/





































































































































































































































































































































































































































Author: Карлов Н.В. Кириченко Н.А.
Tags: религии дальнего востока здравоохранение медицинские науки физика колебания теория колебаний
ISBN: 5-9221-0205-2
Year: 2003



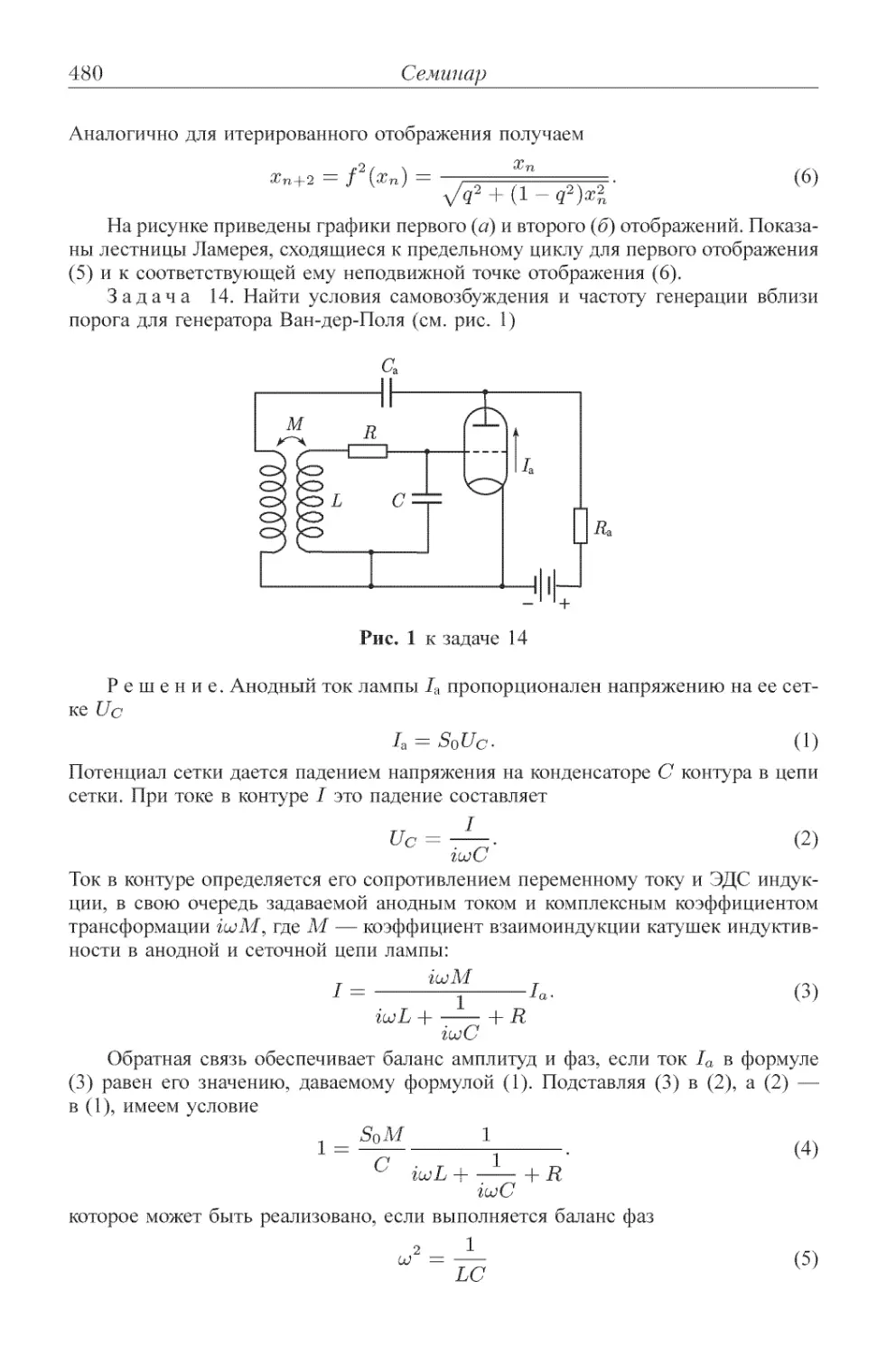
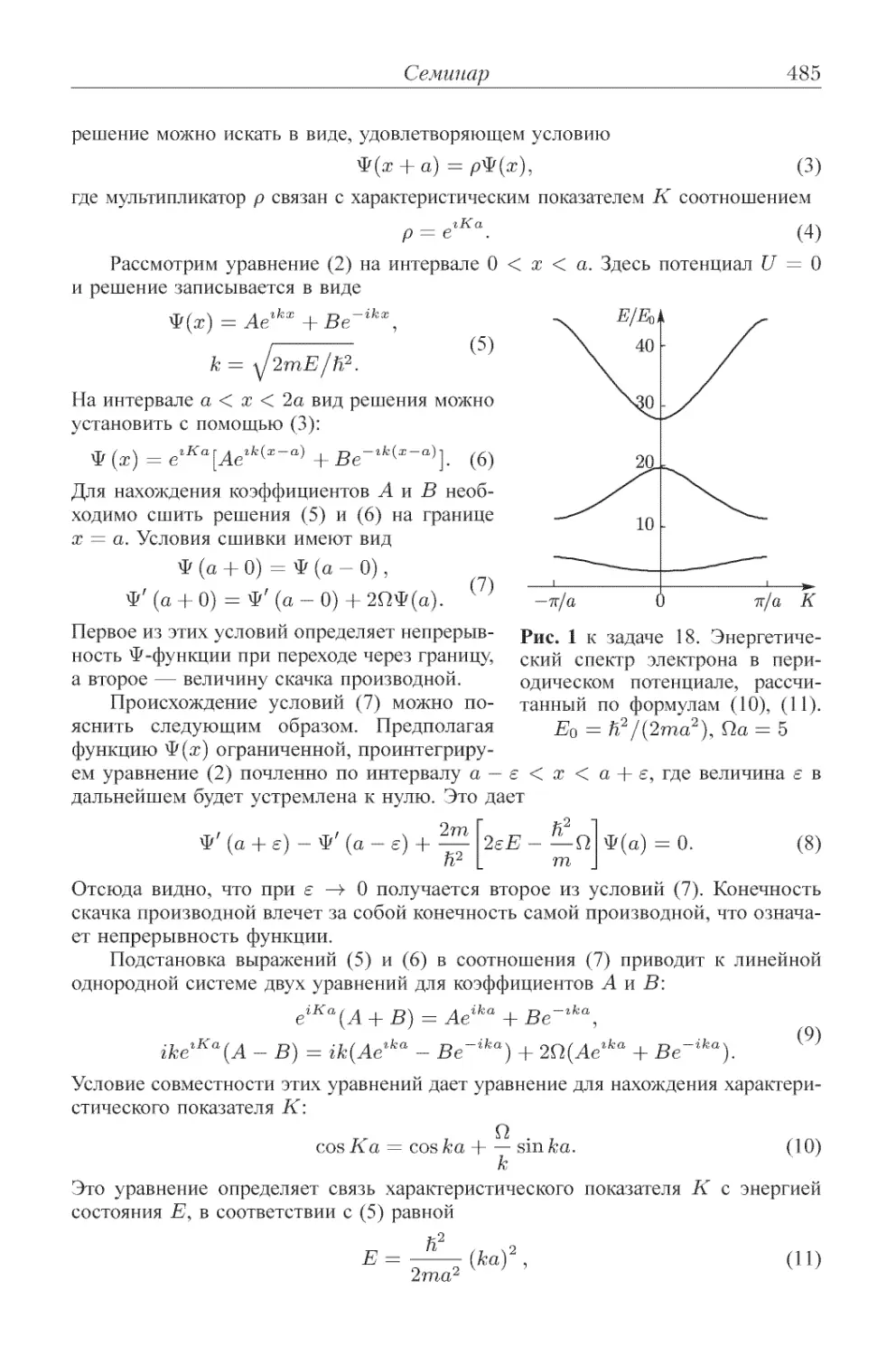
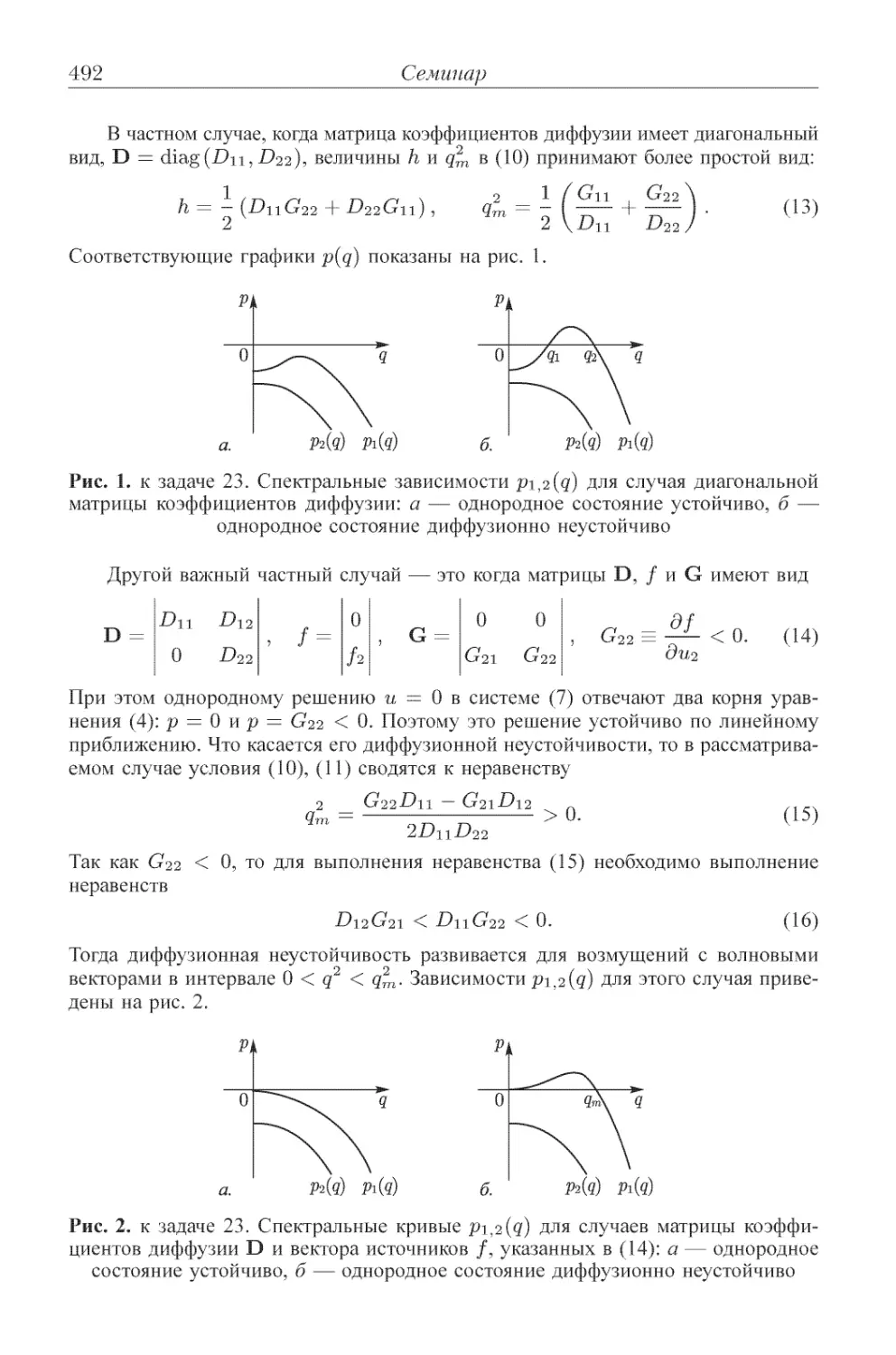
Text
УДК 22.213
ББК 534.1+517.9
К21
Карлов Н. В., Кириченко Н. А. Колебания, волны, структу-
структуры. - М.: ФИЗМАТЛИТ, 2003. - 496 с. - ISBN 5-9221-0205-2.
Дается систематическое изложение современной теории колебаний
и волн. Первая часть представляет собой элементарное введение в теорию
колебаний. Во второй части излагаются наиболее существенные понятия
и методы теории нелинейных динамических систем. Третья часть посвящена
волновым процессам в линейных и нелинейных системах. В комментариях
и приложениях рассмотрены некоторые задачи распространения волн,
взаимодействия излучения с веществом и другие задачи нелинейной
динамики, а также приведены сведения справочного характера. Основное
содержание книги дополнено некоторым количеством задач с подробными
их решениями.
Книга предназначена студентам, аспирантам и научным работникам,
интересующимся теорией колебаний и ее приложениями.
Научное издание
КАРЛОВ Николай Васильевич
КИРИЧЕНКО Николай Александрович
КОЛЕБАНИЯ, ВОЛНЫ, СТРУКТУРЫ
Оригинал-макет: Е.Ю. Морозов
ЛР №071930 от 06.07.99. Подписано в печать 30.01.03.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 31. Уч.-изд. л. 34,1. Заказ №
Издательская фирма
«Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997 Москва, Профсоюзная, 90
E-mail: fizmat@maik.ru
Отпечатано с диапозитивов
в РГУП «Чебоксарская типография № 1»
428019 Чебоксары, пр. И. Яковлева, 15
ISBN 5-9221-0205-2
9785922 102056
ISBN 5-9221-0205-2
© ФИЗМАТЛИТ, 2003
ОГЛАВЛЕНИЕ
Предисловие ............................. 9
ЧАСТЬ 1
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ КОЛЕБАНИЙ
Глава! ............................. 13
Колебательные движения. Математический маятник. Пружинный ма-
маятник. Колебательный контур. Модель "хищник-жертва" Вольтерры.
Модель химической реакции Лотки. Основные характеристики колеба-
колебательного движения. Гармонические колебания. Амплитуда. Круговая и
циклическая частоты. Период. Фаза. Изохронные колебания. Геометри-
Геометрическая интерпретация гармонических колебаний. Комплексное представ-
представление колебаний. Изображающая {фазовая) точка. Фазовая траектория.
Фазовая плоскость. Ангармонические колебания. Точное решение уравнения
движения математического маятника. Осциллятор.
Г л а в а II ............................. 23
Свободные и вынужденные колебания. Амплитудно-частотная характе-
характеристика. Резонанс. Колебания при наличии трения. Апериодическое зату-
затухание. Коэффициент затухания, логарифмический декремент затухания.
Добротность колебательной системы. Резонанс при наличии трения.
Ширина резонанса. Система связанных осцилляторов. Суперпозиция коле-
колебаний. Нормальные колебания (нормальные моды). Собственные частоты
системы. Гармонический анализ. Скалярное сложение колебаний. Биения.
Векторное сложение колебаний. Фигуры Лиссажу. Параметрический ре-
резонанс. Теорема Флоке-Ляпунова. Резонансные полосы. Уравнение Матъе.
Г л а в а III ............................. 39
Кинетическая и потенциальная энергии математического маятника. За-
Закон сохранения энергии. Перекачка кинетической энергии в потенциальную
и обратно. Потери энергии при наличии трения. Слабое затухание. Время
затухания колебаний. Добротность колебаний. Функция Ляпунова. Энергия
вынужденных колебаний. Автономные неавтономные системы. Энергия
системы связанных осцилляторов, разложение по нормальным модам.
Диссипативная функция. Адиабатические инварианты. Адиабатически
медленный процесс. Адиабатический инвариант пружинного маятника.
Гамилыпонова функция (гамильтониан) динамической системы. Степени
свободы. Адиабатический инвариант системы с одной степенью свободы.
Действие и угол, теорема Лиувилля.
Оглавление
Г л а в а IV ............................. 54
Степени свободы. Фазовое пространство. Фазовая или изображающая
точка. Фазовая траектория. Динамические системы. Фазовый портрет.
Фазовая плоскость. Особые точки динамической системы. Центр, фокус,
узел. Устойчивые и неустойчивые особые точки. Седло. Сепаратрисы
седел. Нуль-изоклины. Характеристическое уравнение. Характеристиче-
Характеристические показатели. Особые точки гамилътоновых систем. Предельные
циклы. Автоколебания. Механические часы. Лестница Ламерея. Точечное
отображение или отображение последования. Неподвижная точка ото-
отображения. Одномерное и двумерное отображения. Автогенератор Ван-
дер-Поля. Обратная связь. Уравнение Ван-дер-Поля. Отрицательное тре-
трение. Положительная и отрицательная обратные связи. Стохастические
колебания. Система Лоренца. Странный аттрактор.
ЧАСТЬ 2
НЕЛИНЕЙНЫЕ ДИНАМИЧЕСКИЕ СИСТЕМЫ
ГлаваУ.. ........................... 79
Динамические системы. Эволюционный оператор, задача Коми. Пере-
Пересекающиеся и непересекающиеся фазовые траектории. Особые точки.
Классификация особых точек в трехмерном фазовом пространстве.
Устойчивые и неустойчивые направления. Характеристические показа-
показатели на комплексной плоскости и устойчивость особых точек. Индексы
Пуанкаре, сосуществование особых точек на фазовой плоскости.
Г л а в а VI ............................. 91
Устойчивость, теория устойчивости. Устойчивость по Ляпунову. Фазо-
Фазовый поток, фазовая жидкость, фазовая капля. Асимптотическая устой-
устойчивость. Диссипативные системы. Экспоненциальная устойчивость. Ор-
Орбитальная устойчивость. Асимптотическая и экспоненциальная орби-
орбитальные устойчивости. Равноускоренное движение материальной точки.
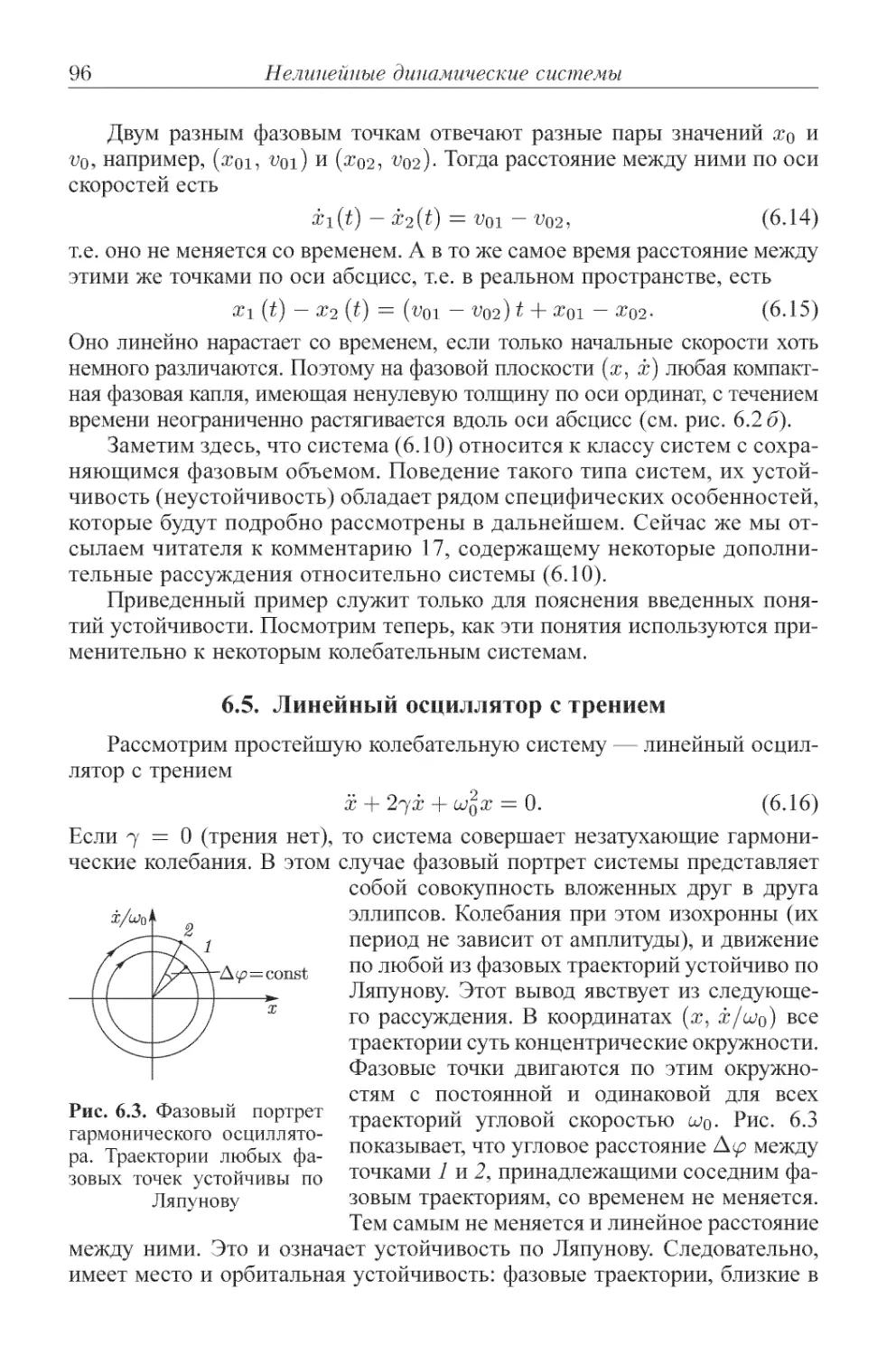
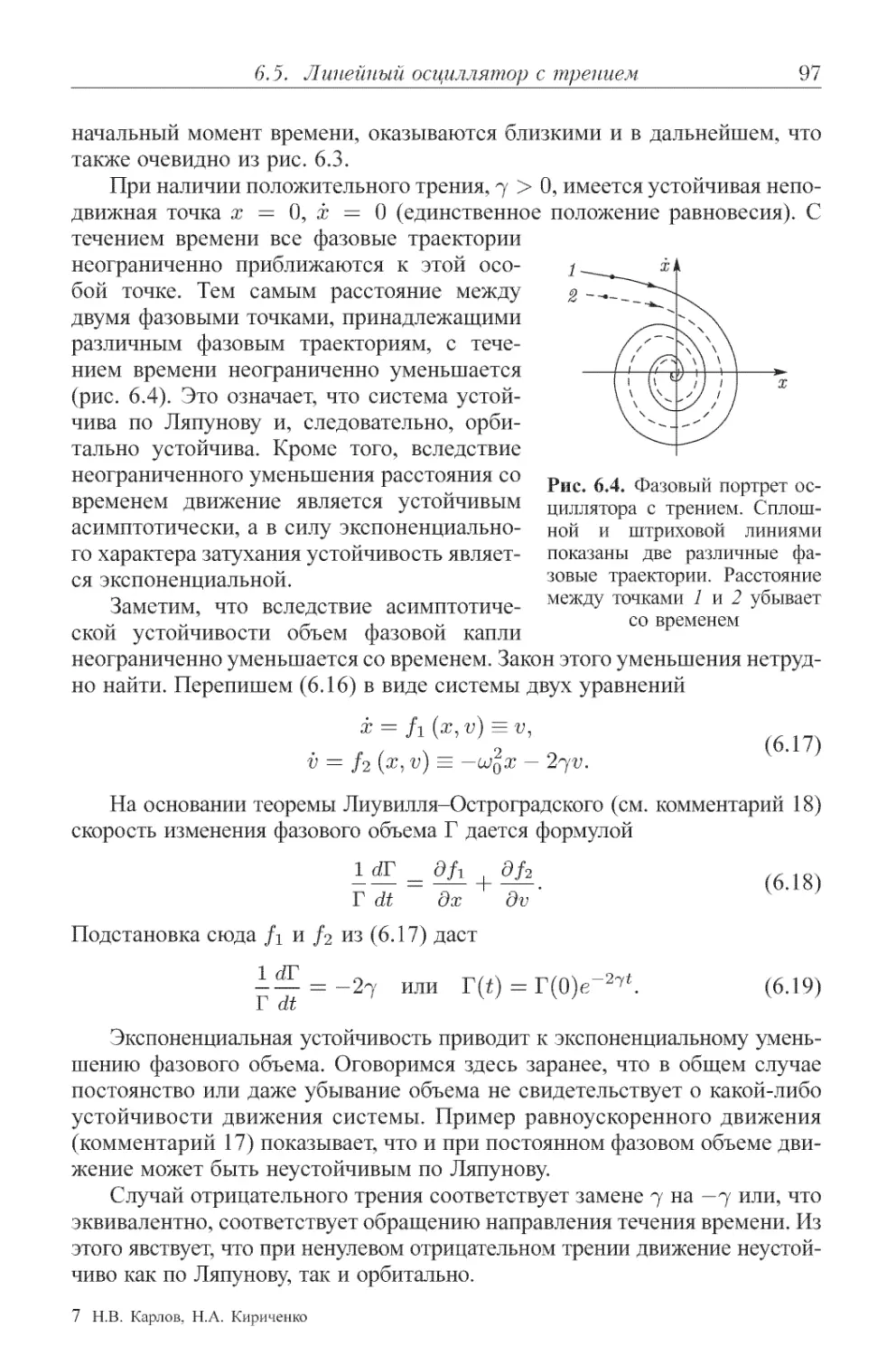
Линейный осциллятор с трением. Нелинейный осциллятор (уравнение
Дуффинга). Аттрактор. Эргодичность. Эргодическая гипотеза. Эргоди-
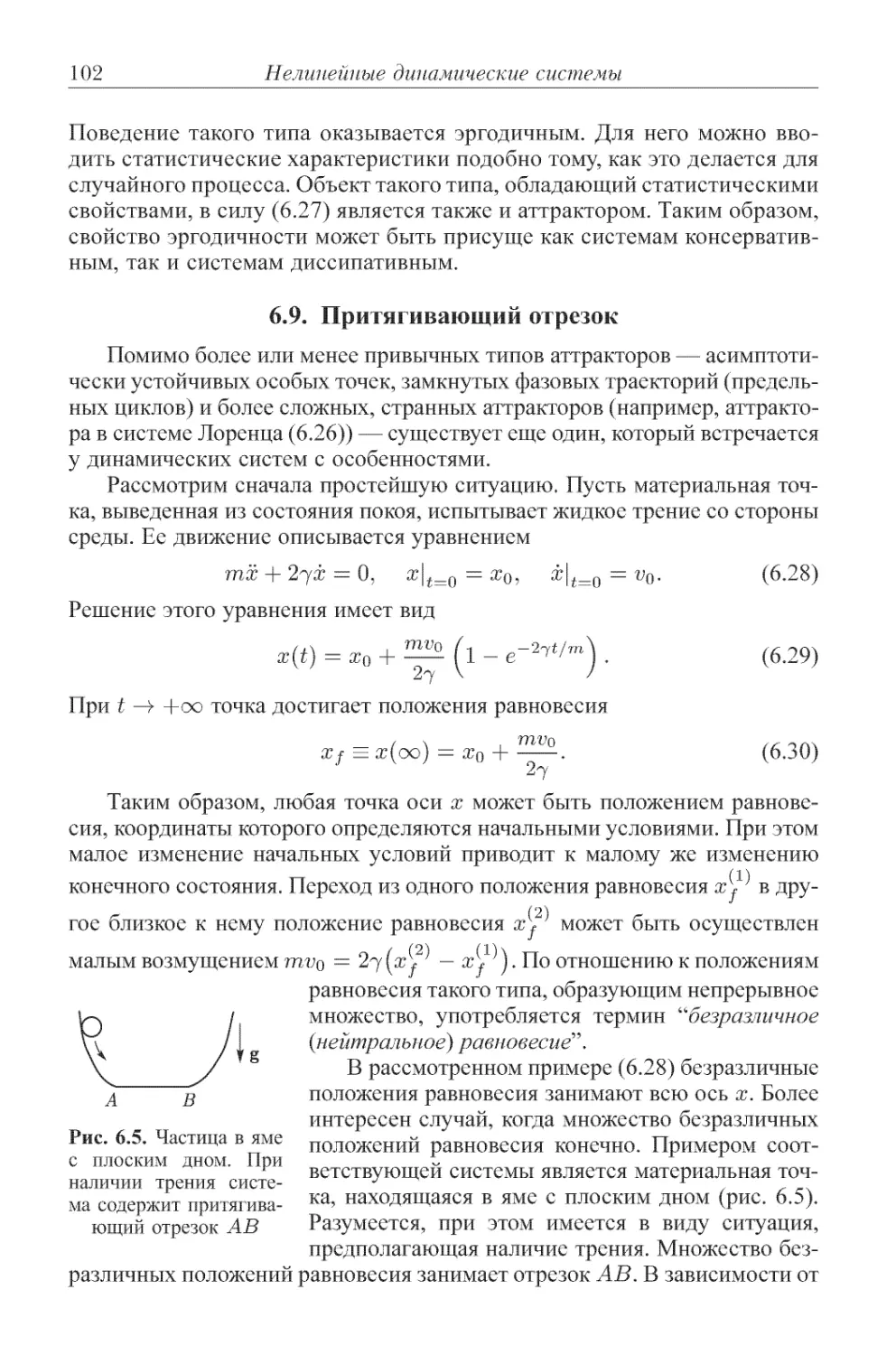
ческие системы. Система Лоренца. Безразличное положение равновесия.
Притягивающий отрезок. Роль нелинейности и неаналитичности.
Г л а в а VII ............................ 105
Бифуркации, бифуркационные значения параметров. Прогиб упругого стер-
стержня. Классификация корней квадратного уравнения. Структурная устой-
устойчивость, грубость системы. Теория катастроф. Складка. Многообразие
катастрофы. Классификация корней кубического уравнения, сборка. Клас-
Классификация корней уравнения четвертой степени, ласточкин хвост. Флаг
катастроф. Ряд касповидных катастроф. Классификация экстремумов
функций. Росток катастрофы, возмущение. Управляющие параметры,
пространство управления. Деформация. Функции многих переменных.
Глава VIII ............................ 118
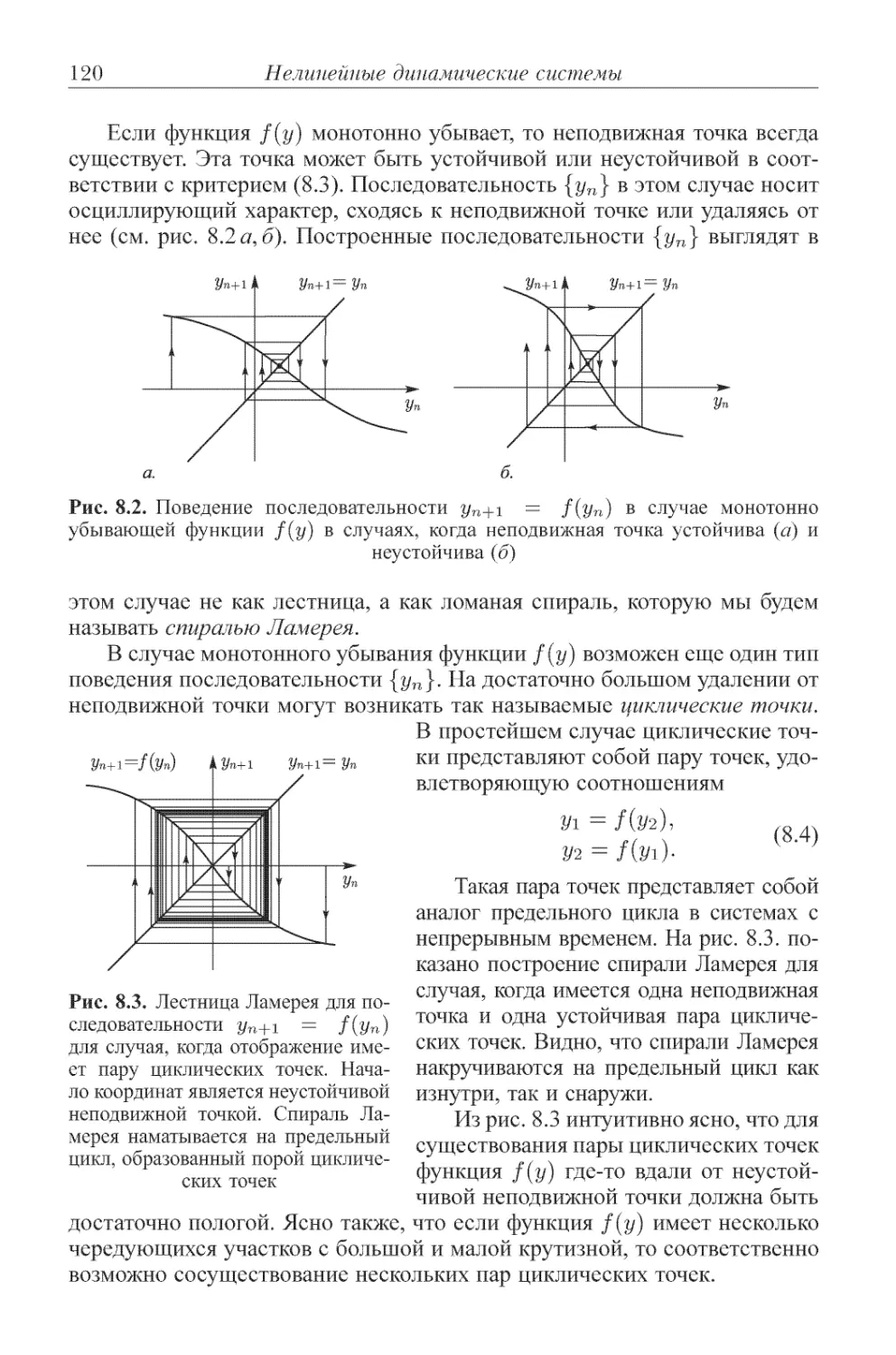
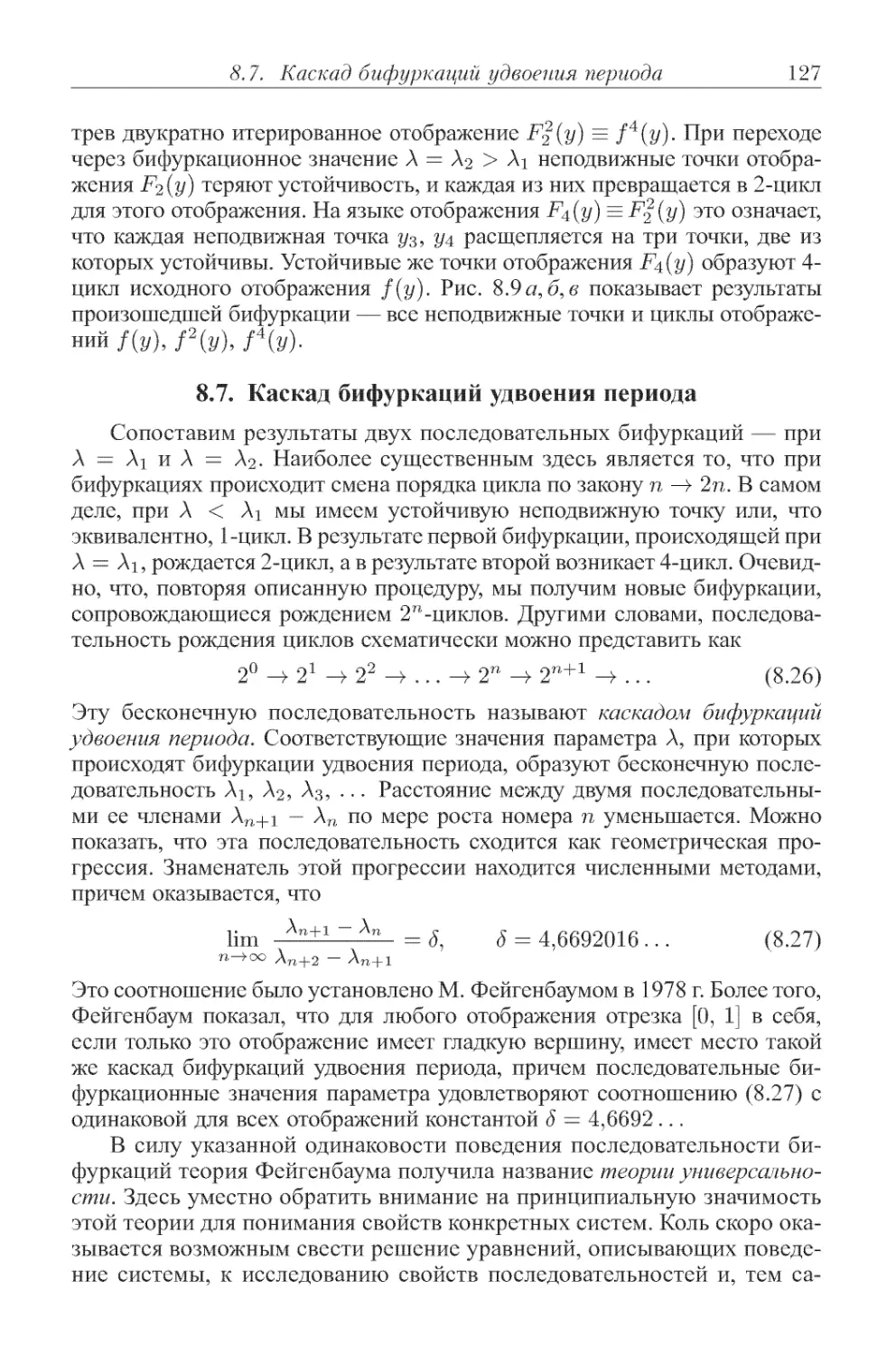
Одномерные точечные отображения. Неподвижные точки отображе-
отображений. Монотонные отображения. Спираль Ламерея. Циклические точки.
Итерированные отображения. Устойчивость циклических точек, п-циклы
Оглавление
(Sn-циклы). Унимодальные отображения. Логистическое отображение
или универсальное отображение Фейгенбаума. Бифуркации циклов в
отображении Фейгенбаума. Бифуркации удвоения периода, каскад бифур-
бифуркаций. Теория универсальности. Универсальный предел итераций гладких
отображений. Сверхустойчивые циклы. Стохастические колебания. Дина-
Динамический {или детерминированный) хаос. Квазислучайные последователь-
последовательности. Шумящие циклы. Цикл Я3. Иерархия циклов. Рождение цикла из
хаоса. Сценарий рождения хаоса через перемежаемость {сценарий Помо—
Манневиля). Распределение вероятностей значений элементов последова-
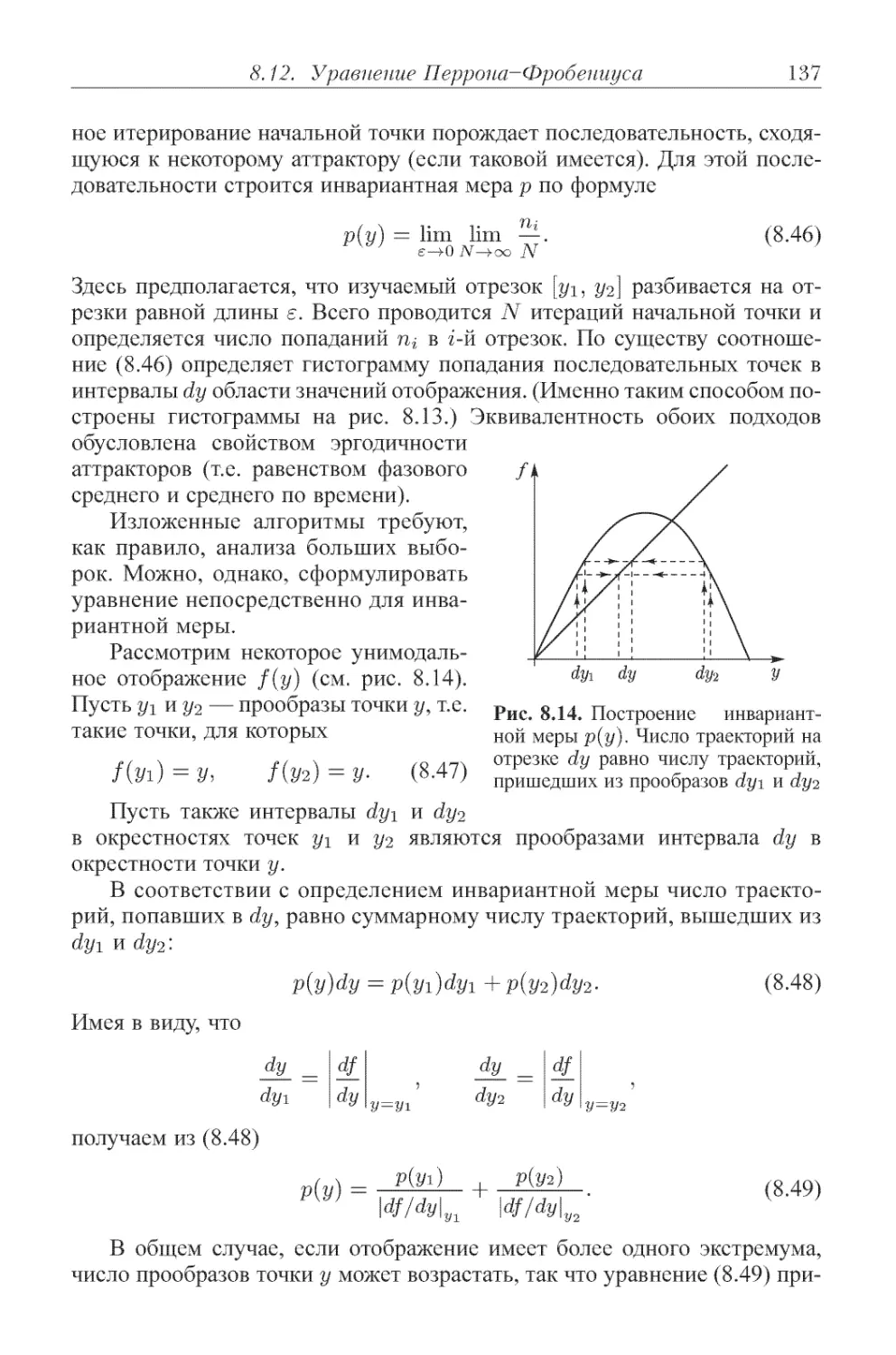
последовательностей. Инвариантное распределение, инвариантная мера. Уравнение
Перрона-Фробениуса.
Г л а в а IX ............................. 140
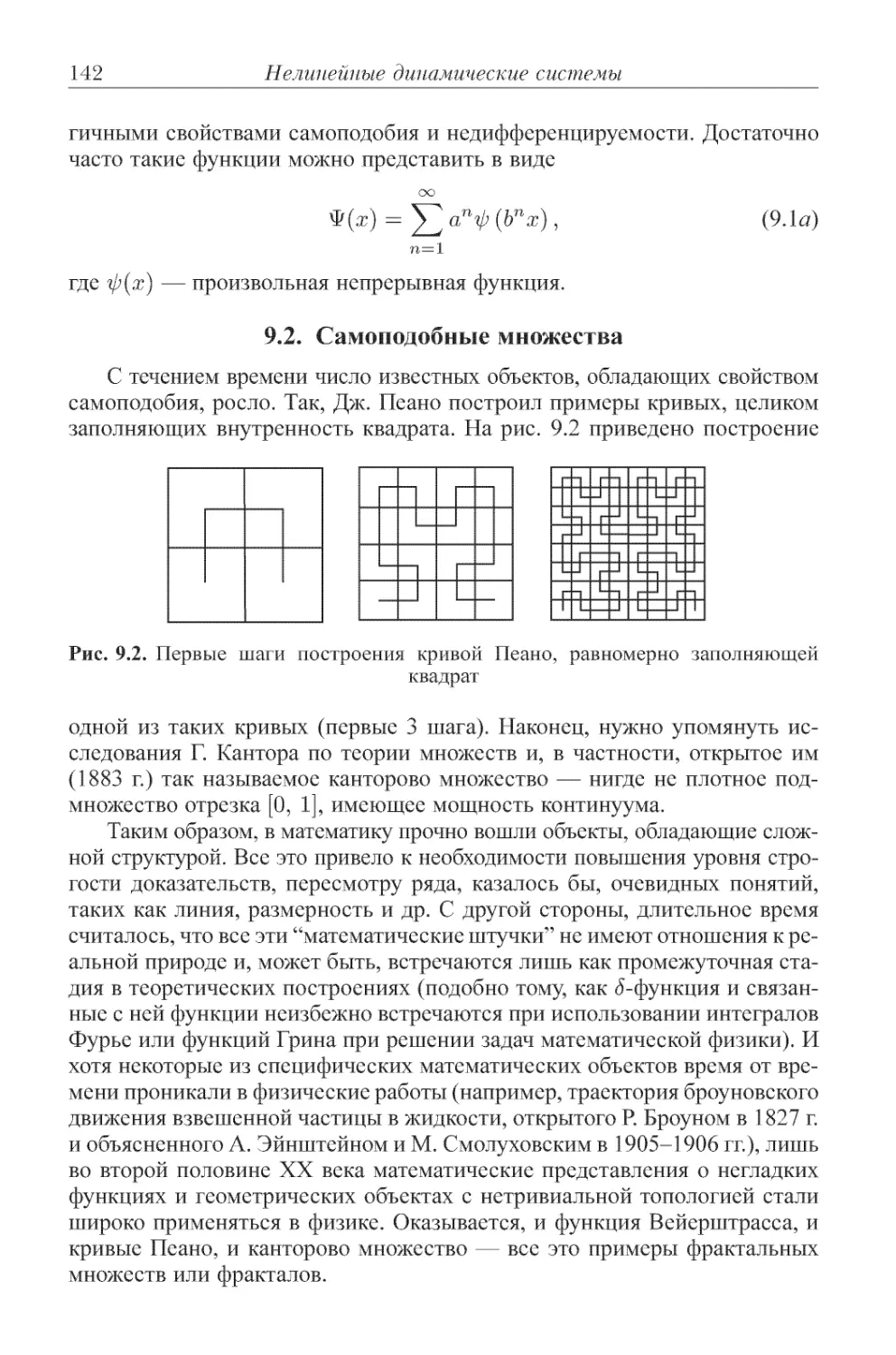
Самоподобие. Фрактальные множества, фракталы. Функция Вейер-
штрасса. Кривые Пеано. Канторовы множества, построение, мера,
самоподобие. Масштабная инвариантность или скейлинг. Канторова {или
"дьявольская") лестница. Кривые Коха, остров Коха. Ковер Серпин-
ского. Двух- и трехмерные фракталы, универсальная кривая Менгера.
Разветвленностъ фрактала. Вероятностные фракталы. Длина береговой
линии. Определения линии. Топологическая размерность. Фрактальная
размерность или емкость. Емкость некоторых фракталов. Размерность
Хаусдорфа—Безиковича. Динамические системы с непрерывным и дискрет-
дискретным, временем. Клеточные автоматы. Фрактальные структуры, поро-
порождаемые клеточными автоматами. Двумерные точечные отображения.
Квадратичное отображение Хенона. Фрактальная структура аттрак-
аттрактора Хенона. Системы итерированных функций, детерминированный и
рандомизированный алгоритмы, фрактальные структуры.
ГлаваХ ............................. 165
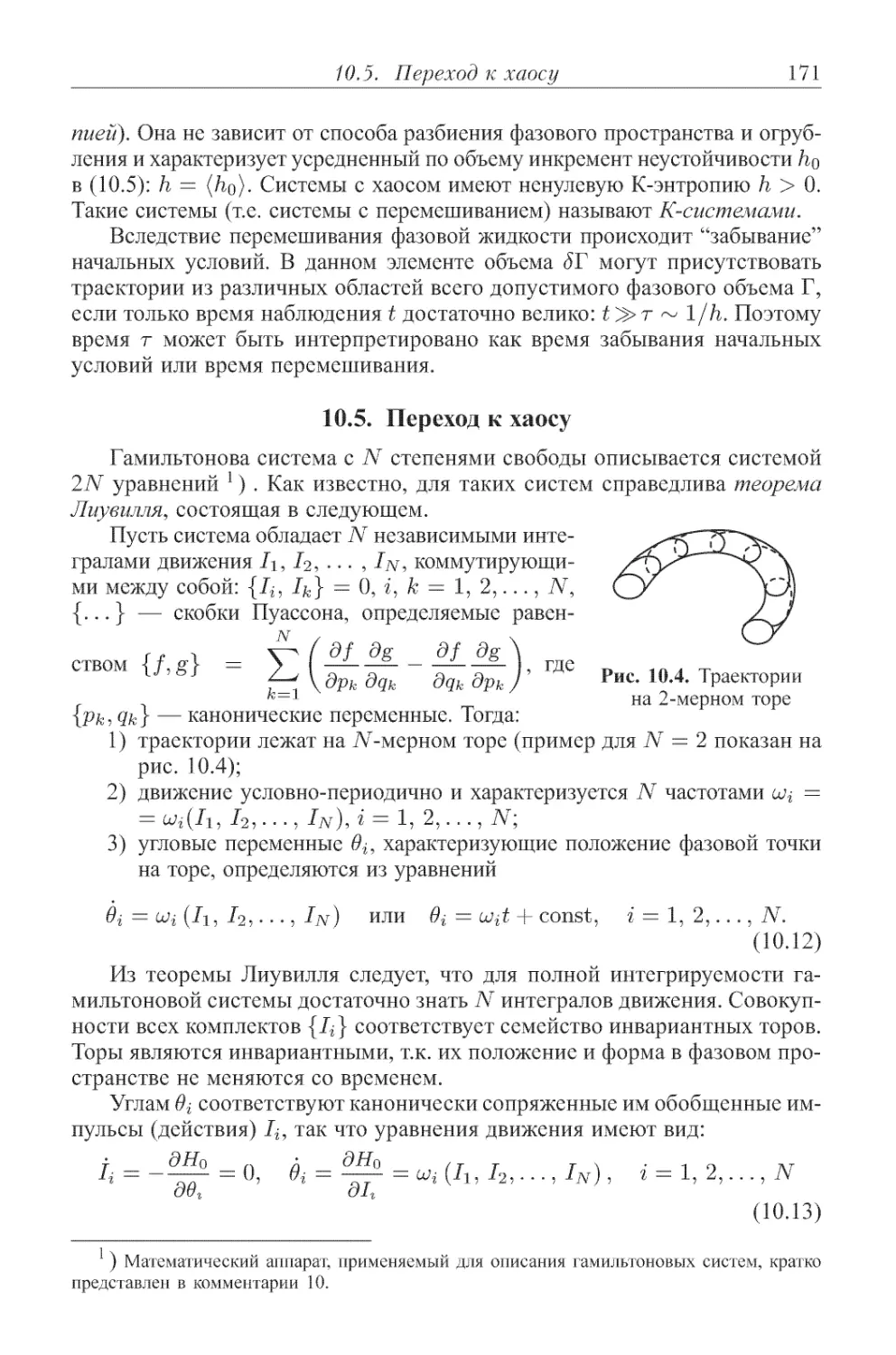
Многопериодическое движение, многомерный тор. Сценарий Ландау-
Хопфа. Случайные процессы, уравнения Ланжевена, уравнение Фоккера-
Планка—Колмогорова. Корреляционная функция. Динамический хаос. Ло-
Локальная неустойчивость. Эргодичность и перемешивание. Преобразо-
Преобразование пекаря. Гамилътоновы системы. Энтропия Колмогорова-Синая
{К-энтропия), К-системы. Теория устойчивости Колмогорова—Арнольда—
Мозера {теория КАМ). Примеры систем с хаосом: рассеяние матери-
материальной точки на твердых шариках, рассеивающие биллиарды {биллиарды
Синая). Одномерные и двумерные точечные отображения. Жесткий ро-
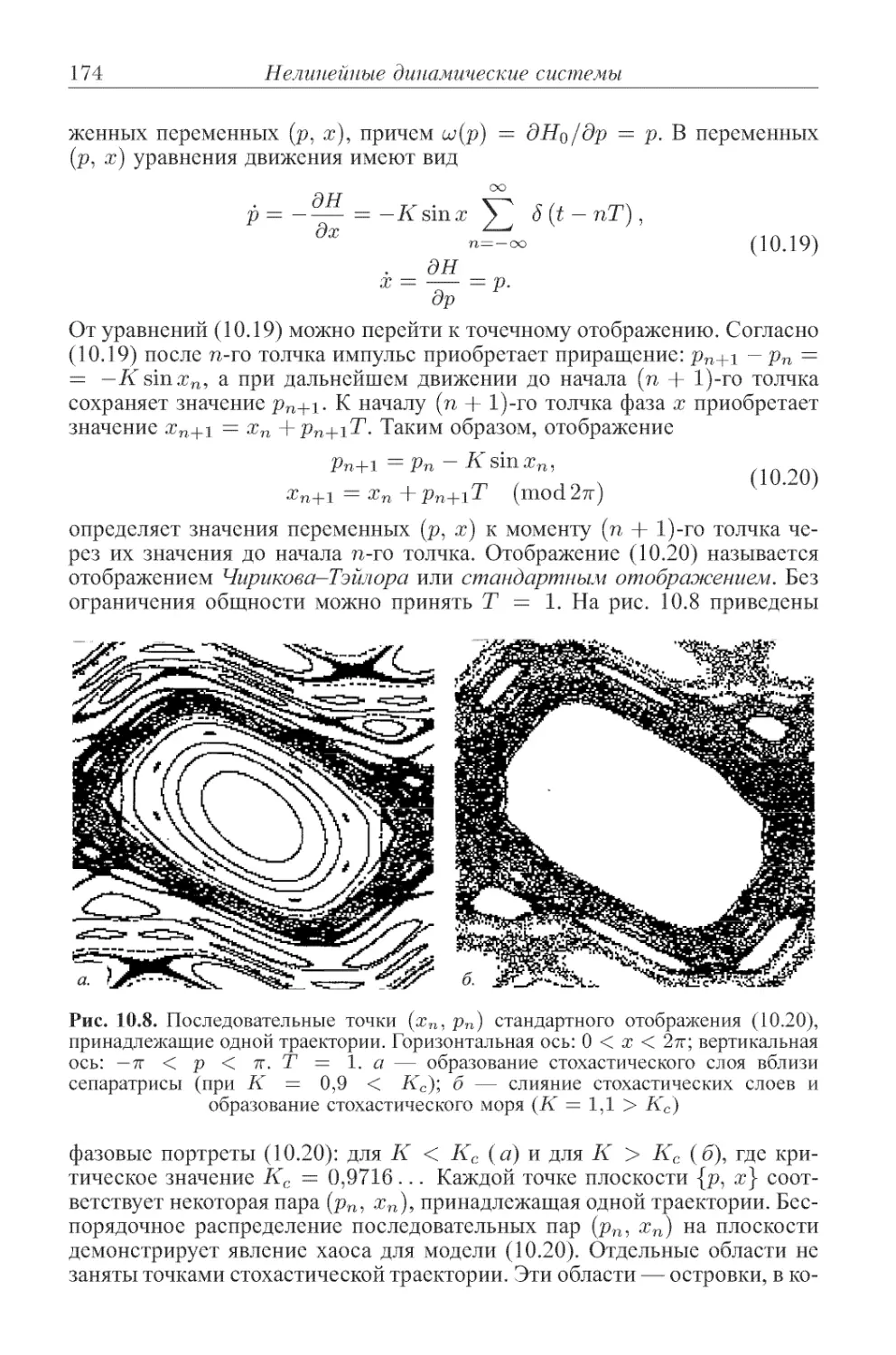
ротатор {отображение Чирикова—Тэйлора). Стохастические слои, стоха-
стохастическое море, стохастическая паутина {паутина Арнольда). Диффузия
Арнольда. Диссипативные системы. Аттракторы и репеллеры. Странный
аттрактор. Показатели Ляпунова. Система Лоренца. Сценарий Рюэля—
Такенса. Аттрактор Рёслера. Ротатор с трением. Квантовый хаос.
ЧАСТЬ 3
ВОЛНЫ И СТРУКТУРЫ
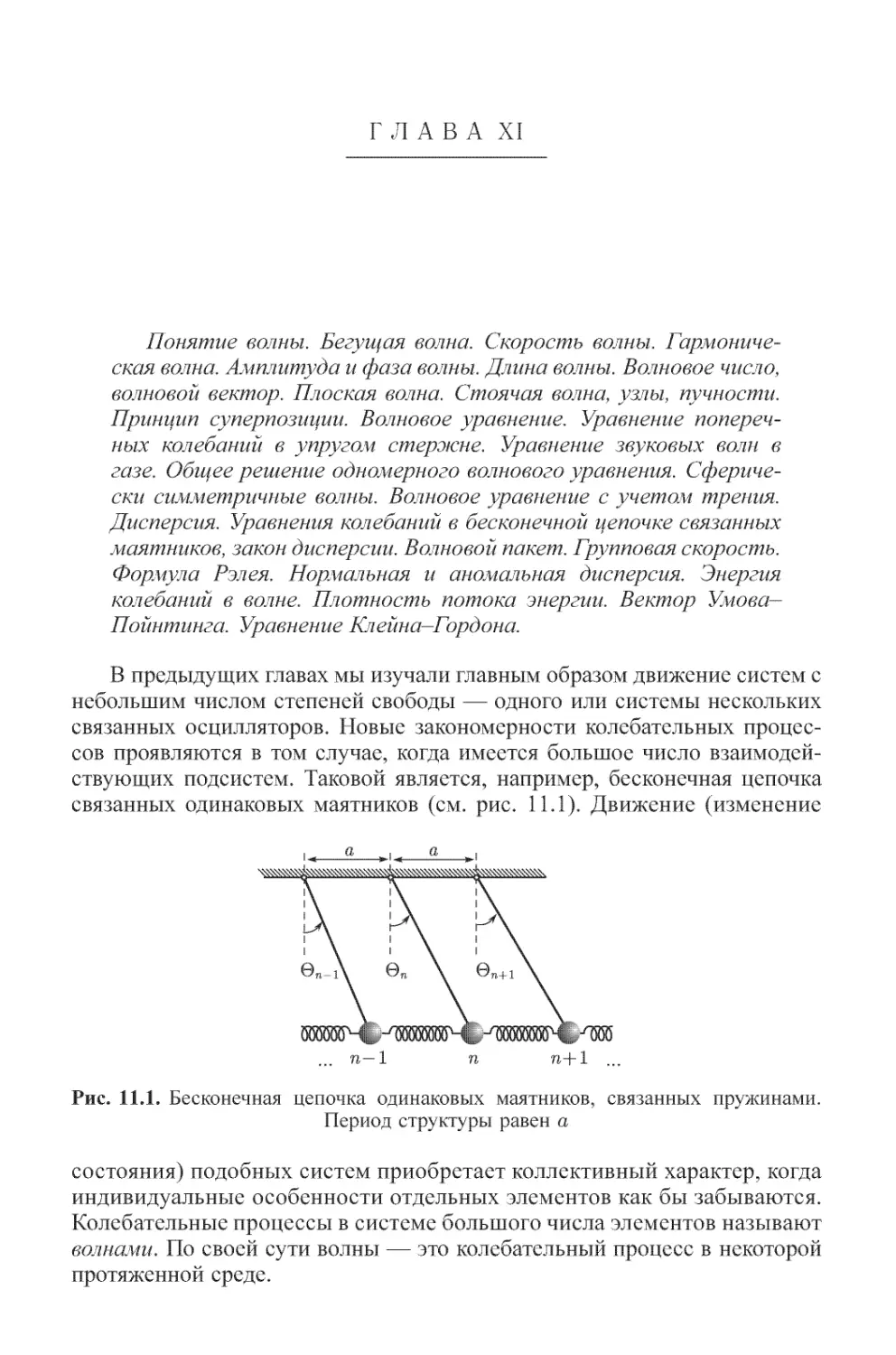
Г лава XI ............................. 185
Понятие волны. Бегущая волна. Скорость волны. Гармоническая волна.
Амплитуда и фаза волны. Длина волны. Волновое число, волновой вектор.
Оглавление
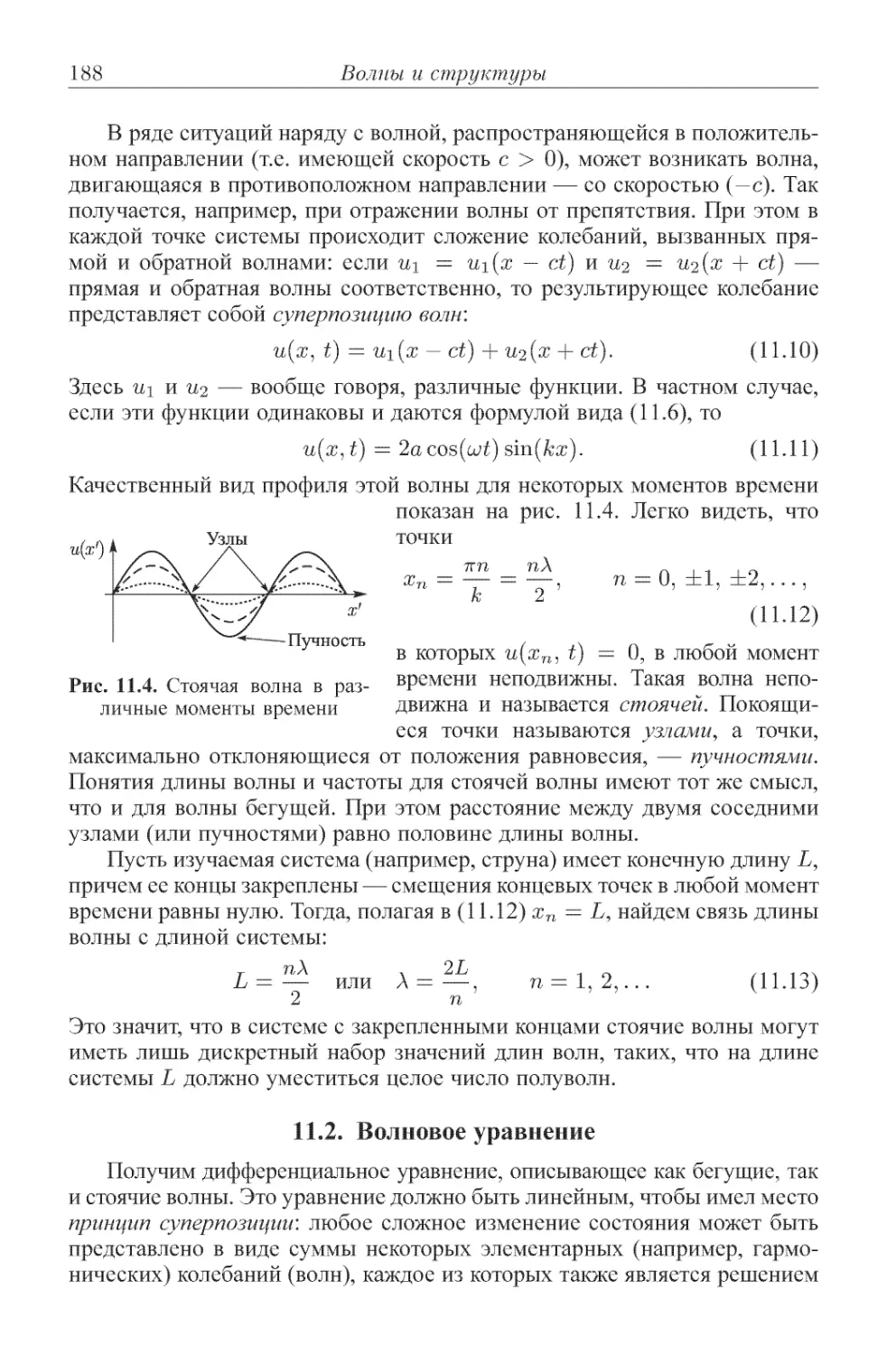
Плоская волна. Стоячая волна, узлы, пучности. Принцип суперпозиции.
Волновое уравнение. Уравнение поперечных колебаний в упругом стержне.
Уравнение звуковых волн в газе. Общее решение одномерного волнового
уравнения. Сферически симметричные волны. Волновое уравнение с учетом
трения. Дисперсия. Уравнения колебаний в бесконечной цепочке связан-
связанных маятников, закон дисперсии. Волновой пакет. Групповая скорость.
Формула Рэлея. Нормальная и аномальная дисперсия. Энергия колебаний в
волне. Плотность потока энергии. Вектор Умова—Пойнтинга. Уравнение
Клейна-Гордона.
Г л а в а XII ............................ 205
Волны в периодических системах. Вектор трансляции, основные периоды
решетки. Обратная решетка. Волны Блоха. Квазиимпульс. Зоны Бриллюэ-
на. Приведенная и расширенная зонные схемы. Одномерный периодический
потенциал, зонная структура спектра. Зонная структура спектра для
системы связанных осцилляторов. Энергетический спектр электронов в
решетке. Квазиконтинуальный спектр. Резонанс Ферми.
Глава XIII ............................ 220
Самовоздействие волны. Нелинейные волны, нелинейный волновой процесс.
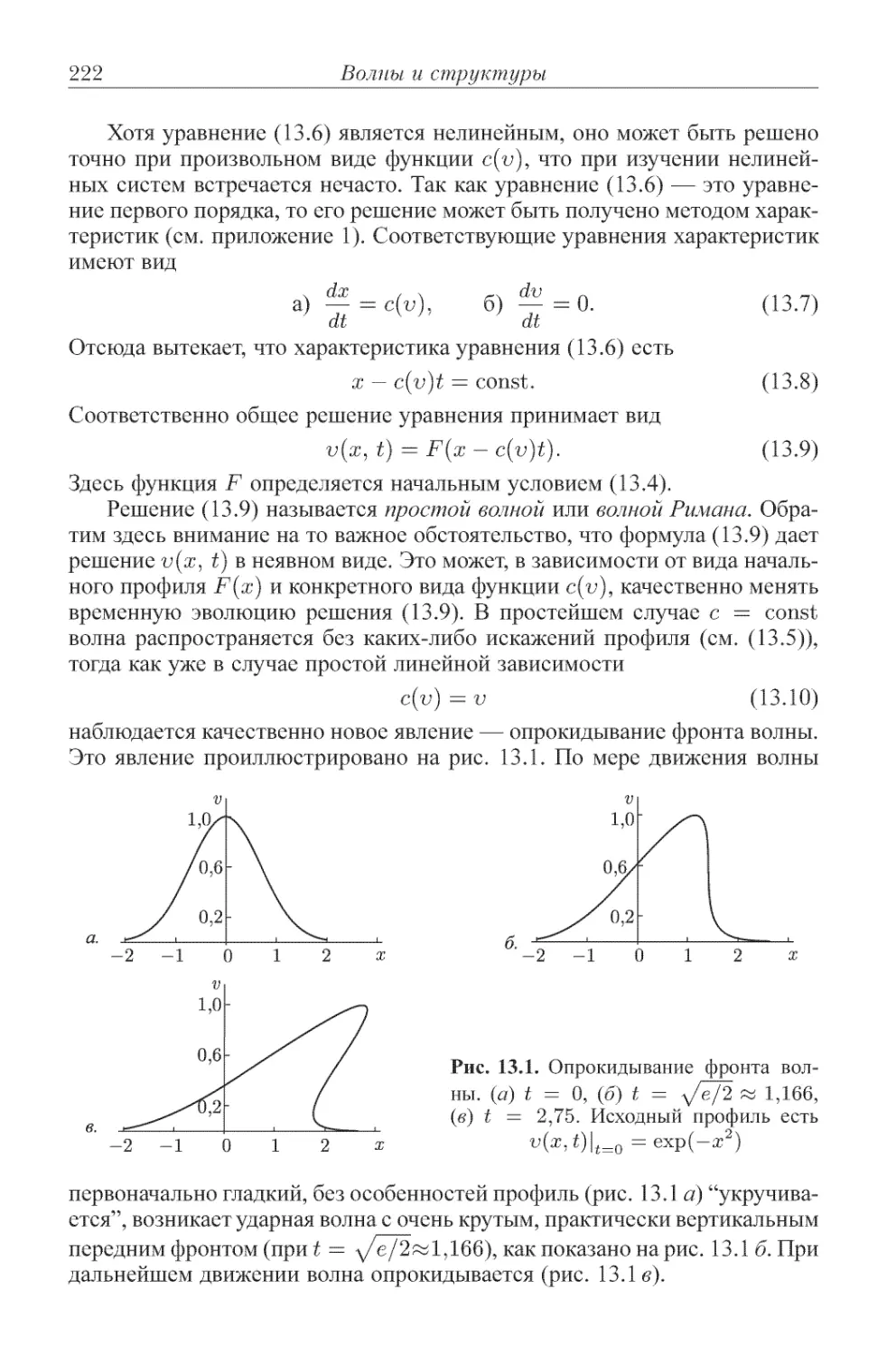
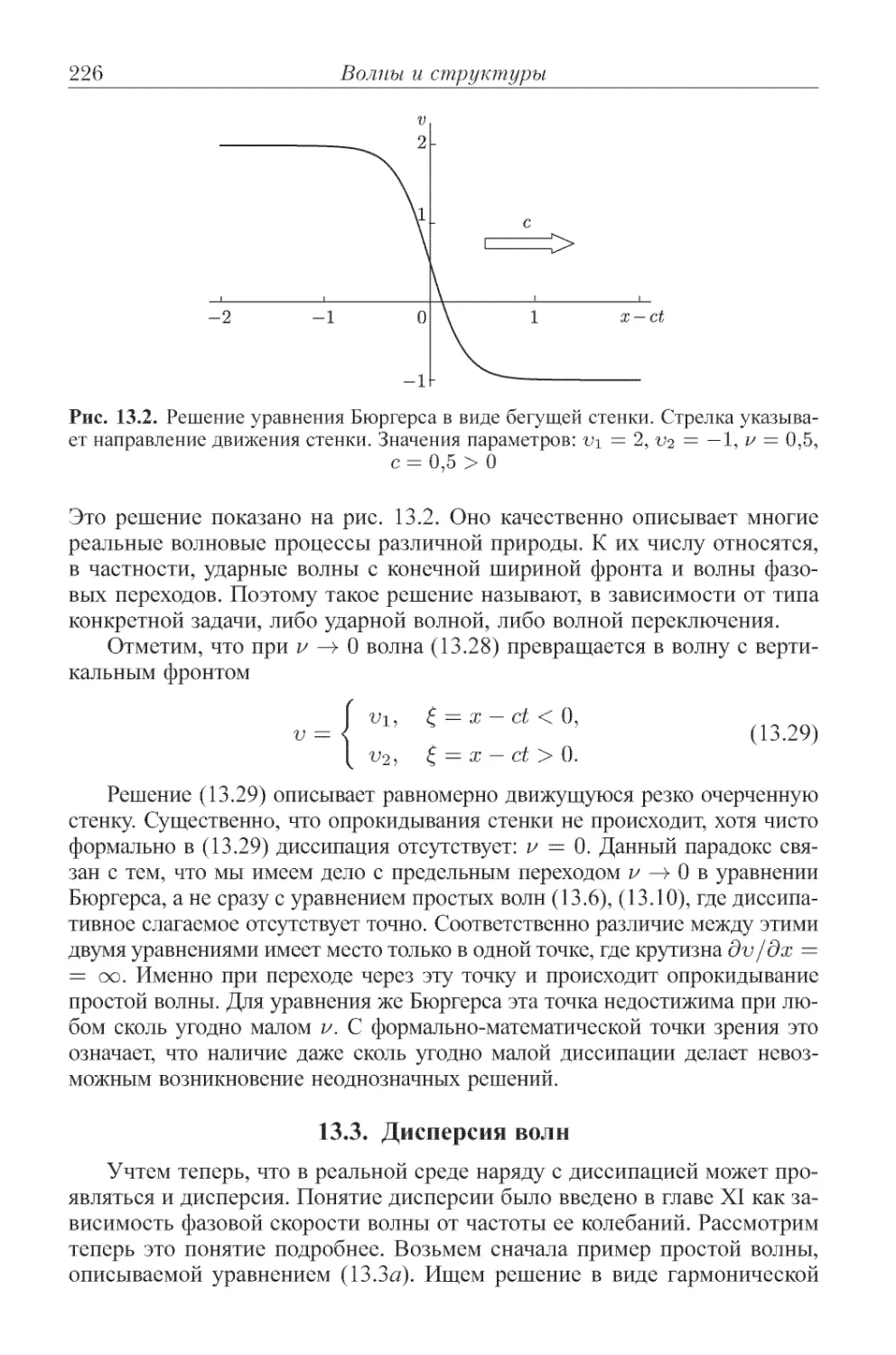
Простые волны (волны Римана). Опрокидывание волны. Уравнение Бюр-
герса. Диссипация, ее роль. Бегущий фронт. Дисперсия волн. Оптическая
и акустическая ветви. Гравитационно-капиллярные волны. Принцип при-
причинности и дисперсионные соотношения. Временная и пространственная
дисперсия. Уравнение Кортевега-де Фриса. Солитон. Многосолитонные
решения. Взаимодействие солитонов. Законы сохранения для уравнения
Кортевега—де Фриса. Другие нелинейные уравнения.
Глава XIV ............................ 240
Параметры порядка и подчиненные переменные. Диссипативные струк-
структуры. Автоволновой процесс, автоволна. Самоорганизация, синергетика.
Эффект Бенара. Модель Колмогорова—Петровского—Пискунова. Закон
дисперсии малых возмущений. Волны переключения, правило Максвелла.
Фазовый переход, стабильная и метастабилъная фазы. Функционал
(функция) Ляпунова. Режимы локализации и обострения для нелинейных
задач теплопроводности. Диффузионная неустойчивость. Диффузионная
неустойчивость тъюринговского типа. Диффузионный хаос. Реакции
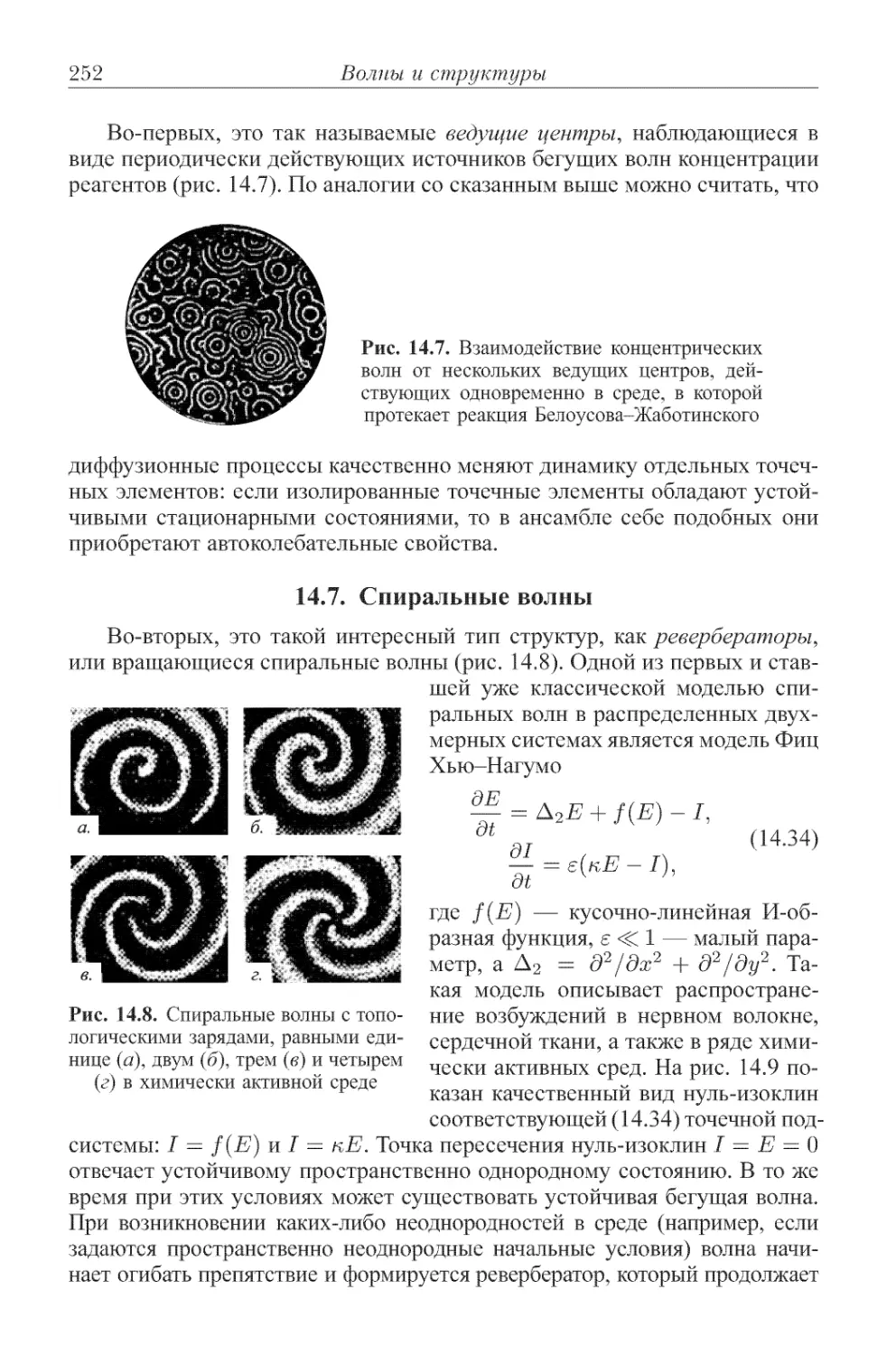
Белоусова-Жаботинского, брюсселятор и орегонатор. Ведущие центры.
Ревербераторы (вращающиеся спиральные волны). Модель Фиц Хью-
Нагумо. Обобщенное уравнение Гинзбурга-Ландау. Уравнение Свифта—
Хоэнберга и его обобщение. Аксиоматический подход. Клеточный авто-
автомат. Возникновение стационарной циркуляции при работе клеточного
автомата.
КОММЕНТАРИИ
К. 1. Формула Эйлера ......................... 259
К.2. Эллиптические функции Якоби .................. 260
К.3. Вырожденное решение дифференциального уравнения у+2<уу+и)оу=0 . 264
К.4. Расщепление частот связанных осцилляторов (график Вина) ..... 265
Оглавление
К.5. Обыкновенные дифференциальные уравнения с периодическими коэф-
коэффициентами ........................... 267
К.6. Приближенное решение уравнения Матье ............. 273
К.7. Параметрический резонанс в системе со скачкообразно меняющимися
параметрами ........................... 277
К.8. О квантовании энергии гармонического осциллятора ........ 284
К.9. О понятии автономности и неавтономности динамических систем . . 286
К. 10. Гамильтоновы уравнения .................... 287
К.11. Адиабатические инварианты в термодинамике ........... 292
К. 12. Об устойчивости неподвижной точки одномерного отображения . . 294
К. 13. Приближенное решение уравнения Ван-дер-Поля ......... 296
К. 14. Нелинейный осциллятор ..................... 299
К. 15. Критерий Рауса—Гурвица .................... 304
К. 16. Метод D-разбиений ....................... 308
К. 17. Равноускоренное движение материальной точки .......... 311
К. 18. Теорема Лиу вил ля-Остроградского ................ 311
К. 19. О теории катастроф ....................... 314
К.20. Об истории представлений нелинейной динамики ......... 319
К.21. Приближенное решение уравнения Фейгенбаума .......... 322
К.22. Длина гипотенузы прямоугольного треугольника .......... 323
К.23. Флуктуации в динамических системах .............. 326
К.24. Уравнение Фоккера-Планка-Колмогорова ............. 328
К.25. Термодинамика, статистическая физика и хаос ...........331
К.26. Волны в линиях передачи .................... 338
К.27. Волновое сопротивление .................... 341
К.28. О дифракции волн (интеграл Кирхгофа) ............. 350
К.29. Метод параболического уравнения в оптике ............ 363
К.30. Обратная решетка ........................ 371
К.31. Соотношения Крамерса-Кронига ................. 373
К.32. Об истории солитона ...................... 379
К.33. Самофокусировка излучения в нелинейной среде .........381
К.34. Эффект самоиндуцированной прозрачности ............ 386
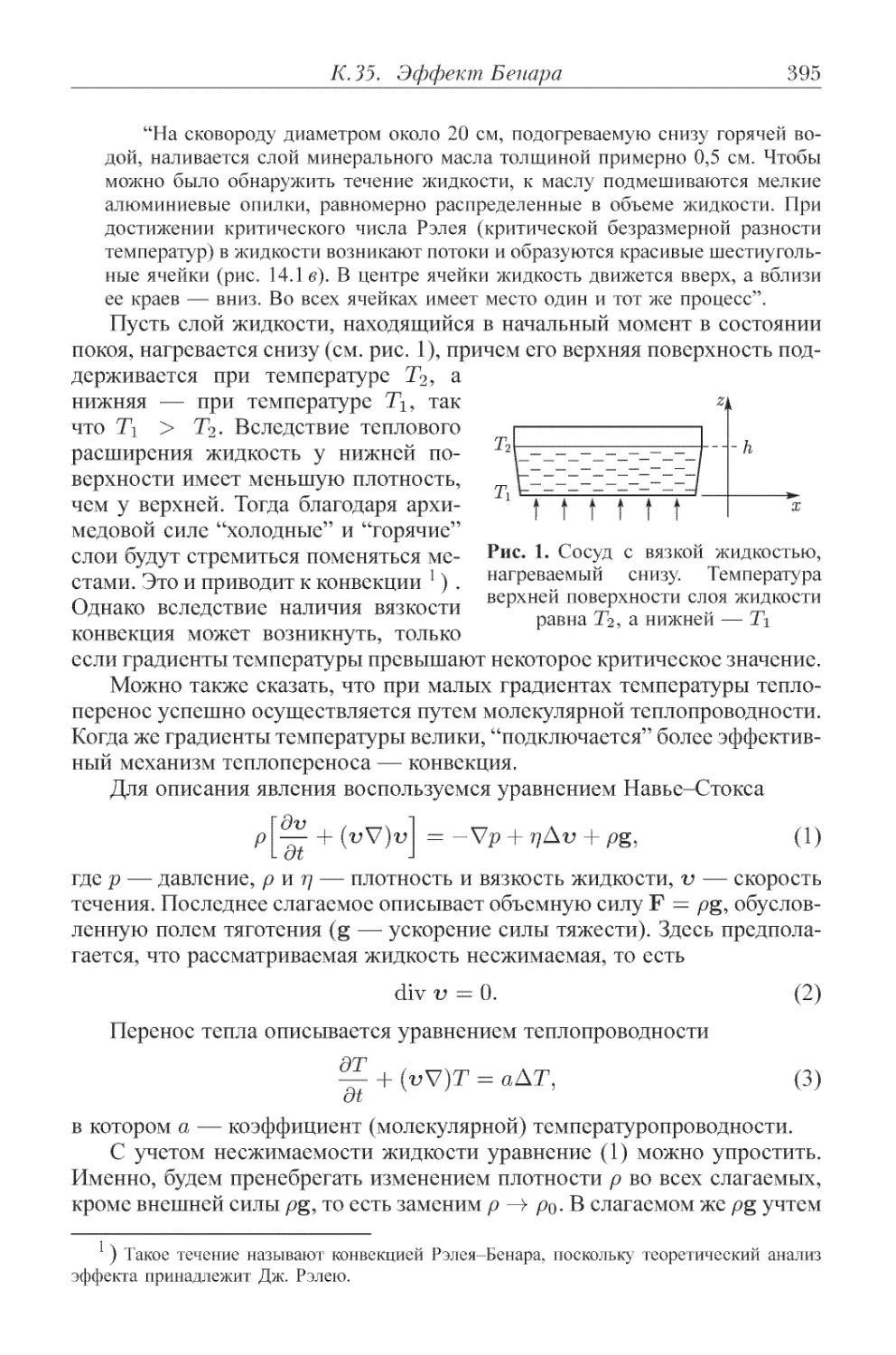
К.35. Эффект Бенара ......................... 394
ПРИЛОЖЕНИЯ
П. 1. Уравнения в частных производных первого порядка ......... 403
Системы двух обыкновенных дифференциальных уравнений первого по-
порядка. Интегральная кривая. Первый интеграл. Системы обыкновенных
дифференциальных уравнений первого порядка с п переменными. Линейные
дифференциальные уравнения в частных производных первого порядка. Ха-
Характеристики. Квазилинейные уравнения в частных производных первого
порядка. Геометрический смысл характеристик. Нелинейные уравнения в
частных производных первого порядка. Конус Монжа, характеристиче-
характеристическая полоса, начальная полоса. Уравнение эйконала. Принцип Ферма. Закон
Снеллиуса. Проникновение луча света в среду с убывающим показателем
преломления.
Оглавление
П.2. Метод обратной задачи рассеяния в теории солитонов ........ 421
Задача Штурма—Лиувилля. Метод Лакса, уравнения Лакса. Уравнение
Кортевега—де Фриса. Другие нелинейные эволюционные уравнения: урав-
уравнение Бюргерса, модифицированное уравнение Коршевега-де Фриса, урав-
уравнение sin-Гордон, нелинейное уравнение Шредингера. Потенциалы Барг-
мана. Основная идея метода обратной задачи рассеяния. Коэффициенты
прохождения и отражения. Одномерная теория рассеяния. Фундамен-
Фундаментальные решения {функции Йоста). Аналитические свойства. Уравнение
Гелъфанда-Левитана-Марченко. 5-образный потенциал. Безотражатель-
Безотражательные потенциалы.
ИЗ. Уравнения градиентного типа ................... 446
Основные определения. Уравнения градиентного типа. Краевые задачи,
эквивалентные задачам градиентного типа. Функции Ляпунова. Примеры
градиентных и эквивалентных им систем. Свойства линеаризованных си-
систем. Устойчивость пространственно-периодических решений. Обыкно-
Обыкновенные дифференциальные уравнения с периодическими коэффициентами.
Исследование краевой задачи для уравнения Кана—Хиллерта. Периодиче-
Периодические решения обратимых систем.
Семинар .............................. 466
156. Природа весьма проста; что этому противоречит, должно
быть отвергнуто.
203 ... Смутно пишут о том, что смутно себе представляют.
252. Уподобления не доказывают, а лишь объясняют доказанное.
(М.В. Ломоносов. Заметки по физике и корпускулярной философии).
Испытание натуры трудно, слушатели, однако приятно, по-
полезно, свято. Чем больше таинства ее разум постигает, тем
вящее увеселение чувствует сердце. Чем далее рачение наше в оном
простирается, тем обильнее собирает плоды для потребностей
житейских.
(М.В. Ломоносов. Слово о происхождении света).
ПРЕДИСЛОВИЕ
Необходимость написания предлагаемой книги стала для нас очевид-
очевидной около десяти лет назад. К тому времени опыт преподавания общей
физики и квантовой электроники, равно как и опыт исследовательской ра-
работы по изучению взаимодействия интенсивного лазерного излучения с
веществом, наглядно показал нам, что из сознания студентов, аспирантов,
да и многих уже вполне работоспособных молодых ученых уходит знание
и понимание общих колебательных закономерностей природы. Будучи пре™
подавателями Московского физико-технического института и сотрудника-
сотрудниками Института общей физики РАН (в прошлом — Лаборатории колебаний
ФИАН), мы решили пойти по традиционному академическому пути и из-
дожить наше представление современной теории колебаний и волн в виде
специально написанной книги.
Представляемый материал естественным образом делится на три части.
Первые четыре главы содержат в себе элементарное изложение прин-
принципов и методов теории колебаний, которые должны быть неотъемлемой
частью общефизического образования. Изучающие курс общей физики уже
с самого начала сталкиваются с разного рода колебательными процессами.
При этом от их внимания часто ускользает главное — единство колебатель-
колебательной природы различных, внешне непохожих физических явлений. Вместе
с тем, уровень математической и общефизической подготовки тех, кто се-
серьезно относится к систематическому изучению физики, позволяет им уже
с самого начала воспринимать идеи и овладевать основными приемами
качественного и количественного исследования колебательных систем.
Первая часть книги дает компактное и вместе с тем достаточно пол-
полное изложение основ теории колебаний. Однако этот материал, несмотря
на всю его высокую общефизическую и даже мировоззренческую значи-
значимость, зачастую оказывается недостаточным для решения многих конкрет-
конкретных задач, объяснения целого ряда явлений природы. Тогда приходится
10 Предисловие
прибегать к более мощному, но и более сложному, более абстрактному ап-
аппарату теории нелинейных динамических систем. Рассмотрению наиболее
существенных, на наш взгляд, понятий и методов этой теории и посвящены
последующие шесть глав, составляющие вторую часть книги.
Третья часть (главы XI-XIV) является в некотором смысле заверша-
завершающей и посвящена волновым процессам в линейных и нелинейных си™
стемах. Хотя изложение, разумеется, не претендует на исчерпывающую
полноту, ключевые вопросы теории волн рассмотрены, как нам предста-
представляется, достаточно подробно. Более того, чтобы сделать изложение до-
достаточно последовательным, мы уделили должное внимание ряду тради-
ционных вопросов, имеющих прикладную и методическую значимость.
Следует отметить, что в книгу включены два важных дополнительных
раздела: "Комментарии" и "Приложения", на которые ложится особая смы-
смысловая нагрузка. Во-первых, в форме комментариев обсуждаются те вопро-
вопросы, которые выходят достаточно далеко за рамки первичного ознакомления
с теорией, но могут быть полезными при более глубоком изучении пред-
предмета. Во-вторых, часть комментариев носит откровенно справочный харак-
характер, позволяющий не прибегать к специальной литературе. Наконец, в тех
случаях, когда современная теория требует привлечения сложного, весь-
весьма специфического математического аппарата, соответствующий материал
вынесен в комментарии или даже в сравнительно объемные приложения.
Мы сочли необходимым дополнить основное содержание книги разде-
разделом "Семинар", содержащим некоторое количество задач с подробным их
решением. Назначение этого раздела состоит в том, чтобы проиллюстри-
проиллюстрировать те или иные положения теории или несколько дополнить изложе-
изложение основного материала. Часть задач заимствована из книг: Карлов КВ.
Лекции по квантовой электронике. — М.: Наука, 1988; Карлов КВ., Ки-
Кириченко Н.А., Лукьянчук Б.С. Лазерная термохимия. Основы и примене-
применения. — М.: ЦентрКом, 1995; Малинецкий Г.Г, Задачи по курсу нелинейной
динамики / Новое в синергетике. Загадки мира неравновесных структур. —
М.: Наука, 1996; Арнольд В.И. Математика и физика: родитель и дитя или
сестры? // Успехи физических наук. — 1999. — Т. 169. — № 12. — С. 1311-
1323. Часть задач придумана нами специально для этой книги.
Возвращаясь к содержанию, мы должны отметить, что отбор материала
(за исключением традиционной части) отражает наши личные биографии
в науке, наши интересы, а также опыт физика-экспериментатора и физика-
теоретика, во многом дополняющих друг друга.
Мы благодарны РИСО и НИЧ МФТИ, в 1995-м, 1998-м и 2001-м годах
последовательно издавшим в виде препринтов все три части этой книги.
Мы безмерно благодарны профессору А.В. Андрееву (Московский госу-
государственный университет) и профессору В.Н. Беляеву (Московский ин-
инженерно-физический институт), взявшим на себя труд прорецензировать
рукописи упомянутых препринтов.
Некоторые проблемы, отраженные в книге, исследованы в ходе прове-
проведения работ по грантам РФФИ №98-0216207 и 01-02-16495.
ЧАСТЬ 1
КОЛЕБАНИЙ
ZevC, X poi/lSfj^, TTpoeaTUjQ tolC, аваиат оСсгь веошш
ei( Х^°С /3ov\tj06l( udfiou ешттоьеш StawXiJT ret
aiOvarepsilonpa тцу Ьщу еутактш(, Sov( тш Оеьш
nai Oat вщтаСС, ipvxa^( X^PW TE XP®V0V T€-
Предвозлежателъ Бессмертных Совета, Хроноса сын, Громовержец Зевес
В бурно кипящий предвечный хаос ясный порядок внести возжелавши,
В светлом эфире разжег череду колебаний, давили пространству размеры
И времени чувство навек заложивши в Космосе,
В Боге, в душе человека.
(IlLjpr]To( АХ1каатеш(. Хшрохроиорах^а, /3.135—138. Текст приведен по
изданию: Librairie classique, grecque, latine et slave. Paris, Edition Dieusaitou,
313, Rue des Ecoles, 1ете ed., 1929, Tm(t ed., 1949. Перевод наш)
Мой друг! Ведь будут после нас сменяться много раз
Ущербный серп и новый серп, и полная луна.
(Омар Хайям. Рубай, 125)
Поэт сказал: "Всякая вещь, исторгнутая из состояния покоя, звучит"
Ли Сян Цзы. "Домик под грушевым деревом".
(Из книги: Черубина де Габриак. Исповедь. — М.: Аграф, 1998, С.187)
•< ..<¦¦¦ if ,¦
.„.-¦¦¦¦¦"""'^ i :-. v .--.ж/ ¦ . . rf!"" „.* -л ¦ -a .\ -¦¦¦¦< ? .-¦ .-'¦ ¦-¦¦ ,• ¦,«
^V.^'-.^^Vi-c.-i
.., ¦¦! '.:'" "!f"! *lP^*^-* .Г ","! >• '^""
-:#
:Ш^:Ш-/л-
ШШ SS ^^IS^? й;Ж1? ?1-Ш^1 SiiSil
ГЛАВА I
Колебательные движения. Математический маятник. Пру-
Пружинный маятник. Колебательный контур. Модель "хищник-
жертва " Вольтерры. Модель химической реакции Лотки. Основ-
Основные характеристики колебательного движения. Гармонические
колебания. Амплитуда. Круговая и циклическая частоты. Пери-
Период. Фаза. Изохронные колебания. Геометрическая интерпретация
гармонических колебаний. Комплексное представление колебаний.
Изображающая (фазовая) точка. Фазовая траектория. Фазовая
плоскость. Ангармонические колебания. Точное решение уравнения
движения математического маятника. Осциллятор.
Одним из самых распространенных типов движения в природе явля-
являются колебания. Эти движения наблюдаются и в физике, и в химии, и в
биологии, и в общественных отношениях.
Колебания — это такие изменения состояния исследуемой системы,
объекта наблюдения, которые достаточно отчетливо характеризуются той
или иной степенью повторяемости, возвращаемое™ к начальному состоя-
состоянию. Примерами колебаний являются движения маятника часов и струны
музыкального инструмента, перемещения водных масс мирового океана
в процессе приливов и отливов, движения планет вокруг их центральной
звезды, суточные изменения числа автомобилей на улицах большого горо-
города, переходы от подъема к упадку и обратно в общественном производстве
и многое другое.
1.1. Примеры простейших колебательных систем
Математический мамтник. Начнем с математического маятника
(рис. 1.1). Пусть имеется материальная точка массой га, подвешенная на
нерастяжимой нити длиной ?. Точка
движется по дуге окружности радиу-
радиуса ? с центром в точке О. На мате™
риальную точку действует сила тяже-
тяжести F, направленная вертикально вниз.
Ее проекция на направление движения
(т.е. на направление касательной к тра™
ектории) есть возвращающаяся сила
Fs = — rag sin 0, где в — угол между
нитью и вертикалью. Следовательно,
/////////////ш///////////
F=mg
Рис. 1.1. Математический маятник
14
Основные понятия теории колебаний
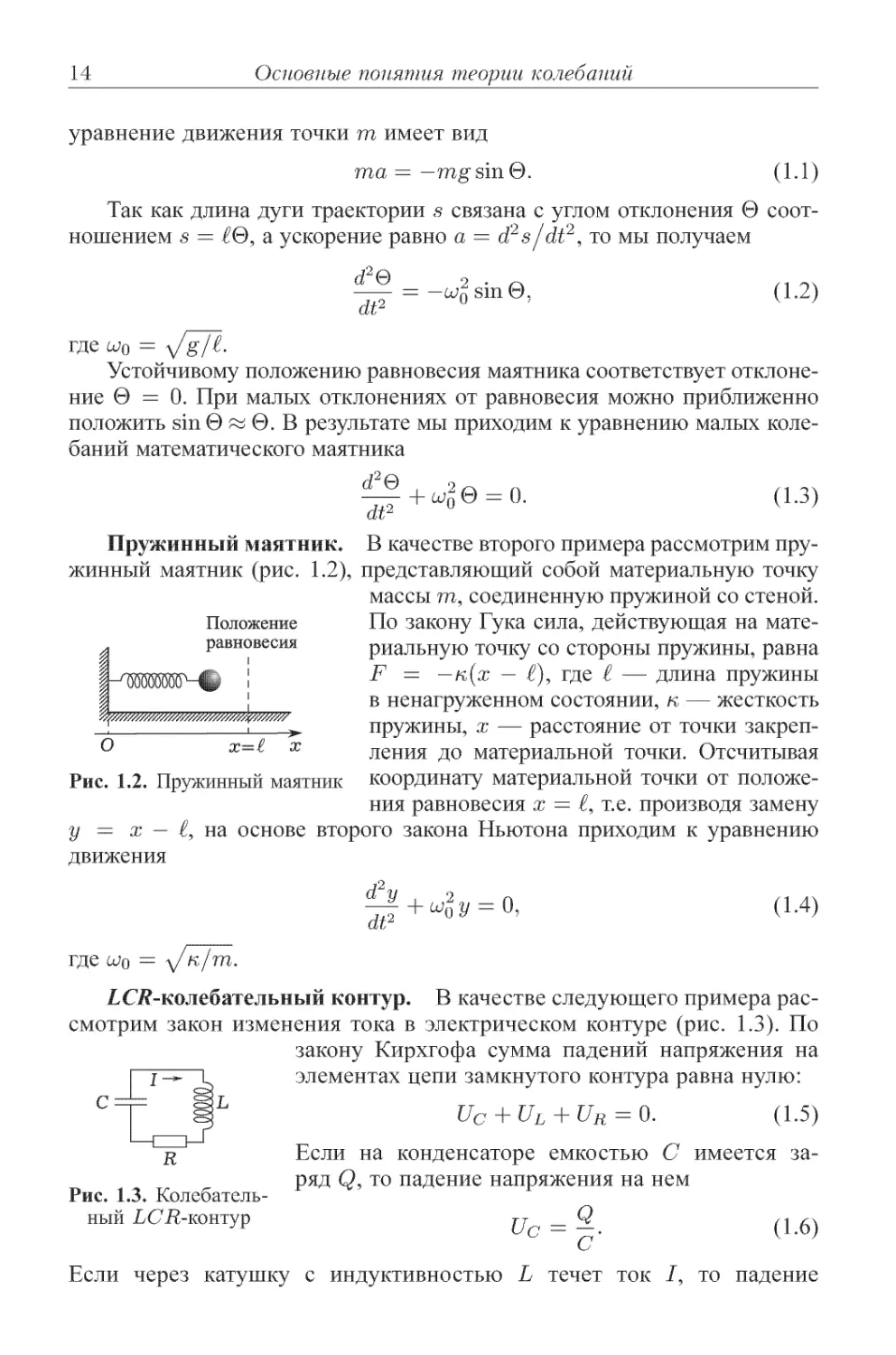
уравнение движения точки га имеет вид
та = —mgsmO. A-1)
Так как длина дуги траектории s связана с углом отклонения в соот-
соотношением s = Ш, а ускорение равно а = d2s/dt2, то мы получаем
A.2)
где ш0 = л/еД.
Устойчивому положению равновесия маятника соответствует отклоне-
ние в = 0. При малых отклонениях от равновесия можно приближенно
положить sin G « В. В результате мы приходим к уравнению малых коле-
колебаний математического маятника
A.3)
dt2
Положение
равновесия
Пружинный мамтник. В качестве второго примера рассмотрим пру-
пружинный маятник (рис. 1.2), представляющий собой материальную точку
массы га, соединенную пружиной со стеной.
По закону Гука сила, действующая на мате-
материальную точку со стороны пружины, равна
F = —к(х — ?), где ? — длина пружины
в ненагруженном состоянии, к — жесткость
пружины, х — расстояние от точки закреп-
закрепления до материальной точки. Отсчитывая
координату материальной точки от положе-
положения равновесия х = ?, т.е. производя замену
у = ж — ?, на основе второго закона Ньютона приходим к уравнению
движения
= 0, A.4)
Рис. 1.2. Пружинный маятник
ХСЖ-колебательный контур. В качестве следующего примера рас-
рассмотрим закон изменения тока в электрическом контуре (рис. 1.3). По
закону Кирхгофа сумма падений напряжения на
элементах цепи замкнутого контура равна нулю:
Uc + UL + UR = 0. A.5)
Если на конденсаторе емкостью С имеется за-
заряд Q, то падение напряжения на нем
Uc = % A.6)
Рис. 1.3. Колебатель-
Колебательный LCR-контур
Если через катушку с индуктивностью L течет ток I, то падение
/. /. Примеры простейших колебательных систем 15
напряжения на ней
UL=A A.7)
Наконец, по закону Ома падение напряжения на сопротивлении R равно
UR = IR. A.8)
Соотношения A.5)—A.8) дают
Q+L*1+IR = O. A.9)
С dt 1 ;
Для преобразования этого уравнения заметим, что ток в цепи рассма-
рассматриваемого контура равен скорости изменения заряда на конденсаторе, I =
= dQ/dt. Дифференцируя A.9) по времени, с учетом сказанного получаем
+ + ^=0. A.10)
di2 L dt LC l ;
Когда активное сопротивление R столь мало, что второе слагаемое в
A.10) можно положить равным нулю, мы получаем уравнение
где о;0 = l/y/LC.
Модель "хищник—жертва". Как еще один пример рассмотрим из-
известную биологическую задачу сосуществования видов животных. Иссле-
Исследуем изменение во времени численности животных, обитающих совмест-
совместно на некоторой траектории. Выделим две группы животных — "хищники"
и "жертвы". Для определенности будем говорить о рысях и зайцах. Обо-
Обозначим число зайцев символом JVb а число рысей — N2. Будем считать,
что рыси питаются только зайцами, а зайцы — только растительностью
(травой), которая имеется в избытке. Если бы рысей не было, то зайцы
размножались бы по закону
dN\ ш /1 юл
—— = a1N1. A.12)
at
Здесь «1 = а\р — aiC9 где слагаемое а\р учитывает естественную рожда-
рождаемость зайцев, а а.\с — их естественную смертность. Так как по пред-
предположению при достаточном количестве корма зайцы размножаются, то
oi\ > 0. Наоборот, в отсутствие зайцев рыси вымирают, причем скорость
уменьшения их численности определяется законом
-a2N2j A.13)
dt
аналогичным закону радиоактивного распада, что связано с вероятност-
вероятностным характером процесса и большим числом элементов системы (N2 ^> 1).
Пусть теперь на рассматриваемой территории сосуществуют зайцы и
рыси. Чем чаще хищники сталкиваются со своими жертвами, тем быстрее
16 Основные понятия теории колебаний
уменьшается число последних. Так как вероятность столкновения зайца
с рысью пропорциональна произведению N\N2, то скорость "поедания"
зайцев рысями записывается в виде eiiViJNfe. Соответственно суммарная
скорость изменения числа зайцев определится уравнением
^ aiNi eiJVxJVa. A.14)
at
Аналогично, чем чаще рыси сталкиваются с зайцами, тем больше кор™
ма они получают и тем эффективнее они размножаются. Можно принять,
что эффективность размножения рысей в этих условиях пропорциональ-
пропорциональна числу столкновений. Для учета этого фактора добавим в правую часть
A.13) слагаемое e2NiN2:
a2N2 + e2N1N2. A.15)
dt
Система уравнений A.14) и A.15) описывает динамику сосуществовав
ния хищников и жертв на одной территории. Эти уравнения предложил
В. Вольтерра в 1926 г. Ранее, в 1925 г., аналогичные уравнения были по-
получены А. Лоткой, применившим идеи химической кинетики к биологиче-
биологической проблеме сосуществования видов. Соответствующая модель извест™
на под названием "модель хищник-жертва". В состоянии равновесия чис-
число зайцев и рысей постоянно и, следовательно, определяется из условий
dNi/dt = 0, dN2/dt = 0. Из A.14) и A.15) следует, что равновесные
численности Ni и N2 составляют
N10 = a2/e2, N20 = a1/e1. A.16)
Заметим, что равновесным является также тривиальное решение N\ =
= N2 = 0, отвечающее полному отсутствию животных на рассматривав
емой территории.
Обозначим отклонения от положения равновесия как
щ = Nt - NWj n2=N2^ JV20. A.17)
Если эти отклонения малы, то входящие в A.14) и A.15) произведения
NiN2 можно приближенно записать как N\N2 ^NiqN2q +Щ2п2 +iV2o^i,
где мы пренебрегли произведением ^1^2 по сравнению с удержанными
слагаемыми. Тогда из A.14) и A.15) с учетом A.16) можно получить сле-
следующие уравнения для малых отклонений от положения равновесия:
^ = -SlN10n2, ^ = e2N20n1. A.18)
at
A.19)
^ SlN10n2, ^
at at
Исключив из A.18) переменную п2, мы приходим к уравнению
где ш0 = ^faia2.
Это уравнение полностью аналогично уравнениям A.3), A.4) и A.11).
Легко убедиться в том, что уравнение для величины п2, т.е. отклонения
численности рысей от равновесного значения, идентично.
Примеры простейших колебательных систем
17
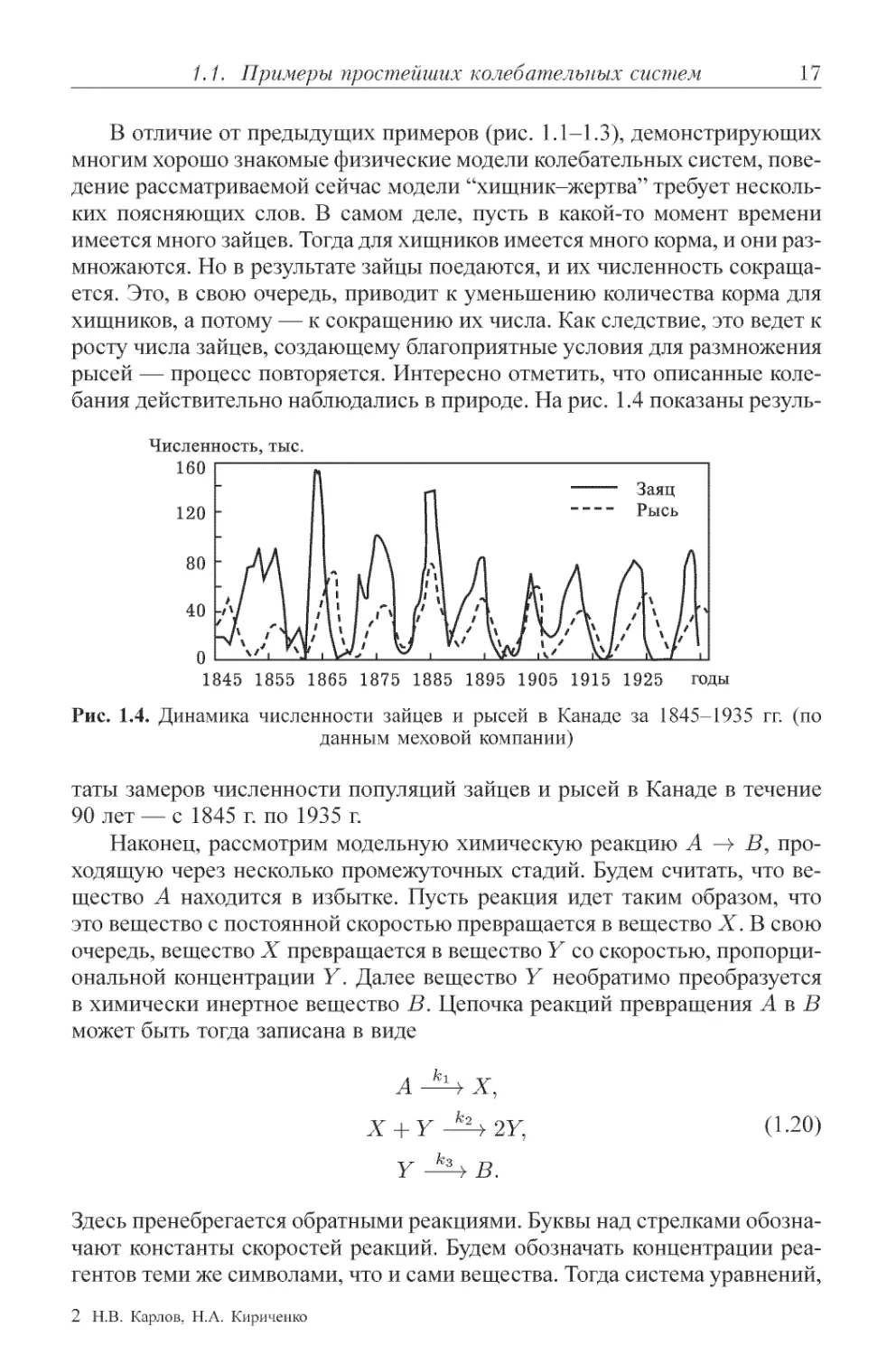
В отличие от предыдущих примеров (рис. 1.1-1.3), демонстрирующих
многим хорошо знакомые физические модели колебательных систем, пове-
поведение рассматриваемой сейчас модели "хищник-жертва" требует несколь-
нескольких поясняющих слов. В самом деле, пусть в какой-то момент времени
имеется много зайцев. Тогда для хищников имеется много корма, и они раз™
множаются. Но в результате зайцы поедаются, и их численность сокраща-
сокращается. Это, в свою очередь, приводит к уменьшению количества корма для
хищников, а потому — к сокращению их числа. Как следствие, это ведет к
росту числа зайцев, создающему благоприятные условия для размножения
рысей — процесс повторяется. Интересно отметить, что описанные коле-
колебания действительно наблюдались в природе. На рис. 1.4 показаны резуль-
Численность, тыс.
160
120 ¦
1845 1855 1865 1875 1885 1895 1905 1915 1925 годы
Рис. 1.4. Динамика численности зайцев и рысей в Канаде за 1845-1935 гг. (по
данным меховой компании)
таты замеров численности популяций зайцев и рысей в Канаде в течение
90 лет — с 1845 г. по 1935 г.
Наконец, рассмотрим модельную химическую реакцию А —>• В, про™
ходящую через несколько промежуточных стадий. Будем считать, что ве~
щество А находится в избытке. Пусть реакция идет таким образом, что
это вещество с постоянной скоростью превращается в вещество X. В свою
очередь, вещество X превращается в вещество Y со скоростью, пропорци™
ональной концентрации Y. Далее вещество Y необратимо преобразуется
в химически инертное вещество В. Цепочка реакций превращения А в В
может быть тогда записана в виде
А^
X + Y
Y —
A.20)
Здесь пренебрегается обратными реакциями. Буквы над стрелками обозна™
чают константы скоростей реакций. Будем обозначать концентрации pea™
гентов теми же символами, что и сами вещества. Тогда система уравнений,
2 Н.В. Карлов, Н.А. Кириченко
18 Основные понятия теории колебаний
описывающих динамику реакции A.20), представляется в виде
kY Ц kY
^ кгАк2Х?, f k2XYk3Y, Ц k3Y. A.21)
dt dt dt
Поскольку, по предположению, вещество А присутствует в избытке,
т.е. в ходе реакции изменениями его концентрации можно пренебречь, то
слагаемое к\ А в первом из этих уравнений следует считать постоянным.
Уравнения A.21) предложил А. Лотка в 1920 г. В виду внешнего сход™
ства уравнений A.14), A.15) и уравнений A.21) модели такого вида назы-
называют моделями Лотки-Вольтерры.
Подсистема, состоящая из первых двух уравнений системы A.21), име-
имеет единственное стационарное состояние
Хо = h/k2, Yo = Акц/к3. A.22)
Вводя для малых отклонений от равновесных значений концентраций ве-
ществ X ш Y обозначения х = X — Хо и у = Y — YQ и пренебрегая
произведением ху, приходим к системе уравнений:
dx k\k2 Л , dy k\k2 Л /i i">\
=Ах — к%у, — = Ах. A.23)
dt к
Ах к%у,
dt кз dt
Исключая отсюда переменную у, приходим к уравнению
d х , п dx ,2 л /1 гу л \
-7^- + 27— + wga; = 0, A.24)
atz at
где 27 = (&1&2/&з)А, и® = ^/к^Ь^А. Таким образом, мы приходим к
уравнению того же типа, что было получено для LCК-контущ (см.A.10)).
1.2. Основные характеристики колебательного движения
Несмотря на различия в природе рассмотренных выше примеров, все они
описываются сходными или просто одинаковыми уравнениями. В связи с
этим оказывается возможным изучать свойства определенных математиче-
математических моделей, прикладывая затем результаты анализа к конкретным системам
и явлениям, может быть, с учетом специфических особенностей последних.
Хорошо известно, что для маятника характерны колебательные движе-
движения. Ясно поэтому, что и во всех других системах, описываемых подобны™
ми же уравнениями, имеют место колебательные процессы. Так вот, общие
свойства колебательных процессов в системах произвольной природы и
составляют предмет теории колебаний. При этом специфические детали
поведения какой-либо конкретной системы оказываются на втором плане
в той мере, в которой они не оказывают влияния на качественные характе-
характеристики движения.
После этих вводных замечаний перейдем к систематическому из ложе™
нию основных понятий теории колебаний.
Рассмотрим простейшее уравнение
х + ШдХ = 0, A.25)
1.2. Основные характеристики колебательного движения
19
где точка над символом обозначает производную по времени. Решение
уравнения A.25) имеет, как известно, вид
х = ж0 cos(ujot + щ). A.26)
Это решение в силу периодичности функции cos (р описывает строго перио-
периодические колебания. Колебания вида A.26) называются гармоническими —
они описываются одной единственной гармоникой, т.е. одной единствен™
ной тригонометрической функцией типа sin ip или cos (p.
В выражении A.26) константы xq и ^о определяются начальными
условиями, т.е. значениями обобщенных координаты х и скорости v =
= х в момент времени t = 0. Пусть х = хн и х = vM при t = 0. Поскольку
v(t) = x(t) = -ш0 sin(ujot + <po), A-27)
то при t = 0 имеем
Отсюда
Х0 =
^нМ)J,
A.28)
A.29)
Величина ж о называется амплитудой колебания, a ljq — его круговой ча-
частотой. Величина / = ujq/2tt называется циклической частотой.
Функция A.26) есть периодическая функция с периодом
Т = 2тг/ш® = 1//. A.30)
Величина (p(i) = oj$t + (fo называется фазой колебания A.26), а (ро —
начальной фазой.
Как видно из A.26), период колебаний системы, описываемой уравне-
уравнением A.25), не зависит от амплитуды. Такие колебания называются изо-
изохронными.
Из A.27) следует, что гармонические колебания совершает не только
координата x(t), но и скорость v(t), причем с тем же периодом Т.
Гармоническим колебаниям может быть дана наглядная геометри™
ческая интерпретация. Пусть точка М рав-
равномерно движется на плоскости {х, у} по
окружности радиуса х® с центром в начале
координат (рис. 1.5). При этом угол ip, об-
образуемый радиусом-вектором точки и осью
абсцисс, меняется со временем по закону
ip = a;ot + <po- A-31)
Тогда координаты точки в момент времени t
равны
X(t) = Xq COs(uJ0t + (fo),
y(t) = Xq SimUJnt + Шп).
Сопоставляя эти соотношения с A.26), ви~
м
Рис. 1.5. Геометрическая ин-
терпретация гармонических
колебаний
20 Основные понятия теории колебаний
дим, что при равномерном движении по окружности проекции точки М на
координатные оси совершают гармонические колебания. Амплитуда этих
колебаний оказывается одинаковой и равной радиусу окружности, а фазы
отличаются на тг/2. Периодичность колебаний проявляется в том, что при
изменении фазы (р = uo^t + tpo на 2тг, т.е. за период колебаний Т = 2тг/шо,
точка возвращается в свое исходное положение.
При исследовании колебательных процессов часто оказывается полез-
полезным применение аппарата теории функций комплексной переменной. Об-
Образуем сумму
A.33)
Подставляя сюда A.32) и используя формулу Эйлера ег(р = cos ip + i sin ip
(см. комментарий 1), перепишем A.33) в виде
г = гоегш\ A.34)
где величина
z0=x0ei(po A.35)
называется комплексной амплитудой. Зная комплексную величину z(t),
можно найти действительные функции x(t) и y(t) по формулам
x(t) = Rez(t), y(t)=Imz(t). A.36)
Использование диаграммы рис. 1.5 оказывается полезным не только
при введении комплексного представления колебаний, но и в ряде других
ситуаций, в частности при изучении сложения колебаний. С таким диа-
диаграммным представлением тесно связано одно из важнейших понятий те-
теории колебаний — понятие фазовой плоскости. Это понятие вводится сле-
следующим образом. Состояние системы в каждой данный момент времени
полностью определяется значениями обобщенной координаты х и обоб-
обобщенной скорости х. Тогда на плоскости {ж, х} состояние системы пред-
представляется точкой А с координатами x(t), x(t)9 называемой изображаю-
изображающей или фазовой точкой. С течением времени положение фазовой точки
меняется, в результате чего она описывает на плоскости {ж, ж} некото-
некоторую кривую, в свою очередь называемую фазовой траекторией. Плос-
Плоскость {ж, х}9 содержащая все допустимые фазовые траектории, называется
фазовой плоскостью изучаемой колебательной системы.
Для гармонического колебания обобщенные координата и скорость да-
даются формулами A.26) и A.27). Исключая из них время, приходим к урав-
уравнению фазовых траекторий гармонического колебания
-) + — =1- A37)
Это есть уравнение эллипса с полуосями xq и cjqXq (см. рис. 1.6). Очевид-
Очевидно, что колебаниям с разными амплитудами на фазовой плоскости отве-
отвечают вложенные один в другой эллипсы. Направление движения фазовой
1.2. Основные характеристики колебательного движения
21
точки А по фазовой траектории удобно обозначать стрелкой. Фазовые тра-
траектории гармонических колебаний замкнуты. Это означает периодичность
движения. Период колебаний определяется
временем однократного обхода траектории
т шО2Ы
" *, A.38) ^^
Рис. 1.6. Фазовая плоскость и
фазовые траектории гармониче-
гармонических колебаний
где второй интеграл берется по замкнутому
контуру, образованному рассматриваемой
фазовой траекторией.
До сих пор мы обсуждали только ма-
малые колебания, описываемые уравнением
A.25). В общем случае немалого отклоне-
отклонения от положения равновесия уравнения
движения в отличие от A.25) являются нелинейными (см., например, A.2),
A.21)). Системы, описываемые нелинейными уравнениями (нелинейные
системы), также могут совершать периодические колебания. Эти колеба™
ния оказываются более сложными, чем гармонические колебания A.26). В
отличие от гармонических, их принято называть ангармоническими.
Точные решения уравнений, описывающих нелинейные системы, оказы-
оказываются, как правило, существенно более сложными. Например, в случае нема™
лых колебаний математического маятника уравнение A.2) имеет решение
sin(e/2) и л 1
ь—i—— = snUcJot + <??о)> #1? A.39)
sin(eo/2)
где q = sin@o/2), Во — максимальное угловое отклонение маятника от
положения равновесия (амплитуда колебаний), по смыслу задачи Во < тг,
sn(z, q) — эллиптический синус Лкоби с модулем q (см. комментарий 2).
При малых амплитудах (Во ^С1) это выражение переходит в известное В =
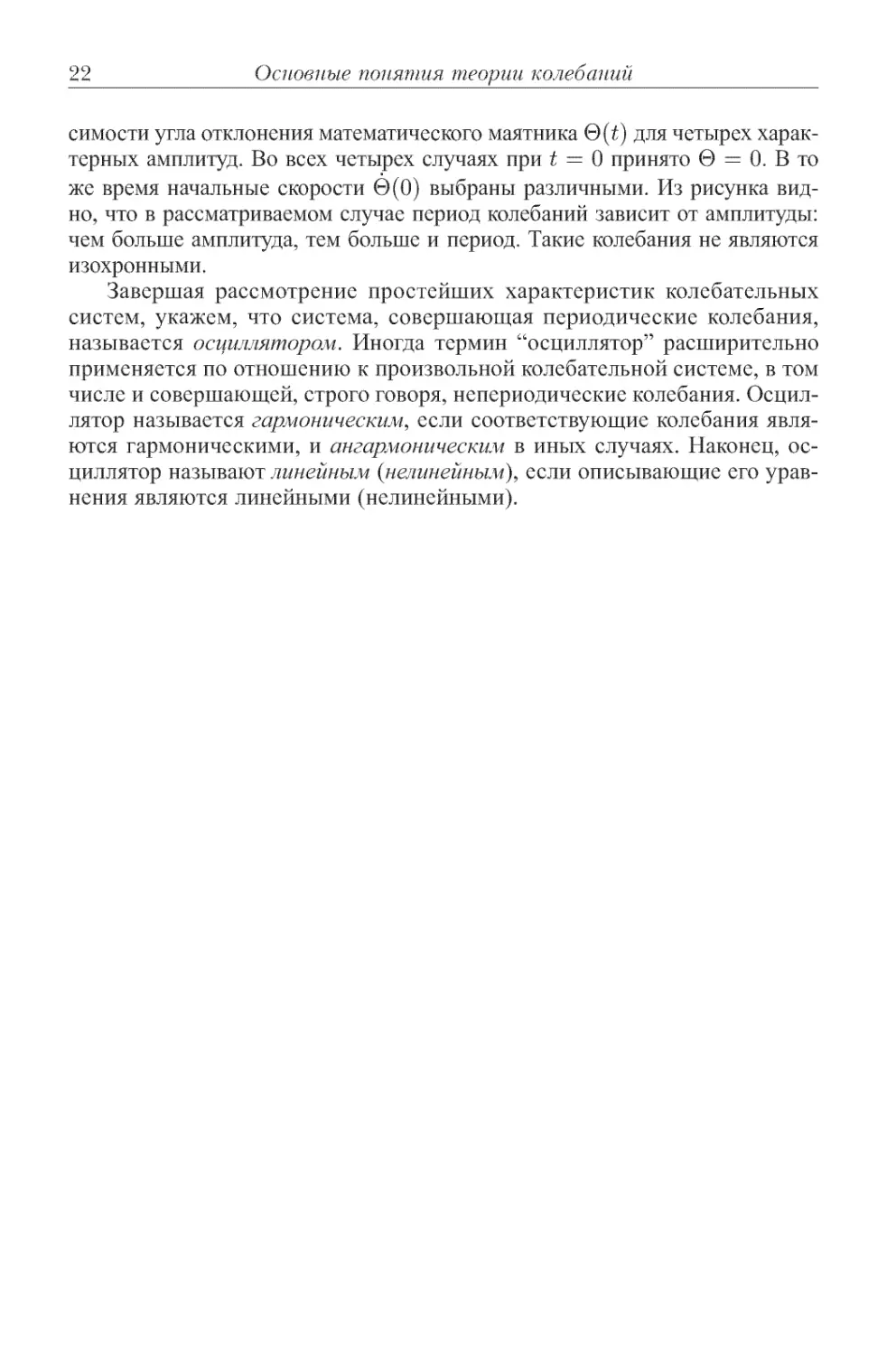
Форма нелинейных колебаний может сильно отличаться от формы гар-
гармонических колебаний. Для примера на рис. 1.7 показаны временные зави™
в
Рис. 1.7. Зависимость угла отклонения математического маятника от времени для сле-
следующих значений амплитуд: Ooi = тг/6, во2 = тг/2, воз = 5тг/6, во4 = Нтг/12
22 Основные понятия теории колебаний
симости угла отклонения математического маятника B(t) для четырех харак-
характерных амплитуд. Во всех четырех случаях при t = 0 принято В = 0. В то
же время начальные скорости 0@) выбраны различными. Из рисунка вид™
но, что в рассматриваемом случае период колебаний зависит от амплитуды:
чем больше амплитуда, тем больше и период. Такие колебания не являются
изохронными.
Завершая рассмотрение простейших характеристик колебательных
систем, укажем, что система, совершающая периодические колебания,
называется осциллятором. Иногда термин "осциллятор" расширительно
применяется по отношению к произвольной колебательной системе, в том
числе и совершающей, строго говоря, непериодические колебания. Осцил-
Осциллятор называется гармоническим, если соответствующие колебания явля-
являются гармоническими, и ангармоническим в иных случаях. Наконец, ос™
циллятор называют линейным (нелинейным), если описывающие его урав™
нения являются линейными (нелинейными).
ГЛАВА II
Свободные и вынужденные колебания. Амплитудно-частот-
Амплитудно-частотная характеристика. Резонанс. Колебания при наличии трения.
Апериодическое затухание. Коэффициент затухания, логарифми-
логарифмический декремент затухания. Добротность колебательной систе-
системы. Резонанс при наличии трения. Ширина резонанса. Система
связанных осцилляторов. Суперпозиция колебаний. Нормальные
колебания (нормальные моды). Собственные частоты системы.
Гармонический анализ. Скалярное сложение колебаний. Биения.
Векторное сложение колебаний. Фигуры Лиссажу. Параметри-
Параметрический резонанс. Теорема Флоке—Ляпунова. Резонансные полосы.
Уравнение Матъе.
2.1. Вынужденные колебания. Резонанс
Рассмотренные в предыдущей главе колебания принято называть сво-
свободными, поскольку они происходят в колебательной системе, выведенной
из положения равновесия и предоставленной после этого самой себе. Вме-
Вместе с тем представляет интерес ситуация, в которой на изучаемую систему
действует периодически меняющаяся внешняя сила.
Пусть, например, на шарик в пружинном маятнике (рис. 1.2) действует
внешняя сила
Fe(t) = FeOsmu)t. B Л)
В этом случае для смещения шарика вблизи положения равновесия вместо
A.4) получаем
у + ш1у = Aesmut, B.2)
где Ае = Feo/m. Нетрудно проверить, что решение уравнения B.2) имеет
вид
у = Уо cos(uj0t + (fo) + Ао smut. B.3)
Здесь первое слагаемое описывает свободные колебания A.26), а второе —
так называемые вынужденные колебания с амплитудой Aq9 равной
о ^j, ()
Обратим внимание на то, что частота вынужденных колебаний совпа-
совпадает с частотой вынуждающей силы, с чем, собственно, и связан термин
24
Основные понятия теории колебаний
"вынужденные колебания". Их фаза либо совпадает с фазой вынуждающей
силы, либо отличается от нее на тг в зависимости от того, меньше или боль-
больше величина и, чем ш® (см. рис. 2.1).
Зависимость амплитуды вынужден-
вынужденных колебаний от частоты вынужда-
вынуждающей силы принято называть ампли-
амплитудно-частотной характеристикой
(АЧХ) колебательной системы.
Амплитуда у® и фаза (р® свободных
колебаний определяются начальными
условиями, т.е. значениями координа-
координаты у и скорости у осциллятора в на-
начальный момент времени.
Как видно из B.4), при прибли-
приближении частоты внешней силы ш к
собственной частоте осциллятора ш®
амплитуда вынужденных колебаний
А® неограниченно возрастает. В пре-
предельном случае точного совпадения частот ш® и ш система уже не
может совершать периодические колебания. В этом случае зависимость
координаты у от времени дается формулой
Рис. 2.1. Частотная зависимость ам-
амплитуды вынужденных колебаний
линейного осциллятора без трения
У = —t COS UJQt ¦
2
B.5)
С некоторой долей условности такое движение можно рассматривать как
колебания с амплитудой Aet/2ajQ9 линейно нарастающей со временем.
Явление раскачки колебаний под действием периодической внешней
силы называется резонансом.
Следует подчеркнуть, что неограниченный резонансный рост амплитуды
вынужденных колебаний B.4),B.5) есть результат идеализации системы. Во-
первых, когда амплитуда колебаний становится достаточно большой, осцил-
осциллятор, как правило, перестает быть линейным. При этом результирующие
колебания оказываются чрезвычайно сложными, нерегулярными и даже хао-
хаотическими. Во-вторых, при записи уравнения B.2) мы пренебрегали силами
трения, приводящими, очевидно, к затуханию колебаний.
Рассмотрим роль последнего фактора более подробно.
2.2. Колебания при наличии трения
Для тела, движущегося в однородной среде, сила трения зависит толь-
только от скорости. При малых скоростях приближенно можно считать, что
сила трения
Fxp = -0v, B.6)
где J3 — положительный постоянный коэффициент. Такое трение часто на-
называют жидким трением, поскольку оно характерно для движения тела в
2.2. Колебания при наличии трения 25
жидкости или газе. Например, сила Стокса, действующая на шарик ради™
уса г со стороны жидкости с вязкостью rj, равна FTp = —UTrrjrv.
С учетом силы трения B.6) уравнение свободных колебаний пружин™
ного маятника вместо A.4) принимает вид
# + 272/ + a;jJ2/ = O. B.7)
Аналогичным образом характеризуется затухание колебаний в элек-
трическом LC-R-колебательном контуре (см. A.10)), затухание колебаний
в химических реакциях A.24) и т.д.
Уравнение B.7) имеет следующее решение:
у = yoe~jt cos(u)t + <р0), и
Это решение применимо, когда 7 < ^о? т.е. в случае малого трения. Если
же трение не мало, 7 > Иъ то решение уравнения B.7) имеет вид
у = e-^{yieTt + у2е-п}, Г = ^72 - < B.9)
В промежуточном случае 7 = ^о решение B.7) записывается как
У = B/1 + Ы)е*. B.10)
Легко видеть, что решение B.8) описывает затухающие колебания,
т.е. колебания с амплитудой, экспоненциально убывающей с характерным
временем та = 1/7- Существенно, что трение приводит к уменьшению
частоты (увеличению периода) колебаний. Когда трение достаточно силь-
сильно, колебания как таковые пропадают, и система стремится к положению
равновесия, совершив конечное число (не более одного-двух) подобных
колебанию движений. Такое поведение принято называть апериодическим
затуханием. Качественно возникновение такого режима легко понять из
того, что при 7 —>¦ ^о согласно B.8) период колебаний Т —>• 2тг/ш, пони-
понимаемый как интервал времени между последовательными максимумами,
стремится к бесконечности.
Решения B.8)—B.10) можно единообразно получить, используя ком-
комплексное представление колебаний. Заменяя переменную у в B.7) ком™
плексной величиной z = Re z + i Im z, положим
z = zoeiXt, B.11)
где величины zq и А есть комплексные числа. При этом предполагается,
что zq отлично от нуля. Подставляя B.11) в B.7), получаем
[-Х2 + 2ij\ + ujl]zoeiXt = 0. B.12)
Так как zq ф 0, то имеем
А2 -2г1Х-ш1 = 0. B.13)
Отсюда следует, что
A B Л 4)
26 Основные понятия теории колебаний
Общее решение имеет вид
z = deiXlt + C2eiX2\ B.15)
где Ci и Сг — комплексные константы. Отделяя в B.15) действительную
часть, с помощью формулы Эйлера можно получить решения B.8) и B.9).
Вырожденный случай ш® = j отвечает тому, что корни квадратного урав-
уравнения B.13) Ai и Аг совпадают. Поэтому решение нашего дифференциаль-
дифференциального уравнения уже не может быть представлено в виде B.15). Тем не ме~
нее, решение вида B.10) может быть получено из B.15) путем предельного
перехода (см. комментарий 3).
Как видно из приведенных соотношений, характер затухающих колеба-
колебаний полностью определяется параметром j, называемым коэффициентом
затухания. Наряду с ним часто используется так называемый логарифми-
логарифмический декремент затухания
5 = \цУ^, B.16)
Угп2
где уш\ и уШ2 — значения функции y(t) в двух последовательных макси™
мумах. Из формулы B.8) легко получить, что
B.17)
72
Из B.17) видно, что величина 5 определена только для j <
Во многих применениях используется величина
B.18)
называемая добротностью колебательной системы.
Переписывая B.18) в виде Q = шота/% = тгта/Т, мы замечаем, что
добротность по порядку величины есть не что иное, как число колебаний,
совершаемых системой за характерное время их затухания та = 1/7- Ин-
Индекс "А" в обозначении подчеркивает тот факт, что речь идет об убывании
амплитуды колебаний.
В случае ЬОД-колебательного контура, описываемого уравнением
A.10), добротность Q связана с электрическими параметрами цепи про-
простым соотношением
Чем больше величина Q, т.е. чем выше добротность контура, тем ближе
контур к идеальному и тем медленнее затухают в нем колебания.
2.3. Вынужденные колебании при наличии трении
Рассмотрим теперь вынужденные колебания при наличии затухания.
Если на осциллятор с трением действует внешняя сила B.1), то уравнение
2.3. Вынужденные колебания при наличии трения
27
таких колебаний имеет вид
у + 2jy
= Ае sin out.
Его решение имеет вид
= А0 sin(ut + (ре) + ys(t),
B.20)
B.21)
где ys(t) означает решение уравнения B.20) в отсутствие внешней силы
(собственные колебания осциллятора B.8)—-B.10) при наличии затухания).
Благодаря трению, j > 0, собственные колебания затухают: ys(t) —>• 0
при t —)- +оо. Поэтому через достаточно большое время после включения
внешней силы осциллятор оказывается совершающим только вынужден™
ные колебания, описываемые первым слагаемым в B.21). Эти колебания
происходят с частотой внешней силы ш и характеризуются амплитудой Ао
и фазовым сдвигом (ре.
Ае =, B.22)
B.23)
Важным отличием здесь от случая вынужденных колебаний осцил-
осциллятора без трения является наличие сдвига фазы (ре между колебаниями
вынуждающей силы и колебаниями осциллятора. При точном совпаде-
совпадении частот, ш = шо, вне зависимости от величины затухания, сдвиг фазы
составляет тг/2.
Другим существенным следствием наличия затухания является каче™
ственное изменение вида резонансной кривой. На рис. 2.2 приведена зави-
зависимость Aq(w) для некоторых характерных значений 7-
тг/2
Рис. 2.2. а — резонансные кривые (амплитудно-частотные характеристики) ли-
линейного осциллятора для различных значений коэффициента трения: 71/^0 = 0,
^/2/о;о = 0,2, 7з/^о = 0,4, 74/^0 = 0,75; б — зависимость сдвига фаз (ре между
колебаниями вынуждающей силы и осциллятора, ji/ujq = 0,01, 72/^0 = 0,2,
7зМ) = 0,4, 74/^0 = 1,0
28 Основные понятия теории колебаний
Максимальное значение амплитуды вынужденных колебаний, покуда
7 ^ шо/\/2, дается формулой
Этому максимуму соответствует резонансная частота
- 272- B-24)
Если затухание мало, j^ujq, to максимум резонансной кривой приблизи-
тельно совпадает с собственной частотой осциллятора ujq. По мере роста ве-
величины коэффициента затухания этот максимум смещается в сторону мень-
меньших частот. При 7 ^ ^o/V^ максимум амплитуды вынужденных колебаний
^4о приходится на частоту ш = 0. По существу это означает исчезновение
резонанса. Напомним, что режим апериодического затухания свободных ко-
колебаний возникает лишь при j ^ ш®. Следовательно, в интервале
шо/лД <j<uj0 B.25)
вынужденные колебания уже не имеют резонансного характера, а собствен-
собственные движения осциллятора еще сохраняют колебательный характер.
Как видно из формулы B.22) и рис. 2.2, при слабом затухании резонанс-
резонансные кривые имеют резко выраженный максимум. Амплитуда вынужденных
колебаний в этом случае быстро убывает по мере удаления от резонансной
частоты. В частности, она падает в у/2 раз при значениях ш, равных
± ад ' B-26)
где для краткости записи обозначено
2
7
Величину Аш, равную
Ао; = о;(+) -а;(-\ B.28)
принято называть шириной резонанса. При малых j эта величина соста-
составляет
Аш = 27. B.29)
Заметим, что добротность, введенная выше формулой B.18), связана с
шириной резонанса (при малых 7) простым соотношением
Q = шо/Аш, B.30)
Обратим теперь внимание на следующее интересное обстоятельство, ко-
которое может иметь и практическое значение. Формула B.22) отвечает откли-
отклику резонансной колебательной системы на внешнее воздействие, измерен-
измеренному в виде зависимости переменной у от времени. В случае LCR-коитура,
речь идет о заряде или напряжении на конденсаторе. Если же исследуется от-
отклик величины, имеющей смысл тока в цепи LCR или падения напряжения
2.4. Связанные осцилляторы
29
на активном сопротивлении R, то следует рассматривать амплитуду колеба™
ний функции 2jy. Согласно B.21) соответствующая амплитуда составляет
q. Из B.22) следует тогда, что величина относительного отклика
Ае
1-
u,02-c242
Очевидно, что эта величина вне зависимости от значения коэффициента
затухания j достигает максимального значения при
и = ш0. B.24')
Другими словами, отклик 2jy на внешнее периодическое воздействие
всегда имеет резонансный характер с максимумом на собственной часто-
частоте колебательной системы ujq. Если же интересоваться откликом функ-
функции у, имеющей смысл ЭДС самоиндукции (со знаком минус), то следует
рассматривать величину uj2Aq. Относительный отклик
ш2А0 ш2
о*J + B7u,J
максимален при
B.24/;)
Ясно, что при Uq < 2j2 резонанса не существует, т.е. отклик являет-
является монотонно возрастающей функцией частоты внешней силы. Подчерк-
Подчеркнем любопытную симметрию выражений для резонансных частот в трех
рассмотренных случаях: частота B.24;) является средним геометрическим
частот B.24) и B.24;/).
2.4. Связанные осцилляторы
До сих пор мы рассматривали поведение одного осциллятора. Вме-
Вместе с тем в большинстве реальных ситуаций мы встречаемся с системой
нескольких (двух и более) взаимодейству™
ющих осцилляторов. Для примера рассмо-
рассмотрим систему двух маятников, связанных
пружиной (рис. 2.3). Поведение этой си-
системы описывается уже не одним, а двумя
уравнениями. Пусть 4и<2 — длины нитей
маятников, 77ii и ТП2 — их массы, к —
жесткость пружины. Для малых колебаний
в отсутствие трения уравнения движения
имеют вид
тпь?г
e2
в2 = -сгЦ
B.31)
^02^2
Рис. 2.3. Система двух мате-
математических маятников, свя-
связанных пружиной
Основные понятия теории колебаний
Здесь o;oi = \Jgji\ и o;q2 = \/g/^2 — собственные частоты отдельных
маятников, а коэффициенты а\ и ®2 описывают взаимодействие между ни-
ними, обусловленное пружиной: а\ = nh2 jm\i\, a\ = nh2/7712^2? ГДО /г —
расстояние от точки подвеса маятника до точки прикрепления пружины.
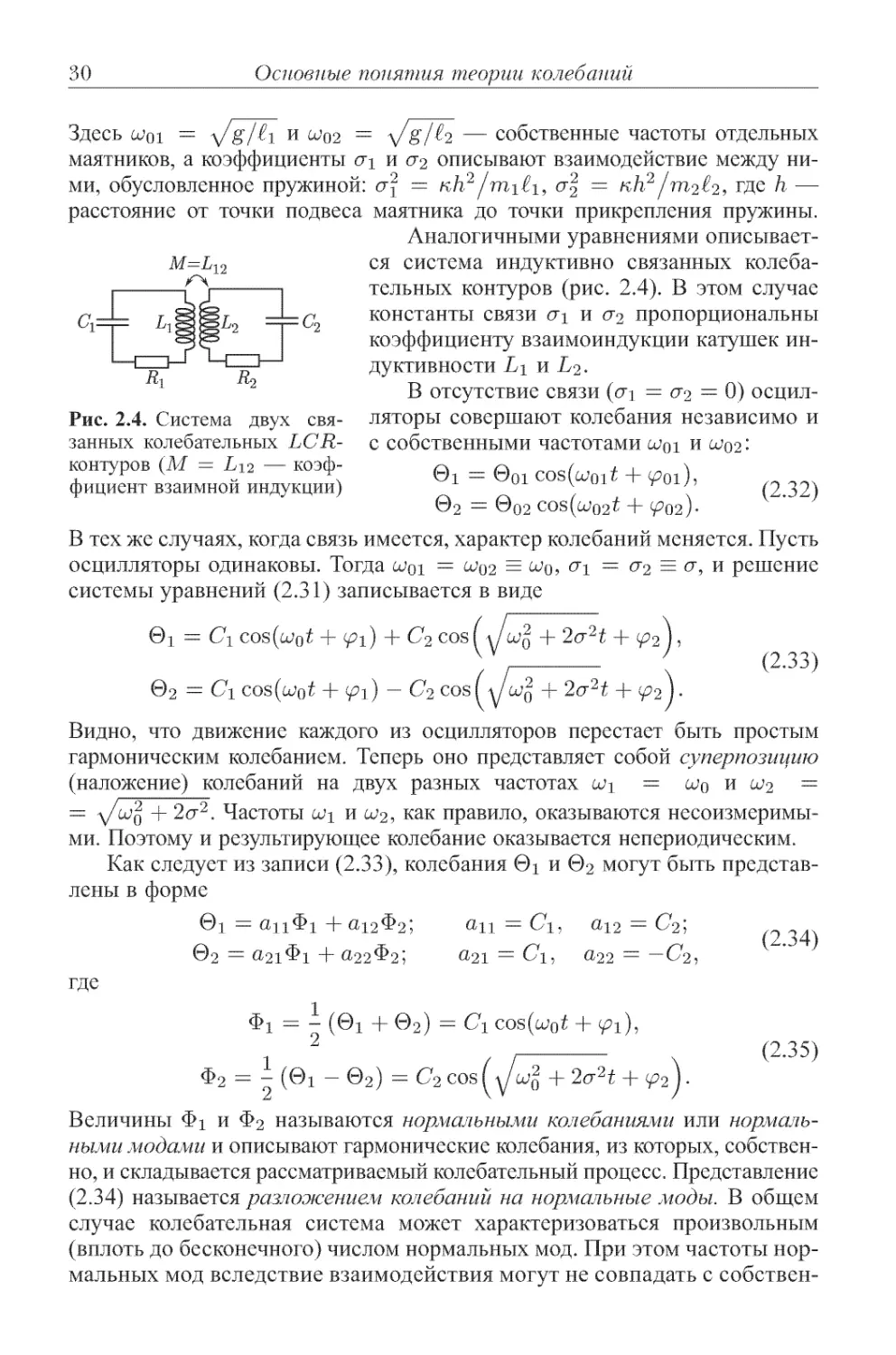
Аналогичными уравнениями описывает-
описывается система индуктивно связанных колеба-
тельных контуров (рис. 2.4). В этом случае
константы связи а\ и <Т2 пропорциональны
коэффициенту взаимоиндукции катушек ин-
индуктивности L\ ш L2.
В отсутствие связи (а± = и 2 = 0) осцил-
осцилляторы совершают колебания независимо и
с собственными частотами o/qi и ш®2'-
Рис. 2.4. Система двух свя-
связанных колебательных LCR-
контуров (М = Li2 — коэф-
коэффициент взаимной индукции)
©1 =
В2 =
~
В тех же случаях, когда связь имеется, характер колебаний меняется. Пусть
осцилляторы одинаковы. Тогда ujqi = Ш02 = ^о? сп = ®2 = &9 и решение
системы уравнений B.31) записывается в виде
- G2 cos
32 = С\ cos(o;ot + (pi) - C2 cos
- 2аЧ -
B.33)
Видно, что движение каждого из осцилляторов перестает быть простым
гармоническим колебанием. Теперь оно представляет собой суперпозицию
(наложение) колебаний на двух разных частотах ш\ = ш® и ш2 =
= л/ujq + 2а2. Частоты ш\ и Ш2, как правило, оказываются несоизмеримы™
ми. Поэтому и результирующее колебание оказывается непериодическим.
Как следует из записи B.33), колебания 0i и 82 могут быть представ™
лены в форме
В2 =
+ «22*25
пц —
«21 =
«12 — С2]
«22 = ^^2
где
*i = - Fi + 62) = Сг
= 1 (©1 " ©2) = C2 ca*
+ ip2)¦
B.34)
B.35)
Величины #i и #2 называются нормальными колебаниями или нормаль-
нормальными модами и описывают гармонические колебания, из которых, собствен-
собственно, и складывается рассматриваемый колебательный процесс. Представление
B.34) называется разложением колебаний на нормальные моды. В общем
случае колебательная система может характеризоваться произвольным
(вплоть до бесконечного) числом нормальных мод. При этом частоты нор-
нормальных мод вследствие взаимодействия могут не совпадать с собствен™
2.4. Связанные осцилляторы 31
ными частотами осцилляторов, т.е. с теми частотами, которыми соста™
вляющие систему осцилляторы обладали бы в отсутствие взаимодействия
(см. комментарий 4). Частоты нормальных мод называются собственными
частотами системы. Число нормальных мод и, соответственно, число соб-
собственных частот равно числу осцилляторов, из которых составлена система.
Если все эти частоты различны, то нормальные моды определяются одно™
значно и разложение по ним единственно. Если же какие-либо собственные
частоты совпадают, то соответствующие им нормальные колебания уже не
определяются однозначно — для разделения мод в этом случае надо привле-
привлекать дополнительные соображения.
В линейных системах взаимодействующих осцилляторов переход к
нормальным модам означает переход к новой базисной системе линей™
ных осцилляторов, не взаимодействующих друг с другом. Иными слова-
словами, осцилляторы, отвечающие нормальным модам, совершают колеба™
ния каждый независимо от всех других.
Выделение нормальных мод той или иной колебательной системы со-
составляет задачу гармонического анализа.
Выше обсуждались два вопроса: вынужденные движения осциллято-
осциллятора под действием внешней силы и движения в системе двух связанных
осцилляторов. На самом деле эти два вопроса тесно связаны друг с дру-
другом, поскольку вынужденные колебания можно рассматривать как частный
случай колебаний в системе двух связанных осцилляторов. Действительно,
пусть имеются два связанных осциллятора y(t) и F(t), поведение которых
описывается уравнениями
alF,
о о B.36)
F2 + uj2F = \
отличающимися от B.31) только переопределением собственных частот
исходных осцилляторов. Положим здесь а2 = 0 и перепишем уравнения:
у + шп у = (j-i F.
„ ° 9 г B37)
Отсюда вытекает, что состояние осциллятора F(t) влияет на состояние ос™
циллятора y(i), а обратное влияние отсутствует. Решение второго из урав-
уравнений B.37) имеет вид F(t) = Fesln(a;t + (pe). Из этого непосредственно
следует, что динамика осциллятора y(t) полностью описывается уравнением
у + Шду = a\Fe sm.(ut + <р0), B.38)
эквивалентным уравнению B.2) для вынужденных колебании.
Физически это означает, что эффективная масса осциллятора F(i) су-
существенно превышает эффективную массу осциллятора y(i). Ситуация
здесь аналогична той, что возникает при столкновении легкой и тяжелой
частиц: энергетический ресурс тяжелой подсистемы существенно пре-
превышает таковой для легкой, в силу чего именно первая из них и навязы-
навязывает движения второй.
Основные понятия теории колебаний
2.5. Сложение колебаний
Из рассмотренных выше примеров вынужденных колебаний и коле™
баний в системе связанных осцилляторов видно, что наблюдающиеся в
реальных системах движения могут иметь сложную форму. Эти движения
можно разложить по нормальным модам. И обратно, если система участву-
ет в нескольких колебаниях, то результирующее движение представляется
их суммой. При этом говорят, что имеет место сложение колебаний. Разли-
Различаются два типа сложения — скалярное и векторное. В первом случае вы™
деляется какая-либо скалярная переменная (угол отклонения, ток в цепи,
длина пройденного пути и т.п.) и временная зависимость этой переменной
изучается как результат наложения отдельных колебаний. Используя по™
нятие нормальных мод, для линейной системы результирующее движение
всегда можно представить в виде суперпозиции этих мод:
B.39)
k=l
где п — число нормальных мод, а Си — некие константы.
Рассмотрим частный случай. Пусть система характеризуется только дву-
двумя модами, между которыми отсутствует фазовый сдвиг:
S(t) = Сг sin^it + С2 smuj2t. B.40)
Предположим, что амплитуды мод совпадают, С\ = С2 = С, а частоты ш\
и Ш2 близки, Аш = \uji — сиз| €^1,^2. Тогда, переписывая B.40) тожде-
тождественно в виде
S(t) = 2OsIn (—t\ sinut, B.41)
получаем зависимость B(t), показанную на рис. 2.5. Как видно из этого
графика, величина B(t) совершает регулярные колебания с периодом Т =
Т0=2тг/Аш
Рис. 2.5. Биения
= 2тг/ш, но при этом амплитуда колебаний также периодически меняет-
меняется с периодом То « 2тг/Ао;. Такое сложное движение, возникающее при
сложении двух близких по частоте гармонических колебаний, называется
биениями. Говорят также, что высокочастотное колебание, имеющее пери™
од Т, промодулировано низкочастотными колебаниями, имеющими период
То, То > Т.
2.5. Сложение колебаний
Тх: Ту -тг/2 -7г/40
i
1:1
1:2
1:3
1:1
1:2
1:3
1:1
1:2
1:3
О
С
е
о
м
о
тг/2 <- ^-^
о
w
Рис. 2.6. а — фигуры Лиссажу при различных соотношениях периодов и фаз
гармонических Х- и F-колебаний:
x(t) = sin(ujxt + (рх), y(t) = sm(ujyt + ipy).
б, в — фигуры, возникающие при сложении гармонического F-сигнала [y(t) =
= sin(ujyt + <py)] и пилообразного Х-сигнала:
2<p(t)/<p0 - 1,
0
Z7T — if®
(p = ujxt + ipx (mod27r), ^о = 0598-2тг.
Справа от рисунков показаны формы складываемых Х- ж F-сигналов
3 Н.В. Карлов, Н.А. Кириченко
34 Основные понятия теории колебаний
Рассмотрим теперь векторное сложение колебаний. Ограничимся случа-
случаем двух взаимно перпендикулярных колебаний. Выберем плоскость {ж, у}.
Тогда радиус-вектор некоторой точки М на плоскости имеет две компонен™
ты: г = (ж, у). Это можно интерпретировать как участие точки М одно™
временно в двух взаимно перпендикулярных движениях — вдоль оси X и
вдоль оси Y. Пусть, например, координаты х и у меняются со временем
по гармоническому закону:
. . B.42)
у = r0 smuut.
В результате сложения таких двух колебаний точка движется по окружно-
сти радиуса г®. Отметим, что этот факт был использован в главе первой
при обсуждении геометрической интерпретации гармонических колебаний
(рис. 1.5)
В более общем случае амплитуды, частоты и начальные фазы колеба-
колебаний по осям х и у не совпадают
x(t)=ry8Ul(uxt + <px),
y(i) = ry sm(ujyt + ify).
Траектория точки на плоскости {ж, у} имеет при этом сложный вид. На
рис. 2.6 а показаны примеры сложения колебаний x(t) и y(t) при различ-
различных соотношениях между частотами шх и шу и фазами (рх и <ру. Замкнутые
траектории, получающиеся при сложении двух взаимно перпендикуляр™
ных гармонических колебаний, называются фигурами Лиссажу. Нетрудно
понять, что траектории замкнуты, если частоты складываемых колебаний
относятся как целые числа. Именно такие фигуры обычно демонстрируют-
демонстрируются на экране катодного осциллографа, когда на его х- и у-входы подаются
соответствующие переменные напряжения.
Замкнутые траектории при сложении ортогональных колебаний наблю-
наблюдаются и в тех случаях, когда складываются периодические, но не гармоничес-
гармонические колебания, периоды которых соотносятся как целые числа (рис. 2.6 б, в).
Такие фигуры, аналогичные фигурам Лиссажу, находят применение при
изучении формы, частоты и фазы периодических процессов.
2.6. Параметрический резонанс
Выше были рассмотрены колебания осциллятора, возбуждаемые внеш-
внешней силой. При этом параметры самого осциллятора предполагались неиз-
неизменными. В то же время внешние воздействия могут сводиться к изме-
изменению со временем параметров колебательной системы. Тогда в общем
случае уравнение движения может быть записано в виде
т^ +ку 0, B.43)
at V at/
2.6. Параметрический резонанс 35
где параметры mm к являются функциями времени. Переходя к новой неза-
независимой переменной т по формуле dr = dt/m(t)9 имеем
^У- + тку = 0. B.44)
dr2
Поэтому без ограничения общности можно рассматривать уравнение
у + ш%(т)у = 0. B.45)
Будем считать, что параметры системы меняются со временем перио-
периодически. Примерами могут служить качели, на которых человек периоди-
периодически встает и садится, колебательный контур, емкость конденсатора кото-
которого периодически меняется, сезонные колебания характеристик (темпера-
(температуры, количества корма и т.п.) среды обитания биологических популяций
в задачах экологии. Периодичность параметров системы означает, что
а;о(* + Ге)=а;о(*). B.46)
Отсюда следует, что уравнение B.45) инвариантно по отношению к пре-
преобразованию t —>> t + Те. Это значит, что если y(t) есть решение, то и
y(t + Те) также есть решение уравнения B.45). Это уравнение есть ли-
линейное уравнение второго порядка. Следовательно, оно имеет два линейно
независимых решения yi(t) и г/2@- Соответственно, функции yi(t + Te) и
2/2(t + Te) также являются решениями исходного уравнения. Произвольное
решение может быть представлено в виде линейной комбинации решений
у lit) и г/2(?). Это утверждение справедливо, в частности, и для функций
( )( те):
Vl(t + Те) = Cliyi(t) + С12У2 (*),
+ C72/W '
Переходя к линейной комбинации решений г/i иг/2, можно построить из
них такую пару Y\{t) и 1^(?), которая преобразуется только через себя
(см. комментарий 5):
Y1(t + Ye)=PlY1(t),
Y2(t + Ye)=p2Y2(t), {1АЪ)
где pi и р2 — постоянные величины, называемые мультипликаторами.
За время, равное одному периоду колебаний, происходит умножение на
р9 за два периода — на р2 и т.д. Соответственно, в произвольный момент
времени t решение можно представить в виде
*« = "?•««>• ,2.49)
где функции Pi (t) и Рг(^) есть периодические функции с периодом Те. Это
утверждение составляет содержание теоремы Флоке-Ляпунова, известной
так же в квантовой механике как теорема Ф. Блоха.
Строго говоря, представление B.48) справедливо, если р\ ф р^. В про-
противном случае запись B.49) усложняется (см. комментарий 5).
36 Основные понятия теории колебаний
Пусть Y\(t) и Y2(t) есть два произвольных решения уравнения B.45),
т.е. пусть Y]_ + ujQ(t)Yi = 0 и Y2 + ujQ(t)Y2 = 0. Тогда умножая первое
уравнение на F1? а второе — на Y2 и вычитая одно из другого, получаем:
У1У2 - ВД = 4 (*i*2 - У1У2) = 0. B.50)
at V /
Отсюда для вронскиана W имеем
W = YtY2 - YtY2 = const. B.51)
Подставляя сюда B.49), находим, что
W(t + Te) = plP2W(t). B.52)
Поскольку, согласно B.51), вронскиан W = const, то
PiP2 = 1. B.53)
В силу того, что исходное уравнение B.45) есть уравнение с действи-
действительными коэффициентами, наряду с решениями B.49) Yi(t) и Y2(t) ком™
плексно им сопряженные функции Y* (t) и Y2 (t) также являются решения-
решениями. С другой стороны, новых линейно независимых решений у уравнений
второго порядка быть не может. Поэтому, Y* и Y2* выражаются линейно
через Yi и Y2. Более того, они должны удовлетворять соотношениям, ана-
аналогичным B.49). Отсюда вытекает, что пара мультипликаторов {pj, р2}
совпадает с парой {/?i, p2}.
В соответствии с этим возможны два случая.
Во-первых, pi = р2, р2 = р\. Это означает, что мультипликаторы р\ и
Р2 комплексно сопряжены. Тогда, в силу B.53), |pi| = \р2\ = 1. В этом
случае функции Yi(t) и Y2(t) — ограниченные. Записывая р\ = р2 =
¦ / t/T i/T
= eltp, замечаем, что множители р/ е и р2; е являются периодическими
функциями с периодом Т = 2тгТе/ф. В общем случае периоды Т ш Те
оказываются несоизмеримыми и результирующие колебания являются апе-
апериодическими.
Во-вторых, pi = рь рз = Р2- Это означает, что мультипликаторы есть
действительные числа, и в силу B.53) один из них, например, р\ > 1,
а другой р2 < 1. Тогда согласно B.49) решение Yi(?) описывает колебание
с экспоненциально нарастающей амплитудой, пропорциональное est, где
s = (l/Te)ln/?i > 0. Это явление называется параметрическим резонан-
резонансом.
Переход от комплексных мультипликаторов к действительным осуще-
осуществляется через вырожденный случай р\ = р2 = 1. Этот случай определяет
границу параметрического резонанса. Обычно здесь колебания нарастают
со временем, но по более слабому закону — не экспоненциально, а степен-
степенным образом.
В отличие от обычного резонанса, рассмотренного выше, состояние
равновесия у = 0 при параметрическом резонансе сохраняется. Однако
оно не устойчиво: достаточно сколь угодно малого отклонения от него для
того, чтобы началась неограниченная раскачка колебаний.
2.6. Параметрический резонанс 37
Другим важным отличием параметрического резонанса от обычного
является то, что он возникает не на одной (резонансной) частоте, а в целой
полосе частот. Пусть, например,
ШШ) = ШИ1 + 4/icQswt). B.54)
Уравнение B.45) с этой зависимостью ujo(i) называется уравнением Ма~
тье. При h <C 1 наиболее сильный параметрический резонанс возникает
при
2ш0 - 2/ш0 < и < 2ш0 + 2huj0. B.55)
Иными словами, ширина полосы основного параметрического резонанса
составляет
Аш = 4huj0. B.56)
Кроме того, параметрический резонанс возникает и в окрестностях других
частот,
ш = 2шо/п, п = 1, 2, 3, ... B.57)
Ширина каждой из этих полос убывает с ростом номера полосы п по за-
кону
Да; - ujohn. B.58)
Математический анализ уравнения Матье и вывод соотношений, ха-
характеризующих первую и вторую зоны параметрического резонанса, при™
ведены в комментарии 6.
Наличие слабого трения качественно не меняет картину параметриче-
параметрического резонанса, лишь несколько уменьшая ширину резонансной полосы и
замедляя темп роста амплитуды колебаний. Если коэффициент затухания
есть 7? то амплитуда колебаний нарастает по закону e^s™7^, 7 < s, а для
полосы основного резонанса вместо B.55) имеем
2ш0 - ^Bhu0J - 472 < ш < 2ш0 + VB^0J-472. B.59)
Подобно тому, как колебания осциллятора под действием внешней си-
силы можно рассматривать как колебания в системе связанных осциллятеь
ров, когда один из коэффициентов связи обращается в нуль, параметриче-
параметрическое возбуждение колебаний можно также рассматривать как колебания в
системе взаимодействующих осцилляторов. В самом деле, полагая
0,
видим, что такая система эквивалентна описываемой уравнением Матье.
Обратим внимание на принципиально важное отличие этой системы от
B.36) — она существенно нелинейна, что проявляется в наличии в первом
из уравнений B.60) слагаемого, пропорционального yF. Для системы тако-
такого типа принцип суперпозиции не выполняется. Это означает следующее.
38 Основные понятия теории колебаний
Пусть у\, F\ и у2, F2 — два произвольных решения системы уравнений
B.60). Тогда их линейная комбинация
уже не является решением системы B.60). Заметим, что построенная анало-
аналогичным образом линейная комбинация явилась бы решением системы B.36).
В общем случае полное аналитическое исследование уравнения Хил™
ла е произвольной (хотя и периодической) зависимостью параметров от
времени невозможно. В отдельных случаях удается, однако, выполнить
соответствующий анализ, используя те или иные приближения. Примером
такого анализа является приближенное решение уравнения Матье (см.
комментарий 6). Вместе с тем, в некоторых задачах полное аналити-
аналитическое исследование возможно. К числу таковых относятся системы,
параметры которых меняются скачкообразно, оставаясь постоянными в
промежутках между скачками. Именно на примерах таких систем обыч™
но дается элементарное введение в теорию параметрического резонанса
(см. комментарий 7).
ГЛАВА III
Кинетическая и потенциальная энергии математического ма~
ятника. Закон сохранения энергии. Перекачка кинетической энер-
энергии в потенциальную и обратно. Потери энергии при наличии
трения. Слабое затухание. Время затухания колебаний. Доброт-
Добротность колебаний. Функции Ляпунова. Энергия вынужденных ко-
колебаний. Автономные неавтономные системы. Энергия системы
связанных осцилляторов, разложение по нормальным модам. Дис-
сипативная функция. Адиабатические инварианты. Адиабатиче-
Адиабатически медленный процесс. Адиабатический инвариант пружинного
маятника. Гамильтонова функция {гамильтониан) динамической
системы. Степени свободы. Адиабатический инвариант системы
с одной степенью свободы. Действие и угол, теорема Лиувилля.
3.1. Энергия свободных колебаний
Рассмотрим математический маятник (рис. 1.1). Так как для матема-
математического маятника массой нити подвеса пренебрегается, то его энергия
целиком определяется энергией груза. Она складывается из двух частей:
кинетической EKWH и потенциальной Епот энергий. Для полной энергии Е
имеем
Е = Екш + ^пот = т?2^ + mg? (I - cos в), C.1)
где потенциальная энергия отсчитывается от уровня, соответствующего по-
положению равновесия.
В случае малых колебаний, в <С 1, формула C.1) переписывается как
А2 П2
C.2)
Введя длину дуги траектории s = ?0 ш частоту ш® = уfg/?, приведем
C.2) к виду
Е^^ C3)
Поскольку для гармонического осциллятора
s = s0 cos (uot + <р0), C.4)
40 Основные понятия теории колебаний
то из C.3) следует, что
Е = = const. C.5)
2
Таким образом, полная энергия математического маятника сохраняется. Это
утверждение получено здесь для случая малых колебаний. Однако нетруд-
нетрудно показать, что для движений математического маятника с произвольной
амплитудой полная энергия не меняется со временем.
Обратим внимание на то обстоятельство, что энергия гармонических ко-
колебаний пропорциональна квадрату их частоты и амплитуды (см. коммен™
тарий 8). Это утверждение относится, вообще говоря, только к линейным
системам. Для нелинейных систем понятия амплитуды и частоты колебаний
не являются столь же наглядными, как в случае гармонических колебаний.
При этом зависимость энергии от параметров, характеризующих смещения
(отклонения от положения равновесия) и периоды колебаний, оказывается
более сложной.
Закон сохранения C.5) есть следствие, во-первых, пренебрежения по™
терями энергии, в нашем случае — на трение в подвесе и при движении
в воздухе, во-вторых, потенциальности силы тяжести и, в третьих, неиз-
неизменности во времени параметров рассматриваемой физической системы
(постоянство тп, ? и g).
В то время как полная энергия сохраняется неизменной, ее составляю-
составляющие — кинетическая и потенциальная энергии — совершают колебания.
Из C.3) и C.4) видно, что кинетическая энергия меняется со временем по
закону
Еша = ^f- = EW sin^ (coot + <р0) , C.6)
а потенциальная — по закону
^пот = muJ®s = Е^2 cos2 (ujot + ^o) • C.7)
Здесь 1?кин = Дгот = -mujQSQ = Е — полная энергия осциллятора.
2
Таким образом, в процессе колебаний осуществляется периодическое
превращение кинетической энергии в потенциальную и обратно. Так как
полная энергия сохраняется, т.е. EKHH(t) + ^пот(^) = Е = const, то измене-
изменения кинетической и потенциальной энергий за любой промежуток време-
времени связаны соотношением АЕКШ = —АЕШТ. Вместе с тем, как это легко
увидеть из формул C.6) и C.7), средние за период колебаний Т = 2тг/ujq
значения кинетической и потенциальной энергий совпадают:
»о = Iе- C-8)
3.1. Энергия свободных колебаний 41
Здесь черта над буквой означает усреднение по времени:
т
t. C.9)
Следует также обратить внимание на то, что колебания Еши(г) и En0T(t)
происходят с частотой, вдвое большей частоты колебаний собственно ма-
маятника (ср. C.4) с C.6) и C.7)). Этот результат есть следствие симмет-
симметричности колебаний математического маятника относительно положения
равновесия. Отметим, что и в случаях немалых, т.е. ангармонических ко™
лебаний при симметричности траектории относительно положения равно™
весия период колебаний кинетической энергии вдвое меньше периода ко™
лебательного движения самого осциллятора.
Для наглядности изложения приведем выражения для энергии в случае
электрических колебаний в LC-контуре. Как известно, энергия электри-
электрического поля, запасенная в конденсаторе, есть Ее = Q2/2С, а энергия
магнитного поля в катушке индуктивности есть El = LI2/2. Учитывая,
что I = Q, для полной энергии имеем
Сравнивая (ЗЛО) с C.3) и C.5), получаем, что колебания происходят с ча-
частотой wq = 1/л/ЬС, причем полная энергия, запасенная в контуре, соста-
составляет
¦pj _ LujqQq _ Q^ И 11)
~ 2 ~ 2C'
где Q® — амплитуда колебаний заряда, Q(t) = Qq cos {uj®t + lpq). Из опре-
определения тока I следует, что амплитуда колебаний тока /о = (jJqQq. Следо-
Следовательно, соотношение C.11) можно представить также в виде
Е=^±. C.12)
Учтем теперь потери энергии. В этом случае (см. B.7)) уравнение дви-
движения имеет вид
= 0. C.13)
Выражение для полной энергии осциллятора как суммы энергий кинети-
кинетической и потенциальной остается прежним (см. C.3)). В то же время зави-
зависимость обобщенной координаты y(t) уже не передается гармоническим
законом типа C.4). Ограничиваясь случаем не слишком больших потерь,
7 < шо, т.е. случаем, когда движение еще носит осциллирующий характер,
запишем решение уравнения (ЗЛЗ) в виде:
у = yoe^jt cos (ut + (fo), ш = Jufi - Jq. C.14)
42 Основные понятия теории колебаний
Подстановка C.14) в выражения для кинетической и потенциальной энер-
энергий дает
^ sin2 (ut + щ + <рг), C.15)
^ cos2 (ujt + Ы . C.16)
Прежде всего, заметим, что наличие трения приводит к возникновению
дополнительного сдвига фаз (р± между колебаниями кинетической и по-
потенциальной энергий:
1 ^ C.17)
/OJq
Этот дополнительный сдвиг фазы при j —>> ujq стремится к тг/2, но частота
осцилляции при этом стремится к нулю, ш —>> 0, т.е. колебания пропадают.
Из C.15) и C.16) видно, что кинетическая и потенциальная энергии
осциллятора совершают колебания с амплитудой, убывающей со временем
пропорционально ехр(^27^). В отличие от них полная энергия убывает
монотонно. Это утверждение можно доказать способом, имеющим доста™
точно широкую область применения.
Умножая почленно уравнение движения C.13) на ту, имеем
туу + 2mjy2 + тш^уу = 0. C.18)
Этому эквивалентно уравнение
C.19)
at ^ 2
Выражение в фигурных скобках есть полная энергия осциллятора Е =
= Дшн + ^пот- Слагаемое же 2mjy2 можно записать как 47Дшн- Следо™
вательно, баланс полной энергии определяется уравнением
^ 47?к„н C.20)
at
Поскольку 7 > 0, то при ненулевых скоростях движения (у ф 0) производи
ная dE/dt < 0. Отсюда следует, что полная энергия монотонно убывает
со временем. Более того, отсюда следует, что dE/dt обращается в нуль
только при EKWii = 0, т.е. только в состоянии покоя. Значит, осциллятор
с трением теряет энергию в течение всего времени движения вплоть до
полной остановки. Заметим также, что при выводе C.20) никак не исполь-
использовалось ограничение на величину коэффициента трения, т.е. не использо-
использовалось ограничение на характер движения системы (затухающие осцилля-
осцилляции или апериодическое затухание). Следовательно, выражение типа C.20)
носит достаточно общий характер в отличие от конкретных выражений
C.15) и C.16).
В случае слабого затухания G <С ш®) нетрудно в явном виде устано-
установить зависимость полной энергии от времени. В этих с условиях средние
3.2. Понятие функции Ляпунова 43
кинетическая и потенциальная энергии мало меняются за период колеба-
колебаний Т = 2тг¦/' sJojq — 72- Следовательно, можно принять, что Ёкш = Ёпот.
Тогда, усредняя по периоду Т полную энергию Е, найдем:
Е = Ешн + ^пот = ^Ешн C.21)
С учетом этого C.20) дает
^ Ё = Ёое^\ C22)
dt
где Ё® — начальное значение полной энергии осциллятора.
Обратим внимание на то, что характерное время убывания энергии ко-
колебаний Е
тЕ = ± = \тА, C.23)
где та — характерное время затухания амплитуды, введенное в предыду-
предыдущей главе. В этой связи можно переписать выражение B.18) для доброт™
ности колебаний в виде
Q = ^огЕ C.24)
Эта простейшая зависимость оправдывает введение понятия добротности
как естественной характеристики скорости превращения энергии в коле™
бательной системе.
3.2. Понятие функции Ляпунова
Формула C.19) и эквивалентная ей C.20) позволяют установить неко-
некоторые общие закономерности поведения системы, не проводя в явном ви~
де решения соответствующих динамических уравнений. В частности, из
C.20) следует, что положение равновесия у = 0, у = 0 является устойчи-
устойчивым в том смысле, что при любом отклонении от него система неизменно
возвращается в это положение. Поскольку энергия системы, предоставлен™
ной самой себе, может только уменьшаться, то самопроизвольный отход от
положения равновесия невозможен.
Возможность установить указанные свойства системы без решения урав-
уравнений ее движения в явном виде обусловлена тем, что удается построить
функцию L = LB/, у), которая удовлетворяет следующим условиям:
1) эта функция неотрицательна, L ^ 0;
2) она монотонно убывает со временем, dL/dt ^ 0;
3) ее производная по времени обращается в нуль на стационарных со™
стояниях системы, dL/dt = 0 при у = 0, т.е. у = у о, где г/о — положение
равновесия.
Функции, обладающие перечисленными свойствами, называются функ-
функциями Ляпунова. Метод функций Ляпунова оказывается весьма эффектив-
эффективным при решении многих задач теории колебаний. В рассмотренной выше
ситуации роль функции Ляпунова играет полная энергия системы Е. Нуж-
Нужно, однако, иметь в виду, что в общем случае нахождение функций Ляпу™
нова представляет собой сложную задачу. Кроме того, для многих систем
44 Основные понятия теории колебаний
функция Ляпунова не существует вовсе. Вместе с тем безуспешность по-
попыток построить функцию Ляпунова не является основанием для вывода
о сложности поведения системы.
3.3. Энергия вынужденных колебаний
До сих пор мы рассматривали колебательную систему в отсутствие
внешних источников энергии. Остановимся теперь на превращениях энер-
энергии в случае вынужденных колебаний. Связь кинетической и потенциаль-
потенциальной энергий со скоростью у и смещением у остается неизменной. Исполь-
зуя решения B.21)^B.23) для установившихся колебаний, т.е. для тех
времен, когда свободные колебания благодаря трению затухли, имеем
Е = ^-^- cosz (ujet + (fo) H ^t smz (ujet + (fo). C.25)
Поскольку ше в общем случае отличается от и о, то величина Е совершает
колебания от значения тА^ш®/2 до значения тА^ш1/2. В частном случае
совпадения частоты внешней силы ше с собственной частотой осциллятора
ш® энергия Е оказывается постоянной: Е = itiAqLj^/2. В этом случае вся
энергия, вносимая в установившемся режиме внешней силой в систему,
тратится на компенсацию потерь энергии на трение.
Колебательная система, взаимодействующая с внешней средой, обме-
обменивается с ней энергией. В рассматриваемом случае вынужденных колеба-
колебаний внешняя сила явно зависит от времени. Напомним, что при обсужде-
нии параметрического резонанса мы имели дело с системами, параметры
которых явно зависят от времени (см. формулы B.44), B.54)). Системы, ха-
характеристики которых зависят от времени явно, называются неавтономны-
неавтономными. Системы же, характеристики которых не зависят от времени, называ-
называются автономными. С физической точки зрения неавтономность означает
незамкнутость, а автономность — замкнутость рассматриваемой системы
(см. комментарий 9).
3.4. Энергия системы осцилляторов
До сих пор мы рассматривали одиночный осциллятор. Однако во мно™
гих случаях приходится иметь дело с системами многих взаимодействую-
взаимодействующих осцилляторов подобно тому, как это имело место в главе второй. Как
это было там указано, всякое сложное колебательное движение может быть
разложено по нормальным модам:
п
yi(t) = Y, АгкЫ*), г = 1, 2, ..., n, C.26)
где нормальные моды Ф^ удовлетворяют уравнению
?fc+o;j^fc = 0, C.27)
а число нормальных мод п равно числу исходных осцилляторов.
3.5. Диссипация энергии в системе осцилляторов 45
В этой задаче потерями энергии пренебрегается. Такое допущение
оправдано для термодинамически замкнутой системы взаимодействующих
друг с другом осцилляторов. В этом случае энергия из системы не ухо-
уходит, а только перераспределяется между различными ее частями, т.е. между
различными осцилляторами. С другой стороны, нормальные моды между
собой не взаимодействуют. Поэтому энергия, запасенная в каждой нор™
мальной моде, сохраняется:
Ек = ^ + mkwfl = mkUJflk = const, к = 1, 2, ..., п.
C.28)
Здесь Фоа; — амплитуда колебаний в к-й нормальной моде, т^ — некото-
некоторые положительные константы, имеющие смысл массы.
Полная энергия исходной системы представляется суммарной энерга-
ей всех нормальных мод:
* = ? [^М + И^Щ . C.29)
k=i k=i L 2 2 J
С другой стороны, энергия исходной системы осцилляторов записывается
как
Е = Е Е* = Е [ + Ц. (з.зо)
k=i k=i L 2 2 J
Равенство сумм C.30) и C.29) есть не что иное, как известное в теории
рядов Фурье равенство Парсеваля, которое в нашем случае формулируется
для конечного числа гармоник. В принципе доказательство этого равенства
для конечного числа осцилляторов не представляет особого труда, и мы
на нем не будем останавливаться. В нашем случае это равенство выра-
выражает закон сохранения энергии в системе осцилляторов вне зависимости
от того, какие собственно осцилляторы были изначально возбуждены: их
взаимодействие может привести лишь к перераспределению энергии меж™
ду ними. В частности, можно представить себе такие начальные условия,
когда почти вся энергия на какое-то время концентрируется в одном из
осцилляторов.
В качестве второго следствия следует отметить, что при конечности
общей энергии Е9 сообщенной изначально системе осцилляторов, ни в од™
ном из них не может сконцентрироваться энергия, превышающая Е. Это
означает, что неограниченная резонансная раскачка в любой сколь угодно
сложной системе осцилляторов невозможна.
3.5. Диссипация энергии в системе осцилляторов
До сих пор мы рассматривали диссипацию энергии в случае одиночно-
одиночного осциллятора, взаимодействующего с внешней средой. Взаимодействие,
приводящее к необратимой потере энергии, учитывалось введением эф™
46 Основные понятия теории колебаний
фективной силы трения FTp по формуле типа B.6). В электрических цепях
аналогом трения служат омические потери.
В случае многих взаимодействующих осцилляторов рассеяние энергии
в окружающую среду (т.е. потери энергии) также может быть учтено вве-
введением неких эффективных сил трения по формуле, являющейся обобще-
обобщением соотношения B.6). По этой формуле сила трения, действующая на
k-й осциллятор, есть
п
г=1
Формула C31) справедлива при не слишком больших скоростях щ и
представляет собой первый член разложения полной силы трения, действу-
действующей на k-й осциллятор, по степеням всех скоростей щ. Смысл же этой
формулы состоит в том, что потери энергии к-ы осциллятором определя-
определяются не только его собственными потерями непосредственно во внешнюю
среду, но и тем, как теряют энергию связанные с ним другие осцилляторы.
Наглядным примером может служить система двух связанных индуктивно
LC R-коятуров. Действительно, потери энергии в каком-то одном из кон™
туров определяются, во-первых, его собственными омическими потерями,
а во-вторых, тем, что этот контур за счет индуктивной связи передает часть
энергии в другой контур, где она необратимо теряется на его активном
сопротивлении.
Заметим, что коэффициенты в формуле C31) обладают свойством сим™
метрии:
аы = агк. C32)
Для разных конкретных систем это свойство может быть доказано с привле-
привлечением тех или иных адекватных системе методов, по существу сводящихся
к соответствующему применению весьма общих термодинамических со-
соображений. В случае электрических LCR-коштуров эти соображения опи-
опираются на так называемую теорему взаимности.
Выражение для силы трения C31) с учетом C.32) может быть представ-
представлено как производная по скорости к~то осциллятора от некоторой функции:
-^,тр = -|^, C33)
где функция D определена равенством
и называется диссшативноп функцией. Она определяет скорость потери
энергии системой. В самом деле, поведение к-то осциллятора описывается
3.6. Адиабатические инварианты 47
уравнением
п
Ук +ш1кук = Ffe)Tp = -}akii/i- C.35)
Умножив это уравнение почленно на ук и просуммировав по всем к, по-
получим
(\ \) = -2Г>- C36)
к=1 k,i=l
В левой части стоит производная по времени от полной энергии системы
осцилляторов. Следовательно, последнее соотношение можно переписать
в форме
— = -2D. C.37)
dt ' }
Частный случай этого соотношения для одного осциллятора был получен
ранее.
Исходя из того, что при наличии диссипации полная энергия системы
может только убывать, получим в соответствии с C.37), что D ^ 0. Иначе
говоря, квадратичная форма C.34) является положительно определенной,
что накладывает известные ограничения на коэффициенты а^.
3.6. Адиабатические инварианты
В главе второй мы рассматривали параметрический резонанс, т.е. яв~
ление раскачки колебаний, обусловленной периодическим изменением со
временем параметров колебательной системы. При этом рассмотрении не
накладывалось ограничений на скорость изменения параметров. В реаль-
реальной практике часто встречаются ситуации, когда параметры системы под
влиянием внешних факторов меняются медленно. Если бы эти изменения
отсутствовали полностью, т.е. если бы параметры были строго постоян™
ными, то, как мы это уже знаем, энергия системы сохранялась бы. При
медленном изменении параметров системы ее колебательная энергия уже
не сохраняется. Однако существуют иные величины, которые изменяются
медленнее, чем параметры системы. Другими словами, скорость их изме™
нения есть величина более высокого порядка малости, чем скорость из-
изменения самих параметров. Количественно это можно охарактеризовать
следующим образом.
Пусть А означает какой-то из параметров системы, а Т — характер-
характерный период колебаний системы. Тогда изменение параметра А считается
медленным, если выполняется неравенство
m dA
dt
<А, C.38)
48 Основные понятия теории колебаний
Введя безразмерный параметр
С=- —, C39)
Л dt
перепишем C.38) в виде
|С| « 1. C.40)
Если изменения параметров системы происходит так, что выполняется нера-
неравенство C.40), то говорят, что эти изменения происходят адиабатически
медленно. Величины, меняющиеся медленнее, чем Л, называются адиа-
адиабатическими инвариантами. Относительная скорость их изменения есть
величина более высокого порядка малости по сравнению с Л:
7 Т* « KI. C-41)
1 at
где I — адиабатический инвариант.
Рассмотрим для примера пружинный маятник (рис. 1.2). Его полная
энергия
Е = ^^ + ^—. C.42)
2 2 Х J
Предположим, что жесткость пружины меняется медленно,
|С|=Г-<1, где Т= —= 2ttW—. C.43)
к ш0 V я
Энергия маятника I? меняется со временем. Найдем скорость ее изменения:
— = у (ту + ку) + -|/2^. C.44)
dt 2
Выражение в скобках обращается в нуль в силу уравнения движения ма-
маятника ту + ку = 0. Значит,
— ^Е * C 45)
dt noV l j
где введено обозначение Е'дот = - ^|/2. Найдем полное изменение энергии
2
колебаний за период Т:
t+T
Г к
AE = E(t + T)-E(t)= Eum-dt. C.46)
J к
t
Формула C.46) является точной. Примем теперь во внимание, что пара-
параметр к меняется медленно. Будем при этом предполагать, что не только
\к/к\ <С 1/Т, но и \к/к\ <С 1/Т. Последнее неравенство означает, что не
только сама величина к меняется медленно, но медленно меняется и ее
производная по времени. Изменение параметра к со временем идет так, что
3.6. Адиабатические инварианты 49
каждое дополнительное дифференцирование по времени вносит малый па-
параметр (" (см. C.43)). Другими словами, если \kf к\ ~ ?/Т, то \'к/ п\ ~
~ B /Т2. С учетом этого множитель к/ к в C.46) может быть вынесен за
знак интеграла. Тогда с точностью до величин порядка B имеем
Euardt. C.47)
t
При вычислении оставшегося интеграла можно считать, что параметры си-
системы за один период колебаний не меняются вовсе, так что зависимость
потенциальной энергии от времени дается гармоническим законом, как для
системы с постоянными параметрами: Ешт = Ecos2(uot + (р®), где Е —
полная энергия системы. Эта энергия согласно C.45) меняется со временем
медленно, в меру малости k/к. Поэтому учет этого изменения в интеграле
C.47) привел бы к появлению поправок более высокого порядка малости.
С учетом этого интегрирование легко выполняется, и мы получаем
АЕ=--Е. C.48)
Величину Тк можно ввиду медленности изменения параметра к записать
как An — полное изменение величины к за период колебаний Т. Тогда
1Ап
Е 2 к
Ввиду малости изменений АЕ и Ак последнее соотношение можно рас™
сматривать как дифференциальное уравнение
т- = т- C-50)
Отсюда следует, что
тр
— = const, C.51)
причем относительная неточность этого соотношения не превышает величи™
ны порядка (. Найденное отношение Е/'у/к является адиабатическим инва™
риантом задачи. Имея целью нахождение частоты и периода колебаний
(см. C.43)), мы можем переписать этот инвариант в одной из двух форм:
I = — = const, ЕТ = const. C.51;)
На примере пружинного маятника мы рассмотрели технику нахождения
адиабатических инвариантов. Аналогичные методы могут быть использова™
ны и в других задачах. Приведем теперь более общее рассмотрение, позво™
ляющее не конкретизировать вид системы.
Введем гамилыпонову функцию {гамильтониан) системы H(q,p, Л). Эта
функция дает связь энергии системы с координатой q и импульсом р 1) .
) Мы пользуемся здесь и ниже обозначениями q и р для обобщенных координаты и
импульса, как это принято в теоретической механике.
4 Н.В. Карлов, Н.А. Кириченко
50 Основные понятия теории колебаний
Здесь предполагается, что состояние системы полностью характеризуется
заданием одной координаты (д) и одного соответствующего ей импульса
(р). В таком случае говорят, что система обладает одной степенью свободы.
В частном случае колебательных систем говорят об одной колебательной
степени свободы. В записи гамильтониана H(q, p, А) в явном виде выделе-
выделена зависимость энергии системы от параметра Л, который может меняться
со временем.
Как известно из механики (см. комментарий 10), уравнения движения
системы записываются следующим образом:
ОН . дН
oq op
В каждой точке траектории системы, т.е. при каждом q = q(t) и р = p(t)
значения гамильтониана H(q,p, А) дают значения энергии системы E(t):
E(t) = H(q{t),p{t),A(t)). C.53)
Продифференцируем C.53) по времени. По правилу дифференцирования
сложной функции находим
dEdH.BH.9Hi „ -Л,
— = -z-Q + 1ГР + ^ГА* C*54)
at oq dp дА
Воспользовавшись уравнениями движения C.52), получаем:
f = fA- C-55)
dt дА
Если бы параметр А не зависел от времени (А = 0), то энергия системы
сохранялась бы (dE/dt = 0), а движение было бы строго периодическим
с периодом, в общем случае зависящим от величины полной энергии.
Усредним C.55) по периоду Т. При этом виду медленности изменения
параметра Л производную А можно вынести за знак интеграла (подобно
тому, как это было сделано выше в C.47)). Тогда
f=Af C.56)
dt дА
При нахождении среднего от дН /дА параметр А следует считать постоян-
постоянным, поскольку учет зависимости A(t) в этом месте вносил бы поправки
более высокого порядка малости. Для проведения дальнейших вычислений
заметим прежде всего, что период колебаний (естественно, при условии
А = const) дается формулой
т t=T
T=\dt= f *=
J J q
JdH/др
0 t=0
C.57)
где символ q заменен на дН/др в соответствии со вторым из уравнений
движения C.52). Знак § означает интегрирование по полному периоду ко-
колебаний (от t = 0 до t = Т), так что начальное и конечное состояния си-
системы совпадают. На фазовой плоскости (р, q) периодическому движению
3.6. Адиабатические инварианты 51
отвечает замкнутая траектория, что и позволяет использовать обозначение
интеграла по замкнутому контуру.
Запишем теперь среднее от производной дН/дА:
Ш=Ц™Лш C.58)
о
Пользуясь приемом, аналогичным использованному при получении C.57),
находим:
ал т) дн/др * v 7
о
В подынтегральном выражении C.59) функция Н = H(q,p,A) = Е.
При этом интегрирование выполняется вдоль траектории, на которой р =
= p(q, А, Е), а Е = const. Следовательно, для каждой точки траектории
можно записать тождество:
ал+^7ал^
тэ дН/дА
Выражая отсюда и подставляя результат в C.59), находим
дН/др
т
дН 1 Г dp j /~> гл\
= —*- da. C.61)
дА Т} дА Ч l ;
о
С учетом C.57) и C.61) выражение C.56) для производной от энергии си™
стемы приобретает вид:
др
^Е = ^А ^Л . C.62)
dt г ор
^ дЕ п
Здесь произведена очевидная замена (дН/др)^1 = др/дЕ. Перепишем
C.62) в виде:
КдрЧШ , dpdA\ , _ (г. ^л
-JL^ + -^-— ] dq = 0. C.63)
дЕ dt дА dt J
Здесь в подынтегральном выражении стоит полная производная dp/dt. По™
этому C.63) переписывается как
^ = °' C*64)
где величина
I = — (ppdg C.65)
2тг I
Основные понятия теории колебаний
является адиабатическим инвариантом задачи. Она называется действием.
Интеграл C.65) вычисляется при фиксированных значениях Е ш А. Коэф-
Коэффициент 1/2тг введен для удобства записи конкретных выражений адиаба™
тических инвариантов.
Отметим два свойства адиабатического инварианта. Во-первых, имея в
виду, что I = 1{Е^ Л), найдем производную д!/дЕ. Дифференцируя C.65)
по энергии и вспоминая определение C.57) периода колебаний Т, находим
2тг— = Г или —=ш. C.66)
дЕ di l
где ш = 2тг/Т. Частоте ш может быть поставлена в соответствие перемен™
пая
-J
<р= \udt, C.67)
имеющая смысл обобщенного угла. В частном случае, когда параметр Л от
времени не зависит, энергия есть величина постоянная и однозначно свя-
связанная с действием /. Поэтому из сохранения энергии Е следует независи™
мость действия I от времени. Имея в виду связь C.66) частоты с энергией,
перепишем C.67) как
(р = u(I)t + const. C.68)
По существу мы перешли от исходных переменных "координата-импульс"
(д, р) к переменным "угол-действие" (<?>, I). Тогда из C.68) следует, что
зная один единственный сохраняющийся интеграл задачи (энергию или
связанное с ней действие), мы имеем полное решение задачи. Сказанное
представляет собой частную формулировку теоремы Лиувилля, согласно
которой для динамической системы с п степенями свободы знания п ин~
тегралов движения достаточно для нахождения в квадратурах общего ре-
решения задачи.
Во-вторых, интегрирование в C.65) проводится по замкнутому контуру,
отвечающему периодическому движению с заданной энергией. Очевидно,
что этот интеграл на плоскости (р, q) представляет собой площадь фигу-
фигуры, ограничиваемой рассматриваемым контуром. Поэтому он может быть
представлен как двумерный интеграл
I=—\dpdq. C.69)
Эта форма записи во многих случаях более удобна, поскольку в ней не
предполагается разделение переменных р и q на зависимые и независимые.
Для иллюстрации применения последней формулы найдем адиабати-
адиабатический инвариант для осциллятора с гамильтонианом
h=p!_ + ™Wu
2т 2
Условие Н = Е выделяет на плоскости (р, q) эллипс с полуосями а =
= \/2тЕ, Ь = у/2Е/тш2. Согласно C.69) адиабатический инвариант есть
3.6. Адиабатические инварианты 53
площадь этого эллипса, деленная на 2тг. Отсюда
I = —7гаЪ= —, C.71)
2тг ш
что очевидным образом совпадает с полученным ранее выражением C.51').
В заключение отметим, что из проведенного рассмотрения могло со™
здаться впечатление, что точность сохранения адиабатического инварианта
есть величина порядка
Можно, однако, показать, что в типичных ситуациях медленного измене™
ния параметра А адиабатический инвариант сохраняется с более высокой
точностью. Его относительное изменение
81 ( const \ f Л
у-ехр( — 1. C.73)
Доказательство этого утверждения можно найти, например, в книге:
Ландау Л.Д., Лифшиц Е.М. Механика. — М.: Наука, 1988.
ГЛАВА IV
Степени свободы. Фазовое пространство. Фазовая или изо-
изображающая точка. Фазовая траектория. Динамические системы.
Фазовый портрет. Фазовая плоскость. Особые точки динами-
динамической системы. Центр, фокус, узел. Устойчивые и неустойчи-
неустойчивые особые точки. Седло. Сепаратрисы седел. Нуль-изоклины.
Характеристическое уравнение. Характеристические показате-
ли. Особые точки гамилътоновых систем. Предельные циклы.
Автоколебания. Механические часы. Лестница Ламерея. Точеч-
Точечное отображение или отображение последования. Неподвижная
точка отображения. Одномерное и двумерное отображения. Ав-
Автогенератор Ван-дер-Поля. Обратная связь. Уравнение Ван-дер-
Поля. Отрицательное трение. Положительная и отрицательная
обратные связи. Стохастические колебания. Система Лоренца.
Странный аттрактор.
В предыдущих главах на примерах анализа простейших колебатель-
колебательных систем был введен ряд понятий, которые при надлежащем обобщении
могут быть применены для анализа систем существенно более сложных.
В этой главе будут кратко изложены основные положения теории нели-
нелинейных колебательных систем. Более подробное изложение и дальнейшее
развитие соответствующей теории дается в следующих главах.
Начнем с обобщения некоторых ранее нами уже введенных понятий.
4.1. Степени свободы
Одним из важнейших понятий, используемых для описания поведения
физической системы, является степень свободы. Исторически это понятие
возникло при изучении движения частиц. Простейший тип движения —
это движение по прямой линии. Оно описывается простейшим, одномер™
ным уравнением Ньютона, т.е. обыкновенным дифференциальным урав™
нением 2-го порядка. В этом случае говорят, что система обладает одной
степенью свободы. В трехмерном пространстве частица может двигать™
ся в трех различных направлениях (вдоль осей X, Y и Z). Соответствен-
Соответственно изменение ее положения описывается векторным уравнением Ньютона
(а = F/m) или тремя обыкновенными дифференциальными уравнениями
2-то порядка (для Х-, Y- и Z-компонент вектора смещения). В этом случае
говорят, что система имеет три степени свободы.
4.2. Фазовое пространство 55
Сказанное обобщается на случай системы произвольной природы сле-
следующим образом. Говорят, что система имеет N степеней свободы, если
ее поведение описывается системой N обыкновенных дифференциальных
уравнений 2-го порядка. Например, для случая одиночного математическо-
математического маятника (рис. 1.1) N = 1, см. уравнение A.2). Для системы, состоя-
состоящей из двух связанных математических маятников (рис. 2.3), N = 2, см.
уравнения B.31). Для случая же движения материальной точки в трехмер-
трехмерном пространстве, как уже отмечалось выше, N = 3. Дело здесь в том,
что положение одиночного маятника однозначно задается указанием одной
координаты — угла В отклонения нити маятника от вертикали. В случае
двух маятников необходимо указать два угла — по одному для каждого из
них. В случае же свободного движения материальной точки в трехмерном
пространстве необходимо указание трех независимых координат.
Одно дифференциальное уравнение 2-го порядка эквивалентно двум
уравнениям первого порядка. Поэтому одному уравнению первого порядка
удобно сопоставить половину степени свободы. Следовательно, система,
описываемая п уравнениями первого порядка, имеет N = п/2 степеней
свободы, В частности, система обладает полутора степенями свободы, ес-
если ее поведение описывается тремя обыкновенными дифференциальными
уравнениями первого порядка.
4.2. Фазовое пространство
Пусть физическая система описывается уравнениями первого порядка:
У% = ЛB/ъ2/25...,2/п,*M г = 1, 2, ..., п. D.1)
Это означает, что состояние системы в каждый данный момент времени
полностью определяется заданием п чисел yi. Введем тг-мерное простран-
пространство, по осям координат которого будем откладывать значения у^. Тогда
состояние изучаемой системы в каждый данный момент времени пред ста™
вляется некоторой точкой в этом пространстве. Введенное таким образом
пространство называется фазовым а точка — фазовой или изображаю-
изображающей точкой. Употребление слова "фазовое" в этих названиях обусловлено
историческими причинами: термин "фаза" восходит к греческому слову
"фазис", обозначавшему появление светил, и используется при описании
состояния той или иной системы (ср. фазы Луны).
С течением времени состояние системы меняется. Соответственно это™
му меняется и положение изображающей точки в фазовом пространстве,
т.е. эта точка описывает некоторую кривую, называемую фазовой траек-
траекторией. Для описания поведения системы кроме уравнений движения необ-
необходимо задание начальных условий, т.е. задание значений переменных у{ в
начальный момент времени:
t = t0: yi = yioj г = 1, 2, ...,гс. D.2)
Эти соотношения означают задание начальной точки в фазовом простран-
пространстве, т.е. указание той точки, из которой выходит рассматриваемая фазовая
56
Основные понятия теории колебаний
траектория. Если состояние системы не меняется со временем, то фазовая
точка неподвижна, т.е. вся фазовая траектория представляет собой одну
точку.
Система называется динамической, если задание начальных условий
полностью определяет ее поведение в последующие моменты времени. Все
рассмотренные выше примеры относятся к динамическим системам. При-
Примером нединамической системы является система, в которой действуют
случайные силы, благодаря которым точное предсказание поведения дела-
делается невозможным.
В случае гладкой динамической системы фазовые траектории не пересе-
пересекаются. В противном случае, взяв в качестве начальной точку пересечения,
мы обнаружили бы, что точное предсказание поведения невозможно: из од™
ной точки начинаются по крайней мере две различные фазовые траектории.
Совокупность фазовых траекторий, отвечающих различным начальным
условиям, образует фазовый портрет системы.
Для систем с одной степенью свободы фазовое пространство двумерно
и называется фазовой плоскостью. В качестве примера фазового портре™
У
д.
Рис. 4.1. Поведение фазовых траекторий на плоскости вблизи особых точек типа
центра (а), устойчивого фокуса (б), устойчивого узла (в), седла (г), неустойчивого
фокуса (д), неустойчивого узла (е)
та на фазовой плоскости можно привести рис. 4.1 а, отвечающий случаю
гармонического осциллятора. Уравнение фазовых траекторий этого осцил-
осциллятора дается формулой A.37).
4.3. Особые точки динамической системы
Фазовые траектории на рис. 4.1а замкнуты, они отвечают тому, что вы™
полняется закон сохранения энергии. При наличии трения (см. B.7)) энер™
гия маятника не сохраняется (см. C.20)) и фазовые траектории оказывают-
оказываются незамкнутыми — они приближаются к точке равновесия у = 0, у = 0.
Уравнение фазовых траекторий можно получить, если исключить время
из выражений у = y(t), у = y(t). Соответствующие фазовые портреты
осциллятора с трением показаны на рис. 4.1 б и 4.1 в.
4.3. Особые точки динамической системы 57
Из рис. 4.1 б и 4.1 в видно, что характер приближения фазовых траек-
траекторий к положению равновесия зависит от того, велико трение G > и) или
мало G < и). В случае слабого трения траектория совершает бесконечное
число оборотов вокруг точки "О", прежде чем достигнет ее. Если же тре-
ние велико, траектория непосредственно идет в точку "О", делая вокруг
нее конечное число витков.
В теории колебаний положения равновесия динамической системы на™
зываются особыми точками. Если фазовые траектории вблизи особой точ-
точки ведут себя так, как показано на рис. 4.1 а, то такая точка называется
центром. Если траектории ведут себя так, как на рис. 4.1 б, то особая точка
называется фокусом. Наконец, особая точка на рис. 4.1 в называется узлом.
Как видно из рис. 4.1а, в окрестности центра каждая траектория есть
замкнутая линия, совершающая один виток вокруг особой точки. Особая
точка типа фокуса (рис. 4.1 б) характеризуется тем, что все траектории
неограниченно приближаются к ней, совершая вместе с тем бесконечное
число оборотов вокруг нее. Наконец, в окрестности узловой особой точ-
точки (рис. 4.1 в) траектории совершают конечное число оборотов (либо ни
одного вовсе).
На рис. 4.1 б и 4.1 в приведены фазовые траектории для случая положи-
положительного трения, 7 > 0. Физически это означает, что система с течением
времени теряет энергию (см. формулу C.20)). Так как в этом случае систе-
система в ходе своей эволюции может к особой точке только приближаться, то
такие узел и фокус называют устойчивыми.
Наряду с положительным трением G > 0) формально можно рас-
рассматривать и отрицательное G < 0). В последнем случае также име-
имеются фазовые траектории типа, показанного на рис. 4.16 и АЛ в с той
лишь разницей, что направление движения изображающей точки вдоль
этих траекторий заменяется на противоположное. Иными словами, тра-
траектории раскручиваются, а система удаляется от положения равновесия.
Энергия системы с течением времени растет. Соответствующие особые
точки называются неустойчивыми (рис. 4.1 д и 4.1 е).
Здесь целесообразно отметить, что особые точки типа центра всегда
устойчивы, ибо траектории замкнуты и никогда от него не удаляются.
На фазовой плоскости, т.е. у систем с 2-мерным фазовым простран-
пространством существует еще один тип особых точек. В самом деле, пусть дина-
динамическая система описывается уравнением
у-г2у = 0. D3)
Общее решение этого уравнения есть
у = dert + C2e^r\ D.4)
Это означает, что либо при t —>• +00, либо при t —>- ^00 решение у —>• оо.
Исключение составляет частный случай С\ = С2 = 0, для которого как
у = 0, так и у = 0. Другими словами, в этом случае мы имеем особую точ-
точку, отвечающую единственному положению равновесия рассматриваемой
системы.
58 Основные понятия теории колебаний
Характер поведения фазовых траекторий в окрестности этой особой
точки нетрудно установить непосредственно из решения D.4). Однако, по-
поскольку диссипации энергии в системе D.3) нет, можно получить уравне™
ние фазовых траекторий, записав закон сохранения:
\f - irV = Е. D.5)
Константа Е, входящая в этот закон сохранения, аналогичная энергии в
случае гармонического осциллятора, может пробегать все действительные
значения. Фиксируя какое-либо одно из них, мы выделим конкретную фа-
фазовую траекторию.
Из D.5) видно, что все фазовые траектории суть гиперболы, ориента™
ция которых зависит от знака Е. Фазовый портрет системы D.3) в окрест™
ности особой точки (у = 0, у = 0) приведен на рис. 4.1г. Такая особая
точка называется седлом.
При Е = 0 имеются четыре фазовые траектории, две из которых
входят в седло, а две другие — выходят. Первым из них отвечает решение
у = C2e™rt, а вторым — у = C\ert. Эти особые траектории называ™
ются сепаратрисами седла. Только эти траектории идут в седло (либо
при t —> +оо, либо при t —>• — оо). Все же прочие траектории в седло-
вую точку не попадают. Как видно из рис. 4.1 г, сепаратрисы делят всю
фазовую плоскость на четыре области, поведение фазовых траекторий
в которых отличается по характеру их асимптотики. Этим объясняется
термин "сепаратриса".
Простейший пример реализации седловой особой точки дает маятник,
поведение которого рассматривается вблизи явно неустойчивого положе-
положения равновесия В = тг.
Как правило, на фазовой плоскости не может быть иных особых то™
чек, кроме приведенных на рис. 4.1. Исключение составляют случаи, когда
особые точки разных типов сближаются и затем сливаются. Анализ таких
ситуаций относится к важному разделу современной математики — теории
структурной устойчивости (теории катастроф), рассматриваемому в главе
седьмой.
Как видно по смыслу особых точек, поведение фазовых траекторий
в их окрестности определяется типом особой точки. Соответственно, по
типу особой точки можно судить о поведении динамической системы, вы-
выведенной из состояния равновесия. Так, если оказывается, что особая точка
есть центр, то это означает, что система, будучи выведенной из состояния
равновесия, неопределенно долго совершает периодические колебания. В
случае седла точка равновесия неустойчива. Фокус и узел свидетельствуют
о характере приближения к равновесию (удаления от него).
Из сказанного вытекает важность нахождения особых точек системы
и определения их типа. Мы рассмотрим этот вопрос на примере системы
с одной степенью свободы, задаваемой двумя обыкновенными дифферен-
4.3. Особые точки динамической системы 59
циальными уравнениями первого порядка:
yi = /i(yi,^), D>б)
т = /2B/1,2/2).
Особые точки, т.е. положения равновесия, определяются из системы урав-
уравнений D.6) путем приравнивания нулю производных у\ и у^\
/iB/i,2/2) = 0, D.7а)
/2B/1,2/2) = 0- D-76)
Уравнения D.7) определяют на фазовой плоскости (i/i, 1/2) пару кривых:
2/2 = ^i B/1) D.8а)
и
2/2 = ^2B/1), D-86)
точки пересечения которых и задают особые точки системы. Кривые D.7)
или, что эквивалентно, D.8) называются нуль-изоклинами. Для того, чтобы
пояснить смысл введенного термина, разделим друг на друга уравнения
D.6). Имеем
dm = /2B/1,2/2) ,4 ^
dyi /1B/1,2/2)
Получившееся обыкновенное дифференциальное уравнение определя-
ет на плоскости (t/i, t/2) интегральные кривые, являющиеся фазовыми тра-
траекториями изучаемой динамической системы. Во всех точках плоскости,
удовлетворяющих, например, уравнению D.76) или D.86), тангенс угла на-
наклона фазовых траекторий равен нулю. Иными словами, все фазовые тра-
траектории в их точках пересечения с кривой D.7) имеют один и тот же (нуле™
вой) наклон. Аналогично, в точках пересечения любой фазовой траектории
с кривой D.7а) или D.8а) тангенс угла наклона фазовой траектории равен
бесконечности. Это верно в таком представлении плоскости, что ось у\
есть ось абсцисс, а ось уч — ось ординат. Если же взять в качестве оси
абсцисс ось |/2, а осью ординат сделать ось у\, то в точках пересечения
фазовых траекторий с кривыми D.7а) или D.8а) тангенс угла наклона был
бы равен нулю. Поэтому говорят, что первое из уравнений D.7) (см.D.8))
задает у\ -нуль-изоклину, а второе — 2/2тнуль-изоклину. При этом имеется
в виду, что касательные к фазовым траекториям в соответствующих точках
пересечения перпендикулярны либо к оси у\, либо к оси уч, т.е. горизон-
горизонтальны (имеют нулевой наклон) при выборе "своей" оси в качестве оси
ординат. (Корень "клин" означает предмет с гранями в виде наклонных
плоскостей, а приставка "изо" вносит смысл постоянства).
Знание особых точек и нуль-изоклин позволяет составить достаточно
наглядное представление о поведении фазовых траекторий. Для примера
рассмотрим построение фазового портрета осциллятора с трением:
jfr = 0. D.10)
60
Основные понятия теории колебаний
Фазовые переменные г/ъ 2/2 введем по формулам
2/1=2/, 2/2=2/- D.11)
В этих переменных одно уравнение второго порядка D.10) сводится к двум
уравнениям первого порядка:
2/1 =2/2,
2/2 = -а>о2/i - 272/2-
Нуль-изоклины этих уравнений суть
2/2 = 0,
D.13)
D.12)
2/2 = -—2/1.
27
Очевидно, что полученные нуль-изоклины представляют собой прямые ли-
линии. Первая из них есть у\-нуль-изоклина, и она совпадает с осью 2/ъ вто-
вторая — это t/2-нуль-изоклина, представляющая собой прямую, проходящую
через начало координат на плоскости B/1, 2/2)- На рис. 4.2 а жирными ли-
Рис. 4.2. а — нуль-изоклины 1 и 2 системы D.13) (показаны жирными линиями).
б — пример построения фазового портрета с помощью нуль-изоклин
ниями показаны эти нуль-изоклины, на которых штрихами отмечены на-
направления касательных к фазовым траекториям в точках их пересечений.
Рис. 4.26 иллюстрирует построение фазовой траектории, использующее
нуль-изоклины предыдущего рисунка.
Следующий шаг в анализе поведения динамической системы — это ис-
исследование типа ее особых точек. Для этого необходимо исследовать пове-
поведение фазовых траекторий в малой окрестности найденных особых точек.
Рассмотрим особую точку
ус = (усЪус2)« D.14)
В малой окрестности этой особой точки правые части уравнений D.6) мож-
можно записать в виде
/iG/ъЫ = fi(yci,yC2) + аиB/1 -Уа) + «12A/2 - 2/С2), D ^
/2B/1,2/2) = /2B/ci,2/c2) + a2iB/i -Уа) + «22B/2 -Ус2),
4.3. Особые точки динамической системы
61
где коэффициенты а^- суть постоянные числа, представляющие собой част™
ные производные от функций /i и /2, вычисленные в точке у = ус:
«21 =
ду2
«22 =
ду2
D.16)
Поскольку точка у = ус есть особая точка, слагаемые /i(|/ci, ^2) и
/2B/01? Усг) в D.15) обращаются в нуль. В результате исходная система
D.6) в окрестности особой точки принимает вид
D.17)
= «21^*1 + «22^2-
где для упрощения записи отклонения функций у\ и г/2 от равновесных
значений обозначены как
^i=2/i-2/cij и2 = у2~Ус2 D.18)
Системы уравнений такого типа мы рассматривали в главе второй при-
применительно к задаче о поведении связанных осцилляторов.
Ввиду линейности системы D.17) ее решение будем искать в виде
и = ще
xt
и =
щ
D.19)
где UQi и А — постоянные, подлежащие определению. Подстановка D.19)
в D.17) дает
\и01 = auuoi + «12^02, ,. 20.
Лг^02 = «21^01 + «22^02-
Рассматривая D.20) как систему двух линейных однородных уравнений
для г/01 и Щ2-, из условия разрешимости этой системы получаем уравнение
для параметра А:
«и - A ai2
«21 «22 —
= 0 или А2 + СХ + D = 0,
D.21)
где
С = -(«11 + «22), D = «ц«22 — «12«21-
Уравнение D.21) называется характеристическим уравнением, а опре-
определенные из него числа А (т.е. собственные значения матрицы А = (а^))
называются характеристическими показателями.
) Использование в этом месте обозначений С и D для коэффициентов в приведенном
квадратном уравнении не должно вызывать недоразумений, связанных с их употреблением
в других местах и в ином смысле.
62 Основные понятия теории колебаний
Квадратное уравнение D.21) имеет два корня. Когда они различны,
Ai ф Лг, решение системы D.17) записывается как
у-ус = u{1)eXlt + u{2)eX2\ D.22)
где и^ ши^ — два линейно независимых собственных вектора матрицы
А, отвечающих собственным значениям Ai и А2 соответственно, Аи^ =
= XiU{i\ г = 1, 2.
Типы особых точек определяются корнями характеристического урав™
нения. Из D.21) видно, что
D.23)
В зависимости от знаков и величины коэффициентов С ш D возможны
следующие четыре случая.
1. Пусть С2/4 > D. Тогда оба корня D.23) действительны и имеют
одинаковый знак. При С > 0 оба корня отрицательны. Следовательно, со-
гласно D.22), при любых начальных условиях y(t) —> yc. Иными словами,
любая фазовая траектория, начинающаяся в некоторой окрестности осо-
особой точки, непременно приближается к этой точке. При достаточно боль-
больших временах это приближение является монотонным. В соответствии с
введенной выше терминологией такая особая точка есть устойчивый узел
(рис. 4.1 в). Аналогично, при С < 0 соответствующая особая точка есть
неустойчивый узел (рис. 4.1 е).
2. Пусть D > О, С2/А < D. Тогда корни характеристического уравне-
уравнения Ai и А2 комплексно сопряжены. Решение D.22) в этом случае можно
представить в виде
у-ус = e~(c/2)t(wA) cosOt + u{2) sinm), D.24)
где О = ^JD — С2/4. При С > 0 фазовые траектории в колебательном
режиме неограниченно приближаются к особой точке. Такая особая точка
есть устойчивый фокус (рис. 4.1 б). Если же С < 0, то фокус оказывается
неустойчивым (рис. 4.1 д).
3. Пусть С = О, D > 0. Тогда оба корня чисто мнимы и комплексно
сопряжены. Решение имеет вид
у-ус = и{1) cos Ш + и{2) sin Ш D.25)
где О = л/D. Это решение описывает периодический колебательный про™
цесс, фазовые траектории замкнуты и особая точка есть центр (рис. 4.1 а).
4. Пусть D < 0. Тогда при любых С корни Ai и А2 действительны и
имеют противоположные знаки. В общем случае решение D.22) содержит
оба слагаемых, одно из которых есть возрастающая экспонента, а другое —
убывающая экспонента. Соответствующая особая точка при любом знаке
С есть седловая точка (рис, 4.1 г).
4.3. Особые точки динамической системы
Заметим, что перейдя от двух уравнений первого порядка D.17) к одно™
му второго, мы получим каноническую запись уравнения движения в виде
щ + Сщ + Вщ = 0.
D.26)
При этой форме записи термины "центр", "фокус" и "узел" имеют тот же
смысл, что и ранее. В то же время определение седловой особой точки,
данное в пункте 4, является более общим по сравнению с даваемым урав-
нением D.3), где по существу предполагается (в обозначениях, использо-
ванных в D.21)) G = 0. Естественно, что различие между этими двумя
определениями седла носит скорее количественный, чем качественный ха-
рактер. Последнее же позволяет изучать трансформации фазовых портре™
тов при изменении параметров динамической системы.
Проведенная классификация особых точек может быть наглядно пока-
зана на плоскости С, D (см. рис. 4.3). Разбиение плоскости С, D параболой
: Устойчивые фокусы ш
| I I I I I I I I I I I I I I I I I I I I
Неустойчивые фокусы
D
Неустойчивые ушшТ/уууу*.
/SSS/SSSSSS//////j
Рис. 4.3. Диаграмма распределения особых точек на плоскости параметров
(С, D). Полуось С = 0, D > 0 соответствует особым точкам типа центра
С2 /4 = D и прямыми ?) = 0иС = 0на области, отвечающие различным
типам особых точек, позволяет изучать трансформацию этих точек при из-
изменении параметров динамической системы. Следует обратить внимание
на то, что особым точкам типа центр (эти точки не отмечены на диаграмме
рис. 4.3) соответствует полуось С = 0, D > 0. Она отделяет устойчивые
узлы и фокусы от неустойчивых. Иными словами, переход от неустойчиво-
неустойчивого фокуса к устойчивому при изменении С осуществляется через образова™
ние центра, что легко видеть, сопоставляя фазовые портреты на рис. 4.1 д9
4.1 а и 4.1 б. Что касается седел, то они неустойчивы при любых знаках С.
При смене знака С для седел происходит лишь изменение ориентации, т.е.
поворот фазового портрета.
В общем случае динамическая система с двумерным фазовым простран-
пространством может иметь особые точки любого из перечисленных выше типов.
Существует, однако, выделенный класс систем, у которых узлы и фокусы
64 Основные понятия теории колебаний
невозможны. Это — гамильтоновы системы, упоминавшиеся в главе тре-
третьей (см., также, комментарий 8).
Пусть гамильтониан системы есть функция обобщенных координаты q
и импульса р, Н = Н(р, q). Уравнения движения записываются в виде
p^-^L = fl(p,q), q=^=f2(p,q). D.27)
oq dp
Рассматривая эти уравнения в окрестности особой точки, по формулам
D.16) можно найти коэффициенты матрицы а^-, собственные значения
которой суть характеристические показатели:
_ dfi _ д2Н _ dfi _ д2Н
dp dpdq dq dq2 ( ,
df2 д2н df2 д2н { }
op op2 oq dpdq
Составляя характеристическое уравнение D.21), найдем, что
d2H\2 д2Нд2Н D.29)
+
dpdqj dp2 dq2
Коэффициент С в характеристическом уравнении для гамильтоновой си™
стемы всегда равен нулю. В соответствии с проведенной выше классифи™
кацией особые точки типа узла и фокуса при этом возникать не могут.
В зависимости же от знака коэффициента D возможны либо центр, либо
седло. Нетрудно понять, что этот вывод, как и закон сохранения энергии,
есть прямое следствие гамильтоновости автономной системы.
В качестве примера рассмотрим математический маятник, не ограни-
ограничиваясь случаем малых колебаний. Уравнение движения такого маятника
дастся формулой A.2):
в =-a;gsin6. D.30)
Точное решение этого уравнения дается формулой A.39).
Строго говоря, уравнение D.30) и его решение A.39) имеют смысл,
только если нерастяжимая нить маятника заменена невесомым жестким
стержнем.
Исследуем фазовый портрет системы D.30). Особые точки суть
6 = 0, 6 = шг, п = 0,±1,±2,... D.31)
Состояния, отличающиеся на целое число полных оборотов Bтг), в силу
периодичности правой части уравнения D.30) физически неразличимы.
Множество решений D.31) естественным образом распадается на две
группы:
В = 2Ьг, к = 0, ±1, ±2,... D.3 la)
и
е = B& + 1)тг, fc = 0,±l,±2,... D.316)
4.3. Особые точки динамической системы
65
Первое семейство решений отвечает положениям равновесия маятника,
в которых груз находится ниже точки подвеса. Второе семейство соот-
соответствует верхнему положению равновесия (перевернутый маятник).
Интуитивно ясно, что, несмотря на отсутствие потерь энергии, положе-
положения равновесия D.31а) и D.316) должны качественно отличаться одно от
другого. Если маятник находится в нижнем положении равновесия D.31а),
то малое отклонение от этого положения приводит только к тому, что си-
система совершает малые колебания в его окрестности. Система не уходит
далеко от положения равновесия. Если же положение равновесия при-
принадлежит семейству D.316), т.е. если маятник находится в верхнем по™
ложении равновесия, то сколь угодно малые воздействия приводят к то™
му, что система далеко уходит от положения равновесия. Система имеет
закон сохранения энергии
я(е,в) = ^- + <
- cos в) = Е.
D32)
Здесь под Е имеется в виду энергия, отнесенная к т?2 — моменту инерции
материальной точки относительно точки подвеса.
Соотношение D.32) дает связь между Вив или, говоря иначе, за™
дает уравнения фазовых траекторий, отличающихся значениями энергий
движения. Соответствующий фазовый портрет приведен на рис. 4.4. По
ш
Рис. 4.4. Фазовый портрет математического маятника D.30)
виду фазовых траекторий легко заключить, что точки семейства D.31а),
т.е. нижние положения равновесия, суть центры, а верхние положения
равновесия D.316) являются седлами. К этим же выводам можно прид-
придти, непосредственно исследуя особые точки D.31) по рассмотренной вы™
ше процедуре путем составления характеристического уравнения D.21).
Для гамильтоновой системы коэффициент С = 0, а коэффициент D легко
вычисляется из гамильтониана D.32):
= u% cos В.
D.33)
Этот коэффициент положителен при В = 2кж и отрицателен при В =
= Bк + 1)тг. В соответствии с диаграммой рис. 4.3 это означает, что ниж™
ним положениям равновесия отвечают особые точки типа центра, а верх™
ним — типа седла.
5 Н.В. Карлов, Н.А. Кириченко
66 Основные понятия теории колебаний
Обратим внимание на то, что фазовый портрет даже такой простой систе-
системы как математический маятник (рис. 4.4) содержит в себе особые точки раз™
ных типов и фазовые траектории различного вида. Помимо замкнутых тра-
траекторий, отвечающих периодическим движениям, присутствуют траектории,
представляемые усами сепаратрис седел и соответствующие апериодическо-
апериодическому движению из верхнего положения равновесия в верхнее же. Последнее
возможно лишь при специальном, точном выборе значения энергий системы
Е = 2o/q. Как видно из рис. 4.4, наряду с перечисленными существует еще
один вид траекторий, отвечающий инфинитному движению. Эти траектории
не пересекают ось абсцисс и соответствуют непрерывному вращению маят-
маятника вокруг точки подвеса.
4.4. Автоколебании
Динамическая система характеризуется на фазовой плоскости не толь-
только особыми точками, но и особыми траекториями. Примером таких траек-
траекторий являются упомянутые выше сепаратрисы седел, которые разделяют
фазовую плоскость на неперекрывающиеся области с качественно различ-
различным поведением фазовых траекторий. Помимо сепаратрис существует еще
один, очень важный тип особых траекторий. Это — предельные циклы.
Движения, представляемые предельными циклами, называются автоколе-
автоколебаниями 1) .
Автоколебания широко распространены в природе. Необходимым усло-
условием их возникновения является наличие процессов энерго- и/или массо-
обмена с окружающей средой. Принципиальным отличием этих колебаний
от рассмотренных в главе второй и также происходящих в открытых си-
системах является автономность. Иными словами, автоколебания возникают
в системах, параметры которых не зависят явно от времени. Существо-
Существование автоколебаний обусловлено авторегулировкой поступления (отвода)
энергии и/или вещества в систему (из системы). Важнейшим признаком
автоколебаний является независимость их амплитуды и периода от началь™
ных условий. Это обстоятельство отличает автоколебания от колебаний,
возникающих в динамической системе, имеющей особую точку типа центр
(рис. 4.1 а). В этом последнем случае именно начальные условия выделяют
конкретную траекторию в окрестности центра, характеризуемую своими
амплитудой и периодом. Отсюда же следует, что фазовая траектория ав-
автоколебаний, т.е. предельный цикл, есть особая или выделенная замкну-
замкнутая траектория, топологически отличающаяся от всех других траекторий,
проходящих в ее окрестности.
Поясним механизм возникновения автоколебаний на конкретном при-
примере. Рассмотрим механические часы с маятником и гирей. В реальных
условиях маятник при колебаниях вследствие трения теряет энергию. Для
) Термины "автоколебания", "автоколебательные системы" были предложены А.А. Ан-
Андроновым в работе "Предельные циклы Пуанкаре и теория автоколебаний", доложенной на
IV съезде русских физиков в 1928 г.
4.4. Автоколебания 67
восполнения запаса энергии маятника используется потенциальная энер-
энергия гири в поле тяжести. Регулярность хода часов обеспечивается тем, что
поступление энергии в систему происходит толчками один раз за каждый
период колебаний фиксированными порциями АЕ. Величина порции опре-
деляется опусканием гири на одно звено цепи, на которой эта гиря висит.
Оказывается, что именно величина АЕ определяет амплитуду установив™
шихся колебаний маятника вне зависимости от величины его начального
отклонения. Рассмотрим этот вопрос подробнее.
Пусть для определенности передача энергии маятнику происходит в
момент его наибольшего отклонения от положения равновесия. Если непо-
непосредственно перед очередным, п-ы толчком маятник имел энергию Е^ ,
то после толчка его энергия составит
Е4К0Н) = ^нач) + АЕ. D.34)
По мере движения маятник теряет энергию. В соответствии с формулой
C.22) за одно полное колебание, т.е. к моменту следующего толчка, энер-
энергия маятника уменьшится до величины
Е%$ = Е^е-2-*Т. D.35)
Здесь предположено, что трение является достаточно малым и жидким.
Сразу же после (п + 1)-го толчка энергия составит
Е%$ = Е^е-2^т + АЕ. D.36)
Таким образом, мы получили рекуррентное соотношение, связывающее
последовательные значения энергии маятника сразу после толчков.
Стационарный режим колебаний соответствует тому, что Е^^ =
= Е%°и) = Е^НК Тогда из D.36) имеем
^(кон) D.37)
Если потери на трение столь малы, что 2jT <C 1, то D.37) переписывается
в виде
27Г V J
Заметим, что пользуясь определением добротности колебательной си-
системы Q = W0/27 = тг/7^1? полученному соотношению можно придать
вид
^ ^Е шш q 2жD39)
2тг АЕ l ;
Это соответствует определению добротности как отношения энергии, на-
накопленной в колебательной системе, к энергии, теряемой за период колеба-
колебаний (с коэффициентом 2тг). Обратим внимание на то, что энергия еКК0Н) не
зависит от начальной энергии маятника. В этой связи представляет интерес
5*
68
Основные понятия теории колебаний
выяснить, как происходит установление стационарного режима, независя-
независящего от начальных условий.
Рассмотрим последовательность D.36) подробнее. Пусть начальная
энергия маятника была равна Е\. Для компактности записи опустим ин-
индекс "кон". После первого толчка имеем
Е2 = Еге^21Т + АЕ, D.40а)
после второго —
Е3 = E2e~2lT + АЕ, D.406)
и т.д. После п-то толчка
Еп+г = Ene~2lT + АЕ. D.40*)
Соотношения D.40) задают бесконечную последовательность {Еп},
которая сходится к значению D.37). В последовательности D.40) началь-
начальное значение энергии маятника Е\ присутствует явно. Для того чтобы
Y=En.
Y=XA
Ег Е2
3 Е2 Ег Y^
Рис. 4.5. Лестница Ламерея для отображения D.40)
увидеть наглядно, как происходит "забывание" этого значения, сделаем
следующее геометрическое построение.
Выберем на плоскости прямоугольную систему координат, по осям ко-
которой будем откладывать величины X = Еп, Y = Еп+\ (рис. 4.5). Прове-
Проведем биссектрису
Y = X или E^+i = Еп. D.41)
Уравнение D.40в) задает прямую
Y = e~2lTX + ДЕ. D.42)
Нанесем эту прямую на плоскость {X, Y}. Точка пересечения прямых D.41)
и D.42), очевидно, соответствует стационарному режиму:
д ел
X Y D.43)
Проведем теперь, используя прямые D.42) и D.41), построение после-
последовательности D.40). Выберем на оси абсцисс начальную точку Е\. Со-
Соответствующую ей ординату Е2 найдем с помощью прямой D.42). Для
4.5. Отображение последования 69
нахождения следующей точки последовательность "превратим" ординату
Е2 в абсциссу Еч с помощью биссектрисы D.41). Этой новой абсциссе
соответствует ордината Е^9 определяемая с помощью прямой D.42). Мно-
Многократно повторяя это построение, получаем ломаную кривую, заключен-
заключенную в нашем случае между прямыми D.41) и D.42) и неограниченно при™
ближающуюся к точке их пересечения. Очевидно, какую бы точку на оси
абсцисс мы ни взяли в качестве начальной, мы неизменно получим лома-
ломаную линию, приближающуюся к точке пересечения прямых. По сути это
означает "забывание" начальных условий и установление стационарного
режима колебаний.
Ломаная линия, построенная в соответствии с описанной процедурой,
называется лестницей Ламерея.
4.5. Отображение доследовании
Рекуррентное соотношение D.36) является частным случаем. В более
общем случае связь элементов последовательности {хп} может быть зада-
задана функцией
хп+1 = f(xn). D.44)
где под хп имеются в виду значения некоторой величины, характерной для
изучаемой системы, взятые в определенные последовательные моменты
времени tn. Другими словами, соотношение D.44) осуществляет отобра™
жение оси X в себя. Такое отображение связывает последовательные точ™
ки и потому называется отображением последования. Отображение f(xn)
далеко не всегда удается найти аналитически. Тогда оказывается необходи-
мым привлечение численных расчетов. В ряде случаев, однако, отображе-
отображение последования находится достаточно просто.
Рассмотрим, например, линейный осциллятор с трением:
х + 2jx + и%х = 0. D.45)
Выберем произвольную начальную точку, лежащую на оси абсцисс, т.е.
положим x(t = 0) = 0, x(t = 0) = xq. Будем далее следить за после-
последовательными пересечениями фазовой траекторией оси абсцисс (х = 0).
Решение уравнения D.45) при ujq > j2 имеет вид
х = e^jt xq cos out + -^—^ sin out ,
/ ix W J^ D-46)
x = —e 1 [ u) + — ) xq sinwt,
Как следует из второй формулы в D.46), в момент пересечения оси абсцисс
sin ut = 0, т.е. пересечения происходят в моменты
tn = —, n = 0, 1, 2,... D.47)
70
Основные понятия теории колебаний
В соответствии с первой из формул D.46) в эти моменты времени коорди-
координата точки пересечения оси абсцисс фазовой траекторией равна
хп = x(tn) = (^1)пжо ехр ( ) . D.48)
Последнее соотношение можно записать в рекуррентной форме:
хп+1 = рхп, D.49)
где
Построение лестницы Ламерея для этого отображения показано на
рис. 4.6. Видно, что лестница Ламерея принимает вид ломаной спирали,
xn+i=pxn
/
/
X
V
* j
s
|«*71+1
/
/
V
V
/хпл
\
X
п
X
Рис. 4.6. Лестница Ламерея для отображения последования D.49)
сходящейся к точке х = 0, х = 0. Эта точка отвечает единственному
положению равновесия — устойчивому фокусу.
Сравнивая рис. 4.5 и рис. 4.6, мы видим, что в обоих случаях наклон
кривой отображения таков, что
dxn
< 1.
D.50)
Именно поэтому последовательность точек отображения {хп} сходится к
предельной точке, определяемой из уравнения
x = f(x). D.51)
Легко понять, что если в качестве начальной точки последовательности
взять точку, удовлетворяющую уравнению D.51), то все последующие точ™
ки отображения D.44) будут совпадать с ней же. Поэтому такая точка на-
называется неподвижной точкой отображения.
Можно доказать (см. комментарий 12) следующее утверждение: для
сходимости последовательности D.44) к неподвижной точке достаточно,
чтобы в этой точке выполнялось условие
df
dx
< 1.
D.52)
4.6. Автогенератор Ван-дер-Поля
71
Для рассмотренных выше последовательностей согласно рис. 4.5 и рис. 4.6
это условие выполняется.
Заметим, что не всегда одномерное точечное отображение вида D.44)
позволяет изучать поведение динамических систем. В ряде случаев оказы™
вается необходимым прибегать к отображениям более высокой размерно-
размерности. Например, двумерное отображение плоскости в плоскость может быть
представлено в виде двух связанных рекуррентных соотношений:
n+i К n, nh D.53)
Уп+1 = (Р\%п,Уп)-
Как правило, такие и более сложные отображения возникают при анализе
поведения динамических систем с полутора и более степенями свободы.
4.6. Автогенератор Ван-дер-Полм
Выше было проанализировано возникновение автоколебаний на при-
примере процесса установления регулярного хода механических часов, рас-
сматриваемых как система с дискретным временем. В ряде случаев пере-
переход к дискретному времени неоправдан. Тогда оказывается необходимым
изучать решения дифференциальных уравнений, в которых, естественно,
время является непрерывной переменной.
Возникновение автоколебаний в системах такого рода мы рассмотрим
на примере электронных генераторов. На рис. 4.7 приведены схемы авто™
а.
Сэ
o.
Рис. 4.7. Схемы генераторов Ван-дер-Поля на транзисторе (а) и на электронной
лампе (б)
генераторов на транзисторе (а) и на электронной лампе (б), по существу
эквивалентные друг другу. Ламповые генераторы подобного типа принято
называть автогенераторами Ван-дер~Поля.
Начнем с качественного обсуждения транзисторной схемы рис. 4.7 а.
Самоподдерживающиеся колебания в колебательном контуре устанавлива-
устанавливаются благодаря тому, что в этом контуре с помощью внешнего источника
(батареи) периодически происходит пополнение энергии. Регулировка ве-
величины вводимой энергии осуществляется путем автоматического вклю-
включения и отключения источника тока с помощью катушки L\, индуктивно
72 Основные понятия теории колебаний
связанной с катушкой L2 в колебательном контуре. Наводимое в катушке
L\ напряжение подается на базу транзистора. В периоды, когда это напря-
напряжение минимально, транзистор открыт, и внешний источник создает ток
/эк, заряжающий конденсатор С2 в колебательном контуре. В периоды же,
когда напряжение на базе максимально, транзистор запирается, внешний
источник отключается и начинается разряд конденсатора через катушку
1/2. Возникающий в ней ток I наводит в индуктивно связанной с ней ка-
катушке L\ переменное напряжение. Это напряжение через разделительный
конденсатор С\ подается на базу транзистора и тем самым управляет током
/эк в цепи эмиттер-коллектор. Таким способом осуществляется обратная
связь между током 1ЭК, и током I в колебательном контуре. Чтобы эта обрат™
ная связь приводила к усилению колебаний, необходимо, чтобы колебания
тока в контуре I и напряжения на базе транзистора происходили в противо™
фазе (баланс фаз). Иными словами, необходимо, чтобы в тот период, когда
конденсатор в колебательном контуре разряжается, транзистор был закрыт.
Для этого напряжение на его базе должно быть максимальным. Когда же
конденсатор заряжается, напряжение на базе должно быть минимальным,
чтобы открыть транзистор для внешнего источника тока. Этот баланс фаз
достигается таким включением катушки Li, чтобы токи в колебательном
контуре C2L2 ив катушке L\ были в противофазе. Вторым необходимым
условием генерации является баланс амплитуд, т.е. условие, при выпол-
выполнении которого потери в колебательном контуре компенсируются подво-
димой к нему энергией. Для этого нужно, чтобы амплитуда колебаний на-
напряжения, подаваемого на базу транзистора с катушки L\, была достаточно
велика и, следовательно, наиболее полно заряжался и разряжался конден-
конденсатор Сг. Это достигается увеличением индуктивностей катушек L\ и L2,
и коэффициента усиления транзистора.
Аналогичным образом возникают колебания и в ламповом генераторе
(рис. 4.7 б). Для этой последней схемы составим уравнения, описывающие
изменения напряжения на конденсаторе С в ЬСД-контуре в цепи сетки
лампы. При указанном на рис. 4.7 б способе связи катушек при увеличении
анодного тока /а и соответствующем росте магнитного потока Ф в катушке
L индуцируется ток I, направленный по правилу Ленца так, что конденса-
конденсатор заряжается, и напряжение на сетке Uc возрастает. Индуктивная связь
катушек La и L создает в цепи LCR-контура ЭДС индукции
Ета = лА D.54)
at
где М — коэффициент взаимной индукции катушек La и L. Знак в правой
части этой формулы выбран так, чтобы Еит было положительным, когда
анодный ток растет. Тогда для рассматриваемого контура имеем
L— + RI + Uc = М^. D.55)
dt dt
Мы считаем, что ток положителен, I > 0, когда он приводит к зарядке
конденсатора, т.е. полагаем I = dQ/dt. Соответственно напряжение на
4.6. Автогенератор Ван-дер-Поля
конденсаторе Uc = Q/C. С учетом этого оказывается, что I = С dUc/dt.
Тогда уравнение D.55) принимает вид
LC-
dt2
dt
di
D.56)
Важным свойством электронной лампы является то, что увеличение
напряжения на ее сетке Uc приводит к увеличению анодного тока /а. Как
следствие, согласно D.60) возрастает ЭДС ЕИНД9 наведенная в катушке L,
входящей в сеточную цепь. В результате растет ток I в сеточной цепи. В
свою очередь это приводит к дальнейшему росту напряжения на сетке, и,
следовательно, к росту анодного тока и т.д.
Проведенное рассуждение демонстрирует принципиальную схему рас™
качки колебаний, т.е. возникновение неустойчивости стационарного режи-
режима. Ограничение амплитуды колебаний обусловлено насыщением анодно-
анодного тока, т.е. прекращением роста /а при увеличении Uc.
Для того, чтобы получить условия самовозбуждения колебаний, при™
мем что анодный ток задается некоторой функцией
h = h(uc).
D.57)
Типичный вид этой зависимости (сеточно-анодной или просто сеточной
характеристики лампы) приведен на рис. 4.8 а. Производная
S(UC) = —
V ; dUc
D.58)
называется крутизной сеточной характеристики. График зависимости S(UC)
приведен на рис. 4.8 б. Для того чтобы усиление лампы было максимальным,
41
а.
0
ис
Рис. 4.8. а — зависимость анодного тока лампы от напряжения на сетке; б —
крутизна анодно-сеточной характеристики лампы в зависимости от напряжения
на сетке
желательно выбирать рабочую точку так, чтобы крутизна сеточной характе™
ристики лампы в этой точке была максимальна. Для упрощения примем,
что соответствующее рабочее напряжение (напряжение смещения) Ucq =
= 0. Этому соответствует анодный ток I = /ао. Обычно при этом лам™
па оказывается наиболее чувствительной к изменениям потенциала сетки.
Другими словами, так выбранный рабочий режим отвечает точке перегиба
на кривой Ia(Uc) и соответствует точке максимума на кривой S(UC). Co™
74 Основные понятия теории колебаний
гласно сказанному, в окрестности рабочей точки
ia — ia0
Подстановка D.59) в D.56) дает
d2Uc M
ler/з D-59)
LClb-W-^+W-O, («О)
где, как обычно, ш^ = 1/LC. Обозначая далее
MS2 o MSq-RC
, 27=
RC' !
, D.61)
LC l ;
перепишем D.60) в виде
х - 27жA - ж2) + ш1х = 0. D.62)
Это уравнение носит название уравнения Ван-дер-Поля и представляет со™
бой одну из наиболее известных математических моделей автоколебаний.
С помощью уравнения Ван~дер~Поля легко проследить развитие неус-
неустойчивости стационарного состояния. Этому стационарному состоянию
отвечает в нашей модели х = 0, т.е. отсутствие напряжения на сетке лам-
лампы. При малых х уравнение D.62) можно приближенно записать в виде
х - 2jx + ш1х = 0. D.63)
Это линейное уравнение аналогично уравнению линейного осциллятора
с трением B.7). Единственное отличие состоит в замене 7 на (—7)- Бш^
годаря этому точка х = 0 оказывается неустойчивой и в зависимости от
соотношения величин 7 и ojq она является либо неустойчивым фокусом
G < с^о), либо неустойчивым узлом G > ш®).
Необходимым условием неустойчивости оказывается выполнение нера-
неравенства
MS0 > RC. D.64)
Это означает, что лампа должна обладать достаточно большим усилением,
чтобы компенсировать потери на активном сопротивлении контура.
Поскольку слагаемое (—2гух) аналогично тому, которое учитывает тре-
трение в B.7), о нем говорят как об отрицательном трении.
По мере развития неустойчивости нелинейное слагаемое 2jx2x в
уравнении D.62) начинает играть все более и более существенную роль,
эффективно создавая положительное трение. Когда влияние отрицатель-
отрицательного и положительного трений уравновешивается, устанавливается ста-
стационарный колебательный режим (автоколебания). Этот режим устой-
устойчив, поскольку при больших отклонениях от равновесия (|ж| ^> 1) воз-
возникает сильное затухание, выводящее из системы избыточную энергию.
Коэффициент взаимной индукции М задает связь между анодным и
сеточным токами. Естественно, что характер связи между анодной и се-
сеточной цепями лампы существенно определяется знаком М. Если М < 0,
4.7. Стохастические колебания 75
то колебания тока в контуре подавляются анодным током. В этом случае
говорят об отрицательной обратной связи между двумя подсистемами,
в нашем случае — между анодной и сеточной цепями лампы. Если же
М > 0, то анодный ток усиливает колебания в контуре. Тогда говорят
о положительной обратной связи. Однако только одного факта наличия
положительной обратной связи может оказаться недостаточно для возник-
возникновения неустойчивости равновесного состояния. Согласно D.64) коэффи-
коэффициент взаимоиндукции должен превышать критическое значение:
М > Мкр = RC/Sq. D.65)
Иными словами, только достаточно глубокая положительная обратная связь
создает отрицательное трение.
Уравнение Ван-дер-Поля D.62) относится к классу нелинейных диффе-
ренциальных уравнений. Как правило, для таких уравнений не удается полу-
получить точные аналитические решения. Поэтому приходится либо прибегать к
качественным методам, либо решать их численно. Возможно также нахожде-
нахождение приближенных решений (см. комментарий 13, иллюстрирующий приме-
применение одного из приближенных методов к уравнению Ван-дер-Поля).
Рассмотренное выше уравнение Ван-дер-Поля описывает возникнове-
возникновение автоколебаний, т.е. самоподдерживающихся периодических колебаний.
На фазовой плоскости {ж, ж} траектория изображающей точки является
замкнутой кривой. Эта траектория называется предельным циклом. Здесь
слово "предельный" указывает на то, что все прочие траектории с течением
времени неограниченно приближаются именно к этой кривой. Ее замкну-
тость, т.е. периодичность движения, подчеркивается в термине "предель-
"предельный цикл" словом "цикл".
Для систем с одной степенью свободы, т.е. описываемых одним урав-
уравнением второго порядка, на фазовой плоскости не существует иных струк-
структурных элементов кроме особых точек, сепаратрис и предельных циклов.
Поведение обычных (неособых) траекторий определяется взаимным рас-
расположением этих выделенных особых структурных элементов. Причиной
тому является то, что фазовые траектории не пересекаются и лежат в одной
плоскости. Кратко говоря, для динамической системы с одной степенью
свободы существуют только три возможности: 1) совершать периодиче-
периодические колебания, 2) неограниченно стремиться к положению равновесия,
3) неограниченно удаляться от положения равновесия.
4.7. Стохастические колебания
Для систем с полутора и более степенями свободы фазовое простран-
пространство имеет размерность 3 и более. Поэтому фазовые траектории в общем
случае не лежат в одной плоскости, в силу чего число возможных динами-
динамических режимов резко возрастает. Так, оказываются возможными комби-
нированные типы особых точек, такие как "седло-узел", "седло-фокус" и
т.п. Тогда у особой точки могут одновременно иметься как "устойчивые"
76 Основные понятия теории колебаний
направления, по которым траектории приближаются к этой точке, так и
"неустойчивые" направления, по которым траектории удаляются.
Кроме того, в многомерном фазовом пространстве возможны принци-
пиально новые структурные элементы, именуемые странными аттрак-
аттракторами. Динамические режимы, представляемые такими элементами, со-
соответствуют финитному апериодическому движению, обладающему к то™
му же всеми признаками стохастического процесса, подобного случайному
блужданию броуновской частицы. Сам термин "странный аттрактор" объ-
объясняется следующим образом. Прежде всего, слово "аттрактор", означаю™
щее нечто привлекательное, имеет смысл притягивающего множества —
в фазовом пространстве все траектории, не принадлежащие этому множе-
множеству, неограниченно к нему притягиваются. Слово же "странный" несет в
себе эмоциональную оценку необычности свойств этой системы, ее слож-
сложного, непредсказуемого поведения. Характерной особенностью этого ат~
трактора является то, что фазовые траектории время от времени перескаки-
перескакивают из окрестности одной неустойчивой особой точки в окрестность дру-
Рис. 4.9. Качественный вид фазового портрета странного аттрактора
гой, тоже неустойчивой особой точки. Это блуждание происходит неогра-
неограниченно долго, фазовая траектория остается незамкнутой (см. рис. 4.9).
Классическим примером динамической системы, имеющей странный
аттрактор, является так называемая система Лоренца
х = ^ах + ау^
у = гх — у — XZj D.66)
z = —Ъх + ху.
где а, г и b — положительные константы. Эта система была получена
Э.Н. Лоренцем при анализе конвективного движения неоднородно нагре™
ваемой вязкой жидкости (проблема Бенара).
Более подробно эти вопросы обсуждаются в главе десятой.
ЧАСТЬ2
СИСТЕМЫ
Qui potuit mundi motus cognoscere et omnes causas atque animo docili casus
meditan, sentii mortales errantes, qui sine meta поп sine proposito tendunt porro
atque retrorsum: dulcia conspiciunt hesternae insignia lucis praelibantque diei simul
speciem venientis.
(Claudius Claudianus. De raptu Proserpinae, Roma, Lib. IV, 1—6)
Тот, кто сумел познать движения мира, а также всем обстоятельствам
внять и с толком в душе их осмыслить, видит блуждания смертных, ко-
которые без назначенья, но не без цели стремятся вперед и назад подаются:
сладостный след вчерашнего дня они отмечают и вместе с тем предвку-
предвкушают грядущего дня очертанья.
(Клавдий Клавдиан (ок. 370^404). Похищение Прозерпины.^ Рим. Кн. 4.
С.1-6)
Сменяется хаосом в мире порядок давно,
И то, что ушло, никому возвратить не дано.
Причина прозрачна, как в чаше хрустальной вино.
Порядок и хаос Всевышнему любы равно.
(Омар Хайям. Рубай 333).
Хаоса бытность довременну
Из бездн ты вечности воззвал,
А вечность, прежде век рожденну,
В себе самом Ты основал...
(Г. Державин. Ода "Бог").
ГЛАВА V
Динамические системы. Эволюционный оператор, задача Ко-
Коти. Пересекающиеся и непересекающиеся фазовые траектории.
Особые точки. Классификация особых точек в трехмерном фа-
фазовом пространстве. Устойчивые и неустойчивые направления.
Характеристические показатели на комплексной плоскости и
устойчивость особых точек. Индексы Пуанкаре, сосуществова-
сосуществование особых точек на фазовой плоскости.
В предыдущих главах на примере анализа простейших колебательных
систем был введен ряд понятий, которые при надлежащем обобщении мо~
гут быть применены для анализа систем существенно более сложных. Имея
в виду эту цель, мы приведем некоторые дополнительные сведения и про-
проведем необходимые обобщения. Однако мы не будем повторять то, что уже
было сформулировано с достаточной полнотой в предыдущих главах.
5.1. Динамические системы
Начнем с уточнения понятия динамической системы. Система называ-
называется динамической, если задание начальных условий полностью опреде-
определяет ее поведение в последующие моменты времени. Все рассмотренные
нами до сих пор примеры относятся к динамическим системам. Приме-
Примером нединамической системы является система, в которой действуют слу-
случайные силы, благодаря которым точное предсказание поведения делается
невозможным. Во многих случаях динамическая система задается систе-
системой обыкновенных дифференциальных уравнений
Г = /iOi^2,...5^n,i), г = 1, 2,...,гс. E.1)
at
Этой системе соответствует п/2 степеней свободы. Для выделения кон-
кретной фазовой траектории необходимо задание начальных условий:
t = t0 : xi= жю, х2 = ж2о, • • •, хп = хп0. E.2)
Условия E.2) выделяют фазовую траекторию, проходящую через точку фа-
фазового пространства Pq, имеющую координаты xq = (жю, ^20, • • •, хпо)-
Более формально динамическую систему принято определять следу-
следующим образом. Пусть эволюционный оператор Т* преобразует некоторое
начальное состояние (в момент времени to) системы Pq в состояние систе-
80 Нелинейные динамические системы
мы Р в момент времени t, Тг : Pq =>¦ Р. Тогда под динамической систе-
системой понимается такая система, эволюционный оператор которой удовле-
удовлетворяет соотношению ТгТт = Tt+T. Другими словами, для динамической
системы время аддитивно, а эволюционный оператор мультипликативен.
При этом эволюционные операторы, отвечающие разным интервалам вре™
мени, коммутируют: ТгТт = ТтТг. Заметим, что определение динамиче™
ской системы через эволюционный оператор позволяет не конкретизиро-
конкретизировать вид динамических уравнений, которыми могут быть обыкновенные
дифференциальные уравнения, уравнения в частных производных, инте-
интегральные уравнения и т.п. По существу, задание динамической системы
отвечает постановке некоторой задачи Коши.
Решение задачи Коши выделяет некоторую траекторию, проходящую
через заданную точку фазового пространства Pq. Движение фазовой точки
по этой траектории в соответствии со смыслом задачи Коши осуществляет-
осуществляется "вперед" по времени (i > to), стартуя от выбранной (заданной) началь-
начальной точки. Вместе с тем возможно изучение тех траекторий, которые начи™
наются в более ранние моменты времени (t < to) и в момент t = i® входят
в точку Pq. Выделение таких участков траектории эквивалентно решению
задачи Коши для движения "вспять" по времени. Формально получить та-
такое обратное движение можно, решив прямую задачу Коши для системы
E.1), в которой знак времени изменен на противоположный: t —>> —t. Ре-
Решение таких прямой и обратной задач Коши позволяет построить полные
фазовые траектории динамической системы в пределах от их естественно-
естественного начала до их естественного конца. Заметим, однако, что естественные
конец и/или начало не всегда существуют. Примером являются замкнутые
траектории, отвечающие периодическому движению.
В случае динамической системы фазовые траектории не пересекают™
ся. В противном случае, взяв в качестве начальной точку пересечения, мы
обнаружили бы, что точное предсказание поведения системы невозможно:
из одной точки начинаются, по крайней мере, две различные траектории.
Строго говоря, последнее утверждение относится только к гладким ди-
динамическим системам, т.е. к системам, для которых правые части уравне-
уравнений E.1) суть непрерывно-дифференцируемые функции. Как известно из
теории дифференциальных уравнений, именно это условие обеспечивает
существование и единственность решения задачи Коши.
Рассмотрим примеры, иллюстрирующие сказанное.
Пусть динамическая система имеет одномерное фазовое пространство
и задается обыкновенным дифференциальным уравнением
х = е~х. E.3)
Решение этого уравнения находится элементарно и имеет вид
*i), E.4)
где t\ — константа интегрирования. Все траектории, задаваемые этим
уравнением, могут быть продолжены неограниченно вперед по времени.
5. /. Динамические системы
81
Однако продвижение вспять по времени возможно лишь до момента t =
= ti, когда х обращается в бесконечность. Этот пример иллюстрирует
вопрос о продолжении траектории впе-
вперед и вспять по времени.
Следующие два примера показывают,
как гладкость или негладкость динами-
динамической системы влияет на возможность
пересечения различных траекторий.
Пусть мы имеем
х = х2. E.5)
Нетрудно убедиться, что это уравнение
имеет два решения
1
=V E.6)
а
О
Л
( ¦
б.
О
х = —-
= 0.
Рис. 5.1. а — график нетривиаль-
нетривиального решения уравнения E.5); б —
фазовый портрет уравнения E.5)
На рис. 5.1 а показан график первого решения, состоящий из двух ветвей
гиперболы.
Фазовое пространство системы одномерно. Ее фазовые траектории
представлены на рис. 5.1 б. Всего имеются три различные траектории:
E.7)
Первая траектория приближается ко второй, не сливаясь с ней, однако, ни
за какое конечное время. Вторая траектория суть неподвижная точка. Нако-
Наконец, третья траектория отделена как от первой, так и от второй траектории
бесконечным промежутком времени.
Пример E.5) показывает, что траекто-
траектории гладкой динамической системы мо-
могут неограниченно приближаться друг
к другу, вместе с тем не сливаясь, т.е. не
пересекаясь друг с другом ни за какое
конечное время.
Рассмотрим теперь пример неглад-
негладкой системы:
х = Зж2/3.
к
а У
У' О
Л ^^^
/
X
E.8)
б.
О
Уравнение E.8) имеет два решения
E.9)
Рис. 5.2. а — график нетривиаль-
нетривиального решения уравнения E.8); б —
фазовый портрет уравнения E.8)
Фазовое пространство одномерно. Рис. 5.2 а показывает зависимость перво-
первого из решений от времени. Оно описывает фазовую траекторию, начинающу-
6 Н.В. Карлов, Н.А. Кириченко
82 Нелинейные динамические системы
юся при t = — оо, заканчивающуюся при t = +oq и проходящую через точку
ж = 0. Второе решение х = 0 представляет собой неподвижную точку.
Таким образом, первая траектория проходит через вторую, т.е. пересекает
ее. Эти обе фазовые траектории показаны на рис. 5.2 6. Пересечение
фазовых траекторий при х = 0 обусловлено неаналитичностью правой
части уравнения E.8) в этой точке.
5.2. Особые точки
Наряду с фазовыми траекториями принципиально важной характе-
ристикой динамических систем являются особые точки. Напомним, что
таковыми являются точки, представляющие в фазовом пространстве по-
ложения равновесия системы. Для автономной динамической системы,
задаваемой уравнениями
—T = f% (яъ #2, • • •, хп), г = 1, 2,..., га, E.10)
at
особые точки определяются, следовательно, системой уравнений
fi (жъ Х2,..., хп) = 0, г = 1, 2,..., п. E.11)
В простейшем случае одной колебательной степени свободы, т.е. когда
фазовое пространство двумерно, динамическая система может иметь осо-
особые точки только следующих четырех типов: центр, узел, фокус, седло (см.
главу четвертую). В частном случае гамильтоновых систем из числа допу-
допустимых особых точек исключаются узел и фокус. Гамильтоновы системы
сравнительно подробно рассмотрены в главе четвертой. В частности, был
исследован нелинейный математический маятник. В комментарии 14 об™
суждаются случай нелинейного осциллятора без трения и также частный
случай так называемого уравнения Дуффинга.
В случае фазового пространства большей размерности число типов
особых точек возрастает. При этом следует иметь в виду, что в тг-мерном
фазовом пространстве при п > 2 особые точки сочетают в себе свойства
перечисленных выше особых точек двумерного фазового пространства.
Поясним суть дела, рассмотрев в качестве примера систему с трехмер-
трехмерным фазовым пространством (п = 3 в уравнениях E.10) и E.11)).
Пусть хс = (xci, хС2, жсз) — особая точка. Для определения типа этой
особой точки нужно линеаризовать E.10) в ее окрестности. Положим
и = х — хс. E.12)
Тогда, считая вектор и = (щ, щ^щ) малым, перепишем E.10) в виде
й = Ащ E.13)
5.
Особые точки
где А — постоянная матрица,
, /2, /з)
Х2,
dh
dh
дхг
0/1
3X2
dh
3X2
dh
дх3
df2
дх3
dh
8x2
/,-,
Будем искать решение уравнения E.13) в виде
„л*
E.14)
E.15)
и = ще
Подстановка E.15) в E.13) приводит к системе линейных уравнений для
коэффициентов и = (щг, ixq2, ^оз)-
\щ = Ащ. E.16)
Условие разрешимости этой системы дает характеристическое уравнение
det(A-AE) = 0, E.17)
где Е — единичная 3x3 матрица.
Уравнение E.17) есть кубическое уравнение
А3 + аА2 + ЬА + с = 0. E.17а)
Оно имеет три решения, которые могут быть как действительными, так и
комплексными (в частном случае — чисто мнимыми). Зная корни Ai, A2,
A3 уравнения E.17), решение уравнения E.13) можно представить в виде
и = u01eXlt + u02eX2t + u03eXst. E.18)
Строго говоря, это решение имеет место в том случае, когда все три кор-
корня различны. Если же среди корней А есть совпадающие, то решение урав-
уравнения E.13) может вырождаться, так что наряду со слагаемым вида ii,QieAt
появляются и слагаемые, пропорциональные text. При совпадении всех трех
корней может происходить дальнейшее вырождение, и решение приобретает
вид и = (uqi -\-tu02 +^2^оз)еЛ*- Техника нахождения вырожденных решений
аналогична продемонстрированной в комментарии 3.
Рассмотрим классификацию особых точек для случая, когда все три
корня характеристического уравнения различны.
Первое. Все три корня действительны. Здесь возможны четыре си-
ситуации:
1. Ai < А2 < А3 < 0;
2. Ai < А2 < 0 < А3;
3. Ai < 0 < А2 < А3;
4. 0 < Ai < А2 < А3.
Первая и четвертая из этих ситуаций суть прямые обобщения соот-
соответствующих устойчивого и неустойчивого узлов фазового портрета ди-
динамической системы на плоскости. По любой паре направлений рассма-
рассматриваемая система, имеющая полторы степени свободы, ведет себя вблизи
E.19)
6*
84
Нелинейные динамические системы
Область в
пространстве
параметров
Расположение
корней на
плоскости
Л = Л; + i\"
Тип
состояния
равновесия
Фазовый портрет
состояния равновесия
Размерность
устойчивого и
неустойчивого
многообразий
Л3 + аЛ2 + Ь\ + с, А = ^a2b2 + 4Ь3 + 4а3с - 18аЬс + 27с3 < О
(в этом случае все корни чисто действительные)
ab - с < О
с < О
Ь> О
Неустойчи-
Неустойчивый узел
dim Ги = 3
dtmrs =0
ab - с > 0
с > 0
Ь> 0
Устойчи-
Устойчивый
узел
dimru = 0
dim Г8 = 3
ab - с < 0
с < 0, 6 > 0
или с > 0,
Ь< 0
Седло
dim Ги = 2
dimTs = 1
ab - с > 0
с < 0, Ь > 0
или с < 0,
6< 0
Седло
dim Г11 = 1
dim Vs = 2
Устойчивый центр
Неустойчивый узел-фокус
Рис. 5.3. Типы состояний равновесия в трехмерном фазовом пространстве (из
и волн. — М.:
5.2. Особые точки
85
Продолжение...
Л3 + аА2 + ЬА + с, А = -а?Ь2 + 4Ь3 + 4а3с - 18abc + 27с3 > О
(в этом случае всегда два корня комплексно сопряженные)
аЬ - с < О
с< О
Ь> О
Неустойчи-
Неустойчивый узел
dimru = 3
dimF5 =0
b - с > О
О О
ь > о
Устойчи-
Устойчивый
узел
dimru = 0
dimT8 = 3
аб - с < 0
с < 0, Ь > 0
или с > 0,
Ь< О
Седло-
фокус
dimru = 2
dimTs = 1
аЬ - с> 0
с < 0, 6 > 0
или с < 0,
Ь< 0
Седло-
фокус
dlmru = 1
dim Г8 = 2
Седло-узел
книги: Рабинович М.И., Трубецков Д.И. Введение в теорию нелинейных колебаний
Наука, 1984)
86 Нелинейные динамические системы
особой точки точно так же, как система с одной степенью свободы ведет
себя вблизи узла той же устойчивости. Вместе с тем вторая и третья из си-
ситуаций E.19) соответствуют новым типам особых точек. Эти точки можно
назвать седло-узел, поскольку они обладают свойствами как узла (по одной
паре направлений), так и седла (по другой паре направлений). "Узловая"
часть этих особых точек может быть как устойчивой (ситуация 2), так и
неустойчивой (ситуация 3).
Второе. Один корень действительный (у кубических уравнений все™
гда, по крайней мере, один корень действительный), а два других — ком-
комплексно сопряженные. Пусть для определенности Im Ai = 0; А2 = AJ т.е.
Re А2 = Re A3 ф 0, Im А2 = — Im A3 ф 0. Тогда возможны ситуации:
1. Ai < 0, Re A2 = Re А3 < 0;
2. Ai < 0, Re A2 = Re A3 > 0;
3. Ai > 0, Re A2 = Re A3 < 0;
4. Ai > 0, Re A2 = Re A3 > 0;
По аналогии с предыдущей классификацией этим особым точкам есте™
ственно дать названия узло-фокус A — устойчивый, 4 — неустойчивый)
и седло-фокус B и 3).
Третье. При одном действительном корне (Ai) два других (А2 и Аз) —
чисто мнимые. Это означает, что в плоскости (ж2,жз) особая точка пред-
представляет собой центр, а в целом она либо устойчива, либо неустойчива в
зависимости от знака Ai. Такую точку можно называть устойчивым (Ai <
< 0) или неустойчивым (Ai > 0) узло-центром.
На рис. 5.3 схематически показано поведение фазовых траекторий в
окрестности рассмотренных выше особых точек. Аналогичную классифи-
классификацию можно провести и для динамических систем с фазовым простран™
ством более высокой размерности. При этом, однако, введение новых на-
названий для соответствующих особых точек не увеличивает наглядность их
представления. Обычно в таких случаях прибегают к выделению в пол-
полном фазовом пространстве Г подпространств Ги и Fs, которые объединяют
неустойчивые (Г11) и устойчивые (Fs) направления. При этом по смыслу
разбиения Г на Ги и Ts
dim Г = dimru + dim Г5, E.21)
где символ dim означает размерность соответствующего (под)простран-
(под)пространства. Такое разбиение, разумеется, имеет смысл для пространств любой
размерности. Так, например, в ситуации E.19) размерности подпрост™
ранств Ги и Fs равны:
1) dimru = 0, dimTs = 3; 2) dlmT11 = 1, dim Г8 = 2;
3) dimT11 = 2, dimTs = 1; 4) dimT11 = 3, dim Г8 = 0. ( }
В случае фазового пространства произвольной размерности для дина-
динамической системы E.10) тип особой точки определяется, очевидно, из ха-
характеристического уравнения вида E.17), в котором матрицы А ш Е суть
5.3. Индексы Пуанкаре
87
соответствующие обобщения матриц, введенных выше для систем с трех™
мерным фазовым пространством:
/dh g/j dfi*
дхп /10 — 0\
О 1 •¦¦ О
д =
дхп
dfn
дх2
dfn
Е =
\о о
1/
E23)
В этих условиях уравнение
det(A - ЛЕ) = 0 E.24)
представляет собой уравнение n-й степени относительно характеристиче-
характеристического показателя Л. Как известно, это уравнение имеет ровно п корней, сре-
среди которых могут быть как действительные, так и комплексные. Последние
появляются комплексно сопряженными парами, поскольку все коэффици-
коэффициенты в уравнении E.24) — действительные.
Запишем корни уравнения E.24) в виде
Xi = Re Xi + i Im A». E.25)
Все корни, расположенные в левой полуплоскости комплексной плоскости
А, где Re A < 0, отвечают устойчивым направлениям, так как отклонения
от положения равновесия по этим направлениям при t —>• +оо затухают,
Х{ — xci ~ exp(?Re A^) —)- 0. Аналогично корни, расположенные в правой
полуплоскости А, отвечают неустойчивым направлениям. Таким образом,
для качественного определения типа собой точки достаточно установить
число корней характеристического уравнения, лежащих в левой и правой
полуплоскостях комплексной плоскости А.
Поскольку для уравнений выше второй степени использовать явные
формулы для корней часто неудобно (а для уравнений степени выше чет-
четвертой такие формулы не существуют), то приобретают ценность методы
определения числа корней того или иного типа, не основанные на яв-
явном решении. К их числу относятся и наиболее часто употребляются ме-
метод D-разбиений и метод, основанный на применении критерия Рауса-
Гурвица (см. комментарии 15 и 16).
5.3. Индексы Пуанкаре
В заключение этой главы вернемся к динамическим системам на штос™
кости, т.е. к системам с одной степенью свободы. Для таких систем не
существует иных структурных элементов, кроме особых точек, сепаратрис
и предельных циклов. Причина состоит в том, что фазовые траектории не
пересекаются и лежат в одной плоскости.
Кратко говоря, для динамической системы с одной степенью свободы
существуют только три возможности: 1) совершать периодические колеба-
88
Нелинейные динамические системы
ния, 2) неограниченно стремиться к положению равновесия, 3) неограни™
ченно удаляться от положения равновесия.
Из сказанного вытекает наличие ограничений на возможности сосу™
шествования на фазовой плоскости структурных элементов разных типов.
Для описания этих ограничений вводится топологическая характеристика
структурного элемента, называемая его индексом Пуанкаре.
Чтобы ввести индексы Пуанкаре, рассмотрим фазовую плоскость ди-
динамической системы. Фазовые траектории на этой плоскости задают неко-
торое векторное поле — поле направлений касательных к траекториям в
каждой точке. Это поле направлений определяется уравнениями фазовых
траекторий
?2=/2&Й', E'26)
причем тангенс угла наклона траектории, проходящей через точку (х\, жг),
равен
tgip = — = E.27)
dxi fi(xi,x2)
Проведем на фазовой плоскости произвольный замкнутый контур L,
как это показано на рис. 5.4 а. Изображенный на этом рисунке контур не
Рис. 5.4. К определению индекса Пуанкаре. Индекс Пуанкаре кривой, не охваты-
охватывающей особых точек, равен нулю: j = О
совпадает, вообще говоря, ни с одной фазовой траекторией. Возьмем на
контуре произвольную точку Р и построим единичный вектор п, начи-
начинающийся в ней и касательный к фазовой траектории, проходящей через
нее же. Будем двигать точку Р по контуру в направлении против часовой
стрелки, считая это направление положительным, направляя вектор п по
касательной к той фазовой траектории, которая проходит через точку Р в
данный момент. Очевидно, что вектор п будет при этом как-то поворачи-
поворачиваться. По завершении полного обхода контура вектор п займет исходное
положение. Это значит, что он совершит целое число полных оборотов, т.е.
его угол поворота составит Atp = 2ttj, где j — целое число. Угол поворота
А(р положителен, если вектор п вращается против часовой стрелки, т.е. в
направлении обхода контура. Число j называется индексом Пуанкаре.
Обратим внимание на то, что в случае фокуса и узла (рис. 5.5 б и 5.5 в)
индекс Пуанкаре не зависит от того, устойчива или неустойчива особая точка.
5.3. Индексы Пуанкаре 89
Рис. 5.5. Индексы Пуанкаре особых точек: центра (а), фокуса (б) и узла (в) равны
j = +1, седла (г) j = — 1. Обход контура L осуществляется против часовой
стрелки
Из определения следует, что индекс Пуанкаре есть целое число, ко-
которое может быть положительным, отрицательным или равным нулю.
Нетрудно видеть, что для случая контура, изображенного на рис. 5.4а,
число j равно нулю. Форма контура не играет при этом роли. Для примера
на рис. 5.46 показан контур сложной формы. Фазовые траектории могут
пересекать такой контур в нескольких точках. Непосредственно следя за
вращением вектора п при обходе такого контура, нетрудно убедиться, что
индекс Пуанкаре остается равным нулю.
В случаях, иллюстрируемых рис. 5.4 а и 5.4 б, в областях фазовой плос-
плоскости, ограничиваемых контуром, нет ни одной особой точки. Ситуация ка-
чественно меняется, когда контуры охватывают особые точки. На рис. 5.5 а
показан контур L, охватывающий особую точку типа центра. Непосредствен™
ная проверка показывает, что индекс Пуанкаре такого контура j = +1. На
рис. 5.5 б контур L охватывает особую точку типа фокуса. В этом случае
также j = +1. Точно таким же образом легко убедиться, что для особой
точки типа узла индекс Пуанкаре j = +1 (рис. 5.5 в). Наконец, в случае
особой точки типа седла (рис. 5.5 г) индекс Пуанкаре j = — 1.
Подобно тому, как в случае рис. 5.4 при изменении формы контура ин-
деке Пуанкаре не менялся, для случая рис. 5.5 форма контура также не играет
роли, лишь бы число особых точек, им охватываемых, не менялось. Поэто-
Поэтому можно сказать, что индекс Пуанкаре характеризует тип особой точки на
фазовой плоскости: для центра, узла и фокуса j = +1, для седла j = —1.
Если на фазовой плоскости имеются замкнутые траектории (например,
траектории в окрестности центра, предельные циклы), то в качестве кон-
контура может быть выбрана сама такая траектория. Очевидно, что для любой
замкнутой траектории j = +1.
Теперь мы можем сформулировать следующее важное утверждение:
индекс Пуанкаре любой замкнутой кривой на фазовой плоскости равен сум-
сумме индексов Пуанкаре особых точек, охватываемых этой кривой. Идея до-
доказательства этого утверждения сводится к разбиению области, охватыва-
охватываемой контуром и содержащей несколько особых точек (см. рис. 5.6), на
подобласти, содержащие по одной особой точке. Тогда суммарный обход
исходного контура L может быть представлен как обход вокруг каждой из
точек. Дополнительные участки контуров, принадлежащие одновременно
90
Нелинейные динамические системы
Рис. 5.6. Область фазового пространства, охва™ Рис. 5.7. Сосуществование особых
тываемая контуром L, содержащая несколько точек внутри предельного цикла: 1,
особых точек, разбивается на несколько обла- 2 — неустойчивые фокусы, 3 —
стей, содержащих по одной особой точке седло; С — предельный цикл
двум областям, при этом не дают никакого вклада, поскольку обходятся
дважды в противоположных направлениях.
Из сформулированного утверждения вытекает, что внутри замкнутой
траектории число седел всегда на единицу меньше числа особых точек дру-
других типов. В самом деле, индекс Пуанкаре замкнутой траектории равен +1.
С другой стороны, этот индекс должен быть равен сумме индексов всех
особых точек внутри контура. Поэтому, например, седло j = — 1 должно
быть сначала "скомпенсировано" фокусом, узлом или центром (j = +1).
Но этого мало. Помимо таких "скомпенсированных" пар внутри замкну™
того контура должна находиться еще одна какая-либо особая точка с j =
= +1. Пример такого сосуществования особых точек приведен на рис. 5.7,
где внутри предельного цикла наличествуют два фокуса и одно седло.
ГЛАВА VI
Устойчивость, теория устойчивости. Устойчивость по
Ляпунову. Фазовый поток, фазовая жидкость, фазовая капля.
Асимптотическая устойчивость. Диссипативные системы.
Экспоненциальная устойчивость. Орбитальная устойчивость.
Асимптотическая и экспоненциальная орбитальные устойчиво-
сти. Равноускоренное движение материальной точки. Линейный
осциллятор с трением. Нелинейный осциллятор {уравнение
Дуффинга). Аттрактор. Эргодичность. Эргодическая гипотеза.
Эргодические системы. Система Лоренца. Безразличное положе-
положение равновесия. Притягивающий отрезок. Роль нелинейности и
неаналитичности.
В двух предыдущих главах подробно рассмотрены особые точки ди-
намических систем. В частности, проводилось деление этих особых точек
на устойчивые и неустойчивые. Используемое при этом понятие устойчи-
устойчивости является, однако, общим, характеризующим состояние и/или поведе-
поведение не только динамических систем и не только в окрестности особых точек.
Ввиду фундаментальности понятия устойчивости целесообразно привести
основные определения, относящиеся к этому свойству систем.
Устойчивость системы — это ее свойство слабо (в том или ином смы-
смысле) менять свое состояние и/или поведение под действием возмущений.
Мера изменения, отражаемая словом "слабо", в каждом конкретном случае
определяется формулируемой задачей: то, что мало в одном смысле, может
оказаться немалым в другом смысле. Совокупность представлений и ме-
методов, обобщающих и формализующих различные стороны устойчивости
разнообразных систем, составляет предмет теории устойчивости.
Наиболее распространенными понятиями теории устойчивости явля-
являются устойчивость по Ляпунову, орбитальная устойчивость, асимптотиче-
асимптотическая устойчивость и структурная устойчивость.
6.1. Устойчивость по Ляпунову
Пусть траектория L динамической системы задается эволюционным
оператором Г* так, что
L: х(г)=Тгх0, F.1)
где x(i) — совокупность координат изображающей точки в фазовом про-
пространстве системы в момент времени t, a xq — начальная точка траектории
92 Нелинейные динамические системы
(т.е. х = xq при t = to). Наряду с траекторией L, начинающейся в точке жо,
будем рассматривать траекторию L, начинающуюся в точке жо, отличной
от xq . Иначе говоря, введем в рассмотрение также траекторию, задаваемую
соотношением
L : x(t) = Т*х0. F.2)
Обозначим символом р = р(х\,Х2) расстояние между точками х\ и Х2
фазового пространства.
Траектория L устойчива по Ляпунову, если для любого сколь угодно
малого е можно найти такое 5, что для любой начальной точки х®, близкой
к жо, т.е. при р = р(ж0, xq) < 5, окажется, что в любой момент времени t >
> 0 последующие точки траекторий L и L удаляются друг от друга меньше
чем на е:
p(x(t),x{t)) = р (Г*яг0, ТЩ < е. F3)
Сказанное означает, что изначально близкие изображающие точки,
принадлежащие разным фазовым траекториям, оказываются близкими и
в последующие моменты времени.
Различные аспекты устойчивости бывает удобно рассматривать, исполь-
используя гидродинамическую аналогию. Для этого следует привлечь образ иде-
идеальной жидкости, т.е. жидкости с нулевым трением. Последнее отражает тот
факт, что фазовые траектории не взаимодействуют друг с другом. Каждой
точке такой фазовой жидкости отвечает некая фазовая точка, которая дви-
движется по фазовой траектории. Совокупность фазовых траекторий образует
фазовый поток. Выберем в фазовом пространстве (т.е. в резервуаре с фазо-
фазовой жидкостью) некоторую область Го, точки которой суть начальные точ™
ки для группы фазовых траекторий. Эта область образует фазовую каплю.
По мере своего движения эта капля с течением времени может менять свою
форму и объем Y(t) = Т*Г0. Для того чтобы сформулировать на этом языке
понятие устойчивости по Ляпунову, введем диаметр капли Г, понимаемый
как наибольшее расстояние между точками, принадлежащими капле:
d = dIamF= sup p{x\,X2). F.4)
Ж1,ж2ЕГ
Тогда устойчивость по Ляпунову означает, что диаметр капли в любой момент
времени d(i) не превышает требуемого значения е, если только начальный
Рис. 6.1. Устойчивость по Ляпунову: диаметр капли в любой момент времени не
превысит заданной величины е, если только в начальный момент ее диаметр не
больше 6 : dlamFo < S => diam V(t) < е Vt
6.2. Асимптотическая устойчивость 93
диаметр do = d(to) не превышает значения S, определяемого по величине е:
если d(t0) < 5, то d(i) < e. F.5)
Другими словами, по мере движения капля может как угодно деформиро-
деформироваться, но ее размер по любому направлению в любой момент времени не
превышает наперед заданного значения е. При этом фазовые точки, попав
в каплю, ее не покидают. Рис. 6.1 качественно иллюстрирует сказанное.
6.2. Асимптотическая устойчивость
Частным случаем устойчивости по Ляпунову является асимптотиче-
асимптотическая устойчивость. Этот случай встречается довольно часто, будучи ха-
рактерным для так называемых диссипативных систем. Термин "дисси-
пативная система" эквивалентен термину "открытая система" или система
с диссипацией (см. главы 3 и 4). При этом под диссипацией имеется в виду
обмен системы со своим окружением энергий и/или веществом. Очевид-
но, что понятие обмена включает в себя не только положительное, но и
отрицательное трение.
Система называется асимптотически устойчивой, если две фазовые точ-
точки, принадлежащие двум различным фазовым траекториям и достаточно
близкие друг к другу в начальный момент времени, неограниченно сбли-
сближаются по мере движения. Формально это определение означает, что су™
ществует такое 8 > 0, что
если р(ж(?о),ж(?о)) < ?, то I™ p (^(t),x(t)) = 0. F.6)
t—У~\-ОО
На языке фазовой жидкости асимптотическая устойчивость означает,
что с течением времени размер фазовой капли неограниченно уменьшается
по всем направлениям (фазовая капля сжимается в точку).
Закон, по которому происходит уменьшение расстояния р в F.6), во-
вообще говоря, может быть неодинаковым для различных систем и даже для
различных направлений в фазовом пространстве одной системы. В этой
связи важным частным случаем асимптотической устойчивости является
так называемая экспоненциальная устойчивость, при которой расстояние
между точками x(i) и x(t) убывает не медленнее чем exp(-Xi), A > 0. Бо-
Более корректно условие экспоненциальной устойчивости записывается как
Urn \-
\-]np[x(t),x{t)]\ <0. F.7)
Черта над знаком предела означает верхний предел, что позволяет в этом
определении учесть возможность осцилляторного изменения расстояния
между изображающими точками со временем.
6.3. Орбитальная устойчивость
Наряду с устойчивостью по Ляпунову часто приходится рассматривать
орбитальную (или орбитную) устойчивость, иногда называемую также
устойчивостью по Пуанкаре. Это понятие определяется следующим образом.
94 Нелинейные динамические системы
Пусть L — некоторая траектория системы, максимально продленная в
обе стороны по времени. Обозначим p(x^L) расстояние от некоторой точки
х до траектории L. Это значит, что
p(x,L) = inf p(x1x1). F.8)
xtEL
Другими словами, под расстоянием от точки х до траектории L пони-
понимается расстояние от точки х до ближайшей к ней точки, принадлежащей
траектории L. Введем теперь ^-окрестность траектории L, т.е. множество
точек х Е U?(L), таких, что р(ж, L) < е.
Если для любого е можно найти такое 5 > О, что всякая траектория,
начинающаяся в Us(L)9 всегда остается в U?(L), то траектория L называ-
называется орбитально устойчивой. Это означает, что если изображающая точка
системы в некоторый момент времени оказывается достаточно близкой к
траектории L, то и при дальнейшем движении эта точка не отойдет далеко
от рассматриваемой траектории.
Используя язык фазовой жидкости, можно следующим образом пе™
реформулировать приведенное выше определение. Введем трубку тока,
содержащую в себе траекторию L. Тогда орбитальная устойчивость озна-
означает, что диаметр трубки тока в любом сечении не превысит любого тре-
требуемого значения, если только начальный диаметр был достаточно
малым.
По аналогии с предыдущим можно ввести понятия асимптотической
и экспоненциальной орбитальных устойчивостей. Так, асимптотическая
орбитальная устойчивость траектории L означает, что
lim p(x (t), L) = 0 F.9)
t—> + оо
для любой траектории L = {x(t)}9 начинающейся достаточно близко к тра™
ектории L. Если к тому же расстояние между траекториями L и L убывает
не медленнее, чем ехр(—А?), А > 0, то траектория L является экспоненци-
экспоненциально орбитально устойчивой.
Нетрудно понять, что понятие орбитальной устойчивости является
более общим, чем понятие устойчивости по Ляпунову: всякая траеюхь
рия, устойчивая по Ляпунову, устойчива и орбитально. Обратное невер™
но: траектория, устойчивая орбитально, может не быть устойчивой по
Ляпунову. В самом деле, если взять в трубке тока, содержащей орби™
тально устойчивую траекторию L, компактную фазовую каплю, то может
оказаться, что с течением времени размер этой капли вдоль траектории
неограниченно возрастает, капля перестанет быть компактной, вытягива™
ясь вдоль, но все время оставаясь внутри трубки тока. Другими словами,
расстояния от точек капли до траектории остаются ограниченными, то™
гда как расстояния между точками самой капли могут оказаться любыми.
Если же траектория устойчива по Ляпунову, то капля, двигаясь в трубке
тока, остается всегда компактной.
6.4. Равноускоренное движение материальной точки
95
6.4. Равноускоренное движение материальной точки
Для иллюстрации введенных понятий рассмотрим простейший при-
пример — равноускоренное движение материальной точки. Если х — коор-
координата точки, а а — ее ускорение, то уравнение движения записывается,
как известно, в виде
х = а. F.10)
Уравнение фазовых траекторий этой динамической системы можно запи-
записать как
х2
— =а(ж —жо)? F.11)
где xq — константа интегрирования, имеющая смысл координаты той точ~
ки, в которой скорость равна нулю. На рис. 6.2 а в соответствии е F.11)
Рис. 6.2. а — фазовый портрет системы F.10); б — эволюция фазовой капли.
Фазовый объем капли (ее площадь) не меняется
приведен фазовый портрет системы F.10) в координатах х, х. Различные
фазовые траектории отличаются друг от друга значениями параметра х®
и образуют семейство вложенных друг в друга парабол. Нетрудно видеть,
что при х —>• оо все траектории сливаются, приближаясь неограниченно,
например, к траектории L: х2 = 2ах. Это означает наличие орбитальной,
более того, асимптотической орбитальной устойчивости. Действительно,
любая траектория с xq ф 0 приближается к траектории L, причем рассто-
расстояние между ними по оси ординат (т.е. по оси скоростей) убывает с ростом
координаты х как
F Л 2)
Соотношение F.12) показывает, что имеет место асимптотическая ор~
битальная (но не экспоненциальная) устойчивость. Вместе с тем, устой-
устойчивость по Ляпунову в системе F.10) отсутствует. Для того, чтобы в этом
убедиться, выпишем известную формулу для равноускоренного движения
X = Х0 ¦
at1
—.
F.13)
96
Нелинейные динамические системы
Двум разным фазовым точкам отвечают разные пары значений xq и
vo, например, (жоъ voi) и (жог? ^02). Тогда расстояние между ними по оси
скоростей есть
xi(i) ~~ x2{t) = vqi - V02, F.14)
т.е. оно не меняется со временем. А в то же самое время расстояние между
этими же точками по оси абсцисс, т.е. в реальном пространстве, есть
Xi (t) - X2 (t) = {vqi - V02) t + Хы- Xq2- F.15)
Оно линейно нарастает со временем, если только начальные скорости хоть
немного различаются. Поэтому на фазовой плоскости (ж, х) любая компакт™
ная фазовая капля, имеющая ненулевую толщину по оси ординат, с течением
времени неограниченно растягивается вдоль оси абсцисс (см. рис. 6.2 б).
Заметим здесь, что система F.10) относится к классу систем с сохра-
сохраняющимся фазовым объемом. Поведение такого типа систем, их устой™
чивость (неустойчивость) обладает рядом специфических особенностей,
которые будут подробно рассмотрены в дальнейшем. Сейчас же мы от-
отсылаем читателя к комментарию 17, содержащему некоторые дополни-
дополнительные рассуждения относительно системы F.10).
Приведенный пример служит только для пояснения введенных поня™
тий устойчивости. Посмотрим теперь, как эти понятия используются при™
менительно к некоторым колебательным системам.
6.5. Линейный осциллятор с трением
Рассмотрим простейшую колебательную систему — линейный осцил-
осциллятор с трением
x + 2-jx + ujIx = 0. F.16)
Если 7 = 0 (трения нет), то система совершает незатухающие гармони™
ческие колебания. В этом случае фазовый портрет системы представляет
собой совокупность вложенных друг в друга
эллипсов. Колебания при этом изохронны (их
период не зависит от амплитуды), и движение
по любой из фазовых траекторий устойчиво по
Ляпунову. Этот вывод явствует из следующе-
следующего рассуждения. В координатах (ж, х/ш®) все
траектории суть концентрические окружности.
Фазовые точки двигаются по этим окружно-
окружностям с постоянной и одинаковой для всех
траекторий угловой скоростью ojq. Рис. 6.3
показывает, что угловое расстояние А<р между
точками 1 и 2, принадлежащими соседним фа-
фазовым траекториям, со временем не меняется.
Тем самым не меняется и линейное расстояние
между ними. Это и означает устойчивость по Ляпунову. Следовательно,
имеет место и орбитальная устойчивость: фазовые траектории, близкие в
¦Д (р=const
Рис. 6.3. Фазовый портрет
гармонического осциллято-
осциллятора. Траектории любых фа-
фазовых точек устойчивы по
Ляпунову
6.5. Линейный осциллятор с трением
97
начальный момент времени, оказываются близкими и в дальнейшем, что
также очевидно из рис. 6.3.
При наличии положительного трения, 7 > 0, имеется устойчивая непо-
неподвижная точка х = 0, х = 0 (единственное положение равновесия). С
течением времени все фазовые траектории
неограниченно приближаются к этой осо-
особой точке. Тем самым расстояние между
двумя фазовыми точками, принадлежащими
различным фазовым траекториям, с тече-
течением времени неограниченно уменьшается
(рис. 6.4). Это означает, что система устой-
чива по Ляпунову и, следовательно, орби-
тально устойчива. Кроме того, вследствие
неограниченного уменьшения расстояния со
временем движение является устойчивым
асимптотически, а в силу экспоненциально-
экспоненциального характера затухания устойчивость являет™
ся экспоненциальной.
Заметим, что вследствие асимптотиче-
асимптотической устойчивости объем фазовой капли
Рис. 6.4. Фазовый портрет ос-
осциллятора с трением. Сплош-
Сплошной и штриховой линиями
показаны две различные фа-
фазовые траектории. Расстояние
между точками 1 и 2 убывает
со временем
неограниченно уменьшается со временем. Закон этого уменьшения нетруд-
нетрудно найти. Перепишем F.16) в виде системы двух уравнений
v = /2
^
5 v) = ^
F.17)
На основании теоремы Лиувилля-Остроградского (см. комментарий 18)
скорость изменения фазового объема Г дается формулой
ldF = dfi +
Г dt дх
Подстановка сюда /i и /2 из F.17) даст
dv
Г dt
или
F.18)
F.19)
Экспоненциальная устойчивость приводит к экспоненциальному умень-
уменьшению фазового объема. Оговоримся здесь заранее, что в общем случае
постоянство или даже убывание объема не свидетельствует о какой-либо
устойчивости движения системы. Пример равноускоренного движения
(комментарий 17) показывает, что и при постоянном фазовом объеме дви-
движение может быть неустойчивым по Ляпунову.
Случай отрицательного трения соответствует замене 7 на —j или, что
эквивалентно, соответствует обращению направления течения времени. Из
этого явствует, что при ненулевом отрицательном трении движение неустой™
чиво как по Ляпунову, так и орбитально.
7 Н.В. Карлов, Н.А. Кириченко
98 Нелинейные динамические системы
6.6. Нелинейный оещиллмтор
Рассмотрим консервативную нелинейную систему, описываемую урав-
уравнением Дуффинга
х + ш1х + ех2 - х3 = 0. F.20)
Для простоты анализа ограничимся частным случаем е = 0. В этом
случае система имеет следующие три особые точки:
хг = —о;0, х2 = 0, хз = +^о- F.21)
Фазовый портрет для уравнения Дуффинга приведен в комментарии 14.
Видно, что точки х\ и жз являются седловыми, а точка х^ — центром. Сле-
Следовательно, движение около первых двух точек (х\ и жз) является неустой-
неустойчивым во всех смыслах: как по Ляпунову, так и орбитально, а движение
в окрестности точки Х2 орбитально устойчиво. Вместе с тем последнее
является неустойчивым по Ляпунову. Этот вывод следует из факта неизо-
неизохронности колебаний, отражаемого амплитудно-частотной характеристи-
характеристикой А = А (—) (см. рис. 2 к комментарию 14). На фазовом портрете в
этом конкретном случае неустойчивость по Ляпунову проявляется в росте
углового расстояния между точками, принадлежащими двум различным
фазовым траекториям (чем дальше фазовая точка находится от центра, тем
медленнее она движется).
Наконец, отметим, что фазовый объем (объем фазовой капли) для нели-
нелинейного осциллятора F.20) сохраняется, как это легко установить с помо-
помощью теоремы Лиувилля-Остроградского подобно тому, как это было выше
сделано для линейного осциллятора.
6.7. Аттрактор
Сравнение поведения линейного и нелинейного осцилляторов демонстри-
демонстрирует роль нелинейности применительно к установлению типа устойчивости
(неустойчивости) динамической системы. Если фазовое пространство систе-
системы не сводится к устойчивой особой точке, то, как правило, наличие нели-
нелинейности ведет к потере устойчивости по Ляпунову, хотя при этом орбиталь-
орбитальная устойчивость может и сохраняться. Как будет видно из дальнейшего,
нелинейность и при наличии диссипации может приводить к разрушению
устойчивости как по Ляпунову, так и орбитальной. Напомним, что в главе 4
мы бегло коснулись этой темы на примере системы Лоренца. Для последней
при некоторых значениях параметров характерны сложные колебательные
режимы, не обладающие устойчивостью орбитальной (и тем более Ляпунов™
ской), но устойчивые в ином, более широком смысле.
Для того чтобы построить соответствующее обобщение, введем поня-
понятие аттрактора.
Грубо говоря, аттрактором называется некоторое компактное асимпто-
асимптотически устойчивое множество в фазовом пространстве рассматриваемой
динамической системы. Иными словами, аттрактор — это такое множе-
6.8. Эргодичность 99
ство, к которому из некоторой его окрестности притягиваются все фазовые
траектории, о чем и свидетельствует смысл термина "аттрактор" (от англ.
attract — "притягивать").
Более точно аттрактор определим следующим образом ]) .
Пусть в фазовом пространстве выделено некоторое множество L. Это
множество называется аттрактором, если оно
1) асимптотически устойчиво, т.е. соответствует определению устой™
чивости в смысле F.9);
2) компактно, что формально проявляется, в частности, в том, что
аттрактор находится в конечной области фазового пространства и
представляет собой замкнутое множество;
3) не разложимо на отдельные компоненты, т.е. является связным;
4) оно есть инвариант эволюционного оператора, т.е. TbL = L. Смысл
этого требования состоит в том, что у аттрактора нет ни начала, ни
конца, он неограниченно продолжается как вперед, так и назад по
времени;
5) фазовый поток, задаваемый эволюционным оператором Т*, рекур-
рентен на L, т.е. для сколь угодно больших времен t\ > 0 траектория
x(t) = Tfxo пройдет при t > ti в сколь угодно малой окрестности
точки xq (предполагается, что в начальный момент времени t = О
траектория начинается в точке х = хо, где х® Е L — произвольная
точка траектории).
Последние два условия означают, в частности, что если аттрактор пред-
представляет собой замкнутую линию в фазовом пространстве, то каждая точка
такой траектории проходится бесконечное число раз (движение периодично).
6.8. Эргодичность
Пункт 5 приведенного выше определения выражает весьма нетриви-
нетривиальное и важное свойство аттракторов: если аттрактор представляет собой
незамкнутую фазовую траекторию, то в любой сколь угодно малой окрест-
окрестности каждой из точек аттрактора фазовая траектория пройдет бесконеч-
бесконечное число раз. По существу, это есть свойство эргодичности движения на
аттракторе.
Понятие эргодичности играет принципиально важную роль в теории
динамических систем. Поэтому остановимся на нем более подробно. Это
понятие восходит к Л. Больцману, который в 70™х годах XIX века выдви-
выдвинул так называемую эргодическую гипотезу — предположение о том, что
фазовая траектория замкнутой динамической системы с течением време-
времени проходит через любую точку поверхности постоянной энергии в фазо-
фазовом пространстве. В такой формулировке предположение Больцмана, стро-
) Следует иметь в виду, что существуют другие определения аттрактора, акцентиру-
акцентирующие внимание на иных свойствах. Соответственно меняется круг объектов, попадающих
под это определение.
7*
100 Нелинейные динамические системы
го говоря, неверно 1) . Однако небольшая модификация делает это пред-
предположение внутренне непротиворечивым. Достаточно потребовать, чтобы
фазовая траектория замкнутой динамической системы с течением време-
времени подходила сколь угодно близко к любой точке поверхности постоянной
энергии в фазовом пространстве, не проходя повторно уже пройденные
ранее точки.
Динамические системы, подчиняющиеся эргодической гипотезе, назы-
называются эргодическими системами. Не каждая динамическая система эр™
годична. Например, системы с двумерным фазовым пространством всегда
неэргодичны (если только движение не периодично). Заметим, что в общем
случае доказательство эргодичности системы представляет собой серьез™
ную математическую проблему.
Введенное выше понятие эргодичности эквивалентно таковому же, ши-
широко применяемому в статистической физике, где под эргодичностью по-
понимается следующее: система эргодична, если средние по времени зна-
значения физических величин, характеризующих систему, равны их средним
статическим значениям, т.е. равны их средним по ансамблю.
Под средним по времени для физической величины f(t) понимается
F.22)
о
Для определения среднего статистического значения нужно ввести ансамбль
тождественных динамических систем или, что эквивалентно, пучок фазо™
вых траекторий, отвечающих всевозможным начальным условиям. Выбрав
произвольный, но одинаковый для всех систем (траекторий) момент вре-
времени t и найдя значения величины f(i) для каждой реализации из этого
ансамбля, следует далее усреднить все полученные таким образом значе-
значения /(?), т.е. следует найти их среднее арифметическое. Результат такой
операции и представляет собой среднее статистическое значение (f(t)).
Эргодическая гипотеза в соответствии со сказанным означает, что
7= </(*)>• F-23)
Заметим, что в соответствии с этим утверждением среднее статистическое
не зависит от времени.
Соотношение F.23) можно обосновать следующим образом. Разобьем
все фазовое пространство, занимаемое системой, на ячейки объемом dT.
Проводя наблюдения через равные промежутки времени, будем регистри-
) Если фазовая траектория динамической системы незамкнута, то она может пройти
через каждую точку, принадлежащую траектории, только один раз, т.к. в соответствии с
теоремой Коши траектория не имеет точек самопересечения. Точка, пройденная в прошлом,
не может быть точно достигнута через конечное время в будущем. Поскольку выбор
начальной точки (момента to) траектории произволен, то из множества допустимых в
процессе эволюции системы точек (при t > to) исключается бесконечное подмножество
точек фазовой траектории.
6.8. Эргодичность 101
ровать события, состоящие в попадании фазовой точки в ту или иную ячей™
ку. Многократные измерения позволяют определить вероятность таких по-
попаданий dw. Тогда статистическое среднее величины / можно записать как
(f)=jfdw. F.24)
Г
С другой стороны, в соответствии с определением вероятности можно
утверждать, что величина dw пропорциональна времени dt9 проводимому
системой в рассматриваемой ячейке dT. Иными словами, если Т — полное
время наблюдения, предполагаемое достаточно большим, то
dw^^- (Т -+ оо). F.25)
Это соотношение тем точнее, чем больше интервал времени наблюдения
Т. При этом предполагается, что все интервалы времени эквивалентны в
соответствии с первым определением эргодичности. Подстановка F.25) в
F.24) при Т —>- оо приводит к равенству F.23).
Строгое доказательство эквивалентности приведенных двух определе-
определений эргодичности громоздко. Качественно же эта эквивалентность видна
из того, что в соответствии с первым определением движение системы
почти периодично: с течением времени фазовая точка сколь угодно близ™
ко подойдет к любой точке, пройденной траекторией ранее, и пойдет да-
далее, почти повторяя многократно пройденный ранее путь. Эквивалент™
ность средних по времени и по ансамблю объясняется тем, что на самом
деле пучок траекторий (ансамбля реализаций) образован участками одной
и той же траектории, принадлежащими различным временным интервалам
прошлого и будущего.
Сказанное сформулировано применительно к системам замкнутым, т.е.
к системам, энергия которых сохраняется. Именно поэтому фазовые траек-
траектории рассмотренных систем лежат на поверхности постоянной энергии.
Вместе с тем свойством эргодичности обладают и неконсервативные си-
системы. В частности, система Лоренца
х = —ах + ау,
у = тх - у - xz, F.26)
z = ^bz + ху
является диссипативной. Ее фазовый объем (при <т, Ъ > 0) неограниченно
уменьшается:
Г dt дх ду dz /^ 27)
T(t) = T@)e~(a+b+1)t; T(t) ^ G при f^ +oo.
Несмотря на это при некоторых значениях параметров <т, г и Ь в систе™
ме наблюдаются сложные колебательные процессы, которым в трехмер-
трехмерном фазовом пространстве отвечают незамкнутые фазовые траектории.
102 Нелинейные динамические системы
Поведение такого типа оказывается эргодичным. Для него можно вво-
вводить статистические характеристики подобно тому, как это делается для
случайного процесса. Объект такого типа, обладающий статистическими
свойствами, в силу F.27) является также и аттрактором. Таким образом,
свойство эргодичности может быть присуще как системам консерватив-
консервативным, так и системам диссипативным.
6.9. Притягивающий отрезок
Помимо более или менее привычных типов аттракторов — асимптоти-
асимптотически устойчивых особых точек, замкнутых фазовых траекторий (предель-
(предельных циклов) и более сложных, странных аттракторов (например, аттракто-
аттрактора в системе Лоренца F.26)) — существует еще один, который встречается
у динамических систем с особенностями.
Рассмотрим сначала простейшую ситуацию. Пусть материальная точ-
точка, выведенная из состояния покоя, испытывает жидкое трение со стороны
среды. Ее движение описывается уравнением
тх + 2^х = 0, x\t=o = x0j x\t=Q = vq. F.28)
Решение этого уравнения имеет вид
При t —>• -foe» точка достигает положения равновесия
/ ч . mvo fc _m
Xf = ж(оо) = xq + ^—. F.30)
27
Таким образом, любая точка оси ж может быть положением равнове™
сия, координаты которого определяются начальными условиями. При этом
малое изменение начальных условий приводит к малому же изменению
конечного состояния. Переход из одного положения равновесия аЛ ' в дру™
гое близкое к нему положение равновесия х^ может быть осуществлен
малым возмущением wivq = 27{xj — Xj ). По отношению к положениям
равновесия такого типа, образующим непрерывное
множество, употребляется термин "безразличное
(нейтральное) равновесие".
В рассмотренном примере F.28) безразличные
положения равновесия занимают всю ось х. Более
интересен случай, когда множество безразличных
Рис. 6.5. Частица в яме положений равновесия конечно. Примером соот-
с плоским дном, ри ветстВуЮще|| системы является материальная точ™
наличии трения систе- J r f _ _ч
ма содержит притягива- ка' находящаяся в яме с плоским дном (рис. 6.5).
ющий отрезок АВ Разумеется, при этом имеется в виду ситуация,
предполагающая наличие трения. Множество без-
безразличных положений равновесия занимает отрезок АВ. В зависимости от
6.9. Притягивающий отрезок
103
начальной скорости и начального положения частица либо сразу, либо по™
еле некоторого числа колебаний останавливается в одной из точек отрезка
АВ. Очевидно, что этот отрезок (дно ямы) является притягивающим в том
смысле, что, стартуя из любого положения, не принадлежащего отрезку,
материальная точка неизбежно остановится в одной из точек отрезка.
Конкретная же координата точки остановки определяется, как и в случае
системы F.28), начальными условиями.
Таким образом, роль притягивающего множества играет не отдельная
особая точка (изолированное асимптотически устойчивое положение рав-
равновесия), а целый отрезок. Притягивающее множество такого типа назы-
называют притягивающим отрезком.
Примером динамической системы, обладающей притягивающим отрез-
отрезком, является система
х + 2jx + ш2(х)х = 0, F.31)
в которой частота ш есть функция координаты:
ш = ш(х) = шов (х2 - xl) . F.32)
Здесь в (ж) — единичная функция Хевисайда. Разумеется, такая модель
описывает поведение материальной точки в яме (рис. 6.5) лишь качествен-
качественно. Ступенчатая функция В(х) в F.32), описывающая изменение частоты
из от значения ш = ш® до значения ш = 0 при переходе частицы со стенки
ямы на дно, может быть заменена функцией, дифференцируемой любое
требуемое число раз, например, используя сшивку с помощью функции ви-
вида ехр ( — ^^^^— ). Такое усовершенствование модели усложняет анализ,
но качественно не меняет его выводов.
Система F.31), F.32) имеет континуум стационарных состояний
—х® < х < +жо- F.33)
Для точек, принадлежащих множеству F.33), система F.31) совпадает с
рассмотренной выше системой F.28). Таким образом, все положения рав-
равновесия из отрезка F.33) являются безразлич™
ными. Вне отрезка F.33) поведение частицы
описывается линейным уравнением осциллято-
ра с трением. Наличие трения приводит к тому,
что частица теряет энергию и, в конце концов,
оказывается в одной из точек дна ямы. На
рис. 6.6 приведен фазовый портрет рассматри-
рассматриваемой системы. Фазовые траектории состоят
из наклонных отрезков прямых, отвечающих
движению в пределах отрезка F.33), и криволи-
криволинейных участков, характерных для траекторий
колебательного движения.
Наклон всех прямолинейных участков опре-
определяется величиной константы трения j и, как
Рис. 6.6. Фазовый портрет
осциллятора F.31), F.32).
Притягивающим отрезком
является участок (—жо, жо)
оси абсцисс
104 Нелинейные динамические системы
легко установить из F.31) при ш = 0, равен
^ = -27) \х\ < х0. F.34)
ах
Любая траектория, приходящая в отрезок {х = 0, |ж| < xq} на рис. 6.6,
дальнейшего продолжения не имеет. Это означает, что аттрактором в зада-
задаче F.31), F.32) является притягивающий отрезок F.33).
Обратим внимание на два обстоятельства. Рассматриваемая система бла-
благодаря зависимости и = ш(х) существенно нелинейна. Поэтому ее фа™
зовые траектории качественно отличаются от таковых для осциллятора.
Кроме того, зависимость ш = ш(х) неаналитична. Последнее и определя-
определяет существование в системе притягивающего отрезка. В рассматриваемой
модели неаналитичность состоит в том, что функция ш = ш(х) (см. F.32))
разрывна. Если бы эта функция была аналитической, то притягивающий
отрезок стянулся бы в одну точку или распался бы на серию изолирован™
ных особых точек. Существование притягивающего отрезка можно было
бы обеспечить и для функции ш = ш(х)9 меняющейся непрерывно между
ш = Ш()Шш = 0ш дифференцируемой сколь угодно раз, но неаналитиче™
, ( а \
скои, как, например, при сшивке с помощью функции ехр ( 1.
V (х-хоJ/
Дело в том, что для существования притягивающего отрезка необходимо,
чтобы на некотором конечном интервале х Е (—#о, хо) функция ш = ш(х)
обращалась в нуль, а вне этого интервала была ненулевой. Такое сопряже™
ние невозможно в классе аналитических функций. Последнее утвержде-
утверждение основано на теореме единственности из теории функций комплекс-
комплексного переменного 1) : может существовать самое большее одна функция
f(x), однозначная и аналитическая в области D, принимающая заданные
значения на некотором множестве точек Е этой области D, обладающем,
по крайней мере, одной предельной точкой zq E Е. [Условия теоремы
заведомо выполнены, если множество Е есть отрезок (интервал) прямой.]
) См.: Маркушевич А.И. Краткий курс теории аналитических функций. — М.: Наука,
1966.
ГЛАВА VII
Бифуркации, бифуркационные значения параметров. Прогиб
упругого стержня. Классификация корней квадратного уравнения.
Структурная устойчивость, грубость системы. Теория ката-
строф. Складка. Многообразие катастрофы. Классификация кор-
корней кубического уравнения, сборка. Классификация корней уравне-
уравнения четвертой степени, ласточкин хвост. Флаг катастроф. Ряд
касповидных катастроф. Классификация экстремумов функций.
Росток катастрофы, возмущение. Управляющие параметры, про-
пространство управления. Деформация. Функции многих переменных.
7.1. Бифуркации
Как мы знаем, поведение динамической системы определяется набо-
ром функций, подчиняющихся уравнениям движения. Изменение же этих
функций во времени зависит не только от вида уравнений, но и от кон™
кретных значений параметров, характеризующих систему. Например, для
частицы, находящейся в потенциальной яме с вертикальными стенками,
состояние системы описывается координатой частицы, а параметром яв-
является ширина ямы.
В соответствии со сказанным автономную динамическую систему можно
задать системой обыкновенных дифференциальных уравнений
dx-
—±=fi (ял, х2, • • •, хп; а), г = 1, 2, ..., п. G.1)
at
Здесь символом а обозначен набор из т параметров, а = («i, «2? • • • ? am).
Изменение значений параметров а может приводить не только к количе-
количественным, но и к качественным изменениям в поведении системы. Убе-
Убедиться в этом можно на следующем очень простом примере:
х = ух2 + а. G.2)
Фазовое пространство этой системы одномерно. Очевидно, что при а >
> 0 через каждую точку фазового пространства проходит траектория си™
стемы. Если же а < 0, то существует "запрещенная" область \х\ < у^а,
в которую не может попасть ни одна траектория. Более того, если при а >
> 0 у системы нет положений равновесия (всегда х > 0), то при а < 0
появляются сразу два положения равновесия: xi^ = =Ьу^а.
106 Нелинейные динамические системы
Таким образом, даже плавное изменение параметров может приводить
к резкому, качественному изменению поведения системы. Такое изменение
свойств и поведения системы называется бифуркацией, а значения пара™
метров, при которых это происходит, называются бифуркационными зна-
значениями. В рассмотренном примере G.2) бифуркационным значением па™
раметра а является а = 0.
В соответствии со сказанным бифуркация означает качественное из™
менение структуры фазового портрета системы. Поскольку эта структура
определяется, как уже отмечалось ранее, числом и типом особых точек и
особых траекторий, то, следовательно, бифуркация состоит в изменении
именно этих характеристик.
Начнем анализ с рассмотрения бифуркаций числа особых точек. По-
Поскольку особые точки суть нули правых частей уравнений G.1), необходи-
необходимо провести классификацию действительных корней уравнений
fi(xtj x2j • •., хп; а) = 0, г = 1, 2,..., п. G.3)
В математике сформулированная задача изучается в рамках теории ка-
катастроф.
Прежде чем перейти к формальному изложению, рассмотрим нагляд-
наглядный пример. Пусть упругий стержень жестко закреплен на концах. Поло™
жение одного конца фиксировано, второй ко™
нец может сдвигаться так, чтобы сжать стер-
стержень, как это показано на рис. 7.1. Кроме того,
на стержень действует сила F. Когда F = 0,
стержень может принять одно из двух положе-
положений — прогибом верх или прогибом вниз.
Положение равновесия, когда стержень
Рис. 7.1. Шарнирно закреп- не ИЗОГНУТ' неустойчиво, т.к. любое малое
ленная балка, находящаяся поперечное воздействие приводит к возник™
под действием внешней силы новению того или иного прогиба. Пусть в
F. Закрепление правого конца состоянии прогиба вверх приложена сила F.
позволяет менять начальный Пока эта сила мала, ее наличие не меняет
прогиб балки направления прогиба. Однако при достиже-
достижении некоторого критического значения FKp
стрела прогиба скачком меняет свой знак (свое направление). Величина
FKp зависит от характеристик стержня и определяется величиной его
начальной деформации. Зависимость же стрелы прогиба от величины
нагрузки F приведена на рис. 7.2 а. Зависимость упругой энергии стержня
от величины прогиба показана на рис. 7.2 б. Очевидно, что минимумы на
этой кривой отвечают устойчивым положениям равновесия (прогибы вниз
и вверх), а локальный максимум (отсутствие прогиба) — неустойчивому
равновесию.
Кривая на рис. 7.2 б симметрична в отсутствие силы F. При наличии
поперечной нагрузки прогиб вниз оказывается энергетически более вы-
выгодным. С ростом нагрузки глубина левого минимума возрастает, а право-
7.2. Простейшие катастрофы
107
Прогиб
Упругая энергия
Упругая энергия
О
Прогиб
б.
Вниз О Вверх
Прогиб
Вниз О Вверх
Рис. 7.2. а — зависимость стрелки прогиба балки от величины внешней силы;
б, в — зависимость упругой энергии балки от величины прогиба в отсутствии
внешней нагрузки (б) и при наличии критической нагрузки (в)
го — убывает. При достижении некоторой критической нагрузки правый
минимум исчезает (рис. 7.2 в), прогиб вверх становится невозможным, и
стержень скачком переходит в положение с прогибом вниз. На рис. 7.2 а
скачок отмечен стрелкой С.
Тем самым реализуется то, что можно интерпретировать как катастро-
катастрофическое, скачкообразное изменение состояния системы.
7.2. Простейшие катастрофы
Ограничимся здесь рассмотрением катастроф, определяющих число
корней в случае гладких функций одной переменной (п = 1), зависящих
также и от параметров. Вследствие гладкости рассматриваемые функции
в окрестности особых точек могут быть аппроксимированы полиномами.
Это сводит задачу к классификации корней полиномов
р
" ' = 0. G.4)
Без ограничения общности можно считать коэффициент ар при стар-
старшей степени аргумента хр равным единице, ар = 1.
Квадратное уравнение. Начнем с квадратного уравнения
х2 + ai^ + a0 = 0. G.5)
Замена переменной по формуле у = х + ai/2 сводит G.5) к простейшей
форме
У2 + Ь = 0, G.6)
где Ъ = ао — а\/А. Видно, что в случае квадратного уравнения классифика-
классификация корней определяется единственным существенным параметром Ь. Из
G.6) следует, что при Ъ > 0 уравнение не имеет действительных корней,
а при Ъ < 0 таких корней два. На рис. 7.3 приведен график зависимости
корней уравнения G.6) от параметра Ь.
Чтобы наглядно проследить, как происходит изменение числа корней
уравнения G.6) при изменении параметра Ь, рассмотрим функцию
f(y) =У2 + Ь. G.7)
108
Нелинейные динамические системы
Рис. 7.3. Зависимость корней ква-
квадратного уравнения от параметра Ь
6<0
Рис. 7.4. Графики функции f(y) = у2 + b
при различных значениях параметра Ь
На рис. 7.4 приведены графики этой функции при значениях параметра Ь >
> 0 и Ъ < 0. В первом случае график функции f(y) не пересекает ось
абсцисс, и уравнение G.6) действительных корней не имеет. Во втором
же случае парабола f(y) пересекает ось абсцисс в двух точках, чему соот™
ветствует наличие двух корней. Переход от одной ситуации к другой про-
происходит через выделенный случай касания параболой оси абсцисс. При
этом корни уравнения сливаются. Иначе говоря, в этом выделенном случае
уравнение имеет один двукратный корень. Двукратно сть корня у о означает,
что он одновременно является нулем функции f(y) и ее производной,
G"8)
/'Ы = о.
Обратим внимание на геометрический смысл второго условия в G.8).
Оно означает, что в точке у о касательная к графику f(y) параллельна оси
абсцисс. Совместно с первым условием f(y) = 0 это означает, что упомя™
нутая касательная совпадает с осью абсцисс.
Отсюда видно, что моменту бифуркации числа корней отвечает каса-
касание кривой G.7) оси абсцисс. Любое изменение существенного параметра
Ь приводит к исчезновению касания и, тем самым, к изменению числа кор™
ней уравнения G.6). Если взять какое-либо значение параметра 6, отличаю-
отличающее от бифуркационного (Ъ = 0), то легко увидеть, что всегда существует
интервал В, содержащий рассматриваемое значение 6, Ь е В, такой, что
для всех точек из этого интервала число корней уравнения одинаково. В
рассматриваемом примере выделяются два таких интервала: Ь > 0, где
корней нет, и Ь < 0, где всегда имеются два корня. Такие интервалы (или
области значений параметров) называют областями структурной устойчи-
устойчивости или грубости системы. На языке теории динамических систем это
означает, что в пределах каждой из областей грубости (структурной устой-
устойчивости) при изменении параметров качественный вид фазового портрета
остается неизменным.
Переход из одной области структурной устойчивости в другую осуще-
осуществляется через негрубое состояние, отвечающее бифуркационному значе-
7.2. Простейшие катастрофы 109
нию параметра. В результате такого перехода поведение системы, т.е. вре-
временное поведение описывающих ее функций, качественно, скачкообразно
меняется. Психологическим отражением такого перехода при сколь угодно
малом изменении параметра является термин "катастрофа", вошедший
как ключевое слово в название раздела математики ''теория катастроф",
изучающего структурные особенности множества корней алгебраических
и/или трансцендентных уравнений (см. комментарий 19).
Рассмотренный пример отражает простейшую катастрофу, получившую
название "складка". Это название связано с тем, что кривая на рис. 7.3, со-
содержащая бифуркационную точку (катастрофу) 6 = 0, напоминает сечение
плоскостью рисунка складки на некоторой поверхности.
Вернемся к системе уравнений G.8), определяющей бифуркационное
значение параметра Ь. С учетом G.7) уравнения G.8) переписываются в
виде
Ъ=^у\ {13а)
2у = 0. G.96)
Это система двух уравнений для двух неизвестных: у и 6, которая имеет
единственное решение: Ь = 0, у = 0.
Кривая G.9а), содержащая все корни рассматриваемого уравнения G.6),
называется многообразием катастрофы. Собственно катастрофа есть точ-
точка, принадлежащая этому многообразию и отвечающая вырождению кор-
корней, наступающему при 6 = 0. При этом значении параметра исходная
функция G.7) принимает простейший вид
Ш-?/2. G.10)
Всякое малое невырожденное "шевеление" этой функции приводит к
тому, что двукратно вырожденный корень либо "рассыпается" на два про-
простых корня, либо исчезает вовсе. По сути именно это и содержится в поня™
тии катастрофы. Здесь под малым невырожденным шевелением понимает™
ся малая добавка (р(у)9 являющаяся гладкой в окрестности у = 0, ^;@) ф
Ф 0. Разложение (р(у) в ряд по степеням у имеет вид
(р(у) = щ + (ргу + (f2y2 + • • •,
где все коэффициенты <^q, фъ ^2? • • • достаточно малы. В этом ряду можно
ограничиться только первыми двумя членами. Действительно, возмущен-
возмущенная функция
f(y) = fc(y) + <p(y) = Ay2 + <ргу + <р0
содержит коэффициент при у2, равный А = 1 + (р2 + О(у). По предположе-
предположению коэффициент (f2 мал, а поправка О (у) —> 0 при у —>> 0. Малое отклоне™
ние А от единицы не влияет на "распад" вырожденного корня. Кроме того,
коэффициент (fi можно устранить сдвигом начала отсчета переменной у.
Так что малое "шевеление" функции fc(y) можно принять в виде <р(у) =
по
Нелинейные динамические системы
Кубическое уравнение. Следующей по сложности является
классификация корней кубического уравнения
3 2 + a^ + a0 = 0. G.11)
х" + а2х"
Замена переменной по формуле у = x + ai/З сводит G.11) к приведен™
ной форме кубического уравнения
На рис. 7.5 показан вид кубических парабол для трех характерных зна-
значений параметров Ъ\ и 6q.
Подобно тому, как это было установлено выше при анализе корней ква-
дратного уравнения, легко понять, что изменение числа корней происходит
в момент касания параболой f(y) оси аб-
абсцисс. Следовательно, для нахождения би-
бифуркационных значений параметров 6q и
Ъ\ мы должны решить уравнение G.12)
совместно с условием
/'B/) = 32/2 + bi =0. G.13)
Из G.12) и G.13) легко получить
: л' G.14)
что задает в параметрическом виде бифур-
бифуркационную кривую на плоскости (bo, bi).
Исключая из G.14) величину у, получаем
уравнение бифуркационной кривой в виде
Рис. 7.5. Кубические параболы
для трех характерных значений
параметров Ьо и Ь\
h
сш,
Левая часть G.15) совпадает с дискри-
минантом D кубического уравнения G.12).
Обращение D в нуль означает вырожде-
вырождение корней уравнения, т.е. изменение их
кратности. Заметим, что условие бифур-
бифуркации корней квадратного уравнения G.5)
или G.6) также совпадает с требованием
обращения в нуль его дискриминанта.
Таким образом, множество значений
параметров, при которых дискриминант
уравнения обращается в нуль, представляет
собой бифуркационное множество задачи.
Для приведенного квадратного уравнения G.6) это множество есть точка.
Для приведенного кубического уравнения G.12) бифуркационное множе-
множество есть полу кубическая парабола G.15) на плоскости (bo, Ь\), показанная
на рис. 7.6. Видно, что последнее бифуркационное множество образовано
Рис. 7.6. Полу кубическая пара-
парабола — бифуркационное мно-
множество кубического уравнения
7.2. Простейшие катастрофы
111
двумя ветвями, входящими в точку возврата второго рода Ьо = Ь\ = 0.
Точки, лежащие на этих ветвях, представляют собой катастрофы типа
складки. При переходе через точки, лежащие на этих ветвях, число
решений уравнения G.12) меняется на два. В той же точке, в которой
ветви сходятся (Ьо = Ъ\ = 0), все корни уравнения совпадают. Это видно
непосредственно из уравнения G.12), которое при Ь® = Ъ\ = 0 принимает
вид у3 = 0, а это последнее имеет один трехкратный корень у = 0.
Соответственно, исходная функция f(y) при этом значении параметров
принимает вид
1с{у) = У3- G.16)
По аналогии со случаем квадратного уравнения малое шевеление функ-
ции f(y) имеет вид
<f(y) = Щ + ^ргУ G.17)
(слагаемое ~ у2 устраняется сдвигом начала отсчета переменной у). От-
Отличие от нуля любого из коэффициентов (ро или (pi приводит к снятию
вырождения корня у = 0.
Таким образом, в точке пересечения ветвей кратность вырождения кор-
корней повышается на единицу и достигает максимально возможного для дан™
ного уравнения значения. Эта точка назы-
вается катастрофой сборки. Смысл по-
последнего термина становится ясным, если
изобразить зависимость корней уравне-
уравнения от параметров. Поскольку, в отличие
от случая квадратного уравнения, число
параметров равно двум, эта зависимость
изображается некоторой поверхностью в
трехмерном пространстве (у, Ьо, &i) на
рис. 7.7. Видно, как в точке сборки
сходятся линии складок. Именно харак-
характер (вид) деформации поверхности у =
= у (bo, bi) в окрестности этой точки и
определил в рассматриваемом случае на-
название катастрофы.
Уравнение четвертой степени. Рассмотрим уравнение чет-
четвертого порядка
х4 + п2Х2 + п2Х2 + а\х + а® = 0. G.18)
Как и в предыдущих случаях, перейдя к переменной у = ж + аз/4,
перепишем это уравнение в виде
Ну) = У4 + hy2 + hy + Ьо = 0. G.19)
Многообразие катастрофы задается уравнением f(y) = 0. Оно представля-
представляет собой трехмерную гиперповерхность в 4-мерном пространстве
Ъо = -у4 - Ъ2у2 - Ь1У. G.20а)
Рис. 7.7. Зависимость корней ку-
кубического уравнения у3 + Ь\у +
+ Ьо = 0 от параметров Ь\ и Ьо
112
Нелинейные динамические системы
Двукратно вырожденный корень определяется из условия ff(y) = 0, т.е.
h = -4ys - 2b2y. G.206)
Пара уравнений G.20а) и G.206) определяет множество точек, являющихся
катастрофами складки. Исключая из этих уравнений величину у, мы полу™
чаем связь параметров
FiFo, bi, Ь2) = 0, G.21)
задающую двумерную поверхность в трехмерном пространстве Fq, &ъ ^)-
Каждая точка этой поверхности есть катастрофа складки.
Для нахождения трехкратно вырожденных корней уравнения G.19)
нужно к G.20а) и G.206) добавить третье уравнение f" {у) = 0, или
Ь2 = -6у2. G.20*)
Совокупность трех уравнений G.20а, б, в) определяют кривую, т.е. одно™
мерное множество точек. Эти точки являются катастрофами сборки.
Уравнение G.19) есть уравнение четвертой степени. Поэтому мак-
максимальное число его действительных корней равно четырем. Соответ™
ственно, максимальная кратность вырождения также равна четырем.
Четырехкратно вырожденный корень
может быть найден, если к уравнениям
G.20а, б, б) добавить уравнение f'"{y) =
= 0, или
0 = -122/. G.20г)
В последней точке, у = 0, согласно
G.20а, б, в) параметры равны
h
bo = Ъ\ = 62 = 0.
G.22)
При этих значениях параметров функция
G.19) принимает вид
Рис. 7.8. Бифуркационное мно-
множество уравнения 4-й степени
G.19). Точка "О" — катастрофа
"ласточкин хвост"
Ш = у4
G.23)
Соответствующая катастрофа называется
"ласточкин хвост". Этот термин наглядно
отражает вид поверхности G.21) в окрест™
ности точки катастрофы (см. рис. 7.8).
Сечения этой поверхности плоскостью 62 = const показаны на рис. 7.9.
Собственно катастрофе ласточкин хвост отвечают значения параметров,
при которых область af3j на рис. 1.9б стягивается в точку. При этом возни-
возникает точка возврата, имеющая вид острия на рис. 7.8. Соответственно, при
малых шевелениях функции G.23) мы переходим от катастрофы (рис. 1.96)
к случаям, представленным на рис. 7.9а и 7.9в. Отметим, что мы получили
последовательность катастроф
складка —>• сборка —>• ласточкин хвост. G.24)
7.3. Классификация экстремумов функций
113
Рис. 7.9. Сечения бифуркационного множества уравнения G.19) плоскостями
62 = const. Кривая на рис. 1 За вблизи точки Ьо = 0 и Ь\ = 0 ведет себя как
Ьо ~ &i/4&2, кривая на рис. 7.96 — как Ьо ~ 3(bi/4L/3
В этой последовательности на рис. 7.9 складкам отвечают линии, сбор™
кам — точки возврата а и C (рис. 7.9в), а ласточкину хвосту — вершина
Ьо = Ъ\ = &2 = 0 на рис. 7.96. Не обсуждая далее случаи уравнений
более высоких степеней, отметим все же, что наивысшая катастрофа для
уравнения 5-й степени носит название "бабочка". В точке катастрофы
уравнение 5-й степени имеет пятикратно вырожденный корень, причем
Л (у) = У5- G.25)
Соответственно последовательность G.24) удлиняется
складка —>• сборка —>• ласточкин хвост —> бабочка. G.26)
Последовательность такого типа называется флагом катастроф.
7.3. Классификации экстремумов функций
До сих пор мы говорили о классификации корней уравнений, содержа-
содержащих одну неизвестную величину. На языке уравнений механики это можно
интерпретировать как нахождение точек, в которых действующая на систе™
му сила обращается в нуль. Продолжая аналогию, можно утверждать, что
эти точки суть точки экстремума потенциальной энергии, поскольку сила
есть взятая с обратным знаком производная от потенциальной энергии по
координате, / = —dV/dy. Графики потенциальной энергии для трех по-
подробно рассмотренных выше случаев приведены на рис. 7.10, 7.11 и 7.12.
Соответствующие выражения для потенциальной энергии V имеют вид
-V = V
О
- by; A21)
-boy; G.28)
4 Z
тг -"- 5 | I-, 3 ii L 2 1^ JL /'7 OQ\
5 3 2
Начальный уровень потенциальной энергии выбран так, что V@) = 0.
На рис. 7.10 а изображен график потенциальной энергии G.27) в слу™
чае отсутствия экстремумов, т.е. когда уравнение G.6) действительных
8 Н.В. Карлов, Н.А. Кириченко
114
Нелинейные динамические системы
Рис. 7.10. Графики потенциальной энергии G.27) при отсутствии (а) и наличии (б)
экстремумов
Vk
V 4
Рис. 7.11. Зависимость потенциальной энергии G.28) от координаты у при на-
наличии одного (а) и трех (б) экстремумов (положение экстремумов относительно
начала координат может меняться при изменении значений параметров)
/Л
Рис. 7.12. Зависимость потенциальной энергии G.29) от координаты у при раз-
различном числе экстремумов
корней не имеет. На рис. 7.106 потенциальная энергия G.27) имеет два
экстремума — минимум и максимум, а уравнение G.6) имеет два корня.
Легко видеть, что бифуркации корней отвечает момент слияния двух экс-
экстремумов разного типа (столкновение минимума с максимумом).
На рис. 7.11 показан качественный вид потенциальной энергии G.28)
для случаев одного и трех экстремумов. Очевидны возможные варианты
столкновения экстремумов и соответствующие бифуркации. Рис. 7.12 дает
ту же схему для потенциальной энергии G.29).
7.4. Росток катастрофы и возмущение 115
Сопоставляя графики потенциальной энергии V с видом фазовых траек™
торий соответствующей динамической системы, легко понять, что максимум
V отвечает седловой особой точке, а минимум — центру, узлу, фокусу.
Обратим внимание на то, что в случае системы с двумерным фазовым
пространством бифуркация как столкновение максимума с минимумом мо-
может быть интерпретирована как слияние простых особых точек, облада™
ющих индексами Пуанкаре противоположного знака (см. главу V). Ясно,
что при переходе через бифуркационное значение параметров суммарный
индекс Пуанкаре не меняется, а число особых точек изменяется на два.
7.4. Росток катастрофы и возмущение
Выше была рассмотрена последовательность катастроф в семействе
гладких функций одной переменной и нескольких параметров. Этот ряд
катастроф принято обозначать символом АП9 где п = 2, 3, 4,...В частно-
частности, А2 — это катастрофа складки, А3 — сборка, А^ — ласточкин хвост
и т.д. Все эти катастрофы в своем графическом представлении являются
вершинами некоего острия. По этой причине ряд Ап называется рядом
касповидных катастроф (от англ. cusp — острый выступ, клык).
В общем случае катастрофам отвечает так называемый росток ката-
катастрофы, т.е. функция, характеризующая собственно катастрофу и облада-
обладающая корнем максимально возможной кратности п. Выше мы эту функ-
функцию обозначали символом fc{y)9 причем для ряда Ап
Ш = Уп- G30)
Очевидно, что формула G.30) отвечает главному члену тейлоровского раз-
разложения функции f(y) вблизи точки у = 0. Члены разложения с более
высокими степенями у пренебрежимо малы, а члены с более низкими сте-
степенями в критической точке устраняются гладкой заменой переменных.
Сама же функция f(y) при малом шевелении вблизи критической точки
представляется суммой ростка катастрофы и возмущения,
f(y) = Ш + <р(у);
х>/ G31)
fe=0
Коэффициенты bk в возмущении (р(у) являются независимыми параметра-
параметрами, образующими пространство управляющих параметров или простран-
пространство управления RP, где р = п — 1. Отметим, что возмущение <р(у) называ-
называют также деформацией, а число р —размерностью деформации. Подчерк™
нем, что (f(y) не содержит слагаемого Ъп-\уп~19 так как оно устраняется
сдвигом начала отсчета аргумента у.
Соотношением G.31) введены росток катастрофы и деформация для
функции f(y)9 классификация корней которой рассматривается. Вместе с
тем, как это уже обсуждалось выше, классификация корней функции ни™
чем не отличается от классификации экстремумов соответствующего по™
116 Нелинейные динамические системы
тенциала. Использование потенциала может быть особенно удобно в слу-
случае нескольких переменных, так как вместо векторной функции f мы име-
имеем тогда дело с одной скалярной функцией V(#i, #2? • • • ? хп] &),
f = - W. G.32)
Аналогично G.31) потенциал V вблизи критической точки может быть
представлен в виде суммы членов
-1 _ui ^ Ь^ fr_ui G 33)
F" / \ 71+1 / / \ \ Wfe fe + 1 V' •~J-Jf
c{y) = —-у , ^Ы = ^2^ i—iy •
n k=o
Слагаемые Vc(y) и ф(у) также называются ростком катастрофы и дефор-
деформацией соответственно. В традиционной теории катастроф именно к функ-
функциям Vc и ф относят термины "росток катастрофы" и "деформация".
7.5. О катастрофах в случае функций двуж переменных
Введем потенциал V(x, у, а), где а — набор управляющих парамет™
ров. Особые точки динамической системы определяются из условия
VF = 0, или
-Л (ж, у; а) = — = О,
ОХ {1 2А\
2{х, у; <*) = — =0.
ду
Эти уравнения суть частные случаи уравнений G.3) для п = 2.
Если зафиксировать одну из переменных и изучать экстремумы потен™
циала по отношению к другой переменной, то задача очевидным образом
сводится к уже решенной с той лишь разницей, что число параметров уве-
увеличивается на единицу. В частности, здесь можно по любой из переменных
отследить весь ряд известных нам касповидных катастроф.
Если же рассматривать переменные х и у совокупно, то классифика™
ция особенностей потенциала существенно усложняется. В этой ситуации
возможны истинные локальные максимумы или минимумы, а также седло-
вые точки. Здесь следует подчеркнуть, что у этих особенностей по разным
направлениям возможна разная кратность вырождения.
Не останавливаясь на том, как это технически получается, приведем
ростки катастроф и возмущения для некоторых простейших случаев.
Для катастрофы, называемой эллиптической омбиликой, росток и де-
деформация есть
Ус = х2у -у3, ф = а(х2 + у2) + Ьх + су. G.35)
Сходная по структуре катастрофа — гиперболическая омбилика — имеет
Vc = х2у + у3, ф = а(х2 + у2) + Ьх + су. G.36)
7.5. О катастрофах в случае функций двух переменных 117
Для записей G.35) и G.36) эквивалентными формами ростков катастроф
являются Vc = х3 — у3 и ?с = х3 + у3 соответственно.
Указанные катастрофы суть первые члены ряда, обозначаемого симво-
символом
D±{k+1): x2y±yk. G.37)
В частности, катастрофа G.35) обозначается как D-4, а G.36) — как D+4-
Катастрофа D±% называется параболической омбиликой.
Если суммарные степени слагаемых в ростках катастроф оказывает-
ся разными, то возникают новые, более сложные ряды катастроф, в част™
ности, так называемые модальные катастрофы, когда тип структурной
особенности изменяется при изменении не только числа независимых па-
параметров, но и их значений. В последнем случае параметры называются
модальными.
Подробнее с теорией катастроф можно ознакомиться по обстоятельной
монографии: Постои Т., Стюарт Й. Теория катастроф и ее применения. —
М.: Мир, 1980.
Завершая на этом этапе обзор основных понятий теории катастроф,
подчеркнем, что эта теория входит как важнейшая составная часть в об-
общую теорию динамических систем. Последняя же прошла путь станов-
становления столь же длительный, что и все современное естествознание (см.
комментарий 21).
ГЛАВА VIII
Одномерные точечные отображения. Неподвижные точки
отображений. Монотонные отображения. Спираль Ламерея. Ци-
Циклические точки. Итерированные отображения. Устойчивость
циклических точек, п-циклы (Sn'-циклы). Унимодальные отобра-
отображения. Логистическое отображение или универсальное отобра-
отображение Фейгенбаума. Бифуркации циклов в отображении Фейген-
баума. Бифуркации удвоения периода, каскад бифуркаций. Теория
универсальности. Универсальный предел итераций гладких ото-
отображений. Сверхустойчивые циклы. Стохастические колебания.
Динамический (или детерминированный) хаос. Квазислучайные
последовательности. Шумящие циклы. Цикл S3. Иерархия ци-
циклов. Рождение цикла из хаоса. Сценарий рождения хаоса через
перемежаемость {сценарий Помо-Манневиля). Распределение ве-
вероятностей значений элементов последовательностей. Инвари-
Инвариантное распределение, инвариантная мера. Уравнение Перрона-
Фробениуса.
8.1. Точечные отображения
В главе 4 были подробно рассмотрены точечные отображения или, что
то же самое, отображения исследования. Сейчас мы, имея в виду изуче-
изучение сложного поведения нелинейных динамических систем, воспользуем-
воспользуемся развитым там аппаратом. Предварительно следует отметить, что полу™
чаемые из такого рассмотрения выводы отражают свойства не только чи-
еловых последовательностей, но и динамических систем с непрерывным
временем. Дело в том, что системы с непрерывным временем всегда мо-
могут быть сведены к системам с дискретным временем, т.е. к отображениям
исследования (см. примеры в главе IV и в задачах 12 и 13).
Начнем с простейшего случая — одномерного точечного отображения,
которое можно задать в виде
уп+1 = f(yn), (8.1)
где f(y) — однозначная кусочно-гладкая функция. Напомним, что анало-
аналогом особой точки динамической системы является неподвижная точка ото™
бражения, определяемая условием
У = f(y), (8.2)
3.2. Монотонные отображения
119
и что графически последовательность (8.1) удобно исследовать с помощью
построения, именуемого лестницей Ламерея.
В дальнейшем нам понадобится критерий устойчивости неподвижной
точки отображения (8.1). В комментарии 12 была доказана важная теорема,
устанавливающая этот критерий: точка у = ус устойчива, если в ней
df
< 1,
(83)
У=Ус
и неустойчива, если знак неравенства противоположен.
8.2. Монотонные отображения
Рассмотрим простейший случай монотонных отображений, т.е. отобра-
отображений (8.1), задаваемых монотонно возрастающей или убывающей функци™
ей f(y). Если функция f(y) монотонно возрастает, то легко убедиться, строя
лестницу Ламерея, что последовательность {уп} либо монотонно сходится
к неподвижной точке (если таковая существует и устойчива), либо моно-
монотонно расходится (если неподвижная точка существует, но неустойчива,
или если неподвижных точек нет вовсе). Различные типы поведения по-
последовательности Уп+i = f{Vn) Для монотонно возрастающей функции
f(y) показаны на рис. 8.1 а, б, б, г.
Уп+1 =
Уп+
у/.
У >
/ /
/
\/Уп+1=Уп
Уп
Уп+
к+1= Уп
Рис. 8.1. Поведение последовательности t/n+i = f(yn) в случае монотонно
возрастающей функции f(y) при наличии устойчивой (а) и неустойчивой (б)
неподвижной точки, а также в отсутствие неподвижных точек (в) и (г)
120
Нелинейные динамические системы
Если функция f(y) монотонно убывает, то неподвижная точка всегда
существует. Эта точка может быть устойчивой или неустойчивой в соот-
соответствии с критерием (8.3). Последовательность {уп} в этом случае носит
осциллирующий характер, сходясь к неподвижной точке или удаляясь от
нее (см. рис. 8.2а, б). Построенные последовательности {уп} выглядят в
Уп+1
\
Уп+1=Уп
/
Уп+1=КУп)
(8.4)
Рис. 8.2. Поведение последовательности t/n+i = 1{Уп) в случае монотонно
убывающей функции f(y) в случаях, когда неподвижная точка устойчива (а) и
неустойчива (б)
этом случае не как лестница, а как ломаная спираль, которую мы будем
называть спиралью Ламерея.
В случае монотонного убывания функции f(y) возможен еще один тип
поведения последовательности {уп}- На достаточно большом удалении от
неподвижной точки могут возникать так называемые циклические точки.
В простейшем случае циклические точ-
точки представляют собой пару точек, удо-
удовлетворяющую соотношениям
2/1 = /B/2),
2/2 = /B/i)-
Такая пара точек представляет собой
аналог предельного цикла в системах с
непрерывным временем. На рис. 8.3. по™
казано построение спирали Ламерея для
случая, когда имеется одна неподвижная
точка и одна устойчивая пара цикличе-
циклических точек. Видно, что спирали Ламерея
накручиваются на предельный цикл как
изнутри, так и снаружи.
Из рис. 8.3 интуитивно ясно, что для
существования пары циклических точек
функция f(y) где-то вдали от неустой-
неустойчивой неподвижной точки должна быть
достаточно пологой. Ясно также, что если функция f(y) имеет несколько
чередующихся участков с большой и малой крутизной, то соответственно
возможно сосуществование нескольких пар циклических точек.
Рис. 8.3. Лестница Ламерея для по-
последовательности Уп+1 = /(Уп)
для случая, когда отображение име-
имеет пару циклических точек. Нача-
Начало координат является неустойчивой
неподвижной точкой. Спираль Ла-
Ламерея наматывается на предельный
цикл, образованный порой цикличе-
циклических точек
8.3. Итерации отображений 121
Прежде чем провести более формальное рассмотрение вопроса о ни™
клических точках, отметим, что перечисленные типы поведения после-
последовательности {уп}, задаваемой отображением (8.1) (см. рис. 8.1-8.3),
исчерпывают все разнообразие динамических режимов в случае моно™
тонной функции f(y).
8.3. Итерации отображений
При изучении сложных динамических систем часто оказывается уд об™
ным применение, наряду с отображением (8.1), производных от него так
называемых итерированных отображений. Суть дела состоит здесь в том,
что рассматривается не вся последовательность {уп}, порождаемая рекур-
рекуррентным соотношением (8.1), а некоторая ее подпоследовательность, чле-
члены которой отбираются по определенному правилу. Обычно оказывается
достаточным, чтобы члены подпоследовательности отстояли друг от друга
на некоторое фиксированное число номеров к = 1, 2, 3,... При к = 1 мы
имеем исходное отображение (8.1). При к = 2 мы сдвигаемся на два шага
сразу, поэтому исходное отображение (8.1) надо применить два раза подряд:
Уп+2 = f{yn+i) = /(/Ы)- (8.5)
Функция, стоящая в правой части (8.5), называется двукратно итерирован-
итерированным отображением и обозначается символом f2{y). Аналогично может быть
построено итерированное отображение более высокой кратности:
Итерированные отображения, конечно, дают менее детальное описание
последовательности, генерируемой исходным отображением. Они, одна-
однако, позволяют выявлять важные закономерности в сложном поведении
динамических систем, не очевидные при использовании исходного ото™
бражения.
8.4. Устойчивость циклических точек
Используя аппарат итерированных отображений, легко установить
критерий устойчивости (неустойчивости) циклических точек (т.е. пре™
дельных циклов).
Пусть, например, цикл состоит из двух точек (8.4). Каждая из точек (у±, у2)
есть неподвижная точка двукратно итерированного отображения /2 (у):
Vi = /2Ы, 2/2 = /2Ы- (8-7)
Точка у\ (или у2) является устойчивой точкой отображения F2(y) = f2(y),
если в этой точке
^ <1. (8.8)
dy
122 Нелинейные динамические системы
Дифференцируя i7^ (у) по правилу дифференцирования сложной функции,
с учетом соотношений (8.4) имеем
= f(f(y))f'(y)\y=yi = f'(V2)f'(yi), (8.9)
•j=yi ~* y=yi
где штрих означает производную по всему аргументу, f'{y) = df /dy. От-
Отсюда следует критерий устойчивости циклической (в нашем случае — дву-
двукратной) точки:
|/'Ы/'Ы1 < 1- (8.Ю)
Если знак неравенства противоположен, то циклическая точка B/1, у2)
неустойчива. Случай, когда знак неравенства в (8.10) заменен знаком ра-
равенства, требует дополнительного анализа.
Отметим, что вследствие симметрии полученного критерия (8.10) от-
относительно точек 2/i и 2/2 они обе одновременно являются устойчивыми
или же неустойчивыми неподвижными точками отображения F2.
Полученное соотношение допускает очевидное обобщение на случай, ко-
когда цикл содержит произвольное число п точек B/1, 2/2? • • • ? Уп)- Каждая из
них является неподвижной точкой в-кратно итерированного отображения
Fn(y) = fn(y), а все они вместе образуют п-цикл. Этот цикл устойчив, если
или \fr(yi)fr(y2) • • -f'(yn)\ < 1? (8.11)
dy
и неустойчив, если знак неравенства противоположный.
Пример точечного отображения, содержащего цикл из двух точек, был
рассмотрен в задаче 13. Покажем, что критерий устойчивости для этого
цикла выполняется. Первое отображение имеет вид
2/n+i = /Ы = - . *" 2-, (8.12)
V9 + A - Q) Уп
где q — параметр. Второе (т.е. итерированное) отображение есть
уп+2 = f(yn) = V» (8.13)
Легко проверить, что итерированное отображение имеет две неподвиж-
неподвижные точки г/1 = +1, у2 = — 1, образующие цикл, удовлетворяющий соот™
ношению (8.4). Производная
8 14)
при у = yi my = y2 имеет значения df /dy = —q. Следовательно, критерий
(8.10) устойчивости цикла {+1, — 1} принимает вид
q2 < 1. (8.15)
Рассмотренный в задаче 13 пример дает точечное отображение для пре™
дельного цикла, в котором параметр q = е^2ж < 1, что и обусловливает
устойчивость этого цикла.
8.5. Унимодальные отображения 123
8.5. Унимодальные отображении
При исследовании конкретных динамических систем возникают отобра-
отображения вида (8.1), которые, однако, содержат дополнительные параметры:
yn+i = f(yn,X). (8.16)
При изменении параметров Л могут меняться число и характер устой™
чивости неподвижных точек, а также размерность и устойчивость циклов.
Анализ множества различных конкретных отображений (8.16) показал, что
если функция f(y) на некотором отрезке [а, Ъ] непрерывна вместе со своей
первой производной, содержит на этом отрезке один максимум и осуще™
ствляет отображение отрезка в себя, то при изменении параметра А харак-
тер поведения итераций, изменения числа и типа циклов при достаточно
больших номерах итераций является универсальным, не зависящим от кон-
кретного вида функции f(y).
В качестве примера приведем отображение П. Стайна
Уп+i = AsinGT2/n), A ^ 1, (8.17)
осуществляющее отображение отрезка [0, 1] в себя. Более простым ото-
отображением, также отображающим отрезок [0, 1] в себя, является так на-
зываемое логистическое отображение или универсальное отображение
Фейгенбаума
уп+1 = ХупA^уп), А ^4. (8.18)
Отображение yn+i = fiVn) c единственным максимумом называется
унимодальным отображением. Смысл сказанного выше состоит в том, что
поведение всех унимодальных отображений с гладким максимумом при
изменении параметра А эквивалентно поведению простейшего из них —
отображения Фейгенбаума. Поэтому дальнейшее рассмотрение целесооб-
целесообразно продолжить анализом именно этого отображения.
8.6. Отображение Фейгенбаума
Рассмотрим свойства отображения (8.18). На рис. 8.4. показан вид
этого отображения. Как было сказано чуть выше, соотношение (8.18)
задает отображение отрезка [0, 1] в се™
бя при 0 ^ А ^ 4. Дело в том, что уп+и
правая часть (8.18) достигает макси-
максимального значения, равного А/4, при А/4
у = 1/2. Именно поэтому мы огра-
ограничиваемся изучением свойств этого
отображения при 0 ^ А ^ 4. В против™
ном случае возникает режим неогра-
неограниченного роста элементов последова-
последовательности, в чем легко убедиться непо- —q-
средственно, осуществляя построение ' '
лестницы Ламерея. Рис. 8.4. Отображение Фейгенбаума
Уп+1= I
124
Нелинейные динамические системы
Отображение (8.18) всегда имеет две неподвижные точки:
1
1/1=0;
2/2 = 1 —
-
л
(8.19)
При Л < 1 вторая неподвижная точка попадает в область отрицательных
значений у, так что на отрезке [0, 1] остается единственная неподвижная
точка г/1 = 0. С помощью критерия (8.3) легко проверить, что эта точка
при Л < 1 устойчива:
df[y)
dy
= A|l-22/i|=A<l.
120)
При любых начальных условиях (О
Уп+lh
0,3
у ^ 1) последовательность, задава-
0 0,5 1,0
Рис. 8.5. Лестница Ламерея для отображения Фейгенбаума (8.18) при А < 1
емая отображением (8.18), сходится к у = у\ =0. На рис. 8.5 показано
построение лестницы Ламерея, сходящейся к у = 0 при А < 1.
Пусть теперь А > 1. Тогда на отрезке [0, 1] возникают две неподвиж-
неподвижные точки. (При А = 1 эти точки сливаются в одну, двукратную у = 0.)
Из (8.20) легко увидеть, что точка
у = у\ = 0 оказывается неустой-
неустойчивой при А > 1. Для второй непо-
неподвижной точки 2/2 критерий устой™
чивости (8.3) даст
Уп+lii
df(y)
dy
У-У2
(8.21)
Рис. 8.6. То же, что на рис.
К А< 3
Это означает, что при 1 < А < 3 непо-
неподвижная точка у2 = 1 — 1/А устой-
устойчива. Следовательно, в этом интервале
значений параметра А любая последо-
последовательность сходится к у = |/2. На рис. 8.6 показан пример построения
последовательности {уп} для 1 < А < 3.
При переходе значения параметра А через Ai = 3 неподвижная точ-
точка |/2 теряет устойчивость (см. (8.21)). Другими словами, на отрезке [0, 1]
устойчивых неподвижных точек больше нет. При этом все точки отображе™
8.6. Отображение Фейгенбаума
125
ния остаются на том же отрезке [0, 1]. Таким образом, система совершает
финитное движение, но не имеет устойчивого положения равновесия.
Для того чтобы понять характер бифуркации, происходящей при пере-
переходе параметра через значения Ai = 3, рассмотрим итерированное отобра-
отображение
Уп+2 = 12(Уп) = Хуп+1 A - 2/n+i) = Х2уп A - уп) A - Хуп + Ху2п) .
(822)
Ищем неподвижные точки. В соответствии с (8.22) эти точки удовлетворя-
удовлетворяют уравнению 4-й степени
у ^ Х2уA - у)A - Ху + Ху2). (8.23)
Легко проверить, что точки у\ и г/2 из (8.19) являются корнями (8.23). Это
очевидно также из того, что неподвижные точки исходного отображения
всегда являются неподвижными точками любого последующего итериро-
итерированного отображения. Знание двух корней уравнения (8.23) в явной форме
позволяет привести это уравнение к виду
у(\у - А + 1) [АV - А (А + 1) у + А + 1] = 0. (8.24)
Видно, что условие обращения в нуль первых двух сомножителей (8.24)
дает уже известные нам корни у\ и г/2 (см- (8.19)). Третий сомножитель в
(8.24) приобретает действительные корни при А ^ 3:
2/з,4 = ^ [А (А + 1) ± у/\* (А + 1) (А - 3)]. (8.25)
При А = Ai = 3 имеется трехкратный корень 1/2 = 2/3 = 2/4 = 2/3. Увеличе-
Увеличение А снимает вырождение: возникают три различных корня, т.е. происходит
бифуркация числа действительных корней с появлением новых неподвиж-
неподвижных точек двукратно итерированного
отображения. При этом число непо-
неподвижных точек исходного отображе-
отображения (8.18) не меняется. Как отмечено
выше, эти последние точки при А >
> Ai = 3 становятся неустойчивыми
(см. (8.21)), а в соответствии с критери-
критерием (8.11) они остаются неустойчивы-
неустойчивыми и для итерированного отображения
(8.22). Вместе с тем, как легко прове-
проверить, новые точки г/з и г/4 при неболь-
небольшом превышении А над Ai устойчивы.
Пара точек г/з, У а (8.25) образует тем
самым 2-цикл в исходном отображении
(8.18). Сказанное означает, что при пе-
переходе параметра А через значение Ai происходит бифуркация рождения
цикла. Поясним это с помощью рис. 8.7 и 8.8. На рис. 8.7 показан график
Уп+2
о
Уп+2= Уп
1,0
Рис. 8.7. Итерированное отображе-
отображение Фейгенбаума уп+2 = f2(yn)
при А < Ai (Ai — порог рождения
2-цикла)
126
Нелинейные динамические системы
Уп+1=Уп
1,0 Уп
Рис. 8.8. а — устойчивый 2-цикл в отображении Фейгенбаума yn+i = f(yn)\ б —
устойчивые неподвижные точки в итерированном отображении уп+2 = /2(|/п).
А > Ai (Ai — порог рождения 2-цикла)
итерированного отображения уп+2 = 12{уп) при значении А, немного
меньшем Ai. Существенно, что это отображение имеет вид двугорбой кривой.
При выбранном значении А < Ai диагональ г/п+2 = Уп пересекает эту кривую
только в двух точках у\ = 0 и у2 = 1 — 1/А. По мере роста А провал
двугорбой кривой опускается все ниже и ниже. При А = Ai = 3 диагональ
касается кривой в точке у = у2, а при А > Ai точка касания распадается на
три различные точки t/2? y%, у а- На рис. 8.8 а показан вид итерированного
отображения при значении А, немного превышающем Ai. Одновремен-
Одновременно на рис. 8.8 6 приведен вид исходного отображения. Неподвижные
точки итерированного отображения рис. 8.8 а, будучи спроецированы на
исходное отображение рис. 8.8 6, образуют на этом отображении пару
циклических точек — устойчивый 2-цикл. Амплитуда колебаний в этом
цикле тем больше, чем дальше мы отходим от точки бифуркации Ai, т.е.
рождение цикла происходит в мягком режиме.
Продолжая увеличивать параметр А, мы придем к ситуации, в которой
точки 1/3 и 2/4 в свою очередь теряют устойчивость. Анализ происходящих
при этом модификаций можно провести в точном подобии тому, как это
было сделано выше, взяв за основу отображение F2 (у) = /2 (у) и рассмо™
Рис. 8.9. Неподвижные точки и циклы в отображении Фейгенбаума после бифур-
бифуркации рождения 4-цикла. Рисунок построен для А = 3,54. а — 4-кратно итери-
итерированное отображение, б — 2-кратно итерированное отображение, в — исходное
отображение
8.7. Каскад бифуркаций удвоения периода 127
трев двукратно итерированное отображение F^y) = f4(y)> При переходе
через бифуркационное значение Л = Л2 > Ai неподвижные точки отобра-
отображения F2 (у) теряют устойчивость, и каждая из них превращается в 2-цикл
для этого отображения. На языке отображения F^{y) = Р^{у) это означает,
что каждая неподвижная точка у^, у а расщепляется на три точки, две из
которых устойчивы. Устойчивые же точки отображения F±(y) образуют 4-
цикл исходного отображения f(y). Рис. 8.9 <я, б, в показывает результаты
произошедшей бифуркации — все неподвижные точки и циклы отображе-
Ы2B/)/4(г/)
8.7. Каскад бифуркаций удвоении периода
Сопоставим результаты двух последовательных бифуркаций — при
А = Ai и А = Аг. Наиболее существенным здесь является то, что при
бифуркациях происходит смена порядка цикла по закону п —>• 2п. В самом
деле, при А < Ai мы имеем устойчивую неподвижную точку или, что
эквивалентно, 1-цикл. В результате первой бифуркации, происходящей при
А = Ai, рождается 2-цикл, а в результате второй возникает 4-цикл. Очевид-
Очевидно, что, повторяя описанную процедуру, мы получим новые бифуркации,
сопровождающиеся рождением 2П-циклов. Другими словами, последова-
последовательность рождения циклов схематически можно представить как
2° ->> 21 ->> 22 -^ ... -» 2п -+ 2п+1 -+ ... (8.26)
Эту бесконечную последовательность называют каскадом бифуркаций
удвоения периода. Соответствующие значения параметра А, при которых
происходят бифуркации удвоения периода, образуют бесконечную после-
последовательность Ai, A2, A3, ... Расстояние между двумя последовательны-
последовательными ее членами An+i — Ап по мере роста номера п уменьшается. Можно
показать, что эта последовательность сходится как геометрическая про-
прогрессия. Знаменатель этой прогрессии находится численными методами,
причем оказывается, что
lim An+1 ~Хп =ё, 5 = 4,6692016... (8.27)
n-Юо Ап+2 — An+i
Это соотношение было установлено М. Фейгенбаумом в 1978 г. Более того,
Фейгенбаум показал, что для любого отображения отрезка [0, 1] в себя,
если только это отображение имеет гладкую вершину, имеет место такой
же каскад бифуркаций удвоения периода, причем последовательные би-
бифуркационные значения параметра удовлетворяют соотношению (8.27) с
одинаковой для всех отображений константой S = 4,6692 ...
В силу указанной одинаковости поведения последовательности би-
бифуркаций теория Фейгенбаума получила название теории универсально-
универсальности. Здесь уместно обратить внимание на принципиальную значимость
этой теории для понимания свойств конкретных систем. Коль скоро ока-
оказывается возможным свести решение уравнений, описывающих поведе-
поведение системы, к исследованию свойств последовательностей и, тем са-
128
Нелинейные динамические системы
мым, к исследованию свойств точечных отображений (подобно тому, как
выше это было сделано для дифференциальных уравнений, описываю-
описывающих автоколебания), то, обнаружив, что это отображение по форме сво™
ей подобно универсальному отображению Фейгенбаума (8.18), мы долж-
должны ожидать здесь существования полного набора бифуркаций удвоения
периода.
Последовательность бифуркаций удобно представить графически в
виде зависимости устойчивых неподвижных точек итерированных ото-
отображений (т.е. устойчивых циклических точек исходного отображения)
от параметра Л (см. рис. 8.10). Для облегчения восприятия на этом рисун-
4,0 А
Рис. 8.10. Зависимость устойчивых неподвижных точек итерированных отобра-
отображений от параметра А. Эти же точки образуют устойчивые циклы (аттракторы)
исходного отображения Фейгенбаума (8.18). а — диапазон 0 ^ А ^ 4; б —
диапазон 2,8 ^ А ^ 4
ке не указаны неустойчивые точки, траектории которых естественным
образом произрастают из бифуркационных точек в направлении роста
параметра А. На рис. 8.10 видно последовательное рождение пар устой™
чивых точек по мере роста параметра А от А = 0 до А = А^ < 4. Забегая
вперед, отметим, что в диапазоне А^ < Л < 4 реализуются наряду с
периодическими и сложные апериодические движения, обладающие все-
всеми основными свойствами стохастических колебаний (так называемый
динамический хаос).
8.8. Универсальный предел итераций гладких отображений 129
8.8. Универсальный предел итераций гладких отображений
Возвращаясь к универсальности отображения Фейгенбаума, обсудим при-
природу этого свойства. Обратимся к рис. 8.10. По мере роста параметра Л воз-
возникают циклы различных периодов. В интервале Ai < А < А2 имеют место
2-циклы. Среди них особое положение занимает цикл, у которого одна из
точек есть у = 1/2. Поскольку в этой точке f'{y) = 0, то в соответствии
с (8.8) производная от итерированного отображения F2{y) = f2[y) в этой и
парной ей точке также равна нулю. Следовательно, этот цикл является наибо-
наиболее устойчивым среди всех 2-циклов из интервала Ai < А < А2. Очевидно,
что среди циклов более высокого порядка, возникающих при последующих
бифуркациях (т.е. при А2 < А < Аз, Аз < А < А4 и т.д.), выделяются, как
наиболее устойчивые, циклы, содержащие элемент у = 1/2. Их называют
сверхустойчивыми циклами. На каждом интервале параметра А, заключен™
ном между соседними бифуркационными значениями (An, An+i), имеется
один сверхустойчивый 2п-цикл. Ему соответствует значение параметра А =
= Ап (см. рис. 8.10). Будем следить далее за такими циклами.
Обозначим расстояние от точки у = 1/2 до ближайшей к ней точке
сверхустойчивого 2п-цикла у = уп символом dn = уп —1/2. Из рис. 8.10
видно, что по мере роста номера п величина dn монотонно убывает, dn —>>
—>> 0 при п —)> оо. Более того, оказывается, что
lim -^ = -а, где а = 2,50297875 ... (8.28)
n^oo dn+i
Определяемое этим соотношением число а, как и число 5 из (8.27), являет-
является универсальным, независящим от конкретного вида отображения, лишь
бы последнее обладало гладкой вершиной, в которой /' = 0, /;/ = 0.
Существование предела (8.28) предопределяет свойство универсально-
универсальности отображения Фейгенбаума. Дело в том, что пара точек сверхустойчи-
сверхустойчивого 2п-цикла у = 1/2 и у = гД непрерывно сближается. При переходе
параметра А через бифуркационное значение все точки каждого устойчи-
устойчивого 2П-цикла "рассыпаются" одновременно, в результате чего образуется
устойчивый 2п+1~цикл. Поэтому достаточно следить за бифуркациями лишь
ближайших к у = 1/2 точек циклов. При этом очевидно, что чем выше номер
бифуркации, тем более близкий к вершине у = 1/2 участок кривой f(y)
играет определяющую роль. Все кривые с гладкой вершиной, в которой /' =
= 0, /;/ < 0, ведут себя вблизи этой вершины одинаково не только качествен-
качественно, но и количественно. Именно поэтому характер бифуркаций при больших
номерах идентичен для любых отображений этого класса, что и проявляется
как универсальное поведение гладких отображений.
Наличие вершины параболического вида с известным значением вто-
второй производной в ней предопределяет вид функции, получаемой в резуль™
тате большого числа итераций,
g(y)= lim f"(y). (8.29)
п—>-оо
9 Н.В. Карлов, Н.А. Кириченко
130 Нелинейные динамические системы
Для упрощения записи сдвинем при дальнейшем рассмотрении начало от™
счета аргумента функции f(y) так, чтобы ее максимум имел место при
нулевом значении аргумента, а сам аргумент менялся в пределах от — 1 до
+1. Для этого перейдем от аргумента у к аргументу х = 2(т/ — 1/2). Кроме
того, изменим масштаб по оси ординат и сдвинем нулевой уровень с тем,
чтобы функция отображения менялась в пределах от — 1 до +1. Другими
словами, точке со старыми координатами A/2, 1/2) теперь соответствует
начало координат @, 0). Для всех последующих итераций изменение мас-
масштаба и сдвиг по оси абсцисс одинаковы.
Мы рассматриваем только сверхустойчивые циклы, и для них мы долж™
ны найти форму кривой отображения, которое само себя воспроизводит
при последующих итерациях, но во все более и более мелких масштабах.
Согласно соотношению (8.28) этот масштаб каждый раз уменьшается в а
раз. Поэтому требование самовоспроизведения функции g(x) приводит к
необходимости сузить область задания аргумента в а раз, т.е. заменить х
на х/а. Применение к этому аргументу функции g дает нам отображение
g(x/a) рассматриваемой области. Сравнение рис. 8.8 а и 8.9 б (см. квадра™
тики, примыкающие к центральному экстремуму) показывает, что кривая
отображения переворачивается. Для того чтобы вернуть ее в исходное по-
положение, надо применить отображение g еще раз, увеличить масштаб в а
раз и учесть изменение знака. В результате уравнение для универсальной
кривой g(x) имеет вид
g(ar) = -ag(g(^)). (8.30)
Учтя, что g@) = 1, получаем уравнение для числа а
g(l) = I/a. (8.31)
Функциональное уравнение (8.30), называемое уравнением Фейгенбау-
ма, определяет универсальную кривую — предел многократных итераций
вблизи максимума функции исходного гладкого отображения f(x). Это урав™
нение имеет единственное гладкое решение, если число а равно значению,
указанному в (8.28). Функция g(x) имеет при этом вид
g(x) = 1 - 1,52763ж2 + 0Д04815ж4 - 0,0267057х6 + ... (8.32)
При х = 1 эта функция с учетом (8.31) позволяет найти число а с довольно
высокой точностью (см. комментарий 21).
Итак, мы проследили сценарий усложнения динамики системы по мере
увеличения параметра ЛотА = 0доЛ = Аоо.
8.9. Стохастические колебания
По мере дальнейшего, свыше Л = Лоо, увеличения параметра Л (см.
рис. 8.10, Лоо < А ^ 4) возникают хаотические колебания различной
сложности.
Заметим предварительно, что значение Хоо зависит от конкретного ви-
вида изучаемого отображения. В частности, для отображения Фейгенбаума
8.9. Стохастические колебания 131
численный счет дает значение Лоо « 3,58. Для нахождения этого значе-
значения с достаточно высокой точностью необходимо отследить бифуркации
появления цикла 2п при достаточно больших значениях п. Соответствую-
щее значение Ап аппроксимирует значение Аоо. В самом деле, переписывая
(8.27) для п-1оов виде
^оо — ^п ~ const • 5^п, const ~ 1, (8.33)
мы видим, что при больших п переход к п +1 повышает точность прибли-
приближения Хп к Лоо в <5 ^ 4,62 раз.
На диаграмме рис. 8.10 для Л > Л^ отчетливо видны области, сплошь
заполненные по ординате значениями уп, принадлежащими той последова-
последовательности {уп}, которая соответствует выбранному значению Л. Эти области
могут состоять из отдельных, не контактирующих друг с другом частей —
"островов". При этом оказывается, что заполнение островов происходит так,
как если бы последовательность {уп} была случайной, а порядок обхода ост-
островов, как некоторых структурных единиц, строго фиксирован. Утверждение
о случайном характере последовательности {уп} основывается, во-первых,
на численном анализе стохастических свойств {уп} (например, на расчете
корреляционных функций) и, во-вторых, на совокупности неких теорем об-
общей теории нелинейных динамических систем с дискретным временем. Мы
не имеем возможности углубляться в эту сторону вопроса.
Обратим теперь внимание на следующее принципиально важное об-
обстоятельство. Случайное поведение последовательности {уп} имеет ме-
место, несмотря на то, что элементы последовательности определяются по
строго детерминированному алгоритму, т.е., по сути, как и во всякой ди-
динамической системе, однозначно определяется заданием начальных усло-
условий. Именно поэтому в таких случаях говорят о наличии динамического
(или детерминированного) хаоса. Такую последовательность {уп} следует,
в отличие от истинно случайной, называть квазислучайной.
Как уже отмечалось выше, область ординат на рис. 8.10, заполняемая
элементами квазислучайной последовательности {уп}9 может состоять из
нескольких островов, которые как структурные единицы обходятся регу-
регулярно, в строго определенном порядке. Имеется в виду, что каждая ите-
итерация отображения Уп+i = Аг/ПA — уп) переводит точки отображения с
острова на остров строго в заданном порядке. Внешне это выглядит как
обычный, регулярный цикл "последовательной инспекции островов", но
конкретные "места посещения" меняются от визита к визиту случайным
образом. Такой колебательный режим называют шумящим циклом и обо-
обозначают символом %п, где п — число островов (макроэлементов).
Как видно из рис. 8.10, при Л^ < А ^ 4 кроме сплошных полос и обла-
областей, состоящих из островов, имеются интервалы значений А, для которых
существуют регулярные циклы с конечным периодом. Эти интервалы выде-
выделяются на рис. 8.10 как светлые вертикальные полосы. Наиболее широкая из
них начинается при Л « 3,83. В самом начале этой полосы реализуется, как
видно из рис. 8.10, цикл S3, содержащий три циклические точки. Очевидно,
9*
132 Нелинейные динамические системы
что этот цикл не принадлежит каскаду 2П-циклов, который, начавшись со
стационарной точки уп = 0, сформировался в результате последовательно-
последовательности бифуркаций удвоения периода, рассмотренной выше.
Цикл S3 рождается скачком из хаоса, а затем, как это можно увидеть
из рис. 8.10, в свою очередь претерпевает последовательность бифуркаций
удвоения периода:
3^3-2^3- 22 ^ 3 • 23 ... ^ 3 • 2П ^ ... (8.34)
В других "белых" зонах наблюдаются следующие каскады бифуркаций:
5^5-2^5- 22 ->> 5 • 23... ->> 5 • 2П ^ ...
7^7-2^7» 22 ^ 7 * 23 ... -> 7 • 2П ^ ... (835)
и т.д.
Удвоение периода в этих случаях происходит также как и раньше, т.е. как
удвоение числа точек цикла на каждом шаге бифуркаций.
8.10. Иерархия циклов
Рис. 8.10 показывает, что при увеличении значения параметра Л циклы
могут возникать, терять устойчивость, но они, вообще говоря, не исчеза™
ют бесследно. Например, при Л = 3,3 мы имеем, как это видно из рис.
8.10, устойчивый цикл S2, но одновременно с ним существует и неустой-
неустойчивый цикл S4 (неустойчивая неподвижная точка). Аналогично, при Л =
= 3,5 имеем устойчивый цикл S4, неустойчивый цикл S2 (неустойчивая
неподвижная точка отображения /2 (у)) и неустойчивый цикл S4. Обобщая
это рассуждение, можно заключить, что наряду с циклом Sn существу-
существуют и все предыдущие циклы, возникающие по мере роста параметра Л.
Это означает, что существует определенная иерархия циклов, такая, что
наличие какого-то цикла свидетельствует об обязательном наличии всех
предыдущих циклов более низкого ранга.
Обозначим символом -<< иерархическое отношение циклов, так что
запись
S1 -< S2 (8.36)
означает, что цикл S2 "старше" цикла S1: из существования цикла S2 сле-
следует существование цикла S1. Тогда цепочка циклов, возникающих в кас-
каскаде бифуркаций удвоения периода, упорядочивается следующим образом:
2° -< 21 ~< 22 ~< 23 -<(... ^ 2П ... ^ 2°°. (8.37)
После циклов удвоения возникают более сложные режимы, которые, одна-
однако, упорядочиваются аналогичным способом. Упомянутые в (8.34) и (8.35)
циклы относятся к числу самых старших циклов в этой иерархии. Послед-
Последний участок этой цепочки записывается как
(8.38)
8.11. Рождение циклов из хаоса
133
Соответствующая теорема была доказана А.Н. Шарковским в 1964 г. В со™
ответствии с этим цикл Я3 является самым старшим циклом в иерархии.
Афористично это формулируют фразой: "Цикл 3 означает хаос".
Подчеркнем, однако, что описанное выше сосуществование циклов не
означает их фактической одновременной наблюдаемости (скажем, путем
перебора начальных условий) в силу неустойчивости абсолютного боль-
большинства из них.
8.11. Рождение циклов из хаоса
Более сложен вопрос о том, как из хаоса рождается регулярный цикл
(в приведенных выше примерах (8.34) и (8.35) такими базовыми регуляр-
ными циклами являются циклы S3, S5, S7, ... )
Для того чтобы проследить бифуркацию рождения регулярного цик™
ла из хаоса при изменении параметра А, рассмотрим эволюцию отобра-
жения Фейгенбаума вблизи точки появления S3. Тот факт, что мы имеем
дело именно с циклом 53, означает, что точки, принадлежащие этому
циклу (г/i, |/2, 2/з) являются неподвижными точками отображения f3(y).
На рис. 8.11 а приведен график отображения
Уп+з = 1ЧУп)» (839)
При значении А = 3,76, отвечающем хаотическому режиму, диагональ
уп+3 = уп пересекает кривую отображения (8.39) в единственной точке,
Уп+З
Уп+1
Рис. 8.11. Рождение 3-цикла из хаоса, а — трехкратно итерированное отобра-
отображение Фейгенбаума уп+ъ = /3(l/n) при А = 3,76 (устойчивых неподвижных
точек нет); б — это же отображение при А = 3,83 (в отображении появляются
шесть неподвижных точек, три из которых устойчивые); в — 3-цикл в исходном
отображении yn+i = fitJn) при А = 3,83
которая неустойчива. При увеличении А до значения А = 3,83 минимумы
кривой f3(y) углубляются, и кривая отображения пересекается с диаго-
диагональю в шести точках (рис. 8.11 б). Три из них {iVi, N2, Щ} образуют
неустойчивый 3-цикл, а три других {Mi, M2, М3} образуют устойчивый
3-цикл. Устойчивость (неустойчивость) этих циклов проверяется с помо-
134
Нелинейные динамические системы
щью критерия (8.11), который для этого случая может быть записан как
|/'Ы/'Ы/'Ы1 < 1 Для точек М1,М2,М3,
|/'Ы/'Ы/'Ы1 > 1 для точек NUN2,N3.
(8.40)
Сказанное иллюстрирует сценарий рождения 3-цикла из хаоса. Анало™
гичным образом рождаются из хаоса и более сложные циклы S5, S7, S9 и т.д.
Посмотрим более внимательно на процесс регуляризации колебаний
при приближении к бифуркационному значению параметра А со стороны
хаотического режима. На рис. 8.12 в увеличенном масштабе показано по-
построение лестницы Ламерея в окрестности одного из минимумов кривой
отображения при значении А = 3,825, которое слегка меньше бифурка-
бифуркационного (цикл S3 еще не возник). В этой области видим некоторый уз-
узкий "канал", образованный диагональю и кривой отображения, в котором
(в канале) помещается большое чис-
число мелких ступенек лестницы Ламерея.
Это означает, что система длительное
время ведет себя так, как если бы в ней
реализовался цикл S39 поскольку после-
последовательные точки трехкратно итери-
итерированного отображения /3 за большое
число шагов почти не меняют свое по-
положение. Тем не менее, как это видно из
рис. 8.12, точки отображения с течением
времени все же смещаются и, в конце
концов, удаляются на большое рассто-
расстояние — в системе явно возникают сто™
хастические колебания. Однако через
какое-то время система снова попадает
в окрестность описанного выше квазирегулярного режима. Затем история
повторяется. Таким образом, длительные периоды почти регулярного
поведения перемежаются всплесками хаотического поведения. Чем ближе
система к точке бифуркации, тем большую часть времени наблюдаются
регулярные колебания и тем реже возникают стохастические всплески.
Такой сценарий мягкого перехода от хаоса к порядку и, наоборот, от
порядка к хаосу получил название рождение хаоса через перемежаемость
или сценарий Помо—Манневиля.
8.12. Уравнение Перрона-Фробениуса
В заключение остановимся на такой важной характеристике хаотиче-
хаотических режимов, как распределение вероятностей значений элементов после-
последовательностей, генерируемых отображением. Как видно из рис. 8.10, даже
в "темных" областях диаграммы плотность точек по вертикали различна.
Это означает, что при выбранном определенном значении А различные зна-
значения элементов последовательности появляются с различной частотой.
Рис. 8.12. Лестница Ламерея при
значении А = 3,827, немного мень-
меньшем порога рождения 3-цикла
8.12. Уравнение Перрона-Фробениуса
135
Строго говоря, в хаотической последовательности ни одно значение не мо-
может повторяться, иначе мы имели бы дело с конечным циклом. Однако
всегда можно ввести плотность вероятности р(у) значений у такую, что
величина р(у) dy представляет собой вероятность того, что элементы по-
последовательности попадают в интервал (у, у + dy). Тогда можно сказать,
что, судя по рис. 8.10, при данном Л плотность вероятности р(у) ф const.
Кроме того, из рис. 8.10 очевидно, что р(у) зависит от Л как от параметра.
На рис. 8.13 приведены распределения р(у) для трех характерных зна-
значений параметра Л. Рис. 8.13 а (Л = 3,6) отвечает шумящему циклу %2-
0,25
Рис. 8.13. Распределение плотности
вероятности значений элементов по-
последовательности {уп} при значени-
значениях А, отвечающих стохастическим
режимам. А = 3,6 (а), А = 3,82 (б),
А = 3,99 (в)
Видны пустоты распределения, отвечающие значениям у, которые не воз-
возникают в последовательности {уп} при этом значении А. Резкие подъемы
в распределении р(у) соответствуют наиболее часто "посещаемым" обла-
областям отрезка [0, 1]. Именно этим областям на рис. 8.10 отвечают наиболее
густо затушеванные места. Рис. 8.13 6 (А = 3,82) отвечает режиму, близ-
близкому к образованию цикла S3. Видно наличие трех хорошо выделенных
136 Нелинейные динамические системы
максимумов, о которых шла речь выше в связи с обсуждением сценария
Помо-Манневиля. Рис. 8.13 в (А = 3,95) показывает, что с приближением
параметра А к предельному значению А = 4 кривая р(у) становится все
более и более гладкой с экстремумами на краях интервала. Заметим, что
подобные распределения в целом характерны для задач об осцилляторах,
в том числе квантовых.
Величина р(у) может быть определена и для регулярных циклов. Тогда
она отлична от нуля только для точек соответствующего цикла, при этом
все значения у, отвечающие одному и тому же регулярному циклу, равно-
равновероятны, поскольку, все точки цикла обходятся в жестко фиксированной
последовательности по одному разу за цикл.
Если цикл содержит п элементов {г/i, г/2? • • • > Уп}, то плотность веро-
вероятности может быть записана в виде
п
р(у) = -
(вероятность посещения каждой точки цикла одинакова и равна 1/п).
Рассмотрим отображение t/n+i = 1{Уп)- Задавая различные начальные
данные г/°\ мы будем получать множество точек г/1), которое можно услов-
условно записать в виде у^ = / (?/°)). Начальное множество г/°) имеет некото-
некоторое распределение плотности р^°) = р(у^), называемое также мерой мно-
множества у(°\ Получаемое в результате действия отображения / множество
г/1) также можно характеризовать распределением плотности (или мерой)
pi1) = p (г/1)). Переход от меры р(°) к мере р^ условно запишем в виде
pi1) = /[р(°)] или р(у{1)) = /[р(г/@)]. (8.42)
Обычно мера р нормируется на единицу:
p(y)dy = l. (8.43)
Функция р = р(у) называется инвариантным распределением (инвариант-
(инвариантной мерой), если
р(у) = f\p(y)]- (8-44)
В общем случае отображение может иметь много инвариантных рас™
пределений. Однако наибольший интерес представляет предельное распре-
распределение, получаемое бесконечнократным итерированием исходного:
..]]. (8.45)
Это распределение соответствует "забыванию" начальных условий и ха-
характеризует аттракторы, задаваемые рассматриваемым отображением.
Для нахождения инвариантной меры можно использовать два подхода.
Во-первых, эта мера получается в результате однократной итерации мно-
множества, состоящего из всех точек аттрактора. Во-вторых, бесконечнократ-
8.12. Уравнение Перрона-Фробениуса
137
ное итерирование начальной точки порождает последовательность, сходя™
щуюся к некоторому аттрактору (если таковой имеется). Для этой после-
последовательности строится инвариантная мера р по формуле
р(у) = lim lim —.
(8.46)
Здесь предполагается, что изучаемый отрезок [|/i, у2] разбивается на от-
отрезки равной длины е. Всего проводится N итераций начальной точки и
определяется число попаданий щ в г-й отрезок. По существу соотноше-
соотношение (8.46) определяет гистограмму попадания последовательных точек в
интервалы dy области значений отображения. (Именно таким способом по-
построены гистограммы на рис. 8.13.) Эквивалентность обоих подходов
обусловлена свойством эргодичности
аттракторов (т.е. равенством фазового
среднего и среднего по времени).
Изложенные алгоритмы требуют,
как правило, анализа больших выбо™
рок. Можно, однако, сформулировать
уравнение непосредственно для инва-
инвариантной меры.
Рассмотрим некоторое унимодаль-
унимодальное отображение f(y) (см. рис. 8.14).
Пусть у\ и у2 — прообразы точки у, т.е.
такие точки, для которых
/Ы = У, /(г/г) = У- (8.47)
Рис. 8.14. Построение инвариант-
инвариантной меры р(у). Число траекторий на
отрезке dy равно числу траекторий,
пришедших из прообразов dy\ и dy^
Пусть также интервалы dy\ и dyi
в окрестностях точек у\ и у2 являются прообразами интервала dy в
окрестности точки у.
В соответствии с определением инвариантной меры число траекто-
траекторий, попавших в dy, равно суммарному числу траекторий, вышедших из
ёуг ndy2:
p{y)dy = p(y1)dy1
(8.48)
Имея в виду, что
dyi
получаем из (8.48)
df
dy
р(у) ~~
У=У1
p(yi)
dy
dy2
- + г
p(y
df
dy
2)
= У2
\df/dy\yi \df/dy\y2
(8.49)
В общем случае, если отображение имеет более одного экстремума,
число прообразов точки у может возрастать, так что уравнение (8.49) при™
138 Нелинейные динамические системы
мет вид
где суммирование выполняется по всем прообразам точки у, f(yi) = у.
Уравнение (8.50) называют уравнением Перрона-Фробениуса. Это
функциональное уравнение допускает в некоторых случаях точное анали-
аналитическое решение.
/
В качестве примера рассмотрим отображение
Это отображение (его иногда называют треуголь-
треугольным) показано на рис. 8.15. Для него уравнение
Перрона-Фробениуса имеет вид
Рис. 8.15. Треугольное р{х) = — Р 1 ^ ) + Р A ^ — I (8.52)
г /о сл\ 2а I \2а/ \ 2а/ J
отображение (8.51)
(прообразы точки х есть х\ = ж/2а, Х2 = 1 —
— х/2а; производные в этих точках одинаковы по величине: f {х\) = —2а,
f'(x2) = +2a).
При а = 1 уравнение (8.52) имеет очевидное решение
р(х) = 1, 0 ^ х ^ 1. (8.53)
Этот результат явно указывает на то, что при а = 1 отображение (8.51) по-
порождает апериодические последовательности. В действительности, наряду
с ними, имеется и бесконечное (счетное) число конечных циклов. Нетрудно
показать, что любое рациональное число из интервала @, 1) дает начало
некоторому циклу Sn,n < oo. Однако этот цикл неустойчив. Действитель-
Действительно, согласно (8.51) для него
\f'(x1)f(x2)...f(xn)\=2n>l. (8.54)
В соответствии с приведенным выше критерием (см. формулу (8.11) и
текст к ней) это и означает неустойчивость цикла, составленного из точек
С другой стороны, любая иррациональная начальная точка порожда-
порождает апериодическую последовательность, обладающую инвариантной ме-
мерой (8.53).
Рассмотрим теперь отображение
Уп+i =4|/пA -уп) (8.55)
(т.е. отображение (8.18) при Л = 4). Произведем замену переменной:
х = — arcsin^/i/ или у = sin —. (8.56)
7Г 2
Это преобразование сводит (8.55) к треугольному отображению (8.51) с
а = 1. Поэтому мы можем уже легко найти инвариантную меру и для
отображения (8.55). Для этого достаточно заметить, что инвариантная мера
8.12. Уравнение Перрона--Фробениуса 139
(плотность вероятности) при замене переменной х -^ у преобразуется по
закону
р(у) dy = р(х) dx. (8.57)
Поскольку dx = , , з,р(х) = 1, то
7Г у/уA - у)
(8.58)
Рисунок 8.13 в подтверждает, что распределение вероятности р(у) стремит-
стремится к пределу (8.58) по мере приближения А к значению А = 4.
В заключение отметим, что более подробно с теорией точечных ото™
бражений можно познакомиться по книгам: Шарковский А.Н., Майстрен-
ко Ю.Л., Романенко Е.Ю. Разностные уравнения и их приложения. —
Киев: Наукова думка, 1986, 280 с; Ахромеева Т.С, Курдюмов СП., Мали-
нецкий Г.Г., Самарский А.А. Нестационарные структуры и диффузионный
хаос. — М.: Наука, 1992, 544 с.
ГЛАВА IX
Самоподобие. Фрактальные множества, фракталы. Функция
Вейерштрасса. Кривые Пеано. Канторовы множества, построе-
построение, мера, самоподобие. Масштабная инвариантность или скей-
линг. Канторова (или ''дьявольская") лестница. Кривые Коха,
остров Коха. Ковер Серпинского. Двух™ и трехмерные фракта-
фракталы, универсальная кривая Менгера. Разветвленностъ фрактала.
Вероятностные фракталы. Длина береговой линии. Определе-
Определения линии. Топологическая размерность. Фрактальная размер-
размерность или емкость. Емкость некоторых фракталов. Размерность
Хаусдорфа-Безиковича. Динамические системы с непрерывным
и дискретным временем. Клеточные автоматы. Фрактальные
структуры, порождаемые клеточными автоматами. Двумерные
точечные отображения. Квадратичное отображение Хенона.
Фрактальная структура аттрактора Хенона. Системы ите-
итерированных функций, детерминированный и рандомизированный
алгоритмы, фрактальные структуры.
В предыдущей главе на примере точечных отображений мы видели, что
нелинейные динамические системы могут обладать весьма сложным пове-
поведением, обозначенным нами термином "динамический хаос". Анализируя
возникновение хаоса, мы рассматривали последовательные итерации ото™
бражений, переходя, тем самым, к всё более и более мелким масштабам.
При этом обнаруживались структуры, подобным образом повторявшие се-
себя на каждом последующем шаге итераций. Это свойство самоподобия ха-
характерно не только для стадии перехода к хаосу, но и в еще большей мере
для собственно хаотических режимов. Таким образом, динамический ха~
ос представляет собой не только разупорядоченную, абсолютно аморфную
структуру, но характеризуется в определенном смысле высокой степенью
регулярности. Анализ внутренней упорядоченности динамического хаоса
приводит к понятию фрактальных множеств (или фракталов).
Строго говоря, с фрактальными множествами математика столкнулась
еще в прошлом веке, хотя сам термин был введен Б. Мандельбротом лишь
в 1975 г. В последние годы фракталы приобрели популярность в связи с
тем, что это чисто математическое понятие получило самые разнообраз™
ные применения в физике, химии, астрофизике, гидродинамике и т.д. Пол-
ная теория фрактальных множеств весьма объемна, однако наиболее суще-
существенные ее аспекты вполне могут быть изложены в рамках одной главы.
9.1. Функция Вейерштрасса
141
9.1. Функции Вейерштрасса
В конце XIX века К. Вейерштрассом был построен пример непрерыв-
непрерывной функции, не имеющей производной ни в одной точке:
сю
-Е
п=1
W(x) = V ап cos (Ъпттх),
(9.1)
где а < 1, Ь > 1, причем произведение аЬ достаточно велико. Сам Вейер-
штрасс доказал недифференцируемость W(x) при аЬ > 1 + Зтг/2. Позднее,
в 1916 г., Г. Харди показал, что недифференцируемость W(x) имеет место
и при более слабом условии аЬ > 1.
График функции W(x) показан на рис. 9.1. Качественно понять при™
чину ее недифференцируемости можно из следующего. Согласно (9.1) для
Рис. 9.1. а — график функции Вейерштрасса: б — часть кривой, выделенная на
рис. 9.1 а прямоугольником, а = 0,5, b = 4
построения W(x) сначала берется гладкая волна W\ = acos(bwx). Затем
на эту волну накладывается "рябь" W2 = a2 cos(b2nx), имеющая мень™
шую амплитуду и большую частоту, чем W\{x). Затем добавляется еще
более мелкая и густая рябь W$ = a3 cos(b37rx) и т.д. В результате возни™
кает бесконечно изрезанная кривая. Из построения видно одно интересное
свойство этой кривой. На рис. 9.1 а график W(x) приведен для 0 ^ х ^ 1.
Рассмотрим часть кривой, выделенную на рис. 9.1 а прямоугольником. Эта
часть в 1/а раз меньше по вертикали и в Ь раз уже по горизонтали, чем
исходный квадрат. Если эту область увеличить до размеров исходного ква™
драга, то мы увидим почти точно исходную кривую (рис. 9.1 б). Повторяя
построение, можно убедиться, что кривая воспроизводится на любом сколь
угодно малом масштабе. Иначе говоря, имеет место самоподобие — часть
подобна целому.
Разумеется, помимо функции Вейерштрасса (9.1), существует беско-
бесконечное число других "вейерштрассовских" функций, обладающих анало-
142
Нелинейные динамические системы
гичными свойствами самоподобия и недифференцируемости. Достаточно
часто такие функции можно представить в виде
(9.1а)
п=1
где ф(х) — произвольная непрерывная функция.
9.2. Самоподобные множества
С течением времени число известных объектов, обладающих свойством
самоподобия, росло. Так, Дж. Пеано построил примеры кривых, целиком
заполняющих внутренность квадрата. На рис. 9.2 приведено построение
Рис. 9.2. Первые шаги построения кривой Пеано, равномерно заполняющей
квадрат
одной из таких кривых (первые 3 шага). Наконец, нужно упомянуть ис-
исследования Г. Кантора по теории множеств и, в частности, открытое им
A883 г.) так называемое канторово множество — нигде не плотное под-
подмножество отрезка [0, 1], имеющее мощность континуума.
Таким образом, в математику прочно вошли объекты, обладающие слож-
сложной структурой. Все это привело к необходимости повышения уровня стро-
гости доказательств, пересмотру ряда, казалось бы, очевидных понятий,
таких как линия, размерность и др. С другой стороны, длительное время
считалось, что все эти "математические штучки" не имеют отношения к ре-
реальной природе и, может быть, встречаются лишь как промежуточная ста-
стадия в теоретических построениях (подобно тому, как ^-функция и связан-
связанные с ней функции неизбежно встречаются при использовании интегралов
Фурье или функций Грина при решении задач математической физики). И
хотя некоторые из специфических математических объектов время от вре-
времени проникали в физические работы (например, траектория броуновского
движения взвешенной частицы в жидкости, открытого Р. Броуном в 1827 г.
и объясненного А. Эйнштейном и М. Смолуховским в 1905-1906 гг.), лишь
во второй половине XX века математические представления о негладких
функциях и геометрических объектах с нетривиальной топологией стали
широко применяться в физике. Оказывается, и функция Вейерштрасса, и
кривые Пеано, и канторово множество — все это примеры фрактальных
множеств или фракталов.
9.3. Канторовы множества 143
Подробное изложение теории фракталов содержится в ставшей класси-
классической монографии: Mandelbrot В.В. Fractals: Form, Chance and Dimension.
San Francisco: Freeman, 1977, 365 p.
9.3. Канторовы множества
Рассмотрим построение классического канторова множества. Возьмем
отрезок [0, 1]. Выбросим его среднюю треть, т.е. интервал A/3, 2/3). Из
оставшихся двух отрезков [0, 1/3] и [2/3, 1] выбросим средние трети, т.е.
интервалы A/9, 2/9) и G/9, 8/9). Из оставшихся четырех отрезков также
выбрасываются их средние трети и так до бесконечности. Первые шаги
описанного процесса проиллюстрированы на рис. 9.3 а.
1/3 1/3 1/3 ^ 0 1
iiii 1-й шаг • •
О 1/3 2/3 1
2-й шаг • • • •
0 1/9 2/9 1/3 2/3 7/9 8/9 1
3-й шаг •••• ••••
нннн нннн •••• •••• •••• ••••
а. б.
Рис. 9.3. Канторово множество: а — построение путем последовательного удале-
удаления интервалов, б — поточечное построение
После бесконечного процесса "выбраковки" остается некоторое мно™
жество точек, которое мы обозначим символом С. Любая точка этого мно-
множества (число) может быть представлена в виде
П=1
где числа /Зп принимают значения 0 или 2. Множество С называется кан-
моровым 1) . Его мера равна нулю. Действительно, на первом шаге уда-
удаляется доля отрезка q = 1/3 и остается 1 — q. На втором шаге удаляется
(l — q)qn остается A — q) — A — q)q = A — qJ. На третьем шаге удаляется
[A — q) — (l — q)q]q = A — qJq и остается A — gK и т. д. Итого, удаляемая
часть составляет
=1 (п = \
удал. q+(q)q + (qfq + ± _ J _
(9.3)
С другой стороны, мощность множества С оставшихся точек равна мощ-
мощности континуума. Действительно, это множество равномощно множеству
всех чисел отрезка [0, 1], что можно показать следующим образом. Предста-
Представим числа отрезка в двоичной записи: А = 0, а±, а^, • • •, ап, ..., где числа
) Так построенное множество называют канторовым триадическим.
144 Нелинейные динамические системы
ап равны 0 или 1. Таким образом, каждому числу А сопоставляется после™
довательность {«i, «2, • • • }• Аналогично, согласно (9.2) каждому числу В
сопоставляется последовательность {/5П}. Полагая (Зп = 2ап, мы устанав-
устанавливаем взаимно однозначное соответствие между точками канторова множе™
ства и точками отрезка [0, 1]. Следовательно, канторово множество имеет ту
же мощность, что и множество точек отрезка, т.е. мощность континуума.
Обратим внимание на одну особенность канторова множества. Возь™
мем, например, отрезок [0, 1/3] на рис. 9.3 а. Увеличив его в три раза, полу™
чим множество С±, тождественное множеству С, образованному из всего
отрезка [0, 1]. Если повторить эту процедуру произвольное число раз (т.е.
у множества СП9 возникшего на п-м шаге, выделяется левая треть и эта
последняя растягивается в 3 раза, образуя в результате множество Cn+i),
то на каждом шаге мы будем приходить к исходному множеству: С = С\ =
= С2 = • • • Другими словами, части множества подобны целому множе-
множеству. Это свойство самоподобия называют также масштабной инвариант-
инвариантностью или скейлингом.
Построение, аналогичное проведенному выше, можно проделать, осуще-
осуществляя деление отрезка не на три, а на большее число частей п. При этом
число q = 1/3 в приведенном рассуждении следует заменить на q = 1/п.
Очевидно, длина выброшенной части отрезка по-прежнему равна 1, а оста-
остающееся множество не содержит ни одного
1,01 ^ целого интервала. Свойство самоподобия со-
сохраняется. Про все такие множества говорят,
что они обладают канторовой структурой.
Свойство самоподобия имеет место и
для другого множества — канторовой лест-
лестницы (часто называемого также "дьяволь-
"дьявольской лестницей"), имеющего приложения в
теории нелинейных динамических систем.
Способ построения такой лестницы состоит
, , в следующем. На 1-м шаге всем точкам
с абсциссами в интервале [1/3, 2/3] при-
Рис. 9.4. Канторова лестница сваивается значение 1/2. На втором шаге
("дьявольская лестница") точкам из интервала [1/9, 2/9] присваива-
присваивается значение 1/4, а точкам из интервала
[7/9, 8/9] — значение 3/4 и т. д. В результате возникает функция, первые
шаги построения которой показаны на рис. 9.4.
Эта функция непрерывна и монотонна, причем ее производная опре-
определена и равна нулю на множестве меры 1. Родство канторовой лестницы
с канторовым множеством очевидно.
9.4. Кривые Кожа
Наряду с канторовыми множествами свойством самоподобия обладают
и иные объекты. Выше мы уже привели пример такого объекта — кривой
0,5
9.4. Кривые Коха
145
Рис. 9.5. Первые шаги построения кривой Пеано, равномерно заполняющей
треугольник
Пеано (рис. 9.2). На рис. 9.5 показано построение кривой Пеано, равномер-
но заполняющей треугольник. Самоподобие таких кривых следует из того,
что на каждом шаге происходит переход к более мелкому масштабу, но ал-
алгоритм преобразования участков кривой остается одинаковым независимо
от масштаба (аналогично построению канторовых множеств). В результате
возникают объекты со сложной структурой. Такие объекты названы фрак-
фракталами (от франц. и англ. fraction — часть, частица, доля).
Рассмотрим еще один класс фрактальных структур — так называемые
кривые (или фигуры) Коха.
На рис. 9.6 показано построение (первые три шага) одной из простей™
ших кривых этого типа. Процедура построения, предложенная фон Кохом,
состоит в следующем. Берется отрезок единичной длины и делится на три
^
Рис. 9.6. Первые шаги построения одной из кривых Коха
равные части. Средняя часть заменяется двухзвенной ломаной кривой со
звеньями равной длины. В результате возникает ломаная четырехзвенная
линия с равными звеньями. На втором шаге с каждым из четырех звеньев
проделывается процедура, идентичная описанной. В результате число зве-
звеньев ломаной увеличивается в четыре раза и достигнет 16. Затем процесс
повторяется с каждым из 16 звеньев и так до бесконечности. Таким об™
разом, получается кривая с бесконечно большим числом бесконечно ма-
10 Н.В. Карлов, Н.А. Кириченко
146
Нелинейные динамические системы
Ill 1"
6. I I I 1
в. I ' ¦ 1 ' ' I ' ' 1 ¦ ' I
Рис. 9.7. Алгоритмы построения Рис. 9.8. Фигура Коха, полученная после
простейших кривых Коха четырехкратной итерации по алгоритму (б)
на рис. 9.7
лых звеньев. Легко увидеть аналогию этой кривой с кривой, определяемой
функцией Вейерштрасса (рис. 9.1).
На рис. 9.7 показаны другие алгоритмы (первый шаг) построения кривых
Коха, а на рис. 9.8 показан пример фигуры Коха после четырех шагов пре-
преобразования отрезка с помощью второго алгоритма на рис. 9.7. После мно™
гократных преобразований возникает ажурная линия с мелкой структурой.
Наконец, алгоритм Коха может быть применен и к замкнутым кривым.
Это приводит к образованию так называемых островов Коха — частей плос-
плоскости, имеющих конечную площадь, но очень сложную границу. Пример
острова Коха, построенного с применением алгоритма рис. 9.6 к сторонам
равностороннего треугольника, показан на рис. 9.9.
Рис. 9.9. Остров Коха, полученный
из равностороннего треугольника
применением алгоритма рис. 9.6 к
каждой из его сторон
9.5. Фрактальные множества на плоскости и в пространстве 147
9.5. Фрактальные множества на плоскости и в пространстве
Рассмотрим построение так называемого ковра Серпинского. Эта про-
процедура показана на рис. 9.10 и состоит в следующем. Берется квадрат со
стороной, равной единице. На первом шаге он делится на 9 равных ква-
4 5
Рис. 9.10. Первые шаги построения ковра Серпинского
дратов (со стороной 1/3), и все внутренние точки центрального квадрата
удаляются (на рис. 9.10 эта часть заштрихована). На втором шаге так же
поступают с оставшимися 8 квадратами, причем возникают уже 64 ква-
квадрата (со стороной 1/9). Далее процесс повторяется на всё более и более
мелких масштабах. Нетрудно найти, что суммарная площадь выброшен™
ных квадратов равна единице:
^удал. — -
9
9
(9.4)
подобно тому, как это имело место в случае канторова множества —
см. (9.3). Оставшееся множество точек называется ковром Серпинского.
Очевидно, что мощность этого множества равна мощности континуума,
поскольку на каждом шаге построения мы проводим процедуру, анало-
аналогичную той, которая выполнялась при построении канторова множества
(рис. 9.3 а), с той лишь разницей, что здесь она осуществлена на плоскости
(в двух измерениях).
148
Нелинейные динамические системы
/
/
/
А
ц
f
/
V
/
/
/
/
Рис. 9.11. Элементарные ячейки шести фракталов
Как видно из приведенного построения, достаточно задать алгоритм
одного шага преобразования, чтобы восстановить структуру фрактала на
любых масштабах. На рис. 9.11 показаны первые шаги построения неко-
некоторых фракталов на плоскости и в 3-мерном пространстве. На этом рисун-
рисунке шаблон (а) задает рассмотренный выше ковер Серпинского, шаблон (в)
есть треугольная кривая Серпинского; шаблон (б) соответствует делению
квадрата на 16 частей и удалению четырех внутренних квадратов. Постро-
Построение трехмерного фрактала (шаблон (д)) состоит в том, что куб делится
плоскостями, параллельными его граням, на 27 равных кубов. Централь-
Центральный куб удаляется. Кроме того, удаляются все кубы, прилегающие к нему
по двумерным граням. С каждым из оставшихся 20 кубов проделывает™
ся точно такое же построение, в результате чего возникает уже 400 ку-
кубов, и т.д. Объект, возникший после бесконечного числа шагов, называ-
называется универсальной кривой Менгера. Последняя представляет собой трех-
трехмерный аналог канторова множества.
Обратим внимание на различие между фракталами, образуемыми по
шаблонам (а), (б) на рис. 9.11, с одной стороны, и по шаблонам (в\ (г) —
с другой. Элементарные ячейки (шаблоны) в случаях (в) и (г) можно раз-
разделить на две несвязные части, удалив конечное число точек (две — для
шаблона (в); две или три — для шаблона (г)). Эти точки на рис. 9.1 \в пока-
показаны стрелками. Ячейки же (а) и (б) можно разрезать на несвязные части,
9.6. Длина береговой линии 149
лишь удалив бесконечное число точек. Минимальное число точек, которое
необходимо удалить для разрезания элементарной ячейки на две несвя-
несвязанные части, называется разветвленностъю г фрактала. Для объектов,
показанных на рис. 9.11 в, г, е, имеем соответственно г = 2, г = 2иг = 3.
Объекты же, представленные шаблонами (а), (б) и (Э), имеют бесконечную
разветвление сть.
В заключение этого раздела отметим следующее. До сих пор мы рас™
сматривали построение фрактала с помощью какого-либо детерминирован-
детерминированного алгоритма. В действительности, как это часто имеет место в природе,
может использоваться вероятностный алгоритм. При этом свойство само-
самоподобия у таких фракталов сохраняется "в среднем" — после серии pea™
лизаций или серии масштабных преобразований.
В качестве примера фрактала в природе рассмотрим явление агрега-
агрегации. Пусть имеется твердая поверхность, на которую оседают частицы,
совершающие случайное блуждание в газе (воздухе). Прилипая к поверх-
поверхности, частицы меняют ее форму. Очевидно, что вероятность столкнуться
с бугорком выше, чем вероятность попасть в яму. В результате этого бугор-
бугорки начинают расти. По достижении достаточно большого размера бугорки
Рис. 9.12. Развитие неустойчивости формы поверхности при осаждении частиц из
газовой фазы
теряют правильную форму — на них появляются ветви и т.д. В результате
формируется осадок, имеющий фрактальную структуру (рис. 9.12).
Другим примером вероятностного фрактала являются хорошо извест-
известные "морозные" цветы на оконных стеклах.
9.6. Длина береговой линии
Рассмотрим эффектный пример фрактала, обнаруженного при опреде-
определении длины береговой линии. В свое время этот пример вызвал довольно
сильную эмоциональную реакцию у геодезистов и картографов. Хорошо
известно, что типичная береговая линия сильно изрезана. Будем измерять
ее длину между двумя точками А и В. Сначала расставим вешки вдоль
береговой линии на расстоянии I = 1 км одна от другой. Соответственно
длина линии будет равна L® = (Щ — 1)Iq, где Щ — число проставленных
вешек (включающее граничные точки А и В). Для следующего измерения
мы возьмем масштаб h = Iq/10, т.е. уменьшим расстояние между вешка-
вешками в 10 раз. Получим длину L\ = (iVi — l)Zi, и так будем продолжать
измерение, уменьшая масштаб и проставляя вешки в непосредственной
150 Нелинейные динамические системы
близости от воды (предполагается, что волнение воды столь мало, что по-
позволяет ставить вешки с достаточно высокой точностью). Ясно, что из-
за изрезанности береговой линии результат измерения будет меняться при
изменении масштаба, причем чем мельче выбранный масштаб I, тем точнее
учитываются неровности берега и тем большую длину L мы получим.
Оказалось, что для Великобритании найденная таким путем зависи-
зависимость имеет вид
где Lq — расстояние между точками А и В по прямой, I — величина вы-
выбранного масштаба (расстояние между вешками), а величина cf ~ 1,3. Со-
Соотношение (9.5) было установлено при измерениях с масштабами в диа-
диапазоне 10 км ^ I ^ 1000 км. Неограниченный рост L при уменьшении I
отражает сильную изрезанность берега, являющуюся характерным свой-
свойством фрактального множества. Разумеется, это множество не является
регулярным фракталом, но, как и большинство "вероятностных" фракта-
фракталов, оно обладает ("в среднем") всеми основными свойствами регуляр™
ных структур. Следует также иметь в виду, что при сохранении
зависимости (9.5) значения показателя d могут различаться для разных
береговых линии, поскольку характер изрезанности определяется сово-
совокупностью геологических и климатических факторов.
Наконец, отметим, что фракталами являются снежинки и частицы са-
сажи. Фрактальными свойствами обладают звездные скопления (метагалак-
(метагалактики) и вихри в турбулентном течении жидкости.
Таким образом, вопрос о предельном переходе при определении коли™
чественных характеристик фрактальных множеств оказывается централь-
центральным. Подчеркнем, что некорректное проведение процедуры предельного
перехода может приводить к парадоксальным результатам даже в простей-
простейших, "школьных" ситуациях (см. комментарий 22).
9.7. Определение линии
Для более строгого обоснования ряда математических утверждений
требуется дать формальные определения таким понятиям, как линия, ко-
которые в меньшей степени опирались бы на интуитивные представления
о кривой как топологическом эквиваленте прямой линии — "длины без
ширины".
Точное и достаточно общее определение линии представляет значи-
значительные трудности 1) . Мы приведем три определения, используемые в
различных разделах математики.
) Здесь возникает известная проблема: практически любая формализация какого-либо
понятия неизбежно ведет к тому, что под определение будут попадать, наряду с требуемыми,
и такие объекты, которые имеют весьма отдаленное сходство с рассматриваемыми вначале.
Например, под известное определение Платона "человек — это двуногое без перьев"
попадает согласно Диогену и ощипанная курица.
9.8. Топологическая размерность 151
1) Естественное определение.
Рассмотримр-мерное пространство Rp с координатами {х±, x<i, • • •, хр}.
Пусть имеется р непрерывных функций
хг = (fi(t), х2 = <P2(i), • • •, хр = (pp(t) или кратко х = у>(?), (9.6)
заданных на отрезке [tH, tK]. Тогда уравнения (9.6) определяют в парамет-
параметрическом виде непрерывную кривую в Rp, соединяющую точки Мн =
= {х^ = ^(^н)} и Мк = {х^ = (f(tK)}. Определенная таким образом
линия представляет собой упорядоченное множество точек, порядок обхо-
обхода которых задается прямым порядком перебора точек отрезка [tH, tK]. Эта
кривая может иметь точки самопересечения, т.е. такие точки Mi = {х^ =
= (f(ti)} и М2 = {х^ = (pfo)}, которые имеют одинаковые координаты
(fi(ti) = (fifo), i = 1, 2,..., р. С точки зрения данного определения точки
Mi и М2 считаются различными.
Несколько иной подход предложен К Жорданом A882). Именно, ли™
нией считается множество точек, удовлетворяющих уравнениям (9.6). При
этом точки уже не считаются упорядоченными, а те точки, которые имеют
одинаковые координаты при различных значениях t, не считаются различ-
различными.
2) Определение Кантора.
Более общее определение линии на плоскости было дано Г. Кантором
A870-е гг.): канторовой кривой на плоскости называется континуум, в
окрестности каждой точки которого имеются точки плоскости, не при-
принадлежащие континууму. Легко понять, что этому определению удовле-
удовлетворяет ковер Серпинского, описанный выше (рис. 9.10). Это множество
представляет собой локально связный континуум и может быть получе-
получено, как непрерывный образ отрезка.
3) Определение Урысона.
Одно из наиболее общих определений линии было дано П.С. Урысоном
A921): линией называется одномерный континуум, т.е. связное компактное
метрическое пространство С, каждая точка которого обладает сколь угодно
малой окрестностью с границей размерности нуль. Другими словами, при
любом е > 0 пространство С может быть представлено в виде суммы
конечного числа множеств диаметра, меньшего е9 обладающих тем свой™
ством, что никакие три из этих множеств не имеют общей точки. Этому
определению удовлетворяют не только привычные кривые, но и канторовы
множества (например, ковер Серпинского), а также универсальная кривая
Менгера (рис. 9.11 д).
9.8. Топологическая размерность
Из приведенных выше определений видно, что формализация, обоб™
щение даже такого, казалось бы, очевидного понятия, как линия, вызывает
значительные трудности и приводит к тому, что под определение начинают
попадать не только привычные кривые, но такие объекты, как фракталь-
152 Нелинейные динамические системы
ные множества. Естественно в этой связи корректно определять и такие
характеристики, как размерность, с тем, чтобы их можно было применять
не только к достаточно простым, связным множествам типа отрезка или
куба, но и к фрактальным структурам.
Рассмотрим сначала простейшую характеристику — топологическую
размерность. Это понятие определяется, используя метод индукции, еле™
дующим образом.
Топологическая размерность конечного или счетного множества точек
принимается равной нулю: d,T = 0. Далее, пусть имеется некоторое множе-
множество точек S. Если его можно разделить на несвязанные между собой части
с помощью множества Si размерностью Ut(S\) = 0 (т.е. удалив множество
точек, имеющее размерность d,T(Si) = 0), то размерность множества S
принимается равной
dT{S) = dT(S1) + l. (9.7)
В частности, отрезок можно разделить на две части, удалив точку. Поэтому
йт (отрезок) = йт (точка) + 1 = 1. (9.7 а)
Аналогично, плоскость делится на несвязанные части с помощью кривой
d>T (плоскость) = йт (отрезок) + 1 = 2 (9.16)
и т.д. Из определения следует, что йт — целое число.
Несмотря на простоту и естественность приведенного определения, воз™
можности применения его для описания фрактальных объектов, таких, на™
пример, как канторовы множества или кривые Пеано, явно ограничены.
В самом деле, какую размерность нужно приписать канторову множеству:
0 или 1? С одной стороны, следует положить йт = 0, поскольку это мно-
множество не содержит ни одного целого интервала. Кроме того, его можно
строить поточечно, в соответствии е формулой B) (рис. 9.3 б). Действи-
Действительно, возьмем сначала пару точек 0 и 1. На втором шаге добавим меж™
ду ними две точки, удаленные на расстояние 1/3 от исходных. Возника-
Возникают две пары: @, 1/3) и B/3, 1). Между точками этих пар проставляются
по две новые точки, удаленные на расстояние по 1/9 от концевых точек
пар. В результате возникают уже 4 пары: @, 1/9), B/9, 1/3), B/3, 7/9),
(8/9, 1), с каждой из которых проделывается описанное преобразование, и
так до бесконечности. Таким образом, "строительными элементами" кан™
торова множества являются блоки с топологической размерностью йт =
= 0, причем на каждом шаге построения возникает множество с конечным
числом точек, для которого йт = 0. Но с другой стороны, получающееся
в пределе множество уже имеет мощность континуума и значение йт = 0
явно неудовлетворительно характеризует свойства такого объекта.
Аналогично, кривым Пеано естественно было бы приписать размер™
ность 1 (как кривым), но с другой стороны, они плотно заполняют часть
плоскости и поэтому близки (в определенном смысле) к объектам с раз™
мерностью 2. Последнее становится очевидным, если, по аналогии с опре™
делением линии по Жордану, рассматривать кривую как неупорядоченное
9.9. Фрактальные размерности 153
множество точек. В связи со сказанным оказывается необходимым дать
иное, более общее определение размерности, которое учитывало бы вну-
внутреннюю структуру множества и позволяло бы отличать фрактальные мно-
множества от обычных геометрических объектов. Эту задачу решают приво-
приводимые ниже определения фрактальной размерности.
9.9. Фрактальные размерности
Одной из первых характеристик, пригодных для описания фракталов, бы™
ла размерность, введенная Ф. Хаусдорфом в 1919 г. Мы начнем с несколько
более простого определения.
Пусть имеется некоторое множество S в р-мерном пространстве. Будем
покрывать это множество р-мерными шарами диаметром е. В некоторых
случаях вместо шаров удобно использовать р-мерные кубы со стороной
Е. Минимальное количество шаров, необходимых для полного покрытия,
обозначим N(e). Величина
i^M (9„8)
/e)
называется фрактальной размерностью 1) или ёмкостью множества S.
Индекс "с" (от англ. capacity) указывает на второе название введенной раз-
размерности. Согласно (9.8)
N(e)~e-dc. (9.9)
Для простых геометрических объектов величина dc совпадает с их то-
пологической размерностью йт. В самом деле, число шаров диаметра е,
необходимых для покрытия отрезка, равно N(s) = L/s9 где L — длина
отрезка. Тогда из (9.8), (9.9) видно, что 6^ = 1. Аналогично, для покры-
покрытия квадрата площадью а требуется число кубов (со стороной е\ равное
N(e) = а/е2, так что согласно (9.9) dT = 2, и т.д.
Принципиально иная ситуация возникает в случае фрактальных мно-
множеств Рассмотрим сначала канторово (триадическое) множество. Исход-
Исходный отрезок покрывается одним шаром диаметра е = 1. После первого
шага требуется N = 2 шара диаметром е = 1/3. На следующем шаге
уже требуется N = 22 шаров диаметром е = 1/32, Вообще, на п-шаге
необходимо N = 2п шаров диаметром е = 1/Зп. По формуле (9.8) находим
, r lnBn) In 2
ас = lim —-—- = «0,631. (9.10)
п^оо 1п(Зп) ЬЗ
Таким образом, для канторова множества размерность является дробной,
причем 0 < dc < 1.
В качестве второго примера рассмотрим ковер Серпинского (рис. 9.10).
Подобно тому, как было сделано выше 2), находим, что исходный ква-
) Иногда ее называют размерностью Минковского.
) В случае ковра Серпинского удобно поверхность покрывать не шарами, а кубами,
что, как известно, эквивалентно.
154 Нелинейные динамические системы
драт покрывается N = 1 кубом со стороной е = 1. После первого шага
требуется N = 8 кубов со стороной е = 1/3 и т. д. После га-го шага
построения потребуется N = 8П кубов со стороной е = 1/Зп. Таким
образом, фрактальная размерность (емкость) ковра Серпинского
r ln(8n) In8 1ono m 11Ч
= lim —-—- = « 1,893, (9.11)
lC) ЬЗ
т.е. 1 < dc < 2. Это означает, что данное множество по топологическим
свойствам находится как бы между отрезком и квадратом.
Найдем теперь фрактальную размерность кривых Коха (рис. 9.6, 9.7).
Для кривой на рис. 9.6 находим: вначале требуется N = 1 шар диаметром
s = 1; после первого шага требуется N = 4 шара диаметром е = 1/3; ... ;
после га-го шага нужно N = 4п шаров диаметром е = 1/Зп и т.д. Отсюда
емкость данной фигуры
4 = ^ и 1,262. (9.12)
in о
Аналогично, для фигур, показанных на рис. 9.7. находим:
, In 5 , , Л , In 8 (ГЛ j In 18 . ч
4 = ^^ (для ФИГУРЫ а) dc = ^—: (б) ас = —— (в).
In 3 In 4 In 6
Отметим одно существенное обстоятельство. Для всех фигур Коха
dc > 1. Согласно (9.9) длина фигуры
)"С. (9.13)
т.е. L —>- оо при е —>• 0: кривые Коха имеют бесконечную длину.
Заметим, что выше при обсуждении длины береговой линии мы при™
вели соотношение (9.5). Легко понять, что показатель степени d есть фрак-
фрактальная размерность береговой линии. Приведенное там значение d « 1,3
свидетельствует, что эта линия является настоящим фрактальным множе-
множеством, "толстой" линией, подобной кривым Коха.
Приведенные примеры позволяют сформулировать простое прави-
правило нахождения dc для множеств, которые строятся по какому-либо регу-
регулярному алгоритму: нужно установить, во сколько раз возрастает число
структурных элементов и во сколько раз уменьшается их линейный размер
после одного шага построения. Отношение логарифмов этих величин и
дает фрактальную размерность рассматриваемого множества. Пользуясь
этим правилом, найдем, например, что для универсальной кривой Менгера
(рис. 9.11 д) dc = 1п20/1пЗ « 2,727.
Для всех объектов, которые мы называли фрактальными множества™
ми, фрактальная размерность dc превышает размерность топологическую
dT- Именно этот признак наиболее ярко отличает фракталы от обычных
геометрических объектов, имеющих dc = с!т- Поэтому (в соответствии
с принятой практикой) фрактальными множествами мы называем такие
объекты, для которых dc > dx-
9.10. Клеточные автоматы 155
Наряду с емкостью dc часто рассматривают иные размерности. Мы да-
дим определение одной из них, называемой размерностью Хаусдорфа-
Безиковича. Пусть задано множество S в р-мерном пространстве. Рассмо-
Рассмотрим покрытие этого множества шарами с диаметрами е^ ^ е. В отличие
от определения dc здесь покрытие осуществляется шарами, вообще говоря,
неодинаковых диаметров. Образуем сумму
Ще)
А=Е4 (9.14)
k=i
где N(e) — число используемых шаров. Обозначим l(e) = inf Л, где точная
нижняя грань берется по всем возможным покрытиям, для которых Ek ^
^ е. Далее ищется предел rrid(S) = ]im?^o l(s). Этот предел называется
хаусдорфовой d-мерой множества S. Существует значение d, обозначаемое
dff, такое что rrid(S) = 0 при d > dff и rrid(S) = оо при d < dff. Число dff
называется размерностью Хаусдорфа-Безиковича. Индекс "Ж" указывает
на фамилию Хаусдорфа (Hausdorf).
Нетрудно показать, что если бы в приведенном определении мы ис-
использовали покрытие шарами одного диаметра, то пришли бы к значению
d = dc. В связи же с тем, что при вычислении dff используется миними-
минимизация по всем покрытиям, (т.е. по множеству покрытий, более широкому,
чем использованное при нахождении dc)9 находим:
dT < dff ^ dc. (9.15)
Здесь также учтено (левое неравенство), что фрактальная размерность все-
всегда оказывается не меньшей, чем топологическая.
9.10. Клеточные автоматы
Рассмотренные выше понятия получили широкое распространение не
только в теории функций, дифференциальной геометрии и топологии. Ока™
залось, что фрактальные структуры возникают и при анализе эволюции
многих нелинейных систем. Именно с их наличием связано сложное, хао-
хаотическое изменение состояния таких систем во времени.
Поведение динамических систем описывается уравнениями (диффе™
ренциальными, разностными и т.д.) или определенными правилами (ал-
(алгоритмами), позволяющими найти состояние этих систем в каждый мо-
момент времени, если оно известно в предыдущий момент. Тривиальный
пример динамической системы с непрерывным временем дает материаль-
материальная точка массы т9 на которую действует сила F. Состояние этой системы
характеризуется положением r(t) и скоростью v(t) точки, которые могут
быть найдены на основании 2-го закона Ньютона путем решения диффе-
дифференциальных уравнений движения
dr d(mv)=R
dt dt V '
156 Нелинейные динамические системы
Примерами абстрактных динамических систем являются числовые или
функциональные последовательности {ап, п = 1, 2, ..., п}9 для которых
задан алгоритм нахождения произвольного члена аП9 если известно конеч™
ное число начальных членов. Обычно такие последовательности задаются
рекуррентными соотношениями типа
an+i = f(a>n) или ап+2 = f(an, an+i) (9.17)
Такие системы называют иногда динамическими системами с дискретным
временем: роль времени играет номер члена последовательности. Приме™
ром является геометрическая прогрессия an+i = gan, где q — знаменатель
прогрессии. Если известно начальное значение ао, то в произвольный мо™
мент "времени" п имеем ап = aoqn.
Произвольная система с непрерывным временем может быть сведена
к системе с дискретным временем. Пример такого сведения рассмотрен
в задаче 13.
Имея в виду сказанное, проследим за возникновением фрактальных
структур в динамических системах с дискретным временем.
Рассмотрим сначала так называемые клеточные автоматы. Их непре-
непрерывным аналогом является сплошная среда с тем или иным законом вза™
имодействия ее элементов. Переход от сплошной среды к ее дискретному
представлению (дискретизация) состоит в замене непрерывной среды на
набор конечного или счетного числа точечных (бесструктурных) элемен-
элементов, взаимодействующих друг е другом. Например, в ряде задач свойства
твердого тела можно описать, заменив его набором твердых шариков, со™
единенных пружинками. Задавая закон взаимодействия элементов среды
(или клеток) друг с другом, мы получаем различные дискретные дина-
динамические системы, называемые клеточными автоматами 1) .
При этом и время также бывает удобно рассматривать как дискретную
переменную. Отметим, что построенный так автомат представляет собой
не что иное, как алгоритм численного решения, например, уравнений в
частных производных 2) .
Проследим теперь на примере работы простейшего клеточного авто-
автомата за возникновением фрактальных структур в динамической системе.
Подчеркнем, однако, что, несмотря на логическую простоту рассматрива-
рассматриваемого далее автомата, его "приборная" реализация может встретиться с се™
рьезными техническими трудностями. Автомат, работающий в точности по
такому алгоритму, вследствие высокого уровня идеализации вряд ли встре-
встречается в природе. Однако динамические системы с качественно близкой
) Употребление слова "автомат" в этом термине отражает тот факт, что после "вклю-
"включения" (т.е. после задания начальных условий) это "устройство" работает автоматически,
следуя законам своей внутренней логики.
) В этой связи представляется неудивительным возникновение идеи клеточного
автомата у создателей кибернетики А. Тьюринга и Н. Винера.
9.10. Клеточные автоматы
157
логикой поведения наверняка осуществляются в тех или иных ситуациях,
игровых или реальных 1) .
Рассмотрим одномерную бесконечную цепочку тождественных эле-
элементов (клеток), взаимодействующих только с ближайшими соседями.
Будем считать, что каждая клетка может пребывать в одном из двух со™
стояний — "покоя" или "возбуждения". Если клетка в момент времени
t находится в состоянии возбуждения, то в момент времени t + 1 она
переходит в состояние покоя, послав свое возбуждение в виде некоторого
сигнала в обе стороны. По предположению сигнал доходит до соседних
клеток в тот же самый момент времени t + 1. Под действием сигнала
невозбужденные клетки переходят в возбужденное состояние мгновен-
мгновенно и при условии, что сигнал поступает только с одной стороны (от од-
одной из двух соседних клеток). Если сигнал приходит с двух сторон, то
клетка не возбуждается (противоположно направленные сигналы гасят
друг друга).
Посмотрим, как работает этот автомат, если в начальный момент вре-
времени t = 0 возбудить одну единственную клетку. Будем представлять
результаты на плоскости (t, ж), где х — дискретная координата вдоль це-
цепочки, at — дискретное время (см. рис. 9.13). На этом рисунке зачерне-
Рис. 9.13. Пример возникновения фрактальной структуры при работе клеточного
автомата
ны возбужденные клетки. Возникновение на плоскости (t, x) фракталь™
ного множества при этом очевидно. В отличие от рассмотренных выше
фракталов, в случае клеточного автомата фрактализация происходит при
увеличении захватываемой возбуждением области, а не при углублении в
области все более и более мелких масштабов.
Задавая автомату иные алгоритмы взаимодействия клеток, можно по-
получить фрактальные множества с другой внутренней структурой. Еще
большего разнообразия можно достичь, переходя от одномерных авто-
автоматов к многомерным.
) Ср. М. Гелл-Ман: "В физике — как в тоталитарном государстве: все, что разрешено —
обязательно"
158 Нелинейные динамические системы
9.11. Фрактальные структуры в точечных отображениях
В предыдущей главе рассматривалось сложное поведение динамиче-
ских систем, описываемых одномерными точечными отображениями. Во
многих случаях, однако, более точное описание требует построения дву™
мерных отображений. Такое представление расширяет возможности моде-
моделирования различных стохастических режимов, охватывает более широ™
кий класс динамических систем — диссипативных и консервативных, по-
позволяет легче увидеть фрактальную структуру динамического хаоса. Рас™
смотрим точечное отображение
9 щ
Уп+1 = Ъхп, а, Ь > О,
известное как квадратичное отображение Хенона. Фазовое пространство
этой системы двумерно. Система диссипативна, поэтому ее фазовый объ-
объем с течением времени уменьшается. Действительно, скорость изменения
фазового объема V равна
1 dV _ d(xn+i, t/n+i) _
Ь
= -Ь<0. (9.19)
V dt д(хп, Уп) 1 Q
так что V = Voe^bt. Следовательно, последовательные точки отображе-
отображения по мере роста "времени" сходятся к некоторому предельному множе-
множеству — аттрактору. Динамика системы и вид аттрактора существенно за™
висят от конкретных значений параметров а жЪ. Положим а = 1,4, Ъ =
= 0,3. Будем вычислять по формулам (9.18) последовательные элементы
последовательности (т.е. пары (жп, уп) для п = 1, 2, ...) и нанесем эти
точки на плоскость с координатами (ж, у). На рис. 9.14а показаны пер-
первые 104 точек, полученных согласно (9.18) начиная с х® = 0,63135, уп =
= 0,18941. Как видно из графика, точки отображения ложатся на три кри-
кривые. К этим же трем кривым сходятся точки и при ином выборе начальных
данных (хо, 2/о)« В связи с этим полученные кривые образуют аттрактор —
притягивающее множество точек отображения (9.18).
Рассмотрим внимательнее аттрактор Хенона. Возьмем участок кривых,
выделенный на рис. 9.14 а квадратиком, и увеличим его до размеров исход™
ного квадрата (рис. 9.146). Мы видим, что произошло расщепление ли-
линий на две или более компоненты. Если квадратик на рис. 9.146 также
увеличить, то обнаружится (см. рис. 9.14 в) новое расщепление кривых,
причем по тому же правилу, что и на рис. 9.14 б Аналогичное расщепление
происходит и на более мелких масштабах.
Таким образом, кривые на рис. 9.14 а имеют сложную внутреннюю
структуру. Эта структура аналогична канторову множеству, рассмотренно-
рассмотренному выше, и представляет собой регулярный фрактал. Вычисление его раз-
размерности (емкости dc) показало, что для случая, показанного на рис. 9.14,
dc « 1,262. Статистический анализ также показывает, что последователь™
9.12. Системы итерированных функций
159
-0,44
-1,0
0,525
0,625
0,725
Уп
0,191
0,188
0,185
0,625
0,6315
0,641
Рис. 9.14. а — аттрактор Хенона, по-
построенный по 104 итерациям отобра-
отображения (9.18); б — область, выделен-
выделенная на рис. 9.14 а прямоугольником.
Использовано 105 итераций отображе-
отображения (9.18); в — область, выделенная
на рис. 9.14 в прямоугольником. Ис-
Использовано 106 итераций отображения
(9 Л 8)
ность точек (xnj yn), образующая кривые на рис. 9.14, обладает всеми
свойствами случайных последовательностей, несмотря на наличие стро-
строго детерминированного алгоритма ее нахождения.
9.12. Системы итерированных функций
В отличие от обсуждавшихся выше нелинейных точечных отображе-
отображений мы рассмотрим теперь системы линейных функций (отображений), за™
дающих аффинные преобразования плоскости. Каждое из преобразований
Т^ системы можно записать в виде:
(9.20)
Здесь матрица А осуществляет деформацию исходного множества, а век-
вектор Ь — параллельный сдвиг. Отображения (9.20) должны быть сжимаю-
сжимающими: Si = det A{ < 1.
Систему функций мы получим, рассматривая совместно набор п ото-
отображений Т = {Ti,T2,..., Tn}. Число отображений Т^, входящих в
систему, может быть произвольным. Однако использование даже неболь-
160 Нелинейные динамические системы
шого их числа (от двух до пяти) уже позволяет получить большое число
нетривиальных структур.
Алгоритм действия отображения Т состоит в следующем. Зададим неко-
некоторое начальное компактное множество точек Eq на плоскости. Первое при™
менение Т к этому множеству (т.е. первая итерация) дает множество
Ег = Т(Е0) = Тг(Е0) U Т2(^0) U ... U Тп(Е0). (921)
Иными словами, мы должны применить каждое из отображений Т^ к ис-
исходному множеству, а затем взять объединение получившихся множеств.
Следующие итерации можно записать в следующем виде:
Ет+1 = Т(Ет) = T!(?m) U T2(Em) U ... U Тп(Ет). (9.22)
Системой итерированных функций (СИФ) называется совокупность
отображений Т^ совместно с итерационной схемой (9.21), (9.22).
Задаваясь некоторым начальным множеством Ео и выполняя итераци-
итерационную процедуру (9.22), мы приходим к последовательности множеств
{Ei, ?^2, • • •, Emj ...}. Эта последовательность сходится к некоторому пре~
дельному множеству
Е= lim Em= lim Tm(E0). (9.23)
т—>оо т—»оо
Можно доказать, что 1) преобразование Т является сжимающим с ко™
эффициентом сжатия s = max{si, «2, • • •, ^п} и 2) при любом выборе на-
начального множества EQ последовательные итерации отображения Т будут
сходиться к одному и тому же предельному множеству Е, являющемуся
аттрактором СИФ.
В качестве примера рассмотрим систему из трех отображений:
A (
V 0 1/2/ \xj
A/2) (9.24)
х2) V 0 1/2/ \x2
хг\ _ /1/2 0 \ /V
" V о 1/2/W ' VV3/4y
Каждое из этих отображений является сжимающим со скоростью сжа-
сжатия 5 = 1/4.
Если в качестве начального множества Eq
взять треугольник с вершинами @,0), A,0),
A/2, \/3/2), то в результате применения к
нему отображения Т = {Ть Т2, Т3} по-
получим множество Ei, состоящее из трех тре-
Рис. 9.15. Действие аффин- угольников меньшего размера (см. рис. 9.15).
ного преобразования (9.24) Повторное применение отображения приво-
на треугольник (первый шаг) дит к аналогичному дроблению треугольни™
9.12. Системы итерированных функций 161
ков, входящих в Ei. Легко понять, что предел итераций даст треугольный
ковер Серпинского (показанный на рис. 9.13).
Если в качестве начального множества Ео взять квадрат, то на каждом
шаге мы будем получать фигуру, состоящую из квадратов (см. рис. 9.16).
¦ ¦ ¦¦ АЛ ¦¦¦¦
¦ ¦ ¦ ¦ А А А А
¦ ¦¦¦¦BBI ¦¦¦¦¦ я iuim
Рис. 9.16. Первые шаги образования ковра Серпинского при действии отображе-
отображения (9.24) на квадрат
Однако предел итераций будет сходиться к тому же треугольному ковру
Серпинского (рис. 9.13).
Описанная процедура называется детерминированным алгоритмом и
по существу она задает обычную динамическую систему. Можно, а зача-
зачастую и удобно, организовать действие отображения Т следующим обра-
образом. Выберем произвольную точку х® на плоскости. На первом шаге мы
случайно выбираем одно из отображений Ti, T2, Т3 и применяем его к
точке xq. В результате получим точку х\. На следующем шаге также слу-
случайным образом выбираем одно из отображений Ti, T2, Т3 и применяем
его к точке xi, получая в результате точку Х2 и т.д. Таким образом, мы
получаем случайную последовательность {xi, #2, • • • }• Если нанести эти
точки на плоскость 1) , то получим множество, представляющее собой ат-
аттрактор СИФ для случайного блуждания точки. Существенно, однако, что
это множество в точности совпадает с предельным множеством в детерми-
детерминированном алгоритме. Процедура, основанная на случайном выборе ото-
отображения Ti, входящего в СИФ, называется рандомизированным алгорит-
) Строго говоря, следует исключить несколько первых точек последовательности,
поскольку они могут еще не достигнуть аттрактора.
11 Н.В. Карлов, Н.А. Кириченко
162
Нелинейные динамические системы
Рис. 9.17. Фигура "Лист", порождаемая отображением (9.25)
мом 1) . Данный алгоритм более прост для компьютерной реализации, требует
меньшего объема памяти и на каждом шаге сразу выдает точку аттрактора.
Следует подчеркнуть, что, как и в случае обсуждавшихся выше динамиче-
динамических систем, аттрактор СИФ не всегда обладает фрактальной структурой.
Обратим внимание на следующее. Если бы мы взяли какую-либо на™
чальную точку и стали применять к ней компоненты Т^ отображения Т в
строго определенной последовательности, то пришли бы к набору цикли-
циклических точек. Например, в случае отображения Т = {Ti, T2} это своди-
лось бы к алгоритму
*l=Ti(z0), *2 = T2Bi), 23 = Ti(*2), Z4=T2(Z3) И Т.Д.,
а две циклические точки определялись бы из систем линейных неоднород-
неоднородных уравнений
или
Именно для того, чтобы не возникали циклические точки, отображение Т
должно применяться либо к некоторому компактному множеству на плоско-
плоскости (множеству ненулевой меры), либо необходимо использовать случайный
(нерегулярный) выбор компонентов отображения на каждом шаге итерации.
Не останавливаясь на более подробном анализе свойств СИФ, приве™
дем некоторые примеры аттракторов-фракталов. Для их построения ис-
использовался рандомизированный алгоритм.
) Этот алгоритм часто называют игрой "Хаос".
9.12. Системы итерированных функций 163
Рис. 9.18. Фигура "Папоротник", порождаемая отображением (9.26)
Рис. 9.19. Фигура "Кристалл", порождаемая отображением (9.27)
11*
164 Нелинейные динамические системы
Фигура "лист", показанная на рис. 9.17, порождается отображением
{Ti, T2}, в котором
_ Д),4000 -0,3733\ (хЛ /0,3533\
\0,0600 0,6000 ) \х2) \0,0000/
(9.25)
f-0,8000 -0,1867\ {хЛ /1,1000\
0,1371 0,8000 ) \х2) \0,1000/ '
Фигура "папоротник", показанная на рис. 9.18, порождается отображе-
отображением {Ti, Т2, Т3, Т4}, в котором
/0,7000 0,0000
\0,0000 0,7000
^0,1000 -0,4330
VO,1732 0,2500
(926)
0,1000 0,4330^
,-0,1732 0,2500у
^0,0000 0,0000\ (хг
v0,0000 0,3000/ \х2
Фигура "кристалл", показанная на рис. 9.19, порождается отображение
ем {Ti, T2, Т3, Т4}, в котором
^0,2550 0,0000
v0,0000 0,2550
^0,2550 0,0000
,0,0000 0,2550
' * - ^ 1 (9.27)
'0,2550 0,0000'
v0,0000 0,2550
^0,3700 -0,6420\
v0,6420 0,3700 ) \х2
Более подробно со свойствами систем итерированных функций и опи-
описываемых ими аттракторов можно познакомиться по книге: Кроновер P.M.
Фракталы и хаос в динамических системах. Основы теории. — М.: Пост-
маркет, 2000, 352 с.
ГЛАВА X
Многопериодическое движение, многомерный тор. Сценарий
Ландау—Хопфа. Случайные процессы, уравнения Ланжевена, урав-
уравнение Фоккера—Планка—Колмогорова. Корреляционная функция.
Динамический хаос. Локальная неустойчивость. Эргодичность и
перемешивание. Преобразование пекаря. Гамилътоновы системы.
Энтропия Колмогорова—Синая (К-энтропия), К-системы. Тео-
Теория устойчивости Колмогорова—Арнольда—Мозера (теория КАМ).
Примеры систем с хаосом: рассеяние материальной точки на
твердых шариках, рассеивающие биллиарды (биллиарды Синая).
Одномерные и двумерные точечные отображения. Жесткий ро-
ротатор (отображение Чирикова-Тэйлора). Стохастические слои,
стохастическое море, стохастическая паутина (паутина Арноль-
Арнольда). Диффузия Арнольда. Диссипативные системы. Аттракторы
и репеллоры. Странный аттрактор. Показатели Ляпунова. Си™
стема Лоренца. Сценарий Рюэля—Такенса. Аттрактор Рёслера.
Ротатор с трением. Квантовый хаос.
10.1. Многопериодические движения. Сценарий Ландау-Хопфа
Реальные физические системы во многих случаях демонстрируют слож™
ное поведение, которое можно воспринимать как хаотическое. Такое пове™
дение обуславливается различными причинами. В предыдущих главах мы
уже сталкивались с возникновением хаоса в динамических системах с дис-
дискретным временем, т.е. в системах, описываемых точечными отображение
ями (отображениями Фейгенбаума и Хенона). Упоминалась также система
Лоренца, задаваемая тремя нелинейными дифференциальными уравнени™
ями (см. F.26)), в которой возникает странный аттрактор.
Вместе с тем выглядящее хаотическим поведение не обязательно явля-
является истинно хаотическим. Так, оно может представлять собой некоторое
многопериодическое движение
X = F (n, т2,..., тп); тг = cjtf, A0.1)
где F — 2тг-периодическая функция по каждому из аргументов. Тогда ес-
если среди частот и есть несоизмеримые, то реализация A0.1) представляет
собой сложное, апериодическое изменение со временем величины X. Рас-
Рассматривая аргументы т как координаты в фазовом пространстве, движение,
166 Нелинейные динамические системы
описываемое формулой A0.1), можно интерпретировать как траекторию,
намотанную на n-мерный тор.
Простейшим, наглядным примером функции F может служить сумма
двух гармоник с несоизмеримыми периодами, F = а\ sint + «2 sln7rf, опи™
сывающая явно апериодическое, но финитное движение. Двухпериодическое
движение возникает, как мы видели в главе II и комментарии 4, в случае двух
связанных линейных осцилляторов (расщепление Вина), а также в системах,
описываемых уравнениями Хилла (см. главу II и комментарий 5).
С возникновением многопериодических движений связан сценарий
Ландау-Хопфа появления турбулентности. Согласно этому сценарию, при
некоторых бифуркационных значениях параметров в функции F в A0.1)
появляются новые аргументы, вносящие дополнительные периоды, несо-
несоизмеримые с уже имеющимися. Например, пусть функция F представлена
в виде ряда
F = ао + а\ sinujit + «2 sina^t + ..., A0.2)
причем коэффициенты щ зависят от некоторого параметра а таким обра™
зом, что
{0, а ^ а7-,
, wn A03)
ai(a) ^ 0, а > щ.
Тогда по мере роста параметра а "включаются" все новые и новые гармони™
ки номера г с несоизмеримыми частотами Ш{. Это означает, что размерность
тора, на который навита фазовая траектория движения A0.1), неограниченно
растет с ростом параметра а. Соответствующее движение носит все более и
более хаотический характер. В пределе, когда число гармоник бесконечно,
результирующее движение фактически не отличается от хаотического.
Однако сценарий Ландау-Хопфа не приводит к возникновению режима
истинно хаотических колебаний, т.е. колебаний, обладающих статистическими
свойствами случайного процесса. Кроме того, для нелинейных динамических
систем сценарий Ландау-Хопфа структурно неустойчив, т.е. нетипичен: как
правило, цепочка бифуркаций A0.3) обрывается уже после первых несколь-
нескольких шагов, после чего скачком возникает настоящий динамический хаос.
10.2. Случайные процессы
Прежде чем перейти к последовательному рассмотрению явления дина™
мического хаоса, отметим, что хаос (стохастическое поведение) изначально
ассоциировался со случайными процессами, обладающими определенными
статистическими свойствами. Такие процессы могут быть связаны со слу-
случайными внешними воздействиями, а также с флуктуациями внутренних па-
параметров системы. Примерами могут служить броуновское движение, шумы
в радиотехнических устройствах (дробовой и тепловой шумы), тепловое из™
лучение и т.п. Описание случайных процессов осуществляется с помощью
либо стохастических уравнений движения (уравнений Ланжевена, см. ком™
10.3. Локальная неустойчивость 167
ментарий 23), либо уравнений для функций распределения (например, урав-
уравнения Фоккера-Шанка-Колмогорова, см. комментарий 24).
Случайный процесс характеризуется такими параметрами, как сред™
нее, дисперсия, корреляционная функция, спектральная функция. Важным
признаком случайности процесса является убывание корреляций по ме-
мере увеличения интервала времени между сопоставляемыми наблюдениями
(измерениями) u(t):
К(т) = (u(t + r)u(t)) ~^0 при t^og. A0.4)
Здесь угловые скобки означают усреднение по ансамблю реализаций. Это-
Этому условию не удовлетворяют, вообще говоря, многопериодические движе™
ния, которые описываются уравнениями типа A0.1), A0.2). Кроме того, спек™
тральный анализ таких движений выявляет наличие лишь конечного числа
несоизмеримых частот и (или) счетного или конечного числа кратных
частот. Поэтому многопериодические движения и колебания в линейных си™
стемах (если, конечно, внешние силы не меняются стохастически) не обла-
обладают необходимыми свойствами истинно стохастических колебаний.
Напротив, исследования нелинейных динамических систем показывают,
что для них характерны такие режимы поведения, которые обладают
свойствами случайных процессов. Это поведение представляет собой дина-
динамический хаос, который и будет предметом изучения в этой главы. Парадок-
Парадоксальность утверждения о возможности существования хаоса в динамической
системе следует из того, что это явление возникает в отсутствие каких-либо
случайных факторов и полностью определяется начальными условиями, т.е.
оно полностью детерминировано. Иллюстрацией может служить математи-
математический маятник с периодически колеблющейся точкой подвеса. Возмущение
маятника не случайно, однако его движение может быть как условно-
периодическим, так и случайным, в зависимости от выбираемых начальных
условий. Явление хаоса присуще большинству нелинейных систем, как
автономных, так и неавтономных. Однако оно может оказаться трудно
наблюдаемым, если хаос является слабым или медленным (т.е. наблюдается
на очень больших временах), либо если он существует в узком диапазоне
значений параметров.
10.3. Локальная неустойчивость
Существование хаоса в динамических системах связано со специфиче-
специфической неустойчивостью, называемой локальной неустойчивостью и опреде-
определяемой следующим образом. Пусть z(t) — точка в фазовом пространстве,
определяющая состояние системы в момент времени t. Совокупность всех
точек z{t) в различные моменты времени t образует фазовую траекторию
системы, выходящую из точки zq = z(to).
Обозначим через d(t) = ||zi(?) — ^2 @11 расстояние между двумя точ-
точками в фазовом пространстве, принадлежащими разным траекториям z\ =
= zi(i) и Z2 = Z2(i), в момент времени t. Пусть система совершает финит-
финитное движение в фазовом пространстве. Такая система называется локально
168
Нелинейные динамические системы
неустойчивой, если для траекторий, близких в начальный момент времени,
существует направление, в котором
d(t) = d@) exp(M), fto > 0 A0.5)
(рис. 10.1 а). Свойство A0.5) имеет место для множества начальных усло-
условий, имеющих конечную меру в фазовом пространстве системы, и при
t=T
t=2T
Рис. 10.1. а — экспоненциальная расходи-
расходимость близких фазовых траекторий; б, в —
запутывание фазовых траекторий в огра-
ограниченной области фазового пространства в
случае, когда движение эргодично. Разли-
Различие между просто эргодическим движени-
движением (б) и движением с перемешиванием (в).
При наличии перемешивания траектории
сразу переплетаются. В случае, когда пе-
перемешивания нет, но движение эргодично,
траектории системы за некоторое время Т
достаточно равномерно покроют сеткой все
фазовое пространство, а через время 2Т это
повторится так, что размеры ячеек сетки
уменьшатся приблизительно в два раза
сколь угодно малых возмущениях начальных условий (т.е. при d@) —>> 0).
Поэтому локальную неустойчивость называют также чувствительностью
к возмущению начальных условий.
Вследствие финитности движения (конечности объема Г фазового про-
пространства, занимаемого траекториями) траектории не могут разойтись на
расстояния, превышающие характерный размер области Г, и начинают за™
путываться (рис. 10.1 б, в). Как следствие, системы с локальной неустойчи-
востью обладают свойством перемешивания.
Это свойство, введенное в статистическую физику в работах Дж. Гибб-
са, является более тонким, чем свойство эргодичности (см. рис. 10.1 б, в).
Пусть z = z(t) — фазовая траектория, характеризующая состояние систе-
системы в момент времени t, zq = z@), f(z) — произвольная функция от z,
Tl — эволюционный оператор: Г* : z@) = z(t).
Движение называется эргодическим, если, независимо от выбора мо-
момента времени t,
/ = ш,
A0.6)
10.3. Локальная неустойчивость
169
где среднее по времени / и фазовое среднее (/) от функции / определены
соотношениями
t+T Т
f = lim — f\z(r)} dr =
1
{t)\ dr = Imi^ - f[TTz0] dr, (f) --
t о г
A0.7)
Здесь dT(z) — элемент объема фазового пространства в окрестности точ-
точки z. В определении учтена независимость / от выбора t (второе равенство
в первой строке).
Пусть имеются две произвольные функции f(z) и g(z). Тогда движе-
движение называется перемешивающим, если
lim Rt(f, g) = 0, A0.8)
t—>oo
где Rt(f, g) — корреляционная функция, определяемая через фазовые
средние равенством
Rt(f,g)=^f(Ttz)g(z)dT(z)-
j
= (f{Ttz)g(z))-(f){g). A0.9)
Из наличия перемешивания автоматически следует свойство эргодич-
эргодичности; обратное, вообще говоря, неверно.
Классическим примером системы с эргодичностью и даже с перемеши-
перемешиванием является система, задаваемая двумерным точечным отображением,
известным как "преобразование пекаря":
\Уп+1,
(
\yn/2j '
0 < хп < 1/2,
1)/2J '
A0.10)
Поясним, как действует это преобразование. Рассмотрим квадрат 1 х 1 на
плоскости х, у. Растянем квадрат по оси х в два раза, сохраняя его пло-
площадь. Разрежем полученный прямоугольник пополам вертикальной чер™
l х 1 х
Рис. 10.2. Действие "преобразования пекаря" на кота Арнольда
170 Нелинейные динамические системы
той. Полученные половинки сложим одна на другую снова в квадрат 1x1.
Очевидно, что примерно таков алгоритм действий пекаря, раскатывающе-
раскатывающего, разрезающего и вновь складывающего свое тесто. Рис. 10.2 иллюстри-
иллюстрирует действие преобразования A0.10) на знаменитого кота Арнольда ]) .
Эффективное перемешивание элемента фазового объема ST происходит за
время т ^ l/hc. Пример эволюции "фазовой капли", иллюстрирующий
свойства локальной неустойчивости и перемешивания, показан на рис. 10.3.
Рис. 10.3. Эволюция "фазовой капли" в системе с перемешиванием. Объем кап-
капли сохраняется, а заполнение фазового объема происходит за счет вытягивания,
утоныыения и переплетения отростков капли
Эволюция динамической системы с перемешиванием различна в зави-
симости от того, является система гамильтоновой или диссипативной.
10.4. Гамильтоновы системы
В этом случае фазовый объем не меняется: 5Tt = ST® (ST® — фа-
фазовый объем капли в начальный момент времени, STt — фазовый объем
той же "капли" в момент времени t). Однако структура "фазовой капли"
изменяется (рис. 10.3): "капля" принимает неправильную, амебообразную
форму и постепенно заполняет все области фазового пространства за счет
вытягивания и утоныпения отростков. Следовательно, эффективный объем
капли растет, однако в нем появляется большое количество пустот.
Для характеристики "раздувания" капли вводится огрубление фазового
объема. Пусть масштаб огрубления есть е (е имеет размерность Г). Это зна™
чит, что все точки капли следует заменить сферами объемом е. Объединение
всех таких сфер даст огрубленный объем фазовой капли STt. В отличие от
истинного объема STt величина STt меняется со временем за счет роста объ™
ема пустот в огрубленной капле. Выберем начальный объем фазовой капли
ST® = е (при точности огрубления е меньший объем не имеет смысла).
Величина
h= lim lim * — A0.11)
t^oo STq^O t STq
называется энтропией Колмогорова-Синая (или К-энтропией, КС-энтро-
) Можно предположить, что сходный алгоритм использовал Пабло Пикассо, творя свои
шедевры периода кубизма A907-1921).
10.5. Переход к хаосу 171
пиеи). Она не зависит от способа разбиения фазового пространства и огруб-
огрубления и характеризует усредненный по объему инкремент неустойчивости ho
в A0.5): h = (ho). Системы с хаосом имеют ненулевую К-энтропию h > 0.
Такие системы (т.е. системы с перемешиванием) называют К-системами.
Вследствие перемешивания фазовой жидкости происходит "забывание"
начальных условий. В данном элементе объема ST могут присутствовать
траектории из различных областей всего допустимого фазового объема Г,
если только время наблюдения t достаточно велико: t ^> т ^j 1/h. Поэтому
время т может быть интерпретировано как время забывания начальных
условий или время перемешивания.
10.5. Переход к хаосу
Гамильтонова система с N степенями свободы описывается системой
2N уравнений 1) . Как известно, для таких систем справедлива теорема
Лиувилля, состоящая в следующем.
Пусть система обладает N независимыми инте™
тралами движения Ii, /2, ... , In, коммутирующи-
коммутирующими между собой: {1^, Ik} = 0, i, k = 1, 2,..., N,
{...} — скобки Пуассона, определяемые равен™
W P-10A Траектории
, 1 на 2-мерном торе
\Pkj qkj — канонические переменные. Тогда:
1) траектории лежат на iV-мерном торе (пример для N = 2 показан на
рис. 10.4);
2) движение условно-периодично и характеризуется N частотами Ш{ =
= с*Aь/2,...,/*),г = 1, 2,...,^;
3) угловые переменные в{, характеризующие положение фазовой точки
на торе, определяются из уравнений
в{ = ил (/1, /2,..., In) или 0i = ujit + const, i = 1, 2,..., N.
A0.12)
Из теоремы Лиувилля следует, что для полной интегрируемости га-
мил ьтоновой системы достаточно знать N интегралов движения. Совокуп™
ности всех комплектов {Ii} соответствует семейство инвариантных торов.
Торы являются инвариантными, т.к. их положение и форма в фазовом про™
странстве не меняются со временем.
Углам 9i соответствуют канонически сопряженные им обобщенные им-
импульсы (действия) 1^, так что уравнения движения имеют вид:
t ^^0 n h ^^° ,,A1 1 \ 1 9 AT
Ji = ^^^ = U' &г = ~7ГГ = Шг (il5 i2, • • • , J-N) j 2 = I, Z, . . . , iV
dOi Oli
A0.13)
) Математический аппарат, применяемый для описания гамильтоновых систем, кратко
представлен в комментарии 10.
172
Нелинейные динамические системы
(первое уравнение — следствие сохранения Ц). В соответствии с теоремой
Лиувилля гамильтониан Но системы может быть записан в виде Щ =
= НОAЪ /2,..., In)-
Действие возмущения на систему описывается гамильтонианом
Я = HQ(h, I2,..., IN) + eV(h, I2,..., In, &i, в2,..., 0N), A0.14)
где углы 0i и действия /^ — канонически сопряженные переменные по
отношению к гамильтониану Hq, е — малый параметр, eV — потенциал
возмущения. Предполагается финитность невозмущенного движения и его
невырожденность: det(d2Hofdlidlk) ф 0.
Согласно теории устойчивости Колмогорова-Арнольда-Мозера (КАМ),
в системе с гамильтонианом A0.14) при достаточно малых е < sq больший™
ство инвариантных торов сохраняется и отличается от невозмущенных торов
слабой деформацией. Они занимают объем Г — ST(e). Часть торов, занимав™
шая объем 5Г(е), разрушается, но их мера стремится к нулю при е —>• 0.
Траектории в 8Т(е) являются стохастическими. Хаос является альтер-
альтернативой устойчивости, описываемой теорией КАМ. Подчеркнем здесь, что
теория КАМ не дает положительной информации о том, какова фактиче-
фактическая мера фазового пространства, в котором хаос присутствует.
10.6. Примеры систем с жаосом
1) Рассеяние материальной точки на шариках радиуса R (рис. 10.5). Из
рисунка видно существование локальной неустойчивости. Данная задача экви-
эквивалентна задаче о рассеянии двух шариков радиуса R/2 каждый. Возникнове-
Возникновение локальной неустойчивости в этой ситуации исследовано Н.С. Крыловым.
Критерий возникновения неустойчивости записывается в виде К =
= p/R > 1, где р — длина свободного пробега материальной точки в "газе"
из неподвижных шариков. Если to — характерное время между соударени-
соударениями, то К-энтропия h « (I/to) In Ж.
2) Рассеивающие биллиарды (биллиарды Синая). Это обобщение пре-
предыдущей модели, в которой вместо рассеивающих шаров имеется кривая
Рис. 10.5. Рассеяние ма-
материальной точки на си-
системе шаров
Рис. 10.6. Биллиард типа
"звезда"
Рис. 10.7. Биллиард типа
"стадион"
10.6. Примеры систем с хаосом 173
граница. Пример биллиарда Синая дан на рис. 10.6. Для таких объектов
характерна выпуклая граница (по отношению к налетающей частице).
Другой тип биллиарда реализуется, если граница вогнутая (по отноше™
нию к частице). На рис. 10.7 показан пример биллиарда типа "стадион". В
таком биллиарде движение частицы также стохастическое. Вообще, почти
все криволинейные формы биллиардов, в которых столкновения частиц со
стенками происходят по законам абсолютно упругого удара, приводят к
стохастическим траекториям частиц.
3) Отображение
хп+1 = {Кхп}, п = 0, 1, 2,... A0.15)
Здесь индекс п играет роль дискретного времени, К — параметр, а скобки
{... } означают дробную часть числа. Соотношение A0.15) задает отображе-
ние отрезка [0, 1] в себя. При К < 1 из A0.15) следует, что хп = Кпх0 —>• 0
при п —>> оо независимо от выбора начального значения х® Е [0, 1]. При
К > 1 расстояние между двумя близкими траекториями растет:
^±=К>1. A0.16)
ёхп
Отсюда ёхп = Кп5х® = ex.p(nho) Sx®. Инкремент неустойчивости ho =
= In К одинаков для всего фазового пространства и поэтому является К-
энтропией: h = hi К.
4) Двумерное отображение
modi A0.17)
где матрица А = .В силу " ^п-и,Уп-и; = det A = 1 ото™
д(хП1уп)
бражение A0.17) сохраняет фазовый объем системы. Характеристические
показатели находятся из уравнения det | А—А1Е| = 0 или А2 — (К+2) А+1 =
= 0. При К > 0 один из корней Хг = -\к + 2+ у (К + 2J - 4J боль-
больше единицы, чем и определяется локальная неустойчивость. Отображение
A0.17) диагонализуется и имеет в направлении первого орта растяжение
элементов длины
Srn+1 = XiSrn, rn = л/x^T^l-
Соответственно К-энтропия равна h = In Ai.
5) Ротатор, испытывающий периодические толчки. Гамильтониан мо~
дели имеет вид
оо
H=-p2-Kcosx V 8{t-nT). A0.18)
2
п= —оо
Невозмущенный гамильтониан Щ = р2 /2 задает пару канонически сопря™
174
Нелинейные динамические системы
женных переменных (р, ж), причем ш(р) = дЩ/др = р. В переменных
(р, ж) уравнения движения имеют вид
ОН т, . v^
р = = —A sin ж у
дх ^^
п= —с
дН
х = = р.
др
S (t — пТ),
A0.19)
От уравнений A0.19) можно перейти к точечному отображению. Согласно
A0.19) после п-го толчка импульс приобретает приращение: pn+i — Рп =
= —К sinxn9 а при дальнейшем движении до начала (п + 1)-го толчка
сохраняет значение pn+i- К началу (п + 1)-го толчка фаза х приобретает
значение хп+\ = хп +рп+\Т. Таким образом, отображение
хп+1 = хп +
(mod 2тг)
определяет значения переменных (р, х) к моменту (п + 1)-го толчка че-
через их значения до начала тг-го толчка. Отображение A0.20) называется
отображением Чирикова—Тэйлора или стандартным отображением. Без
ограничения общности можно принять Т = 1. На рис. 10.8 приведены
Рис. 10.8. Последовательные точки (жп, рп) стандартного отображения A0.20),
принадлежащие одной траектории. Горизонтальная ось: 0 < х < 2тг; вертикальная
осы ™тг < р < тт. Т = 1. а — образование стохастического слоя вблизи
сепаратрисы (при К = 0,9 < Кс); б — слияние стохастических слоев и
образование стохастического моря (К = 1,1 > Кс)
фазовые портреты A0.20): для К < Кс (а) и для К > Кс (б), где кри-
критическое значение Кс = 0,9716... Каждой точке плоскости {р, х} соот-
соответствует некоторая пара (рп, хп), принадлежащая одной траектории. Бес™
порядочное распределение последовательных пар (рп, хп) на плоскости
демонстрирует явление хаоса для модели A0.20). Отдельные области не
заняты точками стохастической траектории. Эти области — островки, в ко™
10.6. Примеры систем с хаосом
175
торых имеется конечная мера периодических траекторий. В центральных
частях островков выполнены условия теории КАМ. На рис. 10.8а узкие
области стохастической динамики (стохастические слои) отделены друг от
друга инвариантными кривыми. На рис. 10.8 б стохастические слои сильно
расширились и соединились друг с другом, образовав "стохастическое мо-
море". Этот переход происходит при критическом значении параметра К =
= Кс. При К > Кс возможно неограниченное увеличение энергии части™
цы благодаря стохастическому ускорению. Существование островков обу-
обусловлено наличием члена ^ sin x в A0.20), который приводит к появлению
областей устойчивости даже при К ^> 1.
Стохастический слой является зародышем хаоса в гамильтоновых си-
системах. Примеры образования таких слоев видны на рис. 10.8 а. Они обра™
зуются при любых сколь угодно малых возмущениях и поэтому являются
примером неустранимого хаоса. Пусть, например, задан нелинейный ма-
маятник, описываемый уравнением движения
х + Шд sin x = е sin(kx — uji).
A0.21)
В отсутствие возмущения (е = 0) сепаратрисой является траектория
с энергией Е = 2и)%, которая отделяет колебания (Е < 2ujq) от враще-
вращений (Е > 2ljq). При ? ф 0 сепаратриса разрушается, и в ее окрестности
возникает зона хаоса шириной 5Е ~ е, если частоты ш ~ ujq.
Если частота ш^>шо, то ширина стохастического слоя оказывается про-
пропорциональной ехр(^тго;/2а;о), т.е. экспоненциально малой.
Различные стохастические слои в фазовом пространстве могут пересе-
пересекаться, образуя некоторую сеть каналов, внутри которых динамика системы
является стохастической (рис. 10.9). Эта
сеть называется стохастической паутиной
(паутиной Арнольда). Если размерность фа-
фазового пространства 2N = 4, то двумерные
инвариантные торы разделяют трехмерный
объем, в котором движется система (из-за со-
сохранения энергии), на изолированные обла™
сти (подобно тому, как линия на плоскости
делит 2-мерное пространство на изолирован-
изолированные части). Однако уже для трех и более
степеней свободы (N > 2) JV-мерные торы
не разделяют BN — 1)-мерную энергетиче-
энергетическую поверхность. Поэтому стохастическая
паутина оказывается связной, подходя сколь
угодно близко к любой точке фазового про-
пространства. Наличие паутины приводит к неограниченному переносу частиц
вдоль стохастического слоя, называемому диффузией Арнольда.
Примером, в котором возникает стохастическая паутина с нетривиаль-
нетривиальной топологией, является осциллятор с гамильтонианом
Рис. 10.9. Пересечение стохас-
стохастических слоев и образование
паутины Арнольда
я = - (р2
2
с2) — К cos х ^> 5 (t — nT)^
п=оо
A0.22)
176
Нелинейные динамические системы
отличающимся от A0.14) наличием потенциальной энергии х2/2. Этому
осциллятору соответствует точечное отображение:
рп+1 = (рп — К sin xn) cos Т — хп sin T,
хп+\ = (рп — К sin жп) sin Т + xn cos Т.
A0.23)
Если период Т следования ударов удовлетворяет условию Т = 2тг/д,
где g — целое число, то при q > 2 на фазовой плоскости возникает сто-
стохастическая паутина с симметрией порядка q. Решетка является тем более
Рис. 10.10. Примеры стохастической паутины в отображении A0.23): а — с сим-
симметрией квадрата (q = 4); б — с гексагональной симметрией (д = 3 и g = 6); б —
с симметрией пятого порядка (q = 5)
правильной, чем тоньше паутина, т.е. чем меньше параметр К. На рис. 10.10
показаны примеры стохастической паутины с различной симметрией.
10.7. Диссипативные системы
В отличие от гамильтоновых систем фазовый объем систем диссипа™
тивных меняется со временем. При этом характер изменения зависит от
выбора области в фазовом пространстве. В соответствии с этим фазовое
пространство диссипативных систем может содержать не только те струк™
турные элементы, которые имеются в случае гамильтоновых систем, но и
такие, как аттракторы и репеллоры. Первые характеризуются тем, что
к ним асимптотически притягиваются все фазовые траектории из некото™
рой области АГ фазового пространства, называемой областью притяже-
притяжения. Для вторых характерна неустойчивость, т.е. отход любой траектории,
начинающейся в некоторой окрестности репеллора. Иными словами, асим-
асимптотические свойства траекторий в окрестности аттрактора и репеллора
аналогичны, если только для первых смотреть прямую эволюцию, т.е. при
t —>> +оо, а для вторых — обратную, т.е. при t —>• ^оо.
Подчеркнем, что аттракторы или репеллоры принципиально невозмож™
ны в гамильтоновых системах. Наибольший интерес для анализа свойств
диссипативных систем представляют именно аттракторы.
В ходе эволюции динамической системы, обладающей аттрактором,
объем фазовой капли неограниченно уменьшается — капля сжимается
к аттрактору. Однако сам аттрактор, имея нулевую меру в фазовом про™
странстве, может оказаться нетривиальным множеством, движение на ко™
10.7. Диссипативные системы 177
тором является стохастическим. Это значит, что 1) на таком аттракторе
движение является локально неустойчивым и для него может быть введена
К-энтропия и 2) это движение обладает свойствами эргодичности и пе-
перемешивания. Аттрактор, на котором реализуется стохастическая динами™
ка, называется стохастическим или странным аттрактором. Последний
термин предложен Д. Рюэлем и Ф. Такенсом.
Асимптотическая устойчивость аттрактора как множества в фазовом про-
пространстве определяется сжатием фазового объема. Средняя скорость этого
сжатия может быть выражена через показатели Ляпунова, определяемые ана™
логично A0.5):
А= lim (-Ы^\ . A0.24)
t^ + oo\t d(O)J
Для различных направлений величина А принимает различные значения,
так что всего имеется М различных показателей 1) А^ (М — число диффе-
дифференциальных уравнений 1-го порядка, описывающих движение системы):
Ai > ¦ • • > Xq = 0 > • • • > Ам. A0.25)
Скорость сжатия фазового объема определится тогда равенством
м
if = gA,<0. ,10.26,
Показатели Ляпунова связаны с К-энтропией. Если все показатели А^ не
зависят от точки, то
h= J2 А- A0-27)
Ai>0
В сумму входят только положительные показатели, поскольку именно
они определяют разбегание фазовых траекторий, имеющее место только
на аттракторе.
Странный аттрактор, занимая область фазового пространства нулевой
меры, не может тем не менее целиком лежать в плоскости (поскольку фазо-
фазовые траектории не пересекаются). Поэтому он должен иметь размерность
d > 2. С геометрической точки зрения он представляет собой, как прави-
правило, фрактальное множество, характеризуемое фрактальной размерностью,
являющейся дробным числом.
В качестве примера диссипативной динамической системы, демонстри-
демонстрирующей стохастическое поведение, можно привести модель Лоренца
х = ^ах + ау,
у = rx-y - xz, A0.28)
z = ху — bz.
) Определенные так показатели Ляпунова содержат в себе как частный случай
характеристические показатели, устанавливающие устойчивость особой точки, являясь,
кроме того, количественной мерой орбитальной устойчивости.
12 Н.В. Карлов, Н.А. Кириченко
178 Нелинейные динамические системы
где <т, г, Ь — неотрицательные числа. Сжатие фазового объема в A0.28)
однородно:
v dt дх ду dz K J K ;
Система A0.28) всегда имеет стационарное решение х = у = z =
= 0. Для этого нулевого решения уравнение, определяющее характеристи-
характеристические показатели Л, имеет вид
(Л + Ь)[Х2 + (<т + 1)А + аA - г)} = 0. A0.30)
Это уравнение при г > 0 имеет три действительных корня. При г < 1 все
они отрицательные, т.е. стационарное состояние х = у = z = 0 устойчиво.
При г > 1 один из корней становится положительным, и соответствующее
стационарное состояние теряет устойчивость. Кроме того, при г > 1 име™
ются еще два стационарных состояния х = у = ±\/Ъ (г — 1), z = г — 1.
Для этих состояний характеристическое уравнение имеет вид
Л3 + (а + Ъ - 1) Л2 + (г + а) ЬХ + 2^6 (г - 1) = 0. A0.31)
Анализ корней этого кубического уравнения показывает, что при г > 1
оно имеет один действительный отрицательный корень и два комплексно
сопряженных корня. Комплексные корни оказываются чисто мнимыми при
а (а + b + 3) лЛллч
г = гс = ^ —-А A0.32)
сг — Ь — 1
При 1 < г < гс действительная часть комплексных корней отрица™
тельна, а при г > гс — положительна. Следовательно, при г > гс все ста™
ционарные состояния неустойчивы. Отметим, что необходимым условием
этого является требование а > Ь+1. По мере дальнейшего роста параметра
г динамика системы усложняется, и после небольшого числа бифуркаций
возникают стохастические колебания, образом которых является странный
аттрактор. Такой путь усложнения динамики называется сценарием Рюэля-
Такенса. На рис. 10.11 а приведен качественный вид соответствующего ат-
аттрактора, получившего название странного аттрактора Лоренца (Э. Ло-
Лоренц исследовал хаотическое поведение системы A0.28) при значениях
параметров а = 10, Ь = 8/3, г = 28; при указанных значениях а и Ь
пороговое значение г составляет гс = 24,74).
Как мы знаем, всякой системе с непрерывным временем можно поста-
поставить в соответствие некоторое точечное отображение. В случае системы
A0.28) это отображение, следуя Лоренцу, строится следующим образом.
Будем фиксировать те моменты времени, в которые значения переменной
z достигают своих последовательных максимумов Мп, п = 1, 2,.... Для
последовательности {Мп} обычным образом строится отображение после™
дования Мп+\ = f(Mn). Разумеется, конкретные значения Мп могут быть
получены только при численном интегрировании исходной системы диф™
ференциальных уравнений A0.28). На рис. 10.116 показан вид соответ™
ствующего отображения. Простая на первый взгляд клювообразная кри-
кривая, представляющая это отображение, имеет на самом деле сложную вну™
треннюю структуру, которая проявляется при рассмотрении этой кривой
10.7. Диссипативные системы
179
Мп+1
450
400
350
300
-
л
л ^\< б. 300 350 400 450 Мп
Рис. 10.11. а — странный аттрактор в системе Лоренца при а = 10, Ь = 10/3, г =
= 28 (плоскость (ж, у) на рисунке отвечает значению z = 27); б — отображение
по следования для аттрактора Лоренца при тех же значениях параметров
в сильно увеличенном масштабе. При таком рассмотрении сначала обна-
обнаруживается расщепление кривой на две практически параллельные. Даль-
Дальнейшее увеличение масштаба вновь обнаруживает такое же расщепление
одной из этих кривых. Если произвести увеличение масштаба еще раз, то
обнаружится дальнейшее расщепление одной из компонент и т.д. Таким
образом, оказывается, что кривая отображения на рис. 10.11 б имеет кан-
торову структуру, т.е. является фрактальным множеством. Для значений
параметров, использованных при построении кривой рис. 10.116, фрак™
тальная размерность оказалась равной dc ^2,05.
Заметим, что в предыдущей главе был рассмотрен пример динамиче-
динамической системы, задаваемой двумерным точечным отображением Хенона.
Была продемонстрирована его фрактальная структура. Именно с нали™
чием фрактальной структуры отображения Хенона связана его стохасти™
ческая динамика (как и в случае аттрактора Лоренца), что типично для
систем с более чем двумерным фазовым пространством.
Другим классическим примером является модель Рёслера
A0.33)
Здесь странный аттрактор обнаруживается при /х > 4,2.
На рис. 10.12 а показан качественный вид аттрактора Рёслера, а на
рис. 10.12 б — вид соответствующего ему точечного отображения. Для по™
строения этого отображения выбирались значения переменной х в после™
довательные моменты пересечения плоскости z = 0 фазовой траекторией.
Обратим внимание на то обстоятельство, что полученное отображение имеет
гладкую вершину. Поэтому следует ожидать, что усложнение динамики про-
происходит в этом случае по сценарию Фейгенбаума — через каскад бифуркаций
удвоения периода, что и подтверждается численным счетом.
12*
180
Нелинейные динамические системы
Хп+1
1
хп
Рис. 10.12. а — странный аттрактор (в проекции на плоскость Z = 0) в системе
Рёслера при /л = 5,7; б — точечное отображение для аттрактора Рёслера в
плоскости Y = 0; в — топология аттрактора Рёслера. Слой из бесконечного числа
листов растягивается и складывается. Затем каждый лист соединяется по линии
АВ с соседним по линии А'В1
Отметим также, что если в случае аттрактора Лоренца фазовые тра-
траектории претерпевают перебросы из окрестности одной неустойчивой
особой точки в окрестность другой точки, также неустойчивой, то в слу™
чае аттрактора Рёслера траектория всегда находится в окрестности одной
неустойчивой особой точки.
Наконец, еще одним примером диссипативной системы со стохастиче-
стохастической динамикой является ротатор с трением, возбуждаемый периодическими
толчками:
(рп - Ksinxn
¦ Арп
A0.34)
10.7. Диссипативные системы
181
где 7 — коэффициент трения, Т — период между толчками. Сжатие фазо-
фазового объема за одну итерацию определяется равенством
д(рП1хп)
A035)
Типичный фазовый портрет стохастического аттрактора отображения A0.34)
показан на рис. 10.13а, где нанесены точки (рп, хп)9 получаемые после-
последовательными итерациями одной начальной точки (ро, хо), т.е. принадле™
Рис. 10.13. а — последовательные точки отображения A0.34) на плоскости
(хп, Рп). Горизонтальная ось: 0 ^ х ^ бтг; вертикальная ось: ^Зтг ^ х ^ Зтг. б —
область, выделенная на рис. 10.13 а квадратом, в увеличенном масштабе. К = 12,
7 = 0,8, Т = 1
жащие одной траектории. Аттрактор имеет канторову структуру в направ-
направлении, перпендикулярном к линиям. Это свойство видно из рис. 10.136,
где в увеличенном масштабе показана область, выделенная на рис. 10.13 а
квадратом. Если на рис. 10.13 б взять малую область и также увеличить ее,
то структура отображения окажется той же, что и на рис. 10.13 б.
В заключение заметим, что существует и такое понятие, как квантовый
хаос, т.е. хаос в квантовых динамических системах. Как известно, динамика
поведения квантовомеханических систем описывается линейным уравнени-
ем Шредингера. Известно вместе с тем, что линейные системы не обладают
стохастическим поведением. Классическое же движение может описываться
нелинейными уравнениями, допускающими стохастизацию. Поэтому кван-
квантовая система может демонстрировать стохастическое поведение в той ме™
ре и на таких временах, когда и если ее можно считать квазиклассической.
В этом случае имеет смысл говорить не об истинном, а о переходном хаосе.
Итак, мы изучили свойства и поведение некоторых классов систем, опи-
описываемых нелинейными уравнениями — точечными отображениями или
обыкновенными дифференциальными уравнениями. На примере анализа кон™
кретных систем мы установили существование различных динамических ре-
режимов — от простейших, стационарных, до сложнейших, колебательных,
обладающих всеми признаками движения хаотического. В силу кажущей-
182 Нелинейные динамические системы
ся искусственности некоторых из отобранных для рассмотрения примеров
необходимо подчеркнуть, что в действительности явление динамического ха-
хаоса присуще абсолютному большинству реальных физических систем и обу-
словлено, во-первых, их нелинейностью и, во-вторых, достаточно большим
числом степеней свободы. Уместно вспомнить, что при нормальных услови-
условиях кубический сантиметр газа содержит ^ 1019 частиц, взаимодействующих
друг с другом. В этой системе число степеней свободы поистине грандиозно,
а взаимодействие, даже в простейшем случае упругих соударений, нелинейно.
Приведем некоторые примеры реальных систем, неотъемлемой чертой
которых является хаотическое поведение (без "внешнего стохаетизатора").
Примеры систем с относительно небольшим числом существенных сте-
степеней свободы, демонстрирующих хаотическую динамику, дает небесная ме-
механика. Это — динамика планет, комет, астероидов, искусственных спутни-
спутников Земли ...
Среди систем с большим числом степеней свободы следует указать
плазму, т.е. совокупность заряженных частиц. В системах с нейтраль-
нейтральными частицами, таких как газы и жидкости, хаос может наблюдаться
в виде турбулентных течений.
Решения, описывающие хаотические движения, возникают в экономи-
экономических и социологических моделях.
Следует также подчеркнуть, что концепцию динамического хаоса необ-
необходимо привлекать при обосновании принципов статистической физики
(комментарий 25).
Завершая эту главу, подчеркнем, что рассмотренные в нем задачи, опи-
описываемые обыкновенными дифференциальными уравнениями, далеко не
исчерпывают все богатство колебательных процессов реального мира. Это-
Этому миру адекватны распределенные задачи, описываемые уравнениями в
частных производных или интегральными уравнениями. В некоторых слу-
случаях распределенная задача может быть сведена к локальной, т.е. к системе
обыкновенных дифференциальных уравнений для существенных степеней
свободы. Вместе с тем существуют процессы, представляющие собой кол-
коллективные движения в распределенных системах, не имеющие себе точеч-
точечного аналога. Изучению колебательных процессов в распределенных си-
системах, т.е. процессов волновых, посвящена следующая часть книги.
ЧАСТЬ 3
ВОЛНЫ И СТРУКТУРЫ
Бе бо море укротилося и тихо быстъ,
и абие въста буря с ветром, и волнам велиим
за собъ въставши, и разби корабля.
(В лето 6374, Софийская Первая Летопись по списку И.Н. Царского,
ПСРЛ. — М.: Наука, 1994. — Т. 39. — С.10).
Man sagh Кете Welle ohne Quelle.
(Meister Eckhart. Uber Kkres und Dunkles, Lex Thuringorum. Bd. XIX,
S.98, Erfurt, Thuringen, 1329).
Свет распространяется колебательным движением
(М.В. Ломоносов. Теория электричества, изложенная математически).
ГЛАВА XI
Понятие волны. Бегущая волна. Скорость волны. Гармониче-
Гармоническая волна. Амплитуда и фаза волны. Длина волны. Волновое число,
волновой вектор. Плоская волна. Стоячая волна, узлы, пучности.
Принцип суперпозиции. Волновое уравнение. Уравнение попереч-
поперечных колебаний в упругом стержне. Уравнение звуковых волн в
газе. Общее решение одномерного волнового уравнения. Сфериче-
Сферически симметричные волны. Волновое уравнение с учетом трения.
Дисперсия. Уравнения колебаний в бесконечной цепочке связанных
маятников, закон дисперсии. Волновой пакет. Групповая скорость.
Формула Рэлея. Нормальная и аномальная дисперсия. Энергия
колебаний в волне. Плотность потока энергии. Вектор Умова-
Пойнтинга. Уравнение Клейна-Гордона.
В предыдущих главах мы изучали главным образом движение систем с
небольшим числом степеней свободы — одного или системы нескольких
связанных осцилляторов. Новые закономерности колебательных процес-
процессов проявляются в том случае, когда имеется большое число взаимодей-
взаимодействующих подсистем. Таковой является, например, бесконечная цепочка
связанных одинаковых маятников (см. рис. 11.1). Движение (изменение
п-1
Рис. 11.1. Бесконечная цепочка одинаковых маятников, связанных пружинами.
Период структуры равен а
состояния) подобных систем приобретает коллективный характер, когда
индивидуальные особенности отдельных элементов как бы забываются.
Колебательные процессы в системе большого числа элементов называют
волнами. По своей сути волны — это колебательный процесс в некоторой
протяженной среде.
186 Волны и структуры
Волновые явления широко распространены в природе. Это волны на
поверхности жидкости, звук в газе, волны сжатия-растяжения в твердом
теле, колебания струны и мембраны. Волновые процессы реализуются при
распространении горения и при фазовых переходах, например, плавления-
кристаллизации. Следует упомянуть также электромагнитные и гравита-
гравитационные волны.
В этой главе, носящей вводный характер, мы рассмотрим простейшие
свойства волнового движения.
В соответствии со сказанным волна — это процесс, разворачивающий-
разворачивающийся во времени и в пространстве. Поэтому для его описания необходимо
для каждого момента времени указать состояния всех элементов, отлича-
отличающихся положением в пространстве. Иными словами, волна описывается
посредством задания некоторой характерной для нее функции, зависящей
как от времени, так и от пространственных координат.
11.1. Бегущая волна
В качестве простейшего примера рассмотрим так называемую бегу™
щую волну. Состояние элементов системы характеризуется некоторой
величиной и. Например, в случае вол-
волны на поверхности жидкости это мо-
жет быть отклонение точек поверхности
жидкости от их положения в состоянии
равновесия. Воспользуемся этим приме-
ром. Пусть в некоторый момент времени
профиль поверхности имеет вид, пока™
x'=x-ct занный на рис. 11.2. Предположим, что
с течением времени профиль волны не
Рис. 11.2. Профиль волны в соб- меняется, а меняется только его положе-
ственной системе отсчета, дви~ ние в пространствев Это значит, что в
жущеися со скоростью с относи- г « ,
тельно наблюдателя любои момент времени профиль волны в
системе отсчета, связанной с ней, имеет
вид, показанный на рис. 11.2. Если х' — координата в собственной
системе отсчета волны, то
и = и(х'). A1.1)
Пусть волна движется с постоянной скоростью с вдоль оси х. Тогда ко-
координаты в неподвижной (х) и в движущейся (xf) системах связаны между
собой соотношением
x' = x-cb. A1.2)
Поэтому бегущая волна может быть представлена функцией
и(х, t) = u(x-ct). A1.3)
В частном случае функции и = u(xf) = asm(kxf) мы получаем гармони-
//./. Бегущая волна
187
ческую волну (рис. 11.3)
и = и(х, t) = asin[k(x ~~ ct)].
Обозначая
A1-4)
A1.5)
перепишем A1.4) в виде
и(х, i) = asin(kx — out). A1-6)
Величина а называется амплитудой, а функция
у?(ж, i) = fcx — o;t A1.6')
фазой волны. Обратим внимание на то, что, фиксируя точку наблюдения ж,
мы получаем в этой точке гармоническое
колебание с частотой ш.
Согласно A1.6), в любых двух точках,
отстоящих друг от друга на расстояние
A1.7)
Рис 1О. Гармоническая волна
в собственной системе отсчета.
Длина волны (период) равна Л
отклонение и от положения равновесия
одинаково в любой момент времени. Ины-
ми словами, точки, отстоящие на расстоя-
ние Л одна от другой, колеблются одина-
ково, синхронно. Величина Л называется
длиной волны, а число к — волновым числом или, довольно часто и с
некоторой долей условности, волновым вектором. Последнее название
связано с обобщением бегущей волны A1.6) на случай ее распространения
в произвольном направлении (а не только вдоль оси х). Именно, если ско-
скорость волны дается вектором с, а в начальный момент пространственный
профиль волны есть и(г)9 то в произвольный момент w(r, i) = u(r — ct).
Гармоническую волну при этом можно представить в виде
u(r,t) = asm(\ar-uji), A1.8)
w = kc. A1.8')
Волна A1.8) называется также плоской волной. Очевидно, что при повороте
системы координат так, чтобы ось х была направлена вдоль вектора к,
мы возвращаемся к представлению A1.6). Таким образом, плоская волна
распространяется по направлению вектора к, что и оправдывает термин
"волновой вектор".
Зная частоту ш и волновое число к, можно найти скорость с:
с=^ = ^. A1.9)
Если наблюдатель движется вдоль оси х со скоростью с, то он наблюдает
один и тот же профиль волны, т.е. регистрирует одну и ту же фазу волны:
(р = const. Поэтому скорость с называют фазовой скоростью.
188 Волны и структуры
В ряде ситуаций наряду с волной, распространяющейся в положите ль™
ном направлении (т.е. имеющей скорость с > 0), может возникать волна,
двигающаяся в противоположном направлении — со скоростью (—с). Так
получается, например, при отражении волны от препятствия. При этом в
каждой точке системы происходит сложение колебаний, вызванных пря-
прямой и обратной волнами: если щ = ui(x — ct) и и^ = U2(x + ct) —
прямая и обратная волны соответственно, то результирующее колебание
представляет собой суперпозицию волн:
и(х, t) = щ(х - ct) + и2{х + ct). A1.10)
Здесь и\ и 42 — вообще говоря, различные функции. В частном случае,
если эти функции одинаковы и даются формулой вида A1.6), то
и{х, t) = 2acos(o;t) sin(kx). A1.11)
Качественный вид профиля этой волны для некоторых моментов времени
показан на рис. 11.4. Легко видеть, что
УЗЛЫ ТОЧКИ
тга пл
хп = — = —, п = 0, ±1, ±2,...,
к л
A1.12)
-Пучность / |Ч ^ г „
в которых и{хп, I) = 0, в любой момент
Рис. 11.4. Стоячая волна в раз™ времени неподвижны. Такая волна непо™
личные моменты времени движна и называется стоячей. Покоящи-
Покоящиеся точки называются узлами, а точки,
максимально отклоняющиеся от положения равновесия, — пучностями.
Понятия длины волны и частоты для стоячей волны имеют тот же смысл,
что и для волны бегущей. При этом расстояние между двумя соседними
узлами (или пучностями) равно половине длины волны.
Пусть изучаемая система (например, струна) имеет конечную длину L,
причем ее концы закреплены — смещения концевых точек в любой момент
времени равны нулю. Тогда, полагая в A1.12) хп = L, найдем связь длины
волны с длиной системы:
L=— или Л=—, п = 1, 2,... A1.13)
2 п
Это значит, что в системе с закрепленными концами стоячие волны могут
иметь лишь дискретный набор значений длин волн, таких, что на длине
системы L должно уместиться целое число полуволн.
11.2. Волновое уравнение
Получим дифференциальное уравнение, описывающее как бегущие, так
и стоячие волны. Это уравнение должно быть линейным, чтобы имел место
принцип суперпозиции: любое сложное изменение состояния может быть
представлено в виде суммы некоторых элементарных (например, гармо-
гармонических) колебаний (волн), каждое из которых также является решением
11.3. Уравнение поперечных колебаний струны 189
уравнения. Кроме того, это уравнение должно описывать волны, бегущие как
в положительном, так и в отрицательном направлениях, поскольку в одно-
однородной изотропной среде эти направления физически ничем не выделены.
Рассмотрим бегущую волну
и(х, t) = f(x-ct), (П.14)
где /(?) — произвольная дважды дифференцируемая функция. Найдем част-
частные производные от и(х, i). Обозначая ? = х — ct и пользуясь правилом
дифференцирования сложной функции, имеем
ди _ d?d^ _ d$_ <Pu _ д_
at ~ d?dt~ °d^ dt2 ~ dt
du _ d?d^ _df_ d^u _ d_ (d
dx ~ d?dx~ d?' dx2 ~ dx
Сравнивая вторые производные от и по t и по ж, мы замечаем, что они
отличаются постоянным множителем с2, так что
1^ = ^. A1.15)
с2 dt2 дх2 1 ;
Полученное соотношение называется волновым уравнением. Оно уста-
новлено для частного случая волны, распространяющейся вдоль оси х. В
более общем случае следует исходить из представления бегущей волны в
виде
2 нетрудно
() [(-ct)]. A1.16)
Обозначая ? = k(r — ct) = kr — u;t и полагая к2 = (cj/c)
получить обобщение уравнения A1.15):
1^ = ^ + ^ + ^. A1.17)
с2 dt2 дх2 ду2 dz2 V ;
Заметим, что полученное уравнение уже не содержит в явном виде каких™
либо векторных характеристик и поэтому допускает решения, описывающие
волны, распространяющиеся в произвольном направлении в пространстве.
Несмотря на некоторую искусственность приведенного вывода волно-
волнового уравнения, мы далее убедимся, что такое (или подобные ему) урав-
уравнение описывает колебательные явления во многих реальных физических
системах.
11.3. Уравнение поперечных колебаний струны
В качестве первого примера рассмотрим малые поперечные колебания
натянутой струны. Обычно под струной понимают упругую нить, не со-
сопротивляющуюся изгибу, но оказывающую сопротивление растяжению и
сжатию. На рис. 11.5 показан участок струны длиной dl и силы натяжения,
действующие на этот участок.
190
Волны и структуры
х x + dx х
Рис. 11.5. Участок струны (к выводу волнового уравнения поперечных колебаний)
В состоянии равновесия струна проходит по оси абсцисс. Отклонения
точек струны будем описывать функцией и(х, t). Рассмотрим участок стру-
струны, имеющий абсциссы начальной и конечной точек соответственно х и
х + dx. Длина этого участка равна
dl =
fduY
\dxJ
dx.
A1.18)
Так как колебания предполагается малыми, то угол наклона этого участка
к оси абсцисс мал:
ди
ди
~дх
Поэтому из A1.18) следует, что dl ~ dx, т.е. изменение длины этого участка
при малых колебаниях мало по сравнению с тем изменением, которому эта
длина подвергалась в ходе начального натяжения в положении равновесия.
По закону Гука относительное удлинение связано с силой натяжения соот-
соотношением
A(dl) _ Г
dl ~ Я'
где Е — модуль Юнга материала струны. Поскольку изменения длины
участка малы в ходе колебаний (A(tfl) « const) и ими можно пренебречь,
то и изменения силы натяжения Т со временем также малы. Поэтому ве™
личину Т можно считать не зависящей от времени. Это же обстоятельство
позволяет считать натяжение Т не зависящим от координаты х. В самом
деле, проектируя силы на ось абсцисс и имея в виду, что рассматриваются
только поперечные смещения струны, имеем условие
Т(х + dx) cos[6>(a; + dx)] - Т(х) cos[0(x)} =0 (П.19)
(силы, действующие на участок струны, не приводят к его смещению вдоль
оси абсцисс). В силу малости угла 9 находим
Т(х + dx) - Т(х) = 0, т.е. Т(х) = const A1.20)
с точностью до малых величин более высокого порядка, чем dx.
Рассмотрим теперь силы, действующие в поперечном направлении.
На выделенный участок действуют в противоположных направлениях
(см. рис. 11.5) две силы:
F^ = ST (х + dx) sin[^ (x + dx)] « ST0(x + dx)
11.4. Уравнение продольных колебаний в стержне 191
F2(±) = ST (х) sin[l9 (х)] « ST0(x),
где S — площадь поперечного сечения струны. Их равнодействующая есть
FW = F{ } - F2( } или
= ST0(x + dx)-ST0(x) = ST—dx. A1.21)
9ж
Поскольку sin 0 « 0 ^ tg $ = —,то
дх
дх2 1 ;
Применим к рассматриваемому участку струны 2-й закон Ньютона:
dm* — =F(±\ A1.23)
at2 ' l ;
где dm = pS • dl ^ pS • dx — масса участка, р — плотность материала.
Приравнивая A1.22) и A1.23), получаем
1 д2и д2и
A1.24)
с2 at2 дх2 J
Здесь введено обозначение
c=J- A1.25)
V р
для величины с, имеющей размерность скорости.
Таким образом, мы пришли к уравнению, совпадающему по виду с вол-
волновым уравнением A1.15). В соответствии со сказанным ранее величина с
имеет смысл скорости волны, причем формула A1.25) устанавливает связь
этой скорости с характеристиками струны.
11.4. Уравнение продольных колебаний в стержне
В качестве второго примера рассмотрим продольные волны сжатия-
растяжения в стержне (рис. 11.6 а). Чтобы получить уравнение таких волн,
введем вектор смещения частиц стержня. Именно, пусть в положении рав-
равновесия некоторая частица находилась в точке ж, а под действием каких-
либо факторов она сместилась на расстояние и от исходного положения.
Тогда смещение точек стержня характеризуется функцией и(х)9 указываю™
щей расстояние, на которое смещается точка, имевшая координату х. Если
две близкие точки в положении равновесия имели координаты х и х + I
соответственно, то в результате деформации эти точки приобретут коор™
динаты
х + и(х) и х + I + и(х + I).
При этом расстояние между этими точками составит
[х + I + и{х + I)] - [х + и (х)} = I + — • I = I + AI
дх
192
Волны и структуры
u(x+t)
Рис. 11.6. а — Продольные колебания в стержне; б — определение вектора
смещения частиц вещества. Штриховыми линиями показано новое положение
рассматриваемого элемента объема
(мы учли, что расстояние I между точками мало). Поскольку начальное
расстояние было равно I, то относительная деформация есть
ди
~дх~°
A1.26)
По закону Гука деформация е связана с силой натяжения Т в стержне со-
соотношением
=^ или
Е
дх
{1121)
где Е — модуль Юнга. Положение рассматриваемого элемента стержня
можно характеризовать величиной и — текущей координатой центра тя™
жести данного элемента. Для составления уравнения движения этого эле™
мента воспользуемся 2-м законом Ньютона:
~ = [T(x
dt2
- T(x)]S =^
дх
A1.28)
В левой части этого соотношения с точностью до малых величин более вы-
высокого порядка, чем I, можно пренебречь различиями значений смещения
разных точек выделенного элемента.
Учитывая соотношение A1.27), мы снова приходим к волновому урав™
нению
д2и
dt2
д2и
дх2'
Е
С = 4 / —•
Р
A1.29)
Здесь, в отличие от A1.25), скорость распространения волны определяется
уже не натяжением, а модулем упругости вещества.
11.5. Уравнение звуковых волн в газе 193
11.5. Уравнение звуковыж волн в газе
В качестве третьего примера мы рассмотрим малые колебания плотно™
сти в газовой среде. Эти колебания представляют собой звуковые волны.
Уравнения течения газа суть уравнение непрерывности
^+dlv(pv) = 0 A1.30)
dt
и уравнение Эйлера
^ + (W)v = -^. A1.31)
dt p
Здесь Р — давление в газе, р — плотность, a v — скорость течения газа.
Рассматривая случай малых колебаний, мы должны считать малыми вели™
чинами скорость течения газа |v| и отклонения плотности р и давления Р
от их значений ро и Pq в покоящемся газе. Поэтому в уравнении A1.30)
заменим dlv(pv) ^ ро div v, а в уравнении A1.31) отбросим малое слага-
слагаемое (vV)v и положим в правой части р = ро. В результате мы приходим
к линеаризованной системе уравнений
-^ + ро div v = 0,
Ot /1 1 о<-)\
^ JL ( }
dt ро
Применяя операцию div ко второму уравнению и исключая div v с помо™
щью первого уравнения, получаем уравнение, связывающее р и Р:
|f=div(VP).
at2
Далее учтем уравнение состояния газа Р = Р(р). Обозначая
с2 = ^, VP = c2VA AL33)
dp
перепишем предыдущее уравнение в виде
^ Ap A1.34)
(с принятой точностью мы должны считать величину с постоянной и вы-
вынести ее за знак дифференцирования).
При записи уравнения состояния газа в виде Р = Р(р) мы предпола-
предполагали, что помимо обычного уравнения Клапейрона-Менделеева
A1.35)
(/1 — молярная масса газа) имеет место дополнительная связь между па™
раметрами газа {Р, р, Т}. Эта связь состоит в требовании адиабатичности
процесса (см. комментарий 11). Для идеального газа это означает, что Р ^
~ р7, 7 = Ср/Су — показатель адиабаты (Ср и Су — теплоемкости газа
13 Н.В. Карлов, Н.А. Кириченко
194 Волны и структуры
при постоянных давлении и объеме соответственно). Поэтому для величи-
величины скорости звука с находим
Г> \ / Г> / DIP
A1.36)
Таким образом, мы получили одно и то же уравнение, описывающее
процессы в качественно различных системах. В приведенных примерах это
уравнение описывало лишь малые колебания вблизи положения равнове-
равновесия. Однако во многих случаях уже этого приближения достаточно, чтобы
понять природу наблюдаемых явлений.
11.6. Решении волнового уравнения
Выше было установлено, что бегущие волны A1.14) являются реше™
ниями волнового уравнения (собственно, вид волнового уравнения и был
найден исходя из вида решений). В соответствии со сказанным общее ре™
шение уравнения A1.15) может быть представлено в виде
ll(r t) — 771 (т — Cf) 4- 1lo(r 4- Ct) П 1 17)
где u\ (у) и и2 (у) — произвольные дважды дифференцируемые функции.
В частности, мы можем взять функции и\ и и2 в виде гармонических:
и\ (х — ct) = a\ cos[A;i [x — ct) + <^i],
и2 [х + ctj := п2 cos[^2 \Х + ctj + 9^2]•
При этом в зависимости от соотношения между амплитудами («i, a2), на™
чальными фазами (^i, tp2) и волновыми числами (^i, ^2) мы будем полу™
чать стоячие или различные бегущие волны.
Более широкий класс решений возникает при переходе от одномерного
A1.15) к трехмерному A1.17) волновому уравнению. Наряду со всеми ре™
шениями, имеющимися у уравнения A1.15), трехмерное уравнение A1.17)
обладает решениями, не являющимися плоскими волнами. Оно, например,
имеет сферически симметричные решения
щ {х, t) = -Д (г - ct) + %2 (г + ct), AL39)
г г
где Д и f2 — произвольные функции. Первое слагаемое в A1.39) описы™
вает волну, расходящуюся от центра г = 0, а второе — волну, сходящуюся
к центру.
Подробный анализ решений волнового уравнения и методов их нахо™
ждения можно найти в учебниках по математической физике.
11.7. Дисперсия волн
Для рассмотренных выше волновых уравнений имело место соотно™
шение A1.5), так что фазовая скорость, которую будем обозначать теперь
11.7. Дисперсия волн 195
как v$,
^Ф = ^ A1.40)
к
не зависела от частоты колебаний и совпадала с коэффициентом с в волно™
вом уравнении A1.15): v$ = с.В более общем случае такая независимость
уже не имеет места. В самом деле, при выводе уравнений мы пренебрега-
пренебрегали рядом факторов. Например, можно было бы учесть трение в задаче о
колебаниях струны. Это дало бы уравнение
±(&и +2 М=^и AМ1)
с2 V dt2 ! dtj дх2 К J
где 7 традиционно обозначает величину, пропорциональную коэффициен-
коэффициенту жидкого трения. В этом случае мы получаем затухающие колебания. В
самом деле, будем искать решение такого уравнения подобно тому, как это
делалось в главе II при изучении затухающих колебаний. Тогда мы должны
положить
и = ще^кх-шг). A1.42)
Подстановка A1.42) в A1.41) дает связь к ш ш:
и2 + 2г7о; = ^2с2. A1.43)
Поэтому фазовая скорость
-I In
v$ = j = c(l + 2il) A1.44)
к V ш /
оказывается не только комплексной (что свидетельствует о затухании ко-
лебаний), но и зависящей от частоты.
Зависимость фазовой скорости от частоты появляется и тогда, когда
трение отсутствует, но играют роль иные физические факторы, не учтен™
ные при выводе уравнений типа A1.15) в конкретной задаче. Оказывается,
во многих случаях волновое уравнение содержит не только вторые, но и
более высокие четные производные. Например,
1 д2и д2и д4и /11 Л .
с2 dt2 дх2 дх4
где ао, «2? «4? • • • — постоянные коэффициенты. Подставляя сюда выра-
выражение A1.42), мы найдем связь волнового числа к с частотой ш:
ш2 = с2[а0 + а2к2 + а4к4 + ...]= ш2 (к), A1.46)
т.е.
ш = и(к). A1.460
Строго говоря, уравнение A1.46) определяет две ветви: ш = ш(к) и
и = —из(к), которым соответствуют две волны, распространяющееся в
противоположных направлениях. Однако ввиду эквивалентности этих на™
правлений достаточно исследовать только одну ветвь. Учет же второй вет-
ветви должен делаться тогда, когда присутствуют одновременно обе волны.
13*
196 Волны и структуры
Соотношение A1.46) можно разрешить относительно к: к = к(ш). То-
Тогда для фазовой скорости находим
«ф = | = «ф (w). A1.47')
Явление, когда фазовая скорость волны зависит от частоты колебаний
(или, что то же самое, от волнового числа), называется дисперсией, а ере™
ды, в которых такое явление наблюдается, — диспергирующими средами.
Соотношение, связывающее частоту и волновое число (волновой вектор),
называется законом дисперсии.
Физически возникновение дисперсии связано с усложнением характера
взаимодействия между отдельными элементами. Для иллюстрации этого яв-
явления рассмотрим модельную среду, образованную из цепочки связанных
маятников (рис. 11.1). Будем считать, что все маятники имеют одинаковые
массу т и длину нити I и связаны пружинами одинаковой жесткости к, име-
имеющими в нерастянутом состоянии длину а. Будем изучать малые колебания.
Для произвольного п-то маятника уравнение движения имеет вид
тЮп = ^тёвп + 4Фп+г - 6П) - I (вп - en_i)]. A1.48)
Левая часть этого уравнения есть произведение массы п-го маятника т
на его ускорение Юп. Первое слагаемое в правой части — это проекция
силы тяжести на траекторию маятника (mg sin вп « —mgOn). Слагае-
Слагаемое /d@n+i — 0n) есть упругая сила, действующая на п-й маятник со
стороны пружины, связывающий его с (п + 1)-м маятником. Слагаемое
же к,1(®п — ©n-i) — аналогичная сила, обусловленная взаимодействием
с (п — 1)-м маятником. Для бесконечной цепочки мы имеем бесконечную
систему уравнений, причем индекс п пробегает значения п = 0, ±1, ±2,...
Введем обозначения
Wo2 = f, М=-. A1.49)
I га
Тогда система уравнений A1.48) переписывается в виде
в„ + ш20вп = /х [вп+1 - 2вп + 0n_i], п = 0, ±1, ±2,... A1.50)
В этой системе индекс п играет роль пространственной координаты, так
что система уравнений A1.50) есть, по сути, модификация волнового урав™
нения, рассмотренного выше. Чтобы увидеть качественное отличие урав-
уравнения A1.50) от A1.15), введем вместо номера п координату хп = па.
Тогда, считая расстояние между маятниками малым, с точностью с лага™
емых более высокого порядка по а имеем
- 2вп
д2в
A1.51)
Соответственно, обозначая jia2 — с2, перепишем A1.50) в виде
^| = -Wo2e + c2$| A1.52)
11.8. Групповая скорость 197
(мы не пишем здесь индекс в, имея в виду, что теперь В явно зависит от
координаты х). Если бы мы провели разложение в A1.51) до более высоких
степеней а, то получили бы в A1.52) слагаемые, содержащие более вы™
сокие производные: a2kO^2k\ к = 2, 3,... Таким образом, непрерывный
(континуальный) аналог дискретной цепочки A1.50) описывается обобще™
нием волнового уравнения A1.45). Естественно ожидать в такой цепочке
явления дисперсии.
Решение системы уравнений A1.50) нетрудно получить, используя
комплексное представление колебаний. Именно, положим
Qn = Qoexp[i(kxn — ait)], xn = па. A1.53)
Подставляя A1.53) в A1.50), получим
(с^о ~~ и2) Gxp[ikna] = fi{exp[ik(n + 1)а] — 2exp[ikna] + exp[ik(n — 1)«]},
или, после несложных преобразований,
и? = ^ + 4/isIn2—. A1.54)
Мы установили закон дисперсии, связывающий частоту и волновое число.
Отсюда видно, что фазовая скорость Уф = ш/к зависит от частоты. Более
того, при к —>• 0 или ш —> шо (т.е. когда длина волны Л —>- оо) v$ —>• оо.
Еще один пример системы с дисперсией (протяженная линия передачи)
рассмотрен в комментариях 26 и 27.
11.8. Групповая скорость
С рассмотренным выше явлением дисперсии тесно связано понятие
групповой скорости. Если фазовая скорость волны характеризует скорость
смещения точки волны, имеющей фиксированное значение фазы, то груп-
групповая скорость отражает скорость переноса энергии в волне, т.е. скорость
передачи взаимодействия.
Чтобы подойти к понятию групповой скорости, рассмотрим две волны
в диспергирующей среде, имеющие частоты ш\ и ш^ и соответствующие
им волновые векторы к\ = k{uj\) и кч = к{ш2). Поскольку фазовые ско-
скорости этих волн отличаются друг от друга, то результат сложения волн в
разные моменты времени будет различным. Рассмотрим это явление по-
подробнее. Пусть волны задаются уравнениями
щ (ж, t) = a sin (кгх - шг€),
U2 (ж, t) = a sin (^2^ — ouit).
Суммарное колебание есть сумма
Jl\\k2 + klUJ2+UJl\ A1.56)
198 Волны и структуры
Пусть волновые векторы к± и А?2 близки, т.е. |А?2 — A;i | <€ik\. Тогда, обозначая
h« ^L Ь>~
2
+ шг
2
перепишем A1.56) в виде
и (x,i) = 2аcos — (ж 1) sin (lex — cut). A1.57)
L 2 V dk / \
Полученное выражение аналогично уравнению биений (см. формулу
B.41)): в каждой фиксированной точке наблюдения колебания имеют вид
биений с периодом
ТБ= 2ж « ^ . A1.58)
|со?2 — <^^i | Ak\du)/dk\
С другой стороны, фиксируя момент наблюдения, мы видим модулирован™
ную волну, у которой амплитуда модуляции дается множителем
A1.59)
Рассматривая теперь эволюцию волны во времени, мы наблюдаем неиз™
менный профиль, т.е. огибающую высокочастотных колебаний, если дви-
двигаемся вдоль волны со скоростью
*VP=^. A1.60)
ак
При таком движении множитель A1.59) сохраняет постоянное значение.
На рис. 11.7 показан профиль модулированной волны A1.57). Со скоро-
Рис. 11.7. Волна, образованная в некоторый момент двумя волнами с близкими
частотами: и = l,75[sinE,7#) + sinF,3x)]
стью vrp движется огибающая высокочастотных колебаний. Величина, вве™
денная соотношением A1.60), называется групповой скоростью.
Нетрудно понять, что определение групповой скорости A1.60) остает-
остается справедливым и в том случае, когда складывается произвольное число
волн. В самом деле, положим
k=k2
u(x,t)= ^2a(k)exp[i(kx-w(k)t)]. A1.61)
11.8. Групповая скорость
199
Будем предполагать, что суммирование производится по узкому интервалу
волновых чисел: к Е [Aji, А^], |А?2 — A;i| <C к\. Тогда можно разложить а;(А;)
в окрестности среднего значения волнового числа:
4- (к - к ) — к — kl + *
dk k=k0" 2
Подставляя A1.62) в A1.61) и переходя к суммированию по q = к ~~
получим
ш(к)
шо=ш(ко). A1.62)
и{х,ъ) =
= exp [
- Vrpt)} =
-ujQt)]F{x-v^t), A1.63)
где, как и выше, мы ввели обозначение t;rp = — . Суммирование в
и К k=ko
A1.63) производится по волновым числам q в диапазоне от gi = —Ак/2
до <у2 = Ак/2, Ак = А?2 — к\. В силу неравенства |g| <C fco функция F(y)
меняется много медленнее, чем экспонента. Поэтому суперпозицию волн
u(x,t) можно представлять как модулированную волну со средними волно™
вым числом ко и частотой ljq, причем амплитуда модуляции дается функ-
функцией F(x — Vrpi). Скорость движения огибающей есть групповая скорость
цуга или волнового пакета. На рис. 11.8 показан волновой пакет, образо-
Рис. 11.8. Цуг, образованный в некоторый момент пятью волнами с близкими
2
частотами: и = Yl un sin(knx); ип = 1/16, кп = 5 A + п/40)
п= —2
ванный из нескольких волн с близкими частотами. Именно волновой па-
пакет, т.е. группа волн, и движется со скоростью г^. Поэтому величину vrp
называют групповой скоростью.
Следует обратить внимание на то, что понятие групповой скорости имеет
ограниченную область применимости, поскольку в среде с дисперсией вол-
волновой пакет с течением времени не только перемещается, но и, как пра-
правило, меняет форму. Чтобы убедиться в этом, достаточно в разложении
A1.63) удержать члены более высокого порядка:
j I j2
и (к) ^ujq + (А; — Ajo) — + -(к - ко) ^^ • A1.64)
rib 1 1 9 ЛЬ^
u К — Kq
Добавочный член приводит к изменению фаз волн, образующих волновой
200 Волны и структуры
пакет, на величину -q
! dvn
2 dk
k=k0
. При этом выражение A1.61) можно еве™
сти к виду модулированной гармонической волны, только если эта добавка
мала (много меньше тг) и не сказывается на относительной разности фаз
между слагаемыми в модулирующей функции
F = 53 exp \iq(x - vTpt) - d (^) t\ = F(x - vrpt, t)
q I ° J
(здесь для краткости индексом " обозначено значение производной при
к = ко). Полагая для оценки q ~ Ак/29 получим характерное время суще-
существования волнового пакета:
"" AL65)
Найдем связь фазовой и групповой скоростей. Подставляя в A1.60) со-
соотношение ш = куф, получим
Пгр = щ + к^. A1.66)
dk,
Переходя здесь от волнового числа к длине волны А = 2ж/к, перепишем
найденную связь в виде
A1.67)
Это соотношение называется формулой Рэлея.
Как следует из A1.66), для сред без дисперсии
т.е. фазовая и групповая скорости совпадают. В рассмотренном выше при™
мере цепочки связанных маятников дисперсия имеется. Поэтому группо-
групповая скорость
vrp = — = — sin lea A1.68)
dk ш
отличается от фазовой. Среды, для которых фазовая скорость растет с
ростом длины волны, dv^/dX > 0, называются средами с нормальной дис-
дисперсией. В противоположном случае говорят о средах с аномальной дис-
дисперсией. Согласно A1.67) в случае нормальной дисперсии г;гр < v$.
Из сопоставления рис. 11.7 и рис. 11.8 видно, что путем увеличения
числа складываемых гармонических волн можно получить волновой пакет
со сложным пространственным профилем. В пределе бесконечного чис™
ла гармоник можно построить локализованный волновой пакет, "частицу",
который движется со скоростью vrp. Понятно, что энергия, содержащаяся в
волновых пакетах, локализована в основном в "сгустках". Это качественно
поясняет то обстоятельство, что энергия в волновом пакете переносится с
групповой, а не фазовой скоростью.
11.9. Вектор У мое а^ П (митинга 201
11.9. Вектор Умова-Пойнтинга
В связи со сказанным рассмотрим вопрос о переносе энергии волнами.
Будем для определенности говорить о продольных волнах в стержне. Вы-
Выделим мысленно в стержне единичный объем и найдем энергию, которой
он обладает. Эта энергия сложится из кинетической энергии
М) A1.69)
и потенциальной энергии деформации
Е
/11 1(ХХ
AL70)
(и — вектор смещения частиц вещества, ди/дх — относительная дефор-
деформация). Скорость изменения полной плотности энергии w = wKUii + wnOT
со временем есть dw/dt.
Пусть через единицу площади поперечного сечения стержня проходит
за единицу времени энергия J(x, i). Так определенная величина J назы-
называется плотностью потока энергии. Рассмотрим элемент объема стержня,
заключенный между координатами х и х + dx. Площадь поперечного сече-
сечения стержня S считаем постоянной. Тогда в единицу времени в этот эле-
элемент объема поступает энергия SJ(x, t) и выходит из него энергия S J(x+
+ dx, t). Разность
S J (ж, i) — SJ (x + dx, t) = —S— dx
dx
есть скорость изменения энергии в объеме Sdx. С другой стороны, эта
скорость есть
dw o ,
— • о ах.
dt
Поэтому баланс энергии определится уравнением
5 + ^=0. A1.71)
dt ох
Попробуем найти явное выражение для плотности потока энергии J,
отталкиваясь от волнового уравнения A1.29):
Поскольку
2 Vat/ 2 V&r
di/ \дх
то, дифференцируя w по времени, найдем
2u |
>.
dt)
dw (дид2и odu d2
= p{ h с
at H\
\dt dt2 dxdxdt
202 Волны и структуры
Заменяя здесь производную d2u/dt2 с помощью волнового уравнения
A1.72), получим
д2и ди\
dxdt дх J
dw 2(дид2и д2и ди\ 2д (ди ди
[ dt дх2 dxdt дх J
Сравнивая A1.74) с A1.71), мы находим выражение для величины J:
J=-PC2~- (П-75)
ot ox
Рассмотрим частный случай, когда в веществе распространяется тар™
моническая бегущая волна
и{х, t} = и$ sm.(kx — oj?). A1.76)
Используя A1.73), найдем плотность энергии:
w = ^ul (ш2 + с2к2) cos2 (кх - ш€). A1.77)
Из A1.75) получим выражение для плотности потока энергии:
J = рс2и^шк cos2 (кх — cut). A1.78)
Сравнивая A1.77) и A1.78), мы заключаем, что
3= 2с2шк w. A1.79)
ш2 + с2к2
Так как волна распространяется в среде без дисперсии, то ш = ск и из
A1.79) следует
J = wc» A1.80)
Мы рассматривали волну, распространяющуюся вдоль оси х. Если вол-
на распространяется в произвольном направлении, характеризуемом век™
тором скорости с, то соотношение A1.80) следует записать в виде
J = wc. A1.81)
Последнее соотношение подчеркивает тот факт, что плотность потока энер-
энергии есть вектор, направление которого указывает направление переноса
энергии. Так определенный вектор J носит называние вектора Умоеа-
Пойнтинга. Его среднее значение за период колебаний называется интен-
интенсивностью волны: I = J.
В более общем случае среды с дисперсией коэффициент пропорцио-
пропорциональности между плотностью энергии и плотностью потока энергии не
совпадает с фазовой скоростью волны (или хотя бы с коэффициентом с,
входящим в волновое уравнение). Для примера рассмотрим волновое урав-
уравнение A1.52), приближенно описывающее поведение цепочки связанных
маятников:
да"-с ft?+"oe = O. (П.82)
Уравнение этого вида называется уравнением Клейна-Гордона. Для него
нетрудно записать закон сохранения энергии типа A1.71). В самом деле, в
11.9. Вектор У мое а^ П (митинга 203
качестве плотности энергии (полагая плотность вещества равной единице)
можно взять выражение
1 [дВ\2 , 1 2 [дв\2 , 1 2гЛ2 /и ооч
w = -[— + -cz (— +-UqQz. A1.83)
2\dtJ 2 \дх/ 2 u
Первые два слагаемые, как и выше, описывают соответственно кинетиче-
кинетическую энергию и энергию упругой деформации (пружин — в случае це-
цепочки рис. 11.1). Последнее слагаемое есть потенциальная энергия малых
колебаний маятника в поле тяжести (ср. формулу C.2)). Дифференцируя
A1.83) по времени и заменяя d2O/dt2 на основании уравнения A1.82),
найдем
dw дв \д2в , 2/-J , 2дв д2в
aei _ с2д^ /<ю ш\
dt dt [di2 u J дх dxdt
ае a^e с
dt дх2 dxdt дх \ ° дх \ dt дх )
Таким образом, как и раньше, для плотности потока энергии мы находим
J=^c2dBdB^ (П84)
dt dx
Закон дисперсии для волн, описываемых уравнением Клейна-Гордона,
устанавливается, если подставить выражение
6(я, t) = eosin(kx^ujt) A1.85)
в уравнение A1.82). Это немедленно дает
ш2 = ш2 (к) = ш1 + с2к2 A1.86)
(последнее, разумеется, совпадает с A1.54) в пределе fca<C 1, т.е. для боль-
больших длин волн).
Для гармонической волны A1.85) плотность энергии A1.83) равна
(ш2 + с2к2) cos2 (кх - out) + * В2,^ sin2 (кх - out). A1.87)
Среднее значение этой величины за период колебаний Т = 2тт/ш есть
п, = -е1{ш2+ш1 + с2к2). A1.87')
Плотность потока энергии A1.84) дается выражением
J = с2в20шк cos2 (кх - cut), A1.88)
интенсивность волны I (т.е. среднее значение J за период колебаний) равна
I = J = ^с2в1шк. A1.880
Из A1.870, A1.880 следует
J= 2с2шк w. A1.89)
w = l
204 Волны и структуры
Здесь для ш(к) использовано выражение A1.86). Соотношение A1.89) как
частный случай включает в себя формулу A1.79), отвечающую отсутствию
дисперсии. Этот случай согласно A1.86) реализуется при ш® —>> 0.
Поскольку ш = ш(к) (в силу закона дисперсии), то формулу A1.89)
можно переписать в виде
J=— w. A1.90)
ш
В случае дисперсии, задаваемой уравнением A1.86), групповая скорость
волны равна
Vrp = — = —, A1.91)
dk ш
т.е. групповая (i;rp = du/dk) и фазовая (v^ = ш/к) скорости связаны соот™
ношением
Гр ^ЦЗ — О . III. У Aj I
Используя A1.91), запишем соотношение A1.90) в следующей форме:
J = ^pti). AL93)
Последнее соотношение, подчеркивая смысл понятия "групповая скорость",
имеет широкую область применений во многих физических задачах.
В данной главе мы не рассматривали методов решения волнового урав-
уравнения в различных конкретных ситуациях. Не обсуждали мы также и такие
типично волновые явления, как дифракция. Эти вопросы затронуты в ком-
комментариях 28 и 29.
ГЛАВА XII
Волны в периодических системах. Вектор трансляции, основ-
ные периоды решетки. Обратная решетка. Волны Блоха. Ква-
зиимпулъс. Зоны Бриллюэна. Приведенная и расширенная зонные
схемы. Одномерный периодический потенциал, зонная структу-
структура спектра. Зонная структура спектра для системы связанных
осцилляторов. Энергетический спектр электронов в решетке.
Квазиконтинуалъный спектр. Резонанс Ферми.
В предыдущей главе рассмотрены основные принципы теории линей-
линейных волн. При этом мы изучали только распространение волн в однород-
ных средах. Реальные среды часто неоднородны, их свойства меняются от
точки к точке. Во многих случаях это может приводить не только к количе-
количественным, но и к качественным изменениям в поведении волны. Очевидно,
что исследовать в общем виде влияние произвольной неоднородности на
характер волнового процесса невозможно.
Существует, однако, важный класс неоднородных структур, где такое
исследование возможно. Это среды с пространственно периодическими
неоднородностями. Примеры здесь простираются от потоков автомобилей
в идеальном городе с почти периодической системой улиц и перекрестков
до движения электронов в кристаллах, от рассеяния света дифракционной
решеткой до распространения радиоволн в спиральных галактиках.
На примере конкретной физической задачи о движении электрона в
кристаллической решетке мы рассмотрим некоторые общие свойства волн
в периодических системах. В кристаллах электрон находится в поле, со-
создаваемом остовами атомов, расположенных в узлах периодической кри™
сталлической решетки, и в поле всех остальных электронов. Эффективный
потенциал С/(г), создаваемый при этом, можно считать периодическим.
Это означает, что существует такой вектор трансляции а, что
C/(r + a) = U(r). A2.1)
В случае трехмерной решетки произвольный вектор трансляции может
быть представлен в виде
а = raiai + п2а2 + н3а3, A2.2)
где ai, 8t-2, аз — три некомпланарных вектора, {ni, тг2, п%\ — произволь-
произвольные целые числа, щ = О, =Ы, ±2,... (г = 1, 2, 3). Если при неизменных
направлениях векторов {ai, а2, аз} выбрать их длины минимальными, то
206 Волны и структуры
эти векторы называются базисными или основными периодами решетки.
Параллелепипед, построенный на основных периодах решетки, называет-
называется элементарной ячейкой. Следует отметить, что выбор основных перио-
периодов неоднозначен.
С пространственной решеткой, задаваемой векторами {ai, a2, аз},
целесообразно связать вспомогательную решетку, называемую обратной.
Рассмотрим сначала одномерный кристалл, в котором потенциал U = U(x)
является периодической функцией координаты х с периодом а. Как и всякую
периодическую функцию, потенциал U{x) можно разложить в ряд Фурье:
оо
ill ПГ* I ~™~™ % / / OATTPl I Q к? ПГ* i I 1 / Ч /У 1
Ь=-. A236)
Входящий в это разложение дискретный набор чисел кр разбивает все
пространство волновых чисел к на последовательность зон длиной 2тг6.
Иными словами, мы получаем в ^-пространстве структуру с периодом 2тг6,
которая (с точностью до множителя 2тг) и называется одномерной обрат-
обратной решеткой. При трансляции на расстояние А, равное произвольному
целому числу периодов пространственной решетки, потенциал U(х) не ме-
меняется, U(x + А) = U(x). Согласно A2.3) это означает
оо оо
Up ехр [гкр (х + А)] = Л, Up exp [гкрх\.
Отсюда ввиду произвольности координаты х следует кр А = 2тгт, где т —
произвольное целое число (т = 0, ±1, ±2,...). Для произвольного век-
вектора обратной решетки В = рЬ это означает, что
В А = т. A2.4а)
Рассмотрим трехмерную ортогональную пространственную решетку.
Выполняя Фурье-преобразования по координатам х, у и z, получим трех-
трехмерную обратную решетку, которая также является ортогональной. Базис-
Базисные векторы этой решетки {bi, Ьг, Ьз} параллельны соответствующим
векторам прямой решетки, а их длины связаны простыми соотношениями:
bi = (а^), г = 1, 2, 3. Если А = niai + B2&2 + n%8L% — произвольный
вектор трансляции, а В = pibi + P2b2 + РзЬз — произвольный вектор
обратной решетки (щ9 Pi — произвольные целые числа), то
ВА = ш, A2.46)
где т — произвольное целое число. Общий трехмерный случай рассмо-
рассмотрен в комментарии 30.
12.1. Волны Блоха 207
12.1. Волны Блоха
Запишем уравнение Шредингера для электрона в периодическом по™
тенциале С/(г):
ф() + и{т)ф{т) = Еф{т). A2.5)
2тп
Осуществим сдвиг на вектор трансляции а. Так как согласно A2.1)
U(r + а) = U(г), то A2.5) записывается как
-—Аф(г + а) + ЩтЩг + а) = Еф{т + а). A2.6)
Отсюда видно, что функция ф{т + а) есть решение исходного уравнения
Шредингера A2.5), т.е. она описывает то же состояние, что и функция ^(г).
Поэтому ф(г + г) и ф(г) могут отличаться только фазовым множителем:
ф(т + а) = CaV'W, \Ca\2 = 1. A2.7)
Положим
Са = eika A2.8)
и введем функцию
u(r) = e"ikPV>(r).
Покажем, что и (г) — периодическая функция. Действительно,
= е"л(г+а)[егка^(г)] = е^к1>(г) = ^(г). A2.9)
Таким образом, мы приходим к представлению волновой функции в виде
^(r) = eikrw(r), A2.10)
где и (г) — периодическая функция с периодом, равным периоду решет-
решетки. Функции, удовлетворяющие условию A2.10), называют волнами Блоха
(F. Bloch, 1929).
Заметим, что в теории дифференциальных уравнений с периодически™
ми коэффициентами существование решений, удовлетворяющих свойствам
A2.7), A2.10), составляет содержание теоремы Флоке-Ляпунова (см. ком-
комментарий 5 и приложение 3).
12.2. Квазиимпульс и энергии электронов
Если бы поле U было всюду равно нулю, то волновая функция элек™
трона была бы плоской волной
ф = фоеАг A2.11)
и описывала бы электрон с импульсом Кк. В случае ненулевого периодиче-
периодического потенциала величина Кк уже не может рассматриваться как обычный
импульс. В самом деле, произведем в Са замену
A2.12)
208 Волны и структуры
где b — произвольный вектор обратной решетки. Согласно A2.46) Ьа =
= га, где га = 0, ±1, ±2,... — целое число. Поэтому
ег(к+2тгЬ)а _ gika^ /|2 13)
Таким образом, при сдвиге на 2жпЪ коэффициент Са не меняется. Это
означает, что вектор к определен лишь с точностью до 2тгпЬ, где п —
произвольное целое число. Поэтому, в отличие от обычного импульса р,
величину Як называют квазиимпульсом.
Минимальная ячейка в ^пространстве, отвечающая физически различ™
ным значениям волнового вектора к, называется зоной Бриллюэна.
Энергия электрона, т.е. собственные значения величины Е, входящей
в уравнение Шредингера A2.5), является функцией квазиимпульса Як.
Поскольку, согласно A2.13), значения квазиимпульса Як и Я(к + 2тгпЬ)
физически неотличимы, энергия Е(к) может рассматриваться как пери™
одическая функция квазиимпульса:
?;(к + 2тгЬ) = Я(к). A2.14)
При таком подходе функция Е(к) не является однозначной: каждому зна-
значению к отвечает бесконечное число значений Е, образующих дискретный
спектр. При этом вектор к пробегает значения, принадлежащие только од-
одной зоне Бриллюэна. Данное представление называется приведенной зон-
зонной схемой.
Альтернативный подход, позволяющий избавиться от такой неодно™
значности, состоит в том, чтобы рассматривать Е(к) как функцию аргу™
мента к, определенную для всех значений вектора к, а не только в интер™
вале (^тгЬ, +тгЬ), как это имело место в приведенной схеме. Такое пред™
ставление называется расширенной зонной схемой. В этом представлении,
оказывается, легко проследить предельный переход к случаю отсутствия
потенциала, U —>> 0, когда энергия электрона равна
П2к2
A2.15)
2т
причем для вектора к допустимы уже все значения, 0 ^ |к| < оо, а вектор
Як имеет смысл обычного импульса. Ниже этот предельный переход будет
описан подробнее.
В стационарных условиях ^(г) и ф*(г) описывают состояния с оди-
одинаковой энергией, поскольку обе эти функции суть решения одного и то™
го же уравнения Шредингера. Это означает, что в случае периодического
потенциала одной энергии соответствуют функции ф(г) = ethru^(r) и
ф*(г) = e^*krw^.(r). Поскольку им отвечают квазиимпульсы Як и ^Як,
то энергия электронов оказывается четной функцией квазиимпульса:
Е(-к) = Я(к). A2.16)
Это утверждение называется теоремой Крамерса.
12.3. Одномерный периодический потенциал
209
12.3. Одномерный периодический потенциал
В общем случае произвольного потенциала U(г) (даже предполагае-
предполагаемого периодическим) решить уравнение A2.5) невозможно. Несколько бо-
более простым для анализа является случай одномерного потенциала U =
= U(x). При этом уравнение Шредингера A2.5) преобразуется в обыкно-
обыкновенное дифференциальное уравнение
+ ^2 Х A2.17)
U(x + a) = U(x).
Обратная решетка в этом случае одномерна и имеет период Ь = 1/а. Основная
зона Бриллюэна представляет собой множество значений к Е [—тг/а, +тг/а].
Уравнение A2.17) представляет собой уравнение Хилла, достаточно
подробно рассмотренное в главе II и комментарии 5 в связи с задачей
о параметрическом резонансе и в приложении 3 в связи с проблемой
устойчивости пространственно-периодических стационарных решений
некоторых классов нелинейных уравнений. Поэтому, не повторяя сказан-
сказанного там, приведем основные результаты.
Требование ограниченности волновых функций во всем пространстве
приводит к тому, что собственные значения энергии вместо непрерывного
множества образуют теперь дискретный набор разрешенных зон (зон ста-
бильности), чередующихся с запрещенными зонами (зонами лабильности).
Иными словами, энергия электрона может принимать только значения, по-
попадающие в разрешенную зону. Качественно структура спектра энергии
показана на рис. 12.1. Рис. 12.1а представляет обычную параболическую
-Зтг/а
—тг/а 0 тг/а
!\ Е
IV
А2
" дГ;
-Зтг/а
б.
--тг/а 0 ж/а
Зтт/а
Рис. 12.1. Зонная структура спектра электрона в периодическом потенциале, а —
Спектральная зависимость для случая потенциала U = 0; б — расщепление
спектра на разрешенные и запрещенные зоны (расширенная зонная схема)
зависимость Е = Я2 к2 /2т, отвечающую случаю потенциала U = 0
(свободное движение). При "включении" потенциала на границе зон, т.е.
в точках к = тт/а, спектр расщепляется, как это показано на рис. 12.1 б:
14 Н.В. Карлов, Н.А. Кириченко
210
Волны и структуры
происходит разрушение непрерывности кривой Е(к). Разрывы непре-
непрерывности отвечают запрещенным зонам. Такая картина расщепления ха-
характерна, вообще говоря, для любого одномерного потенциала, хотя и
существуют потенциалы, для которых некоторые из запрещенных зон
исчезают.
Показанная на рис. 12.1 функция Е(к) однозначна. Это — расширен™
пая зонная схема. Эту же функцию можно рассматривать, перейдя к при™
веденной зонной схеме, т.е. определив ее только в одной зоне Бриллюэна.
При этом она оказывается многозначной. На рис. 12.2а показан пример
Ai
W/////////////////A
ж/а
Рис. 12.2. а — Сведение ветвей спектра Е(к) к одной зоне Бриллюэна (приве-
(приведенная зонная схема), б — Представление спектра в виде серии зон: разрешенные
зоны (заштрихованы) чередуются с запрещенными зонами Ai, A2,—
возможного сведения спектра к одной зоне Бриллюэна. При этом возникает
набор спектральных (энергетических) кривых, отвечающих разрешенным
зонам и разделенных запрещенными зонами. Если не интересоваться яв-
явной зависимостью Е{к) в пределах разрешенной зоны, то зонную струк-
структуру спектра можно упрощенно представить в виде серии полос, как это
показано на рис. 12.2 б. Каждой точке полосы отвечает какое-то значение
квазиимпульса.
Заметим, что процедура сведения разных зон Бриллюэна к одной неод-
неоднозначна. Могут быть предложены способы "склеивания" различных вет-
ветвей спектра, несколько отличные от показанного на рис. 12.2.
Сказанное выше относилось к волнам Блоха, описывающим распро-
распространение электрона в периодических структурах. Однако все это в пол-
полной мере справедливо для волн любой природы. В частности, если бы мы
изучали распространение света в среде, показатель преломления которой
периодически зависит от координаты, то нашли бы, что в такой среде на
большие расстояния может распространяться свет с частотами, принадле-
принадлежащими разрешенным зонам. Свет же с частотами, попадающими в запре-
запрещенную зону, не распространяется. Последнее связано с интерференцией
12.3. Одномерный периодический потенциал 211
волн, рассеянных периодически расположенными неоднородностями сре-
среды, подавляющей прямую волну. При этом вид спектральной зависимости
разрешенных (запрещенных) зон определяется законом дисперсии ш(к).
Волновое уравнение для напряженности поля световой волны представля-
ет собой уравнение Гельмгольца
^() ,
с2 A2.18)
ф) = п2(г).
В рассматриваемом случае показатель преломления п (г) можно пред ста™
вить как
n(r) = no + ni(r), A2.19)
где по — постоянное число, а п\ (г) — периодическая функция координат.
В итоге мы приходим к задаче, аналогичной рассмотренной выше, хотя
частота ш входит в уравнение иначе, чем энергия Е в уравнение ТТТрединге-
ра. Последнее обстоятельство не меняет сути дела, оставляя справедливым
утверждение о зонной структуре спектра.
Наличие зонной структуры спектра проявляется во многих физических
задачах — в кристаллооптике, в физике антенно-фидерных устройств, в
оптике дифракционных решеток, в голографии и т.д. Хотя механизмы воз-
возникновения самих периодических структур и их взаимодействия с полем
волны могут быть качественно различными, результаты, по сути, оказыва-
оказываются аналогичными.
Уместно также сопоставить все сказанное выше с явлением парамет-
параметрического резонанса (см. главу II), где также возникают зоны стабильно™
сти и зоны лабильности по отношению к частоте внешнего воздействия.
Принципиальное отличие параметрического резонанса от случая волн в
периодических структурах состоит в том, что в первом случае периоди-
периодическое изменение параметров системы заданным внешним воздействием
приводит к "закачиванию" энергии в систему. Поэтому разрешенными
оказываются как зоны стабильности, так и зоны лабильности. Меняется
только характер "отклика": если частота внешнего воздействия попада-
попадает в зону стабильности, то колебания оказываются ограниченными по
амплитуде, если же в зону лабильности, то амплитуда колебаний неогра-
неограниченно растет за счет энергии, закачиваемой в систему внешним воз-
воздействием.
В случае волн в периодической структуре раскачка колебаний невоз-
невозможна, так как нет источника необходимой для этого энергии. Кроме того,
периодическая структура представляет собой неизменный фон, на кото-
котором разыгрываются волновые процессы, не влияющие на свойства среды
своего распространения. Именно поэтому зоны лабильности оказываются
запрещенными. Иначе был бы нарушен закон сохранения энергии.
14*
212 Волны и структуры
12.4. Зонная структура энергетического спектра системы
осцилляторов
Рассмотрим модель, описывающую возникновение зонной структуры
энергетического спектра электронов в кристалле 1) . Начнем со случая си™
стемы, состоящей из двух атомов. Для упрощения расчетов представим
атом с его валентным электроном как гармонический осциллятор. Пусть
сначала атомы разнесены на бесконечно большое расстояние, т.е. их мож™
но считать невзаимодействующими. Гамильтониан такой системы может
быть представлен в виде
*-2 о2 2 2
fj. _ по mujox1
1^^2^^?+^^' A2.20)
f> Т? д2 mujlxl
?12 = 1 •
2m dxl 2
Здесь х\ И12 — координаты электронов в первом и втором атомах, от™
считываемые от соответствующих положений устойчивого равновесия, а
ид — собственная частота колебаний электронов в этих атомах.
Энергия системы, т.е. собственное значение гамильтониана Н^°\ равна
Ег = йш0 (rci + - J , пг = 0, 1, 2,..., A2.21)
Е2 = йшо (п2 + -^ , п2 = 0, 1, 2,...
или
?(°) = йшо(т + п2 + 1) = Яа;о(Ж +1), iV = щ + п2, A2.22)
где число iV имеет смысл главного квантового числа. Энергетические уров-
уровни системы вырождены: одна и та же энергия отвечает разным значениям
чисел п\ и п2, лишь бы их сумма щ + п2 была одинаковой. Кратность вы™
рождения уровня равна АГ +1. Основное состояние (N = 0) не вырождено.
Будем сближать атомы. При этом постепенно "включается" взаимодей-
взаимодействие. Пусть атомы электронейтральны (т.е. чисто кулоновское взаимодей-
взаимодействие между ними отсутствует). Тогда при отклонении электрона от по-
ложения равновесия х\ = х2 = 0 атомы приобретают соответственно
дипольные моменты pi = ех\ жр2 = ех2. Если расстояние между атомами
есть R, то потенциальная энергия их взаимодействия
A = ^. A2.23)
) Формулировка рассматриваемой далее модели относится к случаю кристаллов, состоя-
состоящих из одинаковых атомов. Однако качественно механизм возникновения зонной структуры
спектра оказывается таким же и в случае кристаллов, состоящих из различных атомов.
12.4. Энергетический спектр системы осцилляторов
213
С учетом этого гамильтониан системы становится равным
Н = Я(о) + V12 = tfi + Н2 + \хгх2. A2.24)
Чтобы найти собственные значения этого гамильтониана, перейдем к нор™
мальным координатам
A2.25)
В результате несложных преобразований гамильтониан A2.24) приводится
к виду
Я= \-#-
2га
2т dqi
A2.26)
где
А
A2.27)
т т
Таким образом, в нормальных координатах гамильтониан системы двух
взаимодействующих осцилляторов свелся к гамильтониану системы двух
невзаимодействующих осцилляторов, но с различающимися частотами.
При этом энергия системы, в отличие от A2.22), дается формулой
Е =
-J
A2.28)
Если А/т <С ujq (слабое взаимодействие), то расщепление уровней
невелико, и схема уровней энергии системы может быть качественно пред™
ставлена в виде, показанном на рис. 12.3. Из этого рисунка видно, что при
наличии взаимодействия энергетический спектр представляет собой не на-
набор эквидистантных уровней, а систему полос, каждая из которых состоит
Е/Пш
3,5
2,5
1,5
Е/Ты
0,5
Е=0
б.
Е=0
'4,0), @,4);
;3,1), A,3); B,2)
'3,0), @,3);
ад, A,'
'2,0), @,2);
ад
A,0), (ОД)
@,0)
Рис. 12.3. Уровни энергии изолированного гармонического осциллятора (а) и си-
системы двух взаимодействующих осцилляторов (б). Указано положение Е = 0, по
отношению к которому ближайший сверху уровень отвечает нулевым колебаниям.
На рис. 12.3 б справа указаны комбинации чисел (ni, 712), дающие главное кван-
квантовое число N = п\ + П2, соответствующее линии (полосе). Х/тш2 = 0,1
214 Волны и структуры
из нескольких уровней. Когда число осцилляторов растет, вместо изоли-
изолированных полос уровней появляются квазинепрерывные зоны энергетиче-
энергетических состояний.
Рассмотрим этот вопрос чуть более подробно. Пусть система состоит
из п одинаковых взаимодействующих осцилляторов. Будем считать, что
взаимодействуют только ближайшие соседи, т.е. осциллятор с номером
к взаимодействует только с осцилляторами, имеющими номера к + 1 и
к — 1. При этом осцилляторы, находящиеся на концах цепочки, т.е. име-
имеющие номера к = 1 и к = п, взаимодействуют только е одним соседом,
имеющим номер к = 2 или к = п — 1 соответственно.
Обозначим координаты осцилляторов как х\, х2, • • • , хП9 и запишем
уравнение Шредингера для цепочки:
Нф = Еф,
н = нг + н2 +... + нп + у, A2*29)
V =
В этом уравнении также удобно перейти к нормальным координатам
{gi, #2? • • • ? <ln}? в которых гамильтониан iif принимает вид суммы га™
мильтонианов, отвечающих невзаимодействующим осцилляторам, име-
имеющим, однако, соответствующим образом смещенные частоты:
^ *\ A230)
Полная энергия системы как собственное значение гамильтониана A2.30)
представится тогда в виде
A2.31)
k = l
где rik — неотрицательные целые числа. Для классификации состояний
системы удобно использовать главное квантовое число
п
N = J2nk> A232)
k=i
Например, в случае трех осцилляторов главному квантовому числу N = 2
отвечают шесть различных комбинаций чисел (ni, n2j 713):
B,0,0); @,2,0); @,0,2); A,1,0); A,0,1); @,1,1).
Главному квантовому числу N = 0 отвечают нулевые колебания с энергией
п
E0 = ^J2UUJk° A233)
к=1
Величина Eq задает естественное начало отсчета энергии.
12.4. Энергетический спектр системы осцилляторов
215
Для того чтобы по формуле A2.31) построить энергетический спектр
системы, необходимо в явном виде найти частоты нормальных мод. Для
этого, в свою очередь, необходимо произвести диагонализацию гамильто-
ниана A2.29). Рассматривая координаты х^ как координаты некоторой точ-
точки в n-мерном пространстве, произведем ортогональный поворот в этом
пространстве. В полном гамильтониане A2.29) слагаемое, являющееся опе-
оператором кинетической энергии,
Т =
П2 д2
п2
^_^^ = 1Ь д
2тдх\\ 2т "'
A2.34)
где Ап — тг-мерный лапласиан, не меняет вида при таком повороте. В то
же время слагаемое
и =
2 2
¦ тш хк
A2.35)
к=1 к=1
в результате такого преобразования изменяется и при подходящей ориен-
ориентации новых осей приводится к диагональному виду
U =
A2.36)
к=1
Частоты нормальных мод Шк определяются через собственные значе-
значения р трехдиагональной матрицы М, элементы которой М^ суть коэффи-
коэффициенты в квадратичной форме A2.35):
/г
М =
тш
X
О
А
тш
О
А
тш2
\
О
О
О
О \
О
О
тш2/
A2.37)
Собственные значения р этой матрицы удовлетворяют характеристическое
му уравнению
det(M-pI) = 0, A2.38)
где I — единичная п х n-матрица. Всего мы имеем п собственных значений
{Ръ Vi•> • • • 5 Рп} и, следовательно, п частот нормальных мод
шк = л/рфп, к = 1, 2,..., п. A2.39)
Для иллюстрации на рис. 12.4 показано изменение схемы уровней при уве-
увеличении числа осцилляторов в системе. Видно, что уже в случае всего пя~
ти осцилляторов возбужденные уровни сливаются практически в непре™
рывные зоны. Нумерация зон может быть выполнена с помощью главного
квантового числа N (см. A2.32)). С его ростом зоны разбухают, расстояние
216
Волны и структуры
71=1
п=2
Рис. 12.4. Изменение схемы энергетических уровней при увеличении числа п
взаимодействующих осцилляторов в системе. По оси ординат указаны нормиро-
нормированные значения энергии системы, отсчитываемые от энергии нулевых колебаний
Ео (см. A2.33)), то есть значения главного квантового числа N. Х/тш2 = 0,1
между ними уменьшается, и при достаточно большом уровне возбуждения
они сливаются в квазинепрерывный спектр.
Обобщая этот результат на случай системы с большим числом ос-
осцилляторов, мы заключаем, что энергетический спектр такой системы
состоит из небольшого числа полос конечной ширины и квазиконтину-
алъного спектра. Другими словами, вместо серии эквидистантных ли™
ний, характерной для изолированного осциллятора, возникает сложная
спектральная структура наложения серий дискретных линий и участков
непрерывного спектра.
В комментарий 4 было рассмотрено расщепление частот связанных
осцилляторов (график Вина). Легко понять, что рассмотренный выше
эффект образования зон аналогичен классическому расщеплению Вина.
В самом деле, рассмотрим следующую квантово-механичеекую задачу.
Пусть имеется цепочка из N атомов. Обозначим волновую функцию
валентного электрона в n-м атоме через фп. Эти волновые функции отве-
отвечают случаю изолированных атомов и одному и тому же энергетическо-
му состоянию электрона. Поэтому они являются одинаковыми и ортого-
ортогональными (поскольку отличаются лишь координатой атомов и потому не
перекрываются).
По мере сближения атомов электроны могут совершать перескоки от
одного атома к другому. Следовательно, состояние каждого электрона бу-
будет представлять суперпозицию его состояний в разных атомах. При этом
вероятность таких перескоков остается малой, покуда атомы находятся на
12.4, Энергетический спектр системы осцилляторов 217
большом расстоянии друг от друга. Поэтому для их описания можно вое™
пользоваться методами теории возмущений. Запишем волновую функцию
электрона в произвольный момент времени в виде
N
ф = Х)с"^"- A2-40)
п=1
Согласно этой записи вероятность найти электрон в окрестности n-го ато-
атома равна \Cn(t)\2. Функция A2.40) удовлетворяет уравнению Шредингера
Ш^- = (#о + V)*, A2.41)
ot
причем базисные функции фп являются собственными функциями невоз-
невозмущенного гамильтониана Hq,
Щфп = Еофп, A2.42)
и предполагаются независящими от времени. Здесь EQ — энергия электро-
электрона в изолированном атоме. Переходы электрона между атомами описыва-
описываются оператором возмущения V в полном гамильтониане. Умножая A2.41)
на ф^ и интегрируя по координате с учетом ортогональности базисных
функций, получим уравнения для коэффициентов Сп (t):
d^M vmnCn(t), A2.43)
at
71=1
где коэффициенты Vmn представляют собой матричные элементы возму-
возмущения, Vmn = (фт\У\Фп)- Если учесть, что перескоки электрона наиболее
вероятны лишь между соседними атомами, то система уравнений A2.43)
примет вид
indO?l = E0Cn(t) + ACn-i(t) + ACn+1(t), n = l,2,...,N.
dt
A2.44)
Здесь Eq = EQ + Vnn9 A = VnjU^i = VnjU+i. Кроме того, для первого
и последнего атомов нужно отбросить в правой части A2.44) слагаемые,
соответствующие взаимодействию с левым или правым соседом.
Будем искать решение системы уравнений A2.44) в виде
Cn(t) = Co exp[i(kxn - ut)}, xn = па, A2.45)
где а — период решетки (расстояние между атомами), а частота ш связана
с энергией электрона Е соотношением Е = йш. Подстановка A2.45) в
A2.44) приводит к цепочке равенств
ECn(t) = E0Cn(t) + ACn_i(t) + ACn+1(t). A2.46)
218
Волны и структуры
Пусть система состоит только из двух атомов. Тогда вместо A2.46) име-
имеем систему двух уравнений
(Е - Ёо)СгA) = AC2(t),
(Е - E0)C2(t) = Ad(t).
Ее решение показывает, что уровень энергии Ео расщепляется на два под-
уровня:
A2.47)
А
A2.48)
Это значит, что вместо одного изолированного уровня мы имеем два, как
это имело место и в случае системы двух взаимодействующих осциллято-
осцилляторов (виновское расщепление частот).
Рассмотрим теперь бесконечную цепочку атомов. С учетом A2.45) со-
соотношение A2.46) можно переписать в виде
Е =
Aelka = Ёо
2Acos(ka).
A2.49)
Отсюда следует, что в такой цепочке энергия электрона может принимать
непрерывный набор значений. Это означает, что вместо дискретного уров™
ня Eq возникла зона разрешенных значений энергий. Заметим, что соот™
ношение A2.49) аналогично закону дисперсии A1.54), полученному в гла-
главе XI для колебаний в цепочке атомов.
Результат A2.49) легко обобщается на трехмерный случай. Предпола-
Предполагая, например, что кристалл обладает кубической симметрией, в тех же
приближениях, что и выше, получим за-
закон дисперсии
Е = Ео + 2A[cos(kxa) +
+ cos(kya) + cos(kza)] A2.50)
(каждое из слагаемых в скобках отвеча-
отвечает одной степени свободы — движению
вдоль осей х,у или z).
Из изложенного следует, что каждая
разрешенная зона спектра отвечает опре™
деленному терму свободного атома. По-
Поэтому в соответствии с классификацией
атомных уровней можно говорить об s-9
р-9 d-зонах. Для примера на рис. 12.5 при-
приведена качественная схема образования
3s™ и Зр~зон в натрии 1) . Как видно из
Рис. 12.5. Образование зонной
структуры натрия из дискретных
уровней при сближении атомов: из
3s- и Зр-уровней образуются 3s-
и Зр-зоны. Е — энергия системы,
г — расстояние между атомами,
ао — постоянная решетки
) Напомним, что электронная структура атома натрия (uNa) в основном состоянии
есть Is22s22p63s1. Соответственно имеется один валентный электрон, который в первом
возбужденном состоянии попадает в оболочку Зр.
12.4, Энергетический спектр системы осцилляторов 219
рисунка, зоны перекрываются при межатомных расстояниях, соответству-
соответствующих постоянной решетки.
Смещение и расщепление уровней энергии взаимодействующих осцил™
ляторов с близкими частотами нередко наблюдается экспериментально. Так,
в спектроскопии многоатомных молекул известно явление резонанса Фер-
Ферми, при котором частота одного характеристического колебания (колеба-
(колебания, относимого к какой-то одной определенной внутримолекулярной свя-
связи) смещается при случайном совпадении с частотой гармоники другого
колебания. На более высоких уровнях колебательного возбуждения возни-
возникают полосы, состоящие из нескольких уровней энергии. При этом пада-
падает характеристичность колебания (степень соотнесенности колебательного
движения с какой-либо определенной связью).
Заметим, что резонанс Ферми между первым возбужденным уровнем
симметричного валентного колебания трехатомной молекулы двуокиси уг-
углерода С02 и второй гармоникой деформационного колебания этой моле-
молекулы ответствен за высокую эффективность СО2-лазера.
ГЛАВА XIII
Самовоздействие волны. Нелинейные волны, нелинейный вол-
волновой процесс. Простые волны (волны Римана). Опрокидывание
волны. Уравнение Бюргерса. Диссипация, ее роль. Бегущий фронт.
Дисперсия волн. Оптическая и акустическая ветви. Гравитаци-
Гравитационно-капиллярные волны. Принцип причинности и дисперсионные
соотношения. Временная и пространственная дисперсия. Уравне-
Уравнение Кортевега—де Фриса. Солитон. Многосолитонные решения.
Взаимодействие солитонов. Законы сохранения для уравнения
Кортевега-де Фриса. Другие нелинейные уравнения.
В предыдущих главах были подробно рассмотрены закономерности вол™
новых процессов в линейных системах. Реальная жизнь, как правило, слож-
сложнее линейного приближения. Поэтому важно знать, чего, собственно, следует
ожидать в случае нелинейных систем. Иначе говоря, нас интересует, какие
явления могут наблюдаться благодаря нелинейному отклику среды на то или
иное воздействие.
Когда говорят о нелинейной среде или о нелинейном отклике среды,
имеют в виду следующее. Пусть в среде распространяется некоторая вол™
на. Эта волна воздействует на среду и, вообще говоря, изменяет ее свой™
ства. В случае линейных сред это изменение пренебрежимо мало. Если из-
изменение значительно, то им пренебрегать нельзя, что означает изменение
условий распространения самой волны. Тем самым возникает механизм
самовоздействия волны через воздействие волны на среду и обратное дей-
ствие среды на волну. Если не интересоваться специально самой средой,
а обращать внимание на свойства распространяющейся волны, то все это
в целом выглядит как нелинейный волновой процесс или, иначе говоря, как
нелинейная волна. Математически нелинейные волны описываются во мно-
многих случаях нелинейными дифференциальными уравнениями в частных
производных.
Строго говоря, к волновым процессам следует относить любые про-
процессы, развивающиеся в пространстве и во времени. К их числу относятся
теплоперенос, диффузия, тектонические движения, приливы-отливы, рас-
распространение света, звука, излучений всех видов и т.п. Уравнения, их опи-
описывающие, имеют самую различную структуру, но в случае нелинейных волн
все они обязательно содержат нелинейные слагаемые. Имея целью выясне-
выяснение наиболее важных закономерностей, начнем с простейших случаев.
13.1. Простые волны 221
13.1. Простые волны
Рассмотрим волновое уравнение A1.15):
1 d2v d2v
*ее 8*=°- A3Л)
Это уравнение можно представить в виде
f) = O. A3.2)
Последнее уравнение удовлетворяется тождественно, если функция г;(ж, i)
подчиняется уравнению
~ + ?=0 A3.3а)
с at ох
или
~"Г=0. A3-36)
с at ox
Первое из них имеет решение v = fi(x — ct) и описывает волну, распро-
распространяющуюся в положительном направлении оси X. Второе уравнение
имеет решение v = /2 (х + ct) и дает волну, распространяющуюся в отри™
цательном направлении. Существенно, что в обоих случаях в собственной
системе отсчета, т.е. в системе отсчета, движущейся со скоростью +с для
уравнения A3.3 а) ж—с для A3.36), форма волны со временем не меняется.
Неизменность профиля означает, что все точки волны движутся вдоль оси
X с одной и той же скоростью вне зависимости от локального значения
амплитуды волны. Примером такой волны может служить заряд шрапнели,
вылетающей из пушки, в пренебрежении земным тяготением и в предпо™
ложении, что начальные скорости всех шариков шрапнели одинаковы.
С формальной точки зрения неизменность профиля волны означает
следующее. Пусть в начальный момент времени t = 0 профиль волны
задается функцией
v{x, 0) = F(x). A3.4)
Тогда во все последующие моменты окажется, что этот профиль есть
v(x, t) = F(x-ct), A3.5)
что при постоянной скорости, с = const, соответствует переходу в систему
отсчета, движущуюся с этой скоростью.
Рассмотрим теперь обобщение уравнения A3.3а). Пусть скорость с за™
висит от амплитуды волны, с = с(у). Тогда уравнение волны A3.3а) при™
нимает вид
" + ФЬ- = 0< A3-6)
dt дх
Случай, отвечающий уравнению A3.36), получается отсюда простой сме-
сменой знака скорости с.
222
Волны и структуры
Хотя уравнение A3.6) является нелинейным, оно может быть решено
точно при произвольном виде функции с (и), что при изучении нелиней-
нелинейных систем встречается нечасто. Так как уравнение A3.6) — это уравне™
ние первого порядка, то его решение может быть получено методом харак-
характеристик (см. приложение 1). Соответствующие уравнения характеристик
имеют вид
ч dx
а) — =
at
A3.7)
Отсюда вытекает, что характеристика уравнения A3.6) есть
х — c(v)t = const. A3.8)
Соответственно общее решение уравнения принимает вид
v(x, t) = F(x-c{v)t). A3.9)
Здесь функция F определяется начальным условием A3.4).
Решение A3.9) называется простой волной или волной Римана. Обра™
тим здесь внимание на то важное обстоятельство, что формула A3.9) дает
решение г;(ж, i) в неявном виде. Это может, в зависимости от вида началь-
начального профиля F(x) и конкретного вида функции c(v)9 качественно менять
временную эволюцию решения A3.9). В простейшем случае с = const
волна распространяется без каких-либо искажений профиля (см. A3.5)),
тогда как уже в случае простой линейной зависимости
c(v)=v A3.10)
наблюдается качественно новое явление — опрокидывание фронта волны.
Это явление проиллюстрировано на рис. 13.1. По мере движения волны
-1
Рис. 13.1. Опрокидывание фронта вол-
волны, (a) t = 0, (б) t = yfe/2 « 1,166,
(в) t = 2,75. Исходный профиль есть
v(x,t)\t=0 = 2
первоначально гладкий, без особенностей профиль (рис. 13.1а) "укручива™
ется", возникает ударная волна с очень крутым, практически вертикальным
передним фронтом (при t = ^е/2^1,166), как показано на рис. 13.16. При
дальнейшем движении волна опрокидывается (рис. 13.1 в).
13.2. Уравнение Бюргерса 223
Промежуточный случай между линейной (c(v) = const) и нелинейной
(c(v) = v) волнами мы получим, если положим
c(v) = A + Bv. A3.11)
Если ввести функцию v(x, i) по формуле v(x, i) = AJrBv{x1 i), то для нее
будем иметь уравнение щ-\-уух = 0, совпадающее с A3.6), A3.10). Величина
А по существу не влияет на характер процесса, поскольку ее можно исклю-
чить из рассмотрения, если по закону х' = х ~~ At перейти в систему от-
отсчета, движущуюся со скоростью А относительно исходной системы. После
этого коэффициент В можно исключить, изменив масштаб времени t: f =
= Bt. В соответствии со сказанным, зная решение vi(x, t) уравнения A3.6),
A3.10), мы легко получим и решение ^(ж, t) уравнения A3.6), A3.11):
v2{x,i) = v^x-At, Bt).
Таким образом, обобщение A3.11) не приводит к качественно новым
результатам, но позволяет описывать эффект опрокидывания для случая
движущихся волн.
13.2. Уравнение Бюргерса
Уравнение A3.6) есть частный случай хорошо известного в гидроди-
гидродинамике уравнения Эйлера
^^ + (vV)vvP A3.12)
at ot p
и описывает одномерное движение жидкости в среде без градиента давления.
В реальности существует ряд факторов, которые препятствуют опро-
опрокидыванию волны. К их числу относятся различные диссипативные про-
процессы, например, вязкость. При учете вязкости уравнение Эйлера A3.12)
превращается в уравнение Навье-Стокса, которое в простейшем случае од-
одномерного движения в отсутствие градиентов давления имеет вид
dv dv d2v /1O 1ОЧ
Vv— = v , A3.13)
dt дх дх2
где v — кинематическая вязкость. Уравнение A3.13) называется уравнены-
ем Бюргерса. Оно допускает полное аналитическое исследование. Прежде
всего, нетрудно установить наличие закона сохранения.
Запишем уравнение A3.13) в виде
+ (и1а A3Л4)
dt дх V2 дх) V '
Предположим, что v —>• 0 при х —>> =Ьоо. Тогда, интегрируя это уравнение
по х от ~оо до +оо, получаем
v(x, t)dx =0, A3.15)
224 Волны и структуры
откуда следует, что
+ ОО
I(t) = v(x, t) dx = const. A3.16)
— oo
Величина I(t) называется инвариантом движения. Закон сохранения
A3.16) часто используется для получения тех или иных оценок.
Более существенным является то обстоятельство, что уравнение Бюр-
герса допускает точное аналитическое решение. В самом деле, введем
функцию w по формуле
v =—2v—In го или w = ехр г; ст. A3.17)
дх L 2v J J
Подстановка A3.17) в уравнение Бюргерса A3.13) дает
dw d2w ,1O 1ОЛ
— = v , A3.18)
dt дх2' К J
что является обычным уравнением теплопроводности (или диффузии). Его
решение в неограниченной области хорошо известно:
w(x,t) = -^= wo(y)eicp \^K y) dy, A3.19)
где wq(x) связано с начальным профилем волны vq(x) соотношением
A3.17). Подстановка A3.17) в A3.19) позволяет получить решение урав-
уравнения Бюргерса в явном виде
+ ОО
х^у Г 1 1
¦ ехр ~^ф(х, t, у) dy
t L 2i/ '
v(x, t) = ^— , A3.20)
1 1
- — ф(х, t, y)\ dy
_ 2z/ J
-—oo
где введено обозначение
2/
// # \ / \""il /\l / 1 Л Л 1 \
It J
0
Наиболее существенным следствием наличия вязкости в A3.13) явля™
ется невозможность опрокидывания волны даже при сколь угодно малом
значении коэффициента v. Дело в том, что с нелинейным членом vdv/dx,
дающим укручение профиля волны и ее опрокидывание, конкурирует дис-
сипативный член ud2v/dx2, ведущий к диффузионному расплыванию это™
го профиля. Вместе с тем нелинейный член пропорционален первой про-
производной амплитуды волны по координате, тогда как диссипативный член
13.2. Уравнение Бюргерса 225
пропорционален второй производной. Поэтому при малой крутизне доми-
доминирует нелинейность, а при большой — диссипация. Это приводит к тому,
что укручение профиля волны по мере ее распространения прекращается.
Формируется стационарная волна, крутизна которой всюду конечна.
Найдем частное решение уравнения A3.13), описывающее стационар-
стационарную бегущую волну. Будем искать решение в автомодельной форме
v(x, t) = v(x-ct), A3.22)
где с — скорость распространения волны. Введя новую переменную ? =
= х — ct, перепишем уравнение Бюргерса в виде
{v - c)v' = vv\ A3.23)
где штрих означает дифференцирование по переменной ?. В качестве гра-
граничных условий возьмем 1)
V —> Vi ПрИ ? —>- ^ОО,
v ->- v2 при i ->- +оо, A3.24)
v' —>• 0 при ? —>> ±оо.
Для определенности примем, что v\ > v2. Волна распространяется в по-
положительном направлении оси ж, если с > 0, и в отрицательном направ-
направлении — в противоположном случае. Первый интеграл уравнения A3.23)
имеет вид
v2
cv = vv1 + const A3.25)
Значения константы const и скорости волны с можно найти из A3.25) с
помощью A3.24). Подставляя ? —>• ±оо в A3.25), получаем систему двух
уравнений
2 2
— — cv\ — const = 0, — — CV2 — const = 0. A3.26)
Отсюда
с = , const = —v\V2- A3.27)
л л
Дальнейшее интегрирование выполняется элементарно. В результате имеем
A3.28)
или
v = tn (х — ct)\. A3.28 )
2 2 L 2 V ;J l J
) Уравнение A3.23) с граничным условием A3.24) есть краевая задача, а не задача Коши.
Известно, что даже в том случае, когда само дифференциальное уравнение имеет какие-нибудь
решения, соответствующая краевая задача может либо не иметь решения вовсе, либо иметь
конечное или бесконечное число решений. В нашем случае дополнительное граничное условие
v' ¦—> 0 при ? —> zbcx) позволяет выделить единственное гладкое решение.
15 Н.В. Карлов, Н.А. Кириченко
226
Волны и структуры
V
2
-2 -1 0
1
\
V
с
^>
1 x-ct
Рис. 13.2. Решение уравнения Бюргерса в виде бегущей стенки. Стрелка указыва-
указывает направление движения стенки. Значения параметров: v\ = 2, t?2 = — 1, у = 0,5,
с = 0,5>0
Это решение показано на рис. 13.2. Оно качественно описывает многие
реальные волновые процессы различной природы. К их числу относятся,
в частности, ударные волны с конечной шириной фронта и волны фазо-
фазовых переходов. Поэтому такое решение называют, в зависимости от типа
конкретной задачи, либо ударной волной, либо волной переключения.
Отметим, что при у —>> 0 волна A3.28) превращается в волну с верти-
вертикальным фронтом
V =
vi, ? = х — ct < 0,
V2, ^ = X — Ct > 0.
A3.29)
Решение A3.29) описывает равномерно движущуюся резко очерченную
стенку. Существенно, что опрокидывания стенки не происходит, хотя чисто
формально в A3.29) диссипация отсутствует: у = 0. Данный парадокс свя-
связан с тем, что мы имеем дело с предельным переходом у —>> 0 в уравнении
Бюргерса, а не сразу с уравнением простых волн A3.6), A3.10), где диссипа™
тивное слагаемое отсутствует точно. Соответственно различие между этими
двумя уравнениями имеет место только в одной точке, где крутизна dv/dx =
= оо. Именно при переходе через эту точку и происходит опрокидывание
простой волны. Для уравнения же Бюргерса эта точка недостижима при лю-
любом сколь угодно малом у. С формально-математической точки зрения это
означает, что наличие даже сколь угодно малой диссипации делает невоз™
можным возникновение неоднозначных решений.
13.3. Дисперсия волн
Учтем теперь, что в реальной среде наряду с диссипацией может про-
проявляться и дисперсия. Понятие дисперсии было введено в главе XI как за™
висимость фазовой скорости волны от частоты ее колебаний. Рассмотрим
теперь это понятие подробнее. Возьмем сначала пример простой волны,
описываемой уравнением A3.3а). Ищем решение в виде гармонической
13.3. Дисперсия волн 227
бегущей волны
v = уд ещ)(И$х — iujt). A3.30)
Подстановка A3.30) в A3.3а) дает закон дисперсии
оо = ск или Уф = — = с, A3.31)
к
означающий в этом случае постоянство фазовой скорости Уф или отсут-
ствие дисперсии. В случае обычного волнового уравнения
1^ = ^Н A3.32)
с2 dt2 dx2 x J
закон дисперсии имеет вид
ш2 = с2к2 или ш = ±ск. A3.33)
Здесь фазовая скорость v§ также постоянна (и равна +с или —с), а диспер-
сия отсутствует.
В общем случае при учете различных физических эффектов закон дис-
дисперсии может быть записан в виде уравнения
F(u, к) = 0. A3.34)
Будучи разрешено в явном виде относительно частоты ш, это уравнение
определяет несколько групп зависимостей и = ш(к), отличающихся друг
от друга поведением при к —>> 0. Для одной из них, называемой акустиче-
акустической ветвью,
ш —)> с&, г;ф —>> с при к —)• 0. A3.35а)
Для другой, называемой оптической ветвью,
и) —>. ujq ф 0, г;ф —)- оо при к —)- 0. A3.356)
Оптическая и акустическая ветви колебаний весьма характерны для
многих задач радиофизики, оптики, физики твердого тела, физики плаз-
плазмы и т.д. Но ими не исчерпываются все возможные виды законов дис™
персии. Так, в задачах гидродинамики встречается дисперсионная зави-
зависимость более общего типа:
при к —>• 0 ш ~ к^, где /i — любое число. A3.35в)
Например, закон дисперсии для гравитационно-капиллярных волн на по-
поверхности жидкости имеет вид 1)
ш2 = (gk + -к3) thkh, A3.36)
V Р )
где g — ускорение силы тяжести, а — коэффициент поверхностного на-
натяжения, р и h — плотность и толщина слоя жидкости соответственно.
Частные случаи глубокой (kh —>> оо) и мелкой (kh —>> 0) жидкости,
наличия или отсутствия поверхностного натяжения, существенности или
) Ландау Л.Д., Лифшмц ЕМ. Гидродинамика. — М.: Наука, 1986.
15*
228 Волны и структуры
пренебрежимо малой роли силы тяготения дают значения величины /i в
A3.35в) в диапазоне от 1/2 до 2. Остановимся подробнее на частном слу-
случае чисто гравитационной волны (а = 0) и мелкой жидкости (kh <C 1).
Тогда закон дисперсии A3.36) приобретает вид
2 ?ji?7 ? ? 2 /1 1?2?2\ /юотл
uj = gkthkh^ ghk (I к а 1 A3.37)
о
ИЛИ
ш = ск^/3к3, A3.38)
где
В соответствии с приведенной выше классификацией закон дисперсии
A3.38) отвечает акустической ветви колебаний. Фазовая скорость волны
благодаря дисперсии явно зависит от волнового числа:
Vi, = - = c-0k2 = c(l--h2k2). A3.39)
k V 6 /
При этом групповая скорость отличается от фазовой:
VrP = ^ = с - 3Cк2 = с (l - h2k2) . A3.40)
Заметим здесь, что рассматриваемый случай является случаем чистой
дисперсии, не отягощенной диссипацией. Волна распространяется без
затухания или усиления. Для этого необходимо, чтобы дисперсионное
уравнение A3.34), будучи разрешено явно относительно ш для каждой
из ветвей ш = ш(к), не содержало мнимых чисел. Иными словами, дис-
дисперсионное уравнение в форме ш = ш(к) должно связывать чисто дей™
ствительные числа. Уравнение Бюргерса
dv ] , х dv d2v /1O ,1Ч
\-c\v)— = v A3.41)
dt дх дх2
этому условию не удовлетворяет. Действительно, линеаризуя это уравне-
уравнение в окрестности v = 0 и представляя решение в виде плоской волны
A3.30), получаем закон дисперсии
ш = с0к-тк2, со = с@), A3.42)
в котором очевидно наличие диссипации. Важно и то обстоятельство, что
наряду с диссипацией возникает и дисперсия как зависимость фазовой ско-
скорости от волнового числа:
Уф = — = с0 — ivk. A3.43)
к,
Отмеченное обстоятельство есть проявление общего утверждения о том,
что диссипация всегда сопровождается дисперсией.
Здесь нам представляется уместным подойти к понятию дисперсии с
более общих позиций. Прежде всего, следует иметь в виду, что как дис™
персия, так и диссипация обусловлены наличием среды, в которой соб-
собственно и распространяется волна. Поле волны вызывает отклик среды.
13.3. Дисперсия волн 229
Например, в случае электромагнитных волн мерой такого отклика является
поляризация среды Р, или, что эквивалентно, вектор индукции D = Е +
+ 4тгР, где Е — напряженность поля. Предполагая линейность отклика,
связь напряженности и индукции можно представить следующим образом:
dr, A3.44)
о
где функция /(т) описывает свойства среды.
Интегральная запись в A3.44) есть наиболее общее выражение линей™
ной связи двух функций времени, удовлетворяющей принципу причинно-
причинности. Последний, применительно к рассматриваемой системе, состоит в том,
что отклик среды D(?) на данный момент времени определяется значением
поля E(ti) не только в этот момент t\ = t, но и во все предыдущие 1),
^оо < t\ ^ t.
Если в A3.44) перейти к Фурье-компонентам, то мы получаем
Вш=ф)Е„ A3.45)
где
оо
е(ш) = 1 + [ 1(т)егшг dw. A3.46)
о
Величины Ош и Еш суть Фурье-компоненты величин D(t) и Е(?):
--'Dw^ A3.47)
2
E(i)= [ e-^E^, D(*) = f
Функция s(uj) называется диэлектрической проницаемостью среды, а
ее зависимость от частоты ш —законом дисперсии среды. В общем случае
эта функция комплексна:
е(ш) =е'{ш) + 1е!1{ш). A3.48)
Из A3.46) следует, что ее действительная часть е'{ш) — четная функция
частоты ш, а мнимая часть е/г(ш) — нечетная:
е'(ш) = е'(-ш), e"(w) = -eff(-uu). A3.49)
Рассматривая распространение плоской электромагнитной волны в ере™
де с диэлектрической проницаемостью s(lj), можно получить связь между
волновым вектором к и частотой ш в виде
2 f
к2 = —е(о;) или k = —y/e{uS). A3.50)
с2 с
) Более наглядной является ситуация с маятником, находящимся под действием силы
F(t). Величина отклонения и скорость маятника в данный момент времени ?, очевидно,
зависят от того, какая сила действовала на него в предыдущие моменты t\ ^ t.
230 Волны и структуры
Величину л/е(ш) естественно назвать комплексным показателем прелом™
ления
у/ё = п + м, A3.51)
где п — обычный показатель преломления, а к — показатель поглощения.
В частном случае малого поглощения к<п
е" ^у/ё1. A3.52)
Таким образом, диссипативные свойства среды определяются главным
образом мнимой частью диэлектрической проницаемости, а рефракция излу-
излучения в среде — действительной частью. Сказанное становится очевидным,
если с учетом A3.50) и A3.51) записать плоскую волну ехр [г (kx — cut)] в
виде
г(кх ujt) — ах i{k±x cot) — L, — ^ (Л'Х ^\
о — ее 5 1х — —гь5 гь\ — —и. i^ij.jjj
С С
Пусть функция /(т) не обладает какими-либо экзотическими свойства-
свойствами. Это, как правило, справедливо для реальных сред. Тогда, рассматривая
ш как комплексную переменную ш = ш1 + го/'', можно установить неко-
некоторые, весьма общие аналитические свойства функции е{ш). Не приводя
соответствующих рассуждений, отметим, что функция е(ш) аналитична во
всей верхней полуплоскости переменной о; и не имеет особенностей на
действительной оси, кроме, быть может, точки ш = 0. Отсюда непосред-
непосредственно вытекают соотношения 1), связывающие действительную и мни™
мую части е (см. комментарий 31):
+ ОО
= ^V.P. [
7Г J
CJl — CJ
-— оо
A3.54)
1
= V.p.
Ж
где символ "v.p." означает интеграл в смысле главного значения 2) .
Формулы A3.54) называются соотношениями Крамерса—Крошга. Они
являются прямым следствием принципа причинности A3.44) и утвержда-
утверждают, что дисперсия неотделима от диссипации.
Следует подчеркнуть, что хотя выше мы и проводили рассуждения на
примере электромагнитных волн, можно показать, что принцип причин-
ности приведет к аналогичным результатам и для волн другой физической
природы.
Дисперсия диэлектрической проницаемости е{ш), определяемая вре-
временным откликом среды A3.44), A3.45), называется временной дисперси-
) Ландау Л.Д., Лифшщ Е.М. Электродинамика сплошных сред. — М..: Наука, 1982
) От франц. "valeur principale" — главное значение.
13.4. Уравнение Кортевега-де Фриса 231
ей. Однако во многих случаях существенна и пространственная диспер-
дисперсия, обусловленная нелокальностью взаимодействия. Последнее означает,
что принцип причинности A3.44) должен быть переписан с учетом того,
что отклик среды в данной точке пространства зависит не только от поля
в этой точке, но и от поля в других областях пространства.
Нелокальность может быть учтена, если перейти от пространственно™
временной записи к Фурье-представлению не только по времени, но и по
координате:
1)(ш, к) = е(ш, к)Е(о;, к). A3.55)
Очевидно, что вектор к имеет смысл волнового вектора плоской электро-
магнитной волны exp[i(kr — out)}. Зависимость е = е(ш, к) определяет
общий закон дисперсии в среде
к2 = — ф,к). A3.56)
с2
Заметим, что последнее соотношение представляет собой частный случай
введенного выше закона дисперсии A3.34).
Нелокальность A3.55) связана с наличием в среде некоторых выделен™
ных пространственных масштабов, на которых существенна корреляция
поля между различными точками. Например, в бесстолкновительной плаз-
плазме характерным масштабом является дебаевский радиус экранирования,
в столкновительной плазме дополнительный пространственный масштаб
задается длиной свободного пробега частиц. В кристаллах существование
пространственной дисперсии связано с симметрией и характерным мае-
штабом кристаллографической структуры. В случае гравитационно-ка-
гравитационно-капиллярных волн (см. A3.36)), обсуждавшихся выше, пространственная
дисперсия определяется двумя пространственными масштабами: толщи-
толщиной слоя жидкости Qi ~ h) и величиной коэффициента поверхностного
натяжения (h ^ \Jcr/' pg).
Эффекты дисперсии и диссипации, о которых говорилось выше, более
или менее естественно разделяются в электродинамике или в волновых
задачах, описываемых аналогичными уравнениями. В тех же задачах, где
уравнения для поля и для среды, в которой это поле распространяется, име-
имеют иной вид, чем в электродинамике, разделение на дисперсию и дисси-
диссипацию становится весьма сложной проблемой, если вообще имеет смысл.
В случае нелинейных задач такое разделение еще более проблематично.
Соответственно в дальнейшем мы не будем без особой необходимости ука-
указывать, с какими классами эффектов (дисперсией или диссипацией) соот-
соотнесены те или иные слагаемые изучаемых уравнений.
13.4. Уравнение Кортевега-де Фриса
По закону дисперсии можно восстановить вид соответствующего ли-
линейного дифференциального уравнения. Рассмотрим в качестве примера
гравитационные волны на поверхности мелкой жидкости. Соответствую-
232 Волны и структуры
щий закон дисперсии дается формулой A3.38): ш = ск — @к3. Если, вос-
воспользовавшись обычным приемом, заменить здесь частоту и волновое чис-
число операторами по правилу
uм к^г
— к^г — , A3.57)
dt дх
то из A3.38) следует уравнение
которое называют линеаризованным уравнением Коршевега-де Фриса или
сокращенно уравнением КдФ 1) . Уравнение этого типа встречается не толь-
только в задачах о распространении поверхностных звуковых волн, но и во мно-
гих других разделах физики.
Уравнение A3.58) справедливо лишь в пределе малых амплитуд ко-
колебаний v, при которых можно считать скорость с постоянной. Естест-
Естественное обобщение этого уравнения возникает, если учесть возможную
зависимость с = c(v), например, в виде с = с® + v:
5 + (со + ^ + 4^°- A3-59)
dt дх дх3
Заметим, что линейное преобразование
t = л/]Зт, х = y/fiz, w = 6(с0 + г>), A3.60)
приводит уравнение A3.59) к канонической (стандартной) форме уравне™
ния КдФ:
wT + 6wwz + wzzz = 0. A3.61)
В литературе встречаются также другие формы этого уравнения.
Мы пришли к уравнению КдФ, рассматривая волны в жидкости. Ис-
Исторически это уравнение появилось в конце XIX века при анализе именно
этой гидродинамической задачи. Анализ этого и подобных ему уравнений
привел к созданию метода полного интегрирования широкого класса нели™
нейных задач, являющегося, пожалуй, одним из важнейших достижений
теории нелинейных динамических систем — метода обратной задачи рас-
рассеяния (см. приложение 2).
Вернемся к уравнению A3.59). Будем искать его решение в виде ста™
ционарной волны, бегущей со скоростью и:
v(x, t) = V(x - ut) = F(C), i = x-ut. A3.62)
Подстановка в A3.59) приводит к обыкновенному дифференциальному
уравнению
рУ" + (V - Vo) V = 0, A3.63)
) В русскоязычной литературе иногда встречается англизированная (Кортевег, де Вриз)
транскрипция этих голландских фамилий (Diederik Johannes Korteweg, Gustave de Vries) и
соответственно аббревиатура КдВ для названия уравнения.
13.4. Уравнение Кортевега^де Фриса 233
в котором Vq = и ~~ со, а штрих означает дифференцирование по ?. Первое
интегрирование дает
PV" + *F2 - V0V = А, A3.64)
где А — константа интегрирования. Умножая A3.64) на V и интегрируя
еще раз, получаем второй интеграл
-Р {V'f + V3 - -V0V2 ^AV = H, A3.65)
где Н — вторая константа интегрирования.
Читая уравнение A3.65) справа налево, можно интерпретировать ве-
величину Н как гамильтониан частицы массы /3, совершающей движение в
поле с потенциалом
17 (V) = V3 - -V0V2 - AV. A3.66)
6 2
Переменные V и ? играют здесь роль координаты частицы и времени. Со-
Соответственно равенство Н = const есть аналог закона сохранения энергии.
Уравнение A3.65) допускает интегрирование в явном виде. Для этого
перепишем его в виде:
1/3 (УJ + U(V) = Н или Р {V'f = -{V1- V) (V2 - V) (F3 - V),
Л о
A3.67)
где числа Fi, F2, F3 — это корни уравнения U(V) = Н, выражающиеся
через параметры Vq, A, H.
Уравнение A3.67) описывает финитное движение, если все три корня
Fi, F2, F3 суть действительные числа. Примем, что V% ^ V<i < V < V\.
Тогда искомое решение записывается в следующем виде:
V (О = (Fi - V3) dn2 (J^-^^, Л + Уз, A3.68)
где dn(x, к) — эллиптическая функция Якоби 1) (дельта амплитуды) с
модулем
к= a Vl~V2 ^ 1. A3.69)
Полученное решение описывает периодическую волну с периодом
Л = 2К U) J П/3 , A3.70)
где К (ас) — полный эллиптический интеграл первого рода с модулем к,.
Период этой волны неограниченно растет, когда п —>> 1, т.е. когда ?2 —>- V3.
Фактически это означает, что возникает уединенная, локализованная вол™
на. Такую волну называют солитоном. Без ограничения общности можно
) Об эллиптических функциях Якоби см. комментарий 2.
234
Волны и структуры
положить У% = 0. При этом оказывается, что А = 0, Н = 0, V\ =
Тогда профиль волны принимает вид
V (х - ut) =
3F0
ch2
(x - ut)]'
A3.71)
Входящий сюда параметр Vq связан со скоростью волны соотношением
V® = и—с®. Таким образом, амплитуда солитона 3Fq, его скорость и = Vq +
+ со и ширина 5 = l/fi= \f 4,C/У® однозначно связаны между собой. Вид
решений уравнений КдФ, отвечающих периодической волне и солитону,
показан на рис. 13.3.
-6 -4 -2
о
4 ^=x—
о
2 ?=x-ut
Рис. 13.3. Вид решений уравнения КдФ. а — Периодическое решение (при V\ =
= 1, V2 = 0, Уз = —ОД, /3 = ОД, /1 = 0,913); б — солитонное решение (при
Fo = 1, /3 = ОД, ц = 0,5)
Здесь уместно обратить внимание на следующее обстоятельство. Рас™
сматриваемые волны распространяются с некоторой скоростью щ которая
никоим образом не входит в исходное уравнение A3.59) и потому является
свободным параметром. Иными словами, само уравнение КдФ не предо-
пределяет значения скорости описываемых им волн. Ситуация прямо про-
противоположна той, что имеет место в случае волн, описываемых обычным
волновым уравнением типа A3.1). Скорость соответствующих волн всегда
оказывается равной значению константы с, явно входящей в уравнение.
Аналогична ситуация в случае простой волны, описываемой уравнением
A3.3), где скорость волны также предопределена входящей в уравнение
константой с. Однако переход к уравнению КдФ, заключающийся в до-
добавлении слагаемого, пропорционального третьей производной d3v/dx37
качественно меняет картину. Сказанное означает, что в случае уравнения
КдФ и подобных ему скорость волны должна определяться соображени-
соображениями, не учтенными явно в исходном уравнении, например, начальными
условиями. Заметим, что в общем случае нелинейной задачи характери-
характеристики самого решения (амплитуда, период, профиль) могут явно зависеть
от скорости волны.
13.4. Уравнение Кортевега^де Фриса 235
Возникновение солитона прямо обусловлено нелинейностью уравне-
уравнения КдФ (слагаемым vdv/dx в A3.59)). Именно это принципиально отли-
отличает солитон от цуга волн, являющегося суперпозицией частных решений
линейных волновых уравнений. Солитонные решения уравнения КдФ от™
личаются также от решений типа бегущей стенки (бегущего фронта), опи-
описываемых уравнением Бюргерса A3.13), вследствие наличия производных
более высоких порядков.
Несмотря на некоторую экзотичность солитонных решений, сами объ-
объекты такого типа достаточно часто встречаются в природе. Однако первое
документированное наблюдение солитона в природе выполнено только в
1834 г. Дж. Расселом (подробнее см. комментарий 32).
В силу нелинейности уравнения КдФ принцип суперпозиции для его ре-
решений, в том числе и солитоноподобных, не выполняется. Если произволь-
произвольные цуги волн, описываемые линейными волновыми уравнениями, прохо-
проходят друг через друга не взаимодействуя, то столкновение солитоноподобных
волн, описываемых нелинейным уравнением КдФ, происходит гораздо более
сложно. Иными словами, многосолитонное состояние, т.е. решение, описы-
описывающее несколько солитонов, не может просто сводиться к сумме решений
типа A3.71) и даже не может быть представлено в виде A3.62), соответству-
соответствующем волновому движению с постоянной скоростью.
В этой связи необходимо найти более широкий класс решений уравне-
уравнения КдФ, включающий в себя такие решения, которые допускают интер-
интерпретацию как совокупность нескольких солитонов.
Без ограничения общности можно положить cq = 0, а также /3 = 1,
что отвечает изменению масштабов времени и координаты. Это приводит к
уравнению
vt + vvx + vxxx = 0. A3.72а)
Далее вместо функции v введем функцию у по формуле
У = \vdx, v = yx. A3.73)
Тогда для у имеем
Vt + \(ухJ + уххх = 0, A3.726)
что представляет собой еще одну (по сравнению с A3.61)) каноническую
форму уравнения КдФ.
Произведем теперь нелинейную замену
y = 12(lnF)x, F = exp(±jydxY A3.74)
Эта замена сводит уравнение A3.726) к виду
FAFX - FXAF + 3 (Flx - FXFXXX) = 0, A3.75)
где введен оператор А = d/dt + д3/дх3.
236 Волны и структуры
Интересующий нас класс решений уравнения A3.75) может быть най-
найдет, если рассматривать только те решения, которые удовлетворяют про-
простому уравнению
AF = dF/dt + d3F/dx3 = 0. A3.76)
Простейшее решение последнего уравнения есть
F = A + Beicp(wt-kx), ш = к3, A3.77)
Эта же функция обращает в нуль и слагаемое 3(F%X — FXFXXX) в уравне-
уравнении A3.75), давая тем самым одно из решений исходного уравнения.
Произведя обратные замены в A3.74) и A3.73), можно увидеть, что
полученное решение в точности соответствует найденному ранее реше-
решению A3.71) в виде бегущего солитона. Константу А в A3.77) без ограни™
чения общности можно положить равной единице. Константа В должна
быть неотрицательной, поскольку функция
= (lnF) =?k= -ДехрМ-to]
должна оставаться конечной (т.е. не иметь полюсов в действительной обла-
области). Тогда константу В можно внести в показатель экспоненты, В = ехр(а).
Найденная таким образом экспонента ехр[а + (cut — кх)} описывает бегу-
бегущий солитон.
Естественно предположить, что система из нескольких солитонов опи-
описывается некоторой суммой подобных экспонент, т.е.
~ +ММ) + ЫМ) + ..., A3.79)
fn(x, t) = exp[an + (ujnt - knx)\, шп = knJ
каждая из которых отвечает отдельному солитону. Тем не менее, такое пред-
представление не вполне точно, необходимо также учесть взаимодействие соли-
солитонов между собой. В частности, в случае двух солитонов точное решение
уравнения КдФ может быть получено, если представить функцию F в виде
F = l + /i + /2+7/i/2, A3.80)
где параметр 7 подлежит определению. Не останавливаясь на подробно-
подробностях вычислений, приведем явный вид коэффициента j:
Отметим, что согласно A3.77) фазовые скорости всех солитонов, описы-
описываемых уравнением A3.72а) положительны: Уф = ш/к = к2 > 0. Следо-
Следовательно, все солитоны распространяются в одном направлении, отличаясь
друг от друга значениями скоростей и однозначно связанных с ними ампли-
амплитуд. На рис. 13.4 показан пример взаимодействия двух солитонов, отлича-
отличающихся амплитудами. Взаимодействие солитонов не приводит асимптоти-
асимптотически к изменению их форм, меняется лишь относительное расположение.
Процесс выглядит так, как будто более быстрый (и более высокий) солитон
просто обгоняет более медленный (и более низкий). В то же время в обла-
13.4. Уравнение Кортевега^де Фриса
237
V
12
9
6
3
-20
v
12
9
6
3
t=-l
-20
v
12
9
6
3
t=0
-20
v
12
9
6
3
t=l
-20
-10
v
12
9
6
3
4=5
-20
-10
10
10
10
10
10
20
20
20
20
20
Рис. 13.4. Столкновение двух солитонов. Значения параметров: ki = 1, fe = 2,
Oi\ = «2 = 0
238 Волны и структуры
сти их перекрытия принцип суперпозиции отнюдь не выполняется. Напро-
Напротив, наблюдается довольно сложное изменение структуры результирующего
волнового поля. Невыполнение принципа суперпозиции в области тесного
взаимодействия КдФ-солитонов приводит к изменению фаз ап солитонов в
асимптотической области.
13.5. Законы сохранении для уравнения КдФ
Замечательной особенностью уравнения КдФ является полная его ин-
интегрируемость. Как известно, для динамической системы с N степенями
свободы полная интегрируемость означает существование N интегралов
движения. В случае уравнения КдФ число степеней свободы, как и у вся-
всякой распределенной динамической системы, бесконечно. Поэтому под пол-
ной интегрируемостью здесь имеется в виду наличие бесконечного числа
независимых законов сохранения (интегралов движения). Их явный вид
можно найти следующим образом.
Воспользуемся уравнением КдФ в форме (см. A3.61)):
wT + 6wwz + wzzz = 0.
Введем функцию W следующим образом:
w = W + ieWz + e2W2, A3.82)
где е — произвольный параметр. Подстановка A3.82) в исходное уравне-
уравнение A3.61) дает тождество
wT + 6wwz + wzzz =
= (l + 2s2W + ie—) \WT + 6 (W + e2W2) Wz + Wzzz]. A3.83)
Отсюда следует, что любая функция W, которая удовлетворяет уравнению
WT + 6(W + е2 W2)WZ + Wzzz = 0, A3.84)
порождает согласно A3.82) функцию w, являющуюся решением уравнения
КдФ A3.61). Проинтегрируем это уравнение по всей оси z, считая, что при
х —)• =Ъоо функция W шее производные по координате обращаются в нуль.
Это приводит к закону сохранения
A3.85)
+ ОО +ОО
— I W(z,r)dz = 0 или I W(z1r)dz = const.
С другой стороны, соотношение A3.82) можно рассматривать как
уравнение относительно W. Считая параметр е малым, можно решить
это уравнение методом итераций. В результате получается следующий
ряд по степеням е:
W = w- iewz - е2 (wzz + w2) + .... A3.86)
13.5. Законы сохранения для уравнения КдФ 239
Если подставить полученное разложение в закон сохранения A3.85), то вви-
ду произвольности е получим бесконечный набор интегралов движения:
+ ОО +ОО +ОО
w dz = const, w2 dz = const, (го3 w2z J dz = const
— oo —oo —oo
И Т.Д.
A3.87)
Первые два из этого набора законов сохранения допускают более или
менее традиционную, наглядную интерпретацию, аналогичную законам
сохранения импульса и энергии. Последующие же описывают некоторые
особенности сохранения профильных характеристик волны.
Разумеется, рассмотренными выше примерами не исчерпывается мно-
множество замечательных уравнений, описывающих нелинейные процессы в
распределенных системах. В частности, многие задачи приводят к таким
уравнениям, как нелинейное уравнение Шредингера
¦ ди , д2и , , ,2 =() A388)
,-щи
dt дх2 '
и уравнение "sm-Гордон"
— — - — = as'mu. A3.89)
с2 dt2 дх2 К J
Эти уравнения, оказывается, могут быть полностью проинтегрированы ме-
методом обратной задачи рассеяния (о методе см. приложение 2). Кроме того,
они встречаются в ряде физических задач (см. комментарии 33 и 34).
ГЛАВА XIV
Параметры порядка и подчиненные переменные. Диссипа-
тивные структуры. Автоволновой процесс, автоволна. Самоор-
Самоорганизация, синергетика. Эффект Бенара. Модель Колмогорова-
Петровского-Пискунова. Закон дисперсии малых возмущений.
Волны переключения, правило Максвелла. Фазовый переход, ста-
стабильная и метастабилъная фазы. Функционал (функция) Ляпу-
Ляпунова. Режимы локализации и обострения для нелинейных задач
теплопроводности. Диффузионная неустойчивость. Диффузион-
Диффузионная неустойчивость тьюринговского типа. Диффузионный хаос.
Реакции Белоусова-Жаботинского, брюсселятор и орегонатор.
Ведущие центры. Ревербераторы (вращающиеся спиральные вол-
волны). Модель Фиц Хью—Нагумо. Обобщенное уравнение Гинзбурга-
Ландау. Уравнение Свифта-Хоэнберга и его обобщение. Аксио-
Аксиоматический подход. Клеточный автомат. Возникновение стаци-
стационарной циркуляции при работе клеточного автомата.
14.1. Диесипативные системы. Самоорганизация
В предыдущей главе мы подробно исследовали волновые процессы в
нелинейных гамильтоновых системах. С термодинамической точки зрения
такие системы можно рассматривать как замкнутые, подчиняющиеся опре-
определенным законам сохранения. Однако во многих случаях изучаемые си-
системы взаимодействуют со своим окружением, обмениваясь с ним энерги-
энергией и веществом. Поэтому их динамика может качественно отличаться от
таковой для систем замкнутых. Этим системам и посвящена данная глава.
Имея в виду изучение волновых процессов, мы будем говорить о
распределенных системах, в которых эволюция каждого элемента объ™
ема зависит от поведения соседних элементов. Иными словами, возни-
возникает ансамбль взаимодействующих точечных элементов, причем число
элементов велико (или даже бесконечно). Следовательно, фазовый объем
распределенных систем велик (бесконечен), и в принципе динамика может
оказаться чрезвычайно сложной. В действительности не все степени сво™
боды эквивалентны. Часто можно выделить "существенные" переменные
(называемые параметрами порядка), определяющие качественные свой™
ства системы. Прочие же переменные (называемые подчиненными) под-
подстраиваются под первые и влияют лишь на количественные характеры-
14.1. Диссипативные системы. Самоорганизация
241
стики эволюции. С другой стороны, при переходе от точечных систем к
распределенным возникают качественно новые типы упорядочения, отве-
отвечающие коллективным степеням свободы и не имеющие прямых аналогов
на уровне точечных систем. Такие типы упорядочения можно интерпре™
тировать как возникновение в системе когерентных структур. В качестве
наглядного примера укажем волны на поверхности жидкости, возникаю™
щие в результате согласованного, взаимозависимого движения отдельных
частиц. Для структур, возникающих в системах, взаимодействующих с
окружением {диссипативных системах), И.Р. Пригожиным введен термин
"диссипативные структуры". Для обозначения нестационарных дисси-
диссипативных структур удобным является термин "автоволновой процесс",
или просто "автоволна", предложенный Р.В. Хохловым. Существенно, что
подобные структуры возникают практически независимо от начальных
условий. Иными словами, в неравновесных диссипативных системах са-
самопроизвольно формируются регулярные структуры, симметрия которых
может качественно отличаться от симметрии начального состояния. Такое
поведение называется самоорганизацией или формообразованием. Соот-
Соответствующую область науки часто называют синергетикой 1) .
Классическим примером самоорганизации является возникновение ре™
гулярных структур в подогреваемом снизу слое жидкости (рис. 14.1). Этот
Рис. 14.1. Структуры, возникающие в слое
жидкости, нагреваемом снизу, а, б — кон-
конвективные валы в цилиндрическом сосуде;
в — шестигранные ячейки (ячейки Бенара)
) Слово происходит от греч. uavuepjeriKoC — согласованно действующий, совмест-
совместный. Термин введен Г. Хакеыом (Н. Haken) в начале 1970-х годов.
16 Н.В. Карлов, Н.А. Кириченко
242 Волны и структуры
эффект связан с термоконвективной неустойчивостью неоднородно нагре-
нагреваемой жидкости и называется эффектом Бенара (см. комментарий 35).
Очевидно, что исследовать распределенные нелинейные системы го™
раздо труднее, чем точечные. Так, например, в случае точечных систем
нахождение стационарных состояний сводится к решению алгебраических
или трансцендентных уравнений, тогда как в распределенных системах для
этого приходится решать дифференциальные уравнения. Тем не менее, и
в этой области достигнуты серьезные успехи — построены эффективные
приближенные методы, выделены общие свойства решений ряда практи-
практически важных краевых задач и т.п. Для того чтобы продемонстрировать
характерные черты поведения нелинейных распределенных систем, оста-
остановимся на некоторых типичных краевых задачах. Естественным обобще-
обобщением точечной системы является уравнение
du/dt = V (DViz) + (vV) и + /, A4.1)
где величины и и / = f(u; г, t) — покомпонентные столбцы, D — ма-
матрица коэффициентов переноса (коэффициентов диффузии), зависящая
в общем случае от u, v = v(n; r) — вектор скоростей сноса. В правой
части A4.1) первый член описывает процессы переноса диффузионного
типа, второй — конвективный снос, а последнее слагаемое учитывает ло-
кальные "источники" и "стоки". Очевидно, что п равно числу физически
различных параметров системы, таких, как концентрация компонентов,
температура и т.п. Чем большее число компонентов содержит система,
тем, вообще говоря, может быть сложнее ее динамика. Ясно также, что
важную роль играет и пространственная размерность системы. Двух™ и
трехмерные задачи существенно сложнее одномерных. Наиболее иссле-
исследованными являются частные случаи при п = 1ип = 2с одной про™
странственной координатой.
14.2. Модель Колмогорова-Петровского-Пискунова
Начнем с простейшего случая пространственно-одномерной одноком-
понентной (п = 1) системы без конвективного сноса:
%=Dpt+f(u). A4.2)
dt дх2
Первое математически строгое исследование уравнений этого класса бы™
ло выполнено в 1937 г. А.Н. Колмогоровым, И.Г. Петровским и Н.С. Писку-
новым в связи с биологической задачей о распространении популяции на
некоторой территории. Во многих приложениях этого уравнения функцию
f(u) можно задать в виде
f(u) = Ри + еи2-и3. A4.3)
Соотношения A4.3) и A4.2) моделируют также процесс горения. В этом
случае переменная и имеет смысл температуры, а функция f(u) описывает
энерговыделение экзотермической реакции и теплопотери. К уравнению
типа A4.2) приводятся многие задачи физики и химии.
14.3. Волны переключения
243
Исследование подобных задач обычно начинается с нахождения стацио™
парных однородных решений и анализа их устойчивости. Рассмотрим случай
/3 > 0, когда все три корня уравнения f(u) = 0 действительны и различны.
В случае функции / вида A4.3) однородными решениями являются
и2 =0,
A4.4)
Положим и(х, i) = Uk~\-Wk(x, i)9 где индекс к = 1, 2, 3 отвечает одному из
решений A4.4). Считая возмущение w малым, разложим f(u) с точностью
до линейных по w членов: f(u) = f(uk) + ff(uk)wk. Поскольку f(uk) = 0,
то для w получается уравнение
= D-
дх2
fc = 1,2,3,...,
A4.5)
где
1к = f'(uk) =
Поскольку по предположению /3 > 0, то 71 < 0, 7з < 0, 72 > 0.
Уравнение A4.5) линейно, причем коэффициенты его не зависят от ко™
ординаты и времени, и его решение можно искать в виде
Wk(x, t) =wkjOex.p(ptJriqx). A4.6)
Подставляя A4.6) в A4.5), получаем, что параметры р и q связаны соотно-
соотношением
p = 1k-Dq2, fc = 1,2,3,..., -oo<g<+oo, A4.7)
представляющим не что иное, как закон дисперсии. Согласно A4.6) и A4.7)
при к = 1 и к = 3 величина р < 0 для всех q. Решению с к = 2 (и2 =
= 0) отвечает р = f5 ~~ Dq2, причем р > 0 в интервале значений волно-
волнового вектора q E (—y//3/D, +\fj3/D). Следовательно, малые возмущения
в окрестности решений щ и г^з экспоненциально со временем затухают,
а в окрестности решения и^ = 0 — нарастают. Поэтому решения щ и
г^з устойчивы, ан2 — неустойчиво. Если задачу A4.2) интерпретировать
как задачу о фазовом переходе, то стационарным решениям щ и щ соот-
соответствуют стабильные фазы, между которыми, собственно, и происходит
фазовый переход.
14.3. Волны переключения
Решениями типа щ и щ фактически исчерпывается множество устой™
чивых стационарных решений краевой задачи. Кроме того, могут суще-
существовать так называемые волны переключения. Рассмотрим уравнение A4.2)
16*
244
Волны и структуры
+ ОО
A4.8)
со следующими граничными условиями:
и —>• ч\ при х —)> — cxd, и ^ щ при
и будем искать его автомодельные решения вида
и(х, t) = <p(x-vt), A4.9)
где постоянная v отвечает скорости равномерного движения фронта волны
x—vt
Рис. 14.2. Зависимость u(x,t), отвечающая волне переключения из фазы (р = из
в фазу (р = и\. Для данного рисунка параметр е < 0, так что \и\\ > \из\ и волна
движется слева направо
переключения (рис. 14.2). Подстановка A4.9) в A4.2) дает
Dip1' + V + f(<p) = 0, <р(-оо) = гхь <р(+оо) = г/3. A4.10)
Это обыкновенное дифференциальное уравнение можно исследовать с
помощью фазовой плоскости {<?>, <^;}. Тогда оказывается, что точки ip = щ
ш (р = щ являются седлами, а точка <р = щ = 0 — фокусом (рис. 14.3).
Бегущей волне A4.8), A4.9) отвечает такое значение скорости v9 при ко™
тором имеется сепаратриса, соединяющая седла щ и щ. Это значение v
для каждой пары значений е и /5 единственно. Знак скорости легко найти,
умножив A4.10) на (pf и проинтегрировав по dx:
+ ОО
= о,
A4.11)
Отсюда видно, что если Р(щ) > Р(щ), то скорость г; < 0, а при
< F(ui) скорость v > 0. Таким образом, волна переключения движется в
таком направлении, что все пространство заполняется фазой с наибольшим
значением F(u). В частности, при е < 0 мы имеем F{u\) > Р(щ) и v >
> 0, т.е. фаза и = щ оказывается "стабильной", а фаза и = щ — име-
тастабилъной". Можно показать, что в рассматриваемой задаче скорость
14.3. Волны переключения
245
V=V\
(р= щ tp = щ = О if= щ
Рис. 14.3. Качественный вид фазовых
портретов уравнения для трех значений
параметра v. Волне переключения A4.13)
отвечает фазовый портрет при v = V2,
когда имеется сепаратриса, соединяющая
седловые точки <р = щ и <р = из.
О < Vi < V2 < V3
движения фронта волны переключения равна
v = - (щ
а форма волны дается выражением
1X3 —
- exp [—(x — vt)/5]
V2D
из — Mi
D
A4.12)
A4.13)
Величина S в A4.13) имеет очевидный смысл ширины фронта волны. Ав-
Автомодельное решение A4.13) является асимптотически устойчивым. Это
означает, что малые возмущения, наложенные на решение A4.13), с тече-
течением времени затухают, и при t —>• +оо волна переключения описывается
только выражением A4.13). Заметим, что решение A4.13) часто называ-
называют решением типа доменной стенки. Напомним, что аналогичные реше-
решения имели другие нелинейные уравнения, в частности, уравнение Бюргер™
са (см. рис. 13.2).
Поясним выбор направления фазового перехода (знак скорости волны
переключения г;). Для этого введем в рассмотрение функционал
(ил4)
где R — полный линейный размер системы. Легко проверить, что в ходе
246
Волны и структуры
эволюции системы величина L убывает. Действительно,
R
dL [ \т-^ди д (ди\ Р, хди1 ,
— = \D — — flu)— \dx =
dt J L dxdt \dxJ JK J dtl
= -\ \D
ди
dx = —
диу
dt)
dx <: Q. A4.15)
дх2 х '\dt
о о
Второе из равенств, полученное путем интегрирования по частям первого
слагаемого в квадратных скобках, справедливо, например, при граничных
условиях
= 0 или
= 0.
x=O,R — u F1J1F1 " \x=O,R
Введенная соотношением A4.14) величина L в ряде случаев интерпре-
тируется как энергия системы. Следовательно, неравенство A4.15) означа-
означает, что в ходе эволюции энергия системы не возрастает. Мы имеем только
два устойчивых стационарных состояния:
щ и щ. Энергии этих состояний равны
соответственно L\ = —RF{u\) и L% =
= —RF(us). По аналогии можно рассма-
рассматривать величину —F(u) как удельную (на
единицу длины) энергию однородного со™
стояния с амплитудой и. На рис. 14.4 при™
веден график этой величины для рассма-
триваемой задачи. Устойчивым стационар-
стационарным состояниям отвечают "потенциальные
ямы" разной глубины. "Наиболее устойчи-
устойчивому" состоянию отвечает наиболее глубо-
кая яма, куда и стремится система в режиме
волны переключения (правило Максвелла).
Заметим, что введенная соотношени-
соотношением A4.14) величина L является функцио-
функционалом (функцией) Ляпунова рассматрива-
рассматриваемой задачи. Этот функционал удовлетворяет трем условиям: 1) dL/dt ^
^ 0; 2) dL/dt = 0 тогда и только тогда, когда и есть стационарное решение
краевой задачи; 3) L ^ bmin? т.е. ограничен снизу. В нашей задаче Ьтщ =
= —RF(ui), см. рис. 14.4.
Уравнение Колмогорова-Петровского-Пискунова является частным слу-
случаем широкого класса так называемых градиентных краевых задач, обла-
обладающих рядом общих свойств (см. приложение 3).
14.4. Режимы локализации и обострения
В рассмотренной выше пространственно-одномерной однокомпонент-
ной задаче A4.2) нелинейность была обусловлена источником f(u). Этим
Рис. 14.4. Вид функции F(u) из
A4.11) при е < 0. Стрелкой по-
показано направление волны пере-
переключения
14.4. Режимы локализации и обострения 247
далеко не исчерпывается класс представляющих интерес систем. Так, на-
например, для многих важных физических и прикладных задач характерна
зависимость различных коэффициентов переноса, в частности коэффици-
коэффициента диффузии, от температуры, концентрации и т.п. Такая зависимость
сразу же делает соответствующие уравнения нелинейными. Действитель-
Действительно, задача A4.2) приобретает при этом вид
ди д
Уравнение A4.16) наиболее полно исследовано для случаев, когда зависи-
зависимости D(u) и f(u) имеют вид степенных функций
D(u) = ри», f(u) = su1", р > О, A4.17)
где р, s, fj, и v — некоторые константы. Задача имеет автомодельные реше-
решения вида
ч{х, t) = g(*)9@, С = x/<p(t), A4.18)
где ? — автомодельная переменная, g(t) inp(t) — некоторые функции вре-
времени. Эти автомодельные решения для различных случаев были получены
и исследованы в работах Я.Б. Зельдовича, А.С. Компанейца, Г.И. Барен-
блатта, А.А. Самарского и СП. Курдюмова.
В зависимости от значений параметров задачи р, s9 /х и v возможны раз-
различные режимы эволюции начального возмущения и(х, t = 0). Большой
интерес представляет режим так называемого локализованного горения с
обострением, при котором величина и(х, i) неограниченно возрастает за
конечное время в некоторой конечной области пространства. Для того что™
бы возбудить в среде такое горение с помощью очагового инициирования
A4.19)
требуется, чтобы размер очага 2а превышал некоторое пороговое значе-
значение Lt:
PKi7 -г /л, -г ±; и~{у-ц-1)/г ц^ 20)
fJLs(i/-l) °
Тогда при v > fi + 1 температура в центре гх(О, t) обращается в бесконеч™
ность за конечное время
tf = +и2+/_\\и^, A4.21)
а эффективная ширина L теплового поля (например, полуширина на полу-
полувысоте) при стремлении t к tf неограниченно уменьшается по закону
Т л, \а,(п +М(а*+1 — 1/)/2 (Л л 1О\
Li ^ \U\\J) 1>)\ • ylH-.ZZ)
Реально, конечно, температура в бесконечность не обращается, посколь-
поскольку раньше начинают влиять другие, не учитываемые в A4.16) факторы.
248 Волны и структуры
К их числу относятся, например, выгорание вещества, рост тештопотерь
и т.п. Поэтому автомодельные структуры типа A4.18) существуют лишь в
течение некоторого времени t < tf. Тем не менее режимы с обострением
играют важную роль во многих физических задачах.
14.5. Диффузионная неустойчивость
Перейдем далее к более сложному примеру — двухкомпонентной си™
стеме вида
— = f1(ulju2) + D1—Yj — = /2(tii,ii2) + D2—T. A4.23)
dt дх2 dt дх2
При D\ = D2 = 0 система A4.23) сводится к точечной, которую мы по-
подробно исследовали в главах 1-Х. Добавление пространственных произ-
производных, т.е. "включение" диффузионной связи точечных элементов, может
коренным образом изменить свойства системы.
Начнем традиционно с нахождения и исследования устойчивости од-
однородных стационарных состояний. В соответствии с A4.23) эти состоя™
ния определяются из системы уравнений
/i(ui, и2) = 0, /2(щ, и2) = 0. A4.24)
Пусть щ = г4 и 42 = щ — некоторые решения системы A4.24). Для
исследования устойчивости этих решений запишем
m(x, i) = щ'-\-wi(x,t), U2(x,i) = щ -\-W2(x, i). A4.25)
Подставляя A4.25) в A4.23) и линеаризуя получающиеся уравнения по
малым добавкам w\ и w2, получаем систему двух линейных дифференци-
дифференциальных уравнений в частных производных с постоянными коэффициентами
d2w\
at
где производные /^ = dfi/duk вычисляются при гг = u^. Решение си-
системы A4.26) ищется в стандартной форме
wk(x, t) = wk exp(pt + iqx), к = 1, 2. A4.27)
Подстановка A4.27) в A4.26) дает дисперсионное уравнение
Р2 ~~ [fn(q) + /22(9)]^ + fu(o)f22@) - fi2(q)f2i(q) = 0, A4.28)
где fu(q) = fn—q2Di9 /22(g) = /22 — q2D2. Подчеркнем, что при q = 0
дисперсионное уравнение A4.28) совпадает с дисперсионным уравнением
для соответствующей точечной подсистемы. Другими словами, значения
функций p(q), определяемых уравнением A4.28), при q = 0 совпадают с
ляпу невскими показателями линеаризованной точечной системы.
Анализ дисперсионного уравнения A4.28) показывает, что решения урав-
нения A4.23) щ = щ_' и и2 = щ , устойчивые в отсутствие процессов
14.5. Диффузионная неустойчивость
249
переноса, т.е. при D\ = D2 = 0, могут терять устойчивость при "включе-
"включении" диффузии. С точки зрения дисперсионного уравнения это означает,
что, хотя при q = 0 оба его корня отрицательны (pi @) < 0 и р2 @) < 0),
существует интервал значений q9 в котором по крайней мере один из гор™
ней имеет положительную действительную часть. Условия существования
такого интервала следуют из уравнения A4.28). Они записываются в виде
A4.29)
1) /11/22-/12/21 < О,
2) /ll?>2 + /22^1 > О,
Q\ ( ? ТЛ | ? ТЛ \2 \ А ГЛ ГЛ ( ? ? ? ? \
Oj \J11-Ls2 I /22JL^lj -^ ^J~^lJ-^2\JllJ22 — «/12«/21 /?
4) /11 + /22 < 0.
Из сказанного явствует, что возникновение неустойчивости обусловле-
обусловлено наличием процессов переноса. Поэтому такую неустойчивость называ-
называют диффузионной. Ее важной особенностью является требование различия
коэффициентов диффузии:
D1 фВ2, A430)
вытекающее из сопоставления второго и четвертого неравенств в A4.29). На
рис. 14.5 показаны дисперсионные кривые pi,2(<z) для случаев отсутствия
б.
Pi(Q)
Рис. 14.5. Спектральные функции p(q), задаваемые дисперсионным уравнением
A4.28), для устойчивого (а) и неустойчивого (б) однородного состояния
и наличия диффузионной неустойчивости. Возникновение неустойчивости,
иллюстрируемой рис. 14.5, было предсказано A.M. Тьюрингом в 1952 г.
В результате развития диффузионной неустойчивости система перехо-
переходит в пространственно неоднородное состояние. Другими словами, в си™
стеме происходит спонтанная потеря трансляционной симметрии. Это
обстоятельство является частным проявлением весьма общих свойств не ли™
нейных распределенных систем. В этой связи можно указать на такие хоро-
хорошо известные примеры, как образование доменной структуры в ферромаг™
нетиках, потеря калибровочной симметрии при переходе в сверхпроводя-
сверхпроводящее состояние. Идеи спонтанной потери симметрии широко используются
также при разработке единых теорий поля.
Применительно к рассматриваемой нами задаче принято различать две
качественно различные ситуации, в которых проявляется диффузия. Если
корни дисперсионного уравнения A4.28) таковы, что действительная часть
250 Волны и структуры
одного из них всегда отрицательна, а другого — положительна в некотором
интервале волновых чисел q, то такую неустойчивость принято называть
диффузионной неустойчивостью тъюринговского типа. Обычно она ве-
ведет к возникновению неоднородных стационарных структур. Неравенства
A4.29) относятся именно к этому случаю. Если же в некотором интервале
значений q оба корня дисперсионного уравнения обладают положитель-
положительной действительной частью, то соответствующую неустойчивость принято
называть автоколебательной. Она приводит к возникновению автоколеба-
автоколебаний. Этот тип неустойчивости возникает, если соответствующая точечная
подсистема в отсутствие процессов переноса является автоколебательной.
При этом "включение" диффузии может кардинально усложнить динамику
системы, приводя, в частности, к стохастизации колебаний. Такое явление
по аналогии с диффузионной неустойчивостью называется диффузионным
хаосом. Заметим, что если матрица коэффициентов диффузии в отличие
от случая A4.23) недиагональная, то неустойчивость тьюринговского типа
может возникнуть и при условии, что D\ = D2, если только ?)f2+Df x ф 0.
14.6. Реакции Белоусова-Жаботинского
Существование в химических системах сложных динамических режи-
мов и нетривиальных пространственных структур экспериментально бы-
было обнаружено при исследовании так называемых реакций Белоусова-Жа-
ботинского. Эти реакции относятся к классу автокаталитических реакций
окисления. Одним из процессов этого типа являются окислительно-восста-
окислительно-восстановительные реакции
протекающие в растворе серной кислоты, малоновой кислоты, сульфата
церия и бромида калия. Схема этих реакций следующая:
а) восстановление ионов церия
ВгСН(СООНJ + 4Се4+ + 2Н2О ->>
-> 2СО2 + НСООН + 4Се3+ + 5Н+ + Вг™;
б) окисление ионов церия
4Се3+ + ВгОз" + 5Н+ + СН2(СООНJ ->>
-> 4Се4+ + ЗН2О + ВгСН(СООНJ,
6Се3+ + СН2(СООНJ + 2Н2О ->> 6Се4+ + НООН + 2СО2 + 6Н+;
в) синтез малоновой кислоты
ЗСН2(СООНJ + 2Вг^ + ВгО^ + ЗН+ -> ЗВгСН(СООНJ + ЗН2О.
В раствор добавляется индикатор окислительно-восстановительных реак™
14.6. Реакции Белоусова-Жаботинского
251
ций (ферроин), позволяющий следить за ходом реакции по изменению цве-
цвета (или по изменению спектрального поглощения).
Б.П. Белоусовым было замечено, что при постоянной температуре цвет
реакционной смеси периодически изменяется от красного до синего и обрат-
обратно (с периодом порядка нескольких минут) до тех пор, пока практически
полностью не израсходуется один из исходных компонентов. Длительность
процесса в ряде случаев достигала нескольких часов. Кроме того, при нежь
А Красный А
Синий
у//////л
/Красный//
Синий
//Красный'7/
Синий
Рис. 14.6. Пространственно-периодическая
структура в реакции Белоусова-Жаботинско-
Белоусова-Жаботинского. Время, в течение которого наблюдалась
структура, составляло около 30 минут
торых концентрациях компонентов после завершения переходных процес-
процессов возникали пространственно неоднородные структуры в виде серии ело™
ев, окрашенных в красный и синий цвета (см. рис. 14.6).
Наиболее полно исследованы две математические модели, предсказыва-
предсказывающие существенные особенности поведения подобных реакций и получив-
получившие по месту их разработки специальные наименования "брюсселятор" и
"орегонатор". Так, например, брюсселятор отвечает модельной реакции
A + B^G + E, A4.31)
протекающей по схеме
А^ХЪ 2Xi+X2^3Xb B + X1^G + X2, Хг -> Е, A4.32)
где промежуточные компоненты Х\ и Х2 формируют автокаталитические
стадии реакции. В предположении, что константы скоростей всех реакций
A4.32) одинаковы и равны единице, уравнение кинетики процесса A4.31)
можно записать в виде
dXi
dt
= A
dX2
dt
Х{Х2 - ВХг -Хг
= ВХг -
A4.33)
Последние слагаемые в уравнениях A4.33) учитывают диффузию "автока-
"автокаталитических" компонентов Х\ и Х2. С помощью модели брюсселятора
A4.33) можно изучать качественные особенности формирования диссипа-
тивных структур тыоринговского типа для ряда конкретных реакций.
Наряду со стационарными диссипативными структурами в реакции Бе-
Белоусова-Жаботинского экспериментально наблюдались более сложные типы
пространственно-временного упорядочения. Упомянем только два из них.
252
Волны и структуры
Во-первых, это так называемые ведущие центры, наблюдающиеся в
виде периодически действующих источников бегущих волн концентрации
реагентов (рис. 14.7). По аналогии со сказанным выше можно считать, что
Рис. 14.7. Взаимодействие концентрических
волн от нескольких ведущих центров, дей-
действующих одновременно в среде, в которой
протекает реакция Белоусова-Жаботинского
диффузионные процессы качественно меняют динамику отдельных точеч-
точечных элементов: если изолированные точечные элементы обладают устой-
устойчивыми стационарными состояниями, то в ансамбле себе подобных они
приобретают автоколебательные свойства.
14.7. Спиральные волны
Во-вторых, это такой интересный тип структур, как ревербераторы,
или вращающиеся спиральные волны (рис. 14.8). Одной из первых и став-
ставшей уже классической моделью спи-
спиральных волн в распределенных двух-
двухмерных системах является модель Фиц
Хью-Нагумо
9t ЯТ ' A4-34)
где f(E) — кусочно-линейная И-об-
разная функция, е <С 1 — малый пара-
параметр, а А2 = д2/дх2 + д2/ду2. Та-
Такая модель описывает распростране-
распространение возбуждений в нервном волокне,
сердечной ткани, а также в ряде хими-
химически активных сред. На рис. 14.9 по-
показан качественный вид нуль-изоклин
соответствующей A4.34) точечной под-
подсистемы: I = f(E) и I = кЕ. Точка пересечения нуль-изоклин I = Е = О
отвечает устойчивому пространственно однородному состоянию. В то же
время при этих условиях может существовать устойчивая бегущая волна.
При возникновении каких-либо неоднородностей в среде (например, если
задаются пространственно неоднородные начальные условия) волна начи-
начинает огибать препятствие и формируется ревербератор, который продолжает
Рис. 14.8. Спиральные волны с топо-
топологическими зарядами, равными еди-
единице {а), двум (б), трем (в) и четырем
(г) в химически активной среде
14.7. Спиральные волны
253
/V \
Е
Центр
вращения
Рис. 14.9. Качественный вид
нуль-изоклин точечной подси-
подсистемы в A4.34). 1 — нуль-изо-
нуль-изоклина I = f(E), 2 — нуль-
изоклина I = кЕ
Рис. 14.10. Стационарная циркуляция возбу-
возбуждения (ревербератор) в модели Фиц Хью-
Нагумо, найденная при численном интегри-
интегрировании уравнений A4.34). Концентрические
окружности — траектории границ областей с
различным уровнем возбуждения
свое существование и после исчезновения затравочной неоднородности. На
рис. 14.10 показан пример ревербератора, описываемого уравнениями A4.34).
Другой моделью, описывающей различные типы самоорганизации нели™
нейных сред, включая образование ревербераторов, является так называе™
мое обобщенное уравнение Гинзбурга—Ландау 1) :
ди
¦ U — 0,2
A435)
где и = щ + Ш2 — комплексная функция, а±
и «2 — некоторые комплексные константы. Это
же уравнение иногда называют уравнением Кура-
мото—Цудзуки. Оно описывает поведение многих
нелинейных систем в окрестности точек бифур™
кации. Для этого уравнения известны автомодель™
ные решения, которые записываются в виде
и(х, у, t) = R(x, у) exp{ia;t
ia(x, у)}.
A4.36)
Спиральные волны описываются этим решением
при условии
R(x, у) = R(r); а(х, у) = a(r) + N<p; N = 1, 2,...
Рис. 14.11. Спиральная
волна, описываемая ре-
решением A4.36) обобщен-
обобщенного уравнения Гинзбур-
Гинзбурга-Ландау
A437)
в котором х = г cos ip, у = г sin (p. Число N есть число рукавов спирали и
называется топологическим зарядом. Типичный вид однорукавной спира-
спирали (N = 1), описываемой решением A4.36), показан на рис. 14.11. В более
общем случае стационарный ревербератор можно представить в виде
¦ut,r). A4.38)
) Употребляется также название "зависящее от времени уравнение Гинзбурга-Ландау".
В англоязычной литературе для него используется аббревиатура TDGL-equation (Time
Dependent Ginzburg-Landau equation).
254 Волны и структуры
14.8. Уравнение Свифта-Хоэнберга и его обобщение
Наряду с моделями, качественно подобными тем, которые задаются
уравнениями типа A4.34) и A4.35), имеются и иные модели, позволяю-
позволяющие описать более сложные типы спиралевидных структур, покоящихся
и вращающихся, а также имеющих более сложную топологию. К их числу
относится уравнение Свифта-Хоэнберга
|™ = - (А + к2J и + f(u), f(u) = /Зи + ей2 - и\ A439)
описывающее поведение многих физических систем в окрестности точек
бифуркации: конвективные течения в слое нагреваемой жидкости (и, в
частности, эффект Бенара), фазовые переходы и т.п. Здесь величина /3
есть параметр надкритичности, определяющий степень близости системы
к порогу неустойчивости. В самом деле, рассмотрим однородное решение
и = 0. Линеаризуя уравнение A4.39) в окрестности этого решения и при-
нимая зависимость возмущения от времени и координаты в виде
v(r, i) = v0 exp(iqr + pt), A4.40)
получим спектр p(q):
Р(Ч) =Р-(Ч2- к2J. A4.41)
Отсюда видно, что при C > 0 имеется диапазон значений волнового век™
тора q:
л/к2 -f3 < |q| < ^к2 + /3, A4.42)
для которого инкремент р > 0, т.е. решение и = 0 неустойчиво. Макси-
Максимум p(q) находится на кольце |q| = к. Можно показать, что уравнение
A4.39) для широкого класса граничных условий имеет решения, которые
в пределе t —>• +оо выходят на некоторое стационарное состояние (см.
приложение 3). Однако в зависимости от начальных условий и значений
параметра /3 соответствующие асимптотические состояния могут обладать
нетривиальной симметрией, подобной той, которая показана на рис. 14.1.
Другая модель основана на уравнении 1)
^+ev2-^, Ь=Ьев, A4.43а)
дх кх
где А, В, С — некоторые константы, удовлетворяющие условию положи-
тельной определенности соответствующей квадратичной формы: С2 —
— АВ < 0. При наличии аксиальной симметрии вместо A4.43а) удобно
) Арнольд Н.Д., Кириченко Н.А. II Журнал экспериментальной и теоретической
физики. — 1992. — Т.101. — С.1395.
14.8. Уравнение Свифта-Хоэнберга и его обобщение
255
использовать уравнение
ди
dt
= -A\k
д
и —
-В[к%
и —
ди
cos<9 Or
-ей2 - и3,
A4.436)
Эти уравнения, очевидно, включают в себя как частный случай уравнение
Свифта-Хоэнберга A4.39).
Рассмотрим вопрос об устойчивости однородного состояния в модели
A4.43а). Для линейной подсистемы ищем решение в стандартной форме
u(r, i) = щ exp[iqr -\-pi)]. Это приводит к выражению для инкремента
Р(Ч) = /3 - [А (^ -
(q2y
2С (ql - l) (qy 2) (<? Kf
-iqxvxi A4.44)
^. Таким образом, временная эволюция
где мы обозначили vx =
возмущения имеет вид
v(r,t) = voexp[tRep(q) + iqx(x - vxt) + iqyy]. A4.45)
Отсюда видно, что фронт возмущения дрейфует со скоростью vx вдоль оси ж.
В случае уравнения A4.436) вектор скорости дрейфа фронта возмуще™
ния в произвольной точке направлен под углом 0 = arctg(fc^/fcr) к радиу-
су-вектору этой точки, как показано на рис. 14.12а. Как известно, кривая
Рис. 14.12. а — Относительные ориентации радиус-векторов г*, волновых векто-
векторов hi и линий постоянной фазы Ф$ (волновых фронтов), ортогональных соответ-
соответствующим векторам kj для трех различных точек (г = 1, 2,3) в модели, описывае-
описываемой уравнением A4.436). б — Типичный вид закручивающейся логарифмической
спирали (т.е. спирали, отвечающей рис. 14.12 а, где tgf9 < 0)
г = г((р), пересекающая радиус-вектор всюду под одним и тем же углом,
есть логарифмическая спираль 1) . В нашем случае уравнение этой спира™
) Действительно, пусть уравнение кривой в полярных координатах есть г = г(<р).
Тогда приращение радиуса-вектора г при повороте на dip будет равно dr = rdip • tg в, где
9 — угол между радиусом-вектором точки на кривой и касательной к кривой в этой точке.
256 Волны и структуры
ли имеет вид
г = го ехр(а<р), а = igO = к9/кг. A4.46)
Типичный вид закручивающейся логарифмической спирали показан на
рис. 14.126.
Наряду со спиралевидными структурами уравнения A4.43) описыва-
описывают целый ряд структур с более сложной симметрией, а также различные
нестационарные процессы.
14.9. Спиральные волны при работе клеточного автомата
В соответствии со сказанным в начале данной главы, распределенная
система может рассматриваться как совокупность взаимодействующих то™
чечных элементов. В континуальном приближении, когда размер каждо-
каждого элемента бесконечно мал, система описывается уравнениями в частных
производных. Если же считать размеры элементов конечными, мы прихо-
приходим к модели клеточного автомата, работа которого обсуждалась в гла-
главе IX. Подход к исследованию динамики системы на основе приближения,
использующего клеточный автомат, называют аксиоматическим подходом,
а соответствующие модели — аксиоматическими моделями. В закончен-
законченной форме такой подход сформулировали в 1946 г. Н. Винер и А. Розен-
блют в связи с анализом распространения возбуждения в сердечной мыш-
мышце. Однако он позволил исследовать динамику возбуждений и во многих
системах иной природы.
В рамках аксиоматического подхода среда рассматривается как сово-
совокупность взаимодействующих между собой возбудимых элементов, при™
чем предполагается, что каждый элемент может находиться в одном из трех
состояний: покоя, возбуждения, рефрактерности (пассивности). Элемент,
находящийся в состоянии покоя, может быть переведен в возбужденное со-
состояние, если возбужден хотя бы один связанный с ним элемент. Элемент,
передавший свое возбуждение соседним элементам, переходит в состояние
рефрактерности, в котором пребывает в течение некоторого времени Тц
(соответствующий интервал времени можно интерпретировать как период
восстановления активных свойств среды). В этом состоянии он не может
быть возбужден. Длительность рефрактерного периода считается постоян-
постоянной. Скорость распространения возбуждения также постоянна.
Сформулированный подход чрезвычайно прост для анализа. Однако с
его помощью легко воспроизвести разнообразные эффекты, наблюдаемые
в реальной среде. Варьируя такие параметры, как длительность состоя-
состояния рефрактерности, скорость передачи возбуждения, начальные условия,
несложно моделировать такие эффекты, как прямолинейное распростра-
распространение волны, огибание волной препятствия, гашение волн при их столк-
столкновении и т.п. В качестве примера на рис. 14.13 показано возникновение
Решение этого уравнения при в = const есть г((р) = г*о ехр((,с> • tg<9), что представляет
собой уравнение логарифмической спирали.
14.9. Спиральные волны при работе клеточного автомата 257
t=0
t=l
t=4
t=10
БГ
t=u
Ш
щ
Рис. 14.13. Возникновение стационарной циркуляции при работе клеточного ав-
автомата. Начальные условия (момент t = 0): вертикальная "линейка" возбужден-
возбужденных элементов (шириной в 1 клетку) контактирует слева с полосой пассивных
элементов (шириной в 4 клетки). Черным цветом показаны возбужденные эле-
элементы, серым — элементы, находящиеся в рефрактерном состоянии, белым —
невозбужденные элементы. Размер сетки элементов 50 х 50. Длительность времени
рефрактерности Tr = 4
17 Н.В. Карлов, Н.А. Кириченко
258 Волны и структуры
стационарной циркуляции в среде. Среда состоит из прямоугольной сетки
элементов. Начальные условия выбраны так, что при t = 0 имеется верти-
вертикальная "линейка" из возбужденных элементов, а слева от нее — полоса
из элементов, находящихся в состоянии рефрактерности. Последнее было
необходимо для того, чтобы волновой фронт распространялся в определен-
определенном направлении (на рис. 14.13 — слева направо). Далее фронт возбужде™
ния распространяется во всех разрешенных направлениях, т.е. туда, где нет
пассивных элементов. Вследствие конечности рефрактерного периода за
фронтом возбуждения образуется "шлейф" из пассивных элементов. Даль-
нейшая эволюция видна из рис. 14.13. Форма волны напоминает спираль.
Однако в использованном приближении вследствие квадратной симметрии
среды она состоит из квадратиков, образующих в стационарном режиме
ломаную линию.
Дальнейшее усовершенствование аксиоматического подхода состоя™
ло в учете дополнительных свойств тех сред, которые использовались в
экспериментах. Так, в 1958 г. А. Розенблют сформулировал так называ-
называемую т~модель, согласно которой возбужденный элемент способен пе™
редавать свое возбуждение соседям в течение некоторого времени т. В
1960 г. И.М. Гельфанд и М.Л. Цетлин предложили учесть возможность
спонтанной активности каждой точки среды и зависимость скорости рас™
пространения волны от фазы, т.е. времени, прошедшего с момента по™
следнего возбуждения.
Более подробно с методами моделирования динамики и свойствами
возбудимых сред можно ознакомиться по книгам: Эбелинг В. Образова-
Образование структур при необратимых процессах. — М.: Мир, 1979; Зыков B.C.
Моделирование волновых процессов в возбудимых средах. — М.: Наука,
1984.
КОММЕ НТАРИИ
K.I. Формула Эйлера
Эта формула связывает показательную и тригонометрические функции.
Ее строгое обоснование дается в рамках теории функций комплексной пе-
переменной. Существует, однако, достаточно простой, хотя и не вполне стро-
строгий вывод, позволяющий наглядно понять смысл и происхождение этой
формулы.
Рассмотрим уравнение гармонических колебаний
d2y/dt2 = -ш2у. A)
Его решение есть
у = С\ cos out + C2 sin out. B)
С другой стороны, хорошо известно уравнение для показательной функции
dy/dt = ay, C)
которое можно переписать в виде
d2y/dt2 = a2y. D)
Последнее уравнение имеет общее решение
у = C3eat + C4e-at. E)
По смыслу производной как предела отношения малых приращений
переменных стандартные правила дифференциального исчисления мож-
можно применять и по отношению к комплексным переменным. В этой связи
легко видеть, что уравнения A) и D) совпадают, если положить а = гш.
Поэтому следует ожидать, что и решения этих уравнений после указанной
замены совпадают.
Выберем следующие начальные условия: у = 1, у = 0 при t = 0.
Тогда из B) легко получается у = cos wt. С другой стороны, из E) следует,
что у = (eat + e^at)/2 = (eiujt + e^iujt)/2. Сравнивая эти результаты,
приходим к соотношению
A<jjt 1 —ioot
cos out = . F)
Если же теперь принять начальные условия в виде у@) = 0, у@) = 1, то
260 Комментарии
получаем
sinwt = ° G)
2г
Из последних двух соотношений следует формула Эйлера
eiujt = cos out + г sin wt. (8)
Следует подчеркнуть, что по смыслу вывода формула Эйлера справед-
справедлива, если ш не только действительное, но и комплексное число. Поэтому
в F) можно положить ш = —ia. Это дает
eat + e^at
cos iat = chat = . (9)
Аналогично, из G) следует, что в этом случае
sin iat = ish at = г . A0)
Иным способом вывода формулы Эйлера является использование раз™
ложения функций в ряд Маклорена. Известно, что
11 °° хк
к=0
1 ч 1 * ^ ь х2к+1
3! 5! ^ BЛ + 1)!
2! 4! к^о ^кI°
Заменяя в формуле A1) ж —> %х и замечая, что i2n = (^l)n, i2n+1 =
= (^l)ni, получаем, что
eix = 1 + гх - -х2 - ^ix3 + ... A4)
Имея в виду абсолютную сходимость этого ряда, мы можем сгруппировать
его члены так, чтобы разделить действительную и мнимую части. Тогда с
учетом представлений A2) и A3) сразу же получаем формулу Эйлера
егх = cos ж + ism ж. A5)
К.2. Эллиптические функции Якоби
Эллиптические функции относятся к так называемым специальным
(неэлементарным) функциям и определяются следующим образом. Рас-
Рассмотрим интеграл
и
= arcsiniL A)
К. 2. Эллиптические функции Якоби 261
Этот интеграл в неявном виде задает функцию
u(t) = sint. B)
Строго говоря, интеграл A) определен для интервала ™тг/2 < t < тг/2, от™
вечающего положительному знаку \/l — у2. После обращения интеграла,
т.е. после перехода к B), функция u(t) продолжается на всю числовую ось t
таким образом, чтобы она была всюду непрерывной и дифференцируемой.
С учетом таких соображений рассмотрим обобщения интеграла A).
Сначала введем функцию, определяемую интегралом
t=] t dy ^. C)
J y/{i - у2) A - в2»2)
Обращение этого интеграла дает функцию
u = sn(t,q), D)
называемую эллиптическим синусом Икоби. Число q называется модулем.
Очевидно, что при q = 0 интеграл C) переходит в A) и поэтому
sn(t, 0)=sfnt E)
Наряду с sn(t, q) вводятся другие функции: эллиптический косинус
и = cn(t, g), F)
определяемый как обращение интеграла
t = I = , G)
и дельту амплитуды
), (8)
определяемую как обращение интеграла
В интегралы G) и (9) входит величина
q' = ч/l - q2, A0)
называемая дополнительным модулем.
Функции D), F), (8) часто записывают без явного указания второго
аргумента (модуля) как sn t, en t, dn t.
Эллиптические функции sn t, en t и dn t введены К. Икоби в 1827 г. при
решении задачи об обращении эллиптических интегралов C),G) и (9). В
дополнение к ним Якоби ввел обозначение am t как обращение интеграла
am t
Г da
J у I — qz sin a
262 Комментарии
Функцию am t он назвал амплитудой. Используя эту функцию, можно связь
эллиптических функций с тригонометрическими представить в виде
snt = sin(am t),
en t = cos(am ?), A2)
dn t = A(am t),
где обозначено
Au= yi-q2sin2u. A3)
Наряду с фундаментальной тройкой D),F),(8) иногда используются и
следующие функции:
A4)
При всех g < 1 введенные выше эллиптические функции являются
действительными и периодическими, причем sn(t, q) и en (t, </) имеют оди~
наковый период Т = 4К, а функция dn (t, g) имеет период Т = 2К, где
1 тг/2
у da A5)
Vl2i2
cd t =
sd / —
OUL b
ndt
en t
dn^'
snt
dnt'
1
dn :
dci
Т1Г* /
, dn
en
_ 1
en
snt
en t
t
7'
t'
.
ns t
ds / -
ULO b -
CS t =
_ 1
snt
_ dnt
snt
en t
snt
у/A-У2)A-Я2У2) Vg
о о
— полный эллиптический интеграл 1-го рода. Наряду с этим интегралом
используется также полный эллиптический интеграл П-го рода:
^ A6)
о ' о
Нетрудно установить следующие асимптотические соотношения:
при д^О К^тг/2, Е^тг/2;
при g —>> 1 К ^ сх), Е ^ 1.
Отсюда видно, что периоды эллиптических функций sn(t, g) и en (?, g) при
g —>- 0 совпадают с периодом Т = 2тг обычных тригонометрических функ-
функций, а при q —> 1 их периоды стремятся к бесконечности. В этом последнем
пределе эллиптические функции могут быть выражены через функции га™
перболические:
sn(t, 1) = = tht, cn(t, 1) = = sech t,
cht cht /io\
dn(t, 1) = = sech t.
cht
К. 2. Эллиптические функции Якоби 263
Подобно тому, как это имеет место для тригонометрических функций,
для функций эллиптических существуют тождества, связывающих их:
sn2t + cn2t = 1, dn2t + g2sn2t = 1, A9)
sn(t + 2К) = -snt, en(t + 2К) = - en ?, dn(t + 2K) = dn t, B0)
sn(t + K) = —, cn(t + K) = -g; —, dn(t + K) = -^-. B1)
dn ? dn ? dn ?
Правила дифференцирования эллиптических функций имеют вид
— snt = cntdnt. —cut =—sntdnt. —dn t = —q2 sntcn t. B2)
dt dt dt
Эти соотношения совместно с формулами A9) позволяют сформулировать
дифференциальные уравнения, решениями которых являются эллиптиче™
ские функции. Например, функция у = sn(t, q) удовлетворяет уравнению
г>2 - A - 1/2)A - д2!/2) = 0. B3)
Покажем теперь, как получается точное решение нелинейного уравне-
уравнения колебаний математического маятника:
e + a^sine = 0. B4)
Умножая это уравнение почленно на в и интегрируя по времени, получим
первый интеграл, отражающий закон сохранения энергии:
-В2 — ujq cos в = —ujq cos Bq. B5)
Здесь Во — постоянная интегрирования, представляющая собой макси-
максимальное угловое отклонение маятника от положения равновесия. Решение
полученного уравнения имеет вид
в
л/2 J VcosBi — cos Во
о
Константа интегрирования to выбрана так, чтобы при t = to оказалось В =
= 0.
Преобразуем решение B6). Для этого заметим, что
cosBi - cos Во = 2 [sin2(Во/2) - sIn2(Bi/2)].
Введем вместо Bi новую переменную интегрирования у по формуле
f)(f) B7)
Тогда решение B6) примет вид
и
uo(t - to) = [ ,,Л f.yn 2 2., B8)
J 7A2) AV)
264 Комментарии
где введены обозначения q = sin(Oo/2), и = —'—)-. Используя форму-
формуете/г)
лы обращения этого эллиптического интеграла C) и D), получаем ответ:
sin(G/2) г /, , ч 1 /плч
. :'* = sn[(jo(t - t0 , q]. B9)
sin(eo/2)
Интегралу B8) можно придать другой вид, иногда более удобный в
практических расчетах. Замена у = sin а приводит к
C0)
у 1 — q2 sin2 a
КЗ. Вырожденное решение дифференциального уравнении
у + 271/ + o;q2/ = 0.
Общее решение этого уравнения при ш ф 7 получено в главе II в виде
у = deiXlt + C2eiX2t, A)
где
(см. B.7), B.11)^B.15)). Для того чтобы совершить предельный переход
при а;о —>¦ 7? перепишем A) в форме
у = (Сг + С2) esAlt + C2 (eiA2t - eiAlt) . C)
Обозначим
<5i = Ci + С2, С2 = С2 (А2 - АО . D)
Перепишем C) с учетом D)
1« + С2^- \ . E)
А2 — Ai
Поскольку исходные константы С\ и С2 произвольны, то и константы С\ и
<^2 можно считать произвольными. Поэтому при осуществлении предель-
предельного перехода ш —>¦ 7 или ^2 —>¦ Ai величины Gi и &2 можно считать
постоянными. Совершив после этого в множителе при С^ предельный пе-
переход А2 —)• Ai, по правилу Лопиталя немедленно получаем
2/ = CieiAl* + C2eiX2tii = e^f [c?i + iC2t]. F)
Здесь учтено, что при шо = 7 мы имеем Л2 = Ai = ij. Полагая в F)
С\ =2/1, iC2 = 1/2, получаем
2/ = B/i+2/2t)e*. G)
Использованный здесь прием позволяет находить вырожденные реше-
решения во многих практически интересных случаях.
К.4. Расщепление частот связанных осцилляторов 265
К.4. Расщепление частот связанных: осцилляторов
(график Вина)
Рассмотрим систему двух связанных осцилляторов без трения:
Уг +^?2/i =ОлЫ -2/i), A)
у2 +^2 2/i = о"! B/1 -2/2)-
Для нахождения собственных частот этой системы, т.е. частот нормальных
мод fix и О2? составим характеристическое уравнение. Для этого положим
функции I/I, г/2 пропорциональными ехр(гШ). Тогда система A) перепи™
шется как
(о;? + &1- п2)У1 = (т1у2
Условие совместности этих уравнений дает квадратное уравнение относи-
тельно О2:
(uf + <j\- п2)(ш22 + а\- О2) - g\g\ = О, C)
что может быть переписано как
Q4^pQ2 + g = O, D)
где
2 2 2 2 /2 2 \ / 2 2 \ 22
р = С^! + Ш2 + CJ! + <Т2, g = (й^ + ^1 )(<^2 + °°2 ) ~ а1 а2 •
Решение этого квадратного уравнения и дает нормальные частоты Oi и 02-
При этом следует иметь в виду, что частоты Ои-0 соответствуют одному
и тому же типу колебания.
Для того, чтобы дальнейший анализ был более нагляден, рассмотрим
частный случай симметричной связи осцилляторов, положив а± = ст2 = а.
Будем, кроме того, предполагать эту связь слабой, т.е. будем считать
а2 <С тах(ш2, ш2,). E)
Решение квадратного уравнения D) при <j\ = а2 = <J имеет вид
Зафиксируем парциальную частоту одного из осцилляторов, скажем ш\,
и исследуем зависимость частот нормальных мод Oi и О2 от частоты вто-
второго осциллятора Ш2. Для построения графиков зависимости Of;2(^!) Че~
лесообразно привести сначала частные случаи формулы F):
1) а;2 = 0: Of = ш2 + а2, п2 = а\
2) ш2=ш2: п2 = ш2^2а2, п2 = ш2. G)
3) ш2 -> оо : Of^a;| + (j2, O|^a;f+(j2.
266
Комментарии
Малость а2 использована в первом из частных случаев G). Приведенные
значения позволяют легко представить целиком вид дисперсионных кри-
кривых, т.е. вид зависимостей Of (cjf) и О|(ш|). Она изображена на рис. 1.
Соответствующая диаграмма называется графиком Вина. Наиболее суще-
Рис. 1. График Вина — зависимость ча-
частот нормальных мод системы двух свя-
связанных осцилляторов от собственной
частоты одного из осцилляторов
Рис. 2. То же, что на рис. 1, но при
"выключенной" связи между осцил-
осцилляторами (а = 0)
ственным в приведенных зависимостях является то обстоятельство, что ча-
частоты нормальных мод при наличии связи между осцилляторами нигде не
совпадают друг с другом. Для пояснения роли связи между осцилляторами
рассмотрим как отправную точку частный случай, отвечающий математи-
математически точному отсутствию связи, т.е. частный случай а = 0. Из F) следует
тогда, что
Соответствующие зависимости частот нормальных мод от ш| приведе-
приведены на рис. 2. Сопоставление рис. 1 и рис. 2 показывает, что наличие связи
приводит не только к количественным изменениям нормальных частот, но
и качественно меняет их зависимость от параметров осцилляторов.
Прежде всего, видно, что кривые Of (а;|) и О|(а;|), пересекавшиеся в
отсутствие связи (рис. 2), перестают пересекаться при наличии любой сколь
угодно малой связи (рис. 1). Иными словами, происходит расщепление нор™
мальных мод. Такое явление известно в квантовой механике, спектроскопии,
физике твердого тела и т.п. как расщепление энергетических термов или сня-
снятие вырождения. В этих разделах физики роль связи между осцилляторами
играет слабое взаимодействие, т.е. возмущение, снимающее вырождение.
В узком смысле слова расщепление дисперсионных кривых состоит
в том, что вместо одной вырожденной точки, соответствующей пересече™
нию кривых, возникают две (невырожденные) точки, лежащие на различа-
различающихся кривых.
К. 5. ОДУ с периодическими коэффициентами 267
Другим важным обстоятельством является изменение структуры дис-
дисперсионных кривых при появлении взаимодействия. Сопоставление рис. 1
и рис. 2 показывает, что благодаря взаимодействию происходит перезамы™
кание, переключение участков дисперсионных кривых, что эквивалентно
смешению различных состояний.
Отметим, что графики типа представленных на рис. 1 существуют и в
тех случаях, когда рассматриваются зависимости частот нормальных мод
от иных характеристик системы, в частности, от расстройки частот исход-
исходных осцилляторов. Подобные графики также называют графиками Вина.
К.5. Обыкновенные дифференциальные уравнения с
периодическими коэффициентами
Рассмотрим уравнение второго порядка
у" + [g(x) - р]у = 0, р = const. A)
т
где g(x) — периодическая функция с периодом Т, g(x) dx = 0. Это
о
уравнение принято называть уравнением Хилла. В частном случае g(x) =
= go cos cut оно переходит в уравнение Матье.
В соответствии с теоремой Флоке-Ляпунова (см. ниже) уравнение A)
имеет решение
y = C1e^xP1(x) + C2ei^xP2(x). B)
где Pi^(x) — Апериодические функции, a q\ и q2 — некоторые констан™
ты, называемые характеристическими показателями. Представление B)
справедливо, если qT ф птт, п = 1, 2,..., иначе решение записывается в
виде
у = С1хР1(х) + С2Р2(х). C)
Решение B) есть сумма двух линейно независимых решений уравнения
A), причем периодические функции Pi и Р2 входят в у{х) с множителями
exp(igix) и exp(ig2^), соответственно. Значения этих множителей при х =
= Т, т. е. р\ = exp(igiT) и р^ = exp(iq2T), называютсямулыпипликатора-
ми. Мультипликаторы и, следовательно, характеристические показатели мо~
гут быть найдены следующим образом. Пусть уг(х) и У2(%) есть решения
задачи Коши для уравнения A), отвечающие начальным условиям:
0,
=0, 1 ^@) 1
Тогда общее решение есть
у(х) = А1У1(х) + А2у2(х). E)
Подберем коэффициенты А\ и А2 так, чтобы решение у (х) удовлетво™
ряло условию у(х + Т) = ру(х), где в соответствии с B) величина р есть
268 Комментарии
мультипликатор. Учтем, что при указанном условии справедливо и второе
условие: у'(х + Т) = ру1 (х). В соответствии с этим из D),E) имеем для
х = 0:
PlA1=A1y/1(T)^A2yf2(T). { }
Мультипликаторы определяются из условия разрешимости этой системы
уравнений F) относительно коэффициентов А± и А2:
= 0 G)
Vi(T)-p 2/2 (Т)
у[ (Т) ^(Г)-
ИЛИ
Р1.2 = а ± л/а2 - 1, a=^[yi(T) + ^(T)]. (8)
Здесь учтено, что вронскиан уравнения A) в соответствии с начальными
условиями D) равен W = 2/12/2 — 2/i2/2 = 1- Соотношения (8) определяют
два мультипликатора: р\ и р2 и, соответственно, два характеристических
показателя:
9i,2 = — bpi}2. (9)
Таким образом, решая тем или иным способом задачу Коши для урав-
уравнения A) и определяя коэффициент а, можно найти оба мультипликатора.
Если \а\ > 1, то оба мультипликатора действительны и различны, причем
Pi > 1? Р2 < 1? Р1Р2 = 1- Соответствующие характеристические показате-
показатели чисто мнимые. Как следствие, решение неустойчиво, причем согласно
B) его амплитуда экспоненциально растет:
при х —)• +оо у ~ pi' = ехр[ж • | Im q\] —>- 00. A0)
Перебирая значения р в A), мы меняем и значения коэффициента а в
(8) и можем попасть в область, где \а\ < 1. В этом случае соотношение
(8) определяет два мультипликатора таких, что |pi| = \р2\ = 1, р\ = р2.
Для характеристических показателей это означает, что Im q\ = Im q2 = 0.
Тогда из B) следует, что решение у(х) устойчиво — его амплитуда всюду
конечна. Отметим, что в общем случае решение у{х) не периодично, так
как величины Т и 2тг/д, вообще говоря, несоизмеримы.
Интервалы значений р, в которых решение уравнения A) ограничено,
называются зонами стабильности (устойчивости). Интервалы же р, где
решение неограниченно растет, называются зонами лабильности (неустой-
(неустойчивости). На рис. 1 показан качественный вид спектральной функции p(q)9
порождаемой уравнением A). Представлена только та часть зависимости
p(q)9 которая отвечает действительным значениям характеристического по-
казателя q. Как видно из графика, интервалы значений р: Ао, А2, А4, • • • ,
отвечающие зонам стабильности, перемежаются интервалами Ai, А2,... ,
отвечающими зонам лабильности. В первых из них характеристические
К. 5. ОДУ с периодическими коэффициентами
269
р,
-зуг : -*/т о
Ai |
А2 Т\
Дз тг/Г | Зтг/Г «
А4 \
Рис. 1. Качественный вид спектральной функции для уравнения Хилла A)
показатели чисто действительные, а во вторых — чисто мнимы. На гра-
границах между зонами происходит столкновение мультипликаторов (р\ =
= р2) и решение B) может вырождаться в C). Отметим, что решение B)
включает два мультипликатора и, соответственно, два характеристических
показателя. На рис. 1 обе зависимости q\ (р) и cfefjp) объединены в однур(д) с
общим аргументом q. В рассматриваемом примере эта результирующая зави™
симость оказывается однозначной и четной. Последнее свойство происходит
из того, что в силу инвариантности уравнения A) относительно замены х —>>
—> —х характеристические показатели связаны условием q\ = —q^-
Приведенные выше утверждения для уравнения Хилла обобщаются на
случай уравнений произвольного порядка:
г/2") + ё1Ш2п-^ + ... + [g2n(x) -р]у = о, A1)
где gk(x) — Т-периодические функции. Именно, структура общего реше-
решения определяется теоремой Флоке-Ляпунова:
2п
A2)
k=l
где Pk (x) — Т-периодические функции. Задача порождает ровно 2п муль-
мультипликаторов pk = exp(iq%T). Объединяя все 2п зависимостей qk(p) в
одну, получаем кусочно-непрерывную функцию p(q). При столкновении
мультипликаторов (рк = Pj9 к ф j) могут, как и выше, возникать границы
зон стабильности и лабильности, а также экстремумы или иные особенно-
сти функции p(q).
Если уравнение A1) инвариантно относительно замены х —>- —х9 то
все множество 2п мультипликаторов R = {р^, к = 1, 2,..., 2п} разби™
вается на п пар (рк, ркг, к = 1, 2,..., в). Если к тому же коэффициенты
уравнения действительные, то каждому мультипликатору рк с Im рк ф О
в семействе R найдется другой мультипликатор pj, такой что pj = pi
(теорема Ляпунова).
270
Комментарии
Таким образом, кривая p(g), порождаемая уравнением A1) с указанны™
ми свойствами коэффициентов, является симметричной: p(q) = p(—q).
Наконец, отметим, что для нахождения мультипликаторов уравнения
A1) может быть использован метод, аналогичный тому, который применен
к уравнению A). Именно, пусть yi(x)9 у 2 (ж),... , У2п(х) —полная система
решений уравнения A1). Введем матрицу
QI-, ( Т» 1 11п( Т* I ... Ъ1ъ ( Т» 1 1
Z(x) =
у[(х)
A3)
(Zn11/ \ {Zn—l}/ \ (Zn—11/ \
\Уг О) 2/2 Лх) '•• У2п (X)J
Выберем систему решений так, чтобы при х = 0 оказалось Z@) = Е2п,
где Е2П — единичная 2п х 2п™матрица. Тогда мультипликаторы есть соб™
ственные значения матрицы Z(T), т. е. решения уравнения
pE2n]=0. A4)
Переходя к доказательству теоремы Флоке-Ляпунова, покажем снача™
л а, что решение уравнения A) может быть представлено в форме B).
Пусть |/1 (ж) и 2/2 (х) — два линейно независимых решения уравнения
A). В силу периодичности g(x) в A) функции у\{х + Т) иц2(ж + Т) так™
же являются решениями уравнения A). Однако, поскольку имеется всего
лишь два линейно независимых решения (в качестве которых мы взяли
г/1 (х) и 2/2(ж)), то функции 2/1 (х + Т) и|/2(ж + Т) должны представляться
в виде линейных комбинаций
У2(Х + Т) = С21У1(Х) + C22J/2 W, l j
где С = (Cik) — постоянные коэффициенты. В матричной форме соотно-
соотношения A5) записываются в виде
где
\у2(х)) \С21 С22/
Перейдем от пары решений yi(x)9 2/2(ж) к новой паре v-\_(x), V2(x):
Vl(x) = buytix) + Ь12у2(х) X
щ{х) = b2iyi(x) + 6222/2(ж)
или V(x) = ВУ(ж). A6)
Здесь В — постоянная 2 х 2-матрица. Чтобы решения v\ и ^2 были линейно
независимыми, необходимо и достаточно, чтобы матрица преобразования
В была невырожденной: detB ф 0. Для новых решений условие A5;)
К.5. ОДУ с периодическими коэффициентами 271
принимает вид
У(х + Т) = DFW, D = BCB~1 A7)
(существование обратной матрицы В™1 обеспечивается невырожденно™
стью исходной матрицы В).
В общем случае подходящим выбором преобразующей матрицы В
можно привести матрицу С либо к диагональному виду
), A*,)
P2J
либо к жордановой форме (в нашем случае — к треугольному виду)
A86)
Числа, стоящие на диагонали матрицы D в A8), есть одновременно соб-
собственные значения матриц D и С и могут быть найдены из уравнения
det(C - рЕ) = 0, A9)
где Е — единичная 2х2™матрица. В соответствии с A7) эти числа являют™
ся мультипликаторами. Отметим, что хотя формально алгоритмы G) и A9)
нахождения мультипликаторов заметно отличаются, нетрудно убедится в их
полной эквивалентности. Для конкретных же расчетов алгоритм G) суще™
ственно удобнее.
Если собственные значения различны (р\ ф р2), то матрица С всегда
приводится к диагональному виду A8а). Следовательно, существуют ли™
нейные комбинации v\{x) и v2{x), такие, что
vx(x + Г) = pivt(x), v2(x + T) = p2v2(x). B0)
Если же собственные значения совпадают (р\ = р2 = ро)9 то матрица С
приводится либо к виду A8а), либо к виду A86). В первом случае решения
v\ (x) и v2 (x) удовлетворяют равенствам вида B0). Во втором же случае
закон преобразования — более сложный:
i;i (яг + Т) = рцл (я) + 172 (ж), v2(x + Г) = p2v2{x)« B07)
Чтобы доказать соотношения B) и C), введем формально матрицу™
функцию
Щх) = Вж/Т = ехр Г- lnDJ. B1)
Очевидно, что И(х + Т) = К(Т)К(ж) = DR(x), и в соответствии с A7)
столбец V(x) может быть представлен в виде
V(x) = Щх)Р(х), Р{х) = Г15*4 , B2)
\Р()/
где -Pi (ж) и Рг(^) — Г-периодические функции.
272 Комментарии
Если D — диагональная матрица, то матрица К(ж) оказывается равной
n \
С
В этом случае из B2) находим
/ \ х it т-> / \
/ \ Ж/Т „ / ч ^ ^
v2(x) = р2' Р2(ж),
что и доказывает соотношение B).
Если D — жорданова клетка A86), то в соответствии со свойствами
функций от матрицы имеем
Тогда для К(ж) получаем (при /(?) = СЖ^
Щх) = D-" = tfT fa Х/РЛ B6)
и из B2) находим
Этим определяется структура общего решения в случае, когда мультишш™
каторы совпадают (ср. C)).
Отметим, что в рассматриваемом случае мультипликаторы совпада-
совпадают, только если р\ = р2 = Ро = =Ы- Поэтому множитель pxj в B7)
можно отбросить, и эквивалентность соотношений C) и B7) становится
очевидной.
Приведем теперь общее доказательство теоремы Флоке-Ляпунова.
Перепишем уравнение A1) в форме
dz/dx = Н(ф, B8)
Здесь Ш(х) — Т-периодическая 2пх2в™матрица™функция, Ш(х + Т) =
= Н(ж), z = col(zi, Z2,..., ^2n)j символ col означает столбец из пере-
перечисленных элементов.
Уравнение B8) представляет собой систему 2п уравнений первого по-
порядка. К этому виду приводится уравнение 2тг™порядка A1), если ввести
обозначения
К. 6. Приближенное решение уравнения Матье 273
Строим матрицу Z(x), столбцами которой являются векторы z^ фунда-
фундаментальной системы решений так, чтобы выполнялось условие Z@) =
= Е2П, где Е2П — единичная 2п х 2тг-матрица. Любое решение выража™
ется через матрицу Z(x) формулой
z{x) = Z(x)zo, z@) = z0.
Положим у = х + Т, z(T) = zt- Тогда
z(y) = Z(x + T)z0. B9)
С другой стороны, поскольку в B8) Ш(х + Т) = Н(ж), т.е. при сдвиге на
период система не меняется, то z(y) можно выразить и через zt = z(T)
по формуле
z(y) = Z{x)zr, z{y = T) = Z@)zT = zr. C0)
Подставляя сюда вместо zt выражение Z(T)zq и сравнивая с B9), получа™
ем ввиду произвольности zq
Z(x + T) = Z(x)Z(T). C1)
Положим
Z(x) = F(x)exp(iKx), K=ilnZ(T), F@) = 1, C2)
i
где К — постоянная матрица. Покажем, что F(x) — Т-периодическая
матрица-функция. Действительно, на основании C1) и C2) имеем
Z(x + Т) = ?(х + Г) ехр[Ж(ж + Г)] =
= Z(x)Z(T) = F(x) exp[iK(x + Г)]. C3)
Вследствие невырожденности матрицы ехр(Жж) (т.е. det[exp(iKa:)] ф 0)
получаем F(x + Т) = F(x), что и доказывает теорему.
К.6. Приближенное решение уравнения Матье
Рассмотрим применение теоремы Флоке-Ляпунова для приближенно-
го нахождения ширины резонансных зон (зон лабильности) решений урав-
уравнения Матье
у + ш1[1 + Ш cos uet] у = 0. A)
Здесь предполагается 0 < /г<С1. Это условие означает, что решение уравне-
уравнения A) должно быть близко к решению параметрически невозмущенного
уравнения
1 = 0, B)
получаемого из A) при h = 0. Иными словами, мы будем искать решения,
близкие к
y@)=№e<Wot. C)
Смысл понятия "близкий" будет ясен из дальнейшего.
18 Н.В. Карлов, Н.А. Кириченко
274
Комментарии
Итак, в соответствии с теоремой Флокс-Ляпунова будем искать реше-
решение уравнения A) в виде
у = e^P(t), D)
где P(t) — периодическая функция с периодом Т = 2тг/ше:
+ ОО
E)
Используя формулу Эйлера, с учетом D), E) получим
+ ОО
0 cos we* =
Подстановка D)-F) в A) дает
F)
k = — со
+ СО
{ [ш2 - (кше + qJ} ук + 2ha;gB/fc_i + ук+1)}егкш^ = 0. G)
Это равенство должно быть выполнено в произвольный момент времени
t. Следовательно, выражение в фигурных скобках должно обращаться в
нуль для произвольного номера к. В результате приходим к бесконечной
системе линейных уравнений для коэффициентов у к разложения E):
[ш1 ^ (кш + qf]yk + 2ha;gB/fc_i + yk+1) = 0, к = 0, =Ы, ±2,... (8)
В развернутом виде эта система уравнений имеет вид
к = 0
к = +\
= -2
No - Q \ Уо +
No - (д + шеJ]|/1 +
No - (q^^eJ]y^i
No - (q + 2шеJ) y2 -
No - (q ~ 2weJ] 2/_2
N02^(g + 3o;eJ]|/3-
No - (q - ^eJ} у~з
И Т.Д.
Как уже указывалось, при h <C 1 решение должно быть близко к C).
Поэтому коэффициенты ук при достаточно больших \к\ должны быстро
убывать, так что в низшем приближении можно ограничиваться лишь те™
ми членами, коэффициенты (т.е. выражения в квадратных скобках) перед
которыми минимальны. Считая главным коэффициент уп, положим
/-i+2/i) = 0, (9a)
+ 2/2) = 0, (96)
1 + Уз) = 0, (9г)
2/-3 + 2/-1) = 0, (9д)
2 + ^) = о, (9ё)
К. 6. Приближенное решение уравнения Матье 275
Требуется найти поправку S. Легко понять, что резонансного усиления ко-
колебаний следует ожидать при
ше = 2ш0 + ?, |е|<Со;0. A1)
Действительно, при условиях A0), A1) наибольшим оказывается уже бли-
ближайший к уд коэффициент y-i в разложении E), поскольку коэффициент
в квадратных скобках перед ним (см. (9в))
[u)%-(q-u>eJ]n2u>oE-e). A2)
Таким образом, ограничиваясь коэффициентами у о и|/_1 и используя
уравнения (9а) и (9в), найдем в низшем приближении по степеням h:
2 ^2/_1 = 0,
= 0,
или, с учетом A0)—A2),
1у-1 = 0,
0E - e)y-i + 2hw%y0 = 0.
Условие совместности этой системы дает
4ш%5F - е) + 4fo2^ = 0,
откуда
Если "отстройка" е = ше — 2ujq достаточно велика, е2 > 4/г2о;|, то поправка
5 — действительное число, и решение y(t) — ограниченная функция. Если
же
е2 < Ш2ш1, A6)
то
Im 8 = ±dh?ujl - ^е1 ф 0, A7)
и решение D) экспоненциально со временем растет: для одного из двух
линейно независимых решений {y^(t), y^(t)} имеем Im S < 0 и
yA\t) = eM^t^jt}P(t)J A8)
где
v = Re q = ujq -\—e = -ше,
2 "
A9)
aP(t) — Bтг/ше)-периодическая функция. Как следует из A1), A5), пара-
параметрический резонанс возникает для частот в диапазоне
2ш0 - 2huj0 < ше < 2ш0 + 2/ш0, B0)
18*
276 Комментарии
т.е. ширина резонансной полосы (зоны лабильности) Аие = 4/шо. От™
метим, что коэффициенты у® hi/_i в приведенном рассмотрении имели
один, наинизший порядок, тогда как все прочие коэффициенты — более
высокого порядка по h. Например, согласно (9) при условиях A0), A1)
уг « -/i2/o, 2/2 - —/12/1 « тг^ 2/о,
!4 12Х 4\ BD
г/ 2 4 г/ 1, г/ <* 12 ^ 2 48
и т.д. Соотношение же между уо и 2/-1 устанавливается из A4): у®/у^\ =
= кшо/5, где 5 дается формулой A5).
Наряду с основным резонансом, рассмотренным выше, существует
бесконечное множество резонансов на других частотах. Чтобы найти ос-
основную частоту этих резонансов, положим q = ш® и приравняем нулю
коэффициент при у к в (8):
су
Uq — (кше + ш®J = 0 или ше = —ш®. B2)
к
Здесь достаточно рассматривать лишь отрицательные значения к: к = — 1,
—2, — 3,..., поскольку значения к > 0 не приводят к новым резонансам
(в силу инвариантности уравнения A) относительно замены ше —>> —о;е).
В окрестности каждой из частот B2) имеется полоса До/е, в которой на-
наблюдается резонансная раскачка колебаний. Ширина полосы уменьшается с
ростом номера резонанса как hk. Найдем, например, резонансную полосу
к = —2, т.е. при ше = ш®. Для этого в разложении E) удержим слагаемые
ск = -3, -2, -1, 0, +1. Полагая
ше = ш0 + е, g = о;0 + 5,
б|<а;о, I^Kojo, l j
выпишем основные уравнения из системы (9):
к = 0 : - 2шоёу® + 2/ш;2B/-1 + 2/1) = 0,
к = +1 : -3o;o2/i + 2Ло;о2/о = 0,
к = -1: ш2оу^г + 2/i^(^2 + у0) = 0, B4)
к = -2: -2ш®Bе - 8)у^2 + 2Нш1(у-Ъ + 2/-i) = 0,
к = -3 : -Зш^у^з + 2кшду^2 = 0.
Решение этой системы уравнений дает
2е - ? /г2ш0
2/i = -Луо, 2/-1 = -2/i 1 2/о,
2е-5+
0
У-2 = 7 2/0,
3
2
К. 7. Параметрический резонанс
277
а для нахождения связи е и 8 получается уравнение
82 - 2eS + Bh2u0J [* - _?5_1 = 0.
1 ; [9 3h2uj\
Решения этого уравнения — комплексные, если
А = е2 - Bк2ш
9
Отсюда следует, что резонанс имеет место в полосе
0.
h
3
< e < -h2
3
B6)
B7)
B8)
Аналогичным образом определяются параметры всех остальных резо-
резонансных полос.
К.7. Параметрический резонанс в системе со скачкообразно
меняющимися параметрами
Исследование условий возникновения параметрического резонанса
наиболее просто и наглядно может быть проведено для таких систем, па-
параметры которых периодически меняются со временем, причем изменения
происходят скачком в некоторые моменты времени, а в промежутках меж™
ду скачками значения параметров сохраняются постоянными.
Рассмотрим, например, человека на качелях (рис. 1). Пусть этот чело™
век периодически встает и садится, перемещая свой центр тяжести вдоль
нити, причем его движения происходят за времена, малые по сравнению
в0 в
Рис. 1. а — последовательные положения человека, раскачивающегося на качелях;
б — зависимость расстояния от точки подвеса качелей до центра тяжести от угла
отклонения качелей
278 Комментарии
с периодом качаний. Обозначая буквами (р ш ? соответственно угол откло-
отклонения нити от вертикали и расстояние от точки подвеса качелей до центра
тяжести человека и пренебрегая массой платформы и нити, запишем урав™
нение малых колебаний в виде
at
Это уравнение может быть установлено, исходя из уравнения dA/dt = М
для момента импульса человека А = ml2 В, изменяющегося под действием
момента силы тяжести М = —mg? sin в « —mg?B. Оба момента вычис™
ляются относительно точки подвеса качелей. Здесь т — масса человека,
g — ускорение силы тяжести.
В уравнении A) величина ? есть заданная (периодическая) функция
времени. Вводя вместо времени t переменную
t
dt /ол
B)
о
взаимно однозначно связанную с i, приведем уравнение A) к виду
^f + g?3e = o, C)
где можно считать ? = ?(я). Периодичность функции ?{t) влечет за собой
периодичность и функции ?(<;).
Быстрые изменения положения человека означают, что для временной
зависимости ?{t) можно принять
\ ?ъ nTe + h^t^ (п + 1)Ге, D)
п = 0, 1, 2,...
где Те — период, с которым меняется положение человека на качелях, т.е.
интервал времени от какого-то положения "сидя" до следующего положе-
положения "сидя". Через время ti от момента приседания человек встает. В записи
D), следовательно, ?\ < ?0.
К уравнению, подобному C), можно прийти,
рассматривая изменения тока в колебательном LC-
контуре, в котором индуктивность L скачкообразно
изменяется в некоторые моменты времени (рис. 2).
«# т ^°ле^атель™ Это может быть достигнуто, например, путем бы™
ныи jLG-контур с / \
jv строго изменения длины (растяжения или сжатия) ка-
переменной индук™ _ и
тивностью тушки, поскольку индуктивность L связана с длиной
катушки I, площадью витка S и числом витков N
соотношением L = 4тгfiN2S/I, где /i — магнитная проницаемость
сердечника. Пренебрегая потерями на активном сопротивлении цепи,
К. 7. Параметрический резонанс
279
имеем
М Q
dt С
E)
где Ф — магнитный поток через катушку индуктивности, Ф = LI9 I —
ток в цепи, Q — заряд на конденсаторе С. Дифференцируя уравнение E)
почленно, получаем уравнение для магнитного потока
di2
что Q = I
LC
F)
в котором учтено, что Ц = 1 = Ф/L. Если индуктивность меняется
скачкообразно по закону, аналогичному D), то мы приходим к уравнению
того же типа, что и для колебаний качелей C).
Таким образом, мы можем изучать колебания в системе, описываемой
уравнением
где
шт
2,...
Для упрощения расчетов рассмотрим простейший случай t\ = Те/2 = т.
Зависимость w(t), отвечающая этому случаю, представлена на рис. 3.
Те/2 % Ъ%/2 t
Рис. 3. Зависимость oo(t), используемая при решении уравнения G)
Уравнение G) есть уравнение Хилла со специальным выбором функ™
ции uj2(t), позволяющим получить явное аналитическое решение. В таких
случаях используется метод сшивки решений, отвечающих различным зна-
значениям параметра ш, в моменты времени, когда происходит переключение
с одного его значения на другое.
Условия сшивки определяются требованиями непрерывности перемен-
переменных, устанавливаемыми исходя из физического содержания задачи. Для
уравнения G) примем условия сшивки в виде
• (л. г\\ • (л. I с\\ \Р)
280 Комментарии
где tu — момент переключения. Мы требуем, таким образом, чтобы в мо-
момент переключения были непрерывными искомая функция и ее первая про-
производная. Поясним физический смысл этих условий на примере колеба™
тельного контура. В соответствии с уравнением E) имеем
За малое время 2е заряд на конденсаторе меняется незначительно. Поэтому,
устремляя е —>• 0, получаем требование непрерывности магнитного потока
Ф, т.е. первое из условий (8). Аналогичным образом из F) находим, что
*п+?
В виду непрерывности Ф и конечности изменения L после перехода к пре-
пределу е^О получаем требование непрерывности производной магнитного
потока Ф, т.е. второе из условий (8).
В силу периодичности cj(t) достаточно решить уравнение G) на ин™
тервале от t = +0 до t = Те + 0. Другими словами, требуется провести
сшивку решений в моменты t = Те/2 и t = Те.
На интервале 0 < t < т, где т = Те/2, имеем ш = ujq ш
X = ClQ COS U)()t + Ьо Sin UJot. (9)
На интервале же т < t < 2т = Te имеем ш = ш\ и
X = п\ COSLJit + Ь\ ШЮ0\1. A0)
Условия сшивки (8) в момент t = т записываются как
a® cosujqt + Ьо slnoioT = а\ cosl^it + Ь\ sincjir,
o;q [^ao sinш®т + 6q cos ujqt] = ш± [—а\ sin ш\т + Ь\ cos ш\т].
Из этой системы по заданным значениям «о и 6q можно найти коэффици-
коэффициенты а\ и 6i.
Аналогично, при втором (обратном) скачке в момент t = Те = 2т усло-
условия сшивки имеют вид
Q\ cos 2o;it + Ь\ sin 2o;it = «2 cos 2а;от + 62 sin 2ojqt,
uji \—a\ sin 2ш\т + bi cos 2o;ir] = uo® [^«2 sin 2а;от + 62 cos 2шот]
Здесь учтено, что при Те < t < 3Te/2 решение исходного уравнения имеет
вид
х = п2 cosa;ot + 62 slnc^ot. A3)
С помощью системы уравнений A1), A2) амплитуды «2 и &2 в новом цикле
однозначно выражаются через амплитуды а® и 6q исходного цикла.
К. 7. Параметрический резонанс 281
Следуя общей теории (см. комментарий 5), мы должны построить два
линейно независимых решения x\(t) и X2(t) уравнения G), удовлетворя-
удовлетворяющие следующим начальным условиям:
( *i@) = l, ( a:2@)=0,
\ ii@)=0, \ ±2@) = 1,
Первому из них отвечает выбор констант в формуле (9) в виде
а0 = 1, Ьо = 0, A5)
а второму —
«о = 0, Ьо = 1/W A6)
Для нахождения мультипликаторов р нужно составить характеристи-
характеристическое уравнение
xi(Te) - p х2(Те
х2(Те) - р
представляющее собой квадратное уравнение
р2^2ар + 1 = 0, A8)
в котором
а = ±[Х1(Те) + х2(Те)].
В A8) учтено, что в силу выбора начальных условий в виде A4) вронскиан
равен единице, W = xi(t)x2(i) — xi(t)x2(i) = 1.
Задача, таким образом, сводится к нахождению значений х\ (Те) и х2 (Те).
Опуская громоздкие, но элементарные вычисления, приведем окончатель-
окончательное выражение для а:
а = cosujqt cosujit — /^slnoJoTsInoJir, A9)
где
= 0, A7)
2 \шг o
Зная коэффициент а, можно по формуле для корней квадратного уравнения
найти значения мультипликаторов:
pi,2 = а± л/а2 - 1. B0)
В частном случае совпадения частот а;о = ш\ = ш имеем /3 = 1 и а =
= cos 2шт. Соответственно в этом случае мультипликаторы суть комплекс-
комплексно сопряженные числа, равные по модулю единице, и никакой параметри-
параметрической неустойчивости не возникает, чего и следовало ожидать.
Мультипликаторы оказываются действительными числами, когда \а\ >
> 1. В этом случае один из них по модулю превышает единицу, а другой —
282
Комментарии
меньше единицы. Таким образом, граница возникновения неустойчивости,
т.е. граница параметрического резонанса, определяется условием \а\ = 1.
Для графического представления результатов удобно ввести перемен™
ные (?,77):
= О
B1)
Такое определение переменных отвечает общепринятой записи уравне-
уравнения Хилла (см. комментарий 5, в уравнении A) которого следует поло™
жить р = ^О2, а амплитуду периодической функции принять равной
2rjQ2: у" + О2[1 + 2щ(х)\у = 0, g(x) — нормированная модулирующая
функция, например, g(#) = sinuex).
Границы нескольких первых зон параметрического резонанса в коор™
динатах (?, rj) приведены на рис. 4 (зоны неустойчивости на этом рисунке
Рис. 4. Границы зон параметрической неустойчивости в координатах (?, rj) —
см. B1). Зоны неустойчивости заштрихованы
заштрихованы). При rj = 0 зоны возникают в точках ? = птг (п = 1, 2, 3,...).
Легко видеть, что основная (первая) зона параметрического резонанса воз™
никает при частоте изменения параметра ше = 2тг/Те = 20. Воздействие
наиболее сильно, если оно происходит строго дважды за период собственных
колебаний системы (качелей, колебательного контура и т.п.).
Рассмотрим процесс раскачки колебаний во времени. Ограничимся
малой амплитудой модуляции параметра ш , т.е. малой девиацией соб™
ственной частоты колебаний системы, \
B1) удобнее использовать переменные
1. В этих условиях вместо
UJq + UJ\
B1')
Очевидно, что между B1;) и B1) существует взаимно однозначное соот-
соответствие. В обозначениях B1;) коэффициент а записывается как
а =
К. 7. Параметрический резонанс 283
Для первой зоны параметрического резонанса, когда ?i = тг, в области
I77I <С 1 имеем
а = -A + 2т??). B3)
Подстановка этого в B0) дает выражение для мультипликаторов:
р=1±2щ = 1±^±. B4)
А\1
Таким образом, за один период Те колебания параметра ш амплитуда ре-
решения увеличится в р раз, за п периодов — в рп раз. Следовательно, ам-
амплитуда решения меняется по закону р*/Те = ext.
В нашем случае инкремент параметрической неустойчивости Л =
= — In p вблизи ее порога дается соотношением
J- е
A=b^ii. B5)
2пгТе
График рис. 4 показывает, что по мере увеличения амплитуды rj модуляции
параметра ш ширина зон неустойчивости возрастает.
Обратим внимание на одну особенность формы зон резонанса. Зоны
достаточно высокого порядка (п > 3) в некоторых точках сжимаются до
нуля. При достаточно высоких номерах п число таких перетяжек растет
с ростом номера зоны. Наличие подобных особенностей характерно для
решений некоторых типов уравнений Хилла. В решениях же уравнения
Матье такие перетяжки отсутствуют.
В заключение этого комментария целесообразно качественно показать
физику возникновения параметрической неустойчивости. Это можно сде-
сделать следующим образом.
Рассмотрим для определенности электрический LC-kowtjp (рис. 2).
Пусть индуктивность катушки контура скачком уменьшается от значения
L® до значения L\ < L® в тот момент времени, когда ток через катушку
максимален, и скачком же увеличивается до исходного значения Lq в мо-
момент отсутствия тока. Достаточно точно выбирать эти моменты времени
можно лишь в ситуации, когда индуктивности Lq и Li близки друг другу,
Lq — Li <СЬо- Именно при этих условиях период изменения индуктивности
Те близок к половине периода собственных колебаний в контуре,
Те« Г/2 = 27г/[П!A-»??)], rj?<l.
Предположим, что начальный момент времени t = 0 непосредствен-
непосредственно предшествует моменту переключения индуктивности от максимального
значения Lq до минимального L\. В этот момент, т.е. при t = —0, ток в
катушке максимален: I = Iq. Изменяя индуктивность катушки с током,
мы совершаем работу, увеличивая энергию магнитного поля катушки на
величину
MWM^)O. B6)
284 Комментарии
Здесь учтено, что при быстром изменении индуктивности магнитный по-
поток через катушку Ф = Ы сохраняется, L®I® = Li/ь
В колебательном режиме ток через катушку становится равным нулю че-
через четверть периода собственных колебаний контура, т.е. через время Те/2.
При увеличении индуктивности контура в этот момент запасенная в кон-
контуре энергия изменяется минимально. Соответствующее изменение тока в
цепи нетрудно оценить, имея в виду, что в соответствии с E) и F) в момент
скачка индуктивности величина LI остается неизменной. Данное условие
непрерывности можно записать как Liuj\li = LqUq^, где 1^ — амплитуда
колебаний тока после увеличения индуктивности. Имея в виду связь частоты
с индуктивностью, последнее равенство можно переписать как \fL[l\ =
= \/L^l2. Следовательно, по завершении полного периода колебаний ин-
индуктивности амплитуда колебаний тока в контуре оказывается равной
Это означает увеличение амплитуды колебаний в л/Lq/Li > 1 раз за период.
Очевидно, что энергия колебаний за это же время возрастает в Lq/Li > 1
раз, что и означает параметрическую раскачку колебаний. Легко проверить,
что вследствие неравенства Lo — L\ <C L® полученный в этом конкретном
случае закон роста B7) совпадает с тем, который представлен формулой B4).
К.8. О квантовании энергии гармонического осциллятора
Гамильтониан гармонического осциллятора записывается в виде
s = ? + =f!, о,
где оператор импульса
р=-Ш^. B)
ds
Для нахождения стационарных состояний воспользуемся уравнением Шре-
дингера для волновой функции Ф, отвечающим гамильтониану A):
2m ds2 2
где Е — собственное значение гамильтониана, имеющее смысл полной
энергии осциллятора. Перепишем это уравнение в виде
ds* К* \ 2 )
Введем безразмерную переменную
К.8. О квантовании энергии гармонического осциллятора 285
Тогда уравнение Шредингера запишется как
= 0. F)
Здесь штрих означает дифференцирование по р. Уравнение F) имеет ре-
решение вида
Ф = const .е^2/2Яп(р), G)
где число
п=^--К (8)
пшо 2
а Нп — функция Эрмита с индексом п. При этом следует учитывать, что
при р —>> ±оо волновая функция стремится к нулю, Ф —>> 0. Последнее
требование вытекает из условия финитности движения. Эти требования
могут быть удовлетворены, только если число п является целым. Тогда из
(8) немедленно вытекает, что
Еп = Пио(п + 1/2), п = 05 1, 2,... (9)
Таким образом, квантуя энергию колебаний гармонического осциллятора,
мы получим, что эта энергия пропорциональна первой степени частоты
колебаний.
Обратим внимание на некоторую парадоксальность ситуации: с одной
стороны, энергия классического гармонического осциллятора
Е = -mulsl A0)
пропорциональна квадрату частоты. С другой стороны, в квантовой обла-
области энергия осциллятора согласно (9) зависит от частоты линейно.
Это кажущееся противоречие разрешается с учетом того, что при кван-
товомеханическом движении амплитуда колебаний не может принимать
произвольное значение — она квантуется. Оценка характерных квази-
квазиклассических амплитуд колебаний может быть получена сопоставлени-
сопоставлением формул A0) и (9):
^ р2 mools2 2^2 * ( , 1 /о\ /их
Е = — 1 —= muaS1 = пш®{п + 1/2). A1)
2т 2
Отсюда следует, что среднеквадратичная амплитуда колебаний $эфф =
может принимать дискретный ряд значений
Здесь число п согласно (9) имеет смысл числа квантов с частотой ujq, сум-
марная энергия которых Е дается формулой A0). Частота ujq, определяемая
внутренними характеристиками осциллятора, задает минимально возмож-
возможную энергию колебаний и, тем самым, минимально возможную амплитуду
286 Комментарии
^min Последняя по сути своей дается соотношением неопределенностей
ApAs - Я/2. A3)
В самом деле, поскольку движение локализовано в области As ~ smim a
неопределенность импульса составляет
Ар - mvmin - m^oSmin, A4)
где i/min — эффективная скорость движения, соответствующего минималь-
минимальной возможной энергии осциллятора, то подстановка Ар и As в A3) дает
m^oSmin ~ й/2 или smin = л . A5)
Сравнение A5) и A2) приводит к выводу, что A5) дает амплитуду нулевых
колебаний с энергией Нш/2.
К.9. О понятии автономности и неавтономности
динамических систем
Чтобы более ясно понять смысл разделения систем на автономные и
неавтономные, качественно рассмотрим молекулярный ион Н^. Будем счи-
считать, что ион является изолированной системой, т.е. что на него не дей-
ствуют никакие внешние силы. Система Н^ может быть представлена со™
стоящей из трех подсистем — два протона и один электрон. Состояние
всей системы определяется состояниями ее подсистем, т.е. их координа-
координатами и скоростями. Ввиду изолированности иона взаимодействие под си™
стем в нем описывается уравнениями, не содержащими времени явно. Это
значит, что система Н^~ является в нашем примере автономной.
Если состояние каких-то подсистем не меняется со временем, то изме-
нение состояния системы в целом сводится к изменению состояния о сталь™
ных подсистем, к тому способных. В нашем случае ввиду малости массы
электрона по сравнению с массой протона действием электрона на протоны
можно пренебречь. Пусть в начальный момент времени протоны покоятся
относительно друг друга. Тогда независимо от характера движения электрона
это состояние покоя протонов сохранится и в последующем (в меру мало-
малости отношения масс те/тр). Таким образом, в рассматриваемом ионе Bj
движение совершает только электрон, и состояние иона в целом полностью
определяется текущим состоянием его легкой подсистемы (состоянием его
электрона). Одновременно это означает, что состояние электрона описыва-
описывается уравнением, не содержащим времени явно, т.е. подсистему "электрон"
в нашем случае можно рассматривать как автономную систему.
Именно в указанном смысле надо понимать автономность открытых
систем, т.е. систем, находящихся во внешних полях. Примером является
математический маятник, находящийся в гравитационном поле Земли, и
движение которого на это поле практически не влияет. Поправки на неавто-
неавтономность, связанные с вращением Земли, обычно пренебрежимо малы, хо-
хотя и могут наблюдаться экспериментально. Пример хорошо известен. Это
К. 10. Гамилыпоновы уравнения 287
маятник Фуко, плоскость качаний которого меняется со временем по отно-
отношению к системе отсчета, связанной с Землей.
Возвращаясь к иону ffij", рассмотрим другую ситуацию. Пусть возбу-
возбуждены колебательные степени свободы иона, т.е. пусть его ядра соверша™
ют колебания относительно друг друга. Тогда рассмотрение электрона как
автономной системы оказывается невозможным. Автономен лишь ион в
целом. Электрон же совершает движение в поле периодически меняющих™
ся сил. При этом в силу малости отношения масс электрон не оказывает
практически никакого воздействия на движение ядер, и мы имеем случай
движения электрона в заданном внешнем поле, зависящем от времени.
Таким образом, рассмотрение автономных систем, взаимодействующих
с окружающей средой, т.е. рассмотрение автономных открытых систем, есть
приближенный способ исследования больших действительно автономных си™
стем, в которых состояние больших подсистем не меняется со временем, а
обратным влиянием малых подсистем на большие можно пренебречь. Если
же движение тяжелых (больших) подсистем существенно, то легкую (малую)
подсистему следует рассматривать как систему неавтономную.
К.10. Гамильтоновы уравнении
Пусть состояние физической системы характеризуется набором обоб-
щенных координат q = (gi, g2, • • •, qn) и скоростей q = (<ji, (h, • • •, qn).
Как известно, этой системе можно поставить в соответствие некоторую
функцию L(q9q,t)9 называемую функцией Лагранжа или лагранжианом. Эту
функцию обычно можно представить в виде
L = Екшя — EUOTJ A)
где кинетическая энергия Екш = EKsm(q, g, t) есть квадратичная функция
скоростей, а потенциальная энергия Епот = Enm(q, t) от скоростей не за-
зависит.
Изменение состояния системы во времени (от t\ до ^) происходит в со-
соответствии с принципом наименьшего действия, т.е. в соответствии с урав™
нениями движения, задаваемыми экстремалями функционала действия
B)
Соответствующие уравнения движения (уравнения Эйлера-Лагранжа) име-
имеют вид
=0, г = 1, 2,..., п. C)
dt dqi dqi
Величина
Pi = тгг D)
288 Комментарии
называется обобщенным импульсом, а величина
Рг = f- E)
— обобщенной силой. Переходя от обобщенных скоростей к обобщенным
импульсам, введем гамильтонову функцию или гамильтониан Н(р, g, i) по
формуле
п
Н(р, q, t) = ^Tjpiqi-L1 F)
г=1
где с помощью D) все скорости выражены через импульсы. Эта величина
имеет смысл полной энергии системы, Е = Екш + Епот.
С помощью гамильтониана уравнения движения системы записывают-
записываются в виде
dH . dH ,п.
Qi = ^^j Pi = ^^^- G)
dpi dqi
Эти уравнения получаются из следующих цепочек равенств:
dH _ . y^ dqk dL _ . ^-v dqk v^ dL dqk _
dpi ^ dpi dpi ^ dpi ^ dqk dpi
(
Pk
dqkj
аЯ _ y^ dqk_ _ dL_ _ ^ dL_ dqk_ _
dqi ^~^ dqi dqi J^-J dqk dqi
_ _^L v^ / dL\ dgk _ dL
dqi —^ V dqk J dqi dqi
k
(Здесь учтено определение обобщенного импульса D), а также то, что неза™
висимыми переменными в гамильтониане являются обобщенные коорди-
координаты и импульсы {qi, Pi}).
Уравнения G) называются уравнениями Гамильтона (гамильтоновыми
уравнениями) и представляют собой систему 2п дифференциальных урав-
уравнений первого порядка (в отличие от п уравнений второго порядка C)).
Физическая система, уравнения движения которой имеют вид G), называ-
называется гамильтоновой системой.
Если гамильтониан системы не зависит явно от времени, величина
Н(р, q) есть интеграл движения, т.е. не меняется во времени. В самом
деле, дифференцируя Н по времени, находим
dL[ _
dt
г г
Подставляя сюда qi и щ в соответствии с уравнениями движения G), по™
лучаем
— = 0, т.е. И = const. (9)
dt v ;
К. 10. Гамилыпоновы уравнения 289
Последнее означает, что энергия автономной гамильтоновой системы со™
храняется.
В качестве примера рассмотрим математический маятник. Кинетиче-
екая и потенциальная энергии маятника записываются в виде
?ки„ = !!^, Епот = mg?(l - cos в). A0)
Обобщенными координатой и скоростью являются в и В. В соответствии
с A) и D) обобщенный импульс р, соответствующий координате В, дается
формулой
дв
?meQu (П)
дв дВ
Заметим, что здесь обобщенный импульс имеет смысл момента импульса
материальной точки (маятника) относительно точки подвеса. В силу F)
гамильтониан системы записывается как
Н = ^^ + mg?(l - cos В) = ^^ + mg?(l - cos В), A2)
чему соответствуют гамильтоновы уравнения
^ A3)
Нетрудно видеть, что из этой системы уравнений после исключения им-
импульса р непосредственно получается уравнение движения математическо-
математического маятника A.2).
Вернемся к принципу наименьшего действия. Будем рассматривать ав-
автономные системы, т.е. системы, для которых dL/di = dH/dt = 0. Как
уже говорилось, уравнения движения G) получаются из условия экстре-
экстремальности функционала действия B): вариация действия 5S = 0. С учетом
F) выражение B) может быть представлено как
S = j (Y^Pidqt - Hdt). A4)
Поскольку для автономных систем энергия сохраняется, то функцию Н
в A4) можно заменить постоянной величиной Е — полной энергией систе-
системы. Следовательно, при варьировании последнее слагаемое в A4) можно
не учитывать, в силу чего вариационный принцип дает 8Sq = 0 (принцип
Мопертюи), где величина
\Y^dqi A5)
называется укороченным действием. При этом предполагается, что в фор™
мулах A4)иA5) обобщенные импульсы pi выражены в соответствии с D)
через обобщенные координаты и скорости qi и щ с учетом закона сохране-
сохранения энергии E(qi, qi) = Е = const.
19 Н.В. Карлов, Н.А. Кириченко
290 Комментарии
Выбор обобщенных координат и импульсов произволен и определяет™
ся только удобством описания физической системы. Однако часто бывает
необходимо перейти от исходных переменных р, q к новым переменным
Р, Q. Это осуществляется посредством некоторого преобразования:
Qi = Qi(p,q,t), Pi=Pi(P,q,t). A6)
В общем случае при такой замене переменных уравнения обычно пере ста™
ют выглядеть как гамильтоновы уравнения G). Однако при определенных
правилах преобразования уравнения движения в новых переменных сохра-
няют свой вид:
Q* = Ц, А = -%¦ (И)
dPi OQi
где Н' — новая функция Гамильтона. В этом случае преобразование A6)
называется каноническим преобразованием. Такое преобразование осуще-
осуществляется с помощью так называемой производящей функции Ф(д, Р, t),
такой что
Возможны, конечно, и иные формы записи канонических преобразований
A6), в которых производящая функция есть функция иных пар перемен-
переменных, например, Ф(д, Q, t), Ф(р5 Q, t) и т.д.
Среди всевозможных пар переменных р, q существуют некоторые вы-
деленные пары, именуемые каноническими переменными. Пусть рассма™
триваемая система обладает одной степенью свободы. Как было показано
в главе третьей, для этого случая существует некоторая характерная вели-
чина — адиабатический инвариант I, сохраняющийся наряду с энергией.
Поэтому для автономной (замкнутой) системы I = 1(Е). В силу всего
этого удобно выбрать именно адиабатический инвариант в качестве обоб-
обобщенного импульса. Для того чтобы найти обобщенную координату, соот-
соответствующую обобщенному импульсу I, нужно выполнить каноническое
преобразование. В качестве производящей функции используется при этом
укороченное действие Sq A5). Поскольку I = 1(Е)9 первая из формул A8)
записывается как
Вторая же из формул A8) задает новую обобщенную координату:
Г=°*$И. B0)
Переменные <р, / называются каноническими переменными угол™действие.
Поскольку мы имеем дело с автономной системой, *$о не зависит от вре-
времени и третье из уравнений A8) дает Н' = Н. Таким образом, уравнения
Гамильтона в канонических переменных приобретают вид
. B1)
а!
К. 10. Гамилыпоновы уравнения 291
Решение этих уравнений, т.е. решение уравнений движения рассматрива-
рассматриваемой системы в канонических переменных, выглядит особенно просто:
I = const, (f = uj(I)t + const, B2)
где частота шA) = dE/dl.
Обобщение проведенного рассмотрения (формул B1) и B2)) на слу-
случай систем с произвольным числом степеней свободы затруднительно
или невозможно. Существуют, однако, ситуации, когда переменные угол-
действие ввести достаточно просто. Такая ситуация возникает, если уш>
роченное действие допускает представление в виде суммы
So = J>iM, B3)
где каждое из слагаемых Si(qi) есть функция только одной обобщенной
координаты qi. Фактически речь идет о выделении нормальных мод. Для
каждой из координат qi можно по общим правилам ввести соответствую™
щий обобщенный импульс pi:
dSo dSi /nAX
Pi = = • B4)
oqi dqi
Соответственно г-е укороченное действие
St= I Pi dq^ B5)
Пусть движение финитно. Это означает, что изменение каждой из ко-
координат qi происходит в конечном интервале. В сущности, это означает
колебательный характер движения. Тогда каждой паре канонически сопря-
сопряженных переменных q^ pi, можно по приведенному алгоритму поставить
в соответствие переменные угол-действие:
Т 1
h = —
2тг
Производящей функцией при переходе от переменных pi, qi к переменным
Ii, (fi является действие B3). Обобщением формул B1), B2) являются при
этом соотношения
^...)- B7)
dli
Ii = const, (fi = u)i(Ii, I2,... )t + const, B8)
где частоты Ш{ = дЕ/дЦ.
За период колебания по одной из координат ^ соответствующая уг-
угловая переменная (pi меняется на 2тг, A(pi = 2тг. Поэтому произвольная
однозначная функция состояния системы F(p, q), будучи выраженной че-
через переменные угол-действие, оказывается периодической по каждой из
входящих в нее угловых переменных (fi:
) = F(<pu ip2j ¦ - -);
)
19*
292 Комментарии
Поскольку частоты ^ вообще говоря, несоизмеримы, то в целом из™
менение состояния системы происходит апериодично. Это означает, что,
система никогда не возвращается в состояние, пройденное ею хотя бы од™
нажды. Однако по истечении достаточно большого времени система может
оказаться сколь угодно близко к любому из пройденных ранее состояний.
Такое движение называют условно-периодическим. В статистической фи™
зике такое явление возвращаемости называют циклом Пуанкаре, а интер-
интервал времени между двумя последовательными попаданиями в окрестность
одного и того же состояния — временем Пуанкаре. Чем больше число ча-
частиц в системе, тем дольше длится цикл Пуанкаре.
К.11. Адиабатические инварианты в термодинамике
В главе III введено понятие адиабатического инварианта как величины
почти сохраняющейся, то есть меняющейся гораздо более медленно, чем
параметры системы. Поскольку в физике слово "адиабатический" употреб-
употребляется в двух разных смыслах, поясним содержание понятия "адиабатиче™
ский инвариант" применительно к термодинамике.
Термодинамика оперирует понятием "равновесная система". Имеется в
виду такое состояние, которое устанавливается по прошествии длительно™
го времени в изолированной системе, предоставленной самой себе. В этом
состоянии во всех точках системы ее параметры (давление, температура,
плотность) имеют одно и тоже значение. Если же на систему осуществить
какое либо воздействие (изменить число частиц, ввести тепло, произвести
над ней работу) и снова изолировать ее, то через некоторое время в ней
установится новое равновесное состояние. В случае слабого воздействия
начальное и конечное состояния мало различаются. В процессе бесконеч-
бесконечно слабого воздействия различие состояний также оказывается бесконеч-
но малым. Однако, осуществляя большое число малых воздействий, мы
можем перевести систему в некоторое конечное состояние, значительно
отличающееся от начального. В термодинамике такой переход называется
равновесным или квазистатическим процессом. Его важнейшей особенно-
особенностью является то, что по ходу процесса в каждой момент времени система на-
находится вблизи некоторого состояния термодинамического равновесия, каж-
каждый раз разного, но отвечающего суммарному результату произведенного на
нее воздействия. Следовательно, для описания такого процесса достаточно
использовать те же параметры что и для равновесного состояния.
Подчеркнем в этой связи, что описание неравновесного процесса тре-
требует использования большого числа переменных; в пределе сильной нерав™
новесности это число совпадает с тем, которое требуется для описания
индивидуального поведения всех частиц, составляющих систему.
Для равновесного процесса промежуточные состояния можно прону-
пронумеровать, например, значениями времени от начала процесса. При этом
параметры, характеризующие состояние системы, являются однозначными
функциями времени. Если, например, характеризовать состояние системы
К.11. Адиабатические инварианты в термодинамике 293
давлением Р9 объемом V и температурой Т, то закон изменения состояния
системы записывается как
P = P(t), v = V(t), T = T(t). A)
Закон A) задает в пространстве параметров Р, V, Т кривую, отвечающую
рассматриваемому процессу и называемую траекторией процесса. Суще-
Существование такой траектории есть математическое выражение равновесно-
равновесности процесса.
В соответствии со сказанным в главе III равновесному процессу дол™
жен отвечать адиабатический инвариант. Вид этого инварианта, очевидно,
определяется уравнениями A). Исключая из A) время t, мы можем запи-
записать уравнение процесса в виде
/(Р, V) = const. B)
При этом значение константы определяется только начальными условия-
условиями. Функцию /(F, V) можно принять в качестве адиабатического инва-
инварианта изучаемого процесса. Очевидно, что выбор функции не является
единственным: любая функция F(f(P, V)) также представляет собой адиа-
адиабатический инвариант.
Для идеального газа адиабатические инварианты известны. В частно-
частности, в случае изотермического процесса таковым является произведение
h = PV.
Инвариант 1\ и аналогичные ему инварианты при изохорическом и
изобарическом процессах суть простые следствия уравнения Клапейрона-
Менделеева PV = i/RT (у — число молей газа в объеме V, R — газовая
постоянная).
Менее тривиален инвариант 1ч = PV1. Этот инвариант отвечает адиа-
адиабатическому процессу, то есть процессу, происходящему в теплоизолиро-
теплоизолированной системе, когда внешние силы совершают над ней работу.
Здесь целесообразно обратить внимание на некоторую терминологиче-
терминологическую неопределенность: слово "адиабатический" употреблено по отношению
даже к одному и тому же объекту в двух разных смыслах — как характе-
характеристика медленности процесса (адиабатический инвариант) и как характе-
характеристика условий протекания процесса (адиабатическая изоляция системы).
Только соблюдение требований обеих адиабатичностей (медленность и тер-
термоизоляция) обеспечивает наличие инварианта 1ч = PV1.
Для того чтобы понять, как "срабатывают" эти требования, рассмотрим
два примера. Пусть имеется теплоизолированный сосуд, разделенный пе-
перегородкой на две равные части. В одной части находится идеальный газ
при температуре Т, а во второй части газа нет. В некоторый момент време-
времени перегородка быстро удаляется, В результате газ расширяется и запол-
заполняет весь объем сосуда. Этот процесс, конечно, адиабатичен, поскольку
теплообмен с внешней средой отсутствует. В то же время, этот процесс
существенно неравновесен, поскольку в его начале имеют место большие
градиенты плотности частиц, а такие величины, как температура и дав-
давление, не являются хорошо определенными. После удаления перегородки
294 Комментарии
кинетическая энергия молекул не изменяется (газ идеальный, а упругие
удары молекул о неподвижные стенки сосуда не меняют их энергию). Сле-
Следовательно, после установления термодинамического равновесия темпе™
ратура оказывается прежней, объем увеличивается вдвое, а давление, со™
ответственно, вдвое падает. В этом процессе сохраняющейся величиной
оказывается произведение PV, а не PV1.
В качестве второго примера рассмотрим распространение звука в воз™
духе. Примем, что воздух можно считать идеальным газом. Как показыва-
показывают эксперименты, скорость распространения звуковой волны в газе с высо-
высокой степенью точности определяется адиабатической сжимаемостью газа:
с = к ПН =М- = М—• C)
Здесь р — плотность газа, индекс S показывает, что дифференцирование
надлежит выполнять при постоянной энтропии S (процесс адиабатический
или изэнтропический), /i — молярная масса газа. Адиабатичность процес™
са, то есть следование газа закону Р/'р1 = const, обусловлена следующим.
С одной стороны, за характерное время звуковых колебаний (~ 1СП3 с)
тепло не успевает уйти за пределы объема газа, размеры которого опреде™
лены длиной звуковой волны (^ 30 см). С другой стороны, звуковое воз™
действие является медленным по сравнению с процессом релаксации газа
к равновесному состоянию. Характерное время релаксации определяется
отношением длины свободного пробега частиц газа к их тепловой скоро™
сти и составляет 10^8—10^10 с. Таким образом, в случае распространения
звуковой волны в воздухе с большим запасом выполняются условия обеих
адиабатичностей.
К.12. Об устойчивости неподвижной точки одномерного
отображении
Рассмотрим одномерное точечное отображение
%п+1 = f(xn). A)
Пусть это отображение имеет неподвижную точку хС9 то есть
%с = f(xc)- B)
Точка хс называется устойчивой точкой отображения A), если после™
довательность {хп}9 начинающаяся в любой точке х® из некоторой окрест-
окрестности точки хС9 xq ф хС9 сходится к хс:
lim хп = хс. C)
П—5>ОО
Теорема 1. Если функция f(x) непрерывна и дифференцируема в
некоторой окрестности неподвижной точки хС9 причем
\{df/dx)x=Xc\ <1, D)
то точка хс — устойчивая.
К. 12. Об устойчивости неподвижной точки 295
Доказательство. Вследствие непрерывной дифференцируемо сти
функции f(x) в малой окрестности точки х = хс имеем
/О) = f(xc) + р(х - хс) + о(х - хс), E)
где р = (df/dx)x=Xc. Поэтому для нахождения элементов последователь-
последовательности хп из выбранной окрестности имеем вместо A) отображение
жп+1 = f(xc) + р{%п - хс) + о(хп - хс),
или, в силу B),
хп+1 ^хс = р(хп - хс) + о(хп - хс). F)
Отбросим сначала поправку о(хп — хс) в F). Тогда соотношение
хп+1 -хс = р(хп - хс)
задает геометрическую прогрессию со знаменателем р9
%п - хс = рп(х0 - хс), п = 1, 2,... G)
Эта прогрессия сходится при \р\ < 1:
хп —)> хс при п —>- оо. (8)
Покажем теперь, что отброшенное слагаемое о(хп — хс) не меняет вы™
вода (8) о сходимости последовательности {хп}. Положим
\р\ = 1-е, 0<е<1 (9)
и обозначим для краткости уп = хп — хс. Тогда соотношение F) может
быть переписано в виде
Уп+i = РУп + о(уп) = руп{1 + еп), A0)
где
еп^°-^. A1)
РУп
В силу определения величины о(у) всегда можно выбрать такое значение
аргумента у, чтобы сделать значение о{у)/у сколь угодно малым. Выберем
поэтому начальную точку последовательности xq (и, соответственно, уо =
= ж о — хс) так, чтобы
Ы<в, где ?0 = ^. A2)
РУо
Тогда имеем
\У1\ = \р\ ¦ \уо\ ¦ |1 + ео| < A - е)A + Ы)Ы <
< A - г)A + е)\уо\ = A - ?2)|№| < Ы- A3)
В соответствии с определением еп в A1) из неравенства A3) следует \ei \ <
< \ео\ < е и
296 Комментарии
Продолжая построение, получаем для произвольного номера п по с ледова™
тельности
\уп\ < A - е2)п\у0\. A4)
Таким образом, при п —>¦ оо \уп\ —>> 0, то есть имеет место сходимость
последовательности {хп} к хс. Теорема доказана.
Теорема 2. Если функция f(x) непрерывна и дифференцируема в
некоторой окрестности неподвижной точки хс, причем
\(df/dx)x=Xc\ >1, A5)
то точка хс — неустойчивая.
Доказательство этой теоремы аналогично доказательству преды™
дущей теоремы.
Приведенные выше утверждения исключают из рассмотрения случай
|р| = 1, P=(df/dx)x=Xc. A6)
В этом промежуточном случае последовательные итерации отображения
могут как сходится, так и расходится в зависимости от высших членов
разложения функции f(x)9 учитываемых слагаемым о(хп — хс) в F). На-
Например, отображения
хп+1 = h(xn) = хп + ах„, (На)
хп+1 = /2(яп) = хп- ах„, a > 0, A76)
имеют неподвижную точку хс = 0. В этой точке (dfi/dx)x=Xc =
= (df2/dx)x=Xc = 1. Однако в случае отображения A7а) итерации расхо-
расходятся (точка неустойчива), а в случае отображения A76) итерации сходятся
(точка устойчива).
Наконец, существуют смешанные типы неподвижных точек — это так
называемые полуустойчивые неподвижные точки. Например, отображение
^п+1 = h(xn) =хп + «4' а>0 (Ив)
имеет стационарную точку хс = 0, в которой df^/dx = 1. Если начальная
точка xq > xCJ то последовательность {хп} расходится. Если же xq < xC9
то последовательность {хп} сходится к хс.
К.13. Приближенное решение уравнения Ван-дер-Поля
Получим решение уравнения
х - 2jx(l - х2) + ш^х = 0
при условии
0 <7<^о-
Перепишем уравнение A) в виде
При 7 = 0 решение этого уравнения есть
х = a cos шо^ + b sin шо^,
(i)
B)
C)
D)
К. 13. Приближенное решение уравнения Ван-дер-Поля 297
где а и Ь — произвольные константы. В том случае, когда параметр j ф О,
мы можем искать решение в виде
х = a(t) cosu®t + b(t) sinc^t, E)
содержащем две неизвестные функции: a(t) и b(t). Данный подход есть по
существу известный метод вариации постоянных.
Дифференцируем функцию E):
х = [a cos u)®i + b sin ш®?\ — ш®а sin u®t + ш®Ь cos u®t. F)
Поскольку вместо одной функции x(i) мы ввели две новых {«(t), b(t)}, мы
можем связать эти функции одним соотношением. В качестве этого соотно™
шения возьмем равенство нулю содержимого квадратных скобок в F):
a cos ojot + b sin uot = 0. G)
С учетом этого вычисляем вторую производную х. Из F) находим
х = ^ш®а sin ujQt + шоЬ cos uj^t — u)q [a cos ouot + 6 sin ujqI} . (8)
Подстановка этого выражения в исходное уравнение C) дает
^Dodsinuot + шоЪ cos Dot = 2jF(x^ ж), (9)
где вместо ж и ж в правой части следует подставить выражения E) и F)
(последнее — с учетом G)).
Соотношения G) и (9) представляют собой систему линейных уравне-
уравнений относительно величин а и Ь. Решение этой системы дает
а = ^ — F(x, x) sina;ot, b = — F(x, x) cosu)®t. A0)
Учтем теперь неравенство B). Как следует из A0), производные а и
b оказываются малыми в меру малости отношения j/ojq. Это значит, что
функции a(t) и b(i) меняются существенно медленнее, чем функции sin wQt
и cos ujot. Поэтому за период колебаний тригонометрических функций из-
изменениями функций a(i) и b(t) можно пренебречь. В соответствии с этим
усредним равенства A0) по периоду То = 2ж/и®. Это дает
а = ^Р(щЬ), b=^Q(a,b), A1)
где введены обозначения
Р(а,Ъ) =
То
= — F(a cos ujgt + b sin ugt^ —ujqu sin ujQt + шф cos ujgt) sinujotdt.
To J
0
A2)
Q(M) =
io
F(acosa;ot + bslncjot, LJoasinwot + ш®Ь cos D®t) cos ujgidt.
To J
298 Комментарии
Уравнения A1) называются укороченными уравнениями или уравнени-
уравнениями Ван-дер-Поля.
Поскольку для всех целых п ф 0 средние значения от sin nuj®t и cos nuj®t
по периоду То = 2тг/ujq равны нулю, то в функции F в подынтегральных
выражениях в A2) нужно сохранить только те слагаемые, которые содер-
содержат sin wot и coscuot. Для функции F вида C) имеем
F(a cos wot + b sin c^oi, —ujqu sin u)Ot + шф cos uj^t) =
2
1 I (—asmujot + fecoswot). A3)
4 )
(все прочие гармоники, давая нулевой вклад в интегралы A2), не играют
роли и потому здесь не выписаны), С учетом этого из A2) найдем
' ° ^ 4 ' A4)
Таким образом, функции a(t) и b(t) суть решения системы обыкновенных
дифференциальных уравнений первого порядка:
— 1, Ь = 7ЬA — )¦ A5)
Для решения этой системы удобно перейти к полярным координатам:
a = pcos^, Ь = ршир. A6)
Тогда для p(t) и (p(t) из A5) получаем уравнения:
Последнее уравнение имеет очевидное решение if = (ро = const. Решение
же первого уравнения можно записать в виде
A8)
где G — постоянная интегрирования. Переходя от р и ^ к а и 6, имеем:
= 2cQS^o 6(t) = , 2sin^° A9)
Vl + CepB7t) v/l + Cexp(-27t)
Наконец, возвращаясь к исходной переменной x(i) согласно E), получим:
= 2сов(«Ы-<ро)
^l + CBt)
Это решение описывает процесс установления автоколебаний, причем
при С > 0 траектории приближаются к предельному циклу изнутри, а
К. 14. Нелинейный осциллятор 299
при С < 0 — снаружи. При t —>• +00 устанавливаются периодические
колебания вида
x(t) = 2cos{uj0t^(p0), B1)
Подчеркнем, что найденное решение справедливо только при 7^1-
При достаточно больших значениях j форма автоколебаний существенно
отличается от даваемых формулой B1).
К.14. Нелинейный осциллятор
Рассмотрим нелинейный осциллятор без трения, описываемый уравне-
уравнением
х + /(ж) = 0. A)
Отметим, что это уравнение можно заменить системой двух дифференци-
дифференциальных уравнений первого порядка
х2 = -f(Xl), {Z)
где положено х\ = ж, х2 = х. Нуль-изоклины этой системы, очевидно,
записываются как
f(Xl) = 0. ^
На фазовой плоскости (#i, x2) первая из изоклин совпадает с осью х\, а
вторая представляет собой прямые (по числу нулей функции f{x\)\ парал-
параллельные оси х2. Из B) видно, что dx2/dxi = —f(xi)/x2. Поэтому фазовые
траектории пересекают первую нуль-изоклину вертикально, а вторую —
горизонтально.
Поскольку состояния равновесия динамической системы определяют-
определяются как точки пересечения ее нуль-изоклин, то для A) число этих состояний
совпадает с числом нулей функции f(x\).
Пусть функция f(x) такова, что /@) = 0. Система A) обладает зако-
законом сохранения:
ж
h2 + F(x) = E, F(x) = I f(xf) dx'. D)
0
Здесь постоянная Е имеет смысл полной энергии, складывающейся из
"кинетической" ж2/2 и "потенциальной" F(x) частей. Будем считать, что
"сила" —f(x) не имеет особенностей. Тогда интеграл D) в конечных пре-
пределах ограничен, и мы будем иметь дело с конечным значением потен-
потенциальной энергии. Для построения фазового портрета системы выберем
фазовую плоскость, на которой по оси ординат отложены значения х9 а по
оси абсцисс — значения х. Разрешая D) относительно х, получаем явную
зависимость х = х(х) в виде
х = ±y/2(E-F(x)), E)
300
Комментарии
б. Е6
Рис. 1. Построение фазового портрета для уравнения Дуффинга. а — вид функции
f(x) из F); б — вид соответствующей функции F(x) из D); в — фазовые
траектории, отвечающие различным значениям полной энергии Ei
что дает аналитическое выражение для интегральных кривых на фазовой
плоскости. Структура фазового портрета определяется нулями и экстре-
экстремумами функции f(x). На рис. 1 приведен пример построения фазового
портрета для случая функции f(x), даваемой выражением
/О) = -ж3 + ех2 + и%х. F)
Уравнение A) с таким видом функции f(x) называют уравнением Дуффинга.
Как видно из построения, фазовые траектории однозначно нумеруются
значениями полной энергии Е. Видно также, что тем нулям функции /(ж),
в которых f'{x) < 0 (максимумы F{x)\ на фазовом портрете отвечают сед-
ловые точки. Тем же нулям f(x), в которых ff(x) > 0 (минимумы F(x))9
отвечают особые точки типа "центр" (устойчивые особые точки). Внутри
петли сепаратрисы существуют замкнутые траектории, отвечающие перио-
периодическим колебаниям конечной амплитуды. Наряду с этим при всех значе™
К. 14. Нелинейный осциллятор 301
ниях энергии существуют траектории, отвечающие неограниченным (ин-
финитным) движением. Выбор между всеми этими траекториями опреде-
определяется заданием начальных условий, т.е. заданием координаты х и скоро™
сти х в начальный момент времени.
Рассмотрим периодические колебания в системе, описываемой уравне-
уравнением Дуффинга A), F). Легко видеть, что влияние нелинейных слагаемых в
функции f{x) в F) пропадает лишь при амплитуде колебаний, стремящейся
к нулю. При любой конечной амплитуде колебания должны отличаться от
гармонических, в частности, следует ожидать нарушения изохронности ко™
лебаний разной амплитуды. Проиллюстрируем сказанное, получив прибли™
женное решение уравнения Дуффинга для малых колебаний. При этом мы
используем метод решения, широко применяемый при анализе нелинейных
колебательных систем. В отличие от метода Ван-дер-Поля, изложенного в
комментарии 13, развиваемый далее подход удобен для анализа консерватив™
пых систем. Для упрощения расчетов рассмотрим частный случай, когда в
F) параметр е равен нулю, е = 0. При малых энергиях колебаний в качестве
нулевого приближения можно взять гармоническое решение
x{t) = xoslnojot. G)
Это приближение означает пренебрежение членом ж3 в функции f(x) в F).
Учет нелинейного слагаемого можно было бы, на первый взгляд, прово-
проводить методом последовательных приближений. Суть этого метода состоит
в следующем.
Запишем исходное уравнение в форме
х + и%х = х3. (8)
Будем рассматривать здесь правую часть как малую поправку, которую еле™
дует находить, используя предыдущую итерацию. В итоге получаем ите-
итерационную последовательность вида
жп+1 + ш1хп+г = ж3, п = 0, 1, 2,..., (9)
где нулевое приближение дается формулой G). В соответствии со сказан™
ным для нахождения первого приближения имеем
Х\ + UJ^Xi = Xq Sin3 LJ0t. A0)
Правую часть A0) представим в виде
[о 11
- sin ujQt sin3a;o? . A1)
Наличие здесь слагаемого, пропорционального sinojot, т.е. слагаемо-
слагаемого, представляющего колебания "внешней силы" на собственной частоте
осциллятора, означает неограниченную, резонансную раскачку колебаний
осциллятора (9). В свою очередь это означает, что колебания становятся
немалыми. Следовательно, правая часть (9) не может рассматриваться как
малая поправка. В то же время, как видно из рис. 1, в сколь угодно малой
окрестности положения равновесия существуют колебания, мало отлича-
отличающиеся от гармонических. Таким образом, попытка использования мето-
302 Комментарии
да последовательных приближений внутренне противоречива из-за появ-
появления резонансных поправок. Другими словами, итерационный подход к
рассматриваемой задаче неприменим.
В силу сказанного решение должно искаться таким образом, чтобы в
поправках не содержались резонансные "силы". Это означает, прежде все-
всего, что искомое решение не должно содержать колебаний на собственной
частоте ш® линейной части осциллятора (8). Соответственно ищем реше-
решение в виде
x(t) = x\ sinwt, A2)
где определению подлежат параметры х\ и ш, причем амплитуда рассма-
рассматривается как малая величина: х\ <€iujQ.
Рассматривая, как и ранее, правую часть (8) как малую поправку, вме-
вместо A1) имеем
х\ sin3 ut = хЦ-smut sin3o;tl. A3)
Здесь слагаемое, пропорциональное sin 3u)t, соответствует колебаниям, про-
происходящим на утроенной частоте по отношению к приближению A2). Мож™
но показать, что вклад этих высокочастотных колебаний в искомое решение
есть величина следующего порядка малости по х\. Отбрасывая в A3) это
слагаемое и подставляя A2) в левую часть (8), а A3) — в правую, получаем
о
(cjq — оо2) х\ sina;t = -х\ шюог. A4)
Это уравнение позволяет установить самосогласованную связь амплитуды
х\ и частоты ш искомых колебаний:
х\ = -ъ (и>1 - ш2) . A5)
Отсюда видно, что на частоте uoq колебания происходят с нулевой ампли-
амплитудой, т.е. резонансная раскачка колебаний исключается.
Область применимости формулы A5) определяется неравенством
В противном случае надо учитывать вклад гармоник более высокого по-
порядка, т.е. колебаний с частотами За;, Бои, 7ш и т.д.
Кроме того, из A5) видно, что допустимы только такие частоты коле-
колебаний, которые подчиняются условию
ш ^ ш0. A7)
При этом оказывается, что условие A7) сохраняется и при немалых коле-
колебаниях x(t).
Соотношение A5) демонстрирует принципиальное различие между ко-
колебаниями линейного и нелинейного осцилляторов. Если в первом случае
колебания изохронны и характеризуются только амплитудой при одной и
той же частоте ujq, to во втором случае свойство изохронности колебаний
К. 14. Нелинейный осциллятор 303
пропадает: период колебаний (Т = 2тг/ш) оказывается зависящим от их
амплитуды.
Следующие приближения в рамках излагаемого метода следует искать,
полагая
x(t) = x\ sinujt + Ж3 sin3a/t + х§ s'mbut + ... A8)
Значения коэффициентов разложения A8) убывают по мере роста номера
гармоники. Для явного нахождения их значений следует подставить A8) в
исходное уравнение (8) и приравнять коэффициенты при одинаковых гар-
гармониках в правой и левой частях полученного равенства. Это дает систему
алгебраических уравнений относительно неизвестных х\, хъ, х% и т.д., ко-
которую можно решить методом итераций, имея в виду малый параметр A6).
При этом оказывается, что последовательные коэффициенты разложения
убывают по закону
Изложенный метод получения приближенного решения представляет
собой конкретное применение весьма общего метода, называемого мето-
методом Ляпунова-Пуанкаре. Последний применим для анализа колебатель-
колебательных систем вида
x = ay + f(x,y),
у = /3х + <р(х,у),
где функции f(x, у) и<р(х, у) существенно нелинейны, т.е. их разложения
по степеням х и у не содержат линейных членов, начинаясь, по крайней ме-
мере, с членов квадратичных. При этом требуется также, чтобы выполнялось
неравенство
ар < 0. B0)
Тогда линейная подсистема
± = 0*' B1)
у = fix
содержит единственную особую точку типа центра, т.е. описывает гар-
гармонический осциллятор с собственной частотой ш® = -\/—а/3. В окрест-
окрестности особой точки поправки /(ж, у) и <р(х, у) суть малые возмущения
фазовых траекторий осциллятора и играют ту же роль, что и член х3 в
уравнении (8).
Возвращаясь к уравнению Дуффинга (8), приведем для справок его
точное решение:
^ Мг7* B2)
где tH — константа интегрирования, q — модуль эллиптической функции,
304
Комментарии
также определяемый начальными условиями (см. комментарий 2). Коэф-
Коэффициент ujqJ2q2/{1 + q2) = А есть амплитуда колебаний. Период коле-
колебаний Т определяется при этом из условия
/l + ^Kfa), B3)
где К(д) — полный эллиптический интеграл
первого рода.
Рис. 2 показывает найденную таким об-
образом амплитудно-частотную характеристи-
л л /27Г\
ку А = А I — I нелинейного осциллятора
(8). Подчеркнем, что полученная ранее при-
приближенная связь A5) амплитуды и периода
колебаний качественно соответствует пове-
0
1 2тг/Т
Рис. 2. Амплитудно-частотная
характеристика нелинейного
осциллятора (8). шо = 1
дению точной характеристики на рис. 2. При этом соответствие тем точнее
количественно, чем ближе ш к cjq.
К. 15. Критерий Рауса-Гурвица
Установление типа особой точки динамической системы состоит в на™
хождении характеристических показателей и определении знака их действи-
действительных частей. Такая задача сводится, как правило, к решению уравнения
E.24), левая часть которого есть полином п-й степени относительно Л. Для
целей качественного исследования достаточно установить, какое число ха-
характеристических показателей имеет отрицательную действительную часть,
а какое — положительную. Один из конструктивных алгоритмов, позволяю-
позволяющих получить ответ, состоит в применении критерия, основанного на теоре-
теореме Рауса-Гурвица.
Рассмотрим полином п-й степени с действительными коэффициентами
f(x) = апхп + а^гх71^1 + ... + агх + а0 = 0. A)
Составим квадратную п х п-матрицу
\
Н
г-1|
«п-5
ап
0
о
о
о
B)
\ и и и uq J
называемую матрицей Гурвица. В этой матрице все коэффициенты а&, ко-
которым формально приписываются значения индекса к < 0, следует по-
К. 15. Критерий Рауса^Гурвица
305
дожить равными нулю. Отметим, что в правом нижнем углу матрицы Н
всегда стоит коэффициент а® полинома f(x). Обозначим Ai, Д2,..., Ап
миноры матрицы Н, стоящие в левом верхнем углу и имеющие порядок
1, 2,..., п соответственно. Эти миноры называются определителями Гур-
Гурвица. Миноры Ai, A2 и А3 выделены в B) штриховыми линиями.
Если все миноры Ai, А2,..., Ап отличны от нуля, то число т корней
многочлена A), лежащих в правой полуплоскости, равно числу перемен
знака в ряду
Л А2 А3 Ап
an, Ai, ^5 "г—> • • • 5 -г • С3)
Пример 1. Пусть
f(x) = Зх5 + х4 ¦
Составляем 5 х 5-матрицу Гурвица
/12 2
3 4 6
Н =
- 2х2 + 6ж + 2.
О 0\
О О
2 О
6 О
2 2/
D)
E)
Определители Гурвица равны
= 1, А2 =
= -2, Д2 =
= -4,
А4 =
V
F)
Д5 = det Я = а0Д4 = -16.
Ряд C) в данном случае выглядит так:
3, 1, -2, 2, 2, 2.
G)
В этом ряду есть две перемены знака. Поэтому многочлен f(x) имеет т =
= 2 корня в правой полуплоскости (т.е. два корня обладают положительной
действительной частью). В некоторых специальных случаях сформулиро™
ванный алгоритм нуждается в модификациях.
1) Пусть Ап ф 0. При этом An^i ф 0, поскольку имеет место то-
тождество An = aoAn_i. Если среди остальных миноров имеются равные
20 Н.В. Карлов, Н.А. Кириченко
306 Комментарии
нулю,
As ф 0, As+i = ... = As+P = 0, As+p+i ф 0, (8)
причем также As^i Ф О, As+p+2 ф 0 ш р — нечетное число, то число
т корней многочлена /(ж), лежащих в правой полуплоскости, равно числу
перемен знака в ряду C). При этом следует формально полагать, что между
числами —— и —5+р+2 имеется (^i)(p+2)/2^ перемен знака. Здесь
As—I As+p+i 2 2
p
S = +1, если числа —— и —s+p+2 имеют одинаковые знаки, и 8 = — 1, если
As—i A
знаки противоположны. При s = 1 число —— заменяется на Дь
As~i
Наконец, если Ai = ... = Ар = 0, то по приведенному правилу
определяется число перемен знака между числами ап и —^~ (минор Ар+2
А
предполагается ненулевым, а число р — нечетным).
Пример 2. Пусть
/(ж) = ж3 + ж + 2. (9)
Матрица и определители Гурвица равны
А) 2 Q}
Н
\
1 1 0 | , Ai = О, А2 = -2, А3 = -4. A0)
0 0 2,
Число нулевых миноров р = 1. Поэтому число перемен знака между аз =
= 1 и —- = 2 равно (—1)- = 2. Следовательно, в ряду C)
А2 2 2
1т A1)
получаем две перемены знака (в фигурных скобках указаны члены ряда, к
которым применяются особые правила подсчета).
2) Пусть Ап = 0. Тогда многочлен f(x) следует представить в виде
f(x) = D(x)f(x), A2)
где D(x) — наибольший общий делитель многочленов fi(x) = апхп +
+ ап^2^п^2 + • • • и /2(х) = ап-\хп~1 + ап^%хп^3 + • • • • Далее к много-
многочленам D(x) и f*(x) применяют изложенные выше приемы.
Отметим, что для нахождения числа корней, лежащих в левой полу-
полуплоскости, достаточно заменить х = —у и применить изложенный алго-
ритм по отношению к полиному F(y) = f(—x).
Теорему Рауса-Гурвица удобно использовать, когда коэффициенты
многочлена f(x) зависят от параметров и требуется определить, при ка™
ких значениях параметров происходит изменение числа корней в пра-
правой полуплоскости (иначе говоря, когда происходит изменение характера
устойчивости особой точки динамической системы).
К. 15. Критерий Рауса^Гурвица
307
Пример 3 . Рассмотрим многочлен
f(x) = ж3 -ж2+рж + д, A3)
содержащий два параметра р и q. По общим правилам находим матрицу и
определители Гурвица:
«з = 1,
Ряд C) в данном случае имеет вид
1, -1, p + g, д.
A4)
A5)
III
= -Q
Рис. 1.
Число корней многочлена в правой полуплоскости определяется, таким
образом, знаками величин р + q и q. Ситуации, которые здесь могут пред-
представиться, удобно показать на плоскости параметров (р, q) — см. рис. 1.
Всего имеется четыре области, в которых последовательности знаков в
ряду A5) различны. Эти последовательности приведены в таблице.
Таблица 1.
Область на рис. 1
I
II
III
IV
Знаки членов ряда A5)
+
+
+
+
-
-
-
+
-
+
+
+
-
Число перемен
знака
2
2
1
3
В этой таблице в последнем столбце указано число перемен знака и
тем самым число корней полинома, лежащих в правой полуплоскости
(с положительной действительной частью). Таким образом, бифуркаци-
бифуркационное множество задачи, на котором происходит изменение числа кор™
ней с Re х > 0, состоит из всей оси р (т.е. прямой q = 0) и луча q = —р
в области 0 ^ р < оо.
Теорема Рауса-Турвица позволяет сформулировать критерий устойчи-
устойчивости особой точки динамической системы, называемый критерием Рауса-
Гурвица.
Для того чтобы все корни характеристического уравнения /(Л) = 0 име™
ли отрицательные действительные части (т.е. особая точка была устойчивой),
необходимо и достаточно, чтобы все главные миноры матрицы Гурвица B)
для многочлена /(Л) были положительными (при этом, естественно, подра-
подразумевается положительность коэффициента ап при старшей степени Л).
20*
308 Комментарии
Смысл утверждения состоит в том, что в ряду C) число перемен знака
оказывается равным нулю и, следовательно, ни один корень не попадает в
правую полуплоскость.
К.16. Метод D-разбиений
Теорема Рауса-Гурвица дает алгоритм определения типа особой точки,
удобный, когда характеристическое уравнение /(А) = 0 имеет не слиш-
слишком высокую степень. Иначе вычисления сильно усложняются. Существу-
Существует иной метод, позволяющий непосредственно находить бифуркационные
границы, разбивающие пространство параметров на области, отвечающие
различным порядкам неустойчивости D. С точки зрения терминологии по-
полагают, что D — это число корней уравнения /(А) = 0, лежащих в правой
полуплоскости 1) комплексной переменной А. Тогда порядок неустойчи-
вости D = 0 означает, что система устойчива, т.е. нет ни одного корня
с Re А > 0; порядок D = 1 отвечает тому, что в правой полуплоскости
имеется только один корень А и т.д.
Пусть характеристическое уравнение содержит параметр а, т.е.
а) = 0. A)
Это уравнение задает траектории корней А (а) на комплексной плоскости
аргумента А = Re А + г Im А. Нас интересует, как при изменении пара-
параметра а меняется порядок неустойчивости D. Очевидно, что изменение D
при непрерывном изменении а возможно только тогда, когда на комплекс™
ной плоскости А траектория А (а) пересекает мнимую ось, т.е. в момент
Re А (а) = 0. Таким образом, полагая А = iuj, где ш — действительное
число, получим из A) границу D-разбиения в виде
а = <р(ш0), B)
где значение ш = ujq соответствует точке пересечения траекторией А (а)
мнимой оси. В общем случае имеется несколько изолированных точек, об-
образующих границу и отвечающих траекториям различных корней уравне-
уравнения A).
Во многих случаях имеется несколько параметров ai,... , ат, входя-
входящих в характеристическое уравнение
/(А;аь...,ат) = 0. C)
Нетрудно понять, что граница D-разбиения в этой ситуации представляет
собой (га — 1)-мерное множество, задаваемое уравнением
Re Х(аъ ..., аш) = (р(аг,..., ат) = 0. D)
Пример 1. Рассмотрим характеристическое уравнение
А2 + А + а = 0. E)
) D — первая буква французского слова Droit — правый.
К. 16. Метод D-разбиений 309
В соответствии со сказанным положим А = га;. Это дает
-и? + iu + а = 0. F)
Считая а действительным параметром, приходим к системе уравнений
Г -„> + „ = о.
[ ш; = 0,
откуда шо = 0, а = 0. При а > 0 находится область устойчивости (D = 0),
а при а < 0 — область неустойчивости (D = 1).
Пример 2 . Рассмотрим 2™параметрическое характеристическое
уравнение
А3 - А2 + рА + q = 0, (8)
(см. пример 3 в комментарии 15). Положим А = го;. Разделяя действитель-
действительную и мнимую части в (8), приходим к системе двух уравнений
(9)
[ гш (-ш2 +р) =0.
Имея в виду, что ш — действительное число, пробегающее в общем слу-
случае непрерывный ряд значений ^оо < ш < +оо, получаем, что система
уравнений (9) определяет два множества:
а) д = ^ш2, р = ш2;
б) q = 0, р — произвольно.
Первое из этих множеств есть луч q = —p (q ^ 0), а второе — вся ось Р.
Этот же результат в комментарии 15 был получен применением теоремы
Рауеа^Гурвица.
Пример 3. Рассмотрим более сложный случай — систему с запазды-
запаздывающим аргументом. Одним из примеров таких систем является осциллятор
с трением, в котором возвращающая сила есть запаздывающая функция:
-т) = 0. A0)
Подобные уравнения входят, например, в некоторые модели экономики,
где учитывается сдвиг по времени между состоянием системы и управляю™
щим воздействием, обусловленный задержкой, необходимой для оценки си™
туации, принятия решения и подачи управляющего сигнала.
Вследствие линейности уравнения A0) будем искать его решение в виде
x(t) =xoexp(At). A1)
Подставляя A1) в A0), получаем характеристическое уравнение
А2 + 27А + ^е^Ат = 0. A2)
Заметим, что это уравнение уже не имеет полиномиального вида. Для на-
нахождения границ D-разбиения положим А = гш. Тогда, разделяя действи-
310 Комментарии
тельную и мнимую части равенства, приходим к системе двух трансцен-
трансцендентных уравнений
{-ш2 + Шп cos (шт) = 0,
0 V ; A3)
— Uq sin (шт) = 0.
При т = 0 эта система имеет очевидное решение
uj = ujOj 7 = 0? A4)
т.е. в отсутствие задержки смена устойчивости может произойти только
при изменении знака коэффициента трения.
При т ф 0 система может потерять устойчивость, несмотря на на-
наличие трения. Это обусловлено тем, что при подходящей задержке сила
—ш^хA — т) может, за счет сдвига по фазе, действовать не как возвраща-
ющая, а как отталкивающая.
Уравнения A3) определяют границу области устойчивости. Этим урав-
уравнениям удобно придать иной вид. Именно, из первого уравнения в A3)
имеем
[су -|
± arccos ^-+ 2тга L га = 0, ±1, ±2,... A5)
Щ J
Отсюда видно, что существует бесконечный набор чередующихся зон ста-
стабильности (где Re Л < 0) и зон лабильности (где Re Л > 0).
Далее, исключая из уравнений A3) величину шт, получим
откуда
I 4 ___ 4~
Таким образом, перебирая ш из допустимого интервала —uq < ш <
< +а;о, с помощью соотношений A5), A7) получаем (для каждого фик™
сированного значения ш®) серию кривых в плоскости G, т), дающую
границы D-разбиения.
Рассмотрим частный случай: о;о|т| <С 1. Разложим в A0) слагаемое
ujQx(t — т) в ряд по степеням т, ограничиваясь низшим порядком:
x(t-r)=x(t)-^--T. A8)
Это дает
dt2 dt
Отсюда видно, что при наличии временного сдвига т коэффициент трения
— 1
7 заменяется на величину j = 7 ш^т. Следовательно, при т < 2j/ljq
система устойчива G > 0, Re Л < 0), а при т > 2^)ш\ имеет место
К. 17. Равноускоренное движение материальной точки 311
неустойчивость G < 0, Re Л > 0). Явное выражение для характеристиче-
характеристического показателя А имеет наиболее простой вид в случае 7<СИъ ^о
А = ±гш0 - 7 + \ш1т. B0)
Эти же результаты можно получить непосредственно из A2).
Заметим, что в нелинейных системах запаздывание может не только
менять тип устойчивости, но и приводить к стохастизации процесса.
К. 17. Равноускоренное движение материальной точки
Рассмотрим динамическую систему, задаваемую уравнением движения
х = а, а = const. A)
Это уравнение эквивалентно двум уравнениям первого порядка
х = Д(ж, v) = v,
v = /2B;, v) =a.
Таким образом, мы имеем систему с двухмерным фазовым пространством
и координатами (ж, г;). Скорость изменения элемента фазового объема этой
системы Г = dx • dv в соответствии с теоремой Лиувилля-Юстроградского
оказывается равной
Г dt dx dv W
Другими словами, для системы A) объем любой фазовой капли с те™
чением времени не меняется. Рис. 6.2 б основного текста показывает, что,
например, прямоугольная в начальный момент капля с течением времени
вытягивается в параллелограмм при неизменной длине основания (пред™
полагается, что это основание параллельно оси абсцисс). Неизменность
объема капли становится при этом очевидной из чисто геометрических со™
ображений. Одновременно становится очевидным, что расстояние от лю-
любой точки нижней стороны капли до любой точки верхней стороны капли
с течением времени неограниченно растет. Последнее означает неустойчи-
неустойчивость по Ляпунову.
Рассмотренный пример иллюстрирует то общее утверждение, что со-
сохранение фазового объема, присущее гамильтоновым и некоторым другим
системам, не означает существования какого-либо типа устойчивости.
К.18. Теорема Лиувиллм-Остроградского
Для полноты изложения приведем доказательство теоремы Лиувилля-
Остроградского. Эта теорема часто используется в теории нелинейных
динамических систем. В механике и в статистической физике, где рас-
рассматриваются гамильтоновы системы, особое значение имеет следствие
теоремы Лиувилля^Остроградского — теорема Лиувилля о сохранении
фазового объема.
312 Комментарии
Рассмотрим динамическую систему в n-мерном фазовом пространстве,
задаваемую уравнением
x = f(x), A)
где х = (хъ x2j..., хп), / = (/ь /2, • • •, fn) суть гс-мерные векторы.
Элемент объема фазового пространства в окрестности точки х есть
dT = dx\dx2 . . • dxn. B)
Тогда объем конечной области D фазового пространства равен
V = | dT. C)
D
Область D образуют точки, которые можно рассматривать как точки
фазовых траекторий в момент времени t. Эту область можно рассматривать
как фазовую каплю объема V в момент времени t. С течением времени фа-
фазовая капля D претерпевает какие-то изменения, что можно символически
обозначать в виде
D = D(t). D)
Тогда для объема капли мы имеем
V = V(t)= | dr. E)
D{t)
Найдем связь скорости изменения объема капли с уравнениями движе-
движения системы. Для этого рассмотрим множество фазовых траекторий, на™
чинающихся в момент времени t в капле D{t). За время т точки фазо-
фазовой капли с координатами x(t) переместятся так, что их новые положения
будут иметь координаты x(t + г). В предположении, что фазовые траек-
траектории рассматриваемой системы не пересекаются, мы можем утверждать,
что между координатами x(i) и x(t + т) существует взаимно однозначное
соответствие:
Xi(t + т) = Ф.Ы^ x2(t),..., xn(t); г), г = 1, 2,..., п. F)
Явный вид функций Ф^ можно определить, решив систему уравнений A).
Соответствующая фазовая капля D(t) с объемом V(t) превращается за вре™
мя т в фазовую каплю D(t + т) с объемом V(t + т).
Обозначим для краткости
x(t) = ж, x(t-\-r) = у. G)
Тогда соотношение F) задает взаимно однозначную связь между набором
п чисел х и набором п чисел у для каждой из точек фазовых капель D(t)
yi = Фъ(хи хъ,..., хп; г), г = 1, 2,..., п. (8)
К. 18. Теорема Лиувилля-Остроградского 313
Полученное соотношение чисто формально можно интерпретировать
как преобразование системы координат {xi, #2, • • •, %п} в систему коор-
координат {yi, г/2? • • • ? 2/п}- В последней элемент объема равен
df = dy1dy2...dyn. (9)
Как известно, элементы объема dT и dF при преобразовании координат
х —>> 2/ по закону (8) связаны соотношением
) A0)
jp _
Отсюда следует, что
Пусть интервал времени
или
-J;
т мал,
dt) = а
Х2,
0B/1»
Э(Ж1,
Г = |
> 2М
, Жп)
1/2,-..
Ж2,...
dt. Из
dr.
' Уп^ dT
,хп)
A) мы имеем
A2)
A3)
Тогда якобиан преобразования х —>> 2/5 входящий в A1) и равный
detf
i, ж2,.. •, жп) \oxk
может быть найден достаточно просто:
det (^) = det f — + <Й-^Л = det[E + dt • F], A5)
\dxkj \dxk dxkj
где E — единичная n x п-матрица, a F = ( -^1- ). Выделяя в определите-
\dxkj
лях A5) слагаемое наинизшего порядка по dt9 получаем
det (^] = 1 + dt- Sp (^] + О (dt2) = 1 + dtdiv f + О (Л2) .
\dxk J \дхк /
A6)
Подстановка A6) в A1) дает (при т = dt)
Г
+ т) = F(t) + dt dlv / dT, A7)
или
— = div jdF. A8)
dt J
Полученное соотношение и составляет содержание теоремы Лиувилля^
Остроградского.
314 Комментарии
Пусть область D достаточно мала так, что подынтегральное выраже-
выражение в пределах этой области в интеграле A8) можно считать постоянным.
Тогда A8) можно переписать как
V dt дх\ дх2 дхп
Именно в этой форме теорема Лиувилля-Остроградского и использована
в основном тексте.
В частном случае линейной системы, когда
п
fe=l
найдем, что
п
div f = ^Гац=А, B1)
г=1
и для областей фазового пространства произвольного объема получим
t
Adt , Vo = V{0). B2)
В силу инвариантности следа матрицы по отношению к преобразова-
преобразованию поворота величина А представляет собой сумму собственных значе-
значений матрицы А = (dik), т.е. сумму характеристических показателей дина-
динамической системы:
*i- B3)
г=1
Другим следствием теоремы Лиувилля-Остроградского является те-
теорема Лиувилля о сохранении фазового объема гамильтоновой системы.
Пусть динамическая система является гамильтоновой и характеризует-
характеризуется набором 2п переменных х^ jji, г = 1, 2,..., п. При этом уравнения
движения имеют вид
дН . дН
Уг = -т—, х{ = --. B4)
dxi дуг
Тогда
^ дуг) ^\дХг\дуг) дУ Д дхг ) )
Согласно A8) это означает сохранение фазового объема.
К.19. О теории катастроф
В последнее время в научной и околонаучной литературе широко ис-
используется термин "теория катастроф". Различные авторы вкладывают в
К. 19. О теории катастроф
315
этот термин самый разный смысл, зачастую никакого отношения к научной
теории катастроф не имеющей. При этом иногда делаются глобальные, но
совершенно не обоснованные выводы спекулятивного характера. Однако
некоторые из спекуляций выглядят довольно эффектно и даже правдоподоб-
правдоподобно, хотя всерьез и их принимать не следует. Для примера приведем, принад™
лежащий К. Зиману, образчик спекулятивного применения теории катастроф
к исследованию эффективности деятельности творческой личности 1) .
Будем характеризовать творческую личность (например, ученого) тремя
параметрами, называемыми "техника", "увлеченность", "достижения". По-ви-
По-видимому, между этими параметрами должна быть зависимость. Тем самым воз-
возникает поверхность в трехмерном пространстве с координатами (Т, У, Д).
Спроектируем эту поверхность на плоскость (Т, У), перпендикулярную
оси Д. Для поверхности общего положения особенности - складки и сборки
(по теореме Уитни). Утверждается, что сборка, расположенная так, как это
изображено на рис. 1, удовлетворительно
описывает наблюдаемые явления.
Действительно, посмотрим, как в этих
предположениях будут меняться достиже-
достижения ученого в зависимости от его техники
и увлеченности. Если увлеченность неве-
невелика, то достижения монотонно и доволь-
довольно медленно растут с техникой. Если увле-
увлеченность достаточно велика, то наступают
качественно новые явления. В этом случае
достижения с ростом техники могут расти
скачком (такой скачок будет, например, ес-
если техника и увлеченность меняются вдоль
кривой 1 на рис. 1 в точке 2). Область
высоких достижений, в которую мы при
этом попадаем, обозначена на рис. 1 сло-
словом "гении".
С другой стороны, рост увлеченности,
не подкрепленный соответствующим ро-
ростом техники, приводит к катастрофе (на кривой 3 в точке 4, рис. 1), при
которой достижения скачком падают, и мы попадаем в область, обозначенную
на рис. 1 словом "маньяки". Поучительно, что скачки из состояния "гений"
в состояние "маньяк" и обратно происходят на разных линиях, так что
при достаточно большой увлеченности гений и маньяк могут иметь равные
увлеченности и техники, различаясь лишь достижениями (и предысторией).
Зиману принадлежат также многие другие примеры привлечения теории
катастроф к эффектно выглядящему качественному описанию разного рода
явлений в биологии, социологии и других науках. Приведем без пояснений
(см. рис. 2) пример применения катастрофы сборки в этологии для описания
ситуации, когда животное одновременно испытывает ярость и страх.
Недостатки этих моделей и множества аналогичных им спекуляций в
теории катастроф слишком очевидны, чтобы о них говорить подробно.
Рис. 1. Модель "ученый" в про-
пространстве "техника (Т) - увле-
увлеченность (У) — достижения (Д)"
) Арнольд В.И. Теория катастроф. — М.: Физматлит, 1990, с. 12-13.
316
Комментарии
Рис. 2. Модель поведения животного, описываемая катастрофой типа сборки (из
книги: Стюарт Й. Тайны катастроф. — М.: Мир, 1987)
Обращаясь к научно-содержательной стороне вопроса, следует подчерк™
нуть, что катастрофы, катастрофические изменения состояния системы мо-
могут проявляться по-разному в зависимости от типа системы. Соответствен™
но этому различаются и способы их классификации. Так, в главе VII была
рассмотрена классификации числа положений равновесия динамической
системы. Та же классификация, очевидно, применима к анализу числа экс-
экстремумов гладких функций. Последняя может быть полезной при изучении
особенностей геометрических поверхностей. Вместе с тем в ряде случаев
с поверхностями естественно связывается иной тип катастроф, предста-
представляющий интерес для теории волн. Речь идет об особенностях волновых
фронтов, обусловленных пересечением лучей.
Остановимся на последнем вопросе несколько подробнее. Рассмотрим
поведение фронта волны, создаваемой протяженным источником. На рис. 3
К. 19. О теории катастроф
317
Рис. 3. Нахождение нового по-
положения волнового фронта
на основе принципа Гюйген-
Гюйгенса. So — исходное положение
фронта, S — положение фрон-
фронта через некоторое время t
показано положение волнового фронта Sq в начальный момент времени
t = 0. По принципу Гюйгенса, чтобы найти волновой фронт 5 в момент
времени t > 0, нужно в каждой точке по™
верхности Sq провести нормали и на каж-
каждой из этих нормалей, т.е. на соответствую-
соответствующих лучах, отложить в направлении распро-
странения волны отрезки длиной ct, где с —
скорость распространения волны. Геометри-
Геометрическое место всех построенных таким спосо-
способом точек и представляет собой искомый вол™
новой фронт S и называется эквидистантой
исходного фронта. Очевидно, что если фронт
Sq — выпуклый, то лучи при t > 0 не пе-
пересекаются. Если же на каком-либо участке
фронт So вогнут, то лучи пересекаются.
Основным выводом теории катастроф
является утверждение об универсальности
простых типов особенностей волнового
фронта. Эти особенности устойчивы, т.е.
неустранимы при малых вариациях формы
начального фронта So.
Рассмотрим простейший пример дву-
двумерной волны, т.е. волны на плоскости.
Пусть некоторый волновой фронт имеет
форму эллипса. Будем считать волну сходя-
сходящейся, так что начальный волновой фронт
вогнут. На рис. 4 этот фронт обозначен
как Sq. Положения волнового фронта в два
последующих момента времени 0 < t\ <
< ti обозначены на том же рисунке как S\
и 5г. Если фронт S\ (в момент времени i\)
представляет собой гладкую кривую, то уже
фронт S^ (в момент времени t*i) есть кривая с двумя самопересечениями.
Области самопересечения обладают всеми свойствами известной нам
катастрофы типа ласточкин хвост. Интуитивно ясно, что эти особенности
невозможно устранить, слабо меняя форму исходного фронта Sq .
С формально-математической точки зрения эта универсальность свя-
связана со следующим. Моменту бифуркации, т.е. появлению самопересече-
самопересечения, отвечает появление участка фронта нулевой меры (т.е. пятна с нулевой
площадью). Это значит, что в формировании обсуждаемой особенности
волнового фронта участвует бесконечно малый элемент фронта. Все во-
вогнутые гладкие кривые на бесконечно малом участке эквивалентны вне
зависимости от того, какими конкретными функциями они заданы.
В частном случае, когда So представляет собой окружность, все лучи
сходятся в центре. Этот случай является вырожденным, поскольку малым
Рис. 4. Возникновение особен-
особенностей волновых фронтов
318
Комментарии
изменением формы окружность превращается в гладкую вогнутую кри-
кривую, и особенность в центре рассыпается на ласточкины хвосты.
Целесообразно отметить, что катастрофы волновых фронтов в отличие
от катастроф экстремумов происходят не в пространстве параметров за-
задачи, а в реальном, наблюдаемом пространстве, в котором, собственно, и
распространяется изучаемая волна.
Выше говорилось о катастрофе типа ласточкин хвост на плоскости. В
трехмерном пространстве можно выделить набор простейших структурно
Рис. 5. Некоторые особенности трехмерных волновых фронтов
устойчивых катастроф. Рис. 5 показывает поведение трехмерных волновых
фронтов при возникновении некоторых из таких особенностей.
Кроме описания волновых полей на языке волновых фронтов, суще™
ствует еще один, дополнительный способ их анализа. Имеется в виду
описание волновых полей на основе лучевых представлений. Подходы,
основанные на представлении о волновых фронтах и лучах, очевидно эк-
эквивалентны, поскольку, по определению, лучи суть линии, нормальные
к волновым фронтам. Направления лучей есть направления движения
волнового фронта.
Пусть волновой фронт вогнут. Тогда, как это было уже сказано, лучи
пересекаются. В этом случае можно построить огибающую системы лу-
лучей как непрерывную кривую, касающуюся лучей в каждой своей точке.
В математике такая кривая называется эволютой, а исходный волновой
фронт — эвольвентой или инволютой. При этом оказывается, что эволю-
эволюта есть геометрическое место центров кривизны эвольвенты. В физике
К. 20. Об истории представлений нелинейной динамики 319
(в частности, в оптике и в теории волн) эволюту называют каустикой
(от греческого кауатшо^ — жгущий, палящий, воспламеняющийся). Это
название обусловлено тем, что вдоль каустики интенсивность излучения
существенно выше, чем вне ее.
Пример построения каустики при отражении вогнутым зеркалом приве™
ден на рис. 6. Каустика сходящейся двумерной эллиптической волны показа»
Рис. 6. Каустика, возникающая при отраже- Рис. 7. Каустика сходящейся дву-
нии плоской волны вогнутым зеркалом мерной эллиптической волны
на на рис. 7. Обратим внимание на то, что приведенные на рис. 6, 7 каустики
имеют характерные точки возврата того же типа, что и имеющие место в
катастрофе сборки, подробно рассмотренной в основном тексте книги.
Особенности каустик и волновых фронтов по сути своей едины и, кро-
кроме того, тесно связаны с катастрофами в семействе экстремумов гладких
функций. Дело в том, что для построения волнового фронта надо знать фа-
фазу волны как функцию координат. При этом особенности волновых фрон-
фронтов (каустик) определяются числом и типом экстремумов фазы.
В заключение отметим, что катастрофы возникают и во многих других
задачах, например, в задачах об обходе препятствия, задачах оптимального
управления и т.д.
Более подробно с приложениями теории катастроф можно ознакомить™
ся по упомянутой в главе VII книге Т. Постона и И. Стюарта, а также по
монографии: Гилмор Р. Прикладная теория катастроф. Книги 1 и 2. — М.:
Мир, 1984.
К.20. Об истории представлений нелинейной динамики
Начало современной теории динамических систем следует, по-видимому,
отнести к моменту создания механики Ньютоном. Им не только были сфор-
сформулированы общие законы, но и количественно рассмотрены простейшие
виды движения. Как частный случай, были выделены состояния равновесия,
т.е. по современной терминологии — особые точки динамической системы.
320
Комментарии
Для краткости изложения дальнейшие этапы становления теории пред-
представлены в виде следующей ниже схемы. Разумеется, эта схема далеко не
исчерпывает перечня даже наиболее значимых достижений упомянутых в
ней ученых. Приводимые ссылки представляются при этом нам наиболее
важными.
Исаак Ньютон
(Sir Isaac Newton)
Леонард Эйлер
(Leonard Enler)
Пьер Луи Моро де
Мопертюи
(Pierre Louis Moreau de
Maupertuis)
Жан Лерон
Д'Дламбер
(Jean Le Rond
D'Alembert)
Жозеф Луи Лагранж
(Joseph Lois Lagrange)
Уильям Роуан
Гамильтон
(Sir William Rowan
Hamilton)
Жюль Анри Пуанкаре
(Jules Henri Polncare)
"Математические начала натуральной филосо-
философии" (Mathematical Principles of Natural Philosophy),
1686 r.
Три закона механики. Математическое описание
простейших видов движения. Экспериментальное ис-
исследование затухающих колебаний маятника.
Трактат 1736 г., развивающий аналитический под-
подход к механике.
"Метод нахождения кривых линий, обладающих
свойством максимума или минимума" (Methodus
Invenlendl Llneas Curvas Maxlml Mlnlmine Proprletate
Gaudentes. Appendix, De curvls elasticis), 1774 г. Со-
Создание вариационного исчисления. Нахождение рав-
равновесной формы сжатого упругого стержня, установ-
установление возможности существования нескольких поло-
положений равновесия.
Принцип наименьшего действия, 1740 г.
Принцип Д'Аламбера A743) — рассмотрение сил
инерции наряду с реальными, физическими силами.
Теория возмущений движения планет.
"Аналитическая механика" (Mecanlque Analytlque),
1788 г. Принцип виртуальных перемещений в статике,
принцип Д'Аламбера-Лагранжа в динамике. Уравне-
Уравнения движения в форме Лагранжа.
Принцип наименьшего действия в общем виде. Га-
мильтонова форма уравнений механики, 1834 г.
Описание векторного поля фазовых траекторий
дифференциальных уравнений
"Новые методы небесной механики" (Les Methodes
Nouvelles de la Mecanlque Celeste), 1882.
Теория бифуркаций. Индексы Пуанкаре. Прибли-
Приближенные методы решения нелинейных уравнений. Ка-
Качественная теория динамических систем (Программа
Пуанкаре).
К. 20. Об истории представлений нелинейной динамики
321
Александр
Михайлович
Ляпунов
Леонид Исаакович
Мандельштам
Александр
Александрович
Андронов
Николай Николаевич
Боголюбов
М. Морс
(М. Morse)
X. Уитни
(Н. Whitney)
Р. Том
(R. Thorn)
Е.К. Зиман
(E.G. Zeeman)
В.И. Арнольд
"Общая задача об устойчивости движения", 1892.
Современная теория устойчивости равновесия и дви-
движения механических систем с конечным числом па-
параметров. Показатели Ляпунова. Квазиэнергетические
функции (функции Ляпунова).
Научная школа по теории нелинейных колебаний
A927).
Лекции по колебаниям A930-1932 гг.).
"Предельные циклы Пуанкаре и теория колебаний"
(Доклад на IV съезде русских физиков, 1928 г.), теория
автоколебаний. "Теория "грубых" систем" (ДАН СССР,
Т. 14, С. 247, 1937, совместно с Л.С. Понтрягиным),
понятие структурной устойчивости. Теория колебаний
(совместно с А.А. Виттом и С.Э. Хайкиным, первое из-
издание — 1937).
"Введение в нелинейную механику" (Совместно с
Н.М. Крыловым, 1937), строгое математическое обос-
обоснование приближенных методов решения нелинейных
уравнений.
"The critical Points of a Function of nVariables" (Trans.
Am. Math. Soc, V. 33, P. 72, 1931). Структура канониче-
канонических форм функции в окрестности изолированной точки.
"On Singularities of Mapping of Euclidean Spaces. I.
Mapping of the Plane into the Plane" (Ann. Math., V. 62,
P. 374, 1955). Канонические формы отображений в осо-
особых точках.
"Topologlcal Models In Biology" (Topology, v.8, p.313,
1969). "Stabilite stracturelle et morphogenese", 1972.
"Catastrophe Theory: Its Present State and Future
Perspectives", 1974.
Теорема Тома о классификации простейших особен-
особенностей — основная теорема теории катастроф.
"Catastrophe Theory: Selected Papers" A972-1978).
Термин "Теория катастроф".
"Малые знаменатели и проблема устойчивости дви-
движения в классической и небесной механике" (УМН,
Т. 18, вып. 6, С. 91, 1963).
"Лекции о бифуркациях и версальных семействах"
(УМН, Т. 27, Вып.5, С. 119, 1972). "Особенности диф™
ференцируемых отображений" (т.т. I, II, 1982, совмест-
совместно с А.Н. Варченко и СМ. Гусейн-заде).
Общие принципы классификации катастроф, стоха-
стохастическая динамика гамильтоновых систем, диффузия
Арнольда.
21 Н.В. Карлов, Н.А. Кириченко
322 Комментарии
Теория колебаний родилась из попыток количественно описать периоди-
периодические движения (маятник, планеты Солнечной системы). Это требовало аде-
адекватного математического аппарата, что способствовало развитию соответ-
соответствующих разделов математики. К началу XX века в основном сформировал™
ся самодостаточный раздел математики — теория нелинейных динамических
систем со своим языком, специфическими методами. В первой половине XX
века этот раздел математики был взят на вооружение радиофизиками, в
результате чего и возникла теория нелинейных колебаний. Язык теории
колебаний был в дальнейшем перенесен из радиофизики в такие области
знания, как химическая физика, биология, физика плазмы. Надо сказать,
что приложение теории колебаний к целому ряду не радиофизических по
своей сути явлений во многом способствовало пониманию общего в их
природе, как, впрочем, и нахождению этого общего.
Вместе с тем развитие математики шло по своей внутренней логике, и в
наше время невозможно заниматься сколько-нибудь серьезной проблемой,
связанной с колебаниями и волнами, не обращаясь к современной теории
нелинейных динамических систем. В этом смысле употребление термина
"теория колебаний" становится несколько архаичным.
В настоящее время теория нелинейных динамических систем предста™
вляет собой мощный, эффективный математический аппарат, нацеленный
на качественное и количественное исследование поведения многих реаль-
реальных систем. При этом надо помнить, что аппарат сам по себе еще не отра-
отражает закономерностей реального мира. Последнее становится возможным
только после установления соответствия между математическими симво-
символами этого аппарата и объектами реального мира. Это, очевидным образом,
невозможно без конкретизации задачи и понимания существа описывае-
описываемых ею процессов. Сказанное и определяет место теории колебаний (тео-
(теории нелинейных динамических систем, теории самоорганизации, синерге-
синергетики и т.п.) в круге различных научных дисциплин.
К.21. Приближенное решение уравнении Фейгенбаума
Требуется получить приближенное решение уравнения Фейгенбаума
g@) = l. A)
В соответствии со смыслом обсуждения, проведенного в тексте главы VIII,
следует искать решение с гладким параболическим максимумом в точке
х = 0. Тогда можно написать
g(x) = 1 - а2х2 + а4ж4 + ... , B)
где коэффициенты а^ подлежат определению. Подставляя B) в A), имеем
сначала
1 - а2х2 + ... = -ag Л - а2^ + .. .V C)
К. 22. Длина гипотенузы прямоугольного треугольника 323
Для того, чтобы продвинуться далее, допустим, что функция g(x) с
достаточной точностью передается параболой
g(x) = 1 - а2х2 D)
не только вблизи нуля, но и во всем интервале изменений х от х = 0 до
х = 1. Такое допущение оправдано, если коэффициенты а^ достаточно
быстро убывают с ростом номера к. Тогда с учетом D) соотношение C)
приобретает вид
2"
1 — п2Х = —а
- a2 I L ^ a2~
E)
Приравнивая коэффициенты при ж0 и ж2 в правой и левой частях E), имеем
систему двух уравнений для величин а и а2:
Исключая а2, приходим к квадратному уравнению для а:
а2 - 2а - 2 = 0. G)
Это уравнение имеет положительный корень
а = 1 + лД = 2,73 ..., (8)
что с точностью, лучшей 10%, совпадает с точным значением D.28) а =
= 2,50297825 ...
Точность результата может быть повышена путем учета следующих
членов разложения функции g(x) в B). При этом можно проверить, что
коэффициенты а^ в B) убывают по закону
*Й±И ~ -1 - 0,1, (9)
а2к 4ск
так что учет каждого последующего члена в разложении g(x) повышает
точность определения а примерно на порядок.
Подчеркнем, что проведенный анализ существенно базируется на том,
что функция g(x) — гладкая и имеет при х = 0 параболическую вершину,
в которой g/7@) ф 0.
К.22. Длина гипотенузы прямоугольного треугольника
Рассмотрим прямоугольный треугольник с катетами а, Ь и гипотену™
зой с (рис. 1). Как всем хорошо известно, согласно классической теореме
Пифагора
с= \/а2 + Ъ2. A)
Строго говоря, эта теорема доказана для случая, когда в качестве сторон
треугольника фигурируют отрезки прямых. Если же эти отрезки прямых с
той или иной целью заменены более сложными непрерывными кривыми,
21*
324
Комментарии
ломаными или гладкими, но в каком-то пределе неограниченно прибли-
приближающимися к отрезкам а, Ь, с, то результирующее соотношение между
длинами кривых может отличаться от A).
"Докажем", например, что
а в
Рис. 1. Длина гипотенузы
прямоугольного треуголь-
треугольника с__^ mi Lab =
= л/а2 + Ь2 (точная ниж-
нижняя грань берется по всем
кривым, соединяющим
точки А и В)
Рис. 2. Ступенчатая лома-
ломаная линия, аппроксимиру-
аппроксимирующая гипотенузу, имеет
длину Lab = а + Ъ
Рис. 3. Гипотенуза аппро-
аппроксимируется кривой, обра-
образованной гладко соединен-
соединенными полуокружностями.
Эта кривая имеет длину
Lab = (тг/2)>
с = а
5.
B)
Для этого заменим гипотенузу ступенчатой ло-
маной линией со сторонами ступенек, парал-
параллельными катетам треугольника, как это показа-
показано на рис. 2. Очевидно, что длина этой ломаной
равна сумме длин катетов треугольника. Будем
теперь увеличивать число ступенек ломаной, од-
одновременно уменьшая их размеры. На каждом
этапе уменьшения длина ломаной остается, по
построению, неизменной. В пределе ломаная
очевидным образом сольется с гипотенузой, а
длина ее останется по-прежнему равной сумме
длин катетов, "что и требовалось доказать".
Парадоксальный результат B) есть, на са-
самом деле, следствие выбранного способа ап-
аппроксимации гипотенузы и предельного пере-
перехода. Иные аппроксимации могут дать другие,
не менее интересные результаты. Так, например,
можно "показать", что
C)
Для этого разобьем гипотенузу треугольника на
п одинаковых отрезков. Проведем полуокруж-
полуокружности с центрами в середине каждого из этих
отрезков, как показано на рис. 3. В отличие
от предыдущего случая, кривая, аппроксими-
аппроксимирующая гипотенузу, задается уже непрерывно
дифференцируемой функцией. Длина получен-
полученной таким образом кривой, как это легко найти,
равна
тг
с = п-
2
-)
Предельный переход при п —>> оо приводит к
тому, что кривая неограниченно сближается с гипотенузой, а длина ее
остается неизменной и равной C).
Рассмотрим теперь случай еще более гладкой аппроксимации гипо-
гипотенузы с. Пусть на гипотенузу навита синусоида (рис. 4). Разобьем ги-
гипотенузу на п равных участков, каждый из которых содержит полволны
К. 22. Длина гипотенузы прямоугольного треугольника
325
синусоиды. Уравнение синусоиды запишем в А
виде
у = h sin ,
с
E)
где х — координата вдоль гипотенузы, h —
амплитуда синусоиды, с — длина гипотенузы
A). Полная длина синусоиды есть п . w „ т
Рис. 4. Длина кривой Lab
существенно зависит от от-
1 _i_ ( Л2 й — ношения амплитуды h си-
^ ' ~~ нусоиды к ее периоду Т =
= с/Bп), те. от величины
2nh/'л/а2 + Ъ2 (см. форму-
V 1 + a2h2 cos2 axdx] а = ж—. F)
с/п
Очевидная замена переменных сводит F) к виду
уг/2 тг/2
. + h2a2 cos2 (d( = — <
7Г
1 - к2 sin2 (d( =
), G)
где E(A;) — полный эллиптический интеграл второго рода с модулем к =
h2a2
Рассмотрим частные случаи полученного соотношения.
Пусть амплитуда синусоиды h стремится к нулю с ростом числа по-
полуволн п быстрее, чем 1/п. Это значит, что ha —>> 0 при п —>> оо. Тогда
модуль эллиптического интеграла к —> 0. Так как Е@) = тг/2, то в этих
условиях L ^ с при тг —>- оо.
Пусть теперь амплитуда /г стремится к нулю медленнее, чем 1/п (на™
пример, как 1/л/п). Тогда при п —)> оо произведение /га —>> оо, a E(fc) —^ 1.
В результате при n ^ оо из G) следует
L = 2nh —>> оо (8)
вне зависимости от длины гипотенузы A).
Промежуточные случаи, когда nh = const, позволяют получить произ-
произвольное значение L, всегда большее с.
Качественная разница между всеми рассмотренными случаями состеь
ит по сути лишь в способе стремления аппроксимирующей кривой к ги-
гипотенузе как отрезку прямой. Аппроксимация оказывается точной, если
кривизна аппроксимирующей кривой убывает достаточно быстро с ростом
числа шагов. Наоборот, если должное убывание кривизны отсутствует, то
аппроксимация дает результат, сколь угодно сильно отличающийся от ис-
326 Комментарии
тинной длины отрезка. В сущности, недифференцируемость функции Вей™
ерштрасса (9.1) обусловлена этими же причинами: каждое старшее слага-
слагаемое в сумме (9.1) добавляет синусоиду хотя и с убывающей амплитудой,
но с растущей эффективной кривизной.
То же самое обстоятельство приводит и к бесконечной длине фракталь-
фрактальных кривых, например, береговых линий (см. (9.5)).
К.23. Флуктуации в динамических системах
При рассмотрении динамики систем часто пренебрегается влиянием
окружающей среды. Эта среда весьма велика, число ее степеней свободы
значительно превосходит таковое в изучаемой подсистеме. Поэтому изме-
изменение состояния окружающей среды происходит медленно по сравнению с
характерной скоростью процессов в выделенной подсистеме, и ее можно счи-
считать термостатом. Разделение всей системы в целом на подсистему и термо-
термостат неизбежно означает огрубление описания и потому приводит к необхо-
необходимости введения флуктуационных сил. Теория стохастических процессов
к настоящему времени составляет предмет важного раздела математики,
имеющего разнообразные физические приложения. Изложение основных
понятий и методов этой теории можно найти, например, в книге: Гарди-
нер КВ. Стохастические методы в естественных науках. — М.: Мир, 1986.
Релаксационные процессы в интересных для нас случаях обусловлены,
как правило, взаимодействием подсистемы с термостатом. При правиль-
правильном выборе подсистемы и термостата это взаимодействие имеет флукту-
ационный характер. Средняя сила, действующая со стороны термостата
на подсистему, равна нулю. Заметим, что при этом отклик подсистемы в
среднем может быть ненулевым. Наглядным примером здесь служит бро™
уновское движение, при котором средняя сила, действующая на броунов-
броуновскую частицу со стороны остальных, равна нулю, а среднеквадратичное
отклонение частицы от исходного положения растет со временем.
Воспользуемся последним примером для того, чтобы проиллюстриро-
проиллюстрировать один из методов стохастической динамики. Уравнения Ньютона, опи-
описывающие динамику движения броуновской частицы, имеют вид
x = v, mv = -Cv + F(t), A)
где слагаемое (—Cv) учитывает трение между средой и частицей, F(t) —
случайная или, как ее часто называют, ланжевеновская сила. Уравнение,
содержащее случайные внешние силы, называется уравнением Ланжевена.
Такого типа уравнениями описываются, например, флуктуации в электри-
электрических цепях (дробовой и тепловой шумы).
Начальные условия для уравнения A) примем в виде x(t)\t=0 = О,
"(*)lt=o = °-
В гидродинамическом приближении силу трения можно считать сток™
совой. Тогда
С = бтг^Д, B)
К.23. Флуктуации в динамических системах 327
где R — радиус броуновской частицы, sltj — динамическая вязкость среды.
Случайную силу F(t) в соответствии со сказанным выше будем описывать
в приближении "белого шума", т.е. будем считать ее среднее значение рав-
равным нулю, а спектральную плотность — постоянной:
(F(t))=0, K(r) = (F(t + T)F(t))=Gd(r). C)
Здесь К(т) — корреляционная функция, G — спектральная интенсив-
интенсивность, угловые скобки означают усреднение по реализациям.
Решение уравнений A)-C) имеет вид
t t
p(t) = mv(t) = [ехрГ- — (t - t'j\F(t')dt', x(t) = — \p(t')dt'.
J L m J mj
о о
Тогда среднее значение кинетической энергии частицы составляет
D)
2т
t
^-\dt1\dt2 exp [-^ (t - h)] exp [-^ (t - *2I (F(ti)F(t2))
2m J J L m J L туг J
= -^- 1-exp -2-t . E)
Отсюда видно, что покоившаяся в начале броуновская частица набирает
среднюю кинетическую энергию
Ео = G/4C (б)
с характерным временем релаксации
t0 = т/2С. G)
Отметим, что для газов при нормальных условиях величина to составляет
примерно 10~8 с.
Как известно, для газов в равновесных условиях на одну степень сво-
свободы приходится энергия, равная кТ/2. Приравнивая Ео этому значению,
находим из F), что
G = 2СкТ. (8)
Мы получили связь между флуктуационными (спектральная интенсив-
интенсивность G) и диссипативными (вязкое трение С) параметрами системы. Со™
отношение (8) является частным случаем весьма общих так называемых
флуктуационно-диссипативных соотношений.
Для определения характеристик ансамбля броуновских частиц в целом
уравнениям Ланжевена сопоставляются уравнения Фоккера^Планка^Кол-
могорова для функции распределения / (см. комментарий 24). В случае
броуновских частиц это уравнение записывается в виде
dt m dv 2m? dv2
328 Комментарии
Стационарное решение (9) дает хорошо известное распределение Мак™
свелла
/ = const-ехр[-^], A0)
где const определяется из условий нормировки.
Общая идея рассмотрения тех или иных стохастических процессов сво™
дится к следующему. На первом этапе динамические уравнения исследуе-
исследуемого процесса дополняются диссипативными и флуктуационными слагае-
слагаемыми одновременно. При этом флуктуационно-диссипативные соотношения
позволяют правильно установить связь между ними. На втором этапе про™
изводится решение полученных таким образом стохастических уравнений
или соответствующих им уравнений Фоккера-Шанка-Колмогорова. В об-
общем виде стохастические уравнения движения можно записать в виде
dqi(t) = Ki (q(t)) dt + Y^gij (q(t)) dwj(t), A1)
з
где q(t) — вектор состояния системы (обобщенная координата), K(q) —
когерентная сила, входящая в динамические уравнения, gij — структурные
коэффициенты, в общем случае зависящие от q(t), a dwj(t) — дифферен-
дифференциалы флуктуационных сил. Во многих практически важных ситуациях
флуктуационные силы отвечают белому шуму, т.е. обладают следующими
корреляционными свойствами:
(dwi(t)) = 0, (dwi(t)dwj(t)) = Sij dt. A2)
В тех случаях, когда структурные коэффициенты gij не зависят от коор™
динат, стохастические уравнения A1) принято называть уравнениями Лан™
жевена. Если значения gij взяты в начале интервала dt (представление Ито),
то соответствующее формуле A1) уравнение Фоккера-ГЪганка-Колмогорова
имеет вид
Рассмотренный выше частный случай задачи о броуновском движении
(см.A)-C), (9)) получается из общих соотношений A1)—A3), если положить
q= . к= " , Ы =
К.24. Уравнение Фоккера-Планка-Колмогорова
Получим уравнение, которому удовлетворяет функция распределения
(w, t) некоторой случайной величины и. Эта функция нормирована еле™
К. 24. Уравнение Фоккера-Планка-Колмогорова 329
дующим образом:
\f(u,t)du=l. A)
Пусть w{u,t\ ?, т) — вероятность перехода от значения и в момент
времени t к значению и + ? в момент времени t + т. Предполагаем, что
переменная гл изменяется в ходе марковского процесса. Тогда для функции
распределения имеет место уравнение
/ (щ t + т) = | / (и - ?, *)w (и - ?, t; ?, т) d?- B)
Разложим подынтегральное выражение по степеням ? в аргументе и — ?:
f(u-?,t)w(u- С, ?; ?, т) = /(гг, t)ti; (гг, t; ?, т) -
" ?[/(м't)w {щц ^тШ + \ъ^[/{щ t)w {щц ^гЖ"+ •"" C)
Подставляя разложение C) в B) и учитывая нормировку вероятности пе-
перехода
L(M;?,T)d? = l, D)
получим
i[f(u,t + r)-f (и, t)} = -?-[BT{u)f (и, t)] + \^-2[DT{u)f (и, t)],
т ди 2 аи2
E)
где
F)
Наконец, рассматривая малые промежутки времени г и разлагая левую
часть в E) по степеням т, получим окончательно следующее уравнение:
д? = d(Bf) 1 д2 (Df) _
дт ди 2 ди2 ' }
уравнение Фоккера-Планка-Колмогорова. Здесь
В = lim BT(u), D = lim DT(u). (8)
т—>0 т—>0
Для того чтобы уравнение G) было корректным, необходимо, чтобы
пределы В и D в (8) были конечными и дифференцируемыми требуемое
число раз, а все моменты более высокого порядка обращались в нуль, т.е.
lim - hmw(u,t; ?,т) rf? = 0, m = 3, 4,... (9)
330 Комментарии
По сути, предельные переходы т —>> 0 в (8), (9) фиксируют то обсто-
обстоятельство, что рассматриваемый процесс является марковским, т.е. имеет
нулевое время корреляции.
Во многих случаях коэффициенты В и D связаны соотношением В =
= . Тогда уравнение G) может быть записано в дивергентной форме:
2 du
дт 2ди\ ди)
Последнее название связано с тем, что можно ввести плотность потока
вероятности
j = -1d»1 (ID
2 ди Х }
и представить уравнение A0) в виде
^ + - = 0, A2)
dt ди
представляющем собой стандартную запись закона сохранения.
Если и — многокомпонентная величина, и = {ixi, u^, •. • , %}, то
уравнение G) легко обобщается:
^- = -T — (Bif) + -y-^—(Dikf), A3)
дт *-г* дщ 2jL-^ дщдик
г i,k
где коэффициенты переноса Bi и D^fe даются выражениями
Г
Dik = lim-
в которых под ^ понимается вектор ? = {?i, ?2? • • • ? Сп}« Очевидно свой™
ство симметрии: D^ = D^.
Если коэффициенты Bi иД^ связаны соотношениями
к к
то уравнение A3) принимает дивергентную форму
°l = lYi-L(Dik°L\ A6)
дт 2^ диг V дик)' V У
а соответствующий закон сохранения записывается в виде
К.25. Термодинамика, статистическая физика и хаос 331
К.25. Термодинамика, статистическая физика и жаос 1)
Как известно, исходным положением термодинамики является следу™
ющее утверждение.
Предоставленная самой себе изолированная макроскопическая систе-
система приходит в состояние термодинамического равновесия, в котором все
крупномасштабные движения прекратились, скорости прямых и обратных
реакций сравнялись, давление и температура во всех частях системы при-
приняли одинаковые значения. Это утверждение называют иногда общим (или
основным) началом термодинамики.
Термин "макроскопическая система" означает здесь большую систему,
составляемую достаточно большим числом частиц. Например, 1 см3 газа
при нормальных условиях содержит 2,687-1019 частиц (число Лошмидта).
Сказанное есть прямое обобщение всего человеческого опыта, в том
числе и в первую очередь — повседневного опыта. Ввиду особой значи™
мости этого положения его иногда возводят в ранг нулевого или общего
начала термодинамики. Оно выделяет прямое направление течения време-
времени (от прошлого к будущему). Какие бы начальные условия мы ни задали,
изолированная система, в конце концов, придет к одному и тому же конеч-
конечному состоянию — состоянию термодинамического равновесия.
Вместе с тем совокупность частиц может быть, по крайней мере, в
принципе описана уравнениями механики 2) . Эти уравнения, как хорошо
известно, обратимы во времени. Последнее означает, что при одновремен™
ной смене знака скоростей всех частиц система начнет движение в обрат-
обратную сторону по той траектории, по которой она пришла в данное состояние
непосредственно перед сменой знака скоростей.
Таким образом, возникает противоречие между эмпирически установ-
установленным началом термодинамики и законами механики, имеющими столь
же надежные опытные основания. Первое утверждает, что система всегда
и из любых начальных условий стремится к состоянию термодинамиче-
термодинамического равновесия, второе же говорит, что всегда можно указать начальные
условия, стартуя из которых система удаляется от состояния равновесия
(в действительности таких начальных условий бесконечно много). Ясное
понимание существа этого парадокса возникло после установления знаме-
знаменитой Jif-теоремы Больцмана A872 г.). Чтобы сформулировать эту теорему,
необходимо воспользоваться аппаратом кинетического уравнения Больц-
Больцмана. Последнее требует введения функции распределения / (р, г, t). По
определению, функция распределения вводится следующим образом.
Пусть система состоит из N одинаковых частиц. Тогда число частиц в
элементе фазового объема dpdr в момент времени t равно
dN = f(p,r,t)dpdr, A)
) При составлении этого комментария мы частично использовали материал одной из глав
книги: Заславский Г.М. Стохастичность динамических систем. — М.: Наука, 1984, 271 с.
) Мы ограничиваемся случаем классической (не квантовой) механики.
332 Комментарии
причем выполняется условие нормировки
Г Г
\dN = /(р, г, t) dpdr = N. B)
Очевидно, что вводить функцию распределения можно вне зависимо-
зависимости от того, случайно распределение частиц по фазовому пространству или
их движение строго детерминировано.
Для функции распределения /(р, г, i) Л. Больцманом было получено
кинетическое уравнение, называемое ныне его именем:
+v+F[l . C)
dt dr dp UiJst
Здесь v — скорость частицы (v = p/m, m — масса частицы), F — внеш-
внешняя сила, действующая на частицы, вообще говоря, F = F(p, r, i). Симво-
га/i г - - и
лом —-- обозначен так называемый интеграл столкновении ), учиты-
L dt J st
вающий только парные столкновения частиц.
Вывод этого уравнения и явный вид интеграла столкновений можно
найти в любом курсе физической кинетики (см., например: Силин В.П.
Введение в кинетическую теорию газов. — М.: Наука, 1971, 332 с).
Пусть внешние силы отсутствуют, F = 0. Тогда из соображений сим-
симметрии следует, что с течением времени система неизбежно придет к про™
df n Я/
странственно однородному состоянию. В этом случае —^ = Ои — =
дт dt
= — .В стационарном случае — = 0. Следовательно, условием ста-
L dt J st dt
ционарности является обращение в нуль интеграла столкновений. Функ-
Функция распределения, для которой интеграл столкновений обращается в нуль,
оказывается, имеет максвелловский вид:
где m — масса частицы, к — постоянная Больцмана, Т — параметр, про-
порциональный средней кинетической энергии частиц относительно цен™
тра масс системы, т.е. параметр, совпадающий с обычной температурой
для термодинамически равновесного состояния.
Концептуально важным при этом оказывается тот факт, что распреде-
распределение Максвелла D) может быть получено также исходя из предположения
о локальном хаосе в каждой точке пространства, когда все направления
движения частиц равновероятны, а наиболее вероятное состояние системы
определяется только величиной ее полной энергии и числом частиц.
Восходящий к Больцману вывод уравнения C) строго учитывает со™
хранение энергии и импульса при парных столкновениях частиц, проис-
происходящих в соответствии с законами ньютоновской механики. При этом,
) По традиции, восходящей к Больцману, интеграл столкновений снабжается индексом
St, происходящим от немецкого слова Stoss — удар, столкновение.
К.25. Термодинамика, статистическая физика и хаос 333
несмотря на обратимость уравнений Ньютона во времени, из кинетическо-
кинетического уравнения C) вытекает if-теорема
^ О, E)
at
где Н-функция Больцмана определена как
Н= [dp/In/. F)
lf-функция есть среднее значение логарифма функции распределения и
представляет собой взятую со знаком "—" энтропию системы:
Н = -S. G)
Максимальное значение энтропии (или минимальное значение Н) дости-
достигается на равновесном состоянии системы D).
Таким образом, мы видим, что если система подчиняется кинетическо-
кинетическому уравнению Больцмана, то она неизбежно эволюционирует к состоянию,
в котором имеет место локальный хаос.
На этом этапе нашего обсуждения уместно остановиться на дискуссии
Больцмана и его оппонентов. Эта дискуссия отталкивалась от следующих
двух парадоксов.
Парадокс Цермело (парадокс возвращаемости). Если система консерва-
консервативна и осуществляет финитное движение, то любое ее состояние должно
через некоторое достаточно большое время повторяться с любой требуе-
требуемой точностью (не совпадая с ним полностью). Другими словами, имеет
место свойство возвращаемо сти системы (теорема Пуанкаре). Таким об-
образом, система совершает почти циклическое движение (циклы Пуанка-
Пуанкаре), хотя это и не означает строгой периодичности движения во времени.
Значения энтропии в начале и по завершении цикла почти совпадают, что
противоречит Л"-теореме Больцмана о монотонном возрастании энтропии.
Парадокс Лошмидта (парадокс обратимости). Уравнения механики
обратимы во времени. Если имеется последовательность состояний систе-
системы Zi, Z2, ... , Zn, то в силу обратимости движения с тем же правом
существует и обратная последовательность Zn, ... , Z^ Z\. Если в пер-
первой последовательности энтропия растет, то во второй она убывает, что
противоречит Ж-теореме.
Дискуссия протекала достаточно оживленно. В ответ на замечание Цер-
Цермело, что система должна вернуться в исходное состояние, Больцман сказал:
"Долго же Вам придется ждать". А комментируя замечания Лошмидта, что
все частицы можно повернуть в обратную сторону и получить не возраста-
возрастание, а убывание энтропии, Больцман сказал: "Попробуйте повернуть" 1) .
Пожалуй, самое удивительное тут в том, что в этой дискуссии правы
все. Правота Цермело и Лошмидта очевидна, поскольку она базируется
на фундаментальных принципах механики. Правота же Больцмана требует
более тонкого обоснования.
) Слова Л. Больцмана цитируются по упомянутой выше книге Г.М. Заславского.
334 Комментарии
Во-первых, времена возврата, т.е. длительности циклов Пуанкаре мож-
можно оценить с помощью следующей простой модели.
Рассмотрим сосуд объемом V (с характерным линейным размером L =
= V1/3). Пусть в этом сосуде находится газ из N одинаковых частиц, дви-
движущихся хаотически со средней скоростью v. Столкновениями между ча-
частицами пренебрежем (идеальный газ). Последнее означает, что средняя
длина свободного пробега частиц I, обусловленная межчастичными столк-
столкновениями, велика по сравнению с размером сосуда, 1^>L. Пусть в некото-
некоторый начальный момент времени все частицы собрались в одной половине
сосуда. Поскольку все частицы газа движутся независимо, вероятность та-
такого события есть
N
Характерное время пролета частиц из одной половины сосуда в другую
есть
г - L/v. (9)
За время Т >> т происходит Т/т событий перелета частиц из одной по-
половины сосуда в другую. В ходе этих перемещений реализуются различ-
различные распределения частиц между половинами сосуда. Имея в виду, что все
частицы нами как бы пронумерованы, т.е. они различимы, можно утвер-
утверждать, что каждое из таких распределений имеет одну и ту же вероятность,
равную Р. Любое из них, в том числе и интересующее нас начальное рас-
распределение (все частицы находятся в одной половине сосуда), реализуется,
по крайней мере, один раз с большой вероятностью за время Т при условии
Р^ - 1. A0)
т
Отсюда вытекает, что
Т-т/Р = Т'2лг. A1)
Эта оценка и даёт характерный масштаб длительности цикла Пуанкаре.
Пусть L = 10 см, v = 3 • 104 см/с (характерная тепловая скорость при
нормальных условиях). Тогда т ^ 3 • 10~4 с. Следовательно, при N = 10
имеем Т ~ 0,3 с, а уже при N = 70 получаем Т ~ 1010 лет, что совпадает с
оценкой времени существования нашей Вселенной. Заметим, что при глу-
глубоком вакууме, достигаемом в технологических установках (~ 10~10 атм),
число частиц в нашем объеме составляет N ~ 3 • 1012. В этом случае время
Пуанкаре чудовищно велико, Т ^ Ю10 лет.
Таким образом, если для систем с небольшим числом частиц возвраты
к уже пройденным реализациям вполне вероятны, то в случае систем с
большим числом частиц эволюция практически необратима.
Во-вторых, следует ожидать, что в ситуации, описываемой в парадоксе
Лошмидта, увеличение числа частиц также принципиально ограничивает
возможность обращения движения вспять. В самом деле, чтобы повернуть
движение точно вспять, мы должны в одно и то же мгновение поставить
К.25. Термодинамика, статистическая физика и хаос 335
перед каждой из частиц идеально отражающее зеркало. При этом каждое
из зеркал должно быть выставлено абсолютно точно перпендикулярно ско-
скорости каждой из частиц системы ]) . Употребленные здесь слова "точно" и
"в одно и то же мгновение" принципиально важны. Дело в том, что система
многих (N) частиц, характеризуемая фазовой траекторией в 6Ж-мерном
фазовом пространстве, обладает стохастическим поведением. Это означа™
ет, что фазовые траектории с близкими начальными условиями с течением
времени экспоненциально расходятся (см. главу X). Следовательно, малей-
малейшая неточность при попытке обращения движения может привести к то-
му, что полученная таким образом траектория окажется далеко ушедшей
от желаемого направления, и вместо прибытия к начальному состоянию
она будет от него удаляться. Здесь оказывается принципиальным именно
свойство перемешивания траекторий и разбухания фазовых капель.
Используя представление о фазовых каплях, можно дать сказанному
интуитивно более наглядную интерпретацию. Пусть в начальный момент
времени фазовая капля имеет правильную форму и объем Го, например,
как это показано на рис. 10.3 а. Капля эволюционирует и с течением време-
времени приобретает сложную, запутанную, амебообразную форму (рис. 10.3 б).
Естественно, при этом полный объем фазовой жидкости не меняется. По™
явление пустот между "рукавами" фазовой жидкости (между отростками
амебы) приводит к общему разбуханию капли, увеличивая ее огрублен-
огрубленный объем. Термодинамическая необратимость эволюции системы связа™
на именно со сложной структурой разбухшей капли. В самом деле, труд-
трудно ожидать, что капля, представляющая собой клубок сильно перепутанных
траекторий, самопроизвольно распутается и вернется в аккуратную первона-
первоначальную оболочку 2) . Подчеркнем, что возникновение структуры, подобной
показанной на рис. 10.3 б, обусловлено исключительно свойством перемеши™
вания фазовых траекторий, более сильным, чем просто эргодичность.
Проведенное рассуждение дает качественное разрешение парадокса
Цермело (парадокса возвращаемости). Второй парадокс — парадокс обра-
обратимости Лошмидта — рассматривает попытку искусственно (как бы "ру-
"руками") обратить вспять движение системы. На языке фазовых капель этот
парадокс может быть разрешен следующим образом.
Фазовая капля на рис. 10.3 б имеет множество пустот. На самом деле
эти пустоты плотно заполнены фазовыми траекториями, пришедшими сю-
сюда из других, самых различных областей фазового пространства. Другими
словами, в нашей капле перепутано бесконечное число нитей, исходящих
из бесконечного числа различных фазовых капель. При этом все траекто-
) Разумеется, подобную операцию смогли бы успешно осуществить только "демоны
Максвелла".
) " ... если взять обыкновенную бечеву, растянуть ее посреди поля и на полминуты
отвернуться, то окажется, что она за это время собралась в кучу, скрутилась, завязалась в
узлы и превратилась в сплошные петли, а оба ее конца куда-то исчезли. Чтобы распутать
ее, вам придется добрых полчаса просидеть на траве, непрерывно ругаясь". Джером К.
Джером. Трое в лодке, не считая собаки, гл. IX.
336 Комментарии
рии (нити), попавшие в огрубленную каплю, теряют свою индивидуаль-
индивидуальность в том смысле, что, взяв наугад какую-то точку в пределах капли,
мы не можем установить, из какой точки фазового пространства пришла
сюда соответствующая траектория. Именно поэтому попытка обращения
движения вспять (из капли рис. 10.3 б к капле рис. 10.3 а) становится бес-
бессмысленной 1) .
Таким образом, рассуждения Цермело и Лошмидта оправданы для гру-
грубых динамических систем (по терминологии А.А. Андронова), для кото-
которых малые изменения начальных условий не влекут за собой сильных из™
менений траекторий. В обсуждаемом же нами случае система, благодаря
свойству перемешивания (см. главу X), является негрубой. На то обстоя-
обстоятельство, что для обоснования статистических закономерностей требуется
не эргодичность, а перемешивание и связанная с ним локальная неустой-
неустойчивость, обратил внимание Н.С. Крылов A917-1947 гг.).
Развитые к настоящему времени представления нелинейной динамики
о динамическом хаосе Л.Больцману были неизвестны, но его великолепная
физическая интуиция позволила ему понять суть и дать правильные ответы
на замечания оппонентов.
Осталось пояснить два момента: 1) почему в ходе движения системы
многих частиц в ней устанавливается распределение Гиббса (в частном
случае идеального газа — распределение Максвелла); 2) в чем состоит
неправомочность кинетического уравнения Больцмана, из которого вы™
текает Н-теорема.
Первое пояснить просто. То состояние, которое мы называем термо-
термодинамически равновесным, в действительности является наиболее вероят-
вероятным, т.е. занимает наибольшую часть объема в доступной системе области
фазового пространства. Вследствие перемешивания динамический хаос в
этой области фазового пространства выступает как настоящий, случайный
хаос. Это автоматически влечет справедливость (с точностью до малове-
маловероятных флуктуации) распределения Гиббса
Шг ~ехр(-Е{/кТ). A2)
Что касается кинетического уравнения, то, как это выяснилось впо-
впоследствии, при его выводе Больцман использовал упрощенный способ
описания рассматриваемой системы частиц: он исходил из гипотезы воз-
возможности описания системы многих частиц с помощью одночастичной
функцией распределения /(р, г, i).
В действительности же для описания системы частиц необходимо ис-
использовать iV-частичную функцию распределения .F^(pi, i*i, P2, Г2,...
• • • ?Pjv? TNi t). В силу одинаковости частиц эта функция симметрична
относительно перестановки аргументов (р^5 г&) о (ps, rs) для произволь-
произвольной пары индексов к и s. Кроме того, эта функция предполагается норми-
) Проблема окончательно закрывается, если вспомнить, что мир частиц подчиняется
квантовым законам и их соотношениям неопределенности, не позволяющим точно фикси-
фиксировать (одновременно) координаты и импульс частицы.
К.25. Термодинамика, статистическая физика и хаос 337
рованной на единицу. Одночастичная функция распределения F^ связана
с функцией F(n) очевидным соотношением
pi,ri, t) = Fw(pi,rb ... ,pNjrN,t)dp2dr2dp3dr3 .. .dpNdrN.
A3)
Так введенная одночастичная функция распределения с точностью до
нормирующего множителя 1/N совпадает с обычной функцией распреде-
распределения /(pi,ri,t), для которой и было написано кинетическое уравнение
Больцмана: F^ = —/. Аналогично вводятся двухчастичные, трехчастич-
ные и т.д. функции распределения. Например, двухчастичная функция рас-
пределения равна
.. .dpNdrN. A4)
Система описывается цепочкой функций распределения F^\ F^2\
и т.д. При этом чем больше частиц учтено, тем более точно описывается
система.
Если бы все частицы не взаимодействовали друг с другом, их движения
были бы друг от друга независимы. Тогда все многочастичные функции
распределения распались бы на произведения соответствующих одноча-
стичных функций. Если же взаимодействие имеет место, то такой факто-
факторизации уже нет, что учитывается введением корреляционных функций.
Например, для двухчастичной функции F^ имеем
FB) (pbri,p2,r2,t) =
W ^pbrbp2,r2,t), A5)
где G^ — двухчастичная корреляционная функция. Аналогично вводятся
трех- и более частичные корреляционные функции.
Уравнение Больцмана описывает поведение газа, в котором взаимо™
действия (столкновения) частиц довольно редки, что позволило учиты-
учитывать только двухчастичную функцию распределения и соответственно
двухчастичную функцию корреляции. Тем самым пренебрегалось всеми
поправками более высокого порядка. Именно это пренебрежение приве-
привело к такому огрублению описания, которое исключило из рассмотрения
все траектории, ведущие из конечного состояния в начальное. Последнее
и позволило сформулировать и^теорему.
Первым, кто пролил свет на природу if-теоремы Больцмана, был
Н.Н. Боголюбов, который сформулировал цепочку уравнений, связываю™
щую последовательные многочастичные функции распределения. Он по-
показал, как надо обрывать эту цепочку уравнений в зависимости от силы
взаимодействия. Оказалось, что описание возврата требует учета корре-
22 Н.В. Карлов, Н.А. Кириченко
338
Комментарии
ляционных функций порядка, превышающего второй. Некорректный об-
обрыв цепочки Боголюбова и привел к подмене обратимого уравнения Лиу-
вилля для iV-частичной функции распределения необратимым уравнением
Больцмана для одночастичной функции распределения.
К.26. Волны в линияж передачи
Волновые процессы естественным образом возникают в достаточно
протяженных электрических цепях. Наиболее простым является случай
бесконечно длинной последовательности одинаковых элементов. Пусть
этот элемент есть четырехполюсник, как это показано на рис. 1, где Z\ и
Рис. 1. Четырехполюсник — элементарная ячейка линии передачи
Z2 суть комплексные сопротивления (импедансы). Фактически это озна™
чает, что мы имеем переменный ток с временной зависимостью et(Jjt. Для
упрощения записи в большей части наших рассуждений этот множитель
мы не будем выписывать.
С учетом сказанного фрагмент цепи около элемента (ячейки) номер п
представляется электрической схемой, показанной на рис. 2.
и™1 n n+1
Рис. 2. Фрагмент цепи, составленной из одинаковых четырехполюсников
Рассмотрим токи в ячейке номер п. Воспользуемся правилами Кирх-
Кирхгофа для замкнутого контура, для этого выделим фрагмент цепи, условно
обозначив соответствующие токи (см. рис. 3).
Рис. 3. Обозначения токов в п-м элементе цепи
К.26. Волны в линиях передачи 339
В соответствии с правилами Кирхгофа для схемы на рис. 3 имеем
Z\In + ^4,2 — ^4,1 = О?
4-1 = 4 + 4д, A)
4 = 4+i + 4,2-
Исключая токи 4д и 4,2, получаем рекуррентное соотношение
Z1In = Z2(In+1+In-1-2In), B)
связывающее ток в рассматриваемой ячейке п с токами в двух соседних
ячейках (п + 1)и(п — 1). Ввиду линейности этого соотношения решение
можно искать в виде
/„ = 10е"п, C)
где параметр /i подлежит определению, а Iq есть ток в ячейке с номером
п = 0. Подстановка C) в B) дает
Таким образом, найдя /л из уравнения D), мы можем с помощью C)
найти ток в любой ячейке.
Поскольку рассматриваемая цепь не содержит источников энергии, ток
в любой ячейке цепи должен быть конечным. Это накладывает ограниче-
ограничения на допустимые решения уравнения D). Пусть, например, отношение
Zi/Z2 — действительное число. Такое возможно в трех случаях: Z\ и Z2
оба суть либо активные, либо реактивные сопротивления, либо они суть
числа комплексные, но пропорциональны друг другу. В этих случаях, обо-
обозначая ё1 = q, получаем из D) для q квадратное уравнение
( + ^Wl = 05 E)
откуда
При
1 +
< 1 имеем два комплексно-сопряженных корня gi =
2Z2
По теореме Виета это означает, что \q± | = \q21 = 1. Тогда из представления
q = ем следует, что параметр fi — величина чисто мнимая, /i = in. Это в
свою очередь означает (см. C)) существование в цепи на рис. 2 незатуха™
ющих колебаний, 4 = 1оегкп.
В тех случаях, когда
1 +
> 1, уравнение E) имеет два действитель-
2Z2
пых корня, из которых один больше единицы, а другой — меньше единицы.
Требованию конечности тока при п —>> оо отвечает только корень меньше
единицы q < 1, т. е. /i < 0. Это означает, что ток в цепи затухает по мере
22*
340 Комментарии
удаления от начальной ячейки. Обратим внимание на то обстоятельство, что
даже в том случае, когда сопротивления Z\ и Z2 являются чисто реактивны-
реактивными, т. е. диссипации энергии нет, ток тем не менее затухает с ростом п.
Вспомним теперь, что мы имеем дело с синусоидальным током I ^
~ 1оегш1 и рассмотрим случай, когда в цепи существует незатухающее ко-
колебание, то есть выполняется условие
1 +
< 1. Тогда с учетом C)
2Z2
ток в цепи можно представить как
In = A exp[ia;t + inn] + В exp[ia;t — inn], G)
где А и В — константы, задаваемые начальными условиями, ак= |/х|.
Обозначив пространственное расстояние между ячейками символом а
и введя пространственную координату х = па9 перепишем G) в виде
/(ж, i) = A exp[iwt + ikx] + В exp[iwt — ikx], (8)
где введено волновое число к = к/а. В такой записи очевидно, что полу™
ченное решение есть суперпозиция двух волн, бегущих в противополож-
противоположных направлениях со скоростью
v = - = —. (9)
к к
Пусть Z\ имеет чисто индуктивный, a Z2 — чисто емкостной характер,
Z\ = iuL и Z2 = t/(iujC). Тогда
Zt/Z2 = ^uo2LG, A0)
Переходя от значения индуктивности L и емкости С для одиночных яче™
ек к значениям L\ и С\, приходящимся на единицу длины цепи, то есть
переходя к погонным значениям L\ = L/a, C\ = С/а, получаем
Zt/Z2 = -ш2а2Ь1С1. A1)
Теперь мы произведем переход к пределу непрерывной линии. Для это™
го учтем, что ток должен меняться достаточно слабо при переходе от од™
ной ячейки к другой. Из C) следует, что для этого требуется выполнение
условия \fi\ <C 1. Тогда из D) получаем, что
/i ^ л/Щ^. A2)
Ограничиваясь случаем незатухающих колебаний и полагая к2 = —fi2 =
= — Z1/Z2, с учетом (9) и A0) получаем, что скорость волны
у= , г . A3)
Примером рассмотренной континуальной цепи является линия Лехе-
ра, состоящая из двух параллельных проводов, расположенных достаточно
близко друг от друга. При этом расстояние между проводами должно быть
много меньше длины волны электромагнитного излучения, распространяв
ющегося по этой линии. Прямой расчет значений погонных значений емко-
емкости и индуктивности для линии Лехера приводит после подстановки полу-
К.27. Волновое сопротивление 341
ченных значений в A3) к выводу, что скорость волны в этой системе равна
скорости света: v = с.
Исходное уравнение B), которое было получено для явно дискретной
ситуации, в континуальном пределе может быть записано как обычное вол-
волновое уравнение. В самом деле, если заметить, что
/n+i + /„-1 - 2/„ = a2lxx, A4)
то с учетом (9), A0) можно записать уравнение B) как
hx + ^1 = 0, A5)
что представляет собой волновое уравнение для колебательного процесса
с частотой и9 распространяющегося со скоростью v.
Следует иметь в виду, что уравнение A5) лишь приближенно описыва-
описывает волновой процесс в рассматриваемой системе. Более точное уравнение
может быть получено, если провести более точное разложение в A4) и
взять более точное, чем в A2), решение уравнения D). Полученные таким
образом поправки к A5) будут содержать более высокие степени ш и бо-
более высокие порядки производных по х. Все это вместе взятое означает
наличие дисперсии.
К.27. Волновое сопротивление
В комментарии 26 мы получили волновое уравнение для тока в длин-
длинной однородной линии без потерь в виде
дх2 v2
Перепишем это уравнение, введя в рассмотрении в явном виде производную
по времени и учитывая, что для гармонических процессов ш = —id/dt:
^-1^=0. B)
дх2 v2 dt2 1 ;
С целью найти связь между током вдоль линии I и напряжением на
линии V получим это уравнение еще раз для однородной длинной линии
без потерь, обладающей погонными индуктивностью L и емкостью С, не
прибегая к эквивалентным схемам.
По закону Фарадея при изменении тока в цепи со скоростью (dl/dt) из-
изменение напряжения на участке линии длиной dx и индуктивностью L dx
составляет AV = (dV /дх) dx = —Ldx (dl/(c2dt)), что дает
^ = -±L°L. C)
дх с2 dt
Здесь с — скорость света в вакууме 1) .
) Здесь мы пользуемся гауссовой системой единиц.
342 Комментарии
Аналогично при изменении напряжения на конденсаторе емкостью
С dx со скоростью (dV/dt) изменение тока вдоль линии составляет А/ =
= (dl/dx) dx = ^Cdx (8V/8t). Это дает
д-1 = -С9^. D)
дх dt w
Дифференцируя C) и D) по координате и времени и выполняя соответ-
соответствующие подстановки, легко получить волновое уравнение для тока и для
напряжения:
^ = ^ЬСдХ E)
дх2 с2 dt2 w
*v = !lc«X F)
дх2 с2 dt2 x J
Таким образом, волны тока и напряжения описываются уравнением B), в
котором
<7)
Решение волнового уравнения хорошо известно:
) /2 (
где F\, F2 и /i, /2 — произвольные функции, описывающие волны напря-
напряжения (i7) и тока (/), бегущие в положительном (индекс ") и отрицатель™
ном (индекс ") направлениях оси X.
Найдем связь между током и напряжением в этой однородной линии.
Воспользуемся C) и (8).
dt
аж ~ с2 at*
Здесь штрих означает производную по всему аргументу функций Fi^ и
/i,2 соответственно.
Рассмотрим отдельно прямую и обратную волны, то есть волны, бегу™
щие в положительном и отрицательном направлениях оси X соответствен-
соответственно. Для прямой волны
IWt-?) = lL/f (*-?). A0)
Для процессов волновых, то есть переменных во времени, постоянные со™
ставляющие не играют роли. Следовательно, из A0) следует, что
Л (*--) = ^-Fi (*-?) . (П)
К.27. Волновое сопротивление 343
Аналогично для обратной волны имеем
/а (*+-) =-^2 (*+^) . A2)
Следовательно, ток вдоль линии связан с напряжением на линии простым
соотношением, полностью подобным закону Ома:
= f- Ы (<--)+ F2 U + -)} = ±V (x, t), A3)
где введено обозначение
Z
\[— A4)
с2 с V С Cv l ;
для так называемого волнового сопротивления длинной линии, иногда име-
именуемого волновым или характеристическим импедансом.
В линии, составленной из чисто реактивных элементов L и G, то есть
в линии без омических потерь, волновое сопротивление — величина дей™
ствительная. Наличие потерь энергии меняет ситуацию.
Пусть индуктивность L обладает омическим сопротивлением R, а ем-
емкость С имеет конечную омическую проводимость G. Другими словами,
погонная индуктивность L сопровождается последовательно включенным
погонным сопротивлением R, а погонная емкость С шунтируется погон™
ной проводимостью G. Тогда падение напряжения вдоль линии определя-
определяется не только индуктивностью, но и падением напряжения на по с ледова™
тельном сопротивлении, и, в отличие от C), мы имеем
™=-±L*-RI. A5)
дх с2 dt
Аналогично ток поперечной утечки состоит не только из тока смещения
через конденсатор С, но и из тока через шунтирующую конденсатор про-
проводимость G. В результате находим
% = -С%- GV. A6)
дх dt
Для гармонических колебаний вида el(Jjt соотношения A5) и A6) при-
принимают вид ])
г = -("+*?)'• <">
— = - (G + го;С) V, A8)
dx
) В данном комментарии мы записываем волну, бегущую в положительном направле-
направлении в виде rsj ex.p[iout — ikx], где Re k > 0. Соответственно для обратной волны имеем
^ exp[iwt + ikx].
344 Комментарии
откуда легко получить уравнение
d2V
dx2
Здесь введена постоянная распространения
A9)
7 = \ (я + iw—) {G + гшС) = a + i/3. B0)
V v с2/
Как известно, решение уравнения A9) имеет вид
V = Ае^х + Бе7Ж, B1)
так что подстановка B1) в A7) приводит к следующему выражению для
тока:
I = 7 (Ае^х Ве1Х) = (
х - Ве1Х) . B2)
Здесь коэффициент
¦ iujL/c2
7 V G + гшС
B3)
имеет смысл волнового сопротивления и является комплексной величиной.
В реальных линиях передач омические потери всегда малы, 2
G <^шС. Тогда можно считать, что
где волновое сопротивление Z® линии без потерь дается формулой A4).
В волновых линиях передачи мнимая составляющая волнового сопро™
тивления определяется последовательным сопротивлением и параллельной
(поперечной) проводимостью линии, то есть величинами, определяющими
омические потери. Действительно, рассмотрим прямую волну, то есть вол-
ну, бегущую в положительном направлении (первое слагаемое в B1)):
V = Ае~1Х. B5)
Согласно B0) постоянная распространения j = а + i/З содержит коэф™
фициент затухания а, который при малых потерях (Д < wL/c2, G <^шС)
равен
а = Re 7 = • B6)
2Z0 2
Комплексность волнового сопротивления проявления тогда, когда в линиях
возникают потери энергии. Вместе с тем в том же приближении малых
потерь мнимая часть 7 равна
I 1 RCt 2 i R 4
I с + с
В = Im 7 = —vLC I - с + с + ^-^ + ... . B7)
И ! с V Auj2LC 8ш2Ь2 8u;2C2 ) l ;
К.27. Волновое сопротивление 345
Отсюда видно, что в линейном по омическим потерям приближении коэф-
коэффициент /3 не зависит от R и G:
P^^VbC=^ = ^ B8)
С V Л
и имеет смысл волнового числа.
Погонные индуктивность и емкость для двухпроводной линии, со-
состоящей из тонких цилиндрических приводов, даются известными фор™
мулами 1)
L = 2/xln-, С=—-—, B9)
а 2 In d/a
где а — диаметр проводов, d — расстояние между ними (а <С d), e — ди-
диэлектрическая проницаемость, a /i — магнитная проницаемость среды,
заполняющей пространство между проводами. С учетом этого скорость
распространения волны согласно (8) равна
с ее
= -, C0)
л/ЬС
где п — показатель преломления среды. Соответственно волновое со-
сопротивление линии без потерь в гауссовой системе единиц составляет
согласно A4):
с V С с V е
Иногда удобно иметь дело с системой единиц СИ и измерять волновое
сопротивление в Омах. Для этого следует заменить сопротивление C1) ве-
величиной, умноженной на с/4тг. Тогда
гу 1 ш 1 d /o_
Zo = —\ --hi-. C2)
2тг V ? а>
Так как в системе СИ
/1 — /1i/1q, S — ?l?(h W-*/
где /ii и s\ — относительные магнитная и диэлектрическая проницаемости
среды, /xq = 4тг-10~7Гн/м, eq = = 10™9 Ф/м — соответствующие
4тге2 Збтг
проницаемости вакуума, то
Zo = 60W — • In - [Ом], C4)
V ?i a
где учтено, что
= 120тг[Ом]. C5)
) Сивухин Д.В. Общий курс физики. Электричество. — М.: Наука, 1983.
346
Комментарии
Параметр y/fio/eo возникает и в ситуации, которая, на первый взгляд,
выглядит совершенно иной. Рассмотрим следующую задачу 1) .
Пусть линия передачи образова™
на двумя плоскими широкими метал-
металлическими лентами, параллельными
друг другу (см. рис. 1), причем рассто-
расстояние d между ними мало по сравне-
сравнению с их размерами по ширине (h) и
по длине (I). Фактически такая двух-
двухпроводная линия является открытым
полосковым волноводом. По лентам
текут токи, равные по величине и про-
противоположные по направлению. Тогда
на основании теоремы о циркуляции
h
Рис. 1. Линия передачи, состоящая
из двух металлических пластин (по-
(поло сковый волновод)
магнитное поле Н между лентами равно
C6)
(мы пользуемся здесь системой единиц СИ). Аналогично по теореме
Гаусса для электрического поля Е имеем
Е =
C7)
где а — поверхностная плотность зарядов. С другой стороны, в этой
геометрии электрическое поле можно связать с разностью потенциалов
между лентами V:
Е = ?-. C8)
а
Подчеркнем, что формулы C6)-C8) являются приближенными, поскольку
они получены в приближении идеального плоского конденсатора. Поэтому
их дальнейшее применение носит оценочный характер.
Введем обозначение
Z = - = —-
I Hh
C9)
и осуществим предельный переход к свободному пространству, удерживая
при этом отношение d/h = 1. Тогда
z.
Я
С другой стороны, согласно C6) и C7) отношение Е/Н равно
Е_ _ ah
Н ~ ?l?Ol'
D0)
D1)
) Слэтер Дж. Передача ультракоротких радиоволн. — М.-Л.: ОГИЗ ГИТТЛ, 1947.
К.27. Волновое сопротивление 347
Учтем, что поверхностная плотность заряда а = q/(hl), где q — полный
заряд на ленте, а ток I = qv/l, где v — скорость движения зарядов. Это дает
I = —¦ D2)
Скорость v можно определить, если учесть, что рассматриваемый вол-
волновод суть двухпроводная линия передачи, для которой 1/v = л/Щ1 =
э". Поэтому
D3)
В частности, волновое сопротивление вакуума (е± = /ii = 1) составляет
^о = VW^o = 120тг [Ом] = 377 [Ом]. D4)
Пусть линия передачи с волновым сопротивлением Zq является конеч™
ной и нагруженной на некоторое сопротивление ZH (сопротивление нагруз-
нагрузки). В точке подключения нарушена однородность электрической цепи. Как
это обычно бывает, наличие неоднородности ведет к появлению отражен™
ных волн. Рассмотрим это явление подробнее.
В точке нарушения однородности должны выполняться законы Кирх™
гофа. Это означает, что при прохождении этой точки напряжение и ток
должны оставаться непрерывными.
Пусть величина напряжения на зажимах нагрузки Zn составляет VH, a
полное напряжение в линии V слагается из напряжения прямой волны, бегу-
бегущей в положительном направлении Fo , и напряжения отраженной волны,
бегущей в отрицательном направлении Vo . Тогда в точке подключения
V = Voi+) + Vt] = К- D5)
Аналогично сумма волн тока, бегущих в положительном (ц ') и в от™
дательном
нагрузке /н:
рицательном (ц ^) направлениях в подводящей линии Z®, равна току в
4+) + 4 ) = 'н. D6)
Но 4+) = Fo(+)/^o, lt] = V^/i-Zo), 4 = VJZR. Тогда
F(+) y(-) у yWty(-)
Zq Z® Zh Zm
Отсюда легко получить величину коэффициента отражения по напряжению
где k — Zo/ZH — коэффициент согласования сопротивлений подводящей
линии и нагрузки. При к = 1 отраженная волна отсутствует.
348
Комментарии
Рассмотренное явление отражения волн в длинной линии полностью
аналогично эффекту отражения света на границе раздела сред с различаю-
различающимися оптическими свойствами. Будем характеризовать среды их диэлек™
трическими и магнитными проницаемостями е±9 fix и s^ /i2 соответствен-
соответственно. Предположим, что граница раздела сред является плоской и отделяет
одно от другого два свободных полупространства. Тогда в соответствии с
D0) и D3) коэффициент к равен
к =
и для коэффициента отражения р мы имеем
_
D9)
E0)
Это совпадает с френелевским амплитудным коэффициентом отражения
при нормальном падении на плоскую границу раздела. В частном случае
//]_ = /х2 = 1 из C0) находим показатели преломления: п\ = ^/Е{ и п^ =
= -s/62, что приводит к широко известному соотношению
Р =
E1)
Введение понятия волнового сопротивления (волнового импеданса) для
линий передачи, протяженность которых много больше длины волны рас™
пространяющегося в них излучения, может показаться искусственным и
ненужным. Это не так. Линии передачи служат, как это явствует из их на™
звания, для передачи энергии от источника (генератора) к нагрузке. Они
практически всегда имеют конечную длину,
| | будучи с одного конца замкнутыми на внутрен-
П П нее сопротивление источника, а с другого — на
I I ^° ^н| I сопротивление нагрузки.
В случае цепей постоянного тока или ква-
квазистационарных цепей переменного тока ис™
точник всегда непосредственно включен на
нагрузку. Как правило, омическим и реактив-
реактивным сопротивлением подводящих проводов в
этих случаях можно пренебречь. Тогда, как это
широко известно, мощность, выделяемая на
нагрузке, максимальна при равенстве сопро-
сопротивления нагрузки внутреннему сопротивле-
сопротивлению источника. Это легко видеть с помощью схемы рис. 2, показывающей
источник ЭДС Eq с внутренним сопротивлением Rq, нагруженный сопро-
сопротивлением RM. На основании закона Ома для замкнутой цепи легко найти
мощность, выделяемую на нагрузке:
Рис. 2. Электрическая цепь,
содержащая ЭДС Eq с вну-
внутренним сопротивлением Rq
и нагрузку с сопротивлени-
сопротивлением RH
(До + Ruf
E2)
К.27. Волновое сопротивление 349
Эта величина достигает максимального значения при RH = Rq, причем
При этом на внутреннем сопротивлении источника, очевидно, выделяется
точно такая же мощность 1) :
= $-. E4)
iXQ -ГСН
В нестационарных цепях существенны волновые процессы и важную
роль играет неизбежно присутствующая длинная линия передачи между
источником и нагрузкой.
Для источника линия является нагрузкой. Точка подсоединения источ-
источника к линии (входной фланец линии) есть место, где длинная линия неод-
породна, место ее начала. Передача энергии через это место максимальна в
отсутствие отражений. Отражений нет, когда волновое сопротивление рав-
равно внутреннему сопротивлению источника. Аналогично, неоднородность
возникает на выходном конце линии (на выходном фланце), где подсоеди-
подсоединена нагрузка. Подводимое к нагрузке излучение не отражается, когда ее
сопротивление равно волновому сопротивлению линии передачи.
Таким образом, передача энергии от генератора в нагрузку максималь™
на тогда, когда равны друг другу сопротивление нагрузки, внутреннее со™
противление генератора и волновое сопротивление связывающей их ли™
нии передачи. Как говорят в таких случаях, генератор согласован с линией
передачи, а линия передачи согласована с нагрузкой. К этому, собствен™
но, и сводится смысл понятия волнового сопротивления длинной линии
передачи. В сущности, это такая характеристика волноводных устройств,
определяемая их конструкцией, размерами и свойствами наполняющей их
среды, которая свидетельствует об их способности передавать колебатель™
ную энергию от известного генератора к известной нагрузке. Знание зави-
зависимости величины волнового сопротивления от конструкционных особен™
ностей длинной линии позволяет оптимизировать передачу энергии.
Заметим, что при работе линии передачи на свободное пространство,
например, в радиолокации или в радиоастрономии, приходится согласовы-
согласовывать волновое сопротивление антенно-фидерных трактов с сопротивлени-
сопротивлением в 120тгОм = 3770м.
Понятие волнового сопротивления можно связать с понятием потока
энергии. Последнее дается вектором Пойнтинга. В системе СИ вектор Пой-
нтинга равен Q = [ЕН]. Вследствие поперечности волны векторы ЕиН
) Это означает, что всякая попытка передать некоторое количество энергии тому
или иному адресату неизбежно сопровождается выделением в источнике такой же (или
большей) энергии. Пожалуй, в этом утверждении можно увидеть глубокий философский
смысл, сопоставимый с тем, который отражен в началах термодинамики: генератор энергии
должен быть способен выдержать энерговыделение в самом себе, не меньшее того, которое
посылает на объект воздействия.
350
Комментарии
взаимно перпендикулярны, и для случая, показанного на рис. 1, находим
h d
IV
—
S
IV2
- — ,
S Zo
E5)
где S — площадь поперечного сечения "волновода". Полученное соотно-
соотношение не только дает еще одну интерпретацию понятию волнового сопро-
сопротивления, но и позволяет оценивать напряженность электрического поля в
электромагнитной волне, если известен поток энергии QS.
Понятие волнового сопротивления используется не только в электро-
электродинамике, но и в акустике. Для жидкости или газа волновое сопротив-
сопротивление определяется как отношение давления в плоской бегущей волне
к скорости частиц среды, для твердого тела — как отношение механи-
механического напряжения к колебательной скорости частиц. Смысл понятия
волнового сопротивления в акустике тот же, что и в электродинамике:
коэффициент отражения плоских волн при нормальном падении на пло-
плоскую границу раздела двух сред определяется только отношением волно-
волновых сопротивлений этих сред и обращается в нуль при их равенстве друг
другу (см. формулу D8)). Поэтому в технической акустике важную про-
проблему представляет согласование волновых сопротивлений излучения и
среды распространения звука (ультразвука).
К.28. О дифракции волн (интеграл Кирхгофа)
Под дифракцией понимается явление огибания волнами препятствий,
при котором траектории лучей отличаются от тех, которые предписыва-
предписываются законами геометрической оптики (принципом Ферма, см. приложе-
приложение 1). Как известно, из волнового уравне-
уравнения вытекают утверждения, известные как
соотношения неопределенностей:
Ак^Ах
- 2тг5
AKAz
АкуАу
- 2тг5
¦2тг,
A)
где Акх, Аку, Akz — характерные разбро-
разбросы значений волнового вектора, а Ах, At/,
Az — характерные размеры неоднородно-
стей среды, в которой распространяется
волна, то есть размеры отверстий и препят-
препятствий, преодолеваемых волной. Поясним
происхождение этих соотношений. Пусть
на непрозрачный экран, в котором про-
проделана длинная щель шириной d, падает
плоская волна. Для простоты считаем, что волна падает по нормали к
нему (см. рис. 1).
Рис. 1. Плоская волна падает
на непрозрачный экран Э с ще-
щелью, d — ширина щели, в —
угол дифракции
К.28. О дифракции волн (интеграл Кирхгофа) 351
Волну, прошедшую через щель, обозначим как А(х, z, i). Тогда
B)
При z > 0 монохроматическая волна с частотой и описывается уравнением
Гельмгольца
V2A+— А = 0, C)
с2
решение которого, зависящее от координат х и z, можно записать в виде
A(ar,;M) = e-iw* f Akexp[z(fcxz + fc*^] —. D)
J 2тг
Здесь числа kx и fc^ связаны условием
kl + kl = ^^k2. E)
С2
Коэффициенты А^ представляют собой Фурье-компоненты ступенчатой
функции B):
Эта функция определяет эффективную ширину Фурье-спектра по перемен™
ной кх: ширина основного максимума находится из условия kxd/2 = тг,
то есть кх = 2ж/d. Это и означает, что характерный разброс значений
кх определяется условием kxd ~ 2тг, т.е. соотношением A). В свою оче-
очередь, появление такого разброса в значениях волнового вектора означает,
что лучи отклоняются от своего первоначального направления вдоль оси
z. Заменяя кх = к sin в и рассматривая малые отклонения лучей в <С 1,
найдем характерные значения угла дифракции:
^- = ^. G)
Ы d
На расстоянии z от экрана пучок уширяется на величину 9z ^ Xz/d.
В соответствии с этим выделяются три случая.
1) Если уширение мало по сравнению с исходным поперечным разме-
размером пучка, т. е. если
^z<t:d или — >1, (8а)
d Xz
то мы имеем дело с геометрической оптикой.
2) Если
— z^d или — ~ 1, (86)
d Xz
то имеет место дифракция Френеля.
352
Комментарии
3) Если
d
или
f- «1,
(8e)
то наблюдается дифракция Фраунгофера.
Возникающие ситуации удобно характеризовать с помощью волнового
Xz -,. d kd t-j.
параметра q = — или числа Френеля р = — = . Для выделенных
d2 Az 2ttz
выше частных случаев имеем
р ^> 1 — геометрическая оптика, (9а)
р ~ 1 — дифракция Френеля, (96)
р <С 1 — дифракция Фраунгофера. (9в)
Пусть монохроматическая волна имеет частоту ш, волновое число к =
= ш/с и длину волны А = 2тт/к = 2ттс/ш. Эта волна описывается уравне-
уравнением Гельмгольца C). Для ряда практически важных случаев его решение
можно найти с помощью принципа Гюйгенса^Френеля:
АР= \AF—K(a)df.
A0)
Здесь Ар — поле в точках исходного положения волнового фронта F,
К (а) — функция видности, определяемая углом а, под которым площадка
df видна из точки наблюдения Р (см. рис. 2).
Явный вид функция К (а) найден Г.Р. Кирх-
Кирхгофом и записывается следующим образом:
) = —:A + cosa),
к(о) = А.
2тгг
(и)
Выражение A0), A1) называется интегра-
интегралом Кирхгофа. Строго говоря, такое ре-
решение справедливо только на расстояниях
точки Р от поверхности F много больших
длины волны, г >> А. Если имеются экраны,
частично загораживающие волновой фронт,
то предполагается, что их роль сводится
только к "отсечению" (в непосредственной
близости от них) соответствующих частей
фронта точно такому же, какое имеет место
в пределе геометрической оптики. Такое
приближение, очевидно, не всегда коррект-
корректно, поскольку не учитывает законов взаи-
взаимодействия излучения с веществом экрана,
приводящих к искажениям волнового поля, особенно сильным вблизи
экрана. Для описания электромагнитных волн приближение A0), A1) не
Рис. 2. Нахождение волнового
поля в точке Р с помощью
принципа Гюйгенса-Френеля:
каждая точка исходного вол-
волнового фронта F является ис-
источником вторичных сфериче-
сферических волн Гюйгенса Арегкг/г,
которые, доходя до точки на-
наблюдения Р со своими фазами,
интерферируют и формируют
поле Ар
К. 28. О дифракции волн (интеграл Кирхгофа)
353
вполне корректно еще и потому, что оно не учитывает их векторного
характера и, в частности, их поперечности. Однако на расстояниях, много
больших длины волны, многие специфические особенности векторных
волн исчезают, и качественно, а в ряде случаев — и количественно, картина
их дифракции оказывается такой же, как и для скалярных волн.
Отметим, что при расчете волновых полей часто опираются на интуитив-
но ясный принцип предельного поглощения, состоящий в том, что решение
волнового уравнения в среде без поглощения является пределом ограничен-
ограниченного решения в поглощающей среде, когда поглощение стремится к нулю.
Рассчитаем с помощью интеграла Кирх-
Кирхгофа дифракцию на некоторых простейших
преградах.
1. Дифракции на краю экрана. Пусть
плоская волна падает на экран, "отсекаю™
щий" половину волнового фронта (рис. 3).
При расчете поля обычно предполага-
предполагается, что часть волнового фронта F, даю-
дающая существенный вклад в поле в точке
Р, видна под небольшим углом а, так что
с достаточной точностью в интеграле A0)
можно считать К (а) « К{0). Будем также
предполагать, что значения поперечной ко™
Р(х,?)
<К
ординаты х удовлетворяют условию х\ <С
<^ z. Последнее, в частности, означает, что
можно произвести разложение величины г:
т2
—, A2)
Рис. 3. Плоская волна падает
на непрозрачный экран Э, лежа-
лежащий в плоскости z = 0. Поле
изучается в точке наблюдения
Р. Ось абсцисс х ориентирова-
ориентирована перпендикулярно краю экра-
экрана, а ось ординат у направлена
вдоль края (на рисунке не пока-
показана). Край экрана имеет коор-
координаты х = 0, z = 0
Как уже отмечалось, необходимым услови-
условием применимости интеграла Кирхгофа явля™
ется неравенство z ^> А, т. е. kz ^> 1. Поэтому экспонента в интеграле
совершает большое число осцилляции, тогда как величина г^1 меняется
много медленнее. Поэтому заменим под интегралом г™1 « z™1. Тогда с
учетом A2) получим
+ ОО +ОО
ikz С С / /
A(x,y,z) « К@)Ао dx' dy' exp I ik-
2z
kz
?2
exp ( ik— j d^ | exp j ik^- j drj =
2z .
= Aoeik
,z). A3)
23 H.B. Карлов, Н.А. Кириченко
354
Комментарии
1,0
0,6
0,2
о
/
Л
/ ^
/
/
/
/
\ АЛЛ
-2
Рис. 4. Зависимость интенсивности /(ж) от координаты ж, отсчитываемой от края
экрана; область х < 0 соответствует геометрической тени, хо = ^/2z/k
Здесь введена функция
В A3) переменные интегрирования (V,t/) перечисляют точки волнового
фронта. Зависимость от переменной у выпала из окончательного результа-
результата вследствие трансляционной инвариантности рассматриваемой системы
в направлении вдоль щели (координаты у).
Функция R(x,z) выражается через интегралы Френеля 1)
С (и) = а - I cos(r2)dr5 С (-и) = -С {и), С(+оо) = -;
V тг J 2
S(u) = J- Lm
V 7Г J
A4)
S(-u) = -
Соответственно для интенсивности волны I = \А\2 в области z > 0 найдем 2)
I{x,y,z) = ^h
A5)
) Использованы определения интегралов Френеля, приведенные в справочнике: Град-
штейн И.С, Рыжик И.М. Таблицы интегралов, сумм, рядов и произведений. — М.: Наука,
1971. В других справочниках определения иногда отличаются от приведенного.
) В случае электромагнитного поля, строго говоря, интенсивность связана с амплитудой
напряженности электрического поля соотношением 1= спЕ^/8тт, где п — показатель пре-
преломления среды. Мы, однако, не будем явно выписывать множитель сп/8тт (за исключением
тех случаев, когда это действительно необходимо).
К. 28. О дифракции волн (интеграл Кирхгофа)
355
График этой функции приведен на рис. 4. Нетрудно показать, что в
рамках использованного приближения 1@) = 0,25/q.
2. Дифракции на щели. Пусть плоская волна падает на экран со ще™
лью ширины Ь (рис. 5).
Рис. 5. Плоская волна падает на непрозрачный экран Э со щелью. Экран лежит в
плоскости z = 0. Поле изучается в точке наблюдения Р@, z). Ось х ориентирована
перпендикулярно краю экрана, а ось у — вдоль края (на рисунке не показана);
Х2 —- х\ = Ь
Будем предполагать, что точка наблюдения Р имеет абсциссу х = 0, а
края щели — соответственно х = х\ ш х = х2. Повторяя рассуждения из
предыдущего примера, с учетом сказанного найдем
R(xi,x2,z)
A6)
i[S(u2) -
ui =xi\hr
Входящая сюда функция R(xi,X2,z) связана с введенной в A3) функцией
R(x, z) простым соотношением: R(xi, x^z) = R(x2, z) — R(xi, z). В пре-
предельном случае, когда открыт весь волновой фронт, х\ —>• ^оо, Х2 —>- +оо,
из (8) найдем R(x1,x2j z) —)> 1, А(Р) —)> Aoeikz.
Соотношение A6) дает простой способ оценки волнового поля в точке
наблюдения Р в зависимости от размера открытой части волнового фрон-
фронта. Именно, построим на комплексной плоскости график функции, задава-
задаваемый в параметрическом виде уравнениями
Х(и) = С(и), Y{u) = S(u) A7)
(см. рис. 6). Соответствующая кривая называется спиралью Корню или кло~
тоидой. Правая ветвь спирали описывает вклад правой (относительно точ~
23*
356
Комментарии
ад
0,6
0,4
0,2
0
0,2
-0,4
-0,6
-0,6 -0,4 -0,2 0 0,2 0,4 0,6 С(и)
Рис. 6. Спираль Корню (клотоида). Отрезок прямой L представляет открытую
часть волнового фронта. Его длина связана с интенсивностью волны соотноше-
соотношением A8)
ки Р) части волнового фронта на рис. 5, а левая ветвь — вклад левой ча-
части волнового фронта. Квадрат длины радиус-вектора L2, проведенного из
одной точки спирали в другую, пропорционален интенсивности волны в
точке Р:
I = \l0L2{A, В) = 1/0 \(С(и2) - СЮJ + (S(u2) - S(Ul)f]. A8)
3. Дифракции на прямоугольном отверстии. В том случае, когда вол™
новой фронт ограничен не только по оси ж, но и по оси у, амплитуда волны
в точке наблюдения оказывается равной
/
/
(
о
/
У
л
) \
)
А(Р) =
, v, z
A9)
Как и выше, точка наблюдения имеет координаты х = 0, у = 0, а числа Х{9
yi (i = 1? 2) представляют собой координаты краев отверстия.
4. Поле вдали от отверстия. Вдали от отверстия, когда
Т 2 77 2
^ < 1, ^ < 1, B0)
реализуется дифракция Фраунгофера. Здесь а и b — размеры щели по осям
х и у соответственно. Выберем координаты (ж, у) так, чтобы центру щели
соответствовала точка х = 0, у = 0. Заменяя переменные интегрирования
в функциях R(xi,X2, z) и R(yi, V2^z) с учетом неравенств B0) и выполняя
К. 28. О дифракции волн (интеграл Кирхгофа)
357
простое интегрирование, получим поле в точке Р{х1у):
А(Р) = A0etkzR(xux2iz)R(yuy2,z);
R(xux2,z) « J
V zwiz j
R(xux2,z) « J^— I exp ( ife
exp
27riz J F \ 2z
i^rt2 / t2
— exp ( г A; —
7 x
ka—
,, z
2/1
6/2
2z
v
— exp I ik^~
2z
2z
Здесь x и у — координаты точки наблюдения относительно центра щели.
Наконец, для интенсивности излучения в плоскости экрана найдем
1=\А(Р)\2 =
) sin (
2zJ V 2z
2z
B1)
где /max = ^"o ( — ) — интенсивность излучения в точке наблюдения, рас-
\\z /
положенной на оси щели (х = 0, у = 0), а /о — интенсивность волны,
падающей на отверстие. Формулу B1) обычно записывают, вводя углы ди-
дифракции
а - х а - У
B2)
т. е. углы, под которыми видна точка наблюдения из отверстия. Тогда
sin2 I -kaOx J sin2 f -кЪву
\кавх
-кЬв
B3)
358
Комментарии
Рис. 7. го = го± + гоц, го± и
г01| — проекции вектора го на
нормаль к плоскости и на плос-
плоскость экрана Э соответственно
длину Го sin <
5. Дифракции Фраунгофера на круг-
круглом отверстии. Пусть плоская волна па-
падает на круглое отверстие радиуса К
Выберем начало координат О в центре
отверстия в экране Э и введем следующие
обозначения (см. рис. 7): г — вектор,
соединяющий произвольную точку экра™
на и точку наблюдения Р, г0 — радиус-
вектор точки наблюдения Р, р — радиус™
вектор произвольной точки экрана, г =
= го — р, 9 — угол между вектором го и
нормалью к плоскости экрана, (р — угол
между проекцией вектора го на плоскость
экрана и вектором р. Тогда проекция век™
тора го на плоскость экрана будет иметь
и для расстояния г находим выражение
г = \/(гд — рJ = угд + р2 — 2rop sin в cos (р « го — р sin в cos (р. B4)
Здесь мы учли, что в условиях дифракции Фраунгофера г® ^> р для всех
точек отверстия. Заметим, что в указанном приближении величина tq
практически совпадает с расстоянием z от точки Р до экрана, г® ~ z.
Элемент площади в используемых координатах записывается в виде df =
= pdp-dip. Будем считать, что в плоскости экрана волна имеет фазу, равную
нулю, и положим Ар = Aq. Заменяя в интеграле Кирхгофа A0) величину
г на го в знаменателе, получим двойной интеграл
R 2тг
А(Р)? от
О О
Интеграл по угловой переменной равен
sin в cos
2тг
^ — ib cos
- 2irJ0(b), b^kpsind,
B5)
B6)
о
где Jq (%) — функция Бесселя нулевого порядка. Интеграл по радиальной
координате равен
R
^M q = к 8Ш0.
Mqp)pdp =
B7)
Здесь J\ (x) — функция Бесселя первого порядка. В результате поле в точке
Р оказывается равным
2iro
qR
B8)
К. 28. О дифракции волн (интеграл Кирхгофа)
359
Отсюда для интенсивности излучения в заданном направлении 9 находим
— Т 19 г
— -1 max " I L —
qR
¦^max —
жВ?
B9)
Наконец, в случае kR^>l и малых углов дифракции (sin 9?ав<^ 1) получим
(зо)
Из последней формулы следует, в частности, что 1@) обращается в нуль
при 0 « 0,61 А/Л, что и определяет дифракционную расходимость пучка
излучения в данной геометрии.
6. Дифракция на широком отверстии. Ниже мы будем рассматривать
дифрагировавшую волну только на оси отверстия, то есть при х = 0, у = 0.
Сопоставим два случая: квадратное и круглое отверстия.
а) Волна, дифрагировавшая на квадратном отверстии, может быть най-
найдена из общей формулы A9):
АР =
Ip = 2 Jo
Отсюда следует, что по мере увеличения размера отверстия а интенсив™
ность 1р совершает затухающие колебания (см. рис. 4), приближаясь к зна-
значению интенсивности Iq для падающей волны. При этом скорость зату-
затухания осцилляции достаточно велика, так что уже для отверстий размера
а ^ Бу/z/k поле в точке Р мало отличается от такового для случая, когда
открыт весь волновой фронт. Заметим, что выводы не меняются и в том
случае, если при расчете волнового поля не использовать разложения A2)
в показателе экспоненты в интеграле Кирхгофа.
б) Волна, дифрагировавшая на круглом отверстии, может быть найдена
из общего интеграла Кирхгофа A0). Учтем, что, согласно рис. 8,
df = 2тг pdp = 2ттгёг.
Полагая, что волна А®егкг падает по нормали к плоскости отверстия, най-
найдем
R
АР = 2ттА0 f K(r)eikrdr, К (г) = К {а). C2)
о
360
Комментарии
z=0
Рис. 8. К расчету дифракции на Рис. 9. График зависимости интенсивно-
круглом отверстии, г — радиус-вектор сти в точке наблюдения Р на оси отвер-
точки наблюдения Р относительно стия от его радиуса, kz = 3000
площадки df волнового фронта, р —
радиальная координата площадки,
R — радиус отверстия
Если угол, под которым видно отверстие из точки Р, мал, то К(а)&К@) =
= к/2т, так что
АР =
Последняя формула при
IP = 4I0sin2 [i
z принимает более простой вид:
т л т • 2 \ ^^
Ip = 4 Jo sm' ^— .
4
C3)
C4)
График зависимости Ip от радиуса отверстия R показан на рис. 9.
Кроме того, на рис. 10 показана соответствующая фазовая диаграмма
Re[Ap(R)/A0]
-0,5
-1,0
Рис. 10. Фазовая диаграмма изменения амплитуды поля Ар при изменении ради-
радиуса круглого отверстия, kz = 3000, 0 < R < 672z
{Re Ар (R), Im Ар (R)}. На этой диаграмме все точки кривой лежат прак-
практически на одной окружности радиуса Ао.
К.28. О дифракции волн (интеграл Кирхгофа) 361
Таким образом, в рассматриваемом приближении интенсивность излу-
излучения 1р совершает незатухающие колебания по мере увеличения радиуса
отверстия.
Колебания интенсивности будут затухающими, если учесть, например,
угловую зависимость функции К (а), входящей в интеграл Кирхгофа (т. е.
изменение видности площадки df из точки наблюдения), или ослабление
излучения, доходящего до точки Р, обусловленное поглощением его в сре-
среде. Однако необходимо, чтобы вклад участка волнового фронта в ампли™
туду Ар уменьшался до нуля по мере удаления его от точки наблюдения.
В этой связи следует заметить, что не спасает дело учет функции К (а),
даваемой соотношением A1), поскольку она убывает всего лишь в два ра-
раза при возрастании угла а от 0 до тг/2. Для такой функции К (а) график
изменения интенсивности с ростом R приведен на рис. 11.
/До
4
20 40 60 80 100 120 R
Рис. 11. График зависимости интенсивности излучения на оси круглого отверстия
от его радиуса R. Расстояние от плоскости отверстия до точки наблюдения z = 20,
волновое число к = 10. Учтена угловая зависимость функции видности К (а)
Таким образом, возникает противоречие между двумя способами пре™
дельного перехода к полностью открытому волновому фронту: когда мы
изучаем расширяющуюся последовательность отверстий, имеющих форму
а) квадратов (прямоугольников) и б) окружностей. В первом случае, когда
сторона квадрата а —>¦ оо, интенсивность I —>• /о даже без учета каких-либо
дополнительных факторов (спираль Корню достаточно быстро закручива-
закручивается к своим фокусам). Во втором же случае осцилляции I(R) при измене-
нии радиуса отверстия R не имеют тенденции затухать (соответствующая
спираль на рис. 10 не закручивается к фокусу при R —>> оо, а имеет вид
правильной окружности).
Данное противоречие становится очевидным, если попытаться вычис-
вычислить интеграл
[()] C5)
F
рассматривая в качестве области интегрирования F квадраты со сторо™
362
Комментарии
ной а и круги радиуса R, а затем выполняя предельный переход а —>• оо
и R —>> оо. В первом случае, когда F = FKBWaT = {|ж| ^ а/2, |г/| ^ а/2},
при вычислении удобно использовать декартовы координаты, так что df =
= dxdy. Тогда двойной интеграл факторизуется и оказывается равным
«/2
Л
вадрат
При а -+ ОО ./квадрат
iS (-а
) ;
TTi/jJL.
C6)
Тот же интеграл C5), рассматриваемый в круге F = FKpyr = {г ^ R},
вычисляется путем перехода к полярным координатам {г, ср}: полагая df =
= 2тг г dr, получим
R
«/круг = ej^p(ifir2J7rrdr = — [l — ex.p(ifiR2)]. C7)
J M
о
Очевидно, что интеграл JKpyr не имеет определенного значения при R —>> оо.
Следовательно, интеграл J не имеет определенного значения в пре-
пределе, когда область F расширяется до целой плоскости: для получения
конкретных значений необходимо также явно указать форму области, для
которой осуществляется предельный переход.
С формальной точки зрения отсутствие определенного предела обу-
обусловлено тем, что интеграл C5) не сходится абсолютно, поскольку модуль
подынтегральной функции не убывает (или — в более общем случае —
слабо убывает) по мере роста аргумента. В такой ситуации изменение фор-
формы области интегрирования означает перестановку слагаемых в ряду, пред-
ставляющем определенный интеграл, и может вести к изменению значения
суммы этого ряда.
Покажем, что добавки к интегралу C7), воз-
возникающие при дополнении круга FKpyr до квадра™
та кадрах, полностью компенсируют осцилляции
JKpyr(R). Рассмотрим случай, когда радиус R кру-
круга велик. Пусть круг радиуса R вписан в квадрат
со стороной 2R (см. рис. 12). Вся область интегри-
интегрирования в интеграле «/квадрат разбивается на пять
частей: круг и четыре криволинейных треуголь-
треугольника (ограниченные окружностью и сторонами
квадрата). Интеграл по кругу JKpyr дается форму-
формулой C7). Оценим интеграл по одному криволи-
криволинейному треугольнику (вклад каждого из четырех
треугольников в JKBimpaT, очевидно, одинаков):
Рис. 12. К расчету интен-
интенсивности волны, дифраги-
дифрагировавшей на круглом и
квадратном отверстиях
JTpeyr =
df = rdrdtp.
C8)
треуг
К. 29. Метод параболического уравнения в оптике 363
Из рис. 12 легко видеть, что для одного треугольника
(f(r) = arccos (— ) ; ^^р(г) ^ ^ ^ ^(г)-
4 V г /
Следовательно, интеграл по площади одного треугольника JTpeyr принимает вид
Г
JTpeyr = 2 ex.p(i/ir2)(p(r)rdr. C9)
JTpeyr
R
Когда величина /i велика (или велик радиус R), интеграл нетрудно оценить,
имея в виду, что экспонента быстро осциллирует, а функция ip(r) меняется
много медленнее. Тогда
Jipeyr « ИДУ2)еХрBг^)-^(Д)еХр(^) = *
г/i 4/х
В результате получаем
Лвадрат = Лруг + 4Jrpcyr = — [l - ex.p(ifiR2)] + 4^ exp(i/iE2) = —.
/i 4/i /i
D1)
Последний результат совпадает с тем, который получается предельным
переходом ачоов случае квадратной области.
На языке зон Френеля, широко используемом для различных оценок вол-
волновых полей, сказанное может быть интерпретировано следующим образом.
Каждая зона Френеля вносит почти одинаковый по величине вклад в поле
в точке наблюдения Р (как и раньше, предполагается, что эта точка нахо-
находится на оси отверстия). При этом вклад от двух соседних зон противопо-
противоположен по знаку. Поэтому в случае отверстия круглой формы поле в точке
Р осциллирует с ростом R по мере открытия новых зон. Если же отверстие
имеет квадратную форму, то по мере увеличения отверстия полное число зон
Френеля, участвующих в формировании поля Ар, растет как N « 2R2/Xz
BttR2 — площадь круга, в который вписан квадрат со стороной Ry/2 (см.
рис. 12), wXz — площадь одной зоны Френеля). Из них половина (Ni «
« R2/Xz) представляет собой полные зоны и приходится на круг радиуса R,
вписанный в квадрат, а остальные (N2 « R2 /Xz) перекрываются квадратом
лишь частично. В результате именно эти неполные, добавочные участки и
приводят к гашению осцилляции интенсивности.
К.29. Метод параболического уравнения в оптике
Для исследования многих задач оптики широко применяется метод па™
раболического уравнения, ориентированный на описание параксиальных
пучков излучения, то есть пучков с малым углом расходимости. Для этого
случая исходное волновое уравнение может быть сведено к некоторому
уравнению, называемому параболическим или квазиоптическим уравнени-
уравнением, которое в ряде практически важных ситуаций допускает относительно
простое исследование.
364 Комментарии
Квазиоптическое (параболическое) уравнение. Пусть электромагнит-
электромагнитное поле распространяется в среде с диэлектрической проницаемостью е.
Для упрощения мы отвлекаемся от тензорных свойств диэлектрической
проницаемости и эффектов поляризации поля. Будем также считать, что
среда пространственно однородна, то есть е = const.
Исходя из уравнений Максвелла
otH
с dt
D = eE, В =
полагая /i = 1 и исключая магнитное поле, можно получить волновое урав-
нения для электрического поля:
1^^у2Е = 0. B)
с2 at2 l ;
Пусть пучок излучения с частотой ш распространяется вдоль оси z. Будем
искать приближенное решение уравнения B) в виде
Е(г, t) = eE(r) exp[i(kz - out)}, C)
где е — единичный вектор поляризации волны, а волновой вектор к и ча-
частота ш связаны соотношением к = —у/ё. При записи решения в виде C)
с
предполагается, что пучок является почти параллельным (параксиальным),
причем отклонение траектории лучей от оси z обусловлено эффектами ди-
дифракции. Это означает, что амплитуда Е(г) меняется много медленнее, чем
фаза:
дЕ
< Е, D)
= 0. E)
Л
а.
Подставляя C) в B), получим
Здесь А±= 1 лапласиан в плоскости р = {ж, у}, перпендикуляр-
дх2 ду2
ной к направлению распространения пучка z. Будем рассматривать узкие
пучки, эффективная ширина которых а мала по сравнению с характерной
длиной R вдоль оси z, на которой существенно меняется амплитуда Е(г):
а«? F)
С учетом неравенств D), F) в уравнении E) можно пренебречь производ-
д2Е
ной по сравнению с другими слагаемыми. Это приводит к искомому
OZ
уравнению
2гк— + А±Е = 0. G)
К. 29. Метод параболического уравнения в оптике 365
Параболическое уравнение G) широко используется при изучении рас-
распространения узких пучков излучения. В ряде задач это уравнение оказы-
оказывается более удобным, чем интеграл Кирхгофа (см. комментарий 28).
Фокусировка пучка излучения. В качестве первого примера приме™
нения уравнения G) найдем профиль сходящегося пучка излучения. Будем
считать пучок радиально симметричным. Тогда исходное уравнение может
быть переписано в виде
о.7 дЕ 1 д ( дЕ\
2^— + -— [р— =0, (8)
dz р ар \ op J
где использованы полярные координаты {р, z}. Ищем решение в автомо-
автомодельной форме
? = -^- (9)
в которой подлежат определению функции a(z), b(z) и Ф(?). Подставляя
(9) в (8), получим уравнение:
S de V 2 dz J di \2 a dzj l ;
Поскольку переменные ? и z независимы, то необходимо, чтобы
d(b2) ^ Ь2 da
—^—- = const, = const
dz a dz
или
Ьа(*)=6§A + /«)> Ф)=A + ^. (И)
где bo, ао,тш \i — некоторые константы. При т = 0 уравнение A0) имеет
простейшее решение:
Ф = ехрG0, 7 = \ikblli. A2)
Если принять, что на границе z = 0 поле имеет гауссовский профиль
A3)
2%
то из (9), A1), A2) следует а0 = Ео, /i = ¦— и
Щ
, z) = ^^ ехр [ ^ 1, D = — = -. A4)
Здесь введена дифракционная длина пучка z^ = -kb\. Соответственно для
интенсивности излучения получим
J(P*) = ТТТ7
366
Комментарии
т. е. при z = 0 вместо A3) следует записать
,0) = До ехр [-?-**?].
Тогда из A2), A7) следует ц = — .В результате находим
kbg F
Пусть теперь на пути пучка излучения поставлена идеальная тонкая
линза с фокусным расстоянием F. Это значит, что сразу после линзы вол-
волновой фронт представляет собой поверхность сферы с центром в точке
z = F. Это можно интерпретировать так, что в плоскости z = 0 волна
приобретает дополнительную фазу
T^)^ A6)
A7)
F
Zd
A8)
A9)
B0)
Из этого выражения, в частности, следует, что минимальная ширина пучка
Rrain достигается в точке z = zmin, где
F Ro
E(p,z) =
EQ
exp
%1-1+iD
Отсюда для интенсивности излучения получим
/(Лг) = 7о-Й-«р{--?-
где введена эффективная ширина пучка R(z) по интенсивности
^ \ 2
. , /р/„ \2' --nun I ( , ч2 1 -и, - — -и- 1/1)
Дифракция на круглом отверстии. В качестве второго примера рас™
смотрим дифракцию волны на круглом отверстии. Пусть плоская волна
Е = Еоегкг падает по нормали на экран, в котором проделано отверстие
радиуса R. Считаем, что экран расположен в плоскости z = 0. Относи™
тельно отверстия будем предполагать, что его радиус велик по сравнению
с длиной волны излучения, kR ^> 1. Тогда в плоскости z = 0 поле, про™
шедшее через отверстие, будет равно
Е(р,0) =
0, р > R.
B2)
Ищем частное решение уравнения G) в виде i?i(p, z\ q) = exp(inz +
+ щр). Подстановка этого выражения в уравнение G) приводит к связи
К. 29. Метод параболического уравнения в оптике 367
к = —q2/2k. Тогда общее решение можно записать как суперпозицию
частных решений:
B3)
в которой коэффициенты Ео(ц) определяются из граничного условия B2):
Е0(Ч) = f^(p1,0)exp(^iqp1)d2pb B4)
где интегрирование выполняется по площади отверстия. Подставляя B4)
в B3), приходим к решению в форме
Г Г / 2 \ d2
, z) = Е{ръ O)d2pt exp f -i — z + iq(p - p±) \ —— =
К I T7i/ r\\ I -l \H Hi.) I 1'A @K\
2тгг.
Интеграл по d2q вычисляется следующим способом:
2тг
:92
. , \ d2q Г / ,q2 \ qdq Г
^qb = ехр ^г — z exp
о о
V У 2тг
о о
где для краткости введено обозначение Ъ = р — pi. Величина Jo (ж) есть
функция Бесселя нулевого порядка.
Соотношение B5) дает решение уравнения G) для произвольной фор-
формы отверстия. Нетрудно увидеть, что оно практически эквивалентно ре-
решению волнового уравнения в форме интеграла Кирхгофа (см. коммента-
комментарий 28), записанного в приближении малых углов дифракции.
Рассмотрим теперь круглое отверстие и найдем волновое поле на боль™
ших расстояниях от него, где выполняется условие дифракции Фраунго™
фера, z ^> kR2. Пренебрегая малым слагаемым —^ ~ <С 1, пред ста-
Z Z
вим показатель экспоненты в интеграле B5) в виде ik——^— « гк-
., ррг ., р2 ., ppi cos (р ^
— гк1111- = гк1— — гк Выполняя интегрирование сначала по уг-
z 2z z
368 Комментарии
ловои, а затем по радиальной переменной, получим
R
/ 2 \ Г
Т?( \ ^ ZP I *7 Р I О Т (^'РР1\ J
Ь(р, z) = Ь® exp «^^ ZttJq I ^^^ J pidpi =
27riz V 2z/ J \ z J
о
f ч р
exp zfc —
kpR 2z
Здесь Ji(x) есть функция Бесселя первого порядка. Отсюда для интенсив-
интенсивности дифрагировавшей волны найдем
/]€J- Bб)
Здесь /о — интенсивность волны, падающей на отверстие, а /щах — мак-
максимальная интенсивность дифрагировавшей волны (на расстоянии z), до-
достигаемая на оси отверстия. Кроме того, введен угол дифракции
который предполагается малым.
Напомним, что найденная функция Е(г) представляет собой амплиту-
амплитуду волны в записи C), так что полное решение содержит также фазовый
множитель exp[i(fcz — cot)].
Обратим внимание на качественное отличие картины дифракции в слу-
случаях гауссова пучка и плоской волны, дифрагировавшей на отверстии. В
первом случае интенсивность монотонно убывает по мере удаления от оси
пучка, тогда как во втором — убывание происходит в осциллирующем ре™
жиме. Это различие связано с профилем пучка, входящего в область z > 0.
Для гауссова пучка все фазовые соотношения между интерферирующи-
интерферирующими лучами оказываются "оптимальными", ведущими к подавлению осцил-
осцилляции. В случае автомодельных решений гауссовского типа для получе-
получения осцилляции необходимо рассматривать на входе в среду суперпозицию
волн вида Рп(р) ехр(^р2/а2), где Рп{р) — полиномы n-й степени. Такая
суперпозиция позволяет описать любой начальный профиль излучения и
любые моды дифракции.
Эйкональное приближение для квазиоптического уравнения. Для упро-
упрощения уравнения G) будем искать его решение в виде
B7)
где ks(p, z) — добавка к эйконалу, возникающая из-за деформации волно-
волнового фронта в нелинейной среде. Амплитуда Eq и фаза ks в B7) предпола-
предполагаются действительными. Поставляя B7) в G) и отделяя действительную
К. 29. Метод параболического уравнения в оптике 369
и мнимую части, получим систему двух уравнений:
э, B8а)
я . у.^-и,,.^-, ¦ -„-^-=0. B86)
OZ
Введем вектор
u = V±s, B9)
где V^ = i hj —. Этот вектор лежит в плоскости р = {ж, у} и задает
дх ду
проекцию направления распространения луча (волнового вектора) на штос™
кость р (фактически, |и| — это тангенс угла наклона волнового вектора
к ки
луча к оси z: iga = — = — = и). Тогда, применяя к B8а) оператор Vj_,
kz к
перепишем это уравнение в виде
C0)
Здесь мы перешли от амплитуды поля Ео к интенсивности I = —
8тг
С учетом сказанного уравнение B86) принимает следующий вид:
— +div_L(uJ) = 0. C1)
dz
Соотношения C0), C1) представляют собой замкнутую систему урав™
нений для интенсивности волны I и отклонения лучей от оси пучка и и
являются основными для последующего анализа динамики узких пучков.
Мы будем далее рассматривать только осесимметричные пучки. Вве~
дем цилиндрические координаты {/?, z}. Тогда вектор и имеет только ра-
радиальную компоненту ир = и, причем все величины могут зависеть только
от р и z. С учетом этого перепишем исходную систему в виде
ди , ди 1 д \ 1 1 д ( длД\] /ао ч
Ь и— = — о . C2а)
dz dp 2др[к2лДрдр V др )\
+ 0. C26)
dz p др
Автомодельное решение для гауссовского пучка. В качестве примера
применения уравнений C2) рассмотрим распространение осесимметрич-
ного пучка излучения. Уравнения C2) допускают автомодельное решение
вида
^[^] C3.)
u(p,z) = рф(г), C36)
24 Н.В. Карлов, Н.А. Кириченко
370 Комментарии
где Rq = R@). Подстановка выражения C3а) в последнее слагаемое в
C2а) дает
2др[к2л/1 рдр V др )\
а левая часть уравнения C2а) при использовании выражения C36) прини-
принимает вид
ди ди ( dib . ,2\ пп
Ь и— = р I —^ + ф ] . C5)
dz dp \dz /
Приравнивая C4) и C5), получаем обыкновенное дифференциальное урав-
уравнение
dib /2l /^r\
Ь ц) = . C6)
UZ К ль
Подстановка выражений C3) в уравнение C26) дает еще одно уравнение:
/ Х Ш лил
Ф = • C7)
R dz
Исключая из C6), C7) функцию ф, получим дифференциальное уравнение
второго порядка для R(z):
Уравнение C8) должно быть дополнено начальными условиями. Эти
условия вытекают из представления решения в форме C3). Именно, если
пучок с начальным радиусом R® сфокусирован на расстояние z = F, то
R\z=o = Яо, u\z=0 = -¦?-, C9а)
или, согласно C36), C7),
R\z=o —
dR
dz
z=o F '
C96)
Решение уравнения C8) с этими условиями приводит к зависимости ради™
уса пучка от координаты z (см. B0)), полученной ранее другим методом.
Заметим в этой связи, что зависимость C9а) наклона и луча от радиальной
координаты отвечает добавке A6) к фазе волны А (р (и соответственно к
ко2
эйконалу As), равной А(р = к As = ———, учет которой был необходим
IF
для описания фокусировки пучка излучения с помощью параболического
уравнения (8). Действительно, в осесимметричном случае и = —. Тогда
др
согласно C9а) при z = 0 оказывается s = sq — —.
К.30. Обратная решетка 371
К.30. Обратнам решетка
Пусть свойства среды периодичны по пространству, то есть описыва-
описывающий их потенциал является периодической функцией координат:
С7(г + а) = С7(г), A)
где вектор а есть пространственный период решетки, составленный из
основных периодов решетки ai, а2, аз:
а = niai + в2а2 + п3а3. B)
Здесь п\ь в2, щ — произвольные целые числа. Разложим функцию U(r)
в ряд Фурье:
U(r) = J2 иь ехр BтггЬг) C)
ь
Множество допустимых векторов b образует геометрический объект, ко-
который, собственно, и называется обратной решеткой. Если бы векторы
{аъ а2, аз} были взаимно ортогональными, то разложение C) представля-
представляло собой обычное разложение Фурье, а вектор b можно было бы предста-
представить в виде суммы b = pibi + p2b2 + РзЬз, содержащей три взаимно
ортогональных вектора {bi, b2, Ьз}, каждый из которых параллелен соот-
соответствующему вектору основного периода {а1,а2,аз}. При этом выпол-
выполнялись бы соотношения
|bi| = —, |Ь2| = -i-, |Ьз| = ^, D)
ai |а2| |а3|
связывающие длины этих векторов.
В общем случае векторы {ai, a2, аз} не ортогональны и задают аффин-
аффинную (а не декартову) систему координат. Поэтому векторы {bi, b2, Ьз}, яв-
являющиеся основными периодами обратной решетки^ определяются более
сложным образом. Найдем их.
Требование периодичности в разложении C) означает, что при любом
сдвиге г —)> г + а все экспоненциальные множители не меняются. Следо-
Следовательно,
Ьа = га, E)
где га — целое число. В частности, имеем,
bai = pi, Ьа2 = р2, Ьа3 = р3- F)
Здесь р1,Р2,Рз — целые числа (положительные, отрицательные или нуль).
Следовательно, имеем систему трех уравнений, определяющих вектор Ь.
Для ее решения положим
b = pibi + p2b2 + РзЬ3. G)
Замечаем теперь, что
bai =pi(biai)+p2(b2ai)+p3(b3ai), (8a)
ba2 =pi(bia2) +P2(b2a2) +p3(b3a2), (86)
ba3 =pi(bia3) +p2(b2a3) +p3(b3a3), (8e)
24*
372 Комментарии
откуда вытекает
aibi = 1, aib2 = 0, aib3 = 0.
Аналогично, умножая вектор b на векторы а2 и аз и сравнивая резуль-
результат с F), легко получить, что
a2bi = 0, a2b2 = 1, a2b3 = 0,
a3bi = 0, a3b2 = 0, a3b3 = 1.
Более коротко это можно записать в виде
ЪЪк=6гк, (9)
где Sit — символ Кронекера. Отсюда вытекает, что вектор bi перпендику-
перпендикулярен одновременно векторам а2 и а3 и может быть представлен как
bi = /3ia2 х аз, (Ю)
Аналогично,
Ь2=/?2а3хаь b3=AaiXa2, A1)
где /Зь /?2, /?3 — коэффициенты. Так как в соответствии с D) biai = b2a2 =
= b3a3 = 1, то вследствие цикличности смешанного произведения
ai(a2 х а3) = а2(а3 х ах) = a3(ai x а2)
имеем
Pi = fa = Рз =—г^ г- A2)
ai (а2 х а3)
Но произведение ai(a2 x а3) есть объем параллелепипеда v9 построенного
на векторах {ai, a2, аз}. Таким образом,
bi = - а2 х а3, Ь2 = -а3 х аь b3 = -ai x а2. A3)
V V V
Векторы {bi,b2,b3} задают решетку с основными периодами bi, b2 и b3,
называемую обратной решеткой. Объем элементарной ячейки обратной ре-
решетки связан с объемом прямой решетки элементарным соотношением:
V = bi (b2 х b3) = — (а2 х а3) [(а3 х ai) x (ai x а2)] =
V3
= — (а2 х а3) [ai (а2 (а3 х ai)) - а2 (ах (а3 х ai))] =
= — [(а2 х a3)ai][a2 (а3 х ах)] = — [ai ( а2 х a3)][ai ( а2 х а3)] = -.
A4)
Заметим, что числа pi, P2-, Рз суть так называемые кристаллографические
индексы Миллера, поскольку
br = (pibi +p2b2 +p3b3)(niai + nia2 + n3a3) = pint +p2n2 +рз^з,
A5)
К. 31. Соотношения Крамерса-Кронига 373
где 7ii, П2, ^з —пространственные координаты узла. Равенство br = const
есть уравнение плоскости, то есть
+P22/ + Рз^ = const, A6)
где произведена замена щ -^ х, П2 -^ у, п% —>- z. Вводя традиционные
обозначения для индексов Миллера (рьР2?Рз) = {h, k, I), получим оконча-
окончательно уравнение кристаллографической плоскости в виде
hx + ky + lz^D. A7)
Здесь координаты узлов решетки (x,y,z) принимают целочисленные
значения.
К.31. Соотношения Крамерса-Кронига !)
Среди фундаментальных положений физики особую роль играет прин-
принцип причинности, выражающий тот факт, что состояние системы в каждый
конкретный момент времени полностью определяется предысторией возник™
новения этого состояния. Это означает, что описание эволюции физической
системы осуществляется с помощью детерминированных уравнений (дина-
(динамических систем). В свою очередь этот факт накладывает определенные, ино-
гда весьма сильные, ограничения на допустимые классы уравнений, описы™
вающих отклик среды на внешнее воздействие.
В общем случае установить характер подобных ограничений не пред-
представляется возможным. Однако для линейных систем принцип причинно-
причинности позволяет сформулировать некоторые достаточно общие соотношения,
отражающие аналитические свойства функций отклика. Мы получим эти
соотношения, рассматривая в качестве конкретного примера физической
системы электромагнитное поле в линейной среде.
Как известно, отклик среды на электрическое поле описывается векто-
вектором поляризации Р, входящим в вектор электрической индукции D:
В = Е + 4тгР. A)
Здесь Е — вектор напряженности электрического поля. Выражение прин-
принципа причинности состоит в том, что в каждый текущий момент вре-
времени t значение вектора поляризации Р (t) определяется тем, каким было
электрическое поле в предшествующие моменты: E(t;), t' < t. Наиболее
общий вид линейной связи векторов Р(?) и {E(t/),t/ ^ i] может быть
представлен в виде интегрального соотношения
сю
P(t) = ± | /(r)E(t - т)йт. Bа)
О
Согласно A) для вектора D это соотношение записывается следующим
) Ландау Л.Д., Лифшиц ЕМ. Электродинамика сплошных сред. — М.: Наука, 1982.
374 Комментарии
образом:
оо
D(t) = E(t) + f /(r)E(t - r)dr. B6)
о
Символически это соотношение можно записать, введя линейный инте-
интегральный оператор диэлектрической проницаемости г. D = ?Е. Переходя
к Фурье-компонентам (т. е. предполагая временную зависимость полей в
виде e~tajt), нетрудно установить связь компонент этого оператора с функ™
цией f(t):
со
е(ш) = 1+| f(r)eiuTdr. C)
о
Функция е(ш), вообще говоря, комплексная:
Из определения C) следует, что
е(-и)=е*(ш), Eа)
или, отделяя действительную и мнимую части,
e'(-w) = е'(ш), е"(-ш) = -е"(ш). E6)
При частотах ш, стремящихся к нулю, поведение функции е(ш) зависит
от типа среды, в которой распространяется поле: оно различно для метал™
лов и диэлектриков. Для металлов асимптотика е(ш) при ш —>• 0 может
быть установлена на основании уравнения Максвелла
rot H = -^—. Fа)
с dt K J
Это уравнение может быть формально переписано в виде
rot H = —j, F6)
с
справедливом для полей стационарных токов. Для этого используется закон
Ома l) j = сгЕ. Поскольку для ш-гармоники — = —ioul} = —iuje~E, то
приравнивая правые части равенств Fа) и F6), находим Е = —<тЕ,
с с
или
e(oS) = % при ш —)- 0. Gа)
ш
) Использование далее закона Ома в этой форме подразумевает, что входящая в него
величина а является статической проводимостью среды (то есть пределом сг(ш) при
ш —> 0). Предполагается также, что поля достаточно слабые, чтобы считать связь векторов
j и Е линейной.
К. 31. Соотношения Крамерса-Кронига 375
Для идеальных диэлектриков проводимость а = 0, так что
е(ш) —)> е@) < оо при ш —>> 0. G6)
Другой предел, а; —>• оо, является универсальным и определяется тем,
что при больших частотах все электроны в веществе можно рассматривать
как свободные. Считая скорости электронов малыми (г; <С с), замечаем,
что отклонения частиц от их исходного положения малы по сравнению с
длиной волны электромагнитного поля: v/ш <С А. Поэтому для каждого
отдельного электрона поле можно считать однородным. Тогда движение
частицы описывается уравнением
т— = еЕ = еЕое~%шг, (8)
dt
где е, т — заряд и масса электрона, v — дополнительная скорость, при-
приобретаемая под действием электрического поля. Отсюда найдем, что допол-
дополнительное смещение равно г = . Соответственно вектор поляризации
тш2
среды, т. е. дипольный момент единицы объема, оказывается равным
тш2
где N — число электронов в единице объема среды. Для диэлектрической
проницаемости среды из соотношений D = Е + 4тгР = еШ находим
е(ш) = 1 —. (9)
тш2
Таким образом, в пределе ш —>> оо функция е(ш) —>> 1. Этот результат,
впрочем, нетрудно понять и из физических соображений. В самом деле,
отличие векторов D и Е связано с процессами поляризации среды, воз-
возникающими под действием внешнего поля. Если это поле меняется очень
быстро, то инерционность смещения отдельных частиц среды не приводит
к возникновению заметной поляризации Р, так что D^Enewl.K этому
же результату можно прийти и с более общих позиций, отталкиваясь от
соотношения C) и физического смысла функции f(t). Последняя должна
быть конечной при всех t, включая момент t = 0. В случае диэлектриков
(с проводимостью (j = 0) эта функция описывает процесс установления
поляризации среды: чем быстрее происходят релаксационные процессы в
среде, тем уже интервал значений времени t, в котором она заметно от™
лична от нуля. При этом в физически реалистичной ситуации f(t) —> 0
при t —)• оо. Тогда из C) сразу следует, что е —>• 1 при ш —>• оо.
В случае металлов (с проводимостью а ф 0) индукция D оказывается
отличной от нуля даже при наличии постоянного тока, когда поле Е в ве-
веществе равно нулю ]) . В самом деле, из соотношений Fа), F6) и закона
) Указанное отличие поведения функции D для диэлектриков и металлов связано
с несколько искусственным способом учета проводимости вещества путем модификации
определения диэлектрической проницаемости. В результате вектор D теперь учитывает не
только поляризацию среды, но и токи проводимости.
376
Комментарии
Ома следует, что
t
= —сгЕ при D(t) = 4тг
с dt с J
= 4тг
^ r)dr
Этим соотношением фактически учитывается далекая предыстория установ-
установления стационарного тока в среде, когда поле Е еще было ненулевым. Срав-
Сравнение с B6) при E(t) = 0 показывает, что /(т) —>> 4тгсг при т —>> оо. Таким
образом, асимптотику функции f(t) можно записать в универсальной форме:
/(г) - 4тг(т —)> 0 при т —)> оо. A0)
Утверждение же о том, что е(ш) —>• 1 при а/ —>• оо, следует из C), если
предполагать, что частота ш имеет хотя бы малую, но не нулевую, мнимую
часть ш" = Imw > 0. При этом интеграл будет сходиться на верхнем
пределе, поскольку содержит в этом случае убывающую при т —>> +оо
экспоненту е^ш т'.
Соотношение C) позволяет установить некоторые общие аналитиче-
аналитические свойства функции е(ш),в которой переменная ш рассматривается как
комплексная величина: ш = ш' + гш"'. Функция s(uS) аналитична всюду в
верхней полуплоскости. В самом деле, поскольку функция /(г) конечна и
подынтегральное выражение содержит множитель е^ш т, то интеграл в C)
сходится для всех ш, у которых ш" > 0. На действительной оси (ш" = 0)
особых точек также нет, за исключением, быть может, начала координат,
где возможен простой полюс (в случае а ф 0, см. G)). В нижней полу-
полуплоскости функция е(ш) может быть определена только как аналитическое
продолжение из верхней полуплоскости, поскольку интеграл в C) расхо™
дится при ujff < 0. При этом функция e(oS) может иметь в этой области
как полюсы, так и точки ветвления. Подчеркнем еще раз, что отсутствие
особых точек у функции е(ш) в верхней полуплоскости есть отражение
принципа причинности.
Пусть переменная ш принимает вещественные значения. Установим
соотношения, связывающие действительную и мнимую части функции
е(ш) = ef(uj)-\-ieff(uj). Рассмотрим интеграл
T^-dt, A1)
+ОО
Рис. 1. Контур интегрирования
С, не охватывающий особых
точек подынтегрального выра-
выражения в A1). Контур замыкает-
замыкается дугой бесконечно удаленной
полуокружности
взятый по контуру С, показанному на рис. 1.
Этот интеграл равен нулю, J(uj) = 0, по-
поскольку функция е(?) — 1 аналитична всюду
в области D, ограниченной контуром С (то
есть не имеет особых точек), и убывает до
нуля с ростом |?|. Особые же точки подын-
подынтегрального выражения ? = 0 и ? = ш,
лежащие на действительной оси, не входят в
область D. Интеграл по бесконечно удален™
К. 31. Соотношения Крамерса-Кронига
ной полуокружности равен нулю, поскольку подынтегральное выражение
убывает с ростом |?| быстрее, чем l^l.
Интеграл вдоль действительной оси вычисляется на основании то™
ждества
= v. р. т5(х), 7
х + ry
где S(x) — дельта™функция, а символ "v. р." означает главное значение
интеграла:
+ь
Г dx ,. f Aж f da;
л p. — = lim h —
J ж м^о J x J x
a, 6 > 0.
A3)
Если мы имеем дело с диэлектриком, то подынтегральное выражение в A1)
имеет единственный полюс ? = ш, так что
+ ОО
f
1dg = v.p. f g(^dg-Z7
С -оо
Отделяя здесь действительную и мнимую части, получим два соотноше-
соотношения:
+ ОО
7Г J 4 ~~ ш
— сю
+ ОО
A4)
s (ш) = v.p. -^ df.
В случае металлов имеется также полюс ? = 0, так что с учетом G) будем
иметь
+ ОО
Г.4тг<т1
с
-ide = v.P. }
— 1J = 0.
Отсюда находим
е'(ш) - 1 =
+ СХЭ
7Г J C^^
+ ОО
A5)
-
Ж
Формулы A4),A5) называются соотношениями Крамерса-Кронига
(Н.А. Kramers, R.L. Kronig, 1927).
378 Комментарии
В качестве простейшего примера, иллюстрирующего аналитические
свойства е(ш), рассмотрим на основании классической теории диспер™
сии поведение диэлектрической проницаемости диэлектриков в окрест™
ности линии резонансного поглощения. Суть теории состоит в том, что
электроны в диэлектрике ведут себя как осцилляторы с трением, нахо-
находящиеся под действием внешней периодической силы (обусловленной
электрическим полем волны). Соответствующее обобщение модели (8)
имеет вид
dv
т— = FBO3Bp + FTp + eE;
at A6)
i
FB03bP = -кг, FTp = ^2m7v, E = Eoe^iujt.
Здесь FB03Bp — сила, возвращающая электрон в его положение равнове-
равновесия, FTp — сила трения (учитывающая радиационное трение и передачу
энергии среде). Выбирая ось х в качестве направления поляризации волны,
перепишем это уравнение в виде
~Ш + 27— + Щх = е гшг, A7)
dt2 dt rn
где традиционно введено обозначение для собственной частоты осцилля-
осциллятора ш® = у/к/т. Решение уравнения A7) можно представить в виде
*=
Вводя вектор поляризации Р = Ylex = Х^ и диэлектрическую проница-
проницаемость е(ш) по формуле е = 1 + 4тг%, найдем
^^ A9)
Полученная функция имеет два простых полюса cji^ =
Если затухание слабое, т. е. j^ujq, to оба полюса являются комплексными
и лежат в нижней полуплоскости переменной ш. В верхней же полуплос-
полуплоскости функция е(ш) не имеет никаких особенностей, причем \е(ш) — 1|
убывает с ростом \и\ как |о;|^2. Если затухание сильное, то есть 7 > ^о?
то оба корня чисто мнимые, lji^ = ^G =^ л/l2 — ^о)? причем Im ш\^ <
< 0. Таким образом, во всех случаях полюсы е(ш) лежат в нижней полу-
полуплоскости.
Действительная и мнимая части е(ш), согласно A9), равны
Эти функции, как показано выше, связаны соотношениями Крамерса-Кро-
нига A4). В этом можно также убедиться, вычисляя непосредственно со-
К. 32. Об истории солитона
379
- е'(ш)
__J^
_^
0
j
5
Л
/\
Л \
V
1—
1,0
V
уе"М
е'@)
.2,0-—
-1
-1
' е'@) ^ 1
7/^о= 0,2
2,0-
1,0
0.
-1,0 -
Рис. 2. Дисперсионные зависимости действительной ег(ш) и мнимой ?"(и;) частей
диэлектрической проницаемости в окрестности линии резонансного поглощения
ответствующие интегралы. На рис. 2 приведены характерные зависимости
действительной и мнимой частей диэлектрической проницаемостей, рас-
рассчитанные по формулам B0) для случая слабого поглощения G < и)о).
Как видно из рис. 2, зависимость е" {ш) носит типичный резонансный
характер. Заметим, что такое поведение е" {ш) в окрестности ш = ujq легко
наблюдать, изучая прохождение излучения через среду. В самом деле, при
B1)
где введены показатель преломления п и показатель поглощения к. Тогда,
обозначая
B2)
А; = ™v^ = -\Р + ^а)? р = ^ Re у% = —п,
с 2 с Ао
о; т /- 4тг Л 2тгс
а = — lm у Е = —/с, Ло = ,
с Ао ш
представим интенсивность излучения в плоской волне в виде
Кх) ~ \eikx\2 = e~ax B3)
Величина а имеет смысл коэффициента поглощения излучения (по интен-
интенсивности). В соответствии с рис. 2 этот коэффициент резонансно возра™
стает в окрестности ш = и о, что и проявляется в резком возрастании по-
поглощения излучения е ш « wq, to есть в появлении полос поглощения в
спектрах.
К.32. Об истории солитона
В последние годы термин "солитон" стал весьма популярным в раз-
личных разделах науки и техники и даже в околонаучной сфере 1) . Та-
Такая широкая "популярность" затуманивает истинный смысл и значимость
солитонов в физике и математике. Следует ясно понимать, что солитон -
это чисто нелинейный объект, он существует только в нелинейный средах.
) Точнее говоря, в среде антинаучной, оккультной, претендующей на создание
"всеобщей теории всего" взамен существующей фундаментальной науки.
380 Комментарии
Любые попытки интерпретировать его как обычную для линейных систем
суперпозицию волн (волновой пакет) некорректны. Осознание этого факта
явилось, пожалуй, столь же значительным открытием в нелинейной дина™
мике, что и обнаружение стохастического поведения динамических (детер-
(детерминированных) систем. Их роднит то, что оба эти явления невозможны в
линейных системах.
Хотя понимание нетривиальной природы солитонов пришло лишь в 60-х
годах XX века, наблюдались они в природе в течение многих столетий. Be™
роятно, наиболее эффектным примером являются волны цунами, столь же
давно и прочно ассоциируемые в обыденном сознании с Японией, как са-
самурайский кодекс чести и священная гора Фудзи-сан. Тем не менее первое
документированное наблюдение солитона профессиональным естествоиспы-
естествоиспытателем было осуществлено только в 1834 году, когда Джон Скотт Рассел об-
обнаружил "уединенную волну трансляции". Вот как об этом писал он сам 1) :
"Я полагаю, что наилучшее представление об этом явлении дает описа-
описание обстоятельств моего первого знакомства с ним. Я наблюдал за движением
баржи, которую быстро тянула по узкому каналу пара лошадей, когда баржа
неожиданно остановилась. Но масса воды, которую баржа привела в движение,
не остановилась, а собралась у носа судна в состоянии интенсивного движе-
движения, затем неожиданно оставила его позади, катясь вперед с огромной скоро-
скоростью и принимая форму большого одиночного возвышения, то есть округлого,
гладкого и четко выраженного водяного холма, который продолжал свой путь
вдоль канала, не меняя своей формы и не снижая скорости. Я последовал за
ним верхом, и, когда нашел его, он по-прежнему катился вперед со скоростью
приблизительно восемь или девять миль в час, сохранив свой первоначальный
профиль возвышения длиной около тридцати футов и высотой от одного до
полутора футов. Его высота постепенно уменьшалась, и после одной или двух
миль погони я потерял его в изгибах канала. Так в августе 1834 г. мне впервые
довелось столкнуться с необычным и красивым явлением, которое я назвал
уединенной волной трансляции; теперь это название общепринято".
И далее:
"Это самое прекрасное и необычное явление: в первый же день я понял,
что это счастливейший момент моей жизни. Никому до меня не посчастли-
посчастливилось наблюдать его или, во всяком случае, понять, что оно значит. Теперь
оно известно как уединенная волна трансляции. Никто никогда и вообразить
не мог, что существует такое явление, как уединенная волна. Когда я описал ее
сэру Джону Гершелю, он сказал: "Это просто отсеченная половина обычной
волны". Но это не так, поскольку обычные волны распространяются частично
выше, а частично ниже уровня поверхности, и кроме того, ее скорость от-
отличается от скорости обычных волн. Поэтому уединенная волна — полная
волна, а не половина, с той разницей, что она вся целиком располагается выше
поверхности, а не частично выше и частично ниже. Такой водяной холм не
может стоять на месте, а распространяется вдоль канала".
Идеи Рассела далеко не сразу были восприняты научным сообществом.
Такие крупные ученые, как Дж. Эйри и Дж. Стоке, сомневались не только в
) Цит. по: Нъюэлл А. Солитоны в математике и физике. - М.: Мир, 1989.
К.33. Самофокусировка излучения в нелинейной среде 381
самой сути наблюдавшегося Расселом явления, но и в его существовании.
Дело в том, что Стоке в 1849 г. показал, что в линейном приближении волна
такого рода не существует, что, конечно, верно. Вся суть вопроса в том™
то и состоит, что ситуация здесь существенно нелинейна. Лишь в 1876 г.
лорд Рэлей нашел решение для холмообразного возвышения поверхности
свободной жидкости в виде квадрата гиперболического секанса.
Здесь следует сказать, что в 1895 г. Д. Кортевег и Г. де Фрис выве-
вывели уравнение, которое существенно нелинейно и имеет солитонное реше-
решение — уединенную, локализованную волну (см. формулы A3.59) и A3.71)
в главе XIII). Так был дан ответ на возражения Эйри и Стокса и доказаны
существование и устойчивость уединенной волны. Универсальность при™
роды солитона и его свойств были показаны много позднее.
В Лос-Аламосе во время работы по Манхэттенскому проекту Энрико
Ферми, Джон Паста и Станислав Улам решали задачу о теплопроводности
твердого тела, рассматриваемого как одномерная цепочка конечного чис-
числа F4-х) точечных одинаковых масс, связанных друг с другом пружина-
пружинами. При учете нелинейности связи они получили решение, которое впо~
следствии было названо солитонным. Этот термин был введен в 1965 г.
Норманом Забуски и Мартином Крускалом, которые рассмотрели пробле™
му Ферми-Паста-Улама 1) в континуальном пределе. Именно эти авторы
дали окончательно жизнь такому важному направлению нелинейной дина-
динамики, как теория солитонов.
К.ЗЗ. Самофокусировка излучения в нелинейной среде
Одним из наиболее интересных нелинейно-оптических эффектов явля-
является самофокусировка света. Этот эффект был предсказан Г.А. Аскарьяном в
1962 г. и (независимо) В.И. Талановым и Ч. Таунсом (С.Н. Townes) в 1964 г.
Экспериментально самофокусировку излучения впервые получили Н.П. Пи-
липецкий и А.Р. Рустамов в 1965 г. В экспериментах Р. Чиао (R.Y. Chiao),
Е. Гармайр (Е. Garmire) и Ч. Таунса, выполненных в 1966 г., была обнару-
обнаружена самофокусировка пучка излучения рубинового лазера в сероуглероде
CS2 (лазер генерировал пучок излучения мощностью 10-100 кВт и диамет-
диаметром 0,5 мм, длина волны А = 0,693 мкм). Пороговая мощность Ркр, при пре-
превышении которой наблюдался эффект, составила Ркр « 25 кВт.
Рассмотрим упрощенную модель явления.
Нелинейное квазиоптическое уравнение. Пусть электромагнитное по™
ле распространяется в среде с диэлектрической проницаемостью, завися-
зависящей от величины поля по закону:
е = ео + е2Е2 A)
(случай так называемой керровской нелинейности). Для упрощения мы от-
отвлекаемся от тензорных свойств диэлектрической проницаемости и эффек-
) Любопытно, что в той же задаче, как это было показано позднее, возможна и
стохастическая динамика, характерная для многих нелинейных гамильтоновых систем.
382 Комментарии
тов поляризации поля. Нелинейная добавка Е2Е2 предполагается малой.
Считаем также, что в отсутствие поля среда пространственно однородна,
то есть ?q = const.
Подобно тому, как это делалось в комментарии 29, мы исходим из урав™
нений Максвелла:
10В
divD = 0
rotE = ---
с dt
div В = i Х _ "
с dt
D = еЕ, В =
Полагая здесь /i = 1 и исключая магнитное поле, можно получить волно-
волновое уравнение для электрического поля:
с2 dt2
Будем искать решение уравнения C) в параксиальном приближении в виде
волны, распространяющейся вдоль оси z:
Е(г, t) = eE(r) e^p[i(kz - cot)], D)
где е — единичный вектор поляризации волны. Волновой вектор к и частота
ш связаны соотношением к = — л/ёо". Влияние изменения диэлектрической
с
проницаемости мы учтем с помощью модулирующей функции Е(г).
Подставляя D) в C), получим
д2Е + mdE_ + д^ + /V g _кАЕ = о, E)
d2 d2
Здесь Ах = 1 лапласиан в плоскости р = {х,у}9 перпенди™
дх2 ду2
кулярной к направлению распространения пучка z. Будем рассматривать
узкие пучки, эффективная ширина которых а мала по сравнению с харак-
характерной длиной Кя вдоль оси z9 на которой амплитуда Е(г) существенно
меняется благодаря нелинейности:
а < Дн- F)
В приближении параксиальных пучков с учетом неравенств F) в уравне™
нии E) можно пренебречь производной д2Е/'dz2 по сравнению с другими
слагаемыми. Это дает уравнение
дЕ ш2 2
dz с2
где явно учтена зависимость A) диэлектрической проницаемости от на-
напряженности поля. При записи этого уравнения мы учли, что амплитуда Е
является комплексной, так что величину е следует записывать в виде е =
= ?q ^гб2\Е\2, чему отвечает усреднение по периоду колебаний Т = 2тт/ш.
К. 33. Самофокусировка излучения в нелинейной среде 383
Параболическое уравнение G) является основным при изучении са-
самофокусировки узких пучков излучения. Это есть двумерное нелиней-
нелинейное уравнение Шредингера, обобщающее уравнение G) комментария 29
на случай нелинейных сред.
Эйкональное приближение дли квазиоптического уравнения. Для упро-
упрощения уравнения G) будем искать его решение в виде
Е = Е0(р, z) exp(iks), (8)
где ks(p, z) — добавка к фазе, возникающая из-за деформации волнового
фронта в нелинейной среде. Амплитуда Е$ и фаза ks в (8) предполагаются
действительными. Подставляя (8) в G) и отделяя действительную и мни™
мую части, получим систему двух уравнений:
ds 1 2 е? 9 1
\- - (V_ls) = —Ei н А±Е0, (Щ
dz 2 v J 2?0 2к2Е0
^ + (У±Е^) (V±s) + E^A±s = 0. (96)
dz
Введем вектор
u = V±s. A0)
Этот вектор лежит в плоскости р = {ж, у} и дает проекцию направления
распространения луча (волнового вектора) на плоскость р (фактически,
и| — это тангенс угла наклона волнового вектора луча к оси z: tga =
= — = — = и). Тогда, применяя к уравнению (9а) оператор Vj_, пере-
kz к
пишем это уравнение в виде
A1)
Здесь мы перешли от амплитуды поля Aq к интенсивности I = —Л
8тг
и ввели параметр f3 = —. С учетом сказанного уравнение (96) при™
с (еоK/2
нимает следующий вид:
^+div±(u/) = 0. A2)
dz
Далее мы ограничимся только случаем осесимметричных пучков. Вве-
Введем цилиндрические координаты {/?, z}. Тогда вектор и имеет только ра-
радиальную компоненту ир = и, причем все величины могут зависеть только
от р и z. С учетом этого перепишем исходную систему в виде
ди ди Йд11д \ 1 1 д ( длД\\
Ь и— = В — о , A3ш
dz Эр Н dp 2dp[k2Vl pdp\ dp )y l ;
0. A36)
384 Комментарии
Самофокусировка параболических пучков. Рассмотрим сначала пре-
предел геометрической оптики. Ему соответствуют большие значения волнового
числа к —>• оо, что позволяет пренебречь последним слагаемым в уравнении
A3а). Для справедливости такого приближения необходимо, чтобы диаметр
пучка был велик по сравнению с длиной волны. Кроме того, из рассмотрения
должны быть исключены особые точки и области пересечения лучей (каусти-
(каустики). В этом пределе уравнения A3) принимают вид
ди , ди Qdl пл Л
— +^—=/5 — , A4а)
dz др др
dz p др
Пусть пучок излучения, попадающий в нелинейную среду, имеет мак-
максимум интенсивности на оси:
I\z=0 = *> (l - Q , Р«Д0. A5)
Примем также, что на входе в среду этот пучок является плоскопараллель-
плоскопараллельным, то есть
<=о = 0. A6)
Система уравнений A4) с граничными условиями A5), A6) допускает
автомодельное решение:
A7,
u(p,z) = p<p(z),
в котором, согласно A5), A6), функции a(z), R(z), (f(z) удовлетворяют
начальным условиям
а@) = /0, Д@) = До, <р@) = 0. A8)
Подставляя A7) в A4) и приравнивая коэффициенты при одинаковых степе-
степенях р, приходим к системе обыкновенных дифференциальных уравнений:
— + 2а(р = 0,
dz
da 2a dR . п /1ПЧ
— -— — +4а^ = 0, A9)
dz R dz
dtp . 2 2/За
dz * R2
Исключая из первых двух уравнений переменную <р и интегрируя полу™
чившееся уравнение, найдем связь функций a(z) и R(z):
a(z) = -M°-, B0)
1 ; B?{zy l
К. 33. Самофокусировка излучения в нелинейной среде 385
где учтены начальные условия A8). Из этих же уравнений легко устанав-
устанавливается связь
( ) - г dR
R dz
С учетом B0), B1) последнее уравнение в A9) приводится к виду
U it ZpiOltr) /r%r%\
B2)
I):
= 0. B3)
dz2 R3
Начальные условия для этого уравнения следуют из равенств A7), B1):
д(о) = До, ^F
dz z=0
Решение уравнения B2) с условиями B3) имеет вид
B4)
Таким образом, пучок сходится на расстоянии z = Rm которое можно
назвать фокусным расстоянием нелинейной линзы. Интенсивность излу™
чения на оси пучка меняется, согласно A7), B0), B4), по закону
р2 т
imax — i0 2 , . — ( /ft \2' ^ '
В рамках использованных приближений интенсивность растет до беско-
бесконечности по мере приближения к фокусу. Заметим также, что в данной
модели самофокусировка начинается при любом начальном значении ин-
интенсивности пучка /о-
Влияние дифракции на самофокусировку излучении. Учтем теперь
дифракционные эффекты. Для этого будем искать решение уравнений A3)
в автомодельной форме
d2 Г Л 1
B6а)
u(p,z) = pip(z). B66)
При подстановке этого решения в уравнения A3) следует иметь в виду,
что из-за наличия одновременно нелинейного и дифракционного слагаемых
ни гауссов, ни параболический профили не удовлетворяют этим уравнениям
точно. Поэтому такое решение является только приближенно автомодельным.
Подставляя выражения B6) в уравнение A3а), производя разложение
по степеням р и ограничиваясь линейными по р слагаемыми, получим урав-
уравнение
+^ + ^ {21а)
dz * R4 k2R^ l ;
Второе уравнение следует из A36):
1 dR
R dz
25 Н.В. Карлов, Н.А. Кириченко
386 Комментарии
Исключая из B7а), B76) функцию (р, получим окончательное уравнение
для радиуса пучка:
— = ^-, A=l^2pi0R20k2. B8а)
Это уравнение должно быть дополнено начальными условиями. Если на
среду падает плоскопараллельный пучок излучения (F = оо), то
Д@) = До, Д'@) = 0- B86)
Пусть нелинейность слабая. Тогда пучок начинает расходиться бла-
годаря дифракции:
> 0. Если же нелинейность велика, то ди-
фракционная расходимость подавляется и начинается самофокусировка:
d2R
dz
< 0. Граничная ситуация
2R
z=0
= 0 определяет пороговое
z=0
условие самофокусировки: А = 0. В явном виде это условие записыва™
ется следующим образом:
^ ^ ^ B9)
, 2тг 2тге 1 - ,
где А = — = . Таким образом, самофокусировка начинается,
к ш /е
если, независимо от радиуса пучка, мощность излучения превышает кри-
критическое значение Ркр. При этом дифракция уже не в состоянии подавить
самосжатие пучка.
Рассмотренная модель не позволяет найти минимальный радиус ЯШш,
до которого происходит сжатие пучка вследствие самофокусировки. Соот-
Соответствующее ограничение возникает благодаря тому, что диэлектрическая
проницаемость перестает расти при напряженности поля излучения, сопо™
ставимой с величиной поля в атомах.
К.34. Эффект самоиндуцированной прозрачности
При распространении мощного излучения при определенных услови-
условиях наблюдается эффект самоиндуцированной прозрачности, состоящий в
том, что в среде, резонансно поглощающей непрерывное излучение (или
длинные импульсы) с некоторой частотой ujq, мощные короткие импульсы
когерентного излучения могут распространяться без потерь. Этот эффект
был предсказан в С.Л. Мак-Коллом (S.L. McCall) и Э. Ханом (Е. Напп)
в 1965 году и наблюдался ими же в 1967 году. Экспериментально само™
индуцированная прозрачность наблюдалась в рубине при использовании
рубинового лазера, а также при использовании СО2 -лазеров — в большом
числе молекулярных газов типа SF6, BCI3 и т. п., имеющих колебательно-
вращательные переходы в области генерации СС^лазеров. Суть эффекта
состоит в следующем. При прохождении мощного импульса резонансно-
резонансного излучения через среду частицы, составляющие эту среду, подвергаются
К.34. Эффект самоиндуцированной прозрачности 387
действию поля не одновременно, а по мере продвижения импульса через
занимаемую им область пространства. Под действием переднего фронта
импульса частицы переходят в возбужденное состояние, и накрываемый
излучением объем среды поляризуется. В нем запасается энергия уже про-
прошедшего излучения. В основном объеме, занимаемом импульсом, излуче-
излучение практически не поглощается. На заднем фронте импульса частицы ере™
ды переходят в основное (невозбужденное) состояние за счет процессов
вынужденного испускания, приводящих к восстановлению исходного из-
излучения. Рассмотрим простейшую модель явления.
Электрическое поле Е электромагнитной волны в среде описывается
волновым уравнением
V2E^— = — — СП
с2 dt2 с2 dt2 ' 1 ;
в котором Р — вектор поляризации. Будем далее рассматривать одномер-
одномерное (вдоль оси X) распространение плоскополяризованной волны, так что
Е = Е(ж,*) и V2 ^д2/дх2
/
Найдем сначала вектор Р. Предположим, что среда состоит из атомов,
имеющих всего два уровня. Фактически для этого достаточно, чтобы пе-
переходы между другими уровнями имели малую вероятность. Если энергии
уровней есть Е\ и Е2, то резонансный переход между ними происходит
при выполнении условия
Е2 - Ег = Ни, B)
где ш — частота излучения. Волновая функция атома Ф во внешнем поле
удовлетворяет уравнению Шредингера
гЙ^ = (Я0 + Я1т)Ф, C)
dt
где Hq — гамильтониан свободного атома, H-mt = ^dE — оператор вза-
взаимодействия между полем и атомом, d — оператор дипольного момента
атома. В дальнейшем считаем, что векторы d и Е параллельны. Волновая
функция Ф предполагается нормированной,
[ф*(г)Ф(г)с13г= 1. D)
Средний дипольный момент атома в состоянии с волновой функцией Ф
равен
d= (Vd#d3r. E)
J
В отсутствие внешнего поля состояниям атома с энергиями Е\ и Е^
соответствуют волновые функции ^i(r) и ^2(г)? причем
Нофг = Егфъ Й0ф2 = Е2ф2. F)
25*
388 Комментарии
Считаем эти функции нормированными и взаимно ортогональными:
*(г)фк(г)<13г = ёгк. G)
Предполагаем, что в этих состояниях атом симметричен, то есть не имеет
дипольного момента:
j3w
=0. (8)
Для произвольного состояния атома волновая функция может быть
представлена в виде
Ф(г,*) = ai(*)Vi(r) + a2(*)^2(r). (9)
Через коэффициенты а± и а2 выражаются средние заселенности уровней
атома: N\ = |ai|2, N2 = |сх212- Относительная разность заселенностей уров-
уровней равна
N = N2 - iVi = |a2|2 - |ai|2e A0)
В этом состоянии средний дипольный момент атома оказывается равным
= tjjldt/j2d3r =
Получим уравнения для амплитуд ai(t) и d2(t). Для этого, умножая
уравнение C) на ф^ (г) и интегрируя по всему объему с учетом условий ор™
тогональности G), а затем повторяя расчет с функцией ^С1*)? получим 1)
^ A2a)
Здесь введены обозначения
Ei E2 T/ d0E(x,t) /1O.
n n n
причем ?^(ж, t) — это поле в месте нахождения атома.
Для упрощения задачи будем предполагать, что атомы неподвижны,
так что никаких эффектов, связанных с допплеровским сдвигом частоты,
не возникает. Тогда по известному дипольному моменту атома d вектор
поляризации среды определится формулой
Р =
где щ — число атомов в единице объема среды. Если бы допплеровский
сдвиг частоты был существенным, то надлежало бы произвести усредне-
усреднение по интервалу частот Аш ~ wv/c, в котором атомы воспринимали бы
внешнее поле с частотой ш.
) Здесь и далее мы употребляем знак частной производной, поскольку имеется также
зависимость от координаты ж, связанная с пространственной неоднородностью поля Е(х,г).
К. 34. Эффект самоиндуцированной прозрачности
389
В типичных условиях длительность импульса излучения составля-
составляет 10~12-10~8с, а период электромагнитной волны — 1СГ15с, так что
в пределах импульса поле совершает большое число колебаний. Поэтому
можно представить функцию Е(х^)в виде быстро осциллирующей волны
с медленно меняющейся амплитудой:
Е(х, i) = Eo(x,t) cos[kx — u)t-\-(p(x,i)], к = ш/с. A5)
Здесь амплитуда Eq(x, t) и фаза (p(x,i) предполагаются медленно меняю-
меняющимися на расстояниях порядка длины волны Л = 2тг/к, то есть выполня™
ются неравенства
dE0
дх
дх
<¦
дЕ0
dt
д(рр
dt
где к\ = LJi/c, ^2 =
уравнениям
A6а)
A66)
>2 С ПО-
A7)
z. Согласно A2) функции vi, V2 удовлетворяют
Имея это в виду, перейдем от функций а\, а 2 к функциям
мощью соотношений
dt
A8)
dt
Если теперь сюда подставить V = —doE(x,i)/h9 где поле E{x,t) дается
выражением A5), и удержать в правой части только основную гармонику
(имея в виду, что интенсивность поля, генерируемого на частоте 2ш, мала),
то есть произвести замену
i(kx-u,t)
o-i(kx-wt)
cos[kx -
то уравнения A8) примут вид
dvi _ doEo(x,t)
dt ~ 2П
v2e
A9)
Рг(р
dt 2h
В соответствии с A4), A7) вектор поляризации среды выражается через
функции vi, V2 соотношениями
i(kx-wt) _ ,
Р = i
io № ^2ei(
390 Комментарии
где введены обозначения
Рг = inodo[vlv2e-i<p - гл^е^], B1а)
Р2 = -nodo[vlv2e-i<p + гл^е^], B16)
Ф = кс^ш^ + ^. B1 в)
Для удобства дальнейших преобразований здесь явно выделена та же
фаза Ф, что входит в выражение для напряженности поля Е(х, t) в A5).
Через введенные функции гл и v2 относительная разность заселенно™
стей N выражается формулой
N = \v2\2 - |^i|2. B2)
Для дальнейшего нам понадобится производная dNjdi. Ее нетрудно найти
с помощью уравнений A9) и определения B16):
К ^ + v1v2elip\ = -Ео. B3)
dt П L L A J пой
Преобразуем теперь волновое уравнение A). Подставим A5) в левую
часть A) и будем удерживать только производные не выше первого порядка
и в степени не выше первой. В результате получим
а Е 1 <9 I? _. (dip 1 осрЛ ^ , п1 (дЕ0 1 дЕ0\ . ж
— — — — = —2к -JL + - —^ i^o cos Ф — 2к \ — + - ^^ sin Ф.
дх2 с2 dt2 \дх cdt/ V дх с dt )
B4)
При дифференцировании вектора поляризации в правой части уравнения
A) достаточно ограничиться приближением
^ « -со2Р = -со2(Рг cos Ф + Р2зтФ), B5)
поскольку роль вектора Р состоит в модуляции волны, которая предпола-
предполагается медленной.
Таким образом, согласно A) коэффициенты при вшФ и совФ удовле™
творяют уравнениям
B6а)
^+с^ = 2пшР2. B66)
С помощью уравнений A9) и соотношений B1а, б) легко проверить, что
®Pl а Г * -i(p , * ъч>Л ^ о дф /от \
= щи® \v1v2e ^ + V\V2& \— = -г2 —, B7а)
N + Pi_
й dt
Из B6а), B7а) следует, что имеется частное решение
(р = const, Рг = 0, B8)
К.34. Эффект самоиндуцированной прозрачности 391
которое мы далее и будем изучать. В результате приходим к замкнутой
системе, включающей уравнения B3), B66), B76):
дЕо дЕо —. .__ ч
—- + с—— = 2тгиР2. B9а)
dt дх
4Eo^
dt h
ON P2 „ nQ л
— = -Eo. B9б)
dt поп
Для исследования этой системы удобно ввести обозначения
l - _ dp Ер - _ Р2
h
h
С учетом этого уравнения B9) принимают вид
ot ox
^ C16)
^ C1в)
dt
Из уравнений C16, в) следует закон сохранения
Р2 + N2 = const. C2)
Входящая сюда константа равна 1, поскольку в отсутствие поля атомы на-
находятся в чистом состоянии с дипольным моментом, равным нулю. Тогда
вектор поляризации среды также равен нулю, а относительная разность
заселенностей N = =Ы.
Положим
N = ± cos гл.
Тогда из C16) или C1 в) следует
~ du /n л \
Е = —. C4а)
Из последнего соотношения вытекает представление
t
u(x,t) = E(x,tl)dt!. C46)
— оо
Выбор нижнего предела интегрирования здесь определяется начальным услови™
ем и(х, —оо) = 0, то есть N(x, ^оо) = ±1. Нижний знак (АГ(ж, ^оо) = — 1)
отвечает тому, что в начальный момент (то есть до прихода импульса) среда
находилась в невозбужденном состоянии (заселен только нижний уровень).
392 Комментарии
Верхний же знак (N(x, ^оо) = +1) отвечает изначальной инверсии засе-
заселенности. Поэтому в первом случае излучение поглощается в среде (расхо-
(расходуется на переходы 1 —>• 2), а во втором случае среда усиливает излучение
(за счет переходов 2 —>> 1).
Преобразуем уравнение C1а). Для этого введем преобразование коор-
координат:
ож о ( хл
z = S2 —, т = il it
д _п(д дХ д_пд { }
дх с \dz дт/ dt дт
Тогда с учетом соотношений C3) и C4а) получим
д2и . /ог.
= zLsmix. C6)
Таким образом, мы пришли к известному уравнению sin-Горд он. Это
уравнение может быть решено методом обратной задачи рассеяния (см.
приложение 2). Здесь, однако, мы ограничимся лишь его простейшими ре™
шениям солитонного типа.
Пусть в начальный момент среда находится в нижнем энергетическом
состоянии (атомы не возбуждены). Это значит, что выбран нижний знак
в правой части C6), то есть uZT = —тли. Будем искать автомодельное
решение этого уравнения в виде
i = ar--, C7)
а
содержащем произвольную константу а. Подстановка C7) в C6) дает для
функции / обыкновенное дифференциальное уравнение
g=sin/. C8)
Односолитонное решение, отвечающее начальному условию и(х, ~оо) =
= 0 или /(—оо) = 0, имеет вид
/(?) = 4 arctg (еЧ или u(z, г) = 4 arctg ехр [ат ) . C9)
L V a/ J
Отсюда с помощью C4а) найдем выражение для напряженности электри™
ческого поля:
или
fi=E = ua? =
h dt d?
Eo = ^^^ sech ' . D0)
"О^имп L 'Тимп J
Здесь введены обозначения для скорости v и эффективной длительности
импульса тимп:
К. 34. Эффект самоиндуцированной прозрачности
393
-vt
-1,0
Рис. 1. Графики нормированных амплитуды напряженности поля и поляризации
среды в солитоне, формирующемся в среде без начальной инверсии, v = 0,5,
Следовательно, импульс распространяется со скоростью тем меньшей, чем
больше его длительность.
На рис. 1 показан график солитона D0) в собственной системе отсче-
отсчета. На том же рисунке показано распределение поляризации по области,
занятой солитоном:
туг j-\ • о^г.
P(x, t) = — sin w = 2 th
t — x/v
—
• seen
t — x/v
D2)
Помимо солитонного уравнение C8) имеет семейство периодических
решений:
/(?) = 2arccos [gsn(^, q)\ или u(z,r) = 2 arccos gsn \ат — -, q) .
L V a /J
D3)
Здесь g — модуль эллиптической функции Лкоби, допустимые значения
которого ограничены условием q ^ 1.
Что касается среды с изначальной инверсией, N\t^_oo = +1, то в та-
такой среде распространение импульса описывается уравнением sin-Горд он
C6), в котором теперь следует взять знак "+", то есть уравнением uZT =
= sin и. Формально односолитонное решение этого уравнения можно по™
лучить из C6), C9) путем замены z —>- —z:
л
¦ sech
t-x/v
D4)
Здесь, в отличие от D1), скорость v дается выражением v =
I/a2 -
394 Комментарии
Как следует из C9), и(х, +оо) — и(х, —сю) = 2тг. Согласно C46), это
означает, что площадь под импульсом
i~OG i~OG
E(x,t)dt=- E{z, т)йт = 2тг.
D5)
Поэтому данный импульс называют 2тг™импульсом.
Выделенное положение 2тг-импульсов состоит в том, что они устой™
чивы и распространяются в невозбужденной среде без изменения формы.
Иными словами, имеет место точное согласование процессов поглощения
излучения (возбуждения атомов среды) и процессов вынужденного испус-
испускания квантов (переходов атомов в невозбужденное состояние). В самом
деле, пусть площадь под импульсом немного отличается от 2тг: и = 2тг + е.
Перепишем уравнение C6) (со знаком "—" в правой части) вблизи заднего
фронта солитона в виде
1 f) W
= — sin и « —?, t —> +оо, D6)
где использовано соотношение C4а). Тогда, если площадь под импульсом
превышает 2тг (то есть е > 0), то происходит ее уменьшение (амплитуда
солитона уменьшается, dE/dz < 0). Если же если эта площадь меньше,
чем 2тг (то есть е < 0), то она увеличивается (амплитуда солитона увели-
увеличивается, dE/dz > 0).
Аналогичные рассуждения показывают, что 2тг-импульс в усилитель-
усилительной среде (то есть в среде с начальной инверсией N = +1) неустойчив:
его площадь растет, если е > 0, и убывает, если е < 0.
Заметим в заключение, что помимо односолитонных решений суще-
существуют решения и многосолитонные, позволяющие описать формирование
и взаимодействие нескольких локализованных импульсов электромагнит™
ного поля в среде с резонансным поглощением.
Более подробно вопросы самоиндуцированной прозрачности и неко-
некоторых других, родственных квантовомеханических явлений рассматри-
рассматриваются, например, в книгах: Акулин В.М., Карлов КВ. Интенсивные ре™
зонансные взаимодействия в квантовой электронике. — М.: Наука, 1987;
Лэм Дж.Л. Введение в теорию солитонов. — Могилев: Бибфизмат, 1997.
К.35. Эффект Бенара
Одним из наиболее известных примеров самоорганизации нелинейных
диссипативных систем является возникновение регулярных структур в на-
нагреваемом снизу слое жидкости (рис. 14.1), обусловленных вихревыми кон-
конвективными течениями. Этот эффект, систематически исследованный Бенаром
в 1900 году, можно наблюдать экспериментально следующим способом ]) .
) Цит. по книге: Эбелинг В. Образование структур при необратимых процессах. — М.:
Мир, 1979.
К.35. Эффект Бенара 395
"На сковороду диаметром около 20 см, подогреваемую снизу горячей во-
водой, наливается слой минерального масла толщиной примерно 0,5 см. Чтобы
можно было обнаружить течение жидкости, к маслу подмешиваются мелкие
алюминиевые опилки, равномерно распределенные в объеме жидкости. При
достижении критического числа Рэлея (критической безразмерной разности
температур) в жидкости возникают потоки и образуются красивые шестиуголь-
шестиугольные ячейки (рис. 14.1 в). В центре ячейки жидкость движется вверх, а вблизи
ее краев — вниз. Во всех ячейках имеет место один и тот же процесс".
Пусть слой жидкости, находящийся в начальный момент в состоянии
покоя, нагревается снизу (см. рис. 1), причем его верхняя поверхность под-
поддерживается при температуре Т2, а
нижняя — при температуре Ть так
что Т\ > Т2. Вследствие теплового
расширения жидкость у нижней по™ 2
верхности имеет меньшую плотность,
чем у верхней. Тогда благодаря архи-
архимедовой силе "холодные" и "горячие"
слои будут стремиться поменяться ме- Рис- L СосУД с вязкой жидкостью,
стами. Это и приводит к конвекции 1) . нагреваемый снизу. Температура
Однако вследствие наличия вязкости Ве^^^°^^Я^^Ст
конвекция может возникнуть, только
если градиенты температуры превышают некоторое критическое значение.
Можно также сказать, что при малых градиентах температуры тепло™
перенос успешно осуществляется путем молекулярной теплопроводности.
Когда же градиенты температуры велики, "подключается" более эффектив-
эффективный механизм теплопереноса — конвекция.
Для описания явления воспользуемся уравнением Навье-Стокса
L-
t
t t
t
— — -J
t t
-h
X
iT + (vVH VP + ^Av + P8> С1)
dt J
где p — давление, р и rj — плотность и вязкость жидкости, v — скорость
течения. Последнее слагаемое описывает объемную силу F = pg, обуслов-
обусловленную полем тяготения (g — ускорение силы тяжести). Здесь предпола-
предполагается, что рассматриваемая жидкость несжимаемая, то есть
div v = 0. B)
Перенос тепла описывается уравнением теплопроводности
FIT
% = аАТ> C)
в котором а — коэффициент (молекулярной) температуропроводности.
С учетом несжимаемости жидкости уравнение A) можно упростить.
Именно, будем пренебрегать изменением плотности р во всех слагаемых,
кроме внешней силы pg, то есть заменим р —>• ро- В слагаемом же pg учтем
) Такое течение называют конвекцией Рэлея—Бенара, поскольку теоретический анализ
эффекта принадлежит Дж. Рэлею.
396 Комментарии
зависимость плотности от температуры:
р = ро[1-а(Т-То)]7 D)
где а — коэффициент объемного теплового расширения жидкости. Вели-
Величина ро представляет собой плотность жидкости при некоторой средней
температуре То. Тогда вместо A) будем иметь уравнение
— + (vV)v = -—Vp + uAv + [1 - а (Т - T0)]g. E)
ot ро
Здесь введена кинематическая вязкость и = /
Уравнения B), C), E) называются уравнениями термоконвекции в при-
приближении Обербека—Буссинеска.
Будем предполагать, что сосуд является неограниченным по осям X и
F, и рассмотрим далее простейший случай так называемого плоского тече-
течения, когда вектор скорости параллелен плоскости XZ.Fb условия несжи-
несжимаемости жидкости B)
^ + ^ = о. F)
O O
следует, что можно ввести функцию тока Ф(ж, z, ?), через которую выра-
выражаются компоненты вектора скорости:
<9Ф аФ ,_ч
OZ ОХ
(при этом уравнение F) удовлетворяется тождественно). С учетом этого
у -компонента вектора rot v будет равна
/ , ч dvx dvz [дЧ , а2ф\ /оч
ш = (rot v) = — — — = — — + — . (8)
V Jy dz дх \ дх2 dz2 J W
Эта величина называется завихренностью поля скоростей v.
Переформулируем систему уравнений C), E) на языке функции тока
Ф и завихренности ш. Для этого применим оператор гоЦ к уравнению E).
Это дает
— + vx— + vz— = г/Аш - ag—. (9)
ot ox oz ox
Здесь учтено, что вектор ускорения силы тяжести имеет только компоненту
gz = — g. Заменяя здесь величины {vx,vz} по формулам G), получим
Аналогично, уравнение теплопроводности C) переписывается в виде
от
+
Ш d(x,z)
В уравнениях (9), A0) завихренность ш выражается через функцию тока Ф
формулой (8).
К.35. Эффект Бенара 397
В стационарном состоянии конвекция отсутствует, v = 0. Поэтому
можно принять, что иФ = 0. В этом случае решение уравнения тепло-
теплопроводности имеет вид
T = Tc(z) = Тг -/3z, f3=Tl^T2 > 0. A2)
h
Положим
ТО, z, t) = Tc(z) + ВО, z, t). A3)
Тогда из A1) следует, что функция Q(x,z,t) удовлетворяет уравнению
— + ' = аАВ + д^—. A4)
Заметим, что уравнение A0) при этом не меняет вида (только величина Т
заменяется на В).
Уравнения A0), A4) должны быть дополнены граничными условиями.
Прежде всего будем всегда предполагать, что деформация верхней поверх-
поверхности жидкости мала. Это означает, что z-компонента скорости течения
обращается в нуль на обеих граничных поверхностях:
vz = 0 при z = 0 и z = h. A5)
Формально, хотя и не всегда корректно, это можно также интерпретировать
как наличие недеформируемых твердых поверхностей, ограничивающих
слой жидкости как снизу, так и сверху. На этих же поверхностях обраща-
обращается в нуль и величина В:
В = 0 при z = 0 и z = h, A6)
поскольку температура на поверхностях зафиксирована по условию.
Вторая группа граничных условий зависит от свойств границ.
Во-первых, в случае, когда слой жидкости ограничен твердыми поверх-
поверхностями, вследствие наличия вязкости отсутствует проскальзывание жид-
жидкости, то есть на этих границах все компоненты скорости обращаются в
нуль:
vx = 0 при z = 0 и z = h. A7)
Тогда из уравнения непрерывности в форме F) следует, что
dVz = 0. A8)
lh
2 = 0
Во-вторых^ если границы слоя жидкости свободные, то на этих грани-
границах обращаются в нуль компоненты тензора вязких напряжений:
dvx d
+
Поскольку vz\z=o h = 0, то
dvx
dz
z=Q
z=h
= 0 B0)
398 Комментарии
(равенство dvy/dz = 0 является тождеством, поскольку по предположе-
предположению vy = 0). Дифференцируя по z уравнение непрерывности F), находим
другое представление для граничных условий B0):
d2vz
dz
d2vz
z=0
dz
= 0. B1)
z=h
Таким образом, в случае твердых стенок граничные условия даются
равенствами A5), A8) и A6), а в случае свободных поверхностей — ра-
равенствами A5), B1) и A6).
На языке функции тока граничные условия A5), A6), A8), B1) можно
записать в виде:
для твердых поверхностей:
ф = в = Q, — = 0 при z = 0 и z = h; ^22a)
dz
для свободных поверхностей:
дЧ B26)
Ф = в = 0, — = 0 при z = 0 и z = h.
dz2
При выводе условий B2) следует иметь в виду, что функция тока опреде-
определена лишь с точностью до произвольной функции времени.
Рассмотрим сначала вопрос об устойчивости состояния равновесия.
Мы ограничимся наиболее простым для анализа (хотя и не самым реали-
реалистичным) случаем свободных граничных поверхностей слоя жидкости,
то есть случаем граничных условий B26).
Считая величины Фив малыми, линеаризуем уравнения A0), A4).
Это сводится к отбрасыванию якобианов, являющихся величинами второго
порядка малости. Положим далее
Ф(ж, z, t) = Ф(ж, z) exp(pt), Э(х, z, t) = 6(я, z) exp(pt). B3)
Тогда получаем систему двух уравнений для функций Фив:
^вж,
ж. { }
Здесь мы заменили величину ш согласно соотношению (8) на ^ДФ. Ис™
ключая в B4) функцию в, приходим окончательно к уравнению
ш/Д3Ф - р(а + и) Д2Ф + р2 ДФ - a/3g^xx = 0, B5)
которое дополняется граничными условиями B2). Кроме того, добавляется
еще пара граничных условий. Согласно первому из уравнений B4) нетри-
нетривиальное условие, независимое от B26), есть
Д2Ф = 0 при z = 0 и z = h, B6)
Будем искать решение уравнения B5) в виде
qxx + qzz)]. B7)
К.35. Эффект Бенара 399
Подстановка этого выражения в B7) дает характеристическое уравнение
avqe+p(a + v)qi+p2q2-aPgql=0, q2^q2x+q2z. B8)
Данное уравнение определяет две ветви спектра: pi(q) и Р2<я)- Нетрудно
показать, что при q —>> оо эти ветви ведут себя как
Pl(q) = ~ag2, p2(q) = ~щ2. B9)
Поэтому для нахождения порога неустойчивости необходимо найти усло-
условия, при которых оказывается р = 0. Поэтому положим в B8) р = 0. Это
дает уравнение для нахождения допустимых значений qz:
/2 , 2\3 Ra 2 /о/\\
(Qx + Qz) = -j^qZ, C0)
где введено число Рэлея:
Ra = SE&L. = g^Ifo3, AT^T.-T,. C1)
Уравнение C0) имеет шесть корней:
Ш = {±Ро, ±р, ±Р*}, C2)
где
1
Таким образом, при р = 0 функция Ф может быть записана в виде
б C3)
к=1
Граничные условия B26), B6) могут быть удовлетворены, если окажется
Qz = Ро = —5 п = 1, 2, 3,... C4)
При этом
Из C2), C4) находим
Ra
- 1
или Ra = —, C6)
где для краткости введено обозначение j = qxh. Наименьшее собственное
значение ро и соответственно значение Ra получается при п = 1, то есть
ро = тг/ft и
Ka=t^?^ C7,
400
Комментарии
Минимальное значение числа Рэлея достигается при j = тт/л/2, то есть
при qx = ir/hy/2, и равно
RaKp = ^тг4 = 657,5.
C8)
Найденное значение числа Рэлея определяет порог возникновения тер-
термоконвективной неустойчивости в случае свободных граничных поверхно-
поверхностей слоя жидкости. Если жидкость ограничена твердыми поверхностями,
то для числа Рэлея можно получить трансцендентное уравнение, решение
которого есть
RaKp = 1707,8 при 7 = 3,117. C9)
Числа qk в C2) при этом оказываются равными р® = 3,974, р = 5,195+
+г-2,126.
Таким образом, если градиент температуры превышает некоторое кри-
критическое значение (Ra > RaKp), то возникает неустойчивость, ведущая к
образованию системы конвективных валов.
Согласно C3), C5) непосредственно вблизи порога неустойчивости
функция тока Ф(ж, у) и скорость течения v даются формулами:
Т/ \ Л - ( *Х\ ' f^Z
w(x.y) = Asm —— • sin —
V J \hV2j Vh
0-
7ТА . ( ЖХ
rsinl
h \
• cos
D0)
: COS
f 7ГХ \
• SI
sin
zv"" 8x hV2 \hV2J
На рис. 2 приведена зависимость функции тока от координат в верти™
кальном сечении слоя жидкости. Поскольку нормаль к линии уровня Ф =
= const в каждой точке определяется градиентом функции, N = grad Ф,
то согласно G) направление вектора скорости совпадает с направлением
касательной к линии уровня в той же точке. Поэтому рис. 2 иллюстриру™
1,0 F
-1
Рис. 2. Линии уровня функции тока Ф(ж, z) в поперечном сечении слоя жидкости.
Стрелками показано направление циркуляции конвективных течений
ет также поле скоростей течения. Направление циркуляции для некоторых
точек показано стрелками.
К. 35. Эффект Бенара 401
Для описания поведения системы после возникновения неустойчиво-
неустойчивости нужно построить эволюционные уравнения, которые можно было бы
исследовать. Эта процедура была проделана Б. Зальцманом 1) . Он разло™
жил функции 9иФ в двойные ряды Фурье по переменным х и z с зави™
сящими от времени коэффициентами {Фтп(?), втп(?)}, ограничиваясь в
этих рядах конечным числом членов. Подставив эти ряды в уравнения A0),
A1), Зальцман получил систему обыкновенных нелинейных дифференци-
дифференциальных уравнений. Численный анализ показал, что в некоторых случаях
все переменные {Фтоп(^M 0mn(?)}, кроме трех, стремились к нулю. Ис-
Используя результаты Зальцмана, Э. Лоренц 2) с самого начала ограничился
этими тремя нетривиальными членами, положив
, z) = dV2X(t) sin (W) - sin f—
V h У V h
Здесь X(i)9 Y(i), Z(i) — некоторые функции времени, которые, собствен-
собственно, и должны описывать временную динамику конвекции 3) . Число /х =
= qxh/7T (порогу неустойчивости отвечает /i = l/\/2). В вычислениях
Лоренца константы С\ и Сч принимались равными
\i тг Ra
где RaKp есть критическое число Рэлея, даваемое формулой C8). Если вы-
выражения D1) подставить в уравнения A0), A1) и отбросить все гармоники,
кроме тех, которые учтены в D1), то можно получить следующую систему
уравнений:
X = -аХ + о-У,
У = ^XZ + rX - У, D3)
Z = XY - bZ.
Здесь точка означает дифференцирование по безразмерному времени т =
= тг2A + "y2)at/h2, а коэффициенты г, а и Ъ даются формулами
Ra v л 4 ....
r = ^' <J = ^' Ь=Т^^- D4)
Накр а 1 + 7
Очевидно, что величина а есть число Прандтля, а г — нормированное
число Рэлея.
Система уравнений D3) представляет собой известную систему Ло~
ренца, обсуждавшуюся в главе 10 в связи с исследованием стохастиче-
1 ) Saltzman В. II Journal of the Atmospheric Sciences. - 1962.™ V.I9.™ P.329.
2) Lorenz E. II Journal of the Atmospheric Sciences. - 1963.- V.20. - P. 130.
) Использование обрезанных рядов Фурье для приближенного решения нелинейных
уравнений называется аппроксимацией (или методом) Галеркина. Законность подобного
подхода всегда требует специального обоснования.
26 Н.В. Карлов, Н.А. Кириченко
402 Комментарии
ской динамики диссипативных систем. Строго говоря, эта система явля-
является приближенной и не позволяет исследовать реальное турбулентное
течение жидкости. Более того, оказалось, что при учете следующих тар™
моник в приближении D1) и соответствующем увеличении числа урав-
уравнений в системе D3) стохастичноеть, присущая системе Лоренца, вооб-
вообще пропадает. Тем не менее, модель D3) остается классическим приме™
ром, демонстрирующим явление детерминированного хаоса.
ПРИЛОЖЕНИЯ
П.1. Уравнения в частных производных первого пормдка
Системы двух обыкновенных дифференциальных уравнений первого
порядка. Интегральная кривая. Первый интеграл. Системы обыкновен-
обыкновенных дифференциальных уравнений первого порядка с п переменными.
Линейные дифференциальные уравнения в частных производных пер-
первого порядка. Характеристики. Квазилинейные уравнения в частных
производных первого порядка. Геометрический смысл характеристик.
Нелинейные уравнения в частных производных первого порядка. Конус
Монжа, характеристическая полоса, начальная полоса. Уравнение эйко-
эйконала. Принцип Ферма. Закон Снеллиуса. Проникновение луча света в среду
с убывающим показателем преломления.
В данном приложении излагаются некоторые утверждения и методы теории
уравнений в частных производных первого порядка, используемые при решении
многих задач.
Системы двух обыкновенных дифференциальных уравнений первого
порядка 1) . Рассмотрим сначала систему двух обыкновенных дифференциаль-
дифференциальных уравнений 1-го порядка:
^ = /(*,**),
dz A)
— =g(x,y,z).
ах
Произвольное решение этой системы {у = y(x),z = z(x)} называется инте-
интегральной кривой. Геометрически оно может быть интерпретировано как кривая на
фазовой плоскости {у, z}, заданная в параметрической форме (с параметром х).
Систему можно записать в симметричной форме, не выделяя явно функции и
аргумент:
^=X(x,y,z), %=Y(x,y,z), %=Z(x,y,z) Ba)
at at at
=dt. B6)
X(x,y,z) Y(x,y,z) Z(x,y,z)
) Этот и следующие два раздела написаны на основе конспекта лекций по высшей
математике, прочитанных С.Г. Селивановой студентам второго курса МИФИ в 1968 г.
404 Приложения
В этом случае интегральная кривая есть кривая {ж = x(t),y = y(t),z = z(t)} в
трехмерном пространстве {х,у, z},a.t — параметр вдоль неё. Заметим, что любую
часть в равенствах B6) можно заменить конструкцией вида
Аг(ж, у, z)dx + А2(х, у, z)dy + А3(х, у, z)dz = ^
A1(xJy,z)X + A2(x,y,z)Y + A3(x,y,z)Z '
где Ai, A2, A3 — произвольные функции. Это утверждение непосредственно по-
получается, если взять линейную комбинацию уравнений системы в форме Bа), а
затем перейти снова к симметричной форме типа B6). В частности, если функции
Ai есть константы ci, с2, сз, то равенство (За) принимает более простой вид:
dX + c2Y -
Очевидно, система уравнений A) есть частный случай системы B):
dy_ _ Y(x,y,z) _ , ,
dx X(x,y,z) '
dz Z(x,y,z) . ч l j
— = Y) \ =g(x,y,z).
dx X(x,y,z)
Будем далее предполагать, что функции X,Y, Z непрерывны вместе с первы-
первыми частными производными и не обращаются в нуль одновременно в некоторой
области D. Тогда выполнены условия теоремы Коши, и через каждую точку обла-
области D проходит единственная интегральная кривая.
Уравнение <&(x,y,z) = С называется первым интегралом, системы B), если
1) функция Ф(ж, у, z) ^ const;
2) функция Ф(ж, у, z) непрерывна вместе с первыми частными производными
в области D;
3) на любой интегральной кривой системы B) функция Ф(ж, у, z) обращается
в постоянную.
Пример. Рассмотрим систему
dx ' ^х ^У dz
или
(z^yJ z у
dx
Последнее равенство дает
dy dz 2 2 ^
— = — или у — z = С\. F)
z у
Применяя к уравнению в E) преобразование C6), рассматриваем далее систему
вида
dx d(z —
или
{z ~ УJ Z^V zy 1
Последнее уравнение легко интегрируется и дает
2x + {z^yf = C2. (8)
Соотношения F), (8) дают полный набор первых интегралов системы E).
П. 1. Уравнения в частных производных первого порядка
405
Теорема 1. Пусть функция Ф(ж, у, z) непрерывна вместе с первыми част-
частными производными и не равна тождественно постоянной в некоторой области.
Для того чтобы уравнение Ф(ж,г/, г) = С определяло первый интеграл системы
B), необходимо и достаточно, чтобы на любой интегральной кривой выполнялось
тождество
ду
(9)
Доказательство.
Необходимость. Пусть Ф(х7у, z) = С — первый интеграл системы B). Если
{x(t),y(t),z(t)} — произвольная интегральная кривая L, то <&(x(t),y(t),z(t)) =
= const. Тогда
дФ дФ дФ Г<9Ф дФ дФ
дх ду dz I дх ду dz
где дифференциалы dx, dy, dz заменены согласно B) на Xdt, Ydt, Zdt соответ-
соответственно. Отсюда следует равенство (9).
Достаточность. Пусть на произвольной интегральной кривой L выполняется
равенство (9). Заменяя в нем X, Y, Z на dx/dt, dy/dt, dz/dt на основании системы
B), получаем
дФ дФ дФ
— dx Н dy Н dz = 0 или dФ(x(t),y(t),z(t)) = 0.
дх ду dz
Отсюда следует Ф = const. ¦
Системы обыкновенных дифференциальных уравнений первого по-
рмдка с п переменными. Приведенная теорема обобщается на случай произ-
произвольного числа функций, то есть на случай системы вида
dyi
— = Л № 2/1,2/2,..., 2/n-i
dx
dx
ьУп — 1 р / \
— = /n-i(a,2/i,2/2,..., 2/n-i).
dx
A0а)
Переобозначая переменные х —> х\,у\
систему к симметричной форме:
¦ х2, У2
,Уп-1 —> Хп, приведем
dxn
в которой набор функций {Xi, X2,..., Хп} отличается от набора {1, /i, /2,...
..., /n-i} общим множителем Х\.
Если функции Xi, Х2, • • •, Хп непрерывны вместе с первыми частными про-
производными и не обращаются в нуль одновременно в некоторой области D, то в
этой области (или некоторой ее части) существует п — 1 независимых первых
интегралов системы A06):
2,...,ЖП) =С2,
Каждый из этих интегралов определяет интегральную поверхность.
си)
406
Приложения
Теорема 2. Для того чтобы уравнение Ф(ж1,Х2,...,хп) = С было пер-
первым интегралом системы A06), необходимо и достаточно, чтобы на любой инте-
интегральной поверхности системы A06) выполнялось тождество
ОХ\
0X2
дхп
A2)
Доказательство полностью аналогично доказательству теоремы 1. ¦
Произвольная непрерывно дифференцируемая функция первых интегралов
.Р(Ф1,Ф2,...,Фп-1) также является первым интегралом:
, Ф2, • • • , Фп-l) =
2, • • • , Хп) = С.
A3)
Линейные дифференциальные уравнении в частных производных
первого пормдка.
Теорема 3. Если {^i(xi,x2,... ,хп) = Ci, ^2(^1,^2, • • • ,хп) = О2,...
..., Фп-1(ж1, Ж2,... , жп) = C'n-i} — набор независимых первых интегралов
системы уравнений A06), то функция Ф(ж1,жг, • • • ,жп) = F(#i5#2) • • •, Фп-i)
является общим решением дифференциального уравнения
а*
аФ
A4)
Здесь F — произвольная непрерывно дифференцируемая функция своих аргументов.
Независимость функций #i, Ф2, ... , Фте-1 означает, что функциональная
матрица
UX\ UX2 ОХп
^(ФьФз,...,1
V
дхп У
A5)
имеет ранг г = п — 1, то есть эта прямоугольная п х (п — 1)-матрица содержит
квадратную (п — 1) х (п — 1)-матрицу, имеющую ненулевой определитель.
Доказательство. Пусть Ф(х\,х2,...,хп) — произвольное решение урав-
уравнения A4). Покажем, что существует такая непрерывно дифференцируемая функ-
функция ^(Ф1,Ф2,. • • ,Фп-1), что Ф = F. Так как Фх = Ci, Ф2 = С2, ... , Фп-i
= Сп-1 — первые интегралы, ^(Ф1,Ф2, ... ,Фп-1) = С — также первый инте-
интеграл системы A06), то по теореме 2 каждая из функций Ф, #i, #2, • • • , Фп-i
удовлетворяет уравнению A4):
дхг
дхп
(п =0,
1Хп = 0,
A6)
Х\ + Х2 + ... + Хп — 0.
дх\ дх2 дхп
Это есть система п линейных однородных уравнений относительно величин
П. 1. Уравнения в частных производных первого порядка
407
Х2, ... , Хп. Поскольку эти величины не равны нулю одновременно, то
С1, ^,..., «n-iy =Q (П)
Жп То Т 1 ~
С/^Х1,Х2, • • • 5 «-^nj
Согласно A7) ранг системы A6) равен п—1. Поэтому функции Ф, Фх, Ф2,... , Фп-1
зависимы, то есть существует такая функция J^, что ^"(Ф, Фх, Ф2, •. •, Фп-i) =
= 0. Разрешая последнее уравнение относительно Ф, получим окончательно Ф =
Система обыкновенных дифференциальных уравнений A0) называется систе-
системой уравнений характеристик, а интегральные кривые, определяемые этой систе-
системой — характеристическими кривыми, или характеристиками уравнения A4).
Пример. Рассмотрим уравнение
<9Ф <9*Ф <9Ф
ох ду dz
Ему соответствует система обыкновенных дифференциальных уравнений (уравне-
(уравнений характеристик):
dx dy dz
z-y х- z у - z
Два независимых первых интеграла последней системы могут быть получены
следующим образом.
1) Используя свойство (За), сложим все числители и все знаменатели. Это дает
d(x + у + z)
0
= dt, откуда х + у + z = С\.
2) Еще один первый интеграл получается из следующей цепочки равенств:
xdx ydy zdz xdx + ydy + zdz
= dt
=dt
x(z - y) y(x - z) z{y -x) ' 0
=> x2 + y2 + z2 = C2.
По найденным интегралам составляем общее решение исходного уравнения:
Ф(ж, у, z)=F{x + y + z, х2 + у2 + z2),
где F — произвольная функция.
Задача Коши для уравнения A4) формули-
формулируется следующим образом. Среди всех реше-
решений уравнения требуется найти то, которое при
фиксированном значении одного из аргументов
(xi = хм) обращается в заданную функцию
остальных аргументов:
Интегральная
поверхность
,Ж2,... ,Жг-1,Жг+1,... ,ЖП). A8)
С геометрической точки зрения это означает,
что требуется найти ту интегральную поверх- Рис. 1. Интегральная поверх-
поверхность, которая проходит через заданную кривую ность, проходящая через за-
Ьо (как это проиллюстрировано на рис. 1). данную кривую Lo
408 Приложения
Квазилинейные уравнения в частных производных первого пормдка.
Уравнение A4), которое мы до сих пор рассматривали, называется линейным, по-
поскольку его коэффициенты зависят от координат, но не от искомой функции. В
более общем случае приходится иметь дело с уравнениями вида
П Q,Tf
V Xk(V,X1,X2,...,Xn)=R(V,X1,X2,...,Xn), A9)
tidx
называемыми квазилинейными уравнениями. Левая часть A9) есть линейная функ-
функция производных, тогда как коэффициенты Хк и правая часть R зависят от коор-
координат и искомой функции.
Уравнение A9) легко сводится к линейному уравнению, содержащему, однако,
п + 1 независимую переменную. В самом деле, запишем решение в неявной фор-
форме: U = 17(Ф, Ж1, Ж2,..., хп) = 0. Определяя отсюда обычным образом частные
производные от Ф по хк:
аФ = ои/дхк
дхк
и подставляя B0) в A9), приходим к уравнению для функции U:
Г\Т Т ^ AT T
Д(Ф ) + У
У Хк(Ъ,х1,х2,..., хп) = 0, B1)
аФ ^ дхк
которое по своему типу уже не отличается от рассмотренного выше линейного
уравнения A4).
Пример. Рассмотрим уравнение
6»Ф <9Ф т 2
х \-у = Ф .
ох оу
Согласно B1) ему сопоставляется система уравнений характеристик
dx _ dy _ d4!
х у Ф2
Отсюда находятся два семейства характеристик:
dx dy x „ dx c№ . 1 „
— = — => - = Ci; — = — => 1пжН =С2.
х у у х Ф2 Ф
Следовательно,
U = U (-,1пж+ — ) =0 или — = -Inx + F (-
\У Ф/ Ф \2/
где U и F — произвольные функции.
Геометрический смысл характеристик 1) . Рассмотрим квазилинейное
уравнение
ди ди .„.
ар + bq = с, где р = —, q=—, B2)
ож оу
) В этом и в следующем разделах мы, отчасти, следуем книге: Кошляков КС,
Глинер Э.Б., Смирнов М.М. Уравнения в частных производных математической физики. —
М.: Высшая школа, 1970.
П. 1. Уравнения в частных производных первого порядка 409
где а = а(х,у,и), b = b(x,y,u), с = с(х,у,и). Функции а, Ь, с определяют в
каждой точке пространства (х,у,и) поле направлений, то есть совокупность на-
направляющих косинусов:
а Ь с
cos а = , cos р = , cos 7 = , .
Va2 + Ь2 + с2 Va2 + Ь2 + с2 V«2 + b2 + с2
B3)
Интегральные кривые, соответствующие этому полю направлений, определя-
определяются из системы дифференциальных уравнений
—^— = -^— = -^—=dt B4)
а{х,у,и) Ь{х,у,и) с(х,у,и)
и являются характеристиками уравнения B2). В обычной форме эти уравнения
можно переписать в виде
dx , ч dy , ч du , ч /«.х
— = а(ж, w, и), ^=Ь(х,у,и). — = clx.y.u). B5)
1, \*й»7/5 |, \7S»5/7 » \7t77/ V/
at at dt
Решение уравнения B2) определяет интегральную поверхность и = и(х,у).
Вектор нормали N к этой поверхности пропорционален вектору (р, д, — 1). Сле-
Следовательно, уравнение B2) выражает тот факт, что направление, определяемое
полем направлений B3), перпендикулярно к нормали интегральной поверхности
в каждой точке этой поверхности.
Если некоторая поверхность и{х^у) образована характеристиками уравнения
B2), то в каждой точке этой поверхности касательная к характеристике лежит
в касательной плоскости к поверхности и(х,у). Следовательно, эта поверхность
является интегральной. Обратно, если и = и(х^у) есть интегральная поверхность,
то ее всегда можно покрыть семейством характеристик. В самом деле, на любой
интегральной поверхности можно задать однопараметрическое семейство кривых
{x(t),y(t), u(x(t),y(t))} с помощью дифференциальных уравнений
dx , , dy ( .
— =а(х,у,и), — =Ь(х,у,и), B6)
at at
в которых функция и заменена ее выражением и(х,у). Отсюда следует
ди ди ди dx du dy du
— a+—6= —— + —— = —•
ох ду их dt dy dt dt
Поэтому вдоль каждой характеристики уравнение B2) переходит в du/dt = с.
Таким образом, рассматриваемое семейство удовлетворяет уравнениям B5) и, сле-
следовательно, состоит из характеристических кривых.
Нелинейные уравнения в частных производных первого порядка. Рас-
Рассмотрим уравнение
F(x,y,u,p,q) = Q, где Р=тЛ Я = т^- B^)
ох ду
Предполагается, что Fp + F% ф 0. Покажем, как для этого уравнения можно
построить поле направлений и характеристики, являющиеся естественным обобще-
обобщением соответствующих понятий, введенных для случая квазилинейного уравнения.
В каждой фиксированной точке пространства (х,у,и) это уравнение опре-
определяет набор допустимых значений величин (р, q) и, следовательно, семейство
касательных плоскостей, проходящих через указанную точку (касательных — к
410
Приложения
интегральной поверхности и = и(х,у)). Вследствие связи B8) между р и q это
семейство оказывается однопараметрическим ) : р = р(а), q = q(pt) (a — пара-
параметр семейства). Огибающая этого семейства называется конусом Монжа (в дан-
Характеристическая
полоса
Рис. 2. Начальная полоса и одна характеристическая полоса на интегральной
поверхности, проходящей через точку Pq. Показан конус Монжа в точке Pq. N —
вектор нормали к интегральной поверхности
ной точке (х,у,и)) — см. рис. 2. Направления образующих этого конуса называ-
называются характеристическими направлениями.
Уравнение касательной плоскости нетрудно найти, если заметить, что вектор
нормали к интегральной поверхности пропорционален вектору N = {р, q,—l}.
Пусть R = {X, У, U} — радиус-вектор точек касательной плоскости, а г =
= {х,у,и} — радиус-вектор точки интегральной поверхности, через которую про-
проходит эта плоскость. Тогда уравнение касательной плоскости записывается в виде
(R-r)-N =
-x) + q(a)(Y-y)-(U-u) =
B9)
Чтобы найти уравнение огибающей этого семейства плоскостей (то есть урав-
уравнение образующих конуса Монжа), продифференцируем B9) по параметру а:
pl(a)(X-x)+q'(a)(Y-y) = 0.
Дифференцирование соотношения B8) по а дает
где
op
oq
C0)
C1)
Система двух линейных однородных уравнений C0), C1) относительно р'(а)
// ч Х - Х Y - У г-
и q {а) имеет нетривиальное решение, если = . С учетом уравнения
Р Q
) Если бы уравнение содержало п независимых переменных, то мы имели бы п
различных производных pi = du/dxi и число параметров, характеризующих семейство,
составило бы те — 1.
П. 1. Уравнения в частных производных первого порядка 411
B9) получим полную систему уравнений образующих конуса Монжа:
Г- C2)
Направления образующих конуса Монжа называются характеристическими
направлениями. В частном случае квазилинейного уравнения B2) оказывается Р =
= a, Q = b, Pp + Qq = ap + bq = с, так что для всех образующих конуса Монжа
направляющие косинусы одинаковы (не зависят от р и q), и огибающая семей-
семейства касательных плоскостей (конус Монжа) вырождается в прямую, называемую
осью Монжа. Само же семейство плоскостей превращается в пучок плоскостей,
проходящих через ось Монжа.
Линия на интегральной поверхности, касающаяся в каждой своей точке со-
соответствующей образующей, называется характеристической линией (характери-
(характеристикой). Иногда употребляют также названия фокальная кривая, или кривая Мон-
Монжа. Ее дифференциальные уравнения можно получить, если заметить, что соот-
соответствующие направляющие косинусы пропорциональны знаменателям в C2):
dx dy d%
Р Q Pp + Qq
= dt C3a)
dt dt dt
Для заданной интегральной поверхности и = (ж, у) величины р и q име-
имеют вполне определенные значения. Поэтому, интегрируя систему из первых двух
уравнений C36), мы получим однопараметрическое семейство характеристик, ле-
лежащих на данной поверхности. При этом третье уравнение в C36) превращается
в тождество:
дх dy dx dt dy di dt
Заметим теперь, что система уравнений C3) зависит от выбора конкретной
интегральной поверхности, поскольку содержит в явном виде параметры р и д.
Модифицируем эту систему так, чтобы она не зависела явно от выбора интеграль-
интегральной поверхности. Для этого добавим уравнения, описывающие изменения величин
р и q вдоль характеристики.
Учтем, что для каждой фиксированной поверхности р = р(ж, у), q = д(ж, у).
Дифференцируя исходное уравнение B8) сначала по ж, а затем по у, получим
dr or or ou or op or oq or or on OQ
— = 1 1 ^н = 1 p + P^~ + Q-^ = o,
dx dx du dx dp dx dq dx dx du dx dx
dF _ dF dF du dF dp dF dq _ dF dF dp dq _
dy dy du dy dp dy dq dy dy du dy dy
C4)
С другой стороны, вдоль характеристической кривой выполняются равенства
dp dp dx dp dy _ dp dp
dt dx dt dy dt dx dy
dq oq dx uq dy oq oq
dt dx dt dy dt dx dy
412 Приложения
Исключая в C4) производные отридпожиус помощью C5), получим
C6)
( + Р), ( +<
dt \ dx du у dt \ dy du
Дополняя уравнения C3) этими уравнениями, получим полную систему из
пяти уравнений характеристической кривой:
dx dy du
= Р =Q =Pp + Qq
dp __(_ ? q^^^
dt~ \dx + duP) ' dt~ V dy + du
Заметим, что функция F(x,y7uJpJq) принимает постоянные значения, если
величины х, у, и, р, q подчиняются системе уравнений C7). В самом деле,
dF _ dF dx dF dy dF du dF dp dF dq _
dt dx dt dy dt du dt dp dt dq dt
dF „ dF ^ dF /rt ^4 n(dF dF \ ^ (dF dF \ Л
dx dy du \dx du J \ dy du J
откуда следует F = const. Исходному уравнению соответствуют те решения си-
системы C7), для которых F = 0. Другими словами, если начальные условия
хо = х@), |/о = 2/@), и0 = и@), ро = р@), до = д@) C8)
удовлетворяют уравнению F(xo, yo,uo,po,qo) = 0, то решение системы уравне-
уравнений C7) есть интегральная кривая.
Поскольку каждой точке характеристики сопоставлен вектор (р, д, — 1), опре-
определяющий ориентацию касательной плоскости к интегральной поверхности в этой
точке, то характеристическая кривая задается одновременно со своими касатель-
касательными плоскостями и потому называется характеристической полосой. Перебирая
начальные условия (xo,yo,uo,po,qo), мы найдем все множество характеристиче-
характеристических полос.
Выберем некоторую начальную полосу
хо = xo(s), 2/о = yo(s), uq = tiO(s), po = Po(s)j go = qo(s), C9)
где параметр s нумерует начальные условия, причем
F(xo(s),yo(s),uo(s),po(s),qo(s)) = 0. D0)
Тогда, решая систему уравнений C7) с начальными условиями, отвечающими
каждой точке начальной полосы C9), получим совокупность характеристиче-
характеристических полос:
x = x(t,s), y = y(t,s), u = u(t,s), p = p(t,s), q = q(t,s). D1)
Первые три уравнения в D1) определяют в параметрическом виде некоторую по-
поверхность. Если исключить из этих уравнений параметры t и s, то уравнение этой
поверхности запишется в виде и = и(х,у). Последнее возможно, если на началь-
начальной полосе (то есть при s = 0)
д(х,у) _ dx dy dx dy
d(t, s) ~ dt ds ds dt
(в силу непрерывности производных это неравенство будет иметь место и в неко-
некоторой окрестности точки s = 0).
П. 1. Уравнения в частных производных первого порядка 413
Теорема 4. Найденная так функция и = и(х,у) есть интегральная поверх-
поверхность уравнения B8) F(x, у, и, р, q) = 0, если только начальная полоса удовлетво-
удовлетворяет условию
du0 dxo dy0
— =Ро— + Ф) — . D2)
ds ds ds
Доказательство. Если функции x(t), y(t), u(t), p(t), q(t) удовлетворяют
системе уравнений C7) и начальным условиям C9), D0), то функция и(х7у) удо-
удовлетворяет уравнению B8), так как функция F обращается тождественно в нуль
на произвольной характеристической полосе при соблюдении начального условия
D0). Поэтому достаточно доказать, что функции р и q совпадают с производными
ди/дх и ди/ду соответственно.
Имеем тождества:
D3)
uu uu wjj ии иу
ds ~ dx ds dy ds '
Рассмотрим функции
ди dx dy
D4)
Если обе эти функции равны нулю тождественно, то согласно D3) величины р и
q равны соответствующим производным ди/дх и ди/ду.
Функция Н равна тождественно нулю на основании первых трех уравнений
системы C7).
Покажем, что при соблюдении условия D2) функция L также обращается в
нуль. Имеем
дЬ д ( ди\ др дх д2х dq ду д2у
ди
~т
ди
1b
Н =
L =
ди
дх
ди
~ дх
ди
' at ~
ди
~ds "
дх
dt
dx
а^ +
dx
Р dt
dx
Pds
du
dy
du
%
~~ Q
dy
dt1
dy
ds'
dy
dt
dy
ds
dt ds\dt) dt ds Pdtds dt ds Qdtds~
Заменяя здесь, согласно C7), производную ди/dt на Рр + Qq, получим
дЬ дх др ду dq дх др ду dq
dt dt ds dt ds ds dt ds dt
Поскольку на характеристической полосе F(x,y,u,pjq) = 0, то, дифференцируя
это тождество по s, получим
aF^aFcb dF^dy dF^du dF^dp d?dq=Q
ds dx ds dy ds du ds dp ds dq ds
Вычитая это равенство из предыдущего, получим
дЬ dF _ UdF др\ дх f dF dq\ ду dF ди
dt ds L V дх dt / ds \ dy dt / ds du ds
dF\ dx ду ЗиЛ ТТТ
d I d d 3\
p q +
du I ds ds 3s
414 Приложения
Здесь использованы уравнения C7) и введено обозначение U = дР/ди. Решая
полученное уравнение относительно L, найдем
t
Г
— Udt
L = Lq ехр
J
о
Отсюда следует, что если Lq = L\t=0 = 0, то L = 0. Величина же Lq обращает-
обращается в нуль, если для начальной полосы (согласно определению L) выполняется
условие D2). ¦
Заметим, что если функции C9) произвольны и связаны только условиями
D0), D2), то произвольной является и начальная полоса. Поэтому найденная по
указанной схеме интегральная поверхность есть поверхность общего положения
и дает общий интеграл уравнения. Иначе говоря, общий интеграл содержит, как
и в случае квазилинейных уравнений, произвольные функции.
Пример. Найти решение уравнения F(x, у, u,p7q) = pq — и = 0, удовле-
удовлетворяющее начальным условиям: хо = 1, г/о = s, ио = s. (Напомним, что р = их,
q = иу).
Система уравнений характеристик C7) имеет вид
dx dy du n dp do
— = g, — = p, — = 2pq, — = p, — = q.
dt dt dt dt dt
Ее решение, принимающее при t = 0 значения (жо,2/сьг?о,_ро,<уо), есть
х = qoef + хо - до, У = Рое* + г/о - Ро, и= poqoe2t + и0 - родо,
р = рое , q = qoe .
Начальные значения (хо,уо,ию,ро,до) связаны условиями
F(xo(s),2/o(s),wo(s),po(s),go(s)) = 0,
du0 dx0 dyo
as as ds
С учетом начальных условий отсюда вытекает, что
Родо - s = 0, 1 = до-
Следовательно, ро = s, go = 1. Таким образом, решение поставленной задачи
принимает вид
х = е , у = se*, и = 5e2t; р = se*, q = е*.
Исключая параметры ? и s из первых трех уравнений, получим в явном виде урав-
уравнение единственной интегральной поверхности, проходящей через заданную на-
начальную полосу:
и = ху; р = их=у, q = uy=x.
Изложенная теория переносится на случай произвольного числа независимых
переменных:
F(xi,x2,. • • ,xn,ti,pi,p2,... ,рп) = 0, рк = ди/дхк. D5)
В частности, полная система уравнений характеристик имеет вид
dx\ dxn du
Pi ' " Pn
= *^ = „.г = *^=ds, D6)
X + C/ X + U
П. 1. Уравнения в частных производных первого порядка 415
где введены обозначения
Pk = f^, P, = f, U=f, Xk = f. D7)
OXk Opt OU OXk
Задача Коши состоит в нахождении интегральной поверхности, проходящей
через (п — 1)-параметрическую начальную полосу:
@) @)/ х @) @)/ ч @) @)/ ч //1Ох
xl =xk(s)i u =1i W> Pk =Pk (s)' С48)
где параметр s содержит п — 1 компонент, s = (si, $2, • • •, Sn-i)> а начальные
функции связаны условиями полосы:
osr ^ asr
Уравнение эйконала 1) . В качестве одного из приложений изложенной
теории рассмотрим волновое уравнение
v2 at2 аж2 ау2 а^2 ~ '
в котором величина v = с/п — скорость волны в среде, п — показатель пре-
преломления среды, с — скорость волны в вакууме. Монохроматическое решение (с
частотой ш) этого уравнения (для какой-либо компоненты Е поля Е) можно искать
в виде
E(r,t) = а(г)ехр[г(Ф(г) - wt)], E1)
где а(г) и Ф(г) — действительные функции. Величина Ф называется эйконалом
(от греческого слова еькши — образ, изображение, подобие). Часто удобно исполь-
использовать приведенный эйконал Ф = Ф/&о, где ко = ш/с — волновое число в вакууме
(ему отвечает длина волны в вакууме Ао = 2ж/ко). Заметим, что в случае плоской
волны, распространяющейся в среде с постоянным показателем преломления п,
оказывается Ф = пг, где вектор п имеет длину п и направлен по вектору к.
Во многих случаях представляет интерес предел геометрической оптики
ко —^ оо (Ло —^ 0). Подставляя E1) в волновое уравнение, получим
2
-%2a-{[V2a-a(V§J] +i[2(Va,V#) + aV2#]} = 0.
Отделяя здесь действительную и мнимую части, получим систему уравнений для
эйконала Ф и амплитуды а:
V2a-a(V#J = -kin2 a,
о E2)
V2# 0
Переходя в первом уравнении к приведенному эйконалу, получим
(V*J = n2+V^.
) В этом разделе мы частично следуем книгам: Виноградова М.Б., Руденко О.В.,
Сухорукое А.П. Теория волн. — М.: Наука, 1979; Сивухин Д.В, Общий курс физики.
Оптика. — М.: Наука, 1980.
416 Приложения
В пределе ко —»¦ оо отсюда следует уравнение
?)' (?)'+(?)'-"¦¦
называемое уравнением эйконала.
Волна E1) имеет фазу <p(r,i) = Ф(г) — uot = ^оФ(г) — cjt. Условие <р =
= const = (fo определяет в каждый фиксированный момент времени поверхность
в пространстве, называемую фронтом волны. С течением времени положение по-
поверхности с заданным значением фазы (ро меняется — фронт волны смещается по
закону
#(r) = ^0 + wt. E4)
Вектор нормали к фронту волны Ф(г) = const пропорционален вектору
k = grad#(r) = fa)grad#(rM E5)
имеющему смысл волнового вектора в данной точке фронта. В самом деле, в окрест-
окрестности точки го эйконал может быть представлен в виде
Ф(г)«Ф(го) + к(г-го),
так что фаза волны
<р(г, t) = Ф(г) — out « Ф(го) + к(г — го) — out = Lpo + кг — out. E6)
Последнее означает, что в достаточно малой окрестности любой точки фронта
волна аппроксимируется плоской волной с волновым вектором E5), направленным
по нормали к фронту. Таким образом, вектор к дает направление распространения
лучей (ср. комментарий 19).
С точки зрения общей теории уравнение эйконала E3) есть нелинейное урав-
уравнение в частных производных первого порядка, и к нему применима изложенная
выше общая теория. Составим уравнения характеристик. Полагая
E7)
в соответствии
dx
2Рх
dy
F(x,
i с C7)
dz
дх
имеем
2
2n2
ду
Px,Py,Pz) =PX
Py = = 2_
dpx
д{п2)/дх
+ Py + Pz -
Py, Pz =
dpy
д(п2)/ду
- n2 = 0,
dpz
dpz
d(n2)/dz
d. E8)
2n
Здесь учтено последнее равенство E7). Переменная s введена как параметр вдоль
характеристики, смысл которого выясняется ниже. Нетрудно заметить, что вектор
р = (pXiPy,Pz) пропорционален волновому вектору к: к = ^ор.
Перепишем систему уравнений E8) в обычной форме:
ds n ds n ds n
сМ/ _ ^ фж _ dri dp^ _ dri dpz_ _ дп_
ds ds dx ds ду ds dz
П. 1. Уравнения в частных производных первого порядка 417
Из последнего уравнения E7) и уравнений E9а) следует
dx\ f dy\ /'dz\ __ рх + ру + pz _
ds у \ds у \ds у п2
(dxf + (dyf + (dxf = (dsJ. F0)
Отсюда видно, что параметр s имеет смысл длины луча (характеристики), а вектор
е = р/п — единичного касательного к лучу вектора, |е| = 1. Поэтому р = пе, и
уравнения E9) можно переписать в виде
^ = е; F1а)
ds
d(ne) d ( dr\
—^—^ = gradn или — I n— I = gradn; F1o)
ds ds V ds/
— = n. F1e)
Здесь г = (ж, у, z) — радиус-вектор точки луча. Если траектория луча r(s) най-
найдена из F16), то эйконал однозначно определяется из F1 в):
м
Ф(М) = Ф(М0) + I n(r(s))ds. F2)
J
м0
м
г
Величина ?(Mq,M) = n<is называется оптической длиной пути MqM.
м0
Поскольку скорость света в среде равна v = с/п, то заменяя в F2) ds на vdt,
получим
м м
Г Г
?(М0,М) = n-vdt = с dt = cT. F3)
м0 м0
Другими словами, оптическая длина пути пропорциональна времени распростра-
распространения луча по траектории MqM.
Принцип Ферма. Луч света распространяется в пространстве между двумя
точками по тому пути, вдоль которого время его прохождения меньше, чем вдоль
любого другого пути, соединяющего эти точки 1 ) .
Соотношение F3) позволяет дать другую формулировку принципа Ферма:
свет распространяется между двумя точками по той траектории, оптическая дли-
длина которой минимальна.
Строго говоря, отдельно следует рассматривать ситуации, когда имеется пре-
препятствие, делающее выбор траектории неоднозначным, как это проиллюстрировано
) Этот принцип сформулирован Пьером Ферма (P. Fermat) в 1662 г., исходя из
теологических соображений о целенаправленности действий природы, о том, что цель
должна достигаться с наименьшими затратами средств. Пьер Ферма получил ряд важных
результатов в физике и математике. Ему же принадлежит формулировка (около 1630 г.)
Великой теоремы Ферма (о неразрешимости в целых числах уравнения хп + уп = zn при
всех п > 2).
27 Н.В. Карлов, Н.А. Кириченко
418
Приложения
на рис. 3. Поэтому в формулировке принципа Ферма рассматриваются односвязные
области пространства, то есть предполагается, что выбор осуществляется между кри-
кривыми, которые могут быть непрерывным образом переведены одна в другую.
Рис. 3. Траектории лучей L\ и L2,
огибающие препятствие с разных
сторон
Рис. 4. Траектории Lq и L, соединяю-
соединяющие точки Mq и М. Линии со стрел-
стрелками — это траектории лучей
Доказательство. Рассмотрим интеграл J = kdr, вычисленный вдоль
произвольной кривой, соединяющей точки М® и М (см. рис. 4). Согласно E5)
k = grad Ф, так что
1V1
J = f grad#dr = Ф(М) - Ф(М0),
м0
то есть этот интеграл не зависит от формы кривой, а определяется только началь-
начальной и конечной точками.
Для траектории Lo, совпадающей с траекторией луча, векторы к и dr парал-
параллельны, то есть
м
J =
где ?о — оптическая длина участка MqM траектории луча. Если взять какую-
либо иную кривую L, соединяющую точки MqM, то вдоль нее векторы к и dr не
параллельны, так что kds ^ kdr. Поэтому для этой кривой окажется
МММ
ко? = к0 nds = kds ^ kdr = ко?о(Мо, М),
м0 м0 м0
откуда и следует неравенство ? ^ ?о.
Уравнения F1), определяющие траекторию луча, могут быть получены непо-
непосредственно из принципа Ферма. Последний означает, что траектории лучей опре-
м
деляются экстремалями функционала S = nds. Таким образом, получаем ва-
м0
П. 1. Уравнения в частных производных первого порядка
419
риационныи принцип
м
г
SS = 6 \ nds = 0.
м0
F4)
В самом деле, варьируя функционал S, имеем SS = (ёп • ds + п • eds). Пусть
м0
ёг — смещение траектории луча при варьировании (вариация траектории). Тогда
л Пл \2 г/л \ (dr) - 6(dr) dr
ds = у (drJ; o(ds) = -—, = — • d(or) = e • d(or),
у(Л*J ds
где e — единичный вектор, касательный к траектории луча. Кроме того, ёп =
= ёг • Vn. Таким образом,
м м
J J |_ ds J
м0 м0
Ввиду произвольности <5г отсюда следует уравнение F16).
Пример. Получим из принципа Ферма закон преломления света на границе
раздела сред с разными значениями показателя
преломления (рис. 5).
Пусть точка Mi находится на расстоянии hi
от границы раздела сред (оси X), а точка М2 —
на расстоянии h2. Тогда в обозначениях рис. 5
оптическая длина пути М1М2 равна
12 =
F5)
cos (р cos щ)
Учтем, что расстояние X между точками Mi и М2
вдоль оси х является фиксированным:
X = hi tg (p + h2 tg ф = const. F6)
Ми
h
\
щ
щ x
h
M2
Рис. 5. Преломление луча
света при переходе из среды 1
в среду 2
Тогда последнее соотношение задает связь между
углами (риф. Минимальная оптическая длина
imin определится из условия d?/d(p = 0, в котором дифференцирование
производится с учетом связи F6):
— = nihi
dip
dX
sincp
cos2 <p
slnt/? dф
^-^ =0,
cos2 ф dip
dф
dip cos2 (p cos2 ф dp
Исключая из этих равенств производную dф/d^p9 приходим к закону Снеллиуса:
> = п2 Бтф.
Пример. Найдем траекторию луча света в среде с показателем преломления
n(z) = no(l — caz), где z — координата в глубь среды, отсчитываемая по нормали
к поверхности (см. рис. 6).
27*
420 Приложения
Уравнение F16) в нашем случае имеет вид
d ( ^dx\ d ( ^dy\ d ( ^dz\
— (n(z)— =0, - пй- =0, —[n(z)—)=-ano. F7)
as \ as J as \ ds у as \ as у
Величина dx/ds есть sm9x, где вх — угол между осью z и проекцией волнового
вектора на плоскость (x,z) (см. рис. 6). Аналогично, dy/ds есть sin 6^, где ву —
угол между осью z и проекцией волнового вектора на
плоскость (г/, z). Из первого и второго уравнений в F7)
следует
n(z) sin 9Х = n(O)sin0xOl
n(z) sin ву = n@)sin9yo.
n(z) I Поэтому, если в начальный момент луч лежит в
плоскости (x,z), sin^yo = 0, то и в дальнейшем
окажется 0у = 0, то есть луч всегда будет лежать в
Рис. 6. Траектория луча этой плоскости. Ее мы и будем дальше рассматривать,
света в среде с убыва- полагая 9х0 = 0О. Таким образом, задача сводится
ющим показателем пре- к решению системы двух обыкновенных дифференци-
ломления альных уравнений
dx по . dz no(cos во — as)
— = sin 0o, — = — F9)
as n{z) ds n(z)
с начальными условиями z@) = 0, x@) = 0. Из второго уравнения следует, что
dz 1
— = 0 при s = — cos во. Этот момент соответствует отражению луча, то есть
ds a
повороту назад к плоскости z = 0. Максимальная глубина, на которую луч входит
в среду, может быть найдена, если явно решить второе уравнение в F9):
2--scose0). G0)
а у
Полагая здесь s = — cos 0о, найдем zmax = — A — sin 0o). Последний результат
а а
нетрудно установить непосредственно из закона преломления F8) n(z) sin в(z) =
= n@)sin6'o, в котором достаточно положить п@) = 1, <9(^тах) = тг/2. Тогда
^(^тах) = sin 6*о, откуда сразу вытекает приведенная выше формула.
Согласно G0) величина z обращается в нуль как при s = 0, так и при s =
2
= — cos 0o. Последнее значение отвечает моменту возврата пучка к плоскости
а
z = 0, то есть выходу пучка из среды. Для нахождения траектории луча нужно
найти решение первого уравнения в F9), для чего достаточно в него подставить
в явном виде зависимость z(s) из G0):
, ч sin(90 . / — cos во + as + Jl — aBs cos во — as2) \
x(s) = In f- . G1)
a \ 1 — cos 0o /
Пара уравнений G0), G1) задает в параметрическом виде траекторию луча. Пара-
Параметр s имеет смысл геометрической длины пути, пройденного лучом. На рис. 7
приведены найденные таким способом траектории лучей при двух различных на-
начальных углах во.
П. 2. Метод обратной задачи рассеяния в теории солитонов 421
0,6
0,4
0,2
0,2 0,4 0,6 0,8 1,0 х
Рис. 7. Траектории лучей, входящих
в среду (z > 0) с показателем прелом-
преломления n(z) = no(l — olz), при двух
различных углах падения 0о
Этот график иллюстрирует хорошо известное в радиофизике явление сверх-
сверхдальнего (вне пределов прямой видимости) распространения радиоволн в атмо-
атмосфере Земли. Это явление обусловлено
отражением электромагнитных волн от ио-
ионосферы, в которой показатель преломле-
преломления заметно убывает в длинноволновой
области спектра 1) . Что же касается связи
на волнах УКВ диапазона, то в обычных
геофизических условиях вне зоны прямой
видимости она невозможна из-за слишком
слабого изменения показателя преломле-
преломления с высотой. В этом случае приходится
прибегать к спутниковой ретрансляции.
Проникновение света в среду с мень-
меньшим показателем преломления (то есть
в условиях полного внутреннего отраже-
отражения) было продемонстрировано экспери-
экспериментально в очень тонких опытах Л.И.
Мандельштама 2) в 1914 г. путем исполь-
использования флуоресцентного вещества. Волна, проникающая в среду с меньшим п,
вызывала в ее тонком слое, примыкающем к границе раздела "вещество-вакуум",
флуоресценцию, исследование которой позволило определить зависимость глуби-
глубины проникновения от характеристик вещества и света.
П.2. Метод обратной задачи рассеяния в теории солитонов 3)
Задача Штурма—Лиувгшля. Метод Лакса, уравнения Лакса. Уравне-
Уравнение Кортевега-де Фриса. Другие нелинейные эволюционные уравнения:
уравнение Бюргерса, модифицированное уравнение Кортевега—де Фриса,
уравнение sin-Гордон, нелинейное уравнение Шредингера. Потенциалы
Баргмана. Основная идея метода обратной задачи рассеяния. Коэф-
Коэффициенты прохождения и отражения: Одномерная теория рассеяния.
Фундаментальные решения (функции Иоста). Аналитические свойства.
Уравнение Гелъфанда—Левитана—Марченко. 8-образный потенциал. Без™
отражательные потенциалы.
Рассмотрим одномерное уравнение Шредингера для нахождения стационар-
стационарных состояний частицы в потенциале U(x):
dx2
+ [А - Щх)]ф = О,
а < х < Ь.
A)
Это уравнение должно быть дополнено некоторыми граничными условиями при
х = а и х = Ь. Соответствующая краевая задача позволяет найти собственные
) Речь идет именно об искривлении траектории лучей, а не о дифракционных эффектах.
) Мандельштам Л.И. Полное собрание трудов. — Изд. АН СССР, 1948. — Т.1. —
С.261.
) При написании данного приложения мы отчасти следовали книгам: Лэм Дж.Л.
Введение в теорию солитонов. — Могилев: Бибфизмат, 1997; Ньюэлл А. Солитоны в
математике и физике. — М.: Мир, 1989.
422 Приложения
функции ф{х) и соответствующие собственные значения Л. В математике для по-
поставленной задачи употребляется название "'задача Штурма—Лиувилля". Ниже мы
будем говорить о задаче, поставленной в неограниченной области. Граничные усло-
условия при х = ±оо отражают требования конечности волновой функции всюду в
пространстве.
Решение уравнения A) позволяет найти волновую функцию ф(х) при рассея-
рассеянии на заданном потенциале U(x). Можно, однако, поставить и обратную задачу:
найти потенциал U(х) на основе некоторых данных о волновой функции. Такая
задача называется обратной задачей рассеяния.
Пусть функция U(х) в A) зависит также от некоторого параметра г ("вре-
("времени"), U(x,t). Тогда собственные значения Л краевой задачи A) будут, вообще
говоря, также зависеть от этого параметра. Можно поставить вопрос: при каких
зависимостях потенциала U от параметра т собственные значения Л задачи A)
не будут зависеть от г? Иными словами, требуется найти семейство потенциалов
U(x,t), для всех элементов которого набор собственных значений Л одинаков.
Метод Лакса. Эффективный метод решения поставленной задачи был пред-
предложен П. Лаксом 1) . Суть его подхода состоит в следующем. Запишем уравнение
A) в виде
Ьф = Хф, l = ^^ + U(Xit). B)
dx2
В этой записи краевая задача A) явно представлена в виде задачи на нахождение
собственных значений оператора L.
Продифференцируем уравнение B) по параметру т:
(Ьф)т = Ьтф + Ьфт = Хтф + Хфт, C)
где индекс означает дифференцирование по соответствующей переменной; LT = UT.
Важным моментом метода Лакса является допущение, что производную фт
можно представить в виде
Фт = Аф, D)
где А — некоторый линейный дифференциальный оператор. Тогда из C) находим
= \тф, E)
где [L, А] = LA^AL — коммутатор операторов L и А. Здесь мы воспользовались
равенствами Хфт = ХАф = АХф = АЬф.
Как было сказано выше, нас интересует случай Ат = 0, то есть собственные
значения А не зависят от параметра т. Это означает, что оператор А должен удо-
удовлетворять уравнению
LT + [L, А] = 0 Fа)
или
UT + [L, А] = 0. F6)
В общем случае последнее соотношение представляет собой операторное уравне-
уравнение. Однако в некоторых важных случаях оно сводится к уравнению, содержащему
только функцию U и её* производные по координате.
1 ) Lax ED. II Com. Pure Appl. Math. — 1968. — V.21. — P.467-490.
П. 2. Метод обратной задачи рассеяния в теории солитонов 423
Уравнения F) называются уравнениями Лакса, а операторы L и А — парой
Лакса. Заметим, что уравнения F) есть по существу условие совместности урав-
уравнений B), D).
Пример 1. Пусть
А = М=а— + Ъ, G)
dx
где а и Ь — функции от потенциала U и его производных по координате. Имея в
виду, что оператор L дается формулой B), найдем коммутатор [L, А]:
= -Bахфхх + аххфх + аПхф) - (Ъххф + 2Ьхфх). (8)
С учетом этого уравнение Лакса F6) принимает вид
итф - Bахфхх + аххфх + аихф) - (Ьххф + 2Ьхфх) = 0. (9)
В уравнение для потенциала волновая функция ф не входит, если ах = 0, ахх +
+ 2ЬХ = 0, то есть а = а(т), b = Ь(т). Тогда [L, А\] = ^aUx, и уравнение F6)
сводится к следующему:
UT ~~ aUx = 0. A0)
Последнее уравнение имеет решение
U(x,T) = F(x + ja(r)dT). A1)
где F — произвольная дифференцируемая функция. Заметим, что заменой пере-
переменной т всегда можно добиться того, чтобы функция а(т) оказалась константой.
Это мы и будем предполагать в дальнейшем (если не оговаривается иное). При
этом решение A1) принимает более простой вид: 17(ж, г) = F(x + ат).
Таким образом, если найден спектр собственных значений А для уравнения A)
с потенциалом U = F(x), то все потенциалы Р{х + ат) приводят к тому же самому
спектру собственных значений. Полученный результат вполне очевиден: поскольку
уравнение A) рассматривается на всей оси, ^оо < х < +оо, то сдвиг начала
координат на произвольную величину ат не меняет собственных значений А.
Уравнение A0) имеет простую интерпретацию. Если параметр т рассматри-
рассматривать как время, то уравнение A0) описывает волну, движущуюся со скоростью
(—а) вдоль оси х, то есть сдвиг потенциала U на расстояние (—ат). Подчеркнем,
однако, что время т в уравнении Лакса не имеет ничего общего со временем,
входящим в нестационарное уравнение Шредингера, и имеет смысл некоторого
параметра.
Пример 2. Пусть
А = А2 = а^- + Ъ^ + с, A2)
ах2 ах
где a, b и с — некоторые функции потенциала и его пространственных произвол-
424 Приложения
ных. Вычисляем коммутатор, входящий в уравнение Лакса F6):
у
- (а— +Ь— +с ) [—-^ +С7^) = -2аж^жжж - (ажж + 2Ьх)фхх -
\ fjq*? Нор I \ fjq*^ I
- (bxx + 2сж + 2аПх)фх - (схх + а!7жж + ЫГх)ф. A3)
Величина [L, Лг] сводится к произведению некоторой функции на ф, если ах =
= О, ЬХ = 0, сх + а!7ж = 0, то есть если а = const, b = const, с = ^аС/, так что
[L, A2] = ^bUx. В результате уравнение Лакса F6) сводится, как и в предыдущем
примере, к уравнению
UT - bUx = 0, A4)
описывающему равномерное смещение потенциала со скоростью (—Ь): U(x7 т) =
= Щх + Ът).
Пример 3. Пусть
А = А3=а^ + Ь^+Л + /. A5)
axd ах2 ах
Этот оператор позволяет получить нетривиальное семейство потенциалов, сохра-
сохраняющее собственные значения краевой задачи A). Как и выше, вычисляем комму-
коммутатор:
= -2ахфхххх - {ахх + 2ЬЖ)^ЖЖЖ - (Ьжж + 2сж
- (схх + 2/ж + 3aUxx + 2Ы7Ж)^Ж - (/жж + aUxxx + Ы7ЖЖ + cUx)ip. A6)
Коэффициенты при производных от волновой функции обращаются в нуль, если
ах = 0, Ьх = 0, A7а)
2сж + SaUx = 0, A76)
схх + 2/ж + 3aUxx + 2ШЖ = 0. A7в)
Из A7а) следует, что a = const, b = const. Условие A76) означает
c=^aU + c0. A8a)
Тогда из A7в) следует
f = --aUx-bU + f0. A86)
4
В результате коэффициент при ф в A6) оказывается равным
1 /3 \
-[fxx + aUxxx + bUxx + с!7ж] = —aUxxx + ( -all - с0 I C/x, A8в)
4 \ 2 /
так что уравнение Лакса F6) принимает вид
UT - -^aUxxx + ^aUUx - c0Ux = 0. A9)
Входящая сюда константа интегрирования со в общем случае есть функция вре-
времени т. Однако произведя замену переменных
Г
X = X + Со(т)б?Т, Т = Г,
П. 2. Метод обратной задачи рассеяния в теории солитонов 425
мы исключим эту переменную из уравнения. Если, кроме того, положить а = —4 (это
всегда можно сделать, не ограничивая общности, изменив масштабы переменных х
и г), то мы придем к канонической форме уравнения Кортевега-де Фриса
UT - 6UUX + Uxxx = 0, B0)
приведенной в основном тексте (с точностью до знака перед слагаемым 6UUX).
Другие нелинейные эволюционные уравнении. Как было показано вы™
ше, уравнение КдФ может быть представлено в форме Лакса F6) и представляет
собой условие интегрируемости уравнений B), D) при специальном выборе эво-
эволюционного оператора: А = Аз. Оказывается, целый ряд других важных нели-
нелинейных уравнений может быть построен аналогичным образом, как условие сов-
совместности некоторых линейных систем уравнений.
1. Уравнение Бюргерса.
В качестве примера рассмотрим уравнение
фх = U-ф, B1)
содержащее потенциал U. Подчиним волновую функцию ф эволюционному урав-
уравнению
Фт = Вф, B2)
в котором линейный оператор В зависит в общем случае от потенциала 17 и его
производных по координате. Для нахождения условий совместности уравнений
B1) и B2) продифференцируем B1) по т, а B2) — по ж. Вследствие тождества
фхт = фтх находим
(Пф)т = [Вф)х или итф + Пфт = Вхф + Вфх. B3)
Подставлял сюда фт из B2), %фх — из B1), получим операторное уравнение
UT = BX + [B,U]. B4)
Это аналог уравнения Лакса по отношению к уравнению B1).
Пусть В = cU, где с = const. Тогда B4) сводится к уравнению бегущих волн:
UT - cUx = 0. B5)
Если положить
B = U2 + UX, B6)
то мы придем к уравнению
UT^2UUX = UXXJ B7)
представляющему собой уравнение Бюргерса, подробно исследованное в основ-
основном тексте. К обычной форме A3.13) это уравнение сводится масштабным преоб-
преобразованием переменных: т = t/4u, x = —^/2v. Заметим, что из B1) следует
фхх = ихф + ифх = (их + и2)ф = Вф, B8)
где мы воспользовались представлением B6) для оператора В. Сравнивая B8) с
B2), найдем, что волновая функция ф удовлетворяет линейному уравнению теп-
теплопроводности
фт=фХХ1 B9)
426 Приложения
для которого несложно найти общее решение. С другой стороны, из B1) следует,
что
и = фх/Ф = Aпф)х. C0)
Поэтому, зная решение уравнения B9), мы легко найдем и решение уравнения
Бюргерса. Таким образом, мы получили преобразование функции U, линеаризую-
линеаризующее уравнение B7). Оно было использовано в главе XIII.
2. Модифицированное уравнение Кортевега—де Фриса.
Для дальнейшего удобно от одного уравнения Шредингера A) перейти к более
общей системе двух линейных уравнений первого порядка:
vix +ikv! = qv2,
V2x — ikV2 = PV\.
Уравнение A) следует отсюда при k2 = Л , vi = ф, q = 1, р = U.
Переходя в C1) к переменным
V = v1+iv2,
iz = vi — iv2
и рассматривая частный случай р = ^q = —U, приходим к системе уравнений
Zx - iUz = -ky,
в которой величины q и к как бы поменялись местами. Эта система эквивалентна
паре уравнений Шредингера
yxx + (k2 + U2+tUx)y = 0,
zxx + {k2 + U2 -iUx)z = 0
с комплексным эффективным потенциалом —(U2 ± гС7ж).
Рассмотрим систему C1) или эквивалентное ей одно из уравнений C4), на-
например,
*"- + <*'-/>* = °. C5)
V = -(Ua + iUx).
Повторяя для уравнения C5) вычисления, выполненные в примере 3, то есть по-
полагая А = Аз, получим для V эволюционное уравнение вида B0):
VT - 6VVX + Vxxx = 0. C6)
После подстановки явного выражения для V последнее соотношение принимает
вид
VT - WVX + Vxxx = - ( 2U + i— ) \UT + 6U2UX + Uxxx] = 0. C7)
V dx/
Отсюда следует, что уравнение C6) будет удовлетворено, если положить
UT + m2Ux + Uxxx = 0. C8)
Это уравнение называется модифицированным уравнением Кортевега—де Фриса.
П.2. Метод обратной задачи рассеяния в теории солитонов 427
3. Уравнение sin-Гордон.
Рассмотрим теперь систему C1) при р = —q = —U:
vix + ikvi = Uv2,
V2x ~ ikV2 = —UV\.
Дополним ее эволюционными уравнениями
vlT = Avt+ Bv2j
где А, В, С и D — некоторые функции от U. Дифференцируя уравнения C9) по
т, находим
vixr = -ikviT + Uv2t + UTv2 = (-ikA + CU)vi + (-ikB + DU + UT)v2;
V2xT = ikv2r - UvlT - UTV! = (ikC - AU - UT)vi + (ikD - BU)v2.
D1)
Здесь производные v\T и v2r заменены по формулам D0). Аналогично, диффе-
дифференцируя уравнения D0) по ж и заменяя появляющиеся производные v\x и v2x с
помощью формул C9), находим
viTX = (-ikA -BU + Ax)vi + (ikB + AU + Bx)v2;
v2tx = (^ikC ^DU + Cx)v! + (ikD + CU + Dx)v2. { }
Условия совместности систем C9), D0) состоят в том, что производные (viXT, v2xr)
в D1) должны совпадать тождественно с производными (viTXjv2tx) в D2). Срав-
Сравнение D1) с D2) приводит к системе уравнений
Ах = (В + C)U; Dx = -(В + C)U;
Вх + 2ikB = (D- A)U + UT; Cx - 2ikC = (D - A)U - UT. { J)
Из первых двух равенств следует D = —А (константу интегрирования отбрасы-
отбрасываем), что дает
Вх + 2ikB = ^2 AU + UT; D3a)
Сх -2iW = -2AU -UT.
Решение этой системы можно искать в виде рядов по степеням к:
+ оо +оо +оо
а= Yl ankni B= Yl bnkn> c= Y1 СпкП- ^44)
п= —со п = —оо п = —сю
В этих рядах ограничимся лишь членами
a_i = а, Ь-1 = 6, с-1 = с, D5)
полагая все прочие коэффициенты равными нулю, так что
А=Ь В = Ь c=i- D5a)
Подставляя D5а) в D3а) и приравнивая члены с одинаковыми степенями к, найдем
ах = (b + c)U,
2ib = UT1
сх = -2aU, 2ic = UT.
428 Приложения
Отсюда следует, что Ъ = с и
ах = 2bU, Ьх = -2aU, UT = 2ib. D6)
Положим
а = 7 • cos <т, b = 7 * sin cr, 7 = 7(т).
Это дает
ах = -217, UT = 2гу • sincr. D7)
Наконец, исключая отсюда функцию U и полагая j = г/4, получим
С7ЖТ=8П1СТ, U=-(Tx/2. D8)
Это есть каноническая форма уравнения sin-Гордон. Если произвести замену пе-
переменных по формулам
Z = X + Т,
t=*-T; D9)
то уравнение D8) примет вид
®zz - сги = sin ст. E0)
Здесь левая часть имеет вид, характерный для волнового уравнения. В линейном
по а приближении (sin о* рз а) уравнение E0) сводится к известному уравнению
Клейна-Гордона.
4. Нелинейное уравнение Шредингера.
Следуя той же схеме, что и в предыдущем примере, рассмотрим систему
vix -\-ikvi = I7v2,
v2x — ikv2 = —U*vi,
где потенциал U предполагается, вообще говоря, комплексным, а звездочка (*)
означает, как обычно, комплексное сопряжение. Для производных v\T и V2T при-
примем прежние выражения D0). Тогда для рассматриваемого сейчас случая вместо
системы D3 а) получим
Ах = U*B + UC;
Вх + 2ikB = -2AU + UT; E2)
Сх - 2ikC = -2AU* - U*
с дополнительным условием D = —А. Будем искать решение этой системы в виде
полиномов по степеням к:
N N N
А = ^апкп1 B = J2bnkn, С=^спГ. E3)
n=0 n=0 n=0
Если здесь положить N = 1, то мы придем к уравнению первого порядка вида
UT — ia\Ux = 0. Поэтому положим N = 2. Тогда для потенциала U получится
уравнение второго порядка. Подставляя E3) в E2) и приравнивая члены с равными
степенями к, получим
2|| ai=ai(r); a2 = а2(т);
2ib0 = -ia2Ux - 2aiU, h = ia2U, Ь2 = 0,
2ico = ~id2Ux + 2aiU*, c\ = ~id2U*, c2 = 0,
П. 2. Метод обратной задачи рассеяния в теории солитонов 429
Выделяя во втором уравнении E2) слагаемые, содержащие к0, имеем
ЪОх = -2a0U + UT.
Подставляя сюда коэффициенты ао и 6о из E4), найдем
UT - iai{r)Ux + — [Uxx + 2\U\2U] = 0. E5а)
Если здесь положить а\ = 0, а 2 = —2г, то мы придем к обычной форме кубиче-
кубического уравнения Шредингера:
iUT + Uxx + 2|17|217 = 0. E56)
Ограничиваясь приведенными примерами нелинейных уравнений, возникаю-
возникающих как условия совместности некоторых линейных систем, заметим, что ряд ин-
интересных уравнений может возникать и для иных систем.
Потенциалы Баргмана. Солитонные решения уравнения КдФ B0) можно
получать, используя метод Баргмана (по этой причине такие решения, являющи-
являющиеся потенциалами в уравнении Шредингера A), называют иногда потенциалами
Баргмана). Суть метода состоит в следующем. Будем искать решение уравнения
ф" + [к2 -Ц]ф = 0 E6)
в виде
фп(х,к) = егкхРп(х1кI E7)
где Fn(x7 к) — полином n-й степени от к. Рассмотрение такого класса потенциа-
потенциалов представляет собой суть метода. Положим, например, п = 1, т. е.
ipi(x,k) = eikx[2k + ia(x)]. E8)
Здесь коэффициенты выбраны для упрощения промежуточных вычислений. Под-
Подставляя E8) в E6) и приравнивая члены с одинаковыми степенями к, получим
"" = -?; E9)
ахх = аи.
Исключая отсюда 17, придем к простому уравнению
ахх + аах = 0 или ах + -а2 = 2а2, F0)
где а — постоянная интегрирования. Отсюда
a = 2ath(ax-(p) F1)
(<р — постоянная интегрирования). При этом первое из уравнений E9) дает
U = ^ах = -2а2 seek2(ах - ф). F2)
Эта функция должна быть решением уравнения КдФ
UT - QUUX + Uxxx = 0.
Поэтому, подставляя сюда U из F2) и считая ip = (f(r), получим
ipT = 4а или tp = 4а т. F3)
Окончательно имеем
U(x,t) = -2а2 seen2(ах - 4а3т) = -2а2 sech2[a(x - vt)]. F4)
Найденное решение описывает солитон, бегущий со скоростью v = 4а2.
Аналогичным образом могут быть найдены более сложные решения, описы-
описывающие два, три и более солитонов. Для этого достаточно рассмотреть в E7) по-
полиномы Fn(x1 к) более высоких порядков (п > 1).
430 Приложения
Основная идея метода обратной задачи рассеяния. Метод линеариза-
линеаризации, решающий уравнение Бюргерса B1), метод Баргмана, основанный на гипоте-
гипотезе E7), и ряд других методов позволяют получить лишь некоторые решения нели-
нелинейных уравнений. Эти приемы, однако, бессильны в тех случаях, когда требуется
найти более сложные нестационарные решения, исследовать вопросы устойчиво-
устойчивости и т.д. Кроме того, для многих уравнений не всегда удается найти эффективные
приемы получения нетривиальных решений.
Новый подход был предложен в 1967 г. Гарднером, Грином, Крускалом и Ми-
урой ¦ ) для точного решения уравнения КдФ. Основная идея состояла в том, что
для нахождения решений нелинейного уравнения
N(U) = 0 F5а)
не требуется решать само это уравнение. Вместо этого достаточно решить систему
линейных уравнений
Ьф = Хф, F56)
фт = Аф, F5в)
условием совместности которой и является уравнение F5а).
На первый взгляд искать общее решение системы F56), F5 в) не проще, чем
решать F5а), поскольку эта система включает уравнения в частных производных
и к тому же содержащие неизвестный потенциал. Однако оказалось, что для того
чтобы восстановить искомый потенциал, достаточно иметь некоторые данные рас-
рассеяния (фактически — амплитуду рассеяния). Ситуация здесь полностью анало-
аналогична той, что имеет место в случае Фурье-преобразования, когда по Фурье-образу
функции можно восстановить саму функцию. Проиллюстрируем это на примере
решения тривиального уравнения A0):
Uт - aUx = 0, F6а)
которое будем рассматривать как условие совместности уравнения Шредингера
Ьф = к2ф или ф!1 + [к2 - Щх, т)]ф = 0 F66)
и эволюционного уравнения D), G)
фт = Аф или фт = афх + Ьф, a, b = const. F6в)
Предположим, что потенциал локализован, а из х = +оо на него падает волна.
Соответственно будем искать такое решение уравнения F66), которое обладает
следующим асимптотическим поведением:
/ e~ikx + R(k)eikx, Ж^+оо,
ф(х) = < F7)
| T(k)e-tkx, ж^-оо.
Это означает, что в результате взаимодействия с потенциалом волна частично
отражается назад (слагаемое К(к)егкх), а частично проходит вперед (слагаемое
Т(к)е~гкх). Величины R(k) и Т(к) называются соответственно коэффициента-
коэффициентами отражения и прохождения.
1 ) Gardner C.S., Green J.M., Kruskal M.D., Miura KM. II Phys. Rev. Lett. — 1967. —
V.I 9. — P. 1095-1097.
П. 2. Метод обратной задачи рассеяния в теории солитонов 431
Перепишем F66) в виде интегрального уравнения, решение которого обладает
асимптотикой F7):
ф{х) = Рг (ж, k)e~ikx + F2 (ж, к)егкх; F8)
где введены функции
оо
Fi(*,fc) = 1 + -М и(у)ф(у)егк4у,
F2(x,k) = R(k)
2ik
Имея в виду, что при х —$> ™оо функция ф(х) не должна содержать слагаемого
^ егкх, то есть F2 —^ 0 при ж —>- ^оо, получим
+ ОО
R(k) = — [
^ J Щу)ф(у)е*кЧу.
Если теперь перейти к эволюционной задаче, то потенциал U(у) следует за-
заменить на U(y,r). Соответственно приобретут временную зависимость и коэф-
коэффициенты отражения и прохождения: R(k) —»¦ R(k,r) и T(fc) —^ Т(к,т). Эту
зависимость можно найти с помощью уравнения F6в), куда следует подставить
асимптотику F7):
RTeikx = a[^ike^ikx + ?ШгЬ] + Ь[е^гкх + Eeifcx], ж -> +оо,
Сравнивая коэффициенты при егкх и е^гкх в правой и левой частях равенств,
получим
Ь = ika,
RT = (ika + b)R, G0)
Гт = (^ifea + b)T,
откуда
Гт = 0, R(k, т) = R(k7 0)е2гкат. G0a)
Таким образом, из F9) находим
+ оо +оо
f U(XlT)t/j(x,T)e^ikxdx = е2гкат f ио(х)ф(х, 0)e^ikxdx, G1)
j j
где обозначено Uq(x) = U(x,0).
Временная зависимость ф(х1т) может быть найдена из F6в):
G2)
432 Приложения
где фо(х) = ф(х,О) — волновая функция в начальный момент, причем согласно
G0) b = ika. С учетом этого соотношение G1) может быть переписано в виде
+ ОО + ОО
с г
тт/ \ гкат / / . \ —ikxj 2гкат тт / \ i / \ —ikx i
U(x,T)e фо(х + ат)е ах = е Uo(x)ipo(x)e ax
-—со —со
ИЛИ
+ оо +оо
7n(T)ibn(r)p^ikxrlT
Отсюда ввиду произвольности к находим
U(x — сьт,т) = С/о (ж) или С/(ж, т) = С/о (ж + аг). G3)
Это есть общее решение уравнения F6а), если С/о (ж) — произвольная функция.
Заметим, что последняя стадия решения состояла в обращении преобразова-
преобразования Фурье от некоторой функции после того, как была учтена временная эволюция
данных рассеяния. Связь метода обратной задачи рассеяния с преобразованием
Фурье ещё отчетливее видна из представления коэффициента рассеяния в форме
F9). В самом деле, если допустимо использовать борновское приближение для
волновой функции, ф(х) ^ е^гкх, то в этом приближении
+ ОО
R(k)&— I U(x)e~2tkxdx. G4)
2ik J
—-сю
Поэтому восстановление потенциала по коэффициенту рассеяния сводится к обра-
обращению преобразования Фурье в G4). Временную зависимость R находим из G0а):
+ СЮ
I
,0)е2гкат^— I
2ik J
Обозначая q = 2к и обращая преобразование Фурье, получим
+ ОО
¦f
2тг J V2 / 2тг
— ОО
Последний результат, естественно, совпадает с G3), хотя из-за использования бор-
новского приближения требуется отдельно выяснять область его применимости.
Одномернам теории рассеянии. Как видно из рассмотренного примера,
знание коэффициента рассеяния и его временной эволюции К(к,т) позволяет в
принципе восстановить вид рассеивающего потенциала U(k,r)9 то есть решение
изучаемого нелинейного уравнения N(U) = 0. В более общем случае использо-
использование простых приближений для волновой функции типа борновского не вполне
корректно, и представляют интерес иные методы, свободные от указанного недо-
недостатка. Наиболее приемлемым был бы такой подход, в котором устанавливалась
бы прямая связь между коэффициентом рассеяния и искомым потенциалом, минуя
волновую функцию.
П.2. Метод обратной задачи рассеяния в теории солитонов 433
1. Фундаментальные решения.
Рассмотрим уравнение Шредингера
ф" + [ifc2 - и(х)]ф = 0. G5)
Это уравнение имеет пару независимых решений fi(x, к) и /2(ж, к), которые мы
выберем таким образом, что
fi(x,k) ->> екх при ж ->> +оо,
/ ( ^^ -<** G6)
j2{x1k) —>> е при ж —^ ^оо.
Для этих функций можно получить интегральные уравнения Вольтерры 2-го рода
(ср. F8)):
+ ОО
fi(x,k) = eikx^ - f 8т[к(х-х')
к J
X
+ ОО V 7
/2(ж, fc) = e"iife!B + i [
Если 17(ж) и fc — действительные величины, то функции fi(x, к) и /2(ж, к) удо-
удовлетворяют соотношениям
/Г (ж, АО = Л(ж,-АО,
Л*(ж, А;) = f2(x,-k).
Пусть |/1 (ж) и 2/2 (ж) — два произвольных решения уравнения G5). Можно пока-
показать, что вронскиан этих решений
W(yi,y2) = г/12/2 - 2/12/2 = const. G9)
Это позволяет легко установить, что
,AO,/i(a,-AO] = —2zfe, (80a)
ж,А;),/2(ж,-А;)] = 2ik. (Шб)
В самом деле, ввиду свойства G9) достаточно использовать для Д и /2 их асим-
асимптотические представления G6).
Соотношения (80) означают, что функции Д(ж, А;) и Д(ж, —А;) линейно неза-
независимы. Аналогично, линейно независимыми являются функции /2(ж, А;) и
/г(ж, — А;). Решения fi(x,k) и /г(ж, А;) называются фундаментальными решени-
решениями уравнения Шредингера или функциями Йоста.
Поскольку уравнение G5) имеет только два линейно независимых решения,
то, выбирая в качестве таковых функции fi(x,k) и fi(x,—k), мы можем записать
/2(ж,А;) = а(А;)/1(ж,-А;) + Ь(А;)/1(ж,А;). (81)
Используя тождества G8), легко показать, что для действительных значений к
а*(к) = а(^к), Ъ*(к) = Ъ(-к). (82)
Положим в (81) ж —>¦ +оо. С учетом G6) имеем
/2(ж, АО = a(k)e^ikx + b(k)eikx. (83)
Подставляя полученное выражение в (806), с учетом тождеств (82) находим
И2 - \Ц2 = 1. (84)
28 Н.В. Карлов, Н.А. Кириченко
434 Приложения
Выберем теперь решение ф(х,к) уравнения Шредингера G5), удовлетворяю-
удовлетворяющее граничным условиям
ф(х,к)={ \Р' ' ' ' (85)
Тогда из (81) следует, что
ф{х,к)=Т(к)Мх,к), (86)
причем из сравнения (85) и (83) вытекает
Т(к) = , R(k) = -^-. (87)
пук) пук)
Последние равенства с учетом (84) приводят к закону сохранения для процесса
рассеяния:
I T?fh\\^ JL iTf U\\^ 1 /ССЛ
2. Аналитические свойства.
Обратная задача рассеяния состоит в восстановлении вида потенциала по дан-
данным рассеяния. Однако не всякая функция может играть роль амплитуды рассея-
рассеяния R(k): она должна обладать определенными аналитическими свойствами, на-
накладываемыми на неё уравнением Шредингера.
Прежде всего отметим, что при условии ограниченности потенциала U(x) обе
функции Иоста fi(x,k) и /г(ж, fc) голоморфны (аналитичны) в верхней полуплос-
полуплоскости комплексной переменной к. Это следует из структуры уравнений Вольтерры
G7). В самом деле, аналитичность функции в некоторой области D определяется
возможностью её аналитического продолжения в эту область. Для функций Иоста
этому может препятствовать только расходимость интегралов в G7) при каких-либо
значениях. Если искать решения уравнений G7) путем итераций, полагая, например,
то для любой итерации при Im к > 0 интегралы
+ ОО
sin[k(x — x)]U{x)f\ (x\k)dxf =
+ ОО +СХЭ
<lkx f e^kx/U(xf)f(n)(x\k)dx'~е^гкх f eikx'u(x')f[n\x',k)dx'
+ OO
e"
2i
сходятся на верхнем пределе (х = +оо), а интегралы
X
р
1 * Г!/ /\"|тт/ ? \ р{ ТЬ) / I ?\Т /
2г
-е~шх f eikx'U{x')f^n)(x', k)dx'
П.2. Метод обратной задачи рассеяния в теории солитонов 435
сходятся на нижнем пределе (ж = — оо). Это и влечет за собой аналитичность
fi(x, к) и /2 (ж, к) в области Im к > 0.
Из (80), (81) нетрудно установить, что
= W[f2{x,k),h{x,k)] = J_
Следовательно, ввиду аналитичности функций fi(x,k) и /г(ж,/г) в верхней по-
полуплоскости (Im к > 0) функция а (к) аналитична в той же области. Функция
Т(к) также допускает аналитическое продолжение, но в верхней полуплоскости
не имеет нулей (так как а(к) не имеет там полюсов) и является мероморфной ) .
Помимо волноподобных решений уравнения Шредингера, которым отвечают
действительные значения к, могут существовать локализованные решения, то есть
решения, для которых
+ оо
\ф(х)\2Aх < оо. (91)
Им соответствуют чисто мнимые собственные значения к = in, к > 0. В самом
деле, для значений к в верхней полуплоскости (Im к > 0) представим волну,
ведущую себя при ж —> ^оо как
ф(х,к) ^ е^г х при ж —)> —оо.
Эта волна пропорциональна /2 (ж, к) и при ж —> ^оо экспоненциально затухает:
ехр[ж • Im к] —> 0 при ж —» ~оо.
В результате взаимодействия с потенциалом в области ж —»> +оо возникают волны
^+(ж, fc) ^ e*fex и ф-(х,к) ~ е^гкх. При этом
|t/?+ (ж, /г) | rsj ехр[^ж • Im к] —>- 0 при ж —>• +оо,
|^>_ (ж, fc) | ^ ехр[ж • Im к] —> +оо при ж —^ +оо.
Поскольку волновая функция предполагается всюду конечной, компонента г/^ (ж, к)
является недопустимой. В свою очередь она исключается из решения только в тех
точках, в которых а(к) = 0. Это непосредственно следует из представления (81).
Функция а(к) не может обращаться в нуль при действительных значениях к.
Это видно из соотношения (84), справедливого только при Im к = 0. Поэтому для
всех нулей а(к) должно быть Im к > 0. Решения, отвечающие таким значениям
к, экспоненциально затухают как при ж —>• ^оо, так и при ж —>> +оо.
Все нули функции а(к) лежат на мнимой оси. В самом деле, если к — неко-
некоторое собственное значение, отвечающее локализованному состоянию (Im к > 0),
то соответствующая волновая функция удовлетворяет уравнению
Ф" + (к2 - П)ф = 0.
Для комплексно-сопряженной функции ф* имеем уравнение
*" *2 * =0.
) По определению функция является мероморфной, если она может быть представлена
в виде отношения двух аналитических функций.
28*
436 Приложения
Умножая первое из уравнений шф*, а второе — на ф, вычитая из первого второе
и интегрируя по всем х, найдем
-f-OQ
/ /* // /*'\ /7*2 7 2\
(ф ф -ф ) _^ = (k -к ) \
Левая часть этого равенства обращается в нуль, поскольку по предположению функ-
функция |^(ж)| экспоненциально убывает при х —> ±оо. Имея в виду, что интеграл в
правой части является конечной положительной величиной, a Im к > О, находим
^к2=0 или
Из представления функции /2B:, fc) в виде G7) следует, что если потенциал
17 локализован и не имеет сингулярностей, то
^) при
к/
Сравнение с (81) при х —^ +оо дает
a(ife) = l + o(i) при к^оо. (92)
При этом для чисто действительных значений к из соотношений (84), (87) следует
Mm Т(к) = 1, Km R(k) = 0. (93)
fc—>-±oo fc-->dzoo
Применение (92) к чисто мнимым собственным значениям показывает, что функ-
функция а(к) может иметь конечное число нулей. В самом деле, если бы число нулей
было бесконечным, то вследствие (92) существовала бы их точка сгущения. Тогда
благодаря аналитичности в верхней полуплоскости функция а (к) обращалась бы
в нуль тождественно, что противоречит условию (92).
Представляет интерес найти число нулей функции а(к) (или число полюсов). На
основании теоремы о вычетах нетрудно убедиться, что это число дается интегралом
(94)
2ш] а(к)
где штрих означает дифференцирование по к. Контур Г выбирается так, чтобы
охватить все нули а(к). Положим а(к) = \а(к)\ exp[iip(k)] и учтем, что
7^^Г 4^п°(*)] 4М°(*I
а(к) ак ак ак
Выберем в качестве контура Г всю действительную ось, замкнутую в верхней полу-
полуплоскости с помощью дуги полуокружности. Поскольку, согласно (92), а'(к)/а(к) ~
^ к~2, то интеграл по дуге полуокружности обращается в нуль. Таким образом,
интеграл по контуру Г сводится к интегралу вдоль действительной оси, и из (94)
следует 1)
^) - <р(-оо)] (95)
ш
(поскольку согласно (92) In \а{к)\ —»¦ 0 при к —ь об).
) Данное утверждение в квантовой теории известно как теорема Левинсона.
П. 2. Метод обратной задачи рассеяния в теории солитонов 437
3. Уравнение Гелъфанда-Левитана-Марченко.
Как видно из предыдущего, коэффициенты рассеяния и прохождения не могут
выбираться произвольно — они должны удовлетворять определенным, довольно
жестким требованиям. Кроме того, их временная зависимость фиксируется эволю-
эволюционными уравнениями для волновой функции. Таким образом, остается устано-
установить алгоритм, который позволял бы восстанавливать потенциал по данным рас-
рассеяния. Эта задача решается уравнением Гельфанда-Левитана-Марченко.
Прежде всего заметим, что согласно (81), (87) можно записать
T(k)f2(x, k) = h{x, -к) + R(k)Mx, к). (96)
Далее, для функции fi(x, к) имеет место представление
оо
fi(x,k) = eikx + f A(x,x')eikx'dx. (97)
X
Последнее утверждение можно обосновать следующим образом. В соответствии
с определением G6) функция Д(ж, к) описывает рассеяние волны, распространя-
распространяющейся слева направо (из ж = -оо в направлении к х = +оо). Поэтому можно,
как промежуточный этап, рассмотреть процесс рассеяния <5-импульса
2/о ОМ) = S(x-ct), (98)
движущегося со скоростью с. Здесь t — это реальное время, входящее в нестаци-
нестационарное волновое уравнение
с2 di2 дх2 К ^ К J
Если рассматривать только решения вида
то для функции ф(х) возвращаемся к обычному уравнению Шредингера G5). С
другой стороны, конечность скорости распространения сигнала, учитываемая вол-
волновым уравнением, означает, что «5-импульс (98) не может возбудить какие-либо
процессы в тех точках среды, где он еще не прошел, то есть в области х > ct.
Позади же импульса (то есть при х < ct) уже может возникнуть "шлейф". Таким
образом, решение волнового уравнения, описывающее распространение импульса,
можно представить в виде
ф(х, t) = с6(х - ct) + c0(ct - x)A(x, ct), A00)
где 0(х) — единичная функция Хевисайда, а множитель с введен для упрощения
последующих формул. Выполняя здесь Фурье-преобразование по переменной t,
получим
+ оо оо
Y(x,w)= [ ф(х^уш1М = е{кх + f A(x,x')eikx'dx'. A01)
— оо ж
Здесь введено обозначение к = и/с. Очевидно, что функция Y(x,k) обладает
асимптотикой У (ж, к) -^ егкх при х —± +оо. Кроме того, эта функция, как следует
из (99), удовлетворяет уравнению
Y" + [к2 - U{x)]Y = 0, к2 = —.
р2
438 Приложения
Следовательно, функция Y(x,k) обладает той же асимптотикой, что и функция
/i (ж, к), и подчиняется тому же уравнению. Поэтому в силу теоремы единственно-
единственности можно заключить, что fi(x,k) = Y(x,uj)9 причем для функции f±(x,k) имеет
место представление (97).
Между введенной выше функцией А(х, х1) и потенциалом U(x) имеется про-
простая связь. В самом деле, подставим A00) в (99) и учтем, что функции 8{х — ct) и
9(ct — х) удовлетворяют уравнению уи — с2ухх = 0. Тогда оставшиеся слагаемые
можно записать в виде
2dA(x,ct) ndA(x,ct) тт,
ot ox
Jld2A(x,ct) d2A(Xlct) ТТ,,Л, Л
+ c0(ct -х)\ Lj— Lj—- + U(x)A(x, ct) = 0.
lc2 at2 ox2 J
X X
Проинтегрируем это уравнение по времени t в диапазоне е < t <
с с
Устремляя затем е к нулю, получим
+ 2
с dt дх \t=x/c
Отсюда следует искомое соотношение
= _^Мх2А. A02)
dx
Таким образом, зная функцию А(х,у), легко найти и потенциал. Остается полу-
получить уравнение, определяющее функцию А(х,у) по данным рассеяния.
Выполним в (96) обратное Фурье-преобразование. Учтем при этом, что в со-
соответствии со A00), A01) число к = ш/с в функциях fi(x,k) и /г(ж, fc) следует
рассматривать как переменную, сопряженную времени (а не координате) 1) . Тогда
Фурье-преобразование правой части равенства (96) дает
+ ОО
= с f [h{x,-k) + R(k)h{x,k)]e~ikv — ¦ (ЮЗ)
J 2тг
— оо
Здесь введено обозначение у = ct. Далее учтем, что согласно A00)
+ с»
[ fi(x, к)е^гку— = F1(xJ у) = ё(х - у) + 0(у - х)А(х, у). A04)
) При этом для функций R(k) и Т(к) сопряженной (относительно преобразования
Фурье) парой переменных будем по-прежнему считать (к,х).
П.2. Метод обратной задачи рассеяния в теории солитонов 439
Тогда
+ СЮ +СЮ +СЮ +ОО
Ah Г Ah Г Г
-гку ? ( 1 \ Lb"' —гку U/"y / \ --гкг i In / \ гки i
27Г J 27Г J J
— oo —oo -co
+ OO +OO +OO
г г г
= r{z)dz Fi(x,u)S(y + ^ — u)du = r(z)Fi(x,|/+ z)dz.
— oo —oo
Здесь введена удобная для дальнейших расчетов функция
r(z)= \ R(k)etkz — . A05)
J 2тг
С учетом этого выражение A03) принимает вид
— сю
+ ОО
оо
= 8(х + у) + 9(-у - х)А(х, -у) + г(х - у) + r(z - у)А(х, z)dz.
X
В частности, в области х + у < 0 (то есть при t < —x/c) имеем
сю
1 Г
- JP = А(х, -у) + r(x-y)+ r(z - y)A(x, z)dz. A06)
с J
х
Произведем теперь Фурье-преобразование левой части соотношения (96):
+ о
f
J
J^7 =
— oo —oo
A07)
где обозначено у = ct, ш = ck ш по аналогии со A04) введена функция
+ ОО
F2(x,y)= I f2{x1k)e~tky^ A08)
— со
Первое слагаемое в правой части A07) равно
+ оо -j-oo
с [ e~iky— \ T{z)e~ikzdz
J 2тг J
+ +
\ F2(x,u)etkudu = с [ T(z)F2(x,y + z)dz.
J J
— оо —-оо —оо —оо
A09)
440 Приложения
Здесь было удобно ввести функцию Г (г), Фурье-образ которой равен Т(к) ~~ 1.
Это возможно, поскольку при больших импульсах к коэффициент прохождения
(как это следует из F9)) стремится к единице, так что величина Т(к) — 1 стре-
стремится к нулю.
Аналогично тому, как было получено представление (97), можно найти, что
B(x,x')e-ikx'dx. (ПО)
Для этого достаточно учесть, что функция f2(x,k) описывает рассеяние волны,
распространяющейся из х = +оо в направлении х = — оо. Тогда с точки зрения
нестационарной задачи о рассеянии (^-импульсов можно написать
F2(x,y) = ё(х + у) + в(х + у)В(х, -у), у = ct, A11)
откуда при учете A08) непосредственно следует (ПО). Подставим A11) в A07),
A09). Это дает
+ ОО
1 Г
-?е = 6(х + у) + 0(х + у)В(х, -у) + Г(^ж - у) + T(z)B(x, ^у - z)dz.
с J
— х — у
В частности, при х + у < 0 найдем
+ ОО
1 Г
С J
— х — у
Рассмотрим функцию T(z). Вследствие убывания Т(к) — 1 до нуля при к -^ оо
в интеграле
+ ОО
T(z) = f [T(k)~l]eikz— A13)
—-оо
при z > 0 контур интегрирования можно замкнуть в верхней полуплоскости.
Поэтому, если коэффициент прохождения Т(к) не имеет полюсов в верхней по-
полуплоскости переменной к, аналитичность Т(к) при Im к > 0 влечет
T(z) = 0 при z > 0. A14)
Если же функция Т(к) имеет полюса {г/cj, I = 1, 2,..., п} при Im fc > 0, то по
теореме о вычетах имеем
где вычет Т(к) относительно полюса к = гщ обозначен как iji, то есть
/ da(k)
\ dk
С учетом сказанного, если коэффициент прохождения Т(к) (и, следовательно,
амплитуда рассеяния R(k)) аналитичен в верхней полуплоскости переменной к (не
П. 2. Метод обратной задачи рассеяния в теории солитонов 441
имеет там полюсов), то, приравнивая A06) и A12), получим уравнение
оо
А(х, -у) +r{x^y)+ r(z - у)А(х, z)dz = 0. A16а)
х
Полученное уравнение справедливо в области х + у = х + ct < 0. Подчеркнем, что
именно в этой области задача о рассеянии E-импульса A00) определяла функцию
А(х,у). Для конкретных расчетов это уравнение удобно переписать, заменив у —> —у:
ос
г
J
X
и рассматривая его в области х < у.
Пусть теперь коэффициент прохождения Т(к) имеет полюса на мнимой оси
в верхней полуплоскости переменной к. Учтем, что согласно A11) при х + у < 0
функция F2(x,y) = 0. Поэтому вся величина ^ сводится к первому слагаемому
в A07), то есть к функции A09):
+ ОО
-S?= r{z)F2(x,y + z)dz
с J
— оо
A17)
Заметим, что в соответствии с представлением A11) интегрирование в A17) осу-
осуществляется по области z > —(х — у) > 0. Но именно для этой области справед-
справедливо выражение A15). Поэтому
= -?
х -—оо
п
= -?-
,-y- z)]dz =
+ OO
+ e~KlZB(x,z)dz
Здесь использовано представление (ПО) для функции /г(ж, А;). Таким образом, в
полученное выражение входит функция fi (ж, к) при значениях к = Iki, отвечаю-
отвечающих полюсам Т(к) или, что то же самое, нулям а(к). Но согласно (81) при таких
к выполняется соотношение f2(x,iKi) = b(ini)f\(ini). Поэтому
1 п
-& = -yib(iKi)jteKiyfi(x,iKi) =
dz. A18)
442 Приложения
Введем функцию
п
K{z) = r(z) + ^b{im)~{ie~Kl\ A19)
1=1
Тогда с учетом A06), A18) уравнение ?? = 3% принимает вид
оо
А(х, у) + К(х + у)+ f K(z + y)A(x, z)dz = 0. A20)
J
х
Здесь мы также произвели замену у —> —у. Напомним, что это уравнение опреде-
определено при х < у.
Соотношение A20) называется уравнением Гельфанда—Левитана—Марченко и
является центральным в методе обратной задачи рассеяния. Заметим, что функцию
K(z), входящую в A20), можно представить в виде
K(z) = | -^-е'**^ _ iV ^Ш-е-1"* = - R(t)e*zdz, A21)
о! [к) 2тг а1 \itbi) тг J
где контур интегрирования С идет из ^ = ^оо в ^ = +оо над полюсами .
<5-образный потенциал. Рассмотрим уравнение Шредингера
ф" + [к2 - П(х)]ф = 0, U(x) = 2/х • 6(х). A22)
Предполагая, что волна падает на потенциал справа, запишем решение этого урав-
уравнения:
( e~ikx + R(k)eikx при х > 0,
| T(fc)e^fex при ж < 0.
Проведя сшивку левой и правой частей решения в точке х = 0, найдем уравнения
для амплитуд R и~ Т:
(-ik + ikR) - (-ikT) - 26A + R) = 0.
Отсюда
"V, T(fc) = -^-,
-" * + t" .... A23)
v ' T(k) к ' v 7 T(fc) fe
Таким образом, коэффициент отражения имеет полюс в точке к = — i/i.
Рассмотрим обратную задачу: зная коэффициент отражения из A23), восстано-
восстановим вид потенциала с помощью уравнения Гельфанда-Левитана-Марченко A20).
Пусть сначала потенциал U(x) — отталкивающий, так что параметр /л > 0. В
этом случае преобразование Фурье r(z) функции R(k) согласно A05) имеет вид
+ оо +оо
R(k)elkz— = -^- e***_^L_ = -p.el"'d(-z). A24)
2тг 2тг J к + iu
П. 2. Метод обратной задачи рассеяния в теории солитонов 443
При вычислении этого интеграла контур интегрирования при z > 0 замыкается в
верхней полуплоскости, а при z < 0 — в нижней. В первом случае внутри контура
нет ни одного полюса, и интеграл обращается в нуль. Во втором случае внутри
контура оказывается единственный полюс к = —г//, который, однако, обходится в
отрицательном направлении. Применение теоремы о вычетах приводит к результа-
результату A24). Для рассматриваемого случая функция K(z) = r{z). Поэтому уравнение
A20) принимает вид
оо
A{x,y)=^x+v)e{-x-y)+^e^+v)9(-z-y)A(x,z)dz, x < у. A25)
X
Для х > —у оба слагаемых в правой части этого уравнения обращаются в нуль,
так что
А(х,у) = 0 при х > —у. A27а)
В обратном случае уравнение A25) имеет решение
А(х,у) = Aq = const при х < —у. A276)
В самом деле, подстановка A276) в A25) приводит к равенству
-у
Ао = це^х+у) + цА \
представляющему собой тождество, если Aq = ц. Таким образом, находим
А(х,у) = 1лв{-х-у). A27)
Согласно A02) отсюда следует
ЩХ) = -2^Ж'Ж) = -2-f И(-2Ж)] = 2tf{x), A28)
ах ах
что находится в точном соответствии со A22).
Несколько иначе рассматривается случай, когда потенциал притягивающий,
то есть параметр /i < 0. Согласно A23) коэффициент отражения R(k) теперь
имеет полюс к = —ifi в верхней полуплоскости, так что функция r(z) оказывается
равной
ф) = [л-е^в(г). A29)
На основании A19) строим функцию K(z):
п
K{z) = r(z) + Y, b(mi)jie^KlZ = /i • e^z0(z) - e^z = -fj, • e^e^z). A30)
i=i
= —г//, а в сумме имеется единственное слагаемое. Таким образом, функция
K(z) по виду не отличается от функции r(z) в A24), определенной для /л > 0.
Следовательно, и уравнение Гельфанда^Левитана^Марченко A20) будет иметь
прежнее решение A27).
Следует отметить, что оба случая (р > 0 и /i < 0) могут быть единообразно
исследованы, если сразу воспользоваться представлением функции K(z) в виде
A21), в котором контур интегрирования всегда проходит над полюсами
444 Приложения
Безотражательные потенциалы. Полученное выше уравнение Гельфанда-
Левитана-Марченко A20) допускает точное аналитическое решение лишь в неко-
некоторых простейших случаях. К их числу относятся так называемые безотража-
безотражательные потенциалы > то есть потенциалы, для которых коэффициент отражения
R(k) тождественно равен нулю. Имеется в виду следующее. Поскольку коэффи-
коэффициенты рассеяния R(k) и отражения Т(к) определяются двумя функциями, а (к)
и Ь(к), то можно положить одну из них равной нулю (по крайней мере, на дей-
действительной оси), Ь(к) = 0, сохраняя, тем не менее, нетривиальный характер
взаимодействия падающей волны и потенциала. При этом оказывается, что
R(k) = 0, T(k)^0. A31)
Пусть коэффициент прохождения Т(к) имеет п полюсов {mi, 1 = 1,2,..., п},
лежащих на мнимой оси в верхней полуплоскости: ni > 0 для всех I. Согласно
A19) функция K(z) имеет вид
п
K(z) = ^тге~К1\ A32)
где нормировочные постоянные mi предполагаются заданными. Подставляя пред-
представление A32) в уравнение Гельфанда-Левитана—Марченко, получим
„ / ^ \
А{х, y) + Y, m,e-Kl(x+y) + Y, m,e-Kiy e~KlZA(x, z)dz = 0. A33)
Отсюда видно, что искомая функция А(х,у) может быть представлена в виде
п
A(x,y) = J2Mx)e-Kiy. A34)
1 = 1
Подстановка A34) в A33) приводит к уравнению
/
J2 ^К1У А (х) + пые^К1Х + miJ2 Ap(x) e^{Kl+Kp)zdz = 0. A35)
i J
i i
Ввиду произвольности аргумента у отсюда следует система линейных алгебраи-
алгебраических уравнений для функций Ai(x)\
У] (б1р + -J2!—е-^+^Л Ар(х) = -mie-"*x. A36)
Рассмотрим частный случай. Пусть п = 1, то есть в сумме A32) имеется
единственное слагаемое. Обозначим щ = п, mi = m, Ai(x) = А(х). Тогда
система уравнений сводится к одному уравнению, из которого следует
2пте
2п + те~2кх
Подставляя A37) в A34), получаем искомое решение:
{х+у) /Лпах
—. A38)
2°
П. 2. Метод обратной задачи рассеяния в теории солитонов 445
Потенциал U(x) может быть найден по формуле A02):
d 2
U(x) = —2
dx
= 2
= —Акт
2neKX
A39а)
, то последнее
A396)
Если здесь положить т = а • ехр(кхо), 2n = a
соотношение может быть представлено в виде
иМ = -&ГГ п' tfo = -±aV
ch [к,(х — хо)\ 2
представляющем собой односолитонное решение нелинейного уравнения.
Чтобы связать A396) с уравнением Кортевега-де Фриса (см. B0)):
иТ - биих + иххх = о,
нужно установить временную зависимость решения. В нашем случае (см. F2)-
F4)) для этого достаточно определить временную эволюцию параметра хо, что
можно сделать путем подстановки A396) в уравнение КдФ. Это даст хо = vr,
v = 4k2. Последние соотношения можно также получить, используя общий ал-
алгоритм. Для этого нужно воспользоваться одним из исходных уравнений метода
Лакса, которое в случае уравнения КдФ записывается следующим образом:
фт Аф, 14^+617
шг ах
(см. пример 3 раздела "Метод Лакса"). Рассмотрим область
/о
A40)
оо. Поскольку
в этой области асимптотика волновой функции в задаче рассеяния имеет вид
{e + Rke +oo
к J F ' A41)
T[k)%kx
T[k)e~
при х -+ -оо,
а потенциал для n-солитонных решений локализован,
0 при \х\ -^ оо, то
оператор А в уравнении A40) сводится к ^4д3/дх3 + /о и уравнение фт = Аф
принимает вид
о ikx д г • | 3 —ikx • j 3 т-> ikxi
лте = —4[г1с e — г A; lie J
Ti —ikx at • j Srri —ikxi
Te = — 4[ik Те j
Сравнивая коэффициенты при e%kx и е
ний, найдем
, г г —ikx . j-> гйгжт .
+ /o[e + ite j, x —± +00,
, л г/ti — i k x i ^ '
—ikx j>
+ ite
J? —^ —00.
в левой и правой частях этих уравне-
уравнеRT = Dik3 + /0)Д,
Тт = (^4ik3 + /о)Г.
Отсюда, в частности, следует, что
Т{к,т) = Т{к,0).
A43)
V ;
446 Приложения
Из этих соотношений следует, что
а(к,т) = const = а(к,0),
Ь(к, т) = Ъ(к, 0) ехр[8г&3т], A45)
mi (т) = mi @) ехр[8/С| т].
Следовательно, полностью определенная функция K(z,r) из A19) в случае задачи
КдФ будет даваться выражением
+ о
K{z,t)= \ R{k^y{kz+sk*T)— + ^т|@)е^+8к"т. A46)
В рассматриваемом сейчас случае безотражательных потенциалов первое слага-
слагаемое в A46) отсутствует. Поэтому для получения временной зависимости соли-
тонных решений уравнения КдФ достаточно заменить в них mi —»¦ raj(r) no
формулам A45). Для односолитонного решения A39) это приводит к упомянутой
выше его временной зависимости.
Мы рассмотрели простейший случай односолитонного решения. Если бы мы
учли в сумме A32) число слагаемых п > 1, то получили бы решение уравнения
КдФ, описывающее систему с п солитонами — по одному на каждый полюс коэф-
коэффициента прохождения Т(к) в верхней полуплоскости. Пример двухсолитонного
решения был рассмотрен в главе 13 (см. рис. 13.4).
Наконец, следует отметить, что еще один класс потенциалов может быть точно
восстановлен с помощью уравнения Гельфанда-Левитана-Марченко. Этот класс
порождается коэффициентами отражения, являющимися рациональными функци-
функциями волнового числа к:
П (*-&¦
A47)
где га ^ п — 1. В этом случае обращение Фурье r(z) содержит экспоненты, и
уравнение Гельфанда-Левитана-Марченко решается по изложенной выше схеме.
В частном случае m = п — 1 потенциал U(x) будет содержать также E-функцию.
П.З. Уравнения градиентного типа
Основные определения. Уравнения градиентного типа. Краевые за-
задачи, эквивалентные задачам градиентного типа. Функции Ляпунова.
Примеры градиентных и эквивалентных им систем. Свойства ли-
линеаризованных систем. Устойчивость пространственно-периодических
решений. Обыкновенные дифференциальные уравнения с периодическими
коэффициентами. Исследование краевой задачи для уравнения Кана-
Хиллерта. Периодические решения обратимых систем.
Изучение диссипативных структур в нелинейных системах во многих случаях
сводится к исследованию решений специального класса нелинейных уравнений, ко-
который является в некотором смысле родственным по отношению к гамильтоновым
динамическим системам. К таким уравнениям приводят многие задачи, включающие
процессы переноса диффузионного типа (теплопроводность, диффузия, вязкость).
IJ.3. Уравнения градиентного типа 447
Основные определения. Рассмотрим краевую задачу для уравнения пара-
параболического типа
— = Н(х,у,у',у",...), х е О; y\t=0 = уо(х); Г(у)\дп = 0. A)
Здесь Q — область определения функции у(х), дп — граница области п1) .
Штрих означает дифференцирование по координате х.
Уравнение A) называется уравнением градиентного (или вариационного) ти-
типа, если правую часть уравнения можно представить в виде
тт( ' н \ - — - — (ЁЕЛ _l _ 1ЁЕЛ о. п\
ду ох \ ду' / дх1 \ ду" /
где F(xJy,yr ,у",...) — достаточно гладкая функция своих аргументов. Такое
название связано с тем, что если ввести функционал действия
г
S = F(x,y,y,y",...)dx, C)
о
то его вариация дается формулой
SS = JH(x,y,y',y",... Mydx + T(y;Sy)\a
D)
Иными словами, функция Н(х, у,у' ,у", • • •) является вариационной производной
действия S.
Входящая в D) функция Г (у; ёу) имеет вид
dF д fdF\ д2 {dF
ay' ox \ду") ox2 \ay'"
8F д ( OF \ 1 , Г dF 1 „
-¦¦¦\8V + 7ГТ77 - ¦ • • \Sy +¦¦• E)
" dx \dV'"J J Lay"'
Если предполагать, что вариации ёу, ду', ду", ... на границе области О неза-
независимы, то обращение в нуль слагаемого Т(у;ёу)\дп задает набор естественных
граничных условий для уравнения в A):
dF д ( dF\ д2 ( дР
коэффициент при ду: — — — — + —
коэффициент при ду':
дх \dyff) дх2 \ду11!
dF д ( дР
= 0,
дП
ду" дх \душ
= 0,
коэффициент при ду :
= о,
дп
) В более общем случае у = {|/i, t/25 • • •,Уп} — вектор-функция т переменных х =
= {ж1,Ж2, • • •,%}, а О — открытая область в Rm. От функций у требуется, чтобы
они были непрерывно дифференцируемыми необходимое число раз. В дальнейшем мы
будем рассматривать одномерные задачи (то = 1), так что О = (а, Ь) — интервал на
действительной оси.
448 Приложения
Обращение в нуль внеинтегрального члена в D) возможно и при граничных усло-
условиях, отвечающих обращению в нуль вариаций ёу, ёу', ёу", ... , т. е. когда фик-
фиксируются значения функции и ее производных на границе:
ёу = 0 => у\дп = |/о,
6у' = 0 =Ф у\дп=Уо,
ёу =0 => у \дп = |/о,
Допустимы также комбинированные условия, включающие как естественные
условия из списка Fа), так и фиксированные граничные значения функции и
ее производных из списка F6).
Обобщение определения на случай произвольного числа переменных х =
= {ж1, ж2, •.., хт} и функций у = {t/i, у2,.. •, уп} не представляет труда.
Краевую задачу
— =А(х,щи,и",...), хеп; u\t=o = uo(x); G(u)\dQ = 0, G)
от
будем называть эквивалентной задаче градиентного типа A), если существует
такой линейный непрерывно обратимый оператор В, что между решениями задач
A) и G) имеет место соответствие и = By, причем из равенства у = 0 следует
и = 0 и наоборот. Заметим, что если коммутатор [В, d/dt] = 0, то А(и) =
1
Функции Ляпунова. Важным свойством градиентных систем является то,
что они обладают функцией (функционалом) Ляпунова
= -\F(x,y,y',y",...)dx, (8)
которая совпадает с функционалом действия C), взятым со знаком "—". Действи-
Действительно, дифференцируя V(y) по времени с учетом A), B), получим
4(У*^0. (9)
dt J \dtj
n
Отсюда видно, что dV/dt = 0 только на стационарных решениях краевой задачи
dy/dt = 0.
Для эквивалентных краевых задач также существует функция Ляпунова:
Щи) = ^f*F(x,B^V (Б^)',^^)",...)^. A0)
о
Легко проверить, что
о
При этом из определения оператора В следует, что dV3/dt = 0 только при du/dt = 0.
Таким образом, функция Ляпунова монотонно убывает. Если при этом V ^
^ Vmin (или V3 ^ V^min), то она стремится к некоторому пределу так, что
dV/dt —> 0 (и аналогично для эквивалентных задач). Следовательно, произволь-
произвольное решение соответствующей краевой задачи всегда стремится к некоторому
стационарному решению.
П.З. Уравнения градиентного типа 449
Примеры систем. Приведем примеры градиентных и эквивалентных им
уравнений 1).
Пример 1. Уравнение диффузионного типа:
F = -±*(г) (Vj/J + igi(r)j/2 + qo(v)y; ^ = V (fc(r)Vy) + qi(r)y + <fo(r).
A2)
Пример 2. Нелинейное уравнение диффузии:
Р=-\{УУ? + ^ + ^-\у\ ^=Ay + 0y + ey2-hy3. A3)
Пример 3 . Уравнение Свифта-Хоэнберга:
п 1 /л \2 , /т-7 \2 1/1 /э\ 2 , 1 3 ^4
Р=~^(АУ) +(УУ) --A-0)у +-?У - -У \
2 2 3 4 (М)
-? = -А22/ - 2Aj/ - A - Р)у + еу2 - %3,
где ей/3 — некоторые постоянные. Данное уравнение возникает в связи с пробле-
проблемой Бенара (о конвективной неустойчивости гидродинамического течения жидко-
жидкости).
Пример 4 . Двухкомпонентная система (два связанных уравнения диффу-
диффузионного типа):
Vy2) - 7 (»i + yt);
4
% = ДУ1 + gAy2 + p- (Vy2f - hy\,
dt dy2
dt дуг
Пример 5 . Система, для которой плотность действия F содержит только
производные от функции, но не саму функцию:
/Я X 3 h
\дх2 у 2 \дху 3 \дху 4 \дх/ /1Г-Х
v/ х/ х/ х37 A6)
\'
o>t дх4 дх2 дх\дх) дх\дх)
Для этого уравнения граничные условия в области О = (О, R) в ряде практически
важных случаев задают в виде
у\х=о = y\x=R = 0; yff\x=o = y"\x=R = 0. A6а)
Из них первая пара отвечает фиксированным значениям функции на границах
Eу\х=о = Sy\x=R = 0), а вторая пара является естественными условиями.
) Часть приводимых ниже примеров относится, вообще говоря, к многомерным
системам.
29 Н.В. Карлов, Н.А. Кириченко
450 Приложения
Пример 6. Краевая задача, эквивалентная задаче A6), A6а).
Введем функцию и{х) по формуле
х
u(x,t) = — или y(x,i) = u(xi,t)dxij A7)
дх J
о
так что в соотношении и = By оператор В равен В = д/дх. Тогда эквивалентная
краевая задача имеет вид
ди _ ^jf^ /д2и
dt ~ дх2 \дх2
- ри-еи2 + /ш3 1 , A8)
и
I p. Ill 1 III I р, /1 О \
х=о = и x=r = 0, и \х=о = и \x=r = 0. A8а)
Здесь первая пара граничных условий порождена второй парой в A6а), а вторая
пара — следствие уравнения A6). Подчеркнем, что последняя краевая задача не
является задачей градиентного типа.
К рассмотренным выше уравнениям параболического типа тесно примыкают
уравнения гиперболического типа
в которых правая часть определена формулой B), а параметр j > 0. Слагаемое
jdy/dt описывает процессы диссипации. Для этих уравнений также можно ввести
функцию Ляпунова
У (У) = J fe2 - F(x7 у,уг7у'\... Л dx, B0)
о
причем
^ffY^O. B1)
dt I \dtj
о
Отсюда следует, что любое нестационарное решение уравнений типа A9) также
стремится к некоторому стационарному, если только функционал B0) ограничен
снизу, У ^ ^min. Очевидно также, что при 7 = 0 функция Ляпунова есть инва-
инвариант движения.
Свойства линеаризованных систем. Часто нелинейные краевые задачи
типа A) или G) имеют несколько (а в некоторых случаях — бесконечное число)
стационарных решений. Поэтому для того, чтобы определить конечное состояние
системы, необходимо исследовать все эти решения на устойчивость. Это мож-
можно сделать с помощью второго метода Ляпунова (по линейному приближению).
Пусть 2/о (ж) — некоторое стационарное решение задачи A). Полагая y(x,t) =
= г/о(х) + v(x,t), линеаризуя A) относительно малого возмущения v(x,t) и при-
принимая v(x,t) = vo(x)ept, приходим к краевой задаче на собственные значения
линейного оператора L:
pv = Lv, хеп; ST(v)\du = 0. B2)
Имеют место следующие утверждения.
Утверждение 1 . Если Н — градиентный оператор, то оператор L —
самосопряженный для любой функции уо(х).
IJ.3. Уравнения градиентного типа 451
Утверждение 2. Собственные значения краевой задачи B2) действи-
действительные.
Утверждение 3. Система собственных функций краевой задачи B2)
полная.
Докажем первое утверждение. Введем функцию
г
S(ai,a2) = \ F(yo ~\~ aiVi ~{-a2v2)dx1 B3)
J
о
где функции vi и v2 удовлетворяют граничным условиям 8T(vi)\dn = 0, г = 1, 2.
В соответствии с B)
OS Г
Вычисляя затем производную по а2, найдем
д ( dS \ Г
да2 \daij ai=o J
Здесь мы использовали определение скалярного произведения
Г
(vi,v2) = Vi{x)v2{x)dx. B6)
Входящий в B5) оператор L, действующий на v2, определяется действительной
функцией |/о (ж) и, следовательно, является действительным. Поэтому знак ком-
комплексного сопряжения уЬв последнем равенстве B5) не появляется.
Аналогично, вычисляя производные по ai и а2 в обратном порядке, найдем
О ( dS \ Г
^^ ( ^^ I — ^2 (Lvi) dx = (v2,Li;i). B7)
^ai \да2/ «2=о J
«1=0 О
Предполагая функцию F достаточно гладкой, а интегралы сходящимися, в силу
равенства смешанных производных из B5),B7) получим
(LvZ) v\dx = ^2 (Lvi) dx. B8)
о о
В соответствии с определением эрмитово сопряженного оператора Ь+
(v2iLvi) = (L v2jvi), B9)
получаем утверждение 1.
Из самосопряженности оператора L следуют утверждения 2 и 3. Их доказа-
доказательство можно найти в любом курсе математической физики.
Рассмотрим теперь эквивалентную краевую задачу G). Пусть uq(x) — неко-
некоторое ее стационарное решение. Вводя, как и выше, малое возмущение w(x,t) =
= и(х, i) — uo(x) = wo(x)ept, приходим к краевой задаче на собственные значения
оператора Ьэ:
pw = L3w, х е О; 8Тэ(ш)\дп = 0. C0)
29*
452
Приложения
Относительно свойств оператора Ьэ и спектра его собственных значений справед-
справедливы те же утверждения 1—3 с тем лишь изменением, что скалярное произведение
теперь должно определяться формулой
(wi,w2)b= {В 1wi(x))* (В 1w2{x))dx.
C1)
При этом множества собственных значений этой и порождающей ее градиентной
задачи совпадают, а собственные функции связаны соотношением w = Bv.
Устойчивость пространственно-периодических решений. Тот факт, что
собственные значения краевых задач типа B2), C0) являются действительными,
позволяет в некоторых случаях достаточно полно исследовать устойчивость стаци-
стационарных решений исходных нелинейных систем. В частности, это возможно, если
изучаемые решения — одномерные и пространственно-периодические. Соответ-
Соответствующие диссипативные структуры иногда называют "валами". Для таких струк-
структур линеаризованная задача содержит обыкновенные дифференциальные уравне-
уравнения с действительными периодическими коэффициентами, общая теория которых
достаточно хорошо развита. Более того, существование семейств пространствен-
пространственно-периодических решений в некотором смысле типично, поскольку имеет место
утверждение: если оператор Н обратим и уравнение Н(у(х)) = 0 имеет хотя бы
одно периодическое решение, то это уравнение обладает однопараметрическим
семейством периодических по х решений (доказательство приведено в конце дан-
данного приложения).
Итак, пусть краевая задача типа A) имеет семейство стационарных периодиче-
периодических решений Y = {у(х; /i)}, где /л — некоторый параметр, нумерующий решения
и пробегающий непрерывный ряд значений. В качестве такого параметра выберем
основную частоту решения к = 2тг/Г, где Т — период решения.
Введем обозначения
Zl =V, Z2=V',..., Z2n=VBn^1); Z = CO\(z1,Z2,...,X2n). C2)
Здесь символ "col" обозначает столбец, составленный из перечисленных элемен-
элементов. Считая оператор L равномерно эллиптическим, приведем уравнение в B2) к
виду
^- = je>(x,P)z, (зз)
ах
где Ж — 2п х 2п-матрица с элементами, являющимися периодическими функция-
функциями координаты с периодом Т (или, кратко, Т-периодическими). Фундаментальная
система решений (ФСР) системы уравнений C3) содержит 2п линейно независи-
независимых векторов {z^%\ г = 1, 2,..., 2п}. Образуем матрицу
C4)
столбцами которой являются векторы из ФСР, удовлетворяющие граничным усло-
условиям 3?(х)\х=о = J^2n, где J^2n — единичная 2п х 2?г-матрица. Так построенная
матрица 3?(х) называется матрщантом. Любое решение z(x), удовлетворяющее
zl
Л1)
Z2
(x)
(x)
(x)
zl
Z2
(x) ..
(x) ..
(x)
¦ zfn\x)
'C2 Vх/
Z2n \XJ
П.З. Уравнения градиентного типа 453
начальному условию z(x)\x=o = zo, выражается через матрицант формулой
z[x) = 3f{x)z0. C5)
Согласно теореме Флоке-Ляпунова (см. комментарий 5) матрицант 3?(х) мо-
может быть представлен в виде
где &(х) — Т-периодическая невырожденная матрица-функция с кусочно-непре-
кусочно-непрерывной производной, ?} — постоянная 2п х 2п-матрица, называемая показатель-
показательной матрицей ) .
Матрицант 3? при х = Т порождает матрицу монодромии 3?(Т), которая
вследствие линейной независимости ФСР {z^ (х)} является невырожденной,
det fF{T) ф 0. Поэтому все ее собственные значения {мультипликаторы) р отлич-
отличны от нуля. Мультипликаторы являются корнями характеристического уравнения
А(р) = det[JT(T) - р^2п] = 0. C7)
Согласно C7) имеется не более 2п различных мультипликаторов. Заметим также,
что вследствие периодичности матрицы-функции ^(х\ J^@) = ^{Т) = J^2n,
мультипликаторы являются собственными значениями матрицы exp(iJ2?T):
exp(i??T)a = pa. C8)
Собственные значения q показательной матрицы М называются характеристиче-
характеристическими показателями, За = qa. Таким образом, р = exp(igT). Последнее озна-
2ттт
чает, что характеристический показатель определен с точностью до тк = ,
га = 0, =Ы, ±2,..., т.е. с точностью до выбора листа римановой поверхности
функции q = -— Ln p.
Таким образом, мы получаем зависимость характеристического показателя q
от параметров р и k, q = q(p, к), или спектральную функцию р = p(q, к). Уста-
Установим ее свойства.
Теорема 1. Если среди решений системы уравнений C3) имеется хотя бы
одно Т-периодическое, то среди мультипликаторов имеется хотя бы один р = 1.
Доказательство следует непосредственно из представлений C6) и C8).
Пусть периодические функции у(х;к) удовлетворяют нелинейному уравнению
Н(у(х;к)) = 0. Тогда соответствующее уравнение в вариациях Пуанкаре имеет вид
L(v(x;k)) = 0 и совпадает с линеаризованным уравнением в B2) для собственного
значения р = 0. Но для последнего можно явно указать два решения:
v{1) = -^, v{2) = -^. C9)
ох дк
Данное утверждение проверяется непосредственно дифференцированием уравне-
уравнения Н(у(х; к)) = 0 по координате ж и по параметру к.
Структура приведенных решений устанавливается следующим образом. Запи-
Запишем функцию у(х;к) в виде ряда Фурье:
+ ОО
у(х;к) = 2_2 ат(к) ex.p(imkx). D0)
т = — оо
) В математической литературе этим термином обычно обозначают матрицу Ж = i
454 Приложения
Тогда решения tr } иг ' принимают вид
+ ОО
V{1){X)=ik ^ та^
+ ОО + ОО J fj\
B)/ \ • \ л /7\ /• 1 \ \ л СиСЬт\гъ) / . 7 \
t/ \«^j — Mb / IllilfYiynj) t}ji.\jyifilnjJLj ~r / CAp^/lifiXj.
— _ — _ ^K
Отсюда сразу следует, что решение tr1^ периодично вследствие периодичности
у(х;к), а решение v^ имеет структуру
1;B)(ж) = axv{1)(x) + w(x), а = к^г, D2)
где w{x) — Т-периодическая функция.
Из сказанного вытекает следующее утверждение.
Теорема 2. Собственному значению р = 0 в уравнении C3) (или B2))
отвечает, по крайней мере, одно Т-периодическое решение.
Систему C3) называют ж-инвариантной ] ) , если она не меняет вида при за-
замене ж —^ —х.
Теорема Ляпунова. Для ж-инвариантных систем матрица монодромии
iF(T) наряду с собственным значением р имеет и собственное значение р^1 с той
же структурой элементарных делителей. Если коэффициенты системы C3) дей-
действительные, то при Im p ф 0 в спектре fF{T) наряду с собственным значением
р имеется и собственное значение р*.
2п
Отсюда следует, что для ж-инвариантных систем [] р« = 1, det ^{T) = 1.
г=1
Если qT ф гшг, m = 0,±1,±2,..., то мультипликаторы р и р™1 различны,
р2 = expBigT) ф 1. Им отвечают 1 х 1-жордановы клетки матрицы монодромии
и простые решения из ФСР:
z\ = е*джР1(ж), Z2 = e~iqx Лг(ж), D3а)
где Pi (ж) и Рг(ж) —Г-периодические функции.
Если qT = mw, то пара мультипликаторов совпадает: р = р~1 = ±1.В общем
случае этой паре отвечают 2 х 2-жорданов блок матрицы монодромии ^{Т) и
группа решений
хг = ещхРг(х), z2 = eiqx[xK{x) + Р2(ж)] D36)
с Т-периодическими функциями Pi (ж) и Рз(ж).
Значения q = разделяют зоны стабильности и зоны лабильности. На
границах зон происходят столкновения пары мультипликаторов {pi, р2 = pj},
т.е. оказывается pi = p2, и могут появляться (хотя и не всегда) решения вида
D36). Внутри зон стабильности мультипликаторы попарно находятся на единич-
единичной окружности, |pi| = \р2\ = 1, pi = Р2? а характеристические показатели
д, определяемые формулами р\ = ещТ', р2 = е^щТ', — действительные. При
) Другое название, использованное в конце данного приложения, есть "обратимая
система".
П.З. Уравнения градиентного типа 455
этом соответствующие решения системы C3) ограничены. Внутри зон лабиль-
лабильности |pi| < 1, |рг| > 1, характеристические показатели q — комплексные, а
решения экспоненциально нарастают: v[x) ~ ехр(ж • | Im q\).
Граничные условия, входящие в краевую задачу B2), выделяют ограниченные
решения. Следовательно, допустимые характеристические показатели должны быть
действительными, а значения параметров (таких, как р,к), отвечающих зонам ла-
лабильности, исключаются из множества допустимых значений. Кроме того, запрещен-
запрещенными оказываются и решения типа D36), которые возрастают степенным образом
и отвечают границам зон. Таким образом, столкновения мультипликаторов могут
приводить к появлению либо разрывов, либо экстремумов функции р = p(q).
Теорема 3. Если пространственно-однородное решение непрерывным об-
образом включено в семейство периодических решений уравнения Н(у) = 0, то
одно их чисел р+(к) или р~(к) равно нулю.
Здесь р±(к) = lim p(q; к), оператор Н предполагается градиентным, а опе-
q—>k±O
ратор L — ж-инвариантным.
Указанное свойство обосновывается следующим образом. Пусть однородному
решению отвечает значение к = к^°\ Будем считать для определенности у(х; к) =
= l/°) = 0 (в противном случае следует произвести сдвиг решения на г/0^). Тогда
исходная краевая задача A) и линеаризованная задача B2) для р = 0 и у = у^
совпадают. Их решения у(х;к) и v(x) = cos(gx) при к —>> /г0' пропорциональ-
пропорциональны cos(k^x). Следовательно, характеристический показатель должен выбираться
так, чтобы для спектральной функции выполнялось условие р(к^°\ №0') = 0.
Далее необходимо аналитически продолжить функцию p(q,k) = 0 от к = Аг0'
на все остальные значения к. Это делается в соответствии с тем, что при р = 0
уравнение Lv = pv всегда имеет пару решений C9), характеризуемую двукрат-
двукратным мультипликатором р = 1, т. е. q = ±га&, где га — целое число или нуль.
Предельный переход к —»¦ к^ фиксирует значение га = 1.
Таким образом, краевая задача B2) определяет действительную функцию р =
— p(Qi ^) действительных аргументов — поверхность в М3(р, q, к), которая
1) четная, p(—q, к) = p(q7 к) (в силу теоремы Ляпунова);
2) р = p(q,k) —>¦ ^оо при |д| —^ оо (в силу параболичности системы);
3) имеет не более 2п — 1 экстремумов Bп — число уравнений в системе C3)).
Это свойство обусловлено тем, что каждому значению р отвечает 2п харак-
характеристических показателей, из которых число действительных ^ 2п;
4) может иметь разрывы по р в точках q = mk/2, m = ±1, ±2,... (т. е. на
границах между зонами стабильности и лабильности);
5) p(qjk) —> 0 при g —> Jfe (в смысле предела, указанного в теореме 3).
Приведенные свойства функции р = p(q,k) позволяют сформулировать алго-
алгоритм исследования устойчивости решений семейства Y = {у(х; к)}. Поскольку за
неустойчивость отвечает область р > 0, то достаточно найти пересечения поверх-
поверхности р = p(qjk) с плоскостью р = 0. Среди линий пересечения присутствуют
прямые q = ±fc (свойство 5). Наряду с ними могут иметься и другие линии,
задаваемые уравнением p(q, к) = 0. Пересечения последних с прямыми q = ±&
означает исчезновение или возникновение интервалов q, в которых p(q) > 0. С
учетом сказанного этот алгоритм включает следующие действия.
1) Построить семейство решений исходной нелинейной краевой задачи Y =
456
Приложения
2) Построить матрицу монодромии f^{T) как решение задачи Коши для си-
системы обыкновенных дифференциальных уравнений C3) при р = 0.
3) Найти из уравнения C7) мультипликаторы и соответствующие им характе-
характеристические показатели.
4) Найти те значения к, при которых мультипликаторы либо равны единице,
р = 1, либо находятся вне единичной окружности, \р\ / 1.
Последнее требование означает, что для таких значений к поверхность p(q, к)
имеет не более одной общей точки с плоскостью р = 0 и, следовательно, для всех
q проходит в области р ^ 0. Наличие же хотя бы одного мультипликатора р такого,
что р ф 1, но \р\ = 1, означает наличие второй (кроме q = к) точки пересечения
q = —Lnp. В последнем случае существовал бы участок спектра p(q, к) > 0.
IT
Полученные по этому алгоритму значения к отвечают всем тем стационарным
решениям, для которых p(q,k) ^ 0. Если в п. 2 алгоритма принять р ф 0, то можно
построить всю поверхность р = p(q, к).
Геометрический смысл алгоритма проиллюстрирован на рис. 1. Заметим,
что по существу данный алгоритм представляет собой реализацию метода D-
разбиения применительно к данной задаче (см. комментарий 16).
p{q,k) = 0
Рис. 1. Спектральная функция — поверхность р = p(q,k). Жирными линиями
показаны ее пересечения с плоскостью р = 0. Одна из этих линий — прямая q = к
В случае уравнений 4-го порядка вычисления по изложенному алгоритму можно
несколько упростить. Именно, характеристическое уравнение C7) принимает вид
А(р) = Р4 + bip3 + Ь2р2 + Ьгр + 1 = 0,
6i = Sp ^(Т),
причем характеристические показатели q\ и д2 связаны с коэффициентами Ь\ и
простыми соотношениями:
D4)
\ - 4Ь2 +
- Jfe? - 4Ь2
V
pi,2 = exp(zbigiT), D5а)
р3;4 =ехр(±гд2Т). D56)
П.З. Уравнения градиентного типа 457
При р = 0 имеем q^ = к. Тогда из D56) следует Ь^ = — 2(fei + 1), а из D5а)
находим
h = ^4 cos2 f ^ J , 6i = bi(fc). D6)
Таким образом, алгоритм сводится к нахождению единственного коэффициента
bi = Sp fF(T) и всех тех значений к, при которых bi(k) ^ —4.
Исследование краевой задачи для уравнения Кана^Хиллерта. Иссле-
Исследуем в качестве примера краевую задачу A8):
и = - (и" + /(м))", же@,Д); /(w) =fiu + eu2 - и3; D7а)
u\t=o = ио(х); и\х=о = u\x=r = 0; и"\х=о = u"\x=R = 0. D76)
Эта задача встречается при исследовании динамики расслоения сплавов и суспен-
суспензий, поведения нагреваемых излучением газовых смесей, движения дислокаций
в твердых телах и в ряде других ситуациях. Уравнение D7а) иногда называют
уравнением Кана—Хиллерта.
Из уравнения D7а) следует закон сохранения:
R
u(x, t)dx = const = uR. D8)
о
В дальнейшем будем считать п = 0, т. е.
R
u(x,t)dx = 0. D9)
о
В противном случае следует перейти к функции ui (ж, t) = u(x, i) — u9 для которой
равенство D9) уже выполняется, п\ = 0.
Как уже было сказано, задача D7) эквивалентна задаче A6) и имеет функцию
Ляпунова
E0)
где
и
Ф(и) = lf(ui)dui = -и2 + ^и3 - -ti4. E1)
J Z о 4t
О
Нетрудно проверить, что если u(x,t) — решение задачи, то
V3 = - \ ]Хи'" - (f(u))f} dx <C 0. E2)
о
Из E0), E1) легко увидеть, что К» ^ (Кз)тт. Поэтому из любых неособых на-
начальных условий решение стабилизируется к некоторому стационару.
458
Приложения
Оценим скорость изменения u(x,t) со временем. Обозначим
R
z(t) = I u2(x,t)dx. E3)
о
Умножим уравнение в D7а) на и(х, t) и проинтегрируем по координате в пределах
от 0 до Д. Это дает
ldz_
2 dt
R R
f Г " . ?( \ЛИл [\ ( "\2 i df(u) / /\2~| ,
-\u[u + f(u)\ dx = - [u ) H ^^ [u ) \dx
J J L an J
о о
+ el - il
з r2
. E4)
= /3 + 2?ii 3n2 ^ /3 +
Здесь учтено, что — = /3 + 2?ii — 3n2 ^ /3 + ^. Кроме того, использовано
eft* 3 "
неравенство
R
2 n
— y2dx,
R J
о
E5)
справедливое для непрерывно дифференцируемых функций, если только у\х=о =
= y\x=R = 0. Последние равенства выполняются для функции у = и' в силу
граничных условий D76).
Замечание . Неравенство E5) может быть получено методами вариаци-
вариационного исчисления, однако достаточно просто получить несколько более слабое
ограничение. В самом деле, имеем
о о
Воспользуемся неравенством Коши-Буняковского:
о
В результате находим
R
E5а)
Эта оценка в тг2/2 раз хуже, чем E5). ¦
Неравенство E4) означает, что при условии
E6)
IJ.3. Уравнения градиентного типа
459
производная z ^ 0. Поскольку по определению z ^ 0, то из любых начальных
условий u(x,t) стремится к такому решению, для которого и = 0. Последнее,
согласно D7), D9), единственно и имеет вид и = 0.
Для нахождения множества стационарных решений требуется решить следу-
следующую краевую задачу:
и" + /О) = а, х е @,R); f{u) = /Зи + ей2 - и3;
R
Г
\х=о = u\x=R = 0; и(х, t)dx = 0.
J
E7a)
E76)
Здесь а — константа интегрирования, для нахождения которой используется
интегральное условие в E76).
Оценим сначала амплитуду стационарных решений. Без ограничения общно-
общности будем полагать е ^ 0 (иначе достаточно заменить и —t —и). Умножим урав-
уравнение в E7а) на и(х) и проинтегрируем по интервалу @, R):
(V) dx = (/3 + ей — и ) и dx.
о о
Далее воспользуемся неравенством Гель дера
r /r \ г1'р /r ^
\b(x)\qdx
Ко J
о
Vo
, где - + - = 1- E8)
p q
Применяя это неравенство для а(х) = 1, Ь(х) = и(х) и полагая q = 2, q = 3 и
q = 4, приходим к цепочке неравенств:
R) ' V
1/2
1/3
1/4
Имея в виду, что
it
(иJ dx ^ 0,
1/2
R
n
0
3dx $
R
0
\u
0
3dx <
Л
R
u2dx
0
\
3/4
u4dx
E9)
460 Приложения
и обозначая
г)= \Л^и*йх\ , F0)
найдем
/Зт]2 + о/ - ?|4 > 0. F1)
Отсюда получаем искомую оценку
F2)
В частном случае е = 0 находим yu2 ^ г] ^ л/Р. В этом последнем случае видно,
что при /3^0 задача не имеет нетривиальных стационарных решений.
Далее нас будет интересовать вопрос: к какому стационарному решению эво-
эволюционирует при t —> оо решение u(x,t) краевой задачи D7)? Для ответа нужно
явно найти все стационарные решения и исследовать их устойчивость. Строя фазо-
фазовые портреты для уравнения E7а) при различных значениях параметров, нетрудно
убедиться, что все ограниченные стационарные решения краевой задачи E7а,б) пе-
периодические (за исключением тех, которые отвечают замкнутой петле сепаратрисы).
Поэтому достаточно пронумеровать все эти решения каким-либо параметром (напри-
(например, числом к, как это было сделано выше). Фактически свойства решения опреде-
определяются зависимостью амплитуды А от периода Т, точнее — от величины к = 2тг/Г.
Для нахождения функции А(к) понизим порядок исходного уравнения E7а):
- (иJ + Fa(u) = С, где Fa(u) = -аи + ^и2 + ^и3 - *гЛ F3)
2 2 3 4
Здесь С — константа интегрирования. Пусть {tii, izmin, ^max, ^2} — корни урав-
уравнения Fa(u) = С, причем и\ ^ iZmin ^ и ^ Umax ^ U2. Тогда период решения
может быть найден по формуле
Т = 2Т ^ = ^Т , dU , F4)
J и' J y/C-Fa(u)'
и •
R
а условие u(x,t)dx = 0 может быть переписано в виде
о
Udu =0. F5)
y/C-Fa(u)
Пара уравнений F4), F5) позволяет найти зависимость амплитуд itmin и мтах
решения от периода, umin = umin(T), timax = timax(T). Результаты удобнее,
однако, представить в виде зависимости "размаха" решения А = итах — i*min
от величины к = 2тг/Т, т. е. А = А(к). На рис. 2 показаны зависимости А(к) для
некоторых значений е.
П.З. Уравнения градиентного типа
461
0,2 0,4 0,6 0,8 1,0 к
Рис. 2. Зависимость А(к) для некоторых значений е. C = 1
Можно показать, что случае произвольного значения е максимальное значение
амплитуды А достигается при 1;->0и составляет
А ^9
Лтах — ^
F6)
Соответствующее предельное решение Uoo(x) = и(х, k)\k->o отвечает сепаратри-
сепаратрисе, соединяющей две седловые точки на фазовом портрете уравнения E7а). С
формальной точки зрения оно реализуется, когда уравнение Fa(u) = С имеет
два двукратных корня timin и ита,х, т.е. Fa(u) - С = --(и - ита^J (и - uminJ.
Чтобы выделить асимптотически устойчивые решения из полученного семей-
семейства, нужно согласно изложенному выше алгоритму построить картину D-разбие-
D-разбиения. Оказывается, приведенный рис. 2 уже может быть интерпретирован как искомая
картина. В самом деле, этот рисунок устанавливает соответствие к ^ А ш тем са-
самым изменяет способ нумерации решений семейства: {и(х; к)} —> {и(х; А)}. Тогда,
изменяя интерпретацию абсциссы на рис. 2 по правилу к —> q, получаем картину
.D-разбиения на плоскости {A,q}. В соответствии со сказанным выше при q = к
собственные значения р линеаризованной краевой задачи обращаются в нуль. Оста-
Остается установить топологию поверхности p(q,A), т.е. указать явно области,
где р > 0 и р < 0. Это можно сделать,
рассматривая решения семейства {и(х;А)}
с амплитудой, стремящейся к нулю. В этом
пределе из D7) получаем линеаризованную
краевую задачу:
F1a)
F76)
pv = - (vff + Pv)" , x e @, R);
vf\x=0 = vf\x=R = 0;
V ж=о = V |ж=д = 0,
откуда находим
2//э 2\
p = q (p-q ).
Эта спектральная зависимость показана
на рис. 3 (вследствие четности функции
p(q,k) по аргументу q достаточно исследо-
исследовать только область q ^ 0). Соотношение
-0,1 -
-0,3 -
Рис. 3. Спектр собственных значе-
значений р = p(q) краевой задачи F7).
р(д) = 0 при д = Оид = А: =
= \/Р. Ртах = р{л/Р/2). РИСУНОК
приведен для значения /3 = 1
462 Приложения
F8) показывает, что при C > 0 однородное решение и = 0 неустойчиво, т. е.
имеется интервал волновых чисел q, для которых собственные значения р краевой
задачи F7) положительны.
Утверждение. Для всех к функция p(qjk) может обращаться в нуль толь-
только при q = 0 и q = к.
Доказательство. Достаточно показать, что при р = 0 линеаризованная
краевая задача
pv = - {у" + g(x; k)v)" , x e @, R); g(x; k) =
df(u)
du
F9a)
u=u(x]k)
/) / p, HI III fx /Г(\Г\
v \x=o = v X=R = 0, v x=o = v X=R = 0 F96)
имеет только Г-периодические решения или решения со структурой типа D3).
Полагая в F9а) р = 0, получим
v" + g(x; k)v = Ci + C2x, G0)
где С\ и С2 — константы интегрирования. Однородное уравнение
v" + g(x; k)v = 0 G1)
имеет решение v^(x) = ди(х; к)/дх. Второе линейно независимое решение од-
однородного уравнения G1) может быть найдено из того условия, что вронскиан
Это решение имеет вид
^- = ^\X) + W(X), Ъ =]-?—, G2)
где w(x) — Т-периодическая функция.
Имея общее решение однородного уравнения G1) ^Однор(ж) = Сзгг'(ж) +
+ С^2\х)у методом вариации постоянных получим общее решение неоднород-
неоднородного уравнения G0). С учетом G2) это решение может быть представлено в виде
г>„еоднор = хАг (х) + А2 (х), G3)
где А\(х) и Аг(ж) — Т-периодические функции, линейно связанные с четырьмя
константами интегрирования {Ci, Сг, Сз, С4}. Слагаемые с частотами, не кратны-
кратными к = 2тг/Т, в Ai(x) отсутствуют. Из G3) следует, что все четыре мультиплика-
мультипликатора {pi, г = 1, 2, 3, 4} равны 1. Это означает, что при всех значениях к функция
p(q, к) обращается в нуль только при q = пк, п = 0, ±1, ±2,... Сопоставление с
F8) в пределе к —ь- 0 фиксирует значения п = 0ип=1. 1
Сопоставление рис. 2 и рис. 3 однозначно определяет топологию поверхности
p(q,A) и показывает, что для изучаемой задачи для любого решения и(х;к) с
конечным периодом Т (или к Ф 0) собственные значения p(q, к), отвечающие
интервалу q E @, &), положительны. Исключение составляют только решения
и(х;к), имеющие бесконечный период (к —± 0). Для последних интервал q G @, к)
сжимается в точку, в которой р@,0) = 0. Таким образом, в случае бесконечной
области (R —^ оо) все неоднородные стационарные решения неустойчивы, за ис-
исключением предельного Uqo(x) = и(х; к)\к-*о.
П.З. Уравнения градиентного типа
463
В случае конечной области @,R) граничные условия выделяют из исходного
семейства стационарных решений {и(х;к)} конечный набор, для которого к =
= пж/R, п = 1, 2,..., Птах. Иными словами, на оси к выбираются эквидистант-
эквидистантные точки с координатами кп = птт/R. Те из этих точек, для которых имеются
нетривиальные значения ординаты А(кп), отвечают допустимым неоднородным
стационарным решениям. Аналогично, для линеаризованного уравнения Lv = pv
граничные условия выделяют допустимый набор волновых чисел q = ттт/R, га =
= О, =Ы, ±2,... Тогда, используя рис. 2, можно установить, для каких значений q
собственные значения р > 0.
Сказанное позволяет дать ответ на поставленный вопрос. Именно, в области
конечных размеров R асимптотически устойчивыми будут только решения с мак-
максимально возможным периодом Т = 2R. В самом деле, рассмотрим решение с
k = n7r/R, п > 1. Для него в область р > 0 попадают такие волновые числа,
что 0 < \q\ < к, т.е. q = ттт/R, |га| = 1, 2,..., п — 1 (согласно сказанному
выше функция p(q, к) обращается в нуль при q = 0 и q = к). Следовательно,
данное решение неустойчиво. Если же мы рассматриваем решение с максимально
возможным периодом, к = тг/R, то в область 0 < \q\ < к не попадает ни одно-
одного допустимого значения q. Поэтому все собственные значения линеаризованной
задачи р ^ 0, и изучаемое решение устойчиво. Амплитуда этого решения есть
А = A(tt/R) (ее явное значение можно найти, например, из уравнений F4), F5)
или с помощью графиков на рис. 2).
Краевая задача E7) обладает еще одним интересным свойством. Помимо од-
однозначных зависимостей А(к) могут существовать и неоднозначные. Такие зави-
0,900 0,925 0,950 0,975 1,000 1,025 1,050 2тг/Т
Рис. 4. Зависимость А(к) для трех значений параметра е. Штриховыми линиями со
стрелками показана петля гистерезиса для кривой, соответствующей е = 3. /3 = 1
симости реализуются при больших значениях параметра е. На рис. 4 показано
изменение характера зависимости А(к) по мере увеличения е.
Наличие неоднозначности функции А(к) означает появление бистабильно-
сти — в зависимости от начальных условий система может эволюционировать
к одному из двух устойчивых стационарных состояний. Подчеркнем, что такие
состояния реализуются только в области конечных размеров Rmin ^ R ^ -Rmax,
-Rmin = 2тг/1стах, i?max = 2тг/'\ffi\ а величина fcmax — это максимальное значе-
значение к > л//3, при котором имеются нетривиальные стационарные решения.
Согласно F8), однородное решение и = 0 устойчиво при R < Дтах =
= 2тг/'л/Р (когда \q\ > </]$) и неустойчиво в случае области больших разме-
464 Приложения
ров. Более детальный анализ показывает, что из двух неоднородных стационарных
решений в области i?min ^ R ^ -Rmax (или ^min ^ к ^ ктах) устойчивым
является только то, которое лежит на верхней ветви, где dA/dk < 0. Неоднородное
же решение на нижней ветви, где dA/dk > 0, неустойчиво. Поэтому при плавном
изменении R будут происходить скачкообразные переходы с ветви А = 0 на верх-
верхнюю ветвь А ф 0 (при R = .Rmax) и обратно (при R = Rmin), как показано на
рис. 4 штриховыми линиями. Такое явление известно как гистерезис.
Периодические решения обратимых систем 1) . Под обратимыми дина™
мическими системами имеются в виду такие системы, для которых описывающие
их уравнения инвариантны относительно изменения знака координаты: х —ь —х.
Эти системы мы называли выше ж-инвариантными ) .
Обратимые динамические системы обладают особыми свойствами, придаю-
придающими им определенное сходство с гамильтоновыми системами. В частности, они
всегда имеют однопараметрические семейства периодических решений в некото-
некоторой, хотя бы малой, окрестности однородного решения. Для динамических же
систем, не обладающими свойством ж-инвариантности, периодические решения
являются обычно изолированными.
Рассмотрим систему дифференциальных уравнений:
dq . .
у1 =g(q,p),
ах
Здесь q, р, g, f — тг-мерные векторы, причем g и f — набор достаточно глад-
гладких функций, обеспечивающих непрерывную зависимость решений от начальных
условий. Для частного случая гамильтоновых систем с гамильтонианом Н вели-
дн
чины q и р имеют смысл обобщенных координат и импульсов, причем g = ,
q
Определим преобразование инволюции для этой системы:
3=: (q,p)-»(q,-p)- G5)
Если функции g и f обладают следующими свойствами:
g(q» -p) = ^g(q5 p)> f (q» -p) = f (q» p)»
то система G4) обратима и преобразование инволюции эквивалентно преобразо-
преобразованию инверсии координаты х —> —х.
Пусть, например, система задается уравнением F(u, и' ,и" ,и'",...) = 0. Пре-
Преобразование инволюции G5) означает замену
{I II III 1 г / // /// 1
и,и ,и ,и ,... } —>> {и, ^и , и ,—и ,...}•
) В этом разделе мы следуем приложению, написанному В.И. Арнольдом для статьи:
Malomed B.A., Tribelsky M.L II Physica D. — 1984. — V.14. — Р.67.
) В контексте данного приложения мы будем говорить о существовании стационарных
пространственно-периодических решений нелинейных краевых задач. С точностью до
замены координаты х на время t все утверждения переносятся на точечные системы,
решения которых сортируются по начальным данным.
П.З. Уравнения градиентного типа 465
Тогда система окажется обратимой, если при указанной замене уравнение F = О
останется неизменным.
Множество неподвижных точек оператора инволюции Э образует п-мерную
поверхность Е = {р = 0} в фазовом пространстве изучаемой системы.
Теорема. Пусть обратимая система имеет замкнутую траекторию S (пери-
(периодическое решение), пересекающую поверхность Е. Тогда в окрестности S суще-
существует непрерывное однопараметрическое семейство замкнутых траекторий (пе-
(периодических решений) с близкими, но, вообще говоря, различными периодами.
Доказательство. Выберем в 2п-множестве {q, p} какую-либо плоскость,
например, Р = {pi = 0}. Ее размерность равна 2п — 1. Выберем траектории,
которые начинаются на этой плоскости и при своем продолжении пересекают ее по
крайней мере еще раз. На множестве таких траекторий рассмотрим отображение
Т плоскости Р на себя, Т: Р —»> Р. В частности, точки n-мерной поверхности S
при этом отображении образуют w-мерное множество Ei = ТЕ. Существование
этого множества обеспечивается тем, что, во-первых, по предположению имеется
замкнутая траектория S, пересекающая поверхность Е, а во-вторых, непрерывной
зависимостью решений от начальных условий. Два тг-мерных множества Е и Si
погружены на Bп — 1)-мерную поверхность Р и в общем случае пересекаются по
одномерной кривой L, т. е. по однопараметрическому множеству.
Точки кривой L образуют множество начальных данных для периодических
траекторий. В самом деле, пусть образ какой-либо точки а лежит на L, Та =
= b ? L. Вследствие обратимости системы Т^га = ЭЬ. Поскольку Ь G L, то b
одновременно принадлежит множеству неподвижных точек оператора инволюции
Э, так что ЭЬ = Ь. Следовательно, Т^га = b и Та = 6, откуда Т2а = а. Это
означает, что точка а дает начало периодической траектории. Заметим, что найден-
найденная периодическая траектория отвечает 2-циклу (а, Ь) отображения Т, поскольку
всякая периодическая траектория и(х) не менее двух раз за период проходит точку
du/dx = 0, принадлежащую поверхности Р.
Замечания. 1) Сформулированное утверждение допускает следующее
обобщение. Рассмотрим систему дифференциальных уравнений
?=*Ы, G7)
dx
где q и f — тг-мерные векторы. Если преобразование инволюции меняет знак к
обобщенных координат {gi,g2, ••-,(?&}, тогда как у остальных I оставляет знак
неизменным (к + I = п), то анализ, аналогичный проведенному выше, позволяет
установить существование (к — 1-\-1)-параметрического семейства периодических
решений.
2) Следует подчеркнуть, что обратимость системы не есть необходимое
условие существования семейств периодических решений. В некоторых случаях
необратимая система может быть сведена к обратимой путем замены перемен-
переменных. Последнее означает, что при использовании преобразования инволюции
следует более осторожно выбирать преобразуемые переменные.
3) В более общем смысле под инволюцией имеют в виду отображение, ква-
квадрат которого является тождественным преобразованием (или автоморфизм второ-
второго порядка). Например, над полем комплексных чисел преобразование инволюции
- dz 2
может иметь вид az = z . При этом обратимым окажется уравнение — = iz .
dx
30 Н.В. Карлов, Н.А. Кириченко
СЕМИНАР
Задача 1. Получить решение уравнения B.20).
Решение. Введем комплексную функцию У (?), удовлетворяющую уравне-
уравнению
У + 27У + с^У = Аеегш\ A)
Ввиду линейности уравнения действительная функция
y(t) = Im Y(t) B)
удовлетворяет исходному уравнению B.20). Общее решение уравнения A) имеет
вид
C)
где Ys (t) есть общее решение однородного уравнения, то есть уравнения свобод-
свободных колебаний
Ys + 2-fYs+ujlYs = 0. D)
a Yf(t) — частное решение неоднородного уравнения A). Именно это слагаемое
и описывает вынужденные колебания.
Слагаемое Y8(t) было найдено в тексте главы 2 (формулы B.11)—B.15)). Оста-
Остановимся поэтому только на вычислении второго слагаемого. Положим
Yf(t)=Yoemt. E)
Подстановка E) в A) дает
[~п2 + 2i<yu + ш2о]?оегШ = Aeeiut. F)
Требование совпадения временной зависимости правой и левой частей этого со-
соотношения приводит к условию
п = ш. G)
Тогда для амплитуды Y® получаем
uJq — ш2 + 2{^уш
Полученное выражение содержит два простых полюса при значениях ш, равных
ш = г7 ± у/-72+< (9)
Очевидно, что при действительных значениях частоты внешней силы ш эти полю-
полюса недостижимы, то есть амплитуда Уо при 7 Ф 0 и действительных ш в беско-
бесконечность не обращается.
Отметим, что знаменатель в выражении (8) принято называть резонансным.
Семинар 467
Действительное решение г// (?) согласно B) и C) получается отделением мни-
мнимой части в E) с учетом G) и (8). Умножая числитель и знаменатель (8) на величи-
величину, комплексно сопряженную знаменателю, и используя формулу Эйлера для e%UJt,
получаем
yf(t) = Aosin(ujt + (pe). A0)
где Aq и Lpe даются формулами B.22) и B.23).
Задача 2 . Получить уравнения, описывающие изменение тока в системе
двух связанных колебательных контуров (рис. 2.4).
Решение. Пусть 1\ — ток в контуре 1, а /г — в контуре 2. По правилу
Кирхгофа составляем уравнения баланса напряжений отдельно в первом и втором
контурах:
^ f = О,
р индекс в скобках указывает номер кон
A 21
(верхний индекс в скобках указывает номер контура). Падения напряжения Uq '
даются, как и в случае изолированных контуров, выражениями:
Здесь gi и д2 — заряды на конденсаторах С\ и С2 соответственно. Выражения
для падений напряжения U^
тывать взаимную индукцию:
U{c2) = g2/O2, U
а кон
для падений напряжения U^ на катушках индуктивности L\ и Ь2 должны учи-
учиUL = Lull + L12I2J
иЧ] =L21ii+L22i2.
Здесь L12 = L21 — коэффициенты взаимной индукции. Подставляя B) и C) в A)
и дифференцируя получившиеся уравнения один раз по времени, с учетом gi = I\,
д2 = /г имеем
L12/2 + Д1Л + /1/С1 = 0,
Ь212 + L2i/i + Д2/2 + I2/C2 = 0.
Исключим из первого уравнения величину J2, а из второго — величину Д:
Л + 27i/i + ш2101г = Pl{h - /1) + 2/n(i2 - Л),
/2 + 272^2 + ^20^2 = Pl{h - /2) + 2/i2(A - Л),
где введены обозначения
2 __ C2L2 — С\Ь\2 2 __ C\L\ — C2L2I
0J ^
271 =
С1С2А С1С2А
L2Ri - L12R2 o
?i2 ^2 _ -^21 F)
= Li \ Li 2 — L12L2I
468 Семинар
(напомним, что по теореме взаимности L\2 = L21). При отсутствии омических
потерь в контурах (Ri = R2 = 0) согласно F) 71 = 72 = 0, fii = /12 = 0 и
уравнения E) приобретают вид
CJ?O/l=/3?(J2-/l),
=^(/1-/2),
что совпадает по форме с уравнениями малых колебаний двух связанных матема-
математических маятников.
Задача 3 . Показать, что в системе двух связанных осцилляторов без по-
потерь невозможна неограниченная раскачка колебаний, если оба коэффициента свя-
связи ненулевые.
Решение. Система двух связанных осцилляторов без потерь описывается
уравнениями
|/2 + Ш2У2 = Р2 B/1 — 1/2
Будем искать решение этих уравнений в виде
jji + w?2/i Pl{y2 2/i),
2 Р1{ )
toot />~%\
J/2 = г/2ое . B)
Подставляя B) в A), получим
/2 2 , />2\ /э2
(cj2 -^ +P2J2/1 = Р22/1-
Отсюда следует характеристическое уравнение
2 2 , />2\ /э2 ^ '
ИЛИ
ш4 - ш2(^ + ы\ + Р2 + Ц1) + (ш2 + /3?)(wl + /322) - A2^2 = 0. D)
Дискриминант этого уравнения равен
D = (ш\ + и\ + pi + Hlf - 4[(w? + р\){ш1 + pi) - рЩ =
= (loI - wl + Pi -Plf + 4P2PI E)
Он положителен для всех /3i и 02 таких, что /З1/З2 ф 0. Следовательно, при этом
последнем условии все корни характеристического уравнения D) действительны
и различны, и при любых шг, Ш2 решение системы уравнений A) представляется
в виде суперпозиции нормальных мод с различными частотами. Это и означает
отсутствие резонансного воздействия одного осциллятора на другой.
Пусть связь между осцилляторами разрывается, так что /92 = 0, a /3i в общем
случае отлично от нуля. Тогда дискриминант E) оказывается равным
D = (си! - oj22 + 0!J . F)
Он обращается в нуль при uj\ = ш\ + /3|, что в точности соответствует условию
резонанса под действием внешней периодической силы. При этом условии харак-
характеристическое уравнение имеет совпадающие корни
W(D=WB) =
Семинар 469
так что, в соответствии с теорией обыкновенных дифференциальных уравнений,
система уравнений A) наряду с решениями вида
имеет также решения
Atetw г и BtetuJ f (86)
Это и означает возникновение резонанса. Таким образом, резонанс в системе двух
осцилляторов возможен только тогда, когда один из коэффициентов связи (/3i, /З2)
обращается в нуль, т. е. когда запас энергии в одном из осцилляторов неограничен.
Задача 4. Доказать, что энергия математического маятника без потерь со-
сохраняется.
Решение. Имеем уравнение движения математического маятника
A)
Для полной энергии имеем
Е = mi ° + mg?(l - cosO). B)
Дифференцируем энергию по времени:
Ё = ml2вв + +mgie slnB = т?2ё (в + - sine J . C)
\ с у
Пользуясь уравнением A) и определением шо, получаем dE/dt = 0. Отсюда сле-
следует, что Е = const.
Задача 5 . Выразить добротность линейного осциллятора с трением через
значения энергии {Е)о, накопленной в нем, и энергии (АЕH, теряемой за период
колебаний.
Решение. Рассмотрим осциллятор с трением
у + 27у + wgy = 0. A)
Пусть в начальный момент времени осциллятор имеет энергию Е = ЕКИЯ + Еиот.
Считаем трение малым, то есть j <^ ujq. Тогда в соответствии с C.22) в течение
одного периода колебаний Т теряется энергия
(АЕ), = (Е), (l - е-2^т) - 2уТ(ЕI, B)
где {Е)г — энергия в начале рассматриваемого периода Т. В соответствии с C.23),
C.24) добротность есть
Q = шоте = шо/27 = тг/7Т. C)
поскольку Т = 2tt/ujq. Из B) имеем 27Т = {АЕI/{ЕI. Следовательно
Убедимся теперь в том, что правая часть D) не зависит от времени. Для этого
достаточно заметить, что согласно C.22) энергия колебаний в произвольный мо-
момент времени (Е) = (E)Qe^2jt. Соответственно и (АЕ) = (Al?He^27t. Отсюда
вытекает
9 "•¦$;¦
470 Семинар
Таким образом, добротность линейного осциллятора не зависит от времени и
определяется только отношением энергии, имеющейся в осцилляторе на момент
начала какого-то из периодов его колебаний, к энергии, теряемой осциллятором
за тот же период. Полученное соотношение удобно для определения добротности
колебательных систем в самых разнообразных приложениях.
Задача 6. Найти добротность открытого объемного резонатора, образован-
образованного двумя плоскими параллельными зеркалами с коэффициентом отражения R.
Расстояние между зеркалами есть I. Предполагается, что I ^> А, где А — длина
волны. Считать, что потери энергии обусловлены только выходом излучения из
резонатора вследствие частичной прозрачности зеркал.
Решение. Воспользуемся формулой E) предыдущей задачи. Будем считать
коэффициент отражения зеркал большим, то есть пропускание малым 1 — R <С 1.
Тогда при /^>Л с достаточной точностью можно считать, что в резонаторе устанав-
устанавливается стоячая волна, эквивалентная суперпозиции двух одинаковых бегущих
волн, распространяющихся навстречу друг другу. Если поток энергии в каждой из
этих волн равен Р, то энергия, накопленная в резонаторе, равна
Ео = 2Р1/с. A)
Мощность потерь составляет при этом A — RJP. Тогда за период колебаний Т
теряется энергия
АЕ0 = 2РA - R)T. B)
Поскольку
А = сТ C)
то применение формулы E) из предыдущей задачи даст
Q = 2тг—— = 2тг . D)
АЕ0 А 1 - R
Задача 7. Найти частотную функцию передачи и спектральную разрешаю-
разрешающую способность эталона Фабри-Перо, то есть открытого объемного резонатора
(см. предыдущую задачу).
Решение. Пусть на пути распространения плоской электромагнитной вол-
волны стоит система из двух плоских параллельных частично прозрачных зеркал. По-
Поле на выходе этой системы есть суперпозиция излучений, прошедших расстояние
между зеркалами один раз, три раза, пять раз и т. д. многократно. Соответственно
эти излучения испытали отражения от зеркал два раза, четыре раза, шесть раз
и т. д. многократно. В случае нормального падения излучения суммирование ам-
амплитуд выполняется легко. При единичной амплитуде входного сигнала поле на
выходе определяется суммой
g= A- Д)ехр \-ъш (t--) A + Еехр(^2Ш)+Д2ехр(^4Ш) +
+ Д3ехр(-6Ш) + ...}. A)
Коэффициент A — R) равен квадрату модуля амплитудного коэффициента про-
пропускания одного зеркала, 1 — R = \d\2. Его происхождение обусловлено тем, что
все излучение проходит как через входное, так и через выходное зеркала, пред-
предполагаемые одинаковыми. В свою очередь, коэффициент R равен квадрату мо-
модуля амплитудного коэффициента отражения одного зеркала, R = |г|2, причем
¦f \d\2 = 1. Этот коэффициент входит в формулу A) в разных степенях в
Семинар 471
соответствии с тем, что за каждый полный цикл распространения излучения
между зеркалами (туда и обратно) оно испытывает двукратное отражение. Соот-
Соответствующие показатели степени (R, R2, R3, ... и т. д.) указывают номер такого
цикла. Возникновение фазовых сдвигов на каждом из циклов учитывается сте-
степенью экспоненты ехр(—2г&/), где к — волновое число, к = ш/с = 2тг/А.
Так как R < 1, эта геометрическая прогрессия легко суммируется, в результате
чего получается комплексный коэффициент пропускания по напряженности поля
определяемый как коэффициент пропорциональности между выходным сигналом
$ и входным, равным exp(^icjt).
Коэффициент передачи по мощности
G = 1П2 = ^ ~ R^ C)
1 ' l2RcosBkl) + R2
дает спектральную зависимость пропускания эталона Фабри™Перо при нормаль-
нормальном падении излучения на зеркало.
В резонансе, то есть при
cos2M = l, D)
имеем G = 1. Это означает, что вне зависимости от степени связи резонатора с
внешним пространством, то есть при любом коэффициенте пропускания зеркала
1 — R, коэффициент пропускания эталона Фабри-Перо в резонансе равен единице,
лишь бы не было иных, не учтенных в задаче потерь энергии.
Заметим также, что условие резонанса D) эквивалентно хорошо известному
условию возникновения стоячих волн (целое число полуволн):
1/Х = т/2, га=1, 2, 3,... E)
Пусть теперь Ао — длина волны излучения, соответствующая резонансному
условию E). Найдем такое изменение длины волны 8Х, при котором коэффициент
пропускания уменьшается вдвое, то есть найдем такое SX, для которого
G(Xo + SX) = ^G(X0) = -. F)
Полагая отстройку малой (SX <С Ао), записываем
cosBM) = cos { 4тг— J = cos f 4тг ) f 4
1 } V x) \ Xo + sx
Из C), F) и G) имеем тогда уравнение
которое дает
8Ь=^=г-72-,- (9)
472 Семинар
Полная ширина резонансной кривой на середине высоты есть
АЛ = 2<5Л. A0)
Тогда для относительной разрешающей способности мы имеем
ДА = ^-Д^_ (П)
Ло л/R 2тг1
Если ввести обратную ей величину, которую иногда называют разрешающей силой
интерферометра,
S = — = 2тг , A2)
АЛ Л01-Д
то легко видеть, что при больших коэффициентах отражения, R ~ 1, добротность
открытого резонатора и его разрешающая сила как интерферометра Фабри-Перо
суть величины, совпадающие друг с другом и по величине, и по физическому
смыслу.
Задача 8 . Колебательный ЬС-контур подключен к источнику переменной
ЭДС (см. рис. 1). Найти токи через сопротивление R внешней цепи, индуктив-
индуктивность L и емкость С.
Решение . ЭДС источника принимаем, как
обычно, в виде U(t) = UoelU}t. Импеданс LC-контура
определяется из условия
~~ — 1 ? ^l = iuoL, Zc = ^-^;i A)
Z Zjj Zq tujC
откуда
'в z _ гшЬ 2 _ J_ (y\
Рис. 1 к задаче 8 *¦ ~ ш2/шо LC
Полное сопротивление в цепи ЭДС равно
Zo = R + Z. C)
Соответственно, ток через сопротивление R есть
Ir = — = 1т ex.p[i(ujt — (р)], D)
где амплитуда тока равна
д> E)
R2 . i ^
а сдвиг фазы между током и напряжением определяется из уравнения
ujL
Токи через элементы контура L и С найдутся из уравнений Кирхгофа. Для
направлений токов, указанных на рисунке, имеем:
I* = IL-IC
Семинар
473
(первое равенство представляет собой закон сохранения заряда, а второе — это
утверждение о равенстве напряжений на параллельно включенных элементах цепи
L и С). С учетом D) из G) находим
ZC
-Ir =
(8)
Ic = —
-Ir = —
(9)
Ib=In
Ic = 0.
A0)
где параметры 1т ш (р определены в E), F).
В частном случае ш = 0 (постоянное напряжение)
П Т U°
V = 0, Im = -, il
В другом случае, когда частота ЭДС совпадает с резонансной частотой контура,
ш0 = 1/y/LC, из E), F) следует
^ = 7г/2, Im = 0. A1)
то есть ток во внешней цепи (через сопротивление L) отсутствует: на резонансной
частоте колебательный контур без потерь обладает бесконечно большим сопротив-
сопротивлением.
Наконец, токи II и 1с находятся из (8), (9) после подстановки /ш из E) и
перехода к пределу ш —>¦ ujq:
IL=IC = — cos(ooi - тг/2).
UJqL
A2)
Следовательно, несмотря на отсутствие тока во внешней цепи, ток в контуре цир-
циркулирует и имеет фазу, сдвинутую на тг/2 по отношению к ЭДС источника.
Здесь уместно обратить внимание на внутреннее сходство результата этой задачи
с выводом предыдущей задачи об объемном резонаторе. Как было показано выше,
идеальный LC-контур (см. рис. 1) в резонансе представляет собой бесконечно боль-
большое сопротивление. Это значит, что на резонансной частоте напряжение на внешней
нагрузке, подключаемой к точкам Аи В, оказывается таким же, как и в отсутствии
контура вообще. Иными словами, в резонансе контур не привносит в электрическую
цепь каких-либо дополнительных потерь. Аналогично, открытый резонатор в резо-
резонансе также не создает каких-либо потерь для проходящего через него излучения.
Задача 9. Определить частотную функцию передачи для цепи, содержа-
содержащей колебательный контур, включенный параллельно активному сопротивле-
сопротивлению нагрузки (см. рис. 1).
Рис. 1 к задаче 9
474 Семинар
Решение. Пусть источник ЭДС
U(t) = UoetuJ\ A)
обладающий внутренним сопротивлением Ro , включен на сопротивление нагрузки
-RH, параллельно которому стоит колебательный LCR-коптур. Частотной функци-
функцией передачи называется функция
/И = ЬИЗ,, B)
где /h(cj) — ток через сопротивление нагрузки. Иными словами, f(uj) есть ча-
частотная, зависимость падения напряжения на нагрузке, отнесенная к амплитуде
напряжения холостого хода генератора.
Составим уравнения Кирхгофа подобно тому, как это делалось в главе первой.
Выберем направления токов в участках цепи, как это указано на рисунке. Тогда для
падения напряжения имеем:
АТ Г Т
для ЬСД-контура L— + RIL + —dt = 0, C)
dt J С
для ШоДн-контура U(t) = R0I0 + Д„/„, D)
Г Ir
для а?н-контура 0 = —dt + /НДН. E)
J С
Здесь 1ь — ток через катушку индуктивности L, 1с — ток через конденсатор
С, /о — ток генератора ЭДС через его внутреннее сопротивление Ro. По закону
Кирхгофа для токов в разветвлении имеем
/Н + /Ь=/С + /О. F)
Уравнения C)—F) представляют собой систему четырех уравнений для четырех
неизвестных токов: /о, II, Ic, In- Дифференцируя C), имеем
LflL+RdJL+IJ1=0_
dt2 dt С
Обратим внимание на то, что если бы ЬСД-контур был изолированным, то следо-
следовало бы положить II = Ic, и мы пришли бы к уравнению A.10) для колебаний в
ЬСЛ-контуре. В случае же контура, подключенного, как в нашем случае, к внеш-
внешней цепи, токи II и 1с, вообще говоря, различны. Из D) имеем
U - ДН1Н
1о = " • (8)
Ко
Из F) имеем
IL=Ic + Io-IH = Ic-In+U ~nRи ¦ (9)
Ro
После дифференцирования E) и разрешения полученного соотношения относи-
относительно 1с имеем
1с = -ДнС/н. A0)
После подстановки A0) в (9) имеем
^\lK + ^-. A1)
Но J Но
Семинар 475
Подставив A0) и A1) в G), после простых преобразований находим
1 1 R\ • 1 / R R
RHC RoC Lj LC \RH Ro
A2)
(u+
RoR*C V L
Это уравнение несложно исследовать в общем случае и получить функции
/(ш) в явном виде. Соответствующее выражение хотя и наглядно, но относительно
громоздко. Поэтому мы ограничимся частным случаем высокодобротного коле-
колебательного контура, положив R = 0. Кроме того, примем, что сопротивление
нагрузки Rn ^> Ro (режим вольтметра). Тогда A2) упростится, и мы получим
Д + -^ + А = ^_0_, A3)
RqC LC Rq Rb_C
что по внешнему виду совпадает с уравнением B.20) для вынужденных колебаний
в контуре с потерями.
Используя A) и полагая /н = 1ноегшЬ, получаем дисперсионное уравнение
Дн1н0 [ио + 2ijuj — и ] = 2ijujUo. A4)
где ujq = 1/LC, 27 = 1/RqC. Отсюда функция передачи
2?;
/и = „ ?;9. ¦
Резонансный характер этой функции очевиден. Ширина резонансной кривой
определяется потерями на внутреннем сопротивлении источника ЭДС. Обратим
внимание на то, что при ш = шо мы имеем f(uS) = 1. Более того, нетрудно
проверить, что \f{oj)\ достигает максимального значения при ш = сс?о, причем
I/HL» = /(«о) = 1-
Задача 10. Найти зависимость амплитуды малых колебаний математическо-
математического маятника от времени при условии, что его длина медленно меняется со време-
временем по закону ?(t).
Решение. Полная энергия математического маятника
2
2
При неизменной длине его частота
w = Vg/*- B)
Для гармонического осциллятора адиабатический инвариант дается формулой C.71)
I = Е/ш. C)
Если амплитуда колебаний маятника есть во, то
Тогда с учетом B)
I = т?2шв2° = -m^gPQZ. E)
476
Семинар
Поскольку в нашей задаче из всех параметров маятника со временем меня-
меняется только длина ?(t), то из условия, что адиабатический инвариант I = const,
получаем
0о (t) = ©о @)
WJ
F)
Задача 11. Материальная точка (шарик) двигается между двумя параллель-
параллельными стенками со скоростью v, направленной перпендикулярно к стенкам (см.
рис. 1). Расстояние L между стенками медленно меняется. Предполагая, что столк-
столкновения шарика со стенками происходят по законам абсолютно упругого удара,
найти зависимость скорости шарика от расстояния между стенками.
Неподвижная
стенка
1
?
L
Подвижная
стенка
V
V
V0
0
Рис. 1 к задаче 11
Рис. 2 к задаче 11
Решение. Фактически в задаче требуется найти адиабатический инвариант.
Фазовая траектория шарика, имеющего скорость vo, показана на рис. 2 для случая
неподвижных стенок. Метод нахождения адиабатического инварианта, изложен-
изложенный в главе 3, для данной задачи неприменим, т.к. при столкновениях шарика со
стенками скорость меняется сильно (dv/dt = oo). Можно, однако, решить задачу,
непосредственно рассматривая динамику изменения скорости шарика.
Будем для определенности считать, что движется правая стенка, причем ее
скорость есть V. Левая же стенка предполагается покоящейся. Условие медленно-
медленности движения стенки есть
1Л<14 О)
Пусть непосредственно перед столкновением с движущейся стенкой шарик имел
скорость v. Тогда сразу после столкновения его скорость оказывается равной
v = 2V -v.
Далее шарик летит до левой (неподвижной) стенки, после столкновения с которой
он приобретает скорость
v" = ~vf = v - 2V. B)
Этой скоростью обладает шарик вплоть до следующего столкновения с дви-
двигающейся стенкой. Полное изменение скорости за время между соударениями
составляет
Av = v" -v = -
C)
Пусть Т — время движения шарика между двумя последовательными столк-
столкновениями с движущейся стенкой. Тогда за это время расстояние между стенками
Семинар 477
изменится на
т
AL = I* Vdt D)
о
Считая, что скорость V меняется медленно,
If|<l, E)
перепишем D) в виде
AL = VT, (б)
Ввиду малости скорости V время Г можно приближенно представить как Т =
= 2L/v. Поэтому изменение расстояния между стенками оказывается равным
AL = 2V±. G)
V
Вследствие неравенства A) имеем из C) |Дг?| Cv, а из G) \AL\ <СЬ. Поэтому
пару соотношений C), G) можно рассматривать как соотношения для малых при-
приращений переменных v и L. Приращения Av и AL можно приближенно заменить
дифференциалами dv и dL, причем замена тем точнее, чем меньше отношение
|V/i;|. Тогда, деля почленно равенство C) на G), находим
— = --. (8)
dL L К }
Отсюда после несложного интегрирования находим
vL = const. (9)
Полученное соотношение означает, что при адиабатически медленном дви-
движении стенки величина vL остается постоянной независимо от вида закона, по
которому скорость стенки меняется со временем, лишь бы выполнялись неравен-
неравенства A) и E). В частности, при уменьшении расстояния в 2 раза скорость шарика
возрастает в 2 раза.
Отметим, что если формально вычислять адиабатический инвариант как пло-
площадь, ограничиваемую замкнутой фазовой траекторией на плоскости (v,x), то
получим, что адиабатическим инвариантом является действие
I = —vL. A0)
2тг
Формальное совпадение результатов (9),A0) связано с возможностью замены
рассмотренной системы иной, эквивалентной системой, в которой скорость шари-
шарика меняется уже непрерывно. Например, считая стенку резиновой, мы получаем
фазовую траекторию в виде гладкой кривой, для которой адиабатический инвари-
инвариант находится по общим формулам главы 3.
Задача 12. Построить двумерное точечное отображение для задачи о пря-
прямолинейном равноускоренном движении материальной точки.
Решение. Пусть в начальный момент координата и скорость материальной
точки равны
x@) = xo, v@) = vo. A)
478 Семинар
При равноускоренном движении зависимости координаты и скорости от времени
даются формулами
x(t) = хо + vot -\ , Bа)
v(t) = vo + at, B6)
где а — ускорение.
Будем регистрировать значения координаты х и скорости v через фиксирован-
фиксированные промежутки времени т. Тогда получим дискретные последовательности:
хп = х(пт), vn = v(nr), n = 0, 1, 2,... C)
Требуется найти рекуррентные соотношения, связывающие соседние члены этих
последовательностей. Эти соотношения не должны содержать в явном виде вели-
величин хо и^о, то есть должны задавать алгоритм нахождения хп и vn, одинаковый
для произвольных начальных условий. Обозначая tn = пт, из B6) находим
vn = Щ + пат, vn+1 = vq + (n + 1)ат. D)
Отсюда следует первое рекуррентное соотношение
vn+1 = vn + ат. E)
Аналогичным образом, из Bа) находим
ап2т2
хп = хо + vonr Н ,
Жп+1 = Хо + Vo(n + 1)т Н .
Вычитая первое равенство из второго, получим
, аBуг+1)т2
xn+i — жп = vot + . G)
Наконец, исключая отсюда vq с помощью первого соотношения в D), найдем
2
жп+1 = хп + vnr + -—. (8)
Таким образом, пара соотношений E),(8) задает искомое двумерное точеч-
точечное отображение, связывающее состояние системы (xn+i, vn+i) в момент вре-
времени tn+i = (п-\- 1)г с состоянием системы (хп, vn) в предшествующий момент
tn = пт. Пару соотношений E), (8) можно свести к одному соотношению вида
жп+2 = f2(xn,xn+i). Для этого на основании (8) запишем
ат2
Хп+2 = Хп + 1 + Vn + 1T H ,
2 (9)
хп+1 = хп + vnr H .
Вычитая второе равенство из первого, имеем
хп+2 = 2хп+1 - хп + (vn+1 - vn)r. A0)
Воспользовавшись соотношением E), перепишем A0) в виде
хп+2 ~~ 2жп+1 + хп = ат . A1)
Семинар
479
Полученное рекуррентное соотношение позволяет находить последовательные
значения хп, если задать два начальных значения: хо и xi, а не одно, как в слу-
случае одномерного отображения xn+i = fi(xn). Это отличие объясняется тем, что
отображение A1) есть эквивалент дифференциального уравнения второго порядка
d2x(t)
= а,
A2)
записанного в конечных разностях, поскольку величина (жп+2 — 2жп+1 + хп)/т2
есть аппроксимация второй производной d2x/dt2, вычисляемой с шагом т. Урав-
Уравнение же A2) требует для своего решения задание двух начальных условий, на-
например, х@) и ж@). Заметим также, что аппроксимация уравнения A2) в виде
разностного уравнения A1) является точной в случае равноускоренного движения
(а = const).
Задача 13. Построить точечное отображение для динамической системы
вида
х = -у + х[1- (х2 + у2)], у = х + у[1 - (х2 + у2)]. A)
Решение. Общее решение уравнений A) находится путем перехода к по-
полярным координатам х = р cos (р и у = р sin <p и имеет вид
cos(t-to) ,+ч_ sin(t-to)
x(t) =
B)
Константы to и С определяются из начальных условий. Фазовые траектории пе-
пересекают ось х, то есть у = 0, при
t = t0 +mr, n = 0, 1, 2,... C)
Соответствующие абсциссы равны
. (-1)"
Сехр(-2тгп)
D)
Отображение последования строится путем сравнения хп+г с жп и исключе-
исключения постоянной С:
q = e
E)
П+1=ЛЖп)
а.
Z.
\
X
/
V
/
У
Рис. 1 к задаче 13
480
Семинар
Аналогично для итерированного отображения получаем
Хп+2 = / (хп) =
A -
F)
На рисунке приведены графики первого {а) и второго (б) отображений. Показа-
Показаны лестницы Ламерея, сходящиеся к предельному циклу для первого отображения
E) и к соответствующей ему неподвижной точке отображения F).
Задача 14. Найти условия самовозбуждения и частоту генерации вблизи
порога для генератора Ван-дер-Поля (см. рис. 1)
Рис. 1 к задаче 14
Решение. Анодный ток лампы /а пропорционален напряжению на ее сет-
сетке Uс
h = S0Uc. A)
Потенциал сетки дается падением напряжения на конденсаторе С контура в цепи
сетки. При токе в контуре I это падение составляет
Uc = -^-. B)
гшС
Ток в контуре определяется его сопротивлением переменному току и ЭДС индук-
индукции, в свою очередь задаваемой анодным током и комплексным коэффициентом
трансформации iouM, где М — коэффициент взаимоиндукции катушек индуктив-
индуктивности в анодной и сеточной цепи лампы:
/= Щ /„. О)
iujL + ^^ + R
iouC
Обратная связь обеспечивает баланс амплитуд и фаз, если ток 1а в формуле
C) равен его значению, даваемому формулой A). Подставляя C) в B), а B) —
в A), имеем условие
1 =
С
iujL ¦
iuoC
которое может быть реализовано, если выполняется баланс фаз
1
Тс
2
Ш =
D)
E)
Семинар 481
и баланс амплитуд
RC = М50. F)
Первое из них определяет частоту генерации на пороге самовозбуждения, вто-
второе — энергетические условия самовозбуждения.
Подчеркнем, что линейная теория не может дать амплитуду и период коле-
колебаний вдали от порога самовозбуждения. Заметим также, что расчет выполнен в
предположении, что все параметры схемы генератора не зависят от частоты.
Задача 15. Дано уравнение
Ut + Uxx + Uxxxx = 0, 0<ж</. A)
Определить поведение решения при больших временах, если граничные и началь-
начальное условия заданы в виде
Ux @, t) = Ux (I, t) = О, Uxxx @, t) = Uxxx (М) = 0, B)
U(x,0) = <p(x). C)
Решение. Ищем решение в виде суммы гармоник:
оо
U(x,t) = ]Р Cn(t) cos (жпх/l); Dа)
п=0
I I
dx7 n = 1, 2,... D6)
где функции [1, {cos(wnx/l)J n = 1, 2, ...}] образуют полный набор собственных
функций задачи, удовлетворяющих граничным условиям B). Подставляя сумму
Dа) в исходное уравнение A), получаем
со /хоо /\2/\
2^Cn(i) cos I — 1 ^2^Cn(t) I — 1 cosf — 1 +
Требуя обращения в нуль коэффициентов для каждой из гармоник, входящей в сумму,
приходим к бесконечной системе обыкновенных дифференциальных уравнений:
............. F)
cn= [ — ) A- —2X
)
Отсюда вытекает, что гармоники с номерами
п > - G)
ж
31 Н.В. Карлов, Н.А. Кириченко
482 Семинар
на достаточно больших временах затухают. В частности, при условии 1 < тг за-
затухают все гармоники, кроме нулевой. Амплитуда же этой гармоники совпадает с
нулевым коэффициентом разложения начального распределения (р(х) в ряд Фурье:
1
1 Г
U(x,i) —^ - (p(x)dx при t —^ оо. (8)
о
Если I > тг, то асимптотика решения определяется поведением гармоник с
наибольшим инкрементом. Согласно F) зависимость инкремента р от номера гар-
гармоники п имеет вид
Эта величина достигает максимума при п = по = 1/тгу/2. Соответственно асим-
асимптотика решения при t —)> +00 имеет вид
U(x,t)~Cno@)exp(t/4), A0)
где коэффициент Спо @) определяется по начальному распределению формула-
формулами D6).
Задача 16. Определить входное сопротивление на частоте ш отрезка иде-
идеальной (без потерь) линии передач длиной I, нагруженной на сопротивление ZH.
Собственное сопротивление линии равно Zq.
Решение. При записи фазовых набегов будем удерживать только простран-
пространственную составляющую. Тогда в точке с координатой х волна напряжения со-
содержит волну, бегущую в прямом направлении (^ е^гCх), и отраженную волну,
бегущую в обратном направлении (^ е+г^х):
Ft г —ij3x | тт- %вх т/- / —%вх | %вх\ /1\
= Vie H +V2& = Vi(е +ен ), A)
где Р = ш/v, а амплитуда отраженной волны Vi связана с амплитудой прямой
волны Vi простым соотношением Vi = pVi, где
Р = н • B)
Аналогично находим для токов:
C)
Тогда, определяя Z как V/I , имеем
Z(x) = Zoee_^l+pe^l. D)
Подставляя сюда выражение для р из B), с помощью формул Эйлера имеем
Z(x) = Zq^- . E)
Zq cos /Зх — iZm sin /3x
С учетом, что /3 = 2тг/А, соотношение E) при х = I принимает вид
ZB cos f —I J — iZo sin I —I
У _______ у V A / \ A
/2тг \/27r
Zq cos I ^1 J — iZw sin I ^
V A / V A
Семинар 483
Очевидны частные случаи:
/2тг '
1) линия замкнута накоротко, Zn = 0. Тогда Z = ~iZo tg I —I
V A _
2) линия разомкнута, ZH = оо. Тогда Z = i^o ctg ( ^l 1;
\ А у
3) четвертьволновая линия, I = Bfc + l)A/4, к = 0, 1, 2,... Тогда Z = Zq/Zh.
Последний случай дает принципиальную возможность с помощью отрезка ли-
линии передачи длиной в четверть длины волны согласовывать два волновых со-
сопротивления Z\ и /^2 при условии, что волновое сопротивление этой линии —
это вставка с импедансом Zq = \/Z\ Z2. Именно на этом принципе работает про-
просветленная оптика так называемых голубых объективов (термин возник вследствие
того, что просветляющее покрытие имело вид голубоватой пленки).
Задача 17. Пусть волновой пакет в начальный момент времени имеет вид
uq(x) = А ехр [—х /xq\ , A)
а его изменение со временем описывается уравнением Шредингера
г ди ди\ д2и
+е а , оо<ж<оо. B)
ot их J ох1
Исследовать временную эволюцию пакета.
Решение. Будем искать решение уравнения B) в виде плоской волны
и(х, ?) = иг exp(ikx — iujt). C)
Подставляя C) в B), получим закон дисперсии
ш = ск + ак . D)
Соответственно общее решение уравнения B) может быть представлено в виде су-
суперпозиции волн C), в которых частота и волновое число связаны соотношением D):
оо
Jdk
а(к) exp[ikx — iuj(k)t] —. E)
2тг
При t = 0 отсюда имеем
оо
и(х,0) = a(k) exp(ikx)—=uq(x). F)
J 2тг
— оо
Последняя функция должна, естественно, совпадать с A). Поэтому для нахожде-
нахождения коэффициентов а(к) разложим A) в интеграл Фурье. Это дает
а(к) = uq(x) exp(—ikx)dx = А^жхо ехр к хо\. G)
J |_ 4 j
— 00
Подставляя полученное выражение в E), получим решение уравнения A):
оо
•I 112 2 •/?, 12\ A dk
ехр гкх к х0 — г [ск + ак )t\ —. (8)
14 J 2тг
31*
484 Семинар
Вычислив входящий сюда интеграл, найдем
+ ОО
и(х, t) = Ал/жхо exp \ik (х — ct) к (ж0 + 4,iat) — =
J L 4 J 2тг
Входящая сюда функция S(t) определена соотношением
6(t) = yjxl + Mat A0)
Заметим, что решение (9) представляется комплекснозначной функцией. Как
известно, такая функция в квантовой механике дает амплитуду вероятности нахо-
нахождения частицы в точке х в момент времени t. Плотность же вероятности опре-
определяется квадратом модуля найденной функции:
=(ЧУ. (П)
xl A + /И
Обсудим смысл полученного решения. В начальный момент цуг представляет
собой локализованный волновой пакет с размером области локализации ~ xq. С
течением времени пакет перемещается со скоростью с и одновременно расплыва-
расплывается, причем характерное время расплывания составляет to ~ l/л/З = #о/Dа).
Последний эффект связан с тем, что фазовая (v§ = ш/к = с + ак) и групповая
(vTp = duj/dk = с + 2ак) скорости волны не совпадают, то есть имеет место
дисперсия. Найденная скорость расплывания согласуется с оценкой, вытекающей
из формулы A1.65) в главе 11. В самом деле, в соответствии с G) характерный
диапазон волновых чисел, определяющих форму исходного цуга волн, составляет
ёк rsj 4/жо, а производная \dvTp/dk\0 = 2а, так что из A1.65) следует to ~
^ 8w[FkJ\dvTp/dk\0] r^j xq/cl. В отсутствие дисперсии (а = 0) расплывание
пакета, естественно, отсутствует.
Отметим также, что пакет распространяется со скоростью, определяемой ко-
коэффициентом с в уравнении B). Это легко понять, если перейти в систему от-
отсчета, движущуюся со скоростью с, в которой слагаемое гсди/дх в уравнении
B) исчезает, и в этой системе волновой пакет A) эволюционирует симметрично
относительно своей оси.
Задача 18. Пусть частица движется в периодическом потенциале, образо-
образованном <5-функциями Дирака
fJ °°
U(x) = —Q V 5(х + па), A)
т ^^
п = — со
где а — период решетки, a Q — постоянный коэффициент. Требуется найти раз-
разрешенные зоны энергии.
Решение. Волновая функция частиц подчиняется уравнению Шредингера
4>" + ^[E-U(x)]* = 0. B)
Для потенциала A) уравнение B) есть уравнение Хилла. Это означает, что его
Семинар
485
решение можно искать в виде, удовлетворяющем условию
где мультипликатор р связан с характеристическим показателем К соотношением
р = егКа. D)
Рассмотрим уравнение B) на интервале 0 < х < а. Здесь потенциал U = О
и решение записывается в виде
Ф(ж) = Aeikx + Бе^ж,
I — E)
к = у2тЕ/Н2.
На интервале а < х < 2а вид решения можно
установить с помощью C):
Ф (х) = е*Ка[Аегк{х^а) + Be~ik(x~a)]. (б)
Для нахождения коэффициентов А и В необ-
необходимо сшить решения E) и F) на границе
х = а. Условия сшивки имеют вид
Ф (а + 0) = Ф (а - 0),
Ф; (а + 0) = Ф; (а - 0) + 2ОФ(а).
Первое из этих условий определяет непрерыв-
непрерывность Ф-функции при переходе через границу,
а второе — величину скачка производной.
G)
О
ж/а К
Рис. 1 к задаче 18. Энергетиче-
Энергетический спектр электрона в пери-
периодическом потенциале, рассчи-
Происхождение условий G) можно по- тайный по формулам A0), A1).
яснить следующим образом. Предполагая
функцию Ф(ж) ограниченной, проинтегриру-
проинтегрируем уравнение B) почленно по интервалу а — е < х <
дальнейшем будет устремлена к нулю. Это дает
= П2/Bта2), па = Б
¦ + е, где величина е в
Ф; (а + е) - Ф; (а - е) + —
h2
- — fil Ф(а) = 0.
m \
(8)
Отсюда видно, что при е —>> 0 получается второе из условий G). Конечность
скачка производной влечет за собой конечность самой производной, что означа-
означает непрерывность функции.
Подстановка выражений E) и F) в соотношения G) приводит к линейной
однородной системе двух уравнений для коэффициентов А и В:
eiKa(A + В) = Aeika + Ве^гка,
iketKa(A -B) = ik(Aetka - Бе"
- 2п(Аегка + Бе-
Условие совместности этих уравнений дает уравнение для нахождения характери-
характеристического показателя К:
cos Ka = cos ka -\ sin ka.
k
A0)
Это уравнение определяет связь характеристического показателя К с энергией
состояния Е, в соответствии с E) равной
П2
Е =
2та2
(hay
A1)
486 Семинар
т. е. определяет зависимость Е = Е(К). Соответствующий закон дисперсии пока-
показан на графике (см. рис. 1). Из этого рисунка видно, что в соответствии с общими
утверждениями теории волн в периодических структурах энергетический спектр со-
состоит из серии разрешенных зон, чередующихся с запрещенными зонами.
Задача 19. Найти момент опрокидывания волны, описываемой уравнением
Решение. Согласно A3.9) общее решение v(x,t) рассматриваемого урав-
уравнения находится из соотношения
v = ехр[^(ж — vt) ], A)
определяющего функцию v(x,t) в неявном виде. Разрешая это уравнение относи-
относительно координаты х, получим
х = vt + \/~ \nv. B)
При наличии опрокидывания эта функция имеет пару экстремумов (как показано
на рис. 13.1 в), в которых dx/dv = 0, откуда следует
t= 1 . C)
2vy~ In г;
Моменту начала опрокидывания соответствует слияние этой пары, когда выпол-
выполняется условие d2x/dv2 = 0 или
1 =0. D)
Последнее уравнение имеет решение v = l/v^> a соответствующий момент време-
времени определится из уравнения C): t = у/е/2. Это значение указано для рис. 13.1 б.
Задача 20. Показать, что для кубического уравнения Шредингера
i<pt + Av?+ \(p\2<p = Q A)
интегралы
= i\
N = I \tp\2dr, B)
C)
D)
где \(р\ = ^/{fi*tp, являются сохраняющимися величинами. В A)-D) предполагает-
предполагается, что \<р\ —> 0, |Vtp\ —> О при г —> оо, г — радиус-вектор, dr — элемент объема
(одномерного, двумерного или трехмерного — в зависимости от размерности за-
задачи), а интегрирование ведется по всему пространству.
Решение. Запишем уравнение, комплексно-сопряженное исходному:
i(ft - А(р* - \(р\2(р* = 0. E)
Умножая уравнение A) на (р*, а уравнение E) на <р и складывая полученные со-
соотношения, имеем
i((f*<p)t + tp* Atp — (рА(р* = 0. F)
Семинар 487
Отсюда вытекает равенство
dN d
^7 П\ OpV)^ i (^Л^ fAp)dr. G)
at at J J
Воспользуемся тождеством
Поэтому в соответствии с теоремой Гаусса интеграл по объему в G) преобразуется
в интеграл по бесконечно удаленной поверхности г —> оо:
= -гф (<pV<p * -ip * Vy?) dS. (8)
Поскольку по предположению \ip\ -^ 0, \V(p\ —> 0 при г —$> оо, то этот интеграл
обращается в нуль. Следовательно,
Далее, дифференцируя C) по времени, имеем
d?
A0)
На основании тождества
A1)
интеграл (9) можно переписать в виде
«11+ Ь, A2)
где
Г Г
Ii = 2г [y?t Vy? ^ y?t Vy?]dr, I2 = г V (ipt (f - (f ipt) dr.
Преобразуя интеграл I2 no теореме Гаусса в интеграл по бесконечно удаленной
поверхности, заключаем, что I2 = 0. Подставляя в интеграл Ii производные <pt и
(pi из A) и E), преобразуем этот интеграл следующим образом:
Ii = -2
Этот интеграл также обращается в нуль, поскольку сводится к интегралу по бес-
бесконечно удаленной поверхности. Таким образом, мы получили, что dP/dt = 0.
488
Семинар
По аналогичной схеме устанавливается, что
dH
dt
= 2
= -2
\ip\2 (<p*(pt
[<pt
V)
= -2
= 0.
Таким образом, все указанные величины не меняются со временем, то есть явля-
являются интегралами (инвариантами) движения.
Задача 21. Найти параметры волны переключения, описываемой диффузи-
диффузионным уравнением с нелинейным источником:
и = Du" + f(u), ^oo < х < +оо;
f(u) = /Зи + ей —и = —и(и — и\)(и — из), и\ < 0 <
Решение. Будем искать решение в виде бегущей волны и = и(?), ? =
= х — vt, распространяющейся со скоростью v. Подстановка этого решения в A)
приводит к краевой задаче для функции и(?):
Du" + vu + f(u) = 0,
и(—оо) =
г/(+оо) =
- 0 при
оо,
где штрих означает дифференцирование по ?.
Для решения задачи B) обозначим w = и' ш преобразуем производную и":
п dw dw du dw
и = — = = w —.
д? ди д^ ди
В результате B) сводится к следующей краевой задаче:
Ь
Dw
ди
f(u) = 0,
C)
D)
и1<и<из, uui uu3
Ищем ее решение в виде
w = а(и — иг)(и —из), E)
где а — параметр, подлежащий определению. Подставляя E) в D), получим
Da2Bu — 111 — из) + vu — и = 0.
F)
Приравнивая здесь коэффициенты при одинаковых степенях и, получаем два урав-
уравнения для нахождения а и v:
2Da2 ~~ 1 = 0,
из которых следует, что
из) + va = 0,
G)
Семинар
489
Знак а выбран так, что du/d^ > 0 при и\ < и < из. Подставляя (8) в E) и
вспоминая, что w = и , получаем обыкновенное дифференциальное уравнение
du (и — и\)(и — из)
V2D
решение которого имеет вид
из —
/2D
1 + exp [—(x — vt)/S] из — u\
Задача 22. Для краевой задачи
и = -и4 - 2и' - A - 0)и - и3, 0 < х < R;
x=O,R
= 0
(9)
A0)
A)
получить оценку скорости изменения функции u(x,t) со временем.
Решение. Предположим, что функция u(x,t) ограничена со всеми своими
производными. Умножим почленно A) на u(x,t) и проинтегрируем полученное
равенство по ж в пределах от 0 до R. Находим
-— \и2 (x,t)dx = -
2 at J
о
Введем обозначение
м, и
[ [(«" + иJ - Ци2 + и*] dx < [ {ри2 - и4) dx.
z(t) = — и2
Rj
о
B)
C)
для среднего по координате на интервале @, R) значения квадрата функции u(x,t).
Воспользуемся неравенством Коши-Буняковского:
a(x)b(x)\dx
Л
a2{x)dx
b2(x)dx.
Положим в нашем случае а(х) = и2(х), b(x) = 1. Тогда имеем
и4 > (u2Y
D)
E)
F)
Г /Г
R и4 (xj t) dx ^ I I и2 (ж, t) dx
о \o /
С учетом E) соотношение B) приобретает вид
z < 2 (Bz- z2)
Отсюда вытекает, что при C < 0 и любых u(x,t) ф 0 окажется i < 0. Это значит,
что при любых начальных условиях функция u(x,t) с течением времени убывает
до нуля. Никаких нетривиальных стационарных решений при /3 < 0 краевая
задача A) не имеет.
Пусть теперь /3 > 0. Линеаризуя уравнение A) и полагая и = uoept sin(qx),
получим спектр возмущений:
р(в) = /3 - (д2 -1J-
490 Семинар
Очевидно, что для возмущений с волновыми числами в диапазоне 1 — у^З <
< q2 < 1 + л/Р (при /3<1)иО^д2<1 + л/Р (при /3^1) показатель
Ляпунова р > 0. Поэтому решение и = 0 неустойчиво и не может возникнуть
в ходе эволюции. Иными словами, если z мало, то z > 0. С другой стороны, из
F) следует, что, если z > /3, то z < 0. Поэтому слишком сильное отклонение от
нулевого значения приводит к убыванию амплитуды решения. Полагая z = 0, мы
можем найти оценку сверху амплитуды стационарного решения:
z = ^<:f3. G)
Заметим, что из неравенства F) можно получить также оценку сверху для
амплитуды решения при /3^0 для произвольного момента времени:
z(t)<P aeXpB/3t) , a= ZW ¦ (8)
W l + aexpB/3t) 0-z(O)
Задача 23. Найти условия диффузионной неустойчивости однородного ста-
стационарного состояния двухкомпонентной нелинейной системы:
й = (Du
A)
D22l
где матрица коэффициентов диффузии D предполагается постоянной.
Решение. Однородное стационарное решение задачи A) и = и^ удовле-
удовлетворяет системе двух уравнений f(u) = 0. Для определенности положим и^ =
= 0, иначе следует произвести сдвиг u(x,t) на u^s\ Положим и = и^ + v(x,t)
и линеаризуем A) относительно v. Решение полученной таким образом системы
линейных однородных дифференциальных уравнений с постоянными коэффици-
коэффициентами ищем в виде
г;(ж, t) = vq exp(pt + iqx), vq = col (voi, V02) = I I = const. B)
\ ^02 /
Это приводит к системе линейных однородных уравнений:
(Dg2 -G+pl) vq = 0;
= (Gu G12\ = fdh/dm dh/диЛ i_(l o\ C)
u=o \G2i G22 I \df2/dui df2/du2 I \0 1/
G=d-l
д
du
Условие существования ненулевых решений этой системы есть
det(Dg2 - G+pI) = 0,
или
р2 + р Sp (Dg2 - G) + det(Dg2 - G) = 0, Da)
откуда
Р1,2(в) = -- SV(T>q2 - G) ±yJ-[Sp{Dq' - G)}2 - det(Dg2 - G). D6)
Семинар
491
Диффузионный процесс предполагается устойчивым, то есть высокочастотные
(относительно q) гармоники затухают. С формальной точки зрения это означает, что
матрица D положительно определенная. Действительно, если q —>> оо, то
р'.
E)
где v^ = (г^оъ^ог) — эрмитово сопряженный к vq = col (^01,^02) вектор. Тогда
в силу положительной определенности D из E) следует р < 0 для всех q ф 0.
Условия положительной определенности матрицы D состоят в том, что
> 0, D22 > 0, det(D) > 0.
F)
Далее, по смыслу диффузионной неустойчивости однородное решение и = 0
устойчиво для системы
« = /(«). G)
Это значит, что при q = 0 оба корня уравнения Dа) имеют отрицательную дей-
действительную часть. Условие этого состоит в том, что
Gn < 0, G22 < 0, det(G) > 0. (8)
Таким образом, на фазовой плоскости системы G) точка и = 0 является устойчи-
устойчивым узлом или фокусом. Заметим также, что согласно F), (8) при всех значениях
q выполняется неравенство Sp (Dg2 — G) > 0.
Как следует из Dа), решение и = 0 диффузионно неустойчиво, если при
каких-либо q окажется
M(g2)=det(Dg2 - G) < 0.
(9)
Поскольку M{q2) — это полином второй степени относительно q2, и согласно
F), (8) М@) > 0, M(q2) —^ +оо при q2 —)> 00, то при условии (9) уравнение
M(q2) = 0 имеет два действительных корня qf и g|:
2 2
Ql,2 = Qm
det(G). 2 _ h
det(D)' Qm ~ det(D)'
1
dq2
Таким образом, при условиях
h> 0,
G21
D12
G22
1
G11
D21
G12
D22
A0)
>0
A1)
возникает диффузионная неустойчивость — однородное решение оказывается
неустойчивым по отношению к возмущениям с волновыми числами в интервале
ql<q2 < <&. A2)
Граничные условия выделяют из непрерывного набора q дискретный ряд q =
= тгп/R, п = 0, ±1, ±2,... Поэтому в случае конечной области О диффузионная
неустойчивость возникает, только если в интервал A2) попадает хотя бы одно
допустимое значение д.
492
Семинар
D22G11),
A3)
В частном случае, когда матрица коэффициентов диффузии имеет диагональный
вид, D = diag AI1,1J2M величины h и д^ в A0) принимают более простой вид:
2 1 {Gii . G22N
qm = — I I
A \ J-Jll J-^22 ,
Соответствующие графики p(q) показаны на рис. 1.
АЛ
h= -
Рис. 1. к задаче 23. Спектральные зависимости pi,2(q) для случая диагональной
матрицы коэффициентов диффузии: а — однородное состояние устойчиво, б —
однородное состояние диффузионно неустойчиво
Другой важный частный случай — это когда матрицы D, / и G имеют вид
0
D
0
Dl2
D22
/ =
h
о о
G21 G22
= 4^~ < 0- A4)
0U2
При этом однородному решению и = 0 в системе G) отвечают два корня урав-
уравнения D): р = 0 и р = G22 < 0. Поэтому это решение устойчиво по линейному
приближению. Что касается его диффузионной неустойчивости, то в рассматрива-
рассматриваемом случае условия A0), A1) сводятся к неравенству
G22D11 -— G21D12
Чпг =
>
A5)
Так как G22 < 0, то для выполнения неравенства A5) необходимо выполнение
неравенств
^12^21 < DuG22 < 0. A6)
Тогда диффузионная неустойчивость развивается для возмущений с волновыми
векторами в интервале 0 < q2 < q^- Зависимости pi,2(q) для этого случая приве-
приведены на рис. 2.
Р
б.
Рис. 2. к задаче 23. Спектральные кривые pi^(q) для случаев матрицы коэффи-
коэффициентов диффузии D и вектора источников /, указанных в A4): а — однородное
состояние устойчиво, б — однородное состояние диффузионно неустойчиво
Семинар 493
Следует обратить внимание на то, что диффузионная неустойчивость в случае
недиагональной матрицы D (см. A4)) возникает независимо от соотношения меж-
между коэффициентами Dn и D22, лишь бы выполнялись условия Dn > О, D22 >
> 0. В случае же диагональной матрицы D для возникновения диффузионной
неустойчивости необходимо, чтобы указанные коэффициенты различались.
Задача 24. Пусть процесс теплопередачи в полупространстве х > 0 опи-
описывается уравнением теплопроводности
Tt = (кТх)х A)
с коэффициентом теплопроводности
к = Та, а > 1. B)
Граничные условия заданы в виде
Методом разделения переменных найти решение и исследовать его.
Решение. Положим
T(x,t) = g(x)h(t). D)
Подставляя D) в A) и производя разделение переменных, получаем
hg = h ^ (g gx)x или —— = ^^^ = G, E)
ha + l g
где С — константа разделения. Это дает два обыкновенных дифференциальных
уравнения: временное и пространственное. Решение временного уравнения есть
C(t - if) = ^-h~a или h(t) = [Ca(tf - t)]~1/<J. F)
a
Полученная временная зависимость совпадает с представленной в граничном
условии.
Решение уравнения для пространственной зависимости можно искать в виде
степенной функции
. G)
Подстановка этого выражения в уравнение E) дает
а.—-2 + сгск
- —)
) ( ) (8)
f Xf/ \ XfJ
Приравнивая друг другу соответственно показатели степеней и коэффициенты при
функции A — x/xf), имеем:
(9)
и аи \а у
Окончательно находим
-I/a-
где А = | -^- ( - + 1
XfJ
494
Семинар
Сравнивая полученное решение при х = 0 с граничным условием C), находим
А = 1. Отсюда имеем
xf =
A1)
Величину Xf можно трактовать как глубину проникновения теплового поля.
Найденный режим нагрева называют остановившейся тепловой волной: нагрев
идет, а тепло не выходит за пределы области с размером х = ж/.
Задача 25. Найти критические точки и критические значения двумерного
отображения
l/i = a?i -ж2 +аж1,
Решение. Соотношения A) задают отображение плоскости с координа-
координатами {ял, Х2~} на плоскость с координатами {t/i, 1/2}. Критические точки нахо-
находятся из условия
дхг дх2
х\ + а —2x2
2x2 2х\ — а
= 0
или
Следовательно, критические точки образуют окружность
х\ = —a cos у?,
^6
B)
C)
D)
Подставляя D) в A), найдем множество критических
значений:
12 12
2H
2
= -a
1
2
—a
Рис. 1 к задаче 25. Мно-
Множество критических зна-
значений отображения A)
1 1
J- 2 - о J- 2 •
2/2 = —a sin2(p a sin у?.
Это множество, показанное на рисунке, представляет
собой гипоциклоиду с тремя точками возврата.
Рассмотренный пример показывает, что отображе-
отображение A) при а = 0 имеет структурно неустойчивую особую точку х% = Х2 =
= 0. Эта точка при малом "шевелении" (т. е. при малых значениях параметра а)
разваливается и возникает критическая кривая, образ которой есть гипоциклоида.
Задача 26. Материальная точка (шарик) двигается между двумя параллель-
параллельными стенками со скоростью v, направленной перпендикулярно к стенкам (см.
рис. 1). Левая стенка покоится, а координата правой стенки меняется по закону
L = Lq + a cos iot. Построить для этой системы точечное отображение и опреде-
определить условия появления сильной стохастичности движение шарика.
Решение. Скорость правой стенки можно записать как V = ^Vo sin ut.
Пусть столкновение шарика с этой стенкой происходит в моменты времени tn.
Тогда закон сохранения импульса в процессе столкновения принимает вид
vn+\ = vn + 2Fo s'mujtn. A)
Здесь vn и vn+i — скорости шарика перед п-м и (п+1)-м ударами соответственно.
Будем предполагать, что среднее расстояние между стенками велико по сравнению
Семинар
495
с амплитудой дрожания стенки:
Ьо > а = Vo/w. B)
Будем также считать, что скорость шарика
велика по сравнению со скоростью стенки:
v > Vo C)
Поскольку движение шарика между ударами
является свободным, то промежуток времени
между двумя последовательными ударами равен
Неподвижная
стенка
Подвижная
стенка
2а
-tn =
D)
Рис. 1. к задаче 26
Здесь мы пренебрегли поправкой, связанной с изменением расстояния между
стенками за время пролета шарика от столкновения до столкновения. Вводя фазу
<рп = utn, перепишем A), D) в виде двумерного отображения Пуанкаре:
vn+i = vn + 2Fo sirupn,
(mod 2тг).
E)
Во втором из уравнений учтено, что фаза определена с точностью до 2тт, п =
Отображение E) часто называют отображением Улама. Оно аналогично стан-
стандартному отображению A0.20), исследованному в главе 10. Поэтому следует ожи-
ожидать, что в некоторых диапазонах значений параметров должна наблюдаться сто-
стохастическая динамика.
Нетрудно убедиться, что
1.
F)
Поэтому преобразование E) сохраняет фазовый объем. В силу неравенства C) ско-
скорость v меняется мало в результате столкновений, тогда как фаза (р может меняться
очень сильно. Тогда в использованных приближениях вторую формулу в E) можно
переписать в виде:
^ 2Ьош / vn+i — vn\ ^ 2Ьош 2Louj .
Vn \ Vn у Vn Vn
Поэтому коэффициент растяжения фазового объема вдоль координаты <р оказыва-
оказывается равным:
ё(рп^
\К\ =
- 1
Поскольку "наиболее вероятное" значение
стохастичности следует ожидать при К > 1 или
> 1.
(8)
1, то появления развитой
(9)
Наоборот, при выполнении условия К < 1 движение будет (как правило) устой-
устойчивым или квазипериодическим.
Из критерия (9) вытекает ограничение на скорость частицы
V <
A0)
496 Семинар
выше которой стохастическое движение прекращается. Заметим, что согласно B)
Vmax > Vo.
Из первого соотношения в E) следует, что среднеквадратичное изменение ско-
скорости за один цикл равно:
(At;J = (vn+1 - vnJ = 4F02sin2 ^n = 2F02. A1)
Этот цикл осуществляется за время т = 2Lq/v. Поэтому
^^_ у2
(AvJ = 2Vq = —vt. A2)
2L0/v Lq
Последнее соотношение показывает, что имеет место "диффузия" частицы в про-
пространстве скоростей, причем соответствующий коэффициент "диффузии" равен
Dv = — = —v. A3)
т Lq
Введем в области стохастичности функцию распределения частиц по скоростям
f(v). Это позволяет найти закон изменения средней скорости шарика со временем
с помощью уравнения Колмогорова^Фоккера-Планка:
(DvW) A4)
at 2 dv \ dv J
или
d? _ Vi_d^ (ndf
dt ~ 2L0 dv
Вводя среднюю скорость v соотношением
v= \vf(v)dv, A6)
умножая A5) на г; и интегрируя почленно полученное уравнение по dv, получим:
— = — v— v^~~ dv = — — v^-dv = ^—. A7)
dt 2L0 J dv \ dv J 2L0 J dv 2L0
Последний результат означает, что в среднем движение шарика является равно-
равноускоренным:
v=?-t + v0. A8)
Когда скорость, набранная частицей, достигает значений порядка итах (см. A0)),
дальнейшее ускорение прекращается.
Рассмотренное явление получило название стохастического ускорения Фер-
Ферми. Аналогичным способом Ферми пытался объяснить происхождение быстрых
частиц в космических лучах. Идея состояла в том, что заряженные частицы стал-
сталкиваются с магнитными облаками в межзвездной среде и в среднем ускоряются. В
отличие от рассмотренной нами модели ускоряющие частицу облака в межзвезд-
межзвездном пространстве расположены случайно. Однако все сказанное выше нетрудно
переформулировать так, чтобы учесть случайные колебания стенки. Это и отвеча-
отвечало бы случайному расположению облаков.
Наконец, заметим, что если скорость частицы велика (v ^> i;max), но при этом
v ^C ujLq, то стохастическое ускорение уже отсутствует, но изменения фазы при
столкновениях шарика со стенкой еще велики. В этих условиях оказывается спра-
справедливым подход, рассмотренный в задаче 11, где выполнялись условия примени-
применимости адиабатического приближения.