/























































Author: Кадомцев С.Б.
Tags: геометрия алгебра математика линейная алгебра аналитическая геометрия
ISBN: 5-9221-0145-5
Year: 2003




Text
СБ. КАДОМЦЕВ
Аналитическая геометрия
и линейная алгебра
Москва
ФИЗМАТЛИТ
2001
УДК 514
ББК 22.143
К13
Кадомцев СБ. Аналитическая геометрия и линейная
алгебра - М.: ФИЗМАТЛИТ, 2003. - 160 с. - ISBN 5-9221-0145-5.
Настоящее пособие написано на основе курса лекций, читаемого автором
на физическом факультете МГУ. Книга состоит из трех частей. В первой
из них (аппарат аналитической геометрии и линейной алгебры) рассмат-
рассматриваются действия с матрицами, теория определителей и ее приложения
к решению систем линейных уравнений. Во второй части (аналитическая
геометрия) помимо традиционного материала подробно обсуждается теория
ориентации, строится классификация кривых и поверхностей второго поряд-
порядка. Третья часть (линейная алгебра) представляет собой систематическое
изложение теории линейных, евклидовых и унитарных пространств, осно-
основанное на аксиоматике Вейля. Здесь изучаются теория линейных операторов
(в частности, описывается и иллюстрируется примерами метод приведения
матрицы оператора к жордановой форме), теория билинейных и квадратич-
квадратичных форм, тензорная алгебра, рассматривается пространство Минковского.
Выбор последовательности изложения и использование в ряде случаев нетра-
нетрадиционных доказательств теорем позволили автору изложить традиционный
курс относительно компактно.
Книга предназначена, прежде всего, для студентов физико-математиче-
физико-математических специальностей.
ISBN 5-9221-0145-5 © ФИЗМАТЛИТ, 2001, 2003
СОДЕРЖАНИЕ
I. АППАРАТ АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ И ЛИНЕЙНОЙ АЛГЕБРЫ
Глава 1
МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ 8
§ 1. Матрицы 8
1. Сложение матриц (8). 2. Умножение матрицы на число (9). 3. Ариф-
Арифметическое пространство (9).
§ 2. Определители 11
1. Предварительные замечания A1). 2. Определитель A2). 3. Разло-
Разложение определителя по строке A4). 4. Основные свойства определите-
определителя A5).
§ 3. Равноправность строк и столбцов определителя 16
1. Перестановки A6). 2. Выражение определителя через его элемен-
элементы A8). 3. Алгебраическое дополнение A9). 4. Разложение определи-
определителя по столбцу B0).
§4. Произведение матриц 21
1. Свойства произведения матриц B1). 2. Определитель произведения
квадратных матриц B2). 3. Свойства произведения квадратных мат-
риц B3).
§ 5. Базисный минор 24
1. Теорема о базисном миноре B4). 2. Ранг матрицы B5).
Глава 2
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ 27
§ 1. Существование и единственность решения 27
1. Основные определения B7). 2. Существование решения B8). 3. Од-
Однородные системы B8). 4. Единственность решения B8).
§ 2. Нахождение решений 29
1. Формулы Крамера B9). 2. Общий случай C0).
П. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Предварительные замечания 32
Глава 1
ВЕКТОРЫ И КООРДИНАТЫ 33
§ 1. Координаты точки 33
1. Ось координат C3). 2. Декартовы координаты C4). 3. Криволиней-
Криволинейные координаты на плоскости C4). 4. Криволинейные координаты в про-
пространстве C5).
§ 2. Векторы 36
Содержание
1. Вектор C6). 2. Равенство векторов C7). 3. Координаты век-
вектора C7). 4. Сумма векторов C8). 5. Произведение вектора на
число C8). 6. Отождествление равных векторов C9).
§ 3. Скалярное произведение 39
1. Основные определения C9). 2. Скалярное произведение в координа-
координатах D0). 3. Свойства скалярного произведения D0). 4. Площадь парал-
параллелограмма D1). 5. Объем параллелепипеда D1).
§ 4. Базис 42
1. Коллинеарные векторы D2). 2. Компланарные векторы D3). 3. Ли-
Линейная зависимость четырех векторов D3). 4. Базис D3). 5. Аффинные
координаты D4).
Глава 2
ПРЕОБРАЗОВАНИЕ КООРДИНАТ 45
§ 1. Преобразование координат на плоскости 45
1. Правые и левые пары D5). 2. Собственные и несобственные преоб-
преобразования D6). 3. Преобразование координат вектора D7). 4. Правые
системы координат D7). 5. Преобразование координат точки D8).
§ 2. Преобразование координат в пространстве 49
1. Преобразование координат вектора D9). 2. Углы Эйлера E0).
3. Преобразование координат точки E1).
§ 3. Векторное произведение 51
1. Определение векторного произведения E1). 2. Смешанное произведе-
произведение E2). 3. Произведение двух смешанных произведений E3). 4. Ска-
Скалярное произведение двух векторных произведений E3). 5. Двойное век-
векторное произведение E4).
Глава 3
УРАВНЕНИЯ ПРЯМЫХ И ПЛОСКОСТЕЙ 55
§ 1. Прямая на плоскости 55
1. Уравнение прямой E5). 2. Параметрические уравнения прямой E5).
3. Каноническое уравнение прямой E6). 4. Общее уравнение пря-
прямой E6). 5. Нормированное уравнение прямой E6).
§ 2. Плоскость 57
1. Уравнение плоскости E7). 2. Общее уравнение плоскости E8).
3. Нормированное уравнение плоскости E9).
§ 3. Прямая в пространстве 59
1. Уравнение прямой E9). 2. Параметрические уравнения прямой F0).
3. Канонические уравнения прямой F0). 4. Пересечение двух плоско-
плоскостей F0).
Глава 4
ЛИНИИ И ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 62
§ 1. Эллипс, гипербола и парабола 62
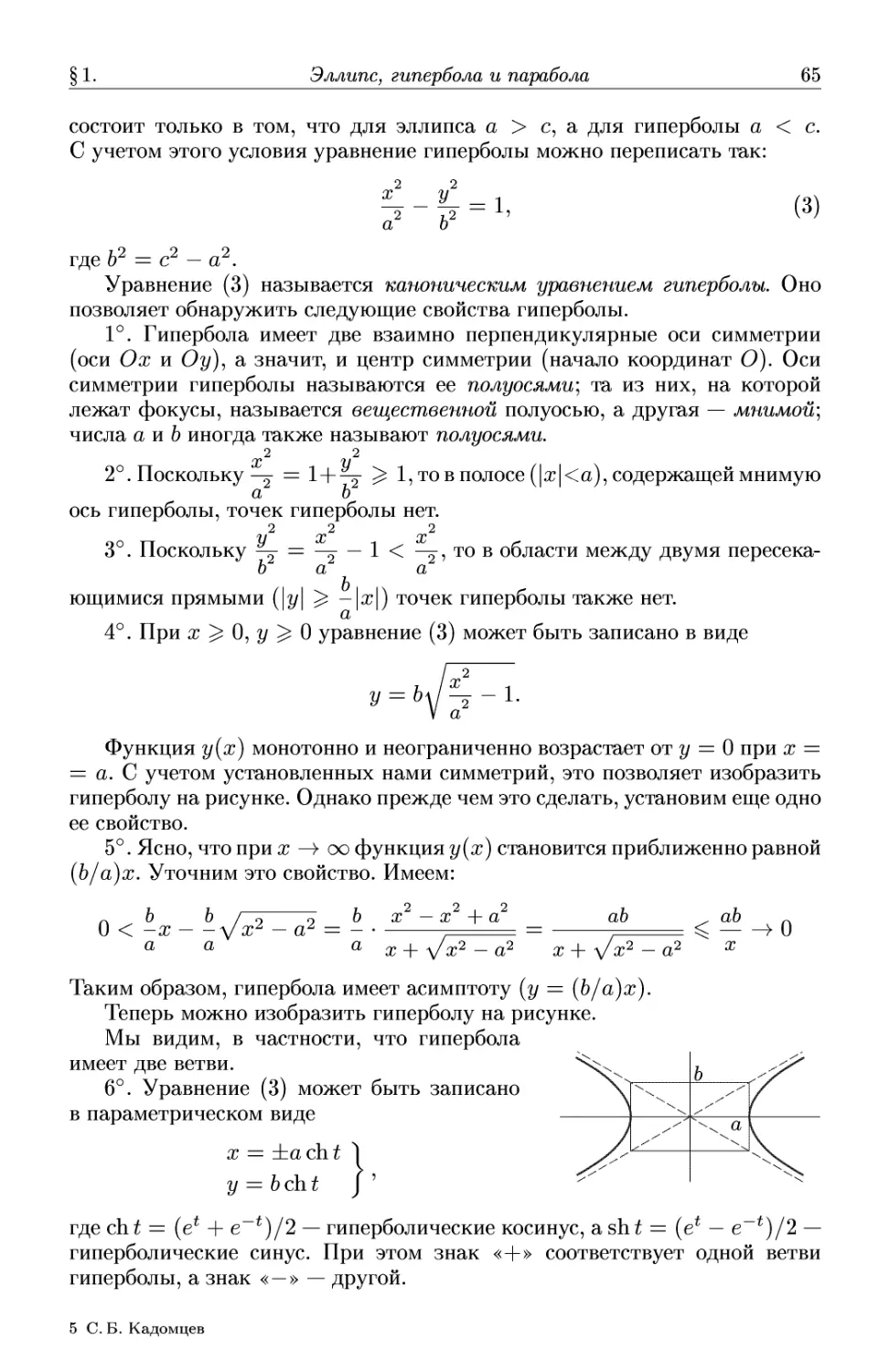
1. Эллипс F2). 2. Гипербола F4). 3. Директриса эллипса и гипербо-
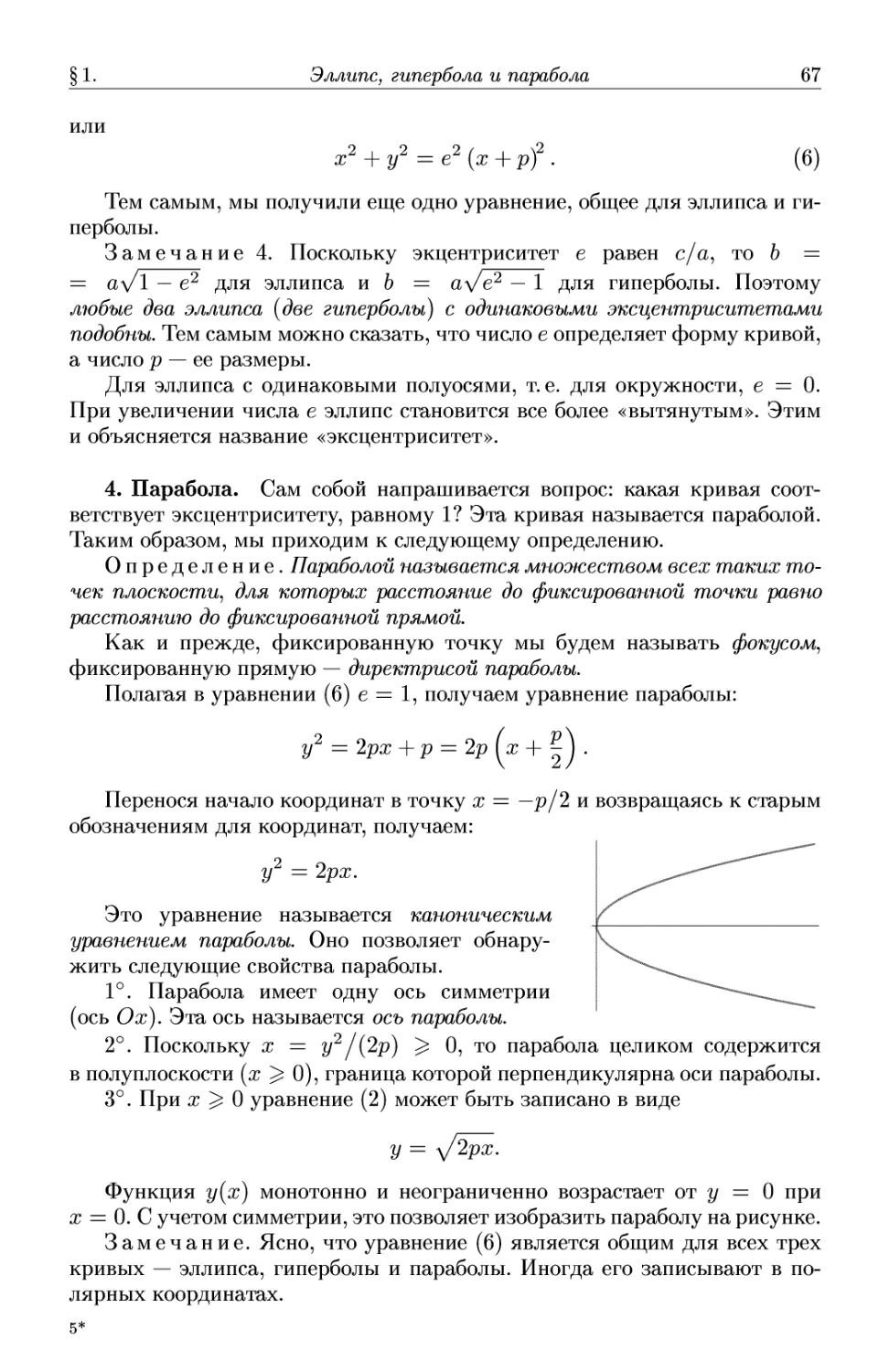
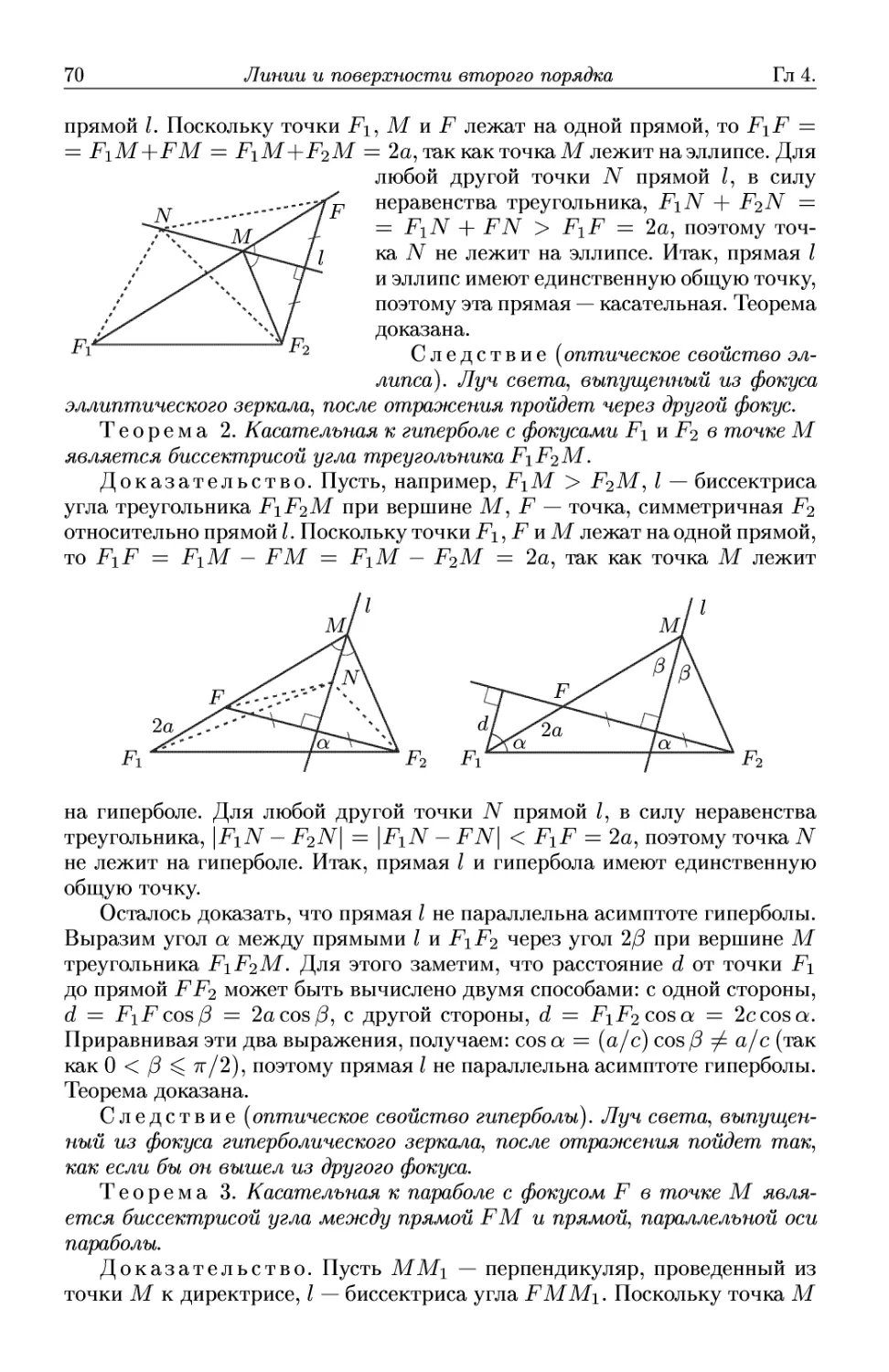
гиперболы F6). 4. Парабола F7). 5. Касательная F8). 6. Оптические свойс-
свойства F9).
§ 2. Кривые второго порядка 71
1. Уравнение кривой второго порядка G1). 2. Классификация G2).
§ 3. Поверхности второго порядка 73
Содержание
1. Уравнение поверхности второго порядка G3). 2. Цилиндры G6).
3. Конусы G6). 4. Завершение классификации G8).
§ 4. Эллипсоид, гиперболоиды и параболоиды 79
1. Эллипсоид G9). 2. Гиперболоиды (80). 3. Параболоиды (81).
III. ЛИНЕЙНАЯ АЛГЕБРА
Глава 1
КОНЕЧНОМЕРНОЕ ЛИНЕЙНОЕ ПРОСТРАНСТВО 84
§ 1. Линейное пространство 84
1. Аксиомы Вейля (84). 2. Линейное пространство (85). 3. Свойства
линейного пространства (86). 4. Линейное подпространство (87).
§ 2. n-мерное линейное пространство 88
1. Базис и размерность (88). 2. Примеры (89). 3. Изоморфизм (90).
4. Линейное дополнение (91).
Глава 2
ЛИНЕЙНЫЕ ОПЕРАТОРЫ 94
§ 1. Операторы, действующие из Ln в Lm 94
1. Линейный оператор (94). 2. Матрица линейного оператора (95).
3. Образ оператора (96). 4. Ядро оператора (96). 5. Произведение опе-
операторов (97).
§ 2. Операторы, действующие из Ln в Ln 98
1. Тождественный оператор и обратный оператор (98). 2. Инвариантные
подпространства (99). 3. Образ и ядро (99). 4. Структура простран-
пространства Lo A01). 5. Собственные значения и собственные векторы A06).
6. Характеристическое уравнение A08). 7. Жорданова форма матрицы
линейного оператора A09).
Глава 3
ПРЕОБРАЗОВАНИЕ БАЗИСОВ И КООРДИНАТ 114
§ 1. Преобразование базисов 114
1. Обозначения A14). 2. Переход к новому базису A14). 3. Последова-
Последовательные преобразования A15).
§2. Преобразование координат 115
1. Преобразование координат вектора A15). 2. Преобразование матрицы
линейного оператора A15). 3. Линейная форма A16).
§3. Тензоры 117
1. Определение тензора A17). 2. Сумма тензоров одинаковой структу-
структуры A18). 3. Прямое произведение тензоров A18). 4. Свертка тензо-
тензора A19). 5. О билинейной форме A20).
§ 4. Квадратичные формы 121
1. Матрица квадратичной формы A21). 2. Метод Лагранжа A21).
3. Закон инерции A22). 4. Критерий Сильвестра A23).
Глава 4
ЕВКЛИДОВО ПРОСТРАНСТВО 125
§ 1. Длины и углы 125
6 Содержание
1. Определение евклидова пространства A25). 2. Неравенство Коши-
Буняковского A25). 3. Длина вектора A26). 4. Угол между вектора-
векторами A26).
§ 2. Ортонормированный базис 127
1. Существование ортонормированного базиса A27). 2. Ортогонализа-
ция A27). 3. Ортогональное дополнение A28). 4. Альтернатива Фред-
гольма A28).
§ 3. Операторы в Еп 129
1. Сопряженный оператор A29). 2. Ортогональный оператор A30).
3. Ортогональные преобразования A32). 4. Самосопряженный опера-
оператор A32). 5. Квадратичная форма в Еп A33).
§ 4. Гиперповерхности второго порядка 134
1. Система координат A34). 2. Каноническое уравнение гиперповерх-
гиперповерхности второго порядка A35). 3. Классификация A36). 4. Инвариан-
Инварианты A36).
Глава 5
НЕКОТОРЫЕ ОБОБЩЕНИЯ 138
§ 1. Унитарное пространство 138
1. Основные свойства A38). 2. Нормальный оператор A39). 3. Унитар-
Унитарный оператор A40). 4. Самосопряженный оператор A41).
§ 2. Псевдоевклидово пространство 141
1. Определение A41). 2. Преобразования Лоренца A42).
§ 3. Группы и поля 143
1. Группа A43). 2. Примеры A45). 3. Поле A46).
Заключение 148
Предметный указатель 154
Часть I
АППАРАТ АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ И ЛИНЕЙНОЙ
АЛГЕБРЫ
Глава 1
МАТРИЦЫ И ОПРЕДЕЛИТЕЛИ
§ 1. Матрицы
1. Сложение матриц.
Определение 1. Таблица из чисел г) вида
называется (т х п)-матрицей.
Здесь первый индекс у числа а^ — это номер строки, а второй — номер
столбца, в котором это число находится.
Иногда мы будем использовать также обозначение (A)ij, понимая под
ним элемент матрицы А с индексами г, j, т. е. а^.
Определение 2. Суммой двух (т х п)-матриц А и В называется
такая (т х п)-матрица С, что (C)ij = а^- + Ъц.
Теорема. Сложение матриц обладает следующими свойствами:
1° для любых (т х п) -матриц А и В выполняется равенство А + В =
= В + А;
2° для любых (т х п)-матриц А, В и С выполняется равенство А +
+ {В + С) = {А + В) + С;
3° существует единственная (т х п)-матрица О такая, что для
любой (т х п) -матрицы А выполняется равенство А-\- О = А;
4° для любой (т х п)-матрицы А существует единственная матрица
(—А) такая, что А + (—А) = О.
Доказательство. 1°. Выберем в матрице (А + 5) произвольный
элемент (А + Б)^-. Имеем: (А + Б)^- = а^- + 6^' = ^ + а^ = (Б + А)^-.
Следовательно, А + В = В -\- А.
2°. [А+(Б + С)]^- = а^ + (Ь^-+^-) = {aij + bifi + dj
а значит, А + (Б + С) = (А + Б) + С.
3°. Согласно определению, (А + Б)^- = а^ + bij. Это число равно а^-
тогда и только тогда, когда 6^ равно нулю. Следовательно, единственной
матрицей О, удовлетворяющей условию А -\- О = А, является матрица О,
все элементы которой равны нулю.
х) Под словом «число» здесь и далее (в части 1) понимается, вообще говоря,
комплексное число; впрочем, если угодно, можно считать, что речь идет о веще-
вещественном числе.
§ 1. Матрицы
4°. Равенство (А + B)ij = а^ + bij = 0 выполняется тогда и только то-
тогда, когда b{j равно (—а^). Следовательно, единственной матрицей (—А),
удовлетворяющей условию А + {—А) = О, является матрица (—А), эле-
элементы которой соответственно равны (—а^). Теорема доказана.
Замечание. Матрица А + (—5) называется разностью матриц А
и В и обозначается так: А — В.
2. Умножение матрицы на число.
Определение. Произведением (га х п)-матрицы А на число X на-
называется такая (га х п)-матрица В, что (-B)ij = Ла^-.
Теорема. Умножение матрицы на число обладает следующими
свойствами:
1° для любой (га х п)-матрицы А имеет место равенство 1 • А = А;
2° для любой (га х п)-матрицы А и любых чисел X и /i имеет место
равенство X(/iA) = (X/i)A;
3° для любой (га х п) -матрицы А и любых чисел X и fi имеет место
равенство (А + fi)A = Л А + \±А\
4° для любых (га х п)-матриц А и В и любого числа X выполняется
равенство Х(А + Б) = АЛ + ЛБ.
Доказательство. Имеем:
1°. A • A)ij = 1 • a,ij = a^j, поэтому 1 • А = А.
2°. [A(//A)]ij = А(/ш^) = (A/i)a^ = [(A/i),%, т.е.
3°. [(А + /х)А]^- = (А + /i)a^ = Xctij + /xa^- = (ХА + /хА)^-, т.е.
(А + fi)A = АА + /iA
4°. [А(А + -B)]ij = X(aij + 6^-) = Xctij + A^j = (AA + XB)ij, а значит,
A(A + В) = ХА + АБ.
Теорема доказана.
3. Арифметическое пространство.
Определение 1. Множество всех упорядоченных наборов из п чи-
чисел (ai, а,2, • • • ,апM для которых определены операции сложения и умно-
умножения на число по правилам:
1° (aba2, ... ,ап) + F1,62, ••• ,6„) = (ai + 6i,a2 + 62, ... ,an + 6n);
2° A(ab a2, ... , an) = (Aab Aa2, ... , Aan),
называется арифметическим пространством.
Если числа, о которых идет речь, вещественные, то пространство обо-
обозначается символом Мп, а если комплексные — то символом Сп. Са-
Сами элементы арифметического пространства условимся обозначать од-
одной буквой полужирного шрифта: а = (ai,a2, ... , an) и называть их
для краткости строками, хотя, конечно, записывать их можно и в виде
столбцов.
Поскольку строки складываются и умножаются на число по тем же
правилам, что и A х п)-матрицы, то сложение строк и умножение их
на число удовлетворяет свойствам, указанным в теоремах пп. 1, 2. Это
позволяет, в частности, сформулировать следующее определение.
10 Матрицы и определители Гл 1.
Определение 2. Сумма вида \\8li + А2а2 + • • • + А&ат называется
линейной комбинацией строк а^ с коэффициентами А^.
Если все коэффициенты равны нулю, то линейная комбинация называ-
называется тривиальной, в противном случае (т. е. если хотя бы один коэффици-
коэффициент отличен от нуля) — нетривиальной.
Среди всевозможных срок особую роль играют строки
ei = (l,0, ... ,0), е2 = @,1, ... ,0), ... , е„ = @,0, ... , 1) A)
(т. е. строки е^, у которых на г-м месте стоит 1, а в остальных местах — 0),
поскольку любая строка может быть представлена и притом единственным
образом в виде их линейной комбинации:
а = (ai, а2, • • • , ап) = а^е^ + а2е2 + ... + апеп.
Строки A) условимся в дальнейшем называть координатными стро-
строками.
Определение 3. Строки называются линейно зависимыми, если
существует их нетривиальная линейная комбинация, равная нулевой
строке о = @, 0, ... , 0); в противном случае они называются линейно
независимыми.
Тем самым, можно сказать так: строки называются линейно неза-
независимыми, если обращение в нулевую строку их линейной комбинации
возможно лишь в том случае, когда эта линейная комбинация триви-
тривиальна. Примером линейно независимых строк могут служить, очевидно,
координатные строки A).
Докажем три теоремы о линейной зависимости строк.
Теорема 1. Если среди строк есть нулевая, то эти строки линейно
зависимы.
Доказательство. Пусть, например, ai = @,0, ... ,0) (этого всегда
можно достичь, занумеровав строки соответствующим образом). Имеем:
lai + 0а2 + ... + 0ат = @, 0, ... , 0), а значит, строки аь а2, ... , аш
линейно зависимы. Теорема доказана.
Теорема 2. Если какие-нибудь к из т строк линейно зависимы, то
и все строки линейно зависимы.
Доказательство. Пусть, например, строки ai,a2, ... , а& линей-
линейно зависимы, т.е. существуют такие числа Ai,A2, ... ,А&, что Aiai +
+ А2а2 + ... + А^а/с = @,0, ... ,0), причем не все А^ равны нулю.
Имеем: Aiai + А2а2 + ... + Afeafe + 0afe+i + ... + 0am = @, 0, ... , 0).
Но это и означает, что строки ai, а2, ... , ат линейно зависимы. Теорема
доказана.
Теорема 3. Если строки линейно зависимы, то одна из них равна
линейной комбинации остальных.
Доказательство. Если строки ai, а2, ... , ат линейно зависимы, то
существуют такие числа Аь А2, ... , Хт, что Aiai + А2а2 + ... + Amam =
= @,0, ... ,0), причем не все А^ равны нулю. Пусть, например, Ai ф 0.
Имеем: ai = —-^а2 — ... —т^ат, что и требовалось доказать.
Ai Ai
§2.
Определители
11
2. Определители
1. Предварительные замечания. Если количество строк матрицы
равно количеству ее столбцов, то матрица называется квадратной. В этом
параграфе речь пойдет о квадратных матрицах.
Начнем с простого примера. Рассмотрим систему двух линейных урав-
уравнений
= h J
с двумя неизвестными х\ mx2- Умножим первое уравнение на <2225 второе —
на (—ai2) и сложим их. В результате получим:
или, если выраж;ение в скобках не обращается в нуль,
Х\ =
CL11CL22 — CL12CL21
Введем обозначение:
Тогда полученный результат можно записать так:
^22
A)
ац
Аналогично
х2 =
CL22
ац bi
Q>21 Ь2
ац ai2
1 &22
Выражение A) называется определителем второго порядка матрицы
А = f ^n ^12 j. Определитель матрицы А обозначают также det A.
Нетрудно убедиться в том, что решение системы трех линейных урав-
уравнений
= Ь\
= b3
12
Матрицы и определители
Гл1.
с тремя неизвестными х±, x
_ detAi
1 det Л '
можно записать так:
det A2 det A3
det A
det A
где
(Ь\ а-12 сцз\ fan Ь\ агз
62 a22 a23 I , A2 = I a2i 62 ^23
&з a32 a33 / \a3i 63 a33
аи
CL21
a3i
а\2
CL22
CL32
01 \
Ь2 ,
Ьч I
, А =
/ аи
1
\аз1
fll2
tt22
а32
Bl3
а23
а33
det A =
аи
a32
= аи
a2i а23
a3i а33
+«.
a2i a22
a3i а32
B)
(если, конечно, det А ф 0). Выражение B) называется определителем
третьего порядка матрицы А.
Определители играют весьма важную роль во многих разделах мате-
математики. Например, как мы вскоре увидим, определитель второго порядка
с точностью до знака равен площади параллелограмма, построенного на
векторах, координаты которых являются его строками, а объем парал-
параллелепипеда, построенного на данных трех векторах, равен модулю опре-
определителя, строками которого являются координаты этих векторов. При
этом оказывается, что формулы A) и B) имеют простой геометрический
смысл: формула A) выражает тот факт, что площадь параллелограмма
равна произведению его основания на высоту, а формула B) — тот факт,
что объем параллелепипеда равен произведению площади его основания
на высоту.
Наша ближайшая задача состоит в том, чтобы, исходя из формул A),
B), обобщить понятие определителя матрицы на случай квадратной
матрицы с произвольным количеством строк. К решению этой задачи
мы и переходим.
2. Определитель. Обратимся к формуле B). Мы видим, что опреде-
определитель третьего порядка представляет собой алгебраическую сумму трех
слагаемых, знаки в которой чередуются, причем первый знак — плюс.
Далее, каждое слагаемое представляет собой произведение элемента первой
строки на определитель матрицы, полученной из исходной вычеркиванием
первой строки и того столбца, из которого этот элемент взят. Отметим, что
если договориться называть определителем первого порядка матрицы А =
= («11) то единственное число an, из которого она состоит, то формула A)
примет вид, структурно аналогичный виду формулы B). Эти наблюдения
приводят нас к следующему определению.
Определение. 1° Определителем первого порядка A х ^-мат-
^-матрицы А называется то единственное число an, из которого эта матрица
состоит;
§2.
Определители
13
2° определителем п-го порядка (п х п) -матрицы А при п > 1 называ-
называется число
detA =
ац
CL22
CLn2
-l)s+1alsAs,
C)
S = l
где As — определитель (п — 1)-го порядка матрицы, получаемой из А
вычеркиванием первой строки и s-го столбца.
Ясно, что это определение позволяет найти выражение для определи-
определителя любого порядка. Например, зная формулу для определителя третьего
порядка, мы можем написать выражение для определителя четвертого
порядка, а значит и пятого и т. д. Для краткости будем называть элемен-
элементами, строками и столбцами определителя элементы, строки и столбцы его
матрицы.
Замечание. Как следует из формулы C), определитель представ-
представляет собой функцию п2 переменных — элементов а^. Иногда, однако,
бывает удобнее рассматривать его как функцию A(ai, а2, • • • •>а™) п пе~
ременных: ai = (ац,а12, ... , ain), а2 = (а2Ьа22, ••• ,а2п), • • • , ап =
= (ani, аП2, • • • 5 апп) — строк этого определителя.
Одно из важнейших свойств определителя состоит в следующем.
Теорема. Если две строки поменять местами, то модуль определи-
определителя не изменится, а его знак изменится на противоположный.
Доказательство. Допустим, что меняются местами г-я и j-я строки,
г < j. При п = 2 (при п = 1 нет двух различных строк) справедливость
утверждения усматривается непосредственно из формулы A). При п > 2
возможны три случая: 1° i,j > 1; 2° г = 1, j' = 2; 3° г = 1, j > 2.
Рассмотрим эти случаи отдельно.
1°. Воспользуемся методом математической индукции. При п = 3 спра-
справедливость утверждения усматривается непосредственно из формулы B),
поскольку в каждом из трех определителей второго порядка меняются
местами две строки и, следовательно, в каждом слагаемом меняется знак.
Если же теорема верна при п = к — 1^3, то она верна и при п = к,
i,j > 1. В самом деле, при перестановке строк с номерами г и j у каждого
из определителей As [к — 1)-го порядка в формуле C) две строки меняются
местами, а значит, по пред пол ожению индукции, перед всеми слагаемыми
в этой формуле изменяется знак, что и требовалось доказать.
2°. Применим формулу C) к определителю A(ai,a2, ... ,ап), а за-
затем — к каждому из определителей As. В результате получим алгебра-
алгебраическую сумму определителей Apq (p < q), полученных из исходного вы-
вычеркиванием первых двух строк и столбцов с номерами р, q, с некоторыми
коэффициентами. При этом слагаемых с Apq будет два: одно получится
в результате вычеркивания первой сроки и р-ro столбца, второй строки
и q-ro столбца
ani ... a
Lp • • • Qiq • • •
np • • • Q,nq • • •
14
Матрицы и определители
Гл1.
а другое — в результате вычеркивания первой сроки и q-ro столбца, второй
строки и р-го столбца:
til 1 • • • OFTp
-.т.-б-2-g-
. . . Q
nq
)р
Коэффициент при Apq в первом слагаемом будет равен (—1)р
• a>ip{—l)9^2g, поскольку после вычеркивания р-го столбца g-й столбец ока-
окажется на q — 1-м месте. Коэффициент при Apq во втором слагаемом будет
равен (—l)q aiq(—l)p а2р, поскольку после вычеркивания g-го столбца
р-и столбец останется на р-м месте. Таким образом, при Apq окажется
коэффициент
{-l)p+q+1{alpa2q - a2palq).
Коэффициент при Apq в определителе Д(а2, ai, ... , ап) можно найти,
поменяв в полученном выражении индексы 1 и 2 местами:
(-l)p+q+1{a2palq-alpa2q).
Найденные выражения равны по модулю и противоположны по знаку,
что и доказывает справедливость утверждения.
3°. Согласно ранее доказанному, имеем:
А(аьа2, ... ,а^, ...) = -А(а2,аь ... ,а^-, ...) =
= А(а2,а^, ... ,аь ...) = -
Теорема доказана.
,а2, ... ,аь
3. Разложение определителя по строке.
Определение. Определитель А^-, получаемый из det А вычеркива-
вычеркиванием i-u строки и j-го столбца, называется минором, дополнительным
к элементу aij.
Теорема. Справедлива следующая формула, называемая формулой
разложения определителя по г-ой строке:
det A =
CL22
D)
где А^ — минор, дополнительный к элементу а^.
Доказательство. Воспользуемся методом математической индук-
индукции. При г = 1 формула D) верна, поскольку совпадает с формулой C).
Допустим, что она верна для строки с номером г — 1 (г ^ п) и докажем,
что тогда она верна и для строки с номером г. Поменяем местами г-ю
и (г — 1)-ю строки (при этом у определителя изменится знак) и, в соответ-
соответствии с предположением индукции, разложим полученный определитель
§ 2. Определители 15
по строке с номером г — 1:
Л f^-i- Л /\ (п Я • 1 Я • Я I /\ 1Я-1 Я • Я • 1 Я 1
U.CI -п. — z_x^ai, . . . , cx<i — \, сх%, . . . , cxjij — z_\^cii, . . . , сх%, <хг — \, . . . , <хпj —
п п
Теорема доказана.
4. Основные свойства определителя. Сформулируем несколько
свойств определителя, вытекающих из установленных нами фактов.
1°. Если все элементы какой-нибудь строки умножить на одно и то
же число, то весь определитель умножится на это число.
В самом деле, если разложить определитель по указанной строке, то
в формуле D) перед каждым слагаемым появится общий множитель. После
вынесения его за скобки в скобках останется исходный определитель, что
и требовалось доказать.
2°. Если к строке определителя прибавить какую-нибудь строку
b = (Ъ\, 62, ... , Ъп), то его можно будет представить в виде суммы двух
определителей: исходного и определителя, в котором указанная строка
заменена на прибавленную: A(ai + b, а2, ... , an) = A(ai, а2, ... , ап) +
+ А(Ь,а2, ... ,ап), А(аьа2 + Ь, ...,ап) = А(аьа2, ... ,ап) +
+ А(аьЬ, ... ,ап), ... ,А(аьа2, ... ,ап + Ь) = А(аьа2, ... ,ап) +
+ A(ai, а2, ... , Ь). В самом деле,
п
A(ai... , 3-i + b, ... , an) = у (~1) iaij ~^~ bj) ^ij =
= А(аь ... ,аь ... ,ап) + А(аь ... ,b, ... ,ап),
что и требовалось доказать.
3°. Если в определителе две строки одинаковые, то он равен нулю.
Действительно, если указанные строки поменять местами, то определи-
определитель, с одной стороны, не изменится, а с другой — у него изменится знак.
Это возможно лишь в том случае, когда он равен нулю.
4°. Определитель A(ei, е2, ... , еп), т.е. определитель
1 0 ... О
О 1 ... О
О 0 ... 1
равен единице.
Для п = 1 это утверждение очевидно; если же оно доказано для п =
= к — 1, то при п = /с, раскладывая данный определитель по первой строке,
получим: А(еье2, ... ,е„) = 1 • 1 = 1.
16 Матрицы и определители Гл 1.
Замечание. Свойства 1°, 2°, 3°, 4° иногда называют основными
свойствами определителя, поскольку из них может быть выведена фор-
формула C), и, следовательно, они могут быть положены в основу аксиомати-
аксиоматического определения определителя.
Следствие 1. Если в определителе две строки пропорциональны
(т. е. 3.1 = Aaj и г ф j), в частности одна из строк состоит из нулей
(случай А = 0), то он равен нулю.
В самом деле, если, пользуясь свойством 1°, вынести общий множитель,
то получится, что две строки в определителе совпадают и, следовательно,
он равен нулю.
Следствие 2. Если одна из строк равна линейной комбинации
остальных, то определитель равен нулю.
Согласно свойству 2°, такой определитель можно представить в виде
суммы определителей, в каждом из которых две строки пропорциональны.
Следствие 3. Если к какой-нибудь строке определителя прибавить
линейную комбинацию остальных строк, то определитель не изменится.
Действительно, согласно свойству 2° он может быть представлен в виде
суммы двух определителей: исходного и определителя, в котором одна из
строк равна линейной комбинации остальных.
§ 3. Равноправность строк и столбцов определителя
1. Перестановки. Для дальнейшего изучения свойств определителя
нам понадобится формула, позволяющая вычислить определитель п-го по-
порядка непосредственно через его элементы. Вывод этой формулы потребует
от нас использования некоторых дополнительных фактов, к обсуждению
которых мы и переходим.
Определение 1. Упорядоченная совокупность а = (o~i, g<i, ... , ап)
п попарно различных натуральных чисел, не превосходящих п, называется
перестановкой из п чисел.
Так, совокупность чисел B, 4, 1, 5, 3) является перестановкой из пяти
чисел. Совокупность же A, 3, 4, 1, 5), равно как совокупность A, 4, 8, 2, 3),
перестановкой не является.
Теорема 1. Количество различных перестановок из п чисел равно п!.
Доказательство. Рассмотрим перестановку а = (o"i,a2, ... ,сгп).
В качестве а± может быть взято любое натуральное число от 1 до п.
Поэтому для выбора о~\ представляется п возможностей. Если число о~\ уже
выбрано, то для выбора числа о~2 остается (п — 1) возможность — числом о~2
может быть любое натуральное число от 1 до п, кроме числа <j\. Таким
образом, для выбора чисел о~\ и о представляется п{п — 1) возможностей.
Продолжая рассуждать аналогично, мы придем в конце концов к выводу,
что всего возможностей п(п — 1)(п — 2) • ... • 1 = п\, что и требовалось
доказать.
Определение 2. Говорят, что пара чисел U{, ctj в перестановке а =
= (о"ъ а2, • • • ,&п) образует беспорядок, если G{ > ctj, а г < j (т. е. большее
число стоит раньше).
§ 3. Равноправность строк и столбцов определителя 17
Например, перестановка A, 2, 3, 4, 5) не содержит беспорядков, а в пе-
перестановке A,3,2,5,4) их два: во-первых, число 3 стоит раньше, чем 2,
во-вторых, число 5 стоит раньше числа 4.
Теорема 2. Если два числа в перестановке поменять местами, то
количество беспорядков в ней изменится на некоторое нечетное число.
Доказательство. Воспользуемся методом математической индук-
индукции. Поменяем в перестановке а числа сг^и Gi+k местами. Рассмотрим
сначала случай j = г + 1. Если прежде числа <7{ и cr^+i не образовывали
беспорядка, то теперь они будут его образовывать; если же они образовы-
образовывали беспорядок, то теперь они перестанут его образовывать. При этом все
прочие беспорядки, очевидно, сохранятся. Таким образом, общее количе-
количество беспорядков изменится ровно на единицу (в ту или в другую сторону),
т. е. на нечетное число.
Допустим теперь, что теорема доказана для к = т — 1 и докажем,
что тогда она справедлива и для к = т. Поменяем сначала места-
местами числа (Ti+k-i и cr^+fe; затем в полученной перестановке (... , с^, ...
... , (Ti+k-, cr^+fc-i, ...) поменяем местами cfi и <Ji+k\ наконец, в пере-
перестановке (... , сг^+д., ... , с^, cr^+fc-i,...) поменяем местами с^, и a^k-i'-
(... , cr^+fc, ... , cr^+zc-i, <Ji, ...). В результате г-й и (г + /г)-й элементы поме-
поменялись местами, а порядок следования остальных элементов не изменился.
При этом количество беспорядков изменялось три раза, причем каждый раз
на нечетное число. Следовательно, в результате количество беспорядков
изменилось на нечетное число. Теорема доказана.
Вернемся теперь к определителям и поставим такой вопрос. Пусть
A(ai,a2, ... , ап) — определитель, а = (cri,a2, ... ,crn) — перестановка.
Переставим в определителе строки так, чтобы первой строкой оказалась
о-я, второй — о~2~я и т. д. Поскольку при перестановке строк модуль опре-
определителя не меняется, то полученный определитель A(a(Jl,a(J2, ... , а<тп)
может отличаться от исходного только знаком. Как определить этот знак?
Ответ дает следующая теорема.
Теорема 3.
Д(а<Т1,а<Т2, ... ,а<т„) = (-lf(CT) Д(аьа2, ... ,ап) A)
где N(a) — количество беспорядков в перестановке а.
Доказательство. Выберем из чисел cri,a2, ... , сгп то а\^ которое
равно 1, и поменяем его местами с а\. Одновременно поменяем места-
местами строку а^ определителя А (а(Т1, а.а2, ... , aJn) со строкой а(Т1. За-
Затем выберем из оставшихся чисел то о~т, которое равно 2, и поменяем
его местами с а2, а строку аСГт определителя — со строкой а^, и т.д.
Продолжая этот процесс, мы, очевидно, и приведем данную перестанов-
перестановку к виду A,2, ... ,п), а определитель А(аСГ1,аСГ2, ... , as J — к виду
А(аьа2, ... ,ап).
Пусть К — число шагов, необходимых для осуществления этого процес-
процесса. Поскольку при каждой перестановке строк знак определителя менялся
на противоположный, то A (ag^a^,... ,а.ап) = (—1) Л(аъа2, ••• ,ап).
2 СБ. Кадомцев
18 Матрицы и определители Гл 1.
С другой стороны, на каждом шаге количество беспорядков в переста-
перестановке изменялось на нечетное число. Перестановка A,2, ... , п) не содер-
содержит беспорядков, и, следовательно, общее число беспорядков N(a) в пере-
перестановке а равно алгебраической сумме К нечетных чисел, которое четно
или нечетно в зависимости от того, четно или нечетно число К. Поэтому
(-1)к = (-l)N(a\ Теорема доказана.
2. Выражение определителя через его элементы.
Теорема. Определитель п-го порядка матрицы А выражается фор-
формулой
det A = Y, ("ifИ а1а1а2а2 • • • апап. B)
Здесь сумма берется по всем перестановкам из п чисел (т. е. каждой
перестановке соответствует одно слагаемое), a N(a) — количество беспо-
беспорядков в перестановке а.
Доказательство. Представим первую строку матрицы А в виде
линейной комбинации координатных строк и воспользуемся свойствами 1°,
2° определителя. Имеем
detA = А(аьа2, ... ,an) =
(aiSleSl,a2,... ,ап) = ^aisi A(eSl,a2, ... ,an).
Аналогичным образом поступим со второй строкой матрицы А, затем —
с третьей и т. д. В результате получим:
det Л = Y^ aiSla2s2...anSnA(eSl,eS2,... ,esj.
Согласно свойству 3° в этой сумме отличны от нуля только те слагае-
слагаемые, в которых все строки es. попарно различны, т. е. числа S{ образуют
перестановку из п чисел. Поэтому полученное выражение можно перепи-
переписать так:
(let А = у а\(Тл CL2ao • • • апа„ ^ (eGi есг9 • • • есгэт )•
а
Осталось заметить, что по формуле A)
A(e(Jl,e(J2,... ,еап) = (-1)ЛГ(<т) Д (еье2, ... ,е„),
а A(ei, е2, ... , еп) = 1. Теорема доказана.
Замечание. Рассмотрим несколько частных случаев.
При п = 1 существует только одна перестановка — A). Поэтому det A =
= an-
При п = 2 перестановок две: A, 2) и B,1). В первой из них беспорядков
нет, а во второй — один беспорядок. Поэтому выражение для det А состоит
§ 3. Равноправность строк и столбцов определителя 19
из двух слагаемых: det A = d\\(i22 ~ cii2a2i- Символически это можно
изобразить так:
о
о
При п = 3 перестановок шесть. Три из них — A,2,3), C,1,2)
и B, 3,1) содержат четное количество беспорядков, а три — A,3, 2), B,1,3)
и C,2,1) — нечетное. Поэтому определитель третьего порядка выглядит
так: det А =
1- Символически это можно изобразить так:
В общем случае:
а) определитель представляет собой алгебраическую сумму п\ слагае-
слагаемых (их столько, сколько различных перестановок из п чисел);
б) каждое слагаемое представляет собой произведение п элемен-
элементов матрицы, взятых из попарно различных строк (с номе-
номерами 1,2, ... ,п) и попарно различных столбцов (с номерами
сг1,сг2, • • • ,сгп);
в) знак перед каждым слагаемым определяется четностью количе-
количества беспорядков в перестановке номеров столбцов в этом слагаемом.
3. Алгебраическое дополнение. Рассмотрим формулу B), выража-
выражающую определитель матрицы А через ее элементы. Сгруппируем в ней
все те слагаемые, которые содержат в качестве сомножителя элемент а^,
и вынесем общий множитель а^ за скобки. Та сумма, которая останется
после этого в скобках, называется алгебраическим дополнением Aij эле-
элемента а^. Иными словами, А^ — это то, во что превращается правая
часть выражения B) при замене элемента а^ на единицу, а всех остальных
элементов г-й строки — на нули.
Теорема. Алгебраическое дополнение элемента а^ равно минору,
дополнительному к а^, взятому со знаком «+», если число (i+j) четно,
и « —» — если нечетно: А^ = (—1)*+JA^.
Доказательство. Из определения следует, что алгебраическое до-
дополнение Aij представляет собой определитель, полученный из det А заме-
заменой элемента а^ на единицу, а всех остальных элементов г-й строки — на
нули. С другой стороны, если такой определитель разложить по г-й строке,
то окажется, что он равен (—1)г+:/А^. Теорема доказана.
2*
20
Матрицы и определители
Гл1.
Замечание 1. Доказанная теорема позволяет по-новому записывать
формулу разложения определителя по г-й строке:
clet A =
s=l
Замечание 2. Рассмотрим определитель, в котором j-я строка заме-
заменена на г-ю (г ф j):
ац
an
an
dni
а22 ... •
di2 ....
а
%2
an2
din
d
d
in
dun
Этот определитель, очевидно, равен нулю — в нем две одинаковые
строки. Раскладывая его по j-ой строке и учитывая, что алгебраические
дополнения к ее элементам не зависят от элементов j-ои строки (она вы-
вычеркивается), получим:
aisAjs = 0.
Объединяя этот результат с утверждением замечания 1, можно напи-
написать так:
" fdetA, i=j;
У CLisAjs = <
C)
4. Разложение определителя по столбцу.
Теорема 1. Справедлива следующая формула, называемая формулой
разложения определителя по j-му столбцу:
s=l
Доказательство. Каждое слагаемое в выражении B) представляет
собой произведение п элементов, взятых из различных столбцов, поэтому
в каждом слагаемом элемент j-ro столбца фигурирует ровно один раз. Сле-
Следовательно, каждое слагаемое из этого выражения войдет в нашу сумму,
и притом только один раз. Теорема доказана.
Определение. Матрицей, транспонированной по отношению к
матрице
§ 4. Произведение матриц 21
называется матрица
(flll CL21 • • • O"ml "
CL12 CL22 • • •
Таким образом, строками матрицы Atr являются столбцы матрицы А
(и наоборот). Например, матрица
/1 2 3 4\
\Ь 6 7 8)
является транспонированной по отношению к матрице
Теорема 2. Для любой (п х п)-матрицы А имеет место равенство
det Atr = det A.
Доказательство. Воспользуемся методом математической индук-
индукции.
При п = 1 утверждение теоремы очевидно — в этом случае транспони-
транспонированная матрица совпадает с исходной.
Допустим, что теорема доказана для п = к. Тогда разложение опре-
определителя (к + 1)-го порядка матрицы Atr по первой строке совпадает
с разложением определителя матрицы А по первому столбцу. Теорема
доказана.
Следствие. Все утверждения о строках определителя справедливы
и для его столбцов. Иными словами, строки и столбцы в определителе
равноправны.
§ 4. Произведение матриц
1. Свойства произведения матриц.
Определение. Произведением (т х п)-матрицы А на (п х к)-
матрицу В называется (т х к)-матрица С, элементы Cij которой рав-
п
НЫ Y^ CLisbsj.
Таким образом, элемент с индексами г и j матрицы С представляет
собой «произведение» г-й строки матрицы А на j-m столбец матрицы В.
Обратим внимание на то, что при этом количество столбцов матрицы А
должно совпадать с количеством строк матрицы В — иначе произведение
матриц А и В не определено.
Из сказанного ясно, что если произведение матриц А и В определено,
то произведение матриц В и А, вообще говоря, не определено. Но
22 Матрицы и определители Гл 1.
даже в том случае, когда оба произведения определены (в част-
частности, когда матрицы А и В — квадратные), АВ, вообще говоря,
не равно В А. В самом деле, пусть, например, А = (i о)' ^ =
/0 1\ т Ап ((I • 0 + 0 • 0) A • 1 + О • 1)\ /0 1\ иА
= ^ ху Тогда АВ = (jbO + o.oj [ы + o.ijj = (о 1> а ВА =
_ /@-1 + 1. 1) @-0 + 1 -0)\ _ A 0\ ЛВ^ВЛ
~ (,@-1 + 1-1) @-0 + 1.0)J - \1 0j'T'e- A*r*A-
Теорема. Умножение матриц (при условии, что оно определено)
обладает следующими свойствами:
Г А(ВС) = (АВ)С-
2° А(В + С) = АВ + АС-
3° (А + В)С = АС + БС;
4° Х(АВ) = (ХА)В = А(ХВ), где X — любое число.
Доказательство.
1°. (А(Ж7))у =Y.aia(BC)ei = J2c4sbspcpj = E (AB)ipCpj =
s s,p p
= ((AB)C)tJ.
2°. (A (B + C)){j = E ais (bsj + csj) — Y, aisbsj + E aisCsj -
3°. ((A + B) C)tj = E fa, + hs) csj = E aiscsj + E biscsj =
= (AC + BC)ir S
4°. (A (AB))^ = A E (Hsbsj = E (Аогя) bsj = ((XA) B)tj =
= Eais(\bsj) = (A(\B))t°.
S
Теорема доказана.
2. Определитель произведения квадратных матриц. Обратимся те-
теперь к квадратным матрицам.
Теорема, det(АВ) = det AdetB.
Доказательство. Пусть С = АВ. Имеем:
det(AB) = detC = А(сьс2, ... ,сп) = Д( ^cieieei,c2, ... ,cn j =
pi0Pl8le8l,c2, ... ,cn j = A( />^aiPlbPl,c2, ... , cn J =
= 2^aiPi^ (bPi?c2, • • • 5CnJ = • • •
• • • = / J 0>lpi a2p2 • • • anpn A (t>pi •> t>p2 , . . . , Dpn J.
Pl,p2, ••• ,Pn
§ 4. Произведение матриц 23
В этой сумме отличными от нуля будут лишь те слагаемые, в которых
все hPi попарно различны, т. е. числа pi образуют перестановку из п чисел.
Поэтому, с учетом формулы A) п. 1 §3, полученное выражение можно
переписать так:
det(АВ) = ^2а1а1 а2(Т2 • • • аП(Тп А (Ъа1, Ъа2, ... , Ъап) =
а
= ^2 (-1OV(<j)ai<7ia2<72 • • • апап А (Ьь b2, ... , bn) =
(j
= det В Y^ {-^)N{a)aia1a2a2 • • • an(Tn = det В det A.
a
Теорема доказана.
Замечание. Подчеркнем особо, что равенства
det (А + В) = det A + det В, det(AA) = A det A
могут выполняться лишь в отдельных (крайне редких) случаях.
3. Свойства произведения квадратных матриц. Произведение квад-
квадратных матриц обладает еще двумя важными свойствами.
Теорема. При любом п:
1° существует такая (п х п)-матрица Е, что для любой (п х п)-
матрицы А имеют место равенства АЕ = ЕА = А\
2° для всякой (п х п)-матрицы А с определителем, отличным от
нуля, существует такая матрица А~х, что АА~Х = А~хА = Е.
Доказательство. 1°. Рассмотрим (п х п)-матрицу
т. е. матрицу, элемент е^ которой равен 1 при г = j и 0 при г Ф j.
Пусть А — произвольная (п х п)-матрица. Имеем: (AE)ij = ^aisesj.
s
В этой сумме все слагаемые, кроме одного (при s = j), равны нулю;
единственное отличное от нуля слагаемое равно a^ejj = а^-1 = а^. Но
это и означает, что АЕ = А. Аналогично доказывается, что ЕА = А.
2°. Пусть А — произвольная (п х п)-матрица с определителем, отлич-
отличным от нуля. Рассмотрим матрицу В, элементами которой являются числа
Ь^ = 3% , где Aji — алгебраическое дополнение элемента aji l). Имеем:
det A
^Обратим внимание на то, что элемент bij выражается через Aji, а не че-
через Aij!
24 Матрицы и определители Гл 1.
_ 1 / detA, i= j _ / 1, i=j
~ det A \ 0, t ф j ~ \ 0, t ^ j
Аналогично доказывается, что {BA)ij = {E)ij. Тем самым, 5 = A-1.
Теорема доказана.
Замечание 1. Нетрудно видеть, что матрица Е определяется един-
единственным образом: если существует такая матрица Е\, что для любой
матрицы А выполняется равенство АЕ\ = Л, то Е\ = ЕЕ\ = Е. Матри-
Матрица Л также определяется единственным образом: если существует такая
матрица А'1, что АА'1 = Е, то А^АА'1 = ЕА~Х = А'1 = А~ХЕ =
= А~х. Матрица Е называется единичной, а матрица А~х — оборотной по
отношению к матрице А.
Замечание 2. В доказанной теореме содержится условие det А ф 0.
Возникает вопрос: а что будет, если это условие нарушено, т. е. det A =
= 0 — существует ли в этом случае матрица А~1е? Ответ оказывается
отрицательным. В самом деле, из равенства АА~^ = Е следует, что
det A det А~х = det .Б = 1. Поэтому предположение о том, что det A =
= 0, приводит к противоречию.
§ 5. Базисный минор
1. Теорема о базисном миноре. Рассмотрим произвольную {т х п)-
матрицу А.
Определение 1. Минором матрицы А, построенным на строках
с номерами %\, %2, ... , ik и столбцах с номерами j\, 21 ? • • • ? jk ? называется
определитель, элементами которого являются элементы матрицы А,
расположенные на пересечении указанных строк и столбцов.
Определение 2. Минор М произвольной матрицы называется ба-
базисным, если он отличен от нуля, а любой минор на единицу большего
порядка, включающий в себя М, равен нулю {или такого минора не су-
существует); строки и столбцы, на которых построен базисный минор,
называются базисными.
Теорема (о базисном миноре). Базисные строки {столбцы) линейно
независимы; любая строка {столбец) представляет собой линейную ком-
комбинацию базисных.
Доказательство. Доказательство теоремы проведем для строк —
для столбцов она доказывается аналогично.
Допустим, что базисные строки линейно зависимы. Тогда одну из них
можно представить в виде линейной комбинации остальных и, следова-
следовательно, базисный минор равен нулю. Полученное противоречие доказывает
первую часть утверждения теоремы.
§ 5.
Базисный минор
25
Осталось доказать, что любая строка равна линейной комбинации ба-
базисных строк. Без ограничения общности будем считать, что базисный
минор М расположен в левом верхнем углу матрицы (в противном случае
строки и столбцы можно соответствующим образом переставить), к — его
порядок. Добавим к нему г-ю строку и j-й столбец:
аи
an
CLkj
a>ij
Полученный определитель равен нулю. В самом деле, если г ^ к или
j ^ к, то в нем две одинаковые строки или два одинаковых столбца; если
же г > к и j > /с, то он является минором (к + 1)-го порядка, включающим
в себя М, а значит, равен нулю по условию теоремы.
Разложим этот определитель по последнему столбцу:
aijAij + • • • +
= 0.
Заметим теперь, что числа А^, ... , Aj~j и М не зависят от j (чис-
(число М не зависит также и от г). Учитывая, что М ф 0, положим Ai =
= —Aij/M, ... , Xk = —Akj/M. Тогда последнее равенство можно будет
переписать так:
aij = Aiaij + \2a2j + • • • + Afca^j.
Но это и означает, что г-я строка, выбранная произвольно, равна линей-
линейной комбинации базисных строк. Теорема доказана.
Следствие. Если минор М — базисный, то любой минор на единицу
большего порядка (если такой есть) равен нулю.
Действительно, рассмотрим произвольный минор N(k + l)-ro порядка.
По теореме о базисном миноре любая его строка гц равна линейной комби-
k
нации строк, на которых построен минор М: щ = ^2 ^is&s- Поэтому
s=l
N = A(nbn2, ... ,nfc+i) =
Но каждый из определителей A(aSl,aS2,... , aSfc+1) равен нулю, по-
поскольку из (k-\-1) его строк различных не более к. Следовательно, минор N
равен нулю.
2. Ранг матрицы.
Определение. Рангом матрицы называется наибольшее число ее
линейно независимых строк.
26 Матрицы и определители Гл 1.
Ранг матрицы А обозначается так: rang А.
Теорема. Ранг матрицы равен порядку ее базисного минора г).
Доказательство. Пусть к — порядок базисного минора матрицы А.
Базисные строки линейно независимы, поэтому rang A ^ к.
Допустим, что rang A > к и, следовательно, среди строк матрицы А
найдется (к-\-1) линейно независимых. Составим из них матрицу. Порядок
базисного минора этой матрицы не превосходит к, поскольку любой ее
минор является одновременно и минором матрицы А. Поэтому не все
ее строки базисные, а значит, одна из них равна линейной комбинации
остальных. Полученное противоречие завершает доказательство теоремы.
Замечание. Аналогично доказывается, что наибольшее число линей-
линейно независимых столбцов матрицы равно порядку ее базисного минора. Тем
самым, наибольшее число линейно независимых строк равно наибольшему
числу линейно независимых столбцов и равно порядку базисного минора.
Это число и называется рангом матрицы.
Следствие. Определитель равен нулю тогда и только тогда, когда
его строки линейно зависимы.
В самом деле, если строки определителя линейно зависимы, то одна
из них равна линейной комбинации остальных, а значит, определитель
равен нулю. Обратно, если определитель {п х п)-матрицы А равен нулю,
то rang A < п, а значит, ее строки линейно зависимы.
*) Если матрица состоит из одних нулей, то, согласно определению, базисного
минора у нее нет. Условимся считать, что порядок базисного минора в этом случае
равен нулю.
Глава 2
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
§ 1. Существование и единственность решения
1. Основные определения. Рассмотрим систему т линейных уравне-
уравнений с п неизвестными х\, х2, • • • ,^п:
= Ъ2 I / ч
flml^l + CLm2X2 + • • • + ашпХп = Ъ
Здесь предполагается, что aij [коэффициенты системы) mbi — извест-
известные числа (вещественные или комплексные).
Решением системы A) называется любой набор чисел {х\,х2, ... , жп),
обращающий все уравнения A) в тождества. Два решения [х\,х2, ... , хп)
и (^/1,2/2, • • • , Уп) считаются различными, если xi ф yi хотя бы при одном
значении г.
Система A) называется однородной, если все Ь\ = 0; в противном случае
(если хотя бы одно число Ь{ отлично от нуля) эта система называется
неоднородной. При этом система
+ ... + ainxn = 0
+ • • • + а2пхп = О
Q"mixi + о,т2х2 + ... + атпхп = О
называется однородной системой, соответствующей системе A).
Введем еще два термина. Матрицу
условимся называть основной матрицей, а матрицу
flu di2 . . . din <
— расширенной матрицей системы A).
28 Системы линейных уравнений Гл 2.
Заметим, что формулы A) и B) можно записать значительно компакт-
компактнее, если воспользоваться определением произведения матриц:
Лх = Ь, A)
Ах = о, B)
где
о =
А — основная матрица системы A). Такую запись систем A) и B) мы будем
для краткости называть матричной.
2. Существование решения.
Теорема(Кронекера-Капелли). Решение системы A) существует
тогда и только тогда, когда rang A = rang .В (ранг основной матрицы
равен рангу расширенной матрицы).
Доказательство. Решение системы A) существует тогда и только
тогда, когда последний столбец матрицы В равен линейной комбинации
(с коэффициентами х±,Х2, • • • , хп) столбцов матрицы А, т. е. тогда и толь-
только тогда, когда в матрице В линейно независимых столбцов столько же,
сколько в А. Но это и означает, что rang A = rang В. Теорема доказана.
3. Однородные системы. Обратимся к однородной системе B). Из
теоремы Кронекера-Капелли следует, что она всегда имеет решение. Впро-
Впрочем, это ясно и так: у нее всегда есть решение х\ = Х2 = ... = хп = 0 —
оно называется тривиальным. Любое другое решение системы B) (для
которого хотя бы одно Х{ отлично от нуля) называется нетривиальным.
Теорема. Система B) имеет нетривиальные решения тогда и толь-
только тогда, когда rang А меньше п (количества неизвестных).
Доказательство. Нетривиальное решение системы B) существу-
существует тогда и только тогда, когда столбцы матрицы А линейно зависимы,
т. е. тогда и только тогда, когда rang А (количество линейно независимых
столбцов) меньше п (количества столбцов или, что то же самое, количества
неизвестных). Теорема доказана.
Следствие. Система B) имеет только тривиальное решение тогда
и только тогда, когда rang A = n (так как rang А не может быть больше
количества столбцов п).
4. Единственность решения.
Теорема 1. Пусть (х\,Х2-> • • • , хп) — решение системы A),
B/1,2/2, • • • ,Уп)— решение системы B). Тогда (хг + У\,х2 + У2, • • • ,хп +
+ Уп) — решение системы A).
Доказательство. Воспользуемся матричной записью систем A), B).
Имеем: А(х + у) = Ах + А у = b + о = Ь. Теорема доказана.
Следствие. Если система A) имеет одно и только одно решение,
то система B) имеет только тривиальное решение, т. е. rang A = п.
§ 2. Нахождение решений 29
Теорема 2. Пусть (х1,х2, ... ,хп) г/ B/1? 2/2? • • • >2/п) — два решения
системы A). Тогда (#i — 2/1, ж 2 — 2/2, • • • ,жп- г/n) ~~ решение системы B).
Доказательство. Воспользуемся матричной записью систем A), B).
Имеем: А(х — у) = Ах — Ay = b — b = о. Теорема доказана.
Следствие 1. Пусть (х\,хъ, • • • ,хп) — какое-нибудь решение си-
системы A). Тогда любое другое решение этой системы представляет собой
(xi+yi,x2+y2i ••• 5#п + 2/п), где B/ь2/2 5 "•• , Уп) ~ решение системы B).
Следствие 2. Если система B) имеет только тривиальное реше-
решение, т. е. rang А = п, то система A) имеет не более одного решения.
Теорема 3 (существования и единственности решения). Система A)
имеет одно и только одно решение тогда и только тогда, когда rang Л =
= rang В = п.
Доказательство. Допустим, что rang A = rang .В = п. Тогда из
равенства rang A = rang .В следует, что решение системы A) существует;
а из равенства rang А = п следует, что система A) имеет не более одного
решения.
Допустим теперь, что решение системы A) существует и оно — един-
единственное. Из того что решение существует, следует, что rang A = rang В.
Из единственности этого решения следует, что rang A = п. Теорема дока-
доказана.
2. Нахождение решений
1. Формулы Крамера. Рассмотрим систему линейных уравнений
A)
CL12X2 + • • • + CLinXn =
^22^2 + • • • + 0<2пхп =
a-nixi + ап2Х2 + ... + аппхп = Ьп
количество уравнений в которой совпадает с количеством неизвест-
неизвестных п. Специфика этого случая состоит в том, что здесь, очевидно,
rang A $J rang .В ^ п (в общем случае rang A $J rang .В ^ min(n + 1,т)).
Поэтому система C) имеет одно и только одно решение тогда и только
тогда, когда rang А = п, т. е. det А фО.
Чтобы найти это решение, вспомним, что из условия det A ^0 следует
существование матрицы Л, обратной к А. Запишем систему C) в матрич-
матричном виде и, предполагая, что х — решение, умножим обе части полученного
тождества слева на эту матрицу: A~xAx = А~ХЪ. Но А~х А = Е, а Ех =
= х. Поэтому
х = А-гЪ.
Это и есть ответ.
Замечание. Выведенная нами формула особенно удобна в тех слу-
случаях, когда нужно решить систему A) при неизменной левой части (т.е.
матрице А) и нескольких различных значениях правой части, поскольку
30 Системы линейных уравнений Гл 2.
наиболее трудоемкую работу — нахождение матрицы А~^ — достаточно
выполнить один раз.
Встречаются, однако, и другие задачи. Например, иногда требуется
найти не все решения а^, а только часть из них или даже какое-нибудь
одно. В этом случае искать А~^ не обязательно. В самом деле, имеем:
ац • • • aik-i b\ aife+i ... air
• • • cink-i bn ank
detA
Эти формулы (при разных значениях к) называются формулами
Крамера.
2. Общий случай. Рассмотрим теперь общий случай: систему т ли-
линейных уравнений с п неизвестными. Предположим, что решение этой
системы существует, и, следовательно, ранг основной матрицы равен рангу
расширенной матрицы: rang A = rang В. Поставим своей целью его найти.
Без ограничения общности будем считать, что базисный минор по-
порядка г, общий для матриц А и В, расположен в левом верхнем углу
матрицы А:
аг1хг + ... + агпхп = Ьг
• • • ~г CLfjir^r ~~г • • • ~г~
Поскольку строки матрицы В с номерами, большими г, представляют
собой линейные комбинации первых г ее строк, то последние (га — г)
уравнений являются следствиями первых г и, следовательно, могут быть
отброшены (они не дают ничего нового).
Оставшиеся г уравнений перепишем так:
... + alrxr = bi — а1г+1хг+1 — ... - а1пхп Л
аТ\Х\ + ... + arrxr = br — агг+1хг+1 — ... - arnxn J
Эту систему можно рассматривать как систему г уравнений с г неиз-
неизвестными Ж1, Х2ч • • • ,хг. Ее определитель, будучи базисным минором, от-
отличен от нуля, поэтому, согласно результатам предыдущего пункта, при
любой правой части, в частности при любых жг+1, жг+2> • • • •> хп-> она имеет
единственное решение. Это означает, что числа жг+1, жг+2, • • • , хп можно
выбрать произвольно, полагая хг+± = Ci, жг+2 = С2, • • • , хп = Сп_г,
а #1, Х2-, • • • ,хг найти, например, по формулам Крамера. Таким образом,
общее решение нашей системы зависит от (п — г) произвольных чисел
Ci,C2i • • • , Сп—Г.
Часть II
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Предварительные замечания
Аналитическая геометрия — это раздел геометрии, в котором свой-
свойства геометрических объектов изучаются методами алгебры.
Поясним эти слова. Геометрия, как и другие разделы математики,
строится так: сначала формулируются исходные положения — аксиомы,
а затем из них выводятся логические следствия — теоремы. Таким образом,
на этом (первом) этапе построение геометрии ведется исключительно на
базе собственных средств — аксиом и ранее доказанных теорем. Эта часть
геометрии называется элементарной геометрией.
Следующий этап в построении геометрии состоит в расширении аппа-
аппарата путем привлечения средств других разделов математики, в первую
очередь, алгебры и математического анализа. Делается это так: вводится
система координат, в результате чего каждая точка описывается набо-
набором чисел, а геометрические фигуры — уравнениями и неравенствами.
Благодаря этому изучение геометрических объектов может быть в ряде
случаев сведено к изучению уравнений. Изучение же свойств уравнений
осуществляется методами алгебры и математического анализа. Так появ-
появляются новые разделы геометрии — аналитическая и дифференциальная
геометрия:
Аксиомы
Теоремы
Коорди-
Координаты
Уравнения
Аналитическая
геометрия (алгебра)
Дифференциальная
геометрия (мат. анализ)
В дальнейшем мы будем предполагать известными аксиомы и основные
теоремы элементарной геометрии; изложение же метода координат (в част-
частности, и материал, входящий в школьную программу) будем снабжать
полными доказательствами.
Примем еще несколько соглашений. Прежде всего, раз и на всегда
договоримся считать заданной единицу измерения отрезков. Тем самым,
длина любого отрезка, площадь фигуры и объем тела мы будем представ-
представлять себе выражающимися вполне определенными вещественными числа-
числами. Далее, под словами «отрезок», «треугольник», «параллелограмм», «па-
«параллелепипед» условимся понимать в том числе и вырожденные объекты:
вырожденный отрезок — это одна точка (она же является и серединой этого
отрезка), вырожденный треугольник или параллелограмм — это отрезок
(в том числе, вырожденный), вырожденный параллелепипед — это фигура,
представляющая собой изображение параллелепипеда на листе бумаги.
Наконец, будем считать, что длина вырожденного отрезка равна нулю,
площадь вырожденного треугольника или параллелограмма равна нулю,
объем вырожденного параллелепипеда равен нулю. Угол между двумя
совпадающими лучами мы также будем считать равным нулю.
Глава 1
ВЕКТОРЫ И КООРДИНАТЫ
§ 1. Координаты точки
1. Ось координат. Пусть / — произвольная прямая, О — какая-нибудь
ее точка. Согласно аксиомам геометрии, точка О разделяет прямую / на
два луча. Выберем один из них и назовем его положительной полуосью.
Определение 1. Прямая, на которой выбрана положительная по-
полуось, называется осью координат; начало положительной полуоси назы-
называется началом координат.
Определение 2. Координатой точки М, лежащей на оси коорди-
координат с началом О, называется длина 1) отрезка ОМ, взятая со знаком
«+», если точка М лежит на положительной полуоси, и « —» — в про-
противном случае.
Из аксиом геометрии следует, что каждая точка М рассматривае-
рассматриваемой оси имеет вполне определенную координату х; обратно, для любо-
любого числа х на данной оси существует ровно одна точка М с координа-
координатой х. Иными словами, соответствие М о х является взаимно однознач-
однозначным. Тот факт, что точка М имеет координату х, условимся обозначать
так: М(х).
Теорема 1. Пусть А(х±) и В(х2) — точки, лежащие на оси коор-
координат. Тогда АВ = |ж2 — х\ •
Доказательство. Если начало координат О лежит на отрезке АВ,
то АВ = АО + ОВ = \x-\_| + \х21 = \\x\\ + 1^21|, причем знаки чисел х\
и Х2 разные. Поэтому АВ = \х2 — х\\. В противном случае АВ = \ОА —
— ОВ\ = ||xi| — \х21| = \х2 — х\\, так как знаки чисел х\ и х^ совпадают.
Теорема доказана.
Теорема 2. Пусть А(х\) и В{х2) — точки, лежащие на оси коорди-
координат, М(х) — середина отрезка АВ. Тогда х = [х\ + #2)/2.
Доказательство. По условию теоремы AM = MB, поэтому, со-
согласно теореме 1, \х — xi\ = \х2 — х\. Представляются возможными два
случая.
1°. х — х\ = Х2 — х, откуда х = (х± + жг)/2.
2°. х — х\ = — Х2 + х, откуда х\ = Х2 и, следовательно, х = х\ = Х2 =
= {х\ + жг)/2. Теорема доказана.
х) Напомним, что единицу измерения отрезков мы договорились считать за-
заданной.
3 СБ. Кадомцев
34 Векторы и координаты Гл 1.
2. Декартовы координаты. Условимся называть проекцией точки М
на прямую I основание перпендикуляра, проведенного из точки М к пря-
прямой I.
Определение 1. Координата проекции точки М на ось координат
называется декартовой координатой точки М по этой оси.
Таким образом, если О — начало координат, то координата точки М
равна ОМ cos (p, где (р — угол между лучом ОМ и положительной полу-
полуосью оси координат.
Определение 2. Упорядоченная совокупность двух (трех) взаимно
перпендикулярных осей координат с общим началом называется декар-
декартовой системой координат на плоскости (в пространстве); координата
точки М по i-й оси координат называется i-ой декартовой координатой
точки М.
Обычно начало координат обозначают буквой О, а оси координат —
Ож, От/, (Oz). Иногда их обозначают также Ох\, 0x2, (Охз). Поскольку
в дальнейшем речь будет идти главным образом о декартовых координатах,
то слово «декартовы» мы будем, как правило, опускать.
Из аксиом геометрии следует, что каждая точка М плоскости (про-
(пространства) имеет вполне определенный набор координат ж, у (x,y,z);
обратно, для любых чисел ж, у (x,y,z) на плоскости (в пространстве) суще-
существует ровно одна точка М с координатами ж, у (ж, у, z). Иными словами,
соответствие М <н> х,у (М о ж, у, z) является взаимно однозначным. Тот
факт, что точка М имеет координаты ж, у (x,y,z) условимся обозначать
так: М(х,у) (M(x,y,z)). Часто бывает удобно обозначать координаты
точки и саму точку одной и той же буквой: М(mi, 777,2) (M(mi, 777,2, тз))-
Теорема 1. АВ = wj^ (Ы — а,{) .
Доказательство. Утверждение теоремы является очевидным след-
следствием теоремы Пифагора, которая, как нетрудно заметить, верна и для
вырожденных треугольников.
Теорема 2. Пусть М — середина отрезка АВ. Тогда mi =
= {сц + Ы)/2.
Доказательство. Пусть А^ В{ и М\ — проекции точек А, В и М
на ось Ох{. Если точки Ai и Bi совпадают, то точка М{ совпадает с А{
и В{, и, следовательно, является серединой отрезка А{В{. Если же точки
А{ и В{ различны, то точка М{ является серединой отрезка AiBi по теореме
Фалеса х). И в том, и в другом случае, согласно теореме 2 п. 1, ттт^ =
3. Криволинейные координаты на плоскости. Наряду с декартовой
рассматриваются и другие системы координат. Их объединяют общим на-
названием криволинейные координаты. Любая такая система координат на
j В стереометрии теорема Фалеса формулируется так: если на одной из двух
прямых отложить последовательно несколько равных отрезков и через их концы
провести параллельные плоскости, пересекающие вторую прямую, то они отсекут
на второй прямой равные между собой отрезки.
§ 1. Координаты точки 35
плоскости задается двумя уравнениями вида
A)
Таким образом, каждому набору чисел и, v соответствует набор чисел
х, у. Если верно и обратное утверждение — каждому набору чисел х,у со-
соответствует единственный набор чисел и, v, то числа и, v могут рассматри-
рассматриваться как криволинейные координаты точки. Чтобы найти криволинейные
координаты точки М, нужно сперва определить ее декартовы координаты,
а затем из формул A) найти и и v.
Название «криволинейные координаты» объясняется тем, что коорди-
координатные линии, т.е. линии u = const, и линии v = const, в таких системах
координат, вообще говоря, не являются прямыми (как в декартовой системе
координат).
Наиболее употребительными криволинейными координатами на плос-
плоскости являются полярные координаты. Они определяются формулами
х = р cos (р
у = psimp
где р ^ 0, 0 ^ (р < 2тг. Нетрудно видеть, что величины р и (р имеют
простой геометрический смысл: р — это расстояние точки М от начала ко-
координат, т. е. ОМ, &(р — угол между лучом ОМ и осью Ох, отсчитываемый
в направлении оси Оу.
Ясно, что по заданным декартовым координатам (х, у) числа (р, (р)
определяются однозначно всегда, за исключением единственного случая:
х = у = 0. В этом случае р = 0, а число (р может быть произвольным.
Таким образом, любая точка, отличная от начала координат О, взаимно од-
однозначно описывается набором чисел (р, ф)\ точка О описывается набором
чисел @,(р), где (р — любое число, удовлетворяющее условию 0 ^ (р <
< 2тг. Отметим, что линии (р = const в полярной системе координат
представляют собой лучи с началом О, а линии р = const — окружности
с центром О.
Используются и другие криволинейные координаты: биполярные коор-
координаты (в них линии и = const представляют собой окружности, про-
проходящие через две данные точки, а линии v = const — так называемые
окружности Апполония, пересекающие линии и = const под прямым уг-
углом), эллиптические координаты (на них мы остановимся в гл. 4) и ряд
других. Выбор тех или иных криволинейных координат определяется, как
правило, симметриями изучаемых с их помощью геометрических объектов.
4. Криволинейные координаты в пространстве. Криволинейные ко-
координаты в пространстве задаются тремя уравнениями вида
х = х (u,v,w)
у = y(u,v,w)
z = z (и, v, w)
36 Векторы и координаты Гл 1.
Наиболее употребительными среди них являются цилиндрические
и сферические координаты.
Цилиндрические координаты определяются формулами
X = р COS if
у = psimp
z = z
где р^0,0^(^<2тг,а число z — любое. Геометрический смысл
цилиндрических координат ясен: число z имеет тот же смысл, что и в
декартовых координатах, а р и (р — это полярные координаты проекции
данной точки на плоскость Оху. Название «цилиндрические координаты»
объясняется тем, что поверхности р = const представляют собой цилин-
цилиндрические поверхности радиуса р с осью Oz.
Сферические координаты определяются формулами г)
х = р cos (р cos в
у = р sin if cos в
z = р sin в
где р ^ О, О $J (р < 2тг, —тг/2 $J 0 $J тг/2. Название «сферические
координаты» объясняется тем, что поверхности р = const представляют
собой сферы радиуса р; линии (р = const представляют собой меридианы
на этих сферах, а линии в = const — параллели (точки в = —тг/2 и в = тг/2
соответствуют южному и северному полюсу, а линия в = 0 — экватору).
§ 2. Векторы
1. Вектор.
Определение. Вектором называется направленный отрезок, т. е.
отрезок, для которого один из концов считается первым {началом), а дру-
другой — вторым {концом).
Если начало и конец вектора совпадают, то он называется нулевым
(в противном случае — ненулевым). Условимся обозначать векторы либо
двумя заглавными буквами полужирного шрифта, например АВ {А —
начало, В — конец), либо одной строчной буквой полужирного шрифта —
а; нулевой вектор будем обозначать символом о.
j Иногда сферическими координатами называют криволинейные координаты,
определяемые формулами
х = р cos (p sin 0 "|
у = р sin cp sin в > ,
z = р cos О J
где р^0,0^<?<2тг,0^#^7г. Принципиально эти координаты ни чем не
отличаются от рассматриваемых нами — они получаются из них заменой 0 —)>
->> тг/2 - в.
§_2. Векторы 37
Из определения следует, что любой отрезок АВ определяет два векто-
вектора: АВ и В А (если отрезок вырожденный, то эти векторы совпадают).
При этом вектор В А называется противоположным АВ (соответствен-
(соответственно АВ — противоположным ВА). Вектор, противоположный вектору а,
обозначают так: —а.
Длиной или модулем вектора АВ называется длина отрезка АВ. Длина
вектора АВ обозначается так: |АВ| или |а|. Если длина вектора равна
единице, то его называют единичным.
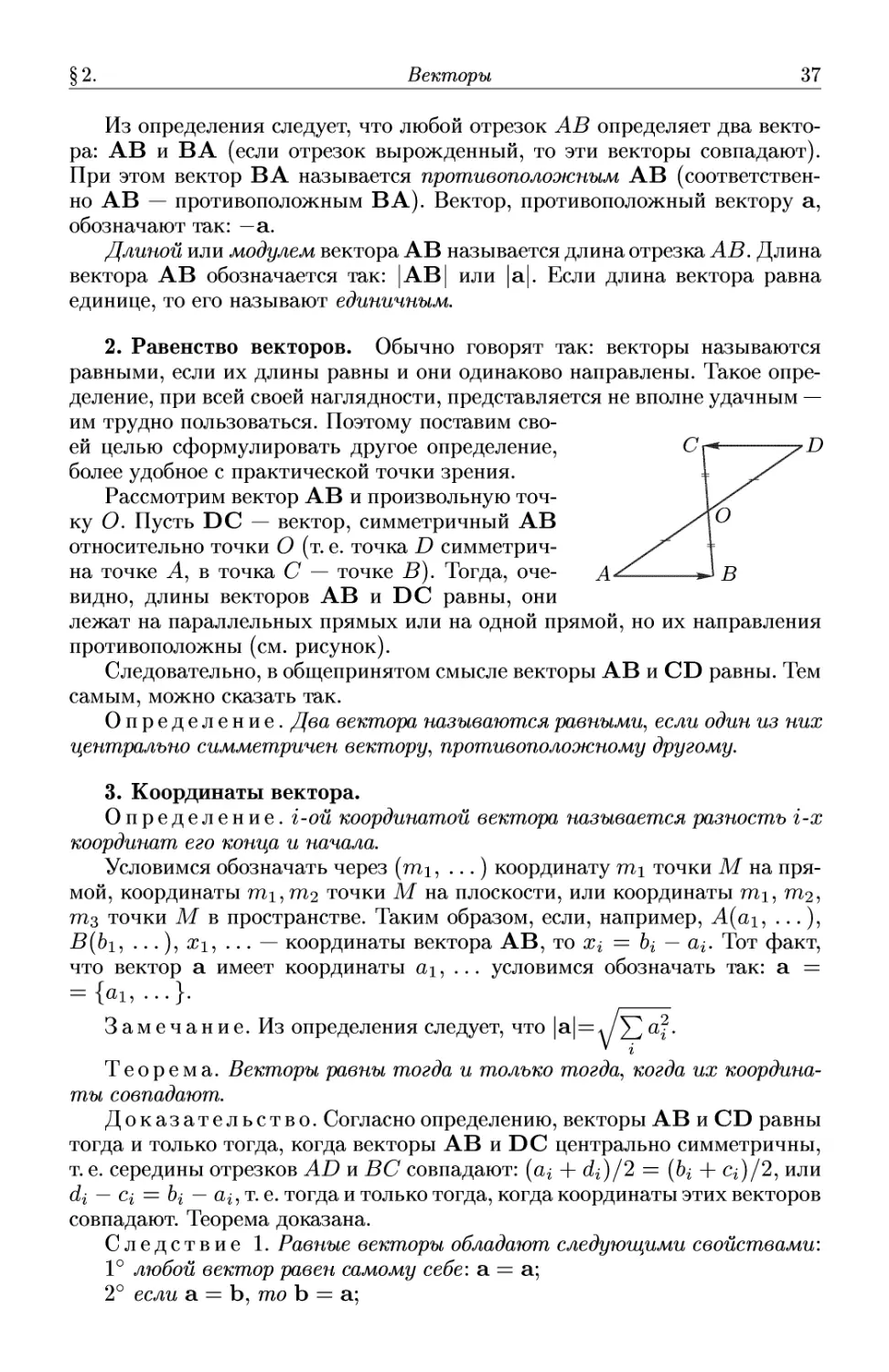
2. Равенство векторов. Обычно говорят так: векторы называются
равными, если их длины равны и они одинаково направлены. Такое опре-
определение, при всей своей наглядности, представляется не вполне удачным —
им трудно пользоваться. Поэтому поставим сво-
своей целью сформулировать другое определение,
более удобное с практической точки зрения.
Рассмотрим вектор АВ и произвольную точ-
точку О. Пусть DC — вектор, симметричный АВ
относительно точки О (т. е. точка D симметрич-
симметрична точке А, в точка С — точке В). Тогда, оче-
очевидно, длины векторов АВ и DC равны, они
лежат на параллельных прямых или на одной прямой, но их направления
противоположны (см. рисунок).
Следовательно, в общепринятом смысле векторы АВ и CD равны. Тем
самым, можно сказать так.
Определение. Два вектора называются равными, если один из них
центрально симметричен вектору, противоположному другому.
3. Координаты вектора.
Определение, i-ой координатой вектора называется разность г-х
координат его конца и начала.
Условимся обозначать через (mi, ...) координату т\ точки М на пря-
прямой, координаты mi, 1П2 точки М на плоскости, или координаты mi, w&2?
7Пз точки М в пространстве. Таким образом, если, например, А(а±, ...),
В(Ъ\, ...), х\, ... — координаты вектора АВ, то Х{ = hi — п{. Тот факт,
что вектор а имеет координаты ai, ... условимся обозначать так: а =
= {аь ...}.
Замечание. Из определения следует, что |а| = ^
Теорема. Векторы равны тогда и только тогда, когда их координа-
координаты совпадают.
Доказательство. Согласно определению, векторы АВ и CD равны
тогда и только тогда, когда векторы АВ и DC центрально симметричны,
т. е. середины отрезков AD и ВС совпадают: (оц + d{)/2 = (b{ + q)/2, или
di — Ci = hi — ai, т. е. тогда и только тогда, когда координаты этих векторов
совпадают. Теорема доказана.
Следствие 1. Равные векторы обладают следующими свойствами:
1° любой вектор равен самому себе: а = а;
2° если а = Ь, то b = а;
38 Векторы и координаты Гл 1.
3° если a = bu b=c, то а = с.
Следствие 2. Для любой точки М и любого вектора а существу-
существует единственная точка N такая, что MN = а (построение вектора
MN = а обычно называют откладыванием вектора а от точки М).
В самом деле, вектор MN равен вектору а тогда и только тогда, когда
П{ — гп{ = cii, т. е. тогда и только тогда, когда щ = оц + га^. Таким образом,
положение точки N определяется однозначно.
Следствие 3. Вектор однозначно определяется своими координата-
координатами и началом.
4. Сумма векторов.
Определение. Пусть АВ и CD — произвольные векторы, BE =
= CD. Суммой АВ + CD называется вектор АЕ.
Таким образом, чтобы сложить два вектора, нужно от конца первого
вектора отложить второй; вектор, началом которого является начало пер-
первого вектора, а концом — конец отложенного, и есть искомая сумма. Это
правило сложения двух векторов называют правилом треугольника.
Теорема. Пусть х = {х\, ... }, у = {т/i, ... }. Тогда х + у =
= {zi + 2/ь ...}.
Доказательство. Пусть А и В — начало и конец вектора х, Е —
конец вектора z = х + у. Тогда Z{ = е^ — а,{ = (е^ — hi) + (^ — сц) =
= yi + Х{ = Xi + yi. Теорема доказана.
5. Произведение вектора на число.
Определение. Произведением вектора АВ на число X называется
такой вектор АС, что:
1° точки А, В и С лежат на одной прямой]
2° АС = \X\AB]
3° при X > О, АВ ф 0 лучи АВ и АС совпадают; при X < О, АВ ф О
лучи АВ и АС не совпадают.
Из этого определения, в частности, следует, что если Л = 0 или АВ = О,
то точки А и С совпадают (см. 2°).
Теорема. Пусть x={a?i, ... }. Тогда Ax={A#i, ... }.
Доказательство. Пусть А и В — начало и конец вектора х, С —
конец вектора у = Ах, (р — угол между прямой АВ х) и положительной
полуосью оси Ох{ @ ^ (р ^ тг/2), Ai, В{иС{ — проекции точек А, В и С на
ось Oxi. Имеем: AiCi = ACcostp = \X\AB cos (p = |A|Ai.Bi, или |q — ai\ =
= |А||Ь^ — di\. Если (^ — оц) = 0 или А = 0, то (q — a^) = 0; если (^ — ац) /0
и А>0, то лучи АВ и AC, a значит и лучи AiBi и А^С^ совпадают, поэтому
знаки чисел (Ь{ — ai) и (с^ — оц) совпадают; если же (fei — а^) ^ 0 и А < 0,
то лучи Ai? и AC, a значит и лучи AiBi и AiCi не совпадают, поэтому
знаки чисел (Ь{ — а,{) и (q — а^) разные. Таким образом, во всех случаях
[ci — a,i) = X(bi — cti), или yi = Аж^, что и требовалось доказать.
х) Если точки А и В совпадают, то справедливость утверждения теоремы
очевидна.
§ 3. Скалярное произведение 39
6. Отождествление равных векторов. Полученные нами результаты
примут существенно более законченный вид, если отождествить все равные
друг другу векторы, т. е. принять следующее соглашение: будем считать,
что равные векторы — это один и тот же вектор, но только отложен-
отложенный от разных точек.
Предположим, что система координат фиксирована. Тогда каждый
вектор а имеет вполне определенный набор координат {а±, ... }; обратно,
для любых чисел а±, ... существует ровно один вектор а с координатами
{ai, ... }. Иными словами, соответствие а О {а±, ... } является взаим-
взаимно однозначным.
Это позволяет, в частности, про вектор с координатами {а\, ... } гово-
говорить так: вектор {а\, ... }. Таким образом, под словом «вектор» можно
понимать не только направленный отрезок, но и упорядоченный набор
чисел — координат этого вектора.
Из теорем п.п. 4 и 5 следует, что векторы, рассматриваемые как упоря-
упорядоченные наборы чисел, складываются и умножаются точно также, как
элементы арифметического пространства. Поэтому сложение векторов
и умножение вектора на число обладают всеми теми же свойствами,
что и соответствующие операции в арифметическом пространстве.
По той же причине к векторам оказываются применимыми все опреде-
определения и теоремы, связанные с линейными комбинациями и линейной зави-
зависимостью элементов арифметического пространства. В частности, любой
вектор {xi, ^2, жз} может быть единственным образом представлен в виде
линейной комбинации векторов ei = {1, 0, 0}, е2 = {0,1, 0}, ез = {0, 0,1},
коэффициентами которой являются координаты этого вектора. Ясно, что
векторы ei, в2, ез — это единичные векторы , лежащие на осях Ох\, 0x2
и Ох%. Как и прежде, будем называть их координатными векторами.
§ 3. Скалярное произведение
1. Основные определения.
Определение 1. Углом между двумя ненулевыми векторами АВ
и CD называется угол между лучами АВ и CD; угол между нулевым
и любым вектором считается равным тг/2.
Таким образом, угол (р между любыми двумя векторами удовлетворяет
неравенствам 0 ^ (р ^ тг.
Определение 2. Два вектора называются ортогональными, если
угол между ними равен тг/2.
Ортогональность векторов а и b условимся обозначать так: а±Ь. Из
определения, в частности, следует, что нулевой вектор ортогонален к лю-
любому вектору: o_Lb.
Определение 3. Скалярным произведением двух векторов называ-
называется произведение их длин на косинус угла между ними.
Скалярное произведение векторов а и b условимся обозначать так: (аЬ).
Из определения, в частности, следует, что (аа) = |а|2.
Теорема. а±Ь тогда и только тогда, когда (аЬ) = 0.
40 Векторы и координаты Гл 1.
Доказательство. 1°. Если а±Ь, то (ab) = |a||b| cos(tt/2) =
= |a||b|0 = 0.
2°. Если (ab) = 0, т. е. |a||b| cos (р = 0 (<р — угол между а и Ь), то либо
|а| =0, либо |Ь| = 0, либо cos (р = 0. В каждом из этих случаев (р = тг/2.
Теорема доказана.
2. Скалярное произведение в координатах.
Теорема. Если а = {ai, ... }, b = {&i, ... }, то (ab) = ^афг.
г
Доказательство. Пусть О А = a, OB = b. Применяя к треуголь-
треугольнику ОАВ теорему косинусов (она, очевидно, верна и для вырожденного
треугольника), получаем:
АВ2 = \Ъ - а|2 = О А2 + ОБ2 - 20 А • OB cos <p =
= |а|2 + |Ь|2 - 2|a||b| costp = |а|2 + |b|2 - 2(ab),
откуда (ab) = 1(|а|2 + |Ь|2 - |Ь - а|2) = \ ? [а2 + Ъ2 - (Ъг - агJ] =
= - J2 2aibi = ^2a>ibi. Теорема доказана.
г г
Следствие. Косинус угла между ненулевыми векторами а =
= {ai, ... } и b = {61, ... } может быть вычислен по формуле
COS if =
Замечание. При доказательстве теоремы мы пользовались теоремой
косинусов. Между тем, в некоторых учебниках по элементарной геометрии
теорема косинусов выводится из свойств скалярного произведения. Тем
самым, у обучавшимся по этим учебникам может возникнуть ощущение
«порочного круга». В действительности никакого «порочного круга» здесь
нет — в большинстве учебников теорема косинусов доказывается без ис-
использования свойств скалярного произведения.
3. Свойства скалярного произведения.
Теорема.
1° Для любых векторов а и b выполняется равенство (ab) = (Ьа);
2° для любых векторов а, b и с выполняется равенство ((а + Ь)с) =
= (ас) + (be);
3° для любых векторов а и b и любого числа А выполняется равенство
((Аа)Ъ) = А(аЬ);
4° для любого вектора а произведение (аа) ^ 0, причем (аа) = 0 тогда
и только тогда, когда а = о.
§3.
Скалярное произведение
41
Доказательство.
1°. Это следует непосредственно из определения скалярного произведе-
произведения;
2°. ((а + Ь)с) =
3°. ((Aa)b) =
= (ас) + (be);
аА = A(ab);
i г
4°. Это следует из того, что (aa) = |a|2.
Теорема доказана.
Следствие, ai = (ае^).
Для доказательства достаточно умножить равенство а =
ска-
лярно на е^ и учесть, что (е^е^) =
при г = j,
при г ф j.
4. Площадь параллелограмма. Условимся обозначать площадь па-
параллелограмма, построенного на векторах а и Ь, символом ?(а, Ь).
Теорема 1. S(a,bJ = |a|2|b|2 - (abJ.
Доказательство. Пусть <р — угол между векторами а и Ь. Имеем
5(а, bJ = (|a||b| sin^J = |a|2|b|2(l - cos2 ф) = |a|2|b|2 - (abJ.
Теорема доказана.
Теорема 2. Площадь параллелограмма, построенного на векторах
а = {ai, 0,2} иЪ = {6i, 62}, выражается формулой
Ъ2
Доказательство. Воспользуемся двумя свойствами определителей:
а) определитель не меняется при транспонировании; б) определитель про-
произведения матриц равен произведению их определителей. Имеем:
Д(а,ЬJ =
аа) (ab)
- (Ьа) (ЪЬ)
Теорема доказана.
5. Объем параллелепипеда. Рассмотрим вектор
е2 е3
&2 &3
a|2|b|2-(abJ =
р(а,Ь) =
- {A23,-Ai3,Ai2}, где
a i a j
Теорема 1. Вектор р(а, b) обладает следующими свойствами:
1°.р(а,Ъ)±а,р(а,Ь)±Ъ;
2°.|p(a,b)|=5(a,b).
Доказательство.
1°. (ар(а, Ь)) = а1Д2з-а2А1з+азА12 = А(а, а, Ь) = 0 г), (bp(a, b)) =
2 = A(b, a, b) = 0.
х) Если
в определителе две строки совпадают, то он равен нулю.
42 Векторы и координаты Гл 1.
2°. Обратим внимание на то, что А^ = — А^ (в частности А^ = 0).
Поэтому
|р (а, Ъ)
, 3 3 3
1 / V~^ 2? 2 , V" 2? 2 г) V~^
2 I 2^ a* Di + Z^ aJbi ~ l Z^
i- - - - 3
3 3
- Y^ aibi Yl aibi = la!2 lb!2 ~ (abJ = S ^a' bJ •
Теорема доказана.
Условимся обозначать объем параллелепипеда, построенного на векто-
векторах a, b и с, символом V(а, Ь, с).
Теорема 2. Объем параллелепипеда, построенного на векторах а =
= {ai,a2,a3}, b = {61,62,63} и с = {ci,c2,c3}, выражается формулой
0,1 CL2
Ъ2 Ъ3
С2 Сз
= |А(а, Ь,
Доказательство. Отлож:им векторы a, b и с от общего начала. При-
Примем плоскость, содержащую векторы а и Ь, за плоскость основания парал-
параллелепипеда и обозначим буквой (р угол между векторами р(а, Ь) и с. Име-
Имеем: V(a,b,с) = *5(а,b)|c|| cos(p\ = |p(a,b)||c|| cos(p\ = |(p(a,b)c)| =
= |ciA23 - C2A13 + C3A12I = |А(с,а, b)| = |Д(а,Ь,с)|. Теорема доказана.
§ 4. Базис
1. Коллинеарные векторы.
Определение. Векторы называются коллинеарнымщ если при от-
откладывании их от общего начала они оказываются лежащими на одной
прямой.
Теорема 1. Два вектора коллинеарны тогда и только тогда, когда
они линейно зависимы.
Доказательство. Рассмотрим векторы а и b с общим началом
и введем в образованной ими плоскости систему координат. Вектора а и b
коллинеарны тогда и только тогда, когда площадь построенного на них
параллелограмма 5 (a, b) = | A (a, b) | равна нулю, т. е. тогда и только тогда,
когда строки определителя А (а, Ь) или, что то же самое, векторы а и b
линейно зависимы. Теорема доказана.
§_4. Базис 43
Следствие. Если два вектора неколлинеарны, то они линейно неза-
независимы.
Теорема 2. Если векторы а и b коллинеарны, причем вектор а
ненулевой, то существует такое число Л, что Ъ = Ла.
Доказательство. Из условия теоремы следует, что ранг матрицы
со строками а и b равен 1, причем строка а — базисная. Поэтому, соглас-
согласно теореме о базисном миноре, строка b пропорциональна строке а, что
и требовалось доказать.
2. Компланарные векторы.
Определение. Векторы называются компланарными, если при от-
откладывании их от общего начала они оказываются лежащими в одной
плоскости.
Теорема 1. Три вектора компланарны тогда и только тогда, когда
они линейно зависимы.
Доказательство. Три вектора a, b и с компланарны тогда и только
тогда, когда объем построенного на них параллелепипеда V(а, Ь, с) =
= | А(а, Ь, с)| равен нулю, т. е. тогда и только тогда, когда строки опреде-
определителя А (а, Ь, с) или, что то же самое, векторы a, b и с линейно зависимы.
Теорема доказана.
Следствие. Если три вектора некомпланарны, то они линейно неза-
независимы.
Теорема 2. Если векторы a, b и с компланарны, а векторы а и b
неколлинеарны, то существуют такие числа Л и \±, что с = Ла + /ib.
Доказательство. Из условия теоремы следует, что ранг матрицы
со строками a, b и с равен 2, причем строки а и b — базисные. Поэтому,
согласно теореме о базисном миноре, строка с равна линейной комбинации
строк а и Ь. Теорема доказана.
3. Линейная зависимость четырех векторов.
Теорема 1. Любые четыре вектора линейно зависимы.
Доказательство. Пусть а, Ь, с и d — произвольные векторы. Со-
Составим матрицу А, строками которой являются координаты этих векторов.
Ее ранг не превосходит количества ее столбцов, т. е. rang A ^ 3. Поэтому
ее строки или, что то же самое, векторы а, Ь, с и d линейно зависимы.
Теорема доказана.
Теорема 2. Если векторы a, b и с некомпланарны, то для любого
вектора d существуют такие числа X, ц и v, что d = Ла + /ib + z/c.
Доказательство. Из условия теоремы следует, что ранг матрицы со
строками а, Ь, с и d равен 3, причем строки a, b и с — базисные. Поэтому,
согласно теореме о базисном миноре, строка d равна линейной комбинации
строк a, b и с. Теорема доказана.
4. Базис.
Определение 1. Говорят, что вектор разложен по каким-то век-
векторам, если он представлен в виде их линейной комбинации.
Определение 2. Упорядоченная совокупность векторов {а^} назы-
называется базисом, если:
44 Векторы и координаты Гл 1.
1° эти векторы линейно независимы;
2° любой вектор может быть по ним разложен.
Из теорем пп. 1-3 следует, что:
1° любой ненулевой вектор образует базис на прямой;
2° любые два неколлинеарных вектора образуют базис на плоскостщ
3° любые три некомпланарных вектора образуют базис в простран-
пространстве.
Теорема 1. Коэффициенты разложения вектора по базису (т.е. чи-
числа, фигурирующие в этом разложении), определяются единственным
образом.
Доказательство. Допустим, что вектор b разложен по базису {а^}
двумя способами: Ъ = J^A^ и Ъ = J^/i^. Вычитая второе равенство
г г
из первого, получаем: о = ^2 (^г ~~ Ач) аг- Поскольку векторы а^ линейно
i
независимы, то А^ = //«, при всех г. Теорема доказана.
Теорема 2. Векторы {а^} образуют базис тогда и только тогда,
когда любой вектор может быть единственным образом разложен по
ним.
Доказательство. Если векторы {а^} образуют базис, то любой
вектор может быть разложен по ним, причем (согласно теореме 1) един-
единственным образом. Обратно, если любой вектор может быть единственным
образом разложен по векторам {а^}, то они образуют базис, так как: 1°
любой вектор может быть по ним разложен; 2° они линейно независимы,
поскольку вектор о может быть представлен только в виде их тривиальной
линейной комбинации.
5. Аффинные координаты. Аффинная система координат определя-
определяется заданием произвольного базиса {а^} и точки О, называемой началом
координат.
Пусть ОА^ = з.{. Лучи OAi принимаются за положительные полуоси,
а прямые OAi называются осями аффинной системы координат.
Аффинными координатами вектора называются коэффициенты его
разложения по базису {а^}. Ясно, что каждому вектору соответствует
вполне определенный набор аффинных координат, и обратно — каждому
набору аффинных координат соответствует ровно один вектор.
Аффинными координатами точки М называются координаты векто-
вектора ОМ.
В частности, если векторы щ — единичные и попарно ортогональные,
то, умножая равенство ОМ = J2 ^s&s скалярно на а^, получаем:
S
Xi = (ОМа») = |OM||a;|cos<^ = ОМ cosy?»,
где (fi — угол между лучами ОМ и '
Таким образом, число А^ представляет собой в этом случае координату
проекции точки М на ось OAi, т.е. г-ю декартову координату точки М.
Иными словами, декартова система координат является частным случа-
случаем аффинной.
Глава 2
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
§ 1. Преобразование координат на плоскости
1. Правые и левые пары. Пусть а и b — два неколлинеарных вектора
с общим началом. Физики говорят так: упорядоченная пара неколлине-
неколлинеарных векторов а и b образуют правую (левую) пару, если кратчайший
поворот от а к b осуществляется против (по) часовой стрелки(е). На
интуитивном уровне эта фраза кажется содержательной — она отвечает
нашим представлениям о плоскости. Однако с точки зрения геометрии она
лишена смысла, поскольку в аксиомах и теоремах геометрии нет упоми-
упоминания о каких-либо часовых стрелках. Наша ближайшая задача состоит
в том, чтобы придать указанным понятиям ясный геометрический смысл.
Прежде всего, следует понять, что может и чего не может дать геомет-
геометрия для решения нашей задачи. Судя по всему, интуитивно ясный факт
существования правых и левых пар векторов свидетельствует о наличии
какого-то геометрического критерия, позволяющего все упорядоченные па-
пары неколлинеарных векторов разделить на два непересекающихся класса.
С другой стороны, ясно, что даже если указанное разделение на два класса
удастся произвести, то эти классы окажутся эквивалентными — нет и не
может быть никакого геометрического признака, по которому один из них
можно было бы выделить и назвать классом правых пар. В самом деле,
если посмотреть на плоскость с противоположной стороны, то все аксиомы,
а значит, и теоремы, сохранятся, но на направление «по часовой стрелке»
изменится на противоположное. Поэтому не остается ничего другого, кроме
как декларативно объявить один из классов классом правых пар.
Сказанное позволяет сделать первый шаг в решении стоящей перед
нами задачи.
Определение 1. Плоскость называется ориентированной, если на
ней задана система координат, которую называют исходной.
На ориентированной плоскости естественным образом возникает упоря-
упорядоченная пара неколлинеарных векторов ei, e2 — координатных векторов
исходной системы координат. Эту пару естественно принять за эталон
ориентации.
Следующий шаг состоит в нахождении критерия, позволяющего любую
упорядоченную пару неколлинеарных векторов отнести к одному из двух
классов. Чтобы это сделать, нужно понять, какими свойствами должен
обладать этот критерий. Вернемся к интуитивным представлениям. Ясно,
что если пара a, b — правая, то пара а, (—Ь), равно как и Ь, а, должна
быть левой. Вспоминая свойства определителя, мы можем теперь сформу-
сформулировать такое определение.
46 Преобразование координат Гл 2.
Определение 2. Упорядоченная пара неколлинеарных векторов a, b
называется правой (левой), если в исходной системе координат А (а, Ь) >
> 0 (< 0).
Ясно, что согласно этому определению любая упорядоченная пара
неколлинеарных векторов оказывается либо правой, либо левой, причем
пара ei, в2 — правая.
Наконец, сформулируем еще одно определение.
Определение 3. Произвольная декартова система координат на
ориентированной плоскости называется правой (левой), если ее коорди-
координатные векторы образуют правую (левую) пару.
Таким образом, исходная система координат — правая.
2. Собственные и несобственные преобразования. Рассмотрим те-
теперь две декартовых системы координат: Ох\Х2 и Ох\Х2- Первую из них
будем называть старой, а вторую — новой. Разложим каждый из коор-
координатных векторов новой системы координат по координатным векторам
старой:
+ <
2 \
г
где a,ij = (e^ej). Поскольку |ei| = |e2| = 1 и (е^) = 0, то
а11 + а12 = 1
2 , 2 1
Q-21 ~т~ 0^22 —
+ ^12^22 = О
Так как |ei| = |ei| = 1, то оц = (eiei) = cos а, где а — угол между
векторами ei и е\ @ $J а $J тг). Положим <р = а, если а\2 ^ 05 или (р =
= 2тг — а в противоположном случае. В результате получим: ац = cos(^,
ai2 = sin <?>. Аналогично, из второго равенства находим: а22 = cos 0, а,2\ =
= sin в. Подставляя эти значения в третье равенство, получаем: sin((^+#) =
= 0, откуда (р + в = /стг, или 0 = /стг — (р, а значит, <22i = — sin (p • cos ктг,
GL22 — cos (^ • cos ктг. Возможны два случая.
1°. Число к — четное, и, следовательно, а,2\ = — sin 92, B22 =
А(еье2) =
CL22
cos у? sin у?
— sin cp cos у?
= 1.
В этом случае переход от старой системы координат к новой называ-
называется собственным преобразованием. В частности, в соответствии с нашим
определением, переход от исходной системы координат к правой осуще-
осуществляется при помощи собственного преобразования.
2°. Число к — нечетное, и, следовательно, a2i = sin<?>, 022 = — cos<?>,
A(ei,e2)= а11 а12 = COS^ Sm^
V -1' z/ О,ол аоо Slll^ — COS <f
= -1.
§ 1.
Преобразование координат на плоскости
47
В этом случае переход от старой системы координат к новой называ-
называется несобственным преобразованием. В частности, переход от исходной
системы координат к левой осуществляется при помощи несобственного
преобразования.
Собственное преобразование называют также поворотом. Ясно, что
несобственное преобразование может рассматриваться как результат по-
последовательного выполнения поворота и симметрии относительно оси Ох\.
Замечание. То, что |Д (е^,?^) | = 1, было ясно и без вычислений —
эта величина представляет собой площадь параллелограмма, построенного
на векторах ei, e^ т. е. площадь единичного квадрата.
3. Преобразование координат вектора. Пусть а — произвольный
вектор. Имеем:
а = Se Ъ^
Умножая это равенство скалярно сначала на вектор ei, а затем на
вектор §2, получаем:
= а,\\а,\
Таким образом, при собственном преобразовании координаты вектора а
преобразуются по формулам
а2 = — aisin ip +
а при несобственном — по формулам
а2 =
in<p Л
3S^ / '
Отметим, что расположение начала новой системы координат относи-
относительно старой в этих формулах роли не играет.
4. Правые системы координат.
Теорема. Для любых векторов а и b величина А (а, Ь) одна и та же
во всех правых системах координат.
Доказательство. Пусть Ox\x<i — исходная система координат,
а 0х\Х2 — любая правая. Имеем:
А(а,Ь) =
а2
cos tp + а,2 sin <p) (—ai sin <p + a<i cos ip)
cos (p + п2 sin (p) (—ai sin tp + a^ cos ip)
CL\ 0,2
bi 62
cos <p — sin <p
sin ip cos (p
a2
62
= Д(а,Ъ).
Теорема доказана.
48 Преобразование координат Гл 2.
Следствие 1. Для определения ориентации пары векторов можно
пользоваться не только исходной, но и любой правой системой коорди-
координат. Иными словами, с этой точки зрения все правые системы координат
равноправны.
Следствие 2. Переход от одной правой системы координат к другой
осуществляется при помощи собственного преобразования (поворота).
Чтобы привести наши построения в полное соответствие с наглядными
представлениями, осталось сделать последний шаг — принять соглашение
о правиле изображения правой пары векторов на рисунках.
Соглашение. Исходная система координат изображается на рисун-
рисунках так, что кратчайший поворот от ei к е2, т.е. поворот на угол тг/2,
осуществляется против часовой стрелки.
Из этого следует, что и любая правая система координат изобража-
изображается по тому же правилу. В самом деле, ei = {1,0} = {cos 0, sin 0},
е2 = {0,1} = {cos@ + 7r/2),sin@ + тг/2)}, ei = {cos<?, simp}, e2 =
= {— simp, cos 92} = {cos((p + тг/2), sin(<?> + тг/2)}, поэтому поворот от
ei к е2 на угол тг/2 осуществляется в том же направлении, что и от ei к е2.
Наконец, то же правило изображения распространяется и на любую
правую пару векторов а и Ь. Действительно, выбирая правую систему
координат Ох\х2 так, чтобы вектор а имел координаты {а, 0}, а > 0,
из условия т т найдем: Ъ2 > 0. Это означает, что при откладывании
вектора b от точки О он оказывается лежащим по ту же сторону от оси
Ох\, что и положительная полуось оси Ох2. Поэтому кратчайший поворот
от а к b осуществляется также против часовой стрелки.
В дальнейшем мы будем рассматривать только правые системы коор-
координат на плоскости.
5. Преобразование координат точки. Пусть, как и прежде, Ох\х2 —
старая система координат, Ох±х2 — новая. Выразим «новые» координаты
произвольной точки М через ее «старые» координаты. Для этого заметим,
что «новые» координаты точки М — это координаты вектора ОМ в новой
системе координат. Найдем сначала координаты этого вектора в старой
системе координат, а затем воспользуемся результатом п. 3. Имеем:
ОМ = ОО + ОМ = -ОО + ОМ = {mi - 01, т2 - о2} .
Следовательно,
т\ = (mi — о\) cos (р + (т2 — о2) sin (p
т2 = — G7ii — oi) sin (р + (т2 — о2) cos (p
(напомним, что мы договорились рассматривать только правые системы
координат).
Таким образом, переход от старой системы координат к новой осуще-
осуществляется при помощи параллельного переноса на вектор ОО и поворота
на угол (р вокруг точки О.
§ 2. Преобразование координат в пространстве 49
§ 2. Преобразование координат в пространстве
1. Преобразование координат вектора.
Определение 1. Пространство называется ориентированным, ес-
если в нем задана система координат, которую называют исходной.
Определение 2. Упорядоченная тройка некомпланарных векторов
а, Ь, с называется правой (левой), если в исходной системе координат
А(а,Ь,с) >0 (<0).
Определение 3. Произвольная система координат в ориентиро-
ориентированном пространстве называется правой (левой), если ее координатные
векторы образуют правую (левую) тройку.
Таким образом, поскольку А(е1,е2,ез) = 1 > 0, то исходная система
координат — правая.
Рассмотрим теперь две системы координат: Ох\х^х^ и Ох 1X2X3. Пер-
Первую из них будем называть старой, а вторую — новой. Разложим каждый
из координатных векторов новой системы координат по координатным
векторам старой:
s=l
где a,ij = (e^ej) — координаты вектора ё^ в старой система координат.
Определитель матрицы А с точностью до знака равен объему паралле-
параллелепипеда, построенного на векторах ё1,ё2,ёз, т.е. 1 — объему единич-
единичного куба. Если det^ = 1, преобразование называется собственным,
а если det А = —1, то несобственным. В частности, переход от исход-
исходной системы координат к правой осуществляется при помощи собствен-
собственного преобразования, а к левой — при помощи несобственного преобра-
преобразования.
Пусть а — произвольный вектор. Имеем:
3 3
а = ^акек = ^ases.
k=i fc=i
Умножая это равенство скалярно на вектор ё^, получаем:
з
ai = ^2aisas. A)
s=l
Отметим, что расположение начала новой системы координат относи-
относительно старой в полученных формулах роли не играет.
Теорема. Для любых векторов а, Ь и с величина А(а,Ь,с) одна и та
же во всех правых системах координат.
Доказательство. Пусть Оххх^х^ — исходная система координат,
а ОХ1Х2Х3 — любая правая. Пользуясь свойствами произведения матриц,
4 С. Б. Кадомцев
50
Преобразование координат
Гл2.
получаем:
А
(а,
ь,
с) =
ai а2
bi b2
Cl С2
аз
Ьз
сз
=
ai
Cl
a2
b2
c2
a3
Ьз
сз
ац
&12
Cl3
0,21
b22
C23
O31
Ьз2
сзз
=
ai
bi
Cl
a2
b2
c2
a3
b3
сз
= Д(а,Ъ,с).
Теорема доказана.
Следствие 1. Для определения ориентации тройки векторов мож-
можно пользоваться не только исходной, но и любой правой системой коорди-
координат. Иными словами, с этой точки зрения все правые системы координат
равноправны.
Следствие 2. Переход от одной правой системы координат к другой
осуществляется при помощи собственного преобразования.
В дальнейшем условимся рассматривать только правые системы ко-
координат.
2. Углы Эйлера. На первый взгляд может показаться, что форму-
формулы A) содержат 9 произвольных параметров — элементов матрицы А. На
самом деле, как мы сейчас увидим, их не 9, и не 8 (det-A = 1), а всего 3.
Точнее, оказывается, что любые две правые системы координат с общим
началом можно совместить друг с другом, выполняя последовательно три
поворота в координатных плоскостях (т.е. вокруг осей координат). От-
Отметим, что каждый из таких поворотов является собственным преобра-
преобразованием:
1
о
О -si
О
О
=
COS<?
О
-sine
sin<?
1
р 0 (
О
О
:os
0
О sintp
О
О 1
= 1.
Пусть ОХ1Х2Х3 и ОХ1Х2Х3 — две правые системы координат с общим
началом. Поступим так.
1°. Поворотом в плоскости Ох\Х2 на угол а перейдем к системе
Ох[х2хз, в которой ось Ох[ лежит в плоскости Ох\Х2- Для этого достаточ-
достаточно взять в качестве оси Ох[ линию пересечения плоскостей Ох\х2 и Ох\Х2
(или положить а = 0, если эти плоскости совпадают).
2°. Поворотом в плоскости Ох'2хз на угол C перейдем к системе
Ох^х'^хз, т. е. совместим оси Ох% и Ох^. Это возможно, поскольку каждая
из этих осей перпендикулярна к оси Ох[.
3°. Наконец, поворотом в плоскости Ох!хх'{ на угол 7 перейдем к системе
Ох 1X2X3. Это можно представить себе так. Совместим оси Ох[ и 05?i,
что возможно, поскольку каждая из них перпендикулярна к оси Охз. При
этом положительная полуось оси Ох2' совместится либо с положительной
полуосью оси 0^2, либо с ее продолжением. Но все выполненные нами
§ 3. Векторное произведение 51
преобразования — собственные, поэтому все рассмотренные системы ко-
координат — правые. Значит, положительная полуось оси Ох" 2 совместится
с положительной полуосью оси 0x2-
Углы а, /3 и 7 называются углами Эйлера. Ясно, что через них можно
выразить все коэффициенты а^ в формулах A).
Соглашение. Исходная система координат изображается на рисун-
рисунках так, что если смотреть с положительной стороны оси Oz, то кратчай-
кратчайший поворот от ei к е2, т.е. поворот на угол тг/2, осуществляется против
часовой стрелки.
Из этого следует, что и любая правая система координат изображается
по тому же правилу, поскольку это правило не меняется при поворотах на
углы Эйлера.
Наконец, то же правило изображения распространяется и на любую
правую тройку векторов a, b и с. Действительно, выберем правую систему
координат так, чтобы векторы а и b имели координаты {а,0,0},а > 0,Ь =
= {&ъ ^2^ 0}, &2 > 0. Тогда если смотреть с положительной стороны оси Oz,
то кратчайший поворот от а к b осуществляется против часовой стрелки.
а 0 0
С другой стороны, из условия
fei 62 0
> 0 найдем: сз > 0. Это означает,
С2
что угол между вектором с и положительной полуосью оси Oz — острый,
т. е. вектор с направлен в то же полупространство, что и эта полуось.
3. Преобразование координат точки.
Пусть, как и прежде, Ох±Х2Х% — старая система координат,
новая, О (oi, 02, 03). Выразим «новые» координаты произвольной точки М
через ее «старые» координаты. Для этого заметим, что «новые» координа-
координаты точки М — это координаты вектора ОМ в новой системе координат.
Найдем сначала координаты этого вектора в старой системе координат,
а затем воспользуемся формулами A) п. 1. Имеем:
ОМ = ОО + ОМ = -ОО + ОМ = {mi - 01, m2 - о2, га3 - о3} .
Следовательно,
з
fhi = ^2ais(ms -os).
8=1
Таким образом, переход от старой системы координат к новой осу-
осуществляется при помощи параллельного переноса на вектор ОО и трех
поворотов на углы Эйлера вокруг точки О.
§ 3. Векторное произведение
1. Определение векторного произведения.
Определение. Векторным произведением векторов а и b называ-
называется вектор [ab], определяемый так:
52
Преобразование координат
Гл2.
1° [аЬ]±аи [ab]_Lb;
2° |[ab]| = |a||b| simp, где (p — угол между векторами а и b;
3° если [ab] ф о, то тройка (a, b, [ab]) — правая.
Замечание. Из определения следует, что модуль векторного произ-
произведения двух векторов равен площади параллелограмма, построенного на
этих векторах. Поэтому, в частности, векторное произведение двух век-
векторов равно нулевому вектору тогда и только тогда, когда эти векторы
коллинеарны.
Теорема. Векторное произведение векторов а = {0,1,0,2,0,3} и b =
= {&ъ ^2, ^з} выражается формулой:
[ab] = р =
Доказательство. Как мы помним (теорема 1 п. 5 § 3 гл. 1), вектор р
ортогонален к векторам а и Ь, а его длина равна площади параллелограм-
параллелограмма, построенного на этих векторах, т. е. равна произведению их длин на
синус угла между ними. Тем самым, осталось доказать, что если [ab] ф о,
то тройка (а, Ь, р) — правая, т. е. что А (а, Ь, р) > 0. Имеем:
ei e2 ез
CL\ U2 O3
b\ 62 Ьз
(\a2 a3
~~ 1 \ h h
U 2 3
•)
a\ аз
Ъ\ Ьз
А(а,Ь,р) =
А23 —
аз
Ьз
А12
Разлагая этот определитель по последней строке, получаем: А(а, Ь,р) =
= Д|3 + А23 + А22 = \р\2 = | [ab] |2 > 0. Теорема доказана.
Из доказанной теоремы и свойств определителей следует, что:
1° для любых векторов а и b выполняется равенство [ab] = — [ba];
2° для любых векторов a, b и с выполняется равенство [(а(Ь + с)] =
= [ab] + [ас];
3° для любых векторов а и b и любого числа X выполняется равенство
[(Aa)b] = A[ab].
2. Смешанное произведение.
Определение. Смешанным произведением трех векторов называ-
называется скалярное произведение первого вектора на векторное произведение
второго и третьего: (abc) = (а[Ьс]).
Сформулируем ряд свойств смешанного произведения.
1°. Из теоремы п. 1 следует, что
(abc) =
2°. Из 1° следует, что смешанное произведение трех векторов равно
объему построенного на них параллелепипеда, взятому со знаком «+»,
если они образуют правую тройку, и « — » — если левую. В частности,
смешанное произведение трех векторов равно нулю тогда и только тогда,
когда эти векторы компланарны.
b2 b3
cl cl
-a2
bi Ьз
Cl C3
+ a3
b\ 62
Cl C2
cli 0,2 аз
b\ 62 ^3
Cl C2 C3
§3.
Векторное произведение
53
3°. Из 1° следует также, что если в смешанном произведении поме-
поменять местами два сомножителя, то его модуль не изменится, а знак
изменится на противоположный.
4°. Из 3° следует, что (abc) = — (acb) = (cab). Такая перестанов-
перестановка объектов, при которой последний из них ставится на первое место,
а порядок следования остальных не меняется, называется циклической
перестановкой этих объектов. Можно сказать, тем самым, что смешанное
произведение не меняется при циклической перестановке сомножителей.
5°. Наконец, из 4° следует, что (a[bc]) = (abc) = (cab) = (c[ab]) =
= ([ab]c). Таким образом, безразлично, какие именно сомножители в сме-
смешанном произведении — первый и второй или второй и третий — пере-
перемножаются векторно.
3. Произведение двух смешанных произведений. Пусть а, Ь, с, d,
е и f — произвольные векторы. Имеем:
(abc) (def) =
сы
Ьг
Cl
а2
ъ2
С2
а3
Ьз
сз
di
d2
d3
ei
в2
ез
/i
Л
/з
=
(ad) (ae) (af)
(bd) (be) (bf)
(cd) (ce) (cf)
В частности,
(abcJ =
a|2 (ab) (ac)
(ab) |b|2 (be)
(ac) (be)
Этот определитель называется определителем Грама векторов a, b и с.
Ясно, что определитель Грама данных векторов неотрицателен и равен
нулю тогда и только тогда, когда эти векторы линейно зависимы.
4. Скалярное произведение двух векторных произведений.
Теорема. Для любых векторов а, Ь, с и d имеет место равенство
([аЪ] [cd]) =
(ас) (ad)
(be) (bd)
Доказательство. Воспользуемся свойствами определителей:
([аЪ] [cd]) =
e2 e3
а2 а3
3 с d
a (ac) (ad)
b (be) (bd)
С2
ез
= 3
(ac) (ad)
(be) (bd)
- с
a (ad)
b (bd)
a (ac)
b (be)
= 3
(ac) (ad)
(be) (bd)
(ac) (ad)
(be) (bd)
(ad) (ac)
(bd) (be)
(ac) (ad)
(be) (bd)
Теорема доказана.
Замечание. Приведенное доказательство весьма схематично, поэто-
поэтому рекомендуется самостоятельно обдумать каждый его шаг.
54 Преобразование координат Гл 2.
5. Двойное векторное произведение.
Определение. Двойным векторным произведением векторов a, b
и с называется вектор [a[be]].
Теорема. Для любых векторов a, b и с имеет место равенство
[a[bc]] =b(ac)-c(ab).
Доказательство. Докажем, что г-е координаты векторов [a[be]]
и (Ь(ас) — c(ab)) совпадают при всех г. Воспользуемся свойством 5° п. 2.
Имеем:
([а[Ьс]]), = Ыа[Ьс]]) = (MN) = |g$ (-)! (* l(ab) (ас)|) =
= (е<(Ь(ас) - c(ab)) = (Ь(ас) - с(аЪ)L.
Таким образом, г-е координаты векторов [а[Ьс]] и b(ac) — c(ab) совпа-
совпадают при всех г, а значит совпадают и сами эти векторы. Теорема доказана.
Глава 3
УРАВНЕНИЯ ПРЯМЫХ
И ПЛОСКОСТЕЙ
§ 1. Прямая на плоскости
1. Уравнение прямой. Пусть на плоскости задана декартова система
координат Оху. Найдем уравнение прямой т, проходящей через две дан-
данные точки Mi(a:i, у\) и М2(ж2, ?/2). Точка М(х,у) принадлежит прямой т
тогда и только тогда, когда площадь параллелограмма, построенного на
векторах MiM и MiM2, равна нулю:
(х-хг)
(х2 -хг)
(y-yi)
(у2 -yi)
= 0.
A)
Это и есть уравнение прямой, проходящей через две данные точки.
В частности, уравнение прямой, пересекающей оси координат в точках
M1(xofi) и М2 @,г/о), имеет вид
(х - х0) у
—хо у о
= ху0 - хоуо + ух0 = 0,
или, если произведение
отлично от нуля,
-!+ -»=!.
хо уо
Это уравнение называется уравнением прямой в отрезках.
2. Параметрические уравнения прямой. Если вторую строку опре-
определителя в уравнении A) умножить на произвольное число Л ф 0, то полу-
получится уравнение, эквивалентное исходному. Иными словами, вектор MiM2
можно заменить любым ненулевым вектором р = {а, 6}, коллинеарным
вектору MiM2, т. е. параллельным прямой т. Это означает, что уравнение
(y-yi)
Ъ
= 0
B)
представляет собой уравнение прямой, проходящей через точку М\ и па-
параллельной вектору р = {а, Ъ}. Из условия р ф о следует, что равен-
равенство B) выполняется тогда и только тогда, когда существует такое число t,
что MiM = pt, или ОМ = OMi + pt, т. е.
х = х\ + at
56 Уравнения прямых и плоскостей Гл 3.
Полученные уравнения называются параметрическими уравнения пря-
прямой. Параметр t в них меняется от —ос до ос. Если интерпретировать t
как время, а вектор р = {а, Ь} — как скорость, то полученные уравнения
можно рассматривать как закон прямолинейного и равномерного движения
материальной точки.
3. Каноническое уравнение прямой. Перепишем уравнение B) в виде
Ъ(х-х1)-а(у-у1) = 0. C)
Если произведение аЪ отлично от нуля, то это уравнение можно запи-
записать так:
X - X! _ у - уг
а
D)
Из условия р = {а, Ь} ф о следует, что числа а и Ъ не могут обращаться
в нуль одновременно. Поэтому, если, например, а = 0, то из уравнения
C) находим: х — х\ = 0, а у — любое число. Примем такое соглашение:
если один из знаменателей в уравнении D) обращается в нуль, то соот-
соответствующий числитель также обращается в нуль. Тогда уравнение D)
станет эквивалентным уравнению C).
Уравнение D) вместе с принятым соглашением называется канониче-
каноническим уравнением прямой.
4. Общее уравнение прямой. Перепишем уравнение C) так:
у1) = 0, E)
где А = 6, В = —а, и рассмотрим вектор п = {А, В}. Ясно, что |п| =
= р| ф 0 и n_Lp. Таким образом, уравнение E) при условии А2 +
-\-В2 ф 0 является уравнением прямой, проходящей через точку Mi (жх, у\)
и перпендикулярной к вектору п = {А, В}.
Полагая в уравнении E) С = —Ах\ — Ву\, получаем:
Ах + By + С = 0. F)
Итак, уравнение любой прямой может быть записано в виде F), где
А2 + В2 ф 0. Верно и обратное утверждение: уравнение F) при условии
А2 + В2 ф 0 является уравнением некоторой прямой. В самом деле, из
условия А2 + В2 ф 0 следует, что rangf^i?) = rangf^i? — С) = 1,
поэтому уравнение F) имеет по крайней мере одно решение: Ах\ -\- Ву\ +
+ G = 0. Следовательно, уравнение F) эквивалентно уравнению E), т.е.
представляет собой уравнение прямой, перпендикулярной к вектору п =
= {А,В}.
Уравнение F) при условии А2 + В2 ф 0 называется общим уравнением
прямой.
5. Нормированное уравнение прямой. Без ограничения общности
будем считать, что число С в уравнении F) неположительно (в противном
случае обе части уравнения можно умножить на —1). Разделив обе части
§ 2. Плоскость 57
В
этого уравнения на V'А2 + В2 и положив —. = cos 0,
VА2 + Б2
—С
= sin 0, = = с/ ^ О, получим:
х cos 0 + 2/ sin 0 = d.
Уравнение G) при условии d ^ 0 называется нормированным уравнени-
уравнением прямой. В нем n = {cos 0, sin 0} — единичный вектор, перпендикуляр-
перпендикулярный к прямой т, 0 — угол, который он образует с положительной полуосью
оси Ож, отсчитываемый против часовой стрелки.
Заметим, что уравнение G) можно записать также в виде
(OMn) = d,
где О — начало координат, а М — точка данной прямой т. Следовательно,
d — это координата точки М по оси с началом О и координатным век-
вектором п. Прямая т перпендикулярна к этой оси, поэтому все ее точки
имеют по ней одну и ту же координату. Поскольку d ^ 0, то: a) d — это
расстояние от прямой т до начала координат; б) вектор п направлен от
начала координат к прямой.
Итак, в нормированном уравнении прямой:
1° n = {cos 0, sin 0} — единичный вектор, перпендикулярный к прямой
и направленный от начала координат к этой прямой;
2° 0 — угол, который вектор п образует с положительной полуосью
оси Ож, отсчитываемый против часовой стрелки;
3° d — расстояние от прямой до начала координат.
Замечание. Пусть Mi(xi,yi) — произвольная точка плоскости. Ве-
Величина
d\ = х\ cos 0 + 2/1 sin в = (OMin)
представляет собой координату точки М\ по оси с началом О и коорди-
координатным вектором п. Поэтому величина d\ — d, называемая отклонением
точки Mi от прямой т, равна расстоянию от точки Mi до прямой т,
взятому со знаком « —», если точки О и М\ лежат по одну сторону от
прямой 772, и «+» — если по разные. Таким образом, нормированным
уравнением прямой удобно пользоваться в тех случаях, когда требуется
найти расстояние от точки до прямой или определить, по какую сторону
от прямой находится эта точка.
§ 2. Плоскость
1. Уравнение плоскости. Пусть в пространстве задана декартова си-
система координат Oxyz. Найдем уравнение плоскости, проходящей через
три данные точки Mi(xi,yi,zi), М2(ж2,2/2, 22), и М3(ж3,2/з,^з), не лежа-
лежащие на одной прямой. Точка М(ж, 2/, z) принадлежит этой плоскости тогда
и только тогда, когда смешанное произведение векторов MiM, M1M2
58 Уравнения прямых и плоскостей Гл 3.
и М1М3 равно нулю:
(MiM • MiM2 • М1М3) = 0. A)
Это и есть уравнение плоскости, проходящей через три данные точки.
В координатах оно выглядит так:
(x-x-i) (y-yi)
(Х2 - Х±) (J/2 - У\)
( ) )
У) ( )
уз -yi) B3 - z\)
= 0.
В частности, уравнение плоскости, пересекающей оси координат в точ-
точках Mi(xq, 0, 0), М2@,уо, 0) И -ОДз@, 0, zo), имеет вид
(х — хо) у z
— Хо уо 0 = XyQZQ — XQyQZQ -\- ZXQyQ -\- yZQXQ = 0,
—Хо 0 Zo
или, если произведение жоУо^о отлично от нуля,
хо уо zo
Это уравнение называется уравнением плоскости в отрезках.
2. Общее уравнение плоскости. Перепишем уравнение A) так:
(MiM[MiM2 • М1М3]) = О.
Если в этом уравнении умножить вектор [MiM2 • М1М3], который,
очевидно, перпендикулярен к плоскости MiM2M3, на произвольное число
А ф 0, то получится уравнение, эквивалентное исходному. Иными словами,
вектор [MiM2 • М1М3] можно заменить любым ненулевым вектором п =
= {А, В, С}, коллинеарным вектору [MiM2 -MiM3], т. е. перпендикуляр-
перпендикулярным к плоскости MiM2M3. Это означает, что уравнение
y1) + C(z-z1) = 0 B)
при условии А2 + В2 + С2 ф 0 представляет собой уравнение плоскости,
проходящей через точку Mi (xi, yi, z\) и перпендикулярной к вектору п =
= {А,В,С}.
Полагая в уравнении B) D = —Ах\ — Ву\ — Cz\, получаем:
Ах + By + Cz + D = 0. C)
Итак, уравнение любой плоскости может быть записано в виде C), где
А2 + В2 + С2 ф 0. Верно и обратное утверждение: уравнение C) при
условии А2 + В2 + С2 ф 0 является уравнением некоторой плоскости.
В самом деле, из условия А2 + В2 + С2 ф 0 следует, что rang (А В С) =
= rang (А ВС — D) = 1, поэтому уравнение C) имеет по крайней мере
одно решение: Ах\ + Ву\ + Cz\ + D = 0. Следовательно, уравнение C)
эквивалентно уравнению B), т. е. представляет собой уравнение плоскости,
перпендикулярной к вектору п = {А, В, С}.
Уравнение C) при условии А2 + В2 + С2 ф 0 называется общим
уравнением плоскости.
§ 3. Прямая в пространстве 59
3. Нормированное уравнение плоскости. Без ограничения общности
будем считать, что число D в уравнении C) неположительно (в противном
случае обе части уравнения можно умножить на —1). Разделив обе ча-
части этого уравнения на V'А2 + В2 + С2 и положив А/V'А2 + В2 + С2 =
= cos a, B/VA2 + В2 + С2 = cos/З , С/\Л42 + Я2 + С2 = cos7,
-D/VA2 + В2 + С2 = d ^ 0, получим:
ж cos а + у cos /3 + z cos 7 = d. D)
Уравнение D) при условии б/ ^ 0 называется нормированным урав-
уравнением плоскости. В нем n = {cos a, cos /3, cos 7} — единичный вектор,
перпендикулярный к плоскости, а, /3, 7 — углы, которые он образует
с положительными полуосями осей координат.
Заметим, что уравнение D) можно записать также в виде
(OMn) = d,
где О — начало координат, а М — точка данной плоскости. Следовательно,
d — это координата точки М по оси с началом О и координатным векто-
вектором п. Рассматриваемая плоскость перпендикулярна к этой оси, поэтому
все ее точки имеют по ней одну и ту же координату. Поскольку d ^ 0, то:
a) d — это расстояние от данной плоскости до начала координат; б) вектор п
направлен от начала координат к плоскости.
Итак, в нормированном уравнении плоскости:
1° n = {cos a, cos /5, cos 7} — единичный вектор, перпендикулярный
к плоскости и направленный от начала координат к этой плоскости;
2° а, /3, 7 ~~ УГЛЫ5 которые вектор п образует с положительными
полуосями осей координат;
3° d — расстояние от данной плоскости до начала координат.
Замечание. Пусть Mi(a?i, 7/1, z-y) — произвольная точка плоскости.
Величина
d\ = x\ cos a + y\ cos C + z\ cos 7 = (OMi • n)
представляет собой координату точки М\ по оси с началом О и координат-
координатным вектором п. Поэтому величина d\ —с/, называемая отклонением точки
Mi от плоскости, равна расстоянию от точки Mi до данной плоскости,
взятому со знаком « —», если точки О и Mi лежат по одну сторону от
плоскости, и «+» — если по разные.
§ 3. Прямая в пространстве
1. Уравнение прямой. Пусть в пространстве задана декартова си-
система координат Oxyz. Найдем уравнение прямой т, проходящей через
две данные точки Mi(#i,2/i,2i) и M^x^-, 2/2, 22)- Точка М(ж,г/,г) при-
принадлежит прямой т тогда и только тогда, когда векторное произведение
векторов MiM и MiM2 равно нулю:
[MiM • MiM2] = о. A)
60 Уравнения прямых и плоскостей Гл 3.
Это и есть уравнение прямой, проходящей через две данные точки. В коор-
координатах оно выглядит так:
ei e2 е3
(x-xi) (y-yi) (z-zi)
(х2 -хг) (у2 -yi) (z2 -zi)
2. Параметрические уравнения прямой. Если вектор М1М2 в урав-
уравнении A) умножить на произвольное число Л ф 0, то получится уравнение,
эквивалентное исходному. Иными словами, вектор М1М2 можно заменить
любым ненулевым вектором р = {а, Ъ, с}, коллинеарным вектору М1М2,
т. е. параллельным прямой т:
[MiM • р] = о.
Полученное уравнение представляет собой уравнение прямой, проходя-
проходящей через точку Mi и параллельной вектору р = {а,Ь,с}. Из условия
р ф 0 следует, что это равенство выполняется тогда и только тогда, когда
существует такое число t, что MiM = pt, или ОМ = OMi + p?, т. е.
B)
Эти уравнения называются параметрическими уравнениями прямой.
Параметр t в них меняется от —ос до оо. Если интерпретировать t как
время, а вектор р = {а, Ъ, с} — как скорость, то полученные уравнения
можно рассматривать как закон прямолинейного и равномерного движения
материальной точки.
3. Канонические уравнения прямой.
Если произведение аЪс отлично от нуля, то параметр t из уравнений B)
можно исключить, переписав их так:
х - xi _ у-ух _ z- z\ ,Qx
Из условия р = {а, 6, с} ф о следует, что числа а, Ъ и с не могут
обращаться в нуль одновременно. Поэтому если, например, а = 0 (и Ъ =
= 0), то из уравнений B) находим: х — х\ = 0 (и у — у\ = 0, a z — любое
число). Примем такое соглашение: если один или два из знаменателей
в уравнениях C) обращаются в нуль, то соответствующие числители
также обращаются в нуль. Тогда уравнения C) станут эквивалентными
уравнениям D).
Уравнения C) вместе с принятым соглашением называются канониче-
каноническими уравнениями прямой.
4. Пересечение двух плоскостей. Рассмотрим две плоскости, задан-
заданные уравнениями А\х + В\у + C\z = D\ и А^х + В^у + C^z = D2. Чтобы
§3.
Прямая в пространстве
61
найти все их общие точки, необходимо решить систему уравнений
А2х + В2у + C2z = -D2 J '
Поскольку Af + 5? + G? / 0, то возможны три случая.
1°. rang (i1 о1 ?Л = rang (i1 о1 S1 "пО = 1- в этом •
из уравнений является следствием другого, а значит, данные плоскости
совпадают.
Кронекера-Капелли в этом случае решений нет и, следовательно, данные
плоскости параллельны.
3°. rang (л1 о1 п1 J = rang ( л1 d1 A nx J = 2. Чтобы найти реше-
ь уЛ2 -D2 Су2/ to \^2 &2 Су2 —J-^2/
ние, необходимо найти базисный минор, общий для основной и расширен-
расширенной матрицы. Пусть, например, таким минором является минор
Перепишем данную систему так:
г В,
А2 В2
А2х + В2у = -D2 - C2z J
Теперь, полагая z равным произвольному числу
по формулам Крамера:
А2 В2
t, найдем х и у
х = —
У =
D2 B2
А2 D2
Аг В,
А2 В2
А2 В2
-1
-1
Сг В,
с2 в2
А2 С2
z =
Аг Вг
А2 В2
Таким образом, пересечением данных плоскостей является прямая
х = x\-\-at
у = ух Л-Ы
z = ct
параллельная вектору
ei e2 ез
Аг Вх d
А2 В2 С2
что и понятно — линия пересечения данных плоскостей должна быть пер-
перпендикулярной к каждому из перпендикуляров к этим плоскостям.
Глава 4
ЛИНИИ И ПОВЕРХНОСТИ ВТОРОГО
ПОРЯДКА
§ 1. Эллипс, гипербола и парабола
1. Эллипс. Эллипс, по-видимому, был известен еще в глубокой древ-
древности, когда облик геометрии соответствовал дословному переводу ее на-
названия. В те времена основными инструментами для выполнения постро-
построений на местности были колья и веревки, позволявшие проводить прямые
и окружности, а значит, и выполнять все те построения, которые теперь
называют построениями с помощью циркуля и линейки.
Ясно, как с помощью указанных инструментов построить окружность:
нужно закрепить один из концов веревки и в натянутом состоянии про-
прочертить вторым концом линию. Напрашивается вопрос: а что получится,
если закрепить оба конца ненатянутой веревки, а затем в натянутом состо-
состоянии прочертить линию? Получится эллипс. Таким образом, мы приходим
к следующему определению.
Определение. Эллипсом называется множество всех таких то-
точек плоскости, для которых сумма расстояний до двух фиксированных
точек постоянна.
Фиксированные точки называются фокусами эллипса.
Пусть 2с — расстояние между фокусами, 2а — сумма расстояний от
точки эллипса до фокусов. Введем декартову систему координат Оху так,
чтобы фокусы Fi и F2 имели координаты F-\_(—с, 0) и F2(c, 0), и выведем
в ней уравнение эллипса. Стоящую перед нами задачу можно сформулиро-
сформулировать так: найти множество всех таких точек М(х, у), для которых
MFx + MF2 = 2а.
Из неравенства треугольника следует, что MF\ + MF2 ^ F\F2, т.е.
а ^ с. При а = с эллипс вырождается в отрезок FiF2, поэтому будем
считать, что а > с.
В координатах уравнение эллипса принимает вид
у/(х + сJ + у2 + у/(х - cf + у2 = 2а.
Умножим обе части этого равенства на разность фигурирующих в нем
радикалов, а затем разделим на 2а. В результате получим:
§1-
Эллипс, гипербола и парабола
63
Теперь можно выразить каждый из радикалов:
у2 = а±—.
\/(x±cf .
Возведем это выражение в квадрат и преобразуем его к виду
Поскольку а ф с, то полученное равенство можно переписать так:
х
а2
или, с учетом условия а>с:
-*?--!
A)
B)
где Ъ2 = а2 - с2 ^ а2.
При возведении в квадрат могли появиться лишние корни, соответ-
соответствующие случаю а ± сх/а < 0. Но этого не происходит: как видно из
уравнения B), |ж| $J а, поэтому \сх/а\ ^ с <
< а. Таким образом, уравнение B) эквивалентно
исходному. Оно называется каноническим урав-
уравнением эллипса.
Уравнение B) позволяет обнаружить следу-
следующие свойства эллипса.
1°. Эллипс имеет две взаимно перпендику-
перпендикулярные оси симметрии (оси Ох и Оу), а значит,
и центр симметрии (начало координат О). Оси симметрии эллипса назы-
называются его полуосямщ та из них, на которой лежат фокусы, называется
большой полуосью, а другая — малощ числа а и Ъ иногда также называют
полуосями.
2°. Поскольку х2/а2 = 1 - у2/Ъ2 ^ 1 и у2/Ъ2 = 1 - х2/а2 ^ 1, то
эллипс целиком содержится в прямоугольнике (|ж| ^ а, \у\ ^ 6), стороны
которого параллельны его осям.
3°. При х ^ 0, у ^0 уравнение B) может быть записано в виде
Функция у(х) монотонно убывает от у = Ъ при х = 0 до у = 0 при
х = а ^ Ъ. С учетом установленных нами симметрии, это позволяет
изобразить эллипс на рисунке.
4°. Уравнение B) может быть записано в параметрическом виде
х = a cos (p
у = Ъ sin if
где 0 $J if < 2тг.
64 Линии и поверхности второго порядка Гл 4.
5°. Как из уравнения B), так и из параметрических уравнений легко
усматривается, что эллипс может быть получен из окружности (радиуса Ь)
равномерным растяжением (в а/Ъ раз) вдоль прямой (оси Ох, т. е. преоб-
преобразованием х —>• (Ь/а)х).
2. Гипербола. Возникает естественный вопрос: что получится, если
в определении эллипса сумму расстояний заменить их разностью? Получит-
Получится гипербола. Таким образом, мы приходим к следующему определению.
Определение. Гиперболой называется множество всех таких то-
точек плоскости, для которых модуль разности расстояний до двух фикси-
фиксированных точек есть постоянная положительная величина.
Фиксированные точки называются фокусами гиперболы.
Пусть 2с — расстояние между фокусами, 2а — модуль разности расстоя-
расстояний от точки гиперболы до фокусов. Введем декартову систему координат
Оху так, чтобы фокусы F\ и F2 имели координаты F\{—с, 0) и F2(c,0),
и выведем в ней уравнение гиперболы. Стоящую перед нами задачу мож-
можно сформулировать так: найти множество всех таких точек М(х,у), для
которых
MFX - MF2 = ±2a.
Из неравенства треугольника следует, что \MF-\_ — MF2\ $J F\F2, т.е.
a $J с. При а = с гипербола вырождается в два луча прямой FiF2,
поэтому будем считать, что а < с. В координатах уравнение гиперболы
принимает вид
¦ + cf + у2 - \]{х - сJ + у2 = ±2а.
Умножим обе части этого равенства на сумму фигурирующих в нем
радикалов, а затем разделим на =Ь2а. В результате получим:
J{x + cf + у2 + J(x - cf + у2 = ± —.
v v a
Теперь можно выразить каждый из радикалов:
(х ±с) + у2 =
. сх
а± —
Возведем это выражение в квадрат (при этом лишних корней, очевидно,
не появится) и преобразуем его к виду
^ у
а
Поскольку а фс,то полученное равенство можно переписать так:
а2 а2- с2
Это и есть искомое уравнение гиперболы. Сравнивая полученный ре-
результат с уравнением A), мы приходим к весьма неожиданному выводу:
гипербола имеет точно такое же уравнение, как и эллипс\ Различие
§1-
Эллипс, гипербола и парабола
65
состоит только в том, что для эллипса а > с, а для гиперболы а < с.
С учетом этого условия уравнение гиперболы можно переписать так:
7-? = i, (з)
7 О О О
где о = с — а .
Уравнение C) называется каноническим уравнением гиперболы. Оно
позволяет обнаружить следующие свойства гиперболы.
1°. Гипербола имеет две взаимно перпендикулярные оси симметрии
(оси Ох и От/), а значит, и центр симметрии (начало координат О). Оси
симметрии гиперболы называются ее полуосямщ та из них, на которой
лежат фокусы, называется вещественной полуосью, а другая — мнимощ
числа а и Ъ иногда также называют полуосями.
2 2
2°. Поскольку — = 1+^2" ^ 1, то в полосе (|ж|<а), содержащей мнимую
а Ъ
ось гиперболы, точек гиперболы нет.
2 2 2
3°. Поскольку ^- = — — 1 < —2, то в области между двумя пересека-
Ъ а а
ющимися прямыми (\у\ ^ -\х\) точек гиперболы также нет.
4°. При х ^ 0, у ^ 0 уравнение C) может быть записано в виде
Функция у(х) монотонно и неограниченно возрастает от у = 0 при х =
= а. С учетом установленных нами симметрии, это позволяет изобразить
гиперболу на рисунке. Однако прежде чем это сделать, установим еще одно
ее свойство.
5°. Ясно, что при х —>- оо функция у(х) становится приближенно равной
(Ъ/а)х. Уточним это свойство. Имеем:
х2 - х2 + а2
Таким образом, гипербола имеет асимптоту (у = (Ъ/а)х).
Теперь можно изобразить гиперболу на рисунке.
Мы видим, в частности, что гипербола
имеет две ветви.
6°. Уравнение C) может быть записано
в параметрическом виде
х = =Ьа ch t
у = bcht
где cht = (e* + е~ь)/2 — гиперболические косинус, a sh? = (e* - е~г)/2 —
гиперболические синус. При этом знак «+» соответствует одной ветви
гиперболы, а знак « —» — другой.
5 СБ. Кадомцев
66 Линии и поверхности второго порядка Гл 4.
3. Директриса эллипса и гиперболы. Вернемся к уравнению A),
которое, как отмечалось, является общим уравнением эллипса и гиперболы.
Умножая это уравнение на а2 — с2, перенося слагаемое (с2/а2)х2 в правую
часть, —с2 — в левую часть и вычитая из обеих частей 2хс, получаем
(при с ф 0):
х2 + с2 - 2хс + у2 = а2 + 4*2 -
а
откуда
х —
X
г t
а \
_а2
с
х2 - 2х-
С
D)
Если предположить, что правая, а значит и левая, части равенства D)
обращаются в нуль, то получится противоречие: х = с, у = 0, с = а2/с,
т.е. с = а, что не выполняется ни для эллипса, ни для гиперболы. Поэтому
равенство D) можно переписать так:
E)
\х-а2/с\ а
В этом уравнении числитель представляет собой расстояние от точки
М(х,у) до фокуса i*2, а знаменатель — расстояние от нее до прямой 0I2,
определяемой уравнением х = а2/с. Поскольку уравнение E) при с ^0 эк-
эквивалентно уравнению A), то мы приходим к следующему выводу: эллипс,
отличный от окружности, (гипербола) является множеством всех та-
таких точек плоскости, для которых отношение расстояния до фиксирован-
фиксированной точки к расстоянию до фиксированной прямой постоянно и меньше
(больше) единицы.
Фиксированную точку, как и прежде, будем называть фокусом, фикси-
фиксированную прямую — директрисой, а указанное отношение — эксцентриси-
эксцентриситетом.
Замечание 1. Как отмечалось выше, правая часть равенства D) не
может обращаться в нуль. Поэтому директриса эллипса (гиперболы) не
имеет с ним (с ней) общих точек.
Замечание 2. Поскольку эллипс и гипербола симметричны относи-
относительно оси Оу, то каждая из этих кривых имеет две директрисы d± и 0I2,
соответствующие фокусам Fi и F2.
Замечание 3. Ясно, что каждый эллипс (каждая гипербола) одно-
однозначно определяется заданием двух чисел: экцентриситета е и расстояния р
между фокусом и директрисой. Введем новую систему координат Оху (для
удобства мы сохраняем прежние обозначения для координат) с началом
в фокусе i^2- Тогда соответствующая ему директриса будет иметь уравне-
уравнение х = —р. Точка М(х,у) принадлежит нашей кривой тогда и только
тогда, когда
§ 1. Эллипс, гипербола и парабола 67
или
=е2 {х +pf. F)
Тем самым, мы получили еще одно уравнение, общее для эллипса и ги-
гиперболы.
Замечание 4. Поскольку экцентриситет е равен с/а, то Ъ =
= а\/1 — е2 для эллипса и b = ал/е2 — 1 для гиперболы. Поэтому
любые два эллипса {две гиперболы) с одинаковыми эксцентриситетами
подобны. Тем самым можно сказать, что число е определяет форму кривой,
а число р — ее размеры.
Для эллипса с одинаковыми полуосями, т. е. для окружности, е = 0.
При увеличении числа е эллипс становится все более «вытянутым». Этим
и объясняется название «эксцентриситет».
4. Парабола. Сам собой напрашивается вопрос: какая кривая соот-
соответствует эксцентриситету, равному 1? Эта кривая называется параболой.
Таким образом, мы приходим к следующему определению.
Определение. Параболой называется множеством всех таких то-
точек плоскости, для которых расстояние до фиксированной точки равно
расстоянию до фиксированной прямой.
Как и прежде, фиксированную точку мы будем называть фокусом,
фиксированную прямую — директрисой параболы.
Полагая в уравнении F) е = 1, получаем уравнение параболы:
у2 = 2рх + р = 2р ( х + -
Перенося начало координат в точку х = —р/2 и возвращаясь к старым
обозначениям для координат, получаем:
у2 = 2рх.
Это уравнение называется каноническим
уравнением параболы. Оно позволяет обнару-
обнаружить следующие свойства параболы.
1°. Парабола имеет одну ось симметрии
(ось Ох). Эта ось называется ось параболы.
2°. Поскольку х = у21Bp) ^ 0, то парабола целиком содержится
в полуплоскости {х ^ 0), граница которой перпендикулярна оси параболы.
3°. При х ^ 0 уравнение B) может быть записано в виде
у = \/2рх.
Функция у{х) монотонно и неограниченно возрастает от у = 0 при
х = 0. С учетом симметрии, это позволяет изобразить параболу на рисунке.
Замечание. Ясно, что уравнение F) является общим для всех трех
кривых — эллипса, гиперболы и параболы. Иногда его записывают в по-
полярных координатах.
68 Линии и поверхности второго порядка Гл 4.
Полагая в уравнении F) х = /9cos<?>, у = psimp и извлекая корень из
обеих частей, получаем:
р = ±e(pcos(p + р),
откуда
рA =р ecos<?>) =
1-е cos у?
_ -ер
1 + е cos у?
Поскольку р ^ 0, то первое из уравнений этой пары является уравнени-
уравнением эллипса, параболы и одной из ветвей гиперболы («правой»), а второе —
уравнением другой ветви гиперболы («левой»).
5. Касательная. Рассмотрим произвольную линию L и возьмем на ней
какие-нибудь точки Мо и Mi. Прямую M0Mi естественно назвать секущей.
Представим себе, что точка Mi, двигаясь по линии L, приближается к Мо.
Предельное положение секущей MqMi при стремлении точки Mi к Mq
называется касательной к линии L в точке Mq .
Пусть теперь L — одна из кривых: эллипс, гипербола или парабола,
уравнение которой записано в виде F). Рассмотрим прямую
х= хо + t cos в
у= Уо + t sin О
(О $J в < тг), проходящую через произвольную точку Мо(жо, у о) кривой L,
и выясним, есть ли у этой прямой и кривой L другие общие точки. Для
этого подставим ж, у из уравнений прямой в уравнение F) и установим,
будет ли полученное уравнение иметь решения, отличные от t = 0 (соот-
(соответствующего точке Mq). Имеем:
хо + Уо + 2? (x0cos 0 + г/о sin 0) + ?2 =
= е2 (ж0 + Р? + 2?е2 (ж0 + р) cos # + ?2е2 cos2 в.
Учитывая, что Мо(жо, у о) — точка кривой L, и сокращая на ?, получаем
уравнение вида
t(l - е2 cos26?) = A cos (9 + В sin (9, G)
где АиВ — некоторые числа, зависящие от жо, 2/о? Р и е-
Замечание 1. Отметим, что в этом уравнении коэффициент при t
и правая часть не могут обращаться в нуль одновременно — иначе ра-
равенство G) было бы справедливо при всех значениях t и, следовательно,
прямая целиком принадлежала бы кривой L, чего не может быть ни для
эллипса, ни для гиперболы, ни для параболы.
Замечание 2. Обратим особое внимание на то, что числа А и В
в формуле G) не обращаются в нуль одновременно. В самом деле, если
§ 1. Эллипс, гипербола и парабола 69
А = В = 0, то при е ) 1 и cos О = 1/е правая часть и коэффициент
при t в формуле G) обращаются в нуль одновременно, чего, как только что
отмечалось, быть не может; при е < 1 получаем, что при любом 0 прямая
и кривая имеют единственную общую точку Mq, т. е. вся кривая состоит из
единственной точки Mq, чего также не может быть.
Итак, в соответствии с замечанием 1, возможны три случая.
1°. Коэффициент при t в уравнении G) обращается в нуль, и, следова-
следовательно, правая часть этого уравнения отлична от нуля. В этом случае урав-
уравнение решений не имеет, поэтому прямая и кривая L имеют единственную
общую точку М0(х0,2/о )•
Для эллипса эта возможность, очевидно, не реализуется.
В случае параболы коэффициент при t обращается в нуль при cos в = 1,
т. е. тогда, когда прямая параллельна оси параболы.
В случае гиперболы коэффициент при t обращается в нуль при cos в =
= =Ы/е = ±а/с, smO = у/\ — а2/с2 = Ъ/с г) , tgO = ±b/a, т.е. тогда,
когда прямая параллельна асимптоте гиперболы.
2°. Коэффициент при t и правая часть в уравнении G) отличны от нуля.
В этом случае уравнение G) имеет решение t ф 0, поэтому прямая и кривая
L имеют еще одну общую точку М\. Тем самым, прямая MqM\ является
секущей.
3°. Правая часть уравнения G) обращается в нуль, и, следовательно,
коэффициент при t этого уравнения отличен от нуля. В этом случае урав-
уравнение G) не имеет решений t ф 0, поэтому кривая L и прямая не имеют
общих точек, отличных от точки Mq. Этот случай можно рассматривать
как предельный случай случая 2°: точки Mq и М± «сливаются», а пря-
прямая MqMi становится касательной. Как мы только что установили, кри-
кривая L и касательная не имеют общих точек, отличных от точки касания Mq.
Следствие 1. Через любую точку эллипса, гиперболы или параболы
проходит одна и только одна касательная (поскольку уравнение A cos в +
+ .Bsin^ = 0 при любых А и В, не обращающихся в нуль одновременно,
имеет единственное решение в, удовлетворяющее условию 0 ^ в < тг).
Следствие 2.
1° Если прямая имеет единственную общую точку с эллипсом, то эта
прямая — касательная;
2° если прямая имеет единственную общую точку с параболой и не
параллельна оси параболы, то эта прямая — касательная;
3° если прямая имеет единственную общую точку с гиперболой и не
параллельна асимптоте гиперболы, то эта прямая — касательная.
6. Оптические свойства.
Теорема 1. Касательная к эллипсу с фокусами F\ и F^ в точке М
является биссектрисой внешнего угла треугольника FiF2M.
Доказательство. Пусть / — биссектриса внешнего угла треуголь-
треугольника F\F^M при вершине М, F — точка, симметричная F2 относительно
*) sin в ^ 0, поскольку 0 ^ в < тг.
70
Линии и поверхности второго порядка
Гл4.
N
прямой /. Поскольку точки F\, M и F лежат на одной прямой, то F\F =
= F\M-\-FM = FiM-\-F2M = 2а, так как точка М лежит на эллипсе. Для
любой другой точки N прямой /, в силу
неравенства треугольника, F\N + F2N =
= F±N + FiV > F±F = 2a, поэтому точ-
точка TV не лежит на эллипсе. Итак, прямая /
и эллипс имеют единственную общую точку,
поэтому эта прямая — касательная. Теорема
доказана.
Следствие (оптическое свойство эл-
эллипса). Луч света, выпущенный из фокуса
эллиптического зеркала, после отражения пройдет через другой фокус.
Теорема 2. Касательная к гиперболе с фокусами F\ и F2 в точке М
является биссектрисой угла треугольника F1F2M.
Доказательство. Пусть, например, F\M > F2M, I — биссектриса
угла треугольника F\F2M при вершине М, F — точка, симметричная F2
относительно прямой /. Поскольку точки i*\, F и М лежат на одной прямой,
то FiF = FiM - FM = FiM - F2M = 2a, так как точка М лежит
М
т
на гиперболе. Для любой другой точки N прямой /, в силу неравенства
треугольника, \FXN - F2N\ = \FXN - FN\ < FXF = 2a, поэтому точка TV
не лежит на гиперболе. Итак, прямая / и гипербола имеют единственную
общую точку.
Осталось доказать, что прямая / не параллельна асимптоте гиперболы.
Выразим угол а между прямыми / и F\F2 через угол 2/3 при вершине М
треугольника F\F2M. Для этого заметим, что расстояние о7 от точки F\
до прямой FF2 может быть вычислено двумя способами: с одной стороны,
d = F\F cos f3 = 2a cos/5, с другой стороны, a7 = Fii^cosa = 2c cos a.
Приравнивая эти два выражения, получаем: cos a = (а/с) cos /3 ф а/с (так
как 0 < C ^ тг/2), поэтому прямая / не параллельна асимптоте гиперболы.
Теорема доказана.
Следствие (оптическое свойство гиперболы). Луч света, выпущен-
выпущенный из фокуса гиперболического зеркала, после отражения пойдет так,
как если бы он вышел из другого фокуса.
Теорема 3. Касательная к параболе с фокусом F в точке М явля-
является биссектрисой угла между прямой FM и прямой, параллельной оси
параболы.
Доказательство. Пусть ММ\ — перпендикуляр, проведенный из
точки М к директрисе, / — биссектриса угла FMM\. Поскольку точка М
§ 2. Кривые второго порядка 71
лежит на параболе, то FM = ММ\, а значит, прямая / является биссектри-
биссектрисой равнобедренного треугольника FMM\ и, следовательно, серединным
перпендикуляром к отрезку FM\. Поэтому для
любой другой точки N прямой / FN = M\N.
Но отрезок MiTV, будучи наклонной, больше
расстояния от точки N до директрисы, поэтому
точка N не лежит на параболе. Итак, прямая /
и парабола имеют единственную общую точку.
Очевидно также, что прямая /, будучи середин-
серединным перпендикуляром к отрезку FM\, не па-
параллельна оси параболы, поэтому эта прямая —
касательная. Теорема доказана.
Следствие (оптическое свойство парабо-
параболы). Луч света, выпущенный из фокуса параболического зеркала, после
отражения пойдет параллельно оси.
Замечание 1. Наличием оптических свойств объясняется название
«фокус». Например, в фокусе параболического зеркала фокусируется после
отражения пучок лучей, параллельных оси.
Замечание 2. Пусть F\ и F2 — фиксированные точки. Тогда через
любую точку М плоскости проходит один и только один эллипс с фоку-
фокусами F\ и F2, поскольку сумма F\M + F2M имеет вполне определенное
значение (при этом отрезок F\F2 считается вырожденным эллипсом). Ана-
Аналогично, через точку М проходит одна и только одна гипербола с фокуса-
фокусами Fi и F2 • Из установленных нами свойств следует, что эллипс и гипербола
пересекаются в точке М под прямым углом.
На этом свойстве основаны эллиптические координаты. Координатные
линии в них представляют собой софокусные эллипсы и гиперболы.
§ 2. Кривые второго порядка
1. Уравнение кривой второго порядка.
Определение. Кривой второго порядка называется множество
всех точек М(х,у) плоскости, координаты которых удовлетворяют
уравнению
ацх\ + 2ai2XiX2 + а22^2 + 2Ъ\Х\ + 2Ъ2х2 + с = 0 A)
при а\х + а\2 + а22 ф 0.
Примерами кривых второго порядка могут служить эллипс, гипербола
и парабола.
Замечание. Ясно, что при растяжении плоскости в каком-либо на-
направлении, т.е. при преобразовании вида х\ —>- рх\, х2 —>- qx2 (p,q ф 0),
кривая второго порядка переходит в кривую второго порядка.
Имея своей целью классифицировать все кривые второго порядка, по-
постараемся, перейдя к новой системе координат, максимально упростить
уравнение A). Как мы помним, такой переход осуществляется при помощи
72 Линии и поверхности второго порядка Гл 4.
поворота и параллельного переноса. Начнем с поворота на угол (р. Имеем:
х\ = xi cos (p — Х2 sin (р
X2 = xi sin (p + X2 cos (p
(здесь старые координаты выражены через новые, поэтому роль (р игра-
играет —ф). Подставим эти выражения в формулу A) и постараемся подо-
подобрать if так, чтобы коэффициент при Х\Х2 обратился в нуль:
(а22 — аи) sin 2(р + 2а\2 cos 2ip = 0.
Если а\2 = 0, то положим (р = 0; если же а\2 ф 0, то положим ctg 2(p =
= (аи — a22)/2ai2. Таким образом, коэффициент при х\Х2 обратится
в нуль, а уравнение A) окажется приведенным к виду
а\ х\ + а2^2 + 2Ъ\Х\ + 262^2 + с = 0
(нетрудно заметить, что с = с, однако для наших целей это не важно).
В этом уравнении а\ + а| / 0^ поскольку новые и старые координаты
связаны между собой линейно. Без ограничения общности будем считать,
что а\ ф 0 (в противном случае оси координат можно переобозначить).
Сделаем теперь параллельный перенос вдоль оси Ох\, полагая х\ =
= х — h\ja\. В результате уравнение примет вид
а1Х2 + а2х\ + 2Ъ2Х2 + с' = 0. B)
Возможны два случая.
1. а2 ^0. Полагая Х2 = у — ^/^25 приведем уравнение B) к виду
а±х2 + а2г/2 + с/; = 0,
где ai, аг ф 0. Таким образом, этот случай распадается на два:
х2 у2
Ii при с" ф 0 уравнение B) принимает вид \- ^— = 1;
х2 у2
Ь при с" = 0 уравнение B) принимает вид \- ^— = 0.
a о
П. а2 = 0, и, следовательно, уравнение B) имеет вид
а±х2 + 2Ъ2х2 -\-с =0.
Этот случай также распадается на два:
Hi при 62 Ф 05 полагая ж2 = У ~ CVB^2M приведем уравнение B) к виду
ж2 = ад, где а ф 0;
П2 при 62 = 0 уравнение B) принимает вид х2 = а.
Итак, уравнение A) распадается на четыре случая.
2. Классификация. Теперь нетрудно классифицировать все кривые
второго порядка. Имеем:
х2 у2
1° при а > 0, Ъ > 0 это уравнение описывает эллипс;
§ 3. Поверхности второго порядка 73
2° при а > О, Ъ < О или при а < О, Ъ > О это уравнение описывает
гиперболу;
3° при а < О, Ь < 0 это уравнение описывает пустое множество.
2 2
2
4° при а > О, Ъ > 0 или при а < О, Ъ < 0 это уравнение описывает точку
ж = у = 0;
5° при а>0, 6<0 или при а<0, Ъ>0 это уравнение описывает две прямые
у = i^-^/aa;, пересекающиеся в точке ж = у = 0;
Hi ж2 = ОД, где a / 0:
6° это уравнение описывает параболу.
Ц2 х2 = а:
7° при а > 0 это уравнение описывает две параллельные прямые ж =
/
8° при а = 0 это уравнение описывает одну прямую ж = 0.
Наконец, при а < 0 это уравнение описывает пустое множество, которое
уже вошло в нашу классификацию.
Итак, всякая кривая второго порядка представляет собой одно из вось-
восьми множеств точек: эллипс, гипербола, парабола, две пересекающиеся
прямые, две параллельные прямые, одна прямая, точка, пустое множе-
множество.
Замечание. Ясно, что при растяжении плоскости в каком-либо на-
направлении тип каждой из указанных восьми кривых не меняется.
§ 3. Поверхности второго порядка
1. Уравнение поверхности второго порядка.
Определение. Поверхностью второго порядка называется мно-
множество всех точек М{х\,Х2^х^), координаты которых удовлетворяют
уравнению
2b2x2 + 263ж3 + с = 0
при а\х + с&22 + <^зз + ai2 + ai3 + a23 / 0-
Замечание. Нетрудно видеть, что сечением поверхности второго по-
порядка плоскостью может быть только кривая второго порядка или сама эта
плоскость. В самом деле, при соответствующем выборе системы координат
уравнение указанной плоскости примет вид ж3 = 0> а уравнение сечения
поверхности — вид
^li^i + ^22^2 + 2а\2х\х2 + 2Ь\Х\ + 2Ь2х2 + с = 0.
Если а\-± + B22 "I" ai2 7^ 05 т0 сечением будет кривая второго порядка.
В противном случае — либо прямая, либо пустое множество, либо вся
плоскость. Это и доказывает утверждение, поскольку прямая и пустое
множество — кривые второго порядка.
74 Линии и поверхности второго порядка Гл 4.
Наша цель состоит в том, чтобы классифицировать все поверхности вто-
второго порядка. Для этого постараемся, перейдя к новой системе координат,
максимально упростить данное уравнение. Как мы помним, такой переход
осуществляется при помощи поворотов на углы Эйлера и параллельного
переноса. Начнем с поворотов.
В нашем распоряжении имеются три угла Эйлера. Поэтому представ-
представляется весьма правдоподобным, что подбором этих углов удастся обратить
в нуль три коэффициента при произведениях разноименных координат, т. е.
привести данное уравнение к виду
а{х\ + а2х% + а3х\ + 2Ь{х\ + 2Ъ2х2 + 2Ь3х3 -\-с = 0. A)
Это утверждение и на самом деле оказывается верным, но доказать
его путем подбора углов Эйлера очень трудно. Поступим иначе. Полагая
dij = dji, заметим, прежде всего, что выражение
з
а\\х\ + а22х\ + а33ж3
можно переписать так:
з з.з ч
ijXiXj =^2\У2 dijXj j Xi = (AX • X).
Далее, поскольку а^- = a^, то
з з
(Ax • y) = ^ ai3XiVj = Yl a3iV3Xi = (АУ ' X)'
Перейдем теперь к решению нашей задачи. Попробуем сначала от-
ответить на такой вопрос: как должен быть направлен вектор ei, чтобы
^ з
в системе координат Ox±xf2xf3 выражение J2 UijXiXj приняло вид
ахх\ + {а!22х% + а'зз42 + 2а/23х/2х/3)? B)
Представим вектор х в виде х = х{е\ + х'2е2 + х'зе'3. Поскольку Ах =
Ae х'2Ае2 + xf3Aef3, то
(Ах • х) = (Aei • ei) x\ + 2 {Аё\ • е^) х\х'2 + 2 {Аё\ • е3)
+ (Ае;2 • е2) ж22 + 2 (Ае'2 • е3) х;24 + (Ае;3 • е3) х;3.
Мы хотим, чтобы выражения {Аё\ • е2) и (Aei • е3) обратились в нуль.
Для этого векторы Ае± и ei должны быть коллинеарными, т. е. Аё\ = Aei,
или, что то же самое, (А — XE)ei = о. Эта однородная система имеет
нетривиальное решение ei тогда и только тогда, когда ее определитель
равен нулю, т.е. когда число А удовлетворяет кубическому уравнению
§ 3. Поверхности второго порядка 75
det(A — ХЕ) = 0. Поскольку кубическое уравнение всегда имеет по край-
крайней мере один вещественный корень Aq, то при Л = Aq рассматриваемая
система имеет нетривиальное решение ei. Принимая вектор ei за первый
координатный вектор новой системы координат, мы и приведем выражение
з
^2 aijxixj к ВИДУ B)- Теперь (точно так же, как это делалось примени-
тельно к кривым второго порядка) поворотом в плоскости Oxf2xf3 можно
привести исходное уравнение к виду A) (нетрудно заметить, что Ъ = с,
однако для наших целей это не важно).
В нашем распоряжении остается еще параллельный перенос. Без огра-
ограничения общности будем считать, что |ai| ^ \а^\ ^ |&з| (в противном
случае оси координат можно переобозначить). Ясно, что а\ + а2, + а2 ф 0.
Поэтому представляются возможными три случая.
I. ai, a2, аз Ф 0. Полагая х\ = х — &i/ai, х2 = у — Ь2/а2, x% = z —
— 63/^3, приведем уравнение A) к виду
+ а2у2 + (I3Z2 + с1 = 0.
Таким образом, этот случай распадается на два:
х2 у2 z2
\\ при с' ф 0 уравнение A) принимает вид 1—— -\ = 1;
Qj О С
х2 у2 z2
Ь при с' = 0 уравнение A) принимает вид \- ^— -\ =0.
а о с
П. ai,a2 ф 0, аз = 0. Полагая х\ = х , х2 = у — —, приведем
п\ CL2
уравнение A) к виду
aix2 + а2у2 + 263S3 + с' = 0.
Этот случай распадается на три:
/
Hi ПРИ ^з Ф 0} полагая х% = z —, получим уравнение вида
х2 у2
- + т = z;
а о
~ 2 2
II2 при Ьз = 0, с' ф 0 уравнение приводится к виду \- ^— = 1;
а о
~ 2 2
Из при 63 = 0, с' = 0 уравнение принимает вид \- ^— = 0.
_ а о
III. а\ ф 0, а2 = аз = 0. Полагая Si = х -, приведем уравнение A)
к виду
с' = 0.
76 Линии и поверхности второго порядка Гл 4.
Этот случай распадается на два:
IIIi при Ь\ + Щ ф 0 сделаем сначала поворот
х2 = у' cos if — z' sin if Л
x3 = у' sin <?? + 2/ cos (^ J
и подберем угол ^ так, чтобы коэффициент при z' обратился в нуль. Для
этого, как нетрудно видеть, достаточно положить (р = 0 при 63 = О или
ctgip = 62/63 ПРИ ^з Ф О- В результате получится уравнение ai^2 + fo/ +
-\-с' = 0, где Ь ф 0. Параллельным переносом г/ = у — с' /Ъ оно приводится
к виду ж2 =3/, где а ф 0;
Ш2 при 62 = 6з = 0 уравнение принимает вид ж2 = а.
Итак, уравнение A) распадается на семь случаев.
2. Цилиндры. Рассмотрим кривую, лежащую в плоскости, и через
каждую ее точку проведем прямую, перпендикулярную к этой плоскости.
Поверхность, образованная проведенными прямыми, называется цилин-
цилиндром. Указанные прямые называются образующими цилиндра, а исходная
кривая — его направляющей.
Можно сказать иначе: направляющая цилиндра — это его сечение плос-
плоскостью, перпендикулярной к образующей. Из этого следует, что если среди
поверхностей второго порядка есть цилиндры, то их не более, чем кривых
второго порядка, т. е. не более 8.
С другой стороны, все уравнения, в которые не входит переменная z
(случаи II2, Из, IIIi, HI2), являются, очевидно, уравнениями цилиндров
с образующими, параллельными оси Oz (поскольку переменная z может
принимать произвольные значения). По внешнему виду указанные уравне-
уравнения идентичны уравнениям всех кривых второго порядка (случаи Ii, Ь, Hi,
П2 предыдущего параграфа). Поэтому цилиндров второго порядка ровно
восемь:
1° эллиптический цилиндр (направляющая — эллипс);
2° гиперболический цилиндр (направляющая — гипербола);
3° параболический цилиндр (направляющая — парабола);
4° две пересекающиеся плоскости (направляющая — две пересекающи-
пересекающиеся прямые);
5° две параллельные плоскости (направляющая — две параллельные
прямые);
6° одна плоскость (направляющая — одна прямая);
7° прямая (направляющая — точка);
8° пустое множество (направляющая — пустое множество).
3. Конусы. Рассмотрим кривую, лежащую в плоскости, и точку, не ле-
лежащую в этой плоскости. Через эту точку и каждую точку кривой проведем
прямую. Поверхность, образованная проведенными прямыми, называется
конусом. Указанные прямые называются образующими конуса, исходная
кривая — его направляющей, а исходная точка — вершиной конуса.
Ясно, что среди поверхностей второго порядка конусов не более, чем
кривых второго порядка, т. е. не более 8. С другой стороны, все поверхности,
§ 3. Поверхности второго порядка 77
описываемые уравнением
2 2 2
а о с
(случай I2), являются конусами с вершиной в начале координат. В самом
деле, как видно из уравнения, вместе с каждой точкой (жо,2/о?^о)? отлич-
отличной от начала координат, рассматриваемая поверхность целиком содержит
прямую
X = tX
z = tz0
проходящую через эту точку (при t = 1) и начало координат (при t = 0).
Представляются возможными два случая:
а) числа а, Ъ и с имеют один и тот же знак; в этом случае нашему уравне-
уравнению удовлетворяют координаты единственной точки — начала координат;
б) знак одного из чисел а, Ъ и с противоположен знаку двух других
(без ограничения общности можно считать, что а, Ъ > 0, а с < 0) и,
следовательно, наше уравнение имеет вид
2
2-
Ъ2
Поверхность, описываемая этим уравнением, называется конусом второго
порядка.
Итак, мы нашли еще две поверхности второго порядка:
9° одна точка]
10° конус второго порядка.
Первая из этих поверхностей представляет собой конус, направляющей
которого является пустое множество.
Образующей конуса второго порядка является, например, сечение плос-
плоскостью z = 1, представляющее собой эллипс с полуосями а и Ъ. Поэтому
конус второго порядка можно назвать также эллиптическим конусом. При
а = Ь = 1 он представляет собой прямой круговой конус с прямым углом
при вершине:
Ясно, что в общем случае конус второго порядка может быть получен из
прямого кругового конуса с прямым углом при вершине равномерным рас-
растяжением в а раз вдоль оси Ох ивЪ раз вдоль оси Оу (т. е. преобразованием
х -+ A/а)х, у -+ A/Ь)у).
Выясним, что представляет собой сечение прямого кругового конуса
с прямым углом при вершине плоскостью, не проходящей через вершину.
Для этого поступим так: сначала повернем систему координат на угол <??,
полагая
х = х cos (p — z sin if
z = х sin if + z cos if
78 Линии и поверхности второго порядка Гл 4.
а затем рассмотрим сечение плоскостью z = zq. В результате в плоскости
¦г = zq получим уравнение
х2 cos 2(р - 2xz0 sin 2(p + у2 = Zq cos 2<^.
При cos 2(^ = 0 это уравнение представляет собой уравнение параболы.
Если же cos 2(p ф О, то, разделив на него, приведем полученное уравнение
к виду
Ясно, что при cos2<?> > 0 полученное уравнение представляет собой
уравнение эллипса, а при cos 2(р < 0 — уравнение гиперболы. Итак,
сечение прямого кругового конуса с прямым углом при вершине плоско-
плоскостью^ не проходящей через вершину, представляет собой либо эллипс,
либо гиперболу, либо параболу. Поскольку любой конус второго порядка
может быть получен из прямого кругового конуса с прямым углом при
вершине равномерным растяжением вдоль осей Ох и Оу, то его сечения
также обладают указанным свойством. По этой причине эллипс, гиперболу
и параболу иногда называют коническими сечениями.
Замечание. Сказанное позволяет заключить, что конус второго по-
порядка, будучи эллиптическим, в определенном смысле может рассматри-
рассматриваться также как параболический или гиперболический — отсюда и назва-
название «конус второго порядка».
Конусы, направляющими которых являются две пересекающиеся или
две параллельные прямые, одна прямая и точка, представляют собой соот-
соответственно две пересекающиеся плоскости, одну плоскость и прямую, т. е.
поверхности, которые мы отнесли к числу цилиндров. Следовательно, среди
поверхностей второго порядка конусов, отличных от цилиндров, ровно
два.
4. Завершение классификации. Осталось рассмотреть два случая.
2 2 2
h °L + У + *_ = 1.
а Ь с
11°. Если числа а,Ь и с положительны, то уравнение поверхности име-
имеет вид
2 2 2
—+^+-=1
а2 + Ь2+ с2
Поверхность, описываемая этим уравнением, называется эллипсоидом.
12°. Если из чисел а, Ъ и с два пол ожите льны, а одно отрицательно, то
уравнение поверхности имеет вид
х2 у2 z2
— + — - — + 1
а2 + Ъ2 ~ с2 +
Поверхность, описываемая этим уравнением, называется однополостным
гиперболоидом.
§ 4. Эллипсоид, гиперболоиды и параболоиды 79
13°. Если одно из чисел а, Ь и с положительно, а два отрицательны, то
уравнение поверхности имеет вид
а2 + Ь2 с2
Поверхность, описываемая этим уравнением, называется двуполостным
гиперболоидом.
Наконец, если числа а, Ъ и с отрицательны, то это уравнение описывает
пустое множество, которое уже вошло в нашу классификацию.
х2 у2
а Ъ
14°. Если знаки чисел а и Ь совпадают, то уравнение поверхности
имеет вид
2 2
х у
Поверхность, описываемая этим уравнением, называется эллиптическим
параболоидом.
15°. Если знаки чисел а и Ь не совпадают, то уравнение поверхности
имеет вид
2 2
х у
Поверхность, описываемая этим уравнением, называется гиперболическим
параболоидом.
Итак, существует ровно 15 типов поверхностей второго порядка: 8
цилиндров, 2 конуса, эллипсоид, 2 гиперболоида и 2 параболоида.
§ 4. Эллипсоид, гиперболоиды и параболоиды
1. Эллипсоид. Чтобы лучше представить себе форму эллипсоида, за-
заданного уравнением
х2 у2 z2
— + — + — = 1
а2 ^ Ъ2 + с2 '
допустим сначала, что Ъ = а. Выясним, что представляет собой сечение
такого эллипсоида плоскостью z = zq. Для этого перепишем уравнение
нашего эллипсоида так:
Полагая в этом уравнении z = zq, обнаружим, что при — с ^ zq $J с
сечением является окружность с центром на оси Oz ( нулевого радиуса при
z = ±с), а при остальных значениях zo — пустое множество. Если вращать
наш эллипсоид вокруг оси Oz, то каждая точка указанной окружности бу-
будет переходить в точку этой же окружности, а значит сам эллипсоид будет
80 Линии и поверхности второго порядка Гл 4.
переходит в себя. Ясно также, что весь эллипсоид может быть получен
вращением вокруг оси Oz своего сечения плоскостью у = 0, т. е. эллипса
х2 z2
— + — - 1
а с
Поэтому такой эллипсоид называют эллипсоидом вращения.
В общем случае эллипсоид получается из эллипсоида вращения рав-
равномерным растяжением вдоль оси, перпендикулярной к оси вращения
(в нашем случае — растяжением в Ъ/а раз вдоль оси Оу), что позволяет
отчетливо представить себе его форму.
2. Гиперболоиды. Рассмотрим сначала двуполостный гиперболоид,
заданный уравнением
х2 у2 z2
?L_ + — - - 1
а2 + Ъ2 ~ с2
Ясно, что эта поверхность не имеет точек в слое —с < zq < си,
следовательно, состоит из двух частей, в одной из которых zq < —с, а в
другой zq > с. Отсюда и название — «двуполостный» гиперболоид.
При Ъ = а уравнение двуполостного гиперболоида может быть записано
так:
Поскольку сечения такого гиперболоида плоскостями z = const пред-
представляют собой окружности с центром на оси Oz, то, если вращать его
вокруг оси Oz, он будет переходит в себя. Таким образом, этот гиперболоид
может быть получен вращением вокруг оси Oz своего сечения у = 0, т. е.
вращением гиперболы
2 2
2 2
с а
вокруг ее вещественной оси. Поэтому такой гиперболоид называют двупо-
двуполостным гиперболоидом вращения. В общем случае двуполостный гипер-
гиперболоид получается из двуполостного гиперболоида вращения равномерным
растяжением вдоль оси, перпендикулярной к оси вращения.
Совершенно аналогично однополостный гиперболоид
а2 Ь2 с2 +
получается из однополостного гиперболоида вращения равномерным рас-
растяжением вдоль оси, перпендикулярной к оси вращения. Последний может
быть получен вращением гиперболы
?!_f!-i
а2 с2 ~
§ 4. Эллипсоид, гиперболоиды и параболоиды 81
вокруг ее мнимой оси. По форме однополостный гиперболоид напоминает
трубку с раструбами. Он состоит из одной части, поэтому и называется
«однополостный».
Замечание 1. Рассмотрим сечение однополостного гиперболоида
вращения
а2+ а2' с2 +
плоскостью х = а. Это сечение, очевидно, представляет собой две пересе-
пересекающиеся прямые: прямую mi, определяемую уравнениями
и прямую 777,2, определяемую уравнениями
Рассмотрим одну из них, например прямую т\. Ясно, что если мы
будем вращать эту прямую вокруг оси Oz, то она «заметет» весь гиперболо-
гиперболоид. Иными словами, однополостный гиперболоид вращения может быть
получен вращением прямой вокруг оси, скрещивающейся с этой прямой.
Замечание 2. Мысль, высказанная в замечании 1, допускает даль-
дальнейшее развитие. Ясно, что однополостный гиперболоид вращения может
быть получен вращением вокруг оси Oz не только прямой mi, но и пря-
прямой 777,2- Это означает, что через каждую точку нашего гиперболоида про-
проходят две прямые, целиком ему принадлежащие. Поскольку любой однопо-
однополостный гиперболоид может быть получен из нашего равномерным растя-
растяжением, то он также обладают указанным свойством. Итак, через каждую
точку однополостного гиперболоида проходят две прямые, целиком ему
принадлежащие.
3. Параболоиды. Рассмотрим сначала эллиптический параболоид, за-
заданный уравнением
2 2
а2 + Ь2 ~ Z'
Ясно, что при Ъ = а он представляет собой поверхность, получаемую
вращением параболы
х2 = a2z
вокруг оси Oz, т.е. вокруг оси параболы. Эта поверхность называется
параболоидом вращения. В общем случае эллиптический параболоид по-
получается из параболоида вращения равномерным растяжением вдоль оси,
перпендикулярной к оси вращения.
6 СБ. Кадомцев
82
Линии и поверхности второго порядка
Гл4.
Рассмотрим теперь гиперболический параболоид, заданный уравнением
а2 Ъ2
Эта поверхность симметрична относительно плоскостей Oxz, Oyz
и оси Oz. Ее сечения плоскостями х = xq представляют собой параболы
2
Х0
У
выпуклые «вверх», а сечения плоскостями у = у о — параболы
выпуклые «вниз». Ясно, что такая поверхность не имеет никакого сходства
с поверхностью вращения. По своей форме она напоминает седло.
При а = Ъ = 1 уравнение гипер-
гиперболического параболоида принима-
принимает вид х2 — у2 = z. Полагая х =
( )/ у = (-х )/
(т. е. осуществляя в плоскости Оху
поворот на —тг/4), приведем это
уравнение к виду 2ху = z. Нетруд-
Нетрудно заметить, что через каждую точ-
точку (хо,уо,2хоуо) этой поверхности
х = хо
проходят две прямые: _ ~
z = 2хоу
= Уо\
= 2yox J
целиком ей принад-
принадлежащие. Поскольку любой гипер-
гиперболический параболоид может быть
получен из нашего равномерным растяжением, то он также обладают ука-
указанным свойством. Итак, через каждую точку гиперболического параболо-
параболоида проходят две прямые, целиком ему принадлежащие.
Замечание. Таким образом, среди поверхностей второго порядка мы
нашли две поверхности — однополостный гиперболоид и гиперболический
параболоид, каждая из которых покрыта двумя различными семействами
прямых. На первый взгляд может показаться, что среди произвольных
поверхностей могут быть и другие поверхности, обладающие этим свой-
свойством. Оказывается, однако, что это не так. В качестве самостоятельного
упражнения предлагается доказать, что если поверхность обладает указан-
указанным свойством, то эта поверхность — либо плоскость, либо однополостный
гиперболоид, либо гиперболический параболоид.
Часть III
ЛИНЕЙНАЯ АЛГЕБРА
Глава 1
КОНЕЧНОМЕРНОЕ ЛИНЕЙНОЕ
ПРОСТРАНСТВО
§ 1. Линейное пространство
1. Аксиомы Вейля. Как известно, одна из первых попыток логиче-
логически обосновать геометрию, в частности сформулировать систему акси-
аксиом геометрии, была предпринята Евклидом в его знаменитых «Началах»
(ок. 300 г. до н. э.). Полностью вопрос об аксиоматизации геометрии был
решен великим немецким математиком Давидом Гильбертом A899 г.).
В несколько видоизмененном виде система аксиом Гильберта фигурирует
в современных школьных учебниках геометрии, поэтому здесь мы не бу-
будем на ней останавливаться подробно. Подчеркнем лишь, что основными
объектами в ней являются точки, прямые, плоскости, «лежать между»
(для трех точек одной прямой) и ряд других.
В 1918 году немецкий математик Герман Вейль предложил принципи-
принципиально новую систему аксиом геометрии. В ней основных объектов два: век-
векторы и точки. Эти объекты не определяются, а их свойства описываются
аксиомами, список которых удобно разделить на четыре группы.
I. Предполагается, что имеются две операции: операция сложения,
ставящая в соответствие любой упорядоченной паре векторов х, у вектор
х + у, и операция умножения вектора на число, ставящая в соответствие
любому вектору х и любому числу Л вектор Лх. При этом:
1° для любых векторов х и у выполняется равенство х + у = у + х;
2° для любых векторов х, у и z выполняется равенство х + (у + z) =
= (х + у) + z;
3° существует такой вектор о, что для любого вектора х выполня-
выполняется равенство х + о = х;
4° для любого вектора х существует такой вектор (—х), что х +
+ (-х) = о;
5° для любого вектора х имеет место равенство 1х = х;
6° для любых векторов х и у и любого числа А выполняется равенство
А(х + у) = Лх + Лу;
7° для любого вектора х и любых чисел А и fi имеет место равенство
(А + /i)x = Лх + /хх;
8° для любого вектора х и любых чисел Л и /i имеет место равенство
= (А/х)х.
§ 1. Линейное пространство 85
П. Пользуясь приведенными аксиомами, можно определить понятия
линейной комбинации векторов (тривиальной, или нетривиальной), линей-
линейной зависимости и линейной независимости так, как это делалось в п. 3 §1
гл. 1 ч.1. Это позволяет сформулировать еще две аксиомы:
1° существует п линейно независимых векторов]
2° любые (п + 1) векторов линейно зависимы.
Для планиметрии п = 2, а для стереометрии п = 3.
Ш. Предполагается, что имеется операция скалярного умножения, ста-
ставящая в соответствие любой упорядоченной паре векторов х, у число (х, у).
При этом:
1° для любых векторов х и у выполняется равенство (х, у) = (у, х);
2° для любых векторов х, у и z выполняется равенство (х + у, z) =
= (x,z) + (y,z);
3° для любых векторов х и у и любого числа Л выполняется равенство
(Ах, у) = А(х,у);
4° для любого вектора х имеет место неравенство (х, х) ^ 0, причем
(х, х) = 0 тогда и только тогда, когда х = о.
IV. Предполагается, что имеется правило, по которому любой упоря-
упорядоченной паре точек А, В ставится в соответствие вектор АВ. При этом:
1° для любого вектора х и любой точки О существует единственная
точка М такая, что ОМ = х (откладывание вектора от данной точки);
2° для любых точек А,ВиС имеет место равенство АВ+ВС = АС
(правило треугольника).
Как мы знаем, если в рамках аксиоматики Гильберта назвать вектором
направленный отрезок, а сумму векторов, произведение вектора на число
и скалярное произведение векторов определить так, как это было сделано
выше, то все аксиомы Вей л я окажутся теоремами — мы их доказали. Ока-
Оказывается, что верно и обратное: если, исходя из аксиом Вейля, определить
прямые, плоскости и другие основные понятия системы аксиом Гильберта,
то все аксиомы Гильберта станут теоремами — их можно будет доказать.
Таким образом, системы аксиом Гильберта и Вейля эквивалентны.
Из рассмотрения аксиом Вейля становится ясным, что основную роль
в них играют векторы — точки появляются лишь в последней группе
аксиом, причем от точек требуется лишь, чтобы они были определенным
образом связаны с векторами. Поэтому наиболее содержательная часть
евклидовой геометрии должна описываться векторами. Это наблюдение
наводит на мысль о целесообразности создания отдельного раздела матема-
математики, посвященного изучению свойств векторов, описываемых аксиомами
Вейля (I, II и III группы аксиом). Таким разделом математики и является
линейная алгебра.
2. Линейное пространство.
Определение. Множество L называется линейным простран-
пространством, если для всех его элементов определены операции сложения двух
элементов и умножения элемента на число, удовлетворяющие I группе
аксиом Вейля. Элементы линейного пространства называются векто-
векторами.
86 Конечномерное линейное пространство Гл 1.
Замечание. Числа, фигурирующие в этом определении, понимаются,
вообще говоря, в весьма широком смысле (на этом вопросе мы остановимся
в конце курса). Мы же будем понимать под числами либо вещественные
числа (в этом случае говорят о линейном пространстве над полем R веще-
вещественных чисел), либо комплексные числа (в этом случае говорят о линей-
линейном пространстве над полем С комплексных чисел). Как правило, о каких
именно числах — вещественных или комплексных — идет речь, для нас
будет несущественно. В тех случаях, когда это будет принципиально, мы
будем специально оговаривать, что в данном случае понимается под словом
«число».
Пример 1. Очевидным примером линейного пространства над по-
полем Ш. является множество векторов — направленных отрезков на прямой,
на плоскости или в пространстве.
Пример 2. Не менее очевидный пример линейного пространства —
арифметическое пространство (W1, или Сп).
Пример 3. Еще одним очевидным примером линейного простран-
пространства является множество всех (га х п)-матриц.
Пример 4. Рассмотрим множество С [а, Ъ] всех непрерывных на от-
отрезке [а, Ъ\ функций. Если сумму функций и умножение функции на число
понимать в общепринятом смысле, то это множество также окажется при-
примером линейного пространства, поскольку при фиксированном значении
аргумента складываются и умножаются на число обычные числа, причем
в результате таких операций получаются функции, непрерывные на отрез-
отрезке [а, Ь].
Можно привести очень большое количество самых разнообразных при-
примеров линейного пространства. Но и приведенных примеров достаточно,
чтобы понять, что класс линейных пространств весьма широк.
3. Свойства линейного пространства.
Теорема 1. В линейном пространстве:
1° вектор о, существование которого гарантируется аксиомой 3°,
определяется единственным образом;
2° вектор (—х), существование которого гарантируется аксиомой 4°,
определяется единственным образом.
Доказательство. 1°. Допустим, что существуют два вектора — Oi
и 02 — такие, что для любого вектора х имеют место равенства: х + Oi =
= х + 02 = х. Тогда, в частности, Oi + 02 = 01 =02+01 =02, т.е.
Oi = о2.
2°. Допустим, что для некоторого вектора х существуют два вектора —
(—хI и (—хJ — такие, что имеют место равенства: х + (—хI = х +
+ (-хJ = о. Тогда (-х)! + (х+ (-хJ) = (-х)х +о = (-х)х = (-х)г +
+ х) + (-хJ = о + (-хJ = (-хJ + о = (-хJ, т.е. (-хI = (-хJ.
Теорема доказана.
Теорема 2. Для любого х Е L имеют место равенства:
1° Ох = о;
§ 1. Линейное пространство 87
Доказательство. 1°. Имеем: Ох + х = @ + 1)х = х. Прибавляя
к левой и правой частям этого равенства вектор (—х), получаем: Ох +
+ (х + (—х)) = 0х + о = 0х = х+ (—х) = о, откуда Ох = о.
2°. Имеем: х + (—1)х = A — 1)х = Ох = о. Теорема доказана.
Теорема 3. Для любых двух векторов a,b E L существует един-
единственный вектор х Е L, являющийся решением уравнения а + х = b
и называемый разностью b — а векторов b и а.
Доказательство. Допустим сначала, что существует такой век-
вектор х, что а + х = Ь. Прибавим к обеим частям этого тождества век-
вектор (—а): (—а + а) + х = (—а) + Ь, откуда х = (—а) + Ь. Таким образом,
если решение уравнения а + х = b существует, то оно определяется
единственным образом: х = (—а) + Ь. Осталось доказать, что х = (—а) +
+ b действительно является решением указанного уравнения. Имеем: а +
+ (—a) + b = o + b = b, что и требовалось доказать.
Следствие. b-a = b + (-a) = b + (—1)а.
4. Линейное подпространство.
Определение. Подмножество L/ линейного пространства L назы-
называется линейным подпространством, если оно само является линейным
пространством, в котором сумма векторов и произведение вектора на
число определяются так же, как в L.
Теорема. Подмножество I/ линейного пространства является ли-
линейным подпространством тогда и только тогда, когда оно обладает
двумя свойствами:
1° для любых двух векторов х и у множества L/ вектор х + у
принадлежит I/;
2° для любого вектора х множества L/ и любого числа А вектор Ах
принадлежит L/.
Доказательство. Ясно, что если множество I/ является линейным
подпространством, то свойствами 1° и 2° оно обладает — это следует
непосредственно из определения.
Допустим, что некоторое подмножество I/ линейного пространства L
обладает свойствами 1° и 2°. Тогда для всех элементов множества I/
определены операции сложения двух элементов и умножения элемента на
число, причем они осуществляются по тем же правилам, что и в простран-
пространстве L. Элемент о пространства L принадлежит I/, так как он равен Ох,
где х — произвольный вектор L/; для любого элемента х множества I/
вектор (—х) также принадлежит L/, так как он равен (—1)х. Наконец,
операции сложения и умножения на число удовлетворяют и всем остальным
аксиомам линейного пространства, поскольку все векторы множества I/
являются в то же время векторами линейного пространства L. Следова-
Следовательно, множество I/ — линейное подпространство. Теорема доказана.
Пример 1. Рассмотрим множество всех решений однородной системы
линейных уравнений Ах = о. Это множество является, очевидно, под-
подмножеством арифметического пространства. С другой стороны, если х =
= {ж1,ж2, ••• ,^п}иу = {j/1,2/2, ••• ,уп} —Два решения, то х+у и Ах при
любом А — также решения этой системы. В самом деле, А(х + у) = Ах +
+ Ау = о + о = о, А (Ах) = ХАх. = Ао = о. Следовательно, множество
88 Конечномерное линейное пространство Гл 1.
всех решений системы Ах = о является линейным подпространством
арифметического пространства.
Пример 2. Линейной оболочкой L(xi,x2, ... ,х&) векторов Xi,
Х2, ... , х& называется множество всех линейных комбинаций этих
векторов.
Нетрудно видеть, что:
линейная оболочка является линейным подпространством, поскольку
сумма любых двух ее элементов и произведение любого ее элемента на
число ей принадлежат;
линейная оболочка является минимальным линейным подпростран-
подпространством, содержащим векторы хь х2, ... , х&, так как любое линейное под-
подпространство, содержащее указанные векторы, содержит также и любую
их линейную комбинацию.
Отметим, что если какие-нибудь т (т < к) из данных векторов
(без ограничения общности — Xi, ... ,xm) представляют собой линейные
комбинации остальных, то L(xi, ... , х&) = L(xm_|_i, ... , х&), поскольку
любая линейная комбинация векторов xi, ... , х& является в то же время
и линейной комбинацией векторов xm+i, ... , х&.
§ 2. n-мерное линейное пространство
1. Базис и размерность. Наличие двух операций в линейном про-
пространстве позволяет определить понятия линейной комбинации и линейной
зависимости векторов (п. 3 § 1 гл. 1 ч. 1), а также ввести понятие базиса так,
как это делалось в аналитической геометрии (п. 4 § 4 гл. 1 ч. 2).
Определение 1. Линейное пространство называется п-мерным
(и обозначается Ln), если оно удовлетворяет II группе системы аксиом
Вейля.
Число п при этом называют размерностью этого пространства и пишут:
dim L = п.
Теорема 1. Любые п линейно независимых векторов в простран-
пространстве Ln образуют базис.
Доказательство. Допустим, что векторы ei,e2, ••• , еп линейно
независимы, и рассмотрим произвольный вектор х. Поскольку размерность
пространства равна п, то векторы х,ei,e2, ••• ,еп линейно зависимы.
Следовательно, существуют такие числа Ao,Ai, ... ,АП, не обращающи-
обращающиеся в нуль одновременно, что Aqx + Aiei + ... + Anen = о, причем Aq
отлично от нуля (иначе оказалось бы, что векторы ei, e2, • • • , еп линейно
зависимы). Но тогда обе части этого равенства можно умножить на 1/Ао
и получить разложение вектора х по векторам ei, e2, • • • , еп.
Итак, векторы ei,e2, ... , еп линейно независимы, и любой вектор х
пространства L может быть по ним разложен. Теорема доказана.
Теорема 2. Если в линейном пространстве L существует базис из
п векторов, то это пространство — п- мерное.
§ 2. п-мерное линейное пространство 89
Доказательство. Допустим, что векторы ei,e2, ••• ,еп образуют
базис линейного пространства L. Тем самым в этом пространстве суще-
существует п линейно независимых векторов (векторы ei, ег, • • • , еп). Осталось
доказать, что любые (п + 1) векторов линейно зависимы.
Пусть gi, g2, ... , gn+i — произвольные векторы пространства L. Раз-
Разложим каждый из них по базису ei, ег, • • • , еп:
gi =
gn+1 = ^() {)
Ранг матрицы Gr не превосходит количества п ее столбцов, поэто-
поэтому ее строки (их п + 1) линейно зависимы. Следовательно, векторы
gb g2, • • • , gn+i также линейно зависимы. Теорема доказана.
Определение 2. Коэффициенты разложения вектора по базису
(т.е. числа, фигурирующие в этом разложении), называются координата-
координатами вектора в этом базисе. Координаты вектора в данном базисе определя-
определяются единственным образом — это утверждение доказывается точно так
же, как в аналитической геометрии (п. 4 § 4 гл. 1 ч. 2). Тот факт, что вектор
х имеет координаты ж1? ж25 ... , жп, условимся, как и прежде, обозначать
так: х = {ж1,ж2, ... ,хп}.
Теорема 3.
1° Еслих = {хих2, ••• ,хп}, у = {г/i,г/2, ••• ,2/п}, шох + у = {^1 +
+ 2/1,ж2 + 2/1, ••• ,^п + уп};
2° если х = {а?1, Ж2? • • • ^ жп}5 то Ах = {A#i, А^2, ... , Ажп}.
Доказательство. Имеем: 1° х + у = х±е\ + ... + хпеп +
+ 2/iei + ... + г/пеп = (а?1 + 2/i)ei + ... + (хп + уп)еп;
2° Ах = A(a?iei + ... + хпеп) = (A#i)ei + ... + (Ххп)еп. Теорема
доказана.
2. Примеры.
Пример 1. Ясно, что размерность пространства векторов — направ-
направленных отрезков на прямой, на плоскости и в пространстве равна соответ-
соответственно 1, 2 и 3.
Пример 2. Ясно также, что dimlRn = dim Cn = п.
Пример 3. Размерность линейного пространства — множества всех
(га х п)-матриц равна ran, поскольку оно отличается от RmXn или СшХп
лишь формой записи элементов. Базисом в нем являются, например,
(га х п)-матрицы, в каждой из которых один элемент равен 1, а все осталь-
остальные — 0.
Пример 4. Если векторы xi, X2, ... , х& линейно независимы, то раз-
размерность их линейной оболочки равна /с, поскольку эти векторы образуют
базис в L(xbx2, ... ,Xfc).
Пример 5. Множество С [а, Ь] всех непрерывных на отрезке [а, Ъ]
функций не имеет конечной размерности, поскольку, например, степен-
степенные функции 1,ж,ж2, ... ,жп, ... линейно независимы (напомним, что
многочлен тождественно равен нулю тогда и только тогда, когда все его
90 Конечномерное линейное пространство Гл 1.
коэффициенты равны нулю), а их бесконечно много. Линейные простран-
пространства, не имеющие конечной размерности, изучаются в специальном разделе
математики, называемом «функциональный анализ».
Пример 6. Найдем размерность пространства решений однородной
системы линейных уравнений. Напомним, что каждое решение представля-
представляет собой набор из п чисел {х\, х2, ... , xr, ci, с2, ... , сп_г} (здесь г — ранг
матрицы системы, п — количество неизвестных), где числа ci, C2, ... , сп_г
могут быть выбраны произвольно, а числа xi,^2, ... , хг по выбранным
ci,C2, ... , сп-г находятся однозначно. Полагая сначала с\ = 1, c<i =
= 0, ... , сп-г = 0, затем с\ = 0, с<2 = 1, ... , сп_г = 0 и т. д., мы получим
(п—г) решений. При этом любое решение {ж1,Ж2, ... ,xr,ci,C2, ... ,cn_r}
данной системы представляет собой их линейную комбинацию с коэффици-
коэффициентами ci, C2, ... , сп_г, и, сверх того, они линейно независимы (поскольку
равенство {х\, Ж2, ... , жг, ci,C2, ... , сп_г} = {0, ... ,0} возможно лишь
при с\ = С2 = ... = сп-г = 0). Таким образом, указанные решения образу-
образуют базис в пространстве решений, а значит размерность этого пространства
равна п — г.
Любой базис в пространстве решений однородной системы линейных
уравнений называется фундаментальной совокупностью решений этой
системы.
3. Изоморфизм.
Определение. Линейные пространства L и L/ называются изо-
изоморфными, если между их элементами можно установить такое вза-
взаимно однозначное соответствие х о х', что:
1° если хнх',у^у',тох + унхЧ у';
2° если х о х', то Ах <н> Ах'.
Само это соответствие называется изоморфизмом.
Замечание. При изоморфизме нулевой элемент пространства L пе-
переходит в нулевой элемент пространства L/. В самом деле, если х <-$- х', то
Ох = о о 0х' = (У.
Теорема 1. Если пространства L и L/ изоморфны, то dimL =
Доказательство. Допустим, что пространства L и L/ изоморф-
изоморфны, dimL = п. Пусть xi,X2, ••• ,хп — произвольные линейно неза-
независимые векторы пространства L. Тогда соответствующие им векторы
х^х^, ... ,х^ также линейно независимы, поскольку если их линейная
комбинация равна о', то соответствующая ей линейная комбинация век-
векторов xi, X2, ... , хп равна о. С другой стороны, любые (п + 1) векторов
пространства L/ линейно зависимы, так как соответствующие им векторы
пространства L линейно зависимы. Следовательно, dimL' = п. Теорема
доказана.
Теорема 2. Любые два линейных пространства над одним и тем же
полем и одинаковой размерности изоморфны.
Доказательство. Пусть ei, е2, • • • , еп и e'i, е2, ... , е'п — базисы
в пространствах L иЬ' соответственно. Поставим в соответствие произ-
произвольному элементу х = xiei + 2^2 + ... + хпеп пространства L элемент
х' = xiefi-\-X2ef2 + .. .-\-xnefn пространства L'. Это соответствие, очевидно,
§ 2. п-мерное линейное пространство 91
взаимно однозначное, а значит, как следует из теоремы 3 п. 1, является
изоморфизмом. Теорема доказана.
Замечание 1. Эта теорема позволяет вместо абстрактного конечно-
конечномерного линейного пространства рассматривать любую его модель, т. е. лю-
любой конкретный пример линейного пространства (например, W1 или Сп).
При этом все результаты, полученные в рамках этой модели, будут ав-
автоматически переноситься на абстрактное линейное пространство той же
размерности или любую его модель.
Замечание 2. К любой системе аксиом обычно предъявляют три
требования: непротиворечивость, полнота и независимость.
Непротиворечивость означает, что ни одна из аксиом не противоречит
остальным аксиомам. Применительно к аксиомам Вейля это требование,
очевидно, выполнено, иначе ей не могли бы удовлетворять векторы —
направленные отрезки.
Полнота означает, что все модели данной системы аксиом изоморф-
изоморфны, т. е. между любыми основными объектами любых двух из них можно
установить взаимно однозначное соответствие, сохраняющее основные от-
отношения между ними. Тем самым теорему 2 можно сформулировать так:
система аксиом п-мерного линейного пространства полна.
Наконец, система аксиом называется независимой, если ни одна из
аксиом не может быть выведена из других как теорема. Этому требованию
аксиомы Вейля не удовлетворяют. В самом деле, если к полной системе ак-
аксиом добавить новые аксиомы, не описывающие новых основных понятий,
то она станет либо противоречивой, либо зависимой — в противном случае
можно было бы указать две неизоморфные друг другу модели исходной,
полной системы аксиом. Из этого, в частности, следует, что аксиомы III
группы не могут быть аксиомами, поскольку новых основных понятий они
не описывают. Более того, даже вопрос о независимости аксиом I группы
(линейного пространства) оказывается не вполне ясным. Как мы увидим
в конце курса, при наиболее естественной трактовке аксиомы 4° аксиома 1°
является теоремой, а не аксиомой!
4. Линейное дополнение.
Определение 1. Пересечением Li П L2 двух линейных подпро-
подпространств Li и L2 линейного пространства Ln называется множество
всех векторов пространства Ln, принадлежащих как Li, так и L2.
Теорема 1. Пересечение двух линейных подпространств является
линейным подпространством.
Доказательство. Если х,у G Li П L2, то х,у G Li и х,у G L2,
поэтому х + у G Li их + у G L2, т. е. х + у G LifiL2; если х G LiflL2, то
х G Li и х G L2, поэтому Ах G Li и Ах G L2, т. е. Ах G Li П L2. Теорема
доказана.
Теорема 2. Пусть ei, ... ,е& — базис подпространства Li,
gb • • • •) gm — базис подпространства^. Векторы ei, ... , е&, gi, ... , gm
линейно независимы тогда и только тогда, когда Li П L2 = о.
Доказательство. Рассмотрим равенство
... + Xkek = /iigi + • • • + /imgm- A)
92 Конечномерное линейное пространство Гл 1.
Левая часть этого равенства представляет собой вектор Xi про-
пространства Li, а правая — вектор Х2 пространства Г»2. Если векторы
еъ ••• ? efe? gi 5 ••• >gm линейно независимы, то равенство A) возможно
лишь при Xi = fij = 0, т. е. когда xi = Х2 = о, а значит, Li П L»2 = о.
Обратно, если Li П L»2 = о, то равенство xi = X2 возможно лишь при
Xi = Х2 = о, т.е. равенство A) возможно лишь при А^ = fij = 0.
Следовательно, векторы ei, ... ,e^,gi,... ,gm линейно независимы.
Теорема доказана.
Определение 2. Говорят, что пространство Ln представляет со-
собой прямую сумму Li 0 L2 двух своих линейных подпространств Li и
L2, если любой вектор х пространства Ln может быть единственным
образом представлен в виде суммы xi + X2, где xi G Li, Х2 G L2.
Теорема 3. Ln = Li 0 L/2 тогда и только тогда, когда совокупность
базисов подпространств Li и L2 образует базис пространства Ln.
Доказательство. Пусть ei, ... ,е& — базис пространства Li,
gb • • • 5 gm — базис пространства L2.
Если Ln = Li 0 L2, то любой вектор х пространства Ln может
быть единственным образом представлен в виде суммы xi + X2, где
xi G L»i,X2 G L2, т.е. единственным образом разложен по векторам
еъ • • • >еьёъ • • • ,gm- Следовательно, эти векторы образуют базис про-
пространства Ln (п. 4 §4 гл.1 ч. 2).
Обратно, если векторы ei, ... ,e^,gi, ... , gm образуют базис про-
пространства Ln, то любой вектор х этого пространства может быть един-
единственным образом по ним разложен, т. е. представлен в виде суммы xi +X2,
где xi G Li, X2 G L2. Теорема доказана.
Следствие. Ln = Li 0 L2 тогда и только тогда, когда Li и L2
обладают двумя свойствами: 1° dimLi + dimL2 = щ 2° Li П L2 = о.
В самом деле, если Ln = Li 0 L2, то векторы ei, ... , е&, gi, ... , gm
образуют базис пространства Ln, поэтому их количество равно п и они
линейно независимы, т. е. Li nL/2 = о. Обратно, если Li flL/2 = о и dim Li +
+ dimL2 = п, то векторы ei, ... ,e&,gi, ... ,gm линейно независимы
и их количество равно п, поэтому они образуют базис пространства Ln.
Следовательно, Ln = Li 0 L2.
Определение 3. Пространство L называется линейным дополне-
дополнением подпространства L пространства Ln, если Ln = L 0 L.
Теорема 4. Любое подпространство L пространства Ln имеет ли-
линейное дополнение.
Доказательство. Пусть ei, ... , е& — базис пространства L. Вос-
Воспользуемся методом математической индукции. Если к = п, то L = о.
Допустим, что теорема уже доказана для случая к = m + 1 ^ пи докажем,
что тогда она верна и в случае к = т < п.
Поскольку к < п, то в пространстве Ln существует такой вектор e^+i,
что векторы ei,... ,ek,?k+i линейно независимы (в противном случае
dimLn = к < п) и, следовательно, образуют базис в линейной обо-
оболочке L(ei, ... ,efc,efc_|_i). Так как dimL(ei, ... ,е^,е^_|_1) = к + 1 =
= т + 1, то по предположению индукции в Ln существует линейное
§ 2. п-мерное линейное пространство 93
дополнение пространства L(ei, ... , e^efc+i). Пусть е&+25 ••• •> еп — ба-
базис в нем. Тогда по теореме 3: а) еь ... , еп — базис в Ln; б) Ln =
= L(eb ... ,efe) 0 L(efe+i, ... ,en), т.е. L(e/c+b ... ,en) — линейное до-
дополнение пространства L = L(ei, ... , e&). Теорема доказана.
Следствие. Любую совокупность линейно независимых векторов
можно дополнить до базиса во всем пространстве (для этого достаточно
построить линейное дополнение к линейной оболочке этих векторов и найти
в нем какой-нибудь базис).
Замечание. Обратим особое внимание на то, что линейное допол-
дополнение подпространства L определяется неоднозначно. В самом деле, ес-
если, например, ei, е2 — базис пространства L2, то при любом AL2 =
= L(ei) ® L(e2 + Aei) (поскольку векторы ei и е2 + Aei линейно независи-
независимы), т. е. L(e2 + Aei) — линейное дополнение пространства L(ei). В связи
с этим возникает вопрос: существует ли простой алгоритм построения
какого-нибудь из линейных дополнений данного подпространства? Такой
алгоритм существует, однако описать его мы пока не можем. К этому
вопросу мы вернемся в гл. 4.
Глава 2
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
§ 1. Операторы, действующие из Ln в Lm
1. Линейный оператор.
Определение 1. Линейным оператором А, действующим из линей-
линейного пространства Ln в линейное пространство Lm, называется такое
отображение Ln в Lm, при котором:
1° для любых х, у G Ln имеет место равенство А(х + у) = -А(х) +
()
я любого х G Ln u любого числа А имеет место равенство
Из этого определения, очевидно, следует, что для любых xi, ... , х& G
G Ln и любых чисел Ai, ... , А& имеет место равенство A(AiXi + ...
Приведем два примера линейных операторов.
Пример 1. Линейная функция у = ах является, очевидно, приме-
примером линейного оператора, действующего из М1 в М1 (или из С1 в С1).
Пример 2. Рассмотрим произвольную (га х п)-матрицу А. Сово-
п
купность равенств yi = ^2 disxs (г = 1, ... , m) определяет линейный
8 = 1
оператор, действующий из W1 в Мт (или из Сп в Ст). В самом деле,
п п п п п
J2 ais {xs + xa) = J2 aisXs + S G4sxs и ^ aisAxs = A J2 aisxs- Как
s=l s=l s=l s = l s=l
мы вскоре увидим, это пример является в определенном смысле универ-
универсальным.
Определение 2. Суммой линейных операторов А и В, действую-
действующих из Ln в Lm, называется отображение С Ln в Lm вм?а: С(х) =
() ()
() ()
Поскольку С(х + у) = А(х + у) + Б(х + у) = А(х) + Б(х) + ()
+ В (у) = С(х) + С(у) и С(Ах) = А(Ах) + Б(Ах) = АА(х) + АБ(х) =
= АС(х), то С(х) — линейный оператор.
Определение 3. Произведением оператора А, действующего из
Ln в Lm, на число А, называется отображение В Ln в Lm
() ()
Так как Б(х + у) = АА(х + у) = АА(х) + АА(у) = Б(х) + Б(у)
и B(fix.) = АА(/хх) = А/хА(х) = /х.В(х), то -В(х) — линейный оператор.
Теорема. Множество A(Ln,Lm) всех линейных операторов, дей-
действующих из Ln в Lm, является линейным пространством.
§ 1. Операторы, действующие из Ln в Lm 95
Доказательство. Роль о в множестве A(Ln,Lm) играет нулевой
оператор О, действующий по правилу О(х) = о, так как А(х) + О(х) =
= А{х). Роль (—А) играет оператор (—1)Д так как А(х) + (—1)А(х) =
= о = О(х). Все остальные аксиомы линейного пространства также
выполнены, так как при фиксированном значении аргумента складываются
и умножаются на число векторы из Lm.
2. Матрица линейного оператора. Пусть А — линейный опера-
оператор, действующий из Ln в Lm, ei, ... ,en — базис пространства Ln,
gb • • • •> gm — базис пространства Lm, x — произвольный вектор простран-
/ п \ п
ства Ln, у = А(х). Имеем: у = Al ^2 Xjej ) = ^2 А (е^) Xj. Каждый из
векторов A(ej), будучи элементом пространства Lm, может быть разложен
по базису этого пространства:
Матрица, состоящая из чисел а^, называется матрицей линейного
оператора А в базисах ei, ... , еп и g1? ... , gm.
Итак, у = J2aijxj8i = ZJ/*g*j откуда
i,j г=1 i j
= о. Поскольку векторы gi, ... , gm линейно независимы, то это равенство
эквивалентно равенствам
п
yi = ^2aijxj. A)
3 = 1
Замечание 1. Из определения матрицы линейного оператора следу-
следует, что ее первый столбец — это координаты вектора -A(ei), второй — это
координаты вектора А(е2) и т. д.
Замечание 2. Мы установили, что при выбранных базисах
ei, ... ,еп и gi, ... , gm каждому линейному оператору соответствует
(т х п)-матрица, столбцами которой являются координаты векторов А(е{).
Ранее (см. пример 2 п. 1) было установлено, что каждой (т х п)-матрице
соответствует линейный оператор, определяемый формулой A). Таким
образом, при выбранных базисах ei, ... , еп и gi, ... ,gm соответствие
между линейными операторами и (m x п)-матрицами является взаимно
однозначным.
Замечание 3. Если договориться записывать координаты векторов
в виде столбцов, то формулу A) можно записать так: у = Ах, где Ах —
произведение матриц А и х. С учетом замечания 2 это дает возможность
обозначать сам оператор и его матрицу одной и той же буквой, а вместо
записи А(х) использовать запись Ах..
Теорема. Пространство A(Ln,Lm) и множество всех (т х п)-
матриц изоморфны.
96 Линейные операторы Гл 2.
Доказательство. Выберем какой-нибудь базис пространства Ln
и какой-нибудь базис пространства Lm. Тогда, согласно замечанию 2, будет
установлено взаимно однозначное соответствие между линейными опера-
операторами из пространства A(Ln, Lm) и (т х п)-матрицами. При этом сумме
матриц А и В соответствует оператор С, действующий по правилу: Сх =
= (А + 5)х = Ах + i?x, т. е. оператор А + #. Матрице АА соответствует
оператор В, действующий по правилу: В~к = (АА)х = ААх, т.е. опера-
оператор ХА. Следовательно, указанное соответствие является изоморфизмом.
Теорема доказана.
Следствие. dimA(Ln,Lm) = тп.
3. Образ оператора.
Определение 1. Множество значений линейного оператора А на-
называется образом этого оператора и обозначается так: imA.
Таким образом, im A = A(Ln).
Замечание. Ясно, что если А — линейный оператор, действующий
из Ln в Lm, то im А С Lm (т. е. im А является подмножеством Lm). Более
того, im A — это линейное подпространство Lm. В самом деле:
1° если уь У2 Е im А, т. е. yi = Axi и у2 = Ах2 при некоторых хь х2,
то A(xi + х2) = Axi + Ах2 = yi + у2, т.е. yi + y2 G im A;
2° если у G imi, т.е. у = Лх, то А(Хх) = ААх = Ау, т.е. Ay G im A
Теорема, dim im A = rang A.
Доказательство. Пусть А — линейный оператор, действующий из
/ П ч П
Ln в Lm. Имеем: А (х) = A[Y^ х^еЛ = ^ ж^(е^), поэтому imA =
= L(A(ei), ... , А(еп)), т. е. im A — это линейная оболочка столбцов мат-
матрицы Л, которая, очевидно, совпадает с линейной оболочкой базисных
столбцов. Поскольку базисные столбцы линейно независимы и их количе-
количество равно рангу матрицы А, то dim im A = rang А. Теорема доказана.
Следствие, dimim^ ^ п.
Определение 2. Рангом линейного оператора называется ранг его
матрицы.
Из доказанной теоремы следует, что ранг оператора, будучи равным
размерности его образа, не зависит от выбора базисов.
Замечание. Пусть imA — линейное дополнение образа оператора А,
действующего из Ln в Lm. Каждый ненулевой вектор у этого пространства
не имеет прообраза. Иными словами, система уравнений Ах = у не имеет
решений (в противном случае оказалось бы, что у G im А, чего не может
быть, поскольку imA П imA = о). Ясно, что dim imA + dim imA = т.
4. Ядро оператора.
Определение. Множество всех аргументов х линейного операто-
оператора Ах, для которых Ах = о, называется ядром этого оператора и обо-
обозначается так: ker А.
§ 1. Операторы, действующие из Ln в Lm 97
Замечание. В арифметическом пространстве ker A — это множество
решений однородной системы линейных уравнений Ах = о. Следователь-
Следовательно, ker A — это линейное подпространство того пространства, из которого
действует оператор А.
Теорема. Пусть А — линейный оператор, действующий из Ln в Lm.
Тогда dim im A + dim ker A = п.
Доказательство, dim ker A — это размерность пространства реше-
решений однородной системы линейных уравнений Ах = о. Следовательно,
dim ker A = п — rang А = п — dim im А. Теорема доказана.
Замечание. Пусть ker A — линейное дополнение ядра оператора А,
действующего из Ln в Lm. Для каждого ненулевого вектора х этого про-
пространства имеет место неравенство Ах ф о (в противном случае оказалось
бы, что х Е ker А, чего не может быть, поскольку ker А П ker A = о). Ясно,
что dim ker A + dim ker A = п, поэтому из доказанной теоремы следует
равенство dim ker A = dim im A.
5. Произведение операторов.
Определение. Пусть В — линейный оператор, действующий из Ln
в Lfe, A — линейный оператор, действующий из Lfe в Lm. Произведени-
Произведением АВ называется отображение С Ln в Lm вида: С(х) = А(Вшх).
Поскольку ЛВ(х + у) = А(Вх + By) = АВ(х) + АВ{у) и АВ(Хх) =
= А(ХВх) = ХАВ(х), то АВ — линейный оператор.
Теорема 1. Матрица оператора АВ равна АВ.
Доказательство. Пусть у = АВ(х). Имеем:
/ _ . ^^ ^^ _ _ \хг.
5 = 1
Теорема доказана.
Следствие. Произведение операторов обладает всеми свойствами
произведения матриц.
Теорема 2. rang AB ^ rang А и rang AB $J rang В.
Доказательство. Справедливость этого утверждения легко усмат-
усматривается из следующего схематического рисунка.
В самом деле, im АВ — это то, во что оператор А переводит im.B.
Следовательно, dim im AB $J dim im В (см. следствие из теоремы п. 3), т. е.
7 С. Б. Кадомцев
98 Линейные операторы Гл 2.
rang AB ^ rang В. Далее, ш\В CLfe,a значит, im AB С im А. Поэтому
dimim AB ^ dimim Л, т.е. rang AB ^ rang А. Теорема доказана.
Замечание. Пользуясь рисунком, нетрудно найти точное значение
разности rang .В — rang А В. Действительно, если рассматривать опера-
оператор А как действующий из ив. В в imiB, то (согласно теореме п. 4)
можно написать так: dimim^|im? + dimkerA|im? = dimim В. Но
dimimA|im? = dimim AE> = rang^^B, dimker A|im^ = dim(ker А П
П im B), dim im В = rang В. Таким образом,
rang В — rang AB = dim(ker А П im B).
§ 2. Операторы, действующие из Ln в Ln
1. Тождественный оператор и обратный оператор. Особого внима-
внимания заслуживает случай, когда размерность того пространства, из которого
действует линейный оператор, совпадает с размерностью того простран-
пространства, в которое он действует. В этом случае обычно считают, что указанные
пространства совпадают х). Иными словами, под линейным оператором,
действующим из Ln в Ln, понимают оператор, переводящий элементы
пространства Ln в элементы этого же пространства.
Напомним, что для определения матрицы линейного оператора, дей-
действующего из Ln в Lm, необходимо задать два базиса: один — в про-
пространстве Ln, а другой — в пространстве Lm. Если же эти пространства
совпадают, то необходимость введения двух базисов отпадает — достаточно
одного базиса. Тем самым, матрица линейного оператора, действующего из
п
Ln в Ln, определяется равенствами: A (ej) = J2 aijei-
i=l
Определение 1. Отображение Е Ln в Ln вида Е(-х) = х называ-
называется тождественным оператором.
Ясно, что Е(х) — линейный оператор.
Замечание. Матрица тождественного оператора в любом базисе
единичная. В самом деле, из равенства Aei = е^ следует, что у г-го столбца
этой матрицы г-ый элемент равен 1, а все остальные элементы равны 0.
Определение 2. Линейный оператор А~х, действующий из Ln
в Ln, называется обратным по отношению к оператору А, если
АА-1 = Е.
Замечание 1. Линейным оператором, обратным по отношению
к оператору А, является оператор с матрицей А, поскольку произве-
произведение этой матрицы на матрицу А должно быть равно Е. Из этого следует,
что оператор А~х существует тогда и только тогда, когда det А ф 0,
т.е. тогда и только тогда, когда rang А = п (или кегЛ = о, так как
dim ker A = п — rang A).
г) Это предположение не ограничивает общности рассмотрения, поскольку все
n-мерные пространства изоморфны друг другу.
§ 2. Операторы, действующие из Ln в Ln 99
Замечание 2. Если оператор А действует из Ln в Ln, то и операторы
А2 = Л А, А3 = ААА, ... действуют из Ln в Ln. При этом, очевидно,
AP+q — АРДят Считают также, что А0 = Е и А~р = (А~1)р (если,
конечно, оператор А~х существует).
2. Инвариантные подпространства.
Определение. Подпространство L С Ln называется инвариант-
инвариантным подпространством линейного оператора А, действующего из Ln в
Ln, если для любого х Е L Ax E L.
Иными словами, подпространство L называется инвариантным под-
подпространством оператора А, если A(L) С L. Примерами инвариантных
подпространств могут служить Ln и о.
Теорема 1. Для любого натурального к подпространства ker Ак,
im Ak являются инвариантными подпространствами оператора А.
Доказательство. Если х Е кетАк, т.е. Акх = о, то Ак(Ах) =
= А(Акх) = Ао = о, поэтому Ах Е ker Ak.
Если х G imife, т.е. х = Аку для некоторого у, то Ах = А(Аку) =
= Afe(Ay), и, следовательно, Ах Е im Ak. Теорема доказана.
Следствие.
im Ak+1 С im Ак, поскольку im Ak+1 = A(im Ak) С im Afe.
Теорема 2. Если Ln = Li 0 L2, причем Li n L2 — инвариантные
подпространства оператора А, то в некотором базисе матрица операто-
оператора А имеет вид
А = (о2 С
гб?е В — матрица оператора, действующего из Li e Li,C — матрица
оператора, действующего из L2 в L2, а матрицы О\ и О2 состоят из
нулей.
Доказательство. Пусть ei, ...,е& — базис пространства Li,
е^_|_1, ... ,еп — базис пространства L2, и, следовательно, ei, ... ,еп —
базис пространства Ln. Рассмотрим матрицу оператора А в этом базисе.
п
Поскольку при всех j ^ k A(&j) = J^ CLijCi E L(ei, ... , е&), то при всех
г=1
i > к и j ^ к ctij = 0. Полагая 6^- = а^- при г, j ^ /с, получаем матрицу
оператора В, действующего из Li в Li, в базисе ei, ... ,е&. Аналогично
находим: aij = 0 при всех г ^ к и j > к. Полагая Cij = а^_^ (j-k)
при г, j > к, получаем матрицу оператора С, действующего из L2 в L2,
в базисе e&+i, ... ,еп. Теорема доказана.
Замечание. Пусть L — инвариантное подпространство оператора А.
Линейный оператор В, действующий из L в L и совпадающий с А на
подпространстве L, называется сужением оператора А на инвариантное
подпространство L. Обращаясь к доказанной теореме, можно сказать,
что операторы В и С представляют собой сужения оператора А на ин-
инвариантные подпространства Li и L2.
3. Образ и ядро. Специфика рассматриваемого случая состоит в том,
что ядро и образ оператора А, а значит и линейные дополнения к ним,
100 Линейные операторы Гл 2.
оказываются лежащими в одном и том же пространстве Ln. При этом
dimimA + dimker A = dimimA + dim ker A = n, dimimA = dim ker A
и, следовательно, dim ker A = dimimA. Это, однако, не означает, что,
например, пространство Ln представляет собой прямую сумму образа и яд-
ядра. Изучение взаимного расположения указанных четырех подпространств
составит основную цель этого и следующего пунктов. Существенную роль
в наших рассуждениях будет играть формула, выведенная в конце п. 5 § 1:
rang В - rang АВ = dim(ker A Him В). A)
Теорема 1. Ln = im A 0 ker А тогда и только тогда, когда rang A2 =
= rang A.
Доказательство. Поскольку dimimA + dim ker A = п, то
Ln = imA 0 ker А тогда и только тогда, когда imi П ker A = о,
т. е. dim (ker А П im A) = rang A — rang A2 = 0. Теорема доказана.
Теорема 2. Если при некотором натуральном k im Afe+1 = im Ак,
то im Ak+2 = im Ak+1.
Доказательство. Воспользуемся формулой A). Если imAfc+1 =
= imAk, то dimimAfe — dimimA/c+1 = dim(imAfc П ker A) = 0.
Поэтому dimimAfe+1 - dimimA/c+2 = dim(imAfe+1 П ker A) =
= dim(im Ak П ker A) = 0, причем im Ak+2 С im Ak+1. Теорема доказана.
Теорема 3. Если dimker А ф0, то существует такое натуральное
число т $J 7i, что dimimA7™ > dimimA771 = dimimA771.
Доказательство. Положим d{ = dimimA* (do = dimimA =
= n). Поскольку imA*+1 С imA* и dim ker А ф 0, то п = do >
> d\ ^ c/2 ^ • • • ^ 0. Поэтому существует такое натуральное число т ^ п,
что drn_1 > dm = dm+i. Теорема доказана.
Следствие 1. Ln = Lo 0 L, где Lo = ker imA771, L = imA771.
В самом деле, из равенства dimimA771 = dimimAm+1 и теоремы 2
следует, что dim im Am+m = dim im А771, т. e. rang A2m = rang А771, откуда,
согласно теореме 1, и вытекает справедливость этого утверждения.
Следствие 2. Существует такой базис пространства Ln, в кото-
котором матрица оператора А имеет вид
А- (В Ol
А-{о2 с
где В и С — матрицы операторов, являющихся сужениями оператора А
на инвариантные подпространства Lo и L соответственно, а матрицы
Oi и О2 состоят из нулей.
Это утверждение является следствием только что сделанного наблюде-
наблюдения и двух теорем п. 2.
Замечание 1. Поскольку Lq = ker im Аш, то для любого вектора х
пространства Lq Amx = Вшх = о. Следовательно, оператор Вш —
нулевой. С другой стороны, оператор Вт~1 — ненулевой. В самом деле,
предполагая противное, получаем: dimker A771 ^ dimLo = dimker A771,
т. е. dim im Am~1 ^ dim im Am, что противоречит способу выбора числа т.
Замечание 2. Так как L = imA771 С imA, то простран-
пространство L не содержит векторов дополнения к образу А. Далее, из
§ 2. Операторы, действующие изЪп в Ln 101
равенства dimimAm = dimim^m+1 и формулы A) следует, что
dim(im^m П ker A) = rangAm — rangAm+1 = 0, т.е. пространство
L пе содержит векторов ядра оператора А. Это означает, что:
1° кег С = о (поскольку на множестве L операторы А и С совпадают),
и, следовательно, rang С = dim L, т. е. det С ^ 0;
2° ker Л = кегБ.
4. Структура пространства Lo. Обратимся теперь к оператору В,
действующему из Lq в Lq. Поскольку Вт = О, то для любого вектора х
пространства Lq Вшх = о. Можно сказать иначе: для любого ненулевого
вектора х пространства Lq существует такое натуральное число k $J т,
что Вк~1шх. ф о, а Вкх = о. Тем самым каждый ненулевой вектор х.к
порождает серию ненулевых векторов х.к~г = Вх.к, х.к~2 = Вх.к~г =
_ ^2xfe^ it jXi _ ^Х2 _ вк~гх.к (векторы серии принято нумеровать
верхними индексами). При этом .Вх1 = Вкх.к = о, т.е. последний из
векторов серии принадлежит ядру оператора В. Если x.k G im^B, т.е.
существует такой вектор xfc+1, что i?xfe+1 = xfe, то серия векторов хг
может быть им пополнена. Если же xfe ^ im^B, то вектор х.к называется
старшим вектором серии, серия — непополнимой, а число к — длиной
серии, порожденной старшим вектором xfe. В частности, серия длины 1
состоит из вектора, принадлежащего ядру и не имеющего прообраза.
Рассмотрим совокупность серий (непополнимых или пополнимых — не
имеет значения) векторов х\. Справедливо следующее утверждение.
Теорема 1. Векторы х\ линейно независимы тогда и только тогда,
когда векторы х\ — последние векторы серий — линейно независимы.
Доказательство. Если часть из векторов xj — векторы х\ — линей-
линейно зависимы, то и все векторы х\ линейно зависимы.
Допустим, что векторы х\ линейно независимы, и некоторая линейная
комбинация векторов xj равна о. Действуя на нее оператором Вш~1 и
тем самым превращая ее в некоторую линейную комбинацию векторов
х\, мы обнаружим, что все коэффициенты при х™ в исходной линейной
комбинации равны 0. Далее, действуя на нее оператором Вш~2, обна-
обнаружим, что и все коэффициенты при х™~1 равны нулю, и т.д. Таким
образом мы установим, что исходная линейная комбинация тривиальна и,
следовательно, векторы х\ линейно независимы. Теорема доказана.
Основываясь на доказанной теореме, условимся называть серии х\ раз-
различными, если последние векторы этих серий линейно независимы.
Теорема 2. Количество различных серий длины не меньшей к равно
fe1
Доказательство. Каждый ненулевой вектор х пространства
(ker В П im^^), будучи вектором ker В, является последним вектором
некоторой серии и представляется в виде х = Вк~1щу, поэтому длина
этой серии не меньше к. С другой стороны, в каждой серии длины не
меньшей к есть вектор х.к, для которого Вк~гх.к = х1 — последний вектор
серии — является ненулевым вектором пространства (ker .В П imBk~1).
102 Линейные операторы Гл 2.
Таким образом, это пространство представляет собой множество последних
векторов указанных серий. Следовательно, количество различных серий
длины не меньшей /с, равно максимальному количеству его линейно
независимых векторов, т. е. его размерности. Теорема доказана.
Следствие 1. Количество различных серий длины не меньшей к
равно ra,ngBk~1 — rangi^ (см. формулу A)).
Следствие 2. Количество различных серий длины к равно
1 - rang?fe) - (rang Б* - rang?fe+1) =
= rang?fe+1 + rang^-1 - 2 rang Bk.
Теорема З. Векторы всех различных непополнимых серий е] образу-
образуют базис пространства Lq.
Доказательство. Найдем общее количество N векторов, составляю-
составляющих всевозможные различные непополнимые серии. Согласно следствию 2
имеем:
т
N = ^2 k (rang Bk+1 + rang Б* - 2 rang Bk).
fc=i
Разобьем эту сумму на три суммы и, учитывая, что Вт = В171^1 = О,
В0 = Е, преобразуем первые две из них так:
т га —1
к=1 к=1
т — 1
krcmgB1*-1 =rang?+ ^ (/с + 1) rang?fe.
к=1 к=1
Ясно такж;е, что в третьей сумме можно ограничиться суммированием
до т — 1. Вновь объединяя три суммы в одну, получаем:
т
N = rang? + ^rangi?fe (к - 1 + к + 1 - 2к) = rang? = dimL0.
fc=i
Таким образом, общее количество векторов, составляющих всевозмож-
всевозможные различные непополнимые серии, равно раз-
размерности пространства Lq, причем, согласно
теореме 1, эти векторы линейно независимы. Сле-
Следовательно, они образуют базис пространства Lo.
Теорема доказана.
„. ^ Замечание 1. В базисе е] отчетливо видна
структура im В, ker В, imB и кетВ. Действитель-
Действительно, пусть Si — линейная оболочка старших векторов серий длины 1, S —
линейная оболочка остальных старших векторов, К — линейная оболочка
S
I
Si
к
§ 2. Операторы, действующие из Ln в Ln 103
векторов ядра, соответствующая сериям длины не меньшей 2,1 — линейная
оболочка всех остальных векторов базиса ej.
Тогда ЫВ = Si 0 S, ker Б = Si 0 К, imB = I 0 К, кёгБ = S 0 I.
С учетом замечания 2 предыдущего пункта можно утверждать также, что
imA = irrLB, ker A = ker В, im A = im В 0 L, кетА = кетВ 0 L. Отметим,
что в случае m = 1 (длины всех серий равны l)S = I = K = onLn =
= im A 0 ker A.
Замечание 2. В построенном базисе действие оператора В задается
формулами: Be] = о, Bej = е^~ . Поэтому если расположим базисные
векторы в порядке е}, е2, ... , е^, е|, ..., то матрица оператора В в этом
базисе примет вид
..0 0
..0 0
0 0 0 0 ... 0 /ifc-i
\0 0 0 0 ... 0 0
где числа \±i равны либо 1, либо 0.
Замечание 3. Теорема 3 не дает конструктивного метода построе-
построения базиса из непополнимых серий. Однако такой метод можно указать,
опираясь на теорему 2. Он состоит в следующем. Найдем сначала самые
длинные серии — серии длины га. С этой целью рассмотрим пространство
(ker .В П imBm~1) = ш\Вш~1 (поскольку все векторы \тВтп~1 лежат
в ker -В), в котором лежат последние векторы всех серий длины не меньшей
7тг, а значит ровно га, так как серий длины большей m нет. Выберем
в ш\Вш~1 произвольным образом базис и выпишем выбранные базисные
векторы. Эти векторы являются последними векторами всех различных
серий длины га. Далее найдем те векторы пространства кегВш~1, которые
оператор Вш~1 переводит в выписанные векторы, т.е. старшие векторы
серий длины 777,. Применяя к ним различные степени оператора В, выпишем
все эти серии.
Рассмотрим теперь пространство (ker .В П ш\Вш~2). В нем, наряду
с найденными последними векторами серий длины га, содержатся послед-
последние векторы серий длины га — 1. Дополнив уже известную нам часть базиса
этого пространства до базиса в нем, мы найдем, тем самым, последние
векторы всех различных серий длины га — 1. Соответствующие им век-
векторы в кегБт~2 являются старшими векторами этих серий, а различные
степени оператора В, примененные к ним, дают сами серии.
Продолжая этот процесс, мы построим, в конце концов, все различные
непополнимые серии, векторы которых, согласно теореме 3, образуют базис
пространства Lq. Рассмотрим два примера.
Пример 1. Построить (если это возможно) базис из непополнимых
серий оператора
A-10 0
1-10 0
3 0 3-3
4-13 -ЗУ
104
Линейные операторы
Гл2.
Решение. Нетрудно проверить, что В2 = О, поэтому искомый базис
существует. Пространство im В состоит из векторов вида
Х\ — Х2
Зх\ + Зжз — 3x4
Cl — Х2 + ЗЖз — 3^
Это пространство двумерно (если из четвертой координаты вычесть
третью, то получится вторая, равная первой). Для выбора базиса в нем
достаточно, например, взять в первом случае х\ = 1, х<2 = жз = ж 4 = 0,
а во втором — х\ = Х2 = х% = 0, х^ = 1. В соответствии с этим получаем:
во =
В построенном таким образом базисе е}, е^, е^, е| матрица данного
оператора имеет вид
/0 1 0 0\
0 0 0 0
0 0 0 1
V0 0 0 0У
Пример 2. Построить базис из непополнимых серий оператора
В =
Решение. Имеем:
V
@
0
0
0
0
Vo
0
V
0
0
0
0
0
0
0
0
0
0
'2
-)
0
0
0
0
0
0
0
0
0
0
0
0
0
V:
2
0
0
0
0
0
Г)
Z
0
0
0
0
0
- 0
0
0
0
0
4
0
4
0
1
2
0
о\
1
2
0
0
0
о/
0
0
0
0
0
0
4
0
V2
4
0
V3
2
0
В3
= 0.
§2.
Операторы, действующие изЪп в Ln
105
Пространство im В2 состоит из векторов вида
(хЛ
х2
х4
\х6/
/ 0 >
2 2Хб
0
0
0
\ 0 I
Это пространство одномерно, и для выбора базиса в нем достаточно
взять xq ф — л/Зж4? например, положить х\ = x<i = жз = х^ = х$ = 0,
^6=1. В соответствии с этим получаем:
/о\
0
0
0
0
, в?
0
У2/4
0
УЗ/2
\ о У
1/2
0
0
о
V о /
Далее: пространство (ker В П im В) состоит из векторов вида
условии, что xq = — \/3^4, т.е. из векторов вида
\
при
Чтобы дополнить известную нам часть базиса этого пространства —
вектор е\ — до базиса пространства (ker .В П im^B), достаточно выбрать
Х4 ф 0, например, положить х\ = х<2 = х% = Ж5 = 0, х/± = 1 (и,
следовательно, же = — \/3^4 = — л/3)- Таким образом,
/ 0 \
0
0
1
0
К-у/г/
5 е2 —
2
jtiGo —
/ о \
0
0
0
-2
106
Линейные операторы
Гл2.
Наконец, пространство (ker В П im Е) представляет собой ker А, т. е.
определяется системой уравнений
/ л/бж _ л/2^ \
4 4
л/б , л/2
—-Ж4 + —t
4 4
0
\ О
/
= О.
Отсюда находим х^ = xq = 0, a?i = Ж3. Таким образом, пространство
ker i? состоит из векторов вида
х2
X!
О
Чтобы дополнить известную нам часть базиса этого пространства —
векторы е\ и е\ — до базиса ker В, достаточно выбрать х\ ф 0, например,
положить, х\ = 1, Х2 = а?5 = 0- Таким образом,
/Л
о
1
о
о
W
В построенном базисе е}, е^, е^, е^, е|,
имеет вид
/0 1 0 0 0 0\
0 0 10 0 0
0 0 0 0 0 0
0 0 0 0 10
0 0 0 0 0 0
\о о о о о о/
матрица данного оператора
5. Собственные значения и собственные векторы. Из всевозможных
инвариантных подпространств оператора А особый интерес представляют
его одномерные инвариантные подпространства — в них Ах = Лх.
Определение. Число Л называется собственным значением опе-
оператора А, если существует ненулевой вектор х, для которого Ах =
= Лх; вектор х при этом называется собственным вектором опера-
оператора А, соответствующим собственному значению Л. Множество всех
собственных значений оператора называется его спектром.
§ 2. Операторы, действующие изЪп в Ln 107
Примером собственного вектора оператора может служить ненулевой
вектор его ядра — он соответствует собственному значению Л = 0.
Замечание 1. Если х — собственный вектор, соответствующий соб-
собственному значению Л, то /ix при /i ф 0 — также собственный вектор,
соответствующий собственному значению Л, поскольку A/ix. = fiAx. =
= A/ix. Тем самым, собственных векторов, соответствующих одному и тому
же собственному значению, бесконечно много.
Замечание 2. Если Л — собственное значение оператора А, то
Л + /1 — собственное значение оператора А + \±Е. В самом деле, пусть
х — собственный вектор оператора А, соответствующий собственному зна-
значению Л. Тогда (А + /xi?)x = Ах + /ix = (Л + /х)х, что и требовалось
доказать. Таким образом, можно сказать, что спектр оператора А + /iE
представляет собой спектр оператора А, «сдвинутый» на fi.
Теорема. Собственные векторы, соответствующие различным соб-
собственным значениям, линейно независимы.
Доказательство. Воспользуемся методом математической индук-
индукции. Если речь идет об одном собственном значении, то утверждение
теоремы очевидно. Допустим, что теорема доказана для к собственных
значений, и докажем, что тогда она верна и для к-\-1 собственного значения.
Предположим, что некоторая линейная комбинация соответствующих этим
собственным значениям собственных векторов равна о:
aixi + ... + акхк + ак+1ък+1 = о. B)
Докажем, что все щ = 0. Имеем:
= о,
= о. Вычитая из этого равенства
равенство B), умноженное на А&+1, получаем:
ai(Ai - Afc+i)xi + ... + ак(Хк - \k+i)xk = о.
По предположению индукции, а\ = ... = ак = 0 (А^ — A^+i ф 0,
поскольку все Xj попарно различны). Но тогда из равенства B) следует,
что и CKfc+i = 0. Теорема доказана.
Следствие. Количество различных собственных значений операто-
оператора не превышает размерности того пространства, в котором он дей-
действует (так как количество соответствующих им линейно независимых
собственных векторов не превосходит размерности этого пространства).
Замечание. Если в пространстве Ln существует базис из соб-
собственных векторов оператора А, то матрица оператора А в этом ба-
базисе диагональна, т.е. а^ = 0 при всех г ф j, причем ее диагональные
элементы являются собственными значениями. В самом деле, в базисе
из собственных векторов k-и столбец матрицы А равен А(ек) = А^е^,
т.е. представляет собой вектор, к-я координата которого равна Хк, а все
остальные — нулю.
108 Линейные операторы Гл 2.
Обратно, если в некотором базисе матрица оператора А диагональна,
то этот базис состоит из его собственных векторов, а диагональные эле-
элементы матрицы являются собственными значениями, поскольку в этом
случае А(ек) = аккек.
6. Характеристическое уравнение. Итак, число Л является собствен-
собственным значением оператора А тогда и только тогда, когда существует вектор
х ф о, для которого Ах = Лх, т.е. (А — ХЕ)х = о. Однородная система
линейных уравнений (А — ХЕ)х = о имеет нетривиальные решения х тогда
и только тогда, когда ее определитель равен нулю:
(аи — Л) а\2 ... а\п
&2\ (&22 — Л) ... U2n _ Q
Это уравнение п-и степени относительно Л называется характеристи-
характеристическим уравнением. Ему удовлетворяет любое собственное значение Л, и,
обратно, любое его решение Л является собственным значением.
Замечание 1. Если речь идет о линейном пространстве над полем М,
то последняя фраза требует уточнения: любое вещественное решение ха-
характеристического уравнения является собственным значением. Посколь-
Поскольку, согласно основной теореме алгебры, всякое уравнение n-й степени имеет
ровно п корней, в том числе комплексных и совпадающих, то в линейном
пространстве над полем Ш. линейный оператор может вообще не иметь
собственных значений, но в n-мерном линейном пространстве над полем
С у него всегда ровно п собственных значений (среди них, конечно, мо-
могут быть и совпадающие). В этом состоит самое главное различие между
указанными пространствами.
Замечание 2. Отметим, что в линейном пространстве над полемШ
каждому комплексному корню характеристического уравнения (не являю-
являющемуся вещественным) соответствует двумерное инвариантное подпро-
подпространство соответствующего оператора.
В самом деле, пусть Л + ifi — один из таких корней (/i ф 0). Поскольку
det(A — (Л + щ)Е) = 0, то однородная система Az = (Л + i\i)z имеет
нетривиальное решение z = х + гу: А(х + гу) = (Л + г/х)(х + гу), или
Ах + гАу = Лх — fiy + г(Лу + fix), откуда находим:
Ах. = Лх — р
Ау = Ху + р
Тем самым, L(x, у) — инвариантное подпространство оператора А.
Осталось доказать, что это подпространство — двумерное, т. е. доказать,
что векторы х и у линейно независимы. Заметим, что из условия /i ф 0
следует, что у ф 0 (иначе из второго уравнения получилось бы, что х =
= о, в то время как |х|2 + |у|2 ф 0). Поэтому из линейной зависимости
векторов х и у следует существование вещественного числа v, для которого
§ 2. Операторы, действующие из Ln в Ln 109
х = vy. В этом случае наши уравнения преобразуются так:
vAy = Xvy - my
Ay = Ху +
откуда, исключая Ау, получаем /i + /iz/2 = 0, чего не может быть (/i ^ 0,
а число v — вещественное). Следовательно, векторы х и у линейно незави-
независимы.
Замечание 3. Обратимся к результатам пп. 3, 4. Представим про-
пространство Ln, в котором действует оператор Д в виде прямой суммы
Lq 0 L, где Lq = kerim A171, L = imA171. Выберем такой базис простран-
пространства Ln, в котором матрица оператора А имеет вид
л=(во^
(
2
0
0
0
0
/il
0
0
0
0
/i2
0
0
0 ...
0 ...
0 ...
0 ...
0
0
0 1
0
0
0
U>k-1
0
где В и С — матрицы операторов, являющихся сужениями оператора А
на инвариантные подпространства Lq и L соответственно, а матрицы О\
и 0<i состоят из нулей. При этом Вт = О, det С ^ 0. Сверх того,
без ограничения общности будем считать, что часть выбранного базиса,
содержащаяся в пространстве Lq, состоит из непополнимых серий и, сле-
следовательно, матрица В имеет вид
в=
где числа \±{ равны либо 1, либо 0. Напишем характеристическое уравнение
det (А — ХЕ) = 0 и разложим det (А — ХЕ) сперва по первому столбцу,
затем — по второму и т.д., вплоть до к-го. В результате получим: (—
—Х)к det(C — ХЕ) = 0. Учитывая, что det С ф 0, мы приходим к сле-
следующим выводам:
1° размерность к пространства Lq равна кратности корня X = 0
характеристического уравнения для оператора А;
2° пространство Ln представляет собой прямую сумму двух инва-
инвариантных подпространств Lq и L, сужение оператора А на первое из
которых имеет единственное собственное значение X = 0, а на второе —
не имеет собственного значения X = 0.
7. Жорданова форма матрицы линейного оператора.
Определение 1. Матрица Л& вида
Afc
0
0
0
1
хк
0
0
0
1
0
0
0
0
0
0
... 0
... 0
... хк
... 0
0
0
1
Хь
называется жордановой клеткой.
В частности, жордановой клеткой является матрица, состоящая из
единственного элемента А&.
110 Линейные операторы Гл 2.
Определение 2. Говорят, что матрица А имеет жорданову фор-
форму, если она имеет вид
А=
где Л^ — жордановы клетки.
Замечание 1. Можно сказать так: у матрицы А, имеющей жордано-
жорданову форму, отличными от нуля могут быть только элементы вида ац и эле-
элементы вида ац+i, причем отличные от нуля элементы вида ац+i равны 1
и, сверх того, если ац+i = 1, то a^+n+i = ац. Поэтому, в частности, на
диагоналях различных жордановых клеток могут находится и совпадаю-
совпадающие числа Xi.
Замечание 2. Нетрудно видеть, что матрица оператора В, упомяну-
упомянутого в замечании 3 предыдущего пункта, имеет жорданову форму.
Замечание 3. Ясно, что если матрица А имеет жорданову форму,
то и матрица А + ХЕ имеет жорданову форму, поскольку она получается
из матрицы А прибавлением ко всем ее диагональным элементам одного
и того же числа Л.
Замечание 4. Характеристическое уравнение для матрицы линей-
линейного оператора, имеющей жорданову форму, записывается так:
п
П (А; - А) = О
г=1
(некоторые из чисел Л^ могут совпадать). Следовательно, числа Л^ явля-
являются собственными значениями этого оператора.
Теорема. Для любого линейного оператора в линейном простран-
пространстве Ln над полем С существует такой базис, в котором матрица этого
оператора имеет жорданову форму.
Доказательство. Воспользуемся методом математической индук-
индукции. Допустим сначала, что оператор А имеет единственное собственное
значение Л. Тогда оператор (А — ХЕ), спектр которого «сдвинут» на Л
(см. замечание 2 п. 5), имеет единственное собственное значение 0 крат-
кратности п. Следовательно, пространство Lo для него совпадает с простран-
пространством Ln (см. замечание 3 п.6), т.е. (А — ХЕ)п = О. В базисе из непо-
полнимых серий матрица оператора (А — ХЕ) имеет жорданову форму.
Поэтому и матрица оператора А в этом базисе имеет жорданову форму.
Допустим теперь, что теорема доказана для оператора, имеющего к
попарно различных собственных значений, и докажем, что тогда она верна
и для оператора А, имеющего (к -\- 1) попарно различных собственных
значений. Пусть Л — какое-нибудь его собственное значение. Рассмотрим
оператор (А — ХЕ). Пространство Ln представляет собой прямую сумму
двух инвариантных относительно оператора (А — ХЕ) подпространств Lo
и L, сужение этого оператора на первое из которых имеет единственное
собственное значение 0, а на второе — не имеет собственного значения 0.
§2. Операторы, действующие из Ln в Ln 111
Подпространства Lq и L, будучи инвариантным относительно операто-
оператора (А — ХЕ), инвариантны и относительно оператора А, так как Ах =
= (А — ХЕ)х + Ах. Спектр оператора А представляет собой спектр опера-
оператора (А — ХЕ), «сдвинутый» на А (см. замечание 2 п. 5). Поэтому матрица
А при соответствующем выборе базиса может быть записана в виде
А - (В Ol
Л ~ \О2 С
причем все собственные значения оператора В равны А, а все собственные
значения оператора С отличны от А, что, в частности, означает, что количе-
количество попарно различных из них равно к. Тем самым, матрица оператора В
может быть приведена к жордановой форме в силу ранее доказанного,
а матрица оператора С — по предположению индукции. Теорема доказана.
Замечание 1. Доказанная теорема верна и в линейном пространстве
над полем М, если все корни характеристического уравнения для опера-
оператора А вещественны. Чтобы убедиться в этом, достаточно посмотреть на
приведенное доказательство под соответствующим углом зрения.
Замечание 2. Вектор хк, для которого при некотором натураль-
натуральном к выполняются два соотношения:
1° (А - ХЕ)кхк ф о,
2° (А - ХЕ)к+1хк = о
— называется присоединенным вектором оператора А k-го порядка, соот-
соответствующим собственному значению А. Этот вектор, тем самым, явля-
является вектором некоторой серии оператора (А — ХЕ) длины не меньшей (& +
+ 1), а собственный вектор оператора А является «присоединенным векто-
вектором нулевого порядка». Приведенное доказательство теоремы показывает,
что базис, в котором матрица оператора А имеет жорданову форму,
состоит из его собственных и присоединенных векторов. В частности,
если оператор А не имеет присоединенных векторов, т. е. если при каждом
собственном значении А длины всех серий оператора (А — ХЕ) равны 1,
то указанный базис состоит лишь из собственных векторов оператора А.
В таком базисе матрица А диагональна.
Замечание 3. Идею доказательства этой теоремы можно использо-
использовать на практике. В самом деле, указанным способом можно сперва постро-
построить часть искомого базиса для одного собственного значения, затем — для
другого и т. д. Приведем пример. Предположим, что требуется привести
матрицу оператора
^3-4 0 2
4-5-2 4
0 0 3-2
\0 0 2-1
к жордановой форме. Будем рассуждать следующим образом. Характери-
Характеристическое уравнение имеет вид
(А-1J(А + 1J = 0.
Оно имеет два корня: А = 1 и А = — 1. Кратность каждого из этих
корней равна 2.
112 Линейные операторы Гл 2.
Рассмотрим сначала корень Л = 1. Имеем:
B-40 2
4-6-2 4
0 0 2-2
0 0 2 -2у
Ранг этого оператора равен 3 (базисный минор расположен в левом
верхнем углу), а значит, размерность его ядра равна 1. Далее,
(-12 16 12 -16\ /-2 4 3 -4>
-16 20 16 -20 \ _ J-454 -5
0 00 0 I ~4 I 0 0 0 0
0 00 0/ \0 00 0
и, следовательно, величина dim ker(A — ЕJ равна 2 — кратности собствен-
собственного значения Л = 0 оператора А — Е. Находим кег(Л — ЕJ как решение
системы (А — EJyi = о:
X =
Значит, пространство im(A — Е)Г\к.ег(А — ЕJ состоит из векторов вида
(А-ЕIЩ =2(С1-С2)(}|.
Это пространства одномерно. Для того чтобы вектор (А — Е)х. об-
образовывал в нем базис, достаточно взять С\ отличным от Сг, например
положить С\ = 1, С2 = 0. Таким образом,
е-, =
Используя аналогичные рассуждения применительно к корню Л = — 1,
получаем:
<-(:)•<-<*¦«>(:)-(«)•
В построенном базисе е}, е^, е^, е| матрица оператора А имеет вид
§2. Операторы, действующие из ~Ln в Ln 113
Замечание 4. Если не требуется искать базис, в котором матрица
оператора А имеет жорданову форму, а требуется лишь найти эту форму,
то можно воспользоваться следующими соображениями: согласно след-
следствию 2 п. 4 количество различных серий из собственных и присоединенных
векторов длины к для данного собственного значения Л равно
rang(^ - \Е)к+г + rang(^ - ХЕI"'1 - 2rang(A - ХЕ)к.
В частности, в рассмотренном примере при Л = ±1 rang (A — ХЕ)к
при к ^ 2 равен 2, rang(A — ХЕ) равен 3, rang(^ — Л.ЕH равен 4, поэтому
при каждом из этих значений Л есть лишь одна серия длины 2, что мы
и получили.
СБ. Кадомцев
Глава 3
ПРЕОБРАЗОВАНИЕ БАЗИСОВ
И КООРДИНАТ
§ 1. Преобразование базисов
1. Обозначения. При изучении вопросов, связанных с преобразовани-
преобразованием координат, часто возникают весьма громоздкие выражения, содержащие
разнообразные суммы. Чтобы сделать несколько более компактной запись
таких выражений, целесообразно принять следующие соглашения:
1° если какой-либо индекс (например, г) встречается дважды, причем
один раз он записан сверху, а другой раз — снизу (например, albi), то
предполагается, что по этому индексу производится суммирование, хотя
сам знак суммы ( J^ j может отсутствовать;
2° элементы базиса обозначаются буквами с нижними индексами.
Тем самым, если мы желаем обойтись без знака суммы, то, например,
координаты вектора следует обозначить буквами с верхними индексами —
тогда разложение вектора по базису можно будет записать так: х = хге{.
Другой пример — матрица линейного оператора. Если ее элементы обозна-
обозначать буквами с двумя индексами, один из которых верхний, а другой —
нижний, то результат действия оператора можно будет записать так: у1 =
Перепишем последнее равенство в виде произведения матриц:
Таким образом, в этих обозначениях верхний индекс — это номер строки,
а нижний — номер столбца.
2. Переход к новому базису. Пусть {е^} и {ё^} — два базиса. Усло-
Условимся называть базис {е^} старым, а базис {ё^} — новым. Каждый вектор
нового базиса можно разложить по старому базису:
е* = а|е8 A)
(напомним, что по индексу s производится суммирование). В этих фор-
формулах det а ф 0, так как столбцы матрицы а — координаты базисных
векторов ei — линейно независимы (поскольку эти векторы линейно неза-
независимы).
§2. Преобразование координат 115
Обратно, если deta ф 0 и {е^} — базис, то векторы ё^ = afes, коор-
координаты которых являются линейно независимыми столбцами матрицы а,
также линейно независимы и, следовательно, образуют базис.
Таким образом, формулы A) являются формулами перехода к новому
базису (от старого базиса {е^}) тогда и только тогда, когда deta ф 0.
Матрица а называется матрицей перехода от базиса {е^} к базису {ё^}.
Переход от старого базиса к новому иногда называют также преобразо-
преобразованием базиса.
3. Последовательные преобразования. Перейдем сначала от базиса
{е^} к базису {ё^} с помощью матрицы а, а затем от базиса {ё^} — к базису
{е^} с помощью матрицы /3. Найдем матрицу перехода от базиса {е^}
к базису {е^}. Имеем: е[ = /3fes = j3fa{ej = (a3sf3f) ej. Таким образом,
искомая матрица представляет собой произведение а/3.
В частности, если базисы {е^} и {е[} совпадают, то a3sf3f = 8% =
п • / . т.е. af3 = Е, а значит, /3 = а~г. Итак, если переход
и при ъ -j— j^
от старого базиса к новому осуществляется с помощью матрицы а, то
переход от нового базиса к старому осуществляется с помощью матрицы
B)
о г> Г7 Г 1 ПРИ * = Зч
Замечание. Выражение о- = < п • / •
F г у 0 при г ф j
К
часто называют
¦* i и при г т= 3
символом Кронекера.
§ 2. Преобразование координат
1. Преобразование координат вектора. Пусть {е^} — старый базис,
{ё^} — новый базис, ё^ = afes, е^ = /3fes, где /3 = а~г. Выразим
координаты произвольного вектора х в новом базисе через его координаты
в старом базисе. Имеем: х = xses = xs(З1^ = жгё^, откуда (в силу
линейной независимости векторов ё^)
~г — oi ^s (л \
Таким образом, координаты вектора преобразуются с помощью матри-
матрицы/3.
Замечание. Ясно, что хг = а\Xs.
2. Преобразование матрицы линейного оператора. Выразим теперь
матрицу линейного оператора А, действующего из Ln в Ln, в новом базисе
через его матрицу в старом базисе. Имеем:
А (ё*) = A (af е8) = a*A (es) = afa^er = а*аг3C3ге^ = a{ej,
116 Преобразование базисов и координат Гл 3.
откуда
а\ = аЦЗ}агв. B)
Замечание. Полученную формулу можно записать так: А = (ЗАа.
Следовательно, det A = det C det A det a = det А, т. е. определитель мат-
матрицы линейного оператора не зависит от выбора базиса.
3. Линейная форма.
Определение 1. Числовая функция (т.е. функция, значениями ко-
которой являются числа) векторного аргумента А(х) называется линейной
формой, если:
1° для любых х, у А(х + у) = А(х) + Л(у);
2° для любого х гл любого числа А А(Хх) =
Пусть А{х) — линейная форма в Ln. Имеем:
Числа cti = ^4(е^) называются коэффициентами линейной формы в ба-
базисе {е^}. Выясним, как они преобразуются при переходе к новому базису.
Имеем ai = А (ё^) = A {afes) = afA (es) = afas. Итак,
ai = a|as, C)
т. е. коэффициенты линейной формы преобразуются с помощью матрицы а
(как базис), а не с помощью матрицы /3 (как координаты вектора).
Определение 2. Числовая функция нескольких векторных аргу-
аргументов называется линейной по одному из них, если при фиксированных
значениях остальных аргументов она является линейной формой.
Определение 3. Числовая функция двух векторных аргументов
называется билинейной формой, если она линейна по каждому из них.
Пусть ?> (х, у) — билинейная форма. Имеем:
В(х,у) = В{х%,у*е5) = В{ъ,У*ъ)х{ = B(ei,ej)xiyj = Ъ^уК
Матрица с элементами bij = -B(e^ej) называется матрицей билиней-
билинейной формы в базисе {е^}. Выясним, как она преобразуется при переходе
к новому базису. Имеем:
Ь^ = В (euej) = В (af е8, а)ег) = а\В (ев, а)ег) =
= ol\oltjB (e8, ег) = а*о$Ъ8Г.
Итак,
\j = a?arjbsr. D)
Эта формула похожа на формулу E) преобразования матрицы линейного
оператора, но в ней матрица а фигурирует дважды, а в формуле E)
фигурируют матрицы а и C.
Тензоры 117
Замечание. Точно так же можно ввести понятие полилинейной <
мы — числовой функции нескольких векторных аргументов, линейной по
каждому из них. Рассуждая аналогично, можно назвать числа Pi1...ik =
= Р (е^, ... , e^fc) координатами полилинейной формы в базисе {е^}, а са-
саму форму записать так:
Р(хь ... ,xfc) =ph...ikx11 ...xlk.
еход
овы
Ph...ik =asi1i...asikkpSl...Sk. E)
Ясно, что при переходе к новому базису координаты полилинейной
формы будут преобразовываться следующим образом:
§ 3. Тензоры
1. Определение тензора. Прежде чем дать определение тензора, об-
обсудим несколько вопросов общего характера.
Ранее отмечалось, что теорема об изоморфизме двух линейных про-
пространств одинаковой размерности позволяет при изучении свойств аб-
абстрактного линейного пространства реально рассматривать вместо него
любую из его интерпретаций, в частности геометрическую (вектор — на-
направленный отрезок) и алгебраическую (вектор — набор чисел). Именно
параллельное рассмотрение указанных интерпретаций в наибольшей мере
способствует эффективному построению линейной алгебры. Например, то,
что размерность образа линейного оператора не превосходит размерности
его области определения, отнюдь не очевидно геометрически, но очевид-
очевидно алгебраически — ранг матрицы не превосходит количества ее строк.
С другой стороны, то, что ранг произведения операторов не превосходит
рангов сомножителей, почти очевидно геометрически (вспомним рисунок),
но далеко не очевидно алгебраически. Идея параллельного рассмотрения
геометрической и алгебраической интерпретации вектора как раз и лежит
в основе понятия тензора.
При изучении геометрического объекта методом координат мы факти-
фактически заменяем его новым объектом: «геометрический объект + система
координат». Поэтому итогом нашего исследования является информация
об этом новом объекте, а не об исходном. Тем самым, на последнем этапе
всегда возникает задача о разделении полученной информации на чисто
геометрическую и ту, которая привнесена специальным выбором системы
координат. Иногда эта задача оказывается весьма сложной. Один из спосо-
способов ее решения состоит в том, чтобы все время оперировать только такими
объектами (их и называют тензорами), которые, в определенном смысле,
не зависят от выбора системы координат.
Поясним, о чем идет речь. Если интерпретировать вектор как набор
чисел, то он, конечно, будет зависеть от выбора системы координат. Однако
вектор — направленный отрезок — от выбора системы координат, очевидно,
не зависит. Но с этой точки зрения такие объекты, как линейный оператор,
линейная, билинейная и полилинейная форма также не зависят от выбора
118 Преобразование базисов и координат Гл 3.
системы координат — их можно интерпретировать как функции от направ-
направленных отрезков. Все эти объекты и называются тензорами.
С алгебраической точки зрения вектор, линейный оператор, линейная,
билинейная и полилинейная форма — это наборы чисел, преобразующиеся
при переходе к новому базису по формулам C)-G). Рассмотрение этих
формул приводит нас к следующему определению.
Определение. Геометрический объект, задаваемый в каждом бази-
базисе пространства Ln совокупностью npJrq чисел, называется р раз ковари-
антным и q раз контравариантным тензором, если при переходе к новому
базису эти числа преобразуются так:
В этих формулах матрица а встречается р раз, а матрица /3 — q раз, чем
и объясняется название «р раз ковариантный и q раз контравариантный
тензор». Иногда этот тензор называют тензором типа (р, д), а числоp+q —
его валентностью или рангом. Обратим внимание на то, что числа р и q
представляют собой количества нижних и верхних индексов t, что является
формальным следствием принятого нами соглашения о суммировании.
Тем самым, можно сказать, что вектор — это тензор типа @,1), линей-
линейный оператор — тензор типа A,1), линейная форма — тензор типа A,0),
билинейная форма — тензор типа B,0), полилинейная форма — тензор
типа (к, 0).
Замечание. Полезно в качестве самостоятельного упражнения убе-
убедиться в корректности определения тензора: если сначала перейти от бази-
базиса {е^} к базису {е^}, а затем от базиса {e'i} — к базису {ё^}, то результат
будет таким же, как при переходе от базиса {е^} непосредственно к базису
2. Сумма тензоров одинаковой структуры.
Определение. Суммой А+В двух тензоров типа (р, q) называется
объект С, определяемый в каждом базисе пространства Ln совокупно-
совокупностью np+q чисел c\x'"Y = a\x'"Y + Ы1'-4.
Ь\...Ьр Ь\...Ьр 1\...1р
Теорема. Сумма двух тензоров типа (р, q) является тензором ти-
типа (p,q).
Доказательство. Имеем:
~3l-3q _-V1...rq iTn-.Tg _
Ч^.Ар — aSl...sp ^uSl...sp —
— aSl aSp6jl ejq(ari'"Tq +bri-'Tq) — aSl aSp 6jl Rjqcri'"rq
— "ii ' ' '^pA-Vi • • •fJrq\as1...sp ^ Us1...Sp) — uh • • -агр/Л-1 • • •fJrqcs1...sp-
Теорема доказана.
3. Прямое произведение тензоров.
Определение. Прямым произведением тензора А типа (pi,qi) на
тензор В типа (p2,q2) называется объект С, определяемый в каждом
§_3. Тензоры 119
базисе пространства Ln совокупностью nPl+qi+P2+q2 чисел
Теорема. Прямое произведение тензора А типа (pi, q±) на тензор В
типа (jp2, Я2) является тензором типа (pi + Р2, #i + Q2)-
Доказательство.?/1"^1"/^2 =а^^^^ =
ll---lpi---lpi+p2 ll-'-lpi lp1+l---lp1+p2
h ''' aiP1
SP1+P2
• ' ' aiP1+P2 Prqi + i • • • Prqi+q2
гР1+Р2
o3q\ o3qi + i n3qi+q2 ^Г1---ГЯ1 iJqi + ^----3qi + q2
•••PrqiPrqi+1 •••Prqi+q2a>s1...8P1oipi+1_ipi+p2 -
ji qJqi o3qi + i o3<ii + q2 ri---rqi---rqi+q2
rx • • -PrqiPrqi + 1 • • • Prqi + q2CSl...8P1...8P1+P2,
что и требовалось доказать.
Замечание. Если все компоненты тензора типа (р, q) в каждом базисе
умножить на одно и то же число Л, т.е. составить прямое произведение
данного тензора и тензора типа @,0), то получится тензор типа (р, q). Ясно,
что множество всех тензоров типа (р, q) в Ln образует линейное простран-
пространство, так как при фиксированном наборе индексов складываются и умно-
умножаются на число обычные числа. Его размерность равна np+gr, поскольку
координаты тензора в одном базисе могут быть выбраны произвольно, а в
любом другом базисе — вычислены по формулам (9).
4. Свертка тензора.
Определение. Сверткой тензора типа (р, q), гдер, q ^ 1, по двум
индексам, один из которых нижний, а другой — верхний, называется
объект, определяемый в каждом базисе пространства Ln совокупностью
np+q-z цисел, которые строятся так: указанные индексы переобознача-
переобозначаются одной буквой, в результате чего сверху и снизу оказывается один
и тот же индекс и, следовательно, по нему производится суммирование.
Теорема. Свертка тензора А типа (p,q) является тензором типа
(p-l,q-l).
Доказательство. Пусть, например, свертка осуществляется по пер-
первым индексам (в остальных случаях доказательство аналогичное). Имеем:
Ц'-f = ae?"f = < ... as//3° ... #'<С"? •
%2--Лр Sl2---bp Ь lp I l\ I Iq Ь\...Ьр
Поскольку (Xs//3^ = 5^, то из суммы по Si остается одно слагаемое —
то, в котором si =7*1. Тем самым,
Th-.-jq _ S2 rySPRS2 Qjqnrir2...rq _ S2 rySPRS2 ftjqhr2---rq
Ui2...ip — ai2 ' ' •OLipPr2 • • •Prqar1s2.-.sp — ai2 " 'aipPr2 • • •Prqus2...Spi
что и требовалось доказать.
120 Преобразование базисов и координат Гл 3.
Замечание 1. Теперь при желании можно полностью перейти на
язык тензоров, отказавшись от употребления слов «вектор», «линейная
форма», «линейный оператор» и т. д. Приведем несколько примеров.
Рассмотрим тензор оц типа A,0) (линейную форму) и тензор х1 типа
@,1) (вектор). Их прямое произведение aix3 — это тензор типа A,1).
Следовательно, его свертка а{Х% — это тензор типа @,0), т.е. число, не
зависящее от выбора базиса (оно представляет собой значение линейной
формы А при аргументе х).
Другой пример: если bij — тензор типа B,0) (билинейная форма), х1
и у1 — тензоры типа @,1) (векторы), то Ь^хгу3 — это тензор типа @,0),
т. е. число, не зависящее от выбора базиса (оно представляет собой значение
билинейной формы при аргументах х,у).
Аналогично, если aj — тензор типа A,1) (линейный оператор), хг —
тензор типа @,1) (вектор), то а\хг — это тензор типа @,1) (вектор, пред-
представляющий собой результат действия линейного оператора на вектор х).
Замечание 2. Линейный оператор — это тензор типа A,1), поэтому
его свертка ass — это тензор типа @, 0), т. е. число, не зависящее от выбора
базиса. Это число обозначается sp А и называется следом оператора А. Оно
представляет собой сумму диагональных элементов матрицы оператора.
Тем самым, sp А, равно как и det А (п. 2 § 2), не зависит от выбора базиса.
Это ясно и из других соображений. Собственные значения оператора,
очевидно, не зависят от выбора базиса. Следовательно, от выбора базиса не
зависят и коэффициенты характеристического уравнения, поскольку они
выражаются через корни этого уравнения. Но sp A — это коэффициент при
A(n-1), a det А — это коэффициент при А0.
5. О билинейной форме.
Теорема 1. Ранг матрицы билинейной формы не зависит от выбора
базиса. _ _
Доказательство. Поскольку bij = а?а^Ь8Г, т.е. В = atrBa, то
rang .В ^ rang В. С другой стороны, В = btrBb, откуда rang .В $J rang В.
Следовательно, rang .В = rang В. Теорема доказана.
Определение 1. Рангом билинейной формы называется ранг ее
матрицы.
Теорема 2. В линейном пространстве над полем Ш знак определи-
определителя матрицы билинейной формы не зависит от выбора базиса.
Доказательство. Поскольку В = atrBa, то det .В = det a2 det .В,
причем det а ф 0. Теорема доказана.
Определение 2. Билинейная форма В (х,у) называется симмет-
симметричной, если при всех х,у имеет место равенство В (у, х) = ?>(х, у).
Теорема 3. Билинейная форма симметрична тогда и только тогда,
когда ее матрица симметрична, т.е. bij = bji.
Доказательство. Если билинейная форма В (х, у) симметрична, то
b^ = B(ei,ej) = B(ej,ei) = bji. Обратно, если b^ = bji, то Б(у,х) =
= bijylxi = bijxiy1 = bjixlyi = bijXlyi = i?(x, у). Теорема доказана.
§ 4. Квадратичные формы 121
Следствие. Если матрица тензора типа B, 0) (билинейной формы)
симметрична в одном базисе (т.е. эта билинейная форма симметрична),
то она симметрична и в любом другом базисе. Такой тензор называется
симметричным тензором типа B,0). Отметим, что матрица линейно-
линейного оператора аналогичным свойством не обладает: если она и окажется
в каком-то базисе симметричной, то в другом базисе она, вообще говоря,
уже не будет симметричной.
§ 4. Квадратичные формы
1. Матрица квадратичной формы.
Определение 1. Квадратичной формой называется выражение
5(х, х), где 5(х, у) — билинейная форма.
Теорема. Каждая квадратичная форма может быть получена из
симметричной билинейной формы, причем такая билинейная форма опре-
определяется единственным образом.
Доказательство. Допустим, что данная квадратичная форма
5(х, х) получена из билинейной формы i?(x, у). Тогда эта же квадратич-
квадратичная форма может быть получена и из симметричной билинейной формы
А(х,у)
С другой стороны, если одна и та же квадратичная форма получена
из двух симметричных билинейных форм, т.е. ^4(х,х) = -В(х,х), то
А(х,у) = Б(х,у). В самом деле, из равенства A(ei + е^,е^ + е^) =
= В(е{ + е^е* + е,) следует, что А(еие{) + 2A{euej) + A(ej,ej) =
= B(euei) + 2B(ei,ej) + Б(е^е^), откуда Л(е^е^) = Б(еье^), т.е.
ctij = bij. Теорема доказана.
Определение 2. Матрицей квадратичной формы называется мат-
матрица той симметричной билинейной формы, из которой она получена.
Замечание. Так как матрица квадратичной формы в любом базисе
совпадает с матрицей соответствующей ей симметричной билинейной фор-
формы, то квадратичная форма — это симметричный тензор типа B,0).
2. Метод Лагранжа.
Определение. Базис линейного пространства над полем Ш (С),
в котором квадратичная форма имеет вид Л(х,х) = \{(хгJ, где Х{ —
одно из чисел 1, —1, 0 A,0), называется каноническим.
Теорема. Для любой квадратичной формы существует канониче-
канонический базис.
Доказательство. Запишем выражение ^4(х,х) = aijXlxJ в каком-
нибудь базисе и воспользуемся методом математической индукции. Если
в выражении а^хгх^ реально не фигурирует ни одной переменной хг, т.е.
-А(х, х) = 0, то данный базис (как, впрочем, и любой другой) является
каноническим.
Допустим, что теорема доказана для случая, когда в выражении а^хгх^
реально фигурируют (п — 1) переменных, и докажем, что тогда она верна
122 Преобразование базисов и координат Гл 3.
и для п реально фигурирующих переменных ж1, ... ,хп. Возможны два
случая.
1°. Коэффициент при (ж1J, т.е. ац, отличен от нуля. Сгруппируем
все слагаемые, в которые входит ж1, и дополним их до полного квадрата.
В результате получим
А (х, х) = ап (V + ^х2 + ... + ^жпJ+Б (ж, х) = ац (г/f+Б (ж, х),
V ац ац У
где 5(х, х) — квадратичная форма, не содержащая х1 и, следовательно, по
предположению индукции, имеющая канонический базис. Для завершения
доказательства, тем самым, осталось положить
Г л/aiiy при ац > О,
х = < (или просто ж = уапу).
[ \/~ап У ПРИ аи < О
2°. ац = 0. В этом случае при некотором г ац ф 0 (иначе переменная х1
не входила бы в выражение а^хгх^). Полагая ж1 = г/1 + г/г, жг = г/1 — у1,
мы сведем стоящую перед нами задачу к случаю 1°, поскольку слагаемое
2ацх1х1 превратится в разность 2ац(у1J — 2ац(у1J. Теорема доказана.
Замечание 1. Идею доказательства этой теоремы можно исполь-
использовать на практике. В самом деле, указанным способом можно сперва
привести данную квадратичную форму к виду А (ж, х) = 1\ (х1) -\-В (ж, ж),
где i?(x, x) — квадратичная форма, не содержащая ж1, затем применить ту
же идею к квадратичной форме i?(x, x) и т. д. Такой метод нахождения ка-
канонического базиса квадратичной формы называется методом Лагранжа.
Замечание 2. Название «каноническийбазис» может ввести в заблу-
заблуждение — может показаться, что такой базис только один. На самом деле
это не так. Например, если искать канонический базис методом Лагранжа,
начиная с ж2, а не с ж1, то результат окажется, вообще говоря, другим.
3. Закон инерции. Начиная с этого места и до конца параграфа мы
будем рассматривать только линейные пространства над полем KL
Определение 1. Квадратичная или билинейная форма называется
положительно (отрицательно) определенной, если для любого х ф о
А(х,х)>0(<0).
Определение 2. Положительным (отрицательным, нулевым) ин-
индексом инерции квадратичной формы в каком-либо ее каноническом базисе
называется количество положительных (отрицательных, нулевых) диа-
диагональных элементов (т.е. элементов ац) ее матрицы в этом базисе.
Замечание. Нулевой индекс инерции квадратичной формы не зави-
зависит от выбора канонического базиса (поскольку он равен п — rang A).
Теорема. Положительный индекс инерции квадратичной формы ра-
равен максимальной размерности подпространства, в котором она являет-
является положительно определенной.
§ 4. Квадратичные формы 123
Доказательство. Без ограничения общности будем считать, что в
некотором каноническом базисе квадратичная форма имеет вид
А(х,х) = (х1J + ...+ (xk+f - (xk++1f - ... - (xk++k-f
(в противном случае базисные векторы можно перенумеровать). Ясно,
что в подпространстве L (е\, ... , е&+) эта квадратичная форма является
положительно определенной.
Допустим, что существует подпространство Lfe++1, в котором она также
положительно определена. Разложим каждый базисный вектор g^ этого
подпространства по базису {е^} и представим его в виде gi = g[ + g" i,
где g[ e L(eb ... ,ек+), g" G L (efe++b ... ,en). Векторы g[ линейно
зависимы — их (Ац + 1) в &+-мерном пространстве. Поэтому существует
их нетривиальная линейная комбинация, равная о. Следовательно, ли-
линейная комбинация векторов g^ с теми же коэффициентами дает нену-
ненулевой вектор (поскольку векторы g^ линейно независимы) х пространства
L (е&++ъ • • • •> еп), а значит, Л(х, х) $J 0. Тем самым, мы пришли к проти-
противоречию — нашли ненулевой вектор х Е Lfc++1, для которого А(х, х) $J 0.
Теорема доказана.
Следствие 1. Положительный индекс инерции не зависит от вы-
выбора канонического базиса.
Следствие 2. Отрицательный индекс инерции не зависит от вы-
выбора канонического базиса, так как от него не зависит величина /с+ + к- =
= rang A.
Итак, все три индекса инерции не зависят от выбора канонического
базиса. Это свойство, называемое законом инерции квадратичных форм,
дает основание для следующего определения.
Определение 3. Вид, который принимает квадратичная форма
в своем каноническом базисе, называется ее каноническим видом.
4. Критерий Сильвестра. Условимся называть угловым минором
матрицы ее минор, расположенный в левом верхнем углу.
Теорема (критерий Сильвестра). Квадратичная форма является
положительно определенной тогда и только тогда, когда все угловые
миноры ее матрицы положительны.
Доказательство. Допустим сначала, что квадратичная форма яв-
является положительно определенной, и докажем, что все угловые миноры ее
матрицы положительны. Воспользуемся методом математической индук-
индукции. В одномерном пространстве справедливость утверждения очевидна.
Предположим, что оно справедливо в n-мерном пространстве, и докажем
его справедливость в (п + 1)-мерном пространстве. Поскольку квадра-
квадратичная форма положительно определена, в частности для векторов под-
/ п . . \
пространства L(ei, ... ,еп) ( Yl ^ijXlx3 ^ 0), то все угловые миноры
ее матрицы, вплоть до n-го порядка, положительны по предположению
индукции. Но и ее определитель больше нуля — в каноническом базисе он
124 Преобразование базисов и координат Гл 3.
равен 1 (так как к+ = п + 1), а знак определителя матрицы билинейной,
а значит и квадратичной, формы не зависит от выбора базиса.
Допустим теперь, что все угловые миноры матрицы квадратичной
формы положительны, и докажем, что эта квадратичная форма является
положительно определенной. Вновь воспользуемся методом математиче-
математической индукции. В одномерном пространстве справедливость утверждения
очевидна. Предположим, что оно справедливо в n-мерном пространстве,
и докажем его справедливость в (п + 1)-мерном пространстве. По пред-
предположению индукции данная квадратичная форма положительно опре-
определена для векторов подпространства L(ei, ... ,еп) и, следовательно, ее
положительный индекс инерции не меньше п. Но если он равен п, то
в каноническом базисе определитель ее матрицы неположительный, а знак
определителя матрицы квадратичной формы не зависит от выбора базиса.
Поэтому он равен п + 1, что и требовалось доказать.
Следствие. Квадратичная форма является отрицательно опреде-
определенной тогда и только тогда, когда угловые миноры ее матрицы четного
порядка положительны, а нечетного — отрицательны.
В самом деле, квадратичная форма ctijXlxJ является отрицательно
определенной тогда и только тогда, когда квадратичная форма (—aij)xlxJ
положительно определена.
Глава 4
ЕВКЛИДОВО ПРОСТРАНСТВО
§ 1. Длины и углы
1. Определение евклидова пространства.
Определение. Линейное пространство над полем Ш называется
евклидовым, если в нем зафиксирована некоторая симметричная положи-
положительно определенная билинейная форма G(x, у), называемая скалярным
произведением (х, у).
Билинейную форму (х, у) = gijXlyi иногда называют также метриче-
метрическим тензором', n-мерное евклидово пространство обозначается так: Еп.
Замечание. Определение евклидова пространства в развернутом ви-
виде можно сформулировать так: линейное пространство над полем Ж назы-
называется евклидовым, если для любой упорядоченной пары его векторов х и у
определена операция скалярного умножения, ставящая ей в соответствие
вещественное число (х, у). При этом:
1° для любых х, у имеет место равенство (х, у) = (у, х);
2° для любых*., у, z имеет место равенство (х+у, z) = (х, z) + (y,z);
3° для любых х, у и любого числа А имеет место равенство (Ах, у) =
= А(х,у);
4° для любого х имеет место неравенство (х, х) ^ 0, причем (х, х) =
= 0 тогда и только тогда, когда х = о.
Перечисленные утверждения составляют III группу аксиом Вейля. Те-
Теперь отчетливо видно, что эти «аксиомы» в действительности таковыми
не являются. Ясно также, что поскольку в линейном пространстве имеется
бесконечное количество симметричных, положительно определенных били-
билинейных форм (их столько же, сколько симметричных матриц, удовлетворя-
удовлетворяющих критерию Сильвестра), то каждое линейное пространство может
быть сделано евклидовым, причем бесконечным числом способов.
2. Неравенство Коши-Буняковского.
Теорема. Для любых двух элементов х, у евклидова пространства
имеет место неравенство (х, уJ ^ (х, х)(у,у).
Доказательство. Из определения скалярного произведения следу-
следует, что для любых векторов х, у и любого числа Л имеет место неравенство
(Лх — у, Лх — у) ^ 0, или Л2(х, х) — 2Л(х, у) + (у, у) ^ 0. Из произволь-
произвольности Л следует, что квадратное уравнение Л2(х, х) — 2Л(х, у) + (у,у) =
= 0 имеет не более одного корня Л (иначе в интервале между корнями
Л2(х,х) — 2Л(х,у) + (у,у) < 0), т.е. его дискриминант неположителен:
(х, уJ — (х, х)(у, у) ^ 0, что и требовалось доказать.
126 Евклидово пространство Гл 4.
Замечание. Установленное нами неравенство в отечественной лите-
литературе называется неравенством Коши-Буняковского, хотя, видимо, пра-
правильнее было бы называть его неравенством Коши-Буняковского-Шварца,
поскольку в мировой литературе в указанном контексте можно встретить
любые комбинации из этих трех фамилий.
3. Длина вектора.
Определение. Длиной вектора х называется число |х| = ^/(х, х).
Ясно, что число |х| — вещественное.
Замечание. В новых обозначениях неравенство Коши-Буняковского
можно записать так: |(х,у)| ^ |х||у|.
Теорема. 1° Для любого х имеет место неравенство |х| ^ 0, причем
х
= 0 тогда и только тогда, когда х = о;
2° для любого вектора х и любого числа X имеет место равенство
|Ах| = |А||х|;
3° для любых х, у имеет место неравенство |х + у| ^ |х| + |у|
{неравенство треугольника).
Доказательство. 1°. Справедливость этого неравенства вытекает
непосредственно из определения.
2°. Имеем: \\х\ = л/(Хх, Хх) = -^/Х2 (х, х) = |А||ж .
3°. Имеем: |х + у|2 = (х + у,х + у) = |х|2 + |у|2 + 2(х,у) <С |х|2 + |у|2 +
+ 2|(х,у)| ^ |х|2 + |у|2 + 2|х||у| = (|х| + |у|J, откуда |х + у| ^ |х| + |у|.
Теорема доказана.
Замечание. Линейное пространство, каждому элементу х которого
ставится в соответствие вещественное число |х| (или ||х||) так, что имеют
место свойства 1°-3°, называется нормированным пространством, а число
|х| (или | |х| |) — нормой х. Поэтому можно сказать, что евклидово простран-
пространство является нормированным пространством с нормой |х| = у (ж, ж).
4. Угол между векторами.
Определение 1. Углом между ненулевыми векторами х и у назы-
называется величина <р (О ^ (р ^ тг), определяемая из уравнения cos <р = ' j.
\х\\у\
Из неравенства Коши-Буняковского следует, что угол определен для
любых двух ненулевых векторов.
Определение 2. Векторы х и у называются ортогональными
(х±у),если (х,у) = 0.
Сделаем несколько очевидных замечаний.
Замечание 1. x_Lx тогда и только тогда, когда х = о.
Замечание 2. Если вектор ортогонален нескольким векторам, то
он ортогонален и любой их линейной комбинации.
Замечание 3. Если x_Ly, то |х + у|2 = (х + у,х + у) = |х|2 + |у
2
(теорема Пифагора).
Замечание 4. Ненулевые попарно ортогональные векторы линейно
независимы.
§ 2. Ортонормированный базис 127
В самом деле, пусть Xi, ... , х& — ненулевые попарно ортогональные
векторы. Допустим, что Asxs = о. Умножая это равенство скалярно на х^
(г = 1, ... , /с), получим Аг = 0, что и требовалось доказать.
§ 2. Ортонормированный базис
1. Существование ортонормированного базиса. Из последнего за-
замечания предыдущего пункта следует, что упорядоченная совокупность п
попарно ортогональных единичных векторов в Еп (если, конечно, она су-
существует) образует базис. Он называется ортонормированным базисом.
Теорема. BW1 существует ортонормированный базис.
Доказательство. Пусть в некотором базисе скалярное произведение
выражается формулой (х, у) = gijXlyJ. Этой симметричной билинейной
форме соответствует положительно определенная квадратичная форма
(х, х), матрица которой в каноническом базисе единичная. Следовательно,
в этом базисе матрица билинейной формы (х, у) также единичная: <^j =
I 1 при г = 7, гтп
= i 0 п^и i ф у Теорема доказана.
Замечание 1. Поскольку в ортонормированном базисе gij =
0 при \~ф\ Т° (Х'у) = х1у1 + ••• + хПУП- В частности,
Замечание 2. Разложение вектора по ортонормированному базису
выглядит так: х = (х, ei)ei + ... + (х, en)en (чтобы убедиться в спра-
справедливости этого равенства, достаточно скалярно умножить обе его части
на е^, полагая г = 1, ... , п).
Определение. Пусть L — линейное подпространство простран-
пространства En, ei, ... ,е& — ортонормированный базис в этом пространстве.
Вектор у = (х, ei)ei + ... + (х, е^)е^ называется проекцией вектора х
на подпространство L.
Замечание. Ясно, что вектор z = х — у ортогонален каждому
из векторов ei, ... ,е&, а значит и любой их линейной комбинации, т.е.
ортогонален любому вектору подпространства L.
2. Ортогонализация. Рассмотрим такую задачу: как, зная какой-ни-
какой-нибудь базис {е^ пространства Еп, построить ортонормированный базис
этого пространства1! Можно, конечно, поступить так: найти матрицу д^ =
= (e^,ej), а затем построить канонический базис квадратичной формы
А(х, х) = gijXlxJ — он и будет ортонормированным. На практике, однако,
чаще поступают иначе.
Положим ei = ei/|ei|. Затем, вычитая из вектора е2 его проекцию
на подпространство L (ei) и обозначая результат через g2, положим §2 =
= g2/|S21- Далее, вычитая из вектора ез его проекцию на подпространство
L(ei,e2) и обозначая результат через g3, положим ёз = ёз/|ёз|? и Т-Д-
Продолжая этот процесс, мы получим, в конце концов, ортонормированный
базис {ё^}. Этот прием называется ортогонализацией.
128 Евклидово пространство Гл 4.
3. Ортогональное дополнение.
Определение. Пусть L — линейное подпространство простран-
пространства^ . Множество ~L±_ всех векторов пространства Еп, ортогональных
всем векторам подпространства L, называется ортогональным дополне-
дополнением подпространства L.
Теорема. Ортогональное дополнение линейного подпространства Lfe
пространства Еп является линейным подпространством размерности
п — к.
Доказательство. Пусть ei, ... , еп — ортонормированный базис
пространства En, gi, ... , g& — произвольный базис пространства IA
Разложим каждый из векторов g^ по базису {е^}: gi = gj^j- Столбцы мат-
матрицы G, будучи координатами линейно независимых векторов g^, линей-
линейно независимы, поэтому rangC = к. Ортогональное дополнение подпро-
подпространства Jjk представляет собой множество всех решений х однородной
системы
Следовательно, оно является линейным подпространством размерности
п — к. Теорема доказана.
Следствие 1. Для любого линейного подпространства L простран-
пространства Еп имеет место равенство En = L 0 L^ (так как совокупность
ортонормированных базисов этих подпространств представляет собой ор-
тонормированную совокупность п векторов, т.е. базис пространства Еп).
Следствие 2. Подпространство L является ортогональным допол-
дополнением подпространства Lj_, поскольку вектор х = у + z (у G L,
z G Li) ортогонален всем векторам подпространства L^ тогда и только
тогда, когда z = о, а значит, х = у G L.
Замечание. В ходе доказательства теоремы нам пришлось восполь-
воспользоваться символом Е, поскольку возникла какая-то «путаница» с верхними
и нижними индексами. Это явление, причина которого вскоре выяснится,
типично при рассмотрении ортонормированных базисов.
4. Альтернатива Фредгольма. Как мы помним, линейное дополнение
подпространства L линейного пространства Ln определяется неоднознач-
неоднозначно. В линейном пространстве над полем R с фиксированным базисом су-
существует простой алгоритм построения одного из линейных дополнений
подпространства L. Он состоит в том, что сначала вводят скалярное про-
произведение, считая данный базис ортонормированным, а затем строят орто-
ортогональное дополнение L^ подпространства L — оно и является искомым
линейным дополнением. Воспользуемся этой идеей для доказательства сле-
следующей теоремы.
Теорема. Система т линейных уравнений с п неизвестными Ах =
= Ь, коэффициенты которой вещественны, имеет решение при любых
вещественных правых частях b тогда и только тогда, когда система
Atrx = о имеет лишь тривиальное решение.
§_3. Операторы в Еп 129
Доказательство. Рассмотрим линейный оператор с матрицей А,
действующий из W1 в Мт. Считая тот базис пространства Мт, в кото-
котором числа dij и hi являются координатами столбцов а^ и Ь, ортонорми-
рованным, представим пространство Мт в виде прямой суммы т\А =
= L(ai, ... , ап) и (im A)± — множества всех решений однородной системы
т
(а^,х) = J2 ajixj = 0 (г = 1, ... ,гг), т.е. системы Atrx = о. Система
3 = 1
Ах. = b имеет решение при любых b тогда и только тогда, когда любой
вектор b пространства Мт принадлежит im А, т. е. тогда и только тогда,
когда (imA)j_ = о, и, следовательно, система Atrx = о имеет лишь
тривиальное решение. Теорема доказана.
Следствие (альтернатива Фредгольма). Либо система линейных
уравнений Ах = b с вещественными коэффициентами имеет решение при
любых вещественных правых частях Ь, либо система Atrx = о имеет
нетривиальное решение.
Замечание 1. Ясно, что система Ах = b имеет решение тогда
и только тогда, когда b G im А или, что то же самое, вектор b ортогонален
к любому вектору пространства (im A)j_. Учитывая, что это пространство
является множеством всех решений системы Atrx = о, мы приходим
к следующему выводу: система Ах = b имеет решение тогда и только
тогда, когда вектор Ъ ортогонален к любому вектору ядра оператора
с матрицей Atr.
Замечание 2. Рассмотрим систему Ах = b и запишем ее в виде
Ах = bi + b2, где bi G imA, b2 G (imA)±. Умножая обе части этого
равенства слева на матрицу Atr и учитывая, что Atrh2 = о, получим:
AtrAx = Atrhi. Но система Ах = bi всегда имеет решение, поскольку
bi G im А Следовательно, и полученная система, т.е. система AtrAx =
= Atrh, имеет решение при всех Ъ.
§ 3. Операторы в Еп
1. Сопряженный оператор.
Определение. Оператор А* называется сопряженным по отно-
отношению к оператору А, если для любых векторов х, у имеет место равен-
равенство (Ах, у) = (х,А*у).
Теорема. Оператор А* является сопряженным по отношению
к оператору А тогда и только тогда, когда в ортонормированном базисе
матрица А* равна Atr.
Доказательство. Оператор В является сопряженным по отноше-
отношению к оператору А тогда и только тогда, когда в ортонормированном ба-
зисе (Ах, у) = Е <**>? = (х, By) = Е **«>,?, и™ Е (< - К) xsyl = 0.
Но билинейная форма тождественно равна нулю тогда и только тогда,
когда все ее коэффициенты (равные ее значениям на базисных векторах)
равны нулю. Следовательно, полученное тождество эквивалентно равен-
равенству В = Atr. Теорема доказана.
9 СБ. Кадомцев
130 Евклидово пространство Гл 4.
Следствие 1. Для любого оператора А существует единственный
оператор А* (чтобы найти его матрицу, нужно взять матрицу оператора А
в каком-нибудь ортонормированном базисе и транспонировать ее).
Следствие 2. (А*)* = А.
2. Ортогональный оператор.
Определение 1. Оператор А называется ортогональным, если для
любых векторов х, у имеет место равенство (Ах, Ау) = (х, у).
Замечание. Поскольку ортогональный оператор не меняет скаляр-
скалярного произведения векторов, то он не меняет длины векторов и углы
между ними. В частности, любой ортонормированный базис он переводит
в ортонормированный базис. Геометрически это соответствует повороту
и отражению относительно координатных плоскостей.
Теорема 1. Если L — инвариантное подпространство ортогональ-
ортогонального оператора А, то и L^ — его инвариантное подпространство.
Доказательство. Оператор А переводит ортонормированный базис
пространства L в ортонормированную совокупность векторов простран-
пространства L, количество которых равно размерности этого пространства, т.е.
в ортонормированный базис пространства L. Следовательно, A(L) = L.
Поэтому для любого вектора х G L существует такой вектор у G L, что
Ау = х.
Если z G Lj_, то для любого х G L имеет место равенство (Az,x) =
= (Az, Ay) = (z, у) = 0, поскольку у G L. Теорема доказана.
Теорема 2. Оператор А является ортогональным тогда и только
тогда, когда А* = А.
Доказательство. Оператор А является ортогональным тогда
и только тогда, когда (Ах, Ау) = (х, А*Ау) = (х, у), или (х, А*Ау —
— у) = 0, т.е. А*Ау = у или А*А = Е. Теорема доказана.
Следствие. Оператор А является ортогональным тогда и только
тогда, когда в ортонормированном базисе матрица А равна Atr.
Определение 2. Матрица А называется ортогональной, если
А = Atr.
Таким образом, можно сказать, что оператор является ортогональным
тогда и только тогда, когда в ортонормированном базисе его матрица —
ортогональная.
Замечание 1. По определению ортогональной матрицы AAtr =
= AtrA = Е, т. е. J2 aisajs = Е asiasj = \ Q ПрИ \~^ 3- Таким обра-
образом, строки (столбцы) ортогональной матрицы — это координаты векторов,
образующих ортонормированный базис.
Замечание 2. Поскольку для ортогональной матрицы AAtr = Е,
то (det АJ = 1. Если det A = 1, то матрица А называется собственной,
а если det A = (—1), то несобственной ортогональной матрицей.
Отметим также, что поскольку определитель матрицы линейного опе-
оператора не зависит от выбора базиса, то определитель матрицы ортогональ-
ортогонального оператора в любом базисе равен ±1.
§3.
Операторы в Еп
131
Теорема 3. Для любого ортогонального оператора существует та-
такой ортонормированный базис, в котором его матрица имеет вид
\
0
COS (fk — Sin (fk
sin ipk cos (fk
0
\
An-2fc /
где Xi = ±1.
Доказательство. Воспользуемся теоремой 1 и методом математиче-
математической индукции. При п = 1 справедливость утверждения очевидна. Допу-
Допустим, что теорема доказана для п $J т — 1, и докажем, что в таком случае
она верна и для п = т.
Если характеристическое уравнение для данного оператора имеет по
крайней мере один вещественный корень Ат, то Хт = ±1, поскольку из
равенства Ах = Атх следует, что (Ах, Ах) = (х, х) = А^(х, х). В этом
случае для доказательства теоремы достаточно принять собственный век-
вектор, соответствующий Аш, за базисный вектор еш, а затем в ортогональном
дополнении к L(em) привести матрицу оператора к требуемому виду.
Возможен, однако, и такой случай: характеристическое уравнение не
имеет вещественных корней. Пусть А + ifi — один из его комплексных
корней. Ему соответствует двумерное инвариантное подпространство L
оператора А (см. п.6 §2 гл.2). Выберем ортонормированный базис {е^}
так, что L = L(ei, ег). Поскольку L^ — также инвариантное подпростран-
подпространство, то матрица оператора в базисе {е^} имеет «блочный» вид
А =
(аи ai2 0 ... 0N
0-21 &22 0 ... О
О О
V о о
Строки ортогональной матрицы — это координаты векторов, образую-
образующих ортонормированный базис, поэтому
А
+ а?2 = 1
¦ а|2 = 1
+ ^12^22 = О
Полагая ац = cos (р, а\2 = ~~ sin<^, получаем:
/an ai2^\ ( cos (^ — sinc^
ya2i a22/ ~~ \=bsin(^ zbcos^
132 Евклидово пространство Гл 4.
Однако один из этих случаев отпадает, поскольку характеристическое урав-
/cos ю — А — sin ю \ \ 2 1 п
нение ^- /Л то,/ \ =А -1 = 0,а значит и характеристическое
уравнение для матрицы А, имеют вещественные корни, что противоречит
предположению. Следовательно, (^ ?*) = (^J "СоГ/)- Для завер-
шения доказательства теоремы осталось привести матрицу А к требуемому
виду, что возможно в силу предположения индукции.
3. Ортогональные преобразования. Пусть {е^} — ортонормирован-
ный базис, {ё^} — произвольный базис, ё^ = afes.
Теорема. Базис {ё^} является ортонормированным тогда и только
тогда, когда матрица а — ортогональная.
Доказательство. Базис {ё^} является ортонормированным тогда
,~ ~ ч j. r Г 1 при г = 7, тт
и только тогда, когда (е», e^-J = dij, где dij = < q т1)и ^ , J- Имеем:
Итак, (ei,ej) = 5^i тогда и только тогда, когда 5^а|а^ = #г/, т.е.
S
atra = Е, или а = atr. Теорема доказана.
Следствие. Произведение ортогональных матриц является орто-
ортогональной матрицей.
Замечание. При ортогональных преобразованиях, т. е. при переходах
от ортонормированных базисов к ортонормированным базисам, исчезает
различие между ковариантными и контравариантными тензорами. В са-
самом деле, рассмотрим, например, тензор типа A,1) (линейный оператор).
Его матрица при переходе к новому базису преобразуется так: А = /ЗАа.
Матрица тензора типа B, 0) (билинейной или квадратичной формы) преоб-
преобразуется так: В = atr Ва. Но при ортогональном преобразовании C = atr,
поэтому эти две формулы становятся одинаковыми. С этим, в частности,
связана «путаница» с верхними и нижними индексами, иногда возникаю-
возникающая при рассмотрении ортонормированных базисов.
4. Самосопряженный оператор.
Определение. Линейный оператор А называется самосопряжен-
самосопряженным, если А* = А.
Тем самым, можно сказать, что в любом ортонормированном базисе
матрица самосопряженного оператора симметрична: а^ = а^.
Теорема 1. Все корни характеристического уравнения для самосо-
самосопряженного оператора вещественны.
Доказательство. Допустим, что указанное характеристическое
уравнение имеет корень Л + г/i, т.е. det(^ — (Л + iy)E) = 0. Тогда
однородная система Аъ = (Л + i/i)z имеет нетривиальное решение z = х +
+ гу: Л(х + гу) = (А + г/х)(х + гу), или Ах + гАу = Лх- /iy + г(Лу + /хх),
§_3. Операторы в Еп 133
откуда
Ах. = Лх — /iy
Ay = Лу + /IX
Умножая скалярно первое уравнение на (—у), второе — на х и скла-
складывая их, получаем: — (Ах., у) + (х, Ay) = /i(|x|2 + |y|2)- Но левая часть
этого равенства равна нулю, поскольку оператор А — самосопряженный.
Следовательно, \± = 0. Теорема доказана.
Теорема 2. Для любого самосопряженного оператора существует
ортонормированный базис из его собственных векторов.
Доказательство. Заметим сначала, что если х — собственный
вектор самосопряженного оператора А, у^х, то Ау1_х. В самом деле,
(х, Ау) = (Ах, у) = А(х, у) = 0. Таким образом, ортогональное допол-
дополнение подпространства L(x) является инвариантным подпространством
оператора А.
Перейдем теперь непосредственно к доказательству теоремы. Найдем
какое-нибудь собственное значение Ai (его существование гарантирует
теорема 1) и соответствующий ему единичный собственный вектор ei.
Ортогональное дополнение подпространства L(ei) является инвариант-
инвариантным подпространством оператора А, поэтому теперь можно рассматри-
рассматривать оператор А только на нем. Найдем какое-нибудь собственное значе-
значение А2 и соответствующий ему единичный собственный вектор е2, после
чего будем рассматривать оператор А только на ортогональном допол-
дополнении подпространства L(ei,e2) и т. д. В результате мы построим орто-
ортонормированный базис из собственных векторов ei,e2, ... ,еп. Теорема
доказана.
Следствие. Для любого самосопряженного оператора существует
такой ортонормированный базис, в котором его матрица диагональна.
Замечание 1. Справедливо и обратное утверждение: если существу-
существует ортонормированный базис, в котором матрица оператора диагональ-
диагональна, то этот оператор — самосопряженный, поскольку в указанном базисе
матрица этого оператора симметрична.
Замечание 2. Отметим, что в том базисе, в котором матрица орто-
ортогонального оператора А имеет вид, указанный в теореме 3 п. 2, матрица
А + Atr диагональна. Попробуйте объяснить этот факт и, основываясь
на Вашем объяснении, привести еще одно доказательство упомянутой тео-
теоремы.
5. Квадратичная форма в Е71.
Теорема. Для любой квадратичной или симметричной билинейной
формы существует такой ортонормированный базис, в котором ее мат-
матрица диагональна.
Доказательство. Рассмотрим сначала произвольный ортонормиро-
ортонормированный базис и запишем в нем матрицу данной квадратичной или сим-
симметричной билинейной формы. Рассмотрим теперь самосопряженный опе-
оператор с такой же матрицей и построим ортонормированный базис из его
собственных векторов. В нем матрица оператора диагональна. Но переход
134 Евклидово пространство Гл 4.
от одного ортонормированного базиса к другому ортонормированному ба-
базису — это ортогональное преобразование, а при таких преобразованиях
матрицы оператора и квадратичной или билинейной формы преобразуют-
преобразуются одинаково. Следовательно, построенный ортонормированный базис —
искомый. Теорема доказана.
Следствие. В линейном пространстве над полем R для любых двух
квадратичных или симметричных билинейных форм, одна из которых —
положительно определенная, существует такой базис, в котором мат-
матрица одной из них — единичная, а другой — диагональная. В самом деле,
принимая положительно определенную симметричную билинейную форму
(данную, или ту, из которой получена данная положительно определенная
квадратичная форма) за скалярное произведение, мы сможем построить
такой ортонормированный базис, в котором матрица второй квадратичной
или симметричной билинейной формы диагональна.
§ 4. Гиперповерхности второго порядка
1. Система координат. Добавим теперь последнюю, IVrpynny аксиом
Вейля. Будем считать, что наряду с векторами в Еп имеются точки, а также
правило, по которому любой упорядоченной паре точек А, В ставится
в соответствие вектор АВ. При этом:
1° для любого вектора х и любой точки О существует единственная
точка М такая, что ОМ = х (откладывание вектора от данной точки);
2° для любых точек А, В и С имеет место равенство АВ+ВС = АС
(правило треугольника).
Следствие 1. Для любой точки А имеет место равенство А А =
= о. В самом деле, прибавляя к обеим частям равенства АА + АА = АА
вектор (—А А), получим: А А + о = о, откуда А А = о.
Следствие 2. Для любых точек А и В имеет место равенство
ВА = —АВ. Действительно, АВ + ВА = АА = о.
Определение. Системой координат Ох1 ... хп называется сово-
совокупность ортонормированного базиса {е^} и точки О {начала координат),
а координатами точки М — координаты вектора ОМ в базисе {е^}.
Ясно, что каждая точка М имеет вполне определенный набор координат
х1, ... ,хп; обратно, для любых чисел х1, ... ,хп существует ровно одна
точка М с координатами х1, ... ,хп (это следует из аксиомы 1°). Иными
словами, соответствие М о (х1, ... ,хп) является взаимно однозначным.
Тот факт, что точка М имеет координаты х1, ... ,хп будем обозначать
так: М(х1, ... ,хп).
Пусть Ох1, ... ,хп — «старая» система координат, Ох1, ... ,хп —
«новая», О [о1, ... ,оп). Выразим «новые» координаты точки М через
ее «старые» координаты. Для этого заметим, что «новые» координаты
точки М — это координаты вектора ОМ в «новой» системе координат.
Найдем сначала координаты этого вектора в «старой» системе координат.
§ 4. Гиперповерхности второго порядка 135
Согласно аксиоме 2° и следствию 2 имеем: ОМ = ОО + ОМ = —ОО +
+ ОМ = {х1 - о1, ... , хп - оп}. Следовательно, х* = /3*8 (xs - os).
Таким образом, переход от «старой» системы координат к «новой»
осуществляется при помощи параллельного переноса на вектор О О и ор-
ортогонального преобразования, поскольку «старый» и «новый» базисы —
ортонормированные. Из полученных формул следует, что старые коорди-
координаты выражаются через новые так: хг = а\Xs + о% где а = /3tr.
2. Каноническое уравнение гиперповерхности второго порядка.
Множество всех точек М^х1, ... ,жп), координаты которых удовле-
удовлетворяют уравнению /(ж1, ... ,жп) = 0, называется гиперповерхностью.
В частности, если /(ж1, ... ,жп) = а,{Хг + Ь и J^af ф 0, то гиперповерх-
гиперповерхность называется гиперплоскостью. Примерами гиперплоскостей могут
служить прямая на плоскости и плоскость в пространстве.
Множество всех точек М(ж1, ... ,жп), координаты которых удовле-
удовлетворяют уравнению а^хгх^ + 2Ь{Хг + с = 0, где $^а^- / 0> называется
гиперповехностью второго порядка. При переходе к новому базису по
формулам х1 = a* Js это уравнение преобразуется так: (af a^asr) жг5Р +
+ 2 (affes) жг + с = 0. Следовательно, А(х, х) = а^хгх^ — квадратичная
форма, -В(х) = Ь^ж* — линейная форма. Поскольку мы ограничиваемся
рассмотрением ортонормированных базисов и, следовательно, не делаем
различия между ковариантными и контравариантными тензорами, то ли-
линейную форму -В(х) мож:но рассматривать как скалярное произведение
вектора b на вектор х: В(х) = (Ь, х).
Уравнение гиперповерхности второго порядка можно существенно
упростить, если перейти к новой системе координат. Делается это, вообще
говоря, в три этапа.
1°. Не меняя начала координат, выполним такое ортогональное пре-
преобразование, при котором матрица А примет диагональный вид. Само
уравнение при этом перепишется так:
= 0.
Здесь к = rang A $J n, Л^ ф 0.
2°. Сделаем теперь параллельный перенос, полагая при г ^ к хг =
у1 — Ь{/Х{. В результате уравнение примет вид
i=l i=k+l
(при к = п вторая группа слагаемых отсутствует).
136 Евклидово пространство Гл 4.
3°. В случае к + 1 < п в нашем распоряжении остается еще ортого-
ортогональное преобразование в пространстве L (e^+i, ... , еп) — оно, очевидно,
не меняет квадратичной формы. Выберем базис в этом пространстве так,
чтобы новый (к + 1)-й базисный вектор оказался направленным вдоль век-
вектора Ь. Тогда в новой системе координат вектор b будет иметь координаты
{6, 0, ... ,0}. Возвращаясь к старым обозначениям, получим окончательно:
Это уравнение называется каноническим уравнением гиперповерхно-
гиперповерхности второго порядка.
3. Классификация. Все гиперповерхности второго порядка, канониче-
канонические уравнения которых не содержат хотя бы одной переменной (т. е. либо
к + 1 < п, либо к + 1 = 71, но Ъ = 0), называются цилиндрами.
Если же каноническое уравнение гиперповерхности второго порядка
содержит все переменные, то возможны 3 случая.
1. Если Ъ = 0, с ф 0, то уравнение принимает вид ^а^(жг) =
i=i
= 1. Гиперповерхности, уравнение которых имеет такой вид, называются
эллипсоидами и гиперболоидами.
п 2
2. Если Ъ = с = 0, то уравнение принимает вид J2 ai (ж*) = 0-
г=1
Гиперповерхности, описываемые уравнениями такого вида, называются
конусами.
3. Наконец, если Ъ ф 0, то, полагая xk+1 = хп — с/B6), приведем
п —1 2
каноническое уравнение к виду J^ а^ (жг) = жп. Гиперповерхности, опи-
г=1
сываемые такими уравнениями, называются параболоидами.
Замечание. Нетрудно убедиться в том, что в n-мерном простран-
пространстве имеется п2 + Зп — 1 различных типов гиперповерхностей второго
порядка, п из которых — мнимые, т.е. их уравнения описывают пустое
множество. При этом цилиндров — п2 + п — 3 (п — 1 из них — мнимые),
эллипсоидов и гиперболоидов — п +1 A — мнимый), конусов — п/2 +1 при
четном пи (п + 1)/2 — при нечетном, а параболоидов — п/2 при четном п
и (п + 1)/2 — при нечетном.
4. Инварианты. Вернемся к общему уравнению гиперповерхности вто-
второго порядка:
aijxixj + 2biX{ + с = 0.
Говорят, что функция / (аи, ... , апп, fei, ... , fen, с) является инвари-
инвариантом этого уравнения, если при переходе к любой другой системе коор-
координат ее значение не изменяется:
= /(an, ... ,ann,bi, ... , &n,c).
§ 4. Гиперповерхности второго порядка 137
Рассмотрим две матрицы:
f CLll U\2 • • • CLir,
A=\ai2 a22 ¦¦ a2n | иВ= .
L _ _ _ / i Q-ln &2n • • • dnn On
Vain a2n ••• ann/ у ^ fe ^ c
Теорема. 5се коэффициенты характеристического уравнения для
матрицы А и det Б являются инвариантами уравнения гиперповерхно-
гиперповерхности второго порядка.
Доказательство. Переход от одной системы координат к другой —
это последовательное выполнение ортогонального преобразования и парал-
параллельного переноса. При параллельном переносе матрица А вообще не из-
изменяется, поэтому не изменяются и коэффициенты указанного характери-
характеристического уравнения. При ортогональном преобразовании коэффициенты
матрицы А изменяются, но не меняются собственные значения самосопря-
самосопряженного оператора А, а значит и коэффициенты указанного характеристи-
характеристического уравнения, поскольку последние через них выражаются:
(an — Л) ai2 • • • air,
a21 (aM-A)... a2n = (Ai _ A)(As _ a)(Ajj _ д).
• • • (ann — Л)
Осталось доказать инвариантность det В. Заметим, прежде всего, что
гиперповерхность, описываемая данным уравнением, может рассматри-
рассматриваться как сечение конуса -В(х, х) = 0 в {п + 1)-мерном пространстве
гиперплоскостью xnJrl = 1, т.е. как направляющая этого конуса. В самом
деле,
п п
?>(х,х)|ж/с+1=1 = 22 а^хгх^ + 2 22^xl • 1 + с • I2.
i,j = l г=1
Далее, переходу к новой системе координат в n-мерном пространстве
по формулам хг = а\Xs -\-ог соответствует преобразование в (гг+1)-мерном
'а\ ...al ,
пространстве с матрицей а = I ' 'п' 'п "п I , поскольку
Г{/" ••• &п О
о ... о 1
fa\ ...al о1'
а'{ ... апп оп
о ... о 1/ \ 1 / \ 1
Следовательно, при переходе к новой системе координат матрица В пре-
преобразуется так: В = atrBa, откуда
det В = (det af det В = (det af det В = det Б,
так как матрица а — ортогональная. Теорема доказана.
Глава 5
НЕКОТОРЫЕ ОБОБЩЕНИЯ
§ 1. Унитарное пространство
1. Основные свойства. Унитарное пространство — это прямое обоб-
обобщение евклидова пространства на случай линейного пространства над по-
полем С. Поэтому иногда его называют комплексным евклидовым простран-
пространством; n-мерное унитарное пространство обозначают так: Un. Бесконечно-
Бесконечномерное унитарное пространство играет фундаментальную роль в квантовой
механике.
Определение. Линейное пространство над полем С называется
унитарным, если для любой упорядоченной пары его векторов хиу опре-
определена операция скалярного умножения, ставящая ей в соответствие
комплексное число (х, у). При этом:
1° для любых х, у имеет место равенство (х, у) = (у, х) (черта
означает комплексное сопряжение);
2° для любых х, у, z имеет место равенство (х+у, z) = (х, z) + (y,z);
3° для любых х, у и любого числа Л имеет место равенство (Ах, у) =
= А(х,у);
4° для любого х имеет место неравенство (х, х) ^ 0, причем (х, х) =
= 0 тогда и только тогда, когда х = о.
Замечание 1. Знак «^» в утверждении 4° может вызвать недоуме-
недоумение — не ясно, как его понимать применительно к комплексным числам.
В действительности речь здесь и не идет о комплексных числах. В самом
деле, согласно 1°, (х, х) = (х, х), поэтому число (х, х) — вещественное.
Замечание 2. Определенное указанным способом скалярное произ-
произведение уже не является билинейной формой. Действительно, (х, у + z) =
= (y + z,x) = (у, х) + (z, х) = (х, у) + (х, z), однако (х, Лу) = (Лу, х) =
= Л (у,х) = Л(х, у) ф А(х, у) (вообще говоря).
Теорема. Для любых векторов х, у имеет, место неравенство
|(х, у)|2 ^ (х, х)(у,у) (неравенство Коши-Буняковского).
Доказательство. Согласно 4° для любых векторов х, у и любого
числа Л имеет место неравенство (Лх — у, Лх — у) ^ 0. В соответствии
с замечанием 2, преобразуем это неравенство так:
(Лх - у, Лх - у) = Л(х, Лх - у) - (у, Лх - у) =
= ЛЛ(х, х) - Л(х, у) - Л(у, х) + (у, у) =
= |А|2(х,х) - Л(х,у) - Л (х,у) + (у, у) ^ 0.
§ 1. Унитарное пространство 139
Полагая Л = t (при (х, у) = 0 справедливость неравенства
(Х'У) I
Коши-Буняковского не вызывает сомнения), где t — произвольное веще-
вещественное число, получаем: (х,х)?2 — 2|(х,y)\t + (у,у) ^ 0. Из произволь-
произвольности t следует, что дискриминант левой части неположителен: |(х, у)|2 —
— (х, х)(у, у) ^ 0, что и требовалось доказать.
Замечание. В унитарном пространстве можно ввести понятия длины
вектора (|х| = у^х, х)), ортонормированного базиса в Un и ортого-
ортогонального дополнения подпространства L пространства Un. Правда, до-
доказательство существования ортонормированного базиса здесь выглядит
иначе — ведь скалярное произведение в этом пространстве уже не является
билинейной формой. Это, впрочем, не мешает провести доказательство,
применяя к произвольному базису процесс ортогонализации (п. 2 § 2 гл. 4).
Не составляет труда перенести на случай унитарного пространства и ре-
результаты, полученные в пп. 3 и 4 § 2 гл. 4. При этом следует иметь в виду,
что в роли матрицы Atr здесь выступает матрица А . Так, например,
альтернатива Фредгольма для системы линейных уравнений с комплекс-
комплексными коэффициентами формулируется следующим образом: либо система
линейных уравнений Ах = b имеет решение при любых Ь, либо система
А х = о имеет нетривиальное решение.
2. Нормальный оператор. Как и прежде, будем говорить, что опера-
оператор А* называется сопряженным по отношению к оператору А, если для
любых векторов х, у имеет место равенство (Ах, у) = (х, А*у). Нетрудно
доказать, что оператор А* является сопряженным по отношению к опе-
оператору А тогда и только тогда, когда в ортонормированном базисе мат-
.. —rtr
рица А равна А — это утверждение доказывается точно так же, как для
евклидова пространства (п. 1 §3 гл.4). Из этого, в частности, следует, что
для любого оператора А существует единственный оператор А*, причем
(А*)* = А.
Введем теперь новое понятие.
Определение. Оператор А называется нормальным, если А А* =
= А*А.
Теорема 1. Если оператор А — нормальный, и Ах = Ах, то i*x =
= Ах.
Доказательство. Равенство Ах = Ах можно переписать так: (А —
- А?)х = о или ((А - А?)х, (А - А#)х)) = 0. Но
((А- А?)х, (А-АВД) = ((А* - АЯ)(А-АЯ)х,х) =
,х) = ((А*-А?)х,(А*-Хё;)х)).
Следовательно, А*х = Ах. Теорема доказана.
Теорема 2. Для любого нормального оператора существует орто-
нормированный базис из его собственных векторов.
Доказательство. Доказательство этой теоремы аналогично дока-
доказательству теоремы о собственных векторах самосопряженного оператора
140 Некоторые обобщения Гл 5.
в Еп. Прежде всего заметим, что если х — собственный вектор нормаль-
нормального оператора A, y_Lx, то ^4y_Lx. В самом деле, (х, Ау) = (А*х,у) =
= (Ах, у) = А(х, у) = 0. Таким образом, ортогональное дополнение к L(x)
является инвариантным подпространством оператора А.
Дальнейшие рассуждения дословно совпадают с соответствующей ча-
частью доказательства теоремы о собственных векторах самосопряженного
оператора вЕп (т. 2 п. 4 § 3 гл. 4).
Следствие. Для любого нормального оператора А существует та-
такой ортонормированный базис, в котором его матрица диагональна, при-
причем диагональными элементами являются его собственные значения.
Замечание. Справедливо и обратное утверждение: если существует
ортонормированный базис, в котором матрица оператора диагональна,
то этот оператор — нормальный, поскольку в указанном базисе и АА*,
и А* А представляют собой диагональную матрицу с диагональными эле-
элементами \а
3. Унитарный оператор.
Определение. Оператор А называется унитарным, если для лю-
любых векторов х, у имеет место равенство (Ах, Ау) = (х, у).
Замечание. Поскольку унитарный оператор не меняет скалярного
произведения, то любой ортонормированный базис он переводит в орто-
ортонормированный базис. Опираясь на аналогию с ортогональным операто-
оператором, можно сказать, что это в каком-то смысле соответствует повороту
и отражению относительно координатных плоскостей.
Точно так же, как для ортогонального оператора в Еп, доказывается,
что оператор А является унитарным тогда и только тогда, когда А* =
= А~г. Из этого, в свою очередь, следует, что:
1° любой унитарный оператор является нормальным;
2° в ортонормированном базисе матрица унитарного оператора удо-
удовлетворяет равенству А~х = А .
Отметим, что матрица, удовлетворяющая равенству А~^ = А , на-
называется унитарной. При помощи унитарных матриц осуществляется
переход от одного ортонормированного базиса к другому (доказательство
этого утверждения полностью аналогично доказательству соответствую-
соответствующего утверждения для ортогональных матриц в Еп). Из этого, в частности,
следует, что произведение двух унитарных матриц является унитарной
матрицей.
Теорема. Все собственные значения унитарного оператора по моду-
модулю равны 1.
Доказательство. Пусть А* = А~х, Ах = Ах. Имеем: А*Ах =
= Ех = х. С другой стороны, согласно теореме 1 п. 2, А* Ах. = А* Ах =
= \А*х = А Ах. Тем самым, А А = |А|2 = 1, что и требовалось доказать.
Следствие. В базисе из собственных векторов матрица унитарного
оператора имеет вид
/е^1 0 ... 0 \
0 е^2 ... 0 ,
V 0 0 ... eiiPn/
§ 2. Псевдоевклидово пространство 141
поскольку любое комплексное число Л можно представить в виде Л =
4. Самосопряженный оператор. Оператор А называется самосопря-
самосопряженным или эрмитовым, если А* = А. Ясно, что в ортонормированном
базисе его матрица удовлетворяет равенству: А = А . Отметим, что
матрица А, обладающая этим свойством, называется эрмитовой.
Непосредственно из определения следует, что самосопряженный опера-
оператор является нормальным оператором.
Теорема. Все собственные значения самосопряженного оператора
вещественные.
Доказательство. Пусть А* = А, Ах = Лх. Согласно теореме 1 п. 2
А*х = Лх. Тем самым, Л = Л, что и требовалось доказать.
§ 2. Псевдоевклидово пространство
1. Определение. Снова вернемся к линейному пространству над по-
полем R, но введем теперь скалярное произведение иначе — без требования
положительной определенности.
Определение 1. Линейное пространство Ъпнад полем R называ-
называется псевдоевклидовым, если в нем фиксирована некоторая симметричная
билинейная форма (х, у) ранга п, называемая скалярным произведением.
Определение 2. Пусть к — положительный индекс инерции квад-
квадратичной формы (х, х), и, следовательно, (п — к) — ее отрицательный
индекс инерции. Пара чисел (к,п — к) называется сигнатурой псевдоев-
псевдоевклидова пространства.
Псевдоевклидово пространство с сигнатурой (к, п — к) обозначается
так: Щ п_к. В частности, Е™?0 — это обычное евклидово пространство Еп.
Для скалярного произведения, как и для всякой симметричной били-
билинейной формы, существует канонический базис {е^} (канонический базис
квадратичной формы (х, х)), в котором
{
-1, i=j
а скалярное произведение имеет вид (х,у) = ххух + ... + хкук —
— хк+1ук+1— ... — хпуп. Такой базис называется галилеевым базисом.
В нем, в частности, (х,х) = (ж1J + ... + (хкJ - (хк+1J - ... - (хпJ.
Нетрудно видеть, что величина (х, х) может быть как положительной, так
и неположительной.
Пусть О — произвольная точка, ОМ = х. Множество всех векторов х,
для которых (х, х) = 0, называется световым конусом (почему этот конус
называется световым, станет ясно чуть позже).
142 Некоторые обобщения Гл 5.
Пространство Е^1 называется пространством Минковского. Обычно
галилеев базис пространства Минковского обозначают так: ео, ei, ... , еп.
2 п -2
Уравнение светового конуса в этом базисе имеет вид (ж0) = J^ (жг) ,
и, следовательно, направляющей этого конуса является n-мерная сфера
J2 (хг) = const.
Особый интерес представляет пространство Минковского при п = 3,
поскольку оно является пространством событий в специальной теории
относительности. В этой теории под ж1, ж2, ж3 понимают координаты
частицы, а под х° — ct, где с — скорость света, a t — время. Каждая частица
в пространстве событий движется по некоторой траектории (движется
всегда, так как меняется ?), называемой мировой линией. Фотон движется
прямолинейно со скоростью с: хг = vlt, где (г'1J + (г>2J + (г>3J = с2, т.е.
по образующей светового конуса. Отсюда и название «световой конус» —
по нему движется свет.
2. Преобразования Лоренца.
Определение. Переход от одного галилеева базиса к другому гали-
лееву базису называется преобразованием Лоренца.
Уточним вид преобразования Лоренца в пространстве Минковского.
Прежде всего, заметим, что переход от галилеева базиса eo,ei, ... ,еп
к галилееву базису ео, ei, ... , ёп — это обычное ортогональное преобразо-
преобразование в пространстве L(ei, ... ,еп), т. е. преобразование с ортогональной
матрицей а. В самом деле, ё^ = <^fes, ej = a^er, причем (e^ej) =
-1 при г = ?, тт х~ ~ ч / ч г ч
О при 1ф]. Имеем: (е''е^) = Ке-.^ег) =
= afarj(es,er) = J2ataj (~1)? откуда atra = Е, т.е. a = atr. Ясно,
S
что переход от базиса ео, ei, ... , еп к базису — ео, ei, ... , еп — это также
(-1 0 ... 0>
О 1 ... О
'о"о'.'.'.' 1,
ортогональна.
Рассмотрим теперь общий случай.
Пусть eo,ei, ... , еп и ёо, ei, ... ,ёп — два галилеевых базиса. Бу-
Будем считать, что (ео,ёо) ^ 0 (в противном случае перейдем от базиса
ео, ei, ... , еп к базису —ео, ei, ... , еп ортогональным преобразованием).
Поступим следующим образом.
1°. Выберем в пространстве L (ео, ёо) вектор е^, для которого (е;ь ео) =
= 0, т. е. е^ G L (ei, ... , еп), и перейдем от базиса ео, ei, ... , еп ортого-
ортогональным преобразованием к базису ео, е^, ... , е'п. В нем е^ G L (ео,ёо).
2°. Преобразованием в пространстве L (ео, ёо) перейдем от базиса ео, е^
к базису ё0, е", в котором (е^ёо) = 0, (е'/, е") = -1 и (е^, e"i) ^ 0.
3°. Наконец, перейдем от базиса ёо,е'/, ... ,е^ ортогональным преоб-
преобразованием к базису eo,ei, ... ,ёп.
§ 3. Группы и поля 143
Выясним, как осуществляется переход 2°. Имеем:
ео =
е'/ = а?е0 + <
где «q = (ео,ёо) ^ 0 и а} = (e^e^i) ^ 0. Далее, поскольку (ёо,ёо) = 1,
КJ - кJ = 1
0 0 11 г\
(а\? - (а?J = 1
Полагая а\ = sh <??, а\ = sh ^, из первого и третьего уравнения находим:
ад = ch<?>, a} = ch^. Подставляя эти значения во второе уравнение,
получаем: ch<?>sh# — sh<?>ch# = sh(<p — 0) = 0, откуда (р = 0. Итак,
переход 2° осуществляется с помощью матрицы
а =
Это преобразование называется гиперболическим поворотом. В специ-
специальной теории относительности его обычно записывают несколько иначе,
полагая th (p = а:
1 а \
а =
Итак, любое преобразование Лоренца в пространстве Минковского
представляет собой суперпозицию (т. е. последовательное выполнение) ор-
ортогональных преобразований и гиперболического поворота.
§ 3. Группы и поля
1. Группа. Сделанные нами обобщения до сих пор касались только
евклидова пространства. В этом параграфе мы рассмотрим некоторые
обобщения понятия линейного пространства.
Определение 1. Множество G называется группой, если для лю-
любой упорядоченной пары его элементов aub определена операция, ставя-
ставящая ей в соответствие элемент ab G G. При этом:
1° для любых а, Ь, с имеет место равенство a(bc) = (ab)c;
2° существует такой элемент е G G, что для любого a G G имеет
место равенство ае = а;
3° среди всех элементов е, обладающих свойством 2°, существует та-
такой элемент ео, что для любого a G G существует элемент a G G,
удовлетворяющий равенству аа = ео-
144 Некоторые обобщения Гл 5.
Если, сверх того, для любых a, b имеет место равенство ab = ba, то
группа называется коммутативной или абелевой.
Замечание. Если операцию обозначать знаком «+», то вместо е
естественно писать о, а вместо а — (—а), хотя, конечно, это только
естественная форма записи, поскольку операция в группе абстрактна, она
не имеет отношения к обычному умножению или сложению.
Рассмотрим несколько свойств группы.
Свойство 1. Элемент е, обладающий свойством 2°, определяется
единственным образом и, следовательно, совпадает с ео- В самом деле,
«умножая» обе части равенства ее = ео слева на е, получаем: еее =
= еео или ее = е, откуда eg = e.
Это свойство позволяет в дальнейшем вместо eg писать просто е.
Замечание. В большинстве учебников свойство 3° формулируют
кратко: для любого a G G существует элемент a G G, удовлетво-
удовлетворяющий равенству аа = е. Такая формулировка, однако, не вполне
корректна, поскольку она допускает неоднозначную трактовку. В самом
деле, наряду с нашей трактовкой (она, по-видимому, наиболее естественна
с точки зрения норм русского языка) возможна и, например, такая: для
любого a G G существует такой элемент a G G, что элемент е =
= аа обладает свойством 2°. При такой трактовке установленное нами
свойство 1 уже не будет иметь места. Например, в множестве с операцией
ab = а любой элемент можно принять за е, а значит и за а. И хотя
формально эта операция удовлетворяет всем свойствам 1°-3°, группой
в общепринятом смысле такое множество не является.
Свойство 2. Имеем: а-1а = а-1ае = а~1аа~1(а~1)~1 =
= а-1е(а-1)-1 = а^а)-1 = е, т.е. а^а = е.
Свойство 3. Имеем: еа = аа-1а = ае = а, т.е. еа = а.
Свойство 4. Элемент а, обладающий свойством 3°, определяет-
определяется единственным образом. В самом деле, допустим, что есть два таких
элемента: а^1 и а^1. Имеем: а^~1аа^ = а^е = а^1. С другой стороны,
а^~1аа^ = еа^ = а^. Следовательно, а^1 = а^1.
Свойство 5. Для любых a, b G G существует единственное ре-
решение х уравнения ах = b и единственное решение у уравнения уа =
= Ь. В самом деле, рассмотрим, например, первое уравнение (для второго
доказательство аналогичное). Если решение х существует, то, «умножая»
обе части уравнения слева на а, получим: х = a-1b, т. е. х определяется
единственным образом. С другой стороны, х = a-1b действительно явля-
является решением, поскольку ах = aa-1b = eb = Ь, т. е. решение существует.
Замечание. В абелевой группе х = a-1b = Ьа = у, что дает
возможность говорить о наличии в ней операции «деления»: х = у = Ь/а.
Определение 2. Подмножество G' группы G называется подгруп-
подгруппой, если G' — группа с той же операцией, что и в G.
Теорема. Подмножество G' группы G является подгруппой тогда
и только тогда, когда оно обладает двумя свойствами:
1° для любых двух элементов а и b множества G' элемент ab
принадлежит G';
2° для любого a G G' элемент а принадлежит G'.
§ 3. Группы и поля 145
Доказательство. Если множество G' является подгруппой, то оно
обладает свойствами 1° и 2° — это следует из определения группы. Допу-
Допустим, что для некоторого подмножества G' группы G выполнены требо-
требования 1° и 2°. Тогда для любых элементов a, b множества С'определена
операция, ставящая им в соответствие элемент ab E G' и обладающая
свойством 1° группы. Кроме того, для любого элемента а множества G'
элемент а, а значит и элемент е = аа, принадлежат G', поэтому
множество G' обладает и свойствами 2°, 3° группы. Теорема доказана.
2. Примеры.
Пример 1. Линейное пространство является абелевой группой, по-
поскольку операция сложения в нем обладает следующими свойствами:
1° для любых векторов аиЬ а + b = b + а;
2° для любых векторов a, b и с а + (Ь + с) = (а + Ь) + с;
3° существует такой вектор о, что для любого вектора а а + о = а;
4° для любого вектора а существует вектор (—а) такой, что а+ (—а) =
= о.
Если отказаться от свойства 1°, а свойство 4° трактовать так, как его
трактуют в определении группы (см. замечание предыдущего пункта), то
и в этом случае линейное пространство останется группой. Более того,
оно останется абелевой группой, т. е. свойством 1° оно по-прежнему будет
обладать. В самом деле, имеем: A + 1)(а + Ь) = 1(а + Ь) + 1(а + Ь) = а +
+ b + a + b. С другой стороны, A + 1)(а + Ь) = A + 1)а+ A + 1)Ь = а +
+ а + b + b. Итак, a + b + a + b = a + a + b + b. Прибавляя к обеим частям
этого равенства справа (—Ь), а слева — (~а)> получим: b + а = а + Ь.
Таким образом, при наиболее естественной трактовке аксиомы 4°, аксиома
1° оказывается лишней.
Пример 2. Комплексные (п х п)-матрицы с отличным от нуля опреде-
определителем образуют группу относительно операции умножения. Эту группу
называют полной линейной группой (general linear group) и обозначают
так: GL(n).
Полная линейная группа имеет разнообразные подгруппы. Рассмотрим
некоторые из них.
Пример 3. Комплексные (п х п)-матрицы с определителем, рав-
равным 1, образуют, очевидно, подгруппу группы GL(n). Эту группу называют
унимодулярной группой и обозначают так: SL(n).
Пример 4. Ортогональные (п х п)-матрицы также образуют под-
подгруппу группы GL(n). В самом деле, с помощью ортогональных матриц
в евклидовом пространстве осуществляется переход от одного ортонорми-
рованного базиса к другому. Поэтому если матрицы Аи В — ортогональ-
ортогональные, то матрицы АВ и А~х также ортогональные. Эту группу называют
ортогональной группой и обозначают так: О(п).
Примеры 5, 6. По аналогичной причине подгруппами группы GL(n)
являются множество унитарных матриц и множество матриц, с помощью
которых осуществляются преобразования Лоренца в пространстве Е^.
Первую группу называют унитарной группой (U(n)), а вторую — псев-
псевдоортогональной группой или группой Лоренца (О(р, q)).
10 СБ. Кадомцев
146 Некоторые обобщения Гл 5.
Примеры 7, 8, 9. Мы получим еще три примера подгрупп группы
GL(n), если в каждой из трех последних групп выделим лишь те матри-
матрицы, определители которых равны 1. Полученные таким образом группы
обозначаются соответственно SO(n), SU(n) и SO(p,q).
3. Поле.
Определение. Множество К называется полем, если для любой
упорядоченной пары его элементов а.иЪ определены две операции, называ-
называемые сложением и умножением, ставящие ей в соответствие элементы
а + ЬеКиаЬеК. При этом:
1° множество К является абелевой группой относительно операции
сложения;
2° множество всех элементов К, отличных от о, является абелевой
группой относительно операции умножения;
3° для любых а, Ь, с G К имеет место равенство а(Ь + с) = ab + ас;
4° множество К содержит не менее двух элементов.
Рассмотрим несколько свойств поля.
Свойство 1. Для любых a, b G К существует единственный эле-
элемент х G К — его называют разностью b — а, являющийся решением
уравнения а + х = х + а = Ь.
Свойство 2. Имеем: а(Ь — с) + ас = а(Ь — с + с) = ab, откуда
а(Ь - с) = ab - ас.
Свойство 3. Имеем: ао = а(а - а) = аа - аа = о, т. е. ао = оа = о.
Свойство 4. Для любых a, b G К при а ф о существует един-
единственный элемент х G К — его называют отношением b/а, являющийся
решением уравнения ах = ха = Ь. В самом деле, при b ф о это следует из
определения поля и свойств абелевой группы; при b = о рассматриваемое
уравнение эквивалентно уравнению х = а о, т. е. уравнению х = о.
Следствие. Равенство ab = о возможно только в тех случаях,
когда либо а = о, либо b = о (поскольку если а / о, то b = о, и нао-
наоборот). Обычно это утверждение формулируют так: в поле отсутствуют
делители нуля.
Приведем теперь несколько примеров полей.
Пример 1. Множество С комплексных чисел.
Примеры 2, 3. Множество R вещественных чисел и множество Q
рациональных чисел являются подполями поля С. Подполя поля С ком-
комплексных чисел называют числовыми полями. Отметим, что числовое поле
содержит 1, поэтому оно содержит все целые числа, а значит и все рацио-
рациональные числа. Тем самым, любое числовое поле содержит в себе поле Q.
Примеры 4, 5. Существуют ли числовые поля, отличные от С, R
и Q? Конечно! Приведем два примера. Первый пример — множество всех
вещественных чисел вида а + Ъу2, где числа а и Ъ — рациональные. Дру-
Другой пример — множество всех комплексных чисел вида а + гЪ, где числа а
и Ъ — также рациональные.
Пример 6. Поскольку любое числовое поле содержит в себе поле Q,
то каждое из них содержит бесконечное количество элементов. А суще-
существуют ли поля, состоящие из конечного числа элементов? Оказывается,
существуют. Приведем пример.
§ 3. Группы и поля 147
Условимся под формулой Ъ = a(modp) понимать следующее: Ъ — а =
= кр, где к — целое число. Например, в этих обозначениях формула sin х =
= 1 эквивалентна формуле х = -(тос12тг).
Пусть р — натуральное число большее 1. Рассмотрим множество Ър
чисел: а$ = О, а\ = 1, ... , ap_i = р — 1. Ясно, что для любого целого
числа Ъ существует единственное число a Е Zp, для которого а = Ъ(т.о&р).
Определим на множестве Ър две операции: а 0 Ъ = (а + 6) (modp) и а 0 & =
= (ab)(modp) так, чтобы a0&GZpHa®feG Zp. Тогда окажется, что:
множество Zp представляет собой абелеву группу относительно опера-
операции 0 (роль о играет ао, а роль (—а,{) — число ap-i)\
а^(Ьфс) =а®Ь0а0с;
а 0 b = b 0 а;
а (8) (Ь О с) = (а 0 Ь) 0 с;
для любого a G Zp a 0 ai = а (поскольку ai = 1), т. е. роль е играет
ai = 1.
Тем не менее, множество Zp может и не быть полем. В самом деле, если
число р — составное, т.е. р = тп, то ат 0 ап = о, в то время как в поле
делители нуля отсутствуют.
Если же число р — простое, то множество Zp — поле (оно называется
полем сравнений по модулю р). Действительно, нам осталось доказать, что
для любого a G Ър (а ф о) существует такой элемент а, что а® а~х =
= е = 1. Докажем это. Рассмотрим числа а, 2 0 а, ... , (р — 1) ® а.
Все эти числа отличны от о, поскольку произведение двух натуральных
чисел меньших простого числа р не может быть кратно р. Более того, все
они попарно различны (из равенства i (g) a = j ® а следовало бы, что
|г — j\a = о, чего, как только что отмечалось, быть не может) и меньше р.
Следовательно, среди них обязательно есть число к 0 а = 1. Но тогда
к = а~1.
Таким образом, возникает целая серия полей, состоящих из конечного
числа элементов: Z2, Z3, Z5, Z7 и т.д.
Замечание. Возвращаясь к определению линейного пространства,
мы можем сказать теперь, что под числами в нем можно понимать элементы
произвольного поля. При этом, правда, формулировки некоторых теорем
(подумайте, каких именно) изменятся.
10*
Заключение
В школьном курсе математики алгебра и геометрия выступают как два
независимых раздела, имеющих между собой мало общего. В противопо-
противоположность этому аналитическая геометрия и линейная алгебра находятся
как раз на стыке этих наук, причем в первой из них превалирует геомет-
геометрия, а во второй — алгебра. Образно говоря, аналитическая геометрия —
это алгебраизированная геометрия, а линейная алгебра — это геометри-
зированная алгебра. Связь между алгеброй и геометрией устанавливается
в значительной мере на базе тех алгебраических фактов, которые изложены
в первой части книги — «Аппарат аналитической геометрии и линейной
алгебры», посвященной действиям с матрицами, теории определителей
квадратных матриц и приложениям этой теории к решению систем ли-
линейных уравнений. Важную роль в последующих рассуждениях играет
также введенное на первых страницах книги понятие арифметического
пространства. Указанный круг вопросов, конечно же, вплотную примы-
примыкает как к аналитической геометрии, так и к линейной алгебре, однако не
является, строго говоря, предметом ни той, ни другой науки.
Вторая часть, «Аналитическая геометрия», в значительной мере из-
известна из курса геометрии средней школы (метод координат, векторы
и линейные операции над ними, скалярное произведение). Принципиально
новым здесь является, главным образом, осознание роли определителей.
Оказывается, что определитель второго порядка с точностью до знака
равен площади параллелограмма, построенного на векторах, координаты
которых являются его строками, а объем параллелепипеда, построенного
на данных трех векторах, равен модулю определителя, строками которого
являются координаты этих векторов. Не менее важную роль играет знак
определителя — он позволяет судить об ориентации упорядоченных пар или
троек векторов, в частности, придать ясный геометрический смысл словам
«по часовой стрелке».
Осознание роли определителей в геометрии, в свою очередь, позволяет
ввести понятия векторного произведения двух векторов и смешанного про-
произведения трех векторов. Эти понятия, при всем своем внешнем различии
(векторное произведение — это вектор, а смешанное произведение — это
число), тесно связаны друг с другом. Более того, с определенной точки
зрения это почти одно и то же. Поясним, что имеется в виду.
Назовем смешанным произведением двух векторов на плоскости опре-
определитель, строками которого являются координаты этих векторов в правой
системе координат. Ясно, что так определенное смешанное произведение
двух векторов представляет собой площадь построенного на них паралле-
параллелограмма, взятую со знаком «+», если они образуют правую пару, и « —» —
если левую. Будем теперь рассматривать те же векторы, но не на плос-
плоскости, а в пространстве. Тогда нашему смешанному произведению можно
приписать направление — считать, что это вектор, ортогональный данным
Заключение 149
и образующий с ними правую тройку. В результате мы приходим к поня-
понятию векторного произведения двух векторов. Далее, определим смешанное
произведение трех векторов в пространстве как определитель, строками
которого являются координаты этих векторов в правой системе координат.
Тогда оно окажется равным объему построенного на этих векторах парал-
параллелепипеда, взятому со знаком «+», если они образуют правую тройку,
и « —» — если левую. Это, как мы помним, следует из формулы для объ-
объема параллелепипеда (произведение площади основания на высоту). Если
теперь рассматривать те же векторы не в трехмерном, а в четырехмерном
пространстве, то можно определить их векторное произведение, приписав
смешанному произведению направление и т. д. Ясно, что таким способом
можно определить векторное произведение и смешанное произведение п
векторов соответственно в {п + 1)-мерном и n-мерном пространстве. При
этом они будут отличаться друг от друга только тем, что первому из них
приписано определенное направление, а второму — нет.
Наличие векторного и смешанного произведения позволяет, как мы
видели, достаточно просто вывести различные виды уравнений прямых
и плоскостей. Отметим также, что указанные произведения широко исполь-
используются в физике. Например, момент приложенной к точке М силы F от-
относительно точки О представляет собой векторное произведение [ОМ • F].
Особое место в аналитической геометрии занимает раздел «Линии и по-
поверхности второго порядка». Определения эллипса и гиперболы похожи
друг на друга. Их можно даже объединить, сказав: эллипсом (гиперболой)
называется множество всех таких точек плоскости, для которых сумма (мо-
(модуль разности) расстояний до двух фиксированных точек есть постоянная
положительная величина. Есть и другое общее определение этих кривых,
включающее заодно и параболу: эллипсом, отличным от окружности (ги-
(гиперболой, параболой), называется множество всех таких точек плоскости,
для которых отношение расстояния до фиксированной точки к расстоянию
до фиксированной прямой постоянно и меньше единицы (больше единицы,
равно единице). Это сходство в определениях проявляется, в частности,
в том, что эллипс, гипербола и парабола могут быть получены в качестве
сечения конуса плоскостью, не проходящей через вершину. Опираясь на
этот факт, можно наглядно проследить, как эти кривые переходят друг
в друга при изменении угла наклона секущей плоскости.
Эллипс, гипербола и парабола играют фундаментальную роль в физи-
физике. Так, брошенный камень движется по параболе, а движение небесных
тел (планет, комет, метеоритов и т.д.) под действием притяжения Солнца
происходит по эллипсу или гиперболе. Широко используются и оптические
свойства этих кривых. Но не это главное. Рассмотрим некоторую функцию
/(ж, у) и поставим такой вопрос: как приближенно описать поведение этой
функции в окрестности точки @,0)? Естественно воспользоваться фор-
формулой Тейлора. В качестве первого, линейного, приближения получаем:
/(ж, у) ж /@, 0) + /ж @, 0)x-\-fy @, 0)у. В этом приближении график нашей
функции, т.е. поверхность z = /(ж, г/), представляет собой плоскость Т —
ее называют касательной плоскостью к поверхности z = /(ж, у) в точке
@,0). Как правило, линейного приближения бывает недостаточно. Второе
150 Заключение
приближение выглядит так: f(x,y) ж /@,0) + /ж@, 0)ж + fy@,0)y +
+ ~ [fxx @, 0)ж2 + 2/жу @, О)жг/ + fyy (О, О)?/2] • В этом приближении поверх-
ность z = f[x,y) представляет собой поверхность второго порядка (если,
конечно, хотя бы одна из вторых производных отлична от нуля) — либо
параболоид, либо параболический цилиндр. Квадратичная часть в этом
уравнении, или, как ее называют в линейной алгебре, квадратичная форма,
описывает, очевидно, отклонение поверхности от касательной плоскости Т.
Всякая квадратичная форма ацх2 + 2а\^Щ + ОД2 (в нашем случае ац =
= «/жж@, 0), ai2 = /жу@, 0), а22 = /щД0,0)), как мы знаем, при помощи
А
поворота может быть приведена к виду а\х2 + а^у1!, т. е. к сумме квадратов
координат с некоторыми коэффициентами, причем п\п2 = «ц«22 ~~ «?2
(убедитесь в этом). Поэтому если аца22 — «12 = «i«2 > 0, т.е. числа а\
и п2 имеют одинаковые знаки, то поверхность z = f(x,y) в окрестности
точки @,0) лежит по одну сторону от плоскости Т — в этом случае точка
@,0) называется эллиптической. При «ц«22 — «?2 < 0 числа а\ и а2
имеют разные знаки, поэтому часть поверхности z = f(x,y) лежит по
одну сторону от плоскости Т, а часть — по другую. Точка @, 0) при этом
называется гиперболической. Наконец, если аца22 — «12 = 05 т-е- одно из
чисел а\ и а2 равно нулю, то точка @,0) называется параболической. В этом
случае поведение поверхности z = f(x,y) по отношению к плоскости Т
в окрестности точки @, 0) определяется производными функции / более
высоких порядков.
По-существу, та же идея лежит в основе классификации дифференци-
дифференциальных уравнений в частных производных вида
allfxx + 2ai2 fXy + «22 fyy + F{x, у, f^fxify) = 0-
При «ца22 — «12 > 0 эт0 уравнение называется эллиптическим, при
«11 «22 — «12 < 0 — гиперболическим, а при аца22 — «22 = 0 — параболиче-
параболическим. Поведение решений эллиптических, гиперболических и параболиче-
параболических уравнений весьма различно, что проявляется, в частности, в различии
тех физических процессов, которые этими уравнениями описываются. Эл-
Эллиптические уравнения описывают, например, стационарное электрическое
или тепловое поле, потенциальное течение жидкости. Гиперболическими
уравнениями описываются разнообразные колебательные и волновые про-
процессы, а параболическими — диффузионные процессы, например, процесс
распространения тепла.
Обратим внимание и на то, что идея классификации квадратичных
форм по количеству положительных и отрицательных элементов их матри-
матрицы, приведенной к диагональному виду (т. е. по индексам инерции), лежит
в основе построения псевдоевклидовых пространств, а затем и специальной
теории относительности.
Обратимся теперь к нашим исследованиям, связанным с классифика-
классификацией кривых и поверхностей второго порядка. Как в случае кривых, так
и в случае поверхностей мы начинали с того, что с помощью поворота си-
системы координат приводили входящую в уравнение квадратичную форму
Заключение 151
к сумме квадратов с некоторыми коэффициентами. Для кривых эта задача
решается просто — получается одно уравнение для тангенса угла поворота,
которое, разумеется, всегда имеет решение. Сложнее обстоит дело с поверх-
поверхностями. Путем весьма нетривиальных рассуждений мы установили, что
стоящая перед нами задача сводится к решению уравнения det(^ — ХЕ) =
= 0 (это уравнение появилось у нас позже и в линейной алгебре, правда,
из совершенно других соображений). Спасительным для нас оказалось то,
что это — кубическое уравнение относительно Л, а кубическое уравнение
всегда имеет вещественный корень. Если бы мы попытались применить ту
же идею к уравнению гиперповерхности второго порядка в четырехмерном
пространстве, то ничего бы не получилось: уравнение det(^ — ХЕ) = О
в этом случае является уравнением четвертой степени, а такое уравнение
может, вообще говоря, и не иметь вещественных корней.
Между тем, представляется весьма правдоподобным, что квадратичная
форма в любом пространстве может быть при помощи поворота (или, как
говорят в линейной алгебре, ортогонального преобразования) приведена
к сумме квадратов с некоторыми коэффициентами. В самом деле, переход
от старой системы координат в n-мерном пространстве к новой осуще-
п
ствляется по формулам е^ = 2 ais^s- Поскольку столбцы матрицы А —
5 = 1
это координаты новых базисных векторов в старом базисе и обе систе-
системы координат — декартовы, то на матрицу А накладываются следующие
ограничения: ее столбцы должны быть координатами единичных (п усло-
условий) и попарно ортогональных (п(п — 1)/2 условий) векторов. Такие мат-
матрицы в линейной алгебре называются ортогональными. Следовательно,
из п2 элементов матрицы А произвольно выбранными могут быть п2 —
— п — п(п — 1)/2 = п(п — 1)/2 элементов. Но и количество коэффици-
коэффициентов квадратичной формы, которые мы хотим обратить в нуль, равно
п(п — 1)/2. Таким образом, количество уравнений совпадает с количеством
неизвестных, что и дает основания для нашей гипотезы.
Вопрос о возможности приведения квадратичной формы к сумме квад-
квадратов (с некоторыми коэффициентами) ортогональным преобразованием
является, пожалуй, центральным вопросом линейной алгебры — науки
о векторах, описываемых аксиоматикой Вей ля. Геометрия подобна зоопар-
зоопарку, имеющему несколько входов (различных систем аксиом), где, например,
шансы увидеть верблюда во многом зависят от того, через какой вход мы
войдем. С этой точки зрения система аксиом Вейля значительно удобнее
для исследования указанного вопроса, нежели система аксиом Гильберта.
Она удобна и в плане возможных обобщений — пространство можно счи-
считать n-мерным, а под числами понимать элементы произвольного поля.
Основным объектом линейной алгебры является n-мерное линейное
пространство. Это — абстрактное пространство, но, благодаря теореме
об изоморфизме линейных пространств одинаковой размерности, вместо
него можно рассматривать любую его конкретную интерпретацию, в част-
частности геометрическую интерпретацию (вектор — направленный отрезок)
152 Заключение
и алгебраическую интерпретацию (вектор — набор чисел). Геометриче-
Геометрическая интерпретация трактует вектор так, как он вводится в аналитиче-
аналитической геометрии. Вектор здесь не связан с какой-либо системой координат.
В рамках алгебраической интерпретации набор чисел, задающих вектор,
конечно же зависит от выбора системы координат, но эта зависимость не
произвольна — она описывается вполне определенными формулами. На
первый взгляд алгебраическая интерпретация вектора кажется надуман-
надуманной. Но в действительности именно она адекватно соответствует физиче-
физической трактовке вектора. В самом деле, в природе нет какой-то абсолютной
системы координат, все инерциальные системы отсчета равноправны. Нет
и каких-либо выделенных направлений. Поэтому понятие «направление»,
а значит и привычная геометрическая интерпретация вектора (при всей
своей наглядности), не имеют, строго говоря, физического смысла.
Поскольку единственное основное понятие линейной алгебры — это век-
вектор, то здесь естественным образом возникают объекты, непосредственно
связанные с вектором: линейный оператор, билинейная форма, получаемая
из нее квадратичная форма, полилинейная форма и ряд других. Все эти
объекты, включая и вектор, объединяются общим названием «тензоры» —
они не зависят от выбора системы координат в том же смысле, что и век-
вектор (вспомним геометрическую интерпретацию вектора). По этой причине
тензоры широко используются в современной теоретической физике (на-
(например, в общей теории относительности).
С алгебраической точки зрения квадратичная форма задается (п х п)-
матрицей. Линейный оператор, действующий из Ln в Ln, также задается
(п х п)-матрицей. Но квадратичная форма — это дважды ковариантный
тензор, а линейный оператор — один раз ковариантный и один раз контра-
вариантный тензор. Это означает, что при переходе к новому базису ука-
указанные матрицы преобразуются по-разному. Иными словами, если в каком-
то базисе эти матрицы совпадали, то в другом базисе они, вообще говоря,
совпадать не будут. Оказывается, однако, что в евклидовом пространстве
при ортогональных преобразованиях — а именно эта ситуация нас и инте-
интересует с точки зрения задачи о приведении квадратичной формы к сумме
квадратов — различие между ковариантностью и контравариантностью
исчезает. Это дает возможность сформулировать нашу задачу на языке
операторов и, благодаря этому, решить ее.
Мы кратко описали центральную линию раздела «Линейная алгебра».
Подобно стволу дерева, она имеет многочисленные ответвления. В роли од-
одного из них выступают наши исследования, связанные со структурой линей-
линейного оператора. Мы установили, что с каждым оператором, действующим
из Ln в Ln, связаны два инвариантных подпространства — ядро и образ,
сумма размерностей которых равна п, но пространство Ln не является,
вообще говоря, их прямой суммой. Путем весьма непростых рассуждений
нам удалось описать взаимное расположение указанных подпространств
в терминах базиса из непополнимых серий. Обратим особое внимание на то,
что эти рассуждения не предполагали какой-либо конкретизации понятия
числа — они верны для любого поля. Лишь при рассмотрении собственных
векторов, собственных значений и связанного с ними характеристического
уравнения для нас стало принципиально, о каком поле идет речь. Это
Заключение 153
объясняется тем, что характеристическое уравнение, будучи уравнением
п-и степени, имеет корни далеко не в любом поле. В поле комплексных
чисел, благодаря наличию основной теоремы алгебры, оно имеет ровно п
корней (включая кратные), поэтому матрица любого оператора может быть
приведена к жордановой форме.
Линейная алгебра имеет многочисленные физические приложения. На-
Например, как мы говорили, унитарное пространство играет фундаменталь-
фундаментальную роль в квантовой механике, где физическая величина интерпрети-
интерпретируется как самосопряженный оператор, а процесс измерения случайным
образом фиксирует один из собственных векторов этого оператора. Об-
Обширны и приложения теории групп, которая используется как в самых аб-
абстрактных разделах современной теоретической физики (например, в кван-
квантовой теории поля), так и во всех без исключения разделах естествознания,
в живописи, в архитектуре и даже в быту.
Предметный указатель
Алгебраическое дополнение 19
Аналитическая геометрия 32
Аффинная система координат 44
Аффинные координаты вектора 44
точки 44
Базис 43
— галилеев 141
— канонический квадратичной фор-
формы 121
— ортонормированный 127
Беспорядок 16
Билинейная форма 116
положительно (отрицательно)
определенная 122
симметричная 120
Валентность тензора 118
Вейля аксиомы 84
Вектор 36, 84, 85
— единичный 37
— нулевой 36
—, противоположный данному век-
вектору 37
— разложен по векторам 43
Векторное произведение двух век-
векторов 51
Векторы коллинеарные 42
— координатные 39
— компланарные 43
— ортогональные 39, 126
— равные 37
Гипербола 64
Гиперболоид двуполостный 79
вращения 80
— однополостный 78
вращения 80
Гиперповерхность 135
— второго порядка 135
мнимая 136
Грама определитель 53
Группа 143
— коммутативная (абелева) 144
— ортогональная (О(п)) 145
— полная линейная (GL(n)) 145
— псевдоортогональная (О(р, q))
145
— унимодулярная (SL(n)) 145
— унитарная (U(n)) 145
Двойное векторное произведение
54
Декартова система координат 34
Делители нуля 146
Директриса 66, 67
Дифференциальная геометрия 32
Длина вектора 37, 126
— непополнимой серии 101
Жорданова клетка 109
— форма матрицы 109
Закон инерции квадратичных
форм 123
Изоморфизм 90
Инвариант уравнения гиперповерх-
гиперповерхности второго порядка 137
Инвариантное подпространство
оператора 99
Индекс инерции квадратичной фор-
формы 122
Канонический вид квадратичной
формы 123
Касательная 68
Квадратичная форма 121
, положительно (отрицательно)
определенная 122
Конические сечения 78
Конус 76
— второго порядка 77
— световой 141
Конусы 136
Координата точки на оси 33
по оси 34
Координаты биполярные 35
— вектора 37, 89
— криволинейные 34
Предметный указатель
155
— полярные 35
— сферические 36
— цилиндрические 36
— эллиптические 35, 71
Коши-Буняковского неравенство
125, 138
Коэффициенты линейной системы
27
формы 116
Крамера формулы 29
Кривая второго порядка 71
Кронекера символ 115
Кронекера-Капелли теорема 28
Лагранжа метод 122
Линейная алгебра 85
— комбинация 10
нетривиальная 10
тривиальная 10
— оболочка 88
— форма 116
Линейное дополнение 92
Линейный оператор 94
нормальный 139
— —, обратный по отношению
к данному 98
ортогональный 130
самосопряженный 132, 141
, сопряженный по отношению
к данному 129, 139
тождественный 98
унитарный 140
эрмитов 141
Линия мировая 142
Лоренца группа 145
— преобразование 142
Матрица 8
— билинейной формы 116
— диагональная 107
— единичная 24
— квадратичной формы 121
— квадратная 11
— линейного оператора 95
— обратная 24
— ортогональная 130
собственная (несобственная)
130
— основная 27
— перехода к новому базису 115
— расширенная 27
— транспонированная 20
— унитарная 140
Матричная запись системы 28
Минор 24
— базисный 24
—, дополнительный к элементу 14
— угловой 123
Модуль вектора 37
Направляющая конуса 76
— цилиндра 76
Начало аффинной системы коорди-
координат 44
— координат 33
Независимость системы аксиом 91
Непротиворечивость системы акси-
аксиом 91
Неравенство треугольника 126
Норма 126
Образ оператора 96
Образующая конуса 76
— цилиндра 76
Определитель 11
— произведения матриц 22
Определителя основные свойства
15
Оптическое свойство гиперболы 70
параболы 71
эллипса 70
Ортогонализация 127
Ортогональное дополнение 128
Ось аффинной системы координат
44
— координат 33
Откладывание вектора от точки 38,
85
Отклонение точки от плоскости 59
прямой 57
Отношение 146
Пара векторов левая 46
правая 46
Парабола 67
Параболоид вращения 81
— гиперболический 79
— эллиптический 79
156
Предметный указатель
Параболоиды 136
Пересечение двух линейных под-
подпространств 91
Перестановка 16
Пифагора теорема 126
Плоскость ориентированная 45
Поверхность второго порядка 73
Поворот 47
— гиперболический 143
Подгруппа 144
Подпространство линейное 87
Полнота системы аксиом 91
Положительная полуось 33
Полуоси гиперболы 65
— эллипса 63
Поле 146
— поле сравнений по модулю р 147
— числовое 146
Полилинейная форма 117
Последний вектор серии 101
Правило треугольника 38, 85
Преобразование базиса 115
несобственное 47, 49
ортогональное 132
собственное 46, 49
Присоединенный вектор 111
Проекция вектора на подпростран-
подпространство 127
— точки на прямую 34
Произведение вектора на число 38,
84
— двух смешанных произведений
53
— линейного оператора на число 94
— матриц 21
— матрицы на число 9
— операторов 97
Пространства изоморфные 90
Пространство арифметическое 9
— евклидово 125
комплексное 138
— линейное 85
п-мерное 88
— Минковского 142
— нормированное 126
— ориентированное 49
— псевдоевклидово 141
— событий 142
— унитарное 138
Прямая сумма двух линейных под-
подпространств 92
Прямое произведение тензоров 118
Разложение определителя по
столбцу 20
строке 14
Размерность 88
Разность 146
— векторов 87
— матриц 9
Ранг билинейной формы 120
— матрицы 25
— оператора 96
— тензора 118
Решение системы 27
нетривиальное 28
тривиальное 28
Свертка тензора 119
Секущая 68
Серии непополнимые различные
101
Серия ненулевых векторов 101
непополнимая 101
Сигнатура псевдоевклидова про-
пространства 141
Сильвестра критерий 123
Система координат 134
исходная 45, 49
левая 46, 49
правая 46, 49
— неоднородная 27
— однородная 27
— —, соответствующая данной
системе 27
Скалярное произведение двух век-
векторных произведений 53
векторов 39, 85, 125, 141
След оператора 120
Смешанное произведение трех век-
векторов 52
Собственный вектор 106
Собственное значение 106
Спектр оператора 106
«сдвинутый» 107
Старший вектор серии 101
Столбцы базисные 24
Предметный указатель
157
Строки 9
— базисные 24
— координатные 10
— линейно зависимые 10
независимые 10
Сужение оператора на инвариант-
инвариантное подпространство 99
Сумма векторов 38, 84
— линейных операторов 94
— матриц 8
— тензоров 118
Тензор 118
— метрический 125
— симметричный типа B,0) 121
— типа (р, q) 118
Точка 84
Тройка векторов левая 49
правая 49
Угол между векторами 39, 126
Уравнение гиперболы каноническое
65
— гиперповерхности второго поряд-
порядка каноническое 136
— параболы каноническое 67
— плоскости в отрезках 58
нормированное 59
общее 58
, проходящей через данную
точку и перпендикулярной к дан-
данному вектору 58
, проходящей через три данные
точки 58
— прямой в отрезках 55
каноническое 56
нормированное 57
общее 56
, проходящей через данную
точку и параллельной данному
вектору 56, 60
, перпендикулярной
к данному вектору 55
, проходящей через две данные
точки 55, 60
— эллипса каноническое 63
Уравнения прямой канонические 60
параметрические 56, 60
Фокус гиперболы 64
— параболы 67
— эллипса 62
Формула разложения определителя
по строке 14
Фредгольма альтернатива 129, 139
Фундаментальная совокупность
решений 90
Функциональный анализ 90
Характеристическое уравнение 108
Циклическая перестановка 53
Цилиндр 76
Цилиндры 136
Эйлера углы 51
Эксцентриситет 66
Элементарная геометрия 32
Эллипс 62
Эллипсоид 78
— вращения 80
Эллипсоиды и гиперболоиды 136
Ядро оператора 96
Издательская фирма
« Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117864 Москва, Профсоюзная ул., 90
1999-2000
В издательстве «ФИЗМАЛИТ» вышли из печати:
Беклемишев Д. В. Аналитическая геометрия и линейная алгебра. Задачник.
Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры:
Учеб. пособие для вузов. Изд 8-е.
Бендриков Г.А., Буховцев Б.Б., Керженцев В.В., Мякишев Г. Я. Задачи
по физике для поступающих в вузы.
Бутиков Е.И., Кондратьев А.С. Физика. В 3-х кн.
Кн. 1: Механика.
Кн. 2: Электродинамика и оптика.
Кн. 3: Строение и свойства вещества.
Бутузов В.Ф., Крутицкая И. Д., Медведев Г.Н., Шишкин А.А. Мате-
Математический анализ в вопросах и задачах: Учеб. пособие для вузов.
Изд. 3-е, исправл.
Буховцев Б.Б., Кривченков В.Д., Мякишев Г.Я., Сараева И.М. Сборник
задач по элементарной физике: Пособие для самообразования.
Изд. 6-е, доп.
Владимиров В.С.,Жаринов В.В. Уравнения математической физики:
Учебник для вузов.
Гусев А. И., Ремпель А.А. Нанокристаллические материалы.
Елютин П.В., Кривченко В.Д. Квантовая механика с задачами.
Зимина О.В.,Кириллов А.И., Сальникова Т.А. Решебник. Высшая мате-
математика.
Иродов И.Е. Волновые процессы. Основные законы: Учебн. пособие для
вузов.
Иродов И.Е. Задачи по общей физике: Учебн. пособие для вузов.
Изд. 4-е, испр.
Иродов И.Е. Механика. Основные законы: Учебн. пособие для вузов.
Изд. 5-е, испр.
Иродов И.Е. Электромагнетизм. Основные законы: Учебн. пособие для
вузов. Изд. 3-е, испр.
Карманов В.Г. Математическое программирование: Учебн. пособие.
Изд. 5-е, испр.
Кату лев А.Н., Северцев Н.А. Исследование операций: принципы принятия
решений и обеспечение безопасности: Учебн. пособие для вузов.
Кострикин А. И. Введение в алгебру. В 3-х книгах: Учебник для вузов.
Кн. 1: Основы алгебры.
Кн. 2: Линейная алгебра.
Кн. 3: Основные структуры алгебры.
Лидов М.Л. Курс лекций по теоретической механике.
Лупанов О. Б. Математические вопросы кибернетики. Вып. 9.
Мандель Л., Вольф Э. Оптическая когерентность и квантовая оптика.
Методы компьютерной оптики / Под ред. В. А. Сойфера.
Моттль В.В., Мучник И.Б. Скрытые марковские модели в структурном
анализе сигналов.
Никольский С.Н. Курс математического анализа: Учебник для вузов.
Изд. 5-е, перераб.
Пинский А.А. Задачи по физике / Под ред. Ю.И. Дика. Изд. 2-е, испр.
Потапов М.К., Олехник С.Н. Нестеренко Ю.В. Конкурсные задачи по
математике. Изд. 2-е.
Рябенький В. С. Введение в вычислительную математику: Учебн. пособие.
Изд. 2-е, испр.
Сборник задач по алгебре / Под ред. А.И. Кострикина: Учебник для вузов.
Изд. 3-е, испр. и доп.
Сборник задач по уравнениям математической физики / Под ред. В. С. Вла-
Владимирова. Изд. 3-е.
Шклярский Д. О., Чепцов Н.Н., Яглом ИМ. Избранные задачи и теоремы
элементарной математики. Геометрия. Планиметрия. Изд. 3-е.
Шклярский Д. О., Чепцов Н.Н., Яглом И.М. Избранные задачи и теоремы
элементарной математики. Геометрия. Стереометрия. Изд. 2-е.
Шклярский Д. О., Чепцов Н.Н., Яглом И.М. Избранные задачи и теоремы
элементарной математики. Арифметика. Алгебра. Изд. 6-е.
Элементарный учебник физики / Под ред. Ландсберга Г. С. В 3-х т.
Изд. 12-е.
Т. 1: Механика. Теплота. Молекулярная физика.
Т. 2: Электричество и магнетизм.
Т. 3: Колебания и волны. Оптика. Атомная и ядерная физика.
Яворский Б.М., Пинский А.А. Основы физики / Под ред. Ю.И. Дика.
Пособие для поступающих в вузы. Изд. 4-е, перераб. В 2-х кн.
Кн. 1: Механика. Молекулярная физика. Электродинамика.
Кн. 2: Колебания и волны. Квантовая физика. Физика ядра и
элементарных частиц.
Яворский Б.М., Селезнев Ю.А. Справочник по физике для школьников и
поступающих в вузы. Изд. 5-е, перераб.
По вопросам приобретения книг обращаться:
тел./факс @95) 334-74-21
e-mail: fizmat@maik.ru
Учебное издание
КАДОМЦЕВ Сергей Борисович
АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
И ЛИНЕЙНАЯ АЛГЕБРА
Редактор Н. Б. Бартошевич-Жагелъ
Оригинал-макет: В. В. Худяков
ЛР № 071930 от 06.07.99.
Подписано в печать 25.06.01. Формат 60x90/16.
Бумага типографская. Печать офсетная.
Усл. печ. л. 10. Уч.-изд. л. 11. Заказ №
Издательская фирма «Физико-математическая литература»
МАЙК «Наука/Интерпериодика»
117864 Москва, Профсоюзная, 90
Отпечатано с готовых диапозитивов в Московской
типографии № 6 Министерства РФ по делам печати,
телерадиовещания и средств массовых коммуникаций
109088 Москва, Южнопортовая ул., 24
БВМ 5-9221-0145-5
9 785922 101455