/

























































































Author: Костин Г.А.
Tags: радиотехника радиолокация радиосвязь военная связь когерентно импульсный метод радиолокации
Year: 1963



Text
АРТИЛЛЕРИЙСКАЯ РАДИОТЕХНИЧЕСКАЯ
ОРДЕНА ОТЕЧЕСТВЕННОЙ ВОЙНЫ
АКАДЕМИЯ СОВЕТСКОЙ АРМИИ
имени Маршала Советского Союза ГОВОРОВА Л. А.
Г. А. КОСТИН
КОГЕРЕНТНО-ИМПУЛЬСНЫЙ
МЕТОД РАДИОЛОКАЦИИ
1963
АРТИЛЛЕРИЙСКАЯ РАДИОТЕХНИЧЕСКАЯ
ОРДЕНА ОТЕЧЕСТВЕННОЙ ВОЙНЫ
АКАДЕМИЯ СОВЕТСКОЙ АРМИИ
имени Маршала Советского Союза ГОВОРОВА Л. А.
Г. А. КОСТИН
КОГЕРЕНТНО-ИМПУЛЬСНЫЙ
МЕТОД РАДИОЛОКАЦИИ
19 6 3
ПРЕДИСЛОВИЕ
Настоящая работа подготовлена как учебное пособие по курсу
«Теоретические основы радиолокации» и по своему содержанию и
методике изложения соответствует программе курса. Вместе с тем
пособие содержит сведения, которые могут быть использованы
слушателями при курсовом и дипломном проектировании.
В основу пособия положен материал лекций, прочитанных в
1959—62 гг. доктором технических наук профессором Я. Д. Шир-
маном и коллективом преподавателей, возглавляемой им кафедры.
Вопросы селекции сигналов движущейся цели оптимальными спо-
собами, являющиеся предметом самостоятельной части курса, в
настоящее пособие не включены.
Автор получил ряд ценных советов и замечаний от Я. Д. Шир-
мана, Б. В. Найденова, А. С. Челпанова, С. И. Красногорова,
И. Н. Бусыгина, которым выражает свою признательность.
2
Введение
Классический импульсный метод радиолокации, хотя и достиг
к настоящему времени высокой степени совершенства (большие
мощности, малая длительность излучаемого импульса и т. д.),
имеет ограниченные возможности наблюдения движущихся целей
на фоне мешающих (неподвижных или малоподвижных) объектов.
Подобные условия возникают, например, при работе наземных, са-
молетных и корабельных радиолокаторов по подвижным целям на
фоне отражений от поверхности земли и воды. Особо важное зна-
чение приобрела в настоящее время селекция движущихся воз-
душных целей. Работу радиолокатора воздушных целей в усло-
виях естественных (гидрометеоры и т. д.) и искусственно создавае-
мых противником пассивных помех следует считать обычным ре-
жимом его работы. Уровень мешающих сигналов может значи-
тельно превышать уровень шумов приемника.
Для выделения движущихся целей во всех этих случаях может
использоваться допплеровский метод радиолокации. Однако про-
стейший допплеровский радиолокатор позволяет получить только
информацию о скорости и угловом положении цели. Что касается
измерения дальности до цели, а тем более разрешения целей по
дальности, то либо они не возможны, либо возможны с ограниче-
ниями при значительном усложнении аппаратуры (например, при
использовании многочастотного допплеровского метода радиоло-
кации).
Когерентно-импульсный метод радиолокации является одним
из наиболее эффективных методов радиолокации, позволяющим
удачно сочетать особенности двух ранее рассмотренных методов
радиолокации: импульсного и допплеровского. Это сочетание обе-
спечивает одновременное решение двух задач:
— селекции движущихся целей на фоне неподвижных (или
движущихся с малой относительной скоростью) объектов и
— определения дальности до объектов с высокой разрешаю-
щей способностью.
В основе когерентно-импульсного метода радиолокации лежит
использование эффекта Допплера-Белопольского при импульсной
работе радиолокатора. Для селекции движущихся целей в данном
случае, как и при непрерывном допплеровском методе радиолока-
ции, используется информация о разности фаз между принятым
3
ki опорным напряжением, которое когерентно с излученным сигна-
лом. Определение дальности до цели производится так же, как и
при обычном импульсном методе.
В качестве опорного напряжения в ряде случаев могут быть
использованы сигналы, отраженные от мешающих объектов. Такие
системы получили название некогерентных систем или систем с
внешней когерентностью (в том смысле, что источником опорного
напряжения является не внутренний генератор, а отражения мест-
ных предметов), а иногда когерентно-импульсных систем без ко-
герентного гетеродина. Наряду с системами с внешней коге-
рентностью большое развитие получили системы с внутренней
когерентностью (в том числе и системы с когерентным гете-
родином), в которых источник опорного напряжения нахо-
дится в самом радиолокаторе. На рис. 1 изображена блок-
Рис. 1.
схема простейшего когерентно-импульсного радиолокатора с
внутренней когерентностью. Источником опорного напряжения
ux(t) в данном случае является задающий генератор непрерывных
немодулированных колебаний, которые используются одновремен-
но и для формирования зондирующих импульсов. Применение по-
добных схем радиолокаторов для практических целей стало воз-
можным лишь в последнее время, когда разработаны энергетиче-
ски эффективные и стабильные генераторы задающих колебаний
(например, стабилитроны) и импульсные усилители большой мощ-
ности в диапазоне высоких частот (ЛОВ, амплитроны, клистроны
4
и т. д.). До этого практически единственным прибором для гене-
рирования колебаний большой мощности в диапазоне сантиметро-
вых волн являлся импульсный магнетрон. Так как импульсы, гене-
рируемые магнетроном, имеют случайные начальные фазы, то есте-
ственно магнетрон не мог использоваться в качестве источника
опорного напряжения. Поэтому и до настоящего времени широкое
применение находят системы с внутренним когерентным гетероди-
ном, т. е. системы, в которых опорное напряжение создается путем
фазирования вспомогательного гетеродина каждым зондирующим
импульсом.
§ 1. Принцип действия когерентно-импульсного радиолокатора
с внутренней когерентностью
Основные физические явления, лежащие в основе когерентно-
импульсного метода радиолокации, рассмотрим на примере ис-
пользования устройства, упрощенная блок-схема которого изобра-
жена на рис. 1. Передатчик радиолокатора состоит из задающего
генератора непрерывных немодулированных колебаний частоты f0,
усилителя мощности и импульсного модулятора, определяющего
длительность т и частоту посылок F радиоимпульсов, излучаемых
в пространству. Принятые отраженные сигналы усиливаются и по-
ступают на детектор, на вход которого подаются также непрерыв-
ные колебания от задающего генератора ux(t), называемые вспо-
могательным или опорным напряжением. Напряжение с выхода
детектора поступает на индикаторное устройство.
Как нетрудно убедиться, при отключенном импульсном модуля-
торе изображенная схема представляет собой блок-схему обычно-
го допплеровского радиолокатора. При наличии связи импульсный
модулятор-усилитель мощности, но отключенном опорном напря-
жении, имеем обычную схему импульсного радиолокатора; нали-
чие двух (передающей и приемной) антенн в данной схеме не из-
меняет существа, так как можно использовать и одну антенну,
предусмотрев переключатель прием-передача.
Опорное напряжение жестко связано по фазе с напряже-
нием излучаемого импульса — когерентно с ним, что послужило
основанием для названия «когерентно-импульсный метод». При по-
даче опорного напряжения вместе с отраженным сигналом на
вход детектора последний оказывается чувствительным к измене-
нию фазы принимаемого колебания. Поэтому такой детектор на-
зывают фазовым (в литературе встречаются и другие названия —
когерентный или синхронный детектор).
Анализ происходящих в схеме процессов можно провести, поль-
зуясь методом временных векторных диаграмм, совершенно ана-
логично тому, как это делается при рассмотрении допплеровского
непрерывного метода радиолокации с той лишь разницей, что как
сами диаграммы напряжений, так и выражения, их описывающие,
имеют смысл только для моментов времени, когда эти напряжения
существуют.
5
Рассмотрим вначале случай приема отраженных сигналов от
неподвижного объекта, находящегося на дальности г=г0 от радио-
локатора. Пусть опорное напряжение подаваемое на детек-
тор от задающего генератора, изменяется по закону
Wl(0 = t/mlCOS(«)0^+^0). (1.1)
Напряжении u2(t), поступающее с усилителя во время при-
хода отраженного импульса, можно записать в виде
«2(0=^m2COS[<o0(^-^)-+<p0], (1.2)
. 2г0
где г3= -—время запаздывания отраженного сигнала относи-
тельно излученного. *
Сдвиг фаз между опорным напряжением zzj(/) и отраженным
сигналом u2(t) будет
(1-3)
Амплитуду ^трез результирующего напряжения на входе фа-
зового детектора определим с помощью временной векторной
диаграммы (рис. 1.1.). Из диаграммы следует, что
"i/2ml + ^2+2^mli/m2cos?. (1.4)
В практических схемах обычно
и поэтому приращение ам-
плитуды результирующего напряжения
в момент прихода отраженного импуль-
са
А^т = ^трез ^т1~^т2с08?- (T5)
Из выражения (1.5) видно, что ам-
плитуда результирующего напряжения
получает приращение только в моменты
прихода отраженного импульса, и в зави-
симости от величины угла <р это прира-
щение может изменяться в пределах
от +t/m2 до — Um2. Сказанное иллюстри-
руется рис. 1.2, на котором изображены
векторные диаграммы, закон изменения
результирующего напряжния wpe3(0 и
* Здесь и в дальнейшем не учитывается скачок фазы сигнала при отраже-
нии и полагается, что начальная фаза отраженного сигнала не меняется за счет
флюктуаций эффективной поверхности цели. Реально начальная фаза вследствие
указанной причины является случайной, но практически неизменной в течение
времени наблюдения. Скорость флюктуаций эффективной поверхности цели на
больших дальностях такова, что если интервал наблюдения не превосходит де-
сятых долей секунды, то это допущение выполняется удовлетворительно.
6
напряжения на выходе фазового детектора (после отделения по-
стоянной составляющей) w0(f) для случаев cos<p>0 и cos<p<0.
Величина угла ® определяется при заданной длине волны
расстоянием от радиолокатора до отражающего объекта. В рас-
сматриваемом случае, т. е. для каждого неподвижного объек-
та, угол <р не меняется от периода к периоду посылки и на вы-
ходе детектора получаются видеоимпульсы одинаковой ампли-
туды и полярности, как при обычном импульсном методе радио-
локации. В отличие от обычного импульсного метода для одних
объектов импульсы будут положительными, а для других—от-
рицательными. В частном случае, при cos<p=^0 выходные импуль
сы не наблюдаются.
В случае цели, движущейся равномерно в радиальном нап-
равлении
r=r(t) = r() + 'Vrt,
а время запаздывания отраженного сигнала
3 с
При этом легко найти отличия в форме сигналов, отражен-
ных от неподвижного объекта и движущейся цели. Очевидно,
с точностью до амплитудного множителя
u2(f)=u(t-t3),
7
где u(f) — напряжение излучаемого сигнала (рис. 1.3, а).
Если для неподвижного объекта
то для движущейся цели, наблюдение за которой начато с той
же дальности
/А Л 2vr . \
^(0—с” с у-------
аа)
(1.7)
цель
Рис. 1.3
Из сравнения выражений (1.6) и (1.7) видно, что сигналы,
отраженные от неподвижного объекта (рис. 1.3,6) и движущейся
цели (рис. 1.3,/?), отличаются изменением аргумента /в(1—
раз. Это означает, что период следования и длительность им-
пульсов, отраженных от движущейся цели, изменяютя, причем,
если цель приближается к станции, т. е. когда vr< 0, период
следования и длительность импульсов уменьшаются, а при уда-
лении цели, когда vr>0— увеличиваются. Так как число перио-
дов высокочастотного заполнения импульсов остается неизмен-
ным, то уменьшение длительности импульса означает одновре-
/ 2v \
менное изменение несущей частоты в 1------раз. Хотя прин-
ципиально указанные отличия в форме сигналов могут быть ис-
пользованы для селекции движущихся целей, практически не пред-
ставляется возможным измерять столь малые временные и час-
тотные разности. Поэтому при когерентно-импульсном методе
8
так же, как и при ранее рассмотренных допплеровских методах
радиолокации, для селекции движущихся целей используют фазо-
вые отличия отраженных сигналов, выявляемые методом биений.
В системе непрерывного излучения амплитуда результирующе-
го напряжения на входе детектора изменяется непрерывно по за-
кону допплеровской частоты (рис. 1.4,а). В случае когерентно-им-
пульсного радиолокатора результирующее напряжение получает
приращение только в моменты прихода отраженных импульсов,
когда t/^2^0. Это приращение при условии равно
ДЧл~^т2 COS<p(f) = Um2 COS<ofi 2<Г»+М =
-i7„,2cos (s/+«0 -М- (1.8)
Рис. 1.4
Закон изменения огибающей (рис. 1.4,6) этих приращений оп-
ределяется допплеровской поправкой частоты:
р __ -д __ vr
д Х0/2
9
После детектирования и устранения постоянной составляющей по-
лучим видеоимпульсы, модулированные по амплитуде с допплеров-
ской частотой (рис. 1,4,в). При подаче таких импульсов на инди-
катор с амплитудной отметкой (рис. 1.5) амплитуда и полярность
импульса от движущейся цели будет меняться — отметка получает-
ся пульсирующей в отличие от отраженного от неподвижного
объекта сигнала, амплитуда которого постоянна.
Рис. 1.5
В заключение представляет интерес сравнить импульсный и ко-
герентно-импульсный радиолокаторы по чувствительности к пере-
мещению цели при одном и том же амплитудном методе индика-
ции. В обычном импульсном радиолокаторе о движении цели
можно судить только при перемещении отметки на индикаторе
примерно на половину или даже на свою ширину, что соответ-
ствует изменению расстояния до цели порядка одной или несколь-
ких сотен метров. При когерентно-импульсном методе изменение
расстояния до цели уже на Хо/4 вызывает изменение фазового
сдвига на 180° и, следовательно, изменение полярности импульса
на экране индикатора. Таким образом, когерентно-импульсный ме-
тод характеризуется острой реакцией на весьма малые перемеще-
ния цели.
§ 2. Фазовый сдвиг за период посылки и за время длительности
импульса в случае движущейся цели
В предыдущем параграфе было установлено, что чувствитель-
ность когеретно-импульсного радиолокатора к перемещению цели
обусловлена изменением фазовых соотношений между опорным
напряжением и отраженными колебаниями от периода к периоду
посылки.
Величину, на которую изменяется фаза отраженного сигнала
по отношению к фазе опорного напряжения за период посылки
(рис. 2.1), будем называть фазовым сдвигом за период посылки
Если в момент излучения какого-то импульса расстояние до
10
цели равно г', а через период посылки это расстояние—г", то
фазовый сдвиг за период посылки
2(г"—г')
= %-------с---
(2.1)
При равномерном движении цели в радиальном направлении
со скоростью vr
r"-r'=vrT, (2.2)
а фазовый сдвиг за период посылки
=U)o Т=2п T=2nFdT. (2.3)
Скачкообразное приращение фазы отра-
женного сигнала от периода к периоду
посылки в случае движущейся цели
эквивалентно, как нетрудно убедиться,
изменению каждого периода следования в
I1---^1 раз в сравнении с периодом
следования импульсов, отраженных от
неподвижного объекта. Действительно
из (2.2) следует, что vrT—rT есть ничто
иное как расстояние, которое проходит
цель в радиальном направлении за пе-
Ао
риод посылки, а у—число полуволн,
укладывающихся на этом расстоянии.
Если за период посылки цель проходит
кратное число полуволн (сигнал прохо-
дит расстояние кратное Хо), то фаза при-
нятого колебания изменяется на вели-
чину кратную 2к относительно фазы излученного сигнала.
Аналогично можно ввести понятие фазового сдвига за время
длительности импульса, определив его как
^=“0 —7^ ':=27Г T=2TCfdT. (2.4)
На временной векторной диаграмме (рис. 2.1) фазовый сдвиг
%, определяет поворот вектора Um2 за время длительности им-
пульса.
В форме напряжения на выходе фазового детектора фазовый
сдвиг за период посылки проявляется в изменении амплитуды и
полярности импульсов от периода к периоду посылок. Фазовый
сдвиг за время-длительности импульса проявляется в изменении
11
амплитуды в пределах импульса, и если длительность импульса
на несколько порядков меньше периода допплеровской частоты, то
этими изменениями можно пренебречь, считая импульс прямо-
угольным.
Оценим количественно изменение фазы за период посылки
и за время длительности импульса. Если скорость цели
^=300 м)сек. то даже при Т—\ мсек и Хо=2 м фазовый сдвиг
за период посылки
о 300 • 10-3 п _
срг=2тс---1--- — 0,6^
т. е. имеет вполне заметную и легко регистрируемую величину.
При увеличении периода посылки (в станциях дальнего обнару-
жения), а также уменьшении длины волны, фазовый сдвиг
возрастает. Что касается фазового сдвига <рх, то при том же по-
рядке величины скорости цели и длительностях импульса, ис-
пользуемых при классическом импульсном методе радиолокации,
даже для сантиметрового диапазона волн, им можно пренебречь,
Так, например, при т=2 мксек и Х0=1О см.
о 300 • 2 • Ю~6 п
---6J65---=°>024*>
что является пренебрежимо малой величиной.
§ 3. Слепые скорости. Частота пульсаций
Как было установлено, на выходе приемника последователь-
ность видеоимпульсов, отраженных от движущейся цели
(рис. 1.4,в), оказывается промодулированной по амплитуде. Час-
тота модуляции равна допплеровской частоте. На экране индика-
тора с амплитудной отметкой такая последовательность в общем
случае дает пульсирующую отметку.
Однако, если скорость цели такова, что за период посылки рас-
стояние до цели в радиальном направлении изменяется на крат-
ное число полуволн, т. е.
vrT=m -у- m=I,2,..., (3.1)
то это соответствует изменению фазового сдвига принимаемых ко-
лебаний за период посылки на 2mи приращение результирую-
щего напряжения от периода к периоду повторения в этом случае
не меняется. Импульсы на выходе детектора имеют одинаковую
амплитуду и полярность, т. е. пульсации сигнала отсутствуют.
Скорости цели, при которых за период посылки цель проходит
в радиальном направлении кратное число полуволн, получили на-
12
звание «слепых скоростей». На основании (3.1) значения «слепых
скоростей» определяются из соотношения
(3-2)
Таким образом, хотя при «слепой скорости» цель-движется,
(имеет место допплеровская поправка частоты), наблюдаемый эф-
фект на экране амплитудного индикатора будет таким же, как и в
случае неподвижного объекта, и, следовательно, частота пульса-
ций неоднозначно соответствует допплеровской частоте.
Для выяснения закона изменения частоты пульсаций в зависи-
мости от допплеровской частоты, рассмотрим случай, когда
Дер, (3.3)
где |Д<р| < к и п=0,1,2,...
Векторные диаграммы на рис. 3.1 иллюстрируют соотноше-
ние (3.3) для двух случаев: когда тс<<рг <2?t (рис. 3.1, а) и
2к <<рг<3тс (рис. 3.1, б).
Очевидно,
|Д<р| = |<рг-2ля|
(3-4)
определяет видимый поворот вектора принимаемых колебаний.
Если для различных скоростей цели (различных <рг) угол |Д<р1
будет одинаковым, то и пульсации видеоимпульсов будут оди-
наковыми.
Периоду пульсаций соответствует изменение фазы огибаю-
щей видеоимпульсов на 2тг, в то время как периоду посылки
импульсов соответствует изменение фазы огибающей на |Д<р|.
Отсюда вытекает следующее математическое выражение для пе-
риода пульсаций
гр ____ 2к ^р
П~ |Д<р| ’
13
или частоты пульсаций
<3-5’
Так как, согласно определению, |Д<р| < л, то
2 ’
(3.6)
т. е. максимальное значение частоты пульсаций не превышает
половины частоты посылки импульсов. В остальных случаях, ес-
ли использовоть соотношенйе (3.4), получим для частоты пуль-
саций формулу
Fn=F-^|?7.-2w|,
или, с учетом того, что ®т—2кРдТ
F^\Fd-nF\. (3.7)
Кривая зависимости частоты пульсаций от допплеровской час-
тоты (фазового сдвига за период посылки или радиальной состав-
ляющей скорости цели) представлена на рис. 3.2.
Скорости цели, соответствующие максимальной частоте пульса-
ций, часто называют оптимальными скоростями.
Наличие «слепых скоростей» цели является существенным не-
удобством при использовании когерентно-импульсного метода в
радиолокации. Количественную оценку значений «слепых скоро-
стей» произведем для станций двух диапазонов волн (метрового и
сантиметрового):
а) при Х0=2 м и Г=5-10~3 сек (F = 200 имл!сек)
-- ^_3 =200 m м)сек,
14
б) при к0=Ю см и Т—10~3 сек (Е=1000 имп!сек)
(пг) 0,05 ,
^гсл= 102з~ ~50 mMjcex.
Если не приняты специальные меры по устранению влияния
«слепых скоростей», то существует вероятность того, что отдель-
ные движущиеся цели л (либо одна цель на отдельных участках
курса) могут быть не обнаружены на фоне неподвижных объектов.
При этом надо иметь в виду, что реально существуют некоторые
зоны «слепых скоростей» (рис. 3.2), определяемые чувствитель-
ностью того или иного индикаторного устройства (систем автома-
тического сопровождения). Другим выводом, следующим из зави-
симости, изображенной на рис. 3.2, является тот вывод, что одно-
значное измерение радиальной составляющей скорости цели воз-
можно только на участке Об. Легко заметить, что одним из спосо-
бов расширения области, в которых отсутствуют «слепые зоны»,
а также расширения пределов однозначного измерения радиальной
составляющей скорости цели, является способ увеличения частоты
посылок. Однако нужно учитывать при этом, что выбор частоты
посылок определяется целым рйдом других факторов (однозначное
измерение дальности до цели и т. д.). В станциях дальнего обна-
ружения, где частоту посылок большой брать нельзя, можно ис-
пользовать изменение частоты посылок или одновременную работу
на нескольких (например, двух) несущих частотах, для которых
слепые скорости не совпадают. Наконец, этот недостаток может
быть устранен тактически целесообразным расположением систе-
мы станций на позициях (при перемещении цели «слепая скорость»
по отношению к одной из станций не нарушает нормальной рабо-
ты другой станции).
На рис. 3.3 показаны временные зависимости результирую-
щего напряжения ирез(£) на входе и напряжения uQ(t) на выходе
фазового детектора для различных значений фазового сдвига за
период посылки <рг. При срг= (рис. 3.3, а) частота пульса-
ций равна допплеровской частоте (сплошная и пунктирная кри-
вые, соответственно) и значение ее определяется из соотноше-
ния
<Рг=2те^Т=2п^- = .
Откуда
Если <рг=те (рис. 3.3, б), то фаза огибающей видеоимпульсов
изменяется на те радиан (180°) между каждыми двумя соседними
15
импульсами, т. е, частота пульсаций равна половине частоты ifo-
сылок, и, следовательно,
При дальнейшем возрастании скорости цели, когда <рт>к, доп-
плеровская частота продолжает расти, но уже не будет равна час-
тоте пульсаций, так как в инт ервале между двумя соседними импуль-
сами теперь укладывается более одного полупериода колебаний
допплеровской частоты. Более того, как наглядно видно из век-
торных диаграмм, частота пульсаций уменьшается. Например, при
з
<рг— -2- к (рис. 3 3, в) диаграмма получается аналогичной случаю
с той лишь разницей, что направление вращения векто-
ра й2 как бы изменилось на обратное. Частота Допплера в этом
случае равна
^=4^
а частота пульсаций, как и при
Гп 4
Рис. 3.3 а
16
$ 4>r-JF
Рит. 3.3 в
2. Костин. Зак. 422-т
17
Рис. 3.3 г
Рис 3.3 д
18
Когда фазовый сдвиг за период посылки равен или кратен
2л, т. е. <рг=/и-2л (рис. 3.3, г), то, как нетрудно убедиться,
а частота пульсаций равна нулю. Это означает, что отметка дви-
жущейся цели (если принебречь изменениями в форме импульсов
за счет сдвига фазы за время длительности импульса) на экране
амплитудного индикатора ничем не отличается от отметки непо-
движного объекта. Данный случай соответствует «слепым скоро-
стям» цели.
§ 4. Спектральный анализ сигналов, отраженных от движущейся
цели и мешающих объектов
Изучение спектральных различий сигналов, отраженных от дви-
жущейся цели и мешающих объектов, необходимо для выяснения
возможных способов селекции полезных сигналов на фоне помех.
Рассмотрим случай, когда движущаяся равномерно в радиаль-
ном направлении цель и неподвижный мешающий объект облуча-
ются радиоимпульсами прямоугольной формы длительностью т,
следующими с постоянным периодом посылки Т. Будем полагать
антенну радиолокатора неподвижной и направленной на цель (об-
зор пространства не производится); задающий генератор (рис. 1)
генерирует монохроматические колебания частоты (о0.
При этих условиях рассмотрим спектры принимаемых сигналов на входе
и выходе фазового (когерентного) детектора.
U(t)
Рис. 4.1
Сигнал, отраженный ог неподвижного мешающего объекта, представляет
ссбой периодическую последовательность одинаковых по амплитуде прямоуголь-
ных радиоимпульсов на входе (рис. 41,а) и видеоимпульсов на выходе
(рис. 4 1,6) детектора Последовательность видеоимпульсов описывается рядом
Фурье
19
00
иМ= -2°- + । A„cosnQt,
n — l
(4.1)
где
Q=2nF-2n ,
T ’
а коэффициенты ряда
т
Д = 7^^о(О^»
о
т
Ап= -у-J uQ(t)cosnQtdt (п=1,2,...)
о
Применительно к прямоугольной форме импульсов
л U
Ло= —у ит>
& — — IT sinx
— т ит------------.
1 X
где
X—ZZ7Z -2_ ,
т
Последовательность радиоимпульсов на входе детектора
^(/)—u0(/)cosu)0^
после преобразования может быть записана в виде ряда
00
«(0- Р cos(«>o+«2)*- (4.2)
п = —00
На рис. 4.2 изображены спектры сигналов, отраженных от неподвижного
объекта на входе (рис. 4.2,а) и выходе (рис. 4.2,6) фазового детектора в со-
ответствии с выражениями (4.1) и (4.2).
Установим теперь при тех же условиях работы радиолокатора различия в
спектре сигналов, отраженных от движущейся цели.
Частота посылок импульсов в первом приближении допплеровскому эффекту
не подвержена. Несущая частота и частоты гармоник спектра последовательно-
сти отраженных от движущейся цели радиоимпульсов изменяются на допплеров-
скую поправку частоты, причем отличные частоты гармоник будут иметь, строго
говоря, разные допплеровские поправки. Но так как практически ширина спект-
А, 2 ..
ра — значительно меньше несущей частоты, то обычно считают, что все
т
частоты гармоник имеют ту же допплеровскую поправку, что и несущая частота.
20
При этом спектр радиоимпульсов, отраженных от движущейся цели, оказывает-
ся смещенным относительно спектра сигналов неподвижного объекта наЛ величи-
ну допплеровской поправки частоты, т. е. на Такое смещение спектра
показано на рис. 4.3,а *.
Заметим в частности, что при равенстве частоты Допплера частоте посылок,
т. е. при
|Qd|=Q,
спектр смещается на один «зубец» и этот случай, как уже известно, соответ-
ствует «слепой скорости» цели.
Последовательность видеоимпульсов на выходе фазового детектора в слу-
чае движущейся цели модулирована колебаниями допплеровской частоты и мо-
жет быть представлена в виде
“i(0=«o(0cosfid<,
или после преобразования
00
«1(O=S 4rcos(«2+2d)'- (4.3)
п = —00
* В дальнейшем, для большей наглядности, при изображении спектров по-
следовательности импульсов будем, как правило, ограничиваться показом не-
скольких гармонических составляющих.
21
Рис. 4.3
Рис. 4.4
22
Спектр, соответствующий выражению (4.3), изображен на рис. 4.3,6**.
На рис. 4.4 показан результирующий амплитудно-частотный
спектр сигналов, отраженных от движущейся цели на фоне непо-
движных объектов, на выходе фазового детектора.
Учтем теперь изменения в спектрах принимаемых сигналов при
осуществлении радиолокатором обзора пространства. Число отра-
женных импульсов за время однократного облучения цели антен-
ной ограничено величиной
Л4=/*?обл’
Форма пакета принимаемых импульсов определяется формой ре-
зультирующей (на передачу и прием) диаграммы направленности.
На рис. 4.5 показана одна из возможных форм пакета принятых радиоим-
пульсов (при колокольной аппроксимации диаграммы направленности). Если
функцию, описывающую огибающую пакета видеоимпульсов, обозначить через
ф(0, то последовательность видеоимпульсов, обусловленную отражениями от
неподвижного объекта, можно записать выражением
ио1(,О=«о(ОФ(О- (<4)
При однократном облучении цели функцию ф(0 можно представить интегра-
лом Фурье, который при выбранном начале Ътсчета (рис. 4.5) имеет вид
00
ф(0= ~ f S(cd)coso)^Zo), (4.5)
о
где S(o))—спектральная плотность функции ф(£).
Форма и ширина спектра 5(о>) определяется формой и длительностью оги-
бающей (|>(Z). При колокольной аппроксимации диаграммы направленности и
длительности пакета /Обл (рис. 4.5) форма спектра 5(ш) является колокольной,
а ширина его имеет порядок 2тс//Обл (рис. 4.6).
** При построении спектра следует учесть, что косинус является четной
функцией своего аргумента.
23
Так, например, если антенна радиолокатора производит круговой обзор со
скоростью об!мин> то при ширине диаграммы направленности Д90 5р=3°,6
время облучения
, 60 Д®0,5Р
обл=: п 360°
имеет значение 0,1 сек, а при этом ширина спектра S(f) получается порядка
10 гц. Но если при линейном сканировании обзор производится в секторе 0О=36°
со скоростью даже /г=10 цикло в] сек, то время облучения /обл=0,01 свк> а
ширина спектра имеет порядок 100 гц.
При подстановке выражений (4.1) для u^(t) и (4.5) для ф(/) в формулу (4.4)
после тригонометрических преобразований получим
woi(O—
00
4 1. С
2 2л: J
о
5(u))cOS<D^a) +
S(a>)C0S(flQ+tt>)tafa).
(4-6)
На рис. 4.7 показан примерный вид амплитудно-частотного
спектра ограниченной последовательности (при колокольной оги-
бающей пакета) прямоугольных видеоимпульсов, а на рис. 4.8—
радиоимпульсов, отраженных от неподвижного мешающего объек-
та. Аналогично для сигналов, отраженных от движущейся цели,
видео- и радиоспектры изображены на рис. 4.9 и ,4.10 соответ-
ственно.
#(<и)
Рис. 4.7
Другим (эквивалентным) методом учета влияния обзора пространства ан-
тенной радиолокатора на изменение спектра отраженных сигналов, приводящим
к тем же результатам, является следующий метод. При обзоре антенной, имею-
щей определенные линейные размеры, различные точки ее раскрыва будут иметь
различные относительные радиальные составляющие скорости вращения. Если
эти точки раскрыва рассматривать как элементарные излучатели, то, очевидно,
24
допплеровские поправки частоты этих излучателей будут иметь разные значения,
что приведет к образованию спектральных полос вокруг каждой из гармониче-
ских составляющих в спектрах, показанных на рис. 4.2 4.4, для случая непо-
движной антенны.
Наконец, мешающий объект может представлять собой сово-
купность отражателей (в том числе и элементарных), переме-
щающихся под действием ветра, сил тяжести и т. п. Примерами
таких мешающих объектов являются осадки (в жидкой или твер-
25
дой фазе), облако металлизированных диполей (пассивные поме-
хи), водная поверхность, большинство наземных поверхностных
объектов (стволы и ветки деревьев, кусты и т. д.).
• Перемещение отдельных (или групп) отражателей с различны-
ми радиальными скоростями приводит к дополнительному расши-
рению спектральных полос в спектре высокочастотных сигналов
(рис. 4.11). Каждая расширенная спектральная полоса оказывает-
ся смещенной по отношению к частотам ю0+/г2 на + 2дпср —доп-
плеровскую поправку частоты, соответствующую средней скорости
перемещения совокупности отражателей. В спектре сигнала ме-
шающих отражателей на выходе фазового детектора образу-
ются две боковые полосы, сдвинутые одна относительно другой
симметрично по отношению к частотам, кратным частоте посылок
(рис. 4.12).
Рис. 4.12
Диапазон частот, который занимает каждая расширенная спек-
тральная полоса, определяется шириной спектра флюктуаций ме3
шающих отражений.
Для осадков характерны весьма быстрые флюктуации, спектр
которых зависит от интенсивности дождя (снега). На рис. 4.13 при-
26
ведены кривые частных случаев энергетического спектра флюктуа-
ций сигналов, отраженных от осадков при работе радиолокатора
в диапазоне Хп^10 см^
В случае облака хаотически перемещающихся металлизиро-
ванных диполей ширина спектра флюктуаций сигнала зависит от
скорости ветра и самолета — постановщика помех и различна да-
же для одной длины волны (рис. 4.14). Самый широкий спектр,
показанный на рис. 4.14, получен при сильном ветре, скорость ко-
торого доходила до 40 км/час, тогда как в остальных случаях ско-
рость ветра не превышала 16 км/час.
<№)\
Рис. 4.14
В сравнении со спектрами флюктуаций от осадков и металли-
зированных диполей спектры отражений от водной и земной по-
верхности имеют некоторые особенности. Диапазон изменения ши-
рины спектра в случае отражений от водной поверхности значи-
тельно меньше. Частные результаты измерений на волне
27
определяют этот диапазон в пределах 25-7- 35 гц на уровне 0,5.
Для флюктуаций при отражениях от земной поверхности ширина
спектра приблизительно на порядок меньше по сравнению со спек-
трами для других видов отражений. Например, в некоторых слу-
чаях при Х0^Ю см ширина спектра на уровне 0,5 составляла
1 -г- 5 гц, что соответствует небольшим величинам относительных
скоростей перемещения отражателей.
§ 5. Способы селекции сигналов движущейся цели
в когерентно-импульсном радиолокаторе
Принципиально селекция сигналов движущейся цели в коге-
рентно-импульсном радиолокаторе может быть осуществлена на
экране амплитудного индикатора. Отметка движущейся цели
имеет при этом характерную штриховку, вследствие пульсаций сиг-
нала и это позволяет оператору отличить ее от отметки, создавае-
мой неподвижным или малоподвижным объектами. Однако уже
при наличии нескольких неподвижных (а тем более малоподвиж-
ных) объектов такое различение отметок становится весьма за-
труднительным. Если же используется индикатор кругового обзо-
ра, то различение отметок движущейся цели и неподвижного
объекта практически невозможно, так как и промодулированные и
неизменные по амплитиуде импульсы дают почти одинаковые по
яркости отметки.
Таким образом, даже при обычных простейших способах инди-
кации сигналов движущихся целей желательным является подав-
ление отражений от неподвижных и малоподвижных мешающих
объектов. Подавление мешающих отражений тем более необходи-
мо, если иметь в виду автоматизацию процессов съема данных ра-
диолокатора с последующим вводом их в вычислительную машину.
Общей основой всех способов селекции являются те или иные
различия сигналов движущейся цели и неподвижных (малопод-
вижных) мешающих объектов, установленные в предыдущих па-
раграфах. Обычно принято говорить об одном из следующих спо-
собов селекции сигналов движущейся цели:
— компенсационном,
— спектральном,
в зависимости от того, рассматривается подавление мешающих
сигналов с временной или частотной точек зрения. Так как времен-
ные различия (изменение амплитуды сигналов движущейся цели
с допплеровской частотой) являются следствием спектральных
различий и наоборот, то совершенно очевидна условность такого
деления, что в дальнейшем и будет показано на конкретных при-
мерах.
Разумеется, что в основу обработки не всегда целесообразно
класть подавление мешающих сигналов, так как одновременно с
подавлением последних может происходить и ослабление полезных
сигналов цели. Более правильно исходить из наилучших условий
28
выделения полезного сигнала на фоне помех. Ё некоторых случаях
такие условия будут созданы, если в основу обработки будет по-
ложено не подавление помехи, а длительное накопление энергии
полезного сигнала за ряд периодов посылки. Следует, однако, ого-
вориться, что такое длительное накопление невозможно без учета
скорости движения цели. Поэтому оно может осуществляться
только тогда, когда производится слежение по скорости либо пре-
дусмотрена многоканальная схема, расчитанная на наилучшее вы-
деление сигналов цели с различными радиальными скоростями *.
Указанные особенности определяют то положение, что до послед-
него времени наибольшее распространение находили системы, ко-
торые рассчитаны на подавление помехи, а не на выделение по-
лезного сигнала.
Обработка сигналов, отраженных от движущейся цели, на фоне
мешающих объектов может быть осуществлена как в высоко-
частотном тракте (в том числе и по промежуточной частоте), так
и на видеочастоте. Спектральный анализ мешающих отражений
позволяет заключить, что селекция полезных сигналов движущей-
ся цели в ряде случаев может быть осуществлена более качествен-
но на высокой (промежуточной) частоте. Ниже рассматриваются
способы селекции, основанные на подавлении помехи в видеотрак-
те приемника.
Компенсационный способ селекции использует череспериодные
различия амплитуды сигналов движущейся цели. На рис. 5.1 пока-
(t)\
Сигнале/
неподв. объектов движущейся
цели
Uo(t-T)
t
Рис. 5.1
заны осциллограммы напряжений на выходе фазового детектора
в двух последовательных периодах посылки: uQ(t) и Uo(7—Т), а
также результат компенсации (вычитания) сигналов этих двух пе-
риодов (первая конечная разность)
* Вопросы селекции сигналов движущейся цели оптимальными способами
являются предметом самостоятельной части курса.
29
Сигналы неподвижных объектов от периода к периоду имеют неиз-
менную амплитуду и поэтому полностью компенсируются, а сигнал
движущейся цели пульсирует и после вычитания дает также пуль-
сирующую отметку. Структурная схема череспериодного компенса-
тора показана на рис. 5.2. В качестве устройства задержки сигна-
U'tt)
С выхода
(разового L
детектора
Рис. 5.2
лов на период посылки могут использоваться различные линии за-
держки или специальные электронно-лучевые трубки — потенциа-
лоскопы. Числа (+1) и (—1) указывают соотношение абсолютных
значений и полярность напряжений прямого >и задержанного ка-
налов на входе сумматора. Для того чтобы после вычитания им-
пульсы движущейся цели имели одну полярность (а это важно,
например, при яркостной индикации цели), на выходе компенсато-
ра ставят двухполупериодный выпрямитель. При этом компенсатор
представляет собой сочетание элементов, выполняющих линейные
операции (задержка и суммирование), а также нелинейного эле-
мента (выпрямителя).
При спектральном способе селекции движущейся цели для по-
давления сигналов неподвижных объектов принципиально можно
использовать на выходе фазового детектора систему узкополосных
фильтров, подавляющих в некоторой полосе частоты кратные
частоте посылок импульсов. Вид частотной характеристики такой
системы фильтров (рис. 5.3) послужил основанием для названия
ее гребенчатым фильтром.
к (и)
Рис. 5.3
Если ограничиться фильтрацией основной части энергии сигна-
ла, заключенной в диапазоне частот от нуля до —» т0 необхо-
30
димое число полос подавления составит — > т. е. равно скважно-
сти импульсов.
В некоторых случаях, когда скважность импульсов мала (по-
рядка 10),’гребенчатый фильтр может представлять собой набор
обычных низкочастотных контуров. Когерентно-импульсные радио-
локаторы малой скважности могут использоваться, например, в ка-
честве аппаратуры защиты на самолетах различных типов, а также
в устройствах самонаведения ракет. Если дальность действия этих
устройств небольшая, то частота посылок может быть значитель-
но увеличена. В пределах удовлетворения требованиям разрешаю-
щей способности по дальности возможно увеличение и длительно-
сти импульсов. В некоторых подобных случаях частота посылок
и длительность импульсов рассчитываются непосредственно из
условий эффективного подавления мешающих сигналов, а для
обеспечения однозначности измерения дальности и необходимой
разрешающей способности применяют специальные меры.
Основным достоинством когерентно-импульсных систем малой
скважности является хорошее подавление сигналов неподвижных
объектов (до 90 ч- 95 дб), хотя оно обеспечивается только при вы-
сокой стабильности частоты (до 10~10) и амплитуды генерируемых
колебаний. Требуемая стабильность достигается кварцевой стаби-
лизацией генератора, фильтрацией питающих напряжений, приме-
нением для питания цепей накалов напряжений, частота которых
кратна частоте посылок, и рядом других мер. Однако большинство
наземных когерентно-импульсных радиолокаторов имеет высокую
скважность импульсов порядка 102 или даже 103. При этом созда-
ние гребенчатых фильтров с помощью обычных резонансных кон-
туров является практически невыполнимой задачей.
В некоторых случаях может найти применение более простой
Рис. 5.4
способ обработки, использующий спектральные различия сигналов
движущейся цели и мешающих объектов. Таким способом являет-
ся способ селекции выделением огибающей, сущность которого со-
стоит в том, что из всего спектра сигналов движущейся цели на
31
выходе фазового детектора выделяется только низкая (допплеров-
ская) частота с помощью узкополосного фильтра, а все остальные
спектральные составляющие подавляются. Примерная форма час-
тотной характеристики фильтра показана на рис. 5.4. Схема селек-
цяспулбс
Рис. 5.5
Рис. 5.6
тора для выделения огибающей представлена на рис. 5.5. Моду-
лированные по амплитуде видеоимпульсы (рис. 5.6,а) после уси-
ления поступают на схему запоминания амплитуд (схему расшире-
32
ния импульсов), простейшее устройство которой показано на
рис. 5.7. Напряжение с выхода этой схемы (рис. 5.6,6) воздейству-
ет на фильтр низких частот, который выделяет составляющую доп-
плеровской частоты (рис. 5.6,в).
R, **Л
Рис. 5.7
Чтобы можно было измерить дальность до движущейся цели,
видеоусилитель стробируется. Длительность стробирующего им-
пульса обычно берется порядка длительности отраженных импуль-
сов. Отсчет дальности при этом производится по положению стро-
бирующего импульса в момент, когда напряжение допплеровской
частоты максимально.
Способ селекции выделением огибающей обладает рядом суще-
ственных недостатков. Дело в том, что для просмотра всего диапа-
зона дальности на данном азимуте необходима либо громоздкая
многоканальная система, либо должен быть осуществлен последо-
вательный анализ участков дальности путем изменения задержки
стробирующего импульса. В последнем случае скорость изменения
задержки стробирующего импульса ограничивается необходимым
временем установления колебаний в узкополосной системе. Это
сильно увеличивает время обзора пространства, так как к времени
обзора по азимуту добавляется еще (и немалое) время обзора
дальности. Поэтому способ селекции выделением огибающей при-
меним в случае, когда обстановка меняется сравнительно медлен-
но или тогда, когда от радиолокатора требуется ограниченная ин-
формация.
§ 6. Амплитудно-скоростная характеристика компенсатора.
Влияние схемы компенсации на чувствительность
когерентно-импульсного радиолокатора
Как и раньше, полагаем антенну радиолокатора длительное
время направленной на цель, т. е. считаем, что обзор пространства
по угловым координатам либо не производится, либо производится
очень медленно. С учетом этих условий на рис. 6.1 изображены
временные зависимости сигнала отраженного от движущейся цели
на входе и выходе схемы вычитания, а также напряжение на вы-
ходе двухполупериодного выпрямителя. Пунктиром на рис. 6.1,г
показано среднее (за период допплеровской частоты) значение ам-
плитуды выпрямленного напряжения.
Зависимость среднего значения амплитуды напряжения на вы-
3. Костин. Зак. 422-т
33
ходе устройства компенсации от радиальной составляющей скоро-
сти цели называется амплитудно-скоростной характеристикой ком-
пенсатора.
Среднее значение амплитуды нас может интересовать в ряде
случаев, например при работе с индикатором кругового обзора,
Рис. 6.1
когда за счет интегрального действия экрана яркость отметки ока-
зывается пропорциональной среднему значению величины сигнала.
Так как изменение амплитуды видеоимпульсов на выходе фазо-
вого (когерентного) детектора (рис. 6.1,а) происходит по закону
U(t)=U.cosQdt,
где Uq — амплитуда видеоимпульсов на выходе обычного ампли-
тудного детектора,
а изменение задержанных на период видеоимпульсов (рис. 6.1,6)
U(t-T)=U0cosS^t-T),
то разность амплитуд видеоимпульсов после вычитания равна
34
U/(t)=U(t)-U(t-T)=
=-2(/0sin^sinaJ/--^y (6.1)
/
Таким образом, на выходе вычитающего устройства видеоим-
пульсы движущейся цели представляют собой также последо-
вательность видеоимпульсов (рис. 6.1, в), промоцулированную
допплеровской частотой. Максимальное значение напряжения на
выходе схемы вычитания
А^макс”2£/о,
т. е. равно удвоенной величине сигнала £70 при обычном прие-
ме.
Напряжение на выходе двухполупериодного выпрямителя, в
соответствии с (6. 1) будет равно
At/(O
/ т
Sin2d 11---
(6-2)
=2UQ sinS4
а среднее значение амплитуд видеоимпульсов
та
A£Jcp = |AC/(Okp= 4- J 1ДС/(01^
О
где
гр__ __ 1
д~
Выполнив интегрирование, найдем окончательное
для амплитудно-скоростной характеристики в виде
2vrT
х» ’
AL/cp = Uo sinitFdT = Uo shut
выражение
(6.3)
4
так как радиальная составляющая скорости цели, как известно,
связана с допплеровской частотой соотношением >
р = %Vr.
Хо
Амплитудно-скоростная характеристика изображена на рис. 6.2.
При слепых скоростях цели, когда
= Z7Z '2у ’
среднее значение амплитуд импульсов на выходе компенсатора
Д£7ср=0. В сдучае оптимальной скорости среднее значение ам-
плитуд импульсов на выходе приемника когерентно-импульсной
станции в 4/тг^1,27 раза больше амплитуды импульсов на вы-
ходе приемника обычного импульсного радиолокатора.
35
Сигналу в канале задержки и й прямом канале сопутствуют
шумы. Напряжения шумов в обоих каналах статистически не-
зависимы и поэтому складываются по мощности.
Если определить отношение сигнал/шум на выхоДе схемы
компенсации как отношение среднего значения амплитуды сиг-
д Чр
Рис. 6.2
нала на выходе двухполупериодного выпрямителя ДС/ср к эффек-
тивному напряжению шума на выходе линейной части компенса-
тора t/эфф.вых, то на основании (6.3) можно записать
Д^сР ____ Д£4р _
(/эфф.вых у~2 f/эфф.вх
-4=-77^ SinirF.T > (6.4)
пу 2 С'эфф.вх ° ' '
где i/эфф.вх — эффективное напряжение шума на входе схемы ком-,
пенсации.
Так как отношение -гг — представляет собой отношение
С/эфф.вх
сигнал/шум на входе схемы компенсации, то
• (6.5)
Таким образом, схема компенсации не вносит существенного
ослабления выходного сигнала при оптимальных скоростях цели,
когда sin^/^T^l. Однако она сильно ослабляет сигнал при ско-
ростях цели близких к „слепым".
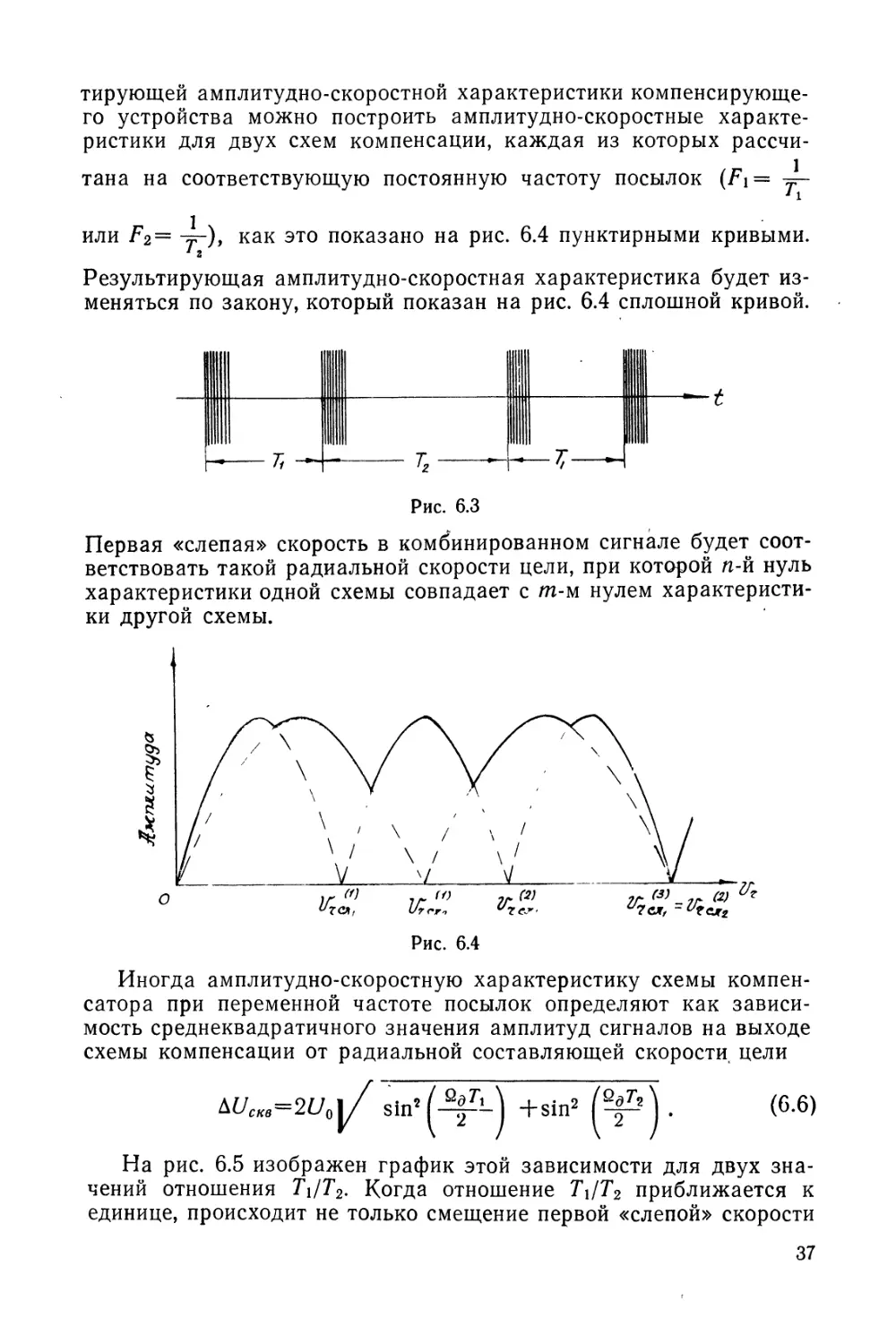
Как отмечалось в § 3, для борьбы со «слепыми» скоростями
может быть применен метод изменения частоты посылок зондирую-
щих импульсов радиолокационной станции (рис. 6.3). Для опре-
деления влияния переменной частоты посылок на форму резуль-
36
тирующей амплитудно-скоростной характеристики компенсирующе-
го устройства можно построить амплитудно-скоростные характе-
ристики для двух схем компенсации, каждая из которых рассчи-
тана на соответствующую постоянную частоту посылок (ri= у-
или F2= -Х-), как это показано на рис. 6.4 пунктирными кривыми.
* 2
Результирующая амплитудно-скоростная характеристика будет из-
меняться по закону, который показан на рис. 6.4 сплошной кривой.
Рис. 6.3
Первая «слепая» скорость в комбинированном сигнале будет соот-
ветствовать такой радиальной скорости цели, при которой n-й нуль
характеристики одной схемы совпадает с /n-м нулем характеристи-
ки другой схемы.
Иногда амплитудно-скоростную характеристику схемы компен-
сатора при переменной частоте посылок определяют как зависи-
мость среднеквадратичного значения амплитуд сигналов на выходе
схемы компенсации от радиальной составляющей скорости цели
At/fOT=2t70j/ sin’p^
+sin2 2
(6.6)
На рис. 6.5 изображен график этой зависимости для двух зна-
чений отношения Т\1Т2. Когда отношение Т\/Т2 приближается к
единице, происходит не только смещение первой «слепой» скорости
37
в сторону больших скоростей, но и увеличивается волнистость кри-
вой. Поэтому при выборе отношения частот посылок необходимо
идти на определенный компромисс между положением первой
«слепой» скорости и допустимой величиной неравномерности ука-
занной характеристики. При этом, естественно, надо помнить, что
Рис. 6.5
изменение частоты посылок имеет определенные пределы. Слиш-
ком высокая частота посылок может привести к неоднозначности
измерения дальности до цели.
§ 7. Схема череспериодной компенсации как гребенчатый фильтр
Выше отмечалось, что спектральные различия сигналов дви-
жущейся цели и неподвижных мешающих объектов являются след-
ствием временных различий этих сигналов. Поэтому естественной
является постановка вопроса об анализе частотных свойств схемы
череспериодной компенсации. При этом сразу же подчеркнем, что
речь идет только о линейной части схемы компенсации (рис. 5.2),
включающей в себя устройства задержки и суммирования. Час-
тотная характеристика линейной части компенсатора в комплекс-
ном виде может быть найдена из выражения.
"<« = 4^ <71>
при
uBX(t)=ejwt.
Так как в нашем случае
Мвых(^)= (^) Max Г),
то после подстановки в (7.1) получим
38
Преобразуем выражение (7.2)
tf(/®) = е~1а> Т (Р —е Т) = 2 je"3* ~sin >
откуда может быть найдена амплитудно-частотная характерис-
тика схемы компенсации в виде
Я’(®) = | #(/<») | =2 sin .
(7-3)
Графическое изображение нормированной амплитудно-частот-
ной характеристики схемы компенсации представлено на рис. 7.1.
Частоты, для которых | I =0, определяются из соотно-
шения
откуда
2я
(7-4)
Таким образом, по своему воздействию на спектр сигнала ком-
пенсатор можно рассматривать как гребенчатый фильтр, не про-
пускающий частот кратных частоте посылок. Как видно из рис. 7.1
(сплошная линия), полученная форма амплитудно-частотной ха-
рактеристики является вполне удовлетворительной, если необходи-
мо компенсировать сигналы идеально неподвижных мешающих
объектов при условии, когда антенна радиолокатора не произво-
дит обзора пространства, т. е. когда спектр результирующего сиг-
нала на выходе фазового детектора имеет вид, показанный на
рис. 4.4.
Рис. 7.1
Следует оговориться, что применение череспериодного компен-
сатора возможно принципиально и до фазового детектора, если к
элементам этого компенсатора предъявлено требование пропускать
39
частоты в некоторых пределах ±Д<о относительно частоты <о0, как
это показано на рис. 7.2.
Обзор пространства антенной радиолокатора и флюктуации
мешающих объектов вызывает появление в спектре отраженного
сигнала спектральных полос (рис. 4.7 и 4.8). Более рациональную
Рис. 7.2
амплитудно-частотную характеристику для подавления мешающих
отражений в этом случае имел бы фильтр, предстаавляющий со-
бой последовтельное включение двух, а иногда и большего числа',
простых череспериодных компенсаторов (рис. 5.2). Нормированная
амплитудно-частотная характеристика устройства при двухкрат-
ном вычитании — образовании второй конечной разности,
в соответствии со схемой на рис. 7.3 (а или б), имеет вид кривой,
меняющейся по закону sin2^, и показанной на рис. 7.1 (пунктир).
40
Рис. 7.4
Рис. 7.5
Устройства многократного вычитания, использующие последова-
тельное включение обычных череспериодных компенсаторов, позво-
ляют создать частотную характеристику с малым коэффициентом
передачи в некотором диапазоне вблизи частот кратных частоте
посылок. Это повышает качество подавления мешающих отраже-
ний. Однако неравномерность частотной характеристики в интер-
вале между этими частотами приводит к расширению зоны «сле-
пых» скоростей за счет одновременного подавления спектральных
составляющих полезного сигнала. Применение отрицательных об-
ратных связей (рис. 7.4) позволяет изменять форму частотной ха-
рактеристики компенсатора выбором величины коэффициентов об-
ратной связи Pi и р2. Примерный вид частотной характеристики
многократного компенсатора при использовании отрицательных,
обратных связей показан на рис. 7.5, где для сравнения пунктиром
изображена зависимость
41
I #(» I Hsin0^- I •
Методику расчета частотной характеристики устройства мно-
гократной компенсации при применении отрицательных обратных
свдзей рассмотрим для конкретных частных примеров. Для схе-
мы, изображенной на рис. 7.4,а, могут быть записаны следую-
щие соотношения
«1(»=«0(» - Р^О),
«2(/<о)=и1(/а))е-А’г>
И3(/о>)=К1(»—«2(уо>),
«вых(/®) = «з(» — «<(»•
В результате решения системы уравнений (7.5) получим вы-
ражение для частотной характеристики в виде
_ц?ыИ./т). = .. . V~e~JWTT)* . т , (7.6)
' u0(jo>) 1-rMl—е-г»т)е-1*т V
откуда после преобразований легко получить также выражение для амплитуд-
но-чаетотной характеристики в виде
О)Т
4sin2 ~2“
/<(«>)= 1ВД 1= аТ/ »т з • (77)
]/ l+4?sin -J- psin -J- 4~sin )
Если использовать в качестве примера систему, показанную на рис. 7.4.6.
то математические операции, аналогичные предыдущим, приводят к выраже-
нию для частотной характеристики в виде
(I—е—1шТ)2
> <7-8)
и соответственно для амлитудно-частотной характеристики
45тг-2~
«•(«>)= | «•(» | = / .......... - • (7.9)
V 1+pj +р2-|-2(₽1СО5<о Г-|-₽2соз2ш Г+ pi^cosmT)
Наконец, следует сказать, если компенсация осуществляется на
высокой (промежуточной) частоте, то должна быть предусмотрена
и настройка гребенчатого фильтра на частоту ®0±2дпср.
Примером эффективности устройства двухкратного череспе-
42
риодного вычитания с использованием обратных связей могут слу-
жить следующие данные. При частоте посылок F=400 гц в диапа-
зоне волн Хо = ( 19-4-77) см такое устройство уменьшало флюктуа-
ции от дождя при 6 импульсах в пачке на 30 дб, в то время как
обычный однократный компенсатор уменьшал величину той же по-
мехи в тех же условиях только на 15 дб.
§ 8. Особенности селекции движущихся целей при наличии
взаимных перемещений радиолокатора и мешающего объекта
В ряде случаев когерентно-импульсный радиолокатор может
быть расположен на движущихся объектах, какими, например, яв-
ляются самолет, корабль и т. д. При работе такого радиолокатора
по движущимся целям на фоне неподвижных (малоподвижных)
относительно поверхности земли объектов возникают трудности
компенсации мешающих отражений в системе селекции. Все сиг-
налы, отраженные от мешающих объектов на выходе фазового де-
тектора, оказываются в данном случае промодулированными по
амплитуде с частотой Допплера, величина которой определяется
скоростью движения радиолокатора. Аналогичное имеет место и
при работе неподвижного радиолокатора по движущейся воздуш-
ной цели на фоне облака пассивных отражателей (в частном слу-
чае— металлизированных полуволновых диполей), перемещающих-
ся в пространстве под действием ветра и собственного веса. Если
разброс скоростей ветра по высоте небольшой, то перемещение
мешающих отражателей в данном случае можно характеризовать
некоторым значением средней радиальной скорости ^пср . При
этом, как указывалось в § 4, спектр высокочастотного отражен-
ного сигнала смещается на допплеровскую поправку частоты
±^пср, а спектральные полосы дополнительно (в сравнении со
случаем неподвижных объектов) расширяются в соответствии со
спектром флюктуаций сигнала. Особенно заметно это расширение
в спектре сигнала на выходе фазового детектора и поэтому прак-
тически невозможно получить достаточно эффективного подавле-
ния помех даже при использовании устройств многократного черес-
периодного вычитания, охваченных обратными связями.
Взаимные перемещения когерентно-импульсного радиолокатора
и мешающего объекта в некоторых случаях могут быть скомпен-
сированы. Для того чтобы уяснить принцип такой компенсации,
будем полагать антенну радиолокатора неподвижной и направлен-
ной на цель, а флюктуации сигнала мешающего объекта — отсут-
ствующими.
Фазовый сдвиг за период посылки для сигнала, отраженного
от мешающего объекта, перемещающегося с некоторой средней
радиальной скоростью ^ГПср, равен
^Vrncp
С
43
Наличие этого фазового сдвига приведет на выходе фазового де-
тектора к амплитудным изменениям мешающих сигналов от пе-
риода к периоду, и, следовательно, к нарушению условий их пол-
ной компенсации.
Из рассмотрения векторной временной диаграммы для этого
случая (рис. 8.1) видно, если осуществить поворот вектора опор-
ного напряжения Uv на угол то хотя
будет иметь место равенство модулей этих векторов, т. е.
| ^рез | == | U рез | •)
а значит будут равны и приращения результирующих напряже-
ний
I ^рез I I I ~ | ^рез | I I •
Равенство приращений результирующего напряжения означает,
что импульсы на выходе фазового детектора будут иметь одинако-
вую амплитуду и на выходё компенсатора произойдет компенса-
ция сигналов мешающего объекта.
Таким образом, для устранения эффекта взаимных перемеще-
ний радиолокатора и мешающего объекта достаточно изменить
фазу опорного напряжения на величину <?т или изменить частоту
опорного напряжения на допплеровскую поправку, соответствую-
щую средней относительной скорости перемещения. Последнее мо-
жет быть осуществлено с помощью преобразователя частоты, ^ак
это показано на рис. 8.2 для схемы простейшего когерентно-им-
пульсного радиолокатора с задающим генератором.
Трудность подобного преобразования заключается в том, что
вводимая допплеровская поправка частоты весьма мала в сравне-
44
нии с частотой опорного напряжения и простое разрешение преоб-
разованных и непреобразованных опорных колебаний с помощью
фильтра на входе фазового детектора практически невозможно.
Поэтому, как правило, осуществляется двойное преобразование
Рис. 8.2
частоты, а схема преобразователя при этом имеет вид, показан-
ный на рис. 8.3. Преобразователь состоит из двух гетеродинов. Гг
и Г2, один из которых является перестраиваемым, и двух смесите-
лей с фильтрами на выходе. Пояснение принципа работы такого
Рис. 8.3
преобразователя можно иллюстрировать рис. 8.4. На выходе пер-
вого смесителя с помощью фильтра выделяется напряжение часто-
ты А+Л+Лип ПРИ условии, что частота f3 много больше полосы
фильтра. После второго преобразования легко выделить необхо-
45
Димую компоненту напряжения частоты /о4-/дП» которая и являет-
ся преобразованным опорным напряжением.
Схемы устранения эффекта взаимных перемещений цели и ме-
шающих объектов, применяемые в когерентно-импульсных радио-
локаторах воздушных целей, иногда называют схемами компенса-
ции скорости ветра.
Рис. 8.4
Так как в реальных условиях имеет место разброс скоростей
перемещения мешающих отражателей, то с помощью изменения
частоты гетеродина Г\ следует выбрать наиболее благоприятный
эффект компенсации, пользуясь, например, выходными индикато-
рами.
Рис. 8.5
В случае режима обзора пространства и больших скоростей
взаимного перемещения, что особенно характерно для самолетных
радиолокаторов, ведущих обзор земной поверхности (рис. 8.5),
приходится учитывать зависимость величины относительной ради-
альной скорости от положения антенны (азимута и угла места).
46
Так как радиальная составляющая скорости цели при этом равна
vr=v cosрcose,
где
т/—относительная скорость перемещения;
р—азимут;
е—угол места облучаемого участка,
то
Рдп=-г- cosBcose.
Ло
В этом случае перестраиваемый гетеродин 1\ может управляться
при помощи счетно-решающего устройства, связанного с датчиком
углового перемещения антенны и относительной скорости переме-
щения (например, путевой скорости самолета) *.
§ 9. Схемы когерентно-импульсных радиолокаторов
с фазированием когерентного напряжения
До сих пор мы ограничивались рассмотрением схемы когерент-
но-импульсного радиолокатора, в которой в качестве опорного на-
пряжения использовались непрерывные колебания задающего ге-
нератора (рис. 1). Если в когерентно-импульсном радиолокаторе
в качестве генератора высокочастотных импульсов, излучаемых
в пространство, применяется генератор с независимым возбужде-
нием (например, магнетрон в импульсном режиме), то использо-
вать колебания такого генератора в качестве опорного напряже-
ния не представляется возможным. Генератор высокочастотных
импульсов с независимым возбуждением излучает в каждый пе-
риод посылки импульсы со случайной и независимой от предыду-
щего периода начальной фазой. Кроме того, опорное напряжение
должно содержать информацию о фазе излученного импульса в
течение всего возможного интервала времени приема сигнала, от-
раженного от цели (практически в течение всего периода посыл-
ки), т. е. и тогда, когда генератор не работает. Следовательно,
возникает задача запоминания фазы каждого излученного импуль-
са на время, равное периоду посылки, а в более общем плане —
задача получения когерентных излучаемых и опорных колебаний,
сравнение которых позволяет осуществить селекцию движущихся
целей на фоне мешающих объектов. В радиолокаторах с внутрен-
ней когерентностью источники этих колебаний находятся в самом
радиолокаторе, а когерентность их обеспечивается обычно в про-
цессе фазирования одного напряжения другим. В некоторых слу-
чаях в метровом и дециметровом диапазонах волн для получения
* Необходимость управления гетеродином отпадает при использовании си<
стем с внешней когерентностью.
47
когерентного напряжения возможно использовать методы умноже-
ния частоты задающего генератора с кварцевой стабилизацией.
В основе классификации систем с внутренней когеретностью
лежат следующие особенности фазирования и сравнения коле-
баний:
— направление фазирования (фазируется когерентный гетеро-
дин, или когерентный гетеродин фазирует генератор передатчика),
— частота фазирования,
— частота сравнения когерентных колебаний.
Принципиально направление фазирования может быть любым,
но в схемах, где фазирование генератора передатчика осуществ-
ляется когерентным гетеродином, последний должен обладать зна-
чительной мощностью, что часто противоречит требованиям обеспе-
чения высокой стабильности частоты когерентного гетеродина,
В метровом и дециметровом диапазонах волн, где в качестве гене-
раторов высокой частоты используются, как правило, ламповые
генераторы и мощные усилители колебаний высокой частоты, воз-
можны оба способа фазирования. В сантиметровом и миллимет-
ровом диапазонах, где пока широко не применяются усилители
мощности высокочастотных колебаний, используется фазирование
когерентного гетеродина.
Фазирование легче осуществлять на промежуточной частоте,
чем на высокой (независимо от направления фазирования). Это
обстоятельство опять-таки определяется требованиями стабильно-
сти частоты генераторов. Очевидно, при одинаковой добротности
контуров меньший уход частоты обеспечивается на более низкой
частоте (за период посылки Т в данном случае укладывается
меньшее число периодов колебаний), а следовательно, допустимый
уход частоты на более низкой частоте обеспечивается при мень-
шей добротности контура генератора, что в свою очередь облег-
чает процесс и повышает качество фазирования. Правда, пониже-
ние требований к стабильности когерентного гетеродина в случае
фазирования на промежуточной частоте покупается за счет введе-
ния дополнительного элемента — местного гетеродина, который
должен работать на высокой частоте и иметь высокую стабиль-
ность. Задача стабилизации частоты местного гетеродина является
весьма сложной задачей, но она облегчается тем, что местный ге-
теродин не фазируется, а при этом его контур может быть взят
высокодобротным/
Сравнение когерентных колебаний: опорного напряжения и от-
раженного сигнала, т. е. образование биений, может быть осуще-
ствлено как на высокой, так и на промежуточной частоте. Наибо-
лее широко до настоящего времени используется обработка 'при-
нятого сигнала на промежуточной и видеочастотах.
Исходя из перечисленных выше особенностей, можно осуще-
ствить ряд вариантов схем образования когерентного напряжения,
основными из которых являются следующие:
48
— фазирование на высокой частоте от когерентного гетероди-
на, а сравнение на промежуточной частоте,
— фазирование от генератора высокой частоты на высокой ча-
стоте и сравнение на высокой частоте,
— фазирование от генератора высокой частоты на промежу-
точной частоте и сравнение на промежуточной частоте.
Рис. 9.1
В сантиметровом диапазоне волн наибольшее распространение
получила схема когерентно-импульсного радиолокатора с фазиро-
ванием от генератора высокой частоты на промежуточной частоте,
показанная на рис. 9.1. В отношении этой схемы следует дополни-
тельно отметить, что случайная начальная фаза колебаний мест-
ного гетеродина, если она остается неизменной в течение времени
запаздывания отраженного сигнала, исключается в колебаниях
биений, так как она входит одновременно и в опорное напряжение
(через фазу преобразованного фазирующего импульса) и в отра-
женный сигнал при преобразовании его частоты в промежуточную.
В заключение заметим, что при применении когерентно-им-
пульсных радиолокаторов с фазированием когерентного гетероди-
на компенсация скорости ветра (§ 8) должна осуществляться пос-
ле фазирования когерентного напряжения.
§ 10. Факторы, определяющие качество работы
систем селекции сигналов движущихся целей
Качество работы систем селекции сигналов движущихся це-
лей часто характеризуется степенью компенсации (подавления)
4. Костин. Зак. 422-т
49
сигналов Мешающих объектов*, т. е. отношением
(10.1)
^ВХ
где At7BbIX—амплитуда нескомпенсированного остатка;
f/BX—амплитуда сигнала мешающего объекта на входе ком-
пенсирующего устройства.
При таком определении степени компенсации q предполагает-
ся, что амплитуда сигналов мешающих объектов на входе ком-
пенсатора i7BX постоянна. Реально же это условие не выпол-
няется в силу, в основном, трех факторов:
—флюктуаций сигналов мешающих объектов,
—модуляции сигналов, вызванной движением антенны радио-
локатора при обзоре,
—нестабильной работы ряда узлов станции.
Что касается первых двух (внешних) факторов, то в § 4 были проанали-
зированы характеристики их влияния на спектральный состав сигналов мешаю-
щих объектов. Для количественной оценки степени компенсации мешающих
отражений представляет интерес характеристика влияния этих факторов по ин-
тенсивности.
Рассмотрим вначале влияние собственных флюктуаций сигналов мешаю-
щих объектов на степень компенсации.
В общем случае сигнал, отраженный от мешающих объектов (расположен-
ных в одном импульсном объеме), представляет собой векторную сумму сигна-
ла, обусловленного устойчивым отражением С/о2 (отражения от здания, моста
и т. п.), и флюктуирующего сигнала (суммарный сигнал элементарных отра-
жателей, таких как листья и ветви деревьев, металлизированные ленты и
т. п.)— t/флг» как это показано на векторной диаграмме рис. 10.1. На этой же
диаграмме вектором £7'фЛ2 показан отраженный флюктуирующий сигнал для
соседнего периода посылки. Так как £/фЛ2 и £/'фл2— случайные векторцые ве-
личины, то случайными будут и результирующие сигналы б7рез и а
значит и разность этих результирующих сигналов Д£/ в двух соседних перио-
дах повторения**.
* Более полно качество селекции оценивается с помощью характеристик
обнаружения.
** В частном случае, например для облака металлизированных лент, раз-
ность Д[/ будет векторной разностью только £/фл2 и СГфЛ2, так как сигнал,
обусловленный устойчивым отражением, при этом отсутствует.
50
Эффективное (сренеквадратичное) значение
разности результирующих сигналов в двух сосед-
них периодах посылки может быть вычислено
по известному энергетическому спектру флюк-
туаций мешающих отражений, а именно
Д^3фф= |/ ^G(f)K\f)df , (10.2)
где
энергетический спектр флюктуаций
мешающих отражений;
K(f)—амплитудно-частотная характеристика
компенсирующего устройства
Аналогично для эффективного значения
амплитуды отраженного мешающего сигнала на
входе схемы компенсации справедливо соотноше-
ние _________
Uэфф == J G(f)df.
На основании формулы (7.3)
K(f) = 2sinn/ Г,
(10.3)
(10.4)
и при этом
G(f)s\n\nfT)df
^G(f)df
о
Д i/дфф
О эфф
В некоторых случаях форма спектров флюктуаций отражений от различ-
ных рассмотренных мешающих объектов достаточно хорошо аппроксимируется
кривой Гаусса
- -Ш'
О(/)=« . (10.S)
где /о~"частота излучаемых колебаний,
а—зависящий от типа мешающего объекта и метеоусловий параметр, зна-
чения которого по результатам частотных измерений приведены в табл. 10.1.
Таблица 10.1
Тип мешающего объекта а
Металлизированные ленты 10*6
Дождевые облака 2,3-1015
Морская поверхность при ветре 1,4-1016
Холмы, поросшие густым лесом, при скорости ветра 32 км)час 2,3-1017
Холмы, поросшие редким лесом, при тихой погоде 3,9 • 10*9
51
Если использовать аппроксимацию спектра флюктуаций кривой Гаусса (10.5),
то легко получить выражение
Д Uэфф
Uэфф
(10.6) .
из которого видно, что степень (качество) компенсации увеличивается (улуч-
шается) с увеличением длины волны и частоты посылок.
На рис. 10.2 приведены графики зависимости (дб) от отношения
С/ эфф
/0/F для различного типа мешающих объектов при неподвижной антенне.
Рис. 10.2
Теперь рассмотрим, как влияет движение антенны радиолокатора при
обзоре пространства на степень компенсации мешающих сш налов. Следует
различать в данном случае изменения сигналов, отраженных от точечных и
протяженных мешающих объектов. При облучении точечного объекта ампли-
туда отраженного сигнала изменяется от импульса к импульсу по закону, ко-
торый определяется только формой диаграммы направленности. Будем аппро-
ксимировать диаграмму направленности антенны по полю кривой Гаусса, т.е.
F(0) = e-K02,
(Ю.7)
где
0 = йобз<;
Йобз—угловая скорость обзора.
52
Коэффициент масштаба k может быть выбран по заданной ширине диаграм-
мы направленности 0О5Р антенны по половинной мощности на основании
условия
е
так как уменьшению мощности в 2 раза соответствует ослабление напряжен-
ности поля в У 2 раз.
Если для передачи и приема используется одна и та же антенна с диа-
граммой направленности Г(0), то закон изменения амплитуды сигнала на вы-
ходе приемника (рис. 10.3), после вычисления масштабного коэффициента k,
может быть записан в виде
___/ е \2
- 2,775|
U(Q) = UQe
где Uq—максимальная величина сигнала*.
Изменение амплитуды импульсов за период посылки определяется соотно-
шением
ДС/=^)Д0>
«0
(10.8)
(10.9)
где Д0=ЙобзТ,
Т— период посылки импульсов.
Максимальное изменение амплитуды импульсов будет
рестностях точки наибольшей крутизны, абсциссу которой
из условия
иметь место в ок-
0Макс можно найти
d2U(Q)
d&
После выполнения расчетов получим
®0,5Р
|0MaKcl“/W5’
* При этом амплитудная характеристика приемника полагается линейной,
и тогда ^7(0)=<7о/72(0).
53
и при* этом значение первой производной в точке
равно dU(W) ® — |®макс1 _^1,4за0
Тогда, на основании de (10.9) да и0 - е = | ®макс1 0°-5Р 1,43 „ _ и ЙобзЛ ^0,5Р
на
а так как число импульсов
винной мощности равно
(10.10)
ширину диаграммы направленности по поло-
„ ®0,5₽
М~ ЙобзГ ’
(10.12)
(10.11)
то окончательно получим
(10.13)
= 1,43
UQ М •
Например, при 0О,5Р=^’ 7^=1000 имп/сек и скорости обзора я = 6 об/мин
число импульсов, облучающих точечную цель, Л4 = 28, а отношение
да
-26 дб
или 50/о.
Если облучаются протяженные мешающие объекты сложной конфигу-
рации, то при вращении антенны одни участки объекта выходят из диаграммы,
другие входят в нее. Аналогичное имеет место и при облучении множествен-
ных элементарных объектов (облаков металлизированных лент, дождя и т. д.).
На рис. 10.4 показаны два вектора, соответствующих отражениям от протя-
женного объекта в двух соседних периодах посылки Un и (7л+1. Величины
и фазы этих векторов случайны. Случайным будет и разностный вектор Да.
Эффективное (среднеквадратичное) значение разностного вектора может быть
найдено из выражения*
ДУэфф-]/ [^резС® + Д0) - ^рез(в)]2Й0 .
где
Fpe3(0)=F2(0)—результирующая (на прием и пере-
дачу) диаграмма направленности;
0
Д0 = 2обзТ = —угол поворота антенны за пе-
М
риод посылки;
коэффициент пропорциональности.
Используя разложение функции Fpe3(0-|-A0) в ряд
Тейлора и ограничиваясь двумя членами ряда, полу-
Рис. 10.4 чим
* Интегрирование ведется по всем возможным значениям 0,
54
Очевидно,
Тогда,
1/эфф = / *J[Fpe3(0)]2d0 .
ДЕ/эфф _ %,5Р
(10.14)
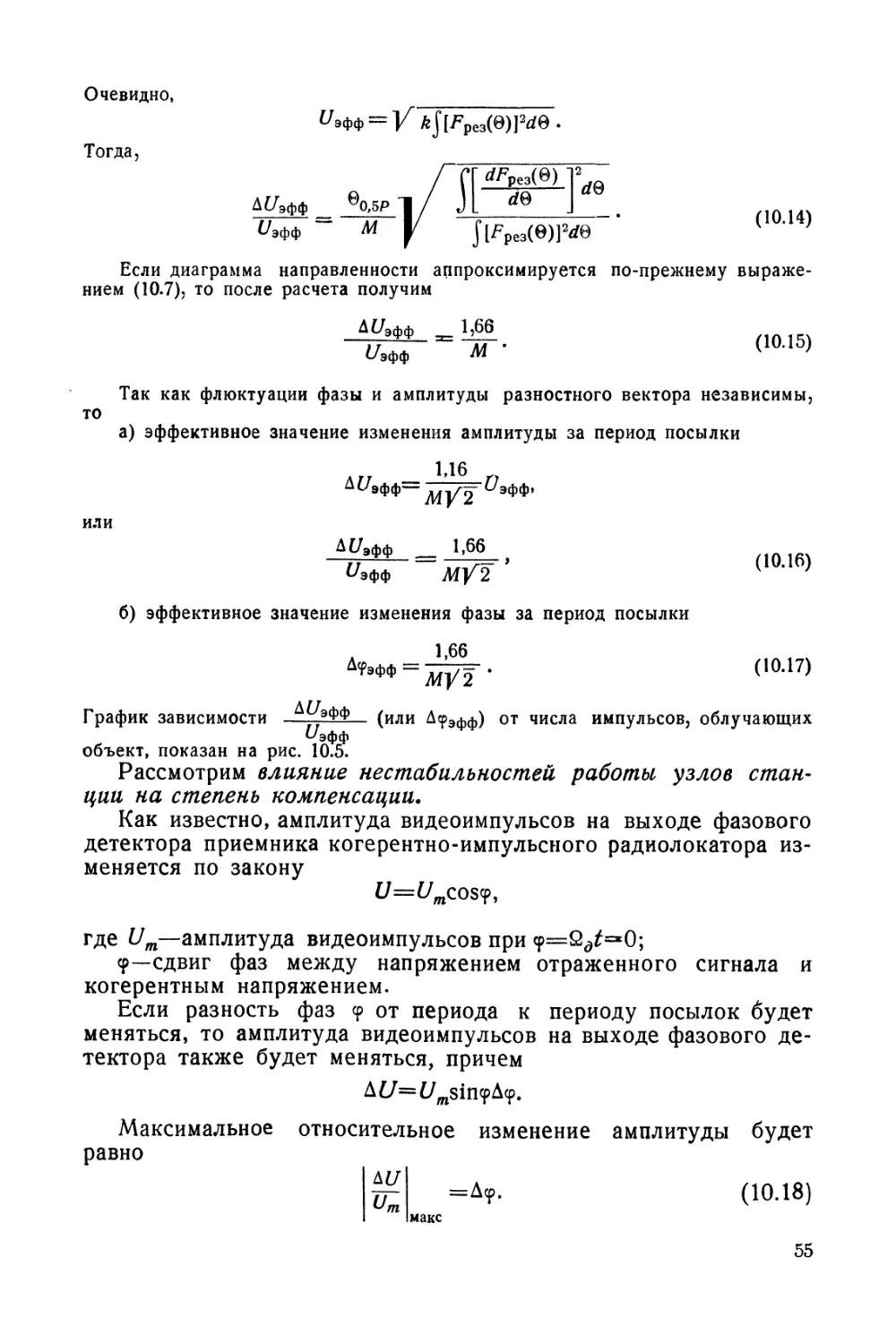
Если диаграмма направленности аппроксимируется по-прежнему выраже-
нием (10.7), то после расчета получим
Д^эфф _ 1,66
£7эфф
(10.15)
Так как флюктуации фазы и амплитуды разностного вектора независимы,
а) эффективное значение изменения амплитуды за период посылки
116
Д^эфф= ^Э*Ф'
Д^/эфф 1,66
^Эфф М/2 ’
б) эффективное значение изменения фазы за период посылки
а 1,66
^ФФ-Л^/З •
(10.16)
(10.17)
График зависимости —,^ФФ— (или Д<рЭфф) от числа импульсов, облучающих
объект, показан на рис. 10.5.
Рассмотрим влияние нестабильностей работы узлов стан-
ции на степень компенсации.
Как известно, амплитуда видеоимпульсов на выходе фазового
детектора приемника когерентно-импульсного радиолокатора из-
меняется по закону
i7=t/mcos?,
где Um—амплитуда видеоимпульсов при ф=2(5/=х0;
Ф—сдвиг фаз между напряжением отраженного сигнала и
когерентным напряжением.
Если разность фаз <р от периода к периоду посылок будет
меняться, то амплитуда видеоимпульсов на выходе фазового де-
тектора также будет меняться, причем
MJ=U msin<pA<p.
Максимальное относительное изменение амплитуды будет
равно
(10.18)
55
Таким образом, стабильность амплитуды сигнала, отраженного
от неподвижного объекта, определяется постоянством (в течение
периода посылки) разности фаз <р. Эта разность фаз в свою оче-
редь определяется фазами колебаний отдельных генераторов стан-
ции, а поэтому уход частоты генератора высокочастотных колеба-
ний, местного и когерентного гетеродинов будет влиять на степень
компенсации мешающих отражений.
(/осело ампульсоб М
Рис. 10.5
Основное влияние на стабильность частоты магнетрона оказы-
вает непостоянство электрического режима магнетрона (анодного
напряжения, магнитного поля), изменение нагрузки магнетрона
при сканировании. Скорость ухода частоты магнетрона в послед-
нем случае может составлять сотни и даже тысячи мггц!сек. Тем-
пературный коэффициент частоты магнетрона составляет
0,1 ч-0,2 мггц/град даже на частотах порядка 10000 мггц, и по-
этому изменение температуры блока магнетрона обычно не ска-
зывается на изменении фазы колебаний в двух смежных периодах
посылки.
У клистронов различают два вида ухода частоты:
— изменения частоты, вызываемые температурной нестабиль-
ностью (температурный коэффициент частоты клистрона состав-
ляет 0,1 -4-0,2 мггц/град),
56
— изменения частоты, вызываемые нестабильностью питающих
напряжений. Эти изменения имеют периодический характер с час-
тотой, равной или кратной частоте напряжения питания. Измене-
ние напряжения на отражателе клистрона на 1 % вызывает уход
частоты до нескольких мггц, а при этом даже при очень хорошей
стабилизации величины питающих напряжений (величина пульса-
ций не больше единиц милливольт) возможен абсолютный уход
частоты клистрона порядка десятков и сотен герц.
В связи со сказанным выше представляет интерес сравнение
различных типов генераторных и усилительных приборов по чув-
ствительности к изменению частоты или фазы при нестабильности
величины питающих их тока и напряжения.
Таблица 10,2
Режим работы Тип прибора Зависимость изменения частоты или фазы от анодных тока или напряжения
Генераторы Магнетрон =(о,оо14-о,ооз)-^
Стабилитрон =0,0004
Усилители Амплитрон Д?о=О,ОО4 ~
Клистрон д<р 0=0,09^
ЛБВ Дср°=о,12 — и
Триод Д<р»=0,005-^-
Как видно из табл. 10.2, стабилитрон на порядок менее чув-
ствителен к изменениям анодного тока, чем магнетрон, а ампли-
троны и~ триоды на порядок менее чувствительны, чем клистроны
и ЛБВ.
Очевидно, нестабильность работы всех генераторов высокой
частоты должна быть такой, чтобы результирующее изменение
фазы за период посылки Дер не превышало допустимого значе-
ния Дсрдоп.
Кроме нестабильности частоты генераторов, на качество ком-
пенсации мешающих отражений будут влиять нестабильность за-
57
пуска передатчика, т. е. непостоянство периода посылки, неста-
бильность длительности импульса, нестабильность времени за-
держки в устройстве задержки компенсатора и др.
Этим закончим рассмотрение основных факторов, влияющих на
степень компенсации: собственных флюктуаций мешающих объек-
тов, возникающих под воздействием ветра, флюктуаций, вызван-
ных вращением антенны и флюктуаций из-за нестабильности рабо-
ты аппаратуры когерентно-импульсного радиолокатора. Неском-
пенсированные остатки, вызванные этими факторами, статистиче-
ски независимы, а поэтому результирующий остаточный сигнал
А(/рез можно найти из соотношения
At/рез = Г ДС/2л+Д^<Д^несТ - (10.19)
где А£7фл, AL% А{7нест—соответственно остаточные сигналы, обу-
словленные собственными флюктуациями мешающих объектов,
флуктуациями из-за вращения антенны и нестабильности аппа-
ратуры.
Из последнего выражения видно, что для уменьшения резуль-
тирующего остаточного сигнала необходимо предъявлять высо-
кие требования к стабильности работы аппаратуры когерентно-
импульсного радиолокатора.
Введем величину допустимого значения некомпенсированного
относительного остатка из-за нестабильности аппаратуры
Д6Г
и
<7доп ---
(10.20)
нест доп
Численное значение <7ДОП =А<рД0Г1 выбирают в зависимости от
конкретных условий работы (типа мешающих объектов, метео-
условий и т. д.) и параметров (длины волны, частоты, посылок,
скорости обзора и т. д.) радиолокатора.
Если, например, потребовать, чтобы
где
1
*7доп 2
Д^
внешн>
(10.21)
то увеличение результирующего относительного остатка
(7рез—
Д%>ез
и
из-за нестабильности аппаратуры не превышает порядка 10% от
9внешн<*
Иногда в качестве исходных данных принимают
9внешн = (25ч-30) дб,
58
что соответствует (3-j-6)®/0 нескомпенсированным остатком из-за
внешних причин, и
0ДОП =0,0154-0,03.
§ 11. Разность фаз принимаемых и опорных колебаний
в системе с когерентным гетеродином
На рис. 11.1, а показаны излучаемый и принимаемый сигналы,
а на рис. 11.1, б— напряжение когерентного гетеродина; момент
времени соответствует моменту окончания процесса фазирова-
ния. Пусть излучаемое импульсное колебание описывается вы-
ражением (справедливым для моментов времени tl—x<t<t1^
йгизл(0=^ЛизлСО8(®(.^"Ьфс), (11.1)
I I I
Рис. 11.1
где ф,— случайная начальная фаза излучаемых колебаний.
Колебания когерентного гетеродина запишем в виде
MC = ^iCOs(o>K/+0 (11.2)
где ч>кг— частота колебаний когерентного готеродина, которая в
в общем случае может несколько отличаться от
фкг—случайная начальная фаза колебаний когерентного гете-
родина.
Наконец, принимаемый сигнал, действующий в интервале
времени ti + t3—может быть представлен выраже-
нием
«2(*)=^2cos [<•>,(/—13)+фс], (11.3)
где для простоты полагается, что начальная фаза излучаемых
колебаний ф,. при отражении не изменяется. В реальных усло-
59
виях эта фаза может измениться, но для дальнейшего важно то
(как об этом упоминалось § 1), что она остается практически
неизменной в течение интервала времени между двумя посыл-
ками.
Необходимо заметить, что, говоря о частоте излучаемого
(принимаемого) сигнала и сравнивая ее с частотой опорных ко-
лебаний, будем иметь в виду либо частоту колебаний непосредст-
венно излучаемых в пространство (в схемах с фазированием по
высокой частоте), либо частоту преобразованных колебаний (в схе-
мах с фазированием на промежуточной частоте).
Разность полные фаз принимаемых и опорных колебаний в
течение времени, когда существует принимаемый сигнал, равна
<Р=Н/ + фкг]-[®е(/-О+фе]. (И-4)
Как видно, эта разность зависит от времени запаздывания t3.
Влияние разности случайных начальных фаз фкг—фс исключается
за счет фазирования. Действительно, в момент времени
®кЛ+Фкг=в>/1+Фс
или
Фжг=Ф«+(®с- ткг)(1- (Н-5)
Подставив (11.5) в выражение для разности фаз (11.4), получим
формулу
<Р=и)«г^+(<вС—t3} » (11-6)
в которой начальные фазы фкг и ф, отсутствуют.
После несложных преобразований выражение (11.6) может
быть приведено к виду
<р=<окг(а (шс—о>кг)(/ (j /3), (11.7)
откуда видно, что для конца принимаемого сигнала, т. е. для
момента времени +13, искомая разность фаз равна
(И-8)
а для начала (при т)
?=<»кг^ + (<«>с—<o«j)t- (П.9)
В том случае, когда частота когерентного гетеродина точно сов-
падает по величине с частотой излучаемого сигнала, т. е. когда
<ос—а>кг, сдвиг фазы для начала и конца принимаемого импульса
один и тот же,
и определяется только временем запаздывания отраженного сиг-
нала.
Очевидно, обеспечить абсолютное равенство частот когерент-
ного гетеродина и излучаемого сигнала в реальных условиях
60
работы аппаратуры не нредстайляеТ'ся йозможным. Естественно
возникает вопрос о пределах допустимой постоянной относитель-
ной расстройки генераторов колебаний опорного и основного
каналов по частоте. Рассмотрим более подробно последствия
этой расстройки для случаев приема сигналов, отраженных от
неподвижного объекта и движущейся цели. Если, объект непод-
вижен, т. е. £3=const, то постоянная относительная расстройка
Д(о=|<ос—сокг| приводит, как следует из соотношений (11.8) и (11.9),
к сдвигу по фазе за время, равное длительности импульса, на
величину
<рх=|<в<,—<окг|т = Дш-t.
На рис. 11.2 изображены векторные диаграммы и эпюры сиг-
налов неподвижного объекта на выходе фазового детектора при
и (для прямоугольной формы импульса). Как видно,
Объект неподвижный
о
Рис. 11.2
при <рт « я (рис. 11.2, а) искажением формы импульсов можно
пренебречь и считать, что ухудшения качества компенсации этих
сигналов не происходит. При фт~я (рис. 11.2,6) расстройка та-
кова, что за время длительности импульса укладывается при-
мерно половина периода колебаний биений. Это приводит к из-
менению формы и даже полярности видеимпульса. На рис. 11.3
показаны форма импульсов на выходе фазового детектора и для
61
йекоторых других значений относительной расстройки Л«>.
Однако, если величина расстройки не меняется от периода к пе-
риоду, то сколь-нибудь существенного ухудшения качества ком-
пенсации сигналов неподвижных объектов не происходит и в
этом случае.
Иная картина имеет место при дви-
I жении цели. На рис. 11.4 изображены
2 I \ аналогичные эпюры при для част-
---1 ।— ного случая движения цели, когда фазо-
Рис. 11.3
вый сдвиг за период посылки <рт=
л
~2
Форма импульса меняется при этом от
периода к периоду, и это изменение обус-
ловлено наличием биений колебаний раз-
ных частот на входе фазового детекто-
ра. Наличие биений приводит к неко-
торому уменьшению амплитуд спек-
тральных составляющих и смещению
спектра принимаемых сигналов в область
высоких частот. Если полосы пропуска-
ния видеоусилителя и компенсатора выб-
браны без учета этого смещения спект-
ра, то в результате произойдет некото-
рое подавление полезного сигнала, что
вызовет уменьшение отношения сигнал—
помеха на выходе видеоусилителя р компенсатора. На экране
амплитудного индикатора импульсы цели получат характерную
не только горизонтальную, но и вертикальную штриховку
(рис. 11.5), что дополнительно ухудшит их наблюдаемость.
Рис. 11.4
Считают допустимой такую постоянную относительную расст-
ройку генераторов колебаний опорного и основного каналов по
62
Частоте, когда в импульсе содержится не более четверти перйо-
да биений, т. е. когда
<рт=Д<от< • (11.10)
При этом
Д/=2кДо> < --L • (11.11)
Если, например, т=1 мксек, то допустимая постоянная отно-
сительная расстройка генераторов не должна превышать 250 кгц.
Заметим, что условия выполнения предъявленных требова-
ний к расстройке, естественно, более благоприятны на проме-
жуточной, чем на высокой частоте.
Рис. 11.5
§ 12. Требования к междупериодной стабильности работы
основных узлов когерентно-импульсного радиолокатора
Требования к стабильности частоты генераторов. В схеме
когерентно-импульсного радиолокатора с задающим генератором
сдвиг, фаз между напряжением отраженного сигнала и опорным
напряжением
а в схеме с когерентным гетеродином, на основании формул
(11.8) и (11.9)
_ | <“ж/3+(<«с—юкг)х~Для начала импульса,
( <»K!t3 —для конца импульса.
Если имеют место нестабильности частаты генераторов, то
изменение фазы за период посылки:
—в схеме с задающим генератором
Д?=^Д<»о. (12.1)
д | t3^KZ +т(Д<0г—Д<ожг)— для начала импульса,
I ^Дш«г —для конца импульса.
На основании формул (10.18) и (10.20) Д<рдоп=<7доп, и при этом
абсолютная величина допустимой расстройки частоты задающе-
го генератора за период посылки в соответствии с (12.1)
63.
dfG== 0,03 1
dt ~ 2тг 200 ’
АЛ= . (12-3)
Если, например, <7доп=0,03, то допустимая скорость ухода час-
тоты задающего генератора
(12-4)
Несколько сложнее обстоит дело в случае схемы радиоло-
катора с когерентным гетеродином. На основании формул (12.2)
изменение фазы за период посылки, вследствие нестабильности:
—генератора передатчика*
Д<рг= тДа^, (12.5)
—когерентного гетеродина (если пренебречь слагаемым тД<охг
в силу условия, что t3^)
д?,г = (12.6)
Кроме того, необходимо учесть еще возможность наличия в
схеме местного гетеродина. Последний участвует в фазировании
когерентного гетеродина в течение времени т, а затем на интер-
вале времени t3—в преобразовании сигнала. Изменение фазы
местного гетеродина, вследствие нестабильности его частоты за
время изменяет фазу преобразованного сигнала. При этом
Д?л<г = 1з^мг-
Так как в схеме с фазированием по промежуточной частоте
то ПРИ равной абсолютной стабильности местного .и ко-
герентного гетеродинов более жесткие требования будут к от-
носительной стабильности местного гетеродина. Чрезмерное по-
вышение требований к абсолютной стабильности когерентного
гетеродина не целесообразно, так как чем выше стабильность
последнего, тем труднее условия его фазирования. Поэтому
обычно требуют одиниковой абсолютной нестабильности фаз
местного и когерентного гетеродинов, т. е.
Д(Рл<г~ДсР«г-
Обычно принимают, что изменение фазы из-за ухода частоты
генератора передатчика может быть таким же, как и при уходе
частоты гетеродинов, т. е. считают
Так как Д<рг=тДюг, а то требования к абсолютной ста-
бильности частоты генератора передатчика в сравнении с гете-
* Когерентный гетеродин при этом полагается абсолютно стабильным, т. е.
Да>Я2==0.
64
роднном можно снизить. Однако условие (12.7) является оправ-
данным, если учесть, что мощный генератор стабилизировать
значительно труднее, чем маломощные гетеродины.
Изменение фаз всех трех генераторов происходит случайно
и в первом приближении независимо, а при этом среднеквадра-
тичное значение результирующего изменения фазы равно
Д?= /Д<р2+Д<р2г+Д?2г=уз д?1. (12.8)
Если по-прежнему считать, что <7дОп=0,03, то на основании
формул (10.18) и (12.8)
доп у— ~ 0,017,
а при этом из формул (12.5)ч-(12.7) находим допустимые абсо-
лютные нестабильности частоты:
—‘генератора передатчика
> (12-9)
—местного и когерентного гетеродинов
АХ А 0,017
Умг=^Кг= (12.10)
Учитывая (12.9) и (12.10), для допустимых скоростей ухода
частоты генераторов получим выражения
dfz_ 0,017
dt ' 2л7т ’
dfMt_. dfK! _ 0,017 (12.11)
dt dt 2xTt3
Очевидно, что во все расчетные формулы допустимых значе-
ний ухода частоты (12.9)-i-(12.11) необходимо подставлять время
запаздывания, соответствующее максимальной дальности работы
радиолокатора.
Определим примерный порядок допустимых значений скорос-
ти ухода частоты, абсолютные и относительные нестабильности
за период посылки для генератора передатчика, местного и ко-
герентного гетеродинов при условиях, когда т = 1 мксек, Т—
= 1000 мксек, /,= 1000 мксек (г=150 км), /=3000 мггц (Х=10 см),
/«=30 мггц.
5. Костин. Зак. 422-т
65
Данные расчета по формулам (12.9)-=-(12.11) приведены в
табл. 12.1.
Таблица 12.1
Генератор передат- чика Местный гетеродин Когерентный гетеродин
df dt о мггц сек 2 кгц сек з кгц сек
V 3 кгц 3 гц 3 гц
V f ю-6 10-9 ю-7
Требования относительной стабильности (10-7-j-10~6; за период
посылки для генератора передатчика и когерентного гетероди-
на являются сравнительно легко реализуемыми на практике. Что
касается местного гетеродина, то для обеспечения требуемой
стабильности частоты его колебаний приходится применять весь-
ма сложные устройства так называемой «абсолютной" стабили-
зации. Во всех случаях на выбор и стабилизацию напряжения
источников питания должно быть обращено очень серьезное
внимание. При этом иногда оказывается целесообразным и воз-
можным выбор частоты питающих напряжений, равной или крат-
ной частоте посылок импульсов. При выполнении последнего
условия изменения амплитуды мешающих сигналов, связанные
с пульсациями питающих напряжений будут одинаковыми во
всех периодах посылки и не скажутся на конечном результате
обработки.
Требования к стабильности длительности импульса моду-
лятора, периода запуска передатчика и времени задержки в
линии задержки. Нестабильность длительности импульса моду-
лятора от периода к периоду приведет к появлению на выходе
компенсатора нескомпенсированных остатков длительностью Дт
(рис. 12.1).
Перед подачей на оконечное (индикаторное) устройство выходное напря-
жение компенсатора после двухполупериодного выпрямления, как правило, уси-
ливается. Найдем напряжение на выходе видеоусилителя, предполагая, что час-
тотная характеристика его имеет прямоугольную форму
*(/)=
1, при
т
О, при 0>/> —,
т
66
а на входе действует прямоугольный импульс амплитуды и длительностью
Дт. При соответствующем выборе начала отсчета выражение для напряжения
нескомпенсированного остатка на выходе видеоимпульса имеет вид
Д/ВУС
д«вус(0=| G(f)K( f)cos2*ftdf, (12.12)
О
где G(f) = Uq спектральная плот-
ность прямоугольного видеоимпульса.
При подстановке значения б(/) в интег-
рал (12.12), учитывая, что —» П0ЛУ“
чим выражение для напряжения на выходе
видеоусилителя в виде
1
UQ с sin тс/Ат
Д«вус(0= V J —7~-
CQ&Kftdf. (12.13)
Так как Дт^т, и
то после вычисления
чательно
при этом sIotc/At^tc/At,
интеграла получим окон-
ДмВУС (0 — nt
sin2rc — •
Рис. 12.1
(12.14)
о
Отношение максимальной величины остатка на выходе видео-
усилителя (рис. 12.2) к амплитуде импульса на выходе компен-
сатора Uo равно
At/вус =^. (12.15)
Если время задержки в линии задержки изменяется за пе-
риод посылки на Д^зад, то сигналы от неподвижных мешающих
объектов будут скомпенсированы неполностью, как это показа-
но на рис. 12.3. Изменение периода посылки модулирующих им-
пульсов на ДТ вызывает такой же эффект, как и изменение вре-
мени задержки в линии.
67
С энергетической точки зрения эти два нескомпенсированных
Остатка (рис. 12.3) длительностью создают в оконеч-
ном устройстве такой же эффект, как и один удвоенной дли-
Рис. 12.3
тельности. Поэтому, если провести рас-
суждения аналогичные тем, которые
имели место при анализе влияния неста-
бильности длительности импульса моду-
лятора, то можно прийти к формулам
относительной величины нескомпенсиро-
ванных остатков на выходе видеоусили-
теля при:
—нестабильности времени задержки
в линии задержки
дйвУС = ^м (12.16)
—нестабильности периода запуска пе-
редатчика
At7Byc 4Д7*
Uo
Будем считать, что каждая из рас-
смотренных нестабильностей имеет мес-
то независимо от другой и что <7ДОП=0,03.
Тогда на основании формул (12.15)4-
-5-(12.17)
Дт = 2Д^зад=2ДТ=(12.18)
т. е. допустимая нестабильность:
— длительности импульса модулятора
Дт~ 0,01 т,
(12.19)
— времени задержки в линии и периода запуска передатчика
д/зад=Д7^0,005т. (12.20)
Несоответствие формы, мешающих сигналов в двух соседних,
периодах также является причиной неполной их компенсации,
поэтому необходимо добиваться идентичности частотных харак-
теристик и коэффициентов усиления прямого и задержанного
каналов компенсирующего устройства. С этой целью следует
предусмотреть коррекцию частотных характеристик и регулиров-
ку усиления в первых каскадах (во избежание появления нели-
нейных искажений) обоих каналов.
Жесткие требования к стабильности длительности импульса и
периода запуска генератора передатчика предъявляют в свою оче-
68
редь повышенные требования к модулятору передатчика. В част-
ности, в модуляторах передатчиков когерентно-импульсных радио-
локаторов используются, как правило, электронно-ламповые схемы.
Применение вращающихся искровых разрядников недопустимо.
Особенно сложной проблемой является стабилизация времени
задержки сигнала в линии задержки, так как скорость распростра-
нения колебаний в них зависит от температуры среды. Даже тер-
мостирование линий часто не обеспечивает требуемых параметров
стабильности. Можно использовать несколько методов уравнива-
ния времени задержки и периода посылки. Один из этих методов
основан на применении линий задержки, в которых имеется воз-
можность регулировать в небольших пределах время задержки из-
менением длины звукопровода. Другие методы, применяющиеся
более широко, основаны на применении синхронизирующих схем,
управляющих работой модулятора передатчика. В простейшем слу-
чае для синхронизации частоты запуска передатчика используется
дополнительная (вспомогательная) линия задержки, аналогичная
«сигнальной» и работающая с ней в одинаковом температурном
режиме (в одном термостате). Импульсы запуска подаются на
вход модулятора только после того, как они прошли через эту
вспомогательную линию. Для синхронизации модулятора может
использоваться и сама «сигнальная» линия задержки, если каналы
синхронизации и сигнала разнести по несущей частоте. Такая си-
стема менее громоздка, чем система со специальной вспомогатель-
ной линией, но имеет свои недостатки, связанные с воздействием
многократно отраженных сигналов на канал синхронизации. Су-
ществуют и более совершенные способы синхронизации, основан-
ные на применении автоматической регулировки частоты посылок
импульсов.
§13. Когерентно-импульсные радиолокаторы без когерентного
гетеродина
Когерентно-импульсные радиолокаторы без когерентного гете-
родина, которые иногда называют системами с внешней когерент-
ностью, позволяют в ряде случаев осуществить селекцию движу-
щихся целей значительно проще, чем системы с внутренней коге-
рентностью (с когерентным гетеродином).
В качестве опорного напряжения в этих системах используются
сигналы, отраженные от мешающего объекта, находящегося в од-
ном импульсном объеме с пеленгуемой движущейся целью. Если
мешающий объект неподвижен, то он является идеальным источ-
ником когерентного опорного напряжения с частотой, равной час-
тоте излучаемого передатчиком сигнала <о0, и фазой, определяемой
расстоянием до объекта. В этом случае на вход приемника радио-
локатора в некоторый период посылки одновременно приходят два
отраженных сигнала:
—от, неподвижного объекта (помехи)
69
ип(*) = tfnC0S Ш0р- V +Фо ’
—от движущейся цели
«4(0=^4cos шор-2Ц^М0 .
где ^ — произвольная (случайная) начальная фаза колебаний пе-
редатчика, которая для упрощения полагается не меняющейся
при отражении.
На входе детектора приемника будут иметь место биения
этих двух сигналов. Фаза напряжения биений равна разности фаз
указанных выше сигналов,
или после преобразования
?=о)о 1 =
При этом напряжение биений на выходе детектора может быть
записано в виде
u6(t)=a^t)=U6c^=U6CQsQdt.
Полученное выражение показывает, что напряжение на выходе
фазового детектора оказывается промодулированным с частотой
Допплера. Если радиолокатор работает в импульсном режиме, то
с частотой Допплера изменяется амплитуда импульсов, отражен-
ных от движущейся цели. На рис. 13.1 изображены эпюры напря-
жений на выходе детектора в двух соседних периодах посылки и
результат вычитания на выходе схемы компенсации при условии,
что мешающий объект имеет протяженность в радиальном направ-
лении много большую разрешающей способности по дальности
(облако металлизированных лент) и
Если имеют место флюктуации мешающего объекта, то в ре-
зультирующем спектре сигнала, отраженного от такого объекта,
всегда присутствует когерентная составляющая, которая и исполь-
зуется в качестве опорной. Естественно, что при этом качество
компенсации ухудшается.
Одним из важных достоинств систем селекции движущихся це-
лей без когерентного гетеродина является то, что при их использо-
вании нет необходимости в специальной компенсации эффекта
взаимных перемещений мешающего объекта и радиолокатора. При
движении радиолокатора как фаза сигнала, отраженного от ме-
шающего объекта, так и фаза сигнала движущейся цели получают
одно и то же приращение
70
А 2г>РЛС я
д?=шо—-с Л
где ^rpJIC—радиальная составляющая скорости движения радио-
локатора.
При этом результат биений на выходе фазового детектора
остается таким же, как и при неподвижном радиолокаторе.
Рис. 13.1
Качество компенсации в системах без когерентного гетеродина
зависит от стабильности частотных и амплитудных характеристик
генераторов. Однако, так как фаза излучаемого сигнала в прием-
нике не запоминается, то нет необходимости в особых мерах по
стабилизации частоты местного гетеродина.
Недостатком когерентно-импульсных радиолокаторов без коге-
рентного гетеродина является необходимость для их нормальной
работы обязательного наличия мешающих объектов в одном им-
пульсном объеме с движущейся целью. Кроме того, движущиеся
цели хорошо обнаруживаются когерентно-импульсными радиоло-
каторами без когерентного гетеродина только в том случае, если»
сигналы мешающих объектов достаточно велики. Эти условия вы-
полняются практически всегда при пеленгации движущихся целей
на фоне земной поверхности, а поэтому рассмотренные системы се-
лекции чаще всего применяются в самолетных радиолокаторах.
Система селекции движущихся целей в данном случае получается
сравнительно простой в схемном и конструктивном отношениях.
71
§ 14. Использование в когерентно-импульсных радиолокаторах
приемника с ограничением и логарифмического приемника ।
Сигналы, отраженные от мешающих объектов, на входе прием-
ника и в тракте УПЧ могут быть значительно интенсивнее полез-
ных сигналов. Для качественной компенсации мешающих сигналов
в данном случае требуется достаточно большой динамический диа-
пазон приемника. Так как осуществить требуемый динамический
диапазон практически не всегда удается, то в когерентно-импульс-
ных радиолокаторах часто используют приемник с ограничением
по амплитуде в тракте УПЧ. Однако при этом особенности обра-
ботки сигнала можно учесть видоизменением фазового детектора.
Амплитудная характеристика приемника с ограничением пока-
зана на рис. 14.1.
рис. 14.1
Предположим, что движущаяся цель и мешающий неподвиж-
ный объект находятся в одном импульсном объеме. Векторная
временная диаграмма отраженного сигнала для этого случая по-
казана на рис. 14.2. Угол ср определяется дальностью до мешаю-
Рис. 14.2
щего объекта, а различные положения вектора Uc соответству-
ют различным положениям движущейся цели в разрешаемом
объеме. Если в приемнике в тракте УПЧ имеется ограничитель
72
по амплитуде, то на входе фазового детектора (рис. 14.3) ам-
плитудные изменения вектора результирующего колебания Up
исчезают и остаются только фазовые изменения оср вектора на-
пряжения t/Orp*
Напряжение на выходе обычного
фазового детектора, при выполнении
условия ^i»fVorp, будет
^BHX~^0rpC0S?»
и при этом чувствительность детектора
при изменении угла <? определяется вы-
ражением
^^вых
dy
{/0Гр I sincp |.
(И-1)
График зависимости (14.1) показан
на рис. 14.4. Из графика видно, что
чувствительность детектора к слабым
сигналам движущейся цели обеспечи-
вается не при всех углах <р, существу-
ют „слепые" фазы („слепые" дальности).
Для устранения „слепых" фаз в систе-
мах селекции движущихся целей, исполь-
зующих приемник с ограничением, обыч-
но применяют балансный фазовый детек-
тор (рис. 14.5). На плечи детектора на-
пряжение когерентного гетеродина
подается в фазе, а напряжение сигна- Рис. 14.3
ла с выхода УПЧ приемника с ограничением £/огр —в противо-
фазе. При условии Uor^Ul которое обычно выполняют на прак-
Рис. 14.4
тике, напряжение на выходе детектора £7ВЫХ может быть найдено
при использовании векторных диаграмм рис. 14.6.
73
Рис. 14.5
Из диаграммы рис. 14.6, а, справедливой для 0<ср<гс
£/pe3=2£^iCos ~2~»
U pe3~2t7jSin 2 *
а при я<ср<2я (рис. 14.6,б)
ср
^рез— 2671COS 2 9
U рез~-2^/jSin 2 *
Рис. 14.6
74
Тогда
Uвых— Uрез— £/Лрез—
2^^008-^- — sin-y-j, при 0<?<тс,
/ ср ср \
—e2U11 cos -у + sin “2“ I, при тс< ср <2тс,
или после преобразований
^ВЫХ“
2р^2 U\ cos + 45°), при 0<ср<тс,
—2/2£7iCos^y- — 45°j, при к<<р<2я,
При этом чувствительность детектора
^^вых
rfcp
|/2 U, sin + 45°
|/Wn - 45°i
при
при тс<ср<2тг.
Зависимость чувствительности балансного фазового детектора
при изменении угла ср показана на рис. 14.7. Как видно, в системе
селекции движущихся целей с амплитудным ограничителем при
использовании балансного фазового детектора удается исключить
Рис. 14.7
«слепые» фазы. Кроме того, при наличии в схеме балансного фа-
зового детектора несколько изменяются условия при постановке
требований к стабильности частоты генераторов когерентно-им-
пульсного радиолокатора. Очевидно, в данном случае амплитуд-
ными флюктуациями мешающих отражений можно пренебречь и
учитывать только фазовые флюктуации. При быстром сканирова-
нии определяющее значение имеют флюктуации мешающих отра-
жений от периода к периоду посылки из-за движения антенны при
обзоре пространства. Тогда для протяженных мешающих объектов,
какими являются, например, облака металлизированных лент, фа-
75
зовые флюктуации мешающих отражений могут быть рассчитаны
по формуле (10.17). На выходе фазового детектора будут иметь
место амплитудные изменения (как следствие фазовых различий
на входе) сигналов мешающих объектов от периода к периоду по-
сылки, которые и являются причиной остатков после компенсации.
В соответствии с рис. 10.5 величина нескомпенсированных остат-
ков будет зависеть от числа импульсов, облучающих объект.
Максимальное относительное изменение амплитуды видеосиг-
налов на выходе балансного фазового детектора при изменении
угла <р на Д<р равно
(14.2)
Если например, по-прежнему считать допустимой величиной
А?доп~0,03,
то, как следует из формулы (14.2)
2Д<Рдоп~0,04,
и, следовательно, требования к стабильности частоты генерато-
ров когерентно-импульсного радиолокатора могут быть ослабле-
ны, хотя и незначительно.
Приемник с ограничением в тракте УПЧ не может применять-
ся в системах с внешней когерентностью, в которых обнаружение
Рис. 14.8
сигналов движущийся целей произ-
водится по изменению амплитуды
мешающих сигналов. Чтобы сжать
флюктуации сигналов мешающих
объектов и тем самым улучшить
качество компенсации (уменьшить
величину остатков мешающих сиг-
налов при компенсации), в систе-
мах с внешней когерентностью
иногда применяют приемник-с ло-
гарифмической амплитудной харак-
теристикой. Предел сжатия опре-
деляется величиной флюктуаций
собственных шумов приемника, а
поскольку эффективная амплитуда
флюктуаций (для данного типа
мешающего объекта) пропорцио-
нальна эффективной амплитуде мешающего сигнала (рис. 14.8),
то сжатие целесообразно только для сильных сигналов, флюк-
туации которых превышают уровень шумов приемника.
76
В логарифмическом приемнике амплитудная характеристика
(рис. 14.9) изменяется по закону
<Швых ^вх ^Л)вх,
^^вх п
при i/BX>t/0Bx.
^вх
Рис. 14.9
т.е. для сигналов, лежащих ниже определенного уровня £Лвх,
она линейна, а для сигналов, превышающих этот уровень, опре-
деляется зависимостью
^ВЫХ~“ ^о^овх [ 1П и^~
\ ь'Овх
На выходе приемника, обладающего
такой характеристикой, амплитуда флюк-
туаций любого выходного сигнала, пре-
вышающего порог линейности f70BX, ос'
тается постоянной и равной амплитуде
флюктуаций сигнала, равного порогу ли-
нейности, что схематически пояснено
рис. 14.10. Заметим, кстати, что при Рис. 14.10
этом фазовые флюктуации выходного сигнала остаются такими
же, как и фазовые флюктуации входного сигнала.
§ 15. Применение линий задержки в устройствах компенсации
мешающих отражений
Принципиально для целей задержки сигналов в устройствах компенсации
мешающих отражений могут быть использованы электрические и ультразвуко-
вые (в том числе и магнитострикционные) линии задержки.
77
Электрические линии задержки как с сосредоточенными, так и с распреде-
ленными постоянными практически не могут обеспечить задержки более несколь-
ких десятков микросекунд и поэтому не находят широкого применения в устрой-
ствах компенсации.
В настоящее время для обеспечения больших задержек электрические
колебания преобразуют в звуковые колебания высокой частоты —
ультразвуковые. Для преобразования могут быть использованы магнито-
стрикционный и пьезоэффект. Так как скорость распространения звука в сотни
тысяч раз меньше скорости распространения электрических колебаний, то габа-
риты таких линий сравнительно невелики. Среду, в которой распространяются
ультразвуковые колебания, называют звукопроводом.
Металлическая
111
Возбуждающая Приемная
катушка катушка
Рис. 15.1
Магнитострикционные линии конструктивно представляют собой металличе-
скую ленту, например никелевую, определенной длины (рис. 15.1). Магнитострик-
ционный эффект заключается в изменении длины звукопровода под воздействи-
ем магнитного поля и наоборот. В качестве преобразователей электрической
энергии в магнитную используются электромагнитные катушки, расположенные
на концах ленты. Скорость распространения продольных ультразвуковых коле-
баний в линии определяется соотношением
где Е — модуль упругости металла первого рода (дин/см2)’
р~ плотность металла (Г!слР).
Для никеля при температуре 60°С скорость распространения ультразвука
V ^4820 м/сек или удельная задержка равна примерно 2,1 мксек/см.
Потери в магнитострикционных линиях при времени задержки 704-100 мксек
могут составлять от 35 дб на несущей частоте порядка 200 кгц и полосе
200 4" 300 кгц до более 80 дб на несущей частоте 5 мггц и полосе 1 мггц.
Преимуществом магнитострикционных линий задержки является то, что в
них весьма удобно осуществляется многократный съем сигналов.
Ультразвуковые линии, использующие для преобразования -электрических
колебаний в звуковые пъезоэффект некоторых материалов (чаще всего кварца),
обычно называют просто ультразвуковыми линиями. Они выполняются как с
Твердым, так и с жидким звукопроводом. В табл. 15.1 приведены характеристи-
ки различных материалов звукопроводов.
К концам твердого звукопровода или сосуда с жидким звукопроводом с
78
помощью лака приклеиваются пластинки кристаллического кварца, как Правило
Х-среза (рис. 15.2). Резонансная частота механических колебаний пластинки
кварца Х-среза в мегагерцах может быть определена по формуле
__ 2,86
J ок л ’
ах
где dx—толщина пластинки в мм.
Эта резонансная частота обычно выбирается равной величине порядка
10-г 15 мггц. Повышение резонансной (несущей) частоты ограничивается сообра-
жениями .неудобства применения более тонких пластин кварца и необходи-
мостью более строгого соблюдения малых механических допусков изготовления
кварцедержателя.
Таблица 15.1
Материал звукопровода Скорость распро- странения [м/сек] « +6^ л «о о.—. xoS 2 >? О о 6 «S го о о х x 23 к, 25 * s S сон х о н C2L < о н — о
Ртуть Плавленный кварц Магниевые сплавы Дюралюминий Кварц Х-среза Сталь Вода 4-этиловый спирт Стекло 1500 5450 5600— —5800 ' 6260 5740 5050 1500 4500+ +5600 4750 2400 0,083 -2-10-43,6 1980 0,0С68 1,1-10-4 2,2—2,96 1440 1240 4- 0,14-0,2 4-Ю-4 2,44-2,7 4-1570 0,14-0,18 - 2,6 1630 _ 9 10 19^4 0,094- 4 • 10-4 7’85 3930 4-0,44 0,047 0при70°С 1 143 11204- - — 2,5 4-1400 - - 2,16 -
3 ч ч СЗ NaCl Продольн. колебан. Поперечн. колебан.
X Q, X о X о на Продольн. колебан. Поперечн колебан. 4450 1770 1 । । о О 1 1 1 1
Отдельная кварцевая пластинка имеет очень высокое качество и узкую по-
лосу пропускания, что делает ее непригодной для передачи микросекундных им-
пульсов. Звукопровод, действуя на кварцевую пластинку как механическая на-
грузка, сильно снижает ее качество и расширяет полосу пропускания до несколь-
ких мггц. Амплитудно-частотная характеристика всего устройства задержки по-
добна резонансной кривой одиночного контура (рис. 15.3,а) с максимумом на
резонансной частоте кварца Поэтому, если через линию пропускать непо-
средственно видеоимпульсы, огибающая спектра которых показана на рис. 15.3,б>
то они будут сильно искажаться. Чтобы уменьшить искажения, видеоимпульсы
используют для модуляции вспомогательного генератора, работающего на резо-
нансной частоте кварца. В линию задержки посылаются, таким образом, уже
79
радиоимпульсы. Это обеспечивает сдвиг спектра задерживаемого сигнала
(рис. 15.3,в) в область полосы частот резонансной кривой задерживающего
устройства. Ультразвуковые линии задержки могут обеспечить полосу шириной
Рис. 15.2
от 50 до 70% от несущей частоты. Передача полярности импульса обеспечивает-
ся тем, что видеоимпульсами модулируются непрерывные колебания вспомога-
тельного генератора, а амплитуда этих непрерывных колебаний больше ампли-
туды видеоимпульсов.
Конструктивно линии задержки с жидким звукопроводом представляют со-
бой стальные (или латунные) трубки, наполненные жидкостью, например
ртутью (рис. 15.4). Внутренний диаметр трубы не делают отличным от актив-
ной площади кварцевой пластинки.. При использовании кварцевых пластинок
меньших размеров увеличиваются искажения сигнала.
Емкость кварцедержателя имеет порядок (30 -j- 70) MkMkF.
Элементы, заполненные ртутью и расположенные за кварцевыми пластинка-
ми, служат для согласования сопротивлений. Энергия сигнала, попадающая на
закрывающую трубу пластинйу (стеклянную или металлическую), практически
полностью рассеивается при многократном отражении внутри конечного элемен-
та, не вызывая паразитных сигналов в линии. Конечные элементы не полностью
заполняются ртутью. Оставляется воздушное пространство объемом порядка
50 -J- ЮО мм3 для компенсации температурного изменения объема ртути.
80
6. Костин. Зак. 422-т
81
Для уменьшения габаритов часто применяют изогнутые линии задержки с
жидким звукопроводом. Изменение хода луча в местах изгиба достигается по-
средством двух плоских отражателей, установленных под углом 45° относитель-
но линии распространения энергии и под углом 90° по отношению друг к другу,
как показано на рис. 15.5.
Линии задержки-с твердым звукопроводом представляют собой бруски ма-
териала различной формы (рис. 15.6). Продольные проточки (пропилы) умень-
шают возможность образования и распространения паразитных колебаний при
многократном отражении от стенок звукопровода.
Рис. 15.6
При распространении вдоль линии ультразвуковые сигналы ослабляются
(затухают), что обусловлено потерями в звукопроводе, в стенках сосуда, заклю-
чающего в себе звукопровод, а главное — потерями на преобразование со звуко-
проводом. Общее затухание в ультразвуковых линиях задержки с ртутным и
магниевым (МА-2, МА-3, МА-8) звукопроводами составляет величину порядка
(50 -у- 70) дб\ твердые линии задержки из плавленного кварца имеют меньшее
затухание. Для компенсации этих неизбежных потерь в линии после нее ставит-
ся, как правило, широкополосный усилитель.
Ультразвуковые линии задержки обеспечивают полосу пропускания порядка
50% от несущей частоты. В связи с необходимостью в ряде случаев задержи-
вать очень короткие сигналы интересны данные, полученные для линий задерж-
ки на монокристаллах поваренной соли (NaCl). С преобразователями на кварце
У-среза (при резонансной частоте кварца 35 мггц) такие линии для времени
задержки порядка 1000 мксек обеспечивали полосу пропускания в диапазоне
13 22 мггц.
С помощью ультразвуковых линий можно осуществить задержку сигнала
до 3 -j- 5 мсек.
82
§16. Применение потенциалоскопов в системах селекции
движущихся целей
В настоящее время в схемах череспериодной компенсации большое приме-
нение нашли потенциалоскопы, выполняющие одновременно функции задержки
и вычитания.
Потенциалоскоп представляет собой электронно-лучевую трубку со специ-
альным экраном (мишенью); остальные элементы такие же, как и у обычной
Рис: 16.1
электронно-лучевой трубки. Внешний вид одного из типов потенциалоскопа по-
казан на рис. 16.1, а схематический чертеж — на рис. 16.2. Трубка состоит из
электронного прожектора (ЭП), который включает в себя эмиссионную и фоку-
Рис. 16.2
сирующую системы отклоняющего устройства электростатического или магнит-
ного вида (на рис. не показанного для упрощения чертежа), коллектора (К),
сигнальной металлической пластины (СП), диэлектрической мишени (М) толщи-
83
ной 10-^-100 микрон и барьерной сетки (С), располагаемой от мишени на рас-
стоянии нескольких десятков микрон. В некоторых типах потенциалоскопов
вместо барьерной сетки вблизи поверхности мишени располагают кольцо, кото-
рое, как и сетка, служит для отсечки вторичных электронов, прошедших плос-
кость кольца.
Электронный луч, сформированный прожектором, обегает мишень по зако-
ну, задаваемому отклоняющей системой. Для лучшего, использования рабочей
поверхности мишени и повышения разрешающей способности потенциалоскопа
обычно применяется развертка в виде свертывающейся спирали.
В общем случае потенциалоскоп работает в Трех периодически чередующих-
ся режимах: записи, считывания и стирания остатков потенциального рельефа.
В системах селекции движущихся целей, как правило, применяются потен-
циалоскопы с барьерной сеткой (радихоны) и модуляцией на сигнальную плас-
тину (входные сигналы подаются на сигнальную пластину). При этом исполь-
зуется так называемая равновесная запись и перезарядное считывание. Пред-
шествующая запись стирается в процессе записи новых сигналов, и стирание
в виде отдельной операции не производится.
Зависимость коэффициента вторичной эмиссии о от скорости первичных
электронов (напряжения, ускоряющего первичные электроны) для большинства
материалов (в том числе и металлов) имеет вид, изображенный на рис. 16.3.
Рис. 16.3
Различают коэффициент полной вторичной эмиссии—аэ и коэффициент
действующей вторичной эмиссии которые определяются выражениями
где
1п—полный эмиттируемый мишенью ток вторичных электронов;
1Л—ток первичных электронов (ток луча);
1К—ток, образуемый той частью электронов, которая попадает на коллек-
тор.
Так как часть эмитируемых мишенью вторичных электронов в некоторых
84
случаях возвращается на поверхность мишени, то для данного материала и
данного ускоряющего первичные электроны напряжения всегда выполняется
условие
°д < °э-
В общем случае ускоряющее напряжение U равно разности потенциалов
поверхности мишени и катода относительно земли.
Вначале с ростом ускоряющего напряжения коэффициент полной вторич-
ной эмиссии растет, так как увеличивается кинетическая энергия первич-
ных электронов, затрачиваемая на создание вторичной эмиссии, и затем дости-
гает своего максимума. Дальнейшее увеличение ускоряющего напряжения при-
водит к уменьшению коэффициента полной вторичной эмиссии, так как вто-
ричные электроны эмитируются в более глубоких слоях диэлектрика, откуда
им труднее выйти из-за потери энергии при соударениях.
Значения ускоряющего напряжения, при которых аэ=1, называются кри-
тическими напряжениями (соответственно, первым—£7кр1 и вторым—£7кр2)-
Каждый элемент мишени, находящийся в вакууме и имеющий произволь-
ный начальный потенциал, при отсутствии входных сигналов приводится пото-
ком первичных электронов к равновесному потенциалу Up> Значения этого
равновесного потенциала для данного типа диэлектрика зависят от ускоряю-
щего первичные электроны напряжения в диапазоне t/Kpi < ^ < С/кр2 и потен-
циала коллектора UK относительно земли (рис. 16.4).
Если U взято внутри интервала критических напряжений, то действующий
коэффициент вторичной эмиссии может быть как больше, так и меньше еди-
ницы в зависимости от того, какой потенциал UM принимает поверхность ми-
шени относительно коллектора в результате бомбардировки ее первичными
электронами.
При UM<Q между мишенью и коллектором действует ускоряющее поле и
все вторичные электроны достигают коллектора, а поэтому кривые и
совпадают. Значение UM=Q соответствует максимальному значению
При UM>^ поле участка мишень-коллектор тормозящее и число вторичных
электронов, достигающих коллектор, а значит и уменьшается. При доста-
точно больших значениях UM ток коллектора вообще становится равным нулю.
Значение UM, при котором коэффициент действующей вторичной эмиссии
о^=1, соответствует устойчивому равновесному потенциалу UM-=Up (точка „а“.)
Действительно, как только ток коллектора увеличивается (уменьшается) при
данном и постоянном токе луча (^>1), поверхность мишени приобретает бо-
лее положительный (отрицательный) потенциал, тормозящее действие участка
мишень-коллектор увеличивается (уменьшается), большее (меньшее) количест-
во электронов возвращается на мишень, потенциал который восстанавливается
до равновесного. Заметим, что барьерная сетка, расположенная близко к ми-
шени, служит (кроме функций отсечки) для того, чтобы вторичные электроны,
85
возвращающиеся на мишень, попадали на те участки ее поверхности, с кото-
рых они были выбиты и не создавали так называемого „засева" смежных
участков, искажающего их потенциал.
В отличие от точки а точка в, в которой коэффициент действующей вторич-
ной эмиссии также равен единице, не является точкой устойчивого равновесия,
так как она лежит в области ускоряющих вторичные электроны напряжений U
Таким образом, поверхность мишени, которая до облучения имела хаотиче-
ское распределение потенциалов, в результате развертки ее электронным лучом
еще до подачи входных сигналов приобретает равновесный потенциал. Через
сопротивление нагрузки 7?w, включенное в цепь коллектора, протекает установив-
шийся ток, соответствующий этому равновесному потенциалу (рис. ,16.5,а)
Если в какой-то момент времени на сигнальную пластину подан сигнал ис
положительной полярности, то результирующий потенциал соответствующего
элемента мишени, равный Up-\-uc приведет к уменьшению ускоряющего поля
участка мишень-коллектор, вследствие чего уменьшается ток коллектора Iк и на
выходе появляется положительный перепад напряжения (рис. 16.5,6). Анало-
гичные рассуждения можно привести и для сигнала отрицательной полярности
(рис. 16.5,в).
Пусть теперь на вход потенциалоскопа подается последовательность им-
пульсов постоянной амплитуды, что соответствует случаю приема сигналов, от-
раженных от неподвижного объекта. Так как запуск развертки потенциалоскопа
производится синхронно с частотой посылок импульсов передатчика, то входной
сигнал каждого последующего цикла развертки встречает уже готовую запись
предыдущего цикла на одних и тех же участках мишени. Состояние равновесия
не нарушается, дополнительные заряды не накапливаются, ток коллектора
остается неизменным и выходные сигналы отсутствуют. При этом, конечно,
86
имеется в виду, что благодаря высокому поверхностному сопротивлению ди-
электрика мишени, утечки зарядов от периода к периоду посылок импульсов не
происходит, а скорость цели такова, что смещение импульса на развертке в двух
соседних периодах посылки незначительно.
Когда амплитуды входных сигналов отличаются от ранее записанных (слу-
чай движущейся цели); то при каждом новом цикле развертки на данном участ-
ке поверхности мишени режим равновесия нарушается, изменяется поток вто-
ричных электронов на коллектор и поверхность диэлектрика приводится к равно-
весному потенциалу в соответствии с изменениями входного напряжения. Пере-
заряд поверхности мишени (перезарядное считывание) пропорционален разности
потенциалов входных сигналов в двух соседних периодах посылки.
Дн = н"+1 —и".
Изменение тока коллектора Д7/г, пропорциональное этой, же разности,
создает на сопротивлении нагрузки падение напряжения —выходной сигнал
wbhx =
Если последующий импульс больше предыдущего по амплитуде, то прира-
щение тока положительно и выходной импульс также положителен.
Применение потенциалоскопа существенно уменьшает габариты и вес аппа-
ратуры, исключает необходимость преобразования видеоимпульсов в радиоим-
пульсы ультразвуковой частоты на входе и радиоимпульсов в видеоимпульсы
на выходе схемы задержки. Очень существенным преимуществом устройств ком-
пенсации с применением потенциалоскопа является возможность работы с пере-
менным периодом посылок без каких бы то ни было изменений в схеме. Дли-
тельность задержки автоматически меняется в соответствии с изменением перио-
да посылок.
К потенциалоскопам, используемым в когерентно-импульсных радиолокато-
рах, предъявляются следующие основные требования:
— достаточное число элементов мишени,
— большой рабочий динамический диапазон,
— хороший коэффициент подавления,
— широкая полоса пропускания.
Необходимое число элементов мишени определяется дальностью действия
радиолокационной станции и ее разрешающей способностью.
гмакс . .
ст
"Г
Реальное число элементов зависит от качества диэлектрика и эффективной
площади сечения луча (качества фокусировки луча). Конечные размеры луча
и распределение плотности электронов в сечении (убывающее от центра луча
к его краям) приводят к размытости изображения входного сигнала. Размы-
тость изображения ухудшает разрешающую способность потенциалоскопа, а зна-
чит уменьшает реальное число элементов.
Рабочий динамический диапазон потенциалоскопа является показателем ин-
тенсивности собственных паразитных сигналов (фона) трубки, которые являются
следствием ряда причин:
87
— неоднородности поверхности мишени и барьерной сеткй,
— неравномерности шага барьерной сетки,
— наводок отклоняющих напряжений развертки на различные цепи и др.
Качество компенсации в потенциалоскопе сигналов от неподвижных объек-
тов характеризуется коэффициентом, подавления. Установление равновесного по-
тенциала при записи и считывании происходит не мгновенно, а в течение неко-
торого интервала времени, характеризующего инерционные свойства потенциало-
скопа. Поэтому, если даже на вход подана последовательность импульсов по-
стоянной амплитуды, на выходе будут иметь место так называемые остатки.
Установление амплитуды остаточных импульсов происходит обычно после не-
скольких периодов посылок. Инерционные свойства потенциалоскопа характери-
зуются коэффициентом первого остатка, т. е. отношением амплитуды первого
остатка к амплитуде входного сигнала. Коэффициент подавления представляет
собой отношение амплитуды входного сигнала к амплитуде установившегося
остатка.
Коэффициент первого остатка уменьшается при уменьшении внешнего диа-
метра спиральной развертки и увеличении тока коллектора. Однако при значи-
тельном уменьшении внешнего диаметра спиральной развертки и конечном диа-
метре луча возможно межвитковое взаимодействие, а следовательно, искажение
формы сигнала. Увеличение тока коллектора неизбежно вызывает возрастание
собственных шумов трубки. Для уменьшения первого остатка принимается ряд
мер как конструктивного (экранирование отклоняющей системы), так и схемно-
го решения. Межвитковое взаимодействие практически отсутствует, если шаг
спирали составляет около двух диаметров луча. Для того, чтобы исключить
влияние питающих напряжений на изменение поперечного сечения и фокусиров-
ки электронного луча (уменьшить разброс по скоростям электронов) предъяв-
ляют жесткие требования к стабильности источников питания.
Расширение полосы пропускания ограничивается большими входной и выход-
ной емкостями потенциалоскопа. Выходная емкость имеет величину порядка
5Q мкмкф, а входная емкость может достигать и согни мкмкф.
В заключение заметим, что снятие выходных сигналов с сопротивления,
включенного в цепь коллектора, является не единственно возможным и даже
не всегда рациональным. ДЗ зависимости от конструкции потенциалоскопа может
оказаться целесообразным включать сопротивление нагрузки в цепь сигнальной
пластины или даже барьерной сетки. Токи нагрузки при этом близки к току
коллектора, а уровень фона существенно снижается, и при этом достигается уве-
личение динамического диапазона потенциалоскопа. Так как при съеме сигна-
лов с нагрузки в цепи сигнальной пластины вход и выход потенциалоскопа ока-
зываются совмещенными, то используют частотное разделение каналов.
88
ЛИТЕРАТУРА
1. Голиков В. Н., Здуров М. Ф., Найденов Б. В., Ширман Я. Д. Основы
радиолокации, изд. АРТА, 1956.
2. Дулевич В. Е., Коростелев А. Д., Мельник Ю. А., Буренин Н. И., Вере-
тягин А. А., Бандурко Н. Г. Физические основы радиолокации, изд. ЛКВВИА
им. А. Ф. Можайского, 1962.
3. Бакулев 'П. А. Радиолокационные методы селекции движущихся целей,
Оборонгиз, 1958.
4. Буга Н. Н., Дулевич В. Е., Мельник Ю. А. Основы импульсной радио-
локации, ч. I, 1957, ч. II, 1958, изд. ЛКВВИА им. А. Ф. Можайского.
5. Грачев В. А., Завьялов В. А. Основы радиолокационной техники, изд.
ЛКВВИА им. А. Ф. Можайского, 1958.
6- . Сайбель А. Г. Основы радиолокации, изд. «Советское радио», 1961.
7. Сиверс А. П., Суслов Н. А., Метельский В. Н. Основы радиолокации,
Судпромгиз, 1959.
8. Бакут П. А., Большаков И. А. и др. (под общей редакцией проф. Тар-
таковского Г. П.). Вопросы статистической теории радиолокации, том. I, изд.
«Советское радио», 1963.
9. «Радиолокационная техника». Перевод с англ., ч. I, ч. II, изд. «Совет-
ское радио», 1949.
10. «Приемники радиолокационных станций», ч. II, изд. «Советское ра-
дио», ,1949.
11. Кнбль М, Кэйзан Б. Электроннолучевые трубки с накоплением зарядов,
Госэнергоиздат, 1955.
12. Фаулер, Уззо, Равин. Обработка сигналов обзорного радиолокатора,
«Зарубежная радиоэлектроника», 1962, № 3.
13. Уайт, Ру вин. Последние достижения в области конструирования гре-
бенчатых фильтров, IRE Nitional Conventional Record, part. 2, стр. 186—199,
1957.
14. Жилеспи, Хигли, Мак Киннон. Развитие и применение когерентных ра-
диолокационных систем, «Зарубежная радиоэлектроника», 1962, № 3.
15. Готц, Олбрайт. Самолетная импульсно-допплеровская радиолокационная
станция, «Зарубежная радиоэлектроника», 1962, №2.
16. Магнитострикционная линия задержки видеосигналов, «Зарубежная ра-
диоэлектроника», 1958, № 9.
17; Бредбэрд Е. Магнитострикционные линии задержки, «Вопросы радиоло-
кационной техники», 1952, № 1.
18. Применение амплитрона и стабилитрона в системах индикации подвиж-
ных целей радиолокаторов. Экспресс-информация, радиотехника и электроника,
вып. 1.1, 1959.
19. Александров К. С., Гуровиц Л. С., Каменский Е; И. О влиянии проме-
жуточного слоя на частотные характеристики ультразвуковых линии задержки,
«Акустический журнал», АН СССР, т. VI, вып. 2, 1960.
20.. Изменение частоты повторения радиолокационной станции при селекции
движущихся целей. «Зарубежная радиоэлектроника», 1959, № 10.
21. Супряга Н. П. Электронно-лучевые трубки с накоплением зарядов,
Воениздат МО, 1961.
89
ОГЛАВЛЕНИЕ
Стр
Предисловие............................................................2
Введение ............................................................. 3
§ 1. Принцип действия когерентно-импульсного радиолокатора с внутрен-
ней когерентностью......................................□ • • 5
§ 2. Фазовый сдвиг за период посылки и за время длительности импуль-
са в случае движущейся цели ..........................................до
§ 3. Слепые скорости. Частота пульсаций..............................12
§ 4. Спектральный анализ сигналов, отраженных от движущейся цели
и мешающих объектов...................................................19
§ 5. Способы селекции сигналов движущейся цели в когерентно-импульс-
ном радиолокаторе . .......................................28
§ 6. Амплитудно-скоростная характеристика компенсатора. Влияние схе-
мы компенсации на чувствительность когерентно-импульсного радио-
локатора .............................................................33
§ 7. Схема чересперйодной компенсации как гребенчатый фильтр . . з§
§ 8. Особенности селекции движущихся целей при наличии взаимных
перемещений радиолокатора и мешающего объекта . . . -43
§ 9. Схемы когерентно-импульсных радиолокаторов с фазированием ко-
герентного напряжения . . ..............................47
§ 10. Факторы, опредляющие качество работы систем селекции сигналов
движущихся целей........................................• • • 49
§ 11. Разность фаз принимаемых и опорных колебаний в системе с коге-
рентным гетеродином...................................................59
§ 12. Требования к междупериодной стабильности работы основных узлов _
когерентно-импульсного радиолокатора . . . ' . . . -63
§ 13. Когерентно-импульсные радиолокаторы без когерентного гетеродина 69
§ 14. Использование в когерентно-импульсных радиолокаторах приемника
с ограничением и логарифмического приемника...........................72
§ 15. Применение линий задержки в устройствах компенсации мешающих
отражений.............................................................77
§ 16. Применение потенциалоскопов в системах селекции движущихся
целей.................................................................83
Для внутриведомственной продажи
цена 35 коп.
Лит. редактор. Тепаев а Ф. К.
Тех. редактор Печурова Г. К.
Корректор Кутп ыло века я И. П.________
Сдано в набор 4.6.63 г. 11одп. печ. 1.8.63 Г—356077
Бум. бОХЭО1/^ Печ. л. 55/я Зак 422т
Типография АРТА
Продаже не подлежит