пусть
тогда мы сможем написать:
Подобным же образом из s уравнений
0=1 0=1
Z*1^ ^о_1 v de*-« gy« —о
07S 1 0ZS 1
мы найдём:
Рассматривая qb как функцию от 8 и 6Я, Мы можем написать:
S—1
ч« dt дЬ at _
Следовательно, в силу равенств D4.22) я D4.24) мы получим:
q\ — 2(U-\-h) ^. D4.33)
Подставив найденные отсюда значения производных ~ в выражение
D4.27), мы найдём:
о_
2-1 ао?9о?р —
о=1,р=1
31* 483
Примем во внимание интеграл энергии
T(q.) =
тогда предыдущее равенство можно будет преобразовать так:
Подобным же образом подставим выражение D4.33) в равенство D4.28);
приняв во внимание формулы D4.21) и D4.17), мы получим:
1 ' - * -
о 1 у
* ~ 2 (U 4- h) Z*
1
0=1
3
0=1
Таким образом, вместо выражения D4.13) мы по формуле D4.26) най-
найдём:
ложений Ао и Аъ а
Ия); D4.34)
здесь пределы интеграла 8(' и 8A) являются значениями функции 6 для по-
пой А А
0=1, И=1
Эта квадратичная дифференциальная форма согласно равенству D4.26)
всегда имеет неотрицательное значение, причём может обратиться в нуль
лишь тогда, когда все Йбл нули.
Сравним теперь значение S действия D4.34) по прямому пути со зна-
значением S, действия по окольному пути. Для прямого пути функции Оя
остаются постоянными; следовательно, Ф2 = 0, а потому
S=8A) — 6@)-
Для окольного же пути по крайней мере одна из функций 8Я непостоянна,
и, следовательно,
@) @)
e@) ,@)
т. е.
что мы и желали получить.
Прежде чем итти дальше, припомним одно предложение из теории
функциональных определителей. Пусть какие-либо s величин хх, хъ ..., х?
определяются из s уравнений
Ух = Сх, у2 = С„ .. ., у, = Cs, D4.35)
484
где Cv С2, ...,CS—данные постоянные, а у,, у2, .. .,_у,—некоторые
функции переменных xv хг, ..., х,. Вообще говоря, из уравнений
D4.35) для каждого ха мы найдём несколько различных значений. Пусть
некоторые из этих значений»становятся равными, т. е. пусть уравнения
D4.35) имеют кратные корни. Тогда уравнениям этим будут УД°~
влетворять не только величины х3, но и xz -|- Ьхя, где Ьх0-—бес-
Ьх0-—бесконечно малые величины; а для этого необходимо, чтобы соблюдались
равенства:
у р. Ьх =0, У рЬх =0 У дрЬх —0, D4.36)
т. е. чтобы определитель
V(xlyxl'.'.'.% D4-37>
равнялся нулю для соответственных значений х,, хъ ..., х,. Наше заклю-
заключение справедливо и для того случая, когда не все корни уравнений
D4.35) становятся кратными, а только некоторые, так как из равенств
D4.36) не вытекает; обращение в нуль выражения D4.37) только тогда,
если все §х, равны нулю, т. е. все корни простые. Само собою разу-
разумеется, что обращение в нуль определителя, обратного определителю
D4.37), т. е.
д (х Хп х )
I !; 2' * * *' а D4.38)
служит признаком того, что система s уравнений относительно ve> a
именно:
хр = const. =yp (P=1.2. •••,*).
имеет кратные корни. Произведение определителей D4.37) и D4.38)
равно единице; следовательно, обращение в нуль одного из них влечёт
за собой обращение в бесконечность другого и наоборот.
Возвращаясь снова к равенству D4.34), вспомним, что заключение
о минимальности действия было получено для случая, когда переменные
</,, Я%1 ¦ • •, Qs можно заменить переменными Ь, 9,, fJ, .. ., 6^ i. Наши сооб-
соображения теряют своё значение, если указанная замена одних переменных
другими невыполнима для всех значений переменных gvg2> •••></*> кото-
которые встречаются по пути интеграла D4.34), т. е. если для некоторых
мест, лежащих на прямом пути, производные -j& и "Ур перестают суще-
существовать, т. е. обращаются в'бесконечность и№ принимают неопределён-
неопределённый вид. Из уравнений D4.29), D4.31) и D4.32) мы видим, что назван-
названное обстоятельство будет иметь место лишь в том случае, когда
определитель ф становится нулём, бесконечностью или неопределён-
неопределённостью.
Рассмотрим сперва случай, когда ф обращается в нуль. Чтобы рас-
раскрыть геометрический смысл указанного обстоятельства, представим
определитель ф в особой форме. С этой целью заметим, что из уравне-
уравнений прямого пути системы D4.23) вытекают следующие дифференциаль-
485
ные равенства:
Отсюда, пользуясь прежними обозначениями фо для адъюнкт определителя
D4.29), мы выводим:
^А..=г*Ь. D4.39)
Умножим члены каждого из этих отношений соответственно на
дЬ дЬ д9
-J— , -г-, ..., з— и возьмем отношение суммы предыдущих членов к
сумме последующих; в знаменателе тогда будет стоять выражение,
представляющее разложение определителя D4.29) по элементам первой
строки, и мы найдём:
= !, 2....* D4.40)
Значения дифференциалов dqa из этих уравнений подставим в равенство
использовав обозначение D4.19), мы получим:
2№ = ^2Г
Но согласно равенству D4.22) мы имеем
на этом основании предыдущее равенство перепишется так:
D4.41)
Отсюда мы выводим, что если ф = 0, то или U-\-h = 0, или все ф,
обращаются в нуль. Первое условие указывает на те положения системы,
в которых она находится в мгновенном покое, ибо из равенства
Г(?,) = */+* = 0
следует, что для названных положений все скорости qa—нули. Второе
условие отмечает особые места прямых путей системы, как это и видно
из уравнений D4.39).
Перейдём ко второму случаю: пусть ф обращается в бесконечность.
Тогда определитель, обратный ф, т. е.
d(9i,?2. ¦¦¦,Qs)
<Н<>Л e,-i)
486
станет пулём. Как мы видели выше, указанное обстоятельство служит
условием того, что некоторое положение А на прямом пути представляет
собою место разветвления функций 0 и 0„: действительно, если мы со-
составим уравнения для нахождения значений 8 и 8Я по значениям
q^,q2, ...,qs, то для значений координат, отвечающих конечному поло-
положению Аг системы, уравнения эти будут иметь кратные корни. Заметим,
однако, что обращение в бесконечность производной от характеристиче-
характеристической функции 6 влечёт за собой согласно формуле D4.41) обращение в
бесконечность функции U-\-h. Следовательно, места разветвления харак-
характеристической функции совпадают с полюсами функции U -\-h. Местами же
разветвления функций \ служат такие конечные положения Л,, для
которых по крайней мере два значения какой-либо функции 6Ж, скажем
8 (J) и бр, становятся равными. Но ведь число комбинаций различных
значений 8,, 82, ..., 6Я i, соответствующих заданному положению Av
определяет собою число прямых путей, ведущих из Ло в Л,; поэтому,
если некоторые из названных значений становятся равными, то соответ-
соответствующие им прямые пути сольются. А тогда положения Ао и Л, станут
взаимными кинетическими фокусами, т. е. такими положениями, между
которыми проходят по крайней мере два бесконечно близких прямых
пути (§ 201).
Наконец, если ф принимает неопределённый вид, то это обстоятель-
обстоятельство сопасно формуле D4.41) соответствует такому положению, для
которого или функция U-\-h, или адъюнкты ф5 становятся неопределён-
неопределёнными, т. е. соответствует или особым местам функции U-\-h, или
в силу уравнений D4.39) особым местам прямого пути. Разбирать
тот исключительный случай, когда в равенствах D4 31) одна или несколь-
несколько адъюнкт Фо обращаются в оо или -^-, а сам определитель с|) со-
сохраняет конечное значение, отличное от нуля, нет необходимости. В самом
' О
деле, из формулы D4.31) мы видим, что обращение в -д- одной какой-
либо адъюнкты с}^ или влечёт за собой обращение в -^ всех вообще ф^,
или даёт неопределённое отношение дифференциалов и, следовательно,
указывает на особое место пути. Обращение одной какой-либо адъюнк-
адъюнкты фо в оо или влечёт за собой обращение всех фо в оо, или требует
обращения в нуль некоторых дифференциалов dqa. В последнем случае
некоторые интегралы уравнения движения имеют вид </о = const.; выбором
новой системы координат этого обстоятельства всегда можно избегнуть.
Если же все cJ>0 обращаются в -^ или оо, то определитель ф может
сохранить своё конечное значение лишь тогда, когда все элементы,
соответствующие адъюнктам срз, т. е. все j-, становятся нулями, что
возможно лишь для места, служащего согласно равенству D4.22) нулём
функции U-\-h. Таким образом, указанный исключительный случай но-
нового ничего не даёт.
Итак, за интегралом 5 сохраняется свойство быть минимумом, если
конечное положение настолько близко к начальному, что путь между
487
ними (включая начальное и конечное положения): 1) не имеет особых
мест, 2) не проходит через нули, полюсы и особые места функции U-\-h
и 3) не содержит ни одного кинетического фокуса, сопряжённого с началь-
начальным положением Ай.
Пример 138. Обратимся снова к движению весомой материальной ча-
частицы единичной массы в вертикальной плоскости, рассмотренному нами в при-
примере 128 на стр. 449, примере 132 на стр. 458 и примере 137 на стр. 479. Для
указанной частицы мы имее_м:
Нули этой функции лежат на прямой
*=—, D4.42)
а полюсы находятся на бесконечности. Особых точек траектории, как кривые
второго порядка, не имеют. Найдём геометрическое место кинетических фоку-
фокусов, сопряжённых с началом координат. Для этого возьмём уравнения D4.11)
или D4.10), изображающие пучок траекторий, и станем искать условие крат-
кратности корней сх или by. Мы получим уравнение параболы
г = — ^- — — . D4.43)
4/z g
Эта парабола является обвёрткой траекторий A7.1) на стр. 154. Прямую у — О,
которая также служит геометрическим местом кинетических фокусов, сопря-
сопряжённых с началом координат, мы исключаем из рассмотрения, потому что
частица, двигаясь по вертикальной прямой, дойдёт до фокуса, только пройдя
положение, лежащее на прямой D4.42J Прямая D4.42) касается параболы
D4.43) в ее вершине.
Пример 139. Рассмотрим ещё плоское движение частицы, притягиваемой
началом координат по закону Ньютона. Если масса частицы равна еди-
единице, то согласно сказанному в примере 131 на стр. 454 характеристическая
функция в полярных координатах р, <р найдётся как полный интеграл урав-
уравнения
26*
отсюда согласно обозначениям, принятым в настоящем параграфе, мы получим:
Уравнение траектории будет
1 /26, ,,\ . о
arccos — ( —L — k" ) 4- '—^
УШ>1 -t-A* \ p / V^bt
Пусть в начальном положении р=р0, у = 0; тогда для определения постоян-
постоянной 6, как функции от координат, отвечающих конечному положению, мы по-
получим уравнение
arccos
УШГ+&\ ро
488
или, после упрощений,
г
1+см
_сов
D4.44)
Геометрическим местом нулей функции U-\-h служит окружность
Полюс функции U-\-h лежит в начале координат. Геометрическое место кине-
кинетических фокусов, сопряжённых с положением (ро, 0), мы найдём, определив
условие кратности корней уравнения D4.44); таким образом, мы получим
кривую
Ро.
Г "~~
Ро
D4.45)
Ро
Это — эллипс, один из фокусов которого лежит в начале координат, а другой —
в точке (р0, 0). Прямую <р = 0 или ? = п мы не принимаем в расчёт по при-
причинам, аналогичным той, которая изложена в предыдущем примере.
Фиг. 135 иллюстрирует рассматриваемое движение для случая Л<0. Притя-
Притягивающий центр находится в точке О, начальным положением частицы служит
точка Ро. Окружность ОХАО^В является .
геометрическим местом нулей функции -"
U-\-h. Радиус этой окружности равен
ОА--~-2а,
где а — длина большой полуоси всех траек-
траекторий, входящих в состав рассматривае-
рассматриваемого пучка (§ 112). Отсюда ясно, что гео-
геометрическим местом фокусов траекторий
служит окружность AFxFtt имеющая центр
в точке Ро и радиус, равный PqA. Геомет-
Геометрическим местом кинетических фокусов,
сопряжённых с точкою Ро, является эллипс
AQC, выражаемый уравнением D4.45).
Пусть конечное положение частицы есть
точка Р. Опишем из этой точки как центра
окружность радиусом, равным РВ. Точки Fx и Ft пересечения этой окруж-
окружности с окружностью AFXF2 будут фокусами тех двух эллиптических траекто-
траекторий РОЕХР и Р^Е^Р, что соединяют точки Ро и Р. Точка Q касания эллипса
PqEiP с эллипсом AQC будет кинетическим фокусом, сопряжённым с точкой Ро.
Следовательно, действие по пути Р$ЕХР будет минимальным, а действие по
пути Р0Е2Р этим свойством уже обладать не будет.
Кривые АТхР0Тъ и OR^R^ соответственно представляют собой геометри-
геометрические места афелиев и перигелиев, т. е. концов больших осей траектории.
Их очень легко получить графически. С этою целью начало О соединяем
с какою-либо точкою F1 окружности AFjF, и полученную прямую OFt про-
продолжаем до встречи с окружностью DXAD2B в точке Dt. Отрезок DXFX делим
пополам в точке Кх и откладываем ORX=-F1KX. Точки К, и Rx лежат на
искомых геометрических местах.
489
Фиг. 135.
ОТДЕЛ VI
ДИНАМИКА ТВЁРДОГО ТЕЛА
XLV. УРАВНЕНИЯ ДВИЖЕНИЯ СВОБОДНОГО ТВЁРДОГО ТЕЛА
249. Основные динамические величины, характеризующие дви-
движение твёрдого тела. Пусть Oxyz—неподвижная система координат
и Л^7]С — система координат, имеющая начало в произвольной точке, или
полюсе А тела, и неизменно связанная с телом (см пример 76 на
стр. 273); пусть, кроме того, AXYZ — система осей, имеющих начало
в той же точке А и параллельных осям неподвижной системы Oxyz
^фиг. 136). Рассмотрим произвольную частицу от, тела. Назовём её ра-
радиусы-векторы в неподвижной и подвижной системах соответственно rv и pv;
радиус-вектор начала А подвижной системы, проведённый из начала О
неподвижной системы, пусть будет гд. Эти
векторы связаны соотношением
г, = гд + рг D5.1)
Из кинематики мы знаем, что скорость да,
любой частицы /rav неизменяемой системы в
данный момент будет известна, если даны
для этого момента поступател1-ная ско-
скорость vд тела, т. е. скорость выбранного
нами полюса А, и мгновенная угловая ско-
скорость ш (гл. IX); действительно, по форму-
л ле (9. 32) на стр. 93 мы имеем
Фиг. 136. «\, = «>>, + «>Хр„. D5.2)
Векторы vA и со можно задать или по отношению к неподвижным
осям Oxyz, т. е. их проекциями
Vax = *a, *>Ду—Уд, *д, = *д; »,, <°v, «„ D5.3)
или по отношению к подвижным осям Л$7]С, неизменно связанным с телом,
т. е. проекциями
VAb VAV VAb Ш5. <°у «"С D5-4)
Соответственно сказанному и основные динамические величины, количе-
количество движения К, кинетический момент О и кинетическая энергия Т тела,
могут быть отнесены как к неподвижным, так и к подвижным осям, г. е.
могут быть соответственно выражены через величины D5. 3) и D5. 4).
Кинетическую энергию Т тела часто, кроме того, выражают через обоб-
обобщённые координаты qa и их производные по времени, т. е. в форме
{32. 35) на стр. 329. За независимые координаты свободного твёрдого
тела могут быть приняты координаты полюса хд, уд, гд и три эйлеро-
эйлеровых угла <р, ф, & (§ 55). Кинетическую энергию неизменяемой системы,
представленную в указанной форме, мы будем называть лагранжевой
формой кинетической энергии.
250. Количество движения и кинетический момент твёрдого
тела. Количеством движения К материальной системы, состоящей из п
490
частии mv, как известно, называется сумма произведений масс /nv частиц
на их скорости да, (§ 178):
К =13 «Л (v=1.2,...,«). D5.5)
Если материальная система состоит не из дискретных частиц, а представ-
представляет собою тело с непрерывно распределённой массой, то при вычислении
количества движения по выше приведённой формуле суммирование сле-
следует заменить интегрированием; тогда мы будем иметь:
D5.6)
при этом dm = odxdydz, где а есть плотность тела в данной точке,
а интеграл распространён на весь объём, занятый телом. В последующем
мы, однако, всегда будем писать символы суммы, помня, что в случае
непрерывно распределённой массы суммы при вычислениях надо заменять
интегралами по типу формулы D5. 6).
Согласно теореме C1.3) на стр. 302 количество движения системы
следующим образом выражается через её массу М и через скорость v^
её пенгра масс С:
По формуле D5.2) мы получаем отсюда:
К = М (vA -f ш X рс). D5 7)
Найдём кинетический момент, или главный момент количеств движе-
движения Од тела относительно начала А подвижной системы координат. По
формуле C1.15) на стр. 307, применённой к полюсу Л, *имеем:
п
О,= ^Р,ХВД. D5.8)
у — I
Подставив сюда значение скорости дау по формуле D5. 2), мы находим:
п
или согласно равенствам B5.1) на стр. 243 и A.36) на стр. 12:
п
ОА = Жр~с X vA + ю 2 «,Р* — 2 "Pv (»•?,)• D5.9)
Спроектируем это выражение на оси неподвижной системы координат
Oxyz, при этом проекции вектора pv выразим через координаты ча-
частицы otv в системе AXYZ; применив обозначения B6.6) и B6.7) на
стр. 256, мы получим:
°Ах = М ( Yd°Az — ZC°Ay) + JXX®X — JXY®y ~ J>* ]
GAv = M(ZcvAx~XcvAt)-JYX<s>x + JYy«>v-JYZ<s>2, К D5.10)
°Аг = Ж {Xd°Av ~ Yd°Ax) — JZXmx — JZY% + JZZ«>*> J
здесь согласно формуле D5.1) положено:
хс~хс—ха> ^с—Ус—Уа> ^c==zc~za"
491
Аналогично в проекциях на оси системы Л?к]?, неизменно связанной
с телом, мы будем иметь:
О At = М (ricVAt — ZCVAJ 4- 4W5 — ^А — ЛЛ-
411)
Ож = М ?cvAit — 1)Л!) — У^ — Ус
Найдём ещё кинетический момент Go тела относительно начала О
неподвижной системы координат; по той же формуле C1.15) на стр. 307
получаем
х
4=1
х
или согласно равенствам D5.5) и D5.8)
•A. D5.12)
251. Кинетическая энергия твёрдого тела, отнесённая к непо-
неподвижным осям. Кинетическая энергия произвольной материальной системы
выражается так:
п
Подставив сюда значение скорости да, из формулы D5.2), мы получим
для кинетической энергии твёрдого тела выражение
т = 2
X р~ -f у Ц да, E X
D5.13)
Здесь первое слагаемое, очевидно, можно упростить следующим образом:
Ко второму слагаемому применим формулы B5.1) на стр. 243 и A.32)
на стр. 11; мы получим:
ш X р, = MvA -ш X рс =
W, шу
лс 'с
(I)
¦г
°Лг
К последнему слагаемому равенства D5.13) применим формулу A -.30)
на сто, 11 и затем выразим вектор ш через его проекции на оси си-
системы Oxyz, а вектор ру — через координаты частицы /rav в системе
OXYZ; мы получим:
-f Z?) — (ю, ATV -f
4Э2
т. е.
pvJ=(к? + z?)
? 4- к,2) <4—
- 2 Г
у
отсюда, применив обозначения B6.6) и B6.7) на стр. 256, мы найдём:
v=l
Собрав результаты, мы получим следующее выражение для кинетической
энергии твёрдого тела в неподвижной системе координат:
Й).
0),
X,
"Ах
vAv
D5.14)
здесь
VAy-\- V2Az
Обозначим косинусы углов мгновенной угловой скорости ю с осями непо-
неподвижной системы координат соответственно через а, [5, у.,т- е- положим
подставим эти выражения в последнее слагаемое в формуле D5.14), в
круглых скобках; тогда, применив теорему B6.8) на стр. 274 и обо-
обозначив Ушш момент инерции тела относительно мгновенной оси полюса А,
мы представим кинетическую энергию твёрдого тела в следующем виде:
D5.15)
Выражение кинетической энергии несколько упростится, если за по-
полюс А взять центр масс С данного твёрдого тела; тогда мы будем
иметь Хс =• KC = ZC = O; следовательно, второе слагаемое в формуле
D5.14) обратится в нуль, и мы получим:
Т = 1 Mv'c + 4 {JXA 4- JYY< 4- Jez»] -
D5.16)
или, если перейти к форма D5.15),
Этот результат мог бы быть непосредственно получен из формулы
C1.44) на стр. 318. Для данного момента времени выражения D5.14)
или D5.16) можно ещё упростить, выбрав за неподвижные оси те на-
направления, которые параллельны главным осям инерции полюсов А или С
493
для рассматриваемого момента времени (§ 154); тогда произведения
инерции для рассматриваемого момента исчезнут, и, Например, вместо
формулы D5.16) мы получим:
Само собою разумеется, что в следующие моменты времени величины
•^yz* ^zx> ^xy> в0°бще говоря, опять появятся, так как главные оси
инерции, как неизменно связанные с телом и, следовательно, участвую-
участвующие в его движении, уже не будут, вообще говоря, совпадать с выбран-
выбранными нами неподвижными осями.
Как показывает формула D5.14), кинетическая энергия тела является
функцией двух векторных величин vA и со или, что то же, функцией
шести проекций этих векторов:
Т = Т (v., со).
Поставим вопрос, чему равен градиент этой функции (§ 108), если век-
вектор vA рассматривается как независимое переменное, а векгор со служит
параметром; градиент, вычисленный в этом предположении, мы будем обо-
обозначать gxa&VAT. Точно так же найдём затем grad^ 7", т. е. будем ю счи-
считать независимым переменным, а <оА—параметром. Имеем
dvAx /
на основании формул A.27) на стр. 10 и D5.7) это равенство может
быть переписано так:
. = прхМ (vA-\- со X рс) = Кг
Присоединив аналогичные формулы для двух дру1их осей, мы получим
следующие соотношения:
<•-&• *•-?;• «=*Ь D5Л8)
или
К ~gradVAT.
Составим теперь производную от кинетической энергии по <ох. Исходя
из того же выражения D5.14), мы найдём:
дТ
Yc
V
Av
"Г J хх0} х J Л •/хгшг>
аналогичные выражения получатся для производных по другим двум про-
проекциям угловой скорости. На основании равенств D5.10) этот результат
можно записать так:
° G ° D519>
или
Имея соотношения D5.12), D5.18) и D5.19), нетрудно также выразить
494
через производив от кинетической энергии и кинетический момент
относительно начала О неподвижной системы координат; мы получим:
у=°а + гаХ grader,
ити, в проекциях:
дТ
X
JL
dvAz
дТ
дТ
дТ
Оу
о* ди>г i A dv 4 4
D5.20)
Как видно из выражения D5.14), кинетическая энергия является одно-
однородной функцией второй степени от переменных vAx, vAy, vAz, шх, шу, о)г«.
Следовательно, по известной теореме Эйлера об однородных функциях
мы имеем
На основании формул D5.18) и D5.19) мы отсюда получаем следующее
важное соотношение:
2T=vA-K-\-u-eA. D5.22)
252. Кинетическая энергия твёрдого тола, отнесённая к осям,
неизменно связанным с телом. Формою D5.14) кинетической энергии
тела пользоваться неудобно, так как коэффициенты Jxx, Jyy, ..., Jxy,
вообще говоря, не постоянны, а являются функциями времени; поэтому
выражение D5.14) не поддаётся упрощению соответственным выбором
системы осей координат, за исключением, разве, отдельных моментов
времени, как это было показано при выводе формулы D5.17). Гораздо
удобнее для приложений вторая форма кинетической энергии твёрдого
тела, именно выражение кинетической энергии, отнесённое к осям A^rjZ,
неизменно связанным с телом. Мы можем прийти к этому выражению
тем же путём, каким формула D5.14) была выведена из равенства D5.13),
но только в окончательном результате все величини, отнесённые к системе
осей Охуг и ей параллельной системе AXYZ, окажутся заменёнными
соответствующими величинами, выраженными в системе AZrfc; мы получим:
1
0M в.
а),
1с
VAX.
Т <Vf + V* + -fc»? -
- 2Vc«>5
), D5:23)
причём
Коэффициенты У^, J , ..., А представляют собой моменты инерции
и произведения инерции относительно осей, неизменно связанных с телом,
и потому являются величинами постоянными. Подобно тому, как это было-
сделано в отношении неподвижных осей, формулу D5.23) можно преоб-
495
разовать к виду
1с '•с
Когда за полюс Л взят центр масс С, то мы будем иметь:
= j)c=:E;c = Ol и формулы D5.23) и D5.24) перейдут в следующие:
или
Т(
VI
- 2
Если, кроме того, неизменно связанные с телом оси С?г\? расположить по
его главным центральным осям инерции (§ 154), то произведения инерции
обратятся в нули, и мы получим:
± ' ). D5.26)
Это — простейшая форма кинетической энергии твёрдого тела, если рас-
распределение масс в нём вполне произвольно. Как видим, в общем случае
выражение кинетической энергии твёрдого тела содержит четыре посто-
постоянных: массу М тела и три главных центральных момента инерции: У^,
J , Ук. В частном случае, когда распределение масс в теле таково, что
центральным эллипсоидом инерции служит эллипсоид вращения, две из
последних трёх постоянных становятся равными между собой. Твёрдое
тело такого типа обыкновенно называют телом вращения в дина-
динамическом смысле, а та главная центральная ось инерции, которая
перпендикулярна к осям равных моментов инерции, носит название оси
динамической симметрии тела. Пусть, например, У^ = У; тогда
вместо формулы D5.26) мы будем иметь:
T = ±Mv\ +1[Ук((оЦ-^) + Ук^]. D5.27)
Наконец, если все три главных центральных момента инерции тела равны
между собой, т. е. центральным эллипсоидом инерции служит шар, тогда
кинетическая энергия содержит лишь две постоянных и имеет вид
г=т^+т^ <45-28)
Сравнивая между собой выражения D5.14) и D5.23) кинетической
энергии в неподвижной системе координат и в системе, неизменно свя-
аанной с телом, мы замечаем, что обе функции имеют совершенно оди-
одинаковую структуру в отношении соответственных проекций скорости vA
полюса А и угловой скорости ю. С другой стороны, как видно из фор-
формул D5.7) и D5.9), количество движения К и кинетический момент G.
относительно полюса А тоже одинаково зависят от vA и ш, если их вырл-
жать в неподвижной системе координат и в системе, неизменно связанной
с телом. Отсюда мы приходим к заключению, что выведенные выше фор-
496
мулы D5.18) и D5.19) справедливы и в отношении системы координат
?, неизменно связанной с телом; т. е. мы имеем
1-г v дТ „ дТ „ dT
L . / , ИЛИ Д, = з . К = -з . Аг = т>
И
К =
D5.29)
или
: Л,., > ^Лт, Л,л > ^ДС Я
D5.30)
Эти формулы можно, конечно, получить и непосредственным дифферен-
дифференцированием выражения D5.22) кинетической энергии. Найдём теперь
соотношения между частными производными от кинетической энергии по
скоростям, выраженным в неподвижной и подвижной системах координат.
Употребляя схему косинусов (8.3) на стр. 74, мы можем согласно фор-
формулам (8.7) и (8.8) на этой странице написать:
Отсюда в силу соотношений D5.18), D5.19), D5.29) и D5.30) мы при-
приходим к следующим равенствам:
дТ
дТ
dT
dT
dvA%
дТ
О"АЪ
дТ
dvAX.
dT
дТ
dT
du>.
dT
дТ
dT
dT
~ dvAx
dT
dvAx
dT
#lAx
dT
dT
dT
date
dT
дТ
дТ
I
"Г
__ дТ
— Ш7. ап "Г
п
21
dT
dvAy
dT
dvAyl
dT
dvAy'
dT
¦4
dT
dT
JL
dT
dT
dT
dT
32.
*3S>
, dT
ai2 1 "XT" агз>
dT
^22
dT
dT
dT dT
dT
dT
dT
dT
¦an>
dT
dT
32 r. К. Суслов
D5.31)
'45.32)
D5.33)
D5.34)
497
В дальнейшем нам понадобится также выражение проекций кинети-
кинетического момента Go относительно начала О неподвижной системы коор-
координат через производные от кинетической энергии по проекциям скоро-
скоростей в подвижной системе координат; из формулы D5.12) на основании
только что выведенных соотношений мы получаем:
дТ . дТ . дТ
дТ
дТ
дТ
дТ
дТ
дТ
дТ
дТ
дТ
дГ
дТ
дТ
D5.35)
дТ
- д^ [хАап Л-У а" 21 + гАап) +
дТ
дТ
D5.36)
Так как выражение D5.23) кинетической энергии представляет собой
однородную функцию второй степени относительно г> „? vAt, v,r, со,, ю , юс,
то по теореме Эйлера, аналогично формуле D6.21), мы находим:" Т'
2Г + ^ + +++
Отсюда, очевидно, опять вытекает соотношение D5.22).
253. Лагранжева форма кинетической энергии твёрдого тела.
Чтобы выразить кинетическую энергию свободного твёрдого тела через
независимые координаты
ха> Уа< za> Ь Ф. &
и их производные по времени (§ 55), нужно подставить в равенство
498
D5.23) значения проекции угловой скорости по формулам (9.30) на
стр. 92, а именно:
а>е = sin <р sin &• ф -\- costp-&,
<о = cos tp sin & • ф — sin 'f • b,
D5.37)
В явном виде мы выпишем результат этой подстановки лишь для случая,
когда за полюс А взят центр масс-С, а оси Ас,т? совмещены с главными-
центральными осями инерции тела; тогда по формуле D5.26) мы поручим:
Г= -тг Mv% -4- тг ГЛе (sin <р sin & • ф -4- cos to • &J 4-
здесь — ©с попрежнему означает скорость центра масс С и выражается так:
Если данное твёрдое тело имеет два главных центральных момента
инерции равными, то, приняв динамическую ось симметрии за ось С?, мы
вместо формулы D5.38) получим следующую:
T=jMv*c _}-у[Ув(8Спя»-ф«4-Ь«) + Уа(со8»4 + *)*]- D5-39)
Заметим, что в этом случае выражение кинетической энергии не со-
содержит явнэ самих координат tp и ф, а только их производные; поэтому
для указанного случая мы имеем
зг-°. тг°- D5-40>
Если все три главных центральных момента одинаковы, то кинетиче-
кинетическая энергия будет равна
7= I Mv\ + 1 ук(у« + Ф2 + &2 + 2 cos &) <р ф).
Возвращаясь к общему случаю, поставим вопрос о механическом
смысле производных от кинетической энергии по переменным ср, ф, &.
Предварительно заметим, что из равенств D5.37) получаются следующие
соотношения:
df df df
—i^ = sintp sin&, —r=costpsin&, —r =
—т = COS tp, —Г1 = — Sin !fl, —г- = 0.
D5.41)
Нетрудно усмотреть, что правые части этих равенств представляют со-
собою косинусы углов между осями собственного вращения, прецессии и ну-
нутации (§ 55) с одной стороны, и осями трёхгранника А?.г? — с другой
(фиг. 137); в помощь к геометрическим соображениям можно при этом
32* 499
воспользоваться третьей строкой формул (8 15) на стр. 77. Введя еди-
единичные векторы, указанные на фиг. 137, можно формулы D5.41) пере-
переписать так
ди>„
aft
0f
ди>г —
D5 42)
Вычислим теперь производную or кинетической энергии по переменной у,
рассматривая кинешческую энергию как сложною функцию от <р, зави-
зависящую от <р посредством промежуточных переменных ш. ш и to;; мы
находим. ^
~ * ~ —~ . дТ дш д Т д*&?
G<р ош Off д<& $<л duty ду
На осмолнии формул D5.30) и D5.42) это
равенство может быть переписано следую-
следующим образом:
д?
или
дТ
если через G^ обозначить кинетический момент тела относительно оси,
при вращении вокруг которой изменяется угол ср, т. е. оси собствен-
собственного вращения. Присоединив аналошчиые выражения для производных по
ф и Э, мы найдем.
дТ дТ дТ
Само собою разумеется, что
AZ,
254. Различные типы уравнений движения свободного твёрдого
тела. Подобно тому, как кинетическая энергия свободного твёрдого
тела может бить представлена в той или другой форме, точно так же
и j равнения движения мог\ т принимать различный вид. Главных типов уравне-
уравнений движения три, соответственно числу форм кинетической энергии, изло-
изложенных выше уравнения движения, отнесённые к неподвижным осям,
уравнения движения, отнесённые к осям, неизменно связанным с телом, и
уравнения движения в независимых координатах (уравнения Лагранжа
второго рода). Твёрдое тело, не стесненное никакими связями, имеет
шесть степеней свободы (см. примеры 76 на стр. 273 и 97 на стр. 324);
500
поэтому и уравнений движения, свободных от реакций связей, должно
быть также шесть Уравнения эти обыкновенно распадаются на две
группы: на три уравнения поступательного движения вместе с некоторою
точкою А тела и на три уравнения движения тела вокруг точки А, как
неподвижной.
255. Уравнения движения твёрдого тела, отнесённые к непо-
неподвижным осяу. Уравнения движения твёрдого тела получаются непосред-
непосредственно, если приложим к нему закон, изложенный в § 183 и представ-
представляющий собой объединение законов изменения количества движения (§ 178)
и кинетического момента (§ 180). Упомянутый закон в применении к твёр-
твёрдому телу гласит: производная по времени от системы скользящих век-
векторов, изображающих количества движения частиц твёрдого тела,
эквивалентна системе скользящих векторов, изображающих действующие
на тело активные силы. Такая формулировка закона вытекает из замеча-
замечаний о сумме и о сумме моментов реакций внутренних связей, сделанных
в § 178 и 180.
Если систему векторов tn^v^ т. е. количеств движения частиц твёр-
твёрдого тела, мы обозначим через S, а систему векторов F4, т. е. приложенных
к телу сил, обозначим через 2, то высказанный закон согласно формуле
C1.25) на стр. 311 символически выразится так:
Sees 2; D5.43)
здесь точка означает, что от системы S взята производная по времени,
а знак = выражает эквивалентность.
Система S для полюса О (начала координат) характеризуется своим
главнум вектором К, т. е. количеством движения твёрдого тела, и своим
глазным моментом Go, т. е. главным моментом количеств движения, или
кинетическим моментом относительно полюса О. Система 2 для того же
полюса характеризуется своим главным вектором F, или результирующею
силою и главным моментом LQ, или моментом результирующей пары.
Так как полюс О неподвижен, то равенство D5.43) равносильно следую-
следующим двум (§ 32):
K=F, G0 = L0. D5.44)
Каждое из этих векторных равенств может быть заменено тремя скаляр-
скалярными:
Со,= ^. &o, = Lor Goz = LQ2; D5.46)
здесь значками х, yt z отмечены проекции векторов на соответственные
оси. Первое из уравнений D5.44) или уравнения D5.45) представляют
собой уравнения поступательного движения тела вместе с некоторою его точ-
точкою А; второе из уравнений D5.44) или уравнения D5.46) являются уравнени-
уравнениями движения твёрдого тела вокруг этой точки А, как вокруг непо-
неподвижной. Раскрыть уравнения поступательного движения можно с помощью
равенств D5.18) и D5.31); точно так же уравнения движения вокруг
точки А раскрываются с помощью равенств D5.20) и D5.35). Таким
образом, если желательно, чтобы динамические величины, входящие в
уравнения движения, были выражены через производные от выражения
D5.14) для кинетической энергии, то вместо уравнений D5.44) мы долж-
501
ны написать следующие:
д dT
dt
di
d дТ_
>vAy
дТ
d дТ
" " ' р " ч I __ р U VI р
dtdvAx *' спдрл.. v» dichT, *'
дт
дТ
дТ дт\—.т
dvAx~*АШ7г)~ or
дТ
vAx
дТ
дТ
=w
D5.47)
D5.48)
Тем же уравнениям можно дать другой вид, если ввести производные от
выражения D5.23) кинетической энергии; для этою нужно восполь-
воспользоваться формулами D5.31) и D5.33); мы тогда получим:
d I дТ _ . дТ , дТ
d ( дТ
d I дТ
d_
dt
ш
d t дТ
dt \dvA^
, дТ
дТ
дТ
дТ ,
дТ
дТ
a W;
D5.^9)
— Х
<?7"
C7
D5.50)
256. Уравнения движения твёрдого тела, отнесённые к осям,
неизменно связанным с телом. Эйлеровы уравнения движения
твёрдого тела. Для получения уравнений движения свободного твёрдою
тела, отнесённых к осям А-rfi, неизменно связанным с телэм, служш тот
же закон, о котором шла речь в предыдущем параграфе, только равен-
равенство D5.43) раскрывается с помощью подвижных осей. С этой целью
мы замечаем, что система ^ для полюса А, служащего на)алом подвиж-
подвижных осей, характеризуется своим главным вектором К и главным момен-
моментом вД, а система 2.— главным вектором F и главным моментом LA.
Значок А по-прежнему отмечает, что момент берётся относительно соот-
соответствующего полюса (в данном случае полюса А). Как и в случае
неподвижного полюса, выражение D5.43) может быть заменено двумя
векторными равенствами, причём второе пишется по типу формулы
C1.27) на стр. 311:
K = F, G.4-v.XK=L,. D5.51)
502
Но по теореме (9.18) на стр. 88 об относительной производной имеем
\п
Поэтому вместо уравнений D5.51) мы получим следующие:
UXK = F, GA + uXGA + vAXK=LA
A + uXGA + vAXK=LA. D5.52)
Спроектируем эти равенства на оси AZrfc при проектировании относи-
относительных производных воспользуемся при этом формулою (9.19) на
стр. 89; мы получим:
+ % ОА
+ f д, Ъ - "л Л, =
D5.53)
Если теперь воспользоваться равенствами D5.29) и D5.30), то мы окон-
окончательно найдём следующие уравнения движения твёрдого тела в си-
системе координат, неизменно связанной с телом:
d дТ , дТ дТ
d дТ
EL
дТ
dt dvAc
d дТ
d дТ
дТ_.
дТ .
— Ft
1-^4-0) ——О) —4-
дТ
дТ
дТ
дТ
дТ
дТ
дТ*
дТ
D5.54)
- L* ,гш
D5.55)
В частном случае, когда за полюс А взят центр масс С, уравнения
D5.55) в согласии с формулою D5.25) упрощаются так:
d дТ , дТ дТ .
— -г 1- (О -г (Or -^— = Lr*
"dt d&i ' ч д<о^ *¦ ди>^ «
Г дТ .
дТ
дТ
дТ
D5-56)
Наконец, если кинетической энергии твёрдого тела мы дадим ферму
D5.26), т. е. систему осей C&fc направим по главным центральным
осям инерции, то получим.
дТ , дТ дТ . „
503
где /ц, /т , /к— главные центральные моменты инерции тела. Уравне-
Уравнения D5.56) примут в этом случае вид
D5.57)"
Эти уравнения носят название эйлеровых уравнений движения свобод-
свободного твёрдого тела вокруг его центра масс.
257. Вывод уравнений движения твёрдого тела из принципа
Даламбера. Уравнения движения твёрдого тела могут быть получены
также с помощью любого из принципов, изложенных в главах XXXIV и
XXXV. В виде примера покажем, как вывести эти уравнения иа принципа
Даламбера. Согласно принципу Даламбера (§ 197), если все связи неосвобо-
ждающие, то элементарная работа потерянных сил на любом виртуальном
перемещении системы равна нулю [см. формулу C4.6) на стр. 349];
т. е. мы имеем
Согласно формуле C6.49) на стр. 387 виртуальное перемещение
Srv частицы твёрдого тела выражается так:
На этом основании предыдущее уравнение можно преобразовать к виду
К • S (/=;—«,»,) + »йа • S 7, X (/\ — и,«\) = 0.
1 = 1 V = l
Ввиду независимости вариаций ЪгА и Ьа. это уравнение распадается на
два [ср. сказанное по поводу уравнения C6.50) на стр. 388]; а именно,
мы получаем:
S(^v-«vwv) = 0, S^X(^-«vWj = 0. D5.58)
1 = 1 V = l
Так как
п п п
Е *\ = ^ и X "MB, = J, Е "W = ? D5.59)
4 = 1 v = [ »^1
то первое из полученных уравнений даёт
K=F. D5.60)
Далее, мы имеем
\^х 2,
V=l 11 = 1 4=]
SO4
Второе и последнее слагаемое в последней строке на основании соотно-
соотношений D5.59) и D5.60) взаимно уничтожаются; первое слагаемое пред-
предL
ставляет собой главный момент
равно
ч — 1
Q внешних "сил, а третье слагаемое
г, х «»«>»= —
где Go есть кинетический момент тела относительно полюса О. Таким
образом, вместо уравнений D5.58) мы получаем:
К = F,
D5.61)
т. е. мы снова пришли к уравнениям движения D5.44).
Для вывода уравнений движения в подвижных осях перейдём прежде
всего в последнем уравнении от полюса О к полюсу А; в согласии с теоре-
теоремою C.2) на стр. 20 мы получаем:
или
последний член в левой части и последний член в правой части согласно
равенству D5.61) взаимно уничтожаются. Чтобы теперь прийти к оконча-
окончательному результату, выразим в последнем уравнении, а также в урав-
уравнении D5.61) производные К и GA через соответствующие относитель-
относительные производные; мы тогда получим ранее выведенные уравнения D5.52):
258. Лагранжевы уравнения движения твёрдого тела. К свободному
твёрдому телу можно приложить непосредственно уравнения движения
Лагранжа второго рода C2.42) на стр. 331. Если положение тела опре-
опреф Ь
делять независимыми координатами
искомые уравнения будут иметь вид
d
dt
d
dt
d
dt
dT
dxA
dT
дУА
dT
dzA
d
dt
d
d
dt
dT
dxA
dT
dyA
dT
dzA
dT
df
dT
4
dT
dh
dl
df
dT
di,
dT
дЬ
р
хА, уА, zA, у, ф, Ь, то
D5.62)
D5.63)
505
Выражения, стоящие в правых частях уравнений, представляют собой
обобщённые силы,отвечающие выбранным независимым координатам твёрдого
тела. Эти обобщённые силы просю выражаются через действующие на
тело силы Fr Чюбы найти эту зависимость, составим выражение для элемен-
элементарной работы сил на произвольном виртуальном перемещении тела.
Согласно формуле C6.49) на стр. 387 мы имеем
v —1
или
ЬА = F • ЬгА -\- LA • а)р§а, D5.64)
л л
где F= 2 ^у и ^л == 2 Pv X ^v являются соответственно главным век-
вектором и главным моментом сил. Поступательное перемещение Ьгд сле-
следующим образом выражается через вариации независимых координат:
brA = x°exA-\-yobyA-\-z°bzA. D5.65)
Чтобы угловое перемещение u)°Sa также выразить через вариации неза-
независимых координат, преобразуем выражение ш°Ьа сперва при помощи
формулы (9.29) на стр. 92:
Отсюда мы получим:
п>° Sa = f°S:p -f" гЩ -f" fbb. D5.66)
Подставив выражения D5.65) и D5.66) в формулу D5.64), мы сможем
представить элементарную работу в следующем виде.
ЬА = FxbxA -\- FvbyA -\- F$zA -\- 1?$(р -f- ?ф5ф + Lbbb, D5.67)
где ?„ = LA • ч°, L^= LA-Z" и Lb = LA'f соответственно представляют
собой главные моменты сил относительно осей собственного вращения,
прецессии и нутации. С другой стороны, согласно формуле C2.30) на
стр. 327 элементарная работа сил следующим образом выражается через
выше введённые обобщённые силы:
bA — Qt bxA-\-Q &yA-\-Qt §zA-\- Q 8ip-f- Q^St])-\- QaS9. D5.68)
Ввиду независимости вариаций координат коэффициенты при одинаковых
вариациях в выражениях D5.67) и D5.68) должны быть равны; отсюда
мы и получаем искомые выражения обобщённых сил через действующие
на тело силы:
506
В частном случае, если действующие на тело силы F, имеют сило-
силовую функцию U, обобщённее силы согласно формуле C2.43) на стр. 332
могут быть представлены как частные производные от этой функции:
0 дЦ_ dU_ _ dU Л
Q ^Ш' Q =d]i' 'q =Ш\ D50)
Заметим, что в этом случае моменты сил относительно координатных
осей LAX, LAY, LAZ и ?д5, LAr, LAt могут быть также выражены че-
через производные от силовой функции. Действительно, пользуясь фиг. 137
на стр. 500 и формулами косинусов (8.15) на стр. 77, нетрудно выра-
выразить моменты 1.^, 1ф, ?g через моменты относительно координатных осей
AXYZ и /!?/)?: мы находим, с одной стороны,
LAXsin ф sin 9 — LAYcos ф sin Ь-^-L^ cos 9, D5.71)
с другой стороны, мы получаем:
)
i0+Z& [ D5.72)
Разрешив систему уравнений D5.71) относительно моментов LAXt LAY, LAZ>
мы находим:
лх = (*•„ — Ч cos
C0S 9)
Наконец, решение системы уравнений D5.72) даёт:
Lft ==¦ (— L cos 9 -|- Z.4) -г-1 -\- Z.9 cos (p,
D5.73)
Положив здесь в соответствии с формулами D5.69) и D5.70)
т —ди I —W i —ди
S—Sf' Ч—tfij.' L» — I"
мы и получим искомые выражения моментов сил относительно координат-
координатных осей через производные от силовой функции.
Система уравне шй поступательного движения D5.62) упрощается
если за полюс взять центр масс; тогда согласно формуле D5.25) мы
507
будем иметь:
дТ_ дТ_ дТ_
дхс дус дгс
и вместо уравнений D5.62) получим:
d_JT__F d дТ d дТ
_J_F ^_Л_ р =F
dt dic ~~ *' dt дус ~~ r dt dic *'
Уравнения движения D5.63) вокруг полюса А принимают Ьсобенпо
простой вид, если твёрдое тело имеет динамическую ось симметрии, про-
проходящую через центр масс. Тогда, приняв центр масс С за полюс,
кинетическую энергию можно привести к виду D5.39), и, следова-
следовательно, в согласии с формулой D5.40) уравнения D5.63) заменятся
такими:
d_cTT , d_ дТ ?j^I_^Z!_/
di ~д$ ~ 'f1 dt 4 ~~ *' dt дЬ дЬ ~ ь'
XLVI. УРАВНЕНИЯ ДВИЖЕНИЯ
НЕСВОБОДНОГО ТВЁРДОГО ТЕЛА
259. Кинетический момент и кинетическая энергия твёрдого
тела, движущегося вокруг неподвижной точки. Из выражений' для
кинетического момента и для кинетической энергии свободного твёрдого
тела, найденных нами в предыдущей главе, легко получить соответствую-
соответствующие выражения для кинетического момента и кинетической энергии
твёрдого тела, одна из точек которого неподвижна; для этого надо
выбрать неподвижную точку полюсом и затем в найденных выше фор-
формулах скорость vД полюса положить равной нулю. Кроме того, мы
будем считать, что в этом полюсе помещено не только начало подвиж-
подвижной системы координат Ac,rfc, но и начало О неподвижной системы
Oxyz. Указанным способом мы найдём, например, по формуле D5.14)
на стр. 493 следующее выражение для кинетической энергии рассматри-
рассматриваемого твёрдого тела, отнесённое к неподвижным осям:
Подобным же образом по формуле D5.23) на стр. 495 при vA=-0 мы
получим кинетическую энергию, отнесённую к осям, неизменно связан-
связанным с телом:
Если же систему осей O^rfc мы направим по главным осям инерции для
неподвижной точки О, то вместо последнего выражения мы будем иметь:
где Ук, У ч, /tt — главные моменты инерции для полюса О.
508
Выражение кинетической энергии через эйлеровы утлы будет сле-
следующим [формулы D5.38) на стр. 499J:
7"= у {J% (sin tp sin & • ф ~\- cos tp • 9J -|- / (cos <p sin 9 • ф — sin cp • &J -j-
f•; D6.2)
постоянные J^., J J^ здесь имеют то же значение, что и в формуле
D6.1). Если ось ОС является осью динамической симметрии тела, т. е.
если J^-=J то выражение кинетической энергии упрощается:
Т= 1 [У№ (sin2 &. ф» + *») + /w (cos & • ф -f у)»]. D6.3)
Кинетическая энергия в этом случае не содержит явно координат (риф
и потому мы имеем
|=0, ?-0. ,46.4,
Наконец, по формуле D5.15) на стр. 493 кинетическая энергия твёр-
твёрдого тела с неподвижной точкой может быть представлена в виде
где Ушш есть момент инерции тела относительно мгновенной оси вра-
вращения.
Выражение кинетического момента мы выпишем лишь для системы
осей O$rj?, неизменно связанной с телом; по формулам D5.11) на
стр. 492 мы получаем:
Go5=
<46-6)
Эти формулы с заменою S, rj, С на х, у, z верны и для неподвижной
системы Oxyz, но в последнем случае моменты инерции не будут
постоянными во времени. Если оси системы Ozr? совместить с глав-
главными осями инерции тела для его неподвижной точки О, то формулы
D6.6) упростятся следующим образом:
°<x = V»s. оог, = ЛЛ- Ooc = Vf D6-7)
Соотношение D5.22) на стр. 495 между кинетической энергией и
кинетическим моментом тела перейдёт в нашем случае в следующее:
Ш-ОО = 27. D6.8)
Независимо от этой формулы мы установим ещё одно, но уже диф-
дифференциальное соотношение между кинетической энергией и кинетиче-
кинетическим моментом. Имеем:
509
no правиту циклической перестановки сомножителей векторно-скалярного
произведения- мы можем написать:
= 2 а>.г*
Следовательно, мы получаем:
dT=& • dGo. D6.9)
Посмотрим теперь, каково взаимное расположение кинетического
момента тела относительно его. неподвижной точки О и эллипсоида инер-
инерции, построенного для этой точки. Пока-
Покажем, что кинетический момент Go перпенди-
перпендикулярен к плоскости, касающейся эллип-
эллипсоида инерции в точке Р, его встречи с
мгновенной осью вращения (фиг. 138).
Согласно формуле B6.9) на стр. 75 ра-
радиус-вектор р( точки Рх по модулю равен
где / — постоянный параметр, характеризующий масштаб построения.
Отсюда сам вектор р, получает выражение
— /аH /о)
В подкоренном выражении в соответствии с формулою D6.5) мы имеем
удвоенную кинетическую энергию 2Т тела. Следовательно,
Pi=T7=- D6.10)
Заменив в формулах D6.8) и D6.9) вектор о> его значением из равен-
равенства D6.10), мы получим:
D6.11)
Продифференцируем первое из этих уравнений и вычтем из результата
второе уравнение; в выражении дифференциала радиуса-вектора опустим
индекс A); мы найдем:
Go-dp = 0. D6.12)
Ввиду произвольности расположения конца вектора dp на поверхности
эллипсоида D6.10), полученное выражение может считаться дифферен-
дифференциальным уравнением касательной плоскости, проведённой к эллипсоиду
в точке его встречи с мгновенного осью. Как видим, эта плоскость дей-
действительно перпендикулярна к кинетическому моменту.
Чтобы найги уравнение касательной плоскости в конечном виде,
нужно проинтегрировать уравнение D6.12) по переменному р; постоян-
постоянную интегрирования следует при этом определить из условия, что пло-
510
скость проходит через точку Р1 с радиусом-вектором pt; выполнив дей-
действия, мы получим:
Go.p"=Go-p~. D6.13)
Расстояние 8 этой плоскости от точки опоры О (начала координат) вы-
выпазит ея так:
разится так:
« = Plc
или согласно формуле D6.11):
D6Л4)
260. Уравнения движения твёрдого тела вокруг неподвижной
точки. Так как кинетическая энергия твёрдого тела, движущегося во-
вокруг неподвижной точки, является, как мы видели, частным видом кине-
кинетической энергии свободного тела в том предположении, что некоторые
из величин, в неё входящих, обращаются в нуль, то всё, что было
сказано нами о частных производных кинетической энергии, остаётся
справедливым и в настоящем случае. При написании уравнений движения
нужно принять во внимание, что полюс А теперь неподвиже'н и" со-
совмещён с началом О неподвижной системы координат.
Для получения уравнений движения, отнесённых к неподвижным осям,
можно исходить из-теоремы об изменении кинетического момента [см.
второе из уравнений D5.44) на стр. 501]
В проекциях на оси неподвижной системы координат это равенство за-
запишется так:
Если мы теперь воспользуемся формулами D5.19) на стр. 494, то полу-
получим окончательно:
d EZi iE L *dTL D61^
L L l*o id)
Эти уравнения можно было бы сразу получить из равенств D5.48) на
стр. 502, положив в них хА=уд = гА = 0.
Уравнения движения, отнесённые к подвижным осям, можно найти,
исходя из формулы D5.52) на стр. 503 или прямо из формул D5.55)
на той же странице, если положить в vA = Q; тогда мы получим в
векторной форме
и в проекциях на подвижные оси S, *j, С
d дГ , дТ дТ
d дТ , дТ
d дТ , дТ <ЭГ_,
D6.16)
511
В том случае, когда оси координат расположены не прризвольно,
а направлены по главным осям инерции для неподвижной точки О, т. е.
когда кинетическая энергия приведена к виду D6.1), вместо последних
уравнений мы получим:
Эти уравнения известны под названием динамических уравне-
уравнений Эйлера. Они вполне совпадают по форме с уравнениями D-5.57) на
стр. 504 для свободного тела, только постоянные /^, Ут(, /^ имеют
здесь другое значение, как это и было указано при выводе.
Наконец, лагранжевы уравнения движения сохраняют свой прежний
вид [см. формулы D5.63) на стр. 505 и D5.69) на стр. 507]:
Tt
dt
d
dt
4
dT
д'Ъ
д$
дТ
дЬ
D6.18)
кинетическая энергия должна быть здесь подсчитана по формуле D6.2),
а если ось ОС является осью динамической симметрии, то по формуле
D6.3).
Все вышеприведённые уравнения движения являются уравнениями
второго порядка относительно трёх функций времени, именно, углов
Эйлера <р, ф, 9-. Каждая из упомянутых систем трёх уравнений второго
порядка может быть заменена системой шести уравнений первого поряд-
порядка; так, например, если к трём уравнениям D6.17) мы присоединим ещё
три уравнения (9.30) на стр. 92, т. е. уравнения:
(ое = sin cp sin Ь • ф -{- cos со • Ь,
«о = cos <p sin Ь' ф — sin<p-4,
«о,. = cos Ь • ф -\- if,
систему шести уравнелий первого
4
D6.19)
порядка относительно
то получим
шести неизвестных функций времени <р, ф, 4, из-, о>т, со,-.
261 Уравнения движения весомого твёрдого тела вокруг не-
неподвижной точки. Пусть твёрдое тело подперто в неподвижной точке
и находится под действием силы тяжести Mg, где М — масса тела и
g—ускорение силы тяжести. Направим ось Oz по вертикали вверх и
обозначим через гс радиус-вектор центра масс С тела. Тогда главный
момент LQ сил, действующих на тело, представится так:
io=fcX%=- Щгс X z\
или согласно третьей из формулы (8.9) на стр. 74 так:
Lo = — MSrc X
512
Исходя из этих двух формул, мы получим следующие выражения для
главных моментов относительно координатных осей:
LQX=-Mgyo LOy =
>x <¦ dt ди>у
Уравнения же типа D6.17) примут вид
Таким образом, для весомого тела уравнениями типа D6.15) будут сле-
следующие:
d дТ .. d дТ .. d дТ ~ ......
— -5—=—Mgyr\ -r-i-r—='MgXr\ т,Г" = 0. D6.20)
dtda>x "•*<¦' dt ди>у ь с' dtdwz v '
D6.21)
— «ззУ- J
Прибавим к этим трём уравнениям ещё три уравнения, выписанные в
последней строке формул (9.23) на стр. 90, а именно:
а31 = 0)^32 —иуг3з> аз2 = а)еаз8 — ?si. «зз = Vsi ~ ^Ы' D6'22)
тогда мы полупим систему шести уравнений первого порядка относи-
относительно шести неизвестных функций времени со., шт, ш,., а31, а32, а33.
Должно заметить, однако, что полная интеграция системы уравнений
D6.21) и D6.22) не даст нам вей-таки окончательного решения вопроса
о движении тела: для нахождения этог'о движения придётся взять ещё
одну квадратуру. Дело в том, что по формулам (8.15) на стр. 77 мы
имеем
а31 = sin cp sin &, а82 =costp sin 9-, a33 = cos&;
следовательно, переменные а31, а32, а33 зависят только от двух углов
у и &; угол же ф придётся определить квадратурой по значениям угло-
угловых скоростей A>5, (от, «о,,,, как об этом мы будем говорить подробнее
в другом месте. Сказанное подтверждается тем обстоятельством, что в
одном из шести независимых интегралов системы уравнений D6.21) и
D6.22) произвольной постоянной необходимо дать частное значение, если
пожелаем, чтобы найденное решение было приложимо к разбираемой
задаче о движении тела; действительно, если уравнения D6.22) умно-
умножить соответственно на а81, а32, а33 и затем сложить, то получится
отсюда видно, что уравнения D2.22) допускают очевидный интеграл
a + a + 4
Эту произвольную постоянную надо положить равной единице, если за
функциями а31, ag2, a83 мы желаел сохранить значения косинусов неко-
некоторого направления.
33 Г. К. Суслов 613
262. Конечные и дифференциальные связи твёрдого тела. Урав-
Уравнения конечных связей, которым подчинено данное твёрдое тело, в соот-
соответствии с выражением C2.13) на стр. 322 имеют вид
/Л* А, У л' za, Ъ Ф> ». 0 = 0, D6.23)
если связи — удерживающие, и
Л (*а. -Уд, *л> Ь Ф. ». 0 > °. D6-24)
если связи—неудержнвающие. Дифференциальные связи твёрдого тела
по типу формулы C2.16) на стр. 322 имеют следующую аналитическую
форму:
щ,Ф + «р
если связи — удерживающие, и
Фр^О, D6.26)
если связи — неудерживающне. Для аналогии с конечными связями коэф-
коэффициенты и с двойными индексами мы будем писать, как частные про-
производные, от левой части уравнения связи по соответствующим ско-
скоростям:
дхА ' ""- дуА ' и*- дуА
дФ* дФ^ дФ3
L и -
Г46.27)
Так как число степеней свободы свободного твёрдого тела равно шести
(§ 190), то общее число удерживающих связей, конечных и дифференци-
дифференциальных, не может превышать пяти; в противном случае все шесть неза-
независимых скоростей тела определились бы из уравнений связей, и следо-
следовательно, движение тела было бы вполне определено.
263. Примеры связей твёрдого тела.
Пример 140. Если точка /И] (Si, чь fi) твёрдого тела закреплена непо-
неподвижно, т. е. если её абсолютные координаты хг, yv Z\ постоянны, то согласно
формулам (8.4) на стр. 74, это обстоятельство равносильно заданию трех ниже
следующих конечных связей:
— У1 = °.
г a -f a8i?, + Яз2% + о33Г, —гг = 0.
В том случае, когда точка тх берётся за полюс А, эти уравнения заменятся
такими:
хА — х1 = Ь, yA—yi = Q, za—z1 = Q.
Пример 141. Если точка т, (?ь чг, ^) твердого тела должна оставаться
на данной поверхности /] (х, у, г, () = 0, то уравнение связи, очевидно, будет
fli2r.i
г а + esi^i -т-озг-Пг + в8вСь( 0 = 0. D6.28)
Пример 142. Если точка т\ (?ь гц, Ci) твёрдого тела не може1 покида|ь
кривой
Л U. J-, ^ t) = 0, /а (х, у, z, t) = 0,
514
то к уравнению D6.28) надо присоединить ещё второе:
/а(*А + fli^i + ol2-ni + an:u .... 0=0.
Пример 143. Положим что неизменно связанная с телом поверхность
/(*, ч, 0 = 0 D6.29)
должн-а касаться плоскости .г = 0. Уравнение этой плоскости в относительных
координатах будет
г а + ашЬ -f а32-ц + а83Г = 0,
если 5, т), С —текущие координаты Но рассматриваемая плоскость должна
быть касательного к поверхности D6.29); следовательно, её* уравнение может
быть приведено к виду
где Е1( Tit, ^ — координаты точки касания. Отсюда вытекает соотношение
Из этих уравнений мы найдём ?ь тц ,Ci как функции от йщ, а^, а,3, .г^; под-
подставив их в равенство D6.29), мы получим искомое уравнение связи. Так, на-
например, если поверхностью DЬ.29) является эллипсоид
то отношения D6.30) будут следующие:
5] T]j Cl . ,
отсюда мы находим:
Подставив эти выражения в равенство D6.31) и воспользовавшись формулами
(8.15) на стр. 77, мы получим уравнение искомой связи
sin2 »(я2 sin" <f -f *2 cos2 ip) -f f2 cos2 9 — z\ = 0.
Для сферы a — b = c = R, и мы имеем просто /?г — ^=0.
Пример 144 Пусть вообще некоторая поверхность /(Е, т], С, <) = 0,
связанная с твёрдым телом, касается во всё время движения некоторой поверх-
поверхности,
F(x,y, г, /) = 0,
заданной в неподвижной системе координат Воспользовавшись равенствами
(8.4) на стр. 74, отнесём уравнение последней поверхности к осям AiК
уравнение поверхности приведётся к виду
Р\^\^ап1, ..., *) = Х(&, Л, Г, 0 = 0;
при этом, конечно, в выражение х войдут как параметры шесть координат
твердого тела- Хд, j/д, zA, у, ф, в. Координаты точки касания ?ь тц, ^ удоз-
летворяют, с одной стороны, уравнениям
/E, ч, С, 0 = 0, х(*. Л, С, 0 = 0, D6.32)
так как эта точка лежит на обеих поверхностях, а с другой стороны, урав-
уравнениям
«3* 515
так как нормали к той и другой поверхности совпадают. Если из четырёх ура-
уравнений D6.32) и D6.33) исключить Ьи т)ь С17 то получится одно уравнение связи.
Пример 145. Положим, что неизменно связанная с твёрдым телом
кривая
ЛF) С ЛE) D6.34)
должна всё время касаться неподвижной кривой
у = а(х), г=Цх).
Отнесём неподвижную кривую к осям, неизменно связанным с телом; пусть её
уравнения примут .вид
л = Х1(&); С = &(*)• D6.35)
В функции F\ и F2 войдут параметрами координаты твердого тела. Коорди-
Координаты точки касания кривых обозначим ?,, тц, i^. Эти величины должны удовле-
удовлетворять уравнениям D6.34) и D6.35), так как точка ?ь %, ?, лежит на обеих
линиях. Кроме тою, совпадение касательных требует, чтобы те же координаты
удовлетворяли и уравнениям
d-fi = ^; § = #• D6.36)
Исключив из шести уравнений D6.34), D6.35) и D6.36) три координаты точки
касания, мы получим искомые три уравнения связей.
Например, пусть ось А?, т. е. прямая
т, = 0, С = 0, D6.37)
должна касаться окружности
2 = 0, Х*-\-у*=1.
Уравнениями этой окружности в относительных координатах будут
г а + «si? + «32^ + °зз^ = 0,
(хА + ап* + апц + й1з02 + (Уa + «2iH «22^1 + o2S02 = 1 • D6.38)
Равенства D6.36) примут вид
ат = 0, (хА -f вц5 + ап-ц 4- д18Г) on -f [уа + ^12^ + ^ -\- амС) ал = 0. D6.39)
Исключив из равенств D6.37), D6.38) и D6.39) координаты 5, т), С, находим
окончательно следующие уравнения связей:
Если обе кривые станут прямыми, то уравнений связей будет не три, а че-
четыре. Так, пусть ось Ах может лишь скользить по оси Ох; тогда уравнения
D6.34) и D6.37) примут вид
т) = 0, С = 0, уА-f дг,5-f а22т) 4- а23: = 0, 2Л4-а31- + «82^1+ «43^ = °.
а уравнения D6.36) напишутся так:
«21 = 0; a3i —0.
Поэтому искомыми уравнениями связей будут
Уа = °, *а = Ъ, в« = 0, йв1 = 0.
Пример 146. Пусть принадлежащая твёрдому телу кривая
Ч = Л(&), С = /2(?) D6.40)
должна касаться неподрижной порерхности F(x,y, 2) = 0. Если уравнение
поверхности в относительных координатах е'сть
ХE, 1, 0 = 0, . D6.41)
то координаты точки касания должны удовлетворять одновременно уравнениям
516
D6.40), D6.41) и ещё следующему:
это уравнение выражает тот факт, что нормаль к поверхности D6.41) и каса-
касательная к кривой D6.40) взаимно перпендикулярны. Исключив из четырех урав-
уравнений D6.40), D6.41) и D6.42) координаты точки касания, мы получим иско-
искомое уравнение связи. Например, пусть окружность
^4-^=1, С = 0 D6.43)
должна касаться плоскости
г = 0.
Уравнением этой плоскости в относительных координатах будет
'A + ablk^-aSit)-\-a3.lz=0. D6.44)
Равенство D6.42) примет вид
«3ii-«32^ = 0. D6.45)
Исключив из уравнений D6.43), D6.44) и D6.45) координаты ?, т), ?, мы полу-
получим уравнение связи
Как в этом примере, так и в примере 145 рассуждения ничуть не изме-
изменятся, если в уравнения кривых или поверхностей войдёт явно время t.
Пример 147. Пусть твёрдое тело неизменно связано с гибкою нигью,
не поддающейся кручению, и пусть другой конец нити соединён с часовым
механизмом, сообщающим ннти постоянную угловую скорость 5>« вокруг ка^-
сательной. Тогда если касательную к нити в той точке, где она прикреплена
к твердому телу, принять за ось AZ, то уравнение данной неинтегрируеыой
связи будет
а),. — а>0 = 0, D6.46)
или, в явной форме,
cos &-4» —j— V ~~ ""о = 0-
Другие примеры на неинтегрируемые связи для 1«ёрдых тел приведены в § 188.
264. Уравнения движения несвободного твёрдого тела в общем
случае. Пусть данное твёрдое тело подчинено а конечным связии типа
D6.23), т. е.
/.(** У* гА> Ь Ф, ». 0 = 0 (а =1, 2, .... а), D6.47)
и b дифференциальным связям типа D6.25), т. е.
(Р = 1, 2, ...,Ь).
Сумма а-\-Ь не может превышать пяти. Если уравнение D6.47) мы про-
продифференцируем по времени, то получим:
из этого равенства вытекают соотношения
d'f% <?/„ dh д/а д'/л д/л 1лссг\\
~.— = , —г=-= , —;— = , Db.t)U)
охд ох а дуА дуд oz ^ дгд
—? = —. ~^=Ti> l~I&==^i' D6.51)
09 dtp иф vd> о и о и
517
ria основании общих соображений главы XXXII по поводу уравнений C2 34)
на стр. 328 лагранжевыми уравнениями движения несвободного твёрдого
тела будут
di
dt
!
dt
d
d
дхА
д'УА
дТ
dl
дУл~ уЛ~??ГдУА^Ь^
дхА
дФя
dT
D6.52)
4=1
=i 3 d '
D6.53)
в этих уравнениях сохранены обозначения § 258, а также использованы
равенства D6.27) на стр. 514.
Приняв во внимание значения величин Fx, ...,Lb, мы на основании
принципа однородности заключаем, что величины Ха —- ,• jia . 8 , ...
дхД ? дхА
представляют собой проекции реакций на неподвижные оси Оху, а вели-
чины X —, щ
...являются моментами реакций относительно осей
собственного вращения, прецессии и нутации.
Воспользовавшись этими соображениями, составим уравнения движе-
движения твёрдого тела, ^отнесённые к подвижным осям /4$ijC. Левые части
уравнений поступательного движения мы возьмём из формул D5.54)
на стр. 503. В правых' частях, кроме проекций активных сил F^, Flt F^,
выпишем проекции реакций, основываясь на сделанных замечаниях относи-
относительно сумм в правых частях равенств D6.52) эти суммы мы преобразуем
по формулам (8.8) на стр. 74. Первым из уравнений, к которым мы
придём таким способом, будет
74 Dб-54)
Заметим теперь, что согласно формулам (8.7) на стр. 74 между проек-
518
циями скоростей существуют следующие зависимости:
ХА = fl, XVM -f a\2VAn + anVAt. •
•У Л = «21 VAi + «22% + «23 V- >
D6.55)
Отсюда мы находим, что
дхА
дУл
_ О* А
Если, кроме того, принять во внимание соотношения D6.50), то выраже-
выражения в скобках в формуле D6.54) можно будет упростить следующим
образом:
дхА
дуА
дг 31
дхА dvA. Т дуА
I
дгА
дхА
дуА
д'гА
дхА
дуА dvM + дгА dvA%
В результате вместо уравнения D6.54) и двух других соответствующих
уравнений мы получим:
d дТ
дТ
дТ
дТ
d дТ
di dvAr
дТ дТ „
з ч>г з— = F
EL..
dvAi
дФ?
4=1
дТ
дТ
o=l
D6.56)
Чтобы написать уравнения движения твёрдого тела вокруг точки А,
обратимся к уравнениям D5.55) на стр. 503. В правых частях этих урав-
уравнений, кроме моментов активных сил L^ L , L^, выпишем моменты реакций.
Эти моменты мы вычислим по формулам D5.73) на стр. 507, заменив в них
величины L9, 1ф, L$ соответствующими суммами из правых частей уравне-
уравнений D6.53). Тогда первое из уравнений движения вокруг полюса А при-
примет вид
d дТ
дТ
дТ
дТ
дТ
519
Для дальнейшего преобразования этого уравнения обратимся к равен-
равенствам D6.19) на стр. 512: разрешив их относительно <р, ф и 9-, мы по-
получим:
<р ¦= 0)^ ((Й? sin !р -\- (О COS <р) Ctg &, '
• (Of sin о -f- со cos <p
ф = — ^-^ , D6.58)
& = o)j cos у — (о sin ср.
Из этих равенств мы находим:
ду п й| sin ср дЬ
<?<о^ * " ' с?»- sin 0 ' с?(о^ ^*
Ефи, кроме того, принять во внимание равенства D6.51), то выражения
в фигурных скобках в уравнении D6.57) можно будет упростить следую-
следующим образом:
sin
с?Фч
П ср . дФа
-iCOStp =
r+^^+^^S'
sin » ¦ tili ' tif
Если воспользоваться этими соотношениями, то уравнение D6.57) и два
аналогичных можно будет переписать так:
d дТ , дТ дТ , дТ дТ
d дТ : дТ
дТ
-Ail
d дТ , дТ
а—I 'О 3=1
дТ, дТ дТ
D6.59)
Если активные силы имеют силовую функцию U и если производную
по времени от этой функции мы обозначим О, то подобно предыдущему
можно будет убедиться в равенствах
L — — L — — L —'
520
Общий ход интегрирования системы уравнений D6.52) и D6.53) или
ей аналогичной был изложен нами в §§ 177 и 189; там же говорилось
и о соответствующих изменениях в ходе решения, если одна или несколько
связей неудерживающие. Шесть уравнений D6.52) и D6.53) предста-
представляют собой систему уравнений второго порядка относительно неизвест-
гых функций времени хд, уд, zA, со, ф, &. Эга система шести уравнений
второго порядка заменится системой двенадцати уравнений первого по-
порядка, если к уравнениям D6.52) и D6.53) присоединить очевидные ра-
равенства
dxA_- йУА—у dJA—z d1—m dJl— I d9_ a
Уравнения D6.56) и D6.59) в соединении с шестью равенствами
D6.55) и D6.58) представляют собой систему двенадцати уравнений пер-
первого порядка относительно двенадцати неизвестных функций времени
хА, ул, гА, <р, ф, Ь; vAi, г»4ч, оА;, % ю,, <ос.
Легко было бы составить для несвободного твёрдого тела и уравне-
уравнения типов D5.47) и D5.48) на стр. 502, но мы на этом останавливаться
не будем.
XLVII. ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ. СЛУЧАЙ ЭЙЛЕРА
265. Эйлеров случай движения твёрдого тела вокруг нелодвиж-
ной точки. Движение твёрдого тела по инерции. Решение вопроса
о движении весомого твёрдого тела вокруг неподвижной точки предста-
представляет собой одну из самых интересных и вместе с тем самых разрабо-
разработанных задач о движении материальной системы. Разрешение этого во-
вопроса в общем виде превышает пока силы анализа, но зато мы имеем
много решений для различных частных случаев. Наиболее важным из
них является так называемый случай Эйлера, а именно, движение весо-
весомого твёрдого тела вокруг своего центра масс, закреплённого неподвижно.
Составим уравнения движения такого тела, отнесённые к неподвижным
осям. Поместим начало координат в неподвижном' центре масс; тогда мы
будем иметь:
iczic==zrc-o-
поэтому уравнения D6.20) на стр. 513 упростятся следующим образом:
dtdux~ ' dtduy~ > dldot~ ' { '
уравнения D6.21) на стр. 513, отнесённые к осям, неизменно связанным
с телом, примут вид
•АЛ —Цр, —•/«)aV°i==0'
Как уравнения D7.1), так и уравнения D7.2) представляют собою лишь
521
частный случай уравнений D6.15) и D6.16) на стр. 511, соответствую-
соответствующий тому условию, что силы, приложенные к телу, дают относительно
точки опоры момент, равный нулю:
Lo=0.
Движение твёрдого тела вокруг неподвижной точки под действием сил,
момент которых относительно этой точки равен нулю, носит назва-
название движения вокруг неподвижной точки по инерции. Таким образом,
эйлеров случай служит частным случаем движения по инерции, когда тело
весомое, а точка опоры совпадает с центром масс.
Заметим, что уравнения D7.2) сохранят свою форму и для свобод-
свободного твёрдого тела, если ограничимся лишь рассмотрением движения
тела вокруг центра масс и положим, что силы дают относительно этой
точки момент, равный нулю; сказанное вытекает из уравнений D5.57) ;на
стр. 504 при Lc = 0. Итак, задача о движении твёрдого тела по инерции
вокруг неподвижной точки, заключающая в себе эйлерово движение как
частный случай,.совпадает с задачею о движении свободного твёрдого
тела вокруг его центра масс, если только силы дают относительно центра
масс момент, равный нулю. Всё различив" в уравнениях движения, инте-
интегрирование которых даёг решение задачи, состоит лишь в значениях по-
постоянных J^, J J^: в первой задаче это — главные моменты инерции,
соответствующие неподвижной точке, а в последней это — главные цен-
центральные моменты инерции. Заметим, что для эйлерова движения и ука-
указанное различие исчезает: неподвижная точка и центр масс совпадают.
Когда речь идёт о свободном геле, не надо упускать из виду того,
что мы в данной главе говорим лишь про его движение вокруг центра масс;
поступательное же движение идёт своим чередом сообразно с законом
изменения количества движения, или законом движения центра масс (§ 178).
Так, например, если свободное тело находится лишь под действием силы
тяжести, центр масс будет двигаться по параболе (§ 97), а тело одно-
одновременно будет двигаться вокруг центра масс по инерции. В дальнейшем
для избежания повторений мы будем говорить лишь о движении тела
вокруг неподвижной точки.
Пример 148. Как было сказано, силы тяжести частиц представляют со-
собой пример сил, главный момент которых относительно центра масс равен
нулю. Другим примером таких сил могут служить силы взаимодействия, или
внутренние силы (§ 178), а из внешних сил — силы, зависящие от притяжения
или отталкивания частиц тзёрдого тела неподвижными центрами прямо про-
пропорционально массам и расстояниям. В самом деле, пусть п частиц неизменяе-
неизменяемой системы, имеющих' массы /я, и радиусы-векторы г„ где v=l, 2, ..., п,
притягиваются или отталкиваются k неподвижными центрами с массами ц, и
радиусами-векторами гх, где х = 1, 2, .... А, причём силы притяжения или
отталкивания прямо пропорциональны произведениям масс на расстояния. Тогда
сила /•",, действующая на массу mv, будет иметь значение
k
/?, = е/н„ 2МЛ.~ Л,). D7-3>
где коэффициент е положителен для сил притяжения и отрицателен для сил
отталкивания. Составим выражение для главного момента Лдэтих сил относи-
относительно начала координат; мы получим:
П Я / ft v k
i0 = 2 л,х л = • 2 { иа x 2 мл, - л.) > = iMrc x 2 iw
522
Отсюда ясно, что при гс = 0, т. е. при совмещении начала координат с цент-
центром масс, мы получим Lo = 0. Исходя из формулы D7.3), нетрудао показать,
что центр масс рассматриваемой неизменяемой системы будет описывать эллипс
вокруг центра притягивающих масс цх (§ 98). В то же время неизменяе-
неизменяемая система будет двигаться по инерции вокруг своего центра масс так, как
если бы эта точка была неподвижной.
266. Простейшие интегралы уравнений движения. Теорема Ла-
гранжа. Кинетическая энергия Т твёрдого тела для рассматриваемого
нами случая движения выражается формулой D6.1) на стр. 508
}\У, D7.4)
отсюда, на основании формул D5.30) на стр. 497, мы получим следую-
следующие равенства:.
~ = О=Ую — = G =У (о — = 0 =У (о D7 5)
Здесь буквою G обозначен кинетический момент твёрдого тела относи-
относительно неподвижной точки. С помощью написанных соотношений мы из
формул D5.33) на стр. 497 выводим
<?7
дГ „ ,..,...!,.. ^47 6^
_
Обратимся теперь к уравнениям движения D7.1); они непосредственно
интегрируются и интегралы их на основании формул D7.6) могут быть
записаны в следующем виде:
Л55 1Л + Лс у D7.7)
Здесь Сх, Су, Сг—произвольные постоянные. Интегралы эти представляют
собой заьон сохранения кинетического момента (§ 181). Действительно,
так как ? = 0, то
G=C, D7.8)
откуда в проекциях на оси неподвижной системы координат и получаются
формулы D7.7) Уравнение семейства лапласовых, или неизменяемых, пло-
плоскостей по формуле C1.23) на стр. 309 напишется так:
Ог=Ъ D7.9)
или
здесь у—произвольный параметр. Уравнение того же семейства, отнесённое
к подвижным осям, будет
523
или согласно формулам D7.5)
Обратимся теперь к уравнениям D7.2). Умножив их соответственно
на @^, <оч, ю^ и сложив, мы получим:
А
+ЛлЧ+Л^А=о;
отсюда мы наводим новый, четвёртый, интеграл уравнений движения
= 2А, D7.11)
где h — произвольная постоянная. Как видно из формулы D7.4), мы полу-
получили интеграл энергии
T = h\ D7.12)
его можно было бы написать непосредственно, приняв в соображение, что
обращение в нуль главного момента L сил относительно точки опоры
влечёт за собой и обращение в нуль работы приложенных к твёрдому
телу сил на любом перемещении тела. В справедливости последнего по-
п
ложения можно убедиться, вычислив элементарную работу сил /,/•"„• dr^
v = l
тем же способом, как это было сделано в примере 1 Юна стр. 387. Дей-
Действительно, мы имеем
Отсюда, воспользовавшись правилом циклической перестановки сомножи-
сомножителей векторно-скалярного произведения, мы получим:
Таким образом, при Z.—О также и
Умножим теперь уравнения D7.2) соответственно на J^a>^, J со , ^
и сложим; мы снова получим в левой части полную производную по вре-
времени
Проинтегрировав это уравнение, мы найдём:
/к«о? + 7,2Х + JJ.,^, = C\ D7.13)
где С2 — произвольная постоянная. Но, очевидно, этот интеграл не неза-
независимый, а представляет собой лишь комбинацию уже найденных интегра-
интегралов D7.7). В самом деле, если мы равенства D7.7) возведём в квадрат,
уложим и примем во внимание соотношения (8.11) на стр. 75 между
косинусами, та найдём:
4 4+/»?+Л»?=с2+с
524
отсюда ясно, что постоянная С2 равна
* 2* = G2; D7.14)
следовательно, интеграл D7.13) выражает собой лишь постоянство модуля
кинетического момента. К уравнению D7.13) можно прийти сразу, если
возвести ь квадрат равенство D7.8) и затем выразить G2 через проекции
вектора G по формулам D7.5).
В заключение остановимся на выше полученном выражении D6.8) на
стр. 509 для кинетической энергии
27- = ^. G.
Поделив это равенство на G, мы найдём:
IT Ш-G .-Л,.
7Г = -7т-= и cos (ю, G);
следовательно, при условии постоянства Гиб проекция мгновен-
мгновенной угловой скорости на неизменное направление
кинетического момента остаётся постоянной, т. е.
@О=^= const. D7.15)
Доказанная теорема принадлежит Лчгранжу,
267. Геометрическая интерпретация Пуансо. Как мы видели, полная
интеграция уравнений D7.2) должна ввести шесть независимых друг от
друга произвольных постоянных (§§ 260 и 261); мы же до сих пор
нашли их только четыре: Сх, Су, Cz, h. Тем не менее, как показал Пуансо
(Poinsot), зная только приведённые выше простейшие интегралы, мы в
состоянии дать вполне ясную геометрическую картину изучаемого
движения. С этой целью рассмотрим снова эллипсоид инерции тела, со-
соответствующий неподвижной точке. Для взятых' нами подвижных осей
уравнение этого эллипсоида по формуле B6.13) на стр. 275 примет вид
Пусть pt есть ргдиус-вектор точки Р,, в которой этот эллипсоид -пере-
-пересекается с мгновенной осью вращения, точнее с той её половиной, на
которой лежит вектор <о (фиг. 138 на стр. 510). Согласно формуле
D6.10) на стр. 510 этот вектор так связан с угловою скоростью тела:
р",=-Й- <47-17)
В § 259 было установлено, что касательная плоскость, проведённая к эл-
эллипсоиду в точке Pv перпендикулярна к кинетическому моменту G и от-
отстоит от точки опоры О на расстоянии
г = /-^? D7.18)
[см. формулу D6.14) на стр. 511]; уравнение этой плоскости имеет вид
D6.14), т. е. G-p = G-pj или, что одно и то же,
0-7 = /КИТ- D7.19)
625
В рассматриваемом случае движения кинетическая энергия Т и кинети-
кинетический момент G постоянны; следовательно, касательная плоскость, про-
проведённая через конец вектора рг, перпендикулярна к некоторому неиз-
неизменному направлению (направлению вектора (?) и, кроме того, остаётся
на постоянном расстоянии ? от точки опоры О, т. е. эта плоскость не-
неподвижна в пространстве. Сопоставляя уравнения D7.9) и D7.19), мы
замечаем, что касатгльная плоскость принадлежит к семейству неизменяе-
неизменяемых плоскостей Лапласа.
Объединив всё выше сказанное, мы можем разбираемое движение
твёрдого тела охарактеризовать следующим образом: твёрдое тело дви-
движется по инерции вокруг неподвижной точки так, что неизменно связанный
с ним эллипсоид инерции, соответствующий неподвижной точке, катится
без скольжения по одной из неизменяемых плоскостей, неподвижной в
пространстве; притом угловая скорость тела пропорциональна длине ра-
радиуса-вектора точки касания эллипсоида с плоскостью качения. Движение
эллипсоида по плоскости будет качением без скольжения потому, что
общая их точка Я, лежит на мгновенной оси и, следовательно, имеет
скорость, равную нулю.
Если рассматривать всю мгновенную ось, а не только ту половину,
на которой лежит вектор <о, то кроме точки Рх мы найдём ещё некоторую
другую точку Я2, диаметрально противоположную первой и также лежа-
лежащую на пересечении мгновенной оси с эллипсоидом инерции (фиг. 139).
Вторая точка обладает теми же свойствами, что и первая; поэтому мы
можем сказанное выше сформулировать так: при движении твёрдого тела
вокруг неподвижной точки по инерции эллипсоид инерции тела,
соответствующий неподвижной точке, катится без скольжения по двум
параллельным неизменяемым плоскостям с угловою скоростью, пропор-
пропорциональной длине хорды, проведённой между точками касания эллипсоида
с названными плоскостями. Постоянное расстояние между плоскостями
равно
2Й 21YW
О
На фиг. 139 плоскости качения обозначены 5, и S2; О — точка опоры,
ОКл = ОКч = Ь; Р,Р9 — хорда, соединяющая точки касания; <о — мгно-
венная угловая скорость тела, по своему
численному значению пропорциональная
отрезку ОРХ или, что одно и то же, про-
пропорциональная отрезку Р)Р2-
268. Интерпретация Мак-Куллага.
В геометрической иллюстрации Пуансо за
основную поверхность, движением которой
характеризуется движение всего тела, был
принят эллипсоид инерции. Но с этим
Фиг. 139. эллипсоидом тесно связан другой эллип-.
соид, а именно, гирационный (§ 155).
Мак-Куллаг (Mac Cullagh) показал, что и движение гирационного эл-
эллипсоида точно так же даёт весьма наглядную картину движения тела
по инерции, причём, как нетрудно сообразить, геометрические образы
526
Мак-Куллага получаются из соответствующих образов Пуансо тем же
путём, каким гирационный эллипсоид строится по эллипсоиду инерции.
По формуле B6.18) на стр. 260 уравнение гирационного эллипсоида,
соответствующего точке опоры, для взятых нами подвижных осей (глав-
(главных осей инерции) пишется так;
l + ^+I^S1, D7-20)
где R и / — некоторые постоянные. Прямую, служащую основанием ки-
кинетического момента тела относительно точки опоры, назовём для крат-
краткости неизменной; она согласно формулам D7.5) изображается уравне-
уравнением
* Ч Е (±7 on
/ ~/ ~/ • y^i.z-ij
Из интеграла D7.8) или интегралов D7.7) мы заключаем, что прямая
эта неподвижна в пространстве. Найдём точку её встречи с поверхностью
D7.20). Координаты ?2, 7J, ?2 искомой точки должны одновременно
удовлетворять обоим уравнениям D7.20) и D7.21). Из последнего урав-
уравнения, если воспользуемся интегралом D7.13), мы имеем
_ пг __ С2 __ У ^ + 4 + 4 __gg /47 22)
где р2 — радиус-вектор искомой точки встречи. Подставим определяемые
этими равенствами выражения $2, г]2, С2 через р2 в уравнение D7.20);
мы найдём:
2
отсюда согласно формулам D7.11) и D7.12) мы поаучим:
D7.23)
т. е. точка встречи гирационного эллипсоида с неизменною, прямою на-
находится на постоянном расстоянии от точки опоры и, следовательно,
остаётся неподвижной. Таких точек две; они диаметрально противоположны
и заменяют собою две неизменяемых плоскости Пуансо. Приняв во вни-
внимание соотношение D7.23), мы из уравнений D7.22) находим:
утг •
D7l24)
Построим в точке ($2, 7]2, С2) плоскость, касательную к эллипсоиду
D7.20); её уравнением будет
Ac
527
Косинусы углов между осями координат и нормалью к этой плоскости про-
пропорциональны величинам
W«f
или, согласно равенствам D7.24), величинам
следовательно, направление нормали к гирационному эллипсоиду, по-
построенному Для неподвижной точки, параллельно мгновенной угловой
скорости тела. Если мы вычислим теперь расстояние S касательной плос-
плоскости D7.25) от точки опоры (начала координат), то найдём:
У ,2 "+" ,2 "Г .2
отсюда по формулам D7.22) и D7.23) мы получим:
'<•>
D7/>6)
' 5-г шч "Г шс "°
т. е. расстояние касательной плоскости D7.25) от точки опоры обратно
пропорционально модулю мгновенной угловой скорости.
Из всего сказанного мы выводим следующее заключение: движение
твёрдого тела вокруг неподвижной точки по инерции происходит так, что
неизменно связанный с телом гирационный эллипсоид,
соответствующий точке опоры, во всё время движе-
движения проходит через две неподвижные точки, лежащие
на неизменной прямой; при этом угловая скорость
тела направлена по перпендикуляру, опущенному из
точки опоры на шоскость, касательную к гирационному
эллипсоиду в одной из неподвижных точек, а по модулю
она обратно пропорциональна расстоянию названной
плоскости от точки опоры.
На фигуре 140 изображены гирационный эллипсоид,
построенный для точки опоры О, и неизменная прямая
Л)Л2; Qx и <?2—неподвижные точки; D—плоскость,
касательная к гирационному эллипсоиду в точке Q{;
ОВ — перпендикуляр, опущенный, из точки О на пло-
плоскость D; (о — мгновенная угловая скорость тела, обратно пропорцио-
пропорциональная отрезку ОВ.
269. Определение проекций угловой скорости как функций вре-
времени. Прежде чем перейти к нахождению дальнейших интегралов урав-
уравнений движения, разберём некоторые неравенства. Пусть моменты инер-
ции
Ут
так располагаются по своей величине:
J^<Jm<J,,, D7.27)
т. е. пусть ось S направлена по большой, а ось ? — по малой оси эллип-
эллипсоида инерции D7.16). По свойству моментов инерции (§ 154) мы
имеем:
528
чс-
D7.28)
Далее из уравнений D7.11) и D7.13), соответственно представляющих
собой интеграл энергии и инте1 рал кинетического момента, мы находим:
5 _ О* = JVi Ц5 - /J <о* + Ук (У5? - Ук) «?
К - О» = Ле (Л: - 4) »? + Л, (у« ~ У„) »v
Отсюда на основании неравенства D7.27) мы заключаем, что
277K— G2>0; ) D7>29)
о знаке же третьей разности ничего наперйд сказать нельзя, так что
возможны следующие три случая:
27^-О2|°- D7.30)
Разбираемые неравенства можно переписать следующим образам:
или, согласно формуле D7.18),
Тогда крайние неравенства станут очевидными геометрически: они
выражают то, что расстояние касательной плоскости к эллипсоиду
инерции от центра поверхности не может быть больше, чем большая
полуось, и меньше, чем малая.
Обратимся к уравнениям Эйлера D7.?) и перепишем их в таком
виде:
Умножив каждое из этих равенств соответственно на <о?, тт, ю, и сло-
сложив их, мы найдём:
или
Так каК
°Y°S -j- со со -|~ МЛ — @@> D7.34)
то мы постараемся выразить со?, cov, co^ также в функциях от со. С этой
34 Г. К Суслов 629
целью мы решим относительно <о|, оJ, а>2 систему уравнений:
(О2 -{- (О2 -f- (О2 = (О2.
Первые два уравнения представляют собой известные нам интегралы
уравнений движения, а последнее выражает связь между модулем угло-
угловой скорости и её проекциями на оси подвижной системы координат.
Найдём <о2:
I /2 /2 /
II 11
02
(О2 1 1
Раскрыв определители и сократив уравнение на J ,— У^, мы получим:
откуда
Так как дробь
( 5)
в силу второго из неравенств D7.29) положительна, то можно принять
j г =@1- D7.36)
С другой стороны, согласно неравенствам D7.27) мы имеем
следовательно, можно положить
= -a2
Тогда вместо выражения D7.35) мы получим:
0J = а2 (оJ—и2).
Подобным же образом мы найдём:
где
530
72—=.
D7.37)
D7.38)
D7.39)
D7.40)
D7.41)
D7.42)
Дробь, обозначенная через ю2, положительна на основании неравенства
D7.28) и второго из неравенств D7.29). Полученные нами выражения для
(ог оJ, оJ показывают, что
ОJ ==S Сй2, 0)| ^2 0)
Определим теперь знаки разностей ю2-
D7.43)
ю2, <о2— wj,
—о>2;
имеем
— Jrr
Лг — Лр
— G2), D7.44)
— О2), D7.45)
— G2). D7.46)
внимание неравенства D7.29), мы заключаем,
и оJ, а знак разности со2 — ю2 одинаков со
знаком левой части неравенства D7.30). Подставив выражения D7.38),
D7.39) и D7.40) в уравнение D7.33) и приняв во внимание равенство
D7.34), мы после сокращения найдём:
Отсюда, приняв во
что ш2, всегда больше <о'
— (о2
— оJ) (aJ —top. D7.47)
При интеграции этого уравнения разберём отдельно три случая:
2> 27 О2<0 3) Ж О2 0 С
р рр
1) 2ТУЩ— О2>0, 2) 27УЧТ— О2<0 и 3) Жщ — О2 = 0. Согласно
формулам D7.32) эти случаи соответствуют условиям, когда расстояние 8
больше, меньше или равно средней полуоси этлипсоида инерции D7.16).
1) Итак, пусть сперва 27Утт) — G2>0. Тогда из формулы D7.46)
мы видим, что (о^^хй^и, следовательно, неравенства D7.43) перепи-
перепишутся так:
о>2 О2.
до
Так как <о2 может изменяться лишь от |
(о2 = 0J cos21 -f- о)* Sin21 = 0J ^- (©«
—новая переменная. Отсюда мы находим:
(ю| — (о|) sin21,
где
(о|—
(о2 — (о| =
— о)|) cos2
(О2—(Й2=(О)| —@2)A —
где
D7.48)
то мы можем положить
юр sin2 X, D7.49)
D7.50)
D7.51)
Из равенств D7.44) и D7.45) видно, что величина А2 положительна,
а неравенства D7.48) показывают, что она численно меньше единицы.
Подставив выражения D7.49) и D7. 50) в уравнение D7.47), мы по-
получим:
84*
531
где
Знак минус следует брать в интервале времени, когда <о убывает от <о2
до о>3, и знак плюс, когда <о возрастает от <о8 до о>2.
Проинтегрируем уравнение D7.52). Назовём t0, tv t2, . .. некоторые
последовательные моменты времени, когда <о становится равной а>2, а>8,
П _ ГС
<о2, .. . , a 1 соответственно принимает значения 0, -^ , U, j и Т- А<
Кроме того, введём обозначение
Для t, заключённого в интервале
мы получим:
х
— [р-^и. D7.53)
о
Отсюда согласно формулам B2.33) и B2.3.4) на стр. 217 мы найдём.
1 = —am и.
При частном значении t=t1 уравнение D7.53) даёт соотношение
K = —s{t1—t0), D7.54)
где К есть полный эллиптический интеграл первого рода [см. формулу
B2.31) на стр. 217]
Перейдём к интервалу
Уравнение D7.51) берём теперь с плюсом. Проинтегрировав его, мы
получим:
¦г
Левую и правую части этого равенства преобразуем так:
532
Решив это уравнение относительно первого слагаемого левой части и
приняв во внимание соотношения D7.54) и D7.55), мы получим:
к
Отсюда мы найдём:
или, согласно теоремам B2.35) и B2.34) на стр. 217:
и т. д. Вернёмся теперь к равенствам D7.38), D7.39) и D7.40). На
основании формул приведения тригонометрических функций мы получим:
<oj = ±a,e Дат[е (/ — *„)], \
<от = rfc ct2sk1 sin am [s (t — *„)], I D7.56)
«c == ± ase?, cos am [s [t —10)}. J
Знаки здесь выбираются в соответствии с начальными данными и во всё
время движения сохраняются одни и те же.
2) для случая 2TJт — G2 <^ 0 совершенно таким же путём мы получим
ю- = 4; пхвлк2 cos am [Sj (t — ^0],
«4 = ± а3?гд am [ 4 (* —10) ].
гле
D7.57)
причём опять
3) Для промежуточного случая 2TJ —О2 = 0 мы согласно фор-
формуле D7.47) имеем
и, следовательно, вместо уравнения D7.46) получим следующее
o>(i = ±(«J2— (o'f) Vw]— (о2. D7.58)
Введём новую переменную ](, положив
<л\ — ш2 = f\ D7.59)
кроме того, введём обозначение
(О* _ <02= Я2;
тогда по формуле D7.44) мы найдём
uJ_aJ=o)j —(о^—f =я2 —f. D7.60)
Подставив выражения D7.59) и D7.60) в уравнение D7.58), мы после
сокращения на jj получим
ff = ±(*"-Xf).
533
Проинтегрировав это уравнение, мы найдём:
— 2л п —
где р — произвольная постоянная. Разрешив это уравнение относительно
^, мы получим:
где
Воспользовавшись формулой
1 — th26= sech2O,
мы найдём отсюда:
ше = ± па, secb 6, шч = ±яо2№в, (о^=± nas sech6. D7.61)
Так как при безграничном возрастании времени / аргумент 6 стремится
к бесконечности и, следовательно, sech 6 стремится к нулю, то из по-
последних уравнений мы заключаем, что в разбираемом случае движение
асимптотически приближается к вращению с постоянной угловой ско-
скоростью па.21\° вокруг средней оси эллипсоида инерции.
270. Определение углов Эйлера как функций времени. Неподвиж-
Неподвижные оси координат Охуг до оих пор были расположены произвольным
образом; теперь примем для упрощения, что ось Ог наиравлена по кине-
кинетическому моменту G. Тогда мы будем иметь
и потому по формулам D7.5) на стр. 523 мы найдём
Здесь направляющие косинусы as], a82, a3S согласно формулам (8.15) на
стр. 77 следующим образом выражаются через эйлеровы углы:
asl = sin <р sin 8, я82 —costpsin», aS3 = cos8. D7.63)
Поэтому для определения углов у и 8 мы получаем следующие урав-
уравнения:
D7.64)
Для нахождения же третьего угла, т. е. угла ф, придётся произвести
ещё одно, последнее, интегрирование. Согласно равенствам D6.19) на
стр. 512 мы имеем
(of = sin tp sin 8 • tj) -j- cos tp • 8,
<oT = cos tp sin 9 • ф — sin tp • 8.
Исключив 8, находим отсюда
sin 8 • ф = <o5 sin tp -\- (o cos tp.
534
Умножив это равенство на sin 8 и приняв во внимание формулы D7.63),
мы получим:
sin2 & ¦ ф = o)j sin f sin & -j- o> cos cp sin & = (o^a8j -f- <oY c32.
Заменив здесь sin 8, an и аз2 их выражениями из равенств D7.62) и
D7.64), мы придём к уравнению
воспользовавшись интегралом D7.11) и формулой D7.12), это уравнение
можно переписать так:
f а*Л1 JJ
Здесь (о^ является уже известной функцией времени и выражается фор-
формулами D7.56), D7.57) или D7.61). Проинтегрировав полученное уравне-
уравнение, мы найдём:
4> = Y + f t + j- B7УК-О«) fp^-^я—я.
где у — шестая и последняя произвольная постоянная.
271. Полодия. Гераолодия. Точка касания эллипсоида инерции и
плоскости качения, перемещаясь с течением времени по той и другой
поверхности, описывает на этих поверхностях
некоторые кривые. Траектория точки по эллип-
эллипсоиду инерции названа Пуансо полодией,
а траектория по неизменяемой плоскости —
герполодией. Так как рассматриваемая
точка лежит на мгновенной оси, то ясно само
собою, что полодия служит направляющей под-
вижного аксоида, а герполодия — направляю-
щей неподвижного аксоида для разбираемого
движения твёрдого тела (§ 68). Поэтому мы
будем иногда называть подвижной аксоид
сом, а неподвижный — гер по л оди ал ьн ым конусом.
Пология — алгебраическая кривая четвёртого порядка (фиг. 141).
Уравнения её легко получить из чисто геометрических соображений.
Любая точка ($, \ Q, принадлежащая полодии, лежит на эллипсоиде
инерции D7 16), т. е.
V-11 + VI+V='8- <4765)
Плоскость, касательная к эллипсоиду в любой точке полодии, находится
от центра эллипсоида на постоянном расстоянии
Фи1
полодиальным кону-
кону[формула D7.18)]. Решив это уравнение относительно G2 и воспользо-
воспользовавшись выражениями D7.5), мы найдём
535
Но угловая скорость согласно формуле D7.17) связана с радиусом-век-
радиусом-вектором р точки, лежащей на полодии, соотношением
- /2Г-
поэтому вместо предыдущего равенства мы получим:
JtF+Jb1f+J$F=4- <47-66>
Система уравнений D7.65) н D7.66) и изображает полодию. Как
видим, полодия представляет собой пересечение двух соосных эллипсои-
эллипсоидов- эллипсоида инерции D7.65) и так Называемого кинетического
эллипсоида D7.66). Последнее название оправдывается тем, что уравне-
уравнение D7.66) выражает постоянство кинетического момента.
Если уравнение D7.65), предварительно умноженное на ^ мы выч-
вычтем из уравнения D7.66), то получим:
(^-S«? = O. D7.67)
Это — уравнение конической поверхности, имеющей вершину в центре
эллипсоида, а направляющей кривой—полодию; другими словами, напи-
написанное уравнение изображает собою подвижной аксоид для данного
движения. Чтобы определить положение этого конуса относительно глав-
главных осей инерции, припомним неравенства D7.32); из них мы видим, что
первый коэффициент в выражении D7.67) всегда отрицательный, а пос-
последний— всегда положительный; что же касается до среднего коэффи-
коэффициента, то знак его меняется в зависимости от начальных условий.
Когда 82^> J—, т. е. расстояние плоскости качения от центра эллипсоида
превышает длину средней полуоси эллипсоида инерции, коэффициент
при гB в уравнении D7.67) больше нуля, и, следовательно, полодиаль-
ный конус охватывает ось S. Когда ?2<Ст~> т. е. расстояние 8 меньше
V)
средней полуоси катящегося эллипсоида, коэффициент при 7]2 меньше
нуля, и, следовательно, полодиальный конус охватывает ось С
/^
В промежуточном случае, когда J2 = -у-, т. е. расстояние Ь равно
средней полуоси, полодиальный конус распадается на две плоскости
проходящие через среднюю ось, а соответствующая полодия предста-
представляет собой два эллипса. На фиг. 141—это эллипсы BEB^EV и BDBlDl.
Точки А, В, С изображают вершины эллипсоида инерции.
Когда Ь2 становится равным -=- тогда уравнение D7.67) принимает
отсюда согласно неравенствам D7.27) мы получаем:
ч = о, :=о.
536
Соответствующая полодия превращается в точку А. Точно так же дл»
?2 = т~ полодия стягивается в точку С.
Не надо упускать из виду, что уравнениями D7.65) и D7.66), соб-
собственно говоря, определяются две полодии, симметричные относитетыю
центра О эллипсоида.
Герполодия, как мы сейчас увидим, является кривой трансцендентной.
Мы не будем искать её уравнения в ко-
конечном виде, а ограничимся лишь вы-
выводом её дифференциального уравнения.
С этой целью спроектируем неподвижную
точку О тела и его угловую скорость
О А = (о на плоскость S качения эллипсоида
инерции (фиг. 142). Назовём Р точку встре-
встречи мгновенной оси вращения с плоскостью
качения и обозначим
OK=t, ОР = р„ КР = г.
Вектор г представляет собой радиус-век-
радиус-вектор точки гериолодии, проведённый из начала К. Из треугольника ОКР
мы имеем
/•2 = ОР2 — ОК2 = р? — 82,
или, если вспомним формулы D6. ГО) на стр. 510 и D7.18) на стр. 525,
г =
Отсюда мы находим:
2Г
IT ,
27/2
г с/2 •
D7.68)
Подставив это значение угловой скорости в уравнение D7.47), мы найдём
следующую дифференциальную зависимость между г и временем:
27 •
Тгг==
Если для сокращения положим
п i — пь о j Я2< q Т~ пз>
•i' a 1
то из равенств D7.36) и D7.42) найдём:
4Р ^ 4Р 2__ _ 4712
Поэтому вместо уравнения D7.69) мы получим.
•'к
D7.70)
4Т2
_._ш2=И1Яг1 D7.71;
. D7.72)
537
Согласно неравенствам D7.31) мы имеем
»1<о, «3>°;
поэтому для п2^>0 произведения, входящие в выражение под радикалом,
удовлетворяют следующим неравенствам:
«г«э>0, nsnx<^0, n1n2<0;
а для п2 <^ 0 мы получаем:
Следовательно, вещественность радикала D7.72) требует, чтобы г за-
ключалось в первом случае между ^~ и or ' а во ВТОРОМ СЛУ'
чае между ~-3 и — - "l. Отсюда мы заключаем, что при «3) от-
отличном от нуля, герполодия расположена между двумя концентрическими
окружностями. Для промежуточного случая, когда и2 = 0, вместо урав--
нения D7.72) мы получаем:
/ ^? D7.73)
где, как и всегда, nsnx <^ 0. Из написанного выражения мы заключаем,
что г не может превышать I у ^ .
В § 270 мы условились расположить неподвижную систему коорди-
координат Oxyz таким образом, чтобы ось Ог была направлена по кинетиче-
кинетическому моменту G и чтобы, следовательно, плоскость Оху была парал-
параллельна плоскости качения S. Проведём в плоскости S ось Кхх, параллельную
оси Ох, и назовём Ь угол, образуемый радиусом-вектором г с этой осью
(фиг. 142). При этих условиях мы можем написать
Отсюда мы находим:
6<ОГ(О„ — (O.,0)v
= - \ , \ Х ', D7.74)
здесь точками, как обычно, обозначены производные по времени. Пре-
Преобразуем прежде всего числитель. Нетрудно заметить, что он предста-
представляет собой' проекцию на ось z векторного произведения угловой
скорости на угловое ускорение:
. . — А.
ю*шу а)у(Ог '— (Ю X 0>)г
Перейдя к системе координат ОЪ[, неизменно связанной с телом, мы
по формуле (8.7) на стр. 74 получим:
(ю х ю)г = (м X »M й3, + (ю X ю)„ ап +(ш X ®\ аг%-
Далее, по теореме (9.18) на стр. 88 об относительной производной мы
найдём:
ю== а) -}" ю X й> — © = <Ц'° -f-
-533
На основании сказанного мы можем написать:
^ u>iw0 «82 + («Ь<»Т — <°Тш,:) <*3s- D7.75)
С другой стороны, вспомнив уравнения движения Эйлера D7.2) на
стр. 521, мы найдём:
юА — ю^=тт„ <J^ (</* ~ J-J "v' ~ Jv- (У« ~ J*> а)?@?}=
tit) ^C
Прибавим и вычтем в скобках по J^i и затем воспользуемся равен-
равенствами D7.11), D7.12), D7.13), D7.14), а также обозначениями D7.70);
мы получим:
«Л- «Л =3^5 BУ«7' ~ G2)=5f ">• D7<76)
Подобным же образом мы найдём:
^ — Ш^ = -J-2- П2, 0)е0)^ — @ч@5 = -j~j- «,.
С помощью этих преобразований формулу D7.75) можно привести к виду
Подстанив сюда значения направляющих косинусов из равенств D7.62),
мы получим:
Выражения D7.38), D7.39), D7.40) на основании соотношений D7.68)
и D7.71) могут быть перенисаны так:
Подставим эти значения проекций угловой скорости в уравнение D7.77);
при этом примем во BHHMdHHe равенства D7.70), а также следующие
тождества:
4е (^ - АО + J^(Лс - J$) -f- Лс (у« ~ ут,) = о,
в результате мы получим:
Юх»,— °>^« = ^r2 + «i«2«8- D7.78)
539
С другой стороны, по теореме Лагранжа D7.15) мы имеем
27
из этого равенства и из равенства D7.68) мы выводим следующее со-
соотношение:
»:|+<о;=:»1-<»2=»1-^ = ^'* D7.79)
Подставив выражения D7.78) и D7.79) в равенство D7.74), мы получим
дифференциальное уравнение, связывающее угол 9 со временем
D7.80)
Наконец, поделив почленно равенства D7.72) и D7.80), мы найдём диф-
дифференциальное уравнение герполотли:
„
)(S+У)
2Г
а г ~
Таким образом, мы видим, что конечное уравнение рассматриваемой кри-
кривой в общем спучае будет содержать эллиптические трансцендентности.
В частном случае, при «3 = 0, уравнение D7.81) упрощается так-
dr Qdb
Положив для сокращения письма
t,2 пЪп1
мы приведём эго уравнение к виду
Проинтегрировав это уравнение, мы найдём:
k
c
где s — произвольная постоянная. Кривая имеет асимптотический полюс
в точке К и завивается вокруг него в двух направлениях (фиг. 143)
272. Вторая интерпретация Пуансо. Картина рассматриваемого
движения, данная Пуансо, замечательна по своей простоте, ясности и
наглядности в геометрическом смысле, но зато роль времени в ней скра-
скрадывается, так как в геометрическом образе нет ни одного элемента,
который изменялся бы пропорционально времени. С целью выразить яснее
зависимость от времени, Пуансо предложил ещё другой способ предста
влять себе движение тела. Разложим мгновенную угловую сьорость
со тела на две составляющие, на составляющую а>' по направлению
540
кинетического момента G и на составляющую а>* по направлению, пер-
перпендикулярному к нему (фиг. 144). По" теореме Лагранжа D 7.15) первая
27"
составляющая постоянна и по модулю равна -р-; что же касается вго
рой составляющей, то она меняется и по модулю, и по направлению
Фиг. 143.
Фиг. 144.
как в неподвижном пространстве, так и внутри самого движущегося
тела. Геометрическим местом прямых, служащих основанием вектора
ш", является в теле некоторая коническая поверхность, неизменно свя-
связанная с телом и носящая название второго конуса Пуансо. Нетрудно
убедиться, что это — конус второго порядка. Возьмём на векторе ю" про-
произвольную точку В и проведём через неё параллельно кинетическому
моменту G прямую до встречи в точке С с мгновенной осью вращения.
Обозначим S, 7), С координаты точки В; координатами точки С будут
&а>?, km , &(!>,., где k — множитель пропорциональности. Так как прямая
ВС параллельна кинетическому моменту G, то уравнениями её согласно
формулам D7.5) будут
/- - /Л _ 1 1Л Т.. .. tft.. * '
С другой стороны, точка В лежит в той неизменяемой плоскости S, ко-
которая проходит через точку О и которая, согласно формуле D7.10),
изображается уравнением
Обозначив общую величину отношений D7.82) через \, мы найдём:
S = o);(fe + 4e); Ч = »,(* + Ч,): ? = «*(*+Цс). D7.84)
Подставив эти значения координат в равенство D7.83), мы получим
следующее уравнение для h
или, согласно формулам D7.11), D7.12), D7.13), D7.14).
Отсюда в соответствии с формулой D7.18) мы найдём:
l 5
541
Равенства D7.84) теперь дают нам следующее соотношение.
Но точка С лежит на подвижном аксоиде, и, следовательно, её коорди-
координаты kas^, km , kw^ удовлетворяют его уравнению D7.67); поэтому мы
имеем
Подставив сюда вместо <о^ ю^, ю,- величины, им пропорциональные, оп-
определяемые формулой D7.85), мы найдём уравнение искомого конуса.
= 0. D7.86)
Когда твёрдое тело будет совершать своё движение, конус D7.86)
будет катиться по неподвижной плоскости St но катиться со скольже-
скольжением, так как он вместе с телом будет поворачиваться вокруг оси ОА,
служащей основанием вектора ю'. При этом согласно теореме Лагранжа
D7.15) угловая скорость ю' будет постоянной:
«' = ¦5-.
Если бы плоскость S и конус D7.86) были абсолютно шероховатыми и
притом плоскость S имела возможность вращаться вокруг оси ОА, то
тело своим движением привело бы её в равномерное вращение с угло-
27"
вой скоростью -рг. Другими словами, тогда угол поворота плоскости
за некоторый промежуток времени был бы пропорционален этому проме-
промежутку. Прикрепив к плоскости S стрелку O\i, мы могли бы движением
этой стрелки по неподвижному циферблату измерять время. Вообразим
теперь, наоборот, что часовой механизм сообщает плоскости 6" постоянное
27
вращение вокруг оси ОА с угловой скоростью -^ > а плоскость с помощью
трения или зубчатого сцепления сообщает движение конусу D7.86).
Тогда тело, неизменно связанное с конусом, придёт как раз в такое
движение, которое совершает тело, движущееся вокруг неподвижной
точки по инерции. На этом соображении основано устройство прибора,
известного под названием герполоидографа Дарбу Кёнигса (Darboux-
Koentgs).
273. Установившиеся, или стационарные, движения твёрдого
тела по инерции. Из уравнения D7.47) мы видим, что твёрдое тело
может двигаться с постоянной по модулю угловой скоростью только
тогда, когда всё время выполняется одно из трёх равенств:
@ = 0),, а) = (оа, @ = (i>s; D7.87)
действительно, только в этом случае будет всё время соблюдаться усло-
условие со —0 Пусть справедливо первое из указанных равенств; тогда по
642
формуле D7.38) мы будем иметь а>5=0. Но, если а>5 — нуль, первое
из уравнений D7.2) требует, чтобы произведение ю^ также обраща-
обращалось в нуль. Предположение, что оба множителя всё время нули, не имеет
смысла, так как тогда тело находилось бы в покое; следовательно,
остаются лишь два случая:
1) @| = @ = const. = 0,' со,. = const.
0
2) (ос = а){ = const. = 0, со = const. фО.
Из остальных двух равенств D7.87) мы найдём ещё только один новый-
случай:
3) со = юс = const. = 0, а>?= const. ^0.
Итак, движения с постоянной по модулю скоростью возможны лишь
вокруг главных осей инерции. Легко показать, что тогда ось вращения,
не изменяющая своего положения в теле, останется неподвижной и в
пространстве. Убедимся в эгом для первого случая, когда движение про-
происходит вокруг оси ОС Если неизменное направление кинетического
момента G возьмём за ось Oz, то из формул D7.62) при а>5=« =0
найдём:
a8i = a82 = °;
следовательно, из соотношения а^ -j- a*2 -j- а^ = 1 мы получим
т. е. ось ОС совпадает с неподвижным направлением б, что и доказывает
требуемое. То же самое можно показать и для остальных двух случаев.
Пусть тело вращается около большой или малой оси эллипсоида
инерции. Весьма слабым толчком возмутим движение тела. От толчка
угловая скорость, вообще говоря, отклонится от оси постоянного вра-
вращения на некоторый угол, движение перестанет быть установившимся, и
мгновенная ось начнёт перемещаться внуфи тела по полодиальному ко-
конусу, охватывающему прежнюю ось вращения: это вытекает из прове-
проведённого выше исследования полодии (§ 271). При достаточно малом
толчке возмущённое движение может сколь угодно мало отличаться от
данного постоянного вращения. В этом смысле говорят, что стационар-
стационарные вращения вокруг большой или малой оси эллипсоида инерции устой-
устойчивы.
Наоборот, вид полодий близ средней оси указывает, что если телу,
совершающему постоянное вращение вокруг средней оси, сообщить
хотя бы самое малое возмущение, выводящее ось вращения из первона-
первоначального положения, то возмущённое движение будет, вообще говоря,
резко отличаться от невозмущённого; поэтому установившееся вращение
вокруг средней оси называется неустойчивым.
Таким образом, вращение вокруг средней оси отличается от осталь-
остальных двух вращений своей неустойчивостью. Разберём теперь, по какому
признаку узнать, происходит ли постоянное вращение вокруг большой
или вокруг малой оси эллипсоида инерции. С этой целью проследим,
в какую сторону перемещается конец мгновенной оси по соответствую-
соответствующей полодии в возмущённом движении. Координатами проекции конца
54а
мгновенной угловой скорости со на плоскость Orfc являются ku) , k®^
где k—-множитель пропорциональности, определяющий масштаб построе-
построения. Следовательно, угол Ь1г который ортогональная составляющая век-
юра ш в плоскости Ог? образует с осью Оц, определяется уравнением
Отсюда быстрота изменения угла 6, со временем выразится формулой
или, согласно соотношению D7.76), формулой
2J%(r-Q4'
Подобным же образом для производной угла 9S между ортогональной
составляющей ю в плоскости Ощ и осью OS мы найдём формулу
@;;. D7.89)
Знаки производных определят собою те направления, в которых пере-
перемещается мгновенная ось по соответствующему иолодиалыюму конусу.
Пусть постоянное вращение происходило вокруг оси О\ против часовой
стрелки (Ю|^> 0); тогда для возмущенного движения, весьма мало отлича-
отличающегося от данного, производная i)j по формулам D7.88) и D7.30) бу-
будет отрица1ельной: следовательно, мгновенная ось будет перемещаться
внутри тела вокруг оси О? no часовой стрелке. А если бы постоянное
вращение против часовой стрелки совершалось около оси ОС (ео^ ^> 0),
то согласно формулам D7.29) и D7.89) и производная 0s была бы больше
нуля, т. е. в возмущённом движении мгновенная ось перемещалась бы
вокруг оси ОС также против часовой стрелки. Подобные же результаты по-
получаются и для вращения по часовой стрелке (<о^<^0 или а>(.<^0). Таким
образом, постоянные вращения вокруг большой или малой оси эллипсоида
инерции отличаются одно от другого тем, что в возмущённом движении
мгновенная ось для первого случая (при вращении вокруг большой оси)
перемещается в теле но направлению, противоположному вращению тела,
а для второго случая (при вращении вокруг малой оси) перемещение
оси совершается по тому же направлению, в котором вращается тело.
Указанные явления легко демонстрируются с помощью остроумного при-
прибора, носящего название волчка Максвелла (Maxwell).
274. Случай, когда эллипсоид инерции является поверхностью
вращения. Когда У^ —./ т. е. когда эллипсоид инерции представляет
собой поверхность вращения, движение тела принимает следующий весьма
лростой характер. Из третьего уравнения D7.2), а именно, из уравнения
при Jrt = J мы находим:
ш;= const. D7.90)
544
Затем интеграл энергии D7.11) и формула D7.12) дают
to? -4- w^ =
Из этих равенств мы получаем:
2f—J
' = const.
(О'
1 = ш* -f- со2 -|- mj? = const.
D7.91)
D7.92)
и, кроме того,
— = cos (С, а>) = cons t.
Следовательно, мгновенная угловая скорость постоянна и образует по-
постоянный угол с осью динамической симметрии тела (§ 252). Подвижным
аксоидом для рассматриваемого движения служит конус вращения во-
вокруг оси ОС. Если ось Ог совпадает с направлением кинетического мо-
момента, то по теореме Лагранжа D7.15) мы имеем a>s= const.; поэтому
из уравнения D7.92) вытекает, что
/\_
—? = со5(.г, ю) = const.,
т. е. мгновенная угловая скорость образует постоянный угол с неизмен-
неизменным направлением кинетического момента G, а потому и неподвижный
аксоид является конусом вращения (вокруг оси Oz). Полодиями и гер-
полодиями здесь служат окружности.
На фиг. 145 и 146 изображены аксоиды для двух случаев: 1) когда
=.-J >./tt, т. е. эллипсоид инерции яйцевидный (фиг. 145); 2) когда
/ ф (ф 146)
/«> т> е> ЭЛЛИП(:оиД инерции—сфероид (фиг. 146).
XLVIII. ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ: ПРЯМОЕ И ОБРАЩЕННОЕ ДВИЖЕНИЯ ПУАНСО
275. Движение Пуансо. Эйлеровы уравнения движения твёрдого
тела по инерции, как мы видели, имеют форму D7.2) на стр. 521
где Уц, Jr , У
35 г. К. Суслов
главные моменты инерции тела для точки опоры. На-
545
званное движение геометрически интерпретируется качением без сколь-
скольжения эллипсоида инерции D7.16)
по одной из касательных к нему плоскостей, неподвижной в простран-
пространстве; при этом согласно формуле D7.17) на стр. 525 угловая скорость
тела пропорциональна рааиусу-вектору точки касания.
Если мы обозначим через о, Ь, с квадраты полуосей эллипсоида
инерции, то уравнение D8.2) перепишется так:
i?_f^_i_ — =1, D8.3)
a i Ь ~ с ' v '
а уравнения D8.1) заменятся следующими:
D8.4)
Интеграл энергии D7.11) на стр. 524 примет вид
9 9 9
ад; ад ад;
+ ' + т
а интеграл D7.13), выражающий постоянство модуля кинетического мо-
момента, напишется так:
Неподвижная плоскость, по которой катится эллипсоид инерции, как
известно, перпендикулярна к кинетическому моменту G; поэтому косинусы
углов нормали этой плоскости с осями координат пропорциональны вели-
величинам
«5 <«_„ «с
а ' 6 ' с *
Квадрат расстояния рассматриваемой плоскости от центра поверхности
2 /уз
согласно формуле D7.18) на стр. 525 равняется -^- . Для того, чтобы
плоскость могла действительно коснуться поверхности, расстояние —^—
должно быть меньше большой полуоси эллипсоида и больше малой; т. е.
из трёх разностей:
2Г/2 —flO2, 2TP — bGz, 2Tl* — cG* D8.7)
только две могут быть одинаковых знаков.
546
В рассматриваемом случае величины а, Ь, с все три положительны
и, кроме того, если e^> b~^> с, то, согласно теореме B6.16) на стр. 258
они подчиняются неравенству
J- + 4->J-. D8.8)
Q О С
Геометрические места точки касания эллипсоида инерции с неподвиж-
неподвижной плоскостью на самом катящемся эллипсоиде и на неподвижной плоско-
плоскости называются, как говорилось ранее, полодией и герполодией. Постоян-
Постоянную /, определяющую размер эллипсоида инерции, можно выбрать так,
что радиус-вектор точки на полодии будет как раз изображать собою
угловую скорость тела. Тогда, очевидно, полодия представит собою
подвижной годограф угловой скорости.
Допустим теперь, что велишны а, Ь, с не выполняют условия D8.8)
и даже могут принимать отрицательные значения. Тогда уравнения D8.4)
потеряют, конечно, свой динамический смысл, т. е. перестанут выражать
движение твёрдого тела по инерции, но сохранят кинематическое значение,
т. е. будут, соответствовать такому движению твёрдого тела, которое
геометрически истолковывается качением без скольжения некоторой цен-
центральной поверхности второго порядка D8.3) по одной из своих каса-
касательных плоскостей, остающейся неподвижной в пространстве. Угловая
скорость тела попрежнему будет пропорциональна радиусу-вектору точки
касания. Такого рода движение носит название движения Пуансо.
Сказанное о разностях D8.7) остаётся справедливым и в настоящем
случае. Поэтому можно сказать, что для возможности движения Пуансо
из трёх произведений
B Г/2 — 6G2)B773 — cG\ 1 D8.9)
B772 — cG2) B 772 — aG2) J
два должны быть отрицательными и одно положи i ельным.
276. Сопряжённые движения Дарбу. Рассмотрим одновременно два
движения Пуансо: одно с угловой скоростью ю и с квадратами полуосей
поверхности а, Ь, с; другое с угловой скоростью ю' и с квадратами
полуосей а', Ь\ с'. Если между этими движениями имеет место такого
рода соотношение, что угловая скорость одного движения в любой мо-
момент равна по модулю и прямо противоположна угловой скорости дру-
другого, т. е. если всегда
ю==—ю', D8.10J
то такие два движения называются сопряжёнными движениями
Дарбу (Darboux). Ясно само собою, что сопряжённые движения Дарбу
имеют тождественные полодии.
Легко убедиться в том, что любому механически возможному движе-
движению Пуансо всегда соответствует ему сопряжённое, тоже механически
возможное. Заметим предварительно, что уравнения, которым удовлетво-
удовлетворяют величины а>?, и,, со,., зависят лишь от отношений полуосей катя-
катящейся поверхности. Если мы положим
ъ — х, с у,
35* 547
то уравнения D8.4) заменятся такими:
<ee=(x — y)at(ob @^ = ^-о)са)Е, ю,. = -=^ ю5 с^. D8.11)
Интегралам D8.5) и D8.6) этих уравнений мы можем дать теперь такую
форму:
а1 + х<о1 + уа>1 = Н, ш| + дг2 со* _J- у Ю2 _ ^ D8.12)
где
„_2аГ г_?О
п — /г > * /а •
Новая постоянная f/ может быть и положительной, и отрицательной: для
возможности движения необходимо лишь согласно формулам D8.9), что-
чтобы из трёх произведений
^)[^) (-fyH-L*) D8.13)
два были отрицательными, а одно положительным.
Подобным же образом, если мы положим
то найдём, что проекции угловой скорости о/ удовлетворяют уравне-
уравнениям
интегралами этих уравнений служат
у2(о;2 = Г2, D8.15)
где ЪГ и V — произвольные постоянные, аналогичные Н и L.
Движение с угловой скоростью ю вполне определяется параметрами
лг, у и постоянными Н и L. Назовём эти величины элементами движе-
движения (ю) и определим по ним элементы лг', у', Н' и U движения (ю'). Из
равенств D8.10), D8.11) и D8.14) вытекает, что
J/— 1 1-Лг' 1—ЛГ ДГГ— 1
Последнее равенство можно отбросить, так как оно служит следствием
первых двух. Решив первые два уравнения относительно дг' и у', мы най-
найдём:
JS=ssXy-* + \t у==су*=УЦ. D8.16)
Далее, в силу соотношения D8.10) интегралы D8.15) заменятся такими:
'^^L'2. D8.17)
Выразим теперь то обстоятельство, что первый из этих интегралов яв-
является следствием интегралов D8.12), т. е. что он получается из ин-
548
тегралов D8.12) путём их умножения на соответственно выбранные мно-
множители X и }л и их сложение. Тогда мы получим:
Отсюда мы найдём"
-1 ' **• y-\-x — i '
следовательно, постоянная If определится следующим образом через эле-
элементы движения (ю):
У + х-1
D8.18)
Если мы выразим, что второй интеграл D8.17) есть следствие интегралов
D8.12), то придём к равенствам
где X', ji'
дём:
•множители, аналогичные I и ц. Из этих уравнений мы най-
у 4ху
p.'={y±xrJ]27Jxy, <«.i9)
так определяется последний элемент движения (а>').
Если бы мы выразили постоянные Н и L? через начальные значения
проекций угловой скорости (оо^, щ^у ю0(., то правая часть равенства
D8.19) приняла бы вид
2 (х-У+Л*.
\у + х-\
отсюда и видно, что L'2~^>0. Из равенств D8.18) и D8.19) мы выво-
выводим:
у —
Н' — L'2 =
В результате мы находим:
У х—у+1\ у
(Я — /.2).
— 1J
D8.20)
549
Полученные формулы на основании соотношений D8.13) доказывают, что
если движение (ю) механически возможно, то и движение (а)') также воз-
возможно.
Заменив ось У а другой осью, всегда можно избежать случая, когда
у-\-х—1=0, если точько основное движение (ю) не является устано-
установившимся вращательным движением; в последнем случае, конечно, it
сопряжённое движение будет установившимся вращательным движением.
Действительно, если у-\-х—1=0, то ~==^т~\ • Заменяем ось
у а осью У В и пусть теперь оказывается, аналогично рассмотренному
счучаю, что -г = j . Написанные равенства возможны одновременно
только тогда, когда с = оо; а в таком случае вместо уравнений D8.4)
мы будем иметь:
Отсюда следует, что или
ю^—со = const. = 0, (!>(. = const. =?t 0,
или со =@,;= const. = 0, (оЕ = const. Ф О,
или со,. = в>? = const. = 0, <от = const. =ФО.
Из уравнений D8.16) вицно, что х' = у' при х = у; л;'=1 при
х=^\; У=1 при 3'==^> следовательно, если катящаяся поверхность
для движения (ш) была поверхностью вращения, то таковою же будет и
катящаяся поверхность для движения (ш'). Когда для одного из движе-
движений расстояние неподвижной плоскости от центра поверхности равно
какой-либо полуоси, то в силу соотношений D8.7), D8.9) и D8.20) то
же имеет место и для другого движения.
Мы выразили элементы движения (ш1) через элементы движения
(ш). Нетрудно было бы показать, что, обратно, элементы движения (ш,
выражаются через элементы движения (ю1) совершенно подобными же
формулами' например, вместо первых равенств D8.16) и D8.20)
мы имели бы
,/-*' +1
277. Обращенное движение Пуансо. Рассмотрим обращенное дви-
движение Пуансо, т. е. движение, соответствующее движению Пуансо, как
движению прямому (§ 54). Это движение геометрически истолко-
истолковывается качением без скольжения по неподвижной центральной поверх-
поверхности второго порядка одной из касательных плоскостей, остающейся
на неизменная расстоянии от центра.
Если мы примем, чго поверхности второго порядка, соответствующие
сопряжённым движениям Дарбу, имеют общие центр и направление осей,
то в силу соотношения D8.10) обе поверхности пересекутся по одной
и той же полодии. Закрепим неподвижно о<5е поверхности; тогда движе-
550
ния касательных плоскостей, т. е. обращенные движения Пуансо, могут
быть заменены качением гернолодиальных конусов, неизменно связанных
с этими плоскостями, по одному и тому же полодиальному конусу. В
каждый момент эти герполодиальные конусы будут иметь общую обра-
образующую с полоа.иал1ны\1 конусом и будут касаться с ним, а следова-
следовательно, и друг с другом. В таком случае относительное движение одной
касательной плоскости по отношению к другой сводится к качению од-
одного герполодиального конуса по другому. Если угловая скорость для
одной касательной плоскости по отношению к неподвижным поверхностям
есть -(- со, го для другой она будет — со, а поэтому для относительного
движения плоскостей угловая скорость будет равна 4; 2а>.
278. Теорема Сильвестра. Полодию для общего случая движения
Пуансо можно определить, как геометрическое место точек, лежащих на
центральной поверхности второго порядка и обладающих тем свойством,
что плоскости, касательные к поверхности в различных точках этой кри-
кривой, находятся на постоянном расстоянии от центра поверхности. Поэтому
на основании формул D7 65) иъ D 7.66) на стр. 535 и 536 при обо-
знпчениях, принятых в настоящей гллве, мы можем уравнения полодии
написать гак:
здесь буквою 8 обозначено постоянное расстояние касательной плоскости
от неподвижной точки тела.
Докажем теперь следующую теорему Сильвестра (Sylvester), которой
нам придётся впоследствии воспользоваться: если на нормалях к цент-
центральной поверхности второго порядка D8.21), проведённых в точках по-
полодии, отложить равные длины, то концы отложенных отрезков будут
лежать на новой полодии, принадлежащей другой центральной поверх-
поверхности второго порядка; эта последняя софокусна с поверхностью, гомо-
гомотетичной с первоначальной, и встречает построенные нормали ортого-
ортогонально. Согласно формулам D8.21) и D8.22) косинусы углов нормали
поверхности D8.21) с осями координат равны
Поэтому, если мы обозначим координаты точки на полодии через ?, г,, ?,
кооординаты конца отложенного отрезка через ?1( ци С,, а длину его
х
через у, то получим:
или
а-\-\'
551
Подставив эти значения отношений — , ~-, — в уравнения полодии
D8.21) и D8.22), мы найдём:
й5' ¦-•'¦¦— - D8.24)
D8.25)
Уравнение D8.24) можно переписать так:
й »2 :2 г %
отсюда, воспользовавшись равенством D8.25), мы найдём:
Формулы D8.25) и D8.26) и доказывают теорему Сильвестра: из ра-
равенства D8.26) видно, что точка ?,, *),, Cj лежит на центральной по-
поверхности второго порядка, софокусной с поверхностью
'а" + Т + 7==1 + ^'
а последняя поверхность гомотетична данной поверхности
равенство же D8.25) показывает, что плоскость, касательная к поверх-
поверхности D8.26) в точке S1( J)lt ?t, находится на неизменном расстоянии
8 —j—д- от центра поверхности; итак, кривая, изображаемая уравнениями
{48.25) и D8.26), представляет собой некоторую полодию; ортогональ-
ортогональность же поверхности D8.26) к построенным нормалям вытекает из ра-
равенств D8.23).
Заметим, что радиус-вектор рг точки (?t, r\v Cn) представляет собой
сумму радиуса-вектора р точки (|, 7), ?) и вектора длины у, направлен-
направленного по соответствующей нормали:
Если мы допустим, что размеры данной поверхности второго порядка
таковы, что радиус-вектор р по длине равен угловой скорости твёрдого
тела, совершающего соответствующее движение Пуансо, то выше изло-
изложенной геометрической теореме Сильвестра можно дать такую кинемати-
кинематическую форму: если телу, совершающему движение Пуансо, сообщить
постоянную угловую скорость вокруг нормали к неподвижной плоскости
качения, то сложное движение будет снова движением Пуансо, и новая
плоскость качения будет параллельна первоначальной; изменится лишь
катящаяся поверхность.
552
XLIX. ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ: СЛУЧАЙ ЛАГРАНЖА
279. Лагранжев случай движения весомого твёрдого тела вокруг
неподвижной точки. Симметричный гироскоп. Пусть весомое твёрдое
тело S движется вокруг неподвижного полюса О, для которого эллип-
эллипсоид инерции тела является поверхностью вращения. Пусть при этом
центр масс тела лежит на оси вращения эллипсоида инерции, или, как
говорят, на динамической оси симметрии тела (§ 252). Этот случай дви-
движения тела носит название лагранжева случай движения весомого твёр-
твёрдого тела, а само тело называется симметричным весомым гироскопом.
Уравнения движения D6.21) на стр. 513 для названного случая примут
вид
D9.1
"V
Здесь ось симметрии тела принята за ось О', а координата С центра
масс тела обозначена Сс, причём эта величина может быть и положи-
положительной, и отрицательной. Ось Oz попрежнему направлена вертикально-
кверху (§ 261). Косинусы а31, а82 по формулам (8.15) на стр. 77 сле-
следующим образом зависят от эйлеровых углов (р и Ь:
я31 = sin tp sin &, as2 = cos <p sin &. D9.2>
280. Простейшие интегралы уравнений движения. Последнее из
уравнений D9.1) показывает, что
о)^ = const. = о)О(.. D9.Зу
Далее, заметим, что приложенная к телу сила тяжести не даёт мо-
момента относительно вертикали; следовательно, кинетический момент тела
относительно оси Oz постоянен и равен своему начальному значению:
Ог = const. = О0г.
Согласно формулам (8.7) на стр. 74, D6.7) на стр. 509 и D9.3) мы
можем это уравнение переписать так:
где для краткости письма положено
« = й88 = соз0 D9.5>
[см. последнюю из формул (8.15) на стр. 77].
Непосредственно из уравнений D9.1) интеграл D9.4) получается так.
Умножаем первое из уравнений D9.1) на а81, второе на aS2 и склады-
складываем:
У« Kasi + %ям) + (Ле — Jv) Ю5 Ка82 — %аз1) = 0. D9.6)
Обратившись теперь к кинематическим формулам (9.23) на стр. 90, мы по-
получаем
J (а>-а
82 — со^д,) = yKa>ta88
553
с другой стороны, мы имеем
Подставив эти выражения в равенство D9.6) и воспользовавшись инте-
интегралом D9.3), мы находим:
J&. Kasi + <?*81 + °>,йв2 + ю„а82) + А^оч" = 0;
отсюда и вытекает интеграл D9.4).
Наконец, напишем интеграл энергии [см. формулу C1.40) на
стр. 316]
T
Выразив кинетическую энергию по формуле D6.1) на стр. 508, а сило-
силовую функцию по формуле C6.54) на стр. 391 и заметив, что
мы найдём:
•Лс ((О2 -I- О)'
281. Окончание интеграции. Выразим ю5, ю^, а>;, а„„ я82 через
эйлеровы углы соответственно по формулам (9.30) на стр. 92 и D9.2);
тогда найденные интегралы D9.3), D9.4) и D9.7) примут вид:
фи -f- <Р = о>ос» D9.8)
А$* A — к2) = GOz — JK(o0x_a, D9.9)
Ai {Ф2 (' — и2) -|- &2} = — 2Mg?cii -J- 2Л — У^о>и(. (^^-10)
Из уравнения D9.9) мы имеем
at
Подставив это выражение в равенство D9.10), мы найдём:
А-и3 (Оп, —
или, после сокращений,
= 7 {[
/
D9.12)
Наконец, из равенства D9.8) мы получим:
f = ^~ Х^ ^913)
Пусть центр масс тела лежит на положительной стороне оси О';
тогда ?с будет положи1ельно, и, следовательно, мы будем иметь
D9.14)
554
Здесь через а0 обозначено начальное значение переменной и, причём,
конечно, и0 заключено в интервале
Полином Q(u) для и—и0 должен принять положительное значение
или обратиться в нуль, так как иначе для начальной скорости и0 мы по
формуле D9.12) получили бы мнимое выражение. Из неравенств D9.14)
мы видим, что
Q(H)=2^k(H_« )(ц_н2)(и — и'), D9.15)
если через и,, ю2, и' мы обозначим три вещественные корня полинома
Q(u). Эгн корни расположены в таких интервалах:
°- D9.16)
Из равенств D9.12) и D9.15) ясно, что для того, чтобы и сохраняло
вещественное значение, и должно меняться в пределах от «j до и2:
«1 =S и sS и2-
Введём новую переменную ^, положив
согласно только что написанным неравенствам ]{ всегда будет оставаться
вещественным. Мы имеем
и — «j — — (и, — аг) sin2x.
и — и' = (и, — и') A — k* sirr'x),
где
и' — иг '
причём А2 в силу неравенств D9.16) заключено в пределах
Подставив вычисленные значения разностей и — и,, и — и2, и—и'
в уравнение D9.12), мы найдём:
—^L== = *dt,
где
У
Отсюда аналогично тому, как это было сделано в § 132 и 269, мы по-
получим:
sin 1 — sin am (st -J- J5),
ne ^ — произвольная постоянная. Теперь из уравнения D9.17) мы най-
найдём и как функцию от времени, а затем получим (риф квадратурами
из уравнений D9.13) и D9.11). Этим мы и закончим интеграцию.
555
Остановимся на частном случае движения гироскопа; именно, до-
пустим, что
«он = О-
Тогда уравнения D9.11) и D9.12) можно будет переписать так:
Выпишем для сравнения первое из уравнений B1.26) и уравнение B1.27)
на стр. 205, относящиеся к движению сферического маятника; предва-
предварительно заменим обозначение угла ср на ф и положим
где Ь в применении к маятнику означает сферическую координату «до-
«дополнение до широты»; мы получим:
о
*-(-*•+*) <> —>-?•
Отвлекаясь от различного обозначения произвольных постоянных, мы ви-
видим, что уравнения движения оси, гироскопа и сферического маятника
станут одинаковыми, если положить радиус шара равным
/? = ——.
Иначе говоря, ось симметрии тела совершает такое же движение, как
радиус-вектор весомой частицы, принуждённой оставаться на сфере ука-
указанного радиуса.
282. Сферический гироскоп. Твёрдое тело, подпёргое в одной точке,
называется сферическим гироскопом, если эллипсоид инерции для точки
опоры обращается в сферу. Покажем, что движение весомого симмет-
симметричного гироскопа может быть поставлено в весьма простую связь с дви-
движением некоторого весомого сферического гироскопа. В самом деле, инте-
интегралам D9.3), D9.4) и D9.7) мы можем дать вид
D9.18)
где
Ш
D9.19)
а ? и К— новые постоянные, функции прежних. Станем теперь одно-
одновременно с симметричным гироскопом S рассматривать воображаемое
556
тело 2, имеющее относительно S постоянную угловую скорость
(а>ос-—шОс) С0 вокруг оси симметрии. Таким образом, проекции угловой
скорости ю' тела 2 на оси ОщИ, равны
Если теперь постоянную величину а>^ мы выберем так, чтобы выполнялось
равенство
то интегралы D9.18) для тела 2 заменятся следующими:
МЛ1 4 <Vs2 + »;* — 2Е< \ D9.20)
«?4-«\2+Ч2=2D«4-2/^'. J
где /Г' —1 новая постоянная, отличная от постоянной К-
Сравнивая уравнения D9.18) и D9.20), мы вддим, что движение тела 2
происходит так, как будто оно было весомое, а эллипсоид инерции для
точки опоры был сферою.
Итак, общий лагранжев случай движения твёрдого тела получается
из того частного, когда эллипсоидом инерции служит сфера, посредством
присоединения постоянного вращения вокруг оси симметрии тела.
283. Разложение движения сферического гироскопа на прямое
и обращенное движения Пуансо. Покажем теперь, как движение весо-
весомого сферического гироскопа с помощью сопряжённых движений Дарбу
(§ 276) можно разложить на два движения: на движение Пуансо и на
обращенное движение Пуансо. С этой целью мы станем искать проме-
промежуточную неизменяемую среду, относительно которой неподвижное про-
пространство и сферический гироскоп совершали бы обращенные движения
Пуансо, сопряжённые между собой. Пусть направлением нормали к ка-
катящейся плоскости для одного движения будет вертикаль, а для другого
ось симметрии. Обозначим через Q угловую скорость гироскопа по от-
отношению к промежуточной среде и через а> его угловую скорость по
отношению к неподвижной среде; тогда по сказанному в § 277 мы
будем иметь:
ю = 2й. D9.21)
Далее, если за координатные оси мы возьмём совпадающие между собой
оси поверхностей второго порядка, неизменно связанных с промежуточной
средой, то косинусы углов вертикали с осями будут пропорциональны
величинам
D9.22)
а косинусы углов оси симметрии величинам
<о5, лг'со^, у\; D9.23)
здесь сохранены обозначения гл. XLVIII.
Прежде всего мы убеждаемся, что интегралы D9.20) могут быть
получены как следствия интегралов D8.12) и D8.17) на стр. 548.
557
Рассмотрение первого из интегралов D9.20) на основании выражений
D9.20) и D9.23) приводит к равенству
<*
если для удобства письма введём новую постоянную В вместо ш^. Из
этого равенства вытекает такое соотношение между постоянными:
2?= Я. D9.24)
Подобным же образом из второго из интегралов D9.20) мы выводим
1-=Е. D9.25)
Третий из интегралов D9.20) в соответствии с выражениями D9.21),
D9.22) и D9.23) напишется так:
и\ + «о», + шс2 = у (Du + К') =2ZT К + **'Ш' + J^"9 + Т *'•
Если интегралы D8.12) на стр. 548 мы умножим на соответственно
выбранные множители X и ц, а затем сложим, то в результате мы должны
будем получить предыдущее выражение. Это соображение приводит нас
к таким четырём уравнениям между постоянными:
D , . , , Dxx'
, / D9 26)
Полученные шесть уравнений связывают произвольные постоянные инте-
интегралов с шестью постоянными: двумя множителями I, ц и четырьмя
элементами х, у, Н, L движения (ю). Остаётся только исследовать,
дают ли предыдущие уравнения вещественные значения для этих эле-
элементов и притом значения, удовлетворяющие условиям D8.13) на
стр. 548.
Прежде чем итти дальше, найдём, какое механическое значение имеют
введённые постоянные В, Е и К'. Постоянная D была уже определена
выше равенством D9.19). Далее нетрудно сообразить, что
0 COS 0 COS if n
В = -^4—. ?=-i2-1. K'=-? — Dcos$0f D9.27)
если под ю0 разуметь начальную угловую скорость гироскопа, под
а, у — углы этой начальной скорости с начальным положением оси симмет-
симметрии и вертикалью, а под &0 — начальный угол оси симметрии с верти-
вертикалью. Заметим, кроме того, что дифференциальное уравнение для опре-
определения и согласно формулам D9.12) и D9.20) теперь будет уже таким:
^u2 = ^(Du^-K'){\ — и2)— В2 — Ег-\-2ВЕи. D9.28)
558
Введём новую переменную z, положив
* = ?. D9.29)
Исключим теперь четыре величины: Ну L, А/ и L' из уравнений D9.24)
и D9.25) настоящего параграфа, а также уравнений D8.18) и D8.19) на
стр. 549 и предыдущего равенства D9.29); мы тогда найдём для г урав-
уравнение
4В»*у(*-!)(*-!) (*--!) +
-4- 1)— 2р=0. D9.30)
При определении постоянных Н% L, H1, L', получается
&[z(y f x+l)-2| .
после этого первое и последнее из уравнений D9.26) дают для множите-
множителей X и (Л следующие значения:
—г 2?»U — г) [г (j/4-^4-D— 2| 2?» U — г) '
г DBz* {у -f х - 1) AV
+ \)— 2) 2& (z — 1) '
Подставив найденные значения X и ц в средние уравнения D9.26), мы
после упрощений получим,
0,
— Mzsy (x —у — 1 + 2гу) = 0, )
где обозначено
1 1 \
= у DB = -т ищ cos a;
D9.32)
Вычти одно из другого уравнения D9.31), мы после сокращений найдём:
-г? , D9.33)
где
Az = E3—{N—M)z — 2Mz2. D9.34)
Исключив из уравнений D9.31) члены с коэффициентом TV, мы получим
после упрощений:
?8[2(.У-1-л;-Н) — 2]-\-2Mz*xy = 0, D9.35)
откуда
559
При упрощениях мы отбрасывали множители (л;—1), (г—1), (у—х)
« т. п., так как обращение их в нуль приводит не к общему случаю, а к
частным: к случаям вращения поверхности, связанной с промежуточной
средой, вокруг главных осей; к случаю, когда эта поверхность является
поверхностью вращения; к случаю качения этой поверхности по плоскости,
отстоящей от центра на длину средней оси.
Равенство D9.33) может быть заменено таким:
,49.37,
Из выражений D9.36) и D9.37) следует, что — и — служат корнями
х у
квадратного уравнения
/^\ = 0.
Если в левую часть этого уравнения подставить z вместо и, то получится
где
k = Es — M — Л/=ДA). D9.39)
Исключив х и у из уравнения D9.30) при помощи равенств D9.36)
и D9.33), мы получим:
F(z) = B^^{z)-\-M^(B2 — G2)z(l—zf = 0. D9.40)
Приняв во внимание равенство D9.39), мы найдём:
D9.41)
следовательно, это — всегда положительная величина.
Мы искали Н, L, х, у, т. е. элементы движения <о. Конечно, можно
было бы искать элементы сопряжённого движения И', L', х', у'. Ясно
само собою, что в результате мы получили бы формулы, вполне анало-
аналогичные найденным, только постоянные В и ? поменялись бы местами.
Так, например, уравнение для
вместо D9.30) было бы таким:
\ (Е2 — В*) z'(\ — гУ = 0,
где
Д, (z1) = Bs — (N1 — М') г' — 2M'z'\ k\ = Д' A),
1 1 (т\ \
М' = т ?>ш0 cos y, N1 = т ©0 cos a \-f- — Dcos tp01 .
Перейдём теперь к исследованию возможности сопряжённых дви-
движений Дарбу. Займёмся сначала тем случаем, когда В2<?^Е2. За
начальное положение гироскопа выберем то, при котором производная
560
по времени от угла & нутации равна нулю. Таких положений два: для
них величина a0 = cos&0 удовлетворяет согласно формуле D9.28) урав-
уравнению
(\ — a*
т. е. в силу соотношений D9.27) уравнению
cos 00 = cos (a± у).
Мы выберем за начальное то положение, для которого
±а = и0 — у. D9.42)
Изменив направление оси симметрии, т. е. знак ?с, мы можем согласно
равенству D9.19) всегда сделать одинаковыми знаки у постоянных Е и D.
Таким образом, все возможные начальные условия сводятся к двум:
1)?>0, Z)>0 и 2)?<0, ?)<0.
При этом постоянная k будет для первого случая отрицательной, а для
второго положительной, как это видно из равенств D9.39) и D9.42):
k — Es — М— N= g-cosy sin2 у j- w0Z) (cos a — cos &0 cos y) =
= j- sin2Y • G j- (o0D sin &0 sin y.
Пусть мы имеем первый подслучай:
52<?2, ?>0, Z)>0,
Из уравнения D9.40) мы находим:
/=¦(— оо)>0, /=-@) = fi2
следовательно, уравнение D9.40) имеет вещественный корень
Но в таком случае из этого уравнения вытекает, что
а потому из равенств D9.35) и D9.38) следует
Итак, х w у оба вещественны и имеют одинаковые знаки. Осталь-
Остальные элементы движения (со), а именно, Я и /., также вещественны, ибо
рационально зависят от л;, у, z. Кроме того,
*о— 1<0,
что в связи с неравенствами D9.43) показывает согласно формуле D9.29)
и формуле D8.13) на стр. 548, что движение (ш) механически возможно;
следовательно, возможно и сопряжённое ему движение (со).
Во втором подслучае мы имеем
36 Г. К. Суслов 561
Теперь из уравнения D9.40) согласно результату D9.41) получается
И + ссКО, /7A)>0;
следовательно, уравнение D9.40) имеет корень
Но в таком случае из уравнения D9.40.) вытекает, что
Д(*а)>0;
следовательно, из выражений D9.36) и D9.38) мы находим:
ху<0, (*o--j) (*о-у) <0. D9.44)
Поэтому х и у оба вещественны и имеют различные знаки, а так как
по предыдущем}
«о—1>0,
то из неравенств D9.44) мы опять выводим, что движения (ю)и(а)') меха-
механически возможны.
Если В*— ?2^>0, то мы обращаемся к уравнениям, определяющим
элементы движения (со'). Повторив дословно выше сказанное, только с
перестановкой постоянных В и Е, а и у, мы убедимся в механической
возможности второго из сопряжённых движений, а следовательно, и
первого.
Если, наконец, В2— Е2 = 0, то уравнение D9.40) для z принимает
вид
Д(>) = 0; D9.45)
следовательно, в силу соотношения D9.35) одна из постоянных х или у
обращается в бесконечность. Пусть л;=оо, т. е. полуось УТ катя-
катящейся поверхности обращается в нуль, и, следовательно, поверхность
становится диском; тогда из соотношения D9.35) мы найдём для у
уравнение
i = -ifl. ,49.46,
Пусть Е > 0 , D > 0; тогда
ДA)<0, Д@)>0;
следовательно, уравнение D9.45) имеет корень zQ, причём
0<*0<1.
Подобным же образом для Е <^ 0, D <^ 0 мы найдём:
ДA)>0, Д@)<0;
следовательно, опять уравнение D9.45) имеет корень в том же интер-
интервале. В обоих случаях раздости
z-\. г--, г-1
для л;=оо заменяются разностями
z— 1, z, z—jl
562
поэтому при произвольном значении у, которое на основании фор-
формулы D9.46) должно быть вещественным, движение (ю) механически воз-
возможно, действительно, из неравенств D9.47) вытекает, что
следовательно, условие D8.13) на стр. 548 всегда выполняется.
Итак, возможность разложения движения сферического гироскопа на
прямое и обращенное движения Пуансо доказана нами для произвольных
начальных условий.
284. Теорема Якоби о разложении движения симметричного гиро-
гироскопа на прямое и обращенное движения Пуансо. В § 282 бы ю
указано, что общий лагранжев случай движения весомого твердого тела
получается из движения сферического весомого гнроскога прибавлением
постоянной угловой скорости вокруг оси симметрии, т. е. перпендику-
перпендикулярно к плоскости качения одного из движений Пуансо, о которых го-
говорилось в предыдущем параграфе. По теореме Сильвестра (§ 278) от
прибавления такой постоянной угловой скорости мы получаем из движе-
движения Пуансо снова движение Пуансо. Таким образом мы и приходим к
теореме Якоби: движение симметричного весомого гироскопа всегда
может быть разложено на два движения: на прямое движение Пуансо и
на обращенное движение Пуансо.
L. ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ:
СЛУЧАЙ С. В. КОВАЛЕВСКОЙ
285. Условия, при которых весомое твёрдое тело совершает
движение, исследованное С. В. Ковалевской. Положим, что для точки
опоры весомого твердого тела между его главными моментами инерции
существует такая зависимость:
Уе = У1П = 2Ук; E0.1)
пусть, кроме того, центр масс тела расположен в плоскости, проходя-
проходящей через точку опоры и перпендикулярьой к динамической оси сим-
симметрии тела плоскость эту для краткости будем называть плоскостью
равных моментов. При указанных условиях тело будет совершать то дви-
движение, которое было рассмотрено С. В. Ковалевской. Закон движения те-
тела в этом случае выражается с помощью ультраэллиптических функций1).
Если крест главных осей инерции с равными моментами повернем в
экваториальной плоскости эллипсоида инерции так, чтобы ось 0$ прошла
через центр масс, то для разбираемого случая уравнения D6.21) на
стр 513 примут вид
i; — /tt«yol = O, |
^ | E0-2)
Непостижная ось Oz потрежнему предполагается направленной вгрти-
1) Ь. KowalSvvski Sur le probleme de la rotation d'un corps sollde autour
d'un point f|xe, Act Math XII,, Sur une propriete du systeme q'equatmns difteren-
tielles qui definit Ja rotation d'un corps solide autour d'un point tixe, Act Math ,XIV.
36* 563
кально вверх Выберем для простоты единицу времени так, чтобы имело
место численное равенство
yK = Af?$c. E0.3)
Тогда уравнения E0.2) заменятся следующими.
E0.4)
Сюда присоединяются еще три уравнения D6.22) на стр. 513.
E0.5)
286. Простейшие (алгебраические) интегралы уравнений движения.
Их геометрическое толкование. Уравнения E0.4) и E0.5) допускают
следующие очев'дные интегралы
2(ш| + шр + ш2 = -2«81+2/г, E0.6)
2 (u>5tf8] -{- шг/г83) -|- w^ass = 2/, E0.7)
в?. + 4+<&=1. E0-8)
где h и /—произвольные постоянные. Первый интеграл представляет со-
собой интеграл энергии. Второй интеграл выражает постоянство кинети-
кинетического момента тела относительно вертикали, проведенной через точку
опоры; непосредственно из уравнений движения он получается тем же
приемом, каким был найден интеграл D9.4) на стр. 553 Наконец, по
следний интеграл представляет собой известное соотношение между напра-
направляющими косинусами прямой
Станем рассматривать воображаемую точку N, координаты которой
S, 7), ? связаны с угловой скоростью и положением тела следующими
численными равенствами:
? = < — ш' — aSI, Ч = 2юе©ч —ви, 2C = a>2-f4u>2. E0.9)
Нетрудно убедиться, что координаты точки N изменяются в зависимости
от времени со1ласно уравнениям
k = <otri, rf=—ю^, ? = С1>С7]. E0.10)
Написанные уравнения имеют очевидные интегралы
С—« = Д E0.11)
i«+!¦,» = *«, E0.12)
где D и k — произвольные постоянные. Интеграл E0.11) совпадает с
интегралом энергии, иначе лишь обозначена произвольная постоянная:
очевидно, что D=2h Интеграл E0.12) — новый, независимый от най-
найденных выше, и называется обыкновенно интегралом Ковалевской. Равен-
Равенства E0.11) и E0.12) показывают, что точка N движется по эллипсу,
служащему пересечением цилин фа E0.12) с плоскостью E0.11).
564
Обратим особое внимание на точку п, являющуюся проекцией точки N
на плоскость равных моментов (фиг. 147). Из уравнений E0.10) мы
полумаем:
Если угол между радиусом-вектором точки п и осью OS мы обо-
обозначим через 6, т. е. если положим Ig8 = y, то с помощью уравнений
E0.10) найдём:
6 = —а)с. E0.13)
Равенства E0.12) и E0.13) говорят, что движение точки п совершается
так, как будто бы она лежала на гладкой плоскости равных моментов
и находилась на конце стержня длины k, сое-
соединённого шарниром с началом координат (точ-
(точкой опоры). Действительно, тогда она принимала
бы участие во вращениях юе и ю7, но не участ-
участвовала бы во вращении и)с, и, следовательно,
угловая скорость её радиуса-вектора по отно-
отношению к твёрдому телу была бы —ш?°. .
Отложим по вертикальной линии, проходя- * '
щей через неподвиж-ный полюс, единичный век-
вектор г° и спроектируем его на плоскость рав-
равных моментов. Точка т, проекция конца построен-
построенного вектора, будет иметь своими координатами я31 и а32. Обозначим
через р вектор, соединяющий точки т и п, и через ф— угол, образуемый
им с осью О?. Тогда мы получим:
? — Д31 — Р cos ф, 1 — Д82== Р s'n Ф-
Если проекцию мгновенной угловой скорости на плоскость равных момен-
моментов мы обозначим ю^ а угол между ортогональной составляющей
угловой скорости в плоскости равных моментов и осью OS через <р, то
первые два равенства E0.9) перепишутся так:
а& cos 2ср = р cos ф, to2 sin 2sp = р sin ф,
или
ш2 _ 1 ,
т. е. квадрат проекции угловой скорости тела на плоскость равных мо-
моментов пропорционален, а при нашем специальном выборе единиц чис-
численно равен расстоянию р, а угол, образуемый с осью OS ортогональ-
ортогональной составляющей угловой скорости в плоскости равных моментов вдвое
меньше угла, образуемого с той же осью вектором р. Что же касается
квадрата проекции угловой скорости на ось ОС. то он следующим обра-
образом зависит от положения точек N, п и т:
287. Подготовительные преобразования. Система шести уравнений
E0.4) н E0.5) содержит время лишь под знаком дифференциала;
565
следовательно, она, как и система уравнений C2.53) на стр. 394, может
быть заменена системой уравнений, числом на единицу менйШим,
т. е. системой из пяти уравнений вида, подобного уравнениям C2.54)
на стр. 395. Для этих уравнений нам уже известны четыре интеграла
E0.6), E0.7), E0.8) и E0.12); а потому на основании теории послед-
последнего множителя Якоби (глава XL) последний, пятый, интеграл найдётся
с помощью квадратуры. Отсюда вытекает, что полная система интегралов
уравнений E0.4) и E0.5) определится с помощью двух квадратур. Тогда
мы найдём а>?, а^, ю,., а31, л82, а33 как функции времени. Однако, как
было уже замечено в § 261, интегрирование уравнений движения E0.4),
рассматриваемых как уравнения второго порядка относительно углов
Эйлера (р, ф, &, этим ещё не закончится: потребуется ещё одна квадра-
квадратура. В самом деле, согласно формулам (8.15) на стр. 77, мы имеем
«81 = sin!p sin 0, а32 = cos <f sin 0, a38 = cos$.
Отсюда мы непосредственно найдём углы <р и 9:
а = arctg ^21 & —arccos а„„.
Что же касается угла ф, то он определится квадратурой. Действительно,
согласно третьей из формул (9.30) на стр. 92 и только что найденному
выражению для ш мы получаем
Во всяком случае из всего сказанного мы выводим, что найденных
четырёх интегралов E0.6), E0.7), E0.8) и E0.12) достаточно для того,
чтобы задача о движении твёрдого тела закончилась квадратурами. Для
приведения разбираемой задачи к квадратурам мы будем пользоваться
изящным геометрическим методом проф. Н. Е. Жуковского !), несколько
упрощённым Танненбергом 2).
Предварительно преобразуем полученные интегралы, а именно, при
помощи равенств E0.9) исключим из них косинусы а81 и а32. Кроме
того, вместо угловых скоростей а>е, со,., а также координат $, rf введём
комплексные величины z, zv ?, С,, связанные с ними так:
г = ш| + /тч, г, = <щ—i©,, :~$-f й}. C, = S — щ, E0.15)
где/ = ]А—1. Следовательно,
2^ = * + *,, 2ч>^1{гх — :), 25 = 5 + :,, 2rJ=si(C1—С).
1) Н. Е. Ж у ков ск и4, Геометрическая интерпретация рассмотренного
С. В. Ковалевского случая движения тяжёлого твёрдого тела около негодвиж»
ной точки, Москва, 1896. Мат. сб., т. XIX.
*)W. Tannenberg, Sur la theonedes formes du quatrieme degre et celle
des integralee elliptiques, Bordeaux, Gounouilhou, 1898.
W. Tannenberg, Sur le raouveraent d'un corps solide pesant autour
d'un point fixe; cas particulier signals par M-rae Kowalewski, Bordeaux, Gou-
Gounouilhou, 1898. В этом же сочинении найдутся и указания на остальную лите-
литератору вопроса; надо только прибавить: Г. Колосов, Об одном свойстве
задачи С. В. Ковалевской о вращении тяжёлого твердого тела вокруг непо»
двнжной точки, XI том Труд. О, Л. Е., А. и Э.
566
Кроме того, по формулам E0.9) мы находим:
Подставив эти выражения в интегралы E0.6), E0.7), E0.8) и E0.12),
мы получим.
? - с*? - с,*8 4- <4 = 1 -
( ]
Дифференциальными уравнениями, которым удовлетворяют переменные
z и z.
согласно равенствам E0.4) будут
2iz =ю;г — й3
• 2izx =
-а„. E0.17)
Из выражений E0.16) мы выведем уравнения для определения
шг.< as8> ? и ^i KaK функций от z и zv Для этого умножим первые три
уравнения E0.16) соответственно на z2, — 2z, 1 и сложим их; затем
умножим эти же уравнения на z\, — 2zlt 1 и сложим; наконец, умножим
уравнения на zxz, — (г, -j-^)» ' и тоже сложим. Четвёртое уравнение оставим
без изменения. В результате мы получим:
E0.18)
где
- аВ8) (е>Л - я3з) =-F (*,*i) —* (* ~*i)a.
f{z) = г4 — 2hz2 -j- 4/г -f fe2 — 1,
1.
E0.19)
E0.20)
288. Криволинейные координаты С. В. Ковалевской. Займёмся
следующими эллиптическими интегралами:
Г йг С dz.
Станем рассматривать ш^ и ю как координаты хну некоторой точки ц,
находящейся на плоскости равных моментов (фиг. 147). В нашем случае
эта точка будет проекцией на плоскость равных моментов конца мгно-
мгновенной угловой скорости тела. Итак, положим временно
Тогда мы получим:
z — x-\-ty, zx = x — iy,
f(z)=X+iY=R (cos X — / sin X),
f(z1) = X— iY— R (cos > — г sin X),
_y
E0.22)
567
Здесь через X, Y, R, \ соответственно обозначены вещественная часть,
коэффициент при мнимой части, модуль и аргумент функции f(z). Семей-
Семейства линий pj = const., p2z= const. могут рассматриваться как система
координатных линий, отвечающих некоторой криволинейной системе ко-
координат на плоскости. Уравнениями этих координатных линий согласно
формулам E0.21) являются
l% Eа23)
E0-24)
Ту же систему координатных линий мы получим, введя
другие координаты sx и s2, если только
Как показал Эйлер, дифференциальное уравнение
трансцендентные интегралы которого написаны выше в форме E0.23) и
E0.24), имеет и алгебраический интеграл. Найдём его по методу Ла-
гранжа. Считая р2 постоянным, мы получим из уравнений E0.21) в соот-
соответствии с равенствами E0.22) следующие соотношения:
Продифференцируем эти уравнения ещё раз; согласно равенству E0.19)
мы получи»:
4+^
dfi dpt rfpf 2Vf(z) dz
Точно так же мы найдём:
Отсюда, заменив z и zx их значениями по формулам E0.22), мы придём
к уравнению
^f = — 2/ — 2Ajc -f- 2 (л^ — Ъхуъ). E0.27)
dpi
Из равенств E0.25) и E0.26) мы находим:
%=±{УЖ)±У7п}, %=j\V7^)-V7W)}; Eo.28)
следовательно,
663
Составив теперь дифференциальное уравнение с помощью выражения
E0.27), мы получим:
Л*х dx dy ли
у —-. — = — 4хуа.
dpi dpx dp,
После умножения на -§ — это уравнение обращается в такое:
2 dx dbc 2_ /dxу dy g dx_
У2 dpi df\ у3 \dp1) df>! dpi
После интегрирования мы отсюда получим:
здесь через s2 обозначена произвольная постоянная; она, очевидно, будет
некоторой функцией одного только р2. Подобным же образом мы полу-
получим уравнения
% V K(^ ^), WO)
из них мы находим интеграл
где 5, есть функция одного только параметра рг
Если для производных -~, —¦* мы введём обозначения
то равенства E0.21) можно будет переписать так:
4L ^ ^E0.33)
4L= + -^L
Vt (ж) Vfi*i)
4L^ dS E0.34)
Определением вида функций фг и ф2 мы теперь и займёмся. Из уравне-
уравнений E0,25), E0.26), E0.31) и E0.30) следует:
dx .
E0.35)
569
Подставив эти значения производных в равенства E0.32) и E0.29), мы
найдём:
2yLy' \ E0.36)
Заменив X, R, x, у их значениями из равенств E0.22), мы получим:
E0.37)
; E0.38)
здесь для сокращения положено
Из приведённых выше значений для s1 и s2 мы выводим:
о о ' JJI " lCLfl QQ\
/72 ft П
5!52 = ^izi;^ = (Z-ZlJ > E0-4')
где
G — lzZi (z-f-z,)-}--^ (^2-|v 1 — *2) (•2' + ziJ4~^('2r~b'2riL~'2'
Из формул E0.40) и E0.41) видно, что s, и s2 служат корнями урав-
уравнения
Ц/^Z, Zj, S) \Z Z^j S l S ~Y~ \J U. @U.4-Z)
Заметим, что левая часть этого уравнения, т. е. функция Q для зна-
значений z, служащих корнями уравнения f(z) = 0, представляет собой
полный квадрат. В самом деле, для z-=z0, если f(zQ) = 0, мы находим
из равенства E0.41) следующее выражение для G:
G_F4z(j, zt, s)t
на этом основании мы из равенства E0.42) получаем:
Г F \2
То же обстоятельство имеет место и для значений zJ( обращающих
В Нуль фуНКЦИЮ /(Zj),
Возьмём от Q производную по s:
Возвысим её в квадрат:
570
Исключим s с помощью соотношения E0.42); согласно равенству E0.41)
мы получим:
Расположим теперь функцию Q по степеням zx: пусть
Q=A?f-f &,+С=0, E0.44)
где согласно равенствам E0.19) и E0.20) коэффициенты А, В, С имеют
значения:
A = s2 — (z* — h)s-\-...,
B= — 2zs2-{-2ls-\-...,
C=z2s? + s(hz2-\-2lz+\ —k2) 4-...;
здесь выписаны лишь члены с высшими степенями s.
Составим производную:
Возвысим её в квадрат:
Исключив z1 с помощью соотношения E0.44), получим:
<5о-45>
Правая часть этого равенства представляет собой целую рациональную
функцию от s и z; при этом по значениям коэффициентов А, В, С можно
усмотреть, что эта функция относительно z — четвёртой степени, а отно-
относительно 5 — только третьей. Когда правая часть равенства E0.45) обра-
обращается в нуль, то выражение E0.44) становится полным квадратом. Но
мы видели раньше, что указанное обстоятельство имеет место для вся-
всякого z, равного какому-либо корню уравнения f(z) = Q; следовательно
выражение В2 — 4АС должно делиться без остатка на f(z), а так как
функция / (z) — четвёртой степени, то по сказанному выше мы имеем
где (р (s) — ц^лая рациональная функция третьей степени от s. Коэффи-
Коэффициент при s8 в <p(s) равняется 4, что можно увидеть из выражений для
А, В и С. Игак, мы имеем
= ?(*)/(*)• E0-46)
Подобным же образом мы найдём симметричное выражение
Составим теперь полный дифференциал функции Q;
571
Подставим сюда знчачения производных и разделим уравнение на произ-
произведение радикалов; мы получим
йг dzt_ . ds
Vt \2)~~V f 1гл)~~ —VvTs) '
Сравнивая полученный результат с равенствами E0.33) и E0.34), мы
видим, что функции ф,(?,), ф2 Eг) имеют такой вид:
<!>() 1 ф E) !
по сказанному выше функция tp (s) равна
<p(s) = 4(*—a)E—P)(s —Т),
где а, р, у — корни кубического уравнения y(s) = 0. Итак, мы имеем
^ ^ ^ E0.48)
* -^L_ = _?r_. E0 49)
Составим теперь выражение для линейного элемента
dS2 = dxs -j- dy2 = dz dzx E0.50)
в новых координатах s, и st. Предвартельно заметим, что новая система
координат ортогональна; кроме того, касательная к координатной линии
р2 = const параллельна биссектрисе угла вектора Л с осью OS. R по-
прежнему означает модуль функции f(z), т. е модуль радиуса-вектора
той точки плоскости, которая изображает собой комплексную величину
f{z). Действительно, угол б, касательной к кривой s2 = const, с осью
? определяется формулой
""V&Nfcp'
этот косинус после подстановки значений производных — , ~- из уравне-
уравнений E0.25) и E0.26) примет вид
cos в, = cos j. E0.51)
Подобным же образом для угла в, касательной к кривой st = const.
с осью ? мы найдём выражение
созб,= — sitij. E0.52)
Сопоставив полученные равенства с формулами E0.22), мы видим, что
оба высказанные выше положения доказаны.
Так как система координат slt ss ортогональна, то линейный элемент
представигся так:
<iSa = da?-|-flbi E0.53)
572
где djv da2—дифференциалы дуг соответствующих координатных линий.
Пусть ?fa, есть элемент координатной линии s2 = const. Тогда для
на этой линии по формулам E0 48) и E0.49) мы найдём
dz . dz\ dsi dz dzi n
,/¦7" Г I
i) ±/niii' Vf{*)
Отсюда мы получим
'Ыг dsx 2dz] ds\
В обеих формулах знаки при радикалах Vfis^) должны быть одинаковы.
Перемножив эти уравнения, мы, согласно формулам E0.50) и E0.22)
найдем.
ds\
У /U)/U,) R
Подобным же образом аля опредепения da, мы получим равенства
dz . dz,
E0.54)
Ыг ds2 2dZ) ds 2
У радикала у tp (s2) в обеих формулах знаки одинаковы, следовательно,
_ z г' г == !i — _ d l E0.55)
Из равенства E0.53), E0.54) и E0.55) мы получим следующее выра-
выражение для линейного элемента'
Имея готовую формулу для dS2, мы с помощью соображений,
использованных при выводе формулы F.23) на стр. 56 можем составить
выражения для проекций скорости v какой-либо точки на оси рассмат-
рассматриваемых координат:
z,cosX = _>3=-^. ™m= -Д=-*?. E0-57)
2Vf(sx) dt 2У — v(si) dt
где через X обозначен угол между скоростью v и касательной к коор-
координатной линии 52 = const.
289. Приведение к квадратурам. В § 288 мы ввели в рассмотрение
точку (л, координаты которой в подвижной системе О1т? имели числен-
численные значения х = ш^ у = (от, z = 0. Представим себе теперь в плоскости
равных моментов еще две точки: точку Л1 с координатами X, Y и точ-
точку V с координатами К', У (фиг. 148) Координаты X, Y пусть имеют
прежние значения E0.22), а X', У пусть следующим образом связаны
с движением точки ц:
(g)\ E0.58)
573
Стороны треугольника OV'Al просто выражаются как функции от 2 и г,.
Действительно, сторона ОМ^=а как модуль функции f(z) представится
так:
OM = a = Vf(z)f(zl). E0.59)
Далее, заметим, что, по доказанному выше, биссектриса угла, образуе-
образуемого стороной ОМ с осью OS, параллельна касательной к кривой 52==const.,
проходящей через точку jjl. Так как согласно формуле E0.58)
то
Точно так же биссектриса угла между отрезком О V' и осью ОЗ парал-
параллельна скорости точки д; это вытекает из равенства E0.60)
= cos2(O-, v).
Пусть Оа и ОР представляют собой биссектрисы углов ЮМ и $Ог»'; если
)jT изображает касательную к координатной линии s2 = const., проходя-
проходящей через рассматриваемое положение точки ц, а вектор ц V изображает
скорость v точки д, то, по сказанному, мы имеем
Осг||ц7\
следовательно, прн обозначении E0.57) мы получаем:
/_ V0M = 2/_ VjiT=2\. E0.62)
Третья сторона MV рассматриваемого треугольника найдётся из следую-
следующих соображений. Уравнения E0.17) и E0.18) дают:
4 (?)¦=/(*)-С (,_г1Л
или, согласно формулам E0.60) и E0.15):
Х' + ,r = * + /K—(г —^«(S-Hr,
Фиг. 143.
Отсюда мы находим:
А" =Х— (z — z
Y'= Y'—{z
zx)\
Эти два скалярные равенства в силу соотношения E0.12) равносильны
следующему векторному:
0V=0M-{-{— {z — zrfk}. E0.63)
574
Второе слагаемое представляет собой вектор длиною (z — z^k, парал-
параллельный вектору Оя = к (см. фиг. 147 на стр. 565). Из равенства E0.63)
мы заключаем, что третья сторона рассматриваемого треугольника равна
MV'=k(z~zlJ. E0.64)
На основании формулы E0.62) мы можем теперь вычислить cosX и
sin X по сторонам треугольника О V'M, а именно:
; + 'C). E0.65)
Sin21 = Sin2 i /. V'OM = (b + c-aUc + a-b) _ EQ 66)
Но согласно формулам E0.59), E0.61), E0.64) имеют место равенства
Кроме того, из равенств E0.17) и E0.18) следует:
Подставив это значение величины 4и2 в предыдущие выражения и вос-
воспользовавшись соотношением E0.37), мы получим:
с = — 2(z — г,JE, — к,),
где
. h_±k. h h — k
На этом основании выражения E0.65) и E0.66), если вспомним соотно-
соотношение E0.61), перепишутся так:
Сопоставив полученные результаты с равенствами E0.57), мы найдём:
dh_(z-z^ /7r \ E0.67)
dt ~~ R V ^. J
dt ~~ R
где
5, =-f (*,)(*, —ft,) (* — fta),
575
Соотношения E0.67) дают
Если же мы примем во внимание равенство E0.39), то из уравнений
E0.67), найдём:
s2ds2 sds
м- <50-69)
Полученные квадратуры E0.68) и E0.69) играют основную роль
в анализе С. В. Ковалевской и заканчивают собой интеграцию системы
уравнений E0.4) и E0.5); движение же твёрдого тела определится
окончательно, если возьмём ещё квадратуру E0.14).
L1. ДВИЖЕНИЕ ТВЁРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ: СЛУЧАЙ ГЕССА; СЛУЧАЙ БОБЫЛЁВА-СТЕКЛОВА
290. Условия, при которых весомое твёрдое тело совершает
гессово движение. Положим, что все три момента инерции твёрдого
тела для точки опоры не равны между собой, а центр масс тела лежит
на перпендикуляре, восставленном из точки опоры к одному из круго-
круговых сечений гирационного эллипсоида. Тогда, если, кроме того, началь-
начальный кинетический момент тела лежит в плоскости выше названного кру-
кругового сечения, то рассматриваемое весомое твёрдое тело будет
совершать движение, указанное Гессом ').
Прежде всего выразим аналитически только что высказанные условия.
Так как три момента инерции по условию не равны друг другу, то
всегда можно считать
^>^>Лс- E1.1)
Уравнение гирационного эллипсоида для точки опоры О по формуле
B6.18) на стр. 260 напишется так:
Круговые сечения этой поверхности получаются как пересечение её с
концентрической сферой радиуса, равного средней полуоси эллипсоида.
На основании формулы E1.1) уравнение этой сферы будет
Вычтя почленно это уравнение из уравнения E1.2), мы получим урав-
уравнения плоскостей круговых сечений
>) Hess, Ueber die Eulerschen Bewegungsgleichungen und iiber eine neue
partikulare Ltisung des Problems der Bewegung eines Korpers urn einen festen
Punkt, Math. Ann., Bd. XXXVII.
576
остановимся на одной из них, например, на следующей:
, Л, - Лс) == 0- E1.3)
Проекции единичного вектора п° положительной нормали к этой плоско-
плоскости, которые мы обозначим через (и°M, (»°)ч, («*% очевидно, выразятся так:
JTm(J& — АО ¦ ' J7tT,(JiiJK>
Центр масс С тела лежит на перпендикуляре к плоскости E1.3);
иначе говоря, радиус-вектор рс центра масс коллинеарен с вектором я0;
исходя из этого»условия, мы приходим к равенству отношений
следовательно,
Чс = °. Sc У Jx (у„ - •/«) = ^с VJ,, (Ук - Утл). E1.6)
Уравнения движения D6.21) и D6.22) на стр. 513 для рассматрива-
рассматриваемого случая примут вид:
«
E1.7)
«32—(°Tl«83-
?с и Сс должны удовлетворять условию E1.6).
Кинетический момент G тела определяется своими проекциями по
формулам D6.7) на стр. 509
Условие, что начальный кинетический момент Go лежит в плоскости E1.3),
ичи, что одно и то же, условие перпендикулярности его к вектору п°
выразится так:
Оо-и° = УцЮое (я°N + ./„«о, (я°), + Л',">ос («°)с = 0,
или согласно соотношениям E1.5):
А^с + А',шо^с = 0. E1.8)
Как видим, по своим условиям случай Гесса существенно отличается
от раньше разобранных случаев Эйлера, Лагранжа и Ковалевской: тело
совершает гессово движение не при произвольных начальных условиях,
а только тогда, когда начальные данные связаны ограничением E1.8).
Другими словами, мы имеем здесь не общее решение задачи о движении
твёрдого тела с определённым распределением масс, как это было в
предьпущих трех случаях, а только частное.
37 г к Суслов 577
291. Простейшие (алгебраические) интегралы уравнений движе-
движения. Уравнения E1.7) имеют следующие очевидные интегралы:
= —2Mgzc-\-2h, E1.9)
Г> E1 •! °)
1. E1.11)
Уравнение E1.9) представляет собой интеграл энергии. Интеграл
E1.10) выражает постоянство кинетического момента тела относительно
вертикали, проходящей через точку опоры; иначе то же выражение можно
написать так:
Ог=Г. E1.12)
Равенство E1.11) является извесгным соотношением между косинусами.
Далее, из первого и третьего уравнений E1.7) мы получаем такое урав-
уравнение:
Но нз равенства E1.6) следует
Л ~ 4сЛе ~ Лщ ,
где буквой k обозначено общее значение этих отношений. Следовательно,
предыдущему равенству мы можем дать вид
Остюда мы заключаем о существовании следующего частного алгебраи-
алгебраического интеграла уравнений движения:
Само собою разумеется, что для существования этого интеграла необхо-
необходимо выполнение условия E1.8) в отношении начальных данных.
Аналитически движение Гесса весьма подробно исследовано проф.
П. А. Некрасовым1); геометрическую картину движения дал проф.
Н. Е. Жуковский2). Результаты исследований второго автора и будут
изложены нами в дальнейшем.
292. Геометрическая интерпретация гессова движения. Прежде
всего остановимся на рассмотрении движения центра масс С тела; по
формулам (9.7) на стр. 85, если принять во внимание первое из равенств
E1.6), мы получаем следующие выражения для проекции скорости vc этой
точки на координатные оси:
va = 0fo Vc^^c — ^c va = — ют5с. E1.14)
1) П. А. Некрасов, Аналитическое исследование одного случая движе-
движения тяжёлого твёрдого тела около неподвижной точки, Матем. сб., т. XVIII,
J895. В этой же статье указана литература вопроса.
*)Н. Е. Жуковский, Локсодромический маятник Гесса, Труды отд.
фнзнч. наук Общ,, люб. естествознания, т. VI, 1893.
578
Составим выражение для кинетической энергии ПС) центра масс в том
предположении, что эта точка обладает массой М тела:
СI + (ш^_ шЕ;сJ f »* S|.] =
^ ^^-2ш;шЛсСс]. E1.15)
Преобразовав последний член выражения в скобках с помощью интеграла
E1.13), мы получим:
— 2(оЕ(о^с!с = ^ш2^4-^(о2,Сс- E1.16)
Далее, из уравнений E1.6) мы имеем
S2 С2 р2
с — с — с E1.17)
где попрежнему рс есть радиус-вектор центра масс, т. е
С помощью равенств E1.16) н E1.17) и формулы D6.1) на стр. 508
выражение E1.15) можно преобразовать к виду
или
Т<-с) = г2Т, E1.18)
где
есть кинетическая энергия тела, а постоянный множитель ? равен
р. E1.19)
Обозначим G(C^ кинетический момент центра масс С в предположении,
что в нём сосредоточена масса М тела; для его проекций на оси коорди-
координат мы в согласии с формулами E1.14) будем иметь выражения:
Иначе, приняв во внимание интеграл E1.13), можно написать
579
Заменив опять ?с, 7]с чергз рс по формуле E2.1?) и воспользовавшись
обозначением E1.19), мы на основании формул D6.7) на стр. 509 по-
получим:
т. е.
G(c> = s2G; E1.20)
G попрежнему означает кинетический момент тела относительно непо-
неподвижной точки.
На основании равенств E1.18) и E1.20) интегралы уравнений дви-
движения E1.9) и E1.12) могут быть переписаны так:
ТЮ= — Mg'zc-\-h\ Gf = T', E1.21)
если обозначить
g> = s*g, А' = 8'А, Г = е»Г.
В первое из уравнений E1.21) введём явно скорость vc центра масс, а во
втором уравнении кинетический момент G<?) выразим через полярные ко-
координаты рс,, ф проекции С точки С на плоскость Оху [ср. формулу
A8.24) на стр. 161]; мы получим:
-^^
Сравнивая эти интегралы с интегралами B1.21) и B1.20) на стр. 204,
относящимися к движению сферического маятника, мы видим, что
центр масс С тела движется, как сферический маятник, в том предполо-
предположении, что ускорение тяжести g заменено через g'.
Однако, движение тела не определится движением только одной его
точки: остаётся ещё неизвестным, каким образом тело вращается вокруг
прямой ОС. Чтобы выяснить себе характер этого последнего движения,
обратим внимание на точку [$, лежащую на конце средней полуоси гира-
ционного эллипсоида {51.2). Координатами этой точки будут
поэтому для проекций её скорости v? на оси мы получим выражения:
v9i = -aiy7^, Wp, = 0, vfi = ta%VTm. E1.22)
Вычислим угол б, образуемый этою скоростью с плоскостью кругового
сечения E1.3); по формулам E1.4) и E1.22) мы находим:
+ ®{1/Л(т/й(Лч — Лс)]- E1-23)
Но из уравнений E1.22) мы имеем
580
Далее, из равенств E1.13) и E1.6) мы находим:
Щ |А/ц (^ -Л,) = - wc ^Лс (Л<, - Лс> • E1.25)
На этом основании равенство E1.24) может быть переписано так:
Если теперь это значение г»» мы подставим в уравнение E2.23) и из
двучлена, стоящего в скобках, исключим со,, при помойки того же равен-
равенства E1.25), то окончательно получим:
E1.26)
Из этого выражения мы видим, что направленяе скорости точки р обра-
образует постоянный угол с плоскостью кругового сечения E1.3). Положение
плоскости E1.3) вполне определяется положением центра масс С тела,
соотношение же E1.26) геометрически вполне характеризует вращение
тела вокруг оси ОС.
В частном случае', когда кинетический момент G тела в начальный
момент равен нулю или горизонтален, постоянная Г в интеграле E1.12)
равна нулю, и точка С движется, как математический маятник (§ 132);
следовательно плоскость E1.3) в этом случае вращается около неподвиж-
неподвижной горизонтальной прямой, перпендикулярной к плоскости траектории
точки С. Пусть одна из точек встречи этой прямой со сферой, радиус
которой равен VOTT, а центр находится в точке опоры, будет К. Нетрудно
сообразить, что траекторией точки р на этой сфере служит кривая, на-
называемая локсодромией. В самом деле, по предыдущему, эта траектория
образует постоянный угол со сферическими радиусами-векторами точки р,
проведёнными из точки К, а это и есть характерное свойство локсодро-
локсодромии. Если центр масс С совершает колебательное движение, т. е. дви-
движение, описанное в п. 1, § 132, то и точка р колеблется по некоторой дуге
локсодромии; если же точка С совершает прогрессивное движение (п. 3,
§ 132), то точка р асимптотически приближается к точке К или к точке,
ей диаметрально противоположной, т. е. движение тела асимптотически
схремится к вращению вокруг средней оси инерции.
293. Случай Бобылёва-Стеклова. Кроме разобранных нами четырёх
случаев движения весомого твёрдого тела вокруг реподвижной точки, было
указано ещё несколько других частных решений уравнений D6.21) и
D6.22) на стр. 513 1). Мы остановимся только на одном весьма простом
') См. например, В. А. Стек л о в, Новое частное решение дифференци-
дифференциальных уравнений движения тяжёлого твёрдого тела, имеющего неподвижную
точку, т. X Трудов Отд. физ. наук Общ. люб. естеств., 1899; Д. Н. Горячев,
Новое частное решение задачи о движении тяжёлого твёрдого тела вокруг
неподвижной точки; т, IX Трудов Отд. физ. наук Общ. люб. естеств.
581
случае, открытом одновременно проф. Д. К. Бобылёвым и проф. В. А. Сте-
кловым 2).
Пусть между моментами инерции для точки опоры имеем соотношение
& центр масс С тела пусть лежит на оси 7], т. е.
Тогда система указанных уравнений D6.21) и D6.22) на стр. 513 упро-
упростится так:
,ш- = 0,
Нетрудно увидеть, что эти уравнения допускают следующее частное ре-
решение:
«с = 0. «,, = const. = шо„ wE = j—Ьал = отаа„
где от — постоянная величина. С помощью этих интегралов система урав-
уравнений E1.27) может быть приведена к такой:
"з1 = — шо,«зз, «за = >пазха33, a3S — asl (w0, — ma32). E1.28)
А для этих уравнений, кроме очевидного интеграла
«3i + e!*+4.= 1. E1-29)
легко находится ещё другой:
2«"Vs2 + me;, = r, E1.30)
где Г — произвольная постоянная. Из уравнений E1.29) и E1.30) мы
находим:
где
Подставив это значение а33 в первое из уравнений E1.28), мы увидим,
что интегрирование уравнений движения сведётся к эллиптической ква-
квадратуре
!) Д. Ьобылёв, Об одном частном решении дифференциальных уравне-
уравнений вращения тяжёлого твёрдого тела вокруг неподвижной точки, т. VIII
Трудов Отд. физ. наук Общ. люб. естеств., 1896. В. Стек лов, Один случай
движения тяжёлого твёрдою тела, имеющего неподвижную точку; там же.
582
LH. ПРИМЕРЫ НА ДВИЖЕНИЕ НЕСВОБОДНОГО ТВЁРДОГО ТЕЛА,
ПОДЧИНЕННОГО КОНЕЧНЫМ СВЯЗЯМ
294. Волчок на горизонтальной плоскости. Вопрос о движении
волчка по горизонтальной плоскости представляет собой задачу о движе-
движении весомого твёрдого тела, являющегося телом вращения в динамическом
смысле (§ 252), в том предположении, что одна из точек тела, лежащих на
оса симметрии, движется по горизонтальной плоскости. Пусть эта пло-
плоскость взята за плоскость Оху, а ось Oz
направлена вертикально кверху (фиг. 149);
динамическую ось симметрии примем за
ось ОС; на ней по условию лежит центр
масс С тела. Тогда, если расстояние от
центра масс С до точки опоры К волчка
на плоскости Оху мы назовём /, а угол меж-
между направлениями осей Oz и ОС попреж-
нему обозначим &, то уравнением связи,
наложенной на движущееся тело, будет
z*
sO. E2.1)
Возьмём центр масс С за полюс; тогда по формуле D5.39) на стр. 499
мы для кинетической энергии Т тела будем иметь выражение
где vc есть скорость полюса С, т. е. vc = хЬ-{-Ус-\- ?С' а двучлен
cos & • ф -|- ф = сос E2.3)
представляет собой проекцию мгновенной угловой скорости со на ось ОС.
Заметим также, что силы, приложенные к рассматриваемому телу, имеют
силовую .функцию, которая согласно формуле C6.54) иа стр. 391 равна
U= — Mgzc-\- const. E2.4)
Обратимся к уравнениям движения тела D6.52) D6.53) на стр. 518;
на основании равенств E2.1), E2.2) и E2.4), а также D5.40) на стр.
499 они иапишутс 1 так:
E2.5)
E2.6)
±д_Г_ ==() I^L^
dt df dt д\
d дТ дТ -,, .
-. = U sin
dt дд б&
здесь 1 является множителем связи. Система уравнений E2.5) и E2.6)
имеет очевидные интегралы:
хс = C(t -\- С2, ус=Сц'-\-С4, E2.7)
>t=C,=yKm0,, E2.8)
дТ
= С6.
E2.9)
583
Здесь Clt C2, ..., Ce — произвольные постоянные: для сокращения здесь
введено обозначение E2.3), причём через шОс обозначено начальное зна-
значение проекции со,, угловой скорости. Рассматриваемое нами твёрдое тело
представляет собой консервативную систему (§ 186); следовательно, к най-
найденным интегралам присоединяется ещё интеграл энергии
T=U-\-h
[формула C1.40) на стр. 316]. Положив константу в выражении E2.4)
силовой функции равной нулю, мы придадим интегралу энергии вид
Т = — Mgzc-\-h. E2.10)
Полученные интегралы дают возможность закончить решение квадра-
квадратурами, но мы не будем излагать задачи в общем виде, а остановимся
лишь на частном случае, соответствующем таким начальным данным:
^ = O, ф0 = 0; E2.11)
словом, из начальных скоростей только ср0 отлично от нуля, т. е. волчок
закручен около оси симметрии и без толчка поставлен на плоскосгь. При
таких начальных условиях С1=Сг=^0 и, следовательно, формулы E2.7)
дадут
т. е. центр масс волчка движется по вертикальной прямой; след О этой
прямой на плоскости Оху мы примем за начало О неподвижной системы
координат Oxyz. Далее, из уравнения E2.9) мы находим:
С6 = /с,ш01. cos &0,
а потому сам интеграл E2.9) перепишется так:
Уц sin2 9 • ф = УцшОс (cos &0 — cos &). E2.12)
Далее, если в интеграле энергии E2.10) кинетическую энергию выразить
по формуле E2.2), а постоянную h через начальные данные и принять
во внимание равенства E2.1), E2.3) и E2.11), то этот интеграл
примет вид
МР sin2» ¦ &2 -f- У^&2 + У5Е sin2 & • ф2 = 2Mgl (cos &0 — cos &). E2.13)
Исключив ф из равенств E2.12) и E2.13), мы найдём:
J^ sin2 »• &2 (МГ- sin2 & -f У?е) =
= (cos &0— cos &) {2JiXMgl sin2 & — У2rco2P (cos 00 — cos 9)}. E2.14)
Угол 9 не может принимать таких значений, для которых правая
часть равенства E2.14) становится отрицательной. На этом основании
мы заключаем, что
так как для Ь, меньшего &0, правая часть представляет собой произве-
5S4
дение двух множителей различных знаков. С другой стороны, угол 9 не
Может увеличиваться до тт, ибо для & = тг правая часть равенства E2.14)
равна
следовательно, 9 может достигнуть лишь некоторого максимального зна-
значения &,, меньшего тт. Итак, значения 9 заключены между пределами
00 <&===:»,< тг. E2.15)
Обозначим через р радиус-вектор точки К тела, проведённый из начала О
координат. Из сказанного ясно, что
/sin&0 E^p ^ /sin Эр-
другими словами, траектория точки К по плоскости Оху заключена между
двумя концентрическими окружностями радиусов р0 = I sin 90 и р, = / sin §,
с центром в точке О.
Заметим, что согласно уравнению E2.12), когда & возвращается
к своему значению 90, угловая скорость прецессии ф обращается в нуль;
отсюда мы заключаем, что траектория точки К имеет на внутренней
окружности радиуса р0 точки возврата.
Во всём предыдущем изложении предполагалось, что ни для значения
9 = &0, ни для значения &=r9j, ни для промежуточных значений волчок
не ложится на плоскость, так как тогда задача о движении тела прини-
принимает совсем другой характер.
295. Симметричный гироскоп. Регулярная и псевдорегулярная
прецессия. Под симметричным гироскопом разумеется твёрдое тело вра-
вращения в динамическом смысле, подпертое неподвижно в некоторой точке О
на оси динамической симметрии. Пусть силы, приложенные к гироскопу,
не дают момента ни относительно оси симметрии, которую мы примем
за ось ОС, ни относительно некоторой неподвижной прямой, проходящей
через точку опоры; эту прямую мы примем за ось Ог. Тогда в лагран-
жевых уравнениях движения D6.18) на стр. 512 мы для взятого гиро-
сиопа будем иметь
вспомним, кроме того, что если ось ОС направлена по оси динамической
симметрии, то кинетическая энергия Т не содержит явно углов (риф,
[см. формулы D6.3) и D6.4) на стр. 509]. На основании сказанного мы
придём к следующим дифференциальным уравнениям движения гироскопа:
где
*^ = 0, *2? = 0, ±*L-dZ = Lb E2.16)
T = j [J^ (&2 + sin* &.ф«) + Укю?]; E2.17)
585
в последнем слагаемом в квадратных скобках сохранено обозначение E2.3).
Первые два уравнения E2.16) приводят к следующим двум интегралам,
выражающим собой постоянство кинетических моментов тела относительно
осей Oz и OZ:
E2.18)
здесь со0(. и Г — произвольные постоянные. Из первого интеграла мы
заключаем о постоянстве проекции со^ угловой скорости со.
Положим, что в начальном положении, т. е. для & = Э0) угловая ско-
скорость ф прецессии была равна нулю. Тогда второй из интегралов E2.18)
даст следующее выражение для ф в какой-либо из последующих мо-
моментов:
Jrre>w (cos f>n — cos Ь)
ф— ^ ' , =-- . -E2.19)
' Ущ sin21) Л '
Пусть соос *^> 0; тогда если Ь станет больше &0, то ф будет больще нуля,
или, как говорят, прецессия будет положительна; если же & станет меньше
&0, то ф станет меньше нуля, т. е. прецессия будет отрицательна.
Наоборот, при со01. <^ 0 увеличение & будет сопровождаться отрицатель-
отрицательной, а уменьшение &—положительной прецессией. Сделанные выводы
можно записать в такой таблице:
<ЙОГ > 0
»>»0
•]>>о
&<90
*<о
<йО!.<0
»>»о
»<»о
Все четыре случая можно соединить в одном правиле, предложенном
проф. Н. Е. Жуковским: дадим оси симметрии гироско-
гироскопа направление, совпадающее с постоянной угловой ско-
скоростью wo^° вращения вокруг этой оси; тогда, если
ось симметрии изменяет своё положение в прост-
пространстве, то она стремится стать параллельной и оди-
одинаково направленной с той осью, около которой
начала вращаться. Так, например, в первом случае
шо: ^> 0> Ф ^> ^о> и ось О? при увеличении & поворачи-
поворачивается вокруг оси Оу, перпендикулярной к плоскости
OzZ, (фиг. 150). Положительная прецессия сообщает
некоторой точке А оси OS скорость, указанную пунк-
пунктирной стрелкой, и, следовательно, приближает ось ОС
Фиг. 150.
к параллельности с осью Оу. То же будет и в остальных случаях.
Рассмотрим теперь то частное решение задачи о движении гироскопа,
при котором отсутствует нутация, т. е. при котором угол нутации 0
586
остаётся постоянным:
8 = const. = &0. E2.20)
Такого рода движение носит название регулярной прецессии.
Третье из уравнений E2.16) в раскрытом виде вьилядит так:
У^О — J^ sin 8 cos 8 • i2 -|- Уссюо: sin &-ф = Le.
Исключив отсюда ф с помощью уравнений E2.18), мы получим:
{Г — Jr,U>ar COS ft) I Jr<i>t)' — Г COS l>) .
J^+-—' Д=L»
При регулярной прецессии во всё время движения мы имеем
следовательно, она возможна лишь для угла 00, служащего корнем урав-
уравнения
Q (&) = (Г — Уцш0; cos 8) (Укш0|. — Г cos 8) — 19Уи sin3 & = 0. E2.22)
Нетрудно усмотреть, что для любых данных Г и со01. уравнение E2.22)
имеет по крайней мере один вещественный корень ft —00 в интервале
между 8=0 и & —тг, если только момент L^ для &=0 или 8 = тс не
обращается в бесконечность порядка третьего или выше; действительно,
подставив значения 0 и тг в выражение Q (8), мы находим:
Q @) = - (Г — V4)* < 0, Q (тг) = (Г + УЛ)« > 0,
что и подтверждает сказанное. Постоянная угловая скорость прецессии
для рассматриваемого движения согласно формулам E2.18) равна
. Г 1„<ат cos »0
Ф = т^ ^-г, = Const.
Написанная формула теряет свой смысл для Й0 = 0 или 80 = тг, ибо
тогда по формуле E2.22) мы имеем T = -+zJ^w0^, указанное обстоятель-
обстоятельство понятно само собой, так как тогда оба направления Oz и О?, опре-
определяющие одну из боковых граней прецессионного угла, сливаются. За-
Заметим, что для весомого гироскопа момент L9, фигурирующий в уравне-
уравнении E2.22), равен Dsin &, где D—некоторая постоянная.
По внешним признакам с регулярной прецессией очень сходен другой
частный случай движения гироскопа, названный Ф. Клейном (F. Klein)
псевдорегулярной прецессией1). Это движение получается при
следующих условиях. Посмотрим, нельзя ли удовлетворить уравнениям
E2.18) и E2.21), положив начальную угловую скорость шос вокруг оси
симметрии очень большой, а угол 9 весьма мало отличающимся от неко-
некоторого постоянного значения 00; а именно, мы примем, что
!) К 1 е i n F. und Sommerfeld, Ober die Theorie des Kreisels, Leipzig,
1897—1910.
587
где а — весьма малая ьеличииа, притом такая, что только произведение
аш^. является веаичиной не пренебрежимо малой. Кроме того, положим,
что при & = 00 угловая скорость прецессии ф обращается в нуль. Фор-
Формула E2.19) даёт для этого случая угловую скорость прецессии
• -/ge")Qr(Cos \ — cos Ь)
• ==
ki sm«»
Заменив здесь Ь на do-f"a и положив
мы получим:
cos 9 = cos &0 — a sin &0J
E2.23)
Уравнение E2.21) теперь преобразуется так:
9 0- J) у
V - -гаг cos &о + "^ а = Lb- E2-24)
По условию ашос — весьма малая величина; пренебрегая её квадратом, мы
можем второй член уравнения E2.24) заменить нулём, егли только, конеч-
конечно, sin &0 не нуль, чего мы ие предполагаем. Кроме того, заменим по
приближению момент Z-8, стоящий в правой части, его значением Lo
при & = &0. Тогда вместо уравнения E2.24) мы будем иметь следующее
линейное дифференциальное уравнение с постоянными коэффициентами:
Общим решением этого уравнения является функция
где Cj и C2 — произвольные постоянные. Будем считать время от того
момента, когда а принимает максимальное значение по; тогда произволь-
произвольные постоянные определятся так:
,22 >
—О
Следовательно, окончательно из общего решения E2.25) мы получаем
следующее выражение для а:
E2.26)
Подставив это значение а в уравнение E2.23) и проинтегрировав
его, мы найдём также выражение для угла ф прецессии:
sin -^-±- \ ; E2.27)
588
постоянная интегрирования здесь получается равной нулю, если начало
отсчёта угл^в ф выбрать так, чтобы ф обращалось в нуль одновременно
с t. Из уравнения E2.23) видно, что в рассматриваемом случае пре-
прецессия будет крайне медленной, так как по условию аю01. — величина
весьма малая. Прецессия будет близка к регулярной, так как коэффи-
коэффициент при синусе в уравнении E2.27) очень мал. Формулы E2.26) и
E2.27) показывают, что след, оставляемый осью симметрии гироскоиа
на сфере с центром в точке опоры, будет сферической циклоидой.
296. Вращение твёрдого тела вокруг неподвижной оси. Физиче-
Физический маятник. Твёрдое тело, вращающееся вокруг неподвижной оси,
представляет собой материальную систему с одной степенью свободы
(^ 190): положение тела вполне определяется углом <р, который образует
плоскость, неизменно связанная с телом и проходящая через ось под-
подвеса, с другой, неподвижной, плоскостью, проходящей через ту же ось.
Примем ось подвеса за ось Oz, момент инерции тела относительно этой
оси обозначим Jzz, главный момент внешних сил обозначим L2. Тогда урав-
уравнение движения тела согласно формуле C5.27) на стр. 371 напишется
так:
J^ = Lf E228)
Прежде всего разберём случай малых качаний тела. Допустим, что
для малых значений угла <р мы можем положить
1г=— ky, E2.29)
где k есть некоторая положительная постоянная. Тогда уравнение E2.28)
обратится в линейное уравнение с постоянными коэффициентами
Это уравнение имеет следующее общее решение:
где Сх и С2 ¦— произвольные постоянные. Заменим Сг и С2 новыми посто-
постоянными D и а с помощью равенств
C1 — D sin a, C2 — D cos а;
тогда мы сможем найденному решению дать вид
Период колебаний, очевидно, равен
Рассмотренное движение представляет собой малые качания тела
окото положения устойчивого равновесия. В самом деле, сопоставив
формулы C5.28) на стр. 371 и E2.29), мы найдём:
dU=Lid--o = — kf do.
589
Следовательно,
= — ^-\-const.
Отсюда мы видим, что при <р = 0 функция U достигает максимума, т. е.
положение ср = 0 есть положение устойчивого равновесия (§ 210).
Вторым примером рассмотрим задачу
о физическом маятнике. Физическим маят-
маятником называется весомое твёрдое тело,
вращающееся вокруг горизонтальной оси.
Примем эту ось за ось Oz (фиг. 151).
Ось Ох проведём вертикально вниз. Будем
определять положение тела углом ср, за-
заключённым между неподвижной плоскостью
Ozx и плоскостью, неизменно связанной
с телом и проведённой через ось Oz и
центр масс С тела. Если расстояние точки
С от оси подвеса мы обозначим через /,
массу тела через М, ускорение силы тя-
L внешних сил относительно оси Oz вира-
Ид-
Фиг. 151.
жести через g, то момент
зится так:
Lz = — Mgl sin 'f.
Следовательно, уравнение E2.28) примет вид
Jay = —Mgl sin у.
Проинтегрировав его, мы получим
Jay* = 2 Mgl cos у-\-2fi,
E2.30)
где h — произвольная постоянная. Полученное уравнение представляет со-
собой интеграл энергии. По форме своей интеграл этот совершенно подо-
подобен интегралу энергии для математического маятника [см. формулу B2.41)
на стр. 218]: последний имел вид
_ 2gR cos <p -f 2/г',
E2.31)
где R — длина маятника, т. е. радиус той окружности, по которой
движется частица Л1, <р— угол ме'жду радиусом-вектором /? частицы и
вертикалью, проведённой книзу через точку подвеса, и 2/г' — новое
обозначение постоянной, входящей в уравнение. Для совпадения выра-
выражений E2.30) и E2.31) необходимо, чтобы соблюдалось равенство
отношений
J^_ Ml _ h_
№ ~~ R ~~ /г'"
Отсюда вытекает соотношение
*=??• <52-32>
Подставим в эту формулу выражение момента инерции J'гг через
радиус инерции рг2 (§ 155), т. е.
590
тогда мы найдём:
2
R=~?. E2.33)
Постоянная R носит название длины эквивалентного матема-
математического маятника, т. е. такого, для которого угол <р изме-
изменяется по тому, же закону, как и для рассматриваемого тела. Как видим,
вопрос о движении физического маятника свёлся к известной уже нам
задаче о движении эквивалентного ему математического маятника (§ 132).
Равенству E2.33) можно дать другой вид. Пусть Усс есть момент
инерции маятника относительно оси PPlt проходящей через центр масс
параллельно оси подвеса Oz, и пусть рсс есть радиус инерции маятника
относительно этой оси. Мы имеем
Кроме того, на основании теоремы Гюйгенса [формула B6.5) на стр. 255]
мы можем написать
Jгг JCC I '"' *
Отсюда мы находим следующее соотношение между радиусами инерции:
р' р
Подставив это значение ргг в равенство E2.33), мы получим:
рсс = /(/? — /). E2.34)
Построим в плоскости COz прямую YY'i отстоящую от оси Oz на рас-
расстоянии R; она окажется дальше от оси Oz, чем прямая РР{, потому
что, как видно из равенства E2.34), R^>I. Прямая уу' и°сит название
оси качаний; от центра масс С она находится на расстоянии
l' = R—/. Формулу E2.34) можно перепи-
переписать так:
//' = р ее. E2.35)
Отсюда видно, что ось подвеса и ось кача-
качаний— прямые, сопряжённые в том смысле,
что если ось качаний мы сделаем осью под-
подвеса, то прежняя ось подвеса станет новой
осью качаний.
297. Реакции оси вращающегося тела.
Исследуем теперь реакции, которые оказывает
неподвижная ось на вращающееся тело.
С этой целью составим уравнения движения,
в которые входили бы реакции связи. Заме-
Заметим, что для закрепления оси необходимо
сделать неподвижными две точки: О и О',
лежащие на ней (фиг. 152). Примем ось вращения за ось OQ системы
координат ОЕт)С, неизменно- связанной с телом. Расстояние 00' обозна-
обозначим /, а реакции, оказываемые опорами О и О', пусть будут соот-
соответственно N и N1, Применив к рассматриваемому телу теорему о
движении центра масс C1.9) на стр. 304 и теорему об изменении кине-
591
Фиг. 152.
тического момента C1.17) на стр. 308, мы получим:
Mw c =
здесь М — масса тела, F—главный вектор внешних активных сил,
Go и Lo — соответственно кинетический момент и главный момент внеш-
внешних активных сил относительно точки О.
Чтобы спроектировать написанные уравнения на оси координат, прежде
всего заметим, что согласно формуле Ривальса A1.1) на стр. П2
мы имеем
где рс — радиус-вектор центра масс, а рс — вектор, соединяющий с цен-
центром масс основание перпендикуляра, опущенного из центра масс на-ось
вращения. Угловая скорость со и угловое ускорение е имеют в нашем
случае выражения
ш = <рС\ i"=$f°, E2.37)
где <р попрежнему—угол поворота тела относительно неподвижной си-
системы отсчёта Oxyz. Поэтому для проекций ускорения wc мы по фор-
формулам A.27) на стр. 10 получаем следующие выражения:
wc\ = — VP — *cf> ис= ZcV — ncf' ™а = °-
Выразим теперь абсолютную производную кинетического момента
через его относительную производную: по формуле (9.18) на стр. 88
мы получаем:
XG0. E2.38)
Далее, согласно формулам D6.6) на стр. 509 и E2. 37) мы находим:
Оо6 = -•/«?• Оо„ = -У^, ОЛ = УК<?. E2.39)
Наконец, при помощи формул E2.37) и E2.39) мы из равенства E2.38)
получаем выражения для проекций вектора Go:
На основании всего сказанного уравнения E2.36) в проекциях на оси
координат запишутся следующим образом:
cf=^ + л/ч
= Lov
E2А0)
592
Мы составили эти уравнения, чтооы по заданному движению опре-
определить опорные реакции TV и N1. Однако, шестое уравнение свободно
от реакций: оно представляет собой уравнение движения E2.28). Таким
образом, для определения шести проекций реакций мы имеем только
пять уравнений, а потому часть этих проекций останется неопределён-
неопределённой. Нетрудно усмотреть, что неопределёнными останутся проекции
реакций Л/^ и Ny и только их сумма Л/,. -\~ Л^ сможет быть найдена из
третьего уравнения.
Те же уравнения E2.40) дают возможность решить такую задачу:
твёрдое тело вращается вокруг неподвижной оси -под действием сил,
дающих только момент относительно оси вращения; при каких условиях
ось не будет оказывать реакций на тело? Так как по предположению
мы имеем
то в случае обращения в нуль всех реакций будут соблюдаться равен-
равенства
Определитель как первой, так и второй пары этих однородных уравнений
равен
Ч4
Поэтому, отвлекаясь от случая, когда угловая скорость и угловое уско-
ускорение одновременно обращаются в нули, мы можем утверждать, что эти
уравнения удовлетворяются лишь нулевыми значениями неизвестных:
Эти равенства показывают, что твёрдое тело, вращающееся вокруг
неподвижной оси, не испытывает реакций со стороны оси и, следова-
следовательно, не оказывает давления на ось при условии, что эта ось совпа-
совпадает с одной из трёх главных центральных осей инерции (§ 154).
LIII. ПРИМЕРЫ НА ДВИЖЕНИЕ НЕСВОБОДНОГО ТВЁРДОГО
ТЕЛА, ПОДЧИНЁННОГО НЕИНТЕГРИРУЕМЫМ
ДИФФЕРЕНЦИАЛЬНЫМ СВЯЗЯМ
298. Движение тел, связанных с нитью, которая не поддаётся
кручению. Рассмотрим два примера такого движения.
Пример 149. Положим, что твёрдое тело, к которому не приложены
активные силы, движется вокруг неподвижной точки и неизменно соединено с
одним ьоноом гибкой, весьма длинной и ие поддающейся кручению нити; другой
конец нити пусть закреплён неподвижно. Пусть, кроме того, касательная
к нити в точке соединения её с телом проходит через точку опоры. Найдём
38 г. к. сусло» 593
движение тела. Если указанную касательную взять за ось OZ, то уравнение
Связи, наложенной на тело, по формуле D6.46) на стр. 517 будет
шс = 0. E3.1)
Направим оси 0% и Ог\ по осям эллипса, который .получается от пересечения
эллипсоида инерции плоскостью, проходящей через неподвижную точку О и
перпендикулярной к оси ОС; тогда кинетическая энергия Т тела предста-
представится так:
т = ~2 Не»! + УчХ + Лс0»* - 2ЛЛШ!: - 2JG*&>-
Поэтому уравнениями движения тела согласно формулам D6.59) иа стр. 520
будут следующие:
= 0. J
E3.2)
E3.3)
где [i есть множитель связи E3.1). Умножив первое уравнение на со-, второе
на со н сложив их, мы найдём:
Отсюда мы интегрированием получим:
это — интеграл энергии. Положим теперь
о>? = Л/ -г- sin х, % = у у- cos х E3.4)
и полстаиим эти выражения проекций угловой скорости в любое из уравне-
уравнений E3.2); мы получим:
=— sin у
Введём постоянные k и \, положив
тогда последнее уравнение перейдёт в следующее:
Отсюда мы интегрированием находим:
где т — произвольная постоянная. Из полученного интеграла и уравнений
E3.4) мы видим, что движение тела асимптотически приближается к вращению
с постоянной угловой скоростью вокруг прямой:
Уравнение E3.3) даёт выражение для момента реакций относительно оси ОХ..
Пример 150. Займёмся теперь той связью, о которой говорилось в при-
примере 99 на стр. 325. Пусть два твёрдых тела i'j и S2, движущихся вокруг
неподвижных полюсов Ь\ и О2, связаны друг с другом весьма длинной, гиб-
гибкой нитью, не поддающейся кручению. Для простоты положим, что касатель-
594
ные в концах нити совпадают с главными осями инерпии тела, соответствую-
соответствующими точкам опоры. Оси координат Oxixr,iCx и O^^t совместим соответ-
соответственно с главными осями инерции тел для точек Ох и Оъ притом
оси ОХСХ и О,С2 направим по касательным в конпах нити в сторону её вну-
внутренней части/ Моменты инерции тел Sx и S2 относительно указанных 'осей
координат обозначим соответственно через
Ах, Вх, Сх и А2, Вь С2,
а проекции угловых скоростей обозначим через
Ръ Чъ ri и Рь 9г, rt.
Уравнение связи согласно сказанному в примере 99 напишется так:
Г1 + Ъ = 0. E3.5)
Выражения кинетичеокой энергии тел будут следующие:
П = у (Агр] + Вхд\ + Crf), Т, = 1 {А^ + B2q\ + С2Й2).
1
Если к телам никаких активных сил не приложено, то их уравнения движения
согласно формулам D6.59) на стр. 520 напишутся так:
= 0, Biqx — (Сх - Ах) r-j>x ~ 0, Схгх — (Ах — Вх) рхЧх = (i,
п— (С2 — А2) г2р2 ~ 0, J
Исключив множитель ц, а также угловую скорость г2, мы придём к системе
уравнений
— (B2 — С2) q2rx — (Cs — i
¦=^. E3.6)
Первые два отношения непосредственно приводят к интегралу
Ах (Ах - СО />? + Вг (Вх - Q) q\ = Гь E3.7)
где ?! — произвольная постоянная. Подобным же образом третье и четвёртое
отношения дают
А2 (А2 — Сг) р\ + 52 Eг - Q) ^ = Г», E3.8)
где Г2 — новая произвольная постоянная. Кроме того, мы имеем интеграл
энергии
Агр\ 4- Bxq\ 4- А2р\ 4- B2q\ 4- (Q 4- С,) ff = 2Л. E35)
Можно было бы из уравнений E3.6) вывести ещё оледующий интеграл:
4-5,?,) + С, (АУ%+ВУ%) 4- С,Сг (d 4- С,) г? = Г3;
однако, этот интеграл был бы следствием раньше найденных; действительно, мы
имеем
Введём новую переменную & положив
rxdt=di. E3.10)
Тогаа первое и последнее из отношений E3.6) на основании интеграла E3.7)
дадут
где
1_
У Г1-А,(А1-С1)р\
«,= 1/ 1- дд'"". E3-12!
595
Для определённости положим, что моменты инерции по своей величине распо-
расположены в следующем порядке:
A-l > #i > Q, Л2 > В2 > С2; E3.13)
тогда в согласии с равенствами E3.7) и E3.8) мы можем положить
Г1 = *?, Г2 = *|. E3.14)
Проинтегрировав уравнение E3.11), мы теперь найдём:
1
,-—-гsin(w1x+<'i), E3.15)
У /4i (Л! — Q)
где aj — произвольная постоянная. Подставив это значение р± в равенство
E3.7), мы получим:
91= , 1Х =,cos(wlX + °i)- E3.16)
У О! («! — Li)
Подобным же образом для р2 и 9% мы в соответствии с обозначениями E3.14)
найдём выражения
2 ч sin(и2х+ а2), ?2 =j-2 „ cos(и2х + "г), E3.17)
где
(Л2 - С2) (В2 - Q)
А2В2
щ= у ¦
Если найденные значения для ру q±, p2, q2 подставить в интеграл энергии
E3.9), то г\ можно будет выразить как функцию от у:
(Q + С,) г\ = 2А - ' sin» (mlZ + ах) -
Л1 — bi
' sin» (mZ + а) '
—
a2) - = r cos2 («2x + a2).
~ C2
2
После этого мы из уравнения E3.10) квадратурой найдём зависимость \ от
времени t. Квадратура эта будет ультраэллиптической, если Отх и щ соизмс
римы, и, в частности, эллиптической, если т\ — т%.
Когда моменты инерции не выполняют условия E3.13), ход решения задачи
остаётся без изменения, только вместо тригонометрических функций могут
появиться логарифмические»
299. Видоизменение принципа Даламбера для систем с неинте-
грируемыми связями. Непосредственное применение принципа Далам-
Даламбера к выводу уравнений движения систем с неинтегрируемыми связями
представляет то неудобство, что в состав аналитического выражения
принципа входят дифференциальные выражения второго порядка, а это
иногда значительно затрудняет переход от одних переменных к другим.
С другой стороны, интегральные принципы, а именно, принципы Гамиль-
Гамильтона, Лагранжа, Гельмгольца, хотя и содержат выражения первого по-
порядка, но они несправедливы для систем с неинтегрируемыми связями.
Между тем, если равенство, выражающее принцип Даламбера, подвер-
подвергнуть одному, почти очевидному, преобразованию, то мы получим фор-
формулу, весьма удобную для приложений, содержащую выражения первого
порядка и по внешнему виду аналогичную формуле для вариации гамиль-
тонова действия.
596
Рассмотрим материальную систему, отнесённую к r-\-b координатам
qt, где о=1, 2, 3, ..., r-\-b, и положим, что эти координаты тожде-
тождественно удовлетворяют всем уравнениям конечных связей системы. Пусть,
кроме того, система подчинена b неинтегрируемым связям; соответствую-
соответствующие уравнения мы представим себе разрешёнными относительно b ско-
скоростей в таком виде:
г
^r+p —S^p—«, = 0 @=1,2,3,...,*). E3.18)
Коэффициенты ив и и„ содержат, вообще говоря, и координаты qa, и
время /. Из уравнений E3.18) вытекает, что возможные перемещения
Д^ системы связаны "равенствами
г
*<W— 2 V<7P—мзД/ = 0 (Р=1, 2, 3, ...,*).
Виртуапьные же перемещения bqa должны удовлетворять условиям
Ч+Р- 2«з.Ч=° (Р = ь 2. 3- •••. *)• E3-19)
Заметим, что для рассматриваемого случая виртуальные перемещения,
вообще говоря, не совпадают с возможными перемещениями, как это
имеет место для систем с конечными связями, уравнения которых не
содержат явно времени. Кроме того, операции дифференцирования и ва-
риирования переместительны лишь для р=1, 2, 3, ..., г.
Jt\ = *% (р = 1, 2, 3, .... г); E3.20)
для остальных же b зависимых скоростей мы из равенств E3.18),
E3.19) и E3.20) выводим следующие соотношения:
г
Ъ s?r+ з - Ч+ з = Е [**№, ~ Я?8%] - s«3 = SBe
p=i
(P=l, 2, 3, ..., *). E3.21)
Здесь символом 5В3 обозначены, для краткости выражения, линейные и
однородные относительно bq?. Все ЬВЪ тождественно обращаются в нуль,
если уравнения E3.18) интегрируются.
Если силы, приложенные к рассматриваемой системе, имеют силовую
функцию, то принципу Даламбера согласно формулам C4.15) на
стр. 353 и C2.31) на стр. 328 можно дать следующее выражение:
.^?, at dq0 ) U K '
Написанное равенство должно выполняться для любых значений незави-
независимых вариаций bqf. Заметив, что
г+ь
Еди> -и
597
мы вместо уравнения E3.22) получим:
Умножив это равенство на dt и проинтегрировав его между пределами
t0 и t, найдём:
(f)W E3'24)
Условимся считать, что для крайних положений системы, соответствую-
соответствующих пределам интеграла, независимые вариации координат Ьд? обра-
обращаются в нуль; тогда в силу соотношения E3.19) тс же можно будет
сказать и про зависимые вариации Ьдг+Г
В уравнении E3.24) отделим члены, содержащие полные производные
по времени, и произведём интегрирование по частям; тогда в согласии
с соотношениями E3.20) мы для р=1, 2, 3, ..., г получим:
ttt t
fd dT дТ Г дТ d С ОТ »• ,
dt dqp р dq0 р J dq^ dt p J dq? p
Далее, для [3=1, 2, 3, ..., b мы согласно формуле E3.21) найдём:
/ t i
1 d дТ
Члены, стоящие не под знаком интеграла, здесь равны нулю на основа-
основании условия о вариациях на границах интервала интегрирования. Подста-
Подставив найденные результаты в уравнение E3.24), мы получим:
t = 0, E3.25)
где
Равенство E3.25) мы и имели в виду получить. Из него ясно видно, что
система с неинтегрируемыми связями не может быть охарактеризована
подобно системам с конечными связями своей силовой функцией и фор-
формой кинетической энергии; оказывается, что необходимо ещё знать в от-
отдельности выражения для импульсов, соответствующих зависимым ско-
скоростям.
Едва ли стоит упоминать о том, что левая часть равенства E3.25)
отнюдь не представляет собой вариации гамильтонова действия, а также
598
останавливаться на доказательстве равносильности выражений E3.23) и
E3.25).
Пример 151. Изучим движение однородного шара радиуса а, катяще-
катящегося без скольжения по плоскости и находящегося под действием сил, имею-
имеющих силовую функцию U. Пусть Охуг— неподвижная система координат,
причём ось г направлена по нормали к плоскости. Примем центр С шара за
полюс, т. е. за начало подвижных осей CXYZ, параллельных неподвижным
осям Охуг. За координаты шара примем координаты Х& у^, *с его центра и
эйлеровы углы <р, 4, ft. Кинетическая энергия Гшара по формуле D5.16) на стр.
493 представится так:
T=j [ M(xl + y\ + iD+Jxx («5+ »y + »l) j; E3.26)
здесь Л4— масса шара, а ^хх есть момент инерции шара относительно его
2
диаметра: Jxx = -=- Маг. Проекции угловой скорости <ох, tay, шг согласно фор-
формулам (9.28) на стр. 91 выражаются следующим образом через углы Эйлера:
шж ^ sin ф sin &- f -|- cos Ф - &, 1
<% =—cos Ф sin &-<p-|-sin <(>•$, > E3.27)
to2 = \ -\- cos & • f. I
Уравнениями связей согласно сказанному в примере 98 на стр. 325 будут
следующие:
zc—a = 0, xc— aajy = 0, yc -f аюх = 0. E3.28)
Обозначим 8ах, lay, Ьа2 бесконечно малые углы, на которые шар соответственно
поворачивается рокруг осей координат системы CXYZ при своём произвольном
виртуальном перемещении, согласно формулам E3.27) эти угловые перемеще-
перемещения выражаются следующим образом через вариации эйлероьых углов:
cajf= sin ф sin &- 5e -}- cos ^ • 5&, \
Ьа.? — Ц -j- cos Ь-lf. J
С помощью этих формул нетрудно записать те условия, которые наклады-
гаются связями E3.28) на вариации координат шара при его виртуальных
перемещениях; мы голучаем-
o2?=^0, *Xq—йооу = 0, °Ус~~\~ йЬо-Х "=: 0. E3.30)
Выведем уравнения движения шара, не содержащие множителей связей,
воспользовавшись видоизменённым принципом Даламбера. Согласно сказанному
выше мы должны рассмотреть выражение
дТ дТ \
IU +lT + —T-lBx+—r-lBv)dt=Q, E3.31)
'о
в котором
ЬВХ = — Ьхс — lie с, ЪВу = — Ьус — Ъус. E3.32)
Интеграл E3.31) должен обращаться в нуль для всех виртуальных перемеще-
перемещений системы, т. е. для таких изменений координат, которые удовлетворяют
уравнениям E3.30). Прежде всего займёмся вычислением разностей E3.32). Из
равенств E3.27) и E3.29) мы находим:
d ,
at'
d
— bay — 5<ov = 6o vie, — аа7@м / E3.33)
at ' '
d
di'
599
Поэтому согласно равенствам v53.28) мы получаем:
ЬВх-= a (iaxwz — Jaz<ex), ЪВу = — a (i
Подставив эти выражения в уравнение E3.29) и приняв во внимание уравне-
уравнения связей E3.28), мы найдём.'
7 ,2
bU -4- "F" Nicfi (о)^ 5(о~ 4~ (ov o(ov) -|- "F" Л1й^ i
1 о у у о
4-iWa2R («ахajv— 5ey <ех)\dt-Q. E3.34)
Заметив, что на границах интеграла вариации координат обращаются в нули,
мы с помощью равенств E3.33) получим:
— laz 1ш „) dt =
dt-
°
'о
, Л- Г» lj
-я-
'о
'о
°
d<ox
t
7 J
'о
da> и
f
t t t
\ <ог 5(O2 rf/ = l шг ^7 baz dt -\- I (
to tQ ta
t
~ { — °az "df + Vz
Составим теперь вариацию силовой функции:
... dU . , d(J , , (?(/ , , dU , , dU . , dU ^
Эту вариацию на основании равенств E3.29) и E3.30) всегда можно представить
в таком виде:
S 4
Подставив эти выражения в уравнение E3.34) и выполнив сокращения, мы
найдём:
J
l<tz( — -|-Ma2 aj2-f-? Л ] dt = 0.
Так как согласно сказанному в примере ПО на стр. 387 произвольность ва-
вариаций Jip, J<!>, ЬЬ влечёт за собой и произвольность величин Ьа^, bay, iaz, то
отсюда мы и выводим искомые уравнения
^- Ма* и>х — Lx, 4- Ma* wv = LY, \ Ma* ®Z = LZ. E3.35)
600
LIV. УРАВНЕНИЯ ДВИЖЕНИЯ ТВЁРДОГО ТЕЛА, ОТНЕСЁННЫЕ К
ОСЯМ, ИМЕЮЩИМ СОБСТВЕННОЕ ДВИЖЕНИЕ
300. Уравнения движения твёрдого тела, отнесённые к осям,
имеющим собственное движение. Как было указано в § 254, уравне-
уравнения движения твёрдого тела получаются путём проектирования на оси
координат уравнений, выражающих закон изменения количества движения
и закон изменения кинетического момента. В настоящей главе мы бу-
будем относить эти законы к системе осей CXYZ, имеющей собственное
движение. При этом мы остановимся только на том частном случае, когда на-
начало С подвижных осей совпадает с центром масс тела.
Обозначим соответственно ю, ю'е) и vc угловую скорость тела, угло-
угловую скорость осей CXYZ и скорость центра масс С относительно не-
неподвижной системы координат Охуг. Скорость произвольной частицы
тела, определяемой по отношению к системе CXYZ радиусом-вектором
р„ выразится согласно формуле (9.32) на стр. 93 следующим обра-
образом:
Отсюда мы получаем для кинетической энергии 7, количества движения К
и кинетического момента Ос относительно точки С выражения, аналогич-
аналогичные выражениям D5.16) на стр. 493 и D5.18) и D5.19) на стр. 494:
± (Jxx m* + Jyy «V + hz '4 — 2JYZmy<°z —
— 2У2Х(о2й)х—2JXY(oxwY); E4.1)
K= Д- = MvC7;
7
r _> r J*F r 7z E4-2)
ucx—da>x> u ° J
Обратимся к закону изменения количества движенияи к закону изменения
кинетического момента системы относительно центра масс С [см. фор-
формулы C1.6) на стр. 304 и C1.31) на стр. 312]; закон изменения
кинетического момента относительно центра масс читается так же, как
в отношении к неподвижному полюсу; мы получаем:
где F и R обозначают соответственно главный вектор внешних активных
сил и главный вектор пассивных сил, a Lc и Нс — главные моменты этих
сил относительно центра масс. Выразим абсолютные производные, вхо-
входящие в эти равенства, через относительные по формуле (9.18) на
стр. 88; мы получим:
K + <oWXK = F + R, Gc + ю«> X Gc = ?с + #с.
Спроектировав эти уравнения на оси CXYZ, мы полечим искомые урав-
уравнения движения, отнесённые к подвижным осям. Приняв во внимание
601
вышенашсанные формулы E4.2), а также теорему (9.19) на стр. 89,
мы найдём:
vcx-
M {icz 4 •!? vCY-
•# vcz) =Fy
wf vcx)=Fz
z;
E4.3)
301. Качение шара по поверхности. Выведенные нами уравнения
E4.3) мы приложим к решению вопроса о качении твёрдого однородного
шара радиуса а и массы М по данной поверхности S. Относительно
сил, приложенных к шару, предположим, что момент их L относительно
центра шара равняется нулю. Если мы допустим, что шар во всё время
движения не покидает поверхности S, то придём к выводу, что центр
его должен двигаться по поверхности Sx, параллельной данной. Примем
нормаль к поверхности Sv направленную от центра шара к точке каса-
касания, за ось CZ; оси СХ, CY будут тогда лежать в плоскости, касатель-
касательной к Sv Вычислим кинетическую энергию шара; так как, по условию,
©сг=0, то по формуле E4.1) мы получим:
Кроме заданных сил, сводящихся согласно сказаному выше к одному
вектору F, на шар действует нормальная реакция N поверхности, направ-
направленная прямо противоположно оси CZ, и сила трения Ф, приложенная к
шару в точке касания его с поверхностью S и лежащая в касательной
плоскости к этой поверхности; мы имеем, следовательно, Фг=0. Таким
образом, по формулам E4.3) уравнения движения шара напишутся так:
-=-Afa2 (юх
~Ma2 (<oy4
vcy—
b>z —
ex)
(|)»r)
= — аФ
у,
E4.4)
toz 4" 0»(x' mr ~~ ^Y mX = °*
Если шар и скользит, и катится по поверхности, то сила трения Ф
направлена обратно скорости точки касания шара с поверхностью 5 и
по модулю равна kN, где k — коэффициент трения (§ 133). Если же
602
качение шара не сопровождается скольжением, то прибавляются две не-
интегрируемые связи
Z ' * 2 К X \ * /
В этом случае проекции Фх и Фу силы трения Ф играют роль множите-
множителей связей
При отсутствии скольжения движение шара определяется теми тремя
уравнениями, которые получаются из равенств E3.4) по исключении N,
юх—
«у + °>?)<Bx — f <' »г = - Ш •
— <в(^ <ох = 0.
E4.6)
Вместо о)т и Юу можно ввести с помощью соотношений E4.5) vcx и
vCY; тогда мы получим:
lm(e){0 a—JLp
E4.7)
Значения проекций угловой скорости ю'е) зависят от движения
трёхгранника CXYZ по поверхности i'j. Для выяснения зависимости на-
названных проекций угловых скоростей от свойств поверхности припомним
сказанное в § 69. Мч там видели, что при переходе какой-либо точки по
поверхности из положения М в смежное положение Ж,, отстоящее от
начального на бесконечно малое расстояние Ъ<з, плоскость, касательная
к поверхности, повёртывается на бесконечно малый угол 8ф = 6 8о во-
вокруг так называемой оси полного изгиба поверхности, соответствующей
точке М и направлению а0; при этом о0 есть единичный вектор каса-
касательной к дуге ММ^, а в — так называемый полный изгиб. Полный из-
изгиб определяется формулами (Ю.З) на стр. 103 и A0.6) или (Ю.7) на
стр. 105. В § 69 было, далее, указано, что полный изгиб 6 может быть раз-
разложен на два составляющих вектора, а именно, по направлению а0 и по
направлению g°, лежащему тоже в касательной плоскости и перпендику-
перпендикулярному к о0:
*<>. E4.8)
Проекции 9а и 9^ полного изгиба 6 соответственно называются закру-
закручиванием поверхности по направлению о0 и чистым изгибом
по направлению о0 [см. формулы A0.10) и A0.11) на стр. 106].
Возьмем теперь какую-нибудь кривую на рассматриваемой поверхно-
поверхности. При качении касательной плоскости по поверхности вдоль взятой
Ш
кривой прямая Az, неизменно связанная с плоскостью и совпадавшая с
касательной к нашей кривой в начальном положении, после прихода
плоскости в смежное положение уже отступит от касательной; для того,
чтобы привести эти прямые к совпадению, нужно касательную плоскость
повернуть около нормали к поверхности на некоторый бесконечно малый
угол. Таким образом, если движение касательной плоскости по выбран-
выбранной кривой (следу плоскости по поверхности) подчиним ещё условию,
чтобы прямая Ах всегда оставалась касательной к следу, то кроке уг-
угловой скорости около оси изгиба мы должны будем сообщить касатель-
касательной плоскости ещё угловую скорость верчения около нормали. Определим
эту угловую скорость Q, рассчитав её на единицу дайны. Будем исходить
из того, что угол а между осью изгиба 6 и направлением о0 опреде-
определяется формулой
Продифференцировав это уравнение по длине дуги о, мы получим:
da (Г
— sin a • -г- =
d
di 6 sin a an
отсюда мы найдём:
Б * „. = _** „о,
dz 8 sin a da
где я0— единичный вектор нормали поверхности. Заменим здесь 6 его
выражением по формуле E4.8) н примем во внимание, что при указан-
указанном способе отсчёта угла мы всегда будем иметь
кроме того, вспомним, чго согласно формуле D.20) на стр. 36 справед"
ливо равенство
ds 7'
где v' есть единичный вектор главной нормали кривой ММг, ар — её
радиус кривизны; наконец, примем во внимание, что o°-v° = 0; в резуль-
результате после сокращений мы получим:
9
На основании формулы B1.10) на стр. 200 отсюда вытекает, что
т. е. модуль искомой угловой скорости численно равен геодезической
кривизне кривой ММХ. Введя угол (я0, V") между нормалью поверх-
поверхности и главной нормалью кривой ММ1 и воспользовавшись формулами
B1.9) и B1.11) на стр 199 и 200, можно также написать
где рл есть радиус кривизны нормального сечения.
604
На основании ск(?анного, если мы ось, СХ направим по касательной
к траектории центра шара в сторону его движения, то найдём:
^CX'
Jc>
d<s
Уравнения E4.7), написанные для случая качения без скольжения, теперь
примут вид
* 5 г-. ^ Л
"
E4.9)
• л 2
Нормальная реакция поверхности найдётся из третьего уравнения E4.4):
X
Линия, во всех точках которой геодезическая кривизна — равна ну-
нулю, как известно, называется геодезической. Если к шару не
приложено никаких заданных сил, т. е. если F=0, то согласно равен-
равенству E4.9) центр его может описывать геодезическую линию лишь при
условии, что (ог = О; постоянство же
<ог требует, чтобы было 6в = 0. Но глав-
главная нормаль геодезической линии сов-
совпадает с нормалью к поверхности; сле-
следовательно, если 9„—0 вдоль всей
геодезической линии, то эта линия не
имеет кручения, иначе говоря, она яв-
является плоской кривой. Итак, центр
шара может описывать геодезическую
линию только тогда, когда она плоская.
Положим теперь, что на поверхности
сеть линий кривизны, характеризуемых,
направлениям закручивание поверхности равно нулю: 6в = 0. Пусть при
этом оси СХ и CY постоянно касаются соответствующих линий кривизны
(фиг. 153). Заметим, что оси CXYZ можно перевести из их первоначаль-
первоначального положения в смежное положение C'X'VZ' нли прямо, заставив сна-
сначала пройти путь СС'=da, или сначала передвинуть оси из положения
CXYZ в положение C"X"Y"Z" по элементу doy одной линии кривизны,
а затем из положения C"X"Y"Z" в положение C'X'VZ' по элементу daz
другой линии кривизны. При движении по da1 оси повернутся вокруг
прямой СХ на угол
153.
, мы построили ортогональную
как известно, тем, что по их
6
и вокруг прямой CZ на угол
605
где pln, p,r Vi и я0 соответственно являются радиусом кривизны
нормального сечения через ось СУ, радиусом геодезической кривизны для
первой линии кривизны, единичным вектором её главной нормали и
единичным вектором нормали к поверхности. Подобным же образом во
второй стадии движения по й?о2 оси повернутся на угол
вокруг оси СХ и на угол
= fife»
вокруг оси CZ; обозначения здесь те же, что и выше. Заметив, что
rfet rfs2
~di фсу» ~Si — vcx>
мы получим следующие выражения для проекций угловой скорости трёх-
трёхгранника CXYZ.
* Рга' Y Hn Ъ Pig~ Hg
Последнее нз уравнений E4.4) перепишется теперь так:
<о )у4о>„.
Pie ran
С другой стороны, в случае качения без скольжения мы согласно по-
последнему из уравнений E4.7) имеем
г сх сг\ 9хпл ы)
Отсюда мы видим, что <ог = const, или при р1п = р2л, т. е. при качении шара
по шару, или при vcxvcy==®' T* е* КОГДа центр шара описывает на по-
поверхности St линию кривизны.
Если силы, приложенные к шару, имеют силовую функцию, а дви-
движение происходит без скольжения, то легко получить из уравнений E4.7)
тпеграл энергии. Действительно, тогда по условию мы имеем
Fxvcxdt -f FyOCYdt—dU,
где U—силовая функция; с другой стороны, из уравнений E4.7) мы
выводим:
2+ ^^Л (FJF) V
Отсюда мы находим искомый интеграл
2 „„ , 9 Ю
7
606
ОТДЕЛ VII
ТЕОРИЯ УДАРА
LV. ТЕОРИЯ УДАРА ЧАСТИЦЫ
302. Ударные силы. До сих пор мы рассматривали лишь такие
движения, при которых скорость изменялась непрерывно как по модулю,
так и по направлению. Однако, иногда приходится встречаться с явле-
явлениями, когда скорость изменяется скачком. Для того, чтобы и подобные
движения подвести под общую механическую схему, мы вводим понятие
о так называемых ударных силах: ударною называется такая сила
F, которая действует в течение бесконечно малого промежутка вре-
времени г, но имеет конечный импульс за время своего действия (§ 100)
(т. е. не бесконечно малый и не бесконечно большой). Импульс силы за
бесконечно малый промежуток времени т от момента t0 до момента ^0-|-т
мы будем обозначать F, т. е. мы положим
Fdt.
При этом иногда в порядке приближения мы будем предполагать, что т
не бесконечно мало, а имеет некоторое малое конечное значение.
Посмотрим, какие следствия вытекают из сделанного определения.
Прежде всего обратим внимание на то, что ударная сила F достигает
за время своего действия бесконечно большого значения. Действительно,
по теореме о среднем значении определённого интеграла, мы нз написанной
выше формулы для импульса получаем
F=Fzpx, E5.1)
где Fcp есть значение силы F в некоторый промежуточный момент
интервала (t0, ^o-J-т). Так как промежуток времени т бесконечно мал,
то последнее равенство и доказывает высказанное утверждение.
Далее заметим, что эффект действия ударной силы на
материальную частицу выражается в мгновенном конечном изме-
изменении скорости частицы. Действительно, если ©0 — скорость частицы
в начале действия силы F, т. е. в момент /0, и v—её скорость в мо-
момент to -j- т окончания действия силы, то по закону изменения количе-
количества движения мы имеем
то— тщ = F E5.2)
[см. формулу A8.12) на стр. 158]; следовательно, при конечном значении
импульса F и приращение г> — щ скорости имеет конечное значение.
Существенно заметить, что перемещением частицы при ударе можно
пренебречь, потому что перемещение будет иметь такой же порядок ма-
малости, как и время, в течение которого происходит удар. Для доказа-
доказательства проинтегрируем уравнение
dr—vdt
607
в пределах от t0 до^о-Ь*; мы найдём:
заменив здесь v его значением из формулы E5.2), мы получим
r—ro =
'о to
Применив к последнему интегралу теорему о среднем значении,
мы найдем отсюда
г — го =
следовательно, при бесконечно малом т перемещение г—г0 тоже беско-
бесконечно мало.
Работа А, совершённая ударной силой за время её действия, имеет
конечную величину: это непосредственно вытекает из приняюго нами
условия о величине импульса ударной силы и теоремы лорда Кельвина
[формула A8.37) на стр. 164], применённой к ударной силе:
Наконец, укажем, что если кроме ударной силы к частице приложена
сила конечного напряжения, то действием последней за время действия
ударной силы можно пренебречь, так как импульс её будет бесконечно
мал: это видно из формулы E5.1), если её применить к силе конечного
напряжения.
Соотношение E5.2), в котором под F понимается сумма импульсов
ударных сил, действующих на частицу, носит название основного урав-
уравнения теории удара материальной частицы. Употребляя ранее введённое
обозначение K=.nw для количества движения, мы можем также иапи-
сать
K—KU = F. E5.3)
303. Удар материальной частицы о связь. Положим, что материаль-
материальная частица массы т подчинена неудерживающей связи
/{х, у, z, 0>0. E5.4)
Пусть сперва связь эта ослаблена, т. е.
/{х, у, z,J)>0,
и частица движется, как свободная, сообразно с, уравнением движения
r=r(t),
или, что то же,
лг = лг(^), y=y(t), z = z(t).
Тогда может случиться, что частица в некоторый момент t0 придёт на
связь, т. е. в момент ta координаты её обратят левую часть выражения
608
E5.4) в нуль. Условимся, что за начало отсчёта времени нами взят
какой-либо момент из той стадии движения, когда частица двигалась,
как свободная; тогда момент t0 прихода частицы на связь, очевидно,
найдётся, если мы определим наименьший положительный корень урав-
уравнения
fix У), y{t), z(t), f] = 0.
Если такого корня не окажется, то, значит, во всём дальнейшем дви-
движении после момента ^ = 0 частица никогда не встретится со связью.
Но пусть корень t = tu найден, и, следовательно, в момент t0 частица
попадает на связь E5.4). Пусть скорость её в этот момент времени
равна ©0. Мы знаем (§ 117), что если частица движется по неудержи-
вающей связи или в данный момент времени / её покидает, скорость
её не может иметь произвольного значения, а подчинена ограничению
^>0, E5.5)
или, что то же,
grad/•©-}-^5*0;
при этом знак «больше» может появиться лишь в моменты, когда ча-
частица покидает связь; в этом случае производные в приведённых урав-
уравнениях следует понимать лишь как правыг производные; иначе говоря,
частица не может притти в данную точку с такой скоростью, чтобы
левая производная была положительной. Допустим, что вышеуказанная
скорость г»0, с которой частица в момент t0 приходит на связь, удовле-
удовлетворяет условию
(dA -о
Тогда, если и все высшие производные функции / в момент t = t0 равны
нулю, т. е.
ю частица в дальнейшем будет двигаться по связи. Если в ряде высших
производных имеется хотя бы одна положительная (очевидно, первая,
отличная от нуля производная обязательно положительна), частица в рас-
рассматриваемый момент t0 снова покинет связь. И в том, и другом случае
скорость г> в момент t0 сохранит свою непрерывность.
Пусть теперь скорость щ такова, что
Тогда, чтобы согласовать это неравенство с условием E5.5), мы примем,
что связь E5.4) оказывает ударную реакцию на частицу, и эта
реакция изменяет скорость v0 в некоторую другую скорость ©2, уже
удовлетворяющую условию E5.5): происходит так называемый удар ча-
частицы о связь. При этом, чтобы подвести возможно большее число на-
наблюдаемых явлений под нашу схему, мы примем, что в общем случае
новая скорость v% удовлетворяет условию E5.5) со знаком ^, т. е.
39 Г. К. Сусло* 609
«равно или больше». Так как ударная реакция отнесена нами к разряду
ударных сил, то по сказанному в § 302 мы примем, что:
1) время действия её т бесконечно мало, или, иначе говоря, продол-
продолжительность удара бесконечно мала;
2) за время удара ни частица, ни поверхность не успевают изменить
своего положения;
3) за время удара импульс всякой конечной силы равен нулю.
Итак,
(dJ\ <0 (dl\ ^0
Полагая, что за время т скорость v частицы меняется непрерывно,
мы примем, что для некоторого промежуточного момента tv т. е.
момента, удовлетворяющего условию
частица приобретает такую скорость ©,, что соблюдается равенство
r°- <55-6>
Промежуток времени (^0, /,) назовём первым актом удара, а проме-
промежуток (tvtu-}-i) вторым актом. В частном случае удар может огра-
ограничиться только одним первым актом, и тогда удар называется абсо-
абсолютно неупругим.
Скорость v0, с которой частица прихоаит на связь, обыкновенно
называется скоростью падения частицы, а скорость v2, которую она
имеет в момент окончания удара, скоростью отра-
отражения (фиг. 154). Угол а между отрицательным
направлением скорости v0 и положительным направле-
направлением нормали к поверхности / (х, у, г, t) = 0 носит
название угла падения, а угол |5 скорости vt с
положительным направлением той же нормали назы-
называется углом отражения.
Мы принимаем, что в случае идеальности связи
ударная реакция N, как и обычная реакция, направ-
Фнг. 154. леиа по градиенту функции /, т е. по положитель-
положительной нормали поверхности /= 0; следовательно, также
направлен и реактивный импульс N; действительно, если я0 есть еди-
единичный вектор нормали к поверхности, то
N= I" Ndt = n° f Ndt =
Из последнего равенства, между прочим, следует, что
j 7V | = ЛЛ- E5 7)
Возьмём какой-либо момент t между tu и t0 -f- т; пусть для него
частица имеет скорость V. По закону изменения количества движения
мы имеем
> — /ифо = я° Г
two — nWn = tt° \ N dt.
610
Из этого уравнения непосредственно видно, что приращение скорости
за любой промежуток в течение удара направлено одинаково с поло-
положительной нормалью. Другими словами, если бы мы построили годограф
скорости частицы за время удара, то получили бы отрезок прямой, па-
параллельной нормали. Скорость г>0 падения и скорость z>2 отражения ле-
лежат, следовательно, в плоскости, нормальной к поверхности /(л;, у, z, t) = О,
и их проекции на касательную плоскость равны между собой:
¦о2 sin P = ©osina. E5.8)
Поставим следующую задачу: пусть для момента t0 начала удара
известно) радиус-вектор г0 частицы и её скорость z>0 (скорость падения);
требуется найти скорость v2 частицы в конце удара (скорость отраже-
отражения), а также импульс N02 реакции за время удара.
Обозначим через NOl импульс реакции за первую стадию удара (^0, tj
и через Nlt её импульс за вторую стадию (tv tu-\-i); очевидно,
JV02= ##
Применив закон -изменения количества движения к первой стадии, а также
ко всему времени удара, мы получим:
me, —m©0 = N01, E5.10)
тщ—mvu = Nm. E5.11)
В дополнение к этим уравнениям мы выпишем условие E5.5), которому
удовлетворяет скорость vx в конце первой стадии удара; употребляя
попрежнему нижние индексы 0, 1, 2 как указание на то, что соответ-
соответствующие величины вычисляются для моментов ^0, tl и t2 = t0-\-T, мы
в данном случае получим:
или, что то же,
Так как координаты частицы за время удара не меняются, то последнее
уравнение можно переписать также в следующих двух видах;
= 0; E5.12)
= 0. E5.13)
Равенствами E5.10), E5.11), E5.12) исчерпываются те независимые
между собой уравнения, которые мы можем составить в рассматриваемой
задаче.
Рассмотрим сначала частный случай, а именно, допустим, что удар
абсолютно неупругий, т. е. ограничивается одним первым актом. Тогда
искомыми будут две неизвестные величины vx и N01, и для нахожде-
нахождения их мы имеем два уравнения: E5.10) и E5.12). Умножим уравнение
39* 611
E5.10) скалярно на grad/0, а уравнение E5.12) на т и вычтем второе
из первого; мы получим:
) *^;oit
нли согласно формуле B0.8) на стр. 186;
отсюда мы найдём:
и, следовательно,
Подставив это значение N01 в уравнение E5.10), мы найдём
Обращаясь к общему случаю, мы видим, что в дополнение к тому,
что проделано, нужно определить две величины: Nu2 и 1)г. Между тем
в нашем распоряжении остаётся лишь одно уравнение E5.11), и, таким
образом, на базе изложенной теории поставленная задача оказывается
неразрешимой. Недостающее уравнение, связывающее наши неизвестные,
берётся из опытов и наблюдений над теми явлениями, которые жела-
желательно подвести под разбираемую механическую схему. Ещё Ньютон,
измеряя углы падения и отражения соударяющихся тел, пришёл к такому
опытному закону: отношение г импульса за второй акт удара к импульсу
за первый акт удара не зависит от скорости падения, а обусловлено
лишь физическими свойствами соударяющихся тел; это отношение, назы-
называемое коэффициентом восстановления, как показывает опыт,
заключено между нулём и единицей:
Формулой положение Ньютона выражается так:
'»12—B'v01* \oo.ii)
Итак, если е известно из опыта, мы имеем в дополнение к составленным
уравнениям ещё уравнение E5.17), и разбираемая задача становится
определённой. Сперва на основании послеанего равенства мы найдём
импульс iVo2 за всё время т удара; имеем
iV02 = ^01-{-/V1S! = (l -H)Nel; E5.18)
отсюда по формуле E5.15) получаем:
\ 1 -j- е) от I — I grad/j
^02= lgrad/0|» " *
512
Теперь по уравнению E5.11) мы определим искомую скорость отраже-
отражения ©8:
Вернёмся к вопросу о коэффициенте восстановления и выразим в
иной форме соотношение Ньютона E5.17). Для этого вычтем сперва
уравнение E5.10) из уравнения E5.11); на основании соотношения
E5.9) результат можно записать так:
Решив это уравнение совместно с уравнением E5.13) так же, как была
решена система уравнений E5.10) и E5.12), мы получим:
(df\
м _ \а*П E5.20)
• 1г lgrad/0| v '
и, следовательно,
__ г,г,а*. E5.21)
Подставив выражения E5.15) и E5.21) импульсов в равенство E5.17), мы
приведём уравнение Ньютона к следующему виду:
C0,—(S).-
Чтобы дать себе отчёт в том, каким обрдаом при помощи измерения
углов падения и отражения можно найти отношение е реактивных им-
импульсов за вторую и первую стадии удара, остановимся на простейшем
случае удара, с которым собственно и производились опыты, а именно,
на случае, когда связь неподвижна, т. е.
В этом случае
и уравнение E5.22) переходит в следующее:
grad /0 • ф2 = — s grad /0 ¦ г>0.
Введя углы аир падения и отражения (фиг. 154) и сократив уравне-
уравнение на |grad/|, мы получим отсюда:
»2 cos р = s vu cos а.
В дополнение к этому равенству возьмём соотношение E5.8)
t>2sinE =t»osin a.
Почленным делением этих двух уравнений мы получим:
ctg p = s ctg a,
613
или
6_ctg|
Ctg a •
т. е. отношение между реактивными импульсами за вторую и первую
стадии удара равно отношению котангенсов углов отражения и падения.
Как было сказано, е заключается в пределах
Если s = 0, второго акта удара вовсе не будет, и удар называется аб-
абсолютно неупругим; если е=1, удар называется абсолютно упругим.
Ньютон нашёл, что при соударении стекла о стекло е= -r^i при соуда-
соударении мячиков, набитых шерстью, е = —; при соударении железа о же-
железо s тоже приблизительно равно—1). Позднейшие опыты также под-
твердили ньютонов закон E5.17).
Пример 152. Пусть частица массы т = 1 движется по закону
x=at, y = bt, z — ct,
где о, b, с — постоянные, и пусть эта частица подчинена иеудерживающей
связи
/= /?2 — (л: — k(f — у* — г* 5» О,
где /? и А —тоже постоянные. В момент t = Q частица находится не на связи.
Момент *0 прихода её на связь мы определим, решив уравнение
#а_ [(a—kf + «« -г- &\ /2 = 0.
Мы находим:
где
В этот момент частица займёт положение
а проекции скорости падения будут равны
Продифференцировав уравнение связи, мы находим, что
следовательно, произойдёт удар. Вычислим j grad/01:
|grad/0|=2a<0;
модуль импульса Nt реакции за первый акт удара согласно формуле E5.14)
будет равен
проекции скорости гг частицы в конце первого акта удара согласно формуле
E5. 16) равны
k Q 0
О Thomson and Tal t, Natural Philosophy, sect. 300.
614
Если коэффициент восстановления равен е, то модуль полного импульса реакции-
Л^ время удара будет равен
а проекции скорости отраження по формуле E5.19) окажутся следующими:
v^^-k — t(a — k), v9y = — tb, vi2 = — tc.
304. Изменение кинетической энергии материальной частицы
за время удара. Согласно теореме лорда Кельвина [см. формулу A8.36)
на стр. 164) приращение кинетической энергии Т частицы за время пер-
первого и второго актов удара может быть выражено следующим образом:
Г,-Г, =±tflt •(», + »,).
Так как импульс реакции направлен одинаково с градиентом функции
/{х, у, г, t), то эти выражения можно преобразовать к следующему" виду:
Теперь вспомним, что
причём для t=t1 мы имеем i-ft) ==^>- Преобразовав с помощью по-
последних соотношений скалярные произведения в уравнениях E5.23), мы
получим:
Т Т - •*" [ (df\ 2[д1\Л
'2-'i— 2|grad/0|LUA" \dtH\ •
Когда связь неподвижна, т. е. ~?==®, мы можем, пользуясь форму-
формулами E5.14) и E5.20), переписать предыдущие равенства так:
Отсюда мы заключаем, что за первый акт удара кинетическая энергия
частицы уменьшается, а за второй акт увеличивается. Сложив последние
два равенства, мы на основании соотношения E5.17) придём к такому
выражению:
78_7-0=-|| A-6»); E5.25)
615
следовательно, за оба акта удара кинетическая энергия частицы, вообще
говоря, уменьшается и только при абсолютно упругом ударе остаётся
без перемены. Равенства E5.24) и E5.25) выражают теоремы Карно
(Carnot).
Формуле E5.25), выражающей изменение кинетической энергии при
ударе, можно дать другой вид, если воспользоваться соотношениями
E5.18) и E5.19); имеем
v _ JVOT m
отсюда, после подстановки в равенство E5.25), мы получаем:
Величина z>0 — z>2 носит название потерянной скорости, а величину
°.—— называют кинетической энергией потерянной скорости; найден-
найденное соотношение известно под названием обобщённой теоремы Карно и
читается обычно так: при ударе частицы о неподвижную идеальную связь
j s
потеря кинетической энергии равна . . -ой доле кинетической энергии
потерянной скорости.
LVI. ТЕОРИЯ УДАРА СИСТЕМЫ ЧАСТИЦ
305. Удар материальной системы о неудерживаюшую связь.
Примем, что положение системы, состоящей из п материальных частиц
с массами /nv, определяется декартовыми координатами jcv, yt, г,, где
V—1,2, 3, ..,,«, Для сокращения письма заменим этн координаты дру-
другими, положив
У^д,2 y^^l y, 3r
Кроме того, введём следующие обозначения для проекций активных сил
действующих на массы mv:
р ,
действующих на массы
Тогда можно будет сказать, что система отнесена к Зл координатам ?,,
где v=l, 2, 3, ..., Зп. Кинетическая энергия Т в новых координатах
представится так:
Зл
7=— V§a. E6.1)
2 +-* v
Пусть система подчинена а удерживающим конечным связям
/,(?„*)= 0, /2 (?„ /) == 0, ..., /e EV, *) = 0, E6.2)
а также неудерживающей конечной связи
/(?„0 5*0. E6.3)
616
Лагранжевы уравнения движения C2.6) на стр. 320 напишутся следую-
следующим образом:
>^ jf =L 2 Зл); E6.4)
здесь Ха и \ представляют собой множители связей.
Положим, что связь E6.3) ослаблена, т. е.
ПК, *)><>>
В этом случае движение системы будет происходить так, как будто бы
этой связи вовсе не было. Пусть указанное движение совершается со-
согласно закону
6, = М') (v=l,2 Зл).
Может случиться, что система снова придёт на связь E6.3), т. е. в некото-
некоторый момент /0 координаты её Sv обратят левую часть выражения E6.3)
в нуль. Условимся, что за начало отсчёта времени нами взят некоторый
момент того промежутка времени, в течение которого связь E6.3) была
ослаблена; тогда момент t0 прихода системы на связь определится, если
мы найдём наименьший положительный корень уравнения
Если такого корня не окажется, то во всё своё дальнейшее движение
система никогда не встретится со связью. Но пусть такой корень t0 най-
найден; тогда в момент tQ система придёт в положение, лежащее на связи
E6.3), и её координаты и скорости будут соответственно иметь значения
Конечно, найденные скорости обязательно удовлетворяют условиям, на-
налагаемым связями E6.2), т. е.
dM -i-(dfA —0 fa—1 2 «\
[см, формулу B7.6) на стр. 275]. Далее, мы знаем, что система, нахо-
находящаяся на неудерживающей связи E6.3), не может иметь произвольных
скоростей, а должна подчиняться ограничению, выражаемому формулой
B7.25) на стр. 281, т. е.
¦й>0, E6.5)
или
?%*•+%**¦
Применив это неравенство к моменту t0, мы найдём, что скорости
должны удовлетворять условию
617
или, короче,
Значок 0 показывает, что в соответствующую функцию вместо 5,, ?„ t
подставлены ?v0, §у0, /0-
Если скорости системы в момент t0 таковы, что левая часть выраже-
выражения E6.6) положительна, то рассматриваемый момент является тем мо-
моментом, в который система снова покидает связь (§ 168). Если скорости
системы в момент tu таковы, что левая часть выражения E6.6) обра-
обращается в нуль, то, в зависимости от значений второй и высших произ-
производных функции /, система или останется на связи, или покинет её. Но
если скорости ?v0 таковы, что
то, чтобы согласовать это неравенство с условием E6.5), мы должны
принять, что связь E6.3) оказывает ударные реакции на массы,
входящие в состав системы, и что эти реакции изменяют невозмож-
невозможные скорости ?v0 в некоторые другие, возможные ?v2. Происходит так
называемый удар системы о связь E6.3). При этом, чтобы возможно
большее число наблюдаемых явлений подвести под нашу схему, мы при-
примем, что в общем случае скорости ?va удовлетворяют условию E6.5) со
знаком :5е, т. е. «равно или больше». Если в момент t0 система покидает
связь, то мы должны исследовать в том же отношении следующий по
величине положительный корень уравнения E6.5) и продолжать таким
образом, пока не переберём всех, корней или не дойдём до такого, при
котором система остаётся на связи или при котором происходит удар.
Итак, пусть для момента @ соблюдается неравенство E6.7). Так как
ударные реакции связи отнесены нами к разряду ударных сил, то в со-
согласии со сказанным в § 302 мы принимаем, что:
1) время действия ударных реакций бесконечно мало, или, иначе говоря,
продолжительность удара т бесконечно мала;
2) за время удара ни система, ни связи не успевают изменять своего
положения или формы;
3) за время удара импульс всякой конечной, т. е. не ударной, силы
равен нулю; кроме того, мы допустим, что
4) удар не разрушает конечных удерживающих связей E6.2) системы.
Пусть удар кончается в момент t2 = t0 -f-1; тогда по сказанному выше
в общем случае мы будем иметь
(а1\
где
„/Л>0. E6.8)
Все коэффициенты, как показывает значок 0, здесь постоянны.
Полагая, что во время удара скорости системы изменяются непре-
непрерывно, мы из уравнений E6.7) и E6.8) заключаем, что для некоторого
618
промежуточного момента tb т. е. момента, удовлетворяющего условию
система приобретает такие скорости ?Vi> что для них соблюдается ра-
равенство
(d?\ =0, E6.10)
где
8я
Промежуток времени от t0 до tt мы назовём первым актом удара, а про-
промежуток от tx до ti = t0-\-z — вторым актом удара. В частном случае удар
может ограничиться только одним первым актом, и тогда мы его будем
называть абсолютно неупругим.
Мы примем, что ударные реакции, а следовательно, и их импульсы
направлены по соответствующим градиентам связей и что каждая связь
характеризуется своим множителем связи (§ 161 и 175). Для реакции #„
связи /., с которой последняя действует на частицу т,, мы имели выра-
выражение C0.16) на стр. 295:
#а, = \»gradv/e. E6.11)
Аналогично для реакции R4 связи f мы получим:
/?, = Xgradv/. E6 12)
Проекции этих реакций при обозначениях настоящего параграфа соот-
соответственно имеют следующие выражения:
Импульсы реакций ьмеют следующие значения:
> t
Я„ = (grad,/Jo | \ dt, #, = (gradv/H Г ) dt.
to ' tB
Пусть попрежнему t0 и t% означают моменты начала и конца удара и
пусть tx ut — соответственно некоторый фиксированный и некоторый про-
произвольный моменты в течение удара. Условимся в следующих обозначениях:
< i
\-=\\<Я, l=[ldt, E6.13)
* i ' t
t, ь
• J
E6.15)
619
Определённые этими равенствами величины мы будем называть импуль-
импульсивными множителями.
С помощью введённых обозначений мы из уравнений E6.4), отнесённых
ко времени удара, интегрированием находим следующие выражения:
« (#).+-4?). E<U6)
(v=l, 2, ..., 3/1).
Здесь по условию C) импульсы конечных сил Хч положены равными
нулю.
Задача об ударе состоит в определении скоростей ?v2 по данным @,
!ц и ? . Рассмотрим сначала частный случай, а именно, допустим, что
удар абсолютно неупругий, т. е. ограничивается одним первым актом.
Тогда искомыми являются скорости svl, числом Зл; для нахождения их,
мы имеем Ъп уравнений E6.16), но этих уравнений недостаточно, так
как сюда входят ещё а-{-\ неизвестных импульсивных множителей Ха0]
и \UV Добавочными уравнениями служат равенство E6.10) и а ра-
равенств:
Зл
A)Л(?)=° («='-' ¦* E(U9)
равенства эти вытекают из условия D), т. е. из того, что удар не раз-
разрушает данных >держивлош.их связей E6.2). Указанных Зл-(-а-(-1
уравнений имеется ровно столько, сколько есть искомых величин
Уравнения для определения импульсивных множителей получаются сле-
следующим приёмом. Умножим каждое из уравнений E6.16) соответственно
на [ Jr) и просуммируем их; таким способом мы найдём:
I, (I).s" -1, (I).s- = I, >¦" m+V-m E6'20>
где символ [<рф] употреблён как обозначение суммы следующего вида:
620
заметим, что справедливо равенство
Если в левой части уравнения E6.20) мы прибавим и вычтем п
и воспользуемся равенством E6.10), то получим:
_ [//]• E6.21)
Умножив уравнения E6.16) соответственно на (:sjr 1 , мы тем же путём
в силу соотношения E6.19) придём к следующим а равенствам:
Л'/] = О (а'=1, 2,..., в). E6.22)
Из уравнений E6.21) и E6.22) мы находим:
X ДооЛ*Л V — — Д«|
где под Д разумеется определитель уравнений E6.20) и E6.21), а под
Доо и Да0 — адъюнкты этого определителя, соответствующие элементам
[//] и [/«/]• Подставив выражения E6.23) импульсивных множителей
в равенства E6.16), мы непосредственно найдём значения скоростей ?vl,
что в нашем частном случае и решает задачу об ударе.
При решении задачи об ударе в общем случае надо обратиться
к уравнениям E6.18) или к группе уравнений E6.16) и E6.17). Нетрудно
усмотреть, что в том и другом случае число неизвестных на единицу
превышает число уравнений. Если остановимся на уравнениях E6.18),
то число неизвестных будет 3/г —f- а —f- 1; этими неизвестными будут ?vl,
К.02 и Чг- Уравнений же будет всего Зл-J-a, а именно, Зл уравнений
E6.18) и а уравнений
которым по условию D) должны удовлетворять скорости ?,_. При другом
выборе уравнений неизвестных окажется 6п-\-2а-\-2, а" именно, это
будут ?v3, ?„,,^,2, \<oi> ^12 и .\>i; уравнений же будет всего бя-f- 2а-\- 1,
т. е. опять на единицу меньше, а именно, Зл уравнений E6.16), Зл урав-
уравнений E6.17), а уравнений E6.19), а уравнений E6.24) и уравнение
E6.10). Если бы для нахождения импульсивных множителей Ха02, Х02 из
уравнений E6.18) мы применили прежний способ, то пришли бы к сле-
следующим равенствам:
а
0 = Е *••» EV.1+.*•¦ [/•'/! (а' = 1, 2, 3, ..., а).
621
Отсюда мы находим:
здесь в выражении [J-A согласно формуле E6.9) содержатся неизвест-
неизвестные скорости ?Vj. Из равенств E6.25) и E6.23) или непосредственно из
уравнений E6.17) мы получаем также
Ы~ Д \dt)^ .42— Д \Л
Недостающее уравнение берётся по аналогии с уравнением E5.17) нэ
стр. 612 в таком виде:
X]2=sX01; E6.27)
здесь s является правильной положительной дробью и носит название
коэффициента восстановления. Если е = 1, уд<ф называется
абсолютно упругим; если s = 0, удар называется абсолютно неупругим.
Уравнение E6.27) согласно формулам E6.26) и E6.23) может быть
заменено следующим, ему равносильным:
Из этого уравнения и из равенств E6.26) и E6.23) мы видим, что и для
импульсивных множителей удерживающих связей мы имеем соотношения,
аналогичные равенству E6.27):
^и=Чи- E6.29)
С добавлением уравнения E6.27) или E6.28) задача об определении
скоростей в конце удара становится вполне определённой; найдя импуль-
импульсивные множители за первый акт удара по формуЛсШ E6.23), мы, поль-
пользуясь соотношениями E6.27) и E6.29), подставляем их значения в урав-
уравнения E6.18) и, наконец, определяем скорости ^ из уравнений
^о1 + (^)о ^ + (|)о E6.30)
здесь в правой части теперь всё уже известно.
Пример 153. Две материальные частицы mi и /я, равных масс связаны
неизменяемым стержнем длины / и движутся в плоскости поступательно, рав-
равномерно и прямолинейно со скоростью ft. Рассмотрим удар этой системы о
прямую, составляющую угол о со стержнем и перпендикулярную к направле-
направлению движения Примем эту прямую за ось Ох, Обозначим через а постоянную
абсциссу частицы тъ и через Ь — начальную ординату частицы тх Если считать,
что &>0 и что частица Ш\ находится ближе к оси Ох, чем частица тъ тс
уравнения движения взятых частиц будут следующие:
jfj = а -(- / cos a, y1 = b — kf, дг,= а; j/,= Ь -+-/ мп а — kt.
Здесь все коэффициенты постоянны. Уравнение наложенной на систему удер
живающей связи напишется так:
622
Неудерживающих связей имеется две:
Так как b > О, ?>О, а > О, то в момент to = -г система сначала ударится о пер-
первую связь. Этот удар мы и будем исследовать. Координаты и скорости системы
для момента t0 будут:
Так как по условию
то произойдёт удар. Для вычисления импульсивных множителей Ха| связи ^
и Xj связи / за первый акт удара воспользуемся формулой E6.23); мы получим:
Следовательно,
2k ft sin«
Отсюда, если коэффициент восстановления равен е, мы по уравнениям E6.30)
найдйм следующие значения скоростей частии в конце удара:
• i * ,i i w ч fe
*is = х\ъ -г Voi v1 "гs) v-*"io — XW —
ДГ22 = X20 -\- k^i ( 1 -х- S) (Л-м — ДГ10) =
— 1 i-cos2a •
*(! 4-s)sin«cosa
= 1 -|_COS2a
12 = По 4- V 0 4- 0 (Ую —У*о) 4- }oi A +-s) = sft,
¦ , ., I .. . — 2* cos2a -f- k
н — Ум 4- V A 4- •) (>м - Ло) = ) ц.Со32а
306. Решение задачи об ударе в обобщённых координатах. Когда
положение системы определяется обобщёнными координатами q^ где
0=1, 2, 3, ..., 5, то ход решения задачи об ударе остаётся тот же
самый, только вычисления будут несколько сложнее. Пусть снова система
подчинена а удерживающим связям:
а также неудерживающей связи:
/to., 02*0.
Момент t0 прихода системы на связь, координаты системы qa для этого
момента и скорости qa, с которыми система приходит к связи, опреде-
определяются совершенно так же, как и в предыдущем параграфе. Встреча
системы со связью будет сопровождаться ударом, если
Вместо уравнений E6.4) мы теперь возьмём уравнения Гамильтона
(формула C3.19) на стр. 345); при обозначениях настоящей главы
623
они напишутся так:
Проинтегрировав эти уравнения в соответственных пределах, мы
вместо равенств E6.16), E6 17) и E6.18) при аналогичных обозначениях
получим:
E6.31)
при написании этих уравнений принято во внимание, что интегралы по
времени от разности
Q
ка основании определения ударных сил бесконечно малы (§ 302).
Составим союзные выражения для производных -4? ч -ft, представив
пх в таком виде:
df — V Df
здесь в соответствии с формулой C3.4) на стр. 340 введено обозначение
_ V b
Исходя из уравнений E6.31), мы тем же путём, как и раньше, при-
придём к ряду равенств:
Ё
а=1
а
&, [/Л]+ТоЛ/Л,
О = Е )т tA /J + .Хо. [/-'Л (о' = 1, 2, 3, .... а).
Символом [(p(J)] обозначена следующая сумма:
E6.32)
Из уравнений E6.32) для импульсов Хв01 и Хо1 за первый акт удара мы
624
снова находим выражения E6.23), где Д будет, конечно, уже определи-
определителем уравнений E6.32). В заключение, если коэффициент восстановле-
восстановления равен е, мы получаем следующие уравнения:
р1 а=1 7в/0
C=1,2,3, .... s).
Отсюда скорости цл найдутся по формулам C3.4) на стр. 340.
Пример 154 Решим задачу, помещённую в предыдущем параграфе, с
помощью независим лх координат. Координатами этими пусть будут хи ух у,
причём
хг — хх — /cosy, j>2—
Кинетическая энергия Т в этих координатах выразится так:
f'2
Поэтому импульсы ръ рь ps, соответствующие координатам хи yi, у, будут
равны
Рх = 2-Ci 4-1 sin <? ¦ <f, /»2 = 2j/j -(-/cos <p-<p, ps = P<f-{-lsiny-Xi-{-Icosf-y^
Уравнения движения системы до удара о связь .УхЭзО напишутся теперь
так:
Х\ = а -\- I COS a, ylz= b — kt, if = а.
Координаты и скорости в момент начала удара будут иметь следующие зна-
значения:
xw=a-\-lcosa, Ую = 0, ?о = я;
Составим уравнения для нахождения импульсивного множителя 101 реакции
связи за первый акт удара; имеем
Р\\ — Рю = 2-ёц + / sin а• yi = 0,
Ръ\ — Ло= 'cos а .'т, 4- 2ft= »оь
/>3i — Рзо = /2?i +l sin «• in + kl cos a = 0;
при написании этих уравнений принято в расчёт, что.уц = 0. Определив из
этих уравнений Хо1, мы получим:
2*
.JOl - ! _|_ C0S2a •
коэффициент восстановления попрежнему обозначить s, то уравнения
для скоростей в конце удара будут следующие:
Аз— />io = 2*i2-f-/sina.?2 -- 0,
/>22 - fto = 2>i2 4-' cos а • ?24-2* = у 1 4-0 =
Pat — Рго= 12Ъ + 'sin «¦¦«'и + / cos а• j>12 4" A;/cos a = 0.
Отсюда мы находим:
k О 4-е) sin a cos a
*12~ 14 cos^a ¦ л»=о;
• 2А:A 4-Ю cos a
40 г. К. Суслов 625
307. Изменение кинетической энергии системы за время удара.
Теоремы Карно. Исследуем теперь, как изменяется кинетическая энер-
энергия системы за время удара, причём ограничимся рассмотрением лишь
того случая, когда связи, как удерживающие E6.2), так и неудержи-
вающие E6.3), не зависят явно от времени, т. е. когда они удовлетво-
удовлетворяют условиям
Само собой разумеется, что если связи изменяются со временем, то ска-
сказать что-либо общее об изменении кинетической энергии системы нельзя,
так как это изменение будет зависеть от индивидуального характера из-
изменения связей. Итак, пусть соблюдены равенства E6.33). Обращаясь
к уравнениям E6.16), умножим их соответственно на ?,, и сложим; мы
получим:
Зл Sn а Зл Зл
Введём следующее обозначение:
зп . .
ПЛ VI С С (K.R ЪК\
N>=1
Далее, в соответствии с формулой E6.1) обозначим через Г, кинети-
кинетическую энергию системы по окончании первого акта удара. Наконец,
примем во внимание, что согласно равенствам E6.10)t E6.19) и E6.33)
мы в нашем случае имеем
Зп Зп
'—) =Y.(—) & =о, (-) =У.(—) s =о.
Тогда из уравнений E6.34) мы получим:
Тх — А = 0. E6.36)
Повторив тот же приём со скоростями Sv0, мы вместо уравнений E6.34)
найдём следующие уравнения:
Зл Зп a in Зп
!v0. E6.37)
Но скорости в начале удара удовлетворяют условиям
поэтому, обозначив через Та кинетическую энергию системы в начальный
момент удара и воспользовавшись обозначением E6.35), мы получим нз
равенства E6.37), как следствие, следующее уравнение:
т — { \ (df
626
Иначе, согласно равенству E6.23) мы можем написать
А— То= — \\}xk\ E6.38)
где коэффициент k2 определяется равенством
доо'
Убедиться в том, что коэффициент, обозначенный нами через ?2, дей-
действительно не отрицателен, можно или непосредственно, заметив что Д —
симметричный определитель, или на основании нижеследующих сообра-
соображений. Вычтя равенство E6.38) из равенства E6.36), мы найдём:
Подставив сюда выше полученные выражения для Tv 70, А, мы придём
к такому равенству:
Зл
Т1+Т0—2А = ±? (io —?,,)¦ = 701, E6.39)
v = l
где Тт есть так называемая кинетическая энергия потерян-
потерянных скоростей за первый акт удара (ср. § 304); как видим, она
представляет собой величину неотрицательную. Итак, вместо уравнения
E6.38), мы имеем
A-To = — ^^ = — Tov E6.40)
Сложением равенств E6.40) и E6.36) мы получаем так называемую пер-
первую теорему Карно (Carnot)
Т т—_12fc2—-г . E6 4П
т. е. если связи системы не зависят явно от времени, то потеря кинети-
кинетической энергии системы за первый акт удара равна кинетической энергии
потерянных скоростей. Как видим, кинетическая энергия системы за пер-
первый акт удара всегда уменьшается.
Обратимся теперь к уравнениям E6.17); умножив их соответственно
на §vl и сложив, мы получим следующее равенство, аналогичное равенству
E6.36):
В — Г, = 0, E6.42)
где
Если же равенства E6.17) соответственно умножить на Sv2 и сложить,
то на основании соотношения E6.26) мы найдём равенство, аналогичное
равенству E6.38), а именно:
7«-я=тЬ.(д),=уН|*1' <56ЛЗ)
40* 627
где 7 есть кинетическая энергия системы по окончании второго акта
удара. Вычтя уравнение E6.42) из уравнения E6.43), мы получим:
\ X*,** = Т2 + Г, - 2В = X &2 - 6,.)а = Л*.
ч —1
где Г]2 есть так называемая кинетическая энергия приобретённых ско-
скоростей за второй акт удара. Следовательно, согласно равенству E6.43)
мы имеем
Сложив полученное равенство с равенством E6.42), мы придём ко вто-
второй теореме Карно
2—М='Ч2^ =мг; E6.44)
т. е. если связи системы не зависят язно от времени, то приращение
кинетической энергии за второй акт удара равно кинетической энергии
приобретённых скоростей. Как видим, кинетическая энергия системы за
второй акт удара (если только он имеет место) всегда увеличивается.
Исключив из равенств E6.44) и E6.41) величину 7, и приняв во
внимание соотношение E6.27), мы выведем третью теорему Карно.
Т Т 1 MAi 1,2 \ L Ь2\'г П s2\-
1 ч ' о — " к \Л12 .01' —' 2 *ui
таким образом, если связи системы не зависят явно от времени, то за
оба акта удара кинетическая энергия системы, вообще говоря, умень-
уменьшается, и только для абсолютно упругого удара, т. е. при s=^=l, она
остаётся без изменения.
Результат исключения 7", из равенств E6.41) и E6.44) можно за-
записать также и в следующей форме:
in
f f ==z'p 7" == 5] {(? \ J (S ? J \ E6 45)
4=1
Для упрощения полученного выражения обратимся к формулам E6.15),
E6.25) и E6.28); из них мы получим следующие вспомогательные соот-
соотношения:
х01 — _!_х02, х^01 — ] х^02,
' \ , E6.46)
Г12 14eY02' *12—
12 1 _|_ в ^02' ,4 2 ГЦГс >02'
Эти равенства позволят нам исключить суммы, стоящие в правых ча-
частях уравнений EЬ.16), E6.17) и E6.18); а именно, мы получим.
5v0 r+~s »2 c"'t0'' v2 »i== 14-5 ^""чг
628
Подставив эти выражения в равенство E6.45), мы придём к соотноше-
соотношению
То-Т,= \^Тп. E6-47)
где через Т02 обозначена сумма
Зл
' 02 == 2ш1 VSO ^v2' •
Равенство E6.47) выражает собой так называемую обобщённую теорему
Карно: потеря кинетической энергии за полное время удара равняется
~s -ой доле кинетической энергии потерянных скоростей за этот про-
1 ~rs
межуток времени.
308. Закон изменения количества движения системы в случае
удара. Положим, что на данную материальную систему, подчинённую
каким-либо идеальным связям, действуют одновременно и конечные, и
ударные силы. Пусть F есть главный вектор активных ударных сил,
F' — главный вектор активных конечных сил, R—главный вектор удар-
ударных реакций, /?' — глапный вектор конечных реакций и
л
АГ=2 m4v1=Moc E6.48)
— количество движения системы. Согласно теореме C1.10) на стр. 305
мы имеем
dK= Fdt -f F'dt + Rdt -j- R'dt.
Проинтегрируем обе части этого уравнения в пределах от /0 до /2, со-
соответствующих времени действия ударных сил; при этом учтём замеча-
замечание C) на стр. 618 об импульсе конечной силы; наконец, по аналогии
с формулами E6.15) введём обозначения
t, t.
Pot=\Fdt, ROi=\Rdt; E6.49)
в результате мы найдём:
/С2 — /Со = f02 + ^о2- E6.50)
Ко и К2 означают количества движения системы в начале и в конце
удара. Полученное уравнение выражает закон изменения количе-
количества движения для ударных сил: приращение количества движения
системы равняется сумме главного вектора активных импульсов и главного
вектора импульсивных реакций. Согласно равенству E6.48) этой теореме
можно дать вид
М*>С2 — MvC0 = F02 -f-/?02.
Если главный вектор импульсивных реакций равен нулю, то вместо урав-
уравнения E6.50) мы получим:
К2 — Ко^ Fa2, E6.51)
т. е. приращение количества движения системы равно главному вектору
629
активных импульсов. Если, кроме того, и JF02 равно нулю или если сумма
F02 -+• Ro2 обращается в нуль, мы имеем
/С2 = Ко,
т. е. количество движения системы не изменяется за время удара.
309. Закон изменения кинетического момента системы в случае
удара. Пусть G есть кинетический момент системы относительно неко-
некоторого центра О (начала координат), a L, L, И и И' соответственно
означают главные моменты ударных и конечных активных сил и ударных
и конечных реакций относительно тою же центра. Будем, кроме того,
аналогично прежнему пользоваться обозначениями
Lo2 = \Ldt, H02=\Hdt.
Нетрудно показать, что i^ и //02 представляют собой соответственно
главные моменты импульсов активных и реактивных ударных сил. Дейст-
Действительно, согласно замечанию 2) на стр. 618 мы, например, имеем
для 1„2
Изучим, как изменяется кинетический момент системы за время удара.
На основании теоремы C1.17) на стр. 308 мы имеем
dG=Ldt-\- Ldt -\-Hdt-\- H'dt.
Проинтегрировав обе части этого уравнения в пределах от t0 до t2, со-
соответствующих времени действия ударных сил, мы на основании преды-
предыдущих замечаний найдём:
G2-G0 = f02 + //02, E6.52)
где б0 и G2 означают кинетический момент системы в начале и конце
удара. Полученное уравнение и выражает закон изменения кине-
кинетического момента для ударных сил; приращение кинетического
момента системы относительно любого полюса равно сумме главных мо-
моментов активных импульсов и импульсивных реакций относительно того же
полюса. Существенно заметить, что формула E6.52) остаётся без изме-
изменения, если полюс А, относительно которого берутся моменты, подвиж-
подвижной. Действительно, в этом случае в левой части равенства E6.52)
t,
согласно формуле C1.27) на стр. 311 добавится член \ vAXKdt. Но
так как скорости частиц системы во время удара остаются конечными,
то этот член бесконечно мал. Если главный момент импульсивных реак-
реакций относительно полюса О равен нулю, то вместо уравнения E6.52)
мы получим:
G2 — G0 = L02, E6.53)
т. е. приращение кинетического момента равно главному моменту актив-
630
ных импульсов. Когда, кроме того, Z.O2 равно нулю или когда сумма
Цъ-\-НОъ обращается в нуль, мы из равенства E6.52) получаем
т. е. кинетический момент системы не изменяется за время удара.
По аналогии со сказанным в § 183 оба закона, E6.50) и E6.52),
мы можем соединить в один, система скользящих векторов, равных при-
приращениям количеств движения частиц системы, эквивалентна системе
векторов, равных активным импульсам и импульсивным реакциям. Ьсли
система векторов, равных импульсивным реакциям, эквивалентна нулю,
то система векторов, равных приращениям количеств движения частиц
системы, эквивалентна системе векторов, равных активным импульсам.
Вместо того, чтобы говорить «система векторов, равных приращениям
количеств движения частиц системы», можно было бы сказать «прира-
«приращение системы векторов, равных количествам движения частиц системы»
(§ 31).
Примером материальной системы, для которой система импульсивных
реакций всегда эквивалентна нулю, может служить свободное абсолютно
твердое тело (§ 178 и 180). Но, конечно, кроме твердого тела можно
подобрать много других материальных систем, для которых указанное
обстоятельство также будет иметь место; такова, например, система,
лежащая на той связи, о которой говорится в примере 89 на стр. 281.
310. Принцип Даламбера в теории удара. Представим себе, что
данная материальная система подчинена а удерживающим конечным свя-
связям типа B7.1) на стр. 273 и b удерживающим дифференциальным типа
B7.12) на стр. 277.
Если /*v и /\ соответственно означают ударную и конечную актив
ные силы, приложенные к частице т^ системы, то уравнения движения
частиц (уравнения Лагранжа 1-го рода) согласно формуле C0.30) на
стр. 298 напишутся следующим образом.
(v=l, 2, ..., n).
Проинтегрируем обе части этих уравнений в пределах от t0 до /, где
/0 — момент начала удара, а /—некоторый момент во время удара; при
этом примем во внимание замечание C) на стр. 618 оэ импульсе конеч-
конечной силы и вспомним обозначения E6.13) и при интегрировании правой
части будем писать
/ t
в результате мы придём к уравнениям
—«\0) = F-:+Д \. teradv Л)о + Д «р$
(v=l, 2, .... п); E6.54J
63J
здесь индексами 0 помечены величины, вычисленные для момента начала
удара. Умножим теперь полученные равенства соответственно на вирту-
виртуальные перемещения 8г„ частиц (§ 171), соответствующие положению
системы в момент tOt и возьмём сумму их для всех частиц системы.
Употребив обозначения § 171, мы найдём:
2 «, («\ - «\0) • &\=2 /% • «г, + 2 w. + 2 ььь-
v = 1 v = l " a=l " 3=1 '
Так как виртуальные перемещения подчинены условиям B8.8) на
стр. 285, т. е.
&Л=о, ьь=о,
то из предыдущего равенства мы выводим следующее окончательное
выражение для принципа Даламбера в приложении к ударным силам:
2 {К - «, («\ - «\0)} • Зг, = 0. E6.55)
¦•=1
По аналогии с даламберовой силой инерции (§ 198) векторную вели-
величину — ту (г»у — z»vo) называют инерционным ударным импульсом, а про-
произведение импульса силы на элементарное перемещение, по аналогии
с элементарной работой силы, называют элементарной работой импульса.
Употребляя эти термины, уравнение E6.55) словами можно прочитать
так: сумма элементарных работ активных и инерционных импульсов на
любом виртуальном перемещении системы равна нулю.
Пусть теперь конечные связи явно не содержат времени, а диффе-
дифференциальные однородны относительно скоростей, т. е. пусть выполнены
условия
^=0, Я„ = 0. E6.56)
В этом случае, как было показано в § 171, виртуальные перемещения
совпадают с возможными перемещениями, и мы в праве положить как
так и
Вставим сперва первое из этих выражений для ?rv, а потом второе
в уравнение E6.55) и в обоих случаях проинтегрируем левую и правую
части уравнения в пределах от @ до (; в первом случае мы получим
а во втором случае
п
r-/l = |?f/^ E6.58)
где 70 и 7—значения кинетической энергии системы в моменты tQ и t,
632
т. е. в начале удара и в момент t во время удара, а буквою А обоз-
обозначена сумма
Если теперь мы сложим уравнения E6.57) и E6.58), то найдём:
Это равенство представляет собой распространение на систему частиц
теоремы лорда Кельвина [см. формулу A8.36) на стр. 164].
Из выражения E6.58) легко получить выше доказанные теоремы
Карно. Приложим, например, равенство E6.58) к первому акту удара
о связь /=0. В этом случае надо будет положить 7=7,; кроме того,
согласно формулам E6.12) и E6.14) мы будем иметь
[см. свойство C) на стр. 618]. В результате мы найдём:
(ср. преобразование, выполненное в 5 163). На основании формулы
E6.10) мы из последнего равенства получим:
Г, — А = 0 E6.59)
Но согласно формуле E6.39) мы имеем
7-,+ 70-2Л=701, E6.60)
где
л
7
Исключив из равенств E6.59) и E6.60) величину А, мы получим первую
теорему Карно
?о — Л = Тор
Аналогичными рассуждениями можно получить и вторую теорему Карно.
311. Теорема лорда Кельвина. Задачу об ударе системы, или о
действии импульсов на систему, можно свести к задаче о разыскании
минимума некоторой функции. Пусть связи рассматриваемой системы
удовлетворяют условиям E6.56) и пусть на систему, находящуюся в по-
покое [а покой является возможным кинематическим состоянием системы
(§ 205)], подействовали некоторые импульсы Fy. Так как все начальные
скорости г»„0 равны нулю, то, применив формулу E6.58) к моменту
окончания действия импульсов, мы найдём:
633
Положим теперь, что на ту же покоящуюся систему подействовали не-
некоторые другие импульсы, и пусть частицы системы от этих импульсов
приобрели скорости z»v2. Допустим при этом, что новые скорости такивы,
что
2 W« = 2 Л-^2- E6-62)
Так как скорости г»'у2 относятся к числу возможных, то в равенстве E6.55)
мы можем положить
Тогда мы получим
По формулам E6.61) и E6.62) мы отсюда выводим
i>v*-v242=27V E6-63)
v=l
Далее, тождественным преобразованием мы находим
Ji"W242 = 7 + ^-7l- E6-64)
где
п п
Т2 = 2 2 мХа • Г22 = 2" X 'м> Ка ~ «\а)8-
Из равенств E6.63) и E6.64), мы, наконец, получаем
т' т — 7" ^> О
* 2 в '22^'
т. е кинетическая энергия, которую получит система в действительности
от приложенных импульсов, будет наименьшей из всех тех кинетических
энергий, которые сообщили бы системе всевозможные импульсы, выпол-
выполняющие условие E6.62).
Когда импульсы Fy приложены не ко всем частицам системы, а только
к некоторым, то условию E6.62) можно удовлетворить, если новые
импульсы подобрать так, чтобы выполнялось условие <v^2 = v^2 для всех
тех частиц, скорости которых входят в условие E6.62).
Пример 155 Две частицы, имеющие массы «i и ш2, связаны неизменяе-
неизменяемым стержнем длины /. Частица гп\ от некоторого толчка начала двигаться со
скоростью »0, перпендикулярное к стержню. Найти начальное положение мгно-
мгновенного центра вращения системы
Пусть начало координат совпадает с начальным положением частицы гп\,
а стержень лежит на положительное части оси Ох. Тогда если искомую ко-
координату мгновенного центра вращения мы обозначим через ?, то для кинети-
кинетической энергии системы в конце удара будем иметь выражение.
Т= -1Ш2 [m,t2 _|_ m2 E _ /J]. E6.65)
634
Скорость частицы т\ в конце удара по модулю равна
v0 - <o=. E6.66)
Применяя теорему лорда Келбвина, мы должны искать минимум функции E6.65)
при условии E6.66) или, что то же, минимум функции
E6.67)
Очевидным решением будет ?=/, т. е. мгновенный центр вращения сов-
совпадает со второй частицей.
312. Теорема Бертрана. Теорема лорда Кельвина сводит задачу
о действии ударных импульсов на материальную систему к рассмотрению
минимума некоторой функции. Подобным образом теорема Бертрана(Вег-
trand) показывает, что задача о действии ударных импульсов сил на си-
систему совпадает с задачей о нахождении некоторою максимума.
Пусть на материальную систему, связи которой удовлетворяют усло-
условиям E6.56), подействовали некоторые импульсы, и пусть частицы системы
от этих импульсов изменили свои первоначальные скорости г»„0 на некото-
некоторые другие г»ч2. Наложим на систему новые связи; тогда наша система
от действия тех же импульсов, исходя из того же начального кинемати-
кинематического состояния, т. е. из того же положения и при тех же начальных
скоростях г»у0, выйдет уже с другими скоростями v\r Эти новые скорости
будут возможными как для системы с увеличенным числом связей, так и
для первоначальной. Приложим равенство E6.55) сначала к первоначаль-
первоначальной системе, положив
br, = vjt; E6.68)
тогда мы получим:
m^2-v' 2-2
itij
Затем приложим равенство E6.55) в предположении E6.68) к системе
с увеличенным числом связей; мы будем иметь:
п п п
Вычтя полученное выражение почленно из равенства E6.69), мы найдём:
2 «л. • <я — 2 «,»Л = °- E6-7°)
v = l v = l
Введём обозначения:
тогда мы будем иметь:
635
На основании сказанного равенство E6.70) приводит к следующему ре-
результату.
Т -г' Т' N0
т. е. прибавление новых связей при тех же импульсах всегда влечёт за
собой уменьшение кинетической энергии системы. Это и составляет те-
теорему Бертрана. Другими словами, её можно высказать так станем рас-
рассматривать движение системы после действия импульсов, как одно из
движений системы с увеличенным числом связей; тогда из бесконечного
множества этих движений система получит такое, которое даст ей наи-
наибольшую кинетическую энергию при тех же импульсах.
Пример 156. На частицу массы Ш\, связанную неизменным стержнем /
с частицей массы т2 и находящуюся в покое, подействовал импульс iV, пер-
перпендикулярный к стержню. Найти начальное положение 'мгновенного центра
вращения системы.
Возьмём ту же систему координат, как в примере 155 на стр 634, и до-
допустим, что некоторая точка с координатой s, лежащая на стержне / или на
его продолжении, закреплена неподвижно. Вращение около мгновенного центра,
которое получит в действительности рассматриваемая система, можно считать
частным случаем указанных вращении при соответственном выборе положения
неподвижной точки или при соответственном значении координаты i. Кинети-
Кинетическая энергия Т при вращении около неподвижно? точки выразится так:
T=^\m& + m2?-iP\; E6.71)
при этом угловая скорость <в найдётся из равенства
ю {«!«-}-т2 (/-&J} = ±#5, E6.72*
выражающего согласно закону E6.53) зависимость между моментом импульса
около неподвижной точки и кинетическим моментом системы относительно
того же полюса. По теореме Бертрана система повернётся около того полюса,
для которого кинетическая энергия E6.71) будет наибольшей при условии
E6.72). Иными словами, надо искать максимум функции
+ 0 -т
Сравнение выражений E6.67) и E6.73) показывает, что методы, примененные
в двух последних примерах, приводят к одному и тому же результату. ? = /.
LVII. ТЕОРИЯ УДАРА ТВЕРДЫХ ТЕЛ
313. Действие ударных сил на твёрдое тело. Применим к твёрдому
телу, подвергающемуся действию ударных сил, закон изменения количе-
количества движения [формула E6.50) на стр. 629] и закон изменения кине-
кинетического момента относительно произвольного (неподвижного или по-
подвижного) центра [формула E6.52) на стр. 630]; мы получим
. E7.2)
Написанные равенства можно было бы получить также из принципа Да-
ламоера (§ 310). Действительно, заменив связи реакциями, тело можно
рассматривать как свободное, поэтому для виртуальных перемещений его
636
частиц можно взять выражение C6.49) на стр. 387: его следует подста-
подставить в равенство E6.од) на стр. 632 и затем приравнять нулю козффи-
циенты при независимых вариациях ЬгА и Ъа.
Уравнение E7.1) можно представить в виде
M(vC2— vcO) = F0t-\-Rn, E7.3)
где М — масса твёрдого тела, a vc0 и vCo — скорости центра масс
в начале и в конце удара. Уравнения E7.3) и E7.2) нетрудно записать
в проекциях на оси декартовых координат; отбросив для упрощения
письма индексы 02 у импульсов и обозначив через ша и ш2 угловые ско-
скорости тела в начале и конце удара, мы по формулам D6.6) на стр. 509
найдем:
у\?у> \ .....
С (О/.*)
M(zCt — zc0) = Ft + Rt\ I
Jxx К* — »0,) — Jxy Ку — »0Г) — Jxz К2 — М0г) =
По уравнениям E7.4) определяется приращение поступательной скорости
тела \vc = vC2— vco; уравнения же E7.5) служат для нахождения при-
приращения его угловой скорости Дсо^ш2— ш0.
Рассмотрим подробнее свободное твёрдое тело. Возьмём за полюс
центр масс С и направим оси координат по главным центральным осям
инерции тела (§ 154). Тогда уравнения E7.5) примут следующий вид.
ш I . т Г//ч \ 1 I I \ 1 /ri» Л»
XX ЧХ G.C' X' У У ' 2у Оу / У' ZZ * oZ OZ' "^^~" Z * * * '
Уравнением прямой, служащей основанием вектора Дм, очевидно, будет
_^=_^ =_?_. E7.7)
Рассмотрим центральный эллипсоид инерции тела. Согласно формуле
B6.12) на стр. 257 «го уравнение напишется так:
Определим направление нормали, проведённой к этому эллипсоиду в точке
его пересечения с прямой E7.7); назвав a, f(, у направляющие косинусы
этой нормали, мы получим:
а ¦$ ¦ Y = Jxx* '¦ Jy *У : JzzZ = Jxx (<°2x — W0 v): JVy (М2„ — W0v): Jzz (Ш2г ~ °>0,).
Сопоставив эту формулу с уравеннями E7.6), мы приходим к такому
результату:
a:$.4 = Lx:Ly:Lt.
Отсюда мы получаем следующую геометрическую картину движения: если
к центральному эллипсоиду инерции провести касательную плоскость, пер-
перпендикулярную к направлению главного момента импульсов относительно
637
центра поверхности, то радиус-вектор точки касания будет параллелен
приращению Дю мгновенной угловой скорости тела. Особенно надо отме-
отметить тот случай, когда первоначально тело было в покое; тогда преды-
предыдущее построение заменяется следующим: если на покоящееся твёрдое
тело подействовали некоторые импульсы, то оно в своём движении около
центра масс начнёт вращаться во-
вокруг радиуса-вектора той точки цент-
центрального эллипсоида инерции, в кото-
которой касательная к поверхности пло-
плоскость перпендикулярна к главному
моменту импульсов относительно
центра масс тела.
Связь указанного построения с той
геометрической картиной, которую
дал Пуансо для эйлерова случая дви-
движения твёрдого тела, ясна сама
собою.
314. Центр улара. Пусть на
покоящееся твёрдое тело массы М
с закреплёнными точками О я О' по-
подействовал импульс F, приложенный
к точке А (фиг. 155). Составим уравнения, определяющие импульсивные
реакции TV и TV' точек О и О'. Поместим начало координат в точке О,
т. е. в одной из закреплённых точек, ось Ог направим по оси враще-
вращения 00', а ось Ох параллельно кратчайшему расстоянию В0А0 между
осью вращения и приложенным импульсом. Расстояние 00' обозначим /,
а скорость центра масс и угловую скорость тела в конце удара назовём
соответственно vc и ю. По формулам (9.15) на стр. 87 мы находим:
Фиг. 155.
у C
Кроме того, при выбранной нами системе осей координат мы имеем
/% = 0. E7.8)
Составив уравнения E7.4) и E7.5), мы получаем:
E7.9)
E7.10)
E7.11)
W;, E7.12)
у Щ E7.13)
J~*,= *AFr E7-14>
Рассмотрим условия, при которых ось подвеса не получает сотрясения
от импульса; другими словами, найдём условия, при которых все импуль-
импульсивные реакции равны нулю. Уравнение E7.10) даёт: Fz=0, что в со-
соединении с равенством E7.8) показывает параллельность импульса оси Оу.
Из уравнения E7.9) мы выводим:
.Ус = 0, E7.15).
638
т. е. центр масс лежит в плоскости, проходящей через ось подвеса и
перпендикулярной к направлению импульса. Далее, исключив Л^ из урав-
уравнений E7.10) и E7.12), мы находим.
Jx,— Мхсгл = 2 ™Л (*, — гА) = 0.
Следовательно,
Из
что
уравнения E7
в соединении
А
.13) мы получаем:
Кг
с уравнением E7
Л*
Мх
= 0
.15)
с
даёт
Наконец, путём исключения F из уравнений E7.10) и E7.14) мы на-
находим:
ХА — Мх-
Если мы введём радиус инерции ргг тела относительно оси вращения,
т. е. положим Jzz=: Mp2zz, то последнее равенство примет вид
Й,
Сравнивая этот результат с формулой E2.33) на стр. 591, мы видим,
что расстояние В0А0 равно длине математического маятника, эквивалент-
эквивалентного рассматриваемому твёрдому телу, подвешенному на оси 00'. Иначе
говоря, В0А0 есть расстояние от оси подвеса 00' до оси качаний уу',
соответствующей данной оси подвеса (§ 296).
Собрав все найденные результаты, мы можем высказать следующие
положения, чтобы импульс F (произвольный по модулю) не вызывал
импульсивных реакций оси, необходимо и достаточно:
1) чтобы импульс был перпендикулярен к плоскости, содержащей ось
подвеса и центр масс тела,
2) чтобы ось подвеса была главною осью инерции для своего следа Ва
на плоскости, проходящей через импульс и перпендикулярной к оси под-
подвеса, и
3) чтобы импульс встречал плоскость, содержащую ось подвеса и
центр масс в точке Ло, расположенной на оси качаний.
Точка Ао встречи импульса с упомянутой осью качаний уу' называется
центром удара для взятой оси подвеса.
315. Соударение твёрдых тел. Представим себе, что два твёрдых,
тела, двигавшихся произвольным образом, столкнулись друг с другом.
Примем, что тела коснулись друг друга только в одной точке и что по-
поверхности тел шероховаты. Относительно силы трения предположим, что:
1) Если разность между проекциями скоростей совпадающих точек на
общую касательную плоскость отлична от нуля, т. е. если тела скользят
639
друг по другу, то сила трения Ф равна по модулю произведению коэф-
коэффициента трения k на модуль взаимной нормальной реакции N тел,
Ф = /гЛ/, E7.16)
и направлена прямо противоположно разности скоростей (для каждого
тела надо вычитать из скорости точки, ему принадлежащей, скорость
точки другого тела).
2) Если вышеназванная разность равна нулю, то сила трения по мо-
модулю равна
Ф = Ш, где \^k; E7.17)
направление же силы Ф заранее неизвестно; таким образом, в этом слу-
случае как модуль, так и направление силы Ф определяются из того усло-
условия, что тела не скользят друг по другу.
Плоскость, касательную к поверхностям тел в общей точке, примем
за плоскость Оху, а общую точку тел — за начало координат, причём
точку первого тела, совпадающую с О, обозначим через О', а точку вто-
второго тела через О". Ось Ог направим по общей нормали внутрь
первого тела. Пусть N означает нормальную реакцию второго • тела на
первое; тогда проекция на ось Ог реакции второго тела на первое будет
равна Л/, а первого тела на второе будет равна —N. Подобным же
образом, пусть Ф есть сила трения, действующая на первое тело и пусть
её проекции на оси Ох и Оу равны Фх, Фу; тогда проекции силы тре-
трения, приложенной ко второму телу, окажутся равными — Ф^. и — Фу.
Обозначим координаты центра масс первого тела через л:', у\ г';
проекции скорости этой точки на оси координат в момент начала удара
через лго, уо, го', проекции скорости той же точки в момент окончания
удара через х% Уъ, Zi\ проекции скорости в какой-либо момент t во
время удара через л:', у', z'. Проекции на оси координат мгновенной
угловой скорости первого тела в названные моменты обозначим через
Ч*> °Vwoz; W2*> °V Ю2г> w'x> °V °V Macca первого тела, его моменты
инерции и произведения инерции относительно осей, проходящих через
центр масс и параллельных координатным, пусть будут М', J'xx, J'yy, f z
f J' f '
Jyz> Jzx' Jxy
Соответствующими обозначениями для второго тела пусть будут: ко-
координаты центра масс х", у", z"; проекции скорости этой точки в со-
соответствующие моменты: лго, Уо, z$; xi, y% z<?, x", у", z"; проекции
мгновенной угловой скорости в те же моменты: %Л, Wqv, to'^z; ta"ix, ш^, Wjr;
т"х, Шу, ю"г; масса тела, моменты инерции и произведения инерции отно-
относительно соответствующих осей: М", J'xx, J"yy, J"zz, J"yz, J"zx, J'^.
Импульс нормальной реакции N за время от начала удара до какого-
либо момента t, предшествующего концу удара, обозначим через N, а
импульс силы трения Ф за то же время обозначим через Ф, т. е.
640
следовательно,
Если тела скользят друг по другу и если разность скоростей совпа-
совпадающих точек образует с осью Ох угол бис осью Оу угол -к —
то на основании условия A) и формулы E7.16) мы имеем
<з!Ф.|.=— kdNcosb, d<$> = — kdN sinb, E7.18)
откуда
(d$xf 4 {d<&yf = k2 (dNJ. E7.19)
Если же скольжения нет, то согласно условию B) и формуле E7.17)
должно соблюдаться неравенство
(d<$>xJ-\-{d<&yJzZk2{dNJ. E7.20)
Приложим к каждому телу закон изменения количества движения и
закон изменения кинетического момента в формах E7.4) и E7.5), приняв
соответственно за полюсы центры масс тел; моменты импульсов вычислим
по формулам B.7) и B.10) на стр. 14; мы получим:
М'(У— у'о) = Ф?, M'(z'
М'{х"—х1) = -Ф„М"С" '"' -1' ""¦- ""¦ ¦¦' E7'21)
К
к- %> +4 к - о=- л'
-»^) -^ (»;- ч>-^(^- о=- ^"ф.+j'
>E7.22)
Составим на основании этих уравнений выражение для скорости сжатия С,
т. е. разности между ортогональными составляющими скоростей точек
О' и О" по общей нормали Ог, а также выражение для скорости сколь-
скольжения S, т. е. разности между ортогональными составляющими скоро-
скоростей точек О' и О" в общей касательной плоскости Оху. Если за бук-
буквою 6 сохраним то же значение, что и в формуле E7.18), то по фор-
формулам (9.36) на стр. 93 мы получим:
i=у — *' со; 4 *'»; — / 4- *Ч—z" K>
C = ;'-y<o'x + x'<oy-z" + y<ox~-x"w';.
41 Г. К. Суслов 641
Так как в формулах E7.21) и E7.22) всюду входят разности между
скоростями в момент (ив начальный момент, то и последним формулам
мы придадим такой вид:
С помощью уравнений E7.21) и E7.22) исключим отсюда разности
*' — К У— Уо> ¦¦•> 'г" — *1' ш'х~-Kx> •••' К~Кг' мы
ScosO — 0% x\fy\,
{ E7-23)
F7.24)
где а, Ь, с, д, е, f—постоянные, зависящие от AT, M", J' ,...,
^х?' J'xx' •••> ^ху' х> У' •"> z"' характеризующих положение и фор-
ыу тел и распределение в них масс.
Для более наглядного исследования задачи воспользуемся в дальней-
дальнейшем геометрическим методом Рауса (Routh)l). С этой целью изобразим
импульсивную реакцию точкой Г с координатами х = Фх, у = ф z = N.
В том же пространстве, где находится точка Г, отметим два' геометри-
геометрических образа: прямую и плоскость. Прямая пусть определяется уравне-
уравнениями
sfn 80-4-/9,+А Фу
дЛГ=0{ I
она иосит название прямой нескольжения, потому что, как видно из
уравнений E7.23), когда точка Г лежит на названной прямой, то 5 = 0,
т. е. тела не скользят друг по другу. Плоскость пусть определяется
уравнением
C+f+df + NO; E7.26)
эта плоскость называется плоскостью наибольшего сжатия, так как со-
согласно равенству E7.24), когда рассматриваемая точка Г достигнет этой
плоскости, С обращается в нуль, т. е. взаимное сжатие тел приоста-
приостанавливается.
Удар тел, по аналогии с предыдущим, мы разобьём на два акта:
первый, от начала удара до момента наибольшего сжатия, т. е. когда
С=0; второй, от момента наибольшего сжатия до конца удара. Отно-
Относительно второго акта опять предположим, что импульс нормальной
реакции Л^12 за этот акт равен импульсу Л/qi за первый акт, умноженному на
коэффициент восстановления е.
1) Routh, Rigid dynamics, Art. 813—331.
642
Займёмся сначала рассмотрением первого акта удара. Положим сна-
сначала, что в начальный момент тела скользили одно по другому, т. е. что
So не было равно нулю. Тогда в начале удара, как видно из формул
E7.18) и E7.19), воображаемая точка Г движется по некоторой винтовой
линии, определяемой уравнениями E7.18). Из уравнения E7.19) мы видим
при этом, что тангенс угла касательной к этой винтовой линии с осью Oz
равен коэффициенту трения k.
Продифференцировав уравнения E7.23) и воспользовавшись равен-
равенствами E7.18), мы находим:
= (— ak cos 6—/fesin6-f- e) dN,
E7.27)
= (—fk cos б — bk sin б -\-d)dN.
Исключив отсюда dN, мы получим следующее уравнение для определе-
определения зависимости 5 от 0:
dS d\nS ,с>
~m—~d6~—w> —
д sin 0 + е cos 8 — ak cos2 6 — bk sin2 6 — /A sin 28
dcos6— esln6-j-(a— b) k sin 8 cos 8 —fk cos 28 " *• ' '
Проинтегрировав это уравнение, мы найдём выражение для S следую-
следующего вида:
S = K-F F), E7.29)
где К—произвольная постоянная. Подставив это значение S в любое
из уравнений E7.27), мы определим N квадратурой в виде
N=Kf{b)-\-L, E7.30)
где L—новая произвольная постоянная. Постоянные К и L определяются
из того условия, что для начального значения 6 = 6О мы имеем S — So
и N= 0. Зная S n N, мы из уравнений E7.23) найдём Фх и Фу как
функции 6:
ФХ = ФХ(Ь), Фу = Ф,(Ь). E7.31)
Уравнения E7.30) и E7.31) изображают собой искомую винтовую линию.
Итак, точка Г движется из начала координат по названной винто-
винтовой линии в том направлении, в котором N возрастает, пока не попадёт
либо на плоскость E7.26) наибольшего сжатия, либо на прямую E7.25)
нескольжения. Если точка Г в своём движении прежде всего встретится с
плоскостью E7.26), то значения её координат Ф^, Ф01я •'Чи и ДаДУт ис"
комые импульсы за первый акт удара. Подставив эти значения в уравне-
уравнения E7.21) и E7.22), мы сможем определить, если пожелаем, кинемати-
кинематическое состояние тел в конце первого акта удара. Если же точка Г
сначала встретит прямую E7.25), то она может оставить свою первона-
первоначальную траекторию (винтовую линию) и начать двигаться по прямой не-
41* 64а
скольжения; указанное обстоятельство случится тогда, когда прямая E7.25)
образует с осью Oz угол, ие превышающий arctg k, как »того требует
условие E7.20). Если же угол прямой иескольжения с осью Oz больше
arctg k, то дальнейшее движение точки Г пойдёт по первоначальной
винтовой линии. Другими словами, тогда мы продолжаем пользоваться
формулами E7.29) и E7.30), причём может случиться, что скорость
скольжения S, определяемая выражением E7.29)^ перейдя через нуль,
изменит своё направление; в этом последнем случав угол б изменятся
иа б -}—тг в формулах E7.18), а следовательно, и в выражениях E7.30)
и E7.31). Импульсы за первый акт удара опять определятся, как коорди-
координаты точки встречи прямой нескольжения или винтовой линии с плоско-
плоскостью наибольшего сжатия.
Импульс Noi за полное время удара мы найдём, умножив импульс Nol
за первый акт удара на 1 —|— е. При этом опять придётся исследовать,
дойдёт ли точка Г до высоты ЛГ01 A —|— е) иад плоскостью Оху по вин-
винтовой линии или по прямой иескольжения, если винтовая линия пересе-
пересекается с этой прямой выше плоскости E7.26). В зависимости от резуль-
результата исследования полные импульсы Ф01ж A -f-e), Фоь,0~Ье) силы трения
найдутся, как координаты х, у той точки, координата z которой равна
/VOi(l-{~s) и которая находится или на винтовой линии или на прямой
нескольжения. Подставив значения Ф01хA -\-s), Ф01 A 4~е), N01 A-}-.е) в
уравнения E7.21) и E7.22), мы определим оттуда х% у2, z\; x%, у2, z%\
t t i tt it n
to:x, щу, оJг, Щх1 0Jу, Ш2г И! следовательно, решим вопрос о движении
тел после удара.
Изложенный приём решения задачи не годится, когда скорость сколь-
скольжения S не меняет своего направления, т. е. когда
б = const. = 80.
Но в таком случае из уравнений E7.18) мы получаем:
йФх йФу dN
cos в0 sin в0' 1 '
т. с. траекторией точки Г служит прямая
Ф,.=— &A/cos60, Фу =— & jVsin 0o, E7.32)
образующая с осью Oz угол, равный arctg k. Угол 0 может оставаться
постоянным только тогда, когда db = 0, что иа основании равенства
E7.28) приводит иас к условию
д cos 80 — е sin 80 -j- (a—b) k sin 80 cos б0 — fk cos 260 = 0. E7.33")
Заметим, что, когда написанное условие соблюдено, прямая E7.32)
всегда встречает линию нескольжеиия E7.25) и, следовательно, если
угол прямой E7.25) с осью Oz не превышает arctg k, точка Г может с
прямой E7.32) перейти иа прямую E7.25); в противном же случае,
если угол прямой нескольжения с осью Oz больше arctg k, точка Г
после встречи с линией нескольжения пойдёт по прямой
644
¦равнения которой получаются из равенств E7.32) заменою б0 нд
Наконец, если начальное значение So скорости скольжения равно
нулю, то с самого начального момента точка Г лежит иа линии несколь-
нескольжения; следовательно, опять она может двигаться либо по этой прямой,
либо по винтовой линии, ио последняя в настоящем случае обращается
в прямую E7.32), так как из равенства E7.28) при S0 = 0 вытекает
для 80 условие E7.33).
Пример 157. Два эллипсоида с полуосями аь Pi, fi и а2, р2, Ъ ударяются
друг о друга концами своих полуосей fi и у?. При прежних обозначениях
коэффициенты а, Ь, с, д, е, f будут равны:
1 1 V2 2 , , 2 Л
_!__!_ *_!_2 h I 1 ' I
yy yy хх хх
Плоскость наибольшего сжатия E7.26) перпендикулярна к оси Oz:
Прямая нескольжения параллельна оси Oz:
а Фх = 50 cos 80) bfy = Sosin%.
Уравнение E7.28) имеет вид
dS a cos2 8 + b sin2 9 а , л b , .
-— = -Е = cte б te 8
Sdv (b — a) sin 9 cos о b — а ь a — b &
Проинтегрировав его и определив произвольную постоянную, мы получим:
а Ь
/ Sin 0 \Ь-а I COS6\ а-Ь
Условие E7.33) неизменности направления скорости скольжения 5 напишется
так:
а = Ь,
т. е.
jxx jyy> ^;; jyy
ИМЕННОЙ УКАЗАТЕЛЬ
Числа указывают страницы
Ампер (Ampere) 40, 380, 382
Аппель (Appel) 379
Бертран (Bertrand) 635
Бине (Binet) 181
Бобылёв 364, 581
Болл (Ball) 416
Борда (Borda) 42
Валлис (Wailie) 221
Вальтон (Walton) 413
Винчи Леонардо да (Leonardo da
Vinci) 81
Галилей (Galilei) 131
Гамильтон (Hamilton) 65, 348, 361, 364,
447, 450, 454
Гаусс (Gauss) 348, 356
Гельмгольтц (Helmholtz) 348, 366, 596
Гесс (Hess) 576
Горячев 581
Гук (Hook) 325
Гульден (Guldin) 252
Гюйгенс (Huyghens) 255
Даламбер (D'Alembert) 347, 348, 354,
355, 631
Дарбу (Darboux) 542, 547, 550, 557
Донкин (Donkin) 343
Евклид (Eox>t8s?) 43
Жуковский 566, 578, 586
Зоммерфельд (Sommerfeld) 587
Карно (Carnot) 616, 627, 628, 629, 633
Кельвин (Kelvin) 171, 478, 608, 615, 633
Кениг (Koenig) 318
Кёнигс (Koenigs) 542
Кеплер (Kepler) 71
Клейн (Klein) 587
Ковалевская 563, 564, 56<i, 567, 576
Колосов 566
Кориолис (Coriolis) 120, 233, 234
Крылов 133
Лагранж (Lagrange) 299, 331, 347, 364,
365, 380, 480, 499, 525 553, 596
Ламе (Lame) 169
Лаплас (Laplace) 309
Лежен-Дирихле (Lejeune-Dirichlet) 389
Лейбнитц (Leibnitz) 163
Мак-Куллаг (Mac Cullagh) 526
Максвелл (Maxwell) 544*
Мёбиус (M6bius) 28
Менье (Meusnier) 199
Некрасов 578
Ньютон (Newton) 40, 43, 71, 133, 135,
136, 176, 612 '
Остроградский 364
Паппус (Pappus) 252
Паскаль (Pascal) 81
Понселе (Poncelet) 24
Пуансо (Poinsot) 525, 535, 540, 547, 550
Пуассон (Poisson) 441, 442
Раут (Routh) 642
Резаль (Resal) 159
Ривальс (Rivals) 112
Сильвестр (Sylvester) 551, 563
Стек лов 581, 582
Суслов 472
Танненберг (Tannenberg) 566
Тейлор (Taylor) 33
Томсон (Thomson) 614
Торичелли (Toiricelli) 391, 413
Тэт (Tait) 614
Фуко (Foucault) 239
Шаль (Chasles) 27
Штейнер (Sterner) 255
Эйлер (EuleV) 76, 85, 92, 202, 341, 481,
502, 512,521
Якоби (Jacobi) 310, 337, 433, 442, 450,568
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксоиды подвижной и неподвижный
101, 109, 535, 545
Амплитуда винта 414
— колебаний 146
Амплитуда-функция 217
Аномалия истинная 178
— эксцентрическая 180
Антипараллелограмм 101
Ассоциативность 7, 8
Бертрана теорема 636
Бине формула 182
Бином Ньютона 221
Бинормаль 67
Болла цилиндроид 416
Валлиса формула 221
Вариация координаты 285, 293, 294
— радиуса-вектора 285
— функции, выражающей связь 285
Вектор 1
— главный сил, внешних и внутренних
802
системы свободных векторов
18
— скользящих векторов 19
— единичный 1
нормали положительной 102,
170
оси естественного трёхгранника
67
координатной 6, 44, 46,
48, 49
— , коллинеарный данному 2
— неподвижный 1
— приложенный 1
— , противоположный данному 2
—, прямо противоположный данно-
данному 13
—, равносильный данному 12
— свободный 1
— скользящий 1, 12
— , эквивалентный данному 12
Вектор-функция 31
Величина векторная 1
— скалярная 1
Вертикаль 238
Вес 131, 238
Винт 27, 414
В взаимные 416
Волчок Максвелла 544
Волчок на горизонтальной плос-
плоскости 583
Вращение собственное 76, 92
— твёрдого тела вокруг неподвиж-
неподвижной оси 76, 87, 370, 542, 589, 591,
638
Время 40, 43
— удара 607, 610, 618
Вычитание векторов 3
Гамильтона принцип 359
— уравнения 346, 434, 446, 451, 624
— функция характеристическая 455,
476, 477
Гаусса принцип 357
Гельмгольтца принцип 366
Геометрия масс 243
Герполодия 535
Герполоидограф Дарбу-Кёнйгса 542
Гесса случай движения твёрдого тела
вокруг неподвижной точки 576
Гироскоп симметричный 553
— сферический 555
Годограф 32, 111
— кинетического момента 159
— скорости 65
Градиент 168
— связи в данной точке 274
Гюйгенса-Штейнера теорема 25Ь
Даламбера принцип 349, 354, 355
.видоизменённый для системе не-
интегрируемыми связями 596
— — в теории удара 631
— сила инерции 354
Дарбу движения сопряжённые 547
Дарбу-Кёнигса герполоидограф 542
Движение 40
— Земли 102
— относительно Земли 236, 239
— твёрдого тела абсолютное 123,128.
130
— — — винтовое 95
— — — вокруг неподвижной оси 76,
87, 370, 542, 589, 591 638
точки 78, 84, 101, 112,
508, 511, 512, 513, 521, 545, 553, 563,
576, 585, 593
— — — — — —, случай Гесса 576
647
Движение твёрдого тела вокруг непо-
неподвижной точки, случай Ковалевской
563
— — , случай Лагранжа 553
______ случай Пуансо 545,
550
— — — — случай Эйлера 521
— — — — , сопряжённые движе-
движения Дарбу 547
— карданово 80, 99, 100
— — — несвободного 517
— — — обращенное 73
— — — основное 123
— — — относительно подвижных
осей 601
относительное 123, 128, 130,
601
— — — параллельно плоскости 79
— — —, подчинённого конечным свя-
связям 583
— , — неинтегрируемым связям
593
— — — поступательное 77, 132
— — — прямое 73
свободного 501, 502, 505
— точки см. «Движение частицы
(точки)»
— фигуры плоской по плоскости
79
— — сферической по сфере 79
— частицы (точки) 49, 137
_ — — абсолютное 117
— — — брахистохронное 215
— весомой 150, 151, 153, 154, 204,
213, 217, 227, 230, 236, 239, 338, 449,
453, 458, 470, 474, 479, 488
весомой в сопротивляющейся
среде 150, 151, 153
— — в координатах декартовых
50, 138- криволинейных (обобщён-
(обобщённых) 49, 57, 138; сферических 50,
139; цилиндрических 50, 57, 138
— —, выраженное в естественной
форме 50, 139
— — гармоническое колебательное
146
_ • изохронное 24, 221,
_ — — инерциальное 233
_ — — криволинейное 49, 154, 155
— — — несвободной 183
— — — относительное 117, ^32
— — — относительно Земли 236
— — — переносное 117
— — — периодическое 146, 221
— — — под действием ньютоновой
силы поитяжения 176, 182, 488
_ по конусу 208
— — — по кривой гладкой 210; ше-
шероховатой 230
— по плоскости шероховатой
227
— — — по поверхности гладкой 197,
207; шероховатой 226, 227, 230
64S
Движение частицы (точки) по связи
идеальной удерживающей 191; не-
удерживающей 193; двум связям 195
— с трением 225
сфере 204, 293
— — — — циклоиде гладкой 213; ше-
шероховатой 230
— — — — цилиндру 208
— — — прогрессивное 228
— прямолинейное 142, 143, 144,
147, 149, 150, 151, 153
— — — равномерное 51
— равнопеременное (равноуско-
(равноускоренное) 68
— свободной 142, 154
— — — сложное (составное) 117
— таутохронное 214, 221, 232
— центральное 160, 181
Девиация 64, 122
Действие и противодействие 136
— по Гамильтону 361, 447, 463
Гельмгольтцу 370
Лагранжу 365, 455, 478, 480
Деление векторов 2, 7, 10
Дина 135
Дистрибутивность 7
Дифференциал вектора 32
Длина вектора 1
Долгота 48
Донкина теоремы 343
Единица си. «Размерность»
Живая сила 163
Жуковского интерпретация движения
твёрдого тела в случае Гесса 578
— правило о движении оси гироскопа
586
Жуковского-Танненберга интерпрета-
интерпретация движения твёрдого тела в слу-
случае Ковалевской 566
Задачи динамики прямая и обратная
40, 139
Закон движения твёрдого тела или
точки см. «Движение твёрдого
тела» и «Движение частицы (точ-
(точки)»
— движения центра масс 304
— изменения кинетического момента
157, 158, 308, 630
в относительном движе-
движении вокруг центра масс 313
при ударе 630
— — кинетической энергии 163, 164
314
— в относительном движении
вокруг центра масс 319
кинетической энергии при ударе
615, 626
— — количества движения 304
при ударе 607, 608, 629
— инерции (первый закон Ньютона) 133
Закон об отношении импульсов при
ударе (закон Ньютона) 612
об ускорении и силе (второй закон
Ньютона) 134
— частицы, движущейся по за-
законам Кеплера (закон Ньютона) 71
— о действии и противодействии
(третий закон Ньютона) 136
— параллелограмма сил 134
— сохранения движения центра масс
306
кинетического момента 309
— — механической энергии 166, 316,
319
— тяготения Ньютона 71
Законы динамики общие: частицы
157, системы 301, их получение из
принципа Даламбера. 351
— Кеплера 171
— механики основные 133, 134, 135
— Ньютона: об отношении импульсов
при ударе 612; об ускорении частицы,
движущейся по законам Кеплера 71;
основные законы механики 133, 134,
135; о тяготении 71
— трения 225, 419, 421
Закручивание поверхности 105
— линейчатой поверхности вдоль об-
образующей 107
Значение численное 1
Изгиб в данной точке по данному на-
направлению ЮЗ
— полный 603
— средний 103
— чистый 106, 603
Изменение см. «Закон изменения»
— движения 133
Импульс обобщённый 340
— реактивный 610, 619
— силы 158
элементарный 158
— ударный (ударной силы) 607
— — инерционный 632
Инвариантность центра системы па-
параллельных векторов 31
Инварианты системы скользящих
векторов 20, 94
Инерция 133
Интеграл Ковалевской 564
— криволинейный 164
— неопределённый от вектора 37
— определённый от вектора 38
— полный 450
— эллиптический первого рода 216
— — полный 217
— энергии 165, 316
для несвободной частицы 203,212
обобщённый 236
Интегралы вторые 140, 161
— кинетического момента 160, 174,
309
— количества движения 160, 360
Интегралы первые 139; их применение
к уменьшению числа переменных 474",
зависимость между ними 162
независимые 162, 204
— площадей 160, 309
— уравнений движения твёрдого тела
в случае Ковалевской 564; случав
Лагранжа 553; случае Эйлера 523
— уравнений равновесия нити 400
Интерпретация Жуковского движения
твёрдого тела в случае Гесса 578
— Жуковского-Танненберга движе ния
твёрдого тела в случае Ковалевской
566
— Мак-Куллага движения твёрдого
тела в случае Эйлера 526
— Пуансо движения твёрдого тела
в случае Эйлера: первая 525, вторая
Исключение зависимых вариаций по
способу множителей 294
Карданово движение 80, 99, 100
Кардано-Гука шарнир 325
Карно теорема обобщённая 619, 629
— теоремы 616, 627, 633
Качение аксоидов 101, 110
— шара по кривой поверхности 602
по плоскости 325, 599
Кельвина теоремы 164, 171, 478, 608,
633
Кенига теорема 318
Кинематика 40
Кинетическая энергия см. «Энергия
кинетическая»
Кинетический момент см. «Момент ки-
кинетический»
Ковалевской интеграл 564
Количество движения 132
— — системы 302
— — твёрдого тела 491
частицы 132, 157
Коммутативность 4, 7, 8
Конгруенция траекторий 477
Конус герпэлодиальный 535
— полодиальный 535
— трения 419, 421
Координаты вектора независимые 13,17
— — свободного 2
— — скользящего 13, 16
— винта 414
— системы векторов свободных 19
— т- — скользящих 19
частиц декартовы 287, 295, 320
— независимые 331
— обобщённые (криволинейные)
287, 321, 616
— твёрдого тела 73, 75, 76
— — — криволинейные Ковалевской
567
— — — независимые 76, 505
— Точки абсолютные 73
— — декартовы 44
649
Координаты точки косоугольные 45
криволинейные 46
общего вида (обобщенные) 45
ортогональные 44
относительные 73
прямолинейные 44, 45
— — прямоугйльные 44
— — сферические 48
цилиндрические 47
эллиптические 260
Косинусы углов между осями ко-
координат декартовых и криволиней-
криволинейных 46
неподвижных и по-
подвижных 48, 49, 74, 77-, 89
Коэффициент взаимный винтов 416
— восстановления при ударе 612,
622
— подобия 79
— трения динамического 225; стати-
статического 226
Кривая, ортогональная к поверхности
уровня 171
Кривизна геодезическая 200, 604
— главная 202
— кривой 36
— нормального сечения 199
Лагранжа переменные 340
— случай движения твердого тела 553
— теорема 525
— тождество 11
— уравнения движения твердого тела
505, 508, 512
второго рода 331, 332, 325
первого рода 191, 298, 320
— форма кинетической энергии 499,
509
Лежен-Дирихле теорема 390
Линия 41
— бегства 59
— винтовая 95
— геодезическая 200
— координатная 45
— кривизны 605
— ортогональная к поверхности уров-
уровня 171
— погони (погоиная) 59
— силовая 172
— сужения 107, 108, ПО
— узлов 76, 170
— цепная 405
Локсодромия 581.
Мак-Куллага интерпретация эйлерова
случая движения твердого тела
526
Максвелла волчок 544
Масса весомая и инертная 182
— отрицательная 244
Материя 131
Матрица линейного преобразования
вектора 267
650
Маятник круговой конический 205
— локсодромический 578
— математический 217, 591
— сферический 204, 239, 580
— физический 590
— Фуко 239
Менье теорема 199
Меридиан 42, 43, 48
Метол Рауса 642
Механика аналитическая 40
— теоретическая 40
Минимум действия в форме Гамиль-
Гамильтона 364
Лагранжа 366, 480
Многоугольник векторный 4
— нитяной 392
— стержневой 392
Множитель импульсивный связи 467,
620
— последний Якоби 433, 434, 436
— связи 191, 295
— системы уравнений 427
Модуль вектора 1
— силы 135
Момент вектора относительно точки
(полюса) 14
— взаимный двух векторов 17
— винта 415
— времени 43
— главный системы сил, внешних и
внутренних 302
скользящих векторов 19, 2Ц
22, 23
— инерции геометрический 268
геометрический относительно
оси: объёма параллелепипеда 270;
цилиндра 270; эллипсоида 271; пло-
площади треугольника 269; эллипса
269
главный 257
— — — центральный 258
— — относительно оси 254
— плоскости 267
точки 253
— — физический 268
— — центробежный 256
— кинетический 157, 307
— количества движения 157
— начальный 43
— пары 26
— силы 157
— статический 244, 288, 289, 290
Направление вектора 1, 2
— положительное нормали 102, 170
Направления главные 202
Напряжение поля 172
Начала механики см. «Принципы»
Начало вектора 1
— отсчёта расстояний 49
Начальные данные 40, 141
Нормаль главная 36
— положительная 102, 170
Нутация 76, 92, 102, 587
Ньютона бином 221
— закон об отношении импульсов при
ударе 612
— ускорении частицы при её
движении по коническому сече-
сечению 71
— — тяготения 71
— основные законы механики 133, 134,
135
Орбита 66, 161
— центральная 174
Орт 2
— нормали положительной 102, 170
— оси естественного трёхгранника 67
— — координатной 6, 44, 46, 48, 49
Ортогональность 44, 45, 47, 171, 478
Основание вектора 12
Ось 3
— винтовая 94, 109
— вращения конечного 82; мгновен-
мгновенного 85, 87; собственного 76
— изгиба 105, 603
— инерции главная 257; распределение
в пространстве 263
центральная 258
— качаний 591
— координатная 6, 44, 46
— нутации 76
— подвеса 591
— прецессии 76
— симметрии динамической 496, 545
— ускорений мгновенная 116
— центральная системы скользящих
векторов 21, 24, 94
Отвес 238
Отталкивание прямо пропорционально
расстоянию 147
Паппуса-Гюльдена теоремы 252
Пара векторов 26
— угловых скоростей 128
Параметр винта 27, 96, 414
— дифференциальный первого порядка
169, 274
— распределения 108, 110
Паскаля улитка 81
Переменные канонические 340
— лагранжевы 340
Переместительность 4, 7, 8
Перемещение виртуальное 284
— возможное 283
— конечное фигуры: плоской по плос-
плоскости 81, сферической по сфере 82
— элементарное точки 56
Перигелий 178
Период колебаний 146, 221
— эллиптической функции 217
Плечо инерции 259
— пары 26
Плоскость горизонта 238
— максимума площадей 309
Плоскость неизменяемая Лапласа 309
— сжатия наибольшего 642
— соприкасающаяся 36, 63
Плотность 132
Поверхность координатная 45
— косая 107, ПО
— линейчатая 107
— равного действия 478
— развёртывающаяся 107, ПО
— уровня 168
Погонная линия 59
Покой 372
Поле функции 168
Полодия 535
Полюс 14, 19, 39, 78, 310, 311, 490
— производный 39, 311
Постоянные произвольные 140, 162,
192, 196, 300, 400, 408, 472
Потенциал 165
— кинетиче! кий 332
Потенциальная функция 165
Преобразование аффинное вектора 267
— координат 49, 74, 79, 262
— проекций вектора 74
— уравнений связей к обобщённым ко-
координатам 320
Прецессия 76, 102
— псевдорегулярная 587
— регулярная 587
Приведение уравнений Лагранжа вто-
второго рода к системе уравнений пер-
первого порядка 334
Принуждение 357
Принцип виртуальных перемещений
376, 380, 382
— Гамильтона 361
— Гаусса 357
— Гельмгольтца 370
— Даламбера 349, 354, 355
— Даламбера, видоизменённый для ск-
стем с неинтегрируемыми связями 596
— Лагранжа 366, 376, 380, 382
— наименьшего принуждения 357
— стационарного действия в форме
Гамильтона 361
— — Гельмгольтца 370
— — — — — Лагранжа 366
— Торичелли 391, 413
Принципы дифференциальные 347
— интегральные 348
Приращение системы скользящих век-
векторов 38
Притяжение прямо пропорционально
расстоянию 155
Продолжительность удара 607,610,618
Проекции вектора на оси 2, 44, 45, 74
— скорости, ускорения см. «Скорость»,
«Ускорение»
Произведение вектора на скаляр 2
— векторно-векторное 12
— векторно-скалярное 11
— векторное 8
— инерции 256
651
Произведение скалярное 6
Производная вектора 38, 87
— — абсолютная 87
— — вторая 36
— — единичного 33
— — локальная 87
относительная 87
— по данному направлению 104, 169,
170
— правая 188
— радиуса-вектора 36
— системы скользящих векторов 38
Производные главной функции 447,
464
— направляющих косинусов осей по-
подвижной системы координат 89, 90
Пространство 42, 43
— многомерное 478
— трёхмерное евклидово 43
Прямая нескольжения 642
Пуансо интерпретация эйлерова случая
движения твёрдого тела; первая 525,
вторая 540
Пуассона скобки 441
— тождество 441
Пуассона-Якоби теорема 442
Пути окольный и прямой 359
Пучок траекторий 478
Работа импульса элементарная 632
— реакции элементарная 296, 297, 298,
379
— силы 164, 608, 633
— силы элементарная 163
Равенство векторов 2
Равновесие 372
— нити 396, 400
на поверхности 421
— системы с трением 422
— твёрдого тела 387, 411
— частицы весомой на шероховатой
циклоиде 421
на шероховатой кривой 421
поверхности 418
Равносильность см. «Эквивалентность»
Радиус-вектор 6, 44
Радиус инерции 259
— кривизны 36
геодезической 199
главный 202
— — нормального сечения 199
Разложение вектора 6
— движения гироскопа 557, 563
твёрдого тела 130
точки 128
— производной вектора на радиальную
и трансверсальную 35
Размерности н единицы; времени 43,
длины 42; количества движения 133;
массы 132; плотности 132; работы
164; силы 135; силы, отнесённой к
единице длины 397; скорости: ли-
линейной 52, секторной 62, угловой
652
62, 85; ускорения: линейного 63,
секторного 70, углового 111
Разность векторов 5
Распределительность 7
Рауса метод 642
Реакция оси вращения тела 591, 593
— связи внешней 303
— — внутренней 303
неудерживающей 194, 207, 228,
296
удерживающей 190, 215, 292
— ударная 609, 618
Ребро возврата ПО
Резаля теорема 159
Ряд Тейлора для векторов 33
Сечения главные 202
Связь 183
— внешняя 287
— внутренняя 287
— геометрическая 183, 273
— голономная 278
— дифференциальная 273, 277
— идеальная 191, 293
— интегрируемая 278
— кинематическая 273
— конечная 273
— неинтегрируемая 278
— неудерживающая 183, 279
— реономная 273
— склерономная 273
— стационарная 273
— твёрдого тела конечная 514, 583
дифференциальная неинтегри-
неинтегрируемая 514, 593, 596
— Одерживающая 184, 273
Секунда 43
Сила 40, 133
— активная 190
— внешняя 302
— внутренняя 302
— инерции даламберова 354
кориолисова 233
¦ переносная 233
— обобщённая 328
—,отнесённая к единице длины 397
— относительная 233
— пассивная 190
— потерянная 354
— приложенная 190
— трения 225
— тяжести 131, 238
— ударная 607
— центральная 160, 174
Сильвестра теорема 551
Синусоида 147
Система векторов 18
— — параллельных 29
— — плоская 29
— —, прямо противоположная дан-
данной 25
-- — свободных 18
— — скользящих 19
Система векторов, эквивалентная дан-
данной 25
, , простейшая 26, 28
— —, — нулю 25
— координат 73, см. также «Коорди-
«Координаты точки»
— отсчёта 41
инерциальная 233
— сил, эквивалентная данной 411
, — нулю 410
— точек изменяемая (деформируемая)
42, 72
неизменяемая 42, 72
— частиц материальных 272
— консервативная 316
— механическая 243
— — — неизменяемая 273
несвободная 273
— — — свободная 272
Скаляр 1
Скобки Пуассона 441
Скорость линейная 61
— обобщённая 61
— поворотная 53, 67
— поступательная 93
— секторная 61, 174
— сжатия 641
— скольжения 641
— точки абсолютная (или в Сложном
движении) 118
— — в данный момент 51
— — в декартовых координатах 52
виртуальная 287
— — в криволинейных координатах 54
— — возможная 282
вращательная 93
в сферических координатах 57
— цилиндрических координатах
52, 56
— — , выраженная через длину дуги
траектории 51
— — относительная 119
— — переносная 119
— — средняя 51
— — тела в общем случае движения 93
— — —, движущегося вокруг непо-
неподвижной точки 84, 85, 87'
— — —, — параллельно плоскости
97
— , — поступательно 84
— угловая 61, 85, 91, 92, 258
Земли 237
— — собственного вращения, нутации
и прецессии 92
Сложение векторов 3
— винтов 418
— скоростей тела: поступательных 127,
угловых 127
точки 119
— ускорений тела поступательных 130
— — точки 120
Составляющая вектора 6
Соударение твёрдых тел 639
Сочетательность 7, 8
Союзное выражение функции 340
Способ множителей 294
Среда 41, 42, 72
Статика 40, 372
— геометрическая 410
— графическая 396
Степеней свободы число 331
Сумма векторов 4
Сутки звёздные, солнечные, средние
солнечные 43
Тейлора теорема для векторов 33
Тело абсолютно твёрдое 273
— твёрдое в динамическом смысле 273
— — — кинематическом смысле 42,
72
— — вращения в динамическом смы-
смысле 496
свободное 331, 489
Теорема Бертрана 636
— Гюйгенса-Штейнера 255
— Гюльдена-Паппуса 252
— Донкина 343
— Карно 616, 627, 633
— Карно обобщённая 616, 629
— Кельвина 164, 171, 478, 608, 633
— Кёнига 318
— Кориолиса 120, 122
— Лагранжа 525, 542, 545
— Лежен-Дирихле 390
— Менье 199
— Паппуса-Гюльдена 252
— площадей 159
— Пуассона-Якоби 442
— Резаля 159
— Ривальса 112
— Сильвестра 551
— Тейлора 33
— Штейнера-Гюйгенса 255
— Эйлера 202, 341
— Якоби 310, 563
— Якоби-Пуассона 442
Тождество Лагранжа 11
— Пуассона 441
Торичелли принцип 391
Точка 43
— геометрическая 43
— кинематическая 43
— материальная 137
— приложения вектора 13
Траектории настильная и навесная 155
Траектория 49
Трёхгранник естественный 68
Углы Эйлера 76
— — как функции времени в эйле-
эйлеровом случае движения тела 534
Угол отражения 610
— падения 610
— поворота тела 86
— грения 226, 419
Удар 195, 301, 607
653
Удар абсолютно неупругий 610, 614,
619, 622
— абсолютно упругий 614, 622
— системы частиц о связь 616, 623
— твёрдых тел 636
— частицы о связь Ь08, 612
Уклонение весомой частицы от верти-
вертикали 239
Улитка Паскаля 81
Уменьшение числа переменных при
помощи интефалов уравнений дви-
движения 474
Умножение см. «Произведение»
Уравнение вековое 265
— дифференциальное частное Якоби-
Гамильтона для главной функции
450, 467
— общее механики 349
— основное динамики 136
относительного движения 233
Уравнения Гамильтона 346, 434, 446,
451, 624
— движения конечные и дифферен-
дифференциальные твёрдого тела, точки и
частицы См. «Движение»
— канонические 346
— Лагранжа второго рода 331, 332,
334, 352
— Лагранжа первого рода 191,298, 320
— равновесия см. «Равновесие»
— Эйлера динамические 504, 512
— Эйлера кинематические 91, 92, 512
— Якоби для консервативной систе-
системы 337
Ускорение секторное 70
— силы тяжести 131
— точки абсолютное (или в сложном
движении) 120
— данный момент 63
— — — декартовых координатах 63
— — — криволинейных координатах
68
— — — сферических координатах 70
— — — цилиндрических координатах
70
возможное 292
вращательное 112
высшего поряцка 72
— — добавочное 120
— — касательное 68
— — кориолисово 120
— — нормальное 68
— — осестремигельное 112
— — относительное 120
— — переносное 120
— — поворотное 120
— — поступательное 111
- — среднее 63
- — тангенциальное 67
- — теаа в общем случае движе-
движения 111
- — —, движущегося вокруг непо-
неподвижной точки 112
654
Ускорение точки тела, движущегося
параллельно плоскости 116
— угловое 111
Условия равновесия см. «Равновесие»
Устойчивость движения 543
— равновесия 389
Фаза колебаний 146
— — начальная 146
Философия натуральная 40
Фокус кинетический 363, 366, 487, 489
— конического сечения 66, 177
Формула Ьине 182
— Валлиса 221
— Эйлера 85, 87
Формулы преобразования см «Преоб-
«Преобразование»
Фуко маятник 239
Функция векторная 31
— главная Гамильтона 447, 456, 464
— Лагранжа 332
— периодическая 217, 221
— потенциааьная 165
— псевдопериодическая 217
— силовая 164, 172
— — силы тяжести 168, 391
— точки 168, 172
— характеристи .еская Гамильтона 455,
476, 477
— эллиптическая 217
Центр инерции 244
— вращения конечного 81
— — мгновенного 82
— масс 244
дуги окружности 248
контура треугольника 249
— — конуса 251'
— — линия 248
— — многогранника 251
— - объёма 247
— — поверхности 247
— — полуэллипсоида 251
— — сегмента 249
— — сектора 249
— — тела, непрерывно протяжённо-
протяжённого 247
трапеции 250
— — треугольника 249
— силы 160, 174
— системы параллельных векторов 29,
244
— скоростей мгновенный 97
— удара 638
— ускорений мгновенный 114
Центроиды 99
Цепная линия 403
Цепь парабочическая 405
Цилиндроид Болла 416
Циркуль эллиптический 81
Частица материальная 137
— — несвободная 183
Частица материальная свободная 183
Частное коллинеагных векторов 2
Частота колебаний 146
угловая 146
Число степеней свободы 331
Шаг винта 96
Шарнир Кардано-Гука 325
Широта 48
— географическая 238
Штейнера-Гюйгенса теорема 255
Эйлера случаи движения твёрдого
тела 521
— теорема 202, 341
— уравнения динамические 504, 512
— уравнения кинематические 91, 92,
512
— формула 85, 87
Экватор 48, 102
Эквивалентность систем сич 411
скользящих векторов 12, 25
Эклиптика 102
Эксцентриситет 177
Эллипсоид, взаимной данным 260
— гирационный 259, 526
Эллипсоид инерции 257, 510, 525
— — сфероидальный 545
— — центральный 258
яйцевидный 545
— кинетический 536
Эллипсоида момент инерции 271
— половины центр масс 251
Энергия кинетическая 163, 314
и ее союзное выражение 329,
341, 342
потерянных скоростей 616, S27
твердого тела 492, 495, 499,
508
— механическая полная 165, 316, 819
— потенциальная 165, 316
— потенциальная весомой частицы
168
Эрг 164
Эталон длины 42
Якоби-Гамильтона уравнение для глав-
главной функпии 450, 467
Якоби-Пуассон» теорема 442
Якоби теорема 310, 563
— уравнения движения консерватив-
консервативной системы 337
ОГЛАВЛЕНИЕ
ЧАСТЬ ПЕРВАЯ
ОСНОВЫ ВЕКТОРНОЙ АЛГЕБРЫ И АНАЛИЗА
I. Свободные векторы 1
1. Скалярные и векторные величины. Векторы. Равенство векторов.
Единичные векторы 1
2. Проекция вектора на ось. Координаты вектора 2
3. Сложение и вычитание векторов. Разложение вектора на соста-
составляющие 3
4. Произведения двух векторов 6
5. Произведения трёх векторов 11
IL Скользящие векторы 12
6. Определение скользящего вектора. Векторы эквивалентные и
прямо противоположные 12
7. Координаты скользящего вектора , 13
8. Момент скользящего вектора относительно точки (полюса).... 14
9. Момент скользящего вектора относительно оси 16
10. Задание скользящего вектора его проекциями и его моментами
относительно координатных осей 18
11. Взаимный момент двух векторов 17
III. Системы векторов 18
12. Система свободных векторов. Главный вектор. Координаты си-
системы 18
13. Система скользящих векторов. Главный вектор. Главный момент.
Координаты системы 19
14. Зависимость координат системы от выбора полюса. 19
15. Инварианты системы скользящих векторов 20
16. Центральная ось системы скользящих векторов 21
17. Распределение главных моментов в пространстве 23
18. Построение Понселе 24
19. Эквивалентные системы скользящих векторов. Системы прямо про-
противоположные. Системы, эквивалентные нулю . 25
20. Простейшие системы скользящих векторов. Один вектор. Пара
векторов 26
21. Замена данной системы векторов простейшей, ей эквивалентной,
при инвариантах, отличных от нуля 26
22. Теоремы Шаля и Мёбиуса 27
23. Замена системы векторов простейшей, если хотя бы один инва-
инвариант равен нулю 28
V
24. Плоская система векторов 29
25. Система параллельных векторов. Центр системы , » 29
IV. Вектор-функции 31
26. Вектор-функция. Годограф. Производная от вектора по скаляр-
скалярному аргументу 31
27. Производная от единичного вектора. Разложение производной
вектора на радиальную и траисверсальную 33
28. Геометрический смысл первой и второй производных вектора. Фор-
Формула кривизны кривой 35
29. Проекции производной вектора на неизменное и подвижное на-
направления 37
30. Интеграл от вектора по скалярному аргументу 37
81. Производная системы скользящих векторов 38
32. Зависимость координат производной системы от изменения поло-
положения полюса 39
ЧАСТЬ ВТОРАЯ
КИНЕМАТИКА
Отдел I
КИНЕМАТИКА ТОЧКИ
V. Конечные уравнения движения точки (закон движения точки) ... -0
33. Введение. Предмет теоретической механики 40
84. Движение . 41
35. Единицы длины и времени 42
36. Радиус-вектор точки и координаты точки 43
37. Конечные уравнения движения точки (закон движения точки).
Траектория 49
VI. Скорость точки 51
38. Перемещение точки. Скорость точки. Проекции скорости на оси
декартовых координат 51
39. Проекции скорости точки на неподвижное и подвижное направ-
направления • 53
40. Выражение скорости в криволинейных координатах. Косоуголь-
Косоугольные и ортогональные проекции скорости на оси криволинейных
координат 54
41. Переход от закона движения точки в координатной форме к за-
закону движения в естественной форме 57
42. Определение движения точки, если известна ее" скорость. Погон-
Погонная линия 57
43. Обобщение понятия о скорости. Скорость линейная, обобщенная,
угловая, секторная 61
VII. Ускорение точки • 63
44. Ускорение точки. Проекции ускорения на оси декартовых коор-
координат 63
45. Девиация,. 64
46. Годограф скорости точки 65
47. Проекции ускорения точии на неподвижное и подвижное направ-
направления 67
VI
48. Проекции ускорения точки на оси естественного трёхгранника . . 67
49. Проекции ускорения точки на оси криволинейных координат . . 68
50. Секторное ускорение 70
51. Скорость и ее момент -как координаты некоторого скользящего
вектора 70
52. Вывод закона Ньютона из законов Кеплера 71
53. Ускорения -точки второго и высших порядков 72
Отдел II
КИНЕМАТИКА АБСОЛЮТНО ТВЁРДОГО ТЕЛА
VIII. Координаты твёрдого тела. Конечные уравнения движения {закон
движения) 72
54. Твердое тело. Движения прямое и обращенное 72
55. Координаты твёрдого тела. Эйлеровы углы 73
56. Поступательное движение тела . . . , 77
57. Движение тела вокруг неподвижной точки 78
58. Движение тела параллельно плоскости. Кардановы движения пря-
прямое и обращенное 79
59. Центр и ось конечного вращения : . . 81
60. Общий случай движения твёрдого тела .... . ... 82
IX. Скорости точек твёрдого тела 84
61. Скорости точек тела, движущегося поступательно 84
62. Скорости точек тела, движущегося вокруг неподвижной точки.
Мгновенная угловая скорость тела 84
63. Относительная (локальная) производная вектора 87
64. Проекции угловой скорости на неподвижные оси координат и на
оси координат, неизменно связанные с телом 91
65. Скорости точек тела в общем случае движения тела. Мгновенная
винтовая ось 92
66. Скорости точек тела, движущегося параллельно плоскости. Мгно-
Мгновенный центр скоростей 97
X. Центроиды. Аксоиды 99
67. Центроиды .... - 99
68. Аксоиды твёрдого тела, движущегося вокруг неподвижной точки . 101
69. Изгиб поверхности. Закручивание поверхности 102
70. Закручивание линейчатой поверхности вдоль образующей .... 107
71. Аксоиды твёрдого тела в общем случае движения 109
XI. Ускорения точек твёрдого тела .111
72. Ускорение произвольной точки твёрдого тела. Теорема Рйвальса 111
73. Проекции ускорения точки твердого тела на неподвижные оси
координат . . . . ИЗ
74 Проекции ускорения точки твёрдого тела на оси, неизменно свя-
связанные с телом 113
75. Мгновенный центр ускорений 114
Отдел Ш
СЛОЖНОЕ ДВИЖЕНИЕ
XII. Сложное движение точки 117
76. Движения точки абсолютное и относительное. Движение пере-
переносное 117
VII
77. Зависимость между скоростями точки в абсолютном и относитель-
относительном движениях 118
78. Зависимость между ускорениями точки в абсолютном и относи-
относительном движениях. Поворотное ускорение. Теорема Кориолиса . . 120
XIII. Сложное движение твёрдого тела. Разложение движений точки
и твёрдого тела '23
79. Движения твёрдого тела абсолютное и относительное. Движение
переносное 123
80. Зависимость между поступательными и угловыми скоростями тв5р-
дого .тела в абсолютном, относительном и переносном движениях . 127
81. Разложение движений точки и твёрдого тела. Разложение ско-
скорости и ускорения точки, угловой скорости тела 128
ЧАСТЬ ТРЕТЬЯ
ДИНАМИКА ЧАСТИЦЫ
Отдел I
ДВИЖЕНИЕ СВОБОДНОЙ МАТЕРИАЛЬНОЙ ЧАСТИЦЫ
XIV. Основные законы механики 131
82. Материя. Масса. Плотность 131
83. Количество движения тела. Изменение движения 132
84. Сила 133
85. Первый закон Ньютона (закон инерции) 133
86. Второй закон Ньютова (об ускорении и силе). Закон параллело-
параллелограмма сил 134
87. Третий закон Ньютона (о действии и противодействии) 136
88. Движение массы относительно другой массы 137
XV. Дифференциальные уравнения движения материальной частицы.
Их интегралы 137
89. Материальная частица 137
90. Дифференциальные уравнения движения частицы 138
91. Интегралы дифференциальных уравнений движения 139
XVI. Прямолинейное движение свободной материальной частицы . . . 142
92. Условия прямолинейности движения 142
93. Движение под действием силы, зависящей лишь от времени ... 143
94. Движение под действием силы, зависящей лишь от положения
частицы 144
95. Движение под действием силы, зависящей лишь от скорости ча-
частицы 149
XVII. Простейшие случаи криволинейного движения материальной
частицы 154
96. Исследование криволинейного движения частицы, сводящееся к за-
задаче о нескольких прямолинейных движениях отдельных точек. . 154
97. Криволинейное движение весомой частицы 154
98. Притяжение частицы неподвижным центром прямо пропорционально
расстоянию _ 165
99. Отталкивание частицы неподвижным центром прямо пропорцио-
пропорционально расстоянию ' 156
VTII
XVIII. Общие законы динамики: закон изменения количества движения,
закон изменения кинетического момента, закон изменения ки-
кинетической энергии 157
100. Закон изменения количества движения и кинетического момента
материальной частицы , 157
101. Интегралы количества движения 160
102. Интегралы кинетического момента (интегралы площадей) 160
103. Зависимость между интегралами количества движения и кинети-
кинетического момента 162
104. Закон изменения кинетической энергии 163
105. Выражение работы силы через её импульс 164
106. Силовая функция. Интеграл энергии. Потенциальная энергия ... 165
107. Силы, направленные по прямым, соединяющим частицу с некото-
некоторыми неподвижными центрами, и зависящие лишь от расстояния
частицы от этих центров 166
108. Функция точки. Поверхность уровня. Градиент 168
109. Производная от функции точки по данному направлению .... 169
110. Свойства силовой функции как функции точки. 172
XIX. Центральные орбиты 174
111. Движение частицы под действ*ием центральной силы, зависящей
лишь от расстояния 174
112. Движение под действием притяжения по закону Ньютона .- . . . 176
ИЗ. Формула Бине 181
Отдел II
ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ЧАСТИЦЫ
XX. Дифференциальные уравнения движения несвободной частицы . . 183
114. Геометрические связи, удерживающие и неудерживающие .... 183
115. Условие, налагаемое на скорость несвободной частицы удержи-
удерживающей связью 186
116. Условие, налагаемое на ускорение несвободной частицы удержи-
удерживающей связью 186
117. Условия, налагаемые на скорость и ускорение несвободной ча-
частицы неудерживающей связью 187
118. Реакция удерживающей связи. Идеальная связь. Множитель
связи 189
119. Дифференциальные уравнения движения частицы, подчинённой
идеальной удерживающей связи 191
120. Реакция неудерживающей связи. Дифференциальные уравнения
движения частицы, подчиненной идеальной иеудерживающей
связи 193
121. Дифференциальные уравнения движения частицы, подчиненной
двум связям 195
XXI. Движение частицы по абсолютно гладкой поиерхностн 197
122. Дифференциальные уравнения движения частицы по поверхности 197
123. Интеграл кинетического момента (интеграл площадей) 202
124 Интеграл энергии 203
125. Сферический маятник 204
126. Движение по инерции 207
IX
127. Движение по конусу вращения 208
XXII. Движение частицы по абсолютно гладкой кривой 210
128. Дифференциальные уравнения движения частицы по кривой ... 210
129. Интеграл энергии 212
130. Движение весомой частицы по циклоиде . . . . 213
131. Элементарные свойства эллиптических интегралов и функций , , 216
132. Математический маятник . 217
XXIII. Движение частицы по связи с трением 225
133. Законы трения 7 225
134. Дифференциальные уравнения движения частицы по шероховатой
поверхности 226
135. Движение весомой частицы по шероховатой наклонной плос-
плоскости 227
136. Движение частицы по шероховатой поверхности по инерции . . . 230
137. Дифференциальные уравнения движения частицы по шероховатой
кривой 230
138. Движение весомой частицы по вертикальной шероховатой цик-
циклоиде , 230
Отдел III
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
XXIV. Относительное движение материальной частицы 232
139. Основное уравнение динамики относительного движения мате-
материальной частицы 232
140. Обобщенный интеграл энергии 235
141. Движение свободной весомой частицы по отношению к вращаю-
вращающейся Земле ' 236
142. Маятник Фуко 239
ЧАСТЬ ЧЕТВЁРТАЯ
ДИНАМИКА СИСТЕМЫ ЧАСТИЦ
Отдел 1
ГЕОМЕТРИЯ МАСС
XXV. Центр масс 243
143. Механическая система материальных частиц 243
144. Координаты центра масс 243
145. Центр масс как центр системы параллельных векторов 244
146. Простейшие свойства центра масс 244
147. Формулы для координат центра масс непрерывно-протяженных
тел 247
148. Центры масс некоторых линий я площадей 248
149. Центры масс некоторых объёмов 250
150. Теоремы Паппуса-Гюльдена 252
XXVI. Моменты инерции 253
151. Момент инерции относительно точки 253
152. Момент инерции относительно оси 254
153. Зависимость между моментами инерции относительно параллель*
ных осей 254
X
154. Зависимость между моментами инерции относительно осей, про-
проходящих через данную точку. Произведения инерции. Эллипсоид
инерции 255
155.. Радиус иЕгерции. Гирашкжиый эллипсоид 258
156. Эллиптические координаты 260
157. Распределение главных осей инерции в пространстве 263
158. Момент инерции относительно плоскости 267
159. Вычисление моментов инерции 267
Отдел II
основные положения динамики систьмы. уравнения движения,
законы динамики
XXVII. Свободные и несвободные материальные системы. Свизи ... 272
160. Свободная и несвободная материальные системы. Связи конечные
и дифференциальные 272
161. Конечные удерживающие связи. Возможное положение системы. 273
162. Градиент конечной связи в данной точке 274
163. Условие, налагаемое удерживающей конечной связью на скорости
частиц системы 275
164. Условие, налагаемое удерживающей конечной связью на ускоре-
ускорения частиц системы 276
165. Удерживающие дифференциальные связи . 277
166. Связи интегрируемые и неинтегрируемые 278
167. Условие, налагаемое удерживающей дифференциальной связью на
ускорения частиц системы 279
168. Неудерживающие связи 279
XXVIII. Возможные и виртуальные перемещения и скорости. Вариа-
Вариации координат 282
169. Возможные скорости системы 282
170. Возможные перемещения системы 283
17L Виртуальные перемещения и скорости. Вариации координат . . . 283
XXIX. Уравнения движения свободной материальной системы 287
172. Уравнения движения свободной материальной системы 287
173. Примеры на движение свободной системы 288
XXX. Реакции связей. Уравнения движения несвободной материаль-
материальной системы в декартовых координатах (уравнения Лагранжа
первого рода) 291
174. Возможные ускорения несвободной системы 291
175. Реакции удерживающих связей. Идеальные связи 291
176. Реакции идеальных неудерживающих связей 296
177. Уравнения движения несвободной системы в декартовых коорди-
координатах (уравнения Лаграижа первого рода) . 298
XXXI. Общие законы динамики: закон изменения количества движе-
движения, закон изменения кинетического момента, закон изменения
кинетической энергии 301
178. Закон изменения количества движения системы (закон движения
центра масс) 301
XI
179. Интегралы количества движения. Закон сохранения движения
центра масс 305
180. Закон изменения кинетического момента 306
181. Интегралы кинетического момента (интегралы площадей)^ Закон
сохранения кинетического момента 308
182. Теорема Якоби 310
183. Объединение законов изменения количества движения и кинети-
кинетического момента системы в один закон 310
184. Закон изменения кинетического момента системы в её относитель-
относительном движении вокруг центра масс . . 313
185. Закон изменения кинетической энергии ........ 313
186. Интеграл энергии. Закон сохранения энергии. Консервативные
системы 315
187. Закон изменения кинетической энергии для относительного дви-
движения системы вокруг центра масс 317
ХХХН. Уравнения движения несвободной системы в обобщённых
координатах. Уравнения движения в независимых координатах
(уравнения Лагранжа второго роаа) 320
188. Преобразование уравнений связей к обобщённым координатам . . 320
189. Уравнения движения несвободной системы в обобщённых коор-
координатах 326
190. Независимые координаты системы. Число степеней свободы си-
системы без неинтегрируемых дифференциальных связей 331
191. Уравнения движения системы в независимы]! координатах (урав-
(уравнения Лагранжа второго рода) 331
192. Приведение уравнений Лаграижа второго рода к системе уравне-
уравнений первого порядка 334
193. Уравнения движения Якоби для консервативной системы .... 335
XXXIII. Союзное выражение кинетической энергии. Уравнения Гамиль-
Гамильтона 339
194. Обобщённые импульсы. Союзное выражение кинетической энер-
энергии 339
195. Теоремы Донкина. Уравнения Гамильтона. Канонические уравне-
уравнения 343
Отдел III
ОБЩИЕ ПРИНЦИПЫ МЕХАНИКИ
XXXIV. Дифференциальные принципы 347
196. Предварительные замечания 347
197. Принцип Даламбера 348
198. Принцип виртуальных перемещений 353
199. Принцип Гаусса, или принцип наименьшего принуждения .... 356
XXXV. Интегральные принципы 359
200. Прямой и окольный пути материальной системы 359
201. Принцип стационарного действия в форме Гамильтона 360
202. Принцип стационарного действия в форме Лагранжа 364
203. Принцип Гельмгольтца , 366
204. Применение принципов 370
XII
Отдел IV
СТАТИКА
XXXVI. Равновесие системы. Принцип виртуальных перемещений.
Устойчивость равновесия 372
205. Положения равновесия. Условия в отношении активных сил и
связей систем, могущих быть в равновесии 372
206. Уравнения равновесия 373
207. Принцип виртуальных перемещений 376
208. Применение принципа виртуальных перемещении к определению
положений равновесия системы 384
209. Определение положений равновесия при силах, имеющих сило-
силовую функцию 389
210. Устойчивое и неустойчивое равновесия. Критерий устойчивости . 389
XXXVII. Равновесие стержневых многоугольников и нитей 392
211. Нитевые и стержневые многоугольники. Условия их равновесия . 392
212. Уравнения равновесия свободной нити 396
213. Интегрирование уравнений равновесия свободной нити 400
214. Связь между задачей о форме равновесия нити и задачей о дви-
движении материальной частицы 401
215. Цепная линия 403
216. Параболическая цепь 405
217. Равновесие нити, лежащей на гладкой поверхности 407
XXXVIII. Геометрическая теория равновесия ПО
218. Основные положения геометрической статики. Эквивалентные
системы сил 410
219. Примеры на определение положений равновесия и нахождение
реакций 411
220. Понятие о винте. Координаты винта 414
221. Взаимный коэффициент двух винтов. Винты, взаимные друг с
другом 415
222. Цилиндроид Болла , 416
XXXIX. Равновесие систем с трением 418
223. Равновесие материальной частицы на шероховатой поверхности . 418
224. Равновесие материальной частицы на шероховатой кривой .... 421
225. Равновесие материальных систем с трением 422
226. Равновесие нити на шероховатой поверхности 425
Отдел V
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ДИНАМИКИ
XL. Последний множитель Якобн 426
227. Предварительные замечания 426
228. Множитель системы уравнений . . . . • 427
229. Дифференциальное уравнение д!Я множителя 428
230. Последний множитель Якоби 432
231. Приложение теории последнего множителя Якоби к уравнениям
динамики в независимых координатах 434
232. Приложение теории последнего множителя к уравнениям несво-
несвободного движения, содержащим множители связей 436
XIII
XLI. Теорема Якобн-Пуассона 440
233. Лемма 440
234. Скобки Пуассона 441
235. Тождество Пуассона 441
236. Теорема Якоби-Пуассона 442
XLII. Главная функция Гамильтона в независимых координатах. Ха-
Характеристическая функция 445
237. Главная функция Гамильтона в независимых координатах .... 446
238. Производные главной функции 447
239. Дифференциальное уравнение Якобн-Гамильтона для главной
функции в частных производных 450
240. Характеристическая функция Гамильтона 454
XLI1I. Главная и характеристическая функция для несвободного дви-
движения в координатах, связанных условными уравнениями ... 461
241. Предварительные замечания 461
242. Главная функция в координатах, связанных условными уравнениями 462
243. Производные главной функции 464
244. Уравнение в частных производных для главной функции .... 467
245. Число произвольных постоянных 472
246. Характеристическая функция 476
XLIV. Некоторые приложения характеристической функции 477
247. Поверхности равного действия. Теорема лорда Кельвина .... 477
248Ч Минимум лаграпжева действия 480
Отдел VI
ДИНАМИКА ТВЁРДОГО ТЕЛА
XLV. Уравнения движения свободного твёрдого тела . . . • 490
249. Основные динамические величины, характеризующие движение
твёрдого тела 490
250. Количество движения и кинетический момент твёрдого тела . . 490
251. Кинетическая энергия твёрдого тела, отнесённая к неподвижным
осям 492
252. Кинетическая энергия твёрдого тела, отнесенная к осям, неиз-
неизменно связанным с телом 495
253. Лагранжева форма кинетической энергии твёрдого тела .... 498
254. Различные типы уравнений движения свободного твёрдого тела 500
255. Уравнения движения твёрдого тела, отнесённые к неподвижным
осям 501
256. Уравнения движения твёрдого тела, отнесённые к осям, неизмен-
неизменно связанным с телом. Эйлеровы уравнения движения твёрдого
тела 502
257. Вывод уравнений движения твёрдого тела из принципа Даламбера 504
258. Лагранжевы уравнения движения твёрдого тела -. . . 505-
XLVI. Уравнения движения несвободного твёрдого тела 508.
259. Кинетический момент и кинетическая энергия твёрдого тела, дви-
движущегося вокруг неподвижной точки 508
260. Уравнения движения твёрдого тела вокруг неподвижной точки 511
261. Уравнения движения весомого твёрдого тела вокруг неподвижной
точки 512
XIV
262. Конечные и дифференциальные связи твердого тела 514
263. Примеры связей твёрдого тела 514
264. Уравнения движения несвободного твёрдого тела в общем случае 517
XLVH. Движение твёрдого тела вокруг неподвижной точки. Случай
Эйлера 521
265. Эйлеров случай движения твёрдого тела вокруг неподвижной
точки. Движение твёрдого тела по инерции 521
266. Простейшие интегралы уравнений движения. Теорема Лагранжа 523
267. Геометрическая интерпретация Пуансо 525
268. Интерпретация Мак-Куллага 526
269. Определение проекций угловой скорости как функций времени 528
270. Определение углов Эйлера как функций времени 534
271. Полодия. Герполодия 535
272. Вторая интерпретация Пуансо 54J
273. Установившиеся, или стационарные, движения твёрдого тела по
инерции 542
274. Случай, когда эллипсоид инерции является поверхностью вращения 544
XLVI1I. Движение твёрдого гела вокруг неподвижной точки: прямое
и обращенное движения Пуансо 545
275. Движение Пуансо 545
276. Сопряжённые движения Дарбу 547
277. Обращенное движение Пуансо 550
278. Теорема Сильвестра 551
XLIX. Движение твёрдого тела вокруг неподвижной точки: случай
Лагранжа 553
279. Лагранжев случай движения весомого твёрдого тела вокруг
неподвижной точки. Симметричный гироскоп 553
280. Простейшие интегралы уравнений движения 553
281. Окончание интеграции 554
282. Сферический гироскоп 556
283. Разложение движения сферического гироскопа на прямое и обра-
обращенное движения Пуансо 557
284. Теорема Якоби о разложении движения симметричного гироско-
гироскопа на прямое и обращенное движения Пуансо 563
L. Движение твёрдого тела вокруг неподвижной точки: случай
С. В. Ковалевской 563
285. Условия, при которых весомое твёрдое тело совершает движе-
движение, исследованное С. В. Ковалевской 563
286. Простейшие (алгебраические) интегралы уравнений движения. Их
геометрическое толкование 564
287. Подготовительные преобразования 565
288. Криволинейные координаты С. В. Ковалевской 567
289. Приведение к квадратурам • . . 573
LI. Движение твёрдого тела вокруг неподвижной точки: случай
Гесса; случай Бобылёва-Стеклова 576
290. Условия, при которых весомое твёрдое тело совершает гессово
движение 576
291. Простейшие (алгебраические) интегралы уравнений движения 578
292. Геометрическая интерпретация гессова движения 578
293. Случай Бобылёва- Стеклова 581
XV
LII. Примеры на движение несвободного твёрдого тела, подчинён-
подчинённого конечным связям 583
294. Волчок на горизонтальной плоскости . 583
295. Симметричный гироскоп. Регулярная и псевдорегулярная пре-
прецессия 585
296. Вращение твёрдого тела вокруг неподвижной оси. Физический
маятник 589
297. Реакции оси вращающегося тела 591
LJII. Примеры на движение несвободного твёрдого тела, подчинён-
подчинённого неинтегрируемым дифференциальным связям 593
298. Движение тел, связанных с нитью, которая не поддаётся кручению 593
299. Видоизменение принципа Даламбера для систем с неинтегриру-
емыми связями 596
LIV. Уравнения движения твёрдого тела, отнесённые к осям, име-
имеющим собственное движение 601
300. Уравнения движения твёрдого тела, отнесённые к осям, имеющим
собственное движение 601
301. Качение шара по поверхности 602
Отдел VII
ТЕОРИЯ УДАРА
LV. Теория удара частицы 607
302. Ударные силы 607
803. Удар материальной частицы о связь 608
304. Изменение кинетической энергии материальной частицы за время
удара .615
LVI. Теория удара системы частиц 616
305. Удар материальной системы о неудерживающую связь 616
806. Решение задачи об ударе в обобщённых координатах 623
307. Изменение кинетической энергии системы за время удара. Теоре-
Теоремы Карно 626
308. Закон изменения количества движения системы в случае удара 629
309. Закон изменения кинетического момента системы в случае удара 630
310. Принцип Даламбера в теории удара 631
311. Теорема лорда Кельвина 633
312. Теорема Бертрана 635
LVH. Теория удара твёрдых тел 636
313. Действие ударных сил на твёрдое тело 636
314. Центр удара 638
315. Соударение твёрдых тел 639
Именной указатель • ... 646
Предметный указатель 647