





































































































































































































Author: Беклемишева Л.А. Петрович А.Ю. Чубаров И.А.
Tags: геометрия физико-математические науки математика линейная алгебра аналитическая геометрия задачи по математике
ISBN: 5-9221-0010-6
Year: 2001




Л.А. БЕКЛЕМИШЕВА
А.Ю. ПЕТРОВИЧ
И.А. ЧУБАРОВ
СБОРНИК ЗАДАЧ
ПО АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ
И ЛИНЕЙНОЙ АЛГЕБРЕ
Под редакцией Д.В. БЕКЛЕМИШЕВА
Издание второе, переработанное
МОСКВА
ФИЗМАТЛИТ
2001
УДК 514 •
• Н42
ВВК 22, Ш-
Бсклемишева Л.А., Петрович А.Ю., Чубаров И.А. Сбор-
Сборник задач по аналитической геометрии и линейной алгебреГУчебн. по-
пособие / Под ред. Д.Ъ. Беклемишева. 2-е изд.,"перераб. —~М.*: ФИЗМАТЛИТ,
2001. — 496 с. — ISBN 5-9221-0010-6.
Сборник соответствует объединенному курсу аналитической геометрии и ли-
линейной алгебры. Имеются теоретические введения ко всем разделам, большое число
задач, способствующих усвоению основных понятий, и серии типовых задач с от-
ответами.
Первое изд. — 1987 г. ? j
Для студентов вузов с повышенной математической подготовкой.
® ФИЗМАТЛИТ, 2001
INHN .1-9221-ООЮ-б
СОДЕРЖАНИЕ
Предисловие 5
Глава 1. Векторы и координаты 7
§ 1. Линейные соотношения 9
§ 2. Скалярное произведение векторов 15 '
§ 3. Векторное и смешанное произведения векторов 20
§ 4. Замена базиса и системы координат 24 •¦ .
Глава 2. Прямая и плоскость 30
§ 5. Прямая на плоскости 30
§ 6. Плоскость и прямая в пространстве 38
Глава 3. Кривые второго порядка 56
§ 7. Геометрические свойства кривых второго порядка и их канони-
канонические уравнения 61
§ 8. Касательные к кривым второго порядка 71
§ 9. Общая теория кривых второго порядка 75
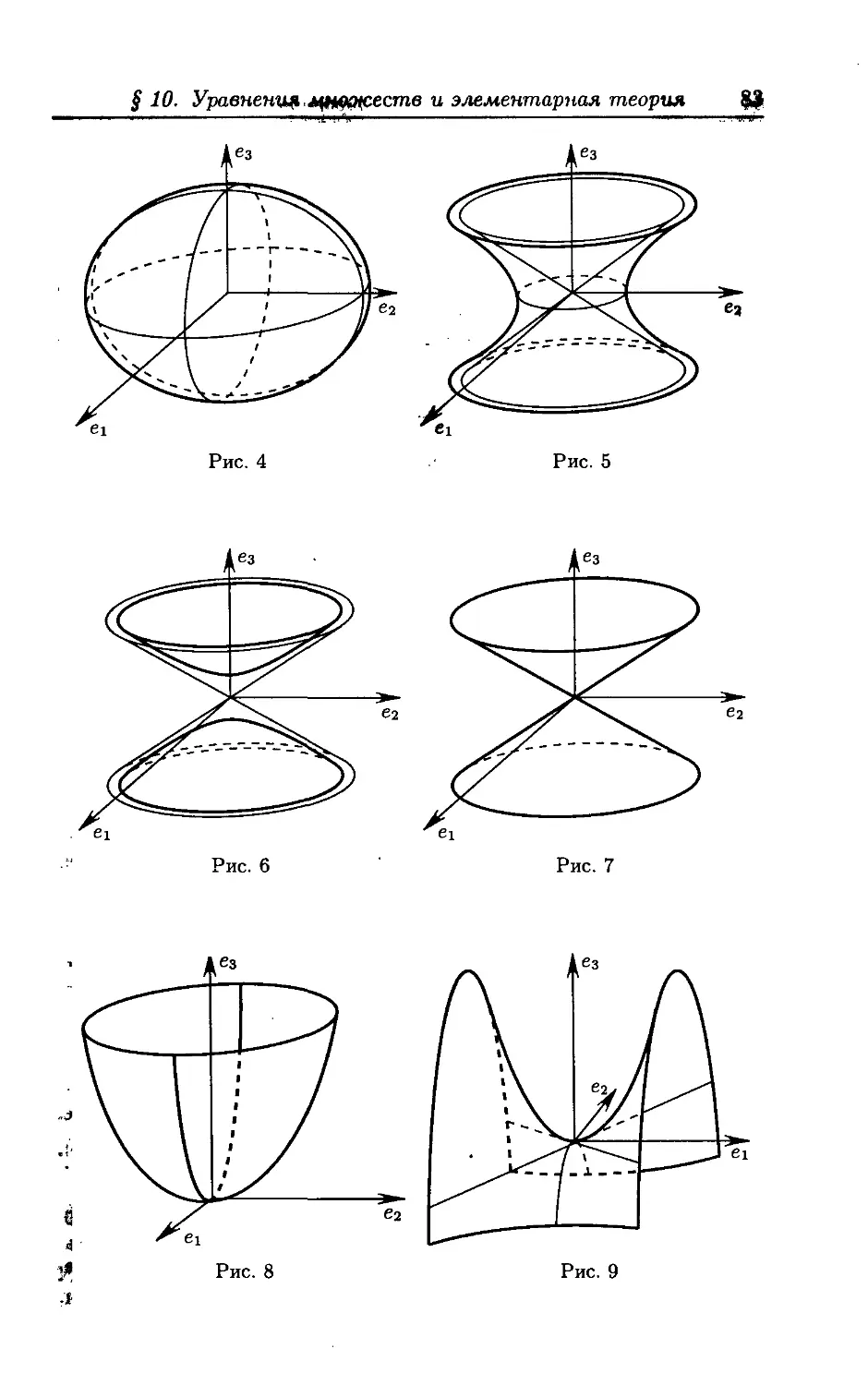
Глава 4. Поверхности второго порядка 81
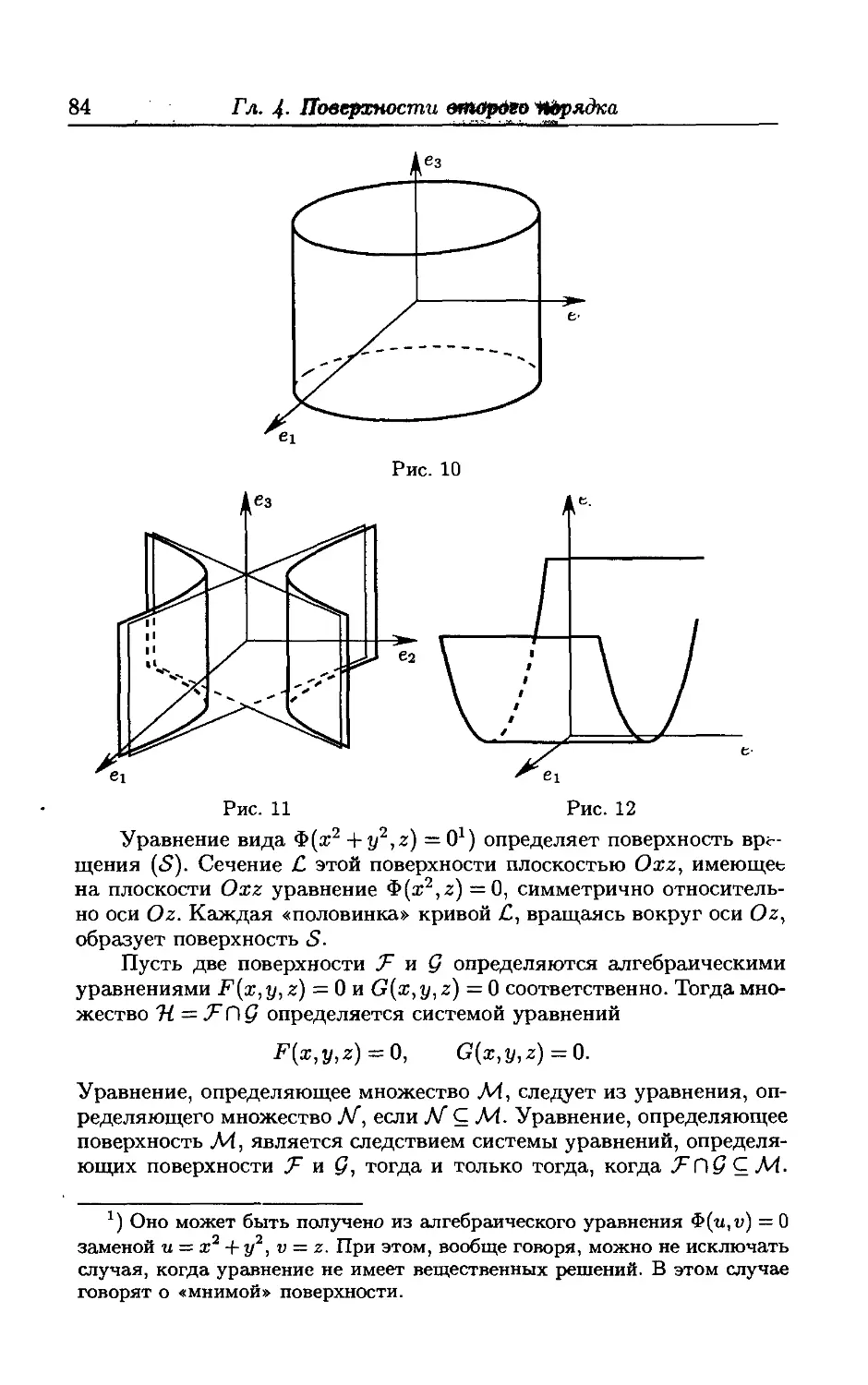
§ 10. Уравнения множеств в пространстве и элементарная теория
поверхностей второго порядка 81
§11. Общая теория поверхностей второго порядка 93
Глава 5. Преобразования плоскости. Группы 103
§ 12. Линейные и аффинные преобразования плоскости 103
§ 13. Понятие о группах 120
Глава 6. Матрицы 127
§ 14. Определители 127
§ 15. Операции с матрицами 134
§ 16. Ранг матрицы 150
Глава 7. Системы линейных уравнений 156
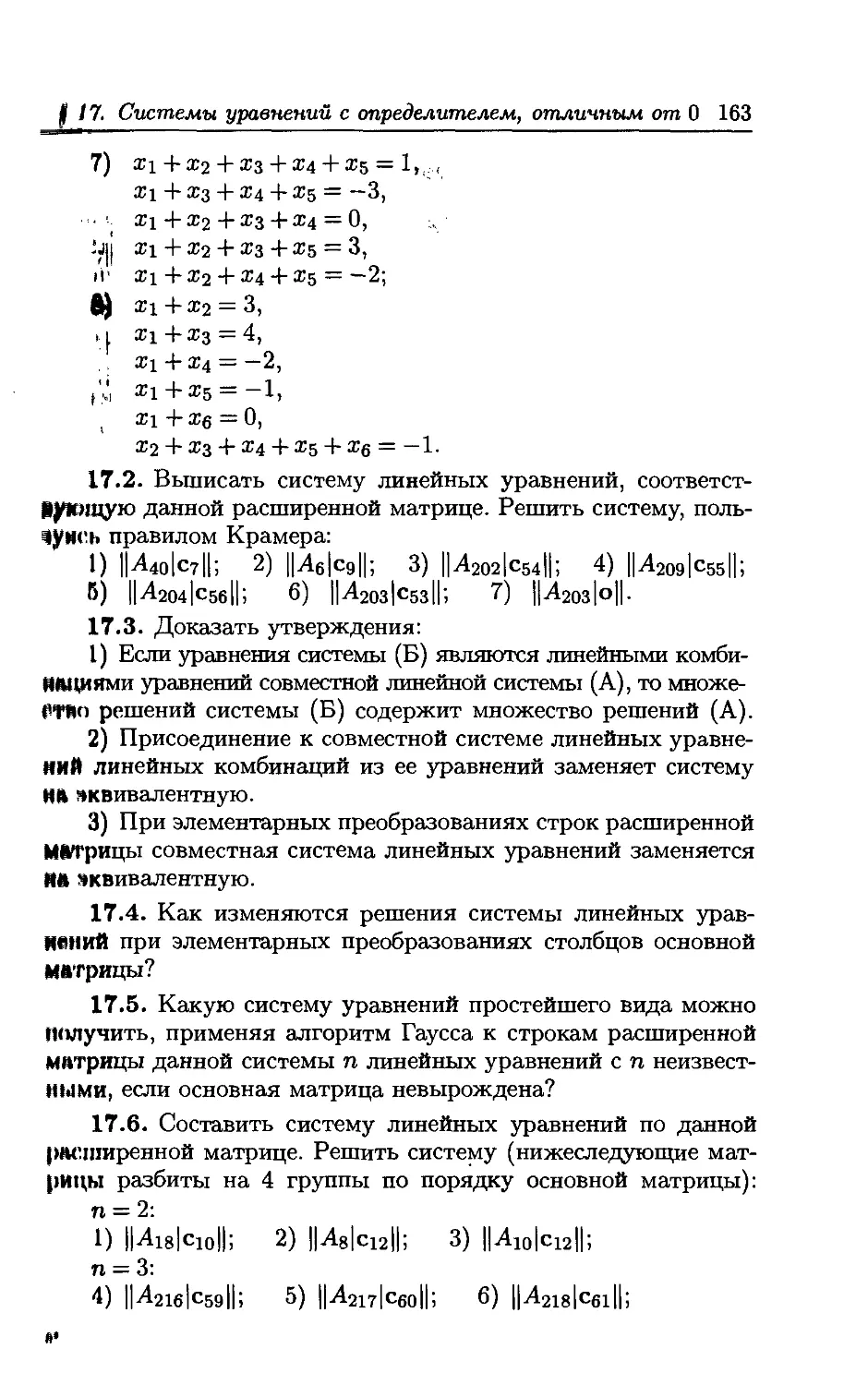
§ 17. Системы линейных уравнений с определителем} отличным от 0 162
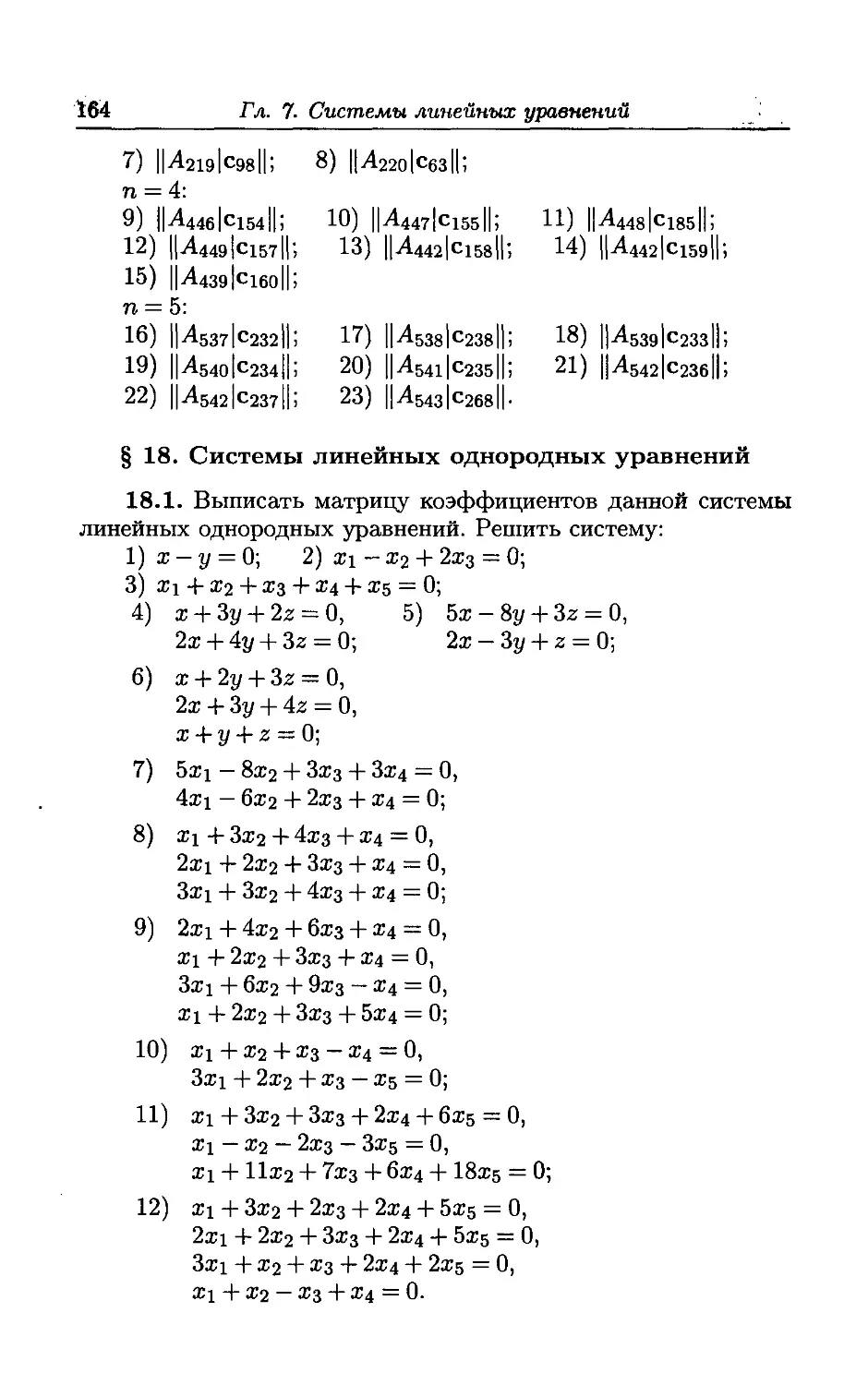
§ 18. Системы линейных однородных уравнений 164
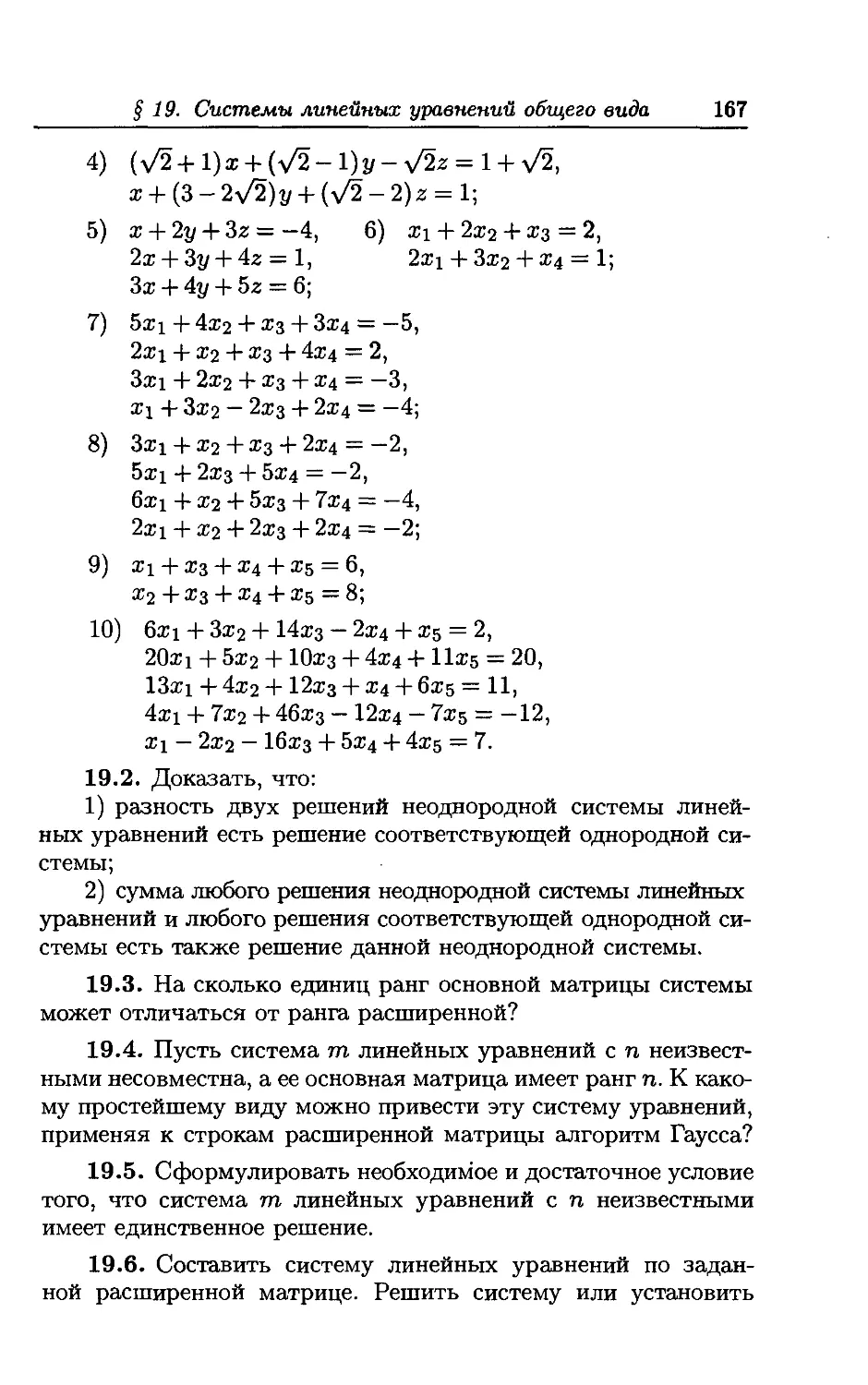
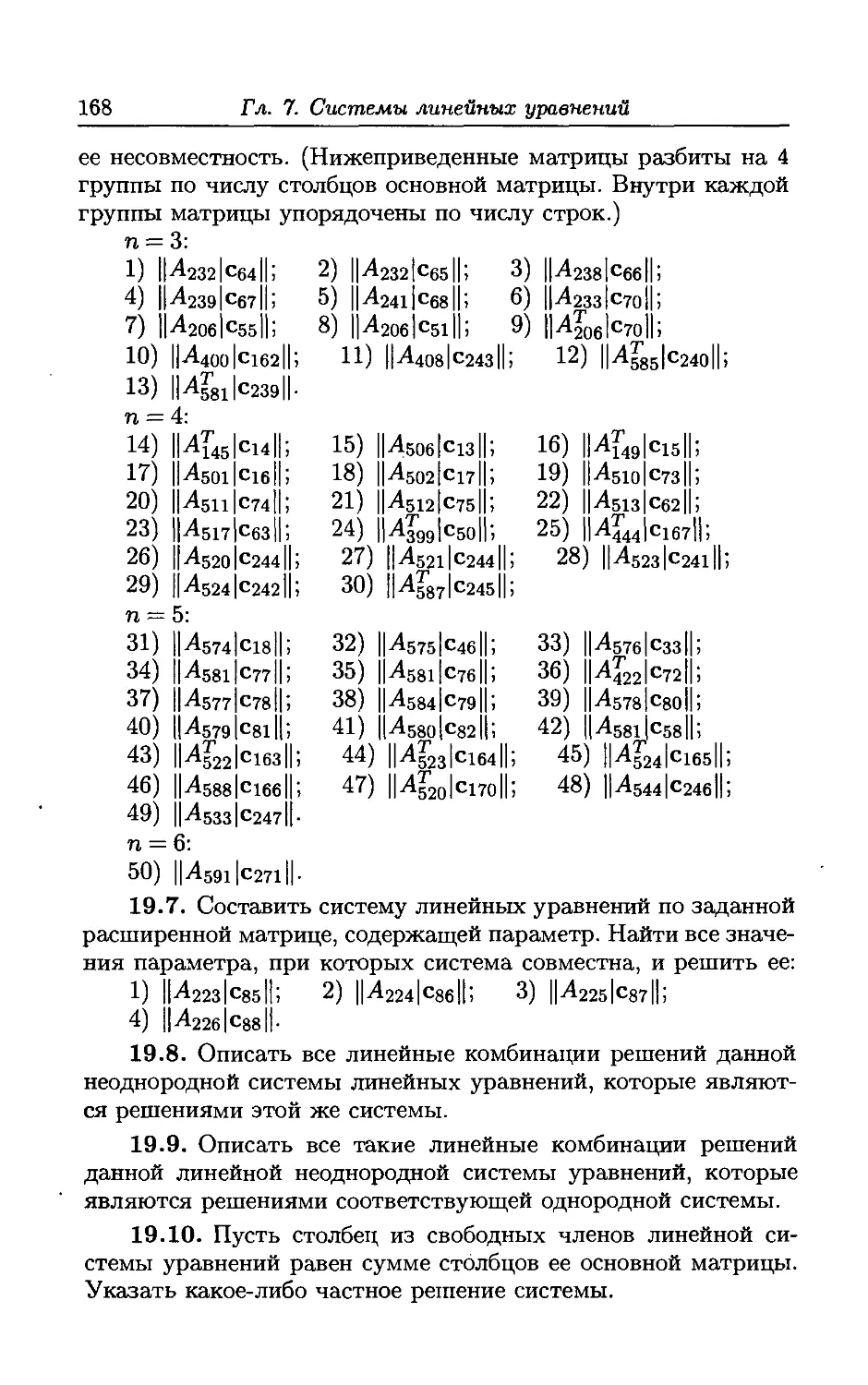
§ 19. Системы линейных уравнений общего вида 166
Глава 8. Линейные пространства 175
§ 20. Примеры пространств. Базис и размерность 180
4 Содержание
§ 21. Сумма и пересечение подпространств 185
§ 22. Комплексные линейные пространства 188
Глава 9. Линейные отображения и преобразования 191
§ 23. Основные свойства линейных отображений и преобразований. 191
§ 24. Инвариантные подпространства, собственные векторы и соб-
собственные значения линейных преобразований 213
Глава 10. Евклидовы и унитарные пространства .. 238
§ 25. Скалярное произведение. Матрица Грама 241
§ 26. Геометрия евклидова пространства 248
§ 27. Унитарные пространства 260
Глава 11. Линейные преобразования евклидовых и
унитарных пространств 265
§ 28. Примеры линейных преобразований евклидова пространства.
Сопряженное преобразование 266
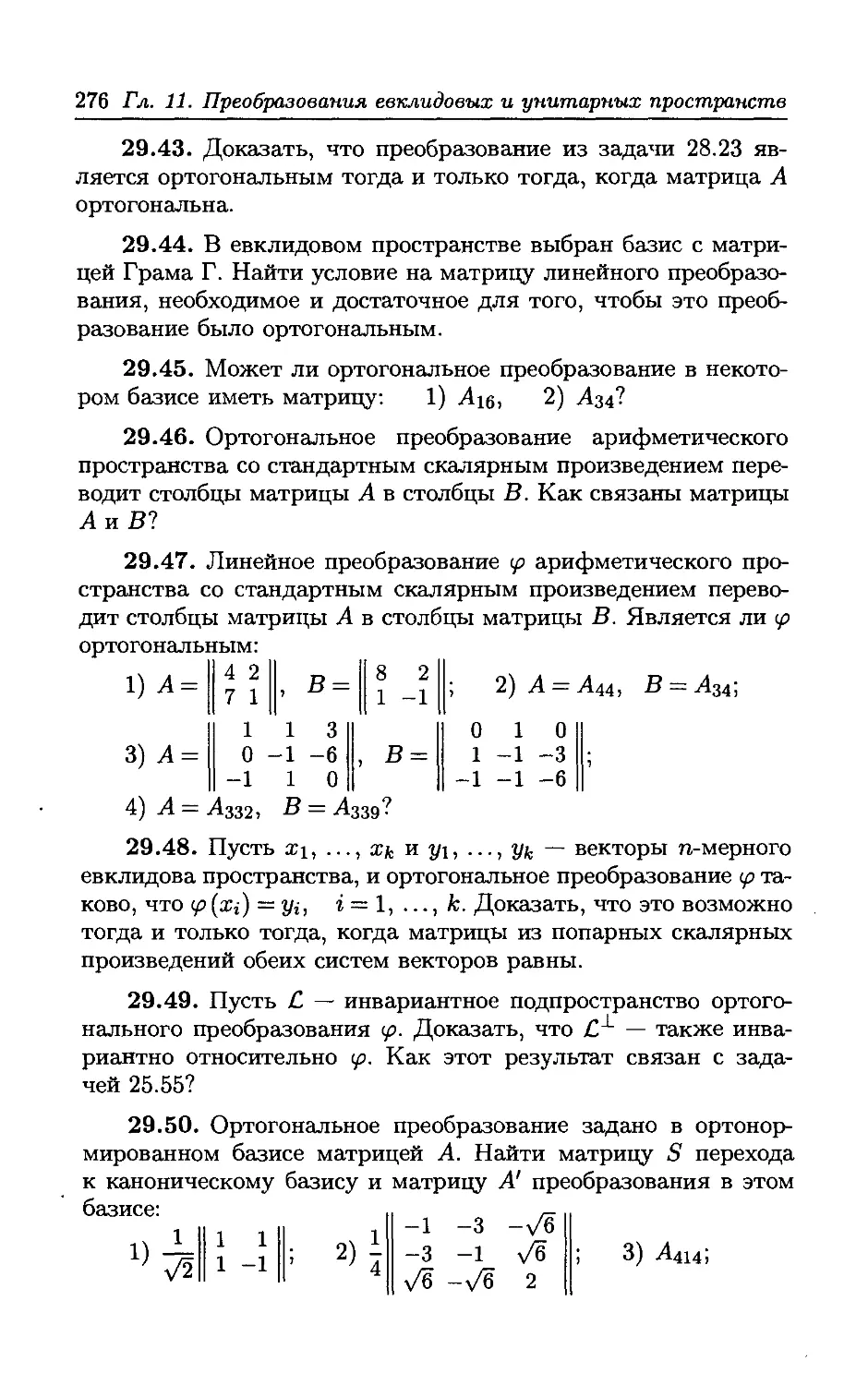
§ 29. Самосопряженные и ортогональные преобразования 271
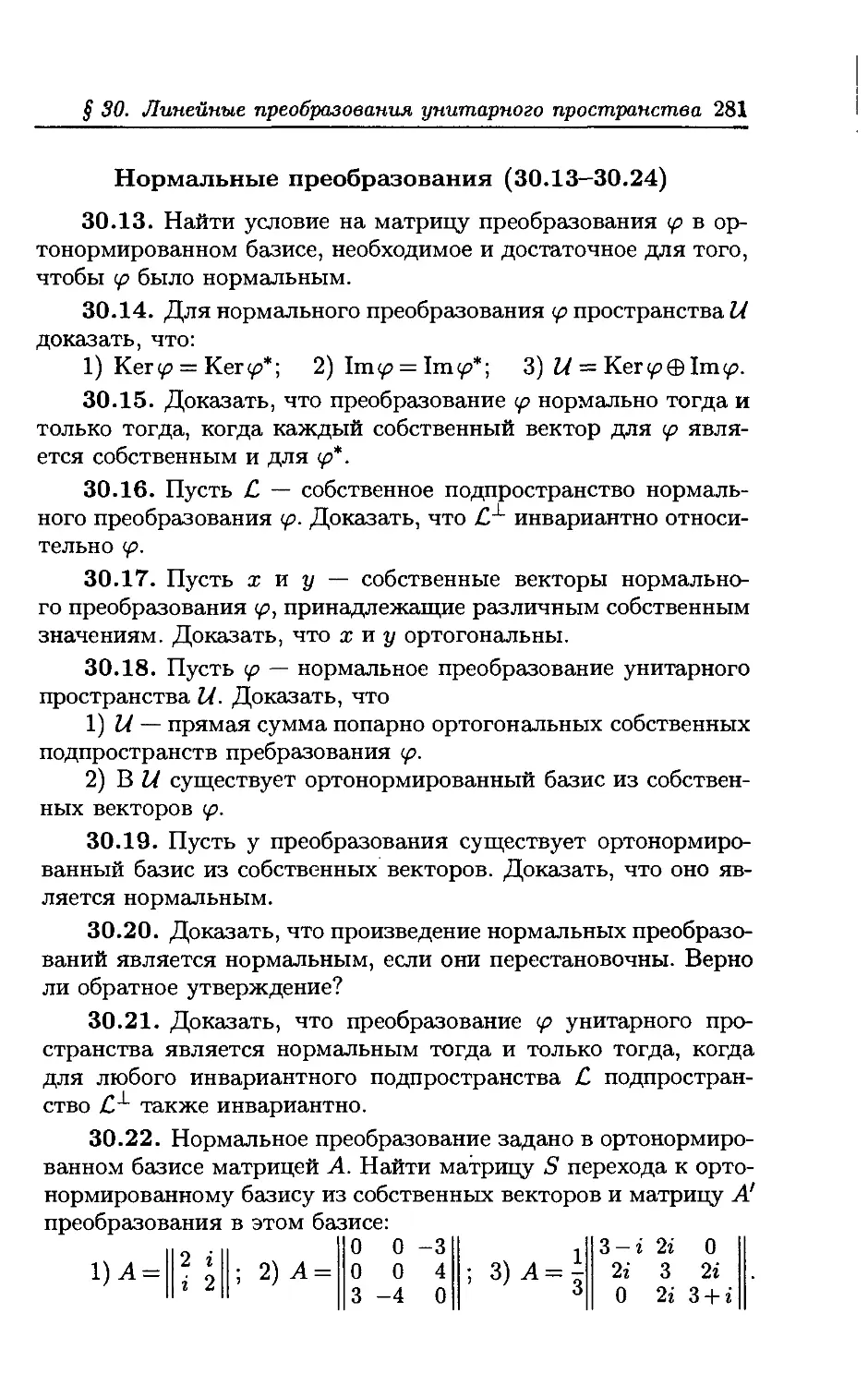
§ 30. Линейные преобразования унитарного пространства 279
Глава 12. Функции на линейном пространстве 285
§ 31. Линейные функции 285
§ 32. Билинейные и квадратичные функции 292
Глава 13. Аффинные и точечные евклидовы про-
пространства 307
§ 33. Аффинные пространства 307
§ 34. Точечные евклидовы пространства 315
Глава 14. Тензоры 323
§ 35. Определение тензора. Тензорные обозначения, пространствен-
пространственные матрицы 328
§ 36. Алгебраические операции с тензорами 334
§ 37. Тензоры в евклидовом пространстве 341
§ 38. Поливекторы и внешние формы 343
Решения 348
Ответы и указания 373
Ванк столбцов и матриц 465
Список литературы 495
ПРЕДИСЛОВИЕ
Kb •''";.
Пособие предназначено для студентов физико-математи-
физико-математических, инженерно-физических и инженерно-технических спе-
специальностей вузов. Цель авторов состояла в создании единого
сборника задач, соответствующего объединенному курсу ана-
аналитической геометрии и линейной алгебры. Все составители за-
задачника имеют опыт преподавания математики в Московском
физико-техническом институте, и этот опыт нашел отражение
в содержании сборника. Последовательность разделов, а также
определения и обозначения в основном соответствуют учебни-
учебнику Д.В. Беклемишева «Курс аналитической геометрии и ли-
линейной алгебры».
Отметим методические особенности сборника.
В задачник включены некоторые разделы, отличающиеся
от традиционных: в главу «Преобразования плоскости. Груп-
Группы» введен ряд задач, в которых обсуждается общее понятие
об отображениях; глава «Функции на линейном пространстве»
содержит параграф «Линейные функции»; задачи, относящи-
относящиеся к точечным n-мерным пространствам, выделены в отдель-
отдельную главу «Аффинные и точечные евклидовы пространства»,
и круг этих задач значительно расширен; наконец, глава «Тен-
«Тензоры», помимо детального обсуждения основных понятий, свя-
связанных с тензорами, содержит большое число упражнений с
пространственными матрицами.
Каждой главе, а также некоторым параграфам предпосла-
предпосланы теоретические введения. Введения начинаются со словаря —
списка необходимых новых понятий, определения которых
затем частично приводятся. Введения содержат также обоз-
обозначения, сводки важнейших формул и подробное изложение
некоторых алгоритмов.
В число задач включен ряд устных вопросов по курсу лек-
лекций. Иногда решение нескольких мелких вопросов приводит
к решению нетривиальной задачи. Такие задачи расположены
группами или обеспечены ссылками. Некоторые задачи предва-
предваряют применение линейной алгебры в других математических
курсах.
Предисловие
Выбор задач, как нам кажется, позволит использовать по-
пособие при различных системах построения курса лекций. Так
в § 14 «Определители» включены задачи, в которых применя-
применяется умножение матриц, задачи из глав X и XI о евклидовых
пространствах могут решаться как до, так и после задач на
квадратичные формы и т.д.
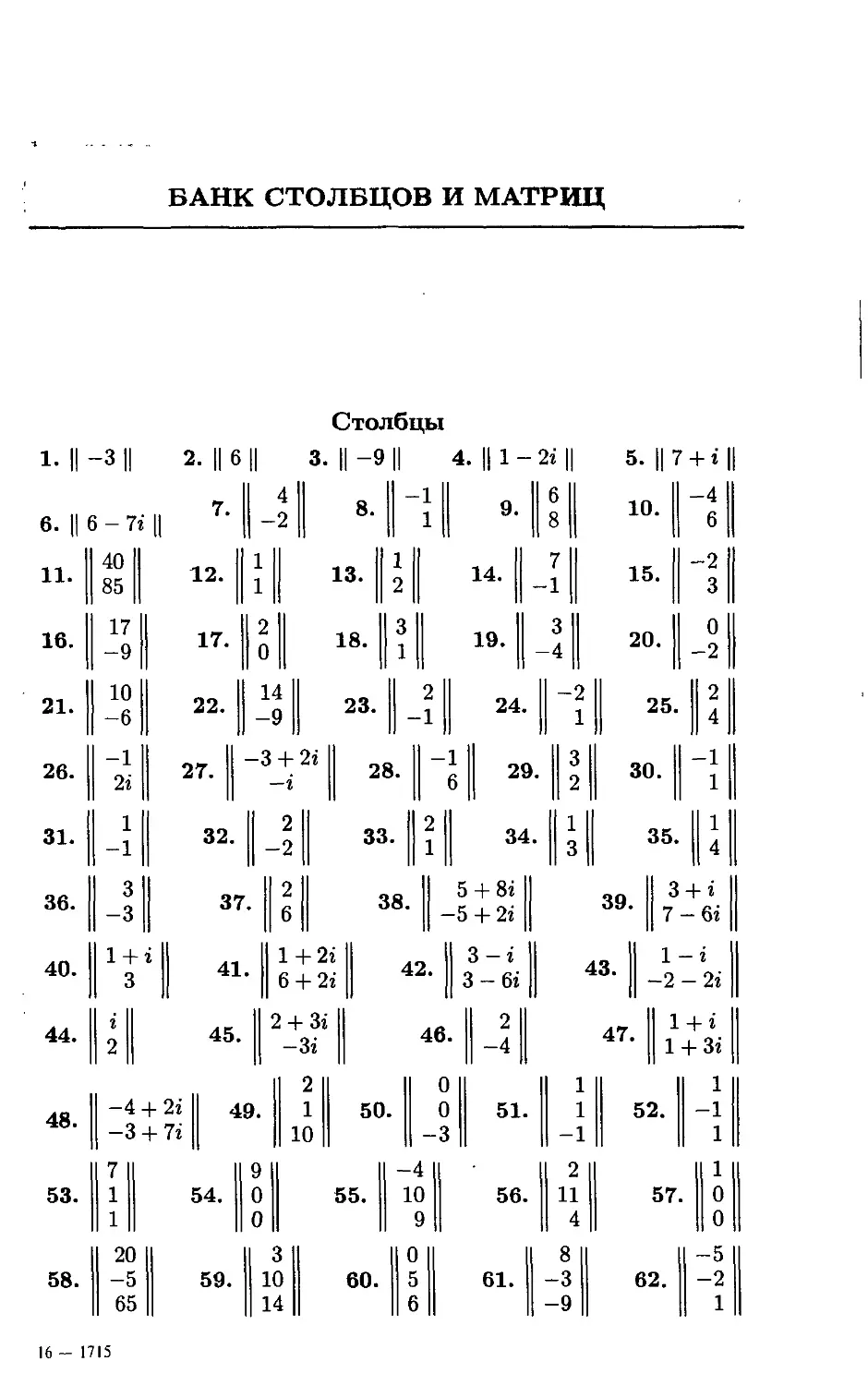
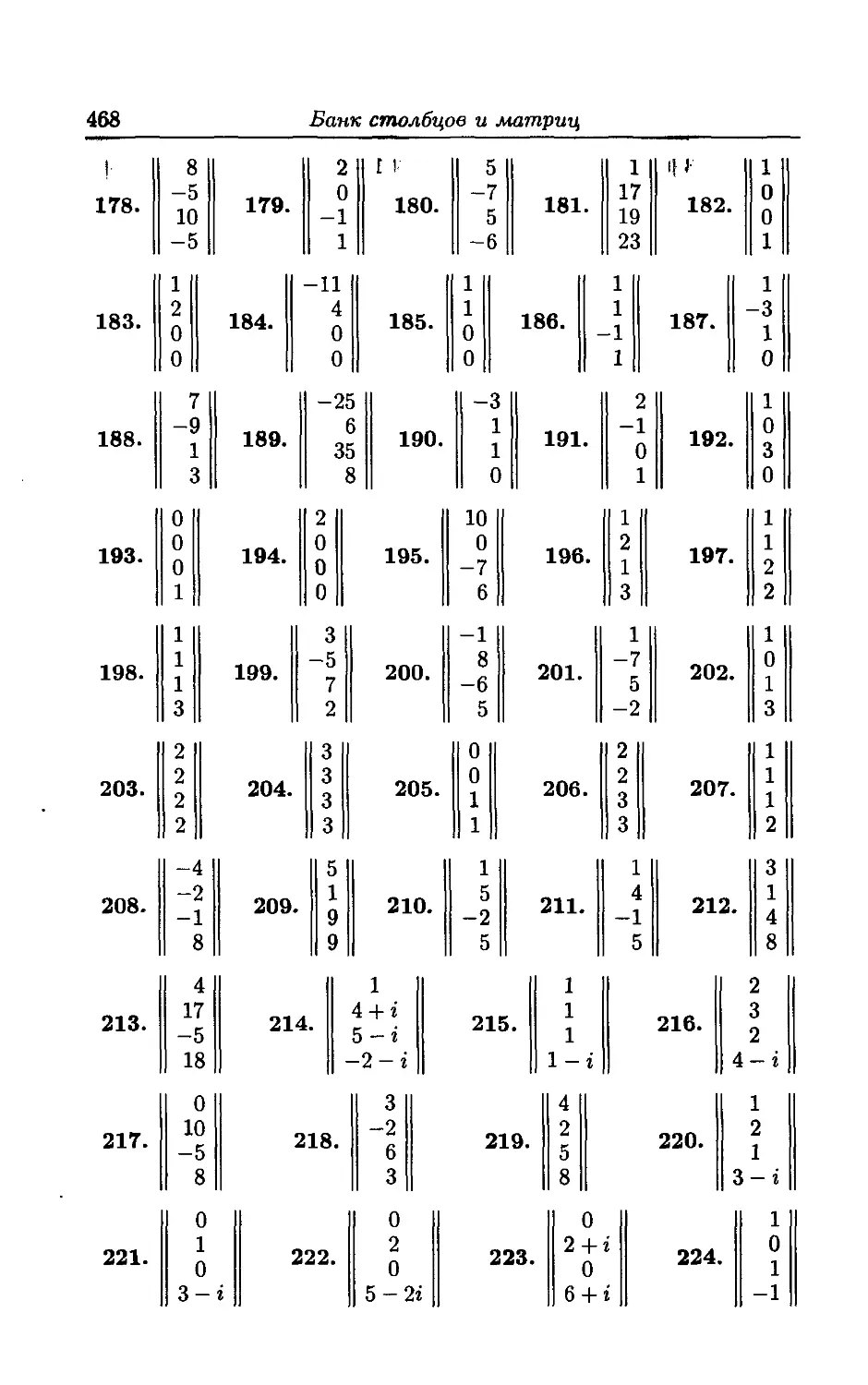
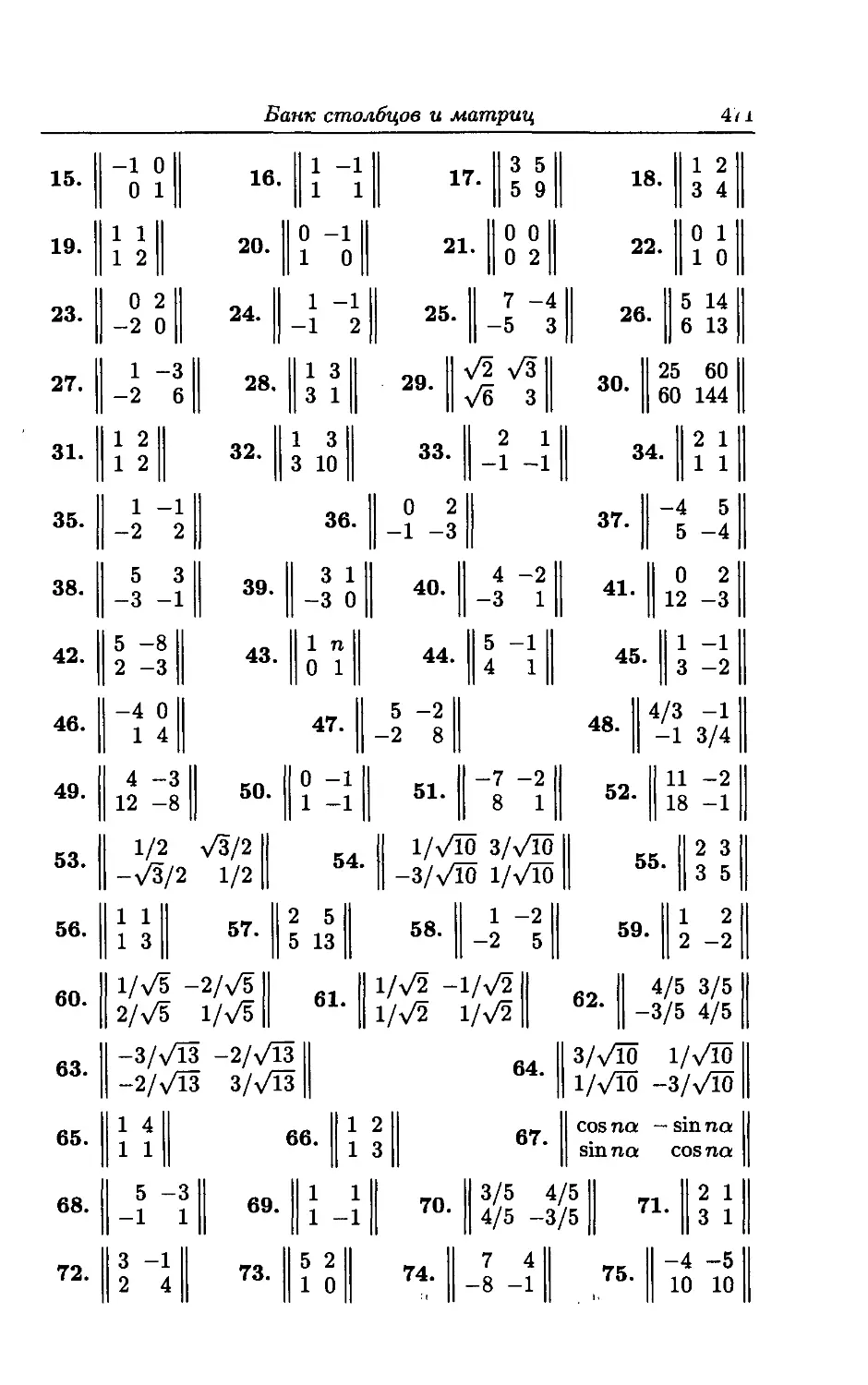
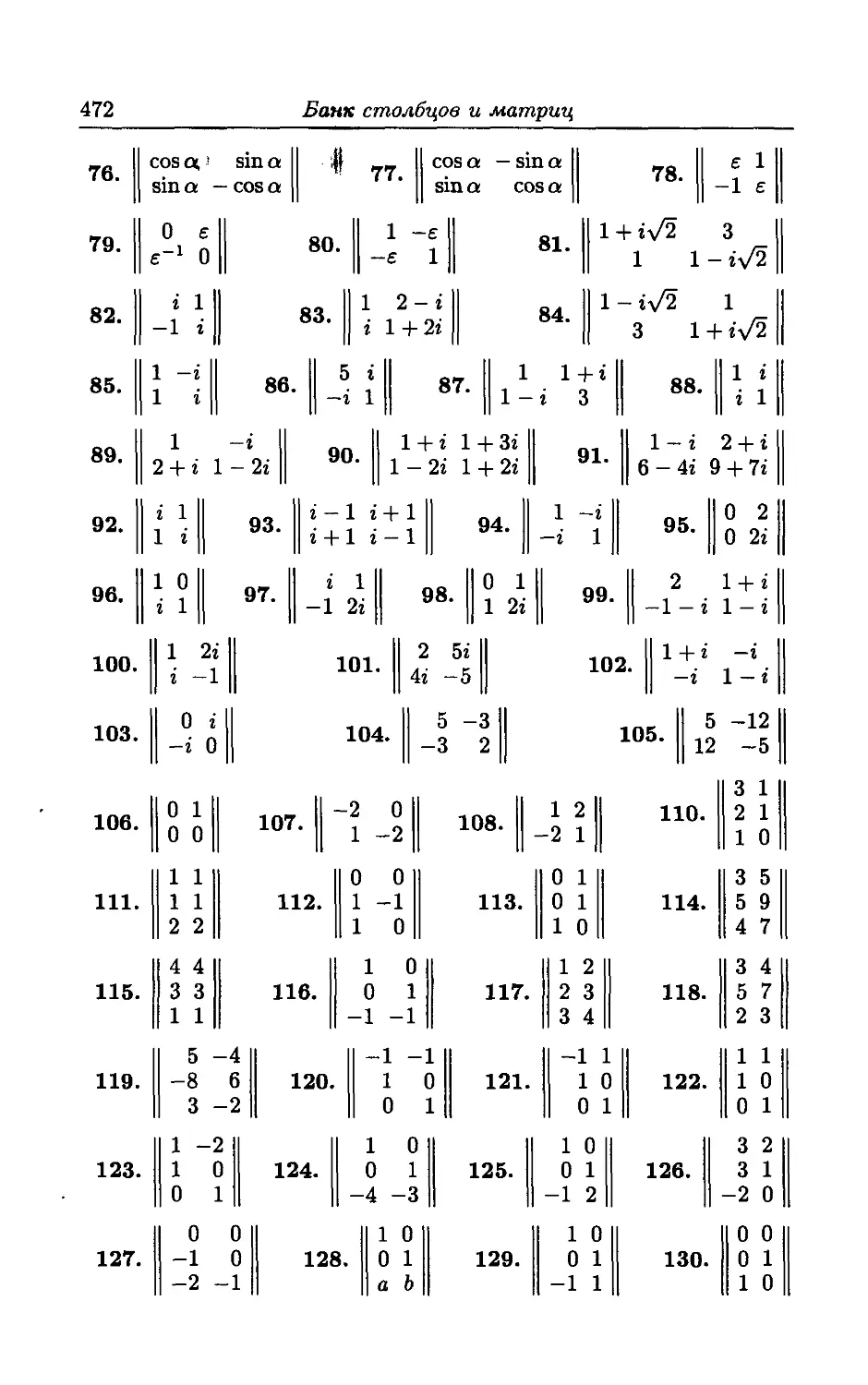
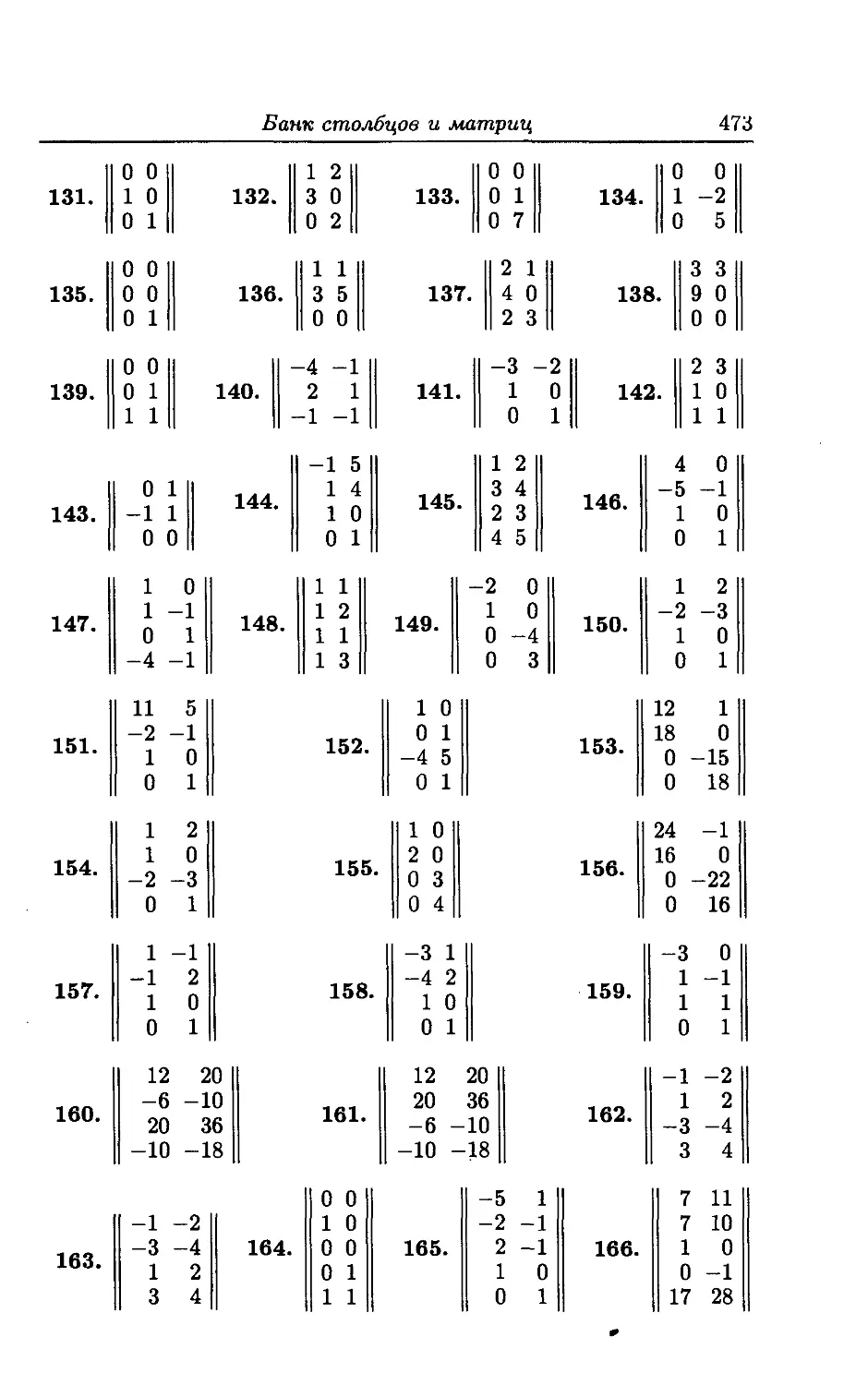
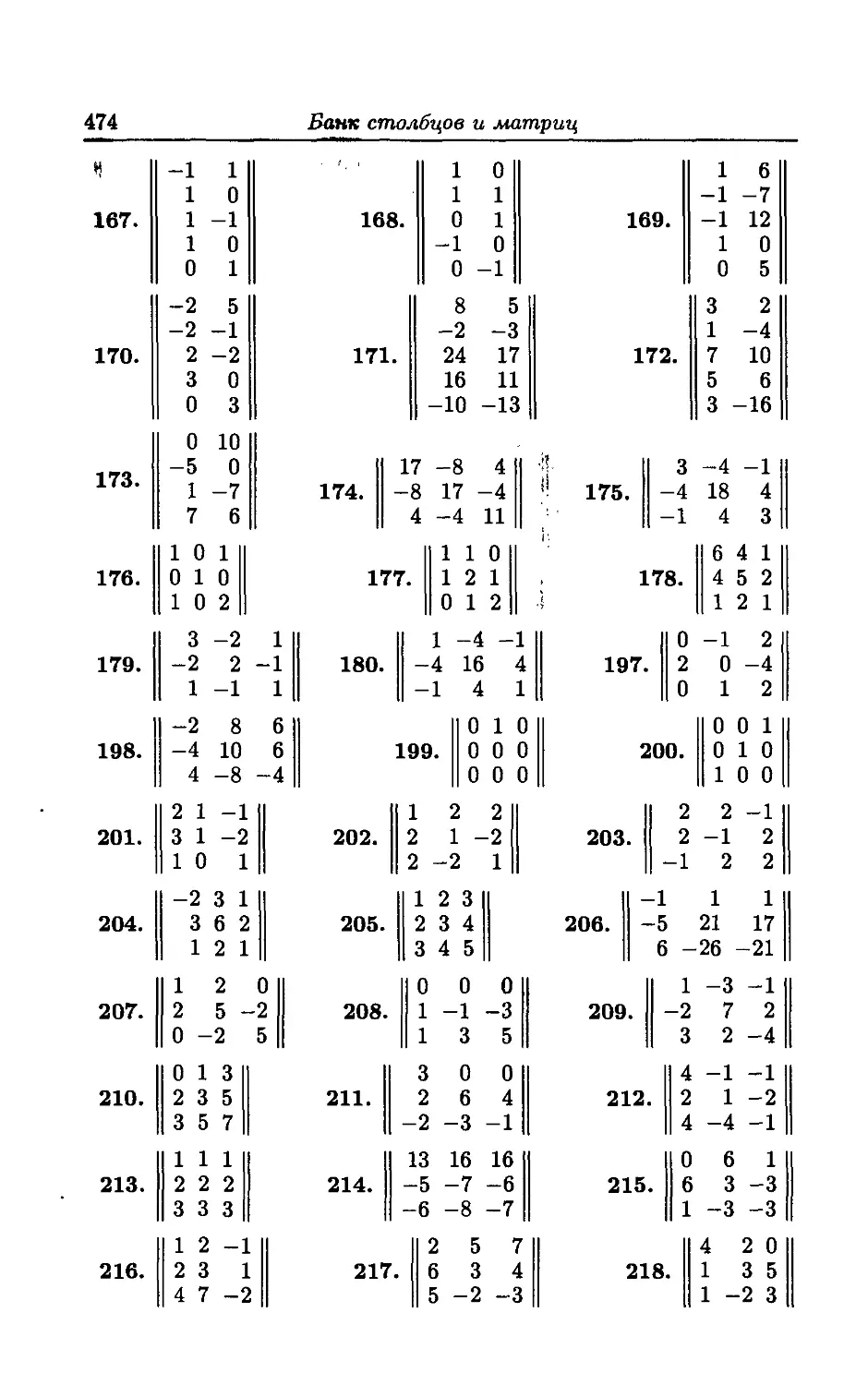
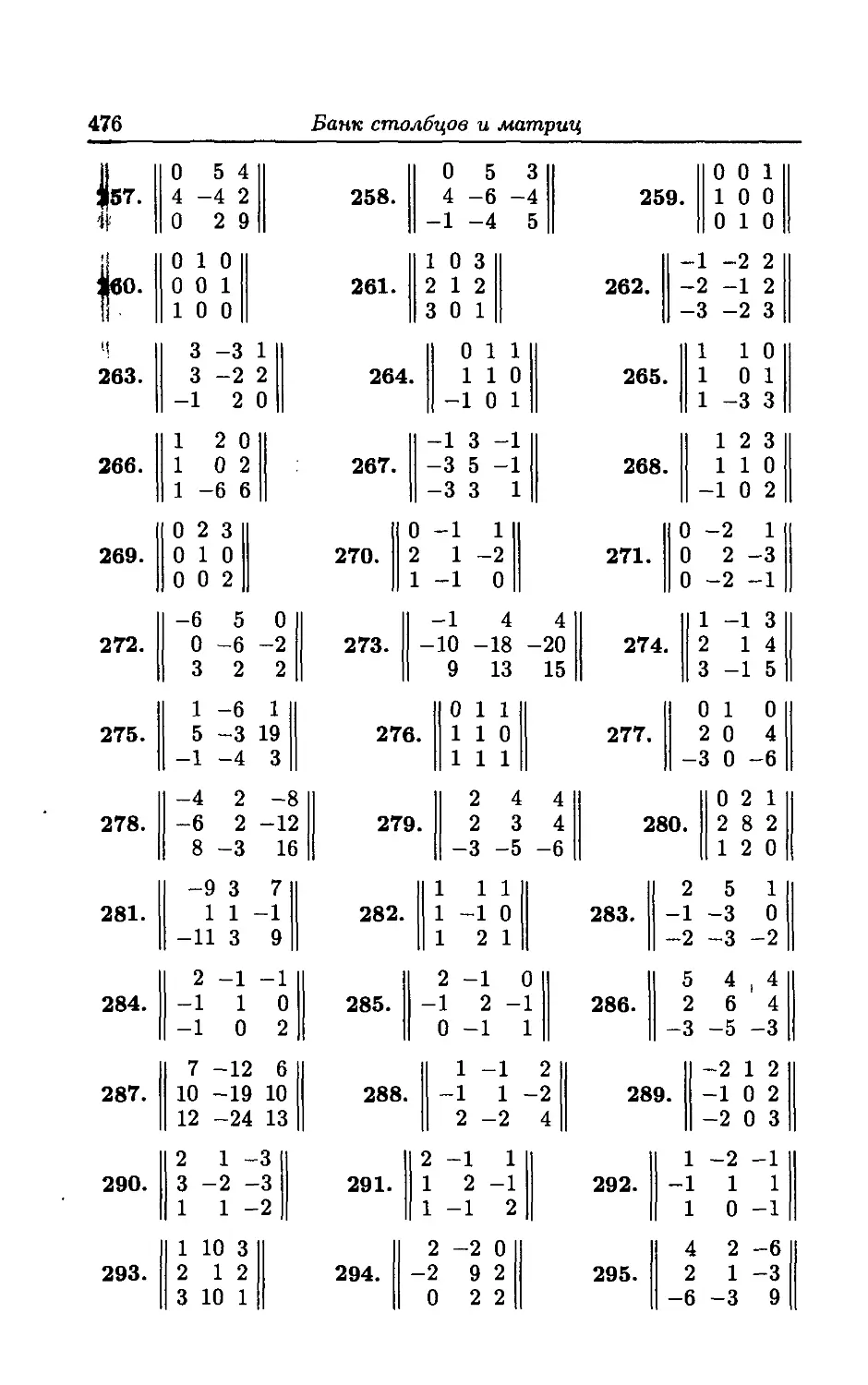
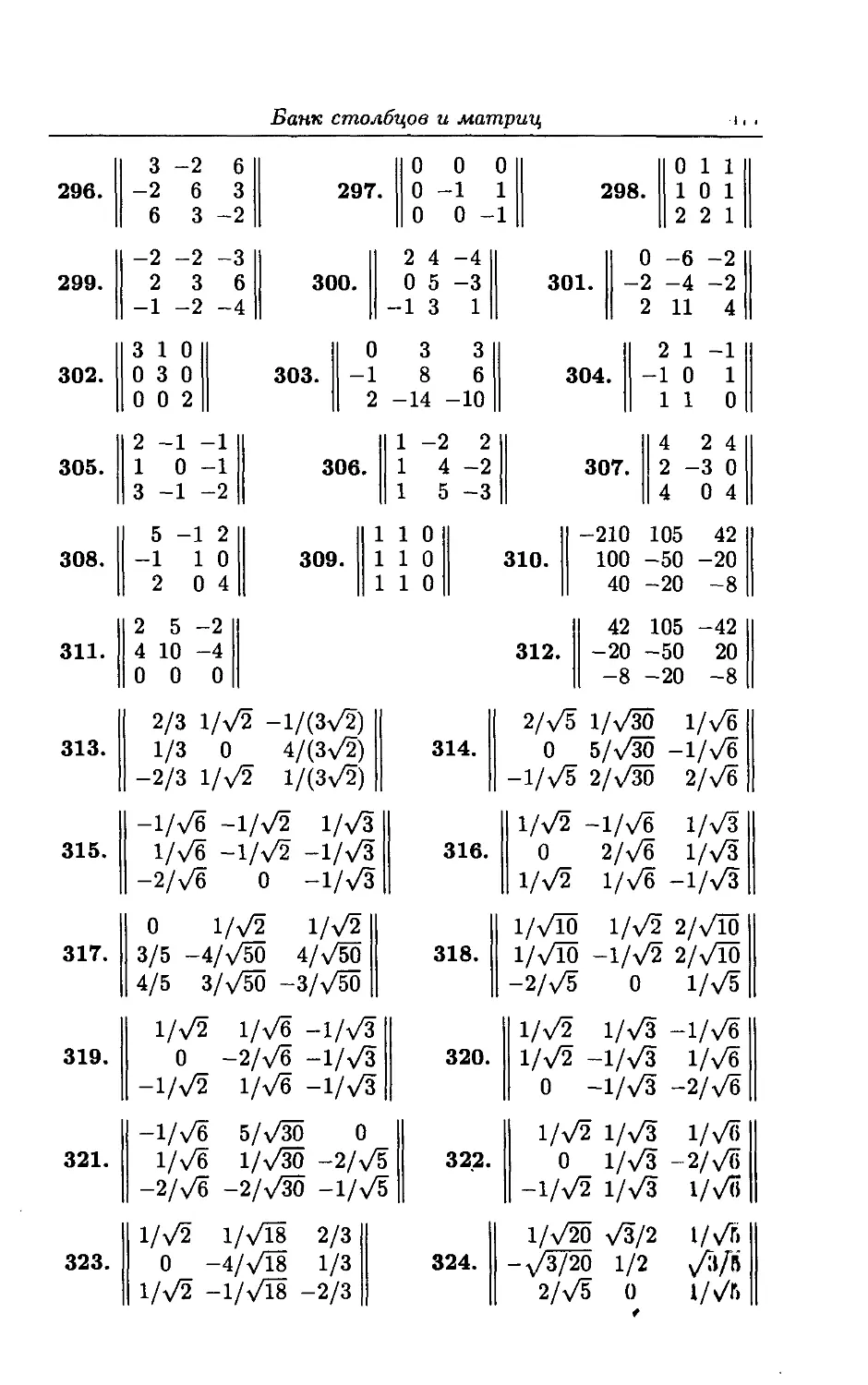
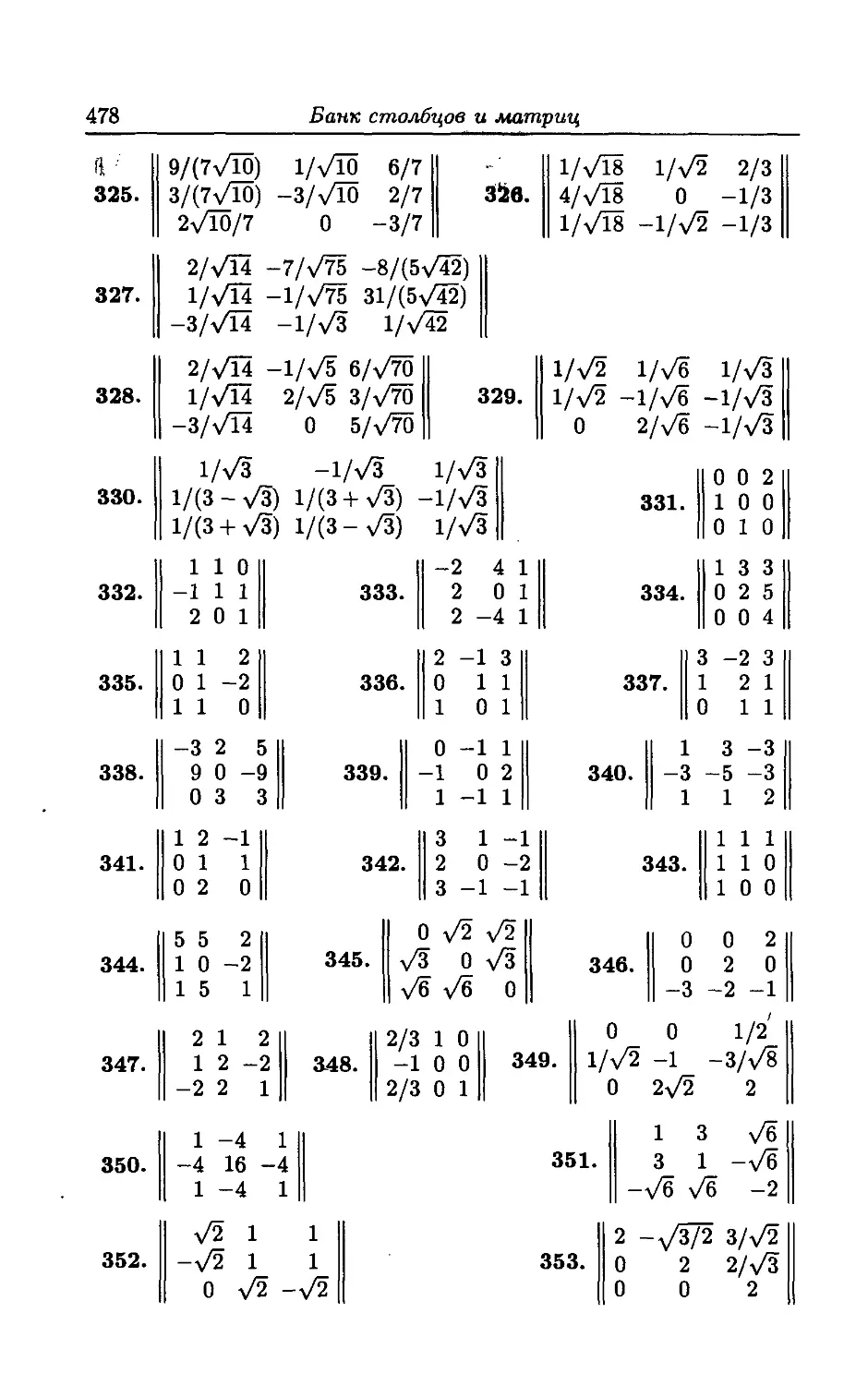
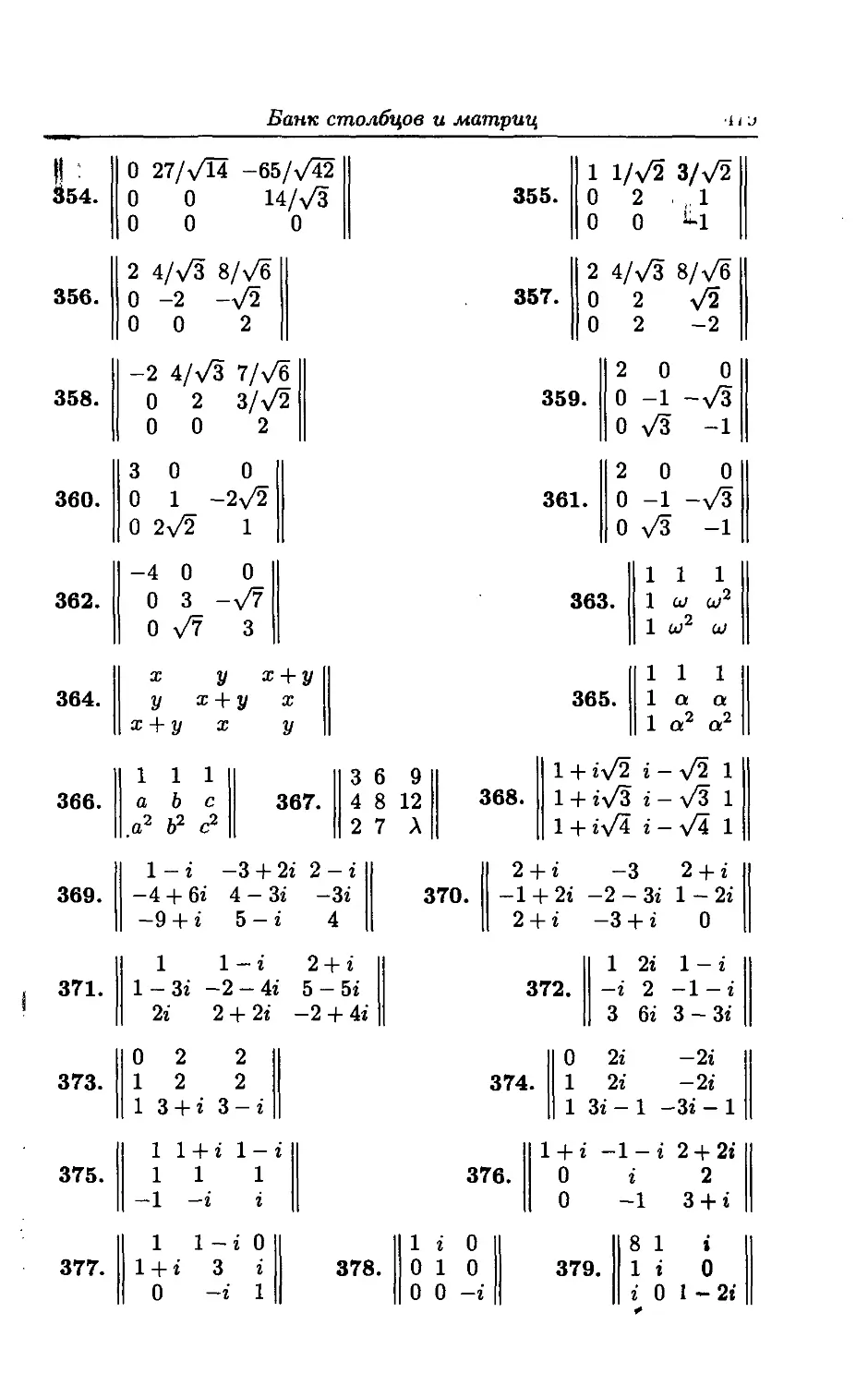
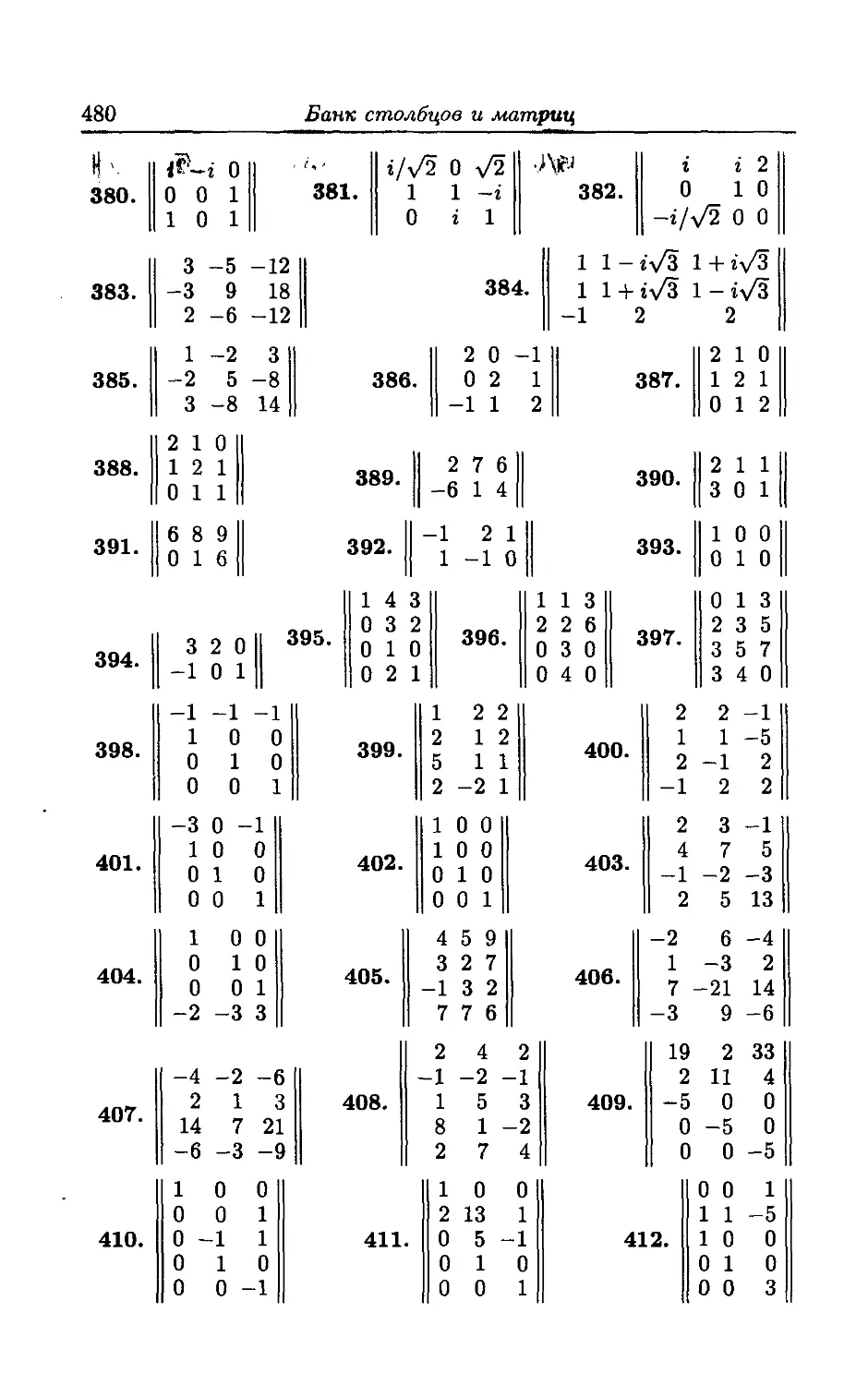
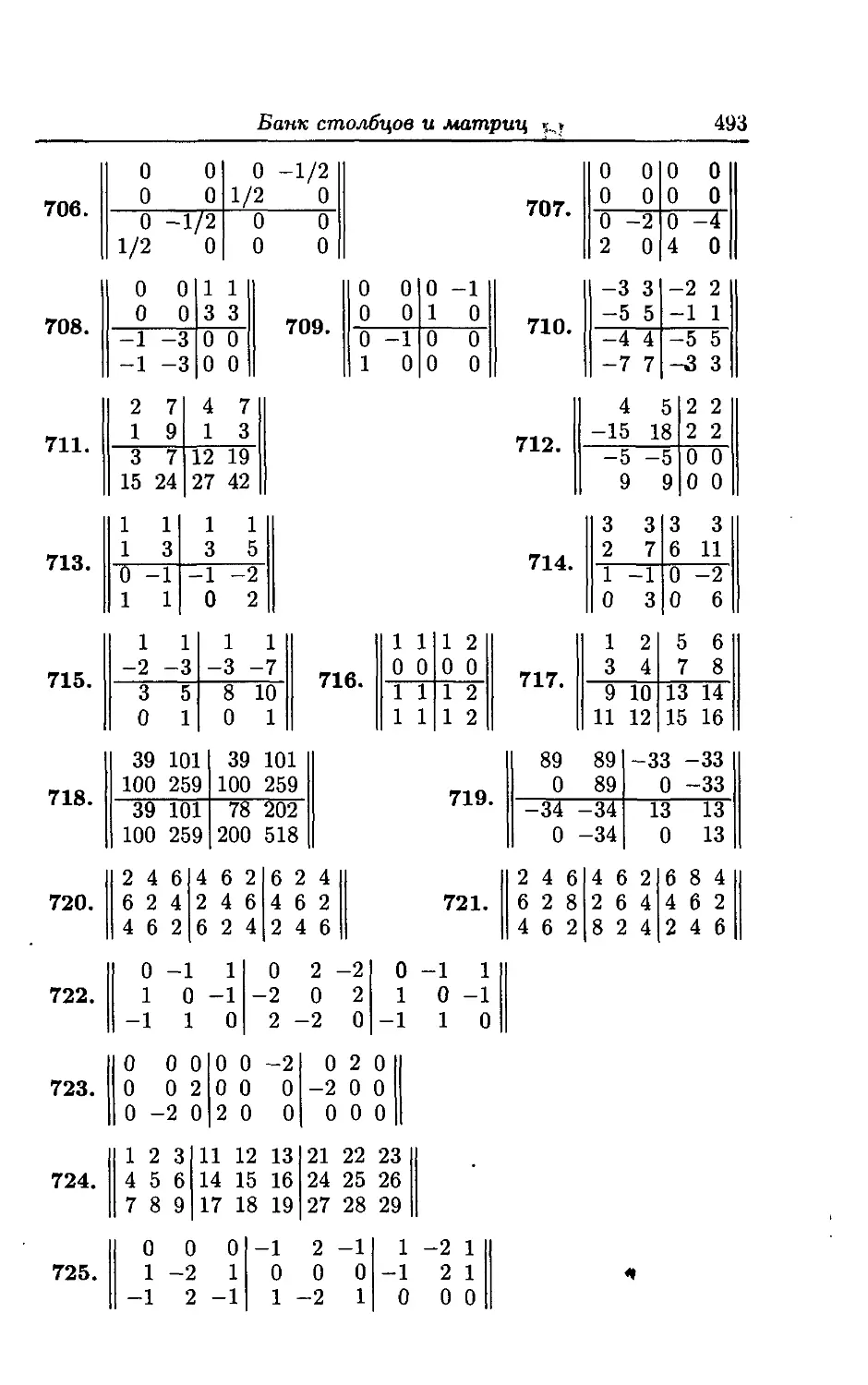
Для облегчения работы преподавателя стандартные задачи
даны большими сериями. При этом, чтобы сохранить объем за-
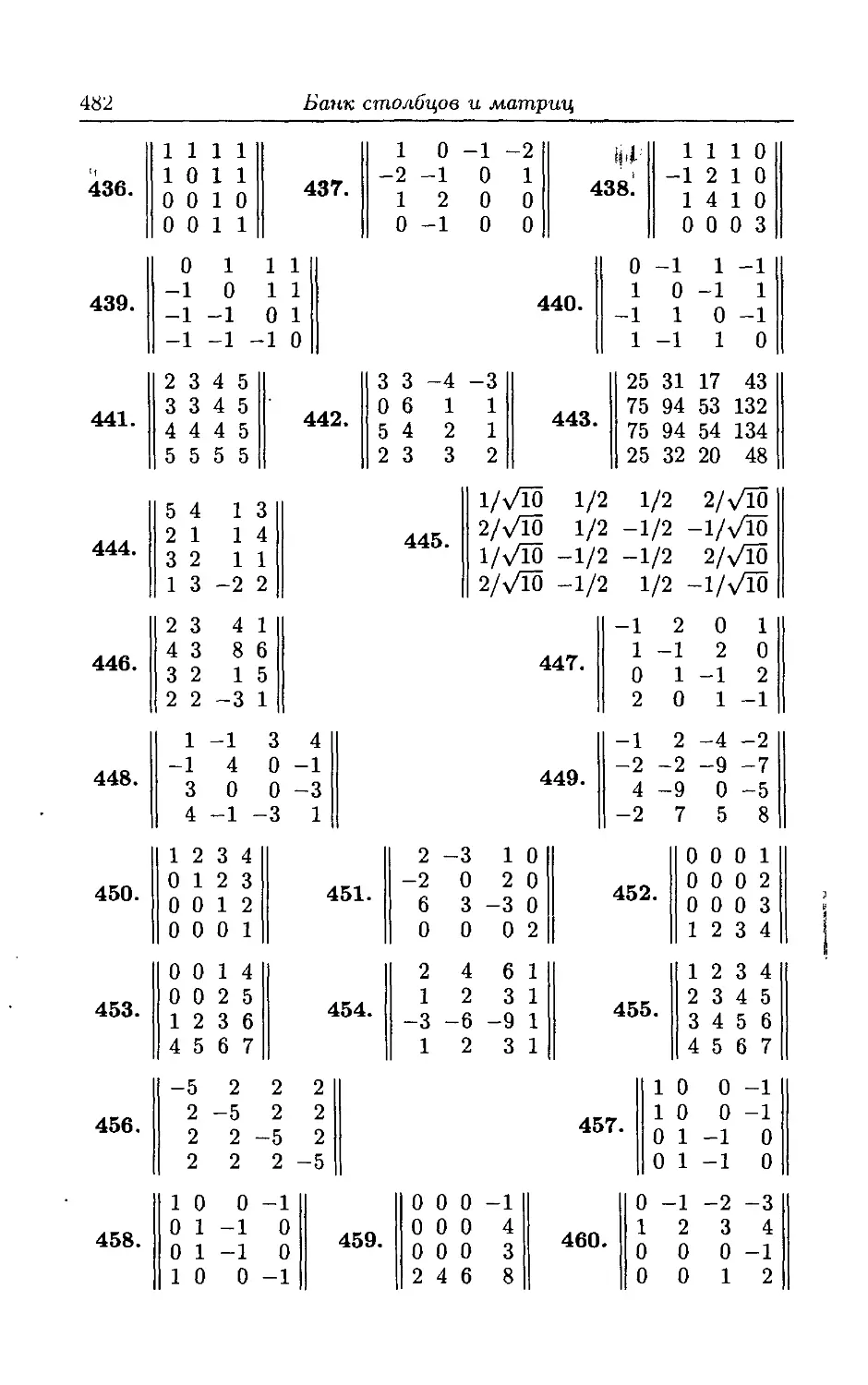
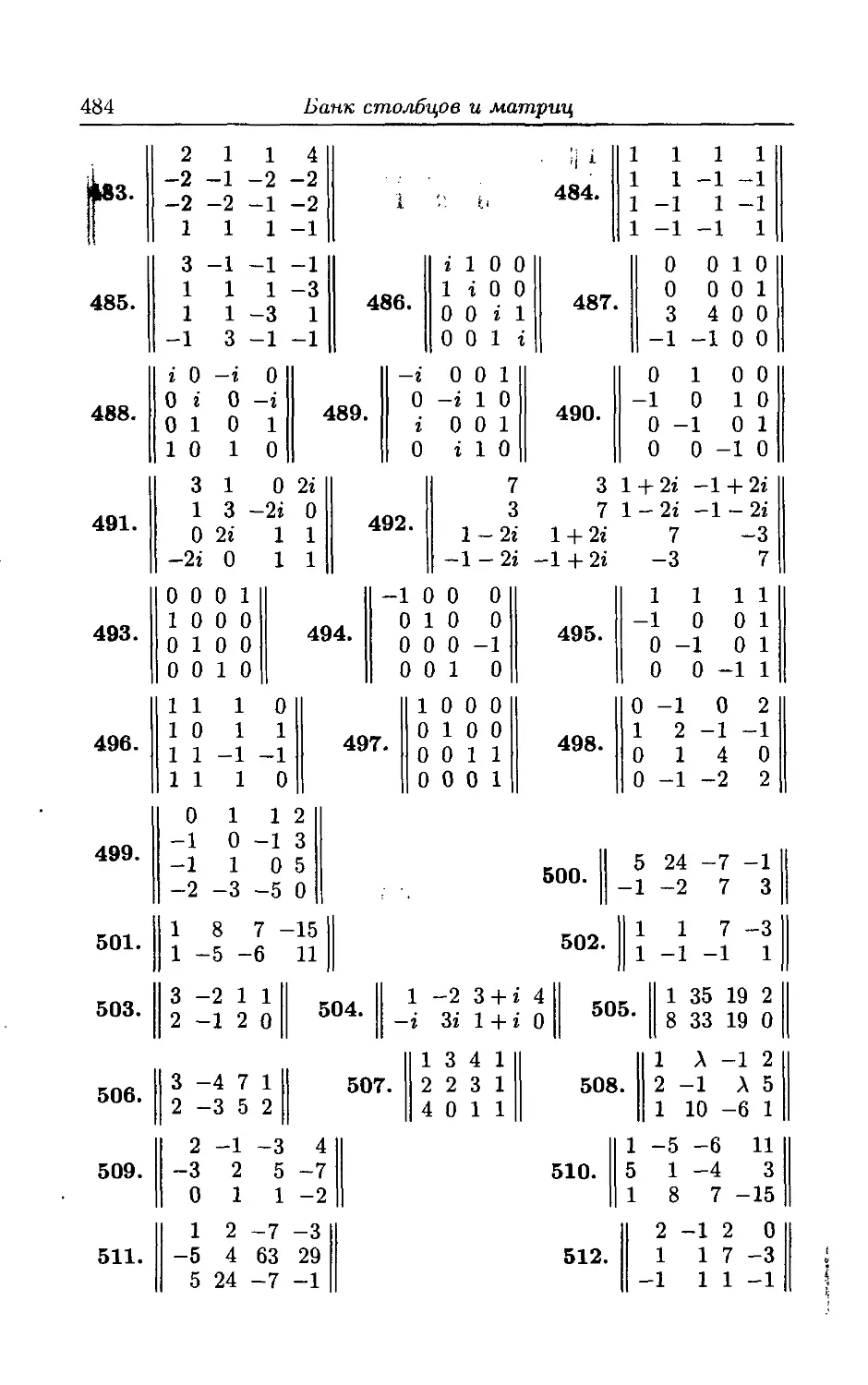
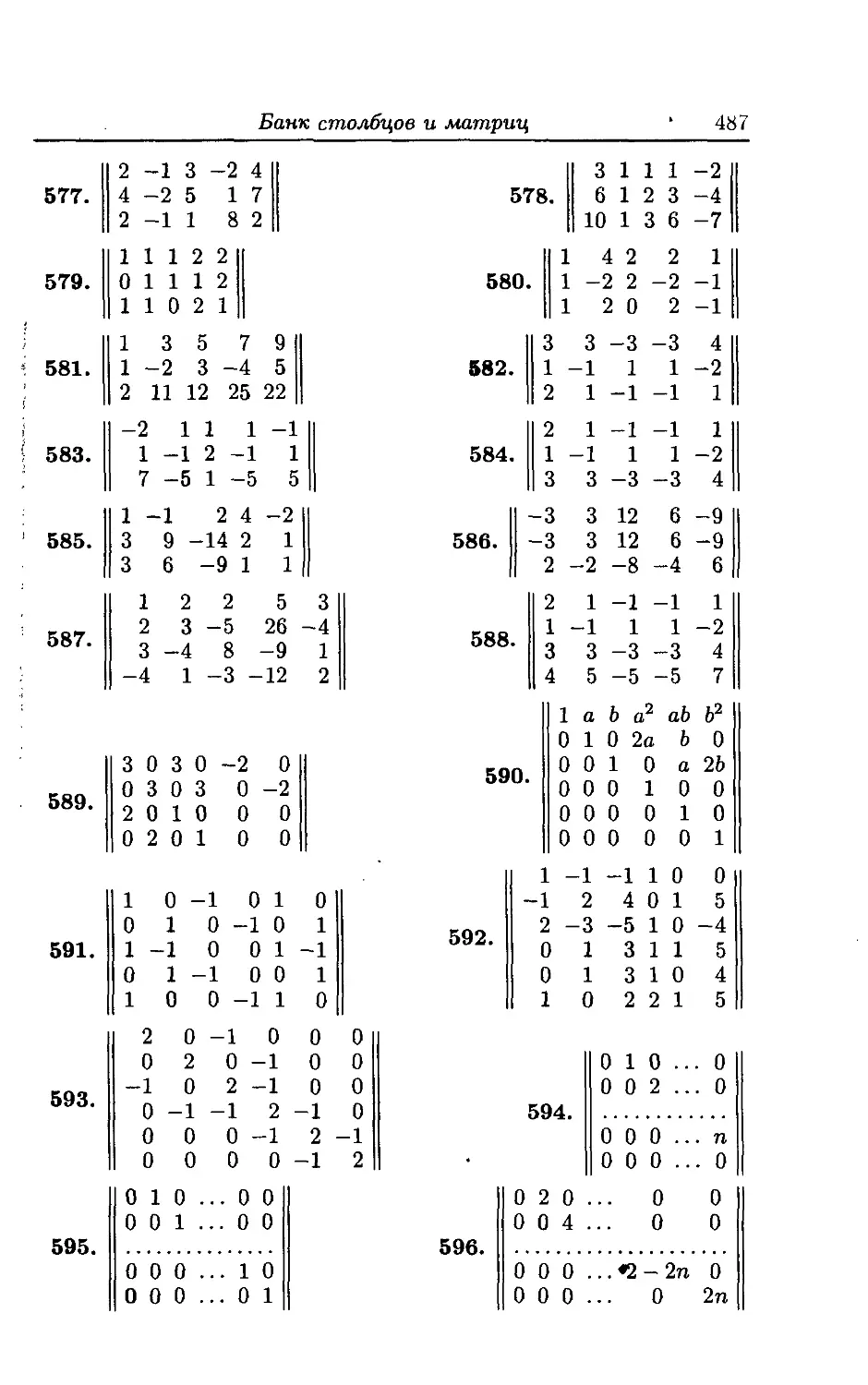
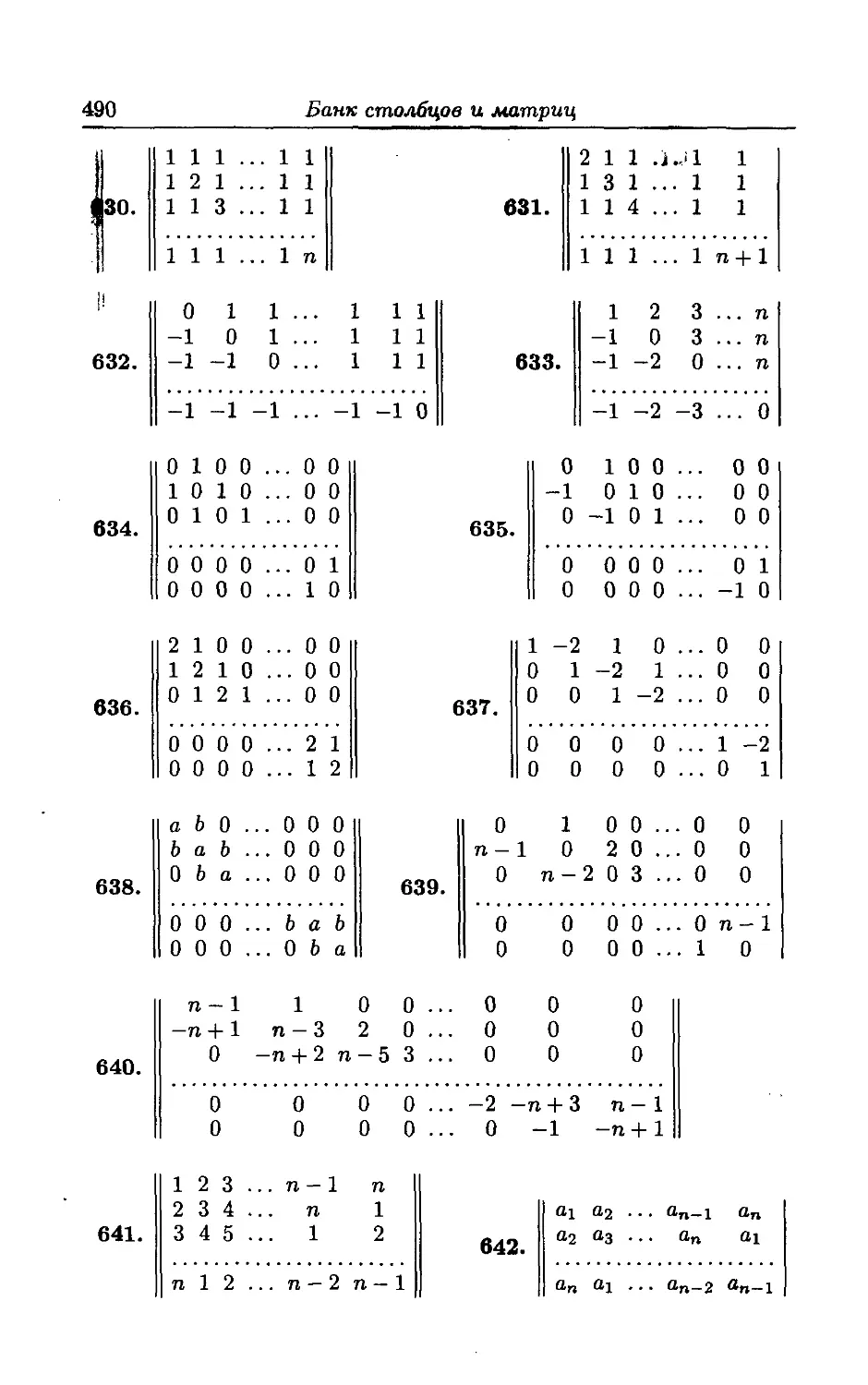
задачника, авторам пришлось организовать банк столбцов и мат-
матриц (с. 465-494). При ссылках столбцы из банка обозначаются
через c/t, а матрицы — А^, где к —- соответствующий номер в
банке. Однако столбцы и матрицы из банка использованы не во
всех задачах, частично изложение оставлено традиционным.
Некоторые типовые и более сложные задачи снабжены пол-
полными решениями, вынесенными в соответствующий раздел. Та-
Такие задачи отмечены знаком (р).
Настоящее издание дополнено и переработано. Заново на-
написаны главы X и XI, составлен раздел о жордановой форме
матрицы, добавлен ряд новых задач в другие разделы. Произ-
Произведены также некоторые сокращения.
При составлении сборника были использованы учебные по-
пособия, список которых приведен в конце книги, а также от-
отдельные задачи, предлагавшиеся на приемных экзаменах или
входящие в задания для студентов МФТИ.
Хотя каждый из авторов нес ответственность за определен-
определенную часть материала, труд их был в значительной мере кол-
коллективным. В работе над первым изданием большое участие
принимал Б.В. Пальцев. В настоящем издании ему принадле-
принадлежит § 34 и часть задач § 33. Некоторые задачи были предло-
предложены коллегами по Московскому физико-техническому инсти-
институту ~ В.Б. Лидским, В.Р. Почуевым, А.А. Болибрухом. Всем
им авторы приносят глубокую благодарность. При подготовке
рукописи были с благодарностью учтены все замечания, по-
поступившие по поводу первого издания. Особенно здесь нужно
отметить вклад И.А. Борачинского и Ю.Ю. Соонталы.
Авторы считают своим приятным долгом отметить, что на
их деятельность оказала решающее влияние система препода-
преподавания математики в МФТИ, сложившаяся под руководством
члена-корреспондента РАН Л.Д. Кудрявцева.
Глава 1
ВЕКТОРЫ И КООРДИНАТЫ
В этой главе используются следующие основные понятия: век-
вектор, нулевой вектор, равные векторы, коллинеарные и компланар-
компланарные векторы, произведение вектора на вещественное число, сумма
векторов, противоположный вектор, разность векторов, линейная
комбинация векторов, линейно зависимые векторы {линейно зави-
зависимая система векторов), базис на плоскости и базис в простран-
пространстве, координаты вектора в базисе, радиус-вектор тонки, общая
Ос.картова система координат, координаты тонки, длина вектора,
угол между векторами, скалярное произведение двух векторов, про-
проекция вектора на прямую, ортогональный и ортонормированный
базисы на плоскости и в пространстве, прямоугольная система
координат, ориентация тройки векторов в пространстве, ориен-
ориентация пары векторов на плоскости, ориентация базиса, векторное
произведение двух векторов, смешанное произведение трех векто-
векторов, определители второго и третьего порядков. Используются так-
также основные свойства линейных операций, скалярного, векторного
и смешанного произведений.
Пусть векторы а, Ь, с имеют в некотором базисе ei, ег, ез коор-
координаты (аь а2, а3), {01, 02, 0з), Ы, 72, 7з)-
Необходимым и достаточным условием коллинеарности векто-
векторов является пропорциональность соответствующих координат этих
векторов.
Необходимым и достаточным условием компланарности векто-
векторов а, Ь, с является обращение в ноль определителя
«1 «2 »3
01 02 03
71 72 73
Если базис ортонормированный, то
дздна вектора а равна
У:*
скалярное произведение векторов a, b равно
' (a,b) = a^i +a2/?2
векторное произведение векторов а, Ь равно
е3
'I [а,Ь]=е
<xi
01
e2
OL2
02
0з
Гл. 1. Векторы и координаты
где е = +1, если базис правый, и е — — 1, если
литель следует понимать символически:
ai a2 аз
01 02 03
Oi2 аз
+ е2
аз ai
0з 01
Смешанное произведение векторов а, Ь, с
жается формулой:
(а,Ь,с) =
ai a2 аз
01 02 0з
71
72 7з
(ei,e2
базис
+ е3
левый. Опреде-
ai a2
01 02
в любом базисе выра-
е3).
Если базис ei, е2, ез ортонормирован, то (в1,е2,ез) = е (число е опре-
определено выше).
Тройка векторов а, Ь, с является правой, если знак определителя
ai a2 a3
01 02 0з
7i 72 7з
совпадает со знаком числа е, и левой в противном случае. Это утвер-
утверждение справедливо при любом базисе.
Косинус угла tp между векторами а, Ь, заданными своими коор-
координатами, можно вычислить по формуле
(а,Ь)
Площадь параллелограмма, построенного на векторах а, Ь, равна
5 = |[а,Ь]|.
Объем параллелепипеда, построенного на векторах а, Ь, с, равен
Любой вектор b на плоскости или в пространстве можно пред-
представить в виде суммы двух векторов х + у так, чтобы вектор х был
коллинеарен данному ненулевому вектору а, а вектор у ортогонален
вектору а. Вектор х называется ортогональной проекцией вектора b
на прямую, направление которой определяется вектором а; вектор
у называется ортогональной составляющей вектора b относительно
этой прямой.
Пусть в пространстве даны два базиса ei, e2, е3 и е'1; е'2, е3, и
векторы второго базиса выражаются через векторы первого базиса
по формулам
i a3ie3,
e'3 =
e'3 =
A)
+ а3зе3.
Тогда координаты c*i, a2, аз вектора в первом базисе выражаются
через его координаты а[, а'2, а3 во втором базисе следующим обра-
образом:
§ 1. Линейные соотношения
•J c*i = з
а2-а21а'1+а22а'2 + а2зО1з, B)
аз = a3ic*i + аз2а'2 + а33а3
(коэффициенты в строках формул A) превращаются в коэффициен-
коэффициенты в столбцах формул B).
Пусть в пространстве даны две системы координат О, ei, ег, ез
и О', е[, е'2, е3, причем начало второй системы координат имеет в
первой системе координаты аю, а,20, язо, а векторы второго базиса
выражаются через векторы первого базиса по формулам A). Тогда
координаты х, у, z точки в первой системе координат выражаются
через ее координаты х', у', z' во второй системе формулами:
х - ацх' + ai2y' + a13z' + аю,
у — п2\х' + а22у' + агз-г' + а2о,
z = a3ix' + а32у' + азз-г' + а3о-
В задачах § 1 система координат считается общей декартовой без
каких-либо дополнительных условий. В задачах § 2, если не оговоре-
оговорено противное, координаты векторов задаются в ортонормированием
базисе, а координаты точек — в прямоугольной системе координат.
13 задачах § 3, если не оговорено противное, координаты векторов
задаются в ортонормированном правом базисе, координаты точек —
в прямоугольной системе координат, базис которой имеет правую
ориентацию.
§ 1. Линейные соотношения
1.1. Доказать утверждения:
1) конечная система векторов, содержащая нулевой век-
вектор, линейно зависима;
2) конечная система векторов, содержащая два равных
вектора, линейно зависима.
1.2. Может ли быть линейно зависимой система, состоя-
состоящая из одного вектора?
1.3. Доказать, что для любых трех векторов а, Ь, с и лю-
любых трех чисел а, C, j векторы аа — /3b, jb — ac, /Зс — ja. ли-
линейно зависимы.
1.4. Даны три вектора аA,2), Ь(-5,— 1), с(—1,3). Найти
координаты векторов 2а + ЗЬ — с, 16а + 5Ь — 9с.
1.5. Даны три вектора аA,3), ЬB, — 1), с(—4,1). Найти чис-
числа а и /3 такие, что аа + /ЗЬ + с = о.
1.6. Проверить, что векторы а(—5,—1) и Ь(—1,3) образу-
образуют базис на плоскости. Найти координаты векторов с(—1,2) и
dB,—6) в этом базисе.
10 Гл. 1. Векторы и координаты
1.7. Вектор а имеет в некотором базисе координаты (ж,
1-х), вектор b — координаты (ж2 — 2х,х2 — 2х + 1). При каких
значениях х векторы 1) коллинеарны; 2) одинаково направле-
направлены?
1.8. Даны четыре вектора аC,0,-2), ЬA,2,-5), с(-1,1,1),
d(8,4,l). Найти координаты векторов -5a + b-6c + d, За —
-b-c-d.
1.9. Даны четыре вектора аD,1,-1), ЬC,-1,0), с(—1,1,1),
d(—1,3,4). Найти числа а, /3, j такие, что аа +/ЗЬ + 7е + d = о.
1.10. Проверить, что векторы аD,1,-1), ЬA,2,—5) ис(—1,
1,1) образуют базис в пространстве. Найти координаты векто-
векторов 1D,4,-5), тB,4,-10), п@,3,-4) в этом базисе.
1.11. Проверить, будут ли компланарны векторы 1, m и
п; в случае положительного ответа указать линейную зависи-
зависимость, их связывающую (здесь а, Ь, с — три некомпланарных
вектора):
1I = 2а — Ь — с, m = 2b — с — a, n = 2c —a —b;
2)l = a-fb + c, m = b-fc, п=-а + с;
3I = с, m = a — b — с, п = а —Ь + с.
1.12. Из одной точки пространства отложены три вектора
а, Ь, с. Доказать, что конец вектора с тогда и только тогда
лежит на отрезке, соединяющем концы векторов а и Ь, когда
выполнено равенство с = аа + /ЗЬ, где а ^ 0, /3^0, а + /3 = 1. В
каком отношении конец вектора с делит этот отрезок?
1.13. В параллелограмме ABCD точка К — середина от-
отрезка ВС и точка О — точка пересечения диагоналей. При-
Принимая за базисные векторы АВ и AD, найти в этом базисе
координаты векторов BD, CO, KD.
1.14. В треугольнике ABC точка М — середина отрезка
АВ и точка О — точка пересечения медиан. Принимая за ба-
базисные векторы А.В и^ АС, найти в этом базисе координаты
векторов AM, АО, МО.
1.15. В трапеции ABCD длины оснований АР и ВС от-
носятся как 3:2. Принимая за базисные векторы^АС и BD,
найти в этом базисе координаты векторов АВ, ВС, CD, DA.
1.16. В трапеции ABCD длины оснований AD и ВС от-
относятся как 3:1.0 — точка пересечения диагоналей трапеции,
S — точка пересечения продолжений боковых сторон. Прини-
Принимая 3&Jбазисные векторы AD и АВ, найти координаты векто-
векторов АС, АО, AS.
§ 1. Линейные соотношения 11
1.17. Точки Е и F являются серединами сторон АВ и CD
четырехугольника ABCD. Доказать, что EF = {ВС + AD)/2.
1.18. Дан правильный шестиугольник ABCDEF. Прини-
Принимая за базисные векторы^ АВ и AF, найти в этош^ базисе коор-
координаты векторов ВС, CD, DE, EF, BD, CF, СЕ.
1.19. В трапеции задачи 1.16 точка М — середина^ стороны
CD. Найти координаты вектора AD в базисе OS, ОМ.
1.20. В треугольнике ABC точки К и L — середины сто-
сторон ВС и АС соответственно. Точки М и N лежат соответ-
соответственно на отрезках АК и BL так, что \АМ\ : \МК\ = 6 : 1 и
\BN\ : \NL\ = 8:1. Точка Р — середина отрезка MN. Найти
координаты вектора АВ в базисе MN, СР.
1.21. В треугольнике ABC точка М — середина стороны
АС, точки К и L на сторонах АВ и ВС расположены так,
что \АК\ : \КВ\ = 3 : 5, a \BL\ : \LC\ = 2:3. Найти координаты
вектора ВМ в базисе AL, СК.
1.22. В треугольнике ABC точки К, L, М расположены
соответственно на сторонах АВ, ВС и АС так, что \АК\ :
: \КВ\ = \BL\ : \LC\ = \СМ\ : \МА\ = 3:1. Медианы треуголь-
треугольника АВ С пересекаются в точке Р. Найти координаты вектора
АР в базисе LK, LM.
1.23. В тетраэдре ОАВС точки К, L, M, N, P, Q — се-
середины ребер О А, ОВ, ОС, АВ, АС, ВС соответственно, S —
точка пересечения медиан треугольника ABC. Принимая
ли базисные векторы О А, ОВ и ОС, найти в этом базисе коор-
координаты:
1) векторов АВ, ВС, АС;
2) векторов KL, PQJJN, MP, KQ;
3) векторов OS и KS.
1.24. Даны три точки О, А, В, не лежащие на одной пря-
прямой. Принимая за базисные векторы О А и ОВ, найти:
1) координаты вектора ОМ, если точка М лежит на отрез-
отрезке АВ и \АМ\ : \ВМ\ = m : n; |
2) координаты вектора ON, если точка N лежит на прямой
АВ вне отрезка АВ и \AN\ : \BN\ = m:n.
1.25. В треугольнике ABC проведена биссектриса AD.
Найти координаты вектора AD в базисе, образованном векто-
векторами АВ и АС.
12 Гл. 1. Векторы и координаты
1.26. Дан правильный шестиугольник ABCDEF. Прини-
Принимая за начало координат вершину А, а за базисные векторы АС
и АЕ, найти координаты вершин шестиугольника и его центра.
1.27. В трапеции ABCD отношение длин оснований AD и
ВС равно 4. Принимая за начало координат вершину А, а за
базисные векторы AD и АВ, найти координаты вершин трапе-
трапеции, точки М пересечения ее диагоналей и точки S пересечения
боковых сторон.
1.28. Дан параллелепипед ABC D A\B\C\D\. Принимая за,
начало координат вершину А, а за базисные векторы АВ., AD
и АА\, найти координаты:
1) вершин С, В\ и С\;
2) точек К и L — середин ребер А\В\ и СС\ соответственно;
3) точек М и N пересечения диагоналей граней A\B\C\D\
и АВВ\А\ соответственно;
4) точки О пересечения диагоналей параллелепипеда.
1.29. Три точки A(xi,yi), В(х2,у2), С(х3,уз), не лежащие
на одной прямой, являются последовательными вершинами па-
параллелограмма. Найти координаты четвертой вершины D это-
этого параллелограмма.
1.30. Даны две различные точки A(x\,yi,zi), B(x2,V2,Z2)-
Найти координаты:
1) точки М, лежащей на отрезке АВ и такой, что \АМ\ :
:\ВМ\ = т:щ
2) точки N, лежащей на прямой АВ вне отрезка АВ и та-
такой, что \AN\ : \BN\ = m:n.
1.31. Даны две точки АC,-2) и ??A,4). Точка М лежит
на прямой АВ, причем \АМ\ — Ъ\АВ\. Найти координаты точ-
точки М, если:
1) М лежит по ту же сторону от точки А, что и точка В;
2) М и В лежат по разные стороны от точки А.
1.32. Даны три точки A (xi, y\, zi),B(x2, У2, г2),С(хз, уз,
2з), не лежащие на одной прямой. Найти координаты точки
пересечения медиан треугольника ABC.
1.33. Зная радиус-векторы Т\, гг, гз, Г4 вершин А, В,
D, А\ параллелепипеда ABCDA\B\C\D\, выразить через них
радиус-векторы остальных четырех вершин.
1.34. Отношение длин оснований AD и ВС тралении ABCD
равно m : п. Выразить радиус-векторы вершины D, точки М
§ 1. Линейные соотношения 13
пересечения диагоналей трапеции и точки S пересечения боко-
ni.ix сторон через радиус-векторы ri, гг, гз вершин А, В, С.
1.35. Доказать, что радиус-вектор центра правильного
многоугольника есть среднее арифметическое радиус-векторов
его вершин.
1.36. Зная радиус-векторы ri, гг, гз вершин треугольни-
треугольника, найти радиус-вектор центра окружности, вписанной в тре-
треугольник.
1.37. В плоскости треугольника ABC найти точку О та-
такую, что О А + ОВ + ОС = о. Существуют ли такие точки вне
плоскости треугольника?
1.38. В точках, имеющих радиус-векторы ri, ..., гп, сосре-
сосредоточены массы mi, ..., тп. Найти радиус-вектор центра тя-
тяжести этой материальной системы.
1.39. Однородная проволока согнута в виде угла АОВ со
сторонами \ОА\ = а и \ОВ\ = Ъ. Найти координаты центра тя-
тяжести проволоки в системе координат О, ОА/а, ОВ/Ъ.
1.40. Найти координаты центра тяжести однородной пла-
пластинки, имеющей форму четырехугольника ABCD с вершина-
вершинами в точках ЛC,1), ?G,3), С@,4), ?>(-1,2).
1.41. Доказать, что если диагонали четырехугольника в
точке пересечения делятся пополам, то этот четырехуголь-
четырехугольник — параллелограмм.
1.42. Точки К и L являются серединами сторон АВ и
DC параллелограмма ОАВС. Доказать, что точка пересече-
пересечения диагоналей ОАВС совпадает с точкой пересечения медиан
треугольника OKL.
1.43. Точка К лежит на продолжении стороны АВ тре-
треугольника ABC за точку В, точка L — на продолжении сто-
стороны ВС за точку С, точка М — на продолжении стороны
С А за точку А, причем \АВ\ : \ВК\ = \ВС\ : \СЬ\ = \СА\ : \АМ\.
Доказать, что точки пересечения медиан треугольников ABC
и KLM совпадают.
1.44. На сторонах АВ и АС треугольника ABC взяты
соответственно точки М и N так, что \АМ\ : \ВМ\ = mi : щ,
\AN\ : \CN\ = m2 : П2. Точку пересечения отрезков BN и СМ
обозначим через О. Найти отношения|ВО| : |CW| и \СО\ : |0М|.
1.45. Применяя результат задачи 1.44 при mi = щ = тпг =
= П2 = 1, доказать, что медианы треугольника пересекаются в
одной точке.
14 Гл. 1. Векторы и координаты
1.46 (р). Вершина D параллелограмма ABCD соединена с
точкой К, лежащей на стороне ВС, такой, что \ВК\ : \КС\ =
= 2:3. Вершина В соединена с точкой L, лежащей на стороне
CD, такой, что \CL\ : \LD\ — 5 : 3. В каком отношении точка М
пересечения прямых DK и BL делит отрезки DK и ВЫ
1.47. На боковых сторонах АВ и ВС равнобедренного тре-
треугольника ABC расположены соответственно точки М и N так,
что \АМ\ : \ВМ\ = т : 1, \CN\ : |БЛГ| = п : 1. Прямая MN пере-
пересекает высоту BD треугольника в точке О. Найти отношение
\DO\ : \ВО\.
1.48. 1) Доказать, что средняя линия трапеции параллель-
параллельна основаниям, а длина средней линии равна полусумме длин
оснований (теорема о средней линии трапеции).
2) Точки Е и F являются серединами сторон АВ и CD
четырехугольника ABCD (на плоскости или в пространстве).
Доказать, что если \EF\ = {\ВС\ + \AD\)/2, то ABCD — тра-
трапеция (теорема, обратная теореме о средней линии трапеции).
1.49. На сторонах АВ, ВС и С А треугольника ABC взяты
соответственно точки М, N, Р так, что \АМ\ = \АВ\/п, \BN\ —
= \ВС\/п, \СР\ = \СА\/п. Площадь треугольника ABC равна
5. Найти площадь треугольника, полученного при пересече-
пересечении прямых AN, BP и СМ. Вывести отсюда, что медианы
треугольника пересекаются в одной точке.
1.50. Доказать, что четыре отрезка, соединяющие верши-
вершины тетраэдра с точками пересечения медиан противоположных
граней, пересекаются в одной точке и делятся в этой точке в
отношении 3:1, считая от вершины.
1.51. Доказать, что три отрезка, соединяющие середины
скрещивающихся ребер тетраэдра, пересекаются в одной точке
и делятся в этой точке пополам.
1.52. На диагоналях АВ\ и СА\ боковых граней треуголь-
треугольной призмы ABCА\В\С\ расположены соответственно точки
Е и F так, что прямые EF и ВС\ параллельны. Найти отно-
отношение \EF\-. \BC\\.
1.53. На диагонали ВС\ боковой грани треугольной приз-
призмы ABCА\В\С\ взята точка М, а на диагонали СА\ другой
боковой грани — точка N. Прямая MN параллельна плоскости
ABBiAi. Найти отношение \CN\: \CAi\, если \ВМ\: \BC\\ =
= 1:3.
§ 2. Скалярное произведение векторов 15
§ 2. Скалярное произведение векторов
2.1. Найти скалярное произведение векторов а и Ь, если:
1) |а| = 3, |Ь| = 1, Z(a,b) = 45°;
'::2)|а| = 6, |Ь| = 7, Z(a,b) = 120°;
"яч 3) |а| = 4, |Ь| = 2, Z(a,b) = 90°;
4) |а| = 5, |Ь| = 1, а и b сонаправлены;
5) |а| = 2, jbj = 3, а и b противоположно направлены.
2.2. Вычислить выражение |а|2 — д/3(а,Ь) + 5|Ь|2, если:
¦''; 2) |а| = з', |Ь| = 2, Z(a'b) = 150°.
2.3. Найти скалярное произведение векторов а и Ь, задан-
заданных своими координатами:
3) аA,2), Ъ(-4,2).
2.4. Найти угол между векторами а и Ь, заданными свои-
своими координатами:
)()
2) аA,2), ЬD,2);
2.5. Найти расстояние между точками А и В, заданными
своими координатами:
1) А(-1,2), ВE,10);
2) 4C,-2), ?C,3);
3) 4A,2), ?A,2).
2.6. Найти скалярное произведение векторов а и Ь, задан-
заданных своими координатами:
)(,,),(,,);
3) аB,1,5), ЬG,-9,-1).
2.7. Найти угол между векторами а и Ь, заданными свои-
своими координатами:
¦ 1)аA,-1,1),ЬE,1,1);
2)аA,-1,1),Ь(-2,2,-2);
3) аA,-1,1)
16 Гл. 1. Векторы и координаты
2.8. Найти расстояние между точками А и В, заданными
своими координатами:
1) 4D,-2,3), 5D,5,2);
2) 4(-3,1,-1),В(-1,1,-1);
3) 4C,-3,-7), ВA,-4,-5).
2.9. Даны три вектора: а(—1,2), ЬE,1), сD, —2). Вычис-
Вычислить:
1)Ь(а,с)-с(а,Ь);
2) |а|2-(Ь,с);
3) |b|2 + (b,a + 3c).
2.10. Даны три вектора: аA,-1,1), ЬE,1,1), с@,3,-2).
Вычислить:
1) Ь(а,с)-с(а,Ь);
2) |a|2 + |c|2-(a,b).(b,c);
3) (a,c)-(a,b)-|a|2(b,c).
2.11. Доказать, что векторы а и Ь(а, с) — с(а,Ь) взаимно
перпендикулярны.
2.12. Верно ли, что для любых векторов а, Ь, с, d выпол-
выполняется соотношение (а,Ь) • (c,d) = (а, с) • (b,d)?
2.13. Даны три вектора а, Ь, с такие, что |а( = |Ь| = |с| = 1,
a + b + с = о. Вычислить (а,Ь) + (Ь,с) + (с,а).
2.14. В треугольнике^ ABC даны длины сторон. Найти ска-
скалярное произведение (АС,ВС), если:
1) |4В| = 5, |Ж7| = 3, |4С| = 4;
2) |4В| = 7,|ВС| = 4,|4С| = 5;
3) \АВ\ = 3, \ВС\ = 2, |4С| = 3.
2.15. Дан треугольник ABC. Выразить через b = АВ и с =
1) длину стороны ВС;
2) длину медианы AM;
3) площадь треугольника.
2.16. В треугольнике ABC проведена высота АН. Най-
Найти координаты вектора АН в базисе, образованном векторами
АВ и АС.
2.17. Доказать, что для произвольного прямоугольника
ABCD и для произвольной точки М (лежащей или не лежащей
в плоскости прямоугольника) имеют место равенства:
1) (МА,~МС) = (МВ~2Мр);
2)
§ 2. Скалярное произведение векторов 17
2.18. В трапеции ABCD отношение длин оснований \AD\:
: \ВС\ равно 3. Выразить через b = АВ и с = АС:
1) длины сторон и углы трапеции;
2) длину отрезка SM, где S — точка пересечения боковых
сторон трапеции, М — точка пересечения диагоналей.
2.19 (р). Длины базисных векторов ei и ег общей декар-
декартовой системы координат на плоскости равны соответственно
у/2 и 1, а угол между ними равен 45°. Вычислить длины диа-
диагоналей и углы параллелограмма, построенного на векторах,
имеющих в этом базисе координаты B, 2) и (—1, 4).
2.20. Длины базисных векторов ei и е% общей декарто-
декартовой системы координат на плоскости равны соответственно 4
и 2, а угол между базисными векторами равен 120°. Относи-
Относительно этой системы координат заданы вершины треугольника
А(—2,2), В(—2,— 1), С(-1,0). Найти длины сторон и углы тре-
треугольника.
2.21. Длины базисных векторов ei, ег, ез равны соот-
соответственно 3, \/2, 4, а углы между ними равны Z(ei,e2) =
= /(ег,ез) = 45°, /(в1,ез) = 60°. Вычислить длины сторон и
углы параллелограмма, построенного на векторах, имеющих
в этом базисе координаты A, —3, 0) и (—1, 2, 1).
2.22. Длины базисных векторов ei, ег, ез равны соот-
соответственно 1, 1, 2; углы между ними равны Z(ei,e2) = 90°,
^(еьез) = /(в2,ез) = 60°. Вычислить площадь параллело-
параллелограмма, построенного на векторах а(—1,0,2) и ЬB, —1,1).
2.23. Из одной точки отложены три вектора а@, —3, 4),
ЬD, 1, —8) и с. Вектор с имеет длину 1 и делит пополам угол
между а и Ь. Вычислить координаты вектора с.
2.24 (р). Даны два вектора а и Ь, причем а ф о. Выразить
через а и b ортогональную проекцию вектора b на прямую,
направление которой определяется вектором а.
2.25. Найти сумму ортогональных проекций вектора а на
стороны правильного треугольника.
2.26. Дан вектор аA,1). Найти ортогональную проекцию
вектора b на прямую, направление которой определяется век-
вектором а, и ортогональную составляющую вектора b относи-
относительно этой прямой, если вектор b имеет координаты:
1) A,-3); 2) A,-1); 3) C,3fcpr*HTfc^
18 Гл. 1. Векторы и координаты
2.27. Дан вектор аA,—1,2). Найти ортогональную проек-
проекцию вектора b на прямую, направление которой определяется
вектором а, и ортогональную составляющую вектора b отно-
относительно этой прямой, если вектор b имеет координаты:
1) B,-2,4); 2) A,1,2); 3) D,0,-2).
2.28. Даны два вектора аC,—1) и Ь(—1,1). Найти век-
вектор х, удовлетворяющий системе уравнений (х,а) = 13,
(х,Ь) = -3.
2.29. Даны векторы а(\/3,—3) и ЬA, — 1). Найти все векто-
векторы х, образующие угол тг/3 с вектором а и такие, что (Ь,х) = 1.
2.30. Даны три вектора аD,1,5), Ь@,5,2) и с(-6,2,3).
Найти вектор х, удовлетворяющий системе уравнений (х,а) =
= 18, (х,Ь) = 1,(х,с) = 1.
2.31. Даны ненулевой вектор а и скаляр р. Выразить че-
через аир какой-нибудь вектор х, удовлетворяющий уравнению
(х,а)=р.
2.32. Объяснить геометрический смысл всех решений век-
векторного уравнения (х,а)=р, а также его частного решения,
коллинеарного вектору а:
1) на плоскости;
2) в пространстве.
2.33. Объяснить геометрический смысл:
1) решения системы векторных уравнений (х,а)=р,
(x,b) = q на плоскости (векторы а и b неколлинеарны);
2) решения системы векторных уравнений (х, а) = р,
(x,b) = q, (x,c) = s, в пространстве (векторы а, Ь, с некомп-
некомпланарны) .
2.34 (р). Даны два вектора аA,—1,1) и ЬE,1,1). Вычис-
Вычислить координаты вектора с, который имеет длину 1 и ортого-
ортогонален векторам а и Ь. Сколько решений имеет задача?
2.35. Даны два вектора а A,-1,1) и b E,1,1). Вектор с
имеет длину 1, ортогонален вектору а и образует с вектором b
угол arccos(-у/2/27). Вычислить координаты вектора с. Сколь-
Сколько решений имеет задача?
2.36. В равнобедренном треугольнике медианы, проведен-
проведенные к боковым сторонам, взаимно перпендикулярны. Найти
углы треугольника.
2.37. В параллелограмме ABCD точки К и L — середины
сторон ВС и CD. Найти \AD\, если \АК\ = 6, \AL\ = 3, а угол
KAL = тг/3.
§ 2. Скалярное произведение векторов 19
2.38. Длины сторон треугольника связаны соотношением
а2 + Ь2 = 5с2. Доказать, что две медианы треугольника перпен-
перпендикулярны.
2.39. Длины соседних сторон параллелограмма относятся
как т:п, а угол между этими сторонами равен а. Найти угол
между диагоналями параллелограмма.
2.40. В выпуклом четырехугольнике сумма квадратов двух
противоположных сторон равна сумме квадратов двух других
противоположных сторон. Найти угол между диагоналями че-
четырехугольника.
2.41. В прямоугольной трапеции диагонали взаимно пер-
перпендикулярны, а отношение длин оснований равно т : п (т >
> п). Найти:
1) отношение длин боковых сторон;
2) отношение длин диагоналей;
'•• 3) величину острого угла трапеции.
2.42. Доказать, что если в треугольнике равны длины двух
медиан, длины двух высот или длины двух биссектрис, то этот
треугольник равнобедренный.
2.43. Пусть М — точка пересечения медиан треугольни-
треугольника ABC. Доказать, что \АМ\2 + \ВМ\2 + \СМ\2 = {\АВ\2 +
|2 ||2)
2.44. Длины ребер АА\, АВ и AD параллелепипеда
ABCDA\B\C\D\ равны соответственно а, Ъ, с. Величины уг-
углов между ними /.BAD, ZA\AD и АА\АВ равны соответствен-
соответственно а, 13, 7- Найти длину диагонали АС\.
2.45. Дан произвольный тетраэдр ABCD. Доказать: если
перпендикулярны ребра АВ и CD и ребра АС и BD, то ребра
ВС и AD также перпендикулярны.
2.46. Даны два отрезка АВ и CD (вообще говоря, в про-
пространстве). Доказать, что отрезки перпендикулярны, если
\AC\2 + \BD\2 = \AD\2 + \BC\2. Верно ли обратное утвержде-
утверждение?
2.47. В правильном тетраэдре ABCD точки М и Р — се-
середины ребер AD и CD соответственно, точки N nQ — центры
граней BCD и ABC соответственно. Найти угол между пря-
прямыми MN и PQ.
2.48. Длина ребра куба ABCDA\B\C\D\ равна а. Точка
Р — середина ребра СС\, точка Q — центр грани АА\В\В. От-
20 Гл. 1. Векторы и координаты
резок MN с концами на прямых AD и А\В\ пересекает прямую
PQ и перпендикулярен ей. Найти длину этого отрезка.
2.49. В правильном тетраэдре ABCD точки Е и F яв-
являются серединами ребер AD и ВС соответственно. На ре-
ребре CD взята точка N, на отрезке EF — точка М так, что
/.MNC = 45°, /-NME = arccosB/3). В каком отношении точ-
точки М и N делят отрезки EF и CD?
2.50. В правильной шестиугольной пирамиде SABCDEF
(S — вершина) длина стороны основания равна 2. Вершины К
и М ромба KLMF лежат на ребрах АВ и SD соответственно,
и |КМ| = 3, а отрезок KL пересекает ребро SB. Найти объем
пирамиды.
§ 3. Векторное и смешанное произведения векторов
3.1. Найти векторное произведение векторов а и Ь, задан-
заданных своими координатами:
1)аC, -1,2), ЬB, -3,-5);
2) аB, -1, 1),Ь(-4, 2, -2);
3) аF, 1,0), ЬC, -2, 0).
3.2. Упростить выражения:
1) [а + b, а-Ь];
2) [а-Ь + с/2, -a + 2b-5cj.
3.3. Доказать, что векторное произведение не изменится,
если к одному из сомножителей прибавить вектор, коллинеар-
ный другому сомножителю.
3.4. Векторы а и b не коллинеарны. При каких значениях
скаляра А коллинеарны векторы Аа + b и За + АЬ?
3.5. Векторы ei, в2, ез образуют:
1) ортонормированный правый базис;
2) ортонормированный левый базис;
3) ортогональный правый базис.
Выразить векторные произведения [ei, ег], [в2, ез], [ез, ei] че-
через векторы ei, ег, ез-
3.6. Известно, что а = [Ь, с], b = [с, а], с = [а, Ь]. Найти
длины векторов а, Ь, с и углы между ними.
3.7. Решить задачи: 1) 2.34; 2) 2.35, дополнительно потре-
потребовав, чтобы ориентация тройки векторов а, Ь, с совпадала
с ориентацией ортонормированного базиса, в котором заданы
координаты векторов.
§ 3. Векторное и смешанное произведения векторов 21
3.8. На векторах аB,3,1) и Ь(—1,1,2), отложенных из од-
одной точки, построен треугольник. Найти:
1) площадь этого треугольника;
2) длины трех его высот.
3.9 (р). Длины базисных векторов ei и ег общей декарто-
декартовой системы координат на плоскости равны соответственно 3 и
2, а угол между ними равен 30°. В этой системе координат даны
координаты трех последовательных вершин параллелограмма:
A,3), A,0) и (—1,2). Найти площадь параллелограмма.
3.10. Доказать, что площадь выпуклого четырехугольни-
ка ABCD равна половине длины векторного произведения
3.11. Доказать, что сумма векторов, перпендикулярных к
граням произвольного тетраэдра, равных по длине площадям
этих граней и направленных в сторону вершин, противолежа-
противолежащих этим граням, равна нулю.
3.12. Доказать, что для трех неколлинеарных векторов а,
Ь, с равенства [а, Ь] = [Ь,с] = [с, а] выполняются тогда и только
тогда, когда а + b + с = о.
3.13. Доказать тождества:
(а, а) (а,Ъ)
(а,Ъ) (Ъ,Ъ)
2) [a,[b,c]] = b(a,c)-c(a,b);
3)
(а, с) (a,d)
(b,c) (b,d)
3.14. Даны a, /3,j — плоские углы трехгранного угла. Най-
Найти его двугранные углы.
3.15. Даны два вектора а и b такие, что а ф 0, (а,Ь) = 0.
Выразить через а и b какой-нибудь вектор х, удовлетворяю-
удовлетворяющий уравнению [х,а] = Ь.
3.16. Объяснить геометрический смысл всех решений век-
векторного уравнения [х, а] = Ь, а также его частного решения,
коллинеарного вектору [а,Ь].
3.17. Из одной точки отложены четыре вектора а, Ь, с, d.
Вектор d имеет длину 1 и образует с некомпланарными векто-
векторами а, Ь, с:
1) равные острые углы; 2) равные тупые углы.
Выразить вектор d через векторы а, Ь, с.
22 Гл. 1. Векторы и координаты
3.18. Из одной точки отложены четыре вектора а(—1,1,
— 1), Ь(—1,1,1), сE, —1,-1) и d. Вектор d имеет длину 1 и об-
образует с векторами а, Ь, с равные острые углы. Вычислить
координаты вектора d.
3.19. Найти смешанное произведение векторов а, Ь, с, за-
заданных своими координатами:
1) аA,-1,1), ЪG,3,-5), €(-2,2,-2);
2)аC,5,1), ( (
3) аB,1,0),
4) аA,2,3),
3.20. Проверить, компланарны ли векторы, заданные сво-
своими координатами в произвольном базисе:
1) аB,3,5),ЬG,1,-1), сC,-5,-11);
2)аB,0,1),ЪE,3,-3),сC,3,10).
3.21. Векторы а, Ь, с некомпланарны. При каких значени-
значениях скаляра А компланарны векторы a + 2b + Ac, 4a + 5b-f6c,
7a + 8b + A2c?
3.22. Три некомпланарных вектора а, Ь, с отложены из
одной точки. Найти:
1) объем треугольной призмы, основание которой построе-
построено на векторах а и Ь, а боковое ребро совпадает с вектором с;
2) объем тетраэдра, построенного на векторах а, Ь, с.
3.23. Даны точки А{2, 1, -1), ВC, 0, 2), С E, 1, 1), D@,
—1, 3), являющиеся вершинами тетраэдра. Найти:
1) объем тетраэдра;
2) длину высоты тетраэдра, опущенной из вершины С.
3.24. Длины базисных векторов ei, ег, ез в пространстве
равны соответственно 1, 2, \/2, а углы между ними равны:
A*i, e2) = 120°, Z(eb e3) = 45°, Z(e2, e3) = 135°. Вычислить
объем параллелепипеда, построенного на векторах, имеющих
в этом базисе координаты (—1,0,2), A,1,3), B,-1,1).
3.25. Даны неколлинеарные векторы a, b и скаляр р.
1) Найти какой-нибудь вектор х, удовлетворяющий урав-
уравнению (х,а,Ь) = р.
2) Объяснить геометрический смысл всех решений уравне-
уравнения (х,а,Ь) = р, а также его частного решения, ортогонального
к векторам а, Ь.
3.26. Доказать тождества:
l)(a,b,cJ + |[[a,b],c]|2 = |[a,b]|2-|c|2;
§ 3. Векторное и смешанное произведения векторов 23
2) [[a,b],[c,d]] = c(a,b,d)-d(a,b,c);
3)d(a,b,c) = a(b,c,d) + b(c,a,d) + c(a,b,d);
4) ([a,b],[b,c],[c,a]) = (a,b,cJ;
a b с
5) (a,b,c)[x,y] =
6) (a,b,c)(x,y,z) =
(a,x) (b,x) (c,x)
(a,y) (b,y) (c,y)
(a,x) (b,x) (c,x)
(a,y) (b,y) (c,y)
(a,z) (b,z) (c,z)
1 3.27. Доказать, что проекция вектора Ь на прямую, пер-
перпендикулярную вектору а, равна [а, [Ь,а]]/|а|2.
'• 3.28. Доказать, что:
ч 1) если векторы [a,b], [b,c], [с,а] компланарны, то векторы
а, Ь, с компланарны;
2) если векторы [a,b], [b,c], [с, а] компланарны, то они кол-
линеарны.
3.29 (р). Две тройки векторов ai, аг, аз и bi, Ьг, Ьз назы-
называются взаимными, если (ai,bj) = 0 при г ф j, (aj,bj) = 1.
1) Доказать, что для существования тройки bi, Ьг, Ьз, вза-
взаимной к ai, аг, аз, необходимо и достаточно, чтобы векторы ai,
аг, аз были нскомпланарны;
2) выразить в этом случае векторы bi, b2, Ьз через векто-
векторы ai, a2, а3.
3) Доказать, что если векторы ai, аг, аз образуют базис, то
векторы взаимной тройки образуют базис той же ориентации
(базис, взаимный к базису ai, аг, аз).
3.30. Для тройки векторов aiC,0,1),а2(-1,1,2), а3A,2,1)
найти взаимную тройку (см. задачу 3.29).
3.31. Решить систему векторных уравнений в простран-
пространстве: (х, а) = р, (x,b) = q, (х,с) = s (векторы а, Ь, с некомпла-
некомпланарны). Геометрическая интерпретация решения дается в за-
задаче 2.33.
3.32. ТочкаМ лежит на ребре ВВ\ куба ABCDA\B\C\D\,
причем \ВМ\ : |MBi| = 2:1. Длина ребра куба равна а. Най-
Найти расстояние между прямыми CD\ и MD.
3.33. Доказать, что площадь треугольника, составленного
из медиан треугольника ABC, равна 3/4 площади треугольни-
треугольника ABC.
3.34. В треугольнике ABC через точку Н на стороне АС
проведена прямая параллельно стороне ВС до пересечения со
24 Гл. 1. Векторы и координаты
стороной АВ в точке М. Площадь треугольника ВНМ в 4,5
раза меньше площади треугольника ABC. Найти отношение
\АМ\:\МВ\.
3.35. Диагонали равнобедренной трапеции взаимно пер-
перпендикулярны. Найти площадь трапеции, если длина высоты
ее равна h.
3.36. Площадь трапеции ABCD равна S, отношение длин
оснований \AD\ : \BC\ = 3:1. Отрезок MN параллелен стороне
CD и пересекает сторону АВ. При этом \АМ\ : \BN\ = 3:2,
\MN\ : \CD\ = 1:3; отрезок AM параллелен отрезку BN. Най-
Найти площадь треугольника BNC.
3.37. Точка М — середина бокового ребра АА\ паралле-
параллелепипеда ABCDA\B]C\D\. Прямые BD, MD\ и А\С попар-
попарно перпендикулярны. Известны длины отрезков: \BD\ = 2а,
\A\C\ = 4а, \ВС\ = За/2. Найти длину высоты параллелепипеда.
3.38. Доказать, что любая плоскость, проходящая через
середины двух скрещивающихся ребер произвольного тетра-
тетраэдра, делит этот тетраэдр на две одинаковые по объему части.
3.39. В правильном тетраэдре ABCD проведены два се-
сечения, параллельные ребрам АС и BD. Найти длину ребра
тетраэдра, если площади сечений равны S\ и 52, а расстояние
между секущими плоскостями равно d.
3.40. Доказать, что все четыре грани произвольного тет-
тетраэдра равновелики тогда и только тогда, когда они конгру-
конгруэнтны.
§ 4. Замена базиса и системы координат
4.1. На плоскости даны два базиса ei, ег и е'г, е'2. Векторы
второго базиса имеют в первом базисе координаты (—1,3) и
B,-7) соответственно.
1) Найти координаты вектора в первом базисе, если извест-
известны его координаты а[, а2 во втором базисе.
2) Найти координаты вектора во втором базисе, если из-
известны его координаты а\, аъ в первом базисе.
3) Найти координаты векторов ei, e% во втором базисе.
4.2. В пространстве даны два базиса ei, в2, ез и е'г, е'2, е'3.
Векторы второго базиса имеют в первом базисе координаты
A,1,1), (-1,-2,-3), A,3,6) соответственно.
1) Найти координаты вектора в первом базисе, если извест-
известны его координаты а\, сс2! аз во втором базисе.
§ 4- Замена базиса и системы координат 25
2) Найти координаты вектора во втором базисе, если из-
известны его координаты а\, а.-}-, аз в первом базисе.
3) Найти координаты векторов ei, ег, ез во втором базисе.
4.3. На плоскости даны две системы координат О, ei, ег
и О', е[, е2. Начало второй системы координат имеет в первой
системе координаты (—1,3), а базисные векторы второй систе-
системы имеют в базисе первой системы координаты B,3) и A,1)
соответственно.
1) Найти координаты точки в первой системе, если извест-
известны ее координаты х\ у' во второй системе координат.
2) Найти координаты точки во второй системе, если из-
известны ее координаты х, у в первой системе координат.
3) Найти координаты точки О во второй системе и коор-
координаты векторов ei, в2 в базисе второй системы координат.
4.4. В пространстве даны две системы координат О, ei, ег,
ез и О', е'г, е'2, е3. Начало второй системы координат имеет в
первой системе координаты A,1,2), а базисные векторы второй
системы координат имеют в базисе первой системы координаты
D,2,1), E,3,2), C,2,1) соответственно.
1) Найти координаты точки в первой системе координат,
если известны ее координаты х', у', z' во второй системе.
2) Найти координаты точки во второй системе, если из-
известны ее координаты х, у, z в первой системе.
3) Найти координаты точки О во второй системе коорди-
координат и координаты векторов ei, ег, ез в базисе второй системы.
4.5. Координаты х, у каждой точки плоскости в систе-
системе координат О, ei, ег выражаются через координаты х', у'
этой же точки в системе О', е[, е2 формулами х = 2х' — у' + 5,
у = За;' + у' + 2.
1) Выразить координаты х', у' через координаты х, у.
2) Найти координаты начала О и базисных векторов ei, ег
первой системы координат во второй системе.
3) Найти координаты начала О' и базисных векторов e'l5
е'2 второй системы координат в первой системе.
4.6. Координаты ж, у, z каждой точки пространства в си-
системе координат О, е\, ег, ез выражаются через координаты
х', у', z' этой же точки в системе О', е[, е2, е'3 формулами
х = х' + у' + z' - 1, у = -х' + z' + 3, z = -х' - у' - 2.
1) Выразить координаты х', у', z' через координаты х, у, z.
2) Найти координаты начала О и базисных векторов ei, ег,
ез первой системы координат во второй системе.
26 Гл. 1. Векторы и координаты
3) Найти координаты начала О' и базисных векторов е^,
е'2, е'3 второй системы в первой системе.
4.7. Найти координаты вектора в базисе eiB,3), в2C,4)
на плоскости, если известны его координаты а[, а2 в базисе
e'^^-l), е'2B,-3).
4.8. Найти координаты вектора в базисе ei(l,3,2),
ег(—1,1,0), езB,—1,1) в пространстве, если известны его ко-
координаты а\, а'2, а'3 в базисе е'^—1,0,2), е'2A,1,1), е'3D,3,-1).
4.9. Найти координаты точки в системе координат 0B, —1),
ei(l,5), ег(—1,4) на плоскости, если известны ее координаты
х', у' в системе координат О'C,2), e'^l,— I), е2D,2).
4.10. Найти координаты точки в системе координат 0A,3,
3), eiC,3,1), в2C,5,2), езA,2,1) в пространстве, если извест-
известны ее координаты х', у', z' в системе координат О'(—1,0,2),
^A,-2,1), е'2D,2,1), е'3B,-1,3).
4.11 (р). В параллелограмме ABCD точка Е лежит на
диагонали BD, причем \ВЕ\ : \ED\ = 1:2. Найти координаты
точки плоскости в системе координат А, АВ, АР, если извест-
ны ее координаты х', у' в системе координат Е, ЕС, ED.
4.12. В параллелограмме ABCD точка Е лежит на сто-
стороне ВС, а точка F — на стороне АВ, причем \ВЕ\ : \ВС\ =
= 1:4, \BF\ : \AF\ = 2:5. Найти координаты точки плоскости
в системе координат С, СЕ, CDl если известны ее координаты
х', у' в системе координат Е, EF, ED.
4.13. В треугольнике ABC точка D лежит на стороне ВС,
а точка Е лежит на продолжении стороны АС за точку С,
причем \BD\ : \DC\ = 1:2, \АС\ : \СЕ\ = 3:1. Найти координа-
координаты точки плоскости в системе координат А, АВ, АС, если из-
вестны ее координаты х'', у' в системе координат D, DA, DE.
4.14. В треугольнике ABC точка D лежит на стороне
АС, а точка Е — на отрезке BD, причем \AD\ : \AC\ = 1:3,
\ВЕ\ : \ED\ = 2:3. Найти координаты точки плоскости в си-
системе координат А, АВ, АР^если^известны ее координаты ж',
у' в системе координат С, СВ, СЕ.
4.15. Дан правильный шестиугольник ABCDEF. Найти
координаты точки плоскости в системе координат А, АВ, AF,
если известны ее координаты х', у' в системе координат С,
СВ, СЕ.
§ 4- Замена базиса и системы координат 27
4.16. В трапеции ABCD диагонали пересекаются в точ-
точки Е, а длины оснований ВС и AD относятся как 2 : 3. Най-
Найти координаты точки плоскости в системе координат А, АВ,
Л?>, если известны ее координаты х',у' в системе координат Е,
Ш,ЕВ.
4.17. В трапеции ABCD длины оснований ВС и AD от-
относятся как 3 : 4, точка Е является серединой основания AD,
а продолжения боковых сторон пересекаются в точке F. Най-
Найти ^координаты точки плоскости в системе координат Е, ЕВ,
ЕС, если известны ее координаты х', у' в системе координат
F, FB, FC.
4.18. В основании призмы ABCDA\B\C\D\ лежит ромб с
острым углом А, равным 60°. Точка К лежит на продолжении
ребра АВ за точку В, причем угол ADK прямой. Найти коор-
координаты точки пространства в системе координат А, АВ, AD,
АА\, если известны ее координаты х',у', z' в системе координат
К, К A, KD, КСЪ
4.19. В треугольной призме ABCА\В\С\ точка М — точка
пересечения медиан грани А\В\С\. Найти координаты точки
пространства в системе координат А, АВ, АС, АВ\, если из-
известны ее^координаты х', у', z' в системе координат А\, А\В,
АХС, АХМ.
4.20. В тетраэдре ABCD точка М — точка пересечения
медиан грани BCD. Найти координаты точки пространства в
системе координат А, АВ, AC, AD, если известны ее коорди-
координаты х', у', z' в системе координат М, MB, МС, МА.
4.21. В правильной шестиугольной пирамиде SABCDEF
с вершиной 5 точка М является центром основания. Найти ко-
координаты точки пространства в системе координат А, АВ, AF,
AS, если известны ее координаты а/, у', z' в системе координат
5, SC, SD, SM.
4.22. Дан параллелепипед ABCDA\B\C\D\. Найти коор-
координаты точки пространства в системе координат А, АС, АВ\,
АА\, если известны ее координаты х', у', z' в системе координат
Di, DXD, DiCi, DXB.
4.23. Координаты х, у каждой точки плоскости в первой
системе координат выражаются через координаты х', у' этой
же точки во второй системе координат соотношениями х =
= ацх' + а\2у' + aw, у = а2\х' + ачъу' + ого- Первая система ко-
координат является прямоугольной. При каком необходимом и
28 Гл. 1. Векторы и координаты
достаточном условии вторая система также является прямо-
прямоугольной?
4.24. Координаты х, у, z каждой точки пространства в
первой системе координат выражаются через координаты х',
у', z' этой же точки во второй системе координат соотношени-
соотношениями
х = апх' + ayiy' + aizz' + аго,
у = п2\х' + а22у' + a23z' + а20,
z =
1) Пусть первая система координат является прямоуголь-
прямоугольной. При каком необходимом и достаточном условии вторая
система также является прямоугольной?
2) При каком необходимом и достаточном условии ориен-
ориентация базисов первой и второй систем одинакова?
4.25. На плоскости даны две прямоугольные системы ко-
координат О, ej, е2 и О', е[, е2. Начало второй системы коорди-
координат имеет в первой системе координаты xq, yo, а векторы е'г
и е'2 получаются из векторов ei и ег соответственно поворотом
на один и тот же угол <р в направлении кратчайшего поворота
от ех к ег-
1) Найти координаты точки в первой системе координат,
если известны ее координаты х', у' во второй системе.
2) Найти координаты точки во второй системе координат,
если известны ее координаты х, у в первой системе.
3) Найти координаты точки О во второй системе координат.
4.26. На плоскости даны две прямоугольные системы ко-
координат О, ei, ег и О', е[, е'2. Начало второй системы коорди-
координат имеет в первой системе координаты 1,3, а векторы е[ и е2
получаются из векторов ei и е2 соответственно поворотом на
один и тот же угол <р в направлении кратчайшего поворота от
ei к е2. Найти координаты точки в первой системе координат,
если известны ее координаты х', у' во второй системе, считая
угол ip равным:
1) 60°; 2) 135°; 3) 90°; 4) 180°.
4.27. На плоскости даны две прямоугольные системы ко-
координат О, ej, е2 и О', е[, е2. Начало второй системы коор-
координат имеет в первой системе координаты хо, уо, а векторы
е'а и —е'2 получаются из векторов ei и е2 соответственно по-
поворотом на один и тот же угол ц> в направлении кратчайшего
поворота от ei к е2.
§ 4- Замена базиса и системы координат 29
1) Найти координаты точки в первой системе координат,
гели известны ее координаты х', у' во второй системе.
2) Найти координаты точки во второй системе координат,
если известны ее координаты х, у в первой системе.
3) Найти координаты точки О во второй системе координат.
4.28. В прямоугольном треугольнике ABC, длины катетов
Которого равны \АВ\ = 3 и \ВС\ = 4, точка D является основа-
основанием высоты, проведенной из вершины прямого угла. Векторы
©1, е2, е'1; е2 имеют длину 1, причем ei сонаправлен с В А, е2
сонаправлен с ВС, e'j сонаправлен с АС, е2 сонаправлен с DB.
Иайти координаты точки плоскости в системе координат В, е\,
©г, если известны ее координаты х', у' в системе координат D,
в1> е2-
4.29. В пространстве даны две прямоугольные системы ко-
координат О, е\, ег, ез и О', е'1; е2, е'3. Начало второй системы
координат имеет в первой системе координаты —1,3,5. Вектор
е'г образует углы, равные 60°, с векторами ei и е2 и острый
угол с вектором ез- Вектор е2 компланарен с векторами ei и
ег и образует с вектором в2 острый угол. Тройки ei, e2, ез и
е'ъ е2, е3 одинаково ориентированы. Найти координаты точ-
точки пространства в первой системе координат, если известны ее
координаты х', у', z' во второй системе.
4.30. В пространстве даны две прямоугольные системы ко-
координат О, е\, e2, ез и О', е'г, е'2, е'3. Точки О и О' различны, а
концы векторов ej и е?, отложенных соответственно из точек О
и О', совпадают (г = 1,2,3). Найти координаты точки простран-
пространства в первой системе координат, если известны ее координаты
х', у', z' во второй системе.
Глава 2
ПРЯМАЯ И ПЛОСКОСТЬ
В этой главе уравнения прямой на плоскости, прямых и плоско-
плоскостей в пространстве используются в векторной и координатной фор-
форме. Основные понятия: направляющий вектор прямой, направляю-
направляющие векторы плоскости, нормальный вектор прямой на плоскости,
нормальный вектор плоскости, пучок прямых на плоскости, пучок
и связка плоскостей, а также параллельность, перпендикулярность,
углы, расстояния и проекции. Всюду, кроме задач 6.33 и 6.34, под
проекцией понимается ортогональная проекция.
§ 5. Прямая на плоскости
Прямая линия на плоскости может быть задана:
1) векторным уравнением в параметрической форме
r = ro + at (a#o), A)
где а — направляющий вектор прямой, го — радиус-вектор фикси-
фиксированной точки на прямой;
2) нормальным векторным уравнением
(г-го,п)=0 (п#о), B)
где п — нормальный вектор прямой;
3) общим уравнением в декартовой системе координат
Ах + Ву + С = 0 (А2 + В2фО). C)
Уравнение B) можно записать в виде
(r,n)=D.
Если уравнение A) записать в общей декартовой системе координат,
то получим параметрические уравнения прямой на плоскости
x = xo + at, у — уо+ Bt.
При а ф О, В Ф 0 исключением параметра t параметрические уравне-
уравнения прямой приводятся к канонической форме
х-хр _у-у0
В '
При а — 0 каноническое уравнение прямой принимает вид
а; = х0, при В — 0 — вид у = у0.
Уравнение прямой, проходящей через две различные точки, мо-
может быть записано в векторной форме
§ 5. Прямая на плоскости 31
и в координатной форме
х-xi у - г/1
Х2 -xi г/2 - г/i
Здесь ri и г2 - радиус-векторы данных точек, а х\, гц и ж2, г/2 — их
декартовы координаты. При х\ — x<i или у\ = г/2 уравнение прямой
Принимает соответственно вид х = х\ или г/ = у\.
Для данной прямой линии ее направляющий и нормальный век-
векторы определены с точностью до умножения на ненулевое число.
Направляющим вектором прямой, заданной общим уравнением C),
ннляется, например, вектор с координатами —В, А. Если система ко-
координат прямоугольная, то нормальным вектором прямой C) явля-
является, например, вектор с координатами А, В.
Если прямая задана общим уравнением C), то для координат
всех точек, лежащих по одну сторону от нее («в положительной по-
полуплоскости»), выполнено неравенство Ах + By + С > О, а для коор-
координат всех точек, лежащих по другую сторону («в отрицательной
Полуплоскости»), — неравенство Ах + By + С < 0.
Расстояние от точки с радиус-вектором ri до прямой, задан-
заданной векторным уравнением B), равно |(ri — Го,п)|/|п|. Расстояние от
точки М{х\,у\) до прямой, заданной уравнением C) в прямоуголь-
прямоугольной системе координат, равно
Векторные уравнения прямых E.1—5.5)
5.1. При каком необходимом и достаточном условии пря-
прямые г = п + ait и г = Г2 + аг<:
1) пересекаются в единственной точке;
2) параллельны, но не совпадают;
3) совпадают?
5.2. Найти угол между прямыми, заданными своими урав-
уравнениями:
1) г = ri + ait и г =
2) (r,ni) = JD1H(
5.3. Две прямые заданы векторными уравнениями (г,п) =
* = D и г = го + at, причем (а, п) ф 0. Найти радиус-вектор точки
пересечения прямых.
5.4. Даны точка Mq с радиус-вектором го и прямая (г,п) =
=я D. Найти радиус-векторы:
1) проекции точки Mq на прямую;
2) точки Mi, симметричной с Mq относительно данной
прямой.
32 Гл. 2. Прямая и плоскость
5.5. Найти расстояние от точки Мо(го) до прямой, задан-
заданной уравнением:
В задачах 5.6—5.21 система координат общая декартова
5.6. Указать хотя бы один направляющий вектор прямой,
которая:
1) имеет угловой коэффициент к;
2) задана общим уравнением Ах + By + С = 0.
5.7. 1) Записать уравнение прямой х = 2 + 3t, у = 3 + 2t в
виде Аж + By + С = 0.
2) Записать уравнение прямой Зх — 4у + 4 = 0 в параметри-
параметрической и канонической формах.
3) Найти угловой коэффициент прямой х — 2 + 3t, у = 3 + 2t.
5.8. Составить уравнение прямой, проходящей через точку
А{—3,4) и параллельной прямой:
1) х-2у + 5 = 0;
i-l _ J/ + 2
3) х = 2;
4)у = -1;
5) x = 3 + t,y = 4-7t
5.9. Составить уравнение прямой, проходящей через две
данные точки:
)
2) Л@,2)иВ(-1,0);
3) АB,1)иВB,-5);
4) ЛA,-3)иВC,-3).
5.10. Установить, пересекаются, параллельны или совпа-
совпадают прямые данной пары; если прямые пересекаются, найти
координаты точки их пересечения:
2) х + Зу - 1 = 0 и 2 - 2х - 6у = 0;
3) -х - у - 3 = 0 и Зх + Зу + 1 = 0;
4) x = l + 2t,y=l-tnx = 2-t,y = 2 + t.
5.11. При каких а прямые ах — 4у = 6 и х — ау = 3:
1) пересекаются; 2) параллельны; 3) совпадают?
5.12. При каких а три прямые аж + у = 1, ж —у = а,
х + у = а? имеют общую точку?
§ 5. Прямая на плоскости 33
5.13. Точка М лежит на прямой Ах + By + С = 0; вектор
ММ\ имеет координаты А,В. Доказать, что точка Mi лежит
и положительной полуплоскости относительно прямой с урав-
ионием Ах + By + С = 0.
5.14. Точка МC,2) является центром параллелограмма, а
его стороны лежат на некоторых четырех прямых. На каждой
из этих прямых расположена одна из точек: PB,l), QD, —1),
Л(—2,0), 5A,5). Найти уравнения прямых.
5.15. Даны две вершины треугольника C,-1) и A,4) и
точка пересечения его медиан @,2). Найти координаты тре-
третьей вершины треугольника и составить уравнения его сторон.
5.16. Составить уравнение прямой, проходящей через точ-
точку АA,2) так, что отрезок этой прямой, заключенный между
прямыми Зх + у + 2 = 0и4х + у — 1 = 0, в точке А делится по-
пополам.
5.17. Две медианы треугольника лежат на прямых х + у —
— Зи2х + 3у=1, а точка АA,1) является вершиной треуголь-
треугольника. Составить уравнения сторон треугольника.
5.18. Точки КA,-2), ?C,4) и МE,0) являются соответ-
соответственно серединами сторон AD, AB и ВС четырехугольника
ABCD, диагонали которого пересекаются в точке 0B,2). Най-
Найти координаты вершин четырехугольника.
5.19. Составить уравнения прямых, проходящих через точ-
точку А{—1,5) и равноудаленных от двух точек ВC,7) и СA, —1).
5.20. (р). Составить уравнения прямых, равноудаленных
от трех точек ЛC,-1), В(9,1) и С(-5,5).
5.21. Через вершину С параллелограмма ABCD проведе-
проведена прямая, пересекающая продолжения сторон АВ и AD соот-
соответственно в точках К и L таких, что |АК"|/|АВ| = 5|AL|/|.A.D|.
Найти отношение площади параллелограмма к площади тре-
треугольника AKL.
В задачах 5.22—5.62 система координат прямоугольная
5.22. Указать хотя бы один нормальный вектор прямой,
которая:
1) имеет угловой коэффициент к;
/1, 2) задана общим уравнением Ах + By + С — 0.
<< 5.23. Составить уравнение прямой, проходящей через точ-
точку А{—3,4) и перпендикулярной прямой:
2- 1715
(И -Гл. 2. Прямая и плоскость
ч 1) ж-
^j 2 ~ 3 '
3) х = 2;
4)у = -1;
5) x = 3 + t, y = 4-7t.
5.24. Точка АC,—2) является вершиной квадрата, а точка
М{\, 1) — точкой пересечения его диагоналей. Составить урав-
уравнения сторон квадрата.
5.25. Длина стороны ромба с острым углом 60° равна 2.
Диагонали ромба пересекаются в точке МA,2), причем боль-
большая диагональ параллельна оси абсцисс. Составить уравнения
сторон ромба.
5.26. На прямой 5х — у — 4 = 0 найти точку, равноудален-
равноудаленную от точек -4A,0) и В{—2,1).
5.27. Найти расстояние от точки АA,—2) до прямой, за-
заданной своим уравнением:
1) 2х - Зу + 5 = 0;
2) 4ж-Зу-15 = 0;
3) 4х = Зу;
4) 4х - Зу - 10 = 0;
5)х = 7;
6) у = 9.
5.28. Найти расстояние между параллельными прямыми
Ах + By + С\ = 0 и Ах + By + С2 = 0.
5.29. Составить уравнения прямых, параллельных пря-
прямой —2х + у + 5 = 0 и отстоящих от точки АA,—2) на рас-
расстояние \/20.
5.30. Точка А лежит на прямой 2х —Зу + 4 = 0. Расстоя-
Расстояние от точки А до прямой Зу = 4х равно 2. Найти координаты
точки А.
5.31. Точка А лежит на прямой х + у = 8, причем А рав-
равноудалена от точки ВB,8) и от прямой х —Зу + 2 = 0. Найти
координаты точки А.
5.32. Найти координаты всех точек, равноудаленных от
точки А{—1,1) и прямых у = — хиу = х + 1.
5.33. Найти множество точек плоскости, отношение рас-
расстояний от которых до двух пересекающихся прямых
А\х + В\у + С\ = 0 и Aix Л- Вчу + Ci = 0 есть постоянная вели-
величина к > 0.
§ 5- Прямая на плоскости 35
5.34 (р). Даны точка А{\,2) и прямая Зж — у + 9 = 0. Найти
координаты:
1) проекции точки А на прямую;
2) точки В, симметричной с А относительно прямой.
5.35. Составить уравнение прямой, симметричной прямой
Зх — у + 5 = 0 относительно прямой х + у = 1.
5.36. Даны уравнения сторон треугольника: х + 2у + 1 = 0,
2х — у — 2 = 0, 2х + у + 2 = 0. Составить уравнение высоты, опу-
опущенной на третью сторону.
5.37. Точка Я(—3,2) является точкой пересечения высот
треугольника, две стороны которого лежат на прямых у = 2х и
у = —х + 3. Составить уравнение третьей стороны.
5.38. Даны координаты двух вершин треугольника АA,3),
/?B,5) и точки пересечения его высот НA,А). Найти координа-
координаты третьей вершины треугольника и составить уравнения его
сторон.
5.39. Точка .4A,2) является серединой одного из основа-
оснований прямоугольной трапеции, а точка ВC, — 1) — серединой
средней линии. Боковая сторона, перпендикулярная основа-
„ х + 1 у-2 „
миям, лежит на прямой —-— = —-—. Составить уравнения
остальных сторон трапеции.
5.40. Точка А(—1,4) — вершина ромба ABCD, диагонали
которого пересекаются в точке МB,3). Точка РC,1) лежит на
стороне АВ. Составить уравнения сторон ромба.
5.41. Составить уравнения сторон прямоугольного треуго-
треугольника, если С(—3,4) — вершина прямого угла, МA,2) — се-
середина гипотенузы, а точка НC,3) лежит на гипотенузе.
5.42. В треугольнике ABC точки MiB,3), Мг@,7) и
Мз(—2,5) — середины сторон ВС, С А и АВ. Составить урав-
уравнение прямой АВ. Найти угол между медианами АМ\ и ВМ2-
5.43. В параллелограмме ABCD вершины А та С имеют
координаты A,2) и G,10) соответственно, ЯC,0) — основание
иысоты, опущенной из В на сторону AD. Составить уравнение
прямой AD. Найти угол между прямыми AD и АВ.
5.44. В параллелограмме ABCD точки К(—1,2), LC,4) и
МE,6) — середины сторон соответственно АВ, ВС и CD. Со-
Составить уравнение прямой ВС. Найти угол между прямыми
AL и AM.
36 Гл. 2. Прямая и плоскость
5.45. В трапеции ABCD с основаниями AD и ВС сто-
сторона CD перпендикулярна основаниям, точки А и С имеют
координаты соответственно E,2) и (-2,3), а продолжения бо-
боковых сторон пересекаются в точке Р(—3,6). Составить урав-
уравнение прямой AD. Найти угол между прямыми AD и АВ.
5.46. Точки iff A,3) и L(—1,1) являются серединами осно-
оснований равнобедренной трапеции, а точки РC,0) и Q(—3,5) ле-
лежат на ее боковых сторонах. Составить уравнения сторон тра-
трапеции.
5.47. Найти угол между прямыми:
1) 2х + у-1 = 0иу-х = 2;
2) х = 4и2х-у-1 = 0;
. х-2 _у-1 х-1 _ J/ + 2
g-l_g-3 x-4_ у
j 1 ~ 2 -2 ~ -4'
5) х = 34, у = -1 + 24 и х = 1 - 2?, у = -5 +1.
5.48. Составить уравнения прямых, проходящих через
точку .4C,1) и образующих с прямой Зх = у + 2 углы в 45°.
5.49. Точка АB,0) является вершиной правильного тре-
треугольника, а противолежащая ей сторона лежит на прямой
х + у — 1 = 0. Составить уравнения двух других сторон.
5.50. Основание равнобедренного треугольника лежит на
прямой х + 1у = 2, а одна из боковых сторон — на прямой
у + 2х = 1. Составить уравнение другой боковой стороны тре-
треугольника, зная, что ее расстояние от точки пересечения дан-
данных прямых равно 1/\/Н.
5.51. Рассматривается тот угол между прямыми у = х + 1
и у = 7х + 1, внутри которого лежит точка АA,3). Найти коор-
координаты точки В, лежащей внутри этого угла и удаленной от
данных прямых соответственно на расстояния 4\/2~ и \/2~-
5.52. Составить уравнения сторон угла с вершиной в точке
В. В угол вписана окружность радиуса R с центром в точке А:
)
2)
5.53 (р). Составить уравнение биссектрисы того угла
между прямыми х — 7у = 1 и х + у = — 7, внутри которого ле-
лежит точка АA,1).
5.54. Составить уравнение биссектрисы острого угла меж-
между прямыми х — 7у—\ их + у = —7.
§ 5. Прямая на плоскости 37
5.55. Составить уравнения биссектрис внутренних углов
треугольника, стороны которого заданы уравнениями Зу = 4х,
5.56. Вершинами треугольника являются точки АB0,15),
/i(—16,0), С(—8,— 6). Найти длины радиусов и координаты
центров вписанной и описанной окружностей.
5.57. Даны координаты двух вершин треугольника А{2, — 1),
/}A,5) и точки пересечения его биссектрис LC,0). Составить
уравнения сторон треугольника.
5.58. Точки АA,2) и В(—3,0) — вершины равнобедрен-
равнобедренного треугольника ABC, углы А и В при основании равны
urccos(l/\/5). Найти координаты вершины С, зная, что она ле-
лежит по ту же сторону от прямой АВ, что и точка МB,3).
5.59. Сторона АВ треугольника ABC задана уравнением
х — у + 1 = 0, сторона ВС — уравнением 2х — Зу + 5 = 0, сто-
сторона АС — уравнением Зх — 4у + 2 = 0. Составить уравнение
прямой, проходящей через вершину С так, что точка пересече-
пересечения этой прямой со стороной АВ удалена от стороны АС на
расстояние 1/5.
5.60. Составить уравнения прямых, образующих угол
arccos(l/\/5) с прямой х + 2у —1 = 0, и удаленных от точки
Л A,1) на расстояние 1.
5.61. Найти радиус и координаты центра окружности, про-
проходящей через точку А(—1,3) и касающейся прямых 7х + у = 0
и х-у + 8 = 0.
5.62. Гипотенуза прямоугольного треугольника лежит на
прямой 2х + у — 2 = 0, а точка СC, —1) является вершиной пря-
прямого угла. Площадь треугольника равна 9/4. Составить урав-
уравнения прямых, на которых лежат катеты.
Замена системы координат E.63-5.67)
5.63. Даны две системы координат О, ei, ег и О', е[, е'2.
Начало второй системы координат имеет в первой системе ко-
координаты аю, а2о, а базисные векторы второй системы имеют
в базисе первой системы координаты ац, агг и а\2, агг соот-
соответственно. В первой системе координат прямая задана урав-
уравнением Ах + By + С = 0. Составить уравнение этой прямой во
второй системе.
38 Гл. 2. Прямая и плоскость
5.64. На плоскости даны три точки АB,3), ВA,4),
С (—1,2) и прямая х — Ъу+ 7 = 0. Составить уравнение этой
прямой в новой системе координат А, АВ, АС.
5.65. Прямые Зу = х + 2 и Зх + 2у — 5 = 0 являются соот-
соответственно осями О'х' и О'у' новой системы координат, а точка
А (—1,2) имеет в новой системе координаты A,1).
1) Найти координаты точки в исходной системе координат,
если известны ее координаты х', у' в новой системе.
2) Составить в новой системе координат уравнение прямой,
которая в исходной системе задается уравнением Ъх — \у + 7 = 0.
5.66. В прямоугольной системе координат О, ei, в2 пря-
прямая задана уравнением \/Зх + 2у — 6 = 0. Начало новой пря-
прямоугольной системы координат находится в точке О'(—2,3), а
базисные векторы е': и е'2 получаются из векторов ei и ег соот-
соответственно поворотом на угол 30° в направлении кратчайшего
поворота от ei к ег- Составить уравнение данной прямой в си-
системе координат О', е[, е2.
5.67. Две взаимно перпендикулярные прямые, заданные в
прямоугольной системе координат уравнениями 2х — у + 1 = 0
и х + 2у — 7 = 0, являются соответственно осями О'х' и О'у' но-
новой прямоугольной системы координат, а точка АB,0) имеет в
новой системе положительные координаты.
1) Найти координаты точки в исходной системе координат,
если известны ее координаты х', у' в новой системе.
2) Составить в новой системе координат уравнение прямой,
которая в исходной системе задается уравнением 4х + у — 1 = 0.
§ 6. Плоскость и прямая в пространстве
Плоскость может быть задана:
1) векторным параметрическим уравнением
r = ro + au-|-bi> ([a,b]^o), A)
где a, b — направляющие векторы плоскости, го — радиус-вектор
фиксированной точки плоскости;
2) нормальным векторным уравнением
(г-го,п)=0 (п^о), B)
где п — нормальный вектор плоскости;
3) общим уравнением в декартовой системе координат
Ax + By + Cz + D = 0 (А2 + В2 + С2ф0). (З)
Уравнение B) можно записать в виде
§ 6. Плоскость и прямая в пространстве 39
(г,п) = Д
& уравнение A) — в виде
(г-го,а,Ъ)=0. D)
Если уравнение A) записать в общей декартовой системе координат,
ТО получим параметрические уравнения плоскости
= 0.
Уравнение D) в координатной форме равносильно уравнению
х-х0 у- г/о z-z
ах 0Х 7i
0:2 02 72
Уравнение плоскости, проходящей через три точки, не лежащие на
одной прямой, можно записать в векторной форме
(г - г0, ri - г0, г2 - г0) = 0
и в координатной форме
х-х0 у - г/о z -
-х0 г/i - г/о zx - z0
= 0.
2 -х0 г/г - г/о z2 - z0
Здесь Xi, г/j, Zi, i = 0,1,2, — декартовы координаты данных точек, а
Г{ — соответствующие радиус-векторы.
Всякий вектор а(а,/3,7), компланарный плоскости, заданной в
общей декартовой системе координат уравнением C), удовлетворяет
уравнению Аа + В/3 + Cj — 0. Если система координат прямоуголь-
прямоугольная, то нормальным вектором плоскости C) является, например,
нсктор с координатами А, В, С-
Если плоскость задана уравнением C), то для координат всех
точек, лежащих по одну сторону от нее («в положительном полупро-
полупространстве»), выполняется неравенство Ах + By + Cz + D > 0, а для
координат всех точек, лежащих по другую сторону («в отрицатель-
отрицательном полупространстве»), — неравенство Ах + By + Cz + D < 0.
Расстояние от точки с радиус-вектором ri до плоскости, за-
заданной уравнением B), равно |(ri — ro,n)|/|n|. Расстояние от точки
M{x\,y\,z\) до плоскости, заданной в прямоугольной системе коор-
координат уравнением C), равно
Прямая линия в пространстве может быть задана:
1) векторным параметрическим уравнением
r = ro+ai (a^-o), E)
где а — направляющий вектор прямой, Го — радиус-вектор фикси-
фиксированной точки прямой;
2) векторными уравнениями
[г-г0,а]=о (а/о)
40 Гл. 2. Прямая и плоскость
или
[г,а]=Ь (а^о, (a,b)=0),
равносильными уравнению E).
Если уравнение E) записать в общей декартовой системе коор-
координат, то получим параметрические уравнения прямой линии:
x = xo + at, y = yo+/3t, z = zo+'yt.
Исключением параметра t параметрические уравнения приводятся
к канонической форме
х-х0 _ у -г/р _ z- z0
« ~ /3 ~ 7
Если 7 = 0, то канонические уравнения принимают вид
х-х0 _ у -г/р _
-—_—?-, Z-Z0.
Аналогично записываются уравнения прямой, если а = 0 или /9 = 0.
Если /3 = 7 = 0, то канонические уравнения прямой линии имеют вид
У — 2/о, z = zo. Аналогично записываются канонические уравнения,
если другая пара компонент направляющего вектора нулевая.
Уравнение прямой, проходящей через две различные точки,
можно задать в векторной форме
r = r1 + (r2-r1)t
и в координатной форме
x-xi _ г/-г/i _ z-zi
х2~х\ г/2-2/1 z2-zi
Здесь п, Гг — радиус-векторы данных точек, a (ii,j/i,zi),
(Х2, J/2>Z2) — их декартовы координаты. Если х\ = жг, то уравнения
У- г/i z-zi
прямой принимают вид ж = х\, = . Если же Х\ — х^
г/2 ~У\ z2- z\
и г/i = г/г, то уравнения прямой запишутся в виде х — х\, у — у\. Ана-
Аналогично рассматриваются другие случаи совпадения одной или двух
координат точек.
Прямую можно задать и как линию пересечения двух непарал-
непараллельных плоскостей с помощью их уравнений.
Векторные уравнения прямых и плоскостей F.1—6.12)
6.1. Записать уравнение:
1) плоскости г = го + 301 + Ьг> в виде (r, n) = D;
2) прямой г = го + at в виде [г, а] = Ь;
3) прямой [г, а] = b в виде г = го + at;
4) прямой (г, ni) = Д, г — 1,2, в виде [г, а] = Ь;
5) прямой (r,rii) = Д, i = 1,2, в виде г = го + at.
6.2. Найти необходимое и достаточное условие, при кото-
котором плоскости (r,ni) = D\ и (г,П2) = Dix.
§ 6. Плоскость и прямая в пространстве 41
-к • 1) пересекаются по прямой;
>и 2) параллельны, но не совпадают;
;ц 3) совпадают.
6.3. Найти необходимое и достаточное условие, при кото-
прямые г = ri + ai< и г = Г2 + a^t:
1) пересекаются (т.е. имеют единственную общую точку);
2) скрещиваются;
м 3) параллельны, но не совпадают;
' 4) совпадают.
6.4. Даны прямая г = го + at и плоскость (г,п) = D. При
каком необходимом и достаточном условии:
1) они пересекаются (имеют единственную общую точку);
2) они параллельны (не имеют общих точек);
3) прямая лежит в плоскости?
6.5. Найти радиус-вектор точки пересечения:
1) прямой г = го + at с плоскостью (г, п) = D (если (а, п) ф
);
2) прямой [г, а] = Ьс плоскостью (г, n) = D (если (а, п) ф
).
6.6. Точка Mq определяется радиус-вектором го. Соста-
нить уравнения:
1) прямой, проходящей через точку Mq перпендикулярно
плоскости (г,п) = D;
2) плоскости, проходящей через точку Mq перпендикуляр-
перпендикулярно прямой г = ri + at.
6.7. Составить векторное уравнение плоскости, проходя-
проходящей через прямую г = ro + at и точку Mi(ri), не лежащую на
этой прямой.
6.8. Даны точка Мо(го) и плоскость (г,п) = D. Найти ра-
радиус-вектор:
1) проекции точки Мо на плоскость;
2) точки М\, симметричной с Мо относительно плоскости.
6.9. Даны точка Мо(го) и прямая г = ri +at. Найти ради-
радиус-вектор:
1) проекции точки Мо на прямую;
2) точки Mi, симметричной с Мо относительно прямой.
6.10. Составить уравнения:
1) проекции прямой г = го + at, не перпендикулярной плос-
плоскости (г,п) = D, на эту плоскость;
42 Гл. 2. Прямая и плоскость
2) прямой, пересекающей прямую г = r\ + at под прямым
углом и проходящей через точку Мо(го), не лежащую на дан-
данной прямой (перпендикуляра, опущенного из точки Мо(го) на
прямую г = ri + at);
3) прямой, пересекающей две скрещивающиеся прямые
г = n + ait и г = Г2 + а2< и проходящей через точку Мо(го), не
лежащую ни на одной из этих прямых;
4) прямой, пересекающей две скрещивающиеся прямые
г = п + a\t и г = Г2 + а2< под прямыми углами (общего перпен-
перпендикуляра к этим прямым).
6.11. Найти расстояние:
1) от точки Мо(го) до плоскости (г,п) = D;
2) между двумя параллельными плоскостями г = г\ + аи +
+ Ъь и г = Г2 + аи + Ъь;
3) между двумя параллельными плоскостями (г, n) = D\ и
(r,n) = D2;
4) от точки Мо(го) до прямой г = ri + at;
5) от точки Мо(го) до прямой [г, а] = Ь;
6) между двумя параллельными прямыми г = ri + at и
г = Г2 + at;
7) между двумя параллельными прямыми [r,a] = t>i и
[r,a] = b2;
8) между двумя скрещивающимися прямыми г = ri + ai< и
г = r2 + a2i;
9) между двумя скрещивающимися прямыми [r,ai] = bi и
[r,a2] = b2.
6.12. Даны прямая г = го + а? и плоскость (r,n) = D, не
параллельные между собой. Точка М лежит на прямой и
удалена от плоскости на расстояние р. Найти радиус-вектор
точки М.
В задачах 6.13—6.44 система координат общая декартова
6.13. Точка М лежит в плоскости Ах + Ву + Cz + D = 0,
вектор ММ\ имеет координаты (А,В,С). Доказать, что точка
Mi лежит в положительном полупространстве относительно
данной плоскости.
6.14. 1) Зная параметрические уравнения плоскости:
х = 1 + и — v, у = 2 + и + 2v, z = — 1 — и + 2v, составить ее общее
уравнение.
2) Зная общее уравнение плоскости 2х — Ъу + z +1 = 0, со-
составить ее параметрические уравнения.
§ 6. Плоскость и прямая в пространстве
43
11 6.15. Доказать, что направляющий вектор а прямой, за-
заданной в виде пересечения двух плоскостей А\х + В\у + C\z +
+Di = О, А2Х + В2у + C2z + D2 — 0, можно находить по прави-
правилу «векторного произведения»
B\
в2
с2
ei +
d
c2
4i
A2
e2 +
Ax
A2
Bx
B2
а =
не только в прямоугольной правой, но и в общей декартовой
системе координат.
6.16. 1) Записать уравнения прямой ж = 2 + 3?, у = 3 — t,
z = 1 +1 в виде пересечения двух плоскостей и в канонической
форме.
2) Записать уравнения прямой х — у + 22 + 4 = 0, — 2х + у +
+2 + 3 = 0 в параметрической и канонической форме.
6.17. Составить уравнение плоскости, проходящей через
точку 4A, —1, 2) и параллельной плоскости:
1) х - Зу + 22 +1 = 0; 2) х = 5; 3) у = 4; 4) z = 3;
6.18. Составить уравнения прямой, проходящей через точ-
точку 4A,3,1) и параллельной прямой:
1) х + у - 2 + 2 = 0, 2х + Зу + 2 = 0;
' 3 4 21 '
3) х = 2, у = 3;
4) ж = 0, 2 = 0;
> 5) у = -1,2 = 2.
6.19. Составить уравнения прямой, проходящей через две
Данные точки:
1LA,3,-1) и 5D,2,1);
2) 4C,2,5) и 5D,1,5);
3L(-1,1,2) и 5E,1,2).
6.20. Составить уравнение плоскости, проходящей через
три данные точки (если эти точки определяют плоскость):
1) 4B,1,3), 5(-1,2,5),СC,0,1);
2) 4A,-1,3), БB,3,4),С(-1,1,2);
3) 4C,0,0), 5@,-1,0), С@,0,4);
4) 4B,1,1), 5B,0,-1), СB,4,3);
5) 4A,1,2), 5B,3,3), С(-1,-3,0).
6.21. Даны две плоскости. Установить, являются ли они
пересекающимися, параллельными или совпадающими. Если
44 Гл. 2. Прямая и плоскость
плоскости пересекаются, составить канонические уравнения
линии пересечения. Плоскости заданы уравнениями:
)
2) х + у - 2z + 1 = 0 и 6z - Ъх - Ъу - 3 = 0;
3) -ж + у + 2 = 1иж-у-2 = 2;
4) x = 3 + u + v, y = 2 — u + v, z = 3u — 2v и ж = 5 — и,
d + v, z — u + 2v.
6.22. При каких а плоскости х + ау + z — 1 = 0 и аж + 9у +
1) пересекаются; 2) параллельны; 3) совпадают?
6.23. Проверить, лежит ли данная прямая в плоскости х —
— Зу+ z + l = 0, параллельна этой плоскости или пересекает ее
в единственной точке; в последнем случае найти координаты
точки пересечения. Прямая задана уравнениями:
. х-1 _ у-1 _ z-1
4 5 ~ 4 ~ 7 '
2) х = 2 + 3t, у = 7 +1, z = 1 +1;
3) ж - у + 22 = 0, х + у - 32 + 2 = 0;
4) Зж - 2у - 1 = 0, 7у - 32 - 4 = 0;
5) ж = 2, у = 5 + <, 2 = 4 + 3*.
6.24. При каких а прямая - = - = :
1 а —1
1) пересекает плоскость За2ж + ау + z — 4а = 0;
2) параллельна этой плоскости;
3) лежит в этой плоскости?
6.25. Даны две прямые. Установить, пересекаются они,
скрещиваются, параллельны или совпадают. Если прямые пе-
пересекаются или параллельны, составить уравнение плоскости,
в которой они лежат. Если прямые пересекаются, найти также
координаты точки их пересечения. Прямые заданы уравнени-
уравнениями:
1)ж + 2-1 = 0, Зж + у-2+13 = 0 и ж-2у + 3 = 0,
у + 2г-8 = 0;
2)ж = 3 + ?, 2/ = —1 + 2*, 2 = 4 и ж + у-2 = 0, 2ж-у +
+ 22 = 0;
3) х = 2 + At, у = -6t, z = -l-8t и х = 7 - Qt, у = 2 + 9t,
z = 12<;
4) х = 9t, у = 5t, z = -3 +1 и 2х - 3y - З2 - 9 = 0,
x-2y + 2 + 3 = 0;
5) x = l + 2t, y = 7 + t, 2 = 3 + 4< иж = 6 + 3<, y=-l-2t,
z = -2 + t.
§ 6. Плоскость и прямая в пространстве 45
6.26. При каких а прямые = —Л— = — и
a I a
X _ у _ ?_
Т~~ а ~ Г
1) пересекаются; 2) скрещиваются; 3) параллельны;
4) совпадают?
6.27. Исследовать взаимное расположение трех плоскос-
плоскостей; если существуют точки, одновременно принадлежащие
трем плоскостям, найти координаты этих точек. Плоскости за-
заданы уравнениями:
1) 2х + Зу - 4z - 1 = 0, -х + Ъу - z - 3 = 0, Зх - 10j/ + lz =
= 0;
2) х + у - 2z + 1 = 0, -х - у + 22 + 1 = 0, 2х + 2у - Az = 0;
3) х + 2у- z- 1 = 0, -2х -4y + 2z + 2 = 0, A + Az-Ax-
-8у = 0;
4) Ьх - 2у + 4 = 0, Зх + z - 5 = 0, 8х - 2у + г + 7 = 0;
5) Ъх - 2у + А = 0, Зх + z - 5 = 0, 8ж - 2у + z - 1 = 0.
6.28. Составить уравнение плоскости, проходящей через
точку АA,3,0) и параллельной прямым х + у — z + 3 = 0,
2x-y + 5z + l = Q и -
6.29. Составить уравнение плоскости:
¦ -.ч „ х-1 у + 2 z-1
1) проходящей через прямую —-— = —-— = и парал-
О ~с ^
„ X у -1 2+1
лельной прямой — = = ;
5 4 3
2) проходящей через прямую х = 3 +1, у = 2 + 5t, z = — 1 +
+ 3t и параллельной прямой х = А — 2t, y = —8 + t, z = 5 + 2t.
6.30. Составить уравнение плоскости, проходящей через
точку А(—1,1,2) и прямую, заданную уравнениями:
1) ж = l + 5i, y = -l + t, z = 2t;
2) х + Ъу - lz + 1 = 0, Зх - у + 2z + 3 = 0.
6.31. Составить уравнение плоскости, проходящей через
х-1 у + 2 z-1 х-2 у
две параллельные прямые = —-— = —-— и —-— = - =
5 3 1 5 3
_ 2 + 3
~ 1 '
6.32. Доказать, что две данные прямые пересекаются и со-
составить уравнение содержащей их плоскости:
. х + 1 _ J/-2 _ z-5 5 8
)
2*, 2 = 2 + 4*.
46 Гл. 2. Прямая и плоскость
6.33. Прямая проектируется на плоскость Oyz параллель-
параллельно оси Ох. Составить уравнения проекции, если прямая задана
уравнениями:
1) х = 1 -4-2*, y = 3t, 2 = 1-*;
2) x + y + z-l = 0, x + 2y-3z + 2 = Q.
6.34. Прямая проектируется на плоскость х + 2у — 3z 4- 2 =
= 0 параллельно вектору 1B, 1, —1). Составить уравнения про-
проекции, если прямая задана уравнениями:
l)x=l
2) x + y
6.35. Три грани параллелепипеда лежат в плоскостях
х - 32 + 18 = 0, 2х - 4у + 52 - 21 = 0, 6ж + у + z - 30 = 0, а од-
одна из его вершин А имеет координаты (—1, 3, 1). Составить
уравнения остальных граней параллелепипеда и его диагона-
диагонали, проходящей через вершину А.
6.36. Точки АA, 0, 3) и В(—1, 2, 1) являются вершинами
тетраэдра ABCD, точка К(—1, 5, 2) — серединой ребра ВС,
а точка М@, 1,4) — точкой пересечения медиан грани BCD.
Составить уравнения плоскостей, в которых лежат грани тет-
тетраэдра.
6.37. Составить уравнения прямой, проходящей через точ-
точку О @, 0, 0) и пересекающей две данные прямые:
1) x-y + z+ 2 = 0, x-2y + 3z-8 = 0ny-z + l = 0, x +
+ y-2z 4-4 = 0;
2) а; = 14-2*, у = 2 + 3t, z = -tnx = 4t, у = 5-5*, z =
= 3 4-2*.
6.38. Составить уравнения прямой, проходящей через точ-
точку А(—1, 1, —1) и пересекающей две данные прямые:
1) x-y + z + 2 = Q, х-2у + Ъг-8 = 0иу~г = 0, х + у-
-224-4 = 0;
оч х-1 _ у-2 _ z х _ у4-5 _ z-3
6.39. Составить уравнения прямой, пересекающей две пря-
ж + 3 у-5 л х-10 г/4-7 л
мые = —-— = - и = —-— = - и параллельной пря-
Ж4-2 у-1 2-3
мой — = -^ = —.
6.40. Составить уравнения плоскостей, проходящих через
х-1 у-1 z + 2
прямую —-— = = —-— и равноудаленных от точек
ЛA,2,5)и5C,0,-1).
§ 6. Плоскость и прямая в пространстве 47
6.41. Составить уравнения плоскостей, проходящих через
точку А{1, 0, 4) и равноудаленных от трех точек В B, 1, 6),
С(-2, 3, 2) и D(8, 1, 0).
6.42. Составить уравнения плоскостей, равноудаленных от
четырех точек А{1, -1, 3), ВC, 3, 5), СA, 7, 3) и DE, 1, 5).
6.43. Плоскость т содержит точки А, В, С, S и пересекает
координатные оси Ox, Оу, Oz в точках Р, Q, R, а координатные
плоскости Оху, Oxz, Oyz — по прямым 1\, /г, h- В плоскости т
выбрана система координат А, АВ, АС. Известно, что точка S
в этой системе координат имеет координаты C, 4), а точки А,
В, С в исходной пространственной системе координат имеют
соответственно координаты:
а) A,2,1), (-1,3,2), A,4,0);
¦; б) B,1,1), B,3,0), A,1,2);
, в) A,-1,0), A,0,-1), @,1,1).
1) Найти координаты точек Р, Q, R, S и составить урав-
уравнения прямых li, I2, /3 в исходной пространственной системе
координат.
2) Найти координаты точек Р, Q, Ди составить уравнения
прямых l\, I2, h в системе координат А, АВ, АС.
6.44 (р). Через вершину С\ параллелепипеда
ABCDA\BxCiD\ проведена плоскость, пересекающая продол-
продолжения ребер АВ, AD и АА\ соответственно в точках Во, Do
. \АВ0\ \AD0\ JAA0\ „ „ Л
и An таких, что , . ' = . , ' = о. . . ' Найти отношение объ-
\АВ\ \AD\ \AAx\
ома параллелепипеда к объему тетраэдра ABqDqAq.
В зг1дачах 6.45—6.92 система координат прямоугольная
6.45. Найти нормальный вектор плоскости:
'¦ 2) х = XQ + a\u + a,2V, у — у
6.46. Составить уравнения прямой, проходящей через точ-
точку А A, —1, 2) и перпендикулярной плоскости:
1) ж-Зу + 22 + 1 = 0; 2) х = 5; 3) у = 4; 4J = 3;
5) х = 4 - и + v, y = 2 + u + 2v, z = -1 + lu + 3v.
6.47. Составить уравнение плоскости, проходящей через
точку АA, 3, 1) и перпендикулярной прямой:
) y
v х + 1 у-2 z + 2 .
2) -д- = — = "й-! 3)ж = 2, у = 3;
4)ж = 0, z = 0; 5)j/ = -l, 2 = 2.
48 Гл. 2. Прямая и плоскость
6.48. Составить уравнение плоскости, проходящей через
точку АB, 1, — 1) и перпендикулярной двум плоскостям:
ж-у + 5;г + 1 = 0и2ж + у = 3.
6.49. Составить уравнение плоскости, перпендикулярной
плоскости х + Зу — 2 + 2 = 0 и проходящей через прямую:
-.ч х-1 _ у-1 _ z-1
> 2 3 4 '
2) 2х - у + г = 0, ж + 2у + z - 3 = 0.
6.50. В пучке, определяемом плоскостями ж + 2у — 3z +
+ 5 = 0 и 4ж — y + 3z + 5 = 0, найти две перпендикулярные
друг другу плоскости, одна из которых проходит через точку
МA,3, 1).
6.51. Точка А лежит на прямой —-— = - = ——, при-
L о Л
чем А равноудалена от точек 5C, 0, —2) и С(—1, 1, 5). Найти
координаты точки А.
6.52. Найти расстояние от точки А(Ъ, 1,— 1) до плоскости:
1) х - у - Ъг + 2 = 0; 2) х - 2у + 2z - 2 = 0;
3) х - 1у + 2z + 7 = 0; 4) ж - 2у + 2^ = 0;
5) х - 1у + 2z + 1 = 0; 6) ж = 1;
7) у = 5; 8) z = 0.
6.53. Найти расстояние между параллельными плоскостями:
1) 6х - Ъу + 2z + 5 = 0 и 6х - Зу + 2z - 9 = 0;
2) 2ж + 2у - г + 3 = 0 и 2ж + 2у - z + 18 = 0;
3) Зх + 4z + 1 = 0 и 6х + 82 - 1 = 0.
6.54. 1) Составить уравнения плоскостей, параллельных
плоскости бж — Зу + 2z + 5 = 0 и отстоящих от нее на рассто-
расстояние 3.
2) Составить уравнения плоскостей, параллельных плос-
плоскости ж + Зу — z + VTI = 0 и отстоящих от нее на расстояние 3.
3) Составить уравнения плоскостей, параллельных плоско-
плоскости 2ж + 2у — г + 3 = 0и отстоящих от точки .4A,2, —1) на рас-
расстояние 3.
4) Составить уравнения плоскостей, параллельных плоско-
плоскости Зж + 4z + 1 = 0 и отстоящих от начала координат на рассто-
расстояние 3.
/? 2. XI Z -4-1
6.55. Точка А лежит на прямой —-— = - = —-—. Расстоя-
ние от точки А до плоскости ж + у + 2 + 3 = 0 равно \/3. Найти
координаты точки А.
§ 6. Плоскость и прямая в пространстве 49
6.56. Точка А лежит на прямой = = , при-
Л о ~о
чем А равноудалена от точки 5@,1,1) и от плоскости 2х — у +
4- 2z + 1 = 0. Найти координаты точки А.
6.57. Точки -4A, —1,2) и 5C,0,4) являются вершинами
куба ABCDA\B\C\D\. Вектор AD перпендикулярен прямой
х = 0, у — z = 0, а ориентация тройки векторов АВ, AD, АА\
совпадает с ориентацией тройки базисных векторов системы
координат, причем сумма координат вектора АА\ отрицатель-
отрицательна. Составить уравнения граней куба.
6.58. Точки А(-3,0,0) и 5C,0,0) являются вершинами
правильного тетраэдра ABCD, вершина С удалена от коор-
координатной плоскости Оху на расстояние 3\/2, причем все ко-
координаты точки Сш неотрицательны. Ориентация тройки век-
векторов АВ, AC, AD совпадает с ориентацией тройки базисных
некторов системы координат. Составить уравнения граней тет-
тетраэдра.
6.59. Дана точка 4C,-1,1). Найти:
1) координаты проекций точки А на координатные плос-
плоскости и координаты точек, симметричных А относительно ко-
координатных плоскостей;
2) координаты проекции точки А на плоскость х + 2у +
4- 2z + 6 = 0 и координаты точки, симметричной с А относи-
относительно этой плоскости;
3) координаты проекции точки А на плоскость 2х + Зу +
+ Qz + 40 = 0 и координаты точки, симметричной А относи-
относительно этой плоскости.
6.60. Составить уравнения прямой, симметричной прямой
х-2 у + 1 z-2
= = —-— относительно плоскости ох — у + z — 4 = 0.
О JL 4
6.61. Составить уравнения проекций на плоскость х + Ъу —
— z — 25 = 0 следующих прямых:
1 1
> 4 2 3 '
2) х - у + 22 - 1 = 0, Зж - у + 22 + 2 = 0;
о\ х + 1 _У _ z~l
6) ПГ~~^Г-
6.62. Найти угол между плоскостями:
2) x + 2y-z = lnx-y =
3) ж + 2у-22 = 0 и 2 = 5;
50 Гл. 2. Прямая и плоскость
4) ж + 2у - z - 1 = 0 и Зж - Ъу - lz = 0;
5) ж + Зу-2 + 1 = 0 и х=1-и, y = 2-3u-v, 2 = 7
+ u + v;
6) ж - Зу + 22 + 1 = 0 и 62 - 9у + Зж + 5 = 0.
6.63. Найти угол между прямыми:
x + y + z-1 = 0;
21 х~1 - у~2 - z + 3 ж + 1 _ У _ ¦г-Ю
' 2~3~-1И-3~4~ 6 '
3)ж = 5-2<, y = 6 + 4t, z = 8< и x = \ + t, y = -2t, z-
= 3 - 4t.
6.64. Найти угол между плоскостью 4х + 4у — 72 + 1 = 0 и
прямой:
ж--1 _ у+_2 _ ^_
; 3 2 -6'
41
J 11 -4 4 '
6.65. Составить уравнения прямой, проходящей через точ-
точку АA, 3, 2) параллельно плоскости Оху и образующей:
1) угол 45° с прямой х = у, 2 = 0;
2) угол arcsin(l/\/l0) с плоскостью х — у = 1.
6.66. Составить уравнение плоскости, проходящей через
точку Л(—1,2,1) параллельно прямой - = —1 = — ги обр'азую-
щей угол 60° с прямой х = у, 2 = 0.
6.67. Составить уравнение плоскости, проходящей через
прямую ж + 5у + 2 = 0, ж — 2 + 4 = 0 и образующей угол 45° с
плоскостью ж — Ау — 82 + 1 = 0.
6.68. Доказать, что две данные прямые пересекаются, и
составить уравнения биссектрис острого и тупого углов между
ними:
1) ж = 4-4<, у = 1 + 4<, 2 = -5 + 7<иж = -3 + <, у =-1 +
+ 2t, z = -4 + 2t;
2)x = A + t, y = l-t, 2 = 5 + 4t и ж =-3-3t, y = 8 + 3i,
2=1;
3)ж = 1 + 2<, y = 2 + 3t, 2 = 11-6* и ж = 1 + <, y
z = 7-t.
§ 6. Плоскость и прямая в пространстве 51
6.69. Боковые стороны равнобедренного треугольника име-
имеют общую вершину ЛC, 4, 5), две другие вершины лежат на
осях Ох и Оу, а плоскость треугольника параллельна оси Oz.
Найти углы треугольника и составить уравнение его плоскости.
6.70. Даны точка АB, —1, 0) и прямая I. Вычислить рас-
расстояние от точки А до прямой /; найти координаты проекции
точки А на I и координаты точки В, симметричной с А от-
относительно /; составить уравнения прямой, проходящей через
точку А и пересекающей данную прямую под прямым углом
(«опустить перпендикуляр» из точки А на I). Прямая I задана
уравнениями:
и х~7 - У - z~3
' 3 ~ 4
4 2 '
2)x = l + 2t, y = 2-2t, z = -
3) 2x + y
6.71. Точка А лежит на прямой х — у — 3 — 0, 2у + z = 0.
Расстояние от точки А до прямой х — у = z равно \/б. Найти
координаты точки А.
6.72. Найти расстояние между прямыми:
, гг-4 _ у + 1 _ z - 1 х-Ъ _ у _ г
> 3 ~ 6 ~ ~^2~ И -6 ~ ^ ~ 4'
2) x = 3 + 2t, y = 10-3t, 2 = 3 + 4t и х = l+3t, y = l-2i,
2 = 1 + 3t;
l 0 3 + 2 = 0 и
6.73. Даны прямые 1\ и /г- Составить уравнения их обще-
общего перпендикуляра (т.е. прямой, пересекающей 1\ и 1% под пря-
прямым углом); найти точки пересечения общего перпендикуляра
с данными прямыми; вычислить расстояние между 1\ и fa. Пря-
Прямые заданы уравнениями:
l)x = b + t, y = 3-t, z = l3 + t n x = 6 + t, y = l + 2t,
z = 10-t;
-,: 2) 2ж + 7у-13 = 0, Зу-2г-1 = 0 и ж + у-8 = 0, 2х +
и
6.74. Точки Л(-1, -3, 1), В(Ъ, 3, 8), C(-l, -3, 5), DB,
1, —4) являются вершинами тетраэдра. Найти:
1) длину высоты тетраэдра, опущенной из вершины D на
грань ABC;
52 Гл. 2. Прямая и плоскость
2) длину высоты основания ABC, опущенной из вершины
С на сторону АВ;
3) расстояние между скрещивающимися ребрами AD и ВС;
4) угол между скрещивающимися ребрами AD и ВС;
5) угол между ребром AD и гранью ABC.
6.75. Длина ребра куба ABCDA\B\C\D\ равна 1. Найти:
1) расстояние от вершины А до плоскости B\CD\;
2) расстояние между диагональю куба АС\ и скрещиваю-
скрещивающейся с ней диагональю боковой грани CD\;
3) отношения, в которых точки пересечения общего пер-
перпендикуляра к прямым АС\ и CD\ с этими прямыми делят
отрезки АС\ и CD\.
6.76. Три грани ABCD, АВВ\А\ и ADD\A\ параллеле-
параллелепипеда ABCDA\B\C\D\ лежат соответственно в плоскостях
2х + Ъу + 4z + 8 = 0, х + Зг/ - 6 = 0, 2 + 5 = 0; вершина С\ име-
имеет координаты 6, —5, 1. Найти:
1) расстояние от вершины А\ до плоскости B\BD;
2) расстояние от вершины D до прямой АВ;
3) расстояние между прямыми АС и А\С\;
4) расстояние между прямыми АА\ и ВС;
5) угол между прямыми АС и C\D\;
6) угол между плоскостями BDD\ и АСС\;
7) угол между прямой СА\ и плоскостью DCC\.
6.77. Найти необходимые и достаточные условия для то-
того, чтобы тот из четырех двугранных углов, образованных дву-
двумя пересекающимися не перпендикулярными плоскостями
Ахх + Вху + Cxz + Di = 0 и А2х + В2у + C2z + D2 = 0, который
содержит точку Mq(xq,iiq,zq), был:
1) острым; 2) тупым.
6.78 (р). Даны две плоскости x + 2y + 2z = 0 и 7ж + 4у +
+4z = 0. Третья плоскость т проходит через начало коорди-
координат О так, что конец ее нормального вектора, отложенного из
точки О, лежит в тупом двугранном угле, образованном дан-
данными плоскостями. Косинусы острых двугранных углов между
т и данными плоскостями равны 2/15 и 4/45 соответственно.
Составить уравнение плоскости т.
6.79. Рассматривается тот двугранный угол между плос-
плоскостями х — 2у+ 2 + 3 = 0 и х + y + 2z = l, внутри которого
лежит точка А(—1,0,0). Доказать, что множеством точек,
лежащих внутри этого угла и удаленных от данных плоско-
§ 6. Плоскость и прямая в пространстве 53
стей соответственно на расстояния л/б и 2л/б, является прямая.
Составить уравнения этой прямой.
6.80. Составить уравнение биссекторной плоскости того
двугранного угла между плоскостями х — z — 5 = 0 и Зж + 5у +
+4z — О, внутри которого лежит точка АA,1,1).
6.81. Составить уравнение биссекторной плоскости остро-
острого двугранного угла между плоскостями х — z — 5 = 0 и Зж +
6.82. Грани тетраэдра заданы уравнениями х + 2у — 1z-\-
f3 = 0, 4ж-4у + 7;г-9 = 0, 8ж + 4у + 2-3 = 0, у- z = 0. Со-
Составить уравнения:
1) биссекторной плоскости внутреннего двугранного угла
между первыми двумя гранями;
2) прямой, лежащей во внутреннем трехгранном угле меж-
между первыми тремя гранями, все точки которой равноудалены
от этих трех граней.
6.83. Вершинами тетраэдра являются точки АA, 2, 3),
В (-2, 8, 9), С E, 0, 7), ?>C, 4, 2). Найти радиусы и координа-
координаты центров вписанной и описанной сфер.
6.84. Найти радиус и координаты центра сферы, проходя-
проходящей через точку А@,1,0) и касающейся плоскостей
6.85. Найти координаты центра О и радиус г сферы, ка-
касающейся плоскостей 5ж — у + z — 17 = 0 и х + у — 2 + 11 = 0 и
проходящей через точки А(—7, — 1, — 1) и 2?A,1,1).
6.86. Найти координаты центра О и радиус г сферы, каса-
касающейся плоскости х + 5у + z — 33 = 0 и проходящей через точ-
точки ЛB,3,-2), В(-2,3,4) и С@,-1,2).
6.87. Вершинами треугольника являются точки ЛA,2,3),
ВA,5,—1), СE,3,— 5). Найти радиусы и координаты центров
вписанной и описанной окружностей.
6.88. Доказать, что три плоскости х — 2у + 1z + 3 = 0,
2х + 2у + z — 6 = 0, Ъх + 14у — 2z — 21 = 0 не имеют общих то-
точек, но три прямые, образованные при пересечении каждой
пары этих плоскостей, параллельны, т.е. плоскости образуют
призму. Найти радиус и уравнения оси прямой круговой ци-
цилиндрической поверхности:
1) вписанной в эту призму; 2) описанной около нее.
6.89. В правильной четырехугольной пирамиде SMNPQ
(S — вершина) точки Н и F — середины ребер MN и NP со-
54 Гл. 2. Прямая и плоскость
ответственно. Точка Е лежит на отрезке SH, причем \SH\ = 3,
\SE\ = 9/4. Расстояние от точки S до прямой EF равно \/5.
Найти объем пирамиды.
6.90. В основании прямой призмы ABCDA\B\C\D\ ле-
лежит ромб ABCD с углом А А = 60°. Длина стороны основания
призмы равна а, длина бокового ребра равна у/За. Точка Е
является ортогональной проекцией вершины С\ на плоскость
AB\Di, а точка F — ортогональной проекцией точки Е на плос-
плоскость AA\D\D. Найти объем пирамиды ADEF.
6.91. В правильной призме ABCА\В\С\ длина бокового
ребра равна 3. Точка М — середина ребра АС, точка N лежит
на ребре В\С\, а точка Р принадлежит грани АА\В\В и удале-
удалена от плоскости ABC на расстояние 1. Известно, что угол в 30°
образуют каждая из прямых РМ и PN с плоскостью АА\ В\ В
и прямая PN с плоскостью ВВ\С\С. Найти объем призмы.
6.92. В правильной призме ABCА\В\С\ длина стороны
основания равна 2а, длина бокового ребра равна а. Через вер-
вершину А проведена плоскость перпендикулярно прямой АВ\,
через вершину В — плоскость перпендикулярно прямой ВС\ и
через вершину С — плоскость перпендикулярно прямой СА\.
Найти объем многогранника, ограниченного этими тремя плос-
плоскостями и плоскостью А\В\С\.
Замена системы координат F.93-6.97)
6.93. Даны две системы координат О, е\, е%, ез и О', е[,
е'2, е'3. Начало второй системы координат имеет в первой систе-
системе координаты аю, «20, озо> а базисные векторы второй систе-
системы имеют в базисе первой системы координаты @11,021,031)»
(<ii2,«22H32), («13,023,033) соответственно. В первой системе ко-
координат плоскость задана уравнением Ах + By + Cz + D = 0.
Составить уравнение этой плоскости во второй системе.
6.94. В пространстве даны четыре точки ЛA,2,1),
В(-1,3,0), СB,5,3), ?>(-2,3,4) и плоскость 2x + y-3z + 2 = 0.
Составить уравнение этой плоскости в новой системе коорди-
координат А, А~В, А~С, A~D.
6.95. Плоскости х - 2у + Zz - 6 = 0, 2х + у - z = 0, 4ж + z -
— 5 = 0 являются соответственно плоскостями O'y'z', O'z'x',
О'х'у' новой системы координат, а точка .4B,0,1) имеет в новой
системе координаты 1,1,1.
§ 6. Плоскость и прямая в пространстве 55
1) Найти координаты точки в исходной системе координат,
если известны ее координаты х', у', z' в новой системе.
2) Составить в новой системе координат канонические
уравнения прямой, которая в исходной системе задается урав-
х-1 у + 1 z-2
нениями = —— = .
1 -4 -1
6.96. В прямоугольной системе координат О, ei, в2, ез
плоскость задана уравнением Зж + 5у + y/2z + л/2 = 0. Начало
новой прямоугольной системы координат находится в точке
О'A,1,-1), базисный вектор е3 противоположен вектору ез,
а базисные векторы е[ и е2 получаются из векторов ei и ег
соответственно поворотом в содержащей ei и ег плоскости на
угол 45° в направлении кратчайшего поворота от ei кег-
1) Найти координаты точки в исходной системе координат,
если известны ее координаты х', у', z' в новой системе.
2) Составить уравнение данной плоскости в новой системе
координат.
6.97. Три плоскости, заданные в прямоугольной систе-
системе координат уравнениями х + 2у — 2z + 3 = 0, 2х + у + 2z = 0,
2ж — 2у — 2 + 3 = 0 (проверить, что они попарно перпендику-
перпендикулярны), являются соответственно плоскостями O'y'z', O'z'x',
О'х'у' новой прямоугольной системы координат, а точка
Л(—1,0,0) имеет в новой системе положительные координаты.
1) Найти координаты точки в исходной системе координат,
если известны ее координаты х', у', z' в новой системе.
2) Составить в новой системе координат канонические
уравнения прямых, заданных в исходной системе уравнениями
х-\ у-\ z-Z т~.
—-— — —-— = —-— и х = у = z. Вычислить в обеих системах
координат угол и расстояние между этими прямыми; убедиться
в совпадении результатов.
•л.
Глава 3
КРИВЫЕ ВТОРОГО ПОРЯДКА
В этой главе используются следующие основные понятия: ал-
алгебраическая кривая, кривая второго порядка, окружность, эллипс,
гипербола, парабола, центр, вершина, ось, полуось, фокус, директри-
директриса, эксцентриситет, хорда, асимптота, касательная, нор-
нормаль, каноническое уравнение кривой второго порядка, централь-
центральная кривая второго порядка.
Система координат, если не оговорено противное, прямо-
прямоугольная.
Алгебраической кривой на плоскости называется множество всех
точек плоскости, координаты (х,у) которых в некоторой декарто-
декартовой системе координат удовлетворяют уравнению Ф(аг,у) = О, где
Ф(х,у) — многочлен от переменных х, у. Степень многочлена Ф(х,у)
(максимальная степень k + l одночленов а^хку1, входящих в Ф(х,у))
называется порядком кривой. Порядок кривой не изменяется при за-
замене системы координат.
Общее уравнение кривой второго порядка имеет вид
Ax2 + 2Bxy + Cy2+2Dx + 2Ey + F = Q (А2 + В2 + С2 ф 0). A)
Выражение Ах2 + 2Вху + Су2 называется квадратичной частью,
2Dx + 2Еу — линейной частью, F — свободным членом уравне-
уравнения A).
Для всякой кривой второго порядка существует прямоугольная
система координат, называемая канонической, в которой уравнение
кривой имеет канонический вид (см. таблицу 1 на с.59).
Уравнение окружности радиуса R с центром в точке С(хо,уо)
имеет вид
(x-xoJ + (y-yoJ=R2. B)
Эллипс (рис. 1) имеет каноническое уравнение
х2 v2
где а ^ b > 0; большая полуось эллипса равна а, а малая равна Ь. Вер-
Вершинами эллипса называются точки (±а,0), @,±6). Фокусами эллип-
эллипса называются точки Fi(c,0) и -Рг(—с,0), где с = л/а2 — Ь2. При а = b
эллипс есть окружность. Площадь части плоскости, ограниченной
эллипсом, равна ттаЬ.
Гл. 3. Кривые второго порядка
57
Гипербола (рис. 2) имеет каноническое уравнение
I
Ь2
D)
"де а > О, Ь > О; действительная полуось равна а, мнимая полуось
эавна Ь. Веошинами гиперболы называются точки (±а,0). Фокусами
У
Рис. 2
типерболы называются точки Fi(c,0) и F2(-c,0), где c= Va2 +b2.
b x2
асимптотами гиперболы являются прямые у = ±—х. Гипербола —? —
а а1
У л - с х У 1
-7=- = — 1 называется сопряженной к гиперболе —- — 77 = 1> она
о а-' о
лмеет те же асимптоты, но ее ветви расположены в другой паре вер-
вертикальных углов между асимптотами.
Парабола (рис. 3) имеет каноническое уравнение
У2 = 2рх, E)
¦де р > 0. Число р называют параметром параболы. Вершиной пара-
"юлы является начало координат, фокусом — точка F(p/2, 0).
Эксцентриситет эллипса или гиперболы равен е = с/а; для эллип-
:а 0 ^ е < 1, для гиперболы е > 1. Эксцентриситет параболы равен 1.
58
Гл. 3. Кривые второго порядка
Расстояние от точки М(х,у), принадлежащей кривой второгс
порядка, до фокуса кривой называется фокальным палиусом то^
ки М. Для эллипса C) и гиперболы D)
М(х,у
Фокальный радиус точки М(х,у), при-
принадлежащей параболе E), равен х + р/2.
Прямые х — ±а/е называются директри-
директрисами эллипса C) и гиперболы D), (см.
рис. 1 и 2). Директрисой параболы E) на-
называется прямая х = — р/2, (см. рис. 3).
Отношение расстояния от любой точки
эллипса, гиперболы или параболы до фо-
фокуса к ее расстоянию до соответствующей
директрисы равно е. Хорды, проходящие
через фокус кривой второго порядка, называются ее фокальными
хордами.
Пусть точка М(хо,уо) лежит на кривой второго порядка. Каса-
Касательная к кривой в этой точке определяется уравнением
+
УУо
Ь2
Л
= * Аля эллипса
ХХо
УУо
Ь2
х2 у2
а2 + Ъ2 ~ '
2 У2
—5 Г5" - 1 Для гиперболы -т - тт = 1;
ууо — р(х
для параболы у2 = 2рх
и уравнением
Ахх0 + В(ху0 + хоу) + Суу0 + D(x + х0) + E(y + yo)
для кривой, заданной общим уравнением A).
Пусть кривая второго порядка задана уравнением Ф(х,у) =0.
Точка О(хо,уо) называется ее центром, если (Ф(жо + а,уо + /3) =
= Ф(х0 -а,уо~ 0) для любых чисел а и р. Точка О(х0,уо) — центр
кривой тогда и только тогда, когда ее координаты удовлетворяют
системе уравнений
Ах0 + Byo + D = O,
Вх0 + Суо + Е = О. ( '
Если линия второго порядка содержит хотя бы одну точку, то каж-
каждый ее центр — центр симметрии, и каждый центр симметрии есть
центр; однако центр определен и для линий, являющихся пустым
множеством.
Кривая называется центральной, если она имеет единственный
центр. Центральными являются кривые первых пяти типов в табл. 1.
Для них центр — начало канонической системы координат. Кривая
является центральной в том и только том случае, когда
А В
В С
6 =
Гл. 3. Кривые второго порядка
59
Таблица 1
шпс» (пустое множе-
чых пересекающихся
(точка)
некающихся прямых
ла
араллельных прямых
мнимых параллельных пря-
_лх» (пустое множество)
л совпавших прямых
Каноническое
х2 у2
*2 , у2
а2 Ь2
х2 у2
а2 Ъ2
х2 у2
а2 Ь2
У2 = 2рх,
у2-а2,
„2 _ _2
У — ~а >
У2 =
уравнение
О6>0
а ф 0, 6^0
= 0
— 1
— J.
= 0
р>0
афО
афО
0
sro имеется девять типов канонических уравнений кривых
.орого порядка. В таблице 1 перечислены эти уравнения вместе с
.азваниями соответствующих типов кривых.
Решение задачи приведения уравнения кривой второго порядка
с каноническому виду включает отыскание канонического уравнения
::ривой и канонической системы координат. Приведение к канониче-
:кому виду позволяет вычислить параметры кривой и определить ее
эасположение относительно исходной системы координат.
Приведение общего уравнения A) кривой к каноническому виду
юуществляется в несколько шагов. Опишем их.
1. Если исходная система координат не прямоугольная, перейдем
; какой-нибудь прямоугольной системе координат. При этом общий
зид уравнения A) не изменится. Далее считаем систему координат
прямоугольной.
2. Если в уравнении A) коэффициент В ф 0, то следует перей-
перейди к такой системе координат, чтобы в преобразованном уравнении
коэффициент при произведении х'у' был равным нулю. Для это-
"о систему координат надо повернуть вокруг начала координат на
тол if:
х = х' cosy? - у'simp,
у — х sirup + у costp.
Значение <р находится из уравнения
2Bcos2ip + (С - A)sin2<p = 0
G)
(8)
60 Гл. 3. Кривые второго порядка
или, при АфС,
2В
Уравнение (8) можно свести к уравнению
2 А-С _х_0 /Ш
Из нескольких возможных значений ip можно брать любое. При А —
= С можно положить if — тг/4. Затем следует вычислить sinip, cosip,
подставить их в формулы G) и выполнить в уравнении A) замену
координат.
3. Если в уравнении A) уже нет члена с произведением перемен-
переменных, следует, если возможно, добиться исчезновения линейных чле-
членов. Это достигается переносом начала координат. А именно: если
в уравнении имеются квадрат какой-либо переменной и одноимен-
одноименный линейный член, то эта пара дополняется до полного квадрата
и начало координат переносится вдоль оси координат так, чтобы в
преобразованном уравнении линейного члена уже не было.
Пример.
Ах2 + 2Dx = А [х2 + —х + -то 1 - -г =
V А А2) А
( D\2 D2 _ ,2 -С2
где х' = х + D/A.
4. Если уравнение A) содержит лишь три члена: квадрат одной
переменной, первую степень другой и свободный член, то с помощью
переноса начала координат вдоль оси, соответствующей линейному
члену, молено добиться исчезновения свободного члена.
Пример.
+. — ] = 0.
Замена у + F/2E - у' дает Ах2 + 2Еу' = 0.
После выполнения указанных в пп. 1-4 действий мы придем к
уравнению, которое отличается от канонического разве что число-
числовым множителем, порядком координат, переносом членов из одной
части уравнения в другую или знаком коэффициента при линейном
члене. Такое уравнение удобно называть «почти каноническим». Для
приведения уравнения к окончательной канонической форме следу-
следует выполнить необходимые преобразования уравнения и замены си-
системы координат. При этом можно обойтись без смены ориентации
исходной системы координат. Изменение порядка координат дости-
достигается дополнительным поворотом на 90°. Чтобы сменить знак ко-
коэффициента при линейном члене уравнения, можно дополнительно
§ 7. Геометрические свойства и канонические уравнения 61
повернуть систему координат на 180°. При этом, почти канониче-
каноническое уравнение Ах2 + 2Еу = 0 преобразуется х2 — (—2Е/А)у, замена
х — -у', у = х' приводит к у'2 = (-2Е/А)х'. Если Е/А > 0, то требу-
требуется еще замена х' = — х", у' = —у", после чего получается канониче-
каноническое уравнение параболы у = 2рх", где р = Е/А > 0.
Для отыскания канонической системы координат выписываем
каждую из формул перехода, подставляем их одна в другую и полу-
получаем окончательное выражение исходных координат через канони-
канонические
у = fii
Коэффициенты этих формул дают координаты начала канонической
системы координат О*(ао,/3о) и ее базисных векторов Ei(qi,^i),
Е2@2,^2) относительно исходной системы координат.
Если система уравнений F) совместна (в частности, если 8 =
= АС — В2 ф 0 — случай центральной кривой), то упрощение урав-
уравнения кривой удобно начинать с переноса начала координат в центр
кривой: х — Хо + х', у — уо + у'¦ Тогда в преобразованном уравнении
коэффициенты при х' и у' обращаются в нуль (см. задачи 9.18, 9.20).
Затем следует выполнить шаг 2.
В первом приближении тип кривой второго порядка можно
определить до упрощения ее уравнения по знаку S.
Кривая относится к эллиптическому типу (эллипс, мнимый эл-
эллипс, пара мнимых пересекающихся прямых) при S > 0; к гиперболи-
гиперболическому типу (гипербола, пара пересекающихся прямых) при 6 < 0;
к параболическому типу (остальные типы в табл. 1) при 5 = 0.
Уравнение второго порядка A) в подходящей декартовой систе-
системе координат приводится к одному из канонических уравнений:
1) х2 +у2 - 1; 2) х2 +у2 = -1; 3) х2 +у2 = 0; 4) х2 -у2 = 1;
5) х2 - у2 = 0; 6) у2 - х; 7) у2 = 1; 8) у2 = -1; 9) у2 = 0.
Таким образом, существуют 9 аффинных типов кривых второго по-
порядка.
§ 7. Геометрические свойства кривых второго порядка
и их канонические уравнения
Окружность G.1-7.10)
7.1. Найти радиус и координаты центра окружности:
2 2
2) х2 + у2 + 5х-5у + 12 = 0;
3) 2х2 + 2у2 - 12х + у + 3 = 0;
4) 7х2 + 7у2-2х-7у-1 = 0.
7.2. При каком необходимом и достаточном условии урав-
уравнение Ах2 + By2 + 2Сх + 2Dy + Е — 0 задает окружность? Вы-
Выразить радиус и координаты центра окружности через коэф-
62 Гл. 3. Кривые второго порядка*
фициенты уравнения. ¦'
7.3. Составить уравнение окружности с центром в точке
МB,2), касающейся прямой Зх + у — 18 = 0.
7.4. Найти необходимое и достаточное условие того, чтобы
прямая Ах + By + С = 0:
1) не имела общих точек с окружностью (х — аJ +
+ (y-bJ = R*;
2) имела с этой окружностью две общие точки;
3) касалась этой окружности.
7.5. 1) Составить уравнение касательной, проведенной к
окружности (х — IJ + (у + 2J = 25 в точке М(—3,1).
2) Составить уравнения касательных к окружности
(х — 1J + (у + 1J = 9, проходящих через точку МA,4).
7.6. Составить уравнения касательных к окружности
(х + ЗJ 4- (у + IJ = 4, параллельных прямой Ъх — 12у + 1 = 0.
7.7. Проверить, что две данные окружности касаются, и
составить уравнение их общей касательной, проходящей через
точку касания:
1) (х-1J + (у-2J = 18, (х-5J + (у-6J = 2;
2) (х+ IJ + (у - IJ = 45, (х -1J + (у - 5J = 5.
7.8. Составить уравнения общих касательных к окружно-
окружностям (:г-2J + (у + 1J = 9и (х_4J + (?/-3J = 1.
7.9. Через точку А, лежащую вне окружности, проведены
прямая, касающаяся окружности в точке В, и еще одна пря-
прямая, пересекающая окружность в точках С и D. Доказать, что
\АВ\2 = \AD\ ¦ \АС\.
7.10. Две окружности касаются внешним образом. Через
точку их касания проведена прямая, пересекающая первую
окружность еще в одной точке А, а вторую окружность еще
в одной точке В. Доказать, что касательные к окружностям в
точках А и В параллельны.
Множества точек на плоскости, при изучении
которых используются уравнения кривых второго
порядка G.11-7.20)
7.11. Доказать, что множеством точек М таких, что для
двух фиксированных точек А и В отношение |МА|/|М5| по-
постоянно и равно к > 0, является прямая линия при к = 1 и ок-
окружность при к ф 1. Выразить радиус этой окружности через к
и длину отрезка АВ.
§ 7. Геометрические свойства и канонические уравнения 63
7.12. Доказать, что множеством точек М таких, что для
двух фиксированных точек А и В сумма \МА\ + \МВ\ посто-
постоянна и равна 2а, является эллипс с фокусами А и В. Выразить
длины полуосей этого эллипса через а и длину отрезка АВ.
7.13. Доказать, что множеством точек М таких, что для
двух фиксированных точек А и В модуль разности
\МА\ — \МВ\ постоянен и равен 2а, является гипербола с фоку-
фокусами Аи В. Выразить полуоси этой гиперболы через а и длину
отрезка АВ.
7.14. Доказать, что множеством точек, равноудаленных от
фиксированной точки А и фиксированной прямой I, является
парабола с фокусом А и директрисой I.
7.15. Определить множества точек, которые в прямо-
прямоугольной системе координат задаются неравенствами:
2 2
1)х + (у
A
3) х2 + у2 + Зх<0, у<0;
4) -2 2
2
х2 v2
+
X2
8) 4x2-4
10) V(x2 + {у- 1J + ^/х2 + (у + IJ > 4;
16 9
х2 и2
х2 v2
13)
х
15) |3х2-9у2|>1;
16) у/{х - 2J + у2 _ ^(Х + 2J + у2 < 2;
17) у2 < 4х;
18) у2 > 6х;
64 Гл. 3. Кривые второго порядка
19) х < у2 < Зх;
20) -2х - х2 < у2 < -2х.
7.16. Какие кривые на плоскости задаются следующими
параметрическими уравнениями:
1) х = 3cos?, у = 3sint, 0 < t < 2п;
2) х = 1 + 2cosi, у = 2 + 2sini, 0 < t < 2п;
3) х = cost, у = sint, 0 < t < 7г?
7.17. Доказать, что параметрические уравнения х = хо +
+ acost, у — уо + bsmt (а > 0, Ь > 0) задают эллипс с центром в
точке (хо,уо) и с полуосями а и Ь.
7.18. Доказать, что параметрические уравнения х = xq +
+ acht, y = yo + bsht, где а > 0, Ь > 0, задают правую ветвь ги-
гиперболы с центром в точке (хо,уо) и с полуосями а и Ь. Как нуж-
нужно изменить эти уравнения, чтобы задать обе ветви гиперболы?
7.19. Изобразить множество точек, которое в полярных
координатах задается уравнением:
^ 1 2>
4)г = -
7.20. На плоскости дан отрезок АВ {\АВ\ = а). Найти мно-
множество точек М таких, что угол при вершине А в треугольнике
АВМ вдвое больше угла при вершине М.
Эллипс G.21-7.34)
7.21. Точка А лежит вне эллипса с фокусами F\, F2, отрез-
отрезки AF\, AF2 пересекают эллипс в точках В, D соответственно,
и С — точка пересечения отрезков F\D, F2B. Доказать, что в
четырехугольник ABCD можно вписать окружность.
7.22. Найти длины полуосей, эксцентриситет, координаты
фокусов, составить уравнения директрис эллипса:
а*
~2
3) 9х2 + 25у2 = 225;
4) 4х2 + у2 = 1.
7.23. Дан эллипс 25а;2 + 144у2 = 1. Определить, лежит ли
точка А на эллипсе, внутри или вне его:
1) АA,1/6); 2) АA/13,1/13); 3) АA/6,-1/24).
§ 7. Геометрические свойства и канонические уравнения 65
7.24. Вычислить длину фокальной хорды эллипса
X2 у2
h — = 1, перпендикулярной большой оси.
7.25. В данной системе координат эллипс имеет канониче-
каноническое уравнение. Составить это уравнение, если:
1) расстояние между вершинами, лежащими на большой
оси, равно 16, а расстояние между фокусами равно 10;
2) хорда, соединяющая две вершины эллипса, имеет дли-
длину 5 и наклонена к его большой оси под углом arcsinC/5);
3) фокусами эллипса являются точки (±1,0), а точка
(\/3, л/3/2) принадлежит эллипсу;
4) фокусами эллипса являются точки (±2,0), а директри-
директрисами являются прямые х = ±18;
5) расстояние от директрисы до ближайшей вершины рав-
равно 4, а до вершины, лежащей на оси Оу, равно 8;
6) треугольник с вершинами в фокусах и в конце малой оси
правильный, а диаметр окружности, проходящей через центр
и две вершины эллипса, равен 7;
7) отрезок оси Ох между фокусом F\ и дальней верши-
вершиной А большой оси делится вторым фокусом F2 пополам, а
расстояние от F2 до пр_ямой, проходящей через А и вершину
малой оси, равно 1/%/17;
8) директрисами эллипса являются прямые х = ±4, а че-
четырехугольник с вершинами в фокусах и концах малой оси —
квадрат;
9) эксцентриситет эллипса равен л/7/4, а четырехугольник,
вершинами которого являются вершины эллипса, описан около
окружности радиуса 4,8.
7.26. Вычислить эксцентриситет эллипса, если:
1) расстояние между фокусами равно среднему арифмети-
арифметическому длин осей;
2) отрезок между фокусом и дальней вершиной большой
оси делится вторым фокусом в отношении 2:1;
3) расстояние от фокуса до дальней вершины большой оси
в 1,5 раза больше расстояния до вершины малой оси;
4) отрезок между фокусами виден из конца малой оси под
прямым углом;
5) большая ось видна из конца малой оси под углом 120°;
6) отрезок между фокусом и дальней вершиной большой
оси виден из конца малой оси под прямым углом;
3- 1715
66 Гл. 3. Кривые второго порядка
7) стороны квадрата, вписанного в эллипс, проходят через
фокусы эллипса.
7.27. Составить уравнения сторон квадрата, вписанного в
х2 у2
эллипс — + Т2" = 1, (а > 6 > 0). Какую часть площади, ограни-
ограниченной эллипсом, составляет площадь этого квадрата?
7.28. Найти множество точек, являющихся серединами
х2 у2
хорд эллипса — + — = 1, параллельных прямой х + 2у = 1.
25 9
7.29. Через точку АG/2,7/4) провести хорду эллипса х2 +
+ 4у2 = 25, делящуюся в этой точке пополам.
7.30. Через точку М@,3) провести прямую, пересекаю-
пересекающую эллипс х2 + 4у2 = 20 в двух точках А и В так, что \МА\ =
= 2\МВ\.
2
7.31. На эллипсе — + у2 = 1 найти точки, из которых от-
отрезок, соединяющий фокусы, виден:
1) под прямым углом;
2) под углом 60°;
3) под наибольшим углом.
7.32. Составить уравнения семейств эллипсов:
1) с общими фокусами (±с,0);
2) с общими директрисами х = ±d и общим центром в на-
начале координат.
7.33. Составить уравнение эллипса, если:
1) точки FiE,1) и -Рг(—1,1) являются фокусами, а прямая
х = 31/3 — одной из директрис;
2) точка F(—6,2) является одним из фокусов, точка
А B, 2) — концом большой оси, эксцентриситет равен 2/3;
3) оси эллипса параллельны осям координат, точки АD,0)
и .В@,4) принадлежат эллипсу, а точка В находится на рассто-
расстоянии 3V^2 от одного из фокусов и на расстоянии 6 от соответ-
соответствующей директрисы.
7.34. Пусть О — центр эллипса, а, Ь — его полуоси, а А
и В — такие точки эллипса, что прямые О А и ОВ взаимно
перпендикулярны.
1) Доказать, что величина + |2 постоянна для
\UA\ \ОВ\
всех возможных пар точек Аи В.
2) Найти наибольшее и наименьшее значения длины отрез-
отрезка АВ.
§ 7. Геометрические свойства и канонические уравнения 67
Гипербола G.35-7.50)
UET'35- Найти полуоси, эксцентриситет, координаты фоку-
фокусов, составить уравнения директрис и асимптот гиперболы:
X2 V2 Т2 V2
5) ху = 1; 6) ху = -2.
7.36. Дана гипербола ЮОх2 — Збу2 = 1. Определить, лежит
ли точка А на гиперболе, внутри одной из ее ветвей или между
ветвями:
1LA/8,-1/8); 2LA,1); 3LA,7); 4) 4(-1/2,0).
х2
7.37. Вычислить длину фокальной хорды гиперболы
— — = 1, перпендикулярной действительной оси.
7.38. В данной системе координат гипербола имеет кано-
каноническое уравнение. Составить это уравнение, если:
1) расстояние между вершинами равно 10, а расстояние
между фокусами равно 12;
2) длина вещественной оси равна 1, а точка A,3) принад-
принадлежит гиперболе;
3) директрисами гиперболы являются прямые х = ±^5/6,
а точка (—9,4) принадлежит гиперболе;
4) длина мнимой полуоси равна 1, а вершина гиперболы
делит отрезок между фокусами в отношении 4:1;
5) эксцентриситет гиперболы равен 7/5, а расстояние от
вершины до ближайшего фокуса равно 2;
6) точка G, —2\/3), принадлежащая гиперболе, удалена от
левого фокуса на расстояние 4\/7;
7) угол между асимптотами, содержащий фокус, равен 60°,
а расстояние от директрисы до ближайшей вершины равно
|
8) точка (—5/4, 3/2) принадлежит гиперболе, а асимптота-
асимптотами являются прямые у = ±2х;
9) точка (—1, 3) принадлежит гиперболе, а асимптотами
являются прямые у = ±2х.
7.39. Составить каноническое уравнение гиперболы, со-
содержащей точку (—1,3) и имеющей асимптоты у = ±2х
(сравнить с задачей 7.38, 9)).
68 Гл. 3. Кривые второго порядка
7.40. Вычислить эксцентриситет гиперболы, если:
1) ее полуоси равны (равносторонняя гипербола);
2) угол между асимптотами, содержащий фокус, равен 120°;
3) асимптотами гиперболы являются прямые у = ±3х.
7.41. Вычислить эксцентриситет гиперболы, имеющей в
данной системе координат каноническое уравнение, если:
1) расстояния от точки МE, — 4), принадлежащей гипербо-
гиперболе, до директрис относятся как 2:1;
2) сумма расстояний от точки N(—5, —4) до асимптот ги-
гиперболы равна 20/3.
7.42. Выразить эксцентриситет гиперболы через эксцен-
эксцентриситет е эллипса, имеющего с этой гиперболой общие фо-
фокальные хорды, перпендикулярные действительной оси.
7.43. Составить уравнение гиперболы, которая имеет об-
общие фокальные хорды, перпендикулярные действительной
х2 у2
оси, с эллипсом — -| = 1.
5 о
7.44. Найти множество точек, являющихся серединами
хорд гиперболы х2 — 2у2 = 1, параллельных прямой 2х — у = 0.
7.45. Через точку АD,4) провести хорду гиперболы
х2 у2
— = 1, делящуюся в этой точке пополам.
2
7.46. На гиперболе х2 — — = 1 найти точки, из которых
отрезок, соединяющий фокусы, виден:
1) под прямым углом;
2) под углом 60°;
3) под наибольшим углом.
7.47. Составить уравнения семейств гипербол:
1) с общими фокусами (±с, 0);
2) с общими директрисами х = ±d и общим центром в на-
начале координат;
3) с общими асимптотами у = ±kx.
7.48. Составить уравнение гиперболы, если:
1) точки FiC, —2) и F2E, —2) являются фокусами, а пря-
прямая х = 7/2 — одной из директрис;
2) точка F(l,3) является одним из фокусов, точка
А (—4, 3) — вершиной, а эксцентриситет равен 3/2;
3) точка F @, 0) является одним из фокусов, а прямые
2 = 0 — асимптотами.
§ 7. Геометрические свойства и канонические уравнения 69
7.49. Доказать, что для данной гиперболы следующие вели-
величины постоянны, и выразить их через полуоси а, Ъ гиперболы:
1) произведение расстояний от любой точки гиперболы до
ее асимптот;
2) площадь параллелограмма, одна из вершин которого ле-
лежит на гиперболе, а две стороны лежат на асимптотах.
7.50. Доказать, что вершины гиперболы и четыре точ-
точки пересечения ее директрис с асимптотами лежат на одной
окружности. Выразить радиус этой окружности через длину
действительной полуоси.
Парабола G.51-7.64)
7.51. Найти координаты фокуса и составить уравнение ди-
директрисы параболы:
1) у2 = 2рх, р > 0; 2) у2 = -рх, р > 0; 3) у2 = 6х;
4)у2 = -3х; Ъ)у = х2; 6)у = -\/Ъх2.
7.52. Как расположены по отношению к параболе у2 — Юж
следующие точки:
1) E, -7); 2) (8, 9); 3) E/2, -5)?
7.53. Вычислить длину фокальной хорды параболы у2 =
= х/5, перпендикулярной оси параболы.
7.54. В данной системе координат парабола имеет канони-
каноническое уравнение. Составить это уравнение, если:
1) точка E,-5) принадлежит параболе;
, 2) расстояние от фокуса до директрисы равно 12;
3) длина хорды, проходящей через фокус под углом 45° к
оси параболы, равна 18.
7.55. Найти уравнение множества точек, являющихся се-
серединами хорд параболы у2 = Зх, параллельных прямой
7.56. Доказать, что середины хорд параболы, параллель-
параллельных некоторой прямой, лежат на прямой, параллельной оси
параболы.
7.57. Через точку АE,3) провести хорду параболы у2 =
= 6х, делящуюся в этой точке пополам.
•. 7.58. На параболе у2 = 10х найти точку М такую, что:
1) прямая, проходящая через точку М и фокус параболы,
образует с осью Ох угол 60°;
70 Гл. 3. Кривые второго порядка
2) площадь треугольника с вершинами в искомой точке М,
фокусе параболы и точке пересечения оси параболы с дирек-
директрисой равна 5;
3) расстояние от точки М до вершины параболы равно рас-
расстоянию от М до фокуса;
4) расстояния от точки М до вершины параболы и до фо-
фокуса параболы относятся как 8 : 7.
7.59. Найти множество значений, которые может прини-
принимать отношение расстояния от точки параболы до ее вершины
к расстоянию от той же точки до фокуса.
7.60. Составить уравнение параболы с параметром р, вер-
вершина которой имеет координаты (а, Ь), а направление оси сов-
совпадает:
1) с положительным направлением оси Ох;
2) с отрицательным направлением оси Ох;
3) с положительным направлением оси Оу;
4) с отрицательным направлением оси Оу.
7.61. Составить уравнения семейства парабол:
1) имеющих общий фокус @,0) и симметричных относи-
относительно оси Ох;
2) имеющих общую директрису х = 0 и симметричных от-
относительно оси Ох.
7.62. Составить уравнение параболы, если:
1) точка FG,0) является фокусом, а прямая х = 1 — ди-
директрисой;
2) точка FG,0) является фокусом, а прямая х = 8 — ди-
директрисой;
3) точка F@,1) является фокусом, парабола симметрична
относительно оси Оу и касается оси Ох;
4) ось параболы параллельна оси Оу, фокус лежит на оси
Ох, парабола проходит через начало координат и высекает на
оси Ох отрезок длины 6.
7.63. Найти наибольший радиус окружности, лежащей внут-
внутри параболы у2 = 2рх и касающейся этой параболы в ее вершине.
7.64. Две параболы, оси которых взаимно перпендикуляр-
перпендикулярны, имеют четыре точки пересечения. Доказать, что эти четыре
точки лежат на одной окружности.
7.65. Кривые у = х5 — 5их = 3 — у2 пересекаются в четы-
четырех точках, лежащих на одной окружности. Найти координаты
центра этой окружности.
§ 8. Касательные к кривым второго порядка 71
§ 8. Касательные к кривым второго порядка
.8.1. Составить уравнение касательной к кривой:
1} }2+T = l
2 2
2) ie + i2 = l
' 2 2
3) у-|^ = 1вточке(-3, 0);
X
,2
У2
4) 32 ~ у = Х в точке F> 1
и. 5) ху = 8 в точке D, 2);
6) у2 = 6ж в точке C/2, 3).
8.2. Составить уравнение касательной к кривой:
(а-аJ (у-/?J. 2 2
1J fl2 + —^2— - 1,
(х-аJ (у-
3) ху = к;
4) (у — /ЗJ = 2р(ж — а) в точке (жо, уо), принадлежащей
данной кривой.
8.3. При каком необходимом и достаточном условии пря-
прямая Ах + By + С = 0 касается:
х2 у2 х2 у2
1) эллипса -=¦ + тт = 1; 2) гиперболы -=• — тт = 1;
а1 о1 а1 о*
х2 у2
; 3) гиперболы — — tj = — 1; 4) гиперболы жу = к;
5) параболы у2 = 2рх?
1 8.4. При каком необходимом и достаточном условии век-
вектор 1(сс,/3) является направляющим вектором некоторой каса-
х2 у2
тельной к гиперболе -г- —- = 1?
аг Ь2
8.5. Проверить, что данная прямая касается данной кри-
кривой, и найти координаты точки касания:
3) Зж - 16у + 24 = 0, жу = -3;
lM 4) ж 2
8.6. Составить уравнения касательных к эллипсу
30 24
1) параллельных прямой 2ж — у — 1 = 0;
72 Гл. 3. Кривые второго порядка
2) перпендикулярных этой же прямой;
3) образующих угол 45° с прямой х + Зу + 3 = 0.
8.7. Составить уравнения касательных к гиперболе
х2 у2
2- = 1, параллельных прямой:
1Lж = 3у; 2)ж = 1; 3)ж-2у + 1 = 0.
8.8. Составить уравнение касательной к параболе у2 =
= 10ж, перпендикулярной прямой:
1Jж + у-4 = 0; 2)у = 3; 3) х = 0.
8.9. Какие точки на данной кривой второго порядка уда-
удалены на наименьшее расстояние от данной прямой? Найти это
расстояние.
2) ^z2 + §V2 = l,
3) 6ж2 - by1 = 19, у
4) 6ж2 - by2 = 19, 12ж + by = 0;
5) у2 = 64ж, 4ж - Зу - 76 = 0.
8.10. Дан эллипс ж2 + 1у2 = 1. Найти расстояния:
1) от фокусов эллипса до касательной к нему в точке
АA/3, 2/3);
2) между касательными к эллипсу, параллельными прямой
х + у = 1.
8.11. Составить уравнение эллипса, оси которого совпада-,
ют с осями координат, если он:
1) содержит точку Л(—3,2) и касается прямой 4х — 6у —
-25 = 0;
2) касается прямых х + у — 5 = 0иж + 4у — 10 = 0.
8.12. Составить уравнение гиперболы, оси которой совпа-
совпадают с осями координат, если она:
1) содержит точку АD, — 2\/2) и касается прямой Зх + у +
+ 8 = 0;
2) касается прямых х — 1 и Ъх — 2у + 3 = 0.
8.13. Составить уравнение гиперболы с асимптотами
л/Зх ± у = 0, касающейся прямой 2х — у — 3 = 0.
8.14. Составить уравнение параболы:
1) симметричной относительно оси Оу и касающейся пря-
прямых у + 2х = 0, 8х - 2у - 3 = 0;
§ 8. Касательные к кривым второго порядка 73
2) заданной каноническим уравнением и касающейся пря-
прямой х + у + 1 = 0.
х2 у2
8.15. Составить уравнения нормалей к эллипсу 1- — =
• 1, образующих угол 45° с его большой осью.
8.16. Составить уравнение касательной к параболе у2 =
- -8ж, отрезок которой между точкой касания и директрисой
делится осью Оу пополам.
8.17. Пусть О — вершина параболы, М — произвольная
tl(. точка, h и bi — касательные к параболе в точках О и М,
N — точка пересечения прямых 1\ и fe, P — проекция отрезка
ОМ на li. Доказать, что точка ЛГ делит отрезок ОР пополам.
Указать вытекающий отсюда способ построения касательной к
параболе.
8.18. Доказать, что:
1) отрезок касательной к гиперболе, заключенный между
се асимптотами, делится точкой касания пополам;
2) все треугольники, образованные асимптотами гипербо-
гиперболы и произвольной касательной к ней, имеют одну и ту же
площадь; выразить эту площадь через полуоси гиперболы.
8.19. Доказать, что хорда, соединяющая точки касания эл-
эллипса (гиперболы) двумя параллельными прямыми, проходит
через центр кривой.
8.20. Доказать, что середины хорд эллипса (гиперболы),
параллельных некоторой прямой 1\, лежат на одной прямой
I}. При этом касательные к кривой в точках ее пересечения с
прямой k параллельны прямой 1\.
8.21. Составить уравнения сторон квадрата, описанного
*2 ^ У2 1
около эллипса — + — = 1.
5 4
8.22. Составить уравнения сторон правильного треуголь-
X1 , 2 1
ника, описанного около эллипса — +у = 1, если:
У
1) одна из вершин треугольника лежит на оси Ох;
2) одна из вершин треугольника лежит на оси Оу.
8.23. При каком необходимом и достаточном условии через
точку Мо(жо,уо) можно провести две касательные:
'*М х2 у2 X2 у2
# 1) к эллипсу — + — = 1; 2) к гиперболе —- - ^- = 1;
"' ао а о
3) к параболе у2 = 2рх?
74 Гл. 3. Кривые второго порядка ч с
8.24. Составить уравнения касательных к элливду
х2 у2
— + — = 1, проходящих через точку:
1) (-6, 0); 2) B,7; у/1)- 3) (_4,-|>/2); 4) A, 2).
8.25. Составить уравнения касательных к гиперболе
х2
2/2 = 1, проходящих через точку:
4 1) (-2, 2); 2) A,6; 0); 3) D, >/3); 4) D, 1); *
5) (8, 4); 6) @,0). '3;
8.26. Составить уравнения касательных к параболе
у2 = 16ж, проходящих через точку:
1) A, -2); 2) A, 4); 3) A, 5).
Если этих касательных две, то вычислить площадь треуголь-
треугольника, образованного касательными и директрисой.
8.27. Через точку Мо(жо)Уо) проведены две касательные
к кривой второго порядка. Доказать, что прямая, проходящая
через точки касания, задается уравнением:
. хх0 ууо , х2 у2 Л
1) —о- + i^- = 1 Для эллипса — + ^ = 1;
а1 Ь2 а2 Ъ2
. хх0 уу0 х2 у2
2) -JT ~ "jT = 1 W151 гиперболы - - - = 1;
3) УУо = р(х + Хо) для параболы у2 = 2рх.
8.28. Составить уравнения общих касательных к двум
кривым второго порядка:
3) y
х2 у2 х2 у2 "
6)-6- + Т = 1и25-Тб=1;
О
7) ^ = -х и у^ = х - 1.
8.29. Доказать, что:
1) нормаль к эллипсу в произвольной его точке делит по-
пополам угол, образованный лучами, выходящими из этой точки
и проходящими через фокусы эллипса; : ,.ч.'!
§ 9. Общая теория кривых второго порядка 75
2) касательная к гиперболе в произвольной ее точке делит
пополам угол, образованный лучами, выходящими из этой точ-
точки и проходящими через фокусы гиперболы;
3) нормаль к параболе в произвольной ее точке делит по-
пополам угол, образованный лучом, выходящим из этой точки
и проходящим через фокус параболы, и лучом, выходящим из
этой точки, лежащим внутри параболы и параллельным ее оси.
8.30. Доказать, что:
1) касательные в точках пересечения эллипса и гиперболы,
имеющих общие фокусы, взаимно перпендикулярны;
2) касательные в точках пересечения двух парабол с об-
общим фокусом и противоположно направленными осями взаим-
взаимно перпендикулярны.
8.31. Из произвольной точки директрисы кривой второго
порядка проведены две касательные к этой кривой. Доказать,
что прямая, соединяющая точки касания, проходит через фо-
фокус, соответствующий этой директрисе.
8.32. Составить уравнения касательных к кривой
бжу + 8у2 - 12ж - 26у + 11 = 0:
; 1) параллельных прямой 6ж + 17у — 4 = 0;
2) перпендикулярных прямой 41ж — 24у + 3 = 0;
3) параллельных прямой у — 2.
8.33. Составить уравнения касательных к кривой 5ж2 +
+ бжу + 5у2 — 16ж — 16у — 16 = 0, проходящих через точку:
1) C,3); 2) @,-0,8); 3) @,1).
§ 9. Общая теория кривых второго порядка
Приведение уравнения кривой второго порядка к
каноническому виду (9.1-9.10)
9.1. Определить тип кривой второго порядка, составить ее
каноническое уравнение и найти каноническую систему коор-
координат:
1) 6ж2 + 6у2 + 6ж - 2у - 1 = 0;
2) 9ж2 - 16у2 - 6ж + 8у - 144 = 0; .
3) 9ж2 + 4у2 + 6ж-4у-2 = 0;
. 4) 12ж2 - 12ж - 32у - 29 = 0;
5) 9у2-7у-16 = 0;
а- 6) 2ж2 + у2 + 4ж-6у + 11 = 0;
г , 7) 2ж2+у2 + 4ж-6у + 12 = 0; •-;...
76 Гл. 3. Кривые второго порядка
8) 4ж2 - 25у2 -2х- 75у + 44 = 0;
9) 25ж2 - ЗОж + 9 = 0;
10) АЪх2 - Збу2 - 90ж - 24у + 41 = 0.
9.2. При каком необходимом и достаточном условии урав-
уравнение Ах2 + By2 + 2Сх + 2Dy + E = 0 задает:
1) эллипс; 2) гиперболу?
9.3. Определить тип кривой второго порядка, составить ее
каноническое уравнение и найти каноническую систему коор-
координат:
1) 2х2 + бжу + Юу2 - 121 = 0;
2) 9жу + 4 = 0;
3) 2ж2-2^жу + 9 = 0;
4) 18ж2 + 24жу + Ну2 -3 = 0;
5) х2 - 2ху + у2 + 2х + 2у = 0;
6) 9ж2-6жу + у2-10 = 0;
7) 81x2-36xj/ + 4j/2 = 0;
8) Зж2 - 4л/Ъху + Ау2 = 0.
9.4. Определить тип кривой второго порядка, составить ее
каноническое уравнение и найти каноническую систему коор-
координат:
1) 2х2 - Аху + Ъу2 +8х-2у + 9 = 0;
2) (р) Аху - Зу2 - Ах+ 10у - 6 = 0;
3) 9ж2 - 2Аху + 16у2 - 8ж + 19у 4- 4 = 0;
4) х2 - ху + у2 + х + у = 0;
5) ху + 2х + у = 0;
6) х2 - 2ху + у2- Юж - 6у + 25 = 0;
7) Ъх2 + 12ху + Щ2 - 6ж + 4у - 1 = 0;
8) 8х2 + ЗАху + 8у2 + 18ж - 18у -17 = 0;
9) 25ж2 - ЗОжу + 9у2 + 68ж + 19 = 0;
10) 8ж2+6жу + 6ж + Зу + 1 = 0;
11) 4ж2 + 12жу + 9у2 - 8ж - 12у - 5 = 0;
12) 225ж2 - 240жу + 64у2 + ЗОж - 16у +1 = 0;
13) х2 + 2ху + у2 - Ъх - Ъу + А = 0;
14) Ъх2 - бжу + 5у2 + 2х- 14у +13 = 0;
15) х2 - 2ху + у2 + 8ж - 8у + 22 = 0;
16) 15ж2 + 24жу + 15у2 + ЗОж - 24у - 20 = 0;
17) 15ж2 - 16жу - 15у2 - 62ж - 44у - 13 = 0.
9.5. Доказать, что кривая второго порядка, заданная урав-
уравнением 34ж2 + 24жу + 41у2 — 44ж + 58у + 1 = 0, является эллип-
§ 9. Общая теория кривых второго порядка 77
сом. Найти длины полуосей и эксцентриситет этого эллипса,
координаты центра и фокусов, составить уравнения осей и ди-
директрис.
9.6. Доказать, что кривая второго порядка, заданная урав-
уравнением 7х2 + 48жу — 7у2 — 62ж — 34у + 98 = 0, является гипербо-
гиперболой. Найти длины полуосей и эксцентриситет этой гиперболы,
координаты центра и фокусов, составить уравнения осей, ди-
директрис и асимптот.
9.7. Доказать, что кривая второго порядка, заданная урав-
уравнением х2 + 2ху + у2 + х = 0, является параболой. Найти пара-
параметр этой параболы, координаты вершины и фокуса, составить
уравнения оси и директрисы.
9.8. Пусть М(х,у) = Ах2 + 2Вху + Су2 + 2Dx + 2Еу + F —
многочлен второй степени от координат (х,у) точки в прямо-
прямоугольной системе координат. Обозначим
А В D
6 =
А В
В С D E F
ВСЕ
Доказать, что величины S, 5, А не изменяются при переходе к
другой прямоугольной системе координат (т.е. являются орто-
ортогональными инвариантами многочлена М(х,у)).
9.9. Кривая второго порядка в прямоугольной системе ко-
координат задана уравнением Ах2 + 2Вху + Су2 + 2Dx + 2Еу +
4- F = 0. Доказать следующие утверждения (обозначения см.
в задаче 9.8):
1) Корни Ai и Аг характеристического уравнения А2 — SX +
\- 6 — 0 вещественны, и хоть один из них отличен от нуля.
2) Кривая является гиперболой тогда и только тогда, когда
6 < 0 и А ф 0. Выразить полуоси гиперболы через 6, A, Ai, A2.
3) Кривая является эллипсом тогда и только тогда, когда
6 > 0, а 5А < 0. Выразить полуоси эллипса через 5, A, Ai, A2.
4) Кривая является параболой тогда и только тогда, когда
6 = 0, а А ф 0. Выразить параметр параболы через S и А.
9.10. Применяя ортогональные инварианты (задачи 9.8
и 9.9), определить тип и составить каноническое уравнение
кривой:
1) х2 + Зху-Зу2 + Ъх-7у + 1 = 0]
2) Ъх2 + 2ху + Ъу2 - 12ж + 20у + 32 = 0;
3) х2 - Аху + Ау2 + 2х +13 = 0.
78 Гл. 3. Кривые второго порядка
Кривые второго порядка в общей декартовой
системе координат (9.11-9.22)
9.11. Доказать, что:
1) кривая, заданная уравнением х2 + у2 = 1, является эл-
эллипсом;
2) кривая, заданная уравнением х2 — у2 = 1, является ги-
гиперболой;
3) кривая, заданная уравнением у2 = х, является пара-
параболой;
4) уравнение ж2 — у2 = 0 задает пару пересекающихся
прямых;
5) уравнение х2 + у2 = 0 задает одну точку;
6) уравнение у2 — 1 = 0 задает пару параллельных прямых;
7) уравнение у2 — 0 задает одну прямую (пару совпавших
прямых);
8) кривая, заданная уравнением ху=1, является гипер-
гиперболой;
9) кривая, заданная уравнением у = х -\—, является гипер-
х
болой.
9.12. Доказать, что кривая, заданная в общей декарто-
декартовой системе координат уравнением Ах2 + 2Вху + Су2 + 2Dx +
+2Ey + F = 0, является гиперболой тогда и только тогда, ко-
когда 5 < 0 и А ф 0, эллипсом тогда и только тогда, когда 5 > 0
и SA < 0, параболой тогда и только тогда, когда 6 = 0 и А ф 0.
9.13. Определить тип кривой второго порядка, заданной
уравнением:
1) (Зж-4уJ-5(ж + 2у-1J = 1;
2) A2ж - 17у - бJ + A7у + Ъх + IJ = 1;
3) (х-у-3)(х
4) Dж + Зу-1J +
5) 17х2-2ху + у2-Зх-у-3 = 0;
6) 4ж2 + 28ху + 49у2 - Зх - 15у + 2 = 0;
7) 4ж2 - 12ху + 8у2 - 15ж + 25у +14 = 0;
8) 2ж2 + 2жу + 5г/2
9) 2х2-5ху-Зу2+9х у ;
10) х2 + 10ху + 2Ъу2 + 2х + 10у - 3 = 0;
11) 5х2 - 16жу + 13у2 + 6ж - Юу + 2 = 0;
12) х2 - Аху + 4у2 + 4ж - 8у + 5 = 0;
13) ж2- 2
I
§ 9. Общая теория кривых второго порядка 79
9.14. Составить уравнение и определить тип кривой вто-
второго порядка, проходящей через 5 точек, заданных своими ко-
координатами:
, 1) (-1, -1), A, 0), @, 1), C, 2), B, 3);
"\'; 2) A, 1), A, 0), @, 1), C, 2), B, 3);
"" 3) (-1,0), A,0), @,1), C,2), B,3);
4) (-3, 0), A, 0), @, 1), C, 2), B, 3);
г 5) (-1, 1), @, 1), B, 3), (-2, -1), C, 4);
<•¦ 6) A, 0), @, 1), A/4, 1/4), D/9, 1/9), A/9, 4/9).
, , 9.15. Исследовать зависимость типа кривой второго по-
порока от параметра:
) 2 А 2
)
.,. 2) \(х2+у2)-10ху + х у ;
., 3) хй -2ху + у2(А-1) + 2А(ж-у + 1) = 0;
4) Аж2 - 2ху + 2у2-2х + 2у-1 = 0.
9.16. Какие типы кривых второго порядка могут быть за-
заданы уравнением:
2
2) (Агх + В1У + dJ + (А2х + В2у + С2J =
3) f f
4)
5)
9.17. Составить уравнения асимптот гиперболы
(Предполагается, что А\В2 — А2В\ ф 0).
1) (Агх + Biy + CiJ - (А2х + В2у + С2J = 1;
2) (Aix + Biy + Ci)(A2x + B2y + C2) = l.
9.18. Не используя уравнений F) из введения к настоя-
настоящей главе, доказать, что начало координат является центром
симметрии кривой второго порядка тогда и только тогда, ко-
когда уравнение кривой не содержит членов с первыми степеня-
степенями переменных хну. Опираясь на это утверждение, вывести
уравнения F) для координат центра кривой второго порядка.
9.19. Проверить, что данная кривая второго порядка яв-
является центральной. Найти координаты центра и избавиться
в уравнении от членов первой степени при помощи переноса
начала координат в центр:
1) х2 - 8ху + Пу2 + 8ж - 38у + 24 = 0;
2) Ъх2 + ху - Ах - у - 1 = 0;
3) 8х2 - 2Аху + 16i/2 + Зж - 7у - 2 = 0.
80 Гл. 3. Кривые второго порядка
9.20. Доказать, что кривая Ах2 + 2Вху + Су2 + 2Dx +
+ 2Ey + F — 0 имеет единственный центр симметрии тогда и
только тогда, когда 6^0.
9.21. Доказать, что множество центров симметрии кривой
второго порядка либо пусто, либо состоит из одной точки, либо
является прямой линией.
9.22. 1) Доказать, что множество центров симметрии ал-
алгебраической кривой либо пусто, либо состоит из одной точки,
либо является прямой линией.
2) Доказать, что множество центров симметрии произво-
произвольного множества точек на плоскости либо пусто, либо состоит
из одной точки, либо бесконечно.
3) Привести пример непрерывной кривой, множество цен-
центров симметрии которой бесконечно, но не является прямой
линией.
Л'.
tn
Г л а в а 4 *¦„.
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
<*¦
§ 10. Уравнения множеств в пространстве и
элементарная теория поверхностей второго порядка
В этом параграфе использованы следующие основные понятия:
уравнение множества, однородный многочлен, алгебраическая по-
поверхность, порядок алгебраической поверхности, параметрические
уравнения поверхности, поверхность вращения, конус, прямой кру-
круговой конус, цилиндр, прямой круговой цилиндр, однополостный
и двуполостпый гиперболоиды, эллиптический и гиперболический
параболоиды, пересечение поверхностей, сечение поверхности плос-
плоскостью, прямолинейная образующая поверхности, проекция неко-
некоторого множества на плоскость, образующие и направляющие ци-
цилиндра и конуса, вершины эллипсоида, гиперболоида, параболоида и
конуса, ось и полуось эллипсоида и гиперболоида, каноническое урав-
уравнение и тип поверхности второго порядка.
Всюду предполагается, что система координат декартова прямо-
прямоугольная, а проекции, если не оговорено противное, ортогональные.
Для каждой поверхности второго порядка существует декартова
прямоугольная система координат, в которой эта поверхность име-
имеет каноническое уравнение. Всего имеется 17 типов поверхностей
второго порядка. Каждый тип поверхностей характеризуется своей
формой канонического уравнения. Все типы поверхностей второго
порядка и соответствующие уравнения перечислены во введении к
§ 11. Здесь приведем канонические уравнения и изображения девяти
основных типов:
эллипсоид „ , ,
однополостный гиперболоид
двуполостный гиперболоид
Т2 V2 Z2
82 Гл. 4- Поверхности второго порядка
конус
s+fJ-^=° (рис-7);
эллиптический параболоид
J + fJ=2z (рис.8); '«,
гиперболический параболоид
X2
--^=2z (рис.9); B)
эллиптический цилиндр
X2 , У2
^4-^ = 1 (рис.10);
гиперболический цилиндр
i-v2=l (рис-и);
параболический цилиндр
х2
-^ = 2z (рис. 12).
При а = Ь конус и эллиптический цилиндр называют прямым круго-
круговым конусом и прямым круговым цилиндром.
Приведем уравнения семейств прямолинейных образующих
двух важных типов поверхностей второго порядка.
Два семейства прямолинейных образующих однополостного ги-
гиперболоида A) могут быть описаны при помощи следующих систем
уравнений:
где а, C — произвольные числа, такие, что а2 4-/?2 т^О. Два семей-
семейства прямолинейных образующих гиперболического параболоида B)
описываются системами уравнений
¦(И)->- f •(;¦!)-'¦
"(И)-* "ИНН-"
где а, Р — произвольные параметры, такие, что а2 4- /?2 ф 0.
Алгебраическое уравнение вида Ф(х,у) = 0 (не содержащее пе-
переменной z) определяет цилиндрическую поверхность. Прямолиней-
Прямолинейные образующие этого цилиндра параллельны оси Oz: они имеют
уравнения х — х0, у = у0, где Ф(х0,у0) = 0.
§10. Уравнении множеств и элементарная теория
ei
Рис. 4
Аез
Рис. 5
Рис. 6
Рис. 7
Рис. 9
84
Гл. 4- Поверхности второго Шрядка
Рис. 10
Рис. 11 Рис. 12
Уравнение вида Ф(х2 +y2,z) =0х) определяет поверхность вра-
вращения (<S). Сечение С этой поверхности плоскостью Oxz, имеющее
на плоскости Oxz уравнение Ф(х2,г) = 0, симметрично относитель-
относительно оси Oz. Каждая «половинка» кривой ?, вращаясь вокруг оси Oz,
образует поверхность <S.
Пусть две поверхности Т и Q определяются алгебраическими
уравнениями F(x,y,z) =0 и G{x,y,z) =0 соответственно. Тогда мно-
множество 7i = !FDQ определяется системой уравнений
F(x,y,z) =
G{x,y,z)=0.
Уравнение, определяющее множество Л4, следует из уравнения, оп-
определяющего множество Л/", если Л/" С /А. Уравнение, определяющее
поверхность Л4, является следствием системы уравнений, определя-
определяющих поверхности Т и Q, тогда и только тогда, когда !FnQ СМ..
1) Оно может быть получено из алгебраического уравнения Ф(и,и) = 0
заменой и = х2 + у2, v = z. При этом, вообще говоря, можно не исключать
случая, когда уравнение не имеет вещественных решений. В этом случае
говорят о «мнимой» поверхности.
§ 10. Уравнения множеств и элементарная теория 85
п Изображение поверхности второго порядка.
Типы поверхностей второго порядка A0.1—10.17)
10.1. 1) Что представляет собой алгебраическая поверх-
поверхность первого порядка?
2) Привести пример алгебраической поверхности третьего
порядка и изобразить ее в декартовой прямоугольной системе
координат.
10.2. Может ли алгебраическая поверхность второго по-
порядка представлять собой прямую? Плоскость? Пустое множе-
множество? Привести примеры.
10.3. Семейство поверхностей задано в прямоугольной си-
системе координат уравнением, содержащим произвольный пара-
параметр А. Определить тип поверхности при всевозможных А:
l)x2 + y2 + z2 = X; 2) Xx22 2
¦ 3) \x2 + y2 + z2 = \; A)x
5)x2-y2-z2 = \; 6)x2 + \{y2 + z
2 =
+ z2) = X; 8)x2+y2 =
z; 10) A(z4y2) = z;
11) x2 + Xy2 = Xz; 12) x2 + Xy2 = Xz + l]
13)x2+y2 = X; U)x2-y2 = X.
10.4. 1) Указать такие типы поверхностей второго поряд-
порядка, которые не содержат ни одной поверхности вращения.
2) Перечислить типы поверхностей второго порядка, кото-
которым принадлежат какие-нибудь поверхности вращения.
10.5. Написать уравнение сферы:
1) с центром в точке СA, 1, 1) и радиусом -\/3;
2) с центром в точке СA, 2, 3) и радиусом 1.
10.6. Найти координаты центра С и радиус R сферы:
1) х2 + у2 + z2 - Ах - 4у - Az = 0;
2) 2х2 + 2у2 + 2z2 + Ах + 8у + Viz + 3 = 0.
10.7. Найти координаты центра поверхности, ее полуоси
и уравнения плоскостей симметрии, изобразить поверхность в
исходной системе координат:
1) х2 + 2у2 + 3z2 + 2х + Ay + 6z = 0;
2) Зх2 + 2у2 + z2 + Qx + Ay + 2z - 6 = 0.
10.8. Найти координаты центра поверхности, ее вершин,
уравнения оси симметрии и плоскостей симметрии, изобразить
поверхность в исходной системе координат:
Гл. 4- Поверхности второго порядка
1) х2 -2у2 -3z2 + 6х + 4у + 6z = 0;
2) 2x2 + 3y2-4z2+4x-8z + 10 = 0.
10.9. Определить тип поверхности:
1) 2х2 + у2- 3z2 + 4x-4y = 0;
2) 2х2 + у2 - 3z2 - Ах + 4у + 6 = 0;
3) 222
4)
5)
6)
10.10. Определить тип поверхности, изобразить поверх-
поверхность в исходной системе координат:
1)ху = 0; 2)ху = 1; 3)ху = -1;
4) 2ху + z = 0; 5) 2ху - z = 0.
10.11. Найти ось вращения поверхности, изобразить по-
поверхность х2 + z2 + а; = 0.
10.12. Определить тип поверхности, найти ось вращения,
координаты вершин, изобразить поверхность:
1) x2 + z2+2y = l; 2)z2 = 2xy.
10.13. Найти координаты центра поверхности, уравнения
оси вращения и горловой окружности, определить радиус гор-
горловой окружности, изобразить поверхность х2 + 2yz = 1.
10.14. Найти точки пересечения поверхности x2 + y2 = z
и прямой:
1) x = y = t, z = 4t; 2)x = y = z + l;
„ч х-1 _ у + 1 _ z + 6
6} 1 ~ 1 ~ 8 -
10.15. Сколько общих точек могут иметь прямая и поверх-
поверхность второго порядка? Привести примеры.
10.16. Определить, лежит ли точка МA,1,1) внутри или
вне эллипсоида х2 + 2у2 + 3z2 — 4.
10.17. Ось Oz направлена вверх. Определить, лежит ли
точка МA,1,1) выше или ниже параболоида х2 + 2у2 = 2z.
Поверхности вращения, цилиндры и конусы
A0.18-10.45)
10.18. Привести примеры поверхностей вращения, кото-
которые являются алгебраическими поверхностями порядка 2, 3, 4.
10.19. Назвать типы и выписать канонические уравнения
цилиндрических поверхностей второго порядка.
§ 10. Уравнения множеств и элементарная теория 87
10.20. Привести примеры цилиндрических поверхностей, ко-
которые являются алгебраическими поверхностями порядка 3, 4.
10.21. Привести пример цилиндрической поверхности, не
являющейся алгебраической.
10.22. Привести примеры цилиндров и конусов, не являю-
являющихся поверхностями вращения.
10.23. Доказать, что всякое уравнение вида F(x,y,z) — О,
где F — однородный многочлен, определяет конус с вершиной
в начале координат.
10.24. Привести пример конической поверхности, не явля-
являющейся алгебраической.
10.25. Можно ли рассматривать плоскость как частный
случай конической поверхности? Как частный случай цилин-
цилиндра? Как поверхность вращения?
10.26. Составить векторное уравнение прямого кругового
цилиндра радиуса R, имеющего ось г = го + at.
10.27. Составить векторное уравнение сферы с центром в
точке Мо(го) и радиусом R.
10.28. Составить векторное уравнение прямого кругового
конуса с вершиной в точке Мо(го) и осью г = го + at, зная, что
угол между его образующей и осью равен а.
10.29. Составить векторное уравнение эллипсоида, получа-
получаемого вращением эллипса с фокусами в точках Mi(ri), Мг(г2)
и большой полуосью о вокруг большой оси эллипса.
10.30. Найти уравнение поверхности, получаемой враще-
вращением параболы z2 = х:
1) вокруг оси Oz\ 2) вокруг оси Ох.
10.31. Найти уравнение и определить тип поверхности, по-
получаемой вращением гиперболы х2 — у2 = 2:
1) вокруг оси Ох; 2) вокруг оси Оу.
10.32. Найти уравнение поверхности, получаемой враще-
вращением окружности х2 + у2 — 4х + 3 = 0 вокруг оси Оу.
10.33. Найти уравнения поверхностей, получаемых враще-
вращением гиперболы ху = 1 вокруг асимптот.
10.34. 1) Написать параметрические уравнения поверхно-
поверхности, образованной вращением кривой z = f(x) (x ^ 0) вокруг
ОСИ OZ. r-,:
88 Гл. 4- Поверхности второго порядка
2) Написать параметрические уравнения поверхности, об-
образованной вращением кривой х = ip(t), у = ф(Ь), z = х(?) во-
вокруг оси Oz.
10.35. Доказать, что цилиндрическая поверхность с на-
направляющей, заданной параметрическими уравнениями х =
= (f(t), у = ip(t), z — х(*)> и с образующей, параллельной векто-
вектору а(о1,О2,оз), определяется уравнениями x = <p(u) + a\v,
у = ф(и) + о2и, z = х(и) + a3v.
10.36. Доказать, что конус с направляющей, заданной па-
параметрическими уравнениями х = ip(t), у = ф(Ь), z = %(*)> и с
вершиной в начале координат определяется уравнениями
х = U(p(v), у = wip(v), z = ux(v).
10.37. Найти уравнение прямого кругового цилиндра ра-
радиуса \/2 с осью х= 1 + t, у = 2 + t, z = 3 +1.
10.38. Найти уравнение прямого кругового цилиндра, про-
проходящего через точку МA,1,2) и имеющего ось х = 1 +1,
y = 2 + t, z = 3 + t.
10.39. Найти уравнение прямого кругового конуса с вер-
вершиной в начале координат и направлением оси, определяемым
вектором аA,1,1), зная, что образующие конуса составляют с
его осью угол arccos(l/\/3).
10.40. Найти уравнение и определить тип поверхности, об-
образованной вращением прямой х = l + t, у — z — 3 + t вокруг
оси Oz.
10.41. Найти уравнение и определить тип поверхности,
образованной вращением прямой х — 0, у — z + 1 = 0 вокруг
оси Oz.
10.42. Найти уравнение и определить тип поверхности, об-
образованной вращением прямой х = —t, у = z = It вокруг пря-
прямой х = у = z.
10.43. Найти уравнение конуса с вершиной в точке
МA,1,1), касающегося сферы х2 + у2 + z2 = 2.
10.44. Найти параметрические уравнения цилиндра с об-
образующей, параллельной вектору аA,1, 1), и направляющей,
заданной уравнениями х = — 1 + 2cost, у = — 1 + 2sint, z = 3 —
— 2cosi-2sint.
10.45. Исключив параметры, получить алгебраическое
уравнение поверхности х = и + cos и, у = и + sin и, z = и —
— cos и — sin и. Что это за поверхность?
§ 10. Уравнения множеств и элементарная теория 89
Сечения поверхностей второго порядка A0.46—10.76)
10.46. 1) Сечения поверхности х2 + 2у2 — 3z2 — 1 = 0 плос-
плоскостями ж = 0, ж = 1, ж = 2 спроектированы на плоскость Oyz.
Изобразить проекции.
2) Сечения поверхности х2 + 2у2 — 3z2 = 0 плоскостями х =
= — 1, х = 0, х — 1 спроектированы на плоскость Oyz. Изобра-
Изобразить проекции.
3) Сечения поверхности 2х2 — y2 — 2z плоскостями х = — 1,
х = 0, х = 1 спроектированы на плоскость Oyz. Изобразить
проекции.
4) Сечения поверхности 2х2 — y2 = 2z плоскостями у = — 1,
у — 0, у = 1 спроектированы на плоскость Oxz. Изобразить
проекции.
5) Сечения поверхности 2х2 — y2 = 2z плоскостями z = — 1,
z = 0, z = 1 спроектированы на плоскость Оху. Изобразить
проекции.
10.47. 1) Сечения поверхностей х2 + 2у2 — 3z2 — 1 = 0,х2 +
+ 2у2 - 3z2 = 0, х2 + 2у2 - 3z2 + 1 = 0 плоскостью х = 0 спроек-
спроектированы на плоскость Oyz. Изобразить проекции.
2) Сечения тех же поверхностей плоскостью z = 1 спроек-
спроектированы на плоскость Оху. Изобразить проекции.
10.48. 1) Является ли линия пересечения двух поверхно-
поверхностей второго порядка плоской кривой? Привести примеры.
2) Пусть линия пересечения двух поверхностей второго по-
порядка плоская. Будет ли эта линия алгебраической? Если да,
то какого порядка? Рассмотреть примеры.
10.49. Определить вид линии пересечения поверхностей
х2 + у2 = 2z, х2 + у2 + z2 = 8 и найти ее параметрические урав-
уравнения.
10.50. Доказать, что линия пересечения поверхности вто-
второго порядка с плоскостью есть алгебраическая линия не выше
второго порядка. Привести примеры, когда это линия первого
порядка.
10.51. Пусть Т — поверхность, определяемая алгебраиче-
алгебраическим уравнением F(x,y) = О, С — непустое множество точек,
определяемое уравнениями F(x,y) = 0, z = 0. Доказать утвер-
утверждения:
1) Т — цилиндрическая поверхность с образующей, парал-
параллельной оси Oz, и направляющей ?;
90 Гл. 4- Поверхности второго порядка
2) С есть сечение !F плоскостью Оху;
3) С есть проекция Т на плоскость Оху;
4) С есть проекция любой направляющей цилиндра на
плоскость Оху;
5) С содержит проекцию на плоскость Оху любой кривой,
лежащей на цилиндре Т.
10.52. Найти уравнение проекции линии пересечения по-
поверхностей х2 + 2у2 = 2z, х + 2у + z = 1 на плоскость Оху. Что
представляет собой эта линия?
10.53. Пусть S — сечение параболоида х2 + у2 = 2z плоско-
плоскостью, которая пересекает положительную полуось Oz в един-
единственной точке. Доказать, что проекция S на плоскость Оху
есть окружность.
10.54. Доказать, что линия пересечения поверхностей х2 +
+ у2 = 2z, x + y + z = l есть эллипс, и найти его параметриче-
параметрические уравнения.
10.55. По какой линии пересекаются параболоид х2 — у2 =
— 2z и плоскость х + у + z = 1?
10.56. Найти координаты центра и радиус окружности
х2 + у2 + z2 - Ylx + Ay - 6z + 24 = 0, 2х + 2у + z + 1 = 0.
10.57. Составить параметрические уравнения конуса с
вершиной в начале координат и направляющей, определенной
уравнениями х2 + у2 = 2z, х + у + z = 1.
10.58. Найти уравнение цилиндра с образующей, парал-
параллельной оси Oz, и направляющей — окружностью х2-\-у2-\-
+ z2 = 3,z = l.
10.59. Образующая цилиндра параллельна оси Oz, его на-
направляющая — окружность х2 + у2 = 2z, х2 + у2 + z2 — 8. Най-
Найти уравнение цилиндра.
10.60. Образующие цилиндра параллельны оси Oz, его на-
направляющая — эллипс х2 + у2 = 2z, х + у + z = 1. Доказать, что
это — прямой круговой цилиндр, написать его уравнение, най-
найти ось и радиус.
10.61. Образующие цилиндра параллельны вектору
а A,1,1), его направляющая — окружность х2 + у2 = 2z,
х2 -\-у2 + z2 = 8. Написать уравнение цилиндра.
10.62. Найти уравнение конуса с вершиной в точке 0@,0,0)
и направляющей — окружностью х2 + у2 + z2 = 1, х + у + z = I.
§ 10. Уравнения множеств и элементарная теория 91
10.63. Найти уравнение эллипсоида, плоскости симметрии
которого совпадают с плоскостями координат, содержащего
точку МC,1,1) и окружность х2 + у2 + z2 = 9, х — z = 0.
10.64. Доказать, что центры плоских сечений эллиптиче-
эллиптического цилиндра лежат на его оси.
10.65. Найти центр сечения эллипсоида х2 + 2у2 + Az2 = 40
плоскостью:
1) x + y + 2z = 5; 2) x + y + z = 7.
10.66 (р). Найти центр сечения гиперболоида х2 + 2у2 —
— 4z2 = —4 плоскостью х + у + 2z = 2.
10.67. Пусть МЬE,7,20) — точка плоскости, а р(—З/л/ТТ,
l/\/lT, l/\/lT), q(l/\/6, 1/\/б, 2/\/б) — ортонормированный
базис на ней. Написать уравнения линии пересечения этой
плоскости и конуса ж2 + Ъу2 — z2 = 0 во внутренней системе ко-
координат Mq, р, q. Найти координаты центра линии пересечения
и уравнения ее осей симметрии в исходной (пространственной)
системе координат.
10.68 (р). Найти уравнение множества центров сечений эл-
эллипсоида х2 + 2у2 + Zz2 = 4 плоскостями, параллельными
плоскости х + у + z = 1.
10.69. Найти уравнение множества центров сечений гипер-
гиперболоида х2 + у2 — Zz2 = 2 плоскостями, параллельными
плоскости х + у + z = 1.
10.70. Найти уравнение множества центров сечений пара-
параболоида х2 + у2 — 2z плоскостями, параллельными плоскости
x + y + z = 1.
10.71 (р). Найти уравнение плоскости, пересекающей эл-
эллипсоид х2 + 2у2 + 4z2 = 9 по эллипсу, центр которого находит-
находится в точке СC,2,1).
10.72. Найти уравнения проекций линии пересечения эл-
эллипсоида Ъх2 + 4у2 + bz2 = 36 и сферы х2 + у2 + z2 = 9 на коор-
координатные плоскости. Что представляет собой сечение?
10.73. Найти уравнения проекций линии пересечения эл-
эллипсоидов х2 + 2у2 + 3z2 = 4, Зх2 + 5у2 + 6z2 = 10 на коорди-
координатные плоскости. Что представляет собой эта линия?
10.74. Написать уравнения проекций линии пересечения
поверхностей х2 + у2 — z2 = 1, х2 — у2 = 2z на координатные
плоскости. Что представляет собой эта линия? Найти ее па-
параметрические уравнения.
Гл. 4- Поверхности второго порядка
пи 10.75 (р). Найти уравнения проекций линии пересечения
поверхностей 5х2 — Зу2 + 4z2 = 0, х2 — у2 -Ь z1 + 1 = 0 на коорди-
координатные плоскости.
10.76. Доказать, что линия пересечения параболоида ж2 +
+ 2у2 = 4z + 10 и сферы х2 + у2 + z2 = 6 состоит из двух окруж-
окружностей. Найти точки пересечения этих окружностей и их
радиусы.
Прямолинейные образующие поверхностей второго
порядка A0.77-10.88)
10.77. Назвать типы поверхностей второго порядка, име-
имеющих прямолинейные образующие.
10.78. Может ли число прямолинейных образующих, про-
проходящих через одну точку поверхности второго порядка, рав-
равняться 0? 1? 2? 3? ... Может ли оно быть бесконечным? При-
Привести примеры.
10.79. Найти уравнение семейства прямолинейных образу-
образующих цилиндра х2 — у2 = 1.
10.80. Найти уравнение семейства прямолинейных образу-
образующих конуса х2 + у2 — z2 — 0.
10.81. Найти прямолинейные образующие параболоида
4х2 —у2 = 16z, пересекающиеся в точке МB,0,1).
10.82. Найти уравнение плоскости, проходящей через точ-
точки Af A,1,1) и ЛГB,0,2) и пересекающей параболоид х2 — у2 =
= 1z по паре прямых.
10.83. Найти уравнение плоскости, пересекающей гипер-
гиперболоид х2 + Ay2 — 9z2 = 36 по паре прямых, проходящих через
точку МF,-3,2).
10.84. Даны параболоид х2 — у2 = 2z и плоскость х +
+ у + z = 1. Найти уравнение плоскости, параллельной данной
и пересекающей параболоид по паре прямых. Найти уравнения
этих прямых и угол между ними.
10.85. Две прямолинейные образующие гиперболоида вра-
вращения х2 + у2 — z2 = 1 пересекаются в точке, принадлежащей
плоскости z — h. Найти угол между ними:
1) при h — 0; 2) при /г=1; 3) при произвольном h.
10.86. Найти множество точек поверхности S, в которых
пересекаются ее взаимно ортогональные прямолинейные обра-
образующие, если S определена уравнением:
§ 11. Общая теория поверхностей второго порядка 93
_ У2 i. f)\ «2 «.2 — oy. o\ «2 /1-ij2 — о -
10.87. Доказать, что проекции прямолинейных образую-
: параболоида х2 — у2 = 2z на плоскость Oxz касаются па-
юлы х2 = 2z.
10.88. Доказать, что проекции прямолинейных образую-
"цих гиперболоида х2 + у2 — z2 = 1 на плоскость Оху касаются
окружности х2 +у2 — 1.
. § 11. Общая теория поверхностей второго порядка
В этом параграфе используются следующие определения: ма-
махая и большая квадратичные формы поверхности второго порядка,
-nun поверхности второго порядка, инварианты — ранг и сигнатура
лалой и большой квадратичных форм поверхности, центр поверх-
юсти, каноническое уравнение поверхности, канонический базис и
каноническая система координат.
Имеется 17 различных типов поверхностей второго порядка.
<аждый тип характеризуется своим набором инвариантов и своей
тзормой канонического уравнения — простейшей формой, к которой
ложно привести уравнение поверхности с помощью выбора декар-
эвой прямоугольной системы координат. Соответствующие базис и
система координат также называются каноническими.
Мы воспроизводим таблицу типов и канонических уравнений по-
поверхностей второго порядка из [2]. Ранги и модули сигнатур большой
\ малой квадратичных форм поверхности обозначены соответствен-
¦ю через R, Е, г, а.
Изложим некоторые детали алгоритма приведения уравнения
зторого порядка к канонической форме. Этот алгоритм может быть
гаюльзован для упрощения уравнений с любым числом перемен-
*ых. Исходная система координат предполагается прямоугольной.
1ри всех заменах координат также совершается переход к прямо-
/гольным системам координат.
Главным моментом является «уничтожение», с помощью подхо-
подходящей замены базиса, членов уравнения, содержащих произведения
теременных. Остановимся на этом моменте. Уравнение поверхности
2ai2xy + 022У2
2о2зуг-|-
-южно записать в матричной форме
A)
B)
X
У
Z
, А =
Оц
Oi2
Oi3
fll2
0.22
<»23
«13
«23
«33
, а = ||ai
a2
«3
94
Гл. 4- Поверхности второго порядка
Таблица 1
Название
Каноническое уравнение
R
4
4
4
4
3
3
4
4
3
3
3
2
2
3
2
2
1
Е
4
2
0
2
3
1
2
0
1
3
1
0
2
1
0
2
1
г
3
3
3
3
3
3
2
2
2
2
2
2
2
1
1
1
1
«Мнимый эллипсоид» (пу-
(пустое множество)
Эллипсоид
Однополостный гипербо-
гиперболоид
Двуполостный гиперболо-
гиперболоид
«Мнимый конус» (точка)
Конус
Эллиптический параболо-
параболоид
Гиперболический парабо-
параболоид
Эллиптический цилиндр
«Мнимый эллиптический
цилиндр» (пустое мно-
множество)
Гиперболический ци-
цилиндр
Пара пересекающихся
плоскостей
«Пара мнимых пересе-
пересекающихся плоскостей»
(прямая линия)
Параболический цилиндр
Пара параллельных плос-
плоскостей
«Пара мнимых парал-
параллельных плоскостей»
(пустое множество)
«Пара совпавших плоско-
стей» (плоскость)
/З2
a"
r
a2+/32 72
^2 v2 C2
-l
7
a2 S1
»72
а2
1^ + ^
а2 /З2
а2
?2 v2
i L -i_ =0
а2 + /З2
- а2 = 0 . *
§ 11. Общая теория поверхностей второго порядка 95
Формулы замены координат при заданной матрице перехода S также
запишем в матричном виде:
?=??'. C)
После подстановки C) в B) получим уравнение
Константа к при замене координат C) не меняется: к' — к,
а' = aS, A' = STAS. D)
Отыскиваем ортонормированиый базис, в котором матрица А' диа-
гональна. Для этого: 1) вычисляем корни характеристического урав-
уравнения \А — ХЕ\ — 0; 2) для каждого корня составляем систему урав-
уравнений (А — \Е)?, = ои находим ее фундаментальную систему реше-
решений; 3) применяя процесс ортогонализации и нормируя полученные
некторы, находим искомый базис; 4) из базисных столбцов состав-
составляем матрицу перехода 5. В новом базисе матрица А' диагональна,
па ее главной диагонали расположены корни характеристического
уравнения, взятые с их кратностями в том же порядке, что и соот-
соответствующие столбцы в матрице S. Коэффициенты при линейных
членах преобразованного уравнения вычисляем по формуле а' — aS.
Если матрица А диагональна: A = diag(Ai,A2,A3), то уравнение
поверхности не содержит произведений переменных и имеет вид
Aiz2 + А2у2 + A3z2 + 2aiz + 2a2y + 2a3z + к = 0. D)
Полное упрощение уравнения A) происходит в несколько этапов.
I. Если в уравнении есть члены ;ержащие произведения пе-
переменных, то заменяем базис с ш ^ю ортогональной матрицы
перехода 5 так, как описано выше, преобразованное уравнение при-
примет вид D).
П. Если в уравнении уже нет членов, содержащих произведе-
произведения переменных, но имеются чвадраты переменных и одноименные
линейные члены, то дополн; эти пары членов «до полных квадра-
квадратов» и переносим начало координат так, чтобы в преобразованном
уравнении соответству^цих линейных членов не было.
III. Если уравнени _ прощено так, что в нем есть квадраты толь-
только двух переменных, линейный член с третьей переменной, а кроме
чтого только свобо^ый член, то переносом начала координат вдоль
оси, соответствую й линейному члену, можно обратить в нуль сво-
свободный член. Например, в уравнении
Aiz2 + А2у2 + az + к = 0
выполняем а ену z = z' — к/а и получаем уравнение
AiZ2 + A2y2 + az' = 0 F)
без свобод 'о члена.
IV. Е в уравнении имеется квадрат лишь одной переменной,
линейные зны, содержащие другие переменные и, может быть, сво-
свободный ч, :, то можно сделать замену координат в плоскости, соот-
96 Гл. 4- Поверхности второго порядка
ветствующей линейным членам так, чтобы все члены ниже второй
степени заменились на один. Например, упростим уравнение
\x2+ay + bz + c = 0. G)
Положим
у' =ц-1(ау + Ьг + с), z' = ^(-by + az), где /х=\/а2 + Ь2. (8)
Формулы (8) определяют ортогональную замену координат.
Уравнение G) переходит в
\х2 + цу' = 0. (9)
V. Выполнив описанные выше действия, мы получим уравнение
поверхности в «почти канонической» форме. Почти каноническими
мы называем уравнения, отличающиеся от табличных канонических
уравнений, самое большее, числовым множителем, нумерацией ко-
координат, переносом членов из одной части равенства в другую или
знаком при линейном члене. Соответствующий базис и систему ко-
координат также будем называть почти каноническими. Переход от
почти канонической системы координат к канонической очевиден.
Она получается из почти канонической возможно изменением ну-
нумерации базисных векторов и заменой направления каких-либо из
этих векторов на противоположные. Начала канонической и почти
канонической системы координат совпадают.
Отыскание формул перехода к канонической системе координат
происходит одновременно с упрощением уравнения поверхности и так-
также распадается на несколько этапов. При этом полезно помнить, что:
а) при последовательных заменах координат матрицы перехода
перемножаются, причем множитель, соответствующий последующей
замене, пишется правее;
б) применяя алгоритм, изложенный выше, на каждом этапе мы
получаем координаты нового начала в промежуточной системе ко-,
ординат.
Задача упрощения уравнения поверхности второго порядка счи-
считается полностью решенной, если найдено каноническое уравнение
поверхности и каноническая система координат.
Добавим, что каноническая система координат для данной по-
поверхности определена не однозначно, также как и почти канониче-
каноническое уравнение и почти каноническая система координат.
Существуют и другие способы приведения уравнения поверх-
поверхности второго порядка к каноническому виду. В некоторых из них
перенос начала координат предшествует изменению базиса, обраща-
обращающему в нуль члены с произведениями координат. Эти способы свя-
связаны с понятием центра поверхности. Если уравнение поверхности
задано в форме B), то координаты центра определяются из уравне-
уравнения
Лс + ат = о. A0)
Если поверхность имеет центр и содержит хоть одну вещественную
точку, то центр является центром симметрии поверхности. ...<¦ ч
§ 11. Общая теория поверхностей второго порядка 97
• Приведем один из таких способов упрощения уравнения поверх-
поверхности, заданного в форме B). Пусть (р — самосопряженное пре-
преобразование, заданное в стандартном базисе арифметического про-
пространства ? матрицей A; Q, V — ядро и множество значений этого
преобразования. Поскольку V®Q = ?, можно разложить строку а
в сумму а = рт + qT, где р Э V, a q Э Q- Имеются две возможности:
а) q = 0. В этом случае ат = р, и система уравнений A0) сов-
совместна. Замена ? = ?,' + с приведет B) к виду, не содержащему ли-
линейных членов.
б) q ф 0. Система A0) не совместна, поверхность не имеет цен-
центра. В этом случае q — собственный вектор преобразования <р, от-
отвечающий нулевому собственному значению, и найдется диагонали-
чирующая А ортогональная матрица 5 со столбцом q / |q|. Система
уравнений ль + р = О) Bq'+ р> + * = 0 A1)
обязательно совместна. Пусть b — одно из ее решений. После замены
t = SE,' + Ь уравнение B) станет почти каноническим.
Для демонстрации обоих вышеизложенных способов в главе
«Решения» разобраны задачи 11.22, 16) и 11.22, 24).
¦ I.
,(, Инварианты. Общие свойства поверхностей
У(( второго порядка A1.1—11.18)
11.1. Перечислить поверхности второго порядка, для ко-
которых:
1) R = 4; 2) R = 3; 3) R = 2; 4) R = 1;
5)г = 3; 6) г = 2; 7)г = 1.
11.2. Охарактеризовать с помощью инвариантов «основ-
«основную» группу вещественных поверхностей второго порядка: эл-
эллипсоиды, гиперболоиды, параболоиды.
11.3. Охарактеризовать с помощью инвариантов следую-
следующие группы поверхностей второго порядка:
1) параболоиды и параболические цилиндры;
2) поверхности, состоящие из плоскостей;
3) «мнимые» поверхности: «мнимые эллипсоиды», «мни-
«мнимые конусы», «мнимые эллиптические цилиндры», «пары мни-
мнимых пересекающихся плоскостей», «пары мнимых параллель-
параллельных плоскостей».
11.4. 1) Какие из «мнимых» поверхностей второго поряд-
порядка (см. задачу 11.3, 3)) не имеют вещественных точек? Охарак-
Охарактеризовать с помощью инвариантов эту группу поверхностей.
2) Какие из «мнимых» поверхностей второго порядка имеют
вещественные точки и как эти поверхности выглядят? Охарак-
Охарактеризовать с помощью инвариантов эту группу поверхностей.
4- 1715
98 Гл. 4- Поверхности второго порядка
11.5. Охарактеризовать с помощью инвариантов поверх-
поверхности второго порядка, не вырождающиеся в пустое множе-
множество, в точку, прямую, плоскость или пару плоскостей.
11.6. Охарактеризовать с помощью инвариантов вещест-
вещественные поверхности, имеющие:
1) два семейства прямолинейных образующих;
2) одно семейство прямолинейных образующих.
11.7. Перечислить поверхности второго порядка, канониче-
канонические уравнения которых содержат ненулевой свободный член.
Охарактеризовать эти поверхности с помощью инвариантов.
11.8. Пусть уравнение поверхности записано в матричной
форме B), преобразованное — в форме D) (см. введение к § 11).
Выразить коэффициенты А', а', к' через А, а., к, если:
'
11.9. 1) Проверить, что существуют такие уравнения вто-
второй степени, в которых с помощью перехода к новой декарто-
декартовой системе координат нельзя уничтожить все члены с пер-
первыми степенями переменных. Перечислить все типы таких
поверхностей и охарактеризовать их с помощью инвариантов.
2) Проверить, что существуют такие уравнения второй сте-
степени, в которых с помощью перехода к новой декартовой си-
системе координат можно уничтожить все члены ниже второй
степени. Перечислить все типы таких поверхностей и охарак-
охарактеризовать их с помощью инвариантов.
11.10. 1) Какие вещественные поверхности второго поряд-
порядка имеют центр симметрии?
2) Сколько центров симметрии может иметь поверхность
второго порядка?
3) Доказать, что для поверхности второго порядка осуще-
осуществимы только следующие возможности. Поверхность:
а) не имеет центра симметрии;
б) имеет единственный центр симметрии;
в) имеет прямую, состоящую из центров симметрии;
г) имеет плоскость, состоящую из центров симметрии.
11.11. Перечислить и охарактеризовать через инварианты
типы поверхностей второго порядка:
1) не имеющих центра;
2) имеющих единственный центр;
3) имеющих бесконечно много центров.
§ И. Общая теория поверхностей второго порядка 99
11.12. Доказать утверждения:
1) если поверхность второго порядка имеет центр, и он рас-
расположен в начале координат, то уравнение поверхности не со-
содержит линейных членов;
2) если уравнение поверхности второго порядка не содер-
содержит линейных членов, то поверхность имеет центр, располо-
расположенный в начале координат.
11.13. 1) Пользуясь результатами задач 11.8 и 11.12, полу-
получить систему уравнений для центра поверхности второго по-
порядка (т. е. уравнение A0) из введения к § 11).
2) Как изменится свободный член уравнения B), если нача-
начало координат поместить в центр поверхности второго порядка?
11.14. Доказать, что условие det А ф 0 необходимо и доста-
достаточно для существования единственного центра у поверхности
второго порядка, заданной уравнением B).
11.15. Обосновать второй способ упрощения уравнения
поверхности второго порядка, изложенный во введении к § 11,
т. е. доказать каждое из утверждений пунктов а) и б).
11.16. 1) Уравнение поверхности второго порядка записа-
записано в развернутой форме A) и в матричной форме B). Все коэф-
коэффициенты развернутого уравнения умножены на число цфО-
Что произойдет с матрицей А? Как изменятся при этом корни
характеристического уравнения \А — А.Е| = 0?
2) Уравнение поверхности второго порядка записано в пря-
прямоугольной системе координат, и в нем совершен переход к
другой прямоугольной системе. Доказать, что при этом не из-
изменится характеристическое уравнение \А — ХЕ\ = 0, а поэтому
не изменятся его корни. Изменится ли det А?
11.17. 1) Дано уравнение второго порядка в матричной
форме B). Выразить матрицу В большой квадратичной фор-
формы поверхности, заданной этим уравнением, через А, а, к.
2) В уравнении поверхности совершена замена координат
? = SE,' + Ь. Выписать матрицу Г, с помощью которой преобра-
преобразуется большая квадратичная форма поверхности, и доказать,
что при переходе от одной прямоугольной системы координат
к другой det В не меняется.
3) Доказать, что при ортогональной замене координат, ос-
оставляющей начало координат на месте, не изменяется характе-
характеристическое уравнение \В — А.Е| = 0, а потому не изменяются
его коэффициенты и корни.
100 Гл. 4- Поверхности второго порядка
11.18. Пусть в некоторой общей декартовой системе коор-
координат уравнение поверхности второго порядка по форме совпа-
совпадает с одним из канонических уравнений. Доказать, что суще-
существует декартова прямоугольная система координат, в которой
уравнение этой поверхности будет каноническим того же типа.
Определение вида и расположения поверхности,
заданной общим уравнением второго порядка
A1.19-11.23)
11.19. Пользуясь результатом задачи 11.18, определить
тип поверхности, заданной в общей декартовой системе коор-
координат уравнением:
2) (х + у)(х + у + 1) = 1;
3) (х + у)(х + у + 1) = х-у;
4) (x + y + z +
5) (х + у + z +
6) (x + y)(x-y) = z;
7) (x + y + z){x-y + z) = 0;
8) (x + 2y)(x + 2y + l) = z;
9) {x + y)(x-75y) = z2;
10) (x + yJ = 3x + z;
11) (x + 2y + 3z) Bx + 3y + 4z) + Cx + 4y + 75zJ = 1;
12) (x + 2y + 3z)Bx + 3y + 4z) - {3x + 4y + 75zJ = 1;
13) (a; + y)z - x* - x = 0;
14) (x + y + zJ + (x + 2y + 3zJ + Bx~y + zJ = 0;
15) (x + y + zJ + (x + 2y + 3zJ + {2x + 3y + 4zf = 0;
16) {x + y + zJ + (x-2y + zJ = 0;
17) (x + у + zJ + {x + yJ + {y + zJ = 1987;
18) {x + y + zJ + {x + yf = 1987;
19) { 2 2 2
20) (
11.20. В общей декартовой системе координат гиперболо-
гиперболоид задан уравнением (х + у + z)(x — у + z) — Bх — у + 2zJ = 1.
Найти уравнение его асимптотического конуса.
11.21. Поверхность задана в общей декартовой системе
координат уравнением, содержащим параметр к. Определить
тип поверхности при всех значениях к.
1) х\ + х\ + \х\ + 4Ж1ЖЗ + 2xixz + 2х\ + 2xi + 5жз + Л = 0;
2) 2х\ + кх2, + SxiX2 + 4х\х$ — 4xi — 8^2 — 4жз = 0;
§ 11. Общая теория поверхностей второго порядка 101
3)
4)
+ 2x3
5)
6)
Зх2 + 2х?,
= 0;
Зх2, + xl -
(Р)х2-2
_L <7»* -L 1 fii*! i^ri -I- Aft r
h 6xi^2 + 2xiX3 + 4x;
x^-3x|-4xix2-6:
C3 + 4x
сз + 4х
г^з + fc
i -1- 4x2 + 4хз +
2x3 - 4xi - 4x2
X2 + x3 + l = 0;
2xi -)- 4x2 ~b 6x3
k = 0;
+
+
11.22. Поверхность задана уравнением в декартовой пря-
прямоугольной системе координат. Найти каноническую систему
координат и каноническое уравнение этой поверхности. Опре-
Определить тип поверхности.
1) 2х2 -)- 9у2 + 2z2 - 4ху + 4yz - 1 = 0;
2) 4у2 - 3z2 + 4ху - Axz + Syz = 0;
3) x2 + y2 + 4z2 - 2xy -I- 4xz - Ayz - 2x + 2y + 2z = 0;
4) x2 -I- y2 + z2 - xy + xz + yz + Зх + Зу - Зг = 0;
5) x2 - 3z2 -
6) х2+у2-)
7) у2 + 2xz + 2x + 2z + 1 = 0;
8) x2 + 2y2 -)- 5z2 + 4yz + 20y + 20z -10 = 0;
9) -x2 + by2 + bz2 + 8yz + 2x + \2y + 24z + 36 = 0;
10) 2x2 -I- by2 + bz2 + 6yz + 4x+ 16y + 16z +10 = 0;
11) 4x2 + Ay2 - 4xy - 12x - 12y - 5z + 1 = 0;
12) x2 + y2 + z2 + 2xy - 12x + Ay + 6z - 3 = 0;
13) 4x2 + 9y2 - 12xy + 2x + Юу +1 = 0;
14) 6xy - 8y2 - z2 + 60y + 2z + 89 = 0;
15) 5x2 + 8y2 -I- 4xy + 2x + 44y - З62; + 65 = 0;
16) (p) -x2 + y2 + z2 - 2yz + 2x + 3y - bz + 1 = 0;
17) 9y2 + 16z2 + 24yz + 5x + IOj/ + bz + 11 = 0;
18) 16х2 + 9у2-г2-24ху-9х-12у-)-42;-)-71 = 0;
19) 2x2 -I- 2y2 + z2- Юху + 20x - 8y + 29 = 0;
20) -x2 + 7y2 - 24yz + 2x + 120y = 0;
21) x2 - 4y2 - 4z2 -I- lOyz + 2x + 2y + 2z + 3 = 0;
22) 3x2+4xy-)-8x-)-8y-42; = 0;
23) -x2 - 9y2 + 6xy + 50x - 50y - 15z - 100 = 0;
24) (p) 4x2 + y2 + 9z2 + Axy - \2xz - 6yz + 2x + Qy-Qz-
-5 = 0.
11.23. Поверхность задана в декартовой прямоугольной
системе координат уравнением, содержащим параметр к. При
данном значении к найти каноническую систему координат и
каноническое уравнение поверхности. Определить тип поверх-
поверхности при всевозможных к. Если поверхность представляет со-
собой прямую, плоскость или пару плоскостей, найти линейные
102 Гл. 4- Поверхности второго порядка
уравнения этих множеств в исходной системе координат.
1) 5х2 + 5у2 + 3z2 + 2ху + 2y/2xz + 2\f2yz + 26х + 34у +
+ ЮуДг + 49 = 0.
2) 2х2 + 9у2 + 2z2 - 4ху + 4yz + 4х + 2у - 4z - 1 = 0;
3) 4у2 — 3z2 + 4ху — 4xz + 8yz + 4х — 2z + k = 0; а) к = — 1;
h | JU Сч • т> 1 Jc Т 1
U I Л. —" fJ > Dlrb A. J. •
4) 2x2 + 2y2 + 2z2 + 2xy + 2xz + 2yz + 4x - 4y + 4 = 0;
5) 3x2 + 3y2 + 3z2 - 2xy - 2xz - 2yz - 8x + 8y + к = 0;
а) к = 4; б) к = 8.
6) x2 + у2 + 4z2 - 2xy + 4xz - 4yz - 12x + 12y - 24z + 6 = 0;
7) x2 + y2+4z2 - 2xy + 4xz - 4yz + 24y - 24z + 12 = 0;
8) x2 + y2 + 4z2 - 2xy + 4xz - 4yz + 5x + у - 2z = 0;
9) 2x2 + 2y2 + 2z2 - 2xy + 2xz + 2yz - 6x - 6y - 12z + к = 0;
a) fc = 15; 6) fc=18.
10) 2x2 + 2y2 + 2z2 - 2xy + 2xz + 2yz + I8z + 18 = 0;
а) к = 8; б) к = 9.
12) x2 + 2y2 + z2- 2xy - 2yz + 18x - 6y + 6z - 18 = 0;
13) 3x2 - 7y2 + 2>z2 + 8xy - 8yz - 8xz - 4x + 6y + 8z + к = 0;
a\ ju — TO* ^i k* — Ч* та i lc — f\
14) 2y2 - 2>z2 - 2\Дху - 4xz + 4\/3yz + 50z + k = 0;
а) к = -75; б) к = -70; в) к = -80.
15) 2х2 + 2у2 + 2z2 + 8ху + 8xz-8yz-8x-4y + 8z + k = 0;
а) к = -4; б) к = 2; в) к = 8.
16) 4х2 + 4у2 - 2z2 + 4ху - 8xz + 8yz + 12х - 12у + 24z +
+ к = 0; а) к = -42; б) к = -36; в) к = -30. .
о j JU — Г\' ^\ JU — О
19) 4х2 + у2 + 9z2 + 4ху - 12xz - 6yz + 11х + Зу - z + 1 = 0;
21) 4х2 + у2 + 9z2 + 4ху - 12xz - 6yz + 4х + 2у - Qz + к = 0;
a) ft. — I, UJ ft. — —1O.
22) -x2 + 10y2 - z2 - 8xy + Qxz + 8yz + 24x - 8y - 16z +
+ fc = 0; a)fc = -26; 6)fc = -14; в) к = -2.
23) 2x2 - у2 + 2z2 + 4xy - 2xz + 4yz + Юх - 2y - 2z + к = 0;
а) к = 2; б) к = 5; в) к = 8.
+ 6 = 0.
25) х2 + у2 - 2z2 + Юху + 4xz - 4yz + 24x - 12z + к = 0;
a) fc = -12; 6) fc = -6.
Глава 5
ПРЕОБРАЗОВАНИЯ ПЛОСКОСТИ. ГРУППЫ
§ 12. Линейные и аффинные
преобразования плоскости
В этом параграфе используются следующие основные понятия:
отображение одного множества в другое, преобразование множе-
множества, образ элемента и множества, полный прообраз элемента и
множества, вложение {ипъективное отображение), взаимно од-
однозначное {биективное) отображение, наложение {сюръективное
отображение), произведение отображений, обратное отображение,
линейное преобразование плоскости, аффинное преобразование, об-
образ вектора при линейном преобразовании, линейное преобразова-
преобразование векторной плоскости, симметрия плоскости относительно
прямой, симметрия плоскости относительно точки, гомотетия,
параллельный перенос плоскости, сжатие к прямой с коэффициен-
коэффициентом к, ортогональное преобразование, главные направления аффин-
аффинного преобразования, собственные векторы линейного преобразова-
преобразования векторной плоскости.
Отображение f: X —> У множества X в множество У — это
правило, которое каждому элементу х 6 X сопоставляет единствен-
единственный элемент у = f(x) ? У, называемый образом элемента х при
отображении /. Множество X называется областью определения, а
множество У — областью значений отображения j. Совокупность
f(X) образов всех элементов х ? X называется множеством значе-
значений отображения f (образом множества X при отображении /).
Отображение /: X —> X называется преобразованием множества X.
Ограничением отображения f: X —> У на подмножестве М С X на-
называется отображение /м'- -М ~* 3^ совпадающее с / на М.
Отображение /: X —> У называется вложением (или инъектив-
иым отображением), если из Х\ ф x-i следует f(x\) ф /(жг). Отобра-
Отображение / называется наложением (или сюръективным отображени-
отображением), если f(X) — У. Отображение / называется взаимно
однозначным отображением X на У (или биективным отображе-
отображением), если оно является вложением и наложением.
Прямым (или декартовым) произведением X х У множеств X, У
называется множество упорядоченных пар {(х,у)\х ? Х,у ?У}- Чис-
Число элементов конечного множества (порядок) обозначается через \Х\.
Произведением отображений f: X -) У ид: У —? Z называет-
называется отображение h = gf: X —> Z, определяемое равенством (gf)(x) —
104 Гл. 5. Преобразования плоскости. Группы
— 9(f(x)) (х ? X). Произведение gf определено, если множество зна-
значений отображения / входит в область определения отображения д.
Тождественное преобразование г (или %х) множества X опреде-
определяется равенством г(х) = х для любого элемента х ? X.
Отображение д: У —> X называется обратным к отображению
/: X —> У и обозначается f~1, если для любых х ? X, у ? У справед-
справедливы равенства f~l(f(x)) = х, f(f~l[y)) = у- Обратное отображение
существует, если / является взаимно однозначным: f~l(y) —x, где
х — единственный элемент из X, такой, что f(x) = у.
Прообразом элемента (в геометрии — точки) у ?У при отобра-
отображении /: X —> У называется любой элемент х ? X такой, что f(x) = y.
Полным прообразом f~1(S) множества S С У называется совокуп-
совокупность всех прообразов всех элементов из S.
Точка х ? X называется неподвижной точкой преобразования
f: X —> X, если f(x) — х. Множество М С X называется неподвиж-
неподвижным относительно преобразования /, если все его точки неподвиж-
неподвижны. Множество Л4 называется инвариантным относительно преоб-
преобразования /, если для любой точки х ? М. также f(x) ? М. Любое
неподвижное множество инвариантно, обратное неверно.
Пусть / — преобразование плоскости, на которой задана декар-
декартова система координат. Координаты х*, у* образа произвольной
точки плоскости выражаются через координаты х, у этой точки с
помощью пары вещественных функций от двух переменных:
х*=<р(х,у), у*=%р(х,у). A)
Формулы A) называются координатной записью преобразова-
преобразования плоскости.
Линейное преобразование плоскости задается в любой декарто-
декартовой системе координат формулами
х* = ?
у* - а2х + b2y + с2. *• '
Взаимно однозначное линейное преобразование плоскости называет-
называется аффинным преобразованием. Линейное преобразование, записан-
записанное формулами B), аффинно тогда и только тогда, когда
Д =
а2 Ь2
Образом вектора а = АВ при линейном преобразовании / называ-
называется вектор а* = f(A)f(B). В силу этого, линейное преобразование
плоскости определяет преобразование множества векторов плоско-
плоскости. Оно обозначается той же буквой / и задается формулами
a* = aia + bi/3, /3* = а2а + b2j3,
где (а,/3) и (а*,/3*) — координаты вектора и его образа. Преобразова-
Преобразование множества векторов, задаваемое такими формулами в некотором
базисе, называется линейным преобразованием.
§ 12. Линейные и аффинные преобразования плоскости 105
Пусть О, е\, е2 — декартова система координат, в которой преоб-
преобразование / задается формулами B), /(ej) = е* (г = 1,2), /(О) = О*.
Тогда ej(ai,a2), е$(ЪиЪ2), О*(сис2).
Аффинное преобразование / называется преобразованием пер-
первого рода, если базисы ei, е2 и /(ei), /(е2) ориентированы одинаково;
второго рода — если противоположно. Для аффинного преобразова-
преобразования первого рода А > 0, для преобразования второго рода Д < 0.
Если Ф — фигура на плоскости, имеющая площадь S, а 5* —
площадь ее образа при аффинном преобразовании /, то S*/S — | Д|.
Ортогональным называется преобразование плоскости, сохра-
сохраняющее расстояния между точками. Ортогональное преобразование
аффинно и задается в прямоугольной системе координат формулами
х* = xcosip-ysmip + x0, .„.
* =xsmip + ycosip + y0 *> >
у* =
для преобразования первого рода и
.<¦! х* — ж cos у 4-?/sin у + хо, ...
у* =xsm<p-ycosip + y0 *¦ '
для преобразования второго рода.
Сжатием с коэффициентом А > 0 к прямой I называется аф-
аффинное преобразование, задаваемое формулами х* =х, у* = Ху, ес-
если прямая I выбрана в качестве оси абсцисс прямоугольной системы
координат. (При А > 1 это преобразование можно называть растяже-
растяжением.)
Всякое аффинное преобразование / является произведением
f = hih,2g, где g — ортогональное преобразование, а hi и /i2 — сжатия
к двум взаимно перпендикулярным прямым. Направления этих пря-
прямых называются главными или сингулярными направлениями пре-
преобразования /.
Ненулевой вектор а называется собственным вектором линей-
линейного преобразования / векторной плоскости, если существует чис-
число А такое, что /(а) = Аа. Число А, удовлетворяющее этому условию,
называется собственным значением преобразования /. Собственные
значения находят как вещественные корни уравнения
\ — А Ь\
а2 Ь2 ~
_ -
,. Преобразованием подобия с коэффициентом к > 0 называется
такое преобразование / плоскости, при котором \f(A)f(B)\ — k\AB\
для любых точек А, В.
В задачах этого параграфа угол поворота плоскости при задан-
заданном базисе на плоскости отсчитывается в направлении кратчайшего
поворота от первого базисного вектора ко второму.
106 Гл. 5. Преобразования плоскости. Группы
Общие свойства отображений A2.1-12.24)
12.1. Пусть /: X —> У — отображение. Доказать, что:
1) если Ах С А2 С А', то /(Л) С /(Д2);
2) /MiUA2) = /Mi)U/(^2);
если ВьйгСДД") С у, то /~1{ВхПВ2) =
4) /(^-1 ПЛ2) Я /(-^l) П/(.42). Может ли образ пересече-
пересечения не совпадать с пересечением образов?
12.2. Сколькими способами можно установить взаимно од-
однозначное соответствие между двумя множествами, содержа-
содержащими по п элементов?
12.3. 1) Сколько существует преобразований множества,
состоящего из п элементов? Сколько среди них взаимно одно-
однозначных?
2) Сколько возможностей имеется для множеств значений
преобразований множества из п элементов?
3) Сколько существует отображений множества из т эле-
элементов в множество из п элементов?
12.4. Пусть /: X -> У, \Х\ = т, \У\ = п. Может ли отобра-
отображение / быть:
1) Наложением при п > т?
2) Вложением при п < ml
12.5. Пусть /: X —»У, где X, У — конечные множества,
состоящие из одинакового числа элементов. Доказать равно-
равносильность следующих утверждений:
1) / — вложение;
2) / — наложение;
3) / взаимно однозначно.
12.6. Привести примеры таких отображений f-.X-ьУ бес-
бесконечных множеств X, У, что:
1) / является наложением, но не вложением;
2) / является вложением, но не взаимно однозначно.
12.7. Установить взаимно однозначные соответствия меж-
между множеством всех натуральных чисел и данным множеством:
1) множество всех целых чисел;
2) множество всех четных чисел;
3) множество всех рациональных чисел;
4) множество всех точек плоскости, координаты которых
рациональны (рациональных точек); ,?.
§ 12. Линейные и аффинные преобразования плоскости 107
5) множество всех интервалов на прямой с рациональными
концами;
6) множество всех кругов на плоскости с центрами в раци-
рациональных точках и рациональными радиусами;
7) множество всех многочленов р(х) = ао-\-а\х +... + апхп
(п = 0, 1, 2, ...) с целочисленными коэффициентами а» (г =
= 0, 1, ...,п).
12.8. Доказать, что:
1) между множеством всех целых чисел и множеством всех
последовательностей чисел 0 и 1 нельзя установить взаимно
однозначного соответствия;
2) существует взаимно однозначное соответствие между
множеством всех действительных чисел и множеством всех по-
последовательностей чисел 0 и 1.
12.9. Пусть X, У — бесконечные множества, /: X —» У —
взаимно однозначное отображение и УГJ = 0. Придумать
взаимно однозначное отображение X на У U Z, если:
1) Z конечно; 2) Z счетно.
12.10. Доказать, что у любого отображения /: X -» У име-
имеется не более одного обратного отображения.
12.11. Придумать взаимно однозначное отображение
прямой:
1) на интервал (—1,1); 2) на отрезок [—1,1].
12.12. Придумать преобразование плоскости, которое вза-
взаимно однозначно отображает плоскость:
1( 1) на открытый круг х2 + у2 < 1;
2) на замкнутый круг х2 + у2 ^ 1;
3) на квадрат |ж| < 1, \у\ < 1 (система координат — прямо-
прямоугольная).
12.13. Дано линейное преобразование числовой прямой:
f(x) = ax + b (а, Ъ — действительные числа). Доказать, что:
1) / взаимно однозначно тогда и только тогда, когда а ф 0;
2) / сохраняет направление векторов на прямой при а > 0
и меняет на противоположное при а < 0;
3) при а ф 0 образом интервала длины I является интервал
длины \а\1.
12.14. Дано преобразование f(x) = ax + b числовой пря-
прямой. Найти:
1) неподвижные точки преобразования /;
2) преобразование, обратное к преобразованию / (а ф 0).
108 Гл. 5- Преобразования плоскости. Группы
12.15. Написать формулу, задающую линейное отображе-
отображение интервала (а, Ь) на интервал (с, d) числовой прямой.
12.16. Даны линейные преобразования fug числовой пря-
прямой: f(x) — ax + b, g(x) = cx + d. Найти произведения fg и gf.
В каком случае fg — gf?
12.17. Отображение / числовой прямой в плоскость зада-
задано формулами в прямоугольной системе координат: х = acost,
y = bsint (a >0, Ь>0).
1) Найти образ 5 прямой при отображении /.
2) Является ли отображение / вложением?
3) Указать какие-либо множества на прямой, которые вза-
взаимно однозначно отображаются на 5.
12.18. Отображение / числовой прямой в плоскость зада-
задано формулами в прямоугольной системе координат: х — — chi,
у — sht.
1) Найти образ 5 прямой при отображении /.
2) Является ли отображение / вложением?
3) Найти прообраз t каждой точки из 5.
12.19. Преобразование / плоскости задано в прямоуголь-
прямоугольной системе координат формулами: х* = х2 — у2, у* = 2ху.
1) Является ли преобразование /: а) наложением, б) вза-
взаимно однозначным?
2) Найти полный прообраз произвольной точки (х*, у*)
плоскости.
12.20. Преобразование / плоскости задано в прямоуголь-
прямоугольной системе координат формулами: х* — excosy, у* — exsiny.
1) Является ли преобразование / взаимно однозначным?
2) Выделить на плоскости области, на которых / взаимно
однозначно. _
3) Пусть / — ограничение преобразования / на полосе 0 <
< у < п. Найти формулы, задающие обратное к / отображение.
12.21. Даны отображения /: X -*У, д : У -» Z и h: Z -»
—? U. Доказать ассоциативность умножения отображений, т. е.
равенство h(gf) = (hg)f.
12.22. Пусть Х,У — непустые множества, Z = X х У. Ото-
Отображение 7г: Z —>• У (проектирование Z на У) определяется ра-
равенством тг((х,у)} = у. Показать, что 7г — наложение.
12.23. Показать, что для всякого множества X существует
вложение 6: X -» X х X.
§ 12. Линейные и аффинные преобразования плоскости 109
12.24. Графиком отображения / : X —» У называется под-
подмножество Г = {(x,f(x))\x G X} С X х у.
1) Найти образ множества X при отображении (р: X —>
—> X хУ, определяемом равенством <р(х) = (x,f(x)).
2) Доказать, что / = тг<р (определение 7г см. 12.22).
3) Доказать, что отображение / является вложением тогда
и только тогда, когда вложением является (р.
4) Доказать, что / является наложением тогда и только
тогда, когда 7г(Г) = У.
Геометрические свойства линейных и аффинных
преобразований плоскости A2.25—12.36)
12.25. Найти радиус-вектор образа произвольной точки
М(г) при данном преобразовании плоскости:
1) гомотетия с центром в точке Мо(го) и коэффициен-
коэффициентом к ф 0;
2) центральная симметрия относительно точки Мо(го);
к" 3) параллельный перенос на вектор а;
, 4) ортогональное проектирование на прямую г = го + ?а;
5) симметрия относительно прямой г = г0 + fa;
6) сжатие к прямой г = го + ta с коэффициентом Л > 0.
12.26. Аффинное преобразование переводит три точки А,
B, С, не лежащие на одной прямой, соответственно в точки В,
C, А. Найти неподвижные точки этого преобразования. При
каком необходимом и достаточном условии преобразование бу-
будет ортогональным?
12.27. Аффинное преобразование переводит вершины тре-
треугольника ABC в середины К, L, М противолежащих им сто-
сторон. Найти образы точек К, L, М и точки О пересечения меди-
медиан треугольника ABC. Выяснить геометрический смысл этого
преобразования.
12.28. Доказать, что:
1) если А и В — две различные неподвижные точки аффин-
аффинного преобразования, то и все точки прямой АВ неподвижны;
2) если аффинное преобразование / имеет единственную
неподвижную точку, то все инвариантные прямые (если они
существуют) проходят через эту точку;
3) точка пересечения двух инвариантных прямых аффин-
аффинного преобразования неподвижна.
110 Гл. 5. Преобразования плоскости. Группы
12.29. Доказать, что аффинное преобразование, имеющее
пучок инвариантных прямых, пересекающихся в точке М, яв-
является гомотетией с центром в точке М.
12.30. Доказать, что линейное преобразование плоскости
тогда и только тогда будет аффинным, когда образ каждого
ненулевого вектора отличен от нуля.
12.31. Доказать, что две касательные к эллипсу (или ги-
гиперболе) параллельны тогда и только тогда, когда точки каса-
касания и центр кривой лежат на одной прямой.
12.32. Доказать, что если эллипс касается стороны описан-
описанного около него параллелограмма в ее середине, то он касается
остальных сторон этого параллелограмма также в их середи-
серединах.
12.33. Около эллипса с центром О описан четырехугольник
ABCD. Доказать, что сумма площадей треугольников ОАВ
и OCD равна сумме площадей треугольников О ВС и OAD.
12.34. Доказать, что вершины ромба, описанного около эл-
эллипса, лежат на осях симметрии этого эллипса.
12.35. Точки А, В, С, D лежат на эллипсе с центром О,
причем площади секторов АОВ и COD равны. Доказать, что
площади треугольников АОВ и COD также равны.
12.36. Точки А и В лежат на эллипсе с центром О, дли-
длины большой и малой полуосей которого равны а и Ъ соответ-
соответственно. Найти площадь сектора АОВ, если угол АОВ равен ip,
0 < (р ^ 7г, а точки А и В симметричны относительно большой
оси эллипса.
Координатная запись линейных и аффинных
преобразований плоскости A2.37-12.62)
В задачах 12.37-12.52 система координат предполагается общей
декартовой.
12.37. Записать формулы, задающие данное преобразова-
преобразование плоскости:
1) гомотетия с центром в начале координат и коэффици-
коэффициентом к;
2) гомотетия с центром в точке М(хо, Уо) и коэффициентом к;
3) центральная симметрия относительно точки М(хо,уо);
4) параллельный перенос на вектор а(а,/3).
12.38. Аффинное преобразование плоскости задается фор-
формулами х* = Зх + 2у - 6, у* = 4х — Зу + 1. Найти образы:
§ 12. Линейные и аффинные преобразования плоскости 111
1) точек а) 0@,0); б) JSi(l,O); в) Я2@,1); г)
2) прямых а) у = 0; б) ж = 0; в) ж — у + 1 = 0; г) ж — у —
-1 = 0; д) 2х + 3у = 7.
12.39. Аффинное преобразование плоскости задается фор-
формулами ж* = 2х + Ъу — 1, у* = —Зх — 4у + 2. Найти прообразы:
1) точек а) О@,0); б) 4(-1,2); в) ?D,-5);
2) прямых а) у = 0; б) ж = 0; в) ж + у — 1 = 0; г) х — у —
-1 = 0; д) х-у + 1 = 0.
12.40. Записать формулы, задающие аффинное преобра-
преобразование плоскости, переводящее точки А, В, С соответственно
в А*, В*, С*:
1LA,0), 5@,1), СA,1), ЛЧ-3,5), В'D,-3), С*@,0);
2) 4C/7,1), 5A,1/4), СB,-1), 4'(-4,2), В*(-1,6),
С*D,13);
3LA,0), В(-1/2,л/3/2), C(-l/2,-V3/2), 4* = В,
В* = С, С* = 4;
4) 4A,2), ?(-7,4), СC,-6); 4*, В*, С* - середины сто-
сторон треугольника ABC, противолежащие вершинам 4, В, С
соответственно.
12.41. Найти всевозможные линейные преобразования
плоскости, переводящие точки 4, В, С соответственно в 4*,
В*, С*, если такие преобразования существуют:
1LA,4), ?(-2,1), С@,3), 4*@,0), ?'A,0), С*@,4);
2) 4(-2, 0), ВB, -1), С@, 4), 4*(-2,1), В*B,1), С*@,1);
3LB,0), 5C,-1), СD,-2), 4*B,1), ?'(-2,-1),
С*(-6,-3);
4L@,0), ?(-1,2), СA,-2), 4*(-1,~1), ?'@,0),
С*A,1).
12.42. Найти все неподвижные точки аффинного преобра-
преобразования, заданного формулами:
1) ж* = 7ж-3у, у* = х + у\
с 2)ж* = -5ж + у, у*=6х;
3) ж* = -5ж + у, у* = 6ж + 1;
„ 4) ж* = 2х - у + 3, у* = -2х + 2у - 6;
5) х* = 4ж + Зу-1, у* = -Зж-2у + 1;
6) х* = ж, у* = у.
12.43. Найти инвариантные прямые линейного преобразо-
преобразования, заданного формулами:
112
Гл. 5. Преобразования плоскости. Группы
02
2) х* = -х + у, у* =х~у;
4) x* = у, у* = -ж + 1;
5) ж* = 2х + у - 3, у* = 2ж + Зу - 6;
6) х* = Ъх + Ъу + 1, у* = -Зж - у;
7) ж* = Зж - 2у + 5, у* - 2ж - у + 5.
12.44. Доказать, что определитель Д = ^ ^ линейного
преобразования, заданного формулами
ж = щж -\-Ь\у + ci, у = а2х ¦
не зависит от выбора системы координат.
12.45. Точки А, В, С имеют в системе координат О, ei,
е2 координаты A,0), @,1), A,1) соответственно, а в системе
координат О*, е*, е2 — координаты A,-1), (-3,2), @,1) со-
соответственно. Записать формулы, задающие в системе коорди-
координат О, ei, e2 аффинное преобразование / такое, что /(О) = О*,
12.46. Даны формулы перехода от системы координат О,
ei, ег к системе (У, е[, е'2- Записать формулы, задающие в
системе координат О, ei, e2 аффинное преобразование / такое,
что /(О) = О', f{e!) = e[, Де2)=е2:
1) х = х' + у'~2, у = 2х'-у' + 3;
2) х = Ъх1 - 4у' - 5, у = 4ж' + Ъу' +1.
12.47. Записать формулы, задающие аффинное преобра-
преобразование:
1) переводящее прямые х — у + 1 = 0, х + у — 1 = 0 соот-
соответственно в прямые Ъх -\-2у — 3 = 0, 2х + Зу + 1 = 0, а точку
4A,1) — в точку В(-1,-2);
2) переводящее прямые .Ai:r + Biy + С\ =0 и .А22: + В2у +
+ Сг = 0 соответственно в ось ординат и ось абсцисс, а точ-
точку А(хо,уо) — в точку ВA,1) (точка А не лежит на данных
прямых).
12.48. Дано аффинное преобразование х* = 2х + Ъу, у* =
= Ъх + Ъу. Составить уравнение образа кривой:
1)х2 + у2 = 1; 2)ж2-у2 = 1; 3) ху = 2;
4) у2 = -бх;
5) (Зж + 4у-1)Dж-Зу + 1) = 0;
6) ( )
§ 12. Линейные и аффинные преобразования плоскости 113
12.49. Дано аффинное преобразование х* = — х-\-Ъу + 1,
у* = Ъх — 2у — 1. Составить уравнения прообраза кривой:
1)х2 + у2 = 4; 2) ^-У2 = 1;
3) (у + 1J = 8(а;-1);
4) {х + у-1)(х-у-1) = 1;
5) (х + 2у-2){х + 2у + 2) = 0.
12.50. 1) Записать формулы аффинного преобразования
первого рода, переводящего эллипс \- у = 1 в себя так, что
точка АA,\/Ъ/2) переходит в точку В(—2,0).
2) Решить такую же задачу для аффинного преобразова-
преобразования второго рода.
12.51. Записать формулы аффинного преобразования, пе-
х2 у2
реводящего гиперболу — = 1 в себя так, что точка А(Ь,4)
переходит в точку Z?(\/5,0).
12.52. Найти аффинное преобразование, если оно перево-
переводит параболу х2 = 4у в себя и:
1) точка А\B,1) переходит в точку ??iD,4), а точка ^A,
1/4) — в точку В2 C,9/4);
2) определитель преобразования равен 1.
В задачах 12.53-12.62 система координат предполагается пря-
прямоугольной.
12.53. Написать формулы, задающие данные преобразо-
преобразования плоскости:
1) поворот на угол <р вокруг начала координат;
2) поворот на угол tp вокруг точки М(хо,Уо)',
3) ортогональное проектирование на ось абсцисс;
4) ортогональное проектирование на прямую х — Зу + 1 =
= 0;
5) симметрия относительно оси ординат;
6) симметрия относительно прямой Ъх + \у — 1 = 0;
7) сжатие к оси абсцисс с коэффициентом А > 0;
8) сжатие к прямой х + у — 2 = 0 с коэффициентом 1/3;
9) сжатие к прямой 2х — у + 5 = 0-с коэффициентом 2.
12.54. Какие из преобразований задачи 12.53 являются:
1) аффинными; 2) ортогональными?
12.55. Охарактеризовать геометрически преобразования:
1) х* =х, у* = Зу; 2) х* = 2х, у* = 2у;
114 Гл. 5. Преобразования плоскости. Группы
)
4) х* = -х, у* = у; 5) х* = -х, у* = -у;
6) х* = -у, у* = х; 7) х* = у, у* = х;
8) х* = -д(х-у), у* = -д{х + у);
9)х = ±(х + у), у = ±(
10) х* = Зх - 6, у* = Ъу + 2;
Щх* = -х-2,
U)x' = ±B1x
Щх* = 1-Bх + у-2),
16) из задачи 12.40, 3);
17) из задачи 12.41, 2).
12.56. При повороте плоскости на угол Зтг/4 вокруг точки
.4@,1) найти:
1) образы точек 0@,0) и ?A,0);
2) прообразы точек О и В;
3) образы прямых х = 0 и у = х;
4) прообразы прямых у = 0 и у — —х.
12.57. На какой угол нужно повернуть прямую Ъх — \у +
+ 25 = 0 вокруг точки М{—7,1), чтобы ее образ:
1) был параллелен оси абсцисс;
2) касался окружности х2 + у2 — 25/2?
12.58. Центром квадрата является точка Р(—1,2), а одна
из сторон задана уравнением х + 2у = 0. Составить уравнения
остальных сторон квадрата.
12.59. Центром правильного шестиугольника является
точка Р(\/3, 3/2), а одна из сторон задана уравнением у = у/Зх.
Составить уравнения остальных сторон шестиугольника.
12.60. Вычислить:
1) площадь параллелограмма, стороны которого заданы
уравнениями а\х-\-Ь\у-\-с\ = 0, п2Х + бгу + сг = 0, а\Х-\-Ь\у Л-
+ di — 0, а2х + Ъ2у + d2 = 0;
2) (р) площадь треугольника, стороны которого заданы урав-
уравнениями а\х + Ь\у + с\ = 0, а,2Х + Ъъу + сг = 0, а$х + Ь$у + сз = 0.
§12. Линейные и аффинные преобразования плоскости 115
12.61. Составить уравнение прямой, проходящей через
точку М{—7,13) и образующей с прямыми 2х + у + 3 = 0иж +
+ у — 2 = 0 треугольник площади 9.
12.62. Окружность задана уравнением ж2 + у2 — 6х + 8у =
= 0. Составить уравнение окружности:
1) симметричной данной окружности относительно пря-
прямой х + у — 6 = 0;
2) полученной из данной окружности поворотом на угол
arctgD/3) относительно начала координат;
3) полученной из данной окружности в результате гомоте-
гомотетии с центром АF,0) и коэффициентом 4.
Операции с линейными преобразованиями. Структура
ортогональных и аффинных преобразований
A2.63-12.89)
Система координат, если не оговорено, считается прямоуголь-
прямоугольной.
12.63. Записать формулы, задающие произведения fg и gf
данных аффинных преобразований (система координат общая
декартова):
1) /: х* = у, у* = х; д: х* = Ъх + Ау + 1, у* = -7х + Ъу - 2;
2) /: х*=4х-2у + 6, у* = -Ъх + у; д: х* = х - у, у* = Ах +
+ У + 1.
12.64. Записать формулы, задающие произведение fg дан-
данных аффинных преобразований / и д, и охарактеризовать это
произведение геометрически (система координат общая декар-
декартова) :
1) / — параллельный перенос на вектор а(—1,1); д — го-
гомотетия с центром в точке МA,2) и коэффициентом 3;
2) / — гомотетия с центром в точке МB, —1) и коэффици-
коэффициентом —1/2; д — центральная симметрия относительно точки
NC,1).
12.65. Записать формулы, задающие преобразование, об-
обратное к данному (система координат общая декартова), если
такое преобразование существует:
2) х* = Зх + 4у + 8, у* =
3) х* - -х + -у + -, у* = -х--у- -;
4) х* = Ъх + Ъу - 4, у* = Ъх + 9у + 6;
5) х* = Ъх - 24, у* = -х + 4у + 12;
116 Гл. 5. Преобразования плоскости. Группы
6) х* = 2х-у, у* = ~
7) х* = 4х-3у, у*
8) х* = Ах + Зу, у* = Зх-Ау;
9) х* = r(xcosip — ysinip), у* ( )
10) х* = г (х cos if + у simp), у* = r(xsimp — ycostp) (r>0).
12.66. Записать формулы, задающие n-ю степень данного
преобразования (п — натуральное число):
1) х* = xcosa — ysina, у* = xsina + ycosa;
\у1У х + \У;
3) х* = х + у, у* = у; 4) х* = Ъх, у* = х + 2у.
12.67. Записать формулы, задающие произведение /ждан-
/жданных аффинных преобразований / и д:
1) / — гомотетия с центром в точке М@,1) и коэффици-
коэффициентом 5, д — симметрия относительно прямой х — 2у — 3 = 0;
2) / — сжатие с коэффициентом 3 к прямой у = х, д —
сжатие с коэффициентом 1/3 к прямой х + у + 1 = 0;
3) / — гомотетия с центром в точке МB, — 1) и коэффици-
коэффициентом 4, д — поворот вокруг точки .АA,1) на угол 7г/6;
4) / — сжатие с коэффициентом 1/2 к прямой 2х + Ъу = 0,
д — гомотетия с центром в точке МA,0) и коэффициен-
коэффициентом -3/2.
12.68. Написать формулы и охарактеризовать геометри-
геометрически преобразования, обратные к преобразованиям задачи
12.55, 1)-15).
12.69. Написать формулы, задающие произведения fg и gf
ортогональных преобразований /ид:
1) / — поворот на угол п/2 вокруг точки АA,1), д — па-
параллельный перенос на вектор а(—1,— 1);
2) / — симметрия относительно прямой х — 2у — 5 = 0, с/ —
параллельный перенос на вектор аB,1);
3) / — поворот на угол 2я"/3 вокруг начала координат, д —
симметрия относительно прямой у = 2;
4) / — симметрия относительно прямой х — у — 1 — 0, д —
симметрия относительно прямой х + у — 1 = 0;
5) / — симметрия относительно прямой Ъх — у — 1 = 0, g —
симметрия относительно прямой Ъх — у + 1 = 0;
6) / — поворот на угол arcsinD/5) вокруг точки .АA,0),
д — поворот на угол arccosD/5) вокруг точки В(—1,0);
7) / — поворот на угол 30° вокруг точки .АA,0), д — пово-
поворот на угол 330° вокруг точки В@,1).
§ 12. Линейные и аффинные преобразования плоскости 117
12.70. 1) Доказать, что произведение поворота плоскости
вокруг некоторой точки и параллельного переноса является по-
поворотом вокруг некоторой другой точки.
2) Найти координаты неподвижной точки Р преобразова-
преобразования, заданного формулами C) из введения к § 12, при <р ф 2im,
п € Z. Доказать, что преобразование является поворотом на
угол <р вокруг точки Р.
3) Охарактеризовать геометрически преобразования fg
и gf задачи 12.69, 1).
12.71. 1) Доказать, что преобразование, заданное форму-
формулами х* = xcosp + ysirup, у* = х simp —у cos ip,
является симметрией относительно некоторой прямой, прохо-
проходящей через начало координат. Найти уравнение этой прямой.
2) При каком условии преобразование, заданное формула-
формулами D) из введения к § 12, является симметрией относительно
некоторой прямой? Найти уравнение этой прямой.
12.72. 1) Доказать формулы C), D) введения к § 12.
2) Доказать, что любое ортогональное преобразование пер-
первого рода является либо параллельным переносом на некото-
некоторый вектор, либо поворотом вокруг некоторой точки.
3) Доказать, что любое ортогональное преобразование вто-
второго рода является произведением двух перестановочных пре-
преобразований — симметрии относительно некоторой прямой и
параллельного переноса на некоторый вектор (вектор перено-
переноса), коллинеарный этой прямой1). Найти вектор переноса а для
преобразования, определенного формулами D) введения к § 12.
12.73. Охарактеризовать геометрически преобразование,
заданное формулами:
1) х* = х + 1,у* = -у;
2)х' = х + 1,у' = -у + 2;
•*'• 3) х* = х, у* = -у + 2.
12.74. Выяснить, какого рода ортогональными преобразо-
преобразованиями являются преобразования /, д, fg и gf задачи 12.69.
Охарактеризовать геометрически (в смысле задачи 12.72) пре-
преобразования fg и gf задач 12.69, 3) и 6).
12.75. Написать формулы ортогонального преобразования
первого рода, переводящего точку АB,0) в точку А*A + \/2,1),
*) Если вектор переноса отличен от о, то преобразование называют
скользящей симметрией.
118 Гл. 5. Преобразования плоскости. Группы
а точку .6B,2) — в точку В*A,1 + у/2). Доказать, что это пре-
преобразование является поворотом вокруг своей единственной
неподвижной точки. Найти координаты этой точки и угол по-
поворота.
12.76. Написать формулы ортогонального преобразования
второго рода, переводящего точку .АB,0) в точку А*A +
+у/2,1), а точку ?B,2) — в точку В*A,1 + л/2). Доказать, что
это преобразование является произведением симметрии отно-
относительно некоторой прямой и параллельного переноса на век-
вектор, коллинеарный этой прямой. Найти координаты вектора
переноса и составить уравнение оси симметрии.
12.77. 1) Доказать, что произведение двух преобразова-
преобразований, каждое из которых — симметрия относительно некоторой
прямой, является параллельным переносом, если эти прямые
параллельны, и поворотом, если прямые не параллельны.
2) Охарактеризовать геометрически преобразования fg
и gf задачи 12.69, 4).
3) Тот же вопрос для задачи 12.69, 5).
12.78. 1) Доказать, что произведение двух поворотов во-
вокруг различных точек на углы, сумма которых равна 2тг, яв-
является параллельным переносом.
2) Охарактеризовать геометрически преобразования fg
и gf задачи 12.69, 7).
12.79. Доказать, что квадрат ортогонального преобразо-
преобразования второго рода является параллельным переносом.
12.80. Представить данное преобразование в виде произ-
произведения нескольких преобразований, каждое из которых явля-
является осевой симметрией:
1) поворот на угол <р вокруг точки М\
2) параллельный перенос на вектор а;
3) произвольное ортогональное преобразование второго рода.
12.81. Найти координаты векторов, задающих главные на-
направления данного аффинного преобразования:
1) х* = Зж, у* = 4у; 2) х* = - Зх, у* = 4у;
3)х* = 3х, у* = -Ъу;
4) х* = х-у, у* = х + у;
5) х* = х, у* = -х + у;
6)х* = Зу-2, у* = -4ж;
7) х* = 2х + 5у, у* = - Их + ГОу;
8) х* = -4х + 7у, у* = 8
§ 12. Линейные и аффинные преобразования плоскости 119
9) х* = -4х + 8у, у* = -1х-Пу;
10) x*=x + VSy + 2, У* = -ЪуД
12.82. Представить каждое из аффинных преобразований
задачи 12.81 в виде произведения / — h^hxg, где д — ортого-
ортогональное преобразование, a hi и hi — сжатия к двум взаимно
перпендикулярным прямым.
12.83. Разложить в произведение hg, где д — ортогональ-
ортогональное преобразование, ah — гомотетия, каждое из преобразова-
преобразований / и /-1 задачи:
1) 12.65, 7); 2) 12.65, 8); 3) 12.65, 9); 4) 12.65, 10).
12.84. Доказать, что преобразование подобия представля-
представляет собой произведение ортогонального преобразования и гомо-
гомотетии.
12.85. Найти собственные значения и координаты отвеча-
отвечающих им собственных векторов линейного преобразования (си-
(система координат общая декартова), если:
3) х* = Ъх — 4у, у* = 4х — Ьу;
4) х* = 8х + Ну, у* = 17ж + 8у;
5) х* = 2х, у* = 2у;
6) х* -х-у, у* = -х + у;
ft* 7) х* = 11х-Ьу, у* = 12х-у;
г 8) х* = 7х-2у, у* = 8х-у.
12.86. Доказать, что аффинное преобразование, заданное
формулами х* = ах + by, у* = Ьх + су, имеет два взаимно пер-
перпендикулярных собственных вектора.
12.87. Аффинное преобразование / задается форму-
формулами х* = а\х + Ъ\у, у* = п2Х + Ьчу, а преобразование f\ — фор-
формулами х*=а\Х + п2У, у* = Ъ\х-\-Ъ2У- Доказать, что главные
направления преобразования / совпадают с направлениями
собственных векторов преобразования f\f.
12.88. Каждая точка плоскости М(х, у) отождествляется
с комплексным числом z = x + iy. Доказать, что:
1) преобразование z*->Tlez = x является ортогональным
проектированием на ось абсцисс;
2) преобразование z <-? ~z = x — iy является симметрией от-
относительно оси абсцисс;
120 Гл. 5. Преобразования плоскости. Группы
3) преобразование z \-? z + zq, где zq = xq-\- iyo — фиксиро-
фиксированное комплексное число, является параллельным переносом
на вектор а(хо,уо);
4) преобразование z н-> az, где а — действительное число,
не равное нулю, является гомотетией с центром в начале коор-
координат и коэффициентом а;
5) преобразование 2 4 (costp + isinip)z = eltpz (yp — фикси-
фиксированное действительное число) является поворотом на угол tp
вокруг начала координат.
12.89. Выяснить геометрический смысл преобразования /
комплексной плоскости (см. задачу 12.88):
1) f(z) = az, где а = г (cos ip + i simp), г > 0;
2) f(z) = az + 6, где а,Ь — комплексные числа, а ф 0.
§ 13. Понятие о группах
В этом параграфе используются следующие основные поня-
понятия: бинарная алгебраическая операция, группа, единичный элемент,
обратный элемент, абелева группа, циклическая группа, подгруппа,
гомоморфизм, изоморфизм групп, нормальная подгруппа, фактор-
факторгруппа.
Непустое множество G называется группой, если в G задана би-
бинарная алгебраическая операция (чаще всего называемая умноже-
умножением), т. е. для каждой упорядоченной пары (а,Ь) элементов из G
определен единственный элемент с = a-b&G — их произведение в
указанном порядке, причем выполнены следующие аксиомы:
1. Умножение ассоциативно: (а-Ь) -с= а- (Ь-с) для любых
а, b,c&G.
2. В G существует нейтральный (единичный) элемент е такой,
что е• а = а-е = а для всех a &G.
3. Для любого a€.G существует обратный элемент а ? G та-
такой, что а • а = а ¦ а — е.
Группа G называется коммутативной или абелевой, если а-Ь =
— Ь- а для любых а, Ь 6 G. В абелевой группе операцию иногда назы-
называют сложением и сумму обозначают а + b. При этом нейтральный
элемент обозначается нулем 0, а обратный к а элемент называется
противоположным и обозначается —а.
Число элементов группы G (если оно конечно) называется по-
порядком группы G и обозначается \G\. Группа G при этом называется
конечной. Если множество G бесконечно, то группа G называется
бесконечной.
Целые степени элемента a EG определяются рекуррентно:
а0 = е, ап+1 = апа для натурального п, а" = (а~п)~1 для целого от-
отрицательного п. Группа G называется циклической группой с образу-
образующим элементом а, если все элементы группы G являются целыми
степенями элемента а.
§ 13. Понятие о группах 121
Наименьшее натуральное число п, для которого ап = е (если
оно существует), называется порядком (периодом) элемента а. Если
ап ф е для любого п, то а считается элементом бесконечного порядка.
Подмножество Н группы G называется подгруппой группы G,
если Н является группой относительно операции, заданной в G. Под-
Подгруппа Н группы G называется нормальной в G (или нормальным
делителем группы G), если для любых элементов h € Н, g € G эле-
элемент ghg~* также принадлежит Н. Элемент группы вида ghg~* на-
называется сопряженным с элементом h посредством д.
Две группы G\ и Gi (с операциями • и * соответственно) назы-
называются изоморфными, если существует такое взаимно однозначное
(биективное) отображение ip: G\ —> G2, что для любых двух элемен-
элементов а и b из G выполняется равенство
Обозначение изоморфизма групп: G\ = Gt-
Пусть Н — подгруппа в G. Левым смежным классом элемента
д € G по подгруппе Н называется множество
gH = {gh:heH}.
Аналогично определяется правый смежный класс Нд = {hg : h € Н}.
Группа G разбивается на попарно не пересекающиеся левые
(правые) смежные классы по подгруппе Н, причем мощность лю-
любого смежного класса равна мощности Н. Отсюда следует теорема
Лагранжа: порядок конечной группы делится па порядок любой ее
подгруппы.
В общем случае дН ф Нд; если подгруппа Н нормальна в G, то
дН = Нд для всех д G G. При этом множество G/H смежных классов
группы G по подгруппе Н является группой относительно операции
умножения классов, определяемой равенством
(аН)(ЪН) = (аЪ)Н.
Эта группа называется факторгруппой группы G по нормальной
подгруппе Н.
Пусть Sn — совокупность всех взаимно однозначных преобразо-
преобразований множества X = {1,...,п}. Любое преобразование а € Sn опре-
определяет перестановку (ii,...,in) чисел A,...,п) (см. § 14); само пре-
преобразование сг называется подстановкой (или также перестановкой)
степени п и изображается двухрядным символом, указывающим об-
образ любого числа к A ^ к ^ п): а = ( ¦ ¦ ¦ ].
у %\ -%2 ... tn j
Умножение перестановок определяется так же, как и для любых пре-
преобразований. Относительно операции умножения множество Sn об-
образует группу — симметрическую группу степени п.
13.1. Образует ли группу относительно операции умноже-
умножения данное множество преобразований плоскости:
122 Гл. 5. Преобразования плоскости. Группы
1) множество всех параллельных переносов;
2) множество всех параллельных переносов на ненулевые
векторы;
3) множество всех поворотов вокруг фиксированной точки;
4) множество всех поворотов;
5) множество всех ортогональных преобразований;
6) множество всех ортогональных преобразований второ-
второго рода;
7) множество всех ортогональных преобразований, имею-
имеющих общую неподвижную точку;
8) множество всех аффинных преобразований;
9) множество всех линейных преобразований;
10) множество, состоящее из тождественного преобразова-
преобразования и симметрии относительно данной прямой;
11) множество поворотов плоскости вокруг центра пра-
правильного n-угольника, совмещающих этот n-угольник с самим
собой (вращения правильного n-угольника);
12) множество всех преобразований подобия?
13.2. Образует ли группу относительно операции умноже-
умножения множество преобразований плоскости, заданных формулами:
1) х* = Ах, у* = Ху;
2) х* = \у,у* = \-1х,\ф0;
3) х* = Хх, у* = у,\фО;
4) х* = х, у* = Хх + у;
5) х* = ах + by, у* = сх + dy;
6) х* = ах 4- by, у* = сх + dy, ad — Ьсф 0;
7) х* = ах - by, у* = bx + ay, a2 + b2 ф 0;
8) х* = r(xcos<p — ysimp), у* = r(xsin<f + ycosif), r > 0;
9) х* = aix + 6iy + ci, у* — а2Х + Ь2у + С2, 0462-0261 = 1?
13.3. Образует ли группу относительно операции сложения:
1) множество всех действительных чисел;
2) множество всех неотрицательных действительных чисел;
3) множество всех рациональных чисел;
4) множество всех целых чисел;
5) множество всех четных чисел;
6) множество всех нечетных чисел;
7) множество всех комплексных чисел;
8) множество всех чисто мнимых комплексных чисел;
9) множество из одного числа 0?
13.4. Образует ли группу относительно операции умножения:
1) множество всех действительных чисел;
§ 13. Понятие о группах 123
2) множество всех положительных действительных чисел;
3) множество всех рациональных чисел;
4) множество всех натуральных чисел;
5) множество всех ненулевых комплексных чисел;
6) множество всех комплексных чисел, по модулю равных 1;
7) множество всех ненулевых чисто мнимых комплексных
чисел;
8) множество комплексных корней n-й степени из 1 (п —
натуральное число)?
13.5. Доказать, что в любой группе:
1) единичный элемент е единственен;
2) для любого элемента а обратный элемент а един-
единственен;
3) равенство ах — b равносильно х = а~1Ъ, а равенство ха =
= Ъ равносильно х = Ъа~1;
4) для любых элементов а и 6 выполняется равенство
1 11
13.6. Доказать, что если квадрат любого элемента группы
равен единичному элементу, то группа абелева.
13.7. Доказать, что все аффинные преобразования плос-
плоскости, при которых данный треугольник переходит в себя, об-
образуют неабелеву группу. Найти порядок этой группы.
13.8. Доказать, что две группы изоморфны:
1) группа комплексных чисел относительно операции сло-
сложения и группа параллельных переносов плоскости относи-
относительно операции умножения (композиции);
2) группа комплексных чисел, по модулю равных 1, относи-
относительно операции умножения и группа поворотов плоскости во-
вокруг фиксированной точки относительно операции умножения;
3) группа ненулевых действительных чисел относительно
операции умножения и группа гомотетий с центром в данной
точке относительно операции умножения (коэффициент гомо-
гомотетии отличен от нуля);
4) группа ненулевых комплексных чисел относительно опе-
операции умножения и группа преобразований плоскости, задан-
заданных формулами х* = ах — by, у* = bx + ay (a2 + б2 > 0), относи-
относительно операции умножения;
5) группа действительных чисел относительно операции
сложения и группа положительных действительных чисел от-
относительно операции умножения;
124 Гл. 5. Преобразования плоскости. Группы
6) группа Сп вращений правильного n-угольника относи-
относительно операции умножения и группа Un комплексных корней
n-й степени из 1 относительно операции умножения.
13.9. Доказать, что существуют только две неизоморфные
группы, содержащие четыре элемента. Привести примеры для
обоих случаев.
13.10. Доказать, что данная группа является цикличе-
циклической, и найти ее образующий элемент:
1) группа всех целых чисел относительно сложения;
2) группа пЪ целых чисел, кратных данному натуральному
числу п, относительно сложения;
3) группа Un комплексных корней степени п из 1 относи-
относительно умножения;
4) группа Сп вращений правильного п-угольника.
13.11. Найти все подгруппы групп из задачи 13.10.
13.12. Доказать, что:
1) всякая бесконечная циклическая группа изоморфна
группе целых чисел;
2) все конечные циклические группы одинакового порядка
изоморфны друг другу.
13.13. Доказать, что:
1) всякая подгруппа циклической группы сама циклическая;
2) порядок любой подгруппы конечной циклической груп-
группы является делителем порядка группы.
13.14. Пусть Я — непустое подмножество группы G. До-
Доказать, что Я является подгруппой в G тогда и только тогда,
когда выполняются два условия: а) если hi, hi G Я, то h\hi G Я,
б) если h G Я, то h~l G Я.
13.15. Пусть Я — непустое подмножество группы G, за-
замкнутое относительно умножения (т. е. выполнено условие а)
задачи 13.14). Доказать, что при любом из следующих усло-
условий Я будет подгруппой в G:
1) Я — конечное множество;
2) все элементы из Я имеют конечные порядки.
13.16. Показать, что:
1) группа всех ортогональных преобразований, сохраняю-
сохраняющих данный правильный n-угольник (называемая его группой
симметрии, а также группой диэдра степени п, Dn), содержит
2п преобразований;
§ 13. Понятие о группах 125
2) группа Сп вращений правильного n-угольника является
нормальной подгруппой в Dn.
13.17. Пусть \G\ = In и Н — подгруппа в G порядка п.
Доказать, что Н — нормальная подгруппа группы G.
13.18. Доказать при помощи теоремы Лагранжа, что:
1) порядок конечной группы делится на порядок любого ее
элемента;
2) группа простого порядка является циклической.
13.19. Пусть G = Dz — группа симметрии правильного
треугольника (см. задачу 13.16), а Н — ее подгруппа, состо-
состоящая из тождественного преобразования г и симметрии отно-
относительно одной из высот треугольника. Найти разбиение груп-
группы G на левые и правые смежные классы по Н и убедиться в
том, что Н не является нормальной подгруппой в G.
13.20. Доказать, что:
1) параллельные переносы образуют нормальную подгруп-
подгруппу группы ортогональных преобразований плоскости;
2) преобразования, имеющие общую неподвижную точку,
образуют подгруппу группы ортогональных преобразований
плоскости, но она не является нормальной.
13.21. Доказать, что:
1) если конечное множество аффинных преобразований
плоскости образует группу, то все преобразования из этого мно-
множества имеют общую неподвижную точку,
2) всякая конечная группа ортогональных преобразований
плоскости является группой симметрии или группой вращений
некоторого правильного многоугольника.
13.22. Найти (с точностью до изоморфизма) факторгруп-
факторгруппу G/H, если:
1) G — группа всех комплексных чисел с операцией сложе-
сложения, Н — подгруппа всех вещественных чисел.
2) G — группа ненулевых комплексных чисел с операцией
умножения, Н — подгруппа положительных вещественных чисел.
3) G — группа ненулевых комплексных чисел с операцией
умножения, Н — подгруппа чисел, по модулю равных 1.
4) G — группа всех вещественных чисел с операцией сло-
сложения, Н — подгруппа целых чисел.
5) G = Z — группа целых чисел с операцией сложения,
Н = пЪ — подгруппа чисел, кратных данному натуральному
числу п.
126 Гл. 5. Преобразования плоскости. Группы
6) G — группа всех ортогональных преобразований плоско-
плоскости первого рода с операцией умножения преобразований, Н —
подгруппа параллельных переносов.
13.23. 1) Доказать, что множество Sn всех подстановок
степени п является группой относительно операции умножения
преобразований (симметрической группой степени п). Найти
порядок этой группы.
2) Доказать, что группы Sn некоммутативны при п ^ 3.
2V- 2) A 2 Ъ\A 2 3
13.24. Вычислить:
A \.(
2 3
12
1234\ /1234
13.25. Доказать, что все четные перестановки (см. введе-
введение к § 14) образуют нормальную подгруппу Ап в 5П, и найти
ее порядок.
13.26. Пусть V — нециклическая подгруппа четвертого по-
порядка в ?4. Доказать, что:
1) V С А4; 2) V нормальна в 54; 3) 54/V = S3.
13.27. Найти:
1) все подгруппы в 5з;
2) все нормальные подгруппы в 54.
Глава 6
МАТРИЦЫ
§ 14. Определители
В этом параграфе используются следующие основные понятия:
матрица, подматрица, строка матрицы, столбец матрицы, пере-
перестановка, четная или нечетная перестановка, число нарушений
порядка в перестановке, определитель (детерминант) квадратной
матрицы, минор матрицы, элементарные преобразования матри-
матрицы, транспонирование матрицы. В задачах 14.33-14.44 используют-
используются и другие операции с матрицами и некоторые специальные виды
матриц; соответствующие обозначения и определения даны во вве-
введении к § 15.
Квадратная матрица порядка п
А =
U21 U22
ап\ ап2 ¦ ¦ ¦ апп
обозначается также через ||а^|| или (a,-j). Элементы аа,...,а{„ об-
образуют i-ю строку, элементы а\j,...,anj — j-й столбец матрицы А.
Говорят, что элемент a<j лежит на пересечении ее i-й строки и j-ro
столбца. Всюду в этой главе, кроме нескольких специально оговорен-
оговоренных случаев, предполагается, что элементы матриц — вещественные
или комплексные числа. Определитель матрицы А обозначается че-
через detA, \A\ или
ап\ аП2 ¦ ¦ ¦ ann
Приведем основные формулы для вычисления определителей:
A)
а2 Ъ2 с2
аз Ьз сз
—
Ь2с2
-ъ
аЬ
cd
а2 с2
= ad-
be;
а2 b2
аз Ьз
B)
Рекуррентные формулы:
128
Гл. 6. Матрицы
(формула разложения определителя по i-й строке),
C)
D)
k=\
(формула разложения определителя по j-му столбцу). В формулах
C), D) через Mik обозначен дополнительный минор элемента а^, т.е.
определитель матрицы порядка п — 1, полученной из А вычеркива-
вычеркиванием строки и столбца, в которых расположен элемент а^.
ап...аХп
а„1...апп
E)
— формула полного разложения (или полного развертывания) опре-
определителя, выражающая определитель матрицы n-го порядка через ее
элементы. В слагаемых формулы E) значения индексов i\, ..., in об-
образуют всевозможные перестановки чисел 1, 2, ..., п, а через
N(ii, ..., in) обозначено число нарушений порядка в перестановке
(ii,...,in). Напомним, что перестановка (z'i, ..., in) называется чет-
четной, если число N(i\, ..., гп) четно, и нечетной в противном случае.
Приведем формулировку теоремы Лапласа. Минором порядка s
(s ^ n) матрицы А называется определитель матрицы, образующей-
образующейся в пересечении каких-либо s строк и s столбцов матрицы А. Если
эти строки имеют номера (ii,... ,is), а столбцы — номера (ji,... ,js),
то соответствующий минор обозначается через L
- Л:
"Л.-Je
а»
1Л
..п;
а,
¦«л
..а
isjs
Через M'}']s обозначаем минор, дополнительный к минору L}'"'?,
т. е. определитель матрицы порядка п — s, полученной из А вычер-
вычеркиванием выделенных строк и столбцов. Для любого натурального
числа s (s ^ п) и любого фиксированного набора строк с номерами
ti,... ,is таких, что i\ < ii < ... < is, справедлива формула
^:2m^;;Z, (б)
где сумма берется по всевозможным наборам значений индексов
ji > • • •) За, таким, что 1 ^ ji < j2 < ¦ • • < js ^ n ¦ Формулу F) можно на-
назвать формулой разложения определителя по данным s строкам.
Аналогична формула разложения определителя по данным s столб-
столбцам:
§ 14- Определители 129
Здесь индексы j\,...,js фиксированы, а сумма берется по всевоз-
всевозможным наборам значений индексов i\,...,is таким, что 1 ^ti < ...
... < is ^ п.
Перестановки A4.1—14.3)
14.1. 1) Доказать, что последовательно переставляя сосе-
соседние числа, можно поменять местами любые два элемента переста-
перестановки, сохранив при этом расположение остальных элементов.
2) Доказать, что четность перестановки изменится, если в
ней поменять местами два элемента.
14.2. 1) Доказать, что конечное число (к) раз переставляя
соседние числа, можно расположить элементы перестановки в
порядке возрастания. Однозначно ли определено fc?
2) Пусть s — число нарушений порядка в перестановке. До-
Доказать, что числа к и s имеют одинаковую четность.
3) Указать последовательность из s перемен мест в парах
соседних чисел, в результате которой все элементы перестанов-
перестановки будут расположены в порядке возрастания.
14.3. Последовательно переставляя соседние числа, распо-
расположить элементы следующих перестановок в порядке возрас-
возрастания. Найти число нарушений порядка и определить четность
перестановки:
>j. 1) ( 5 4 3 2 1 ); 2) ( 6 4 5 2 3 1 );
3) ( 1 2 4 5 6 3 ); 4) ( 1 2 4 3 5 9 8 7 6 );
и, 5) (987654321); 6) D32159876);
7) (п, п-1, ..., 1);
8) A, 3, 5, ..., 2п-1, 2, 4, 6, ..., 2п);
9) B, 4, 6, ..., 2п, 1, 3, 5, ..., 2п + 1).
"'*' Вычисление определителей A4.4—14.32)
14.4. Вычислить определитель второго порядка:
1) |Л5|; 2) |Л6|; 3) \А7\;
4) |Л81|; 5) \А77\; 6) |Л8|. .
14.5. Вычислить 1^781 при е = е/3.
14.6. Пусть х = rcosip, y = rsimp. Вычислить якобиан
дх/дг dx/dip
ду/дг dy/dip
5- 1715
130 Гл. 6. Матрицы
14.7. Вычислить определитель третьего порядка:
1) |А2Оо|; 2) 1-4.20x1; 3) \АШ\\ 4) |А203|;
5) \А2М\- 6) |A205|; 7) |А209|; 8) |Л210|;
9) Изб5|; ю) \АШ\\ п) |А366|; 12) \Ащ\-
14.8. Вычислить |Азбз| ПРИ w = е27"/3.
14.9. Пусть х = rcosipcostp, у = rsintpcosip, z = rsmtp.
дх/дг дх/д(р дх/дф
Вычислить якобиан ду/дг ду/др ду/дтр
dz/dr dz/dp dz/дф
14.10. Решить относительно неизвестного Л уравнение:
1) \А2п - \Е\ = 0; 2) \A2i2 - ХЕ\ = 0;
3) |^2i3 ~ Щ = 0.
14.11. Сколько слагаемых входит:
1) в формулу полного разложения определителя четверто-
четвертого порядка;
2) в формулу полного разложения определителя пятого по-
порядка?
14.12. 1) Имеются ли в формуле полного разложения опреде-
определителя матрицы ||ац\\ пятого порядка слагаемые а^а^а^а^ха^,
055012034021043?
2) С какими знаками входят в формулу полного раз-
разложения определителя матрицы пятого порядка слагаемые
012021034045053, 0150^034041052?
14.13. Пусть в матрице А порядка п точно п элементов
равны 1, а остальные — нули. Чему может быть равен опреде-
определитель матрицы А?
14.14. Доказать, что определитель диагональной матрицы
равен произведению ее диагональных элементов.
14.15. Доказать, что определитель треугольной матрицы
равен произведению ее диагональных элементов.
14.16. 1) Как изменится определитель, если в матрице пе-
переставить две строки?
2) Как изменится определитель, если к одной строке мат-
матрицы прибавить другую?
3) Как изменится определитель, если одну строку в матри-
матрице умножить на число А?
4) Как будет изменяться определитель, если со столбцами
матрицы совершать такие же элементарные преобразования?
14.17. Изменится ли определитель, если матрицу транспо-
транспонировать?
§ Ц. Определители
131
14.18. Как изменится определитель, если все элементы
матрицы заменить комплексно сопряженными числами?
14.19. Сформулировать несколько достаточных условий,
при которых определитель матрицы А равен 0. Сформулиро-
Сформулировать необходимое и достаточное условие.
14.20. Пусть detA ф 0. Доказать, что, применяя к строкам
матрицы элементарные преобразования, сохраняющие опреде-
определитель, можно получить: 1) треугольную матрицу; 2) диаго-
диагональную матрицу.
14.21. Вычислить определитель четвертого порядка:
5) |А43б|; 6) |Аш|; 7) |Аш|; 8) \А^\\
¦ 9) |Auo|; Ю) |,444iI; И) \Аш\; 12) |А,42|;
13) |Аш|; 14) |Аш|; 15) |Л445|-
14.22. Вычислить определитель пятого порядка:
-1 \ I л 1 е\\ \ A j, о Ч 1/1 I • 4Л I 21 I* ^»^ I 21 I
14.23. Вычислить определитель порядка п:
,-j 1) И6оо|; 2) \АШ\\ 3) |А6ю|; 4) \M\\\\ 5) \Аш\\
6) Ибоб|; 7) |А614|; 8) |А615|; 9) |А622|; Ю) |Л6зз|;
^ И) \Мт&\\ 12) Иб2б|; 13) \Аюа\\ 14) И628|;
15) |A4ij; 16) |Абзв|; 17) Ибзэ|; 18) \А^2\\ (п = 2к).
14.24. Вычислить определитель порядка п (полезно полу-
получить рекуррентную формулу):
,, 4) |Лз2|; 5) |Лз4|; 6) |А635Г;
7) |-Аб44| («детерминант Вандермонда»);
лм:
-«ь
- anbi
- anbn
Ю) (Р)
2а
1
0
0
1
2а
1
0
0
1
2а
0
... 0
... 0
... 0
... 1
0
0
0
2с
132
Гл. 6. Матрицы
И)
12)
2cosip 1 0 ... О О
1 2cosip 1 ... О О
О
1 2cos(/? ... О О
О
О
о
2chip 1 О
1 2chy 1
О 1 2chy
... 1 2 cosy
..О О
..О О
..О О
13) (р) И638.
О О О ... 1 2chy
14.25. Показать, что определитель матрицы А порядка т
равен 0, если в ней имеется нулевая подматрица размеров к х
и к + 1 > п.
14.26. Вычислить detA, зная, что в матрице A cyMMi
строк с четными номерами равна сумме строк с нечетнымг
номерами.
14.27. Как изменится определитель, если переставит*
столбцы матрицы, расположив их в обратном порядке?
14.28. Как изменится определитель, если матрицу траш-
понировать относительно второй диагонали?
14.29. Числа 1081, 1403, 2093 и 1541 делятся на 23. O6t
яснить без вычислений, почему число
также делится на 23.
14.30. Пусть Mij — дополнительный минор элемента й{
п
матрицы А. Доказать, что ^T]akjMij(—I)*"-' = 0 при кфг (п -
порядок А).
14.31. 1) Пусть все элементы матрицы второго порядка яь-
ляются дифференцируемыми функциями от одной переменно!:
t. Доказать, что для производной от определителя, рассматри
ваемого как функция от ?, имеет место формула
a{t) b{t) ' _ a'(t) b'{t) a{t) b{t)
c{t) d\t) ~ c{t) d{t) + c'{t) d'{t)
2) Составить и доказать формулу дифференцирования
определителя порядка п.
1
1
2
1
0
4
0
5
8
0
9
4
1
3
3
1
§ 14- Определители 133
14.32. Доказать, что det(yl — \Е) — многочлен от Л, и вы-
вычислить его коэффициенты.
Задачи, в которых употребляются операции с
матрицами и специальные виды матриц A4.33—14.44)
14.33. Справедливы ли тождества (п — порядок матрицы А):
а
•¦ 2)
3)
4) det(i4fc) = (detA)k?
, i| 14.34. Пусть А — квадратная матрица порядка n; bij —
дополнительный минор ее элемента а^; Cjj — алгебраическое
дополнение элемента а^; из них образованы матрицы В = (bij),
С = (cij). Доказать, что detB = detC = (detA)".
14.35. Доказать, что определитель эрмитовой матрицы —
вещественное число.
14.36. Доказать, что определитель кососимметрической
матрицы нечетного порядка равен 0.
14.37. Доказать, что если матрица А унитарна, то
14.38. Доказать, что для любой вещественной матрицы А
выполнено detAA71 ^ 0.
14.39. Пусть Bi,...,Bk — квадратные матрицы,
Вг О
Н = •. — блочно диагональная матрица. Доказать,
О Вк
что det На - det Вх... det Bk.
II А О II
14.40. Пусть A, D — квадратные матрицы, Н = „ ^ —
блочно треугольная матрица. Доказать, что
14.41. Пусть А — квадратная матрица порядка n, det A =
II А 1АII п
= а, Я = L^ 4^ . Вычислить detЯu.
14.42. Пусть А — квадратная матрица, А2, А3, А4 — ее
степени, Я = .3 >i4 • Вычислить detЯl-l.
IIл л II
134
Гл. 6. Матрицы
14.43. 1) Пусть А, В, С, Е — квадратные матрицы порядка
п, Е — единичная матрица, Н =
,-, . Доказать, что
()
2) Всегда ли справедливо равенство det/f1-' = det(ylD —
— ВС) для блочной матрицы Н =
А В
С D
14.44. Выразить определитель кронекеровского произве-
произведения А®В через определители матриц А, В.
§ 15. Операции с матрицами
В этом параграфе используются следующие основные понятия:
матрица, размеры матрицы, подматрица (блок, клетка матрицы),
элементарные преобразования матрицы, сумма матриц, произве-
произведение матрицы на число, произведение матриц, перестановочные
(коммутирующие) матрицы, обратная матрица, след матрицы,
многочлен от матрицы. В некоторых задачах предполагается зна-
знакомство с алгоритмом Гаусса. Подробное изложение алгоритма Гаус-
Гаусса дано во введении к § 16.
Приведем некоторые обозначения и определения. Матрица
А =
... alr
содержит т строк и п столбцов, имеет размеры (размер) т х п, ши-
ширину п и высоту т. Рассмотрим матрицы А, В, С с элементами aij,
bij, Cij соответственно.
Матрица В называется произведением матрицы А на число а,
если для всех элементов этих матриц выполнены равенства b^ = aaij
(размеры матриц А, В одинаковые). Обозначение: В = а А.
Пусть А, В, С — матрицы одинаковых размеров. Матрица С
называется суммой матриц А и В и обозначается С = А + В, если
для всех значений индексов i,j выполнены равенства Cjj = а^ + Ьу.
Пусть число п столбцов матрицы А равно числу строк мат-
матрицы В. Матрица С называется произведением А на В (справа),
С = АВ, если для всех значений индексов i, j выполнены равенства
п
Cij = 2_]aikbkj- Если А имеет размеры m х п, г. В — размеры n x р,
к=\
то матрица С — АВ имеет размеры ту.р. Матрицы А и В комму-
коммутируют, если АВ = В А.
Следующие два типа преобразований строк назовем основными
элементарными преобразованиями строк матрицы:
1) умножение строки на число, отличное от нуля;
2) прибавление к какой-либо строке матрицы другой ее строки.
§ 15. Операции с матрицами 135
К элементарным преобразованиям строк относят также:
3) перестановку двух строк матрицы;
4) прибавление к какой-либо строке матрицы другой ее строки,
умноженной на число.
Матрица В называется транспонированной по отношению к
матрице А и обозначается В = АТ, если строками матрицы В явля-
являются соответствующие столбцы матрицы А, т. е. для всех i,j выпол-
выполнены равенства bij = aji. Операция перехода от Л к Ат называется
транспонированием матрицы А. Если А имеет размеры тх п, то
А имеет размеры пхт.
Матрица В называется комплексно сопряженной по отношению
к комплексной матрице А и обозначается В = А, если для всех i,j
выполнено равенство bij = aj]. Матрица В называется эрмитово со-
сопряженной по отношению к матрице А и обозначается В = Ан, если
у
В = А , т. е. для всех г, j выполнено bij — aji.
Матрица называется нулевой, А = О, если все ее элементы рав-
равны 0. Матрица А называется матричной единицей с индексами г'о, jo
и обозначается А — Eiojo, если все ее элементы, кроме ajojo, нулевые,
Элементы ац,а22,---,апп образуют (главную) диагональ квад-
квадратной матрицы А = \\uij\\ порядка п и называются ее диагональ-
диагональными элементами. Сумма диагональных элементов называется сле-
п
дом матрицы А и обозначается tvA. Таким образом, trA =
Квадратная матрица называется диагональной, если все ее неди-
недиагональные элементы равны 0, т. е. atj=O при гф]. Диагональ-
Диагональная матрица порядка п обозначается diag(an,... ,ann). Диагональная
матрица порядка п, у которой все диагональные элементы равны 1,
называется единичной и обозначается Е или Еп. Элементы единич-
единичной матрицы обозначаются <5jj: Е — \\Sij\\,
1 при г = j,
0 при г ф j.
м Пусть А — квадратная матрица порядка п. Матрица В назы-
называется обратной к А и обозначается В — А'1, если АВ = В А — Е.
Элементы обратной матрицы можно вычислить по формуле:
3 detA '
где Mji — дополнительный минор элемента a3j в матрице А. Матри-
Матрица А обратима, если det А ф 0.
Пусть p(t) — по + ait + ... + uktk — многочлен. Матрица В =
= uqE + а\А +... + akAk называется многочленом от матрицы А и
обозначается В — р(А).
Перечислим некоторые специальные виды квадратных матриц
136 Гл. 6. Матрицы
скалярная: А = diag(A,..., А), где А — некоторое число;
вырожденная (особая): detA — 0;
невырожденная (неособая): detA^O;
унимодулярная: detA — 1;
матрица перестановки: матрица А получена из единичной мат-
матрицы Е перестановкой строк;
элементарная матрица: матрица А, полученная из Е элемен-
элементарным преобразованием;
верхняя треугольная: ац = О при г > j;
нижняя треугольная: ац — 0 при i < j;
симметрическая (или симметричная): АТ = А;
кососимметрическая (или кососимметринная): АТ — —А;
эрмитова: Ан = А;
косоэрмитова: Ан = —А;
ортогональная: АТ = А~1;
унитарная: Ан = А~1;
неотрицательная: atj Ji 0 при всех i,j;
п
стохастическая (марковская): aij Jj 0 при всех г, j и 2,aik = 1
при j = l,...,n;
нильпотентная: Ak ~О при некотором натуральном к (наи-
(наименьшее из таких к называется показателем нильпотентности
матрицы А);
периодическая: Ак — Е при некотором натуральном к (к назы-
называется периодом матрицы А).
Матрица В называется блочной (клеточной), если ее элемента-
элементами являются матрицы Вц размеров m,- x п,. При этом все матри-
матрицы Bij, принадлежащие одной строке В, имеют одинаковую высоту,
а все матрицы В^, принадлежащие одному столбцу В, имеют оди-
одинаковую ширину. Операции с блочными матрицами определяются
по тем же правилам, что и с обычными числовыми матрицами. Ес-
Если числовая матрица А разбита горизонтальными и вертикальными
прямыми на блоки Bij, занумерованные естественным образом, и из
этих блоков сформирована блочная матрица В = \\Bij\\, то говорим,
что матрица В получена из А разбиением на блоки. Пусть, наоборот,
дана блочная матрица В = Ц-В^Ц. Из элементов матриц В^ можно
естественным образом сформировать числовую матрицу А размеров
У^т, х 22iny ^ ЭТ0М случае мы говорим, что матрица А получе-
» i
на объединением блоков матрицы В и пишем А = Ва. Когда для
путаницы нет оснований, значок а опускаем, и числовую матрицу
обозначаем той же буквой, что и блочную.
Пусть А = \\uij\\ и В — числовые матрицы, С — \\Cij\\ — блочная
матрица, определенная равенствами C,j — aijB при всех i,j. Число-
Числовая матрица, получаемая объединением блоков матрицы С, называ-
§ 15. Операции с матрицами
137
«угся (правым) кронекеровским произведением (или правым прямым
произведением) матриц А и В и обозначается А®В.
Основные операции с матрицами: умножение на
число, сложение и умножение матриц A5.1—15.24)
15.1. Сформулировать требования, которые надо предъ-
предъявить к матрицам для того, чтобы их можно было сложить.
15.2. Вычислить линейную комбинацию матриц:
¦V.
3 2|| ||О 1
3 2 Но 1
3) 2II1 8 7 ~151
6> Z\\l -5 -6 11
п\
j
24
-2
2)
-7
7
2
—
3
2
2
1
1
-3
О
5
6
5
1 -2 7
6)
15.3. Описать условия, при которых верны следующие
тождества, и доказать эти тождества (А, В, С — матрицы,
а, /3 — числа):
1) А + В = В + А; 2) А + {В + С) = {А + В) + С;
3) а@А) = (а/3)А; 4) а{А + В) = аА + аВ;
5) {
15.4. 1) Можно ли умножить строку длины т на столбец
ВЫСОТЫ П?
2) Можно ли умножить столбец высоты пна строку длины т?
15.5. Вычислить произведение матриц:
1) || 2 -3 01
13 5
5 9
2)
4)
|2 -3 О||;
5) А4А395; 6) Л442С168;
7) АпоА\2', 8) А3А205', 9) -А4З6С166; Ю) -4601-^602;
11) АША6О5) 12) Л05Л01; 13) (Л20бJ; 14) (^2ооJ;
15) (ЛпJ; 16) (А645J при е = е27"Л\
15.6. Каким условиям должны удовлетворять матрицы А
, чтобы:
jj . 1) существовало произведение АВ;
2) существовало произведение В А;
3) существовали произведения АВ и ВА1
15.7. Выразить размеры матрипъ! АВ через размеры у1 и В.
138
Гл. 6. Матрицы
15.8. Матрицы А, С имеют размеры соответственно m х
хп и р х q, и существует произведение ABC. Каковы размеры
матриц В, АВС1
15.9. Проверить справедливость тождества (А, В, С, D —
матрицы, а — число):
1) а(АВ) = {аА)В; 2) (АВ)С =
3)
4) (
5) А{В
15.10. Проверить, существует ли произведение, и если да,
«ч II 2 ||И1
то вычислить его:
I)lli2||||l2|
3)
|3 4|
И 21
2 4II; 4) А2А8с8А2.
15.11. Вычислить:
1)
1 1
1 1
2)
5) (А1г)п;
1 1 1
0 0 0
0 0 0
3)
6)
4) (А)"
8) (Аш)п; 9) (А6Ы)п; Ю)
15.12. Транспонировать матрицу:
0
0 10 0
0 0 10
0 0 0 1
0 0 0 0
7)
1)
7 -4
-5 3
2)
4)
3)||12 3||;
An 0
5) Ад; 6) Азэо; 7) А544) 8)
15.13. Проверить справедливость тождества:
1) {аА)Т = аАт; 2) (АВ)Т = ВТАТ;
3){ABC)T = CTBTAT; 4) {А + В)т = Ат + Вт.
15.14. Вычислить матрицу Р = Е — (щ — е^):г(е,- — е^) (че-
(через е» обозначена г-я строка единичной матрицы Е).
15.15. Пусть a, b — столбцы одинаковой высоты и Н =
= abT. Доказать, что Я2 = АЯ для некоторого числа А.
15.16. Всегда ли верно матричное равенство АВ = ВА?
Привести примеры коммутирующих и некоммутирующих мат-
матриц.
15.17. Что можно сказать о размерах матриц А, В, если
АВ = ВА1
§ 15. Операции с матрицами
139
15.18. Вычислить матрицу [А, В] =¦ АВ — В А {коммута-
{коммутатор матриц А, В), если:
1) A = Ai2, В = Аь; 2) А = А20, В = А16.
15.19. Проверить справедливость тождества (см. зада-
задачу 15.18):
1)[АУВ] = -[В,А); 2)[А,А} = 0; 3) [А,Е] = [Е,А] = О;
4) [А,(В + С)] = [А,В] + [А,С].
15.20. Вычислить матрицу {А,В} = \{АВ + ВА) {произ-
{произведение Йордана матриц А, В), если:
1) А = А12, В = А5; 2) А = А20, В = Аи.
15.21. Проверить справедливость тождества (см. задачу
15.20):
1) {А,В} = {В,А}; 2) {А,А} = А2; 3) {А,Е} = А;
4) {А,{В + С)}^{А,В} + {А,С}.
.„. 15.22. Вычислить f{A), если:
I)
= t2-2t+l,A=
A=
А = Ап;
о 3)
¦W 4)
5)
ч 15.23. Разложив многочлен f{t) на множители, вычислить
f(A), если:
1) /(t) = t2 -1, A = А2зо; 2) /(*) = t2 + 2t - 3, А = А2н.
15.24. Проверить, справедливы ли матричные тождества:
*; 2 2 2
,; )
! 2)
)
) { ){);
4) (Л + Ef = А3 + ЗА2 + SA + E.
Si
Связь умножения матриц и элементарных
1 преобразований A5.25—15.38)
15.25. Доказать, что fc-й столбец матрицы АВ равен про-
произведению матрицы А на fc-й столбец В.
15.26. Сформулировать и доказать предложение, анало-
аналогичное 15.25, для строк.
15.27. Доказать, что fc-й столбец матрицы АВ равен ли-
линейной комбинации столбцов матрицы А с коэффициентами из
элементов fc-ro столбца матрицы В.
140 Гл. 6. Матрицы
15.28. Сформулировать и доказать аналог предложения
15.27 для строк.
15.29. Доказать, что:
1) при перестановке двух строк матрицы А соответствую-
соответствующие строки в АВ также переставляются;
2) если fc-ю строку матрицы А умножить на число Л, то к-я
строка АВ также умножится на А;
3) если к fc-й строке матрицы А прибавить ее j-ю строку,
то с матрицей АВ произойдет то же элементарное преобразо-
преобразование.
15.30. Сформулировать и доказать аналоги предложений
15.29 для столбцов.
15.31. 1) Доказать, что прибавление к строке матрицы ли-
линейной комбинации остальных ее строк может быть осуще-
осуществлено при помощи последовательного применения основных
элементарных преобразований строк.
2) Доказать аналогичное утверждение для преобразова-
преобразования, состоящего в перестановке двух строк матрицы.
15.32. Вычислить произведение eiAe? для произвольной
матрицы А (через е; обозначена i-я строка единичной матрицы
подходящего размера).
15.33. Для произвольной матрицы А и матричной едини-
единицы Eij подходящего размера вычислить произведение:
1) Ei:jА; 2) AEtj.
15.34. Пусть матрицы А и В таковы, что для произволь-
произвольных столбцов ?, и г| подходящей высоты выполнено равенство
?,ту1г| = Е,ТВц. Доказать, что А — В.
15.35. Пусть А — матрица размеров mxn, Em и Еп —
единичные матрицы порядка тип соответственно. Доказать,
что ЕтА = АЕп = А.
15.36. На какую матрицу следует умножить матрицу А,
чтобы в результате получить:
1) первый столбец А; 2) первую строку А?
15.37. Подобрать элементарную матрицу К так, чтобы
матрица К А получалась из А:
1) перестановкой двух первых строк А;
2) прибавлением первой строки ко второй;
3) умножением первой строки А на число А ф 0.
§ 15. Операции с матрицами
141
15.38. Подобрать элементарную матрицу К так, чтобы
произведение АК получалось из А при помощи заданного эле-
элементарного преобразования столбцов.
'* Обратная матрица A5.39-15.65)
т 15.39. Привести примеры вырожденных и невырожден-
невырожденных матриц.
15.40. Пусть А — вырожденная матрица второго поряд-
порядка, т — натуральное число. Доказать, что существует число Л
такое, что Ат — \т~1А для всех т.
15.41. Обратима ли прямоугольная матрица?
15.42. Доказать, что если матрица В, обратная к А, суще-
существует, то detA ф 0, detB ф 0, det.B = (detA)~l.
15.43. 1) Доказать, что если А, В, С — квадратные мат-
матрицы и АВ = Е, АС - Е, то В = С.
2) Возможно ли равенство АВ = Е для прямоугольных
матриц? Справедливо ли утверждение 1) для прямоугольных
матриц?
15.44. Дана квадратная матрица А = Ца^-Ц. Выписать си-
систему уравнений, которой удовлетворяют элементы j-ro столб-
столбца матрицы А~1.
, 15.45. Вычислить:
¦¦&.
1)
4)
8)
3 5
5 9
-1
2)
-1
3)
0
An О
7) (Азот)-1;
2-10
0 2 -1
-1 -1 1
5) (A77)-lli 6) (Л)-1; ^
15.46. Доказать, что матрица, обратная к элементарной,
есть элементарная матрица.
15.47. Вычислить обратную к данной элементарной мат-
матрице:
1)
I
5)
9)
-2
0
3
0
0
0
г-Н
0
0
1
0
0
1
2)
6)
0
1
Г-Н
0
2
1
0
0 0
1 0
0 1
3)
7)
1
.3
I—I
0
0
0
1
J
о
-1
(
3
0
0
1
4)
1
0
0
; 8)
-2 0
1 0 ;
0 1
1 0 0
0 0 1
0 1 0
10)
И) А200.
142
Гл. 6. Матрицы
15.48. Проверить, справедливо ли тождество:
1) (AT)~l = {А~1)т- 2) {аА)~1 = а'1 А'1;
3) {АВ)~г = В'1 А~1; 4) (ABC) = C-^-U;
5) (А~1)к = (Ак)-1; 6) (А + Б)-1-^-1^-^-1.
15.49. 1) Доказать, что квадратную матрицу с помощью
элементарных преобразований строк можно перевести в еди-
единичную тогда и только тогда, когда она невырождена.
2) Сформулировать и доказать аналогичное утверждение
для элементарных преобразований столбцов матрицы.
15.50 (р). Доказать, что всякая невырожденная матрица
есть произведение элементарных матриц.
15.51. Разложить данную матрицу в произведение элемен-
элементарных матриц:
1
-2
2)
1 -1
1 1
3)
0 -2
1 3
4)
1 О О
1 1 2
1 1 3
15.52. 1) Пусть А, В — матрицы одного порядка и матри-
матрица А с помощью цепочки элементарных преобразований строк
переведена в единичную матрицу Е. В какую матрицу переве-
переведет та же цепочка элементарных преобразований матрицу Е1
Матрицу В?
2) Ответить на те же вопросы для цепочки элементарных
преобразований столбцов матрицы А, переводящих А в Е.
15.53. 1) Описать и обосновать способ вычисления мат-
матрицы А~^, использующий элементарные преобразования строк
матрицы \\В Е\\а.
2) Описать и обосновать способ вычисления мат-
матрицы Л", использующий элементарные преобразования столб-
А
цов матрицы
Е
?
15.
1)
4I
8) (
54.
0
0
1
0
A,
А4
Вычислить:
0
0
0
-1
зо)~
зэ)~
0
0
0
1.
1;
0
1
0
0
5)
9)
—1
; 2)
(Аш)"
(Азсп)"
г-Н
-1
1
0
1
J
1 1
2 1
4 1
0 0
6)
10)
0
0
о
3
-1
>
(Am)
(А
514N
3)
-1.
Г1;
1 1
0 1
0 0
7) (
П)
г-Н
... 1
... 1
—:
АшГ1;
(Азоэ)
-1
12) (Азов); 13) (Айв).
15.55. Пусть А2 + А + Е = О. Доказать, что матрица А не-
невырождена, и указать простейший способ вычисления А~1.
§ 15. Операции с матрицами
143
15.56. Пусть Ат = О. Доказать, что {Е - А)'1 = Е + А +
+ --- + Ат~1.
15.57. Матрица А коммутирует с В. Доказать, что то-
тогда Л коммутирует с В (предполагается, что матрицы об-
обратимы).
15.58. Проверить формулу E~1A5)m = S~1AmS.
15.59. Пусть S~lAS = B и f(t) — многочлен. Доказать,
что /(В) = S-lf(A)S.
15.60. Пусть a, b — столбцы одинаковой высоты, 1//х =
= 1 4- Ьта ф О, В = Е + аЪТ. Проверить справедливость равен-
равенства В = Е — даЬт.
15.61. Пусть a, b — столбцы высоты n, A — обратимая
матрица порядка п, \j\i — 1 + Ь:гАа ф О и В = А + abT. Про-
Проверить справедливость равенства В = А~1 — цА~1аЪтА~1.
15.62. 1) Описать и обосновать способ вычисления произ-
произведения А~1В, использующий элементарные преобразования
строк матрицы \\В Е\\а.
2) Описать и обосновать способ вычисления произведения
г-1, использующий элементарные преобразования столбцов
A D
матрицы
Е
15.63. Вычислить произведения матриц:
"Х 25 2)АША-^ 3)
1 1
О 1
4)
1 3
1203^205;
6)
15.64. Пусть матрицы А, С невырожденные. Решить мат-
1чное уравнение:
1) АХ = О; 2) АХ = В; 3) ХА = В;
А)АХС = В; 3) А(Х + С) = В.
15.65. Найти матрицу X из уравнения:
1)
3)
5) X
2 5
1 3
2 1
1 1
г
с
X
X
=
=
СМ г-н СМ
1
2 1
1 1
10
17
-1
2
2
;
2)
; 4)
5 5
5 8
X
1
2
0
2
-1
СМ г-н
1
to ел to
;
со ел
=
0
-2
5
2
1
Х =
1
1
;
1
0
0
0
1
1
0
1
0
144
6) x||}
8) AnX
11) Ащ
14) Al26
1
1
X
X
=
= a\
1
1
>28
>30
9)
Гл
;}
(J.
;
12) j
15) Л
Матрицы
7)
1
0
1
1
A,
A2]
X
10)
i6;
з;
1 1
0 1
13) A20
16) XA22
;
3X = C53;
Другие операции с матрицами и специальные виды
матриц A5.66-15.130)
15.66. Пусть А, В — диагональные матрицы одного поряд-
порядка, а — число. Доказать, что матрицы аА, А + В, АВ, В А тоже
диагональные и АВ = В А.
15.67. Пусть А = diag(Ai,...,ЛП). Доказать, что:
1) столбцы матрицы В А получаются умножением столбцов
матрицы В на числа Ai,..., Лп;
2) строки матрицы АВ получаются умножением строк В
на числа Ai,..., Ап.
15.68. Пусть А — диагональная матрица, /(?) — много-
многочлен. Доказать, что тогда матрица f(A) также диагональна.
15.69. Пусть матрица А диагональна, все ее диагональные
элементы различны и АВ = В А. Доказать, что тогда и матрица
В диагональна.
15.70. Матрица А перестановочна с любой диагональной
матрицей порядка п. Доказать, что А — диагональная матрица
порядка п.
15.71. Матрица А перестановочна со всеми матричными
единицами порядка п. Доказать, что А — скалярная матрица.
15.72. Матрица А перестановочна с любой матрицей по-
порядка п. Доказать, что А — скалярная матрица.
15.73 (р). Найти все матрицы, перестановочные с каждой
невырожденной матрицей порядка п.
15.74. Найти матрицу, эрмитово сопряженную данной
матрице:
1) А82; 2) А№; 3) А&9; 4) А81.
15.75. Проверить справедливость тождества:
1) (А + В)н = АН + ВН; 2)(аА)н = аАн; 3) {Ан)н = А;
4) (А ¦ В)" = ВНАН; 5) {А")'1 = (А'1)н.
15.76. Определить, является ли указанная матрица второ-
второго порядка диагональной, скалярной, треугольной, симметри-
§ 15. Операции с матрицами 145
ческой, кососимметрической, эрмитовой, косоэрмитовой, уни-
унитарной, ортогональной или матрицей перестановки:
1) AS2; 2) Al2] 3) А87; 4) Л86; 5) А77; 6) А15;
7) А46; 8) А23; 9) -±=А8&; 10) А22; 11) -^=
15.77. Доказать, что:
1) все диагональные элементы кососимметрической матри-
матрицы равны 0;
2) диагональные элементы эрмитовой матрицы вещественны;
3) диагональные элементы косоэрмитовой матрицы мнимые.
15.78. Доказать, что:
¦-,4, 1) если матрица А эрмитова, то матрица г А косоэрмитова;
ojj,: 2) если матрица А косоэрмитова, то гА эрмитова.
15.79. 1) Найти общий вид эрмитовых матриц второго по-
ка.
2) Найти общий вид косоэрмитовых матриц второго поряд-
поряд3) Указать все матрицы перестановок второго порядка.
ка.
Доказать утверждения 15.80-15.86.
15.80. Если матрица А диагональна и все ее диагональные
элементы отличны от 0, то А~^ существует и является диаго-
диагональной.
15.81 (р). Если матрица А верхняя треугольная и все ее
диагональные элементы отличны от 0, то А~1 существует и
является верхней треугольной.
15.82. Если А — невырожденная симметрическая матри-
матрица, то А — также симметрическая матрица.
15.83. Если А — невырожденная кососимметрическая мат-
матрица, то А - также кососимметрическая матрица.
15.84. Если А — ортогональная матрица, то А существу-
существует и ортогональна.
15.85. Если А — унитарная матрица, то А существует и
унитарна.
15.86. Если А — матрица перестановки, то А~х существует
и также является матрицей перестановки.
15.87. Доказать, что данная матрица ортогональна и най-
найти обратную к ней: 1) А77; 2) Азп; 3) A3i8; 4) А322; 5)
146 Гл. 6. Матрицы
15.88. Доказать, что данная матрица унитарна и найти
обратную к ней:
1) Люз; 2) -j=Am-
15.89. Пусть матрицы А и В — верхние треугольные. Вы-
Выразить элементы матрицы АВ через элементы матриц А и В.
15.90. Пусть матрицы А и В — верхние треугольные. До-
Доказать, что матрицы А + В и АВ — также верхние треуголь-
треугольные.
15.91. Пусть матрицы Аи В симметрические. Доказать, что:
1) А + В — симметрическая матрица;
2) Ак — симметрическая матрица при любом натуральном к;
3) матрица АВ является симметрической тогда и только
тогда, когда матрицы А и В перестановочны.
15.92. Пусть матрицы А и В кососимметрические. Дока-
Доказать, что:
1) А -\-В — кососимметрическая матрица;
2) Ак — кососимметрическая матрица при нечетном к и
симметрическая матрица при четном к;
3) матрица АВ является симметрической тогда и только
тогда, когда А я В перестановочны.
4) Сформулировать и доказать необходимое и достаточное
условие кососимметричности произведения матриц А и В.
15.93. Пусть А — произвольная квадратная матрица. До-
Доказать, что матрицы А + АТ и ААТ симметрические, матрица
А — Ат кососимметрическая.
15.94. Доказать, что любую квадратную матрицу мож-
можно разложить в сумму симметрической и кососимметрической
матриц. Единственно ли это разложение?
15.95. Разложить данную матрицу в сумму симметриче-
симметрической и кососимметрической матриц:
1) А49; 2) Aia; 3) Л2з4-
15.96. Пусть S — невырожденная матрица и STAS — В.
Доказать, что каждое из свойств: симметричность, кососим-
кососимметричность — выполняется для матриц А и В одновременно
(т. е. если оно выполнено для матрицы А, то выполнено и для
В, и обратно).
15.97. Доказать утверждение: всякая эрмитова веществен-
вещественная матрица является симметрической.
§ 15. Операции с матрицами 147
-ЯК 15.98. Пусть матрицы А и В эрмитовы. Доказать, что:
1) матрица А + В эрмитова;
,» . 2) матрица АВ является эрмитовой тогда и только тогда,
когда матрицы А и В перестановочны.
15.99. Пусть А — эрмитова матрица и A = B + iC, при-
причем В и С — вещественные матрицы. Доказать, что В — сим-
симметрическая матрица, а С — кососимметрическая.
15.100. Доказать, что любую квадратную матрицу можно
разложить в сумму эрмитовой и косоэрмитовой. Единственно
ли это разложение?
? Доказать утверждения 15.101-15.104.
15.101. Вещественная унитарная матрица ортогональна.
15.102. Если матрицы А и В ортогональны, то АВ ор-
Яфгональна.
15.103. Если матрицы А и В унитарны, то АВ унитарна.
15.104. Пусть А — ортогональная матрица. Тогда сумма
квадратов элементов любой ее строки равна 1, а сумма попар-
попарных произведений соответствующих элементов двух различ-
различных строк равна 0. Являются ли эти свойства определяющими?
15.105. Сформулировать и доказать свойства столбцов ор-
ортогональной матрицы, аналогичные 15.104.
15.106. Сформулировать и доказать свойства унитарной
матрицы, аналогичные свойствам 15.104, 15.105 ортогональной.
15.107. Доказать, что матрица перестановки ортогональна.
15.108. Доказать, что если А и В — матрицы перестано-
перестановок, то АВ — также матрица перестановки.
15.109. Известно, что матрица А диагональна и ортого-
ортогональна. Что можно сказать о ее диагональных элементах Aj?
15.110. Матрица А диагональна и унитарна. Что можно
сказать о ее диагональных элементах Aj?
15.111. Проверить, является ли данная матрица перио-
периодичной, нильпотентной или стохастической; найти период, по-
показатель нильпотентности:
I) А22; 2) Аи; 3) 1-А12- 4) А5; 5) А77-
6) А24г; 7) А2г5; 8) А2г7; 9) А236; 10)
II) Am; 12) А4Ъ7; 13) ±АШ; 14) Азхз-
148 Гл. 6. Матрицы
Проверить свойства квадратных матриц, сформулирован-
сформулированные в задачах 15.112-15.121.
15.112. Нильпотентная матрица всегда вырождена, пери-
периодичная — невырождена.
15.113. Если А — нильпотентная матрица второго поряд-
порядка, то А2 = О.
15.114. Треугольная матрица нильпотентна тогда и толь-
только тогда, когда все ее диагональные элементы нулевые.
15.115. Если матрицы А, В нильпотентны и перестановоч-
перестановочны, то А + В и АВ нильпотентны.
15.116. Если матрицы А и В периодические и перестано-
перестановочные, то АВ — периодическая матрица. Выразить какой-
либо ее период через периоды матриц А, В.
15.117. Пусть Ат + А171'1 + ... + Е = О. Доказать, что А —
периодическая матрица.
15.118. Всякая матрица перестановки периодична.
15.119. Пусть матрица А является одновременно унитар-
унитарной и эрмитовой. Доказать, что А периодична.
15.120. Пусть S — невырожденная матрица и S~1AS — В.
Тогда каждое из свойств: периодичность, нильпотентность —
выполняется для матриц А и В одновременно (т. е. если оно
выполнено для матрицы А, то выполнено и для В, и обратно).
15.121. Пусть матрицы А и В неотрицательные. Тогда А +
+ В, АВ — также неотрицательные матрицы.
15.122. Пусть / — столбец из единиц, и матрица А неотри-
неотрицательная. Доказать, что условие AI = I — необходимое и до-
достаточное условие стохастичности А.
15.123. Доказать, что если матрицы Аи В стохастические,
то матрица АВ также стохастическая.
15.124. Пусть матрица А стохастическая. Существует
ли А~^1 Будет ли А~^ стохастической, если она существует?
15.125. В каком случае стохастическая матрица является
ортогональной?
15.126. Доказать справедливость тождества:
1) tx{A + B) = tiA + tiB; 2) tiAB = tiBA.
15.127. Пусть А — треугольная матрица, т — натуральное
число. Вычислить след матрицы Ат.
§ 15. Операции с матрицами 149
15.128. Пусть А — произвольная матрица. Вычислить:
1) tr(ATA); 2) tT(AHA);
3) Доказать, что если tr(AH А) — 0, то А = О.
15.129. Доказать, что если А — нильпотентная матрица
второго порядка, то tr A = 0.
15.130. Доказать, что не существует матриц А л В таких,
что АВ - В А = Е.
Блочные матрицы A5.131—15.141)
15.131. Пусть А и В — блочные матрицы второго порядка.
Сформулировать условия, при которых эти матрицы можно пе-
перемножить. Доказать, что если существует произведение АВ,
то (АВ)а = А°Ва.
15.132. Пусть А и В — верхние блочно треугольные матри-
матрицы второго порядка и произведение А В существует. Получить
формулу для вычисления матрицы -АПВ .
15.133. Пусть А — блочная матрица второго порядка, В —
блочная матрица — столбец из двух блоков.
1) Сформулировать условия, при которых определено про-
произведение АВ.
2) Доказать, что если АВ существует, то (АВ)П = АаВа.
3) Получить формулу для вычисления А^ВР.
15.134. Пусть А и В — блочно диагональные матрицы.
Сформулировать условия, при которых:
1) определено произведение АВ;
2) (AB)D = ADBD;
3) определены произведения АВ и В А;
*¦ 4) АВ = В А.
, 15.135. Проверить справедливость тождеств (А + В) =
= Аа + Вп, (АВ)п = АиВи для произвольных блочных матриц.
15.136. Разбивая данные матрицы на блоки, вычислить
произведение:
1) АшАш; 2) А432А450; 3)
^ 4) A45iA}52; 5) Л436Л437; 6)
3 15.137. Найти матрицу (На)~1, если Н — блочная матрица:
%, 1) ь
4 2) Н = ^ ^ (матрицы А и С обратимы).
Е
О
А
О
А
Е
В
С
150 Гл. 6. Матрицы
15.138. Пусть Е — единичная матрица порядка г; D —
произвольная матрица размера г х s; о, b, x - столбцы. Ре-
Решить уравнение:
1) ||E?>||Dx = o; 2) ||E?>||Dx = b.
15.139. Вычислить кронекеровское произведение матриц:
1) Ап®с7; 2)с7®Ап; 3)Ai8<g>c8; 4) c8<g>A18;
5) A17®Ai8; 6) Am®An; 7) Ап®А1я.
15.140. Пусть a=||oi>...,on||, b = ||6Ь. ..,6Ш||Т. Вычис-
Вычислить а <8> b, b <8> а и сравнить с Ьа.
15.141. Проверить справедливость тождества:
1) (аА)®В = а{А®В);
2) {А + В)®С = А®С + В®С;
3) А ® (В + С) = А ® В + А ® С;
4) А®(В®С) = (А®В)®С;
5) AB®CD = {A®C)(B®D);
6) (AeBJ-^A-^B-1.
§ 16. Ранг матрицы
В этом параграфе используются понятия: ранг матрицы, ба-
базисный минор матрицы, базисные столбцы и строки матрицы.
При решении задач полезны теоремы о связи этих понятий, а также
основной факт, состоящий в том, что ранг матрицы не меняется при
элементарных преобразованиях ее строк и столбцов.
Дадим описание некоторых методов упрощения матрицы с по-
помощью элементарных преобразований ее строк.
Мы говорим, что матрица А размеров т х п имеет упрощенный
вид, если: 1) некоторые г (г ^ 0) ее столбцов являются первыми г
столбцами единичной матрицы порядка т, 2) при г < т последние
т — г ее строк нулевые. Ранг упрощенной матрицы равен г.
Метод приведения матрицы к упрощенной форме, называемый
методом Гаусса-Жордана, сводится к последовательному выполне-
выполнению шагов, каждый из которых превращает один из столбцов данной
матрицы в столбец единичной матрицы.
Опишем сначала один шаг преобразования. Предварительно от-
отметим, что, хотя после каждого элементарного преобразования полу-
получается новая матрица, для простоты изложения мы сохраняем для
всех таких матриц обозначение А = ||а^||-
Пусть выбран некоторый ненулевой элемент ац матрицы А. На-
Назовем его ведущим элементом данного шага. Строку и столбец с
номерами г, j, в которых он расположен, будем называть веду-
ведущей строкой и ведущим столбцом. Один mar состоит из следующих
элементарных преобразований. 1) Ведущая строка переставляется
на новое место. Новый номер ведущей строки равен номеру шага.
2) Ведущая строка умножается на число (а^), в результате чего
§16. Ранг матрицы 151
ведущий элемент становится равным единице. 3) К каждой строке,
отличной от ведущей, прибавляется ведущая строка, умноженная
на некоторое число Л. Числовые множители выбираются так, чтобы
обратить в 0 все элементы ведущего столбца матрицы, кроме веду-
ведущего элемента: для k-й строки (к ф г) полагаем Л = —ukj-
В результате преобразований 1)-3) j-Pi столбец матрицы А пре-
превращается в s-й столбец единичной матрицы, где s — номер шага.
Теперь дадим общее описание одной из возможных последова-
последовательностей шагов.
Если все столбцы матрицы А нулевые, то А имеет упрощенный
вид, г = 0. В противном случае, просматривая столбцы матрицы сле-
слева направо, находим первый ненулевой столбец. Пусть его номер ра-
равен ji. В качестве ведущего элемента первого шага выбираем любой
ненулевой элемент этого столбца и выполняем первый шаг преоб-
преобразования. Теперь в матрице первые j\ — 1 столбцов нулевые, а j-й
столбец равен первому столбцу единичной матрицы. Если при этом
т = 1 или в строках с номерами 2,...,т нет ненулевых элементов,
то г = 1 и приведение к упрощенному виду закончено. В противном
случае выберем самый левый столбец с номером ji > ji, у которо-
которого имеются отличные от 0 элементы ниже первой строки. Любой из
этих элементов может быть взят в качестве ведущего элемента вто-
второго шага. Выполнив второй шаг процедуры упрощения матрицы,
можно продолжить просмотр остальных столбцов и при необходи-
необходимости перейти к третьему шагу. Шаг с номером г будет последним,
если г — т или если в строках с номерами r + l,...,m не останется
ненулевых элементов. На этом процесс упрощения матрицы закан-
заканчивается.
Другим употребительным способом упрощения матрицы с по-
помощью элементарных преобразований строк является метод Гаусса.
Вычисления распадаются на два этапа. На первом этапе, называе-
называемом прямым ходом метода Гаусса, мы выполняем, как и в методе
Гаусса-Жордана, г шагов. При выбранном ведущем элементе Ojj s-
й шаг состоит из трех действий: 1) ведущую строку переносим на
s-e место; 2) делим эту строку на а^-; 3) из каждой строки с номе-
номером, большим чем s, вычитаем s-ю строку, умноженную на некоторое
число Л. Множители Л выбираются так, чтобы обратить в 0 все эле-
элементы ведущего столбца, расположенные ниже ведущего элемента.
Последовательный выбор ведущих столбцов и ведущих элементов
совершаем точно так же, как и в методе Гаусса-Жордана. После
последнего (r-го) шага матрица приобретает так называемый сту-
ступенчатый вид.
Ведущие столбцы ступенчатой матрицы образуют первые г
столбцов верхней треугольной матрицы, у которой все диагональ-
диагональные элементы равны 1. Все строки ступенчатой матрицы с номерами,
большими чем г, нулевые. Ранг ступенчатой матрицы равен г.
При отыскании ранга матрицы достаточно привести ее к ступен-
ступенчатой форме.
152
Гл. 6. Матрицы
Для того чтобы привести ступенчатую матрицу к упрощенному
виду, можно использовать обратный ход метода Гаусса. Он состоит
из г — 1 шагов. На s-м шаге ведущим столбцом является столбец с но-
номером j'r-з+1) а ведущей строкой — строка с номером г - s + 1. При
этом из каждой строки с номером, меньшим г — s +1, вычитается
ведущая строка с таким множителем Л, чтобы обратить в 0 все эле-
элементы ведущего столбца, расположенные выше ведущего элемента.
После г — \ шагов все ведущие столбцы превратятся в столбцы еди-
единичной матрицы, а данная матрица А приобретет упрощенный вид.
16.1. Дать описание всех матриц ранга 0.
16.2. Дать описание всех матриц ранга 1.
16.3. Возможно ли, чтобы в матрице не было базисного
минора?
16.4. Указать какой-нибудь базисный минор и определить
ранг матрицы:
1)
5)
0
0
0
0
1
0
0
0
1
0
0
0
0
2)
1
2
; 6)
-1
-2
1
2
3
1
2
3
1
1
3
4
3)
1
0
; 7)
0
1
2
2
4
2
1
1
2
1
1
1
2
1
4)
1 1
2 3
3 4
1 1
0 1
0 0
16.5. Указать базисные строки в матрицах 1)-7) задачи 16.4.
16.6. Указать базисные столбцы в матрицах 1)-7) задачи 16.4.
16.7. Указать базисный минор, базисные столбцы и базис-
базисные строки в квадратной матрице с определителем, отличным
от 0. Чему равен ранг такой матрицы?
Доказать утверждения 16.8-16.13
16.8. Ранг диагональной матрицы равен числу ее элемен-
элементов, отличных от нуля.
16.9. Если в матрице равны нулю все миноры порядка к,
то и все миноры порядка к + 1 равны нулю.
16.10. Ранг матрицы не меньше ранга любой ее подматрицы.
16.11. Приписывание к матрице нулевого столбца не ме-
меняет ее ранга.
16.12. Приписывание к матрице столбца, равного линей-
линейной комбинации ее столбцов, не меняет ее ранга.
16.13. Если столбцы матрицы В являются линейными
комбинациями столбцов матрицы А, то rgB ^ rg A.
§ 16. Ранг матрицы 153
16.14. Оценить ранг матрицы \\А В\\п через ранги мат-
матриц А и В.
16.15. Пусть матрицы А и В имеют одинаковую высоту,
и ранг А не меняется после приписывания к ней любого из
столбцов В. Доказать, что rg \\А В\\а — rg A.
16.16. Доказать следующие свойства ранга матрицы:
1) Умножение какой-либо строки матрицы на число, от-
отличное от нуля, не меняет ее ранга.
2) Перестановка строк матрицы не меняет ее ранга.
3) Прибавление к какой-либо строке матрицы линейной
комбинации остальных строк не меняет ее ранга.
4) Ранг матрицы не меняется при элементарных преобра-
преобразованиях ее столбцов.
16.17. Описать способ вычисления ранга матрицы с испо-
использованием элементарных преобразований ее строк и столбцов.
16.18. Вычислить ранг матрицы:
1)||Ю||; 2I|010||; 3) Аи; 4) А20; 5) Аи;
6) А12; 7) А7; 8) А81; 9) Аш; 10) А202;
11) А205; 12) А233; 13) A2i4; 14) А232; 15) А368;
16) Азэе; 17) А408; 18) А452; 19) А435; 20) А453;
¦'• 21) А444; 22) А454; 23) А443; 24) А587; 25) А533;
-> 26) А544; 27) А592; 28) Аб32; 29) Аш.
16.19. Вычислить ранг матрицы при всевозможных значе-
значениях параметра:
1) А78; 2) А3б7; 3) А3б5; 4) А3б3;
5) А5ов; 6) Аб29; 7) Аб45-
16.20. Вычислить ранг матрицы А — ХЕ при всех значени-
значениях параметра Л, если:
1) А = А47; 2) А = А2ц; 3) А = A43i.
16.21. Доказать, что если det A = 0, то строки матрицы А,
так же как и ее столбцы, линейно зависимы.
16.22. Матрица А имеет порядок п и содержит нулевую
подматрицу порядка п— 1. Оценить ранг А.
16.23. Матрица А имеет порядок п и содержит нулевую
подматрицу порядка s. Оценить ранг А.
16.24. Матрица А имеет порядок п и содержит подматри-
подматрицу порядка п — 1, имеющую ранг 1. Оценить ранг А.
16.25. 1) Оценить ранг произведения двух матриц через
ранги сомножителей.
$94 Гл. 6. Матрицы
-j 2) Привести примеры, когда выполнены соотношения:
rgAB<rgA, rgAB <rgB, rgAB < min(rgA,rg.B), vgAB =
= щА, rgAB = rgB.
16.26. 1) Пусть а — строка, b — столбец. Вычислить ранг
матрицы Ьа.
2) (р). Пусть rg A = 1. Доказать, что матрица А равна про-
произведению некоторого столбца на некоторую строку.
16.27 (р). Пусть А, В, С — матрицы, det А ф О и определе-
определены произведения АВ, С А. Доказать, что rgAB = rgB, rg С А =
= rgC. Может ли быть выполнено какое-либо из этих равенств,
если det A = О?
16.28. Доказать, что если rgA = r, то минор, стоящий на
пересечении г линейно независимых строк и г линейно незави-
независимых столбцов матрицы А, отличен от 0.
16.29. Пусть матрица А состоит из г линейно независимых
столбцов, В — из г линейно независимых строк. Чему равен
ранг АВ?
16.30. Матрицы А и В имеют размеры соответственно
тхгигхп, и rgAB = г. Найти ранги матриц А и Б.
16.31. Разложение матрицы А в произведение А = ВС на-
называется скелетным, если rg A = rgB = rgC и матрицы В и С
имеют полный ранг (т.е. ранг, равный одному из размеров мат-
матрицы).
1) Доказать, что всякую матрицу А можно представить
как произведение матрицы М, состоящей из базисных строк А,
на некоторую матрицу К (скелетное разложение матрицы по
строкам).
2) Сформулировать и доказать аналогичное утверждение
для скелетного разложения матрицы по столбцам.
3) Как связаны между собой различные скелетные разло-
разложения одной матрицы?
16.32. Найти какие-нибудь скелетные разложения (см. за-
задачу 16.31) по строкам и столбцам для следующих матриц:
1) А14; 2) A23i; 3) A25i; 4) А403; 5) А454-
16.33. Доказать, что любую матрицу ранга г можно пред-
представить в виде суммы г матриц ранга 1.
16.34. Указать, какие из выписанных ниже соотношений
возможны. Какие из них выполнены для произвольной пары
матриц одинаковых размеров? •
§ 16. Ранг матрицы
155
= max(rgA,rg?);
= TgA + vgB;
<min(rgA)rgB);
)
тт 2)
> 3)
" 4)
•v 5)
" 6)
16.35 (p). Пусть матрицы А и В имеют размеры соответ-
соответственно тхпипхр, и пусть АВ = О. Доказать, что rg A +
16.36. Доказать, что
rg
16.37. Доказать, что
А О
О В
16.38. Доказать, что
А С
т* О В
sin(an
a
rgB.
16.39. Пусть А — квадратная матрица. Доказать, что
А А2
А3 А4
D
= rgA.
16.40. Пусть Е — единичная, А, В — произвольные квад-
квадратные матрицы порядка п. Доказать, что
D
= п.
16.41. Доказать
rg
rg
., что
А
ЗА
Е
А
В
-В
В
АВ
1Г
16.42. Пусть А невырожденная квадратная матрица по-
порядка п, а матрицы В, С и D — прямоугольные. Найти необ-
необходимое и достаточное условие для того, чтобы
?
rg
А В
С D
= п.
Глава 7
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
В этой главе используются следующие понятия и термины: од-
однородная и неоднородная система линейных уравнений, основная
матрица системы {матрица коэффициентов), определитель си-
системы п линейных уравнений с п неизвестными, расширенная мат-
матрица системы, столбец свободных членов, совместная и несовмест-
несовместная система уравнений, эквивалентные системы уравнений, частное
решение и общее решение системы линейных уравнений, фундамен-
фундаментальная система решений и фундаментальная матрица однород-
однородной системы линейных уравнений, базисные неизвестные тл пара-
параметрические {свободные) неизвестные, однородная система линей-
линейных уравнений, сопряженная данной.
Основные теоремы: теорема о существовании и единственности
решения системы п линейных уравнений с п неизвестными (теорема
Крамера), а также два критерия совместности системы т уравне-
уравнений с п неизвестными: теорема Кронекера-Капелли и теорема Фред-
гольма.
Приведем некоторые формулы и обозначения.
Система т линейных уравнений с п неизвестными
-...+ainxn=bi,
A)
¦... + атпхп = Ьт
может быть записана в матричном виде:
где через х и b обозначены столбцы ||zi ...жп||т и
ветственно. Матрицы
А =
air
ami
и ||Л|Ь|| =
соот-
h
называются основной и расширенной матрицами системы уравне-
уравнений. Решением системы A) называется упорядоченный набор чи-
чисел, такой, что после подстановки г-го числа вместо неизвестной Х{
для каждого г во все уравнения мы получим т истинных равенств.
Эти числа называются компонентами решения. Решение системы
уравнений записываем в виде столбца. Множество всех решений од-
однородной системы линейных уравнений с п неизвестными задается
формулой
X = /i1X1 + ... + /in_rXn_r. B)
Гл. 7. Системы линейных уравнений 157
Здесь: столбцы Xi,...,Xn_r — линейно независимые частные ре-
решения данной однородной системы, /ii,...,/in_r — произвольные
постоянные числа (параметры), r = rgA — ранг системы. Множе-
Множество {Xi,...,Xn_r} называется фундаментальной системой реше-
решений однородной системы уравнений. Все решения однородной
системы образуют линейное подпространство в пространстве столб-
столбцов высоты п; фундаментальная система решений есть базис в этом
подпространстве. Правая часть формулы B) называется общим ре-
решением однородной системы. Формуле B) можно придать матрич-
матричный вид
X = ФЬ. C)
Здесь Ф — матрица из столбцов Xi,...,Xn_r, ah — столбец высо-
высоты п — г из произвольных постоянных hi,...,hn_r. Матрица Ф назы-
называется фундаментальной матрицей однородной системы
уравнений.
Общее решение неоднородной системы линейных уравнений мо-
может быть записано в векторной форме
D)
или в матричной форме
Х = ФЬ + Х0, E)
где Хо — некоторое (произвольное) частное решение неоднородной
системы уравнений, a /iiXi +... + /in_rXn_r = ФЬ — общее решение
соответствующей однородной системы.
Системы уравнений, имеющие одно и то же множество реше-
решений, называются эквивалентными. Это понятие относим лишь к сов-
совместным системам. Мы говорим также, что система уравнений (Б)
следует из (А), если множество решений (Б) содержит множество
решений (А). При решении некоторых задач полезны утверждения:
подсистема есть следствие системы; присоединение к системе урав-
уравнений ее следствий заменяет данную систему на эквивалентную.
Основным аппаратом при исследовании совместности системы
линейных уравнений и отыскании ее решений служат преобразова-
преобразования системы уравнений, соответствующие элементарным преобра-
преобразованиям строк расширенной матрицы. При этих преобразованиях
несовместная система переходит в несовместную, а совместная — в
совместную систему уравнений, эквивалентную данной.
С помощью элементарных преобразований строк расширенная
(и одновременно основная) матрица системы может быть приведена
к упрощенной форме. Система уравнений, соответствующая упро-
упрощенной расширенной матрице, называется упрощенной.
Для того чтобы решить систему уравнений, можно придержи-
придерживаться следующей схемы.
1. Расширенную матрицу системы с помощью элементарных
преобразований строк приводим к упрощенной форме.
158
Гл. 7. Системы линейных уравнений
2. Проверяем совместность упрощенной системы, пользуясь те-
теоремой Кронекера-Капелли. Признаком совместности системы яг-
ляется наличие базисного минора расширенной матрицы внутш.
основной матрицы системы. Система несовместна тогда и только т<-
гда, когда в упрощенный вид расширенной матрицы входит строке.
|| ||
3. Решаем упрощенную систему уравнений, если она оказалась
совместной.
Допустим, что базисными являются первые г столбцов матри-
матрицы А совместной системы. Тогда упрощенная расшиоенная
имеет вид
F
1
0
0
0
0
0
1
0
0
0
... 0
... 0
... 1
... 0
... 0
"И
a2i
ari
0
... C*l,n_r
... C*2,n-r
... аг,п-г
0
0
0
0
Ей соответствует упрощенная система уравнений
G
Г)П_гх„ =fir.
Неизвестные X\,...,xr, соответствующие базисным столбцам матри-
матрицы, называются базисными, остальные неизвестные — ?r+i, • • • >хп —
свободными. Задав значения hi,...,hn-r свободных неизвестных, на-
находим базисные неизвестные из системы уравнений G). Общее реше-
решение получим в параметрической форме
хТ — -
-... -аГ)П_г/1п_г+/Зг,
где hi,...,hn-r — произвольные постоянные. Общее решение (8
можно записать в векторной D) и матричной E) форме, положиг
х =
Xn
Хо =
0
0
Ф —
-аи
-Oir,n-r
О
О
1
X; — СТОЛбцЫ Ф.
Пусть г = rg A, ii < ii < ... < iT — номера базисных столбцов J-.
ir+\ < ... <in — номера остальных ее столбцов. Фундаментальная
матрица, строки которой с номерами ir+\ < ... <in образуют ед^
ничную подматрицу, называется нормальной фундаментально?
матрицей, соответствующей базисным неизвестным х^,...,х^
Гл. 7. Системы линейных уравнений
159
Столбцы нормальной фундаментальной матрицы образуют нормаль-
нормальную фундаментальную систему решений однородной системы урав-
уравнений. В частности, Ф в формуле (9) — нормальная фундаменталь-
фундаментальная матрица однородной системы
anxr+1
,n-r*n = О,
.r,'n-"xn' = O,
A0)
соответствующая базисным неизвестным х\,...,хТ.
Нормальную фундаментальную матрицу Ф, частное решение Хо
и формулу общего решения можно выписать прямо по расширенной
матрице F). Если расширенную матрицу кратко записать в виде
то
Ет
О
-D
Еп-Г
D
О
и E) примет вид
X =
Еп-т
E')
Здесь Ег, Еп-Г — единичные матрицы порядка г и п — г соответ-
соответственно, а 3 — столбец из чисел C\,..., /Зг.
Общее решение системы уравнений в форме D) и E) можно
получить из систем уравнений G), A0) без обращения к формуле
(8). Частное решение можно найти из системы G), задав каким-
нибудь образом свободные неизвестные (если мы приравняем их к 0,
то получим частное решение, определяемое формулой (9)). Столбцы
фундаментальной матрицы можно найти как решения системы A0),
придавая параметрическим неизвестным значения, образующие в со-
совокупности невырожденную матрицу. В частности, если приравнять
значения ||xr+i,..., хп||т к столбцам единичной матрицы, то решения
системы A0) образуют фундаментальную матрицу (9).
Замечание. Допустим, что данная система уравнений сов-
совместна, но базисными являются не первые г столбцов основной мат-
матрицы, а какие-то другие. В этом случае, чтобы решить упрощенную
систему уравнений, можно действовать одним из двух способов.
С п о с о б 1 . Аналогично п. 3 составляем упрощенную систе-
систему уравнений, называем базисными неизвестные, соответствующие
базисным столбцам матрицы системы, выражаем базисные неизвест-
неизвестные через остальные (свободные) и записываем общее решение в
форме D) или E).
С и о с о б 2 . Неизвестные, соответствующие базисным столб-
столбцам матрицы системы, обозначаем через уг,---,уг, остальные — через
yr+i,...,yn- После этой замены неизвестных получаем упрощенную
систему уравнений вида G), решаем ее и делаем обратную замену.
160
Гл. 7. Системы линейных уравнений
Таким образом, существует много путей получения общего ре-
решения системы линейных уравнений и много различных форм ег<
записи. Ниже рассмотрен пример неоднородной системы линейны:
уравнений, имеющей бесконечное множество решений. Общее реше
ние получено в параметрической (8), векторной D) и матричной фог-
ме E).
Для сокращения записи в этой главе системы линейных уравне
ний и ответы к ним лишь частично приведены в развернутой форме
A) и (8). Некоторая часть систем уравнений задана с помощью рас-
расширенной матрицы. В ответах к этим упражнениям мы помещаел
фундаментальную матрицу решений однородной системы уравнений
и столбец какого-либо частного решения неоднородной системы. Kai
в условиях задач, так и в ответах матрицы и столбцы не выписаны
непосредственно, а указаны их номера в банке.
Пример. Система уравнений задана расширенной матрице!
||А581|с58|| (задача 19.6, 42)). В банке находим
1Ы\\ =
1
1
2
3
-2
11
5
3
12
7
-4
25
9
5
22
20
-5
65
Эта расширенная матрица соответствует системе уравнений
X! + Зх2 + 5Х3 + 7х4 + 9х5 = 20,
xi - 2х2 + Зхз - 4х4 + 5x5 = -5,
2ц + 11х2 + 12х3 + 25х4 + 22х5 = 65.
(И
Применяя алгоритм Гаусса, приводим расширенную матрицу к ynpi-
щенному виду:
A2
Замечаем, что система совместна, так как в расширенной матрк-
це A2) базисными являются два первых столбца. Расширенная мат-
матрица A2) соответствует системе уравнений
1
0
0
0
1
0
19
У
2
5
0
2
5
11
5
0
33
~5~
4
5
0
5
5
0
19 2 33
XI + —Х3 + JX4 + —Х5 = 5,
0 0 0
2 11 4
ГЖ3 + — Х4 + -Х5 = 5,
5 5 5
A3
эквивалентной данной. Базисные неизвестные — xi, хг, свободные —
хз, Х4, Х5- Обозначим последние через hi, /12, ^з> получаем o6ui,et
решение:
Гл. 7. Системы линейных уравнений
161
19, 2, 33, .
A4)
ге решение системы уравнений A3) можно получить другим спо-
ипбом. Сначала, положив в A3) %з = ^4 = ^ъ — 0, находим ее частное
|№11Н'|[ие:
A5)
эроди
19
Хо =
5
5
0
0
0
ую систему
2
+ -гх3 + -а
0 0
2
+ 53
11
ч +
Хл ~
33
У*5
4
5 5
= 0
= 0.
х2 + г^з + -^
5 5
Положив х3 = 1, х4 = хъ= 0, находим Х\ = -19/5, ж2 = -2/5. Поло-
ШНН хз = 0, i4 = 1, ?5 = 0, находим xi = -2/5, х2 — -11/5. Положив
#ц • Х4 = 0, о;5 = 1, находим Х\ — -33/5, я2 = -4/5. Таким образом,
мы находим три линейно независимых частных решения однородной
ииетемы уравнений (фундаментальную систему решений):
-19/5
-2/5
1
0
0
-2/5
-11/5
0
1
0
-33/5
-4/5
0
0
1
можно записать общее решение данной системы уравнений
A1) в векторной форме
Х=/ц
-19/5
-2/5
1
0
0
+ h2
-2/5
-11/5
0
1
0
+ /13
-33/5
-4/5
0
0
1
+
5
5
0
0
0
A6)
Очевидно, что A6) есть другая запись формулы A4).
Наконец, можно получить общее решение системы уравнений
A3) сразу в матричной форме E'). В данном случае
п_|| 19/5 2/5 33/5 || д_||
^-|| 2/5 11/5 4/5 I' Р-||
• 1715
162
Гл. 7. Системы линейных уравнений
Таким образом, общее решение
-19/5 -2/5 -33/5
-2/5 -11/5 -4/5
0 О
1 О
Х =
1
о
о
0
1
A7)
где h — столбец из произвольных постоянных hi, h2, h3. Ясно, что
A7) есть матричная запись A6).
Заменим произвольные постоянные hi, /12, /13 на — 5/ij, — 5/12,
-5/i3 соответственно. Формула A7) примет вид
Х =
19
2
О
о
о
2
11
О
О
33
4
0
0
-5
h +
5
5
0
0
0
где h =
A8)
В ответе к данной задаче 19.6, 42) указаны фундаментальная мат-
матрица Л409 и столбец С231 • В банке находим
Ф = Л4оэ =
19
2
-5
О
О
2
11
0
-5
33
4
0
О
С231 =
О -5
что соответствует решению A8). Напомним, что и фундаментальная
система решений, и частное решение определены не однозначно.
§ 17. Системы линейных уравнений с определителем,
отличным от О
17.1. Выписать расширенную матрицу данной системы
уравнений. Решить систему:
3) 2a;i + х2 - х3 = 2, 4)
Зж1 + х2 - 2хз = 3,
х\ + жз = 3;
Х\ + 1х2 + Хз + Х4 ^ 23,
. + Хо +
2х + Ъу + bz = 3,
- 5у + 7z = 6;
6) 2х + Зу + 4z + Ы = 30,
17. Системы уравнений с определителем, отличным от 0 163
7)
+ %2 + ХЗ + Х4 = О,
i'v x\ +X2 + Х4 + ^5 = — 2;
В) Ж
= -2,
Х6 = -1.
17.2. Выписать систему линейных уравнений, соответст-
данной расширенной матрице. Решить систему, поль-
правилом Крамера:
1) ||А4о|с7||; 2) ||А6|с9||; 3) |И202|с54||; 4) [|
б) 1И204|с5б||; 6) ||А2Оз|с5з||; 7) ||А20з|о||.
17.3. Доказать утверждения:
1) Если уравнения системы (Б) являются линейными комби-
Нициями уравнений совместной линейной системы (А), то множе-
Cflo решений системы (Б) содержит множество решений (А).
2) Присоединение к совместной системе линейных уравне-
уравнений линейных комбинаций из ее уравнений заменяет систему
И* эквивалентную.
3) При элементарных преобразованиях строк расширенной
Матрицы совместная система линейных уравнений заменяется
йв яквивалентную.
17.4. Как изменяются решения системы линейных урав-
уравнений при элементарных преобразованиях столбцов основной
матрицы?
17.5. Какую систему уравнений простейшего вида можно
ШШучить, применяя алгоритм Гаусса к строкам расширенной
матрицы данной системы п линейных уравнений с п неизвест-
неизвестными, если основная матрица невырождена?
17.6. Составить систему линейных уравнений по данной
расширенной матрице. Решить систему (нижеследующие мат-
матрицы разбиты на 4 группы по порядку основной матрицы):
п = 2:
1) ||Ai8|c10||; 2) HAelciall; 3) ||A10|c12||;
n = 3:
4) ||A216|c59||; 5) И217|с60||; 6) ||A218|c6i||;
#•
164 Гл. 7. Системы линейных уравнений
7) ||А219|с98||; 8) ||А22о|с6з||;
п = 4:
9) ||А446|С154||; Ю) ||А447|С155||; И) ||А44
12) ||А449|С157||; 13) ||А442|С15в||; 14) ||-4.4421
15) ||А439|С16О||;
п = 5:
16) ||А537|С232||; 17) ||А538|С238||; 18) ||А539|С233||;
19) ||А54О|С234||; 20) ||A54l|C235||; 21) ||А542|С236||;
22) ||А542|С237||; 23) ||А543|С268||.
§ 18. Системы линейных однородных уравнений
18.1. Выписать матрицу коэффициентов данной системы
линейных однородных уравнений. Решить систему:
1) х - у = 0; 2) xi - х2 + 2х3 = 0;
3) х\ + Х2 + жз + Х4 + хъ = 0;
4) ж + Зу + 2z = 0, 5) 5ж-8у + Зг = 0,
2х + 4у + 3z = 0; 2х - Ъу + z = 0;
6) x + 2y + 3z = 0,
4z = 0,
7) 5xi - 8x2 + Зж3 + Зж4 = 0,
4zi - бж2 + 2ж3 + х4 = 0;
8) Ж1+Зж2 + 4жз + Ж4 = 0,
2ж1 + 2ж2 + Зж3 + х4 = 0,
Зж1 + Зж2 + 4ж3 + х4 = 0;
9) 2ж1 + 4ж2 + 6ж3 + х4 = 0,
х\ 4- 2ж2 + Зжз + х4 = О,
3xi + 6ж2 + 9жз — Ж4 = О,
xi 4- 2ж2 + Зжз + Ьх4 = 0;
10) Ж1+Ж2 + Жз-Ж4 = 0,
Зж1 + 2ж2 + ж3 - Ж5 = 0;
11) XI + 3X2 + 3X3 + 2X4 + 6X5 = 0,
Xi — Х2 — 2жз - 3X5 = О,
xi + 11х2 + 7х3 + 6х4 + 18ж5 = 0;
12) xi + Зх2 + 2х3 + 2х4 + 5х5 = О,
2xi + 2х2 + Зх3 + 2х4 + 5х5 = О,
3xi + х2 + хз + 2x4 + 2x5 = О,
Х\ + Х2 — Хз + Х4 = 0.
§ 18. Системы линейных однородных уравнений 165
18.2. Доказать, что:
1) сумма двух решений однородной системы линейных
уравнений есть решение той же системы;
2) произведение какого-либо решения однородной системы
линейных уравнений на число есть решение той же системы.
18.3. Пусть к — максимальное число линейно независимых
решений однородной системы линейных уравнений. Выразить к
через размеры и ранг матрицы системы. В каком случае к = О?
18.4. Сколько линейно независимых решений имеет одно-
однородная система линейных уравнений, если ее матрица невыро-
невырождена?
18.5. Может ли однородная система линейных уравнений
оказаться несовместной?
18.6. Сформулировать условия (и проверить их необходи-
необходимость и достаточность), при которых однородная система ли-
линейных уравнений имеет: 1) единственное решение; 2) беско-
бесконечно много решений.
18.7. Составить и решить однородную систему линейных
уравнений, заданную своей матрицей коэффициентов:
мс, 1) ||12||; 2)||111||; 3)||1301||; 4) Аш; 5) А455;
6) А500; 7) A5i4; 8) Л519; 9) А573; Ю) Л582; 11) A5S3.
18.8. Составить однородную систему линейных уравнений
по заданной матрице коэффициентов, содержащей параметр.
Решить систему при всевозможных значениях параметра:
1) А = А22Х - ХЕ; 2) А = А212 - ХЕ;
3) А = А222 - ХЕ; 4) А = A365;
, 5) А = А2п-ХЕ; 2) А = А36з-
18.9. Решить однородную систему линейных уравнений,
заданную своей матрицей коэффициентов. Составить и решить
соответствующую сопряженную систему:
1) Аи4; 2) Ац5; 3) Аи8; 4) А2йь; 5) А2оэ; 6) А368;
7) A408; 8) А145; 9) А146; 10) А443; 11) А587; 12) А536-
18.10. Могут ли данная однородная система линейных
уравнений и ее сопряженная система иметь одинаковое число
линейно независимых решений?
18.11. Могут ли совпадать множества решений данной од-
однородной системы линейных уравнений и ее сопряженной?
18.12. Доказать, что однородная система линейных урав-
уравнений имеет нетривиальное решение тогда и только тогда, ко-
166 Гл. 7. Системы линейных уравнений
гда строки основной матрицы сопряженной системы линейно
зависимы.
18.13. Зная одну фундаментальную матрицу Ф, найти об-
общий вид произвольной фундаментальной матрицы той же си-
системы уравнений.
18.14. Данная матрица является фундаментальной матри-
матрицей некоторой однородной системы линейных уравнений. Най-
Найти хотя бы одну нормальную фундаментальную матрицу:
1) Ац7; 2) Аш\ 3) А397-
18.15. Данная матрица является фундаментальной матри-
матрицей некоторой системы линейных уравнений. Найти все нор-
нормальные фундаментальные матрицы этой системы уравнений:
1) Ац9; 2) ci97; 3) Ап2; 4) А398-
18.16. В системе уравнений Ах = о (х — столбец), име-
имеющей фундаментальную матрицу Ф, выполнена замена неиз-
неизвестных х = iSy (det5 ф 0). Какая система уравнений получит-
получится для у? Укажите фундаментальную матрицу решений этой
системы.
18.17. Найти хотя бы одну однородную систему линейных
уравнений, для которой данная матрица является фундамен-
фундаментальной:
1) Ацо; 2) Аит, 3) ci97; 4) (р) Аи&; 5) А4ц.
18.18. Найти все однородные системы уравнений, эквива-
эквивалентные данной системе Ах = о.
18.19. Найти все однородные системы уравнений, для ко-
которых данная матрица Ф является фундаментальной.
18.20. Дана матрица А, строки которой линейно незави-
независимы. Снизу к ней приписали транспонированную фундамен-
фундаментальную матрицу системы Ах = о. Доказать, что детерминант
полученной матрицы отличен от нуля.
§ 19. Системы линейных уравнений общего вида
Системы линейных неоднородных
уравнений A9.1-19.12)
19.1. Решить систему линейных уравнений:
1) 2х - Зу = 4; 2) х\ + х2 + 2х3 + Зх4 = 1;
3) 2x + y + z = 4,
Зж + z = 4;
§ 19. Системы линейных уравнений общего вида 167
4) (л/2 + 1)z+ (V2 - 1)у - л/2* = 1 +л/2,
z+ C-2^/2)i/ +(л/2-2)z = l;
5) ж + 2у + 3z =-4, 6) Ж1
Зх + 4у + 5z = 6;
7) 5ж1+4ж2 + ж
+ 4ж4 = 2,
Х4 = —3,
2ж4 = -4;
8) Зж1 + ж2 + ж3 + 2ж4 = -2,
5xi 4- 2жз + 5x4 = -2,
6xi +X2 + 5жз + 7х4 = -4,
2а; 1 + х2 + 2ж3 + 2х4 = -2;
9) Ж1 + Жз + Ж4 + Ж5 = б,
10) 6ж1 + Зж2 + 14ж3 - 2ж4 + хъ = 2,
+ 5ж2 + 10ж3 + 4ж4 + 11ж5 = 20,
12ж3 + Х4 + бж5 = 11,
+ 4бж3 - 12ж4 - 7ж5 = -12,
бжз + 5ж4 + 4ж5 = 7.
19.2. Доказать, что:
1) разность двух решений неоднородной системы линей-
линейных уравнений есть решение соответствующей однородной си-
системы;
2) сумма любого решения неоднородной системы линейных
уравнений и любого решения соответствующей однородной си-
системы есть также решение данной неоднородной системы.
19.3. На сколько единиц ранг основной матрицы системы
может отличаться от ранга расширенной?
19.4. Пусть система т линейных уравнений с п неизвест-
неизвестными несовместна, а ее основная матрица имеет ранг п. К како-
какому простейшему виду можно привести эту систему уравнений,
применяя к строкам расширенной матрицы алгоритм Гаусса?
19.5. Сформулировать необходимое и достаточное условие
того, что система т линейных уравнений с п неизвестными
имеет единственное решение.
19.6. Составить систему линейных уравнений по задан-
заданной расширенной матрице. Решить систему или установить
168 Гл. 7. Системы линейных уравнений
ее несовместность. (Нижеприведенные матрицы разбиты на 4
группы по числу столбцов основной матрицы. Внутри каждой
группы матрицы упорядочены по числу строк.)
п = 3:
1) ||4ш|Сб4||; 2) ||А232|Сб5||; 3) ||А238|с66||;
4) ||А2з9|с67||;
7) |И20б|с55||;
Ю) ||A4oo|ci62||;
13) ||^58llc239||-
n = 4:
14) |K45|c14||;
17) ||A5oi|ci6||;
20) ||A5ii|c74||;
00\ It A 1 II ,
26) ||A52o|c244|i;
29) P524|C242||;
n — b:
31) ||A574|C18||;
34) ||A58i|c77||;
37) ||A577|c78||;
40) ||A579|c8i||;
43) Ц-^и^сгбзН;
46) ||A588|c166||;
5) ||A24i|c68||; 6)
8) ||A206|c5i||; 9)
И) ||Аю8|с24з||;
15) ||А5об|с1з||;
18) ||A502|ci7||;
21) ||A5i2|c75||;
24^ IIA Ictcn II *
27) ||A52l|c244'||;
^(\\ \\ А* \Г*П Af II •
o\jj I] Ji-KQij ^z451|)
32) ||А575|с4б||;
35) ||A58i|c76||;
38) ||А584|с79||;
41) UAssoMI;
44) ||^4.5^3jci641|;
47) ||-<4.52o|ci7o||;
11^2зз|с7о||;
II "^^^nfi 70II)
1 О ] /Л ! f*f\Af\ \\ '
16) ||Af49|c15||;
19) ||A5io|c73||;
ooN II Л 1 л II.
11) ||Л51з|Сб2|Ь
25) ||Aj44|c167||;
28) P523|C24l|h
33) ||А57б|сзз||;
o\j) ||-^*-422l 721| j
39) ||A578|c8o||;
42) ||A58iJc58||;
45) ||Af24|ci65||;
48) ||A544|C246||;
|||||
49) ||А5зз|с247||-
п = 6:
50) ||A59i|c27i||.
19.7. Составить систему линейных уравнений по заданной
расширенной матрице, содержащей параметр. Найти все значе-
значения параметра, при которых система совместна, и решить ее:
1) ||А22з|с85||; 2) ||А224|с86||; 3) ||А225|с87||;
4) ||А226|с88||.
19.8. Описать все линейные комбинации решений данной
неоднородной системы линейных уравнений, которые являют-
являются решениями этой же системы.
19.9. Описать все такие линейные комбинации решений
данной линейной неоднородной системы уравнений, которые
являются решениями соответствующей однородной системы.
19.10. Пусть столбец из свободных членов линейной си-
системы уравнений равен сумме столбцов ее основной матрицы.
Указать какое-либо частное решение системы.
§ 19. Системы линейных уравнений общего вида 169
19.11. Пусть столбец из свободных членов линейной си-
системы уравнений совпадает с последним столбцом ее основной
матрицы. Указать какое-либо частное решение системы.
19.12. Пусть х, у — столбцы решений систем уравнений
Ах. ~ а, Ау = Ъ соответственно и a, /? — некоторые числа. Ка-
Какой системе уравнений удовлетворяет:
l)z = ax; 2)z = x + y; 3) z = ах + ?у
\ п Условия совместности системы
'**¦¦ линейных уравнений A9.13-19.20)
19.13. Доказать, что если столбцы основной матрицы ли-
линейно независимы, то система линейных уравнений имеет не
более одного решения.
19.14. Доказать, что если строки основной матрицы ли-
линейно независимы, то система уравнений совместна при любом
столбце свободных членов.
19.15. Доказать следующее утверждение: если система ли-
линейных уравнений совместна при любом столбце свободных
членов, то строки ее основной матрицы линейно независимы.
19.16. Доказать, что всегда имеет место одна из двух возмо-
возможностей: либо система линейных уравнений совместна при любом
столбце свободных членов, либо ее сопряженная однородная
система имеет ненулевое решение {альтернатива Фредголъма).
19.17. Сформулировать условия (и доказать их необходи-
необходимость и достаточность), которым должна удовлетворять основная
матрица для того, чтобы число решений системы линейных урав-
уравнений, в зависимости от столбца b свободных членов, равнялось:
1) 0 или 1; 2) 1 или оо; 3) 0 или оо; 4) 1 при всех Ь.
19.18. Система линейных уравнений задана своей расши-
расширенной матрицей. Проверить совместность этой системы, поль-
пользуясь теоремой Фредгольма и результатом задачи 18.9 для со-
соответствующей сопряженной системы уравнений:
1) ||Ац4|с89||; 2) ||А118|с90||; 3) ||А587|сш||.
19.19. Система уравнений задана своей расширенной мат-
матрицей, содержащей параметр. Применяя теорему Фредгольма,
найти все значения параметра, при которых система совместна,
и решить ее:
1) ||A205|c9i||; 2) ||A5i5|c9i||; 3) HAorMI.
19.20. Система уравнений задана своей расширенной мат-
матрицей ||Аб44|с282||, зависящей от параметров Ai,...,An,/Lt. Опи-
170
Гл. 7. Системы линейных уравнений
сать множество значений параметров, при которых система
совместна, и решить ее.
Эквивалентные системы уравнений A9.21-19.29)
19.21. Доказать, что если эквивалентны совместные систе-
системы линейных неоднородных уравнений, то эквивалентны и со-
соответствующие однородные системы.
19.22. 1) Доказать, что нетривиальные уравнения*)
а\Х\ +... + апхп = 0 и b\Xi H ЬЬпхп = 0 эквивалентны тогда
... ап
... ьп
2) Доказать, что нетривиальные1) уравнения а\Х\-\-...
... + апхп = а и b\xi -\ Ь Ьпхп — Ь эквивалентны тогда и толь-
ап а
и только тогда, когда rg
ко тогда, когда rg
h ... К Ь
= 1.
3) Сформулировать признак попарной эквивалентности к
линейных уравнений.
19.23. 1) Доказать, что системы линейных уравнений
Ах = о, Вх = о эквивалентны тогда и только тогда, когда
Л
В
2) Доказать, что совместные системы линейных уравнений
Ах = а, Вх = Ь эквивалентны тогда и только тогда, когда
D
ны
||
19.24. Проверить эквивалентность систем уравнений
18.1, 11) и 18.1, 12).
19.25. Проверить, эквивалентны ли системы уравнений,
определяемые расширенными матрицами:
1) (^502|сп) И (А5оз|с12); 2) (А239|Сб7) И (А24О|С147);
3) (A5si|c69) и (Aj22\c72).
19.26. Проверить эквивалентность всех систем данной со-
совокупности (каждая система уравнений задана расширенной
матрицей): (A5oi|ci6), (А5оэ|сб7) и (А5ю|с7з)-
19.27. 1) Допустим, что добавление к данной однородной
системе линейных уравнений еще некоторого числа линейных
однородных уравнений не меняет множества ее решений. До-
') Линейное уравнение нетривиально, если хотя бы один из коэффи-
коэффициентов при неизвестных отличен от 0.
§ 19. Системы линейных уравнений общего вида 171
казать, что добавленные уравнения являются линейными ком-
комбинациями уравнений данной системы.
2) Доказать то же утверждение для совместной системы
линейных неоднородных уравнений. Сравнить с задачей 17.3. 2).
19.28. 1) Допустим, что каждое решение однородной си-
системы линейных уравнений (А) является также и решением
однородной системы линейных уравнений (Б). Доказать, что
тогда каждое уравнение системы (Б) является линейной ком-
комбинацией уравнений системы (А).
2) Доказать то же утверждение для совместных систем ли-
линейных неоднородных уравнений. Сравнить с задачей 17.3. 1).
19.29. 1) Доказать, что две однородные системы линейных
уравнений эквивалентны тогда и только тогда, когда уравне-
уравнения каждой из них являются линейными комбинациями урав-
уравнений другой системы.
2) Доказать то же утверждение для совместных систем ли-
линейных неоднородных уравнений.
Приложения A9.30-19.49)
19.30 (р). Пусть Ах. = b — произвольная система ли-
линейных уравнений. Доказать, что система уравнений
(АТА)х — АТЪ совместна.
19.31 (р). Дана квадратная матрица А= Ца^Ц. Доказать,
что если при всех г выполнено неравенство \ац\ > /]\ajk\,
19.32. Доказать, что для любых попарно различных чисел
а\,..., an+i и любых чисел Ь\,..., bn+i существует единственный
многочлен /(?) степени не выше п такой, что
= bn+i.
19.33. Найти многочлен f(t) третьей степени такой, что
) (
Приведенные ниже задачи 19.34-19.49 относятся к прямой,
окружности, плоскости и сфере. Следует брать за определение
алгебраическое уравнение соответствующего множества, а при
решении задач применять теорию систем линейных уравнений,
не пользуясь методами аналитической геометрии.
19.34. 1) (р) Сформулировать в терминах рангов и дока-
доказать условие на декартовы координаты (ai,bi), (a2,b2), (аз;Ьз)
172 Гл. 7. Системы линейных уравнений
трех точек плоскости, необходимое и достаточное для того, что-
чтобы эти точки не лежали на одной прямой.
2) Решить тот же вопрос для четырех точек плоскости.
19.35 (р). Доказать, что через две различные точки с де-
декартовыми координатами (а\,Ь\), (а2,6г) проходит единствен-
единственная прямая, и найти ее уравнение.
19.36. Показать, что через три точки с координатами
(a\,b\), (a,2,b2), (аЗ)^з), не лежащие на одной прямой, прохо-
проходит единственная окружность, и найти ее уравнение. Система
координат декартова прямоугольная.
19.37. 1) Три прямые заданы на плоскости в общей де-
декартовой системе координат уравнениями А%х + Biy + Ci = О,
г = 1,2,3. Сформулировать в терминах рангов и доказать усло-
условие на коэффициенты уравнений, необходимое и достаточное
для того, чтобы эти прямые не проходили через одну точку.
2) Решить тот же вопрос для четырех прямых.
19.38. Используя результат задачи 19.37, определить, име-
имеют ли данные прямые общую точку:
1) 2ж + Зу + 1 = 0, 7ж + 11у + 4 = 0, Зж + 4у + 1 = 0;
2) х + 8у+1 = 0, 7х-у + 1 = 0, 11х-26у-1 = 0,
8х + 1у + 2 = 0.
19.39. 1) Четыре точки заданы своими декартовыми ко-
координатами (aj,bj,Cj), i = 1,2,3,4. Сформулировать в терминах
рангов и доказать условие, необходимое и достаточное для то-
того, чтобы эти точки не лежали в одной плоскости.
2) Решить тот же вопрос для пяти точек.
19.40. Используя результат задачи 19.39, определить, ле-
лежат ли данные точки на одной плоскости:
1) G,-1,2), B,3,1), @,10,0), C,4,1), F,-2,2);
2) F,1,2), B,3,1), C,4,1), F,2,2).
19.41. Показать, что через четыре точки с координатами
(ai,bi,Ci), i = 1,2,3,4, не лежащие в одной плоскости, прохо-
проходит единственная сфера, и найти ее уравнение. Система коор-
координат декартова прямоугольная.
19.42. Три точки заданы своими декартовыми координа-
координатами (щ,Ь(,С{), г = 1,2,3.
1) (р) Сформулировать в терминах рангов и доказать ус-
условие, необходимое и достаточное для того, чтобы эти точки
не лежали на одной прямой.
2) Решить тот же вопрос для т точек (т ^ 4).
§ 19. Системы линейных уравнений общего вида 173
19.43. Используя результат задачи 19.42, определить, ле-
лежат ли данные точки на одной прямой:
1) B,3,1), C,4,2), @,1,-1), (-2,-1,-3), (-6,-5,-7);
2) B,3,1), C,4,2), @,1,1), B,1,3), F,5,4).
19.44. Доказать, что через три точки с декартовыми ко-
координатами (a,,bj,Cj), г = 1,2,3, не лежащие на одной прямой,
проходит единственная плоскость, и найти ее уравнение.
19.45. Две плоскости заданы в общей декартовой систе-
системе координат уравнениями AiX + Biy + dz + Di = 0, i = 1,2.
Сформулировать в терминах рангов и доказать условия на ко-
коэффициенты уравнений, необходимые и достаточные для того,
чтобы эти плоскости:
1) совпадали;
2) имели единственную общую прямую;
3) были параллельными, но не совпадали.
19.46. Три плоскости заданы в общей декартовой систе-
системе координат уравнениями А{Х + В^у + dz + D{ = 0, i = 1,2,3.
Сформулировать в терминах рангов и доказать условия на ко-
коэффициенты уравнений, необходимые и достаточные для того,
чтобы эти плоскости:
1) совпадали;
2) имели единственную общую точку;
3) имели единственную общую прямую;
4) были параллельными, но не все совпадали;
5) образовывали призму.
¦'• 19.47. Используя результат задачи 19.46, определить вза-
взаимное расположение плоскостей:
1) Зх + 1у + 52 - 1 = 0, 2х + Зу + 32 + 1 = 0,
2) х - у - 2 + 1 = 0, Ъх - 21у - 172 + 1 = 0,
19.48. Четыре плоскости заданы в общей декартовой си-
системе координат уравнениями А{Х + Biy + Ciz + Д = 0, i = 1,2,
3,4. Известно, что пары, соответствующие г = 1,2 и г = 3,4,
определяют прямые линии. Сформулировать в терминах ран-
рангов и доказать условия на коэффициенты уравнений, необхо-
необходимые и достаточные для того, чтобы эти прямые:
1) пересекались;
2) были параллельными, но не совпадали;
174 Гл. 7. Системы линейных уравнений
3) совпадали;
4) скрещивались.
19.49. Используя результат задачи 19.48, определить вза-
взаимное расположение прямых:
Г
\
-х + 2у + Ъг - 1 = О,
Ах - 6у + 72 + 2 = О,
Ъх 4- Ъу - 82 - 3 = 0;
2)
Гх + Зу + 32-2 = 0,
\ х - 9у - 62 - 5 = 0,
Г 2х - 14у - 92 - 9 = 0,
\ Ах + 2у + 2 - 7 = 0.
Г л а в а 8
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
В этой главе используются следующие основные понятия и тер-
термины: вещественное линейное пространство (линейное простран-
пространство над полем вещественных чисел), комплексное линейное
пространство (линейное пространство над полем комплексных
чисел), линейная комбинация векторов, линейно зависимая сис-
система векторов, базис в линейном пространстве, координаты век-
вектора в базисе, координатный столбец вектора, конечномерное
линейное пространство и его размерность, арифметическое про-
пространство (вещественное и комплексное), бесконечномерное линей-
линейное пространство, матрица перехода от одного базиса к друго-
другому, линейное подпространство, нулевое подпространство, линейная
оболочка системы векторов (линейное подпространство, натяну-
натянутое на эту систему векторов), сумма и пересечение двух (и любо-
любого конечного числа) подпространств, прямая сумма двух (и любого
конечного числа) подпространств.
Перечислим основные примеры линейных пространств.
1) Геометрическое пространство — множество векторов (на-
(направленных отрезков) пространства, изучаемого в элементарной
геометрии.
2) Арифметическое n-мерное линейное пространство Лп над полем
вещественных чисел (вещественное арифметическое пространство) —
пространство столбцов высоты п с вещественными элементами. Опера-
Операции сложения столбцов и умножения столбца на число осуществля-
осуществляются покомпонентно. Базис этого пространства, состоящий из столб-
столбцов единичной матрицы, называется стандартным. Координатами
столбца относительно стандартного базиса являются его элементы.
3) Арифметическое п-мерное линейное пространство Сп над по-
полем комплексных чисел (комплексное арифметическое простран-
пространство) — пространство столбцов высоты п с комплексными элемента-
элементами. Операции и стандартный базис определяются так же, как и в Лп.
4) Пространство Лтхп вещественных матриц размера т х п
над полем вещественных чисел с обычными операциями сложения
матриц и умножения матрицы на число. Размерность пространства
ЛтХп равна тп. В пространстве Лтхп стандартным называем ба-
базис, состоящий из матричных единиц E{j, i = 1,..., m; j = 1,..., n (см.
введение к § 15). Базисные матрицы упорядочиваем следующим об-
образом: Ец, E2i, -. -, Ет\, Е\2, ¦ ¦ ¦, Ет2, ¦ . ., Е\п, ..., Етп 1).
') О другом способе упорядочивания см. введение к гл. 12.
176 Гл. 8. Линейные пространства
5) Пространство Cmxn комплексных матриц размера m x п над
полем комплексных чисел. Операции, размерность, стандартный ба-
базис — такие же, как и в 7?.mXn-
6) Пространство 7>(п) многочленов с вещественными коэффици-
коэффициентами от одной переменной t, имеющих степени, не превосходящие
данного числа п. Операции — обычные операции сложения много-
многочленов и умножения многочлена на число. Размерность простран-
пространства J>(n) равна п + 1. Стандартным базисом называем базис из мно-
многочленов 1, t, t2, . . . , tn.
Произвольное линейное пространство обозначаем буквой С, его
размерность — dim?. Если dim? = п, то пишем: Сп. Элементы ли-
линейного пространства называем векторами, их координаты записы-
записываем в виде столбцов.
Пусть Е, = (?i,..., ?„ )Т — координатный столбец вектора х в ба-
базисе е = (ei,..., е„). Тогда
п
=е?,, A)
где е понимается как строка из векторов е\,...,еп. Формула A) на-
называется формулой разложения вектора х по базису е.
Пусть векторы e'lt...,e'n базиса е' заданы своими координатами
относительно базиса е = (ei,...,en):
гые*., i = l,...,n. B)
к=1
Матрица 5, столбцами которой являются координатные столбцы но-
новых базисных векторов е[,...,е'п относительно старого базиса е, на-
называется матрицей перехода от базиса е к базису е'. Равенство B)
можно переписать так:
е' = eS. C)
Это равенство сохранится, если вместо строк из векторов е и е' рас-
рассматривать матрицы из координатных столбцов векторов е\,...,еп и
е[,...,е'п в некотором фиксированном базисе.
Если вектор х имеет координатный столбец ?, в базисе е и коор-
координатный столбец ?,' в базисе е', а 5 — матрица перехода от базиса
е к базису е', то
t = 5t'. D)
При фиксированном базисе пространства каждой линейной ком-
комбинации векторов взаимно однозначно соответствует такая же линей-
линейная комбинация их координатных столбцов.
Пусть векторы ai,...,ajt заданы своими координатными столб-
столбцами. Составим из этих столбцов матрицу А и будем делать эле-
элементарные преобразования ее строк. Столбцы преобразованной мат-
матрицы можно интерпретировать как координатные столбцы тех же
Гл. 8. Линейные пространства 177
векторов в новом базисе. Матрица перехода к нему получается из
единичной матрицы Е с помощью тех же элементарных преобразо-
преобразований строк.
Элементарным преобразованиям столбцов матрицы А соответ-
соответствует переход к системе векторов, являющихся линейными комби-
комбинациями данных. Матрица из коэффициентов этих линейных комби-
комбинаций получается из Е теми же элементарными преобразованиями
столбцов.
Приведем схемы решения некоторых важных типичных задач.
1) Векторы /i,...,/n базиса f и вектор х даны своими коор-
координатными столбцами относительно базиса е. Найти координатный
столбец ?,' вектора х относительно базиса f.
Решение. Столбец Е,' находится из матричного уравнения
D), где ?, — координатный столбец вектора х в базисе е, a S — мат-
матрица из координатных столбцов векторов /i,...,/n в базисе е. Для
того, чтобы вычислить столбец ?,, матрицу || S | ?, || с помощью эле-
элементарных преобразований строк упрощаем так, чтобы на месте S
оказалась единичная матрица. Тогда на месте столбца ?, окажется
искомый столбец ?,'.
2) Векторы базисов f = (Д,...,/„) и g = (д1}... ,дп) заданы сво-
своими координатными столбцами относительно третьего базиса е =
= (ei,...,en). Найти матрицу перехода 5 от базиса f к базису g.
Решение. Пусть F и G — матрицы из координатных столб-
столбцов векторов /i,...,/n и gi,...,gn. Применяя в нашем случае мат-
матричное равенство C), имеем: G — FS-
Матрицу S = F~lG можно вычислить с помощью элементарных
преобразований строк матрицы || F \ G ||. Если после элементарных
преобразований строк на месте матрицы F окажется единичная мат-
матрица, то на месте G будет искомая матрица S.
3) Векторы ai,...,а* заданы своими координатными столбцами
в некотором базисе е. Проверить, образуют ли данные векторы базис
в пространстве, выявить линейные зависимости между ними, найти
базис в линейной оболочке системы ai,...,Ofc.
Решение. Пусть А — матрица из координатных столбцов
данных векторов. Элементарное преобразование строк А равносиль-
равносильно умножению А слева на невырожденную матрицу Т. При этом все
столбцы А также умножаются слева на Г, и линейные зависимости
между столбцами матрицы не меняются. Эти действия можно по-
понимать как замену координат: новые столбцы — новые координаты
данных векторов.
Данные векторы образуют базис в Сп тогда и только тогда, ко-
когда к = п и det-A^O. Обозначим линейную оболочку ai,...,ajt че-
через V. Базис в V состоит из таких векторов <Zj, координатные столб-
столбцы которых являются базисными столбцами матрицы А. Остальные
векторы раскладываются по ним с теми же коэффициентами, с кото-
которыми соответствующие координатные столбцы раскладываются по
базисным столбцам А. Для отыскания этих коэффициентов матри-
178
Гл. 8. Линейные пространства
цу А следует привести к упрощенной форме с помощью элементар-
элементарных преобразований строк.
Например, пусть векторы oi, 0,2, 03 четырехмерного простран-
пространства имеют в некотором базисе е координатные столбцы
1
_ J
1
0
1
1
0
1
2
0
1
1
Матрицу
1
-1
1
0
1
1
0
1
2
0
1
1
с помощью преобразований строк приводим к виду
1
0
0
0
0
1
0
0
1
1
0
0
А
Очевидно, третий столбец матрицы А равен сумме двух первых. По-
Поэтому третий столбец матрицы А также равен сумме двух первых, и
аз = 0.1 + о-г-
Базис в линейной оболочке системы векторов можно найти так
же, упрощая матрицу А с помощью элементарных преобразований
столбцов. Эти преобразования заменяют данные векторы на их неза-
независимые линейные комбинации, и их линейная оболочка остается
неизменной.
Множество решений системы линейных однородных уравнений
с п неизвестными можно рассматривать как множество координат-
координатных столбцов векторов некоторого линейного подпространства в про-
пространстве Сп. В этом смысле каждая система линейных однородных
уравнений с п неизвестными определяет линейное подпространство
в ?„. Базис этого подпространства есть совокупность векторов, ко-
координатные столбцы которых образуют фундаментальную систему
решений данной однородной системы линейных уравнений.
4) Векторы ai,...,ajt заданы своими координатными столбцами
относительно базиса е пространства Сп. Найти систему линейных
уравнений, определяющую линейную оболочку "Р данных векторов.
Решение. Выпишем матрицу А из координатных столбцов
векторов ai,...,ajfc. Пусть щА = г. Для того чтобы вектор с коорди-
координатным столбцом ?, = (х\,...,хп)Т принадлежал подпространству V,
необходимо и достаточно, чтобы ранг матрицы А = \\А\Е,\\ также был
равен г. Элементарными преобразованиями строк матрица А приво-
приводится к ступенчатому виду; при этом последние п — г строк стано-
становятся нулевыми. Если такие же преобразования проделать с мат-
Гл. 8. Линейные пространства
179
рицей А, то в последних п — г строках на (к + 1)-м месте появятся
некоторые линейные комбинации чисел х\,...,хп. Приравняв их ну-
нулю, получим искомую систему линейных уравнений.
Составим, например, систему уравнений, определяющую линей-
линейную оболочку системы векторов oi, 02, 03 из предыдущего номера.
Матрица
МЛ
А =
1
-1
1
0
1
1
0
1
2
0
1
1
XI
хз
Х4
¦риводится к ступенчатому виду
1
0
0
0
1
1
0
0
2
1
0
0
х4
- Х\ + Х4
Ранг матрицы без четвертого столбца равен 2; для того чтобы
ранг всей матрицы тоже был равен 2, необходимо и достаточно вы-
выполнение условий х\ + Х2 — 2^4 = 0,Ж1— хз~ Х4 = 0. Это и есть иско-
искомая система линейных уравнений, определяющая линейную оболоч-
оболочку векторов ai, 02, аз в базисе е.
Суммой конечного числа линейных подпространств М., Л/", ...,V
называется линейная оболочка объединения множеств М, Л/", ..., V-
Сумма М + N +... + V конечного числа линейных подпространств
называется прямой суммой, если каждое из подпространств М,
Л/", ..., V имеет нулевое пересечение с суммой остальных подпро-
подпространств. Прямая сумма обозначается так: М ф Л/" ф... ф V.
Если С — М Ф Л/", то проекцией вектора ж € ? на линейное под-
подпространство М параллельно линейному подпространству N назы-
называется слагаемое xi в разложении х — х\ +Хг, где х\ € Ai, xi €Л/".
Остановимся на основных задачах, связанных с понятиями сум-
суммы и пересечения подпространств.
5) Линейные подпространства V и Q заданы как линейные обо-
оболочки векторов ai,...,ak и Ь\,...,Ь; соответственно. Найти базис сум-
суммы V + Q.
Решение. Подпространство V + Q является линейной обо-
оболочкой системы векторов а\,..., ojt, Ь\,..., 6;. Поэтому задача сводит-
сводится к задаче 3).
6) Линейные подпространства V и Q заданы системами линей-
линейных однородных уравнений. Найти пересечение V П Q.
Решение. Подпространство V П Q задается системой урав-
уравнений, составленной из уравнений обеих данных систем. Размерность
подпространства VC\Q можно вычислить по формуле Грассмана
dim(P П Q) = dimP + dim Q - dim(P + Q).
7) Линейные подпространства V и Q — линейные оболочки си-
систем векторов ai,...,ak и 6i,...,6|. Эти векторы заданы их коорди-
180 Гл. 8. Линейные пространства
натными столбцами, которые образуют матрицы Аи В соответствен-
соответственно. Найти размерность и базис суммы V + Q и пересечения VC\Q.
Решение. Приведем матрицу ||Л|В|| к упрощенному виду
||Л'|Б'|| при помощи элементарных преобразований строк. При этом
выберем упрощенный вид так, чтобы в число базисных столбцов во-
вошли все базисные столбцы А и столько столбцов из В, сколько потре-
потребуется. Тогда векторы, соответствующие базисным столбцам матри-
матрицы ||А'|В'||, составляют базис в?+2,а соответствующие базисным
столбцам, расположенным в А', составят базис в V.
Для того, чтобы найти размерности Q и V П Q, упростим теперь
матрицу В' с помощью элементарных преобразований столбцов так,
чтобы не менять ранее найденных базисных столбцов (назовем эти
столбцы основными). Полный набор базисных столбцов преобразо-
преобразованной матрицы В" соответствует базису в Q, а базисные столбцы
В", дополняющие основные, соответствуют базису в VD Q. Для то-
того чтобы проследить за тем, какие линейные комбинации векторов
Ь\,..., 6; они образуют, и таким образом найти исходные координа-
координаты базисных векторов подпространства V П Q, можно проделать со
столбцами единичной матрицы порядка I те же элементарные преоб-
преобразования, что и со столбцами В'.
В главе «решения» приведено решение задачи 21.7, 11) указан-
указанным способом.
§ 20. Примеры пространств.
Базис и размерность
20.1. Можно ли подходящим введением операций сложе-
сложения и умножения на число сделать линейным пространством:
1) пустое множество; 2) множество из одного элемента;
3) множество из двух элементов?
20.2. Доказать, что:
1) если система векторов содержит линейно зависимую
подсистему, то она линейно зависима;
2) если система векторов линейно независима, то любая ее
подсистема также линейно независима;
3) если векторы а\, ..., а^ линейно независимы, а векторы
ао, а\, ..., df. линейно зависимы, то вектор clq является линей-
линейной комбинацией векторов ai, ..., а^-
20.3. Выяснить, является ли линейным подпространством
данное множество векторов в n-мерном пространстве, и если
является, то найти его размерность:
1) множество векторов, все координаты которых равны
между собой;
2) множество векторов, первая координата которых равна 0;
§ 20. Примеры пространств. Базис и размерность 181
3) множество векторов, сумма координат которых равна 0;
4) множество векторов, сумма координат которых равна 1.
20.4. Выяснить, является ли линейным подпространством
данное множество векторов геометрического пространства, и
если является, определить его размерность:
1) множество векторов плоскости, параллельных данной
прямой;
2) множество векторов трехмерного пространства, перпен-
перпендикулярных данной прямой;
3) множество векторов плоскости, по модулю не превосхо-
превосходящих 1;
4) множество векторов плоскости, образующих угол а с
данной прямой @° ^ а ^ 90°).
20.5. Доказать, что множество матриц размера тхп об-
образует линейное пространство относительно обычных опера-
операций сложения матриц и умножения матрицы на число. Найти
размерность и базис этого пространства Итхп-
20.6. Выяснить, является ли данное множество квадрат-
квадратных матриц порядка п, линейным подпространством в про-
пространстве всех квадратных матриц порядка п, и если является,
то найти его размерность:
1) множество матриц с нулевой первой строкой;
2) множество диагональных матриц;
.! 3) множество верхних треугольных матриц;
4) множество симметрических матриц;
5) множество кососимметрических матриц;
6) множество вырожденных матриц.
20.7. Выяснить, образует ли данное множество функций
на произвольном отрезке [а,Ь] линейное пространство относи-
относительно обычных операций сложения и умножения на число:
1) множество функций, непрерывных на [а,Ь];
2) множество функций, дифференцируемых на [а,Ь];
3) множество функций, интегрируемых по Риману на [а,Ь];
¦ * 4) множество функций, ограниченных на [a,b];
г 5) множество функций таких, что sup |/(ж)| ^ 1;
[а,Ь]
6) множество функций, неотрицательных на [а,Ь]\
7) множество функций таких, что /(а) = 0;
8) множество функций таких, что /(а) = 1;
9) множество функций таких, что lim /(ж) = оо;
х-Уа+0
182 Гл. 8. Линейные пространства --
10) множество функций, монотонно возрастающих на fa, 6];
11) множество функций, монотонных на [а,Ь].
20.8. Доказать, что при любом натуральном п данное мно-
множество функций образует конечномерное линейное простран-
пространство; найти размерность и указать базис этого пространства:
1) множество многочленов степени не выше п (обозначает-
(обозначается 7>W);
2) множество четных многочленов степени не выше п;
3) множество нечетных многочленов степени не выше п;
4) множество тригонометрических многочленов порядка
не выше п, т. е. множество функций вида f(t) = ао + а\ cost +
+ 6i sint + ... + ап cosnt -\- bnsmnt;
5) множество четных тригонометрических многочленов
порядка не выше п;
6) множество нечетных тригонометрических многочленов
порядка не выше п;
7) множество функций вида f (t) = eat (ао + а\ cost +
+ b\ sin t + ... + an cos nt + bn sin nt), где а — фиксированное дей-
действительное число.
20.9. Доказать, что данное множество функций образует
бесконечномерное линейное пространство:
1) множество всех многочленов;
2) множество всех тригонометрических многочленов;
3) множество функций, непрерывных на некотором отрезке.
20.10. Найти линейную комбинацию столбцов:
lKci-|c2; 2) -C29 + C33 + 2c3i;
3) 2С143 ~ 2°138' 4) °206 ~ 3°198 + 2с199-
20.11. Найти линейную комбинацию матриц
Г^215 ^252 + ^253 ~ ^254-
X..
20.12. Найти столбец х из уравнения:
1\ i О„ П\ C141+x C146 + X
1) С28 + С29 - 2Х = С32! 2) = C142J
3) 3(Ci97 + X) + 2(С2О2 - X) = 4(С2О4 ~ х).
20.13. Выявить линейные зависимости между данными
столбцами:
1) С34, С35, С2д; 2) С84, С83, С120;
3) Ci66, Ci98, C199, C201; 4) Ci66, Cl97, C205, C206-
§ 20. Примеры пространств. Базис и размерность 183
20.14. Найти размерность и базис линейной оболочки дан-
данной системы столбцов:
1) Ci, Сг; 2) Сзь С28, Сзо", 3) С31, Сзо, C32J
4) Ci21, C124) СЦ85 5) Ci66, Ci98, C199, C201",
6) С196, С198, С2О25 7) C166, Ci96, C197, Ci98;
8) о; 9) ci66, C203, C204, C197.
20.15. Найти размерность и базис линейной оболочки си-
системы матриц А391, A390, -Азвэ-
20.16. Найти размерность и базис линейной оболочки си-
системы многочленов A + tK, t3, I, t + t2.
20.17. Доказать что векторы ei,... ,е„ образуют базис в п-
мерном арифметическом пространстве, и найти координатный
столбец вектора х в этом базисе:
1) n=l, ei = cb x = c2;
2) п = 2, ei = С28, е2 = с29, х = с3о;
3) п = 3, ei = сц6, ег = ci2o, ез = С122, х = с4д;
4) п = 4, ei = ci96, e2 = С197, ез = cigs, e4 = С199, x = сгоо;
5) П = 5, ei = С255> в2 = С263, ©3 = С264, е4 = С265, ©5 = С266>
Х=С267-
20.18. Доказать, что матрицы As, Aw, A13, Ав образуют
базис в пространстве квадратных матриц порядка 2, и найти
координатный столбец матрицы Лгб в этом базисе.
20.19. Доказать, что матрицы А200, ^202, ^205, А204, ^203,
А242 образуют базис в пространстве симметрических матриц
порядка 3, и найти координатный столбец матрицы А^ в этом
базисе.
20.20. Доказать, что многочлены 1, t — a, (t — aJ, ...
..., (t — a)n образуют базис в пространстве многочленов сте-
степени не выше п, и найти координатный столбец произвольного
многочлена pn(t) степени не выше п в этом базисе.
20.21 (р). Доказать, что многочлены 2t + t5, t3-t5, t + t3
образуют базис в пространстве нечетных многочленов степени
не выше 5, и найти координатный столбец многочлена Ы — t3 +
+ 2t5 в этом базисе.
20.22. Найти размерность и базис линейного подпростран-
подпространства, заданного в некотором базисе системой линейных урав-
уравнений:
1)Л27Х = о; 2) А238Х = о; 3)Л24эх = о; 4
5) AUQx = о; 6) Amx = о; 7) Л577Х = о.
184 Гл. 8. Линейные пространства
20.23. Составить систему уравнений, определяющую ли-
линейную оболочку данной системы столбцов:
1) сбб, саз; 2) сзь с3о; 3) сзо, сгэ;
4) Ci66, C1965 5) С197; 6) Ci66, C198, С199, C201;
7) ci66, ci96, C197, ci98i 8) @, 0, 0, 0)т.
20.24. Доказать, что каждая из двух систем векторов fi,...
..., fn и gi, ..., gn является базисом в n-мерном арифметиче-
арифметическом пространстве, и найти матрицу перехода от первого ба-
базиса ко второму. Найти координаты вектора в первом базисе,
если известны его координаты ?[, ..., ?'п во втором базисе:
1) n = l, fi = ci, gi = c3;
2)n = 2, fl = С29, f2 = C33, gl=C32, g2 = C28;
3) П = 3, f1 = Cue, f2 = C117, f3 = C94, gi = C119, g2 = C84,
g3 = C83;
4) n = 4, f1 = C166, h = Cl96, f3 = C197, f4 = Cl98> gl = Cl99,
g2 = C200, g3 = C202, g4 = C203-
20.25. Доказать, что каждая из двух систем матриц А132,
^143, Мзл, ^133, ^110, ^135 и ^136, ^137! ^112, -<4l38i ^139i ^113
является базисом в пространстве матриц размера 3 х 2, и найти
матрицу перехода от первого базиса ко второму. Найти коор-
координаты матрицы 3 х 2 в первом базисе, если известны ее коор-
координаты ?i,..., ?б во втором базисе.
20.26 (р). Доказать, что каждая из двух систем матриц
¦^250, ^251, ^252 И ДгбЗ, ^254, ^255 ЯВЛЯеТСЯ баЗИСОМ В прОСТраН-
стве кососимметрических матриц порядка 3, и найти матрицу
перехода от первого базиса ко второму. Найти координаты ко-
сосимметрической матрицы порядка 3 в первом базисе, если
известны ее координаты ?[, ?2> ?з во втором базисе.
20.27. Доказать, что каждая из двух систем функций
t-t2,t3, l + 5t + t3, A + гKиA + *K, A-tK, t~t2 + t3, l + t +
+ t2 +13 является базисом в пространстве многочленов степени
не выше 3. Найти матрицу перехода от первого базиса ко вто-
второму и координаты многочлена в первом базисе, если известны
его координаты ?[, ?'2, ?3> ?4 во втором базисе.
20.28. Доказать, что каждая из двух систем функций
A-И2J, A-t2J, 1 и 1-И2-И4, 1-t2-И4,*4 является базисом
в пространстве четных многочленов степени не выше 4, и найти
матрицу перехода от первого базиса ко второму. Найти коорди-
координаты четного многочлена степени не выше 4 в первом базисе,
если известны его координаты ?[, ?2, ?з во втором базисе.
§ 21. Сумма и пересечение подпространств 185
20.29. Как изменится матрица перехода от одного базиса
к другому, если:
1) поменять местами г-й и j-й векторы первого базиса;
2) поменять местами г-й и j-vi векторы второго базиса;
"'» 3) расположить векторы обоих базисов в обратном порядке.
20.30. Матрица Si является матрицей перехода от первого
базиса е\,..., еп в n-мерном линейном пространстве ко второму
базису fi,...,fn, а матрица 5г — матрицей перехода от второго
базиса к третьему базису gi,--.,gn- Найти матрицу перехода:
,*, 1) от первого базиса к третьему;
2) от второго базиса к первому.
20.31. Описать взаимное расположение двух базисов в
трехмерном линейном пространстве, если матрица перехода от
первого базиса ко второму:
1) диагональная;
2) верхняя треугольная;
3) нижняя треугольная.
20.32. Векторы базисов <zi,...,an и b\,...,bn даны своими
координатными столбцами относительно базиса е. Эти столбцы
составляют соответственно матрицы А и В. Найти матрицу
перехода от базиса а к базису Ь, если:
1) А = Л54, В = А64; 2) А = Aw, В = Азл;
3) А = А427, В = АШ.
20.33. Доказать, что многочлены Лежандра 1, t,
-Ct2 — 1), -E?3 — 3?) образуют базис в пространстве многочле-
многочленов степени не выше 3. Найти матрицы перехода от стандарт-
стандартного базиса к данному и обратно.
20.34. Найти координаты многочлена p(t) в стандартном
базисе пространства многочленов степени не выше 3 и в базисе
задачи 20.33:
#, l)p(t) = 5«3-3i; 2) p(t) = 2t - 1; 3) p(t) = 9t2 - 1;
и,- 4) 2 3
§ 21. Сумма и пересечение подпространств
21.1. Доказать, что пространство квадратных матриц по-
порядка п является прямой суммой подпространства симметри-
симметрических матриц и подпространства кососимметрических матриц
того же порядка.
186 Гл. 8. Линейные пространства
21.2. Доказать, что пространство многочленов степени не
выше п является прямой суммой подпространства четных мно-
многочленов степени не выше п и подпространства нечетных мно-
многочленов степени не выше п.
21.3. 1) Доказать, что n-мерное линейное пространство
является прямой суммой подпространства векторов, все коор-
координаты которых равны между собой, и подпространства век-
векторов, сумма координат которых равна 0.
2) Дана матрица А из п строк. Доказать, что п-мерное
арифметическое пространство является прямой суммой линей-
линейной оболочки столбцов А и подпространства решений системы
линейных уравнений Агх = о.
21.4. Доказать, что n-мерное арифметическое простран-
пространство является прямой суммой линейных подпространств, на-
натянутых на системы векторов ai,..., а& и t>i,..., b;:
1) n = 2, ai = сзо, аг = сз2, bi = C35;
2) n = 3, ai = ci4i, аг = ci46, bi = Сбб,
3) n = 4, ai = ci98, аг = C196, bi = C197, Ьг
4) n = 4, ai = C196, a2 = cig8, аз = C202, &4 = C199, bi =
Ьг = C204-
21.5. Разложить данный вектор х из n-мерного арифмети-
арифметического пространства в сумму двух векторов, один из которых
лежит в V, а другой — в Q, где V — линейная оболочка си-
системы векторов ai,...,a&, a Q — линейная оболочка системы
векторов bi,...,bj. Проверить единственность разложения:
1) п = 2, X = С29, аХ = С28, Ьг = С30;
2) n = 3, х = С12О) ai = C84, аг = с8з, bi = с6б;
3)n = 3, x = ci45, ai = C84, аг = С8з, bi = Сбб;
4) n = 3, x = C139, ai = c84, a2 = саз, bi = Сбб;
5) n — 4, x = c2oo, ai = C166, a2 = cigg, аз = сго7, bi = C202,
Ьг = C205-
21.6. Найти проекцию данного вектора х из п-мерного
арифметического пространства на линейное подпространст-
подпространство V параллельно линейному подпространству Q, где V — ли-
линейная оболочка системы векторов ai,...,a&, a Q — линейная
оболочка системы векторов bi,...,bj:
l)n = 2, x = c32, ai = c30, bi = c34;
2)n = 2, x = c37, ai = c30, bi = c34;
3)n = 2, x = c35, ai=c30, bi = c34;
4) n = 3, x = ci46, ai = C66, a2 = ci2i, аз = C122,
5) n = 4, x = C20I) ai = C166, аг = ci99, bx = C197,
§ 21. Сумма и пересечение подпространств 187
21.7. Найти размерность и базис суммы и пересечения ли-
линейных подпространств n-мерного арифметического простран-
пространства, натянутых на системы векторов ai,..., а& и Ьх,..., bj:
1)п = 2, ах = с34, а2 = с37, а3 = с35, Ьх=с3о, Ь2 = с3б,
Ь3 = с3г;
2) п = 3, ах = сххб, а2 = схгь а3 = сш, Ьх = схгг, Ь2 = с125,
Ь3 = схэв;
3) п — 3, ах = Сбб, а2 = схзэ. а3 = Сх4о, bx = C94, Ь2 = Сх4х,
1»3 = СХХ75
4)(р)п = 3, ах=С8з, аг = сх42, аз = сх43, bx = C84, Ь2 =
= Сх44, Ьз = СХХ7;
5) п = 3, ах = Сбб, а2 = с116, а3 = Сх45, Ьх = с122, Ь2 = Сх4б,
6) п = 3, ах = С83, аг = С84, аз = схгсъ bi = Сбб, b2 = cm
7) п — 4, ах = сх9б, а2 = с2оо, аз = с2х7, Ьх = сгхь b2 = c2i8,
= С2хэ;
8) П = 4, ах = С196, а2 = С198, аз = С202, Ьх = Схбб, Ь2 = С204,
= CX97J
9) п = 4, ах = схбб, а2 = схэв» аз = сх97> bi = с2оз, b2 = c2os>
10) п = 4, ах = схбб, а2 = схэв, а3 = cige, а4 = с2о2, bi =
= С207, Ь2 = С204> Ьз = CI97, Ь4 = С205!
ll)(p)n = 4, ai=||l -1 1 Of, a2=||l 1 0 1||Т,
аз = ||2 0 1 2f, а4 = ||2 0 1 1||Т, bx =||3 5 -1 4|f,
Ь2 = ||1 1 0 Of, Ьз = ||2 2 0 3f, Ь4 = ||1 3 -1 if.
21.8. Найти размерность и базис суммы и пересечения ли-
линейных подпространств пространства квадратных матриц по-
порядка 3, натянутых на системы матриц А202, -Агоь -^209! -^204 и
^256) ^205, ^257, ^258-
21.9. Найти размерность и базис суммы и пересечения
линейных подпространств пространства многочленов степени
не выше 3, натянутых на системы многочленов l + 2t + t3,
1 + t + t2, t-t2 + t3 и 1-И2, l + 3t + t3, 3t-t2 + t3.
21.10. Используя понятие суммы двух линейных подпро-
подпространств, доказать неравенство rg(A + B) ^rgA + rgB, где А
и В — две матрицы одного размера m x п.
21.11. Доказать, что сумма С двух линейных подпрос-
подпространств V и Q тогда и только тогда будет прямой суммой,
188 Гл. 8. Линейные пространства
когда хотя бы один вектор х € С, однозначно представляется в
виде х = у + z, где у G V, z G Q.
21.12. Пусть V я Q — два линейных подпространства ко-
конечномерного линейного пространства. Доказать, что:
1) если сумма размерностей V и Q больше размерности
всего пространства, то пересечение VC\Q содержит ненулевой
вектор;
2) если размерность суммы V и Q на единицу больше раз-
размерности их пересечения, то одно из этих подпространств со-
содержится в другом.
21.13. Доказать, что для любого линейного подпростран-
подпространства V конечномерного линейного пространства существует
другое подпространство Q такое, что все пространство явля-
является прямой суммой V w Q.
21.14. Пусть С, ЛЛ, N — три линейных подпространства;
1) Доказать, что V С Q.
2) Возможен ли случай V ф Q? Привести соответствующий
пример.
21.15. Доказать, что сумма линейных подпространств
\ ..., С(к) совпадает с множеством векторов, представимых
в виде х = xi + ... + Хк, где Xi € &l\ i = 1, ..., к.
21.16. Пусть С, ЛЛ, N — три линейных подпространства.
Доказать, что
С + М +ЛГ = {С + М) +ЛГ = С + {М +Af).
21.17. Доказать, что сумма С, линейных подпространств
?(*),... ,С(к' тогда и только тогда будет прямой суммой, когда
хотя бы один вектор х € С однозначно представляется в виде
х = х\ +... +хь, где Xi € ?^ (обобщение задачи 21.11).
§ 22. Комплексные линейные пространства
22.1. Найти линейную комбинацию столбцов:
1) (l-H)c4-ic5; 2) 2гс42 + C + г)сзо-С41;
3) (l-2i)ci48 + ^ci52.
22.2. Найти линейную комбинацию матриц
B + г)А8д + ъА\о + А^ - 2A9i.
§ 22. Комплексные линейные пространства 189
Q ' 22.3. Найти столбец х из уравнения:
)
2) 2С153 - С149 + гх = Ci50-
¦¦¦:iflh 22.4. Выявить линейные зависимости между данными
Столбцами:
•• • 1) С26, С29> С43; 2) С26; С30, C40', 3) Ci31, Сш, С133-
22.5. Найти размерность и базис линейной оболочки дан-
Щй системы столбцов:
1) С5; 2) С27, Сзэ; 3) С26, С43, С44;
'-•' 4) Ci34, Cl51, Ci52! 5) С275, С215, C2765
6) Ci66, C215, Ci96, Ci93, C216-
22.6. Доказать, что векторы ei,...,en образуют базис в
комплексном n-мерном арифметическом пространстве, и найти
координатный столбец вектора х в этом базисе:
1) п= 1, ei = с4, х = с5;
2)n = 2, ei = C3i, e2 = c35, x = c3g;
3) п~2, ei = c26, e2 = c4o, x = c4i;
4)n = 2, ei = c26, е2 = с27, х = с3в;
5)n=3, ei=Ci26, в2 = С127, ез = С128, X = C273J
6) П = 4, ei = Ci66, в2 = С207, вз = С274, в4 = С275, X = С276-
22.7. Найти размерность и базис линейного пространства,
заданного в некотором базисе системой линейных уравнений:
1) А90х = о; 2) A9ix = o; 3) Азеэх = о;
4) A37ix = o; 5) Л525Х = о.
22.8. Составить систему уравнений, определяющую линей-
линейную оболочку данной системы столбцов:
1) С40, С42", 2) С26, С42; 3) С215', 4) Ci28, C273!
5) С275, С276, C214i С215-
22.9. Доказать, что каждая из двух систем векторов fi, ...
..., fn и gi, ..., gn является базисом в комплексном п-мерном
арифметическом пространстве, и найти матрицу перехода от
первого базиса ко второму. Найти координаты вектора в пер-
первом базисе, если известны его координаты ?i,.">?n во втором
базисе:
1) п= 1, fi = c4, gi = c6;
2)n=2, fl=C31, f2 = C45, gl=C44, g2 = C39;
3) П = 3, f 1 = C129, f2 = Cl28, f3 — С130, gl = C122, g2 = Ci26,
g3 = Cg4-
22.10. Найти проекцию данного вектора х двумерного
комплексного арифметического пространства на линейное под-
190 Гл. 8. Линейные пространства
пространство V параллельно линейному подпространству Q,
где V натянуто на вектор С44, a Q натянуто на вектор С4о".
1)Х = С26; 2)X=C42J 32)Х=С45-
22.11. Найти размерность и базис суммы и пересечения
линейных подпространств комплексного n-мерного арифмети-
арифметического пространства, натянутых на системы векторов ai, ...
..., а* и bi, ..., bj:
1) n = 3, ai = С83, аг = c134, аз = Ci48, bi = сш, b2 = C149,
2) n = 3, ai = C131, a2 = C132, аз = C133, bi = C134, Ьг = С135,
Ьз = ci36;
3) n = 4, ai = C166, a2 = C220, »з = C216, a4 = C215, bi = C221,
Ь2 = С222, Ьз = С223, Ь4 = C214-
22.12. 1) Доказать, что если в n-мерном комплексном ли-
линейном пространстве рассматривать умножение векторов лишь
на вещественные числа, то получим 2п-мерное вещественное
линейное пространство.
2) В двумерном комплексном арифметическом простран-
пространстве рассматривается операция умножения векторов лишь на
вещественные числа. Найти базис в полученном вещественном
пространстве и координатный столбец вектора С27 в этом базисе.
22.13. Доказать, что множество многочленов степени не
выше п с комплексными коэффициентами можно рассматри-
рассматривать и как комплексное линейное пространство, и как веще-
вещественное линейное пространство. В обоих случаях найти:
1) базис и размерность пространства;
2) координатный столбец многочлена 1 — 2г + C + i)t — 3<2
в найденном базисе (при тг = 2).
Глава 9
ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ
И ПРЕОБРАЗОВАНИЯ
§ 23. Основные свойства линейных отображений
и преобразований
Общие понятия, относящиеся к отображениям, введены в § 12. В
настоящем параграфе используются также следующие понятия: ли-
линейное отображение, линейное преобразование, ранг и ядро линей-
линейного отображения, изоморфизм, матрица линейного отображения
в паре базисов, матрица линейного преобразования в данном бази-
базисе, сумма и произведение линейных отображений, произведение ли-
линейного отображения на число, подобные линейные преобразования
и матрицы.
Пусть С, С — линейные пространства над одним и тем же полем
(оба вещественные или оба комплексные). Отображение tp-.C-^C
называется линейным, если для любых векторов х,у е С и любого
числа а справедливы равенства
tp{x + y) = tp{x) + tp(y), ip{ax) = a<p{x). A)
Если пространства С и С совпадают, условия A) определяют
линейное преобразование пространства С. Нередко используют так-
также термины линейный оператор из С в С и линейный оператор в
пространстве С, особенно для дифференциальных и интегральных
операторов в пространствах функций.
Множество значений tp(?) = Imip линейного отображения </?:?—*•
—> С является линейным подпространством в С. Его размерность на-
называется рангом отображения tp и обозначается rgip. Ядром линей-
линейного отображения tp называется множество Кепр = {гб C\ip{x) = о).
Отображение tp называется вырожденным, если Кспрф{о}, B про-
противном случае — невырожденным.
Взаимно однозначное линейное отображение пространства С на
пространство С называется изоморфизмом Сиг. С. Если существует
изоморфизм С на С, то пространства С и С называются изомор-
изоморфными.
Пусть tp : С —> С — линейное отображение, е = (ei,... ,еп) — ба-
базис пространства С, f = (Д,..., fm) — базис пространства С. Матри-
Матрицей линейного отображения tp в паре базисов е, f называется мат-
матрица А = Av, столбцами которой являются координатные столбцы
192 Гл. 9. Линейные отображения и преобразования
векторов (р(е\),...,<р{еп) в базисе f. Матрицей линейного преобра-
преобразования ip в базисе е называется матрица линейного отображения
tp : С —> С в паре базисов е, е.
Если ?, — координатный столбец вектора х е С в базисе е, а г\ —
координатный столбец его образа <р{х) S С в базисе f, то
Л = At,. B)
Пусть е и е' — два базиса в пространстве С, f и f — два ба-
базиса в пространстве ?,, S и Т — матрицы перехода от е к е' и от f
к f соответственно. Если А и Л' — матрицы линейного отображе-
отображения tp : С —> ? в парах базисов е, f и е', f, то
A' = T~1AS. C)
В частности, если А и А' — матрицы линейного преобразования в
базисах е и е', a S — матрица перехода от е к е', то
А' = S^AS. D)
Матрицы А, А', связанные соотношением D) для некоторой невыро-
невырожденной матрицы S, называются подобными (Л' ~ А).
Линейные преобразования <р и -ф пространства С называются по-
подобными, если существует такое обратимое линейное преобразование
ш, что ф = ui~1ipui.
Пусть линейное отображение tp имеет матрицу А в паре базисов
е, f. Ядро отображения <р определяется в базисе е системой уравне-
уравнений АЕ, = о. Множество значений отображения <р является линейной
оболочкой системы векторов, координатными столбцами которых в
базисе f являются столбцы матрицы А. Ранг отображения <р> равен
рангу его матрицы.
Нулевое отображение в : ? —> С определяется формулой в(х) =
= о для всех х S С. Тождественное преобразование линейного про-
пространства С обозначается г. Естественное вложение tp : Ai —> С
линейного подпространства тИС? в ? определяется равенством
<р(х) = х для х G А4- Гомотетия {растяжение, преобразование подо-
подобия) пространства С с коэффициентом Л ф 0 определяется формулой
tp(x) = \x (хеС).
Пусть С является прямой суммой ненулевых линейных подпро-
подпространств С' и С", тогда любой вектор х S С однозначно представля-
представляется в виде х — х\+Хч где Х\ S С, x<i S С". Проектированием про-
пространства С на подпространство С параллельно подпространству С"
называется преобразование тг пространства С, определяемое равен-
равенством тг{х\ + xi) — x\. Проектирование можно рассматривать и как
отображение пространства С на С. Отражением пространства С
в подпространстве С параллельно С" (или симметрией простран-
пространства С относительно С параллельно С") называется преобразование
</?:?—>•?, определяемое равенством ip(x\ + Х2) — xi — х^-
Линейное пространство ? векторов плоскости или трехмерного
пространства с заданным в нем скалярным произведением в даль-
§ 23. Основные свойства линейных отображений 193
нейшем упоминается как геометрическое векторное пространство
(двумерное или трехмерное). В нем можно рассматривать преобразо-
преобразования ортогонального проектирования и ортогонального отражения
(ортогональной симметрии) в подпространстве (прямой или плоско-
плоскости). Подробнее об ортогональном проектировании в геометрическом
векторном пространстве см. введение к гл. 12.
Суммой двух линейных отображений ip, ф : С —> С называется
отображение ip + rj) такое, что для всех х ? С
Произведение отображения <р на число а определяется для всех
х S С равенством {оир)х — atp(x).
Примеры линейных отображений и преобразований.
Ядро, множество значений. Матрицы
линейных отображений и преобразований B3.1—23.51)
23.1. Пусть х = (xi, X2, •-., хп)Т — произвольный вектор
n-мерного арифметического пространства. Исследовать линей-
линейность преобразования <р, если:
1) <р (х) = (х2, xi - ж2)Т (п = 2);
2) ?>(х) = (*2, xix2)T (n = 2);
, 3) <р (х) = (Х2, хх - 3, х3)т {п = 3);
4) (р(х) = Bхз+ Ж1, 2хзХ1, xi -Х2)т (п — 3);
() ()т
xl)T (n = 3);
7) v>(x) = (<),..., О, 1)т;
8) ?>(х) = (sinxi, COSX2, хз) (п = 3);
9) (р(х) - (х„, х„_ь ..., х\У\
10) ?>(х) = Bх1, 2|х2|,2х3)г (п = 3).
23.2. Доказать линейность преобразования у> простран-
пространства С, выяснить, является ли (р инъективным, сюръективным
или биективным, указать его матрицу в произвольном базисе
пространства С, если <р есть:
1) нулевое отображение;
2) тождественное преобразование;
3) гомотетия.
23.3. Пусть <р — линейное отображение пространства С
в С Доказать, что:
1) ip(o) = о;
2) ядро <р есть линейное подпространство в ?;
3) образ <р(Л4) линейного подпространства Л4 С С есть
подпространство в ?, причем dim<^(.M)
7- 1715
194 Гл. 9. Линейные отображения и преобразования
4) ip инъективно тогда и только тогда, когда Kerip = {о};
5) dimKery + dimlm^ = dim?.
23.4. Пусть АЛ — подпространство линейного простран-
пространства С Доказать, что естественное вложение АЛ —> С — инъ-
ективное линейное отображение. Может ли оно быть изомор-
изоморфизмом?
23.5. Пусть АЛ — подпространство линейного простран-
пространства С Отображение <р : С -» АЛ определено правилами: <р(х) =
= х при х G АЛ, <р(х) = о при х ? АЛ. Линейно ли отображе-
отображение <р?
23.6. Пусть х — произвольный вектор, а, п — фиксиро-
фиксированные ненулевые векторы геометрического векторного про-
пространства (двумерного или трехмерного). Проверить линей-
линейность преобразования tp, заданного следующей формулой, и
выяснить его геометрический смысл, если:
3)
23.7. Проверить линейность и выяснить геометрический
смысл преобразования <р трехмерного геометрического вектор-
векторного пространства, заданного формулой (a, u, v — фиксиро-
фиксированные векторы):
) ] (
2) ?>(x) = u(x, v)-v(x,u) ([u,
23.8. Пусть а и п — ненулевые векторы трехмерного гео-
геометрического векторного пространства, причем (а,п) ф О, С\ —
прямая с направляющим вектором а, а ?г — плоскость с нор-
нормальным вектором п. Записать формулой преобразование <р,
проверить его линейность, найти ядро, множество значений и
ранг, если ip есть:
1) ортогональное проектирование на ?г;
2) ортогональное проектирование на С\\
3) проектирование на L% параллельно вектору а;
4) проектирование на L\ параллельно С,ч\
5) ортогональное отражение относительно С%\
6) ортогональное отражение относительно С\\
§ 23. Основные свойства линейных отображений 195
7) отражение в ?г параллельно вектору а;
• 8) отражение в С\ параллельно С.2-
В задачах 23.9-23.14 линейные подпространства трехмер-
трехмерного геометрического векторного пространства ?з заданы сво-
своими уравнениями в некотором ортонормированном базисе.
23.9. Вычислить матрицу ортогонального проектирования
пространства Е% на подпространство С, если С есть:
¦ >' 1) прямая х = z = 0;
' . 2) прямая х = у = z;
' 'fl 3) плоскость х + у + z = 0;
4) плоскость, натянутая на векторы а(—1, 1, —1) и
23.10. Вычислить матрицу проектирования пространства
?3 на подпространство С параллельно подпространству М, если:
1) С определено уравнением х — 0, ЛЛ — уравнениями 2х =
= 2у = -г;
2) С имеет уравнение х = у, ЛЛ определяется системой
уравнений х + у + z = 0, 2х + у + 4z = 0;
3) С определено уравнениями — 20ж = \Ъу = Viz, ЛЛ — ура-
уравнением 2х + Зу — z — 0;
4) С определено системой уравнений х — y + z = 0, 2x —
- Ъу + 4z = 0, М — уравнением 2х + Ъу — 4z = 0.
23.11. Преобразования пространства ?з из задач 23.9 и
23.10 рассматриваются как линейные отображения простран-
пространства ?з на подпространство С. Вычислить матрицу каждого из
этих отображений в какой-либо паре базисов.
23.12. Найти матрицу линейного преобразования <р, ес-
если tp — ортогональное отражение пространства ?$:
1) относительно плоскости х = 0;
2) относительно прямой х = 2у = z;
3) относительно линейной оболочки векторов аA,0, —1) и
(,1,-2).
23.13. Найти матрицу отражения пространства ?%:
1) в плоскости х = 0 параллельно прямой 2х = у = —z;
2) в прямой x = z, х — у + z = 0 параллельно плоскости
23.14. В трехмерном геометрическом векторном простран-
пространстве ?з задан ортонормированный базис ег, ег, ез- Вычислить
матрицу поворота пространства:
1) на угол а вокруг вектора ез;
196 Гл. 9. Линейные отображения и преобразования
2) на угол 7г/2 вокруг вектора ei;
3) на угол 27г/3 вокруг прямой, имеющей уравнения х =
= y = z.
23.15. Пусть линейное пространство С является прямой
суммой ненулевых подпространств С, С".
1) Доказать, что преобразование <р проектирования С на С
параллельно С" линейно. Найти ядро и множество значений <р.
Записать матрицу преобразования <р в базисе, составленном из
базисов подпространств С и ?".
2) Решить задачу, рассматривая ip как отображение про-
пространства С на С.
23.16. Пусть линейное пространство С является прямой
суммой ненулевых подпространств С, С". Доказать, что от-
отражение <р пространства Съ С параллельно С" есть линейное
преобразование пространства С. Найти его ядро и множество
значений. Показать, что <р является изоморфизмом. Записать
матрицу ср в базисе, составленном из базисов подпространств
С, С".
23.17. Пусть <р : С -? С — линейное отображение, М. =
= ip(?). Рассмотрим <р как линейное отображение <р : С —> ЛЛ.
Доказать, что:
1) ядра отображений <р и <р совпадают так же, как их ранги;
2) ф сюръективно;
3) (р инъективно тогда и только тогда, когда <р инъективно.
4) если dim? = dim?, то <р тогда и только тогда являет-
является изоморфизмом, когда изоморфизмом является ф. Выяснить
связь между матрицами отображений (риф (выбрать согласо-
согласованные базисы в С и М).
23.18. Доказать, что ранг матрицы линейного отображе-
отображения не зависит от выбора пары базисов в линейных простран-
пространствах.
23.19. Доказать, что:
1) ранг матрицы линейного сюръективного отображения
равен числу ее строк;
2) ранг матрицы линейного инъективного отображения ра-
равен числу ее столбцов.
23.20. Пусть <р : С—? С — линейное отображение, dim? =
= n, dim? = m, А — матрица ip в некоторой паре базисов,
TgA = г. Доказать, что:
r; 2) dimKery = n — г.
§ 23. Основные свойства линейных отображений 197
23.21. Доказать, что:
1) отображение, обратное к изоморфизму, существует и
также является изоморфизмом;
2) линейное отображение, не являющееся изоморфизмом,
не имеет обратного.
23.22. 1) Чему равен ранг и каково ядро линейного отоб-
отображения <р : С —> С, являющегося изоморфизмом?
2) Как связаны матрицы А, В линейного отображения и
обратного к нему?
23.23. Пусть ip: С —> С — линейное отображение, и
diva С = dim?. Доказать равносильность утверждений:
1) <р изоморфизм;
' :>' 2) <р инъективно;
(! 3) <р сюрьективно.
Показать, что при dim? ф dim? из 2) или 3) не следует 1).
23.24. Пусть (р: С —> С — линейное отображение, и
dim? = dim?. Доказать утверждения:
1) Для того чтобы уравнение <р(х) = у (х G С) было разре-
разрешимо при любом у G С необходимо и достаточно, чтобы одно-
однородное уравнение <р(х) — о имело только нулевое решение.
2) Если уравнение <р(х) = у разрешимо при всех у € С, то
оно имеет для каждого у единственное решение.
3) Пусть уравнение <р(х) = у разрешимо не при всех у G С,
но при некотором у разрешимо. Тогда его решение не един-
единственно.
23.25. Доказать, что любое n-мерное линейное простран-
пространство изоморфно n-мерному арифметическому пространству
над тем же полем и, следовательно, все линейные пространства
одинаковой размерности (над одним и тем же полем) изоморф-
изоморфны.
23.26. Линейное преобразование трехмерного арифмети-
арифметического пространства задано в стандартном базисе матрицей А.
Найти образы векторов ai, аг, аз и объяснить геометрический
смысл преобразования (кроме 3)):
1) А = А261, ai = A, 0, -If, а2 = @, 1, 0)г, а3 = C, 3, 3)г;
, 2) А = А22Ь ai = A, 1, 2?, а2 = A, 2, 3)г, а3 = A, 2, 4)г;
й Ъ)А = А241, aj = @, 1, 1)г, а2 = A, О, -1)г, а3 = B, 1, 0)г;
,0 4)А = А262, ai = @, 1, 1)Г, а2 = B, 2, T
«8 = B,2, 3-i)r;
198 Гл. 9. Линейные отображения и преобразования
5L = 4263, ai = A, 1, -1)г, а2 = A+*,1,-if,
а3 = A-г, Mf-
23.27. Линейное отображение n-мерного арифметическо-
арифметического пространства в m-мерное задано матрицей 4. Числа тип
определяются размерами матрицы. Вычислить образы указан-
указанных векторов:
1) А = А507, а=D,-1,-1,3)г;
2) А = А455, а=(-1, 1, 1,-1)г;
3) 4 = 4522, а =(-2, 1,3, -if;
4)m = n, А = АЬ07, ai = (l, 1, ..., 1)т, а2 = A, -1, 0, ...
...,0)г,...>ап = A,0,...,0,-1)г.
23.28. Линейное преобразование n-мерного линейного про-
пространства С задано матрицей А в базисе е. Число п определяет-
определяется порядком матрицы. Найти ядро и множество значений пре-
преобразования. Выяснить, является ли оно изоморфизмом, если:
1) А = 430; 2) А = А236; 3) А = 4264;
4) А = А465; 5) А = 446б; 6) А = 4547-
23.29. Линейное отображение n-мерного линейного про-
пространства в m-мерное задано матрицей А в базисах е и f. Чис-
Числа т и п определяются размерами матрицы. Найти ядро и
множество значений отображения. Выяснить, является ли оно
сюръективным, инъективным, если:
lL = 45i6; 2)A = A4Q5; 3) А = АШ; 4L = 457б;
5) А = А420; 6) А = А585.
23.30. Линейное отображение n-мерного арифметического
пространства в m-мерное задано в стандартных базисах этих
пространств матрицей А. Числа тип определяются размера-
размерами матрицы. Вычислить полный прообраз вектора а, если:
1)А = АШ, а =(-1,0,1/;
2)A = A58h a =A,2, If;
3) А = 4421, а=D,2,9,-20,-3f;
4) А = 4421, а= @,1, 1,2,-If.
23.31. Линейное отображение n-мерного арифметическо-
арифметического пространства в m-мерное задано в стандартных базисах
этих пространств матрицей А. Числа тип определяются
размерами матрицы. Найти полный прообраз подпространства
ЛЛ С 7?т, если:
1) 4 = ^576) -М натянуто на вектор C, —if;
2) 4 = 4517, М. задано системой уравнений x
xi - ж3 = 0;
§ 23. Основные свойства линейных отображений 199
3) А = А$92, -М задано системой уравнений 2х\— жз = О,
+ хз — 2ж4 = 0; -хч + 2ж4 — xq — 0, Х5 = 0.
23.32. Доказать, что пространство 7?.mxn вещественных
матриц размеров тхп (задача 20.5) изоморфно арифметиче-
арифметическому пространству 7?mn.
23.33. Пусть а=(ао, ai> •••) «п)г. Показать, что отобра-
отображение /(а) = ао + a\t + ... + antn устанавливает изоморфизм
(п +1)-мерного арифметического пространства и линейного
пространства многочленов степени, не превосходящей п.
23.34. Отображение двумерного вещественного арифме-
арифметического пространства в линейное пространство веществен-
вещественных квадратных матриц второго порядка задано формулой
/ \х _уII
¦ Доказать линейность и инъективность ото-
бражения ip. Вычислить его матрицу в стандартных базисах
пространств.
23.35. Отображение трехмерного вещественного арифме-
арифметического пространства в пространство матриц второго поряд-
поряд)Т матрицу Х2 Хз
ка сопоставляет вектору (xi, X4, х$) матрицу . До-
|| Хз Х\ ||
казать линейность и инъективность отображения. Вычислить
его матрицу в стандартных базисах пространств.
23.36. Пусть Л^2х2 — множество комплексных матриц вто-
второго порядка, рассматриваемое как вещественное линейное
пространство со стандартным базисом Е\\, iEn, Е-ц, гЕ2\,
iE\2, Е22, гЕ22 (см. задачу 22.12). Отображение (р : 7?з -
сопоставляет вектору (х\,Х2,х3)т матрицу ^3. Xl_ гХ2 .
Доказать, что отображение <р линейно и инъективно. Найти
его матрицу в стандартных базисах пространств.
23.37. Отображение tp : 71$ —> Л^2х2 (см. задачу 23.36) за-
задано формулой <р(х) = -г _ , где (xi,X2,X3,X4)T, а = х\ +1x2,
а = xi — гж2, Ь = жз + гх4- Доказать, что <р линейно и инъектив-
инъективно, найти его матрицу в стандартных базисах пространств.
23.38. Доказать, что данное множество квадратных мат-
матриц является вещественным линейным пространством, изо-
изоморфным арифметическому пространству Ti.%:
1) множество всех вещественных матриц второго порядка
с нулевым следом;
200 Гл. 9. Линейные отображения и преобразования
2) множество всех вещественных кососимметрических мат-
матриц третьего порядка;
3) множество всех комплексных матриц вида
II ixi хл + ixo II
_ _г . _. , где xi, X2, хз — вещественные числа.
23.39. Пусть D = - операция дифференцирования, co-
corn
поставляющая функции f(t) ее производную f'(t). Показать,
что D является линейным преобразованием линейного про-
пространства функций, бесконечно дифференцируемых на интер-
интервале (а, Ь).
23.40. Пусть "Р^) — линейное пространство вещественных
многочленов степени не выше т.
1) Проверить, что дифференцирование (определенное в за-
задаче 23.39) есть линейное преобразование D : р^т) —> pim)t
найти его ядро и множество значений. Вычислить матрицу пре-
преобразования D:
а) в стандартном базисе 1, t, ..., tm;
б) в базисе 1, t -10, ..., (t - tQ)m;
t tm
в) в базисе 1, —, ..., —г.
1! m!
2) Найти матрицу дифференцирования как линейного
отображения D : р(т) -fpt™--1) базисах 1, t, ..., — и 1, t, ...
tm-l
¦¦•' j^rfi-
23.41. Показать, что дифференцирование (задача 23.39)
определяет линейное отображение:
1) пространства четных многочленов степени не выше 2п в
пространство V нечетных многочленов степени не выше 2п — 1;
2) пространства нечетных многочленов степени не выше
2п +1 в пространство Q четных многочленов степени не вы-
выше 2п.
Найти ядро, множество значений и ранг отображения. Запи-
Записать его матрицу А в стандартных базисах пространств.
23.42. Проверить, что функции eXtp(t), где А — фиксиро-
фиксированное число, p(t) — многочлен степени не выше п, образуют
линейное пространство, а дифференцирование является его ли-
линейным преобразованием. Вычислить матрицу преобразования
tk
в базисе rj-eAt (k = 0,1,...,п).
§ 23. Основные свойства линейных отображений 201
¦ 23.43. 1) Показать, что дифференцирование является ли-
линейным преобразованием пространства тригонометричес-
тригонометрических многочленов f(t) = uq + aicost + bisint + ... + ancosnt +
+ bnsmnt порядка не выше п (см. задачу 20.8.4). Найти мат-
матрицу преобразования D в стандартном базисе 1, cost, smt, ...
...cosnt, sinnt этого пространства.
2) Доказать, что дифференцирование D устанавливает
изоморфизм между линейными пространствами нечетных три-
тригонометрических многочленов b\ sint + &2sin2i + ... + bnsinnt и
четных тригонометрических многочленов вида aicost +
+ d2cos2t +... + ancosnt (n — фиксированное число). Вычис-
Вычислить матрицы отображения D и обратного отображения в ба-
базисах sini, ..., sinni и cosi, ..., cosnt.
23.44. Пусть f(t) — непрерывная функция (tGM). Рас-
t
смотрим операцию интегрирования / : f(t) —t / f(?)d?.
о
1) Проверить, что интегрирование определяет линейное
отображение / : ~р(п~^ —> ~р(п) (п ^ 1), найти его ядро, множе-
множество значений и ранг. Записать матрицу отображения в стан-
стандартных базисах.
2) Интегрирование рассматривается как линейное преобра-
преобразование пространства V всех вещественных многочленов. Най-
Найти его множество значений. Является ли это преобразование
сюръективным, инъективным, изоморфизмом?
3) Пусть М. — пространство многочленов с нулевым сво-
свободным членом, / : V —> М. — операция интегрирования и
D : M—tV — дифференцирование. Доказать, что эти линей-
линейные отображения взаимно обратны.
23.45. Пусть Т — линейное пространство функций f(t),
непрерывных на отрезке [—1,1], Т — линейное пространство
непрерывно дифференцируемых на [—1,1] функций f(t) таких,
что /@) = 0, Q и ~Н ~ подпространства четных и нечетных
функций в Т соответственно.
1) Интегрирование / из задачи 23.44 (—l^f<l) рассмат-
рассматривается как линейное преобразование пространства Т. Яв-
Является ли это преобразование инъективным, сюръективным?
Обратимо ли оно?
2) Доказать, что интегрирование определяет изомор-
изоморфизм / : Т' —> Т'. Найти для него обратное отображение.
202 Гл. 9. Линейные отображения и преобразования
3) Показать, что интегрирование определяет линейные
отображения I\: Q —> % и /2 : ~H—^G- Ответить для этих отоб-
отображений на вопросы п. 1).
23.46. Пусть линейное преобразование пространства всех
многочленов от t переводит каждый многочлен tk в t2k (к =
= 0, 1, 2, ...). Убедиться в том, что это преобразование инъек-
тивно, но не сюръективно. Найти множество его значений.
23.47. Пусть %тхп — линейное пространство матриц раз-
размеров тхп.
1) Доказать, что умножение матриц размеров тхп слева
на фиксированную матрицу А размеров к хт есть линейное
отображение у? : 7?.mXn -»"R-fcxn- Вычислить матрицу отображе-
отображения у? в стандартных базисах, если п = 2, А = А-ц. Найти ядро
и множество значений этого отображения.
2) Доказать, что умножение матриц размеров тхп спра-
справа на фиксированную матрицу В размеров п х к есть линейное
отображение у? : TZmxn —^ Т^тхк- Вычислить матрицу отображе-
отображения (р в стандартных базисах, если т = 2, В = А\26- Найти ядро
и множество значений отображения (р.
23.48. Пусть xi, ...,хп — столбцы матрицы X —
= ||xi...xn|| размеров т х п, и Y = ||xi ...xn_i ||. Отображе-
Отображение <р: Итхп —>Kmx(n-i) определим равенством ip(X) = Y.
1) Доказать, что отображение у? линейно, найти его ядро и
множество значений.
2) Вычислить матрицу отображения у? в стандартных ба-
базисах пространств.
3) Показать, что у? является одним из отображений, опре-
определенных в задаче 23.47, для подходящей матрицы В.
23.49. Пусть Mi,.,.,Mn — фиксированные матрицы по-
порядка т, х = (х\,..., хп)Т. Отображение <р : %п —>• Tlmxm опре-
определим формулой у?(х) = Х\М\ + ... + хпМп. Доказать линей-
линейность отображения (р. Найти ядро, множество значений, ранг и
вычислить матрицу А отображения (р в стандартных базисах,
еслип = 4, Mi = Аи, -^2 = ^13, Мз = Мб, М± = А20.
23.50. В линейном пространстве вещественных многочле-
многочленов р(х,у) от двух переменных х,у преобразование <р
определено формулой (р(р(х, у)) =р(х + а, у + b) (a, b — фик-
фиксированные числа). Показать, что у? определяет линейное пре-
преобразование пространства многочленов не выше второй степе-
степени, и вычислить его матрицу в базисе 1, х, у, х2, ху, у2.
§ 23. Основные свойства линейных отображений 203
23.51. Показать, что однородные многочлены степени п
п
вида р(х, у) = V^afca;n~fcyfc образуют линейное подпростран-
fc=0
ство "НУ") пространства всех многочленов от двух переменных.
Преобразование <р определено одной из следующих формул:
Доказать, что у? — линейное преобразование пространства 'НУп\
и вычислить его матрицу в базисе хп, хп~1у, ..., хуп~1, уп.
Найти ядро и множество значений преобразования у?.
Матрицы линейных отображений и преобразований
в разных базисах. Подобные матрицы B3.52-23.77)
23.52. Пусть е\,...,еп — базис в линейном пространстве ?,
а f\,...,fn — произвольные векторы из линейного простран-
пространства С. Доказать, что существует единственное линейное отоб-
отображение (р: С —> С такое, что </?(ej) = /j (г = 1,..., n).
23.53. 1) Пусть ai,...,afc — линейно независимые векторы
линейного пространства С, а b\,...,bk — некоторые векторы
пространства С. Доказать, что существует линейное отображе-
отображение (/?:?->? такое, что у?(сц) = Ы (i — 1,... ,к). В каком случае
отображение if единственно?
2) Пусть ai,...,ufc — векторы из С, а Ь\,...,Ьк — векторы
из С Сформулировать необходимые и достаточные условия,
при которых: а) существует линейное отображение у?: ? —> С
такое, что у?(сц) = bi (г = 1,...,к); б) это отображение един-
единственно.
23.54. Пусть А — невырожденная матрица порядка п, В —
матрица размеров тхп. Доказать, что существует единствен-
единственное линейное отображение n-мерного арифметического про-
пространства в m-мерное, при котором образами столбцов матри-
матрицы А являются соответствующие столбцы матрицы В. Найти
матрицу этого отображения:
1) в стандартных базисах пространств;
2) в базисе пространства Ип из столбцов матрицы А и стан-
стандартном базисе пространства Ит;
3) в базисе пространства Ип из столбцов матрицы А и ба-
204 Гл. 9. Линейные отображения и преобразования
зисе пространства И.т из столбцов матрицы В (при условии,
что т = п и В невырождена).
23.55. Пусть А и В — невырожденные матрицы порядка п.
Доказать, что существует единственное линейное преобразо-
преобразование n-мерного арифметического пространства, переводящее
столбцы матрицы А в соответствующие столбцы матрицы В.
Найти матрицу этого преобразования:
1) в стандартном базисе;
2) в базисе из столбцов матрицы А;
3) в базисе из столбцов матрицы В.
23.56. Линейное преобразование (р двумерного арифмети-
арифметического пространства переводит вектор а* в вектор bj (г = 1,2).
Вычислить матрицу преобразования </? в стандартном базисе,
если:
1) ах = A, ~1)Т, а2 = (-1, 2f, bi = B, 0)т, Ь2 = (-3, 1)т;
2) ах = D, -3)г, а2 = B, if, Ьх = (-2, -2)т, Ь2 = D, 4)г;
3) а1 = (-5, 3)т, а2 = (-3, 1)г, Ьх = D, 15)г, Ь2 = @, 1)г;
4)а1 = A, 1)г, а2 = A,3)т, Ьх = @, v^)r,
b2 = (-у/2, 2v^)r-
23.57. Матрицы А, В составлены из координатных столб-
столбцов векторов ах, а2, аз и 6х, 62, 6з в некотором базисе е трех-
трехмерного линейного пространства С. Для приведенных ниже
случаев проверить, что существует единственное линейное пре-
преобразование if пространства ?, переводящее векторы а,{ в Ь\
(г = 1,2,3). Вычислить матрицу преобразования у?:
а) в базисе е; б) в базисе ах, а?, аз, если:
1) А = А265, В = Л266; 2) А = А268, В = А269;
3) А = А270, В = А271; 4) А = А22Э, В = А272.
23.58. Показать, что существует и единственно линейное
отображение у? : Лп —> 7?т, переводящее столбцы данной мат-
матрицы А в соответствующие столбцы матрицы В. Найти мат-
матрицу отображения ip:
1) в стандартных базисах пространств Ип и 7?т;
2) в базисе пространства 7?.п, состоящем из столбцов мат-
матрицы А, и стандартном базисе пространства
а) п = 2, т ~ 3, А = Л3з, В = Аио]
б) п = 3, т = 2, А = А276, В = Л394;
в) п = 2, т = 5, А = Л34, В — Ащ)
г) п = 4, т = 2, А = Аш7, В = Л505;
д) п = 3, т = 4, А = А227, В = А4ог,
е) п = 4, т - 3, А - Л484, В = A5i8.
§ 23. Основные свойства линейных отображений 205
23.59. Выяснить, существует ли линейное преобразова-
преобразование (р, переводящее столбцы матрицы А в соответствующие
столбцы матрицы В. В случае существования вычислить мат-
матрицу if в стандартном базисе:
1) А = А5, В = А35; 2) А = А5, В = А12;
3) А = А277, В = А278- 4) А = А2и, В = А279.
23.60. При линейном отображении у?: 71п —> 71т столбцы
матрицы А переходят в соответствующие столбцы матрицы В.
Выяснить, является ли отображение у? инъективным, сюръек-
тивным, найти размерность ядра и ранг отображения f. Вы-
Вычислить образ вектора а, если:
В = А24, а=A, 7, 3)г
В = А23о, а=C, 1)Т;
В = АШ, а=D,-4,-3, 12, 2)г;
И; 5 = ^420, а=Aб, 5, -6)г
23.61. Показать, что существует единственное линейное
преобразование комплексного арифметического простран-
пространства Сп, переводящее столбцы данной матрицы А в соответ-
соответствующие столбцы матрицы В. Вычислить матрицу этого пре-
преобразования в стандартном базисе, если:
)г;
: 2) п = 2, А = Аы, В = А95;
¦ з) п = 2, А = А96, В = А97;
4) п = 3, А
23.62. Линейное преобразование ip имеет в данном базисе
матрицу А, а координатные столбцы новых базисных векто-
векторов образуют матрицу S. Вычислить матрицу преобразования
в новом базисе, если:
1) А^Азе, S = A33] 2) А = А37, S = А16;
3) А = А38, 5 = Л39; 4) А = А40, S = Аш-
5) А = Л280, S = Л203; 6) А = А2ы, S ~ А2%2;
г, 7) А = Л28з, S = Аш; 8) А = А285, S = Л265;
9) А = Л469, S = А470; Ю) Л = А4п, 5 = Am-
)} 23.63. Линейное преобразование комплексного арифмети-
арифметического пространства имеет в стандартном базисе матрицу А.
Новый базис задан матрицей перехода S. Вычислить матрицу
преобразования в новом базисе:
1) Л = А87, S = А94;
- 2) А = А79, S = Л80 (е = е2^/3);
3) Л = Л263, S = А375;
206 Гл. 9. Линейные отображения и преобразования
4) А =
5) А = А4г2, S = Л47з; 6) А = А474, S = А475.
23.64. Линейное отображение n-мерного арифметического
пространства в m-мерное задано в стандартных базисах мат-
матрицей А, столбцы новых базисных векторов f = (/i,...,/n) и
g = (Ръ ¦ • чРт) составляют соответственно матрицы S и Т. Вы-
Вычислить матрицу отображения в базисах f и g:
1)п = 3, т = 2, А = А392, S = А286, Т = А42;
2)n = 4, m = 2, Л = Л5о2, S = А47е, Т =
3)п = 2, т = 3, Л = ЛП7, S = A9l
4) n = 3, m = 4, A=:^403, 5 = ^285,
23.65. Вычислить матрицу линейного преобразования (р
множества векторов плоскости с заданным на ней базисом, ес-
если if есть:
1) отражение плоскости в прямой х + 2у = 0 параллельно
прямой х + Зу = 0;
2) проектирование плоскости на прямую х + у = 0 парал-
параллельно прямой 4ж + 5у = 0;
3) сжатие с коэффициентом А = 2 к прямой Зж — 2у = 0 па-
параллельно прямой х — у = 0.
23.66. Вычислить матрицу линейного преобразования ip
трехмерного геометрического векторного пространства (в ко-
котором задан ортонормированный базис), пользуясь надлежа-
надлежащей заменой базиса, если (р есть:
1) проектирование на плоскость Зж — у = 0 параллельно
прямой х + z — 0, x + y + 2z = 0;
2) отражение пространства в прямой х = у = —2z парал-
параллельно плоскости х + у + 3z = 0;
3) сжатие с коэффициентом А = 2 к плоскости х — 1z = 0
параллельно прямой х = у = z;
4) поворот вокруг прямой х = у = — z на угол тг/2;
5) поворот вокруг прямой ж + у = 0, у — 2 = 0на такой угол,
что первая из данных плоскостей переходит во вторую.
23.67. Пусть D — дифференцирование в пространстве
многочленов степени не выше т. Вычислить матрицу преобь
разования D, если базис состоит из многочленов:
1) 1-М, t + 2t2, 3i2-l (m = 2);
2)t3 + l, 1-t, 1-t + t2, I~t + t2-t3 (m = 3);
ft2 t tm
3) 1, 1 + t, I + yt + 2,, -.., 1 + I7 + --- + ^! (m^1);
§ 23. Основные свойства линейных отображений 207
4I, 1-И, 1 + t + t2, ..., l + t + ... + tm (m>l);
5) 1, t-1, t2~t, ..., tm-tm~x (m>l).
23.68. Вычислить матрицу преобразования дифференци-
дифференцирования в пространстве тригонометрических многочленов по-
порядка не выше п (см. задачу 23.43), если базис состоит из функ-
функций:
1) 1, cost — sint, cosi + sini, ..., cosni — sinni, cosnt+
+ sinnt (n ^ 1);
2) 1, 1 + cosi, ..., 1 + cosi +... -t-cosnf, sini, ..., sini + ...
... + sinni;
3) 2cos2i, 2sin2i, sini + cosi, sini — cosi, (sini + costJ
(n = 2).
23.69. Как изменится матрица линейного отображения,
заданная в паре базисов е\, ..., еп; Д, ..., /т, если:
1) поменять местами векторы е» и е^-;
2) поменять местами векторы //ь и /j;
3) вектор е\ умножить на число А ф 0, а Д умножить на
4) вектор е» заменить на е» + е^-, а вектор Д — на Д — Д
23.70. Как изменится матрица линейного преобразования,
заданная в базисе е\, ..., еп, если:
1) поменять местами векторы е» и е^-;
2) вектор ej умножить на число А ф 0;
, 3) вектор е» заменить на е» + ej;
4) перейти к базису en, ei, ..., en_i;
5) перейти к базису en, en_i, ..., ei?
23.71. 1) Пусть А и В — матрицы линейного отображения
в двух парах базисов. Доказать, что В можно получить из А
элементарными преобразованиями строк и столбцов.
2) Пусть А и В — матрицы линейного преобразования в
двух базисах. Доказать, что В можно получить из А согла-
согласованными друг с другом элементарными преобразованиями
строк и столбцов.
23.72. Пусть ip: C-? С — линейное отображение. Дока-
Доказать, что:
1) если базисный вектор линейного пространства С при-
принадлежит ядру if, то соответствующий столбец матрицы отоб-
отображения нулевой;
, 2) если е\, ..., еп — базис пространства С, причем век-
208 Гл. 9. Линейные отображения и преобразования
торы er+i, ..., еп (г ^ п) образуют базис ядра у?, то векторы
y?(ei), ..., <р(ег) образуют базис в <р(?).
23.73. Доказать, что для всякого линейного отображе-
отображения ip существует пара базисов, в которых матрица отображе-
отображения имеет простейший вид L~ ^ . Чему равен порядок мат-
матрицы Е1
23.74. В стандартных базисах арифметических прос-
пространств Ип и 71т линейное отображение (р имеет матрицу А.
Найти пару базисов, в которой матрица отображения у? имеет
простейший вид (см. задачу 23.73):
1)А = А12; 2)А = А32- Ъ)А = А2ьг\
4) А = А288; 5) А = А576; 6) А = А42о-
23.75. Пусть А — матрица линейного преобразования в
некотором базисе. Доказать, что матрица, полученная из А
центральной симметрией, является матрицей того же преоб-
преобразования в другом базисе.
23.76. Доказать, что подобны матрицы:
1) А-п и обратная к ней; 2) А2ъэ и А2бо-
* 23.77. Найти все матрицы, каждая из которых подобна
только самой себе.
Операции с линейными отображениями и
преобразованиями B3.78-23.104)
23.78. Даны линейные отображения (р : Ип —> 71т, ф :
Щ -+ Пк.
1) Указать условия на т, п, к, I, необходимые и достаточ-
достаточные для существования произведений <рф и ф(р.
2) Пусть х = fifi- Показать, что х ~~ линейное отображение.
Как связаны матрицы отображений <р, ip, x?
23.79. Пусть (р, ip, х — линейные отображения арифмети-
арифметических линейных пространств, а — число. При каких условиях
на размерности пространств справедливо каждое из следую-
следующих равенств:
1)
2)
з)
4) a (ip + ф) = а<р + а.ф1
Показать, что матрицы данных Отображений удовлетворяют
тем же равенствам.
§ 23. Основные свойства линейных отображений 209
23.80. Доказать, что всякое линейное отображение пред-
ставимо в виде произведения сюръективного и инъективного
линейных отображений.
23.81. Пусть С — С ® С", где С, С" — ненулевые подпро-
подпространства линейного пространства С. Показать, что тожде-
тождественное преобразование представляется в виде суммы
1 = 7Г1+7Г2, где 7Ti (тгг) — проектирование пространства С на
подпространство С' (?") параллельно подпространству С" (?').
23.82. Координатные столбцы векторов а\, а,2, аз; Ь\, Ь2,
6з; Ci, C2, сз образуют соответственно матрицы А289> -^229) -^285-
Линейное преобразование у? переводит векторы а\, а,2, аз в
Ь\, Ьг, 63, a линейное преобразование ф переводит 61,62,^3 B
ci, C2, сз соответственно. Найти матрицу преобразования ф<р:
1) в исходном базисе;
; 2) в базисе а\, а,2, аз;
3) в базисе Ь\, 62, h-
23.83. Пусть <р, ф — линейные преобразования двумерного
арифметического пространства, if имеет матрицу А44 в стан-
стандартном базисе, а ф — матрицу Лю7 в базисе из столбцов мат-
рицы А^ь- Вычислить матрицу преобразования:
1) ip2 - 6<р + 9t; 2) ф2 + Аф + 4t;
и 3) if2 —ф2 в стандартном базисе;
4) А(рф~г в базисе из столбцов матрицы Л45;
к 5) Up + фL в базисе, образованном столбцами A,2)Т,
@, -If.
23.84. Пусть V^ — пространство многочленов степени не
выше п (n ^ 1) с вещественными коэффициентами. Отображе-
Отображения
р : p("-x) ->. V(n), ф : V{n) ->¦ р^-1)
определим формулами
у?(а0 + ait + ... + an-itn~l) = aot + ait2 + ... + an_if\
Проверить линейность отображений и показать, что ф(р — тож-
тождественное преобразование, а у?ф — нет.
23.85. Пусть С — линейное пространство функций с бази-
базисом е, D — дифференцирование. Найти матрицу преобразова-
преобразования Dk (k = l, 2, ...), если:
1) ? — пространство многочленов степени не выше п,
210 Гл. 9. Линейные отображения и преобразования
2) С — пространство тригонометрических многочленов по-
порядка не выше п (см. задачу 23.43), е = A, cost, sint, ..., cosnt,
sinnt).
23.86. В пространстве всех многочленов от t рассматрива-
рассматриваются линейные преобразования: г — умножение на t и диффе-
дифференцирование D = —. Найти преобразование:
at
1) tD; 2) Dt\ 3) коммутатор [D, т] = Dt — tD.
4) Доказать равенство Dmr — rDm = mDm~l (m —
= 1,2,...; D° = t).
23.87. Доказать, что коммутатор [tp, ip] = (pip — ф<р двух
линейных преобразований конечномерного линейного прос-
пространства не может быть тождественным преобразованием (ср.
задачу 15.130).
23.88. Доказать, что матрицы подобных линейных преоб-
преобразований подобны.
23.89. Доказать, что отношение подобия между линейны-
линейными преобразованиями является отношением эквивалентности
(т.е. (р ~ (р\ из (р~ф следует ¦ф ~ (р; из (р ~ ip и ip ~ x следует
ip~X)-
23.90. Пусть (р, ip — линейные преобразования линейного
пространства С. Доказать, что:
1) если ip подобно (р, то для любого базиса е пространства
С существует такой базис е', что матрица преобразования ip в
базисе е' совпадает с матрицей ip в базисе е;
2) если для преобразований (риф в С существуют такие ба-
базисы е и е', что матрица преобразования (р в базисе е совпадает
с матрицей преобразования ip в базисе е', то (р и ip подобны.
23.91. Пусть линейные преобразования (риф подобны. По-
Показать, что подобны также преобразования:
1) p((p) = a0L + ai(p + ... + anipn и р(ф), где p(t) = a0 +
+ a\t +... + antn — произвольный многочлен;
2) (р~1 и 1р~г, если (риф обратимы.
23.92. Пусть (риф — линейные преобразования некоторо-
некоторого линейного пространства, хотя бы одно из которых невыро-
невырождено.
1) Доказать, что преобразования (рф и ф(р подобны.
2) Сформулировать и доказать матричный вариант этого
утверждения.
§ 23. Основные свойства линейных отображений 211
23.93. Доказать, что линейное отображение ранга г пред-
ставимо в виде суммы г линейных отображений ранга 1, но не
представимо в виде суммы меньшего числа таких отображений
(ср. задачу 16.33).
23.94. Пусть </?, ф — линейные отображения пространства С
в С. Доказать, что rg(tp + x()) ^rgtp + rgx() (ср. задачу 16.34, 6)).
23.95. Пусть (р : С—> М, ф : М —> N — линейные отобра-
отображения, dimA4 — т. Доказать:
1) xg^p + xgф — т ^ rg(t/><p) ^ min(rg<?>, rg^) (неравенства
Сильвестра);
2) <ИтКег(ф(р) ^ dimKer^ + dimKeri/);
3) если ф(р = в, то Tgip + rgtf) ^m (напомним, что через 9
обозначено нулевое отображение).
23.96. Пусть <р : С —> С — линейное преобразование. Дока-
Доказать, что для любого к, удовлетворяющего условию rg<p ^ к ^
^ п — dim?, существует линейное преобразование ф такое, что
ф(р = в И Т?<р + Т?ф — к.
23.97. Доказать, что для любых двух перестановочных ли-
линейных преобразований ip и ф имеет место включение Ker ip +
+ Ken/; СКег((рф).
23.98. Пусть <р — линейное преобразование n-мерного ли-
линейного пространства и (р = с. Доказать, что:
) g(p ) g(p);
2) dimKer(</? + t) + dimKer(tp — i) = n.
23.99. Пусть ip, Ф, X ~ такие линейные отображения, что
произведение <рфх существует. Доказать, что
23.100. Пусть V, Q — вещественные линейные простран-
пространства и L(V, Q) — множество всех линейных отображений
1) Доказать, что L(V, Q) — линейное пространство отно-
относительно операций сложения линейных отображений и умно-
умножения отображения на число.
2) Пусть dimT7 = n, dim Q = т. Построить базис простран-
пространства L(V, Q) и найти его размерность.
3) Показать, что в условиях п. 2) пространство L(V, Q)
изоморфно пространству 1Zmxn вещественных матриц разме-
размеров ту. п.
212 Гл. 9. Линейные отображения и преобразования
23.101. Выяснить, образует ли данное множество линей-
линейных отображений линейное подпространство в L(V, Q) (см. за-
задачу 23.100):
1) множество всех отображений ранга к ^ 1;
2) множество всех отображений ранга, не превосходящего
fc > 1;
3) множество всех отображений, ядра которых содержат
некоторое фиксированное подпространство из V;
4) множество всех инъективных отображений;
5) множество всех сюръективных отображений;
6) множество всех отображений, множества значений ко-
которых содержатся в фиксированном подпространстве из Q.
23.102. Пусть в линейном пространстве С задан базис е.
Доказать, что данное множество линейных преобразований
пространства С является группой относительно операции
умножения преобразований:
1) множество всех невырожденных преобразований;
2) множество всех преобразований с определителем, рав-
равным 1;
3) множество всех невырожденных преобразований, мат-
матрицы которых в базисе е верхние треугольные;
4) множество всех невырожденных преобразований, задан-
заданных в базисе е диагональными матрицами;
5) множество всех гомотетий At, где число Л отлично от 0;
6) множество всех преобразований, имеющих в базисе е
матрицы перестановок.
23.103. В линейном пространстве С дан базис е. Является
ли группой относительно умножения данное множество линей-
линейных преобразований пространства С:
1) множество всех линейных преобразований;
2) множество всех преобразований, матрицы которых диа-
гональны в базисе е;
3) множество всех невырожденных преобразований, кото-
которые в базисе е задаются целочисленными матрицами, т. е. мат-
матрицами \\aij\\, где aij — целые числа;
4) множество всех преобразований, матрицы которых в ба-
базисе е целочисленны и имеют определители, равные 1 или —1;
5) множество всех преобразований с данным определителем d;
6) множество всех невырожденных преобразований, име-
имеющих в базисе е матрицы, каждая строка и каждый столбец
которых содержат ровно по одному ненулевому элементу?
§ 24- Собственные векторы и собственные значения 213
23.104. В технике используется уголковый отражатель.
Он представляет собой трехгранный угол, грани которого —
взаимно перпендикулярные зеркала. Доказать, что луч света,
выпущенный из точки внутри этого трехгранного угла, отра-
отразившись от всех его граней, сменит свое направление на про-
противоположное.
§ 24. Инвариантные подпространства,
/gv собственные векторы и собственные значения
линейных преобразований
В этом параграфе используются понятия: инвариантное подпро-
подпространство, ограничение линейного преобразования на инвариант-
инвариантном подпространстве, собственное значение, собственный вектор
и собственное подпространство линейного преобразования, харак-
характеристический многочлен и характеристическое число матрицы
линейного преобразования, диагонализируемое линейное преобразо-
преобразование, аннулирующий многочлен, минимальный аннулирующий
многочлен матрицы (линейного преобразования), корневой вектор,
корневое подпространство, нилъпотентное преобразование, цикли-
циклическое подпространство, жорданова цепочка, жорданов базис, жор-
данова клетка, жорданова матрица.
Подпространство М. линейного пространства ?, называется
инвариантным относительно линейного преобразования tp (или
инвариантным подпространством преобразования tp), если для
любого х ? Л4 выполнено <р(х) S /А. Ограничением (сужением)
преобразования <р на инвариантном подпространстве М называет-
называется преобразование <рм пространства ЛЛ, определенное равенством
4>м (х) = 4>(х) Для х еМ.
Если подпространство Ker(y> — At) ненулевое, оно называется
собственным подпространством преобразования ip, отвечающим
собственному значению Л. Ненулевые векторы собственного подпро-
подпространства называются собственными векторами. Иначе, ненулевой
вектор х называется собственным вектором преобразования <р, при-
принадлежащим собственному значению Л, если существует такое чис-
число Л, что ip(x) = Хх.
Укажем метод отыскания собственных значений и собствен-
собственных векторов линейного преобразования, заданного матрицей. Пусть
<р : ?, -> С — линейное преобразование и в ? выбран базис, в котором
А — матрица преобразования р, а ?, — координатный столбец соб-
собственного вектора, отвечающего собственному значению А. Тогда ?,
является решением системы линейных уравнений
(А-ХЕ)Е,= о. A)
Для существования ненулевого решения системы A) необходимо,
чтобы
det(A - ХЕ) = 0. B)
Гл. 9. Линейные отображения и преобразования
д» Уравнение B) называется характеристическим уравнением, а
его корни — характеристическими числами матрицы А. В ком-
комплексном линейном пространстве все характеристические числа
матрицы линейного преобразования являются его собственными зна-
значениями, а в вещественном пространстве — только вещественные
характеристические числа.
Выражение PA(t) = det(^ — tE) является многочленом от t сте-
степени п = dim?, который называется характеристическим многочле-
многочленом матрицы А:
pA(t) = det(A - tE) = (-t)n + tr Ai-t)"-1 + ... + det A. C)
Характеристический многочлен матрицы А линейного преобразова-
преобразования не изменяется при замене базиса, следовательно, не изменяются
его коэффициенты, в частности след и определитель матрицы А, а
также характеристические числа. Это дает основание называть ха-
характеристическим многочленом, характеристическими числами,
определителем и следом линейного преобразования соответствующие
объекты для матрицы преобразования в некотором (любом) базисе.
Собственные векторы линейного преобразования, заданного гео-
геометрически или явной формулой, иногда можно находить непосред-
непосредственно, не вычисляя его матрицы.
Решение задачи на собственные значения и собственные век-
векторы линейного преобразования tp включает: а) вычисление корней
его характеристического многочлена; б) в случае вещественного про-
пространства — отбор вещественных корней, так как только они являют-
являются собственными значениями; в) отыскание максимальной линейно
независимой системы собственных векторов преобразования tp, кото-
которая состоит из базисов собственных подпространств ?\ для каждого
собственного значения Л.
Матрица линейного преобразования <р в некотором базисе диа-
гональна тогда и только тогда, когда все базисные векторы — соб-
собственные для ip. При этом на диагонали матрицы находятся со-
соответствующие собственные значения. Линейное преобразование
пространства ? называется диагонализируемым (или преобразовани-
преобразованием простой структуры), если в ? существует базис, в котором мат-
матрица преобразования диагональна. Матрица, подобная диагональ-
диагональной, называется диагонализируемой (матрицей простой структуры).
Диагонализируемость зависит от поля, над которым определено про-
пространство С. Вещественная матрица, имеющая комплексные харак-
характеристические числа, не диагонализируема как матрица линейного
преобразования в вещественном пространстве, но может быть диа-
диагонализируемой над полем комплексных чисел.
Привести линейное преобразование (или его матрицу) к диаго-
диагональному виду — значит найти базис из собственных векторов пре-
преобразования и записать матрицу преобразования в этом базисе.
Пусть <р — линейное преобразование вещественного линейного
пространства, Л, А — пара его комплексно сопряженных характери-
§ 24- Собственные векторы и собственные значения 215
стических чисел. Они являются корнями квадратного трехчлена t2 +
+ pt + q, где р = -(А + А) и q = XX. Подпространство Ker(ip2 +ptp +
+ qi) — ненулевое и инвариантное относительно tp. Оно называется
квазисобственным подпространством, отвечающим характеристиче-
характеристическому числу А.
Многочлен f(t) называется аннулирующим многочленом
матрицы А или линейного преобразования tp, если f(A) — О (соот-
(соответственно f(<p) = о). Согласно теореме Гамильтона-Кэли характе-
характеристический многочлен матрицы (преобразования) является анну-
аннулирующим.
Многочлен (со старшим коэффициентом, равным 1) минималь-
минимальной степени среди аннулирующих многочленов называется мини-
минимальным многочленом и обозначается д?,(<) или ца{^)-
Пусть характеристический многочлен линейного преобразова-
преобразования раскладывается на множители
(все Ai, ..., А3 попарно различны). Тогда подпространство
\ii)ki (г = 1, ..., а)
называется корневым подпространством, а его ненулевые векторы —
корневыми векторами.
Для любого преобразования <р комплексного пространства С
C = K.i®...®Ka. D)
Для вещественного С это верно, если все Ai, ..., А3 вещественны.
Линейное преобразование гр называется нилъпотентным, если
¦фт = о для некоторого натурального т. Число т называется его по-
показателем нильпотентности. Ограничение гр{ = (<р — Аг<-)|к;; преоб-
преобразования (<р — \ь) на подпространстве /С* является нильпотентным,
и его показатель нильпотентности не превосходит к{.
Будем говорить, что корневой вектор ж имеет высоту h, если
ф^(х) = о, но ф^1 Ф о. Собственные векторы <р — корневые векто-
векторы высоты 1. Вектор е1 называется присоединенным к собствен-
собственному вектору е°, если tpi(e1) = e°. По индукции, 1-й присоединен-
присоединенный вектор определяется равенством ipi(el) = е'. Если вектор em+1
не существует, то собственный вектор е° и присоединенные к нему
е1, ..., ет образуют жорданову цепочку.
Линейная оболочка векторов жордановой цепочки — инвариант-
инвариантное подпространство. Матрица ограничения преобразования <р на
нем имеет вид
Аг- 1 0 ... О
О Xi 1 ... О
1
216 Гл. 9. Линейные отображения и преобразования
Матрицы такого вида называются жордаповыми клетками. Жор-
данову клетку порядка т обозначают Jm(A).
В каждом корневом подпространстве существует базис, состоя-
состоящий из жордановых цепочек. Если имеет место разложение D), то
объединение таких базисов — базис в С, называемый жордановым
базисом. В жордановом базисе матрица преобразования <р имеет
жорданову форму: является клеточно-диагональной матрицей
с жордановыми клетками на диагонали. (Собственные значения кле-
клеток не обязательно различны.)
Общее число всех жордановых клеток равно сумме размерно-
размерностей всех собственных подпространств.
оо
V4
Пусть дан матричный ряд 2_,А^к\ где А^ — матрицы одинако-
fc=O
вых размеров с элементами a\j . Суммой этого ряда называют матри-
матрицу, составленную из сумм числовых рядов 2_1аЬ' Экспонентой квад-
к
ратной матрицы А называется су^ма матричного степенного ряда:
fc=0
Собственные векторы и собственные значения
B4.1-24.65)
24.1. Доказать, что множество всех собственных векторов
линейного преобразования, отвечающих одному собственному
значению, дополненное нулевым вектором, совпадает с соб-
собственным подпространством.
24.2. Доказать, что:
1) ядро линейного преобразования совпадает с собствен-
собственным подпространством, отвечающим нулевому собственному
значению;
2) Собственное подпространство преобразования tp, отве-
отвечающее собственному значению А, есть множество векторов,
удовлетворяющих условию <р{х) = Хх.
24.3. Пусть А — матрица, а А — собственное значение
линейного преобразования n-мерного линейного пространства.
Чему равна размерность собственного подпространства, отве-
отвечающего собственному значению А, если ранг матрицы А — ХЕ
равен г?
24.4. Какой вид имеет матрица линейного преобразова-
преобразования, если первые к базисных векторов являются его собствен-
собственными векторами?
§ 24- Собственные векторы и собственные значения 217
24.5. Доказать, что размерность собственного подпрос-
подпространства, отвечающего данному корню характеристического
многочлена, не превосходит кратности этого корня.
24.6. Пусть х, у — собственные векторы линейного преоб-
преобразования, отвечающие различным собственным значениям, а
числа а, 13 отличны от нуля. Доказать, что вектор ах + /3у не
является собственным.
24.7. Доказать, что ненулевое линейное преобразование,
для которого все ненулевые векторы собственные, является го-
гомотетией.
24.8. Доказать, что система собственных векторов, отвеча-
отвечающих попарно различным собственным значениям линейного
преобразования, линейно независима.
24.9. Доказать, что матрица линейного преобразования в
некотором базисе тогда и только тогда диагональна, когда все
векторы базиса собственные.
24.10. Доказать, что линейное преобразование п-мерного
линейного пространства, имеющее п различных собственных
значений, диагонализируемо.
24.11. Пусть (р — линейное преобразование конечномерно-
конечномерного линейного пространства С. Доказать, что следующие выска-
высказывания равносильны:
1) (р диагонализируемо;
2) в С существует базис из собственных векторов преобра-
преобразования (р;
3) объединение базисов собственных подпространств явля-
является базисом в С;
4) кратность каждого корня Л характеристического урав-
уравнения равна размерности собственного подпространства С\\
5) ? является прямой суммой собственных подпространств.
24.12. Доказать, что:
1) в комплексном линейном пространстве каждое характе-
характеристическое число матрицы линейного преобразования явля-
является собственным значением, так что произвольное линейное
преобразование имеет хотя бы один собственный вектор;
2) в вещественном пространстве каждое вещественное ха-
характеристическое число является собственным значением.
24.13. Доказать, что линейное преобразование нечетно-
мерного (например, трехмерного) вещественного линейного
пространства имеет хотя бы один собственный вектор.
218 Гл. 9. Линейные отображения и преобразования
24.14. 1) Доказать, что характеристический многочлен,
определитель и след матрицы линейного преобразования не за-
зависят от выбора базиса.
2) Найти выражение коэффициентов характеристического
многочлена, в частности следа и определителя матрицы поряд-
порядка п, через характеристические числа.
24.15. Найти собственные векторы и собственные значе-
значения каждого из следующих преобразований:
1) нулевого; 2) тождественного; 3) гомотетии.
24.16. Найти собственные значения и собственные векто-
векторы линейного преобразования, заданного в некотором базисе
n-мерного линейного пространства матрицей А^2 = Jn(A).
24.17. Пусть матрица линейного преобразования в неко-
некотором базисе — верхняя или нижняя треугольная с диагональ-
диагональными элементами \\, ..., Лп. Найти все собственные значения
этого преобразования.
24.18. Пусть ? = ?'<$?", где ?', С" — ненулевые подпро-
подпространства. Найти собственные значения и собственные подпро-
подпространства линейного преобразования (р; доказать, что tp имеет
базис из собственных векторов, и указать диагональный вид
его матрицы, если tp есть:
1) проектирование на подпространство С параллельно ?";
2) отражение в подпространстве С параллельно С".
24.19. Найти собственные значения и собственные подпро-
подпространства, привести к диагональному виду матрицы линейных
преобразований, определенных в задаче 23.65.
24.20. Найти собственные значения, собственные подпро-
подпространства, привести к диагональному виду матрицу линейного
преобразования, определенного в задаче:
1) 23.9, 1); 2) 23.9, 2); 3) 23.9, 3); 4) 23.9, 4); 5) 23.10, 1);
6) 23.10, 2); 7) 23.10, 3); 8) 23.10, 4); 9) 23.12, 1);
10) 23.12, 2); 11) 23.12, 3); 12) 23.13, 1); 13) 23.13, 2).
24.21. Найти собственные значения и собственные векто-
векторы линейного преобразования, определенного в задаче:
1) 23.14, 1); 2) 23.14, 2); 3) 23.14, 3); 4) 23.66, 1);
5) 23.66, 2); 6) 23.66, 3); 7) 23.66, 4); 8) 23.66, 5).
Можно ли из собственных векторов преобразования составить
базис?
24.22. 1) Найти собственные значения и собственные век-
векторы линейного преобразования ip, заданного матрицей
§ 24- Собственные векторы и собственные значения 219
А=(аи ...,ап)Т (Ъъ...,Ъп)ф0.
2) Найти необходимое и достаточное условие диагонализи-
руемости преобразования ip.
3) Выяснить, диагонализируемы ли преобразования, за-
заданные матрицами: а) А213; б) ^222-
24.23. Пусть k, т, п — натуральные числа, 1 ^ к ^ m ^ п.
Привести пример линейного преобразования n-мерного линей-
линейного пространства, для которого данное число Л является кор-
корнем характеристического многочлена кратности т, а отвеча-
отвечающее ему собственное подпространство имеет размерность к.
24.24. Пусть линейное преобразование ip трехмерного ком-
комплексного линейного пространства в некотором базисе имеет
вещественную матрицу и по крайней мере одно характеристи-
характеристическое число этой матрицы не является вещественным. Дока-
Доказать, что ip диагонализируемо.
24.25. Пусть х — собственный вектор линейного преобра-
преобразования ip, отвечающий собственному значению Л, ар(?) — мно-
многочлен. Доказать, что вектор х является собственным для пре-
преобразования р{ф) и принадлежит собственному значению р(А).
24.26. Пусть Ai, ,..., А„ — характеристические числа ли-
линейного преобразования ц> в n-мерном линейном пространстве.
Чему равны характеристические числа (с учетом кратностей)
преобразования:
1) (р) (р2\ 2) (р) ipm (m — натуральное число);
3) <р (при условии, что (р обратимо);
4) р{ф), где p(t) — произвольный многочлен (при условии,
что Ai, ..., А„ различны)?
24.27. Пусть характеристические многочлены квадратных
матриц А и В имеют простые корни Ai, ..., Xm и /ii, ..., /in
соответственно. Найти характеристические числа кронекеров-
ского произведения А®В матриц А, В. (См. введение к § 15.)
24.28. Пусть линейное преобразование <р линейного про-
пространства С диагонализируемо. Доказать утверждения:
1) lm(f есть линейная оболочка множества всех собствен-
собственных векторов, отвечающих ненулевым собственным значениям;
2) ? = Im<peKer<?.
24.29. Привести пример линейного преобразования ip про-
пространства Ип, для которого 7?п ф Im<?> + Ker ip.
24.30. Линейное преобразование вещественного п-мерного
линейного пространства задано своей матрицей. Вычислить
220 Гл. 9. Линейные отображения и преобразования
собственные значения и найти максимальную линейно неза-
независимую систему собственных векторов преобразования. Ес-
Если найденная система векторов образует базис, записать в нем
матрицу преобразования и выяснить геометрический смысл
преобразования:
^'\ Л .„•
*¦) -Г146,
6) Аз;
п = 3:
И) A26i;
16) А293;
21) А2965
26) Л230;
п = 4:
31) А77;
36) А149;
2) А4;
7) Аг;
12) А243
17) А294
11) Л297
27) Азз7
32) Am
37) Aj83
з)
8)
>
;
;
;
Азе;
Аз;
13)
18)
23)
28)
33)
38)
4)
9)
А290
А295
А298
А299
Aj8o
Al84
A AT,
Азо;
; 14)
; 19)
; 24)
; 29)
; 34)
; 39)
5) Ai8;
Ю) Л49;
Аш;
Аш;
А273;
Аз87;
Aisi;
15)
20)
25)
30)
35)
40)
А292;
А267;
А235;
А28З;
Аш;
Al69-
24.31. Линейное преобразование комплексного п-мерного
линейного пространства задано своей матрицей. Найти базис
из собственных векторов и записать матрицу преобразования
в этом базисе:
п = 2:
1) А20- 2) Аю; 3) Аз2; 4) А79 (е = е2^3);
5) А*; 6) Am 7) А78 (? = е2-/з); 8) А87;
п = 3:
9) Аззэ; Ю) А262; И) А263; 12) Азоо; 13) Ат;
14) А2бо; 15) Азез (ш = е2-/3); 16) Аз76; 17) А377;
п = 4:
18) Аш; 19) А447; 20) Ат; 21) Ai72.
24.32. Найти собственные значения и максимальную ли-
линейно независимую систему собственных векторов линейного
преобразования, заданного своей матрицей. Объяснить, поче-
почему преобразование не диагонализируемо:
1) Ая; 2) А>2; 3) А286; 4) Л303; 5) А289;
6) А236; 7) At57; 8) Аы, 9) Аш.
24.33. Найти характеристические числа линейного преоб-
преобразования, заданного своей матрицей. Выяснить, диагонализи-
диагонализируемо ли преобразование: а) в вещественном пространстве, б)
в комплексном пространстве. Если да, то найти базис из соб-
собственных векторов и записать в нем матрицу преобразования; в
противном случае указать, какое из необходимых условий диа-
§ 24- Собственные векторы и собственные значения 221
гонализуемости не выполнено:
1) А45; 2) А77; 3) А259; 4) А44; 5) А2ЬЗ;
6) А98; 7) А436; 8) А430; 9) А478; 10) А474.
24.34. Решить задачу на собственные значения и собствен-
собственные векторы и указать диагональный вид матрицы линейного
преобразования, заданного в стандартном базисе:
вещественного n-мерного арифметического пространства:
1) А604; 2) А621 (п = 2т); 3) А625; 4) А627;
5) А640; 6) Аез9; 7) А634; 8) А62о;
9) Авоб (Ai = ... = Лт = 1, Am+i = ... = An = 2; m=[(n +
/])
10) A6o6 (Ai = ... = ATO = 1, Am+i = ... = An = 0; m = [(n
/])
комплексного n-мерного арифметического пространства:
11) -^605 (Ai = ... = Am = 1, Am+i = ... = Xn = —1;
[(/])
12) A6l4; 13)
24.35. Найти характеристические числа матрицы:
,ж 1) А490; 2) Аш; 3) А492; 4) А549; 5) Аььо
(
)
6) А6з8; 7) А643; 8) А642; 9) А645 (п—нечетно).
24.36. Вычислить:
os-^-; 2)Vcos-^;
71 + 1' ' ^ 71+1'
3) J]efc2, где е = e27ri/n, n = 2т+ 1;
fc=0
4) П (е* ~ eJ')- гДе е = e2Wn' n = 2m + 1-
24.37. 1) Одна из матриц ^287) -^289 подобна матрице D =
= diag(l, 1, —1). Какая именно? Ответ обосновать, не находя
собственных векторов и характеристических чисел.
2) Матрица D = diag(l, 1, 0) подобна одной из матриц
-^230) -^264- Выяснить, какой именно, не находя собственных
значений и собственных векторов.
3) Из двух матриц A3q4, A305 одна подобна матрице D\ =
= diag(l, —I, 0), а другая — матрице D2 = diag(l, 1,0). Выяс-
Выяснить, какая именно, без вычисления собственных значений и
собственных векторов.
24.38. 1) Матрица .Агвз подобна одной из матриц: — Е,
~1)) diag(—I, J^{—!))• Какой именно?
222 Гл. 9. Линейные отображения и преобразования
2) Одна из матриц А457, ^458> ^485 подобна матрице J4@).
Какая именно?
Задачи 24.39-24.41 решить как задачи на собственные
векторы и собственные значения
24.39. Треугольники ABC и А'В'С подобны (с коэффици-
коэффициентом подобия А). Если длины сторон треугольника ABC рав-
равны а, Ь, с, то соответствующие стороны треугольника А'В'С
имеют длины За + Ъ + с, а + ЗЬ + с, а + Ъ + Зс. Доказать, что
треугольники правильные, и найти А.
24.40. Сумма различных натуральных чисел ni, П2, П3, щ
равна 18. После того как их увеличили в одинаковое чис-
число А раз, получились числа п\ + П2 + пз + щ, щ + ni — пз — щ,
П\ — П2 + ПЗ - П4, П\ — 2П2 - ПЗ + ЗП4- НаЙТИ Щ, П2, ПЗ, П4, А.
24.41. Последовательность {хп} задана рекуррентной
2 1
формулой: xn+i = -хп + -жп_1 (п=1, 2, ...); жо = а, хх = Ь.
Доказать, что последовательность сходится, и найти ее предел.
24.42. Найти собственные значения и собственные векто-
векторы (собственные функции) дифференцирования D как линей-
линейного преобразования каждого из следующих линейных
пространств вещественных функций (п — фиксированное на-
натуральное число):
1) пространство всех многочленов степени не выше п;
2) пространство всех тригонометрических многочленов ви-
вида / (t) = ао + ai cost + b\sint+ ... + ancosnt + bnsmnt;
3) линейная оболочка системы функций еЛх*, ..., ел"*, где
Ai, ..., Ап — попарно различные числа.
4) пространство всех функций вида eXotp(t), где p(t) — лю-
любой многочлен степени не выше п, Ао — фиксированное число
(Ло#О).
24.43. Найти собственные значения и собственные векто-
векторы преобразования D2 в пространствах функций задачи 24.42.
24.44. Проверить, что функции вида у = elp{t), где p(t) —
многочлен не выше второй степени, образуют линейное про-
пространство С. Убедиться в том, что tp — линейное преобразо-
преобразование пространства С, и решить для tp задачу на собственные
значения и собственные векторы:
1) Ч>(У) = У"-Ь' + У, т. е. ip = D2-2D + t;
2) <p = D3-2D2; 3) <р = D3-3D2+ 3D +1,.
§ 24- Собственные векторы и собственные значения 223
24.45. Проверить, что функции вида у = е~* (acosi + bsini)
образуют линейное пространство М. и что преобразование tp =
— p{D), где p{t) — данный многочлен, D — дифференциро-
дифференцирование, является линейным преобразованием пространства Л4.
Решить для tp задачу на собственные значения и собственные
векторы, если:
1) p(t) = (t + IJ; 2)p(t) = *2-l.
24.46. В линейной оболочке функций cos2f, sin2f, tcos2t,
tsin2t задано линейное преобразование tp = p(D), где p(t) —
многочлен, D — дифференцирование. Решить для tp задачу на
собственные значения и собственные векторы, если:
24.47. Найти собственные значения и собственные векто-
векторы линейного преобразования tp пространства вещественных
многочленов p(t) не выше второй степени, если:
?\ )
3) ip(p) = t2p"-tp' + 2p.
24.48. Найти собственные значения и собственные векто-
векторы преобразования дифференцирования в пространстве функ-
функций, бесконечно дифференцируемых на всей числовой прямой.
24.49. Пусть С — множество функций y(t), бесконечно
дифференцируемых на отрезке [0, тг] и таких, что у @) =
= У 00 = 0.
1) Проверить, что С — линейное пространство.
2) Найти собственные векторы и собственные значения ли-
линейного преобразования tp пространства С, заданного форму-
формулой <р(у) = у".
24.50. Пусть А, В — квадратные матрицы, и матрица
А С D
q о диагонализируема. Доказать, что матрицы А, В диа-
гонализируемы. Показать на примере, что обратное утвержде-
утверждение неверно.
24.51. Зафиксируем вещественный многочлен po(t) степе-
степени т (т ^ 1). Любой многочлен p{t) можно разделить на
Po(t) с остатком, т. е. однозначно представить в виде
p(t) = q(t)pQ(t)+r(t) D)
(степень остатка r(t) меньше степени po(t)). Преобразование tp
пространства V всех вещественных многочленов определим
формулой <р (р (?)) = г (i).
224 Гл. 9. Линейные отображения и преобразования
1) Показать, что преобразование tp линейно и tp2 = tp.
2) Найти собственные значения и собственные векторы
преобразования tp.
3) Доказать, что формула D) дает разложение простран-
пространства V в прямую сумму собственных подпространств.
24.52. Пусть ip — операция взятия остатка от деления на
многочлен po(t) (см. задачу 24.51) в пространстве многочленов
степени не выше 3. Найти базис из собственных векторов и
записать матрицу преобразования tp в этом базисе, если:
1) po(t) = t; 2) po(t) = t2 + 1; 3) po(t) = (t- IK.
24.53. В пространстве Т1пхп квадратных матриц поряд-
порядка п рассматривается операция транспонирования т : А —> АТ.
Проверить, что т — линейное преобразование и т2 = ь. Най-
Найти собственные значения и собственные векторы преобразова-
преобразования т. Разложить пространство Ипхп в прямую сумму соб-
собственных подпространств преобразования т.
24.54. Множество комплексных матриц порядка п рас-
рассматривается как вещественное линейное пространство М. раз-
размерности 2п2.
1) Проверить, что операция г/: А —> Ан — А эрмитова со-
сопряжения матрицы является вещественным линейным преоб-
преобразованием пространства М., причем гJ = о.
2) Найти собственные значения и собственные векторы
преобразования г).
3) Показать, что преобразование г/ не является линейным,
преобразованием комплексного пространства СпХп.
24.55. Пусть А — матрица второго порядка. Формула
tp (X) = АХ определяет линейное преобразование пространства
матриц второго порядка (задача 23.47). Найти собственные
значения и максимальную линейно независимую систему соб-
собственных векторов преобразования tp. В случае, когда эта си-
система является базисом, записать в нем матрицу преобразова-
преобразования tp:
1)А = А46; 2)А = АЬ2;
3) А — Аг,о (в пространстве комплексных матриц).
24.56. Решить задачу на собственные значения и собствен-
собственные векторы для преобразования tp{X) = XB пространства
матриц второго порядка, если:
1) В — Азе) 2) В = Аы (пространство вещественное);
3) В = А45 (пространство комплексное).
§ 24- Собственные векторы и собственные значения 225
24.57. Преобразование пространства матриц второго по-
порядка определено формулой <р(Х) = АХ — ХА, где А — фик-
фиксированная матрица.
1) Показать, что преобразование tp линейно, и найти его
матрицу в стандартном базисе.
2) Решить для преобразования tp задачу на собственные
значения и собственные векторы, если:
¦ а) А = АШ;
б) А = А22 (пространство вещественное);
в) А = Аго (пространство комплексное).
24.58. Пусть А — невырожденная матрица второго поряд-
порядка. Показать, что формула tp(X) = А~1ХА определяет линей-
линейное преобразование пространства матриц второго порядка. Ре-
Решить для преобразования tp задачу на собственные значения и
собственные векторы, если:
1)А = А22; 2)А = А13.
24.59. Найти собственные векторы и собственные значе-
значения преобразования сдвига в пространстве многочленов от
двух переменных, определенного в задаче 23.50, если:
1) а = 1, Ь = 0; 2) а = 1, Ъ=-2.
24.60. Решить задачу о собственных значениях и собствен-
собственных векторах для линейных преобразований пространства од-
однородных многочленов степени п от двух переменных, опреде-
определенных в задаче 23.51.
24.61. Пусть А — матрица второго порядка, (х*, у*) =
— (х, у) А. Преобразование tp пространства многочленов р (х, у)
степени не выше п определим формулой ip(p(x, у)) =р(х*, у*).
Показать, что ip — линейное преобразование. Найти его соб-
собственные векторы и собственные значения, если п = 2 и
1) А-\\° Ml- 2^ А-\\° Ч- 3) A-W1 °||
> IIо оI)' -)Л~||1о||> ' ||о -i||"
24.62. Пусть К.(х, y) = go(y) + xgi(y) + x2g2(y), где gQ(y),
g\{y)i 52 {у) — непрерывные функции на отрезке [—1, 1]. По-
Показать, что преобразование tp, определяемое формулой
1
tp(p(x))= K.(x,y)'p(y)dy, E)
-1
является линейным преобразованием пространства многочле-
многочленов р(х) степени не выше 2. Найти собственные значения и
собственные векторы преобразования tp, если:
8 - 1715
22В Гл. 9. Линейные отображения и преобразования
¦1) К. (х, у) = :
24.63. Показать, что формула
)) = JlC(x,y)f(y)dy
определяет линейное преобразование ip пространства тригоно-
тригонометрических многочленов вида:
1) acosa; + bsinar, если К. (х, у) = sin(ar + у);
2) a + bcos2ar + csin2ar, если К. (х, у) = cos2(x — у). Найти
собственные значения и собственные векторы преобразования tp.
24.64. Найти собственные значения и собственные векто-
ры оператора Лапласа Л = -^-^ + -=-? в пространстве много-
y
членов р(х, у) с вещественными коэффициентами.
24.65. Пусть (р, "ф — подобные преобразования линейного
пространства С (см. формулу E) введения к § 23). Доказать,
что:
1) характеристические многочлены преобразований (риф
совпадают;
2) если х — собственный вектор преобразования tp, то
ш~1(х) — собственный вектор преобразования чр, отвечающий
тому же собственному значению;
3) если в С существует базис, в котором матрица преоб-
преобразования ip диагональна (треугольна), то аналогичный базис
существует и для -ф.
4) Показать на примере, что совпадение характеристиче-
характеристических многочленов двух линейных преобразований не влечет
подобия этих преобразований.
Инвариантные подпространства.
Перестановочные преобразования B4.66-24.112)
24.66. Доказать, что 1) ядро и 2) множество значений
линейного преобразования являются инвариантными подпро-
подпространствами.
24.67. Доказать, что собственное подпространство линей-
линейного преобразования инвариантно.
24.68. Пусть <р — линейное преобразование линейного про-
пространства ?, М — подпространство в С, инвариантное относи-
§ 24- Собственные векторы и собственные значения 227
тельно tp, и p(t) — многочлен. Доказать, что данное подпро-
подпространство в С инвариантно относительно tp:
1) tp{M); 2) tp~l {M.) (если tp обратимо);
-3) tp™(M) (ш>1); 4) Kerpfa); 5) p(ip)(M).
24.69. Доказать, что 1) сумма двух (и вообще любого ко-
конечного множества) и 2) пересечение двух (и вообще любого
множества) инвариантных подпространств линейного преобра-
преобразования — инвариантные подпространства.
24.70. Пусть tp — линейное преобразование линейного про-
пространства. Доказать, что любое подпространство, содержащее
Imtp, инвариантно.
24.71. Доказать, что если линейное преобразование tp
невырождено, то <?> и tp~l имеют одни и те же инвариантные
подпространства.
24.72. Какой вид имеет матрица линейного преобразова-
преобразования n-мерного линейного пространства, если базис инвариант-
инвариантного подпространства образован:
1) первыми к базисными векторами;
2) последними п — к базисными векторами?
24.73. 1) Пусть линейное пространство является прямой
суммой двух инвариантных подпространств линейного преоб-
преобразования. Доказать, что тогда в некотором базисе матрица
преобразования имеет вид L~ „ , где А, В — квадратные мат-
матрицы.
2) Сформулировать и доказать обратное утверждение.
24.74. Доказать, что:
1) характеристический многочлен линейного преобразова-
преобразования делится на характеристический многочлен его ограниче-
ограничения на инвариантном подпространстве;
2) если все корни характеристического многочлена линей-
линейного преобразования tp линейного пространства С принадлежат
полю, над которым определено С, то всякое подпространство
в С, инвариантное относительно tp, содержит собственный век-
вектор этого преобразования;
3) если линейное пространство является прямой суммой
инвариантных подпространств линейного преобразования tp, то
характеристический многочлен tp равен произведению харак-
характеристических многочленов ограничений tp на этих инвариант-
инвариантных подпространствах.
228 Гл. 9. Линейные отображения и преобразования
24.75. Найти все подпространства, инвариантные относи-
относительно гомотетии линейного пространства.
24.76. Найти подпространства, инвариантные относитель-
относительно поворота плоскости вокруг начала координат на угол а.
24.77. Найти подпространства трехмерного геометричес-
геометрического векторного пространства, инвариантные относительно по-
поворота на угол а вокруг прямой х = ta. (а ф 0).
24.78. Пусть линейное преобразование n-мерного линейно-
линейного пространства имеет п попарно различных собственных зна-
значений. Найти все инвариантные подпространства и подсчитать
их количество.
24.79. Пусть ip — диагонализируемое линейное преобразо-
преобразование п-мерного линейного пространства С. Найти все подпро-
подпространства в С, инвариантные относительно преобразования (р.
24.80. Пусть в базисе е\, ..., еп линейного пространства С
линейное преобразование ip имеет матрицу:
1) 72(А) (п = 2); 2) J3(A) (n = 3); 3) Jn(A).
Найти все подпространства в С, инвариантные относительно <р.
24.81. Пусть C = Ci®jC,2- Найти инвариантные подпро-
подпространства данного линейного преобразования пространства С:
1) проектирования на С\ параллельно ?г!
2) отражения в С\ параллельно ?г-
24.82. 1) Показать, что преобразование </? проектирования
линейного пространства обладает свойством: tp2 = <р.
2) Доказать, что ненулевое линейное преобразование tp ф с,
для которого <р2 = ip, есть проектирование на Im<p параллельно
Kerip.
24.83. 1) Показать, что преобразование ip отражения ли-
линейного пространства в подпространстве обладает свойством
^ = 1.
2) Доказать, что линейное преобразование ip, отличное от
±t, для которого </?2 = с, есть отражение пространства в под-
подпространстве неподвижных векторов параллельно некоторому
дополнительному подпространству.
24.84. Пусть tp — линейное преобразование простран-
пространства С. Доказать, что при любом а каждое подпространство,
содержащее 1т((р + аь), инвариантно относительно (р.
§ 24- Собственные векторы и собственные значения 229
'•' 24.85. Доказать утверждения:
1) Если линейное преобразование n-мерного линейного
пространства имеет собственный вектор, то для него существу-
существует и (п — 1)-мерное инвариантное подпространство.
2) Пусть А — матрица линейного преобразования ip в неко-
некотором базисе е, А — собственное значение и строка а определена
уравнением а (А — ХЕ) = о. Тогда уравнение а? = 0 в базисе е
определяет (п —1)-мерное подпространство, инвариантное от-
относительно преобразования <р. Справедливо ли обратное утвер-
утверждение?
3) Всякое fc-мерное инвариантное подпространство линей-
линейного преобразования комплексного пространства содержит
(к — 1)-мерное инвариантное подпространство.
24.86. Линейное преобразование ip арифметического про-
пространства IZn в стандартном базисе е\, ..., еп задано матри-
матрицей А. Найти подпространства, инвариантные относительно ip,
если:
1) А = А36; 2) А = Аы; 3) А = А306; 4) А = А287]
^ (n = 2m); 7)А
24.87. Найти (п— 1)-мерные подпространства в 7Zn, инва-
инвариантные относительно линейного преобразования, заданного
еврей матрицей А, если:
, г 1) А = Амц 2) А = А222; 3) А = А238; 4) А = А262;
5) A = A4ST, 6)А = А44Т, 7)А = А54<); 8)А = АШ-
24.88. 1) Пусть А = а + i/3 (/3 ф 0) — характеристическое
число вещественной матрицы А порядка п, 1 = х + гу — соб-
собственный вектор линейного преобразования пространства Сп с
матрицей А (х, у — вещественные векторы). Доказать,
что х и у образуют базис двумерного инвариантного подпро-
подпространства линейного преобразования пространства Ип, задан-
заданного матрицей А.
2) Найти двумерные инвариантные подпространства С для
линейного преобразования пространства 7^4 > заданного в стан-
стандартном базисе матрицей ^474-
24.89. Пусть (р — линейное преобразование вещественного
линейного пространства, А, А — пара его комплексно со_пряжен-
ных характеристических чисел, р=—(А + А) и q = XX. Дока-
Доказать, что квазисобственное подпространство Ker(tp2 +ptp + qt) —
ненулевое и инвариантно относительно ip.
330
Гл. 9. Линейные отображения и преобразования
24.90. Найти квазисобственные подпространства преобра-
преобразования (р, заданного матрицей А:
!"' 0 1 2
1) А= -1 0 -2 ; 2) А =
3) А =
0
-1
-2
0
-1
-2
2
1
0
2
2
-2
1
0
-2
-2
0
2
2
0
1
—2
2
-1
0
1
0
-1
_2
0
1
2
1
-1
-2
1
0
2
1
0
1
4)
5) AAli.
24.91. Доказать, что квазисобственное подпространство не
содержит собственных векторов, и через каждый его вектор
проходит двумерное инвариантное подпространство.
24.92. Доказать, что размерность квазисобственного под-
подпространства — четное число.
24.93. Доказать, что квазисобственное подпространстве
можно разложить в прямую сумму двумерных инвариантных
подпространств.
24.94. Доказать, что размерность квазисобственного про-
пространства не превосходит удвоенной кратности соответствую-
соответствующего характеристического числа.
24.95. Доказать, что в двумерном инвариантном подпро-
подпространстве преобразования <р, не содержащем собственных век-
векторов, можно выбрать базис так, что матрица ограничения <f
е. II а /3||
будет иметь вид \\ _а ¦
24.96. Доказать, что любое двумерное инвариантное под-
подпространство, не содержащее собственных векторов, лежит в
некотором квазисобственном подпространстве.
24.97. Доказать, что любые два квазисобственные подпро-
подпространства имеют нулевое пересечение.
24.98. Доказать, что собственные и квазисобственные под-
подпространства линейного преобразования расположены так, что
сумма их — прямая сумма.
24.99. Для каждого из преобразований задачи 24.90 най-
найти матрицу перехода к такому базису, в котором его матрица
— клеточно диагональная, и найти матрицу преобразования в
этом базисе. (В каждом случае найти хотя бы одно решение.)
24.100. 1) Пусть линейное преобразование tp n-мерного ли-
линейного пространства С обладает цепочкой вложенных друг
§ 24- Собственные векторы и собственные значения 231
в друга попарно различных инвариантных подпространств:
С\ С ?2 С ... С Сп = С. Доказать, что в С существует базис, в
котором матрица преобразования ц> верхняя треугольная.
2) Пусть в базисе е\, ..., еп матрица линейного преобразо-
преобразования ip пространства С верхняя треугольная. Доказать, что
подпространства Ck = ?{ei, ¦ • • ,efc} (fc = 1, ..., n) инвариант-
инвариантны относительно <р и Ck С Ck+i (fc = 1, ..., n — 1).
24.101. Линейное преобразование пространства 7?з задано
матрицей А в стандартном базисе. Привести матрицу преобра-
преобразования к треугольному виду, если:
24.102. 1) Пусть L\ С ?2 С ... С ?г = С — цепочка подпро-
подпространств линейного пространства С, инвариантных относи-
относительно линейного преобразования (р, dim?j = щ (щ < тг2 < ...
... < ггГ = гг). Допустим, что базис е\, ..., еп выбран так, что
векторы ei, ..., ещ принадлежат ?» (г = 1, ...,г). Показать,
что матрица Av — верхняя блочно треугольная с диагональ-
диагональными блоками размеров fcj x fc», где fcj = щ — щ-\ (г = 2, ..., г),
fci = fii-
2) Пусть в некотором базисе матрица линейного преобра-
преобразования — верхняя блочно треугольная. Доказать, что преобра-
преобразование обладает цепочкой инвариантных подпространств. Вы-
Выразить их размерности через порядки диагональных
блоков.
24.103. Пусть С — линейное пространство бесконечно
дифференцируемых функций / (i) (t € К), п — целое неотри-
неотрицательное число, Л — фиксированное действительное число.
Доказать, что данное множество функций образует подпро-
подпространство в С, инвариантное относительно дифференцирова-
дифференцирования D:
1) множество всех многочленов;
2) множество всех многочленов степени не выше тг;
3) множество всех тригонометрических многочленов по-
порядка не выше тг;
4) множество всех линейных комбинаций функций е*1', ...
.. . , с ,
5) множество всех функций f(t) = eXtp(t), где p(t) — про-
произвольный многочлен;
6) множество всех функций f (t) = еЛ'Т(?), где T(t) — про-
произвольный тригонометрический многочлен;
232 Гл. 9. Линейные отображения и преобразования
7) множество всех функций p(t)cost, p(t)sint, где p(t) —
произвольный многочлен.
24.104. Пусть С — линейное пространство функций зада-
задачи 24.103, (р = D2. Доказать, что данное множество функций
является подпространством в С, инвариантным относительно
преобразования (р. Найти собственные значения и собственные
векторы ограничения преобразования на этом подпростран-
подпространстве:
1) множество всех четных многочленов степени не вы-
выше 2тг;
2) множество всех нечетных многочленов степени не вы-
выше 2тг + 1;
3) множество всех четных тригонометрических многочле-
многочленов ао + ai cost + ... + ап cos nt;
4) множество всех нечетных тригонометрических много-
многочленов bi sint + ...-\-bn sinnt.
24.105. Найти все подпространства линейного простран-
пространства всех многочленов, инвариантные относительно дифферен-
дифференцирования.
24.106. Показать, что линейное преобразование простран-
пространства всех многочленов, состоящее в умножении многочленов
на t, не имеет ни собственных векторов, ни инвариантных
подпространств (кроме нулевого подпространства и всего про-
пространства).
24.107. Найти подпространства, инвариантные относи-
относительно операции взятия остатка (см. задачу 24.51) в простран-
пространстве всех многочленов.
24.108. Пусть <р — линейное преобразование пространства
многочленов р(х, у), определенное в задаче 24.61. Доказать,
что подпространства однородных многочленов степени п (п =
= 0, 1, ...) инвариантны относительно преобразования (р.
24.109. Найти подпространства линейного пространства
матриц порядка п, инвариантные относительно транспониро-
транспонирования.
24.110. В пространстве Tlnxn рассматривается преобразо-
преобразование (р (X) = АХ, где А — фиксированная матрица. Доказать,
что 72.пхп является прямой суммой п подпространств, инвари-
инвариантных относительно (р.
24.111. В пространстве Т2.пХп рассматривается преобразо-
преобразование <р (X) = АХ — ХА, где А — фиксированная матрица. До-
§ 24- Собственные векторы и собственные значения 233
казать, что данное множество образует инвариантное относи-
относительно (р подпространство:
1) множество всех матриц с нулевым следом;
2) множество всех верхних треугольных матриц (если мат-
матрица А верхняя треугольная);
3) множество всех кососимметрических матриц (если мат-
матрица А кососимметрическая);
4) множество всех диагональных матриц (если матрица А
диагональная).
24.112. Линейное преобразование <р пространства 72.пхп
вещественных матриц порядка п определено формулой ц> (X) =
= АТХ + ХА, где А — фиксированная матрица.
1) Доказать, что кососимметрические матрицы образуют
подпространство в 72.пхп, инвариантное относительно преобра-
преобразования <р;
2) выразить характеристические числа ограничения <р на
этом подпространстве через характеристические числа матри-
матрицы А.
24.113. Линейное преобразование пространства матриц
порядка п определено формулой <р(Х) = А~гХА, где А —
невырожденная матрица. Доказать, что данное множество мат-
матриц является подпространством, инвариантным относительно
преобразования ц>\
1) множество всех матриц с нулевым следом;
2) множество всех скалярных матриц;
3) множество всех верхних треугольных матриц (если мат-
матрица А верхняя треугольная);
4) а) множество всех симметрических матриц; б) множе-
множество всех кососимметрических матриц (если матрица А орто-
ортогональная);
5) а) множество всех эрмитовых матриц; б) множество всех
косоэрмитовых матриц (если А — унитарная матрица и если
эти множества — подпространства 2п2-мерного вещественного
пространства комплексных матриц порядка тг).
24.114. Линейное преобразование <р комплексного прост-
пространства матриц второго порядка задано формулой (р(Х) =
= А~1ХА, где А = Ал, а — вещественное число. Найти соб-
собственные значения и собственные векторы ограничения преоб-
преобразования <р на подпространстве:
1) симметрических матриц; 2) матриц с нулевым следом.
234 Гл. 9. Линейные отображения и преобразования
Жорданова форма матрицы B4.115-24.138)
24.115. Привести пример матрицы порядка п > 1, имею-
имеющей характеристическое число А кратности к, 1 ^ к ^ п, и соб-
собственное подпространство размерности т. Сколько жордано-
вых клеток отвечает этому А, и чему равна сумма порядков
этих клеток?
24.116. Проверить прямым вычислением терему Гамиль-
тона-Кэли для данной матрицы и определить ее минимальный
многочлен:
1) А37; 2) А38; 3) А29; 4) А82;
5) А98; 6) Л233; 7) А222; 8) А236.
24.117. Может ли минимальный многочлен матрицы по-
порядка п 1) быть многочленом первой степени; 2) иметь вид
(t — Х)п. Привести примеры.
24.118. 1) Показать, что собственный вектор является кор-
корневым. Чему равна высота собственного вектора?
2) Доказать, что матрица линейного преобразования тогда
и только тогда диагонализуема, когда высота каждого корне-
корневого вектора равна 1.
24.119. Доказать, что корневые векторы, отвечающие по-
попарно различным собственным значениям, линейно неза-
независимы.
24.120. Пусть К.\ и /Сг корневые подпространства, отве-
отвечающие собственным значениям Ai ф A2. Доказать, что /С2 ин-
инвариантно относительно ф\ = ц> — Ai с, и ограничение i/>i на /С2
невырождено.
24.121. Доказать, что размерность корневого подпрост-
подпространства равна кратности соответствующего собственного зна-
значения как корня характеристического многочлена.
24.122. Доказать линейную независимость векторов жор-
дановой цепочки.
24.123. Доказать, что начальные векторы жордановых це-
цепочек, составляющих базис корневого подпространства, обра-
образуют базис соответствующего собственного подпространства.
24.124. Пусть размерность собственного подпространства,
соответствующего характеристическому числу А, меньше крат-
кратности А. Каждый ли собственный вектор имеет присоединен-
присоединенный вектор?
§ 24- Собственные векторы и собственные значения 235
24.125. Найти базисы корневых подпространств линейно-
линейного преобразования, заданного матрицей А:
1) А27; 2) Ап; 3) А5; 4) А51; 5) Л198; 6) Л222;
7) Азоз; 8) Л289.
24.126. Проверить, что линейное преобразование, задан-
заданное матрицей А, нильпотентно и найти для него жорданов ба-
базис и жорданову форму матрицы:
1) А5; 2)А38-2Е; 3)А52-5Е; 4) А236; 5) А235;
J 6) А2&3 + Е; 7) А458; 8) А457; 9) Д485.
24.127. Привести к жордановой форме матрицу:
'* 1) Аъх- 2) А30; 3) А49; 4) А52; 5) А198; 6) А299;
7) А247; 8) А248; 9) А264; 10) А273; 11) А738;
3 12) (р) А283; 13) А289; 14) Аш; 15) (р) А465;
lt 16) А4бо; 17) А469; 18) А487.
24.128. Приводятся ли к жордановой форме следующие
матрицы линейных преобразований вещественного простран-
пространства? Найти их жорданову форму как матриц линейных пре-
преобразований комплексного пространства:
1) А45; 2) А62; 3) А44; 4) А262; 5) A30i;
6) А447; 7) А474.
24.129. Привести к жордановой форме матрицу линейного
преобразования комплексного арифметического пространства:
1) А82; 2) А78; 3) А80; 4) А98.
24.130. Вычислить значение следующих многочленов от
матрицы Jn(X) :
1) (?-A)m; 2) tm; 3) произвольный многочлен f(t).
24.131. Найти жорданову форму матрицы:
,,l)Jn2(A); 2) J™(A) (m натуральное); 3) J'^X) (A#0).
¦'• 24.132. Что можно сказать о матрице А порядка п, если ее
кШнимальный многочлен удовлетворяет следующему условию:
': 1) имеет все корни кратности 1;
2) с точностью до знака совпадает с характеристическим
многочленом.
24.133. Пусть ipm = с для некоторого натурального числа
т. Доказать, что жорданова форма матрицы ip диагональна.
Какие числа стоят на диагонали этой матрицы?
24.134. Найти жорданову форму линейного преобразова-
преобразования комплексного арифметического пространства с матрицей:
2) А599; 3) А6о9; 4) А615; 5)
236 Гл. 9. Линейные отображения и преобразования
6) Л62о; 7) А632; 8) Л635; 9) Аш; 10) Аш.
24.135. Не находя жордановых базисов, установить жор-
дановы формы матриц, зная, что их характеристические мно-
многочлены равны (t — IL:
1)Л458 + Я; 2) А46о; 3) А469-
24.136. Проверить, что матрицы Дш и -А273 имеют оди-
одинаковые характеристические многочлены. Найти их минималь-
минимальные многочлены и жордановы формы.
24.137. Определить жорданову форму матрицы А по за-
заданному характеристическому многочлену p(t) = — (t + lK(t —
- 2J, зная, что Rg(A - 2Е) = 3, a Rg(A + E) = A.
24.138. Найти экспоненту матрицы:
1) Jn@); 2) А5; 3) ||° ~а|, а Е М.
24.139. Пусть линейные преобразования (р, ф перестано-
перестановочны. Доказать, что:
1) ядро и множество значений одного из них инвариантны
относительно другого;
2) собственные подпространства преобразования (р инвари-
инвариантны относительно ф.
24.140. Пусть Ао — собственное значение линейного пре-
преобразования <р.
1) Доказать, что подпространства С\. = Кег(уз — АоО (к =
= 1, 2, ...) инвариантны относительно <р.
2) Показать, что ?fcC?fc+1. Может ли включение быть
строгим?
24.141. Доказать, что:
1) любые два перестановочных линейных преобразования
комплексного пространства имеют общий собственный вектор;
2) то же утверждение верно для вещественного простран-
пространства, если все характеристические числа преобразований веще-
вещественны.
21.142. Пусть (р — вырожденное линейное преобразование
конечномерного линейного пространства. Доказать, что суще-
существует такое ?о > 0, что для всех |е| ^ ео, преобразование <р + et
невырождено.
24.143. Доказать, что для любых двух линейных преобра-
преобразований ip, ф одного и того же линейного пространства харак-
характеристические многочлены преобразований ц>ф иф<р совпадают.
§ 24- Собственные векторы и собственные значения 237
•1* 24.144. Пусть <р, ф — перестановочные линейные преобра-
преобразования n-мерного пространства, причем (р имеет п различных
собственных значений. Доказать, что все собственные векто-
векторы преобразования <р являются собственными и для ф, так что
матрицы <риф диагональны в общем для них базисе.
24.145. Пусть линейное преобразование ц> диагонализи-
руемо и каждое его собственное подпространство инвариант-
инвариантно относительно линейного преобразования ф. Доказать, что
<рф = ф<р.
24.146. Пусть С = С®С", где ?', С" - ненулевые линей-
линейные подпространства в С.
1) Пусть (р — проектирование пространства С на С па-
параллельно С", а ф — некоторое линейное преобразование в С
Доказать, что ц>ф = ф<р тогда и только тогда, когда подпро-
подпространства С и С" инвариантны относительно ф.
2) Сформулировать и доказать аналогичное утверждение
для отражения пространства С в С параллельно С".
24.147. Пусть (р, ф — линейные преобразования п-мерного
линейного пространства. Дано, что ipn — 9, dimKeryi = l и
[¦^>, ф\ = ф(р — 1рф = <р. Доказать, что ф имеет п собственных
значений вида А, А — 1, ..., А— (тг — 1), где А — некоторое
число.
24.148 (р). Пусть (риф — линейные преобразования про-
пространства С, причем (р взаимно однозначно. Найдите такое
е > 0, что для любого 5 G (—е, е) линейное преобразование
(р + 6ф взаимно однозначно.
Глава 10
ЕВКЛИДОВЫ И УНИТАРНЫЕ ПРОСТРАНСТВА
В этой главе используются следующие основные понятия: скляр-
ное умножение, евклидово пространство, унитарное (эрмитово)
пространство, длина (норма) вектора, угол между векторами, мат-
матрица Грама, ортогональная и ортонормированная системы векто-
векторов, ортонормированный базис, базис, биортогональный данному ба-
базису, ортогональное дополнение подпространства, ортогональная
проекция и ортогональная составляющая вектора, процесс орто-
гонализации, QR-разложение матрицы, объем k-мерного паралле-
параллелепипеда, угол между вектором и подпространством, угол между
двумя подпространствами.
Операция евклидова скалярного умножения в вещественном ли-
линейном пространстве С ставит в соответствие каждой паре векторов
г и у из ? вещественное число, обозначаемое (х, у) таким образом,
что для любых векторов х, уиги чисел а и /3 выполнены следующие
условия:
1) (аг, у) = (у, х);
2) (ax + /3y,z) = a(x,z)+0(y,z);
3) (х, х) > 0 для любых х ф о.
Операция унитарного скалярного умножения в комплексном
линейном пространстве С ставит в соответствие каждой паре векто-
векторов х и у из С комплексное число, обозначаемое (х, у) таким образом,
что для любых векторов х, у и z и чисел а и /3 выполнены следующие
условия:
1) (аг, у) = (у, аг);
2) (ах + 0у, z)=a(x, z)+0(y, z);
3) (х, х) > 0 для любых хфо.
Вещественное (или комплексное) линейное пространство с вве-
введенной в нем операцией скалярного умножения называется евклидо-
евклидовым (или, соответственно, унитарным). Мы обозначаем евклидовы
пространства буквой ?, а унитарные — U.
Число (х, у) называется скалярным произведением (при необхо-
необходимости, с уточнением: евклидовым или унитарным).
В задачах этой главы часто используются следующие важные
примеры евклидовых и унитарных пространств. Множество всех
векторов пространства, изучаемого в элементарной геометрии. Его
мы будем называть геометрическим пространством.
В n-мерном вещественном арифметическом пространстве 1Zn
стандартным скалярным произведением векторов х и у называется
Гл. 10. Евклидовы и унитарные пространства 239
число (х, у) - хТу = Ziyi +... + хпуп.
В n-мерном комплексном арифметическом пространстве Сп
стандартным скалярным произведением векторов хну называется
число (х, у) = хТу = xiyj +... + хпу^.
В линейном пространстве "RmXn вещественных матриц размеров
mxnc обычными операциями сложения и умножения на веществен-
вещественное число стандартное евклидово скалярное произведение матриц
X = \\xjk\\ и Y = \\yjk\\ определяется формулой
j=l fc=l
Это же число может быть записано и как tiXTY (см. задачу 25.4).
Аналогично в пространстве комплексных матриц СтХп стан-
стандартное унитарное скалярное произведение определяется формулой
(X, Г) =
j=lfc=l
или, что то же, (X, Y) =txXTY.
В пространстве вещественных многочленов от переменной t,
имеющих степень не выше фиксированного числа п, стандарт-
стандартное скалярное произведение определяется формулой (см. зада-
задачу 25.8, 1)):
1
(P,q)=Jp(t)q(t)dt;
-1
В евклидовом пространстве скалярное произведение выражает-
выражается через координаты векторов в выбранном базисе ei, ..., еп форму-
формулой
где Г — матрица из элементов <ftj = (ej, ej), называемая матрицей
Грома базиса е\, ..., е„.
Для унитарного пространства соответствующая формула имеет
аналогичный вид {х, у) = ?, Гц.
Если S — матрица перехода от базиса е к базису е', то матри-
матрицы Грама этих базисов связаны формулой Г' = STTS для евклидова
пространства, иГ' = STTS — для унитарного.
Как в евклидовом, так и в унитарном пространстве длиной век-
вектора, а также евклидовой (унитарной) нормой называется число
\х\ = \/(х, х). Вектор длины 1 называется нормированным векто-
вектором. Для любых векторов х и у выполняется неравенство Коши-
Буняковского
240 Гл. 10. Евклидовы и унитарные пространства
\{х,у)\^\х\-\у\.
Угол между векторами определяется формулой а —
= arccos((a;, J/)/(|i||j/|))- Векторы х и у называются ортогональны-
ортогональными, если (х, у) = 0. Система попарно ортогональных векторов на-
называется ортогональной и ортонормированной, если эти векторы
нормированы.
Пусть а — фиксированный вектор евклидова пространства ?.
Сопоставим произвольному вектору х € ? число (а, х). Это опреде-
определяет линейную функцию, присоединенную вектору х. Соответствие,
сопоставляющее каждому вектору его присоединенную функцию —
изоморфизм пространства ? на его сопряженное пространство. Этот
изоморфизм не зависит от выбора базиса и потому позволяет отож-
отождествить эти пространства: принято отождествлять вектор с его при-
присоединенной функцией.
Если в ? выбран базис ei, ..., е„, то функции, составляющие
его взаимный базис в сопряженном пространстве, отождествляются
с такими векторами е^, ..., е„, что
= {
Базис е*, связанный таким соотношением с базисом е, называется
ему биортогоналъным.
Вектор называется ортогональным линейному подпространству
евклидова или унитарного пространства, если он ортогонален каж-
каждому вектору пространства.
Множество всех векторов, ортогональных подпространству С,
называется ортогональным дополнением С и обозначается ?х. Это
линейное подпространство, и С ф С1- = ?. Если х = х' + х", где х' 6 С,
а х" 6 ?-*¦, то х' называется ортогональной проекцией х на С, а, х" —
ортогональной составляющей х относительно С.
Говорят, что вектор а; — 2х" получен из х ортогональным отра-
отражением в подпространстве С.
Процесс ортогонализации позволяет построить из произвольной
линейно независимой системы векторов f\, ..., fm ортогональную
систему ненулевых векторов д\, ..., дт- В частности, произвольный
базис можно преобразовать в ортогональный, а при последующей
нормировке — в ортонормированный. Для этого из каждого из век-
векторов /2, ..., fm вычитают его проекцию на линейную оболочку пре-
предыдущих векторов. Это приводит к следующим рекуррентным фор-
формулам . .
, V^ (fk, 9i) .
Существенно, что матрица перехода от /ь ..., /т к д\, ..., дт явля-
является верхней треугольной (как и матрица обратного перехода).
Линейное подпространство С\ называется ортогональным Li,
если ?iC?^. Тогда и ?2 С С{.
' § 25. Скалярное произведение. Матрица Грама 241
Рассмотрим к линейно независимых векторов Д, ..., Д в 71-
мерном евклидовом пространстве. Под к-мерным параллелепипедом
{/ъ ¦¦•) Л}> построенным на них, мы будем понимать множество
всех их линейных комбинаций с коэффициентами оц, 0 ^ Qj ^ 1,
(г — 1, ..., к). Векторы Д, ..., Д назовем ребрами параллелепипеда.
Параллелепипед {Д, ..., Д-i} естественно назвать основанием па-
параллелепипеда {Д, ..., Д}, а высотой, соответствующей этому осно-
основанию, назовем длину \hk\ ортогональной составляющей h^ векто-
вектора Д относительно линейной оболочки Д, ..., Д_ь
Объем одномерного параллелепипеда {/} мы определим как
длину его единственного ребра: V {/} = |/|, а объем к-мерного парал-
параллелепипеда V{/i, ..., Д} определим по индукции как произведение
объема основания на высоту.
Объем fc-мерного параллелепипеда вычисляется по формуле
где Ff — матрица Грама системы векторов Д, ..., Д. Пусть е — про-
произвольный базис, a F — матрица из координатных столбцов векторов
Д, ..., /„ в этом базисе. Тогда
В частности, для ортонормированногобазиса V{f\, ..., fn} — |detF|.
Углом между вектором х и линейным подпространством С
называется точная нижняя грань угла, который х образует с раз-
различными векторами из С.
Пусть С\ и ?.2 — два ненулевых линейных подпространства. Ес-
Если одно из них лежит в другом, то угол между ними по опреде-
определению равен нулю. В противном случае обозначим через С\ и ?,%
ортогональные дополнения подпространства С\ П Ci соответствен-
соответственно в С\ и ?-2. Углом между подпространствами С\ и ?г называ-
называется точная нижняя грань значений угла между векторами х G С\
куе?%.
В § 25 и § 26 рассматривается евклидово пространство, а в § 27 —
унитарное. Это не будет каждый раз оговариваться.
§ 25. Скалярное произведение. Матрица Грама.
Определение евклидова пространства B5.1—25.19)
25.1. Пусть п — фиксированный ненулевой вектор в гео-
геометрическом пространстве. Сопоставим произвольной паре
векторов х, у:
14 1) смешанное произведение (п, х, у);
ц 2) скалярное произведение (х + n, у + п);
>,- 3) (п,х)(п,у); 4)|п|(х,у); 5)|х||у|.
Можно ли принять такую функцию за скалярное произведение?
242 Гл. 10. Евклидовы и унитарные пространства
25.2. Может ли скалярное произведение в вещественном
n-мерном линейном пространстве задаваться следующей функ-
функцией от координат векторов:
1) Ж1У1 + 2ж2у2, а)п = 2; б) п = 3;
2) ЖЦ/1 + Ж2, п = 2;
3) Зжш + 2ж1у2 + ж2у1 + ж2у2, п = 2;
4) 2жху1 + Ж1у2 + ж2у1 + 2ж2у2, п = 2;
5) Ж1У1 + 2ж1у2 + 2ж2у1 + ж2у2 + ж3уз, п = 3.
25.3 (р). На плоскости нарисован эллипс с полуосями 2
и 1. Пусть дан вектор х. Рассмотрим вектор хо, сонаправлен-
ный с х, начало которого — центр эллипса, а конец лежит на
эллипсе. Положим <р(х) = |х|/|хо|, и <р(о) = 0. Теперь произ-
произвольной паре векторов можно сопоставить число
Доказать, что этим определено скалярное произведение. Най-
Найти его выражение через координаты векторов в канонической
системе координат эллипса.
25.4. 1) Доказать, что функция F(X, Y) = trXTY запи-
записывается через элементы матриц формулой A) из введения и
может быть принята за скалярное произведение в пространстве
вещественных матриц размеров тхп.
2) Евклидовой нормой матрицы называется ее длина при
этом скалярном произведении. Доказать, что евклидова норма
равна квадратному корню из суммы квадратов всех элементов
матрицы.
3) Найти длины векторов стандартного базиса и углы меж-
между ними относительно такого скалярного произведения.
25.5. Рассматривается пространство квадратных матриц
порядка п, и каждой паре матриц сопоставлено число:
1) F(X, Y) = trXY; 2) F(X, У) = trXtrY;
3) F(X,Y) = detXY.
Может ли такая функция быть принята за скалярное про-
произведение?
25.6. Пусть Р фиксированная квадратная матрица поряд-
порядка т. При каких условиях на эту матрицу функция F (X, Y) —
= tr XTPY является скалярным произведением в линейном
пространстве матриц размеров тхп?
25.7. В линейном пространстве функций, непрерывных на
отрезке [—1, 1], функциям / и g сопоставляется число
§ 25. Скалярное произведение. Матрица Грома 243
1
= Jf(t)g(t)dt.
-1
Доказать, что этим определено скалярное произведение.
25.8. В линейном пространстве многочленов степени не
выше п двум многочленам р и q сопоставлено число F(p, q).
Доказать, что этим определено скалярное произведение:
1
= Jp(t)q(t)dt;
-1
2) F — сумма произведений производных порядка к, вы-
вычисленных в точке to,
fe=0
3) F — сумма произведений коэффициентов при равных
степенях,
п
F(p, g) = ?>*&;
fe=0
4) F — сумма произведений значений р и q в т > п раз-
ЛРшых точках,
к-\
(Убедиться, что требование т> п необходимо.)
25.9. Доказать, что в евклидовом пространстве из зада-
задачи 25.8,1) многочлены Лежандра
Po(t) = h
образуют ортогональный базис. Найти длины (нормы) этих
многочленов.
25.10. Пусть е — базис в линейном пространстве ?. Дока-
Доказать, что в ? существует одно и только одно скалярное произве-
произведение, относительно которого базис е — ортонормированный.
25.11. Пусть в вещественном линейном пространстве за-
заданы два скалярных произведения (х, у)\ и (х, у)ч. Доказать,
что для любых положительных чисел Лид функция (ж, у) =
= Л (ж, y)i + ц(х, у)г — также скалярное произведение.
244 Гл. 10. Евклидовы и унитарные пространства
25.12. Дано линейное пространство С — прямая сумма
подпространств С\ и ?г> в которых заданы скалярные про-
произведения (Ж, у)х И (х, уJ- Пусть Х = Х\+Х2 И У = 2/1+J/2,
где Х\, 2/i € С\; Х2, 2/2 € ?г- Доказать, что функция (х, 2/) =
= (жъ 2/1 )i + (^г»2/2J есть скалярное произведение на С
25.13. Пусть |ж| длина вектора х в евклидовом простран-
пространстве. Доказать, что:
\ \2-\х-у\2);
2)(z,y)
25.14. Пусть в вещественном линейном пространстве зада-
заданы два скалярных произведения (х, у)i и (ж, уJ, и любой век-
вектор имеет одинаковые длины в каждом из них: (х, x)i = (х, хJ-
Доказать, что скалярные произведения совпадают.
25.15. В пространстве многочленов степени ^ 3 со стандар-
стандартным скалярным произведением задан треугольник со сторонами
t, t3 и t — t3. Найти 1) углы треугольника; 1) длины его сторон.
25.16. Доказать, что треугольник в евклидовом простран-
пространстве прямоугольный тогда и только тогда, когда длина одной
из сторон равна длине другой стороны, умноженной на косинус
угла между этими сторонами.
25.17. Доказать, что медиана треугольника в евклидовом
пространстве короче одной из сторон, между которыми она ле-
лежит.
25.18. Доказать, что сумма углов произвольного треуголь-
треугольника в евклидовом пространстве равна 7г.
25.19. Пусть С конечномерное линейное пространство. До-
Доказать, что выбор определенного изоморфизма С на его сопря-
сопряженное С* равносилен заданию скалярного произведения в С.
Скалярное произведение в координатах B5.20—25.44)
25.20. В арифметическом пространстве со стандартным
скалярным произведением найти скалярные произведения
1) || 1 1 1 1||Ти||1 2 5 8||Т;
2)||1 2 1 4||Ти||1 -1 1 Of;
3)||-1 2 1 -4||Ти||4 -1 -2 if;
4) cm и ci72; 5) cm и ci75.
25.21. Найти угол между ребром и диагональю п-мерного
куба.
§ 25. Скалярное произведение. Матрица Грама
245
25.22. Найти длины векторов и косинусы углов между ни-
ними в задаче 25.20.
25.23. Пусть в некотором базисе квадрат длины любого
вектора х равен сумме квадратов его координат. Доказать, что
базис ортонормированный.
25.24. Нарисовать на плоскости какой-либо базис с матри-
матрицей Грама Aig. Описать все множество таких базисов.
25.25. Найти скалярное произведение векторов, если зада-
заданы их координаты в некотором базисе и матрица Грама Г этого
базиса:
1 If, ||1 3 if, Г =
2I1-1 -1 if, ||0 1 3f, Г =
С23, Г =
Г
4) С23,
1
-2
1
-2
5
-4
1 2
2 5
3 8
1
-4
6
3
8
14
-V
¦(. .
1)
2)
3)
4)
111 l|
2 1 \/2
5 0 2 1
| 1 0||, || 0 11|; базис с матрицей Грама
3) его,
5) ||1 ... 1\\2 , C282, Абзо-
25.26. Найти углы между векторами, заданными их коор-
дцнатами:
|0 2 0 21|; базис ортонормированный;
1H20 2 ||; базис ортонормированный;
|2 1 2 11|; базис ортонормированный;
I1 Ml-
Jl 4||'
5) ci2, C33; базис с матрицей Грама
6) Ci8, C12; базис с матрицей Грама
в9 25.27. Найти длины векторов в задаче 25.25.
25.28. При каких значениях параметров е, а данные мат-
матрицы могут служить матрицами Грама в евклидовом простран-
пространстве: 1) А80; 2) А77; 3) А76.
25.29. Доказать, что в n-мерном пространстве квадратная
матрица Г порядка п может служить матрицей Грама какого-
либо базиса тогда и только тогда, когда найдется квадратная
матрица S с детерминантом, отличным от нуля, такая, что Г =
= STS.
25.30. Доказать, что в n-мерном пространстве квадрат-
квадратная матрица Г порядка п может служить матрицей Грама
какого-либо базиса тогда и только тогда, когда она положи-
положительно определена, то есть Г = Гт и ?,ТГ?, > 0 для любого столб-
столбца ?,т^ о.
Гл. 10. Евклидовы и унитарные пространства
•1st ; 25.31. Пусть Г — матрица Грама некоторого базиса е. До-
Доказать, что матрицами Грама некоторых базисов являются так-
также матрицы:
1) Г; 2) Г2; 3) Тк, где к целое.
25.32. Пусть Ti и Гг — матрицы Грама базисов ei и в2-
Доказать, что при любых положительных коэффициентах мат-
матрица Г = a\Fi + 0.2T2 также есть матрица Грама некоторого
базиса.
25.33. В матрице Грама некоторого базиса все элементы
равны либо 0, либо 1, либо — 1. Доказать, что базис ортонор-
мированный.
25.34. Доказать, что максимальный по модулю элемент
матрицы Грама расположен на главной диагонали.
25.35. Может ли третья строка матрицы Грама некоторого
базиса в четырехмерном пространстве быть строкой:
1)||1 1 1 1||; 2)||-1 -1 -1 -1||; 3)||1 0 1 0||;
4) 110 1 0 111; 5) \\- - - ill.
' " "' ' II 2 2 4 2 11
25.36. Найти матрицу Грама стандартного базиса про-
пространства квадратных матриц второго порядка1) со скаляр-
скалярным произведением, определенным в задаче 25.6, если Р равно:
1) А17; 2) А24.
25.37. В пространстве многочленов степени не выше двух
со стандартным скалярным произведением найти матрицу Гра-
Грама стандартного базиса.
25.38. В пространстве квадратных матриц порядка п со
скалярным произведением задачи 25.4 найти матрицу Грама
стандартного базиса.
25.39. Дана матрица Грама базиса е. Найти матрицу Гра-
Грама его биортогонального базиса е*.
25.40. Пусть любые два различных вектора из системы
Xi, ..., хп образуют угол 7г/3. Доказать, что эти векторы ли-
линейно независимы.
25.41. Даны две системы векторов xi, ..., хр и yi, ..., ур, и
из скалярных произведений Cj,- = (xj, у,) составлена матрица С.
1) Доказать, что detC = 0, если хоть одна из систем линей-
линейно зависима.
2) Верно ли обратное утверждение?
См. введение к § 15
§ 25. Скалярное произведение. Матрица Грома 247
25.42. Две упорядоченные системы векторов ei, ..., еу. и
Л > • • ¦ > fk в евклидовом пространстве называются биортого-
нальными, если (е,, /j) = О при i ф j, a (е*, /г) = 1 для всех г.
Доказать, что каждая из двух биортогональных систем линей-
линейно независима.
25.43. Для системы векторов Х\, ..., хр евклидова про-
пространства составляется матрица С с элементами с^ = (xi, Xj).
Пусть Rg С = к и минор порядка к в левом верхнем углу —
базисный. Указать какую-нибудь максимальную линейно неза-
независимую подсистему данной системы векторов.
25.44. Используя свойства матрицы, составленной из все-
всевозможных скалярных произведений, доказать, что для любой
матрицы А выполнено Rg AT A = Rg-A.
Ортогональные матрицы B5.45-25.58)
25.45. Какие из следующих матриц являются ортогональ-
ортогональными:
:%-' 1) А32; 2) А22; 3) А16; 4) А1Ь; 5) А20; 6) А64;
7) А24з; 8) А253; 9) А255; 10) А329; 11) А330]
щ 12) А432; 13) Аш; 14) А445; 15) А436.
*JH 25.46. Останется ли ортогональная матрица ортогональ-
если:
1) переставить ее строки;
2) переставить ее столбцы;
3) написать элементы строк, имеющих нечетные номера, в
эатном порядке;
4) транспонировать;
.-,,, 5) повернуть вокруг побочной диагонали;
щг 6) умножить одну из строк на число;
if, 7) прибавить одну из строк к другой.
25.47. Пусть А и В — ортогональные матрицы одного по-
порядка. Являются ли ортогональными матрицы:
1)А + В; 2) АВ; 3) АВТ; 4) аА; 5) Ак, А: целое.
25.48. Найти все такие пары ортогональных матриц вто-
второго порядка, сумма которых — ортогональная матрица.
25.49. При каком условии для ортогональной матрицы А
найдется число а ф 0 такое, что матрица А + аЕ также явля-
является ортогональной? Существуют ли такие матрицы, отличные
от Е и — Е, для п = 2, 3, 4?
248 Гл. 10. Евклидовы и унитарные пространства
25.50. Может ли ортогональная матрица четвертого по-
порядка содержать строку:
1) 111 0 10||; 2)|ii0-L|?
25.51. Дана строка длины п, сумма квадратов элементов
которой равна 1. Существует ли ортогональная матрица по-
порядка п с такой строкой?
25.52. Найти все ортогональные матрицы, имеющие пер-
II 1 1 1 1
вую строку - - - - •
у HJ II 2222
25.53. 1) Могут ли все элементы ортогональной матрицы
быть положительными?
2) Доказать, что ортогональная матрица, все элементы ко-
которой неотрицательны, получается из единичной матрицы пе-
перестановкой столбцов.
25.54. Найти все ортогональные матрицы, являющиеся
верхними треугольными.
25.55. При каком условии подматрица ортогональной мат-
матрицы также будет ортогональной?
25.56. Допустим, что все элементы ортогональной матри-
матрицы порядка п равны между собой по абсолютной величине.
Чему равна абсолютная величина элемента?
25.57. Доказать, что ортогональные матрицы, описанные
в задаче 25.56, существуют, если n = 2k,k — натуральное число.
25.58. 1) Даны два ортонормированных базиса е\, ..., еп и
Л, ¦¦•¦> /п- Доказать, что матрица из скалярных произведений
(ei; fj) ~~ ортогональная.
2) Даны две ортонормированные системы по k < n векто-
векторов в n-мерном евклидовом пространстве. При каком условии
ортогональна матрица из попарных скалярных произведений
векторов этих систем?
§ 26. Геометрия евклидова пространства
Ортогональное дополнение
подпространства B6.1-26.21)
26.1. Пусть а — ненулевой вектор n-мерного евклидова
пространства. Доказать, что уравнение (а, х) = 0 определяет
подпространство размерности п — 1.
§ 26. Геометрия евклидова пространства 249
26.2. Пусть множества Р и Q векторов евклидова про-
пространства таковы, что (ж, у) = О для любых х € Р и у € Q. До-
Доказать, что линейные оболочки этих множеств ортогональны.
26.3. В евклидовом пространстве ? найти ортогональные
дополнения 1) нулевого подпространства; 2) пространства ?.
26.4. Пусть подпространства С\, ..., Cs евклидова прост-
пространства попарно ортогональны. Доказать, что С\ + ... + Cs —
прямая сумма.
26.5. Доказать следующие свойства операции перехода к
ортогональному дополнению: 1) (С\ + ?г)Х = ?"t ^jC^;
2) (?1П?2I = ^+^; 3) (CL)L = C.
26.6. Подпространства С\ и ?г ортогональны. Обязатель-
Обязательно ли ортогональны С^ и ?j"?
26.7. Найти нормированный вектор, ортогональный за-
заданным:
1) ||4 0 4 ||Т, ||2 6 5||Т, базис ортонормированный;
2) ||2 3 2 1||т, ||1 0 1 2||Т, ||0 1 О 0||Т, базис ортонормирован-
ортонормированный;
3) ||3 1||Т, базис с матрицей Грама А$ъ\
(Ф 4) ||-11 0||Т, И0 1 1||Т, базис с матрицей Грама А207-
26.8. Подпространство С задано в ортонормированном ба-
базисе системой линейных уравнений А?, = о. Найти:
1) базис в С1-; 2) систему уравнений подпространства ?¦*-.
26.9. Пусть a\,...,af. — базис подпространства С, и ко-
координатные столбы векторов ai,..., од в ортонормированном
базисе пространства ? составляют матрицу А. Найти:
1) базис в ?х; 2) систему уравнений подпространства CL.
26.10. Решите с помощью геометрических соображений
задачу 18.20.
26.11. Подпространство С задано в базисе е с матрицей
Грама Г системой линейных уравнений АЕ, = о. Найти:
1) базис в ?¦*-;
2) матрицу системы уравнений подпространства ?-4
" 26.12. Пусть ai,..., од — базис подпространства С, и коор-
координатные столбы векторов aj, ..., од в базисе е пространства ?
составляют матрицу А. Дана матрица Грама Г базиса е. Найти:
1) базис в ?¦*-;
2) матрицу системы уравнений подпространства ?L.
Гл. 10. Евклидовы и унитарные пространства
ч&. 26.13. Подпространство С задано как линейная оболочка
(^|вкторов, имеющих в ортонормированном базисе координаты
Л столбцы:
3) ||3 -15 91||Т,||3 -6 -3 2||т;
4) ||4 3 -3 2||т, Ц-13 2 -3||Т, Ц2 91 -4||т.
Найти:
а) матрицу системы уравнений, определяющей ?х,
б) базис в ?х.
26.14. Подпространство С задано в ортонормированном
базисе системой линейных уравнений АЕ, = о. Найти базис под-
подпространства ?х, если матрица А равна:
1
4)
J21||; 2)
1-5-6 11
5 1-43
1 8 7 15
1 -5 1
-1 1 1
3)
3-12
2-1 3 5
1 10 -6 1
5) А519; 6) A5S2; 7) A51S; 8) А514.
1)
2)
3)
4)
26.15. Подпространство С задано в ортонормированном
базисе системой линейных уравнений АЕ, = о. Найти систему
уравнений подпространства ?х:
8жх — жг + 2жз + 4ж4 = 0;
11ж1+2ж2-жз-а;4 = 0,
Ж2 + 2жз — 4ж4 = 0,
+ Зж2 — 4жз + 6ж4 = 0;
• 7ж2 + 2жз + 5ж4 + 16ж5 = 0;
5xi + 24^2 - 7жз — Зж4 = 0,
—х\ — 2ж2 + 7жз + Зж4 = 0;
5) Система уравнений имеет матрицу а) А57З) б) -Абвз-
26.16. Подпространство С задано в базисе е с матрицей
Грама Г системой линейных уравнений АЕ, = о:
А=\\12ЦТ,Г =
3) А =
3 1 2
111
, Г =
1 0 1
110
-110 1
1-210
, Г =
Найти: а) базис в CL; б) матрицу системы уравнений подпро-
подпространства ?-4
§ 26. Геометрия евклидова пространства
251
26.17. Пусть ai, ..., afc — базис подпространства ?, и ко-
координатные столбцы векторов а\, ..., а^ в базисе е простран-
пространства ? составляют матрицу А. Дана матрица Грама Г базиса е:
1) А = \\1 1 2||Т, Г = А20Г, 2)А =
2 О
1 1
3) А =
1 1
1 1
1 2
1 2
2 1
1 1
2 2
Г - Л424-
.,' Найти а) базис в ?х; б) систему уравнений подпростран-
подпространства ?-*-.
26.18. В пространстве квадратных матриц со стандарт-
стандартным скалярным произведением найти ортогональное дополне-
дополнение подпространства
1) матриц со следом, равным нулю;
2) верхних треугольных матриц.
26.19. В пространстве многочленов степени не выше п со
стандартным скалярным произведением найти ортогональное
дополнение подпространства многочленов четной степени.
26.20. Пусть евклидово пространство ? — прямая сумма
подпространств С{ (г = 1, ..., s), и х = ХK1» У = Х)у» (ж»> У» ?
€ ?i). Доказать, что подпространства Ci попарно ортогональ-
ортогональны, если (х, у) = XXх»> У») Для любых х и у.
26.21. 1) Для нахождения коэффициентов разложения
вектора Ь по векторам аГ и Щ составлена система из трех ли-
линейных уравнений с двумя неизвестными. Установить, что те-
теорема Фредгольма для этой системы равносильна следующему
(геометрически очевидному) утверждению: вектор Ь расклады-
раскладывается по of и aj тогда и только тогда, когда он ортогонален
каждому вектору у", ортогональному этим векторам.
2) Доказать теорему Фредгольма, пользуясь результатом
задачи 26.5, 3).
Ортогональные проекции B6.22-26.41)
26.22. В евклидовом пространстве ? задан вектор х. Най-
Найти его ортогональную проекцию и ортогональную составляю-
составляющую при проектировании
1) на нулевое подпространство; 2) на ?.
26.23. В подпространстве Сс? задан базис ai, ...,а^.
В ортонормированием базисе пространства ? координатные
252 Гл. 10. Евклидовы и унитарные пространства
столбцы этих векторов составляют матрицу А. Вектор х ? ?
задан своим координатным столбцом ?,. Найти ортогональные
проекции х' и х" вектора ж на ? и ?-L.
26.24. В ортонормированном базисе подпространство ?
задано системой линейных уравнений с матрицей А (строки А
линейно независимы). Вектор х задан своим координатным
столбцом ?,. Найти ортогональные проекции х' и х" вектора х
на ? и ?х.
26.25. В пространстве ? выбран базис е с матрицей Гра-
ма Г. Подпространство ? натянуто на линейно независимые
векторы а\, ..., а^, координатные столбцы которых составля-
составляют матрицу А. Вектор х € ? задан своим координатным столб-
столбцом ?,. Найти ортогональные проекции х' и х" вектора х на ?
и?^.
26.26. В базисе е с матрицей Грама Г подпространство ?
задано системой линейных уравнений с матрицей А (строки А
линейно независимы). Вектор х задан своим координатным
столбцом ?,. Найти ортогональные проекции х' и х" вектора х
на Си ?х.
26.27. Подпространство ? — линейная оболочка векторов
ai, ..., ajt- В ортонормированном базисе заданы координатные
столбцы этих векторов и координатный столбец ?, вектора х.
Найти координатные столбцы ?,' и ?," ортогональных проекций7
вектора х соответственно на ? и ?-*-:
1) аг = || 10 5 5f, ?. = ||3 0 Of;
2) ai=j|6 1 5||Т, а2=||4 -1 3|f, t = ||l 3 -2i
3)ах=||2 1 1 2f, t = ||5 3 7 0|f;
4) ai = ||3 -2 1 if, a2=||l 0 -1 1 f,
?, = || 2 -1 3 -2||T;
5)аг=||2 3 0 if, a2=||0 5 -2 -if, ?, = ||6
6) ai=||4 3 -3 2||T, a2 = ||2 9 1 -4||T,
аз = ||-1 3 2 -3f, t = ||2 4 -1 3||T;
7)ai=||3 1 -2 -2f, a2=||3 1 -1 -3f,
a3=||3 -1 0 -2f, t = ||6 4 -2 -4f;
8) ai=||3 1 1 2f, a2 = ||4 0 2 1 f, a3=||8 0 2 3f,
4 = 11-7 13 if;
9) ai = C201, »2 = C202, t =
§ 26. Геометрия евклидова пространства
253
s;10) ai='
:eti 11) ai = С236, аг = 0271, »2 = С28З, ? = '
26.28. В ортонормированием базисе подпространство ?
-.адано системой линейных уравнений с матрицей А, а век-
вектор х — координатным столбцом ?,. Найти проекции ж на ? и
ла ?х:
¦ «1:
2) А =
'3) А =
4) А =
5) А =
3 2-51
1 -1 2|
3f;
4 2 6f;
|5 4 3 2 if;
t = ||7 -5 9 4|f ;
t = ||-2 4 2 Of;
= ||8 -5 3 -1|IT
11111
2-351
3-561
4 3 5-2
3 2 4-1
'•г 10 3 1 3
6) А = 4 10 1
8 3 11
26.29. Для векторов и подпространств, заданных в зада-
задаче 26.28 найти координаты вектора у, получаемого отражением
зектора х в подпространстве ?.
26.30. Найти ортогональную проекцию многочлена 35?4 +
— 15?3 — 15?2 — 8? + 4 на подпространство многочленов степени
ie выше 2 в пространстве многочленов:
1) со стандартным скалярным произведением;
2) со скалярным произведением, определенным в зада-
*е 25.8, 3).
26.31. В пространстве многочленов со стандартным ска-
тярным произведением найти расстояние от многочлена tn до
танейной оболочки многочленов 1, t, ..., tn~l\
1) при п = 2; 2) при п — 3.
26.32. Пусть Д, ..., Д базис подпространства ?. Дока-
Доказать, что ортогональная проекция произвольного вектора х
ча ? равна сумме его проекций на одномерные подпростран-
¦.тва, натянутые на Д, ..., Д, тогда и только тогда, когда базис
штогонал ьный.
26.33. Пусть для любого вектора х € ? сумма его ортого-
чальных проекций на подпространства ?i, ?2 С ? равна орто-
ортогональной проекции х на их сумму L\ + ?2. Доказать, что под-
фостранства С\ и ?г ортогональны.
26.34. Рассматривается пространство функций, непрерыв-
непрерывных на отрезке [—1, 1], со скалярным произведением, опреде-
254 Гл. 10. Евклидовы и унитарные пространства
ленным в задаче 25.7. Ортогональную проекцию функции /
на подпространство Vk многочленов степени не выше /с, раз-
разложить по базису, состоящему из многочленов Лежандра Pi(t)
(задача 25.9).
26.35. Пусть х' — ортогональная проекция х на подпро-
подпространство. Доказать, что |х'| ^ |х|, причем равенство имеет ме-
место тогда и только тогда, когда х' = х.
26.36. Пусть х' — ортогональная проекция х на подпро-
подпространство ? С ?, ах" — ортогональная составляющая. Дока-
Доказать, что для любого вектора у € ?, отличного от х', выполнено
|х"| < |х —у|.
26.37. Пусть Ci, (i = l, ...,e) попарно ортогональные
подпространства евклидова пространства. Доказать, что сум-
сумма квадратов длин проекций произвольного вектора х на эти
подпространства не превосходит |х|2, и эта граница достигает-
достигается, если х принадлежит сумме подпространств.
26.38. Рассмотрим два подпространства С\ С ?2- Обозна-
Обозначим через ?' ортогональное дополнение L\ в ?2, a xi, x2 и х'
ортогональные проекции вектора х на подпространства С\, ?г
и ?'. Доказать, что:
1) %i = х\ 4- х ;
2) |xi| ^ |хг|, причем для любого х равенство имеет место
тогда и только тогда, когда С\ — ?2.
26.39. Пусть ? — /с-мерное подпространство n-мерного ев-
евклидова пространства ?. Пусть также е\, ..., еп — ортонорми-
ортонормированный базис в ?, a e[, ¦.., е'п ортогональные проекции этих
k ^
векторов на ?. Доказать, что X) leil2 = ^- '
26.40 (р). Пусть ei, ..., еп — ортонормированный базис в
евклидовом пространстве и система векторов д\, ..., дп такова,
п
что X) Iе» ~ 9i\ < 1- Доказать, что эта система векторов линейно
независима.
26.41. Пусть е\, ..., еп — ортонормированный базис в ев-
евклидовом пространстве и система векторов д\, ..., дп такова,
п
что X) cos(ei75i) ^ Bп — 1)/2. Доказать, что эта система векто-
ров линейно независима.
§ 26. Геометрия евклидова пространства 255
Ортогонализация B6.42-26.48)
26.42. Ортогонализовать следующие системы векторов
арифметического пространства со стандартным скалярным
произведением:
l)||13-2f, ||3 7-2f;
2) || 2 1 0 -if, || 3 6 2 6jjT;
. 3)||1 3 if, ||5 1 3f, ||1 6 -8||T;
4)||2 1 2|f, ||6 2 2f, ||1 4 -3f;
5)||12 3f, ||2 1 if, ||6-7-2f;
6) ||1 2 1 2f, ||4 0 4 if, || 1 13 -1 -3f;
7) II1 -1 -1 if, ||2 3 3 2||T, ||4 4 0 2||T,
||1 _5 _5 _if.
26.43. В евклидовом пространстве ? выбран ортонормиро-
ванный базис е. В нем заданы координаты векторов базиса а под-
подпространства ? С Е. С помощью процесса ортогонализации найти
в е координатные столбцы векторов ортонормированного бази-
базиса в ? и выписать матрицу перехода от базиса а к этому базису:
1) || 3 if, || 9 -7 f;
, 2) ||1 10|f, ||2 0 -if, ||0 0 3|f;
3)||1 1 -2V2|f, ||3 -1 -2V2|f, ||4 2-V2|f;
4) ||1 1 1 -if, || 3 3 1 -if, || 3 1 -1 3|f,
||1 —1 3 3|f-
5) ||1 2 1 2f, ||2 3 0 if, ||3 2 -1 2|f, ||4 1 2 if;'
6) ||1 4 2 3|f, ||1 5 0 3|f, ||-1 9 2 7|f;
• 7) || 4 -2 -1 Of, || 9 -2 -2 Of, ||-3 -1 11 if;
¦¦' 8)||1 2 1 3|f, ||4 3 2 6|f, ||4 3 -7 4|f.
26.44. Ортогонализовать и нормировать систему векто-
векторов, заданных в базисе е своими координатными столбцами.
Матрица Грама Г базиса е задана:
1)||1 3|f, ||2 4f, Г = А19;
2)||1 2 Of, ||2 0 3f, ||1 8 6f, Г = А387;
3)||1 1 If, ||4 2 If, ||1 9 -8|f, Г = Л386;
4)||-3 2 1||, ||-8 5 4||, ||2 4 0||, T
26.45. 1) С помощью процесса ортогонализации доказать,
что невырожденная квадратная матрица может быть разло-
256
Гл. 10. Евклидовы и унитарные пространства
жена в произведение ортогональной матрицы Q и верхней тре-
треугольной матрицы R с положительными диагональными эле-
элементами (<ЗЯ-разложение).
2) Доказать единственность <ЗЯ-разложения невырожден-
невырожденной матрицы.
26.46. Получить <ЗЯ-разложение данной матрицы (зада-
(задача 26.45):
1)
4)
11-21
1 6
2)
1 3 4
1 -1 2
-2%/2 -2%/2 -%/
П 11
1
1
1
-1
1
r-H
0
3
3
1
-1
2
0
1
3
1
-1
3
0
0
1
—
)
1
1
3
3
; о)
1 2
2 3
0
3 4
2 1
10-12
2 1 2 1
26.47. Доказать, что матрица Грама произвольного бази-
базиса может быть разложена в произведение Г = RTR, где R —
верхняя треугольная матрица с положительными элементами
на диагонали. (Сравнить это с задачей 25.29.)
26.48. В евклидовом пространстве известна матрица Гра-
Грама базиса f. Найти матрицу перехода к ортонормированному
базису, получаемому ортогонализацией f:
5
13
3) Г =
12 3
2 5 8
3 8 14
2) Г =
4)Г =
1
3
3 13
4
0
0
4
0
4
4
0
)
0
4
8
0
4
0
0
20
Объем B6.49-26.54)
26.49. Доказать, что детерминант матрицы Грама систе-
системы векторов не меняется при ортогонализации этой системы
(без нормировки векторов).
26.50. Найти объем параллелепипеда, построенного на за-
заданных векторах. Координатные столбцы векторов в ортонор-
мированном базисе составляют матрицу:
1) A6i7 при п = 4; 2)
3) А395; 4) Ают, 5) А398; 6) ^412; 7) А436.
26.51. Найти объем параллелепипеда, построенного на за-
заданных векторах. Координатные столбцы векторов в базисе е
l
г-Н
-1
0
1
1
1
-1
1
1
1
1
§ 26. Геометрия евклидова пространства
257
2
1
0
0
1
2
1
0
0
1
2
1
0
0
1
2
составляют матрицу А. Матрица Грама базиса е равна Г:
2) А = Ащ4, Г = Лбзо пРи п = 4;
3) А = А397, Г = Аш-
26.52. Доказать, что объем параллелепипеда, построенно-
построенного на векторах Д, ..., /п, не превосходит произведения длин
его ребер:
и равенство имеет место тогда и только тогда, когда ребра по-
попарно ортогональны.
. 26.53. Для квадратной матрицы А порядка п:
1) доказать неравенство Адамара
2) выяснить условия, при которых неравенство Адамара
выполнено как равенство;
3) выписать неравенство Адамара для матрицы A\g- Чем объ-
объясняется такая большая разница между правой и левой частью?
26.54. 1) Пусть е\, ..., еп — базис в евклидовом простран-
пространстве, и е'^+1, ..., е"п — ортогональные проекции векторов ejt+i, ¦..
..., еп на ортогональное дополнение линейной оболочки е\,..., е^.
Доказать, что V{ei, ..., е„} = V{ei, ..., ek}V{e'l+V ..., е?}.
2) В n-мерном евклидовом пространстве дано подпростран-
подпространство С и линейно независимые векторы aj, ..., ар. Обозначим
а'1} ..., Ор ортогональные проекции этих векторов на С. Дока-
Доказать, что detГ(ai, ..., Op) ^ detГ(а[, ..., а'р).
3) Доказать, что объем параллелепипеда V{f\, ..., fn},
построенного на векторах Д, ..., /п, не превосходит произве-
произведения объемов V{fi, ..., fk} и V{fk+i, ••-, fn}-
Угол меясду вектором и подпространством
B6.55-26.58)
26.55. Пусть х' — ортогональная проекция вектора х на
подпространство ?. Доказать, что угол вектора х и подпро-
подпространства С равен углу между х и х1, если х' ф о, и равен тг/2,
9- 1715
258
Гл. 10. Евклидовы и унитарные пространства
26.56. Пусть х' — ортогональная проекция вектора х на
подпространство С и угол вектора х и подпространства С ра-
равен ц>. Доказать, что cos<^= |ж'|/|ж|.
26.57. Доказать, что сумма углов вектора х с подпростран-
подпространствами С и С1- равна тг/2. 2
26.58. В ортонормированном базисе векторы х и Д, ..., Д
заданы их координатными столбцами ?, и <pi, ..., ф?. Найти
угол между вектором х и подпространством ?, натянутым на х
и /i, ..., Д:
2 1 2||т, Ф1=||5 0 -4 2||т, Ф2=||3 1 -5
2) е. = |
3) t = |
X 1
3 3||Т, Ф1=||-4 4 2 3||Т, ф2=||-5 2 1 Of;
|| || ||
6 2 6||Т,Ф1=||О -1 -1 if,
Ф2=||1 0 1 -1||г;Фз=||-3 1 1 01
Отражение B6.59-26.62)
26.59. Пусть ненулевые векторы х и а заданы их коорди-
координатными столбцами ?, и а соответственно, подпространство С
определяется уравнением (а, х) = 0. Найти образ у при отра-
отражении вектора х в подпространстве С:
1| а || 1 01|
1) ?. = ||1 1Ц-, а =
2) ?, = ci62, а =
3)t = ||l if
4)
= ||2 2 1 -1
а =
1 01| , базис ортонормированный;
, базис ортонормированный;
11 01| , базис с матрицей Грама Aig;
а = ||1 1 0 01| , базис с матрицей
Грама
4
0
0
4
0
4
4
0
0
4
8
0
4
0
0
8
26.60. В ортонормированном базисе подпространство С
задано системой линейных уравнений с матрицей А, а век-
вектор х — координатным столбцом ?,. Найти образ у при отраже-
отражении вектора х в подпространстве С:
Т
1) А =
2) А =
3) А =
4) А =
5) Л =
= || X 2 3|
3 2-5
-1 -1 2
11111
2-351
3-561
4 3 5-2
3 2 4-1
t = ||5 4 3 2
= ||7 -5 9 4|
, = ||-2 4 2 0|
i -
6)
A =
10
4
8
3
1
3
1
0
1
3
1
1
§ 26. Геометрия евклидова пространства 259
= ||8 -5 3 -if.
26.61. При каком необходимом и достаточном условии век-
вектор х можно перевести в вектор у с помощью отражения в
(п — 1)-мерном подпространстве СР. Как найти такое подпро-
подпространство, если условие выполнено?
26.62. Подобрать (п — 1)-мерное подпространство С так,
чтобы вектор х при отражении в нем перешел в данный век-
вектор у. Векторы заданы в ортонормированием базисе их коор-
координатными столбцами ?, и т|:
1) t = ||l 2||T, Т
3) ?, = С16О, Л
Линейные функции на евклидовом пространстве
B6.63-26.74)
26.63. Найти коэффициенты линейной функции, присо-
присоединенной к данному вектору. Вектор задан координатным
столбцом а в базисе с матрицей Грама Г:
1) а = ||1 1 if, Г = А294; 2) а = ||1 1 -if, Г = АШ;
3) а = ||-2 1 Of, Г = Л207.
26.64. Найти координатный столбец вектора, присоеди-
присоединенного к данной линейной функции. Функция задана строкой
коэффициентов ф в базисе с матрицей Грама Г:
1)<р=||4 0 4||, Г = Л294; 2) <р=||4 0 2||, Г = Ат]
3) Ф=||3 5 3||, Г = А207.
26.65. В пространстве квадратных матриц порядка п со
скалярным произведением (X, Y) = tvXTY найти вектор (мат-
(матрицу) С, присоединенный к функции:
l)/(X) = trX; 2)/(X) = I>y; 3) п = 4 и /(X) рав-
,3
но элементу произведения матрицы А444 на X, расположенно-
расположенному в первой строке и первом столбце.
26.66. В пространстве многочленов степени ^ 3 со стан-
стандартным скалярным произведением линейная функция сопо-
сопоставляет многочлену p(t) его свободный член р@). Найти век-
вектор (многочлен), присоединенный к этой линейной функции.
26.67. В базисе е переставлены векторы. Как изменится
его биортогональный базис?
260 Гл. 10. Евклидовы и унитарные пространства
26.68. В арифметическом пространстве со стандартным
скалярным произведением столбцы L,y, ..., ?,п составляют ба-
базис. Найти соответствующий биортогональный базис:
1) г,! =||2 of, г,2=||оз||т;
2)^=111 2|f, ta = ||2 if;
3) ti=||l 3f, t2=||2 5|f;
4) ti=||l 1 if, t2=||110f, t3=||l0 0|f.
26.69. В евклидовом пространстве в базисе е с матрицей
Грама Г даны координаты векторов базиса h. Найти коорди-
координаты векторов биортогонального базиса h*:
1)||1 3|f, ||2 5|f, Г
2)||1 -if, || 1 if,
3)||l0 0f, ||1 1 Of, ||1 1 if, Г = А38т;
4)||0 1 if, 11 2 if, i|-1 1 if, F = A385.
26.70. В пространстве многочленов степени не выше 2 со
стандартным скалярным произведением найти базис, биорто-
биортогональный базису 1, t, t2.
26.71. Доказать, что координаты вектора х в базисе е
можно вычислить по формулам ?1 = (х, е\), i = 1, ..., п, где
е* — векторы базиса, биортогонального е.
26.72. Доказать, что скалярное произведение в евклидовом
пространстве можно вычислить по формуле (х, у) = ^rjj +...
• • • + ?Пг7п> гДе ?ь • • • 1 ?п — координаты вектора х в базисе е, а
^г > • • ¦) Vn — координаты вектора у в биортогональном базисе е*.
26.73. 1) Найти матрицу перехода от базиса е к его биор-
тогональному базису е*.
2) Используя полученный результат, доказать, что Ге* =
4
26.74. Пусть S — матрица перехода от базиса е к базису f.
Найти матрицу перехода от базиса е*, биортогонального е, к
базису f*, биортогональному f.
§ 27. Унитарные пространства
О пределение
27.1. Будет ли комплексное двумерное линейное простран-
пространство унитарным, если в нем задать скалярное произведение сле-
следующей функцией от координат векторов:
§ 27. Унитарные пространства 261
2)
¦> 3) Ж1Уа + Ж2У25 4)
27.2. 1) Доказать, что функция F(X, Y) =tvXTY может
быть принята за унитарное скалярное произведение в про-
пространстве комплексных матриц размеров mxn.
2) Найти длины векторов стандартного базиса и углы меж-
между ними относительно такого скалярного произведения.
3) Рассматривается пространство комплексных квадрат-
квадратных матриц порядка п,_а каждой паре матриц сопоставлено
число F(X, Y) = trXtrY. Может ли такая функция быть при-
принята за унитарное скалярное произведение?
27.3. Унитарной нормой матрицы называется ее длина при
скалярном произведении, определенном в задаче 27.2, 1). Дока-
Доказать, что унитарная норма равна квадратному корню из суммы
квадратов модулей всех элементов матрицы.
27.4. Пусть е — базис в комплексном линейном простран-
пространстве ?. Доказать, что в ? существует одно и только одно
унитарное скалярное произведение, относительно которого ба-
базис е — ортонормированный.
27.5. Пусть в комплексном линейном пространстве заданы
два унитарных скалярных произведения (х, y)i и (ж, у)г. До-
Доказать, что для любых вещественных положительных чисел А
и ц функция (х, у) — А(ж, y)i + /х(ж, у)г — также унитарное ска-
скалярное произведение.
27.6. Доказать, что в унитарном пространстве равенства
из задачи 25.13 выполняются не для любых пар векторов.
27.7. Пусть в комплексном линейном пространстве заданы
два скалярных произведения (ж, у)\ = (ж, у)г и любой вектор
имеет одинаковые длины в каждом из них: (ж, х)\ = (ж, ж)г-
Доказать, что скалярные произведения совпадают.
27.8. Доказать, что треугольник со сторонами ж, у и z в
унитарном пространстве прямоугольный, если \z\ = |ж|соз(ж72),
и может не быть прямоугольным, если \z\ — |ж|созB7ж).
27.9. Доказать, что в унитарном пространстве из (ж, у) = О
следует |ж|2 + |у|2 = |ж + у|2- Что можно сказать о произведении
(ж, у), если последнее равенство выполнено?
262
Гл. 10. Евклидовы и унитарные пространства
Скалярное произведение в координатах B7.10—27.25
27.10. В комплексном арифметическом пространстве ее
стандартным скалярным произведением найти скалярные пр< -
изведения векторов
1)|| 1С ||ilf; 2) ||1 if,
С ||f
2i -l + 2if, ||
if
if;
i lf,\\i
if
|
if;
' 5)jjl + i 1 + i 1 + if, II1-г 1-i 1-if;
6) C222, С223; 7) C221, C215-
27.11. В задаче 27.10 для каждой пары векторов найтк
длину первого вектора.
27.12. Найти скалярное произведение векторов унитарнс-
го пространства по их координатам в базисе е и матрице Грь-
ма Г этого базиса:
12» II
2)||1 +
3) c40,
5)
¦\\Т
1 1-i
"p
•||Т
2 г
-г 2
3 1 +
1-г 1
4) С44, С40, Г = .
* 0 l + 2i
if
2 + i
6)||1 1 if, || 1 0 if, Г =
2 г 0
-г 2 -г
0 i 2
7)||-1 2 + г 11
-г 1 + г
•||Г
8) ||-2 1+i 1)
l-2 + i 1 + i II
Г=
1 + г 3 г ||
О -г 2 [|
2 1-гО
1+г 3 г
О -г 2
27.13. В задаче 27.12 для каждой пары векторов найтг
длину первого вектора.
27.14. Доказать, что эрмитова матрица Г может служит!
матрицей Грама в унитарном пространстве тогда и толькс
тогда, когда для любого ненулевого столбца ?, выполненс
в,тг1 > о.
27.15. Доказать, что квадратная матрица Г порядка п mi-
жет служить матрицей Грама в n-мерном унитарном простраь-
стве тогда и только тогда, ^согда найдется такая невырождер-
ная матрица S, что Г = STS.
§ 27. Унитарные пространства 263
27.16. Выбрать из банка эрмитовы матрицы (за исключе-
исключением вещественных симметричных) и среди них те, которые
могут служить матрицами Грама в унитарном пространстве.
27.17. В матрице Грама некоторого базиса в унитарном
пространстве все ненулевые элементы по модулю равны 1. До-
Доказать, что базис ортонормированный.
27.18. В матрице Грама некоторого базиса:
1) ко всем элементам главной диагонали прибавили веще-
вещественное число а;
2) к некоторым элементам главной диагонали прибавили
положительное число а;
3) переставили две строки;
4) переставили две строки, а также два столбца с теми же
номерами, что и у строк.
Осталась ли матрица эрмитовой, может ли она быть матрицей
Грама какого-либо базиса?
27.19. Доказать, что детерминант матрицы, составленной из
попарных скалярных произведений некоторой системы векто-
векторов — вещественное неотрицательное число, равное нулю тогда
и только тогда, когда эта система векторов линейно зависима.
27^20. Доказать, что для любой комплексной матрицы
RgATA = RgA.
27.21. Выбрать из банка унитарные матрицы, не являю-
щиесяК вещественными ортогональными матрицами.
27.22. Написать какую-нибудь унитарную матрицу тре-
третьего порядка.
27.23. Описать все треугольные унитарные матрицы.
27.24. Может ли унитарная матрица четвертого порядка
содержать строку:
1)||г -а -г||; 2)|1±1 оо iz
~
" 27.25. Пусть А и В — вещественные квадратные матрицы
порядка п. Из них можно составить комплексную матрицу С =
= А + гВ и вещественную матрицу порядка 2п
?Л 1-1
А
В
-В
А
Доказать, что:
264 Гл. 10. Евклидовы и унитарные пространства
1) С эрмитова тогда и только тогда, когда D симметрична;
2) С унитарна тогда и только тогда, когда D ортогональна.
Ортогональность
27.26. В комплексном арифметическом пространстве со
стандартным скалярным произведением найти базис в ортого-
ортогональном дополнении подпространства, заданного системой ли-
линейных уравнений: 1) х\ + гх2 = 0;
2) х\ + гх2 + A — г)хз = 0; — гх\ + B + г)х2 — хг = 0;
3) однородная система с матрицей .А377;
4) однородная система с матрицей
5) однородная система с матрицей
11.11. В комплексном арифметическом пространстве со
стандартным скалярным произведением найти базис в ортого-
ортогональном дополнении подпространства, натянутого на следую-
следующие векторы:
1)||1 г||Т; 2) ||-i I 1 + tf; 3) || 1 -t lf,||i I Of;
4) столбцы матрицы А372', 5) столбцы матрицы Авб8-
27.28. При помощи процесса ортогонализации построить
ортонормированный базис в линейной оболочке заданных век-
векторов комплексного арифметического пространства со стан-
стандартным скалярным произведением:
1)||1 г||Т, || 1 if; 2) || 2 — х г||Т, || 4 — * 2-3if;
3) || 1 i 1\\T, \\2-i г-1 2|[Т;
4) || 1 г if, || t 1 0||Т, ||-1 0 1||Т;
5) ||1 + г 2 + г 1-г||Т, ||-2 4 + г 1-г||Т, || 1 2 + i 2-if.
27.29. В комплексном арифметическом пространстве со
стандартным скалярным произведением найти ортогональную
проекцию вектора х на линейную оболочку векторов oi, ..., а^:
1) а; = || 1 -г||Т, о = ||1 -1||;
2) а; = || 2 +г 0 2-if, а = || -1 * 1 + г ||Т;
3) a; = j|2 + » i 2-if, Oi=||l t 1 ||т, о2 = ||* 0 -t|f;
4) a; = ||l + * 1 + i 1 |f, ax =|| -1 * 1 ||T,
O2 = ||l+* 1-* 0||T;
5) 01 = 0134, 02 = 0132.
Глава 11
ЛИНЕЙНЫЕ ПРЕОБРАЗОВАНИЯ ЕВКЛИДОВЫХ
И УНИТАРНЫХ ПРОСТРАНСТВ
В этой главе используются следующие основные понятия: пре-
преобразование, сопряженное данному линейному преобразованию,
самосопряженное преобразование, ортогональное преобразование,
нормальное преобразование, унитарное преобразование, полярное
разложение линейного преобразования, сингулярные числа преобра-
преобразования, сингулярные базисы преобразования.
Определения ортогонального проектирования и ортогонально-
ортогонального отражения даны во введении к гл. 10. Везде, где не оговорено
противное, отражение и проектирование будут предполагаться ор-
ортогональными.
Преобразование (р* называется сопряженным линейному преоб-
преобразованию <р, если для любых векторов х и у выполнено равенство
(<р(а:), у) = (х, <р*(у))- У каждого преобразования существует един-
единственное сопряженное преобразование. Его матрица в базисе е опре-
определяется по матрице А преобразования <р формулой А* = Г~1АТГ,
если пространство евклидово, и формулой А* = Г-1ЛТГ в унитар-
унитарном пространстве. Г здесь обозначает матрицу Грама выбранного
базиса. Если базис ортонормированный, эти формулы принимают,
соответственно, вид А* = АТ и А* = Ат.
Линейное преобразование <р как в евклидовом, так и в уни-
унитарном пространстве называется самосопряженным, если ip = <р*.
В ортонормированном базисе его матрица симметрична в случае ев-
евклидова пространства и эрмитова в случае унитарного. Все корни
характеристического уравнения самосопряженного преобразования
вещественны, и существует ортонормированный базис из его соб-
собственных векторов.
Самосопряженное преобразование ip называется положитель-
положительным {неотрицательным), если (tp(x), x) > 0 (соответственно ^ 0)
для любого ненулевого вектора х.
Линейное преобразование ц> евклидова пространства называ-
называется ортогональным, если оно сохраняет скалярное произведение:
(<р(х), <р{у)) — {х, у). В унитарном пространстве преобразования, со-
сохраняющие скалярное произведение, называются унитарными. В
ортонормированном базисе матрица ортогонального преобразования
является ортогональной, а унитарного преобразования — унитарной.
Сопряженное для ортогонального или унитарного преобразования
является ему обратным.
I
266 Гл. 11. Преобразования евклидовых и унитарных пространств
Если ip — ортогональное преобразование, то найдется ортонор-
мированный базис, в котором его матрица имеет следующий вид: на
ее главной диагонали расположены либо числа +1 и — 1, либо под-
подматрицы второго порядка, а остальные элементы матрицы равны
нулю. При этом подматрицы второго порядка имеют вид
cos a — sin a
sin a cos a
то есть, являются матрицами поворота плоскости в ортонормирован-
ном базисе. Базис, в котором матрица ортогонального преобразова-
преобразования имеет описанный выше вид, называется каноническим базисом.
Линейное преобразование, перестановочное со своим сопряжен-
сопряженным, называется нормальным. Соответственно, матрица А называ-
называется нормальной, если Ан А = ААН. Самосопряженные и унитарные
преобразования являются нормальными. Если <р — нормальное пре-
преобразование унитарного пространства, то существует ортонормиро-
ванный базис из собственных векторов <р. В частности, это относится
к унитарным преобразованиям. Для евклидова пространства анало-
аналогичное утверждение не верно. Например, у ортогонального преобра-
преобразования в общем случае базиса из собственных векторов нет.
Линейное преобразование <р евклидова пространства может
быть разложено в произведение дгр, где в — ортогональное, а ф —
неотрицательное самосопряженное преобразование. Такое разложе-
разложение ip называется полярным разложением. Собственные значения
преобразования гр носят название сингулярных чисел преобразова-
преобразования ip. Ортонормированный базис из собственных векторов ф и его
образ при преобразовании в — это сингулярные базисы преобразова-
преобразования (р.
В некоторых задачах решение не единственно, например, иско-
искомый базис определен не однозначно. В таких случаях приводится
один из возможных ответов.
В § 28 и § 29 пространство предполагается евклидовым, а в § 30 —
унитарным.
§ 28. Примеры линейных преобразований евклидова
пространства. Сопряженное преобразование
Примеры B8.1-28.9)
28.1. Пусть oi, ..., o/fe — ортонормированный базис в под-
подпространстве С С ?. Координатные столбцы этих векторов в
ортонормированием базисе е пространства ? составляют мат-
матрицу А. Написать в базисе е матрицу
1) ортогонального проектирования на пространство ?;
2) матрицу отражения в подпространстве С.
§ 28. Примеры преобразований евклидова пространства 267
28.2. Пусть oi, ..., a/fe — базис в подпространстве ?с?.
Координатные столбцы этих векторов в ортонормированном
базисе е пространства ? составляют матрицу А. Написать в
базисе е матрицу:
1) ортогонального проектирования на подпространство ?;
2) матрицу отражения в подпространстве ?.
28.3. Пусть а\, ...,аь — базис в подпространстве ?с?.
Координатные столбцы этих векторов в базисе е простран-
пространства ? составляют матрицу А. Дана матрица Грама Г базиса е.
Написать в базисе е матрицу:
1) ортогонального проектирования на подпространство ?;
2) матрицу отражения в подпространстве ?.
28.4. 1) Дан вектор а, и подпространство ? С ? задано
уравнением (а, х) = 0. Найти образ вектора х при отраже-
отражении в ? и выразить матрицу этого преобразования через ко-
координатный столбец а вектора а в ортонормированном базисе.
2) Пусть даны вектор х и вектор у длины 1. Найти (п — 1)-
мерное подпространство, при отражении в котором х переходит
в вектор Ху (Л > 0). Чему равно А?
28.5. Найти матрицу отражения в (п— 1)-мерном подпро-
подпространстве, переводящего вектор х в вектор у. Векторы заданы
своими координатными столбцами ?, и ц в ортонормированном
базисе:
I)*=||l2f, Ч = || 2 if;
2)*=||-12||Г, i, = ||l-2f;
4) t=||2 1 -2||Т, л = || 0 3 0||Т;
5) *=||1 0 2 if, ti = || 2 -1 1 Of.
28.6. Выяснить геометрический смысл преобразования,
заданного в ортонормированном базисе матрицей:
1) A/2L4685 2) A/3L202! 3)A/18Lз50; 4L43о; 5) A43i.
28.7. Рассматривается четырехмерное евклидово прост-
пространство и ортонормированный базис е в нем. Во всех случаях
поворот производится в направлении от первого из указанных
векторов ко второму. Написать матрицу:
1) поворота на тг/2 в линейной оболочке ? векторов ег + ез
и е\ — в4 (векторы ?-L неподвижны);
2) поворота на тг/4 в линейной оболочке ? векторов е\ + е\
и ег — ез (векторы ?-L неподвижны);
268 Гл. 11. Преобразования евклидовых и унитарных пространств
3) поворота на тг/б в линейной оболочке С векторов е\ — еч
и ез — в4 (векторы С1- неподвижны);
4) поворота на тг/4 в линейной оболочке С векторов ei + e-i
и ез + в4 и на тг/4 в линейной оболочке С векторов ез — е^ и
е\ —в2-
28.8. Пусть /i, ..., /тир1, ¦¦¦, 9т~ две системы векторов
в n-мерном евклидовом пространстве. Их координатные столб-
столбцы в ортонормированном базисе составляют, соответственно,
матрицы F и G. Найти матрицу преобразования
3=1
28.9. В подпространствах Л, В С ? выбраны ортонормиро-
ванные базисы oi, ..., а& и bi, ..., bm. Вектор х € Л проектиру-
проектируется на В, а затем полученная проекция проектируется на Л.
Этим определено преобразование подпространства Л. Найти
его матрицу в базисе oi, ..., а^. Доказать, что собственные
значения этого преобразования принадлежат отрезку [0, 1].
Сопряженное преобразование B8.10-28.37)
28.10. Пусть для некоторого преобразования (р евклидова
пространства нашлось преобразование ср* такое, что {(f(x), у) =
= (х, <р*(у)) для любых векторов ж и у. Доказать, что оба пре-
преобразования являются линейными.
28.11. Найти преобразование, сопряженное произвольно-
произвольному преобразованию <р одномерного евклидова пространства.
28.12. Найти преобразование, сопряженное преобразова-
преобразованию из задачи 28.8.
28.13. Доказать, что два преобразования перестановочны
тогда и только тогда, когда перестановочны их сопряженные
преобразования.
28.14. Пусть преобразование <р нильпотентно. Доказать,
что его сопряженное преобразование также нильпотентно с тем
же показателем нильпотентности.
28.15. Доказать, что для двух преобразований (риф про-
произведение (р*ф = о тогда и только тогда, когда Im <p ортогональ-
ортогонально ImV'-
28.16. Пусть ip — поворот плоскости на угол а. Найти со-
сопряженное преобразование (р*.
§ 28. Примеры преобразований евклидова пространства 269
28.17. Пусть о"— фиксированный вектор трехмерного гео-
геометрического пространства. Преобразование <р сопоставляет
каждому вектору сЕ векторное произведение \Я, Щ. Найти (р*.
28.18. В арифметическом пространстве со стандартным
скалярным произведением преобразование (р переводит векто-
векторы oi, O2, аз соответственно в векторы Ь\, Ь2, Ъ$. Найти матри-
матрицу сопряженного преобразования <р*\
1) ai=C99, O2 = C52, Оз = С515 bi=CnO, Ь2 = С89, Ьз = С64;
2) a2 = c66, «3 = C144i bl = С83, Ь2 Ь
3) a\ = C57, a<i = C77, 03 = c64; bi = C145, Ъг — сюь h = C67-
28.19. Дана матрица А преобразования ip в базисе е с
матрицей Грама Г. Найти матрицу сопряженного преобразо-
преобразования ip*:
1)А = А50, T = AW; 2)А = А1в, Г = Аш;
3) А = А20, Г = Аю4; 4) А = А260, Г = Аш;
5)^ = ^199, Г = А176; 6)A = A26i, Г = А176;
7)А = А259, Т = Ат; 8) А = A26o, r = A179;
9) А = А269, Г = ^з88-
28.20. В трехмерном арифметическом пространстве со
стандартным скалярным произведением найти преобразова-
преобразование, сопряженное проектированию на прямую х = 2у = 3z па-
параллельно плоскости 2 = 0.
28.21. В пространстве V2 многочленов степени не выше 2
со стандартным скалярным произведением преобразование 5
сопоставляет многочлену его производную. Найти сопряжен-
сопряженное преобразование S*. Написать матрицу «5*:
1) в базисе 1, t, t2, 2) в базисе 1, t, Ci2 - l)/2.
28.22. В пространстве V2 многочленов степени не выше 2
со скалярным произведением, определенным в задаче 25.8, 3),
преобразование «5 сопоставляет многочлену его производную.
Найти сопряженное преобразование «5*. Написать матрицу «5*:
1) в базисе l,t,t2, 2) в базисе 1, t, C?2 - 1)/2.
28.23. Пусть А — квадратная матрица порядка п. Любой
квадратной матрице X того же порядка сопоставляется мат-
матрица (р{Х) = АХ. Этим определено линейное преобразование
пространства квадратных матриц со стандартным скалярным
произведением. Найти его сопряженное преобразование (р*.
28.24. Пусть А — невырожденная квадратная матрица по-
порядка п. Любой квадратной матрице X того же порядка сопо-
270 Гл. 11. Преобразования евклидовых и унитарных пространств
ставляется матрица р(Х) = А~1ХА. Этим определено линей-
линейное преобразование пространства квадратных матриц со стан-
стандартным скалярным произведением. Найти его сопряженное
преобразование (р*.
28.25. Доказать следующие свойства операции перехода
к сопряженному преобразованию в евклидовом пространстве:
1) {<Р + ф)* = <р* + ф*; 2){<рф)* = Ф*Ч>*\ S) {<*?)* = а<р*;
4) Если (р имеет обратное, то <р* также обратимо, и
28.26. Доказать, что у сопряженных друг другу преобра-
преобразований евклидова пространства совпадают: 1) ранги, 2) харак-
характеристические многочлены, 3) собственные значения, 4) раз-
размерности собственных подпространств.
28.27. Пусть преобразование (р диагонализуемо. Доказать,
что ср* также диагонализуемо.
28.28. Пусть е — базис из собственных векторов преобра-
преобразования (р. Доказать, что его биортогональный базис е* состо-
состоит из собственных векторов сопряженного преобразования ip*.
28.29. Пусть преобразование ip в базисе е имеет матри-
матрицу А. Доказать, что (р* в биортогональном базисе е* имеет
матрицу АТ.
28.30. 1) Доказать, что множество значений линейного
преобразования (р совпадает с ортогональным дополнением
ядра сопряженного преобразования ср*.
2) Убедиться, что утверждение 1) равносильно теореме
Фредгольма для систем линейных уравнений.
28.31. Найти множество значений преобразования «5* из
задачи 28.21 и непосредственно проверить, что оно совпадает
с ортогональным дополнением ядра if.
28.32. Найти ядро преобразования (р из задачи 28.17 и
непосредственно проверить, что оно совпадает с ортогональ-
ортогональным дополнением множества значений (р*.
28.33. 1) Пусть Ai и Аг — различные собственные значе-
значения преобразования (р евклидова пространства. Доказать, что
( Ait) С lm((p — A21).
2) Верно ли такое утверждение для преобразования линей-
линейного пространства?
28.34. 1) Пусть подпространство С С ? инвариантно отно-
относительно преобразования ip. Доказать, что С?- инвариантно от-
относительно (р*.
§ 29. Самосопряженные и ортогональные преобразования 271
2) Пусть преобразование ц> имеет вещественное характери-
характеристическое число. Доказать, что у него есть (га — 1)-мерное ин-
инвариантное подпространство. Верно ли обратное утверждение?
3) Пусть все корни характеристического многочлена пре-
преобразования tp вещественны. Доказать, что найдется такой ор-
тонормированный базис, в котором матрица преобразования
верхняя треугольная.
28.35. Преобразование tp задано в ортонормированном ба-
базисе матрицей А. Найти ортонормированный базис, в котором
его матрица А' верхняя треугольная, и написать матрицу А':
3 1-1
0 2 2
2) А = А22У, 3) А = А292)
-1 -1 1
4) А = Л2эо; 5) А =
28.36. Пусть ip — линейное преобразование евклидова про-
пространства. Доказать, что корневые подпространства tp и ip*,
принадлежащие неравным собственным значениям, орто-
ортогональны.
28.37. Пусть ip — линейное преобразование евклидова про-
пространства. Как связаны жордановы формы преобразований tp
ntp*l
§ 29. Самосопряженные и ортогональные
преобразования
Самосопряженные преобразования B9.1—29.37)
29.1. Может ли матрица самосопряженного преобразова-
преобразования в каком бы то ни было базисе быть:
1) не симметричной; 2) кососимметричной.
29.2. Доказать, что матрица А является матрицей самосо-
самосопряженного преобразования в базисе е тогда и только тогда,
когда матрица Ге^4 симметрична.
29.3. Доказать, что все собственные значения самосопря-
самосопряженного преобразования равны нулю тогда и только тогда, ко-
когда это — нулевое преобразование.
29.4. Найти все самосопряженные нильпотентные преоб-
преобразования.
29.5. Найти все самосопряженные ортогональные преоб-
преобразования.
272 Гл. И. Преобразования евклидовых и унитарных пространств
29.6. Найти все самосопряженные идемпотентные преоб-
преобразования.
29.7. Пусть ip — самосопряженное преобразование про-
пространства ?. Доказать, что:
1) ? — прямая сумма подпространств Im</? и Кег</?, и эти
подпространства ортогональны;
2) в 1т</з существует базис из собственных векторов ip, со-
соответствующих ненулевым собственным значениям.
29.8. Преобразование ц> задано в ортонормированном ба-
базисе матрицей УЦбг- Найдите какой-нибудь ортонормирован-
ный базис, векторы которого лежат в Im</? и Kerip, и матрицу
преобразования в этом базисе.
29.9. Сколько существует ортонормированных базисов из
собственных векторов данного самосопряженного преобразова-
преобразования, если оно:
1) не имеет кратных характеристических чисел;
2) имеет кратные характеристические числа?
29.10. Может ли самосопряженное преобразование иметь
базис из собственных векторов:
1) не ортонормированный; 2) не ортогональный.
29.11. Пусть в пространстве существует ортонормирован-
ортонормированный базис из собственных векторов преобразования ip. Дока-
Доказать, что преобразование <р — самосопряженное.
29.12. Пусть Ai, ..., Ап — собственные значения, а е\, ...
..., еп — ортонормированный базис из собственных векторов
самосопряженного преобразования <р {а принадлежит Aj). Най-
Найти ip (x) для произвольного вектора х.
29.13. Доказать, что матрица А может быть матрицей са-
самосопряженного преобразования ср в некотором базисе тогда и
только тогда, когда найдется такая невырожденная матрица S,
что S~lAS диагональная матрица.
29.14. Может ли самосопряженное преобразование в ка-
каком бы то ни было базисе иметь матрицу:
1) Аьь, 2) А50, 3) А2е, 4) УЦ9-
29.15. Пусть ? = С\ф С2- Доказать, что проектирование
на С\ параллельно Ci является самосопряженным преобразо-
преобразованием тогда и только тогда, когда Li = Cj-.
29.16. Пусть преобразования ip и ф — самосопряженные.
Доказать, что самосопряженными будут также преобразова-
преобразования:
§ 29. Самосопряженные и ортогональные преобразования 273
1) аир + /Зф при любых а, /3 G Ж, 2) ^ + Ф<Р,
3) у для невырожденного ip.
29.17. Доказать, что произведение самосопряженных пре-
преобразований является самосопряженным тогда и только тогда,
когда они перестановочны.
29.18. Доказать, что в каждом инвариантном подпростран-
подпространстве самосопряженного преобразования найдется ортонормиро-
ванный базис из собственных векторов этого преобразования.
29.19. Найти матрицу перехода к ортонормированному ба-
базису из собственных векторов преобразования ip и матрицу пре-
преобразования в этом базисе, если ip задано в ортонормирован-
ном базисе матрицей: 1) А59] 2) Аи', 3) А28] 4) А47; 5) А200]
6) А2оз; 7) Азьо; 8) А280; 9) Л294; 10) А288; 11) ААМ;
12) А4ьв; 13) Аш; 14) Аш; 15) А174- 16) А175.
29.20. Преобразование (р арифметического пространства
со стандартным скалярным произведением задано матрицей
Аб27- Найти собственные значения и ортонормированный ба-
базис из собственных векторов этого преобразования.
29.21. Доказать, что для самосопряженного преобразова-
преобразования размерность собственного подпространства, соответствую-
соответствующего собственному значению А, равна кратности А как корня
характеристического многочлена.
29.22. Доказать, что два самосопряженных преобразова-
преобразования перестановочны тогда и только тогда, когда имеют общий
ортонормированный базис из собственных векторов.
29.23. Для двух самосопряженных преобразований, задан-
заданных в ортонормированном базисе матрицами:
А =
17
-2
2
-2
14
4
2
4
14
в =
-7
4
-4
4
-8
-4
8
найти матрицу перехода к общему ортонормированному бази-
базису из собственных векторов и матрицы преобразований в этом
базисе.
29.24. Доказать, что любое самосопряженное преобразо-
преобразование ранга г можно разложить в сумму г самосопряженных
преобразований ранга 1.
29.25. Доказать, что любое самосопряженное преобразо-
преобразование можно разложить в линейную комбинацию ортогональ-
274 Гл. 11. Преобразования евклидовых и унитарных пространств
ных проектирований на попарно ортогональные одномерные
подпространства.
29.26. Самосопряженное преобразование ip задано в орто-
нормированном базисе матрицей А. Разложить (р в линейную
комбинацию ортогональных проектирований на попарно орто-
ортогональные подпространства:
1) А = А174; 2) А = А17Ъ; 3) А = Л294.
29.27. Доказать, что самосопряженные преобразования ip
и ф равны тогда и только тогда, когда (ip (x), х) = (ф (х), х) для
любого х G ?.
29.28. Доказать, что самосопряженное преобразование <р
положительно (неотрицательно) тогда и только тогда, когда
все его собственные значения положительны (соответственно
неотрицательны).
29.29. Доказать, что положительное самосопряженное
преобразование может быть разложено на произведение п сжа-
сжатий по попарно ортогональным направлениям.
29.30. Разложить в произведение трех сжатий по попарно
ортогональным направлениям (иначе — к трем попарно орто-
ортогональным плоскостям) преобразования, заданные в ортонор-
ортонормированием базисе матрицами 1) Ап$\ 2) А\7$.
29.31. Доказать, что неотрицательное самосопряженное
преобразование имеет обратное тогда и только тогда, когда оно
положительно.
29.32. 1) Доказать, что для неотрицательного самосопря-
самосопряженного преобразования ц> найдется неотрицательное самосо-
самосопряженное преобразование ф такое, что ф2 — <р. Необходима ли
неотрицательность </??
2) Доказать, что преобразование ф однозначно определено.
29.33. Преобразование <р задано в ортонормированном ба-
базисе своей матрицей. Найти матрицу положительного самосо-
самосопряженного преобразования ф такого, что ф =
5/2 3/2 19 3 3
3/2 5/2
2)А =
3)А =
3 19 3
3 3 19
29.34. Пусть собственные значения самосопряженного
преобразования ip пронумерованы так, что Ai ^ А2 ^ ... ^ А„.
1) Доказать, что
(у? (х), х) . (у? (х), х)
Ai = max , ,—-, А„ = mm —;—75—.
§ 29. Самосопряженные и ортогональные преобразования 275
2) Доказать, что (<р (х), х)/\х\2 = Ai (или Ап), тогда и толь-
только тогда, когда х — собственный вектор, принадлежащий Ai
(соответственно А„).
29.35. Доказать, что диагональные элементы симметриче-
симметрической матрицы заключены между ее минимальным и макси-
максимальным характеристическими числами.
29.36. Пусть А — симметрическая матрица, Ai и Ап — ее
максимальное и минимальное характеристические числа, a /^i и
fj,k — максимальное и минимальное характеристические числа
ее диагональной подматрицы1). Доказать, что Х\ ^ /xi ^ /хд. ^
Ж-
29.37. Пусть ср линейное преобразование евклидова про-
пространства. Доказать, что:
1) преобразования <р*<р и </?</?* — неотрицательные самосо-
самосопряженные.
2) KeTip*<p = Кет<р и lmtp*<p — Irmp*.
3) Rg<p*tp = Rg(p<p* = Rg<p.
4) собственные значения и их кратности у преобразований
tp*ip и ipip* совпадают.
Ортогональные преобразования B9.38—29.51)
29.38. Пусть преобразование ip изометрично, т.е.
(ip (x),(p(y)) = (х, у) для любых векторов ж и у. Доказать, что <р
линейно и взаимно однозначно.
29.39. Доказать, что ортогональные преобразования ев-
евклидова пространства ? образуют группу относительно обыч-
обычной операции умножения преобразований.
29.40. 1) Убедиться, что сумма ортогональных преобразо-
преобразований в общем случае не является ортогональным преобразо-
преобразованием.
2) Является ли ортогональным преобразованием произве-
произведение ортогонального преобразования на число?
29.41. Доказать, что для любых двух векторов одинаковой
длины найдется ортогональное преобразование, переводящее
первый вектор во второй.
29.42. Доказать, что для любых двух ортонормированных
базисов найдется ортогональное преобразование, переводящее
первый базис во второй.
1) Подматрица диагональна, если ее главная диагональ — подмноже-
подмножество главной диагонали матрицы
276 Гл. 11. Преобразования евклидовых и унитарных пространств
29.43. Доказать, что преобразование из задачи 28.23 яв-
является ортогональным тогда и только тогда, когда матрица А
ортогональна.
29.44. В евклидовом пространстве выбран базис с матри-
матрицей Грама Г. Найти условие на матрицу линейного преобразо-
преобразования, необходимое и достаточное для того, чтобы это преоб-
преобразование было ортогональным.
29.45. Может ли ортогональное преобразование в некото-
некотором базисе иметь матрицу: 1) А\ь, 2) А34?
29.46. Ортогональное преобразование арифметического
пространства со стандартным скалярным произведением пере-
переводит столбцы матрицы А в столбцы В. Как связаны матрицы
А и В?
29.47. Линейное преобразование ip арифметического про-
пространства со стандартным скалярным произведением перево-
переводит столбцы матрицы А в столбцы матрицы В. Является ли ip
ортогональным:
II п л
2) А = Aj4, В =
1 О
-1 -6
3)
4)
А =
А = .
4 2
7 1
1
0
-1
<4з32,
1
-1
1
В
В =
3
-6
0
= А'к
8 2
1 -1
, в =
J39?
0
1
-1
29.48. Пусть х\, ...
у\,
— векторы п-мерного
евклидова пространства, и ортогональное преобразование </? та-
таково, что ip (xi) = yt, i = 1, ..., к. Доказать, что это возможно
тогда и только тогда, когда матрицы из попарных скалярных
произведений обеих систем векторов равны.
29.49. Пусть С — инвариантное подпространство ортого-
ортогонального преобразования (р. Доказать, что С1- — также инва-
инвариантно относительно (р. Как этот результат связан с зада-
задачей 25.55?
29.50. Ортогональное преобразование задано в ортонор-
ортонормированием базисе матрицей А. Найти матрицу S перехода
к каноническому базису и матрицу А' преобразования в этом
базисе: ,-
-1 -3 -у/6
-3-1 v/6 ; 3)
V^ -%/б 2
1)
1 1
1 -1
§ 29. Самосопряженные и ортогональные преобразования 277
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
-1
0
0
0
0
0
J9.51. Доказать, что преобразование <p*tp ортогонально то-
и только тогда, когда ортогонально <р.
Полярное разложение
29.52. Почему не является полярным разложением равен-
5 О
4 5
0 1
1 О
4 5
5 О
29.53. Получить полярное разложение матрицы:
1)
5)
11 10
-2 5
0 0
4 -3
- 2)
6)
5 0
4 3
у/2 1
0 V
3)
л/3 -2
0 л/3
4)
7 7
1 1
29.54. В пространстве V2 многочленов степени не выше 2
:о стандартным скалярным произведением преобразование 5
¦.опоставляет многочлену его производную. Для полярного раз-
гожения 5 написать в базисе l,t,t2 матрицу Q ортогонального
л матрицу V самосопряженного преобразования.
29.55. Доказать, что для произвольного линейного преоб-
преобразования <р существует вторая форма полярного разложения:
о — фв, где ф — неотрицательное самосопряженное преобразо-
зание, а в — ортогональное.
29.56. Доказать, что для квадратной матрицы А найдутся
^акие ортогональные матрицы Q и Р, что А = QDP, где D —
диагональная матрица с сингулярными числами матрицы А на
диагонали.
29.57. 1) Доказать, что каково бы ни было полярное разло-
кение tp = вф, ортогональное преобразование в переводит соб-
собственный вектор преобразования ip*ipB собственный вектор (pip*.
2) Доказать, что второй сингулярный базис состоит из соб-
собственных векторов преобразования tpip*'.
29.58. Пусть ip — невырожденное преобразование, и
о = вф=ф\в\, где ф, ф\ неотрицательные самосопряженные,
\ в, в\ — ортогональные преобразования.
278 Гл. 11. Преобразования евклидовых и унитарных пространств
1) Доказать, что в = в\. 2) Как связаны ф и ф\!
3) Доказать, что собственные значения ф и ф\ одинаковы,
а собственные векторы, вообще говоря, различны.
29.59. Доказать, что неотрицательное самосопряженное
преобразование ф в полярном разложении ip = вф определено
однозначно.
29.60. Доказать, что для невырожденного преобразования
полярное разложение единственно.
29.61. Доказать, что линейное преобразование является
нормальным тогда и только тогда, когда перестановочны со-
сомножители в его полярном разложении.
29.62. Доказать, что сингулярные числа самосопряженно-
самосопряженного преобразования равны модулям его собственных значений.
29.63. Найти сингулярные числа ортогональной матрицы.
29.64. Пусть ai, ..., а„ — сингулярные числа невырож-
невырожденной матрицы А. Найти сингулярные числа А'1.
29.65. Матрица умножена на число а. Как изменились ее
сингулярные числа?
29.66. Доказать, что у преобразования ip и ему сопряжен-
сопряженного tp* сингулярные числа совпадают.
29.67. Доказать, что сингулярные числа матриц А и В сов-
совпадают тогда и только тогда, когда найдутся ортогональные
матрицы U и V такие, что В = UAV.
29.68. Доказать, что для линейного преобразования ip от-
отношение |</5(ж)|/|ж| при любом ненулевом векторе х заключено
между минимальным и максимальным сингулярным числом ip.
29.69. Доказать, что модули всех собственных значений
преобразования ip принадлежат отрезку [а„, а{\, где а\ и а„ —
его наибольшее и наименьшее сингулярные числа.
29.70. Доказать, что для квадратной матрицы А произве-
произведение сингулярных чисел равно |detA|.
29.71. Найти сингулярные числа следующих матриц:
6-6 3
1) Л202, 2) А2з9, 3) А21з, 4)
1 2 2
4 2-4
5)
§ 30. Линейные преобразования унитарного пространства 279
§ 30. Линейные преобразования унитарного
пространства
Примеры преобразований. Сопряженное
преобразование C0.1—30.12)
30.1. Пусть ai, ..., at — базис в подпространстве CcU.
Координатные столбцы этих векторов в ортонормированном
базисе е пространства Ы составляют матрицу А. Написать в
базисе е:
1) матрицу Р ортогонального проектирования на подпро-
подпространство С,
2) матрицу Q отражения в подпространстве С.
30.2. Пусть CcU линейная оболочка векторов а\ и а^. В
ортонормированном базисе е пространства U даны координат-
координатные столбцы этих векторов. Написать в базисе е матрицу Р
ортогонального проектирования на подпространство С и мат-
матрицу Q отражения в подпространстве С:
1)||1 г 1 + if, ||г 1 1-if; 2) ||г г if, ||2г 0 3f;
3) ||г 1 1 if, || 2* 0 3 if.
30.3. Дан вектор а, и подпространство С С Ы задано урав-
уравнением (а, х) = 0. Найти образ вектора х при отражении в С, и
выразить матрицу этого преобразования через координатный
столбец а вектора а в ортонормированном базисе.
30.4. В ортонормированном базисе дан координатный стол-
столбец а вектора а. Пусть <р — отражение в подпространстве
С CU, заданном уравнением (а, х) = 0. Выразить матрицу пре-
преобразования ip через а, если:
1) а = ||3 -1 2if; 2)а=С15з; 3)а = сш; 4)а=с215.
30.5. Доказать, что в унитарном пространстве операция
перехода к сопряженному преобразованию обладает следую-
следующими свойствами:
1) (<р + -ф)* = <р*+Г\ 2)(^)*=VV; $ {окр)'= atp*;
4) если <р имеет обратное, то <р* также имеет обратное, и
(?»*)-г = (?>-г)*.
30.6. В ортонормированном базисе дана матрица линейно-
линейного преобразования унитарного пространства. Найти матрицу
сопряженного преобразования: 1) У^; 2) Аюз', 3) Аюо-
280 Гл. 11. Преобразования евклидовых и унитарных пространств
30.7. Пусть А — матрица линейного преобразования в ба-
базисе с матрицей Грама Г. Найти матрицу сопряженного преоб-
преобразования:
1) А = А92, Г = А87; 2) А = А97, Г = А86;
3) А = А375, Г = Аш.
30.8. 1) Пусть вектор х является собственным для преоб-
преобразования <р с собственным значением А и собственным для <р*
с собственным значением /х. Доказать, что А = Д.
2) Доказать, что преобразование </?*, сопряженное преобра-
преобразованию <р с собственными значениями Ai, ..., Ап, имеет соб-
собственные значения Ai, ..., Ап.
30.9. Пусть подпространство С инвариантно относительно
преобразования ip. Доказать, что С1- инвариантно относитель-
относительно сопряженного преобразования ср*.
30.10. 1) Доказать, что множество значений линейного
преобразования <р унитарного пространства совпадает с ортого-
ортогональным дополнением ядра сопряженного преобразования (р*.
2) Доказать, что теорема Фредгольма для комплексных си-
систем линейных уравнений верна также и в следующей форму-
формулировке: система Ах. = b совместна тогда и только тогда, когда
каждое решение системы линейных уравнений А у = о удовле-
удовлетворяет равенству yTb = 0.
30.11. 1) Доказать, что у каждого линейного преобразова-
преобразования унитарного пространства есть (п — 1)-мерное инвариантное
подпространство. Верно ли это утверждение для комплексных
линейных пространств?
2) Доказать, что для каждого линейного преобразования
унитарного пространства найдется такой ортонормированный
базис, в котором матрица преобразования верхняя треу-
треугольная.
30.12. В ортонормированном базисе дана матрица А ли-
линейного преобразования <р. Найти матрицу S перехода к орто-
нормированному базису, в котором ip имеет треугольную мат-
матрицу А', и написать матрицу А':
3) А =
г
0
2
i
i
1
1-г
1
1 + г
i
1
1 + г
0
0
2-г
—i
0
—г
; 2) А =
-1
1 + г
1-г
-1 + г
1
1-г
-1-г
1 + г
1
§ SO. Линейные преобразования унитарного пространства 281
Нормальные преобразования C0.13-30.24)
30.13. Найти условие на матрицу преобразования ip в ор-
тонормированном базисе, необходимое и достаточное для того,
чтобы (р было нормальным.
30.14. Для нормального преобразования ip пространства U
доказать, что:
1) Kerip = Kerip*; 2) Imy? = Imy?*; 3) Ы — Kery?©Imy?.
30.15. Доказать, что преобразование (р нормально тогда и
только тогда, когда каждый собственный вектор для ц> явля-
является собственным и для ip*.
30.16. Пусть С — собственное подпространство нормаль-
нормального преобразования (р. Доказать, что ?х инвариантно относи-
относительно ц>.
30.17. Пусть хну — собственные векторы нормально-
нормального преобразования ц>, принадлежащие различным собственным
значениям. Доказать, что хну ортогональны.
30.18. Пусть (р — нормальное преобразование унитарного
пространства Ы. Доказать, что
1) Ы — прямая сумма попарно ортогональных собственных
подпространств пребразования ip.
2) В U существует ортонормированный базис из собствен-
собственных векторов ip.
30.19. Пусть у преобразования существует ортонормиро-
ортонормированный базис из собственных векторов. Доказать, что оно яв-
является нормальным.
30.20. Доказать, что произведение нормальных преобразо-
преобразований является нормальным, если они перестановочны. Верно
ли обратное утверждение?
30.21. Доказать, что преобразование ц> унитарного про-
пространства является нормальным тогда и только тогда, когда
для любого инвариантного подпространства С, подпростран-
подпространство /З1 также инвариантно.
30.22. Нормальное преобразование задано в ортонормиро-
ванном базисе матрицей А. Найти матрицу S перехода к орто-
нормированному базису из собственных векторов и матрицу А'
преобразования в этом базисе:
3-i 2i 0
I ; 2) ; 3) А 2i 3 2t
г ^1 34 0 6 0 2г 3 + г
Ио .,, 0 0-3 ,
1) А = \\. I ; 2) А = 0 0 4 ; 3) А = -
IIг ^1 34 0 6
0
0
3
0
0
-4
-3
4
0
282 Гл. 11. Преобразования евклидовых и унитарных пространств
30.23. Пусть преобразования (риф — нормальные, и (рф =
= о. Следует ли отсюда, что ф(р = о?
30.24. Доказать, что:
1) для любой комплексной матрицы сумма квадратов мо-
модулей всех элементов не меньше суммы квадратов модулей всех
собственных значений (каждое из которых считается столько
раз, какова его кратность);
2) для нормальной матрицы упомянутые в первом пункте
суммы равны.
Самосопряженные и унитарные преобразования
C0.25-30.44)
30.25. Пусть преобразования (риф самосопряженные. До-
Доказать, что самосопряженными будут и преобразования (рф +
+ ф(р и {(рф — %ф(р.
30.26. Доказать, что:
1) самосопряженные преобразования можно определить
как нормальные преобразования, собственные значения кото-
которых вещественны;
2) унитарные преобразования можно определить как нор-
нормальные преобразования, собственные значения которых по
модулю равны 1.
30.27. Доказать, что:
1) каждое преобразование (р унитарного пространства
можно представить в виде (р = (pi+i<pi, где (р\ и (pi — само-
самосопряженные преобразования;
2) (р\ и (pi перестановочны тогда и только тогда, когда (р
— нормальное преобразование.
30.28. Доказать, что произведение ненулевого самосопря-
самосопряженного преобразования на число а будет самосопряженным
тогда и только тогда, когда а вещественно.
30.29. Пусть преобразование (р таково, что {(р(х), х) = О
для любого вектора i€W. Доказать, что (р = о, если:
1) (р самосопряженное;
2) (р удовлетворяет условию (р = —(р*.
30.30. Доказать, что ((р(х), х) вещественно для любого
вектора х € U тогда и только тогда, когда (р — самосопряженное.
30.31. Пусть преобразования (риф самосопряженные. До-
Доказать, что ((р (х), ф (х)) вещественно для любого вектора х € Ы
тогда и только тогда, когда (риф перестановочны.
§ 30. Линейные преобразования унитарного пространства 283
30.32. Пусть ip — неотрицательное самосопряженное пре-
преобразование и trip = 0. Доказать, что <р = о.
30.33. Доказать, что преобразование <р является нормаль-
нормальным тогда и только тогда, когда |у(а;)| = |у?*(а;)| для любого
вектора х.
30.34. Найти условие на матрицу линейного преобразова-
преобразования ц> в базисе с матрицей Грама Г, необходимое и достаточное
для того, чтобы преобразование было:
1) самосопряженным; 2) унитарным.
30.35. Доказать, что матрица А является матрицей само-
самосопряженного преобразования ранга 1 в ортонормированием
базисе тогда и только тогда, когда найдется такой столбец а,
что А = аат.
30.36. В ортонормированном базисе дана матрица А само-
самосопряженного преобразования унитарного пространства. Най-
Найти матрицу перехода S к ортонормированному базису из соб-
собственных векторов и матрицу А' преобразования в новом
базисе:
1)
4) "А
7 Зг
-Зг -1
377-
2)
4 v/3 + i
v/3-i 1
5 \/2A
\/2A-г) 2
30.37. Пусть ip — самосопряженное преобразование. Дока-
Доказать, что:
1) преобразование ip = ((р — и) ~1 ((р + й) определено и явля-
является унитарным;
2) гр — l имеет обратное, и (р = г{ф + ь){ф - i)~l._
30.38. 1) Доказать, что линейное преобразование ip — уни-
унитарное тогда и только тогда, когда ip* = <p~l.
2) Доказать, что для унитарного преобразования сопря-
сопряженное — также унитарное.
30.39. Доказать, что унитарная норма матрицы А (зада-
(задача 27.3) не меняется после умножения А справа или слева на
унитарную матрицу U.
30.40. Пусть линейное преобразование ц> унитарного про-
пространства сохраняет длину каждого вектора: |у(а;)| = |ж|. До-
Доказать, что оно унитарное.
30.41. Доказать, что линейное преобразование ц> унитар-
унитарное, если оно:
1) переводит какой-либо ортонормированный базис в орто-
ортонормированный ;
284 Гл. 11. Преобразования евклидовых и унитарных пространств
2) сохраняет попарные скалярные произведения базисных
векторов некоторого базиса.
30.42. ip — нормальное преобразование, некоторая нату-
натуральная степень которого есть тождественное преобразование.
Доказать, что ip — унитарное.
30.43. 1) Будет ли сумма унитарных преобразований уни-
унитарным преобразованием?
2) Будет ли унитарным преобразованием произведение
унитарного преобразования на число а?
30.44. Для унитарного преобразования, заданного в орто-
нормированном базисе матрицей А, найти ортонормированный
базис из собственных векторов и матрицу преобразования в
этом базисе:
cos a -sin а
sin а cos а
4 + 3i 4
—4г 4 —
6 + 2г -2-
•
1'
i
3i
-6г
2)
-6-
-2-
1
А =
2г
6г
1
~ 5
З + Зг
V7
3-Зг
Глава 12
ФУНКЦИИ НА ЛИНЕЙНОМ ПРОСТРАНСТВЕ
§ 31. Линейные функции
В этом параграфе используются следующие основные понятия:
линейная функция па линейном пространстве, строка коэффициен-
коэффициентов (координатная строка) линейной функции, операции сложения
и умножения на число для линейных функций и свойства этих опе-
операций, сопряженное пространство, биортогональный базис.
Обозначения: Сп — линейное га-мерное пространство, Ип —
арифметическое га-мерное пространство, 7?пХп — линейное простран-
пространство квадратных матриц порядка га, Т>(п) — линейное пространство
многочленов степени не выше га. Через ?*, 1Vn, Я*х„, р(")* обозна-
обозначаются соответствующие сопряженные пространства.
Стандартный базис в пространстве 7?пХп состоит из матричных
единиц Eij, г, j = 1, ..., п (см. введение к § 15). В этом базисе ко-
коэффициенты линейной функции f, заданной на 1ZnXn, естественным
образом располагаются в матрицу: на пересечении ее г-й строки и
j-ro столбца стоит коэффициент сц = f {Eij). Матрицу С = \\cij\\ мы
будем называть координатной матрицей линейной функции.
В некоторых задачах, относящихся к линейным функциям на
линейном пространстве векторов — направленных отрезков (в гео-
геометрическом векторном пространстве, обозначаемом через ?г или ?$
в соответствии с размерностью) используется понятие ортогональ-
ортогональной проекции вектора. Напомним его.
Векторной ортогональной проекцией вектора АВ на прямую
или плоскость называется вектор А\В\, где А\ и В\ — ортогональ-
ортогональные проекции точек А и В. Скалярной проекцией вектора АВ на
ось (т. е. прямую, на которой задано направление при помощи нену-
ненулевого вектора а) называется число ±|j4iJ5i|, где знак + или — вы-
выбирается в зависимости от того, одинаково или противоположно на-
направлены векторы а и А\В\.
Определение линейной функции.
Примеры линейных функций C1.1-31.32)
31.1. Какие условия выделяют линейные функции из
остальных линейных отображений?
31.2. Как преобразуется строка коэффициентов линейной
функции при изменении базиса?
286 Гл. 12. Функции на линейном пространстве
31.3. Как выражаются через базисные векторы коэффи-
коэффициенты линейной функции в базисе е?
31.4. Выпишите строку коэффициентов нулевой линейной
функции.
31.5. Может ли для линейной функции f, заданной на Сп,
при всех х € Сп выполняться:
1) неравенство f (х) > 0;
2) неравенство f (x) ^ 0;
3) равенство f (х) = а!
31.6. Даны линейная функция f на ?„ и число а. Всегда
ли найдется такой вектор х из ?п, что f (x) = а!
31.7. Определить множество значений произвольной ли-
линейной функции на вещественном линейном пространстве.
31.8. Пусть (?i, ?2, ?з)Т — координатный столбец вектора
х G ?з в некотором базисе. Будет ли линейной функция f на
Сз, определенная равенством:
2
31.9. Выписать строку коэффициентов функции f в слу-
случаях 1), 4) задачи 31.8.
31.10. В некотором базисе пространства ?з функции f и g
имеют координатные строки соответственно A, 2, 3) и C, 2, 1).
Найти координатные строки функций:
l)f+g; 2Jf; 3) 3g; 4) f - g.
31.11. 1) Пусть а — вектор из пространства 5з- Сопоставим
каждому вектору х из ?з его скалярную ортогональную про-
проекцию на ось, определяемую вектором а. Доказать, что этим
определяется линейная функция на ?$. Найти координатную
строку этой функции в каком-нибудь ортонормированием ба-
базисе пространства ?3.
2) Пусть m — какая-нибудь плоскость в пространстве ?$.
Сопоставим каждому вектору из ?% длину его ортогональной
проекции на т. Будет ли полученная числовая функция ли-
линейной?
31.12. 1) Пусть а — фиксированный вектор на плоско-
плоскости ?i- Сопоставим каждому вектору х из ?ч число, равное
площади ориентированного параллелограмма, построенного на
векторах а и х. Доказать, что этим определена линейная функ-
§ 31. Линейные функции 287
ция на ?г, и вычислить ее координатную строку в каком-нибудь
ортонормированном базисе.
2) Пусть а — фиксированный вектор на плоскости ?г- Со-
Сопоставим каждому вектору х G Ei число, равное площади па-
параллелограмма, построенного на векторах а и х. Будет ли по-
построенная функция линейной?
31.13. 1) Пусть а и b — фиксированные векторы в про-
пространстве ?з- Сопоставим произвольному вектору х G ?з число,
равное объему ориентированного параллелепипеда, построен-
построенного на векторах a, b и х, или нулю, если a, b и х компла-
компланарны. Доказать, что этим определена линейная функция, и
вычислить ее координатную строку в каком-либо ортонорми-
ортонормированном базисе.
2) Пусть а и b — фиксированные векторы в простран-
пространстве ?з- Сопоставим произвольному вектору х G ?з число, рав-
равное объему параллелепипеда, построенного на векторах a, b
и х, или нулю, если a, b и х компланарны. Будет ли построен-
построенная функция линейной?
31.14. 1) Сопоставим столбцу высоты п отношение первых
двух его элементов. Будет ли этим определена функция на 7\Ln?
2) Сопоставим каждому столбцу высоты п сумму квадра-
квадратов всех его элементов. Будет ли этим определена линейная
функция на Ип!
3) Сопоставим каждому столбцу высоты п его г-й элемент.
Доказать, что этим определена линейная функция на Ип, и
найти ее координатную строку в стандартном базисе простран-
пространства Ип.
4) Сопоставим каждому столбцу высоты п сумму его эле-
элементов. Доказать, что этим определена линейная функция
на 1Zn, и найти ее координатную строку в стандартном базисе
пространства Ип.
31.15. Функция trX сопоставляет каждой квадратной
матрице X порядка п ее след. Проверить, что эта функция
является линейной, и найти ее координатную строку (коорди-
(координатную матрицу) в стандартном базисе пространства матриц.
31.16. Пусть С — квадратная матрица порядка п. Сопоста-
Сопоставим каждой квадратной матрице X порядка п число tr (CTX).
Показать, что этим определена линейная функция на про-
пространстве Tinxn, и найти ее координатную строку (координат-
(координатную матрицу).
288 Гл. 12. Функции на линейном, пространстве
31.17. Пусть f — какая-нибудь линейная функция, опре-
определенная на пространстве 7\LnXn. Доказать, что существует та-
такая квадратная матрица С, что для произвольной матрицы
X € Ti-nxn выполнено равенство f (X) = tr (CFX).
31.18. Пусть линейная функция f на пространстве 7\LnXn
для любых двух квадратных матриц А и В порядка п удовле-
удовлетворяет условию f (АВ) = f (BA). Доказать, что f определяется
равенством f (X) = atrX.
31.19. 1) Сопоставим каждому многочлену p(t) степе-
степени ^ 3 число
1
f (р) = (l + t2)p(t)dt.
-1
Доказать, что этим определена линейная функция на про-
пространстве многочленов V^3\ и вычислить ее координатную
строку в базисе из многочленов 1, t, t2, t3.
2) Сопоставим каждому многочлену р (t) степени $С 3 число
1
f (р) = I p(t2)dt.
о
Доказать, что этим определена линейная функция на про-
пространстве многочленов V^3\ и вычислить ее координатную
строку в базисе из многочленов 1, ?, t2, t3.
31.20. Сопоставим каждому многочлену p(t) степени $С п
его значение при t = 0. Доказать, что этим определена линей-
линейная функция на р(п), и вычислить ее координатную строку в
базисе 1, t,t2, ..., tn.
31.21. Пусть to — фиксированное число. Сопоставим каж-
каждому многочлену р (t) степени $С п его значение при t = to. До-
Доказать, что этим определена линейная функция ip на простран-
пространстве р(п). Вычислить координатную строку функции (р в бази-
базисах 1, t, ..., tn и 1, t - to, ..., (t~ to)n-
31.22. Пусть t\, ..., tn+i — попарно различные точки чи-
числовой оси, ipi, ..., y?n+i ~ соответствующие этим точкам ли-
линейные функции на пространстве *р(п\ определенные в задаче
31.21.
1) Доказать, что функции ipi, ..., y?n+i линейно незави-
независимы.
§ 31. Линейные функции 289
2) Доказать, что произвольная линейная функция на про-
пространстве р(п) может быть разложена в линейную комбинацию
функций <рь ..., <pn+i.
31.23. Линейная функция 8 сопоставляет каждому много-
многочлену р (t) степени n (n ^ 2) его свободный член. Разложить
эту функцию в линейную комбинацию функций <pi, ip%, <р$,
сопоставляющих каждому многочлену его значение соответ-
соответственно при t = l, t = 2nt = 3.
31.24. Пусть to — какое-нибудь, a t\, ..., tn+i — попар-
попарно различные вещественные числа. Доказать, что найдутся та-
такие числа Ai, ..., An+i, что для любого многочлена p(t) ? V^
будет выполнено равенство р (to) = Х\р (ti) + ... + An+ip (tn+i).
31.25. Пусть fc — натуральное число. Сопоставим каждо-
каждому многочлену р (t) степени $С п значение его fc-й производной
при t = 0. Доказать, что этим определена линейная функция
на пространстве V^n\ и вычислить ее координатную строку в
базисе 1, t,t2, ..., tn.
31.26. Пусть fc — натуральное число, fc ^ n, to — веще-
вещественное число. Сопоставим каждому многочлену р (t) степени
не выше п значение его fc-й производной при t = to. Доказать,
что этим определена линейная функция на пространстве р(п).
Вычислить ее координатную строку в базисах:
1) 1, *,...,*"; 2) 1, t - to, .--,(*- *о)"-
31.27. Линейные функции So,Si,...,Sn определены на
пространстве V^ равенствами
dk(p)
Skip) =
dtk
(fc = 0, 1, ...,n).
t=t0
Доказать, что функции So, Si, ..., Sn линейно независимы.
31.28. Функции Sq, S\, ..., 5n определены так же, как в за-
задаче 31.27. Доказать, что произвольная линейная функция, за-
заданная на пространстве Р'"', может быть разложена в линей-
линейную комбинацию функций 5k (fc = 0, 1, ..., n).
31.29. Пусть в базисе ei, ег, ез линейная функция i выра-
выражается через координаты ?i, ?г> ?з вектора х формулой f (x) =
= ?i + 2^2 + 3?з- Какой формулой выражается f (x) через коор-
координаты х в базисе е\ = е\ + ег, е'2 = ег + ез, е'3 = ез + ei?
31.30. Доказать, что всякую ненулевую линейную функ-
функцию f на Сп подходящим выбором базиса в Сп можно привести
к виду i (х) = ?i, где ?i — первая координата вектора х.
10 - 1715
290 Гл. 12. Функции на линейном пространстве
31.31. В базисе е линейная функция f имеет строку ко-
коэффициентов и. Найти ее строку коэффициентов х' в базисе
е' = е?, если:
31.32. Функции ipi, ip2% Уз, определенные в задаче 31.23,
а также функции So, Si, <$2, определенные с помощью формул
Ш=Ш- , к = 0,1, 2,
аъ t=2
образуют пару базисов в пространстве рB)*. Выписать форму-
формулы перехода от первого базиса ко второму.
Биортогональный базис C1.33-31.42)
31.33. 1) Многочлены 1, t, ..., tn образуют базис в про-
пространстве р("). Найти соответствующий биортогональный ба-
базис.
2) Многочлены 1, t — to, ..., (t — to)" образуют базис в про-
пространстве р("). Найти соответствующий биортогональный ба-
базис.
31.34. Как преобразуется биортогональный базис, если
данный базис преобразуется матрицей перехода 5?
31.35. 1) Пусть базису е\, е2, ез пространства ?з биорто-
гонален базис fi, f2, f3 пространства ?g- Найти базис, биорто-
биортогональный базису е\ = е\ + е2, е'2 = 62 + 63,63 = 63.
2) В четырехмерном арифметическом пространстве столб-
столбцы матрицы Аш образуют базис. Найти строки коэффициен-
коэффициентов элементов биортогонального базиса.
31.36. Построить базис пространства V^2\ биортогональ-
биортогональный базису из функций ipi, ip2, уз> определенных в задаче
31.23.
31.37. Найти базис пространства *р(п\ биортогональный
базису из функций ipi, у2, ..., уп-ы, построенному в задачах
31.21, 31.22. Вычислить координаты произвольного многочлена
в найденном базисе.
31.38. Построить базис пространства V^2\ биортогональ-
биортогональный базису из функций Sq, Si, $2, определенных в задаче 31.32.
31.39. Пусть е\, ..., еп — базис в пространстве Сп, а
fi, ..., fn — биортогональный ему базис в ?*. Доказать, что
для всех х G Сп выполнено равенство
§ 31. Линейные функции
291
х = fi (x) ei + ... + fn (x) е„,
а для всех у €?„ — равенство
A)
Применить формулу A) к базисам, рассмотренным в задаче
31.34.
31.40. Используя результат задачи 31.34, доказать, что
многочлены ро> • • • > Рк степени не выше к линейно независимы
0.
1 0
0 1
0 1
1 0
0 -i
i 0
' аз
1 0
0 -1
тогда и только тогда, когда для некоторого to det ||p^ (to) ||
31.41. Найти базис, биортогональный стандартному бази-
базису пространства 7^пхп- Вычислить матрицы С, соответствую-
соответствующие функциям этого базиса (в смысле задачи 31.17).
31.42. Матрицы Паули
<хо =
образуют базис в пространстве комплексных квадратных мат-
матриц порядка 2. Найти базис, биортогональный базису его, <т\,
°) 0"з> и вычислить матрицы С, соответствующие функциям
этого базиса в смысле задачи 31.17.
Обращение линейной функции в нуль C1.43—31.49)
31.43. Доказать, что произведение двух линейных функ-
функций на Сп тождественно равно 0 тогда и только тогда, когда
хотя бы одна из функций нулевая.
31.44. Пусть f — линейная функция на Сп. Доказать, что
множество Л/" векторов, для которых f (х) = 0, является линей-
линейным подпространством в Сп. Какова размерность ЛГ? Возмож-
Возможно ли совпадение N и ?п?
31.45. Пусть f, g — линейные функции на Сп и f (х) = 0 для
всех тех х, для которых g (х) = 0. Доказать, что тогда найдется
такое число а, что f = ag.
31.46. В пространстве ?4 выбран базис и даны линей-
линейные функции с координатными строками E, 24, —7, —1) и
(—1,-2,7,3). Найти множество векторов, на которых эти
функции одновременно обращаются в 0.
31.47. Пусть ЛГ — линейное подпространство в ?п, К —
множество всех линейных функций, обращающихся в 0 на Л/".
Доказать, что К является линейным подпространством в С*п, и
вычислить его размерность.
10*
292 Гл. 12. Функции на линейном пространстве
31.48. Подпространство Л/" в ?5 задано в некотором базисе
как линейная оболочка векторов с координатными столбцами
(О, 0, 1, 1, 1)т и @, 1, О, О, 1)т. Найти в том же базисе коор-
координатные строки всех линейных функций, обращающихся в О
на ЛЛ
31.49. Подпространство Л/" С V^ задано как множество
всех многочленов вида (t — l)(t — 2Jp(t), где p(t) G V^. Най-
Найти множество линейных функций, определенных на V^ и об-
обращающихся в 0 на ЛЛ
31.50. Пусть fi, ..., ffc и f линейные функции на линей-
линейном пространстве ?, и Л/" — множество таких векторов из С,
что fi (ж) = ... = & (х) = 0. Доказать, что f раскладывается по
fi, ..., ffc тогда и только тогда, когда f (х) = 0 для всех х из ЛЛ
§ 32. Билинейные и квадратичные функции
В этом параграфе используются следующие основные понятия:
билинейная и квадратичная функции, симметричная билинейная
функция, матрица билинейной или квадратичной функции (били-
(билинейной или квадратичной формы), диагональная и каноническая
формы билинейной (квадратичной) функции, положительно и от-
отрицательно определенные квадратичные функции, главные (угло-
(угловые) миноры симметрической матрицы, ранг и индекс квадратич-
квадратичной функции (формы), присоединенное преобразование билинейной
функции в евклидовом пространстве; эрмитова билинейная (полу-
торалинейная) функция (форма) в комплексном пространстве, эрми-
эрмитова симметричная (эрмитова) функция, квадратичная эрмитова
функция (форма).
Пусть С — вещественное или комплексное линейное простран-
пространство. Функция двух переменных b (х, у) со значениями в поле, над
которым определено пространство С, называется билинейной функ-
функцией в пространстве С, если
b (х + у, z) = Ъ (х, г) + Ъ (у, z),
Ъ(х, у + z) = Ъ(х, у)+Ъ(х, z),
b(ax, /Зу) = a/3b(x, у)
для любых векторов х, у, z из С. и чисел а, 0.
Билинейная функция b называется симметричной, если Ъ (х, у) =
= b (у, х) для любых векторов х, у € С Пусть b симметрична. Тогда
функция k (x) = b (x, х) называется квадратичной функцией, поро-
порожденной Ь. По данной квадратичной функции порождающая ее сим-
симметричная билинейная функция восстанавливается однозначно.
Пусть ei, ...,е„ — базис в С. Числа Ьу=Ь(е<(е^) (г, j =
= 1,..., п) называются коэффициентами, а матрица В = ||ftj,j-|| —
матрицей билинейной функции в этом базисе. У симметричных
§ 32. Билинейные и квадратичные функции 293
функций и только у них матрицы симметричны (В = ВТ). Матри-
Матрицей квадратичной функции называется матрица порождающей ее
симметричной билинейной функции. Значения функций b (х, у) и
к (х) выражаются через координатные столбцы ?, и т| векторов х и у
по формулам
B)
Формой степени m от переменных ?i, ..., ?„ называется одно-
однородный многочлен степени т от ?i, ..., ?„. Ввиду этого выраже-
выражения A) и B) билинейной и квадратичной функций в координатах
называются соответственно билинейной и квадратичной формами.
Матрица из коэффициентов В = \\bij\\ называется также матрицей
билинейной (квадратичной) формы.
Пусть 5 — матрица перехода от базиса е к базису е', а В и В' —
матрицы билинейной функции в этих базисах. Тогда
В' = STBS. C)
Билинейная форма
и квадратичная форма
называются диагональными. Если коэффициенты t\, ..., еп диаго-
диагональной формы равны ±1 или 0, то она называется канонической.
Для каждой симметричной билинейной (квадратичной) функ-
функции в вещественном n-мерном линейном пространстве существует ба-
базис, в котором соответствующая билинейная (квадратичная) форма
является канонической.
Привести билинейную (квадратичную) функцию к диагональ-
диагональному или каноническому виду — значит, найти такую форму и со-
соответствующий ей базис (или формулы замены координат). Употре-
Употребительно также выражение «привести билинейную (квадратичную)
форму к диагональному или к каноническому виду».
Закон инерции квадратичных форм состоит в том, что число
положительных коэффициентов р и число отрицательных коэффи-
коэффициентов q в канонической квадратичной форме не зависит от базиса,
в котором функция к приведена к каноническому виду. Эти числа
294 Гл. 12. Функции на линейном пространстве
называются положительным и отрицательным индексами инер-
инерции к. Не зависят от базиса и числа r=p + qna=p — q, называе-
называемые соответственно рангом и сигнатурой квадратичной функции. В
произвольном базисе RgB = г.
Для приведения квадратичной формы к каноническому виду
применяется метод выделения квадратов (метод Лагранжа). Можно
использовать также элементарные преобразования матрицы квадра-
квадратичной формы. При этом после каждого элементарного преобразова-
преобразования строк матрицы необходимо выполнить такое же преобразование
столбцов. Для того, чтобы получить матрицу перехода к канониче-
каноническому базису, нужно проделать те же элементарные преобразования
со столбцами единичной матрицы.
Квадратичная функция к(х) называется положительно (от-
(отрицательно) определенной, если к (х) > 0 (соответственно к (х) < 0)
для всех х из С, отличных от о. Если к (х) ^ 0 (к (х) ^ 0) для всех
х S ?, то функция к (х) называется полуопределенной — неотри-
неотрицательной (соответственно, неположительной). Такие же термины
применяются для квадратичной формы, служащей координатной за-
записью квадратичной функции. Для положительной определенности
квадратичной формы с матрицей В = \\bij || необходимо и достаточно,
чтобы все главные миноры Д^ матрицы В были положительными:
>0, Ы п D)
(критерий Сильвестра).
Пусть b (x, у) — симметричная билинейная функция в евклидо-
евклидовом пространстве ?. Линейное преобразование <р пространства ? на-
называется присоединенным к функции b (х, у), если для всех х, у G ?:
Ъ(х, у) = (х, f(y)). Присоединенное преобразование является само-
самосопряженным. Преобразование, присоединенное к билинейной функ-
функции, называется также присоединенным к квадратичной функции
к(х) = Ь(х, х).
Для любой симметричной билинейной функции b (x, у) (и квад-
квадратичной функции к (х)) в евклидовом пространстве ?п существует
ортонормированный базис, в котором она имеет диагональный вид:
Ъ (х, y) =
Векторы такого базиса являются собственными векторами присоеди-
присоединенного преобразования, а коэффициенты А^ — его собственными
значениями.
С помощью ортогональной матрицы перехода можно привести
к диагональному виду билинейную и квадратичную функцию в про-
произвольном конечномерном линейном пространстве С Для этого в С,
следует ввести скалярное произведение, относительно которого ис-
исходный базис е является ортонормированным, и найти ортонорми-
§ 32. Билинейные и квадратичные функции 295
рованный базис е' из собственных векторов присоединенного преоб-
преобразования. Тогда матрица перехода 5 от е к е' будет ортогональной,
а матрица В' = STBS = S~1BS — диагональной.
Диагональный вид билинейной (квадратичной) функции можно
использовать как промежуточный этап в ее приведении к канониче-
каноническому виду: надо только умножить на подходящие числа векторы
базиса, в котором квадратичная форма имеет диагональный вид.
Пусть f (а;) и g (х) — квадратичные функции (формы) в п-
мерном вещественном линейном пространстве С, причем функция
g (х) положительно определена. Тогда в С существует базис, в кото-
котором обе формы диагональны, и, более того, g (x) имеет канонический
вид. Если F (х, у) и G (а;, у) — симметрические билинейные функции,
порождающие квадратичные формы f (x) и g(a;), то искомый базис
— ортонормированный базис из собственных векторов самосопря-
самосопряженного преобразования, присоединенного к F(x, у), относительно
скалярного произведения, определяемого функцией G (х, у).
Пусть F и G — матрицы форм i и g в некотором базисе е. Диа-
Диагональные коэффициенты формы f в подходящем базисе являются
корнями уравнения
det (F - XG) = 0, E)
а соответствующие базисные векторы находятся из системы уравне-
уравнений
(F - AG) * = 0 F)
для каждого корня А уравнения E).
На практике пару квадратичных форм f, g приводят к диаго-
диагональному виду в два этапа: 1) находят базис е', в котором форма g
является канонической (например, методом Лагранжа), и преобра-
преобразуют форму i к базису е', 2) находят базис е", матрица перехода
к которому от базиса е' ортогональна и в котором форма i име-
имеет диагональный вид: в этом базисе форма g остается канонической.
Если 5 — матрица перехода от базиса е к промежуточному базису е',
а Т — матрица перехода от е' к базису е", то матрица перехода от е
к е" равна ST.
Функция h (х, у) в комплексном линейном пространстве С назы-
называется эрмитовой билинейной (полуторалинейиой), если
h (x + у, z) = h (x, z) + h (у, z),
h (x, у + z) = h(x, y) + h(x, z),
h(ax, 0y) =a]3h(x,y)
для всех х, у, z € С. и а, 0 € С. Эрмитова билинейная функция назы-
называется симметричной (эрмитовой), если h(x, у) = Ъ.(у, х) для всех
х, у е С Такая функция порождает квадратичную эрмитову функ-
функцию k(x) = h(x, x). Ее матрица эрмитова: ВТ = В.
Пусть В, В' — матрицы эрмитовой билинейной функции h (x, у)
в базисах е, е' комплексного пространства, 5 — матрица перехода
296 Гл. 12. Функции на линейном пространстве
от е к е', а ?,, т| — столбцы координат векторов х, у в базисе е.
Тогда
h(х, у) = 1,ТВц, к (х) = ?,Т??Е,;
В' = 5ТВ5.
Многочлен, служащий координатной записью билинейной (квадра-
(квадратичной) эрмитовой функции, называется соответственно билинейной
(квадратичной) эрмитовой формой.
Квадратичная форма в п-мерном комплексном пространстве
г
приводится к каноническому виду J2 С], гДе r ~ Ранг формы.
Квадратичная эрмитова форма приводится к каноническому ви-
п
ду $2 ?j-|?j|2, где tj равны 1, —1 или 0. Закон инерции и крите-
1=1
рий положительной определенности (критерий Сильвестра) квадра-
квадратичной эрмитовой формы формулируются точно так же, как для
вещественной квадратичной формы. Для квадратичной эрмитовой
формы к (х) в унитарном пространстве существует ортонормирован-
п
ный базис, в котором она диагональна: к(х) = ^2 A? l?jl2- Если В —
3=1
матрица формы в ортонормированном базисе, то коэффициенты Xj
являются характеристическими числами матрицы В.
Билинейные и квадратичные функции
в вещественном линейном пространстве C2.1—32.26)
32.1. Составить матрицу данной билинейной формы и за-
записать соответствуюшую ей квадратичную форму в п-мерном
линейном пространстве:
1) Х1У1 (п = 1); 2) xjyi (п = 2);
3) 2xiyi - xiy2 - x2yi - 5х2у2 (п = 2);
= з)_ XW2 ХШ+ Х2УЗ+Х2У!
п п
5) у !•«•¦ 6) У~* х у -Ч-1' 7) У^ ху-
i-\ i=\ I
32.2. Восстановить симметричную билинейную форму в п-
мерном линейном пространстве по данной квадратичной фор-
форме и составить
1)
2)
3)
oXi М
—18xiX2
X? + 4xi;
ее
а -
+
?2
матрицу:
9х\ (п =
+ 4xiX3 +
2);
Ъх\ +12х
2Х3 + 1х\
(п =
з);
§ 32. Билинейные и квадратичные функции 297
..>$¦{¦ П —1
А ' 4) 2х\ - 6х1Х2 - Ъх\ (п = 3); 5) J2 XiXi+l-
r" i=i
32.3. Записать квадратичную форму, имеющую данную
матрицу:
1) An; 2) А37; 3) Azor, 4) А280; 5) Аш;
6) Aj7i; 7) А593; 8) Л634-
32.4. 1) Восстановить симметричную билинейную функ-
функцию по порожденной ей квадратичной функции.
2) Доказать, что любую билинейную функцию b (x, у)
можно единственным образом представить как сумму b (x, у) =
= Ъ+ {х, у) + Ь_ (х, у), где Ь+ (х, у) = Ь+ (у, ж), а Ь_ {х, у) =
= —Ь_ (у, х). Доказать, что при этом b (х, х) = Ь+ (ж, х).
32.5. Как изменится матрица билинейной (квадратичной)
функции, если изменить базис е\, ..., еп следующим образом:
1) поменять местами г-й и j-й векторы базиса;
2) умножить г-й базисный вектор на число А ф 0;
3) вектор е\ заменить на ej + Ае, (г ф j);
4) векторы базиса расположить в обратном порядке?
32.6. Квадратичная функция и линейное преобразование
имеют в некотором базисе одинаковые матрицы. Какой должна
быть матрица перехода от этого базиса к другому базису для
того, чтобы в другом базисе матрицы квадратичной функции
и линейного преобразования также совпадали?
32.7. Квадратичная функция дана в базисе е\, ..., еп. За-
Записать эту квадратичную функцию в базисе е[, ..., е'п:
е'2 = —
) i 2 ^ е2 ;
2) 3x\ + Южхжг + 9ж|, е\ = 2ei - е2, е'2 = ei - e2;
3) 4х\ ~ I2xix2 + Qxl, e'j =-ei --е2, е'2 = -ei + -e2;
.it- 4 о 4 о
У 4) х\ + 4x\xi + 4х\х% — Жд, е[ = ei + ег + ез, е'2 = 2ei —
-ег + ез, е'3 = -ei + 2е2 - Зез;
5) х\ + 2xio;2 — х\х$ - х\ + 2х^х% + х\, 6^ = 261-63, е'2 =
= -ei + 2е2 - е3, е3 = -е2 + е3;
6) Ъх\ + 5ж| + З^з + 2Ж1Ж2 + 2\/2х1о;з + 2\/2ж2жз, е^ = ei +
+е2-2\/2е3, е'2 = ei - е2, е'3 = V^ei + л/2е2 + е3;
п-1
*• 7) Y, XiXi+i, e'j = ei + ei+i + ... + е„, г = 1,2, ...,n.
Г г=1
32.8. Привести данную квадратичную форму к канониче-
|вкому виду с помощью метода Лагранжа или элементарных
298 Гл. 12. Функции на линейном пространстве
преобразований ее матрицы. Найти ранг, положительный и от-
отрицательный индексы инерции и сигнатуру этой формы:
) \ 12
2) х\ - х\х2 - х\\
3) -xix2;
4) 1Ьх\ + 30x1X2 + ^;
5) 2xiX2 - х\ - 2х\;
6) 24xix2 - 16х? -9х|;
7) х^ + 4x |
8) х\ + 2xix2 + 2xix3 - 3x2 ~ з
9) 2х\ + 8xix2 + 4xix3 + 9х| + 19х|;
10) 9х^ - 12xiX2 - 6xix3 + 4х2!
11) 8x1 + &Х2 + хз + 16xiX2
12) (р) xiX2 + Х2Хз + xix3;
13) х\ + 2х\ + 2х\ + 3x1 + 2xix2 + 2х2х3 + 2х3х4;
14) х\ - 2xix3 + х\ - 2х2х4 + х\ - 2х3х5 + х\ - 2х4хб + х\ +
+4;
15) Х1Х2 + 2X2X3 — ЗХ3Х4;
16) XjX2 + Х2Х3 — х\ — х\ — х\.
32.9. Выяснить, какие квадратичные формы из задачи
32.8 являются положительно определенными, отрицательно
определенными, полуопределенными.
32.10. Привести к каноническому виду данную билиней-
билинейную форму:
1) xiyi + Х1У2 + Х2У1 + Зх2уг;
2) xiyj - Х1У2 ~ x2yi + Х2У2;
3) 13xiyi
4) -Х1У2 ~
5) xiy2 + Х2У1 + Х1уз + x3yi + х2уз
6) xiyi + 2х2у2 + Зх3уз + Х]у2 + x2yi + Х1у3 + x3yi + 2х2уз +
+2х3у2;
7) xiyi + Х1у2 + x2yi + х2уз-
32.11. Доказать, что несимметричную билинейную функ-
функцию нельзя привести к диагональному виду.
32.12. Привести квадратичную форму, зависящую от дей-
действительного параметра А, к каноническому виду при всевоз-
всевозможных значениях А:
1) Ъх\ — 2x1X2 + Ах2;
2) 8х? + Axix2 + 2х|;
3) 2х\ + 8xix2 + 4xix3
§ 32. Билинейные и квадратичные функции 299
4) х\ + х\
5) За;! + §х\Х2 + 2х\х$ + ^х^х^ + \x2x4 + х\ + Х3Х4 + х\.
32.13. Привести к каноническому виду данную квадратич-
квадратичную форму в n-мерном пространстве:
J2
i=2 i=l
3) Е 4 + Е XiXj) 4)
Е
г=1
6) Е((г-1J + 1)а;? +
i=l
32.14. Доказать, что для положительной определенности
квадратичной функции к (х) необходимо и достаточно любое
из условий:
1) к (ej) > 0 (г = 1, ..., п) для любого базиса е\, ..., еп;
2) к (х) приводится к диагональному виду с положитель-
положительными коэффициентами;
3) к (х) приводится к каноническому виду ?,2 + ¦¦¦ + ?%¦
32.15. Показать, что для положительной определенности
квадратичной функции необходима, но недостаточна положи-
положительность всех диагональных элементов ее матрицы в некото-
некотором базисе.
32.16. Доказать, что квадратичная форма отрицательно
определена тогда и только тогда, когда знаки главных миноров
ее матрицы чередуются следующим образом:
Ai<0, A2>0, А3<0, ..., signAn = (-l)n.
32.17. Пусть ранг квадратичной функции к (х) в п-мерном
линейном пространстве С равен г. Доказать утверждения:
1) в С существует базис, в котором главные миноры А^
матрицы функции к (ж) отличны от нуля при к = 1, ..., г и
равны нулю при к = г + 1, ..., п.
2) пусть в некотором базисе главные миноры Дц. (к =
= 1, ... , г) матрицы функции к (х) отличны от нуля. Тогда
300 Гл. 12. Функции на линейном пространстве
г
к (ж) приводится к диагональной форме 53 ?fc (^о = 1) и
fc=iAfc-i
к канонической форме У) ?&??> гДе ?fc = sign — (k = 1,... ,r).
32.18. При каких значениях параметра А данная квадра-
квадратичная форма положительно, отрицательно определена или по-
полуопределена:
1) Хх\ - ixix2 + (А + 3) х\\
2) -Qxj + 6\xix2 - х\\
3) \х\ + 8x1 + х\ + 16xiX2 + 4zia:3 + 4ж2хз;
4) х\ + 2АЖ1Ж2 + 2Ж1ЖЗ + Ах\ - \х\ + 2х2х%\
5) D - А) х? + D - А) о;2 - B + А) х\ + 4a;ix2 -
32.19. Пусть к (х) — квадратичная функция в линейном
пространстве С. Является ли линейным подпространством в С
множество всех векторов х из С, для которых к (х) ^ 0 (к (х) ^
^0)? Рассмотреть примеры к (х) — х\ + х\ — х\ (п = 3) и
h(x) — х\ + х\ (п = 3).
32.20. 1) В матрице положительно определенной квадра-
квадратичной формы увеличили один диагональный элемент. Дока-
Доказать, что детерминант матрицы увеличился.
2) Доказать, что в матрице положительно определенной
квадратичной формы максимальный по модулю элемент по-
положителен.
32.21. 1) Доказать, что в линейном пространстве веще-
вещественных квадратных матриц порядка п функция к (X) =
= tr (XTX) является положительно определенной квадратич-
квадратичной функцией.
2) Доказать, что в линейном пространстве вещественных
квадратных матриц порядка п функция к (X) = tr (X2) явля-
является квадратичной функцией. Найти ее ранг и сигнатуру.
32.22. Доказать, что функция
-1
является симметричной билинейной функцией в пространстве
многочленов степени не выше п. Привести ее к каноническому
виду при п — 3.
'¦< § 32. Билинейные и квадратичные функции 301
32.23. Доказать, что ранг билинейной функции равен 1 то-
тогда и только тогда, когда эта функция — произведение двух
ненулевых линейных функций.
32.24. Доказать, что для представимости квадратичной
функции в виде произведения двух линейных вещественных
функций необходимо и достаточно, чтобы либо ранг этой квад-
квадратичной функции не превосходил 1, либо ранг был равен 2, а
сигнатура равна нулю.
32.25. При каком необходимом и достаточном условии
квадратичные функции к (х) и —к (х) могут быть приведены к
одному и тому же каноническому виду?
32.26. 1) Пусть b (x, у) — билинейная функция в линей-
линейном пространстве С Назовем функцию b (x, у) инвариантной
относительно линейного преобразования (р пространства ?, ес-
если b (ip (x), ip (у)) = Ъ (х, у) для всех х, у € С. Доказать, что b
тогда и только тогда инвариантна относительно <р, когда их
матрицы (В и А соответственно) в некотором базисе удовле-
удовлетворяют равенству АТВА — В.
2) Найти все линейные преобразования двумерного про-
пространства, относительно которых инвариантна билинейная
форма: а) х\у\ + х2у2\ б) х\у\ - х2у2.
Квадратичные функции в евклидовом пространстве.
Пары форм C2.27-32.39)
32.27. Квадратичная (билинейная) функция записана в
ортонормированном базисе n-мерного евклидова пространства.
Найти ортонормированный базис, в котором данная функция
имеет диагональный вид, и записать этот диагональный вид.
п = 2:
1)
2)
3)
4)
5)
n
6)
7)
8)
-4xf + Юх
4 2 n
-X( - 2xiX;
lx\ + 4л/3а:
-xi2/i + 3x]
1
= 3:
—X? + X1X2
2xi — 4xiX2
^12/1 — ^lJ/2
lX2 - 4x|;
^3 2
s + 4*2;
:ix2 + Зж^;
L2/2 + 3X22/1 — 9X22/2;
1
Ш + т^2У1 — x2y2;
— Ж2;
; + 9x2 + 4x2X3 + 2a
~ Х2У\ + 2^22/2 — X;
302 Гл. 12. Функции на линейном пространстве
9) 2x\y2 +'
- Зхзуз;
10) (р) 2х\
11) Зх2-2,
12) Зх2 + 8
13) х\ - xi
2^22/1 ~~ 2xi 2/з
+ 4xiX2 — 2х
XlX2 - 2XiX3
Х\Х2 — 8X1X3
Х2 + xiX3 + а
, — 2хзУ1 + 4X22/2
ix3 - х\ + 4х2ж3
+ 3X2 — 2Х2Хз +
— 7X2 — 8X2X3 +
•\ + Х2Х3 + х\;
14) \х\ + \x\x<i - \2x\Xj, -Vx\- 6Ж2Ж3 + 9^3;
15) х\у2 + х2у\ - 2х\у% - 2x3yi - ххух - х2у2 + 2х2уз
16)
п = 4:
17) хг + 2xiX2 + 2x1x3 + 2x1X4 + х\ — 2x2X3 — 2x2X4 + х3 —
- 2х3Х4 + х\\
18) X2 - 2xiX2 + 6X1X3 + 8X1X4 + 4X2 ~ 2X2X4 - 6X3X4 + X2;
19) 2х? - 4xiX2 + 4xiX3 + бх2, - 6x2X3 + 2x2X4 + бх2. + 2х3Х4 +
+ 4х2-
A\J) Хл ~\~ 2iX\Xc2t 1 ?X\XQ ~\~ ?Х\Х^ — Д/q — Хо — *?д]
21) -xi2/2 + r^22/i + ^^32/4 + ^^42/з;
22) Зх2 — 8x1X2 — ЗХ2 — Х3 + 4x3X4 — 4x4;
п . , 2п-1
} / j \ } ^%yjj ^OJ / j JLj%JL•J.Xl — Z)
In 2n n-1
26) y^x2 + y^xxo • г 27) У* хх-
i=l * г=1 г=1
32.28. Найти канонический вид, ранг и сигнатуру каждой
из квадратичных и билинейных форм задачи 32.27.
32.29. Доказать, что квадратичная форма является поло-
положительно определенной тогда и только тогда, когда все харак-
характеристические числа ее матрицы положительны, и отрицатель-
отрицательно определенной тогда и только тогда, когда отрицательны.
32.30. Пусть все характеристические числа вещественной
симметрической матрицы А принадлежат отрезку [а, Ъ]. Дока-
Доказать, что квадратичная форма с матрицей А — ХЕ положитель-
положительно определена при Л < а и отрицательно определена при Л > Ь.
32.31. Доказать, что квадратичная форма положительно
определена тогда и только тогда, когда все коэффициенты ха-
характеристического многочлена ее матрицы отличны от нуля
§ 32. Билинейные и квадратичные функции 303
и знаки этих коэффициентов чередуются, причем свободный
член положителен.
32.32. 1) Доказать, что линейное преобразование ip евкли-
евклидова пространства, присоединенное к заданной в нем симмет-
симметричной билинейной функции b (х, у), является самосопряжен-
самосопряженным.
2) Пусть в некотором базисе е билинейная функция Ъ(х,у)
имеет симметричную матрицу В, а матрица Грама базиса е
равна Г. Найти матрицу преобразования, присоединенного к
функции Ъ(х, у).
32.33. В базисе е евклидова пространства задана квадра-
квадратичная форма. Найти в том же базисе матрицу присоединенно-
присоединенного к ней преобразования, если матрица Грама базиса е равна Г:
1) 4х\ + 16a;ia;2 + 6х%, Г = Аье;
2) 4х? - 6xix2 - Ьх\ Г = Аъъ;
3) 2rria:2 ~х\, Г = А9;
4) 2х\ + Ах\Х2 - 1х\х?, -х% + 4х2Хз + 2х§, Г = А^ат,
5) Ъх\ + х\ + 4ж| + 1х\Х2 + 4ж1а;з + 4x2^3,
6) xf + х\ + х\ + х\ + 2xiX2 + 2xiX3 + 2xix4 -
— 2x2X4 — 2x3X4, Г =
32.34. Пусть в некотором базисе е п-мерного евклидова
пространства с матрицей Грама Г квадратичная функция к (х)
имеет матрицу В. Доказать, что ортонормированный базис, в
котором к (х) диагональна, и ее диагональные коэффициенты
в этом базисе находятся как решения обобщенной задачи на
собственные значения и собственные векторы: J3E, = АГ?, (?, €
€Пп).
32.35. Пусть М. — r-мерное линейное подпространство п-
мерного евклидова пространства. Функция к (х) равна квадра-
квадрату длины ортогональной проекции вектора х на подпростран-
подпространство Л4. Доказать, что функция к(х) является квадратичной.
Найти диагональный вид, который имеет эта функция в неко-
некотором ортонормированном базисе.
32.36. Проверить, что по меньшей мере одна из двух дан-
данных квадратичных форм является знакоопределенной. Найти
замену координат, приводящую эти две формы одновременно к
диагональному виду, и записать этот диагональный вид обеих
форм.
ли 1) f = х\ + 2xix2 + Зх^, g = 4х? + 16xix2 + 6х|;
304 Гл. 12. Функции на линейном пространстве
2) f = 2х\ — Зх\Х2 — -х\, g = 2х\ + 6x1X2 + Ъх\\
3) f = \\х\ - 6xix2 + х2,, g = \Ъх\ - 10xix2 + Зх2,;
4) f = 9rcf — ЮХ1Х2 + Зх2., g = 2xiX2 — х2.;
\ + x\, g = 17x1 + 8x1X2 + x\\
7
+ 2mx\X2 + x\, где тиа — вещественные параметры, а2 + о
;
9) f = Ъх\ + 2xia;2 + 4ж1а;з + х2, + 4x2a;3 + 4x|, g = 5ж
— 2xiX2 + 4x1X3 + х2 + 2х\\
10) f = 15хз ~ ^хз ~~ lO^i^ - 8x1X3 + 22x2X3, g = х2 —
- 2x1X3 + 4x2
11) (р) f = 6х\ + 6xix3 + х\ - 6х2х3
х\ — 2x2^3 + 2х2;
) ?
12) f = 2х? - 2a;ix2 - 2xiX3 + x\ + 2x% g =
- 24xix3 + 4х| + 16ж2Х3 + 16х|;
+ 4х| + 16ж2Х3 + 16х|;
13) f = х\ + Чх\ + 16xf + 19х| - г
— 10xiX4 — 26X2^3 + 8X2X4 — 2X3X4, g = —X2 + 2x^X2 —
+ 4x2X3 — 5х| + 6x3X4 - 10х2;
14) i=x\~ 4x2X3 + 4x| - 4x3X4 + 4x|, g = x2
+ 2x?, - 2x2x3 + 2x\ - 2x3X4 + 2x|.
32.37. Доказать, что если среди линейных комбинаций
двух квадратичных функций имеется положительно опреде-
определенная, то эти две функции одновременно приводятся к диа-
диагональной форме. Показать на примере, что это условие не
является необходимым.
32.38. В некотором базисе е n-мерного линейного про-
пространства квадратичные функции f и g имеют соответственно
матрицы F и G. Пусть в базисе е', заданном матрицей перехода
S от базиса е, функция g имеет каноническую форму ]Г} ?t- ,a
« 2 i=l
функция f — диагональную форму 2j \€i ¦ Доказать, что:
1) det (F - XG) = (det 5J(Ai - А) *~. (А„ - А);
2) векторы базиса е' находятся из системы уравнений (F —
— XG) ? — о для каждого корня А уравнения det (F — XG) = 0.
32.39. Не находя замены координат, приводящей положи-
положительно определенную квадратичную форму g к каноническому
§ 32. Билинейные и квадратичные функции 305
виду, а квадратичную форму f к диагональному виду, найти
этот диагональный вид формы f.
1) f = х\ + 2ххх2 + х2, g = Юх\ + 6ххх2 + x\;
,^,.2) f = 89z? - \2xxx2 + bx\, g = \\x\ - \8x\x2 + 2x\\
1*,3) f = 4xxx2 + 31x1, g = x\ + 2xxx2 + 2x1;
' 1 1
'ЩП) f = 8x\ ~ Ьхххъ + -x\, g = x\- хгх2 + -x\.
-nttr. l *•
Билинейные и квадратичные функции
. в комплексном пространстве C2.40—32.47)
32.40. Показать, что:
1) если b (х, у) — билинейная функция в n-мерном ком-
комплексном арифметическом пространстве, то функция h(x, у) =
= b (x, у) является эрмитовой билинейной;
2) если b (x, у) — эрмитова билинейная функция в про-
пространстве С„, то b (х, у) = h (x, у) — билинейная функция.
32.41. Привести следующие квадратичные формы к кано-
каноническому виду:
1) 4ж? - \2ix\X2 - §х\\
^ 2) 9х\ + 24(г + 1) ххх2 + 16ж|; 3) ххх2\
« 4) е2х1-еххх2 + х1е = е2™/3;
Ж 5) A + г) х\ + B + 2г) ххх3 + ix\ + 2>х\;
¦mi 6) х\ + B- 2i)xxx2 + 2ххх3 + 2ix\ + B + 2%)х2хъ + A + i)x\\
|Я 7) -х\ - 4гж1Ж2 - B - 2г) х\х% + \х\ - D + 4г) х2х3 + 2ix\.
. v- 32.42. Составить матрицы данных эрмитовых билинейных
^)врм в n-мерном пространстве:
М 1) -ixryl (n = 1); 2) -ixiyj {n = 2);
3) Зх1уг + 4ixiy2 - Ъх2ух + ix2y2 (n = 2);
4) -Згх1уг + 2хгу2 + 2х2ух + A - г) х2у2 (п = 2);
5) A + г) xiy2 + A + г) х2ух - 5х2у2 (п = 2);
6) A + г) хху2 + A - г) х2ух - Ъх2у2 (п = 2);
7) хгух - Зх2у2 + B + г) х3уг - ixxy2 + D + i)xzyx (n = 3);
8) 2х1уг - 6х2у2 + A + 3\/2) х3Щ + Зхху2 + Зх2уг + B -
- 5г) хху3 + B + 5г) жзу! + 4ix2y3 - Aix3y2 (n = 3);
9) Е х&.
г=1
32.43. Какие из эрмитовых билинейных форм в задаче
32.42 симметричны? Записать соответствующие им эрмитовы
квадратичные формы.
306 Гл. 12. Функции на линейном пространстве
32.44. Записать эрмитову квадратичную форму, имею-
имеющую данную матрицу:
1) АА7; 2) А79 (при е = е2™'/3); 3) Л280; 4) Аш.
32.45. Эрмитова квадратичная форма записана в ортонор-
мированном базисе n-мерного унитарного пространства. Найти
ортонормированный базис, в котором данная эрмитова квадра-
квадратичная форма имеет диагональный вид, и записать этот диа-
диагональный вид:
1) 2 l^il2 + ixxx2 - ix2xi + 2 |х2|2 (n = 2);
2) |xi|2 + C - 4г) xix2 + C + 4г) х2хг + \x2\2 (n = 2);
3)\xl\2 + exlx2 + ex2xl + \x2\2 (e = e27ri/3) (n = 2);
4) 3 |агг|2 + 3 |ж2|2 - 5 |ж3|2 - ixix2 + ix2xx (n = 3);
5) |a;i|2 + |ж2|2 + |а;з|2 + а;1Х2-|-а;2Х1 + ix\x~z — ix$x\ +гх2Щ —
- ixzx2 (n = 3);
6) 12|:n|2 - A + *) xxx2 - A - *) x2xx + 2Ж1ХЗ + 2x3xi + C +
+ Зг) xix4 + C - Зг) x4xi + 12 |x2|2 + A - г) x2x3 + A + i)x3x2 -
- 2x2X4 — 2x4X2 + 8 |хз|2 — A + г) Х3Х4 — A — г) Х4Х3 + 8 |x4|2
(n = 4).
32.46. Восстановить симметричную эрмитову билинейную
функцию h (x, у) по эрмитовой квадратичной функции к (х) =
= h(x, x).
32.47. Доказать, что в линейном пространстве комплекс-
комплексных матриц порядка п функция k(X) = tr lX ¦ ХТ\ являет-
является положительно определенной эрмитовой квадратичной функ-
функцией.
Глава 13
АФФИННЫЕ И ТОЧЕЧНЫЕ
ЕВКЛИДОВЫ ПРОСТРАНСТВА
§ 33. Аффинные пространства
В этом параграфе используются следующие основные понятия:
вещественное п-мерное аффинное пространство и его простран-
пространство векторов, декартова система координат, декартовы коорди-
координаты и координатный столбец точки, независимая система точек,
плоскость в аффинном пространстве, прямая линия, гиперплос-
гиперплоскость, направляющее подпространство плоскости, проекции точ-
точки и вектора на плоскость параллельно другой плоскости, отрезок,
выпуклое множество, выпуклая оболочка множества, симплекс,
треугольник, тетраэдр, грани и ребра симплекса, параллелепипед,
параллелограмм, граница, грани, ребра, вершины, диагонали паралле-
параллелепипеда.
Единственную точку В аффинного пространства такую, что
АВ = х, обозначаем Р (А, х).
Система точек Ао, А\, ..., Ак аффинного пространства называ-
называется независимой (или системой в общем положении), если система
векторов AqA\, A0A2, ¦ ¦ ¦, AoAk является линейно независимой.
Рассмотрим плоскость т в аффинном пространстве Л.
Пусть Л о — фиксированная точка, принадлежащая плоскости,
bi, ..., bk — базис направляющего подпространства плоскости, а О —
фиксированная точка аффинного пространства. Радиус-вектором
точки А относительно точки О называется вектор О А. Точка А с
радиус-вектором х принадлежит плоскости тогда и только тогда,
когда
х = xq + txbi + ... +tkbk. A)
Параметры t\, ..., tk принимают произвольные значения и одно-
однозначно определяются точкой А.
Если ввести декартову систему координат с началом в точке О,
то все векторы в уравнении A) могут быть заменены их координат-
координатными столбцами в этой системе координат О, е:
х = хо + fibi + ... + tfcbfc.
Наконец, записывая уравнение A) покоординатно в базисе е, мы по-
получим параметрические уравнения плоскости m в системе коорди-
координат О, е:
Xi - xi0 + hbn + ... + tkbik, i = 1, ..., k
308 Гл. 13. Аффинные и точечные евклидовы пространства
Пусть m и т' — две плоскости в аффинном пространстве Л с
пространством векторов ?, а АЛ и АЛ' — направляющие подпростран-
подпространства этих плоскостей. Если АЛ С АЛ' или АЛ' С АЛ, то плоскости m
и т' называются параллельными. Если m и т' не имеют общих точек
и не параллельны, то эти плоскости называются скрещивающимися.
Различают два случая: если при этом АЛ Г\АЛ' — {о}, то плоскости
называются абсолютно скрещивающимися; если же m и т' скре-
скрещиваются, а пересечение АЛ П АЛ' содержит ненулевой вектор, но не
совпадает ни с одним из подпространств АЛ и АЛ', то плоскости назы-
называются скрещивающимися параллельно подпространству АЛ П АЛ'.
Если прямая сумма направляющих подпространств АЛ и АЛ'
плоскостей m и т' совпадает с пространством векторов ?, то плоско-
плоскости m и т' имеют единственную общую точку. В этом случае опре-
определено понятие проекции точки А ? Л на одну из этих плоскостей
параллельно другой, а именно: проекцией точки А на плоскость т!
параллельно плоскости m (или параллельно АЛ) называется точка
пересечения плоскости т' с плоскостью, имеющей направляющее
подпространство АЛ и содержащей точку А.
Отрезком АВ, соединяющим точки Аи В аффинного простран-
пространства, называется множество всех точек вида Р(А, tAB), t € [0, 1].
Хотя в аффинном пространстве расстояние между точками не опре-
определено, тем не менее можно ввести понятие деления отрезка в задан-
заданном отношении. Если р и q — некоторые числа, р + q ф 0, то говорят,
что точка С делит отрезок АВ в отношении р : q, если qAC = рСВ.
Если отношение р: q отрицательно, то точка С лежит вне отрез-
отрезка АВ.
Серединой отрезка называется точка, делящая этот отрезок в от-
отношении 1:1.
Множество Q точек аффинного пространства называется вы-
выпуклым, если для любых двух точек из Q весь отрезок, их соединя-
соединяющий, целиком содержится в Q.
Выпуклой оболочкой некоторого множества АЛ аффинного про-
пространства называется пересечение всех выпуклых множеств, содер-
содержащих АЛ.
Выпуклая оболочка независимой системы точек Ао, А\, ..., Ak
называется k-мерным симплексом с вершинами Ао, А\, . ¦ ¦, Ak.
Нульмерным симплексом является точка, одномерным — отрезок;
двумерный симплекс с вершинами Ао, А\, Ai называется треуголь-
треугольником, трехмерный симплекс с вершинами Ао, А\, Аг, Аз называ-
называется тетраэдром. Всякий р-мерный симплекс, вершинами которого
являются некоторые точки Bq, В\, ..., Вр из множества вершин
данного fc-мерного симплекса, называется р-мерной гранью данно-
данного fc-мерного симплекса @ ^ к < р). Одномерные грани симплекса
называются ребрами.
Пусть заданы точка Ао аффинного пространства А с простран-
пространством векторов ? и система Д, ..., fk линейно независимых векто-
векторов ?. Множество всех точек вида
§ 33. Аффинные пространства 309
Р(Ль hh + ¦ ¦ ¦ + tkfk), O^tj^l, j = l,...,k B)
называется к-мерным параллелепипедом П (Ао; /ь ..., Д) с верши-
вершиной Aq, построенным на векторах f\, ..., Д. Нульмерным парал-
параллелепипедом является точка, одномерным параллелепипедом — от-
отрезок; двумерный параллелепипед называется параллелограммом.
Границей параллелепипеда П (Ао; /i, . • •, Д) называется подмноже-
подмножество тех его точек, для которых значения по крайней мере одного
из параметров tj в B) равны либо 0, либо 1. Множество точек гра-
границы параллелепипеда, для которых какие-нибудь фиксированные
р параметров принимают произвольные значения, а значения осталь-
остальных к — р параметров постоянны и равны либо 0, либо 1, называет-
называется р-мерной гранью параллелепипеда (к = 0, 1, ..., р — 1). Вершиной
параллелепипеда называется любая его нульмерная грань (т. е. точ-
точка границы, для которой каждый из параметров tj принимает зна-
значение либо 0, либо 1). Одномерные грани параллелепипеда называ-
называются его ребрами. Отрезок, соединяющий какие-либо две вершины
параллелепипеда и не лежащий ни в одной из его граней, называется
диагональю параллелепипеда.
33.1. Проверить, что гг-мерное линейное пространство С
является аффинным пространством с пространством векторов,
совпадающим с ?, если точками этого аффинного простран-
пространства считать векторы из ? и всякой упорядоченной паре век-
векторов о, Ь ставить в соответствие вектор х = Ь — а.
ЗЗ^Доказать, что в аффинном пространстве Л:
1) А А = о для любой точки А из Л;
2) Р (А, о) = А для любой точки А из Л;
3) АВ = —ВА для любых точек Л и В из Л;
4) равенство АВ — А\В\ имеет место тогда и только тогда,
когда АА\ — ВВ\.
33.3. 1) Доказать, что система точек Aq, A\, ..., А^ аф-
аффинного пространства независима тогда и только тогда, когда
не существует плоскости размерности, меньшей к, содержащей
эту систему точек.
2) Доказать, что система точек Ао, А\, ..., Ак аффинно-
аффинного пространства независима тогда и только тогда, когда для
произвольной точки О из равенств
Х0ОА0 + XiOM + ... + \kOAk~ = о,
До + Ai + ... + Afc = 0
следует, что Ао = Ai = ... = А* = 0.
310 Гл. 13. Аффинные и точечные евклидовы пространства
33.4. Независима ли система точек с координатами:
1) @, 1, 1), A, 0, 1), A, 1, 0);
2) @, 1, 1), A, 0, 1), A, 1, 0), B, 2, 2);
3) @, 1, 1), A, 0, 1), A, 1, 0), B/3, 2/3, 2/3)?
33.5. Показать, что понятие независимости системы точек
Aq, А\, ..., Ak равноправно относительно всех точек этой си-
стемы. А именно, если система векторов АоА\, А0А2, ..., AoAk
линейно независима, то линейно независима и любая система
AjA0, ..., AjAj^x, AjAj+i, ..., A0Ak, j = 1, 2, ..., fe.
33.6. Пусть m и m' — плоскости с направляющими под-
подпространствами М. и М.' ¦ Доказать, что:
1) если М. С М!, то либо m и т' не имеют общих точек,
либо m С т';
2) если М. = Л4', то т и т' либо не имеют общих точек,
либо совпадают.
33.7. Доказать, что если прямая имеет две различные об-
общие точки с плоскостью, то она принадлежит этой плоскости.
33.8. Доказать, что если fc-мерная плоскость mi содержит
независимую систему точек Aq, A\, ..., Ak, общих с плоско-
плоскостью наг, то mi С ni2-
33.9. Доказать, что существует ровно одна fc-мерная плос-
плоскость, содержащая независимую систему точек Ао, А\, ..., Ak-
33.10. Пусть Ао, А\, ..., Ak — независимая система точек
в fc-мерной плоскости т, а О — фиксированная точка аффин-
аффинного пространства. Доказать, что m состоит из тех и только
тех точек А, для которых
Ш = А0ОА) + AiOAT + ... + AfcOlT,
где Ао, Ai, ..., А^ — числа, удовлетворяющие равенству Ао +
+ Ai + ... + Afc = 1.
33.11. Пусть li, I2, I3, Ц — прямые в аффинном простран-
пространстве, причем U параллельна 1г, а 1з параллельна Ц. Пусть, да-
далее, 1з пересекает Ц и h в точках А\ и В\ соответственно, а Ц
пересекает Ц в точке А^. Ддказать; что Ц пересекает и 1г в точке
??2 такой, что А\Ач = В1В2, A\Bi = A2B2.
33.12. Доказать, что любые две прямые n-мерного аффин-
аффинного пространства (n ^ 3) целиком содержатся в некоторой
трехмерной плоскости.
33.13. При каком необходимом и достаточном условии две
прямые ж = оо + oit и а; = Ьо + bit содержатся в одной двумер-
двумерной плоскости?
§ 33. Аффинные пространства 311
33.14. Составить уравнения:
1) прямой, проходящей через точки А(—1,0, 3, — 2) и
5B,1,4,5);
2) двумерной плоскости, проходящей через точки
А (-2, 1, 1, 1), В A, 3, -5, 2) и С @, 1, 1, 4);
3) трехмерной плоскости (гиперплоскости), проходящей
через точки А A,1,0,-1), В B,-1,3,3), С {1,-1,1,5) и
D @,0, 3,-1).
33.15. Пусть А (х[, х'2, ..., х'п) и В (х'{, х'2', ..., а#) — две
различные точки, р и q — некоторые числа. Найти координаты
точки С, делящей отрезок АВ в отношении р : q.
33.16. Пусть точки А, В, С в n-мерном пространстве не
лежат на одной прямой. Доказать, что медианы треугольни-
треугольника ABC проходят через одну точку и делятся в этой точке в
отношении 2:1, считая от вершины.
33.17. Точка М принадлежит гиперплоскости; заданной
уравнением а\Х\ + ... + апхп + а^ = 0, & вектор ММ\ имеет ко-
координатный столбец (oi, O2) • • •, о,п)Т. Доказать, что координа-
координаты точки М\ удовлетворяют неравенству а\Х\ + ... + апхп +
+ а0 > 0.
33.18. Составить параметрические уравнения плоскости,
заданной системой линейных уравнений:
1) А27Х. = С46; 2) Aiq-X = C2g; 3) А198Х = С1235
4) А249Х = С124; 5) А267Х = с66; 6) А517Х = ci25;
7) AlO3X = C208J 8) >*58бХ = С123-
33.19. Составить систему уравнений, определяющую дан-
данную плоскость:
1) х = С28 + tc33; 2) х = с83 + hcu + *2С66;
3) X = С147 + ^ш; 4) X = Сгб8 + «С2О75
5) X = С199 + *1С166 + *2С200-
33.20. Составить уравнение гиперплоскости в четырехмер-
четырехмерном пространстве, проходящей через точку М(—1, 2, 3, 5) па-
параллельно гиперплоскости 2х\ + 3x2 — 4ж3 + х± + 5 = 0.
33.21. Составить уравнение прямой в четырехмерном про-
пространстве, проходящей через точку М•(—1, 3, 4, 0) параллельно
прямой х\ = 2 + 3t, X2 = — 1 + t, хз = 7t, X4 = 2 — t.
33.22. Составить уравнения трехмерной плоскости в пяти-
пятимерном пространстве, проходящей:
1) через точку М@, 1, —1, 3, 4) параллельно трехмерной
ПЛОСКОСТИ Х\ + 2^2 + Зж3 = Ж4, Х\ + Х2 + Х3 + ?4 = 2X5!
312 Гл. 13. Аффинные и точечные евклидовы пространства
2) через точки М\ A, 3, 1, 0, 1) и М2 (О, 0, 1, 1, -1) парал-
параллельно двумерной плоскости х\ + Х2 — 1 = О, Х\ — хз + х± = О,
х\ + хз - хь + 1 = 0;
3) через точки Мг (-1, 2, 0, 0, 4), М2 A, 1, 1,1,1), М3 @, 1,
3, —1, 1) параллельно прямой х\ = 1 + 2?, жг = 3 - ?, яз =
= 4, Х4 = 1 + t, Хь = ~t.
33.23. Пусть 1 и m — две плоскости в аффинном простран-
пространстве с направляющими подпространствами С и М. соответ-
соответственно, проходящие: 1 — через точку Л, m — через точку В.
Доказать, что:
1) пересечение 1 с m непусто тогда и только тогда, когда
вектор АВ принадлежит подпространству С + М;
2) если плоскости 1 и m пересекаются, то пересечение 1П m
представляет собой плоскость с направляющим подпростран-
подпространством С Г) М..
33.24. Пусть две плоскости размерностей к\ и к% в п-
мерном аффинном пространстве имеют общую точку, и к\ +
+ кч > п. Доказать, что размерность пересечения данных плос-
плоскостей не меньше, чем к\ + къ — п. Дать формулировки этого
утверждения для всех возможных случаев при п = 3 и п = 4.
33.25. Пусть плоскость 1 с направляющим подпростран-
подпространством С проходит через точку А, плоскость m с направляющим
подпространством М. проходит через точку В, не совпадаю-
совпадающую с А. Доказать, что существует и единственна плоскость
наименьшей размерности, содержащая как 1, так и т; при этом
направляющим подпространством искомой плоскости являет-
является сумма С + М. + V, где V — подпространство, натянутое на
вектор АВ.
33.26. Сформулировать и доказать утверждение, анало-
аналогичное утверждению в задаче 33.25, для трех плоскостей.
33.27. Составить уравнения заданной плоскости в четы-
четырехмерном пространстве:
1) двумерной плоскости, содержащей точку А(—1, 0, 2, 3)
и прямую х\ = 1 — t, Хъ = 3 + 2?, х3 = 1 +1, x± = 3?;
2) двумерной плоскости, содержащей параллельные пря-
прямые х\ = — 1 + 2t, Х2 = t, хз = 0, Х4 = — 5 — t и х\ = 3 + 2t,
Х2 = — 4 + t, ж3 = 1, Х4 = —t;
3) трехмерной плоскости, содержащей точку А (—3, 0, 1, 0)
И Двумерную ПЛОСКОСТЬ Х\ — Х2 + Хз — 1 = 0, Х\ + Х2 + Х\ ~ 0.
§ 33. Аффинные пространства 313
33.28. Составить уравнения плоскости наименьшей раз-
размерности, содержащей две данные плоскости пятимерного про-
пространства:
1) прямые х\ = 1 — *, х2 = 2 + 3*, хз = 4*, х\ = —*, х$ = 3
и xi = 2 + *, x2 = 2t, х3 = 1 + *, x4 = -1 + 2*, х5 = 3 - *;
2) прямую xi = 2 + *, X2 = —t, хз = — 1 + *, x\ = 1 + 2*,
Х5 = —3* и двумерную плоскость х\ = *i + 3*2, хг = — 1 + 4ti —
- *2, Жз = -3 + ii + *2, Х4 = 4 - ti + *2i Ж5 = -2 + *2;
3) двумерные плоскости xi — хз + Х4 — 1 = 0, xi + 2x4 —
— Х5 — 2 = 0, хг + хз — 2 = 0 и xi = хг = хз = 1.
33.29. 1) Доказать, что если две плоскости в n-мерном про-
пространстве абсолютно скрещиваются, то сумма их размерностей
не превосходит п — 1.
2) Доказать, что если две плоскости в n-мерном простран-
пространстве скрещиваются параллельно г-мерной плоскости, то сумма
их размерностей не превосходит п + г — 1.
33.30. Исследовать взаимное расположение прямой и дву-
двумерной плоскости в четырехмерном пространстве, если дву-
двумерная плоскость задается уравнениями х\ — 2хз + 1 = 0, х\ +
+ 2x2 — Зхз + Х4 — 2 = 0, а прямая задана параметрически:
l)xi = 3 + 2f, хг = 5, хз = 2 + ?, Х4 = t;
2)x! = -2 + 3i, x2 = 3-t, x3 = -l + 2t, x4 = -4 + 4t;
3)xi = 6+-t, x2 = 5-t, x3 = l + 2t, x4 = l + 3t;
4) яя = -1 + 2t, x2 = l + t, x3 = t, xA = l-t.
33.31. Исследовать взаимное расположение двух двумер-
двумерных плоскостей в пятимерном пространстве, если первая плос-
плоскость задается уравнениями х\ = xi = 1, хз + Х4 = Х5, а вто-
вторая — параметрическими уравнениями:
l)zi = 2 + ti, х2 = 3, хз = 3 + 2*2, х4 = А, х5 = 5 +
) ,
ir5 = 2 + t2;
3) xi = 2 + ti + t2, x2 = 3 + ti + t2, x3 = 3 + 2*i + t2,
X4 = 4 + *i, X5 = 5-2*2;
4)xi=*i-*2, x2 = 1, х3 = *ь x4 = l-*2, x5 = 3-
- *i +12;
5) xi = 1, хг = 4, хз = 1 + *i + *2, x4 = 2 + 2*! - 2*2,
x5 = -5 + 3*i - *2;
6) xi = 1, x2 = 1, x3 = 2 + 2*i+*2, X4 = -3 + *i -3*2,
x5 = -l + 3*i -2*2-
314 Гл. 13. Аффинные и точечные евклидовы пространства
33.32. Доказать, что две прямые в четырехмерном про-
пространстве, заданные уравнениями х = сгоэ + ?ci97 и х = сгю +
+ *C2oi, имеют единственную общую точку. Найти координаты
этой точки и составить уравнения двумерной плоскости, содер-
содержащей данные прямые.
33.33. Точками аффинного пространства являются мно-
многочлены степени не выше 4, векторами являются те же мно-
многочлены: р\ (t)p2 (t) = Р2 (*) ~ Pi (*)• Первая прямая содержит
точки 2?4 — 2? и t4 + ?3 — t, вторая прямая содержит точки
5 + 10t2 + 2t3 и — 1 — 2t2 + 2tz. Доказать, что эти прямые имеют
единственную общую точку, и найти эту точку (многочлен).
33.34. Составить параметрические уравнения прямой в че-
четырехмерном пространстве, содержащей точку с координат-
координатным столбцом С2ц и пересекающей прямые х = c2i2 + *С202
и х = С21з + ?с2ю; найти координаты точек пересечения.
33.35. Система точек А\, ..., Ау., В\, ..., Bj независима.
Доказать, что существуют непересекающиеся плоскости 1 и m
размерностей к — 1 и j — 1 соответственно такие, что плос-
плоскость 1 содержит точки А\, ..., А^, а плоскость m содержит
точки В\, ..., Bj.
33.36. Пусть 1 и m — плоскости аффинного пространства
такие, что пространство векторов аффинного пространства яв-
является прямой суммой направляющих подпространств С и М
этих плоскостей. Доказать, что:
1) проекция любой точки аффинного пространства на
плоскость 1 параллельно плоскости m определена однозначно;
2) проекция любого вектора АВ на плоскость 1 параллель-
параллельно плоскости m является проекцией этого вектора на подпро-
подпространство С параллельно подпространству М.
33.37. Найти координаты проекции точки М E, 0, —3, 4)
четырехмерного пространства:
1) на гиперплоскость х\ + Х2 — х$ + 2х± = 2 параллельно
ПрЯМОЙ Х\ — 1 — t, X2 = 3 + At, Жз = St, X4 = 1 + t]
2) на двумерную плоскость х\ — хч + жз +1 = 0> xi + #2 = Х4
параллельно двумерной плоскости х\ + Х2 + #з + ^4 = 0, х\ —
- 2ж4 - 3 = 0.
33.38. Является ли выпуклым множество точек в п-мерном
аффинном пространстве (п = 1, 2, ...), координаты х\, ..., хп
которых в декартовой системе координат удовлетворяют усло-
условию:
§ 34- Точечные евклидовы пространства 315
•'¦¦¦ 1) а\х\ + ... 4- апхп + о0 = 0;
; л 2) огх1 + ... + апхп + оо ^ 0;
3) Aix? + ... + Апж^ ^ 1, где А* ^г 0, г = 1, ..., тг;
4) Агх| ^
5) яя ^ 0, х2 > О, ..., хп > 0; 6) ж1Ж2 • •. хп > О?
33.39. Доказать выпуклость fc-мерного параллелепипеда.
33.40. Доказать, что пересечение выпуклых множеств яв-
является выпуклым множеством.
33.41. Найти проекцию четырехмерного симплекса, огра-
ограниченного гиперплоскостями х\ =0, х2 = 0, хз — 0, х\ = 0 и
xi + яг + жз + %4 — 1) на гиперплоскость xi + хч + хз + х\ = 0
параллельно прямой х\ = Х2 = жз = ^4-
33.42. Доказать, что все диагонали параллелепипеда пере-
пересекаются в одной точке, называемой центром параллелепипеда.
33.43. Для fc-мерного параллелепипеда найти число:
1) различных р-мерных граней;
2) различных диагоналей.
33.44. Определить форму и вершины сечений четырехмер-
четырехмерного параллелепипеда — 1 ^ Жг ^ 1, г = 1, 2, 3, 4, гиперплоско-
гиперплоскостью XI + Х2 + Хз + Х4 = 0.
§ 34. Точечные евклидовы пространства
В этом параграфе используются следующие основные понятия:
точечное евклидово пространство, расстояние между точками,
декартова прямоугольная система координат, ортогональные про-
проекции точки и вектора на плоскость, правильный симплекс, пря-
прямоугольный параллелепипед, k-мерный куб, объем k-мерного парал-
параллелепипеда, сфера, центр и радиус сферы, расстояние между двумя
множествами, угол между вектором и плоскостью, между пря-
прямой и плоскостью, угол между двумя плоскостями.
Декартова система координат О, е называется декартовой пря-
прямоугольной системой координат, если базис е ортонормированный.
Ортогональной проекцией точки А на плоскость m с направ-
направляющим подпространством М. называется проекция точки А на m
параллельно М.^. Аналогично определяется ортогональная проек-
проекция А\В\ вектора АВ на плоскость т.
Правильным симплексом в точечном евклидовом пространстве
называется симплекс, у которого длины всех ребер равны между со-
собой. Параллелепипед П(Ао; /i, ..., Д) называется прямоугольным,
если система векторов /i, ..., Д ортогональная; fe-мерный прямо-
прямоугольный параллелепипед называется к-мерным кубом, если длины
всех его ребер равны между собой.
316 Гл. 13. Аффинные и точечные евклидовы пространства
Сферой с центром в точке Aq и радиусом R > О точечного ев-
евклидова пространства называется множество точек {А :\ \AqA\ = R}.
Расстоянием между двумя множествами М. и N точечного ев-
евклидова пространства называется величина
inf |AB|.
Углом между ненулевым вектором и плоскостью m называет-
называется угол между этим вектором и направляющим подпространством
плоскости т. Углом между прямой 1 и плоскостью т называет-
называется угол между направляющим вектором прямой 1 и направляющим
подпространством плоскости т.
Углом между двумя плоскостями называется угол между на-
направляющими подпространствами этих плоскостей.
В задачах § 34 координаты векторов задаются в ортонормиро-
ванном базисе, а координаты точек — в декартовой прямоугольной
системе координат.
34.1. Проверить, что расстояние р(А, В) между точка-
точками А и В в точечном евклидовом пространстве обладает сле-
следующими свойствами:
1) р (А, В) = р (В, А) для любых точек Аи В;
2) р(А, В) ^ р(А, С) + р(В, С) для любых точек А, В, С;
3) для любой точки С такой, что АС = ХАВ, выполняется
равенство р(А, С) = \Х\р(А, В).
34.2. Найти длины сторон и внутренние углы треугольни-
треугольника ABC, заданного координатами вершин:
1) А (-1, 0, -1, 2), В @, 2, 0, 3), С B, 1, 1, 2);
2) А A, 2, 2, -1), В C, 0, 3, -1), С B, 1, 1, 0);
3) А @, 1, -1, 2, -1), В D, 1, 1, 2, 3), С C, 4, 2, 5, -1).
34.3. Доказать, что множеством точек, равноудаленных от
двух заданных различных точек А и В, является гиперплос-
гиперплоскость, проходящая через середину отрезка АВ перпендикуляр-
перпендикулярно этому отрезку.
34.4. Найти центр и радиус сферы, описанной около четы-
четырехмерного симплекса, заданного координатами вершин:
1) Ао D, -2, -1, -1), Ах A, 1, 2, 2), А2 C, 1, 0, 0),
4,@,2,3,-1), ^4A,-5,-4,2);
2) Ао C, 3, 1, -1), Аг A, 3, 3, 1), А2 @, 3, 4, -1),
А3 B, 1, 2, 3), А4 B, 3, 0, 1).
34.5. Гиперплоскость m в четырехмерном точечном ев-
евклидовом пространстве содержит тетраэдр, заданный коор-
координатами своих вершин: AiD, 4, —1, 1), ^(—2, —8, —5, 1),
§ 34- Точечные евклидовы пространства 317
А;\ C, 3, 1, 3), А\ A, —2, 4, 1). Гиперплоскость m рассматрива-
рассматривается как трехмерное точечное евклидово пространство. Найти
и этом пространстве центр и радиус сферы, описанной около
данного тетраэдра.
34.6. Доказать, что расстояние от точки А до ^-мерной
плоскости m равно:
1) расстоянию между точкой А и ее ортогональной проек-
проекцией на т;
2) длине ортогональной составляющей вектора АВ (В —
Произвольная точка из т) относительно направляющего под-
подпространства плоскости т.
34.7. Пусть 1 и m — плоскости с направляющими подпро-
подпространствами С и М соответственно, проходящие: 1 — через точ-
точку А и m — через точку В. Доказать, что расстояние между
плоскостям^ 1 и m равно длине ортогональной составляющей
нсктора АВ относительно подпространства С + М.
34.8. Гиперплоскость m задана уравнением а\Х\ + ...
... + апхп + оо = 0- Доказать, что:
1) вектор с координатным столбцом (oi, ..., ап)Т ортого-
ортогонален т;
2) расстояние от точки A (у\, ..., уп) до m равно
\aiyi + ... + апуп + о0|/у а\ + ... + (%.
34.9. Точка А задана координатами, гиперплоскость m —
уравнением. Найти расстояние от А до т, если:
, ,. ;1) А (9, 2, -3, 1), т: 3xi + х2 - х3 - 5ж4 + 3 = 0;
2) А A, -3, 0, -2, 4), т: 2ц - 5х2 + ж3 + Зж4 + 5х5 - 7 = 0.
' 34.10. Составить уравнение гиперплоскости, параллель-
параллельной гиперплоскости m и расположенной от m на заданном
расстоянии d, если:
1) т: 5Ж1 + 2xi - 4ж3 + 2х4 = 3, d = 2;
2) т: xi - 4х2 + 2ж3 + 2ж4 = 4, d = 5;
3) т: 2х\ — хъ — ж3 + ж4 + ЗЖ5 = —5, d = 3.
34.11. Найти ортогональную проекцию точки А на гипер-
гиперплоскость т:
1) А G, -1, 6, 1), т: 3xi - х2 + 2х3 + х4 = 5;
2) А A, 2, 8, -2), т: 2xi - 2ж3 + х4 = 11;
3) А C, 0, -1, 2, 6), т: 5хг + Зж2 - 2х3 - х4 + 4х5 = -16.
318 Гл. 13. Аффинные и точечные евклидовы пространства
34.12. Точки 4 и В заданы своими координатами. Найти
ортогональную проекцию вектора АВ на гиперплоскость т,
если:
1) А (-3, 0, 1, 3), В E, 2, 2, 3), т: 2xi + х2 - хА = 3;
2LC,3,-8,-3,4), ВC, 2,-1,-2, 2), т: хх + х2 -
- 2хз + Х4 + хъ = 5.
34.13. Найти отношение длины ортогональной проекции
произвольного ребра n-мерного куба на его диагональ к длине
диагонали.
34.14. Найти точку, ортогонально симметричную точке А
относительно гиперплоскости пг.
1) А E, 5, 3, 3), m: 2ц + Зж2 + ж3 + 2ж4 + 2 = 0;
2) 4 C, 5, -3, 5), т: х\ - Ъх2 + 4ж3 - 5ж4 - 2 = 0;
3) А C, 6, 3, 8, 1), т: х\ - х2 - 2ж4 + 2х5 - 3 = 0.
34.15. Найти ортогональную проекцию точки А на пря-
прямую 1:
1LA,-5,2,0); l:si = 4 + t, x2 = 3 + 2t, x3 = -3-t,
хА = 7 + 3t;
2) 4(-2,1,4,2); \:xi = -3 + 2t, x2 = S-t, x3 = -l + t,
xA = -3 + t;
3LB,4,3,-1,1); 1: zi = 2 - 2t, z2 =-1 + 3t, ж3 =
= -l + 2t, x4 = 2 + t, s5 = -t.
34.16. Точка 4 не принадлежит плоскости т. Доказать,
что существует единственная прямая, проходящая через точ-
точку 4, пересекающая m и перпендикулярная к т.
34.17. Составить уравнения перпендикуляра, опущенного
из точки 4 на прямую 1:
1LA,-3,-2,4); l:ari=4 + 3t, х2 = 2 +1, x3 = 3 + t,
Х4 = -1 - t;
2LA,-3,-1,3); 1: xi = 2 + t, x2 = l-2t, x3 = -1 +
+ 2t, X4 = t;
3LD,0,1,1,1); 1: xi = t, x2 = 3 - 2t, x3 =-2 + t,
x4 = -3 + 2t, x5 = t.
34.18. Найти точку, ортогонально симметричную точке А
относительно прямой 1:
1) 4D, 1, —1, —1), 1 — прямая задачи 34.15, 1);
2) 4 B, 5, -3, -2), 1 — прямая задачи 34.15, 2).
34.19. Найти угол между вектором, заданным координат-
координатным столбцом а, и гиперплоскостью т, если:
1) а = @, 1, 0, 1)Т, m: 3xi - х2 + х3 - 5х4 = 2;
§ 34- Точечные евклидовы пространства
2) а = A, -1, 1, 1)г, m: 3xi - х2 + 2я3 + 2х4 = 5;
,-3) а= A,-3,2,-1,-1)Т, т: хг + х2 - 2х3 + 3х4 -х5 = 1.
! 34.20. Найти угол между прямыми \\ и 12, если:
l)li:xi = 4 + t, x2 = -2t, x3 = l-t, х4 = 2; I2:xi=3,
а?2 = t, хз = 5 + t, X4 = —1;
2) Ц: xi = l + t, x2 = 2 + t, x3 = 3 + t, x\ = 1t, x5 =
= l-i; l2:xi=t, X2 = 5, X3 = -l + t, xa = 3 - 2t, x$ =
= 2t.
34.21. Найти расстояние от точки А до прямой 1:
1) 4@,3,2,-5); 1: xi = l + t, х2 =-t, x3 = 2 + 2t,
хА = -2 + 2t;
2LB,-2,1,5); l:ari = 3 + t, x2 = -l + t, x3 = 2 + t,
x4 = -t;
3LC,3,1,0,0); 1: xi = 2 + 3t, x2 = l + 2t, x3 = -t,
X4 = 1 + t, X5 = — 1 — t;
4LA,-1,-1,1); 1: X! + x2 +2x3 + 1 = 0, 3x2 + 2x3-
— X4 — 1 = 0, X\ — x2 + X3 + Ж4 + 2 = 0.
34.22. Прямая li с направляющим вектором oi проходит
через точку А\, прямая 12 с направляющим вектором а2 про-
проходит через точку 42. Доказать, что:
1) если oi и а2 не коллинеарны, то квадрат расстояния
между li и 12 равен detFDi42, 01, o2)/detr(oi, o2);
2) если oi и а2 коллинеарны, то квадрат расстояния меж-
между li и 12 равен detFDi42, oi)/|oi|2.
34.23. Найти расстояние между прямыми Ц и 12:
1) Ц: xi = 1 + t, х2 = -1, хз = -t, х4 = -2 + t;
12: Х\ = 4 + t, x2 = 2t, хз = 1 + t, X4 = t;
2) h: xi = 2 + t, x2 = -l-2t, x3 = 2 + 2t, x4 = 1 -1;
12: xi = 3 - t, x2 = 1 + 2t, x3 = -1 - 2t, x4 = 2 + t;
3) h: xi=3 + t, x2 = 2, x3 = t, x4 = 3 + t, x5 = -t;
12: xi = 1 + 2t, x2 = 2t, x3 = 1 - t, X4 = t, X5 = 2;
4)h:xi = l + t, X2 = 2t, хз = 1-*, Ж4 = —1 + t, X5 = t;
I2:xi = 3 + t, x2 = -2t, X3 = -l-t, X4 = l + t, Х5 = 2-И;
5) h: x\ = l-2t, x2 = 0, x3 = t, xA = l + t, x5 = 2;
h- Xi = -l + t, X2 = -l + t, X3 = 0, X4 = 1, X5 = -2 —t.
34.24. Составить уравнения перпендикуляра, опущенного
из точки 4 на плоскость т, если:
1LC,7,-2,1); m:x1=2 + t1, x2 = 2 + t2, x3 = t\ +
+ *2, х4 = -t2;
320 Гл. 13. Аффинные и точечные евклидовы пространства
2) 4(-3, -1, 4, 7, -3); m: xi = tг + t3, х2 = 2 + t2 + 13
Х3 = 2 + *1, Ж4 = 1+*2 + *3, Ж5 = 1 + <2- -
34.25. Найти ортогональную проекцию точки 4 на пло()
кость т, если: »
1) А (-3, 2, 2, -2); т: хг = 2 + *г + «2, х2 = 4 + 2ti
а?з = *i, ^4 = —*г;
2)^C,2,1,4,-1); m:zi = l+ti, z2 = -l + t2, а;з =
= 2 + ti+*2, Ж4 = -2-*1, Х5 = *г;
3) i4 @,-1, 5, 1,-2); т: xi = l + ti, х2 = t3, гз = И
+ tl+*2i Ж4 = -2 + *з, Х5 = -1+*2-
34.26. Найти точку, ортогонально симметричную точке /
относительно плоскости т, если:
1LE,3,-1,-1); т: xi = l + tlt х2 = t2, x3 = -2 4
+ *2, Ж4 = -1+*1".
2LC,5,0,2,2); т: zi = tb ж2 = 2 + *2, x3 = -3 + *i
Х4 = 3 — ti — ?2, ^5 = 1.
34.27. Пусть m — плоскость с направляющим подпро-
подпространством М, проходящая через точку Aq, a f\, ¦¦¦, fk —
базис в М.- Доказать, что квадрат расстояния от точки А\ дс
плоскости m равен
detrD^T, Л,..., /fc)/detr(/i, ..., Л).
34.28. Найти расстояние от точки А до плоскости т:
1) в задаче 34.24, 1);
2) в задаче 34.24, 2).
34.29. Найти расстояние от точки А до плоскости т, за-
заданной параметрически, если:
1LA,2,1,1); m: si = -2ti+4t2, х2 = -1 + ti - t2,
хз = —*з> Х4 = *i — t2;
2LC,1,1,0); т: xi = -2 + *i, x2 =-*i + 2t2, x3 =
= *1 — *2, Х4 = 1-*1-*2;
3LA,2,1,3,0); т: xi = l + *i, х2 = -*1+*2, х3 =
= 1 + <2, Х4 = -1~*2, Х5 = *1.
34.30. Найти расстояние от точки 4 до плоскости т, за-
заданной системой линейных уравнений, если:
1) 4 A, 0, 0, 1); т: хх + 2х2 + 2х3 - Зх4 = 7, х\ - 2х3 +
+ 2ж4 = -6;
2LA,2,0,0); т: хх+х2 - ж3 - х4 = 1, 2х2 - Зх3+
+ х\ = 2, 2xi + хз — 3x4 = 0.
34.31. Точки 4 и В ^заданы своими координатами. Найти
угол между вектором АВ и плоскостью т, если:
л*> § 34- Точечные евклидовы пространства 321
1) Л A,2, 2,3), 5D,0,0,2); m: Xl = l + h, х2 = 2 +
2, x3 = -*i + *2, ж4 = 3;
2) Л @, 1, -1, 0, 1), В C, 1, О, 1, 2); m: x1 = ti + t2, х2 = 5,
З 2, 4 12, 5 i;
3) Л(-1, -1, 1, О, 1), 5B,1,1,1,0); m:si=ti + t3,
Х2 = 2 + *2, Ж3 = 1-*2, Х4 = -*1+*з, Х5 = -2*3.
34.32. Плоскости 1 и m из n-мерного точечного евклидова
пространства с направляющими подпространствами Си ЛЛ со-
соответственно проходят: 1 — через точку A, m — через точку В.
Пусть <7i, ..., gk — базис в подпространстве С + ЛЛ. Доказать,
что квадрат расстояния между плоскостями 1 и m равен
detr (АВ, л,..., дО/detr foi, ..., gfc).
34.33. Найти расстояние между плоскостями 1 и ш:
1I: xi = 2 - 2t, х2 = 4 + t, ж3 = 1 + *, х4 = 0;
ю: xi = 1-2*1, х2 = 1 + 2*1 + 3*2, ж3 = 1 + *ь хА = 1 +
+ 2*1 + 2*2;
2) 1: xi = 3 + *! + 2*2, х2 = -*i, х3 = 1 + *i - *2,
х4 = -*i - *25 ni: xi = 2*1 + *2, Х2 = 1 - 3*1 + t2,
х3 = -8 - *2, х4 = 1 + *i - *2",
3I: xi = 2 + *, Х2 = 2*, хз = 1, Х4 = t, X5 = 0;
m: xi = 0, X2 = l + *i+*2, х3 = 3 + 2*2, х4 = 2*i, x5 =
= l + *i-t2;
т: xi = *2 + 2*з, х2 = 2 + *1 + 2*з, хз = х4 = 1 + *i - *2 + *з,
х5 = 2 + *i - *2 + 2*3;
5) 1: 2xi - х3 + Зх4 = 0, 2хг - 2х2 + Зх3 - Зх4 = 8;
т: Х2 = —Зхз — 2x4 = 2, xi — Х3 — Х4 = 0;
6I: Х1 + Х2 —хз = 1, 2xi + X2-x4 = 4; m: X1+X2 +
34.34. В n-мерном пространстве плоскости mi и тг раз-
размерностей fci и к2 соответственно абсолютно скрещиваются.
Доказать, что:
1) существует единственная плоскость размерности п —
— к\ — &2, ортогональная к mi и к ni2 и пересекающая каж-
каждую из этих плоскостей;
2) существует единственная прямая, ортогональная к mi и
к тг и пересекающая каждую из этих плоскостей.
34.35. Найти уравнения плоскости максимальной размер-
размерности, ортогональной к заданным плоскостям mi и тг и пе-
пересекающей каждую из этих плоскостей, а также уравнения
II - 1715
322 Гл. 13. Аффинные и точечные евклидовы птростралШНяй
общего перпендикуляра к mi и тг, если:
1) mi и ГП2 — прямые в задаче 34.23, 1);
2) mi и наг — прямые в задаче 34.23, 3);
3) mi и ГП2 — плоскости в задаче 34.33, 3).
34.36. Найти угол между плоскостями mi: х\ = 2 +1\ +
+ *2, Х2 = Я3 = *1> Ж4 = —1 + <1 — <2 и m2: Xi = t\+2t2, X2 =
= 3 + t2, Ж3 = 2-*1-2*2, Ж4 = ~*2-
34.37. В правильном пятимерном симплексе
А0А1А2А3А4А5 найти угол:
1) между гранями А0А1А2 и А0А3А4;
2) между гранями А0А1А2 и А0А3А4А5;
3) между гранями А0А1А2 и ЛЛЛАЛ
Глава 14
ТЕНЗОРЫ
В § 35 используются следующие основные понятия: инвариант,
тензор типа (р, q) (p раз контравариантный, q раз ковариантный,
(р + ч)-валентный тензор), ковектор, компоненты тензора, мат-
матрица из компонент тензора, закон преобразования компонент тен-
тензора при замене базиса.
Линейное n-мерное пространство обозначается через Сп. Всю-
Всюду в этой главе предполагается, что пространство Сп вещественное.
Тензор обозначается одной буквой, его компоненты — той же бук-
иой с индексами. Например, компоненты тензора а типа B, 1) обо-
обозначаются через al? (предполагается, что индексы г, j, к принимают
нсевозможные натуральные значения от 1 до п, где п — размерность
пространства). Через а%? можно обозначать и сам тензор.
Нижние и верхние индексы называются также ковариантными
и контравариантными соответственно.
Для элементов матрицы 5 перехода от одного базиса к другому
принято стандартное обозначение <т*- (г — номер строки, j — номер
столбца). Через rj обозначаются элементы матрицы Т, обратной к
S. Компоненты тензора типа B, 1) при переходе к новому базису
изменяются по формуле
В правой части равенства предполагается суммирование по индек-
индексам г, j, к. Все индексы пробегают натуральные значения от 1 до
п. Аналогичный вид имеет закон преобразования компонент произ-
произвольного тензора. Говорят, что нижние индексы преобразуются с
помощью элементов матрицы перехода S, а верхние — с помощью
элементов обратной матрицы.
Инвариант, т.е. числовую величину, не зависящую от базиса,
считают тензором типа @, 0) (с одной компонентой). Относитель-
Относительным инвариантом веса р называется числовая величина, которая
при переходе от базиса е к базису eS умножается на (det S)p.
Тензоры, все компоненты которых равны 0, называются нуле-
нулевыми. В некоторых задачах употребляется тензор типа A, 1), назы-
называемый символом Кронекера. Его компоненты во всех базисах опре-
определяются формулой
О при i ф j.
324 Гл. Ц. Тензоры
В тех случаях, когда нужно выписать все компоненты какого-либс
тензора, мы пользуемся матричной записью. Скажем о ней под-
подробнее.
Предварительно все индексы тензора упорядочим следующи\
образом: сначала все верхние индексы слева направо, затем все ниж-
нижние индексы слева направо 1). Упорядочив индексы, мы можем сово-
совокупность компонент двухвалентного тензора записать в виде квад-
квадратной матрицы порядка п; при этом первый индекс компонента
полагаем равным номеру строки, второй — номеру столбца.
Аналогично, совокупность компонент трехвалентного тензорг
можно расположить в виде трехмерной матрицы тг-ro порядка. Что-
Чтобы записать трехмерную матрицу, поступаем следующим образом.
Зафиксировав какое-либо значение к третьего индекса, мы получаем
двумерный слой или двумерное сечение трехмерной матрицы — квад-
квадратную матрицу Ак порядка п. В матрице Ак компоненты данного
тензора расположены так, что значение первого индекса компонен-
компоненты равно номеру строки, второго — номеру столбца, а третий индекс
равен к. Теперь все компоненты данного тензора можно записать в
виде (плоской) прямоугольной матрицы А — || А\ Аг ... Ап ||D 2)
размеров п х п2, образованной из элементов блоков Ak- Матрицу А
также условно называем трехмерной матрицей. Например, при п = 2
компоненты тензора а%-к образуют «трехмерную матрицу второго по-
порядка»
1
«21
Ь
2
а12
«22
2
содержащую два двумерных слоя.
Компоненты четырехвалентного тензора в ?„ образуют четы-
четырехмерную матрицу порядка п. Зафиксировав какие-либо значения
к, I двух последних индексов, мы получаем квадратную матрицу Аы
порядка п — двумерное сечение четырехмерной матрицы. В матри-
матрице Aki компоненты данного тензора расположены так, что значение
первого индекса компоненты совпадает с номером строки, значение
второго — с номером столбца, а третий и четвертый индексы рав-
равны соответственно к и I. Теперь все компоненты данного тензора
можно записать в виде плоской квадратной матрицы А = || Аы \\а
порядка п2, образованной из элементов блоков Aki- Матрица А так-
также может быть названа условно четырехмерной матрицей. Напри-
Например, при п — 2 тензору a^i соответствует «четырехмерная матрица
хДля некоторых тензоров в евклидовом пространстве употребляется
другой способ упорядочивания индексов. О нем сказано ниже, в коммен-
комментарии к § 37. Описание матричной записи компонент тензора относится к
любым тензорам, у которых все индексы как-то упорядочены.
2 Значок'-' показывает, что элементы матрицы — числа, а не матри-
матрицы, — см. введение к гл. 6.
Гл. Ц. Тензоры 325
второго порядка»
«ни
«2111 ?12211
«1121 «1221
Я2121 ^2221
«1112 «1212
02112 02212
«1122 «1222
«2122 Я2222
содержащая четыре двумерных слоя.
В § 36 рассматриваются следующие тензорные операции:
сложение тензоров, умножение на число, умножение тензоров,
свертывание по одному верхнему и одному нижнему индексу, свер-
свертывание двух тензоров, транспонирование, симметрирование и
альтернирование тензора по некоторому множеству нижних или
верхних индексов.
Вообще говоря, тензор, полученный в результате некоторой ал-
алгебраической операции, обозначается новой буквой. Так, тензор, по-
полученный транспонированием тензора aij, можно обозначить 6jj; при
чтом для всех компонент выполнено равенство bij = aji- Операция
симметрирования обозначается заключением в круглые скобки тех
индексов тензора, по которым производится симметрирование. Ес-
Если внутри скобок оказались индексы, по которым симметрирова-
симметрирования нет, эти индексы выделяются прямыми чертами. Например, тен-
тензор bijki = a(i|j|fc)f получается из aijki симметрированием по индек-
индексам г, к. Аналогичное замечание можно сделать об операции аль-
альтернирования, обозначаемой с помощью заключения в квадратные
скобки индексов, по которым производится альтернирование. Умно-
Умножение тензоров обозначается значком ® или точкой. Умножение тен-
тензоров не коммутативно. Так, если af,- и Ьы — компоненты тензоров a
и Ъ, то можно записать а®Ь = с, b®a = d; при этом Cijki — а^Ьы,
(Ujki = bijuki- Тензоры с, d получаются один из другого транспони-
транспонированием.
В § 37 рассматриваются тензоры в n-мерном евклидовом про-
пространстве ?п. В ?п определен метрический тензор д. Его компонен-
компоненты в произвольном базисе е\, ..., еп определяются через скалярные
произведения базисных векторов формулой g^- = (ei, ej). Тензор д —
симметричный типа @, 2); его компоненты образуют в каждом бази-
базисе матрицу Грама Г этого базиса. Матрица Г определяет симмет-
симметричный тензор д* типа B, 0) — контравариантный метрический
тензор пространства ?п. Его компоненты обозначаются через g*J.
Имеют место формулы: g'kgkj — <5j, 9«fc9fcj = 5^. В ортонормирован-
ном базисе компоненты тензоров gik и д%к образуют единичные мат-
матрицы.
В евклидовом пространстве определены операции поднятия и
опускания индекса. Для того чтобы у тензора можно было опустить
индекс, необходимо, чтобы данный тензор имел хотя бы один верх-
верхний индекс. В результате опускания индекса из тензора а получается
новый тензор, у которого число нижних индексов увеличено на 1, а
число верхних индексов уменьшено на 1 по сравнению с а. Новый
326 Гл. 14- Тензоры
тензор во всех ортонормированных базисах имеет те же компонен
ты, что и старый. Перечисленные требования однозначно опреде
ляют операцию опускания индекса. В неортонормированном базис»
компоненты старого и нового тензоров уже не совпадают. Аналогич-
Аналогично определяется операция поднятия индекса.
Тензор, полученный из данного тензора в результате поднятш
или опускания индекса, обозначается той же буквой, но с иным рас-
расположением индексов. Если некоторый верхний индекс появился вза-
взамен нижнего, то на месте исчезнувшего индекса оставляется пропус*
или ставится точка, а вновь появившийся верхний индекс ставите*
над ней. Порядок перечисления индексов в преобразованном тензор<
должен остаться тем же, что и в исходном, т. е. при упорядочивание
индексов вновь появившийся верхний индекс занимает место исчез-
исчезнувшего нижнего. При этом обычное правило порядка (все верхние
индексы раньше всех нижних) может быть нарушено. Точки отме-
отмечают места нарушения.
Для того чтобы опустить индекс у тензора а, заданного свои-
своими компонентами в произвольном базисе, можно вычислить ceepTKj
произведения а ® д или д ® а и, при необходимости, изменить поря-
порядок индексов в полученном тензоре (транспонировать его матрицу).
Аналогично, с помощью тензорных произведений а® д* ид*® а, осу-
осуществляется подъем индекса.
Поясним сказанное примерами.
1. Опускание индекса у тензора а*-. В результате опускания ин-
индекса должен получиться тензор типа @, 2). Обычный порядок ин-
индексов у тензоров alj и а^- совпадает, поэтому опускание индекса у
тензора а*- приводит к тензору а^ — д^а^1.
2. Подъем первого индекса у тензора а^- аналогичен:
4 = gikakj = akjgki.
3. Поднимем второй индекс у тензора а^-, т. е. вычислим тен-
тензор а/. Вычисляя компоненты свертки а&д^ = Ь? по обычным пра-
правилам, индексу считаем первым, г — вторым. В тензоре а?, индекс г —
первый, j — второй (при тех же значениях компонент). Матрица
тензора а^ транспонирована по отношению к матрице тензора \ri.
4. Аналогично, тензор а1'* может быть вычислен как сверт-
свертка atlkgij, но при записи его матрицы порядок индексов должен быть
таким: г, j, к.
В некоторых задачах используются ориентация п-мерного ев-
евклидова пространства и дискриминаптный тензор. Приведем их
определения. Все базисы пространства ?„ могут быть разделены на
два класса так, что детерминант матрицы перехода от любого ба-
базиса из одного класса к базису из другого класса отрицателен, а
детерминант матрицы перехода, связывающей два базиса из одного
класса, положителен. В пространстве ?п задана ориентация, если
Гл. 14- Тензоры 327
ныбран один из двух классов базисов. По аналогии с трехмерным
случаем базисы этого класса можно называть правыми, а базисы
другого класса — левыми. Ориентацию пространства можно задать,
например, выбрав один какой-нибудь базис в качестве представителя
правых базисов. Если ориентация выбрана, пространство называется
ориентированным.
Дискриминантный тензор в ориентированном евклидовом про-
пространстве определяется как тензор типа @, п), имеющий в некотором
правом ортонормированием базисе координаты
если среди значений индексов
_ есть равные,
»i...in ^ (_i\N(t1 ...»„) если значения индексов
попарно различны.
Через N (i\ ... г„) обозначено число нарушений порядка в переста-
перестановке (ii ... гп). Пользуясь законом преобразования компонент, мы
можем найти компоненты дискриминантного тензора в любом бази-
базисе. В частности, его компоненты в любом правом ортонормирован-
пом базисе те же, что и в исходном.
В § 38 используются следующие понятия: поливектор (р-век-
тор), внешняя форма степени q (q-форма), простой (разложимый)
поливектор, разложимая внешняя форма. Теоремы и определения,
касающиеся поливекторов, совершенно аналогичны теоремам и опре-
определениям, касающимся внешних форм. Поэтому задачи, сформули-
сформулированные для поливекторов, могут быть поставлены и для внешних
форм, и наоборот.
Под внешним произведением внешних форм и и v степеней рид
понимается их тензорное произведение, альтернированное по всем
индексам и умноженное на число (р + q)\/(p\ql). Оно обозначается
и Л v. Аналогично определяется внешнее произведение поливекто-
поливекторов. Разложимый р-вектор представим в виде и = Х\ Л ... Л хр, где
х\, ..., хр — векторы.
Внешнее произведение линейно по каждому сомножителю. В си-
силу этого для данного р-вектора и множество таких векторов х, для
которых и /\х = о, является линейным подпространством С. Гово-
Говорят, что подпространство С определяется (или порождается) р-век-
тором и.
В задачах этого параграфа мы, если не оговорено противное,
задаем поливекторы (и внешние формы) с помощью их существен-
существенных компонент — тех компонент ц*1 •"*>', для которых значения
индексов удовлетворяют условию i\ < 12 < ¦ ¦. < ip (остальные ком-
компоненты поливектора и определяются по существенным с помо-
помощью условий антисимметрии). Существенные компоненты мы будем
располагать в столбец или строку в лексикографическом порядке:
компонента и11 ¦1р располагается перед ujl — i', если для некоторого
s ^ 1 выполнено i\ = ji, ¦.., is-i — js-ь *s < js- Например, бивекто-
328 Гл. Ц. Тензоры
ру B-вектору) в ?4 соответствует столбец существенных компонен
(и12, и13, и14, и23, и24, и34)г, а 3-форме в ?4 соответствует строк
(/i23> /124, /134) /234)-
Под значением q-формы f на системе q векторов ii, ..., х
понимается свертка произведения ?®xi®...®xq. В частности
2-форма определяет билинейную функцию, матрица которой в лю
бом базисе кососимметрична:
Матрица F называется матрицей 2-формы в рассматриваемом бази
се.
§ 35. Определение тензора. Тензорные обозначения,
пространственные матрицы
35.1. Пусть ?*, ?2 и rj1, г\2 — координаты векторов х и у ъ
произвольном базисе двумерного линейного пространства. Со-
Сопоставим этому базису числа:
1) ^ + е2; 2) f + tI; 3) J2 n2
Как изменяются эти числа при замене базиса? Проверьте, яв-
является ли каждая из данных величин тензором.
35.2. Сопоставим каждому базису в линейном простран-
пространстве Сп:
1) число 1; 2) упорядоченный набор чисел 1, ..., п.
Будет ли данное соответствие тензором? Инвариантом?
35.3. Пусть ip — линейное преобразование линейного про-
пространства ?з- Обозначим через А = || а*- || его матрицу в про-
произвольном базисе и сопоставим этому базису число:
1) detA; 2) cosdetyl; 3) RgA;
4) det ATA; 5) a\ + a\; 6) a\ + al + a\.
В каких случаях этим определен инвариант?
35.4. Пусть b — билинейная функция, В = || bij || — ее мат-
матрица в произвольном базисе пространства Сп. Сопоставим это-
этому базису число:
l)detB; 2) Ьц + ... + Ьпп; 3) Ьц;
4) detBTB; 5) RgB; 6) sign det В.
Как изменяется каждая из этих величин при замене базиса? В
каких случаях она определяет инвариант?
35.5. Пусть f — линейная функция на линейном простран-
пространстве Сп и (ai, ..., an) — строка ее коэффициентов в произволь-
произвольном базисе. Сопоставим этому базису:
1) число а\ + ... + an;
§ 35. Определение тензора. Тензорные обозначения 329
2) упорядоченный набор чисел а\, ..., ап.
Как изменяются данные величины при замене базиса? Какие
из них являются тензорами? Инвариантами?
35.6. 1) Какого типа тензор в Сп определяет билинейная
функция? Как найти компоненты этого тензора?
2) Какого типа тензор в Сп определяет квадратичная
функция? Как найти компоненты этого тензора?
35.7. Линейные функции f, g имеют в базисе е простран-
пространства Сп коэффициенты а\, ..., ап и Ь\, ..., Ьп соответственно.
Показать, что функции:
1) f2; 2) fg
определяют тензоры в Сп, указать их типы и выписать для
каждого компоненты в базисе е.
35.8. Линейные функции f, g имеют в базисе е простран-
пространства Сп коэффициенты а\, ..., ап и Ь\, ..., Ьп соответственно.
Сопоставим каждой паре векторов х, у из Сп число:
l)f(x)g(y); 2)f(x)f(y).
Показать, что каждая из полученных функций определяет тен-
тензор в Сп, указать его тип и выписать компоненты в базисе е.
35.9. Каждой паре векторов х, у линейного пространства
Сп (п ^ 3) сопоставлено число f (x, у), определяемое через ком-
компоненты ?г, ..., ?™ и г]1, ..., if1 этих векторов, заданные в ба-
базисе е, одной из следующих формул:
i
Указать тип соответствующего тензора и выписать его компо-
компоненты в базисе е.
35.10. Функция f: ?„ —> Е (n ^ 2) определяется через ком-
компоненты ?*, ..., ?п вектора х, заданные в базисе е, одной из
формул:
1) / (х)=е+е2; 2) / (х) = (е1J+2ее-
з) / (х) = (е1 +... + п2; 4) / (х) = ? (еJ.
г
Указать тип соответствующего тензора и выписать его компо-
компоненты в базисе е.
35.11. Пусть ?* — пространство всех линейных функций,
определенных на линейном пространстве ?n, a tp: Сп —* М —
линейная функция на ?*. Показать, что tp определяет тензор
типа A, 0) на Сп-
330 Гл. Ц. Тензоры
35.12. Даны тензоры а^-, а*-, ?*, г\г, 6j. Величины с, d, g,
определены в каждом базисе формулами:
3) д = a^hiU 4) h = Ъ?\
Опираясь на закон преобразования компонент данных тензс
ров, показать непосредственно, что эти величины являются ин
вариантами.
35.13. Даны тензоры а*-, ?г, bj. Величины сг, di определе
ны в каждом базисе формулами сг = а%Л3 и di = a\bj соответ
ственно. Опираясь на закон преобразования компонент данныз
тензоров, показать, что сг есть вектор, a di — ковектор.
35.14. Тензор типа A, 1) имеет в некотором базисе компо-
компоненты
Si _ Г1, если i = j;
* | 0, если г ф j.
Изменяются ли его компоненты при переходе к другому бази-
базису? Какой геометрический смысл имеет этот тензор?
35.15. Тензор типа @, 2) имеет в некотором базисе компо-
компоненты
5.._fl, если i = j;
*J I 0, если г ф j.
Как изменятся его компоненты при переходе к другому базису?
Какая билинейная функция соответствует этому тензору?
35.16. Тензор типа A,0) имеет в некотором базисе компо-
компоненты
i \1, если i = г0;
с/ == \
I 0, если г Ф го
(го — фиксированное целое число, 1 ^ г'о ^ п). Найти компонен-
компоненты данного тензора в базисе е' = eS.
35.17. Тензор типа @, 1) имеет в некотором базисе компо-
компоненты
^ _ fl, если i = го;
|0, если г ф го
(г'о — фиксированное целое число, 1 ^ г'о ^ п). Найти компонен-
компоненты этого тензора в базисе е' = е5. :..
§ 35. Определение тензора. Тензорные обозначения 331
35.18. Каждому базису пространства Сп (п > 2) сопостав-
сопоставлены числа
A, если i = к ф j = I;
— 1, если i = I ф j = к;
О в остальных случаях.
Будет ли такое соответствие тензором? Сколько нулевых ком-
компонент у этого тензора при п = 3?
35.19. Тензор в типа @, 2) имеет в некотором базисе е ли-
линейного пространства ?,„ (п > 2) компоненты вы = Sff° (го, jo
- фиксированные целые числа, 1 ^ г'о ^ п, 1 ^. jo ^.п, символ
tiff0 определен в задаче 35.18).
1) Выписать'явно все компоненты тензора в в базисе е при
п = 3.
2) Найти компоненты тензора в в базисе е' = е5.
35.20. Каждому базису пространства Сп (п > к ^ 1) сопо-
сопоставлены числа:
1, если (ii, ..., ik) — четная перестановка
попарно различных чисел ji, • ¦ ¦, jk',
—1, если (ii, ..., ik) — нечетная перестановка
попарно различных чисел j\, ..., jk\
О в остальных случаях.
Будет ли такое соответствие тензором?
35.21. 1) Тензор типа @, п) имеет в некотором базисе ком-
компоненты
{(—1)-^A1 -гп); если все числа i\, .. ¦, ik различны;
О в остальных случаях
(N (ii ... гп) — число нарушений порядка в перестановке
(ii, ..., г„)). Вычислить компоненты данного тензора в базисе
е' = eS.
2) Каждому базису пространства ?„ сопоставлены числа
?»!,...,»„• Будет ли это соответствие тензором типа @, п)?
35.22. В четырехмерном пространстве дан трехвалентный
тензор. Сколько компонент он имеет? Сколько слагаемых вхо-
входит в выражение новой компоненты через старую при записи
закона преобразования компонент? Сколько сомножителей бу-
будет в каждом слагаемом?
31 —Зк
332 Гл. Ц. Тензоры
35.23. В пространстве ?г Дан тензор типа:
1) A, 1); 2) B, 0); 3) A, 2).
В развернутой форме, не используя сокращенных обозначений
суммирования, написать закон преобразования его компонент
35.24. В двумерном пространстве задан тензор типа (р, q)
Упорядочим его компоненты так, чтобы они составили стол-
столбец а высоты 2р+д. Записать закон преобразования компонент
тензора в виде а' = Va, где V — квадратная матрица порядка
2Р+9 и:
1)р=1, g = l; 2)р=2, 9 = 0;
3) р = 1, 9 = 2.
35.25. Записать в матричной форме закон преобразования
компонент тензоров типа:
1) @, 2); 2) A, 1); 3) B, 0).
35.26. Компоненты двухвалентного тензора типа (р, q) об-
образуют в произвольном базисе е линейного пространства ?„
матрицу Ае. Сопоставим базису е матрицу А~1. Доказать, что
это соответствие определяет тензор, и указать его тип, если:
1) р = 0, д = 2;
2) р = 1, 9=1 (объяснить геометрический смысл получен-
полученного тензора);
3) р = 2, 9 = 0.
35.27. Тензоры каких типов имеют двумерные матрицы
компонент? Трехмерные? Четырехмерные? fc-мерные матрицы
компонент?
35.28. Трехмерная матрица ||a»jfc|| второго порядка имеет
сечение к — 1, состоящее из единиц, а сечение к = 2 — из нулей.
Выписать aijk для всевозможных значений индексов.
35.29. Трехмерная матрица ||a»jfc|| третьего порядка имеет
сечения к = 1 и к = 2, состоящие из единиц, а сечение к — 3 —
из нулей. Выписать двумерные сечения данной матрицы, соот-
соответствующие ъ = 1, г = 2, i = 3.
35.30. 1) Сколько различных двумерных сечений имеет
трехмерная матрица третьего порядка? Какой порядок имеет
каждое сечение?
2) Сколько двумерных сечений имеет четырехмерная мат-
матрица второго порядка?
3) Сколько двумерных сечений имеет четырехмерная мат-
матрица третьего порядка?
§ 35. Определение тензора. Тензорные обозначенгья 333
35.31. Числа S1^ образуют четырехмерную матрицу второ-
второго порядка.
1) Выписать все ее двумерные сечения, соответствующие
фиксированным нижним индексам.
2) Найти связь между сечениями матрицы ||6^|| и матри-
матрицей \\вы\\ (символы 5г^, 9ki определены в задачах 35.18, 35.19
соответственно).
35.32. 1) Даны базис еи(р + д)-мерная матрица А. Дока-
liiTb, что существует тензор типа (р, q), имеющий в базисе е
матрицу А.
2) Доказать, что существует тензор любого наперед задан-
заданного типа.
35.33. Пусть f — вещественная функция от трех аргумен-
аргументов х € ?„, у € ?„, z e ?„, линейная по каждому из этих аргу-
аргументов при фиксированных остальных.
1) Выразить значение данной функции через компоненты
векторов х, у, z.
2) Показать, что совокупность коэффициентов полученной
формы представляет собой тензор типа @, 3).
3) Выразить компоненты этого тензора через значения f на
базисных векторах.
35.34. Линейные функции f, g, h на ?з имеют в базисе е
коэффициенты а\, аг, аз; /3i, /З2, /?з; 7ъ 72; 73 соответственно.
Сопоставим тройке векторов х, у, z из ?3 число:
)()g(j,)() )()()()
3) f (x)f (y)f (z) + g (x)g (y)g (z) + h (x)h (y)h (z).
Показать, что каждая из построенных функций определяет
тензор в ?з, указать его тип и выписать матрицу в базисе е.
35.35. Каждой тройке векторов пространства ?з сопостав-
сопоставлено число f (x, у, z), определяемое через компоненты этих век-
векторов в некотором базисе — ^х, ^2, ^3; 772, т?2, rj3; С1, С2> С3 ~~
одной из следующих формул:
)(j ) j:cf
1=1
Указать тип соответствующего тензора и вьшисать его матрицу.
35.36. Пусть В — линейное пространство билинейных
функций на ?„, а <р: ?„ —)¦ В — линейное отображение. По-
Показать, что tp определяет тензор типа @, 3) в пространстве Сп.
334 Гл. Ц. Тензоры
35.37. Тензор типа (р, q) в базисе е\, ег, ез пространства L
задан матрицей А. Найти его матрицу в базисе е'г, е2, е'3, есл1
1) р = 2, q - 1, А = А726, е'г = еь е'2 = е3, е'3 = е2;
2)р = 2, д = 1, А = А727, е[ = -еь е'2 = -е2, е'3 = -е;
3)р = 0, д = 3, А = А723, ei = 2eb е'2 = -е2, е'3 = Зе;
35.38. Определить, 1сак изменяются компоненты тензор
типа A, 2), заданного в пространстве ?п, при произвольно:
перестановке базисных векторов.
35.39. Тензор типа (р, q) в базисе е пространства Li зада]
матрицей А. Найти его матрицу в базисе е' = eS, если:
1) р = 1, q = 2, A = А652, S =
2)р = 0, q = 3, A = A654, S =
3) Р = 0, 9 = 3, Л = А654, 5 =
§ 36. Алгебраические операции с тензорами
Линейные операции, умножение тензоров C6.1—36.20)
36.1. Проверить закон преобразования компонент суммы
тензоров аг,к и Щк, исходя из закона преобразования компонент
слагаемых.
36.2. Как связана сумма линейных преобразований с сум-
суммой соответствующих тензоров?
36.3. Пусть Ае — матрица линейного преобразова-
преобразования (р. Ве — матрица билинейной функции b в базисе е. Опре-
Определена ли сумма Ае + Ве? Будет ли тензором соответствие,
сопоставляющее каждому базису е сумму матриц Ае + Ве1
36.4. Тензоры а и b одного типа имеют в базисе е матри-
матрицы компонент А я В. Найти компоненты тензоров: а) а + Ь;
б) 1а + 36; в) Ь — 2а в том же базисе, если:
1)А = А65о, В = А651; 2)А = Абьъ В = А652;
3) А = А652, В = А65з; 4) А = Лэз, В = Аш.
36.5. Заданы матрицы А, В, С, D из компонент четырех
тензоров. Определить, являются ли тензоры линейно зависи-
зависимыми, если:
1) А = А662, В = А665, С = Аш, D = Д352;
2)А = А65о, В = А651, ^ = ^652, D = А65з;
3) А = А666, В = А663, С = А65о, D = А^2-
36.6. 1) Какова размерность линейного пространства С
тензоров типа (р, q) в двумерном пространстве?
§ 36. Алгебраические операции с тензорами 335
2) Указать какой-нибудь базис в L.
3) Указать еще один базис в ?,.
36.7. Базису е двумерного линейного пространства соот-
соответствует базис е* в пространстве тензоров типа:
1) @, 1); 2) A, 1); 3) (р) @, 2); 4) A, 2).
Базис е* состоит из тензоров, имеющих в базисе е одну ком-
компоненту, равную 1, а остальные — равные 0. Как преобразует-
преобразуется базис е*, если базис е преобразуется матрицей перехода 5?
36.8. Проверить закон преобразования компонент тензо-
тензора а®Ь, исходя из законов преобразования компонент сомно-
сомножителей
36.9.
1)
2)
3)
4)
о)
6)
' 7)
8)
9)
Ю)
. 11)
. 12)
13)
14)
15)
16)
17)
18)
a)k> Щк.
Найти тип
тип а
A,0),
A,0),
A, 0),
@, 1),
@, 2),
@, 1),
B, 0),
A,1),
A,0),
A, 0),
@, 3),
@, 1),
A,2),
@, 1),
@, 2),
@, 2),
A, 1),
B,0),
и матрицу
матрица а
С12,
С-12,
С12>
С12,
An,
с7,
Ai8,
С8,
С8,
^650,
т
С25>
^651,
С8 '
Ai$,
А13,
An,
тензора а ® Ь,
тип Ь
A, 0),
@, 1),
A, 0),
@, 1),
@, 1),
@, 2),
A, 0),
A, 0),
B, 0),
A, 1),
@, 1),
@, 3),
@, 1),
A, 2),
@, 2),
@, 2),
A,1),
A,1),
если:
матрица Ь
сзи
C3li
C3i;
с7;
An;
eg;
cs;
Ais;
^185
pt ¦
T
ч;
^185
An;
A\q;
A\Q.
36.10. Записать матрицу из компонент тензора:
1) а1Ь>; 2) афу, 3) а%; 4) а{Ъ>
как кронекеровское произведение матриц из компонент этих
тензоров.
36.11. Пусть a, b — двухвалентные тензоры с матрица-
матрицами А, В. Какого типа должны быть эти тензоры, чтобы матри-
матрица их тензорного произведения была (правым) кронекеровским
произведением:
• 1) А® Б; 2) В <8> А?
336 Гл. Ц. Тензоры
36.12. Линейные функции f и g заданы в базисе е коорди-
координатными строками xnfi. Найти матрицу тензора:
1) f®g;2)g®f.
Какой геометрический смысл имеют эти тензоры?
36.13. Линейная функция f задана в базисе е координат**
ной строкой х, вектор у — столбцом т|. Найти матрицу тензорг
/ ®у. Какой геометрический смысл имеет этот тензор?
36.14. 1) Пусть х — вектор, f — ковектор. Доказать, чтс
f ® X — X ® f.
2) Привести пример тензоров а и Ь, для которых а ® Ь
фЬ®а. i
36.15. Пусть х\, Х2, хз — векторы, a fi, f2,f3 — ковекторы.
Какие из приведенных ниже выражений имеют смысл? Если
данное выражение есть тензор, указать его тип:
3) xi ® fi - 2fi ® х\\ 4) х\ ® f2 + fi ® f2;
5) х\ ® f2 + Х2 ® f 1; 6) fi <8> xi ® Х2 + Х2 ® хз ® f2",
8) fi®f2-3(f2®f3).
36.16. Найти компоненты тензоров 1), 3), 5), 7), 8) задачи
36.15, если векторы х\, Х2, хз и ковекторы fi, f2, f3 заданы с
помощью столбцов и строк соответственно: его, С12, C25; сТ,
т т
с10> С22-
36.17. 1) Пусть а = х ® у, а векторы хиу имеют в базисе е,
компоненты 1, 0, 0 и 0, 1, 0 соответственно. Найти компоненты
тензора а в базисе е и в базисе е' = е5, где 5 = Аго7-
2) Пусть а = f ® g, а ковекторы f и g имеют в базисе е коор-
координатные строки A, 0, 0) и @, 1, 0) соответственно. Найти ком-
компоненты тензора а в базисе е и в базисе е' = е5, где 5 = Аго7-
3) Пусть а = х ® f, а вектор х и ковектор f имеют в базисе е
компоненты 1, 0, 0 и 0, 1,0 соответственно. Найти компоненты
тензора а в базисе е и в базисе е' = е5, где 5 = А207.
Сравнить результаты задач 1), 2), 3).
36.18. Разложить тензор в произведение одновалентных
тензоров, если он имеет:
1) тип B, 0) и матрицу А$;
2) тип B, 1) и матрицу Аб73-
36.19. 1) Пусть а — тензор типа A, 1) и матрица его ком-
компонент имеет ранг г. Доказать, что найдутся г линейно незави-
независимых векторов а\, ..., аг и г линейно независимых ковекторов
§ 36. Алгебраические операции с тензорами 337
г
fi, ..., fr таких, что а = Yl aa ® fQ-
а=1
2) Сформулировать и доказать аналогичное утверждение
для тензоров типа B, 0).
36.20. 1) Пусть тензор а типа @, 2) имеет в некотором
базисе матрицу ранга г. Доказать, что существуют г линей-
линейно независимых ковекторов fi, ..., fr и г линейно независимых
г
ковекторов gi, .. •, gr таких, что а = Y1 ^а ® ga-
Q=l
2) Представить билинейную функцию З^1^1 + 2^-rj1 +
+ З^2!?1 + 2?2rj2 как произведение линейных. Единственно ли
такое представление?
3) Билинейная функция f в некотором базисе линейно-
линейного пространства задана матрицей ^454- Представить ее как
сумму двух произведений пар линейных функций: f (x, у) =
= fi (x) gi (у) + f2 (x) g2 (у). Единственно ли это представление?
Свертывание C6.21-36.29)
36.21. Исходя из законов преобразования тензоров a'fe, a*-,
ft'-, aj, b*J', a^m, ?k, проверить закон преобразования компонент
сверток:
l)aji; 2) a*-bi; 3) <ц№; 4) a^fc.
36.22. Исходя из геометрического смысла тензоров а*, ?г,
сЛ, bij, объяснить геометрический смысл сверток:
1) щС; 2) а)&; 3) Ьцё&.
36.23. Можно ли свернуть:
1) вектор и ковектор? 2) вектор и вектор?
,. 3) пару ковекторов?
36.24. Записать произведение линейных преобразований в
тензорных обозначениях.
36.25. Тензоры а*-, ?г, щ заданы матрицами: А232, Сю4>
с^04. Вычислить свертки:
1) а)?; 2) ajxi; 3) а\^н{.
36.26. Сколько различных тензоров можно образовать при
помощи свертывания из данного тензора типа B, 2)?
36.27. Тензор а% задан матрицей:
1) А6Ъ1; 2) А655.
Найти матрицы сверток: а) а?; б) а1?.
338 Гл. Ц. Тензоры
36.28. Тензор а^ задан матрицей:
1) ^649', 2) А69з; 3) Ащ.
Вычислить свертки: а) <$; б) а%у, в) а]?; г) аЦ; я) al; e) а1?.
36.29. 1) Каждому базису пространства Сп сопоставлен
упорядоченный набор чисел а?1т (все индексы пробегают зна-
значения от 1 до п). Известно, что для произвольного вектора ?fc
числа a^m?fc являются компонентами тензора типа B, 2). До-
Доказать, что а^т — тензор типа B, 3).
2) Каждому базису пространства ?„ сопоставлен упорядо-
упорядоченный набор чисел а%цт (все индексы пробегают значения от 1
до га). Известно, что для произвольного тензора u\a типа A, 2)
числа alMmuij являются компонентами тензора типа @, 2). До-
Доказать, что аг^1т — тензор типа B, 3).
Транспонирование, симметрирование,
альтернирование. Симметричные и
антисимметричные тензоры C6.30—36.57).
36.30. Можно ли транспонировать тензор:
1) типа A, 1); 2) типа B, 0)?
36.31. Один тензор типа @, 2) получается из другого
транспонированием. Как связаны соответствующие билиней-
билинейные функции?
36.32. Тензоры
1) щу, 2) а«"; 3) ajf; 4) а)к
заданы соответственно матрицами Aiq, Ам>, Aqjq, A^o. Найти
матрицы транспонированных тензоров.
36.33. 1) Сколько различных тензоров можно получить
с помощью операции транспонирования из данного тензора
«»i...ifc?
2) Тензор типа @, 3) задан матрицей А§?о. Выписать мат-
матрицы всех тензоров, получаемых из него транспонированием.
Изменится ли ответ, если данный тензор имеет тип C, 0)?
3) Тензор а с компонентами а^у. задан матрицей ^727- Вы-
Выписать матрицы транспонированных тензоров Ь и с, если Ь^ =
= ajki, Cijk = dikj.
4) Тензор а с компонентами а^м задан матрицей ^717-
Выписать матрицы транспонированных тензоров b и с, если
§ 36. Алгебраические операции с тензорами 339
. 36.34. Пусть а, Ь — тензоры типа A, 1). Выразить тензор
с = Ь <8> а через d = a <g) Ь.
36.35. Не используя сокращенных обозначений, выпишите
все компоненты тензоров, заданных в пространстве С^-
1) хУ; 2) xVJ5 3) xfy*]; 4) x'V,
5) х<а4к; 6) xfcaj; 7) A?; 8) xlfcaf;
9) a\akk; 10) ajja*; 11) аЦ; 12) *ja*;
13) 5}4; 14) <5*af; 15) «Jjaf; 16) afjj.
36.36. Тензор a1-7 задан матрицей:
1) Аю; 2) A77; 3) A24; 4) A232.
Найти компоненты тензоров: а) а,№\ б) а^-7'.
36.37. Тензор аф задан матрицей:
1) А650; 2) A65i; 3) А720.
Найти компоненты тензоров: а) а^^; б) ац^у, ъ)
г) a{ijk).
36.38. Тензор а^ задан матрицей:
1) Л94; 2) А684.
Найти компоненты тензоров: а) <щ , б) аKыу, в) аУ^
36.39. Тензор aijk задан матрицей:
1) А65о; 2) A65i; 3) А720-
Найти компоненты тензоров: а) O[ij]fc'i б) а^у^; в) a[
36.40. Тензор аг^ задан матрицей:
1) ^694; 2) А684.
Найти компоненты тензоров: а) а%3'; б) ajjL; в) a^i.
36.41. Тензор a,jfe задан матрицей:
1) А726; 2) Ащ.
Найти компоненты тензоров: а) ciujk]) б) а^у
36.42. Тензор типа @, 3) задан матрицей:
1) А723; 2) А725; 3) А720; 4) А650; 5) А722.
Выяснить, является ли тензор симметричным (антисимметрич-
(антисимметричным), и если да, то по каким индексам.
36.43. Тензор aj задан матрицей А:
1) А58; 2) А207-
Вычислить инварианты: а) а\; б) oLo^i; в) а^о^аи. Сравнить
найденные инварианты с коэффициентами характеристическо-
характеристического многочлена матрицы А.
ЗУЮ Гл. Ц. Тензоры
• ]¦ 36.44. 1) Доказать, что тензор ?i, ...»п (см. задачу 35.21)
кососимметричен по любой паре индексов.
2) Доказать, что тензор е{х..лп кососимметричен по любо-
любому подмножеству множества индексов.
3) Доказать, что тензор <5}{;"}* (см. задачу 35.20) кососим-
кососимметричен по любой паре верхних индексов.
4) Доказать, что тензор 6г-1'"г!° кососимметричен по любо-
любому подмножеству множества верхних индексов.
5) Доказать утверждение 4) для нижних индексов.
36.45. Пусть CLij и W — компоненты соответственно сим-
симметричного и антисимметричного тензоров. Вычислить сверт-
свертку aijW.
36.46. Для тензора <5!-j'"^fc, определенного в задаче 35.20,
и произвольных тензоров а-71 '"Зк и bix ...jfc доказать, что:
\\ yi-Hflii-jk _ п[ч ...ifc]. о) (Г1 •ifcb- • — h- -i
l>°h-ika ~a ' ?> °ii...jfc°4-4b - %\-3kY
36.47. Пусть OijkC&Z!1 — 0 Для любого вектора ^г. Дока-
Доказать, что ajjjfc] = 0.
36.48. Доказать, что о^а^ = aj-ajl, а^а^ = аг<-а$.
36.49. Вычислить:
1) 8)8lS[5h 2) 5)8{8^т; 3) *$«* ;
36.50. 1) Пусть тензор симметричен по некоторой паре ин-
индексов. Доказать, что операция симметрирования по этим ин-
индексам тензора не меняет, а операция альтернирования дает
нулевой тензор.
2) Пусть тензор антисимметричен по некоторой паре ин-
индексов. Доказать, что операция симметрирования по этим ин-
индексам дает нулевой тензор, а операция альтернирования тен-
тензора не меняет.
36.51. 1) Доказать, что для симметричного по двум пер-
первым индексам тензора имеет место тождество
1
2) Доказать, что для антисимметричного по двум первым
индексам тензора имеет место тождество
1
a[ijk] = ~z(aijk + &kij + ajki)-
1 § 37. Тензоры в евклидовом пространстве 341
36.52. 1) Тензор типа @, 3) симметричен по двум первым
и симметричен по двум последним индексам. Доказать, что он
симметричен также и по первому и третьему индексам.
2) Тензор типа @, 3) антисимметричен по двум первым и
антисимметричен по двум последним индексам. Доказать, что
он антисимметричен также и по первому и третьему индексам.
3) Пусть тензор типа @, 3) симметричен по двум первым
индексам и антисимметричен по двум последним индексам. До-
Доказать, что он нулевой.
36.53. 1) Привести пример тензора типа @, 3), для кото-
которого aujkj = 0, но не симметричного по трем индексам.
2) Привести пример тензора типа @, 3), для которого
aujk) = 0, но не антисимметричного по трем индексам.
3) Доказать, что для ненулевого тензора а типа @, 3) возмо-
возможно одновременное выполнение равенств a^jk) = 0 и а^ц = 0.
36.54. Доказать, что любой тензор типа @, 2) или B, 0)
можно разложить в сумму симметричного и антисимметрич-
антисимметричного тензоров.
36.55. Разложить в сумму симметричного и антисиммет-
антисимметричного тензоров тензор типа @, 2), заданный матрицей:
1) А49; 2) А16; 3) А234-
36.56. Из символа Кронекера с помощью тензорных опе-
операций получить тензоры:
1) 6%; 2) $?;;;}* (см. задачи 35.18, 35.20).
36.57. 1) Пусть симметричный тензор а типа @, 2) име-
имеет в некотором базисе матрицу ранга г. Доказать, что суще-
существуют г линейно независимых ковекторов fi, ..., fr, таких, что
2) Сформулировать и доказать обратное утверждение.
3) Квадратичная функция <р в С% задана матрицей А^.
Представить ее как сумму квадратов двух линейных функций.
Единственно ли это представление?
§ 37. Тензоры в евклидовом пространстве
37.1. Векторы e'i, е'2 заданы своими координатами A, 0) и
(cos a, sin а) относительно некоторого ортонормированного ба-
базиса е\, е2 двумерного евклидова пространства. Выписать мат-
матрицы: а) метрического, б) контравариантного метрического, в)
342 Гл. Ц. Тензоры
дискриминантного тензоров в базисах:
1) еь е2; 2) е[, е'2.
37.2. Доказать, что в произвольном базисе евклидова про-
пространства дискриминантный тензор имеет следующие компо-
компоненты: ?ii...in = 0, если среди значений индексов есть равные, и
?ii...in = (—l)JV('1"'l")cr-\/det Г, если индексы попарно различны.
Здесь Г — матрица метрического тензора, JV(*i ... г„) — чис-
число нарушений порядка в перестановке (i\, ..., г„); а = 1 для
правых базисов, а — — 1 для левых базисов.
37.3. Доказать, что во всех правых ортонормированных
базисах дискриминантный тензор имеет следующие компонен-
компоненты: ?-ix...in = 0, если среди индексов есть равные, и ?г1...г„ =
= (—1)^D-'"), если i\... in попарно различны. Здесь N(i\.. лп)
— число нарушений порядка в перестановке [г\, ..., гп).
37.4. Какой тензор получается, если у метрического тен-
тензора поднять один индекс? Оба индекса?
37.5. Какой тензор получается, если у символа Кронекера
опустить индекс? Поднять индекс?
37.6. Привести примеры свертывания с метрическим тен-
тензором, встречавшиеся в курсе линейной алгебры.
37.7. 1) Тензор а* определяет линейное преобразование в
евклидовом пространстве ?п. Найти тензор, определяющий со-
сопряженное преобразование.
2) Сформулировать условие, при котором тензор а*- опре-
определяет самосопряженное преобразование.
37.8. Метрический тензор и тензор оу заданы соответ-
соответственно матрицами:
1) Аьь, А9; 2) Аь7, А18; 3) А24ь, ^210-
Найти матрицы тензоров: а) а^-; б) а?; в) аи.
37.9. Верно ли утверждение: если матрица тензора Ojj сим-
симметрична, то симметричны и матрицы тензоров:
1) <4; 2) а«?
37.10. Метрический тензор и тензор а'- заданы соответ-
соответственно матрицами:
1) Аь8, А40; 2) Л207, 4ш-
Найти матрицы тензоров: а)с^-; б)а^.
37.11. Метрический тензор и тензор аг-к заданы соответ-
соответственно матрицами:
§ 38. Поливекторы и внешние формы 343
2) А55, А6ы; 3)
Найти матрицу тензора: а) а^; б) а\3к\ в) аг'к; г) atjfe.
37.12. Метрический тензор и тензор ajjj заданы соответ-
соответственно матрицами:
1) А57, А69Т, 2) Л19, Аш-
Найти матрицы тензоров: а) а^ы] б) оч'ы.
37.13. Упростить выражения:
l)(aijgik + 8ialjglk)gks; 2) ЩдыаИ; 3) а^к9ыди.
37.14. Известно, что а? = gtlg^maimk- Выразить aimk че-
через а?.
37.15 (р). Пусть ip — линейное преобразование евклидова
пространства, ip* — сопряженное преобразование. У тензора,
соответствующего произведению преобразований <pip*, опуска-
опускают индекс. Показать, что полученный тензор имеет тип @, 2)
и симметричен.
37.16. В двумерном евклидовом пространстве Еч векто-
вектору ?fe сопоставляется вектор g%->?jk?k- Доказать, что этим опре-
определено линейное преобразование пространства ?г, и выяснить
его геометрический смысл.
37.17. В трехмерном евклидовом пространстве паре векто-
векторов ?*, гр сопоставляется вектор С,к = gkl?uj?%rt>. Доказать, что
вектор Cfc есть векторное произведение векторов ?* и rf.
37.18. В четырехмерном евклидовом пространстве векто-
векторам х, у, z с компонентами ?*, if, ?fe сопоставляется линейная
функция f с коэффициентами щ = SijidCrfСк• Доказать, что
37.19. В четырехмерном евклидовом пространстве векто-
векторам х, у, z с компонентами ?*, rf, Ck сопоставляется вектор и с
компонентами gml€njkCifCk-
1) Доказать, что вектор и ортогонален векторам х, у, z.
2) Доказать, что вектор и, соответствующий тройке х, у, z,
отличается множителем —1 от вектора и, соответствующего
тройке у, х, z.
§ 38. Поливекторы и внешние формы
38.1. Функция fa от двух векторов на трехмерном вектор-
векторном пространстве сопоставляет любым векторам х и у сме-
смешанное произведение (а, х, у). Доказать, что fa — 2-форма.
344 Гл. Ц. Тензоры
Выразить ее матрицу в ортонормированием базисе через ко-
координаты вектора а.
38.2. Найти связь между векторным произведением двух
векторов и их внешним произведением.
38.3. Написать матрицу 2-формы и в базисе е простран-
пространства ?.4, если дано ее выражение через 1-формы, составляющие
базис, биортогональный е:
1) ы = f1 Л f2; 2) и = -h Л f3 + f2 Л f4;
3) w = f1 Л f2 + f1 Л f3 + f1 Л f4 + f2 Л f3 + f3 Л f4.
38.4. Найти внешнее произведение двух 1-форм, заданных
координатными строками:
I) с79, с75, /; с95, с93,
. гр гр . гр гр
"*/ С174> С166' V С156> С193-
38.5. Найти внешнее произведение трех 1-форм, заданных
координатными строками:
L) С12' С13> С14> z/ U99' U52i ЬЫ' °) и83' С124' и118>
V С172> С154> С218' °> С197' С198' с207' D^ С255> С256' С257'
38.6. 2-форма задана матрицей, 1-форма задана коорди-
координатной строкой. Найти их внешнее произведение.
1) ^254, С^; 2) ^254, С^6; 3) Л252, Сд^;
4) -4499, сГб2; 5) -4432, С^.
38.7. Пусть и, щ, v и w — внешние формы степеней соот-
соответственно р, р, q и г. Доказать, что:
1) (Аи) Л v = А (и A v);
2) (и + и\) A v = и A v + щ A v;
3) (и Av) Aw = и A (v A w);
4) и A v = ( — l)pqv Л и.
38.8. Доказать, что значение q-формы на системе векторов
xi, ..., xq фактически зависит только от q-вектора х\ А ... Л xq.
38.9. Пусть f1, ..., Р — 1-формы. Найти значение р-фор-
мы f1 Л ... Л f на системе векторов х\, ..., хр.
38.10. 2-форма в ?4 задана строкой ее существенных ком-
компонент ф, а векторы х и у — координатными столбцами ?,, л-
Найти значение 2-формы на паре х, у:
1) ф = С279, ?, = Ci74, Л = С186;
2) ф = cjgg, ?, = C171, Л = С177-
38.11. Доказать, что для линейной зависимости векторов
а\, ..., Ор необходимо и достаточно, чтобы а\ А ... А ар = 0.
§ 38. Поливекторы и внешние формы 345
•чн.; 38.12. Пусть ei, ..., еп — базис в Сп. Доказать, что:
1) бивекторы а Л ej для всех пар г, j таких, что г < j, об-
образуют базис в пространстве бивекторов пространства ?п.
2) р-векторы е»! Л ... Л е*р для всех сочетаний индексов
ii, ..., гр (i\ < ... < ip) образуют базис в пространстве р-
векторов пространства Сп.
38.13. Базису е = (ei, ег, ез, &а) пространства ?4 сопоста-
сопоставим базис е = (ei Л ег, е\ Л ез, е\ Л б4, ег Л ез, ег Л е4, ез Л е4) со-
соответствующего пространства бивекторов, а базису е' — анало-
аналогично построенный базис е'. Найти матрицу перехода отеке',
если матрица перехода отеке' есть 5.
38.14. Внешнее произведение и*1""*"-1 векторов xi, ...
..., xn-i из Сп имеет п существенных компонент. Доказать,
что при замене базиса в Сп с матрицей перехода 5 строка а =
= (о1, ..., а") из существенных компонент а* = ц1!—•»-1>»+1>-.п
преобразуется по формуле а' = a5(det5)~1.
38.15. Используя результат задачи 38.8, доказать, что ли-
линейное пространство р-форм может быть отождествлено с со-
сопряженным к линейному пространству р-векторов.
38.16. Доказать, что в Сг каждый бивектор разложим.
38.17. Доказать, что для разложимости бивектора ulJ
в ?-4 необходимо и достаточно выполнение равенства и12и34 —
-и13и24 + иии23 = 0.
38.18. Пусть oi, О2, аз и О4 — линейно независимые векто-
векторы. Разложимы ли бивекторы:
1) ai Л О2 + аз Ла45
2) аз Л О2 + ai Л О4 + ai Л аг;
3) ai Л О2 + аз Л О4 + аз Л О2 + ai Л 04?
38.19. Разложим ли бивектор в ?4, задаваемый в некото-
некотором базисе столбцом существенных компонент а:
1) а = с27э; 2) а = с26э; 3) а = с278; 4) а = c28i?
Д 38.20. Доказать, что подпространство, порождаемое р-
вектором, имеет размерность г ^ р, причем равенство достига-
достигается для разложимых р-векторов и только для них.
38.21. 1) Пусть разложимый бивектор в базисе е\, ..., еп
имеет компоненты ихК Доказать, что векторы 1г = u^ej лежат
в пространстве, порождаемом этим бивектором.
2) Сформулировать и доказать аналогичное утверждение
для разложимых р-векторов.
346 Гл. Ц. Тензоры
38.22. Может ли размерность подпространства, порожда-
порождаемого бивектором в пространстве ?4, равняться 1? 3?
38.23. В некотором базисе пространства ?4 бивектор и
определен столбцом существенных компонент а. Найти линей-
линейное подпространство, порождаемое этим бивектором:
1) а = с279; 2) а = с269; 3) а = с278; 4) а = с280.
38.24. Доказать, что разложимый р-вектор, определяю-
определяющий подпространство ?р, может быть найден по этому под-
подпространству с точностью до числового множителя.
38.25. Подпространство ?2 в пространстве ?4 задано си-
системой линейных уравнений с матрицей А. Найти компоненты
бивектора, определяющего ?2:
1) А = АЪ02; 2) А = Л503; 3) А = Аъо6.
38.26. Подпространства С\ и ?2 в пространстве ?4 поро-
порождены соответственно вектором х и бивектором и. Вектор за-
задан координатным столбцом ?,, а бивектор — столбцом суще-
существенных компонент а. Проверить, что С\ С ?2, и найти такой
вектор у, что и = х А у:
1) ?,= (-2, 6, 1, If, а= A0, 1, 3, 2, -4, -1)т;
2) ?,= A,2,0, if, а =B, 1,3, 2, 4,-1)т.
38.27. Подпространства С\ и ?2 в пространстве ?4 поро-
порождены соответственно вектором х и бивектором и. Вектор за-
задан координатным столбцом ?,, а бивектор — столбцом суще-
существенных компонент а. Проверить, что С\ П ?2 = {о}, и найти
3-вектор, порождающий ? = С\ Ф ?2. Найти уравнение подпро-
подпространства ?:
1) ?,= B,2,1,1)^ а=B, 1, 3, 2, 4, -1)т;
2) ?, = A, 0, 1, 1)т, а = (9, 5, 1, 4, -1, -1)т.
38.28. Пусть 1-формы f1, ... , ffe линейно независимы и
для 1-форм д1, ... , дк выполнено равенство f1 Л д1 + ...
к
... + ffe /\дк = 0. Доказать, что дг — ^ а^Р для всех г = 1,..., к,
причем alJ = aJl (лемма Картана).
38.29. 1-формы f1, f2 и д1 заданы координатными строка-
строками ф1, ф2,^1. Существует ли такая 1-форма д2, что f1 Ад1 +
+ f2 Л д2 — 0? Найти все такие формы, если они существуют:
1) ф1 = с[72, ф2 = cf73, 1} = cf66;
94 fol — rT fo2 _ rT tl _ rT .
§ 38. Поливекторы и внешние формы 347
3) ф = С1бб, ф = С228> t = С227>
4) ф1 = cf71, ф2 = с[86, i,1 = cf93.
38.30. Доказать, что для каждой 2-формы ш существует
базис f1, ... , Р в пространстве 1-форм такой, что форма ш
имеет канонический вид ш = f1 Л f2 + f3A f4 + ... + f2p-1 Л f2p
Bp ^ n).
38.31. 2-форма задана своей матрицей в некотором базисе.
Привести ее к каноническому виду, описанному в задаче 38.30:
1) -425о; 2) Л439; 3) Аш; 4) А4Ш.
РЕШЕНИЯ
1.46. Введем на плоскости базис AD = а, АВ = Ь. Имеем:
= 1Э& + 7ТК=Ъ-\а, БГ=БС + с1 = а-|ь, ~DM = \~DK,
5 о
ВМ = цВЬ. Найдем неизвестные Ли/i. Так как
1М = AD + DM = а + АИэ- -а] = fl-^
- |,Л Ь,
3
то, приравнивая коэффициенты при аи Ь, имеем 1 — — X — fi, А =
1 5 л 3 16 о
= 1 — -/х, откуда А = —, /х = —. Окончательно,
8 5 25
\DM\ : |MJf| = 3:2, |БМ| : \МЦ = 16 : 9.
2.19. Параллелограмм строится на векторах а = 2е\ + 2в2, b =
= — ei + 4е2. Длины диагоналей параллелограмма — это длины век-
векторов а + b и а - Ь. Имеем: а + b = ei + 6е2, а - b = 3ei - 2e2;
|а + b|2 = lei|2 + 36|е2|2 + 12 (еь е2), |а - b|2 = 9|ei|2 + 4le2|2 -
- 12(еье2). Поэтому |а + Ь|2 = 50, так как (ei,e2) = 1; |a-b|2 = 10.
Итак, длины диагоналей параллелограмма равны 5v2 и у10.
Один из углов параллелограмма — это угол ip между вектора-
векторами а и Ь; cosф = , а' „ ,. Имеем (a, b) = -2|ei |2 + 8|е2|2 + 6(еь е2) =
N • |Ь|
= 10, |а|2 = 4|е1|2 + 4|е2|2 + 8 (вь е2) = 20, |Ь|2 = |е1|2 + 16|е2|2 -
— 8 (ei, е2) = 10; cosy = \j\Fi- Итак, острый угол параллелограмма
равен 45°.
2.24. По определению b = х + у, где вектор х коллинеарен век-
вектору а, а вектор у ортогонален вектору а. Иначе говоря, b = Аа + у,
где (а, у) = 0. Умножая обе части векторного равенства скалярно на
а, имеем
(а, Ь) = А|а|2 + (а, у) = А|а|2,
откуда А = .' . Итак, х = .' а-
1а1 1а1
2.34. Пусть вектор с имеет координаты х, у, z. Из условия орто-
ортогональности векторам а и b имеем: х — у + z = 0, 5х + у + z — 0. Вы-
Выражая из первого уравнения z = у — х я подставляя во второе, име-
Решения 349
ем: 2?/ + Ах — О, откуда у — —2х, z = — Зх. Условию ортогональности
векторам а и b удовлетворяет бесконечно много векторов с с коорди-
координатами (х, —2х, —Зх). Из условия |с| = 1 имеем |х| = 1/y/lA, откуда
х = ±1/\/14. Задача имеет два решения: (l/\/l4, —2/y/Ti, -3/\/l4)
и (-l/x/14, 2/VU, З/у/Щ.
3.9. Площадь параллелограмма равна S = \[ВА, ВС}\ (если
плоскость рассматривать в пространстве). Имеем В А = Зе2, ВС =
= -2е1+2е2, |[еь е2]| = 3, [~ВА, ВС] = 6[е2, е2 - d] = 6[е2, е2] +
+ 6 [ei, е2] = 6 [еь е2]. Искомая площадь равна S = 6 |[ei, e2j| = 18.
3.29. 1) Если векторы ai, a2, аз компланарны, то, например,
а3 = Aai + да2. Так как (b3, ai) = (b3, a2) = 0, то и (Ь3, а3) = 0, что
противоречит равенству (Ьз, аз) = 1. Пусть теперь векторы ai, a2, а3
некомпланарны. Докажем, что в этом случае взаимная тройка суще-
существует. Так как (b3, ai) = (b3, a2) = 0, то Ь3 = Х[ач, а2]. Скаляр Л
находим из условия (Ь3, а3) = 1. Имеем A([ai, а2], аз) = 1, откуда
Л = l/(ai, а2, а3), а Ьз = [ai, a2]/(ai, a2, аз). Аналогично находим
bt = [а2, аз]/(аь а2, а3), Ь2 = [а3, a1]/(ai, a2, а3).
2) Формулы описаны выше.
3) По формуле задачи 3.26, 4), (bb b2, b3) = l/(ai, a2, а3). По-
Поэтому знаки чисел (аь а2, аз) и (b1; b2, b3) совпадают. Значит век-
векторы bi, b2, Ьз образуют базис той же ориентации, что и ai, a2, аз.
4.11. Имеем: ~Ш5 = \~B~D = ~ СаЗ-~А~в), ~ЁС = ~ED + DC =
2 - 1—-
— tAD + —АВ. Поэтому базисные векторы второй системы коор-
о о
динат выражаются через базисные векторы первой системы так:
\ 2 2 2 ¦- •- •-
ei = ?ei + ое2. е2 = ~ое1 + ое2- Далее^ АЕ = Ав + ВЕ = Ав +
о о о о
+ — IAD — АВ J; поэтому начало второй системы координат имеет
в первой системе координаты I -, -I. Теперь остается записать:
_1, 2, 2 _2, 2, 1
5.20. Если бы три точки А, В, С лежали по одну сторону от ис-
искомой прямой, то они принадлежали бы одной прямой, параллельной
искомой. Но точки А, В, С не лежат на одной прямой; значит, две из
них лежат по одну сторону от искомой прямой, третья — по другую.
Если А и В лежат по одну сторону от прямой, С — по другую, то
искомая прямая проходит через точки L B, 3) и М (—1, 2) — середи-
середины отрезков ВС и АС соответственно; ее уравнение —-—- = -—-,
— 1 — 2 2 — о
т.е. х - Зу + 7 = 0.
350 Решения
Аналогично разбираются два других случая расположения то-
точек А, В, С относительно прямой.
Задача имеет три решения: х — Ъу + 7 = 0, Зх + &у - 18 = 0, 2х +
+ 7у - 12 = 0.
5.34. Проведем через точку А A, 2) прямую, перпендикуляр-
перпендикулярную прямой Зх — у + 9 = 0. Ее параметрические уравнения х =
= 1 +3t, у — 2 — t (так как направляющий вектор имеет координаты
C, —1))- Пусть А\ — искомая проекция. Обозначим через to значе-
значение параметра t на прямой х = 1 + 3?, у = 2 -t, соответствующее
точке пересечения с прямой Зх — у + 9 = 0 (т.е. точке Ai). Найдем
это значение to из уравнения 3 A + 3t0) - B - t0) + 9 = 0, откуда
to = —1. Тогда искомая проекция имеет координаты (—2, 3). Далее,
так как вектор АгВ = AAi имеет координаты (-3, 1), то точка В
имеет координаты (—5, 4).
5.53. Точки, равноудаленные от двух данных прямых, имеют
\х-7у-1\ \х + у + 7\
координаты, удовлетворяющие уравнению — = -= .
5у2 л/2
Множество таких точек — пара прямых (биссектрисы двух углов
между данными прямыми). Угол, содержащий точку j4A, 1), опре-
определяется неравенствами х — 7у — 1 <0,х-Ьу + 7>0. Поэтому урав-
- Л -х + 7у+1 х + у + 7
нение искомой биссектрисы -р. = -=.—, т.е. Зх — у +
52 2
+ 17 = 0.
6.44. Введем систему координат с началом в точке А и базис-
базисными векторами ei = AAi, e2 — АВ, ез = AD. По условию задачи
Аэ (Л/3, 0, 0), Во @, Л, 0), D @, 0, Л), где Л > 0. Уравнение плоскости
AqB0D0 во введенной системе: Зх + у + z = Л. Точка С\ имеет коор-
координаты A, 1, 1) и принадлежит плоскости A3.B0.D0> значит, Л = 5.
Объем параллелепипеда V= I AAi, АВ, AD) . Объем тетраэдра
_ , , 1 \ / \ - т. ,\
АА0, АВо, AD0 ) = - -ААЬ ЛАВ, ЛАО )
/I 6|\3 /
= l8V'
6.78. Уравнение плоскости с нормальным вектором п(А, В, С),
проходящей через начало координат: Ах + By + Cz = 0. Из условия
задачи имеем:
\А + 2В + 2С\ = _2_
+ В2+С2 15' 1 '
Разделим A) на B):
2\А + 2В + 2С\ = \7А + АВ + АС\. C)
Решения 351
Конец нормального вектора искомой плоскости, отложенного из
начала координат, имеет координаты ХА, ХВ, ХС, где А ф 0. Усло-
Условие принадлежности этого конца тупому двугранному углу между
данными плоскостями имеет вид
A • 7 + 2 ¦ 4 + 2 • 4) (ХА + 2ХВ + 2ХС) GХА + 4ХВ + 4ЛС) > 0
(см. задачу 6.75), т.е. (А + 2В + 2С) (ТА + АВ + 4С) > 0. Значит, C)
раскрывается как 2(А + 2В + 2С) = ТА + АВ + 4С, т.е. А = 0. То-
Тогда из A) имеем: 5\В + С\ — VВ2 + С2, что равносильно 12В2 +
+ 2ЪВС + 12С2 = 0. Отношение В/С отсюда принимает два значе-
значения: —3/4 и —4/3. Нормальный вектор искомой плоскости можно
взять равным п@, 3, —4) или п@, 4, —3). Задача имеет два реше-
решения: Зу — 4z; Ay = Zz.
7.34. Введем полярную систему координат, полюс которой на-
находится в центре эллипса, а полярная ось направлена по большой
оси. Тогда х = г cos ip, и эллипс имеет уравнение
= '
a2 b2 ' ' ' a2 sin2 tp + b2 cos2 tp'
1) Так как по условию полярные углы точек А, В равны tp и
> + тг/2, то
1 1 _ a2 sin2 tp + b2 cos2 tp a2 cos2 tp + b2 sin2 tp a2 +b2
OA2 ОБ2 a2b2 a2b2 a2b2
OA2 + ОБ2 = „.,аЬ„ , +
a2 sin ip + b2 cos2 ip a2 cos2 y> + b2 sin2
j>-\-qcos2ip p — q cos lip'
a2+b2 a2-b2 n ,D, 2pa2b2
где p = —-— > q — —-— > 0, так что АВ* =
p2 — q2 cos2 2
Наименьшее значение ЛI? достигается при cos 2tp = 0 и равно
наибольшее значение АВ достигается при cos2<^ = ±l и равно
у/а2 + Ь2.
9.4. 2) Найдем угол поворота tp системы координат из формулы
(9) (при этом можно считать, что 0 < tp < тг/2, тогда sin 2tp > 0, и
4 13
знаки tg2tp и cos2tp совпадают): tg2tp — —,' cos2<^ =
1 2
smtp — —=, cos ip = —=. Замена координат при повороте на угол tp
V5 V5
2х' — у1 х' + 2у'
осуществляется по формулам G): х — -=—, у = -=—. Под-
¦¦¦щг уЬ V5
352 Решения
ставляя эти выражения в уравнение кривой, получим после упроще-
ния: ж' — 4у' -\——ж' -\—у=у' — 6 = 0. Выделим полные квадраты по
( 1 \ /" з \
— 6 = 0, т.е. I ж' -\—-= ] — 4 I y' -= ] +1 = 0. Перенесем нача-
1 3
ло координат по формулам ж" = ж' Н—-=., у" = у' -= и получим
V5 v5
ж" — 4у" = — 1. Так как это уравнение отличается от канонического
уравнения гиперболы знаком свободного члена, требуется дополни-
дополнительный поворот системы на угол тг/2: ж" = —У, у" = X, после кото-
которого получаем каноническое уравнение гиперболы: 4Х2 — Y2 — 1. За-
Записав теперь окончательные формулы перехода от исходной системы
— X — 2Y 2Х — Y
координат к канонической: ж = -= 1, у = ¦= (-1, нахо-
V5 V5
. / i 2 \
дим каноническую систему координат: О' (—1, 1), Е\ ( = , —j= ),
V V5 V5 /
10.66. Найдем уравнения проекции сечения на плоскость Ожу,
исключив z из данных уравнений. Получим ж2 + 2у2 — B — ж — уJ =
= —4, или у2 — 2а;у + 4ж + 4у = 0. Теперь найдем центр полученной
линии второго порядка, используя уравнения F) из введения к гл. 3.
или задачу 9.18. Уравнения F) имеют вид -2у + 4 = 0, 2у — 2ж + 4 =
= 0. Находим жо = 4, уо = 2. Так как искомая точка лежит на данной
плоскости, то жо + уо + 2zo = 2, откуда Zq = —2. Ответ: С D, 2, —2).
10.68. Изложим один из способов решения задачи. Сначала со-
составляем уравнения проекции на плоскость Oyz сечения данного
эллипсоида плоскостью ж + у + z — h и находим центр полученной
линии второго порядка. Искомый центр сечения имеет те же коор-
координаты уо, Zo, что и центр проекции; при найденных уо, Zq коорди-
координату ж0 центра сечения легко определить из уравнения плоскости.
Принимая h за параметр, таким образом находим искомое множе-
множество точек.
Выполним намеченную программу. Уравнение проекции на пло-
плоскость Oyz получим, исключая ж из уравнений ж2 + 2у2 + 3z2 = 4 и
ж + у + z — h. Получаем
Зу2 + 4z2 + 2yz - 2hy - 2hz + h2 - 4 = 0.
Составляем уравнения для определения центра этой кривой (см. за-
задачу 9.18)
6у + 2z - 2h = 0, 8z + 2y - 2/i = 0.
Отсюда уо = ЗЛ/11, z0 = 2Л/11. Подставляя эти числа в уравнение
плоскости ж + у + z = h, получим ж0 = 6Л/11. Итак, ж0 = 6Л/11, уо =
Решения 353
= 3/i/ll, zq = 2/i/H. Обозначив h — lit, получим x = 6t, у = 3?, z =
= It — уравнения линии центров. Однако искомому множеству при-
принадлежат не все точки прямой, а лишь лежащие внутри эллипсоида.
Вычисляя значения параметра t = ±-^/2/33, соответствующие точ-
точкам пересечения прямой и эллипсоида, находим ограничение на t.
Ответ: х = 6t, y = U, z = 2t, \t\ ^ ^/2/33.
10.71. Укажем один из способов решения задачи. Запишем
уравнение плоскости в параметрическом виде: х = 3 + а\и + biv, у =
= 2 + а2и + b2v, z = ази + Ьзу. Подставив эти уравнения в уравнение
эллипсоида, получим уравнение сечения во внутренних координатах
плоскости:
C + ахи + hvf + 2B + а2и + b2vJ + 4A + а3и + b3vJ = 9. (9)
Так как по условию центр этого эллипса лежит в точке с коор-
координатами Uq =0, ^о = 0, то в уравнении (9) отсутствуют линей-
линейные члены. Приравнивая нулю коэффициенты при этих членах, по-
получим условия на координаты направляющих векторов плоскости:
6di + 8d2 + 8аз = 0, 6bi + 862 + 863 = 0. Они показывают, что за нор-
нормальный вектор искомой плоскости можно взять вектор пF, 8, 8).
Но наша плоскость по условию проходит через точку С C, 2, 1). По-
Поэтому ее уравнение имеет вид 6(ж — 3) 4- 8(у — 2) + 8(z — 1) = 0, или
Зж + 4у + Az - 21 = 0.
10.75. Найдем проекцию сечения на плоскость Оху. Для этого
исключим из данных уравнений z. Получим х2 + у2 — 4 = 0. Следова-
Следовательно, искомая проекция содержится в окружности. Однако для то-
точек данного гиперболоида х2 — у2 + z2 + 1 = 0 всегда х2 — у2 + 1 ^ 0.
Поэтому искомая проекция состоит из двух дуг окружности, заклю-
заключенных внутри ветвей гиперболы х2 — у2 + 1 = 0. Найдя точки пере-
пересечения гиперболы и окружности, получаем ответ: 2 = 0, х2 + у2 —
= 4, \у\ ^ у/Ь/2 (или |ж| ^ \JZ/2). Остальные проекции находятся
аналогично.
11.12. 1) Допустим, что данная поверхность — эллипсоид. В
канонической системе координат уравнение эллипсоида линейных
членов не содержит. Любая другая система координат с началом
в центре симметрии эллипсоида отличается от канонической лишь
базисом. Формулы замены базиса однородные, и при такой замене
совокупность членов второй степени переходит в совокупность чле-
членов второй степени; линейные члены не могут «возникнуть». Для
остальных типов поверхностей доказательство аналогичное. Отме-
Отметим, что если у поверхности бесконечно много центров симметрии,
то каждый из них можно принять за начало канонической системы
координат.
11.21. 6) Для решения задачи можно привести уравнение по-
поверхности к канонической форме путем перехода к какой-нибудь де-
декартовой (не обязательно прямоугольной) системе координат. После
12- 1715
354
Решения
этого определить тип поверхности можно по таблице типов, восполь-
воспользовавшись результатом задачи 11.8 или непосредственно вычисляя
ранги и сигнатуры большой и малой квадратичных форм поверхно-
поверхностей.
Упрощение данного уравнения выполним двумя способами.
Способ 1. Выделяя полные квадраты, содержащие последо-
последовательно переменные х\, х2,хз, данное уравнение запишем в виде
(zj - 2х2 - Зх3 - IJ - 6(ж2 + ж3J -6x1 +к-1 = 0.
Положим
X\ — 1x2 — Зжз — 1 = U\, X2 + X3 = U2, Ж3 = Щ.
Эта замена переменных, очевидно, обратима. Уравнение поверхно-
поверхности в новых координатах
и\ - 6и\ - 6и\ + к - 1 = О
является почти каноническим. Легко убедиться, что при к = 1 это
уравнение приводится к канонической форме
соответствующей конусу, при к > 1 — к канонической форме
е , v2 с2
¦ +
= 1,
jfc-l ' к-1 6(к-1)
соответствующей однополостному гиперболоиду, при к < 1 — к ка-
канонической форме, соответствующей двуполостному гиперболоиду.
Способ 2. Выписываем матрицу большой квадратичной
формы поверхности и приводим ее к диагональному виду, применяя
элементарные преобразования к строкам (по методу Гаусса) и такие
же преобразования к столбцам. Если при этом последний столбец
и последняя строка не прибавляются с какими-либо множителями
к остальным и не умножаются на числа, отличные от единицы, то
элементарные преобразования соответствуют матрице перехода Т
задачи 11.17, 2). Попутно эти преобразования упрощают и матрицу
малой квадратичной формы поверхности, не меняя рангов и сигна-
сигнатур. В данном случае
10 0 0 10 0 0
0-6-6 0 0-600
0 -6 -12 0 ~ 0 0 -6 0
0 0 0 jfc-l 0 0 0 Jfc-l
При к > 1: R = 4, г = 3, ? = 0, а = 1. Поверхность — однополост-
ный гиперболоид. При к = 1: R — т = Ъ, S = cr = l. Поверхность —
конус. При к < 1: R = 4, г = 3, Е = 2, а — 1. Поверхность — двупо-
лостный гиперболоид.
11.22. 16) Последовательно выполним рекомендованные
действия. Сначала с помощью ортогональной замены координат
1
-2
-3
-1
_2
-2
0
2
—3
0
-3
3
-1
2
3
jfc
Решения
355
упростим квадратичную форму поверхности. В данном случае до-
достаточно лишь обратить в нуль член с произведением yz. Выпишем;
матрицу из коэффициентов членов второй степени, содержащих у и
z, и строку коэффициентов при у и z в первой степени:
1 -1
-1 1
а=|||3 -5
Составим характеристическое уравнение \А — ХЕ\ = 0:
= 0.
1-Л -1
-1 1-Л
Корни этого уравнения Ai = 0, Аг = 2. Для нахождения ортонорми-
рованного базиса из собственных векторов составляем систему урав-
уравнений (А — ХЕ) Е, — о. В данном случае
1 -1
-1 1
:!:!*- *=
h, А = 0;
Л, Л = 2;
D)
E)
Различным собственным значениям Ai = 0 и Лг = 2 принадлежат
взаимно ортогональные собственные векторы. Поэтому для отыска-
отыскания ортонормированного базиса из собственных векторов достаточ-
достаточно пронормировать найденные столбцы D) и E). Получаем столб-
столбцы
-1
1
. Искомая замена координат
Г* = 5 /
имеет матрицу перехода
составленную из этих
Til1 1И
столбцов. При такой замене координат члены данного уравнения
у2 + г2 — 2yz переходят в 2г' . Чтобы найти коэффициенты при ли-
линейных членах преобразованного уравнения, используем формулу
а' = 55. Получим 5' = (—1/\/2, — 2\/2)- Остальные члены уравнения
при нашей замене координат не меняются. Мы можем выписать пре-
преобразованное уравнение
/2
-ж2
2z'
2x-
= 0.
Теперь необходимо перенести начало координат в пространстве.
Для этого группируем одноименные переменные и дополняем их до
полного квадрата; наше уравнение приобретает вид
-(х-1J + (z'V2-2J - V2y' -2 = 0
или
-(х - IJ + 2{z' - у/2J - V2(y' + у/2) = 0.
Делаем замену координат х = ?+1, у' = т) — у/2, z' = С + \/2 (пере-
(перенос начала координат в точку О с координатами 1, — \/2, \/2 относи-
12*
356
Решения
тельно повернутой системы). Получаем почти каноническое уравне-
уравнение
-^ + 2С2 - ч/2т7 = 0. F)
Ясно, что данное уравнение описывает гиперболический параболоид.
Сделаем некоторые дополнительные замечания к решению за-
задачи. Прежде всего вычислим исходные координаты точки О. Отме-
Отметим, что при замене только переменных у и z первая координата лю-
любой точки остается неизменной. Поэтому первая координата точки О
равна 1 и в повернутой, и в исходной системе координат. Остальные
координаты можно вычислить, пользуясь формулой перехода:
и
v/2
-2
0
X
У
Z
= S
С
V
С
+
1—1
_2
0
Таким образом, старые координаты точки О суть 1, —2, 0.
Поясним, как выписать формулу перехода от координат х, у, z
к ?, т), ?. Она имеет матричный вид
G)
где матрица перехода S содержит 5 в качестве подматрицы:
1 0 0
5= 0 1/уД -1Д/2
0 1/лД 1/\/2
Раскрывая матричную формулу G), получим итоговую замену ко-
координат в развернутой форме
v2 y2 v2 v2
Наконец, остановимся на переходе от почти канонического уравне-
уравнения к каноническому. Можно, например, умножить обе части равен-
равенства F) на 1/2, перенести линейный член в правую часть и сделать
замену координат
? = ,/, т] = С, С = С- (9)
После этого уравнение F) превратится в каноническое уравнение
?'2 _ \* = J_C'
Замена координат (9) имеет матрицу
0
1—1
0
0
0
1—1
1—1
0
0
и соответствует пе-
перестановке базисных векторов. Переход от исходных координат к
каноническим в силу (8) и (9) определяется формулами
Решения
357
11.22. 24). Приведем важнейшие этапы решения, не останавли-
останавливаясь на деталях отыскания собственных значений, собственных век-
векторов, подпространств V и Q, разложения вектора ат в сумму р + q,
выбора и нормировки столбцов матрицы S, решения системы урав-
уравнений A1)- Все обозначения приведены во введении к § 11. Ссылки
на уравнения относятся к формулам того же введения.
В нашем случае
4 2-6
А= 2 1-3 , а= || 1 3 -3||, ifc= -5.
-6 -3 9
Характеристические числа матрицы 14, 0, 0, соответствующие соб-
собственные векторы || 2 1 -3 ||Т, || -1 2 О ||Т, || 6 3 5 ||Т. Они по-
попарно ортогональны. Подпространство V натянуто на первый из них,
Q — линейная оболочка второго и третьего. В разложении ат = р + q
получаем р = || 2 1 -3 ||т, q = || -1 2 О ||Т.
Значит, за столбцы 5 можно принять нормированные собствен-
собственные векторы:
s =
V70
2\/5 -y/U 6
у/Ъ 2у/п 3
О 5
= А
328-
Выписываем систему уравнений A1):
4
2
-6
0
2
1
-3
5
-6
-3
9
К 1
о -т
2
1
-3
-5
= 0.
Последнее уравнение — это BqT + рт)Ъ + к = 0. Находим частное
решение b = || — 1 1 0 || . Замена переменных ? = 5?' + b приведет
данное уравнение к виду D): коэффициенты А', а', к' вычисляем,
пользуясь формулами из ответа к задаче 11.8, 2), а также свойствами
матрицы 5 и системы уравнений A1): А' = diagA4, 0, 0),
а' = (ЪтА+рт + qT)S = qTS - || 0 |9| 0 || = || 0
0
к' = BqT +рт)Ъ + к = 0. Таким образом, уравнение D) принимает
почти канонический вид
14ж2 + \/Ъу = 0,
что соответствует ответу задачи.
12.60. 2) Обозначим искомую площадь через S. Преобразование
х* -a^x + biy + Ci, у* = а2х + Ь2у + с2 A1)
переводит первые две прямые в оси Оу и Ох. Найдем образ I* третьей
прямой, подставив решения системы A1):
1
—
03
х* — ci bi
У* - с2 Ь2
1
у= y
си х - ci
а-i У* - с2
а2
358
Решения
в уравнение прямой а3х + Ь^у + сз = 0. Получим
х* -
У* - С2 h
0,1 X —
а-1 У* -
или
т.е.
ai Ь\ х* — с\
0-2 Ь-1 у* - С2
= 0,
а2
аз
h
ь2
Ьг
X*
У*
0
=
= a2
С2
= д.
Подставим у* = 0 и х* = 0 в уравнение прямой 1* и найдем, что I*f
отсекает на осях Ох и Оу отрезки длины \А/6\\ и |Д/^2|) где
0,2
аз
Следовательно, 1* образует с осями координат треугольник площади
14.24. 10) Обозначим искомый определитель через Д„. Раскла-
Раскладывая его по первой строке, получим рекуррентное соотношение
Д„ = 2аД„_1 — Д„_2- Пусть q таково, что la = q -\— (решив квад-
q
ратное уравнение, находим, например, что q = а + \/а2 — 1, - =
q
/ j\
= а — у/ос1 — 1). Из равенства Дп = I g -\— ] Дп-1 — Дп-2 следуют
V 9/
два рекуррентных соотношения
Д„ - дД„_! = -(Д„_1 - дД„-2),
q
Д„ - -Д„_1 = д(Д„_1 - -Д„-2)-
9 q
Отсюда заключаем, что величины
г„ = Д„ - дД„_1 и sn = Д„ - -Д„_1
A2)
A3)
образуют геометрические прогрессии со знаменателями -ид соот-
q
ветственно. Вычислим
-J - 1 - g ( q+ - j = -^;
Решения 359
аналогично получим S2 = q2, откуда следует г„ = — и sn — qn (n > 1).
Из формул A3) следует, что sn — г„ — I q I An-i- Поэтому при
V Ч)
ff/il Дп-1 — [ qn ] I [q )• Заменив q его выражением
V чп) I \ я/
через а и раскрыв степени по биному Ньютона, получим
а + Va2 - 1) - (a - у/а2 - 1)
[()/]
= ? C2fc+1an-2fc-1(a2-l)fc.
fe=o
Заменяя п — 1 на п, получим ответ задачи.
Рассмотрим случай q = ±1 (а = ±1). При q = 1 обе формулы
A2) совпадают и показывают, что Дп образуют арифметическую
прогрессию со знаменателем, равным 1. Так как при этом Ai = 2, то
Дп = п + 1. Аналогично убеждаемся, что при д= -1 (а = -1) Д„ =
= (—1)п(п+ 1). Эти частные случаи также содержатся в формуле,
указанной в ответе задачи.
14.24. 13) Пусть Ь ф 0. Вынося из каждой строки определителя
множитель Ь и обозначая а/Ь = х, получим
х 1 0 ... 0 0
1 х 1 ... 0 0
0 0 0 ... 1 х
Следовательно, задача сводится к 14.24, 10), что дает после соот-
соответствующих замен обозначений первую из приведенных в ответе
формул. Эта формула остается справедливой и в пропущенном на-
нами тривиальном случае 6 = 0.
Чтобы получить ответ в другой форме, будем считать х перемен-
переменной величиной. Тогда Д можно рассматривать как многочлен от х
степени п со старшим коэффициентом, равным Ьп. По теореме Везу
fe=i
где ajt — корни уравнения Д (ж) = 0. Из ответа к задаче 14.24, 11),
тгк
следует, что Д„ = 0 при w = (к = 1, ..., п). Сравнивая Д„
п + 1
и Д, убеждаемся, что многочлен Д (ж) имеет п различных корней
ajt = 2 cos , откуда и получаем
п +1
л ,« тт (а жк \ тт ( _,
Д = Ьп И т - 2 cos = ТТ [а - 26cos
= Ьп И т -
ТТ [а 26cos
п+\) 1=1Д n +
360
Решения
Очевидно, эта формула верна и в пропущенном тривиальном случае
6 = 0.
15.50. Каждое элементарное преобразование строк матрицы А
эквивалентно умножению ее слева на элементарную матрицу, кото-
которая получается из единичной матрицы с помощью того же элемен-
элементарного преобразования. Невырожденную матрицу с помощью эле-
элементарных преобразований можно перевести в единичную. Значит, в
этом случае получаем Sk ¦ ¦ ¦ Si А = Е, откуда Sk ¦ ¦ ¦ Si = А~1, А =
= Sj~ ... S^. Матрицы S{" , • • ¦, S^, так же как и Si, ..., Sk, эле-
элементарные; они получаются из единичной матрицы «обратными»
элементарными преобразованиями строк.
15.51. 1) Общие соображения: в силу решения задачи 15.50,
А = Si ... S^1, где матрицы Si, ..., Sk соответствуют элементар-
элементарным преобразованиям строк матрицы А, переводящим ее в единич-
единичную матрицу. Подобрав S1; ..., Sk, затем находим Sf1, ..., S^.
На данном примере ниже показано, что процесс можно сократить
., . II 1 1
на один шаг. Упрощаем матрицу А = « _„
строку на —1/2. Это равносильно умножению А слева на матрицу
0 -МО II- Получим
Умножим вторую
-1/2
1 0
0 -1/2
1 1
0 -2
1 1
0 1
A4)
Матрица В элементарная. Вычисляем
= S.
1 0 _ 1 0
0 -1/2 II - || 0 -2 и
Умножая обе части равенства A4) на S слева, получим искомое раз-
1-1
ложение
1 1
0 -2
1 0
0 -2
15.73. Диагональная матрица diag(l, 2, ..., п) невырождена.
Используя эту матрицу, мы можем применить результат задачи
15.69, откуда следует диагональность данной матрицы А. Остает-
Остается доказать равенство всех диагональных элементов А. Если А —
0
матрица второго порядка: А =
справа на матрицу S =
0 -1
1 0
п \ и> т0 умножим ее слева и
и Л2 ||
Приравнивая AS и SA, убедим-
ся, что Ai = Аг- Аналогичным образом, подбирая S для диагональ-
диагональной матрицы А произвольного порядка, проверим равенство любых
двух диагональных элементов А.
15.81. Обратную матрицу ищем методом Гаусса, исходя из мат-
матрицы || А\Е || (см. задачу 15.53). Процесс упрощения начинаем с
нижней строки. При этом элементы матриц А и Е, расположенные
Решения 361
ниже главной диагонали, не меняются. В итоге из единичной матри-
матрицы должна получиться верхняя треугольная.
15.118. Пусть А — данная матрица перестановки. Рассмотрим
всевозможные матрицы Ак. Это — матрицы перестановок (см. зада-
задачу 15.108). Число различных матриц перестановок одного порядка
конечно. Поэтому существуют натуральные числа р, q такие, что
р > q и Ая = Ар; отсюда Ая~р = Е.
16.26. 2) Пусть b — отличный от о столбец матрицы А. Все
столбцы А пропорциональны Ь. Если а — строка из коэффициентов
пропорциональности, то А = Ьа.
16.27. В = А~1(АВ), С = {СА)А~1. Применяя теорему об
оценке "ранга произведения матриц (задача 16.25, 1)), получим нера-
неравенства rg В ^ rg АВ ^ rg В, rg С ^ rg С А ^ rg С, откуда и следуют
утверждения.
16.35. Уравнение АВ — О эквивалентно уравнению
^^B) = О, где S,T — любые невырожденные матрицы под-
II С1 Г\
ходящего порядка. Подберем 5, Т так, чтобы А' = SAT = \\ A q
где Ет — единичная матрица порядка г = rg А. Обозначим В' =
= Т~гВ. Легко проверить, что первые г строк произведения А'В'
совпадают с первыми г строками матрицы В'. Поэтому равенство
А'В' — О возможно, лишь если первые г строк матрицы В' нуле-
нулевые. Следовательно, rg В' ^п — г. Но rg В' — rg В, rg A' = rg A = г,
поэтому rg A + rg В = rg A' + rg В' ^ п. Другое решение задачи полу-
получим, если будем интерпретировать столбцы В как решения системы
уравнений Ах = о. Тогда данная задача сводится к оценке макси-
максимального числа линейно независимых решений этой системы.
18.17. 4) Ранг данной фундаментальной матрицы равен п — г =
= 4 — г = 2, так что ранг искомой системы уравнений: г = 2. Будем
искать два независимых уравнения вида aixi + a^x-i + 0.3X3 + 04X4 =
= 0. Столбцы данной матрицы им удовлетворяют:
«1 + Я2 + аз + а.4 = 0, а! + 2а2 + а3 + Зсц = 0.
Столбцы фундаментальной матрицы этой системы уравнений
1 0 1 0||Т
1 -2 0 1 И
дают коэффициенты искомой системы из двух независимых уравне-
уравнений: —xi + хз = 0, xi — 2x2 + Х4 = 0. Ответ не однозначен.
19.30. Проверим для системы уравнений (АТА) х = АТЪ усло-
условия теоремы Фредгольма. Пусть уо — решение сопряженной од-
однородной системы у (АТА) = о. Тогда уо (АТА) уд = 0, откуда
(уоАт) (уоАт) = 0, что возможно, только если (уоАг) = о. Умно-
Умножая последнее равенство на Ь, получим при любом столбце Ь:
уо (АТЬ) = 0, т.е. действительно условия теоремы Фредгольма
362 Решения
выполнены. Отсюда следует совместность системы уравнений
(АТА) х = АТЪ.
п
19.31. Допустим противное. Тогда система уравнений ]П djkXk =
fe=i
= 0 (j = 1,..., п) имеет нетривиальное решение х?,..., х°. Если х° —
максимальная по модулю компонента этого решения, то х° ф 0, и
j-e уравнение системы дает cljj + Y1 а]к{х°к/х®) — 0, откуда ввиду
|x°/xj| ^ 1 получаем \a.jj\ ^ 52 \ajk\> что противоречит условию.
19.34. Будем искать прямую Ах + By + С = 0, содержащую три
данные точки. Рассматриваем равенства
Aai + ВЪх + С = 0,
Аа2 + ВЪ-2 + С = 0,
Аа3 + ВЪ3 + С = 0
как систему уравнений относительно неизвестных А, В, С с матри-
матрицей коэффициентов
М =
а.2
Любое нетривиальное решение системы удовлетворяет условию А2 +
+ В2 фО, так как последний коэффициент в каждом уравнении ра-
равен единице. Поэтому нетривиальные решения системы и только
они соответствуют прямым, содержащим три данные точки. Условие
rg M = 3 необходимо и достаточно для того, чтобы система уравне-
уравнений нетривиальных решений не имела, т. е. оно необходимо и доста-
достаточно для того, чтобы три данные точки не лежали на одной прямой.
19.35. 1) Будем искать уравнение прямой, проходящей через 2
данные точки, в виде Ах + By + С = 0. Рассмотрим систему уравне-
уравнений для определения А, В, С:
Aai + ВЪх + С = 0,
Аа2 + ВЬ2 + С = 0.
Ее матрица есть х ь1 i = М. Каждое нетривиальное решение
II ^2 -!¦
системы удовлетворяет условию А2 + В2 ф 0, так как последний ко-
коэффициент в каждом уравнении равен единице. Поэтому нетриви-
нетривиальные решения системы и только они соответствуют прямым, со-
содержащим две данные точки. Если точки (а1; 6i) и (аг, ^г) различны,
то rg M = 2 и система уравнений имеет одно линейно независимое
решение, т. е. существует единственная прямая, содержащая данные
точки.
Решения
363
X
0-1
«2
У
Ъ.
ь2
1
1
1
2) Для того чтобы три точки с координатами (х, у), (a.i, 61),
(а2, Ьг) лежали на одной прямой, необходимо и достаточно (см. ре-
решение задачи 19.34) условие
У 1
= 0.
Это и есть искомое уравнение. Заметим, что если данные точки раз-
различны, то хотя бы один из коэффициентов при неизвестных отличен
от 0, т. е. полученное уравнение действительно определяет прямую.
19.42. 1) Будем искать всевозможные плоскости, содержащие
три данные точки. Эта задана приводит к системе уравнений
Ааг + ВЪх + Ссг + D = 0,
Аа2 + ВЬ2 + Сс2 + D = 0,
относительно неизвестных А, В, С, D. Так как последний коэффици-
коэффициент в каждом уравнении равен единице, то каждое нетривиальное ре-
решение системы уравнений удовлетворяет условию А2 + В2 + С2 фО
и действительно дает плоскость, содержащую три данные точки. Нас
интересует случай, когда фундаментальная система решений содер-
содержит единственное решение — в этом случае существует единствен-
единственная плоскость, содержащая данные точки. Для этого необходимо и
достаточно, чтобы
h сх 1
а2 Ь-2 с2 1 = 3.
20.21. Пространство нечетных многочленов степени не выше 5
имеет размерность 3; представим данные многочлены их координат-
координатными столбцами в базисе t, t3, tb. Приведем соответствующую рас-
расширенную матрицу к треугольному виду:
2
0
1
0
1
-1
1
1
0
5
-1
2
1
0
0
-1
1
0
0
1
1
2
-1
Теперь ясно, что многочлены 2t + t5, t3 — t5, t + t3 образуют базис в
пространстве нечетных многочленов степени не выше 5. Продолжаем
элементарные преобразования расширенной матрицы:
1
0
0
0
1
0
0
0
1
4
2
Многочлен Ы - t3 + 2t5 имеет в базисе 2t + t5, t3 -t5, t+tz коорди-
координатный столбец D, 2, -3)т.
20.26. Пространство кососимметрических матриц порядка 3
имеет размерность 3; базис образуют матрицы
364
Решения
О 1 О
10 0
0 0 0
О 0 1
0 0 0
10 0
0 0 0
0 0 1
0-10
Матрица
О
-а
-Ъ -с О
а Ъ
0 с
имеет в этом базисе координатный столбец
1
1
-1
3
5
2
1
0
3
1
1
-1
3
5
2
1
0
3
—
1
_2
3
0
-1
4
-1
2
-2
(а, Ь, с)т. Так как 15 0 = 13 ф 0, то вторая система является
базисом. То, что первая система является базисом, можно специ-
специально не проверять — этот факт обнаружится в ходе дальнейших
вычислений. Матрица перехода 5 ищется из уравнения G — FS, т. е.
S.
Для решения этого матричного уравнения составим матрицу || F | G ||.
Элементарными преобразованиями строк приведем «левую полови-
половину» к единичному виду (этим будет автоматически проверено, что
первая система является базисом); при этом «правая половина» пре-
преобразуется в искомую матрицу 5. Имеем
9 40 9
-3 -11 -2
8 37 8
Искомая связь координат имеет вид: ?i = 9?[ + 40^ + 9?3> ?г =
1
-2
3
0
-1
4
-1
2
-2
1
1
-1
3
5
2
1
0
3
1
0
0
0
1
0
0
0
1
21.7. 4) Составим системы уравнений, определяющие данные
подпространства V и Q. Имеем (см.введение к гл. 8):
Х\
х2 - 2х!
хз - х2 - х
хз
х2 - Зх3
Xi - Х2 - X
первое подпространство задается одним уравнением хз — х2 — х\ = 0,
второе — одним уравнением х\ — х2 — Хз = 0- При этом мы замечаем
также, что dimP = dim Q = 2. Базис в V образуют, например, век-
векторы ai и а2; базис в Q образуют, например, векторы bi и b2.
Найдем размерность и базис суммы V + Q. Имеем
1
2
3
4
3
1
0
1
1
1
1
0
1
1
2
5
3
2
Xi
х2
Хз
XI
х2
Хз
1
0
0
1
0
0
0
1
0
0
1
0
1
-1
0
2
—3
0
1
2
3
0
1
1
4
3
1
1
1
0
1
0
0
0
1
0
4
1
3
1
1
1
dim (V + Q) = 3, т. е. сумма V + Q совпадает со всем трехмерным
пространством; базис суммы образуют, например, векторы ai, a2, bi.
Решения
365
¦eft' Пересечение V П Q задается системой уравнений
xi + х2 - х3 = 0, xi - х2 - х3 = 0.
Матрица этой системы элементарными преобразованиями строк при-
приводится к виду
11-1
1 -1 -1
1 О
О 1
0
Ранг матрицы равен 2, значит, dim (PflQ) = 3 — 2 = 1, что, впрочем,
можно было определить и раньше по формуле
dim (Р П Q) = dimP + dim Q - dim(P + Q).
Базисный вектор пересечения имеет координатный столбец, удо-
удовлетворяющий условиям Xi — ?3 = 0, Х2 = 0; можно взять столбец
A, 0, 1)т.
21.7. 11) Используем обозначения и алгоритм, изложенный в
разделе 7 введения к гл. 8.
а) Составляем и упрощаем с помощью элементарных преобра-
преобразований строк матрицу
А\В\\ =
1
-1
1
0
1
1
0
1
2
0
1
2
2
0
1
1
4
6
-1
4
1
1
0
0
1
1
0
3
1
0
0
0
0
1
0
0
0
0
1
0
1
1
0
0
-1
4
0
1
0
0
0
1
-1
1
1
-1
0
3
-1
1
= \\А> Iв>
б) Составляем и упрощаем с помощью элементарных преобра-
преобразований столбцов матрицу
В'
-1
4
0
1
1
0
0
0
0
0
0
1
0
1
0
0
-1
1
1
_ J
0
0
1
0
0
3
-1
1
0
0
0
1
Е
в) Видно, что число независимых столбцов матрицы А' равно 3,
это первые ее три столбца. Вместе со вторым столбцом В' они явля-
явля\' \' \
0
0
0
1
0
1
0
0
_ J
1
1
0
0
1
1
0
-1
4
0
0
1
-1
0
0
0
0
0
0
-1
1
1
1
В"
Поэтому векторы
базис в V + Q
ются базисными столбцами в матрице \[А' \В' \\
ai, 0.2, аз образуют базис в V, а векторы а\, аг, а3,
(т. е. сумма совпадает со всем пространством).
Число независимых столбцов матрицы В" равно 3, поэтому
dim Q = 3, и
dim(P П Q) = dimP + dim Q - dim(P + Q) = 2.
366 Решения
Базис в V П Q образуют векторы, соответствующие второму и тре-
третьему столбцам В": это два линейно независимых столбца, принадле-
принадлежащих обоим подпространствам. Действительно, второй столбец В"
равен, как показывает матрица Е", сумме второго и третьего столб-
столбцов В', то есть соответствует вектору Ь2 + 63. Аналогично, третий
столбец В" соответствует вектору 6i — 62. В то же время, как видно
из сравнения с матрицей А', второй и третий столбцы В" расклады-
раскладываются по первым трем столбцам А', а именно,
62 + 63 = -ai + а2 + а3; 6i - 62 = -аг + 4а2.
Вычисляя координатные столбцы этих линейных комбинаций, полу-
гр гр
чаем || 2 203 || и || 3 5 — 1 4 || , что совпадает с ответом задачи.
Непосредственное сравнение координат правых и левых частей по-
последних равенств может служить проверкой.
24.26. Пусть А — матрица преобразования <р в некотором базисе
и
det (А - \Е) = (Ai - А) ... (А„ - А).
1) Заменив А на —А, имеем также
det (A + AJ5) = (Ai + А) ... (А„ + А).
Перемножив эти равенства, получим
или
det {A2 -tE) = (A? -*)..- (А2 -*),
где t = A2.
2) В разложении характеристического многочлена заменим А на
Ае* (к = 0, ..., т - 1), где е = e2w</m (em = 1):
det (A - ХЕ) = (Ai - А) ... (А„ - А),
det (А - ХеЕ) = (Ai - Ае) ... (А„ - Ае),
det (А - \ет-гЕ) = (Ai - Ае) ... (А„ - Ае).
Поскольку матрицы А — ХекЕ (к — 0, ..., т — 1) перестановочные,
перемножив равенства почленно, получим
det (Ат - \тЕ) = (AJ1 - Ат) ... (А^1 - Ат),
или, положив Ат = t, требуемое
det {Ат - tE) = (А?1 - t) ... (А? - *)•
Здесь использовано разложение ат — Ат = (а — А) (а - Ае)... (а -
— Ае). Чтобы получить его, достаточно заметить, что многочлен
ат — А имеет корни а, ае, ..., ает~1.
Решения
24.127. 12) Характеристическое уравнение (Л + IK = 0.
3 5 1
-1 -2 0
-2 -3 -1
В = А283 + Е =
RgB = 2. Собственное подпространство одномерно. Находим его ба-
базисный вектор: hi = || — 2 1 1 || . Составляем систему уравнений
для первого присоединенного вектора:
Ее решение Л
соединенного
3
-2
5
_2
-3
1
0
-1
-2
1
1
= || 1 —1 0 || . Система уравнений для второго при-
3
1
2
5
-2
-3
1
0
-1
1
-1
0
Из нее находим /г3 = || 1 0 2
хода к жорданову базису
-2
1
1
1
-1
0
Итак, А' = J3(—!)• Матрица пере-
24.127. 15) Характеристическое уравнение Л3(Л —2) =0. Най-
Найдем собственное подпространство для Л = 0. Матрица -А465 элемен-
элементарными преобразованиями строк приводится к виду
10 0 0
0 1-11
Поэтому собственное подпространство двумерное. Так как корневое
пространство трехмерное, должен быть один присоединенный век-
вектор. Найдем его. Произвольный собственный вектор можно написать
Гр Гр
как Л = а || 0 1 1 0|| +/ЗЦОО 1 1|| . Присоединенный вектор су-
существует у того вектора, для которого совместна система уравнений
с матрицей
1
1
-3
1
-1
-1
1
-1
1
1
1
-1
-1
1
0
а
а +
./з
/з
Условие совместности /3 = —2а, и можно взять а = 2, /3 = —4, что
соответствует собственному вектору /ц = || 0 2 —2 — 4 || . Находим
частное решение системы для а = 2, /3 = —4. Это и есть присоеди-
присоединенный к hi вектор /i2 = || 1 0 1 0 || . Для получения жорданова ба-
базиса корневого подпространства дополняем найденные векторы еще
368 Решения
одним собственным вектором, например, Лз = || 0 1 1 0 || . Нетруд-
но найти собственный вектор Нц = || 1 0 2 1 || для Л = 2. В базисе
hi, h2, h3, hi матрица преобразования равна diag(J2@), 0, 2).
24.148. При <5 = О преобразование взаимно однозначно. При
«5^0 его можно представить в виде <р + 5ф = 6<рE~1г + 'р~1ф). Пре-
Преобразование будет взаимно однозначным тогда и только тогда, когда
взаимно однозначен второй сомножитель. Таким образом, мы ищем
те 5, для которых det {v~lip + 5~1г) ф 0. Для этого достаточно, что-
чтобы l^! был больше максимального из модулей собственных значе-
значений преобразования <р~1/ф. Пусть это число равно р. Тогда можно
положить е = р~х.
25.3. Пусть х = ахо, и в канонической системе координат
х (?, у?), х0 (|о, Щ)- Тогда v2(x) = а2 и
Поэтому <р2(х.) =?2/4 + т?2- Пусть y(^i, r)i). Легко подсчитать, что
F (х, у) = ??j + 4t]1]i. Используя это выражение, проверяем свойства
скалярного произведения.
26.40. Предположим, что система д\, ..., дп линейно зависима,
и докажем, что приведенная в условии сумма больше или равна 1.
Действительно, при таком предположении gi, ..., дп лежат в неко-
некотором (п — 1)-мерном подпространстве С. Обозначим через а, \а\ = 1
единичный базисный вектор в ?х. Для любого г = 1, ..., п проек-
проекция et на ?х равна Zi — (е,, а)а. Так как д, € С, по результату задачи
26.36 имеем \zi\ ^ |е* - gt\. Отсюда следует, что X) l-2i| ^ Z) Iе» "" 9i\2-
Но Yj\z%\2 = S(ei> aJ = 1°|2 - !• Следовательно, Y,\ei ~ 9i? > 1-
Теперь легко видеть, что ^2 Iе» ~ 9i\ ^ 1- Действительно, в противном
случае каждый из модулей меньше единицы, и сумма их квадратов
подавно меньше 1.
32.8. 12) Сделаем замену координат
xi=x\ + x'2, x2 = x'l~x'2, х3 = х'3. A5)
В новых координатах форма примет вид
х[2 - х'2 + 2х\х'3 = (zi + х^J - х'22 - х32.
После второй замены координат
z? = х\ + х'3, х'2' = х'2, х'3' = х'3 A6)
данная квадратичная форма примет канонический вид
х»2 _ х _ х»2
J-l J-2 X3 •
Положительный индекс инерции данной формы равен 1, отрица-
отрицательный равен 2. Ранг формы равен 1 + 2 = 3, сигнатура равна
1-2= -1.
Решения ЗЬУ
а Можно записать замену координат, приводящую данную форму
к каноническому виду, как суперпозицию замен A5) и A6):
Х\ — Xi ~г <^2 — Х3, Xi — Х^ — Х2 — Х3 , ?3 — ?3 •
32.27. 10) Матрица данной квадратичной формы В = Агоз име-
имеет характеристические числа 3 (кратности 2) и 3 (кратности 1).
Инвариантное подпространство, соответствующее собственному зна-
значению 3, задается однородной системой линейных уравнений с
матрицей В — ЗЕ; находим два линейно независимых собственных
вектора ai, 02 с координатными столбцами A, 0, — 1)т и B, 1, 0)т со-
соответственно. Собственное подпространство, соответствующее соб-
собственному значению —3, задается однородной системой линейных
уравнений с матрицей В + ЪЕ; находим один линейно независи-
независимый собственный вектор аз с координатным столбцом A, —2, 1)т.
Векторы ai, 02, аз образуют собственный базис присоединенного
преобразования данной квадратичной формы, но нас интересу-
интересует ортонормированный собственный базис. Так как собственные
векторы самосопряженных линейных преобразований евклидова
пространства, соответствующие различным собственным значени-
значениям, ортогональны, то автоматически (а\, аз) = (аг, аз) = 0. Оста-
Остается провести ортогонализацию системы векторов ai, 02. Положим
6i = а\, &2 = а2 — aai! a выбираем так, чтобы (bi, Ьг) = 0, т. е. a =
(аь «2) л ,
= = 1, откуда получаем, что вектор 02 имеет координатный
(ab ai)
столбец (—1, —1, — 1)т. Векторы bi, Ьг, аз образуют ортогональный
собственный базис присоединенного преобразования; пронормировав
эти векторы, получим искомый ортонормированный собственный
базис. Для удобства мы изменим знаки всех координат вектора Ъ^-
Координатные столбцы полученных векторов образуют матрицу пе-
перехода от данного ортонормированного базиса к базису bi, —Ьг, аз —
матрицу 5 = -Аз22- В найденном базисе квадратичная форма имеет
диагональный вид Ъх\ + Зх2 ~ Зж3 • Можно, пользуясь матрицей 5,
записать замену координат, приводящую данную квадратичную
форму к диагональному виду:
1 / ! / 1 i
Xl ~ V2Xl + TI*2 + Те*3'
Х2 = Ж2 ~ 7Г3'
32.36. 11) Укажем два способа решения задачи.
Способ 1. Обе формы будем рассматривать в трехмерном
арифметическом пространстве столбцов. Выпишем матрицы данных
форм в исходном базисе:
370
Решения
6 0 3
0 1-3
3-3 6
Все главные миноры матрицы G
у-1
2 0 1
0 1-1
1 -1 2
2,
2 О
О 1
2 О 1
0 1-1
1-12
положительны, следовательно, по критерию Сильвестра форма д по-
положительно определена. Соответствующую ей билинейную функцию
примем за скалярное произведение и теперь считаем пространство
евклидовым. С помощью метода, изложенного во введении к § 32,
найдем ортонормированный базис из собственных векторов самосо-
самосопряженного линейного преобразования ip, присоединенного к фор-
форме f. Собственные значения и собственные векторы вычисляем по
формулам F) и G) § 32:
6 - 2А 0 3 - Л
0 1-А -3 + А
3-Л -3 + А 6-2А
det (F - AC) =
0
0
0
0
-2
0
0
0
0
2 0 1
0 1-А -3 + А =-C-АJC + А); А = ±3.
1-1 2
12 0 6
0 4-6
6 -6 12
Фундаментальное решение системы уравнений (F + 3G) ? = о рав-
равно х = (—1, 3, 2)т. Значение функции g (х) на векторе (—1, 3, 2)т
есть квадрат его длины. Вычисляя это значение, находим нор-
нормированный собственный вектор, соответствующий А = —3: е[ =
= (-1/\/3, а/3, 2/а/3)т. Из системы уравнений (F-3G)? = o на-
находим, что собственному значению А = 3 соответствует собственная
плоскость х2 = 0. Найдем в ней два ортогональных собственных
вектора. В качестве первого вектора можно взять любое ненуле-
ненулевое решение уравнения хч — 0, например, b = A, 0, 0)г. Для на-
нахождения второго собственного вектора с= (х\, х2, хз)т к урав-
уравнению Х2 — 0 присоединяем условие ортогональности векторов b
и с: bTGc = 2xi + жз — 0. Из двух уравнений х2 = 0 и 2xi + хз = 0
находим, что с = A, 0, — 2)т с точностью до числового множителя.
Теперь найденные векторы b и с нормируем, вычисляя квадраты
их длин g (b) = 2 и g (с) = 6. Заметим, что векторы b и с ортого-
ортогональны к а, так как соответствующие собственные значения различ-
различны, а преобразование <р самосопряженное. Мы получили ортонор-
Решения
6t i
мированный базис из собственных векторов преобразования tp: e'x =
= (-1/ч/3, ч/З, 2/ч/3)т, е'2 = A/V5, 0, 0)т, «? = A/л/б, 0, -2/ч/б)т.
В этом базисе матрица F' формы f диагональна, а значит, f имеет
диагональный вид:
F' = diag (-3, 3, 3); f (x) = -Зх\2 + Зж'22 + Зж^2.
Так как базис е'1; е2, е3 ортонормирован относительно введенно-
введенного скалярного произведения, то в нем скалярный квадрат вектора
(значение функции g на векторе) выражается канонической формой
х'22
х'32.
g(x) = х'2
Осталось составить из столбцов e'lt е2, е3 матрицу перехода
5=
-i/л/з 1/V5 1/л/б
у/3 О О
2/а/З 0 -2/>/б
а по ней — формулы замены координат
Xl = "Тз*'1 + ~Ж2 + 7^
Обратим внимание читателя на очевидную уже из хода решения
неединственность искомого базиса (ср. ответ).
С п о с о б 2. Дадим лишь его краткое описание. Прежде всего
убеждаемся, что форма g положительно определена, и с ее помо-
помощью вводим скалярное произведение. Затем находим какой-нибудь
базис, в котором форма g имеет канонический вид. Это можно сде-
сделать методом выделения квадратов или с помощью элементарных
преобразований. Новый базис е' является ортонормированным отно-
относительно введенного скалярного произведения. Пусть 5i — матрица
перехода к базису е'. Вычислим матрицу F' формы f в базисе е'.
Так как базис е' ортонормирован, то присоединенное к f преобразо-
преобразование (р имеет в этом базисе ту же матрицу F'. Найдем собственные
значения и ортонормированный базис е" из собственных векторов
преобразования <р по его матрице F' обычным способом, используя
уравнения A) и B) § 24. Обозначим через 5г ортогональную матри-
матрицу перехода от базиса е' к базису е" (она состоит из координатных
столбцов векторов е", е2 и е'3' относительно базиса е'). В базисе е"
матрица преобразования ср равна матрице формы f и диагональна
с собственными значениями на диагонали, а форма g по-прежнему
выражает скалярный квадрат вектора в ортонормированном бази-
базисе и, значит, равна сумме квадратов координат вектора. Матрица 5
перехода от базиса е к базису е" определяется формулой 5 = S1S2.
Действительно, из е" = е'5г и е' = eSi следует е" = e5j52- В столб-
372
Решения
цах матрицы S стоят координаты векторов е", е^' и е'? относительно
исходного базиса е.
36.7. Напишем выражение старых компонент тензора через но-
новые. С этой целью умножим обе части равенства а'- = сг^сг^аы на
ТрТ^ и просуммируем по i и j. Тогда
= a
pq.
Следовательно, apq — т^т^а'^. Эти равенства можно написать в мат-
матричном виде:
о-п
^1^.1 „1^.2
:o м ул Ул
Т\Ч Т\Ч Т\Т;
т\т\ Тот} ТоТ
Г2Г2
«12
«21
«22
A7)
Вспомним теперь, что в произвольном линейном пространстве (а
значит, и в пространстве тензоров типа @, 2)) старые компоненты
вектора выражаются через новые формулой Е, = SE,'. Это означает,
что матрица из произведений т^т^ в формуле A7) и есть искомая
матрица перехода. Нетрудно проверить, что она равна Тт ® Тт.
37.15. Используя результат задачи 37.7, 1), находим компонен-
компоненты тензора, соответствующего произведению (pip*:
свк = 9тзаТ9139гка) = ajakj.
Если ввести обозначение b^j — gika%j = akj, то
Сак = ghbsibkj, Ска = 9l3bkibsj.
Используя симметрию тензора д1], можно проверить, что выраже-
выражения Ска и сак отличаются только обозначением индексов суммирова-
суммирования и порядком числовых сомножителей.
Иначе можно рассуждать так: матрица тензора с^ в ортонорми-
ортонормированием базисе симметрична, так как совпадает с матрицей самосо-
самосопряженного преобразования уу*. Поскольку тензор имеет тип @, 2),
его матрица симметрична и в любом базисе. Это решение кажется
проще, но оно опирается на несколько теорем, тогда как первое ре-
решение не использует ничего, кроме определений.
ОТВЕТЫ И УКАЗАНИЯ
«•¦I
1.4. (-12, -2), @,0). 1.5. а = 2/7, /3 = 13/7. 1.6. сA/16,
11/16), d@, -2). 1.7. 1) i = 0, а; = 1,1 = 3/2; 2) i = 0. 1.8. @,
0, 0), A, -7, -3). 1.9. а = 0, 0=-1, 7=-4- 1.10. 1A,
1, 1), т@, 2, 0), п@, 1, 1). 1.11. 1) да; 1 + т + п = 0;
2) нет; 3) да; 21 + m - п = 0. 1.12. 0 : а. 1.13. BD (-1, 1),
C0J-1/2, -1/2), KD (-1, 1/2)._1Л4. AM A/2, 0),_Ю A/3, 1/3),
МО (-1/6, 1/3^ 1.15. АВ C/V-2/5), ВС B/5, 2/5),
CD (-2/5, 3/5), DA (-4/5, -3/5)^1.16. ACJl/3, 1), A0J1/4, 3/4),
ASJp, 3/2)_^.18. BCJ1, 1), CD @, 1), 0?J-1, 0), EF (-1, -1),
B?> A, 2), CF (-2, 0), C? (-1, 1). 1.19. AD A, 3). У к а з а н и е:
разложить векторы AD, OS, ОМ по базису AD, AB. Равенство
AD = xOS + уОМ представляется как система из двух линейных
уравнений с двумя неизвестными. Аналогично рекомендуется
решать задачи 1.20-1.22. 1.20. (-71/22,-1/11). 1.21. (-13/12,
-14/15). 1.22. D/21, -20/21). 1.23. 1) АВ (-1,1,0),
ВС@, -1, 1), АС(-1, 0, 1)^2) Ш (-1/2, 1/2, 0),PQ (-1/2, 1/2, 0),
CN A/2,1/2,-1), МР A/2,0,0), KQ (-112,112,1/2);
^(
2) off (-!!_, -ЛЦ. ,Л5.
1.26. Л@, 0), В B/3, -1/3), СA, 0), DB/3, 2/3), Е@, 1),
F(-l/3, 2/3), О A/3, 1/3); О -центр шестиугольника. 1.27. А@,
0),В@, l),C(l/4,l),D(l,0),M(l/5,4/5),5@,4/3). 1.28. СA,
1,0), В, A,0, l),d(l, 1, 1), А"A/2, 0, 1),LA, 1, 1/2), МA/2,
1/2, 1), NA/2, 0, 1/2), 0A/2, 1/2, 1/2). 1.29. D(Xl-x2 + x3,
, \ 1 »п л\ (ПЦ+ТПХ2 пу1+ту2 nzi + mz2 \
Vi — V2 + у-*). 1.30. 1) М , , I;
о\ ATfnxl-mx2 пу1-ту2 nz1-mz2\ -.
2) N , , . Указание: ис-
\ п-т п—т п—т )
пользовать задачу 1.24. 1.31. 1) (-3, 16); 2) (9, -20).
1.32.^ , , j.l.33.rc-r2
- rb rBl = г2 + г4 - гь rDl = г3 + г4 - гь rCl = г2 + г3 + г4 -
374 Ответы и указания
1.34. rD = ri Н (г3 - г2), гм = гх Н ¦—г3, rs =
п т + п т + п
п т |ri -г2|г3
— -Г! Н Г2. 1.36.
п - т т-п ' |ri - г2| + |г2 - г3| + |г3 - гх|
1.37. Точка пересечения медиан треугольника; вне плоско-
сти треугольника таких точек нет. 1.38.
+ ... + тп
, \СО\ :\ОЫ\ = (""+"''. 1.46. \DM\ :\МК\ = 3:2,
ТП1П2 П1ТП2
\ВМ\ : \МЬ\ = 16 : 9. 1.47. т + п. 1.48. У к а з а н и е: исполь-
использовать задачу 1.17. 1.49. ;" ~ ' S. 1.52. 1 : 3. 1.53. 2 : 3.
п2 - п + 1
2.1. 1K/>/5;2)-21;3H;4M;5)-6. 2.2. 1) 6; 2) 38. 2.3. 1) 3; 2) -1;
3H. 2.4. 1) 0; 2) arccos D/5); 3) 90°; 4) arccos (-З/х/Тб); 5) 180°.
2.5. 1) 10; 2) 5; 3) 0. 2.6. 1) 22; 2) -1; 3) 0. 2.7. 1) arccos E/9);
2) 180°; 3) 0; 4) 90°; 5) arccos (-1/3). 2.8. 1) 5v^; 2) 2; 3) 3.
2.9. 1) (-28, -14); 2) -13; 3) 77. 2.10. 1) (-25, -20, 5);
2) 11; 3) -28. 2.12. Нет. 2.13. -3/2. 2.14. 1) 0; 2) -4;
3) 2. 2.15. 1) Vlbp + lcP^^c); 2) iVW2 + |c|2 + 2(b,c); 3)
2
, |b|2+ic|2_2(b)C)J-
c|2-(b,cJ. 2.16.
2.18. 1) \AB\ = |b|, \BC\ = ^|b|2 + |c|2 -2(b,c), \AD\ = 3\BC\,
CK «\ _ IKI2
\CD\ = v/9|b|2 + 4|cP-12(b,c), cos ZA = '
-180° ZA со,//? 2lc|2 + 3|bp-5(b,c)
- 180 - ZA, cos ZD
2) \SM\ - — ^/41 b |2 + |c|2 -4(b,c). 2.19. Длины диагоналей
5\/2 и х/Тб, острый угол 45°. 2.20. |АВ| = 6, \АС\ = 4л/3,
\ВС\ = 2а/3, ZA = 30°, ZB = 90°, ZC = 60°. 2.21. Длины сторон
3 и 5, острый угол arccosD/5). 2.22. \/94. 2.23. —A0,-11,
-2). 2.24. VV^a. 2.25. -а. 2.26. 1) (-1, -1) и B, -2);
2) @, 0) и A, -1); 3) C, 3) и @, 0); 4) (-2, -2) и @, 0).
2.27. 1) B, -2, 4) и @, 0, 0); 2) |A, -1, 2) и |A, 5, 2);
Ответы и указания
3) (О, О, 0) и D, О, -2). 2.28. E, 2). 2.29. A, 0) или
j 230 A13) 231 х=а
Указание: вектор х искать в виде Ла. 2.32. 1) Множество
концов векторов, удовлетворяющих уравнению (х, а) = р, является
прямой линией (все векторы отложены из некоторой точки О).
Нормальным вектором этой прямой является вектор а. Проекцией
точки О на прямую является конец вектора х0 = т—П7а- 2) Мно-
1а1
жество концов векторов, удовлетворяющих уравнению (х, а) = р,
является плоскостью (все векторы отложены из некоторой точ-
точки О). Нормальным вектором этой плоскости является вектор а.
р
Проекцией точки О на плоскость является конец вектора хо = ттта-
|а|2
2.33. 1) Радиус-вектор точки пересечения двух прямых (см. задачу
2.32). 2) Радиус-вектор общей точки трех плоскостей (см. задачу
2.32). 2.34. Два решения: ±—={\, -2, -3). 2.35. Два решения:
V14
11 4
-т=@, 1, 1) и —рE, —3, —8). 2.36. Угол при вершине arccos-.
v2 7v2 5
2.37. 4. 2.39. Острый угол arccos
\т2-п2\
Vm4 + n4 - 2m2n2 cos2a
2.40. 90°. 2.41. 1) ('" '" "mnV/2; 2)
22
\ тп )
3) arcsin I , m" ) . 2.44. \Ad\2 = а2 + b2 + с2 +
\m2+n2-mnj
л/29
+ 2abcos7 + 2bccosa + 2accos/3. 2.47. arccos(l/18). 2.48. -——a.
о
2.49. \EM\ : \MF\ = \CN\ : \ND\ = 3 : 1. 2.50. 6a/3. 3.1. 1) A1,
19, -7); 2) @, 0, 0); 3) @, 0, -15). 3.2. 1) 2 [b, а];
2) [a,b] + 4[bJc] + |[c,a]. 3.4. Л = ±\/3. 3.5. 1) [еье2] = е3,
[е2,е3] = еь [e3)ei] = е2; 2) [еье2] = -е3, [е2,е3] = -еь [e3)ei] = -e2;
о\ г 1 |ei| • |е2| . . |е2|-|е3| . . |е3| • |ei|
3) еье2] = е3, [е2)е3] = —M~"^eb le3.ei] = , е2.
|е3| |ei| |e2|
3.6. Либо все векторы а, Ь, с нулевые, либо они образуют ортонор-
мированный базис (тройка векторов а, Ь, с правая). 3.7. Задача
2.34: единственное решение . (—1, 2, 3); задача 2.35: единствен-
у14
ное решение -^= @, 1, 1). 3.8. 1) | уД; 2) 5 у/г/U, 4=. 5
v2 * v 2
376 Ответы и указания
cos a — cos в cos у
3.9. 18. 3.14. cos0 = :— , где в — двугранный угол,
sin p sin 7
образованный плоскими углами /3, у. Остальные углы выражаются
аналогичными формулами. Указание: при вычислениях исполь-
использовать формулу задачи 3.13, 3). 3.15. х = ' . Указание:
1аГ
вектор х искать в виде Л [а, Ъ]. 3.16. Множество концов векторов,
удовлетворяющих уравнению [х, а] = Ь, является прямой линией
(все векторы отложены из некоторой точки О). Направляющим
вектором этой прямой является вектор а. Проекцией точки О на
прямую является конец вектора х0 = [а,Ь]/|а|2. 3.17. d = ±f/|f|,
f = |а| [b,c] + |Ь| [с, а] 4- |c| [a,b]; 1) знак + соответствует правой трой-
тройке a, b, с, знак — соответствует левой тройке; 2) знак + соответ-
соответствует левой тройке а, Ь, с, знак — соответствует правой тройке.
3.18. 4=A, 2, 0). 3.19. 1) 0; 2) -23; 3) 0; 4) 6. 3.20. 1) Да;
v5
2) нет. 3.21. А = 3, А =-4. 3.22. 1) |(а,Ь,с)|/2; 2) |(а,Ь,с)|/6.
3.23. 1) 1/3; 2) 1/</30. 3.24. 10%/2. 3.25. Множество концов
векторов, удовлетворяющих уравнению (х, а, Ь) = р, является
плоскостью (все векторы отложены из некоторой точки О). Эта
плоскость параллельна векторам а и Ь. Проекцией точки О на
плоскость является конец вектора хо = тт—г-гг^а, Ь]; этот вектор
11а> Ь| |
является частным решением данного уравнения. Указание:
использовать результат задачи 2.32. 3.26. Указания:
2) использовать формулу двойного векторного произведения
(задача 3.13, 2)); 3) и 4) — использовать формулу задачи 3.26,
2); 5) положить в формуле задачи 3.26, 3) d = [x, у], при вы-
вычислении смешанных произведений использовать формулу задачи
ч т? <с\ ч оо о^к [а2,аз] , [a3,ai] , [ai,a2]
3.13, 6). 3.29. 2) bi = -, b2 = -, b3 = -.
(аьа2,а3) (ai,a2la3) (аьа2,а3)
з.зо. bl (I, -i, i), b2 (-1, -J, i), b3
(I, -i, i),
(a, b, c)
3.32.
2 1
1 : 2 (два решения). 3.35. Л2. 3.36. —S или —5. 3.37. 2y/2a.
15 15
3.39.
2
№I-
4.1. 1) ax = -a\ + 2a
a2 = 3c*i - 7q2; 2) a'x = ~7ai - 2a2, a'2 = -3«i - a2; 3) ei (-7,
-3), e2 (-2, -1). 4.2. 1) ai = ai - a'2 + a'3, a2 = a[ - 2a'2 + 3a'3,
a3 = q'j - 3a2 + 6a3; 2) a\ = 3«i - 3a2 + a3, a'2 = 3«i - 5a2 + 2a3,
Ответы и указания
377
«', =
езA, 2, 1).
- 2а2 + а3; 3) ех C, 3, 1), е2 (-3, -5, -2),
, 1). 4.3. 1) х = 2х' + у1 - 1, у = 3z' + у1 + 3;
+ 4 ' Ъ 2 + 9 3) О D 9) A 3)
е3 A, 2, 1). 4.3. 1) х = 2х' + у1 - 1, у = 3z' + у' + 3;
2) z' = -z + у - 4, у' = 3z - 2у + 9; 3) О (-4, 9), ex (-1, 3),
е2 A, -2). 4.4. 1) х = Ах' + Ъу' + Ъг' + 1, у = 2z' + оу' + 2z' + 1,
z = х' + 2у' + z' + 2; 2) z' = z - у - z + 2, у' = -у + 2z - 3,
z' = -z + 3j/ - 2z + 2; 3) О B, -3, 2), - " " ' '
3),es(-l, 2, -2). 4.5. -' ' 1 г
1 7 2 2
1Д = 5a'j - 9а'3. 4.9. z = -х' + 2у' + -,y = --zx' - 2у' - -. 4.10. х =
-- Ах' + Ъу' + 6z', у = -8z' - Ъу' - \Ъг' - 1, z = 13z' + 4y' + 23z' + 1.
12 2 2 2 1 1
,11. z = -z' - -у' + -, у = -х' + -у' + -. 4.12. х=-х'-у' + 1,
6 6 6 6 6 6 6
y=\
х = "
2,2,
у
2
3'
1
3-
о ух
4.14. x = x' + f»', v - -ox' - —y' + 3. 4.15. x = -x' -y' + 2,
5 5
у = -a;' + y' + 1. 4.16. 1 - --z' + -y' + -, у - --z' - -y' + -.
5 5 5 5 5 5
4.17. z = -z' - 2y' + 2, у = -2x' - y' + 2. 4.18. z =
\
= -2z' -2y' -z' + 2,y = y' + z', z = z'. 4.19. x = 2x' + y' + \z'
«12 + «22 = !> «11«12 + О2Ю22 = 0. 4.24. 1) O^ + O^ + O^ = 1,
«12 + «22 + «32 = !. «13 + «23 + «33 = *> «11«12 + «21«22 + «31«32 = 0,
О11О13 + О21О23 + 031033 = 0, ai2Oi3 + О22О23 + 032033 = 0;
2)
0-21 О22 O23
CL31 0.32 033
1) x = x' cos <p - y' sin <p + z0,
378 Ответы и указания
у = ж' sin (р + у' cos ц> + уо; 2) ж' = (ж - ж0) cos ip + (у - уо) sin \p,
у1 — (у — Уо) cos ц> — (ж — Жо) sin ip; 3) О (—жо cosy — уо siny>,
у (у j/) у ( ) ц\ ) (y yy,
х0 sin у? - уо cos y>). 4.26. 1) х = -ж' - —у' + 1, у = —ж' + -у' + 3;
= ж' + 3;4) ж = -ж' + 1, у- -у' + З. 4.27. 1) ж = z'cos у; + у'sin у +
+ 0ж0, у = х' sin у -у' cos у? + у0; 2) ж' = (ж - a;0)cosy; + (у -yo)simp,
у' = (ж - ж0) sin ip - (у - уо) cos ip; 3) О (-х0cosip - у0simp,
ч я оо 3 , 4 , 48 4 , 3 , 36
). 4.28. х = --х - -у + —, у = -ж - -у + —.
5 5 25 5 5 25
4.29. ^'--Ly-I*'-1'^?'^'-^3'
2,1,2,2 2,2,1,2
5.1. 1) ai и a.2 не коллинеарны; 2) ai и &2 коллинеар-
ны, ai и г2 — Ti не коллинеарны; 3) аь а2, г2 - ri коллинеарны.
5.2. 1)arccosKa^;2)arccosl(?bM. 5.з. ro+D7^n>a.
|ai|-|a2| |ni|-|n2| (a,n)
5.4. l)ro + j^p n;2)ro + 2 ^p n. 5.5. 1) ^ ;
2) ltr°-ri,a]l 5Q у (ltkyt2) (-B,A). 5.7. 1Jж-Зу+5 = 0;
lal
2) ж = 4t, у = 1 + 3t, т.е. | = ^; 3) |. 5.8. 1) ж - 2y + 11 = 0;
2) ^y~ = S^; 3) ж = -3; 4) у = 4; 5) ж = -3 + f, у = 4 - 7t.
5.9. 1) ж - 4y + 7 = 0; 2) 2ж - у + 2 = 0; 3) ж = 2; 4) у = -3.
5.10. 1) Пересекаются в точке E/7, —3/7); 2) совпадают; 3) парал-
параллельны; 4) пересекаются в точке E, —1). 5.11. 1) а ф ±2; 2) а = —2;
3)а = 2. 5.12. о = 1,а = -1,а = -2. 5.14. у = |, у = | + 1, у = -1,
у = 5. 5.15. (-4, 3);5ж + 2у-13 = 0;ж-5у + 19 = 0;4
5.16. 43ж + 2у — 67 = 0. Указание: искомая прямая — вторая
диагональ параллелограмма со сторонами на данных прямых и с
центром в точке А. 5.17. 10ж + Ну - 21 = 0; 4ж + 5у - 9 = 0;
2ж + у-15 = 0. 5.18. Л B.4, 1.2), В C.6, 6.8), С F.4, -6.8),
D (-0.4, -5.2). 5.19. 2 прямые: 4ж - у + 9 - 0, 2ж + Зу - 13 = 0.
5.20. 3 прямые: ж - Зу + 7 = 0, Зж + 4у - 18 = 0, 2ж + 7у - 12 = 0.
5.21. 5:18. 5.22. 1) (-fc, 1); 2) {А, В). 5.23. 1Jж + у + 2 = 0;
Ответы и указания 379
2) ?_±| = У-±. з) у = 4; 4) ж = -*3; 5) ж = -3 + 7t, у = 4 + L
5.24. 5ж - у - 17 = 0, Ъх - у + 9 = О, а; + 5у - 19 = О,
ж + 5у + 7 = 0. 5.25. x-yV3 + ZV3-l=0, х-улД+лД-1=0,
х + у\/3 - ЗаД -1 = 0, ж + ул/3 - уД - 1 = 0. 5.26. C, 11).
5.27. 1) л/13; 2) 1; 3) 2; 4) 0; 5) 6; 6) 11. 5.28. \С2 - Ci\/y/A2 +В2.
5.29. 2х - у - 14 = 0, 2х -у + 6 = 0. 5.30. G, 6) или (-3,
-2/3). 5.31. C, 5) или (-37, 45). 5.32. (-1.5, 0.5) и (-0.5,
1.5). 5.33. Пара прямых: Ахх + Вху + Ci = ±Х(А2х + В2у + С2),
где \ = к^ЩТЩуЩТЩ). 5.34. 1) (-2, 3); 2) (-5, 4).
5.35. х - Зу + 7 = 0. 5.36. 5ж - Юу - 11 = 0. 5.37. х = 5.
5.38. G, -5); 2х - Зу + 11 = 0; 2х + у - 9 = 0; ж + у - 2 = 0.
5.39. Зж + 4у - 11 = 0, Зж + 4у + 1 = 0, 63ж + 59у - 205 = 0.
5.40. Зж + 4у-13 = 0, Зж + 4у - 23 = 0, у = 2, у = 4. 5.41. ж =-3,
у = 4, ж-2у + 3 = 0. 5.42. 2ж + у - 1 = 0; тг/4. 5.43. ж-2у + 3 = 0;
тг/4. 5.44. 2ж-Зу + 6 = 0; arctgF/43). 5.45. ж - Зу + 1 = 0; тг/4.
5.46. ж + у-4 = 0, х + у = О, у = 5, ж = 3. 5.47. 1) arccosA/\/10);
2) arccos B/\/5); 3) 90°; 4) 0; 5) arccos D/</б5). 5.48. 2 пря-
прямые: 2ж + у - 7 = 0, i - 2у - 1 = 0. 5.49. ж = 2 + уB + \/3),
ж = 2 + ?/B - а/3)- 5.50. 2ж - Пу + 16 = 0 или 2ж - Ну + 6 = 0.
5.51. C, 12). 5.52. 1) у = 1, 12ж - 5у + 53 = 0; 2) х= -2,
4ж - Ъу + 5 = 0. 5.53. Зж - у + 17 = 0. 5.54. ж + Зу + 9 = 0.
5.55. 77ж + 21у - 50 = 0, 7ж - 56у + 25 = 0, у = х. 5.56. Радиус
вписанной окружности равен 4, радиус описанной окружности равен
325/16. Центр вписанной окружности имеет координаты (—8, —1),
центр описанной окружности имеет координаты (—3/16, 51/4).
5.57. 6ж + ?/-11=0, ж + 6у + 4 = 0,146ж + 99у - 641 = 0. 5.58. (-3,
5). 5.59. Пж - 15у + 11 = 0. 5.60. ж = 2, ж = 0, Зж - 4у + 6 = 0,
Зж - 4у — 4 = 0. 5.61. Два решения: 1) радиус равен 2л/2, центр име-
имеет координаты (—3, 1); 2) радиус равен \/2, центр имеет координаты
(-2, 4). 5.62. ж = 3, у = -1, или Зж + 4у - 5 = 0, 4ж - Ъу - 15 = 0.
5.63. (Лап + Ва21)х' + (Аа12 + Ва22)у' + Аа10 + Ва20 + С = 0.
5.64. Зж' - у' + 3 = 0. 5.65. 1) ж = -^ж' - ^у' + 1,
г/ = -^-ж' + ^г/' + 1;2Jж' + 5г/'-4 = 0. 5.66. 5ж' + vV -4\/3 - 0.
5.67. 1) Х = --^ж' + -^ + 1, , = -^ж' - -Ly' + 3;
2) 6ж' - 7у' - 6V5 = 0. 6.1. 1) (г, [а, Ъ]) - (r0> a, b);
2) [г, а] = [г0, а]; 3) г - ^ + at- 4) [г, [щ, n2]] = D2m - Dm2;
lal
5) г = [
380 Ответы и указания
2) [ni,n2] = 0; если ni = Лп2, то Di ф \D2; 3) [пьп2] = 0; если
П1 = Лп2, то Г>! = XD2. 6.3. 1) [аьа2] ^ 0, (г2 - гь аь а2) = 0;
2) [ai,a2] 7^0, (r2 - rbai,a2) ^ 0; 3) [аьа2] =0, [r2-ri,ai] ^ 0;
4) [аь а2] = 0, [г2 - гь ах] - 0. 6.4. 1) (а, п) ф 0; 2) (а, п) = О,
(г0, п) ф D; 3) (а, п) = 0, (г0> п) = D. 6.5. 1) г0 + ^Т^'^а;
2» w + °%»ТК- "¦"¦ ч * - - + °'; 2>(г - *»'•"> - °-
6.7. (г - гс г, - гс а) = 0. 6.8. 1) г0 + Р~ц,'°^о; 2) г0 +
. е.9.
6.10. 1) (г, п) = D, (г - г0, а, п) = 0; 2) (г - г0, гх - г0, а) = О,
(г - г0, а) = 0; 3) (г - г0, ri - г0, аг) = О, (г - г0, г2 - г0,
а2) = 0; 4) (г - гь аь [аь а2]) =0, (г - г2, а2, [аь а2]) = 0.
|(г0>п)-Д| Kn-ra.a.b)! |Di-Da| |[ro-n,a]|
611- *) —i^i—;2) —m~m—;3) —с—;4) ;
a
|[ro,a]-bl . |[ri -r2,a]| |bt -b2| [(n -r2,aba2)
5) n—; 6) —r—i—; n —ri—; 8) —ir, „ n—
I II II I L * ' "J I
„ч I(ai,b2) + (a2,bi)| D-(ro,n)±p|n|
9) - г?1 r- —. 6.12. Два решения: г0 Н —, ¦? —-а.
|[ai,a2j| (a, n)
6.14. 1) Ах - у + Ъг + 1 = 0; 2) х = и, у = v, z = -1 - 2и + Zv.
6.16. 1) x + Zy - 11 = 0, у + z - 4 = 0; ^Lzl = ^-^ = ^-^;
2) x = 7 + Zt, у = 11 + Ы, z = t; ^— = ^— = |.
6.17. 1) x - Zy + 2z - 8 = 0; 2) x = 1; 3) у = -1; 4) z = 2; 5) x = 1 -
z = 1; 5) j/ = 3, z = 1. 6.19. 1) z + 3y - 10 = 0, 2y + z - 5 = 0;
2) x + у - 5 = 0, z = 5; 3) у = 1, г = 2. 6.20. 1) 2j/ - z + 1 = 0;
2) 6z + у - lOz + 25 = 0; 3) 4z - 12y + Zz - 12 = 0; 4) x = 2; 5) три
данные точки лежат на одной прямой и не определяют плоскость.
3 _ 1
х 4 4
6.21. 1) Пересекаются по прямой — = — = —-—; 2) совпадают;
о\ л\ - Х + Z у Z -2
6) параллельны; 4) пересекаются по прямой —-— = — = —.
о 1 — X
6.22. 1) а ф ±3; 2) а = 3; 3) а = -3. 6.23. 1) Прямая лежит в
плоскости; 2) пересечение в точке E3, 24, 18); 3) пересечение в
точке (—3/4, 1/4, 1/2); 4) прямая лежит в плоскости; 5) прямая
параллельна плоскости. 6.24. 1) а ф ±1/2; 2) a — -1/2; 3) а = 1/2.
Ответы и указания 381
6.25. 1) Пересекаются в точке (—3, 0, 4) и лежат в плоскости
2х — у + 6z — 18 = 0; 2) скрещиваются; 3) параллельны и лежат в
плоскости 5z — 22у + 19z + 9 = 0; 4) совпадают; 5) пересекаются в
точке (—3, 5, —5) и лежат в плоскости 9х + Юу — lz — 58 = 0.
6.26. 1) а = 3; 2) а ф ±1, а ф 3; 3) а = -1; 4) а = 1. 6.27. 1) Плос-
Плоскости имеют единственную общую точку A, 1, 1); 2) плоскости не
имеют общих точек — попарно параллельны; 3) плоскости совпа-
совпадают (множество общих точек — вся плоскость х + 2у — z — 1 = 0);
4) плоскости образуют призму (каждая пара пересекается по
прямой, три прямые пересечения попарно параллельны); точек,
одновременно принадлежащих трем плоскостям, не существует;
_ч ,„ х у-2 z-Ъ
5) плоскости пересекаются по общей прямой — = = .
2, о — 6
6.28. 39ж + 27у - llz - 120 = 0. 6.29. 1) 4ж + у - 8z + 6 = 0;
2) 7х - 8у + llz + 6 = 0. 6.30. 1) х + 1у - 6z + 6 = 0;
2) 10z + 2у - z + 10 = 0. 6.31. 2х - Зу - z - 7 = 0.
6.32. 1) 13а; - 6у + 8z - 15 = 0; 2) 6z - 17у + 10z - 43 = 0.
6.33. 1) ж = 0, у = 3t, z = 1 - t; 2) ж = 0, у - 4z + 3 = 0.
Указание: исключая х из уравнений данной прямой, полу-
получим уравнение проектирующей плоскости. 6.34. 1) х = —5 — 4?,
у = — 3 + Ы, z = — 3 + 2t. Указание: составить параметриче-
параметрические уравнения проектирующей плоскости. 2) 2х + у + Ъг — 6 = 0,
х + 2у - 3z + 2 = 0. 6.35. х - 3z + 4 = 0, 2х - 4у + Ъг + 9 = 0,
х + 1 « - 3 z-1
6z + y+z + 2 = 0; —— = 2-— = ___. 6.36. 4а; + г/-Зг + 5 = 0,
10z + у - 3z + 11 = 0, 20z + 5у + 3z - 29 = 0, х - 2у - 3z + 8 = 0.
6.37. 1) 5z - 6у + 7z = 0, я - Зу + 2z = 0; 2) 2а; - у + z = 0,
25z + 12j/ - 20z = 0. 6.38. 1) 13z - 12y + llz + 36 = 0,
z - 2y + z + 4 = 0; 2) z - у - z + 1 = 0, 8z + 14y + 19z + 13 = 0.
6.39. 2i - 3j/ + 5z + 21 = 0, i - j/ - z - 17 = 0. 6.40. 2 плоскости:
llz - 13y -I- 8z + 18 = 0, 20z - 8y - 5z - 22 = 0. 6.41. 4 плоскости:
z + 4y -I- z - 5 = 0, z - Юу - 6z + 23 = 0, 2z + у + 2z - 10 = 0,
2z -I- у + 9z - 38 = 0. 6.42. 7 плоскостей: 5z -I- y - 7z + 13 = 0,
3z-y-5z+15 = 0, z - 4 = 0, z + y + z-7 = 0, z-z+l = 0,
z + y-3z + 5 = 0, z-2z+6 = 0. 6.43. 1) a) P(ll/3, 0, 0), Q @,
11/2, 0), Д@, 0, 11/4), S (-5, 13, 0); Ц: 3z + 2y + 4z - 11 = 0,
z = 0; 12: 3z + 2y + 4z - 11 = 0, у = 0; 13: 3z + 2y + 4z - 11 = 0,
z = 0; 6) PG/2, 0, 0), Q@, 7, 0), Л@, 0, 7/2), S (-2, 7,
2); Ц: 2z + у + 2z - 7 = 0, z = 0; 12: 2z + у + 2z - 7 = 0, y = 0;
H:2z + y + 2z-7 = 0, z = 0;b)PB/3, 0, 0),Q@, 2, 0), Д@, 0, 2),
5(-3, 10, 1); Ц: 3z + у + z - 2 = 0, z = 0; 12: 3z + y+ z - 2 = 0, у = 0;
l3:3z + y + z-2 = 0,z = 0;2)a)P(-4/3, -1/3), QA/2, 3/2), ЯA/2,
-5/4), h: u - v + 1 = 0, 12: u + 2v + 2 = 0, 13: u = 1/2; б) Р (-1/2,
-3/2), QC, 2), Я(-1/2, 2), Ц: u - v - 1 = 0, 12: u = -1/2, 13: v = 2;
в) P(l/3, 1/3), Q(l, 1), Я(-1, 1), li: u-« = 0, la: u + 2v-l=0,
1з:« = 1. 6.44. 18:125. 6.45. 1) (A, B, C); 2) [nbn2], где п{ (au
382 Ответы и указания
bi, а), г = 1, 2. 6.46. 1) 2у± = ±±j = ~^-; 2)y = -l,z = 2;
3) х = 1, z = 2; 4) х = 1, у = -1; 5) ?^I = «Ltl = ?z2.
6.47. 1) 4z - 3y + z + 4 = 0; 2) 3z + 4y + 21z - 36 = 0;
3) z = 1; 4) у = 3; 5) z = 1. 6.48. 5z - 10y - 3z - 3 = 0.
6.49. 1) 5x - 2y - z - 2 = 0; 2) 7z - у + 4z - 3 = 0.
6.50. x-y + 2z = 0, 39x + 15y - 12z + 90 = 0. 6.51. A,-3,2).
6.52. 1) V3; 2) 1; 3) 2; 4) 1/3; 5) 0; 6) 2; 7) 4; 8) 1. 6.53. 1) 2;
2) 5; 3) 3/10. 6.54. 1) 6z - 3y + 2z + 26 = 0 и 6z - 3y + 2z - 16 = 0;
2) z + Zy - z + 4\/Tl =0hz + 3j/-z- 2\/Tl = 0; 3) 2x + 2y - z + 2 = 0
и 2z + 2y-z-16 = 0; 4) 3z + 4z ± 15 = 0. 6.55. A,0, -1) или
(-1, -3, -2). 6.56. @, 0, 1) или (-6/97, -18/97, 127/97).
6.57. 2z - 2j/ - z - 2 = 0, z + 2j/ - 2z + 5 = 0, 2z + у + 2z - 5 = 0,
2z - 2y - z - 11 = 0, z + 2y - 2z + 14 = 0, 2z + у + 2z - 14 = 0.
6.58. xs/2 + z - 3>/2 = 0, xs/2 - z + 3>/2 = 0, y\/2 ± z = 0.
6.59. 1) C, -1, 0), C, -1, -1); C, 0, 1), C, 1, 1); @, -1, 1),
(-3, -1, 1);2) B, -3, -1), A, -5, -3);3) A, -4, -5), (-1, -7,
-11). 6.60. ?±l = Ll2 = lli. 6.61. l)z + 5y-z-25 = 0,
— 11 / о
17x - ly - 18z + 35 = 0; 2) x + by - z - 25 = 0, 7z - у + 2z + 8 = 0;
3) единственная точка @, 5, 0). 6.62. 1) arccos (у'б/З);
2) arccos—-=; 3) axccos-; 4) 90°; 5) 90°; 6) 0. 6.63. 1) arccos—;
2) 90°; 3) 0. 6.64. 1) arcsin (l/>/6); 2) arcsin F2/63); 3) 90°;
4) 0. 6.65. 1) у = 3, z = 2 или x = 1, z = 2; 2) 2z - у + 1 = 0,
z = 2 или z - 2y + 5 = 0, z = 2. 6.66. 2x + y + z-l = 0
или 14z + 13y - llz - 1 = 0. 6.67. x - z + 4 = 0 или
z-3 _ y-2 _ z-1 z-3 _ y-2 _ z-1 z-3
1 - -1 - -2 ' 1 ~ -1 ~ 1 ' °' 7-2V3
у—5 z-5 z—3 у-5 z-5
7-3\/3 -7 + 6\/3' 7+2\/3 7+3\/3 - 7 - 6\/3'
6.69. 90°, 45°, 45°; 4a:+ 3y-24 = 0. 6.70. 1K, D, -3, 1), F, -5,
/ / \
x-2
)
z-2_y+l_z 5 * /31 4 16Л /44 1 32\
) ~2~ ~ "^2" " I' 1] 3V ' VT' ~9' ~~%Г \J' ~9' ~T/'
_y + l_ z /З /3 15 2W 8 23 _4\
"~5~~ -165lJJ У7Ч7' 7'/Ч 71 У 77'
^ = ^ = |. 6.71. C,0,0) или B,-1, 2). 6.72. 1) ^26/7;
Ответы и указания 383
2) \/62; 3) 1/л/59. 6.73. 1) 5ж + 4у - z - 24 = 0, 4ж - у + 2z - 43 = О;
E,3, 13) и F,1, 10); /п;2Jж-5у + 8г-9 = 0, z-z + 8 = 0; (-4,
3, 4) и (-1, 9, 7);3v^;3Kx-2y-z-6 = 0,5z + 34y-llz-38 = 0;
G, 3, 9) и C, 1, 1); 2V2I. 6.74. 1) -Ь 2) ^^2; 3)
4) агссо8(Зл/2/10); 5) arcsin(l/10). 6.75. 1) 2/>/3; 2) 1/л/б; 3) от-
отрезок ЛС1 делится в отношении 2:1, отрезок CD\ делится в отно-
отношении 1 : 1. 6.76. 1) 4=; 2) ^|\/29; 3) ^-\/б5; 4) 6; 5) arccos ^|;
у65 13 11 143
3 15
6) arccos —; 7) arcsin j=. 6.77. 1) Выражение {А\А2 + В1В2
13 19Ю
) ( + Biyo + Ciz0 + Di) ¦ (A2xo + B2y0 + C2z0 + D2) от-
отрицательно; 2) то же выражение положительно. 6.78. Зу — 4z = 0
или 4у - 3z - 0. 6.79. z + у + 2z + 11 = 0, z-2y+z-3 = 0.
6.80. 8z + 5y - z - 25 = 0. 6.81. 2z - 5y - 9z - 25 = 0.
6.82. 1) x ~ Юу + 13z - 18 = 0; 2) x - Юу + 13z - 18 = 0,
3z + 2z — 3 = 0. 6.83. Радиус вписанной сферы равен 1, радиус
описанной сферы равен — vl4. Центр вписанной сферы имеет
координаты B, 3, 4), центр описанной сферы имеет координаты
E/2, 5, 15/2). 6.84. Два решения: 1) радиус равен -у/2, центр име-
имеет координаты @,2, 1); 2) радиус равен \/2/3, центр имеет коор-
координаты @, 2/3, 1/3). 6.85. Два решения: г = 3\/3, О (-2, -2,
-2) и г = — \/3, О (——, y,-2j. 6.86. Два решения: г = 3\/3,
О(-3, 2, -1) . r-f Л О(§, И, g). 6.87. Радиус
вписанной окружности равен л/2, радиус описанной окружности
27 г
равен —V2. Центр вписанной окружности имеет координаты
8
B, 18/5, —4/5), центр описанной окружности имеет координаты
C1/8, 6/5, —29/40). 6.88. Радиус вписанного цилиндра равен
1/3, радиус описанного цилиндра равен — \/l3. Ось вписанного
36
z-4 _ у _ z + 3
~ 1 ~ 2 '
х - 17/36 у - 16/9 z
цилиндра задается уравнениями — — — — —-—, ось описан-
— Z* л. 2»
ного цилиндра задается уравнениями
-2 1 2
6.89. 4^6 или f^P-. 6.90. ^-а3. 6.91. ^. 6.92. ^a3.
9\/3 50 2 4
6.93. (Лап + Ва2\ + CaZi)x' + (Аа12 + Ва22 + Са32)у' {
= 0. 6.94. у' + 14z' - 3 = 0.
384 Ответы и указания
6.95. 1) ж = -ж' + 6у' - 4z' + 1, у = 6ж' - ЗЗг/ + 28z' - 1,
z = 4ж' - 24у' + 20z' + 1; 2) ^±1 = t±2!± = _fl. 6.96. 1) ж =
= X-^L + 1, у = ^^ + 1, z = -z' - 1; 2) 4ж' + у' - z' + 4^2 = 0.
6.97. 1) ж = 1ж' - f у' + f z' - 1, „ = |ж' - '-у' - f z',
Z 3Z3y3'J2 -7 1И 1 -5 -1
агссозB>/2/3); \Д.
7.1. 1) 2; @, -2); 2) -L; (-2.5, 2.5); 3) ^;
4) 9/14; A/7, 1/2). 7.2. А = В ф О, С2 + D2 > АЕ. Радиус
равен \/С2 + D2 — АЕ/\А\, координаты центра (—С/A, —D/A).
7.3. (ж - 2J + (у - 2J = 10. 7.4. 1) \Аа + ВЬ + С\> Д^Л2 + Д2;
2) |Ла + ВЬ + С\ < Rs/A2 + В2; 3) \Аа + ВЬ + С\ = Да/Л2 + В2.
7.5. 1) 4ж - Зу + 15 = 0; 2) 4ж + Зу - 16 = 0; 4ж - Зу + 8 = 0.
7.6. 5ж - 12у + 29 = 0, 5ж - 12у - 23 = 0. 7.7. 1) ж + у - 9 = 0;
2) х + 2у - 16 = 0. 7.8. ж - 5 = 0, у - 2 = 0, Зж - 4у + 5 = О,
4ж + Зу-20 = 0. 7.11. _fc . |лв|. 7.12. a,
7.13. а, i/-|ЛВ|2 - а2. 7.15. 1) Внутренность круга радиуса 2 с
центром в точке @, —2) (вместе с точками окружности); 2) внеш-
внешность круга радиуса 5 с центром в точке (—1/2, 3/2) (без точек
окружности); 3) часть внутренности круга радиуса 3/2 с центром в
точке (—3/2, 0), лежащая в нижней полуплоскости (без точек гра-
границы); 4) часть плоскости, заключенная между окружностями ради-
радиусов 1 и 3 с общим центром в точке A, —1) (вместе с точками этих
окружностей); 5) внутренность эллипса с полуосями 4 и 3, центром
которого является точка @, 0), а фокусы лежат на оси Ох (вме-
(вместе с точками границы); 6) внешность эллипса с полуосями 3 и 2,
центром которого является точка @, 0), а фокусы лежат на оси Оу
(без точек границы); 7) часть плоскости, заключенная между двумя
эллипсами с центрами в точке @, 0) и фокусами на оси Ох\ один
из эллипсов имеет полуоси 9 и 3, другой — полуоси 3 и 1 (вместе с
точками границы); 8) внутренность эллипса с полуосями 1/2 и 1/3,
центром которого является точка A/2, —1/3), а большая ось па-
параллельна оси Ох (без точек границы); этот эллипс вписан в IV
координатный угол; 9) внутренность эллипса с фокусами в точках
A, 0) и (—1, 0) и большой полуосью, равной 3 (без точек границы);
малая полуось равна 2\/2; 10) внешность эллипса с фокусами в
Ответы и уксиапия 385
точках @, 1) и @, -1) на оси Оу и большой полуосью, равной 2
(без точек границы); малая полуось равна \/3; 11) часть плоскости,
заключенная между двумя ветвями гиперболы с центром в точке
(О, 0) и фокусами на оси Ох (вместе с точками границы); действи-
действительная полуось гиперболы равна 4, мнимая равна 3; 12) части плос-
плоскости, находящиеся правее правой ветви и левее левой ветви ги-
гиперболы с центром в точке @, 0) и фокусами на оси Ох (вместе
с точками границы); действительная полуось гиперболы равна 2,
мнимая равна 3; 13) часть плоскости, ограниченная отрезками осей
координат и параболой с вершиной с точке О'A, 1), осью, со-
направленной с вектором а A, 1) и параметром 2\/2 (точки гра-
границы включены в множество); 14) часть плоскости, заключенная
между четырьмя ветвями двух гипербол с общим центром в точке
@, 0) (без точек границы); фокусы первой гиперболы находятся на
оси Ох, действительная полуось равна 2, мнимая равна 6; фоку-
фокусы второй гиперболы находятся на оси Оу, действительная полу-
полуось равна 6, мнимая равна 2; 15) внешность области, заключенной
между четырьмя ветвями двух гипербол с общим центром в точке
@, 0) (без точек границы); фокусы первой гиперболы находятся на
оси Ох, действительная полуось равна 1/\/3, мнимая равна 1/3;
фокусы второй гиперболы находятся на оси Оу, действительная
полуось равна 1/3, мнимая равна 1/\/3; 16) часть плоскости, на-
находящаяся правее левой ветви гиперболы с фокусами в точках
B, 0) и (—2, 0) и действительной полуосью, равной 1 (без точек гра-
границы), мнимая полуось равна \/3; 17) внутренность параболы, вер-
вершина которой находится в точке @, 0), а фокус — в точке A, 0)
(вместе с точками границы); 18) внешность параболы, вершина ко-
которой находится в точке @, 0), а фокус — в точке A,5, 0) (без
точек границы); 19) часть плоскости, заключенная между двумя
параболами с общей вершиной в точке @, 0), (вместе с точка-
точками границы); фокус одной из парабол находится в точке A/4, 0),
другой — в точке C/4, 0); 20) часть плоскости, заключенная
между параболой с вершиной в точке @, 0) и фокусом в точке
( — 1/2, 0) и окружностью радиуса 1 с центром в точке A, 0) (без
точек границы). 7.16. 1) Окружность радиуса 3 с центром в
точке @, 0); 2) окружность радиуса 2 с центром в точке A, 2);
3) верхняя полуокружность радиуса 1 с центром в точке @, 0).
7.18. Другая ветвь гиперболы задается параметрическими уравне-
уравнениями х = xq — acht, у = уо + bsht; обе ветви сразу — уравнениями
х — хо ± acht, у = уо + bsht. 7.19. 1) Окружность радиуса 1 с
центром в начале координат; 2) ветвь гиперболы, фокус которой на-
находится в начале координат, вершина — в точке (—1/3, 0), центр —
в точке (—2/3, 0), действительная полуось равна 1/3, мнимая рав-
равна 1/\/3; 3) эллипс, левый фокус которого находится в начале ко-
координат, центр — в точке A, 0), большая полуось равна 2, малая
13- 1715
386
Ответы и указания
равна \/3; 4) парабола, фокус которой находится в начале коорди-
координат, а вершина — в точке (—1, 0). 7.20. Ветвь гиперболы, фокус
которой находится в точке А, действительной осью является пря-
прямая АВ, длина действительной полуоси равна а/3, мнимой — а/\/Ъ.
7.22. 1) а и Ъ; у/1 - (Ь/аJ; (л/а2-Ь2,0) и (-л/а2 - Ь2, 0);
х = ± а2/\/а2-Ь2; 2) Ъ и а; у/\ - (а/6J; @, \/Ь2 - а2) и
@, -VW^?); у = ±&ly/F=a*; 3) 5 и 3; 4/5; D, 0) и (-4, 0);
х = ±25/4; 4) 1 и 1/2; ^3/2; @, Уз/2) и @, -,Д/2); у = ±2/>/3.
7.23. 1) Вне эллипса; 2) принадлежит эллипсу; 3) внутри эл-
g + g = 1; 2) g + ? =
2) 1/2; 3) 1/2; 4) 1/^2; 5)
ab
7.27. х = ±—.= ,у =
V2 Ъ2
; 6) (V5 - 1)/2; 7) (у/% - 1)/2.
7.28. Часть пря-
.= ,у = ± , ;—,.
a2 + Ъ2 V'а2 + Ь2 Trv/a2 + Ь2
мой 18z — 25у = 0, лежащая внутри эллипса. 7.29. х + 2у — 7 = 0.
7.30. 2 решения: у = 3 ± |. 7.31. 1) 4 точки
2) 4 точки (±4>/2/3, ±1/3); 3) точки @, ±1); (угол 120°).
, ±1/л/з);
У2
7.32. 1) -5-
a2 a' - с"
где 0 < a < \d\. 7.33.
= 1, где a > |с|; 2) — +
'2..2
d2y
a2 a2(d2 -а2)
1,
64
. , или
' 25
(ж + 22J
576
16
(У-2J
320
576
= 1; 3) 4 решения:
-IJ,, (х-12J (у-7J_ (х-3J (г/-4J_
9 ' 162 81 9 18
(х + 3J (у + 8J _
81 + 162 " L 74-
2) max АВ = д/а2 + Ь2, min ЛВ =
1
ОА2 OB2 a2b2 '
7.35. 1) а и Ъ;
у/\ + (Ь/аJ; (\/а2 + Ъ2,0) и (-у/а2 + Ь2, 0); ж = ±а2/у/а2 + Ъ2;
Ъх±ау = 0; 2) ha; ^1 + (а/ЬJ; @, л/а2 + Ъ2) и @, -\/а2 + Ъ2);
у = ±Ь2/\/а2 + Ь2; Ьх±ау = 0; 3) 4 и 3; 5/4; E, 0) и (-5, 0);
z = ±16/5;3z±4y = 0;4) 1и1;Д @, л/2") и @, -у/2);у = ±1/х/2;
у ± х = 0; 5) \/2 и >/2; \/2; (\/2, v^) и (г>/2, -у/Т); ^
Ответы и указания 387
х = Ои у = 0; 6) 2 и 2; /2; (-2, 2) и B, -2); у-х±2 = 0;х = 0и
у — 0. 7.36. 1) Принадлежит гиперболе; 2) внутри (правее) правой
ветви; 3) между двумя ветвями; 4) внутри (левее) левой ветви.
7.37.49.7.38. 1) g - g = 1; 2) ^ - ? = 1; 3) х2 - JjL = 1 или
??»! i 41 ?1 ? 1 51 ? 1 6^ ? 1
i 41 = 1 51 1 6^ 1
485/6 7760 ' ; 9/64 1/4 ' °' 25 24 ~ ' °> 7 2 ~ '
х1 v2 v2 X2 Y2
7) — - ^- = 1; 8) х2 - ?- = 1; 9) нет решений. 7.39. —- - — = 1.
7.40. 1) /2; 2) 2; 3) /16 или /16/3. 7.41. 1) 3//5 или
/41/5; 2) 3//5 или 6/5. 7.42. 1/е. 7.43. — - — = 1.
4 6
7.44. Два луча прямой х — 4у = 0, лежащие правее правой
ветви и левее левой ветви гиперболы. 7.45. Ах — Зу — 4 = 0.
7.46. 1) 4 точки (±3/\/5, ±4/\/5); 2) 4 точки (±-/17/5,
2 2
±4Ч/375); 3) (±1, 0) (угол 180°). 7.47. 1) 2L _ _JL_ = i, где
7.48. 1) 2(i - 4J - 2(y + 2J = 1; 2) Щ^- - ™^- = 1 или
4 5
100 125 = 1; ^ 2 У = L 7-49" ^ a2 + b2'
2) y. 7.50. a. 7.51. 1) (p/2, 0), x = -p/2; 2) (-p/4, 0), x = p/4;
3) C/2, 0), x = -3/2; 4) (-3/4, 0), x = 3/4; 5) @, 1/4), у = -1/4;
6) @, -/3/4), у = /3/4. 7.52. 1) Внутри параболы; 2) вне
параболы; 3) принадлежит параболе. 7.53. 1/5. 7.54. 1) у2 = 5х;
2) у2 = 24х; 3) у2 = 9х. 7.55. Луч прямой у = -9/4, лежащий
внутри параболы. 7.57. х - у - 2 = 0. 7.58. 1) A5/2, 5/3) и
A5/2, -5/3); 2) B/5, 2) и B/5, -2); 3) E/4, 5//2) и E/4, -5//2);
4) (8,4/5), (8,-4/5), A0/3, 10//3) и (lO/З,-10//3).
7.59. На отрезке [0, 2//3]. 7.60. 1) (у - ЬJ = 2р(х - а);
2) (у - ЪJ = 2р(а - х); 3) (х - аJ = 2р(у - Ь); 4) (х - аJ = 2р{Ь - у).
7.61. 1) у2 = р2 + 2рх, р ф 0; 2). у2 = -р2 + 2рх, р ф 0.
7.62. 1) у2 = 12х - 48; 2) у2 = 15 - 2х; 3) х2 = 4у; 4) 4 параболы
±бу = х(х±б). 7.63. р. 7.65. (-1/4,1/2). 8.1. 1) х + у = 4;
2) х - Зу - 12 = 0; 3) х = -3; 4) За; - 2у - 16 = 0; 5) х + 2у - 8 = 0;
= 0. 8.2. 1) (* +
388 Ответы и указания
(ж - а)(д0 - а) (у-/3)(уо-/3) _
2) j ~ Гг = !; 3)
4) B/ - /3)(Уо - /3) = р(х + х0- 2а). 8.3. 1) а2Л2 + Ь2?2 = С2;
2) а2Л2 - Ь2В2 = С2, С ф 0; 3) а2Л2 - Ь2В2 = -С2, С ф 0;
4) 4ЛВА: = С2, С ф 0; 5) рВ2 = 2ЛС. 8.4. аЩ > Ъ\а\.
8.5. 1) F, -3); 2) E, 3); 3) (-4, 3/4); 4) A, -2).
8.6. 1) 2ж - у ± 12 = 0; 2) ж + 2у ± За/14 = 0; 3) 2z + у ± 12 = 0;
ж - 2у ± За/14 = 0. 8.7. 1) 4ж - Зу ± 16 = 0; 2) ж = ±5; 3) нет решений.
8.8. 1) ж - 2у + 10 = 0; 2) ж = 0; 3) нет решений. 8.9. 1) (—2/3,
-2/3), 1/15; 2) (^, --L) и (-^, -L), 0; 3) B, -1), 1;
4) B, -1)и (-2, 1), 19/13; 5) (9, 24), 112/5. У к а з а н и е: рассмот-
реть касательные, параллельные данной прямой. 8.10. 1) -=—;
v34
ал, „ ^.i = lMgg = li ,,^
х2 v2 1
8.13. — -f= = l- 8.14. 1)у = 2ж2 + -;2)у2 = 4а;. 8.15. 4 прямые
ж ± у ± у/2/3. 8.16. х + у - 2 = 0 или ж - у - 2 = 0. 8.18. 2) ab.
8.21. а; ± у ± 3 = 0. 8.22. 1) х = -3, х ± УЗу - 2^3 = 0 или
ж = 3, ж ± V3y + 2^3 = 0; 2) у = -1, ±ж\/3 + у - 2л/7 = 0 или
2 2
у = 1, ±a;V3 + у + 2/7 = 0. 8.23. 1) Ц + || > 1 (точка лежит
ж2 у2
вне эллипса); 2) 0 ^ —!г — -гт < 1 (точка лежит между ветвями
a2 tr
гиперболы, но не на асимптотах); 3) у2, > 2ржо (точка лежит вне
параболы). 8.24. 1) 2х ± Зу + 12 = 0; 2) Юж + Зл/7у - 48 = 0 и
Юж + 51^7у - 384 = 0; 3) 8ж + 3%/2у + 36 = 0 (точка лежит на эллип-
эллипсе); 4) точка лежит внутри эллипса, решений нет. 8.25. 1) ж + 2 = 0
и 5ж + 8у - 6 - 0; 2) Ьх ± 6у - 8 = 0; 3) ж - у/Зу -1 = 0 (точка ле-
лежит на гиперболе); 4) точка лежит правее ветви гиперболы, решений
нет; 5) 17а; — ЗОу — 16 = 0 (точка лежит на асимптоте); 6) точка
совпадает с центром гиперболы, решений нет. 8.26. 1) точка ле-
лежит внутри параболы, решений нет; 2) 2ж — у + 2 = 0 (точка ле-
лежит на параболе); 3) х — г/ + 4 = 0и4ж — у+1 = 0; площадь тре-
треугольника равна 37,5. 8.28. 1) 4 касательные х ± 4у ± 10 = 0;
2) 4 касательные ж±у±1 = 0; 3) 2 касательные х ± yfby + 3 = 0;
4) 2 касательные ж ± \/2у + 1 = 0; 5) 4 касательные х ± \/2у +1 = 0,
х ± л/бу + 3 = 0; 6) 4 касательные ж±у±3 = 0; 7) 2 касательные
Ответы и указания
x ± 6y + 8 = 0. 8.32. 1) 6a; + 17y - 10 = 0 и 6a; + 17у ~ 46 = 0;
2) 24z + 41y - 22 = 0 и 24a; + 41y - 94 = 0; 3) решений нет (данная
кривая является гиперболой, а данная прямая — ее асимптотой).
8.33. 1) х + Зу - 12 = 0 и За; + у - 12 = 0; 2) 13z + 15у + 12 = 0 (точка
лежит на кривой); 3) решений нет (данная кривая является эллип-
эллипсом, а данная точка лежит внутри этого эллипса). 9.1. 1) Эллипс
B\ X2 Y2 ( 1 1\
окружность радиуса - ) —г- + -гтг = 1; О1 -- , - ),Ei A, 0),
Е2@, 1); 2) гипербола ^--^- = 1; О'Q, Jj,Ei(l, 0),E2@, 1);
3) эллипс X2 + |L = 1; О'(-\, i), Ei@, 1), E2(-l, 0);
4/У \ о Z J
4) парабола У2 = ^Х; О' Q, -Л, Ej @, 1), Е2 (-1, 0); 5) пара
параллельных прямых у = 16/9, у = -1; У2 = B5/18J; О1 @, 7/18),
Ei A, 0), Е2 @, 1); 6) пара мнимых прямых (а; + 2J + (у - ЗJ = 0,
пересекающихся в вещественной точке О' ( — 1, 3); 7) мнимый
эллипс X2 + 2Y2 = -1, О1 (-1, 3), Ei A, 0), Е2 @, 1); 8) гипербола
Т" + if = 1у °' ^4> ~3^2^' El ^0> ^' Е2 ^~1' °^; 9^ пара сов"
павших прямых х = 3/5; У2 = 0; О1 C/5, 0), Е! @, 1), Е2 (-1, 0);
10) пара пересекающихся прямых 3V5 (ж — 1) = ±2 (Зу + 1);
77? - Т77 = 0; С A, -1/3), Е, A, 0), Е2 @, 1). 9.2. Обозначим
1/5 1/4
С2 D2
К = —— + —— Е. 1) Кривая является эллипсом тогда и только то-
J\. JO
гда, когда А, В, К не равны нулю и все одного знака; центр в точке
(—С/A, —D/B). При А = В окружность радиуса \JK/A, оба фокуса
совпадают с центром. При \А\ < \В\ большая полуось равна -^/К/А,
(С IK К Г)\
— — ± 1/— — ).
А у A xj xj /
При \А\ > \В\ большая полуось равна л/К/В, малая равна у/К/А;
фокусы в точках
ся гиперболой тогда и только тогда, когда А, В, К не равны
нулю и АВ < 0; центр в точке (-С/А, -D/B). При АК > 0
действительная полуось равна у/К/А, мнимая равна у/—К/В;
с Гк к d\
фокусы в точках | -— ± \/-j —-,-- . При ВК > 0 действи-
A ±j ±j }
тельная полуось равна л^К/В, мнимая равна
С D \к К\ ч
~~7>~~Б^:\15 —Т )¦ 2) Кривая являет-
A t A J
390 Ответы и указания
(С D , [к К\ м u
в точках I — —, —— ± 4 / — I. 9.3. Начало канонической
системы координат везде совпадает с началом исходной системы.
X2 У2 ' '
X2 У2 /l \/з\ / \/3 l\
3) гипербола — — = 1; Ei -, -— , Е2 ——, - ; 4) эллипс
У о \ Z о J \ ? Z I
X2 Y2 /3 4
Щ + 179 = 1; ElU' U
Ei (—1/л/2, —1/л/2), Е2 A/л/2, -1/%/t); 6) пара параллельных
прямых За; - у ± у/lO = 0; У2 = 1; Ej A/\Яо, 3/\/l0), E2 (-3/v/l0,
1/\/10); 7) пара совпавших прямых 9х - 2у = 0; У2 = 0; Ei B/\/85,
9/\/85), Е2 (-9/\/85, 2/\/85); 8) пара пересекающихся прямых
9.4. ЧЭнт^ + ^ = i;O'(-3, -I),». Q. ^).».(-^.
-|); 2) „п^бола ^ - У» = 1; <,'(-!, 1), Е, (-L, -^),
Е2 B/V5, 1/V5); 3) парабола У2 = Х/5; О' F/25, -8/25),
-2), Е! A/уД, 1/V2), Е2 (-1/уД, 1/V2); 6) парабола У2 =
°'B'1}-El (^ ^)«Е2 ("^ 7f); 7) эллипс тт
О'C, -2), El (-^, --^), Е2 (-^, -1=); 8) гипербола
* -±\ Е2 (±, ');
1/9 1/25 ~ А' ^ ^' ^' -1 VV2' ^' Vv/2'
9) парабола У2 _ ^Х; О' (-g, »), El (--»,,
Е2 I , т= I; 10) пара пересекающихся прямых а; = —,
V V 34 V34 / 2
Ответы и указания
4» + * + 1 = 0; * - У> = 0; О' (-1, I), E,
Е2 (-1/л/Ш, З/у/То); 11) пара параллельных прямых 2х + Ъу - 5 = О,
2а; + 3» + 1 = О; У2 = 9/13; О' D/13, 6/13), Е: (З/у/Тз, -2/у/Щ,
Е2 B/у/Тъ, Ъ/у/Тз); 12) пара совпавших прямых 15а; - 8у + 1 = О;
У2 = О; О' (-15/289, 8/289), Ех (8/17, 15/17), Е2 (-15/17, 8/17);
13) пара параллельных прямых х + у — 4 = 0, х + у — 1 = 0; У2 = 9/8;
О'E/4, 5/4); Ех A/^2, -1/уД), Е2 A/^2, 1/уД); 14) пара мни-
мнимых прямых X2 + AY2 — 0, пересекающихся в вещественной точ-
точке О' A, 2); Ei A/V2, 1/\/2), Е2 (-1/V2, 1/\/2); 15) пара мни-
мнимых параллельных прямых (х — у + 4J = —6; 16) мнимый эллипс
X2 У2
—-.—Ь —.— = — 1; 17) пара пересекающихся прямых За; — Ъу — 13 = О,
О/о о/21
Ъх + Ъу + 1 = 0; X2 - У2 = 0; О' A, -2), Ех (l/\/l7, 4/ч/17),
Е2 (—A/y/VI, l/\/l7). 9.5. Длины полуосей равны \/2 и 1, эксцен-
эксцентриситет равен 1/\/2, центром является точка A, —1), уравнение
большой оси За; + Ау + 1 = 0, уравнение малой оси Ах — Ъу — 1 = 0.
Фокусу F\ A/5, —2/5) соответствует директриса 4а; — Зу + 3 = 0,
фокусу F2 (9/5, —8/5) соответствует директриса 4а; — Зу — 17 = 0.
9.6. Длины обеих полуосей равны \/2) эксцентриситет равен \/2;
центром является точка A, 1), уравнение действительной оси
Ах + Зу — 1 = 0, уравнение мнимой оси За; — Ау + 1 = 0. Фокусу
Fi (—1/5, 13/5) соответствует директриса За; — Ау + 6 = 0, фо-
фокусу F2 A1/5, -3/5) соответствует директриса За; - Ау - А = 0.
Уравнения асимптот х + 1у = 8 и 7а; — у = 6. 9.7. Парабола:
р = V2/8, вершина О' (-1/16, -3/16), фокус F (-1/8 -1/8),
ось 4х + Ау + 1 = 0, директриса Ах - Ау = 1. 9.9. 2) ^-A/6\\,
и у/~А/6Х2\ A) y/-A/S3. 9.10. 1) Гипербола
200/147 200/63 = 1; 2) ЭЛЛИПС Tf3 + ^9 = 1; 3) Параб0Ла
У2 = 0, 16 • у/ЪХ. 9.13. 1) Гипербола; 2) эллипс; 3) гипербо-
гипербола; 4) пара параллельных прямых 4а; + Зу = 0, Ах + Зу + 1 = 0;
5) эллипс; 6) парабола; 7) гипербола; 8) мнимый эллипс; 9) пара
пересекающихся прямых х — Зу + А = 0, 2а; + у + 1 = 0; 10) пара па-
параллельных прямых х + 5у — 1 = 0, х + 5у + 3 = 0; 11) пара мнимых
прямых, пересекающихся в действительной точке A, 1); 12) па-
пара мнимых параллельных прямых; 13) пара совпавших прямых
х - Ау + 3 = 0. 9.14. 1) 11а;2 - 20ху + Ну2 - За; - Зу - 8 = 0 (эллипс);
2) а;2 - Аху + у2 + Зх + Зу - 4 = 0 (гипербола); 3) а;2 - 2ху + у2 - 1 = 0
(пара параллельных прямых х — у + 1 = 0, х — у — 1 = 0);
4) За;2 — 10ху + Зу2 + 6а; + 6у — 9 = 0 (пара пересекающихся прямых
Зх — у — 3 = 0, Зу — х — 3 = 0); 5) четыре точки из пяти лежат на
392 Ответы и указания
одной прямой х — у + 1 = 0, и данные 5 точек не определяют одно-
однозначно кривую второго порядка; 6) х2 - 2ху + у2 - 2х - 2у + 1 = О
(парабола). 9.15. 1) Эллипс при |А| < 2, гипербола при |А| > 2,
пара параллельных прямых при А = ±2; 2) мнимый эллипс при
А < 41/8, эллипс при 5 < А < 41/8 и при А < -5, пара мнимых пря-
прямых, пересекающихся в действительной точке, при А = 41/8, па-
парабола при А = 5, гипербола при —5 < А < 5, пара параллельных
прямых при А = — 5; 3) эллипс при А > 2; гипербола при А < 2,
А ф 0, пара совпавших прямых при А = 2; пара пересекающих-
пересекающихся прямых при А = 0; 4) эллипс при А > 1/2; гипербола при А <
1/2, А ф 1/3; парабола при А = 1/2; пара пересекающихся прямых
Л R
при А = 1/3. 9.16. Если Д = л1 т,1 ф 0, то данные уравнения
л2 п2
задают: 1) параболу; 2) эллипс; 3) гиперболу; 4) гиперболу; 5) па-
пару пересекающихся прямых. Если Д = 0, то уравнения 1)-4) могут
задавать пару параллельных прямых, пару мнимых параллельных
прямых; уравнение 5) может задавать пару параллельных прямых,
пару совпавших прямых. В случае Д = 0 при некоторых значениях
коэффициентов уравнения 1)-5) могут вообще не задавать кривую
второго порядка. 9.17. 1) А^х + В\у + С\ = ±(А2х + В2у + С2);
2) Ахх + В1У + d = 0, А2х + В2у + С2 = 0. 9.19. 1) (8, 3),
х'2-8х'у' + 17у'2-1 = 0;2)A, -6), Ьх12 + х'у' = 0; 3) (-9/8, -5/8),
8х12 - 24х'у' + 16г/2 -1,5 = 0. 9.22. 2) У к а з а н и е: если А и В —
два центра симметрии, то точка, симметричная А относительно В,
также является центром симметрии. 3) у — sin x = 0.
10.3. 1) При А > 0 эллипсоид, при А = 0 точка, при А < 0 пу-
пустое множество; 2) при А > 0 эллипсоид, при А = 0 эллиптический
цилиндр, при А < 0 однополостный гиперболоид; 3) при А > 0 эл-
эллипсоид, при А = 0 прямая, при А < 0 двуполостный гиперболоид;
4) при А > 0 однополостный гиперболоид, при А = 0 конус, при
А < 0 двуполостный гиперболоид; 5) При А > 0 двуполостный
гиперболоид, при А = 0 конус, при А < 0 однополостный гипер-
гиперболоид; 6) при А > 0 эллипсоид, при А = 0 пара параллельных
плоскостей, при А < 0 двуполостный гиперболоид; 7) при А > 0
эллипсоид, при А = 0 плоскость, при А < 0 однополостный ги-
гиперболоид; 8) при А ф 0 эллиптический параболоид, при А = 0
прямая; 9) при А > 0 эллиптический параболоид, при А = 0
параболический цилиндр, при А < 0 гиперболический параболоид;
10) при А ф 0 эллиптический параболоид, при А = 0 плоскость;
11) при А > 0 эллиптический параболоид, при А = 0 плоскость,
при А < 0 гиперболический параболоид; 12) при А > 0 эллипти-
эллиптический параболоид, при А = 0 пара параллельных плоскостей,
при А < 0 гиперболический параболоид; 13) при А > 0 эллипти-
эллиптический цилиндр, при А = 0 прямая, при А < 0 пустое множество;
14) при А ф 0 гиперболический цилиндр, при А = 0 пара пересе-
пересекающихся плоскостей. 10.5. 1) х2 + у2 + z2 - 2х - 2у — 2z = 0;
Ответы и указания 393
2) х2 + у2 + z2 - 2х - Ау - 6z + 13 = 0. 10.6. 1) С B, 2, 2),
R = 2%/3; 2) С(-1, -2, -3), Я = 5/У2. Ю.7. 1) Эллипсоид;
центр С(—1, — 1, —1), полуоси \/б, \/3, \/2, плоскости симметрии
х = —1, ?/ = -1, z = — 1; 2) эллипсоид; центр С(—1, —1, -1),
полуоси 2, \/б, 2-\/3, плоскости симметрии х = — 1, у = —1, z = —1.
Эллипсоиды подобны. 10.8. 1) Двуплостный гиперболоид; центр
симметрии С(-3, 1, 1), вершины Л (-5, 1, 1), В{-1, 1, 1), ось
симметрии у — z = 1, плоскости симметрии х = —3, у = 1, z = 1;
2) двуполостный гиперболоид; центр симметрии С(—1, 0, —1),
вершины А(-1, О, -1-\/3), В(-1, 0, -1 + \/з), ось симмет-
симметрии х = —1, J/ = 0, плоскости симметрии х = — 1, J/ = 0, z = —1.
10.9. 1) Однополостный гиперболоид; 2) конус; 3) двуполостный
гиперболоид; 4) эллиптический параболоид; 5) гиперболический
параболоид; 6) эллиптический цилиндр. 10.10. 1) Координат-
Координатные плоскости Oxz и Oyz; 2), 3) гиперболический цилиндр с
образующими, параллельными оси Oz и направляющей — данной
гиперболой на плоскости Оху; 4) гиперболический параболоид;
плоскости симметрии х = ±j/. 10.11. Цилиндр радиуса 1/2 с
осью х = —1/2, z = 0. 10.12. 1) Параболоид вращения вокруг
отрицательной части оси Оу, вершина С @, 1/2, 0); 2) конус с
вершиной в начале координат, ось вращения — прямая х — у, z = 0.
10.13. Однополостный гиперболоид. Центр — начало координат.
Ось вращения х = 0, у + z = 0. Плоскость горловой окружности
у = z; ее уравнение х2 + 2yz — 1 = 0, у = z; радиус 1. 10.14. 1) @,0,
0) и B, 2, 8); 2) точек пересечения нет; 3) C, 1, 10). 10.16. Вне.
10.17. Ниже. 10.26. |[г - г0, а]| = Я|а|. 10.27. |г - го| = Я.
10.28. |(r-ro,a)l = |r-r0||a||cosa|. 10.29. |г- г^ + |г - г2| = 2а.
10.30. 1) х2 + у2 - z4 = 0; 2) х = у2 + z2. 10.31. 1) Двуплост-
Двуплостный гиперболоид х2 — у2 — z2 = 2; 2) однополостный гиперболоид
х2 - у2 + z2 - 2. 10.32. Тор {х2 + у2 + z2 + ЗJ = 16(х2 + z2).
10.33. х2(у2 + z2) = 1 и у2{х2 + z2) = 1. 10.34. 1) х = t cos 9,
y = tsin9,z = f(t) (*JsO, 0^ 9 < 2тг);2) х = ip(t)cos9, у = ip(t)sin9,
z = x{t) @ ^ 9 < 2тг). 10.37. x2 + y2 + z2 - xy - xz - yz + 3x - 3z = 0.
10.38. x2 + y2 + z2 - xy - xz ~ yz + 3x - 3z + 2 = 0. 10.39. zy +
+ xz + yz = 0. 10.40. Однополостный гиперболоид х2 + у2 - 2z2 +
+ 4z — 4 = 0. Указание: см. задачу 10.34, 2). 10.41. Конус
х2 + у2 — (z — IJ = 0. Указание: прямая пересекает ось Oz.
10.42. Конус xy + xz + yz = 0. Указание: см. задачу 10.28.
10.43. xj/ + xz + J/z-2x-2j/-2z + 3 = 0. 10.44. x-u + 2cosv,y =
= и + 2 sin d, z = 4 + u — 2 cos v — 2 sin и. Указание: см. зада-
задачу 10.35. 10.45. Цилиндр Bх - у - zJ + Bу - х - zJ = 9.
10.49. Окружность х = 2cost, у = 2sinf, z = 2. 10.52. Эллипс
х2 + 2у2 + 2х + Ау - 2 = 0. 10.54. х - -1+ 2cost, у = -1 + 2sint,
z = 3 — 2 cos < — 2 sin ?. Указание: исключив z из данных
уравнений, получим уравнение проекции эллипса на плоскость
Оху — уравнение окружности (х + IJ + (у + IJ = 4. За параметр
394 Ответы и указания
принимаем угловой параметр окружности. 10.55. По гиперболе.
Указание: найти уравнение проекции линии пересечения на
плоскость Оху. 10.56. Центр С A0/3, -14/3, 5/3), радиус R = 3.
10.57. х = и(-1 + 2cost;), у — и(-1 + 2sini;), z - и{3 - 2cosv -
— 2sint>). Указание: использовать задачу 10.54 10.58. х2 + у2 — 2.
10.59. х2+у2 = А. 10.60. х2+ у2+2х + 2у-2-0. Осьх = г/ = -1,
R = 2. У к а з а н и е: см. задачу 10.54. 10.61. (х - z + 2J + (у -
-z + 2J = 4. 10.62. ху + yz + xz = 0. 10.63. Зх2 + 4г/2 + 5г2 = 36.
10.65. 1) B, 1, 1);2) D, 2, 1). 10.66. D, 2, -2). 10.67. ^ +
V2
+ 390 =1; E> 7' 2°); x = b + t> У = 7 + г> г = 20 + 2<; х = 5 - 3i,
у = 7 + t, z = 20 + ? 10.68. Диаметр х = 6?, г/ = 3i, z = 2t
f |t| г$ ^2/Зз). 10.69. Диаметр х = 3t, у = 3t, z = -t. 10.70. Диа-
Диаметр x = у = -1, z Js 1. 10.71. Зх + 4j/ + 4z - 21 = 0.
10.72. x2 - z2 = 0 (|x| ^ 3/\/2); У2 + 2z2 = 9; 2x2 + y2 = 9.
Сечение представляет собой пару окружностей, лежащих в плос-
плоскостях х = ±г. 10.73. х2 + у2 = 2; у2 + Зг2 = 2; Зг2 - х2 = О
(|х| ^ \/2). Сечение представляет собой пару эллипсов, лежащих в
плоскостях х = ±V3 z. 10.74. х±г/±\/2 = 0; z± x\/2 + 1 = 0;
z ± J/n/2 — 1=0. Сечение состоит из четырех прямых: х = t,
y = ±(t + \/2), z = -1 - t-Д и х = t, г/ = ±(t - -Л), z = -1 + *\/2.
10.75. 2х2 + z2 = 3; 2у2 - z2 = 5, |у| ^ 2 (|z| ^ V3) (две дуги
гиперболы); х2 + у2 = 4, \у\ > \/б72 (|х| ^ \/3/2) (две дуги окруж-
окружности). 10.76. Точки пересечения: Мг (\/2, 0, -2), М2 (—\/2,
О, -2); радиусы R = 2. 10.79. а(х - у) = /3, /3(х + г/) = а
(Q2+/32^0) 10.80. a(z-y) =/3x, 0{z + y) = ах(а2 +/З2 ^ 0).
10.81. х = t, у = 2t - 4, z = ? - 1; х - t, у = 4 - 2t, z = t - 1.
10.82. Зх + г/-2г-2 = 0. 10.83. x - 2j/ - 3z - 6 = 0. 10.84. Плос-
Плоскость x + у + z = 0; прямые х = < — 2, у = t, z = 2 — 2t и x = f,
у = -t, z = 0. Угол тг/2. 10.85. 1) тг/2; 2) тг/3; 3) arccos — -.
it ~j~ -L
10.86. 1) Окружность x2 + у2 = 1, z = 0; 2) пара прямых у ± х = О,
2 = 0; 3) гипербола 4х2 - 16г/2 + 3 = 0, z = -3/8.
Указание к задачам 11.1-11.11: при вычислениях и
доказательствах использовать таблицу, приведенную в начале §11.
11.1. 1) Эллипсоиды, гиперболоиды, параболоиды; 2) конусы и
цилиндры; 3) пары не совпавших плоскостей; 4) пары совпавших
плоскостей; 5) эллипсоиды, гиперболоиды, конусы; 6) параболо-
параболоиды, цилиндры (кроме параболического), пары пересекающихся
плоскостей; 7) параболические цилиндры, пары плоскостей (кроме
пересекающихся). 11.2. R - 4 > ?. 11.3. 1) R = г + 2; 2) R ^ 2;
3) R = Е > 1. 11.4. 1) «Мнимые эллипсоиды», «мнимые эллип-
эллиптические цилиндры», «пары мнимых параллельных плоскостей»,
Ответы и указания 395
Я = ? > г; 2) «мнимые конусы» (точки), «пары мнимых пересе-
пересекающихся плоскостей» (прямые), Я = ? = г > 1. 11.5. Я ^ 3,
Я-?^2. 11.6. 1) Я = 4, ? = 0; 2) Я = 3, ? = 1. 11.8. 1) А,
ЪТА + а, ЬТЛЬ + 2ab + к; 2) STAS, (ЪТА + аM, ЬТАЬ + 2ab + jfc.
11.9. 1) Параболоиды и параболические цилиндры, Я = г + 2; 2) ко-
конусы и пары плоскостей (кроме параллельных), Я = г. 11.10. 1) Ве-
Вещественные эллипсоиды, гиперболоиды, конусы, цилиндры (кроме
параболического), пары плоскостей; 2) 0, 1 или бесконечно много.
11.11. 1) См. ответ к 11.9, 1); 2) эллипсоиды, гиперболоиды,
конусы, г — 3; 3) цилиндры (кроме параболического), пары плос-
плоскостей, Я ^ г + 1 $С 3. 11.13. 2) К нему добавится ас, где с —
координатный столбец центра. 11.16. 1) Матрица Л и все корни ха-
характеристического уравнения умножатся на ц; 2) det А не изменится.
11.17. 1) В =
А а
а к
т
о
;2)Т =
5 b
о 1
D
11.18. Указание:
вычислить инварианты Я, г. 11.19. 1) Гиперболический цилиндр;
2) пара параллельных плоскостей; 3) параболический цилиндр;
4) гиперболический цилиндр; 5), 6) гиперболический парабо-
параболоид; 7) пара пересекающихся плоскостей; 8) параболический
цилиндр; 9) конус; 10) параболический цилиндр; 11) однопо-
лостный гиперболоид; 12) двуполостный гиперболоид; 13) од-
нополостный гиперболоид; 14) «мнимый конус»; 15), 16) «пара
мнимых пересекающихся плоскостей»; 17) эллипсоид; 18), 19) эл-
эллиптический цилиндр; 20) «мнимый эллиптический цилиндр».
11.20. (x + y + z)(x-y + z) = Bх - г/+ 2zJ. 11.21. 1)При
к > 7/4 двуполостный гиперболоид, при А; = 7/4 конус, при к < 7/4
однополостный гиперболоид; 2) при А; < 0 двуполостный гиперболо-
гиперболоид, при А; = 0 гиперболический цилиндр, при к > 0 однополостный
гиперболоид; 3) при А; > 6 «мнимый эллипсоид», при А; = 6 «мнимый
конус», при А; < 6 эллипсоид; 4) при к > 8 эллипсоид, при А; = 8 эл-
эллиптический цилиндр, при к < 8 однополостный гиперболоид; 5) при
к ^ 3 гиперболический параболоид, при А; = 3 гиперболический ци-
цилиндр; 6) при к > 1 однополостный гиперболоид, при А; = 1 конус,
при к < 1 двуполостный гиперболоид. 11.22. В ответах к задачам
этого номера перечисляются: матрица из координатных столбцов
базисных векторов почти канонического базиса (в тех случаях,
когда имеет смысл делать замену базиса лишь в какой-нибудь из
координатных плоскостей, в ответе приведена соответствующая
матрица второго порядка), координаты начала О канонической
системы координат, почти каноническое уравнение данной поверх-
поверхности, записанное в координатах ?, г], С,, тип данной поверхности.
Для полного решения задачи, т. е. нахождения канонической
системы координат и канонического уравнения поверхности, в
некоторых случаях необходимо выполнить еще одно или несколько
несложных преобразований уравнения и системы координат.
Подробно о переходе от почти канонического уравнения к канони-
396 Ответы и указания
ческому сказано во введении к § 11. См. также решения задач 16)
и 24). 1) Л31з; 0@, 0, 0); ?2+2if + Щ2 = 1; эллипсоид; 2) Азы;
О (О, 0, 0); ?2 + 6г72 - 6С2 = 0; конус; 3) А315; О @, 0, 0); %/3?2 = С;
параболический цилиндр; 4) А316; О (О, О, 0); ?2 + Ц2 + 2\/3? = 0;
эллиптический параболоид; 5) А60; О @, 2, -1); ?2 - 4г72 + С2 = 0;
конус; 6) .Абъ 0A, —1, 0); 2г72 + ?2 = 1; эллиптический цилиндр;
7) А6\; О (-1, 0, -1); ?2 + г]2 - С2 = 1; однополостный гиперболоид;
8) А60; О @, -5, 0); ?2 + 6т?2 + С2 = 60; эллипсоид; 9) A6i; О A,
2, -4); ? - 9г]2 - ?2 = 1; двуполостный гиперболоид; 10) A6i;
О(-1, -1, -1); ?2 + 4т?2 + С2 = 4; эллипсоид; 11) А61; 0C, 3,
—7); 2?2 + 6т72 = 5С; эллиптический параболоид; 12) A6i; О @,
2, -3); 2?2 + С2 = -8tj\/2; эллиптический параболоид; 13) А63;
0B/13, -3/13, 0); л/ТЗг72 = 2?; параболический цилиндр; 14) А64;
О (-10, 0, 1); ?2 — 9г72 - С2 = -90; однополостный гиперболоид;
15) А6о; О A, —3, 0); 9?2 + 4г]2 — 36?; эллиптический параболоид;
16) Аб1; О A, —2, 0); — ?2 + 2?2 = \/2г7; гиперболический параболоид;
17) Азп; О (-26/15, -1/3, 0); 5?2 = —\/2С; параболический ци-
цилиндр; 18) А62; 0C, 4, 2); 25?2 - С2 — 15т7; гиперболический
параболоид; 19) А61; О @, 2, 0); 3?2 - 7г72 - С2 = 21; двуполостный
гиперболоид; 20) А62; О A, 0, 5); ?2 - I6772 + 9С2 = 1; однополостный
гиперболоид; 21) А61; О (-1, -1, -1); ?2 + Г72 - 9С2 = 0; конус;
22) А6о; 0A, —2, -1); 4^2 ~ г]2 = 4?; гиперболический параболоид;
23) А325! 0A, -3, 0); 2т72 = 7С; параболический цилиндр; 24) А32в;
0A, —1, 0); 14?2 + у/Ъг] = 0; параболический цилиндр. 11.23. От-
Ответы к задачам этого номера содержат:матрицу из координатных
столбцов базисных векторов почти канонической системы коор-
динат,координаты начала О канонической системы координат,
почти канонические уравнения поверхностей при заданных зна-
значениях параметра к,описание вида данных поверхностей при
всевозможных значениях параметра. См. также замечание к от-
ответам задачи 11.22. 1) A3i8; О(-2, -3, 0); 2?2 + 4ту2 + 7?2 = 28; при
к < 77 эллипсоид, при к = 77 точка О, при к > 77 пустое множество;
2) А31з; О (-2, -1, 2); ?2 + 2т72 + ЮС2 = 10; при к < 9 эллипсоид,
при /г = 9 точка О, при к > 9 пустое множество; 3) А314; О (—2, 0,
1); а) е + 6rj2 - 6С2 = 6; б) ?2 + бг,2 - 6С2 = 0; в) ?2 + бту2 - 6^ = -6;
при к < 5 однополостный гиперболоид, при к = 5 конус, при А; > 5
двуполостный гиперболоид; 4) А319; О (—2, 2, 0); ?2 + гJ + 4?2 = 4;
при к < 8 эллипсоид, при к = 8 точка О, при А; > 8 пустое множество;
5) Азю; 0A, -1, 0); а) 4?2 + 4т;2 + С2 - 4; б) ? = г] = С = 0; при
к < 8 эллипсоид, при fc = 8 точка О, при fc > 8 пустое множество;
6) А32о; 0A, -1, 2); С2 = 5; при fc < 36 пара параллельных
плоскостей х — у + 2z — 6± \/36 — fc = 0, при fc = 36 плоскость
x-j/ + 2z-6 = 0, при fc > 36 пустое множество; 7) А32о', О B, 0,
2); ?2 = —2\/2?; при всех к параболический цилиндр; 8) A32i; О (О,
0, 0); \/б?2 = —\/5т7; при всех fc параболический цилиндр; 9)
Ответы и укилшия
0A, 1, 2); а) ?2 + г}2 = 1; б) ? = г] = 0; при к < 18 прямой круговой
цилиндр, при к — 18 прямая х = у — 3 — z, при А; > 18 пустое множе-
множество; 10) А31б; О (-1, -1, 2); ?2 + rj2 = 2\/Ъ(,\ при всех fc параболоид
вращения; 11) А322; О (-2, 1, 1); а) ?2 + ЗС2 = 1; б) ? = С = 0; при
к < 9 эллиптический цилиндр, при к — 9 прямая у = z = х + 3, при
к > 9 пустое множество; 12) А322; О(-1, 5, 5); С2 + ЗС2 = -6\/3т/;
при всех к эллиптический параболоид; 13) А323; 0A0/9, 5/9, 8/9);
а) е + 9т72 - 9С2 = -9; б) ?2 + 9т?2 - 9С2 = 0; в) ?2 + 9т?2 - 9С2 - 9;
при к < —3 двуполостный гиперболоид; при к = — 3 конус; при
к > — 3 однополостный гиперболоид; 14) А324; О B, —2-\/3, 3);
а) 5?2 + V2- 5С2 = 0; б) 5?2 + г,2 - 5С2 = 5; в) 5?2 + г?2 - 5С2 = -5;
при к > —75 однополостный гиперболоид; при к — —75 конус;
при к < —75 двуполостный гиперболоид; 15) А329; О@, 1, 0);
а) е + г,2 - С2 = 1; б) е + V2 - С2 = 0; в) е + г,2 - С2 = -1; при
fc < 2 однополостный гиперболоид; при к = — 2 конус; при fc > 2 дву-
двуполостный гиперболоид; 16) А3го; 0A, -1, 2); а) ?2 + г]2 - С2 = 1;
б) С2 + Ч2 - С2 = 0; в) ?2 + ц2 - С2 = -1;при fc < -36 однополост-
однополостный гиперболоид; при fc = — 36 конус; при fc > — 36 двуполостный
гиперболоид; 17) А326; 0(8/9, -4/9, -10/9); а) 9?2 - ц2 = 0;
б) 9?2 — г]2 = 9; при fc ф 0 гиперболический цилиндр, при fc = 0 пара
пересекающихся плоскостей х + 2у — 0 и 2у + z + 2 = 0; 18) А326;
0B/9, -1/9, -16/9); г]2 - 9?2 = 6С; при всех fc гиперболиче-
гиперболический параболоид; 19) А327; О (-1/7, -1/14, 3/14); 14?2 = 5%/Зт7;
при всех fc параболический цилиндр; 20) А328! О (—8/7, 27/14,
3/14); 14?2 = 2\/Ьт)\ при всех fc параболический цилиндр; 21) А2зв;
О (-1/7, -1/14, 3/14); а) ?2 = 0, б) ^2 = 1; при fc < 1 пара парал-
параллельных плоскостей 2х + у — 3z + 1 ± \/1 — к = 0; при fc = 1 плос-
плоскость 2х + у - 3z + 1 = 0; при fc > 1 пустое множество. 22) А3гз;
О A/6, 4/3, -13/6); а) ?2 + 6т?2 - ЗС2 - 6; б) ?2 + 6г?2 - ЗС2 = 0;
в) ^2 + 6т72 — З^2 = —6; при fc < —14 однополостный гиперболо-
гиперболоид; при fc = —14 конус; при fc > —14 двуполостный гиперболоид;
23) Аз22; О (-1, -1, 1); а) ?2 + г,2 - С2 - 1; б) ?2 + г,2 - С2 - 0;
в) ?2 + г]2 — ?2 = — 1; при fc < 5 однополостный гиперболоид; при
fc = 5 конус; при fc > 5 двуполостный гиперболоид; 24) А320; О (О,
—2, 2); \/б?2 — \/бг72 = С; при всех fc гиперболический параболо-
ид; 25) А32о; О @, -2, -1); а) ?2 - г,2 - 1; б) ?2 - г?2 = 0; при
fc ф — 6 гиперболический цилиндр, при fc = — 6 пара пересекающихся
плоскостей (V3 ± \/2)з + (>Д Т \/2)у Т V2z + 2^Д ^ 3\/2 = 0.
12.2. п!. 12.3. 1) пп, п\; 2) 2"; 3) т". 12.4. 1) Нет; 2) нет.
12.6. 1) Л" — множество целых чисел, У '— множество целых неотри-
неотрицательных чисел, f(x) = х2; 2) X = У — множество целых чисел,
f(x) = 2х. 12.9. 2) Указание: пусть X и У счетны, X — хп,
У = Уп, Z = zn, f(xn) = у„ (п = 1, 2,...). Положим <p(x2k-i) = Ук,
4>{х2к) — Zfc. Тогда <р: X —* У U Z есть искомое отображение. В общем
случае пусть уп — последовательность различных точек из У такая,
398 Ответы и указания
что f(xn) = уп. Полагаем p(x2n-i) = Уп, <^(х2п) = г„ и <р(х) = /(я),
если х т^ хп. 12.11. Указание: использовать задачу 12.9.
12.14. 1) Неподвижных точек нет при а = 1 и Ь ф 0. При а = 1, Ь — 0
все точки прямой неподвижны. Если а ф 1, Ь ф 0, то неподвижная
V — 6
точка единственна: х = 6/A — а). 2) f~x(y) = • 12.15. /(х) =
{а) + с. 12.16. (/?/)(x)=acx + ad + 6, {gf)(x) = acx + bc + d;
b-a"
1 2
fg = gf при d(a - 1) = b(c - 1). 12.17. 1) Эллипс %; + V-z - 1;
or о
2) нет; З) [2тт,2тг(п + 1)), n ? Z. 12.18. 1) Левая ветвь гиперболы
x2 - у2 = 1; 2) да; 3) t = In (у + V^Tl) (» € R, x2 - у2 = l).
12.19. 1) а) Да; б) нет; 2) точка О @, 0) имеет один прообраз —
О@, 0); точка М* (х*, у*) имеет два прообраза М{х, у), где
х- ±—=Jx* + \/х*2 + у**, г/ = ±—^sgnj/*v/-x* + i/а;*2 + У*2 (бе-
V2 V2
рутся оба верхних или оба нижних знака). 12.20. 1) Нет; 2) напри-
например, полосы а <у <Ь, где 0 < 6 — a $C 2тг, и их произвольные подмно-
1 (aictg{y*/x*) при х* > 0,
жества; 3) х = -In (х* + у* ), у = < тг + a,rctg(y*/х*) при ж* < 0,
[тг/2 приж* = 0.
12.23. 5(х) = (х;х). 12.24. 1) Г. 12.25. 1) г* = г0 + k(r - г0);
2) г* - -г + 2г0; 3) г* = г + а; 4) г* = г0 + ^Т^'^а; 5) г* =
1а1
аГ
а •
Г
12.26. Неподвижна точка пересечения медиан треугольника ABC.
Преобразование ортогонально тогда и только тогда, когда треуголь-
треугольник ABC правильный. 12.27. Гомотетия с центром в точке О и
коэффициентом —1/2; точки К, L, М переходят в середины соответ-
соответствующих медиан, точка О неподвижна. 12.36. a&arctg ( - tg — I,
если 0 < цз < тг, тгаЬ/2, если ц> = тг. 12.37. 1) х* = fcx, у* = ку;
2) х* = х0 + к(х - 10), У* = г/о + fc(j/ - г/0); 3) х* = -х + 2х0, г/* = -у +
+ 2г/0; 4) х* = х + а, у* = у + /3. 12.38. 1) а) (-6, 1); б) (-3,5);
в) (-4, -2); г) (-1, 2);д) A, -18); 2) а) 4х - Зг/ + 27 = 0; б) Зх +
+ 2у + 16=0; в) х - Ъу - 6 = 0; г) х - Ъу + 28 = 0; д) 18х - Ъу - 6 = 0.
12.39. 1) а) B, -1); б) @, 0); в) A, 1); 2) а) Зх + 4» - 2 = 0;
б) 2х + Зг/ - 1 = 0; в) х + у = 0; г) 5х + 7у - 4 = 0; д) 5х + 7г/ - 2 = 0.
12.40. 1) х* = -Ах + Зг/ + 1, у* = Зх - 5г/ + 2; 2) х* = -4г/, г/* = 7х - 1;
3) х* = -^х - —у, у* = —х - -у; А) х* = --х - -, у* = --у.
Ответы и уксиипия ЗУ9
12.41. 1) Задача не имеет решений (точки А, В, С лежат на одной
прямой, точки А*, В", С* не лежат на одной прямой); 2) х* = х,
у* = 1 (линейное, но не аффинное преобразование); 3) задача
имеет бесконечно много решений: х* = рх + (р + 4)у + 2 — 2р, у* —
= qx + (q + 2)у + 1 — 2<7, где р и q — параметры, принимающие все-
всевозможные действительные значения; 4) задача не имеет решений
(точки А, В, С лежат на одной прямой, причем А — середина отрез-
отрезка ВС, точки А*, В*, С* лежат на одной прямой, но В* — середина
отрезка А*С*). 12.42. 1) @, 0); 2) неподвижная прямая у = 6х;
3) нет неподвижных точек; 4) (—3, 0); 5) неподвижная прямая
Зх + Зу — 1 = 0; 6) все точки неподвижны. 12.43. 1) х + у = 0,
у = 0; 2) х + у = 0; х - у = 0; 3) Зх + у - 13 = 0; Зх - у + 7 = 0;
4) нет решений; 5) х + у - 3 = 0, 2х - у + С = 0; 6) х + у + 1 = 0;
2 14 13 2
7) х-г,+ G = 0. 12.45. х* = -х+ -у + -, у* = -х + -у + -.
ООО 000
12.46. 1) х* = х + у - 2, у* = 2х - у + 3; 2) х* = Зх - 4г/ - 5, у* =
= 4х + Зг/ + 1. 12.47. 1) х* = ~—х+ — у - —, у* = --х- — у+ —;
ODD D О D
2) х* = (Ахх + Biy + Ci)/(Aix0 + В1Уо + d), г/* = (Л2х + В2у +
+ С2)/{А2х0 + В2у0 + С2). 12.48. 1) 34х2 - 42ху + 13j/2 = 1;
2) 16х2 - 18хг/ + 5г/2 = 1; 3) 15х2 - 19хг/ + 6у2 + 2 = 0; 4) 9х2 -
- 12хг/ + 4г/2 + ЗОх - 18г/ = 0; 5) (Зх - у - 1)B9х - 18г/ + 1) = 0;
6) Bх - у - 1)Bх - у + 1) = 2. 12.49. 1) Юх2 - 22ху + 29г/2 -
- 8х + Uy - 2 = 0; 2) 35х2 - 38ху - 9у2 - 22х + 6г/ + 7 = 0;
3) 9х2 - 12хг/ + 4г/2 + 8х - 40у = 0; 4) Bх + Ъу - 1)Gг/ - 4х + 1) = 1;
5) Eх + г/ - 3)Eх + у + 1) = 0. 12.50. 1) х* = -]-х - V3y,
y* = llx-ly-2)x* = ~x-V3y,y* = -^j-x+^y. 12.51. х* =
= >/5(а:-»),Ю* = ±>/5Dа:/5-»). 12.52. 1) х* = х + 2, у* = х + у + 1;
С С2
2) х* = х + С, у* =—х + у +—. 12.53. 1) х* = xcosy - у simp,
у* — х sin <р 4- J/ cos <p; 2) x* = x0 + (x - xo) cos ц> - (j/ - j/0) sin <p,
У* = г/о + (x - x0) sin <p + {y - yo) cos <p; 3) x* = x, j/* = 0;
4) x* = (9x + 3y- l)/10, »• = (Зх + у + 3)/10; 5) x" = -x, у* = у;
6) x* = Gs - 24j/ + 6)/25, »• = (-24x - 7» + 8)/25; 7) x* = x, y* = Xy;
8) a* = Bx - у + 2)/3, y* = (-x + 2» + 2)/3; 9) x* = (9x - 2y + 10)/5,
y* = (—2x 4- 6j/ — 5)/5. Указание: использовать задачу 12.25.
12.54. 1): 1), 2), 5), 6), 7), 8), 9); 2): 1), 2), 5), 6). 12.55. 1) Сжатие
к оси абсцисс с коэффициентом 3; 2) гомотетия относительно начала
координат с коэффициентом 2; 3) параллельный перенос на вектор
а ( — 1, 1); 4) симметрия относительно оси ординат; 5) симметрия от-
относительно точки О; 6) поворот на угол тг/2 вокруг точки О; 7) сим-
симметрия относительно прямой у = х; 8) поворот относительно точки
400
Ответы и указания
О на угол тг/4; 9) симметрия относительно прямой у — (\/2 — 1) х;
10) гомотетия относительно точки РC, —1) с коэффициентом 3;
,^ /о х» ( 1 + ^ \
11) поворот на угол тг/3 вокруг точки М I —,
V 2
12) симметрия относительно прямой х - y/by + 2 = 0; 13) симметрия
относительно точки К ( — 1, 1); 14) сжатие к прямой Зх — 4у = 0 с
коэффициентом 1/2; 15) сжатие к прямой х — у + 2 = 0 с коэффи-
коэффициентом 1/3; 16) поворот на угол 2тг/3 вокруг начала координат;
17) ортогональное проектирование на прямую у = I. Указания:
9) найти образы базисных векторов; 10)—13) перенести начало
координат в неподвижную точку. 1256 1) I 1 Л
(о,
2) (-А=,
12.56.
и (-
1) I —j=, 1 Л
\ v 2
з-1); 3) y = x + i и
12.57. l)tgv=-3/4;
v/2' HV y/2'
2) -5тг/12, -7Г/12, 77Г/12, Итг/12, .... 12.58. x + 2j/ - 6 = 0,
2x-j/ + l = 0, 2x - г/ + 7 = 0. Указание: использовать поворот
вокруг точки Р. 12.59. \Дх + г/ - 3 = 0, у- 3/4, %/Зх - г/ - 3 = 0,
\fbx + y — 6 = 0, у = 9/4. Указание: использовать поворот вокруг
Д2
точки Р. 12.60. 1) !(<*! - ci)(d2 - c2)(a!b2 - а^)-1!; 2)
где Д =
ai a1 Cl
a2 62 c2
a3 63 c3
12.61. г/ = 13,
= 0. 12.62.
а2 02 г _ аз
аз 6
:2 + г/2-20х-6г/ + 84 = 0;
2) х2 + у2 - Юх = 0; 3) х2 + у2 + 12х + 32г/ - 108 = 0. 12.63. 1) fg:
х* = -7х + Ьу - 2, у* = Зх + 4у + 1; ?//: х* = 4х + Зг/ + 1,
у* =Ьх-1у- 2; 2) /э: х* = -Ах - 6у + 4, г/* = х + 4г/ + 1; #/:
х* = 7х - Зг/ + 6, у* = 13х - 7г/ + 25. 12.64. 1) х* = Зх - 3, у* = Зг/ - 3
(гомотетия с центром А C/2, 3/2) и коэффициентом 3); 2) х* = -х,
у* — -у - - (гомотетия с центром В @, -5) и коэффициентом
1/2). 12.65. 1) х* = Зх - у - 10, у" = х - 3; 2) х* = 7х - 4г/ - 32,
у* = -5х + Ъу + 22; 3) х" = \х + |» + |т. »' = |г - |» - ^;
4)
33, у" = -|я: + |» - 19; 5)
8,
у* — —х + -у — 1; 6) обратное преобразование не существует;
Ответы и указания 4Uj.
7) x* = —Dx 4- Зу), у* = ^r(-3z 4- 4у); 8) х* = — Dх 4- Зу), у* =
•~ ^ (°"х ~ ^)> 9) х* = г~г (х cos у 4- у sin у), у* = r~x (—x sin у +
25
4- у cos у); 10) х* = r-1(xcosy 4- у sin у), у* = г (х sin у — у cosy).
2.66. 1) х* = х cos па — у sin па, у* = х sin па + у cos па; 2) х* =
(= xcos— 4- у sin—-, у = —xsm— 4- ycos—; 3) х = х 4-та/, у = у;
0 0 0 0
4) х* = Зпх, у* = (Зп - 2П) х 4- 2пу. 12.67. 1) х* = Зх 4- 4у 4- 6,
'у* = 4х - Зу - 16; 2) х* = Eх - 4у - 1)/3, у* - (-4х + 5у - 1)/3;
!3) х* = 2уДх - 2у - 2уД, у* = 2х 4- 2уДу 4- 5 - 2ч/3; 4) х* =
,= (-ЗЗх 4- 9у 4- 55)/26, у* = A8х - 51у - 30)/52. 12.68. В зада-
задачах 4), 5), 7), 9), 12), 13), Г1 = /; 1) х* = х, у* = у/3, сжатие
к оси абсцисс с коэффициентом 1/3; 2) х* — ж/2, у* = у/2, го-
гомотетия относительно начала координат с коэффициентом 1/2;
3) х* = х 4-1, у* = у — 1, параллельный перенос на вектор аA, —1);
6) х* = у, у* = —х, поворот на угол —тг/2 вокруг начала коор-
координат; 8) х* = (х 4- у)/у/2, у* = (-х 4- у)/у/2, поворот на угол
-¦к/А вокруг начала координат; 10) ж* = (ж 4- 6)/3, у* = (у - 2)/3,
гомотетия относительно точки МC, —1) с коэффициентом 1/3;
11) х* = (х 4- у/Зу + 1 - уД)/2, у* = (-ч/Зх 4- у - 1 - уД)/2, по-
поворот на угол тг/3 вокруг точки М (-A 4- у/Ъ)/2, A - %/3)/2);
14) х* = A4х - 12у)/15, у* = (-12х 4- 21у)/15, сжатие к пря-
прямой Зх - 4у = 0 с коэффициентом 2; 15) х* = 2х - у 4- 2,
у* = —х 4- 2у — 2, сжатие к прямой х — у + 2 — Ос коэффициентом
3. 12.69. 1) fg: х* = -у + 3, у* = х - 1; gf: х* = -у + 1, у* = х - 1;
2) fg = <?/: х* = JCx 4- 4у) 4- 4, у* = 1Dх - Зу) - 3; 3) /5: х* =
- i(-x 4- v^y) - 2>/3, У* = ^(>/Зх 4- у) - 2, gf: x* = 1(-х - >/Зу),
у* = -(->/Зх 4- у) + 4; 4) /5 = Э/: х* = 2 - х, у* = -у; 5) /5:
х* = х 4- 1,2, у* - у - 0,4, gf: х* = х - 1,2, у* = у 4- 0,4; 6) fg:
х* = -у - 0,2, у* = х - 0,6, з/: х* = -у 4- 0,6, у* = х 4- 0,2;
7) fg: х* = х 4- A - л/3)/2, у* = у + (уД - 3)/2, о/: х* =
г- г- 1 / ф\
= х+{уД- 3)/2, у* = у 4- A - уД)/2. 12.70. 2) - х0 - у0 ctg - ),
2 V 2)
х B/о + ^о ctg — ); 3) fg — поворот вокруг точки Р B, 1) на
/
угол тг/2; з/ — поворот вокруг точки Q A, 0) на угол тг/2.
12.71. 1) х sin у/2 - у cos у/2 = 0; 2) х0 cos (ip/2) + у0 sin (y/2) - 0,
Bх - х0) sin(y/2) - Bу - у0) cos(y/2) = 0. 12.72. 3) а (Л cos (у/2),
Asin(y/2)), где А = х0 cos (у/2) 4-Уо sin (у/2). 12.73. 1) Скользящая
402 Ответы и указания
симметрия относительно оси Ох, вектор переноса аA, 0); 2) сколь-
скользящая симметрия относительно оси у = 1, вектор переноса аA, 0);
3) симметрия относительно оси у = 1. 12.74. 1) Все преобразования
первого рода; 2) преобразование д первого рода, остальные — второ-
второго; 3) преобразование / первого рода, остальные — второго; fg —
скользящая симметрия относительно прямой х%/3 — у + 2 — 0, век-
вектор переноса (—%/3, — 3); gf — скользящая симметрия относительно
прямой хуЗ + У — 2 = 0, вектор переноса (—v3, 3); 4), 5) /, д второго
рода, fg и gf — первого; 6) все преобразования первого рода; fg —
поворот на угол тг/2 вокруг точки РA/5, —2/5); gf — поворот на
угол тг/2 вокруг точки Q(l/5, 2/5); 7) все преобразования первого
рода. 12.75. х* = —j=(x -у) + \,у* = —=(х+ у) + 1- \[2 — поворот
науголтг/4 вокруг точки МA, 1). 12.76. х* = \ + 2\/2 —(х + у),
у* — 1 + \/2 Н—-j=(y - х); вектор переноса а I —=. - 1, —=. J, ось
симметрии х + у (\/2 - 1) = \/2 + 1. 12.77. 2) fg = gf, центральная
симметрия относительно точки А A, 0); 3) fg — параллельный
перенос на вектор а F/5, —2/5), gf — параллельный перенос
на вектор —а. 12.78. 2) fg — параллельный перенос на век-
вектор I —-—, —-— I, gf — параллельный перенос на вектор
12.80. 1) Произведение симметрии отно-
относительно двух осей, угол между которыми равен у/2, проходящих
через точку М; 2) произведение симметрии относительно двух пря-
прямых, расстояние между которыми равно |а|/2, перпендикулярных
вектору а; 3) Указание:/ = hg, где д — осевая симметрия, h —
параллельный перенос (см. задачу 12.72, 3)), h разлагаем согласно
12.80, 2). Оси симметрии могут быть выбраны не единственным об-
образом. См. также задачу 12.77, 1). 12.81. 1) A, 0), @, 1); 2) A, 0),
@, 1); 3), 4) любая пара ненулевых взаимно ортогональных векто-
ров; 5) B, 1 + у/Щ,B,1-тД);в) A,0), @, 1); 7) A, 1), (-1, 1);
8) A, 2), (-2, 1); 9) A, 3), (-3, 1); 10) A, Уз), (->/3, 1).
12.82. 1) д — тождественное преобразование, hi — сжатие к оси
абцисс с коэффициентом 3, Лг — сжатие к оси ординат с коэффици-
коэффициентом 4; 2) д — симметрия относительно оси абцисс, /ii — сжатие
к оси абцисс с коэффициентом 3, Лг — сжатие к оси ординат с
коэффициентом 4; 3) д — симметрия относительно оси ординат, h\
и /12 — сжатия к двум произвольным взаимно перпендикулярным
прямым с коэффициентом 3; 4) д — поворот на угол тг/4 вокруг
Ответы и ук<мапия
начала координат, hi и Лг сжатия к двум произвольным взаим-
взаимно перпендикулярным прямым с коэффициентом v2; 5) д — пово-
поворот на угол — arccos B/\/5) вокруг начала координат, hi — сжатие
к прямой A - \/Ъ) х + 1у — 0 с коэффициентом (\/5 4- 1) /2, h2 —
сжатие к прямой (l 4- s/b) х + 2у = 0 с коэффициентом (\/5 — 1) /2;
6) д — поворот на угол —тг/2 вокруг точки М(—2/13, 8/13), h\ —
сжатие к прямой у = 8/13 с коэффициентом 3; h2 — сжатие к прямой
х = —2/13 с коэффициентом 4; 7) д — поворот на угол — arccos C/5)
вокруг начала координат, h\ — сжатие к прямой х + Ту — 0 с коэф-
коэффициентом 15, h2 — сжатие к прямой 7х — у = 0 с коэффициентом 5;
8) д — <7i<?2) где д2 — поворот на угол —arccos C/\/l6) вокруг на-
начала координат, gi — симметрия относительно прямой у = х; hi
— сжатие к црямой у = х с коэффициентом 3\/Т0, h2 — сжатие к
прямой у = — х с коэффициентом 2\/10; 9) д — поворот на угол
-Зтг/4 вокруг начала координат, hi — сжатие к прямой 2х + у = 0 с
коэффициентом 5\/2, h2 сжатие к прямой х — 2у + 5 = 0с коэффи-
коэффициентом 10\/2; 10) д — поворот вокруг точки М ( — 1/9, — 2/%/3) на
угол — 7г/3, hi — сжатие к прямой у = — 2/у/Ъ с коэффициентом 6,
/i2 — сжатие к прямой х = —1/9 с коэффициентом 2. 12.83. h
— гомотетия относительно начала координат с коэффициентом к;
1) к = 5, д — поворот вокруг начала координат на угол arcsin C/5);
2) к — 5, д — симметрия относительно прямой х = Зу; 3) к = г, д —
поворот вокруг начала координат на угол <р; 4) к = г, д — симметрия
относительно прямой xsin(^/2) = ycos(<p/2). 12.85. Всюду а —
произвольное ненулевое число: 1) А] = 7, а B, -1); Л2 = 5, а @, 1);
2) А, =1, аA, -1); А2 = 4, аA, 2); 3) Ai = 3, а B, 1); А2 = -3,
а A, 2); все ненулевые векторы — собственные, А = 2; 6) А] = 1,
а (—1, 1); А2 = 0, а A, 1); 7) собственных векторов нет; 8) А = 3,
аA, 2). 12.89. 1) Произведение поворота на угол <р вокруг на-
начала координат и гомотетии с центром @, 0) и коэффициентом г;
2) произведение поворота на угол <р, гомотетии с коэффициентом г,
если а = r(cos <р + г sin ip), и параллельного переноса на вектор,
изображаемый радиус-вектором точки Ь, или произведение парал-
параллельного переноса на вектор, изображаемый радиус-вектором точ-
точки Ьа, гомотетии с коэффициентом г и поворота на угол ip.
13.1. 1) Да; 2) нет; 3) да; 4) нет; 5) да; 6) нет; 7) да; 8) да; 9) нет;
10) да; 11) да; 12) да. 13.2. 1) Нет; 2) нет; 3) да; 4) да; 5) нет; 6) да;
7) да; 8) да; 9) да. 13.3. 1) Да; 2) нет; 3) да; 4) да; 5) да; 6) нет; 7) да;
8) да; 9) да. 13.4. 1) Нет; 2) да; 3) нет; 4) нет; 5) да; 6) да; 7) нет;
8) да. 13.7. 6 элементов. 13.9. Обе группы содержатся в группе са-
самосовмещений квадрата: циклическая группа вращений квадрата и
нециклическая группа, состоящая из симметрии относительно сред-
средних линий квадрата, поворота на 180° и тождественного преобразо-
преобразования. 13.10. 1) ±1;2) ±п; 3) cosB?rfc/n) + isinB7rfc/n), где к<пи
404 Ответы и указания
взаимно просто с п; А) повороты на углы Bтг/с/п), где к < п и взаим-
взаимно просто с п. 13.11. 1) nZ, где п — любое целое число; 2) mZ, где
т — целое число, кратное п; 3) Um, где т — делитель п; 4) Ст, где
т — делитель п. 13.13. 1) Указание: пусть а — образующий
элемент в G, Н — подгруппа в G и т — наименьшее натуральное
число такое, что b = ат ? Н. Тогда Ь — образующий элемент в Н.
13.15. Указание: найти элемент, обратный к а, среди положи-
положительных степеней а. 13.16. 1) Dn состоит из 2п преобразований: п
поворотов и п осевых симметрии. 2) Указание: показать, что ес-
если а — поворот, a b — осевая симметрия, то b~*ab — также поворот.
13.18. 1) Указание: воспользоваться тем, что число элементов
циклической подгруппы с образующим элементом а равно порядку
этого элемента. 13.19. Пусть а — поворот треугольника на 2тг/3
вокруг его центра, b — симметрия относительно одной из высот. То-
Тогда G = {г, а, а2 — а, Ь, аЬ, а~1Ь}, Н — {г, Ь}, b~lab — а. Левые
смежные классы по Н: Н, аН = {a,ab}, а~1Н = {а~1,а^1Ь}. Правые
смежные классы но Н: Н, На = {а,Ьа — а~1Ь}, На~1 — {a~l,ab}.
13.20. Указание: пусть а — параллельный перенос, a b — орто-
ортогональное преобразование с единственной неподвижной точкой. До-
Доказать, что Ь~хаЬ — параллельный перенос. 13.22. 1) R; 2) группа
комплексных чисел, по модулю равных 1; 3) группа положительных
вещественных чисел; 4) группа комплексных чисел, по модулю рав-
равных 1; 5) группа Zn классов вычетов {т + nZ}, m G Z с операцией
сложения: (т + nZ) + (к + nZ) = (т + к + nZ); 6) группа всех пово-
поворотов вокруг фиксированной точки. 13.23. 1) п\. 13.24. 1) г;
%У, 3) г; 4) A 4 3 2) и (з 2 1 \\ 1325' п!/2'
13.27. 1) {г}, три подгруппы второго порядка с образующими эле-
1 2 3 Л / 1 2 3 Л /123\
1 3 2 ]' 3 2 1 )' подгруппа третьего по-
/ 1 2 3 "\
рядка с образующим элементом L „ . I, вся группа S3; 2) поми-
ментами i o i q
J
мо {г} и всей группы S4, подгруппа четных перестановок А$ (поряд-
(порядка 12) и нециклическая группа V, состоящая из четырех элементов:
1234\ /1234\ /1234
14.3. 1) 10, четная; 2) 13, нечетная; 3) 3, нечетная; 4) 7, нечет-
нечетная; 5) 36, четная; 6) 12, четная; 7), 8) п(п — 1)/2, четная при п — Ак
или п = Ак + 1 и нечетная в остальных случаях; 9) п(п + 1)/2, чет-
четная при п — Ак или п = Ак + 3 и нечетная в остальных случаях.
14.4. 1) 0; 2) 1; 3) 0; 4) 0; 5) 1; 6) -1487 600. 14.5. е. 14.6. г.
14.7. 1) -1; 2) -2; 3) -27; 4) -27; 5) -7; 6) 0; 7) -1; 8) 4;
9) 0; 10) -2(х3 + у3); 11) (а - с)(Ъ - с)(Ь - а); 12) 0. 14.8. -Згч/З.
14.9. r2cos^. 14.10. 1) 3, 3, 2; 2) 3, 3,-2; 3) 0, 0, 6. 14.11. 1J4;
2) 120. 14.13. 1, 0 или -1. 14.21. 1) 1; 2) 1; 3) 1; 4) 0; 5) -1;
Ответы и указания 405
6) 1; 7) -18; 8) 1; 9) 1; 10) -5; 11) -7; 12) -1; 13) 0; 14) 0;
15) 1. 14.22. 1) -2; 2) -10; 3) 0; 4) 48; 5) 0. 14.23. 1) n!;
9\ \ \ • Q"> 1 ¦ A\ 4n- ^\ 1 • R\ I 1 \t»(ti—1)/2 \ \ . T\ ( -\\n+l.
A) \\ . . . An, 6) I, 4J J , 0) I, O) ( — i.) " Ai . . . An, I) ( — !¦) ,
8) (-l)n+1; 9) 1 - n; 10) n!; 11) (-l)n(l - 2n); 12) (-2)"-1En - 2);
13) (-I)"; 14) (-2)"-2(l - n); 15) (-l)^»-1)/2^-1^ + l)/2;
16) n + 1; 17) 0, если п нечетно, (-l)n/2[(n - l)!!]2, если п четно;
18) (—3fc). 14.24. В этой задаче через Ап обозначается опреде-
определитель порядка п. 1) [1 - (-1)п]/2. Указание: An = l- An_i.
2) (-l)n[An - А"-1^ + 1)/2]. 3) п! B+^ +-+... + -).
\ 2 3 п)
Указание: An = nAn_i + (n - 1)!. 4) [1 + (-1)п]/2.
Указание: Д„ = 1 — Д„_1. 5) 0, если п нечетно, и (—1)п/2,
если четно. Указание: Д„ = -Д„-2- 6) [1 + (-1)п]/2
Указание: А„ = Дп-2- 7) Д (Aj — A/t). Указание:
обозначим р(А)=
1 ... 1 1
Aj ... An_i A
. Так как p(Aj) = 0 для всех
\п-1 Х™-1 \n-l
i = 1,..., n, находим p(A) = C(A - Ai)... (A - An_i), где С = А„_г.
8) П (а» ~ ak)(bi — bk)- Указание: выполнив деление, пред-
ставить определитель как произведение двух определителей Вандер-
монда. 9) [2xix2 ... х„ - (xi - 1)(х2 - 1)... (х„ - 1)] [] (ж« - хк)-
Указание: дополнить матрицу сверху строкой из нулей, а затем
слева- столбцом из единиц. 10) ? С™*1 ап~2к(а2 - 1)к; 11) ^?-
fc=o sin <р
при у ^ fc?r; п + 1 при у = 2fc?r; (—l)n(n + 1) при <р = Bк + 1)тт (к =
— 0, ±1, ±2,...) Указание: решение аналогично решению 10) при
q = cosy + г sin у. Если q ф ±1, то Д„_1 вычисляем, используя фор-
sh по?
мулу (eI?>)n = emv = cosn<p +isinntp. 12) при у> ^ 0; n+ 1 при
shy
y = 0. 13) [Е C2^(f)(a2-4b2)fc= ft
k=o \*) k=\
14.26. 0. 14.27. Умножится на (-l)"^-1)/2. 14.28. He изменится.
Указание: использовать задачу 14.27. 14.29. Указание:
умножить первый столбец матрицы на 1000, второй — на
100, третий — на 10, и сумму полученных столбцов приба-
прибавить к последнему столбцу. 14.30. Указание: данное
выражение есть разложение по г'-й строке определителя мат-
матрицы, полученной из А повторением к-й строки на г-м месте.
406
Ответы и указания
14.31.
... 4-
2)
an(t) ... aln(t)
a2i(t) ... a2n(t)
a'n(t) ... a[n(t)
a2i (t) ... a2n (t)
anl (t) ... ann (t)
+ ...
all {t) • ¦ ¦ a\n @
a2i (t) ... a2n (t)
-Указание: применить индукцию по
порядку матрицы. 14.32. Если обозначить det (A - ХЕ) = (—А)" +
+ а\{ — А)™ + • • ¦ + an-i(—А) 4- ап, то as есть сумма всех диагональ-
диагональных миноров порядка s в матрице А; в частности, aj есть след А, ап —
определитель А. Указание: если обозначить р (t) = det(A 4- tE),
dkp (t)
. При вычислении производных от функ-
то an_fc = -
dtk
t=o
ции p(i) использовать результат задачи 14.31. 14.33. 1), 2), вообще
говоря, неверны, 3), 4) — верны. 14.34. Указание: соглас-
согласно задаче 14.30 и формуле разложения определителя по строке:
АСТ — diag (det A, ..., det A), откуда получаем det С при det А ф 0.
Матрица В получается из С умножением г'-й строки на (—1)* и j'-ro
столбца на ( —1)^ (для всех г, j). 14.35. Указание: исполь-
использовать формулу det A = det A. 14.41. (—2)" а2. Указание: из
(тг + k)-ro столбца матрицы На вычесть удвоенный k-й столбец
(fc = 1, ..., тг) и применить результат задачи 14.40. 14.42. 0.
Указание: строки матрицы || А3 А4 || являются линейными
комбинациями строк || А А2 || (с коэффициентами из строк мат-
матрицы А2). 14.43. 1) Указание: строки матрицы || ВС В ||а
являются линейными комбинациями строк || С Е ||а. Поэтому
det
А В
С Е
= det
?
Далее применить результат
А-ВС О
С Е
задачи 14.40. 2) Не всегда. 14.44. det A • (detB)n. 15.1. Матрицы
4
15.2. 1) О; 2)
должны иметь одинаковые размеры.
-11
-16
3)
-3 -8 21 -29
3 -8 -19 19
; 4) 5?; 5) 2А22; 6) А572; 7) с57. 15.3. 1),
2), 4) справедливы, если матрицы имеют одинаковые размеры; 3),
5) верны всегда. 15.4. 1) Если тп ~ п; 2) да. 15.5. 1) || -1 ||;
8 -12 0
2)
8 14
8 14
; 4) || 1 1 ||; 5) || 0 3 2 ||; 6) с172; 7) А115;
6-9 0
2 3 0
8) || 6 9 12 ||; 9) с173; 10) Е; 11) А606; 12) А607; 13) А246; 14) Е-
15) A6i8; 16) пА61б- 15.6. 1) Ширина А равна высоте В; 2) вы-
высота А равне ширине В; 3) ширина А равна высоте В, высота А
Ответы и указания
407
равна ширине В. 15.7. Ширина АВ равна ширине В, высота АВ
равна высоте А. 15.8. В имеет размеры п х р, ABC имеет
размеры т х q. 15.9. Тождества справедливы, если выполнимы
употребляемые в них операции. 15.10. 1) Не существует; 2)
3) || 8 16 ||; 4) || -1200 1300 ||. 15.11. 1) 2
п-1
1 1
1 1
16
1 1 1
0 0 0
0 0 0
3)
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
4) О при п > 1; 5) А43; 6) А14; 7) А67; 8) А603;
9) Е; 10) О. 15.12. 1)
7
-4
2)
Л„
0
; з)
1
2
3
4) || 1 2 3 4 ||; 5) А9; 6) А142; 7) А546; 8) -А632. 15.13. Тож-
Тождества 2)-4) справедливы, если выполнимы употребляемые в них
операции; 1) справедливо всегда. 15.14. Р получается из Е
перестановкой г-й и к-й строк. 15.17. А, В — квадратные
матрицы одного порядка. 15.18. 1) 2А$; 2) О. 15.20. 1) As;
2) -Af6. 15.22. 1) Е- 2) О; 3) О; 4) -Е; 5) А247. 15.23. 1) О;
2) А248- 15.24. Тождества 1)-3) справедливы, если матрицы А
и В перестановочны, 4) всегда. 15.26. к-я строка АВ равна
произведению к-й строки А на матрицу В. 15.28. к-я строка
матрицы АВ равна линейной комбинации строк матрицы В с
коэффициентами из к-й строки А. 15.29. Указание: зада-
задача 15.26. 15.30. 1) При перестановке двух столбцов матрицы В
соответствующие столбцы АВ также переставляются; 2) если к-й
столбец матрицы В умножить на число А, то k-й столбец АВ также
умножится на А; 3) если к г-му столбцу В прибавить j-й столбец, то
с матрицей АВ произойдет такое же элементарное преобразование.
15.31. 2) Указание: для столбца из двух элементов преобразова-
преобразоваa
b
a + b
b
a + b
b-{a + b)
b
—a
b
a
ния следующие:
15.32. ац,, если А = || ац. ||. 15.33. 1) Матрица у которой
все строки нулевые, кроме г-й, на месте которой располагает-
располагается j-я строка А; 2) матрица, у которой все столбцы нулевые,
кроме j-ro, на месте которого располагается г-й столбец А.
15.34. Указание: в качестве ?, ц взять всевозможные столбцы
единичной матрицы. 15.36. 1) Умножить А справа на столбец
|| 1 0 0 ... О ||Т; 2) умножить А слева на строку || 1 0 ... О ||.
15.37, 15.38. Матрица К получается из Е таким же элементарным
а Ь
преобразованием. 15.40. Указание: если А =
ta tb
то
408
Ответы и указания
Am — (a + tb)m lA. 15.43. Утверждение 1) для прямоуголь-
прямоугольных матриц, вообще говоря, не верно. Пример: А393 • Ai28 = Е,
+ ... + а1пхп = О,
(а, Ь — произвольные числа). 15.44.
или, в матричной форме, АХ = е,-, где
1 1 1
15.45. 1]
4) А24; 5) .
15.47. 1)
9 -5
-5 3
2)
+ а.ппхп = О,
— j-тл столбец Е.
О АГ
12 2
2 3 4
1
3)
о
7; 6) А25; 7) А245; 8) -А203; 9) -А202; 10) А229.
-1/2 0
0
; 2)
0 1
1 0
9
3)
5)
9)
1/3 0 0
0 10
0 0 1
1 -1
0 1
6)
; ю)
вообще говоря, неверно.
1 0
ных ответов. 1)
1 0 0
0 10
-2 0 1
1 -га
0 1
15.51.
1 1
0 1
1 0
-3 1
1 0 0
0-10
О 0 1
4)
8)
1 2 О
0 10
0 0 1
1 О О
0 0 1
0 10
0 -2
11) А2оо- 15.48. Утверждение 6),
Приведен один из возмож-
3)
-2 О
О 1
1 О
3 1
0 1
1 О
2)
1
0
0
0
1
1
1
0
0
0
1
-1
1
2 О
О 1
1 О О
1 1 О
О 0 1
1 О
1 1
1 О О
О 1 2
О 0 1
15.52.
?~ А"; ?~ А-1Б;2) Е~ А~1;?~?А~1. 15.53. ^Со-
^Совершаем со строками матрицы || А Е ||D (т.е. со строками А и Е)
элементарные преобразования, переводящие А в Е. После пре-
преобразований на месте матрицы А окажется В, а на месте Е —
матрица А~:. 2) Со столбцами матрицы
Е
a
совершаем эле-
ментарные преобразования, переводящие А в Е. В результате
на месте Е окажется матрица А . 15.54. 1)
0
0
_ j
0
0
0
0
1
1
0
0
0
0
-1
0
0
' 6>
1 -1 0
0 1 -1
2-3 10
-2020
6 3-3 0
0 0 0 2
6) А450; 7) -А456; 8) А440; 9) А602; 10)
0 0 0
4) -А430; 5) -А432;
; 11) А617; 12) А619;
Ответы и указания
409
13) А637. 15.55. А = -(А + Е). 15.62. 1) Совершаем со
строками матрицы || А В ||п элементарные преобразования, пе-
переводящие матрицу А в Е. После этих преобразований на месте
матрицы А окажется Е, а на месте В — матрица А~*В. 2) Совер-
Совершаем со столбцами матрицы
элементарные преобразования,
I
Переводящие В в В. В результате на месте А окажется матри-
матрица АВ-1. 15.63. 1) А66; 2), 3) -А205; 4) 7А208; 5) А437; 6) А617.
1; 5) А~1В - С.
21 -14 -10
-10 7 5
-4 3 2
15.64. 1) О; 2) А~1В; 3) ВА~1; 4)
, 15.65. 1)
2 1 1
3 0 1
1 -2
0 1
5 -8
2 -3
; з)
-7
24
; 6) решений нет. В ответах к задачам 7)—11) числа а,
6, с произвольны: 7)
а 6
0 а
а 6
1 -а -1 -6
а 1 — а
6 1-6
10)
а 6
-а 6
а Ь с
1-а 2-6 4-с
; 12) А127; 13) -с92; 14) А392;
15) решений нет; 16) А244- 15.70. Указание: положить
В — Ekk, вычислить АВ и В А и применить результат задачи 15.67.
15.71. Указание: использовать задачу 15.70. 15.72. См. за-
задачу 15.71. 15.73. Скалярные матрицы. 15.74. 1) — А82; 2) А$в;
3) Авз; 4) А84- 15.76. 1) Косоэрмитова; 2), 9) симметричны; 3), 4) эр-
эрмитовы; 5), 10), 11) ортогональные; 6) диагональная; 7) треугольная;
8) кососимметричная; 9) унитарная; 10) матрица перестановки.
15.79. 1)
а 6 + ic
6 — ic d
га 6 + ic
—6 + ic id
(а, 6, с, d — произ-
вольные вещественные числа); 3)
1 0
0 1
0 1
1 0
15.87. Обрат-
Обратная матрица транспонирована к данной.
15.88. Обратная
1
матрица эрмитово сопряжена к данной: 1) Аюз; 2) —— А489.
15.89. Пусть А = || аи ||, В = || Ьц ||, С = АВ = \\ сц ||. Тогда
на главной диагонали С: сц — ацЬц; на побочной диагонали:
Ci,j+i = а.цЬг^+1 + fl«,i+ibt+i,t+i) на m-й побочной диагонали:
Ci,i+m = aubi,i+m + aj,i+i6j+I|i+m + ... + ai,i+mbi+m:i+m- Ниже глав-
ной диагонали — нули. 15.92. АВ = —ВА. 15.94. Разложение
единственно: А = -(А + Ат) + -(А - Ат). 15.95. 1) А59 + А20;
2) Е + А20; 3) А242 + А25з- 15.100. Разложение единственно:
А— -(А + Ат) -\—(А — Ат). 15.104. Эти свойства обеспечивают
ортогональность матрицы. 15.107. Указание: проверить
410
Ответы и указания
свойства ортогональных матриц, сформулированные %, зада-
задаче 15.104. 15.108. Указание: умножение на матрицу
перестановки слева равносильно перестановке строк умножае-
умножаемой матрицы. 15.109. Диагональные элементы равны или 1,
или -1. 15.110. Для всех i: |А<| = 1. 15.111. 1), 2), 3), 6),
13) стохастичны; 4), 7), 8), 9), 12), 14) нилыютентны с показателями
нильпотентности, соответственно равными 2, 3, 2, 2, 3, п; 1), 6),
10), 11) периодичны с периодами, соответственно равными 2, 2,
4, 4; 5) периодична при а — 2-np/q, ее период равен q при р ф 0
(р — целое, q — натуральное число, дробь несократима) и пе-
период 1 при а = 0. 15.113. Указание: использовать задачи
15.112, 15.40. 15.115. Указание: если Ак = О, В1 = О, то
(АВ)Ы = О и (А + B)k+l = О. 15.116. АВ имеет период к = 1т,
где I, m — периоды А, В. 15.117. Указание: умножить обе
части равенства на Е — А. 15.123. Указание: использовать
результаты задач 15.121, 15.122. 15.124. Не всегда. Примеры: Aj4
1
не обратима, I — Агв I не стохастична, но матрицы перестановок
V4 /
стохастичны вместе со своими обратными. 15.125. Если матрица
п
является матрицей перестановки. 15.127. ? а™, если А — || ац ||
1
(i,j = l, ..., п). Указание: задача 15.89. 15.128. 1) J2alk'>
2) ЕЫ2> если А = || aik ||. 15.131. Если А = || Ац ||, В = || Вц \\,
(г = 1, 2), то для существования АВ, помимо условий, выте-
вытекающих из определения блочной матрицы, требуется, чтобы
ширина Ац равнялась высоте Вц, ширина А]2 равнялась вы-
высоте В2\. 15.132.
15.133. 1)ЕслиА= 'Г" 'л™ ,В= р1 , то, помимо условий,
А21 А22 х?2
вытекающих из определения блочной матрицы, требуется, чтобы
ширина матрицы Ац равнялась высоте В\, а ширина Ai2 равнялась
м
о
А„
А21
JV
Р
а
А22
D
О
,в
F
G
=
а
в1 '
MD MF+NG
О PG
высоте В2. 3) AD?D =
АиВ1+АиВ2
п
15.134. 1)-3) Коли-
чества блоков на диагоналях матриц А, В совпадают, и совпадают
порядки диагональных блоков, имеющих одинаковые номера.
4) Для того чтобы АВ = В А, необходимы и достаточны условия 1)
и перестановочность диагональных блоков, имеющих одинаковые
номера. 15.136. 1) -А432; 2) А460; 3) Е; 4) А459; 5) A46i;
6) А545. 15.137. 1)
Е -А
О Е
А-1
о
-А~1ВС~1
с-1
Ответы и указания
41 i
15.138. 1)
-D
Е
h; 2)
-D
Е
h
а
(Е — единич-
единичная матрица порядка s, о — нулевой столбец высоты s, h —
произвольный столбец высоты s). 15.139. 1) Ai6o; 2) Ai6i; 3) А\62;
4) А163; 5) A462; 6) А463; 7) AiM. 15.140. a®b = b®a = ba.
16.3. Да, если матрица нулевая. 16.4. 1) Базисного минора
нет; 2) базисным является любой элемент матрицы; 3)-5) базисные
миноры равны соответственно
1 О
О 1
0 1
1 О
6)-7) базисным
будет, например, минор
2 3
3 4
. Ранги: 1) 0; 2) 1; 3) 2; 4) 1; 5) 2;
6) 2; 7) 2. 16.5. 1) Не существует; 2) любая строка; 3) все строки;
4) первая строка; 5) вторая и третья строки; 6) любые две строки;
7) любая пара разных строк, например 1-я и 2-я (но не 1-я и
4-я). 16.6. 1) Не существует; 2) любой столбец; 3) все столбцы;
4) второй столбец; 5) первый и второй столбцы; 6) любые два
столбца; 7) любая пара столбцов, один из которых имеет номер,
больший чем 3, например первый и четвертый столбцы (но не
первый и второй). 16.7. Базисный минор равен определителю
матрицы. Все строки, а также все столбцы матрицы базисные.
Ранг равен порядку матрицы. 16.14. rg || А В \\а ^ rg A + rg В.
16.18. 1) 1; 2) 1; 3) 1; 4) 2; 5) 2; 6) 1; 7) 1; 8) 1; 9) 1; 10) 3; 11) 2;
12) 1; 13) 3; 14) 2; 15) 2; 16) 2; 17) 2; 18) 2; 19) 3; 20) 4; 21) 3;
22) 2; 23) 3; 24) 4; 25) 4; 26) 4; 27) 3; 28), 29) п, если п четно, и
п — 1, если п нечетно. 16.19. 1) 1 при е = ±г; 2 при других е; 2) 2
при всех Л; 3) 1 при а = 1, 2 при других а; 4) 1 при и> = 1, 2 при
ш = 0иш= —2, 3 при остальных ш\ 5) 2 при Л = 3, 3 при других Л;
6) 1 при Л = 0, п — 1 при Л = — п (п + 1), п при остальных Л; 7) 2
при е = 0; к, если е — первообразный корень fc-й степени из 1
И к < п; п при остальных е. 16.20. 1) 1 при А = 4 и А = 9, 2
при остальных Л; 2) 1 при Л = 3; 2 при Л = 2, 3 при остальных
А; 3) 2 при Л = ±i, 4 при остальных Л. 16.22. 0 ^ rg A ^ 2;
оценки точные при п ^ 2. 16.23. 0 ^ rg A ^ 2(n — s); оценки
точные при п ^ 2s. 16.24. 1 ^ rg А ^ 3; оценки точные при п ^ 3.
16.25. 1) rgAB ^ min(rgA,rg?). 16.26. 1) 1, если а Ф о и b ф о;
¦ 0 в других случаях. 16.27. Оба равенства выполнены, например,
, при А = В = С = О. 16.28. Указание: упростить матрицу с
¦ помощью элементарных преобразований строк и столбцов, приняв
; за базисные — выбранные строки и столбцы. Ранг матрицы, сто-
стоящей на их пересечении, не будет меняться, а сама эта матрица
превратится в единичную. 16.29. г. Указание: в данном
случае базисный минор АВ есть произведение базисных миноров
матриц А и Б. 16.30. igA — igB — r. 16.31. 1) Указание:
строка матрицы К состоит из коэффициентов разложения строк
412
Ответы и указания
матрицы А по строкам М. 2) Всякую матрицу А можно представить
как произведение матрицы М, состоящей из базисных столбцов А,
на некоторую матрицу К: А = МК. При этом столбцы К состо-
состоят из коэффициентов разложения столбцов А по столбцам М.
3) Для любых двух скелетных разложений А — КМ = К'М'
выполнены равенства К' = КБ~г, М' = SM, где S — невыро-
невырожденная матрица порядка г — Щ А. 16.32. 1)
2)
4
3
1
О -1
0 4
1 О
2-3 0
1-4 0
0 0 1
6
2
4)
1 -3/2 0 ||; 3)
1 0
-4 0
0 1
1 0
1 0
1 -2
0 1
-1 -4
2 3-1
-1 -2 -3
0
1 -
2
4
-1
2
0
4
_^
0
3
7
—2
5
1
0
0
1
-11
7
; 5)
1
0
-4
0
0
1
5
1
2
1
4
2
6
3
1
1
1
2
1
-3
1
1
1
1
1
12 3 0
0 0 0 1
16.33. Указание: представить соответствующую упрощен-
упрощенную матрицу как сумму г матриц ранга 1. 16.34. 1)-5) верны
не всегда, примеры обеспечиваются суммами
II 0 0 1
1 0
0 0
о о
0 1
; 6) верно всегда. 16.36. Указание:
1 0 1
0 1 1 | т || 0 0 1
[редставить данную "матрицу как произведение матрицы из двух
строк на матрицу из двух столбцов. 16.38. Пример строгого
0 1
неравенства: rg
0 0
> 0. 16.40. Указание: строки матрицы
|| А В |р являются линейными комбинациями строк \\ Е В |р.
16.41. Указание: с помощью элементарных преобразований
задачу свести к задаче 16.37. 16.42. D = СА~гВ.
17.1. 1) X! = -7, х2 = 24; 2) х - -1, у = 1; 3) хг = 2, х2 - -1,
х3 = 1; 4) х = 1, у = 2, z = -1; 5) хх = 1, х2 — 3, хз = 0, х4 = 1;
6) х = 4, у = 3, z = 2, t = 1; 7) хх = -5, xi = 4, х% = 3, х4 = -2, хъ = 1;
8) х\ = 1, xi = 2, х3 = 3, Х4 = -3, хь = -2, х6 = -1. 17.2. 1) с2о;
2) с2г, 3) с9з; 4) с94; 5) с6б5 6) -с92; 7) о. 17.4. С компонен-
компонентами решений происходят те же элементарные преобразования.
Указание: использовать матричную запись системы уравнений
и выражение элементарных преобразований через умножение мат-
матриц. 17.5. Основная матрица системы приводится к единичной,
в правой части оказывается решение. 17.6. 1) С22; 2) -—--с$;
Ответы и указания
1 м*
3) с24; 4) с93; 5) с51; 6) с63; 7) -^эв; 8) -с52; 9) с174; 10) ст;
11) rci64; 12) ci95; 13) Ci75; 14) с176; 15) Ci77; 16) с248; 17) с236;
18) с249; 19) с250; 20) с251; 21) с237; 22) с236; 23) с270. 18.1. В от-
ответах через ft, h\, ft2, ... обозначены произвольные постоянные
'(параметры). 1) х = ft, у = ft; 2) Xi = hi - 2ft2, x2 = fti, ж3 — ft2;
.3) xi = -h\ - h2 - hz - /ц, x2 — hi, ж3 = h2, x4 = h3, x5 = /14;
¦; 4) x = у = h, z = — 2ft; 5) x = у = z = h; 6) x = z — h, у = —2ft;
7) ?i = fti + 10ft2, ж2 = fti + 7ft2, x3 = fti, a;4 = 2ft2; 8) Zi = 0,
,,x2 = Ж4 = ft, x3 = —ft; 9) Xi = —2hi — 3ft2, x2 = hi, X3 = ft2, X4 = 0;
10) xi = fti, x2 = ft2, x3 = ft3, x4 = fti + ft2 + ft3, a;5 = 3fti + 2ft2 + ft3;
11), 12) Xi = fti, x2 = hi + ft2, X3 — ft2, X4 = — 2fti, a;5 = —ft2.
18.3. fc = n - г, где n — число столбцов матрицы, г — ее ранг; к = 0,
.если столбцы матрицы линейно независимы. 18.4. 0. 18.5. Од-
Однородная система уравнений всегда совместна. 18.6. 1) Столбцы
матрицы системы линейно независимы. 2) Столбцы матрицы си-
системы линейно зависимы. 18.7. 1) с24; 2) Ai2o; 3) A4oi; 4) с97;
,5) ^i5o; 6) Ai51; 7) ^iS6; 8) с180; 9) A4W; 10) Ац3; 11) AYM.
18.8. В ответах указана фундаментальная матрица, а при ее
отсутствии — нулевой столбец. 1) c9s при Л = 2; vli2i при Л = 3;
о при остальных Л; 2) c9s при Л = —2; Ai22 при Л = 3; о при
остальных Л; 3) А120 при Л = 0; о при Л ф 0; 4) Ai2o при а = 1; с77
при а ф 1; 5) Cs3 при Л = 6; j4i20 при Л = 0; о при остальных Л; 6) с77
при ш — 0; Ai2o при ш = 1; с277 при ш = —2; о при остальных ш.
18.9. В ответах указаны фундаментальные матрицы данной и
сопряженной систем уравнений, а при их отсутствии — нулевые
столбцы. 1) о, сюо; 2) с8, Ат; 3) о, с52; 4) сш, сш; 5) о, о;
6) сю2, сюз; 7) сю4, АЛП; 8) о, Ai54; 9) о, А152; 10) Ci78, ci79;
11) -<4i65, Cisi; 12) с259, с252. 18.10. Да, если основная матрица
системы квадратная. 18.11. Да, если, например, матрица системы
симметрическая. 18.13. ФС, где det С ф 0. 18.14. 1) Ai25; Ai29;
Л4о4. Указание: все фундаментальные матрицы получаются
из одной с помощью элементарных преобразований столбцов.
18.15. 1) Ai2o и все матрицы, которые получаются из нее пере-
1
становками строки || -1 -1 ||; 2) Ci97 и -Ci97; 3) AJ3i; 4) А398 и
все матрицы, которые получаются из нее перестановками строки
|| —1 -1 -1 ||. 18.16. А'у = о, где А' = AS, с фундаментальной
матрицей Ф' = S^1®. 18.17. 1) хг - х2 - х3 = 0; 2) хг - х2 - х3 = 0,
5xi - Х2 + Х4 — 0; 3) х\ - х2 = 0, 2ху - х3 = 0, 2xi - х4 = 0;
4) хх - ж3 = 0, Xi - 2х2 + х4 = 0; 5) 2хх - х2 + 13х4 + х5 = 0,
Хз — 5ж4 + х^ = 0. 18.18. Системы с матрицами вида С А, где
столбцы С линейно независимы. 18.19. Системы с матрицами
вида С А, где столбцы С линейно независимы, а АТ — фундамен-
фундаментальная матрица системы Фтх = о. 19.1. В ответах через ft,
414 Ответы и указания
hi, ft2, ... обозначены произвольные постоянные (параметры).
1) х = 2 + 3ft, у = 2h; 2) з^ = 1 - hi - 2ft2 - 3ft3, x2 = fti, z3 = ft2,
a:4 = ft3; 3) x = у = ft, z = 4 - 3ft; 4) a: = fti + ft2, у = -1 - fti + fta,
Z--2 + hiy/2 + 2ft2; 5) a; = 14 + ft, у = -9 - 2ft, z = ft; 6) ari = 1 - hi,
x2 = -h2, x3 = 1 + fti + 2ft2, xA = -1 + 2ftj + 3ft2; 7) ц = -2 - ft,
a;2 = ft, a:3 = 2 + ft, x\ = 1; 8) Xi = — 1 - 5ft, ?2 = 6ft, a:3 = -1 - 5ft,
a:4 = 1 + 7ft; 9) яг = 6 - fti - ft2 - ft3, x2 = 8 - fti - ft2 - ft3,
z3 = ftb ar4 = ft2, x5 - ft3; 10) xi = 2 + 4ftx - llft2 - 14ft3,
а?2 = 1 - 22fti + 32ft2 + 23ft3, ar3 = -1 + 3fti, ar4 = -1 + 15ft2,
a;5 = -l + 15ft3. 19.3. He более чем на 1. 19.4. Xi = 0, a;2 = 0, ...,
xn — 0,0 = 1. 19.5. Ранги основной и расширенной матриц равны п.
19.6. В ответах указаны частное решение и фундаментальная
матрица, а если решение единственно — решение. 1) Сю5, Cioii
2) сюб, си»; 3) решений нет; 4) с8э, сюэ; 5) -c6s, ci42; 6) с77, Ai23;
7) решений нет; 8) -с51, сют, 9) -3ci4i, сюв; Ю) с9о; 11) -сю7) сю4;
12) сцо; 13) с9б, ст; 14) -Ci78, A154; 15) Ci93, Ai44; 16) Ci82, A155;
17) ci83, Ащ7; 18) ci85, A158; 19) c183, Л157; 20) ci84, A151; 21) c185,
Ai58; 22) Ci86, Am; 23) решений нет; 24) c187, Ci88; 25) c17b Ci89;
26) c178; 27) решений нет; 28) c191, Л159; 29) c167, A159; 30) c167,
cisi; 31) c253, Л411; 32) C27o, A4i2; 33) -c255, A415; 34) —— c266,
A409; 35) решений нет; 36) -c246, A166; 37) c253, A4n; 38) c256,
^412; 39) c258, Ai67; 40) c257, ^i68; 41) c258, Лп0; 42) с23Ь Aj09;
43) ~2С2бь ^1695 44) --c258, Л417; 45) -с24б, А418; 46) --c236,
^412; 47) c259, c260; 48) c26i, c258; 49) c272, c262; 50) -c269, Л419.
19.7. В ответах указаны: значение параметра, при котором
система совместна, частное решение и фундаментальное решение
однородной системы при этом значении параметра. 1) Л = 15,
сиг, спз; 2) Л = 9, с89, сП4; 3) Л = 7, с77, сц5; 4) Л = 12, с89, с77.
19.8. Линейные комбинации с суммой коэффициентов, равной 1.
19.9. Линейные комбинации с суммой коэффициентов, равной 0.
19.10. A,1,..., 1). 19.11. @,0,...,0,1). 19.12. 1) Аъ = аа;
2) Аъ = а + Ь; 3) Аъ — аъ. + 0Ъ. 19.16. Указание: теорема
сводится к задачам 18.12, 19.14. 19.17. Если система уравнений
содержит т уравнений с п неизвестными, и ранг основной матрицы
равен г, то: 1) п = г; 2) т = г (указание: применить теорему
Фредгольма); 3) п > г; 4) т = п — г. 19.18. 1) Несовместна;
2) совместна; 3) несовместна. 19.19. 1) Система уравнений
совместна при а — 0, а = 1. При а = 0 фундаментальная мат-
матрица Cioi; при а = 1 фундаментальная матрица та же, частное
решение с77. 2) Система уравнений совместна при а = 0, а = 1. При
а = 0 фундаментальная матрица А^з; при а = 1 фундаментальная
Ответы и указания
415
матрица та же, частное решение —Ci92- 3) Система уравнений
18
совместна при а — О, а = 1, а = 2. При а = О фундаментальная
матрица А147; при а = 1, а = 2 фундаментальные матрицы те же;
частное решение при а — 1 равно С193, при а = 2 частное решение
равно Ci94- 19.20. Система совместна, если: 1) все Ai различны,
или 2) при некотором i выполнено А; = /х. В случае 1) решение
единственно: Хк = П
А*
, k = 1, ..., п. В случае 2) в качестве
частного решения можно взять столбец, у которого все компоненты,
кроме г-й, равны 0, a Xi — \. Для описания фундаментальной
системы решений заметим, что базисными неизвестными являются
те неизвестные, которым соответствуют всевозможные различные
столбцы коэффициентов. Поэтому fc-e решение из фундаменталь-
фундаментальной системы решений имеет fc-e свободное неизвестное, равное 1,
базисное неизвестное, которому соответствует такой же столбец
коэффициентов, равное —1, а остальные компоненты fc-ro реше-
решения фундаментальной системы равны 0. 19.21. Указание:
представить решение однородной системы уравнений как разность
двух решений неоднородной системы. 19.22. 3) Необходимое
и достаточное условие попарной эквивалентности нетривиаль-
нетривиальных уравнений а\Х\ + ... + апхп = а, Ь\Х\ + ... + Ьпхп = Ь, ...,
... ап а
... Ьп Ъ
+ ... + hnxn = h есть rg
= 1. Указание:
hn h
сравнить каждое из данных уравнений с системой, полученной
объединением всех уравнений. 19.23. Указание аналогично
указанию в 19.22. 19.24. Системы эквивалентны. 19.25. 1) Экви-
Эквивалентны; 2) эквивалентны; 3) не эквивалентны. 19.26. Системы
эквивалентны. 19.32. Указание: система уравнений для вы-
вычисления коэффициентов имеет основную матрицу с определителем
Вандермонда W (а\, ..., an+i) (см. задачу 14.28, 8)). 19.33. а;3 —
1 Ь, 1
- 6х2 + Их - 5. 19.34. 1) rg
а2 Ь2
аз Ьз
= 3; 2) rg
19.35.
У
h
Ь2
19.37. 1) rg
А2
Аз
= 0.
19.36.
а2 Ьд
а3 Ь;
а4 h
х у
а2 Ъ2
аз Ьз
= 3.
= 0.
rg
A2 B2 C2
A3 Вг Сг
2) rg
Ax
A2
A3
A4
Bi
B2
Вг
B4
416
Ответы и указания
< rg
A2
Аз
A4
в2
В3
в4
с2
Сз
с4
19.38. 1) Прямые пересекаются в единст-
венной точке; 2) прямые пересекаются в единственной точке.
а\ Ь\ с\ 1
а2 Ь2 с2 1
19.39. 1) rg anl Ц Ц \ = 4; 2) rg а3 Ь3 с3 1 = 4.
4 Ь4 С4 1
5 Ь5 С5 1
19.40. 1) Все точки лежат в одной плоскости; 2) данные точки не
а2
аз
а4
h
ь2
Ьз
ь4
с2
сз
с4
1
1
1
1
лежат в одной плоскости. 19.41.
х2 + у2 + z2 х у z 1
а2 + Ъ2 + с2 а, 6, с, 1
гЛ
19.42.
1)
аг
а2
аз
bi
ь2
Ьз
С\
с2
сз
1
1
1
= 3; 2) rg
с2 а2 Ь2 с2
Сз аз Ьз сз
с4 а4 Ь4 с4
а\ Ь\ С\ 1
а2 Ь2 с2 1
-0.
3.
19.43. 1) Все точки лежат на одной прямой; 2) точки не ле-
х у z 1
жат на одной прямой. 19.44.
= 0. Указание:
а\ b\ С\
а2 Ь2 с2
а3 Ь3 с3
см. решение задачи 19.35. 19.45. 1) г = R = 1; 2) г = R = 2;
3) г = 1, R = 2, где г = rg
Ai B1 d
А2 В2 С2
А2 В2 С2 &2
19.46. 1) г = R = 1; 2) г = R = 3; 3) г = R = 2; 4) г = 1, R = 2;
5) г = 2, Л = 3, где г = rg
= rg
А2
A3
?>з
19.47. 1) Плоскости образуют призму; 2) плоскости имеют одну
общую прямую. 19.48. 1) г = R = 3; 2) г = 2, R - 3; 3) г = 2, Л = 2;
4) г = 3, Д = 4, где г = rg
i
A2 B2 C2
A3 B3 Сз
A2 B2 C2 D2
A3 B3 Сз D3
A4 B4 C4 D4
A4 B4 C4
19.49. 1) Прямые скрещиваются; 2) прямые пересекаются.
20.1. 1) Нет; 2) да; 3) нет. 20.3. 1) Да; размерность равна 1.
2) Да; размерность равна п — 1. 3) Да; размерность равна п — 1.
4) Нет. 20.4. 1) Да; размерность равна 1. 2) Да; размерность
равна 2. 3) Нет. 4) При а = 0° и при а = 90° данное множество явля-
является линейным подпространством размерности 1, при 0° < а < 90°
не является линейным подпространством. 20.5. Размерность
Ответы и указания
пространства равна т.п. Базис образуют занумерованные в
каком-нибудь порядке матричные единицы (см. введение к § 15).
Стандартный базис указан во введении к гл. 8. 20.6. 1) Да; размер-
размерность равна п(п — 1). 2) Да; размерность равна п. 3) Да; размерность
равна п(п + 1)/2. 4) Да; размерность равна п(п + 1)/2; 5) Да; размер-
размерность равна п(п — 1)/2. 6) Нет. 20.7. 1) Да; 2) да; 3) да; 4) да; 5) нет;
6) нет; 7) да; 8) нет; 9) нет; 10) нет; 11) нет. 20.8. 1) Размерность
равна п + 1; базис: 1, t, ..., tn. 2) Размерность равна [п/2] + 1; базис:
1, t2, ..., t2k (k = [п/2]). 3) Размерность равна [(п + 1)/2]; базис: t,
t3, ..., t2k~l \k - \{n + l)/2]). 4) Размерность равна 2п + 1; базис:
1, cost, sint, ..., cosnt, sinnt. 5) Размерность равна п + 1; базис:
1, cost, ..., cosnt. 6) Размерность равна n; базис: sint, sin2t, ...,
sinnt. 7) Размерность равна In + 1; базис: eat, eat cost, eat sint, ...,
eatcosnt,eatsinnt. 20.10. 1) (-11); 2) A, -3)T; 3) (-3, 1/2, -5)T;
4) E, -11, 14, -2) . 20.11.
5)T;2) (-4, ll,5)T;3)iG,9,4,0)
О 1/2 -14/3
7/2 1 -3
16/3 1 -1
т
20.12. 1) @,
20.13.
c29 = 10c34 - 7c35;
2) C120 = C84 - 2с8з; 3) C201 = C199 - Ci98 - C166; 4) C205 = -Ci66 + C197,
C206 = C166 + C197. 20.14. 1) Размерность равна 1; базис: Ci. 2) Раз-
Размерность равна 2; базис: С31, С28- 3) Размерность равна 1; базис:
Сзь 4) Размерность равна 2; базис: С121, Ci24- 5) Размерность
равна 3; базис: Ci66, C198, Ci99- 6) Размерность равна 2; базис:
Ci96> Ci98- 7) Размерность равна 4; базис: Ci66, Ci96, C197, c^s-
8) Размерность равна 0. 9) Размерность равна 2; базис: Ci66, Ci97-
20.15. Размерность равна 2; базис: А391, ^зэо- 20.16. Размерность
равна 3; базис: A + tK, t3, 1. 20.17. 1) (-2); 2) A/4, -1/4)Т;
3) A, -2, -1)Т; 4) A, -1, 2, -1)Т; 5) A, 2, -1, 0, 1)т.
20.18. (-1, 2, -1, 1)Т. 20.19. A, 1, -1, 1, 1, 1)г.
20.20. (р„(а), ±р'п{а), ^(а), .... ^и) ¦ 20.21. D,2,-3)т.
20.22. 1) Размерность равна 1; базис: C, 1)т. 2) Размерность равна 1;
базис: @, 1, 1)г. 3) Размерность равна 2; базис: B, О, -3)Г, A, 3, 0)т;
4) Размерность равна 1; базис: B3, —18, 3) . 5) Размерность
равна 0. 6) Размерность равна 0. 7) Размерность равна 3;
базис: A, 2, 0, 0, 0)г, (-13, 0, 10, 2, 0)т, A, 0, 2, 0, -2)т.
20.23. 1) хг - 2х2 + ?з = 0; 2) хх + х2 = 0; 3) 0 = 0; 4) хг - х3 = 0,
xi - 2х2 + хА = 0; 5) xi - х2 = 0, 2xi - х3 = 0, 2хх - х4 = 0;
6) Зх! - х2 - 2х3 = 0; 7) 0 = 0; 8) Xj = х2 = х3 = х4 = 0.
20.24. 1) || 3 ||; fc = 3&; 2) ' ~6 13
14- 1715
10 -20
- -6^1 + 13Й,
418
Ответы и указания
fc = 10ft - 20ft; 3)
-5 0 -4
-4 -1 4
13 3 -1
Sift
= -5ft - 4ft,
- -4ft - Й + 4ft, 6 = 13ft + 3ft - ft; 4)
3/2 -3/2 О
-8 9-1
4 -5
11/2 -7/2
= fft - f
2ft, fc = -8ft
1
-1
-1
4
О
-4
7
19
29
2
- ft,
-3
= 4ft - 5?,
3
-3
-3
-3
0
-3
5
12
19
1
-25 -287
-3
6
13
20
1
199
20.27.
5
13
19
1
192 30 -186
= -ft + 7& + 5ft "
9 406' 9
-3 -11 -2
8 37 8
40ft + 9ft, Ь = -3ft - lift - 2ft, ?3 - 8ft + 37ft + 8ft.
0 -18 1 -10
0 -2 1
0 6 0
1 -5 0
3/4 1/4 1/2
= 6ft + 4ft, & = ft - 5ft - 3ft. 20.28.
= -25?{ - 287ft - 192ft + 30ft - 186ft - 199ft. 20.26.
0
4
-3
= -18ft + ft - 10ft, & = -2ft + ft,
/ / /
1/4 3/4 1/2
0 0-1
5& fc - ^
ift, 6 - -ft-
20.29. 1) По-
меняются местами i-я и j'-я строки матрицы перехода; 2) поменяются
местами г-й и j'-й столбцы матрицы перехода; 3) матрица перехода,
рассматриваемая как квадратная таблица, отразится симмет-
симметрично относительно своего центра. 20.30. 1) S1S2; 2) Sf1.
20.31. 1) e'i коллинеарны ej, г = 1, 2, 3; 2) е\ и е\ коллинеарны,
ei, е2, &2 компланарны; 3) е'$ и ез коллинеарны, ег, ез, е^ компла-
компла1 Л
нарны. 20.32. 1) S = 5-1 = Л22; 2) 5 = Л4;
(n = 2); 3) S = A426, S-1 = A425. 20.33.
(n = -2), 5"
1 0 -1/2
0 1 0
0 0 3/2
0 0 0
1 = Лз
0
-3/2
0
5/2
1
0
0
0
0
1
0
0
1/3
0
2/3
0
0
3/5
0
2/5
20.34. 1) 2с19з и || 0 -3 0 5 ||Т; 2) ci83 в обоих
Ответы и указания
базисах; 3) 2с192 и || -1 0 9 О ||Т; 4) с165 и || 1 -4 -3 10 ||Т.
21.5. 1) х = aj - 4bi; 2) х = aj - 2а2 G V; 3) х = у + z,
y = -ai -За2= (-7, -9, -10)г е V, z = 9bx € д;4)х=-2Ъ!е Q;
5) х = у + z, у = -21а! + 29а2 = (8, 8, 8, 37)т е V,
z = -9bi - 5b2 = (-9, 0, -14, -32)т € Q. 21.6. 1) х;
2)o;3)^ai= (-±, ±) ;4Ja1+a2=(-l,4, 2)Т;5)а2-а1 = B,
-6, 6, 1)Т. 21.7. 1) Размерность суммы равна 2 (сумма совпадает
со всем пространством); базис: ai, аз- Размерность пересечения
равна 1 (пересечение совпадает со вторым подпространством);
базис: bi. 2) Размерность суммы равна 3 (сумма совпадает со
всем пространством); базис: &\, а2, аз. Размерность пересечения
равна 2 (пересечение совпадает со вторым подпространством);
базис: bi, b2. 3) Размерность суммы равна 3 (сумма совпадает со
всем пространством); базис: aj, bi, b2. Размерность пересечения
равна 0 (сумма прямая). 4) Размерность суммы равна 3 (сумма
совпадает со всем пространством); базис: ai, a2, bi. Размерность
пересечения равна 1; базис: A, 0, 1) . 5) Размерность суммы
равна 3 (сумма совпадает со всем пространством); базис: aj, a2, b].
Размерность пересечения равна 1; базис: C,1,0) .6) Размерность
суммы равна 3 (сумма совпадает со всем пространством); базис:
ai, a2, bi. Размерность пересечения равна 1; базис: D0, 45, 43) .
7) Размерность суммы равна 3; базис: ai, a2, bi. Размерность
пересечения равна 1; базис: B, -6, 7, -2)Т. 8) Размерность
суммы равна 4 (сумма совпадает со всем пространством); базис:
аь а2, bi, b3. Размерность пересечения равна 0 (сумма прямая).
9) Размерность суммы равна 3; базис: ai, a2, аз- Размерность
пересечения равна 2; базис: bi, b2. Сумма совпадает с первым
подпространством, пересечение — со вторым. 10) Размерность
суммы равна 4 (сумма совпадает со всем пространством); базис:
ai, а2, аз, b,j. Размерность пересечения равна 2; базис: bi, ai.
11) Размерность суммы равна 4 (сумма совпадает со всем про-
пространством); базис: аь а2, а3, Ь2. Размерность пересечения равна 2;
базис: Ь2 + Ьз, и bi — b2 с координатными столбцами || 2 2 0 3 ||
и || 3 5 —1 4 || . 21.8. Размерность суммы равна 5; базис: Л2о2,
¦А2оъ А2оэ, А2о4, -А256- Размерность пересечения равна 2; базис: А2о2,
Л258- 21.9. Размерность суммы равна 3; базис: 1 + 2< + t3, I + t2,
1 + t + t2. Размерность пересечения равна 1; базис: 2 + 3? + t2 + t3.
21.14. 2) Если С, Л4, Af — одномерные пространства, натянутые
на три компланарных, но не коллинеарных вектора, то V ф Q.
22.1. 1) D-8i); 2) (-2 + Зг, 9 + 5г)Т; 3) ^ D + г, -18г, 1 - 10г)Т.
22.2.
14*
1 + 5г -6 + г
-11 + 13г -8 - 14г
22.3. 1) (— 1 — 8г, — 3 + 6г)
т
420
Ответы и указания
2) B, -Юг, 4-6i)T. 22.4. •> 1)
. 2 + 9г — 3 + 4г .
2) с4о = -—с2б + с3о; 3)
о о
с43 = (-1 + i)c26;
= -2сш + с132-
с2б +
о о
22.5. 1) Размерность равна 1; базис: С5. 2) Размерность равна 2;
базис: С27) Сзэ- 3) Размерность равна 1; базис: с2б- 4) Размерность
равна 1; базис: ci34- 5) Размерность равна 2; базис: С215, c27s-
6) Размерность равна 3; базис: Ci66, C215, Ci96- 22.6. 1) A + Зг);
2) A + 2*, 2-if; 3) A, 2)Т; 4) A + i, -Зг)Т; 5) A, -i, 2)T;
6) A + i, -г, 0, 2)Т. 22.7. 1) Размерность равна 0. 2) Раз-
Размерность равна 1; базис: A + Зг, -2) . 3) Размерность равна 1;
базис: A,1,1) .4) Размерность равна 2; базис: A—г, —1, 0) ,
B + г, 0, -1)т. 5) Размерность равна 2; базис: (—1, г, 1, 0) ,
A + г", 1, 0, -1)т. 22.8. 1) C - Зг)ц - 2х2 = 0; 2) 0 = 0;
3) хх- Х2 = 0, X! - хз, = 0, A - i)n - Х4 = 0; 4) A3 - Ai)xi +
+ 37z2 - A1 + 45г)ж3 = 0; 5) A - 71)хг + (-11 + 7г)ж2 + Юа* = 0,
> ) || ||
(-19
2 + Г
= A +
о
10 - 5г
( O
1 + A -
о
(9 - Si)x2 + Wx4 = 0.
-1 - 6г -29 - 18г II
2 + г 10 — 5* (р1
2-г —1 — 2г
22.9.
29 + 18г
1-г
-2 - i 3 + Юг -1 + 5г
1 + 2г 1 - 8г 1 — 4г
= -B + »)Й + C
+ (-1
+ A - 40&. 22.10. 1) х = ic44; 2) о;
22.11. 1) Размерность суммы
3) -B - 9г)с44 = - (9 + 2г, 4 - 18г)
5 5
равна 3 (сумма совпадает со всем пространством); базис: ai, a2, bj.
Размерность пересечения равна 1; базис: @, 4, 3 —г) .2) Размер-
Размерность суммы равна 3 (сумма совпадает со всем пространством);
базис: ai, a2, bi. Размерность пересечения равна 1; базис: (9+ Юг,
2 — 16г , —10 — Зг) . 3) Размерность суммы равна 4 (сумма совпадает
со всем пространством); базис: аь а2, 34, b4. Размерность пересе-
пересечения равна 2; базис: bj, b2. 22.12. 2) Базис образуют векторы
Т1 Т* Т Т1
A,0) , (г, 0) , @,1) , @, г) . Вектор с27 имеет в этом базисе
координатный столбец (—3, 2, 0, —1) . 22.13. 1) Комплексное
пространство (тг + 1)-мерно; базис: 1, t, ... , tn. Вещественное
пространство Bп + 2)-мерно; базис: 1, i, t, it, ... , tn, itn. 2) В
комплексном пространстве: A — 2г, 3 + г, —3) . В вещественном
пространстве: A, —2, 3, 1, -3, 0)т.
23.1. 1), 5), 9) - линейно; 2), 3), 4), 6), 7), 8), 10) - нет.
23.2. В любом базисе: 1) нулевая матрица; 2) единичная матри-
матрица Е\ 3) скалярная матрица ХЕ (Л — коэффициент гомотетии). 1) Не
является; 2), 3) изоморфизм. 23.4. При М = С. 23.5. Нет при
{о} -ф М ф С. 23.6. 1) Ортогональное проектирование на прямую
Ответы и указания
421
г = ia; 2) проектирование на подггространство г = fa параллельно
подпространству (г, п) = 0; 3) ортогональное проектирование на
подпространство (г, п) — 0; 4) проектирование на подпространство
(г, п) = 0 параллельно вектору а; 5) ортогональное отражение в
подпространстве (г, п) = 0; 6) ортогональное отражение в прямой
г = fa. 23.7. 1) Произведение ортогонального проектирования
на плоскость (х, а) = 0 и поворота на тг/2 вокруг прямой х = <а.
2) Произведение проектирования на плоскость (x,u,v) — 0, поворота
на угол тг/2 вокруг прямой х = <[u, v] и гомотетии с коэффициентом
(х,п)
|[u,v]|. 23.8. 1)
= х —
-п; ядро — прямая [г, п] = 0;
множество значений — плоскость (г, п) = 0; rg ip — 2; 2) ip(x) =
= (х, a) -j—j^; ядро — плоскость (г, а) = 0; множество значений —
СП)
прямая [г, а] = 0; rg ip = 1; 3) <р(х) = х
(а, п)
а, ядро — прямая
[г, а] = 0, множество значений — плоскость (г, п) = 0; rg ip = 2;
4) ip(x) = т~~\ а> ЯДР° ~ плоскость (г, п) = 0; множество значений
(а,п)
п
- прямая [г, а] = 0; rg <р = 1; 5) <р(х) = х - 2 (х, п) -^; 6) <р(х) =
= 2 (а, х) ^ - х; 7) „(х) = х -
а; 8) „(х) =
- х;
'(а,п)-'~'~-' >,„)'
5)-8) преобразования являются изоморфизмами; Кег <р = {0};
Imip — все пространство; rg = 3. 23.9. 1)
5 1 2
1 5 -2
2-2 2
зовать результаты задач 23.8, 1) и 2). 23.10. 1)
2
-1
-1
-1
2
-1
-1
-1
2
; 4)
i
A.
6
)
0
0
0
У
0
1
0
к
0
0
0
а з
; 2'
а н
-.
_
3
и е
1
1
1
1
1
1
1
1
1
исполь-
0 0 0
-110
2 0 1
2
2
1
3
3
_1
0
0
5
; 3)
-6
8
10
-9
12
15
3
_4
2 3-4
4 6-8
2 3-4
. Указание:
то же, что и в задаче 23.9. 23.11. Если исходный базис в ?з орто-
нормированный, а базис в С состоит из вектора а (в случае прямой)
или пары векторов a, b (в случае плоскости), то: 23.9. 1) || 0 1 0 ||,
приа@, 1, 0); 2) i || 1 1 1 || приаA, 1, 1); 3) i
10-1
0 1-1
аB, -1, -
(-1, 2, -1
при
8 4 2
3 3 0
- 23Л0-
-110
2 0 1
422
Ответы и указания
при а
3) II 2
23.12
Ука
23.13
@,
3
з а
1, t
-1
1)
н и
1)
)fb(c
II 'фи
-1
0
0
ал
а(-3,
0 0
1 0
0 1
2)
4
2)
5
5)
1
X
9
е: использовать
-1 0
-4 1
4 0
0
0
1
; 2)
вать результаты задач 23
_
3
2 3 0
1-15
;4)
-1
4
8
[1/2
4
-7
4
приа>(ТТ,"о),Ь(О,
3/4 -1|| приаA,
8
4
-1
1
; з) -
3
1 -2
-2 1
-2 -2
результаты задач 23.8, 5)
-1 2
4 1
2 2
7) и 8).
0
0
-3
0, 1);
2, 3).
-2
-2
1
и 6).
. Указание: использо-
23.14. 1)
cos a T sin
± sin a cos q
0
0
а 0
о ;
1
; 3) А259 и А260. 23.15. В 1) и 2) Ker p = ?",
1 0 0
2) 0 0 =Fl
0 ±1 0
Im tp = ?'. Если базис в ?' образуют первые к базисных век-
векторов базиса пространства ?, то: 1) diag A, ..., 1,0, ..., 0)
(к единиц); 2) ]) Е^ О \\а (Е>. — единичная матрица порядка к).
23.16. diag(l, ..., 1, —1, ..., —1); tp — изоморфизм (число единиц
равно размерности ?'). 23.17. Пусть ej, ..., ег — базис в М,
а векторы er+i, •¦-, е„ дополняют его до базиса в ?. Матрица
отображения ip в паре базисов (ej, ..., en), (ej, ..., ег) получается
из матрицы преобразования tp в базисе (ei, ..., еп) вычеркиванием
строк с номерами г + 1, ¦.., п. 23.22. 1) rg tp — dim ? = dim ?,
Ker tp — {о}; 2) В — A'1. 23.25. Указание: выбрать базис
в ?, включающий базис подпространства (если оно ненулевое).
23.26. 1) -2аь а2, 4аз- Произведение растяжений с коэффици-
коэффициентами —2, 1, 4 в направлении соответственно векторов ai, а2,
аз- 2) Заь За2, 2аз- Гомотетия с коэффициентом 3 в плоскости
х = ssl\ + ?a2 и растяжение с коэффициентом 2 в направлении
вектора а3. 3) о, E, 0, -5)Т, A1, 5, -1)Т. 4) аь га2, -га3.
Произведение растяжений комплексного арифметического про-
пространства в направлении векторов ai, a2, а3 с коэффициентами 1,
г, —г соответственно. 5) — а[; A + г)а2> A ~ г)аз- Произведение
растяжений комплексного арифметического пространства в на-
направлении векторов ai, а2, аз с коэффициентами —1, 1 + г, 1—г
соответственно. 23.27. 1) @, 6, 18) ; 2) о; 3) (-8, -11, 3, 0, -13)т;
4) i/?(ai) = Bn - l)ai, ^(а^) = —ajfc (к = 2, ..., п). В ответах к зада-
задачам 23.28, 23.29 и 23.31 приведены координатные столбцы базис-
базисных векторов искомых подпространств. 23.28. 1) A2, — 5)г и
E, 12)т; 2) A, 1, -I)'1, C, 0, 2)Т и A, 1, -1)т; 3) A, -1, 1)т и
A, 1, 0)т, @, 1, -1)т; 4) @, 1, 1, 0)т, @, 0, 1, 1)т и A, 1, -3, -3)т,
A, —1, -1, 1)т; 5), 6) Ker tp — {о}, Ira tp — С, tp — изоморфизм.
Ответы и указания
423
23.29. 1) @, 2, О, if, (О, -3, 1, О)Т и (О, 1, О)т, A, О, -2)Г;-
2) <р инъективно, Кепр = {о}; D, 3, -1, 7)Т, E, 2, 3, 7)т, (9,7,
2, 6)Т; 3) C, 1, Of, B, О, -if и (-2, 1, 7, -3)т; 4) B, О, 1,
-1, Of (О, 1, 2, О, Of, (О, О, 1, О, if; ip сюръективно; 5) (О, 1,
if и (-2, -2, -3, 4, 6f B,2,2,1, -5)Т; 6) A,1,0,-3, 6)Т,
(-2, О, 1, 5, 10)Т; ip сюръективно. 23.30. Здесь С, Сь С2, С3 —
любые действительные числа. 1) @, 0, 1/10, 1/5)Т + Сх A0, О,
-7, 6)Т + С2 @, 5, -1, -7)Т;2) G/2, 0, -1/2, О, О)Т + d A9,
2, -5, 0, Of+ С2 D1, 0, -11, 2, 0)т + С3 A, 0, -2, 0, if;
3) @, 0, if + СA, -2, -3)т;4) (О, 1, О, О)Т+ СB, 2, 1, -if.
23.31. 1) A, 1_, 0, 0, Of (О, 1, 2, 0, Of B, О, 1, -1, of
-if @, 2, 1, Of G, 23, О,
(О, О, 1, 0, if; 2) A, 1, -1,
-llf; 3) @, 3, -1, 0, 0, Of (О, 1, О, -1, О, ОO, @, 4, О, О,
1 О
О, -1)', A, О, О, О, О, 0)J, (О, О, О, О, 1, 0)'. 23.34.
23.35.
0
0
0
1
1
0
0
0
0
-1
1
0
23.36.
0
0
1
0
1
0
0
0
0
0
0
-1
0
1
0
0
1
0
0
0
0
0
-1
0
23.37.
О 1
0 -1
1 О
0 0 0
1 О О
0-10
0 0 1
1 О
О 1
о
о
о
О -1
23.38. Изоморфизм определяется равенством: 1) <р{х) =
О О
О О
х2
-хг
2) ф) =
О
х2
0
гх2
гх2 —i
где
3) ф) =
—х2 —хз О
х = (xi, х2, хз) ¦ 23.40. 1) Ядро — многочлены нулевой сте-
степени; множество значений — многочлены степени не выше то — 1;
а), б) А594 {п - т + 1); в) Ав13 (п = т + 1). 2) АЬ9Ь (размеров
т х {т + 1)). 23.41. 1) Ядро состоит из многочленов нулевой
степени; множество значений — V; ранг п; А = А^дв; 2) ядро {о};
множество значений — Q; ранг п + 1; А = diag A,3, ..., 2п + 1).
23.42. A6l2(n =
. 23.43. 1) diag Го,
0
-1
1
0
) ¦
' * •>
0
—п
п
0
(матрица порядка 2п + 1); 2) diag A, ..., n), diag A, 1/2, ..., 1/п).
23.44. 1) Ядро {0}; множество значений — подпространство мно-
многочленов степени не выше п с нулевым свободным членом; ранг п;
А — ^597- 2) Л4; преобразование инъективно, но не сюръективно.
424
Ответы и указания
23.45. 1), 3) Отображения инъективны, но не сюръективны и
не обратимы. 2) Обратное отображение — дифференцирование.
23.46. Четные многочлены. 23.47. 1) diag {А, А). Базис ядра
3 О
1 О
О 3
О 1
; базис образа
1 О
-2 О
О 1
О -2
; 2) А589- Базис ядра
0 0 0
-2 4 3
; <р сюръективно. 23.48. 1) Ядро состоит из
-2 4 3
0 0 0
матриц, у которых первые п — 1 столбцов нулевые; ip сюръективно.
2) || i?m(n_i) о || матрица размеров т(п — 1) х van. 3) ip — умножение
справа на
о
— матрицу размеров п х (п — 1). 23.49. Ядро
натянуто на вектор A, —2, 1, —2) ; множество значений — веще-
о 6
ственные матрицы вида
с о
; rg <р = 3; А = Aim. 23.50. А
590.
23.51. 1) Ядро — многочлены вида ОоЖ™, множество значений состо-
состоит из многочленов без у™ (оп = 0); 2) ядро — многочлены вида а„уп,
множество значений состоит из многочленов без хп (оо = 0); 3) при
нечетном п преобразование является изоморфизмом, при п = 2т
его ядро состоит из многочленов вида атхтут, множество значе-
значений — из многочленов, не содержащих члена хтут. Матрицы 1)
0 10
0 0 2
0 0 0
0 0 0
0 0
п 0
0 п-1
0 0
0 0
0 0
п 0
0 п-2
0 0 ... -п+2 0
0 0 ... 0 -п
, ..., аг образуют базис
пк- Тогда ar+i, ... , а^
0 0 ... 1 0 и
23.53. 1) При к = dim С. 2) а) Пусть
в линейной оболочке векторов ai, ...
должны быть такими же линейными комбинациями векторов
oi, ..., ог, как 6r+i, ..., Ьк — векторов 6i, ..., 6Г. Условие 1)
и г = dim?. 23.54. 1) В А'1; 2) В; 3) Е. 23.55. 1) ВА~Х;
2),3)А~1В. 23.56. 1) Л16;2) Л3ъ 3) Л32; 4) Л61. 23.57. 1) а) Л267;
-1 -1 2
б) diag A, 2, 2); 2) а) Л230; б) diag @, 1, 1); 3) а)
-5 -1 2
-7 -3 6
0
0
0
0
2
0
0
1
2
б)
23.59. 1)
; 4) а) Л273; б)
о 1 - о
Ь 1-6
-3 1 0
0-3 0
0 0 2
б) Л392; в) Л172; г) Л50е; д) Л40е; е) Л516. 2) Во всех задачах:
матрица В. Указание: использовать результат задачи 23.54.
2 -2 + За 2а У
2 -3 + 36 2а
-3 4 + Зс 2с
числа). 2), 4) не существует. 23.60. 1) <р сюръективно; dimKer <p = l;
ip(a) = D, -1)Т; 2) <р инъективно; rg ip = 2; <р(а) = A1, 10, -6)Т;
23.58. 1) а) А141;
(а, 6, с — произвольные
Ответы и указания
4/0
3) <р сюръективно; dimKer i/j = 2; 2) <р(а) — (-4, -6, 0) ; 4) ip не
единственно, ранг может равняться двум или трем, размерность
ядра 1 или 0 соответственно. Во втором случае <р инъективно.
<p(a) = (-10, -10, -13, 10, 28) . 23.61.
-1 0
3) A9S; 4) Л262.
4)
-2 1
-12 7
23.62. 1)
4 0 5
0 0 0
5 0 4
0 -2
1 0
6)
0
0 2 0
0 0-2
1) A + г)Е- 2) Л82;
0 -9 у5 3) 1 2
-1 1 0
7) 0-11
0 0-1
8)
2)
3 -3
-2
-3
1 0
-1 -1
5 -3
5 -3
; 9) А497; 10) А498. 23.63. 1)
3 1+г
1-г 1
-2, 2»); 6) diag
2) |(
23.65. 1)
; 3) diag(-l, 1 + г, 1 - г); 4) diag A, ш2, и); 5) diagB, 2,
23.64. 1)
г 1
О г
-г 1
О -г
-42 -18 -20 48
15 7 7 -17
3)
-5
-1
5
-5 -12
2 5
сначала записать
3
1
-3
3)
векторов данных
2)
матрицу
прямых.
3
4
-2
1
1 +
-1 +
4
3
-2
v/3
ч/З
0
3
1
э
1
— 1
3)
—
1
-
0
-1
-1
\/3 -
—
v/3
0
1
0
1
1
2
2
3
-v/3
+ v/3
1
1
3
;5)
базисе
23.66.
1
4 -2
4 -1
из
36
23
-3
1
5
1
-25
-16
-15
5
25
5
-3
_2
9
5
-31
1
Указание:
направляющих
-1 1 0
-3 3 0
3-12
l + v/3 -l + v/3
l-v/3 1 -1-\/3
-l-v/3 v/3-1 1
2 -2 1
1 2 2
-2 -1 2
1
из
0 0-1
-10 0
0 10
Указание: сначала записать матрицу преобразования в базисе,
составленном из базисов данных подпространств. 23.67. 1) Лзвз;
2) ^428", 3) Л613 (п = т + 1); 4) A5gs (п = т)\ 5) А5дд (п = т).
23.68. 1) Та же матрица, что и в ответе к 23.43, 1); 2)
где А —
О А
В О
?
-1
1
0
-1
-1
2
... -1
... -1
... -1
В =
0-1 1
0 0-2
0 0 0
—п
¦ 3) А
551-
0 0 ... П
II
23.69. 1) Поменяются местами г-й и j-й столбцы; 2) поменяются
426
Ответы и указагшя
местами fc-я и 1-я строки; 3) i-й столбец умножится на А, j-я строка
разделится на ц; 4) к г'-му столбцу прибавляется j-й, к 1-й строке
прибавляется k-я. 23.70. 1) Поменяются местами две строки и два
столбца с номерами г и j; 2) г-я строка умножится на Л, г-й столбец
разделится на Л; 3) к г'-му столбцу прибавится j-й, из j-й строки
вычтется г-я; 4) произойдут аналогичные перестановки столбцов
и строк матрицы; 5) матрица заменится на центрально симметрич-
симметричную исходной. Указание: при решении задач 23.69-23.71 мож-
можно использовать формулы C), D) из введения к § 23 и задачи
15.27-15.30. 23.73. rgtp. Указание: использовать задачу 23.72
или 23.71 и метод Гаусса. 23.74. 1) diag A, 0) в базисах A, 0)т,
@, 1)Ти A,
3)т, C, 10)Г; 3) diag (I, 1, 0) в базисах A, 0, 0)Т, @, 1, 0)Т; A,
(-1, 1)' и A, 1)J, @, 1)J; 2) Е в базисах A, 0)J
1, -1)J и
базисах A
(о, -l, -iI
A, 0, 1)Т, @, 0, 1)Т;
0, 0)J, A, 1, 0)J
A,-1, -1)Т и A, -1, 2)т,
4) diag A, 0, 0) в
@, 1,
Of @, 0, 1)'; 5) А570 в базисах: A, О, О, О, О)', (О, 1, О, О,
Of, (О, 1, 2, О, Of B, О, 1, -1, Of (О, О, 1, О, if и A,
if B, -2)Т; 6) Ац6 в базисах: A,0, 0)Г, (О, 1, 0)Т, (О, 1, if и
(-2, -2, -3, 4, 6)т, (-2, -2, -2, -1, 5)т, (О, 1, О, О, О)Т, (О,
О, О, 1, of @, 0, 0, 0, if. 23.77. AJS, где А - произвольное
число. 23.78. 1) <рф существует при п = к, ф<р существует при
т = 1. 23.79. Пусть tp: Пк -*¦ Hi, Ф- Кп -» "Я™, Х- Кя -» Ut- I) n = t,
т = к; 2) s = n, t = rn^= к; 3) t — к = п, / = т; 4) к — п, I = т.
23.80. Если ip: С —> С и М. = <р{С), то <р = \<р, где <р: С —> М. и
-14-2
i: .ЛЛ -» ? — естественное вложение. 23.82. 1)
2 -1 -1
-1 0 1
2)
-3 8-5
0 5 -4
-2 5-3
3)
2 8-5
4 5-4
3 13 -8
матрицы, составленные из координатных столбцов векторов
bi, q (г = 1, 2, 3), X, Y — матрицы преобразований <р и
в данном базисе. Тогда ХА = В, YB = С, YXA = YB = С,
т.е. матрица Z преобразования ф<р удовлетворяет матричному
уравнению ZA = С. В базисе сц, ог, а3: Z' = A~lZA = А~гС,
AZ' = С. В базисе Ьи Ь2, Ь3: Z" = B~lZB. 23.83. 1), 2) 0;
Указание: пусть А, В, С —
ф
3)
25 -10
40 -15
-6 0
-5 -6
23.85. 1) Матрица порядка п + 1:
.Указание: ip - ф = 5г.
О Е
О О
, где Е — единичная
матрица порядка п — к + 1 при к ^ п, 0 при к > п; 2) матрица
порядка 2п + 1: (-1)" diag @, В, 2кВ, ..., пкВ), где В = J ~
Ответы и указания 427
при к — 2s — 1, В =
1 О
О 1
при к = 2s {к = 1, 2, ..., s = [(к + 1)/2]).
23.86. 1) (tD) {ao+ait + ... + antn) = М + 2a2t2 + ... + nantn;
2) (Dt) (a0 + ait + ... + antn) = a0 + 2M + ... + (n + l)on*n;
3) [D, t] = г; 4) указание: доказывать по индукции на основе
результата задачи 3). 23.91. Ср. 15.59. 23.100. 2) Пусть
отображение etj имеет в некоторой паре базисов матрицу Ejj
(матричную единицу). Базис в L (V, Q) состоит из всех отоб-
отображений Sij] dimL(V, Q) = тп. 23.101. 1), 2), 4), 5) — нет;
3), 6) - да. 23.103. 1), 2), 3), 5) при d ф 1 нет; 4), 6) - да.
23.104. Указание: если грани отражателя совместить с коор-
координатными плоскостями, то направляющий вектор луча подверг-
подвергнется последовательным отражениям с матрицами diag(l, 1, —1),
diag(l, -I, l),diag(-l, 1, 1).
В ответах к задачам на отыскание собственных значений
и собственных векторов для каждого собственного значения А
указывается либо множество X соответствующих собственных
векторов, либо базис собственного подпространства, а в случае
диагонализируемого преобразования — диагональный вид матрицы
преобразования и собственный базис или матрица из коорди-
координатных столбцов векторов этого базиса. 24.1. Указание:
рассматриваемое множество содержится в собственном подпро-
подпространстве. 24.3. п — г. 24.4.
А В
О С
П
, где A = diag(Ai, ..., АД
a Ai, ..., Afc — собственные значения. 24.13. Указание:
многочлен нечетной степени с вещественными коэффициентами
имеет хотя бы один вещественный корень. 24.14. 2) Пусть
det(А - \Е) - (Ai - А)... (А„ - А); тогда ак = ]Г) А*, ... Aik, где
(»i,...,ik)
(ii, ..., if.) пробегает упорядоченные fc-элементные подмножества
множества {1, 2, ... , п} (к — 1, ... , n); tr А — Ai + ¦ • ¦ + А„;
det A = Ai ...An. 24.15. Все нулевые векторы. 24.16. Соб-
Собственное значение А (кратности п), собственные векторы ае\ а ф 0.
24.17. Ai,...,An. 24.18. Искомый базис е= (еь ..., еп), где (еь ...,
ек) — базис в ?', (efc+1, ..., е„) — базис в С". 1) diag(i?fc, О);
2) diag(J5jt, -?„_*) в базисе е. 24.19. 1) А = 1, х + 2у = 0; А = -1,
х + Зу = 0; diag (-1, 1) в базисе (-2, 1)Т, (-3, 1)т. 2) А = 1,
х + у - 0; А = 0, 4а; + Ъу = 0; diag A, 0) в базисе A, -1)т, (-5, 4)т.
3) А = 1, За; - 2у = 0; А = 2, х - у = 0; diag A, 2) в базисе B, 3)т,
A, 1)Т. 24.20. 1) А = 1, прямая х = z = 0; А = 0, плоскость у = 0;
diag @, 1, 0) в данном базисе. 2) А = 1, прямая a; — j/ = z = O;A = O,
плоскость х + у + z = 0; diag A, 0, 0) в базисе A,1, 1)Т, A, —1,
0) , A, 0, —1) . 3) А = 1, плоскость х + у + z = 0; А = 0, прямая х —
= y = z;diag(l, 1, 0) в базисе A, -1, 0)Т, A, 0, -1)Т, A, 1, 1)т.
428 Ответы и указания
4) A = 1, плоскость -х + у + 2z = 0; А = 0, прямая -2х = 2у = z;
diag(l, 1, 0) в базисе A, -1, if A, -3, 2)т, (-1, 1, 2)т.
5) А = 1, плоскость х = 0; А = 0, прямая 2а; = 2у = -z; diag A, 1, 0)
в базисе @,1, 0)Т, @, 0, if, A,1, -2)т. 6) А = 1, плоскость х = у;
А = 0, прямая -2а; = Зу = 6z; diag(l, I, 0) в базисе A, 1, 0)Т,
@, 0, 1)т, (-3, 2, 1)т 7) А = 1, прямая -20а; = 15у = 12г; А = 0,
плоскость 2а; + Зу - z — 0; diag (I, 0, 0) в базисе (-3, 4, 5)Т, A,
0, 2) , @, 1, 3) . 8) А = 1, прямая 2а; = у = 2z; A = 0, плоскость
2z + 3y-4z = 0;diag(l, 0, 0) в базисе A, 2, 1)Т, (-3, 2, 0)Т, B,
0, 1)т. 9) А = 1, плоскость х — 0; А = —1, прямая у = z = 0; diag(-l,
1, 1) в базисе A,0, 0)т, @,1, 0)Т, @,0, 1)т. 10) А = 1, прямая
х = 2у = z; X — -1, плоскость 2а; + у + 2z = 0; diag (I, -1, -1) в
базисе B, 1, 2)т, (-1, 2, 0)Т, A, 0, -1)т. 11) А = 1, плоскость
а; + у + z = 0; А= —1, прямая х = у = z; diag A,1, —1) в базисе A,
-1, 0)Т, A,0, -1)т, A,1, 1)т. 12) А = 1, плоскость х = 0; А =-1,
прямая 2х = у = -z; diag(l, I, -1) в базисе @,1, 0)Т, @,0, if,
A, 2, —2) . 13) А = 1, прямая 2а; = у = 2г; А = —1, плоскость
х + у = 0; diag A, -1, -1) в базисе A, 2, 1)Т, (-1, 1, 0)Т, @,
0, 1) . 24.21. 1) При а = 2ктг: А = 1, все ненулевые векторы
собственные; при а = Bк + 1)тг: А = 1, X = {аез|а ф 0} и А = — 1,
X = {aei + /Зе2| |а| + |/3| ф 0}; при а ф ктт: А = 1, X = {ае\а фО}(к-
целое); 2) А = 1, X = {ad \а ф 0}; 3) А = 1, X = {а A, 1, if |а ф 0};
4) А = 1, X = {аA, 1, -1)т|а^0} и А = 0, X = {а(-3, 1, 0)т +
+ /3@, 0, 1)Т| \а\ + Щ ф 0}; 5) А = 1, X = {а B, 2, -1)т |а ^ 0}
и А = -1, X = {а A, -1, 0)т + /3 C, 0, -1)т | |а| + |/3| ф 0};
о) А = 2, X — {а A, 1, 1) |а ф 0} и А = 1, X = {а @, 1, 0) + /3 B,
0, 1)Т | Н + |/3| # 0}; 7) А = 1, Л1 = {а A, 1, -1)т |а ф 0};
8) А = 1, X = {а (-1, 1, if \аф 0}. 24.22. 1) А = 0, собственное
подпространство biXi + . ¦. + Ьпхп — 0; если oibj + ... + anbn ф 0,
то еще А = а^ + ... + anbn, X - {a (oi, ..., о„)Т |а # 0}.
2) aifti +... + о„Ь„ ф 0; 3) а) да; б) нет. 24.23. Преобразование с мат-
матрицей diag (АЯ*-1, Jm+J(A), цЕп_т), где ц ф А. 24.26. l)Af, ...,А^;
2) Ау, ... , AJJ1; 3) AJ, ... , А. Указание: доказать, что при
А ф 0 det(A - ХЕ) = (-1)"det Л • de^A" - Х~1Е). 4) p(Ai),..., р{Хп).
Указание: использовать задачу 24.25. 24.27. Xifj.j.
Указание: диагонализируемость матриц А и В влечет диа-
гонализируемость А® В. 24.29. Преобразование с матрицей Jn@).
24.30. 1) diag (-4, 4) в базисе (8, -if @, 1)Т; 2) diag@, 1)
в базисе @, if (I, if 3) diag (-1, -2) в базисе B, -if
A, -1)Т; 4) diag D, 9) в базисе B, if, (-1, 2)Т; 5) diag@, 25/12)
Ответы и указания 429
в базисе C, 4)т, D, -3) ; 6) Л = 1, A, 0); 7) diagB, 0) в базисе
A, if, (I, -if; 8) Л-0, A, if; 9) diag A69, 0) в базисе E, 12)т,
(-12, 5)Т; 10) Л = -2, A, 2)т; 11) diag (-2, 1, 4) в базисе A,0,
-if (О, 1, Of C, 4, 3)г; 12) diag(l, 1, -1) в базисе A,0, of
(О, 1, if, (О, -1, if 13) diag(l, -I, -2) в базисе B, 1, if
A,0, if (I, -1, if 14) diag(l, 2, 3) в базисе (О, 1, if (I,
1, if A, 0, if; 15) diag @, -1, 2) в базисе A, 0, if (О, 1,
-2f C, -2, if; 16) diag (-2, 9, -4) в базисе A, 0, -if B,
1, 2)т, E, -4, 5)Т; 17) diag(l, 2, 10) в базисе B, 1, -2)т, A, О,
if (-1,4, if; 18) diag A4, 0, 0) в базисе B,1, -3)Т, (-1,2,
Of, F, 3, 5)Т; 19) diagC, 3, 2) в базисе A, -1, 0)Т, A,0, if
A,2, 4)т; 20) diag(l, 2, 2) в базисе A,1, if A,0, -3)Т, (О,
1, 3)Т; 21) diag G, 7, -7) в базисе A, -2, of (О, 3, if, B,1,
-3f;22)A = 0, A, О, 0)Т; Л =-1, (О, 1, of; 23) diag C, -1, -1)
в базисе A, 1, 2)т, A,-1, 0)Т, A, 0, -if; 24) Л = -3, B, 0, if;
Л = 2, (О, -1, if; 25) Л = 0, B, -1, 0)Т; 26) diag (О, 1, 1) в базисе
A, 1, -if, B, l,0f, C,0, 2)Т;27)А = 0, A, 1,0)Т, (-1, 3, 2)Т;
28) Л = -1, B, -1, Of A, -2, if; 29) diag (-1, 1, 1) в базисе C,
5, 6)Т, B,1, Of A,0, -if; 30) Л= -1, (-2,1, if; 31) diag A,
1, -1, -1) в базисе A, 0, 0, if @, 1, 1, 0)Т, (О, -1, 1, 0)т,
(-1, 0, 0, if; 32) diag A, -1, 1, -1) в базисе A,1,0,0)Т, (-1,
1, 0, Of (О, О, 1, if, (О, О, -1, if 33) diag D, 9, 9, -1) в
базисе B, 1, 0, 0)т, A, -2, О, 0)Т, (О, О, 1, if, (8, 4, -5, 5)Т;
34) diag @, 0, 0, 4) в базисе A,1,0,0)т, @, 1,1, of @,0,1,
if, (I, -1, 1, -if; 35) Л-О, A, 0, 0, if @, 1, 1,0)Т;А = 2,
A, -1, 1, -if; 36) diag A, 3, 5, -4) в базисе A, О, -1, if, A,
1, 0, -if, A, 1, -1, Of (О, 1, 1, -if; 37) diag (-1, 1, 1, -2)
в базисе (-2, 1, 1, if, (I, -1, О, 0)Т, A, О, -1, of (I, 0, О,
-if; 38) diag B,2,2,-2), А468; 39) А = 0, A,1,1, if; 40) А = 1,
A, О, 1, Of, A, -3, 0, Of A,1,-1, -if. 24.31. 1) diag (г,
-г) в базисе A, -if (-г, if; 2) diag(e, s2), s = e2?ri/3, в базисе
A, -sf (-?, if; 3) diag(O, 2i) в базисе A, -if, (-г, if
4) diag(-l, 1) в базисе (e, -if {s, if; 5) diag A-г, 1 + i) в
базисе A, if, (-1, if 6) diag (eia, e~ia) в базисе A, -if, (-г,
if 7) diag(e + i, e-i) в базисе A, if, (г, if; 8) diagB + \/3,
2-\/3) в базисе (л/3 - 1, 1-if A + i, 1 - \fbf\ 9) diag @,
Зг, -Зг) в базисе B, 2, -if E, Зг-4, 2 + Qif E, -4-Зг,
430 Ответы и указания
4«2-6г)Т; 10) diag(l, г, -г) в базисе @,1, if, B, 2, 3 + if, B,
2, 3 - if; 11) diag (-1, 1 + г, 1 - г) в базисе A, 1, -1)Т, A + г,
1, -if, A-t, 1, if, 12) diag B, 3 + г, 3 - г) в базисе B, 1, 1)т,
D, 3, 2-if, D, 3, 2 +if; 13) diag B, -1 + г, -1-г) в базисе
A, 0, -if B, 2, -5-if, B, 2, -5 + if; 14) diag(l, и, ш2),
w = e2ni/3, в базисе А363; 15) diag (у/г, -\/3, г-Уз) в базисе A + уД,
1, 1)Т, A->/3, 1, 1)Т, (О, 1, -1)Т; 16) diag A +г, 1 + г, 2 + г)
в базисе A, О, 0)Т, @, 2, 1)т, A + г, 1, if; 17) diag D, 1, 0) в
базисе A + г, Зг, if (I, 0, i - if A + г, -г, 1)Т; 18) diag (г,
-г, г, -г) в базисе Л48б; 19) diag B, -4, —1 + г, —1—г) в базисе
A, 1, 1, if, A, -1, 1, -if A, г, -1, -if A, -г, -1,
if 20) diag A + г, -1+г, 1 + г, -1 + г) в базисе diag(Ai6, A16);
21) diag B, 2, -2, 2г) в базисе А473. 24.32. 1) Л = -3, (-1, 2)Т;
2) Л = 5, A, 3)Т;3)А = 3, B, О, -1)Т; Л = 2, (О, -1, if; 4) Л = О,
B, 1, -if; Л = -1, C, 3, -4)Т; 5) Л = -1, B, 0, if; Л = 1, A,
1, if 6) Л = 0, A, 1, -if, C, О, 2)Т; 7) А = О, A, О, О, if
(О, 1, 1, 0)Т; 8) Л = 1, B, -1, 2, -if Л = -1, B, -1, -2,
1)т; 9) Л = 1, A, 1, О, О, 0)Т, (О, О, О, 1, if, А = -1, (О, 1, 1,
О, 0)т. 24.33. 1) Ai = е, А2 = е2; а) нет; б) diag(e, e2) в базисе
A, 1-ef, A, 1 -e2f (e = е2™/3). 2) Alj2 = e±ia; a)(-l)"B при
а = пп (п —целое), в любом базисе; при остальных а преобразование
не диагонализируемо; б) diag (ега, е~%а), A9i. 3) Ах = 1, \2 = ш,
Аз = ш2; а) нет; б) diag(l, ш2, ш), Л363 (w = е2"/3). 4) Ai,2 = 3;
а), б) нет. 5) Ai = 0, А2,з = ±г>/3; а) нет; б) diag @, гУз, -г-Уз),
^384- 6) Ai,2 = 1; а), б) нет. 7) Ali2 = A ± Vb)/2, А3,4 = 1; а), б) нет.
8) Ai,2=i, А3,4 = -г; а) нет; б) diag (г, г, -г, -г), Л488- 9) Ai,2 = 1 +г,
Аз,4 = 1 - г; а) нет; б) diag A +г, 1 + г, 1-г, 1 - г), Л488- Ю) Ai,2 = г,
Аз,4 — —г; а), б) нет. 24.34. Пусть ei, ..., еп — стандартный базис,
т — [(п + 1)/2], г = [п/2]. 1) diag (Em, -Ег) в базисе из векто-
векторов ek + en_fc+1 (к = 1, ... , т) и ек - en-k+i {к = 1, ... , г).
2) diagCi?m, —Ет) в базисе примера 1). 3) diag Bп - 1, —1, ...
..., -1) в базисе из векторов ех + ... + е„, ei — е* (А; = 2, ..., п).
4) diag (х + (п — 1)у, х — у, ..., х — у) в базисе примера 3).
п-1
5) А = 0, базисный собственный вектор ^D (~l)*^n-ie«+i> преоб-
разование не диагонализируемо. 6) diag (п — 1, п — 3, ..., 1 — п),
компонентами fc-ro базисного вектора являются коэффициенты
многочлена A + t)n~k(l — t)k~1, расположенного по возрастающим
степеням
( (
t. 7) diag I 2 cos , ..., 2 cos ) в базисе из
\ п + 1 п + 1/
Ответы и указания
Ttks
векторов ак = ]С sin 7es> А; = 1, ... , п. 8) diag @, ..., О, п)
s=i п + 1
в базисе ai, ... , ап, где ai, ... , an_i — базис подпространства
хх - х2 + ... + (-l)"^ =0, an = ei - е2 + ... + (-l)"-1^.
9) diagB?m, -2Ет) при п = 2m; diag B?;га_1, 1, -2Em_i) при
п = 2т — 1 в базисе из векторов ек + 2еп~к+\ (fc = 1, ... , m),
ej; — 2en_fc+i (fc = 1, ..., r). 10) Л = 0 с собственными векторами
ei, ... , ег; при п = 2m — 1 еще Л = 1 с собственным вектором
ет; преобразование не диагонализируемо. 11) diag(ii?m, —iEm)
при п = 2т; diag (гЕт_1, 1, -i?Jra_!) при п = 2т - 1 в базисе из
векторов ек + ien_fc+i (к = 1, ..., m), efc - ien_fc+1 (fc = 1, ..., г).
12) diag A, ?, ..., ?n~1) в базисе из векторов ак —
e=i
(к —
= 0, 1, ...,п-1;е = е2"/"). 13) diag ( 2icos —^—-
\ тг + 1
п+1
в базисе из векторов ак =
irks
sin ¦
-еа, к = 1, ... , п.
24.35. 1) ±^ (\/5± 1); 2) 4, 0, 2 ± 2%/2; 3) 0, 8, 8, 12; 4) 0, ±4i,
±8г; 5) efc7ri/3, fc = 0, ±1, ±2; 6) а + 2Ь cos
¦кк
-, к = 1, ... , п.
Указание: использовать преобразование аг + bip, где -ф —
преобразование из 24.34, 7). 7) Хк — аг + aiEk + ... + апе^~х, где
ек — е2жк1/п, к = 0, 1, ..., п — 1. Указание: перейти к базису
ffc = A, ?fc, ..., el~l) , fc = 0, 1, ..., n- 1. 8) ax + ... + an и ±Afc,
где Afc = |ai + a2efc + ... + а^^1], ек = e2nki'n, 0<k< [n/2], а при
четном n также ai - a2 + ... + (-l)™^. 9) y/n, —y/n, iy/n, -iy/n с
кратностями соответственно к + 1, к, к, к при п = 4к + 1ик + 1,к + 1,
к + 1, к при n = 4fc + 3. Указание: характеристические числа
матрицы А2 равны п и — п с кратностями соответственно (п + 1)/2
и (п - 1)/2. 24.36. 1) 1 + (-1)"; 2) 0; 3) V" при п = Ак + 1, г^/п
при n = 4fc + 3; 4) ^n~1'CTl~2'/2nTl/'2. Указание: воспользоваться
результатами задач 24.34, 7) и 24.35, 9). 24.37. 1) A2g7; 2) Л2зо;
3) Л304 ~ D2, А3оъ ~ -Di- 24.38. 1) J3(-l); 2) Л485. 24.39. 5.
24.40. 9, 4, 3,2; или 9,2, 6, 1. А = 2. 24.41. ^.Указание:
проверить, что
Выразить
хп+\
через
= А
a
, где А — некоторая матрица.
и А. Для вычисления Ап привести
матрицу А к диагональному виду. 24.42. 1), 2) А = 0, собственные
векторы — константы; 3) собственному значению А^ отвечает соб-
собственная функция eAfct, к = 1, ..., п; 4) А = Ао, собственная функция
432
Ответы и указания
еА°*. 24.43. 1) Л — 0, собственные векторы -*;многочлены at + г
{\а\ + \Ь\ ф 0); 2) Л = 0, собственные векторы — константы; Л = — к'
X = {akcoskt + bkS\D.kt\\a\ + \b\^0}, к = I, ..., га; 3) Л = Aj.
Х= {сех"г\сф0}, к = 1, .... га; 4) Л = А2,, X = {ceA°*|C^Oj
{ 'H l
24.44. 1) A = О, X = {{a0 + aii)e'| |ao| + |ai| ф 0}; 2) A = -1
X = {ae'|a ф 0}; 3) A = 2, все ненулевые функции из L coc-
ственные. 24.45. 1) А = —1, все ненулевые функции из Л'
собственные. 2) Нет собственных векторов. 24.46. 1) А = С
X — {acos2f + Ьsin2i| \а\ + \Ь\ ф 0}; 2) А = -16, все ненулевые
функции собственные. 24.47. Через р, q обозначены базисные
векторы собственных подпространств. 1) А = 0, р = 1; А = 1
р = f, А = 2, р = t2; 2) А = 1, р = 1; А = 2, р = t; А = 3, р = i~
3) А = 1, р = t; А = 2, р = 1, q = i2. 24.48. Собственные знь
чения — всевозможные А € К. Собственные функции сеА', с ф L
24.49. А = —га2, X = {csinn?|c ф 0}, га любое натуральное число
24.50. А = В = С = Е. 24.51. 2) А = 1, собственные векторы -
многочлены степени меньше т; А = 0, собственные векторы — мно-
многочлены, делящиеся на po(t). 24.52. 1) diag (I, 0, 0, 0) в базис;
1, t, t2, t3; 2) diag A, 1, 0, 0) в базисе 1, t, t2 + 1, t3 +1\ 3) diag A
1, 1, 0) в базисе 1, t - 1, (t - IJ, (t - IK. 24.53. A = 1, coc-
ственные векторы — ненулевые симметрические матрицы; А = — 1
собственные векторы — ненулевые кососимметрические матрицы
Формула А — ~(А + АТ) + —(А — Ат) дает искомое разложениь
24.54. А = 1, собственные векторы — ненулевые эрмитовы матрицы
А = — 1, собственные векторы — ненулевые косоэрмитовы матрицы
24.55. 1) diag (-4, -4, 4, 4) в базисе
0 0"
„ . и; 2) А = 5, собственные матрицы
2, ?2), ? = е27Г'/3, в базисе
1 0
-е 0
8
_j
1 0
3 0
0
0
)
5
0
0
0
0
1
3
8
-1
;3)
0 0
1 0
diag (e , ?
0 1
0 -?
24.56.
1 2
0 0
3) diag (i
3 ?2-
0 0
1) diag (-1, -1, -2, -2) в базисе
0 0
1 2
; 2) А — — 3, собственные матрицы
), ? = е2*'/3, в базисе
-? 0
1 0 ||
1 1
0 0
2 1
0 0
3 ?-1
0 0
0 -е
0 1
0 0
1 1
о о
2 1
0 0
3 ?-1
0 0
3 ?2-1
24.57. 1) Если А =
•/х/л —•
0
-Я21
о
«21 «22 - «11
—ai2 0 an - «22
0 — ai2 a2i
0
-«21
«12
о
«11 «12
«21 «22
Ti
. 2) а) А = 0, собственные
Ответы и указания
433
1
0
0
1
3
0
1
-1
0
1
-г
1
1
г
>
i
1
1
—г
матрицы Е, Аю6; б) diag (О, О, 2, -2) в базисе Е, А22, Аъ, Af,
в) diag(O, О, -2г, 2г) в базисе
24.58. 1) diag A, 1, -1, -1) в базисе Е, А22, -А5, А20; 2) Л = 1,
собственные матрицы Е, Awq. 24.59. Л = 1; собственные функции:
1) 1> У> У2\ 2) 1) 2ж + у, Bх + уJ. Указание: можно использовать
результат задачи 23.50. 24.60. 1) Л = 0, собственный вектор хп\
2) А = О, собственный вектор уп; 3) diag (п, п — 2, ..., —п) в
базисе хп, хп~гу, ..., уп~1х, уп. Указание: можно использовать
задачу 23.51. 24.61. 1) А = 1, собственные векторы — константы;
А = 0, собственные векторы х, ху, х2. 2) diag A, 1, 1, 1, —1,
-1) в базисе 1, х + у, ху, х2 + у2, х - у, х2 - у2. 3) А = 1, соб-
собственные векторы 1, х, х2, у2; А = —1, собственные векторы у, ху.
24.62. 1) diag B, -2, 0) в базисе х + х2, х - х2, 3 - 5х2; 2) diag B/3,
4/3, -8/15) в базисе 6х + 1, х, Зх2 - 1. 24.63. 1) diag (тт/2, -тг/2)
в базисе sin a; + cosx, sin re — cosx; 2) diag (тг/2, тг/4, тг/4) в базисе
1, cos2:r, sin2x. 24.64. А = 0, собственные векторы — гармонические
многочлены, т.е. решения уравнения Лапласа Ар = 0. При п = 0 это
многочлены нулевой степени, а при п ^ 1 существуют два линейно
п:
независимых однородных гармонических многочлена степени
[п/2] [п/2]
U — У* (_l)k(j2k n-2k 2k у _ у^
(—l)kC2k+1xn~2k~ly2k+1
Указание: ип + ivn = (x + iy)n. 24.65. Преобразования с
матрицами
1 0
0 1
1 1
0 1
24.72. 1)
А В
О С
А О
В С
матрица А порядка к. 24.75. Любое подпространство инвариантно.
24.76. Вся плоскость и нулевое подпространство. 24.77. Прямая
х = ta и плоскость (х, а) = 0. 24.78. Если матрица преобразования
диагональна в базисе ei,..., е„, то ненулевые инвариантные подпро-
подпространства натянуты на всевозможные системы векторов е^, ..., е^.
Число инвариантных подпространств равно 2™. 24.79. Пусть С яв-
является прямой суммой собственных подпространств преобразования
<р: С = С\ Ф ... ф ?а. Тогда любое инвариантное подпростран-
подпространство М имеет вид /Л = Mi Ф •¦¦ Ф Ms, где Mi — некоторое
подпространство в ?j (г = 1, ..., s). 24.80. Подпространства {о}
и линейные оболочки векторов ei, ..., е^ для каждого к = 1, ..., п.
24.81. М\ + М2, где Mi — произвольное подпространство в
d г — 1, 2. 24.82. 2) Указание: использовать задачи 24.2
и 24.26, 4). 24.83. 2) Указание: использовать задачи 24.26,
1) и 23.98. 24.85. Указание: использовать задачу 24.84.
24.86. Очевидные инвариантные подпространства: {о} и все про-
15- 1715
434
Ответы и указания
странство. Другие инвариантные подпространства: 1) одномерные
с базисными векторами B, —1) и A, —1) ; 2) одномерное с
базисным вектором (—1, 2); 3) одномерные подпространства
с базисными векторами ai = @, 1, 1) , аг = A, —1, —1),
аз = A, —1, —2) , двумерные: линейные оболочки пар векторов
ai, at, I ^ i < k ^ 3; 4) одномерное инвариантное подпростран-
подпространство V с базисным вектором C, 5, 6) , двумерное инвариантное
подпространство Q с базисом B, 1, 0)Т, A, О, -1)Т; все под-
подпространства М. пространства Q; всевозможные суммы М + V-
5), 6) Собственные подпространства М, J\f с базисами из векторов
efe + en_fc+i, I ^ k ^ [(га + 1)/2] и ек - en-k+i, 1 ^ к ^ [га/2]; все под-
подпространства V, Q пространств М, 7V; всевозможные суммы V + Q.
7) Собственные подпространства М, N с базисами ei + ... + е„ и
е% — ег,. • •, ej — е„; все подпространства V пространства Л/"; все сум-
суммы V + М- 24.87. (п — 1)-мерные инвариантные подпространства
определяются уравнениями: 1) Xj — 2хг + хз = 0 и х\ — Х2 + хз = 0;
2) Bа + Щхг - ах2 + ^х3 = 0 (|а| + |0| ф 0); 3) хг - х2 + 2х3 = 0;
4) xi - х2 - 0; 5) xi + 2х2 ± {^з + 2х4) = 0; 6) xi + х3 ± (х2 + х4) = 0;
7) 2xi + х2 + Зхз + х4 - х5 = 0; 8) хх + х2 + . ¦. + х„ = 0.
Указание: использовать результаты задачи 24.84 или 24.85,
2). 24.88. 2) Базис в ?: A, -1, -1, 0)т, @, 0, 0, if.
24.89. 1) Указание: если ei, ..., ек — базис в Ск (к — 1, ..., п),
то ei, ..., еп — искомый базис. 24.90. Линейные оболочки пар
векторов: 1) || 1 0 2 ||Т, || 0 1 2 |jT; 2) || 1 0 1 0 ||Т, || 0 1 0 1 ||Т и
||Т
1 0 -1 0||J,
: || 1 у/2 1
-1110
|| 0 1 0 -1 ||'; 3) || 1
0 if || -у/2 -1 0 1
-уД 1 0
4) все
V2 -1 0 1
5)
А' =
3) S =
4) 5 =
4
-5
0
5
4
0
0
0
0
0 0 0 1
2) 8 =
24.99. 1) S =
1 уД 1
V2 -1 уД
1 0 1
О 10
1 0 0 2
0-102
0-210
О 2 0 1
1
0
1
0
0
1
0
1
1
0
-1
0
0
1
0
-1
, А' =
-1
о
1
А' =
А' =
0
1
0
0
-9
0
0
0
0
0
0
1
0
0
-9
0
; 5)
пространство;
1 0 2
0 12
2 2-1
0 2 0 О
-2 0 0 О
0 0 2-2
0 0 2 2
-л/2 -10 0
1 0 0 0
О О \Д -1
О 0 10
-3 -3 -1 О
3 2 10
4 3 10
10 0 1
Ответы и указания
435
A' =
1 0 0
0-10
0 0 0
0 0-1
0
0
1
0
. 24.101. Искомый базис задан матрицей S.
Решение не единственно. 1)
S =
1 1 0
-1 2 0
0-3 1
; 3)
0 -25 0
0 5
0 0
-1 -1 -1
0 -1 1
0
0 -1
1
5
,s =
, S —
0 10
15 0
1 4 1
-2 11
1 0 0
1
-1 0
; 2)
0 0 0
0 0 1
0 0 0
. 4) Матрица к
треугольному виду над полем действительных чисел не приводится.
Указание: применить задачу 24.100. Молено использовать
результаты задачи 24.87. 24.102. 2) Если fci, ..., fcr — порядки
диагональных блоков, то dim Cj — к\ + ... + kj (j = 1, ... , г).
24.104. 1) А = 0, собственные векторы — константы; 2) Л = 0, at
{а ф 0); 3) Afe = -к2, acoskt (а ф 0), А; = 0,1,..., га; 4) Afe = -к2, bsinkt
(b ф 0), к = 0,1, ..., га. 24.105. Многочлен степени не выше га.
24.107. См. ответ к задаче 24.81, где С\ — подпространство много-
многочленов степени не выше т — 1, Ci — подпространство многочленов,
делящихся на po(i). Указание: преобразование является проек-
проектированием на L\ параллельно ?г- 24.109. См. ответ к задаче 24.81,
где С\ — подпространство симметрических матриц, Li — подпро-
подпространство кососимметрических матриц. 24.110. Указание:
Ск есть множество матриц, у которых все столбцы, кроме fc-ro,
нулевые. 24.112. 2) Aj + \j, 1 ^ г < j ^ га. 24.114. При а = wk
(к — целое) преобразования 1), 2) тождественные, Л = 1, все нену-
ненулевые матрицы порядка 2 собственные. При а = — + пк имеется
собственное значение Л = 1 с собственной матрицей Е для 1) и Аго
для 2) и собственное значение Л = — 1 с собственными матрицами
, _ , |а| + |Ь| ф 0, для обоих преобразований. При а ф пк/2
собственное значение А = 1 с собственной матрицей Е для 1) и Аго
для 2), а также собственные значения А — e±2ta с собственными
1 ±i
матрицами
ний.
±i -
24.115. Например,
соответственно для обоих преобразова-
А, ..., A, Jrfe_m+i(A),
m —1 n—k
при А ф /х. Число клеток равно m, сумма их порядков равна fc.
24.116. 1) (t - l)(t + 9); 2) (t - 2J; 3) t(t - 3 - \/2); 4) t{t - 2i);
5) (t - iJ; 6) t(t - 2); 7) t2; 8) t3. 24.117. 1) t - А, если A = XE;
2) (t - A)n, если A = Jn(X). 24.118. 1) 1. 24.124. Пусть
A = diag Gг@), 0). Собственное подпространство (Л = 0) двумерно,
и к вектору h = || 0 0 1 || не существует присоединенного
как система Ах = h несовместна. 24.125. 1) Ai = 0, || 3 1
так
г
15*
436 Ответы и указания
и Аа = 7, || 1 -2 f; 2) Ах = 1, || 2 -1 f и А2 = 2, || 1 -1 ||Т;
3) А = 0, || 1 О ||т, || О 1 || (все пространство — корневое); 4) А = О,
|| 1 0 0 || , || 0 1 0 || , || 0 0 1 || (все пространство — корневое);
5) Ai = О, Ц 1 1 -1 ||Т и А2 = 2, || 1 2 О ||т, || 3 0 2 ||т (собствен-
(собственные пространства совпадают с корневыми); 6) А = 0, || 1 0 0 || ,
|| 0 1 0 || , || 0 0 1 || (все пространство — корневое); 7) Ai = —1,
|| 0 1 -2 ||т, || 3 0 2 ||т и А2 = 0, || 3 3 -4 ||т; 8) Ai = -1,
|| 2 0 1 ||Т и А2 = 2, || 1 1 О ||Т, || 0 0 1 |jT. 24.126. Указывается
жорданова форма и соответствующий ей базис. 1) J2@), || 1 1 || ,
|| 1 0 f; 2) МО), || 3 -3 f, || 0 1 |f; 3) Ja@), || 2 6 f, || 0 -1 ||Т;
4) diag (Ja@), 0), || 2 2 -2 f, || -1 0 0 ||х, || 3 0 2 ||Т; 5) J3@),
|| 2 -1 О ||т, || -1 2 -1 f, || 0 -1 1 ||Т; 6) МО), II 2 -1 -1 f,
|| 1 0 -1 ||Т, || 0 0 1 f; 7) diag (Ja@), Л@)), || 1 0 0 1 f,
||1 0 0 0||х, И 0 1 1 О |Г, Ц0 10 0||х; 8) diag(J3(O), 0),
|| 1 1 1 1 ||т, || 1 1 0 0 ||т, || 1 О О 0 ||т, || 1 О О 1 ||Т; 9) J4@),
S| 16 16 16 16 f, || 8 8 О О ||Т, || 3 1 1 -1 f, || 1 О О О f.
24.127. 1) J2(-3), ||1 -2 ||х; ||0,-1/2||Т; 2) diag @, 169),
|| 12 -5 If, || 12 5 ||Т; 3) J2(-2), || 3 6 ||Т; || 1 1 ||х; 4) J2E),
||-2 -6||Т, || О if; 5) diag B, 2, 0), || 2 1 О ||т, || 3 0 2 ||т,
|| 1 1 -if; 6) diag (J2(-l), -1), || 1 -2 if, ||-1 О О f,
|| 2 -1 О ||Т; 7) diag(l, Ja(l)), || 5 1 О ||Т, || 1 -3 4 ||х, || 1 О О ||Т;
8) diag (О, J2@)), || 0 1 0 IIх, || 16 -4 -8 f, || 1 О О f; 9) diag (О,
Ja(l)), || 1 -1 1 |Г, || О 1 -1 IIх, || 1 О 1 ||х; 10) diag(J2(-3), 2),
|| 5 0 -10 IIх, I) -17 11 0 IIх, || 0 1 -1 f; 11) J3B), || 1 2 1 ||Т,
|| 1 1 0 f, || О -1 О ||х; 12) J3(-l), || 2 -1 -1 IIх, || -1 1 0 f,
||-10 2 ||х, 13) diag (Ja(l), -1), ||2 2 2||т, || О О 1 f,
|| 2 О 1 f; 14) diag B, 2, 2, -2), || 1 1 1 -1 f, || 1 1 -1 1 f,
|| 1 -1 1 1 IIх, || -1 1 1 1 ||х; 15) diag @, 72@), 2), || О 1 1 О ||Х,
|| 0 2 -2 -4 IIх, || 1 О 1 О ||т, || 1 0 2 1 f; 16) diag (J3(l),
1), || 0 2 0 0 f, || -2 3-11 f, || 0 0 1 О ||т, || 1 -1 О О ||Т;
17) diag(Ja(l), 1, 1), || -1-111 IIх, || О 1 0 0 If, || 1 О 1 0 If,
|| 0 7 0 -if; 18) diag (J2(l), Ja(-1)), || 2 -1 2 -if,
|| 0 1 2 0 ||x, || 2-1-2 1 f, || 1 -1 1 0 ||x. 24.128. К ве-
вещественной жордановой форме приводится только матрица 3).
||l 1-?||T,||1 l-g||x,e = e-2"/3;2)diag(D + 3t
|| 1* |Г, ||1-г|Г; 3) JaC), || 1 2 ||х || О -1
Ответы и указания
437
4) diag A, г, -г), || О 1 If
5) diag B, -1 + г, -1-0,
1 О
3 г -1 -г
т
|| 2 2 -5 +г || ;
|| 1 -1 1 -1 f,
Ja(-0), || 1 -1 -1 ~i „ .
|| О 1 г —3 - Зг f. 24.129.
2) diag (e + i, е-г), II 1 *
II 1 -1 f, II 1 1
6) diag B, -4, 1 + г, 1-0,
3 г -1 г
II О О Ч — i II ¦
II id Li О — ? | ,
I 2 2 -5-if,
-2-111 f,
7) diag (J2(i),
|1-1-1 г f,
T ii i ^ ||T"
0 1 -г 3i-3||J,
1) diagBi, 0), ||1 i\\\ ||1 -t.. .
', || i 1||T, 3) diag(l+?, 1-е),
? = cos (-2тгг/3) + i sin (-2тгг'/3); 4) 7г@>
и 1 i ||J, || 0 1 ||J. 24.130. 1) При m < n матрица содер-
содержит единичную подматрицу порядка га — гаг в правом верх-
верхнем углу, остальные ее элементы равны нулю, а при гаг ^ га
Лт С^А™-1 С^Ат-2
Лт CIА™-1
матрица нулевая.
2)
0
0
0
о
о
0
0
\т-1
3)
/(Л) /'(А) /"(А)/2!
0 /(Л) /'(Л)
. 24.131. 1) Jn(A2)
О О О ... f{\)
О 0 0 ... /(А)
при А ф 0. При А = 0 две клетки порядка fc, если n = 2fc, и порядков к
и к + 1, если и = 2к + 1. Указание: если е\, ..., еп жорданова
цепочка у>(е^+1) = е* (г = 1, ..., га - 1), то относительно <р2 она рас-
распадается на две цепочки: еп, е„_2, ... и en_i, ега_з, ... из векторов,
номера которых имеют одну четность. 2) 7п(Ага) при А ф 0. При А = 0
относительно <р2 образуются m клеток, соответствующих цепочкам
векторов, номера которых имеют одинаковые остатки при делении
на т. 3) Jr^A). 24.132. 1) Приводится к диагональному виду.
2) Для каждого характеристического числа имеется по одной жор-
дановой клетке. 24.134. 1) Jn+i@); 2) Jn(l); 3) diag (e, ..., en~l),
где ? = cos (тг/га) + г sin (тг/га); 4) diag @, ..., га); 5) 2г diag (cos a, ...
..., cosraa), гдеа = тг/(га + 1); 6) Jn@); 7) diag (га-1, га - 3, ..., 1 -га).
24.135. 1) diag G2A), -Ml)); 2) diag(J3(l), 1); 3) diag(J2(l), I, 1).
Указание: Л458 = (Ai69 - ЕJ — О, но Rg Л458 = 2, а
Rg (Л469 -Е) = \. (Л460 - ЕJ ф 0, (Л46о - ЕK = О. 24.136. Ха-
Характеристический многочлен (А — 3J(А + 2); для А221 мини-
минимальный многочлен (А — 3)(А + 2), жорданова форма diag C, 3,
—2); для —Л273 минимальный многочлен (А — 3J(А + 2), жор-
жорданова форма diag(J2C), -2). 24.137. diag (J3(-l), 2, 2).
438
Ответы и указания
24.138.
0 0 0 0 ... (I!)
О 0 0 0 ... 1
3) A-j-j. 24.141. Указание: использовать утверждение 2) заде
чи 24.139. 24.142. Если Ао — наименьшее по модулю ненулевое
собственное значение <р, то 0 < го < |Ао|- Если все собственные зн;-
чения равны нулю, то годится любое ?о > 0. 24.143. Указание
если одно из преобразований невырождено, воспользоваться утвер-
утверждением задачи 23.92. Если оба вырождены, то использоват:
утверждение задачи 24.142. В этом случае преобразования (р + е
и ¦ф перестановочны, и имеют одинаковые характеристические
многочлены при любом е € @, ?о)- Переходя к пределу npi
е —>• +0, получаем требуемое. 24.144. Указание: применит*
утверждение задачи 24.141. 24.145. Указание: доказать, чтс
(риф имеют общий собственный базис. 24.146. Указание
применить утверждения задач 24.144 и 24.145. 24.147. Пуст..
<p(ei) — о. Тогда е\ собственный вектор для \j) с некоторым сог-
ственным значением А. Векторы ег, • • •, е„, такие, что (p(ek+i) = чк
(к = \, ..., п — 1), линейно независимы, причем ^(е^) = (А — к + 1)е^
(fc = 1, ... , п). 24.148. Пусть Ао — максимальное по модул»
собственное значение tp~1i>- Тогда е = jАо| х -
25.1. 1) Нет; 2) нет; 3) нет; 4) да; 5) нет. 25.2. 1) а) Дс:
б) нет; 2) нет; 3) нет; 4)да; 5) да. 25.4. 2) Стандартный бази:
ортонормирован. 25.5. 1) Нет; 2) нет; 3)нет. 25.6. Р должн;
быть положительно определенной (задача 25.30). Указание
составить скалярные произведения матриц стандартного базиса.
25.9. \рк\ — у/2Bк +1). 25.14. Указание: используйте
результат задачи 25.13. 25.15. 1) cos^ — \/2Т/5; cosy>2 = ч/Зб/Ю
cosip3 = \/35/B\/21); 2) ^/Щ; ^J2fj\ 4/у/Ш. 25.20. 1) 16; 2) О
3) -12; 4) 7; 5) 3. 25.21. cos a = 1/у/п. 25.22. 1) 2,
8/>^4; 2) v^2, V5, 0; 3) у/22, V22, -6/11; 4) V5, >/§8, /
5) 2, \/П, 3/2\/1Т. 25.23. Указание: вычислите \е{ +
25.24. Каждый базис с указанной матрицей Грама получаете*
из одного такого базиса некоторым ортогональным преобразов?
нием плоскости. Обратите внимание, что для того, чтобы сделат.
рисунок, необходимо выбрать единицу масштаба. 25.25. 1) 0
^ Izi?. 25.26. 1) тг/*
1 — fi
- 25.27. 1) у/2, у/ТЪ
5) |xi|2 = Cn2 - n)/l:
2) 10; 3) 8; 4) 0; 5) пр + /^, где Р =
2) я-/3; 3) jt/6; 4) я-/3; 5) я-/4; 6) ^/2
2) v/2, V179; 3) у/8, VlO; 4) 1,
Ответы и указания
43У
(fc € N); 3) ни при каком а. 25.29. Указание: исполь-
используйте связь матриц Грама двух базисов для случая, когда
один из них — ортонормированный. 25.31. Указание:
использовать результат задачи 25.29. 25.33. Указание:
использовать неравенство Коши-Буняковского. 25.35. 1) Да;
2) нет; 3) да; 4) нет; 5) да. Указание: утвердительные от-
отобосновать, написав соответствующие матрицы.
веты
можно
25.36. 1)
3
5
0
0
5
9
0
0
0
0
3
5
0
0
5
9
;2)
1
-1
0
0
-1
2
0
0
0
0
1
-1
0
0
-1
2
25.37.
О 2/3
2/3 О
2/3 0 2/5
25.38. Еп2. 25.39. Г .Указание: помимо базиса е, введите
какой-нибудь ортонормированный базис и используйте матрицы
перехода от него к базисам е и е*. (См. также задачу 25.31).
25.41. 2) Нет. Указание: выразите С через матрицы, состоя-
состоящие из координатных столбцов векторов соответствующих систем
в некотором ортонормированном базисе. 25.43. xi, ..., Хк-
25.44. Указание: используйте результат задачи 25.43.
25.45. 2), 4), 5), 6), 7), 10) 11), 12), 13), 14) - да, остальные - нет.
24.46. 1) Да; 2) да; 3) в общем случае, нет; 4) да; 5) да: поворот
вокруг побочной диагонали можно осуществить так: переписать все
строки и все столбцы в обратном порядке, а затем транспонировать
{aij —>• an_j+i]T1_j+i). 6) Только если число равно 1 или —1. 7) Нет.
25.47. 1) Нет; 2) да; 3) да; 4) только при |а| = 1; 5) да. 25.48. Все
пары, которые получаются из Е, — А53 умножением обеих матриц
на одну и ту же ортогональную матрицу. 25.49. Ортогональная
матрица должна отличаться от антисимметричной матрицы на
слагаемое вида — Е. Существуют при п = 2 и 4, а при п = 3 — нет.
25.50. 1) Нет; 2) да. 25.51. Да. Рассмотрим ортоиормированный
базис е и вектор, имеющий в этом базисе компоненты, равные
элементам строки. Дополним этот вектор до ортонормированного
базиса е'. Если S — матрица перехода от е к е', то ST — искомая
матрица. 25.52. Произведение матрицы п\л К где Q — произ-
и | W ||
вольная ортогональная матрица третьего порядка, на одну из таких
матриц, например, Аш- 25.53. 1) Нет. 25.54. Диагональные
матрицы с элементами +1 или —1 на диагонали. 25.55. Остальные
элементы строк и столбцов, пересекающих подматрицу, равны нулю.
25.56. 1Д/п. 25.57. Указание: если А — ортогональная
матрица, то матрица —=. —jt—-3- также ортогональная. Про-
Проверьте это. 25.58. 2) Необходимо и достаточно, чтобы линейные
оболочки обеих систем совпадали. Указание: воспользуй-
440
Ответы и указания
тесь результатом задачи 25.55. 26.3. 1) 5; 5) {о}. 26.6. Нет.
. 2) ±4= || -1 0 1 О ||Т. 3) ±
¦ v/2 " '
— 15 7 3 || . 26.8. 1) Координатные столбцы векторов
1
4)±
базиса в С1- — базисные столбцы матрицы Ат. 2) FTr\ — о, где
F — фундаментальная матрица системы АЕ, = о. 26.9. 1) Ко-
Координатные столбцы векторов базиса в С1- — фундаментальная
система решений системы Атл\ = о. 2) Атл\ — о. 26.11. 1) Ко-
Координаты векторов базиса в ? — базисные столбцы матрицы
Г~1АТ, иначе — фундаментальная система решений системы из
п. 2. 2) FTYx\ = о, где F — фундаментальная матрица системы
АЕ, = о. 26.12. 1) Координатные столбцы векторов базиса в С
составляют матрицу FF, где F — фундаментальная матрица
системы АТЕ, = о, иначе — фундаментальная система решений си-
системы из п. 2. 2) АтГц = о. 26.13. 1) а) || 3 1 2 ||; б) || 1 —3 О ||Т,
1 -5 1
-1 1 1
; б) || 3 1 2 f; 3) а)
-7 0 1 12
|| 0 -2 1 ||т; 2) а)
б) || 8 1 0 -9 ||
б) || -3 1-3 0 ||
цы векторов базиса в С1- составляют матрицу 1) || 3 2 1
4) а)
3-15 9 1
3-6-3 2
-13 2-3
2 9 1-4
10 2 1
26.14. Координатные столб-
2)
5)
8)
1)
1 -5 1
-111
12 3 1
3 2 1 1
2 3 1-1
2-3 5 7
2 -3 -11 -15
1-6-7 0
0-2-3 1
3)
1 3 -1 2
2-1 3 5 || ;
2 1-1-1 1
1-1 1 1-2
1-5003
4)
1 -5 -6 11
5 1-43
|| 0 -1 1 -4
2 13-2
26.15. Система уравнений имеет матрицу:
1 -10 -9 0
0 2 3 1
3-2100
4-3010
3-4001
5) a) AJ1O; б) A{f
2) а)
4) а)
-3 1 0
1 0 1
164-
Т
-1 0 2 0
-1-2 0 2
26.16.
II 0 1 -
б)
1) а) || -3 2 1 ||Т; б)
1 4 -5
0 1-2
° J °
; б) || 1 0 -1
2 112
0 10 1
б) || 3 3 8 ||; 2) а) || 5 2 0 ||Т; б)
26.17. 1) а)
1 -1 0
0-8 3
2-5 0
0 0 1
; 3) а) || 1 -1 1
Ответы и указания
441
,J 1 1 О
б) О 1 1
;4)а)
0 1 1-1
10-2 О
0 10 1
2 0 11
. 26.18. 1) Про-
Про|т,
||т
странство скалярных матриц. 2) Пространство нижних тре-
треугольных матриц с нулями на диагонали. 26.19. Подпро-
Подпространство многочленов нечетной степени. 26.22. 1) о, х;
2) х, о. 26.23. Е,' = А(АТА)-1АТЕ,, Е," = (Е - А{АТ А)~1 АТ)Е,.
26.24. Е," = (Е - AT{AAT)-lA)l, Е," = Ат(ААТ)'1 АЕ,.
26.25. Е,' = А(АТГЛ)-МТГ^, Е," = (Е - А{АТГА)-1АТГ)Е,.
26.26. Е,' = (Е-Г-1АТ{АГ-1АТ)-1А)Е,! Е,"=Г~1 Ат{AT'1 AT)~lАЕ,.
26.27. 1) ?,' = || 2 1 1 ||т, Е," = || 1 -1 -1 ||т; 2) Е,' = || -3 2 -2 ||т,
Е," = || 4 1 -5 ||Т; 3) ?. = || 4 2 2 4 ||т, Е," = || 1 1 5 -4 ||т;
4) ?,' = || 1 -2 3 -1 ||т, Е," = || 1 1 0 -1 ||т; 5) ?,' = || 5 0 3 4
?," = || 1 0 1 -2 ||т; 6) Е! = || 3 3 -2 1 ||т, ^" = || —1 112 ||;
7) Е! = || 5 3 -3 -5 ||Т, ?," = || 1 1 1 1 ||Т; 8) ?,' = || -6 3 2 -1 ||т,
Е," - || -1 -2 1 2 ||т; 9) Е! = -^аь ?," = ?,- ?,'; 10) Е,' =
= ~Ы + ^-а2, ?," = ?,- ?,'; 11) ?,' = -^аь Е," = Е, - Е,'.
26.28. 1) ?,' = || -1 0 1 ||Т, Е," = || 2 2 2 ||Г; 2) ?,' = || 4 4 4 |т
?," = || 0 -2 2 ||Т; 3) ?,' = || 2 1 0 -1 -2 ||Т, ?," = || 3 3 3 3 3 |
4) Е! = || 3 1 -1 2 ||т, ?," = || 4 -6 10 2 ||т; 5) Е,' = \\ -3 3 1 1 |
г." = || 1 1 1 -1 ||Т; 6) Е! = || 2 -6 4 -2 ||Т, ^" = || 6 1 -1 1
26.29. 1) || -3 -2 -1 ||т; 2) || 4 6 2 ||Т; 3) || -1 -2 -3 -4 -5
4) || -1 7 -11 0 ||Т; 5) || -4 2 0 2 ||Т; 6) || -4 -7 5 -3 ||
26.30. 1) Ш2 + t + 1; 2) -Ш2 - 8f + 4. 26.31. 1) 8/C2 • 5);
2) 8/E2 • 7). 26.34. Д@ = ? «цВД, где а{ - ^^
||Т;
||т,
||Т.
||Т;
||Т
i=0
26.39. Указание: выразим |е^|2 с помощью ортонормированного ба-
п п k
зиса а 1,.. .,а* в подпространстве С и получим Sleil2 = S S(ajie«J-
26.41. Указание:
шением задачи 26.40.
г=1
воспользоваться
приведенным ре-
26.42. 1) || 1 3 -2 |f, || 1 1 2 |f;
2) || 2 1 0 -1 |f, || 1 5 2 7 |f; 3) || 1 3 1 |f, || 2 -1 1 |f,
|f,
|f,
|f
4)
2 1 2
|| 3 0 -1 |
2 7 0 -8
|| 1 0 -1
1 -5 3|f:
-1 4 -1
6)
II 4 1 -7 |П
5) || 1 2 3
|| 3 -2 3 -1
|| 1 2 -2 -1 ||' , || 2 -1 1 -2 ||J . 26.43. Столбцы матрицы Q —
координатные столбцы искомых векторов, S —матрица перехода:
; 7)
|f
1-1-11
1 2 1 2
1 1 1 1
442
Ответы и указания
1) Q =
ч/2
3
ч/То
1
¦ч/io
1
ч/Тб
3
л/Ш
, 5 =
1
л/Ш
0
2
Зл/Ш
1
ЗуД6
; 2)
•к
О -т= —;=
л/3 ч/б
1
о о -=
4)
5 =
5 =
;3)Q =
S =
л/lO 2л/2
0 J
2л/2
О О
L
2\/10
ч/1О
= -^468,
5 =
О -
1
л/То
О
1
2
1
2
г
1
~2
2л/Т0
О
° 2 "~2ч/Т0
\/30
о о
1 -ч/б -\/3
О \/б -ч/З
О О у/Ъ
5 =
\/21 \/5 \/106
О — —
ч/б л/106
о о 1
л/106
1-1 2-4
О 1-1 2
О О 1-1
О О О 1
6) g =
5) g =
\/ЗО
О
ч/б
2 -2\/б
3 О
_2 2_
ч/21 л/5
V21
О О
-3\/3
О
О
\/3
/106
1
106
10
Тбб
1
; 8) О =
ч/Т06
1
ч/Т5 л/5
2 J_
Til ~л/5
1
л/70
2
ч/Т5
3
уДЪ
о -
л/70
8
ч/70
1
77б
Ответы и указания
443
v/15
О
1
о
12 0
-= II 1 1 1
v/70
1
Tfo
1
26.44.
r 111 3
иг 1
VT2
1
1
7^
7! "-321
|| 1 -2 3 ||
2 0-1 ||Г
II 1 -1 1
v/42
V84
1
\/22
^ II 7 -4
о
II ~5 4 °1Г
-5 7 -8 ||:
II -19 8 3
J6.45. 2) Указание: если Qii?i = Q2R2, то матри-
и Р = Q^Qi = ДгД^1 и ортогональная и треугольная.
J6.46. 1) Q =
Д =
= \/10
1 2
0 3
; 3) Q =
у/2 2\/2
О 4ч/2
V2
-R =
-, 2) Q =
/2 О
3 1
1 -3
\/10 \/10
0 2\/2 \/2
О 0 у/16
^/iO \/Т0 \/10
; 5) Q = -
О \/3 -l/ч/З
О 0 ч/2/ч/З
2 4 0 0
0 2 4 0
0 0 2 4
0 0 0 2
4) Q =
6) Q = А445,
0
0
0
2
0
0
2
2
0
1
1
л/1
26.48.
1)
l/v/2 -5/v/2 II
О v^ '
4)
2
0
0
0
0
2
0
0
0
2
2
0
4
0
0
2
10 0-1
1 || 2 -3 II „ 1 0 1-10
'' 2 0 1' 6> 2 0 0 10
0 0 0 1
указание: составить систему уравнений для элементов ис-
искомой треугольной матрицы (см. задачу 26.47). 26.50. 1) 1;
J) v/32; 3) v/21; 4) 8лДТ; 5) 2; 6) v/55; 7) 1. 26.51. 1) y/U;
J) \/T07; 3) 4\/TT0. 26.53. 1) Указание: воспользовать-
п
¦;я результатом задачи 26.52. 2) Либо JZ a»ja»fc = 0 при j ф к,
г=1
либо один из столбцов матрицы — нулевой. 3) 4 ^ 200. Угол
гр гр
а между векторами ||1 3|| и ||2 4|| при стандартном ска-
скалярном произведении в М2 мал: cos а = 14/10\/2 и 0.98995.
26.54. 1) Указание: перейти к базису ei, ..., е*,, ej.'+1, ..., е^'
и использовать результат задачи 14.39. 2) Указание: если
444
Ответы и указания
а{, ... , ар — ортогональные составляющие соответствующих век-
векторов, то Г(аь ... , ар) = Г(а'!, ... , а'р) + Г(а'/, ... , а"). Можно
считать, что а{,
а" линейно независимы, иначе результат
очевиден. Пусть S — матрица перехода от а'{, ... , ар к тому
базису, в котором квадратичная форма с матрицей Г (а", ... , а'р)
имеет канонический вид. Умножим обе части равенства справа
на S, а слева на ST и воспользуемся результатом задачи 32.20. 1).
26.58. 1) 7г/3; 2) 7г/6; 3) 7г/3. 26.59. у имеет координатный столбец
1) || -1 1 ||Г; 2) || 5 4 7 6 ||Т; 3) || -3 1 ||Т; 4) || 0 0 1 -1 ||Т.
имеет координатный столбец 1) || — 3 —2 — 1 || ;
Г; 3) || -1 -2 -3 -4 -5 ||Т; 4) || -1 7 -11 0 ||Т;
1|Т; 6) || -4 -7 5 -3 ||т. 26.61. |я| = \у\. С пер-
26.62. С перпендикулярно
26.60. у
2) || 4 6 2 ||Т;
5) || -4 2 0 2
пендикулярно вектору а — х — у.
2)
вектору 1) || -1 1
4) || 2 -2 2 2 ||т. 26.63. 1)
26.64. 1) || 2 0 2 ||Т; 2)
2) сц = 1, (г, j = l, ..., п); 3)
5
4
1
3
0
0
0
0
0
0
0
0
0
0
0
0
II • 41 II 1^4 — 1 II •
II 1 Л) II —i 0 Л 6 II !
2 0-2 ||; 3) || 0 1 -2 ||.
26.65. 1) Е;
26.66. (9 -
0-11-2
0 9 4 ||; 2) ||
1 1 0 f; 3) || 1 1 1
о о
0 0
0 0
0 0
26.67. Будет произведена та же перестановка базисных векторов.
26.68. 1) || 1/2 0 f, || 0 1/3 f; 2) || -1/3 2/3 ||Т, || 2/3 -1/3 f;
3) || -5 3 ||т, || 2 -1 ||т; 4) || 0 0 1 ||т, || 0 1 -1 ||т, || 1 -1 0 ||.
26.69. 1) || -12 7 ||т, || 7 -4 ||т; 2) || 13/2 -2 ||т, || 7/2 -1 ||Т;
3) || 5/4 -3/2 3/4 f, || -3/4 3/2 -5/4 f, || 1/4 -1/2 3/4 ||Т;
4) || 1 0 0 ||т, || 3 3 1 ||т, || -3 -1 0 ||т. 26.70. (9 - Ш2)/8, 3*/2,
(-15 + 45?2)/8. 26.73. Матрица Грама базиса е*. Указание:
использовать задачу 26.72. 26.74. TeSTjl. Указание: ис-
использовать задачу 26.73. 27.1. 1) Нет; 2) да; 3) нет; 4) нет.
27.2. 3) Нет. 27.9. Re (х, у) = 0. 27.10. 1) 0; 2) 2; 3) Юг;
4) -г; 5) 6г; 6) 32 - 19г; 7) 4 + 2г. 27.11. 1) у/2; 2) \/2; 3) у/Тб;
4) ч/З; 5) уД; 6) \/33; 7) \/П. 27.12. 1) -Зг; 2) 1 + 7г; 3) 58 - 16г;
4) 6 + Зг; 5) 2 + 13г; 6) 4 - 2г; 7) 9г; 8) 16 + 4г. 27.13. 1) у/б; 2) v/TT;
3) \/29; 4) \/5; 5) VT5; 6) у/б; 7) у/п; 8) у/п. 27.16. Эрмитовы
-486, -487, -410з, -4377, -4492- Из них Аюз и Л377 не могут служить
матрицами Грама. 27.18. 1)Да; при а < 0 — нет; 2)да; да;
3) нет; 4) да; да. 27.21. ^4юз- 27.23. Диагональные матрицы,
с числами, по модулю равными 1, на диагонали. 27.24. 1) Нет;
2) да; 3) да. Указание: любой единичный вектор можно до-
полнить до ортонормированного базиса. 27.26. 1) || 1 — г || ;
2) || 1 -г 1 + г ||Т, || г 2 - г -1 ||Т; 3) || 1 - г 2 0 ||Т, || 0 г 1 ||Т;
Ответы и указания
4)
1 -г 1
г 1 О ||Т; 5) ||\/3-\/4\/4-\/2\/2-\/3
27.27. 1) || г 1 ||Т; 2) || 1 -г О ||т,
О г-1 1||Т; 3) || -г 1 Of;
4) || -г 1 О
-3 О 1 || ; 5) || 1 г -2 || . 27.28. 1) -=
V2
1+г
1-z
2)
4\/б
1
3)
2)
1-Зг
-3-2г
1
3 + г
_2
О
5 + Зг
5г
5-Зг
- Е. 28.2.
2-г
i
1
г
1
Те
1
1 -2г
' 3V7
2г
1 + Зг
1
г
-2
3) -7S
ч 1
г
1
г
1
1 + г
2 + г
1-z
27.29.
1) ^а; 2) -I
а;
1
п
1)
-7-4г
16 + 6г . 28.1.
6-5г
; 2) 2А{АТА)~1АТ - Е.
28.3. 1) А(АТТА)-1АТГ;2JА{АТГА)-1АТТ-Е. 28.4. 1)
= х - 2а (а, х) /|а|2, Е - 2 (а, ат) / (ат, а); 2) (а, х) = 0, где
О 1
а = Лу - х, Л = |х|. 28.5. 1)
1 О
; 2) А70- 3) diag(l; -1, 1);
4) -^202; 5) —^484- 28.6. 1) Отражение в пространстве с нор-
мальным вектором || 1 —1 —1 1 || ; 2) отражение в пространстве
с нормальным вектором || 1 —1 —1 || ; 3) проектирование на
линейную оболочку вектора || 1 —4 1 || ; 4) поворот на тг/2 в
плоскостях, натянутых на пары векторов ег, ез и е\, е$\ 5) поворот
на тг/2 в плоскостях, натянутых на пары векторов е\, ез и е4, ег-
+ V2 -1 1 1-V5
28.7. 1) А423; 2)
-Ц-л/2
\/2
i 4) -т=;
М78-
28.8.
1-\/2
\/3 2 - V3 -1 1 '
/о" о 1 /о" 1 1
у о ? -\- у/о 1 —1
1 -12 + V32-\/3
-1 12-4/32 + ^/3
28.9. GTG, где G — матрица из элементов д^ = F;, а^).
Указание: см. задачу 26.35. 28.11. ip* = <р. 28.12. у*(х) =
m
26.16. ip* = ip-1. 28.17. ip* = -ip.
446
Ответы и указания
28.18.
28.19.
1)
0 3 1
10 3
3 10
2
1
2)
1 9 5
-4 -24 -13
11 44 23
4-3 2
5-3 2
-1 2 -1
2)
-3 -4 -5
4 2 8
-3 0 -5
20 13
-34 22
4 2 9
0 10
0 0-2
-3 -3 2
2 2-1
0 0 0
5) 1 0 1 ; 6)
0 0 0
111
8) 5 -3 2 ; 9) -2 -2 -2
8 7 4
на прямую х — у — 0 параллельно плоскости 6х + Зу + 1z = (.
28.21. S*(р) = ЗрA)(-1 + It + 5i2)/4-Зр(-1)(-1 -2t + 5i2)/4-p'(t.
3)
О -3
5 -1
-1 2
-21 13
-34 21
5-1
28.20. Проектирование
0
6
0
-5
0
15
0
2
0
; 2)
0
3
0
0
0
5
0
0
0
Указание: интегрируем по ча-
частям и подбираем многочлены r(t) и s(t) так, чтобы для любог<
многочлена q(t) выполнялось (г, q) = q(l) и (s, q) = q(—1.
0 0 0
28.22. S*(p) проекция на V2 многочлена t(tp(t))', 1)
1 0 0
0 2 0
0
6
0
4
0
8
0
-3
0
. 28.23. ч>*{Х)=АТХ. 28.24.
Указание: всегда tr PQ — tr QP. 28.33.
, 4/3 1^/2
28.35. 1) S = — -л/3 1 л/2 , А' = A=
2)
S =
-ч/З
1 лД
1 v/2
0 -2 л/2
1 -\/3
1 ч/З
2 0
-л^|
2) Да.
1
3) 5 =
v/30
2л/б
5 =
5) 5 =
0
V2
0
1
i
0
l
l
0
_ 2
-5
2
1
1
А' =
0
0
1 2л/2
0 4
28.34. 2) Д
4л/2 -1
0 2\/б 3\/3
0 0 2\/б
3 0 11/л/2
0 3 -лД/2
0 0 2
-2/л/ЗО
4/V5
0
ч/2 4
-2 ЗлД
0 1
-1
0
0
0 1
0 ч/2 0
10-1
]
, А = I
(
29.1. 1) Да; 2) только если она нулевая. 29.4. Нулевое преобразове
ние. 29.5. Ортогональное отражение в некотором подпространства
тождественное преобразование и центральная симметрия. 29.6. Ог-
0 0-2
28.37. Совпадают
Ответы и указания
тогональное проектирование на некоторое подпространство.
29.8. S =
v/42
О уД -4\/2 -у/7
О 2уД -у/2 2у/7
О 3\/3 2-у/2 -\/7
\/42 О
О
О
4 у/п О О
-у/П 0 0 0
О 0 0 0
0 0 0 0
29.9. 1) 2nn!; 2) бесконечно много. 29.10. 1) Да; 2) да.
29.12. ip(x) = J2 Xi(x, еи е{). 29.14. 1) Да; 2) нет; 3) да;
4) нет. 29.19. 1) S = (l/y/b)Aw&, A' = diag (-3, 2); 2) S =
= (l/v/2)A69) A' = diag B, 0); 3) S = A/у/2)А69, А' = diag D, 2);
1 0 -1
0 \/2 0
4) S = A/ч/5)Аюв, А' = diag (9, 4); 5) S = 4=
' = diag(l, 1, -1); 6) 5 =
3, -3); 7) S = -=
1 3 \/8
4 0 -v/2
3%/2
1 -3
0 -\/2
уД у/2
-\/3 \/2
\/2
\/2
\/2 —у/3 1
1 О
0-2
, А' = diagC,
A' = diagC, 3, -3); 8) 5 =
, A' -diag(9, -1,0); 9M =
3%/2
-1 3 \/8
4 0 у/2
1 3 —у/8
А' = diag A0, 2, 1); 10) 5 = А315, А' = diag F, 0, 0);
11) 5 = A/2)Л484, А' = diag G, -1, -1, -1); 12) 5 - A/2)А,84,
А' = diag A, -7, -7, -7); 13) 5 = A/2)А«4, А' = diag B, 2, 2, -2);
14) 5 = A/2)А«и, А' = diag B, 2, 2, -2); 15) 5 = A/2)А347,
3 \/8 1
А' = diag (9, 9, 27); 16) 5 =
3\/2
О у/г -4
3 -л/8 -1
, А'= diag B, 2, 20).
29.20. Ai =x + (n - 1)у, ei = A/л/п) II 1 1 • • • х if; A2 = х - у,
ек+1 = A/VWTk) || 1^Л -* 0 ... О ||т (fc = 1, ... , п - 1).
29.23. S=-
12-2
-2 2 1
2 12
, А' = diag (9,18,18), В' = diag (9, -9, -9).
29.26. 1) 9Ai + 27А2, где Аг = -
2)
+ 20А2, где
1
18
5 4 -2
4 5 2
-2 2 8
17 4 1
4 2-4
1 -4 17
4-4 2
-4 4 -2
2-2 1
, А2 = A/18)А180;
448
Ответы и указания
3) 10^! + 2А2 +
i
9
4 2-4
2 1 -2
-4 -2 4
A2 = -
9
i
~ 2
17 16
16 41
16 32
3 0-1
0 2 0
-10 3
Az,
¦ Hi
-V
где Ах i
. 29.30. A = A
16
32
41
A2
, A3 =
I
~~ 9
13
2
4
1/1
1
J.
9
2
10
8)Ai8Ol
1
2
1
А3,гдеАг-^
113
-104
52
4
2
2 13
29.32. 1) Необходима. 29.33.
3) -
13 1 1
1 13 1
1 1 13
или -1. 29.44.
29.46. ATA =
29.50. 1) S
2)S = A320, A' =
, 1
y/l
-1 1
-1 -1
0 0
0 0
I
~ 2
0 -2
2 0
BT
у
1
2
0
0
1 -
1
0
0
0 0 -v/3
0 0
0 0
0
0
1
0
0
29.40.
АТГА =
В. 29.47
1
-2 0
0 1
и — у о
0
0
1
1
¦ АЛ <?
0 0
0 0
-1 0
-у/г 0
0 у/г
0
Только
: Г.
v/2
0
1
j.
1
2 v/3
0
0
0
0
1
-1 v/3
9
1 0 1
0 0 0
1 0 1
41 U
16 П
-32 -If
-104 52
113 -52
-52 35
18
; 2)
I A% —
*
i -32
' -16
5 41
Ах =
37 -76 19
-76 322 -76
19 -76 37
-2 «ИМ
II
1/2)Л2ь
при умножении на -
29.45. 1) Нет;
1) Да;
1 1-
"-1
;3) 5 =
2 С
о :
2) нет; 3) да;
-s/2
1
1
" 2
, А'
2) нет
4) нет
1 0
0 -1
1 1 у/г 0
0 -V2
-1 1
v/2 0 -
) 1 v/3 1
J -v/3 -1 \/3
-2 0 2 0 2
о -:
2 (
о :
.Указ
J —у/3 1 v/3
) 1 -v/3 1
2 0 2 0
1 1
0 у/1
-1 1
у/г
0
-1
-v/3
-2
i
а н и е: для нахожденш
инвариантных подпространств воспользоваться задачей 24.8L
29.52. Симметрическая матрица не является неотрицатель
ной. 29.53. 1) Q - А
62,
14
3
3)
q = -
—
10 5
5 10
v/3 -1
]
у/г
; 2) ц
1
2
1
~уД
3
-•v/j
2
1
-1
2
->Д
5
Ответы и указания
4) Q = А62, V = 5А12; 5) Q = А70, V = A2/5)А«; 6) Q = -
4 у/2
у/2 5
л/8 1
-1 у/Ъ
; (В задачах 4) и 5) разложение не единственно.)
29.54.
29.58.
2\/15
-by/I 2у/Ъ -5\/3/3
0 0 4
1Ъу/Ъ 0 5\/3
V = —
у/г
0 0 -\/5
0 3 0
О 0 3\/5
«Г1,
2) ф-у = вгрв. 29.63. Все равны 1. 29.64.
г = 1,...,п. 29.65. Умножились на \а\. 29.71. 1) аг = а2 = а3 = 3;
2) «1 = а2 = 3, аз = 0; 3) Qi = у/п, а2 = а3 = 0; 4) ау = 9, а2 = 6,
аз = 5; 5) «1 = ... = an_i = 1, а„ = \е\.
30.1.
30.2.
2) Р =
Р =
где
14
1
10
3
—г
-4г
2
г
7
_2
4г
4г
-2
7
г
2
-4г
—г
3
3 0 0
0 1 1 + г
О 1-г 2
5 3 6г
3 13 -2г
-6г 2г 10
,0 = 1
= атл, q = 2Р - г;,
зо о
О -1 2 + 2г
О 2 - 2г 1
3 6г
-2
3 6 -2г
-6г 2г 3
-2 г 4г 2
-г 2 -2 -4z
3) Р =
-4г -2
2 4г
2 -г
г -2
. 30.3. у = х-
-2Wa,Q = f;-27-T. 30.4. 1) Матрица Q из ответа к 30.2, 2).
2) Q= и
3)
3)
30.7. 1)
-2 + 2г -
1 -г
-2г -1
3 + 4г 2 -2г
—3 — 8г -2 4г
6+Юг 5 1-5г
2-i 2 1
9 -2г -6
2г 9 6г
-6 -6г -7
3 -2
-2 3
-2 -2
-2
2 + Зг 9 + 2г
3)
_2
-2
3
Ь2г
Q =
-2-
-2-
-2-
1
2
-2г 1
-2г
-2г
1
1 -г -1 + г
г 1 1+г
-1 - г 1 - г О
. 30.6. 1) А94; 2) А103;
— 2г -2-5г
г 1
29 -13г
30.11.
0
0
г 1-г
О 1
, 5 = А260; 2) А' =
1) Да-
1
5 =
А319!
3) А' =
1 г\/2 -1 -
О г
0 0
-г\/2
-г
30.12. 1) А' =
>/бC - *)
3\/2A + г)
3
0 \/2 О
10-1
1 О 1
Зг -
О -Зг
0 0
5 = ~
450
Ответы и указания
30.13. АТАААТ. 30.14. Указание: перенести на унитарные про-
пространства результат задачи 29.37. 30.15. Указание: использо-
использовать результат задачи 30.14, 1). 30.16. Указание: использовать
результаты задач 24.139 и 30.9. 30.17. Указание: использо-
использовать результат задачи 30.15. 30.18. Указание: использовать
результаты задач 30.16 и 30.17. 30.20. Обратное неверно.
30.21. Указание: если ip — нормальное, то С содержит базис из
собственных векторов и в силу 30.15 инвариантно относительно tp*.
30.22. 1) А' = diag B + t, 2 - г), 5 = A6i; 2) А' = diag @, -5г, 5г),
4\/2 -Зг Зг
5 =
5>/2
3\/2
0
4г —4г
; 3) А' = diag A + г, 1,1 - г), 5 = A/3)А
202-
30.23. Да. Указание: использовать результат задачи 30.14.
30.24. Указание: использовать задачи 30.11, 2) и 30.39.
30.33. Указание: использовать задачу 30.29. 30.34. 1) Мат-
Матрица ГТЛ — эрмитова; 2) ГА = АТГ. 30.35. Указание:
рассмотреть переход к данному ортонормированному базису от ор-
тонормированного базиса из собственных векторов. 30.36. 1) 5 —
1
Зг
А' = diag (-2, 8); 2) S = -д
1' = diag @, 5); 3) 5 = -=.
>/3(l - г)
4M =
у/12
-iy/Z
-1 v/2(l
v/2(l - г) 1
-2г 1 - г
О 3
2A +г) -г
л/3-г 1
, А' = diag A,6);
, А' = diag @,1,4). 30.43. 1) В
общем случае, нет. 2) Только если |а| = 1. 30.44. 1M= (l/\/i)A94,
А' = diag (cos a + г sin a, cos а — г sin а); 2) 5 = —=. . г= , А —
11-%
-2г г 2
г -2г 2
= diag(l, г, -г).
31.1. Линейная функция в Сп линейное отображение в R (или
в С, если Сп комплексное). 31.2. Если е' = е5 и х, yd — коор-
координатные строки линейной функции в базисах е и е', то V = xS.
31.3. щ = f(ei), г = 1, ..., п. 31.4. @,...,0). 31.5. 1) Нет;
2) только для нулевой функции; 3) только при а = 0. 31.6. Для
ненулевой функции всегда, для нулевой только при а = 0. 31.7. Для
ненулевой функции Ш, для нулевой {0}. 31.8. 1), 4) Да; 2), 3) нет.
31.9. 1) A, 1, 0); 4) A, 2, -3). 31.10. 1) D, 4, 4); 2) B, 4, 6);
^Ц^ («г , а2 , а3), где аи а2, а3 -
3) (9, 6, 3); 4) (-2, 0, 2). 31.11. 1) ^Ц
1а1
координаты а. 2) Нет. 31.12. 1) (-а2, «i); где «i, «2 —координа-
—координаты а; 2) нет. 31.13. 1) (а20з - "зДг, «зА - ai/?3 > "i/Зг - 0i<x2), где
Ответы и указания
оч, ol%, «з и y9i, /З2, /Зз — координаты векторов а, Ъ; 2) нет. 31.14. 1),
2) Нет; 3) @, ..., 0, 1, 0, ..., 0) (единица на г-м месте); 4) A, ..., 1).
31.15. Еп. 31.16. С. 31.19. 1) (8/3,0,16/15,0); 2) A,1/3,1/5,1/7).
31.20. A, 0, ..., 0). 31.21. 1) A, to tg); 2) A, 0, ..., 0).
31.23. 5 = 3^i - 3(^2 + рз- 31-25- *! (О, ... , 0, 1, 0, ... , 0)
(единица на (fc + 1)-м месте) при к ^ п; @, ... , 0) при к > п.
31.26. 1) (х0, ..., хп), где щ = 0 при i ^ fc и xj = г(г — 1) ...
... (г - fcL~fe~1 при г > &; 2) fc! (О, ..., 0, 1, 0, ..., 0) (единица на
(fc + l)-M месте). 31.29. f(x) = 3^ + 5?2 + 4?3- 31.31. 1) (О, О,-2);
2) E, -5, -2); 3) C, 3, 3); 4) @, 7, 2). 31.32. 60 = ip2, «1 = ^3 - Vi),
= Ч>\ ~
+ ?>з, или 6 = 1<рА197. 31.33. 1) Sk{p) = Ti^-Ш
если
= ао + a\t + ... + antn.
(fc = 0, ..., n) или Sk(p) =
1 dk(p)
2) fk{p) — ту , k (^ = 0, ..., n). 31.34. С помощью мат-
рицы (ST)-\ 31.35. ° 1) /f = Л, Гг = к- h, /з - /з - h + Л;
2) Строки матрицы А^3 = ААЪ0. 31.36. -(t - 2){t - 3), {t - 1)C -1),
i(*-l)(*-2). 31.37.
^
, г = 1,...,п + 1. Координаты
многочлена p{t) равны р(^), ..., p(fn+1). 31.38. 1, t - 2, {t - 2J/2.
31.39.
n!
)n- 31.41. Ба-
зис состоит из функций fij{X) — Хц, где X = || хц || ? 7^nxn- Функ-
Функции fij соответствует матрица dj = Eij. 31.42. Базис состает из
функций fi(X) = tiCfX, i = 0, 1, 2, 3, где Со = -ст0, d = -а1у
Ci = —-Ст2) Сз = -сг3. 31.43. Указание: использовать зада-
задачу 31.30. 31.44. dimA/" = п - 1 при f ф 0 и Л/" = ?„ при f = 0.
31.45. Указание: выбрать подходящий базис. 31.46. А\ь\ {с\,
сг) , ci, с2 — произвольные числа. 31.47. dim/С = п — dim Л/".
31.48. (ci, с2, сз)-/!^, Ci,c2, сз — произвольные числа. 31.49. Ли-
Линейная оболочка функций щ, tp%, 8\, определенных в задачах 31.23
и 31.32.
0 0 II" *3! 3> И -1 ij 1.2*3-2*1*2-5x2;
4)
32.
0
1
-3
1.
1
0
7
1I1
-3
7
1
ill,*?; 2)
, 2х\х2 - 6
t=l
, аг?; 6)
+ 14x2^3 + х\\ 5) единичная матрица,
п п—1
i; 7) Л6зв при a - Ъ = 1, ? z,? + 2 ?
452
Ответы и указания
32.
3)
4- (
5)
2)
4- a
2.
1
2
2
>x3
1
2
]
2
5
6
2/2
Us
-4x\
:Xi
IX
+ *D\
Z2
4 -
7)
)
2
6
7
4-
4 j
4-
4-2
x2
2(.
1 -3II,
, Х\У\
7x3y3;
1 "^
2 i=i
lOzia-
2:12:34-
c2 -zx
-3xi 2/1;
4- 2xij/2 4
4)
2
-3
0
xiUi + l +
2 - 4x2;
8a;2. 4- 4a;
x3 4-
z| -
2)
-2x2
-3
-3
0
xi+ll
3)
22:3;
);6)
x2x4
0
-9
0
0
0
u)
4x
5)
2(
4-
4-
2
a-?
1
2
-9
9
2ЖЦ/3 4
2xij/i -
32.3.
4- 4a-ix
+ x24-
— XiX2
-3:3X4
9(-XiJ/2
- 2x3j/i 4-
- 3xij/2 -
1) 5x2
2 4- 8xia
a-| 4- x\ +
4- X? — X2
4- x| - a-^
— x2y\ 4" ^22/2I
5X2?/2 "i" 6Х2У3 4"
- 3x22/i — &X2y2\
— 4x^x2 4- 8x2;
2{x\x2 4- X1X3 4-
x3 - x2x4 4- x\ 4-
«2
); 8) 2
32.4. 1) b(x, y) = (k(x + y) - k(x) - k(y))/2;
) b(z y) = b(x,y)-b(y,x)
2) ЪЛх, %y) = b('.») + , b_(z> y) =
32.5. 1) Поменяются местами г'-я и j-я строки, а также г'-й и
j-й столбцы; 2) г'-я строка и j-й столбец умножатся на Л (при
этом элемент диагонали, стоящий на их пересечении, умножит-
умножится на Л2); 3) к г-й строке прибавится j-я, умноженная на Л, а
также к i-му столбцу прибавится j-й, умноженный на Л (при
этом элемент диагонали, стоящий на их пересечении, преобразу-
преобразуется по формуле b'ti = Ьц + 2Xbij + X2bjj); 4) матрица отразится
симметрично относительно побочной диагонали. 32.6. Ортого-
Ортогональная матрица. 32.7. 1) lSx'j2 - 46xiz'2 4- 41х'22; 2) х[2 + 2аг'22;
3) z'j2; 4) 8z'!2 - 18x^2 - 8z'iZ3 + 3z'22 - 6x2ar3 - 4z'32; 5) 7x\2 -
- lla:22 - 2z32 4- Ъх'гх'2 - бж'^ 4- Пх'2х'г; 6) 20z'j2 4- 8ar22 4- 35a:32;
7) (n - \)x[2 + (n- 2)z22 4-... 4- x;_!2 4- Bn - З)*'^ 4- Bn-
4- Bn - 5)x'24 4- ... 4- x[x'n
xn_lXn.
32.8.
4- x'22;
2, 2, 0, 2; 2) xi* - x'^; 2, 1, 1, 0; 3) xi" - x'2z; 2, 1, 1, 0; 4) х'г2; 1, 1, 0, 1;
5) -x;2 - x'22; 2, 0, 2, -2; 6) -х'х2; 1, 0, 1, -1; 7) x'22 4- x'2 - x32;
3, 2, 1, 1; 8) x;2 - x22 - x32; 3, 1, 2, -1; 9) x;2 4- x22 + x32; 3, 3, 0, 3;
10) x'2- 1,1, 0,1; 11) x'x24-x'22; 2, 2, 0, 2; 12) x'x2 - x'22 - x'32; 3,1, 2, -1;
13) x'x2 4-x22 4-x'32 4-x42; 4, 4, 0, 4; 14) x'x2 4-x22 4-a-32 4-x42 - x'52 - x^2;
6, 4, 2, 2; 15) x'x2 4- x'22 - x'32 - a-42; 4, 2, 2, 0; 16) -x'x2 - x'22 - x'32;
3, 0, 3, —3. 32.9. Пусть п — размерность линейного пространства.
Положительно определенными являются формы: 1) при п = 2,
9) при п = 3, 13) при п = 4. Отрицательно определенными являются
формы: 5) при ?г = 2, 16) при ?г = 3. Неотрицательными являются
формы: 1) при п > 2, 4) п > 2, 10), 11) при п > 3, 9) при ?г > 3; 13) при
п > 4. Неположительными являются формы: 5) при п > 2, 6) при
Ответы и указания
п > 2, 16) при п > 3. 32.10. 1) x^j/i + х'2у'2; 2) х'^; 3) х'^ + х'2у'2;
4) x'jj/i - х'2у2; 5) x'jj/i - х'2у'2 - х'3у'3; 6) x'jj/i + х'2у'2 + х'3у'3; 7) не при-
приводится (форма несимметрична). 32.12. 1) х'х + х'2 , при А > 1/3,
x'j2 при А = 1/3, x'j2 -х'22 при А < 1/3; 2) x'j2 + х'22 при |А| < 8, х'2 при
|А| = 8, х'2 - х'22 при |А| > 8; 3) х^2 - х22 + х32 при А > -6, х^2 - х'22
Л л /2 /2 /2 л п л\ i *• \ /2 / 2 . /2
= -6, х\ - х2 - х3 при А < -6; 4) х\ + х2 - х3 + х4
при А > 7/4, х'2 + х'2 - х'32 при А = 7/4, х^2 + х'22 - х'32 - х'2 при
А < 7/4; 5) х':2 + х'22 - х32 при А = 3, x'j2 + х'22 - х'32 - х'2 при
А ф 3. 32.13. 1) ? х'2; 2) ? (-lL^2; 3) ? х'2; 4) х'2 - ? х'2;
i=l i=l i=l t=2
п „ п-1 „
5) - 53 х\ ; 6) 5Z xi • 32.18. 1) Положительно определена при
А > 1, неотрицательна при А = 1, отрицательно определена при
А < —4, неположительна при А = —4; 2) отрицательно определена
при |А| < 1, неположительна при А ± 1; 3) положительно определена
при А > 8, неотрицательна при А = 8; 4) таких значений А нет;
5) положительно определена при А < —6, неотрицательна при
А = — 6, отрицательно определена при А > 6, неположительна при
1 [%
А = 6. 32.21. 2)п2ип. 32.22. ?2 +?2 +?3 +?| в базисе —=, J-t,
v 2 V 2
re"V2 - 1 /7е "
V2 2 ' V2~
32.25. Ранг — четное число, сигнату-
сигнатура равна нулю. 32.26. 2) Все линейные преобразования, матри-
матрицы которых ортогональны в том базисе, в котором записана дан-
данная форма. 32.27. Приводятся матрицы или формулы перехода
от данного базиса е\, ..., е„ к базису е[, ..., е'п и диагональная
форма в новом базисе. 1) Aei, х[ — 9х'2 ; 2) Аб2, rrx'i ; 3)
'2 + 9х'2; 4) А lOii 5) А ^ ^
х'2 + 9х'22; 4) АЪ4, -lOxij/i; 5) А61, —^ - ^х'2у'2; 6) diag(i4ei, 1),
-\*'? ~ \А2\ 7) А313, х'2 + 2х'2 + Юх'з2; 8) А319, х'^ + Zx'2y'2;
9) Азы, x'jj/i + 6х'2у'2 - 6х'3у'3; 10) А322, Ъ(х'2 + х'22 - х'32); 11) А319,
Ах'2 + 4х'22 + х'32; 12) А313, 9х[2 - х'2 - 9х'32; 13) А316, |(х'х2 + х'22);
14) Л328,14х;2; 15) А315, -6х'х^; 16) Лззо,
2{х'2 + х^2 + х'32 - х^2); 18) 3x'j2 + Зх^2 + 6х'32 - 6х^2 в базисе
ei = -Wei + е2 + е3), е'2 = -^=(е2 - е3 + е4), е'3 = -Wei - е2 + е4),
е4 = —T=(ei - е3 - е4); 19) x'j2 + 2х'22 + 5х32 + Юх42 в базисе
3
454 Ответы и указания
| е2 - е3), е'2 = ?(е2 + ез ~ е4), е3 = -/=(^2 + е3 + 2е4),
е4 = -(ei - 2е2 + 2е3); 20) -x'j2 - х'22 + 2х32 - 2х42 в базисе е\ =
О
-7={е2 - е3), е'2 = -^=(е2 + е3 - 2е4), е3 = ^=Cei + е2 + е3 + е4),
е4 = -(-ej + е2 + е3 + е4); 21) -(xiyj + х'2з/2 - x3j/3 - x4j/4) в ба-
базисе ei = -^=(ei + e2), e'2 = -^(e3 + e4), e3 = —=(ei - e2), e4 =
-=(e3 - e4); 22) 5(x'j2 - x'22 - z'32) в базисе ei = -Tj?Bei - e2),
e'2 = "^(ei +2e2), e3 = -^(e3 -2e4), e4 = _Be3 +e4); 23) ^— x'j2 +
-(x22 + •.. + <2); ei = —p: ? ei; e2, ... , e'n — какой-либо орто-
l Vn »=i
нормированный базис подпространства xi + ... + xn = 0, напри-
мер е'к = J_ ( Е ^ - (fc - l)efc ) (fc = 2, ... , n); 24)
ei = —7= 53 (~l)*~1e.; e2,..., e'n — ортонормированный базис подпро-
Vni=l
'2 + + x'2
странства ? (-l)^1^ = 0; 25) x'12 + ...+ x'n2 - x'n+2 - ... - z^
в базисе e'k = -j=(ek + e2n_fc), e^ = en, e^+fc = "T=(efc - e2n_fc) A ^ fc
1
9 1 1
i ; ^ { + ) '
<n-l); 26) 2 5>i ; e? = -^(efc + e2n_fc+1), e'n+fc =
A ^ fc ^ n); 27) 53 zfcos-^-j- в базисе е'к = fk/\\fk\\, где
Л = E sin-^-ei (fc = 1, ..., n). 32.28. xf - xf; 2, 0; 2) xf;
i=l П+ i.
1, 1; 3) xf + xf; 2, 2; 4) -x'X; 1, -1; 5) -x'[y>l - x2'y'2'; 2, -2;
6) -xf - xf; 2, -2; 7) xf + xf + xf; 3, 3; 8) x'{y'{ + x2'y'2'; 2, 2;
9) x'X + x2'y2' - x3'j/3'; 3,1; 10) xf + xf - xf; 3,1; 11) xf + xf + xf;
3, 3; 12) xf - xf - xf; 3, -1; 13) xf + xf; 2, 2; 14) xf; 1, 1;
15) -xf; 1, -1; 16) x'X - x2'j/2'; 2, 0; 17), 18) xf + xf + xf - xf;
4, 2; 19) xf, xf + xf + xf; 4, 4; 20) xf - xf - xf - xf; 4,
-2; 21) xi'j/i' + x'2'y2' ~ *Wi ~ <У'1\ 4, 0; 22) xf -xf - xf; 3, -1;
23) ? xf; n, n; 24) x'{y'{; 1, 1; 25) ? xf - ^ xf; 2n - 1, 1;
! = 1 t = l !=n+l
26)
? xf; n, n; 27) 53 sgn cos —— xf, ранг равен 2[п/2].
Ответы и указания
455
32.32. 2) Г-1 В. 32.33. 1)
26 44 -49
-12 -21 24
-5 -8 10
-1 И -
5 12
8 4 8
-1 1 2
29 О
18 -1
6)
;3)
5/2 -1
9/2 -2
3 10 0
5 1-1-1
3 0 0-1
3 0-1 0
32.35. x'j + ... + х'г , если первые г векторов ортонормированно-
го базиса принадлежат М, а остальные п — г принадлежат М-1.
JZ.Jb. I) Xi =. —;= — Хо, Х2 = п /-. Н —, / — Xj + Х2 , 9 =
г - 4х- 2} х, = л/5х" х, = ~3х" + Х2/- f = ??х - -х
г'2 4- -х
или xi =
V^ ' ^21'
т" т"
2 2х" х"
х" +7х2 (обе формы положительно определены); 4) xi =—р-Н—^=,
l^i f = xf + xf, 9 = xf - \xf; 5) xx =
v3
_ 2 _
> / — ^bari ) Э — xi
2
_
x2 —
- 2x4 + 34
;
— 'У — uJ'j — ~J
или Xi =
VT0x'{ - 4x'2'
Х2?; / = 8xf + 0.2x'2'2, 9 = -xf - x'2'2; 7) X! = (V3x>> -
y/2x%)/y/b, x2 = ((v/2 - 2y/Z)x4 + {s/Z + 2y/2)x2')/V5; / = 3xf - 2x'2'2,
2 2
x2 =
%)/
9 = x'/2 - x'2'2; 8) Xi =
- msfaTl)x'l +
xi' - у/ах'2)/у/2а+ 1, х2 =
+ т^)х2')/\^П; / = (о + l)xf - axf,
х" х" 2х" х" х" х"
= 3xf + 2xf, g = xf + xf + xf; 10) xx = %
x'i
4V5'
«о V v^o ..о ##2
-^ + ^-; ^ = 5li "X2
5xf, 9 - xf + xf + xf; 11) Xi - Щ= + Щ= - Щ=, х2 = ^x'3',
To - -^- 4- 2X3. * _ o_»2 , o_//2 o_//2 _ //2 „2
X3 — ^ -i j=, J — OXj -f OX2 - OX3 , 9 — Xj -f X,
2х'2'
4x'{ , 3x'2'
L2
3ii'
456
Ответы и указания
Vxf
/ — х" -г л2 -г х3
8х'/ - 2х'2'
f
lf JltofiW,*»^-1*
6х'3'
х2 =
х4 =
5х3' - 8х4'
л/б
ГУ."
ч/б
ч/З
хз =
Q™«2
Зх','
л/б
л/б
3xf
л/3
6zf -
д = -xf - х'2'2
т" 4- т"
?3_3_4
л/3
- xf - xf; 14) хх = ar? + х2' + х3' + х4
Х2 = (*'/ + Х'{ + X'l + 3li')/2, ^3 = Х'з' + Xi', X4 = (~Х'{ + ХЧ + Х'{ + Х'1)Г-
ffff f f f+xf. 32.37. Фор-
Форf
xf
f)
= 2{xf+xf+xf-xf),g =
мы х\ и х\ диагонал^ны, но среди их линейных комбинаций не"
положительно определенных форм. 32.39. 1) 5х" ; 2) х" + 4х2"
3) f xf - \xf; 4) 9xf
xf. 32.41. l)xf;2), 3), 4) xf + x2"
5) xf + xf + xf; 6) xf + xf; 7) x
2) -* ° • 3) 3 4i ¦ 4) '3i '¦
Z) 0 0 ' 6) -5 i ' *> 2 1
6) I _ j ; 7) 0 -3 0 ; 8]
4 + i 0 2 + i
9) единичная матрица. 32.43. 6) A + i)xiX2 + A — i)x2ii — 5|a:2
B - 5i)xix3 + B +
i2- 9)
32.42.
5)
2
3
1) II-*"
0 l + i
1 + г -5
3 2 - Ы
-6 4i
-4г 1 + 3\/2
8) 2|xi|2
- 6|x2|2
32.44.
3) 8|x2|2
4) 3(|an|2
3\/2)|x3|
8|x2|2; 2)
2x1x2 + 2x2xx +
|x2|2) + |x3|2 + |x4|2 + xxx2
— 2i{x2xz - X3X2) + X3X4 + X4X3. 32.45.
- 2i(xix4 -
В ответах даны фог-
мулы замены координат при переходе к искомому ортонорм*.-
рованному базису. 1) xi = (х'х - ix'2)/y/2, x2 — {-ix\ + x'2)/y/i
l-r'l2 4- Ч1т' I2- ">\ т, — "*" (т> Л- т' ¦> тп — (т' — ¦
\Х1\ + Л\Х2\ 1 *¦) Х\ — _ ^Xj -t- X2J, X2 — ^Xj
6|xi|2 - 4|х'2|2; 3) х,
4)
•1 = (*i
I2-5
,
Л3 - v^ " V
X2 — (x'2 + C
/ / -J I -\ / I
32.46. h(x, y) =
~ bV2K1
= (xi + x'2)/V2,
ix'2)/V2, x2 = {ix1
D) Xl ~ 71+ 71"
^1, 3|xi|2; 6) n = (-a
i)x'3 - x4)/2, x3 = (xi -
x'2)/V2, x3 =
x2 =
л/6' л/3
+ x'3 + A"
(-1 + i)x'2 +
'|2
x'2
x'2 + x4)/2, 4 .
fc(i + I/)-fc(x)-fc(tf) , ,*(*
12|4|2
+ 1-
4)/2;
.. 16КГ-
- fc(x) - k(y)
Ответы и указания 457
33.4. 1) Да; 2) да; 3) нет. 33.13. При условии линейной зави-
зависимости векторов ai, bi, uq — bo. 33.14. 1) Zi = —1 + 3*, x2 — t,
x3 = 3 + *, x4 = -2 + 7*; 2) ц = -2 + 3«i + 2*2, x2 = 1 + 2*i,
x3 = 1 - 6*i, x4 = 1 + *i + 3*2; 3) 2xi - 32x2 - 10x3 - 9x4 + 21 = 0.
33.15. с(??Щ±,...,&±Щ. 33.18. I)x1 = 2 + 3t,xa = t;
2) xi = -1, x2 = 1; 3) xi = 1 + t, x2 = 1 + t, x3 = 1 - *; 4) ц = *ь
x2 = -3 + 3<i + 2*2, a:3 = *2; 5) x2 = x2 = x3 = 1; 6) ix = 1 + 7t2,
x2 = 2*i + 23*2, ж3 = 1 + *i, x4 = 1 - 11*2; 7) xi = 11*, x2 = -1 - 7*,
x3 = 1 + *; 8) xi = *i + 4*2 + 2*з - 3*4, x2 = *b x3 = 1 + *2, x4 = *3,
x5 = *4- 33.19. 1) xi - 2x2 + 13 = 0; 2) 2x2 - 3x2 + z3 + 1 = 0;
3) 4xi - x2 - 22 = 0, x2 - 4x3 - 2 = 0; 4) xx - x2 + 1 = 0, xj - x3 = 0,
2xi - x4 = 0; 5) 14a;i - 5x2 - 9z3 - 4 = 0, ц + 2z2 - 3x4 + 13 = 0.
33.20. 2xi+3x2-4z3 + x4 + 3 = 0. 33.21. Xl - -1 + 3*, x2 = 3 + *,
x3=4 + 7t, 14 = -*. 33.22. l)x1+2z2+3z3-z4 + 6 = 0,a;i+x2+x3 +
+ z4 - 2xb + 5 = 0; 2) xx - x3 + x4 = 0, 5xi + x2 + 4x3 - Axb - 8 = 0;
3) 2xi + 3z2 - x4 - 4 = 0, x2 + 2z3 + 2a:4 + xb - 6 = 0. 33.24. Если
две двумерные плоскости в трехмерном пространстве имеют общую
точку, то они содержат и общую прямую. Если в четырехмерном
пространстве трехмерная и двумерная плоскости имеют общую точ-
точку, то они содержат и общую прямую. Если в четырехмерном про-
пространстве две трехмерные плоскости имеют общую точку, то они
содержат и общую двумерную плоскость. 33.26. Пусть mi, m2
и m3 — плоскости с направляющими подпространствами С, М и Л/",
проходящие через точки А, В и С соответственно. Тогда существу-
существует единственная плоскость наименьшей размерности, содержащая
т\, т2 и т3; направляющим подпространством искомой плоско-
плоскости является сумма С + М + 7V + V, где V — линейная оболоч-
оболочка системы векторов АВ, АС. 33.27. 1) 5xi - х2 + 7х3 -9 = 0,
Зх3 - х4 - 3 = 0; 2) xi - 2х2 - 12х3 + 1 = 0, х2 - х3 + х4 + 5 = 0;
3) 2х2 — х3 + Х4 + 1 = 0. 33.28. 1) Трехмерная плоскость 5xi +
+ 2х2 + х4 + 11х5 - 42 = 0, llxi + 5х2 - х3 + 20х5 - 81 = 0; 2) че-
четырехмерная плоскость 73xi — 6х2 — 111х3 — 62z4 — 52xs — 195 = 0;
3) четырехмерная плоскость х2 + х3 - 2 = 0. 33.30. 1) Параллель-
Параллельны; 2) имеют единственную общую точку A, 2, 1, 0); 3) скрещи-
скрещиваются (абсолютно); 4) прямая принадлежит двумерной плоскости.
33.31. 1) Абсолютно скрещиваются; 2) имеют единственную об-
общую точку A, 1, 1, 1/2, 3/2); 3) скрещиваются параллельно прямой
xi = х2 = 0, х3 = z4 = —?5, 4) пересекаются по прямой xi = х2 = 1,
х3 + х4 = хс, = 2; 5) параллельны; 6) совпадают. 33.32. B, —2, 3, 3);
14xi - 4а:3 - 3z4 - 7 = 0, 3xi + x2 - 2х4 + 2 = 0. 33.33. 2*^.
33.34. xi = 1, х2 = 4 + *, х3 = -1 - *, х4 = 5 + *; A,1, 2, 2) и A, 2,1, 3).
33.37. 1) A2, -28, -24, -3); 2) (-5, 4, 8, -1). 33.38. 1) Явля-
Является; 2) является; 3) является; 4) является при Ai = ... = Лп = 0,
не является во всех остальных случаях; 5) является; 6) является
458
Ответы и указания
при п = 1, не является при п ^ 2. 33.41. Тетраэдр с верши-
вершинами в точках C/4, -1/4, -1/4, -1/4), (-1/4, 3/4, -1/4, -1/4),
(-1/4, -1/4, 3/4, -1/4), (-1/4, -1/4, -1/4, 3/4). 33.43. 1) Cpk2k-";
2) 2k~l. 33.44. Октаэдр с вершинами в точках A, 1, —1, —1),
A, -1,1, -1М1, -W, 1), (-М, 1, -1), (-1,1, -1,1), (-1, -1,1,1).
34.2. 1) \АВ\ = \ВС\ = у/7, \АС\ = у/п, ZB = 90°, ZA = ZC = 45°;
2) \АВ\ = 3, \АС\ = 2, \ВС\ = у/7, ZA = 60°, ZB = arccos -i=,
2V7
ZC = arccos -^=; 3) |AB| = \B~C\ = \AC\ = 6, ZA = ZB = ZC = 60°.
34.4. 1) (-2, -2, -1, -1), Л = 6; 2) @, -1, 1, -1), R = 5.
34.5. A, -1, -3, 1), R = 7. 34.9. 1) 5; 2) 3. 34.10. 1) 5xj + 2x2 -
- 4x3 + 2x4 = Ci,2; d = 17, C2 = -11; 2) xl - 4x2 + 2x3 + 2x4 =
= Ci 2; Cj = 29, C2 = -21; 3) 2xx - x2 - x3 + x4 + Ъхъ = Ci,2;
d = 7, C2 = -17. 34.11. 1) A, 1, 2, -1); 2) G, 2, 2, 1);
3) (-2, -3, 1, 3, 2). 34.12. 1) B, -1, 1, 3); 2) B, 1, 3, 3, 0).
34.13. 1/n. 34.14. l)(-3,-7,-1,-5); 2) E,-1,5,-5); G, 2,3,0,9).
34.15. 1) A, -3, 0, -2); 2) A, 1, 1, -1); 3) @, 2, 1, 3, -1).
34.17. l)x1 = l + t,x2 = -Z-t,X3 = -2-t,x4 = 4 + t,2)xi=l +1,
x2 = -3 +1, x3 = -1 + t, x4 = 3 - t\ 3) xi = 4 + 2t, x2=t,x3 = l + t,
14 = 1, ie = 1 - <• 34.18. 1) @, -3, -1, 3); 2) (-4, -1, 3, -2).
34.19. lL5°;2)arccos(l/3);3K0°. 34.20. 1) 30°; 2) arccos(l/V5).
34.21. 1) 3; 2) 2у/Ъ; 3) 4; 4) уД. 34.23. 1) V^; 2) y/Z; 3) 2; 4) 2v/2;
5) 4. 34.24. 1) xj = 3 + t, x2 = 7 + 2t, x3 = -2 - t, xA = 1 + t\
2) xi - -3 + t, x2 - -1 + t, x3 - 4 - t, Xi = 7 - 2t, x5 = -3 + <•
34.25. 1) @, 2, -1, 1); 2) (-1, 0, 1, 0, 1); 3) B, 1, 3, -1, 0).
34.26. 1) A, 1, 1, 3); 2) A, 1, -2, -2, 0). 34.28. 1) 2^7; 2) 6>/2.
34.29. 1) v/2; 2) y/U; 3) 4. 34.30. 1) 3; 2) 1. 34.31. 1) arccos (v/7/3);
2) 45°; 3) arccos у/Щ. 34.33. 1) l/>/5; 2) 5; 3) 2; 4) 3/>/5; 5) V6;
6) гу^/З. 34.35. 1) xi = 2 + *i + t2, x2 = -1 - ti, x3 = -1 + *i,
x4 = -l-t2HXi=2 + i, x2 = -l-<, 2:3 = -l+«, 14 = -1; 2) xi=2 + ti,
x2 = 2 +12, x3 = -1 + <з, z4 = 2 - 2*i - 2t2 + *з, ar5 = 1 - *i - 2*2 + 2*3
и X! = 2 + *, x2 = 2, x3 = -1 + *, x4 = 2 - *, x5 = 1 + *; 3) xi = 3*i + 2*2,
x2 = -1 - 2*i - *2, x3 = 1 + *i + *2, X4 = — 2 + *i, X5 = 1 + *2 и
xi = t, x2 = -1 - t, x3 = 1, X4 - -2 + t, x5 = 1 - *. 34.36. 45°.
34.37. 1) arccos B/3); 2) 45°; 3) arccos {1/y/E).
35.1. 1) te'I + (?J = K1 + 7*)? +
= detT-
2)
e
e
^ . Ни одна
из величин не является ни тензором, ни инвариантом. 35.2. 1) Ин-
Инвариант; 2) набор из п инвариантов, не тензор. 35.3. 1), 2), 3), 4),
6) Инварианты; 5) нет. 35.4. 1), 4) Относительные инварианты;
5), 6) инварианты; 2), 3) не инварианты. 35.5. 1) Не инвариант;
2) тензор типа @, 1). 35.6. 1) Тензор типа @, 2); 2) тензор типа
Ответы и указания
45У
(О, 2). 35.7. 1) Тензор типа @, 2), aik = а{ак; 2) тензор типа @, 2),
(Чк — о.{Ьк. 35.8. 1) Тензор типа @, 2), a,ik = афк; 2) тензор типа
(О, 2), aik = а^ак. 35.9. 1) Тензор типа @, 2), ai3 — 1, %¦ = О при
г ф 1 или j ф 3; 2) тензор типа @, 2), аы = 1, ац = О при i ф j.
35.10. 1) Тензор типа (О, 1), аг = а2 = 1, аз = ... = ап = 0; 2) тензор
типа @, 2), оц = ai2 = «21 = 1, aij — 0 при г + j ^ 4; 3) тензор
типа @, 2), ац = 1 при всех г, j; 4) тензор типа @, 2), аи = 1,
aij = 0 при г т^ j. 35.14. Данный тензор («символ Кронекера»,
или «изотропный тензор») соответствует тождественному линей-
линейному преобразованию, его компоненты во всех базисах одинаковы.
п
35.15. 8'tj = Y1 а?а<?- Билинейная функция, соответствующая
п
этому тензору, в базисе е определяется формулой К (х, у) = 5Z ?*»7*,
г=1
где ^*, 77* — координаты векторов х и у. Она симметрична и положи-
положительно определена. 35.16. (в1)' = т-0, где Т = 5 = ||г*||. Данный
тензор есть г'о-й базисный вектор базиса е. 35.17. (в1I = а\а, где
5 = \\(Jj\\. Ковектор в{ соответствует функции ip: Сп —> R, которая
в базисе е определяется формулой yj(x) = ^г° (^!° — координата с
номером го вектора х в базисе е). 35.18. <$*?J — изотропный тензор
типа B, 2). У к а з а н и е: проверить закон преобразования компо-
компонент. При п = 3 среди компонент — 69 нулевых. 35.19. При i0 = j0
все компоненты нулевые; при г'о ф jo: ^i0j0 — 1> ^jo*o = ~^-> остальные
компоненты нулевые; в'ы =
- а\°а
\°аа
35.20. Изотропный
тензор типа (к, к). У к а з а н и е: проверить закон преобразования
координат. 35.21. 1) e'it in = (det ?)?<!...»„; 2) совокупность nn
инвариантов, но не тензор. 35.22. Трехвалентный тензор в
четырехмерном пространстве имеет 64 компоненты. При замене
координат выражение для каждой компоненты будет содержать
64 слагаемых, каждое из которых состоит из четырех сомножителей.
35.23. Для всех возможных значений индексов г, j: (a')*- = а\о}-т\ +
+ а\о*т[ + а\а^т^ + а^а^т^ 2) для всех возможных значений индек-
индексов г, j: {a')ij = anTJrf + а12т{т^ + а21т^т( + а22т^т(; 3) для всех
возможных значений индексов i, j, fc: (a')'.fc = ancrjcr^ri +о\1а^а\т2 4-
35.24. 1) V = T ® ST:
a
a
a
a
l
2
/2
1
/2
2
o\t\
a\r2
\t\
o\t\
o\t\ o\t\
a\
a\
460
Ответы и указания
т
2) V = Т®Т:
а'11
а'12
а'21
а'22
?
АЛ
(т!)
!J
i11
.,12
321
„22
; 3) если
компоненты тензора a*-fc упорядочены так: a\lt а\2, а21, а22, a\i,
ai2> a2i> a22i то У = T ® ST <g> ST. Указание: при вычислениях
использовать результат соответствующего пункта задачи 35.23.
T ^
35.25. 1) А' = STAS, где А = ||ау||; 2) А1 =
3) А' =
, где А = \\а)
) ), где Л = ||а«||. 35.26. 1) Тензор типа B, 0);
2) тензор типа A, 1); 3) тензор типа @, 2); если данный тензор
соответствует линейному преобразованию ip, то тензор, имеющий
обратную матрицу, соответствует обратному преобразованию <р~х.
35.27. fc-мерные матрицы компонент имеют fc-валентные тензоры.
35.28. пщ — ai2i = a211 = «221 = 1, «112 = ^212 — a122 — «222 = 0.
35.29. Л309 при всех г. 35.30. 1) 9 двумерных сечений третьего
порядка; 2) 24; 3) 54. 35.31. 1)
0
0
0
0
0
-1
1
0
0 -1
1 0
о о
о о
2) матрица ||0jfc;|| — сечение матрицы ||<$?{||, соответствующее фикси-
фиксированным верхним индексам: г = г'о, j — jo- 35.33. 1) f (х, у, z) —
= a.ijkCvjCk; 3) aijk =f (ei, e,, efc). 35.34. Тензоры типа @, 3).
1) a.ijk = aibjCk', 2) aijk = aiujuk', 3) a^i, aiajak + bibjbk + CiCjCk-
35.35. Тензоры типа @, 3). 1) a\^ = «321 = 1, остальные
компоненты нулевые; 2) am = 0222 = «эзз = 1, остальные компо-
компоненты нулевые. 35.37. 1) В каждом из сечений переставляются
две последние строки и два последних столбца; кроме того, два
последних сечения меняются местами: ^727- 2) Все элементы
матрицы меняют знак. 3) 12^731- 35.38. Если е\ = emi, то
a'k3
TO
3)
=
s-1
1
-3
= ST.
1
0
0
Ук
35
2
-1
аза
.39.
;4)
н и е:
1)
-8
-4
если
-16
-11
-6
3
21
12
8
5
S -
12
8
14 |!
8I
— матрица перестановки
11
9
, 2)
. 36.4. 1
7 9
11 15
) а)Л66С
12 16
18 25
>; б)Л662
з; 2) а)Л664, б)Л665, в)Л6бв; 3) а)Л6бь б)Лб67, в)Авп; 4)
L, B)-^7i5- 36.5. 1), 3) линейно зависимы; 2) линейно незави-
независимы. 36.6. 1) 2p+q; 2) базис состоит из всевозможных тензоров,
у которых одна компонента равна единице, остальные — нули.
36.7. Упорядочим компоненты тензоров так: 2) (aj, а\, а2, а2);
3) (ац, а12, a2i, а2г); 4) (а^, а\2, а^, а\2, а22, a22j, a21, а^), и
пусть Т = 5. Тогда матрица перехода в пространстве тензоров
есть: 1) Тт, 2) 5 ® Тт; 3) Тт ® Тт; 4) 5 ® Тт ® Тт. 36.9. 1) B, 0),
А5; 2) A, 1), А5; 3) A, 1), А\, 4) @, 2), А5; 5) @, 3), Л656;
6) @, 3), Л657; 7) @, 3), А658; 8) B, 1), Л668; 9) C, 0), Л659;
10) B, 1), Л659; И) @, 4), А689; 12) @, 4), AG90; 13) A, 3), Л691;
Ответы и указания
461
14) A, 3), Апо; 15) @, 4), А695; 16) (О, 4), А696; 17) B, 2), А716;
18) C, 1), А697. 36.10. 1) а ® ЬТ = Ьт <8> а; 2) Ь ® ат = ат ® 6;
3) а <8> 6; 4) 6 ® а. 36.11. 1) uijbkl; 2) а^6ы; a^'6f; ацЪы; а)Ьы\
a^bki- 36.12. 1) хтц; 2) цтх. Билинейные функции, определяемые
формулами: 1)Ъ(х,у)= f(i)g(y); 2) Ь(ж, у) = g(i)f(y). 36.13. Ли-
Линейное преобразование <р пространства ?„, определяемое формулой
ф(х) = f(x)j/, имеет матрицу tjx в базисе е. 36.14. См. ответ задачи
36.12. 36.15. 1) Тензор типа B, 0); 3), 5) тензоры типа A, 1);
6) тензор типа B, 1); 7) тензор тина B, 0); 8) тензор типа @, 2);
выражения 2), 4) смысла не имеют. 36.16. 1)
2 4
О 2
;3)
О -4
2 2
-1 1
7 -11
; 6) А672; 7)
4 8
6 18
52 -18
-76 42
36.17. 1) А199,
у, 2) А199, А3ц; 3) А199, А312. 36.18. 1) а® Ъ; 2) а ® Ь ® с,
где а, 6 — векторы, с — ковектор с компонентами, соответственно
равными A, 1), A, -1), A, 2). 36.20. 2) {хг + x2){Zyi + 2у2);
3) координатные строки функций fj, gi, f2, g2 соответственно равны,
например, B, 1, -3, 0), A, 2, 3, 0), A, 1, 1, 1), @, 0, 0, 1).
Разложение не единственно. Указание: использовать задачу
16.31. 36.22. 1) Значение линейной функции на векторе; 2) образ
вектора при линейном преобразовании; 3) значение билинейной
функции на паре одинаковых векторов. 36.23. 1) Да; 2) нет; 3) нет.
36.24. с% = аЩ (свертка). 36.25. 1) F, 8, 2)Т; 2) @, -1, -2);
3) -12. 36.26. 6. 36.27. 1) а) D, 7)Т; б) (8, 8)Т; 2) а) C, 0)Т;б) E,
3)Т. 36.28. 1) а)
д) 3; е) -5; 2) а)
1
2
0
0
3
2
0
0
-4
4
0
-5
-7
7
_5
0
;в)
; в'
-1
-4
3
4
1
4
_^
-2
¦¦А
; г)
-10
10
-2
1
-5
5
—4
3
д) 0; е) 1; 3) а)
6 10
8 12
5 -5
-5 13
-1 3
1 5
-2 2
2 6
; д) 18;
еL. 36.30. 1) Нет; 2) да. 36.31. f (ж, у) = g{y, x). 36.32. 1)
2) Aj6; 3) А648; 4) A649- 36.33. 1) fc!; 2) А648, А649,
1 2
5 6
3 4
7 8
1 3
5 7
2 4
6 8
1 5
2 6
3 7
4 8
; для тензора типа C, 0) ответ тот же;
3)
4)
1 11 21
2 12 22
3 13 23
4 14 24
5 15 25
6 16 26
1
5
3
7
2
4
4
8
9
13
11
15
10
14
12
16
7 17 27
8 18 28
9 19 29
1 5
9 13
2 6
10 14
3
11
4
12
j
1
2
7
15
8
16
1-2 3
11 12 13
21 22 23
4 5 6
14 15 16
24 25 26
7
17
27
8
18
28
9
19
29
36.34.
Л1к-
462
Ответы и указания
36.35. 1)
У
х2у2
; 2)
з)
5) (ххац +x2a2i, x1a12 + ж2а22); 6)
7) ( х1^ + -(ж1^ + ж2^), х2а2 + -(х2
х2а2\
хга22
x2ai2
{xa\ + ха\), ха\ + (ха\ + х'а2)); 8) \{х1а2 - х2а\,
х2а\ - хга?); 9) (а\ + а2J; 10) а\а2 - а\а2; 11) (а\J + (а2J +
a\al + a\a\; 12), 13)
а\ а\
а\ а\
14) а\ + а22; 15)
а\ О
16)
б)
а\
0
0
а\
а?
0
0
а?
-1
0
«2
0
0
а\
«22
0
0
4
3)
а)
2
а\ О
О at
О а\
36.36. 1)а)
2 3
3 3
О 2
-2 О
1 -1
-1 2
I; б) I J ; 4) а) 2 3 5/2
I u u 2 5/2 1
0 0 1
б) О О 3/2
-1 -3/2 О
2) а) А679; б) А680; в) A68i; г) А682; 3) а) А683; б) А720; в) А729; г) А73о-
a) A7Qi; б) Л702; в) А703.
36.37. 1) а) А676; б) А650; в) А677; г) А678;
36.38. 1) а) А698; б) А699; в) А700; 2
36.39. 1) а) А675; б) О; в) А675; 2) а)
в)
О О
3/2 1
-3/2 -1
О -1/2
1/2 О
О 2
-2 О
О
О
;б) А
674)
; 3) а) А722; б) О; в) А72Б. 36.40. 1) а) А704;
б) А705; в) А706; 2) а) А707; б) А708; в) А709. 36.41. 1) a) A73i;
б) ^47зз; 2) а) А72з5 б) А734- 36.42. 1) Антисимметричен по
трем индексам; 2), 3) антисимметричен по первому и тре-
третьему индексам; 4) симметричен по первому и третьему ин-
индексам; 5) антисимметричен по первому и второму индексам.
36.43. 1) а) 6; б) 1; в) 0; 2) а) 11; б) 27; в) 1. 36.45. 0.
36.49. 1) п; 2) <4; 3) (п3 - Зп2 + 2п)/6; 4) (п3 + Зп2 + 2п)/6; 5) па\.
36.53. 1)
36.55. 1) А59 + А20; 2) Е + А20; 3) А253 + А2А2. 36.56. 1)
0
0
0
0
0
5
0
3
0
0
0
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
; 2)
0
0
0
0
0
0
0
3
0
0
0
2
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Ответы и указания
2)
36.57.
vie, a = (e + e? +
Представление не единственно.
1
37.1. 2) a)
1 cos a
cos a 1
б)
sin от
1 — cos q
— cos a 1
0 sin a
sin a 0
37.2. Указание:
если S — матрица перехода от некоторого ортонормированного
базиса к данному базису е, то матрица Грама базиса е равна STS;
можно использовать также задачу 35.21. 37.4. <5*, glj. 37.5. д^,дгК
37.7. 1) glj9ika); 2) a\j9k]i = 0. 37.8.
,л 60 -37 II , 402 -248 . ,
0) -34 21 I' в) -248 153 ' 1) &)
^fi99 4 7 13
в) „ _о ; 3) а) 4 7 17 ; б)
37.9. 1) Нет; 2) да. 37.10. 1) а)
_2
1 -
2 -1 13
6 9 19
13 17 25
10 -4
-23 1
; б)
в)
60 -34
-37
)
3
19
14 17
8 9
53 67
42
21
-1
7
51
71
37
16
-113 -45
2) а)
6
10
1
8
17
-1
11
24
-3
;б)
37.11. 1) a) A6S3; б) А
647;
рованном базисе. 38.1. ±
(знак + для правого
2-2 3
-16 33 18
43 -21 -9
в) А647; г) Аз8е; 2) а) А687; б) А688; в) А684; г) А685; 3) а) А735;
б) А736; в) А732; г) А737. 37.12. 1) а) А718; б) А719; 2) а) Аш;
б) Ап2. 37.13. 1) 2a(is); 2) а\; 3) of. 37.14. almk = 9Hgmjaijk.
37.16. Вектор у получается из х поворотом на тг/2 в направ-
направлении, противоположном направлению кратчайшего поворота
от ei к ег, если ei, e^ — правый базис. Указание: вычис-
вычислить компоненты вектора у в правом ортонормированном базисе.
37.17. Указание: найти компоненты z в правом ортонорми-
0 а3 -а2
-а3 0 ai
0,2 —Oi 0
базиса). 38.3. 1) А429; 2) A43i; 3) А439. 38.4. 1) D2, -42, 84);
2) (-2, 0, 4); 3) (-2, -2, -2, 0, 0, 0); 4) @, 0, 6, 0, 6, 0).
38.5. 1) 0; 2) 4; 3) 156; 4) (-138, -192, 48, 114); 5) @, 0, 1, 1);
6) (-12, -12, -18, 0, 18, 18, 0, 24, 24, 0). 38.6. 1) 6; 2) 0;
3) -6; 4) (-6, 33, 45, -15); 5) -с204. 38.9. (р!)-Че1||/'(х>)||.
38.10. 1) —8; 2) 3. 38.14. Матрица, составленная из миноров вто-
второго порядка матрицы S. 38.18. 1), 2) нет; 3) да. 38.19. 1), 3) да;
2), 4) нет. 38.21. Векторы /*i---»»>-i = ufI-1»>-ifcefc лежат в подпро-
подпространстве, порожденном разложимым р-вектором и. 38.22. Нет.
38.23. 1) Линейная оболочка векторов A, 0, -1, -2)г, @, 1, 2, 3)г.
3) Линейная оболочка векторов ( — 1, 1, —4, 0)т, (—1, 0, —2, 1)т.
2), 4) {о}. 38.25. 1), 2) i B, 1, 3, 2, 4, -1); 3) i (9, 5, 1, 4, -1, -1).
464 Ответы и указания
38.26. 1) @, -10, -1, -3)г + а?; 2) @, 4, 2, 6)г + а? (а - произволь-
произвольное число). 38.27. 1) D, 4, -4, -4),С1-С2-^3 + ^4 = 0; 2) A3,
8,-3, 5), 5*1 - 3?2 + 8?3 - 13?4 = 0. 38.29. 1), 4) не существует;
2) g2 = (l/2)f1 + af2; 3) g2 = -f1 + af2 (a — произвольное число).
38.31. 1) f1 Л f2, f1 = g1 - 3g3, f2 = g2 - 2g3; 2) f* Л f2 + f3 Л f4,
f1 = g1 + g2, f2 = g2 + g3 + g4, f3 = g3,f4 = g4; 3) f1 Л f2 + f3 Л f4,
fi = gi _ „3; f2 = g2; f3 = g3| ?4 = g4. 4) fi Л f2j fi = gi + g3 _ 3g4)
f2 = g2 + g3 4- 2g4 (g1, g2, g3, g4 — базис, биортогональный исходному
базису в Ci).
БАНК СТОЛБЦОВ И МАТРИЦ
1. II -3
6. || 6 - 7г
11.
16.
21.
26.
31.
36.
40.
44.
48.
53.
58.
40
85
17
-9
10
-6
-1
2г
1
— 1
3
-3
1 + г
3
-4 +
-3 +
7
1
1
20
О
65
2. || 6
7.
12.
17.
22.
27.
Столбцы
3. II -9 || 4.
1-2г
4
-2
1
1
2
0
14
-9
8.
13.
18.
23.
-1
1
1
2
3
1
2
-1
9.
14.
19.
24.
6
8
7
3
-4
10.
15.
20.
-2
1
25.
-3 + 2г
32.
37.
41.
45.
49.
2
-2
2
6
1+2г
6 + 2г
2 + Зг
-Зг
2
1
10
28.
33.
38.
-1
6
29.
34.
30.
-4
6
-2
3
0
-2
II 2
II 4
-1
1
35.
42.
-5 + 2г
3-г
3-бг
39.
43.
3 + г
7-6г
1-г
-2 - 2г
54.
59.
50.
46.
О
О
-3
3
10
14
55.
60.
-4
10
9
О
5
6
2
-4
51.
56.
61.
1
1
-1
2
11
4
8
3
9
47.
1
1
52.
57
62.
4
г
Зг
1
-1
1
1
0
0
0
-2
1
16 - 1715
466
Банк столбцов и матриц
63.
68.
73.
78.
83.
88.
93.
98.
103.
107.
111.
115.
120.
1
2
-2
-1
О
1
-9
7
17
3
1
-7
1
2
3
5
6
А
1
2
2
64.
69.
74.
79.
84.
89.
94.
-1
1
2
-26
-11
-67
65.
70.
-4
1
5
66.
67.
71.
12
4
3
-3
71
41
20
-2
42
4
3
1
75.
80.
85.
1
2
0
2
6
11
7
_2
А
76.
81.
86.
1
1
-3
6
3
3
А
5
7
90.
95.
1
2
4
л/2-
л/3-
1
-3
4
99.
-л/3
-л/4
-л/2
-1
1
1
Ш
100.
104.
i.
-1
5
4
1
-2
3
_2
-2
-4
-1
-1
2
91.
96.
101.
а
а2
а3
-3
О
1
105.
-3
1
1
-1
5
7
2
-1
-5
112.
11
-5
О
109.
113.
5
-3
0
2
2
-1
о
з
1
не.
4
2
1
121.
117.
-3
2
О
118.
О
—4
15
122.
-2
3
1
72.
77.
82.
87.
92.
97.
О
1
2
-5
1
3
О
-1
1
-5
7
2
А
5
15
15
-3
23
-18
3
1
-2
1
102.
—г
1
0
106.
110.
114.
119.
123.
14
—9
О
2
-1
1
20
1
-12
-1
4
О
12
12
Банк столбцов и матриц
467
124.
128.
132.
136.
140.
145.
149.
153.
158.
163.
168.
173.
-3
6
-15
-2
1
1
0
Зг
0
5 + i
-Зг
4
4
4
2
0
-1
1
4
3 +
—г
-1
-Зг
9
19
18
13
2
-2
1
1
0
1
0
0
4
3
1
2
125.
129.
133.
137.
2
141. 1
1
146.
150.
2г
154.
159.
1
164. \
1
10
169. ^
28
-1
г-,, \
1
5
3 126.
13
-1
2 + г
1
-1
2г
-2 + г
7г
-7-2г
-1 + 7г
142.
1
4
1
-1
4
3-4г
6
1
5
-2
8
и 16С
-9
165.
170.
175.
130.
13-
0
1
1
147
151
3
0
0
-1
4
• з
0
0
1
-1
2
-1
8
17
14
1
3
0
1
1-г
2 + г
3
-2 + г
1+г
1
1
4. -2
г
7
138. 0
12
143.
5
-2
-1
2-г
-4+2г
1 + 2г
156.
161.
166.
171.
-
176.
127.
(
-1
3-
131.
]
135. ]
139.
1
1 144.
2
148.
г
к
152.
6
6 157
0
1
1
0 162
1
1
\ 167.
1
-1
\ 172
0
1
1
77.
)
+ 2г
- г
1
—г
L + г
2
L + г
—г
—2
-2
-2
1
1
0
2
0
5 + г
Зг
-6г
-3
6
1
10
у
9
0
3
6
0
-1
1
2
3
6
1 4
3
-2
1
1
2
- 16'
468
Банк столбцов и матриц
178.
183.
188.
193.
198.
203.
208.
213.
217.
221.
8
-5
10
-5
179.
2
0
-1
1
1 !•¦
180.
5
-7
5
-6
181.
1
17
19
23
182.
1
0
0
1
1
2
0
0
184.
-11
4
0
0
185.
1
1
0
0
186.
1
1
-1
1
187.
1
-3
1
0
7
-9
1
3
189.
-25
6
35
8
190.
-3
1
1
0
191.
2
-1
0
1
192.
1
0
3
0
0
0
0
1
194.
2
0
0
0
195.
10
0
—7
6
196.
1
2
1
3
197.
1
1
2
2
1
1
1
3
199.
3
-5
7
2
200.
-1
8
-6
5
201.
1
-7
5
-2
202.
1
0
1
3
2
to to
2
204.
3
со со
3
205.
0
0
1
1
206.
2
со to
3
207.
1
1
1
2
-4
_2
-1
8
209.
5
1
9
9
210.
1
5
-2
5
211.
1
4
^
5
212.
3
1
4
8
4
17
-5
18
214.
1
4 + г
5-г
-2-г
215.
1
1
1
1-г
216.
2
3
2
4-г
о
10
-5
8
0
1
0
3-г
218.
222.
3
—2
6
3
о
2
0
5-2г
219.
223.
220.
224.
1
2
1
3-г
1
О
1
-1
Банк столбцов и матриц
225.
1
_1
2
0
226.
-1
1
1
3
227.
1
-1
1
-1
228.
0
1
0
1
229.
1
1
2
-1
230.
1
0
0
0
231.
5
5
0
0
0
232.
2
2
0
_2
-2
233.
4
-1
-5
3
-1
234.
10
84
6
27
1
235.
244.
248.
252.
257.
239. -
-2
10
-10
-14
30
-1
-1
0
1
1
О
-3
3
3
О
236.
-2
-1
О
1
2
237.
2
1
О
-1
-2
238.
4
-1
6
-12
1
2
-3
4
-5
240.
2
-5
9
7
-4
241.
2
5
5
3
1
242.
4
-1
1
2
3
243.
2
-1
2
3
3
245.
249.
-7
7
-59
9
1
-3
-2
3
О
246.
250.
О
1
1
О
2
О
О
-1
О
1
247.
30000
3000
100
40
3
251.
2
О
2
_2
1
7
0
2
0
-17
253.
0
12
5
0
0
254.
0
2
0
0
1
255.
1
1
1
1
1
256.
6
8
0
0
о
258.
1
-2
1
О
О
259.
-11
О
3
о
2
260.
2
3
4
-1
О
470
Банк столбцов и матриц
261.
265.
270.
274.
278.
283.
2
-1
О
2
-1
О
2
5
3
-1
2
1
2
-1
262.
40000
-11000
1100
-50
1
263.
-1
2
1
0
3
264.
266.
7
0
0
-1
0
267.
4
4
-1
-2
6
268.
0
4
6
4
0
269.
-1
0
0
1
2
271.
1
-1
2
-1
1
272.
10000
7000
-800
30
О
273.
-3-
4-Зг
г
1 + i
-3 + 2z
0
275.
0
3 + г
4-г
-3
276.
1
7 + 2г
9-2г
-5-г
277.
-2
1
1
-1
2
1
2
-1
4
279.
1
2
3
1
2
1
280.
-1
2
1
2
-1
2
281.
0
4
6
4
2
3
282.
1
у,
•
1.
5.
8.
11.
1 0|| "
5:5||
2.
13574 13647
28423 28523
0 -2
1 3
Ц-12
f
12.
13
•¦!
i
i
Матрицы
II з. || l
3 4
57
9.
1
1
1
9 -5
-5 3
13
1
1
1
0
II
7.
1
1
4. || 0
1 + \/2
2 + \/5
10
14
1
0 0
2-\/5
l-v/2
•
•
2 5
1 3
1 0
1 0
Банк столбцов и матриц
15.
19.
23.
27.
31.
35.
38.
42.
46.
49.
53.
56.
60.
65.
68.
72.
-1 О
О 1
1 1
1 2
0 2
-2 0 ||
1 -3
-2 6
1 2
1 2
1 -1
-2 2
5 3
-3 -1
5 -8
2 -3
-4 О
1 4
4 -3
12 -8
16.
1 -1
17.
20.
24.
28.
32.
39.
43.
50.
0 -1
1 О
1 -1
-1 2
1 3
3 1
1 3
3 10
36.
3 1
-3 О
1 п
О 1
47.
0 -1
1 -1
21.
25.
29.
33.
О 2
-1 -3
40.
44.
5 -2
-2 8
51.
3 5
| 5 9
О О
О 2
II
II 7 ~4
II ~5 3
ч/2 л/3 II
2 1
-1 -1
4 -2
-3 1
5 -1
4 1
-7 -2
8 1
1/2 у/3/2 II
->/3/2 1/2 ||
54.
-ъ/>/Тб 1/у/го
l l
1 3
57.
2 5
5 13
58.
1 -2
-2 5
1/л/5 -2Д/5 I
2/>/5 / |
61.
1Д/2 -1Д/2
1Д/2 /
|| -3/^13 -2/^13
' || -2/\/13 3/\/13
1 4
1 1
5 -3
-1 1
3 -1
2 4
66.
64.
67.
18.
22.
26.
1 2
3 4
0 1
1 О
30.
II5
II 6
25
60
14
13
60
144
34.
2 1
1 1
37.
41.
45.
-4 5
5 -4
0 2
12 -3
1 -1
3 -2
48.
52.
4/3 -1
-1 3/4
И -2
18 -1
55.
59.
2 3
3 5
1 2
2 -2
62.
4/5 3/5 I
-3/5 4/5
/
-з/Vio
cos na — sin па
sin па cos na
69.
73.
1 1
1 -1
5 2
1 О
74.
3/5 4/5
4/5 -3/5
7 4
-8 -1
75.
2 1
• || 3 1
-4 -5
10 10
472
Банк столбцов и матриц
76.
79.
82.
85.
89.
92.
96. II
100.
103.
106.
111.
115.
119.
123.
127.
cos a, i
sin a -
0 ?
e-1 0
sin a
- cos a
¦I
77.
cos а — sin а
sin а cos а
78.
e 1
-1 e
80.
г 1
-1 i
1 -i
1 i
83.
1 -?
1 2-i
86.
1 -t
2 + i l-2i
5 i
-i 1
90.
87.
81.
84.
1 1+t
1-t 3
l + iy/2 3
l-iy/2
88.
iy/2
1 i
i 1
1 + i 1 + Зг
1 — 2г 1 + 2г
91.
i 1
1 t
1 О
г 1
93.
97.
i —
i +
i
-1
1 i
1 i
1
2i
+ 1
-1
98.
94
0
1
1
2i
1
—г
—i
1
99.
1-i 2+i
6-4г 9 + 7i
95.
О 2
О 2г
1 2t
i -1
0 i
-i 0
0 1
0 0
1 1
1 1
2 2
4 4
3 3
1 1
5 -4
-8 6
3 -2
101.
104.
2 Ы
4г -5
5 -3
-3 2
102.
2
-1-г
1 + t —
-i
105.
12
107.
112.
116.
-2 О
1 -2
0 О
1 -1
1 О
108.
1
0
-1
0
1
-1
1 -2
1
0
0
-1
-2
0
1
0
0
-1
120.
124.
128.
—1 —1
1 О
0 1
1 О
О 1
-4 -3
1 О
О 1
а Ь
113.
117.
121.
125.
129.
1 2
-2 1
0 1
0 1
1 0
1 2
2 3
3 4
-1 1
1 0
0 1
1 0
0 1
-1 2
1 0
0 1
-1 1
110.
114.
118.
122.
126.
130.
1 +
1-
1-
i
i
i
i
-12
-5
3
2
1
1
1
0
3 5
5 9
4 7
3 4
5 7
2 3
1 1
1 0
0 1
3 2
3 1
-2 0
0 0
0 1
1 0
Банк столбцов и матриц
473
131.
135.
139.
0 0
1 0
0 1
0 0
0 0
0 1
0 0
0 1
1 1
132.
136.
140.
1 2
3 0
0 2
1 1
3 5
0 0
-4 -1
2 1
-1 -1
133.
137.
141.
0 0
0 1
0 7
2 1
4 0
2 3
-3 -2
1 0
0
1
134.
(
(
138.
142.
) 0
L -2
) 5
3 3
9 0
0 0
2 3
1 0
1 1
143. -
0
_ J
0
1
1
0
144.
-1
1
1
0
5
4
0
1
145.
1
3
2
4
2
4
3
5
146.
4
-5
1
0
0
-1
0
1
147.
1
1
0
-4
0
-1
1
-1
148.
1
1
1
1
1
2
1
3
149.
-2
1
0
0
0
0
-4
3
150.
1
-2
1
0
2
-3
0
1
151.
11
-2
1
0
5
-1
0
1
152.
1
0
-4
0
0
1
5
1
153.
12
18
0
0
1
0
-15
18
154.
1
1
-2
0
2
0
-3
1
155.
1
2
0
0
0
0
3
4
156.
24
16
0
0
-1
0
-22
16
157.
1
-1
1
0
-1
2
0
1
158.
-3
-4
1
0
1
2
0
1
159.
1
1
0
0
-1
1
1
160.
12
-6
20
-10
20
-10
36
-18
161.
12
20
-6
-10
20
36
-10
-18
162.
-1
1
-3
3
-2
2
-4
4
163.
-1
-3
1
3
-2
-4
2
4
164.
0 0
1 0
0 0
0 1
1 1
165.
-5
-2
2
1
0
1
-1
-1
0
1
166.
7
7
1
0
17
11
10
0
_^
28
474
Банк столбцов и матриц
167.
170.
173.
176.
179.
198.
201.
204.
207.
210.
213.
216.
1
1 1
о со to to to
0
-5
1
7
1 0
0 1
1 0
3
-2
1
-2
-4
4
2 1
3 1
1 0
-2
?
1
0
-1
0
1
5
-1
-2
0
3
10
0
-7
6
1
0
2
-2 1
2 -1
-1 1
8 6
10 6
-8 -4
-1
-2
1
3 1
6 2
2 1
12 0
2 5-2
0-2 5
со to о
1 1
2 2
3 3
1 2
2 3
4 7
—J СП СО
1
2
3
-1
1
-2
168.
171.
1
1
0
-1
0
0
1
1
0
-1
8
-2
24
16
-10
5
-3
17
11
-13
174.
17
-8
4
177.
-8
17
-4
1
1
0
1
2
1
4
-4
11
0
1
2
180.
1 -4 -1
-4 16 4
-14 1
199.
0 1 0
0 0 0
0 0 0
202.
205.
208.
211.
214.
217.
12 2
2 1 -2
2-2 1
12 3
2 3 4
3 4 5
0
1
1
3
2
-2
13
-5
-6
0
-1
3
0
6
-3
16
-7
-8
0
-3
5
0
4
-1
16
-6
-7
2 5 7
6 3 4
5 -2 -3
169.
172.
1
-1
-1
1
0
3
1
7
5
3
6
-7
12
0
5
2
-4
10
6
-16
175.
3 -4 -1
-4 18 4
-14 3
178.
6 4 1
4 5 2
1 2 1
197.
0-12
2 0-4
0 12
200.
0 0 1
0 1 0
1 О О
203.
206.
209.
2 2-1
2-12
-12 2
-111
-5 21 17
6 -26 -21
1 -3 -1
-2 7 2
3 2-4
212.
215.
218.
4 -1 -1
2 1-2
4 -4 -1
0 6 1
6 3-3
1 -3 -3
4 2 0
1 3 5
1-2 3
Банк столбцов и матриц
475
219.
222.
225.
228.
231.
234.
237.
240.
243.
246.
249.
251.
254.
2 3 4
4 3 8
3 2 1
1 1
2 2
-3 -3
2 -1
1 -4
-1 -3
12 4
1 2 4
2 4 8
8 -12
6 -9
2 -3
0 2
0 -1 -
0 0 -
-1 1
3 -3
2 -2
-5 4
2 1
1 -2
1 0 0
0 0 1
0 1 0
2 -6
2 -6
-2 6
-3
6 -
-15
0 0
0 0
1 -4
0 3
-3 0
-5 -2
1
2
-3
1
3
2
220.
1
3
-2
223.
226.
229.
0
0
0
2
-2
-2
-2
6
4
-2
6
_2
5 3
9 4
-7 -3
2 3 1
3 7-6
5 8 1
3 2 2
2 4 4
5 7 7
2-10
0 2-1
-1 -1 1
232.
235.
238.
12 3
2 3 4
1 1 1
1 2 1
1 2 4
-1 -2 -3
-3 10 -1
-7 4-
-2 -3
241.
244.
-
-5
-5
5
1 -2
2 4
5 -10
-1
4
0
5
2
0
247.
6-11
5-5 5
4-9 9
4 -4 1
15-3
-3 -2 2
2 -5 -
-3 16 1
4 -20 -1
252.
0-12
10-2
-2 2 0
255.
0 1 (
-1 0 :
0 -3 (
221
224.
4
2
4
1 -11
5 -2
4 -l|f
-2 4 -3
4 4 7
1 4 2
227.
230.
233
236.
D
4 239.
3
242.
245.
1 1 1
1 2 2
2 3 4
-14 3
-2 5 3
2 -4 -2
1-12
3-3 6
2-2 4
-2 5 3
-2 5 3
2 -5 -3
0 1 2
-1 0 -2
-2 2 0
0 1 1
1 -1 -1
1 -1 -2
21 -10 -4
-10 5 2
-4 2 1
4
2 248.
5
250.
253.
}
}
}
16 0 32
-4 0 -8
-8 0 -16
0 1 -2
-10 3
2-3 0
0 1 1
-1 0 -1
-1 1 0
256.
0 0 1
0 2 6
1 6 4
476
Банк столбцов и матриц
0
4
0
0
0
1
5 4
-4 2
2 9
1 0
0 1
0 0
258.
261.
0
4
-1
1 0
2 1
3 0
5
-6
-4
3
2
1
3
-4
5
259
262.
0 0
1 0
0 1
-1 -2
-2 -1
-3 -2
1
0
0
2
2
3
263.
266.
269.
272.
275.
278.
281.
284.
287.
290.
293.
3 -3 1
3-2 2
-1 2 0
2 0
О 2
-6 6
0 2 3
О 1 О
0 0 2
-6 5 0
0 -6 -2
3 2 2
1 -6 1
5 -3 19
-1 -4 3
-4 2 -8
-6 2 -12
8 -3 16
-9 3 7
1 1 -1
-11 3 9
2 -1 -1
-1 1 О
-10 2
7 -12 6
10 -19 10
12 -24 13
2 1-3
3 -2 -3
1 1 -2
1 10 3
2 1 2
3 10 1
264.
267.
270.
273.
0 1 1
1 1 О
-1 0 1
-1 3 -1
-3 5 -1
-3 3 1
0-1 1
2 1-2
1 -1 О
-14 4
-10 -18 -20
9 13 15
276.
279.
282.
285.
288.
291.
294.
0 1 1
1 1 О
111
2 4 4
2 3 4
-3 -5 -6
1 1 1
1 -1 О
1 2 1
2-10
-1 2 -1
О -1 1
1 -1 2
-1 1 -2
2-2 4
2-11
1 2 -1
1 -1 2
2-2 0
-2 9 2
0 2 2
265.
268.
271.
274.
277.
1 1 О
1 0 1
1-3 3
1 2 3
1 1 О
-10 2
О -2 1
0 2-3
О -2 -1
1 -1 3
2 1 4
3-15
О 1 О
2 0 4
-3 0 -6
280.
0 2 1
2 8 2
1 2 О
283.
286.
2 5 1
-1 -3 О
-2 -3 -2
5 4,4
2 6 4
-3 -5 -3
289.
292.
295.
-2 12
-10 2
-2 0 3
1 -2 -1
-1 1 1
10-1
4 2-6
2 1-3
-6 -3 9
Банк столбцов и матриц
296.
299.
3
-2
6
-2
2
-1
-2
6
3
_2
3
-2
6
3
-2
-3
6
-4
297.
300.
0
0 -
0
2 4
0 5
1 3
0
-1
0 -
-4
-3
1
0
1
1
298.
301.
0
-2
2
0
1
2
-6
-4
11
1 1
0 1
2 1
-2
-2
4
302.
305.
3
0
0
2
1
3
1 0
3 0
0 2
-1 -
0 -
-1
-1
-1
-2
303.
0
-1
2
306.
-
1
1
1
3
8
3
6
14 -10
-2
4
5
2
-2
-3
304.
2
-1
1
307.
4
2
4
1 -1
0
1
2
-3
0
1
0
4
0
4
308.
311.
313.
315.
317.
319.
321.
323.
5-12
-1 1 О
2 0 4
2 5-2
4 10 -4
0 0 0
309.
110
1 1 О
110
310.
312.
-210 105 42
100 -50 -20
40 -20 -8
42 105 -42
-20 -50 20
-8 -20 -8
2/3 l/v/2 -1/C>/2)
1/3 0 4/C>/2)
-2/3 l/v/2 /)
-1Д/6 -l/v/2 1/л/З
1/л/б -1/>/2 -1/л/З
-2/>/б 0 -1/л/З
О l/v/2 l/v/2
3/5 -4/\/50 4/ч/50
4/5 3/v/50 -3/\/50
l/v/2 l/v/б -l/v/3
О —2/л/б -1/л/З
-l/v/2 1Д/6 -1/л/З
-l/v/б 5/ч/30 О
l/v/б l/v/ЗО -2/л/5
-2/л/б -2/VS0 -1/л/5
l/v/2 l/v/l8 2/3
О -4/\/18 1/3
/ -2/3
314.
316.
318.
320.
322.
324.
/ l/v/6
О 5/VM -1/л/б
2/v/30 2/v/6
/ 1/V3
2/V6 1/л/З
l/v/2 l/v/6 -1/>/3
1/v/lO l/\/2 2/v/lO
1/v/lO -l/v/2 2/v/lO
/ /
/
-2/v/5
/
l/v/5
l/v/2 l/v/3 -l/v/6
l/v/2 -l/v/3 l/v/6
0 -l/v/3 -2/v/6
l/v/2 l/v/3 l/v/0
-l/v/2 l/v/3 l/v/П
l/v/20 -y/3/2 1/v/Ti
-^/з/го i/2 v/a/ft
2/v/5 0 l/v/5
478
Банк столбцов и матриц
325.
327.
328.
330.
344.
347.
350.
352.
9/G^10) 1//Ш 6/7
3/Gл/10) -3/лДб 2/7
2^10/7 0 -3/7
2/VT3 -7/\/75 -8/E^42)
l/\/l4 -l/\/75 31/E^42)
-3/\/l4 -1/л/З 1/\A2
1/\/18 1Д/2 2/3
4/\/18 0 -1/3
-1/3
2/vT3 -1/у/Ь 6/\/70
l/\/ii 2/у/Ъ 3/\/7б 329.
-Ъ/y/U 0 5/ч/70
1/л/З -1/>/3 1/л/З
1/C - л/3) 1/C+ ч/3) -1/ч/3
1/C + ч/3) 1/C -ч/З) 1/ч/3
1/уД l/v/б 1/л/З
1/%/2 -1Д/6 -1/л/З
О 2/^/6 -1/>/3
332.
335.
1
-1
2
1 1
О 1
1 1
1—i
1
О
О
1
1
2
-2
О
333.
336.
-2 4 1
2 О 1
2 -4 1
! -1 3
I 1 1
О 1
331.
334.
337.
0 0 2
10 0
О 1 О
13 3
0 2 5
0 0 4
3-2 3
1 2 1
О 1 1
338.
341.
1—i
О
О
3
9
О
2
1
2
2
О
3
с
-9
3
-1
1
О
339.
О
-1
1
342.
3
2
3
—1
О
-1
1
О
-1
1
2
1—i
340.
_1
-2
L
1
-3
1
343.
3
-5
1
1
1
1
-3
-3
2
1 1
1 0
0 0
5 5 2
10-2
1 5 1
2 12
12-2
-2 2 1
345.
348.
О уД уД
\/3 0 у/г
ч/б ч/б О
2/3 1 0
-10 0
2/3 0 1
349.
346.
0
0
2
it
0
1/\/2 -:
о
1 -4 1
-4 16 -4
1 -4 1
л/2 1 1
-л/2 1 1
О \/2 -уД
351.
353.
1/2
-3/\/8
2
1 3 уД
3 1 -ч/б
-ч/б ч/б -2
2 -х/зД 3/ч/2
О 2 2/уД
0 0 2
Банк столбцов и матриц
О 27/у/п -65/-/42
О О Ы/уД
0 0 О
2 А/уД 8/v/6
О -2 ->/5
0 0 2
-2 4/>/3 7/>/б
О 2 З/у/2
0 0 2
3 0 О
О 1 -2уД
О 2\/2 1
-4 0 О
О 3 -у/7
О у/1 3
355.
357.
1 1/\/2 3/>/2
О 2 , ,. 1
О О Ч
2 4/>/3 8/ч/б
О 2 V5
0 2-2
359.
361.
2 0 0
О -1 ~уД
О >/3 -1
2 0 0
О -1 -л/3
О \/3 -1
ж
У
ж + у
111
а Ь с
а2
у ж + у
+ у ж
ж у
363.
365.
1 1 1
1 ш си
1 ш2 ш
1 1 1
1 а а
1 а2 а2
ъ2 г
367.
3 6 9
4 8 12
2 7 А
368.
1 + гл/2 г - л/2 1
1 + г-у/3 г - уД 1
1 + г\/4 г - у/1 1
1 - i -3 + 2i 2 - i
-4 + 6i 4 - Зг -Зг
-9+г 5-г 4
1 1-г 2+г
1 — Зг —2 — 4г Ъ-Ы
2г" 2 + 2г -2 + 4i
0 2 2
12 2
1 3+i 3-г
1 1 + г 1-г
1 1 1
-1 —г г
370.
2 + г -3 2 + г
-1 + 2г -2-Зг 1 — 2г
2+г -3+г О
372.
1 2г 1-г
-г 2 -1-г
3 6г 3 — Зг
374.
376.
0 2г -2г
1 2г -2г
1 Зг — 1 —Зг — 1
1 + г -1-г 2 + 2i
О г 2
О -1 3 + г
1 1-гО
1 + г 3 г
О -г 1
378.
1 г О
0 10
О 0 -г
379.
8 1 %
1 г О
г о 1 -:
480
Банк столбцов и матриц
Ч '•
380.
383.
385.
0 0
1 0
3
—3
2
1
-2
3
i 0
1
1
-5
9
-6
-2
5
-8
-12
18
-12
3
-8
14
381.
394.
398.
401.
404.
407.
410.
i/лД О у/2
1 1 -г
О i 1
¦)\Р
382.
386.
388.
391.
2
1
0
6
0
1
2
1
8
1
0
1
1
9
6
3 2 0
-10 1
395.
1
1
0
0
-1
0
1
0
-1
0
0
1
3
1
0
0
1
0
0
2
0
0
1
0
-1
0
1
0
3
0
0
1
0
0
1
3
-4 -2 -6
2 13
14 7 21
-6 -3 -9
1
0
0
0
0
0
0
-1
1
0
0
1
1
0
-1
384.
2 0-1
О 2 1
-112
389.
392.
1
0
0
0
4
3
1
2
3
2
0
1
399.
402.
405.
408.
2 7 6
-6 14
-1 2 1
1 -1 О
396.
1 2 2
2 1 2
5 1 1
2-2 1
1 О О
10 0
О 1 О
О 0 1
4 5 9
3 2 7
-13 2
7 7 6
411.
2
-1
1
8
2
1
2
0
0
0
4
-2
5
1
7
0
13
5
1
0
2
-1
3
-2
4
0
1
-1
0
1
i i 2
О 10
-i/y/2 О О
1 1-г-у/З l + iy/3
1 1 + г-у/З 1-г-у/З
-12 2
1 1 3
2 2 6
0 3 0
0 4 0
387.
390.
393.
397.
2 1 О
1 2 1
О 1 2
2
3
1
0
0
2
3
3
1
0
0
1
1
3
5
4
1
1
0
0
3
5
7
0
400.
403.
406.
409.
2
1
2
-1
2
4
-1
1
-2
1
7
-3
2
1
-1
2
3
7
-2
5
6
-3
-21
9
19 2
с
1 11
-5 0
0 -5
(
2.
) 0
0 0
1 1
1 0
0 1
0 0
-1
-5
2
2
-1
5
-3
13
-4
2
14
-6
33
4
0
0
-5
1
-5
0
0
3
Банк столбцов и матриц
4Ы
430.
433.
1 О О
О 1 О
0 0 1
5 1 -1
3 0 0
1 0 0
0 1 0
0 0 0
0 0 0
0 0 0
1 -1 0
10-1
1 0 0
1 0 0
0 1 0
0 0 1
414.
417.
420.
4
2
9
-20
-3
1
-11
2
13
4
9
-15
8
5
2
2 0 0-1
0 2-10
0-120
-10 0 2
1
0
0
0
-2
1
0
0
4
-2
1
0
-8
4
-2
1
0
3
3
0
-1
0
1
-1
1
-2
-1
1
1
1
-4
1
0 0 0-1
10 0 О
0 10 О
0 0 1 О
10 1 -26
-11 -1 9
7 0 0
О 1 О
0 0 7
423.
415.
418.
0 0-2
10 0
О 1 О
О 0 1
„-2 1 1
-2 0 -4
0 0 2
О 1 О
1-2 9
2 10
2
2
3
4
6
2
-2
-2
-1
5
2
2
2
1
-5
421.
30
-24
43
-50
-5
9
-15
8
5
2
4
2
9
-20
-3
1/2 1/2 1/2 1/2
-1/2 1/2 -1/2 1/2
-1/2 -1/2 1/2 1/2
1/2 -1/2 -1/2 1/2
425.
1
0
0
0
2
1
0
0
0
2
1
0
0
0
2
1
427.
13 3 1
13 1-1
11-13
-1-1 3 3
429.
0
-1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
-1
0
0
-1
0
0
0
431.
0
0
1
0
0
0
0
-1
-1
0
0
0
0
1
0
0
432.
0
1
0
0
-1
0
0
0
0
0
0
1
0
0
-1
0
1
0
0
0
-2
1
0
0
1
-2
1
0
0
1
-2
1
434.
12 2 2
2 12 2
2 2 12
2 2 2 1
435.
0
0
0
1
0
0
0
2
9
9
9
3
1
2
3
4
482
Банк столбцов и матриц
436.
439.
441.
444.
446.
448.
450.
453.
456.
458.
1—1
1
0
0
1
0
0
0
1
1
1
1
1
1
0
1
437.
0
1
1
1
1
0
-1
-1
1—1
1
0
-1
1
1—1
1
0
2 3 4 5
3 3 4 5
4 4 4 5
5 5 5 5
5 4 13
2 1 14
3 2 11
13-22
2 3 4 1
4 3 8 6
3 2 15
2 2-31
442.
1
1—1
3
4
-1
4
0
—1
3
0
0
-3
4
-1
-3
1—1
1
0
0
0
2
1
0
0
3
2
1
0
4
3
2
1
0
0
1
4
0
0
2
5
1
2
3
6
4
5
6
7
1 0-1-2
-2-1 0 1
12 0 0
0-100
3 3-4-3
0 6 11
5 4 2 1
2 3 3 2
451.
454.
-5222
2-522
2 2-52
2 2 2-5
438!
L4U.
л л о
443.
0
1
_ J
1
25
75
75
25
1
-1
1
0
-1
0
1
-1
31
94
94
32
1
2
4
0
1
0
1
17
53
54
20
1 0
1 0
1 0
0 3
-1
1
_^
0
43
132
134
48
445.
1/v/IO 1/2 1/2 2/v/lO
2/-/L0 1/2 -1/2 -1/л/10
1/-/L0 -1/2 -1/2 2/v/lO
2/v/lO -1/2 1/2 -l/v/10
447.
449.
2
_2
6
0
-3
0
3
0
1
2
-3
0
0
0
0
2
2
1
-3
1
4
2
-6
2
6
3
-9
3
1
1
г-1
1
-12 0 1
1-12 0
0 1-12
2 0 1-1
-1 2 -4 -2
-2 -2 -9 -7
4-9 0-5
-2758
452.
455.
0
0
0
1
0
0
0
2
0
0
0
3
1
2
3
4
i
12 3 4
2 3 4 5
3 4 5 6
4 5 6 7
457.
1
0
0
1
0
1
1
0
0
-1
0
-1
0
0
-1
459.
0
0
0
2
0
0
0
4
0
0
0
6
-1
4
3
8
460.
10 0-1
10 0-1
0 1-1 0
0 1-1 0
0 -1 -2 -3
12 3 4
0 0 0-1
0 0 12
Банк столбцов и матриц
¦1Ьо
461.
463.
466.
468.
470.
472.
474.
476.
478.
481.
0
2
1
1
0
1
2
1
-1
-1
0
0
-1
-2
0
0
3
5
9
15
5
9
15
27
6
10
12
20
10
18
20
36
464.
1
2
0
3
1
-1
1
-1
-1
3
-1
1
1
-2
2
-1
111-1
11-11
1-111
-1111
1
-3
0
0
1
0
1
0
-1
-1
1
1
0
1
0
0
1
1
1
1
1
г
-1
—г
1
-1
1
-1
1
—г
-1
i
-5 -2 -3 -1
4 2 2 1
6 3 3 1
2-340
1110
0 111
-1 0-1 1
1-1 0-1
1-1 1-1
-1 1-1 1
1-1 1-1
-1 1-1 1
475.
1
0
0
1
0
1
1
0
0
-1
1
0
-1
0
0
1
479.
462.
3
9
5
15
6
12
10
20
5
15
9
27
10
20
18
36
1
1
0
0
1
2
0
0
1
1
1
г-1
1
2
1
2
465.
11-11
1-1 1-1
-3 -1 1 -1
-3 1-1 1
467.
4
3
-1
7
5
2
3
7
9
7
2
6
3
-2
-2
i-H
1
469.
471.
2
3
3
3
-1
0
1
1
3
3
-2
-7
-7
7
8
2
1
0
0
-1
2
__^
-1
0
-1
2
0
0
-1
0
2
2
1
0
1
1
0
1
0
-1
1
1
1
0
-1
0
1
473.
10 1 0
-1 1-1 1
-1 -г -1 i
-i Зг-3 i -З-Зг"
477.
0
0
0
1
0
0
1
0
0
1
0
0
1
0
0
0
0
1
0
0
1
0
0
0
0
0
0
1
0
0
1
0'
480.
5
2
0
0
-2
8
0
0
4
2
4
5
-4
-2
5
4
482.
10 0-1
0 1-10
-1,0 0 1
0-110
484
Банк столбцов и матриц
485.
488.
491.
493.
496.
499.
501.
503.
506.
509.
511.
2
2
2
1
3
1
1
1
1
-1
-2
i—i
-1
1
1
3
i—i
-2
-1
1
-1
i—i
-3
-1
4
-2
-2
-1
-1
-3
1
-1
484.
486.
i
1
0
0
i—i
i
0
0
0
0
i
1
0
0
1
i
487.
i
0
0
1
0
i
1
0
—i
0
0
1—1
0
—i
1
0
489.
i
0
i
0
0
—i
0
i
0
1
0
1
1
0
1
0
490.
3
1
0
2i
i—i
3
0
0
~2i
1
1
2i
0
1
1
492.
0 0 0 1
10 0 0
0 10 0
0 0 10
494.
1
1
1
1
1
0
1
1
1
i—i i—i
1
0
1—1 1—1
1
0
497.
1111
1 1-1-1
1-1 1-1
1-1-1 1
0 0 10
0 0 0 1
3 4 0 0
-1-10 0
0 10 0
-10 10
0-1 0 1
0 0-10
7 3 1 + 2» —1 + 2»
3 7 1 — 2i —1-2»
1 — 2г 1 + 2г 7 -3
—1 — 2г —1 + 2» -3 7
1111
-10 0 1
0-1 0 1
0 0-11
0-102
1 2-1-1
0 14 0
0-1-2 2
1 0
0 1
0 0
0 0
1—1
0
0
0
0
0
0
1—1
0
1
0
0
0
0
1
0
0
0
-1
0
0
0
1
1
495.
498.
0
-1
-1
i—i
0
1
-2 -3
1 8
1 -5
3 -2
2 -1
3 -4
2 -3
1
-1
0
-5
7 -
-6
1
2
7
5
i—i
0
i—i
2
2
3
5
0
-15
11
KC\A
OU4.
-
I 507.
i—i
i
1
2
4
-2
3i
3
2
0
3 + 2
1 + г
4 1
3 1
1 1
КПП
ouu.
5
-1
502.
4
0
i—i
1
DUO.
508.
24 -7 -1
-2
i—i
7
3
7 -3
-1 -1
1 35
8 33
1 A
2 -1
1 10
19
19
_!
A
-6
i—i
2
0
2
5
1
2
3
0
1
5
5
-1
2
1
2
4
24
-3
5
1
-7
63
-7
4
-7
-2
-3
29
-1
510.
512.
1 -5 -6 11
5 1-4 3
1 8 7-15
2-12 0
1 17-3
-1 11-1
Банк столбцов и матриц
513.
515.
517.
519.
522.
524.
530.
533.
-1 -5
3
6
9
3
2
8
2 -1
5
-2
-4
-6
1
-3
-1
3
5
4
3
-4
2
8
4
3
2
-2
6 -
2
-3
-1
1
4
-5
3
1 2 3
3 2 1
2 3 1
2 2 2
5 5 2
1
1
-1
1
О
1
2
-1
0
4
0
1
1
2
-1
_2
-1
0
1
1
0
5
0
5
7
2 5 14
-5 -8 -7 -1
3 5 4 1
2 4 2 2
13 0 3
520.
1
0
0
2
5
0
1
0
3
4
0
0
1
4
7
2
-3
4
11
12
514.
516.
518.
2 -3
4 -
6
2 -3 -
-2
8
4
0
16
0
521.
523.
1
4
-2
-2
8
4
1
0
0
2
5
3 5
4 9
2 7
1 4
6 7
5
2
11
3
12
-6
2
24
-4
0 0
1 0
0 1
3 4
4 7
4
3
-1
_ ^
11
7
3
-15
-2
-8
4
-8
-16
16
2
-3
4
11
26
1
6
8
5
-4
525.
1-2 l + 2i -1 + г
-1 3 -1-Зг 2-г
г 1+г 1 2г
2г 0 2г -2 + 2г
О 2 — i —1 — 2i 2-г
1
3
0
0
0
2
4
0
0
0
5
6
1
1
1
5
6
1
2
2
5
6
1
2
3
531.
1
3
0
0
0
2
4
0
0
0
0
0
1
1
1
0
0
1
2
2
0
0
1
2
3
532.
1
1
0
0
0
1
2
1
2
4
1
3
1
3
9
0
0
1
4
16
0
0
1
5
25
1
0,1
0
0
0
10
2
0,1
0
0
10 100 103 104
30 400 5000
3 60 800
0,1 4 90
О 0,1 5
534.
0
0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
1
0
0
0
0
535.
11110
12 3 0 0
0 1111
О а Ь с d
г
о а2 ъ2 г
536.
0
1
0
2
0
7
4
1
8
3
0
3
0
4
0
1
9
5
7
1
0
1
0
5
0
537.
3 5 5 5 5
5 3 5 5 5
5 5 3 5 5
«55535
5 5 5 5 3
486
Банк столбцов и матриц
538.
540.
542.
545.
547.
549.
551.
571.
573.
575.
6
7
14
4
9
4 1
17 2
3 0
4 1
2 2
1
-7
5
-11
-7
4 1
7 2
10 3
2 1
2
18
-8
8 2 5
-2
-2
О
-1
4
17
-1
12
10
9
82
4
27
0
12 2 2 2
2 12 2 2
2 2 12 2 543.
2 2 2 12
2 2 2 2 1
7 10 15 25 20
15 22 18 30 36
0 0 3 5 6
О 0 5 9 И
О 0 6 11 14
¦ 1
3-1102
2-5011
10 0-12
0 2 11-1
11-310
О 2-2 0-4
-2 0 4-5 3
2-4011
0 5-102
4 -3 -1 -2 О
1-1 0 0 1
1-1 0 0-1
0 0 0 10
О 0-10 О
-22000
10 111
0 1111
0 0 111
0 10 0 1
1-1 1 1-2
2 1-1-1 1
539.
541.
2
1
0
0
0
1
2
1
0
0
0
1
2
1
0
0
0
1
2
1
0
0
0
1
2
1
0
0
0
1
4
2
3
i—i
-1
-1
1
0
0
1
3
-1
1
2
1
0
-1
1
0
1
-4
-3
1
3
-1
0
0
-1
1
1
2
-4
2
4
-2
0
0
0
-1
1
2
2
-1
_1
3
544.
546.
12 3 0 0
2 3 4 0 0
1110 0
0 0 0 12
0 0 0 3 4
12 10 0
2 3 10 0
3 4 10 0
0 0 0 13
0 0 0 2 4
548.
10 0 1-1
О 1-2 3-3
О 0-1 2-2
1-110 1
1-1 1-1 2
550.
0
1
1
0
0
0
0
0
1
1
-1
— 1
-1
_1
-1
1
1
0
0
0
0
0
1
1
0
572.
574.
576.
0.
-1
0
2
4
1
0
0
1
0
1
1
-1
-1 3
-2 5
1 2
1 -2
т-Н т-Н
0
0
0
0
1—1 1—1
1
-2
1
1
3
0
0
1
1
4
7
1
-1
Банк столбцов и матриц
487
2
4
2
1
0
1
1
1
2
-1
-2
-1
1 1
1 1
1 0
3
-2
11
-2
1
3
3
3 -2
4
5 17
1 8 2
2 2
1 2
2 1
5 7
3 -4
12 25
111
1-12-1
7-5 1-5
-1
9
6
2 4
-14 2
-9
1
9
5
22
-1
1
5
-2
1
1
578.
12 2 5 3
2 3-5 26 -4
3-4 8-9 1
-4 1 -3 -12 2
3 0 3 0-2 0
0 3 0 3 0-2
2 0 10 О О
0 2 0 1 О О
1 0-1 0 1 О
О 1 0-10 1
1-1 0 0 1-1
1-1 0 0
О 0-11
О
0 0 0
о о
о о
2 0-1
0 2 0-1
-1 0 2-1
0-1-1 2-1 О
О 0 0-1 2-1
0 0 0 0-12
О 1 0 ... О О
О 0 1 ... О О
О 0 0 ... 1 О
О 0 0 ... О 1
580.
3
6
10
1 4
1 -2
1 2
1
1
1
2
2
0
1
2
3
1
3
6
2
-2
2
-2
-4
-7
1
-1
-1
582.
584.
586.
588.
590.
3 3-3-3 4
1-1 1 1-2
2 1-1-1 1
2 1-1-1 1
1-1 1 1-2
3 3-3-3 4
-3 3 12 6 -9
-3 3 12 6 -9
2 -2 -8 -4 6
2 1-1-1 1
1-1 1 1-2
3 3-3-3 4
4 5-5-5 7
1 а Ь а2 аЬ Ь2
О 1 0 2о Ъ О
0 0 1 0 а 26
0 0 0 10 0
0 0 0 0 10
0 0 0 0 0 1
592.
1-1-110 О
-1 2 4 0 1 5
2-3-510-4
О 1 3 11 5
0 1 3 10 4
1 0 2 2 1 5
596.
0
0
0
0
594.
2
0
0
0
0
4
0
0
0
0
0
0
1
0
0
0
•2
0 ..
2 ..
0 ..
0 ..
0
0
-2п
0
. 0
. 0
. п
. 0
0
0
0
2п
488
Банк столбцов и матриц
597.
599.
602.
604.
606.
608.
ею.
612.
0
1
0
0
0
0
0
0
0 .
0 .
1/2 :
0 .
1 1 .
0 2 .
0 0 .
0 0 .
.', 0
•1 °
Л 0
.. 1/п
;; ;
.. 1
.. (
L
L
г
3
1/Ai
1/Аа
О
о
1
-|
1
о
а;
1
0
0
0
1
3
0
0
А
0
0
0
..
!
г
1 0
1 1
0 0
0 0
0 0
1 0
0 0
0 0
1 0
А 1
0 0
0 0
1
О
А2
О
..0 0
..0 0
..11
..0 1
..0 0
..0 0
... 3 1
... 0 3
...
...
0
0
1
А
600.
О
1/Ап
1
2
О
0
0
0
1
598.
О
п
601.
603.
605.
607.
609.
О
0 1 -
0 0
D 0
0 0
Ai
о
А?
о
о
к
1 -1 0
0 1 -1
0 0 0
0 0 0
611.
613.
3 1
0 3
0 0
00
0 1
0 0
0 0
0 0
-1
2
0
0
А2
А?
¦
0
1
0
0
0
1
0
0
•
А
.. 0
.. 0
.. 1
.. 0
...
. . .
-1
-1
п
0
О
О
К
Ai
О
iAn
О
0
0
-1
1
0 0
0 0
3 1
0 3
0 0
0 0
0 1
0 0
Банк столбцов и матриц
il
614
I
J
616
! 618.
!
Г
620.
622.
624.
626.
628.
0
0
0
1
1
0
о
0
1
0
0
(-
0
1
1
1
1
1
1
1
1
1
3
5
5
5
0
1
i—l
1
1
0
0
0
0
0
о
1
2
1
0
1
0 .
i—l
0 .
0 .
* • .
3
2
0
-1
-1)
1
1
0
0
0
1
0
1
1
1
5
3
5
5
1
0
2
2
n-
1
0
1
0
0
1—1
1
0
1
1
5
5
5
5
1
2
0
2
, .
••
0
0
1
0
L
••
••
••
0
0
1
0
0
1
о
0
n
n
-1
1
-1
1
(-1)"-
1
0
0
! 1-й
. 0
. 1
. 1
i—i !
. 0
. 1
. 5
. 5
3
. 5
. 1
. 2
. 2
. 2
1
0
0
0
1—1
1
1
1
1
0
5
5
5
з
1
2
2
0
A
615.
617.
619.
1 -1 ]
0 1
0 0
0 0
1 2
1 1 1
Oil
0 0 0
0 0 0
0 1 -1 ...
0 0 0 ...
... (—I)"
... (-1)"-2
V /
2 ... 1
621.
623.
1
0
о
2
1
1
0
0
0
625.
627.
629.
1-A 1
1 2-
1
с
0 0..
1 0 ..
2 0..
0 0..
1 1 ..
1 0 ..
11..
0 0..
0 0 .
12 2
2 12
2 2 2
2 2 2
x у
У x
У У
3 .
-А 3
1 3
0-i
1 *
0 .
3 .
. . .
(-1
(-1
. 0
. 0
0
. 0
. 1
. 0
. 0
. 1
. 0
• * *
...
...
...
У
У
У
1
1
1
0
)""
|п~
L
0
2
1
0
I—I
0
0
1
1
2
2
1
2
г
г
а -
0
0
1
п
1
1
1
1
-1
2
0
0
1
1
0
0
0
1
2
2
2
1—i
У
У
X
i
i
-А
490
Банк столбцов и матриц
10.
1 1 1
1 п
631.
632.
0
1
1
1
0
-1
1 ...
1 ...
0 ...
1
1
1
1
1
1
1
1
1
-1 -1 -1 ... -1 -1 0
633.
12 3..
-1 0 3 ..
-1-2 0 ..
. п
. п
. п
-1 -2 -3 ... О
634.
0 10 0
10 10
0 10 1
0 0 0 0
0 0 0 0
о о
о о
о о
0 1
1 О
635.
О 10 0
-1 0 10
0-101
о
о
0 0 0
0 0 0
о о
о о
о о
О 1
-1 О
636.
2 10 0
12 10
0 12 1
0 0 0 0
0 0 0 0
о о
о о
о о
2 1
1 2
637.
1-210
0 1-21
0 0 1-2
0 0 0 0
0 0 0 0
..0 0
..0 0
..0 0
..1-2
..0 1
638.
обо
баб
Оба
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
баб
Оба
639.
О 1 0 0 ... О О
п-1 0 2 0 ... О О
О п-2 0 3 ... О О
О
О
О
О
О О
О О
0 п-1
1 О
640.
п-1 1 00... О О О
-п + 1 п-3 2 0... О О О
О -п + 2 п-5 3 ... О О О
О
О
О 0 0
О 0 0
-2 -п + 3 п-1
О -1 -п+1
641.
12 3
2 3 4
3 4 5
п 1 2
п-1
п
1
п
1
2
п-2 п-1
642.
a2 ..
аз ¦
ап-2 «п-1
Банк столбцов и матриц
a2
а3
644.
1
?2(п-1)
?п-1 ?2(п-1) _
646.
0
0
0
?
1
0
0
0
0
1
0
0
... 0
... 0
... 1
... 0
Блочные матрицы
7 3
7 3
3 1
3 1
1 1
1 1
7
-5
12 ;
20 :
1
-1
1 -1
-4
8
Ю
3 4
2 2
-6 -10
-10
-18
648.
651.
654.
1
h
3
5
3
4
4
7
5
6
2
1
7
8
5
3
1 -1
1 1
2 1
1 1
657.
649.
652.
655.
12 20
-6 10
1 5
3 7
-4 2
-5 3
0 -2
1 3
2 6
4 8
3 4
5 7
2 5
3 2
-1 -2
-3 -4
1 2
3 4
659.
-1 -3
1 3
20 36
-10 -18
-2 -4
2 4
4 5
6 8
1 2
3 5
-10
-15
3 4
2 2
0 7
-1 5
-6
-11
661.
664.
-1 -8 ||
3 1
3 -2
-10 11
-1 6
0 10
6 8
7 9
5 9
6 10
662.
665.
667.
11 14
17 23
-6 4
-5 23
13 -8
-25 30
8 13
5 7
13 22
17 27
15 20
16 20
-1 -2
1 2
15 -8
5 2
-3
3
3
-8
-4
4
-4
-12
669.
-1 1
-2 2
-3 3
-4 4
670.
1 2
3 4
5 6
7 8
672.
-14
-18
12 26
12 22
1 -1
1 -1
2 -2
2 -2
674.
1 1
1 1
1 О
О -1
677.
1 1
1 О
i
1
1
_ j
-3
0
-1
0
0
675.
678.
0
0
1 Д
1 1/3
0
0
0 1
1 0
1 1/3
492
Банк столбцов и матриц
679.
682.
684.
686.
688.
3 9/2
9/2 7
2 3
3 3
680.
3 11/3
11/3 13/3
11/3 13/3
13/3 3
19
17
41
41
30
41
17
17
8
11
17
17
13
17
7
7
-23 10
39 17
20 9
11 5
1
690.
692.
лад.
2 2
4 4
2 2
4 4
-3
3
-4
4
1
—4
-4
5
2
4
-2
-4
—5
5
-7
7
2
-3
-3
6
2
4
-2
-4
-2 -
2
-5 -
5
3
-2
-2
7
-1
1
coco
4
-1
-1
8
1
696.
U ?7 ?7.
701.
3 6
9 12
5 10
15 20
1
-4
-1/2
3/2
2 2
2 2
2 0
0 -2
5
15
9
27
2
-3
1/2
5/2
4
4
4
10
20
18
36
697.
-1/2 1/2
3/2 5/2
-2 -1
7 8
4
4
0
0 -4
702
704.
0
-3
0
4
3
0
-4
0
0
-3
0
4
3
0
-4
0
3 3
5 4
3 5
4 3
1
0
1
0
1
1
1
1
1
0
2
0
1
1
2
2
681.
683.
685.
687.
689.
3 4
7/2 6
7/2 6
1 3
2
3
155
167
-7
19
-1
3
68
75
-10
27
693.
Банк столбцов и матриц ?.,»
493
706.
708.
711.
713.
715.
718.
720.
722.
723.
724.
725.
О
О
О -1/2
1/2 О
О -1/2
1/2 О
О
О
707.
0
0
0
2
0
0
-2
0
0
0
0
4
0
0
-4
0
0
0
_ j
0
0
-3
-3
1
3
0
0
1
3
0
0
709.
0
0
0
1
0
0
_1
0
0
1
0
0
0
0
0
710.
-3
-5
-4
-7
3
5
4
7
_2
-1
-5
-3
2
1
5
3
2
1
3
15
7
9
7
24
4
1
12
27
7
3
19
42
1
1
0
1
1
3
-1
1
1
3
-1
0
1
5
-2
2
712.
714.
4
-15
-5
9
5
18
-5
9
2
2
0
0
2
2
0
0
3
2
1
0
3
7
-1
3
3
6
0
0
3
11
-2
6
1
-2
3
0
1
_о
5
1
1
-3
8
0
1
-7
10
1
716.
1
0
1
1
1
0
1
1
1
0
1
1
2
0
2
2
717.
1
3
9
11
2
4
10
12
5
7
13
15
6
8
14
16
39 101
100 259
39 101
100 259
39 101
100 259
78 202
200 518
2 4 6
6 2 4
4 6 2
4 6 2
2 4 6
6 2 4
0 -1 1
1 0 -1
-1 1 О
6 2 4
4 6 2
2 4 6
0 2-2
-2 0 2
2-2 0
719.
721.
0 -1 1
1 0 -1
-1 1 О
89 89
О 89
-34 -34
О -34
-33 -33
О -33
13 13
О 13
2 4 6
6 2 8
4 6 2
4 6 2
2 6 4
8 2 4
6 8 4
4 6 2
2 4 6
0 0 0
0 0 2
0-2 0
0 0-2
0 0 О
2 0 0
12 3
4 5 6
7 8 9
11 12 13
14 15 16
17 18 19
0 2 0
-2 0 0
0 0 0
21 22 23
24 25 26
27 28 29
0 0 0
1 -2 1
-1 2 -1
-1 2 -1
0 0 0
1-2 1
1 -2 1
-1 2 1
0 0 0
494
Банк столбцов и матриц
Ц !
726.
728.
730.
731.
732.
733.
734.
735.
736.
737.
1 2 3
4 3 2
9 8 7
2 5 5
5 2 5
5 5 2
4 5 6
1 5 9
6 5 4
4 4 4
4 4 4
4 4 4
7 8 9
8 7 6
3 2 1
6 3 3
3 6 3
3 3 6
727.
729.
13 2
9 7 8
4 2 3
2 4 6
5 4 3
5 4 3
7 9 8
3 12
8 6 7
5 4 3
2 4 6
5 4 3
2 14/3 14/3
14/3 10/3 4
16/3 4 8/3
0 0 0
0 0-1
0 1 О
О 0 1
0 0 0
-10 0
14/3 10/3 4
10/3 4 14/3
4 14/3 10/3
0-10
1 О О
0 0 0
16/3 4 8/3
4 14/3 10/3
8 10/3 6
0 3-3
-3 0 3
3-3 0
О 10 -10
-10 0 10
10 -10 О
0-9 9
9 0-9
-9 9 0
1 10/3 19/3
10/3 3 19/3
19/3 19/3 19/3
2 14/3 16/3
14/3 10/3 6
16/3 6 8/3
10/3 3 19/3
3 5 7
19/3 7 4
19/3 19/3 19/3
19/3 7 4
19/3 4 1
14/3 10/3 6
10/3 4 14/3
6 14/3 10/3
16/3 6 8/3
6 14/3 10/3
8/3 10/3 6
-6 -25 31
3 12 -15
1 5 -6
-2 -7 7
1 4 5
1 3 -2
6 21 -21
-3 -12 15
-3 -9 6
12 50 -62
-6 24 30
-2 10 12
-6 -25 31
3 12 -15
1 5 -6
4 14 -4
-2 8 10
-2 -6 4
-2 -7
1 4
1 3
20 70 -70
-10 -40 50
-10 -30 20
-18 -63 63
9 36 -45
9 27 -18
4 6 5
6 4 5
1 9 5
5 4 3
5 4 3
2 4 6
СПИСОК ЛИТЕРАТУРЫ
1. Бахвалов СВ., Моденов П. С, Пархоменко А.С. Сборник задач по
аналитической геометрии. — М.: Наука, 1964.
2. Беклемишев Д. В. Курс аналитической геометрии и линейной ал-
алгебры. — М.: Наука, 2000.
3. Беклемишев Д.В. Дополнительные главы линейной алгебры. —
М.: Наука, 1983.
4. Воеводин В.В., Кузнецов Ю.А. Матрицы и вычисления. — М.:
Наука, 1984.
5. Глазман И.М., Любин Ю.И. Конечномерный линейный анализ. —
М.: Наука, 1969.
6. Гусятников П.Н., Реэпичепко СВ. Векторная алгебра в примерах
и задачах. — М.: Высшая школа, 1985.
7. Икрамов Х.Д. Задачник но линейной алгебре. — М.: Наука, 1975.
8. Ильин В.А., Поэняк Э.Г. Аналитическая геометрия. — М.: Наука,
1981.
9. Ильин В.А., Поэняк Э.Г. Линейная алгебра. — М.: Наука, 1984.
10. Кострикин А.И. Внсдснис в алгебру. Ч. П. Линейная алгебра. —
М.: Физматлит. 2000.
11. Кузнецов Л.А. Сборник заданий по высшей математике. — М.:
Высшая школа, 1983.
12. Моденов П.С, Пархоменко А.С Сборник задач по аналитиче-
аналитической геометрии. — М.: Наука, 1976.
13. Прасолов В.В. Задачи и теоремы линейной алгебры. — М.: Наука,
Физматлит, 1996.
14. Проскуряков И.В. Сборник задач по линейной алгебре. — М.:
Наука, 1984.
15. Сборник задач по алгебре/Под ред. А.И. Кострикина. — М.: Фак-
Факториал, 1995.
16. Фаддеев Д.К., Соминский И.С. Сборник задач по высшей алге-
алгебре. — М.: Наука, 1977.
17. Фаддеева В.Н., Колотилина Л.Ю. Вычислительные методы ли-
линейной алгебры. Набор матриц для тестирования. — Л.: Наука,
1982. - Ч. I; 1983. Ч. II, III..
18. Цубербиллер О.Н. Задачи и упражнения по аналитической гео-
геометрии. — М.: Наука, 1970.