/

























































































































































































































































































































































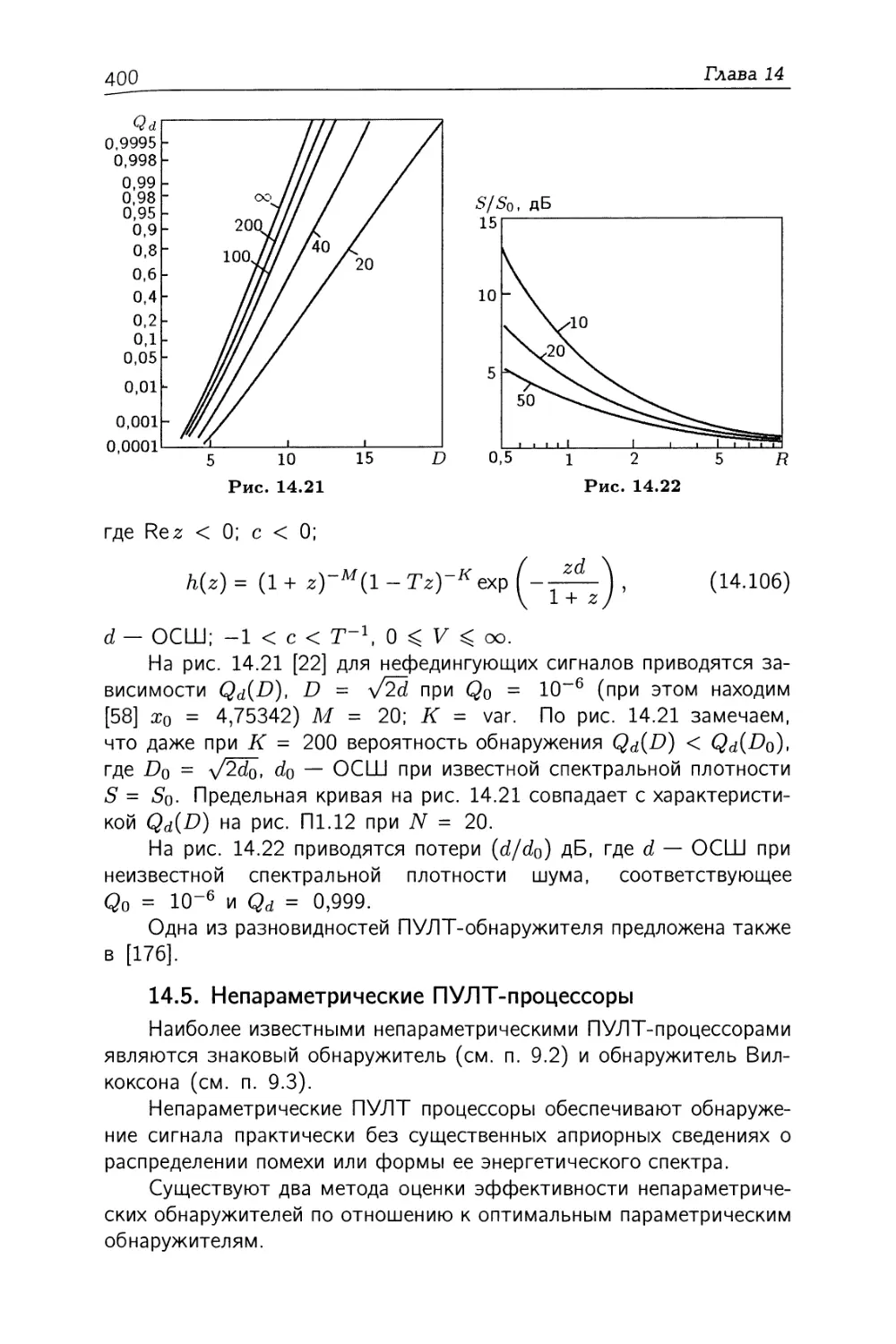





















































Author: Шахтарин Б.И.
Tags: электротехника радиоприемные устройства (радиоприемники) инженерия радиоприемники
ISBN: 978-5-9912-0395-1
Year: 2015




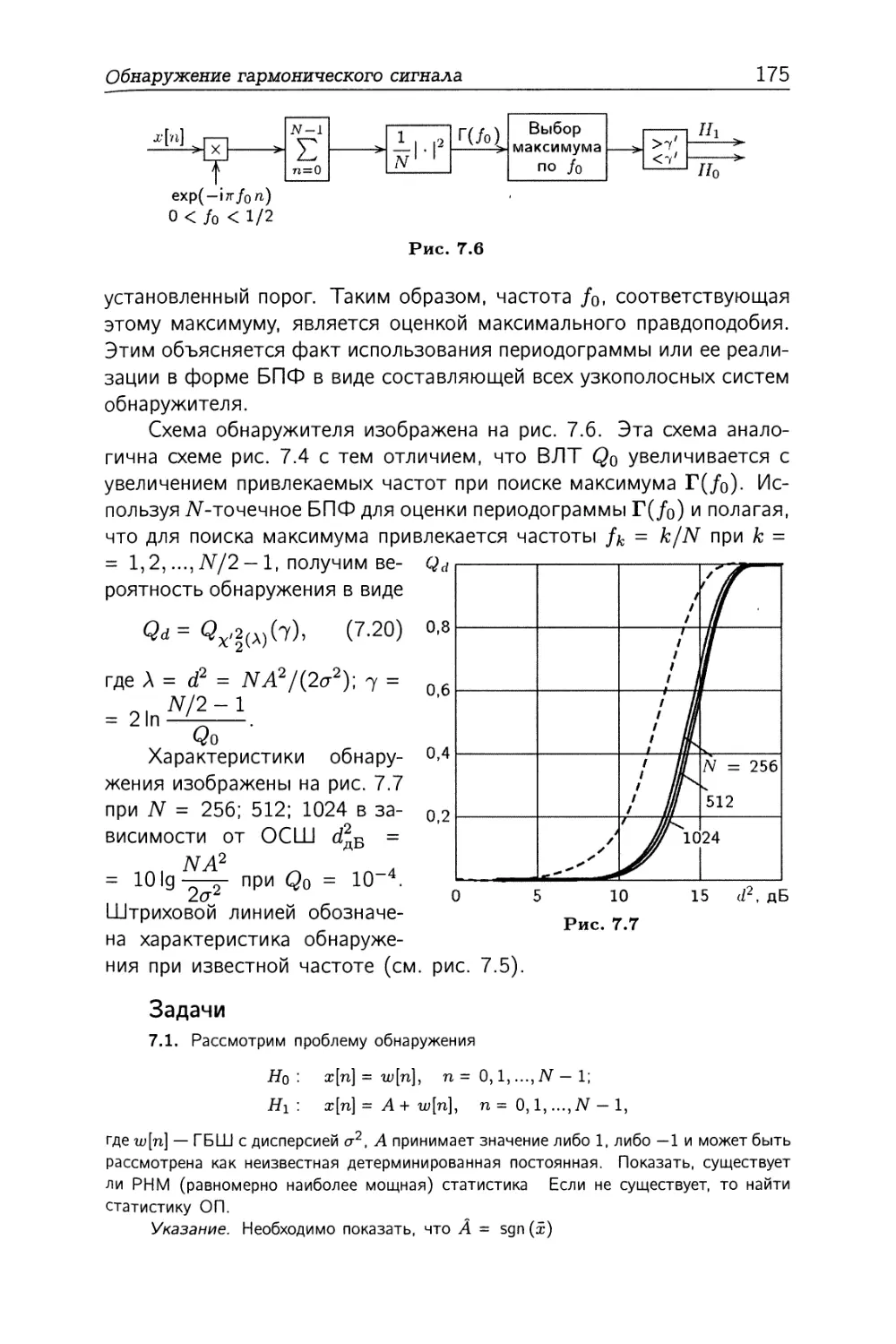
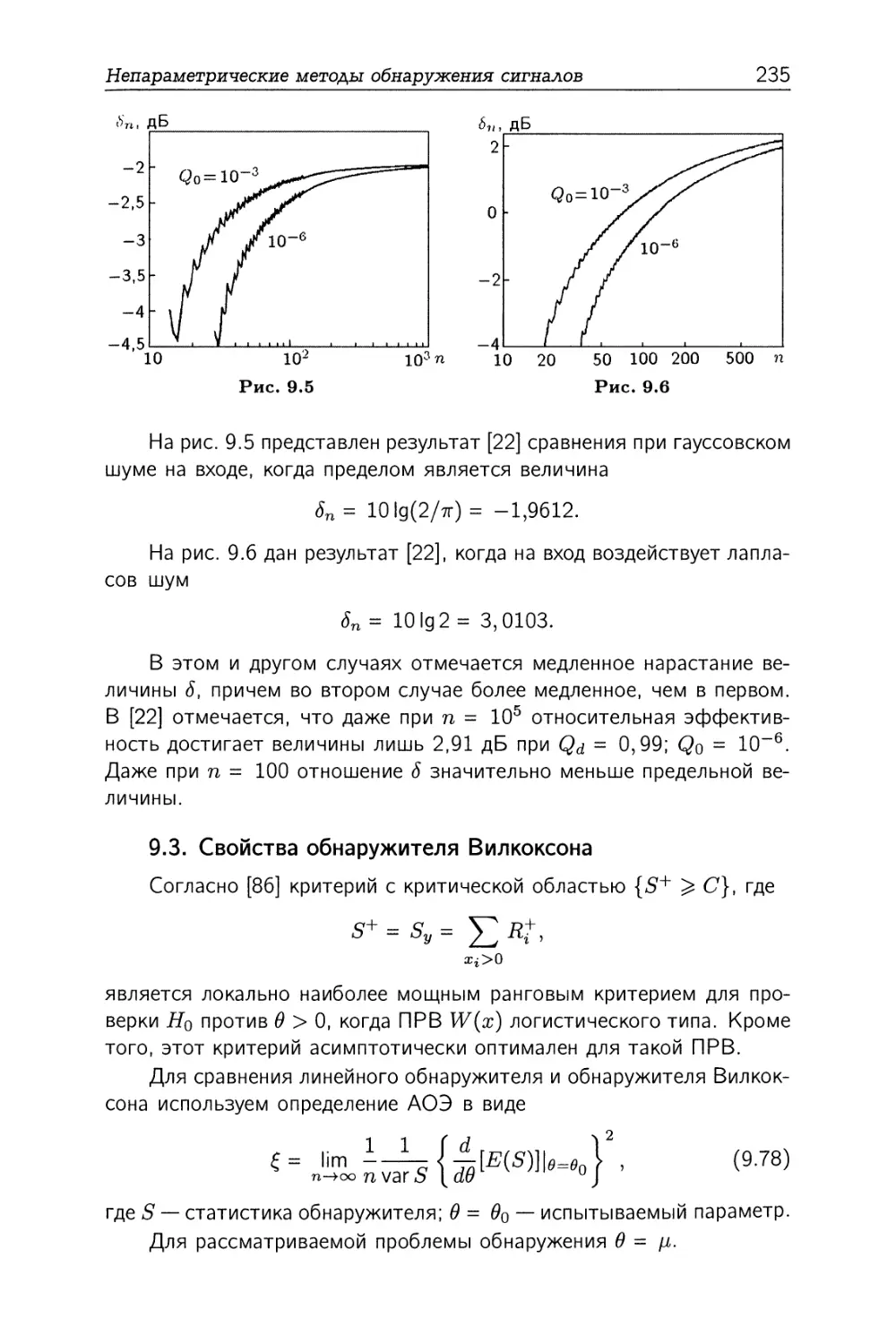
Text
Б. И. Шахтарин
УЧЕБНОЕ ПОСОБИЕ
ОБНАРУЖЕНИЕ
СИГНАЛОВ
шрнчап линин-Телеком
Б. И. Шахтарин
3-е издание
Б. И. Шахтарин
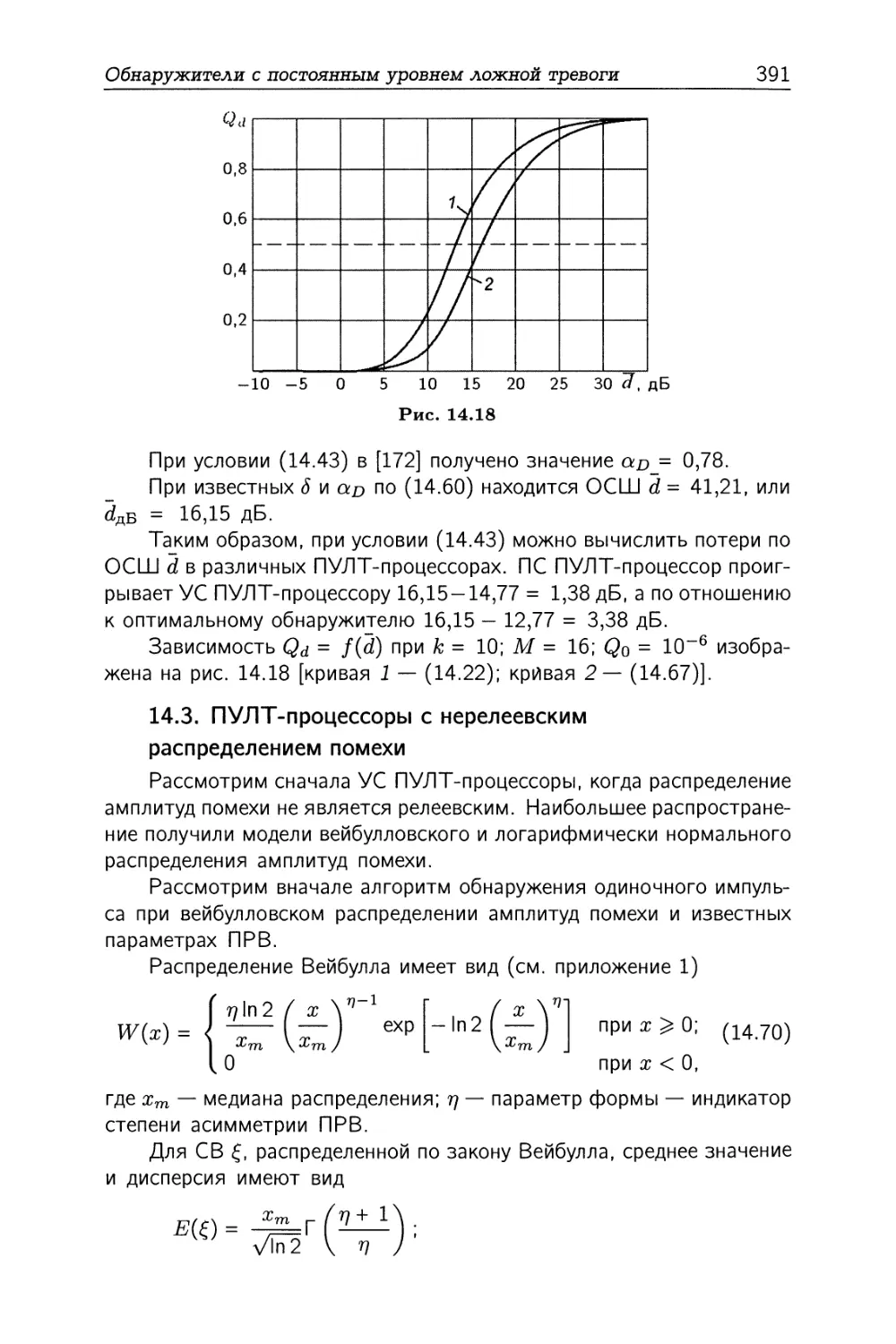
ОБНАРУЖЕНИЕ
СИГНАЛОВ
3-е издание
Рекомендовано учебно-методическим объединением вузов
по университетскому образованию в качестве учебного пособия для
студентов высших учебных заведений
Москва
Горячая линия - Телеком
2015
УДК 621.37:621.391
ББК 32.849
Ш32
Рецензенты: доктор физ.-мат. наук, профессор А. И. Козлов\
доктор техн. наук, профессор Н. Н. Удалов
Шахтарин Б. И.
Ш32 Обнаружение сигналов. Учебное пособие для вузов. - 3-е изд.,
испр. - М.: Горячая линия-Телеком, 2015. -464 с.: ил.
ISBN 978-5-9912-0395-1.
Рассмотрены основы теории обнаружения сигналов и ее основные на¬
правления от классического подхода, включая последовательное обнару¬
жение, до разделов, касающихся обнаружения сигналов при априорной
неопределенности, включая непараметрическое обнаружение (знаковые
обнаружители, обнаружители Вилкоксона, Манна-Уитли и др. с приме¬
рами АОЭ обнаружителей) и адаптивный прием. Приводятся алгоритмы
обнаружения случайных сигналов нэ основе приемников Стратоновича-
Сосулина и приемника Швеппе. Рассмотрены обнаружители с постоян¬
ным уровнем ложной тревоги и примеры робастных обнаружителей.
Для студентов старших курсов и аспирантов.
ББК 32.841
Адрес издательства в Интернет WWW.TECHBOOK.ru
ISBN 978-5-9912-0395-1 © Б. И. Шахтарин, 2006, 2015
© Издательство Горячая линия-Телеком, 2015
Предисловие
В данном, третьем издании книги «Обнаружение сигналов» в ос¬
новном сохранена структура первого издания. Как и в первом изда¬
нии, рассмотрены основы теории обнаружения сигналов и ее основ¬
ные направления от классического подхода, включая последователь¬
ное обнаружение, до разделов, касающихся обнаружения сигналов
при априорной неопределенности, включая непараметрическое обна¬
ружение (знаковые обнаружители, обнаружители Вилкоксона, Манна-
Уитли и другие с примерами АОЭ обнаружителей), а также адаптив¬
ный прием сигналов.
Приводятся алгоритмы обнаружения случайных сигналов на ос¬
нове приемника Стратоновича-Сосулина и приемника Швеппе.
В процессе работы над вторым изданием книги автором расши¬
рена глава 5 «Последовательное обнаружение» за счет материалов
по вычислению АОЭ обнаружителей и усеченному последовательно¬
му анализу.
Переработана также глава 10 «Адаптивный прием сигналов».
Кроме того, добавлена глава 14 «Обнаружители с постоянным
уровнем ложной тревоги» [ПУЛТ-процессоры (обнаружители), или
CFAR-processors (receiver)] и глава 15 «Робастные методы фильтра¬
ции».
Автор благодарит за помощь в работе д.т.н., проф. В.И. Ти¬
хонова, д.т.н. В.В. Сизых, д.т.н., проф. В.И. Хименко, к.т.н., доц.
И.В. Шитова, к.т.н., доц. М.С. Долгих, В.М. Зинченко, А.А. Бутенко,
М.М. Трегубенко, которые не пожалели своих усилий и средств для
обеспечения автора столь необходимой в работе над данным учеб¬
ным пособием литературой. Вячеслав Максимович Зимчук поделился
с автором своими результатами, использованными в главах шестой
и девятой, и подарил книгу Gibson J.D., Melsa J.L «Introduction to
nonparametric detection with application», без которой было бы весьма
затруднительно подготовить главу 9, а также снабдил автора копиями
статей F.C. Schweppe, L.L. Scharf и некоторыми другими.
За вклад в издание книги автор приносит искреннюю благодар¬
ность Б.А. Атаянцу, А.А. Быкову, А.А. Бутенко, В.А. Шадрину,
Д.И. Темирханову.
Автор искренне благодарен д.т.н., профессору Юрию Георгиеви¬
чу Сосулину за предоставленную им возможность использовать мате¬
4
Предисловие
риалы его книги «Теория обнаружения и оценивания стохастических
сигналов», без которых было бы трудно подготовить главы 10 и 13.
Автор благодарит к.т.н., доц. Ю.А. Сидоркину за набор нового
материала книги.
За внимание к работе автор благодарит чл. корр. РАН И.Б. Фё¬
дорова, к.т.н., доц. В.В. Зеленцова, к.т.н., доц. А.К. Ковальчука.
Особую благодарность автор выражает к.т.н., профессору
Ю.Н. Чернышову за редактирование и верстку книги.
Автор благодарит рецензентов и д.ф-м. н. А.И. Козлова и д.т.н.,
проф. Н.Н. Удалова за благожелательные отзывы на данное учебное
пособие.
Введение
Теории обнаружения сигналов посвящены многочисленные рабо¬
ты, включая монографии, учебные пособия и статьи.
Современные обзоры [1-3] составлены авторами, принимавшими
непосредственное участие в разработке этой теории. Отметим, что
перевод обзора [3] на русский язык представлен в Дополнении.
Классическая теория обнаружения и различения сигналов осно¬
вана на работах [4-10] и на предшествующих им статьях [11, 12]. Оче¬
видно, в нашем Отечестве работы [5-12] являются первыми, в кото¬
рых систематизировано изложена классическая теория обнаружения
сигналов. Дальнейшее развитие классическая теория получила в 60-х
годах прошлого века [13-17]. Докторская диссертация В.А. Котель¬
никова (1947 г.) - одна из первых в мире, которая до сих пор широко
цитируется в России и в зарубежной литературе [1-3].
При написании первого раздела данного учебного пособия «Об¬
наружение и различение сигналов (классическая версия)» использо¬
вались в частности статьи и книги [18-26], а также другие источники,
на которые имеются ссылки по мере изложения материала первого
раздела.
При написании главы 5 «Последовательное обнаружение сигна¬
лов» использовались материалы [22, 27-29 и др.].
Материалы второго раздела «Обнаружения сигналов в условиях
априорной неопределенности» основаны на [22, 28, 30-49].
В основе материалов третьего раздела «Обнаружение случайных
сигналов» использованы книги [22, 24, 43, 50, 51] и статьи [3, 52, 53].
В данном пособии основное внимание уделяется алгоритмиче¬
ским вопросам. Такие понятия, как равномерно наиболее мощный
(РНМ) критерии, локально оптимальный (ЛО) обнаружитель и дру¬
гие, связанные с общей теорией проверки гипотез практически не
рассматриваются.
В области непараметрических методов обнаружения необходимо
отметить работы П.С. Акимова, которые автор использовал при напи¬
сании главы 9. П.С. Акимов (1931-2002) был не только выдающимся
ученым МГТУ им. Н.Э. Баумана, но и признанным в России [44, 77] и
за рубежом [96-105] как высококлассный и эрудированный специалист
в области непараметрического обнаружения сигналов и оценки их па¬
раметров. Так, например, в библиографическом списке С.А. Кассама
6
Введение
[48] имеются ссылки на 10 работ П.С. Акимова [96-105]. Следует от¬
метить, что и в [95] также цитируются многие работы П.С. Акимова.
Безусловно, неоценим вклад в теорию обнаружения случайных
сигналов Р.Л. Стратоновича, который разработал теорию нелинейной
оптимальной фильтрации случайных сигналов и создал целое направ¬
ление в этой теории [130, 133, 134, 139, 146 и др.]. Совместно с
Ю.Г. Сосулиным им предложен нелинейный оптимальный приемник
случайных сигналов, причем это сделано задолго до появления ли¬
нейного приемника Швеппе [46].
В своей версии изложения данной темы автор старается придер¬
живаться структуры замечательного обзора известных специалистов
[3]. В этой связи добавлены две главы: глава 14 «Обнаружители с
постоянным уровнем ложной тревоги» (ПУЛТ процессоры, или CFAR
processors) и глава 15 «Робастные методы фильтрации», поскольку в
последние 25 лет робастным методам обработки сигналов посвящено
значительное число работ [112, 155 и др.].
Часть I
Обнаружение и различение сигналов
(классическая версия)
Посвящается светлой памяти
Ильи Николаевича Амиантова
1 Проверка статистических гипотез при
обнаружении (различении) сигналов
В данной главе рассматривается задача проверки двухальтерна¬
тивных гипотез, а именно простейший случай проверки гипотез.
Пусть наблюдается некоторое событие, которое может быть по¬
рождено одной из двух взаимно исключающих друг друга причин По
или П\. Гипотеза о том, что событие обусловлено первой из двух
причин, обозначается через Я0, а гипотеза о том, что событие обу¬
словлено второй причиной, — через Н\. Требуется установить подхо¬
дящее правило для выбора между гипотезами Но и Hi и тем самым
принять решение о том, которая из двух причин наблюдаемого со¬
бытия в каком-то смысле (по сформулированному критерию) более
правдоподобна. Данные измерений (выборки) х на основе которых
принимается решение, могут быть одномерными (скалярными) или
многомерными (векторными). Все пространство данных делится на
две области Ro \л R\. Правило выбора D(x) гипотезы определено,
если определено одно из множеств R0 или Дь так что Ro U Ri = R,
RoHRi = 0. Обычно проверка гипотез рассматривается с точки зре¬
ния одной из гипотез, например Я0. Тогда Ro называется областью
принятия гипотезы, a Ri — областью отвергания гипотезы (или кри¬
тической областью). Если результаты измерения попадают в область
Ro (х е Ro), то принимается решение D0 о том, что справедлива ги¬
потеза Н0; аналогично при (х Е Ri) принимается решение D\ о том,
что справедлива гипотеза Яь
Если наблюдаемое значение х попадает в Ri так, что отвергается
гипотеза Я0, а на самом деле Я0 является истинной, то говорят, что
допущена ошибка первого рода, ее вероятность обозначается через
P(Di | Но) = Qo• Если х попадает в R0, а правильной является Hi,
то говорят об ошибке второго рода с вероятностью P(D0 \ Hi) =
8
Глава 1
= Qi. При этом вероятность Q0 = P(D\ | Я0) называется уров¬
нем значимости или объемом критерия. Вероятность P(D1 | Hi) =
= 1 - P(D0 | Hi) отождествляется с мощностью критерия.
В радиолокации ошибка первого рода называется ложной трево¬
гой, P(Di | Н0) = Qo = Рлт — вероятность ложной тревоги (ВЛТ);
ошибка второго рода называется пропуском сигнала, P(Dq \ Щ) =
= Q1 — вероятность пропуска сигнала. Мощность критерия называ¬
ется вероятностью обнаружения сигнала
Qd= P(Di\Hi)= l-P(D0\Hi). (1.1)
В рассматриваемой бинарной задаче существует несколько спо¬
собов для определения «наилучшей» стратегии в терминах вероятно¬
стей обнаружения и ложной тревоги. Одним из наиболее известных и
используемых в радиолокации является критерий Неймана-Пирсона,
который на языке математической статистики определяет критерий
выбора между Я0 и Яь обладающий максимальной мощностью из
всех критериев с уровнем значимости, не большим заданного зна¬
чения, или иначе в терминах радиолокации: по критерию Неймана-
Пирсона максимизируется вероятность обнаружения (1.1) при сохра¬
нении вероятности ложной тревоги Qo на заранее заданном уровне,
т.е. решается задача
max = P(Di | Hi)\ P(DX \ H0) ^ Рлт, (1-2)
D(x)
где D(x) обозначает правило решения.
Вместе с тем критерий Неймана-Пирсона в другой формулиров¬
ке предписывает добиваться минимума вероятности пропуска сигнала
при ограничении сверху на вероятность ложной тревоги. Таким об¬
разом, решается задача
D{x) = Р(Д> | Hi): P(Di | Но) ^ Рлт. (1-3)
Однако наиболее общей наилучшей стратегией выбора между ги¬
потезами является байесовское решение (правило Байеса), из кото¬
рого вытекают другие критерии, в том числе и критерий Неймана-
Пирсона.
Допустим, что за ошибку первого рода наблюдатель платит
штраф Со, а за ошибку второго рода — штраф С\, при этом вели¬
чина CoQo называется риском, соответствующим гипотезе Я0, тогда
CiQi — риск, соответствующий гипотезе Яь
Средний риск при принятии решения
С = noCoQo + TTiCiQb (1*4)
где 7г0 и 7Ti — априорные вероятности гипотез, причем 7г0 + tti = 1.
Проверка статистических гипотез
9
Наблюдатель должен выбрать такую стратегию (правило Байе¬
са), которая минимизировала бы средний риск. Минимальное значе¬
ние среднего риска С = С называется байесовским риском.
Далее для того чтобы найти границу раздела областей Ro и Ri,
необходимо предположить наличие ПРВ Wo(x) и Wi(x), х е R, каж¬
дая из которых определяет вероятностный закон, соответствующий
одной из двух взаимно исключающих друг друга причин.
Задача состоит в установлении разумного правила выбора между
Яо и Яь Это означает, что пространство R надо разделить на две
области Ro и Ri так, чтобы для всякого отсчета х можно было ска¬
зать, какая из двух причин считается действительно имеющей место.
В случае скалярных (одномерных) данных, требуется найти величину
х = хо (рис. 1.1), разделяющую области Ro и Ri.
При найденном значении х = хо
Qo = P(£>i | Я0) = [ W0(x) dx = Г W0(x) dx\
J .R^ J XQ
Г Гх 0
Qi = P(D0 | #i) = / Wi{x)dx = / Wi{x)dx\
J Rq J — oo
Qd = P(Di | Hi) = j W\{x)dx= f Wi(x)dx.
J J xo
Критерий Неймана-Пирсона (1.2) записывается в виде
maxP(L>i | Hi) = max / Wi(x)dx\
JRl
P(Di\H0)= [ W0(x)dx^PJlT.
J R-\
(1.5)
(1.6)
(1.7)
(1.8)
Согласно байесовскому решению должно выполняться условие
минимума среднего риска, когда граничное значение хо находится из
уравнения
dC(x о)
dx о
О,
10
Глава 1
где
Г°° Гх О
С(хо) = 7ГоСо / Wo(x)dx+ тт\С\ / W\(x)dx.
J Х(Л J—оо
' XQ J— оо
Тогда, дифференцируя интегралы с переменными пределами, получим
= -ttoCoWoOco) + ibCiWi{x0) = 0. (1.9)
dx о
Отсюда получаем уравнение для получения х0:
Wi(x о) ТТоСо
W0(x0) ttiCi
= Ло. (1.10)
Величина А(х) = —■■■■■■ называется отношением правдоподобия (ОП).
Wq(x)
Байесовское решение:
при А(х) > А0 принимается гипотеза #ь
при А(х) < А0 принимается гипотеза Я0.
Критерий отношения правдоподобия является частным случаем
байесовского решения:
при Л(х) > 1 принимается гипотеза Яь
при А(х) < 1 принимается гипотеза Я0.
Этим реализуется принцип наибольшего правдоподобия.
Более общим, чем критерий отношения правдоподобия, критери¬
ем является критерий максимума апостериорной вероятности (МАВ)
(англ.: maximum a posteriori probability (МАР)). Если обозначить апо¬
стериорные вероятности причин П0 и Пх через Р(П0 | х) и Р(Пх | х),
то критерий МАВ принимает вид
Р(Пх | х) > Р(П0 | х) (1.12)
в том случае, когда принимается гипотеза Яь в противном случае
принимается гипотеза Я0.
Можно показать справедливость соотношения [7, 8]
mis) *мх)
Р(П0|х) n0W0(xy
Следовательно, критерий МАВ является частным случаем байе¬
совского критерия (1.11) при С\ - Со'.
С ТТ А / \ ^1 (Х) 7Г0
следует выбирать гипотезу Яь если А(х) = хтг / - > — = А0;
W0(x) 7Г1
выбирать гипотезу Я0, если А(х) < —. (1.14)
7Г1
Проверка статистических гипотез
11
В системах связи обычно не разделяют ошибки двух типов, а
вычисляют полную вероятность ошибки
Рош = Р(Яо)Р(£>! I Но) + P(H\)P{Dq I ЯО = TToQo + *iQi =
= 7Го / Wo(x)dx+ 7г 1 / Wi(a:)da: =
J J Rq
r°° px0
= 7Tq Wo(x)dx+ 7Г1 / (1*15)
J xq J— oo
В качестве следующего критерия проверки гипотез может быть
принят критерий идеального наблюдателя, который минимизирует ве¬
роятность полной ошибки Рош. Из условия dPoul/dxo = 0, как и в слу¬
чае (1.9), приходим к соотношениям (1.14), следовательно, критерий
идеального наблюдателя эквивалентен критерию МАВ.
Вывод. Приведенные четыре критерия (критерии Байеса, отно¬
шение правдоподобия, МАВ, идеального наблюдателя) отличаются
друг от друга лишь величиной порога Ло, с которым сравнивается
отношение правдоподобия А(х).
Пример 1.1. Пусть наблюдается случайная величина
х = т + п, (1-16)
где п — СВ, распределенная по закону Гаусса 7V(0,cr£), величина т
может принимать два значения а0 и а\ (ai > ао). Тогда
(х - а{)21
Wi(x) = —j== exp
уД-
7ГСГ:
2 а*
i= 0,1. (1.17)
Найти вероятности Q0, Qi и Qd.
Решение. Выберем критерий МАВ.
Согласно критерию МАВ или критерию идеального наблюдателя
(1.14), минимизирующего полную вероятность ошибки принимается
гипотеза Hi : т = аь если
Al(z) = 7Г1И/Г1(ж)/[7Г0И/0(ж)] > 1,
или в силу монотонности функции этот критерий эквивалентен нера¬
венству для логарифма ОП (ЛОП)
In Ai(x) > 0.
Используя (1.17) при а\ > ао, приходим к правилу выбора Н\\
т = а 1, если
х > х0 = [crl/(ai - ао)] 1п(7т0/7Г1) + (ai + а0)/2. (1-18)
12
Глава 1
Вероятности ошибок первого и второго рода принимают вид
Qo = P(Di | Н0) =
y/brcFi
Г
п J CCQ
ехр
(х - т0)
21
2сг2
dx =
1 f°° 2
= —= / е_и /2 du = Q(uo) = erfcuo = 0,5 -^(uo); (1-19)
V 27Г Juq
1 7Tq d Cli (2q / / \ 1 f —u2/2 л
o = — In — + -; d = ; = —== / e ' du\
d TTi 2 an J ^ Jo
^ ,_ i __ v 1 l*®0 Г (ж —mi)2
Qi = P(D0 I #i) = -/=— / exp —
у/2тгсгп J-oo I 2an
= —L= f e~u2/2du= O(ui) = 0,5+ ^(^i)'.
V 27Г «У — oo
dx =
(1.20)
1 | 7Г0 d J
Ui = - In - = u0-a.
a jt[ 2
Иначе вероятность ложной тревоги (ВЛТ) Qo и вероятность об¬
наружения Qd можно записать в виде:
Qo = Q(x); Qd = Q(s - d),
(1.21)
1 Г00 2 1 /** 2
где(Э(ж)= —f= / e_u 12du= 1-Ф(ж); Ф(я) = —= / e-u /2du.
v27t Jx \/2тг J—oo
Параметр d принимается за ОСШ.
Зависимость Qd = /(Qo) при d = const называется рабочей ха¬
рактеристикой приемника (РХП) (рис. 1.2). Зависимость вероятности
ошибки Рош (1.15) от ОСШ d при 7г0 = const (7Г1 = const) изображена
на рис. 1.3. При равенстве априорных вероятностей 7г0 = tti = 1/2
с учетом равенства d/2) = —ф{й/2) по (1.19) и (1.20) находим
Проверка статистических гипотез
13
Qo = Qъ поэтому по (1.15) получим
Рош = Qo = Qi = erfc(d/2) = Q(d/ 2), (1.22)
что соответствует верхней кривой рис: 1.3. При d = 0 по (1.15) сле¬
дует Рош = тт 1.
Теорема Неймана-Пирсона утверждает, что принцип наибольше¬
го правдоподобия удовлетворяет критерию (1.2), а именно, если rj —
действительное неотрицательное число, то критическая область
Ri(r)), состоящая из всех х, для которых Wi(x)/Wo(x) ^ rj, опре¬
деляет критерий выбора между гипотезами Я0 и Яь обладающий
максимальной мощностью из всех критериев с уровнем значимости
Qo ^ Qo (Ri(v))- Доказательство теоремы приводится в [7].
Таким образом, критерий Неймана-Пирсона отличается от других
критериев, перечисленных в выводе, лишь величиной порога rj = А0.
Поскольку справедливо равенство [8, 13] (рис. 1.3)
dQd
dQo
= Ао,
(1.23)
X — XQ
то в отличие от других упомянутых критериев в критерии Неймана-
Пирсона величина порога До зависит от ОСШ и находится в точке
касания к РХП (при заданной вероятности Qo = Рлт) прямой с углом
наклона </?о, таким, что (рис. 1.4)
tg<
Ао-
(1.24)
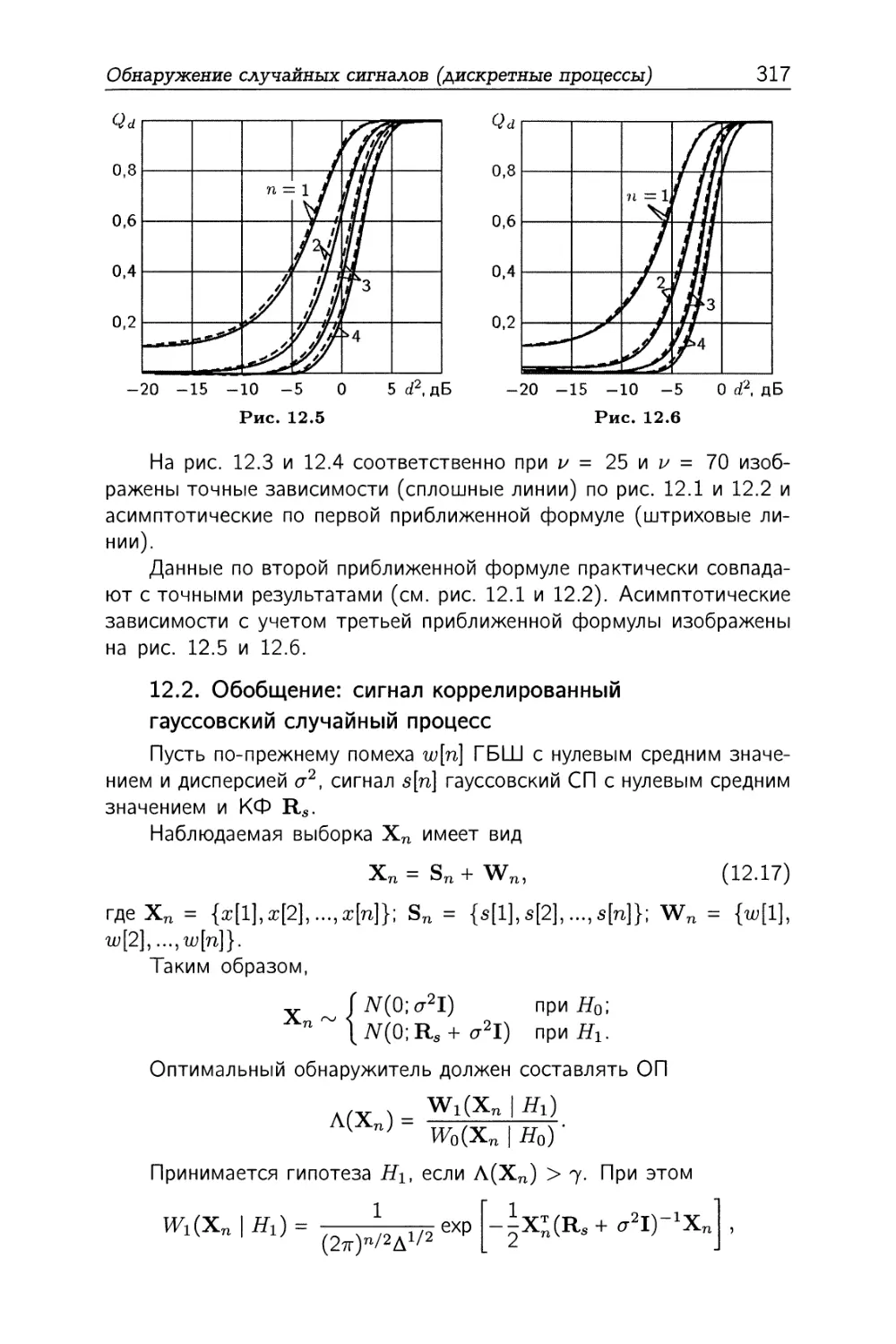
По известной РХП (рис. 1.2) могут быть вычислены характери¬
стики обнаружения (рис. 1.5), причем при d = 0 Qd = Qo (ср. (119)
и (1.20))
Qd. = f(d) при Qo = Рлт = const. (1-25)
При заданной вероятности Qd = Qdi по характеристике обна-
14
Глава 1
ружения (при Qo = Рлт = const находится пороговое ОСШ d = d,
обеспечивающее данную вероятность обнаружения Qdi. Найденному
значению d и заданной вероятности Q0 = Рлт на известной РХП при
d = d находится рабочая точка, в которой тангенс угла ipo наклона
касательной к РХП определяет необходимую величину порога До-
В условиях примера 1.1
Qo
г°° 1 г
P(D1\H0)= / W0(x)dx= -= /
Jxq V 27Г J (з
(x0-a0)/an
(1.26)
Пример 1.2. Пусть задана вероятность ложной тревоги Рлх =
= 10-6 и ОСШ d = 5. Найти вероятность Qd и порог xq.
Решение. По кривой обнаружения рис. 1.5 находим вероятность
обнаружения Qd = 0,6. Определим, кроме того, порог ж0. По (1.26)
при Рлт = 10-6 находим (по таблице) (х0 - ao)/crn = 4,75. Если,
например, положить ао = 1, оп = 0,25, то получим хо = 2,19 и,
следовательно, критическая область Pi определяется неравенством
ж > 2,19.
Пример 1.3. Пусть 7Го = 7ri = 0,5, an = 1, m = 0, либо m = 1.
Найти вероятность ошибки Рош.
Решение. Случайная величина (1.16) является гауссовской со
средним значением 0 или 1 для гипотез Я0 и Hi соответственно.
По критерию минимума вероятности ошибки Рош по (1.14) на¬
ходим
ЛЫ = EiM > !
4 1 ' W„lx) > '
Проверка статистических гипотез
15
Отсюда следует ЛОП
. (х — I)2 х2
1пА(®) = - + > 0.
2<тп 2<тп
или эквивалентно х = xq = 1/2. Тогда
1 f°° 2
Qo = -j= / е~“ 12du = erfc0,5 = 0,5 - V»(0,5) = 0,309.
у/2тг J0,5
По (1.22) Qi = Qo = 0,309 и вероятность ошибки
Рош = + 2 Q1 = 0»309.
По рис. 1.3 при 7Го = 7Г1 = 0,5, используя верхнюю кривую при
Рош = 0,31, находим d = 1, как и должно быть согласно условию
m/an = 1.
Минимаксный критерий
При неизвестных априорных вероятностях 7Го и щ байесовское
решение (1.11) найти невозможно. В этом случае критерий мини¬
мального среднего риска следует заменить на минимаксный крите¬
рий. Согласно этому критерию наблюдатель должен использовать
байесовскую стратегию, соответствующую такому значению априор¬
ной вероятности 7Го = £, для которого байесовский риск максима¬
лен (байесовским риском называется минимальное значение среднего
риска С = С). Зная £, которым пользуется природа (или другой
противник), наблюдатель применил бы байесовское решение, соот-
ветствующее_этому значению f, и его потери были бы равны байесов¬
скому риску С(£) (рис. 1.6, кривая 2). Когда наблюдатель использует
байесовское решение для априорной вероятности £ = £ь а природа
пользуется другим значением £, то средние потери наблюдателя (не
минимальные) описываются прямой, касательной к графику кривой
С(£) в точке f = fi (рис. 1.6, штриховая линия 1). Уравнение прямой
имеет вид
С = С{О = ZCoQ'o + (1 - OCiQi, (1.27)
где Qo = Qo(&); Qi = Qi(6)-
Потери при этом могут быть достаточно большими, но если на¬
блюдатель использует байесовское решение для значения £ = £о._при
котором байесовский риск (рис. 1.6, штрихпунктирная линия) С(£)
максимален и прямая (1.27) горизонтальна, то он уверен, что его по¬
тери не будут превышать С(£о) независимо от величины £, которую
выбирает природа (противник). Байесовская стратегия для £ = £0 на¬
зывается минимаксной стратегией, а величина С(£о) — минимаксным
риском.
16
Глава 1
Пример 1.4. В условиях примера 1.1 положим Я0: т = 0, Яь
т = 1, оп - 1. Пусть кроме того, штрафы Со = 1; С\ - С. Найти
величину порога и С.
Решение. По (1.9) Ао = 7r0/(C7ri), и из условия
Г рафик байесовского риска С(£) изображен на рис. 1.6 при С - 2
(кривая 2). В данном случае £о = 0,6 и минимаксный риск С(£о) =
= С(0,6) = 0,42. Уравнение прямой (1.27) среднего (не минималь¬
ного) риска принимает вид
с= С(0= £P(Di|tf0,£i)+ С(1-0^о|Яь6). (1.30)
График прямой изображен на рис. 1.6 штриховой линией при
С = 2; = 0,3. Прямая касается кривой байесовского риска С(£) в
точке f = fi = 0,3. Минимаксные потери обозначены на рис. 1.6
штрихпунктирной прямой параллельной оси абсцисс и касающейся
кривой С(£) в точке £ = £0 = 0,6.
7пСМх) _ 7T1CW1(x) _
А2[Х) TroCoWo(x) TToWo(x)
получим значение порога
хо = 0,5 + ln[7ro/(C7ri)] = 0,5 + In
(1.28)
При этом байесовский риск принимает вид
6(0= ШО+
(1.29)
где
1 Р°° 2
Qo(0 = P(Di | Но) = -т= / е-“ /2du;
V 2тг Лп(£)
1 rxo(€) , Q ,
Qi(0 = P(A) I Hi) = —j= / e-^"-1) '2du.
y/2ir J-oo
0,5
0,4
0,3
0,2
0,1
0
0,2 0,4
0,6 0,8 1,0 £
Рис. 1.6
Проверка статистических гипотез
17
Дифференцируя средний риск (1.4) по £ и приравнивая производ¬
ную нулю, получим dC(£)/d£ = 0, или
CoQo(xo) = СМх о). (1.31)
Таким образом, минимаксное решение есть байесовское решение,
для которого риски, соответствующие двум гипотезам, равны.
По трансцендентному уравнению (1.31) может быть найдено зна¬
чение порога хо при £ = £о. определяемое также по (1.28). Значения
каждой части уравнения (1.31) при этом равно минимальному риску.
Действительно, при Со = 1, С\ = С = 2, £о = 0,6 по (1.28) находим
хо = 0,212,_отсюда Qo - erfc0,212 = 0,5 - -0(0,212) ^ 0,5 - 0,083 ^
« 0,42 = С(0,6).
Пример 1.5 [8]. Со = 2; Ci = 1; f = & = 0,23. На рис. 1.4 1 —
точки байесовского решения; 2— минимаксное решение; штрихпунк-
тирная прямая — линия равных рисков.
Пример 1.6. Пусть Со = Ci = 1. Априорные вероятности 7Го и 7ri
неизвестны. Найти величину порога х0 и вероятность ошибки Рош.
Решение. Согласно минимаксной стратегии по (1.31) находим
Qo(xo) = Qi(^o). или, если воспользоваться примером 1.1 при а0 = 0;
ai = 1; оп - 1, то получим
* f°° e~u2l2du = * Г е-^Чи= * Г'е^Чи,
Jxq У/2.7Г J—оо v27T J—оо
ИЛИ
Q(x0) = 1 - 'ф(хо) = Ф(яо - 1) = <2(1 - хо).
Отсюда находим х0 = 0,5.
Однако при известных априорных вероятностях порог хо опреде¬
ляется по (1.28) и при С = 1 х0 = 0,5+ ln(7r0/7ri). Таким образом,
минимаксная стратегия соответствует выбору 7го = iri = 0,5 и, сле¬
довательно, по (1.22)
Рош = Q о = Q1 •
Следует отметить, что все примеры здесь рассмотрены при усло¬
вии единичного (скалярного или одномерного) измерения. Однако
основные поняти и положения проверки двухальтернативных гипотез
остаются справедливыми и при векторных (многомерных) измерени¬
ях с учетом их специфики.
Проверка простых гипотез при многократных измерениях. Про¬
верка гипотез при единичном измерении без труда переносится на слу¬
чай многократных измерений, основное отличие которых в том, что
аргументом функции теперь является выборка х = {х\,х2, ...,жп), где
п — объем выборки или кратность измерения; ПРВ Wo(x), Wi(x),
18
Глава 1
и отношение правдоподобия Л(х) являются функциями га перемен¬
ных. По-прежнему, вычисляется отношение правдоподобия Л(х) =
= H/ri(x)/W0(x), которое сравнивается с порогом А0. Если выпол¬
няется неравенство
Л(х) > А0, (1-32)
принимается гипотеза Яь при
Л(х) < А0
принимается гиипотеза Я0.
Замечание. Если отсчеты (xi,x2, ---,хп) независимы, то сов¬
местная ПРВ Wfc(x), к = 0,1, равна произведению одномерных ПРВ
Wk(xi), i = 1,2,...,га, характеризующих единичные измерения.
Пример 1.7. Пусть отсчеты (xi,x2, независимы и имеют
нормальное распределение с равными дисперсиями а2. Среднее зна¬
чение каждого отсчета равно ао при гипотезе Но и а\ при гипотезе
Яь Найти отношение правдоподобия и вероятности Qo и Qi.
Решение. В силу предыдущего замечания совместная ПРВ име¬
ет вид
(Хг - ак)2
Wk(x.) = (2тга2)-п/2ехр
i= 1
2<72
к = 0,1.
Отношение правдоподобия
, Wi(x) ai-ao
Л(х) = Т1Г , [ - ехр
Wo(x)
1=1
п(а\ - ag)
2<72
(1.33)
(1.34)
Наблюдатель принимает гипотезу Яь если Л(х) > А0, где А0 опре¬
деляется выбранным критерием решения.
Экпоненциальная функция является монотонной, поэтому реше¬
ние на основе величины А(х) может быть заменено решением на ос¬
нове выборочного среднего значения:
г=1
которое должно сраниваться с порогом
a2 In А0
(1.35)
(1.36)
2 ra(ai - ао)
Принимается гипотеза Hi, если х > хо. Поверхность решения
определяется равенством х = хо или
£
г= 1
Xi = гахо-
(1.37)
Это равенство определяет плоскость.
Проверка статистических гипотез
19
Как известно, Е(х) = ак, к = 0,1, а дисперсия Е[(х — ак)2] =
а2/п в силу независимости отсчетов. Выборочное среднее как сум¬
ма гауссовских случайных величин имеет нормальное распределение
Wq(x) в случае гиипотезы Я0 и W\(x) в случае гипотезы Н\ при рав¬
ных дисперсиях D = а2/п. Поэтому ошибки Q0 и Qi определяются
соотношениями:
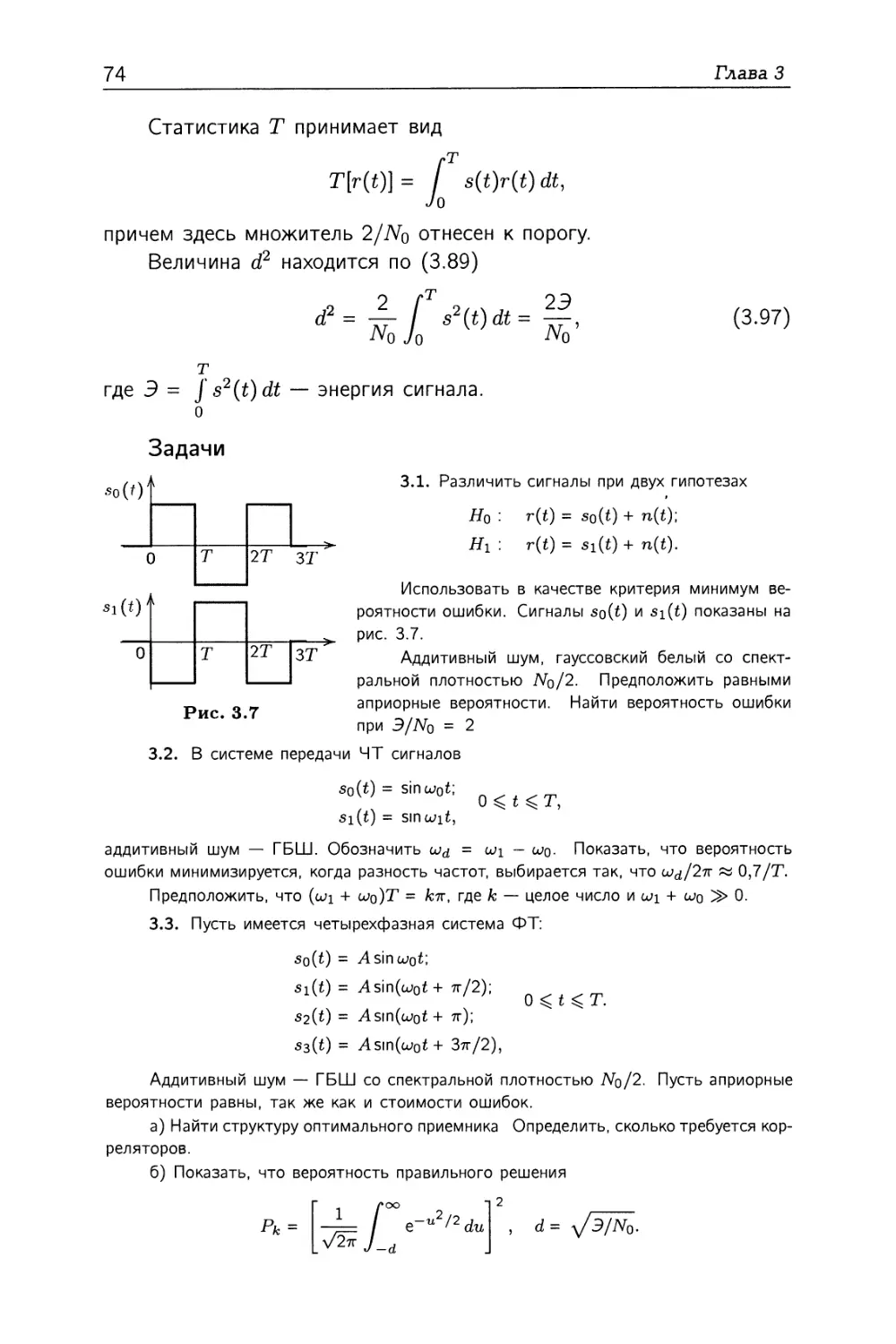
1.1. Найти критерий проверки гипотезы Но относительно гипотезы Hi, обеспе¬
чивающий минимум ожидаемых потерь, если Щ — гипотеза о том, что наблюдаемое
действительное число х имеет равномерное распределение
Априорные вероятности Р(Но) - 1/4, Р(Н\) = 3/4. Потери, связанные с ошиб¬
ками обоих родов, одинаковы. Найти полную вероятность ошибки.
1.2. Определить оптимальный алгоритм распознавания двух пуассоновских слу¬
чайных процессов с интенсивностями тп\ и m2, наблюдаемых в течение интервала Т.
1.3. Пусть форма принимаемого сигнала описывается равенством
где so(t) = cos31: si(t) = cos21\ n(t) = xi cost+ a^sin t\ a x\ и X2 — независимые
гауссовские случайные величины (СВ) с нулевыми средними значениями и дисперсиями
а2. Найти функцию для которой с вероятностью, равной единице,
1.4. Вычислить амплитуду видеоимпульса s(t), который при приеме на фоне
гауссовского шума со спектральной плотностью
обеспечит заданную вероятность ложной тревоги Qo и вероятность правильного обна¬
ружения Qd при использовании одного отсчета входного сигнала х{Ьк)- Рассчитать
необходимое отношение сигнал/шум при Qo = 0,01 и Qd = 0,9.
Qo = Wo(x)dx‘, Q i= Wi(x)dx.
Интегрируя, получаем, как и в примере 1.1,
Задачи*
при 0 ^ х ^ 4;
при других х,
a Hi — гипотеза о том, что х имеет распределение
x(t) = Si(t) + n(t), 0 ^ t ^ 27г, i = 0,1,
при 1/1 < /с,
ПРИ |/| > /с,
* Решения задач 1.1-1.9 приводятся в [20].
20
Глава 1
1.5. Пусть имеется аддитивная смесь x(t) сигнала s(t) и шума n(t):
x(t) = Si(t) + n(t),
где so(t) = 0, si(t) = M; n(t) — гауссовский шум с дисперсией сг2.
Определить оптимальный алгоритм обнаружения сигнала при использовании од¬
ного отсчета, если
а) М — гауссовская СВ с математическим ожиданием Е(М) = т и диспер-
б) М — неизвестная детерминированная величина.
1.6. Найти необходимое число отсчетов входного колебания для использования
критерия Неймана-Пирсона, которое обеспечивает заданные вероятности ложной тре¬
воги Qo и обнаружения Qd.
1.7. На вход приемника поступает аддитивная смесь сигнала и шума
где so(t) = 0; si(t) = A, n(t) — гауссовский шум с нулевым средним значением и
корреляционной функцией Я(т).
Требуется:
а) построить оптимальный алгоритм обнаружения сигнала при использовании
двух отсчетов входной реализации через интервал времени Д£;
б) нарисовать схему оптимального обнаружителя:
- при прямой реализации алгоритма;
- при использовании метода выбеливания,
- при использовании метода ортогональных преобразований.
1.8. Пусть имеется аддитивная смесь сигнала s(t) и узкополосного гауссовского
шума n(t) с нулевым соедним значением и дисперсией а2
где s(t) = Acos(ujct + ip), ip — СВ, равномерно распределенная в интервале (0,27г).
Определить оптимальное правило обнаружения сигнала, если наблюдается вы¬
борка огибающей колебания x(t) v = (vi,v2, где отсчеты огибающей можно
считать независимыми.
1.9. Показать, что для условия задачи 1.8 вероятность ложной тревоги [7]
сией сг2м\
x(t) = Si(t) + n(t). i = 0,1,
x(t) = s(t) + n(t),
а вероятность обнаружения
где 7 = A2/2а2 — ОСШ, ln(x) — модифицированная функция Бесселя.
1.10. Найти ОП, чтобы выбрать между гипотезами
Н\ : Wi(x) = - е х /2, —сю < х < оо;
—сю < х < сю;
Н0 : Wo(s) = ( У2 ПРИ 1<х< 1:
^ 0 при других х.
а) При пороге, равном единице, найти область решения.
при — 1 < х < 1;
при других х.
Проверка статистических гипотез
21
б) Использовать критерий Неймана-Пирсона при Qо = а. Какова при этом об¬
ласть решения.
1.11. Основываясь на одном измерении, использовать критерий минимакс, чтобы
проверить гипотезы
Но : r(t) = n(£); Hi : r(t) = 1 + n(t).
Пусть n(t) — гауссовский процесс с нулевым средним значением и средней мощ¬
ностью а2.
Принять следующие условия: Соо = Сц = 0; Сю = Coi = 1. Найти порог
решения.
1.12. Использовать критерий Неймана-Пирсона для проверки гипотез
Но : j! = 0; Hi : fi = 1.
При единственном наблюдении х[0] « 1) найти ошибки 1-го и 2-го родов
(Qo и Qi = 1 — Qd). Изобразить зависимость Qi = /(Qo)-
1.13. Пусть требуется обнаружить постоянный сигнал в гауссовском белом шуме
так, что ВЛТ Qo = 10“4 и вероятность обнаружения Qd = 0,99. При условии, что
ОСШ d2 = 10 lg(A2/cr2) = —30 дБ, найти наблюдаемое число отсчетов N.
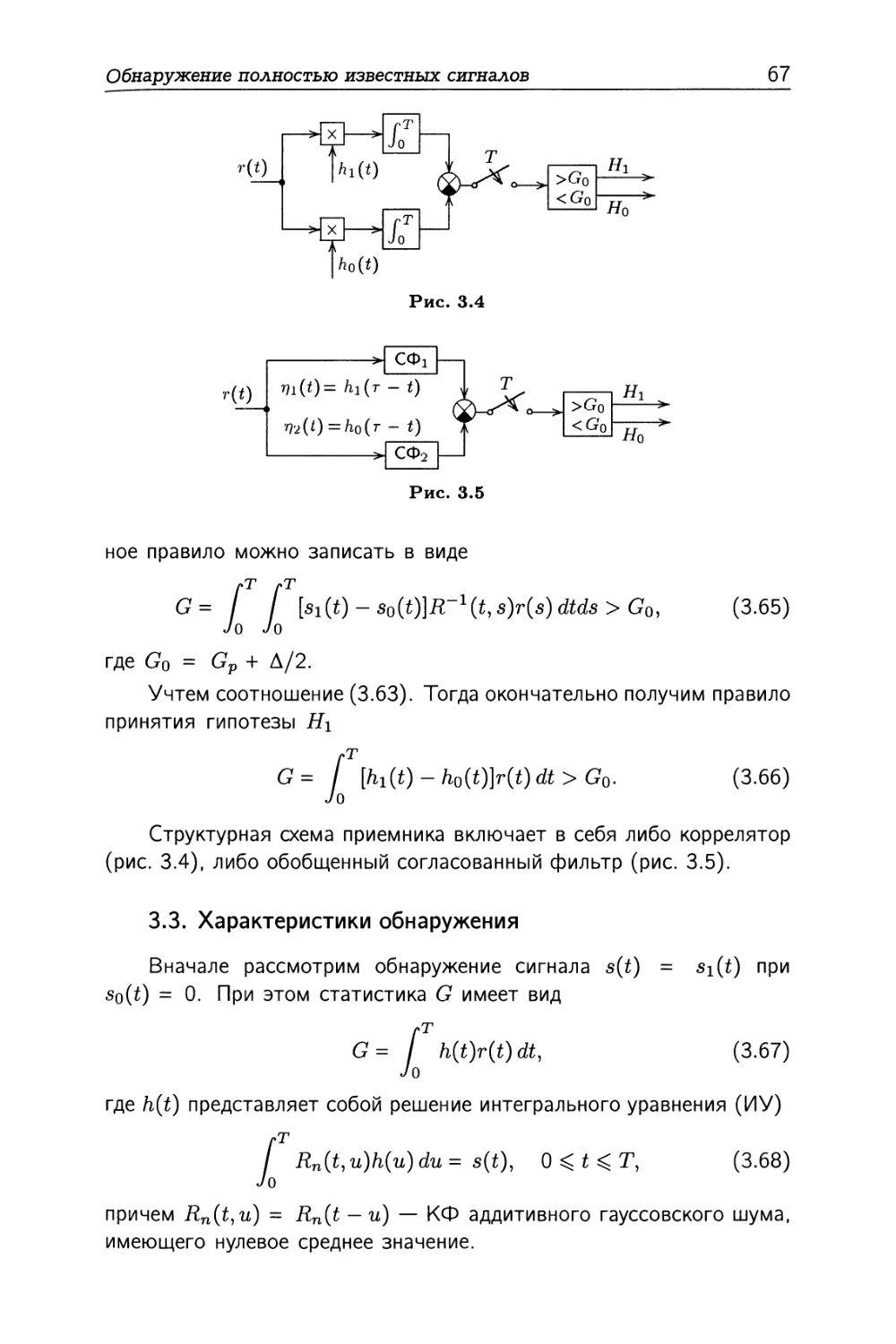
2 Обнаружение полностью известных
сигналов (дискретные процессы)
Вначале рассмотрим обнаружение сигнала на основе наблюдае¬
мой выборки конечной длины Хп. Исследуем обнаружение сигнала в
гауссовском белом шуме (ГБШ).
2.1. Обнаружение сигнала в белом шуме
В процессе обнаружения рассматриваются две гипотезы
где сигнал s[n] предполагается известным; w[n] — отсчеты ГБШ с
дисперсией а2 и нулевым средним значением: E{w[n\) = 0. Отсчеты
КФ ГБШ имеют вид
где 5[к] — символ Кронекера.
Обнаружитель Неймана-Пирсона принимает гипотезу Яь если
отношение правдоподобия (ОП) превышает заранее заданный порог,
когда
Но : х[п] = Цп], п = 0,1,— 1;
Hi : х[п] = s[n] + w[n\, п = 0,1,N — 1,
(2.1)
r„,[A:] = E(w[n]w[n + к]) - сг25[к],
(2.2)
(2.3)
где XN = (ж[0],ж[1],...,x[./V - 1])т.
В (2.3)
В результате по (2.3) получим ОП
1 /N-1 JV—1
In L(XN)= J^(a:[n] - s[n])2 - ^ х2[п] > In7.
'N-1 TV —1
_7l = 0
n=0
Обнаружение полностью известных сигналов
23
Принимается гипотеза Яь если
~2 _ 2^2 Ц s2W > In 7-
71 — 0 71 = 0
Поскольку сигнал s[n\ известен полностью, то его энергию можно
включить в величину порога. В результате получим статистику
N~ 1 х
Т(Хдг) = ^2 x[n\s[n\ > °2 In7 + 2^’
71 = 0
TV—1
где Э = s2[n\ ~ энергия сигнала.
тг=0
Вводя новую величину порога 7' = a2 In7+ (1/2)3, окончательно
получим, что принимается гипотеза #ь если выполняется неравен¬
ство
TV—1
Г(Хдг) = J2 ®[«]s[«] > У- (2-4)
71 = 0
Таков обнаружитель Неймана-Пирсона, который включает в себя
формирователь статистики Т(Хм) и устройство сравнения с порогом
7', причем величина порога должна удовлетворять заданной вероят¬
ности ложной тревоги (ВЛТ) Qo = а.
Пример 2.1. Обнаружение сигнала постоянной величины. Пусть
s[n] = А = const, где А > 0, тогда по (2.4) статистика Т(Хдг) име¬
ет вид
TV —1
T(XN) = А 22 *[«]•
71 = 0
Введя новую статистику Т'(Х^) = j^jT(Xn), находим, что при¬
нимается гипотеза Hi, если
TV—1
T'(XN) = - £ x[n] =х> 7", (2.5)
71 = 0
где 7" = У/NA] х — выборочное среднее.
Получили обнаружитель на основе выборочного среднего. При
А < 0 принимается гипотеза Hi, если х < 7".
Для того чтобы найти характеристики обнаружителя, необходимо
определить характеристики статистики Т'(Хлг) для каждой из гипо¬
тез. В силу гауссовского характера выборочного среднего достаточно
найти лишь среднее значение и дисперсию выборочного среднего.
24
Глава 2
При гипотезе Щ
( I N-l \ N-1
£(T'(Xn) | Я0) = £7(5) = £ - £ w[n] = - £ E(w[n}) = 0.
V п=0 / п=0
Аналогично при гипотезе Hi
E(T'(Xn) I ЯО = А.
Дисперсия статистики (выборочного среднего)
J2
/ N-1 \ JV-1
N Е «М = 7V2 Е var(™M)
\ 71 = 0 / 71 = 0
По = var(T'(Xn) I Я0) = var ( Цп] ) = var(to[n]) = ^г,
так как, по предположению СВ w[n] являются независимыми (см. (2.2)).
Аналогично при гипотезе Hi получим
Di = var(Г'(Хлг) I Hi) = <j2/N = D0.
Таким образом, гауссова статистика 'Т(Хлг) имеет параметры
T’(XN) ~ I м°Аа22ш\ ПрИ^0’ (2.6)
4 ' \N(A,a2/N) при Яь 4 '
Поэтому ВЛТ
Qo = P{T'(XN) > 7" I Но} = Q{l"/D), (2.7)
где Q(z) — функция нормального распределения
1 Г°° 9
Q(z) = у e-u /2 du.
Поэтому
Г)0 = - [ р-«2/2£>о л, = [ р-*2/2 и? - п (-1 ^
g° У7„ dU V2i Jy/л/Щ Q\VD~o)'
Аналогично получим вероятность обнаружения
Qrf = P{T'(XN) > 7" I Я,} = Q (2^) • (2-8)
По (2.7) находим процентную точку нормального распределения
l" / \/~Do = Q-1(Qo)-
Тогда вероятность обнаружения принимает вид
Qd= Q(g_1(Qo)-V^), (2.9)
где d2 = A2N/a2 — отношение сигнал/шум (ОСШ).
Обнаружение полностью известных сигналов
25
CL
О
5
10
15 d2, дБ
Рис. 2.1
Характеристики обнаружения данного обнаружителя изображены
на рис. 2.1 при Qo = Ю”п, п = 1,7, в зависимости от величины ОСШ
^дБ = Ю lg(iVTL2/cr2) от 0 до 20 дБ.
Иногда удобно характеристики обнаружения отображать в лога¬
рифмическом масштабе как функцию ОСШ d.
Задачу обнаружения постоянного сигнала можно обобщить и рас¬
сматривать задачу различения двух постоянных сигналов при наличии
гауссовского шума. Эта проблема называется проблемой сдвига сред¬
него (англ. термин: mean-shifted Gauss-Gauss). В этом случае вместо
статистики (2.6) получим статистику Т со свойствами
где fix > /л0.
Принимается гипотеза Яь если Г > У, и Я0 в противном случае.
Таким образом, принимается та или иная гипотеза в зависимости от
сдвига среднего значения статистики.
Для такого обнаружителя ОСШ d2 обобщается и называется ко¬
эффициентом девиации
N(fi0,a2) при Я0;
N(/jLi,a2) при #ь
2= [Е(Т | Hi) — Е(Т | Я0)]2
var(Т | Н0)
При 110 = 0 d2 = fi\/(J2 - ОСШ.
В данном случае ВЛТ
26
Глава 2
Вероятность обнаружения
Qd= P{T>i\H1}= Q1 7' ^
= q (>о + aQ HQo) ~ mi j = q
Q_1(Qo) - ———
или, используя (2.10), получим
Qd= QlQ-'iQo)-^?}. (2.11)
В системах связи при передаче сигналов задача обнаружения
(2.1) может быть рассмотрена как прием бинарных посылок, таких,
что so [га] = 0; si[ra] = А. Предполагая равными их априорные вероят¬
ности Р{Но) = Р{Нi) = 1/2, получим обнаружитель, минимизирую¬
щий вероятность ошибки Рош, так что принимается гипотеза Яь если
W(XN 1 ЯО Р(Н0) =
W(XN | Н0) Р{Нг)
Таким образом, принимается гипотеза Яь если выполняется не¬
равенство (2.3) при 7 = 1. И после логарифмирования в случае вы¬
полнения неравенства (при sn = А)
N-1
-^(-2А 22 х[п] + NA2) > 0. (2.12)
71 — 0
Отсюда следует правило решения
N—1
1
X
22 > А/2. (2.13)
71 = 0
как и ранее, решение принимается на основе статистики х (выбороч¬
ного среднего). Как было показано
Г iV(0, Dq) при Я0;
\N{A,Do) при Яь
где Do = <j2/N.
Вероятность ошибки находится по формуле
Рош = Р(Н0 | Я!)Р(Я0 + Р(Нг | Яо)Р(Яо), (2.14)
где P(Hi | Hj) — условная вероятность принятия гипотезы Hi при
условии, что истинной является гипотеза Hj.
При P(Hi) = Р(Но) = 1/2 получим вероятность ошибки
Рош = \\Р{Но I Цх) + Р(Я! I Яо)] =
Обнаружение полностью известных сигналов
27
= \[Р{х < j | Н,} + Р{х > |
1-Q
А/2-А
Учтем соотношение
Q(-x) =
'/Do)
1 - Q(ar) = Ф(ж),
#o}] =
ст*
iV‘
(2.15)
где
«■>-££
2 “ du.
В результате получим
Рош = <3
In а2
■0-
4сг2
(2.16)
N-1
Е
н=0
Т(ХЛ^
>у
<у
Но
Рис. 2.2
Заметим, что в общем слу¬
чае согласно алгоритму (2.4) статистика Т(Хм) взвешивает наблю¬
даемые данные, весовые коэффициентами являются отсчеты сигнала
s[n\. Такой обнаружитель функционирует как коррелятор (рис. 2.2),
вычисляет взаимную КФ входного воздействия и сигнала.
Корреляционный эффект может быть также достигнут за счет
применения цифрового согласованного фильтра (ЦСФ) на базе КИХ-
фильтра [60], характеристики которого имеют конечное число отсче¬
тов h[n], не равных нулю при п = 0,1,N— 1. В совокупности отсче¬
ты ИХ можно представить вектором = (h[0], /г[1],h[N - 1])т.
Отклик ЦФ в момент времени п имеет вид свертки [60]
у[п] = £ h[n — k\x[k], п > 0.
(2.17)
к=0
Введем обращенный вектор ИХ = {h[n\,h[n — 1],/г[0])т,
тогда (2.17) можно записать в векторной форме
У[п]
(х[0], х[1],..., х[п])т.
H^Xjv, (2.18)
где XN
При п < 0 значение отклика равно нулю, так как предполагается,
что отсчеты входного воздействия не равны нулю только в интервале
[0,^-1].
Известно [60], что для ЦСФ его ИХ h[n\ является «зеркальной»
версией сигнала
h[n] = s[N — 1 — n]l[n], n = 0,1,N — 1,
(2.19)
28
Глава 2
5i
4-
2
1 •
a)
Iii
2 3 4
N -
hln]
5-
4'
31
2-
1 '
2 3 4
N - 1
Рис. 2.3
где 1 [n] — функция единичного сигнала (рис. 2.3,а)', N — 1 — время
последнего отсчета сигнала.
При сигнале рис. 2.3 ИХ ЦСФ представляет собой зеркальное
отображение сигнала относительно оси ординат с последующим сдви¬
гом вправо на N — 1 отсчетов. При этом отклик ЦСФ согласно (2.17)
имеет вид
у[п] = £ s[N — 1 — (п — к)]х[к]
к=О
ЦСФ
п — N — 1
Рис. 2.4
>v
<у
Я1
Но
и в конце действия сигнала при
к = N — 1 получим
N-1
y[N — 1] -Е s[k]x[kl (2.20)
fc=о
что совпадает со статистикой Т(Х^) корреляционного обнаружителя
(см. рис. 2.2).
Обнаружитель в форме ЦСФ изображен на рис. 2.4.
Для сигнала с неизменными значениями отсчетов (рис. 2.5,а) ИХ
ЦСФ имеет вид рис. 2.5,6, и отклик ЦСФ изображен на рис. 2.6 (оги¬
бающая отклика имеет вид треугольного импульса). Причем макси¬
мум отклика приходится на время последнего отсчета сигнала.
Фч
1«
•им..
1 2 3 4 п
N - 1
h[n]
1 <
т т т т
1 2 3 4 П
N - 1
Рис. 2.5
уЫ
5
4
3
2
1
JLl
2 3 4 5 6
N - 1
Рис. 2.6
7 8 9 10
Обнаружение полностью известных сигналов
29
Свертка (2.17) соответствует произведению Фурье-образов со¬
множителей, и тогда по теореме Парсеваля по (2.17) получим
/•1/2
у[п}= / H(f)X(f)ei2nfn df, (2.21)
J-1/2
где H(f) = д9{h[n])\ X(f) = gg{x[n]), %g — знак дискретного пре¬
образования Фурье (ДПФ).
Используя (2.19), можно показать [60], что
H{f) = S*(f)e~i2nf(N~1\ (2.22)
Здесь S*(f) — комплексно-сопряженная величина Фурье-образа сиг¬
нала.
По (2.21) с учетом (2.22) находим
/*1/2
У[п] = / S*(f)X(f) ехр[12тгДп - (N - 1))] df. (2.23)
J-1/2
Отсюда при п — N — 1 получим
/•1/2
y[tf-l] = / S*(f)X(f)df.
7-1/2
Основное свойство ЦСФ на основе КИХ-фильтра (нерекурсивно¬
го ЦФ) — максимизация ОСШ на выходе фильтра.
Определим ОСШ на выходе фильтра в момент последнего отсче¬
та сигнала
E2(y[N-l]\H1)
q var(y[N - 1] | Я1)’
причем согласно (2.17)
71
y[N - 1] - Y, h^N ~ 1 _
k=0
Тогда
TV—1 TV-1
E(y[N-1] \Hi)= h[N-l-k]E(x[k}) = ^ h[N-l-k]s[k] = my.
k=0 k=0
В знаменателе ОСШ q имеем
var(y[iV - 1] | = E[(y[N - 1] - my)2] =
30
Глава 2
Введем векторы
SN = (s[0], s[l],s[N — 1])T; W„ = (ш[0],ш[1],...,ш[^ — 1])т;
HN= (h[N-l],h[N-2],...,h[0])T.
Заметим, что Hjv — это обращенный вектор ИХ, когда Ндг =
(h[0],h[l\,...,h[N - 1])т. Тогда получим ОСШ в векторной форме
= (HTNSN)2 (HtnSn)2 (H^Sat)2 _
Q E[( H^WN)2] HTNE(WNvrN)HN H>2IHjv
_ 1 (h;s^)2
^2 Н^Ндг
Согласно неравенству Коши-Буняковского
(HtnSn)2 < (nTNHN)(SrNSN), (2.25)
причем равенство достигается в том и только в том случае, когда
Йм = cSyv,_c = const. При с - 1 отсюда находим H/v = Sat, или
(Нлг)опт = Sat, т.е. оптимальный вектор ИХ равен обращенному век¬
тору сигнала, а это означает равенство (2.19) h[n] = s[N — 1 — п],
п = 0, l,...,iV— 1, которое характеризует ЦСФ. При этом из (2.24)
с учетом (2.25) получим
q ^ \STNSN.
(7
Следовательно, максимум ОСШ
q= qm- S^SN/a2 = Э/a2, (2.26)
где Э — энергия сигнала.
Найдем характеристики обнаружения обнаружителя на основе
ЦСФ.
Согласно (2.4) принимается гипотеза Яь причем статистика
Т(Х^) является гауссовской СВ. Найдем два первых момента этой
статистики:
Е(Т \Н0) = е(^2 Цп]в[п]| = 0;
\п=0 /
Е(Т | Нх) = E (Y (SN + w[n])s[n] J = Э;
\n=0 /
TV-1 TV-1
var(T | Hq) = var ^ w[n]s[n] = ^ s[n] var(w[n]) = E A
TV —1 TV-1 TV—1
°'n\
71 = 0 71 = 0 71 = 0
= o2
-2Э.
Обнаружение полностью известных сигналов
31
Аналогично получим var(Т | Hi) = сг2Э.
Таким образом,
ЛРИ"о; (2.27)
\jV(3,cr23) при Hi.
Согласно (2.4) ВЛТ
Qo = P{T(XN) > У | Но} = Q{i/V^3). (2.28)
Вероятность обнаружения
Qd = P{T(XN) > i | Hi} = Q[{i - Э)/у/&Щ. (2.29)
процентная точка нормального распределения
У = Q-\Qo),
>/о*Э
подставляя ее в (2.28) получим
в- =«(v^~%3Qo) -Щ’О («"<«"> - Щ ■ <2-3°)
Здесь, согласно (2.26) аргументом служит qm = Э/a2 = d2.
Характеристика обнаружения изображена на рис. 2.7 при Qo =
10-n, п = 1/7, в зависимости от ОСШ dAв = 101д(Э/сг2).
По (2.30) замечаем, что форма сигнала не оказывает влияния на
характеристики обнаружения. Однако, как будет показано, если шум
w[n] коррелирован, то форма сигнала оказывает влияние на характе¬
ристики обнаружения.
32
Глава 2
2.2. Обобщенные согласованные фильтры
Согласованные фильтры подразумевают ГБШ на входе фильтра,
но если в аддитивной смеси сигнала и шума (2.1) шум w[n] является
коррелированным, то его ПРВ — гауссовская с матрицей ковариации
К, причем Wiv ~ N(0,K) [153]. Если шум стационарный в широком
смысле с нулевым средним значением, тогда
(K)mn = cov (w[m]w[n]) = E(w[m\w[n\) = rw [т — п\.
В данном случае при E(Wм) = 0; К = R
-^(Xn-SnYR-^Xm-Sn)
W(XN I Щ) = 1 . exp
V ^ (27r)JV/2^R
W(XN I H0) = 1 . exp
v 1 (27r)^/2VditR
Заметим, что при Я0 Хдг ~ AT(0,R); при Hi Хм ~ iV(Sjv,R)-
Принимается гипотеза Hi, если
1,
2'
-xX^/R_1Xjv
Здесь ЛОП
In А(Хлг) = -\[{XN - SnYR-HXn - SN) - XIR-'Xn] ■■
^XlfR-'XN - 2X^R-1Sjv + S]vR_1SN - X^R^Xn
= X]vR_1SN - ^S]vR_1SN. (2.31)
Если на зависящее от наблюдаемых данных второе слагаемое
включить в величину порога, то получим
T(XN) = X^R_1SW > у. (2-32)
Обнаружитель, действующий по алгоритму (2.32), называется
обобщенным коррелятором или обобщенным согласованным филь¬
тром. Опорный сигнал в данном случае имеет вид S'^ = R-1S;v.
Тогда статистику можно записать в виде
T(XN) = XIR-'S N = XJfS'N,
т.е. в этом случае входное воздействие коррелирует с преобразован¬
ным (искаженным) сигналом.
Обнаружение полностью известных сигналов
33
В частном случае ГБШ R = сг21, тогда по (2.32) получим
> 7' или = 22 ^[ФИ > 7;/.
п=0
как при согласованной фильтрации.
Пример 2.2. Некоррелированный шум с неравными дисперсиями.
В данном случае w[n] ~ iV(0, сг2) и w[n] — некоррелированная СВ,
когда R= diag(cro,cr2, при этом R-1 = diag(l/crQ, 1/сг2,
Таким образом, согласно (2.32) принимается гипотеза Яь если
тГтг \ _ ®[n]e[n] ^
T(XN) - ^ > 7 •
71 = 0 П
Запишем статистику Т(Хдг) в виде
= V £ti±fM £М = у;1 («/w + гИ) гИ.
n=0 °n n^O V
Здесь отсчеты шума выровнены или обелены, так как R^/ = I. Та¬
ким образом, первой процедурой обобщенного СФ является обеление
отсчетов шума; при этом сигнал искажается и становится равным
s'[n\ = s[n\/an. В результате обеления шума обнаружитель осуществ¬
ляет корреляцию с искаженным сигналом. Статистика обобщенного
СФ выражается в виде
t(x!n) = ХУкИп],
71=0
где x'[n] = х[п]/сгп.
В случае, более общем, чем рассмотренный в примере 2.2, пред¬
положим, что матрица R положительно определенная, тогда обратная
ей матрица R-1 существует и является также положительно опреде¬
ленной. Следовательно, она может быть факторизирована в виде
R-1 = DTD,
где D — несингулярная N х TV-матрица. Для примера 2.2 D =
= diag(l/a0, I/ax,...,1/ajv-i).
В общем случае получим статистику
T(XN) = X^R-'Sn = XtnBtBSn = X’fiS'ft,
где = BXN, S'n = DSn. Матрица D называется обеляющей.
Обобщенный согласованный фильтр с предварительным обели-
ванием шума имеет схему, показанную на рис. 2.8.
34
Глава 2
Обеляющая
Рис. 2.8
Пусть W'jv = DWjv, тогда
Rw> = E(W'nW'tn) = Е( DWjvWtwDt) = D£(WWT)DT =
= DRDT = D(DTD)"1DT = DD^D^D1 = I.
Если длина N вектора наблюдения велика и шум стационарный,
то обобщенный СФ может быть аппроксимирован таким образом, что
его статистика принимает вид
где Sw(f) — энергетический спектр шума.
Характеристики обнаружения обобщенного СФ. Статистика обоб¬
щенного СФ имеет вид (2.32) и является гауссовской СВ, при той и
другой гипотезах, причем
Е{Т | Н0) = Е(W^R_1WN) = 0;
Е{Т | Щ) = Е[{SN + WnYR-'Sn] = S^R-'Sn;
var(T | H0) = £[(W]vR-1Sjv)2] = £(S^R-1WwW]vR-1SN) =
= S^R-1^(W7VW]v)R-1SAr = S]vR_1S N.
var(T | H^ = E^R-'Sn - ^(X^R-^w)]2} =
= E{[XN - EiX^YR^SN} = E(W^R-'Sn)2 = var(T | Я0).(2.35)
Как и в случае БШ, используя свойства статистик (2.33), (2.34),
можно показать, что вероятность обнаружения имеет вид
(2.33)
(2.34)
В преобразовании использовалось свойство
(R-1)T = R"T = R-1.
Далее
Qd = Q{Q~\Qo) - VdP),
где d2 — коэффициент девиации,
[E{T | Щ)-E{T | Я0)]2
var(T | Ho)
(2.36)
Обнаружение полностью известных сигналов
35
Нетрудно показать, что здесь d2 = SIR-1 Sn, и таким образом
Qd = Q[Q~4Qo) - ^StnR-1Sat]. (2.37)
При R = o2l отсюда следует соотношение (2.30). Однако, если при
БШ на входе форма сигнала не имела значение, то в общем случае
R ^ а21 сигнал может быть выбран таким образом, чтобы макси¬
мизировать величину StnK~1Sn и, следовательно, максимизировать
вероятность обнаружения Qd.
Осуществим максимизацию квадратичной формы S^R-1 Sn при
условии (ограничении), что энергия сигнала конечна: STNSn = Э или
Э- StnSn = 0.
Составим функцию Лагранжа (шаг 1 [60])
L(Sn,X)= StnR~1Sn+ \(9-StnSn).
Возьмем производную функции Лагранжа по S# = S и прирав¬
няем ее нулю (шаг 2 [60]).
Г\ J
— = 2R_1S - 2AS = 0. (2.38)
U\5
При этой операции использовалось равенство
ЩМ = 2Ах при А = I: %^=2х,
ах ах
где А — симметрическая матрица, как и R-1.
По (2.38) получим
R-1Sjv = ASiv. (2.39)
Следовательно, Sn является собственным вектором матрицы
R-1. Этот собственный вектор должен максимизировать квадратич¬
ную форму SjvR-1 SN.
По (2.39) умножением слева на вектор находим
StnH~1Sn = AS^Siv = А Э.
Таким образом, собственный вектор матрицы R-1 должен соответ¬
ствовать максимальному собственному числу А = Атах-
Замечание. Собственные значения положительно определенной
матрицы вещественны и положительны.
По (2.39) умножением слева на матрицу R получим
S n = ARS Ni или RSjv = T&N-
л
Следовательно, искомый сигнал, максимизирующий квадратич¬
ную форму S^R-1 Sn представляет собой собственный вектор мат¬
36
Глава 2
рицы R-1, который соответствует минимальному собственному зна¬
чению этой матрицы. Если нормировать собственный вектор V так,
что ||V|| = 1, то искомый сигнал удовлетворяет соотношению
SN= у/ЭУ. (2.40)
Пример 2.3. Пусть корреляционная матрица имеет вид [60, при¬
мер 24.2]
R =
где р — коэффициент корреляции, такой что \р\ < 1. Найти сигналь¬
ную форму, максимизирующую ОСШ.
Решение. Решая характеристическое уравнение [60] (1 -\)2-р2 =
= 0, получим Ai = 1 + р\ Л2 = 1 — р.
Собственные векторы V*(г = 1,2) должны удовлетворять систе¬
ме однородных уравнений
(R - AI)V = 0,
или
1 — Ai
Р
>(1)'
'0'
Р
•<
1
гН
’[/С2)
0
(2.41)
Решая эту систему уравнений и нормируя собственные векторы,
получим [60, пример 24.2]
1
Полагая р > 0, когда отсчеты шума коррелированны положитель¬
но, находим, что минимальному собственному значению А2 = 1 — р
соответствует вектор V = V2. Тогда оптимальный сигнал имеет вид
(2.42)
s2 = \/3V2 = у -
При этом статистика (2.32) приобретает форму
Г(Х2) = Х^ВГ^г = X£R "1V5v2.
Поскольку
R
-1
1 — р2
то получим
1 -р
-р 1
r_1v2 =
у/2 1 -р'
г(1+р)
(2.43)
Обнаружение полностью известных сигналов
37
За счет вычитания двух отсчетов, когда х[0] - х[1\ = s[0] - s[ 1] +
+ w[0\-w[l], шум в силу положительной корреляции отсчетов сильно
подавляется, при этом сигнальная составляющая по причине проти-
вофазности отсчетов (см. (2.41)) усиливается.
Преобразуем ОСШ:
<? = S^R_1S2 = 3V^R_1V2.
Учитывая (2.42), получим
. Г шс* (,44,
J-1/2 ^W\J)
w z * 1
Р 1 ~ Р
При р -> О (когда шум полностью подавляется) ЦО] - w[ 1] -> О,
d2 —> оо.
В случае достаточно большой длины вектора наблюдения стаци¬
онарного шума справедлива статистика (2.33) и характеристика обна¬
ружения Qd (2.37), где ОСШ d2 заменяется на величину
г1!2 i.<?mi2
' -1/2
Таким образом, чтобы максимизировать вероятность обнаруже¬
ния, необходимо энергию сигнала \S(f)\2 сосредоточить на частотах,
где ЭС шума Sw(f) минимален.
2.3. Применение алгоритмов обнаружения
Рассмотрим вначале бинарную задачу обнаружения (различения)
Но : х\п] = 5nfnl + w\n\,
° L п = 0,1,...,ЛГ- 1, (2.45)
Hi : x[n\ = si [n\ + w[n\,
где so И и ^i[n] — известные детерминированные сигналы, w[n\ —
ГБШ с нулевым средним значением E{w[n\) = 0 и дисперсией а2.
При равных априорных вероятностях передачи сигналов so[n] и
si[n\ Р(Но) = P(Hi) = 1/2 принимается гипотеза Hi, если выпол¬
няется неравенство
W(XN | Hi) P(tfo) _
W{XN I Ho) 1 P(Hi) •
Таким образом, в данном случае при обнаружении используется кри¬
терий наибольшего правдоподобия: выбирается та гипотеза, для ко¬
торой условная ПРВ И^(Хдг | Hi) наибольшая, эта ПРВ имеет вид
-7Г2
W(XN I Я,) = ехр
38
Глава 2
Следовательно, выбирается та гипотеза Щ, для которой минимальна
величина
N-1
D2 = 22 (Ф1 - *Ф])2 = (X* - SiNr(XN - SiN) = \\XN - SiN\\2.
n=0
(2.46)
Обнаружитель, действующий по этому алгоритму, называется
приемником минимальной дистанции (ПМД).
Согласно (2.46) принимается та гипотеза, чей сигнальный вектор
ближе к вектору наблюдения Х^.
Рассмотрим частный случай при N = 2. При
этом следует определить, какой из сигналов S02
или S12 передан, если наблюдается вектор Х2 =
= (х[0]х[1])т. Геометрически эту ситуацию иллю¬
стрирует рис. 2.9,а, где изображены на плоскости
векторы Х2, S02 и Si2.
Необходимо принять гипотезу Я0, если рас¬
стояние ||Х2—S021| меньше, чем расстояние ||Х2 —
— Si21| и в противном случае принимается гипо¬
теза Н\. По изображению на рис. 2.9,а должна
приниматься гипотеза Я0.
В общем случае на плоскости строится гра¬
ница решения, равноудаленная от точек So2 и Si2. Таким образом,
принимается гипотеза Я0, если точки Х2 попадают в область R0 и
гипотеза Яь если точки Х2 попадают в область Ri (рис. 2.9,6).
Алгоритм приемника минимальной дистанции связан со стати¬
стикой Тг(Хдг), г - 1,0, поскольку
N-1 N-1 N-1
D? = Yh x2[ni_ 2 Y Ф1*Ф]+ Y si W-
71 = 0 71 = 0 П = о
Статистика Т*(ХN) (2.4) принимает вид
N-l 1 N — 1 N-1 ^
Ti{XN) = 22 ФКЫ - 2 Y = Y ФКМ - у. (2.47)
71=0 71=0 71= 0
Таким образом, ПМД принимает гипотезу Hi для которой стати¬
стика Tj(Xjv) максимальна. Схема приемника минимальной дистагнР
ции изображена на рис. 2.10.
Вероятность ошибки Рош находится на основе теоремы о полной
вероятности:
Рош = P(Hi I Яо)Р(Яо) + Р(Яо I Hi)P(Hi),
г[1]
с5
S12
3)
*[0]
Обнаружение полностью известных сигналов
39
T0(XN)
S о [п]
Эо/2
X Ti(Xn)
Ti(Xn)>T0(Xn)
T0(XN)>T(XN)
Но
|si[n] \Э1/2
Рис. 2.10
где Р(Щ | Hj) — условная вероятность принять гипотезу Hit если
истиной является Hj.
В предположении равных априорных вероятностей Р(Но) =
= P(Hi) = 1/2 вероятность ошибки принимает вид
Рош = 1[.Р(Нг | Н0) + Р(Н0 | Нг)] =
= 1[Р{Гх > То | Но} + Р{Т0 > Тг \ Нг}] =
= i[P{Ti - То > 0 | Но} + Р{Т0 - Тх > 0 | Hi}]. (2.48)
Пусть T(Xjv) = Ti(Xjv) -To(Xjv), тогда по (2.46) получим
N-1 -
T(Xjv) = 22 *N(ei[n] - eo[n]) - 2 (Эх - Эо). (2.49)
п=0
Статистика Т(Хдг) является гауссовской как при Я0, так и при
Hi. Найдем числовые характеристик этой статистики:
N-1
Е{Т | Н0) = 22 so[n](si[n] - s0[n])
3i - Эо
n=0
n=0
N
n=0
71 = 0
= -\ £(*iM - S°W)2 = ~l\\SiN - Soivll2 = m<°>.
71 = 0
Аналогично получаем
mW = E(T | Ях) = |||SiN - SqjvII2 = -E(T | H0).
Найдем дисперсию статистики:
~N — 1
var(T | Я0) = var
(2.50)
22 xN(si[n] - so[n]) I Ho
_ 71 = 0
40
Глава 2
\\’(Т | Но)
W(T | Ih)
T
P(T < 0 \ II\) P(T > 0 \ IIq)
Рис. 2.11
N-1
= Y, var(z[n])(si[n] - 5oW)2 = cr21|Siiv - S0N\\ = D<0>.
n=0
Аналогично находим
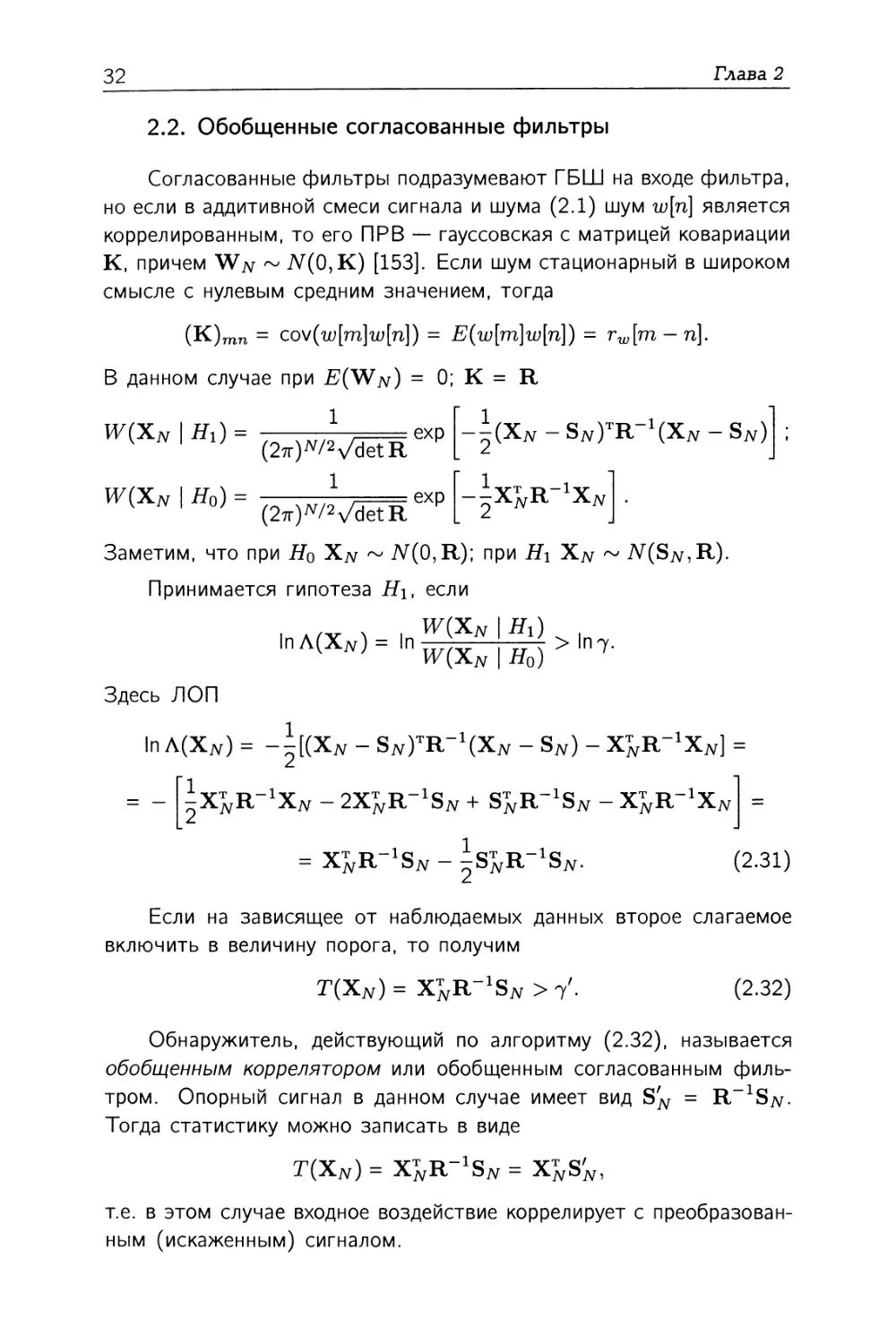
D(1) = var(T | Hi) = ct2||S1jv - S0N\\2 = var(T | H0) = D(0). (2.51)
Таким образом, условные ПРВ статистики W(T \ Но) и W(T
Hi) симметричны относительно оси ординат (рис. 2.11).
В силу симметрии условных ПРВ по (2.48) получим
где согласно (2.50), (2.51) Т ~ N(m^0\D0). Тогда по (2.52) вероят¬
ность ошибки может быть выражена через Q-функцию нормального
распределения:
Таким образом, с увеличением расстояния между сигналами
||Sin ~ Sow||, вероятность ошибки уменьшается.
Зафиксируем среднюю энергию сигналов Э = (Эо + 3i)/2, что
предполагает равные априорные вероятности.
Выразим расстояние между сигналами через среднюю энергию Э
Рош = P{T(XN) > 0 | Я0},
(2.52)
l\\S1N-S0N\\2 _
\/<72||Sijv - SqjvII2
Окончательно получаем
(2.53)
Обнаружение полностью известных сигналов
41
и коэффициент корреляции сигналов ps:
где
PS 1 /QТ Q , QT Q \ »
2\PlN^lN +
(2.54)
причем \р3\ ^ 1. Например, если сигналы ортогональны, когда
SxnSon = 0, то р3 = 0.
По (2.52) получим
Для того чтобы минимизировать вероятность ошибки, необходи¬
мо выбрать такие сигналы, которые гарантируют условие ps = -1.
Рассмотрим частные случаи.
Пример 2.4. Сигналы фазовой телеграфии (ФТ-сигналы, Phase
Shift Keying, PSK).
В данном случае рассматривается когерентный ФТ-сигнал, так
как предполагается, что сигнал известен полностью. Рассмотрим дво¬
ичный ФТ-сигнал (ДФТ-сигнал) (англ. binary PSK, BPSK)
S0[n] = Acos27r/On;
71 — U 1 ... Jy — 1.
Si[ti] = i4cos(27r/on+ 7Г) = — i4cos27r/on,
Здесь Sin = —Son-
При N = 2 и /о = 0,25 диаграмма сигналов изображена на
рис. 2.12. Очевидно, здесь ps = -1 (сигналы противофазны), так
как вероятность ошибки минимизируется. Каждый сигнал несет одну
и ту же энергию Э « NA2/2, так что Э = Э. Согласно (2.55)
здесь d2 = Э/сг2 — ОСШ.
График зависимости POUi(d2), при d2B = 101д(Э/сг2) изображен
на рис. 2.13.
Пример 2.5. Сигналы частотной телеграфии (ЧТ-сигналы) (Fre¬
quency Shift Keying, FSK).
Рассматриваются когерентные сигналы
(2.55)
Рош = <Э(л/Э/^),
(2.56)
So[n] = i4cOS7r/on;
si[n] = Acos27r/in,
n = 0,1,...,AT- 1.
42
Глава 2
Коэффициент ps сигнальной корреляции зависит от величины ча¬
стотного сдвига (девиации частоты). При |/i - /0| > 1/2N сигналы
можно считать приблизительно ортогональными и имеющими при¬
близительно одну и ту же энергию Э « NA2/2. Таким образом, по
(2.55) находим
Рош = Q(y/3/2a2). (2.57)
Зависимость Pom(d2) изображена на рис. 2.13. Сравнивая поме-
хоустойчивость ДФТ и ЧТ по рис. 2.13, по (2.56) и (2.57) замечаем,
что средняя энергия для ЧТ-сигнала должна быть в два раза больше
чем для ДФТ-сигналов, чтобы обеспечить ту же вероятность ошибки.
Пример 2.6. Случай га-кратных сигналов. Если предстоит вы¬
брать один из М сигналов {s0[n], si[n],..., sm-iM} пРи равных их
априорных вероятностях, тогда принимается гипотеза #*, для кото¬
рой W(Xдг | Щ) максимальна.
Оптимальным приемником и в этом является приемник мини¬
мальной дистанции (ПМД). Таким образом, принимается гипотеза
#ь если среди всех статистик {Т0(Хдг),Т0(Хдг), ...,ТМ-i(Xw)}, мак¬
симальной является статистика
N — 1 _
Tfc(Xjv) = 22 x[n]sk[n] - -у.
П — О
Схема оптимального приемника изображена на рис. 2.14.
Вычислить вероятность ошибки в общем случае весьма затруд¬
нительно, но в предположении ортогональности сигналов гауссовские
СВ будут некоррелированы, а следовательно, и независимы. В ре¬
зультате по (2.57) можно получить условную ковариацию вида
TV —1 ^
со\t{Ti,Tj I Hi)= Е
22 w[n]sj[n] > =
n=0
Обнаружение полностью известных сигналов
43
Рис. 2.14
N — 1 N-1
N-1
= ^ ^ E(w[m]w[n])si[m]sj[n] = <т2 ^ si[n]sj[n] = О,
m-О п=0 п=О
при г ^ j.
В последнем случае использовалось условие ортогональности
сигналов. В дальнейшем предположим равенство сигнальных энер¬
гий: 3i = Э. Ошибка возникает, если Hi является истинной, а ста¬
тистика Ti при этом не максимальна. Следовательно, справедливо
соотношение
М-1
Рош = 22 p{Ti < max№),| Hi)}P{Hi).
i=О
Используя симметрию всех условных ПРВ, как и в случае рис. 2.11
(при М = 2), получим
Рош = Р{То < max(Ti,T2, ...,Tm-i) | #о}-
При условии гипотезы Щ
N-1
Ti(xN) = 22
n—О
так что
rp /-V- л / N(3/2, а2Э) при г = 0;
Ы**г) ~ | N(—3/2, а23) при г J- 0.
(2.58)
Таким образом,
Рош = 1 — Р{То > max(Ti,T2, ...,Тм-1) | Но} =
= 1 — Р{Т\ < Т0,Т2 < То, ...,Тм-1 < То | Н0} =
/ОО
P{Ti < t, Т2 < Гм-1 < t | Т0 = t | Hq}Wt0 (t) dt =
-oo
44
Глава 2
/оо М — 1
П P{Ti<t\H0}WTo(t)dt.
■°° t=1
Здесь учтена независимость статистик Т*. Учтем (2.58), тогда по¬
лучим
21
рош = 1 - / фМ—1 (1 exp
/
«/ —с
= — г
л/2я- У_<
V а2 Э J V2na23
2а2Э V * 2
dt,
где Ф(х) = I— I е z I2 dz.
v 27Г J — оо
Делая подстановку и = (t + Э/2)/\/а2Э, окончательно получим
2"
dw. (2.59)
/оо
Om_1(w)—= exp
-оо V 27Г
Таким образом, вероятность ошибки зависит от числа сигналов
М и ОСШ d2 = Э/а2.
Эта зависимость изображена на рис. 2.15 при М = 2, 4, 8, 16
в диапазоне с?дб = 101д(Э/сг2) от 0 до 16 дБ. Увеличение М ведет
к увеличению вероятности ошибки. Это происходит по той причине,
что приемник должен различать большое число сигналов, таких, у ко¬
торых межсигнальное расстояние не увеличивается. Чтобы убедиться
в этом, потребуем для М ортогональных сигналов условия N ^ М.
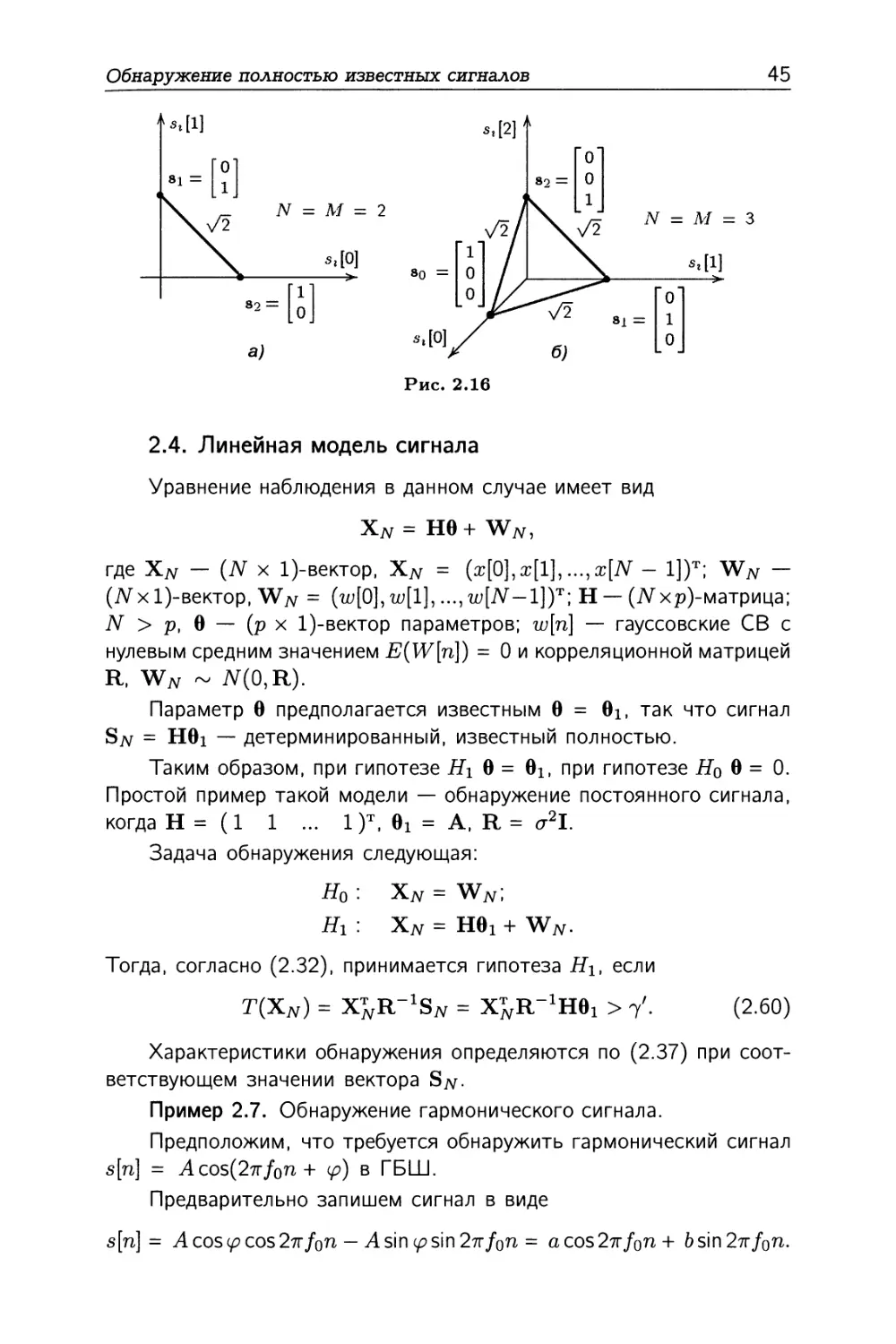
В качестве примера рассмотрим два случая (рис. 2.16).
Дистанция между сигналами одна и та же при М - 2 и при М -
- 3, так что энергия сигналов не увеличивается с ростом N. На
рис. 2.16 каждый сигнал имеет энергию Э = 1.
Рис. 2.15
Обнаружение полностью известных сигналов
45
.[1]
0‘
V
1
82 =
0
II
a:
и
Ю
l
а)
s,[0]
2.4. Линейная модель сигнала
Уравнение наблюдения в данном случае имеет вид
Хдг = Н0+ WN,
где Xw — (N х 1)-вектор, Х^ = (ж[0],ж[1],...,а:[ЛГ - 1])т; Wn —
(АГх1)-вектор, Wjv = (го[0], гу[1],..., ЦЛГ-1])Т; Н — (ЛГхр)-матрица;
N > р, 0 — (р х 1)-вектор параметров; u>[n] — гауссовские СВ с
нулевым средним значением E(W[n]) = 0 и корреляционной матрицей
R, Wjv ~ N{0,R).
Параметр 0 предполагается известным 0 = 0г, так что сигнал
S N = Н01 — детерминированный, известный полностью.
Таким образом, при гипотезе Н\ 0 = Oi, при гипотезе Щ 0 = 0.
Простой пример такой модели — обнаружение постоянного сигнала,
когда Н = (1 1 ... 1 )т, Oi = A, R = <т21.
Задача обнаружения следующая:
Н0 : Хдг = WN;
Hi: XN= H0i + WN.
Тогда, согласно (2.32), принимается гипотеза #ь если
T(Xjv) = X^R^Sjv = X]vR_1H0! > у.
(2.60)
Характеристики обнаружения определяются по (2.37) при соот¬
ветствующем значении вектора вдг.
Пример 2.7. Обнаружение гармонического сигнала.
Предположим, что требуется обнаружить гармонический сигнал
s[n] = Лсоб(27г/оп+ ф) в ГБШ.
Предварительно запишем сигнал в виде
s[n] = Acos(pcos27rfon-As\n(fs\n27rfon= acos27r/0n+ 6sin27r/0n.
46
Глава 2
Задача обнаружения следующая:
#о : х[п] = w[n}\
Hi : х[п] = acos27r/on+ frsin27r/0n + w[n],
где w[n] — ГБШ с дисперсией <т2.
Гипотезе Hi соответствует линейная модель
1 0
cos27r/o sin 27г/0
Н = ; 01 =
Lcos2^/0(7V-1) sin2^/o(7V-l)-
при этом 0 < /о < 1/2.
Согласно статистике (2.60)
Г(Хдг) = ^Х^Нвх.
<TZ
Масштабируя, получаем новую статистику
Т'(Хлг) = = -^(НтХдг)01,
п = 0,1,N — 1,
R = <7 I,
ЛГ
где
Обозначим оценку 0
N — 1
2 г
— Y xln1 cos2tt/0п
п=0
2 w-i
— ^ ж[п] sin 27Г/0П
п=0
Ь] (см. задачу 2.27), получим
Г'(Хлг) = aa + Sb.
Таким образом, статистика представляет собой корреляционный
момент истинного значения 0, 0i = (a, Ь)т с оценкой 0. Очевидно,
что если принимается гипотеза Я0 (Яо — истинна), то a « E’(a) «
0, 6 « Е’(ё) « 0, так что Т'(Хдг) = 0. Если истинна Яь то a «
£(a) « a, 8 « £(8) « 6, так что Т'(Хдг) = а2 + 62 (если /0 = k/N,
при к = 1,2,ЛГ/2 — 1, то тогда Е(а) = а и Е(Ь) = Ь). Значение
Т'(Хдг) = а2 + Ь2 пропорционально мощности сигнала.
Для обобщения полученного результата необходимо воспользо¬
ваться формулой оценки [66, с. 97] 0 = (HTR_1H)_1HTR_1Xw. Ис¬
пользуя (2.60), находим
T(XN) = X^R_1H0! = [(HTR_1H)(HTR_1H)-1HTR_1Xw]T0i =
= [(HTR1H)0]T0i = 0T(HTR1H)0i.
Обнаружение полностью известных сигналов
47
Используем свойство корреляции оценки 6:
R.0 = (ITR-1!!)-1.
Тогда получим, что принимается гипотеза Яь если
Г(Хлг) = e'R^ex > у.
(2.61)
Сравнивая (2.61) и (2.32), находим, что полученная статистика
аналогична статистике в задаче обнаружения известного сигнала Sn
в коррелированном шуме с коррелированной матрицей R, если вос¬
пользоваться соответствиями
В заключение по (2.37) находим характеристики обнаружения
2.1. Пусть s[n] = (—1)п при п = 0,1,2,3 и s[n] = 0 при других значения п.
Найти ИХ ЦСФ и значение сигнала на его выходе.
2.2. Используя (2.23), показать, что сигнал на выходе ЦСФ максимизируется
при п - N — 1.
2.3. Рассмотреть обнаружение сигнала s[n\ = Acos2nfon при 0 < /о < 1/2),
п = 0,1,..., N—1, в присутствии ГБШ. Найти сигнал на выходе ЦСФ в точке n = N — 1.
Предполагать, что сигнал задерживается на время по > 0, так что принимается его
версия s[n-по]. Используя тот же ЦСФ, что и ранее найти сигнал на выходе ЦСФ при
n = N — 1 как функцию по. Предложить, что N достаточно велико так, что среднее
значение синусоиды равно нулю, когда происходит усреднение за несколько периодов.
2.4. Пусть необходимо обнаружить неизвестный сигнал s[n], не равный нулю
только при п = 0,1, ...,7V — 1; аддитивный шум — ГБШ с дисперсией а2. Считать, что
интервал наблюдения бесконечен: —оо < п < оо. Пусть h[n] — отсчеты ИХ линейного
ЦФ. Тогда отклик ЦФ имеет вид свертки
Если отклик ЦФ отсчитывается в точке n = N - 1, тогда ОСШ может быть
определено в виде
Хдг —у Oj R —у ^0' Sn —^ ®i*
Задачи
оо
к= —оо
2-
е ( 22 hiN -1 -
Показать, что ОСШ максимизируется выбором как в ЦСФ или h[n] =
= s[N-l-n] для п = 0,1,..., N—1 и h[n] - 0 при других значениях гг. Таким образом,
48
Глава 2
использование шумовых отсчетов вне интервала существования сигнала не улучшает
характеристику обнаружения (величину d2), если отсчеты шума не коррелированны.
Указание: использовать предположение, что s[k] = 0 для к вне интервала [О,
N - 1].
2.5. В предыдущей задаче показано, что ЦСФ оптимален даже для бесконечного
интервала наблюдения. В данной задаче показать, что был исследован не общий слу¬
чай, когда шум коррелирован. Повторить решение задачи 2.4, но в предположении, что
отсчеты шума {ги[0],ги[1], ...,w[N — 1]} представляет собой ГБШ, но вне интервала
[0,7V — 1], шум — периодический процесс, когда w[n] = w[n+ 7V]. Найти ОСШ d2 на
выходе ЦСФ, пользуясь выражениями в задаче 2.4, если ИХ ЦФ имеет вид
Найти отклик ЦФ при п = 7V - 1. Объяснить результаты.
2.6. Найти алгоритм обнаружения известного сигнала s[n] = Агп при п = 0,
1, ...,7V — 1 в аддитивном ГБШ с дисперсией о2. Построить характеристики обнаруже¬
ния Объяснить, что получится при 7V->oon0<r<l;r = 1; г > 1.
2.7. Пусть передается сигнал s[n\ - Acos2nfon, п = 0,1,...,7V — 1. Прием
осуществляется в ГБШ с дисперсией a2 - 1. Обнаружитель должен быть рассчитан
при ВЛТ Qo = 10-8 при /о = 0,25 и 7V = 25. Найти зависимость вероятности
обнаружения от амплитуды А.
2.8. Необходимо выбрать сигнал для лучшего обнаружения в ГБШ. Рассмотреть
два сигнала si[n] = А и S2[n] = A(-l)n, п = 0,1,...,7V - 1. Определить, какой из
сигналов обеспечивает лучшие характеристики обнаружения.
2.9. Рассмотреть обнаружение сигнала s[n] = Acos2irfon, п = 0,1, ...,7V — 1, в
ГБШ с дисперсией о2. Определить ОСШ на входе в виде d\ = А2/2сг2. Найти ОСШ
на выходе ЦСФ. Затем найти ЧХ ЦСФ и найти зависимость АЧХ от 7V. Объяснить,
почему ЦСФ улучшает обнаруживаемость синусоиды. Положить 0 < /о < 1/2 и взять
большое значение 7V
Указание. Воспользоваться соотношением
2.10. Найти обеляющую матрицу D при корреляционной матрице шума
Указание. Использовать пример 2 3 и разложение VTRV = А, где V = [^1,^2].
А = diag(AiЛ2). и равенство VT = V-1.
2.11. Рассмотреть обнаружение детерминированного сигнала в гауссовском шуме
W, когда W ~ 7V(0,R). Если R-1 = DTD, где D — неособенная матрица, то можно
получить эквивалентный обнаружитель, основанный на преобразовании вектора у =
Dx. Найти обнаружитель Неймана-Пирсона, вычисляя ОП на основе вектора у.
2.12. Известно, что собственные значения TV х 7V симметрической теплицевой
ковариационной матрицы К для стационарного СП w[n], имеющего ЭС Sw(f), аппрок¬
симируются при 7V -> оо величиной
N-1
Е
MN-i)a/2sm(7VQ:/2)
sin(o;/2)
Afc = Sw(k/N), k= 0,1,..., 7V — 1,
Обнаружение полностью известных сигналов
49
и соответствующими собственными векторами
Vfc= _L [1;ei2.fc/JVie.2-2fc/N;ei2.(Ar-l)l!/JV]T| fc= 0, 1.
VN
Используя известные свойства собственных значений и собственных векторов,
показать, что
ri/2
Г‘
C^K-iSjv» /
J - 1
при больших N. Здесь
TV —1 TV —1
S(f) = ^ s[n]e-[2*fn; X(f) = ^ i[n]e-i2,r/n.
n= 0 n= 0
2.13. Используя ту же асимптотику , что и в задаче 2.12, показать, что при
больших N справедливо соотношение
1/2 ше*.
1/2
2.14. Найти оптимальный линейный фильтр обнаружителя известного сигнала
при коррелированном стационарном гауссовском шуме при бесконечном интервале на¬
блюдения, т.е. при использовании отсчетов шума в том числе и вне интервала суще¬
ствования сигнала. Задача обнаружения такова:
Но : x[n] = w[n\ при — оо < п < оо;
fj г 1 _ / SM + wln] ПРИ 0 ^ n ^ N — 1;
1 ' x'-n* \ w[n] при других п,
где w[n] — гауссовский шум, имеющий ЭС S(f).
На выходе фильтра ОСШ в момент n = N — 1 имеет вид
f 22 -1 - щ |
^2 _ \к=-оо )
Е
22 h[k]wlN-l-k]
\к= — оо
Следует заметить, что в силу того, что фильтрация осуществляется на бесконечном
интервале времени (-оо < п < оо), то фильтр в общем случае будет физически
неосуществимый.
Показать, что ОСШ d2 может быть записано в частотной области в виде
1/2 N, 2
H(f)S(f)ea^^N~1'> df
,2 _ V-l/2
50
Глава 2
Использовать неравенство Коши-Буняковского
2 -1/2 г 1/2
\h(f)\2df.
1/2 J-1/2
Г1/2 2 Г1/2 /-1,
/ 9(f)h(f)df Ц / |3(/)|2d/ /
7-1/2 7-1/2 7-1
Равенство обеспечивается тогда и только тогда, когда g(f) = ch*(f) при комплексной
постоянной с. Показать при этом, что d2 максимизируется при
5»(/)e-i *cf(N-i)
Sw(f)
2.15. Найти обнаружитель Неймана-Пирсона и его характеристики обнаружения
при обнаружении известного сигнала s[n] = А при п = 0,1,...,N — 1, где А > 0 в
коррелированном гауссовском шуме. Шумовой (N х 1)-вектор характеризуется соот¬
ношением Wn ~ 7V(0,R), где R = о2 diag(l,r, ...,rN~l) и г > 0.
Что произойдет при N -* оо?
2.16. В задаче 2.8 взять гауссовский шум с КФ rw[k] = Р + сг25[к], Р > 0, так
чтобы ковариационная матрица имела вид К = сг21 + Р[1; 1]т.
Найти наилучший сигнал и определить ОСШ d2 = STK-1S.
2.17. Известный сигнал должен быть обнаружен в стационарном гауссовском
авторегрессионном шуме со спектральной плотностью
Sw(f) =
|1 + aexp(-i27r/)|2
Найти асимптотический обнаружитель Неймана-Пирсона со статистикой (2.33) и по¬
казать, что его статистика приближенно имеет вид
N-1
Т(ХП) = — 5>[n] + ax[n - l])(s[n] + as[n - 1]),
n= 0
где, по предположению, х[п] наблюдается при п = 0,1,..., N — 1. Объяснить действия
статистики в терминах обеления и согласованной фильтрации.
Указание. Заметить, что шум обеляется ЦФ с системной функцией A(z) =
= 1 + az~1.
2.18. Для приемника минимальной дистанции в случае бинарной передачи по¬
казать, что границей в пространстве RN является перпендикулярная к линии, соеди¬
няющей Sotv и Sitv, граница, равноудаленная от Sotv и Sin. пРи этом исходить из
равенства ||Xyv — SotvII = ||Xyv — Siwll-
2.19. Для бинарной передачи при N = 2 использовать S02 = [1; —1]т и S12 =
= [1; 1]т. Принимается сигнал в аддитивной смеси с ГБШ, имеющего дисперсию
сг2 = 1. Нарисовать решающую границу в R2, определяющую минимизацию веро¬
ятности ошибки, без предположения о равенстве априорных вероятностей. Объяснить
результаты.
2.20. Доказать, что сигнальный коэффициент корреляции ps по (2.54) удовле¬
творяет неравенству \ps\ ^ 1.
2.21. Показать, что сигналы so [гг] = Асоъ2тт}оп и si[n] = Acos27r/in при
п - 0,1,..., N—1 приблизительно ортогональны, если |Д—/о| 1/2N и 0 < /о < 1/2,
0 < /1 < 1/2.
Указание. При достаточно большом N можно использовать результат
N — 1 / N — 1 >
— cos ап = — Re I elo;n
N ^ N
п= 0 \п=0
Обнаружение полностью известных сигналов
51
_ 1 Re(Sin Na/2c<(N-l)a/2}
sin Na
N sin a/2 2N sin a/2
2.22. Для когерентного ЧТ-сигнала найти разность частот, которая минимизиру¬
ет вероятность ошибки. Предположить N достаточно большим. Сначала показать, что
sin 2tt(/i - f0)N
Ps 2N sin 7r(/i — /о) ’
используя указания к задаче 2.21.
2.23. Для бинарной передачи используются сигналы so[n] = 0 и si[n] =
= Acos27r/in при п = 0,— 1. Найти вероятность ошибки, если сигнал при¬
нимается на фоне ГБШ с дисперсией а2. Сравнить данную бинарную (АТ) систему с
когерентной ФТ и ЧТ при равной пиковой мощности и одной и той же амплитуде А.
Предположить, что N достаточно велико.
2.24. При амплитудно-импульсной модуляции (АИМ) передается один из уровней,
так что Si[n] = Ai, п- 0,1,N — 1, i = 0,1,..., М — 1. Найти оптимальный прием¬
ник при ГБШ на входе с дисперсией а2 при условии минимизации вероятности ошибки
Рош Найти минимум Рош при М - 2. Если средняя энергия сигнала ограничена, то
каким должны быть выбраны амплитуды Ао и А\.
2.25. Показать, что (2.59) при М = 2 приводится к виду Рош = Qiy/э/2*1).
что соответствует (2.55) при ps = 0 и Э = Э.
Указание. В полученном двойном интервале сделать замену переменной v =
- и — у/э/*2. а также использовать преобразование
1/V2 -1/V2] Г Л
. 1/л/2 1/V2 J М '
Последнее преобразование соответствует повороту оси на 7г/4.
2.26. Показать, что в примере 2.7 вектор (ab)T является оценкой вектора (а6)т,
определяя среднее значение оценки при условии, что гипотеза Hi истинна. Предполо¬
жить, что N достаточно велико.
2.27. Пусть требуется обнаружить прямую s[n] = А + Вп, п = 0,1,..., N — 1, в
ГБШ с дисперсией а2. А и В известны. Показать, что данные могут быть записаны в
форме линейной модели. Найти обнаружитель Неймана-Пирсона, его характеристики
обнаружения.
V.
3 Обнаружение полностью известных
сигналов (непрерывные процессы)
3.1. Обнаружение сигнала при аддитивном шуме
на входе
Пусть наблюдается аддитивная смесь сигнала s(t) и шума n(t)
Положим, что сигнал s(t) задан на интервале t е [0,ти]? где ти —
длительность сигнала, ти ^ Т (Т — время наблюдения). Вне ука¬
занного интервала сигнал равен нулю. Шум n{t) в аддитивной смеси
представляет собой квазибелый шум с гауссовской ПРВ, имеющей
равномерный двухсторонний энергетический спектр
Наблюдатель принимает ту или иную гипотезу (Щ или Hi) на ос¬
нове отсчетов напряжения rk = r(tk), к = 1,2,...,п. Таким образом,
предполагается, что в процессе измерения производится квантование
по времени напряжения r(t) из (3.1) с постоянным шагом (интервалом
дискретизации), равным At = 1/2В. Отсчеты выбираются в точках
tk = kAt, 1 ^ к ^ п. Они описываются совместными ПРВ Wo(r) и
^(г), соответствующими гипотезам Я0 и Н\\ г = (ri,r2, ...,гп). На¬
блюдатель (приемник) вычисляет отношение правдоподобия Л(х) и
сравнивает его с порогом А0, величина которого зависит от принято¬
го критерия решения (байесовского, минимаксного, Неймана-Пирсона
и т.д.). Принимается гипотеза Hi (сигнал обнаруживается), если
Л(х) > Л0.
Обнаружитель сигнала (приемник) характеризуется вероятно¬
стью обнаружения Qd = 1 - Qi и вероятностью ложной тревоги Q0,
в плоскости которых (Qo,Qd) строятся рабочие характеристики при¬
емника (РХП). Найдем эти величины.
Если интервал дискретизации At > 1/2В, то отсчеты можно счи¬
тать независимыми и распределенными по нормальному закону. Сред¬
нее значение шума по условию (3.2) равно нулю. Дисперсия шума
r(t) = s(t) + n(t)
(3.1)
при |/| < /„;
при I/I > /„.
(3.2)
Обнаружение полностью известных сигналов
53
Тогда в случае гипотезы Я0 совместная ПРВ W0(x.) имеет вид
При наличии сигнала отсчеты напряжения, обусловленные шу¬
мом, имеют вид разности rk — Sk, где sk = s(tk). Поэтому совместная
ПРВ, соответствующая гипотезе Яь имеет вид
Задача обнаружения сигнала, таким образом, сводится к провер¬
ке гипотез Н0 и Hi по известному алгоритму при а0 = 0 и ai = sk
(см. пример 1.7).
Отношение правдоподобия Л(г) после преобразования принима¬
ет вид
Наблюдатель принимает гипотезу Hi (сигнал обнаруживется с
вероятностью Qd), если Л(х) > А0. В силу монотонности экспонен¬
циальной функции, как в примере 1.7, в этом случае получаем экви¬
валентное неравенство
и сравнении его с порогом Go, зависящим от принятого критерия
обнаружения.
Заметим, что поверхность решения (при известных значениях Sk)
представляет гиперплоскость
перпендикулярную направляющему вектору s = (sb s2,sn).
С увеличением ширины полосы 2В шума n(t) интервал дискре¬
тизации At может быть сделан малым по сравнению с интервалом
наблюдения, таким, что At < Т, тогда можно положить п оо. При
(3.3)
к=1 к=1
Итак, наблюдатель свое решение основывает на значении
п
к=1
п
const,
к=1
54
Глава 3
этом, переходя к пределу, получим корреляционный интеграл по (3.5)
G= ( s(t)r(t)dt. (3.6)
Jo
Величина G является случайной в силу случайности r(t) из-за
наличия шума n(t). Подставляя r(t) из (3.1) в (3.6), получим
G= ( s2(t)dt+ j s(t)n(t)dt. (3.7)
Jo Jo
Найдем среднее значение E(G) и дисперсию D(G) случайной ве¬
личины G.
При отсутствии сигнала, очевидно, E(G) = 0, при наличии сиг¬
нала в силу равенства E[n(t)] = О
E{G) = Э,
где Э - /0Т s2(t)dt — энергия сигнала.
Таким образом, имеем E[G \ Я0] = О, E[G \ Н\] = Э. Дисперсия
D(G) = [ [ s(ti)s(t2)E[n(ti)n(t2)\dtidt2 (3.8)
Jo Jo
одинакова при той и другой гипотезе.
По предположению шум n(t) белый, поэтому его корреляционная
функция Rn(ti,t2) = (N0/2)6(ti - t2) = Rn{r). Подставляя Rn(r) в
(3.8) и используя фильтрующее свойство дельта-функции, получим
D = D(G) = (3.9)
В процедуре обнаружения сигнала величина G сравнивается с по¬
рогом Go, значение которого зависит от выбранного критерия обнра-
ружения. Если G > G0, то принимается гипотеза Hi (сигнал обна¬
ружен).
Очевидно, закон распределения случайной величины G нормаль¬
ный, так как это распределение совпадает с законом распределения
шума:
(3'10)
<ЗЛ1)
Вероятность ложной тревоги Qo и обнаружения Qd находятся по
Обнаружение полностью известных сигналов
55
формулам:
Г ОС Г ОС
Qo = / Wo(G)dG\ Qd= / W!(G)dG. (3.12)
Jg0 Jg0
Интегрируя с учетом (3.10) и (3.11), получим
Qo = erfc х = Q(x), Qd = erfc(o? - d) = Q(x - d), (3.13)
I 2 /о 9 1 Z*00 2
где* Ww’vsl
Величина d называется отношением сигнал/шум (ОСШ) и харак¬
теризуется отношением энергии сигнала к двухсторонней спектраль¬
ной плотности шума. Отношение сигнал/шум не зависит непосред¬
ственно от формы (вида) сигнала. Следовательно, характеристики
обнаружителя Qo. Qd, РХП при полностью известном сигнале не за¬
висят от его формы. Для рассматриваемого случая полностью из¬
вестного сигнала характеристики обнаружения Qd(d) при Qo = const
изображены на рис. 3.1 (здесь параметром служит Q0 = const), РХП
представлена на рис. 1.2.
56
Глава 3
Рис. 3.2
WAG)
Величина порога До отношения правдоподобия A(G) = т—г
Wo(&)
находится из условия Л0 = A(Go). После деления найдем
Л(С)=ехр(-£)ехр (-?|), (3.14)
где G = G(r) рассчитывается по (3.6). Тогда Ао = exp[(2Go - 3)/N].
Следовательно, порог G0 = ^ + ^ 1пЛ0, гдеЛ0 определяется выбран¬
ным критерием. Если использован критерий Неймана-Пирсона, то по
формуле (3.13) при заданной величине Qo сразу найдем порог Go.
В результате придем к выводу, что оптимальный обнаружитель
сигнала (приемник) должен формировать статистику G (3.6), сравни¬
вать ее значение с порогом Go и выдавать решенее о наличии сигнала,
если G > G0.
Из (3.6) следует, что статистика G является временной взаимной
корреляционной функцией сигнала s(t) и входного воздействия r(t),
поэтому устройство, формирующее ввеличину G, называют корреля¬
тором. Операция (3.6) может быть осуществлена линейным филь¬
тром, который называется согласованным (СФ) [7, 60]. При извест¬
ной форме сигнала s(t) на интервале наблюдения (0,Т) согласован¬
ный фильтр имеет импульсную характеристику h{t) (с точностью до
постоянного множителя), равную
s(T — t) при 0 < t < Т; (3 15)
0 при других t.
h{t) = |
На выходе фильтра при входном воздействии r(t) получим отклик
y(t) = f h(r)r(t - r)dr = f s(T - r)r{t - r) dr.
Jo Jo
Сделаем подстановку и = T - т, тогда после преобразований
будем иметь
y(t) = ( s(u)r(u + t — Т) du. (3.16)
Jo
В момент принятия решения t = Т найдем
у(Т) = f s(u)r(u)du= G.
Jo
Обнаружение полностью известных сигналов
57
. п(0
Согласованный
G
Пороговое
s ^ G > Gq
фильтр h(t)
устройство
n~a<a0
Рис. 3.3
В зависимости от формирования статистики G рассматривают
два типа оптимальных обнаружителей: а) с использованием корреля¬
ционного приемника (рис. 3.2) и б) с использованием согласованного
фильтра (рис. 3.3).
Различение двух полностью известных сигналов в аддитивном
гауссовском шуме (векторное представление). Предположим, что на¬
блюдаемое колебание r(t) состоит из одного или другого известных
сигналов so(t) и si(t) в аддитивной смеси с гауссовским шумом, имею¬
щим нулевое среднее значение. Сигналы и шум ограничены по частоте
|/| ^ В. Все колебания дискретизируются с частотой дискретизации
fg=2B= 1/At в интервале наблюдения 0 ^ t ^ Т, так что произво¬
дятся T/At = 2ВТ отсчетов r(tk) = Пь 0 ^ к ^ га-1. Таким образом
формируется n-мерный вектор столбец г = (го,п, ...,rn_i)T.
Рассмотрим следующие две гипотезы
(3.17)
Н0 : г = s0 + п,
Н\ \ г = si + п,
где Е(п) = 0; Е{г/Щ) = sit i = 0,1.
Для проверки гипотез воспользуемся следующим критерием:
Выбираем Hi, если
Л(г)= Wi(r)/Wb(r)>A0, (3.18)
где Ао — некоторая постоянная, определяемая используемым крите¬
рием оптимальности.
Многомерная ПРВ для того или иного сигнала является гаус¬
совской
Wi{ г)
1
: ехр
(27r)n/2\/deFC
Тогда отношение правдоподобия (ОП)
Л(г) = С ехр ' 1 " лтг,_1
-^(г-8»)тС<(г-84)
(3-19)
(r-sifCi (r-si)+ -(г — s0)TC0 (г — s0)
(3.20)
где С
det Со
несущественная константа.
det Сх
Здесь Со и Ci — ковариационные матрицы наблюдаемого коле¬
бания г, соответствующие каждой из гипотез:
Сг = Е{ггт | Щ) - Е[г | Щ]Е[г | HiY = (N + sis?) - s*sj = N,
где N — ковариационная матрица шума n(t).
Возьмем логарифм отношения правдоподобия за вычетом In С,
тогда по (3.20) получим
5(г)= InA(r) - In С =
= (si - s0)TN_1r > In До + - sgN-^o) = So. (3.21)
Вычислим вероятность ложной тревоги Qo и вероятность обнару¬
жения Qd. Предварительно установим, что распределение статистики
S (3.21) является гауссовским, как линейная комбинация гауссовских
СВ Гк, 0 ^ к ^ п — 1, при этом
E(S | Hi) = (Si - s0)TN-1E(r | Щ) = (Sl - s0)TN-V (3.22)
Ds = a $ = E{[S - E(S \ Щ)]2 \ Щ} =
= E{[(sx - s0)TN_1(r - sj)][(si - s0)TN_1(r - Sj)]T} =
= (si - s0)TN_1[£J(r - s,)(r - Si)T]N_1(si - s0) =
= (si - s0)TN_1NN_1(si - So) = (As)TN_1(As), (3.23)
где As = si - s0.
По (3.22), (3.23) находим
(S — AsTN-1s;)21
W(S\Hi)= -J=^=exp
V2™s
2a2s
Тогда
roo i roо
Qo = P(S > So | Ho) = / W(S | H0) dS = -= / e~u '2 du;
Js0 v27T Jax
Ax = (So - AstN_1s0)/cts;
Г°° 1 r°° 2
Qd = P(5 > So | #j) = / W(S\H1)dS=-= e~u/2du\
Js0 V 27Г Jbx
Bi = (S'o-As’N-^O/as.
Введем обозначение
ж = (So - AsT7V-1s0)/crs = Ль
тогда
Обнаружение полностью известных сигналов 59
Qd
где
1 Г°° 2
■■■■ — / e~u /2 du = erfc(o? — d) = Q(x — d), (3.24)
V27T Jx — d
. AsTN *As AsTN *As /7—__ 1 __4
d = = , : = V AsTN As. (3.25)
^5 \/AsTN As
Рассмотрим частный случай, когда гауссовский шум с нулевым
средним значением является белым (ГБШ) с постоянным ЭС в за¬
данной полосе частот
Sn(f) = 7Vo/2, 1/1 ^ В.
Для такого шума КФ имеет вид
Rn(r) = ГЧЗД)] - Щ-ё21Г^т df = NoBSm2llBTT.
Если осуществлять дискретизацию, как и ранее с шагом At =
= 1/2Б, то для коэффициента корреляции отсчетов шума n{tk) = пк
получим
Е{щпк) = i?n(|jf - /с|А£) = N0B6jk,
где — символ Кронекера.
В этом случае вектор п в (3.17) имеет нулевое среднее значение
и корреляционную матрицу
N = (N0B) I,
где I — единичная n х п матрица, при этом отсчеты шума пк имеют
дисперсию сг2 = N0B.
Правило решения (3.21) преобразуется к виду
5(г) = (si - s0fv/a2n = (As)Tr/a2n > In l0+ (sjsi - sls0)/2a2n =
= ln/0+ (||Sl||2 - ||s0||2)/2^. (3.26)
По (3.25) ОСШ d упрощается:
d= V AsTN_1As = ||si-s2||/<7„. (3.27)
В (3.26) и (3.27) положим сг2 = N0B = No/2At, тогда получим
5(г) = ТГ - e0fc)r*At > In /о + £ (sifc = 50;
0 fe=0 fe=0 0
(3.28)
d2 = ^(sifc - s0k)2&t. (3.29)
2 w-i
N0
u fc=0
60
Глава 3
Пусть At -> 0 и в то же время остается неизменным интервал
наблюдения 0 ^ t ^ Т, тогда п = T/At оо. В пределе по (3.28)
получим
S= -J- [ (si(t) - s0(t))r(t) dt > ln/0+ -^r [ (sl{t) - sl{t)) dt = S0.
No Jo Nо Jo
(3.30)
Введем новую переменную
F = T15 " \ jf [s’(t) ~ e°(t)1 dt > Tln г°= F°- (3-31)
По (3.29) находим ОСШ
d2= ^ [Tisiit)-s0it))2dt. (3.32)
^0 Jo
Преобразуем ОСШ d2\
d2= ^j\slit)-slit))dt--^£ s0it)Slit)dt= ^(1 -p);
3=\fo [siW+soWl^; (3.33)
P - soit)siit) dt. (3.34)
Здесь Э — суммарная энергия сигналов; р — взаимный временной
коэффициент корреляции двух сигналов.
Величина ОСШ
d= \/ 4Э(1 — p)/No- (3.35)
При новой переменной F (3.31) нижний предел в интегралах
(3.24) имеет вид
U=[F0- E0(F)]/cjf, (3.36)
где
EoiF)= ^EoiS)-l-j\slit)-slit)]dt= -lj\Slit)-Soit)Ydt =
= --J-d2 = -э(! ~P)-
Аналогично находим
E,iF)= Э(1 -p).
Обнаружение полностью известных сигналов
61
Кроме того,
2) is:1 <4s,T(As)
, _ (NoV , _
F - [~2 J aS -
► ^ fT[si(t) ~ s0(i)]2 dt = N03(l - p). (3.37)
1 Jo
Таким образом, приемник характеризуется вероятностями
1 2
Qo = -j= / I2 du - erfcx = Q{x)\
v 2ir Jx
где
Qd
X =
1 f°° 2
—j= / e~“ /2 du = erfc(x - d) = Q(x - d),
V27T Jx—d
(3.38)
ViV03(l - p)
N0
No
(3.39)
Следовательно, характеристики когерентного приемника со ста¬
тистикой F зависят только от энергии сигналов, их временного коэф¬
фициента корреляции и спектральной плотности шума. Вероятности
Qo и Qd не зависят от структуры сигналов. Коэффициент корреляции
р заключен в пределах \р\ ^ 1, так как
(К [ [so(t) + si(t)]2 dt = ( [so(t) + s\(t)] dt ± 2 ( so(t)si(t) dt =
Jo Jo Jo
= 2Э±2Эр= 23(1 ±p)
При тех же условиях, что и при получении (3.28) ПРВ можно
записать в виде
п/2
ж(г)=(^) е<р
~rk)2bt/N
к=О
где гк = E[rk{t)\.
При В —у оо A.t —у 0, и в результате получим функционал плот¬
ности вероятности
гТ
}2dt}, (3.40)
W(r) = aexpj [КО - К*)]2
где a — несущественная константа, так как она исчезает при вы¬
числении отношения правдоподобия 1(г). Если r(t) = s(t) + n(t),
62
Глава 3
E[n(t)] = 0, то r{t) = s(t), тогда
К г) = 1пЛ(г) = —
о
2 f s(t)r(t)dt- ( s2(t)dt
J о Jo
(3.41)
Пример 3.1. Рассмотрим две гипотезы при полностью известных
сигналах so(t) и
Н0 : r(t) = s0(t) + n{t)\
Hi : r(t) = 5i(t) + n{t),
и пусть сигналы имеют вид
Si(t) = Ai(t) cos[coct + </?*(£) + 0»], i= 0,1, (3.42)
где параметры Ai, <pi, 9i и fc — известные. По прежнему E(n(t)) = 0.
Найти отношение правдоподобия l(r).
Решение. По (3.40) получим функционал
~ [T[r(t)-Si(t)]2dt
МО J о
Fi(r) = Wi(r) = a exp
(3.43)
Пусть so(t) = 0, тогда по (3.41) находим
гТ
2 Г
/(г) = 1пЛ(г)= — / Л(£) cos[cjc£ + <^(£) + e]r(t) dt — Э/No,
No Jo
fT 1 fT
где Э = / A2(t)cos2[ujct + (p(t) + 6\dt « - / A2(t)dt — энергия
J о 2 j0
сигнала.
Если so(0 i= 0, то с использованием (3.40) получим
/(г) = In Л(г(*)) = -J- [ [si(£) - soWM*) dt - (3i - 3o)/iVo,
^vo Jo
где Эг — энергия сигналов i = Од-
S.2. Обнаружение сигнала при коррелированном
шуме на входе
В данном случае используется ортогональное разложение (разло¬
жение Карунена-Лоэва) не обязательно стационарного СП. Оно осно¬
вано на возможности представления корреляционной функции i?(t,s)
случайного процесса в виде равномерно сходящегося ряда
оо
Я(м) = 'Yl ^k<Pk(t)(pk(s) при a^t^b,a^s^b, (3.44)
к=1
где {(pk(t)} — собственные функции; А*; — собственные значения од¬
Обнаружение полностью известных сигналов
63
нородного интегрального уравнения Фредгольма второго рода
гЪ
R(t,s)(p(s)ds = X(p(t). (3.45)
/
J a
Функция R(t,s) называется ядром интегрального уравнения (3.45).
Справедливость разложения (3.44) устанавливается теоремой
Мерсера [7], которая утверждает, что, если вещественная функция
R(t,s) симметрична, непрерывна и неотрицательна в прямоугольнике
a < t ^ b, а ^ 5 ^ Ь, то она может быть разложена в ряд (3.44).
Причем, если R(t,s) вещественная функция, то и собственные функ¬
ции ipn(t), и собственные значения Ап также вещественны, причем,
если R(t,s) положительно определенная функция (как в случае кор¬
реляционной функции), то система функций {сpn(t)} ортогональна на
(а,Ь), т.е.
I dt = Smn = | J JJPJ 2=¥l (3.46)
где Smn — символ Кронекера.
Отсюда следует, что любой непрерывный в среднеквадратичном
смысле случайный процесс x(t) с автокорреляционной функцией
R(t, 5) может быть представлен в среднеквадратичном смысле на [а; Ь]
ортогональным разложением
оо
x(t) = ^ (3.47)
71— 1
где
хп = j x(t)<pn(t) dt. (3.48)
J a
По (3.48) находим
E{xmxn} = E^J x(t)ipm(t)dtJ z(s)<pn(s)dsj =
pb pb
- R(t,s)ipm(t)ipn(s)dtds.
J a J a
Используя условия (3.45) и (3.46), получим
E{xmxn} — An j dt = An<Smn.
J a
Таким образом, коэффициентами ряда (3.47) являются некорре¬
лированные (ортогональные) случайные величины, имеющие второй
64
Глава 3
начальный момент
Е{х2п} = Л„. (3.49)
Ряд (3.47) называется разложением Карунена-Лоэва, или кано¬
ническим разложением случайного процесса. Если записать ряд
(3.47) в форме
ОО
x(t) = Y2anx'nipn{t), (3.50)
71 — 1
тогда выполняется условие ортонормированности для случайных ве¬
личин х'п
Е = {хтхп} = ^тп)
причем о\ - Ап.
Обратная к ядру R(t,s) функция R^^t^s) удовлетворяет урав¬
нению
т
i?-1(£, s)R(s, т) ds = S(t - г), 0 ^ t, г ^ Г, (3.51)
/о
и имеет разложение
оо
Я_1(м) = (3-52)
г-1
причем при симметричном ядре R(t,s) обратная функция также сим¬
метрична:
Д'ЧМ) = R-^s.t). (3.53)
Пусть полностью известны сигналы s0(t) и si(t), принимаемые в
гауссовском коррелированном шуме n(t) с нулевым средним значени¬
ем, при этом шум необязательно стационарный.
Гипотезы Н0 и Hi таковы, что
Н„: r(t) = <*,(() + n(t);
Hi : r{t) = Si(t) + n(t),
Используя (3.48) и уравнение для собственных функций (3.45)
получим отсчеты
П= [ r(t)ifi(t) dt. (3.55)
J о
Здесь п гауссовские переменные, поскольку они получаются посред¬
ством линейной операцией над гауссовским СП. Кроме того, эти СВ
независимы. Поэтому для решения проблемы обнаружения (разли¬
чения) сигналов достаточно найти средние значения и дисперсии СВ
Обнаружение полностью известных сигналов
65
п. Сразу находим
E{n I Но) = [ s0(t)<pi(t) dt = 50г;
Jo
Е(п | #i) = [ s^tfyitt) dt = su.
Jo
По (3.49) дисперсия отсчетов n равны собственным значениям
Ai. В результате при N отсчетах получим соответствующие ПРВ
N
"ьм-П
и',(’', = П7Щехр
(п -
2Л i
{п - Su)21
2Xi
(3.56)
(3.57)
В показателе экспоненты (3.56) и (3.57) после перемножения при
N -> оо получим величину
°о 1
А = ~ (2тч “ Si)Sib
Л 2Л;
г=1
(3.58)
Преобразуем первое слагаемое с учетом (3.55):
2
I dt =
^ 2 °° -1 г±
Е t = Е д- I
i=i 1 i=i г L*70
ГТ °° .<р&Ы8)
(3.59)
= f ( КРУ) r(s) dtds = f ( r(t)R 1(t,s)r(s) dtds,
Jo Jo Л Jo Jo
г= I
причем в последнем случае было использовано соотношение (3.52).
Рассмотрим второе слагаемое в (3.58):
Е
г=1
(2г^ Sj)sj
А]
00 /*т
= 22т / - SW] dt
<=i Ai •'о
= f [2r(t)-s(t)}f]S-i^dt= f [2r(i)-«(*)]/»(*) *,(3.60)
Jo i=1 лг Jo
где
~
(3.61)
i=l
66
Глава 3
Получим условие, которому должна удовлетворять функция h(t):
Гт ^ 5 Гт
/ R(t, s)h(s) ds = У2 Т1 / R(t,s)(pi(s)ds =
J 0 J О
/0 i=1 ^ Jo
oo oo
St
= 22 = 22Siif>i(t)= sW- (3.62)
i= 1 г г— 1
Здесь использовалось уравнение Фредгольма (3.45) и разложе¬
ние сигнала по собственным функциям {(fi(t)}.
Можно выразить функцию h(t) в явном виде, если использовать
обратную функцию ядра Д”1^^)
f R~1(t,v)s(v) dv = j f R~1(t,v)R(v,u)h(u) dvdu =
Jo Jo Jo
= f S(t — u)h(u) du = h(t), (3.63)
Jo
при этом использовано соотношение (3.51).
Используя (3.60), (3.62) и (3.63), а также свойство симметрии
(3.53) функции R^lt^s), получим ПРВ (3.56) и (3.57) в обобщен¬
ном виде:
W[r(t)] = Сехр|-^ / J [r(t) - s^R^^iU^r^) - s(u)]dtdu^j ,
(3.64)
где постоянная С находится из условия нормировки.
Используя значения сигналов 5 = s0(£) и 5 = si(t), получим ста¬
тистику
Gi = \nWi[r{t)] - \nW0[r(t)\ =
= ~J J [r(t) - si(i)]i?-1(i,s)[r(s) - si(s)]dtds+
+ ^ J J И0 - so(*)#-1(f, s)[r(s) - s0(s)]] dtds.
В результате правило решения в пользу Hi принимает вид
Gi = [ [ [si(t) - s0(t)]R~1(t,s)r(s)dtds - ^ > Gp,
Jo Jo ^
где
A = f ( Si(t)R~1(t,s)si(s)dtds- f f so(£)#_1(£, s)sq(s) dtds.
Jo Jo Jo Jo
Поскольку величина А не зависит от наблюдений r(t), то получе-
Обнаружение полностью известных сигналов
67
Рис. 3.4
Рис. 3.5
ное правило можно записать в виде
гт гт
G = f f [si(t) - so(t)]R 1(t,s)r(s) dtds > Go, (3.65)
Jo Jo
где G0 = Gp + Д/2.
Учтем соотношение (3.63). Тогда окончательно получим правило
принятия гипотезы Hi
гр
G - [ [^1 (0 - ho{t)]r(t) dt > Go. (3.66)
Jo
Структурная схема приемника включает в себя либо коррелятор
(рис. 3.4), либо обобщенный согласованный фильтр (рис. 3.5).
3.3. Характеристики обнаружения
Вначале рассмотрим обнаружение сигнала s(t) = si(t) при
s0{t) = 0. При этом статистика G имеет вид
(3.67)
G= f h(t)r(t)dt,
Jo
где h(t) представляет собой решение интегрального уравнения (ИУ)
рт
Rn(t, u)h(u) du = s(t), 0 ^ t ^ T, (3.68)
/
Jo
причем Rn(t,u) = Rn(t - u) — КФ аддитивного гауссовского шума,
имеющего нулевое среднее значение.
68
Глава 3
Таблица 3.1
КФ
Вид решения ИУ (3.45)
Белый шум (Nq/2)8(t)
Низкочастотный шум
сг2 ехр(—а|т|)
Узкополосный шум
<т2 ехр(—а|т|)х
Г а ■ 1 1
X COSCJ1T+ —sincji|r ,
L ^>1
где uj\ — cJq — а2; а = ао/2
(2/N0)s(t)
±^ST^l\s{t-T)
—L—[sIV{t) - (2а,2 - a§)8"(t) + u,04S(i)]
2(J га +
Как и раньше, статистика G — гауссовская, причем
E(G | Н0) = 0; E(G | Ях) = [ h{t)E[r{t)] dt = [ h(t)s(t) dt = d2,
Jo Jo
(3.69)
где d2 называется отношением сигнал/шум (ОСШ) [8, 19], поскольку
при ГБШ Rn(t - и) = (No/2)S(t — и), когда h(t) = (2/N0)s(t), по
формуле (3.69) находим
d2 = Э= [ s2(t) dt. (3.70)
Jo
2Э
No’ Jo
Дисперсия статистики G при гипотезах Но и Hi одна и та же:
гт гт
D(G) = [ [ h(ti)h(t2)E[n(ti)n(t2)]dtidt2 =
Jo Jo
= f j h(ti)h(t2)Rn{ti - £2) dtidt2 = [ h(t)s(t) dt = d2, (3.71)
Jo Jo Jo
причем здесь в преобразованиях учтено соотношение (3.68).
При данных табл. 3.1 в [19] получено ОСШ d2 при коррелирован¬
ном шуме на входе.
В результате находим ПРВ статистики G
(G - d)21
2d2
При этом вероятности ложной тревоги и обнаружения выражаются
формулами
Qo = erfcz = Q{x)\ Qd = erfc(x — d) - Q(x - d), x = Go/d.
(3.72)
Таким образом, можно воспользоваться графиками рис. 1.5, 3.1,
1.2, используя для ОСШ d новое определение (3.69).
Обнаружение полностью известных сигналов
69
Таблица 3 2
КФ
Вид решения ИУ (3.45)
Белый шум (No/2)8(r)
Низкочастотный шум
сг2 ехр(—а|т|)
Узкополосный шум
сг2 ехр(—а|т|)х
X COSCJiT + — sincjilr ,
L 9 wi, J 7
где uj\ — lOq — a ; a — qq/2
(2/N0)s(t)
a Г 4 s"(i)l 1 si
2^ [S(t) C? J + «7= S0 ^ 5(t) +
1 Г sfr-1 1
+ — \ sT S(t — T)
<7 1 a
2a2a0 + ш2 + {2ш° “o)s"(*) + +
+ 2 2 {^WK" + (u2 ao)so + o:ow§so] +
GAOL 0 + CJq
+ 6(t - T)[-s- (tj2 - a2)s'T + a0uj2sT] +
+ <5'(£)[s" “ Qoso + woso]+
8f(t - T)[-s" - a2sfT - сo2sT)
В заключение в табл. 3.2 приводятся решения интегрального
уравнения (3.45) при трех КФ шума [6; см. также 21, табл. 1.1]. При
нулевых граничных условиях по табл. 3.2 получим решение, приведен¬
ное в табл. 3.1.
Можно показать, что в общем случае при гипотезах (3.54) ПРВ
Wi(x) при х = Go имеют вид
х ± о\!2
Wo,10*0= ■/-—.-exp
V27rcri
2о\
где а2 = сг^ — ОСШ.
Принимается гипотеза Яь если G\ > Gp. Тогда
Qo = Q(z); Qd = Q(z - cti), (3.73)
где г = (Gp + a\/2)/ai.
Рассмотрим задачу различения сигналов, эквивалентную (3.54)
Н° ' П=Щ' 0 < ^ Т, (3.74)
Hi : rt= nt+ St,
где st = s(t) - s0{t); {nt\t e [0,T]} — гауссовский СП с нулевым
средним значением и КФ Rn(t,u), (t,u) е [О,Т]2.
Запишем сигнал st в виде
st
к=1
где {(fk}kLi — последовательность ортонормированных функций, со¬
ответствующих ядру Rn(t,u), отсчеты Sk определяются соотноше-
70
Глава 3
нием
S/c
rp
= [ st<Pk(t)dt, к =1,2,.... (3.76)
Jo
Используя (3.75) и разложение Карунена-Лоэва СП {nt\t Е (0,Т)},
запишем проблему различения (3.74) в виде
#о : П = '^nk4>k(t)\
71=1
ОО
Я1 :
где
к=1
гТ
Пк= [ nt(pk(t)dt, /с =1,2,.... (3.78)
Jo
В результате наблюдаемый СП можно записать обобщенно
оо
rt=YZkMt), O^t^T, (3-79)
к=1
где
Zk= [ rt<pk(t)dt={™k пои Я°’ (3-8°)
Jо t + $к При Mi.
Тогда согласно (3.74)
^°: 2к=Пк■ к =1,2,.... (3.81)
Hi'. zk= пк+ Sk,
Как было отмечено ранее, {пк}^=1 — это последовательность
независимых СВ, таких, что Пк ~ (0, А^). где {Ak}kLi — последо¬
вательность собственных значений интегрального уравнения с ядром
Rn{t, 'по¬
следовательно, ОП при конечных значениях к = 1,п записыва¬
ется в виде
A(*n) = exp
n 1 n 2
ESkZk _ 1
A/e 2 A/e
Lfc=l * k=l K
(3.82)
Сходимость A(z) = lim A(zn) исследуется отдельно.
n—>oo
Определим ОСШ
oo 2 00
d2 = 22 = YqkSk’ (3-83)
fc=l fc=l
Qk = Sk/Xk- (3.84)
Обнаружение полностью известных сигналов
71
Рис. 3.6
Коэффициенты qk определяют разложение
оо
Q(t) =
fc= 1
Тогда принимается гипотеза Hi если A(z) > 7 или
fc=i
т^= Eif >|п^+ т = 7о-
d2
(3.85)
(3.86)
Структура оптимального обнаружения когерентного сигнала изоб¬
ражена на рис. 3.6.
Статистике T(z) можно придать другую форму:
ОО ОО ОО рТ пТ
T(z)=22~T^=YqkZk=Yqk 4>k{t)r{t) dt = / q(t)r(t) dt.
k=1 Xk fc=1 fe=i Jo Jo
(3.87)
Снова получим условие, которому должна удовлетворять функция q(t):
,т ОО ,т
/ Rn(t,u)q(u) du = YV / Rn(t,u)ipk(u)du =
Jo fc=1 Jo
OO OO
= YXkqk^k^ = YSk(fik^ =
fc=l fc=l
Таким образом, функция q(t) должна удовлетворять неоднородному
интегральному уравнению
f Rn{t,u)q{u) du = s(£), 0 ^ t ^ Т. (3.88)
J о
Сравнивая (3.87) и (3.83), получим
d2 = f s(t)q(t) dt. (3.89)
Jo
Докажем справедливость соотношения (3.84).
72
Глава 3
С учетом (3.88) имеем
оо 00
s(t) = 22 skV>k(t) = / Rn(t, и) 22 Як<Рк(и) du =
fc=1 к=1
ОО рТ ОО
= 22qkT / Rn(t,u)ipk(u)du= 22qkXkVk{i:)-
к=i fc=i
oo
Отсюда J^(Sk - Xqk)<Pk(t) = 0- что приводит к (3.84).
k=i
Статистика T(z) = ^ является гауссовской в силу гаус-
к=1 fc
совского характера СВ {z/Jfcli-
При гипотезе Я0 ^ ~ А^(0, Л^), поэтому в этом случае
оо
t(z)= 22Чг ~ N^d2y
к=1 к
При гипотезе Н\ Zk ~ N(sk, Л^), тогда
'к£,
Afc
оо
Г(*)= £^~iV(d2,d2).
/с—1
При этом ВЛТ
Qo = P{T(z) > 70} = -)= Г e-2/2d2 dy=-}= Г e-“2/2 du =
CL у J 'yQ V Z7T ь/'у^
= Q(7i) = 1 -®(7i),
1 , d
где 7i = - In7o + -.
Вероятность обнаружения
Qd = P{T(*) > 70} - -4f= Г e-^-d2)/2d2 dy =
dV 2тг J1q
1 Г°° 2
= J e-“ /2 du = Q(72) = 1 - 0(72)1
lo~d2 70 1 d
где 72 = —-— = — - d = ^ In7 - - = 71 - d.
Таким образом, характеристики обнаружения принимают вид
Qo = Q(7i) = 1 - Ф(7г); Qd = Q(7i - d) = 1 - Ф(71 - d). (3.90)
Пусть Qo = ос, тогда 71 = Q-1(a). Следовательно,
Qd= Q[Q~Ha)-d\.
Обнаружение полностью известных сигналов
73
Запишем аналогичные соотношения через функции Ф(х). По
(3.90)
3>(7i)= 1—а; 71 = Ф_1(1-а): Qd = 1—Ф[Ф_1(1—ск)—d], (3.91)
По (3.91) Ф[Ф-Х(1 - а) - d] = 1 - Qd = Qi = /3. Отсюда
Ф-1(1 — a) — d= Ф-1(/3),
ИЛИ
d= Ф-1(1 — а) — Ф_1(/3). (3.92)
Соотношение (3.92) позволяет найти порог по ОСШ, которое при
заданных значениях ВЛТ Qo и вероятности обнаружения Qd опреде¬
ляет минимально обнаруживаемый сигнал.
Например, при Q0 = 10-6, Qd = 0,99 (/3 = 0,01) получим d= d =
= ф-г(1 - 10"6) - O-HOjOl).
Согласно [38] справедливо соотношение
Ф_1(р) + Ф"1(1-р)= 0. (3.93)
Тогда d = Ф_1(1 - 10"6) + Ф_1(0,99).
По [38] находим Ф~1(1 - 10"6) = 4,7534, ф-г(0,99) = 2,3263.
Следовательно, d = 7,0797, или d2 = 50,122 и (с22)дб =
= 10 lg 50,122 « 17 дБ.
По (3.82) запишем ОП
71 1 71 2
ESkZk _ 1 £fc.
хк “9
A(z) = exp
.fc=i
2tiXk
d2
= exp ( T(z) - —
ИЛИ
A (z) = exp
q(t)r(t) dt - s(t)q(t) dt
(3.94)
Если шум n{t) — белый с односторонним ЭС No, то
No
Rnfau) = -6(t-u).
Тогда по (3.88)
«М = ^.(t)
и по (3.94) ОП
A(z) = A[r(£)] = exp
N0
s(t)r(t) dt~J^fo И*)]2 dt
(3.95)
(3.96)
74
Глава 3
Статистика Т принимает вид
T[r(t)] = f s(t)r(t) dt,
Jo
причем здесь множитель 2/No отнесен к порогу.
Величина d2 находится по (3.89)
fT
dt
- _2_ /
" N~oJo
s (t) dt ■
23
No’
(3.97)
где Э = J' s2(t)dt
о
энергия сигнала.
Задачи
.50 (О
(
)
T
2 j
3 T
51 (f)'
0
T
2 т
3 T
3.1. Различить сигналы при двух гипотезах
Hq : r(t) = so(t) + n(t):
Hi : r(t) = si(t) + n(t).
Рис. 3.7
Использовать в качестве критерия минимум ве¬
роятности ошибки. Сигналы so(t) и si(t) показаны на
рис. 3.7.
Аддитивный шум, гауссовский белый со спект¬
ральной плотностью No/2. Предположить равными
априорные вероятности. Найти вероятность ошибки
при Э/No = 2
3.2. В системе передачи ЧТ сигналов
so(t) = smujot]
si(t) = smcjit,
аддитивный шум — ГБШ. Обозначить ид = uji — ujq. Показать, что вероятность
ошибки минимизируется, когда разность частот, выбирается так, что ш^/2п « 0,7/Т.
Предположить, что + шо)Т = кп, где к — целое число и uji + ujq 0.
3.3. Пусть имеется четырехфазная система ФТ:
0 <t^T.
so(t) = Asincjo^:
si(t) = Asin(a;o^+ 7г/2);
S2(t) = Asin(a;o£+ 7г);
ss(t) = Asin(a;o£+ 37t/2),
Аддитивный шум — ГБШ со спектральной плотностью No/2. Пусть априорные
вероятности равны, так же как и стоимости ошибок.
а) Найти структуру оптимального приемника Определить, сколько требуется кор¬
реляторов.
б) Показать, что вероятность правильного решения
2
Рк= ~k= I e~u2/2du , d = \J Э/No-
7- Г
_ч/2n J_d
Обнаружение полностью известных сигналов
75
в) Сравнить с вероятностью правильного решения для бинарного случая коге¬
рентного сигнала.
3.4. Рассмотреть троичный сигнал
Но : so{t) = 0;
Н1 : si(t) = Asmujot:
#2 : S2W = —Asmujot.
Аддитивный шум — гауссовский со спектральной плотностью No/2.
а) Найти ОП, чтобы минимизировать вероятность ошибки.
б) Показать, что
P(Di | Нх) = P(D2 | H2) = —== / e-“2/2 du,
v2,r J-di
где di = 3/2N. Следовательно, вероятность правильного решения
fdl 2
yfaJo 6 “
2 ‘-^du+l
в) Сравнить характеристики системы с троичным сигналом и системы с бинарным
ЧТ-сигналом и четерехфазной системы задачи 3.3.
3.5. Составить ОП приемника, осуществляющего проверку гипотез
Но : r(t) = Bcos(uj2t + ф) + n(t)\
Hi : r(t) = AcosuJit+ Bcos(oj2t+ (p) + n(£),
где A, B, uji, uj2 и ip — известные постоянные. Шум n(t) — ГБШ со спектральной
плотностью No/2. Как влияет на характеристики приемника сигнал Bcos(u>2t + ip)?
3.6. Рассмотреть согласованный фильтр (СФ) для сигнала
s(t)=
А при 0 ^ t ^ Т;
при других t.
при ГБШ на входе.
а) Каково максимальное значение ОСШ на выходе?
б) Рассмотреть вместо СФ фильтр, имеющий ИХ
h(t) = { e~at при 0 ^ 4 ^ Т'
\ 0 при других t.
Найти максимальное значение ОСШ на выходе фильтра. Существует ли оптимальное
значение параметра а?
в) Пусть используется фильтр с ИХ h(t) = e~at, t ^ 0. Найти максимальное
значение ОСШ на выходе фильтра. Показать, что ОСШ в этом случае меньше или
равно ОСШ, полученного в случае (б).
3.7. Для предыдущей задачи рассмотреть гауссовский фильтр
h(r) = — exp 2°^ ^ ’ _0° < т < 00’ т° >
а) В какой момент времени ОСШ на выходе фильтра будет максимальным.
б) Найти выражение для ОСШ.
76
Глава 3
3.8. Пусть сигнал имеет вид
s(t) = 1 — cosojot, 0 ^ t ^ 27t/cjo,
и ЭС шума
5„(w) =
а) Найти обобщенный СФ для этой задачи, решая уравнение
г1о
J о
27Г
h(v)Rn(v,u) dv = s(tt), 0 ^ tt ^ То, То = —. (3.98)
wo
/о
Ответ должен быть следующим:
- 2тг
о о
bL/n + wf
/l(t) =1 -А- COSCJO^, 0 < t ^
0^1 ^о
б) Найти результирующее максимальное ОСШ.
3.9. Решить интегральное уравнение (3.98) для обобщенного СФ при сигнале
s(t) = srnujot, 0 ^ t ^ 27г/а;о = То,
и КФ шума
Дп(т)= ^e“"iM.
а) Показать, что ИХ фильтра
Mt)= s(T-t)-\^s(T-t)
ujf dtz
не идентично решению интегрального уравнения.
б) Пусть к ИХ добавляется линейная комбинация дельта-функции a8(t)+ b8(t—T).
Удовлетворяется ли для этой суммы интегральное уравнение и какие при этом должны
быть а и Ы
3.10. В предыдущей задаче:
а) найти максимум ОСШ;
б) при тех же сигнале и шуме как в предыдущей задаче, предположить, что ИХ
фильтра имеет вид
и фильтр используется вместо оптимального.
Найти ОСШ для данного фильтра Сравнить оптимальный фильтр с квазиопти-
мальным при ujq = uj\.
3.11. Найти верхнюю и нижнюю треугольную матрицы, произведение которых
определяется марковской корреляционной матрицей
1 р р2
р 1 р
р2 р 1
Обнаружение полностью известных сигналов
77
3.12. Пусть А*; — к-е собственное значение интегрального уравнения
А № = Г R(t, s)f(s) ds, O^t^T.
-f
Jo
Доказать, что
oo pT 00 pT pT
22xk = / Yxk= / /
k= 1 Jo k=1 Jo Jo
R(t, u)R(u, t) dudt.
Указание. Воспользоваться разложением КФ R(t,s) в ряд Фурье (формулой
Мерсера)
R(t, s) = Е
3.13. Стационарный гауссовский СП x(t) имеет нулевое среднее значение и КФ
R(t). Дисперсия СП может быть оценена временным средним
-г Л
ичины
'^1
т
2,
[ж(£)] dt.
Найти среднее значение величины z и показать, что
Гт
var z=^l (Т - s)[R(s)]2 ds.
Указание. Использовать соотношение [60, ф-ла 6.15]
Е(х 1Ж2Ж3Ж4) = Е{Х\Х2)Е{Х2Х^) + Е{х\Хз)Е{х2Х4) + Е{Х\Х/\Г)Е{Х2Х2)-
3.14. Пусть известен обнаружитель сигнала s(t) в ГБШ, но сигнал, который воз¬
действует на вход обнаружителя изменился на si(t) вместо s(t). Вычислить вероят¬
ность обнаружения сигнала si(t) и показать, как эта вероятность зависит от величины
интеграла
Г
ps = I s(t)si(t)dt.
-f
Jo
3.15. Сигнал s(t) = A[l—e~at] должен быть обнаружен на фоне ГБШ, с односто¬
ронней спектральной плотностью равной N. Интервал наблюдения 0 ^ t ^ Т. Найти
ИХ соответствующего СФ и отклик СФ как функцию времени. Положить s(t) = 0
при t > Т.
3.16. Приемник должен быть спроектирован, чтобы решить, какой из двух сиг¬
налов so(t) или si(t) принимается в присутствии ГБШ с односторонней спектральной
плотностью N. Показать, что приемник может основывать свое решение на корреляции
входа с разностью сигналов. Найти ОП и сравнить его с порогом.
3.17. В предыдущей задаче найти вероятности Qo и Qi каждой из двух родов
ошибок Показать, что при фиксированной ВЛТ Qo. вероятность пропуска Qi = 1 —Qd
зависит от эффективного ОСШ
d2 = 2(3i + Эо - 2ps)/N,
78
Глава 3
где Эо и Э\ — энергия каждого из двух сигналов;
Ps= so(t)si(t) dt.
s(t) = A cos + В cos
должен быть обнаружен в гауссовском шуме с КФ
R(t,s) = a cos (y1) cos (yS) + 13C0S (yO C°S (f^) 1
а > 0, & > 0,
путем наблюдения входного колебания r(t) = s(t)+ n(t) на интервал наблюдения (0, Т).
При гипотезах
описать обнаружитель Неймана-Пирсона, вычислить вероятность обнаружения Qd и
показать, как она зависит от ВЛТ Qo.
3.19. Сигнал
где все д*. положительны.
Входное колебание r{t) наблюдается в интервале (0,Т). Найти оптимальный об¬
наружитель Неймана-Пирсона и вычислить ВЛТ Qo и вероятность обнаружения Q^.
Выразить Qd через энергию сигнала s{t) и другие параметры обнаружителя.
3.20. Сигнал s(t) = Ate~btl(t) принимается в аддитивной смеси с шумом, имею¬
щим КФ R(t) = #ое~^1т1. Показать, как должно быть обработано входное колебание
r(t) обобщенным согласованным фильтром, чтобы решить, присутствует ли сигнал.
Вычислить ОСШ d2 и установить, как от него зависит вероятность обнаружения.
3.21. Сигнал s(t) должен быть обнаружен в смеси с белым шумом с односторон¬
ним ЭС, равным N и коррелированным шумом с КФ
Показать, как вычисляется ИХ обнаружителя. В качестве примера рассмотреть сигнал
s(t) = А и найти ИХ фильтра и ОСШ d2.
3.22. Шум на входе приемника стационарный и гауссовский и состоит из суммы
БШ с односторонним ЭС равным N и шума с КФ R(t) как в предыдущей задаче.
Приемник должен обнаружить сигнал
Найти статистику оптимального обнаружителя Неймана-Пирсона и вычислить вероят¬
ность обнаружения при фиксированной ВЛТ Qo.
Но : r(t) = n(t);
Hi : r(t) = s(t) + n(t)
s(t) - Acosut, 0 ^ t ^ T, uj - 2n/T,
должен быть обнаружен в гауссовском шуме с КФ
п
Я(т) = <r2e_MlTL
s(t) = Ае °^, — оо < t < оо.
Обнаружение полностью известных сигналов
79
3.23. (а) Прямоугольный сигнал длительностью Т\
А при 0 ^ t ^ Т\\
при t ^ 0; t ^ Т\,
»(*) = {о
должен быть обнаружен в присутствии гауссовского шума, состоящего из двух компо¬
нент: белого шума и стационарного шума, имеющего Лоренцеву спектральную плот¬
ность
u + flz
Входное колебание приемника наблюдается в интервале (—Т, Т), который намного
больше, чем длительность сигнала и ширина ц,~1 КФ небелой компоненты шума.
Найти ИХ оптимального фильтра для обнаружителя сигнала с максимальной ве¬
роятностью обнаружения Qd при фиксированной ВЛТ Qo.
(б) Показать как оптимальный приемник в (а) может быть подразделен на обеля¬
ющий фильтр и следующий за ним второй линейный фильтр. Привести передаточную
функцию и импульсную характеристику обеляющего фильтра для сигнала и шума и
вычислить сигнал si(t) на выходе обеляющего фильтра при прямоугольном сигнале на
входе. Найти ИХ второго фильтра.'
(в) Вычислить максимальную вероятность обнаружения Qd, достигаемую опти¬
мальным приемником части (а), при фиксированной ВЛТ Qo и соответствующем ОСШ
<%о и вычислить это ОСШ.
3.24. Необходимо обнаружить сигнал с ограниченным спектром
А при |ш| < 7vW]
при |oj| ^ nW.
Аддитивный шум стационарный гауссовский с КФ
a2 а2
R= 1. 2-
az + rz
Допускается наблюдение на бесконечном интервале времени. Вычислить максимально
возможную вероятность обнаружения Qd при фиксированном ВЛТ Qo-
3.25. Сигнал Af(t) известной формы и амплитуды должен быть обнаружен в
аддитивной смеси с ГБШ при его одностороннем ЭС Nq. При фиксированной матрице
потерь С и априорных вероятностей 7го и ni гипотез Но и Hi показать, что ВЛТ Qo
и вероятность обнаружения Qd определяются формулами:
Qo = Q(x)\ Qd = Q(x - d): Q(x) =-= e-“2/2 du
VSF Jx
при x = (1/d) In Л0 + d/2; d= у/23/N, когда До определяется соотношением
no(Cw - Coo)
Ао =
*ri(Cbi-Cn)’
Найти минимальные байесовские потери C(d) в виде функции ОСШ d и показать, что
при d 0 разность С(0) — C(d) (при d <^С 1) пропорциональна величине
3 I In2 Л0
d еХР< —2*
Следовательно, разность C(0) — C(d) стремится к нулю быстрее, чем ОСШ при d —>■ 0.
80
Глава 3
Указание. Воспользоваться асимптотикой [65]
<?(*) = —5=е-*2/2 (1 - \ + ...) , х » 1.
xV2tv \ х2 )
гл/2тг
3.26. Решить интегральное уравнение
Гт
cos сot
при a > 2T.
Указание. Дифференцируя треугольное ядро R(t — s) дважды, показать, что оно
удовлетворяет ДУ
где F(t) содержит дельта-функции. Определить F(t).
3.27. Трехпозиционная система связи передает один из трех сигналов /(£), 0,
—/(£) каждые Т секунд. Эти сигналы принимаются с энергией Э или 0 в присутствии
ГБШ с односторонним ЭС N В конце каждого интервала (0,Т) выход фильтра, со¬
гласованного с функцией /(£), измеряется и сравнивается с порогами +а и —а. Если
ж > а, то принимается решение, что передан сигнал +/(£), если ж < —а, то передан
И если —a<x<a, то принимается решение, что передана нулевая посыл¬
ка. Какова вероятность Qk = 1 — -Рош правильного решения как функция а, Э v\ N,
когда все три сигнала посылаются одинаково часто7 Какова максимально возможная ■
вероятность Qk и при какой величине порога а она достигается?
3.28. Четырехпозиционная система связи передает каждые Т секунд один из
четырех сигналов.
si(t) = Afi(£), s2(t) = -Afi{t), s3{t) = Af2(t), s4(£) = —Af2(t).
Функции fi(t) и /2(t) ортогональны, сигналы принимаются с равными энергиями в
аддитивной смеси с ГБШ. Приемник имеет фильтры, согласованные с fi(t) и
причем на их выходе наблюдаются величины у\ и у2 в конце каждого интервала (0,Т).
Построить стратегию минимизации вероятности ошибки Рош в виде функции ОСШ.
3.29. Каждые Т секунд четырехпозиционная система связи передает один из
четырех сигналов:
Л = aif(t), В - a2f(t), С = -a2f(t), D = -aif(t), 0 < а2 < а\.
Сигналы следуют с одинаковой относительной частотой Эти сигналы затем принима¬
ются при общем затухании fi в присутствии ГБШ с ЭС N. Это значит, что если послан
сигнал А, то принят сигнал и т.д. В конце каждого интервала (0,Т) выход
фильтра, согласованного с f(t) сравнивается с тремя решающими уровнями Ь, 0 и —Ь,
и решение о переданных сигналах принимается на основе схемы
у > b —у А, 0 <с у Ь —у В, —b <с у ^ 0 —у С, у ^ —b —у D.
Найти среднюю вероятность ошибки при приеме указанных четырех сигналов и выбрать
порог Ь, который минимизирует эту вероятность. Показать, как определяются ампли¬
туды а\ и а2, чтобы сделать минимальную ошибку как можно меньше при ограничении
на среднюю передаваемую мощность сигнала.
3.30. Пусть А*. — собственное значение интегрального уравнения с ядром Ят(г),
где Rm(ti,t2) = E[m(ti)m(t2)\. Показать, что
Обнаружение полностью известных сигналов
81
3.31. Пусть дана аддитивная смесь
r(t) = m(t) + n(t), 0 ^ t ^ Т,
где m(t) — коррелированный гауссовский СП с нулевым средним значением, имеющий
КФ Rm(r), n(t) — ГБШ с нулевым средним значением и КФ Rn{r) - (No/2)S(t).
а) Имеется разложение
о
Показать, что коэффициенты гк будут статистически независимы, если {V'fcW}
являются собственными функциями интегрального уравнения при ядре Ят(т).
б) Найти ковариацию коэффициентов.
в) Используя отрезок ряда для коэффициентов, найти функцию правдоподобия
где Afc — собственное значение интегрального уравнения при ядре Ят(т).
б) Найти среднее значение и дисперсию статистики 7Т для каждой из гипотез.
3.33. В предыдущей задаче, пренебрегая условиями сходимости, при К —> оо
рассмотреть
к
к
П
k= О
k= О
Т
где rk = J r(t)if>k(t)dt, аналогичные представления справедливы для mk и nk.
для r(t).
3.32. Рассмотреть проблему обнаружения
Я0 : r(t) = п(£);
i/i : r(t) = ra(£) + n(£)
где ra(£) и n(t) те же, что и в задаче 3.31.
а) Показать, что можно использовать в качестве статистики величину
^kTk
ъ-ЬйГПъ’
k= 1
к= 1
Показать, что статистику 7Т можно представить в интегральной форме
где h(t,v) — решение интегрального уравнения
82
Глава 3
3.34. Рассмотреть обнаружение сигнала в аддитивной смеси с коррелированным
и белым шумами
Н0 : r(t) = m(t) + n(t), о < t < Т
Н\ : r(t) = s(t) + m(t) + n(t),
где m(t) и n(t) описаны в задаче 3.31.
Показать, что можно использовать статистику
Т(г) = Г [r(£) — s(t)]h(t) dt,
где h(t) — решение интегрального уравнения
=[
Jo
пьно
f
Jo
2 Г 1
h(t)+— / h(r)Rrn{t - r)dr = —s(t), O^t^T.
No JQ N0
f
Jo
3.35. Рассмотреть обнаружение известного сигнала в коррелированном шуме
Но: r(t)=n(t); о <t<T
Нх\ r(t)= s(t)+ n(t), " "
Пусть Rn(r) — КФ шума, используя критерий Неймана-Пирсона, найти форму
сигнала, который максимизирует вероятность обнаружения.
3.36. Пусть дано интегральное уравнение
рт
h(r)Rn(t — r)dr = g(t), 0 ^ t ^ Т,
/о
где Rn(r) и g(t) — известные функции.
Принять S'n(cj) = ш2/(ш2 + uj\) или Rn(r) = (o;i/2)e-a;ilrl.
Показать, что
h(t) = 9(t) - “г 4гЗ(4)
dtz
является решением интегрального уравнения, если только
^-<7(0) = О, М*2-д(Т)= О,
L)J\ L)J\
где gf(0) и д'(Т) — производные функции g(t) при t = 0 и t = Т соответственно.
3.37. Найти решение интегрального уравнение в предыдущей задаче, если приве¬
денные там граничные условия не выполняются.
3.38. Пусть ядром интегрального уравнения Фредгольма первого рода является
функция
Rn(r) = а6(т) + .
а) Какое дифференциальное уравнение при этом необходимо решать?
б) Какова форма решения однородного уравнения7
в) Если g(t) = 1 — cosujot, то какова форма частного решения.
3.39. Пусть задано ядро интегрального уравнения
Rn(t) = ( 1 - lTl/L ПРИ И ^ 1'
{ 0 при других т.
Найти дифференциальное уравнение, определяющие собственные функции инте¬
грального уравнения
гт
/(т)Rn(t — т) dr = А/(£), 0 ^ t ^ Т < L.
f
Jo
4 Обнаружение сигналов при наличии
случайных (неизмеряемых) параметров
4.1. Методы обнаружения
В общем случае полезный сигнал может зависеть не только от
параметра А, называемого существенным, но и от ряда несуществен¬
ных (неизмеряемых) случайных параметров к = (Ai, А2,..., Хк)т- При
этих условиях и функционал плотности вероятности F[x(t) - з(£Д)]
оказывается зависящим от несущественных случайных параметров и
для определения функционала правдоподобия F[x(t) | требуется
его усреднение по несущественным (неизмеряемым) параметрам:
F[x(t) | Ц = F(l) =
/00 /«ОО
... F[x(t)-s(t,k)]Wk(V)dX (4.1)
-оо J — оо
Здесь W(Vj = ИЪ(А1,А2,...,А*) — совместная плотность вероятно¬
сти несущественных параметров Ai, А2,..., А
Пусть входное воздействие имеет вид
x{t) = з(£Д) + n(£), (4.2)
где к = {Ai, А2,Am}T — случайные неизмеряемые параметры, ха¬
рактеризуемые совместной ПРВ W(\i, А2,Am) = W(k). При этом
ПРВИ^(х),х = (ж!,ж2, ..,жп)т, зависит от параметров Л, = (Ai, А2,
Am)T, те. Wi(x) = W(x,h) = W(l)W(x \ I).
Введем отношение правдоподобия (ОП)
Л(х | к) = Wi(x| X)/Wb(x)
(отношение правдоподобия для сигнала с полностью известными па¬
раметрами). Согласно [26]
Л(х | X) = ехр ( ехР
(4.3)
dt.
где Э(к) = ( s2{t,V)dt\ G(x | V) = /* 5(£Д)ж(£)
J о J о
При наличии случайных неизмеряемых параметров отношение
правдоподобия Л(х) = Е[А(х | J,)], где Е[-] — усреднение по спу-
84
Глава 4
чайным параметрам, имеющих совместную ПРВ W(k)’
Л(х) = [ W(V>Л(х | X) dk. (4.4)
JD{ А)
Используя (4.2), окончательно найдем
Л(х) = [ W(X,)e-3(X)/woe7%G(X(t)|X)dX. (4.5)
JD(k)
Пример 4.1. Оптимальное обнаружение сигнала со случайной на¬
чальной фазой.
Пусть в смеси x(t) = s(t) + n(t) сигнал s(t) имеет случайную
начальную фазу, равную А, тогда
s(t, А) = A(t) cos[cjo^ + (f(t) + А]. (4.6)
Здесь А — скалярный параметр, поэтому сигнал зависит от одного
параметра, что является частным случаем.
Начальную фазу А полагаем равномерно распределенной в ин¬
тервале (0;27г), те.
тл)=Г1/2тг при Ае(0;2тг); , .
К ) \0 при А£ (0;2тг). ( ’
Найдем корреляционный интеграл (статистику) G = G(x). Пред¬
ставим сигнал (4.6) в виде суммы
s(t, А) = si cos А + S2 sin А,
где
si = si(t) = A(t) cos[ujot + ip(t)]’, S2 = S2(t) = — A(t) sin[cj0t + (^(OI-
Рассмотрим статистику
2 2 fT
G= — G(x | A) = — / s(t, X)x(t) dt = Gi cos A + G2 sin A, (4.8)
No No Jo
где
Gl ' Ж = j| i »■«>*<*><* Сг' ж = ^
Введем величины Д и т/\ определяемые соотношениями
R=y/Gi+(%= cosф=^; ^пф=^. (4.9)
Тогда статистика G примет вид
G - R(cos A cos V’ + sin A sin V*) = -Rcos(A - ф).
Обнаружение сигналов при наличии случайных параметров
85
Найдем отношение правдоподобия по формуле (4.5):
1 г2п
А(х) = e~3{x^No— / eRcos{x~^ d\.
2тг Jо
1 г2п
— eficos(A-,/’) dA = /0(Я), (4.10)
2ТГ Jo
Известна формула [59]
2тг,
где Io(R) — модифицированная функция Бесселя нулевого порядка.
Таким образом, для сигнала со случайной начальной фазой от¬
ношение правдоподобия
Л(х) = e~^x)/No I0(R). (4.11)
Заметим, что если амплитуда A(t) и фаза <p(t) сигнала меняются
незначительно за период колебаний Т0 = 27г/ы0. что эквивалентно
предположению об узкополосности сигнала s(t, А), то энергия сигнала
практически не зависит от начальной фазы:
Гт Гт
Э(А) = / s2(t, A)dt = / A2(t) cos2[cjo^ + (p(t) + A] dt w
Jo Jo
Kl-j\\t)dt= Э. (4.12)
В результате окончательно получим
Л(®) = e~d2/2I0(R), (4.13)
где d2 = 2Э/Щ — отношение сигнал-шум (ОСШ).
При отсутствии сигнала статистики G\ и Gz имеют нулевые сред¬
ние значения E(Gi) = E(G2) = 0 и равные дисперсии:
D(Gi) = D(G2) =
2\2П,- , /2\2П,- N {2\2{N09\ ,2
Можно показать, что статистики Gi и G2 независимы, поэтому
их совместное распределение (при х - Gi, у = G2) имеет вид (в
случае гипотезы Я0)
. . 1 / х2 + у2
wo(x,y) = 7Г-И еХР -
2nd2 к V 2d2
Распределение W0(R) устанавливается без труда: оно представ¬
ляет собой распределение Релея, т.е. распределение длины вектора со
86
Глава 4
случайными координатами х и у, которые независимы:
R2
'2d2
Вероятность ложной тревоги
/'ОО
Qo= Wq(R) dR = ехр
jRn
2d2
(4.14)
(4.15)
При наличии сигнала статистики Gi = х и Gz = у имеют одинако¬
вые дисперсии D(Gi) = £>(£2) = сг2 и средние значения тх = E{G\)
и ту = E(G2)> Эти статистики также независимы. В результате
(ж - тх)2 + (у - шу)2"
2сг2
Wi(®,y,A) =
ехр
27ГСГ2
Воспользуемся соотношением (4.9)
х = Rcos'ip; у - Дsin-0,
и значением якобиана преобразования J при переходе от переменных
х, у к новым переменным R, ф (J = R). В новых переменных получим
Я
27Гсг2
ехр
R2 — 2R(mx соэф + ту sin ф) + т2
2 а2
где т2 = т2 + т2.
(4.16)
Полагая
тх cos ф + ту sin ф = т cos(ф — в)
(tg 9 = ту/тх) и интегрируя по ф в интервале (0; 27т), с учетом (4.10)
окончательно найдем
W1(R)= ^е-(д2+т2)/2ст2/0 .
(4.17)
Это распределение называется распределением Райса.
В рассматриваемом случае D(G\) = £>(£2) = d2 (т.е. а2 = d2)\
тх = E(Gi) = d2 cos A; = E{G2) = <i2 sin A; m = d2. Тогда
no (4.16)
Д (R2/d2 + d2)
Wi(il)= ^e 2 /0(д).
(4.18)
Вероятность обнаружения
/»оо
Qd= / ЩД)
JRcx
dR.
Обнаружение сигналов при наличии случайных параметров
87
"i
Рис. 4.1
Проведем подстановку R/d = х, a = d, Ro/d = (3 и получим
г <^-> 2 2
Qd= хе~(х +ос ^2Io(ax)dx = Q(a,f3), (4.19)
h
где Q(a,/3) — так называемая Q-функция Маркума, которая табули¬
рована [18, 70].
Схема некогерентного обнаружения изображена на рис. 4.1, где
К — квадратор.
Кривые обнаружения сигнала со случайной фазой изображены на
рис. 4.2 штриховыми линиями, здесь же сплошными линиями пред¬
ставлены кривые обнаружения полностью известного сигнала, пара¬
метром служат значения ВЛТ Qo- РХП для сигнала со случайной
фазой изображены на рис. 4.3.
Сравнение кривых на рис. 4.2 показывает, что отношение сиг¬
нал/шум d, требуемое для получения заданной вероятности обнару¬
жения при одинаковой вероятности ложной тревоги, когда фаза сигна-
(I, дБ
19
17
15
13
11
9
7
5
3
0,0001 0,005 0,002 0,1 0,2 0,3 0,5 0,7 0,8 0,9 0,95 0,980,99 0,999 Qd
•<»
*
в -*■
. -
- -
•
•<
**
'О?1'
^ *
*
У
*
X*
^ '
*
]
L0—1
>
0/
У
✓ >
У
* s
г у
*
✓ ‘
^ *
/V
V
*
/
/ У
/
/
/
/
/У
*
у
У
/У
У
S
J
10-
/
У
/
А
10-
/
Ъ/
.0“
/
/7
/7
0-41
/
/У
/
4
/
/
/
У
/
/
г
4
'А
//
10“
Ун
г /
г2
/
/
/
/
//
г—
7
V
г
/
г/
/
/1
г
/
Рис. 4.2
88
Глава 4
ла неизвестна, несколько боль¬
ше, чем в случае полностью из¬
вестного сигнала. Например [8],
при Qo = Ю-10, Qd = 0,9 d = 8
для сигналов с неизвестной фа¬
зой и d = 7,6, когда фаза извест¬
на. Это увеличение d на 0,4 гру¬
бо выполняется для большинст¬
ва кривых.
Потери е ОСШ изображены
на рис. 4.4 [22], где параметром
служит вероятность обнаруже-
0 0.2 0,4 0,6 0,8 Qd ния Qd а потерИ определяются
Рис-4 3 величиной е = 10lg(d2/do), где
d2 — ОСШ при полностью известнном сигнале; d\ — ОСШ при слу¬
чайной фазе, которые обеспечивают одну и ту же надежноть (Q0, Qi).
По рис. 4.4 замечаем, что практически во всем диапазоне d0 и Q0 по¬
тери не превышают 1 дБ.
Пример 4.2. Рассмотреть проблему обнаружения
Н0 : хк = wk —
к = 1, п,
Н1 : хк= wk+ sk(6),
где wk — ГБШ с нулевым средним значением и дисперсией сг2, sk(6) —
известная функция аргумента в.
Найти характеристики обнаружения.
дБ
2,0
1,5
1,0
0,5
о
0 -10 -8 -6 -4 -2 lg Qo
Рис. 4.4
Обнаружение сигналов при наличии случайных параметров
89
Решение. Согласно (2.3) получим ОП
или
Ь(Хп,в) = ехр
Ь(Хп,в) = ехр
2 сг2
Кк=1
к=1
4(0))
\k=i к=1 /.
(4.20)
где Xn = (xux2,...xn)T.
Пусть в — СВ, равномерно распределенная в интервале (0,27т).
Тогда усреднением по (4.4) получим
1 /*27Г 1 / _,ь. 1 _>ь. 1
L(X")=2Wo 6ХР ^ ( Y^XkSk^ ~ 2
_ \ к ^ 1 fc—1 /
Пусть сигнал s*;(0) имеет вид гармонического колебания
Sk{0) = dk sin[(£; — 1 )шсТ + 0], к = 1, n,
где аь а2,..., ап — известная последовательность амплитуд аь =
= а(к - 1 )Т; 0 — СВ, не зависимая от шума; ис — известная несу¬
щая; Т — интервал дискритезации, причем выполняется равенство
писТ = т2тг при целом га. Рассматривается интервал (0, пТ), причем
предполагается, что отношение n/га значительно больше единицы.
Преобразуем сумму произведений XkSk(O), используя соотноше¬
ние sin(a+ b) = cosasin6+ sinacosb. Тогда получим
п
^^XkSkid) = Xcs\n6 + Xs cos в,
d6. (4.21)
к=1
где
Хс — ^ ^ CLfcXk C0s[(k 1)ыс], Xs — ^ ^ CLkXfo sin[(/u l)cJc], UJq — CUqT.
k=1
k=l
(4.22)
Используя равенство sin2a = \ - |cos2a, преобразуем сумму
квадратов:
n
- \ £ 4(0) = “ £>2 + z £>2 cos[(2fc - 1)5JC + 20]. (4.23)
fc=l
В большинстве практических случаев второе слагаемое в (4.23)
равно нулю при всех значениях в. Например, когда отсчеты посто¬
янны или когда a/e = А{ 1 - cos[(£; - 1)27г/(п - 1)]} при к = 1, п.
В других случаях на практике отсчеты а2,... а2 обычно медленно
90
Глава 4
Квадратурная ветвь
Рис. 4.5
изменяется по сравнению с cos(2£; - l)cJCf и эти слагаемые фильтру¬
ются фильтром низкой частоты. Принебрегая вторым слагаемым в
(4.23), по (4.21) получим аналог формулы (4.3) для ОП:
п2тг
L(Xn)= е~па2/4^^- I ехр
CT2J_ Г
2тг Уо
Дг- (Хс sin в + Xs cos в)
сН
d6, (4.24)
где а2
1 . П
п= 1
Сравнивая статистику G = Xcsin0+ Xicos# со статистикой
(4.8), после усреднения получим ОП
Ь(Хп) = е_па2/4о'2/0(г), (4.25)
где г = у/XI + XI
Структура оптимального обнаружителя при некогерентном прие¬
ме модулированного гармонического колебания изображена на
рис. 4.5.
Пример 4.3. Различение радиосигналов со случайными началь¬
ными фазами.
Рассматриваются два сигнала в аддитивной смеси с ГБШ
Sjk(0) = djk sin[(fc — l)loc + 0], к= 1 ,nj = 0,1. (4.26)
В данном случае с учетом (4.25) получим ОП
их.) - (4,7)
е~па0/4а2 io{ro/a2)
где
— 1
п
ai = -E4; ri = +
х^ ’
Xsj■
к= 1
Обнаружение сигналов при наличии случайных параметров
91
xCj = ^2 ajk%k cos[(/c - 1)cjc]; xSj = ^ ajkxk sin[(/c - 1)cjc].
k=1 k=1
Можно показать, что при условиях
п п
22a3kaik = 0 при j 1 1• 22aikaikS'n[(k ~ 1^с + ^ = 0
к=1 к=1
вероятность ошибки имеет вид
Рош = \<Гь2/\ (4.28)
где Ь2 = па2/2а2 = па^/2а2.
При непрерывных сигналах [26]
Si(t) = Oi(t) cosfait + *фi(t) + 0*), i= 1,2, (4.29)
где cji/27r = fi — несущая частота; a*(£) и ^i(t) — функции, отража¬
ющие законы амплитудной и фазовой (частотной) модуляции; 0* —
начальные фазы, представляющие собой независимые СВ, равномер¬
но распределенные на интервале (0,27т).
Предполагается, что ширина спектров сигналов si(t) и s2(t) мно¬
го меньше их несущих частот и кроме того \u2 - cji| < сj*.
В данном случае ОП имеет вид
Л(Х„) = г 1, (4.30)
где N — односторонняя спектральная плотность ГБШ; Э* — энергия
сигнала, Э, = f0T sj(t)dt; Xt = V4+X?s,
Xic = [ x(t)ai(t) cos[cJit + ^i(t)\ dt\
Jo
Xis = / x(t)di sin[cj^ + ^i(t)\ dt.
Jo
Принимается гипотеза Яь если
In/o^i) - InIo(A2) >7, Ai= 2Xi/N. (4.31)
Вероятность ошибки -foiu имеет вид [26]
Рош = Q(a, b) - 0,5e~d2/4I0(pd2/4), (4.32)
где Q(a,b) — Q- функция Маркума; d2 = 23/N — ОСШ;
a= Wd2(i - \/l-p2): b= \\Jd2( 1+ y/i-p2):
92
Глава 4
Р = ^\/Ьс + ЬЬ 1
ьс= ai(t)a2(t) cos[(cj2 - wi)t + ^2(0 - ^iM] dt\
Jo
bs= ai(t)a2(t) sin[(cj2 - wi)* + ^2 W - V>i(*)] dt-
Jo
При p = О, используя свойство Q(o,u) = e~u2/2 no (4.32) полу¬
чим формулу, аналогичную (4.28):
Рош = \e-d214. (4.33)
4.2. Характеристики обнаружения
Чтобы найти характеристики обнаружения (Qo, Qd), необходимо
определить моменты статистик Хс \л Xs. Очевидно, что при гипо¬
тезе Но
п
Е(ХС | Н0) = 22 akE(wk) cos[(fc - l)wc] = 0.
fc=i
Аналогично, получим
E{XS I Но) = 0;
var(Xc I Ho) = E(X2 I Ho) =
n n
= 22 £ akaiE{(wkwi) cos[(fc - 1)й7с] cos[(l - l)wc]} =
k=1;=i
71 О 9" nT
2 v ^ 2 2 г/ т ncHcr 2 ncr
= ak cos P - ~ —= atr , a = —.
k= 1
Причем здесь учтено, что E{wk'wi) = сг25ы и равенство нулю суммы
от вторых гармоник, аналогично сумме (4.23). Нетрудно показать,
что var(Xs | Н0) = var(Xc | Я0).
Найдем корреляционный момент
п п
E(XCXS | Но) = 22'^2akaiE(wkwi) cos[(fc - l)a7c]sin[(i - l)tDc] =
fe=ii=i
71
- a2 22 at cos[(A; - l)wc] sin[(fc - 1)й7с] =
k=1
2 71
= у 22 ak sir,[2(fc - 1)й7с1 ~ °-
k=1
Таким образом, при гипотезе Но СВ Хс и Х\ некорррелирова-
Обнаружение сигналов при наличии случайных параметров
93
ны, а в силу их гауссовского распределения и независимы. Каждая
из этих СВ подчиняется нормальному распределению N(0,na2a2/2).
Тогда ВЛТ Qo находиться из соотношения
1
Q о
- //
Х2+Х|^72
= е-(*с2+*Ь/(-2а2) dXcdXs =
1
7Г77/(7'
п2тт р
5 a2 Jo J'у
ге
rz/(n<j2a2) ^T(^q _ e-iz/n<rza2 ^
Здесь использован переход к полярной системе координат (г, в). Та¬
ким образом, ВЛТ
Q0 = e_7^/(n,j2a2) = e-y£/Va°£).
(4.34)
Для того чтобы найти вероятность обнаружения Qd, необходимо
определить моменты статистик Хс и Xs при гипотезе Яь Найдем
условное среднее значение при 0=0:
71
Е{ХС | Яь 0 = в} = £ а*£?{а:* | Яь 0 = 0} cos[(fc - 1)57с] =
fc=l
= ^a2 sin[(fc - 1)cjc + в] cos[(k - 1)cjc] = sin в = a sin в
k=1
Аналогично получим условное среднее значение E{XS | Яь0 =
= в] = (na2/2)cos0 = acos0.
При фиксированном в дисперсия и корреляционный момент СВ
Хс и X* при гипотезе Hi те же, что и для Хс и X* при гипотезе Но.
Очевидно, совместная ПРВ W(XS,XC,6 | Hi) имеет вид (4.16)
при х = Xs\ у = Хс; гах = acosQ\ my = asin0; а2 = о\ - по2а2/2 =
= аа2
1
W(x,y | Hi,в) = ^2 ехр
(х -тх)2 + {у-Шу)2
2 ак
Переходя к полярным координатам (г,в), когда х = rcos0; у =
= г sin 0, получим аналог (4.17)
г2 — 2r(mx cos в + ту sin 0) + a2"1
WMI Яь0)= ^—2 ехр
2тг ag
ехр
2ag
г2 + a2 — 2ra cos(0 — i/>)
2 erg
94
Глава 4
Интегрируя по в с учетом (4.10), находим
W(r) = ^e^2+a2^oI0 (™
°0 \°0.
Тогда вероятность обнаружения принимает вид
Qd= /°° W(r) dr = r^e-^2^oI0(r-^)dr =
J 7 У 7
Г л о
= / xe~(x +h ^2I0(bx) dx = Q(b,70), (4.35)
Ло
где Q(b,jo) — Q-функция Маркума; я = r/o2b\ 70 = 7/ст2Ь; b2 =
= a2/<Jo = a/a2.
По (4.28) находим
ln(l/<2o) = 72/ncr2o2 = 72/2acr2 = 7q/2.
Отсюда 7o = 1/2 ln(l/<3o). Тогда no (4.35) получим
Qd= Q{b,V2ln(l/Qo)}. (4.36)
Найдем среднее значение энергии сигнала
11 о2
2
Е
I п 11 /*27Г
-£5^) =п2^ £alsin2[(fc - l)u>c + 9]d6
71=1 J Jo к= 1
Таким образом, Ь2 = na2/2a2, что эквивалентно ОСШ d2 при коге¬
рентном обнаружении.
Если (при известном в) сигнал обнаруживается когерентно, то
ОСШ d2 имеет вид
= = ^ <4-37>
к=1
Однако характеристики обнаружения различны для случая из¬
вестного в и для случая неизвестного в. Потери при этом отобра¬
жаются на рис. 4.4. При равных в том и другом случае Qo и Qd
решение уравнения
Q{b, л/2 ln(l/<2o)} = 1 - Ф[Ф_1(1 - Qo) ~ d] (4.38)
приводит к приближенному соотношению Ъ « d + 0,4. Это же было
отмечено в примере 4.1.
В примерах 4.1 и 4.2 рассматривалась статистика z2 - х2 + у2,
где х ~ ЛГ(0,сг2); у ~ ЛГ(0,сг2) при гипотезе Яо и х ~ ЛГ(гах,сг2);
у ~ N(my,a2) при гипотезе Яь
Рассмотрим нормированную статистику р = z2/сг2, такую что р =
Обнаружение сигналов при наличии случайных параметров
95
= х\ + у\, где XI ~ ЛГ(0,1); уг АГ(0,1) при гипотезе Яо и xi ~
~ N(m'x, 1); ух rsj N(rriy,l) при гипотезе Н\.
Таким образом, статистика р подчиняется распределению xi ПРИ
гипотезе Но и нецентральному распределению X2W ПРИ гипотезе
Hi, где показатель нецентральности
a=(4)2+K)!“(v)2+(v)2-
В примере 4.1 сг = d\mx- d2cosQ\ my = d2sin0, поэтому здесь
показатель нецентральности
А = d2 cos в + d2 sin 0 = d2.
В (4.35) = асг2; mx = acos6\ my = asin0, тогда
a 2 -2 a , ( a \ • 2 a _ aa<1 _ aa<1 _ a _ ,2
A = — cos в + — sin 0=^-= — = — =^.
V<W V^oy Oo a
Найдем характеристики обнаружения:
Qo = P{r > Ro} = P{r/a > Ro/v} = P{p > До/^2} =
1 poo poo О 2
= <3x2(i?o/o-2) = ~ I e~u/2du= / e~zdz = e-7, 7= —
2 2 7Л2/(Т2 77
Это значение ВЛТ Q0 при сг2 = d2 совпадает с (4.15), а при ctq = асг2,
До = 7 ВЛТ Qo совпадает с (4.34).
Вероятность обнаружения
Qd = Р{р > ДоА7-2} = £х'2(А)(Яо/^2) =
1 Г°°
= e~(-x+x^2Io(y/Xx) dx -
2 JR\I°2
= \ Г e~(x+d2)/2I0(dVx)dx= [°° ze~(z2+d2)/2I0(dz)dz.
2 JRlld2 Jp
Таким образом,
Qd= Q(d, /3), /3= Ro/d. (4.39)
Это совпадает с (4.19), а при А = Ъ2, 70 = 7/сг0 — с (4.35).
Пример 4.4. Оптимальное обнаружение сигнала со случайными
амплитудой и фазой.
Пусть радиосигнал имеет вид
s(t,\,A) = Aao(t) cos[cjo£ + <p(t) + A] (4.40)
и случайной является не только фаза А с распределением (4.7), но
и амплитудный множитель А, причем ПРВ W(A) имеет вид закона
96
Глава 4
Релея:
А ( А2
л>0-
В данном случае энергия Э(А, А) зависит от случайного множи¬
теля А:
Э(А, А) = А2Э\, Э*= IJ* aoW dt. (4.41)
Ее среднее значение
роо п2тг
Э = / dA Э(а, A)W(\, A) dX,
Jo Jo
где W(\, А) = J^W(A), поэтому
Л3е 2ai dA = 2а23\.
Используя формулы (4.4) и (4.5), получим отношение правдо¬
подобия
Г2” Ae-A*/(2*2l)e-A2d>/2eARcos{a-e) d
2тга2 Л Jо
где d2 = 23i/N0.
Интегрируя с учетом формулы (4.10), получим
Л= А [ Io{AR)e-A2^2+1/,7b/2AdA.
а1 J О
Используя табличный интеграл [59]
/*оо ^ 12
/ Io{plx)&-vx xdx= ^ /Av, (4.42)
Jo 2z/
найдем окончательно (при (i = R, х = А, и = (d2 + 1 /сг?)/2)
Л = u2d2 + iefl2/(2d2+2/<7i). (4.43)
Функция ПРВ W0(i?) остается той же, что и в (4.14). Для нахож¬
дения Wi(R) необходимо усреднить (4.16) по амплитуде A: Wi(R) =
= .E[Wi(i?)]. В результате (при m, = Ad2, сг2 = d2)
Wi(R) = Г ^e-R2/2d2e-A2d2/2^e~A2/2,7iI0(AR) dA =
Jo d
= K-R2/2*2 Г Ae-A^d2+1/^/2Io(AR)dA =
a Jo
Обнаружение сигналов при наличии случайных параметров
97
= Яе-я2/2<*2л. (4.44)
Теперь можно построить РХП Qd(Qo) и кривые обнаружения при
ПОО ПОО
Qo = / Wo(R)dR\ Qd= W\(R) dR.
Jrq Jrq
Вероятность ложной тревоги определяется по (4.15). Вероят¬
ность обнаружения находится с учетом (4.44) и (4.43):
Qd= ,2П 1 ,2 2, Г Re-*2/™\R2/W2+V°bdR.
d2( 1 + d2af) JДо
Запишем Qd в виде
Г оо 2 о Г оо
Qd= e~aRd(a2R2)= / e~vdy = e~h°, (4.45)
JR0 Jh0
где у = a2R2\ a2 = [2d2(l + d2cr2)]-1; /го = а2Яо-
Радиосигнал (4.40) может быть назван федингирующим из-за
случайного характера амплитудного множителя. РХП Qd(Qo) федин-
гирующего сигнала определяется соотношениями (4.15), (4.45). Для
сравнения со случаем нефедингирующего сигнала неоходимо задать¬
ся равенством средней энергии Э федингирующего сигнала и энер¬
гии нефедингирующего сигнала. Это равенство обеспечивается при
сг2 = 1/2. В этом случае по (4.45)
_и ^ До _ ^ |п гл _ |п ^1/(1+с?2/2)
0 1 + d2/2 2d,2 1 + d2/2 Q°
Отсюда получим
Qt=«;/<i+d!/2>. (4.46)
Кривые обнаружения федингирующего сигнала изображены на
рис. 4.6 сплошными линиями: штриховыми линиями обозначены ха¬
рактеристики обнаружения сигнала со случайной фазой (ср. с рис. 4.2)
(параметром служит значение ВЛТ Qo).
По формуле (4.46) могут быть построены и РХП Qd (Qo), напри¬
мер, при d = 0 имеем прямую линию Qd = Qo, при d = V2 — дугу
параболы Qd = VQo-
Рассмотрим проблему обнаружения узкополосных сигналов, ис¬
пользуя комплексные огибающие вещественных сигналов.
Сформулируем проблему обнаружения (различения)
Я„: г(!) =*,(.) + »(t); (44?)
#i : r(t) = si(t) + n(t),
98
Глава 4
d, дБ
19
17
15
13
11
9
7
5
10“
1 1
10-1°
ОС
1
О
— »-н
/
$
/■
% **
o'*
* **
- '
■ ---■&*■
ю-,;
jio-4
1 П — 2
**
%
%
«г**
ф
.. ^ ‘
10
у'
✓
/
>
/'■
*
*
/
>
У
г
у ‘ ‘
/
/
А
/
■■ X
у
У
у
,/
г
fV
У
А
t)
/
/
г
uf
/
^ /
/
/у
//
Л/
у
/
А
к'
/
//
у '
' г
' /
/
А
/
/
/
/ .
/
о
/
/
/
0,0001 0,005 0,002 0,1 0,2 0,3 0,5 0,7 0,8 0,9 0,95 0,980,99 0,999 Qd
Рис. 4.6
где n(t) - ГБШ, его КФ Дп(т) = Ц*6(т);
s0,i(t) = Ao'i(t) cos[u>ct + <po,i(t) + 0o,i
Сигнал s(t) записывается в виде
s(t) = Re{s{t)e[u)ci},
где s(t) — комплексная огибающая,
s(£) - [s(t) + is(t)]e~luJct,
a s(t) — преобразование Гильберта от s(t).
В случае сигнала (4.48)
s(t) = A(t)e^+el
Вместо проблемы (4.47) будем рассматривать следующую про¬
блему обнаружения (различения)
Н0 : f(t) = Ao(t)e^o(t)+o\ +
(4.48)
(4.49)
(4.50)
(4.51)
Hi : f{t) = Ai{t)e^^+^ + n(t).
(4.52)
Здесь
n{t) - nc(t) + irik{t) = [n(i) + in(£)]e lu,ct;
nc{t) и rik{t) — соответственно синфазная и квадратурная составляю-
Обнаружение сигналов при наличии случайных параметров
99
щие шума. Можно показать [23], что ПРВ сигналов г и ОП имеют вид:
гТ И*) - 3од(0|2
Wo,i[r(*)] = a ехр
/
Jo
2N0
• dt
(4.53)
In A[r(t)] = 4- Re / [Si(t) - dt-
Jvo Jo
1
2 No
f \s!(t)\2dt- j |s2(t)|2
Jo Jo
dt
(4.54)
Заметим, что последнее соотношение является комплексным ана¬
логом соотношения (3.20), записанным через огибающие сигнала и
входного воздействия.
Полагая фазовые углы 0од в (4.48) случайными, запишем усред¬
ненное ОП в виде
A[r(t)} = E[W(r | 0i)]/E[W(r | 02)]. (4.55)
Используя (4.53) для числителя и знаменателя (4.55), получим
E{W[r{t) \е]}= £-J ехр - J
|r(t) - S(t)|a
2N0
dt
dff. (4.56)
В целях дальнейших преобразований запишем комплексную оги¬
бающую сигнала в виде
s(t) = Aa(t) exp{i [</?(£) + 0]}, (4.57)
причем при условии нормализации вещественной огибающей a(t)
(4.58)
Раскроем в (4.56) квадрат модуля
И*) - s(t)|2 = |r(0|2 - |s(t)|2 - 2 Res*(t)r(t) =
= \r(t)\ + A a (t) - 2Aa(t) Rer(t)e
-\e
Далее запишем интеграл
rT \r(t) - §(*)|2
/о
-f
Jo
r(t) |2+ A2a2(t)
2N0
A n
+ TTRe
No
-f
Jo
rT
~w / a(t)f(t)e~[^ dt
Jo
dt+
(4.59)
100
Глава 4
Введем условие
Г a(t)f(t)e-ivW dt = 2qev, (4.60)
Jo
где величины q и /3 подлежат определению в дальнейшем. Например,
Q =
f a(t)r(t)e 11
Jo
dt
(4.61)
Тогда с учетом (4.60) получим
А
— Re
Nq
-i9 f a{t)f{t)e-iv{t) dt
Jo
= ^Ree"i(0-^= ^cos(0-/3).
No N0
В результате по (4.56) следует
E{W[f(t) | в]} =
a
=sexp
f
Jo
*(t) |2+ Aa2(t)
2 No
dt
f
J —7Г
exp
2 Aq
N0
cos(0 - /3)
(4.62)
dp.
Согласно (4.10)
J exp[7cos(0 —/3)]d0= 27г/0(7), (4'63)
Окончательно no (4.62) находим
[ {\r(t)\2 + Aa2(t)) dt
Jo
E{W[f(t) | 0]} = alo ) exp
2N0
(4.64)
Поэтому ОП (4.55) принимает вид
_2^o Jo
(4.65)
В случае простого обнаружения, когда so(t) = 0 по (4.65) следует
A[f(t)} = Io(2Aq/N0)e-A2^2No, (4.66)
если учесть условие нормировки (4.58) и равенство /о(0) = 1.
Энергия сигнала
рТ д2 рт д2гр
s2(t)dt*A 1 A1
/о
ГТ л2 рТ
Э = / s2(t)dttt— / a2(t)dt =
Jo 2 Jo
Обнаружение сигналов при наличии случайных параметров
101
С учетом (4.66) принимается гипотеза Н\, если
I0(2Aq/N0) > 7ти
(4.67)
причем в порог 7П входит величина ехр(Л2Т/2АГ0).
В силу монотонности функции 1о(х) решению (4.67) соответству¬
ет неравенство
Условие (4.68) соответствует квадратурному приемнику, решаю¬
щему проблему обнаружения (4.52) при so(t) = 0.
Необходимо заметить, что статистика q2 в (4.68) не зависит от
величины сигнальной амплитуды А. Следовательно, данный крите¬
рий является равномерно наиболее мощный (РНМ) по отношению к
амплитуде А.
Преобразуем статистику q (4.61), когда
где индекс «НЧ» указывает на низкочастотную часть процесса в квад¬
ратных скобках за счет прохождения его через НЧ фильтр.
Учитывая, что операция интегрирования в (4.69) эквивалентна
НЧ фильтрации, запишем статистику q2 с учетом (4.70)
Здесь произведение a(t)r(t) является вещественной функцией, поэто¬
му (4.71) эквивалентно записи
где первое слагаемое определяет синфазную ветвь приемника, а вто¬
рое — квадратурную ветвь.
Структурная схема некогерентного обнаружителя изображена на
рис. 4.7. Она аналогична схеме рис. 4.1. Эта схема квадратурного
приемника эквивалентна схеме с использованием СФ (рис. 4.8). На
(4.68)
С учетом (П1.63), (П1.64) можно записать
f(f) = 2[г(Ь)е~Шс%ч,
(4.69)
(4.70)
Jo
102
Глава 4
a(t) cos[u;сi -f +(t)]
L43—
СФ_|—ДО —о—-
T L—
a.(/)sm[u;c/ + ^(01
Рис. 4.7
Рис. 4.8
Отсчет
при t = Т
рис. 4.8 ДО — детектор огибающей; СФ — согласованный фильтр
с ИХ;
h(t) = а(Т — t) cos[coct — (р(Т — £)], 0 ^ t ^ Т,
4.3. Характеристики обнаружителя
Запишем статистику q (4.61) в форме
причем г(£) — преобразование Гилберта от r(t) (см. Приложение 1).
В силу гауссовского характера r(t) СП г(t) также является гаус¬
совским и, следовательно, гауссовскими являются и СВ х и у.
Таким образом, для вычисления характеристик обнаружения
ВЛТ Qo и вероятности обнаружения Qd необходимо найти лишь сред¬
ние значения и дисперсии СВ х и у при их некоррелированности, а сле¬
довательно, и независимости, причем последнее нетрудно установить.
Очевидно, что при гипотезе Я0
д= |5| = у/х2 + у2,
(4.73)
где
^ f a(t)r(t)e l(p^ dt - х + \у\ r(t) = [r(t) — ir(t)]e lWct
(4.74)
E(x I H0) = E(y I H0) = 0,
так как процесс n(t) имеет нулевое среднее значение.
При гипотезе #1 по (4.74) находим
Е(х | Яь в) = \ [ a(t) ReE[r(t) | H1]e~i,fi{t) dt =
2 ./n
2 Jo w 1 w J 2 J0 v
Здесь учтено выражение (4.57) для s(t).
Аналогично получим
Е{у | Нг,в)= (АТ/2) sin 9.
(4.76)
Обнаружение сигналов при наличии случайных параметров
103
Можно показать, что дисперсия СВ х и у при #0 и Hi имеет
вид [23]
а2 = N0T/ 4. (4.77)
Введем статистику
~2
причем здесь при гипотезе Я0 xi ~ iV(0,1), yi ~ N(0,1), следова¬
тельно, статистика р имеет Х2"РаспРеДеление- Таким образом, ВЛТ
= \Г e~u/2du= е-£/2*2, (4.78)
J (дп/»)2
где
qn/a = у/—2 InQo- (4.79)
АТ
При гипотезе Hi xi ~ N(mx, 1), yi ~ N(yx, 1), где mx = — cos9,
2сг
AT .
mv = —— sm 9.
2a
Таким образом, здесь статистика р подчиняется нецентральному
распределению xfW с показателем нецентральности
2 2 (АТ)2 (АТ)2 А2Т 2Э 2
А - m* + ту - 4^2 - N^T ^ ^ - d , (4.80)
1 Рт А2 Гт А2
гдеЭ = s2(t) dt = — J^ a2(t)dt= —.
Вероятность обнаружения
1 г°°
Qd = P{p > ql/cr2} = -? e~{x+x)/2I0(VXx) dx =
2 hll°2
= \ f°° e-(x+d2)/2Io (d^)dx= Г ze-(z2+d2V2I0(dz)dz,
2 hll°2 hi
где /3 = qn/a.
Таким образом,
Qd= Q(d,/3), (4.81)
где Q(d,/3) — Q-функция Маркума.
Соотношение (4.81), как и следовало ожидать, совпадает с (4.19)
и (4.39).
Рассмотрим случай флуктуирующей амплитуды сигнала при от¬
сутствии фазовой модуляции (<p(t) = 0).
104
Глава 4
Таким образом, рассматривается проблема обнаружения
Но : r(t) = n(t)\
Q^t^T, (4.82)
#i : r(£) = Acos(uct + 9) + n(£),
где A — CB, 0 — СВ, равномерно распределенная в интервале (0,27г).
Пусть СВ А имеет ПРВ Релея
W(A) = {А/А2) ехр(—A2/2Aq), А > 0; А2 = Е(А2)/2. (4.83)
Гипотеза Hi принимается, если q > qn, причем статистика q опре¬
деляется по (4.61) при a(t) = 1; ip(t) = 0, или соответственно по
(4.71).
Как уже было отмечено, статистика q не зависит от амплитуды
А, и критерий q > qn равномерно наиболее мощный по параметру А.
Однако характеристики обнаружения зависят от А, т.е. Qd = Qd(A).
Как и ранее, для вычисления вероятности обнаружения произве¬
дем усреднение Qd(A) (4.81) по амплитуде согласно (4.4), т.е. вычис¬
лим среднее значение
лОО
Qd=E[Qd(A)} = Q(d,p)W(A)dA. (4.84)
Jo
Подставив сюда ПРВ W(A) (4.83), получим
®d= J ^2е~Л2/2Л° J z ехр (~ Z 2 d ) dzdA ~
Снова используем интеграл (4.42) при р = zy/T/N0:
v - J_ + JL - I (J_ + 1Л - 1 N° + АоТ
2А1 2 N0 2 \ A2 N0) 2 N0A2 '
Тогда получим
Г° л -иА2Т/ 1 м2/4«, И0А% (z2 А2Т
/ Ае I0(pA)dA = — ем /4и = — ехр — ——5т , .
Jo 2г/ N0+A2T у\2 N0 + А20Т)
В результате находим вероятность обнаружения
Qd= 1 + AIT/No J 26XP ("21+ AST/No) dZ =
= [ e~u du = e“^2/2c = exp Г
J в2/2c
T(A2T + Nq)
так как /3 = qn/a, с - 1 + A%T/N0, a2 = N0T/4.
Обнаружение сигналов при наличии случайных параметров
105
Таким образом, при флуктуирующей амплитуде и случайной фазе
Qd = ехр[-2 q2n/T(A2T + N0)]. (4.85)
По аналогии с ОСШ (4.80) в данном случае введем ОСШ в виде
Т ?ТА2
dc р = E(d) = —Е(А2) = —а, (4.86)
iVо iVo
где согласно (4.83) Е(А2) = 2А2.
Для проблемы обнаружения (4.82) средняя энергия сигнала
Эср = Е{А2) [ cos2(uct + в) dt и -]е{А2) = А20Т.
J о 2
Тогда с учетом (4.86) получим
d% = 2Эср/АГо, (^р)дв = Ю 1д(2Эср/ЛГ0). (4.87)
По (4.79) с учетом равенства (4.77) находим
q2n= —{NqT/2) In Q0.
Подставляя это значение q2 в (4.85), получим РХП
Qd = gJ/(1+cicP/2> = Ql/{1+3c p/n°). (4.88)
Зависимость вероятности обнаружения от ОСШ (йср)дб изобра¬
жена на рис. 4.6 сплошными линиями, здесь же штриховыми линиями
обозначена аналитическая зависимость Qd(dcp) для сигнала со слу¬
чайной фазой.
4.4. Учет коррелированности входного шума
При коррелированном шуме на входе вместе с гармоническим сиг¬
налом проблема обнаружения остается прежней (4.52) при сигнале
s(t), определяемом по (4.49), и шуме
n(t) = R e[n(t)eiUc% (4.89)
где комплексная огибающая шума имеет в общем случае комплекс¬
ную КФ
<p(ti,t2) = ^E[n(ti)n*(t2)]. (4.90)
Отсчеты Гк комплексной огибающей f(t) определяются соотно¬
шением
fT
Гк
= [ fk(t)r(t)dt,
Jo
106
Глава 4
где fk(t) — собственные функции интегрального уравнения
гТ
Akfk(t)= / (p(t, u)fk(u) du.
Jo
Гипотезе Я0 соответствует ПРВ
к=1
21
Ы
2Хк
(4.91)
Среднее значение координат ?к при гипотезе Hi
rT
Е(гк | ЯО = sfc = [ fk(t)s(t)dt,
Jo
где s(£) — комплексная огибающая сигнала. Тогда ПРВ Wi(r), соот¬
ветствующая гипотезе #ь имеет вид
fc=l
27rAfc
l^fc ~ §fc
2Afc
12 ”|
Отношение правдоподобия
Wi(f) =
fc=l
A„(f) =
Wo(r)
IJexp
|®fc|2 - |Vk - Sk
2Afc
= exp
_ 1 y- l§fcl2
Afc 2 ^■** А^
fc=l K k=1 K
Re^
Испытываемая достаточная статистика
СЮ ~ оо
G== Re^^ffc,
fc=l k к=1
где qk — Sk/^k-
Статистика G может быть записана в виде
G = Re f q*(t)r(t) dt,
Jo
где q(t) является решением интегрального уравнения
[ (p(t, u)q(u) du = s(t), 0 ^ t ^ T.
Jo
При этом ОСШ d2 определяется равенством
оо |2 оо ~Т
d2 = 22^— = = / s*(t)q(t) dt.
к=1 Хк к=1 Jo
(4.92)
(4.93)
(4.94)
(4.95)
(4.96)
(4.97)
Обнаружение сигналов при наличии случайных параметров
107
Отношение правдоподобия (4.93) с учетом (4.94) и (4.97) при¬
нимает вид
При белом шуме на входе [22] Cp{t,u) = N06(t - и), тогда ста¬
тистика
Характеристики обнаружения ВЛТ Qo и вероятность обнаруже¬
ния Qd по форме совпадают с полученными ранее:
Qo = exp(-R20/2d2)-, Qd= Q(d,R0/d), (4.102)
где Q(a,/3) — Q-функция Маркума.
Отличие заключается в вычислении порога R0 и ОСШ d.
Задачи
4.1. Корреляционный приемник оптимален при обнаружении известного сигнала
вида s(t) = Asin(cj<4+ 0) в ГБШ, когда фаза сигнала известна. Допустить, что фаза
в равна нулю, когда в действительности это не так.
а) Найти вероятность обнаружения корреляционным приемником в виде функции
от в и сравнить результат со случаем, когда 6 известна полностью.
б) Показать, что вероятность обнаружения, зависящая от в, может быть меньше
вероятности ложной тревоги.
4.2. Показать, что для обобщенного СФ (согласованного с гармоническим сину¬
соидальным колебанием с последующим детектированием огибающей) выбор величины
фазы не имеет значения.
4.3. Рассмотреть гипотезы [26]
Вместо (4.60) запишем
(4.99)
(4.100)
и ОСШ [22]
(4.101)
#о : r(t) = n(t)\
Н\ : r(t) = As\r\((jjct + в) + n(t)
где A = const, ljc = const; n(t) — ГБШ со спектральной плотностью No/2; Rn(r) =
= (N0/2)S(t).
Пусть фаза в — это СВ, имеющая ПРВ
108
Глава 4
ЧсфЫкдЬЧх}
На сравнение
с порогом
Рис. 4.11
Используя критерий Неймана-Пирсона показать, что структурная схема обнару¬
жителя имеет вид рис. 4.11 (СФ — согласованный фильтр, КД — квадратичный де¬
тектор).
Указание. Использовать соотношение
1 г2*
— J exp[(i/+ qc) cos в - qssm в] d9 = Io[y/(u + qc)2 + q§].
4.4. Рассмотреть гипотезы
где u)c = const, в — СВ, равномерно распределенная в интервале (0,27т), n(t) — ГБШ
со спектральной плотностью Nq/2.
а) Пусть А — дискретная СВ, такая, что Р(А = 0) = 1 - р\ Р(А = Ао) = Р-
Найти отношение правдоподобия используя критерий Неймана-Пирсона. Можно ли
использовать q в качестве статистики испытания7
б) Показать, что вероятность обнаружения имеет вид
где Qo — ВЛТ, Qd(Ao) — вероятность обнаружения при постоянной амплитуде, рав¬
ной Ао-
4.5. Для проблемы обнаружения в предыдущей задаче положить распределение
амплитуды в виде
где А ^ 0; р i- 0.
а) Найти отношение правдоподобия, используя критерий Неймана-Пирсона.
Можно ли использовать q в качестве статистики испытания?
б) Показать, что вероятность обнаружения определяется соотношением
где и = 1/(1 + TAq/Nq), причем когда величина Ао становится достаточно большой,
Qd(Aо) стремиться к р (в предположении малой ВЛТ Qo)-
4.6. В задаче 4.4 предположить, что распределение амплитуды имеет вид
Hq : r(t) = n(t)\
Hi • r(t) = As\n((jjct + в) + n(t),
Qd = (1 - p)Qo + pQd(Ao)>
W(A) = (1 - p)S(A) + p-^2 exp(—Л2/2Лц)|
Lo
Qd - (i - p)Qo + pQo,
M
W(A)= - Ai).
i= 1
Можно ли q использовать в качестве статистики испытания7
Обнаружение сигналов при наличии случайных параметров
109
4.7. Вероятность обнаружения сигнала, федингующего по закону Релея, опреде¬
ляется формулой (4 85)
Qd= ехр{—2 qj/[T(A20T+ N0)]}.
Получить этот результат при рассмотрении следующей проблемы: колебание
r(t) = a(t) cos[cjg£ + 4>{t)] + n(t), —oo ^ t ^ oo,
пропускается через линейный фильтр имеющий ИХ
h(r) = cos(jJqt, 0 ^ г ^ Т,
и затем проходит через детектор огибающей.
Сигнал s(t) = a(t) cos[ijct + (p(t)] + n(t) является гауссовским СП, a Яа(т) и ip(t)
считаются постоянными на интервале Т. Дать обоснование узкополосности процесса.
а) Найти вероятность того, что отсчет на выходе детектора превосходит порог rj.
б) Полученный результат совпадает с формулой (4.85). Объяснить это совпа¬
дение.
4.8. Рассмотреть проблему обнаружения
Я0: г (t)=Sl(t)+n(ty, o<t<T,
Hi : r(t) = A coscjii + si(t) + n(t),
где si(t) = В cos(iJ2t + ip)\ A, B, lji, lj2 — известные постоянные; n(t) — ГБШ;
— СВ, равномерно распределенная в интервале (0,27г). Показать, что оптимальный
обнаружитель может использовать в качестве статистики величину
рт
r(t) coscjit dt,
если выполняются соотношения
гт гТ
■!
J о
Г г
I COSLJit COS LJ2t dt = I COS LJit S\n U)2t dt = 0.
Jo Jo
4.9. Видоизменить предыдущую задачу так, что
Hi . r(t) = A cos(u)it + в) + si(t) + n(t),
где 9 — СВ, распределенная равномерно в интервале (0,27т) и не зависящая от (р.
Предположить, что
/
J о
рт
cos(ujit + в) cos(u)2t + ip)dt = 0,
/о
при всех 0 W ip.
Показать, что оптимальный приемник может в качестве испытываемой статисти¬
ки величину q, где
2
■ гТ
2
- ,т
я2 =
1 r(t) COSLJit dt
Jo
+
/ r(t) smcjitdt
Jo
4.10. Пусть в примере 4 2 последовательность ai,a2,...an определяется соот¬
ношением
а/с — АЪк, к — l,7i,
110
Глава 4
n
где ^2/Ь2к = п; А — положительная СВ, не зависящая от в и подчиняющаяся закону
к= 1
Релея с параметром Ао
WA(a)= (а/А%) ехр(—a2/2Ag), а ^ 0.
Найти обнаружитель Неймана-Пирсона, включая зависимость величины порога
от а = Qo и РПХ.
4.11. Пусть Ф(т) — комплексная КФ узкополосного гауссовского шума. Пусть
комплексная огибающая шума для двух моментов времени t\ и t,2 имеет вид
Rj exp(i0j) = X(tj)+ iY(tj), j = 1,2. Показать, что соответствующая ПРВ амплитуд
Ri и R2 имеет вид
W(RuR2)= Af.lR2~< ехР
0-4(1 _
где сг2 = Ф(0), г = |Ф(^1 — ^2)|/Ф(0).
Указание. Найти совместную ПРВ W(Ri, Я2, Qi, О2) и проинтегрировать по 9\
и 62-
4.12. В условиях предыдущей задачи найти ПРВ разности = #i—#2. интегрируя
совместную ПРВ W(Ri, Я2,0i, 62) по R\,R2 вместо интегрирования по фазам [71].
Указание. Перейти к переменным {z,t), где R\ = azcost, R2 = azsmt и инте¬
грировать сначала по z, 0 < z < 00, и затем по t, 0 < t < 7г/2.
Ответ. При а = j-r| cos(^ — /3) и /3 = агдг
W(¥) = (27г)-1(1 - |г|2)(1 - а2)“3/2[\/1 - а2 + а(7г/2 + arcsin а)].
4.13. Синусоидальный сигнал с амплитудой А смешан аддитивно с гауссовским
узкополосным шумом, у которого сг2 = Ф(0). Показать, что фаза 9 аддитивной суммы
имеет ПРВ
W(9) = — е“а2/2 + —^=acos0e-o,5a2sm2 G[1 - erfc(acos0)],
2тг V2tt
где а = А/сг.
Найти гауссовскую аппроксимацию для этой ПРВ при а 1 [71].
4.14. Показать, что ОП (4.13) равно производной dQd/dQo, где Qo и Qd нахо¬
дятся соответственно по (4.15) и (4.19).
4.15. Пусть имеется аддитивная смесь сигнала s(t) и узкополосного гауссовского
шума n(t) с нулевым средним значением и дисперсией сг2.
x(t) = s(t) + n(t),
гfles(t) = Acos(ijct+0) Здесь в — СВ, равномерно распределенная в интервале [0; 27т].
Определить оптимальное правило обнаружения сигнала, если наблюдается выбор¬
ка огибающей колебания x{t)\ V = (Vi, V2,Vx)r, где Vi — отсчеты огибающей [20].
R2 + Я2
2сг2(1 — г2)
/о
rR\R2
2(1 -Г2)
5 Последовательное обнаружение
5.1. Последовательные многошаговые алгоритмы
проверки простой гипотезы против простой
альтернативы
В предыдущих главах интервал наблюдения (объем выборки) был
фиксирован. Если интервал наблюдения не фиксирован, а зависит
от самих входных данных, то говорят, что приемное устройство осу¬
ществляет последовательный анализ.
При последовательном анализе (ПА) количество выполненных из¬
мерений зависит от характера данных x(t) (или Хп) т.е. от значений
статистик Ть Т2 Тк.
На А;-м этапе выбор между продолжением эксперимента еще на
один шаг и вынесением окончательного решения определяется отно¬
шением правдоподобия (ОП)
7 7/ \ W\ (3?1 5 ) • • • ) /г- и\
lk= lk(x г, (5.1)
составляемого для первых к отсчетов наблюдения. Как и ранее,
Wo(xi,x2, ...хь) — это совместная ПРВ, соответствующая гипотезе
Но, a Wi(xi,x2, ...Xk) — соответствующая гипотезе
При ПА обнаружитель сравнивает ОП с двумя порогами А
и В, А > В. Если Ik < В, то принимается гипотеза Я0: сигнал
отсутствует. Если Ik > А, то выносится решение в пользу гипотезы
#i: сигнал присутствует. Если оказывается, что В < Ik < А, то
решение не выносится и наблюдение продолжается, т.е. происходит
переход к следующей стадии к + 1.
На последующем этапе формируется следующая статистика и но¬
вое ОП Afc+i, которое затем сравнивается с порогами А и В. Эти
процедуры продолжаются до тех пор, пока окончательно не будет вы¬
брана одна из двух гипотез, т.е. процесс продолжается до тех пор,
пока не окажется, наконец, больше А и меньше В и, следовательно,
будет принято соответствующее решение.
Последовательные методы являются оптимальными в том смыс¬
ле, что позволяют ускорять (в среднем) окончание проверки гипотез
или при той же длительности испытаний выполнить проверки с мень¬
шими ошибками или при одинаковых ошибках разделять менее разли¬
чимые гипотезы, чем в случае испытаний при фиксированном объеме
112
Глава 5
выборки. Таким образом, алгоритм проверки гипотезы становится
многошаговым.
При многошаговом (последовательном) алгоритме следует опре¬
делить два правила [67]:
1) правило остановки, которое определяет, когда следует прекра¬
тить наблюдение;
2) правило выбора решения, позволяющее принять гипотезу по¬
сле прекращения наблюдений.
Вначале наблюдают одно значение х\ (извлекают выборку разме¬
ром п = 1) и на основании этого значения по заранее установленному
правилу либо останавливают наблюдение и принимают одно из двух
решений (D0 или Di), либо продолжают наблюдения (т.е. отказыва¬
ются на первом шаге от принятия решения). Если правило предписы¬
вает отказ от решения, то извлекают следующую выборку, а описан¬
ная процедура повторяется: на основании выборки (хьхг) размером
п = 2 либо останавливается наблюдение и принимается решение, либо
наблюдают следующее значение х3 и указанная процедура повторяет¬
ся относительно выборки (xi,x2,x3). Испытание заканчивается на
той выборке, на основании которой наблюдение в соответствии с пра¬
вилом остановки прекращается и принимается одно из двух решений
Do или Dl.
При использовании последовательного алгоритма момент оста¬
новки процесса наблюдения является случайным и зависит от пред¬
шествующих ему результатов наблюдений. Размер выборки п, при
которой выносится окончательное решение, заранее не назначается,
а является случайной величиной. На каждом шаге пространство вы¬
борок соответствующего числа измерений должно делиться не на две,
а на три области: критическую Ri, допустимую Ro и промежуточную
Rnp. Разделение пространства выборок на три области и содержит
указание на то, должно ли быть принято одно из решений D0 или Di,
или наблюдение должно быть продолжено. Если выборочное значе¬
ние попадает в критическую область Дь то гипотеза Я0 отвергается;
если в допустимую область R0, то она принимается, а если выбороч¬
ное значение попало в промежуточную область Rnp, то это служит
указанием на необходимость продолжить наблюдения.
Как и при непоследовательных алгоритмах, число способов раз¬
биения пространства выборок на три области не ограничено. Следо¬
вательно, возможны разнообразные последовательные правила выбо¬
ра решения, и, очевидно, необходим критерий качества, при помощи
которого можно сравнивать различные последовательные правила и
выбирать наилучшие.
Последовательное обнаружение
113
5.2. Последовательный алгоритм Вальда
Для синтеза оптимального последовательного алгоритма провер¬
ки простой гипотезы Я0 против простой альтернативы Ях А. Вальд
предложил использовать в качестве критерия минимум среднего зна¬
чения размера выборки (длительности процесса наблюдения до мо¬
мента его остановки) при условии, что вероятность ошибки перво¬
го рода (уровень значимости) не превышает a = Qo. а вероятность
правильного отклонения гипотезы Я0 (мощность критерия) не менее
1 — /3 = Qd = 7- Заметим при этом, что средние значения размера
п выборки E{N | Я0}, E{N | Hi} при справедливости гипотез Я0 и
Hi соответственно, вообще говоря, не равны, и требуется минимизи¬
ровать обе величины.
В [27] А. Вальд показал, что при независимых наблюдениях среди
всех алгоритмах принятия решения — последовательных и непоследо¬
вательных, для которых условные вероятности ошибок не превосходят
величин а и /3, последовательное правило выбора решения, состоя¬
щее в сравнении отношения правдоподобия с двумя порогами В и А,
приводит к наименьшим значениям E{N | Я0}, E{N \ Hi}.
Рассмотрим применение последовательного анализа в проблеме
обнаружения положительного сигнала в аддитивном шуме.
Пусть наблюдаются переменные xi,x2,..., обозначим отсчеты
шума через и сигнал через 0\. Задачей является провер¬
ка гипотез
В дальнейшем будем сравнивать обнаружитель с фиксирован¬
ным объемом выборки — обнаружитель с фиксированным отноше¬
нием правдоподобия (ФОП-обнаружитель; англ. аналог FSS — fixed
sample-size detector) и последовательный обнаружитель Вальда (ПОВ;
англ. аналог Wald’s sequential probability ratio test — SPRT).
В первом случае фиксируется объем выборки величиной М и вы¬
бирается порог То.
В последовательном обнаружителе объем выборки зависит от ре¬
ализаций xi,x2, Обозначим этот объем выборки через N. Как
было отмечено, этот объем выборки является случайной величиной.
Допустим, что отсчеты шума независимы и одинаково
распределены с известной ПРВ W(x) и 6i — известный сигнал. Тогда
ОП (5.1) при п наблюдениях х = (xi,X2-.-xn) имеет вид
H0:xi = Vi, i= 1,2...;
Hi: Xi = vi + 0i, г=1,2...
(5.2)
(5.3)
114
Глава 5
Оценка сигнала
In А
In В
Зона принятия гипотезы Hq>
Ve-*r
» , •* * * ”• * a tga = Ml >0
I I I I I I ГТТТТТТТП I I I I I i i i * i i ( i
• *
Зона продолжения испытаний
Ц о < 0
^Зона принятия гипотезы
Рис. 5.1
Последовательный обнаружитель Вальда сравнивает ОП 1п{х) с
двумя постоянными порогами А и В (обычно 0<Б<1<А< оо)
при п = 1,2,....
Испытание заканчивается, если 1п(х) ^ А, и принимается гипо¬
теза Hi или, если 1п(х) ^ В, то принимается гипотеза Я0.
Аналогично испытывать можно логарифм ОП (ЛОП) и в качестве
попрогов принять a = \пА и b = In В, так что алгоритм принятия
решения принимает вид
^ a — принимается #ь
^ b — принимается Я0;
иначе берется следующий отсчет и испытания
повторяются.
Здесь Zi = In [ТУ (ж* -Oi)/W{xi)\ = In/(ж*).
Границы области применения решения и траектории отсчетов по¬
казаны на рис. 5.1. На рисунке
22Zi =
i=1
(5.4)
(5.5).
i=1
Объем выборки N равен значению п, при котором принимается
решение
N = inf < п:
i=1
Как показал А. Вальд, ПОВ завершает испытания с вероятно¬
стью, равной единице, т.е. P{N < оо} = 1.
Последовательное обнаружение
115
Как и ранее, обозначим через а вероятность ошибки первого рода
(ВЛТ):
Qo = P(Di | Но) = a
и вероятность ошибки второго рода (пропуск сигнала) через
Qx= 0= P(D0\H1)= 1-7,
где 7 = Qd= P(Di | Hi) — вероятность обнаружения. Согласно [27]
а и 7 удовлетворяют соотношениям:
— < А~1 = е-а; (5.6)
7
^ В = еь. (5.7)
1 — а
Поскольку 0 < 7 ^ 1, 0 < 1 — а ^ 1, то неравенства (5.6) и (5.7)
эквивалентны следующим неравенствам:
о^е“а, 7^1-еь. (5.8)
Если среднее значение и дисперсия ЛОП 1п/(х) малы по сравне¬
нию с а и |Ь|, то объем выборки становится значительным. В этих
случаях неравенства (5.8) можно заменить приблизительными равен¬
ствами при условии пренебрежения эффектом перескока решающих
порогов:
а « In —; b= In ^(5.9)
а 1 — а
Отсюда достаточно просто находятся пороги а и Ь, поскольку a
и /3 считаются заданными. В этом одно из достоинств ПОВ.
Введем среднее значение выборки и обозначим это значение че¬
рез E(N | 0), если справедлива гипотеза Я0, и E(N | Oi), если спра¬
ведлива гипотеза Щ.
Для обнаружителя с фиксированным объемом выборки при фик¬
сированном ОП (ФОП обнаружителе) среднее значение выборки сов¬
падает с объемом выборки М = const.
Известно, что при наблюдениях, когда отсчеты шума независимы
и одинаково распределены ПОВ обладает оптимальным свойством —
минимизирует E(N \ 0) и E(N \ Oi) как в классе последовательных,
так и в классе непоследовательных процедур, при вероятностях оши¬
бок не больших а и /3 = 1 — 7 при гипотезах Я0 и Hi соответственно
и конечных средних значениях выборки.
Пусть ПОВ имеет вероятности ошибок а и /3 = 1 — 7 (и соот¬
ветствующих значения а и Ь) и пусть при этом средние значения рав¬
ны E(N | 0) и E(N | 9i)\ и пусть альтернативное (конкурирующее)
испытание имеет ошибку а' при Я0 и ошибку /3' = 1 - 7' при Яь
116 Глава 5
E(N' | 0) < оо при Н0 и E(N' \ 9\) < оо при Яь тогда оптимальность
ПОВ характеризуется условием
о! ^ а; 1 - 7' ^ 1 - 7 (5.10)
и, как следствие, выполняются неравенства
E(N | 0) ^ E(Nf | 0); E(N \ 9г) ^ E(N' | 9Х). (5.11)
Область значений а и 1 -7, определяемых по (5.10), изображена
на рис. 5.2.
i _ у Кроме положительных свойств, ПОВ имеет
и недостатки. Один из них состоит в том, что
при умеренном или малом среднем значении вы-
, > борки реальный объем выборки N может быть
° 1 очень большим. Этот недостаток можно устра-
Рис. 5.2 нить, если завершить испытания, когда величина
N становится достаточно большой.
Однако это усечение изменяет характеристику ПОВ (т.е. веро¬
ятности ошибок и среднее значение выборки). Для того чтобы со¬
хранить характеристики ПОВ относительно неизменными, точка от¬
сечения ?7-тах должна быть такова, чтобы вероятность неравенства
N > ?7-тах была мала [109, 165-168]. Указанный алгоритм проверки
гипотез называется усеченным последовательным алгоритмом (англ:
truncated SPRT).
Для всех п < 77-max устанавливается (как для неусеченного алго¬
ритма) два порога, с которыми сравниваются ОП. Если размер выбор¬
ки N = nmax, то ОП сравнивается только с одним порогом согласно
одношаговому алгоритму. Чем меньше птах, т.е. чем сильнее усече¬
ние, тем меньше будет выигрыш в среднем времени, получаемом от
последовательной процедуры.
Другим недостатком ПОВ является необходимость знания вели¬
чины #1 в процессе испытаний. Однако истинное значение сигнала в
практических случаях может быть неизвестно, в связи с чем возника¬
ет необходимость его предварительной оценки.
Пусть истинное значение сигнала имеет величину 9. Если 0 <
9 < 9г, то вероятность обнаружения уменьшается и среднее значение
выборки возрастает.
Одной из проблем, возникающей при использовании ПОВ, явля¬
ется нахождение точных формул, связывающих пороги а и b и вероят¬
ности ошибок а и 1 - /3, поскольку в практических случаях формулы
(5.9) являются грубыми.
Для того чтобы анализировать изменение характеристик ПОВ
при изменении значений сигнала 9, А. Вальд ввел вероятность L(9)
1-
1-7
Последовательное обнаружение
117
принять в конце испытания гипотезу Я0, эту вероятность Вальд на¬
звал оперативной характеристической функцией (ОХФ). Как правило,
Ь(9) уменьшается при увеличении в. Поскольку рассматриваемые ис¬
пытания должны непременно закончиться, то вероятность принять
гипотезу Hi равна 1 - L{9). Наряду с ОХФ вводится зависимость от
величины 9 среднего значения выборки E(N | в).
Справедливы равенства
1 — а = L(0); 1-7= Цвг). (5.12)
А. Вальд получил следующие приближенные соотношения:
ехр [ah(9)] — 1
m
exp[a/i(0)] - exp[6/i(0)]
a
при h(9) 4 0,
при h(9) = 0;
E(N | 9) =
bL(6) + a( 1 - Ь(в))
E(Z | 9)
—ab
I E(Z2 | 9)
где h(9) — нетривиальное решение уравнения
при E(Z | 9) ^ 0;
при E(Z | 9) = 0,
(5.13)
(5.14)
W( х-вх)
W(x)
цв)
W(x — в) dx = 1,
(5.15)
если нетривиальное решение существует, и h(9) - 0 в других случаях;
/О
-с
In
W(х - в) dx.
(5.16)
а)
W{x)
Если в = 0 (справедлива гипотеза Но),
тогда h{9 = 0) = 1, если 9=61 (справедлива
гипотеза Hi), тогда h{9 = 9\) = -1. При
этом согласно (5.13)
е° — 1 еь(1 — е“)
^°) - Ш) - (5-17)
Приблизительный вид' кривых L{9) и
E(N | 9) изображен на рис. 5.3.
Величина E(N \ 9) достигает максимума
в точке 9=9*, причем 9 < 9* < 9\, если
ПРВ W(x) — симметричная, и E(N \ 9) сим¬
метричная относительно точки 9* = 9\/2, то
a ~ Рис. 5.3
Следует отметить, что в общем случае отсутствуют точные вы¬
ражения для ОХФ L(9) и величины E(N \ 9) в замкнутой форме.
Е(ЛГ|0) >
E(N | 0)
E(N | в,)
0*
б)
01 о
118
Глава 5
5.3. Асимптотическая относительная
эффективность
Данный показатель определяется при малом сигнале и большом
объеме выборки и выражает меру эффективности одного обнаружи¬
теля перед другим. В рассматриваемом случае сравниваются ПОВ-
и ФОП-обнаружители.
Пусть М(а,7) — объем выборки ФОП обнаружителя, тогда
(*■»)
с вероятностью ошибок а при Н0 и /3 при Н\.
Пусть E(N | а,7,0) и E(N | а,7,в\) — средние значения вы¬
борки при гипотезах Но и Hi соответственно для ПОВ с алгоритмом
(5.4), который характеризуется вероятностями ошибок а \л (3 = 1 -7.
Тогда асимптотическая относительная эффективность — АОЭ ПОВ
по отношению к ФОП-обнаружителю определяется соотношением
АОЭпов,фоп = I'm ,лу, *^пч (5.19)
0!->о E(N | а, 7,0)
при гипотезе Я0 и
АОЭПов,фоп = lim ^ (5.20)
0!->о E(N | а,7,0i)
при гипотезе Hi. Здесь пределы взяты при 9i -> 0 и постоянных
вероятностях а и 1 - 7.
При некоторых слабых ограничениях на ПРВ W(x) находятся при¬
ближенные (при малых 9i) соотношения [109]:
М(а,/3)
сго(01)Ф х(а) + (71(01)Ф Hi-7)
^i(0i) - fio(9i)
2
(5.21)
E(N I a,7,0) s» a 'П(7/а) + (1 ~ °>'"P ~ 7)/(1 - tt)l; (5.22)
E(N | а,7A) « T-|"(7M)-b(l-7)ln[(l-7)/(l-<»)l| (5 23)
Mi(c'i)
где N(6{) = E(Zt | Hj); Zt = In[W{Xt - d^/W^Xi)] = In 1(Х{);
&j(0i) — дисперсия CB Zi при гипотезе Hj-, Ф_1(0 — обратная функ¬
ция стандартного нормального распределения Ф(0- При этом [109]
,|m j=0,1;
Ы^-мо^)]2 „ . n , [}
lim 77Г\—ттг~;— =2, j = 0.1.
Последовательное обнаружение
119
Тогда соотношения (5.22) и (5.23) можно записать в виде
E(N | а, 7,0) = Е[1(х) | Н0]/цо, (5.25)
E(N | а,7,0i) = Е[1(х) | Щ)/^, (5.26)
где
Е[1(х) | Н0] = (1 -а)1п—^— + а In —(5.27)
1 — а а
Е[1(х) | Я1] = /?1п—^— + (1-/?)1п —(5.28)
1 — а а
/3 = 1 - 7 = Qi.
С учетом соотношений (5.22)-(5.24) получим [109]
ЛП. _ о, [Ф-1(а) + Ф-1(1 — 7)]2
АОЭпов,фоп - -°’5а1п(7/а)+(1_а)|п[(1_7)/(1_а)] (5-29)
при Но и
лП. о, [Ф-1(а) + Ф_1(1 — 7)]2
A(JJnOB,OOn - и,о . > , ГГТП wT^ \Т vb.oUJ
71п(7/а) + (1 - 7) 1п[(1 - 7)/(1 “ «)]
при Эти соотношения зависят от конкретных значений а и 7.
Величины АОЭ изменяются от 1,61 до 9,52 при а £ (Ю-12,10-2)
и 7 <Е (10“12,10“2).
Замечание. Если воспользоваться приближенными соотношени¬
ями (5.9), то среднее значение выборки можно представить в виде
E(N | Но) = [aQo + Ъ( 1 - Qq)]/im>\ (5.31)
E(N I Нг) = [aQd + b( 1 - Qd)]/m- (5-32)
Пример 5.1. Обнаружение постоянного сигнала.
Сравним условия обнаружения постоянного сигнала А = 9 > 0
при фиксированном объеме выборки N и обнаружения постоянного
сигнала при последовательном обнаружении.
Согласно гл. 2, рабочая характеристика приемника (РХП) ФОП-
обнаружителя определяется соотношением
Qd = Q(Q~4Qo) - d), (5.33)
где d = VMA2/cr = у/Мв/cr', M = Мфоп — объем выборки.
Запишем (5.31) в развернутом виде:
Qo = Q(x): Qd = Q(x - d).
Пусть Qo = a\ Qd = 7 = 1 - /3. Тогда a = 1 - Ф(а:); 1 - /3 =
= 1 — Ф(а: - d). Отсюда
Ф(ж) = 1 — a; x = Ф-1(1 — a);
120
Глава 5
1-13= 1 - Ф(ж - d) = 1- Ф[Ф_1(1 -a)-d\.
При этом
р = Ф[Ф_1(1 - a) -d],
ИЛИ
Отсюда
Тогда
Ф-1(1 — а) — d = Ф_1(/3)-
d = Ф_1(1 - а) -ф-^/З).
М = Мфоп = ^[Ф_1(1 - а) - Ф-W-
— |
02'
Остается найти величину /хх. Согласно гл. 2, подлежащая
танию статистика имеет вид
N ' в
a2 f—' V 2
fc=i
Тогда
Н = J57{ln[И^х(ап)/Wo(®i) I Я,-]} = -0/2) | Я,-} =
Г -в2/la2 при j = 0;
\ в2/2а2 при j = 1.
Учитывая (5.28), получим
E(N | Hi)
Е[1(х) | Hx] 2a
M./, л-
/3ln + (1-/J)ln
Mi <?2
Воспользуемся соотношением [38]
ф-1(р)+ ф-!(1 - р) = о.
Тогда (5.34) приобретает эквивалентный вид:
2
Мфоп = ^-[Ф_1(а) + Ф-1 (/?)].
В результате находим
Мфоп
1 — а) V <
АОЭпов,фоп = Jim
= 0,5
в-уо E(N | Нх)
[ф-!(а)+ Ф_1(1 — 7)]2
71п(7/а) + (1 - 7) In[(1 - 7>/(1 - а)] ’
что совпадает с (5.30).
(5.34)
испы-
(5.35)
(5.36)
(5.37)
Последовательное обнаружение
121
Пусть a = /3 = 0,1, тогда в (5.34) с учетом (5.36) получим
Ф_1(1 - а) + Ф_1(£) = ф-^О.Э) - Ф_1(0Д) =
- 2Ф-1(0,9) = 2 • 1,282 = 2,564.
С другой стороны, при а = (3 = 0,1 по (5.28) имеем
Следовательно, в данном случае фиксированный объем выборки
почти в два раза превышает среднее число испытаний при последо¬
вательном обнаружении.
Можно показать, что справедливо соотношение [57, 75]
Пример 5.2 [8]. Наблюдатель должен решить, какой из двух ис¬
точников гауссова шума присутствует, причем один из них имеет дис¬
персию No, другой — Ni. Среднее значение шума в том и другом
случае равно нулю. Наблюдатель измеряет напряжение в п момен¬
тов времени, достаточно далеких друг от друга, чтобы результаты
xi,x2,.. .хп были статитически независимы. Две гипотезы, между
которыми должен выбирать наблюдатель, это
где Хп = (хьх2,...,хп)т.
Найти среднее значение числа измерений при обеих гипотезах.
Решение. Совместная ПРВ системы п измерений напряжения
выражается формулой
Е[1(х | Нг] = 0,1 In ^4 + 0,9 In ^ = 1,6 In 3 и 1,7577.
и«У и * 1
Тогда
АОЭпов.фоп =
lim — г-т = 4.
а=(3—>0 ЕI i)
Я0: Xi ~ N(0, No)', . —
г = 1 , п,
Нг: Xi~N( 0, ATj),
Тогда ОП имеет вид
122
Глава 5
или
ы(Хп)= ”\п£-±(±-±) у>?.
к ' 2 N\ 2\N\ No J —
г=1
Отсюда находим величину г, в (5.8)
т-No 2 , 1 No
г‘=
Величина Zk (5.5) вычисляется после к-го измерения напряжения и
прибавляется к предыдущей сумме:
Zk-l - Z1 + z2 + • • • + zk— 1 •
На этапе (шаге), когда сумма устанавливается ниже b = In Б,
испытание заканчивается, и наблюдатель решает в пользу гипотезы
Я0. Если же сумма превосходит порог a = In А, то выбирается ги¬
потеза #i.
Среднее значение fij, j = 0,1 принимает вид
м, = ljtWl(x)dx=
Отсюда находим
1 Л ЛГо , Wi-M ,сооЧ
+ (538)
1 (, «о . N,-N0\ ,„nl
"1=2Г^ (539)
В результате по (5.27), (5.31) и (5.28), (5.32) получим среднее
число испытаний. Чем ближе дисперсии N0 и JVb тем больше в сред¬
нем требуется измерений, чтобы достигнуть определенных вероятно¬
стей ошибок.
Пример 5.3. Сравнить число испытаний для энергетического при¬
емника (см. гл. 12) в случае фиксированного объема выборки — при
фиксированном ОП (ФОП) и среднее значение последовательных ис¬
пытаний.
Решение. В данном случае из примера 5.2 находим величину zk
при Ni = сг2 + сг2; N0 = сг2, когда проверяются гипотезы
Н0 : х[п\ = w[n\\
Н1 : х[п\ = s[n\ + w[n\, п = 1, iV,
где s[n] и w[n] — независимые гауссовские СВ с нулевыми средними
значениями, s[n] ~ N(Q,cr2), w[n] ~ iV(0,cr2).
Последовательное обнаружение
123
Отношение правдоподобия имеет вид
I ni(Xn)
N
In
1
+ --
N
2 a2 + a2 2 cr2(a2 + сг2)
fc=i
По (5.38) и (5.39) получим
1 ft a
Mo = j ( ln
Mi
или
Mo = j
1
2
1
Mi = 2
2+a2
a2
<72 + (T2
1
erf + (Тг
1+ a2/a2
[(Jl | Л
— — In I 1 + —
V
In 1 +
(5.40)
Пусть сг2/сг2 = 1, тогда
/i0 = -0,0965; /ii = 0,5(1 - 0,6931) = 0,1535.
Полагая, как и в примере 5.1, Qo = Qi - 0,1; Qd = 0,9, по (5.25),
(5.26) получим среднее число испытаний
E(N I В0) = = 18,2; E(N \ Нг) = = 11,5.
0,0965
0,1535
Найдем число испытаний при ФОП. Известно (см. гл. 12), что
характеристики обнаружения энергетического приемника имеют вид
Qd — Qx 2
XN
'X2n
1 + a2/a2
^25
При Qo = a = 0,1 процентная точка х2-распределения Q j, = 34,382
[38,58], тогда при сг2/сг2 = 1
Qd= Qx2 (17,2)= 0,87 « 0,9.
Таким образом, выполняются условия расчета среднего значения
последовательного анализа (Qo = 0,1; Qd = 0,9), и отношение
M<&on/E(N | Hj), j = 0,1, имеет вид
Мфоп
25
= 1,37;
Мфоп
25
E(N | Н0) 18,2 ’ ’ E(N \ Нг) 11,5
Снова, как и в примере 5.1, получили превышение над средним зна¬
чением Мфоп в 1,4 и 2,2 раза соответственно.
124
Глава 5
5.4. О длительности последовательного
испытания [26]
Рассмотрим применение методов, связанных с достижением гра¬
ниц марковскими процессами, к оценке длительности последователь¬
ной процедуры обнаружения детерминированного сигнала s(t) на фоне
белого шума n{t) [72]. В этом случае отношение правдоподобия име¬
ет вид
1{Т) = ехр | -J- - S2(f)] di j (5.41)
В соответствии с процедурой последовательных испытаний Валь¬
да отношение правдоподобия l(t) в каждый момент времени сравни¬
вается с двумя пороговыми величинами [см. (5.6), (5.7)]:
А = Qd/Qo, В= Qi/(1 —Оо),
где Qo — вероятность ложной тревоги, Qi = 1—Qd', Qd ~ вероятность
обнаружения сигнала. Испытания заканчиваются принятием решения
о наличии в течение времени наблюдения сигнала (гипотеза Hi), ес¬
ли в некоторый момент времени l(t) ^ А, или об отсутствии сигнала
(гипотеза Но), если l(t) ^ В. При В < l(t) < А испытания продолжа¬
ются. Очевидно, что при Q0 < 1/2 имеет место соотношение А> В.
Таким образом, время принятия решения при описанной процеду¬
ре последовательного анализа является случайной величиной. Вычис¬
лим распределение длительности процедуры последовательного ана¬
лиза и ее моменты. Можно показать, что среди всех возможных про¬
цедур обнаружения сигнала процедура последовательного анализа ми¬
нимизирует среднее время, необходимое для принятия решения при
заданных вероятностях Q0 и Qd.
Рассмотрим случайный процесс
v(t)= lnZ(t)= [ [2£(t)s(t) — s2(t)]dr. (5.42)
^V0 Jo
Так как экспонента — монотонная функция, то достижение границ А
или В процессом l(t) эквивалентно достижению процессом v(t) границ
а = In A, b = In В.
Поскольку £(£) представляет собой гауссовский процесс, то v(t)
также является гауссовским процессом. Покажем, что v(t) являет¬
ся винеровским процессом с независимыми приращениями. Действи¬
тельно, производная по времени процесса v(t) при наличии сигнала
Последовательное обнаружение
125
(гипотеза Hi) равна
ft = ^-[82(t)+2s(t)n(t)}. (5.43)
В отсутствие сигнала (гипотеза Я0)
= i-[-s2(t)+2S(t)n(t)}. (5.44)
Стохастические дифференциальные уравнения (5.43) и (5.44)
определяют неоднородный марковский процесс с коэффициентами
сноса и диффузии, равными
a(v,t) = ±s2(t)/No, b(t) = 2s2(t)/No. (5.45)
Для него справедливо уравнение Фоккера-Планка-Колмогорова
ЛГ„ Эр _ д*р ^ & (5 46)
s2(t) dt dv2 дг/
Заменой переменных
/‘
./о
s (r)dr (5.47)
уравнение (5.46) приводится к виду
др _ 1 / д2р др
дт 2 \<%2 ^ dv
Решением этого уравнения является выражение
1 - v0 ±т/2)2_|
р{у,т I г;0) = —т== ехр
V27гт
2г
Отсюда следует, что процесс г>(£) является винеровским процессом
с независимыми приращениями и имеет плотность вероятности пе¬
рехода
•л-л» н , л - I ~Р j_[y-X±[r(r)-r(t)],2?X
{У’ ' ' ] у/2п[т(г)-тт Р1 2 [r(r)-r(t)] J'
(5.48)
Здесь знак плюс соответствует отсутствию, а минус — наличию сиг¬
нала в принятой реализации £(£).
Таким образом, задача нахождения распределения длительности
процедуры последовательного обнаружения детерминированного сиг¬
нала на фоне белого шума свелась к задаче достижения границ (а, Ь)
нестационарным винеровским процессом v(t). В [72] показано, что
формула (5.48) справедлива для более общего случая обнаружения
детерминированного сигнала на фоне гауссовских помех с дробно¬
126
Глава 5
рациональной спектральной плотностью. Однако в этом случае r(t)
определяется более сложным путем.
Заменой переменных (5.47) плотность вероятности рь,а(£, Vo) вре¬
мени первого достижения границ (а, Ъ) из начальной точки v0 сводится
к плотности вероятности дь,а(т,у0) достижения границ (а, Ь) однород¬
ным винеровским процессом. При этом
Pb,a(tyvо)dt = 9ь,а(*> v0)dT, а < v0 < Ь. (5.49)
Можно показать [73], что для преобразования Лапласа
р ОО
9 4,a(s,v о) = / 9b,a(r,vo)exp(-sT)dr
Jo
от плотности вероятности дь,а(т,и0) справедливо уравнение
ld2g*bta(s,v0) idg*b(s,v0)
2 dv$ 2 duo s9b,a(s'vo)= (5.50)
с граничными условиями
06,a(s>a) = 9b,a(S>b) = !• (5-51)
В уравнении (5.50) знак плюс соответствует Яь знак минус — Я0.
Отметим, что при определении распределения длительности процеду¬
ры последовательного анализа интересуются временем первого дости¬
жения границ (а, Ь) процессом v(t) из начального состояния г>(0) = 0.
С учетом этого решение уравнения (5.50) с граничными условиями
(5.51) при наличии сигнала в принятой реализации (гипотеза Hi)
имеет вид
+ -^[бу^тув)] /ау
ь'“ sh [(6 — a)y/2(s + 1/8)] \2J
_ sh[aV2(s+ 1/8)] П
9ь’а{ ’ sh [(а. — b)\/2{s + 1/8)] \2
(5.52)
Здесь через <7^*(s, 0) обозначено преобразование Лапласа от плотно¬
сти вероятности д^а{т, 0) достижения границы а (а> Ь) раньше, чем
границы Ь. Согласно обратному преобразованию от (5.52)
+ t 1 (Ла-т
<а(Т> 0) = /=— еХР
Т\/27ГГ
(2 га 2 ^
[а — 2п(а — 6)] ехр < — - - п(а — Ь) > ;
= — по ^ '
X
71= — ОО
5ь'^Т’°^ т^/Ътт6ХР ( 8 )Х ^5‘53^
Последовательное обнаружение
127
^ I 2
х [2п(Ь - а) -Ь\ ехр < —
П— — 00 У
^ — п(Ь - а)
9ьЛТ. 0) = 9ь,а(Т’ °) + 5ь,а(Г. °)-
Плотности вероятности v^a{t, 0) времени принятия решения Яь
Pbatt’Q) ~ принятия решения Я0 и рь,а(£, 0) — длительности проце¬
дуры последовательного анализа при наличии сигнала можно найти
согласно (5.49), подставив в (5.53) г = т(Ь) и умножив на br(t)/dt =
2s2(t)/N0.
В отсутствие сигнала (гипотеза Я0) аналогичным образом по¬
лучим
9ь'Л' ’ shKb-a)^2(«+ 1/8)] 2/ (С|С41
sh[(o-t)V2(»+ 1/8)] V 2,
По известной плотности вероятности Pb,a(t, 0) среднее время про¬
цедуры последовательного анализа находится по формуле
Р оо
Ti(b, 0, а) = / tpb,a{t,0)dt. (5.55)
Jo
В ряде случаев для его нахождения можно также воспользоваться
свойством преобразования Лапласа
71(6,0,0)= - lim| (s,o). (5.56)
s—>0 as
Рассмотрим два примера.
Пример 5.4. Длительность процедуры последовательного обна¬
ружения постоянного сигнала.
Пусть s(t) = А = const. В этом случае
r(t) = 2A2t/No\ t = Not/2A2.
Следовательно, средняя длительность процедуры обнаружения
/»°° дг /»СЮ
Ti(6,0,a)= / трь,а(г,0)<1т = тдь,а(т, 0) dr =
2А2 s—>о ds
В отсутствие сигнала (Я0) на интервале наблюдения из (5.54) и (5.57)
128
Глава 5
после вычисления предела производной д *ъ,а («5,0) получим
т.О.а) = -f2 (а|^1 + . (5.58)
Так как справедливы равенства
1 - eb еа - 1
= еа _ еЪ ’ 1 - Qo = еа _ еь »
то формуле (5.58) можно придать другой вид:
Nn
Ti(b, 0, а) = -~{aQo+ 6(1-Qo)], (5-59)
что совпадает с (5.31) при /л0 = A2/N0.
Аналогично, при наличии сигнала (#i) при помощи (5.53) и (5.57)
получим
Та (6,0, а) = ^f[a<?d+ 6(1-<?,,)], (5.60)
что совпадает с (5.32) при /л0 = A2/N0.
Пример 5.5. Длительность процедуры последовательного обна¬
ружения гармонического сигнала [72].
Пусть
s(t) = AmCOSCdt, (5.61)
где Ат и си — известные амплитуда и частота. В данном случае из
(5.47) следует, что
{***£?)■ <5-б2>
На практике обычно выполняется условие и > 1. При этом из
(5.62) видно, что средняя длительность последовательного обнару¬
жения гармонического сигнала на фоне белого шума в первом при¬
ближении может быть оценена по формулам (5.59) и (5.62). Чтобы
получить более точный результат, обозначим р = A^/No и заметим,
что из (5.62) следует приближенное равенство
1 ( sin2cjA /г_
)■ <5'бз>
Для определения средней длительности процедуры последова¬
тельного обнаружения согласно формуле (5.56) необходимо предва¬
рительно найти преобразование Лапласа от плотности вероятности
роо
=~stdt
РОС
Pb,a(0) = / РЬ,а(*’ °Ж
J О
Последовательное обнаружение
129
f
Jo
е 'st/pgb,a(ri 0)ехр ( - sin2cjr ) dr.
(5.64)
/о \P 2и
Имея в виду последующий предельный переход при s 0, раз¬
ложим экспоненту в ряд Тейлора и сохраним члены только первого
порядка малости
' s sin 2сот
ехр I -
s sin 2сОТ , оч
I 1 + —~— + ф)•
кр 2(jj ) р 2oj
Подставив это разложение в (5.63), из (5.56) получим
Т\(а, О, Ь)
lim
dPb,a(S,°y
= lim
s—>0
ds
s—>0
+ lim
1
s—>о А\иор
9b, а
.0)-s;,« [ 2-^,0
s + 2i u>
P / V P
T1(1)(b,0,a)+T1(2)(b,0,a).
(5.65)
Здесь при записи второго предела было использовано следующее
свойство преобразования Лапласа:
г
J е stf(t) smoot dt = ^[f*(s-\co)+ f*(s + iw)].
Для первого предела в (5.64) аналогично (5.59) и (5.60) получим
Т1(1)(6,0,а)= —[aQo + 6(1 - Qo)]
Р
(5.66)
при отсутствии сигнала (Но), что совпадает с (5.31) при /л0 = -р/2.
При наличии сигнала (Hi)
Т1(1)(6,0,а)= -\aQd+ 6(1 - <?«,)],
Р
(5.67)
что совпадает с (5.32) при = р/2.
Для второго предела при справедливости гипотезы Я0 и 2cj
> 1/4 получим
Tf2)(b,0,a).
1
4icup
z-a/2
sh[bV2\oo
sh[by/—2\u
sh(b — a)y/buo sh (b — a)y/—2\u
+ e
— 6/2
sh[ay/2\uj
sh[ay/—2\u
(5.68)
sh(a - b)y/2\u sh(a — b)y/—2\oj
При больших значениях uo это выражение несколько упрощается:
Т$2\ъ, О, а) = J- {e-a/2[e-(a-2b)v^ sin(a - 2b)y/w- e“a^ sin aV^] +
130
Глава 5
+ е 6/2[е (2а sin (2а - Ъ)у/й + e6v/^sin 6v^]|- (5.69)
Из формулы (5.69) следует, что для больших значений ш влияние
вибрационного сомножителя coseut в (5.61) на среднюю длительность
процедуры последовательного анализа очень мало.
При наличии сигнала (Hi) для Т^ получается выражение типа
(5.69), в котором ехр(-а/2) и ехр(-6/2) заменяются на ехр(а/2) и
ехр(6/2) соответственно.
Пример 5.6 [29]. Некогерентное обнаружение синусоидального
сигнала в шуме.
Пусть исследуемая выборка состоит из отсчетов огибающей ад¬
дитивной смеси узкополосного шума и синусоидального сигнала с ам¬
плитудой А и с частотой, равной средней частоте ЭС шума. В предпо¬
ложении, что шум имеет гауссовское распределение с нулевым сред¬
ним значением и дисперсией сг2, распределение огибающей подчиня¬
ется закону Райса [154] (см. (4.17))
W(y А) = { (у/^2)е_(у2+л2)/2<т2/о(уА/<т2) при у ^ 0;
10 при у < 0,
где 1о(и) — модифицированная функция Бесселя нулевого порядка.
Введем новые обозначения
х = у/у/ъё\ d = A/VTa2, (5.70)
где d? — ОСШ (отношение мощностей сигнала и шума).
В результате ПРВ величины х принимает вид
W(x, d)= \ 2xe-d2~x210(2dx) при х > 0; (5 71)
I 0 при х < 0.
Считается, что наблюдается СВ X и наблюдения независимы
друг от друга.
В распределении W(x) неизвестен параметр d\ при d = 0 сиг¬
нал отсутствует (справедлива гипотеза Я0), при d = d\ справедлива
гипотеза Hi (сигнал присутствует).
Введем величину
z=\n l(x), l(x) = W(x\ d1)/W(x\ 0). (5.72)
Тогда по (5.71) находим
z = -dl+ \nI0(2dlX). (5.73)
При слабых сигналах правую часть (5.73) можно разложить в
степенной ряд [29]
2 = —d\ + d\x2 — ^d\x4 + 0(dfx6). (5-74)
Последовательное обнаружение
131
О 0,2 0,4 0,6 0,8 1,0 d/d! О 0,5 1 d/dx
Рис. 5.4 Рис. 5.5
Среднее значение имеет вид [29] [см. (5.16)]
г°° л
z(d) = / z(d\, x)W(x, d) dx = d2d[ — -d\ + 0(d\). (5.75)
Jo 2
По (5.15) получим уравнение для определения величины h\
/*°° 2 2 2
/ [e~diIo(2dix)]h2xe~d е~х Io(2dx)dx= 1,
Jo
или
poo 2 2 2
2/ xl0(2dx)[l0(2dix)]he-x dx= ed+hdi. (5.76)
Jo
При произвольных значениях величин d и d\ это уравнение допускает
лишь численное решение.
Для слабых сигналов при малых d и d\ (d <С 1, d\ <С 1) можно
получить приближенное соотношение [29]
h= l-2(d/d1)2. (5.77)
Подставляя это значение h в (5.13), получим оперативную харак¬
теристическую функцию L(d), изображенную на рис. 5.4 [29].
Заметим, что согласно (5.12) L(0) = 1-а; и при djd\ = 1, когда
d = di,
L(d0= 1-7= /3.
В своей работе [27] А. Вальд показал, что вероятность обнару¬
жения Qd(d) как функция параметра определяется соотношением [27,
132
Глава 5
0,2 0,4 0,6 0,8 1,0 d/di
Рис. 5.6
0,5 1
Рис. 5.7
d/d
Зависимость Qd(d/d\) изображена на рис. 5.5 при a = 1СГ4. Ес¬
ли d/di = 1, то по (5.77) h = -1, и, следовательно, Qd(d) = Qd(di) =
= 0,5 (см. рис. 5.5), так как В « 0,5; А~х = 2 • 10“4 [см. (5.6), (5.7)].
Найдем среднюю длительность процедуры E(N \ H\,d) = v(d).
Сначала по (5.75) находим
z(d) = E(z | Hud)= -d\ 1 - (d/dxY /2 = -hdj/2.
Следовательно, /j,i = E(z | H\,d) = -d\hj2.
Среднее число шагов имеет вид [75]
E(N | НЪ(1) = ^d) + 6[1 “ Qd(d)]
Отсюда находим
d\u(d) = d\E(N | Hi,d) = -2
Mi
aQd(d) + b[l - Qd(d)]
h
(5.79)
(5.80)
что эквивалентно (5.14), так как 1 - Qd(d) = L(d).
Зависимость djv(d) = f(di/d) изображена на рис. 5.6 [29]. На
рис. 5.7 изображена зависимость dfv(d) при а = 10—4; Qd(d) =
= 7 = 0,5 (кривая 1). При djd\ = 1, когда Qd{d) = 0,5 (см. рис. 5.7),
d\v(d) = diis(di) = a+ b.
Здесь
a = In A = ln(7/a) = ln(0,5 • 10“4) = 8,509;
b= In В = ln(0/a) = In 0,5 = -0,691. '
Тогда a + b= 7,818, d|i/(d) = dfv(di) = 7,818 (рис. 5.7, кривая 1).
Последовательное обнаружение
133
Пусть h = О, тогда d/d\ = 1/л/2 « 0,707. При этом можно
использовать формулы [76]
Ь 1
L(d*) =
Qd(d*) =
(5.82)
a — b' ' a — b 1 — a/b'
Поэтому при a = 8,509; b = -0,691 получим Qd(d*) = 0,075 (cm.
рис. 5.7).
В общем случае при h = 0 справедливо равенство
ab
E(N | Hud) = -
ад-
(5.83)
Пример 5.7. Когерентное обнаружение известного сигнала в усло¬
виях примера 5.1.
Решение. В данном случае при нормировке х = у/ст\ d2 = А2/о2
получим ПРВ
W(x,d)= —Le-(x-d)2/2.
V2n
(5.84)
(5.85)
По (5.35) находим (при в/а = db хк/о = х)
z = In l(x) = d\(x — di/2)
Тогда
-*ИМН!
(5.86)
Д1 = E(z | Н\, d) = d\
Уравнение для определения параметра h (5.15) имеет вид
— Г
л/27Г У_(
ed1x-d21/2']h e-(x-d)2/2 dx =
ИЛИ
f
J — с
e^WfodJda: = e^72.
)
Отсюда находится [29, 74]
/i= l-2d/di. (5.87)
Следовательно, по (5.84)
li i = —d\h/2. (5.88)
Поэтому средняя длительность процедуры
i/(d) = E(N | tfbd) = -2{aQd(d) + 6[1 - Qd{d)]}/hd\, (5.89)
гДе Qd(d) вычисляется по (5.78)
134
Глава 5
О 0,2 0,4 0,6 0,8 d/c/i 0 0,2 0,4 0,6 0,8 1,0 d/d\
Рис. 5.8
Г рафик оперативной характеристической функции изображена на
рис. 5.8. Характеристики обнаружения Qd(d) = f\(d/d\) (5.78) и за¬
висимость средней длительности процедуры d\v(d) = ^(d/ck) (5.89)
изображены на рис. 5.9,а и б соответственно. При этом приняты сле¬
дующие параметры: допустимая ВЛТ Q0 = ос = 1СГ4 и требуемая
(стандартная) вероятность обнаружения при ожидаемой интенсивно¬
сти di равна 7 = Qd(di) = 0,5 (рис. 5.8,6, кривая 1).
В частности, при djd\ = 1, когда h = -1, по (5.78) находим
I- Вн 1-2
QM) = Ah _ Bh « —— = 0.5 (см. рис. 5.9, а);
d\v{d) = а + b = 8,509 - 0,691 = 7,818 (см. рис. 5.9, б, кривая 1).
В критической точке, когда h = 0 (d/d\ = 0,5), fj,i = 0, по (5.82)
находим
Q{dd*) = 0,691/9,2 = 0,075 (см. рис. 5.9, а).
о
0,5 1
а)
d/di 0
Рис. 5.9
0,5 1
б)
Последовательное обнаружение
135
При h = 0 справедливо соотношение (5.83), причем дисперсия
D(z) может быть найдена по (5.85):
D(z) = d\D(x) = d\,
так как согласно (5.84) D(x) = 1. Тогда по (5.83) получим
d\v(d*) = d\E(N | Hud*) = -ab= 5.88
(см. рис. 5.9,6, кривая 1).
Пример 5.8 [75]. В условиях примера 5.7 положим Q0 = 1СГ4;
Qd(<h) = 0,99.
Найти зависимость Qd(d) = fi(d/d\) и зависимость средней дли¬
тельности d\v(d).
Решение.
b w In 0,01 = -2 In 10 = -2 • 2,3 = -4,6;
а = In 0,99 • 104 = In 9,9 + 3 In 10 = 2,29 + 6,9 = 9,19.
Вероятность обнаружения находится по (5.78) при В « 0,01, А =
= 9,9 • 103. Например, при d/d\ = 1 h = -1 получим
1 — Б”1
Qd(d) = Л(1)
1-100
А-1-В-1 100
При h = 0 (d/di = 0,5) по (5.82) находим
Ъ 4,6
0,99.
Qd(d?)= Л (0,5)
13,79
0,33.
Зависимость Qd(d) = f\(d/d\) при di = 1 изображена на
рис. 5.10,а вместе с зависимостью Qd(d) = QiQ^iQo) - VNd], при
М = Мфоп = 36 [75] (рис. 5.10,а, кривая 1). Эта зависимость ха¬
0,8
0,6
0,4
0,2
60
50
40
30
1А
20
ч2
10
п
0,5
а)
1
/
//
,2
/
У
1
d/fu
Рис. 5.10
0,5
б)
d/d1
136
Глава 5
рактеризует вероятность обнаружения полностью известного посто¬
янного сигнала (см. пример 5.1).
Найдем характерные точки этой зависимости при Оо = Ю”4,
когда 0-1(Оо) = Q-1(10“4) = 3,719.При d = 0,5 получим
Qd(0,5) = 0(3,719 - 3) = 0(0,719) = 1 - Ф(0,719) = 0,236;
(рис. 5.10,а, кривая 2). При d = 1
Qd( 1) = 0(3,719 - 6) = 0(—2,28) = Ф(2,28) = 0,9886 « 0,99.
Зависимость средней длительности процедуры d\v(d) = /2(d/di)
рассчитывается по (5.89) и изображена на рис. 5.10,6. Найдем ха¬
рактерные точки этой зависимости. При d/d\ = 1 h = -1, тогда
(рис. 5.10,6, кривая 1)
d\v = 2(9,19 • 0,99 + 4,6 • 0,01) = 18,28 < 36 = МФОп-
При d/di = 0,5 h = 0 и по (5.83) по¬
лучим (рис. 5.10,6, кривая 1 при
D(a) = d2)
dp(d*) = —ab =
= 9,19 • 4,6 = 42,2 > 36 = Мфоп-
Как было отмечено, для того что¬
бы избежать чрезмерно большой дли¬
тельности испытаний ПОВ, вводится
процедура усечения. Точка усечения
^ = ^шах выбирается так, чтобы незна¬
чительно ухудшить характеристики
ПОВ [165]. Если число испытаний п*
достигает величины nmax, то переходят
к испытанию с одним порогом.
Рис. 5.11
При п = п* решающим правилом является [165]
п* ,
Е*{
г=1 ^
^ t* принимается #ь
< t* принимается #0,
где t* — фиксированный порог.
На рис. 5.11 изображены зависимости предельных средних зна¬
чений v(r) при a = 10”4; (3 = 5-10“4 [165] (сплошная кривая — ПОВ,
штриховая — усеченный ПОВ), горизонтальный отрезок соответству¬
ет ФОП-обнаружителю. Пунктирная кривая соответствует прибли¬
женному значению v(r) при усеченном испытании.
Последовательное обнаружение
137
Величина г = ^ — при решающем правиле
Vi —
H0:Xi^W(x-e), 0=0о,
Hi:XifzW(x-6), 6» =6»i > 00-
Задачи
5.1. Сигналы sk(t) известны полностью, кроме общей амплитуды А. Они прихо¬
дят в известное время в аддитивной смеси с белым гауссовским шумом с односторон¬
ней спектральной плотностью N, и в к-м интервале наблюдения продолжительности
Т = Тк на вход приемника принимаются гипотезы
Но : vk{t) = nk{t)\
Hi . vk(t) = sk(t) + Tik{t).
Взять стандартный сигнал энергии Э и отношения сигнал/шум d\ = ^2Э/N, ко¬
торый должен быть обнаружен с вероятностью Qi(di) и последовательным анализом,
описанным в данной главе.
а) Выразить ЛОП Zj = In для j-го интервала в условиях входа Vj(t) в течение
этого интервала.
б) Показать, что Zj — гауссовская СВ, и получить ее среднее значение и диспер¬
сию, когда присутствует сигнал энергии Э.
в) Пусть d = yj2Э/N. Найти производящую функцию моментов h(z] d) стати¬
стики и доказать (5.87).
г) Записать формулы для вероятности Qd{d\) обнаружения и среднего числа
v(d) этапов последовательного испытания.
д) Построить зависимости v(d) и Qd{di) как функцию отношения сигнал/шум d
для 0 < d < d\ = 1, с Qd{di), Э = 0,9; Qo = Ю~6. Использовать приближенные
данные данной главы.
5.2. Предложить последовательный анализ для решения задачи, является ли дис¬
персия гауссовского шума на входе No или Ni, Ni > No. Вторая дисперсия Ni может
представлять сумму дисперсии Nq шума и дисперсии Ns = Ni — No независимого
подобного шуму сигнала. Такой сигнал является выходом передатчика, создающего
помехи. Наблюдаются отсчеты с нулевыми средними значениями.
а) Найти ЛОП Zj = \n[Wi(xj)/Wo(xj)\, где Wo{x3), W\{xj) — гауссовские ПРВ
при нулевых средних значениях и дисперсиях No, N\ соответственно.
б) Показать, что если истинная дисперсия данных N, N > No, то производящая
функция моментов статистики г имеет вид
К,;*). I-1"
v ' \nJ [ N0Ni .
в) Вычислить среднее значение и дисперсию статистики г, если дисперсия ис¬
тинного шума равна N.
г) Показать, как определять вероятность обнаружения и среднее число v шагов
испытания как функцию N. Использовать приближенные формулы данной главы.
5.3. Предложить процедуру последовательного анализа для обнаружения нуле¬
вой и единичной посылок, прошедших канал с релеевским замиранием (федингом).
Предположить, что канал — нешумящий с обратной связью, когда передатчику дается
138
Глава 5
команда о передаче следующего символа. Считать амплитуду сигнала и фазу незави¬
симыми СВ, причем амплитуда подчиняется закону Релея
W(d)= (d/s2) ехр(—d2/2s2),
где s = so.
Найти ЛОП и вычислить производящую функцию моментов, среднее значение и
дисперсию, когда истинное значение параметра распределения Релея равно s [78].
5.4. В приемнике оптических сигналов свет падает на фотодиод, и в каждый
из последовательных интервалов продолжительности Т = Tj, j = 1,2,..., приемник
считает номера ni,n2,.... Приемник должен выбрать между гипотезой Hq, что только
фон присутствует на его входе, и гипотезой Н\, когда присутствует оптический сигнал.
Вероятности наличия rij электронов в j-м интервале при каждой гипотезе подчиняются
закону Пуассона
Л к
P{nj = к | Hi} = -у ехр(-Аг), г = 0,1; Ai > А0.
Числа rij в последовательных интервалах статистически независимы.
а) Показать, как использовать последовательный обнаружитель оптического сиг¬
нала на основе процедуры Вальда, взяв в качестве стандартного среднего значения
величину Ais для числа rij при гипотезе Hi. Здесь данные характеризуются не ПРВ,
а распределением вероятностей.
б) Используя аппроксимации Вальда, определить решающие пороги А и В.
в) Вычислить производящую функцию моментов статистики г, которая характе¬
ризуется как функция испытаний, и показать, как определяется вероятность обнаруже¬
ния и среднее число шагов, когда среднее число электронов при гипотезе Яi не равно
Ais, а равно Ai > Ао-
г) Показать, как сравнить характеристики испытания ПОВ и ФОП-обнаружителя,
когда различение гипотез Hq и Hi происходит на основе общего числа электронов
п\ + П2 + ... + пм, подсчитанных за М последовательных интервалов.
5.5 [20]. Получить оптимальный последовательный алгоритм обнаружения сиг¬
нала s(t) на фоне гауссовского шума с дисперсией сг2, обеспечивающий заданные ве¬
роятности ложной тревоги Qo и обнаружения Qd. Отсчеты считать независимыми.
Часть II
Обнаружение сигналов в условиях
неопределенности
6 Обнаружение сигналов при неизвестных
параметрах
Пример 6.1. Рассмотреть проблему обнаружения детерминиро¬
ванного сигнала, известного за исключением его амплитуды А, при
наличии ГБШ с известной дисперсией, когда гипотезы имеют вид
Н0 : Xi = Wi,
Hi : Xi= Asi + Wi,
(6.1)
где Si — известная функция, A — неизвестная величина, Wi — ГБШ
с известной дисперсией а2.
Найти характеристики обнаружения.
Решение. Оптимальный обнаружитель должен определить ОП
Л(Х„ I А) = Pi(Xn I 1)/Ро(Х„) = P(Xn,Hi)/P(Xn,H0) (6.2)
и сравнить ОП с порогом
А(Х„ | А) > 7,
где А — оценка амплитуды, получаемая методом максимального прав¬
доподобия из уравнения
д
— lnPi(X„| А)= 0.
Здесь
Pi(X„ | А) =
Ро(Х„) =
(2-7Г <72)”/2
1
ехр
-^(Xn-ASny(Xn-ASn)
ехр
-2^х;х„
(27Г<Т2)п/2
Хп = [ж0, 3?15 • • • j %п— l] » Sn = [so, ^1) • • • j ^n—l] •
(6.3)
140
Глава 6
-г' ?Г7]
N- 1
£
п = 0
Г V2
7YX„)
>У
Г
\ )
<V
Яо
st
Рис. 6.1
Решая уравнение правдоподобия, находим оценку амплитуды
X"Sr
71—1
- — XTS - — Ws-
— -ч -^п^п — 3 г г’
г=0
где
п —1
э1 = s;s„=
г=0
Логарифмируя неравенство А(ХП | Л) > 7, получим
1 ”
- —-j + A2sf) > In 7.
i=0
Используя выражение для оценки А, находим
1
2<т2
-2AA]Ts2 + A2£S2 ) > In7.
г=0 г=0 /
Таким образом, принимается гипотеза Яь если
2<т2 In 7
Л2
>
Эх ’
или эквивалентно,
Г(Х„) = YI> 2<j2 |п ^ = 'У'-
\г=0 /
Отсюда видно, что принимается гипотеза Яь если
п—1
£
г=0
XiSi
> \/2и2 In 7Э1 = -\/У-
(6-4)
(6.5)
(6.6)
(6.7)
(6.8)
Схема обнаружителя изображена на рис. 6.1.
Прежде чем вычислять характеристики обнаружителя, рассмот¬
рим свойства статистики
п—1
и(Х„) = v = X£S„ = $><*■ (6.9)
г=0
Обнаружение сигналов при неизвестных параметрах
141
Очевидно, величина v распределена по нормальному закону, причем
E(v | Н0) = ] = 0;
E(v | Hi) = E ^^(As, + Wi)s^j = АЭ1.
Дисперсия CB v имеет вид
(71— 1 \ 71— 1
= J2D(Wi)s* =
i—0 / 2—0
71—1
= O2 Si = a23i = D(v I Hi).
i=о
Таким образом, находим
,,/X 'l - v - YVs- ~ / N(0,a29i) при tf0; ,fi
v{Xn) - v - ^хгзг ^n{A9u(J29i) приЯг (б-Ю)
Отсюда получим вероятность ложной тревоги (ВЛТ)
Qo = Р{КХ„)| > | Но} =
= Р{г;(Хп) > | Но} + P{v(Xn) <-•//! Н0}.
Преобразуем первое слагаемое:
1 /*°° 2 2
P{v(Xn) > v9 | Но} = = / e~v '2°- dv =
J л/т'
-Г
J\/l'/&v V <W
WY/vv
y/i y/i
Oi = -
O' yPl
Аналогично находится второе слагаемое:
1/2
= ; Q(x) = —= / е~г 12dt= erfcx.
i л/2nJx
P{v(Xn) < -v9 I Ho} = —^= [ 7 e""2/2^ dv = Q (—) •
<Jvy2n J-oo V av J
Тогда ВЛТ имеет вид
Qo = 2 Q(e). (6.11)
Отсюда e = Q~1(Q0/2).
142
Глава 6
Рис. 6.2
Найдем вероятность обнаружения
Qd = P{\v\ > sfi \Hi}= P{v > y/у I Hi} + P{v < -yfi? I Hi}.
Преобразуем первое слагаемое:
P{v > S? I я,} = Г exP “ '4Э,)21
(Jvy Ztt J y
' V7 - '
2
Q(e - d),
dv
где d2 = А2Эг/а2 = Э/а2 - ОСШ.
Аналогично находим второе слагаемое:
л/У
ехр
p{v<-^y\Hi}= —L= [
avy/27r J-
~(v- АЭi)2
2cr2
dv
Q(e+d).
(6.12)
Таким образом, вероятность обнаружения
Qd = Q(e -d)+ Q(e + d).
Характеристики обнаружения Qd(d2) при Q0 = const и Q0 = 10~n,
n = 1,5, изображены на рис. 6.2, где по оси абсцисс отложена вели¬
чина dAб = 10 lg d2. Здесь же приводятся штриховыми линиями харак¬
теристики обнаружения при полностью известном сигнале Qo = Q(x);
Qd = Q(x - d). Как видно из рис. 6.2, наблюдается ухудшение обна¬
ружения при неизвестной амплитуде по сравнению с обнаружением
полностью известного сигнала.
Пример 6.2 [36]. Обнаружить сигнал заданного вида s(t), адди¬
тивно смешанного с гауссовским некоррелированным шумом, облада¬
ющим неизвестной интенсивностью.
Обнаружение сигналов при неизвестных параметрах
143
Пусть наблюдается выборка Xn = {xi,X2, ...,хп}, которая может
состоять либо из шумовых компонент, либо из компонент, образован¬
ных суммой сигнала и шума. Тогда
Xn — ASn + Nn,
(6.13)
где Л = 1с вероятностью 7Гь Л = Ос вероятностью 7г0 (7Г1 + 7Го = 1);
Sn = {*}; Si = s(ti)\ Nn = {щ}, щ = n(ti)\ Xn = {xi}\ = x(U).
Корреляционная матрица шума Rn = ||сг2<^||, Sij — символ Кроне-
кера, а дисперсия сг2 неизвестна и может считаться распределенной
равномерно в некотором интервале А (сг2).
Решение. Оптимальный обнаружитель должен сформировать от¬
ношение правдоподобия
Wi(Xn |а2)
Л(ХП I <71з<т2) =
Wo(Xn |<72)’
(6.14)
где <т2 и о\ — оценки максимального правдоподобия дисперсии шума,
полученные в предположениях о наличии и отсутствии сигнала соот¬
ветственно. Очевидно, что ПРВ в числителе и знаменателе (6.14)
определяются выражениями
1
W1(Xn\a2) =
W0(Xn | сг2) =
(27ГСГ2)п/2
1
ехр
ехр
1
2а2
(Хп — Sn)T(Xn — Sn)
-^XTnXn
(6.15)
(27ГСГ2)п/2
Таким образом, отношение правдоподобия (ОП) имеет вид
Л(Хп|<т2,<3-2) =
СГп
ехр
{4
(Х„ - Sn)T(Xn - S„)
Х£ХП
}
Оценки а2 и <т| находятся из уравнений
9In W;(Xn | a2)
da2
Дифференцируя, находим
О,
0,1.
(6.16)
(6.17)
d\nW1(Xn\a2)
da2
<9ln W0(X„ | a2)
Bi = (X„ — S„)T(X„ - S„);
da2
= -2^+2^B°:
Тогда получим
<7i =
Bx
a n =
Bo
(6.18)
144
Глава 6
Поэтому ОП принимает вид
Л(Х„ I aj,aо) =
2 \ п/2
В2
В1
п/2
2 = 1
- s»)2
Li=l
п/2
(6.19)
Отношение правдоподобия должно сравниваться с обобщенным
порогом [36]
do (Хп)
Co,i = зе
ai(Xn)’
(6.20)
#21 — 922 7Г0 .
где зе = ————; {gij}?j=i — коэффициенты потерь.
912 - #11 7Г1
Для того чтобы вычислить {ai(Xn)}}=G, необходимо найти ве¬
личину
02|падс„|а?)
^0,1= > *=0,1. (6.21)
Вычислим вторые производные с учетом (6.18)
п
Bi
п
Вщ3
2 (а2)2 (а2)3 2 В2 В3 2ВХ
92W!(Xn | а2)
д(а2)2
d2W0(Xn | а2) -п3
д(а2)2 2В0'
Коэффициенты aj(Xn), i = 0,1 имеют вид [36]
1 '
—п°
1(6.22)
(6.23)
ai(Xn) —
2тг / \r \ 1
-Яь ао(Ап) =
27Г
A(cr2))j п3/2 11 А(сг2)^1 п3/2
Порог Сод (6.20) с учетом (6.24) принимает вид
Во. (6.24)
Во
— и ^0
Сод = зе— = эет^.
(6.25)
Поэтому принимается решение о наличии сигнала, если
2\ п/2 л 2
> Со,1 =
что эквивалентно неравенству
-2 / -2 ^ 2/(п—2) _
ao/°i ^ зе = О,
или
Bo/Bi > С.
(6.26)
(6.27)
Обнаружение сигналов при неизвестных параметрах
145
Таким образом, оптимальный обнаружитель должен вычислять
оценки неизвестной дисперсии шума в предположениях, соответству¬
ющих той и другой конкурирующей гипотезе, и сравнивать с порогом
отношение этих оценок.
Введем обозначение
Ч» = оЦд\= В2/Вг. (6.28)
Для нахождения характеристики обнаружения необходимо вычис¬
лять вероятность
/•ОО
Р(Ч» > С) = Р[(В2 - СВХ) > 0] = / W(z) dz, (6.29)
Jo
где W(z) - ПРВ СВ
п п
z = В2 - СВг = х2 - С 5^(®< - Si)2 = (6.30)
2 = 1 2 = 1
71 71 71 71
= (1 — С) ^ х2 — С ^(s2 - 2siXi) = {l-C)YJ^i + 2CYJSixi-C3,
2 = 1 2 = 1 2=1 2 = 1
где Э = £ s?.
2 = 1
После преобразований получим [36]
п / Л \2 упг ^
г= (1-c)S(*i+в<ггс) ^б31^
2=1 ' '
По (6.31) замечаем [36], что W(z) — нецентральное распределе¬
ние х2. При больших значениях п справедливо гауссово приближение
(z - in)2"1
W(z) = /=—техР
у/2к о*
2 а2
(6.32)
При Л = 0 и Л = 1по (6.18) легко находим соответственно при
Х{ = Щ И Xi = Si + щ
zno = (1 - C)no2 - СЭ\ ini = (1 - C)na2 + Э. (6.33)
Вычислим дисперсии сг2-, i = 0,1. По (6.30) получим
а2 = (1 - С)2 + 4С2 (6.34)
2 = 1 2 = 1
Поскольку D(x2) = D(n2) = m2x2 - m2^2 = За4 - сг4 = 2сг4,
D(xi) = D(n2) = сг2, то окончательно находим
сг20 = 2(1 - С)2п(72 + 4С2Эсг2. (6.35)
146
Глава 6
При Л = 1, когда xi = Si + щ, по (6.34) получим
D{z)=a2n i= (1 -Cff^D
Tli +
= (1 - CfnD(-n?) + 43D(ni) = 2(1 - C)W + Ot‘
С учетом (6.32) найдем интеграл
(б.Зб)
Г°° 1 Г
/ W(z)dz= ~7= /
Jo V:27гап Jо
О О
g-(z-zn) /2<т„ ^ _
- J_ /°°
л/27Г J—Zn/&n
е х2/2 da; = —[ е х2^2 dx + г
л/2тг J — Zn/crn
+ 1= 1+ xpflli
2 2 U„
Ф
(Тп
Здесь
'Р(ж) = —[ е х212 dx\ Ф(х) = —L= [ е и I2 du. (6.37)
V ^ Jo V^J-oo
В результате находим вероятность ложной тревоги
Qo = Ф
^пО
&п0
и вероятность обнаружения
Qd = Ф
Znl\
°nl )
Ф
Ф
(1 - С)п/2 - hC
Л/(1-С')2п/2+ 2 hC2
(1 - С)п/2 + h
у/(1 - С)2п/2 + 2h
(6.38)
(6.39)
где h = Э/2о2 - ОСШ.
Рабочая характеристика Qd(Qo) изображена на рис. 6.3 [36] при
h = 1, п = 10 (кривая 1). Кривая 2— рабочая характеристика при
известной интенсивности шума.
По (6.38) и (6.39) можно получить асимптотические рабочие ха¬
рактеристики (характеристики обнаружения) при п > 1.
Запишем порог (6.20) в виде
С = ае2/(п_2) =
ехр
п — 2
In ае
(6.40)
где ае — порог при отсутствии априорной неопределенности.
При п»1п-2^пиС'^1+ (2/п)1пае. Тогда по (6.38) и
(6.39) получим
In ае + h
V2h
1-Ф
In ае + h
V2h
Qo
(0).
Обнаружение сигналов при неизвестных параметрах
147
«"-•(-ж)-1"= * <6'41>
где Qо°^ и — вероятности ложной тревоги и обнаружения при
отсутствии априорной неопределенности.
Обозначим х = (lnae+ h)/d, d = \/2h, тогда получим
Qо°^ = 1 — Ф(х) = erfc(x); = 1 — Ф(х — d) - erfc(х —d). (6.42)
Функциональная схема обнаружителя изображена на рис. 6.4, где
1 — генератор сигнала s(t)\ 2 — квадратор; 3 — интегратор; 4 —
устройство деления; 5 — реле.
Пример 6.3. Обнаружение сигнала в шуме неизвестной интенсив¬
ности (алгоритм с обучением)
В предыдущем примере рассмотрен алгоритм обнаружения, в ко¬
тором оценка дисперсии шума производилась в процессе обнаружения
на основе использования одной и той же выборки Хп. Однако быва¬
ют ситуации, в которых для оценки неизвестной интенсивности шума
может быть использована отдельная чисто шумовая выборка. Это со¬
ответствует задаче с обучением, когда система обнаружения прежде,
чем обнаружить сигнал, настраивается на интенсивность шума.
Пусть, как и в предыдущем примере, наблюдается выборка Хп на
интервале 0 ^ t ^ Т, причем Т = nAt\ At = 1/2А/; А/ — полоса
шума.
Аддитивная смесь сигнала и шума имеет вид
Xn = ASn + Nn,
где Sn — вектор сигнала; Л = 1 с вероятностью 7Гь А = 0 с вероят¬
ностью 7Го (7Ti + 7го = 1); Nn — вектор некоррелированного шума с
неизвестной дисперсией a2 = 2NoAf. По наблюдению Хп необходимо
установить наличие (отсутствие) сигнала.
148
Глава 6
В данном случае для нахождения неизвестной интенсивности шу¬
ма на интервале £0 ^ t ^ to + Ть на котором сигнал может не быть
наблюдается, выборка шума
Yга = {У\) •••} Ут}5 ^ = Т\/Af.
Этим обеспечивается процесс обучения.
По выборке Yт находится оценка <т2 максимального правдоподо¬
бия дисперсии шума сг2. Эта оценка имеет вид
а2 =
YT Y
1 га 1 т У
-ES- <6-43>
т z' m
г=1
Решение о наличии сигнала принимается при выполнении условия
А(х-'г,| = щШ'с (6'44)
Плотности вероятности W\ и W2 определены в (6.15). Поэтому
по (6.44) с учетом (6.16) при о\ - <т2 - &2 получим
'2\ _ nvn ( SnSn , Х^п
A(Xn I a ) = exp ^ j . (6.45)
Правило решения (6.44) эквивалентно следующему неравенству:
XTS„>a2lnC+ is;sn. (6.46)
Заменяя а2 на ее значение (6.43), получим правило решения в
виде
п | ^ т 1 га
^ ^Y,y2i+ 2 XX (б-47)
г—1 г=1 г=1
Это неравенство определяет сравнение функции входных отсчетов с
переменным порогом, который зависит от оценки дисперсии шума за
время обучения.
Если (6.47) записать в другой форме —
П 771 ^
J2xiSi- aY^Vi ^ 2’ ^б‘48^
г=1 i—1
где a = Со/т; Со = In С, Э = ^s2, то очевидно, что результат
г=1
обработки сравнивается с постоянным порогом.
При непрерывном наблюдении по (6.48) при At -» 0, п -» оо,
Обнаружение сигналов при неизвестных параметрах
149
получим следующий алгоритм обнаружения сигнала:
f* о+т1 - Эо
/о •/*<■> 2
Гт 11
/ x(t)s(t)dt-a x2(t)dt^ (6.49)
Jo Jt0 2
где Эо = [ s2(t)dt.
Jo
Функциональная схема обнаружителя, соответствующая (6.49),
изображена на рис. 6.5, где 1 — генератор сигнала s(t)\ 2— квадратор;
3— интегратор за время Ti; 4— интегратор за время Т; 5 —усилитель
с коэффициентом усиления а; 6 —линия задержки на время T—Ti—to
(to < —Ti); 7 — реле.
Введем обозначения для случайных величин в левой части нера¬
венства (6.48)
(6.50)
(6.51)
где
U - U\ — U2 ^ 3/2,
n m
■Е
U\ = 'Y^XiSi', u2
i=1
2/i>
г=1
и найдем законы распределения для СВ щ и гл2. необходимые для
расчета характеристик обнаружения Qo и Qd и построения рабочей
характеристики обнаружителя.
По условию входной СП x(t) — гауссовкий с нулевым среднем
значением, поэтому
W1(u1) =
1
причем среднее значение СВ щ
ехр
Ы - U\)2
2 о\
0 при Л = 0;
Э при Л = 1.
ui = E(u\) = |1
Дисперсия как при Л = 0, так и при Л = 1
п п
о\ = D(ui) = 'Y^D(siXi) = ^~^sfD(xi) = сг2Э.
(6.52)
(6.53)
(6.54)
2=1
2=1
150
Глава 6
По условию, отсчеты у{ — независимые нормально распределен-
т
ные СВ, поэтому сумма Vi описывается распределением х2 с т
г—1
степенями свободы, и при больших т справедливо гауссовское при¬
ближение
W2(u2) =
1
: ехр
!7ГСГо
(и2 - и2)21
2сг|
(6.55)
Здесь среднее значение СВ и2
т
й2 = Е(и2) = a'Y^Eiyi) = ama2 = Cqct2.
i=1
Дисперсия
m m
= E[(u2 - й2)2) = a2 D(Vi) = a2 ^2 е\(у1 ~ Vi)2] =
(6.56)
i=1
i—1
m m r.
a2 'S^(m2y2 — m\y^) = ^ = 2a2mcr4 = —CqCt4.(6.57)
i=l
2=1
Очевидно, что разность и = и\-и2 также описывается (при до¬
статочно больших т) нормальным распределением со средним зна¬
чением й = щ — й2 и дисперсией сг2 = о\ + сг2. При этом
й = { Э -°q>, А = l! = ^ + 2Со^/т.
Вероятность ложной тревоги
(6.58)
Qo
роО 1 />оо
= W(u\0)du=^= ехр
JЭ/2 л/27Г(7« •'•Э/2
(ц+ О2)21
2сг„2
du
v27T JЭ/2+Cqu2/ии \ /
1 -Ф
Э/2 + С0ст5
(6.59)
Вероятность обнаружения
\ <?u J \ <?и J
Введем ОСШ h = Э/2а2, тогда по (6.68) и (6.69) получим
С0+ h
(6.60)
Qo = 1 — Ф
y/2(h + СЦт)
: 1-фГ ,
\л/2(^+ <?оМ),
Обнаружение сигналов при неизвестных параметрах
151
И наконец, обозначим
х =
С0+ h
\/2(h + Co/m) ’
окончательно находим характеристики обнаружения (рабочие харак¬
теристики приемника, РХП) в виде
Qo = erfc(x) = 1 —Ф(х); Qd- erfc(x — vd) = 1 —Ф(x — vd), (6.61)
где <P = 2h\ v = 1/V1 + Cg/ftm.
Характеристики Q0 и Qd (6.71) справедливы и при непрерывном
наблюдении, причем в этом случае ОСШ h = 3q/2Nq, га = 2Ti/A/.
На рис. 6.6 изображена РХП (кривая 1), рассчитанная по (6.61)
при h= 1, га= 10, а также РХП (кривая 2) при известной интенсив¬
ности шума (по (6.61) при v = 1, га —»• оо) [36].
Пример 6.4. Обнаружение сигна¬
ла с неизвестной амплитудой в шуме
неизвестной интенсивности. Допус¬
тим, что в моменты ---^п наблю¬
дается выборка Xn = {xi,...,xn} СП
X(t), которая может состоять из ком¬
понент шума n(t) либо из компонент
сигнала as(t) заданного вида s(t) с
неизвестной амплитудой а и шума.
Интенсивность шума неизвестна.
Выборку Хп можно записать в
виде суммы
Рис. 6.6
X.
(6.62)
— AaSn + Nn,
где Л = 1с вероятностью 7ri и Л = Ос вероятностью 7г0 (7Гх + 7го = 1);
Sn = “ заданный вектор; s* = s(^); a — случайный па¬
раметр, который считается равномерно распределенным в интервале
Да = ol<i — ct\.
Шум является гауссовским с корреляционной матрицей Rn =
= ст2||(У|, а сг2 = 2AfNo — неизвестная интенсивность шума, по
условию распределенная равномерно в интервале Дсг2.
Найти рабочую характеристику (Q0, Qd) оптимального обнаружи¬
теля.
Решение [36]. Для решения задачи необходимо вычислить ОП
Wi(Xn\a,di)
Л(Х„ I a,CTj,<т|) =
и сравнить его с порогом.
W0(Xn | &%)
(6.63)
152
Глава 6
В (6.63) a, а2, д\ — соответствующие оценки амплитуды а и
дисперсий а\ и о\, которые находятся методом максимального прав¬
доподобия, причем ПРВ Wo(Xn | а%) и оценка д\ находятся соответ¬
ственно по (6.23) и (6.26):
1 °l)' ехр ; (6 64)
&§ = Вг/п = Х;Х„/п. (б.65)
Функция Wi(Xn | a,af) определяется формулой
W1(Xn \a,a2x)= (27г>2)п/2 ехр
-^(Х„ - aS„)T(Xn - aSn)
2.0
(б.бб)
Оценки а и &2 находятся из системы уравнений правдоподобия
^ ^ (6.67)
да да2
Сначала выразим InW\\
In W1 = In 2тп72 - 2^2 (x;xn - 2as;s„ + a2S;S„). (6.68)
Поскольку в дальнейшем необходимо вычислять вторые производные
от In , то запишем первые частные производные
= ^(XlSn - aSlSny, (6.69)
д In Wi п 1
1^2“ ~ _2^2 + 2(^2)2 ^а)’ ( ^
где Bi(a) = (Xn - aS„)T(X„ - aS„).
По первому уравнению (6.67) с учетом (6.69) находим оценку ам¬
плитуды
YT 1 n
(6-71)
Ъпъп Ji"
а =
где Э! = S^Sn = £ s2.
i=1
По второму уравнению (6.67) с учетом (6.70) получим оценку
дисперсии а2
<т2 = is^a) = ^(Xn - aSn)T(X„ - aSn) =
1 П 1
= ZT = -№ - 2ax;s„ + a2s;sn) =
11 TI
i=l
Обнаружение сигналов при неизвестных параметрах
153
XIX,
2_
■Эг
(s’sn)
х^х„ — — (X£S„)2
1
n
(s;s„)2
n - / n
(Ёж*
г=1 x \ 2=1
Отношение правдоподобия принимает вид
Л(ХП I a,ox,a2) =
n/2
D
2=1
n 1 / П
.2=1 1 \ 2= 1
Xi Si
Это отношение должно сравниваться с порогом [36]
С°Д - ~ Tv \ ’
&1
#21 — 922 Щ . .
где ае = ; как и в предыдущих примерах, г, j =
912 - ри tti
коэффициенты потерь.
Коэффициент ао(Хп) определяется формулой (6.24):
a(WJ> = ^V^x"x”-
Коэффициент ах(Хп) определяется формулой [36]
ai(Xn) = a;(ai,ai)-
27Г
где
Di =
л/det Di:
Э2 In I^i Э2 In Wj 1
9а2 dada2
d2\nWl d2\nW1
a=a;a2=a2
da2da d(a2)2 -
u;(&i,<r2) — совместная ПРВ CB &i и a2. Получаем
(- -2ч 1 1
так как СВ di и а2 независимы и распределены равномерно.
По (6.69) получим
д21пИ^ _ _ Эх
dot2 ry = rv /Т-2
a=oc
’М
Ос —Ос
•\=>\
пЭ\
В^&У
.(6.72)
п/2
(6.73)
(6.74)
1,2. —
(6.75)
(6.76)
(6-77)
154
Глава 6
По (6.70) находим
д2 In Wi
d(a2)2
1 Гп_2ВМ\
OC = OC
2a4
n
OC = OC
2Bi(a)
По (6.69), (6.70) получим значение смешанной производной
d2\nWi 82\r\W1 1 ,
dada2 da2da
Ot = Ot
:(-x;s„ + os;s j
. . ‘(вд-55=3,1-0.
a=a a V
ai=°i
Следовательно, матрица D\ диагональная, и ее определитель
, г. n43i
det Di = тззг"'\•
Тогда по (6.76) с учетом (6.77) находим коэффициент
2W2 Bl/2{a)
11 п) AaAa2n2y/3i'
В результате можно вычислить порог (6.74)
(6.78)
о0(Хп) у/пЭг В2 . A a a$
Cq,i = ае—ч = ае———т=Аа = ае
-5i
oi(X„) л/2п B\\fB[
y/nal(a)]j 2 of (а)'
(6.79)
Таким образом, принимается решение о наличии сигнала, если
<5о
где
С(ХП) = С,
а2(а)
/
" 1 ~ ^ )
Aa\/ho\
2/(п-2)
(6.80)
(6.81)
причем ho = Э-у/(2а\а) — оценка ОСШ ho = 3i/(2cr2). Если поло¬
жить а\ = 0 и Да = с*2 = а, то порог С(Х„) принимает вид
2/(п—2)
С(Хп) = |aej^] , (6.82)
где Ah = a23i/[2cj\(a)\ — оценочное значение диапазона изменения
ОСШ (про заданном диапазоне амплитуды а сигнала и оценки интен¬
сивности шума, полученной в предположении наличия сигнала).
Обнаружение сигналов при неизвестных параметрах
155
При переходе к наблюдению непрерывных сигналов алгоритм
(6.80) принимает вид [36]
гт
) dt
~2 > C[x(t)],
Г X\t)i
J о
Г 1 Г
/ x2(t)dt—— / x(t)s(t)dt
Jo Эо Jo
где Э0 = /0Т s2(t)dt.
Рабочую характеристику приемника (Qd,Qo) найдем в предполо¬
жении, что порог не зависит от выборки Хп. Тогда решение о наличии
сигнала принимается, когда выполняется неравенство
/ \ '^2х2г-Уп) >С,
2 = 1
\%=1
где
1 71
9"=73г§
Х% Si.
(6.83)
(6.84)
Введем линейное преобразование [36]
Yn - GXn,
где матрица G такая, что GT = G-1. Тогда
Х_ p-lv — PTV • 'VT _ 'VT ■ 'VrT Y _ vTpp-lv — V"rV
n — V» 1 П “ ^ 1 ПI -Л-п — I пь, Л.ПЛ.П — X X n — I n I n.
Отсюда следует
n n
2=1
2=1
В [36] показано, что в данном случае алгоритм обнаружения сво¬
дится к сравнению с порогом С0 = С — 1 случайной величины
/п — 1
= у2 / Е
Уг ■
2 = 1
Для расчета вероятностей Q0 и Qd необходимо вычислить веро¬
ятность Р(£2 ^ С0), причем
Р(? >с°)= 1 - F*(Vc°) + F€(-\/C°),
156
Глава 6
где — интегральный закон распределения СВ £. Если ввести СВ
Т] = \/п-1£ = Уп
П
1 П—1
2=1
то получим [36]
Р(? >с°)= 1 - FvW(n-l)C°} + F4[-V(n - 1)С°], (6.85)
где Fv — интегральный закон распределения СВ 77 (распределение
Стьюдента [37] с (п - 1) степенью свободы); при Л = 0 это цен¬
тральное, при Л = 1 — нецентральное распределение Стьюдента).
Полученная по (6.85) РХП изоб¬
ражена на рис. 6.7 при п = 10, h = 8
[36].
Пример 6.5. Рассмотрим задачу
обнаружения сигналов как проверку
двух альтернативных гипотез Я0 и Hi:
Hq . Xi — TI'i, % — 1)7^»
Hi : Xi - Asi + Пг, i- 1, n,
(6.86)
где {s;}, i = l,n, — отсчеты известной сигнальной формы; А —
неизвестный множитель (амплитуда сигнала); {щ}, г - 1 ,п, — отсче¬
ты гауссовского белого шума (ГБШ) с нулевым средним значением и
неизвестной дисперсией D = сг2.
Предположим, что имеется возможность провести обучение уст¬
ройства обнаружения для оценки дисперсии шума по его реализации
{yt}, г = 1,т. В результате такого обучения находится оценка неиз¬
вестной дисперсии шума методом максимального правдоподобия
D = а2 =
г=1
(6.87)
Пусть Г — случайная величина (СВ), реализация которой D равна
неизвестной дисперсии шума, Л — СВ, реализация которой Л равна
Л = 0 при отсутствии сигнала (при гипотезе Hq) и Л = 1 при наличии
полезного сигнала (при гипотезе Hi). 0 — СВ, реализация которой
равна неизвестному множителю А при сигнальной форме.
Задача обнаружения, как было отмечено, заключается в проверке
двух гипотез (6.86).
Построим оценку А значения А методом максимального правдо¬
подобия.
Введем условную плотность распределения вероятности (ПРВ)
И/Х|0гд(х | А, D, Л) случайного вектора X, реализация которого х =
Обнаружение сигналов при неизвестных параметрах
157
= [яъЖ2, •••>жп]т представляет собой отсчеты наблюдаемого колеба¬
ния при условии 0 = А, Г = D, А = Л.
Оценка А параметра А находится из условия
^х|0гл(я | А,Ь, 1) = maxWx\®r\(x I А Д1)- (6.88)
В случае ГБШ {щ}, г = 1,п, получим
1 Л
(6.89)
Н^|©гл(я | А, А 1) - -- ехр
ИЪ|егл(® I ДО) - (27г2)„/2 ехр
%-
1 П
-iV:
on ^
2 D‘f
2=1
(6.90)
Дифференцируя (6.89) и приравнивая к нулю полученный резуль¬
тат, находим оценку А максимального правдоподобия:
1 71
А= - ^XiSi, (6.91)
2 = 1
П
где Э = si ~ энергия сигнальной формы.
2=1
Алгоритм обнаружения сигнала реализует метод отношения прав¬
доподобия (ОП). Принимается гипотеза Яь если
А, v , тахд Wxl@rA(x | A, D, 1)
Мхп) = —— , п > 71- (6-92)
^х|0гл(я I А 0)
В противном случае при А(ХП) < 71 принимается гипотеза Hq.
После подстановки в (6.92) ПРВ (6.89), (6.90) с учетом (6.87),
логарифмирования и преобразований получим, что принимается ги¬
потеза Hi, если
(±хА2 /(2^£yl)>^ = Г (6.93)
/ / \ Ш ■ 1
42=1 / \ 2=1
Здесь с учетом (6.91) использовано равенство
-А±х^+\{А?±3^±-(±хЛ2.
2=1 2=1 \ 2 = 1 /
При отсутствии полезного сигнала СВ (статистика)
Z=^7=Txisi (6.94)
распределена по нормальному закону с нулевым средним значением,
158
Глава 6
так как Е(хг | Я0) = 0, и единичной дисперсией, поскольку дисперсия
п
D^n СВ £n = YI xisi ПРИ гипотезе Я0 имеет вид
г= 1
DU = D ( J = J^sfDixi) = <т2Э,
\г=1 / i=1
а дисперсия D(z) = = 1-
При наличии полезного сигнала (Л = 1) СВ Z (6.94) распределе¬
на также по нормальному закону с единичной дисперсией и средним
значением mz = у/Э/ст, поскольку
п
E(Hn | #i) = J2SiE(Xi I =э-
2=1
Таким образом, при гипотезе Я0 статистика
<б-95)
имеет центральное распределение Фишера Fi?m, так как в общем слу¬
чае СВ X, распределенная по закону Фишера FUl^2, записывается
в виде
где xi ~ ^2 ~ х22, a xi и х2 независимы.
В данном случае (6.95) имеем vi = 1; v2 = га; xi ~ ~ xL-
Таким образом, статистика (6.95) имеет распределение Фишера
Fhm с (1,га) степенями свободы.
В случае гипотезы Hi в (6.96) имеем xi ~ х'^А); х2 Х'12( А),
где = x'\W ~ нецентральное распределение хи-квадрат. По¬
казатель нецентральности Л = га2 = Э2/сг2. Таким образом, при ги¬
потезе Hi статистика G2 имеет нецентральное распределение Фишера
^i,mM с (1?т) степенями свободы и с показателем нецентральности
А = га2 = Э2/а2.
Характеристики обнаружения. Располагая статистикой G2, на¬
ходим вероятность ложной тревоги (В/1Т) Qo и вероятность обнару¬
жения Qd'.
Qo = P{G2 > 7 I Я0}; = P{G2 > 7 I #i}- (6.97)
Обнаружение сигналов при неизвестных параметрах
159
Qd
0,8
0,6
0,4
0,2
/7 /
!
тп
—► оо /
N
1
\
зоП
20 J1
\ I
j
.
j
б /
IV.
1
10 15 20 d2, дБ
а)
0
Рис. 6.8
10 15
б)
20 d2, дБ
Таким образом,
Qo = Qfx шЫ; Qd - Qf\ (7)?
x>m l,m
где Q(x) — Q-функция,
ПОО
Q(x) = / W*(:r)dx, г=0,1;
J X
Wi(x) — соответствующее распределение Фишера.
Процентная точка распределения Фишера
7= QfIAQo)-
(6.98)
(6.99)
На рис. б.8,а и б изображены характеристики обнаружения при
m = 2, 4, б, 10, 20, 80 и Q0 = 10~fc, /г = 4 и б соответственно.
Штриховой линией на рисунках изображены предельные характери¬
стики обнаружения:
Qo = Q{x) = 1 - Ф(х), Qd= Q(x-d)= l-<S>(x-d), (6.100)
где Q(
X)=
12 du.
Характеристики (6.100) соответствуют обнаружения полностью
известного сигнала с известной дисперсией шума и находятся по (6.98)
при m —» оо.
Поскольку при гипотезе Hq статистика G имеет вид
Vxlb/m
то согласно определению, статистика G подчиняется центральному
160
Глава 6
распределению Стьюдента с т степенями свободы. Тогда по (6.97)
ВЛТ имеет вид
Qo = P{G2 > 7 I Н0} = P{\G\ > ^7 I H0} =
= P{T < -V7} + P{T > x/7}, (6.101)
при этом G — статистика, имеющая центральное распределение Стью¬
дента.
Запишем интегральное распределение
Г-л/7
P{T<-V7}= / Vt(®)d®,
J —оо
где Wt(x) — распределение Стьюдента с т степенями свободы [58],
wM-c(i+i!V<m+1>/2; с. 1 ЛО-Ч/21
т) ’ л/тпж Г(ш/2) ’
где Г — гамма-функция. Отсюда следует, что Wt(x) — функция чет¬
ная, Wt(—x) = Wi(x). Тогда
рОО
Р{Т < - V7} = Qt(Vx) = / ^(х) dx.
J-sfi
По (6.101) получим Qo = 2Qt(A/у), и, следовательно, процентная
точка
ta= V7= Qt-1(Qo/2). (6.102)
Аналогично при гипотезе Ях статистика G подчиняется нецен¬
тральному распределению Стьюдента [58]
21
Wt(x, S) = Ci jf ut™"1)/2 exp(—u/2) exp ^
du,
где 1 = 2(ш+1)/2Г(га/2)у/7гга. Тогда вероятность обнаружения
Qd = Р{Т < - V7} +
где T — статистика, имеющая нецентральное распределение Стью¬
дента с показателем нецентральности 5 = V% причем
/-y/l ГОО
Wt(x,6)dx= / Wt(z,-S)dz = Qt(Sy,-6).
-ОО J у/'у
Таким образом,
Qd = QtW7, *) + Qt(V7, -5). (6.103)
Обнаружение сигналов при неизвестных параметрах
161
Сравнивая (6.93) и (6.98), приходим к соотношению
Qf' (7, А) = Qt(V7,8) + QtW7, -5), (6-104)
l,m
где 6 = л/А.
С другой стороны, сравнивая (6.104) и [58, ф-ла (26.6.19)] заме¬
чаем, что в [58] допущена ошибка (опечатка), так как там отсутствует
второе слагаемое в правой части (9.104).
Сравним полученный результат с (6.85), где при аналогичной по¬
становке задачи (но не тождественной, так как в [36] отсутствует
обучение) получена формула
Qd = 1 - Fv(y/7) + (6.Ю5)
где 7 = (n — 1)С°, Fv(x) — интегральный закон нецентрального рас¬
пределения Стьюдента с (п — 1) степенью свободы.
По определению,
QfJ(V7,«)= ^(-V7)= f^wt(x,6)dx= Qr,(y/l,-6).
J — oo
Следовательно, результат (6.85) с точностью до обозначений и
числа степеней свободы (п - 1 = га) совпадает с формулой (6.104).
Приближенная (асимптотическая) формула для характеристик
обнаружения. Асимптотическая формула для интегрального нецен¬
трального распределения Стьюдента имеет вид [58]
ЯМ)= F(x): (6.106)
1 + л/t2/2u
где F(x) = —= [ е u2^2du = Ф(ж).
\/27Г 7_оо
На рис. 6.9,а изображены точные зависимости рис. 6.8 (при Qo =
= 10-4), на рис. 6.9,6— зависимости, полученные с использованием
приближенной формулы (6.106).
Для приближенных расчетов представим соотношение для веро¬
ятности обнаружения (6.103) в виде
где ж1)2 =
Qd= [1-ФЫ]+ [1-Ф(*2)],
t( 1 - 1/Av) 6
1+ y/t2/ 2u
Пусть v = m = 9; 5 = %/8 (A = 8); Q0 = 0,01; процентная точка
ta = 3,25 (находится по (6.101) при ^ - ta). Тогда х\ « 0,1875;
Х2 яз 3,3907; Qd « (1 - 0,5744) + (1 - 0,9997) = 0,4260.
Точное значение по формуле (6.98) при процентной точке (6.99)
7 = Qp} (0,01) = Fa = 10,56 равно Qd = 0,3987.
1 ,m
162
Глава 6
О 5 10 15 20 d2, дБ 0 5 10 15 20 d2, дБ
а) б)
Рис. 6.9
Точное значение по (6.103) при процентной точке (6.102) Qd =
= 0,3987, причем точное значение второго слагаемого в (6.103) равно
2,8 • 10"7.
Далее, пусть 5=A=l;i/=ra=9;Q0 = 0,1, тогда ta =
= 1,8331, Fa = 3,3603. Здесь х\ = 0,5462, х2 = 1,9428. Прибли¬
женное значение
Qd~ (1 - 0,7075) + (1 - 0,9740) = 0,3185.
Точное значение
Qd(F) = 0,2410; Qd(t) = 0,2360+ 0,0050 = 0,2410.
Таким образом, чем больше показатель нецентральности, тем
выше точность приближенной формулы, причем с ростом 5 умень¬
шается вклад второго слагаемого в (6.103), (6.104).
Задачи
6.1. Сигнал s(t) = af(t) известной формы, но неизвестной положительной ам¬
плитуды а принимается в шуме n(t) (ГБШ) [ж(£) = s(t) + n(t)] с неизвестной спек¬
тральной плотностью No. Ряд взаимно ортонормированных функций Д, /2, ..., ор¬
тогональных также и к f(t), определен на интервале наблюдения (0, Т) в результате
ортогонализации Грамма-Шмидта. Входной процесс x(t) проходит через п параллель¬
ных фильтров, согласованных с п функциями fj(t) для получения статистик
хз~ [ j = 1,2,... ,п.
Jo
Показать, что несмещенная оценка N спёктральной плотности N имеет вид
j=l
Обнаружение сигналов при неизвестных параметрах
163
и при достаточно больших п дисперсия оценки может быть сделана сколь угодно малой.
Приемник для обнаружения сигнала s(t) использует оценку N и отклик фильтра,
согласованного с формой сигнала f(t)
Показать, что при достаточно большом п этот приемник по достоверности совпа¬
дает с обнаружителем сигнала в белом шуме с известной спектральной плотностью N.
6.2. Пусть задан сигнал s(t) = af(t) известной формы, но неизвестной положи¬
тельной амплитуды а. Сигнал должен быть обнаружен в гауссовском шуме n(t), кото¬
рый имеет КВФ Kn(t, s) = a2rj(t, s), причем функция r](t, s) известна, а дисперсия a2
неизвестна, 77(0, 0) = 1 Воспользоваться разложением Карунена-Лоэва сигнала, шу¬
ма и входного воздействия x(t) = s(t) + n(t). Ранжировать собственные значения
ядра r](t, s) в порядке убывания и обозначить соответствующие собственные функции
через Использовать п отсчетов
Спроектировать приемник максимального правдоподобия для обнаружения сигна¬
ла на основе оценок а, а2 амплитуды а и дисперсии а2 Показать, что при достаточно
большом п достоверность приема такого же обнаружителя такая же, как и приемника,
синтезированного для обнаружения сигнала в шуме с известной дисперсией.
6.3. Пусть x(t) — реализация гауссовского СП с КВФ Kx(t, s) = Br(t, s), где В —
положительная, но неизвестная постоянная Если x(t) задана на конечном интервале
(0,Т), то постоянная В может быть оценена сколь угодно точно Чтобы показать это,
следует рассмотреть оценку
причем Ai ^ А2 ^ ^ Ап > 0.
Показать, что Ъп — несмещенная оценка величины В и что дисперсии
varbn —> 0 и, таким образом, чем больше слагаемых у Ъп, тем выше точность оценки.
6.4. Разработать следующую альтернативную версию решения задачи 6 2 За¬
писать входное воздействие x(t) в виде
x(t) = х\(t) + Х2(i), 0 t Т,
где xi(t) определяется через интеграл
хк - 1,2,..., п.
к= 1
где хк - JQT fk(t)x(t) dt\ fk(t) — ортонормированные собственные функции,
собственные значения интегрального уравнения
А/(t) = r(t, s)f(s) ds, 0
n—t оо
а 9{t) — решение интегрального уравнения
f(t) = ф, s)g(s) ds, 0
164
Глава 6
Показать, что х2(t) не зависит от x\(t) и ее ПРВ одна и та же, что при нали¬
чии сигнала, то и при его отсутствии. Получить ее КВФ. Используя решение задачи
6.3, определить неизвестную дисперсию сг2 слагаемого X2(t) и использовать общую
дисперсию для получения порога статистики обнаружения. Найти эту статистику.
6.5. Методом перевала получить аппроксимацию нулевого порядка для вероят¬
ностей ложной тревоги (ВЛТ) и обнаружения для постоянного уровня ложной тревоги
(ПУЛТ), исходя из моментной функции
h(z) = (1 + -Pz)~M' ехр (~Y^)
и выражения
лс+ioo
Qd = P(V ^ О I Hi)= / z~1h(z)dz, с < О,
27Г /
J с—IOO
где S - ОСШ.
Определить постоянную /3 при постоянной ВЛТ Qo = Р{У ^ PU' | Но). Затем,
используя полученную аппроксимацию, вычислить величину Qd при Qd > 0,9.
6.6. Пусть заданы квазигармонические сигналы
Sfc(t) = A Re F(t) ехр(1Ш + \фк), к = 1,2,..., п,
со случайными независимыми фазами фк, общей, хотя и неизвестной амплитудой А,
все эти сигналы могут присутствовать или отсутствовать в последовательности из п
входных воздействий приемника. Величины, на основе которых основывается обна¬
ружение сигналов, — это вещественная и мнимая части хк и ук отклика фильтра,
согласованного с сигналом
+ iyfc = / F*(t)Xk(t) dt, к = 1, 2,... ,n,
Jo
где Xk(t) — комплексная огибающая к-го входного воздействия. Аддитивный шум
является ГБШ с неизвестной спектральной плотностью.
Методом максимального правдоподобия для каждой из гипотез вычислить общие
дисперсии п составляющих хк и ук, а также оценок фк Фаз Фк 1/1 общей амплитуды
А Показать, что оптимальный обнаружитель по критерию отношения правдоподобия
сравнивает статистику
" п I2
Е + у I
_к= 1
п
^2(xi+yi)
к= 1
с соответствующим порогом.
6.7 [43]. Имеются две независимые выборки Ж1,Ж2,... ,xni и yi,y2, • • • ,Уп2 нор¬
мального распределения с неизвестными средними значениями и дисперсиями. Про¬
веряется гипотеза Но о неравенстве дисперсий в указанных распределениях против
альтернативы Hi, что сг2 > сг2 Показать, что РНМ-алгоритм (РНМ — равномерный
наиболее мощный) проверки гипотез имеет вид (при фиксированной вероятности Qo
ошибки первого рода)
S2
-ф ^ Fa{ni - 1 :п2- 1),
Обнаружение сигналов при неизвестных параметрах
165
где
1
пк - 1
"-к / "-к
к = 1,2;
з=1
Fa(^i — 1,пг — 1) — процентная точка F распределения с ni — 1,П2 — 1 степенями
свободы. Плотность F распределения с n — 1,га — 1 степенями свободы определяется
по формуле
^■гтк^)г(х)]
\m-lj \ т-1 )
х
(т+ п—2)/2
Показать, что вероятность ошибки второго рода Qi = 1 — зависит только
от отношения <7Х/&У-
6.8 (Тест Стейна [42, 43]). Рассмотреть задачу обнаружения постоянного сигнала
s(t) = fi (величина неизвестная) на фоне аддитивного гауссовского шума с нулевым
средним значением и неизвестной дисперсией.
Пусть сначала наблюдается независимая выборка xi,x2,... ,хпо объема по и по
этой выборке вычисляется несмещенная оценка неизвестной дисперсии помехи
по - 1
по
по
3= 1
затем производится п — по дополнительных независимых наблюдений, причем
п = max{[s2/co] + l,no+ 1},
где со > 0 — заданная константа, [z] — наибольшее целое ^ z.
Показать, что статистика
1
Уп(Хп) = ajXj', Хп = {жг}^_з^)
где весовые коэффициенты удовлетворяют условию
ai=a2
i= 1
u-n0.
ai = 1;
ano+l — ano+2 —
n
S2 dj = Co,
i= 1
An I
подчиняется центральному распределению Стьюдента с no - 1 степенью свободы.
Показать, что для алгоритмов обнаружения, согласно которым выносится реше¬
ние о наличии сигнала,
Уп(Хп) ^ ta(n0 - 1) при /х ^ 0;
|Уп(Хп)| ^ ta/2(n0 — 1)
при произвольном знаке /х. t\(m) — процентная точка распределения Стьюдента с га
степенью свободы. Кроме того, показать, что вероятность обнаружения Qd не зависит
от дисперсии помехи и является возрастающей функцией от \fi\ (в правой части формул
a = Qo — заданная вероятность ложной тревоги).
166
Глава 6
6.9 [43]. Показать, что основанное на наблюдаемой реализации x(t), |£| ^ Т,
несмещенное РНМ правило обнаружения сигнала fis(t), где /х — неизвестная амплиту¬
да сигнала, s(t) — заданная функция, на фоне аддитивной гауссовской помехи с нуле¬
вым средним значением и известной КФ Rn(t,u) имеет следующий вид- принимается
решение о наличии сигнала, если
гТ
g(t)x(t) dt
/-т
где g(t) — решение интегрального уравнения
рт
Rn(t,u)g{u) du = s(i), |i| ^ T;
£
/;
xa/2 — процентная точка нормального распределения, соответствующая заданной ве¬
роятности ложной тревоги Qo \л d2 = g(t)s(t) dt.
6.10. В условиях задачи 6.9 рассмотреть случай, когда известно, что fi > 0, и
показать, что при этом РНМ правило состоит в принятии гипотезы о наличии сигна¬
ла, если
гт
/ g(t)x(t) dt ^ d2xa-
J-т
6.11 [43]. Показать, что оптимальное по критерию максимального правдоподо¬
бия правило различения двух сигналов ^isi(^) и гДе Mi и М2 — неизвестные
амплитуды сигналов; si(t) и s2{t) — известные функции, на фоне аддитивной гаус¬
совской помехи с нулевым средним значением и известной КФ Rn(t,u) основанное на
наблюдаемой реализации x(t), \t\ ^ Т, имеет вид: принимается решение о том, что
присутствует сигнал fiisi(t), если
1 fT 1 (Т
щ J g\(t)x{t)dt^ J g2(t)x{t)dt,
-т 2 J-т
где gi(t) и д2{Ь) — решения интегральных уравнений
лТ гт
/ Rn(t, u)gi(u) du = si(t), / Rn(t,u)g2(u) du = S2(t), \t\ ^ T;
J-T J-T
-T
rT
9i(t)si(t) dt, i- 1,2.
6.12. Пусть наблюдается реализация x(t) = fis(t) + n(t), fi > 0; n(t) — гауссов¬
ский шум с нулевым средним значением и КФ Rn(t,u) = cr2r(t,u), причем функция
r(t,u) задана, а дисперсия а2 неизвестна Показать, что правило обнаружения сиг¬
нала следующее [43]:
\
п / п
Е
/с= 1 \/с=1
xksk
где хк = у/Хк J^Tx(t)fk(t) dt, Хк и fk(t) — собственные значения и собственные
Обнаружение сигналов при неизвестных параметрах
167
функции интегрального уравнения
Л f r(t,u)f(u)du= f(t), \t\ ^ Т; sk= f s(t)fk(t)dt;
7-т J-т
ta— процентная точка распределения Стьюдента (центрального); а = Qo — заданное
значение вероятности ложной тревоги.
6.13. Пусть сигнал Sn = у/йап, гдеап= (ai, аг, • • •, an)T, ата = 1; 1/= S^Sn—
неизвестная интенсивность (энергия) сигнала, принимается на фоне аддитивной поме¬
хи, представленной гауссовской выборкой Хп = (жх, ^2,..., хп)т, причем E(xi) = О,
г = 1,п. Корреляционная матрица помехи
Ап — £/(Хтт,Хп) — ||, TYlij — E(xiXj),
причем An = еА; trA = 1; е = trAn; -А — полностью известная нормированная
корреляционная матрица помехи; е — неизвестный параметр, определяющий интенсив¬
ность (среднюю энергию) помехи
Показать, что решающее правило имеет вид [44, 45]
x;A-!xn > c0t;а-'Хп,
где С — коэффициент, зависящий от уровня ложной тревоги a = Qo.
6.14. В условиях задачи 6.13 показать, что характеристики сигнала определяются
вероятностью неравенства [104, 105]
tn-1 = ^(n-lVxLi > \ЛП ~ 1)С,2, С2 = с2/(м - С2),
где fi = атА_1а — коэффициент, учитывающий влияние порогового отношения сиг¬
нал/помеха, объем выборки, форму сигнала, корреляции и нестационарность помехи;
случайная величина tn-i распределена по закону Стьюдента с п — 1 степенью сво¬
боды — центральному с ПРВ Wo(t) в отсутствии сигнала и нецентральному с ПРВ
Wfay/q) с параметром нецентральности y/q, q = ^7 = — эквивалентное от¬
ношение сигнал/помеха.
7 Обнаружение гармонического сигнала
с неизвестными параметрами
в гауссовском белом шуме
Рассмотрим задачу обнаружения гармонического сигнала
Н0 : х[п] = Цп]; —
п- О, N — 1,
Н\ : х[п] = Лсо5(27г/0п+ Ф) + w[n\,
где параметры {Д/о,Ф} неизвестны, но детерминированы; Цп] —
ГБШ с известной дисперсией а2.
Рассмотрим три случая:
1) неизвестна амплитуда А;
2) неизвестны амплитуда А и фаза Ф;
3) неизвестны амплитуда А, фаза Ф и частота /0.
1. При неизвестной амплитуде запишем сигнал в виде As[n], где
s[n] = cos(27r/огг+ Ф), причем форма сигнала s[n] считается извест¬
ной. Эта задача в общем виде рассмотрена в гл. 4, где решающее
правило получено в виде
"N-1 I2
Hi : ^2 х[п\ С05(2тг/0гг + Ф) > 7' (7.1)
_п=0
Характеристики обнаружения определяются соотношением (6.12)
Qd = Q(7 - + Q(7 + x/d2), (7.2)
где 7 = Q-\Qq/2)\ d2 = NA2/2a2.
Оценка А максимального правдоподобия определяется соотно¬
шением
N-1
ж[п] СО5(2тг/0П + Ф)
А =
п=0
X) COS2(27T/On + Ф)
п=0
Полагая
N—1
cos2(27T/0п + Ф)
п=0
находим
ЛГ-1
А и — ^ ж[п] cos(27г/0п + Ф),
(7.3)
(7.4)
(7.5)
п=0
Обнаружение гармонического сигнала
169
s[n] = cos(27r/o?i + Ф)
Рис. 7.1
¥ 1/2-
Структура обнаружителя
изображена на рис. 7.1. На
этом рисунке
т(х)= { Yh •
(7.6)
Характеристики обнару¬
жения, вычисленные по (7.2),
изображены сплошными лини¬
ями на рис. 7.2 при Qo = Ю_п, Рис> 7>2
п = 1,5 и ОСШ d2B =
= 10 \q(NA2/2ct2) от 0 до 20 дБ. Штриховыми линиями на этом
рисунке изображены кривые обнаружения при полностью известном
сигнале.
2. Рассмотрим обнаружение сигнала при неизвестной амплитуде
А и фазе Ф.
Найдем алгоритм обнаружения сигнала
Si[n] = А С05(27г/оП + Ф)
при наличии ГБШ w[n\ с известной дисперсией сг2, если амплитуда А и
фаза Ф сигнала неизвестны. Вычислим характеристики обнаружения.
В данном случае принимается гипотеза Яь если выполняется
неравенство
, а. Л(Х„ | А,ФЯ,}
Л(Х"|'4'Ф)= ад,|я„) >7'
При этом ОП принимает вид
1 \ 1 N_1 1
дадехр 1Е Мп] -1 ^s(2nfon + ф)]2 \
Л(Х„ I А,Ф) =
(27r(72)iV/2
п=0
1
(27П72)^/2
ехр
N-1
-^2 Е
п=0
170
Глава 7
где АиФ — оценки максимального правдоподобия; /0 ^ 0, /о ^ 1/2.
После преобразований получим ЛОП в виде
1
2а2
In А(ХП | А, Ф) =
7V-1 7V-1
— 2х[п]А С05(27г/оП + Ф) + ^ А2 С052(27г/оП + Ф)
_ п=0 п=0
Найдем оценки АиФ. Предварительно запишем
А С05(2тг/0гг + Ф) = Асоб(Ф) С05(27г/0п) - Asin(i>)sin(27r/0n) =
= ai cos(27r/0n) + а2 sin(27r/0n);
ai = Асоб(Ф); а2 = —A sin(O). (7.7)
При найденных оценках СВ а\ и а2 оценки АиФ принимают вид
А = \Jol\+ ® = arctg(-a2/a2). (7-8)
Оценки ai и а2 будем искать методом максимального правдопо¬
добия. Для этого запишем функцию правдоподобия
2(j2-(Xn aiCn c^2Sn) (Xn c^2Sn)
L(Xn | ai,a2) = Piptn | &i,a2) =
= (2тг<t2)w/2 еХП
где X„ = {as[0],as[l],as[JV — 1]>T. Cn = {c[0], c[l],c[N- 1]}T; Sn =
= {s[0], s[l],s[N — 1]}T; c[n] = cos(27r/0n); s[n] = sin(27r/on); n =
= 0, iV — 1.
Уравнения правдоподобия
9 9
—-lnPi(Xn | ai,a2) = 0; —-lnPi(Xn | аьа2) = 0
OOL\ OOL2
принимают вид
О н
— InPxCXn |аьа2)= ^j(2X;C„-2a1C’C„-2&2C^Sn)= 0;
lnPi(Xn | aba2) = (2X^S„ - 2aiC^S„ - 2a2S*S„) = 0.
Отсюда находим систему уравнений для оценок ai и a2:
fa1C;C„+ a2S;Cn= Х;С„;
\a!C;Sn+ a2S;S„= X^S„.
Пусть величина N значительна (N > 1), тогда приближенно
Обнаружение гармонического сигнала
171
можно положить
JV-1
с;с„ = c°s2(27г/0п) « у; s;s„ = ^ sin2(27r/0n)
JV-1
n=0
п=О
JV-1
S*C„ = C*S„ = J2 cos(27r/0n)sin(27r/0n) « 0.
n—0
В результате находим
2_
N
N-1
Й! = -|x*Cn = |: E *[n]cos(27T/on);
n—0
2 2
a2 = -X^Sn = — ^2 x[n]sin(27r/0n).
N
N
n=0
С учетом этих значений и соотношений (7.7) получим
N-1 iV-1
У x[n]A cos(27r/on + Ф) = ^ x[n] COS(27r/on)A cos(O) —
n=0
n=0
JV-1
iv.
— a:[n] sin(27r/on)Asin(<b) = —(а2 + a:2).
n=0
Полагая
JV-1
COS2(27r/on+ Ф)
n—0
находим логарифм ОП:
In Л(Х„ | «1,0:2) = ~2^2
N
~2'
nN,„2 Aо\ N-,2
(ai + ai) +
1
2a2
AT 2 л 2\
— (af + a|)
/ л2 л2\
= 4^2(ai+
Принимается гипотеза #ь если
4^2 (ai + “2) > ln7-
Преобразуем сумму квадратов оценок ai и а^.
(7.9)
а1 + а2 ~
N2
^jV-1
^JV-l
х[п] COS(27r/on) I + j ^ x[n] Sin(27r/on)
\ п=0
4 1
jvjv
ЛГ-1
У" х[п\ exp(-i27r/0n)
где Г(/0) — периодограмма [60, ф-ла (12.15)] в точке / = /о-
172
Глава 7
s[n] = sin(27r/0?i)
Рис. 7.3
exp(-i7r/0n)
Рис. 7.4
Таким образом принимается гипотеза #ь если
Г(/0) >ст21п7= У. (7.10)
Рассмотрим две эквивалентные схемы обнаружения — квадратур¬
ную (рис. 7.3) и периодограммную (рис. 7.4). Обнаружитель по схеме
рис. 7.3 называют некогерентным или квадратурным.
Найдем характеристику обнаружения рассматриваемого обнару¬
жителя. Представим статистику (периодограмму) Г(/0) в виде
Г(/о) = Ci + (7.11)
где
^ АЛ—1 J АЛ—1
^ = Е a;[n]cos(27r/0n); £2 = -7= V х[п] sin(27r/0n).
Каждая из СВ £1 и £2 является результатом линейного преобра¬
зования гауссовой СВ х[п], причем
Е(^ | Но) = 0; Е(& \ Н0) = 0;
VN
1 | Hi) = —!= Acos(2nf0n+ Ф)соб(27г/0п) « -^Acos(O);
n=0
1 N — l rrz
I -Hi) = -^= ^ Лcos(27r/0n + <&)sin(27r/0n) « ——Asin(<D).
Обнаружение гармонического сигнала
173
Дисперсия СВ и £2 при обеих гипотезах одинакова:
N — 1 о
Di = D{x[n}} cos2 (2nf0n) « у;
JV-1
Таким образом, периодограмма Г(/0) при /0 ^ 0, /0 ^ 1/2 пред¬
ставляет собой сумму квадратов двух независимых гауссовских СВ.
Следовательно, если нормировать £1 и £2 делением на а2/у/2, то по¬
лучим при Н0 ПРВ W(T(f0)) = х2 (центральное распределение xl с
двумя степенями свободы). При Hi ПРВ W(T(f0)) является нецен¬
тральным распределением х'^А) с параметром нецентральности
Последним соотношением определяется РХП. Фиксируя Q0 =
= 10_п, п = 1,7 получим характеристики обнаружения Qd(d2) при
Qo = const, при d2 = NA2/2а2 = А (Л — коэффициент нецентрально-
сти- ^дв ~ lOlgd2), изображенные на рис. 7.5. Можно показать, что
-\Zzv4 sm(£
a/V2
2
Вычислим ВЛТ
Qo= Р{Г(/0)>У \Н0}=
Г(/о) У
О /п ^ О /
а2/2 о2/2
так как xl = 2е при х ^
Таким образом,
e~zdz= е-"1'/*2,
Qo=e^>2; У/а2 = ln(l/Q0).
(7.13)
Найдем вероятность обнаружения
(7.14)
174
Глава 7
вероятность обнаружения выражается через Q-функцию Маркума
1
Qd = Qn
NA2 _ _ /2у \ V = 2|n
2а2 '
POO
где QM = Q{a, 7) = zexр
J~l
--(г2+а2)
Qo’
/o(az)dz; /о(^) — мо¬
дифицированная функция Бесселя нулевого порядка; QM — функция
Маркума табулирована [18, 70].
Пусть неизвестными является амплитуда А, фаза Ф и частота /о.
Гипотеза #i принимается, когда выполняется неравенство
_ wx
W0(x;tf0)
Wo
или
> 7,
max/0 Wj
Wo
>7
(7.15)
Поскольку ПРВ W0(x; Я0)
не зависит от /0, то неравен¬
ство (7.15) можно записать в
виде
Wi
max — > 7,
/о Wq
(7.16)
Рис. 7.5
или в силу монотонности лога¬
рифма
In (тахтгг^ > In 7.
V /о W0)
По свойству монотонности можно переставлять операции In и
max, в результате получим
Wi
max In —- > In 7.
/0 W0
Используя (7.16), находим
|П Щ = Г(/о)
(7.17)
(7.18)
Wo
Поэтому окончательно принимается гипотеза Hi, если выполняется
неравенство
тахГ(/0) > а2 1п7 = 7'. (7.19)
/о
Обнаружитель принимает решение о наличии гармонического
сигнала, если максимальное значение периодограммы превышает
Обнаружение гармонического сигнала
175
ехр(—i/r/o п)
О < /о < 1/2
Рис. 7.6
установленный порог. Таким образом, частота /о, соответствующая
этому максимуму, является оценкой максимального правдоподобия.
Этим объясняется факт использования периодограммы или ее реали¬
зации в форме БПФ в виде составляющей всех узкополосных систем
обнаружителя.
Схема обнаружителя изображена на рис. 7.6. Эта схема анало¬
гична схеме рис. 7.4 с тем отличием, что ВЛТ Qo увеличивается с
увеличением привлекаемых частот при поиске максимума Г(/0). Ис¬
пользуя А/’-точечное БПФ для оценки периодограммы Г(/о) и полагая,
что для поиска максимума привлекается частоты fk = k/N при к =
= 1,2, ...,N/2 — 1, получим ве¬
роятность обнаружения в виде
(7.20)
где X = d2 = NA2/(2a2)-, 7 =
N/2-1
= 2 In — .
Qo
Характеристики обнару¬
жения изображены на рис. 7.7
при N = 256; 512; 1024 в за¬
висимости от ОСШ 4? =
NA2
= 10 Ig—^ при Qo = 10-4.
2аг и
Штриховой линией обозначе¬
на характеристика обнаруже¬
ния при известной частоте (см. рис. 7.5).
ю
Рис. 7.7
15 d2, дБ
Задачи
7.1. Рассмотрим проблему обнаружения
Но : х[п] = w[n], п = 0,1,..., N — 1;
Н\ : х[п] = А + w[n], п = 0,1,..., N — 1,
где w[n] — ГБШ с дисперсией сг2, А принимает значение либо 1, либо —1 и может быть
рассмотрена как неизвестная детерминированная постоянная. Показать, существует
ли РНМ (равномерно наиболее мощная) статистика Если не существует, то найти
статистику ОП.
Указание. Необходимо показать, что А = sgn (х)
8 Обнаружение сигналов
при негауссовских помехах
8.1. Негауссовские распределения
Простота решения задач при наличии аддитивных гауссовских по¬
мех объясняется тем, что наблюдаемый процесс можно полностью
характеризовать его средним значением и корреляционной функцией
(или матрицей). Полученные при этом алгоритмы обнаружения сиг¬
налов являются оптимальными. Гауссовость помех нарушается при
появлении в составляющих помехи аномального шума в форме так
называемых шумовых выбросов, игнорирование их приводит к ухуд¬
шению характеристик обнаружения. Одними из ранних работ, где рас¬
смотрены негауссовские процессы являются работы Миддлтона [63,
64] (см. также [65, 83]). Материалы по негауссовским помехам изло¬
жены также в [43, 54, 84, 85].
Наиболее часто рассматривается негауссовская аддитивная по¬
меха, имеющая одномерную ПРВ в форме двустороннего показатель¬
ного распределения (ПРВ Лапласа). В этом случае, если наблюдается
аддитивная смесь сигнала s[n] = sn и помехи w[n] = wn
хп — sn (8*1)
то ПРВ W{wn) помехи имеет вид
W(wn) = —-/= ехр
cry 2
Здесь а2 — дисперсия (мощность) помехи.
Нормальный закон при той же дисперсии а2 имеет вид
%)= . (8.з)
О V 27Г
На рис. 8.1,<э и б изображены ПРВ (8.2) (кривая 2) и (8.3) (кри¬
вая 1) соответственно в линейном и логарифмическом масштабах при
сг2 = 1.
Очевидно, логарифм ПРВ Лапласа — это отрезки прямых, и по
рис. 8.1,6замечаем увеличение расхождения нормального и лапласова
распределений с удалением от начала координат. Например, вероят¬
ность превышения уровня За имеет вид
P(wn > За) = 1 - P(wn < За) = 1 - F(3a),
V2,
w„
—ОО < U)n < оо.
(8.2)
Обнаружение сигналов при негауссовских помехах
177
W
10”1
10“2
10“3
10"4
10“5
10"6
г
V
/
г
\
у
/
1
V
\ \
ч
V
/
\
/
\
5 -4 -3 -2
а)
-10 1
2 3 4
Рис. 8.1
что дает при нормальном распределении F(3a) = 0,99865 и F(wn >
> За) = 0,00135, при распределении Лапласа F(wn > Зсг) = е_3ч/2 =
= 0,01446, т.е. вероятность в десять раз большую, чем при нормаль¬
ном распределении. Такова цена расхождения на «концах» распре¬
деления.
Критерием отличия закона распределения от нормального при
нулевых средних значениях служит эксцесс
,А\
(8.4)
Ех = 4-э= 5^ -з.
<т4 E2{wl)
Для нормального распределения Ех = 0, так как E[w\) = За4,
E{w2n) = а2. В случае распределения Лапласа E(w2) = a2, E(w\) =
= 6а4 и Ех = 3, так как
/оо г
x4W(x) dx - 2
-оо J 0
ОО I
,4 „-(^2Дг)х dx_
ту/2
Учитывая [59, ф-ла 3.381.4], что
к\
/о a
f
Jo
xke~axdx =
при a > 0 и к — целое,
(8.5)
получим при к = 4 и a = у/2/a, E(w4) = 6а4.
Распределение Лапласа из класса тех, которые на «концах» рас¬
пределения убывают медленнее, чем нормальное распределение. У
таких распределений эксцесс всегда положителен (иначе: это распре¬
деление более «островершинное», чем нормальное).
Менее островершинные (или плосковершинные) распределения
имеют отрицательный эксцесс. Например, при равномерном распре-
178
Глава 8
100
200 300
б)
Рис. 8.2
делении с той же дисперсиеи сг, когда
1
т\ i _ nr При \Wn\ ^ СГ\/3,
W(wn) = { 2<7\[Ъ
О при |г«„| > aV3,
получим
E{w*) =
2<тл/3
/сг\/3
X
-сг\/3
4 7 у 4
dx = -сг ,
5
(8.6)
и, следовательно, Ех = -1,2.
На рис. 8.2,а и б изображены реализации СП соответственно с
гауссовским и лапласовским распределением при сг2 = 1. На рис. 8.2,6
видны выбросы, отсутствующие на рис. 8.2,а.
Так называемое обобщенное распределение Гаусса включает в се-
Обнаружение сигналов при негауссовских помехах
179
Таблица 8.1
р
—0,5
-0,75
-0,99
С1
0,3207
0,2978
0,2887
с2
0,1142
0,0098
0
Рис. 8.3
б я нормальное распределение, а также распределение Лапласа и рав¬
номерное.
Обобщенная ПРВ Гаусса имеет вид
2/(1+/3)1
где
cm =
W(x) = ехр
|( 1+/3)
-са(/3)
(8.7)
(1+/3)а ГЗ
2(1+/3)
С2(/3) =
/3 > —1; Г(г) — гамма-функция
ПОО
Г(г)= / uz~1e_ncb. (8.8)
Jo
Таким образом, при /3 = О ПРВ (8.7) — нормальная, поскольку
Г(1/2) = Г(3/2) = Г(1 + 1/2) = (1/2)Г(1/2) = *(0) =
= 1/v^tt; сг(0) = 1/2; при /3=1 — лапласова, поскольку здесь
Г(3) = 2! = 2; Г(1) = Г(2) = 1; сг( 1) = 1/у/2\ с2( 1) = у/2. Если /3 ->
-1, то (8.7) стремится к равномерному распределению. На рис. 8.3
изображены ПРВ W(x) при /3 = -0,5; -0,75; -0,99 при a = 1.
В табл. 8.1 приведены значения с\ и с2 в зависимости от /3.
8.2. Обнаружение детерминированных сигналов
Пример 8.1. Найти алгоритм обнаружения постоянного сигнала
величиной А, А > 0 при негауссовском шуме, имеющим ПРВ W(x),
180
Глава 8
когда гипотезы Но и Н\ имеют вид
Но : х[п\ = w[n\:
Hi : х[п] = А + w[n],
Решение. Наблюдатель принимает гипотезу Яь если ОП Л(ХП)
п = 0,1,N — 1.
превышает порог:
W(Xn I Но)
где Xn = (x0,xi,...,xN-i)T.
По предположению, отсчеты zfn] = хп независимы, поэтому ОП
записывается как отношение произведений
Ъ1 W(xn | Нг) Ъ1 Щх* ~ A) n- 1
Л(Х„)= ”=0 - п=0
п
W(x, - А)
N — X ЛГ-1 11 Ш(х 'I ’
п W(xn I Но) п Щхп) п=° к }
п=0 п—О
Таким образом, принимается гипотеза Hi, если
N-1
I a /"v \ I W(xn — А) ,
ШЛ(Х„) = g> шы >|П7=7-
Если положить
п=0
(8.9)
ff(®) = ln[W(® - i4)/W(®)],
то гипотеза Н\ будет приниматься при условии
N-1
X] 5Г(Ж«) > V-
п=0
Если ПРВ нормальная, как в (8.3), то
(8.10)
д(х) = In
<т\/Ът
ехр
ту/Ът
ехр
х
2<т2
Ах А2
<Т2 2<т2
(8.11)
Таким образом, при нормальной ПРВ функция д(х) — линейная,
и правило решения (8.10) принимает вид
Обнаружение сигналов при негауссовских помехах
181
N-1
гдех ■
-Ё
N ^
выборочное среднее; 7" =
71 = 0
А о1 ,
— + V.
2 NA 7
В общем случае функция д(х) является
нелинейной. Получим значения этой функции,
когда ПРВ W(x) — распределение Лапласа
(8.2). Тогда
д(х) = In
V2
А
-А\/
0Л ъ
V
2
б)
(|ж| -\х- Л|).
Рис. 8.4
График этой функции изображен на рис. 8.4,а.
Если ввести отсчет уп = хп - А/2, когда при Н0 E(yn) = -А/2;
а при Hi Е(уп) = А/2, то нелинейность становится симметричной,
так что по (8.10) принимается гипотеза Hi, если
N-1
Y 9(Уп + А/2) > 7',
71 = 0
или
N-1
Y Н(УП) > Т,/>
71=0
W(y-A/2)
где Л(У) = S(V+ А/2) = In vr(i(+ А/2).
Таким образом, при распределении Лапласа (8.2) нелинейность
h(y) принимает вид рис. 8.4,6.
Схема обнаружения постоянного сигнала изображена на рис. 8.5.
Нелинейность приводит к амплитудному ограничению, значитель¬
ных по амплитуде отсчетов. Без ограничителя вероятность обнару¬
жения Qd уменьшилась бы значительно.
\h
г~>
J
У
N-1
Е
п = 0
Л/2 Ограничитель
Рис. 8.5
>г
<у
Но
182
Глава 8
Уп
Азп/ 2
\h
J\
У
/V-1
£ ■
п = 0
<У
ГГ1у
Рис. 8.6
Пример 8.2. Пусть наблюдается аддитивная смесь, такая что
Но- Хп= Wn,
71= 0,1,iv — 1,
H-i . хп — Asn + wn
где А > 0, sn — известные отсчеты сигнала. Найти алгоритм обна¬
ружения сигнала известной формы.
Решение. Как и предыдущем примере, принимается гипотеза Яь
если
N-1
Y 9s{xn) > i, (8.13)
71 = 0
где
W(x - As„) , .
вЛх)=,п 1УЙ • (ai4)
Полагая уп - хп - Asn/2, получим условия принятия гипоте¬
зы Яь
N-1
£ Л»(1/п) > V, (8-15)
71 = 0
где
h (х) = w(y~Asn/2)
^ W(y+ASn/2)'
Снова пришли к симметричному ограничению, как показано на
рис. 8.6.
Вычисление ВЛТ Q0 и вероятности обнаружения Qd по стати¬
стике (8.14) затруднено из-за нелинейного характера функции hs(y).
Поэтому, как правило, рассматривается асимптотический случай сла¬
бого сигнала, когда Ас 1. При этом функции д8(х) (8.14) представ¬
ляются линейным членом (отрезком) ряда Маклорена в точке А - 0.
Положим
9° = ln W('u7r = ln W(x ~ А$п) - ln W(x)'
W {х)
Тогда
Ш(г-А.яЛ 1
, W(x - Asn)
gs(x) «In
W(x)
A=0 W(z)
Обнаружение сигналов при негауссовских помехах
183
Уп
Asnj 2
,9
А
X
N-l
Е
п=0
s[n]
Коррелятор
Рис. 8.7
>7
<У
Я1
Н0
= 0+ T7i-W^U=o-^= -B(x)Asn, (8.17)
W(a;)
W(®) cte
где В(ж) =
1 <fW(a:)
W(x) dx '
Таким образом, принимается гипотеза Hi, если
N-l
N-l
ti=0
или эквивалентно
71 = 0
N-l
n_o dxn
(8.18)
где 7" = 7;/A A > 0.
Обнаружитель со статистикой T(Xn) (8.18) называется локально
оптимальным (ЛО-обнаружитель), его схема изображена на рис. 8.7,
где
1 dW(x)
д(х) =
W(x) dx '
(8.19)
Нетрудно показать, что если ПРВ W(x) является четной функци¬
ей, то функция д(х) (8.19) будет функцией нечетной, когда д(-х) =
= -д(х).
В частном случае, когда помеха распределена по нормальному
закону (8.3), то
1 dW(x) _ d\nW{x) _ d / ~2"’-2'
9{х) =
„-xz/2gz
W(x) dx
dx
=-*in
о\[7ж
т2*
Тогда по (8.18) получим статистику
х N-1
т(х„) = -j Y z[n]s[n],
71 = 0
которая является линейной функцией наблюдаемых отсчетов х[п\ и
схема рис. 8.7 вырождается просто в коррелятор.
184
Глава 8
Найдем ПРВ статистики (8.18)
гл/у- \ _ d\nW(xn)
(Хп) — / v . $П'
71=0
dxn
(8.20)
На основании центральной предельной теоремы будем полагать, что
статистика Т(ХП) асимптотически имеет нормальное распределение,
поэтому остается найти ее среднее значение и дисперсию, как при
гипотезе Я0, так и при гипотезе Hi.
При гипотезе Я0 находим среднее значение
d\nW(xn)
dx71
= rdjuwi^ Г
J-оо dx J-с
dW(x)
dx
dx =
00 = 0.
oo
= W{x) I
Таким образом, E[T(Xn) | Я0] = 0.
Найдем дисперсию статистики T(Xn):
N-l
D(T(Xn) \H0)=Y *lD
71 = 0
В силу нулевого среднего значения статистики Т(Х„) ее дисперсия
равна второму начальному моменту:
2
d\nW(xn)
dxn
D
din W{xn)
dx^
-f
J — С
d\nW(xn)
dxji
W{x) dx =
Следовательно,
N-l
При гипотезе Hi
d\wW{xn)
D[T(Xn) | tf0] = i(A) КА)Э!.
71 = 0
_ Г°° d\x\W{x)
J — ОС
dx
W(x — Asn) dx.
Используя разложение, аналогичное (8.17), получим
W(® - Asn) и W(x) - ^^-Asn.
dx
С учетом этого разложения находим
d\nW{xn)
dxji
Обнаружение сигналов при негауссовских помехах
185
, - Г Г
J-oo dx J-с
d\nW(x) W(x)
-ОО
рОО
dx dx
2
[°° dW(x) ^ 1 fdWV . _
~ J-oo dx J-ooW(x) \dx ) dx~As^A)-
Таким образом, среднее значение статистики
N-l
Е(Т(ХП) | Hi) = Ai(A) Y 4 = АЭгг{А).
71 = 0
Найдем дисперсию статистики
N-l
71 = 0
Здесь второй начальный момент
21
га2 = Е
d\nW(x)Y
dx J
-s
J —с
d\nW(x)\2 Tir. .
) W(x — Asn) dx :
dx )
f
J — с
din
W(a:)y
•/ —С
din И^(дг)
dx
dx J
i
W(x) dx
W(x)~
dW(x)
dx
Asri
dx =
2
_Аз[~Ы_1»шу dw^dx
J — OO V dx J dx
Первое слагаемое равно г(А), вторым можно пренебречь при
А <С 1. Следовательно,
m2 = Е
d In
W(a:)y
:i(A).
dx J
Тогда дисперсия с учетом малости А
D « га2 —т\ = г(А) - A2s^i2(A) « г(А).
Таким образом,
N-1
D[T(Xn) | tfj = г(Л) = Э^(А) = ^[T(xn) I яо]-
71 = 0
В результате получаем
Т(ХП)
Г ЩО-.ЭгЦА))
при Яо;
\ N(A3xi(A)\3xi(A)) при Яь
(8.21)
Можно показать, что величина г{А) является информацией по
Фишеру.
186
Глава 8
Найдем характеристики обнаружения, в частности, ВЛТ Qо име¬
ет вид:
1 Г°° 2 2
Qo = Р{Т > 7" | Яо} = —= / е"“ /2<r du,
cry 27Г "
где a2 = Э\г{А). В результате получим
Qo=Q(?): =
Вероятность обнаружения
1 Г°° 2 2
Qd = Р{Т > 7" | Н{\ = —= / /2<Т du,
сту2ж Jj'f
где гпт = A3\i(A). Поэтому
Qd = Q = <г[<?-1(<?о) - ^]; (8.22)
,о m2, А2Э2Л2(А) , оЧ
d = = зх^) = ^ -^(А) = Эг(А). (8.23)
N-1
где Э = A2 J2 s2 — энергия сигнала; d2 — ОСШ.
71 = 0
Пример 8.3. Найти статистику Т(ХП) при обнаружении постоян¬
ного сигнала в лапласовом шуме.
Решение. По (8.18) при sn = 1 находим, что принимается гипо¬
теза Яь если
(8.24)
По (8.2) получим
_ 1 dW{x) _ d\nW(x) _ V2d\x\
^ Х W(xn) dx dx о dx'
Учтем равенство
d\x\
-^ = sgn*’
тогда получим выражение для статистики
/2 М~г
Т(Хп)= I- ^sgnzn. (8.25)
п—О
Таким образом, получили знаковый обнаружитель — обнаружи¬
тель слабого сигнала попросту суммирует знаки наблюдаемых выбо¬
Обнаружение сигналов при негауссовских помехах
187
рок. При этом нелинейность
о , v did Г1 при х > 0;
= = sgnx = < , ^ п
у/2 } dx \ -1 при х < 0,
что соответствует предельному ограничителю входного сигнала.
Характеристики обнаружителя находятся по (8.22) и (8.23). Най¬
дем величину i(A)\
dx dx
dx
V2 dW 1 V2 Г Г dW 1 f°° dW '
= / sgn x—— dx = — / ——dx — / ——dx =
CT J_00 dx a [J_ oo dx J0 dx
= —2W(0) = —2—^= = (8.26)
о о cry/2 о
ЛЛ|| ,2 -V/1. 2Э 2A2^ 2NA2
Тогда ОСШ d = 3i(A) = —T = —r- / sn = —о—, так как здесь
(7 (71 О
n=0
Sn = 1 ■
При нормальном распределении (8.3) д(х) = х/a2, тогда
■ / л\ Г , ч dW _ 1 dW _ 1 ... 1
г(Л) = - / g{x)——dx= / x——dx= i(A) =
J-oo dx ° J-OO dx ° °
(8.27)
Следовательно,
d2 = NA2/g2,
т.е. ОСШ при нормальной ПРВ в два раза меньше, чем при лапла-
совом распределении.
Таким образом, асимптотически характеристики обнаружителя
при лапласовом шуме лучше, чем при гауссовском шуме.
Можно показать, что и в общем случае, среди всех ПРВ W(x)
при нулевом среднем значении и дисперсии, равной единице, величина
i(A) минимальна при гауссовском ПРВ (8.3). Для доказательства
воспользуемся неравенством Коши-Буняковского
о
оо \ оо 2
J d'"2{x)xW(x)dx\ < j (d'n^W) W{x)dx J x2W(x) dx.
— oo / —oo —oo
Это неравенство переходит в равенство тогда и только тогда, если
d\nW(x) ,
т = кх, к = const.
dx
188
Глава 8
Для гауссовской ПРВ последнее соотношение выполняется при
к = -1. Утверждение доказано. Следует отметить, что, как было
доказано в [4], гауссовское распределение обладает максимальной эн¬
тропией Я = 1п(сг\/27ге), что согласуется с минимальным значением
информации по Фишеру. Из неравенства Коши-Буняковского следует
соотношение i(A) ^ 1/а2 при а2 ^ 1.
8.3. Обнаружение детерминированных сигналов
с неизвестными параметрами
Пусть необходимо проверить гипотезы
Я0 : хп= wn\
п = 0,1...N - 1,
Ях . Хп — Asji “Ь Wjd
где А — неизвестная амплитуда; отсчеты sn = s[n] известны;
wn = w[n] — негауссовский шум с известной ПРВ W(wn).
По критерию ОП Л(ХП) принимается гипотеза Яь если
Л(Х '... W{X„,A\Hl)
№(Х„ | Щ) > ’ <8'28)
где А — оценка максимального правдоподобия при гипотезе Яь
N-l N-l
W(Xn; А\Нг)= J] W(xn - Asn); W(Xn | H0) = Ц W(xn).
n=0 n=0
(8.29)
Следовательно,
2|пЛ(Х„) = 2 ^~fn) = 2 max £ In ^ ■
ti л Щ*.)
(8.30)
Можно показать, что асимптотически (при больших N) справед¬
ливы соотношения
21пА(Х„)~ \х\ при^°: (8.31)
{Xi при Яь v '
где Л = А21(А = 0), 1(A) — информация Фишера.
Статистика Рао не требует вычисления оценки А, при гипотезе
Hi статистика Рао имеет вид
Tjt(X,t)- 1 ( d\riW(X.n,A | Hi) 4 2
A=0
I {A = 0) V dA
Обнаружение сигналов при негауссовских помехах
189
С учетом (8.29) находим
N-1
»Е„К_Ч
71 = 0
дА
N-1
- £
1 dW(z)
*
( 5П).
z=xn — As.
Тогда получим статистику Рао в виде
1 ( N~x
TR(Xn) =
(8.32)
(8.33)
Статистика Рао отличается от статистики локально оптимально¬
го обнаружителя (8.18) наличием квадрата статистики Т(Х„) (8.18)
и нормировочным делителем 1(А = 0), причем
'<Э21п W(Xn,A | Hi)'
1(A) = -Е
дА2
= 1(А= 0) = i(A)9u (8.34)
где
[00 1 dW{x)
,(A)=Lvnxj—
Таким образом, принимается гипотеза Яь если
[Т(Х„)]2
Тд(х„) =
>У.
(8.35)
г(А)Э:
где Т(Х„) — статистика (8.18).
Асимптотические характеристики обнаружения находятся по
(8.31) с коэффициентом нецентральности
Л = А2Э^{А) = Э»(Л).
Пример 8.4. Обнаружение постоянного сигнала неизвестного зна¬
чения А в лаплассовом шуме.
Найти критерий обнаружения по ОП, используя соотношение
(8.30), при sn = 1.
Решение. Согласно (8.30) требуется максимизировать по множе¬
ству А ПРВ
190
Глава 8
Максимизация функции (8.36) эквивалентна минимизации суммы
N-1
J(A)= 5>п-Л|.
71 = 0
Чтобы упростить дальнейший вывод, предположим, что число
N — четное, и заметим, что функция J(A) дифференцируема за ис¬
ключением точек {х0, x^v-i}. Исключая эти точки, получим
1 Т/ л\ W-1
£>„(*,,-4).
71 = 0
Замечая, что sgn (хп — А) = 1 при А < хп и sgn (хп — А) = -1 при
А > хп, приходим к выводу, что равенство = 0 достигается, если в
качестве А берется медиана отсчетов данных хп А - хмед. Таким об¬
разом, половина отсчетов имеет отрицательный знак: sgn (хп — А) =
= -1, а другая половина имеет положительный знак sgn (хп -А) = 1.
Следует отметить, что значение меди¬
аны не единственно. Например, если
хп = 1, 2, 4, 10, тогда медиана лежит
между 2 и 4.
Функция, подлежащая минимиза¬
ции, изображена на рис. 8.8.
Можно убедиться, что J(A) дости¬
гает минимума при 2 < А < 4 и J(A) =
= 11.
Таким образом, оценкой макси¬
мального правдоподобия величины А
является медиана, т.е. А = хмед и ОП
I» лгу \ _ |„ W (Хп, Хмед | Hi) _ 2\[2 _ | |_ |\ ^ ,
1^ Л(ХП) — In . . — / v (1 %п ^мед| |^п|) > 1П 7.
a n=Q
Можно упростить статистику, если ранжировать наблюдаемые
отсчеты. Пусть, например, эти отсчеты имеют вид {xo,xi, ...,xN-i},
где хо — наименьшее значение отсчетов х[п], a xn-i — наибольшее
значение отсчетов. Если N — четное число, то в качестве медиа¬
ны хмед можно взять среднее между отсчетами в точках N/2 - 1 и
N/2, тогда
XN/ 2 — 1 + %N/2
хмед ~ ~ •
Рис. 8.8
имеет вид
Обнаружение сигналов при негауссовских помехах
191
Тогда статистика приводится к виду
VS""1
21пЛ(хп) = —
^ п=0
“ — £ (I*"
71 = 0 ^
у/S ^ Г
71 = 0
т Е {W -
n—N/2 '
vs"'2-1
xn — X (ЯАГ/2-1 + XN/ 2)
xn — ~(XN/ 2-1 + XN/ 2)
^71 ~ ~(^N/2-l + ^N/2)
}■
V8
N-l
71 = 0
n—N/2
Если хмед > 0, то все отсчеты {xN/2>xn/2+i---xn-i} положи¬
тельны, следовательно, второе слагаемое равно нулю, и вклад в ста¬
тистику дают лишь положительные слагаемые первого слагаемого.
Аналогично, при хмед < 0 только отрицательные слагаемые второй
суммы остаются в статистике.
Окончательно получим
Г л/32
21пЛ(хп) =
сг
у/32
сг
Xv Хп
{п: 0<а:п<а:мед}
{п: яМед<Яп<0}
При Хмед О,
При ХМед 0.
Обнаружитель с точностью до постоянного множителя сумми¬
рует величины тех отсчетов, которые находятся в интервале между
нулем и медианой. Таким образом, если медиана положительна, то
суммируются значения хп от нуля до хмед и отбрасываются отсчеты,
превышающие по своему значению величину медианы. Любые вы¬
бросы не имеют значения, так как любой отсчет, больший медианы,
может быть сколь угодно большим и не оказывать действие на сумму.
В то время как при гауссовском шуме суммируются все отсчеты.
Асимптотические характеристики обнаружения ясны из (8.31):
2А(хп) *\42(
Г х( при Я0;
lXi2M при Яь
(8.37)
где показатель нецентральности
Л = А21[А = 0] = A2i(A) J2sl=2N
так как по (8.26) i(A) = 2/ст2.
N — 1
п=0
А2
т2 >
192
Глава 8
Пример 8.5. Статистика Рао для обнаружения постоянного сиг¬
нала с неизвестным значением А в лапласовом шуме.
По (8.35) запишем статистику Рао в виде
1 ( У 1 dW(xn)\\ ;
й( п) 2N/a2 [ 2 dXn )
так как здесь sn = 1, г(А) = 2/сг2 (см. (8.26)).
С учетом закона Лапласа (8.2) получим
1 dW(xn) d\nW(xn) л/2^|хп| \/2
sgnx.
П)
VF(xn) dxn dxn сг chn сг
при этом исключается хп = 0, при котором производная не существу¬
ет. Поскольку вероятность получить точно значение хп = 0 равна
нулю, то можно не считаться с этой возможностью.
Следовательно, статистика Рао принимает вид
/N-1 рг \ 2 / ЛГ-i \ 2
Гя(х")= »sgni”j ■ <8-38)
С точностью до постоянного множителя по статистике Рао необ¬
ходимо сначала вычислить среднее значение знаков наблюдаемых от¬
счетов и затем это число возвести в квадрат. Асимптотические ха¬
рактеристики обнаружения те же, что и при (8.37). Но по сравнению
с алгоритмом при (8.37) обнаружитель Рао суммирует не отсчеты,
а лишь их знаки. Это также позволяет избежать влияния выбросов
суммы.
Сформулируем полезную в дальнейшем теорему [24].
Теорема 8.1. Статистика Рао для линейной модели сигнала в
негаусовском шуме.
Пусть уравнение наблюдения имеет вид
х = не + w,
где Н — известная N х р-матрица наблюдения ранга р, N > р\ 0 —
(р х 1)-вектор параметров, W — (N х 1)-вектор шума, координаты
которого — одинаково распределенные СВ с известной ПРВ W(wn).
Испытываются две гипотезы.
Я0 : 0 = 0;
Hi : 0^0.
Статистика Рао при принятии гипотезы Hi подчиняется нера-
Обнаружение сигналов при негауссовских помехах
193
венству
где Y
TR(Xn) =
YTH(HTH) HTY
i(A)
{2/[0],2/[1]---2/[АГ - 1]}т, причем у[п)
1 dW{z)
>7,
д(Ф]У
9(z) =
W(z) dz
1
(dW(z)V
W(z)\dz J
(8.39)
(8.40)
(8.41)
Асимптотически (при N —> oo) характеристики обнаружения име¬
ют вид
= ^Хр(Х)^ = ^ (8.42)
где показатель нецентральности
Л = г(А)0?НтН0ь (8.43)
01 — истинное значение параметра 0 при гипотезе Н\.
Заметим, что статистика Рао для сигнала известной формы с
неизвестной амплитудой А получена ранее и имеет вид (8.35).
Пример 8.6. Обнаружение гармонического сигнала с неизвестной
амплитудой и фазой в негаусовском шуме.
Решение. Проблема обнаружения следующая:
Но : х[п] = w[n]\
Hi : x[n\ = Acos(27r/on + Ф) + w[n\,
где А и Ф — неизвестные параметры, А > 0, Ф е (0,27т); /о — из¬
вестная частота, 0 < /о < 1/2; w[n\ — отсчеты шума, имеющего
обобщенную гаусовскую ПРВ (8.7).
В линейной модели наблюдения в данном случае имеем
п = 0,1,N — 1,
1
0
H =
COS27r/o
sin27r/0
; 0 =
ai
.cos2/Kfa(N - 1)
sin 2Trfo(N - 1).
.a2.
где oli = АсобФ; а2 = -Asm®.
Поскольку 0 < /о < 1/2, то, следовательно, НТН
I — единичная матрица. Тогда по (8.39)
ТЯ(ХП) = 2YTHTHY
(N/2)1, где
Ni(A)
Ni(A)
SN-l
(N-1
^2 y[n] cos 27r/0n j + ( ^2 y[n] sin 27Г/0П
194
Глава 8
N-l
Ni(A)
y[n]e~i2^on
n—0
i(A)
(8.44)
где Г„(/о) — периодограмма в точке / = /0.
Чтобы найти отсчеты у[п], используем значение функции g(z)
(8.40) и ПРВ (8.7):
2/(1+/3)
1 dW(z) dtoW(z) _,a,i
3{z) ’ ’ 1— = cMTz
Запишем производную
dz
при z > 0;
^(-г)2/(1+/3) при z < 0.
ф|2/(1+« _ J ±z2H1+ft
I Tz
Взяв производные, получим
d\z\i/{i+P) ( I-jL^(1-/3)/(i+/3) при z > 0;
dz | при z < 0.
Окончательно находим
фр/а+л _ 2
dz
Таким образом,
Ф) =
Следовательно,
у[п] =
1+ /3
2 са(/3)
|г|(1 ^/(i+^sgn г.
(1 + j0)(<T2)1/( i+«
1/(1+/3)
sgn г.
|(1 + /3)
<7 Г
с[п]|(ь
sgnx[n].
(8.45)
Нормализованная нелинейная функция /г,(х) принимает вид
h(x) = |x|^1_^^1+^sgn а;, (8.46)
Графики функции /1(2:) изображены на рис. 8.9.
Можно показать, что функция г(А) (8.41) имеет вид [24]
г(А)
/2 ГГ3+/3)Г
1
т—1
со
4/а2 V 2 )
2
(1 + /зу
1+0
(8.47)
Обнаружение сигналов при негауссовских помехах
195
Схема обнаружителя Рао
гармонического сигнала с не¬
известной амплитудой и фазой
изображена на рис. 8.10.
Характеристики обнару¬
жителя являются частным
случаем (8.42) при р = 2:
= ^ = е 7 /2;
(8.48)
(8.49)
Показатель нецентральности
7V-1
»(А)'
Л= i(A)||H0i||2
N-1
a2cos2(27r/0n) + ^ o^|sin2(27r/ori)
(8.50)
п=0
71 = 0
По (8.49) следует, что на вероятность обнаружения Qd вид ПРВ
оказывает влияние только через функцию г(А). Для гауссовского шу¬
ма согласно (8.27) г(А) = 1 /сг2 и показатель нецентральности Л =
= NA2/7a2. С ростом Л увеличивается вероятность обнаружения Qd.
Поэтому показателем выигрыша при обнаружении в негауссовском
шуме по сравнению с гауссовским является величина R = a2i(A),
или в децибелах
ДцБ = 101дсг2г(А) = 101д
г
[3(1 + /3)1
г(3-^
4
2
V 2 )
(1 + /З)2
1+ /3
Г рафик #(/3)дб изображен на рис. 8.11 при -1 < /3 < 3. Минимум
этого показателя, как и следовало ожидать, соответствует /3=0 (при
гауссовском шуме).
Рис. 8.10
196
Глава 8
Если в статистике Т(хдг) (8.18)
оставить множителем амплитуду А, то
получим
п
T(xn) = A^2g(xi)si. (8.51)
г=1
Пусть А = 7/л/п, где 7 — произ¬
вольная положительная ограниченная
постоянная, пропорциональная ОСШ.
Тогда статистику (8.51) можно запи¬
сать в виде
и
Т(*п) = ~7г ^ у 9(xi)si'
i—1
(8.52)
После разложения в ряд Маклорена логарифм ОП (8.9) прини¬
мает вид [43, 54]
(8.53)
где If = i(A) — информация Фишера; Ps — мощность сигнала,
Ps = lim
n—^00 П z'
i—l
Обозначая = U/T, Axi = (ti+1 —U)/T = l/n, получим при
n » 1 [43]
-У''«?(<») = y^,s2(Txi)Axi к [ s2(Tx)dx = ^ [ s2(t)dt.
nti U J° TJ0
Прежде чем рассматривать асимптотику статистики (8.53), най¬
дем параметры статистики
(8.54)
При гипотезе Я0
/00
g2(x)W(x\H0)dx-
-ОО
/ОО
g(x)W(x I Hq) dx = 0.
-OO
Обнаружение сигналов при негауссовских помехах
197
Поэтому при гипотезе Яо
Е[Т(хп) | Я0] = 0; D[T2(x„) | Я0] = D(g | Я0)^ f>2 ~ IfPs.
i—l
Можно показать, что при гипотезе Hi среднее значение стати¬
стики [43,54]
£[Т(хп) | Hi] « ^fIfPa; 23[Т(хп) | Нг] « £[Т(хп) | Я0] « //Рв.
В результате получаем асимптотические параметры статистики (8.53)
При статистике (8.54) асимптотически оптимальное (АО) прави¬
ло для обнаружения детерминированного сигнала As(t) на фоне неза¬
висимых помех с распределением Wi(x,Hi) можно сформулировать
следующим образом: при n > 1 принимается решение о наличии сиг¬
нала (справедлива гипотеза Hi), если
и в противном случае при Т(хп) < С принимается гипотеза Я0 (сиг¬
нал отсутствует).
Учтем асимптотическую гауссовость статистики Т(хп) и значе¬
ния параметров этой статистики:
В результате получим характеристики обнаружения. В частности,
ВЛТ имеет вид
ШЛ(Х„)= {"[,
Ni-'flfPsfc'flfPs) приЯо;
NtflfPs/l-.^IfPs) при Нг.
(8.55)
(8.56)
при Я0;
при Нг-
(8.57)
1 Г°° 2
Q0 = a = Р{Т > С | Я0} = —т= / е-<2-т) !2° dz =
ayl'n Jc
где m = 0, «г2 = IfPs- Следовательно, ВЛТ
Q0=a = Q(C/^TS).
(8.58)
Вероятность обнаружения
1 2
Qd = Р{Т ^ С | Нг} - / e-*/2dz =
у 2.ТТ J(C—mi)/a
198
Глава 8
= Q
г'-чifps\ _ (с-^рЛ
vws )-Q{ — '•
Найдем процентные точки
td =
VWs J
точки
c ~lIfPs = Q-\Qd): ta = Q~HQo)
(8.59)
С
JTJP*
Отсюда получим соотношение
^d ~ ta 7\JIf Ps)
VWs'
(8.60)
ИЛИ
7 = (*a - *d)/у/IfPs, Qo < Qd-
Запишем соотношения (8.59), (8.60) в виде
Qd = Q[Q_1(Qo) - ТлА/^s]-
(8.61)
Таким образом, характеристики обнаружения асимптотически оп¬
тимального (АО) алгоритма (8.56) обнаружения детерминированного
сигнала при фиксированном 7 и п -> оо аналогичны характеристикам
оптимального (по критерию Неймана-Пирсона) алгоритма обнаруже¬
ния полностью известного сигнала (см. гл. 2, 3) (при той же посто¬
янной 7), если величину IfPs рассматривать как обобщенное ОСШ.
Действительно, при гауссовской помехе, когда If = i(A) = 1/a2
получим IfPs = Ps/cr2, что совпадает с определением стандартного
ОСШ. Структурная схема асимптотически оптимального (АО) обна¬
ружителя изображена на рис. 8.12. Устройство обнаружения состоит
из трех блоков: первый представляет собой безъинерционный нели¬
нейный преобразователь наблюдаемой выборки х в величину д(х),
второй блок — коррелятор, выполняющий операцию перемножения
напряжения выхода первого блока и сигнального напряжения и опе¬
рацию суммирования. Третий блок вслед за коррелятором предна¬
значен для установки порога, и в случае его превышения выносится
решение о наличии сигнала.
Устойчивость АО алгоритма обнаружения детерминированного
сигнала. Предположим, что ПРВ помехи изменилась и возникла по¬
меха с новой ПРВ щ(х | Но) вместо Wo(x | Я0), для которой АО
алгоритм (8.56) асимптотически оптимален.
\Я
J\
X
N-1
Е
п —О
/\А
Коррелятор
>С
< С
Ih
По
Рис. 8.12
Обнаружение сигналов при негауссовских помехах
199
Очевидно, что статистика (8.54), на которой основан алгоритм
(8.56), асимптотически гауссова и в том случае, когда она принадле¬
жит ПРВ щ(х | Hq). Изменяются лишь параметры асимптотического
нормального распределения.
Новая статистика будет иметь вид, аналогичный (8.56) при за¬
мене функции g(xi) на функцию f(xi), где
Выразим коэффициент асимптотической оптимальной эффектив¬
ности (АОЭ) старого алгоритма по отношению к новому при том, что
ПРВ Wq(x) и ио(х) симметричны относительно нуля, когда выполня¬
ется условие
причем р < 1 и р = 1 при д(х) = f(x).
Пример 8.7. Пусть д(х) = х/a2, когда АО алгоритм совпадает
с принятым алгоритмом, оптимальным при гауссовской аддитивной
помехе
и предположим, что линейный алгоритм используется для обнаруже¬
ния детерминированного сигнала на фоне аддитивной помехи с рас¬
пределением Лапласа с той же дисперсией а2, когда
Найти АОЭ.
Решение. При лапласовой помехи АОЭ линейного алгоритма по
отношению к АО алгоритму для этой (лапласовой) помехи находят
(8.62)
Коэффициент АОЭ имеет вид [43]
АОЭ = р =
(8.63)
W0(x | Яо) = -4=
а у/2тг
u0(x I Яо) = _J_e~'/2M/°'
а у2
В этом случае
f(x)= (V2/a)sgnx.
200
Глава 8
оо \ 2
у/2\х\/aQ
по (8.63):
— 1 рОО гОО г\ •
1 / / a;2e-'/5lxl/,7dx
СТ6 У-оо J-оо
Таким образом, АОЭ линейного алгоритма АО гауссовой помехе сни¬
жается в два раза при его использовании для обнаружения сигнала
на фоне лапласовой помехи.
Задачи
8.1. Рассмотреть проблему обнаружения
Но • я[п] = w[n\;
п = 0,1,..., N — 1,
Hi ‘ х[п] = А + w[n],
где А — известно и w[n] имеет ПРВ Коши
W(w) = ——-——, —оо < w < оо.
7г( 1 + Wг)
Найти статистику Неймана-Пирсона и изобразить ее при нелинейности
w(x — А)
д(х) = In ■
w(x)
при А = 1.
8.2. Пусть задана проблема обнаружения
Я0 : х[п] = го[п];
п = 0,1,..., N — 1,
Hi : х[п] = As[n] + w[n],
где А — неизвестная амплитуда, А > 0, s[n] — известная форма сигнала; s[n] — негаус¬
совский шум с ПРВ W(wn). Показать, что локально наиболее мощный обнаружитель
эквивалентен (8.18) с точностью до постоянного множителя.
8.3. Показать, что если ПРВ шума функция четная, тогда функция
, ч 1 dW(x)
^ W(x) dx
будет нечетной.
8.4 В условиях задачи 8.1 найти статистику Неймана-Пирсона при слабом сиг¬
нале, полагая А > 0. Изобразить схему обнаружителя.
8.5. Рассмотреть проблему обнаружения
Н0 : х[п] = го[п];
п = 0,1,..., N — 1,
Hi : х[п] = А + w[n],
где А — известная величина, А > 0, w[n] — одинаково распреденные и независимые СВ
с ПРВ W(w„), wn = w[n], причем E(wn) = 0, E(w£) = сг2 Линейный обнаружитель
принимает решение в пользу гипотезы Hi на основе статистики выборочного среднего
N-1
T(Xn)=
п= 0
Обнаружение сигналов при негауссовских помехах
201
Найти ВЛТ Qo и вероятность обнаружения Qd для такого обнаружителя, исполь¬
зуя центральную предельную теорему. Рассмотреть робастность данного обнаружите¬
ля, т.е. как изменяются его характеристики, если форма ПРВ W(wn) изменяется, а
среднее значение и дисперсия остаются теми же.
Если wn имеет лапласово распределение (8.2), то каковы максимальные потери
этого обнаружителя при наличии слабого сигнала в случае обнаружителя Неймана-
Пирсона примера 8.3.
8.6. Рассмотреть эффективность статистики Т(ХП) (т.е. обнаружителя) для од¬
носторонней проблемы проверки гипотез
Я0 : 9 = 0;
Hi\ е > о.
Принимается гипотеза Hi, если Т(ХП) > 7'. Рассмотреть эффективность статистики
Т в случае слабо сигнальной модели при значительном объеме выборки N. Выбор
между гипотезами 9 = 0 и 9 > 0 при большом объеме выборки определяется следу¬
ющей величиной (эффективностью).
{(Т). lin, lim Щ-%,
N—>■00 0->о N var(T, 9)
где Е(Т, 9) и var(T, 9) — соответственно среднее значение и дисперсия статистики Т
при усреднении с весом W(Xn,9). Для статистики (8.18) положить 9 = А и s[n] = 1,
чтобы найти эффективность. Затем, используя (8.21), определить соотношение ее с
девиацией
d2= [Е(Т | Hi) - Е(Т 1 Яр)]2
var(Т | Я0)
8.7. Как известно, асимптотическая относительная эффективность (АОЭ, англ.
ARE — asymptotic relative efficiency) является критерием сравнения двух различных
статистик для проблемы испытания аналогичной, проблеме задачи 8.6. АОЭ опреде¬
ляется как соотношение отсчетов, необходимых для достижения заданных ВЛТ Qo и
вероятности обнаружения Qd, когда объем выборки N -> оо. Иначе АОЭ статистики
Т2 по соотношению к статистике Ti определяется соотношением
Ni
АОЭ2д = lim —,
N-+ 00 N2
где N1 < N2, так что 0 < АОЭ2Д < 1.
Рассмотреть проблему обнаружения
Я0 : х[п] = Цп];
п = 0,1...N — 1,
Hi : x[n] = А + w[n],
где А — известная величина, А > 0; w[n] = wn — одинаково распределенные и неза¬
висимые СВ, имеющие ПРВ W(wn), причем E(wn) = 0,E(w2) = сг2. Локально
оптимальный (ЛО) обнаружитель определяется алгоритмом (8.18). Обозначим эту
статистику через Ti(Xn). Сравнить ее характеристики (8.21) со статистикой выбороч¬
ного среднего (т.е. с линейным обнаружителем), когда принимается гипотеза Hi, если
N-1
T2(Xn)= i^x[n]>y.
п= О
Сравнение провести по критерию АОЭ. Предположить, что при достаточно боль¬
шом объеме выборки N статистика Т2(ХП) имеет нормальное распределение. Пока¬
202
Глава 8
зать что АОЭ является отношением эффективностей
— Hi-
8.8. Показать, что статистика (8.38) асимптотически имеет ПРВ (8.31) при ги¬
потезе Но- Использовать центральную предельную теорему и оценить как среднее,
так и дисперсию данной статистики, полагая, что отсчеты w[n] = wn подчиняются
лапласовой ПРВ.
8.9. Оценить статистику Рао, определяемую по (8.39), если w[n] — ГБШ с дис¬
персией сг2. Необходимо получить те же результаты, что и в теореме 8 1 для ОП,
полагая А = I. Объяснить результат.
8.10. Получить соотношение (8.47).
Указание. Использовать формулу [59, ф-ла 3.381 4]
I
Xl/e~axdx= —1), ^ > 0, а > 0.
о
8.11. Для сигнала в примере 8 б рассмотреть обнаружитель, в котором прини¬
мается гипотеза Яь если
Г*(/о)
Е
1
х\п}е-'2ж/о"
<72/2
2
>У,
периодограмма отсчетов х[п]. Такой обна-
71= 0
ружитель, как показано в гл 7 [см. (7.10)], действует на основе ОП в случае ГБШ.
Здесь, однако, шум wn = W[n] негауссовский с ПРВ W(wn), имеющий нулевое сред¬
нее значение и дисперсию сг2.
Доказать, используя центральную предельную теорему, что при N —> оо
Га,(/о) _ Г Х2 ПРИ Н0;
°2/2 1 Хг2(л) ПРИ Н\,
где Л = NA2/(2a2) — показатель нецентральности.
Показать это при значительном объеме выборки N потери относительно обнару¬
жителя (8.41) равны 101дсг2г(Л) дБ.
Указание. Использовать п. 2 гл. 7.
8.12. Найти АОЭ АО алгоритма обнаружения детерминированного сигнала на
фоне лапласовой помехи, если этот алгоритм используется при аддитивной гауссовской
помехе с той же дисперсией сг2.
Ответ: АОЭ = 2/тг « 0,637 « 0,64.
9 Непараметрические методы
обнаружения сигналов
Посвящается памяти Павла Сергее¬
вича Акимова (16.09.31-12.09.02)
9.1. Статистики непараметрических алгоритмов
обнаружения сигналов
В последнее время в задачах обнаружения сигналов все чаще при¬
влекают внимание непараметрические методы. Статистический метод
называется непараметрическим, если его применение не предполага¬
ет знания функционального вида распределений. В теории обнару¬
жения обнаружитель принято называть непараметрическим, если он
обеспечивает постоянную вероятность ложной тревоги Qo независи¬
мо от статистических характеристик помехи. Качество обнаружителя
определяется двумя показателями: вероятностями ложной тревоги
Qo и пропуска полезного сигнала /3 (или вероятностью обнаружения
Qq- 1 - (3). Поэтому задача стабилизации на заданном уровне хотя
бы одного из этих показателей (например, а) при изменении помехо-
вой обстановки является весьма важной.
Анализ качества известных непараметрических тестов для слу¬
чая гауссовской помехи показывает, что некоторые из них (например,
ранговые) незначительно уступают по эффективности оптимально¬
му правилу. В то же время при изменении вида помехи ранговые
алгоритмы оказываются в общем случае более эффективными, чем
классические, которые в новых условиях становятся уже неоптималь¬
ными. Это полезное свойство непараметрических тестов сохранять
в определенных пределах свои характеристики при изменении поме-
ховой обстановки принято называть устойчивостью. Поэтому приме¬
нение непараметрической обработки особенно целесообразно с точки
зрения, как стабилизации вероятности ложной тревоги, так и эффек¬
тивности (вероятности) обнаружения в том случае, когда распределе¬
ние помехи отлично от нормального.
Помимо того, что реально существуют помехи, отличные от гаус¬
совской, в ряде случаев приходится отказываться от гауссовской мо¬
дели помехи, которая традиционно считается нормальной. Известно,
что точность аппроксимации нормальным законом реального распре¬
деления оказывается на практике достаточно высокой для средней
части кривой распределения (плотности вероятности), на «хвостах»
204
Глава 9
же кривой точность быстро убывает по мере удаления от ее средней
части (см. гл. 8).
Специфика некоторых систем обнаружения такова, что вероят¬
ность ложной тревоги выражается весьма малой величиной (10-3...
... 10~2), нехарактерной для вероятностей ошибок, с которыми имеет
дело классическая статистика. Столь малым вероятностям соответ¬
ствуют «хвосты» распределения помехи, где нормальная аппрокси¬
мация распределения неудовлетворительна.
Применение непараметрической обработки оказывается целесо¬
образным и в случае обнаружения сигнала на фоне гауссовской поме¬
хи неизвестной интенсивности. В обнаружителях наблюдается весьма
критическая зависимость вероятности ложной тревоги а от мощно¬
сти помехи сг2, коэффициента усиления приемника и порогового уров¬
ня обнаружения. Незначительное (на 10...20 %) изменение одной из
этих величин приводит к изменению а на несколько порядков [96].
Поддерживать стабильность работы приемника или измерять мощ¬
ность помехи следует, поэтому с точностью, которую трудно реали¬
зовать на практике.
С позиции теории проверки статистических гипотез задача об¬
наружения формулируется как проверка гипотезы Яо о том, что на¬
блюдаемый процесс является только помехой против альтернативной
гипотезы (альтернативы) Hi о том, что этот процесс смесь сигнала
с помехой. Иными словами, задача обнаружения представляет собой
статистическую задачу различения двух типов распределений (плот¬
ностей) — гипотетического F0(t) и альтернативного Fi(t).
Знаковые статистики. Для наиболее часто встречающихся аль¬
тернатив, таких как альтернатива сдвига Fi(t) = F0(t-a) (а - некото¬
рая постоянная), характерная, в частности, для задачи когерентного
обнаружения, альтернатива масштаба Fi(t) = F0(t/a) или альтер¬
натива более общего вида Fi(t) < F0(t/a), характерная для задачи
некогерентного обнаружения, проще и зачастую эффективнее оказы¬
ваются правила, основанные на знаковых и ранговых статистиках.
Знаковый тест является одним из наиболее простых непарамет¬
рических тестов. Статистика его основана на учете полярностей (зна¬
ков) независимых наблюдений
Тест применяется для проверки гипотезы Я0 о том, что медиа¬
на распределения F0(t) равна нулю, против альтернативной гипотезы
о том, что медиана распределения Fi(t) больше нуля. Это соответ¬
ствует задаче обнаружения постоянного положительного сигнала на
при Xi > 0,
при Xi < 0.
Непараметрические методы обнаружения сигналов
205
фоне аддитивной помехи с симметричной плотностью распределения
W(x | Н0) и нулевым математическим ожиданием.
Когда медиана F0(t) неизвестна, а известно лишь, что она мень¬
ше медианы Fi(t), то приходят к двухвыборному знаковому тесту, ос¬
нованному на подсчете знаков разностей пар наблюдений помеховой
У\,У2,--,Уп и исследуемой rci,X2, ...,rcn выборок:
w): Ч*"р"% <
г=1 4
Для принятия решения статистики Si и S2 испытываются на по¬
рог С, определяемый по заданной вероятности a = Qo из соотноше¬
ния P(S > С | Я0) = а.
Нетрудно увидеть, что число единиц в суммах Si и £2 эквива¬
лентно числу положительных исходов в схеме Бернулли, поэтому ве¬
роятность превышения порога
п
p(s > с) = Y, С№(1-рГ~\
где р = Р(х > у) — вероятность события х > у(х > 0); Сгп — число
сочетаний из п по г. Для гипотезы Я0 р= 1/2, поэтому вероятность
ее ложного отклонения
a=P(S>C\H0)= (±)" £ &n
\ / i=c+1
не зависит от распределения F0(£), что и доказывает непараметрич-
ность теста.
Если имеется независимая выборка наблюдений, то можно синте¬
зировать непараметрические алгоритмы обнаружения сигналов, кото¬
рые сохраняют вероятность ложной тревоги неизменной при любых
распределениях стационарной помехи и при произвольных размерах
выборки. Вероятность пропуска сигнала при использовании таких ал¬
горитмов, конечно, всегда будет больше минимальной теоретически
возможной и будет зависеть от распределения помехи. Рассмотрим
непараметрические алгоритмы обнаружения сигналов, использующие
знаковые статистики.
Пусть х = (хь ...,хп) — наблюдаемая выборка. Введем знаковую
функцию
х Г1) я ^ о, 1 \
sgna;_R~{-i, х<о. (9Л)
Знаковым вектором выборки назовем вектор sgnx с компонента¬
ми (sgnxi, ...,sgnxn). Произвольную функцию знакового вектора на¬
206
Глава 9
зовем знаковой статистикой, а алгоритм, использующий только знаки
элементов выборки, — знаковым алгоритмом.
Если распределение стационарной помехи симметрично относи¬
тельно нуля, то число положительных и отрицательных знаков в вы¬
борке независимо от вида помехи равновероятно. При появлении по¬
стоянного сигнала (положительного) на фоне помехи вероятность по¬
ложительных знаков выборки становится больше вероятности отри¬
цательных знаков, что позволяет обнаружить сигнал. Таким обра¬
зом, знаковые алгоритмы реагируют на постоянную составляющую
сигнала.
Иногда вместо знаковой функции (9.1) используют функцию еди¬
ничного скачка. Вектор и(х) с компонентами [u(x{), ...,и(хп)\ назо¬
вем положительным знаковым вектором выборки. Знаковая функция
однозначно связана с функцией единичного скачка, так как
и(х) = / 0 при ® < 0; (g 2)
^ ' \ 1 при х > 0.
Поэтому
2u(x) = sgnx+ 1. (9.3)
Порядковые статистики. Перегруппируем элементы выборки
х = (xi, ...,хп), расставляя их в возрастающем порядке так, что
х(к) ^ Ж(Л, если к < j. Тогда получим упорядоченную выборку (вари¬
ационный ряд). Вектор х(‘), элементы которого совпадают с члена¬
ми вариационного ряда, называют вектором порядковых статистик, а
элементы этого вектора — порядковыми статистиками. Для выборок
из распределения, имеющего непрерывную плотность, вероятность
совпадения двух и более выборочных значений, а следовательно, и
порядковых статистик, равна нулю.
Нетрудно найти интегральную функцию распределения F^l\x)
порядковой статистики х^ для однородной независимой выборки раз¬
мера п из распределения Fi(x). Так как вероятность того, что в
независимой выборке (xi,x2, ...,хп) имеется ровно к элементов, не
превосходящих заданного порога х, равна
то
п
F^(x) = P{®W < х} = ^ ж ^ o;(fc+1)} =
k=i
= 52(Пк)[Ых)}к[1-РЛх)}п-к, i = l,...,n:x^= оо.(9.4)
k=i ' '
}1епараметрические методы обнаружения сигналов
207
в ( п\ _ rk _ п'■
гд \к J Сп к\(п-к)\'
Из (9.4) дифференцированием по х правой части получим выра¬
жение для ПРВ порядковой статистики х^ [43]
W?\x) = = ( " "J) [ВДГЧ! - Fi(®)]"-Wi(*).
(9.5)
Совместная плотность вероятности г порядковых статистик
yi = x(Si\ 1 < 5i ^ < 5Г < п, равна [86]
Wr(yi,...,yr) = n![(si - 1)!(s2 - si - l)!...(n - sr)!]_1x
Г
xF^-1(y1){F1(y2)-F1(y1)r2-^-1...{l-F1(yr)r-^l[w1(yi).^)
2 — 1
Из (9.5) и (9.6) следует, что совокупность порядковых статистик
х^\ ...,ж(п) представляет простую марковскую последовательность,
так как
Wr+i{yi,,..,yr+i)
W(yr+i | yr,-,yi) =
Wr(yu...,yr)
- t \w ( ' 1 — •^in-r~1(y*’+i) _ W"2(!/r,!/r+i) _ , x
(n r) 1 (Уг+l) 1_Fn-r(yrj Wi(yr) (yr+i\yr)-
Ранговые статистики. Более мощными оказываются ранговые
тесты, которые в отличие от знакового учитывают не только факт, но
и степень отклонения элементов исследуемой выборки от некоторого
уровня или элементов опорной выборки.
Рангом Ri элемента выборки я* называется порядковый номер
этого элемента в вариационном ряду, составленном из элементов х и
у, упорядоченных по какому либо признаку, например расположенных
в порядке возрастания от меньшего к большему. Так, в вариацион¬
ном ряду уухухху... значения рангов соответствующих отсчетов х,
образующих ранговый вектор, равны 3, 5, 6...
Поскольку при справедливости гипотезы для однородной незави¬
симой выборки значение ранга какого-либо элемента выборки рав¬
новероятно (отсчеты х и у равномерно перемешаны в вариационном
ряду), то каким бы ни было распределение F0(t), тест, использующий
ранговую статистику (произвольную функцию от рангового вектора),
оказывается непараметрическим.
Когда справедлива альтернатива Fi(t) < F0(t), в частности аль¬
тернатива сдвига Fi(t) = Fo(t-a), отсчеты х располагаются преиму¬
щественно в правой части ряда, т.е. значения их рангов статистически
больше, чем при гипотезе Я0. Эти различия в значениях рангов слу¬
208
Глава 9
жат мерой, характеризующей контраст между опорной и исследуемой
выборками.
Укажем на одно замечательное свойство ранговых статистик - их
инвариантность относительно нелинейных монотонных преобразова¬
ний. Действительно, любое преобразование указанного типа не нару¬
шает порядок расположения отсчетов в вариационном ряду, а значит,
и не изменяет значения их рангов. Поэтому мощность теста (Qd) и
его значимость (Q0) остаются такими же, как до преобразования.
Применение ранговых процедур неизбежно приводит к потери ча¬
сти информации, однако при увеличении объема наблюдений эти по¬
тери уменьшаются и некоторые ранговые алгоритмы оказываются
столь же эффективными, как и оптимальные, т.е. асимптотически
оптимальными.
Поскольку рангом Ri элемента я* выборки называется порядко¬
вый номер этого элемента в вариационном ряду, или, другими слова¬
ми, число элементов выборки х, меньших или равных Xi, то, следо¬
вательно, выборочному значению я* соответствует порядковая стати¬
стика вариационного ряда.
Ранговым вектором R(x) = выборки х называется
перестановка чисел 1,2, которая получается при замене элемен¬
тов выборки их рангами. Ранговой статистикой называется произ¬
вольная функция от рангового вектора. Ранговый алгоритм предпи¬
сывает сравнение некоторой ранговой статистики с порогом.
Исходную выборку х можно восстановить, если известен вектор
х(') порядковых статистик и ранговый вектор R. По отдельности лю¬
бой из этих двух векторов представляет необратимое нелинейное пре¬
образование исходной выборки. Для однородной независимой выбор¬
ки х случайные векторы х(') и R независимы.
Ранг Ri элемента я* выборки объема п можно при помощи функ¬
ции единичного скачка и(х) или знаковой функции представить сле¬
дующим образом:
Из (9.7) следует, что ранги являются знаковыми статистиками
от разностей выборочных значений.
Для однородной независимой выборки функция правдоподобия
инвариантна к группе перестановок аргументов. Отсюда следует, что
для указанной выборки все ранговые векторы равновероятны, каково
п
(9.7)
П
Непараметрические методы обнаружения сигналов
209
бы ни было распределение, которому принадлежит выборка. Общее
число возможных ранговых векторов, соответствующих выборке объ¬
ема п, равно числу перестановок п чисел, т.е. равно п!. Иначе говоря,
выборочное пространство ранговых векторов состоит из п! дискрет¬
ных точек n-мерного евклидового пространства. Вероятность попа¬
дания рангового вектора R наблюдаемой выборки в любую точку п,
i = 1 этого дискретного множества равна 1 /гг!, т.е. для любо¬
го г = 1 и для любого распределения однородной независимой
выборки
P{R= г* I #о}= 1/п!.
Отсюда следует, что при использовании рангового алгоритма обнару¬
жения сигнала сохраняется неизменной вероятность ложной тревоги
для стационарной независимой помехи с произвольным распределе¬
нием. Таким образом, ранговый алгоритм — непараметрический по
отношению к стационарной независимой помехе.
При появлении изменяющегося во времени сигнала ранги пере¬
стают быть равновероятными из-за возникающей при этом неодно¬
родности выборки*. Расположение по величине элементов выборки
уже определяется формой сигнала, и это позволяет обнаружить сиг¬
нал. Таким образом, ранговый алгоритм реагирует на нестационар-
ность, вносимую переменным сигналом в стационарную помеху.
Ранговый вектор стационарной помехи инвариантен к безынер¬
ционному преобразованию выборки:
R(x) = ВД),
где ix — вектор с компонентами /(xi),..., f(xn) и f(x) — неубываю¬
щая функция, так как такое преобразование не изменяет относитель¬
ного расположения элементов выборки. Ранговый алгоритм сохраня¬
ет свойство непараметричности относительно стационарной незави¬
симой помехи и после указанного нелинейного преобразования.
В некоторых задачах используются вектор абсолютных величин
наблюдений |х| = (|xi|,..., \хп\) и вектор положительных рангов R+ =
= представляющих порядковые номера элементов вари¬
ационного ряда |х|(п) выборки абсолютных величин наблю¬
дений. Ясно, что xi = |x|^^sgnxi. Аналогично (9.7) R+ можно
представить в виде суммы:
п
Rt = ^2u(\xi\-\xk\), i=l,...,n.
k=1
* Например, при n = 2 для неоднородной независимой выборки W2(xi,
Х2) = Wn(xi)Wi2(x2) ¥ Wn(x2)Wi2(xi).
210
Глава 9
Знаково-ранговый алгоритм использует знаково-ранговую стати¬
стику, зависящую как от вектора рангов R, так и от вектора знаков
sgnx наблюдаемой выборки.
Ранговые и знако-ранговые алгоритмы используются для повы¬
шения эффективности непараметрического обнаружения. Несмотря
на простоту реализации знаковый обнаружитель использует сравни¬
тельно мало информации, содержащейся во входных данных. В част¬
ности, при его использовании не учитывается удаление элементов вы¬
борки Xi от начала координат. В ряде случаев вместо статистики
где весовые коэффициенты А* зависят от расстояния наблюдений Xi
от начала координат.
Обнаружитель Вилкоксона. К знако-ранговому алгоритму отно¬
сится обнаружитель Вилкоксона (F. Wilcoxon, 1945), в котором вы¬
полняется ранжирование выборочных данных и их упорядочивание по
величине абсолютных значений х\ так, чтобы выполнялись неравен¬
ства [88]
Пусть х = (xi,X2, ...хп) — наблюдаемая независимая выборка.
В знако-ранговом алгоритме Вилкоксона берутся абсолютные вели¬
чины наблюдений |xi|, ...\хп\ и рассматривают их в порядке возраста¬
ния < |х|(2) < ...|х|(п\ затем определяется ранг Rf, i = 1 ,n,
который равен обычному рангу для \xi\ в этой возрастающей после¬
довательности ...|х|(П).
Таким образом, алгоритм Вилкоксона обнаружения положитель¬
ного сигнала состоит в сравнении с порогом суммы тех компонент
вектора положительных рангов, которые соответствуют положитель¬
ным выборочным значениям xik > 0.
п
S = У^u(xj)
1=1
целесообразнее использовать взвешенные статистики
п
2=1
\Xix I < \xi2 \ < ... < \xin\.
(9.8)
При этом алгоритм обнаружения имеет вид [47, 88]
П
(9.9)
k=1
при Xik < 0,
при xik > 0.
Непараметрические методы обнаружения сигналов
211
Выносится решение о наличии сигнала, если
п
Sy = 5„(Х) =^Rt= £#«(*<) ^ С’ (9Л°)
Xi>0 г=1
где порог С определяется заданной ВЛТ Qq = a.
Поскольку [87]
г=1 k=1
то с учетом (9.3) статистику Вилкоксона (9.10) можно выразить в
виде
= 5„(х) = lit R?sQn Xi + n(n4+ (9-п)
г=1
ЧБ-
Е
Т
Структурная схема обнаружи- >|^у]
теля Вилкоксона (рис. 9.1) вклю¬
чает выпрямитель, устройство ран¬
жирования абсолютных значений
элементов выборки (верхняя ветвь Рис 9Л
структурной схемы), идеальный ограничитель, перемножитель, сум¬
матор и устройство сравнения с порогом (ПУ).
Алгоритм Вилкоксона можно записать более компактно, если
учесть, что и (xi+ Xj) = 1 тогда и только тогда, когда Xi > \xj\, Xi > 0
или Xj > \xi\, Xj > 0. В результате вместо (9.9) получим [43, 88]
Sy = Sn(x) = и(х{ + Xj) > С.
2 = 1 j = 1
(9.12)
Эквивалентными записями статистики Вилкоксона являются [22]
к=1
с учетом ранжирования (9.8), а также [22]
п 3
sv = + хЛ-
2 = 1 j = 1
В силу ранжирования (9.8) можно положить
|zi| < \х2\ < ... < \хп\
(9.13)
(9.14)
212
Глава 9
и рассмотреть сумму в правой части (9.14)
з
tj = u(Xi + Xj).
i=1
Если Xj > 0, то сумма xi + Xj также положительна, так как \xi\ <
< \xj \ и u(xi+xj) = 1 и всех г, поэтому^- = j. С другой стороны, если
Xj < 0, то xi + Xj < 0 для всех г и tj = 0. Следовательно, tj = ju(xj),
таким образом, приходим к (9.13) с учетом ранжировки (9.15).
Отсюда следует эквивалентность записи статистики Вилкоксона
в виде (9.12), (9.13), (9.14).
Пример 9.1. Пусть х\ = -3, х2 = 2, х3 = -1, т.е. здесь п = 3.
Найти ранги отсчетов и статистику Вилкоксона.
Решение, ранги отсчетов имеют значение соответственно 3, 2,
1. По (9.9) и (9.10) статистика Вилкоксона равна сумме рангов по¬
ложительных наблюдений
з
5, = ЗД = £4 = J2Rt= 2-
к=1 хк>0
С другой стороны, для вычисления статистики Вилкоксона можно ис¬
пользовать (9.12), тогда
з з
Sy — S$(x) — ^ ^ ^ ^ u(xj + Xj).
k=ij=i
Для вычисления по этой формуле составим таблицу:
II
I—1
II
I—1
u( x\ + aii) = 0,
i = 1, j=2
u(x\ + X2) = 0,
i= 1, j = 3
u(x 1 + x3) = 0,
t = 2, j = 2
u(x 2 + X2) = 1,
i = 2, j = 3
u(x 2 + x3) = 1,
i = 3, j = 3
u(x3 + x3) = 0
з з
+ хэ)= 2-
i—l i=1
Наконец, по формуле (9.13) получим с учетом (9.2)
п
Sy = 'EMxj) = u(x i) + 2u(x2) + Зи(хз) = 2.
з=1
Непараметрические методы обнаружения сигналов
213
Таким образом,
п 3 3 п
Sy= J2dk= + хо) = J2Mxj) = 2-
k=1 к— 1 j=l j=l
Поскольку справедлива нормализация статистики Вилкоксона, то
потребуется знание о ее среднем значении и дисперсии.
В случае гипотезы Яо по (9.11) находим
E(Sy I Яо) = i £>(Л+)Я(sgnz<) + n(n4+ 1}- (9.15)
г=1
При симметричном распределении помехи E^sgna^) = 0, поэтому
E(S, | Я„) = ^±11. (9.16)
Дисперсия статистики Вилкоксона имеет вид [49, 88]
£(й/ | Яо) = var^ | Яо) = ^n(n + l)(2n + 1). (9.17)
Недостатком обнаружителя Вилкоксона, так же как эквивалент¬
ного ему [86] обнаружителя Манна-Уитни, является необходимость
запомнить выборку для ее ранжирования прежде, чем вычислить са¬
му статистику. Этого недостатка лишены знаковый обнаружитель и
статистика Стьюдента (t-статистика).
Статистика Стьюдента (t-статистика). Обычно непараметриче¬
ские статистики сравниваются со статистикой линейного обнаружи¬
теля и как следствие с t-статистикой. Поэтому рассмотрим кратко
следующую проблему обнаружения постоянного сигнала:
Н0 : x[n] = w[n], п - 0,1...N — 1,
Hi : x[n\ = А + w[n\, п = 0,1...N — 1,
где А — неизвестная постоянная, принимающая положительные и от¬
рицательные значения, —оо < А < оо; w[n] — ГБШ с неизвестной
дисперсией сг2.
Здесь РНМ статистики не существует, так как задача эквивалент¬
на следующей:
Я0 : А = 0; а2 > 0,
Hi : А J 0; а2 > 0,
которая в свою очередь является двусторонней. В данном случае
паразитным параметром является неизвестная дисперсия сг2.
214
Глава 9
Как известно (см. гл. 6) решающим правилом является
rfv , ИМХя.А.г»? I я, _
где (Д а2)т — оценка максимального правдоподобия вектора (А, а2)т
при гипотезе Hi, а ао — оценка максимального правдоподобия пара¬
метра а2 при гипотезе Я0.
Для нахождения оценок А и а\ необходимо максимизировать ПРВ
И^СХлг, Л,<т | Ях) (2тгсг2)^/2 ехр
2ст2
п=0
В результате получим (см. гл. 6)
^= х= jj Е^ =
N ^ 1 1 1 N п
п=0 п=0
После преобразований получим
Аналогично максимизацией ПРВ
ЩХ„,<г2|Д0)=
получим оценку дисперсии
N-1
&о = ^
Таким образом,
N „
п=0
I я.) =
В результате получим ОП в виде
Л(Хдг) = {al/a\)N/\
или эквивалентно ЛОП
21пА(Хлг) = N\n(al/a\).
Преобразуем оценку а\\
-х? = jj Е “ 2х[п]х + я2)
п=0 п=0
Непараметрические методы обнаружения сигналов
215
п=О
Тогда ЛОП принимает вид
Поскольку 1п(1+ х) является монотонно возрастающей функцией
с ростом х, то эквивалентной статистикой в решении данной задачи
является статистика
— t-статистика (статистика Стьюдента). Случайная величина t име¬
ет распределение Стьюдента с п — 1 степенью свободы. Решающим
правилом при проверке гипотез является: применяется гипотеза
если Ti(Xjv) > 7'. Тогда (см. гл. 6)
где показатель нецентральности А = NA2/cr2(-) распределения Фи¬
шера.
Как показано в гл. б, Q-функция Фишера выражается через сум¬
му распределений Стьюдента. Однако, если при постановке задачи
ограничится только положительными значениями амплитуды А > О,
то решающим правилом будет t > to. При этом ВЛТ Qo = & име¬
ет вид
В первом случае используется центральное распределение Стьюдента,
во втором — нецентральное распределение Стьюдента при показателе
нецентральности 6 = л/А = y/NA/a.
При А > 0 равномерно наиболее мощным (РНМ) является та¬
кое правило, при котором критическая область определяется неравен¬
T(Xtf) = x2/a2.
Можно показать, что
Тг(Хм) = (N - 1)T(XN) = t2 = t2(XN),
где
N-l
t =
= t(XN)
Qo = Qfx Qd = Q'(x) (7;)>
’ 1 /V г 1
1,N-1
a = P(t > t0 | #o); Qd = Pit > to | Hi).
216
Глава 9
ством t > ta, где ta — процентная точка, определяемая по формуле
/•ОО
I (t) dt
Jta
где Sn-i(t) — распределение Стьюдента era — 1 степенью свободы.
При А > 0 гипотеза Hi выбирается, когда t превосходит порог
to- Это известно как односторонний t-тест. Если —оо < А < оо, то
требуется, чтобы абсолютные значения превышали порог tf0 (t2 > to!
\t\ > t'Q). Это процедура двустороннего теста.
Когда число отсчетов N значительно, распределение t-статисти-
ки приблизительно гауссовское. Тогда при заданном ВЛТ Q0 = a
пороги определяются из соотношений
Qo ~ Q(tо); Qo = 2Q(£q),
где Q — Q-функция нормального распределения N(0,1). При этом
в пределе при N > 1 ВЛТ будет одна и та же для всех распреде¬
лений, поэтому говорят, что обнаружитель является асимптотически
непараметрическим.
Когда N значительно, выборочная дисперсия приблизительно
равна истинной дисперсии шума и среднее значение t-статистики при
гипотезе Hi
E(t | Hi) к = dVN,
a
где d2 = A2/a2 — ОСШ.
Дисперсия t-статистики при этом приблизительно равны едини¬
це, т.е.
D(t | Hi) = D(t | Но) « 1.
Тогда вероятность обнаружения соответственно для одностороннего
и двустороннего теста определяется соотношениями (см. гл. 6)
Qd = Q(to ~ d\fN)\ Qd = Q(t'0 - dy/N) + Q(tf0 + dy/N).
Таким образом, в пределе при больших N обнаружитель, осно¬
ванный на t-статистике, аналогичен стандартному приемнику Нейма¬
на-Пирсона.
Асимптотическая относительная эффективность (АОЭ) обнару¬
жителя с t-статистикой по отношению к стандартному приемнику рав¬
на единице. Но это только при условии значительных объемов вы¬
борки N. Если N мало, то указанные обнаружители ведут себя со¬
вершенно отлично, чем в асимптотическом случае. При конечных N
обнаружитель с t-статистикой не является непараметрическим, его
ВЛТ при фиксированных порогах зависит от истинной ПРВ шума.
Непараметрические методы обнаружения сигналов
217
Существует несколько модификаций и обобщений статистики
Вилкоксона. В частности, к ним относятся знаковые статистики Фи-
шера-Иейтса (называемый иногда критерием нормальных меток или
ci-критерием), а также статистика Ван дер Вардена.
Статистика Фишера-Иейтса. Допустим, что имеются п независи¬
мых и одинаково распределенных наблюдений xi,x2, ...,жп. Эти дан¬
ные ранжируются по абсолютной величине xit так, что
kfcj < N2I < ••• < I**»!-
Пусть эти наблюдения заменяются на преобразованные по закону
Гаусса значения
В результате получается алгоритм обнаружителя Фишера-Иейт¬
са (обнаружителя нормальных меток)
где Zi соответствует порядку величин |у^|. Поскольку последние (уь)
являются результатом гауссовского преобразования при нулевом сред¬
нем и единичной дисперсии нормальной ПРВ, то Zi — упорядоченная
выборка объема п из стационарного нормального распределения. Ве¬
личина E(zi) находится по таблицам усредненных нормальных меток
[49, табл. В-5].
Обнаружитель Фишера-Иейтса со статистикой й'фи является ло¬
кально наиболее мощным среди обнаружителей, основанных на зна¬
коранговых статистиках при проверке гипотез:
#7: W(x) — нормальная ПРВ с нулевым средним значением и
дисперсией сг2, против альтернативы К7 — нормальная ПРВ со сред¬
ним значением [л > 0 и дисперсией сг2.
Пример 9.2. Пусть даны 12 наблюдений: 5,1; 4,2; —3,6; 0,8;
-2,1; 3,7; 6,4; -2,5; -1,1; -0,5; 3,9; 4,8. Найти ранги наблюдений
и вычислить статистику
12%I < Ы2 \ < - < \Укп\-
п
i—l
если выполняется гипотеза Hi.
Величина di имеет вид
если ж*;. < 0,
если х^ > 0,
(9.18)
П
где di определяется по (9.18).
218
Глава 9
Решение. Запишем наблюдения вместе с их рангами в виде
табл. 9.1.
Таблица 9.1
Наблюдения ж»
5,1
4,2
-3,6
0,8
-2,1
3,7
6,4
-2,5
-1Д
-0,5
3,9
4,8
Ранг R{xi)
11
9
б
2
4
7
12
5
3
1
8
10
Средние значения E(zi) для рангов г = 1,2,..., 12 могут быть вы¬
числены по таблице усредненных нормальных меток [49, табл. В-5]
(фрагмент табл. В-5 для данного примера дан в табл. 9.2). В резуль¬
тате находится ряд значений, приведенных в табл. 9.3.
Таблица 9.2
2
3
4
5
6
7
8
9
10
1
0,56419
0,84628
1,02938
1,16296
1,26721
1,35218
1,42360
1,48501
1,53875
2
0,00000
0,29701
0,49502
0,64176
0,75737
0,85222
0,93230
1,00136
3
0,00000
0,20155
0,35271
0,47282
0,57197
0,65606
4
0,00000
0,15251
0,27453
0,37576
5
0,00000
0,12267
11
12
13
14
15
16
17
18
19
1
1,58644
1,62923
1,66799
1,70338
1,73591
1,76599
1,79394
1,82003
1,84448
2
1,06192
1,11573
1,16408
1,20790
1,24794
1,28474
1,31878
1,35041
1,37994
3
0,72884
0,79284
0,84983
0,90113
0,94769
0,99027
1,02946
1,06573
1,09945
4
0,46198
0,53684
0,60285
0,66176
0,71488
0,76317
0,80738
0,84812
0,88586
5
0,22489
0,31225
0,38833
0,45557
0,51570
0,57001
0,61946
0,66479
0,70661
6
0,00000
0,10259
0,19052
0,26730
0,33530
0,39622
0,45133
0,50158
0,54771
7
0,00000
0,08816
0,16530
0,23375
0,29519
0,35084
0,40164
8
0,00000
0,07729
0,14599
0,20774
0,26374
9
0,00000
0,06880
0,13072
10
0,00000
Таблица 9.3
г
1
2
3
4
5
6
7
8
9
10
И
12
ЕМ
-1,63
-1Д2
-0,79
-0,54
-0,31
-0,10
0,10
0,31
0,54
0,79
1,12
1,63
Каждому наблюдению соответственно его рангу приписывается
величина E(zi). Так, например, наблюдению 5,1 с рангом 11 соот¬
ветствует E(zn) = 1,12. Чтобы получить величину статистики 5фи,
необходимо просуммировать значения E(zi) для каждого положитель¬
ного значения наблюдения.
В результате находятся семь слагаемых
Зои = 1,63 + 1,12 + 0,79 + 0,54 + 0,31 + 0,10 - 1,12 = 3,37.
Статистика Фишера-Иейтса имеет по отношению к t-статистике
АОЭ
АОЭфи,* ^ 1
Непараметрические методы обнаружения сигналов
219
при симметричном шуме на входе. Такая эффективность достигается
за счет усложнения алгоритма обнаружения.
Другим знако-ранговым алгоритмом более эффективным, чем
алгоритм Вилкоксона, но за то и более сложным в реализации, яв¬
ляется алгоритм Ван дер Вардена.
Этот алгоритм использует обращение нормальной функции рас¬
пределения и называется также статистикой инверсных нормальных
меток (inverse normal scores test).
В таком обнаружителе принимается гипотеза Hi, если
Swdw = ^ di > Т,
где Т — порог;
di= {^=ф-1(йтг)
при xki < О,
при хк. > О,
(9.19)
(9.20)
где xki — наблюдение, имеющее г-ю наименьшую абсолютную вели¬
чину.
Пример 9.3. Используя наблюдения примера 9.2, найти величину
статистики Ван дер Вардена Swdw-
Решение. Сначала составим таблицу значений р = г/(п+ 1) —
аргумента обратной функции Ф-1(р), затем по таблице нормальных
процентных точек вычислим величины [38, 58], когда Ф(с?г) = Р•
В результате получим табл. 9.4.
Таблица 9.4
ъ
1
2
3
4
5
6
V
0,0769
0,1538
0,2308
0,3077
0,3846
0,4615
£р
-1,43
-1,02
-0,74
-0,50
-0,29
-0,10
ъ
7
8
9
10
И
12
р
0,5385
0,6154
0,6923
0,7692
0,8262
0,9231
£р
0,10
0,29
0,50
0,74
1,02
1,43
При вычислениях использовалось равенство [38]
Ф(р) + ^(1 -р) =
где гр(р) = N~l(p, 0,1) и Ф[ф(р)] = р, 0 < р < 1.
Статистика Swdw определяется суммой тех величин £р, которые
соответствуют положительным наблюдением. В результате получаем
7 слагаемых в соответствии с таблицей примера 9.2:
Swdw = 1ДЗ + 1,02 + 0,74 + 0,50 + 0,29 + 0,10 - 1,02 = 3,06
220
Глава 9
Количественной мерой сравнения качества двух тестов (обнару¬
жителей), как уже отмечалось, служит коэффициент эффективности
одного теста по сравнению с другим: n2(ai,JDi,d)/ni(ai,JDi,d), где
через щ, г = 1,2, обозначено наименьшее число наблюдений, необ¬
ходимое для того, чтобы г-й обнаружитель обеспечивал вероятность
обнаружения Qd гипотезы Hi при вероятности ложного обнаружения
Qo = а для гипотезы Н0 и заданном «расстоянии» d между гипо¬
тезами.
Вычислить это отношение для произвольных a, Qd, #i и Я0 весь¬
ма сложно. Вычисления удается проделать лишь при неограниченном
возрастании щ и п2, когда статистики сравниваемых тестов норма¬
лизуются. Однако при неограниченном возрастании ni и п2 для со¬
стоятельных тестов вероятность Qd стремится к единице. Чтобы она
осталась постоянной при ni,n2 оо, необходимо, чтобы одновремен¬
но «расстояние» между гипотезами стремилось к нулю. Таким обра¬
зом, получаем коэффициент асимптотической относительной эффек¬
тивности (АОЭ) первого теста относительно второго:
АОЭ 12 - lim
п1,п2->оо m(ai,JDi,d)
d->о (я1-)-я0)
Неограниченное увеличение числа наблюдений и связанное с этим
стремление Hi к Hq соответствует обнаружению слабых сигналов. В
частности, для нормальной альтернативы сдвига, характерной для за¬
дачи обнаружения когерентного сигнала, расстояние d определяется
отношением сигнал-помеха. Поэтому стремление его к нулю означа¬
ет стремление к нулю значения сигнала. Коэффициент АОЭ любого
обнаружителя по сравнению с оптимальным всегда меньше единицы.
Отклонение его от единицы служит мерой качества обнаружителя для
рассматриваемых условий (Hi и Но). В то же время для некоторых
других Hi и Но, для которых тест оказывается неоптимальным, ко¬
эффициент АОЭ может превысить единицу.
Коэффициент АОЭ знакового теста при обнаружении постоянно¬
го положительного сдвига (сигнала) в гауссовской помехе по сравне¬
нию с обычным линейным обнаружителем, использующим в качестве
статистики сумму отсчетов, составляет 0,64. Это значит, что чис¬
ло наблюдений, требуемое линейному тесту для обнаружения слабого
сигнала с заданными ai и Qd, составляет 64 % числа наблюдений, ко¬
торое требуется знаковому тесту, работающему в тех же условиях и
реализующему те же показатели качества. В то же время при помехе
с распределением Лапласа знаковый обнаружитель лучше линейного
в 2 раза, т.е. АОЭ = 2.
Коэффициент АОЭ рангового алгоритма обнаружения постоян¬
Непараметрические методы обнаружения сигналов
221
ного сигнала в гауссовской помехе, в которой используется статисти¬
ка Вилкоксона, по отношению к линейному накопителю составляет
3/7г « 0,955, т.е. ранговый обнаружитель лишь незначительно усту¬
пает линейному. Грубо говоря, ранговому тесту требуется 32 наблю¬
дения, а линейному — 30. В то же время для помехи с распределе¬
нием Лапласа АОЭ = 1,5. Асимптотическая эффективность ранго¬
вого теста Вилкоксона по отношению к линейному накопителю при
альтернативе сдвига выше, чем у тестов согласия типа Колмогорова,
Смирнова, Крамера-Мизеса и др.
Тест Ван-дер-Вардена при альтернативе сдвига имеет эффектив¬
ность в гауссовской помехе, равную единице, т.е. этот тест является
асимптотически оптимальным.
В практике обнаружения объем выборки п является ограничен¬
ным, поэтому использование коэффициента АОЭ для оценки теста
носит лишь приблизительный характер в том смысле, что большое
его значение позволяет лишь предположить высокую эффективность
алгоритма при конечном числе испытаний, но не более. Суждение
об эффективности обнаружителя можно вынести лишь на основании
расчета и анализа его рабочих характеристик.
9.2. Свойства знакового алгоритма обнаружения
сигналов
Пример 9.4. Пусть X — СВ с произвольной и непрерывной функ¬
цией распределения F(x) = Р(Х ^ х). Медиана в СВ (или эквива¬
лентно F) определяется соотношением
Предполагается, что медиана в — единственная. Выборочной мо¬
делью является случайная выборка Xi, ...,ХП независимых, одина¬
ково распределяемых СВ, каждая из которых распределена по закону
Р(Х ^в) = Р{Х ^в)= 1/2.
Н0: 0=0,
tfi : в > 0.
(9.21)
Рассмотрим знаковую статистику
п
(9.22)
г = 1
где
1 при х > 0;
0 при х ^ 0.
222
Глава 9
Гипотеза Я0 отклоняется в пользу Яь если S ^ к, причем порог
к определяется на основе ВЛТ
P{S^k | Я0) = а. (9.23)
Найдем вначале распределение статистики S в случае гипотезы
Я0. При Н0 u(Xi),... ,и(Хп) — независимые, одинаково распреде¬
ленные СВ, причем каждая из них биноминальная с параметрами 1 и
р = Р(Х > 0) = 1 - Р(Х ^ 0) = 1 - F(0) = 1/2. Обозначим это
распределение через Б(1; 1/2). Тогда S — это сумма п независимых,
одинаково распределенных по Б(1; 1/2) СВ, и, следовательно, имеет
распределение Б(1;1/2). Порог к можно найти по таблице биноми¬
ального распределения.
Поскольку распределение СВ S не зависит от распределения F
элементов выборки, то порог к можно найти, не зная F. Таким обра¬
зом, СВ 5 — свободная от распределения или непараметрическая СВ
при выполнении гипотезы Щ: 0 = 0. С другой стороны, при выпол¬
нении гипотезы Н\: 9 = 9f > 0 СВ S имеет В(п,р) распределение,
но теперь
р = Р(Х > 0) = 1 - F{-6f) (9.24)
зависит от F. Следовательно, S не свободно от распределения при
выполнении гипотезы Hi.
Поскольку при обеих гипотезах СВ S (9.22) сумма независимых
одинаково распределенных СВ с распределением Б(1,р), var[u(Xi)] =
= р( 1 — р) и согласно центральной предельной теореме можно утвер¬
ждать, что СВ
с = [S - E(S)]/VvarS (9.25)
имеет приближенно стандартное нормальное распределение с нулевым
средним значением и единичной дисперсией при 0 < р < 1. Таким
образом,
f —> Z«W(0,1). (9.26)
п—Уоо
При гипотезе Hq
E(S | Я0) = n/2: var(S | Я0) = nj4. (9.27)
Тогда при такой аппроксимации можно приближенно вычислить вели¬
чину порога к при отсутствии таблицы биномиального распределения
получим
Непараметрические методы обнаружения сигналов
223
1 - Ф
к - п/2\
ч \№ )
(9.28)
где
Ф(х)
kf-J'b°du: Q(x)=wJl
\[Ък j —ОО л/SF Jj;
Пусть Za — верхняя a-процентная точка нормального распре¬
деления, т.е. a = 1 - Ф(Za), тогда (к - n/r)/yJn/A = Zai или
к = n/2 + Zay/n/2.
С учетом дискретности биномиального распределения можно
уточнить величину порога вычитанием 0,5 из к\ в результате полу¬
чим [87]
к= п/2 + 1/2+ Zayjn/2.
(9.29)
Удовлетворительное приближение к а в (9.28) достигается при
малых объемах выборки, равных 3 или 4. В табл. 9.5 дается сравне¬
ние при вычислении порога к при использовании нормального и би¬
номиального распределения с поправкой при р = 1/2, п = 5. Причем
при расчете по нормальному распределению используется формула
Муавра-Лапласа
к — пр+ 1/2
у/пр(1-р)
(9.30)
г=0
По этой формуле рассчитываются данные второй строки табл. 9.5.
Расчет данных первой строки осуществляется по формуле
к
F = P{S ^ к} = Е C'inpiqn~’ = р“
г=0
При к = 0 F = р5 = 0,03125; при к = 1 F = 0,03125(1 + 5)
и при к = 2 F = 0,1875 + 0,3125 = 0,5.
Очевидно, что при к = 2 и Ф(0) = 1/2. Таким образом, в [87,
табл. 1.1] допущена опечатка: в последнем столбце вместо к = 3
должно быть к = 2 и табл. 9.5 выглядит следующим образом:
Таблица 9.5
0,1875
Функция
к
0
1
2
3
F = P(S ^ к)
0,03125
0,1875
0,5
1
Ф(-)
0,0367
0,1867
0,5
0,9099
При к = 5 F = 1; Ф(3/л/5) = Ф(1,341) = 0,9099 « 0,91.
224
Глава 9
В [87] в частности доказывается, что «критерий знаков — рав¬
номерно наиболее мощный» (РНМ). Следуя [87], проведем это дока¬
зательство. Начнем с обозначений. Нулевая гипотеза Но обозначает,
что выборка берется из F е Qo, а альтернативная гипотеза означает,
эта выборка берется из G(x) = К(х - в), где К е Qo и в > 0. Здесь
используются различные обозначения для нулевой гипотезы и аль¬
тернативы (F и К), чтобы показать их сложную природу. Гипотезы
записываются в виде
Н0 : F(0) = 1/2,
Нг : 1 - G(0) > 1/2.
Любую функцию распределения G можно представить в виде сум¬
мы
G(x) = Р(Х ^х) =
= Р(Х ^ х | X ^ 0 )Р{Х ^ 0) + Р(Х ^х\Х> 0 )Р{Х > 0). (9.31)
Согласно (9.24)
р= 1-G(0). (9.32)
Определим две функции д~(х) и д+(х) (рис. 9.2):
d_
' (9.33)
° г 9-(х) =
О
б)
Рис. 9.2
дЛ*)
■Р(Х ^ х | X ^ 0) при х ^ 0;
О в противном
случае;
-^-Р(Х ^ х I X > 0) при х ^ 0;
& (9.34)
0 в противном
случае;
В результате по (9.31) получим ПРВ
д(х) = (1-р)д_(х) + рд+(х). (9.35)
Это позволяет отличить проверяемый параметр (медиану) от пара¬
метра формы распределения и сформировать гипотезу в терминах
вероятности р.
Пример 9.5. Положим
д(х) = { 1/3 при -1 < ж < 2;
[0 при других X.
При этом (рис. 9.3)
{0 при х ^ -1;
(х + 1)/3 при -1 < х < 2;
1 при х ^ 2.
Непараметрические методы обнаружения сигналов
225
При -1 < х < О
Gi(z)= Р(Х ^х \Х^О) = х+ 1.
Gi(x) — функция распределения вероятности; Gi(—1) = 0; Gi(0) =
= 1, тогда
9_М = -£(?,(*) = { I при х€ (-1,0);
dx [0 при других х.
Аналогично при 0 < х < 2
G2(x) = P(X^x\X>0)= |[G2(0) = 0; G2(2) = 1],
тогда ПРВ (рис 9.4)
9+(х)={1/2 при о; е (0,2);
I
I
0 при других X. L
1,0
0,5
2+
-10 12т
Теперь р = 1 - G(0) = 1 — 1/3 = 2/3 > 1/2. Следо- Рис# 9#4
вательно, ПРВ д(х) можно рассматривать как рав¬
номерные ПРВ, взятые с весом р = 2/3.
В общем случае можно определить распределение выборок трой¬
ки (р,р+,0_). В примере 9.5 - это (2/3, #+,£_).
Гипотезы принимают вид
но- (1/2, д+,д~), (9 36)
Нц (р,Л+,Л_), р> 1/2,
где G и Н — произвольные функции распределения соответствую¬
щей ПРВ.
На основе критерия Неймана-Пирсона в [87] находится РНМ кри¬
терий на основе наименее благоприятных распределений.
Процедура доказательства состоит из четырех этапов.
1. Устанавливается альтернативное распределение и по этому
распределению выбирается сложная нулевая гипотеза так, чтобы её
как можно труднее было отличить от установленной (фиксированной)
альтернативы. Если распределение выбрано правильно, то это будет
наименее благоприятное распределение.
2. Находится критерий Неймана-Пирсона размера а для этой
простой гипотезы против простой альтернативы.
3. Показывается, что критерий сохраниет размер айв случае
нулевой гипотезы.
4. Устанавливается независимость критерия от фиксированной
альтернативы, и таким образом доказывается, что критерий равно¬
мерно наиболее мощный (РНМ).
В процессе доказательства следует:
226
Глава 9
1. Выбрать р = р1 > 1/2 и /г+, /г_ так, что альтернативой станет
(p,h+,h-).
2. Предположить, что наименее благоприятным будет распреде¬
ление (1/2,h+,h-) и проверить
Н0: (1/2 ,Л+,Л_)
против
Я! : (p',ft+,ft-)
с определенными р' > 1/2, /г+, /г_.
Пример 9.6.
1. Принимая во внимание пример 9.4, предположить, что наиме¬
нее благоприятным распределением является распределение
I I ( V2 ПРИ -1 < ^ < 0;
^9+(х) + ^9-(х) = ■( 1/4 при 0 < х < 2;
при других х.
2 к ' 2“ ' ' I '
1о
2. Согласно критерию Неймана-Пирсона гипотеза Но должна
быть отклонена, если
П
г=1
\h-{x) + i/i+( х)
- ^ К. (9.37)
П К1 ~v')h-{x) + рК(х)\
г—1
Пусть Xi — г-я порядковая статистика и для выборки справедливы
неравенства
X(i) <с ... <С %(t) ^ 0 <с <с . . . х^п^. (9.38)
Тогда (9.37) можно записать в виде
^ ^ \ п t п
2 ) П
i=1 i=t+1 < К. (9.39)
Отсюда следует неравенство
(1/2)- /1-^\п+
(1 — р')п \ р
где Ti-\- — u(xi) — число положительных наблюдений.
г=*+1
Непараметрические методы обнаружения сигналов
227
Поскольку р' > 1/2, логарифмируя с учетом того, что К — тре¬
буемая постоянная, находим, что данный критерий эквивалентен от¬
клонению Но при S ^ к, где S — статистика критерия знаков.
3. Критерий знаков — критерий размера а для сложной нулевой
гипотезы, поскольку он свободен от распределения.
4. Критерий знаков — равномерно наиболее мощный (РНМ), по¬
скольку критическая область не изменяется для вс ехр' > 1/2 и любых
других h+, h-.
Это означает, что для любой фиксированной альтернативы с по¬
ложительной медианой нет критерия размера а с большой мощно¬
стью.
Рассмотрим другое решение задачи (9.39) применительно к непа¬
раметрическому обнаружению постоянного положительного сигнала.
Этот подход отражен в работах [47, 49, 88].
Пример 9.7 [47, 49]. Непараметрическое обнаружение постоянно¬
го положительного сигнала. Пусть задан вектор Xn = (xi, х2,..., хп)
наблюдений, {я*} — независимые СВ с одинаковой функцией распре¬
деления F(x) = P(xi ^ х).
Найти рабочую характеристику обнаружителя (РХО) непарамет¬
рического типа, рассматривая две непараметрические гипотезы:
Н ■ Р > 1/2 <9'41)
Н1 . р > 1/2,
где
р = P(xi > 0) = 1 - F(0). (9.42)
Замечание. При гипотезе Яо случайные величины представляют
собой независимые наблюдения шума, имеющие нулевые медианы, а
при альтернативе Hi медианы этих независимых наблюдений больше
нуля из-за присутствия в шуме аддитивного положительного сигнала.
Решение. Пусть W = Wi(xi) — некоторая ПРВ в случае, когда
сигнал присутствует. Обозначим через W+ и W~ — условные ПРВ
СВ Xi при Xi > 0 и Xi < 0 соответственно.
Из определения условной ПРВ следует (9.35)
W = pW+ + (1 -p)W~. (9.43)
Введем новую ПРВ Wo, равную
Р.44)
причем Wq — это ПРВ СВ с нулевой медианой, так как она удовле¬
творяет (9.43) при р = 1/2.
228
Глава 9
Отношение правдоподобия (ОП) имеет вид
(М5>
Отношение W\{xi)/W0(xi) принимает одно из двух возможных
значений в зависимости оттого, какое из неравенству > 0 или х^ < О
выполняется. Таким образом,
Wi(s<) pW+
W0{xi) 0,5W+
Wiixi) _ (1 -p)W
2p при Xi > 0; (9.46)
- = 2(1 -p) при Xi < 0. (9.47)
W0(xi) 0,5 W-
Поэтому ОП (9.45) принимает вид
A(x) = 2npn+(l —p)n~n+, (9.48)
П
где 77,+ = u(xi)'. u(xi) — функция Хевисайда,
i=1
n(n) = ( ! лри (9.49)
v г} \ 0 при Xi < 0. v '
Формула (9.48) совпадает с (9.40), найденной несколько иначе.
Сравнение ОП А(х) с порогом эквивалентно сравнению суммы
п
n+='£u(xi) (9.50)
i=l
с некоторой константой С.
По (9.48) получим
2прп+(1 — р)п~п+ > С0,
если выполняется гипотеза Н\. Отсюда находим
[2(1-р)Г\р/(1-р)У+ >С0,
или
\р/(1-р)]п+ >[2(1-р)]-пС0= Сг.
Взяв логарифм по основанию р/( 1 —р), окончательно получим реша¬
ющее правило
п
п+ = ’Y^uixi) > logp/(1_p) Сх = С. (9.51)
г=1
Таким образом, обнаружитель Неймана-Пирсона в данном случае
Непараметрические методы обнаружения сигналов
229
представляет собой знаковый обнаружитель
П+ = | ^ °с (9.52)
1 = 1 ^ 1?
где постоянная С определяется заданной вероятностью ложной тре¬
воги Qq = a.
Случайная величина (9.50) равна числу к положительных (успеш¬
ных) наблюдений и имеет биномиальное распределение с параметром
р. Таким образом, распределение вероятностей при гипотезе Н\ опре¬
деляется законом Бернулли
Ь(к,п,р) = Скрк(1 -р)п~к, к= 0,1,...,п. (9.53)
Гипотезе Hq соответствует распределение
£>(&, ti, 1/2) = С^(1/2)", к = 0,1,...,71. (9.54)
Характеристика обнаружения имеет вид [49, 57]
п
Qd= J2 Cknp\l-p)n-\ (9.55)
к=с+1
где с (порог) — наименьшее целое число, удовлетворяющее неравен¬
ству [49]
П
О^^1/2)", (9.56)
к=с
где a = Qo — заданная вероятность ложной тревоги.
По (9.56) замечаем, что величина с в данном случае одинако¬
ва для всех распределений, соответствующих гипотезе Но, т.е. для
всех распределений входного шума, имеющих нулевую медиану. Та¬
ким образом, знаковый обнаружитель является непараметрическим
обнаружителем для гипотезы Я0.
Пример 9.8. Рассмотрим проблему обнаружения постоянного сиг¬
нала в общем виде при наличии аддитивного шума, который имеет
симметричную, а в остальном неизвестную ПРВ. Гипотезы принима¬
ются следующие:
Но'Р= ” или /1=0, ПРВ W симметрична, в остальном неизвестна,
Н\.р> ^ или ц> 0, ПРВ W симметрична, в остальном неизвестна.
(9.57)
Здесь /i — среднее значение для ПРВ W \л р = Р(х > 0) = 1 - ^(0).
Сравним знаковый и линейный обнаружители по критерию АОЭ,
230
Глава 9
предварительно вычислив асимптотические значения ВЛТ Q0 и веро¬
ятности обнаружения Qd для двух обнаружителей и на этой основе
определим объемы выборок п\ и П2, соответственно для линейного
и знакового обнаружителей, необходимых каждому из них для дости¬
жения одной и той же надежности (Qo,Qd).
Алгоритм линейного обнаружения при объеме выборки щ, если
принимается гипотеза Hi, имеет вид
ni
Т = > Ti,
к=1
г оо -у р оо
Qdi= / W1{x\H1)dx= —=== / ехр
JTi cry 27Г77,1 JTl
где Xi, i = 1,774, ~ входная выборка.
Статистика Т асимптотически при п\ > 1 имеет гауссовскую
ПРВ со средним значением и дисперсией
Е(Т) = 77,1/х; D(T) = nicr2.
Тогда вероятность обнаружения Qd находится по формуле
1 f х — niji\2
2 V CFy/ni )
= Qb) = ф(-т),
где 7 = (Тх - пщ)/(тЛ/щ.
Аналогично находим асимптотическое значение ВЛТ Q0\
Г°° 1 Г00 /
Qoi= Wo(x \ Но) dx = / ехр
Jtx ay/2-Kni JTl
= Q{7i) = 1 - Ф(71),
где 7! = Тх/стл/пх.
По (9.59) находим значение порога Т\\
2пх<т2
dx =
(9.58)
dx =
(9.59)
Ti
ф-Hi - ci),
или
СГу/Щ.
где ax = Qoi-
Подставляя величину Тх в (9.58), получим
д^/пГФ-1 (1 - ai)
= «ту'пГФ 1(l-ai), (9.60)
ПхЦ
СГу/пX
= ф
фч Ф *(1 — ai)
сг
(9.61)
В знаковом обнаружителе принимается гипотеза Hi, если вы¬
полняется неравенство (9.51)
п2
E«Oi)>72- (9.62)
г= 1
Непараметрические методы обнаружения сигналов
231
п2
Пусть к равно п+ = ^ ~~ числу положительных отсчетов в
г= 1
выборке. При гипотезе #i 'и(хг) принимает значение, равное единице
с вероятностью р, и, следовательно, к = п+ — СВ, имеющая бино¬
миальное распределение с параметрами (п2,р). Это распределение
имеет вид
b(t,n2,p) = С* Р*(1 -P)"2_fc, Л = 1.П2
п2
причем среднее значение и дисперсия СВ к таковы:
Е(к) = ri2P\ D(k) = n2p( 1 -р).
(9.63)
(9.64)
При значительных объемах выборки п2 распределение (9.63) при¬
ближается к гауссовскому со средним значением и дисперсией (9.64).
Аналогично (9.58) находим вероятность обнаружения
7°
J То
ехр
/»оо
= / Wi(® |#i)d® =
Jt2
х -Е(к)\
у/Ш )
где 7з
л/bтЩк) jt2
Т2 — Е(к) _ Т2 — п2р
л/ТЩ yjn2p{l-p)
Таким образом, вероятность обнаружения
dx = <5(7з) = Ф(—73),
Qd2= Ф
При гипотезе Но р = 1 - р
делению
п2р - Г2
(9.65)
\/п2р{1 -р)_
= 1/2, и СВ к подчиняется распре-
Ь(к;п2,1/2) = С'^2(1/2)"2.
(9.66)
При значительных объемах выборки п2 распределение вероятно¬
сти СВ к (9.66) близко к нормальному при среднем значении и дис¬
персии СВ к (9.27)
Е{к)
nf.
Тогда асимптотическое значение ВЛТ Q0 принимает вид
£ им. над-
ехр
^/2тт2/А Jt2
Q(74) = 1 - Ф(74)-
1
'2
х - п2/2\
К VW2 J
(9.67)
dx =
(9.68)
232
Глава 9
Т2 — П2/2 2X2 — п2 п ^
где 74 = —При Qo2 = получим
л/^2/2 \/™2
1 — а2 = Ф(74) или 74 =
Таким образом, величина порога
22—22= ф-1(1-<*,).
Л/П2
Т2 — —[П2 + \/п2^ *(1 — СК2)]-
Подставляя это значение Т2 в (9.65), получим
п2р - 0,5[п2 + у/гъФ_1(1 - а2)]
(9.69)
Qd2 “ Ф '
vW(i -р)
= Ф ( у^(2р - 1) + Ф *(1 - а2)
1 2л/р(1 -Р)
(9.70)
Найдем отношение ni/n2 при одинаковой надежности обнаружи¬
теля
Qdl = <3d2 = Qd\ 0*1 = а2 = а.
По (9.61) и (9.70) получим равенство
(9.71)
Ф
y/nifi
-Ф_1(1 - а)
Ф
уп?(2р-1)+ Ф^д-а)'
2\/р(1 - р)
которому соответствует равенство аргументов
\/™Гм Ф-1Г1 ч v/^2(2P-1)+ ф-1(1-а)
1 ^ " 2у^(1^)
ИЛИ
y/nill _ у/П2{2р - 1)
° 2л/р(1 -р)
= Л,Ф_1(1 — «),
где h = 1+2
2л/р(!-р)
Преобразуя левую часть равенства, получим
аА2
ni \х
2р — 1
™2 сг 2д/р(1 — р)
После деления на находим
д 2р - 1 1
™2 СГ 2у/р(1 -р) л/™2
= 1гФ (1 — а).
НФ (1 - а),
Непараметрические методы обнаружения сигналов
233
или
/5Г= * Лф-1(1_а)+ (2р-1)т
V n2 2ny/p(l-p)
Возведем в квадрат левую и правую части этого равенства:
— = -^-[ЛФ"1(1-«)]2+ (2?~1Ж,,=Ьф-1(1-а)+ f^~1)2(72
™2 М п2 М2\/^2Р(1 - Р) _^)
(9.72)
Используем определение асимптотической относительной эффек¬
тивности (АОЭ)
АОЭ21= lim —. (9.73)
’ П-1 —>ПО 4 '
П1^°° По
п2->°о
Я^ЯП
В результате по (9.72) получим
А0^‘ - (9'т4)
Полученное выражение для АОЭ2Д не является наглядным. Что¬
бы сделать его полезным необходимо учесть ряд факторов: симмет¬
ричность ПРВ, р > 1/2 (при гипотезе #1), малое значение величины
/х (поскольку в (9.73) Hi —> Но).
Из определения величины р следует
р = P{xi > 0) = 1 - F(0) = 1 - f W{x) dx,
J—00
где W(x) — симметричная ПРВ при среднем значении /л и диспер¬
сии сг2.
После подстановки у = х — /л получим
г-ц
/-fi /*00 pfi
Wi(y)dy= 1- / / Wi(1/)d1/ =
-00 J у J — oo
1
= 2 + J0 W^y)dy'
Здесь W^y) — симметричная ПРВ с нулевым средним значением и
дисперсией сг2.
При малом [л величина р аппроксимируется выражением
Р~\+ 0).
Подставляя это значение р в (9.74), получим
[1/2 + nW(0) - 1/2]2a2 _ /j,2<j2W2(0) __
АОЭ
2,1
М2[1/2 + fiW(0)][1 - 1/2 - м^(0)] м2[1/4 - М2^2(0)]
234
Глава 9
4a2W2(0)
~ 1-VW2(0)‘
Здесь Wi заменяется на W в силу незначительной величины /л. При
/х -> 0 Hi -> Я0 и АОЭ знакового обнаружителя по отношению к
линейному принимает вид [47, 49, 88]
АОЭ2д «4ст21У2(0) (9.75)
при испытании гипотезы Щ против альтернативности #ь По (9.75)
видна независимость АОЭ от уровня ВЛТ а.
Чтобы получить конкретные числовые результаты, необходимо
задаться видом ПРВ. Пусть шум является гауссовским СП с нулевым
средним значением и дисперсией а2, тогда
W( 0) =
и по (9.75) получим
1
тл/2тт
АОЭ2,1 = 4сг2 (—^—) = -. (9.76)
\ау2тт/ к
Следовательно, эффективность обнаружителя составляет лишь
63,7 % эффективности линейного обнаружителя, когда шум на входе
гауссовский с нулевым средним значением и дисперсией а2.
Допустим, что шум на входе лапласов с ПРВ
W(x) =
cry 2
так что W(0) = 1/а>/2. Тогда по (9.75) получим
АОЭ!,2 = 4<т2 = 2- (9-77)
В этом случае эффективность знакового обнаружителя в 2 раза выше
эффективности линейного обнаружителя.
Таким образом, оптимальный обнаружитель может быть хуже
квазиоптимального в том случае, если условия, при которых прохо¬
дила оптимизация, изменяются.
В заключение следует отметить, что предел (9.73) может дости¬
гаться очень медленно. Для иллюстрации этого, можно привести гра¬
фики зависимости 5 = S1/S2 от объема выборки п при достижении
одной и той же надежности (Q0, Qd) при Si - ОСШ, требуемое прием¬
ником Неймана-Пирсона, 52 - ОСШ, требуемое знаковым обнаружи¬
телем. На рис. 9.5 и 9.6 изображены соответствующие зависимости,
когда 5 = 10 lg(5i/52), Qd = 0,99; Q0 = Ю~3 и Q0 = 10~6.
Непараметрические методы обнаружения сигналов
235
Яп, дБ
6-м, дБ
-4,5
-2,5
-3,5
-4
-2
-3
_4l L L_. , , ,
103n 10 20 50 100 200 500 n
Рис. 9.6
10
102
Рис. 9.5
На рис. 9.5 представлен результат [22] сравнения при гауссовском
шуме на входе, когда пределом является величина
8П = 101д(2/тг) = -1,9612.
На рис. 9.6 дан результат [22], когда на вход воздействует лапла-
сов шум
В этом и другом случаях отмечается медленное нарастание ве¬
личины 6, причем во втором случае более медленное, чем в первом.
В [22] отмечается, что даже при n = 105 относительная эффектив¬
ность достигает величины лишь 2,91 дБ при Qd = 0,99; Qo = Ю-6.
Даже при п = 100 отношение 6 значительно меньше предельной ве¬
личины.
9.3. Свойства обнаружителя Вилкоксона
Согласно [86] критерий с критической областью {5+ ^ С}, где
является локально наиболее мощным ранговым критерием для про¬
верки #0 против 9 > 0, когда ПРВ W(x) логистического типа. Кроме
того, этот критерий асимптотически оптимален для такой ПРВ.
Для сравнения линейного обнаружителя и обнаружителя Вилкок¬
сона используем определение АОЭ в виде
где S — статистика обнаружителя; 9 = 60 — испытываемый параметр.
Для рассматриваемой проблемы обнаружения в = /л.
6П= 10 Ig 2 = 3,0103.
Xi> 0
(9.78)
236
Глава 9
Для того чтобы определить АОЭ, необходимо сначала найти сред¬
нее значение и дисперсию той и другой статистик и по (9.78) вычис¬
лить эффективность £ каждого обнаружителя.
ni
Среднее значение и дисперсия статистики Si = ^ хк линейного
п—1
обнаружителя имеет вид
E(S\) = пщ: D(Si) = var Si = щст2. (9.79)
Подставляя эти значения в (9.78), получим
lim —Ц- J -^[пцл]
щ-*оо ац
_1_
/т-2 *
(9.80)
Найдем эффективность £2 статистики S2 Вилкоксона. Для на¬
хождения среднего значения E(S2) воспользуемся представлением
статистики S2 = Sy в виде (9.14), предварительно обозначив и(х{ +
+ хз) = Kj. гДе 1881
у _ ( 1 при Xi > 0 И X; > |Xj|,
\ 0 при других значениях Xi и х^.
Тогда статистику Вилкоксона запишем в виде
по по
* = ЕЕ^-
t=i j=1
Ее среднее значение
п2 п2
ВД) = ЕЕ^)- (9-81)
г=1 j=1
Поскольку Xi и Xj — элементы случайной выборки, то среднее значе¬
ние в (9.81) становится равным [88]
п2 п2
e(s2) = ЕЕ Р = п\р, (9.82)
i—l j=1
где р — вероятность того, что х* больше Xj или, эквивалентно, веро¬
ятность неравенства Xi — Xj < 0.
Известно, что ПРВ суммы независимых СВ равна свертке ПРВ
слагаемых. Тогда, если z = и + у, то
/оо
Wu(z-y)Wy(y)dy.
-ОО
Непараметрические методы обнаружения сигналов
237
Функция распределения Fz(z) имеет вид
/г nZ nOO I
Wz(X)d\= / / Wu{\-y)Wy{y)dyd\ =
-оо J —оо J —оо
/оо
Fu{z-y)Wy{y)dy.
-ОО
Отсюда находим ПРВ разности Xj - xit полагая z = Xj - xit в F(-) —
у = x - fi v\ вместо у в Wy(-) взяв х. Таким образом, получим
/оо
F(xj — Xi + х — fi)W(x) dx. (9.83)
-oo
По определению,
p = P(xj - Xi < 0) = F(0).
Следовательно, no (9.83) находим
/оо
F(0 + x- n)W(x) dx. (9.84)
-OO
Подставляя этот результат в (9.82) с последующим взятием част¬
ной производной, получим
W{x - n)W{x) dx\ .
(9.85)
Дисперсия статистики Вилкоксона известна [47, 86]:
D(S2) = var S2 = ^пг(п2 + 1)(2 n2 + 1). (9.86)
В результате с учетом (9.78), (9.85), (9.86) находится эффектив¬
ность обнаружителя Вилкоксона:
24
Ь = lim -7ГГ „ w„ , ч
п2->°° щ(п2 + 1)(2П2 + 1)
W(x - n)W(x) dx
ОО
24n\
- lim —гг ттх
n2
->00(77,2 + l)(2fl2 + 1)
Н-/
a00 > 2 s poo "4 2
[W(x)]2dxj = 12 I J [W{x)fdx\
Таким образом, АОЭ обнаружителя Вилкоксона по отношению к
238
Глава 9
линейному обнаружителю определяется соотношением
АОЭгд = 12<т2 | J [W(x)]2dx^ , (9.87)
где W(x) — ПРВ шума.
Рассмотрим два частных случая.
Пример 9.9. Пусть аддитивный шум - гауссовский СП с нулевым
средним значением, тогда
W(x) = -^=е~х2^2
ау2тт
При этом
[ [W(x)\2 dx = [ (—^=е~х^2^\ dx
J— oo J— oo V СГ v 2тт
/0/т2
= -L- Г e-2/'2 d* = (9 88)
Тогда по (9.87) получим
А0Э- -12"2 (^)2 - - ;■ <9-89>
Следовательно, эффективность обнаружителя Вилкоксона по от¬
ношению к линейному обнаружителю составляет 95,5 %. Это яв¬
ляется достаточно существенным, учитывая, что линейный детектор
при гауссовском шуме является оптимальным. Таким образом, об¬
наружитель Вилкоксона не существенно проигрывает оптимальному
обнаружителю.
Пример 9.10. Второй частный случай: шум лапласовый,
W(x) = _1_е_л/21ж1/'7.
сг у/2
В этом случае
/ОО POO 1 1 рОО
[W(x)}2 dx= e-2v^|l|/'T dx=-z e~2V2x/u dx =
-oo J-oo 2° & Jo
1
o'2 \2y/2J 2ay/2
Следовательно,
A03i‘ ■12"2 (575)2 - - i -№ <9'90)
Отсюда следует, что обнаружитель Вилкоксона в 1,5 раза эффектив¬
Непараметрические методы обнаружения сигналов
239
нее линейного обнаружителя в том случае, если шум имеет ПРВ Ла¬
пласа.
Можно показать [49], что нижней границей АОЭ2Д является
АОЭ2,1 = 0,864.
(9.91)
Это означает, что обнаружитель Вилкоксона имеет эффективность не
ниже 86,4 % эффективности линейного обнаружителя независимо от
ПРВ сопутствующего шума.
Воспользуемся еще одним определением АОЭ [22]
D2
АОЭ2,1 = lim —§,
А—>-00 D
где D2 и D\ — ОСШ (девиация) для двух обнаружителей, когда на
входе имеется сигнал интенсивностью А. Тогда [22, ф-ла (4.68)]
Л2= [Е(х\НъА)-Е(х\Н0)}2
varox
1 \д_
var0x д А
А2
varo х
^Е{х\НъА)
А\
где г] =
Е{х\НъА)
Параметр 77 называется эффек¬
тивностью обнаружителя. Тогда [22]
АОЭ12 = —.
Vi
Пример 9.11. Рассмотрим статистику Вилкоксона в виде
м м
г = + ХЛ-
i=1 j=1
Найдем среднее значение E[r \ Hi), разбивая двойную сумму на
два слагаемых: при % - j и г ^ j. В первом случае сумма содержит М
слагаемых, во втором М(М — 1)/2 слагаемых. В результате получим
Е(г | Hi) = ME[u{Xi) I Нх] + IМ(М - 1 )E[u(xj + а*) \ Hui j- j].
В первом слагаемом
/•ОО гоо
E[u(xj) I tfi] = / Wi(x) dx= Wo(x - A) dx =
Jo Jo
= 1-F0(-A)= F0(A),
где Fq(x) = Wo(z) dz. Для второго слагаемого в сумме E(r \ Hi)
получим
240
Глава 9
/оо г оо
W0(x 1 — A)dxi / W0(x2 — A) dx2 =
-ОО j —Xl
/оо /*оо
Wo(a?i - A) cfai / Wo(a;)da;.
-oo «/—A
После подстановки х\ — А = у находим
/ОО роо
Wo(y) dy / Wq{x) dx =
-oo J—y—2A
/oo py-\-2A poo
W0(y)dy W0(z)dz= W0(y)F0(y+2A)dy.
-oo J—oo J—oo
Найдем числитель девиации D2\
1 f°°
E{r | Нг)-Е(г | H0) = -M(M-l) / W0(y)[Fo(v+ 2A)-F0(y)\ dy+
J — oo
+ Fo(0)+ M[F0(A) - Fo(0)}.
При малых значениях A, A <C a, справедливо приближенное ра¬
венство
F0(y + 2A) - F0(y) и F'(y)2A = 2AW0(y).
В результате получим
/ОО
[W0(y)}2dy+ О(М),
-ОО
где О(М) слагаемое порядка М, которым можно пренебречь при
М > 1.
Найдем знаменатель девиации D2, а именно дисперсию стати¬
стики Вилкоксона при отсутствии сигнала. Воспользуемся представ¬
лением статистики Вилкоксона
м м
r= ^~2ки(хк)= kwk,
причем известно, что СВ wk независимы и
= 1 I Яо} = P{t«fc = 0 I Яо} = i
Тогда
м 1 м 1
varr = ^fc2varw* = - = — М(М+ l)(2Af+ 1).
/с=1 fc=l
В последнем случае использовалось равенство [59, ф-ла 0.121.2; 87,
Непараметрические методы обнаружения сигналов
241
Теорема А.21]
м
J2k2= тМ(М+ 1)(2 М+ 1).
k=1
Таким образом, девиация статистики Вилкоксона
1 2
Dl = 12 МА2
/ОО
№ (у)?
-оо
dy
Dl
Для сравнения при вычислении АОЭгд используется статистика
линейного обнаружителя
м
G -
г=1
причем E(G | Но) = 0; E(G \ Hi) = МА\ var0 G = Мо2. В результате
девиация здесь совпадает с ОСШ
D2g = MA2/a2 = D\.
Окончательно получим
Dl
АОЭг 1 = lim —£■ = 12<т
’ л->о Dq
/ОО
[Wo(x)]2
-ОО
dx
Найдем надежность (Qo,Qd) обнаружителя Вилкоксона.
При значительных объемах выборки п при гипотезе Но получим
по (9.19) и (9.86)
E(S2 I Но) » П2/4; D(S2 \ Н0) « п3/12. (9.92)
Тогда при условии нормализации статистики Вилкоксона, получим
ВЛТ Qo =
Qo =
1 f°
^2irD(S2) Jc
exp
(x - n2/4)
21
= 1 -Ф
2 D(S2)
(C- n2/4
dx = Q
C-n2/A \ _
k^4Y2)~
(9.93)
\/n3/12
Порог С в алгоритме Вилкоксона S2^ С находится из уравнения
С - п2 /А
= Ф (1 — а).
Отсюда находим
242
Глава 9
Таблица 9.6
ПРВ помехи
АОЭ для обнаружителя
линейного
знакового
Г аусса
0,955
1,5
Лапласа
1,5
0,75
Равномерная
1
3
WH(x)
0,864
1,94
Уточненное значение порога Т имеет вид [49]
Т — fj>n + СГПФ (1 O'),
где ц = п(п + 1)/4; а2 = п(п - 1)(2п - 1)/24.
Вероятность обнаружения Qd найдем, если согласно (9.82) и
(9.92) положим
E(S2 |Ях)= п2р\ D(S2 | яо
п°
12 *
Тогда получим
Qd= Q
С
п2р
УпЗ/12^
= 1 -Ф
С - п2р
где С определяется по (9.94).
В заключение приведем таблицу [43], в которой приводятся АОЭ
обнаружителя Вилкоксона по отношению к линейному и знаковому об¬
наружителям (табл. 9.6) при указанных в таблице помехах. В послед¬
ней строке приводится наименее благоприятное распределение поме¬
хи, ее ПРВ [43]
WH(x) = ~ ^ ^
4сг\/5
— 1.
5сг2 у
В табл. 9.7 приведены АОЭ непараметрических обнаружителей
по отношению к линейному оптимальному обнаружителю [49].
Таблица 9.7
Вид
обнаружителя
ПРВ помехи
Нижняя
граница АОЭ
Г аусса
Лапласа
Равномерная
Экспоненциальная
Знаковый
0,637
2,00
0,333
_
0
Вилкоксона
0,955
1,5
1,00
-
0.864
Фишера-Иэйтса
1,00
-
-
-
1.0
Ван дер Вардена
1,00
-
-
-
1,0
Кендалла
0,912
-
-
0,312
-
Спирмена
0,912
-
-
0,312
-
Непараметрические методы обнаружения сигналов
243
9.4. Двухканальные системы обнаружения сигналов
Обнаружители с двумя входами. До сих пор рассматривались об¬
наружители с одним входом. Однако на практике встречаются обна¬
ружители с двумя входами. Соответствующие алгоритмы могут быть
названы двухвыборочными или двухканальными. Такие обнаружите¬
ли можно разбить на два класса: 1 — обнаружители с одним входом
(сигнальным) и с опорным шумовым вторым входом; 2 — обнаружи¬
тели с двумя сигнальными входами.
Обнаружители первого класса полезны при испытаниях гипотез
на положительный сдвиг ПРВ. К первому классу, в частности, отно¬
сится двухвыборочная версия t-статистики Стьюдента, которая
асимптотически непараметрическая, сюда же примыкает обнаружи¬
тель Манна-Уитни (двухвыборочный обнаружитель Вилкоксона), а
также обнаружитель нормальных меток (normal scores test).
К второму классу относятся по существу различные корреляторы,
вычисляющие корреляцию между двумя входами. Эти обнаружители
находят применение в задачах обнаружения случайных сигналов с за¬
данной ПРВ. Сюда относится обычный асимптотически непарамет¬
рический коррелятор, р-обнаружитель Спирмена и т-обнаружитель
Кендалла.
Двухвыборочный обнаружитель Вилкоксона называется также
обнаружителем Манна-Уитни. Он предназначен для обнаружения по¬
ложительного сдвига ПРВ. На него поступает две последовательно¬
сти наблюдений; одна из них представляет шумовые отсчеты Хп =
= {^1,^2, ...£n} с функцией распределения F(Xn), а другая — это ряд
наблюдений, подлежащих испытанию Ym = {2/1,2/2, •••2/m} с функцией
распределения G(Ym).
Гипотезы и ее альтернативы записываются следующим образом:
Н0 : F(Xn) = G(Ym) для всех Хп и Ym;
tfx : F(Xn) > G(Ym) для всех Хп и Ym и F(Xn) > G(Ym)
для некоторых Хп и Ym. (9.95)
Сформулированное положение соответствует утверждению о не¬
обходимости обнаружить положительный сдвиг ПРВ наблюдений Ym.
Иначе говоря, рассматриваемый критерий Вилкоксона (Манна-
Уитни) предназначен для проверки гипотезы Но об однородности двух
случайных выборок: СьС2,---Сп и СъС^-Ст- Предполагается, что
элементы обеих выборок взаимно независимы и подчиняются непре¬
рывным распределениям. Основная гипотеза Я0 заключается в пред¬
положении, что обе выборки извлечены из одной и той же совокуп¬
ности, и, значит, функции распределения F(Xn) и G(Ym) случайных
244
Глава 9
величин С и С’ одинаковы. Эту гипотезу можно также выразить тож¬
деством
Н0 : Р{( < х} = Р{С < х}, |я:| <оо,
и воспользоваться для ее проверки ранговым критерием (без ограни¬
чения общности предположения, что т ^ п, в противном случае £ и
можно поменять местами).
Составим из величин Q и один общий вариационный ряд, т.е.
расположим ^ и в порядке возрастания их значений. В результате
получим последовательность типа
уухууухххх ...у х х
123456789 10 ...N-2 N-l N
где N = т + п, а х и у — члены вариационного ряда, принадлежащие
выборкам Q и CJ- соответственно. Снизу указаны порядковые номера
(ранги).
Обнаружитель предложен Вилкоксоном в 1945 г. и состоит из ал¬
гебраического ранжирования га + п доступных наблюдений и последу¬
ющего суммирования рангов наблюдений Х{ и сравнения полученной
статистики с порогом
S=itR*ifTo. (9.96)
*=i н0
Отсюда видно, что гипотеза Но принимается, если статистика пре¬
вышает фиксированный порог.
Поскольку в инженерной практике обычно применяется превыше¬
ние порога для альтернативы, то статистику можно модифицровать
и рассматривать в виде
771 Н0
s'=Y,RyjtT'- (9-97)
3 =1 Hi
где Ryj — ранги случайных величин в общем вариационном ряду.
Решение (9.97) эквивалентно решению (9.96).
Статистика Манна-Уитни имеет форму
771 П
(9.98)
j = l i=1 Но
где и(х) — единичная функция.
По (9.98) {7-обнаружитель подсчитывает число раз, которое на¬
блюдение хп превышает наблюдение ут и принимается гипотеза Я0,
когда эта статистика превышает порог Т2.
Непараметрические методы обнаружения сигналов
245
По той же причине, что и переход к (9.97), можно ввести новую
статистику
которая эквивалентна статистике U (9.98).
В своей работе Манн и Уитни показали справедливость соотно¬
шения
где статистика S' основана на рангах наблюдений Ym и определяется
по (9.97).
Для дальнейших расчетов необходимы среднее значение E(Sf \
Но) и дисперсия var(S' | Но). Эти параметры статистики S' имеют
вид [38, 49]
E(S' | Я0) = ^m(iV + 1); var(S" | Я0) = ^mn(iV + 1), (9.100)
где N = m + п.
Можно показать [49], что АОЭ обнаружителя Манна-Уитни по
отношению к обнаружителю Стьюдента (с t-статистикой) имеет вид
Таким образом, эффективность обнаружителя Манна-Утни состав¬
ляет 95,5 % эффективности оптимального параметрического обнару¬
жителя в случае гауссовской помехи. В случае негауссовской помехи
этот показатель может превысить единицу.
Пусть Хп = {ж1,ж2,...,жп} и Yn = {3/1,3/2,2/п} представля¬
ют собой случайные векторы, координаты которых суть независимые,
одинаково распределенные наблюдения, поступающие на два входа
двухканального обнаружителя. Если сигнал отсутствует, то Хп и Уп
состоят из отсчетов независимых СП. Если присутствует сигнал, то
координаты этих векторов состоят из отсчетов случайного сигнала в
аддитивной смеси с независимым СП в каждом канале. Таким обра¬
зом, при наличии сигнала два процесса на входе обнаружителя ста¬
новятся коррелированными.
U = тпп + [m(m + 1)/2] — S',
(9.99)
■ poo 1 2
A03My,t = 12cr2 / W2(u)du . (9.
(9.101)
В случае нормального распределения
Поэтому
АОЭму,* = 3/7Г = 0,955.
(9.102)
246
Глава 9
Проблема обнаружения формулируется следующим образом:
Н0 : ПРВ W0(Xn, Yn) гауссова при г = 0;
Hi : ПРВ VF0(Xn, Yn) гауссова при г < 0;
(9.103)
где Wi(Xn, Yn)|i=o,i — совместная ПРВ векторов Хп и Yn; г — ко¬
эффициент корреляции.
Допустим, это каждое наблюдение х имеет функцию распределе¬
ния F(x) со средним значением цх и дисперсией сг2, аналогично для
у имеем F(y) и \ху и сг2.
Коэффициент корреляции при гипотезе Hi имеет вид
г= Е[(х - цх){у - цу) \ Hi]
у
(9.104)
Если оба шумовых процесса имеют нулевые средние значения и
одинаковые дисперсии, равные erg, а у сигнала среднее значение равно
и неизвестная дисперсия сг2, то х = s + пь у = s + п2 и по (9.1)
находим
/т2
Г =
E[{s + щ - /Jis)(s + n2 - fj-s) ] Hi) _ -E[(s - Hs)2]
Vas + VoV^s + °0
При гипотезе Я0 получим
W0 = (Xn, Yn | Hq) = П^ехР
°i +
-K?+y?)
7s ^ a0
(9.105)
i—l
2a\
Аналогично при гипотезе Hi
^1(Xn,Y„|ff1)= J]——
f=\ 2n(a2 + a%)V 1 - r2
x exp
It
Г2)
(Xj-Hs)2 _ 2r(Xj - fj,s)(yi - fi,s) (Vi-fis)2
+ СГ2 a2 + a\
Без потери общности можно положить \xs = 0, тогда ПРВ Wi(Xn,
Yn) принимает вид
W1(Xn,Yn\H1)= J]
\ 2тг(сг2 + о1)\/\-г2
ехр
Х\ - 2 ГХгУг + у(
2{l - r2){a2 + al)
Упростим это выражение, учитывая, что a2 + а2 = <7q/(1 - г).
Тогда получим
W1(Xn,Yn\Hi)= П
^ 27г(<72 + CTq)\/1 — г2
ехр
x2j - 2rxiyi + yf
2(1 + r)al
Непараметрические методы обнаружения сигналов
247
В результате деления Wi/Wo находим ОП
A(X„,Y„) =
-п
~Л + a0 Wl-r-
: ехр
-xj - yj + xj - IrXiVi + yf
<72(1+г)
}■
-п
<^0
i=1 (^+CTo)Vl-r2
exp
г#2 + у? + rx2 + ryf -x\+ 2rXiyi - yf
TT %=
г=1 (ff2 +
: exp
2crg(i + r)
Г
2a$(l+ r)
(%i Vi)
Взяв логарифм, получим в случае, если справедлива гипотеза Яь
l(Xn, Y„)= 1пА(Х„, Yn) =
- nln
A°l + ^0 V1 - г2
2*2(1+г) Ё^+^)2>Г'-
Включая первое слагаемое и множитель у второго слагаемого в
величину порога, получим, что принимается гипотеза Hi, если
s = Ё (*<+ ^)2 > Г’
(9.106)
2=1
что представляет собой наиболее мощный обнаружитель Неймана-
Пирсона при испытании гипотез Я0 и Яь при условии все процессы
имеют нулевые средние значения.
Структурная схема обнаружителя,
реализующего алгоритм (9.106), изобра¬
жена на рис. 9.7 (ПУ —пороговое устрой¬
ство).
Найдем характеристики обнаруже¬
ния (Qo,Qd) данного обнаружителя. Вычислим среднее значение и
дисперсию статистики S (9.106) при гипотезе Я0:
Рис. 9.7
m
(0) _
= E(S I Но) = I яо) + 2Е(ХгУг I Но) + E(yf I Яо)]
2 = 1
2 nal,
(9.107)
так как E{xiyi | Но) = 0;
Do = DslHo = var(5 | Я0) = E(S2 \ Н0) - E2(S | Я0) =
= Е
+ у^2(хз+ Уз)21
2=1 j = 1
(2пСГд) = — 4n (Jq +
248
Глава 9
+ Y^Eiixi+Vifixj+yjf | Я0]+ УУ, E[(xj+ Vifjxj+yj)2 | Я0] =
i—lj — 1 i=lj=l
i=j ъФз
= п[Е(х* | Я0) + 6E(x2y2 | Яо) + E(yf \ H0)] + n(n - l)x
x[E(x2y2 | H0)+E(y2y2 | H0)+E(x2y2 \ H0)+E(x2x2 | Я0)]-4п2^ =
= 12nao + 4n(n - 1)ctq - 4n2crQ.
При вычислениях учтено, что
Я(®? | Яо) = E(yf | Я0) = 3ctq ;
E(x2y2 | Яо) = E(x2 | Щ)Е(у2 \ H0) = a04.
Следовательно,
£>0 = £>s|tf0 = var(5 I Яо) = 8nc>0. (9.108)
Среднее значение статистики S (9.106) при гипотезе Hi
тЫ = E(S | Hi) = £,[(4 + a2) + 2a2 + (a2 + a2s)\ = 2n{a20 + 2a2).
l~l (9.109)
Дисперсия статистики
n n
Di = £>S|Hl = var(5 | Hi) = + vMxi + Vi? I H^+
2 = 1 j-1
i=j
+ ^^E[{xi+ yi)2{xj + yj)2 | Hi)-[2n{al+ cr])2 = 3n(4cr2 + 2<rg)2+
i=l j = 1
*Фэ
+ n(n - l)[4(cr2 + <7g) + 8cr2(cr2 + erg) + 4cr4] - 4n2(2<r2 + erg) =
= 8n(2cr2 + erg)2.
По (9.106) замечаем, что статистика S представляет собой сум¬
му квадратов независимых и одинаково распределенных СВ, тогда со¬
гласно центральной предельной теореме при больших п эту сумму
можно считать асимптотически нормальной с параметрами ти Do
при гипотезе Н0 So ~ N(m^°\Do) и и Di — при гипотезе Hi
Si ~ N(m^\Di). Поэтому ВЛТ
Т — 2п(То
у/8гшJ
(9.110)
(Т -тп^\
Qo = a = P{S > Т | Яо} = Q f- = 1 — Ф
Непараметрические методы обнаружения сигналов
249
Аналогично находим вероятность обнаружения
Qd= P{S>T\H1}= Q
m
(i)
VD~i
= 1 -Ф
T - 2n(al + 2a2sy
(<7o + 2aj)V8n .
Подставляя сюда значение порога Т, определяемого по (9.110):
Т = cTo\/8nQ_1(a) + 2псгд = ^о\/8пФ_1(1 — а) + 2ctq п,
получим вероятность обнаружения в виде
Qd= Q
Q 1(a)~ yjbuj\!al
1 + 2сг2/(т g
= 1 -Ф
Ф Х(1 — а) - у/2паЦа^
1+ 2 оЦо1
Е
г=\
(9.111)
^пуТ-^
Рис. 9.8
(9.112)
К двухканальным системам относится так¬
же коррелятор [90,91]. Алгоритм коррелятора
при гипотезе Hi имеет вид
п
Sk = Е XiVi ^ Т'
1=1
Схема коррелятора изображена на рис. 9.8.
Статистика Sk (9.112) выражается через сумму п независимых и
одинаково распределенных СВ. При значительных объемах выборки
п СВ
- E(Sk)
£
л/varS*
согласно центральной предельной теореме имеет нормальное распре¬
деление с нулевым средним значением и единичной дисперсией.
При обнаружении сигнала рассматриваются следующие гипоте¬
зы:
Н0: Хп и Yn — независимые с нулевым средним значением гаус¬
совские СВ, каждая с дисперсией
Hi\ Хп и Yn — гауссовские СВ с нулевым средним значением,
состоящие из сигнала с дисперсией сг2 и аддитивного шума с диспер¬
сией erg.
Средние значения и дисперсии статистики Sk имеют вид
E{Sk | Я0); var(Sfc | Я0) = rurg;
E(Sk | Hi) = na2s\ var(Sk \ Hi) = n(ag + 2crg<r2).
В результате находим ВЛТ Qo = a
T \ . „ f T
Qo = a — P{Sk >T\H0}= Q
= 1 -Ф
CrgVn
(9.113)
250
Глава 9
Вероятность обнаружения
Qd = P{Sk > Т | Hi} =
- Q
naz
= 1 -Ф
naz
Vn(ao + 2(jl°V)
Выражая из (9.113) порог T через В/IT а, получим
Г= <rgVn®-1(l - а)
или
Т = a\\fnQ 1(а).
Тогда вероятность обнаружения принимает вид
Qd = Q
Q г(а) - (°s/vo)V™
VI+2 (c^/ag)
= 1-Ф
Ф *(1 - а) - (q2/qg)Vn
х/ГТ2(^2)
(9.114)
Сравним коррелятор с оптимальным обнаружителем Неймана-
Пирсона. По (9.111) и (9.113) соответственно получим
Ф-1(1 -a)~ \F2n\{o2slol),
l+2((T2/(jg)
®-1(l-Qd) =
1( Ф \1-а) - y/2^(a2s/al)
ф (1-«й)= ГТадТЛ) '
Приравнивая правые части этих соотношений, получим равенство
2п2 = щ. Следовательно,
пг
АОЭ2 1 = lim
’ n-1 —> оо
2.
1^°° П2
П<2 —> оо
Таким образом, асимптотически коррелятор в два раза меньше тре¬
бует объема выборки, чем оптимальный обнаружитель при одной и
той же надежности (Qo,Qd)•
В том случае, если средние значения и дисперсии гауссовских
сигнала и помехи неизвестны, то задача обнаружения сигнала (9.95)
формулируется как задача проверки гипотезы Я0: г = 0 против аль¬
тернативы Hi\ г > 0.
Н0 : ПРВ Wo(Xn, Yn) — гауссова при г = 0,
цх,цу,а1,ау неизвестны;
Hi '. ПРВ Wi(Xn,Yn) — гауссова при г ^ 0,
(9.115)
цх,цу,сг1,сгу неизвестны.
Здесь
W0(Xn,Yn \Н0) =
Непараметрические методы обнаружения сигналов
251
(27Г ст.,
W1(Xn,Yn\H1) =
1
1 \
^*4’nSA“
(27г)п[ог|сг2(1 - Г2)]”/2
(9.116)
2
При гипотезе Я0 методом максимального правдоподобия нахо¬
дятся оценки параметров ПРВ Wo
^ n 1 п
Ах = Ay =
2=1 2=1
^ - А*)2: ^ EO/i - Ay)2-
2=1
п Г -
2 = 1
В результате ПРВ W0(Xn,Yn | Я0) принимает вид
Ж0(ХП,УП |Я0) =
[<^]"/2ехр{ 2fj
(27т)г
Аналогично получаем ПРВ
^(Xn.Ynl Нг) =
xi Аж \ ^ (Vi fay
Ох )
(27г)п[ст2(Х2]п/2 6ХР 1 2(1
1 71 / Л \ ^
1 [ xi~ Р>х\
-r2)^[v
где fix, fiy, а\, a2, г — оценки параметров ПРВ (9.116) методом мак¬
симального правдоподобия:
А х
^Х> h-kt*
2=1 2=1
“ А^)2; ^у = _ Аг/)2; (9.117)
Ti TI
2=1 2=1
* = -tV f>i - A*)(yi - Ay)- (9-118)
^ nax0y f^x
После деления ПРВ Wi(Xn,Yn | Hi) на Wo(X„,Yn | Но) полу¬
252
Глава 9
чим ОП A(Xn,Yn). Поскольку соотношения для оценок совпадают,
искомое ОП принимает вид
A(Xn,Yn)= (l-r2)-"/2. (9.119)
Таким образом, принимается гипотеза Яь если
Л(ХП, Y„) = (1 - г2)-"/2 > Гь (9.120)
Это правило эквивалентно двум другим:
Окончательно получаем, что принимается гипотеза Яь если
г >\^Jl-(l/T1)Vn\= Т. (9.121)
Если учесть значение оценки для коэффициента корреляции
(9.118), то вместо (9.121) получим
\
>Т. (9.122)
Таким образом, алгоритм обнаружения основан на сравнении вы¬
борочного коэффициента корреляции г с порогом Т.
К двухканальным обнаружителям относится также коррелятор
совпадения полярностей (КСП, или КП) (англ. РСС — polarity coinci¬
dence correlator). Данный коррелятор использует знаковый алгоритм.
Принимается решение, что присутствует сигнал (гипотеза Hi), если
71
Skn = Е sgn Xi sgn Vi ^ T> (9.123)
2=1
где Xi и yit i = l,n, — две последовательности наблюдений, которые
состоят из одного шума Xi = vu\ yi = v2% или из сигнала и аддитивно¬
го шума Xi = s;+ vii, yi = s*+ V2i• Здесь sif vu, v2i по предположению,
случайные независимые стационарные последовательности с одним и
тем же законом распределения. Предполагается также, что соответ¬
ствующие ПРВ имеют нулевую медиану и симметричны относительно
начала координат.
Непараметрические методы обнаружения сигналов
253
Проверке подлежат гипотезы
Я0 • Xi = Уц, Ifi — V2i, . -— v
i= l,n. (9.124)
ail ■ ^ + ^1г» 2/г — ^2г?
При гипотезе Я0
P{sgn ж* sgn у» = + 1 | Я0} = P{xi > 0,у* > 0 | Я0}+
+ P{Xi < 0,Уг < О | Но} = P{Xi > О | Н0}Р{Уг > 0 | Я0} +
+ P{Xi < О I Ho}P{Vi < О I Яо} = (1/2)2 + (1/2)2 = 1/2.
Аналогично находим
P{sgnxisgnyi = -1 | Я0} = 1/2.
Если справедлива гипотеза Hi, тогда [49]
P{sgnzisgnyi = + 1 | Нг} = Р{х> > 0,у, > 0 | Ях}+
/ОО
P{Vu > -U,V2i > -U}Ws(U)dU+
-ОО
/ОО
P{VLi < -U, V2i < -U}WS{U) dU. (9.125)
-OO
Поскольку оба канала независимы и распределение шума сим¬
метрично относительно начала координат, то вероятности под знаком
интеграла можно преобразовать к виду
P{Vu > -U,V2i > -U} = P{Vyi > -U}P{V2i > -U} = [1 -Fv(-U)}2.
Аналогично получаем
P{VU < -Vi,Vh < -U} = P{VU < -Ui,V2i < -U} = F2(-U).
Тогда no (9.125) находим
/ОО
[l-Fv(-U)]2Ws{U)dU+
-OO
/OO POO
Fy(—U)WsdU = / 1-2FV(-U)+ 2Ffr(-U)Ws(U)dU =
-oo J — OO
/OO
1 - 2Fv{-u) + 2Ffr(-U)Ws(U) dU =
-OO
[1 - 2FV(X) + 2F2(X)]WS(X) dX.
Определим величину
/ОО
[1 - 2FV(X) + 2F2(X)]Ws(X) dX. (9.126)
-OO
f —OO
pOO
J
J —(
254
Глава 9
Поскольку Fy(x) имеет нулевую медиану, эта функция распределения
может быть представлена в виде
где <2(0) = 0 и Q(А) имеет положительные или отрицательные зна¬
чения, если Л положительно или отрицательно соответственно. Ис¬
пользуя это определение, найдем выражение для Р+ в другой форме:
Таким образом, для любого ненулевого сигнала, присутствующе¬
го в том и другом каналах, величина Р+ больше, чем 1/2.
Заметим, что соотношение для Р+ (9.128), используя (9.127),
можно записать в виде
что отличается от [43, формула (2.173)].
Распределение вероятностей для статистики 5кп (9.123) мож¬
но найти, учитывая независимость каждого сомножителя в (9.123).
Таким образом, получим
а = P{SKn >Т\Н0}= £ Ск( 1/2)к(1/2)п-к. (9.130)
Это соотношение и равенство Т = V -пр могут быть использованы
для нахождения порога Т, чтобы получить желаемую ВЛТ.
При Р = Р+ и уже определенном пороге Т можно найти веро¬
ятность обнаружения.
Пример 9.12. Пусть
Fy(А) - Fy{0) + Q(А) - - + <2(А),
(9.127)
/°° г 1 1
1 — 2 • - — 2Q(A) + 2 • - + 2Q(A) + Q2(A) We(A)dA =
1 f°° Г ll
P+ = - + 2 / FV(A) - - Ws(A)dA, (9.129)
J —OO .
P{Skn = A: - np} = C„pkqn k = b(k,n,p)
тогда ВЛТ a = Qo принимает вид
n
при -1/2 < и < 1/2;
при других v,
при -1/2 < s < 1/2;
при других s.
Непараметрические методы обнаружения сигналов
255
Тогда
FV(U)= [ WV(X) dX = V + 1/2.
J-1/2
Сравнивая полученную функцию распределения с (9.127), нахо¬
дим Q{V) = V. Следовательно, по (9.128) [также, как и по (9.129)]
вычислим Р+:
1/2 -I 2
'2л _ 1 , ^ \3
Р+ = - + 2 / X dX = - + -Л'
2 3
1/2
2
Допустим, что установлена ВЛТ а = 0,25 и п = 10, тогда
10 /1\п
«=ЕсМо <°>25-
k=Tf ' '
По табл. [49, табл. В-1] находим, что a = 0,1719 при Т' = 7.
Ю / -j \ 10 1 •• у/-
Е^о ( 2) = 210 (12° + 45 + 10 + i) = 1024 = °’1718175-
к=7 ^ '
Тогда порог Т = Т1 - пр = 7 — 10 • | = 2.
Вероятность обнаружения
10 /о\ ^ /1 \ Ю — к
Е СЦ§)
к=Т'=7 ' '
27 128 258
= 3^(120 + 45 ■ 2 + 10 ■ 4 ♦ 8) = = 0,559.
При значительных объемах выборки п статистика
SW = Suk-E(Suk) (9 131)
\/var 5Пк
подчиняется нормальному распределению с нулевым средним значе¬
нием и единичной дисперсией.
Среднее значение и дисперсию статистики Suk можно найти, ес¬
ли записать ее в виде
п
5пк=
г=1
где Wi — независимые одинаково распределенные СВ. Тогда
E(Suk) = nE(Wi)\ var Suk — гг var
причем
E{Wi)= (-l)(l-p)+ (+1 )p= 2p-l-
256
Глава 9
E(W?) = (-l)2(l -р)+ (+1 )2р= 1;
var Wi = E(Wf) - E(Wi) = 4p(l -p),
когда p = 1/2 при гипотезе Я0 и р = р+ при гипотезе Щ.
При гипотезе Я0 E(Suk | Щ) = 0; var(5nx | Но) = тогда ВЛТ
1 /*°° 2
Qo = а = Р{5ПК > Т | Я0} = -= / е^ /2” dU, (9.132)
л/27гп 7т
(9.133)
или
а = Q(T/y/n) = 1 - Ф(Т/у/п).
Если справедлива гипотеза Яь то
£7(Wi | ЯО = 2р+ - 1; var(Wi | Щ) = 4р+(1 - р+).
Тогда вероятность обнаружителя
Qd = P{Suk >Т\Н1} =
= Q
Т — п(2р+ - 1)
Ф
Т — п(2р+ — 1)
у/4пр+(-р+)
i/4np+(l -J3+)
причем порог Т находится по (9.133):
Т = y/nQ~1(a) = ^Ф_1(1 -о).
Тогда
пФ_1(1 — а) — п(2р+ — 1)
(9.134)
(9.135)
Qd = 1 - Ф
1 -Ф
Л/4пр+(1 -р+)
Ф-1(1 - а) - уп(2р+ - 1)
2\/р+(1 -Р+)
(9.136)
Пример 9.13. Найти порог Т и вероятность обнаружения при
заданной ВЛТ 0,25 в условиях примера 9.12.
Решение.
а = 1 - Ф(Т/у/10) = 0,75.
Отсюда при Ф(Т/%/10) = 0,75 по таблице нормального распределения
[38, 58] находим Т/y/lO = 0,6745; Т - 2,13. Тогда по (9.134) получим
Qd= 1 — Ф ^2,13J^_1/3j = 1 - Ф(—0,342) = Ф(0,342) = 0,634.
В сравнении с примером 9.12 получили большую вероятность обна¬
ружителя, отчасти по той причине, что использовано значение ВЛТ
более близкое к заданному.
Непараметрические методы обнаружения сигналов
257
Поскольку статистика 5пк имеет биномиальное распределение
при любых ПРВ сигнала и шума, то обнаружитель (КСП) является
непараметрическим в данной проблеме проверки гипотезы.
Для того чтобы сравнить по эффективности КСП и другие обна¬
ружители, необходимо вычислить значение Р+ по формуле (9.126).
В [93] показано, что в качестве Р+ можно приближенно принять
значение
Р+= 1/2 + 2(F^)42, (9-137)
где ^(0) = ВД|А=о = J^(A)|a=o. a Fv(А) - ПРВ шума.
При гауссовом шуме с нулевым средним значением
F'( 0) = 1/<70ч/27г.
Тогда по (9.137) следует
1 1 ст2
- +
7г а,
.2 *
(9.138)
Подставляя это значение Р+ в (9.136), получим
Ф-1(1 - а) - у/пЦ2/ж)(о1/сг1)
Qd = 1 - Ф
1 -Ф
Ф_1(1 — а) —
2у/пз о\
.2 1
(9.139)
В последнем случае предполагается, что o2sja\ <С 1, поэтому знаме¬
натель заменяется на единицу.
Согласно определению, АОЭ представляет собой предел объемов
выборки двух обнаружителей при которых каждый обнаружитель дол¬
жен обладать одной и той же ВЛТ Qo = а и вероятностью обнаруже¬
ния Qd. Приравнивая вероятности обнаружения двух обнаружителей,
найдем отношение объемов выборки.
Например, сравним эффективность полярного коррелятора
(КСП) с вероятностью обнаружения (9.139) и эффективность обыч¬
ного коррелятора с вероятностью обнаружителя (9.114). Тогда полу¬
чим равенство Qd(ni) = Qd(n?>) или
1 -Ф
Ф-\1-a)
л/1 + 2 К/со)
= 1 -ф
Ф_1(1 -а) -2
у/Щсг1
7Г О,
0 J
Пренебрегая в знаменателе левой части величиной 2а2/а^ п0
сравнению с единицей (о2/&о < 1). получим равенство
(^2K2)V^= (2 V^/*){°2s/g2o\
258
Глава 9
или П1/П3 = (2/-7г)2. Тогда АОЭ обнаружителя на основе КСП по
сравнению с корреляционным обнаружителем
АОЭ ксп, к = (2/тг)2 = 0,405.
Таким образом, при гауссовских помехах обнаружитель на основе
КСП уступает корреляционному обнаружителю.
Пример 9.14. Найдем эффективность КСП по сравнению с оп¬
тимальным по Нейману-Пирсону обнаружителем. Для этого прирав¬
няем вероятности обнаружения Qd(n3) = <3d(n2), когда Qd{n2) нахо¬
дится по (9.111). Приходим к равенству при 2оЦо\ < 1
V^^/crg) = 2(\/пз/7г)(а2/erg),
или П2/П3 = (2/7г)2/2 = 2/тг2 = 0,202.
АОЭксп,нп = 2/7г2 = 0,202.
Коррелятор совпадения полярностей существенно уступает по
эффективности оптимальному обнаружителю стохастического сигна¬
ла.
Иная картина наблюдается, если помеха отлична от гауссовской.
Например, если помеха лапласова, тогда по (9.137) получим
Р+ = 1/2 + tf/a*).
Тогда, подставляя это значение Р+ в (9.136), получим вероятность
обнаружителя в виде
Qd = 1-Ф
ф-1(1_а)_2^2Д72
а-Ф
-G
2 1
Ф (1—а) — 2у/пз
ио J
2ч/1/4 -И/а2)2
Из равенства Qd(n3) = <5а(пг), где Qdfa) находится по (9.114),
получаем эффективность КСП по отношению к коррелятору
1 _ ф{ф-1(1 _ а) _ 2у^(<т2/а2)} = 1 - ф{ф-1(1 - а) -
Отсюда находим щ/п3 = 4.
Таким образом, АОЭ КСП по отношению к коррелятору при ла¬
пласовой помехе АОЭксп,к = 4.
Аналогично можно показать, что АОЭ КСП по отношению к оп¬
тимальному для гауссовской помехи обнаружителю, когда действи¬
тельная помеха лапласова имеет вид [43, 93]
АОЭксп,нп = 3,5.
Таким образом, КСП более эффективен по сравнению с опти¬
мальным обнаружителем стохастического сигнала в том случае, если
нарушаются условия его оптимизации (меняется распределение по¬
мехи).
Непараметрические методы обнаружения сигналов 259
9.5. Ранговые алгоритмы обнаружения
стохастического сигнала
Критерий Спирмена. Пусть имеется случайная выборка (Xi,Yi),
...,(Xn,Yn) из генеральной совокупности двумерной непрерывной СВ
(X, Y) с функцией распределения F{t,r), a Fx(t) и Fy{r) — функции
распределения СВ X и Y соответственно.
Если СВ X и Y имеют нормальные распределения, то для провер¬
ки статистической гипотезы об их независимости.
Я0: F(t,r)= Fx(t)FY{r) (9.140)
можно использовать выборочный коэффициент корреляции г.
Если о распределениях СВ X и Y ничего не известно, то для
проверки гипотезы Щ (9.140) при альтернативе
Щ : F(t,r) ^ Fx(t)FY(r) (9.141)
используется ранговый критерий Спирмена.
Обозначим через R(xi) и S(yi) ранги элементов Xi и yit i = l,n.
В частности, R(xi) = 1, если Xi — наименьшее по величине значение
xit г = 1,гг; R(xi) = 2, тогда Xi — второе по величине малости значе¬
ния Xi и т.д.; наблюдение Xi с наибольшей величиной имеет ранг гг.
Ранговым коэффициентом корреляции Спирмена называется СВ
[49]
/о(Х„, Y„)
\
ljT(R(Xi)-R)(S(yi)-S)
i=1 = . (9.142)
П • 1
2—1
Статистика (9.142) является выборочным коэффициентом корреля¬
ции последовательности рангов.
Согласно определению рангов
яЛ£д(*).1£\=1!!(!!±2)=!11Л (9.143)
п ' п ' п 2 2
2—1 2—1
Аналогично
^Е5^)= (9-144)
п 2
2 — 1
где использовано равенство [59, 87]
^,= п(п+ 1) (9145)
г=1
260
Глава 9
Выборочная дисперсия рангов имеет вид
2
1 \ lv'A n+lV (n+ l)(n- 1)
Db=-Вжх,)-д)2 = -Е(>-—j = -—£—-
i=l г—1 4
(9.146)
причем здесь использовано соотношение [59, 87]
га(га + 1)(2гг + 1)
«■ —« ■
п
Е>2
Подставляя среднее значение R и S и дисперсии D# и Ds в
(9.142), получим р-статистику Спирмена в виде
1 ,е—л (-п, \ TI + l\ (r>f \ 41+ 1
" = »(»+1)(,,-1)/12 Е (ад 2“) {S(v<) ~ —
2 1 (9.147)
Другую форму р-статистике Спирмена можно придать, если вве¬
сти вспомогательную величину рт [49]
РТ = £{[Д(а*) -R]~ №) - 5]}2, (9.148)
i= 1
причем рт можно представить в виде [49]
рт = 1п{п2 - 1) - ЭФО - R] - [S(yi) - 5],
i=l
В результате получим
Р= п(п2 — 1)" (9Л49)
Обнаружитель, использующий статистику рт вместо р-статисти-
ки Спирмена, называется обнаружителем Хотеллинга-Пабста (Hotel-
ling-Pabst). Преимущество рт-статистики перед р-статистикой в том,
что первая требует меньше арифметических операций. Заметим, что
[49] рт велико, когда р мало, и наоборот.
Далее можно показать, что [94]
р = р(х„, Y„) = 1 - -^26-_- ) Y^lRixi) - 5(ш)]2. (9.150)
' г=1
Без ограничения общности можно считать, что значения пар на¬
блюдений (xi.yi), г = 1,га, пронумерованы в порядке возрастания их
элементов, тогда выполняются неравенства х\ < х2 < ... < хп. В этом
случае реализация ri ранга Д(ж») равна г, г = 17га, и значение р(хп, уп)
Непараметрические метоАы обнаружения сигналов
261
статистики p(Xn,Yn) вычисляется по формуле [38]
б
/о(х„, у„) = 1
п(п2 — 1) ^
2 = 1
(9.151)
где Si — реализация ранга S(yi), i = 1 ,n.
Чтобы найти среднее значение и дисперсию р-статистики Спир¬
мена, преобразуем правую часть (9.147) [49]:
Р =
12
71+ 1
п(п2
.2=1 2 = 1
п(п + 1)2>| 12 \л/ ч п(п+1)2
+^г^}=--4-^+
п(п + 1)21 12 ^ ч ч 3(п+1) ,
+ -Ч-1} = М^Т) Е й<*‘№) - ~^ГГ- (9Л52>
У 4 7 2=1
В силу независимости рангов R(xi) и S(yi) получим
Е
^2 R(xi)S(yi) | Яо
2=1
= nE[R{xi) | H0]E[S(yi) | Я0]; (9.153)
var^T[R(xi)S(уi) | Я0] = пуаг[Д(а:<) | Я0] var[S,(2/i) | Я0]н
2=1
+ n(n - 1) cov[P(xi)it!(xj) I Яо] COy[S(yi)S(yj) | Я0]. (9.154)
Если справедлива гипотеза Я0, то ранги равновероятны, следо¬
вательно, [49]
E[R{Xi) | Я0] = E[S{yi) \ Я0] = - =
Г) '
п + 1
(9.155)
2=1
E[R2(xi) | Я0] = E[S2(yi) | Яо] = - f^i2 = (п + 1){2п-+Л-
г) О
(9.156)
2 = 1
Тогда
var[R(Xi) | Я0] = var[5(W) | Я0] = (гг2 - 1)/12.
(9.157)
Если справедлива гипотеза Я0, то ковариация рангов принимает
вид [49]
cov[R(xi)R(xj) | Я0] = E[R(xi)R(xj) | Я0] - E[R(xi) | Я0]х
262
Глава 9
1 п п 1 / П \ ^
xE[R(xj) | Я0] = = (53*) > (9Л58)
г=1 j=l \г—1 /
так как га(га - 1) — равновероятная комбинация рангов. Первое сла¬
гаемое (9.158) преобразуется к виду
п п / п \ 2 п
ЕЕ^' = (Еч -Е*2>
г=1 j=l \г=1 / г=1
В результате получим [49]
(п \ 2 п /П\2
Еч -nEi2-(n_1)(Ем
| ^oj = —
i
1 "oi ■ 5(n-i)
га2(га + l)2 ra2(2ra + l)(ra + 1)
\i=l
ra2(ra ~ 1)
П + 1
12
. (9.159)
Таким образом, окончательно по (9.152) получим
Щр | Яо) = 12п£№,) | Я,1ВДВ) | Я„1 _ 30^ = 0. (9 т)
var(p | Яо) = var
144
га2(га2 — l)2
var
ra(ra2 — 1) n — 1
—-^*(*‘№>1/7» =
1
П — 1
(9.161)
E^(*i)5(y4) |Я0
.2 = 1
При га > 0 используется тот факт, что СВ z = ру/п - 1 асимпто¬
тически имеет нормальное распределение с нулевым средним значе¬
нием и единичной дисперсией [iV(0,1)].
Пример 9.15. Проверить гипотезу Я0 (9.140) при альтернативе
Hi при объеме выборке га = 10 и ВЛТ Q0 = а = 0,1.
Решение. По таблице р-статистики Спирмена [49] находим зна¬
чение порога Ti = 0,4424. Если использовать нормальную аппрок¬
симацию, тогда
а
г оо
= j N(0, a) dx = Q(T/cr) = 1 - Ф(Т/а).
При этом Т/а = Ф_1(1 - а) = Ф_1(0,9) = 1,282, полагая сг2 =
= var(p | Н0) = 1 /(га - 1) = 1/9; 1/а = 3, получим Т = 0,4273.
Пример 9.16. Наблюдения со своими рангами при га = 10 заданы
табл. 9.8.
Принять решение, какую из гипотез следует отвергнуть.
Непараметрические методы обнаружения сигналов
263
Таблица 9.8
г
1
2
3
4
5
6
7
8
9
10
Xi
5,2
11
9,1
7,3
3,2
6,1
1.2
8,6
7
4,1
R(xi)
4
10
9
7
2
5
1
8
6
3
Vi
3,2
7
8
6,4
6,1
10
4,2
7,2
5,1
3,3
S(Vi)
1
7
9
б
5
10
3
8
4
2
Решение. Вычислим величину р-статистики Спирмена по фор¬
муле (9.152)
12 y-"4 т-»/ \ п/ \ 3(10+ 1)
р = 10(10-- 10-1 =
12(4 + 70+ 81+ 42+ 10+ 50+ 3+ 64+ 24+ 6) 33
" 990 У
= 4,29 - 3,67 = 0,62.
Ранговый критерий Спирмена отклоняет гипотезу Но, если
\р\ > Т. В данном случае выполняется условие 0,62 > Т = 0,4424.
Поэтому следует принять гипотезу Н\.
Замечание. В общем случае ранговый критерий Спирмена откло¬
няет гипотезу Но на уровне значимости а, если
И > Pl-a/2, (9.162)
где pi-a/2 — квантиль уровня 1 - а/2 распределения СВ p(Xn, Yn)
при истинности гипотезы Я0.
Пример 9.17. Пусть наблюдения и их ранги заданы табл. 9.9
(п = 10).
Таблица 9.9
г
1
2
3
4
5
6
7
8
9
10
X 2
1.5
-0,7
-2,1
0,6
1.1
3,4
0,2
-1
-0,4
-2,3
R{xi)
7
4
8
3
6
10
1
5
2
9
Vi
2,4
0,4
-2,1
-3
-0,6
1.7
1.9
-0,2
2,3
0,5
S(Vi)
9
2
7
10
4
5
6
1
8
3
Следует отметить, что из-за наличия отрицательных величин в
выборках перед ранжировкой следует образовать вариационный ряд
из абсолютных значений наблюдаемых величин. Например, ранг
Уз - -2,1 равен R(y3) = 7, а ранг у9 = 2,3 равен R(yQ) = 8. Требу¬
ется принять решение в пользу той или иной гипотезы.
Решение. Вычислим величину р-статистики Спирмена
12(63 + 8+ 56+ 30+ 24+ 50+ 6+ 5+ 16+ 27)
р = — ' _ 3 67 =
н 990
= 3,45-3,67= -0,22.
264
Глава 9
Поскольку в данном случае \р\ < Т = 0,4424, то принимается гипо¬
теза Я0.
Пример 9.18. Три способа вычисления р-статистики Спирмена.
Пусть наблюдения (реализации) пары СВ X и Y (п = 10) имеют
вид табл. 9.10.
Таблица 9.10
Xi
-1,63
1,11
1,15
-1,93
0,38
-1,08
-0,31
0,60
0,12
0,92
Vi
0,54
0,88
-1,21
0,89
-0,64
-0,21
0,08
-0,74
0,79
0,14
Проверить при уровне значимости (ВЛТ) a = 0,05 гипотезу Я0
о независимости СВ X и Y.
Решение. Найдем вначале значение р-статистики Спирмена тре¬
мя способами.
Во-первых, расположим каждую из последовательностей х\ и yi
в порядке возрастания значений (табл. 9.11 и 9.12).
Таблица 9.11
i
1
2
3
4
5
6
7
8
9
10
Xi
-1,93
-1,63
-1,08
-0,31
0,12
0,38
0,60
0,92
1,11
1,15
Таблица 9.12
j
1
2
3
4
5
6
7
8
9
10
Уз
-1,21
-0,74
-0,64
-0,21
0,08
0,14
0,54
0,79
0,88
0,89
Тем самым определяются ранги наблюдений.
Сначала воспользуемся формулой (9.151), для чего под после¬
довательностью чисел г = 1,10 подставим ранги соответствующие
наблюдениям yj[-\ и их ранги S(yj) (табл. 9.13).
Таблица 9.13
i
1
2
3
4
5
6
7
8
9
10
Vi
0,89
0,54
-0,21
0,08
0,79
-0,64
-0,74
0,14
0,88
-1,21
S(Vi)
10
7
4
5
8
3
2
6
9
1
Производим расчет по формуле (9.151):
ЛГ Ю
О - (7-2)»+(4-3)4
+ (5 —4)2+ (8 —5)2+ (3-б)2+ (2 —7)2 + (6 —8)2+ (9-9)2+ (1-Ю)2] =
= 1-^(81+25+1+1+9+9+25+4+0+81) = 1 — 6Q^6 = -0,4303.
Непараметрические методы обнаружения сигналов
265
Таблица 9.14
R{xi)
2
9
10
1
б
3
4
7
5
8
S(Vi)
7
9
1
10
3
4
5
2
8
б
Чтобы вычислить величину р-статистики по формуле (9.150), соста¬
вим последовательность рангов наблюдений табл. 9.14.
В результате по формуле (9.150) получим
Р = 1-7^[(2-7)2+ (9-9)2+ (Ю-1)2+ (1-10)2+ (6-3)2 + (3—4)2+
9901
= 1
990
+ (4 - 5) + (7 - 2) + (5 - 8) + (8 - б)2] =
[25 + 0 + 81 + 81 + 9 + 1 + 1 + 25 + 9 + 2] = -0,4303.
Наконец, воспользуемся формулой (9.152):
12 А N 3(n+ 1)
Р =
п(п2
—— '%2R(xi)S(yi)
' i=1
n-1
= 7^(14 + 81 + 10 + 10 + 18 + 12 + 20 + 14 + 40 + 48) - ^ =
990 ’ 9
= 3,23636 - 3,66667 = -0,4303.
По [49, табл. В-8] при a = 0,05 находим порог Т = 0,5515. Сле¬
довательно, \р\ = 0,4303 < 0,5515, и следует принять гипотезу Я0 о
независимости СВ X и Y, или, что то же самое, — сигнал отсутству¬
ет. Аналогичный результат получим, используя [38, табл. 6.10,а]: при
a = 0,048 порог Т = 0,5636.
Двухвыборочный т-обнаружитель Кендалла. Коэффициент ран¬
говой корреляции т Кендалла основан на двух последовательностях
данных наблюдения Хп \л Yn, каждая из которых состоит из п со¬
ставляющих:
Хп — 5 * * • 5 Хп } , Yn — {2/1 , У2 , . • . , Уп } •
(9.163)
Каждая из последовательностей ранжируется сама по себе, в ре¬
зультате находится последовательность рангов
{Rx 1} Rx2 5 • • • J Rxn\ « {Ryll Ry2i • • • 5 Ryn\ •
(9.164)
Пусть первая пара рангов будет Rx 1, Rx2. Если два ранга слева
направо возрастают в этой паре, то этой паре придается метка + 1, но
если убывают ранги в паре, то даётся метка —1 для этой пары. Такая
же процедура осуществляется и для пары рангов Ry 1, Ry2. Ранговая
метка х-пары умножается на ранговую метку у-пары. Если метки у
х-пары и у-пары совпадают по знаку, то приписывается в результате
умножения обобщенной метке величина +1, если у х-пары и у-пары
266
Глава 9
метки разного знака, то обобщенной метке приписывается -1. Затем
ранг Rx 1 образует пару с Rx3, a Ryi с Ry3. Процедура продолжается,
пока Rx 1 и Ryi не будуи сравнены с каждым из последующих рангов.
Во втором этапе такое сравнение осуществляется при начальных ран¬
гах Rx2 и Ry2, и последующих. После того как п(п — 1)/2 возможных
пар получили свои метки, все метки складываются со своими знаками.
Обозначим сумму меток через S и пусть Р и Q будут соответствен¬
но чило положительных и отрицательнах меток, тогда S = Р — Q и
коэффициент ранговой корреляции т Кендалла записывают в виде
то согласно (9.165) —1 < т < 1.
Пример 9.19. Пусть имеются две последовательности наблюде¬
ний Х3 = {xi,x2,x3} и У3 = {у1,у2,уз} и определены ранги каждого
наблюдения:
xi х2 х3 yi у2 уз
2 3 13 12
Рассмотрим первую пару xi~x2, их ранги идут в порядке роста,
следовательно этой паре приписывается метка +1. У первой пары
2/1—2/2 аналогично приписывается метка —1 (ранги идут в убывающем
порядке). В результате первым парам вместе приписывается метка
(+1)(-1) = -1. Таким образом, образуется п(п - 1)/2 = 3 обоб¬
щенных пар:
Получаем сумму меток S = -1. Тогда коэффициент корреляции
Кендалла т = S/n{n - 1)/2 = -1/3 = -0,333.
В общем случае при наличии последовательности рангов (9.164)
коэффициент ранговой корреляции т Кендалла выражается в виде
т = S/n(n - 1)/2 = (Р - Q)/n(n - 1)/2. (9.165)
Поскольку
max£ = п{п - 1)/2; S = -п{п - 1)/2,
-| ft ft
Т = n(n- 1) 53 Esgn (Rxi - R*i)s3n (Ryi - Ryi)- (9-166)
n n
1=1 j=l
гфз
Непараметрические методы обнаружения сигналов
267
Если результаты ранжирования можно записать в виде подста¬
новки
1 2 3 (9.167)
Г1 Г2 Г3 ... гп) '
где и — порядковый номер (по второму признаку) того отсчета, ко¬
торый по первой серии имеет номер г. Тогда коэффициент раговой
корреляции т Кендалла примет вид [38]
т = n(n- 1) S Е sgn (ri - ГЛ- (9Лб8)
Пример 9.20. Рассмотрим таблицу рангов примера 9.16.
Таблица 9.15
I
R(xi)
R(yi)
2
10
7
б
5
10
10
3
2
Согласно примеру 9.19 при АВ(4; 10) по Xi имеет метку +1, па¬
ра ВС(10;9) — метку -1 и т.д. Пара АВ(1;7) по yi имеет метку
+ 1. Таким образом, обе пары по х\ и по yi имеют обобщенную
метку (+1)(+1) = +1 и т.д. Составим таблицу обобщенных меток
(табл. 9.16).
Таблица 9.16
Обобщ пара
Метка
Обобщ. пара
Метка
Обобщ. пара
Метка
Обобщ. пара
Метка
АВ
+ 1
BF
-1
DE
+ 1
FH
-1
АС
+ 1
BG
+ 1
DF
-1
FI
-1
AD
+ 1
ВН
-1
DG
+ 1
FJ
+ 1
АЕ
-1
BI
+ 1
DH
+ 1
GH
+ 1
AF
+ 1
BJ
+ 1
DI
+ 1
GI
+ 1
AG
-1
CD
+ 1
DJ
+ 1
GJ
-1
АН
+ 1
СЕ
+ 1
EF
+ 1
HI
+ 1
AI
+ 1
CF
-1
EG
+ 1
HJ
+ 1
AJ
-1
CG
+ 1
ЕН
+ 1
IJ
+ 1
ВС
-1
сн
+ 1
EI
-1
BD
+ 1
CI
+ 1
EJ
-1
BE
+ 1
CJ
+ 1
FG
+ 1
В результате подсчета находим Р = 32; Q = 13; S = 32-13 = 19;
max5 = n(n — 1)/2 = 45. Поэтому значение т-статистики Кендалла
г = (Р - Q)/45 = 19/45 = 0,42.
Подсчет р-статистики Спирмена показал более высокий коэффи¬
циент ранговой корреляции р = 0,62.
268
Глава 9
Используя равенство Р + Q = п(п - 1)/2 и соотношение (9.165)
получим т-статистику Кендалла в виде
т= P-Q = 1-2Q _ 2Р — 1_
n(n-l)/2 n(n-l)/2 п(п-1)/2
Пример 9.21. Можно упростить вычисление т-статистики Кен¬
далла, если составить подстановку (9.167) в форме табл. 9.17.
Таблица 9.17
В
R{xi)
R(Vi)
10
3
2
5
10
2
10
7
Тогда достаточно вычислить только количество положительных ме¬
ток, чтобы получить
р= +7 + 5 + 6 + 6 + 0+4 + 3 + 1+0 = 32.
По (9.169) получим т — 2 • 32/45 - 1 = 1,42 - 1 = 0,42.
Среднее значение и дисперсия г-статистики при гипотизе Яо име¬
ет вид [42]
2(2п+ 5)
Е(т | Я0) = 0; vaг(т | Я0) =
(9.170)
9 п(п — 1) *
Значения этих величин при больших п позволяют воспользоваться
гауссовской аппроксимацией.
Пример 9.22. Пусть ВЛТ Q0 = a = 0,1 и число наблюдений
п = 10 на первом и на втором входах. По [49, табл. В-7] получим
пороговое значение Sn = 15, тогда Т = 2S/n[n - 1) = 30/90 = 0,33.
При п= 10 дисперсия т-с татистики var(T | Я0) = 2 • 25/(9 • 90) =
= 50/810 « 0,06.
При гауссовсовской аппроксимации получим ~
~ iV(0,1). При этом величина порога находится по формуле
Т = 60_1(1 - a) = 0,2449Ф_1(0,9) = 0,2449 • 1,2816 = 0,3138.
Таким образом, вычисленное значение
т = 0,42 > Тх = 0,33; т = 0,42 > Т2 = 0,314.
Поэтому следует принять гипотезу Н\.
Задачи
9.1. Дано 20 наблюдений’
8,1; 2,4; -0,2, 1,1; 1,4; 6,2; -4,4; 6,5; 7,7; 4,1;
Непараметрические методы обнаружения сигналов
269
3,0; 7,1; 4,9, 4,3; -0,4, 0,6; -0,1; 5,4, 5,2; 3,9.
Проверить гипотезу Hq. W(x) = W(—x) против альтернативы Hi, используя
обнаружитель Вилконсона.
Требумая вероятность ложной тревоги a = 0,1.
Указание. Используйте гауссово приближение для распределения статистики об¬
наружителя Вилконсона.
9.2. Дано множество из 10 независимых одинаково распределенных наблюдений
случайной переменной х с интегральной функцией распределения F(x). Требуется
проверить гипотезу Hq: F(0) = 0,5 против альтернативы Н\\ F(0) < 0,5, используя
знаковый обнаружитель.
Напишите выражение для функции мощности критерия и определите вероятность
ложной тревоги а, если порог Т - 8. Предположить, что F(0 \ Hi) = Р[х ^ 0 | Hi] =
= 0,1, и определить вероятность обнаружения.
9.3. Используйте знаковый обнаружитель для проверки гипотезы нулевой медиа¬
ны против альтернативы положительного сдвига медианы для трех заданных совокуп¬
ностей наблюдений. Предположить а = 0,1 и, не прибегая к рандомизации, получить
точное значение а. Наблюдения следующие:
1) 1,7; 0,8; -0,2; 1,3; -1,8; 2,2; 1,4; -0,6; -1,1; 1,9;
2) 9,3; 1,4; -1,2; 3,3; 6,4; 2,1; 0,6; 0,4; 8,8; 6,1;
3) -1,2; 1,1; 0,0; 3,1; 2,6, -0,6; -0,9; -2,1; 2,4; 1,4.
9.4. Используйте обнаружитель Вилконсона для проверки Hq: W(x) = W(—х)
против Hi для заданных 10 наблюдений:
0,4; 2,0; 1,2, -0,2; -0,8; 0,9; 2,2; 0,6; 0,1; 1,3.
Предположить а = 0,1 и использовать точное распределение статистики
9.5. Повторите задачу 9.4, используя гауссово приближение.
9.6. При наличии п = 12 наблюдений, взятых из гауссова распределения со сред¬
ним 1± = 32,3 и дисперсией о2 = 1, требуется сравнить работу знакового обнаружителя
и оптимального параметрического обнаружителя Неймана-Пирсона для проверки гипо¬
тезы Hq: F(31) = 0,5 против альтернативы Н\. F(31) < 0,5.
Требуемый уровень значимости а = 0,08.
Для этой задачи определить порог Т, обеспечивающий требуемую вероятность
ложной тревоги, точное значение а и вероятность обнаружения Q^ для знакового об¬
наружителя и оптимального обнаружителя Неймана-Пирсона.
9.7. Для 10 наблюдений, заданных в задаче 9.4, вычислить значение статистики
Ван дер Вардена.
9.8. Вычислить значение статистики нормальных меток для 10 наблюдений, за¬
данных в задаче 9 4 (использовать таблицу ожидаемых значений нормальных поряд¬
ковых статистик)
9.9. Вычислить значение р-статистики обнаружителя Спирмэна для 10 наблюде¬
ний, заданных в задаче 9.4 Определить, каким образом можно выбрать такой порог
обнаружителя, который обеспечит уровень значимости а = 0,05 при проверке Hq-
W(x) = W(—x) против Hi.
9.10. Проверьте точность гауссова приближения при определении порога для 1)
знакового критерия и 2) обнаружителя Вилконсона.
Предположить, что а = 0,05, и рассмотреть случаи, когда число наблюдений
п = 8, 10 и 12. Произведите проверку гипотезы Я0: W(x) = W(—x) против аль¬
тернативы Hi.
270
Глава 9
W(x) = { J’
9.11. Вычислить АОЭ знакового обнаружителя относительно линейного обнару¬
жителя при условии равномерного распределения шума, выраженного формулой
-1/2 ^ ж ^ 1/2,
при других значениях.
9.12. Вычислить эффективность знакового обнаружителя при проверке парамет¬
ра сдвига 9 симметричной ПРВ.
9.13. Повторить задачу 9.12 для обнаружителя по t-критерию Стьюдента.
9.14. Подтвердить значения АОЭ знакового обнаружителя, данные в табл. 9.7, в
условиях гауссова, равномерного и лапласова распределения шума и при использовании
результатов решения задач 9.12 и 9.13.
9.15. Воспользоваться уравнением (9.87) для вычисления АОЭ обнаружителя
Вилкоксона при равномерной ПРВ в интервале -1/2 ^ х ^ 1/2.
9.16. Вычислить конечную относительную эффективность знакового обнаружи¬
теля по выборкам конечного объема в сравнении с линейным обнаружителем при про¬
верке гипотезы
Я0 : F(31) = 0,5,
F — гауссова ПРВ при а2 = 1 относительно альтернативы
#i . F(31) < 0,5,
F — гауссова ПРВ при ц = 32,3 и а2 = 1 при уровне значимости а = 0,08; в предпо¬
ложении, что знаковый обнаружитель использует 12 наблюдений (ср. с задачей 9.6).
9.17. Показать, что если одновходовый обнаружитель имеет статистику, которая
удовлетворяет условиям регулярности, то
lim = 2[erf-1(l — 2а) + erf-1(l — 2/?)]2,
п—+ оо
2 / _ 2
где erf х — —т= / е у dy\ £ — эффективность обнаружителя.
v*j0
Указание. См. [117, 118].
9.18. Используя результат задачи 9.17, показать, что если статистики двух обна¬
ружителей, скажем Sn и S*, удовлетворяют условиям регулярности, то АОЭ Sn обна¬
ружителя по отношению к S* обнаружителю является отношением их эффективностей
АОЭ ss* = €s/€s*-
(см. [117, 118] или [95, с. 116-127]).
9.19. Используя статистику S' обнаружителя Манна-Уитни, по (9.97) провести
проверку на положительный сдвиг в yj наблюдениях. Имеется п = 30 наблюдений xi
(контрольные шумы) и т = 20 наблюдений yj. Если величина статистики Манна-
Уитни равна 562, на каком минимальном уровне значимости а гипотеза будет отверг¬
нута? Применить гауссово приближение.
9.20. Показать, что формула для дисперсии статистики Спирмена
var (р 1 Н0) = l/(n- 1),
где Hq — гипотеза о независимости выборки, верна на основе выбора нескольких слу¬
чаев из таблицы ожидаемых нормальных меток.
9.21. Показать, что статистика оптимального двухканального обнаружителя
Sonj = ^Г^(Жг + Vi)2
Непараметрические методы обнаружения сигналов
271
имеет ^-распределение с п степенями свободы, когда гипотеза Hq (г = 0) верна.
9.22. Проверить Но (г = 0) с помощью p-об наружи тел я Спирмена при двух
совокупностях наблюдений (п = 5):
i
1
2
3
4
5
x<i
3,1
2,6
2,4
0,8
1,1
Vi
2,3
2,0
4,2
0,4
1,9
При уровне значимости a = 0,1 определить порог как из точного распределения,
так из нормального приближения. Сравнить полученные решения.
9.23. Проверить
Но . W2(x,y) = Wi(x)Wi(y)\
Hi - г > 0, W2(x,y) неизвестно
при уровне значимости a = 0,1 с помощью двух совокупностей наблюдений в задаче
9.22 и т-критерия Кендалла. Вычислить порог только с помощью точного распре¬
деления.
9.24. При п = 10 наблюдениях контрольного шума проверить m - 10 входных
наблюдений на положительный сдвиг распределения с помощью обнаружителя Манна-
Уитни. Положить a = 0,25 и применить точное распределение.
п = 10
0,82
0,11
0,21
-0,32
-0,60
-0,27
-0,41
0,63
0,54
-0,73
га = 10
1,11
0,65
0,10
1,42
1,08
-0,08
0,40
0,95
0,33
0,55
9.25. Применить обнаружитель КСП (коорелятор совпадения полярностей) для
проверки двух совокупностей п = 12 наблюдений, данных ниже, на наличие или от¬
сутствие стационарного случайного сигнала на уровне значимости a = 0,10. Считать,
что все распределения имеют нулевую медиану.
i
1
2
3
4
5
6
7
8
9
10
11
12
Xi
Vi
0,81
0,76
1,63
0,89
-0,42
-0,66
0,08
0,53
-0,11
0,21
-0,55
-0,30
-0,03
-0,45
0,90
1,07
0,78
0,95
1 1
° Р
о о
2,21
1,77
1,43
1,39
9.26. Повторить задачу 9.25 с помощью p-об наружи тел я Спирм1:на при a = 0,1.
Найти порог точно и с помощью нормальной аппроксимации
9.27. Повторить задачу 9.25 для выборочного коэффициента корреляции.
9.28. Сравнить затраты, требуемые в задачах 9.25-9.27 для вычисления значений
статистик и принятия решения. Какая проверка предпочтительнее: обнаружитель КСП,
р-обнаружитель Спирмена или выборочный коэффициент корреляции г?
9.29. Использовать уравнение (9.101) для вычисления АОЭ обнаружителя Манна-
Уитни относительно t-критерия Стьюдента при равномерной плотности вероятностей
на входе в пределах —1/2 ^ у ^ 1/2.
9.30. Показать, что если шум имеет лапласову экспоненциальную плотность, то
АОЭ обнаружителя Манна-Уитни относительно t-критерия Стьюдента АОЭму,* = 1>5.
9.31. Известно, что т-статистика Кендалла может быть записана в виде
= 1 4(Э
п(п — 1) ’
272
Глава 9
где Q — общее число отрицательных меток. Показать, что
п—1 п п—1 п
Q = Е X/ u^Vj - = 2 Е X/ ^ _ sgn ^ ~ !/<^9П ^
г= 1 j'= г+1 г= 1 j=i+l
9.32. Используя результат решения задачи 9.31, вычислить Е{т | Н\}, где Н\ —
альтернатива в том, что х \л у имеют двумерное гауссово распределение с коэффици¬
ентом корреляции г > 0.
Указание [111].
' -1, 0<О,
9.33. Согласно соотношению
var(т \ Н0) =
9п(п — 1)
приближенно можно принять vaг{т | Яо} = 4/9п при большом значении п и гипотезе
Но', г = 0. Пользуясь этим выражением и £{т | Pi} из задачи 9.32, вычислить
эффективность т-статистики Кендала.
9.34. При больших значениях п Е{г | Н\} - г и var{r | Яо} и 1/п [111].
Используя эти результаты, получить выражения для эффективности выборочного ко¬
эффициента корреляции.
9.35. Вычислить АОЭ т-обнаружителя Кендалла относительно выборочного ко¬
эффициента корреляции для двумерных гауссовых альтернатив при использовании эф¬
фективностей, вычисленных в задачах 9.33 и 9.34.
9.36. Вывести выражение для дисперсии статистики знакового обнаружителя
п
Y2u(xi) при условии, что входные наблюдения представляют собой зависимые вы-
г= 1
борки из стационарного случайного процесса. Выразить ответ в виде [112, 113]
E[u(xi)u(xj)] = R[(i — j)r] = R[kr).
9.37. Поскольку КФ R(kr) = E[u(xi)u(xi+ ^)] не равна нулю только при ж* > 0
и xi+k > 0,
поо п оо
/?(/ст) Р[х{ 0, Х}+ fa 0] —■ I I д, (^-г > ^г+ k ) dX{dXi+ д..
Jo Jo
При условии, что совместная ПРВ Xi и Xi+k гауссова с нулевым средним зна¬
чением,
Олф .ф . . о-»2
WXiXi .(xi,xi+k) = 1 ехр
2tt(72v/ITV
ж? - 2pxjxi+k + x2i+k
2СГ2(1 — /92)
найти R(kr) [113].
9.38. Использовать результаты решения задач 9.36 и 9.37 таким образом, чтобы
получить соотношение
п
r{Sn} = J- + — У3 f1 _ arcsin /o(fc-r),
4п 7ГП > \ п/
где S'n = - М — известная медиана ПРВ шума; Wi — входные отсчеты;
к= 1
п(х) — единичная функция.
Непараметрические методы обнаружения сигналов
273
9.39. Вычислить среднее и дисперсию статистики линейного обнаружителя для
зависимых входных наблюдений при наличии сигнала, имеющего амплитуду в.
9.40. С помощью результатов решения задачи 9.39 получить выражение для
эффективности линейного обнаружителя в случае зависимых выборок.
9.41. При условии, что эффективность обнаружителя Вилкоксона для зависимых
наблюдений равна
-1
Е
p(nAt)
доказать, используя эффективность линейного обнаружителя, вычисленную в задаче
9.40, что АОЭ обнаружителя Вилкоксона относительно линейного обнаружителя равна
-1
У" p(nAt)
2 'У ' arcsin -p(nAt)
9.42. Предположить, что
{0, 8, п = ±1;
1, п = 0;
0 в остальных случаях,
и вычислить АОЭ обнаружителя Вилкоксона относительно линейного обнаружителя,
используя выражение в задаче 9.41.
Ответы к задачам
9.1. Для п = 20 среднее значение и дисперсия статистики Вилкоксона соответ¬
ственно равны 105 и 717,5. При этом величина статистики S = 192. При a = 0,1 порог
Т = 139,4. Следовательно, S = 192 > Т = 139,4, поэтому применяется гипотеза Н\.
9.2. Функция мощности (вероятность обнаружения)
ю
Qd = l-P='%2c?oPk(l-p)10-k,
k= 8
где р = 1 - F(0); ВЛТ = а = 0,0547 и для F(0 | Щ) = 0,1 Qd = 1 - (3 w 0,93.
9.3. Наибольшее значение а из тех, что а ^ 0,1, равно 0,0547, и, следовательно,
порог Т = 8.
ю
1) n(xj) = 6 < 8, следовательно, принимается Яо;
9 > 8, следовательно, принимается Яь
г= 1
10
2)
г= 1
3) знаковая статистика не может быть использована из-за наличия нулевого от¬
счета в наблюдениях.
9.4. По [49, табл. В-4] определяем порог Т = 41. Значение статистики S = 48
Таким образом, S = 48 > Т = 41, следовательно, принимается Н\.
9.5. Среднее значение и дисперсия статистики при п = 20 равны соответственно
27,5 и 96,25. Тогда порог Т « 40 Следовательно, S = 48 > Т = 40, следовательно,
принимается Яь
274
Глава 9
9.6. Порог для знакового обнаружителя находится из условия
12
А = 5)12 < <* = °>08-
к=Т
Положив Т = 9, находим
12
1 \ I 1 299
А = — > С12 ~ -гт(220 + бб + 12 + 1) = и 0,07299 и 0,073.
212 12 212 4096
к=9
Получим Л = 0,073 < 0,08, следовательно, порог Т = 9; р - 1 — F(31) =
= Ф(1,3) = 0,903, тогда
12
Qd='^2 с12Рк(-1 - р')12~к = 220 • (°-903)9 • (0,097)3+
к= 9
+ 66 • (0,903)10 • (0,097)2 + 12 • (0,903)п • 0,097 + (0,903)12 =
= 0,0799 + 0,2233 + 0,3784 + 0,2935 = 0,9751.
Для оптимального обнаружителя порог Т = 31,41, точное значение а = 0,0793,
следовательно, вероятность обнаружения Qд = 0,999.
9.7. Вначале следует составить таблицу наблюдений и рангов (аналогично
табл. 9.1):
Xi
0,4
2,0
1,2
-0,2
-0,8
0,9
2,2
0,6
0,1
1,3
R(xi)
3
9
7
2
5
6
10
4
1
8
Затем вычислить величину р = г/(п + 1) = г/11, по значениям р найти =
Ф_1(р) и составить таблицу, аналогичную табл. 9.4. В результате для вычисления
статистики Swdw суммируются те значения £р, которые соответствуют положительным
величинам наблюдений:
Swdw = -1,3346 - 0,6037 - 0,3477 + 0,1156 + 0,3425 + 0,6037+
+ 0,9078+ 1,3346 = 1,0182 и 1,02.
9.8. При суммировании исключаются ранги R(x*) = R(—0.2) = 2 и R(xs) =
= R(—0,8) = 5. В результате, используя табл. 9.2, получим
5фИ = 5Нм = 3,6947 - 2,5706 = 1,124.
9.9. На основе таблицы в решении задачи 9.7 составить следующую таблицу, где
Ri = R(xi) — ранг г-го наблюдения:
г
1
2
3
4
5
6
7
8
9
10
iRj
3
18
21
8
25
36
70
32
9
80
В результате суммирования находим значение р статистики Спирмена
п ю
Sp — ^ ^ di Ri — ^ ^ di Ri,
i- 1 i= 1
где diRi = { ?_ "»и ** <
^ г Ri при Xi > 0.
Таким образом, не учитывая отсчеты х4 = -0,2 и х$ - -0,8, получим Sp = 269.
Непараметрические методы обнаружения сигналов
275
Вероятность ложной тревоги Qo = ос определяется по формуле
m
a = —— п!,
2io ’
где га — число возможных значений статистик, которое превышает выбранную ве¬
личину порога Т. Таким образом, a = 0,05 = m/(3,7159 • 109), следовательно,
га = 1,8579 • 108.
9.10. При знаковой статистике точное значение порога Т определяется по фор¬
муле
Взяв п = 8, 10, 12, получим 28 = 256; 210 = 1024, 212 = 4096. Тогда получим пороги
Т и соответствующие точные значения ВЛТ а:
п = 8 : Т = 7, а = 9/256 = 0,0352;
п = 10: Т= 9, а = 11/1024 = 0,0107;
п = 12 : Т = 10, а = 79/4096 = 0,0193.
При гауссовской аппроксимации статистики знакового обнаружителя величины
порога Т находят по формуле (9.69)
Т= i[n+ ^пФ-1(1-“)] = 0-5п+ 0,5\/пФ-1(0,95) =
= 0,5п + 0,5у/п • 1,6448 = 0,5п + 0,8224у/п.
При п = 8, 10, 12 получим соответственно Tg = 6,3261; Тю = 7,6006; Ти =
= 8,8488.
При нормализации статистики Вилкоксона порог Т определяется по формуле
(9.94):
' п
_ п
Т= -
2
+
2
Гп Л, А п Гп Гп
\/зФ ■<!-»>] =2 .2* Уз'1'
При п = 8, 10, 12 соответственно получим Ts = 26,7438; Тю = 40,0149; Т12 =
= 55,7376.
Если использовать вместо приближенных формул (9.93) точные величины для
среднего значения и дисперсии цп = E(S2 | no) = n(n + 1)/4; D(S2 | Но) = сг2 =
= п(п + 1)(2п + 1)/24, то при больших значениях можно пользоваться следующей
формулой для определения порога Т при гауссовском приближении:
Ф[(Т /in)/crn] = 1 ос.
Отсюда Т - jип + сгпФ_1(1 — ос).
При п = 8, 10, 12 получим = 18; уью = 27,5; /ли = 39; <Т8 = 7,1414;
сю = 9,8167, (712 = 12,7475. В результате получим уточненные значения порога
Т8 = 29,7462; Т10 = 43,6366; Т12 = 59,9671.
Точные значения порога Т при ао близких к 0,05 находятся по таблицам [43, 49]:
Tq — 31; Qo = 0,039; Тю = 45; с*о = 0,043, Т12 — 61; о;о = 0,046.
Сравнивая табличные данные и гауссовскую аппроксимацию, находим, что стати¬
стика Вилкоксона лучше аппроксимируется нормальным распределением, чем знаковая
статистика.
9.11. АОЭ определяется по (9.75): АОЭгд = 4a2W2(0). Для данной равномер¬
ной ПРВ W(0) = 1; сг2 = 1/12. Таким образом, АОЭгд = 1/3.
276
Глава 9
9.12. Для статистики S знакового обнаружителя среднее значение и дисперсия
соответственно равны пр и пр(1 —р), где р = Р(Х > 0) = 1 - Fx(0). Следовательно,
E(S | Hi) = пр = пР(Х > 0 | #i), jqE(S I #i) = п1Ур). В результате получим
is = 4W2(0).
9.13. Для значительных n t-статистика Стьюдента Sc имеет нормальное рас¬
пределение при среднем значении /л и дисперсии а2 в общем случае гипотезы Н\.
Следовательно, E(SC \ Hi) = y/nfi/a и дисперсия var(5c | Но или Hi) = 1.
Используя выражение для эффективности £, получим £sc ~ 1/с2-
9.15. По (9.87) AC02,i = 1, так как а2 = 1/12.
9.16. Для знакового обнаружителя при п = 12 согласно задаче 9.6 порог Т = 9,
ВЛТ а = 0,073, вероятность обнаружения = 0,975. Тогда £(S0m- I #о) = 31;
var(50nT | Hq) — 1/ti;
а = 0,073
= р[
Qd = 0,975 = Р
По формуле (*) находим
5опт — 31 Т — 31
1/у/п 1 7 ^
‘S’onT —
1/v^
1/Vn
32,3 Т
>
■32,3
1/%/п
Я1
(*)
(**)
\ 1/л/п/
Отсюда
(Т - 31)Vn = Ф_1(1 - а) = Ф_1(0,927) = 1,4538.
Аналогично по (**) получим
(Т - 32,3)х/^ = -2,34.
В результате из уравнений
Т - 31 = 1,4538/>/п; Т - 32,3 = -2,34/>/п
находим = 3,7938/1,3 = 2,918, тогда п = 8,5.
Относительная эффективность £s)0m- = 8,5/12 = 0,71.
9.19. По (9.100) находим
E(S' | Но) = -га(га + n + 1) = 510;
var(S' | Но) = ^ran(ra + n + 1) = 2550.
Отсюда a(S' \ Н0) = 50,5.
Согласно гауссовской аппроксимации
Г S' -510
а = Р
50,5
>Т| Яо
Поскольку S' = 562, то Т
52 = 1 0297:
50,5 J.,vjzy f .
1,03. Тогда
а = Q(T) = 1 - Ф(Т) = 1 - Ф(1,03) = 1 - 0,8485 = 0,1515.
9.22. Вычислим сначала величину р-статистики Спирмена. Согласно заданной
таблице наблюдений составим таблицу рангов:
г
1
2
3
4
5
R(xi)
5
4
3
1
2
S(vi)
4
3
5
1
2
Непараметрические методы обнаружения сигналов
277
Используя формулу (9.150), получим
5
Р = 1 ,2 14 У~![Д(д») “ 5(3/i)]2 =
n{nz — 1) ^'
i= 1
= 1 - —(l2 + l2 + 22 + О2 + О2) = 1 - 0,3 = 0,7.
120 '
По таблице распределения коэффициента корреляции р Спирмена [49] получим
Тточн = 0,7. По [38] при ос — 0,067 Ттонн = 0,8, при ос = 0,117, Ттонн = 0,7. Прибли¬
женное значение порога Тпр находится по формуле
Тпр = Ф_1(1 - а) = Ф-1(0,9) = 1,2815.
Таким образом, ТТОнн = 0,7 = р и непосредственно принимается альтернатива
Н\(г > 0). Аналогично, если воспользоваться гауссовской аппроксимацией, то Z -
- р\/п — 1 = 0,7>/4 = 1,4 > 1,2815. И снова принимается альтернатива Н\.
9.23. По таблице распределения ранговой корреляции т Кендалла [49] находим
при ot - 0,1 ST = 6 и т - ST2/[n(n — 1)] = 0,6.
Аналогично по [38] при a = 0,117 находим вероятность a = P{ST ^ s} = 0,117,
тогда s = 6 и порог находится из равенства ST = [n(n — 1)/2]Т = s = 6.
Снова Т = 6. Найдем величину т-статистики Кендалла. Для этого воспользуемся
таблицей рангов задачи 9.22:
А
В
С
D
Е
г
1
2
3
4
5
R(xi)
5
4
3
1
2
S(yi)
4
3
5
1
2
Составим таблицу меток:
АВ
АС
AD
АЕ
ВС
BD
BE
CD
СЕ
DE
М-щ
-1
-1
-1
-1
-1
-1
-1
-1
-1
+ 1
Му{
-1
+ 1
-1
-1
+ 1
-1
-1
-1
-1
+ 1
+ 1
-1
+ 1
+ 1
-1
+ 1
+ 1
+ 1
+ 1
+ 1
Отсюда находим число положительных Р и число отрицательных Q меток Пху
Р = 8, Q = 2.
При п = 5 п(п — 1)/2 = 10, следовательно, значение т-с татистики
п(п - 1)/2 10
Значение статистики совпадает со своим порогом, принимается альтернатива Н\
(г > 0), как и в случае р-статистики Спирмена (задача 9.22).
9.24. Образуем смешанный вариационный ряд из отсчетов ж* и yi и во второй
строке укажем ранги
-0,73
-0,60
-0,41
-0,32
-0,27
-0,08
-0,10
0,11
0,21
0,33
15
12
9
6
5
1
2
3
4
7
0,40
0,54
0,55
0,63
0,65
0,82
0,95
1,08
1,11
1,42
8
10
11
13
14
16
17
18
19
20
Суммируя, по (9.96) и (9.97) получим значение статистики Вилкоксона (Манна-
Уитни)
ю ю
5=ХЯ^ = 93: 5'=Х^ = Ш-
г- 1 г= 1
278
Глава 9
По таблице [49, табл. 13-16] находим: порог Т = 115 при ао = 0,241 Таким образом,
S = 93 < 115, и принимается гипотеза Hi (г > 0), а 5' = 117 > 115, и снова
принимается гипотеза Н\
9.25. Вычислим сначала статистику коррелятора совпадения полярностей (КСП)
12
S = y'sgnxjsgnyi.
i= 1
Составим таблицу знаков отсчетов:
г
1
2
3
4
5
6
7
8
9
10
11
12
sgn xi
1
1
-1
1
-1
-1
-1
1
1
-1
1
1
sgn у*
1
1
-1
1
1
-1
-1
1
1
-1
1
1
sgnxisgnyi
1
1
1
1
-1
1
1
1
1
1
1
1
В результате получим 5ксп = И-
Найдем порог Т, используя соотношение
12
а0
= Ec“G) = m >т)=1 -p(ess т)’
к=Т
p««T>-X>f=(0’!-55s£O:
I к
12»
к= О
к= О
при к = 3
< 3) =
1 299
(1 + 12 + 66 + 220) = = 0,0729 w 0,073 » 0,1 = а.
4096 4096
Следовательно, порог Т = 12-3 = 9 и выполняется условие 5ксп
нимается гипотеза Н\ (сигнал присутствует).
9.26. Составим вначале таблицу рангов наблюдений ж* и yf.
10 > 9. При-
г
1
2
3
4
5
6
7
8
9
10
11
12
R(xi)
8
11
5
3
4
6
1
9
7
2
12
10
Я(у<)
7
8
6
5
2
3
4
10
9
1
12
И
Аг
1
3
-1
-2
2
3
-3
-1
-2
1
0
-1
А?
1
9
1
4
4
9
9
1
4
1
0
1
Воспользуемся формулой
1 —, 2 ,\ =
п(п2 — 1) <
= 1 ■
12 • 143 -
Е9 44
А2 = 1 = 1 - 0,154 = 0,846.
286
По [49, табл В-8] находим порог Т = 0,3986. Следовательно, р = 0,846 >
>Т = 0,3986, и принимается альтернатива Н\ (сигнал присутствует). При нормальной
аппроксимации
Qo
где сг = 1/у/п - 1
Непараметрические методы обнаружения сигналов
279
При п = 12 получим
Т„ = <тФ_1(1 - а) = —р=Ф-1(0,9) =
1,2816
= 0,3864,
v/il 3,3166
и р < Т„.
9.27. Значение выборочного коэффициента корреляции находим по формуле
ху — ху
где
x=^£xi; ху=Ш
i= 1 i= 1 i= 1
xiVi.
бХ>-*>2
i= 1
^X>-*)2
i= 1
Используя таблицу в задаче 9.25, находим ж = 0,5575; у = 0,5125; жу = 0,8454,
ху — жу = 0,5597, следовательно, Q = 0,7025 • 0,5319 = 0,3736; \/Й = 0,6112.
Таким образом, г = 0,5597/0,6112 = 0,9157.
Взяв число степеней свободы п — 2 = 12 — 2 = 10 по [49, табл. В-3] находим при
а = 0,1 порог Tt = 1,372, тогда по формуле
Tt
Vn-2+Tt2
получим = 0,398. Следовательно, г = 0,916 > 7> = 0,398.
Принимается альтернатива Н\ — сигнал присутствует.
9.29. АОЭМу)£ = 1.
9.33. Из решения задачи 9.32 можно получить значение производной
£-Е(т |tfi)= — \/l — г2.
ОГ 7Г
Таким образом, эффективность т-обнаружителя Кендалла = 18/7Г2.
9.34. & = 2.
9.35. АОЭГ)^ = 9/тг2.
10 Адаптивный прием сигналов
10.1. Постановка задачи адаптивной фильтрации
В адаптивных (приспосабливающихся) системах априорная не¬
определенность статистических характеристик сообщений преодоле¬
вается оцениванием их в процессе работы системы и использовани¬
ем полученной информации для оптимизации ее параметров. Часто
неопределенность характеристик сообщения может быть сведена к
неопределенности некоторых параметров принятой модели сообще¬
ния, например дисперсии и(или) ширины спектра отдельных компо¬
нент, спектральной плотности формирующих шумов и др. [51]. В этом
случае говорят о параметрической априорной неопределенности.
Пусть на вход приемника поступает реализация
y{t) = s(t, A(t, а)) + n(t), (10.1)
где \(t,a) — фильтруемый процесс, зависящий от вектора а неиз¬
вестных параметров, которые являются случайными величинами с
заданной ПРВ Wpr(а). Задание а в виде случайных величин пред¬
полагает их постоянство за время наблюдения, что математически
может быть записано в виде
da л . .
_ = 0, а(0) = а0,
где ао — случайная величина.
Процесс А(£, а) в пространстве состояний задается вектором
х(£, а), так что А(£, а) = сх(£,а) и
dx.
— = F(t,a)x+ G(t,a)x(£), x(t0) = x0, (10.2)
где %(t) — m-мерный вектор ГБШ с корреляционной матрицей R^(r).
Уравнение наблюдения принимается в виде
y(t) = H(t)x(t, a)+ n(t). (10.3)
В (10.1), (10.3) характеристики шума n(t) полагаются известными.
Задача синтеза оптимальной системы фильтрации заключается
в нахождении оценки х(£) по критерию минимума среднего квадрата
ошибки.
.Адаптивный прием сигналов
281
10.2. Показатели качества адаптивных систем
фильтрации
Точность фильтрации характеризуется дисперсией ошибки филь¬
трации
а2= Е[(\-\П
Для линейной модели сообщения и наблюдений (10.3) оптималь¬
ная структура системы фильтрации определяется фильтром Калмана.
Предельная точность фильтрации определяется уравнением Риккати.
Найденная таким образом предельная точность фильтрации опреде¬
ляет потенциальные возможности адаптивного измерителя.
Выигрыш в точности фильтрации можно оценить величиной [131]
В = х/ДЖ, (10.4)
где Da, Du — дисперсии ошибок фильтрации сообщения в адаптивной
и неадаптивной системе соответственно.
Пример 10.1. Сравнить адаптивное и неадаптивное устройства
при использовании в первом случае непрерывного фильтра Калмана,
когда уравнение наблюдения и информационное уравнения имеют вид:
x(t) = Ai (t) + v(t)\ (10.5)
d\-\ „ dXo .
= Л2; — = »((), (10.6)
где v(t) - БШ; его КФ Rv(t) = S0S(t), w(t) - БШ; его КФ Rw(t) =
= qwS(r).
Замечание. Данная задача соответствует оценке расстояния Ai =
= R(t) и скорости А2 = v(t) наблюдаемого объекта.
Решение.
Запишем заданные уравнения в векторной форме:
x(t) = Ш, + v;
dk „
—— — Fk + G W)
dt
0 1
-° °_
Уравнение фильтра Калмана (ФК) принимает вид [91]
где Н = [1 0]; G = [0 1]т; к = [Ai А2]т; F
^ = Fl(t) + к(t)[x(t) - m(t)}-, i(о) = i0,
где К(t) = D(t)HTS'^1; D(t) — матрица дисперсий (дисперсионная
матрица) ошибки измерения, для нее справедливо ДУ
— = FD(i) + D(i)FT + qwGGT - T>(t)HrSo1(t)D(t); D(0) = D0.
282
Глава 10
В данном случае это уравнение принимает вид
сГО
dt
= FD(i) + D(t)FT + Qo - K(i)HD(i),
(10.7)
где Q = qw = const; Q0 = g^GGT
Введем обозначение
0 0
0 Qw
D =
dn
di2
dn
di2
_d2i
d22 _
du
d22 _
Тогда
К (0
d\\ di2
di2 d22
n-1
c-1
dn
du
HD = [dn di2\.
В результате система ДУ (10.7) может быть записана в виде
dn di2
dl2 d22
2di2 d22
d22 0
0 0
0 Qw
st
-1
du
dndi2
dndi2
di2
В скалярной форме получим:
d(dn)
dt
d(d22)
dt
= d22-So1d11d12;
— Qw s0 di2-
В стационарном режиме находим
di2 = yjQwSo = a; dn - y/2SoOi] d22 = \J2qwa.
Уравнение ФК принимает вид [91]
di
dt
+ (KH-F)*,= Kx(t),
(10.8)
(10.9)
(10.10)
где К = [fci,fc2]T; h= So1dn\k2= %Ч2; KH-F =
По (10.10) в скалярной форме получим [91]
fci -1
к2 0
^1 Л . 7 / \ \ d\2
_=Л2+М*~ А,),
В стационарном режиме
к2(х - Ai).
(10.11)
к2с - S0 1di2 - yjqw/So', kic = S0 xdn = yj2y/qw/So = \/2k2c.
(10.12)
В качестве неадаптивной системы будем использовать динамиче¬
скую систему, которая описывается системой ДУ (10.11) при
к\ kic — ki, к2 — к2с — к2.
Адаптивный прием сигналов
283
Рис. 10.1
Чтобы найти ошибку фильтрации динамической системы (10.11),
необходимо рассмотреть эквивалентную схему фильтра Калмана
(рис. 10.1).
Энергетический спектр (ЭС) Se(v) ошибки имеет вид [148]
С ЛЛ - , I^MI2 о ЛЛ
е( } |1 + W(iw)I2 |1 + жир
где Sxi(u) ЭС процесса xi. Sxi(w) = g№/|(iw)2|; 5„(ш) = Sv =
= const — ЭС СП v(t); W(\u) — характеристика прямой цепи кон¬
тура ФК,
мп \ ^/s + + *2
= :— = —12—•
S Sz
Заметим, что Oi(s) = W(s)/( 1 + W(s)) — передаточная функция
замкнутой цепи ФК, тогда
1 = 1 -Oi(s).
1 + W(s)
Поскольку Ol(s) = fclg + ^ т0 1 — Oi(s) = S
s2 + kis + k2 s2 + k\s + k2
Таким образом, энергетический спектр ошибки имеет вид
Следовательно, дисперсию ошибки De можно записать в виде
2
Sods.
D _ J_ Г°° qwds | 1 Г°° k\s + к2
2тт\ J_ioo Is2 + k\s + к212 2тт\ J_{
s2 + k\s + к2
В результате находим ошибку фильтрации в установившемся ре¬
жиме в неадаптивном фильтре:
284
Глава 10
Используя значение интеграла [60]
1 Г°°
/„= — / H(s)H(—s) ds
2тгг J_[oo
при H(s) = c(s)/d(s); c(s) = cn_i5n_1 + ... + Co; d(s) = dnsn + ... +
d0l когда
c\ d0 + Cgd2
2dodid2
при ci = jfei; со = k2: do = k2\ d\ = k\\ d2 - 1, найдем значение
первого слагаемого
!<■> - s/'tPf— = -iff? + ijl =
3S» ■/£.
2fc2fci 2fci41 2\/2
Аналогично находим второе слагаемое при ci = 0; со = 1; do =
= к2\ di = fci; d2 = 1:
/(2) - Q
i2 —
1
Qw
[131]
’2k2k 2V2kl/2'
Выигрыш в точности фильтрации можно оценить отношением
В - л/D„/Da,
где D„ = 1^ + 42); при к2 = y/qw/S0 Da = (dn)c = \/25оУ<ьДь
Поскольку k2c = y/Soqw/So; k2 = y/$oqw/So, to k2c/k2 -
= s/q-w/q-w = y/x\ Da = So\/2k2c.
После преобразований получим величину (10.4) [131]
В - ^\/ж3/4 + За:-1/4, х= zr^-,
2 Qw
(10.13)
так как к2 = y/qw/So-
Заметим, что передаточную функцию по оценке Ai можно вычис¬
лить исходя из ДУ (10.10) в операторной форме. Тогда матричная
передаточная функция принимает вид
Ф(з) = (KH-F + Ь^К,
или
ф(*) =
к\ + 5 —1
к2 s
К
1_
А
5 1
-к2 к\ + s
К,
где А — определитель матрицы, А = s2 + k\s + fc2. Тогда после
преобразований находим
1
k\s + к2
’«Ms)'
А
k2s
,Ф2(5)_
где Ф1 (5) — передаточная функция по оценке Ai.
Адаптивный прием сигналов
285
Как следует из (10.13), предельный выигрыш в точности филь¬
трации зависит только от отношения спектральных плотностей в адап¬
тивном и неадаптивном фильтрах и не зависит от спектральной плот¬
ности аддитивного шума.
Для получения выигрыша в точности фильтрации в [131] рас¬
сматривается диапазон неопределенности по qw = 0,5...20000 м2с-3,
что примерно соответствует интенсивности ускорения цели a = 0,5...
100 м/с2.
Анализируется две ситуации. Сначала предполагается, что не¬
адаптивный фильтр настроен на минимальное ускорение, т.е. qw =
= 0,5 м2с-3. Тогда отношение х = qw/qw изменяется в диапазоне
[1; 4 - 104], на правом конце интервала при такой настройке неадап¬
тивного фильтра выигрыш может достигать 26,6 раза при сильном
ускорении цели.
Когда неадаптивный фильтр настроен на максимальную интен¬
сивность маневра цели, т.е. qw = 20000 м2с_3, х G [0,25 • 104;1],
выигрыш В « 3,27 на левом конце интервала. Следовательно, неадап¬
тивный фильтр целесообразно настраивать на максимальное значение
маневра цели.
Сходимость процесса адаптации. Если алгоритм адаптации об¬
ладает этим свойством, то оценки характеристик сообщения, выра¬
батываемые фильтром в процессе адаптации, сходятся к истинным
значениям этих характеристик [60].
Время адаптации. Пока процесс адаптации не завершен, исполь¬
зуемые в системе оценки неизвестных параметров сообщения даже
при сходящемся алгоритме адаптации значительно отличаются от ис¬
тинных значений. Это приводит к увеличению ошибок фильтрации.
Поэтому важно, чтобы время адаптации было достаточно малым [60].
Точность адаптации. Если неизвестные параметры сообщения
постоянны во времени, то в адаптивных системах со сходящимся про¬
цессом адаптации ошибки оценивания этих параметров можно сде¬
лать в установившемся режиме равными нулю. При изменяющихся во
времени параметров сообщения ошибки их оценивания даже в устано¬
вившемся режиме не равны нулю, что определяется наличием шумов
и динамикой изменения данных параметров.
Чувствительность адаптивных измерителей. Важным показате¬
лем качества работы адаптивных систем является их чувствитель¬
ность к изменению условий работы по сравнению с принятыми при
их синтезе и, в частности, чувствительность адаптивной системы к
изменению характера (модели) сообщения [113-116].
При оценке возможностей адаптивных систем важную роль игра¬
ет их чувствительность к изменению уровня шума (если в фильтре
286
Глава 10
не предусмотрена соответствующая адаптация), изменению крутизны
дискриминатора и других параметров заданной части измерителя.
10.3. Адаптивная нелинейная оптимальная
фильтрация при наличии постоянных параметров
Фильтрация непрерывных марковских процессов. Рассмотрим
ситуацию, когда в уравнениях моделей сообщения и наблюдения име¬
ется ряд неизвестных постоянных параметров. Запишем в этом слу¬
чае модели сообщения и наблюдения в форме стохастических диф¬
ференциальных уравнений Ито:
dX= F (X,k,t)dt+ G(X,M)dwt;
dY= H (X,M)d*+ ^(*)dvt, (10.14)
где X G Mn,\ — вектор сообщения; Y G Mm,i ~ вектор наблюде¬
ния; F : Mn,i x R Mn,i — вектор-функция; G : Mn,i x R
—> Mn,r — матричная функция; Ч? : R Mm,i — матричная функ¬
ция; wt G Mr,l — вектор независимых винеровских стандартных СП
с ковариационной функцией J5{wtw£} = I\t - т|, I = diag(l, 1,..., 1),
v* G Mi,i — вектор независимых винеровских стандартных шумов
наблюдения с ковариационной функцией E{vtvl} = 1|£-т|, незави¬
симый от X(t) и w{; 1 G Mk,i — вектор постоянных неизвестных
параметров.
Поскольку вектор *к является постоянным, то его можно предста¬
вить в виде решения ДУ
dk = 0. (10.15)
К решению задачи адаптивной фильтрации имеется несколько
подходов. Первый, наиболее распространенный, из них заключается в
расширении вектора сообщений и включении в него вектора неизвест¬
ных параметров. В этом случае первое уравнение (10.14) и уравнение
(10.15) образуют новую модель наблюдений. Поскольку априорное
распределение вектора к неизвестно, в качестве такового берут до¬
статочно широкое распределение. Обоснование такому подходу при¬
водят следующее (см. [51]). При выборе конкретного априорного рас¬
пределения W^(x) синтезируется оптимальный для этого распределе¬
ния алгоритм. При переборе всевозможных априорных распределений
получается семейство оптимальных алгоритмов. На практике оказы¬
вается, что все оптимальные алгоритмы близки по результату, осо¬
бенно при увеличении объема выборки. Это свойство носит название
* Раздел 10.3 за исключением примера 10.6 по просьбе автора подго¬
товил д.т.н. В.В. Сизых.
Адаптивный прием сигналов
287
асимптотической нечувствительности. Преимуществом такого подхо¬
да является то, что синтез адаптивного приемника при таком подходе
ничем не отличается от решения стандартной задачи фильтрации.
Пример 10.2. Рассмотрим задачу фильтрации гауссовского слу¬
чайного процесса с экспоненциальной корреляционной функцией и с
неизвестной интенсивностью на фоне белого гауссовского шума. Мо¬
дели сообщения и наблюдения в этом случае имеют вид:
dx 1 = 0,
dx 2- ~(l/T)x2dt + (1 /T)gdwt\ (10.16)
dy - x\{t)x2{t) dt + rdvt,
где wt и vt — независимые стандартные винеровские случайные про¬
цессы.
Здесь переменная xi(t) описывает неизвестную интенсивность
сообщения X2(t).
Рассмотрим уравнения фильтра Стратоновича, соответствующие
моделям (10.16). Алгоритм фильтрации можно представить в форме
dX = Fdt + D(H')TR-\dy - Hdt)\
^ = GGT + F'D + (F'D)T - D(H/)TiZ-1H/D;
о o 1 (10-17)
F = [0; —(1/Т)ж2]т; F'
0 -1/T
H = xix2; H' = [x2; x\]\ G = [0;g/T]T; R = r2,
где X = [xi; x2]T — вектор оценок; D — матрица размером 2x2.
В скалярной форме уравнения (10.17) имеют вид:
dx 1 = R~1(Dnx2 + Di2xi)(dy — Х\Х2 dt)]
dx2 = ~^X2dt+ R~1(Di2x2 + D22Xi)(dy - xix2dt)’,
= -R~1(Dl1xl + 2DuDi2xix2 + Dl2xl)’,
dt
^ - -^^12 — R~l{DnD\2x\ + x\x2(D\2 + DuD12) + ^12^22^1);
^■=-^2- |^22 - R~4D212x2 + 2DX2D22xyx2 + D22x2).
На рис. 10.2-10.4 представлены результаты моделирования алго¬
ритма (10.17) при значениях параметров: Т = 10, г = 0,1, <7=1,
a;i(0) = 1, :г2(0) = 0, и начальных условиях: Х(0) = [1;0]т; D(0)
'1 0'
0 1
288
Глава 10
На рис. 10.2 жирной линией изображена зависимость от времени
оценки x2(t) полезного сигнала x2(t), который показан тонкой лини¬
ей с крестиками. На рис. 10.3 непрерывной линией показана оцен¬
ка неизвестной постоянной интенсивности х\ полезного сообщения
x2(t). Истинное значение х\ изображено на рисунке штриховой ли¬
нией. На рис. 10.4 представлены зависимости от времени элемен¬
тов матрицы D = Е{ххт} апостериорных дисперсий: Du(t), Di2(t),
D22(t). Особенность динамики рассматриваемой системы обусловле¬
на тем, что в начальный момент времени оценка неизвестного пара¬
метра совпадает с его истинным значением, но остальные начальные
условия являются неравновесными.
Как видно из рисунков после окончания процесса адаптации сиг¬
нал x2(t) на выходе системы близок к полезному.
На рис. 10.5-10.7 показаны результаты аналогичных расчетов при
Адаптивный прием сигналов
289
Рис. 10.4
10 20 30 40 50 60 70 80 90 /
Рис. 10.5
значениях параметров: Т = 10, г
и начальных условиях: Х(0) = [1;0]т; D(0) =
. В этом
0,1, д = 1, £i(0) = 4, х2(0) = 0,
'0,01 0
0 0,01
случае значения х\ = 4 и xi(0) = 1 не совпадают и на рисунках наблю¬
дается процесс адаптации по переменной х\, начиная практически с
начального момента времени.
Вторым подходом к построению адаптивных систем является по¬
строение оценок неизвестных параметров методом максимального
правдоподобия. В этом случае не требуется задания априорных рас¬
пределений неизвестных параметров.
Если обозначить через И^у*|х(Уо I х^) плотность распределения
наблюдения уд в течение времени [0\t] при известных значениях х
параметров *к, то максимально правдоподобная оценка i(t) вектора
290
Глава 10
Рис. 10.7
параметров к находится из условия [51]:
Иу‘|л(Уо I М) = maxWV‘|*(yo I х^)
или из решения уравнения
д In WYt |j.(yS I kt)
= 0.
dk
Следующий адаптивный алгоритм построен по принципу многока¬
нальной системы. Он является строгим, если неизвестный параметр
является дискретной случайной величиной, принимающей конечное
число известных значений. При непрерывном распределении неиз¬
вестных параметров алгоритм является квазиоптимальным даже при
линейных моделях сообщения и наблюдения. Сущность адаптивного
алгоритма заключается в усреднении оценок информативных пара¬
Адаптивный прием сигналов
291
метров, полученных при фиксированных значениях неизвестных пара¬
метров с ПРВ И^|У*(х;£ | Уо).
Рассмотрим выражение для среднего риска
r(d)= / / / L(x, d(y£)) WXXYt (x,z,y£,;t)dxdzdy£„
Jo.vt Jx 0
0
где L(x, d(уд)) — функция потерь от принятия решения d(у£) при
наличии наблюдений у^; WxlYt (х, z,yg\t) — функционал совместной
ПРВ значений вектора информативных параметров X, неизвестных
параметров X и наблюдений Yq за время [0\t\.
Если в качестве функции потерь используется квадратичная
функция, то оптимальной оценкой является оценка условного сред¬
него
X(t)= f xWxiYt^xii I Уо)с?х.
J X
Используя запись одномерной ПРВ через двумерную маргинальную
ПРВ
Wxiy* (х I Уо) = / Wxmy‘(x,z;* I Уо)^>
о Jnx о
выражение для оценки можно представить в виде
Х(£) = / / (х, z; t | Уо) dzdx.
Jx J0
Используя определение условной ПРВ, находим
X(i)= [ *(z)WW(z |y£)dz, (10.18)
0
где
x(z)= f х1УХ|У^(х; t | yj,, z) dx (10.19)
J X
— обычная оценка вектора информативных параметров при условии
известного значения вектора параметров X = ъ.
Апостериорная ПРВ расширенного вектора [ХД]Т сообщения
^х*|у*(х>2^ I Уо) находится обычным образом с использованием
решения уравнения Стратоновича.
Рассмотрим расширенный вектор состояния {ХД}, который за-
датся стохастическими ДУ в форме Ито (10.14) и (10.15). Относи¬
тельно расширенного вектора можно записать стохастическое урав¬
нение Стратоновича:
^^XX|Yq (Х’ Z’ ^ I Уо) = ^+[^X3i|Y^(XJ Z» ^ I Уо)]^+
292
Глава 10
+ [Н(х,z,t) — Н(Х,X,i)]TR Х(^)ИУ(-Н(ХД,t)dt]WXi\yt^(х,z; t | Уо)>
(10.20)
где R(t) = ,>¥(t)'>¥'r(t), L+ — дифференциальный оператор прямого
уравнения Колмогорова (уравнения ФПК):
г=1 i—1 j — 1 J
Н(Х, к, t) = [ [ Н(х, z, t)WxxlYt (х, z; t I Уо) cOdx.
Упх >4 0
Следует отметить в качестве существенного факта, что опера¬
тор L+ совпадает с оператором прямого уравнения Колмогорова для
марковского СП Х(£) (10.14) при условии известного значения век¬
тора постоянных параметров к = z. Таким образом, можно записать
уравнение Стратоновича относительно условной апостериорной ПРВ
dWx|Y‘Ji(x:* I Уо.2) = L+[Wx|Y‘b(x;* I Уо>z)] dt+
+ [Н(х, z, £) — Н(Х, z, t)]TR_1(t)[dyt — Н(Х, z, i)d£] WX|Yt j/x; t \ уь0,г),
(10.21)
где
Н(Х, z,t)= [ Н(х, z, t)WX\ytх(х; t I Уо, z) dx.
JQX
Для вычисления апостериорной ПРВ И^|У*(г;£ | Уо), зависи¬
мость которой от времени и определяетт процесс адаптации, проинте¬
грируем уравнение Стратоновича (10.20) по переменной х в области
fix- Учтем при этом, что
WxlY* (*: * I Уо) = / Wxxiy* (х> Z'1 I Уо) rfx
J пх
и
/ Н(х, z, (х, z; f I Уо) dx =
Jcix о
= J H(X, z, i)VFx|y^(x; i | Уо, k)W4Yto (z; t | y&) dx =
= H(X, z, t)И^|У4 (z; t I Уо).
Тогда имеем
dWl]Yto(z-t |y*)= (H(X"z,t)-H(X"i.,t)]TR“1(0x
Адаптивный прием сигналов
293
x[dyt ~ H(X,X,t)dt]WX|Yt (z;t \ у*0). (10.22)
Поскольку распредение параметра к дискретное, то
m
WMYto(z;t\ у*) = £Я(*Ж*- А*), (10.23)
г—1
где <5(я) — дельта-функция, a Pi(t) — вероятности состояний.
Тогда подставляя (10.23) в (10.22) и интегрируя по переменной z
в окрестности А* правую и левую части уравнения, находим уравнения
относительно Pi(t)\
dPi(t) = - £н(хл-,«)^(0]тк-1(0><
3 = 1
m
x[dyt-]TH(x; (10.24)
i=i
Уравнения (10.22) и (10.24) и дают искомое решение задачи.
Рассмотрим несколько примеров.
Пример 10.3. Модель сообщения и наблюдения (10.3) при фикси¬
рованном значении х\ являются линейными относительно х2, поэто¬
му уравнение Стратоновича (10.22) приводит к алгоритму линейного
фильтра Калмана:
dx2j = — ~x2j dt + ^Dj(t)Xj[dy - XjX2j dt]\
dDj 2 g
—1 = + -
dt T 3 1
dt
dy ~Y2XiX2iPi^
%— 1
^jx2j ~ Y< ^3X2iPj(t)
i—l
Оценку согласно (10.18) находим по формуле
m
Х2 = ’*Tx2iPi(t)\.
W).
г=1
На рис. 10.8 и 10.9 изображены результаты расчетов по изложен¬
ному выше алгоритму. Моделирование велось при следующих значе¬
ниях параметров: Т = 10, г = 0,1, д = 1, zi(0) = 4, ^(0) = 0, и
’1 0'
начальных условиях: х2(0) = 0; D(0) = ^ ^ ; Ai = 1; Х2 = 6;
А3 = 10. Состояния параметра считались равновероятными. На
рис. 10.8 изображены зависимости от времени истинного значения
294
Глава 10
2 3 4 5 6
Рис. 10.9
полезного сигнала х2 (тонкая линия с крестиками) и оценки х2 (жир¬
ная линия). На рис. 10.9 изображены зависимости от времени апосте-
рирных вероятностей Pi(t). Из рисунка видно, что в апостериорная
вероятность Р2 с течением времени стремится к единице.
На рис. 10.10 и 10.11 изображены результаты расчетов при сле¬
дующих значениях параметров: Т = 10, г = 0,1, д = 1, xi(0) = 4,
нулевых начальных условиях: х»(0) = 0; D(0) = q ^
Л2 = 2; Л3 = 3; Л4 = 4; Л5 = 5; Л6 = 6. Состояния параметра
считались равновероятными. Из рисунка видно, что в апостериорная
вероятность Р4 с течением времени стремится к единице.
Пример 10.4. В качестве второго примера рассмотрим работу си¬
стемы фазовой автоподстройки для слежения за винеровской фазой
гармонического сигнала на фоне белого шума с неизвестной интен-
Ai = 1;
Адаптивный прием сигналов
295
сивностью:
dx 1 = 0; dx 2 = gdwt\
dy = Aosin(c<;o+ x2 (t))dt+ A dvt,
где wt и vt — стандартные винеровские случайные процессы.
Поскольку модель наблюдения нелинейная, воспользуемся урав¬
нениями фильтрации в нормальном приближении (алгоритм фильтра
Стратоновича первого порядка). При линеаризации функции sin(c<;o£ +
+ х2) в окрестности в окрестности оценки х2 получаем уравнения
фильтрации при фиксированном значении параметра А:
dx2i = ^Di(t)A0 cos(uj0t + x2i)[dy - A0 sin(uj0t + x2i) dt]\
296
Глава 10
dDj
dt
Рис. 10.12
Ао
= 9
2 А?
Df.
Если пренебречь в полученном уравнении фильтрации слагаемы¬
ми частоты 2шо, то приходим к широкоизвестному уравнению ФАП
первого порядка
Ао
dx2i = -jjD(t)dycos(u0t+ х2»).
Уравнение адаптации имеет вид
1
dPi = ^2 (A0sin(o;o + х2*) - s)(dy
sdt)Pi\
s= ^A0sin(o;o+ x2i])Pi-
i—l
Оценка фазы дается выражением
т
*2 (t) = У]^2г (t)Pi(t).
i—l
(10.25)
На рис. 10.12 и 10.13 изображены результаты расчетов при сле¬
дующих значениях параметров: А0 = 1, д = ОД, ооо = Ю3, £i(0) = 0,
1 0'
х2г(0) = 0; D(0) =
0 1
Ai = 0,05; А2 = 0,1; А3 = 0,2. На
рис. 10.12 изображены полезный сигнал и его оценка, на рис. 10.13 —
апостериорные вероятности состояний параметра. Состояния пара¬
метра считались равновероятными. Из рисунка видно, что в апосте¬
риорная вероятность Р2 с течением времени стремится к единице.
В заключение рассмотрим построение адаптивной системы для
Адаптивный прием сигналов
297
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
ОД
V .К* V
0 5 10 15 20 25 30 35 40 45 t
Рис. 10.13
линейной задачи оценки дальности и скорости до цели. Будем счи¬
тать, что ускорение цели представляет собой случайный процесс ти¬
па гауссовского белого шума с неизвестной спектральной плотностью
мощности (двусторонней) Л. Наблюдению доступна дальность до це¬
ли, причем измерения проводятся на фоне гауссовского аддитивного
белого шума со спектральной плотностью мощности N0/2. Таким
образом, модели сообщения и наблюдения имеют вид:
где wt — гауссовский белый шум с корреляционной функцией Rw{r) =
= А2<5(т); vt — независимый от wt белый гауссовский шум с корреля¬
ционной функцией Rv(t) = (N0/2)S(r).
Уравнения многоканальной (число каналов га) адаптивной филь¬
трации в скалярной форме имеют вид:
298
Глава 10
Рис. 10.14
Рис. 10.15
dDi22 .2 2 2
" А‘ " ivo i12'
dt
kii = 2£)in/iVo; ki2 - 2Dn2/No’t
s(t) =
i=1
На рис. 10.14-10.17 изображены результаты расчетов по приве¬
денному алгоритму при следующих значениях параметров: £i(0) =
= 5ц(0) = 50000, ®2(0) = *«(0) = -500, N0 = 10; d<(0) = J J
Ai = 0,7; A2 = 10; A3 = 50. Рис. 10.14 и 10.15 соответствует зна-
Адаптивный прием сигналов
299
Рис. 10.16
Рис. 10.17
чению Л = 0,7; рис. 10.16 — Л = 10; рис. 10.17 — Л = 50. На
рис. 10.17 изображены зависимости для апостериорных дисперсий в
трех каналах адаптивного приемника, на рис. 10.14, 10.16, 10.17 —
апостериорные вероятности состояний параметра Л. Начальное со¬
стояние параметра считались равновероятными. Из рисунков видно,
что во всех случаях было принято правильное решение о значении
неизвестного параметра.
Пример 10.6 [127]. Адаптивная фильтрация гауссовского марков¬
ского процесса с неизвестным математическим ожиданием и диспер¬
сией [127].
Постановка задачи. Наблюдается случайный процесс
x(t) = X(t) + n(t), (10.26)
300
Глава 10
где n{t) — ГБШ с известными характеристиками:
E{n(t)}= 0, E{n(ti)n(t2)} =
Здесь X(t) — стационарный диффузионный процесс, удовлетворяю¬
щий стохастическому дифференциальному уравнению
d\/dt= -a(X - т) + n\(t), (10.27)
где т — неизвестное среднее значение случайного процесса X(t)\
n\(t) — ГБШ с корреляционной функцией E{n\(ti)n\(t2)} =
= (Nx/2)S(t2 - h).
Корреляционная функция процесса X(t) равна R\(t) = D\ х
х ехр(-а|т|); D\ = N\/Aa. Ширина спектра а считается известной.
Требуется отфильтровать случайный процесс A(t) с неизвестным
средним значением и дисперсией D\ (последние эквивалентно незна¬
нию спектральной плотности N\).
Задача имеет очевидный адаптивный характер. Для оптималь¬
ной оценки случайного процесса A(t) необходимо дополнительно оце¬
нивать среднее значение и дисперсию.
Синтез адаптивного устройства фильтрации. Среди различных
известных подходов к синтезу оптимальных адаптивных алгоритмов
применим подход Р.Л. Стратоновича [130], базирующийся на включе¬
ние совокупности неизвестных параметров, характеризующих неопре¬
деленность, в число оцениваемых [51, 130].
Вся доступная информация о значении A(t) случайного процес¬
са в момент времени t содержится в апостериорной плотности веро¬
ятности (АПРВ) W(t, А). При неизвестных параметрах процесса не
существует непосредственного рекуррентного алгоритма вычисления
W(t, А). Поэтому приходится определять W(t, А) из соотношения
W(t, А) = JJ W(t, А, т, D) dmdD,
где W(t, А, га, D) — апостериорная совместная плотность вероятности
самого процесса и его параметров. При этом оптимальная оценка по
критерию минимума среднего квадрата ошибки
A (t) = J XW(t,X)dX= JJJ XW(t, A, га, D) dXdmdD. (10.28)
Апостериорную плотность вероятности находим решением основ¬
ного интегро-дифференциального уравнения
dt дл д\2
+ [F{t, А) - F(t)]W(t, А, т, D), (10.29)
Адаптивный прием сигналов
301
где F(t, А) = ^
а;(*)А - ^А2
;F(t) = JF(t, X)W(t, A, m, D) dXdmdD.
Задача фильтрации сводится к отысканию способов технической
реализации алгоритмов (10.28), (10.29). В общем случае уравнение
вида (10.29) не имеет явных решений, исключением является линей¬
ная фильтрация. Поэтому ограничиваются приближенными решени¬
ями, обеспечивающими приемлемую точность и допускающими срав¬
нительно простую техническую реализацию. Наиболее распростра¬
ненный метод, приводящий к наиболее простым в реализации при¬
ближенным решениям — гауссовское приближение — в рассматрива¬
емом случае приводит к алгоритму, который не работоспособен. Это
проверено моделированием на ЭВМ [127]. Для получения технически
реализуемых приближенных алгоритмов при решении (10.29) приме¬
няется комбинация метода разделения и метода гауссовского прибли¬
жения [127].
Согласно методу разделения [128], оптимальный адаптивный
фильтр оценки X(t) представляется в виде линейной неадаптивной ча¬
сти, состоящей из множества линейных фильтров Калмана, совокуп¬
ность которых перекрывает область допустимых значений неизвест¬
ных параметров га, D и нелинейной части, включающей устройства
вычисления АПРВ неизвестных параметров W(t,m,D) и учитываю¬
щей адаптивный характер задачи. При этом линейные фильтры Кал¬
мана не связаны друг с другом, т.е. каждый фильтр функционирует
независимо от остальных. Эта особенность существенно упрощает
цифровую реализацию алгоритма [128].
Если неизвестных параметров много, то для перекрытия обла¬
сти допустимых значений по всем параметрам может потребоваться
недопустимо большое число параллельных схем. Предлагаемая в [127]
комбинация метода разделения и гауссовского приближения позволя¬
ет часть параметров неизвестного процесса \(t), оценка которых воз¬
можна линейным фильтром, оценивать одновременно с самим процес¬
сом при условии заданных значений остальных параметров. Структур¬
ная схема устройства адаптации получается значительно проще, так
как имеет меньшее количество параллельных каналов.
Случайный процесс X(t) и его среднее значение га оценивается
при разных фиксированных значениях дисперсии D.
Воспользовавшись алгоритмом разделения, представим АПРВ в
виде произведения
W(t, А, га, D) = W(t, Л, га | D)W(t, D), (10.30)
г f\eW(t,D) = / D)d\dm — АПРВ параметра!); W(t,\,m \
D) — условная АПРВ А, га при фиксированном параметре D.
302
Глава 10
Подставляя (10.20) в (10.29) и интегрируя по Л и т, получим
±щг,т =
где
FD(t)~ [ FD(t)W(t, D) dD
Jd
Fo(t) = I FD(t,X)W(t,\,m,D) dXdm.
Jd
(10.31)
(10.32)
Уравнение (10.31) имеет решение
W(t,D)
ехр
[ Fd(t)dr
.Jo
7Г a(D)
/ехр
f FD(r)dT
Jo
na(D)dD
(10.33)
где 7ra(D) — априорное (начальное) распределение параметра D. Ис¬
пользуя выражение для F(t,А), вместо (10.32) получим
FD(t) =
x{t)XD(t) - -X2D{t)
2_
N
(10.34)
где Лo(t) — условная (при фиксированном D) оценка А(£); X2D(t) —
момент второго порядка для W(t,\,m \ D), т.е.
= JJ X2W(t,\,m\ D)d\dm = [Xn(t)]2 + Rn(t)',
Ro(t) — апостериорная дисперсия оценки (при условии D), т.е.
RD(t) = JJ [Л — \r)(t)]2W(t,\,nn | D)d\dm.
Уравнение для W(t,\,m \ D) получается подстановкой (10.30),
(10.31) в (10.29):
dw(i > ^ I m d(\-m)W(t,\,m,D) d2W(t,\,m\D)
S (■ 1 D) ’ “ ал + aD Ш +
(10.35)
Точным решением уравнения (10.35) является гауссовская ПРВ.
При этом уравнения для условной апостериорной оценки и дисперсии
имеют вид
d 2
— Xd = —cx(\d - rho) + — Длл[^(0 - Ао)\
d 2
—ifiQ — — RTn\[x(t') Ах)],
(10.36)
Адаптивный прием сигналов
303
Рис. 10.18
d N\ 2 -
= —2aR\\ + 2aRm\ + —
d 2
^•^mA = Q-RmX "b &Rmm yy R\\Rm\ <
dt
Rn
TD
ДГ mA
(10.37)
2
Выражение (10.28) для оценки \(t), подстановкой (10.30) приво¬
дится к виду
\(t)= j XD(t)W{t,D)dD.
(10.38)
Для практической реализации алгоритмов (10.33), (10.36) и
(10.37) область всех возможных значений дисперсии дискретизиру¬
ется, т.е. в ней выбирается конечное число точек Dit i = 1,...,М, в
которых осуществляется вычисление условных апостериорных оценок
и дисперсий. При этом выражение для оценки переходит в
м
Ш = YI ^ I , А)ДА. (10.39)
г=1
Структурная схема адаптивного устройства фильтрации изобра¬
жена на рис. 10.18. Устройство представляет совокупность парал¬
лельно включенных фильтров, охватывающих весь возможный диа¬
пазон неопределенности дисперсии D. Предложенный метод позво¬
304
Глава 10
ляет существенно сократить число параллельных каналов устройства,
так как при непосредственной реализации метода разделения было бы
необходимо иметь общее число, равное произведению числа каналов
М по параметру D на число каналов по параметру га.
Характеристики адаптации. Решение уравнения Риккати (10.37)
для условных ковариаций R\\, Дтл, Rmm осуществлялось на ЭВМ
методом Рунге-Кутта [127].
#Аа/Яа, Bmm/D А,
Рис. 10.19
На рис. 10.19 приведены
апостериорные дисперсии оцен¬
ки сообщения R\\ (кривая 1) и
оценки математического ожи¬
дания Rmm (кривая 2) нормиро¬
ванные к D\. При этом приня¬
то отношение сигнал/шум q2 =
= N\/(2Na2) = 5 и отноше¬
ние априорных дисперсий
Rmm/Rxx = 100, т.е. рассмот¬
рен случай значительной не¬
определенности в знании мате¬
матического ожидания.
Важной характеристикой алгоритмов адаптации является время
на обучение, т.е. время, потребное для устранения начальной неопре¬
деленности в значении неизвестного параметра до некоторых прием¬
лемых точностей его оценки. Как следует из графиков, при известной
дисперсии процесса, время, необходимое для обучения, составляет
5...10 времен корреляции процесса.
Исследование времени на обучение при неизвестной дисперсии
помехи в принципе возможно методами статистического моделиро¬
вания.
Можно ожидать, что оценка дисперсии при не слишком малых
ОСШ требует меньшего времени, чем оценка среднего значения. Спе¬
циальное исследование показывает, что это имеет место уже при
ОСШ q2 « 10.
Таким образом, время на обучение при адаптивной фильтрации
гауссовского марковского процесса имеет порядок десятков времен
корреляции процесса.
Часть III
Обнаружение случайных сигналов
11 Обнаружение гауссовских сигналов
на фоне гауссовского белого шума
(непрерывные процессы) [50]
Пусть наблюдается аддитивная смесь сигнала s(t) и шума w(t),
причем сигнал и шум являются независимыми гауссовскими случай¬
ными процессами с нулевыми средними значениями:
E[s(t)} = E[w(t)] = 0.
Кроме того, шум — ГБШ со спектральной плотностью Nq/2. КФ
сигнала и шума
Nn
Rw(t — u)= —8{t — u)\ Rs(t,u)= E[s(t)s(u)].
Отсюда следует, что КФ аддитивной суммы
r(t) = s(t) + w(t), Ti^t^ T2,
имеет вид
Nn
Rr(t,u) = E[r(t)r(u)] = Rs(t,u) + —S(t — и), T\ ^ t,u ^ T2.
Таким образом, задача обнаружения случайного сигнала сводит¬
ся к проверке двух гипотез
Яо : r(t) = w(t)\ . ч
Я,: т-«)+«,). (11л)
В дальнейшем разложим процесс в ряд, используя собственные
функции сигнального процесса в качестве координатных функций.
Шумовая составляющая w(t) является БШ, и поэтому коэффици¬
енты разложения будут некоррелированными по обеим гипотезам и
независимыми в силу гауссовского характера наблюдаемого СП r(t).
Далее рассмотрим усеченный ряд rk(t) на к-м слагаемом.
Введем отношение правдоподобия (ОП)
<112)
306
Глава. 11
Пусть lim A(rk(t)) = A(r(t)). Тогда решающее правило прини-
к—юо
мает вид
Нг : Л(г(0) > 7,
Н0 : A(r(t)) < 7.
Как и прежде (см. гл. 1, 2) порог 7 определяется стоимостью
и априорными вероятностями при испытании по критерию Байеса и
требуемой вероятностью ложной тревоги (ВЛТ) Qo при испытании
по критерию Неймана-Пирсона.
Усеченный ряд имеет вид
к
rk(t) = ^2 't'nVnit), Т2;
71 = 1
где
f r(t)<pn(t)dt.
Jti
(11.3)
/:
Ортонормальные функции {ipn(t)} являются собственными функ¬
циями интегрального уравнения
гт2
Rs(t,u)<pn(u)du= A nipn(t), Т2, (П-4)
/Тх
где Ап — п-е собственное значение интегрального уравнения. Тогда
r(t) = lim rk(t), Ti < t < T2.
k—too
Найдем средние значения и корреляционные моменты коэффи¬
циентов гп, соответственно двум гипотезам:
гт2
Е(гп | Но) = Е
Г12
/ W(t)<pn(t)
Jtx
dt
0;
Я(г*г,- | Яо) =
где 6ij — символ Кронекера;
Е(гп \Нг)= Е
Гт2 ГТ2
/ s(t)(pn(t) dt + / w{t)ipn{t)dt
Jtx Jti
0;
No
Rr(i,j) = Е(пг, I Hi) = ^An + —J 5ij,
так как E(sisj) = A*5^.
Поскольку ri являются статистически независимыми гауссовски¬
Обнаружение гауссовских сигналов на фоне ГВШ
307
ми СВ по той и другой гипотезам, то ОП принимает вид
Л 1 ( г?
П /о^лг-/о;т:ехр
... i\VMN0/2+ Хг V 2tiX^N'о/2,
A(rfc(i)) = -
/:
После преобразований и логарифмирования найдем
1ПАЫ0) = i t, - 5 Е1" (J + ^) • (Ч 5)
Необходимо найти ОП в замкнутой форме при к оо. Для этого
следует оределить обратное ядро интегрального уравнения, которое
находим из соотношения
гт2
Rr(t, u)Qr(u, z) du = 5(t — z), T\ ^ T2.
/Ti
Будучи записанным через собственные функции и собственные
значения это ядро имеет вид [50]
00 1
Qr(t,u) = д. + дго/2^^)^^)’ ^1 ^ ^ ^ ^2*
г=1
Обратное ядро можно записать в виде суммы [50]:
Qr(t,u)= -£-[8(t-u)-hi(t,u)], Ti^t^T2,
iv о
где функция удовлетворяет интегральному уравнению
No Гт<2
—hi(t,u)+ / hi(t,z)Rs(z,u) dz = Rs(t,u), Ti ^ £, u ^ T2.
2
(11.6)
Решение интегрального уравнения (11.6) можно записать, ис¬
пользуя собственные значения А* и собственные функции
оо 1
Д. + N Ti^t,u^T2. (11.7)
г=1 г '
Для первого слагаемого (11.5) учтем соотношения (11.3), тогда
(11.5) принимает вид
л('г‘(*)) = к Ll Цr{,) (I; Jrrkj2v,(,)vM)r(n) itdu~
308
Глава 11
h\(t, и) ^(0
Рис. 11.1
Перейдем к пределу при к оо и учтем (11.7). В результате
получим
По критерию минимума среднего квадрата ошибки оценку s(t)
сигнала можно получить, пропустив наблюдаемый СП r(t) через
фильтр с импульсной характеристикой hi(t,u)\
где hi(t,u) удовлетворяет интегральному уравнению (11.6). В таком
случае приемник осуществляет коррекцию СП r(t) с оценкой сигнала
§(£). Поэтому такой приемник называют оценивателем — коррелято¬
ром [50] (рис. 11.1).
Возможна и другая реализация приемника, а именно в виде оп¬
тимального реализуемого фильтра. Такой подход на основе исполь¬
зования интегрального уравнения (11.6) предложен Швеппе [46]. В
данном случае ОП формируется в реальном масштабе времени как
выходное напряжение нелинейной динамической системы. На основе
теории марковских СП этот же подход ранее был предложен в работах
Р.Л. Стратоновича и Ю.Г. Сосулина [51, 133-136].
В дальнейшем положим Xi = 0; Т2 = Т. Запишем ОП h(T)
Решающее правило принимает вид
Нг : 1а > У;
Hq . ls > 'у ,
где
I Гт2 ГТ2
—— / / r(t)hi(t,u)r(u) dtdu\
No Jtx Jti
(11.8)
si
rT2
(t) = / h\(t,u)r(u)du, Ti ^ ^ T2, (11-9)
JTl
Обнаружение гауссовских сигналов на фоне ГБШ
309
в виде
I,
<(Т) = ~jP~dt= Is{t)dt,
dt jo
где ls(0) = 0.
Заменив T на t в (11.8), получим [50]
ls(t) = -j- [ r(r)dr [ hi(r,u : t)r(u) du, (11.10)
No Jo Jo
где hi(r,u : t) удовлетворяет интегральному уравнению
N rt
—hi(r,u:t)+ / h\(r,z \ t)Rs(z,u) dz = Rs(t,u)\ 0 ^ t, u ^ t.
2 Jo
(11.11)
Решение этого уравнения зависит от времени t, что подчеркива¬
ется формой записи hi(r,u : t).
Дифференцируя ls(t) (11.10), получим
is(i) = jrM J h\(t,u : t)r(u) du+
* dh\{r, u : t)
+ r(£) [ r(r) hi(r,t:t)r(t)+ [
Jo L Jo
dt
-r(u) du
drj .(11.12)
В этом случае интегральное уравнение (11.11) приводится к виду
N pt
—hi(t,u:t)+ / hi(t,z : t)Rs(z,u)dz = Rs(t,u), O^u^t.
2 Jo
(11.13)
Введем оценку s(t) сигнала, аналогичного (11.9):
или в форме
s(t) = / h\(t,u : t)r(u) du,
Jo
s(t) = / h\(u,t : t)r(u) du.
Jo
(11.14)
(11.15)
Последняя формула следует из симметрии решения уравнения
(11.11). Учитывая (11.14), (11.15), из (11.12) находим
rt rt
ш
No
2r(t)s(t) +f dr f r(r)
Jo Jo
dh\ (r, u : t)
r(it) du
Докажем справедливость соотношения
<9/ii(r, u : £)
dt
(u.16)
310
Глава 11
МофТ—i—[кв]-—1
Рис. 11.2
Сначала дифференцируем (11.11):
N0dh
2
0 < т, и ^ t.
Далее заменим КФ Rs(t,u) левой частью уравнения (11.13) и пере¬
группируем слагаемые. В результате получим
Следует заметить, что суммы в квадратных скобках выполняют
роль собственных функций с собственными значениями Л = —N0/2,
что следует из сравнения (11.17) с интегральным уравнением (11.4).
Однако, по определению ядра Rs(z,u), интегральное уравнение с та¬
ким ядром не может иметь отрицательного собственного значения.
Следовательно, чтобы соблюдалось равенство в (11.17), необходимо
приравнять выражения в квадратных скобках. Отсюда следует спра¬
ведливость (11.16). Подставив значение производной из (11.16) в
(11.15) и учитывая (11.13), получаем искомый результат:
Структура оптимального приемника имеет вид рис. 11.2. На этом
рисунке ОФ — оптимальный фильтр; КВ — квадратор.
Рассмотрим реализацию оптимального приемника в переменных
состояния. Здесь информационный процесс описывается уравнением
состояния [50]
/
Jo
N0 \dhi{r,u : t)
~2~ [ dt
~dhi(r,z : t) + h
dt
+ hi (r, t : t)hi (t, z \t) Rs (z, и) dz,
+ /ii(r, t : t)hi(t, и : t) =
(11.17)
Ш= ^[2г(03(0-32(0].
iV0
(11.18)
Отсюда после интегрирования находим ОП
X(i) = F (i)X(i) + G(t)u(i),
где F(£) и G(t) — соответствующие матрицы.
Обнаружение гауссовских сигналов на фоне ГВШ
311
Гкв]—1
dt ■
Рис. 11.3
Уравнение наблюдения имеет вид
5(0 = Н(*)Х(*).
Случайный процесс u(t) — БШ, такой, что
-E[u(£)ut(t)] = Q S(t — r).
Начальные условия имеют вид
ВДО)] = 0, Я[Х(0)Хт(0)] = Р0.
Оценка сигнала s(t) оптимальная по критерию минимума средне¬
го квадрата ошибки имеет вид
s(t) = Н (t)x(t).
причем оценка x(t) удовлетворяет уравнению фильтра Калмана [95]
x(t) = F(t)x(t) + K(t)[r(t) - Н(t)x(t)],
где К(t) = D(t)HT(t)So ^1(t)', Sq *(i) = 2/N0; D(t) — матрица диспер-
сии, удовлетворяющая уравнению Риккати
^ = F(t)B(t)+-D(t)F'T(t)+G{t)Q(t)Gr{t)--D(t)Hrr(t)So1H(t)B{ty,
D(0) = D0.
Матрица D(£) является ковариационной матрицей ошибки e(t) =
= X(i) - Х(£):
D(t) - E{[X(t) - X(mT(t) - XT(i)]}.
Средний квадрат ошибки оценки сигнала
a2s(t) = H(f)D(f)IT(f).
Значение матрицы дисперсий D(£) и величину cr2(t) можно вы¬
числить до приема процесса r(t).
Уравнение состояния для ОП получается по (11.18). Таким об¬
разом, ОП формируется как выходное напряжение динамической си¬
стемы.
Структурная схема оптимального приемника в переменных состо¬
яния изображена на рис. 11.3.
12 Обнаружение случайных сигналов
(дискретные процессы)
12.1. Энергетический приемник
Сигнал s[n] моделируется стационарным гауссовским белым слу¬
чайным процессом (ГБШ) с нулевым средним значением и дисперси¬
ей сг2. Помеха (шум) w[n) представляет собой также ГБШ с нулевым
средним значением и дисперсией сг2. Шум и сигнал — независимые
случайные процессы:
х[п] - s[n] + w[n\. (12.1)
Обнаружитель (приемник) должен различать две гипотезы:
Н0 ■■ х[п] = Цп];
гт г 1 г 1 г 1 п ~ °’N-
Н1 : х[п\ = s[nj + w[n\,
Принимается гипотеза Hi, если ОП превышает некоторый по¬
рог 7:
иад)
( n) W2{xn I Яо) Т ( }
По предположению, х ~ А^(0; сг21) при гипотезе Н0 (I — единич¬
ная матрица) и N(0: (сг2 + сг2)1) при гипотезе Hi. Таким образом,
получим ОП
Л(Хп)
[27г(<72 + CT2)]N/2
ехр
N
аг[гс]
Логарифм А(ХП) имеет вид
N
2 Г
п—1
In Л(ХП) = ^|п—^-2-1 f—1—--1)Уж2[п]
2 СГ? + <72 2 V сг? + а2 а2 / ^ J
П= 1
N, а2 1 a2 N
|п^—9+ ^ о/ о* ж2[п].
^ сг2 + сг2 2 сг2(сг2 + сг2) '
П = 1
Таким образом, принимается решение в пользу гипотезы Яь если
Обнаружение случайных сигналов (дискретные процессы)
313
статистика Т(ХП) удовлетворяет неравенству
N
Т(Х„)= Х>2[п| >у. (12.3)
П—1
Следовательно, обнаружитель Неймана-Пирсона должен вычис¬
ли
лять энергию наблюдаемых данных Х^ХП = х2[п], Хп = {х[1],
П — 1
х[2],x[7V]}, и сравнивать ее с порогом. Такой обнаружитель изве¬
стен как энергетический приемник. Очевидно, в присутствии сигнала
энергия принятого колебания возрастает.
Если ввести эквивалентную статистику
т'(х„) =
71 — 1
то получим устройство оценки дисперсии наблюдаемого колебания.
После нормировки статистики Т(ХП) получим
Г(Хп) 2
2— ~ Xn пРи гипотезе Я0,
Т(ХП) 2 ^12'4^
-о о ~ Xn пРи гипотезе Яь
а2 + а2
так как статистика Т(ХП) представляет собой сумму 7V квадратов
одинаково распределенных гауссовских СВ с нулевым средним зна¬
чением и дисперсией, равной соответственно а2 (при Я0) и а2 + а2
(при Hi).
Таким образом, вероятность обнаружения Qd и ВЛТ Q0 выража¬
ются через Q-функцию вида
РОО
QMx)= / W{u)du, (12.5)
л-u I
J X
где W{u) — распределение xl c v степенью свободы (v = N, v > 1);
( xv!2~x ( 1 \
W(X)‘ 2^/2)^ Г) "P"I>0;
[ 0 при x < 0;
T(z) — гамма-функция,
poo
T(z)= /
Jo
причем Г(г) = (z - 1)Г(г - 1) при любом г; Г(1/2) = л/тт, Г(п) =
= (п — 1)! при целом п.
314
Глава 12
Выразим ВЛТ Qo через Q-функцию Q(x):
Qo = P{T(Xn) > У | Я0} -
(12.6)
где olv = 'у'/сг2: av — процентная точка х2-распределения. Тогда
вероятность обнаружения
Очевидно, что с ростом ОСШ о2jo2 вероятность обнаружения
возрастает.
Если ввести процентную точку распределения х2, равную
При Qo - Ю п, п - 1,4, по таблице находим для v = 25 qi =
- 34,3816; q2 = 44,3141; q3 = 52,620; qA = 60,140. При v = 70 qx =
= 85,5271; g2 - 100,425; g3 - 112,317; qA = 122,755.
Характеристики обнаружения энергетического приемника изоб¬
ражены на рис. 12.1 (при v - 25) и рис. 12.2 (при v - 70) при
Qo = Ю-п, п - 1,4, в зависимости от ОСШ с£дв = 101д(сг2/<72)
от -20 до 10 дБ.
-20 -15 -10 -5 О 5 ri2, дБ -20 -15 -10 -5 0 </2, дБ
(12.7)
ч = QjiQo) = i/o2
Хи
(12.8)
то получим
(12.9)
Рис. 12.1
Рис. 12.2
Обнаружение случайных сигналов (дискретные процессы) 315
Для вероятности обнаружения могут быть получены приближен¬
ные формулы, если использовать асимптотические соотношения для
Q 2-функции [58]:
Xu
первая асимптотическая формула
Qxt(x) = Q (~ж) :
вторая асимптотическая формула
Л / Ч Ч (ж/г^)1/3 - (1 -2/91/)
Qx2 (ж) - Q(x0), х0 - '
третья асимптотическая формула
Qo (х) - Q(x i), xi = у/be — \/2v — 1 « у/2х — V2v. (12.12)
Xu
(12.10)
(12.11)
Обозначим 7'/о2 = a„. Тогда по (12.6) получим
Q I ) = Qo-
Отсюда
Oil/ V Oiy/
y/2v V 2
Тогда
= A-
Q~\Qo), A= Q~1(Qo)+
Qd = Qjl ( 2/ 2 . 1
\GslG + 1
/.
Oil/
Q
a2/a2 + 1
\/2v
Q
a2Ja2 + 1
- Q
7“
«Л
a2/a2 + 1
I 7 = Q {Qo)-
Таким образом, первая приближенная формула принимает вид
-г 2
<г = -4.
(12.13)
Согласно второй асимптотической формуле
316
Глава 12
-20 -15 -10 -5 0 5 d2. дБ
Рис. 12.3
-20 -15 -10 -5 0 d'2, дБ
Рис. 12.4
Из условия
Qo = Q
(х/и)1/3
В
(12.14)
при х - av
находим
Qd = Qv 2
OLy
х" \d2 + 1
где ri = d2 + 1 = о2 jo2 + 1
«-'(«о)
. (a„/r)v)113 A\ f {av/v)1/3 A
В в) в*?1/3 в
По (12.14)
(а„/v)1/3
В
A
7+ в-
Таким образом, вторая приближенная формула принимает вид
Q*=Q\1±M1-^) = Q
В
7
А
у/з В
(12.15)
Согласно третьей асимптотической формуле (12.12)
\/2av - \/2г/ = Q_1(Qo) = 71 х/2а^ = 7 + sFlv.
Тогда
Qd = Qx2(av/ri) = Q ( \/2^- - у/to) = Q - >/?£) =
(12.16)
Обнаружение случайных сигналов (дискретные процессы)
317
Рис. 12.5
Рис. 12.6
На рис. 12.3 и 12.4 соответственно при v = 25 и v = 70 изоб¬
ражены точные зависимости (сплошные линии) по рис. 12.1 и 12.2 и
асимптотические по первой приближенной формуле (штриховые ли¬
нии).
Данные по второй приближенной формуле практически совпада¬
ют с точными результатами (см. рис. 12.1 и 12.2). Асимптотические
зависимости с учетом третьей приближенной формулы изображены
на рис. 12.5 и 12.6.
12.2. Обобщение: сигнал коррелированный
гауссовский случайный процесс
Пусть по-прежнему помеха w[n] ГБШ с нулевым средним значе¬
нием и дисперсией сг2, сигнал s[n] гауссовский СП с нулевым средним
значением и КФ Rs.
Наблюдаемая выборка Хп имеет вид
Xn = Sn + Wn, (12.17)
где Х„ = {ж[1],ж[2],...,а:[гг]}; S„ = {s[l], s[2],s[n]}; W„ = {Ц1],
го[2],...,Цтг]}.
Таким образом,
х Г 7V(0; ст21) при Н0',
” ~ \ N(0\ Rs + ст21) при Яь
Оптимальный обнаружитель должен составлять ОП
W!(Xn I Нг)
A(Anj Wo(X„ | Яо) '
Принимается гипотеза Hi, если А(Х„) > 7. При этом
Wi(X„ | Нг)
(2тг)«/2д1/2
ехр
--X;(RS+ аЧ)-1^
318
Глава 12
где А = det(Rs + сг21);
Wo(X„ | Яо) =
(27П72)п/2
ехр
' 2^2 X«Xn
Взяв логарифм ОП и оставляя слагаемые, зависящие только от
наблюдаемой выборки Хп, получим, что принимается гипотеза Hi,
если
XT
'П
(Rs + сг21) 1
хп > у.
Таким образом, испытывается статистика
Т(Х„) = а2Х1
1
-ri - (R, + а2!)-1
Х„ > 2 У а2.
(12.18)
[61]
Согласно лемме матричного обращения справедливо обращение
(А + BCD)-1 = А-1 - A_1B(DA_1B + C-1)-1DA-1. (12.19)
Полагая А = <т21, В = D = I, С = Rs, получим
(R®+о2*)-1 = А1 - A f А1+R*_1
Следовательно, испытываемая статистика Т(Хп) принимает вид
-1
Т(хп)= х;4 I 4i+ R71
х„
Введем вектор
1
1+ R71
Хп
Преобразуя этот вектор, получим
-1
ri+ R;
х„= —
A^+ct^r;1
хп =
= RS(RS + аЧу'Хп.
Таким образом, принимается гипотеза Hi, если
Т(Х„) = Х> > 7",
(12.20)
где T(Xn) = J2 х[к\а[п].
к=1
Покажем, что вектор а представляет собой оптимальную по кри¬
терию минимума среднего квадрата ошибки оценку сигнального век-
Обнаружение случайных сигналов (дискретные процессы)
319
тора Sn:
а = Sn = RS(RS + <72I)_1Xn.
При входном процессе на входе нерекурсивного фильтра Винера
x[n] = s[n] + w[n]
известно уравнение Винера-Хопера [60, с. 365]
RxH — rsa:,
где Н = Нопт импульсная характеристика оптимального фильтра,
rsx — вектор взаимной КФ сигнала и выходной последовательности.
Если сигнал и помеха не коррелированны, то rsx = rs, где rs — вектор,
состоящий из отсчетов сигнальной КФ; в данном случае Их = Rs +
+ R™ = Rs + сг21, где Rs — корреляционная матрица сигнала. Тогда
по (12.20) находим
(R* + сг21)Н - Rs.
Отсюда
Н = (Rs + a2I)_1Re.
Скалярная оценка сигнала имеет вид [60, р. 365]
sn = HTXn = rsrI(Rs + cr2I)_1Xn,
так как матрица Кх = Rs + a2l симметрическая.
Векторное обобщение формулы (12.21) имеет вид [24]
Sn = RS(RS + <72I)-1Xn.
Таким образом, принимается гипотеза Яь если
T(Xn) = X*Sn > 7",
где
T(Xn) = ^)x[fe]a[n].
(12.21)
(12.22)
(12.23)
(12.24)
k=1
Следовательно, структурная схема обнаружителя принимает вид,
показанный на рис. 12.7 (ЦФВ — цифровой фильтр Винера).
Рассмотрим два примера.
Рис. 12.7
320
Глава 12
Пример 12.1. Энергетический приемник.
В этом случае Rs = a2l и оценка сигнала Sn принимает вид
J2
Sn = a2I(a2I + сг21) 1
aj + a*
гХп.
Следовательно,
s„[n]
ai + и-
г ж[гг].
Таким образом, принимается гипотеза Hi, если
л-2
Т(Х„) = ^z[fc]s[n] =
к=1
at + (7“
У}Гх2[к} > 7"
(12.25)
к=1
ИЛИ
г(х„)= 5>2[fc]>
7
к=1
Rc
Этот же критерий получен ранее на основе ОП.
Пример 12.2. Сигнал имеет вид двумерного вектора п = 2. Сиг¬
нал коррелирован, его корреляционная матрица
1 Р
_Р 1_
где р — коэффициент корреляции между s[ 1] и s[2] (к принимает зна¬
чения 1 и 2).
Испытываемая статистика
Т(Х„) = X;Rs(R5 + сг21)-1Хп.
Выразим статистику через вектор
Yn - VTX„
(12.26)
где V — ортогональная матрица
V
г J_ _1_
у/2 у/2
1 1_
у/2 у/2
Свойство матрицы V: VT = V
Преобразуем статистику Т(ХП):
Т(Х„) - Xj;wTReVV-1(Re + <72I)-1VVTXn =
= (VTX„)T(VTRSV)[V-1(R, + a2I)V]_1VTXn =
= (VtX„)t(VtRsV)(VtR5V+ a'lj-'VX.
Преобразованием
VTR,V = Л»
Обнаружение случайных сигналов (дискретные процессы)
321
приведем матрицу Rs к диагональному виду:
Л., = a
1+ р О
О 1 -р
Тогда статистика Т(ХП) приводится к квадратичной форме
T(Xn) = Y;AS(AS + аЧу'Уп = Y;AY„, (12.27)
где А — диагональная матрица,
А =
О
О А2
А,.^±£L;
^1(1 + Р) + a2' <^(1-p)+(j2’
Таким образом, статистика Т(ХП) принимает вид
Г(ХП) = А1У2{ 1] + А2у2{ 2]. (12.28)
Получили статистику, аналогичную статистике энергетического
приемника, но не в виде чистой суммы квадратов, а в виде взвешенной
суммы квадратов с весовыми коэффициентами А\ и А2.
Если сигналом является ГБШ, когда р = 0, то, учитывая соот¬
ношение
YTnYn = y;vvty„ = х;х„,
получим
Т(ХП) = ~^(у2{ 1] + у2 [2]) = ~^(х2[1] + а;2 [2]),
ai + a ai + az
что совпадает с (12.25).
Следует заметить, что линейное преобразование (12.26) обеляет
входной процесс. Это видно из следующего вывода:
^ = E(YnYTn) = £(VTXnX;V) = VTRXV - VT(RS + <72I)V =
= VTRSV + a21 = As + a21.
Таким образом, получим диагональную матрицу Ку. Аналогично
при гипотезе Но Иу = а21, и поэтому преобразованный вектор Yn
состоит из некоррелированных координат, хотя и с разными диспер¬
сиями, чем объясняется наличие разных весовых коэффициентов А\
и А2 в (12.28).
Рассмотренный двумерный вариант модифицированного энерге¬
тического приемника можно обобщить на n-мерный и таким образом
получить его каноническую структурную схему.
Воспользуемся теоремой [62, теорема 7.7]: Для любой симмет¬
рической матрицы М существует такая ортогональная матрица U,
что UTMU = А, где А = diag(Ai,Ап) — диагональная матрица,
диагональными элементами которой являются собственные значения
322
Глава 12
матрицы М, повторяющиеся согласно их кратности. При этом орто¬
гональная матрица U состоит из собственных векторов матрицы М.
На этом основании для симметрической матрицы Rs порядка n х п
можно записать
VTRSV = As,
где V = {г>1,г>2,vn}, Vk, k = T/n, — собственные векторы матрицы
Rs, As = diag(AbAn), где Ak, k = T/n, — собственные значения
матрицы Rs.
В результате получим новую форму статистики
Г(ХП) = x;s„ = X;RS(RS + cr2I)“1X„ = Y;As(As + a2I)"1Yn =
Afc
A k + cr2
= £t^3»2M. <12-29>
/e=l
так как справедливо свойство для диагональной матрицы
fl/Ai
0
0
0
л;1 =
0
1/Л2
0
0
. 0
0
0
1/А,
Заметим, что квадратичная форма
а\х\ + ... + апх2п
называется квадратической формой канонического вида, сами пере¬
менные Хк, к = l^n, — каноническими переменными. Отсюда и об¬
наружитель со статистикой (12.29) называется каноническим. Кано¬
ническая форма обнаружителя гауссовского случайного сигнала при
наличии помехи в виде ГБШ, изображен на рис. 12.8.
Рассмотрим обобщение задачи обнаружения случайного сигнала
при условии, что помеха — не ГБШ, а гауссовский шум с нулевым
средним значением и корреляционной матрицей Kw.
Сигнал и помеха независимы. Тогда
х (N(0:11^) при Я0;
n ~ \ N(0',Rs + Rw) при Яь
y?7 = vtx77 л*
Ак + V2
Рис. 12.8
Обнаружение случайных сигналов (дискретные процессы)
323
В этом случае ОП принимает вид
Л(Х„) =
1
ехр
(27t)»/2Ai
ix£(Rs + Ru,)-1X„
(27Г)П/2А2
ехр
1 VT D-lv
" 2 лпйг«
> 7,
где Ai = y/6et(Rs + R^); A2 = \/detRw.
Взяв логарифм и оставляя только те слагаемые, которые зависят
от входных данных, получим статистику
Т(Х„) = X^R-1 - (R№ + R,)"1]^ > 2У. (12.30)
Преобразуем обратную матрицу (Rw + Rs)_1, используя лемму
об обращении матриц (12.19) при А = Hw, В = D = I, С = Rs.
Тогда получим
(Rw + Rs)_1 = R;1 - R^R;1 + RJ^R-1.
После вычитания в квадратных скобках в (12.30) остается ве¬
личина
R-1^1 + R71)_1R^1. (12.31)
Рассмотрим отдельно сумму
r-1 + r;1 = R-41+ r^r;1) = r-^r, + rjr;1.
После обращения этой суммы находим
[R<l/;1(RS 4- R^)RX 1] 1 = RS(RS 4- R^) 1Rw
В результате выражение (12.31) принимает вид
R“1RS(RS + R№)_1.
Поэтому статистика Т(ХП) упрощается:
Г(ХП) = X^R“1RS(RS + RJ-1.
Обозначим через Sn оценку, оптимальную по критерию миниму¬
ма среднего квадрата ошибки, которую формирует цифровой фильтр
Винера:
Sn = RS(RS 4- Rw) 1Xn.
Тогда статистика Т(ХП) принимает окончательный вид:
Т(Х„) = X£R^Sn. (12.32)
Эта статистика характеризует оптимальный обнаружитель слу¬
чайного сигнала, когда помеха не зависит от сигнала и представляет
собой гауссовский СП с КФ Kw.
324
Глава 12
В частном случае при = <т21 получаем обнаружитель сигнала
на фоне ГБШ, а при Rs = a21 — энергетический приемник.
Рассмотрим общий случай задания уравнения наблюдения
X = Ш + W,
где X = [ж[0],ж[1], ...,x[7V - 1]]т, Н — N х р-матрица; I — случайный
р х 1-вектор; W — N х 1-БШ, причем к ~ N(0,K\), W ~ iV(0,<j2I),
СВ Л и tt; независимы.
Проблема обнаружения такова:
Я0 : X = W ,
(12.33)
Нг : X = Ш + W. v '
Обозначим сигнальный вектор S = Ш,, причем S ~ N(0,RS),
где Rs — корреляционная матрица сигнального вектора,
Rs = HRaHt. (12.34)
Оцениватель-коррелятор принимает гипотезу Яь если статисти¬
ка
Т(Х) = XTRS(RS + сг21)_1Х > 7", (12.35)
или после подстановки (12.34)
Т(Х) = XtHRaHt(HRaHt + сг21)_1Х > 7".
Статистку Т(Х) можно записать в виде
т(х) = xTs = xTm,
где X — оптимальная оценка случайного вектора по критерию мини¬
мума среднего квадрата ошибки.
В качестве примера рассмотрим гармонический сигнал, когда
уравнение наблюдения имеет вид
х[п\ = A cos(27r/on + Ф) + w[n\, п= 0,1...7V— 1, (12.36)
где /о < 1/2; w[n\ — ГБШ с нулевым среднем значением и диспер¬
сией <т2.
Запишем сигнал в форме двух слагаемых
s[n\ = a cos(27r/on) + 6sin(27r/on), (12.37)
где a = AcosO; В = В sinO.
Для того чтобы s[n] был стационарным случайным процессом,
необходимо выполнение условий [60]
Е(а) = Е(Ь) = 0; Е(а2) = Е(Ъ2) = а2, (12.38)
Обнаружение случайных сигналов (дискретные процессы) 325
причем первое условие вытекает из равенства
£(s[n]) = E(a) cos(27r/on) + E(b) sin(27r/on) = 0.
В результате получим [60]
rs[k] = £[s[n]s[n+ k]\ = a2 cos(27r/o/c); A =
-N(0,a2s I).
(12.39)
Отсюда следует [60], что амплитуда А имеет распределения Ре¬
лея, а фаза Ф распределена равномерно:
А ( А2 \
W(A)= { ^2 ехр у 2crf)
0 при А < 0.
при А > 0;
щ<ь)=[Ь пРиФе(°>27г);
t 0 при Ф $£ (0,27г).
Матрица наблюдения Н имеет вид
1 0
н_ cos27r/o sin 27г/о
(12.40)
_cos27T/0(iV- 1) sin 2-rrfo(N - 1).
Статистика T(X) с учетом свойства X ~ ЛГ(0,<721) преобразуется
к виду
Т(Х) = <г2ХтННт(ст*ННт + <т21)-1Х.
Воспользуемся леммой об обращении матриц [61]
(А + BCD)"1 = А1 - A“1B(DA1B + C-1)-1DA_1
при А = сг21; В = ст2Н; С = I; D = Нт. В результате получим
(12.41)
Г(Х) = <г2ХтННт
1 _ 1 2„ /ст2НтН _
-ri TCrfH + I
a
4 s
Нт
X.
Учтем матричное произведение
ННТ =
А В
В С
где
JV —1
N-1
А= cos2(27r/0п); В= cos(27r/on) sin(27r/0n);
n=0
n=0
326
Глава 12
N-l
П = 0
Если N достаточно велико и 0 < /о < 1/2, то можно воспользо¬
ваться приближенными соотношениями
N-1
N-1
\+\ cos(47r/0n)
N
2 '
А = cos2(27r/0n) = ^2
п=О п=О
N-1 ^ N-1
В = cos(27T/0п) sin(27r/0n) = 2 sin(47r/o™) ~ 0;
п=0 —Л
N-l iV-1
С = ^ sin2(27r/0n) = ^
П—0
Таким образом,
п=0
AT
"2'
N
ННТ = —I.
2
Поэтому статистика Т(Х) может быть преобразована к виду
Т(Х) = <r2XTHHT(-^1 - Н + l) ШТ)Х =
= rf2XTHHTX - + 1хтннтх = ^ХТННТХ,
где с = Nd2/(d2N/2 + 1); d2 = cr2/a2.
Если отнести положительную постоянную с в величину порога,
то получим статистику
1_
N'
и принимается гипотеза Hi, если
Т'(Х) >7"/с= 7'". (12.42)
Раскроем статистику Т'(Х) за счет перемножения НТХ с учетом
вида матрицы Н (12.40):
N-1
х[п] C0s(27r/on)
г'(х)= ^хтннтх = -^||нтх||2,
Г'(Х) =
п=0
N-1
x[n] sin(27r/on)
п=0
Обнаружение случайных сигналов (дискретные процессы)
327
sin(27r/0n)
Рис. 12.9
exp(-i27r/0?i)
Рис. 12.10
Отсюда получим
Т'(Х) =
N
‘N-1
x[n] cos(27r/on)
_п=0
N-1 ",2
х[п] Sin(27r/on)
_п=0
Имеем
N-l
i27r/on
n=0
(12.43)
(12.44)
Структурные схемы обнаружителей изображены на рис. 12.9 и
12.10. На рис. 12.9 — по алгоритму (12.42) с учетом (12.43), где ис
и Uk — соответственно синфазная и квадратурная составляющие. На
рис. 12.10 — по алгоритму (12.42) с учетом (12.44), причем последний
обнаружитель называется периодограммным.
Найдем характеристики обнаружения.
Воспользуемся общими формулами для ВЛТ Qo и вероятности
обнаружения Qd [24]
/»оо / 1 /»оо N — 1 1
<?»= / i / п
j-y/// у27г J_сю n_Q у 1 2iofncj
e-^da; dt] (12.45)
/•oo / -1 /*оо N-l -j \
(I246)
где An — собственные значения симметрической корреляционной мат¬
328
Глава 12
рицы Rs сигнального вектора; ап = Лпсг2/(Лп + сг2);
п
Rs = VAVT = (12.47)
г=1
где Vi, г = 1,п, — собственные вектора матрицы Rs.
При Ra = <т21 запишем матрицу сигнального вектора
Rs = HRaHt = <г2ННт. (12.48)
Двухстолбцовую матрицу Н (12.40) запишем в виде Н = [h0 hi],
тогда
hT0
hi
No] h0 hj N<j2s hi _hj_
2 ^N/2^/N/2 2 ^/N/2 ^N/2’
Rs = or2 [h0 hi
причем
vjvi = ^2 cos(27r/0n)sin(27r/0n) « 0
2 N-l
N n
71 = 0
при значительных величинах N.
По аналогии с (12.47) запишем
R-s = A0v0vS + Aivivj,
где А0 = Ai = Na2/2; А0 = Хг = Naj/2\ Vl = Ьг/у/Щ.
Таким образом, можно приближенно рассматривать v0 и vi в
качестве собственных векторов матрицы Rs, которым соответствуют
собственные значения Ао и Ль остальные N — 2 собственных значений
равны нулю, так как матрица Rs имеет ранг равный двум. Полагая
Ао = Ai = Na2s/2, А2 = А3 = ... = \n-i = 0 по (12.45) получим
Qo
р оо
= / a(t)dt, (12.49)
J V'
где
л поо л 1 1 /*°° 1
a(t) = — / e~luJtduj —L—fa =
2тт J_00 1 — 2ia0uj 2ao 2тг J_00 x + zu
J_e-t/2aoi(t).
2ao
Здесь x = l/2a0: aQ = A0a2/(A0 + a2) = ^2/2/Д = ccr2/2.
После интегрирования получим
Qo = P{T'(X) < i" | Я0} = P{T(X) < 7" | Я0} = e-7"/2“o,
или
Qo=e“7'"/ff2, i" =i'jc. (12.50)
Обнаружение случайных сигналов (дискретные процессы) 329
Аналогично по (12.46) вычисляем вероятность обнаружения
Qd= e-V'/2A0 = e-ч''/л^
и, следовательно,
ryfff
<3i=exp‘ №,2/2
По (12.50) находим значения порога 7'"
7"'= ^InQo1.
(12.51)
(12.52)
Учтем, что для распределения Релея среднее значение квадрата
амплитуды Е(А2) = 2а2, и введем параметр rj = Na2s/a2 =
= NE(A2/2)/а2 = ё/а2, где е = NE(A2/2) — среднее значение энер¬
гии сигнала. Используя (12.52) и значение rj, по (12.51) получим
7 '"/а2
= ехр -
InQo = Qo
i/№/2+i)
(12.53)
rj/2 + l) W'K + 1
Характеристики обнаружения для гармонического колебания с
релеевским замиранием изображены на рис. 12.11 при Qo = Ю-п,
п- 1,5, причем по оси абсцисс отложены значения d2B = 10 lg 77 =
= 10lg(i/(j2) от 0 до 30 дБ.
В качестве другого важного
примера рассмотрим получение
характеристик обнаружения сиг¬
нала, прошедшего многолучевой
канал связи с релеевским зами¬
ранием. Сам сигнал представ¬
ляет собой сигнал с модуляцией
частотным сдвигом (МЧС, англ.
FSK — Frequency Shift Keying).
Рассмотрим обнаружение
сигнала so[n\ = cos(27r/on) при
si[n\ = cos(27r/in) после его
прохождения через релеевский
канал. Допущения следующие:
0 < /о < 1/2; 0 < h < 1/2, N
Рис. 12.11
велико.
На выходе канала связи необходимо различать гипотезы
Щ : х[п\ = Ао cos(27r/on + Фо) + w[n\,
Hi : x[n] = Ai cos(27r/in + Ф1) + w[n\,
2
n
0,JV-1,
где w[n] — ГБШ с дисперсией a'z, причем распределение вектора
[Ао Ф0]т такое же, как и вектора [А± Ф1]
330
Глава 12
Найдем оптимальный приемник, минимизирующий вероятность
ошибки Р0ш- Для равных априорных вероятностей передачи для сиг¬
налов принимается гипотеза #ь если
W1(x | Нг)
W0(x | Н0)
> 1,
или
Вг ехр
-^XT(RS1 + аЧГ'Х
Во ехр
-ixT(RSQ + cr2I)-1X
> 1,
(12.54)
где Bi = (27r)w/Vdet(RSi + аЧ), i = 0,1. Здесь Rs< = ВДАНТ -
= CTjHjHJ, тогда
det(RSi + <т21) = det(<j2HjHj + <т21) = det (°2jl + ,
если учесть, что N достаточно велико.
Таким образом, принимается гипотеза #ь если
ехр -^XT(RS1 + аЧу'Х
- > 1.
ехр
--XT(RSQ+ а2!)-1*
Используя лемму об обращении матриц [61] (см. (12.19)), по¬
лучим
R-.)_,x<J,X'X-ijX'(il+ R-'Vx.
Отсюда переходим к неравенству
-1
Хт —I + R7
х>хт
-1
-1' X.
Преобразуем обратную матрицу суммы матриц:
-1
-jl+ R71 - а2( 1+ ^R-1)-1 = a2RSi(RSi + a2I)~1
и учтем, что оценка сигнала
Si = Rs,(RSi + <j2I)X.
Поэтому принимается гипотеза Нг, если выполняется неравенство
XTSi > XTS0. (12.55)
Обнаружение случайных сигналов (дискретные процессы)
331
ехр( —i2/T/0n)
Рис. 12.12
С другой стороны, как было показано, статистика
Т(Х) = XTS0 = с/(/0),
где /(/о) — периодограмма, определяемая по (12.44). Аналогичная
статистика справедлива и для сигнала s\. Поэтому принимается ги¬
потеза Н\, если
1(h) > Д/о). (12.56)
Структурная схема оптимального приемника изображена на
рис. 12.12.
Для того чтобы определить вероятность ошибки
Рош = 7Г1 Р(#! | Яо) + 7Г0Р(Я0 | ЯО,
где 7Го и 7Г1 — априорные вероятности; 7Го+ щ = 1, предположим, что
сигналы существенно не перекрываются, а это значит, что частоты /0
и fi сильно разнесены и выполняется неравенство |Д - /о| > 1/iV.
При равных априорных вероятностях 7г0 = щ = 1/2 получим
Рош = \[Р{Нг I Яо) + Р(Я0 I ЯО].
В силу симметрии Р(Яо | Я1) = Р(Ях | Я0), поэтому
Рош = Р(Яо I Ях) = Р{/(/о) > /(Л) | ях} =
/»оо
= / Р{/(Л) < 11 /(/о) = i,^}W/(/0)(i|^)^,
*/0
где Wj^(t | Я1) — условная ПРВ периодограммы /(/о) при условии,
что справедлива гипотеза Яь
Но статистики /(/о) и /(/i) приблизительно независимы при
сильном разносе частот. Тогда
/»оо
Рош= / Р{/(/1)<*|Я1}^/(/о)(*|Я1)£Й. (12.57)
J о
332
Глава 12
Здесь
P{I{f1)<t\H1}= Рг= 1
где Pi — вероятность пропуска, причем
t
Qd,
Qd = ехр
Na2/ 2+ сг2
Так как периодограмма при условии справедливости гипотезы от¬
вечает условию наличия чистого шума (поскольку сигнал
Ai cos(27r/in + Oi) не влияет на периодограмму) при / = /0, то
WI{fo)(t I #i) = ^P{J(/i) < t I чистый шум} =
dt
1
Причем здесь использовалось значение Qo по (12.50).
Окончательно получим
1 ^—e-i/a2dt =
-f
Jo
ехр
Na2/2 + a2
1
°2
2+ rj/2’
(12.58)
где г) - е/a2 - NE(A2/2)/a2 = Na2/a2.
На рис. 12.13 сплошной линией (кривая 1) изображена зависи¬
мость вероятности ошибки Рош от ОСШ d2B = 10 lg 77 в диапазоне
значений ОСШ от 0 до 20 дБ при многолучевом сигнале. Здесь же
изображена зависимость (кривая 2)
(12.59)
при когерентном приеме сигнала МЧС (при полностью известных сиг¬
налах).
13 Совместное обнаружение и фильтрация
марковских сигналов
13.1. Рекуррентная связь отношения правдоподобия
и апостериорной плотности сигнала*
Предположим, что в моменты времени t\ < t2 < ... < U < ... tn
наблюдается последовательность СВ 2/(ti), 2/(^2), • • • • • • »2/(^п),
где Л — параметр со значениями Л = 0 (при гипотезе Н0 сигнал от¬
сутствует) и Л = 1 (при гипотезе Н\ — при наличии сигнала). При
рассмотрении задачи в байесовской постановке Л — СВ с соответству¬
ющим распределением вероятностей; s(xi,U) — полезный сигнал; s —
известная функция; Xi — СВ, образующая простой марковский про¬
цесс (МСП) {xi} с дискретным временем. Переходная плотность ве¬
роятностей МСП обозначается через ^+1(^+1, ^+1 | XiiU), а началь¬
ная ПРВ 7Ti(xi,ti): СВ & — помеха (шум) с независимыми отсчетами
{&Ь=Т^Г со своей ПРВ Ptf (*>*»)• i =
Предполагаются известными ПРВ сигнала и шума. Поэтому оп¬
тимальная процедура обнаружения сигнала при фиксированном вре¬
мени наблюдения сводится к формированию ОП и сравнению его с
порогом.
Можно показать [51], что ОП выражается в виде рекуррентного
алгоритма
Здесь Wk(xk) — апостериорная ПРВ (АПРВ), для которой справедли¬
во рекуррентное соотношение [51]
у{к) = Уг= \s(xi,ti) + &, г = 1, n,
(13.1)
Afc+1 рЫ+i)
л*
J J pbk+1 - «(zfc+OMzfc+i I xk)wk(xk) dxkdxk+i,
к = 1,2,..., n — 1.
(13.2)
р[Ук+1 - s(a;fc+i)]7r(a;fc+1 | xk)w{xk)dxk
р[Ук+1 - s(z*;+i)Mzfc+i I xk)w(xk)dxkdxk+i
(13.3)
* В данной главе с разрешения Юрия Георгиевича Сосулина в основном
использованы материалы его книги [51].
334
Глава 13
при начальном условии
Wl(®l)
p[yi ~ s(zi)M®i)
J Phi
5(ж1 )]7Г(а;1) dxi
(13.4)
При
(13.4) и
использовании (13.2) начальными условиями являются
р{у\)
J p[yi
s(xi)]n(xi) dx\
(13.5)
Рекуррентные алгоритмы (13.2) и (13.3) позволяют вычислять
ОП последовательно, вычисляя w\, Ai; u>2, Л2...и>п, An.
Структура совместного обнаружения и фильтрации. Обратим
внимание на следующее. Если рекуррентный алгоритм (13.3) можно
применять (для задачи фильтрации) независимо от (13.2), то алго¬
ритмы (13.2) невозможно использовать независимо от (13.2). Только
совместное решение рекуррентных уравнений (13.2), (13.3) позволяет
найти ОП и тем самым решить задачу синтеза оптимального обнару¬
жителя. При этом система, моделирующая данные алгоритмы, наря¬
ду с обнаружением будет осуществлять оптимальную (линейную или
нелинейную) фильтрацию сигналов и (или) их параметров. Причем
фильтрация (оценивание) будет происходить как до, так и после уста¬
новления факта обнаружения сигналов. В соответствии с указанными
обстоятельствами соотношения (13.2), (13.3) называем рекуррентны¬
ми алгоритмами совместного обнаружения и фильтрации.
На рис. 13.1 представлена структурная схема синтезированной
системы совместного обнаружения и фильтрации сигналов. Структу¬
ра блока оптимальной фильтрации (ОФ) определяется алгоритмоми
(13.3), а структура блока формирования отношения правдоподобия
(ОП) — алгоритмами (13.2). Согласно рекуррентному характеру этих
алгоритмов блоки охвачены обратной связью с задержкой на период
At= (tk+i—tk) поступления наблюдаемых данных. Блок включения В
в конечный момент времени tn пропускает значение Ап на пороговое
устройство ПУ, где в результате сравнения Ап с порогом h выносится
одно из двух решений: d\ (есть сигнал) или d0 (нет сигнала). Вели¬
чина h определяется выбранным критерием оптимальности.
УК +1
Ук
т
ОФ
щ
ОП
Ч-+1
>ПГ1-^{пу
■di
■do
Оценка ■
ОЗ-
Рис. 13.1
Совместное обнаружение и фильтрация марковских сигналов 335
На выходе блока d* формируются оптимальные оценки сигнала и
его параметра. Если блок ОФ смоделирован согласно (13.3), то блок
d* должен включать операции усреднения.
В зависимости от конкретных задач на функционирование блока
d* можно налагать различные требования. Например, он может сразу
же после наблюдения формировать на выходе оценки d^d?;,..., кото¬
рые затем отвергаются, если выносится решение do. Во многих прак¬
тических задачах целесообразна работа блока d* в ключевом режиме,
когда до вынесения решения об обнаружении на выходе d* оценок нет.
Но после принятия решения d\ с выхода блока d* сразу же поступают
оценки d*, d*+1,.... При этом, если в блок d* включить схему памяти,
то могут быть использованы предыдущие оценки d\,...,d*n_i.
Не исключен случай, когда в блоке ПУ выносится решение 6=1,
хотя на самом деле имеет место ситуация в = 0. В этом случае
на выходе блока d* формируются псевдооценки. Возможна также и
обратная ситуация: принимается решение d0, хотя 9=1, при этом
оценки d|,d2,... будут отвергнуты как псевдооценки.
Рассмотрим другую, отличную от (13.1) модель наблюдаемого
процесса [132]. Пусть гипотеза Я0 состоит в том, что наблюдаемая
выборка Xi = (xi,... ,жп) представляет только помеху, которая явля¬
ется марковским случайным процессом r](t) с дискретным временем
с одномерной плотностью uo\n(y,t) и плотностью вероятностей пере¬
хода 0J2n(yk,tk | Ук-htk-i)- Альтернатива Hi состоит в том, что
наблюдаемая выборка представляет аддитивную смесь я™ = s™ + у™
марковской помехи r)(t) и сигнала, который также является марков¬
ским случайным процессом £(£) с одномерной плотностью coins', t) и
плотностью вероятностей перехода ui^(ski,tk \ Sk-i,tk-i). При ука¬
занных предположениях можно установить рекуррентную связь от¬
ношения правдоподобия Ak(xi) для текущего размера выборки к с
отношением правдоподобия Ak-i(xJ-1) и апостериорной плотностью
сигнала W(sk-i | xf-1,^”1) для выборки размера к - 1.
Искомая рекуррентная связь Ак с Ak~i имеет вид [132]
Л*(х{) = Afc-i(xi - Г Г W(sfc-1 I xf-1,*J-1)x
(jJ2r)\%k>tk I З'/с— litk— l) J—oo J—oo
XCJ2£(S/c, tk | S/c—i, t/c—1 ')Ш2т}{%к &ki tк \ %k— 1 $k — 1, tjfc—1) dsk — idsk.
(13.6)
причем апостериорная плотность сигнала W(sk-i I xf-1,^-1) опре¬
деляется по рекуррентной формуле [51, 132]
/оо
W{sn-1 | xr^r'Wfanlfn I sn-i,tn-i)x
-oo
336
Глава 13
X t^2?7Sn, tn | %n— 1 5n_i, ) dsn_i X
/oo poo
/ W(s„_i | x"-1,£i-1)w2£(sn;£n | s„_i;t„_i) x .
-oo J —oo
XW2rj{%n Sn>tn | 1 5n_i, tn_l) dsn_i(isn
-1
(13.7)
В этой формуле cj2£ и и271 — заданные плотности вероятности пере¬
хода, a W(sn-1 | я™ ) — апостериорная ПРВ значения сигнала
в предшествующий момент времени.
Начальными условиями при использовании (13.6) являются
Ai(xi)
W(s\ | х\\t\) =
W!{X! \Нг)
Wi(xi | Я0) wir,(xi\ti)
uiz(si\ti)LJir,(xi
/oo
0Jis(si,ti)uJin(xi - si,ti)dsi,
-oo
/
J —с
(13.8)
wi?(si; ti)u}ir,(xi - si\ti) dsi
Структура совместного обнаружения и фильтрации. Формула
(13.6) определяет рекуррентный алгоритм вычисления ОП. При по¬
ступлении очередного наблюдения хк для определения отношения
правдоподобия по всей выборке размера к следует хранить лишь
предыдущие значения Xk-i, s/c-i, а вычислители функции W(sk-i \
x\~lAfc-i^i-1) должны быть охвачены обратными связями
с задержками только на интервал времени между последовательны¬
ми наблюдениями. Структурная схема такого алгоритма показана на
рис. 13.2.
Оптимальное по критерию Неймана-Пирсона правило обнаруже¬
ния состоит в сравнении при фиксированном п накопленной величины
Лп с порогом, определяемым заданной вероятностью ложных тревог.
Входящий в состав обнаружителя блок, вычисляющий АПРВ сигна¬
ла W(sk-1
к—1. ,к
t\~l) может быть использован для оптимальной
фильтрации сигнала из его смеси с помехой по критерию максиму¬
ма апостериорной плотности (или по критерию минимума среднего
квадрата ошибки), а также и по байесовскому критерию. Оценка сиг¬
нала f(£m) выдается лишь в том случае, когда принято решение d\
о наличии сигнала (на рис. 13.2 решение d0 запирает выход блока
W(sk-1 | x\~lоценка £(tm) может относиться не только к зна
Рис. 13.2
Совместное обнаружение и фильтрация марковских сигналов 337
чению в конце интервала наблюдения, но также к интерполирован¬
ному или экстраполированным значениям. При принятии решения d\
оценка |(£ш) не учитывает того, что вероятность правильного обнару¬
жения меньше единицы. В отличие от байесовского подхода при таком
оценивании предполагается, что присутствие сигнала достоверно.
В частном случае, когда аддитивная помеха представляет случай¬
ный процесс с независимыми значениями, из (13.6) получим [132]
X($к 51к | Sfc—1, 1 )^1?7(з?/с Sk, £/с) dsk—idsk- (13.9)
где апостериорная плотность сигнала W(sk-i | я^-1;^-1) определя¬
ется по рекуррентной формуле [132, 140].
Если помеха представляет процесс с независимыми значениями
(например, белый шум), то и271(ук'Лк \ Ук-\'Лк-\) = ^(Ук) и фор¬
мула (13.7) упрощается:
W(sn-1 | ху;*?) = ulT1(xn - sn\tn)x
пОО
х J W(sn_i | Х-^ , 11 in | $п—11 tn—i) dsn—i x
-oo
poo poo
/oo
(sn—i | x1 ,11 )bJ2g(sn, tn | sn—i, tn—i) dsn
-oo
/oo poo
/ W(Sn_! (ХГ'^Г^Х
-oo J — oo
1_1
XCJ2^(5ni | 5n_i, ^71 — 1)^177(^71 ^tii ^n) dsn_i dsn
В другом частном случае, когда обнаруживается детерминиро¬
ванный сигнал s(t) на фоне аддитивной марковской помехи,
(,$к I tk | 5/c—i, tk—l) — $[Sjfc <s(t/c)],
W{sk-X I if"1; if"1) = 6[afc_i - s(ifc_i)],
плотность вероятности перехода сигнала и апостериорная плотность
при гипотезе Hi равны, и из (13.6) получим [132]
^к(х 1) = Afc 1(3?! ) Г ,5[Sfc _ s(£fc_j)]x
^2rj\Xkttk I Xk—lttk—l) J—00
^^2т}\%к S(tk), tk j Хк—1 S/-—1, 1] (iS/c—i
л („k-l\u)2‘r][xk ~ ^(tk), tk I Xk-1 ~ s(tk-l), tk-l] fо T n\
= Ak-i{Xi ) ——j — . (L3.1UJ
^2rj\Xkt tk I Xk—l,tk—l)
338
Глава 13
13.2. Обнаружение и фильтрация марковского
нормального сигнала на фоне аддитивной помехи
с независимыми значениями
Для марковского нормального стационарного сигнала с априор¬
ной дисперсией сг2 и коэффициентом корреляции R и стационарной
помехи с независимыми значениями, дисперсия которой сг2, а сред¬
нее равно нулю, имеем [132]
7}{%к 5/с) —
у/2-
: ехр
1
у/г
7ГСР
ехр
1
2а2
(хк - Sk)2
7Г(Т
^2f(Sfc | Sk-1) =
W(sk-i\xk1~l) =
^2ira2(l-R2)
1
exp
exp
2(7Ll
(sfc Rsk-i)
' 2af(l - Д*)
(Sfe-l — £fc-l)*
(13.11)
(13.12)
(13.13)
(13.14)
где i? = exp[—a\tk — ijt—11]; |fc-i и cr^_j определяются рекуррентными
формулами [132]
1к-
Хк-т; +
IkRa,
a2 a2 (1 — R2) + cr‘l_lR2 ’
6 =
zi
1
a2 =
1 + jx-
(13.15)
- ^
лг2
(13.16)
Если воспользоваться (13.9), то для рассматриваемого случая
можно найти отношение Кк{х\) / Kk-i^x1^1). После подстановки
(13.13) и (13.14) в (13.9) и последующего интегрирования по пере¬
менной Sk-1 находится искомое отношение [132]
Ak(Xi) 1 1
Ak_i(a:f х) у/Ъ( ^2(! _ Д2) + я2^
(,R£,k— 1 5/с) ^1гу(^/с 5/с)
ехр
2[(7в2(1-Д2)+ да^]
1 1
^177 (^/с)
: X
d<S/c
р оо
х / ехр
^ ^j<J2{l-R2) + Д2(Т2_1
- Sfc)2 s| - 2a;fcSfc
2^(1 - Л2) +
2сг2
С?5/с.
Совместное обнаружение и фильтрация марковских сигналов 339
После интегрирования по переменной sk следует [132]
Afc(:ri) сг 1
А^
-1(^1 *) V^F ^/ст2(1 — Д2) + R2a2_1 + a2
х ехр
2[<т2(1-Д2)+ Д2^]
X I Ж* + |fc_r
ехр
1 ст^-Д^+Д^2^
ст2Д
2сг2 сг2(1 —Д2) + R2a2_1 + a2
2~|
1а2(1-Д2) + Д2<т2_1
где в соответствии с (13.15) и (13.16)
а^а-зм^а-д^ + ^я2]-1
Ж* + £fc-l
(13.17)
сг Д
= ?2&-
(13.18)
ст2(1 - д2) + д2ст|_1 <г
Начальные условия для рекуррентного алгоритма (13.17):
?i =
aix 1
a2sa2
a2 + a2 о2 Ж1' °x a2 + a2'
Ai(a;i) = — exp
2 \a2 + a2
(13.19)
= ^2х2/(2**) = ^iet2/(2a2)_
& s °s
(13.20)
При R -» 0 (нормально распределенный сигнал с независимыми
значениями) из (13.17) следует очевидное равенство
Afc(*f) = Afc-i (zj-1)—eCTixfc/(2or4) = Ak-M-^Xk).
Формула (13.17) устанавливает рекуррентную связь отношения
правдоподобия и оптимальной оценки марковского нормального сиг¬
нала. Логарифмируя обе части равенства (13.17), получим [132]
In Afc(arJ) = In A*—! (a^i—1) + аЩ - - <%, (13.21)
где
п2 -
сг2
а2(1-Д2)+Д2^
ак ~
2^'
a2(1_R2)+R2<72_i+a2'
h2 -
Д2
1
° к ~
2 а
в2(1-Д2)+ДМ-i'
С*
?r to
II
i+(i д2)4 +д2*7*;1
аг
(13.22)
(13.23)
(13.24)
Структурная схема устройства совместного обнаружения и филь-
340
Глава 13
Рис. 13.3
трации, работающего согласно рекуррентному алгоритму (13.21),
представлена на рис. 13.3, где ук = InAfc.
13.3. Связь функционала отношения правдоподобия
с оценками сигнала по критерию минимума среднего
квадрата ошибки
Рассмотрим задачу обнаружения непрерывного марковского сиг¬
нала £(£) на фоне аддитивного нормального белого шума rj(t). В этом
случае наблюдаемый процесс может быть представлен при помощи
стохастического дифференциального уравнения
= £(*)*+ y/Nodv(t), (13.25)
если верна гипотеза Яь и при помощи уравнения
dm = VN~0dv(t), (13.26)
если верна гипотеза Яо. В приведенных уравнениях v(t) — стандарт¬
ный винеровский процесс, r](t) = y/Nodv(t)/dt — белый нормальный
шум со спектральной плотностью N0, x(t) = d£(t)/dt — наблюдаемая
реализация.
Для установления связи функционала отношения правдоподобия
с оценками сигнала воспользуемся предельной формой соотношения
(13.9). Для этого необходимо сначала перейти к дискретному вариан¬
ту рассматриваемой задачи, вводя интервал дискретизации At между
последовательными наблюдениями. Выборочному значению при
гипотезе Я0 соответствует VNo[v(tk) - v(tk-1)]. Так как винеров¬
ский процесс представляет процесс с независимыми приращениями,
причем mi{v(tk) - v(tk-1)} = 0 и mi{\v(tk) - v(tk-1)|2} = At, то b
рассматриваемом случае отношение плотностей ui^Xk — sk)/uiv(xk)
Совместное обнаружение и фильтрация марковских сигналов 341
в (13.9) равно (при замене sk на SkAt)
ехР {2N~At^2XkSkAt\ ~ ^А<2} = ехр
= ехр
•Ек^к
. N0
хЫ
2N*
f o(At).
-At
(13.27)
Подставляя (13.27) в выражение (13.9) вместо отношения
UlT)(Xk - Sk)/oOin{Xk) и интегрируя ПО Sk-ь получим*
Ak{x\) = Ак_1(х1 )
„2
гр Г°°
1+7Г/ SkWisklx^^dsk-
No J — оо
щ (ы ■ы) /«, s*iv(s‘1 if_,) +o(A,)
(13.28)
Переходя к пределу при At -»■ 0, т.е. заменяя Afc(a;f)-Afc_i(xf *)
на dA(xt) и Хк на y/Nod^(t), получим
(13.29)
(13.30)
dA(xt) = A(art)iV0 1//2s(i) d£(t),
где xt — реализация, наблюдаемая на интервале (0, £);
/ОО
sl^(s, t | х*) ds
-oo
представляет оптимальную оценку сигнала по критерию минимума
среднего квадрата ошибки, вычисленную в предположении, что сиг¬
нал присутствует.
При переходе от dA(xt) к d\r\A(xt) используется правило диф¬
ференцирования Ито:
dlnA(st) =
(13.31)
Из (13.31) находим связь функционала логарифма отношения
правдоподобия с оценкой марковского сигнала по критерию миниму¬
ма среднего квадрата ошибки:
гТ
([ s(t)x(t) dt — ^ f [s(£)]2 dt
Jo^t 2 Jo
(13.32)
где — условное обозначение стохастического интеграла Ито.
Приемник, выполняющий операции (13.32), назовем приемником
Стратоновича-Сосулина.
* Здесь использовано соотношение (dv)2 ~ dt, из-за чего последнее
слагаемое в (13.27) обращается в нуль. Уравнение (13.28) — стохастическое
дифференциальное уравнение Ито.
342
Глава 13
Нетрудно заметить, что структура формулы (13.32) аналогична
структуре выражения логарифма функционала отношения правдопо¬
добия в задаче обнаружения детерминированного сигнала s(t) на фоне
аддитивного нормального белого шума (см. гл. 1). Отличие состоит
лишь в том, что детерминированный сигнал s(t) заменяется оценкой
s(t) марковского сигнала, вычисленной согласно (13.30), а интеграл,
содержащий реализацию, заменен интегралом Ито.
13.4. Метод порождающего процесса
13.4.1. Определение и свойства порождающего процесса
Пусть наблюдаемая на интервале (0,Т) реализация x(t) представ¬
ляет сумму стохастического сигнала £(t) и нормального белого шума
rj(t) со спектральной плотностью N0. Оптимальная по критерию ми¬
нимума квадрата ошибки линейная оценка £(£) сигнала равна следу¬
ющему функционалу реализации:
|(t) = f h*(t,t — u)x(t — u)du, (13.33)
Jo
где h*(t,y) в случае белого шума, независимого от сигнала, удовле¬
творяет интегральному уравнению
Щ(ЪУ) = N0h*(t,y) + [ h*(t,u)Bz(u,y)du, (13.34)
Jo
где R^(t,y) — корреляционная функция сигнала.
Ошибка оценивания A(t) = £(t) — £(£) и значения наблюдаемой
реализации х(т) некоррелированы при любых т < t.
Назовем порождающим процессом* v(t) разность
v{t) = x{t) - £(£) = A(t) + т/(£), (13.35)
где£(£) определяется согласно (13.33), (13.34). Покажем, что порож¬
дающий процесс так же, как и процесс r](t), является белым шумом.
Для этого найдем корреляционную функцию процесса v(t)
E{i/(t),i/(u)} =
= E{A(t)A(u)} + E{A(t)rj(u)} + E{A(u)r](t)} + N06(t - u). (13.36)
Ho
E{A(t)A(u)} = E{6(t) | £(u) -|(u)} = E{A(t)au)}~
* Метод, разработанный Кайлатом [53], представляет развитие идеи обе¬
ляющего фильтра. В оригинальных работах Кайлата он назван innovation
approach [144]. Трудно переводимый неологизм автора заменен термином
«порождающий процесс» (имеется также русский термин «обновляющий
процесс» [143]).
Совместное обнаружение и фильтрация марковских сигналов 343
- [ h*(u,u - y)E{A(t)x(u - y)}dy,
Jo
и так как E{A(t)x(u - у)} = 0, t > и,у > О, то
£{Д(*)Д(и)} = JS{A(f)f(u)}. (13.37)
Далее, согласно (13.37)
E{A(t)A(u)} + E{A(t)r](u)} = £{A(f)[£(u) + rj(u)]} =
= E{A(t)x(u)} =0, t > u.
Кроме того, для белого шума
E{A(t)rj(u)} = E{£(u)ri(t)} - E{l(u)r](t)} = 0,
и из (13.36) при t > и находим
E{v(t)v(u)} = N05(t - и). (13.38)
Ясно, что (13.38) справедливо и при и > t.
Из определения порождающего процесса [см. (13.35)] следует,
что этот процесс связан с наблюдаемой реализацией функциональ¬
ным преобразованием
v(t) = x(t)— f h*(t,t—u)x(t—u)du= f [6(u)—h*(t,t—u)\x(t—u)du.
Jo Jo
(13.39)
Фильтр с импульсной переходной функцией 6(и) — h*(t,t — и) —
«обеляющий», так как он преобразует наблюдаемую реализацию в
белый шум.
Если сигнал является нормальным случайным процессом, то по¬
рождающий процесс (13.39) как линейный функционал нормального
процесса представляет нормальный белый шум.
Замечательное свойство порождающего процесса состоит в том,
что он представляет нормальный белый шум даже и в тех случаях,
когда распределение стохастического сигнала £(t) не является нор¬
мальным.
13.4.2. Общая структура логарифма функционала
отношения правдоподобия
Рассмотрим задачу обнаружения стохастического сигнала £(£) на
фоне нормального белого шума rj(t). Эта задача формулируется в
терминах проверки статистических гипотез. Вводится гипотеза Но о
том, что наблюдаемая реализация x(t) на интервале (0,Т) принадле¬
жит белому нормальному шуму rj(t) против альтернативы Яь что эта
реализация принадлежит сумме сигнала и шума £(t) + rj(t). Так как
порождающий процесс v(t), определенный в предыдущем разделе, и
344
Глава 13
нормальный белый шум rj(t) статистически неразличимы, то сформу¬
лированная задача полностью эквивалентна следующей: проверяется
гипотеза Яо, что на интервале (О,Г)
x(t) = v(t) = rj(t), (13.40)
против альтернативы, что на указанном интервале
x{t) = |(f) + v{t) = £(f) + 77(f), (13.41)
где £(£) — оптимальная по критерию минимума среднего квадрата
ошибки оценка сигнала £(£). В этой формулировке роль обнаружива¬
емого сигнала играет оценка £(£), а роль аддитивного нормального бе¬
лого шума — порождающий процесс v(t). Хотя в обеих формулиров¬
ках сигнал случайный, но во втором случае он может быть вычислен
по наблюдаемой реализации согласно (13.33). Поэтому естествен¬
но предположить, что формула для функционала отношения правдо¬
подобия в задаче обнаружения детерминированного сигнала на фоне
аддитивного нормального белого шума остается справедливой при за¬
мене детерминированного сигнала условно известным значением |(£)
после наблюдения реализации х(т) на заданном интервале времени.
Это предположение подтвердилось, и строгое его доказательство да¬
но в [144].
Таким образом, заменяя в алгоритме различения сигналов (si(t)
и so(t)) на £(£) (при so = 0), получаем общее выражение логарифма
функционала отношения правдоподобия
In A[z(f)] = Jo |(f)a;(f)df--щ J [Ш? dt- (13.42)
Формула (13.42) обобщает выражения функционалов отношения
правдоподобия для случаев обнаружения на фоне нормального бе¬
лого шума нормального стохастического сигнала и диффузионного
марковского процесса.
13.5. Общие алгоритмы (непрерывное время)
Пусть наблюдение и марковские процессы, на основе которых
строятся модели сигналов, протекают в непрерывном времени. На¬
блюдаемый процесс в данном случае имеет вид
y{t) = 9s(xut) + в ^ 0; 0 ^ t ^ Г, (13.43)
где параметр xt сигнала s(xt,t) является марковским процессом с
непрерывным временем. Этот параметр может описываться гауссов¬
ским и негауссовским распределением вероятностей, иметь непрерыв¬
ное и дискретное фазовое пространство.
Совместное обнаружение и фильтрация марковских сигналов 345
Шум £* представляет собой процесс с независимыми значениями
{ft, г = 1,2,...} и определяется плотностями вероятностей р(&,и), ко¬
торые могут быть гауссовскими и негауссовскими. При непрерывном
времени случайный процесс с независимыми значениями переходит в
обобщенный случайный процесс типа белого шума, который можно
рассматривать как производную процесса с независимыми прираще¬
ниями. Среди процессов такого типа важнейшее место занимает гаус¬
совский белый шум — производная винеровского процесса. В даль¬
нейшем под ft понимается гауссовский белый шум со спектральной
плотностью N, статистически не зависящий от процесса xt.
13.5.1. Уравнения для отношения правдоподобия [51].
Приемник Стратоновича-Сосулина
Выведем стохастические уравнения путем предельного перехода
в рекуррентном алгоритме.
Гауссовскому белому шуму {ft,£ ^ 0} соответствует в дискретном
времени гауссовский процесс с независимыми значениями {£(£*),& =
= 1,2,...}, описываемый ПРВ
ж‘)= ттте,*{-М;е1)' = <13-44>
Далее необходимо подставить (13.44) в (13.2) и разложить экс¬
поненту в ряд по степеням At. Затем при использовании условия
нормировки
//■
7r(xfc+i | xk)wk(xk) dxkdxk+i = 1,
(13.2) приводится к виду
Afc+i = Afc+ Ak J J {^[2yk+is(xk+i) - s2(zfc+i)]+
(A t)2y2
+ —2AT2fc+1 g2(a:«=+i)}7r(a:fc+i I xk)wk{xk) dxkdxk+1 + o[(At)2], (13.45)
где o[(At)2] — члены порядка малости (At)2 и выше. Рассмотрим
интеграл
//
^(xfc+iMzfc+i | xk)wk{xk)dxkdxk+i
J s(xk+i)W(xk+1 \vi,&= 1 )dxk.
В пределе при At -> 0 он переходит в апостериорное среднее
значение сигнала s(xt,t), параметр которого xt является марковским
346
Глава 13
диффузионным процессом,
E[s(xt,t) | Уо,0 = 1] = J s(x,t)wt(x)dx = st. (13.46)
Здесь
wt(x)= W(xt\yl@= 1) (13.47)
— АПРВ параметра сигнала. Через у£ обозначена наблюдаемая на
отрезке [0,£] реализация процесса {yt}.
При переходе в рекуррентном соотношении (13.45) к пределу при
At Оможно получить стохастические дифференциальные уравнения
двух видов в зависимости от того, учитывается или отбрасывается
член типа (Atyk+i)2-
Если под шумом понимать строго дельта-коррелированный про¬
цесс, то указанный член необходимо учитывать, поскольку при At О
он дает вклад NAt в силу свойства (13.3) стандартного винеровско-
го процесса. При этом соответствующее стохастическое уравнение
будет записано в форме Ито.
В результате из (13.45) при At 0 получаем стохастическое
уравнение для функционала отношения правдоподобия (ОП)
\у(у* | е = 1)
* W(yt\®=oy
В форме Ито получим [51]
d*At = 1л tstdyu (13.48)
где
dyt= [ У г dr. (13.49)
Jo
В практических задачах шум является «сглаженным» процессом,
не дельта-коррелированным. При этом член (Atyk+i)2 имеет порядок
малости уже не o[(A£)], a o[(At)2] и в пределе дает нулевой вклад.
Переходя в (13.45) к пределу, отбрасывая указанный член, получим
стохастическое уравнение для ОП, записанное в симметризованной
форме (в форме Стратоновича):
1 1
dAt = NAt^tdyt ~ 2NAt^dt' (13.50)
или
= Л]Kt'StVt ~ 2/VAt§*- (13.51)
Здесь обозначено
s2t = E[s2(xt,t) \уо,&= 1] = /s2(x,t)wt(x)dx. (13.52)
Совместное обнаружение и фильтрация марковских сигналов 347
При симметризованной записи стохастических выражений с ними
можно обращаться, используя обычные правила дифференцирования
и интегрирования, как если бы процессы {£*},{&} были гладкими
функциями. Найдем решения полученных стохастических дифферен¬
циальных уравнений. Для этого сделаем замену zt = In Л*. Рас¬
смотрим вначале симметризованное уравнение (13.51). Учитывая,
что дифференцирование в этом случае осуществляется по обычному
правилу zt = At/At, из (13.51) получим
Zt = jjStVt ~ 2^3?- (13.53)
Используя начальное условие zo = 0 (так как Ао = 1), находим
логарифм отношения правдоподобия (ЛОП) приемника Стратонови-
ча-Сосулина
ZT= Jj JQ %tVt dt~2Jf J §2 dt’ (13.54)
откуда
At = exp {jf Jo StVt dt~ 2If Jo ' (13.55)
Рассмотрим теперь уравнение (13.48). В данном случае диффе¬
ренцирование производится по правилу Ито. Для того чтобы непо¬
средственно использовать указанное правило в рассматриваемой за¬
даче, нужно стохастический дифференциал (13.49) выразить через
дифференциал стандартного винеровского процесса ut, для которо¬
го E(ut) = 0, Dwt = t. Учитывая (13.43), (13.49), а также то, что
ft = y/Nujt, получим
dyt = &s(xt,t)dt + y/Ndujt. (13.56)
Подставим это выражение в (13.48), затем применим к lnAt фор¬
мулу дифференцирования Ито и вновь воспользуемся (13.56). В ре¬
зультате получим
d*zt = ^Stdyt ~ 2^3?dt. (13.57)
Таким образом,
348
Глава 13
При этом ОП приемника СтратоновиЧа-Сосулина
Здесь введено обозначение для стохастического дифференциала Ито
d*yt = ytd*t.
Формулы (13.55) и (13.59) определяют ОП для проблемы (13.43).
Различный вид этих выражений является следствием использования
различных форм записи стохастических интегралов.
Полученные алгоритмы дают ОП в виде функционального пре¬
образования наблюдаемого процесса и байесовских среднеквадрати¬
ческих оценок (13.46), (13.52). Основные операции при обработке
наблюдаемого процесса yt в ряде случаев сводятся к моделированию
первого члена в алгоритмах (13.54), (13.58). Эти операции состоят
в умножении yt на оценку st полезного сигнала и последующем ин¬
тегрировании. Таким образом, основной элемент обнаружения пред¬
ставляет собой коррелятор наблюдаемых данных и оценки сигнала.
Поэтому полученные алгоритмы называют алгоритмами оценочно¬
корреляционного типа.
В частном случае, когда сигнал является детерминированным
s(xt,t) = s(t), оценка равна самому сигналу:
В этом вырожденном случае стохастические интегралы Ито и
симметризованный совпадают. Поэтому в данном случае должны сов¬
падать полученные здесь симметризованный алгоритм и алгоритм в
форме Ито. Действительно, для детерминированного сигнала
-2 2
St = Sf
При этом алгоритмы (13.54) и (13.58) приобретают одинаковый вид:
Формула (13.61) определяет ЛОП в задаче обнаружения детер¬
минированного сигнала на фоне белого шума. Она дает структуру
оптимального приемника в виде коррелятора или согласованного ли¬
нейного фильтра. Импульсная характеристика согласованного филь-
Таким образом, корреляционная обработка является частным
случаем оценочно-корреляционных алгоритмов.
St = s(t).
(13.60)
(13.61)
тра, формирующего интеграл JQT s(t)y(t)dt, равна
h(t) = s(T — t).
(13.62)
Совместное обнаружение и фильтрация марковских сигналов
349
Если сигнал не является детерминированным, то необходимо
отыскать оценку st (13.46) сигнала s(xt,t). Для этого потребуется
АПРВ (13.47).
13.5.2. Уравнения нелинейной фильтрации [51]
Выведем уравнения для АПРВ (13.47) методом предельного пере¬
хода к непрерывному времени в соответствующем рекуррентном ал¬
горитме.
Подставляя (13.44) в (13.3) и поступая затем также, как и при
получении (13.45), найдем:
Uk+l{Xk+l) =
1 + f (vk+l8(Xk+l) - \s2(xk+1)j + ^±il!s2(Xfc+1) х
X J 7T(xfc+1 I Xk)u>k{xk)(
(Atyk+i)2 I"1
2jy2 5/c,/c+ij o[(At )],
где
§fc,fc+i = J J s(xk+i)n(xk+i | xk)u>k(xk) dxkdxk+i =
= £[s(xfc+1) | у*,0 = 1]; §2 fc+1 = E[s2(xk+1) | i/*,© = 1].
Далее, используя разложение
ТТй “ 1 - if + <4‘>2 -
{
* 2
Uk-\-lSk,k-\-l ~Skk+l
получим
Uk+i(xk+i) - J ir(xk+1 | xkwk(xk)dxk+
-L{wk) j 7T(xfc+1 I Xk)ujk{xk) dxk + o[(Ai)2]. (13.63)
где
L(uk) - jjyk+1[s(xk+i) - Sfc,fc+i] - ^[s2(xfc+1) - s| fc+1]+
. (A^fc+i)2rl 2, 1л2
Pf 2 12 2S/c’fc+1 S\Xk+l)Sk,k+l + 5fc,fc+lJ‘
(13.64)
Нетрудно видеть, что если исключить произведение L{ujk) х
х f 7rujk dxk из (13.63), то (13.63) перейдет в уравнение Колмогорова-
Чемпена, которое в пределе при At —> 0 переходит в соотношение,
350
Глава 13
определяющее эволюцию априорной плотности вероятностей процес¬
са xt, т.е. уравнение Фоккера-Планка-Колмогорова (ФПК) с опера¬
тором
V = ~a(x,t) + \^b{x,t). (13.65)
Оставив L(u>k) J тгu>kdxk в (13.63), в пределе получим уравнение
для АПРВ (13.47), которое можно записать в виде
u>t(x) = Lpru)t(x) + L(ojt)uJt(x), 0. (13.66)
Оператор L(ujt) определяется в результате предельного перехода
в (13.64). Заменив (Atyk+i)2 при At —> 0 на NAt, получим L(u>t) в
форме Ито:
L{yjt)= jj[s(x,t) - st][yt ~ st], (13.67)
где st = st(wt) определяется соотношением (13.46).
Отбросив в (13.64) члены содержащие (Atyk+i)2, найдем сим¬
метризированное выражение
L{ut)= -^yt[s(x,t)-st]~ ^[s2(x,t)-s2]. (13.68)
где s2 определяется формулой (13.52).
Итак, получено стохастическое уравнение (13.66), описывающее
эволюцию во времени АПРВ ut(x) диффузионного параметра xt сиг¬
нала s(xt,t), наблюдаемого на фоне белого шума. Оно является урав¬
нением в форме Ито, если L(ut) берется из (13.67), и симметризо-
ванным, если используется (13.68). Оператор Lpr для обоих случаев
определяется формулой (13.65). Начальное условие для (13.66) за¬
дается априорной ПРВ uq{x) случайной величины ж0.
Уравнение (13.66) является нелинейным интегро-дифференци-
альным с частными производными. Определяя АПРВ ut(x), это урав¬
нение позволяет находить оптимальные (линейные и нелинейные)
оценки сигнала s(xt, t) и интерпретируется как уравнение оптимальной
нелинейной фильтрации. Впервые это уравнение получено Стратоно-
вичем [133, 134].
Введем обозначение:
Fi(x,t) = 2yts(x,t) - s2(x,t)\ (F^x.t)) = J F(x,t)wt{x)dx.
Тогда уравнение Стратоновича примет вид
dU>dtX^ = LprWt^ + _ (Fi(x,t))]wt(x). (13.69)
Совместное обнаружение и фильтрация марковских сигналов 351
Пусть модели сообщения и наблюдения удовлетворяют стохасти¬
ческим ДУ в форме Ито:
dX = F (X,t)dt+ Gdwt; E{X(t0)} = X0;
dY= H (X,t)dt + dvt, (13.70)
где X = X(t) — n-мерный вектор состояния системы; F(X, t) — n-
мерный вектор; G(X,t) — n x г-матрица; wt — r-мерный винеров-
ский процесс с ковариационной матрицей E{wtwJ+T} = Q(t - т);
Y = Y(t) — m-мерный вектор, реализация которого доступна наблю¬
дению; Н(Х,£) — m-мерный вектор; vt — m-мерный винеровский СП
с ковариационной матрицей £'{vtvJ'+T} = R(t - т), независимой от
wt и X(t).
Уравнение Стратоновича при уравнениях Ито (13.70) имеет вид
[154] •
dWt{x)= Lpr[Wt{x)\dt + [Н(®, t) - Н(ж,i)]TR_1[dY - Н(®, t)]Wt(x);
(13.71)
или в другой форме [145]:
= Lpr[Wt(x)} + fai)]Wt(x),
(13.72)
где z = dy/dt; H(x,t) = E{H(x,t)}.
Построение точного решения уравнения Стратоновича не пред¬
ставляется возможным.
Уравнения относительно апостериорных среднего значения
(оценки) и матрицы дисперсий имеют вид [154]:
dX = F(x, t)dt + pC-X]HT(x,t)R-1[dy ~ d*H(x,t)L (13.73)
где
X(t) = JxWt(x)dx; H(x,i) = J H(x,t)Wt(x) dx;
dD = F(X, i)(X — X)T + (X - X)FT(X, i) + GQGT—
-(X-X)Wr(X,t)R-1U(X,t)(X-X)'rdt+ [(X-X)(X-X)THT(X, t)-
-(X - X)(X - X)THT(X, £)]R_1[dY - H(X,t)dt}. (13.74)
Уравнения (13.73) и (13.74) могут быть записаны в эквивалент¬
ной форме [154]:
352
Глава 13
^ = [ВД-(Х,0 -XiFjiX't)] + mx,t)Xj - Я(х,ад]+
+ (GQGT)y - [XiH(X,t) - ^H(X,0]TR-1[H(X,i)^i -H(X,t)X~]+
+ [XiXjH(X, t) - XiXj H(X, t) - Xi XjH(X, t) - Xj XiH(X, t)+
+ 237A>H(X,i)]TR-1[Z(*)-H(X,t)], (13.76)
~ 1)^» Dij(t o) = (Do)ij.
Пример 13.1. Оценивание состояния одномерной нелинейной си¬
стемы.
В этом случае z их являются скалярами, и в исходных уравнениях
(13.70) необходимо принять т = п = г = 1. При этом исходные
уравнения (13.70) принимают вид:
dx
= f(x,t) + g(x,t)w(t); £'[a:(io)] = z(t) = h(x,t) + v(t).
(13.77)
Стохастические ДУ (13.75) и (13.76) упрощаются:
doc л Л л
— = f(x,t)+ [xh — xh\R~l (t)[z{t) — h]\ (13.78)
^ = 2(xf - xf) + g2Q - [xh - xh\R~l(t)[hx — hx\+
+ [x2h — x2h — 2xxh + 2x2h\R~l[z{t) - Я], (13.79)
где знакл соответствует усреднению по АПРВ.
13.6. Гауссовское приближение
Обозначим в (13.65)
a(x,t) = Ki(x,t)] b(x,t) = K2(x,t). (13.80)
Если априорный процесс, который описывается уравнением ФПК,
является гауссовским, для чего необходимо выполнение условий:
Ki(x,t) = ax + b] a,b= const; K2(x,t) = const, (13.81)
то АПРВ будет гауссовской в том случае, когда функция Fi(x,t) пред¬
ставляет собой полином от х степени не выше второй [146]. Это
утверждение основано на предполагаемой форме АПРВ (гауссовской)
Wps(x,t) = w1(x) = у^ех Р
(13.82)
где ht = 1 /of; m(t) и a2(t) — среднее значение и дисперсия АПРВ.
Если подставить функцию (13.82) в уравнение Стратоновича
(13.69), то в левой части после взятия производной по t будут члены,
содержащие х в нулевой, первой и второй степенях. Равенство при
Совместное обнаружение и фильтрация марковских сигналов 353
такой подстановке будет обеспечено, когда правая часть уравнения
после взятия производных по х будет содержать х только в приве¬
денных степенях. При F\(x,t) = a + bx + сх2 (а, Ъ, с = const) это
условие выполняется.
В результате указанной подстановки получены следующие урав¬
нения гауссовского приближения [51]:
где zt — логарифм ОП (ЛОП).
Если ввести дисперсию сг2 = Dt = 1 /ht, которая является апо¬
стериорной дисперсией (в гауссовском приближении) процесса xt, то
по (13.83) получим ДУ [51]:
Следует отметить, что ДУ (13.86) и (13.87) при условии (13.80)
эквивалентны следующим ДУ [17]:
ht = -b(mut)h% - 2ht
д a(mt,t)
Ц—&с
d2s(mt,t) 1 дs(mt,t) 2
дх2 + N дх
(13.83)
rat = a{mut) + —-
JSht
(13.84)
1 d2s(mt,t)
\ht дх2
1
2N
,(13.85)
(13.86)
Тогда из (13.84) вытекает ДУ оценки сигнала:
(13.87)
354
Глава 13
При Ki{x) = -ax; К2(х) = Nx/2 по (13.88) следует [17]:
-ах + DFx(x,t);
dD Nx-2aD+D2F”x(x,t). (13.90)
dt 2
Пример 13.2. Пусть уравнения сообщения и наблюдения заданы
в виде [60]:
dx . ч
(13.91)
yt- hx+ v(t),
где w(t) и v(t) — ГБШ с нулевыми средними значениями и КФ:
Rw(t) = qS(t)] Rv(t) = R5(t); q,R= const; f,g,h = const.
Тогда K\(x) = fx\ K2 = g2q\ s = hx\ ds/dx = h\ d2s/dx2 = 0,
поэтому no (13.86), (13.87) получим систему ДУ:
^ = fx + K(yt - hx)\
f .vd.^+a.
(13.92)
(13.93)
Таким образом, получили уравнение фильтра Калмана [154] при
коэффициенте усиления фильтра К = Dh/R и соответствующее
уравнение Риккати [60, формула (33.3)].
При задании одномерной нелинейной системы в виде (13.77) гаус¬
совское приближение имеет вид [145, 154]:
+ Dh'x(x, t)R J(i)
z{t) - h(x,t) - -Dhxx(x, t)
^ = 2Dfx(x,t)+ g2q — Dhx(x, t)R 1(t)tix(x,t)D+
+ 2D2Kx{x,t)R 40
z(t) - h(x,t) - -Dh”x(x,t)
(13.94)
(13.95)
x(h) = x0; D(t0) = D0,
где g2q определяется соотношением [145]:
g2q= g2(x,t)q + [gx{x,t)]2Dq + g(x,t)gxx(x,t)Dq + ^[gxx(x,t)]2D2q.
(13.96)
Положим, как в (13.90): f(x,t) = fx; h(x,z) = hx; g(x,t) - g
при f,g,h= const, тогда /' = /; h!x = h; f”x = 0; /&. = 0; g'x = 0;
9XX = 0; 924 = 92Q• Поэтому no (13.94), (13.95) снова приходим к
Совместное обнаружение и фильтрация марковских сигналов
355
уравнениям (13.92), (13.93) фильтра Калмана. Для сравнения приве¬
дем ДУ фильтра Стратоновича второго порядка [154]:
^ = /ОМ) + ^Df"x(x,t)+
+ Dh'x{x,t)R-\t)
z(t) - h(x,t) - -Dhxx(x,t)
; (13.97)
^ = 2Df'x(x,t) + g2Q - Dti^m^MKix^D-, (13.98)
s(*o) = W, D(t0) = D0.
Замечаем, что ДУ для оценки х (13.93) и (13.97) совпадают.
Уравнение (13.98) образуется отбрасыванием последнего слагаемого
в правой части ДУ (13.95).
Пусть сигнал s(t, Аь Л2) зависит от двух параметров Ai(t) и A2(t).
В этом случае уравнение ФПК имеет вид [17]:
"^r(AiT) А2т» Ai, А2)
дт
(13.99)
2 2
= 2t)Wt]+IY,
1 = 1
i,j = 1 ~-гтдкот
2 d\iTd\iTlbij{XlT’X2T)WT]'
Здесь необходимо использовать двумерную нормальную АПРВ
1 , Г ^
I 2 (alal-,
W(t, Ai, Аз) =
2тг y/cr2^ — к2
к2)
(Ai - Аю)2 2fc(Ai - Аю)(А2 - А2о) , (А2 - А20)2
2^2
07 сг;
12
(13.100)
где k(t) — функция взаимной корреляции между параметрами.
Введем обозначение
F(t, Ai, А2) — - —[2/4 —s(t,Ai,A2)]2.
(13.101)
Тогда можно получить уравнения оптимальной нелинейной фильтра¬
ции следующего вида (уравнения расширенного фильтра Стратоно-
вича):
с?Аю
2 dF
dt
= ai + axlx/
d\2o
dt
= a2+<72^'
dcr2
= bn + 2cr2^-
dt
MAi
,d2F , u2d2F
(13.102)
d2F _ даг
7 + Щ + * Щ + 2к<,'дхж + 2t8Al:
356
Глава 13
del , . „ 2да2 . 4d2F ,2d2F . 2 82F . ^ da2
J2
dk . , fdai da2\ , / 2d2F 2d2F\
= bio -1- h I -I- 1 \ 4- h l гг Г -I- rri
dt ’ h2 *2а-‘Ъх,* + к'‘щ + + 2*5v
л = 1,12 + ЧалГ + 0V + Ч"1 W + "2 Щ)
/99 i 9\ ® E 9 <9^2 9 ^^1 /H ^ ^ _ 4
+ (^2+*)aA^+,’1aA7+,’23V <13'103)
13.7. Применение алгоритмов гауссовского
приближения к задаче синтеза систем
Пример 13.3. Рассмотрим задачу, когда обнаруживаемый в БШ
сигнал имеет вид
s(xt,t) = A0sin(u;o£+ xt) (13.104)
и является фазомодулированным процессом. Причем А0 и со0 извест¬
ные постоянные, а флуктуации фазы xt определяются уравнением
хь = -7 xt + wt, (13.105)
где wt — ГБШ с нулевым средним значением E(wt) = 0 и КФ вида
Rw(5) = qS(t). Начальное условие задается гауссовской СВ ж0-
Таким образом, в (13.104) фаза xt — гауссовско-марковский СП.
Сигнал s(xt,t) описывается негауссовской ПРВ.
Используем соотношения (13.83)-(13.85) при а(х) = -'ух:
да/дх = -7; b = q\ ds/dx = Ао cos(cuot+ xt)\ d2s/dx2 = -A0sin(u;o£+
+ xt); получим
rht = -7mt + —|jhAq cos(u)0t + mt) - sin[2(w0i + m()] j ;
If A2
ht = ~qh2 + 2ha - — < -ytA0 sinw0i - ^|[1 + cos(2[w0i + rnt])]
+ 2^r^+ cos[2(wo^ + 7?T.t)]};
'Zt = T7[^osin(w0f + rnt) - ^-sin(woi + mt)\-
Jy 2ht
где zt — логарифм ОП (ЛОП).
Пренебрегая вторыми гармониками, а в третьем ДУ и постоян-
А2 А2
ными ^ и которые можно отнести к порогу, получим окон-
Совместное обнаружение и фильтрация марковских сигналов 357
чательно систему ДУ [51]
mt = —7mt + cos((jJot + mt)\
Ы
zt ■
Nht
-qh2t + 27ht + s\n(uJot + mt)\
(1
1
2X;
N
) sin(u;o£ + mt).
(13.106)
(13.107)
(13.108)
Полученные уравнения определяют структурную схему квазиоп-
тимальной системы совместного обнаружения и оценивания фазы)
фазомодулированного сигнала. Отметим, что блок нелинейной филь¬
трации, описываемый (13.106), (13.108), моделируется следящим
устройством типа фазовой автоподстройки частоты с переменным ко¬
эффициентом усиления в цепи обратной связи. Согласно (13.106)
коэффициент усиления зависит от наблюдаемого процесса.
13.7.1. Фазовая автоподстройка в задачах совместного
обнаружения и фильтрации
Если в (13.106), (13.107) положить 7 = 0, то получим уравне¬
ния, описывающие квазиоптимальную систему, когда фаза xt сигна¬
ла (13.104) испытывает нестационарные блуждания и является ви¬
неровским процессом: xt = wt. Для этого случая в соответствии
с (13.106)—(13.108) на рис. 13.4 представлена структурная схема си¬
стемы. (При моделировании (13.108) учтено, что при выполнении
условий, необходимых для асимптотической оптимальности алгорит¬
мов гауссовского приближения, апостериорная дисперсия l/ht мала,
при этом (1 - 1/2ht) ~ 1.)
На рис. 13.4 обозначено: ПГ — пе¬
рестраиваемый генератор, РЭ — реактив¬
ный элемент, управляющий частотой ПГ;
7г/2 — фазовращатель, осуществляющий
поворот фазы сигнала ПГ на 7г/2; ПУ —
пороговое устройство. Коэффициент уси¬
ления К = 1 jht усилителя в цепи обрат¬
ной связи ПГ, вообще говоря, перемен¬
ный, причем случайный (зависит от yt).
Поэтому схему рис. 13.4 следовало бы дополнить схемой регулировки
усиления, структура которой определяется уравнением (13.107). Для
простоты технической реализации можно в стационарном режиме пре¬
небречь флуктуациями коэффициента усиления и взять в качестве_его
компоненту К = 1/h (в рамках гауссовского приближения), где h —
среднее значение параметра ht. Такая упрощающая процедура пред¬
ложена в [139] при решении задач фильтрации.
358
Глава 13
Проведя указанное усреднение (см. [135]), получим (при 7=0)
l/h= ■sJlqN/Al. (13.109)
Этот же результат можно получить из второго ДУ РФК (13.98)
при д = 1; R = N\ Q = q; /' = 0; dD/dt = 0; h't(x, t) = [A0 s\n(coot +
+ x)]x = A0cos(ujQt+ x). Тогда no (13.98) находим
я-^(K)2 = °, или 4 = cos[2(w0*mt)]}.
Пренебрегая второй гармоникой, получим
D= у/2 qN/Al
что совпадает с (13.109).
В результате приходим к постоянному коэффициенту усиления
К, при этом блок фильтрации в схеме рис. 13.4 будет моделироваться
типовой схемой фазовой автоподстройки частоты (ФАП) 1-го порядка
(коэффициент передач фильтра нижних частот в цепи обратной связи
равен 1).
Таким образом, синтезированная система представляет собой
оценочно-корреляционный обнаружитель, блоком оценки которого
служит типовая схема ФАП 1-го порядка. Чтобы получить обнаружи¬
тель, схема ФАП дополняется фазовращателем, умножителем (кото¬
рый может быть выполнен, например, при помощи фазового детекто¬
ра), интегратором и пороговым устройством. Система осуществляет
обнаружение, оценку сигнала и его параметра.
13.7.2. Частотно-модулированный радиосигнал
Пример 13.4. Рассмотрим теперь другой практически важный
случай, когда полезный сигнал
s(xu,t) = A0sin(u;o£+ x\t) (13.110)
является частотно-модулированным процессом, для которого измене¬
ния фазы и частоты описываются уравнениями
Xit=X2U X2t = -7^24 + Wt, mi in
E{wt) = 0, Rw(r) = q6(r).
Сигнал (13.110), (13.111) может служить моделью доплеровско-
го радиосигнала, при этом рассматриваемая задача может быть ис¬
пользована при решении вопросов обнаружения и измерения скорости
движущейся цели.
Применительно к рассматриваемой задаче
Vt = Ао s\n(ujot + x\t) +
Совместное обнаружение и фильтрация марковских сигналов 359
(13.112)
где n(t) — ГБШ с нулевым средним значением и КФ
Rn(r) = NS(t)', F(t, xt) = jjVtAo sin(w0£ + %).
В (13.102) dl = X2t\ 02 = -lX2t\ ^11 = ^12 = ^21 = 0; 622 = Q',
OF OF A0yt , dF OF n
d\x “ dxi ~ N C0S^° + *“)' d\2 ~ dx2 ~ '
Тогда no (13.102) получим первые два уравнения следующей системы
ДУ, третье уравнение определяется по [51]:
dX\ Л 2 -^-0 / , л \
— = Х2 + CTj —yt COS (Wot + Xit)',
dx2 „ ,A0 , . Л .
— = -7^2 + k—ytcos(wot+ Xu);
^ sin(w0i + ®u). (13.113)
Параметры a2 = cr2(t) и i: = k(t) находятся из системы ДУ
(13.103). В первом ДУ этой системы Ьц = 0; <9ai/<9Ai = 0; d2F/d\2 =
= 0; d2F/d\\d\2 = 0; да\/дх2 = 1; во втором ДУ Ь22 = да2/д\2 =
= -7; d2F/d\2 = 0; <92F/(9Ai(9A2 = 0; <9a2/<9Ai = 0; в третьем ДУ
612 = 0; <9ai/<9Ai = 0; <9a2/<9A2 = -7! <92^/<9А2 = 0; <92F/<9Ai<9A2 = 0;
<9a2/(9Ai = 0; dai/d\2 = 1.
Следовательно, система ДУ (13.103) принимает вид
^1=2к+ а4 — '
dt 1 дх\ ’
(13.,14)
<tt , , ,82F ,
В этой системе ДУ вторая частная производная заменяется на
ее среднее значение [17] (d2F/dx\) = Aq/2N. В результате система
ДУ принимает вид
= 2к - а\ае;
dt
= q — 2^27 — А;2ае; (13.115)
dt
dk j 2 1 2
— = —kj + сг2 - fc^ae,
где ае = Aq/27V.
360
Глава 13
da\ da\ dk
В стационарном режиме, когда —L = —— = — = 0, находится
dt dt dt
система алгебраических уравнений
2 к - at ае = 0;
q - 2^a\ - fc2ae = 0; (13.116)
a\ — jk — ka\ae = 0.
Введем обозначения: к - du, aj - dn: a\ = d22\ ae = p\ 7 = a;
g = Q, тогда система уравнений (13.116) приводится к виду [154,
система (31.32)]
2di2 - pd\x = 0;
d22 ~ Oid\2 - pd\\d\2 = 0; (13.117)
Q — 2ad22 — pd\2 ~ 0*
Из первого уравнения выразим
.
С учетом этого из последнего уравнения получим
3. - ±£. = 8. _
2а 2а 2а 8а
Подставим найденные значения du и d22 во второе уравнение.
В результате находим соотношение
Q _ Р3,2 Л + 2сЛ2
2а ~ 8а \ ~р / ’
или
Поскольку С?22 > 0, получим
, Л 2а\ 2x/Q „ л
dn ( d\\ + “j- ) ~ —;—~^ ИЛИ dn —^11 1—~ ~ 0*
Отсюда
2a\ _ 2y/Q j2 2a , 2jQ
— I - —p-) или dn + —dn -p
P J Py/P P Py/P
и - -- j. —m 2V^
11 p у P2 P3/2 '
Обозначим r = p/a, тогда после преобразований получаем
Совместное обнаружение и фильтрация марковских сигналов
361
. Оценка сигнала
■ Оценка параметра
(частоты)
Рис. 13.5
При этом
РАч _ рА2/2г2 _ 2Q/a2
(1 + у/ТТ~А)2 (1 + \/1 + А)2'
dn =
2a 2a 2a \ Q LZ) 2a
i-
(1 + VT+A)4_
При этом алгоритм (13.112), (13.113) приводит к оценочно-кор-
реляционой системе, в которой блок оценки опять моделируется схе¬
мой ФАП. В отличие от предыдущего случая (рис. 13.4), здесь це¬
пи обратной связи ФП имеются два канала (см. (13.112)). В одном
из них есть интегрирующая цепочка RC, образующая фильтр, кото¬
рый может быть представлен как пропорционально-интегрирующий
фильтр [17].
В данном примере изменение частоты представляет собой гаус¬
совский экспоненциально-коррелированный процесс (см. (13.111)).
Остановимся на другом частном случае, когда процесс изменения
частоты является винеровским процессом. Для этого нужно поло¬
жить 7=0. Соответствующая этому случаю схема системы, мо¬
делирующая (13.112), (13.113) (7 = 0), показана на рис. 13.5 (/сц =
= a\ = dn; ki2 - (у\- di2- Блок оценки синтезированного оценочно¬
корреляционного обнаружителя представляет собой астатическую
ФАП. Система наряду с обнаружением формирует оценку радиосиг¬
нала, а также оценку его частоты.
Сравним уравнения фильтрации гауссовского приближения [урав¬
нения (3.112)] и фильтра Стратоновича первого порядка для модели
наблюдения
yt = Asin(cjo^ + xi) + n(t), (13.118)
где n(t) — ГБШ с нулевым средним значением при КФ Дп(т) -
= №(т).
362
Глава 13
Уравнения сообщения имеют вид (13.111). Запишем эти уравне¬
ния в векторно-матричном виде. Пусть х = (xi,x2)T, тогда получим
^ = Ах + G wt,
at
G
(13.119)
О 1
О —7
где wt — ГБШ с нулевым средним значением и КФ Rw{t) = q6(r).
Уравнение наблюдения (13.118) имеет вид
yt = s(t,xi)+ n(t) - H0s+ n(t)\
s= [si,s2]T; s2 = 0; si = s(t,x i); H0 = [1 0].
Уравнения фильтра Стратоновича первого порядка имеют вид
[154]
dx
dt = F(x, t) + D9HTJ*’t}N-'lyt - H(x, t)}-,
(13.120)
dD dF(Z,t)^ flFT(x,i) ^
— = —+ D + GoG - D ,
dt diz <9x q \ dSi J N <9x
(13.121)
В данном случае F(x,i) = Ax; <9F/dx = A; H = HoS = Aosin(wo^ +
+ xi)H0,
Ш л , . лтх
-qT = A0cos(w0i+ xi)H0;
D
dW
~d±
dn du
'Г
d2i d22 _
_...
о
Aocos(ujot+ xi)
dn
di2
Aq cos(u>ot + xi) — 6Aq cos(u>ot + xi); 8 = [dn di2]T.
В результате по (13.120) получим
dSt
— = Ах + (Ao/N) cos(u0t + xi)[yt - A0 sin(u>0i + xi)]6 =
= Ax+ (Aoyt/N)b cos(ivot + xi) + (Ao/2iV)6sin[2(u;o£ + ^l)]-
Пренебрегая второй гармоникой, получим систему ДУ для оценок
xi, Х2 в скалярной форме:
dx1 „ , Ао . Л .
— = х2+ dn—ytcos(w0t+ xi);
dx2 , i А0 . . Л .
— = -7x2 + di2—ytcos(w0i + xi).
(13.122)
Эти уравнения совпадают с уравнением (13.112) гауссова приближе¬
ния при du = о\, di2 = к.
Совместное обнаружение и фильтрация марковских сигналов
363
Рассмотрим дисперсионное уравнение (13.121)
dD
dt
где
= AD + DAT + ?GGT
JL_
N
ЬАо cos(uot + xi)6i Aq cos(uot + xi),
61 = H0D
[dn di2]; 661 =
GGT =
dn
di2
[0 1]
[dn di2] =
di 1
dndi2
dndi2
d\2
AD =
DAT =
0 1
0 —7
dn di2
di2 d22
dn d\2
di2 d22
0 0
1 -7
0 0
0 1
di2 d22
—7di2 —7d22
di2 —7^12
d22 —7^22
Пренебрегая второй гармоникой, получаем систему ДУ в виде
dn di2
di2 ^22
2di2 d22 — 7^12
d22 — 7^12 —2/yd22
1
I
о
о
AI
.° <?.
2 N
dfi ^11^12
dndi2 dj2
Перепишем эту систему в скалярном виде:
d(dn) 9, Ао
= 2du~2N
= d22 — 7^12
dt
d(di2)
dt
d{d22)
dt
(13.123)
2jd22-^d212.
Система ДУ (13.123) совпадает с системой ДУ (13.115), так как
dn = сг?; di2 = /с; d22 = сг2- При этом отсутствует необходимость в
усреднении величины d2F/dx\.
Пример 13.5. Обнаружение замирающего радиосигнала. Рас¬
смотрим задачу обнаружения сигнала s(£, А(£)) на фоне ГБШ no(t):
£(t) = 0s(*, A (t)) + n0(t), O^t^T, (13.124)
где £[n0(t)] = 0; Rno(r) = (N0/2)6(t)\ 6 — дискретный информаци¬
онный параметр, принимающий два значения: 0 или 1 с априорными
вероятностями р0 и р0 + рг = 1. Полезный сигнал имеет вид
s(t,X(t)) = Aocosouot + H(£)i,(£), (13.125)
где Н(t) = [cosw0t, sin w0t], X(t) = [\i(t), \2(t)]T — вектор независи¬
мых сопутствующих параметров, представляющих собой гауссовско-
364
Глава 13
марковские процессы, заданные уравнениями
dX
dt = ~a\i+rii(ty, E{rii{t)} = 0; Е{щ{Ь)щ{Ь+ т)} = г= 1,2,
или, что то же самое, в векторно-матричном виде
dk/dt = A (t)Jt(i) + n(t), (13.126)
где
ni(t)
nzit)
E{n(t)n(t + т)} = N<5(t).
Mt)
-a 0
0 —a
n (t) =
N
N/2 0
0 N/2
Примем начальные условия для X(t) нулевыми: Ц0) = 0.
Сигнал (13.124) можно представить в другом виде:
s(t) = B(t) cos[u)0t + B(t) = \J[Aq + Ai(t)]2 + A%(t):
/ \ A2 (t)
y(l) = arctg
где огибающая Б(£) распределена по закону Райса, а случайная фаза
распределена в интервале (—7г,7г).
Так как дискретный параметр 9 на интервале наблюдения Т по¬
стоянный, то совместная апостериорная ПРВ р(£, 0Д) будет опреде¬
ляться уравнением
dp(t,e,k)
dt
Lpr{p{t,6,'k)} + [F(t,e,l.)-F(t)]p(t,e,b), (13.127)
где ipr{-} —априорный оператор ФПК для процесса X(f);
рц. 0 2^(t)s(t,e,k) -s2(t,e,l)
Nq
F^= E /^МЛММЛ)^.
e ^
Представим совместную АПРВ в виде
p(t,e,k) = p(t,e)p(t,i\ в).
(13.128)
(13.129)
Подставив (13.129) в (13.127) и проинтегрировав обе части урав-
нения по X, получим
J F(t, в, k)p(t, к | e)dk-F(t)
p(t, в). (13.130)
Здесь было учтено условие нормировки для p(t,k \ в) и получающееся
Совместное обнаружение и фильтрация марковских сигналов 365
из него дифференцированием по времени тождество
L{p(t,k | 9)} dX = 0.
С учетом выражения для F(t,9,V) (13.127) можно написать
F(t,e,),)p(t,k\e)dX= -l-[2Z(t)s(t,0)-s2(t,e)-R(t,e)]. (13.131)
/
L‘ 7V0 1
Здесь s(t, 9) — апостериорное среднее значение полезного сигнала по
сопутствующему параметру k при фиксированном 9:
s(t, в) = J s(t, k)p(t, X I б») dA = | SQ(t)> I : J: (13.132)
R(t,9) — дисперсия оценки сигнала при фиксированном 9\
R(t, в) = в, %) - s(t, o)]2P(t, i\o)di=[ j? = i;
(13.133)
Подставив (13.131) в (13.130), для апостериорных вероятностей
Pi(t) = p(t,9 = 1) и p0(t) = p(t,9 = 0) получим уравнения
^ - s2(t) - R(t)}pi(t)po(t)\
, ° (13.134)
= ~ — [2£(t)s(t) - s2(t) - R(t)]pi(t)p0(t)
с начальными условиями pi(0) = pi, ро(0) = ро-
Как известно, решение принимается на основании сравнения с
порогом ЛОП z(t) = \n\pi(t)/po(t)]. Для него из (13.134) имеем
§ = ^[2*(*Ж*) - s2(t) - R(t)}; z(0) = In Hi. (13.135)
dt No po
Определение величины z(t = T) является основой алгоритма
обнаружения сигнала. По критерию минимума вероятности средней
ошибки (идеального наблюдателя) оптимальный алгоритм имеет вид
гТ
-i- [ [2£(£)s(£) — s2(t) — R(t)\dt > In — = h\ 0=1;
No Jo Pi
±-j\2mm-~s2(t)-Rmt
No JOrT yi (13.136)
< In — = h; 0=0.
Pi
Этот алгоритм будет оптимальным и по критерию Неймана-Пирсона,
если выбрать соответствующий порог h.
Как следует из (13.132), для нахождения s(t) необходимо знать
366
Глава 13
ПРВ p(t,k | 9). Для нее путем подстановки (13.129) в (13.127) имеем
dp(t,k | 9)
dt
Lpr{p(t,K9)}+
F(t, в, к) - J F(t, в, k)p(t, k\9)d\
p(t,k\0). (13.137)
В рассматриваемом примере плотность вероятности р(£Д | 9)
является нормальной, так как ^,(t) есть гауссовский процесс и он вхо¬
дит в уравнения наблюдения (13.124) и сообщения (13.126) линейно.
Если опустить слагаемые с удвоенной частотой 2c*j0. то для векто¬
ра среднего значения i(t) и корреляционной матрицы ошибок оценок
D(t) получим уравнения:
НА - Ао cos(w0£>)]; (13.138)
= AD + DAT - -^-DHTHD + N.
(13.139)
dt " No'
Рассмотрим решение дисперсионного уравнения (13.139). Учтем,
что матрица А = — ai (I — единичная матрица), тогда AD = DAT =
= —aD. Кроме того, пренебрегая вторыми гармониками, получим
произведение НТН в виде матрицы НТН = ^1. В результате систему
ДУ (13.139) можно записать в виде
где N = (N/2)1.
Запишем эту систему ДУ в скалярном виде:
dn
d2i
di2
d22
-2a
dn
d2i
di2
d22
1
dn + d\2
di2(dn + d22)
N
_i_
'1 O'
JVo
_di2(dn + d22)
d\2 + с/м
2
0 1
Отсюда находим
d(du)
dt
d(dl2)
dt
d(d22)
dt
-2adn
1
No'
~(dh + d(2) +
N.
~2’
-2ad\2 — — di2(dn + d22)\
iV о
(13.140)
- -2ad22 - J^d\2
+ d\2) +
N
2 ‘
Таким образом, в стационарном режиме
d\2 = 0; dn = d22 = aNo(y/l + 2d/aNo — 1) = R, (13.141)
где d = N/Aa; R совпадает с дисперсией (13.133) оценки сигнала.
Совместное обнаружение и фильтрация марковских сигналов 367
Структурная схема оптимального обнаружителя замирающего ра¬
диосигнала (13.125), реализующая алгоритм (13.136), (13.138), изоб¬
ражена на рис. 13.6. Схема состоит из двух квадратурных каналов,
связанных между собой через параметр R12. Однако в стационарном
режиме работы эта связь исчезает (#12 = 0).
Аналитический расчет характеристик обнаружения полученного
оптимального обнаружителя является довольно сложной и трудоем¬
кой задачей. Его удается выполнить, например, в том случае, когда
случайный процесс z(t) является приближенно одномерным марков¬
ским диффузионным [51]. Для рассматриваемого примера это выпол¬
няется, если интервал корреляции процесса k(t) много меньше интер¬
вала наблюдения Т (быстрые замирания сигнала). В общем случае
эти формулы имеют вид [51, ф-ла (8.2.36)]
Qo — ot, — Q(uо), Qd ~ Qiyi' 1)5
где
Q{x)
/2 du\
щ
h-TMo
VKoT
гп
h - TMi
VKiT
Коэффициенты TMo, TMi, TK0, TKi суть «приближенные сред¬
ние значения при использовании гауссовской аппроксимации ПРВ
W(ZT | 0 = 0) и W(ZT | 0 = 1) и дисперсии СВ Z = ZT (при
0 = 0 и 1 соответственно)» [51].
Окончательные формулы для ВЛТ Q0 и вероятности обнаруже¬
ния Qd следующие [56]:
<Эо=1-Ф(ио); С?й=1-ФЫ, (13.142)
368
Глава 13
1 2
где Ф(х) — интеграл вероятности, Ф(ж) = —j==. / e“u I2 du\
V 27Г J —oo
h — clqT h — a\T
Uo = Ul" “70^
Ag / R \2 R2 _ Д .
a°- 2ЛГ0 V 7^oJ 27JV02' a+ N0'
Ai R2 dR
ai = —-7- - гго +
bi
2N0 277V02 7iV2'
4g ^ Я V , R2 (л Д V.
Wo
2dR
6° " I1 7^o J + 7^ I1 1
(a+ 7Ж02
d dR
1 +
<x/Vo 2a(a+7)A^oJ*
Выражения для коэффициентов ai, bi, i = 0,1, можно упростить,
если воспользоваться условием
d/aNo < 1
или эквивалентным условием
2(dT/N0)/aT < 1.
Тогда по (13.141) находим R « d. В этом случае
7 = a(l — d/aNo) « a.
В результате получим
1 /А2Т d2 \ . A2 d2 _ . _ .
ao = “о ( ~лГ~ + —тто ) = flii 60 - — + ——2 - 61 - 2ai.
2 \ Nq aN2J 11 и А^о aA^o
(13.143)
Таким образом, выполняется условие [51, ф-ла (8.2.66)].
сц = —ao = 0,5&о = 0,5bi.
Подставляя найденные приближенные (при аТ > 1) соотноше¬
ния (13.143) в (13.142), получим
Qo = Q(x) = 1 - Ф(х); Qd = Q{x -qi)= 1 - Ф(х - <?i),
где
л/biT bi у No aNg’
Следовательно, снова выполняется условие [51, ф-ла (8.2.66)]
Совместное обнаружение и фильтрация марковских сигналов 369
Рис. 13.7 Рис. 13.8
Запишем ОСШ qi в виде q\ = yjq2 + qo.
На рис. 13.7 изображены характеристики обнаружения Qd =
- Qd(q) при Qo = 10“3, когда х - 3,09 = Q~l(Qo), или х =
= Ф-1(1 — Qo). Параметром кривых обнаружения служит величи¬
на qo - 0; 1; 2; 3. Как и следовало ожидать, увеличение отношения
qo при фиксированном значении ОСШ q улучшает обнаруживаемость
исследуемого в данной задаче сигнала. Аналогичные кривые обнару¬
жения приведены на рис. 13.8 при ВЛТ Qq = 1СГ6.
14 Обнаружители с постоянным уровнем
ложной тревоги
14.1. Классические модели обнаружителей
Рассмотрим вначале алгоритм классического обнаружителя оди¬
ночного сигнала, принимаемого на фоне узкополосного гаусссовского
шума, полагая, что сигнал отражен от нефлуктуирующей цели. Обо¬
значим смесь сигнала и шума величиной v(t).
Тогда, положив порог, равный Т, и взяв некоторую статистику
D(v)t алгоритм обнаружителя сигнала можно сформулировать в виде:
а) при D(v) > Т принимается решение D\\ сигнал (цель) присут¬
ствует в интервале наблюдения;
б) при D(v) < Т сигнал (цель) отсутствует в интервале наблю¬
дения (принимается решение Do).
Будем полагать, что в качестве детектора используется детек¬
тор огибающей, которая в интервале наблюдения формируется из от¬
кликов двух фильтров, согласованных для синфазной и квадратурной
составляющих принимаемого сигнала.
При отсутствии сигнала (цели) в интервале наблюдения СВ D(v)
представляет собой огибающую помехи. Тогда вероятность ложной
тревоги
пОО
а = Qo = P{D{v) ZT\H0}= J W0(x) dx, (14.1)
где W0(x) - ПРВ CB D0{u).
Порог T находится no (14.1) при заданной ВЛТ Qo-
Вероятность обнаружения имеет вид
ПОО
7= Qd= P{D{v)>T\Hl}= / W^dx, (14.2)
JT(a)
где Wi(x) — ПРВ CB Di(jy) при условии, что сигнал (цель) присут¬
ствует в интервале наблюдения.
При сформулированном условии приема, если сигнал отсутствует,
то огибающая шума имеет распределение Релея
W0{x) = ~е-х2^2, х^О, (14.3)
где сг — параметр закона Релея; сг2 — дисперсия входного гауссовского
узкополосного шума.
Обнаружители с постоянным уровнем ложной тревоги
371
В результате по (14.1) находим
°°=Г e~“dv‘ ■е‘,|“2^2=e_TW -
(14.4)
Отсюда находим значение порога
Т= аЛ/21п(1/а). (14.5)
Известно (см. Приложение 1), что среднее значение СВ, распре¬
деленной по закону Релея, равно
mi = ayj 7г/2 = E[Dq{v)\.
Следовательно, величину порога (14.3) можно выразить в виде
(14.6)
Для того чтобы получить конкретное выражение для статистики
D(v), рассмотрим логарифм ОП (ЛОП) (3.41) для одиночного ра¬
диоимпульса
l(v)=~q+J^f v(t)s(t)dt, (14.7)
где q = Э/No — ОСШ; N0/2 — двухсторонний энергетический спектр
шума, Э = /0Т s2(t)dt — энергия сигнала; [0.То] — интервал наблю¬
дения.
Пусть радиоимпульс имеет вид
s(t) = Aa(t) cos[cjo£ + 0(t) + <p], 0 < t < To, (14.8)
где A, a(t), 9(t), To, ojo — известные величины; <p — CB, равномерно
распределенная на интервале (0,27т).
Введем обозначения
uc(t) = a(t) cos[cjo£ + 0(t)Y us(t) = a(t) sin[cdo£ + 0(t)]. (14.9)
Тогда сигнал s(t) принимает вид
s(t) = Auc cos p — Auss\rnp, (14.10)
причем uc(t) и us(t) называются квадратурными составляющими сиг¬
нала.
Энергия сигнала
гто гто
Э = A2 u2(t)dt = А2 / u2{t)dt.
Jo Jo
372
Глава 14
Рис. 14.1
Пусть
Гт0 л гт0
Г*0 Г*0
= / uc(t) dt = / u2s(t)dt,
Jo Jo
тогда
Э = A2£. (14.11)
Подставив s(t) (14.8) в (14.7), получим
1{у | ф) =
(2A fT° \ (2А Гт° \
= ~q+\~NoJ u(t)uc(t) dt j cosip- I —J v(t)us{t) dt I sin ip.
Обозначим интегралы
rTo rTo
- & / v{t)uc{t)dt\ Q(v) = к / v(t)us(t)dt, (14.12)
Jo Jo
где I(v) и Q(v) — отклики фильтров, согласованных для uc(t) и us(t),
с коэффициентами усиления к (рис. 14.1).
На рис. 14.1 ПУ — пороговое устройство; ВП — вычислитель
порога.
Положим
D{y) = у/Р{у) + Q2(v), a(v) = arctg [Q{y)/I{y)]. (14.13)
Тогда ЛОП
2 А
l{v I ф)= -q + ——[Iiv) cosip - Q(v)s\nip] =
к Nq
2 Л j 9 A
= Q2(l/) cos[</?+ а(г/)] = -q+—D(i/)cos[<p+a(v)].
Введем ОП A(i/ | ip) = e*^ и усредним ОП с весом ПРВ W(tp) =
= 1/(27г). Тогда получим
А (г/) = £[А(г/ \ tp)] = J e~q ехр | щ-D(v) cos[cp + a(v)\ | W (ip) dip =
Обнаружители с постоянным уровнем ложной тревоги
373
2ж ( 2А I
е~д ехр | cost*/5 + а(и)} | dip = e_g/o
2 А
kN0
D{v)
(14.14)
Здесь Io(x) — модифицированная функция Бесселя нулевого порядка
>-=г
ercos(0+e) de_
Ur
В результате приходим к решающему правилу:
2А
Яь/о
Я0:/0
kN0
D{v)
2А '
^ еяк — цель (сигнал) присутствует;
< еяк — цель (сигнал) отсутствует,
где величина к определяется значением (1.10) к = До = noCo/(iriCi).
В силу монотонности функции 1о(г) решающее правило можно
сформулировать в виде
D(v) ^ Т <=$ Л(г/) ^ к,
D(v) < Т Л(г/) < к.
Следовательно, байесовское правило сводится к сравнению с поро¬
гом Т:
— цель (сигнал) присутствует, если
D{y) ^ Т; (14.15)
— цель (сигнал) отсутствует, если
D{y) < Т.
Замечание 1. Обнаружитель с правилом решения (4.15) (см.
рис. 14.1) называется линейным обнаружителем (детектором) оди¬
ночного радиоимпульса (англ.: single pulse linear detector).
Поскольку n(t) — гауссовский СП, то величины I(v) и Q(v) под¬
чинены нормальному распределению N(0,<т2), так как
E[I(u)] = E[Q(v)\ = 0.
Найдем величину дисперсии а2 = vaг/(г/):
№ гто
var I(v) = к Е
г*о г1о
/ n{t)uc{t)dt / n(a)uc(a)
Jo Jo
da
Пто
E[n(t)n(a)]uc(t)uc(a)
dtda =
374
Глава 14
Г° (\t-c,)uMuAa)dMa= Г uHt) Л = №»‘2?
2 Jo Jo 2 Jo
Аналогично получим
, N0k2e
va rQ{y) =
Покажем, что CB I{у) и Q{y) некоррелированы:
Kiq = Riq =
= E[I(v)Q{y)] = к2 E
riо fTb
/ n{t)uc{t)dt / n(a)us(a)da
Jo Jo
Лто 7Vn rTo
E[n(t)n(a)]uc(t)us(a) dtda = — k / uc(t)us(t) dt = 0.
2 ./o
Следовательно, CB I{v) и Q(v) независимы. Поэтому их совмест¬
ная ПРВ
1 ( х2 + у2'
2(Т2
Отсюда следует [154], что СВ D{v) подчиняется распределению Релея
(14.3) с параметром
a = ky/Nos/2. (14.16)
При этом согласно (14.4) ВЛТ
а = Qo = exp(-T2/N0k2e) (14.17)
и по (14.5) определяется порог
Т= y/N0k2e 1п(1/а). (14.18)
Можно показать [156] (рис. 14.2), что небольшие изменения в
спектральной плотности No (или параметра a = k^N0e/2) приводят
к значительным изменениям ВЛТ Qo = со¬
процесс стабилизации ВЛТ сопровождается в свою очередь по¬
терями, которые, однако, не превосходят 3 дБ при больших объемах
выборки (при большой длине окна К).
Вероятность обнаружения Qd определяется формулой
Qd
Г°° 2 2
= / хе~(х +d ^2Io(dx) dx = Q(d,[i), (14.19)
J LL
где Q(d,n) — Q-функция Маркума; ц = у/2 ln(l/Q0).
Как и в случае (7.14), вероятности обнаружения можно придать
Обнаружители с постоянным уровнем ложной тревоги
375
Рис. 14.2
ВИД
&=<31?М(2Ш^) (14.20)
где d — коэффициент нецентральности Х22Ы) распределения (см. при¬
ложение 1).
Кривые обнаружения Qd(d) при Q0 = const (Qo = Ю_п, n= 1,7)
изображены на рис. 14.2.
При одиночном радиоимпульсе и гауссовском СП в аддитивной
смеси сигнала и шума на входе квадратичного детектора (КД) на
его выходе (после ФНЧ) процесс имеет показательные распределе¬
ния (см. гл. 12, п. 12.1, а также [154, лекция 5])
Wo(x) = \е~Хх, А = 1 /а<т2, а = const,
_ _ (14.21
Wi(x) = Aie 1Ж, Ai = 1/аа (1 + d) = A/(l + d),
где d = (J2S/(J2 — ОСШ.
При отсутствии ПУЛТ-процессора при фиксированной величине
порога Т и релеевском законе распределения огибающей ВЛТ Qo и
вероятность обнаружения Qd согласно (14.21) выражаются в виде
рОО
Qo= W0(z)dz = е~хт;
.оо - (14-22)
Qd= j W\(z)dz = e-AiT = Ql0,(1+d\
Отсюда находим ОСШ
~d= (14.23)
In Qd
Зависимости Qd(d) при Qo = 10_n, n = 2,4,6, изображены на
рис. 14.3.
376
Глава 14
14.2. Обнаружители с постоянным уровнем ложной
тревоги с релеевском распределении помех
Обнаружитель с постоянным уровнем ложной тревоги по терми¬
нологии П.А. Бакулева [30, 31, 158] сокращенно называется ПУЛТ-
процессор (ПУЛТ — постоянный уровень ложной тревоги) (англ.:
constant false alarm rate (CFAR) processor).
Основное назначение ПУЛТ-процессоров при релеевских поме¬
хах, когда параметр а или неизвестен или меняется во времени, —
обеспечить оценку порога обнаружения Т таким образом, чтобы об¬
наружение сигнала происходило с относительно неизменной ВЛТ Qo-
Рассмотрим вначале наиболее широко распространенный вид
ПУЛТ-процессора, а именно, ПУЛТ-процессор с усреднением (УС
ПУЛТ [30, 31, 156-158], англ.: СА CFAR, CA-cell-averaging).
Как было показано [см. (14.10)], величина порога Т при обнару¬
жении сигнала со случайной начальной фазой на фоне ГБШ опреде¬
ляется равенством (при линейном детектировании)
(14-24)
Однако, если интенсивность помехи неизвестна, то среднее зна¬
чение E{Dq) заменяется на выборочное среднее отсчетов статистики
D = D(v):
1 к
E'(Do)=-J2D^ (14-25)
где Dit % - 1,jRT, — статистики, формируемые в элементах разреше¬
ния, которые предшествуют, следуют за и окружают так называемый
анализируемый элемент; К — размер ПУЛТ-окна (рис. 14.4).
Обнаружители с постоянным уровнем ложной тревоги
377
»К
1
D
Dn
Dr
Рис. 14.4
АЭ
Рис. 14.5
На рис. 14.4 1 — анализируемый элемент (test cell); 2— защитные
элементы (ячейки, guard cell); 3— опорные элементы окна (элементы
разрешения, reference window cell).
Схематично УС ПУЛТ можно представить в виде рис. 14.5 (Д —
детектор, АК — амплитудный компаратор, АЭ — анализируемый эле¬
мент, С — скалярный множитель). После детектора отсчеты стати¬
стик поступают на линию задержки (сдвигающий регистр). Регистр
сдвига записывает уровень отраженных сигналов и помех в ячейках
(дальности) и далее усредняются значения ячеек (элементов разре¬
шения), прилегающих к ячейке с целью (см. D на рис. 14.5).
Таким образом, правило различения альтернативных гипотез от¬
сутствия (Но) и наличия (Hi) сигнала имеет вид
Hi:D>T'C\
H0:D<T'C,
(14.26)
где D — решающая статистика — элемент выборки в центральном
(анализируемом) элементе (АЭ) ПУЛТ-окна.
Для исключения влияния сигнала (от цели) на формирование
оценки E(D0) УС ПУЛТ-процессоры не используют анализируемый
и соседние с ним «защитные» элементы ПУЛТ-окна, чтобы гаранти¬
ровать независимость статистик Di, и их одинаковые распределения.
В качестве детектора Д в УС ПУЛТ-процессоре может быть ис¬
пользован линейный детектор (рис. 14.6), квадратичный или лога¬
рифмический детекторы.
На рис. 14.6 изображена схема УС ПУЛТ процессора с линей¬
ным детектором ЛД при помехе с распределением Релея при приеме
одиночного радиоимпульса, на рис. 14.6 заштрихованы защитные эле¬
менты ПУЛТ окна: ФС — формирователь статистик U и Qi, АК —
амплитудный компаратор.
378
Глава 14
АЭ
"(0.
ФС
h,Qi
лд
Пг=у/1ЛО~г
Dk ...
Лп+1
D
Dn ... Di
1 -■ 1
\ ... j
U= £ D,
1 = 77+1
n
v = J2v,
1=1
Z = U + V
-ЕЯ1
С'(«о,*)Т
#i
Ltf0
Рис. 14.6
В УС ПУЛТ-процессоре порог Т' определяется произведением
Т' = E'(Do)C(Qo,K), (14.27)
где E'(Do) = A: C^Qo,#) ~■ скалярный множитель, зави¬
сящий только от ВЛТ a = Qo \л длины окна К. Этот множитель не
зависит от неизвестного параметра а распределения Релея.
Справедливо предельное соотношение
lim C(Qo,K) =
К—too
(14.28)
При конечных значениях К величина множителя C(Qo, К) больше его
значения на бесконечности: C(Qo,K) > C(Qo,oo).
Зависимость ВЛТ Qo от величины C(Qo,K) изображена на
рис. 14.7 [156]. Эта зависимость имеет вид [156]
Qo =
2п
> /°°е-*2/2 Г
JO J-с
[G(t)]kе~1ТХд drdx,
(14.29)
где 5 = K/C(Q0,K); G(r) = /0°°уе~у /2[cosту + is\nTy]dy.
Зависимость вероятности обнаружения Qd от отношения сигнал/
помеха d\ = к2А2е2/2сг2 и величины ПУЛТ-окна К изображены на
рис. 14.8 и 14.9 при ВЛТ Qo = Ю-4 и Q0 = Ю-8 соответственно
[159].
Критерием сравнения ПУЛТ процессоров являются потери в от¬
ношении сигнал/помеха по сравнению с асимптотически (при К
оо) оптимальным ПУЛТ-процессором. Потери П зависят от длины
К ПУЛТ-окна, ВЛТ Q0 и вероятности обнаружения Qd. На рис. 14.10
и 14.11 приведены потери УС ПУЛТ-процессора для релеевского рас¬
пределения амплитуд помехи при Q0 = 10-4 (рис. 14.10) и Qo = Ю-6
(рис. 14.11) [156].
Обнаружители с постоянным уровнем ложной тревоги
379
Задаваясь вероятностями Qo, Qd и допустимым уровнем потерь,
можно выбрать необходимую длину К УС ПУЛТ-окна.
В [159] приводится универсальная кривая Хансена УС ПУЛТ-
потерь в зависимости от универсального показателя 5 = п/тЭ1 где
n = -IgQo — показатель степени ВЛТ Q0 = Ю-п (рис. 14.12).
Пусть К — длина УС ПУЛТ-окна, тогда тэ = К для квадратич-
380
Глава 14
П, дБ
10
8
6
4
2
0
О 0.5 1,0 6
Рис. 14.12
ного детектора. В более общем случае
тэ= (К+ 0/(1+ 0, (14.30)
где I = 0,09 для линейного детектора (детектора огибающей); I = 0,65
для логарифмического детектора. Так, например, при Qo = Ю-4 и
т = 8 (при 6 = 0,5) получим П < 3 дБ.
При анализе УС ПУЛТ-процессоров использовалось предположе¬
ние, что помеха однородная и стационарная в пределах ПУЛТ-окна
(модель 1 [31]). Если помеха неоднородная по мощности в пределах
ПУЛТ-окна (модель 2 [31]), то обычные УС ПУЛТ-процессоры имеют
недопустимо большие потери и не обеспечивают постоянного уровня
ложных тревог [31]. Это же относится и к помехе, однородной с ме¬
шающими целями в ПУЛТ-окне (модель 3 [31]).
Действие неоднородных помех и помех модели 3 [31] можно ми¬
нимизировать, если модифицировать УС ПУЛТ процессоры. Три мо¬
дификации ПУЛТ процессоров наиболее известны. Две из них харак¬
теризуются логикой на элементах ПУЛТ окна (второй класс ПУЛТ
процессоров [31]). Одна из них — это ПУЛТ процессоры с выбо¬
ром «большего из» (БИ ПУЛТ) (англ.: GO CFAR, GO — greatest
П, дБ
\1\
10
vVv
8
nYv?'9
6
0,5V^v
4
0,5%.
2
0
Qd = 0
Рис. 14.10 Рис. 14.11
П, дБ
Обнаружители с постоянным уровнем ложной тревоги
381
АЭ
of CFAR), другая с выбором «меньшего из» (МИ ПУЛТ) (англ.: SO
CFAR, SO - smalles of CFAR).
Третья модификация известна как ПУЛТ-процессоры на осно¬
ве порядковой статистики (ПС ПУЛТ-процессоры, англ.: OS CFAR,
OS — order statistic CFAR).
На рис. 14.13 приведена схема БИ ПУЛТ- и МИ ПУЛТ-процессо-
ров. В том и другом процессоре ячейки регистра делятся на два плеча:
до анализируемого элемента (АЭ) и последнего по М ячеек в каждом
плече. В каждом из них формируются средние значения
- к п=М
Е№о) = м £ А: El(D°) = м £ А’ К= 2М•
г=М+1 г=1
На рис. 14.13 ФСг — формирователь статистик U и Qi г-й ячейки;
ЛД — линейный детектор (формирует статистику Di = y/lf + Q?);
ФЗС — формирователь среднего значения.
Потери БИ ПУЛТ-процессора на 0,1...0,3 дБ больше потерь в
УС ПУЛТ-процессоре при использовании модели 1 помехи [31], этот
процессор стабилизирует заданный уровень ложной тревоги при ис¬
пользовании моделей 2 и 3 помехи.
Потери БИ ПУЛТ-процессора можно рассчитывать по универ¬
сальной кривой Хансена (см. рис. 14.12), полагая в (14.30) I = 0,37
для квадратичного детектора, / = 0,5 для детектора огибающей,
I = 1,26 для логарифмического детектора.
Эффект маскировки обнаруживаемой цели кромкой помехи и ме¬
шающими целями БИ ПУЛТ процессоры не устраняют [31].
Ослабить эффект маскировки цели позволяет МИ ПУЛТ-процес-
сор (см. рис. 14.13). Этот процессор исключает эффект маскировки
цели для моделей помех 2 и 3, когда мешающие цели сосредоточены в
одном из полуокон, поскольку МИ-логика устраняет мешающие цели
и кромку помехи, как аномальные выбросы.
382
Глава 14
АЭ
Рис. 14.14
Рассмотрим УС ПУЛ-процессор при реелевской помехе и квадра¬
тичном детекторе на входе (рис. 14.14).
Если в схеме рис. 14.14 величину 1/М отнести к порогу Т -
= Т'/М, то правило различения альтернативных гипотез (14.26) при¬
нимает вид
H\ \D > TZ,
Hq : D < TZ.
Тогда вероятность обнаружения
пОО
Qd= P{D > TZ | z,Hi}Wi(x)dx = EZ[P{D > TZ \ Z,H\)}.
Jo
(14.32)
Подставляя в (14.32) ПРВ W\(x) из (14.21), находим
(14.31)
Qd= Ez\ I Aie-Aix dx
Itz
}■
Ez(e
-TZ Ai
)•
Аналогично находим ВЛТ
Q0=a = Ez(e~TZX).
Поскольку
м
i=1
(14.33)
(14.34)
(14.35)
где статистики Di независимы и одинаково распределены,
м
Ez(e~TZX)= ]]EDi(e-TXD>).
i= 1
Поскольку согласно (14.21) статистики Di распределены по по¬
казательному закону W{Di) = Xe~XDi,
EDi(e-XTD*) =
Обнаружители с постоянным уровнем ложной тревоги
383
/» ОО POO -I
= / &~XTDiW{Di)dDi - X е_(1+т)л£,< dDi = -—-.
Уо Vo l+i
/о
Следовательно, ВЛТ
1
Qo = а = Я2(е"ЛТ2) = (1/г)М- (14.36)
Отсюда находим порог
Т=-1+а~1/м. (14.37)
Аналогично находится вероятность обнаружения (при А = Ai)
Из соотношений (14.37), (14.38) получим
Q~l/M = 1 + —= 1 + -1 + Qo_ ' , (14.39)
d l+d l+d
отсюда следует
_ _i + 0-i/M о1/м-01/м-1
i+ d = _1+ Чх = ^ \ (1440)
-1 + Qd Ql,M ~qJ + l
Далее находим
d — — 1 +
(i - Qo/M)Qd/M QT-Ql,M
(l -QlJM)Q\/M (l -Q1d/M)Ql/M'
Окончательно получим, что в случае релеевского распределения по¬
мехи для УС ПУЛТ-процессора
з , (Qd/Qo)1/M -1
М = 1 _ nVM • (14'41)
1 Vd
Раскрывая неопределенность при М -» оо (х = 1/М -» 0) (пред¬
варительно обозначив f(x) = Qd ~ Qo> д(х) = 1 ~ Qd и используя
правило Лопиталя \mx^o f(x)/g(x) = 1|тж_>о //(0)/5,/(0)), в резуль¬
тате находим
doc = ln(^Qrf). (14.42)
InQd
что совпадает с (14.23).
Можно получить приближенную формулу для величины потерь
[174]
ПдБ = 101д(с?м/^оо).
384
Глава 14
Запишем числитель формулы (14.41) в виде
ол1/м
Qo)
1
1 = ехр
JL in (9±
м VQo
1+ Т7|п
м
±1П(9*
М \Q0
~ 1
In
Qd
Qo
1 + —г In
2 М
Qd
Qo
Qd
Qo
Аналогично записывается знаменатель (14.41)
I _ e(i/M)\nQd _ г _
1
i - qT
i+ 'b]r'®d + \
В результате получим
doо
M
1 + In
2 M
|П Qd 1 + WT7 ln Qd
2 M
1 + In
2 M
Qd
Qo
Qd
Qo
1 + 2M
1 - 2M
1 + --T In
2 M
Qd
Qo
-2М1л(ад=1-2М1л£г»'
Окончательно находим [174]
1
ПдБ = Ю lg
10
In 10
In
5 In(Qp)
M In 10'
Таким образом, приближенная формула потерь принимает вид
ПдВ= м'9
1
Qo
Ъп
W
где -п — показатель степени ВЛТ Qo = 10-п.
При п = б и М = 30 получим П = 1 дБ, здесь отношение п/М =
= 0,2, поэтому по кривой Хансена (рис. 14.12) находим П « 1 дБ, т.е.
полученная формула является довольно точной и тем точнее, чем
больше величина М.
Предполагая в дальнейшем вычислить и потери ПС ПУЛТ-про¬
цессора, положим
Qo = Ю_6, Qd = 0,5; М = 16; к = 10. (14.43)
Тогда с учетом (14.43) по (14.23) и (14.42) d = cfco = 18,93, или
12,77 дБ, в то же время по (14.41) d = 29,97, или 14,77 дБ [172].
Таким образом, потери УС ПУЛТ процессора по сравнению с оп¬
тимальным обнаружителем составляют 2 дБ. Этот же результат мож-
Обнаружители с постоянным уровнем ложной тревоги
385
но получить по кривой Хансена (см. рис. 14.12) при М/п = 16/6 =
= 0,375; Лдв » 2 дБ.
Согласно формуле (14.38) рабочая характеристика УС ПУЛТ про¬
цессора в принятых здесь обозначениях принимает вид
(1 + d)M (1 + d)M
Qd
(id+Qo1/M)M
- Qo
(1+ dQl/M)M'
(14.44)
По (14.42)при M -» oo находим
Qd= Ql/(1+dco),
что совпадает с (14.22).
Если положить Qo = 10“
Qd - Ti
то получим
(1+ d)M
(d+ 10 n/M)M
(14.45)
Зависимости Qd = /(a,M,d) изображены на рис. 14.15-14.16
при М = 16; 100 соответственно. Сплошные кривые построены по
(14.22), штриховые — по (14.45); на рис. 14.16 при Qo = Ю-2 обе
кривые практически сливаются.
Третья модификация УС ПУЛТ-процессора, а именно процес¬
соры на основе порядковой статистики (ПС ПУЛТ-процессоры), об¬
ладают улучшенными характеристиками по сравнению с УП ПУЛТ-
процессорами как по отношению мешающей цели, так и по нейтрали¬
зации маскировки цели кромкой помехи в модели 2.
Схема ПС ПУЛТ-процессора изображена на рис. 14.17. На этом
рисунке ФС — формирователь статистик 7* и Qi\ ЛД — линейный
детектор; ФПС — формирователь порядковых статистик. Этот про-
386
Глава 14
Рис. 14.16
АЭ
Рис. 14.17
цессор выбирает к-ю наибольшую выборку Di в ячейках регистра,
в которых отсутствует сигнал, и величина E'(Do) = Di формирует
порог Т.
Замечание 2. Порядковая статистика (order statistic) — это ста¬
тистика X(fc), 1 ^ к ^ п, определяется как к-й член вариационного
ряда [170]
(14.46)
по выборке (Xj-Lp
Таким образом, на рис. 14.17 ФПС выбирает наибольшее Х(к),
1 < к < N, в (14.46), в качестве которого выступает отсчет Di, и эта
порядковая статистика является оценкой среднего значения E(D0)
(мощности помехи).
Величина к выбирается из компромисса между возможностью
обеспечить заданную ВЛТ, потерями в отношении сигнал/помеха и
эффектом маскировки цели в анализируемом элементе кромкой по¬
мехи и мешающими целями [31].
При к > М/2 стабилизируется уровень ложных тревог в модели
Обнаружители с постоянным уровнем ложной тревоги
387
1 помехи, однако имеет место маскировка цели кромкой помехи в
модели 2 [31].
ПС ПУЛТ-процессоры стабилизируют уровень ложных тревог для
всех моделей 1, 2, 3 помехи и имеют малые потери, лежащие между
значениями потерь в УС ПУЛТ и БИ ПУЛТ процессорах при одина¬
ковой длине окна [31, 161, 162].
При большом значении к относительно длины окна М ПС ПУЛТ-
процессор обеспечивает уровень ложной тревоги с учетом кромки по¬
мехи такой же, как БИ ПУЛТ-процессор. Однако для таких значений
к эффективность обнаружения ПС ПУЛТ-процессора будет меньше,
чем у БИ ПУЛТ-процессора. В процессе обнаружения с учетом ме¬
шающих целей характеристики ПС ПУЛТ-процессора сравнимы с ха¬
рактеристиками МИ ПУЛТ-процессора.
В силу простоты вычисления Qd и Qo ПС ПУЛТ-процессор яв¬
ляется достаточно популярным.
Если величины Xit отмеченные в замечании 2, независимы и име¬
ют общую функцию распределения F, то ПРВ порядковой статистики
при гауссовском фоне определяется производной
Wx{k)(z) = j-/k(z) = j-zP{X(k) sj z}. (14.47)
Характеристики ПС ПУЛТ-процессора (OS CFAR
processor)
Величина z на входе ПУЛТ-процессора является случайной. До¬
пустим, что в ПУЛТ процессоре имеется М опорных ячеек. В ПС
ПУЛТ-процессоре значение СВ z ранжируется согласно их величине
на входе процессора (см. (14.46))
z\ ^ ^ ••• ^ z% ^ ... ^ zk ^ ... ^ Zjyi, (14.48)
где М — длина опорного окна ПС ПУЛТ-процессора (см. рис. 14.17).
Величина к согласно замечанию 2 является рангом ячейки (эле¬
мента окна), который вычисляется для определения порога. Порого¬
вый уровень ZT находится умножением порядковой статистики zk на
скалярный множитель 5:
Zt = 5zk- (14.49)
Эта величина связывается с ВЛТ Qo-
Случайная величина Z, как показано в [161], имеет ПРВ W(z) и
функцию распределения F(z), тогда порядковая статистика zk имеет
ПРВ [161, 170] (см. (9.5))
WK(z) = kCkM[F{z)]k-1[l - F(z)]M~kW(z). (14.50)
388
Глава 14
При релеевском распределении помехи W(z) и F(z) имеют вид
[lei]
W{z) = F{z) = 1 - e~z^, (14.51)
[i
где /х — средняя мощность помехи. Тогда по (14.50) получим
WK(z)= -C^[exp(-z/fi)]M~k+1[l - exp(-z//x)]fe_1. (14.52)
м
Вероятность того, что помеха в анализируемом элементе пре¬
взойдет порог ZT, имеет вид
1 Г°°
P(z >ZT\ZT)= - / e~z/tldz = ехр{-ZT/n), (14.53)
J Z'J'
где ZT - Sz. Здесь порог Zt является функцией СВ zk (14.48).
Следовательно, для вычисления ВЛТ Qo = а необходимо усреднить
величину (14.53) с весом W(zk) = Wk(z)\
POO
Qo = / P{z^ZT\ZT)Wk(z)dz =
Jo
r / \ -| M-fc + 1
. - / 7. \
dz =
roo г г / ~ \ 1 M — k+1
/ e-<5z/#t-C^(l-e-2/#t)fc-1
JO №
exp [ --
pOO
kChM
nOO
/ exp[-y(<S + M-k + 1)][1 - exp(—y)]fe_1 dy. (14.54)
Jo
По (14.54) можно сделать важное заключение, а именно, ВЛТ
Qo не зависит от средней мощности помехи /х, что характерно для
ПУЛТ процессоров.
По (14.54) после интегрирования можно получить следующее вы¬
ражение для ВЛТ Qo [161]:
(14,55)
Результаты расчета множителя 5 приведены в [161] при Q0 =
= 10_6 (табл. 14.1) при размерах опорного окна М = 8; 16; 24; 32.
Соотношению (14.55) можно придать иной вид [173]
- М! Г(5+ М-к+ 1) _ -X 6
Qo (М-к)\ Г(<5 + М + 1) П( + М+1-? ’ ( ' ^
где Г(х) — гамма-функция.
Замечание 3. В силу приведенного вывода можно рассматривать
величины zit % - 1,М, нормированными и вместо (14.51) рассмат¬
ривать
W{z) = W0(z) = e~z\ F0(z) = 1 - e~z. (14.57)
Обнаружители с постоянным уровнем ложной тревоги
389
Таблица 14.1
к
00
II
Si
М = 16
М = 24
М = 32
1
7 999 992,0
15 999 984,0
23 999 976,0
31 999 968,0
2
7 475,8
15 476,4
23 471,2
31 464,5
3
688,2
1 482,8
2 275,5
3 067,9
4
196,0
442,7
688,1
933,3
5
86,4
206,7
326,0
444,9
6
46,7
120,4
192,8
265,0
7
27,8
79,4
129,5
179,2
8
16,8
56,6
94,1
131,3
9
42,4
72,1
101,4
10
32,9
57,3
81,4
11
26,1
46,8
67,2
12
20,9
39,1
56,7
13
16,9
33,1
48,5
14
13,7
28,3
42,2
15
10,9
24,5
37,0
16
8,3
21,3
32,7
17
18,6
29,2
18
16,3
26,1
19
14,3
23,5
20
12,5
21,2
21
10,8
19,2
22
9,3
17,4
23
7,9
15,8
24
6,3
14,4
25
13,1
26
11,9
27
10,7
28
9,6
29
8,6
30
7,6
31
6,6
32
5,4
Аналогично, при наличии сигнала [172, 173]
W^z) = Dexp(-Dz), (14.58)
где D = 1/(1 + d), d — среднее ОСШ, d = v?z/ц в предположении,
что цель флуктуирует так, что огибающая сигнала имеет релеевское
распределение при среднем ОСШ d. Тогда цель обнаруживается с
вероятностью Qd в анализируемом элементе [172, 173] [вычисляется
аналогично (14.55) и (14.56)] [172]
,fc (aD + М — к)\(к — 1)! _
Qd = кС\
м~
(old + М)\
Mt Г($Р + М - к + 1) Л/ SD .
(М-к)\ r(6D + М + 1) 11 V М+1-i/
390
Глава 14
где
aD = <5/(1 + d). (14.60)
При D = 1 из (14.59) следует (14.56).
Для расчета характеристики ПС ПУЛТ-процессора можно вос¬
пользоваться асимптотической формулой Стерлинга
п\ к Vb^nne~ne^n\ |0(п)| < 1/(12п). (14.61)
Представим ВЛТ (14.55) в виде
(6+М-к)\ М\
Qo~ (5+М)\ (.М-к)\' ( ^
В аналогичной форме может быть записана и вероятность обна¬
ружения Qd (14.59).
В [172] определяются функции
f(S, М, к) = In /(0,М, к) = In {М~^\ (14.63)
и используется формула Стирлинга в виде
ln(n!) ^ ^ In27г + Inn - п + (14.64)
В результате находим соотношение
f(S,м,к)к (s + М -к + ln(($ + М-к)+
+ [6 + М+1) 1п(<5 + М)+ + к. (14.65)
V 2J К ' 12 (5+М-к)(5+М) К '
Используя функции (14.63), можно выразить через них и ВЛТ
Qo и вероятность обнаружения Qd:
In Qo - /№ М, /с) - /(0, М, /с); (14.66)
In Qd = /(aD, М, /с) - /(0, М, /с). (14.67)
При этом характеристики ПС ПУЛТ процессора находятся по (14.66),
(14.67) с учетом (14.60).
Рассмотрим частный случай (14.43). Величина 5 определяется
по табл. 14.1 и равна S = 32,9 (М = 16; к = 10).
В общем случае значение S находится из уравнения
In Qo + /(0, М, к) = /(5, М, к). (14.68)
Аналогично при заданной вероятности обнаружения ищется ве¬
личина ао из уравнения
In Qd + /(0, М, fc) = /(aD, М, /с). (14.69)
Обнаружители с постоянным уровнем ложной тревоги
391
При условии (14.43) в [172] получено значение а&_= 0,78.
При известных 5 и ао по (14.60) находится ОСШ d = 41,21, или
5Дв = 16,15 дБ.
Та_ким образом, при условии (14.43) можно вычислить потери по
ОСШ d в различных ПУЛТ-процессорах. ПС ПУЛТ-процессор проиг¬
рывает УС ПУЛТ-процессору 16,15 — 14,77 = 1,38 дБ, а по отношению
к оптимальному обнаружителю 16,15 — 12,77 = 3,38 дБ.
Зависимость Qd = f(d) при к = 10; М = 16; Qo = 10“6 изобра¬
жена на рис. 14.18 [кривая 1 — (14.22); кривая 2— (14.67)].
14.3. ПУЛТ-процессоры с нерелеевским
распределением помехи
Рассмотрим сначала УС ПУЛТ-процессоры, когда распределение
амплитуд помехи не является релеевским. Наибольшее распростране¬
ние получили модели вейбулловского и логарифмически нормального
распределения амплитуд помехи.
Рассмотрим вначале алгоритм обнаружения одиночного импуль¬
са при вейбулловском распределении амплитуд помехи и известных
параметрах ПРВ.
Распределение Вейбулла имеет вид (см. приложение 1)
W{x) =
77 In 2
х
ехр -In2^—J при x ^ 0; (1470)
0 при х < 0,
где хш — медиана распределения; rj — параметр формы — индикатор
степени асимметрии ПРВ.
Для СВ £, распределенной по закону Вейбулла, среднее значение
и дисперсия имеют вид
392
Глава 14
D(0 = var £ =
_ -s/ln 2
I/77
7? + 2
7?
-2 (HL1
v
.(14.71)
Так же, как и в начале данной главы, рассмотрим алгоритм клас¬
сического обнаружения, полагая, что параметры распределения Вей¬
булла известны и решающее правило основано на поступлении оди¬
ночного импульса:
Hx:D[y)>Tt
Я0:ОД <Т.
(14.72)
Порог Т определяется через ВЛТ Qo соотношением
Qo = P{D(v) = Т | цель отсутсвует в элементе разрешения} =
W0(x)dx. (14.73)
-f
JT
Вероятность обнаружения
Qd = P{D(v) ^ Т | цель присутсвует в элементе разрешения} =
W^xjdx. (14.74)
Подставляя (14.70) в (14.73), находим
711п 2 (х/хтУ-'е- ln2(*/*™)’' dx.
Q о
ч:
it х
После подстановки у = \п2(х/хггь)'п получим
Qo
г
Jin5
l2(T/lm)’>
Отсюда следует значение порога
Т = хп
е vdy= exp[-ln2(T/xm)7'].
In Qo
п
In 2
I/77
(14.75)
С учетом соотношения (14.71) получим связь порога со средним
значением статистики D0 = Dq(v)\
Т= E(D0)
(14.76)
Г(1+ l/г))'
Вероятность обнаружения может быть получена в виде [156]
Qd= Ja £J Vi(y,9)dyde= Qd(Qo,W), (14.77)
Обнаружители с постоянным уровнем ложной тревоги
393
где
У
Ф1^)= [АГ(1 + 2/7?) - 2у/ХГ(1 + 2 pq)y cos 9 + у2](2-ч)/2 *
х ехр{-[ЛГ(1 + 2/г)) — 2д/ЛГ(1 + 2/rj)ycos9+ у2]7'72}; (14.78)
Ь2(1п 2)2/^
А = (InQo1)1^- ^ = 2"r?i—оТ-^ — ОСП (отношение сигнал/по-
меха); b = /сгА
Таким образом, вероятность обнаружения зависит от трех пара-
метров: = Qd(Qo,X,v)-
В результате графики зависимости (14.77) для нефлуктуирующей
цели при вейбулловском распределении амплитуд помехи принимают
вид рис. 14.19 [156]. На этом рисунке Q0 = 1СГ6, причем параметром
кривых служит величина г).
Заметим, что распределение Вейбулла при г) = 2 вырождается в
закон Релея. Действительно, при rj = 2 по (14.70) находим
X 2 /0 2
W(®) = -5-е /2<т , X > О,
сг"*
где сг — параметр закона Релея; сг = хт/у/2 In 2. Тогда по (14.71)
получим
Я(0 = сгл/2Г(3/2) = сг^/^72,
ДО = сг22[Г(2) - Г2(3/2)] = (2 - тг/2)<72,
так как Г(2) = 1, Г(3/2) = л/тг/2. Таким образом, кривая при rj = 2
на рис. 14.19 соответствует распределению Релея.
При rj = 1 закон Вейбулла вырождается в показательное распре¬
деление
W(x) = Ае-Лж, х > 0,
где А = In 2/xm.
394
Глава 14
Рассмотрим характеристики обнаружителя, когда распределение
амплитуд помехи подчиняется логарифмически нормальному распре¬
делению, которое имеет вид
w№ = —и I ехР
Ху/Ап In р
(In Ж - lnxm)2
4 In р
где Хт — медиана распределения; р — показатель асимметрии ПРВ,
причем
р = Вд/Sm. (14.80)
Найдем характеристики обнаружения одиночного импульса при
логарифмически нормальном распределении амплитуды помехи и из¬
вестных параметрах ПРВ.
Найдем вначале выражение для ВЛТ
ГОО -1
Qo= е-(1пх-1пжт) /4\npdX'
JT ху/Атгтр
После подстановки у = (Inя — \пхт)/у/2\пр получим
'InT - In ж,
1-erf
л/4 In р
(14.81)
где В = erf д; = _Н_ [ е у2 dy. Следовательно, величина
л/2 In р фт Jo
порога Т определяется соотношением
Т = ®mexp[v^erf-1(l-2Qo)]. (14.82)
С учетом соотношения (14.80) по (14.82) находим
Т = E(D0)p~1 exp[^/4lnperf_1(l - 2Q0)]. (14.83)
Можно показать, что вероятность обнаружения Qd определяется
соотношением [156]
п ОО п2тт
Qd= 2kJc J0 ф^У^)аУйв= Qd(Qo,\p), (14.84)
где С = exp[v/4Tnperf_1(l - 2Q0)]\
1 У
^ ^ \/47r In p p4X — 2p2\f\y cos 0 + y2
x exp \J P4^ _ 2p2VXycosO + y2]2j ; (14.85)
A = b2/(x^p4) — отношение сигнал/помеха на выходе обнаружителя;
Ь = кеА2.
Обнаружители с постоянным уровнем ложной тревоги
395
Рис. 14.20
Зависимости Qd(А) изображены на рис. 14.20: а — при Q0 =
= 10“2; 6 — при Qo = Ю-4.
Найдем характеристики обнаружения единичного импульса ли¬
нейным детектором с использованием УС ПУЛТ-процессора.
Структура обнаружителя при помехах с распределениями Вейбул¬
ла и логарифмически нормальным аналогична структуре при релеев-
ских помехах. При этом, как и ранее, порог обнаружения можно за¬
писать в виде V = E'(Do)C(Qo,K), причем при К -» оо
MQo1)}1^
Г(3/2)
при помехе с распределением Вейбулла;
C(Q0, К) ->• р~х ехр[л/4 In /?erf-1 (1 - 2Q0)\
при помехе с логарифмически нормальным распределением, причем
при К < оо коэффициент C(Qo,i^) больше, чем его величина на
бесконечности.
В УС ПУЛТ-процессоре порог вычисляется согласно его оценке
1 к
Т’= C(Q0,K)~Y,Di- (14.86)
C(Qo,K)
i=1
Величина Ск = C(Qo,K) при распределении Вейбулла находится
из соотношения [156]
1
Ск =
Kg-^iQoY
(14.87)
когда
т)\п2хГ} 1 х
396
Глава 14
xe-i„2 X\isxdx
e lsuK/Ck dsdu - g^ K ^
ck
При логарифмически нормальном распределении [156]
1
Ск =
Kh-^{QoY
(14.88)
(14.89)
когда
Qo
erf
In и
л/4 In p
/ОО Г pO
-oo .J0
1
хл/ЛтГ\пр
- (ln x) /4ln Peisx
= hr,,K(K/Ck).
к
-isuK/Ck dsdu =
Вероятность обнаружения при использовании УС ПУЛТ с распре¬
делением помех по закону Вейбулла имеет вид [156]
р оо поо р2тт
^=Т-/ / / 4>i(y,®)d®dl/
70 [уЛ1
/ОО Г р ОО 1
/ Tj In 2гч-1е-ln 2rVeisr dr e-isuK/c* dsdu =
-oo [.J — oo
.-1 /
JsT
27rCfe
= Qd{K/Ck, A, 77, fc) = <3d[^fe(<3o), A, 77, fc] = ^,a:(Qo,A), (14.90)
где Фi(y,0) определяется no (14.78), Ai = (In 2)1/r/u.
Вероятность обнаружения при использовании УС ПУЛТ с рас¬
пределением помех по логарифмическому нормальному закону имеет
вид [156]
X
п ОО ПОО 1 pZlX
<5d=y j 2nj ®2(y,®)dyde
J__K_ Г00 Г Г
2-tt Ск У_оо У0
1
-(In г) /4 ln Peisr
К
e-isuK/Ck dsdu =
(14.91)
T\J47Г In p
= Qd(K/CK^iP,K) = Qrf[^p,/c(Qo), a, /9,7^],
где Фг(у,0) определяется по (14.85).
Пусть на входе ПС ПУЛТ-процессора воздействует помеха с рас¬
пределением амплитуд по закону Вейбулла (см. Приложение 1).
Л-1
ехр
(!);
(14.92)
Это распределение переходит в закон Релея при Л = 2 и чем
меньше Л, тем протяженнее «хвост» распределения, при А = 1 рас-
Обнаружители с постоянным уровнем ложной тревоги
397
пределение Вейбулла вырождается в показательный закон.
Если процессору предшествует квадратичный детектор с харак¬
теристикой д(х) = х2, то результирующее распределение после нели¬
нейного элемента будет также вейбулловским. Без потери общно¬
сти положим z = (х/b)2, тогда обратная функция х = (p(z) = by/z\
dip/dz = b/2^/z и тогда получим
W(z) = olzol~1 ехр (-*“), (14.93)
где a = А/2.
Снова получили распределение Вейбулла, графики ПРВ W(z) ко¬
торого [170] приведены на рис. П1.8 приложения (1 — a = 0,5; 2 —
a = 1 (показательный закон), 3 — a = 2 (закон Релея), 4 — a = 5).
По (14.93) находим
W(z) = —(e~z0i)f, a = А/2. (14.94)
Тогда функция распределения имеет вид
F(z) = 1 - е"Л а = А/2. (14.95)
Для того чтобы найти выражение ВЛТ для ПС ПУЛТ-процессора,
выразим вначале вероятность
P(z >ZT\ZT)= j W(z)dz = f (-e~zay dz = e-(i**)A/2.
J Znp J Szfc
Тогда согласно (14.54) получим ВЛТ
poo
Qo = / exp [-(Szk)^2)W(zk)dzk. (14.96)
Jo
Используя выражение для ПРВ (14.93)
M~k^zx/2~i 0Хр^
(14.97)
W(zk) = кСм\\ - exp(-zx/2)]k 1 exp(-2A/2)M k^zx^2 1 ехр(-zx/2),
получим ВЛТ
р оо
Qo= ехр[-(6г)х/2]кСм[1 - exp(-.zA/2)]fe_1 х
Jo
х exp(-zA,/2)M-i:^,zA/2-1 exp(-zA/2) dz. (14.98)
В [173] после интегрирования получен результат
q М! Г(<?А/2 + М-к + 1) * 5W г ,
(М - к)\ Г((5А/2 + М + 1) 1И М+1-i^
Отсюда при А = 2 находится соотношение (14.56) для релеевской
398
Глава 14
помехи, а значит, и справедливы значения табл. 14.1, если в них по¬
ложить вместо 6 величину 5х/2 (при Qo = 10“6).
Справедливо также использование формулы Стирлинга.
14.4. Другие разновидности ПУЛТ-процессоров
В [22] (см. также [186, 187]) рассмотрена разновидность ПУЛТ-
приемника (CFAR receiver), решающего задачу обнаружения сигнала,
когда помехой является ГБШ nk(t), к = 1,М, с неизвестной спек¬
тральной плотностью So-
Задача обнаружения сформулирована следующим образом:
Н\. Vk{t) — Tlk(t) + (^), к — 1, М,
где Sk(t) = A ReF(£)exp(iQ£ + Wk) ~ отсчеты фазы Ч!к — независи¬
мые СВ, равномерно распределенные в интервале (0,27т).
Решающей статистикой является
ющая fc-го входного колебания, (О,Г) — интервал, включающий весь
сигнал.
Составляющие хк, ук — независимые гауссовские СВ такие, что
при Я0: Е(гк | Но) = 0; при Яь
E{zk | tfi) = Е(хк | Нг) + \Е(ук \ Нг) = dfcexp^fc,
где dk = 23k/Sf, к = 1,М; Эк — энергия сигнала, принятого в к-м
интервале наблюдения; S' — аналог неизвестной спектральной плот¬
ности So-
Если спектральная плотность 50 известна, то приемник должен
сравнивать решающую статистику U с ее пороговым уровнем и0 про¬
порциональным So- В противном случае приемник предварительно
должен оценить неизвестную спектральную плотность So- Чтобы сде¬
лать это, используются к вспомогательных входных колебаний v’y
j = l,fc, содержащих только один ГБШ, независимый от ГБШ nk(t)
и обладающий той же неизвестной спектральной плотностью So- От¬
счеты zk = х'к + \ук, к = 1,К, формируются соответствующим об¬
разом, как и отсчеты zkt причем хк и ук являются независимыми
гауссовскими СВ с равными нулю средними значениями как при ги¬
потезе Но, так и при гипотезе Яь Эти составляющие статистически
независимы от М составляющих хк и ук и имеют те же дисперсии.
H0:vk(t) = nk(t), к = 1, М;
(14.100)
к=1
где zk = хк + %ук = С fJ'F*(t)Vk(t)dt,; Vk(t) — комплексная огиба-
Обнаружители с постоянным уровнем ложной тревоги
399
Статистика
и'= ^£|4|2 (14.101)
к= 1
являются оценкой неизвестной спектральной плотности So. ее среднее
значение пропорционально действительной спектральной плотности
помехи.
В результате решающим правилом является
H0:U<TU'\
Hi.U^TU',
где Т — постоянная величина — порог, значение которого определя¬
ется заранее определенной ВЛТ Qo-
Поскольку приемник использует одну и ту же ВЛТ независимо от
того, какова может быть истинная плотность действующего ГБШ, то
такой приемник относится к классу ПУЛТ-приемникам (CFAR receiver).
В [22] показано, что ВЛТ Q0 такого приемника
Qo = P(U > TU' | Я0) = P(U/U' ^ Т | Я0)
определяется соотношением
(М-ЩК% I Ь= ^ (14.102)
Если значения М и К = RM достаточно велики, то СВ V =
- U - TU' имеет нормальное распределение. Полагая без потери
общности S' = So = 1, находим среднее значение и дисперсию [22]:
E(V) = E(U) - TE(U') = М - ТК\
a2v = уаг(У | Н0) = var С/ + /З2 var U' = М + Т2К.
Таким образом,
Qo = P(V > 0 | Я0) и erfc = erfca;o, (14.103)
= .JK~M к < х20, (14.104)
^М+Т2К 0
erfcx - Q(x) = e~u2/2du.
Вероятность обнаружения находится в интегральном виде
1 /•c+ioo
Qd = Р(у > 0 | Hi) = / z~xh(z) dz, (14.105)
■^-^"1 J с—ioo
400
Глава 14
Qd
0,9995
0,998
0,99
0,98
0,95
0,9
0,8
0,6
0,4
0,2
0,1
0,05
0,01
0,001
0,0001
5 Ю 15
Рис. 14.21
D 0,5
1 2
Рис. 14.22
5
R
где Rez < 0; с < 0;
h(z) = (1 + z)~M{ 1 - Tz)~K exp
zd
(14.106)
1 + z)'
d - ОСШ; -1 < с < T~\ 0 ^ V ^ oo.
На рис. 14.21 [22] для нефедингующих сигналов приводятся за¬
висимости Qd(D), D = y/2d при Qo = Ю“6 (при этом находим
[58] х0 = 4,75342) М = 20; К = var. По рис. 14.21 замечаем,
что даже при К = 200 вероятность обнаружения Qd(D) < Qd(D0),
где Do = у/2do, do — ОСШ при известной спектральной плотности
S = So- Предельная кривая на рис. 14.21 совпадает с характеристи¬
кой Qd(D) на рис. П1.12 при N = 20.
На рис. 14.22 приводятся потери (d/do) дБ, где d — ОСШ при
неизвестной спектральной плотности шума, соответствующее
Qo = Ю-6 и Qd = 0,999.
Одна из разновидностей ПУЛТ-обнаружителя предложена также
14.5. Непараметрические ПУЛТ-процессоры
Наиболее известными непараметрическими ПУЛТ-процессорами
являются знаковый обнаружитель (см. п. 9.2) и обнаружитель Вил¬
коксона (см. п. 9.3).
Непараметрические ПУЛТ процессоры обеспечивают обнаруже¬
ние сигнала практически без существенных априорных сведениях о
распределении помехи или формы ее энергетического спектра.
Существуют два метода оценки эффективности непараметриче¬
ских обнаружителей по отношению к оптимальным параметрическим
обнаружителям.
в [176].
Обнаружители с постоянным уровнем ложной тревоги
401
Один из этих методов основан на вычислении асимптотической
относительной эффективности (АОЭ), а другой использует моделиро¬
вание методом статистических испытаний (методом Монте-Карло).
Знаковый обнаружитель использует статистику ступенек (9.52)
N
£>=£«(«*), (14.107)
i—l
t ч Г 1 при пл > 0,
где uiwi) = < п Л
v г) \ 0 при Wi < 0.
Таким образом, если Wi, i = 1,N, являются независимыми, оди¬
наково распределенными СВ, то статистики D подчиняются биноми¬
нальному распределению с параметром р\
P(D = К) = С$рк( 1 - p)N~K, К =0,1,..., N. (14.108)
Следовательно, ВЛТ Q0 находится из соотношения (9.56):
N
Qo = P(D = Т | Но) = cn(1/2)N- (14.109)
к=т
Порог обнаружения определяется при известных Q0 и N. Следо¬
вательно, порог Т не зависит от формы распределения помехи. Отсю¬
да следует, что знаковый обнаружитель обладает свойством ПУЛТ-
процессора.
Вероятность обнаружения Qd определяется соотношением (9.55):
N
Qd = P(D > Т | Hi) = Y^C$pK(l -p)N~K. (14.110)
т
Схема знакового обнаружителя изображена на рис. 14.23. На
этом рисунке СФ — согласованный фильтр для сигнала Si(t), отсчеты
осуществляются в точках t = (г - 1 )ТР + т, где т — длительность
импульса, Тр — период повторения импульсов;
р{г-1)Тр-\-т
Wi= Vi(t)si(t) dt,
J (i-l)Tp
РУ — решающее устройство, определяющее порог на основе решения
уравнения (14.109); АК — амплитудный компаратор.
Обнаружитель Вилкоксона имеет решающую статистику (9.13)
(см. пример 9.1).
N
D=Y,xMwi), (14.111)
г— 1
402
Глава 14
v,(t) ®
СФ
/"Л
ФР
©
N
£(•)
i=l
= IJV
ДЛЯ Si(t)
t ги,
v(w7)
РУ
т 1
по (14.109)
Oi
Г
■Hi
■Но
Рис. 14.23
где А
Рис. 14.24
г при Wi > О,
О при Wi ^ 0.
Правило проверки гипотез следующее:
Hi-.D^T,
H0:D<T.
(14.112)
При отсутствии сигнала ВЛТ не зависит от вида распределения
помехи, и таким образом обнаружитель Вилкоксона обладает свой¬
ством ПУЛТ-процессора.
Схема обнаружителя Вилкоксона изображена на рис. 14.24, на
котором ФР — формирователь ранга А*.
Недостатком обнаружителя Вилкоксона является необходимость
запоминать выборку для ее ранжирования.
15 Робастные методы фильтрации
При проектировании реальных систем разработчики зачастую
сталкиваются с тем обстоятельством, что полезные сигналы на входе
и параметры шумов могут в некоторой степени варьироваться. При
этом оказывается, что даже небольшие изменения могут приводить
к существенной деградации характеристик системы, синтезированной
для некоторого «номинального» случая. Один из подходов к реше¬
нию задачи в этих условиях заключается в построении адаптивных
систем.
Другим способом преодоления априорной неопределенности яв¬
ляется построение робастных алгоритмов обработки сигналов. При
наличии параметрической или непараметрической неопределенности в
сигнально-помеховой обстановке робастный алгоритм синтезируется
для «наихудшего» случая, обеспечивая тем самым гарантированные
рабочие характеристики системы обработки в данном классе сигналов
и помех. Это так называемый минимаксный подход. Следует особо
отметить, что робастные процедуры могут с успехом применяться при
непараметрической априорной неопределенности. Используя робаст¬
ный алгоритм фильтрации, зачастую удается за счет незначительного
ухудшения характеристик системы добиться значительного уменьше¬
ния чувствительности алгоритма к изменению априорных данных.
Основные модели априорной неопределенности. Чаще всего воз¬
никают неопределенности в спектрах (корреляционных функциях) по¬
лезных сигналов и шумов на входе приемника, а также в их законах
распределения вероятностей. Модели априорной неопределенности
как для спектров, так и для плотностей распределения вероятностей
чаще всего выглядят одинаково. Рассмотрим основные такие модели.
Модель е-загрязнения. Пусть Ф(о;) — энергетический спектр не¬
которого сигнала. Тогда модель класса спектров с е-загрязнением
имеет вид
{Ф | Ф(си) = (1 - е)Ф0М + еФгСи)}, (15.1)
где ФоМ — «номинальный» (невозмущенный) спектр; Ф^и;) — про¬
извольный неизвестный «загрязняющий» спектр; параметр 0 < е < 1
описывает неопределенность исходных данных.
Класс е-загрязненных ПРВ описывается аналогично, т.е. в ка¬
честве Фо(х) выступает невозмущенная ПРВ, а в качестве Ф\(х) —
возмущающая ПРВ. Например, часто принимают в качестве Фо(х)
404
Глава 15
нормальное распределение, а Фг(х) может быть атомарным распре¬
делением: Ф\(х) = 6(х - Хо).
Модель е-окрестности. В этом случае в качестве спектрального
класса рассматривается е-окрестность невозмущенного спектра Фо(^):
{Ф| ЦФН-ФоНИеЦФНЦ}. (15.2)
Например, для энергетических спектров, интегрируемых по абсолют¬
ному значению, такой класс выглядит следующим образом:
|ф(ш) |-^ У |Ф0(ш)-®i(w)|da; ^ £(Т^|, (15.3)
1 Г°°
ГД6 °° = 2п J
Робастный согласованный фильтр. Робастный согласованный
фильтр часто называют оптимально-стабильным согласованным
фильтром. Проиллюстрируем на его примере важность построения
робастных процедур.
Рассмотрим обнаружение сигнала вида s(t) = A0s\n(x)/x в дис¬
кретном времени на фоне коррелированного шума с треугольным
энергетическим спектром. Непрерывный случай такой фильтрации
в предельном случае бесконечного времени наблюдения рассмотрен
В [1].
При дискретном наблюдении положим
иоок
где (D0 = u0At, At — шаг дискретизации. Спектр дискретного шума
примем равным
с / л - / ад - им>) при и < ьу,
\0 при 7Г > \й\ > оир.
Построим дискретный согласованный фильтр для рассматривае¬
мого случая.
Корреляционная функция шума
Rn{k)=2^J 5"(*)е<*ПсЕ)-
Составим из значений корреляционной функции шума теплицеву мат¬
рицу
Rn( 0) Rn( 1) ... Rn(N) -
Rn( 1) Rn( 0) ... Rn(N-l)
R n =
Rn(N) Rn(N-l) ... Rn( 0)
Робастные методы фильтрации
405
0,6 0,8 1,0 1,2 1,4 1,6 1,8 2,0 w
Рис. 15.1
а из отсчетов полезного сигнала s(k) — вектор s = [s(N), s(N—1),...,
s(0)]T. С учетом принятых обозначений вектор отсчетов импульсной
характеристики согласованного фильтра Hopt = [h(0), h( 1),..., h(N)]T
определяется выражением
Hotp = R^s. (15.4)
Теперь допустим, что на самом деле значение параметра а)0 неиз¬
вестно. Если на согласованный фильтр, оптимизированный для сиг¬
нала с параметром й)0, подать аддитивную смесь шума и полезного
сигнала другим значением параметра й)о. то ОСШ q на выходе такого
случая будет отличаться от оптимального.
На рис. 15.1 изображена зависимость ОСШ на выходе фильтра,
оптимизированного для сигнала с йо = 1, отличающегося от того,
который поступает на вход фильтра с параметром w = ш0. При рас¬
четах полагалось: N = 100, At = 1, шр = 0,l7r, So = 1, Ао = 1.
Как видно из рисунка, характеристики фильтра существенно изме¬
няются при сравнительно небольшом рассогласовании в параметрах
сигналов на входе и выходе. Более того, в правой окрестности но¬
минального значения uj = 1 наблюдается существенно немонотонный
ход кривой. Формы невозмущенного и возмущенного полезных сиг¬
налов представлены на рис. 15.2 и 15.3 соответственно при значениях
параметра а)0 = 1 (рис. 15.2) иа/0= 1,05 (рис. 15.3). По этим рисун¬
кам на глаз сложно отличить сигналы, в то время как характеристики
фильтра меняются существенно.
Рассмотрим способ построения робастного согласованного филь¬
тра. В случае синтеза согласованного фильтра критерием является
достижение наибольшего ОСШ, которое зависит от вида полезно¬
го сигнала S = {s(t),t е [0,Т]} и характеристик шума N = {n(t),
406
Глава 15
s
1,0
0,8
0,6
0,4
0,2
0
“0,2
,.iunjiSr«iripai.iriJ.Jrlb ill I
0 10 20 30 40 50 60 70 80 90 n
Рис. 15.2
Рис. 15.3
t e [0,T]}. Пусть полезный сигнал на входе фильтра принадлежит
некоторому классу Qs, а шум — классу С1п. Тогда отношение сиг¬
нал/шум на выходе фильтра можно записать в виде
р = p(s,n,/i),
где s е S', п е N\ h — импульсная характеристика согласованного
фильтра для сигнала s на фоне аддитивного шума п.
Импульсная характеристика h* робастного согласованного филь¬
тра должна удовлетворять соотношению [192]
inf p(s,n, h*) = max{ inf p(s,n, h)}. (15.5)
(s,n)£SxN h (s,n)£SxN
Точка (s*,n*,/i*) называется седловой точкой игры (15.5), если
Робастные методы фильтрации
407
Рис. 15.4 Рис. 15.5
выполнено соотношение
inf p(s,n,h*)
(s,n)eSxN
p(s*,n*,h*)
max/o(s*, n*, h).
h
(15.6)
В [193] показано, что в случае описания неопределенности моде¬
лью с ^-окрестностью вектор импульсной характеристики робастного
согласованного фильтра имеет вид
(15.7)
где о% =
so — невозмущенныи полезный
e/||Hr||2, ||s - soil2 ^ е,
сигнал.
Рассмотрим, какие характе¬
ристики будет иметь робастный
согласованный фильтр для наше¬
го примера. На рис. 15.4-15.6
изображены зависимости ОСШ
на выходе робастного согласован¬
ного фильтра от расстройки пара¬
метра сигнала. Рисунки постро¬
ены при тех же параметрах, что
и рис. 15.1; для рис. 15.4 <т0 =
= 0,2, для рис. 15.5 сг о = 0,05,
для рис. 15.4 сто = 0,01. Из рисунков видно, что в окрестности но¬
минального значения параметра cDo = 1 поведение кривых меняется
достаточно существенно. При этом проигрыш в ОСШ при номиналь¬
ном значении параметра небольшой.
Робастный фильтр Колмогорова-Винера. Рассмотрим построе¬
ние и характеристики робастного варианта фильтра, минимизирую¬
щего дисперсию ошибки оценивания. Рассмотрим модель наблюде¬
ния следующего вида:
y(t) = s(t) + n(t), (15.8)
408
Глава 15
где s(t) и n{t) — независимые стационарные случайные процессы с
нулевыми средними значениями и энергетическими спектрами, рав¬
ными Ss(u) и Sn(u) соответственно. Случайный процесс s(t) описы¬
вает информативный процесс, a n(t) — шум наблюдения. Пусть тре¬
буется найти линейный фильтр с частотной характеристикой
при подаче на вход которого аддитивной смеси (15.8) на его выходе
формируется оценка s(t) информативного случайного процесса s(t) с
наименьшей дисперсией a2 = E{[s(£) - $(£)]2}.
Напомним основные соотношения винеровской фильтрации.
Пусть h(t) = 7г_1{Я(1о;)} — импульсная характеристика фильтра.
Тогда дисперсию сигнала на его выходе можно записать в виде
Первое слагаемое этого выражения представляет собой дисперсию
информативного случайного процесса и по теореме Парсеваля
Второе слааемое представляет собой дисперсию случайного процесса
на выходе фильтра, которая по теореме Винера-Хинчина и теореме
Парсеваля равна
Учтем, что в последнем слагаемом h{t) — детерминированная
функция, a E{s(t)y(r)} = E{s(t)[s(r)+ п(т)]} = E{s(£)s(r)} = Rs(t-
т) в силу независимости информативного сигнала s(t) и шума n(t) и
равенства нуля их математических ожиданий. С учетом этого преоб¬
разуем последнее слагаемое:
1
— [ЗД+ Sn(0j)}\H(iuj)\2 du.
J — OO
Учитывая, что
поо
/ е-‘“(‘-т)е-^((-г) dr = 2ne-iate-i0tS(a + 0),
J — OO
Робастные методы фильтрации
409
где S(t) — дельта-функция Дирака, окончательно получаем
/оо поо
Rs(t — r)h(t — т) dr = — / Ss(uo)H(\uo) duo.
-oo ^ J — oo
Таким образом, после приведения подобных слагаемых имеем
1 Г°°
a2 = E{[s(t)-s(t)}2} = т- / {^(^)|1-Я(го;)|2+ Sn(u>)\H(iu>)\2} du.
J — qo
(15.9)
Из этого уравнения сразу же следует, что частотная характеристика
Но(ои) = H(\uj) фильтра Винера, минимизирующая дисперсию,
Но{ш) = 5e(w)i 1п(шУ (15Л0)
а минимальная ошибка оценивания
^ ' гы&фй-ь. (i5.li,
2тг J_00 Ss(uj) + Sn(uj)
В случае, если наблюдение на входе имеет вид
y(t) = s'(t) + n'(*),
где характеристики независимых случайных процессов s'(t) и n'(t), от¬
личаются от тех, для которых строится фильтр Колмогорова-Винера,
то выражение (15.9) видоизменяется:
а2
1 f°°
— J {Ss,(Lj)\l-H(iLj)\2+ Sn,(uj)\H(iu))\2}du). (15.12)
Согласно [112] частотная характеристика робастного варианта
фильтра Колмогорова-Винера задается выражением:
{с2 при #0(cj) > с2,
Но(и) при с\ ^ Но(ш) ^ с2, (15.13)
ci при Hq(lj) < Ci,
где Но(и) — частотная характеристика фильтра Колмогорова-Винера
для номинального случая, задаваемая выражением (15.10).
В качестве примера рассмотрим две модели искажения энергети¬
ческого спектра информативного сигнала. Обозначим номинальные
энергетические спектры сигнала и помехи соотвественно
«*<"> - TTW s”<“>=17lb?-
В качестве первой модели примем возмущение энергетического спек-
410
Глава 15
Рис. 15.7
тра информативного сообщения в виде
Sa(u) = (1 - e)SsоМ + e5„(w), е G [0; 1]. (15.14)
При е = 0 энергетический спектр сообщения совпадает с номи¬
нальным, а при е = 1 — с шумом.
На рис. 15.7 изображена зависимость дисперсии ошибки филь¬
трации от параметра е. Рисунок построен при следующих значени¬
ях параметров энергетических спектров: ks = 1, Ts = 10, кп = 1,
Тп = 1. В этом случае Ts > Г„, т.е. информативный сигнал является
узкополосным по сравнению с шумом.
Сплошная линия 1 соответствует фильтру, оптимальному при но¬
минальных значениях параметров. Сплошная линия 2 соответствует
оптимальному фильтру. Штриховая линия 3 соответствует робастно¬
му фильтру (15.13) при ci = 0,2, с2 = 0,8. Как следует из рисунка, при
малых значениях е робастный фильтр проигрывает неробастному ва¬
рианту, однако при сближении спектров полезного сигнала и помехи,
робастный вариант предпочтительнее. Кривая 3 дает нижнюю гра¬
ницу дисперсии ошибки оценивания, достижимой методами линейной
фильтрации.
В качестве второй модели интересно рассмотреть вариацию па¬
раметров энергетического спектра иформативного сигнала. Будем
рассматривать параметр ks изменяющимся и построим зависимость
дисперсии на выходах фильтра Колмогорова-Винера, оптимизирован¬
ного для конкретного значения ks, и робастного варианта фильтра от
этого параметра. Результаты расчетов изображены на рис. 15.8. Ри¬
сунок построен при следующих значениях параметров энергетических
спектров: Ts = 10, кп = 1, Тп = 1. Для робастного фильтра прини-
Робастные методы фильтрации
411
Рис. 15.8
малось ci = 0,2, с2 = 0,8. Сплошная линия 1 соответствует фильтру,
оптимальному при значении ks = 1. Сплошная линия 2 соответствует
оптимальному фильтру. Линия 3 соответствует робастному фильтру.
При выбранных значениях параметров робастный фильтр проигрыва¬
ет неробастному при значениях ks, изображенных на графике и на¬
чинает давать выигрыш только при гораздо больших значениях ks,
начиная примерно с 10.
Построим теперь соответствующие кривые для случая широко-
плосного по сравнению с шумом полезного сигнала. Результаты рас¬
четов при значениях параметров ks = 1, Ts = 1, кп = 5, Тп = 10,
ci = 0,2, с2 = 0,8 изображены на рис. 15.9 и 15.10. Рис. 15.9 соот¬
ветствует модели неопределенности (15.14), рис. 15.10 построен при
изменяющемся значении параметра к3. На рис. 15.9 кривая 1 соот¬
ветствует фильтру, оптимальному при значении ks = 1, кривая 2 —
робастному фильтру при ci = 0,2, с2 = 0,8. Из рисунка видно, что в
этом случае уже при небольшом отклонении спектра информативно¬
го сигнала от номинального робастный фильтр обеспечивает лучшие
характеристики. Кривая 3 на рисунке — дисперсия сигнала на выходе
оптимального фильтра Колмогрова-Винера.
На рис. 15.10 кривая 1 соответствует фильтру, оптимальному при
значении к3 = 1, кривая 3 соответствует робастному фильтру при
ci = 0,2, с2 = 0,8. Кривая 2 определяет предельно достижимую
для линейного фильтра точность оценки. Из рисунка видно, что и в
этом случае область изменения параметра ks можно разделить на две
подобласти, в которых робастный фильтр пригрывает или выигрывает
по сравнению с неробастным алгоритмом, хотя различия и меньше,
чем на рис. 15.9.
412
Глава 15
Рис. 15.9
Рис. 15.10
Рассмотрим аналогичные кривые для значений параметров ks =
= 1, Та = 10, кп = 1, Тп = 30, ci = 0,2, с2 = 0,7, изображенные на
рис. 15.11 и 15.12. Рис. 15.11 соответствует модели неопределенности
(15.14), рис. 15.12 построен при изменяющемся значении параметра
ks- На рисунках кривые 1 соответствуют фильтру, оптимальному при
значении ks = 1, кривая 2 — робастному фильтру, кривая 3 — пре¬
дельно достижимым характеристикам.
Из приведенных рисунков видно, что выбор коэффициентов ci и
с2, определяющих характеристики робастного фильтра, позволяет пе¬
ремещать точку в области параметров, для которой дисперсии оценок
робастного и неробастного алгоритма совпадают.
Смысл параметров ci и с2 допускает достаточно наглядное физи-
Робастные методы фильтрации
413
ческое объяснение [112]. Частотная характеристика фильтра Колмо¬
горова-Винера, как видно из (15.10), строится таким образом, что на
частотах, где значение ОСШ 5s(cj)/5n(cj) велико, значение частотной
характеритки близко к единице. На частотах, где это отношение мало,
частотная характеристика близка к нулю. Между этими предельными
случаями усиление фильтра выбирается так, чтобы обеспечить ком¬
промисс между искажением информативного сигнала и подавлением
адитивного шума. Частотная характеристика робастного фильтра об¬
ладает схожими свойствами. Однако из-за спектральной неопредлен-
ности необходимо ограничить частотную характеристику сверху и сни¬
зу. Если коэффициент передачи исходного неробастного фильтра на
определенной частоте близок к единице, то его ограничивают свер-
414
Глава 15
Рис. 15.13
ху значением с2, чтобы уменьшить влияние возможного попадания
большей, чем в номинальном случае, шумовой составляющей на эту
частоту. Поскольку для номинального случая имеется достаточный
запас по ОСШ, то деградация характеристик робастного фильтра по
этой причине будет не такой большой. С другой стороны, в области
малых значений частотной характеристики исходного фильтра необ¬
ходимо выбрать несколько большее усиление сь для того чтобы не
допусить чрезмерного подавления сигнала при непридвиденном попа¬
дании его частотных компонент в эту область.
Проиллюстрируем теперь зависимость дисперсии ошибки от из¬
менения ширины спектра информативного сигнала. Зависимость дис¬
персии ошибки оценивания от параметра Ts энергетического спектра
сигнала приведена на рис. 15.13 для неробастного (кривая 1), робаст¬
ного (кривая 3) и оптимального (кривая 2) алгоритмов фильтрации.
Рисунок построен при значениях параметров к3 = 1, кп = 1, Тп = 30,
Робастные методы фильтрации
415
сг1
0,7
0,6
О 10 20 30 40 50 60 70 80 90 Ts
Рис. 15.15
ci = 0,05, с2 = 0,7. Номинальный фильтр Колмогорова-Винера рас¬
считывался для значения параметра Ts = 10. Как видно из рисун¬
ка, при выбранных значениях параметров робастного фильтра он до¬
статочно сильно проигрывает при малых значениях Ts неробастному
алгоритму. При умеренно больших значениях Ts выигрыш от исполь¬
зования робастной процедуры незначителен. Следует отметить тот
факт, что характеритика робастного фильтра практически совпадает
с характеристикой оптимального при значении Ts « 15.
Результаты аналогичных расчетов приведены также на рис. 15.14
и 15.15. Рис. 15.14 построен при значениях ks = 1, кп = 1, Тп = 30,
ci = 0,1, с2 = 0,9. Рис. 15.15 построен при значениях ks = 1, кп = 1,
Тп = 30, ci = 0,1, с2 = 0,6. На рис. 15.14 величина ci выбрана
достаточно малой, а с2 достаточно большой, поэтому характеристики
робастного и неробастного алгоритмов в этом случае совпадают.
Приложения
1. Основные законы распределения вероятностей
П1.1. Гауссовское распределение
Гауссовская плотность распределения вероятностей (ПРВ) (так¬
же известная как нормальная ПРВ) для скалярной случайной пере¬
менной х определяется как
W(x) = Д_- ехр
\/27гсг
— ОО < X < 00, (П1.1)
где ц — среднее значение (математическое ожидание); а2 — дис¬
персия СВ х. ПРВ обозначается как 7V(^,cr2), и говорят, что х ~
~ N(fji,cr2), где «~» значит «распределен по». Если /л = 0, то мо¬
менты равны
Е(хп) = / 1 * 3 • 5 ’ * • п — четное; ,П2 2,
\ 0, п — нечетное.
Функция распределения при /л= 0 и а2 = 1 называется стандарт¬
ной нормальной ПРВ и определяется как
= I ехр (-^<2) dt (П1.3)
Более удобно представление Q(x) = 1 - Ф(х), где
= 7^ / ехр (-5<2) dt" (П1-4)
При этом Q(x) называется правосторонней вероятностью и является
вероятностью превышения данного значения. Ее значения показаны
на рис. П1.1 в линейном и логарифмическом масштабе. Для расче¬
тов используется программа Q.m пакета MATLAB или таблица [58].
Иногда используется следующее приближение:
Q(x) ~ ехР (~\х2
v^F* Ч 2
которое также построено на рис. П1.2 вместе с точными значениями
Q(x). Приближение достаточно точно при х > 4.
Приложения
417
Рис. П1.1
Если известен закон распределения вероятности Р = Q(j), то
можно определить 7 по заданной вероятности Р. При записи в сим¬
вольном виде имеем 7 = Q~1(P), где Q-1 — обратная функция.
Обратная функция должна существовать, так как Q(x) монотонно
убывает. Программа Qinv.m вычисляет функцию Q-1 и может быть
использована для вычисления 7 численно.
Многомерная гауссовская
ПРВ случайного n-мерного векто¬
ра х определяется в виде
1
W(x) =
(2тг)”/2 det1/2(K)
х ехр
--(х-у)т К-^х-у)
1
10"1
10“2
10-'
10-4
10-5
(П1.5) ю-
VV
Q\
м
*4,
< vfeexp (-5*а)
\
N
\
\
2 з
Рис. П1.2
где у — вектор средних значений; ю-7
К — ковариационная матрица.
Данная ПРВ обозначается как
N(y,K). Подразумевается, что К — положительно определена и,
следовательно, К-1 существует.
Координаты вектора средних значений задаются в виде
[у]г = Е(х{), Z = 1,2,..., 77-,
а элементы ковариационной матрицы
[К]у = Е[(х{ - E(xi))(xj - E(xj))\,
1,2,..., n; j = 1,2,..., n.
Сама ковариационная матрица имеет вид
к= Е[(х-ад)(х-адл.
418
Приложения
Если /л = 0, то все смешанные моменты нечетных порядков равны
нулю. Моменты четных порядков находятся как комбинации моментов
второго порядка. При /л = 0 получим [154]
E(xiXjXkxi) = E(xiXj)E(xkXi) + E(xiXk)E(xjXi) + E(xiXi)E(xjXk).
(П1.6)
П1.2. Распределение хи-квадрат (центральное)
ПРВ по закону хи-квадрат с v степенями свободы задается сле¬
дующим образом:
.xv/2-i ехр (—1Х) ? х > 0;
х < 0,
W(x)
{ 2t'/2F(v/2)'
10,
(П1.7)
и обозначается как xl- Предполагается, что степени свободы v яв¬
ляются целыми числами v ^ 1. Здесь Г(и) — гамма-функция, опре¬
деляемая следующим образом:
г оо
Г(и) = / tu~l ехр(—t) dt.
Jo
(П1.8)
Выражение Г(и) = (и — 1)Г(и — 1) верно для любого и, Г(1 /2) =
= V5F и Г(п) = (п - 1)! для целых п. Для примера возьмем ПРВ,
приведенную на рис. П1.3. По мере увеличения v закон приближается
к гауссовому. Следует заметить, что при v = 1 данная ПРВ равна
бесконечности при х = 0.
v
ПРВ хи-квадрат ведет себя как ПРВ от х, где х - Yh ХЬ 3 х* ~
i—l
~ iV(0,1) и все Х{ не зависят друг от друга и одинаково распределены.
Их среднее значение и дисперсия равны соответственно
Е(х)
v\
var(z) = 2v.
(П1.9)
Следует отметить случай v =
= 2. Приходим к следующему вы¬
ражению:
W(x) = { Ъ ехр (”5Ж) ’ х >
М \0, х<0,
(П1.10)
то есть к экспоненциальной ПРВ
(рис. П1.3).
Правосторонняя вероятность
для случайной переменной xl вы¬
ражается следующим образом:
ПОО
Qv2(х) = / W(x)dx, х > 0, (П1.11)
и J х
Приложения
419
QXг(я)= exp(-L)
Qx 2{x)
и можно показать [58], что для четных v
1/72-1 (х/2)к
2~) ^ к! ’
7 к=О
1У> 2, (П1.12)
что при с = i//2; т = х/2 = х2/2 совпадает с распределением Пуас¬
сона [58]. Для нечетных и
f 2Q(y/x), v = 1,
w М , <5хр(-Ж/2) (t - l)!(2z)‘-^
fa —(2FTi)i—■ •'>3-
(П1.13)
П1.3. Закон хи-квадрат (не центральный)
Обобщим ПРВ х2> просуммировав квадраты независимых и рас¬
пределенных по гауссовому закону случайных переменных с ненулевы-
v
ми средними значениями. А именно, если х = Yh Х1 • гДе хг НеЗаВИСИ-
^Х
мы и Xi ~ N(m, 1), то х имеет не центральную ПРВ, распределенную
по закону хи-квадрат, с v степенями свободы и параметром нецен-
тральности А = Yh Ее выражение имеет вид
г—1
Ли-2)/А
W(x)= |Hf)( ехР [~\(х + Л)] ^/2-i(VXx),
X > О,
х > О,
(П1.14)
где Ir{u) — модифицированная функция Бесселя первого рода поряд¬
ка г. Она выглядит следующим образом:
Ir(u) = [ exp(ucos0)sin2rOdO (П1.15)
а/тгГ(г + 1/2) Jо
I exp(ucos0) sin2r
Jo
и представляется в виде ряда
7>)=Е*,гУ/2)ГГ1Г (П1Лб)
4 ' к\Г(г + к+1)
Некоторые графики данной ПРВ (П1.14) приведены приведены на
рис. П1.4. Следует заметить, что по мере увеличения и данная ПРВ
приближается к гауссовой. Используя разложение в ряд для Ir(u),
данную ПРВ можно представить в виде ряда:
*72-1 г т (Аж/4)
Wix) = ~~^yW ехр
■\(х+Х)
(П1.17)
2-,ок\Г(и/2+кУ ( }
420
Приложения
а)
б)
Рис. П1.4
Заметим, что при Л = 0 не центральная ПРВ, распределенная по
закону хи-квадрат, вырождается в ПРВ, распределенную по простому
закону хи-квадрат. Не центральная ПРВ, распределенная по закону
хи-квадрат с v степенями свободы и параметром нецентральности Л,
записывается как
Среднее значение и дисперсия СВ равны
Е(х) = v + Л; var(x) = 2j/+ 4А.
Обозначим правостороннюю вероятность как
р оо
= / W{t)dt, х > 0.
v J X
П1.4. F-распределение (центральное)
(П1.18)
(П1.19)
ПРВ F-распределения характеризует СВ в виде отношения двух
независимых случайных переменных, распределенных по закону хи-
квадрат. А именно,
xi/vi
х =
х2^2 '
(П1.20)
где х\ ~ х2 ~ ХЪ2' пРичем х\,х2 — независимы.
ПРВ F-распределения определяется следующим образом:
Г ж-1/2-1
Щх)= < B(vi/2,1^2/2) [1+ {ul/v2)x]^+v2y2' Х ’ (П1.21)
{ 0, х < 0.
где B{u,v) — бета-функция, которая выражается через гамма-фун
Приложения
421
кцию
B(u,v)
г» г»
Г(u + v) ‘
(П1.22) 0)8
Данная ПРВ обозначается °*6
как FUl^2, что значит F-ПРВ с v\
0,4
0,2
степенями свободы в числителе и
v2 степенями свободы в знамена¬
теле. Некоторые графики данной
ПРВ приведены на рис. П1.5.
Правосторонняя вероятность
обозначается как QfUv„2 (я) и мо¬
жет быть вычислена численно [58].
Среднее значение и дисперсия соответственно равны
^2
1 1
/4^2 =
/V50
I
: 10(
!> 1
/Л
1
1 —
1
10
Да
0
А
1 2
Рис. П1.5
вд =
var(x) =
v2 > 2;
v2-2
2г/|(^1 + ^2
2)
^l(^2 — 2)2(^2 -4)’
^2 > 4.
(П1.23)
(П1.24)
так как х2/г/2 1-
П1.5. F-распределение (не центральное)
Не центральная F-ПРВ получается в результате отношения не
центральной случайной переменной, распределенной по закону хи-
квадрат к центральной случайной переменной, распределенной по за¬
кону хи-квадрат:
X\/V\
х =
(П1.25)
^2 ’
a xi,x2 — независимы. Говорят, что х
что
имеет не центральную F-ПРВ. Она обозначается как F'v
читается как не центральная F-ПРВ с v\ степенями свободы в числи¬
теле, v2 — в знаменателе и параметром нецентральности А. Данная
ПРВ может быть представлена в виде ряда
И'(х) = ехр (-i) f, (Л/2)‘
' ' к=0
{vi/V2)^/2+k
М
1+^Х
V2
B{(vx + 2к)/2,и2/2]
-(i/1+i/2)/2-к
(П1.26)
При А = 0 она сводится к центральной ПРВ (при к = 0 в (П1.26)).
422
Приложения
Среднее значение и дисперсия СВ равны
v2(y\ + А)
Е(х)
v\(v2 - 2) ’
^2 > 2,
(П1.27)
U2 >4. (П1.28)
(^2 - 2)2(^2 - 4)
Правосторонняя вероятность обозначается как ^(ajOe) и
требует численного оценивания. Также отметим, что при v2
00
fIx,v2W хДМ-
П1.6. Закон Релея
Закон Релея является распре¬
делением вероятности СВ х =
= V#2 + х\, где xi ~ 7V(0,a2), Х2 ~
~ 7V(0,ст2), a xi,x2 — независимы.
Эта ПРВ имеет вид
W(x) = { £ ®Ч> (-^) .*><>•
I 0. х < 0.
(П1.29)
На рис. П1.6 ПРВ изображена
при а2 = 1. Среднее значение и дис¬
персия вычисляются достаточно
просто [154]:
Е(х) = var(x) = (2-0 <х2. (П1.30)
2 3 4
Рис. П1.6
Правосторонняя вероятность Q(х) имеет вид
ж2 \
2<т2/
поо
Q(x) = / W(t)dt=ex р
J X
(П1.31)
Релеевская ПРВ получается из Х2~ПРВ, так как если х — слу¬
чайная переменная, распределенная по закону Релея, то х = сгу/у,
где у ~ х!- В результате правосторонняя вероятность может быть
рассчитана следующим образом:
Р{х > у/у} = Plx/Va2 > у/У/сг2} = Р{у/у > vV/°2} =
= Р{у > Цо2} = Q^W/a2), (П1.32)
ИЛИ
Р{х > 7} = Qy2(j2/cr2),
(П1.33)
откуда получаем (П1.31), так как Q 2(х) = ехр(-ж/2).
х2
Приложения
423
П1.7. Распределение Райса
ПРВ Райса является распределением вероятности СВ х =
= yjx\ + х2, где xi ~ N(ni,a2), х2 ~ iV(/x2,<x2) и xi,x2 — неза¬
висимы. ПРВ записывается в виде
W(X) = { а2 еХР
О,
__1_(ж2 + 0,2)1 Io , х> О, (П1
34)
х < О,
где а2 = [I2 + ^2 и Io(u) выражается формулой (П1.16) при г = 0 или
1 Г 1 Г
Iq(u) = - / exp(ticos0)dO = — / exp(ticos0)(П1.35)
^ Уо 2tt 7o
Графики ПРВ приведены на рис. П1.7 при а2 = 1.
При а2 = 0 она превраща¬
ется в релеевскую ПРВ. Момен¬
ты СВ выражаются через вы¬
рожденные гипергеометриче-
ские функции [154].
восторонняя вероятность отно¬
сится к вероятности не цент¬
ральной случайной переменной,
квадрат, и может быть оценена
численно. Для этого произве¬
дем следующие действия:
Р{х > v/y} =
**2
О 1 2
3 4 5 6
Рис. П1.7
8 9
(П1.36)
=
Xf + XX
>
+ х%
>
Таким образом,
Р{х> 7}= Qx'2(a)(72/^2),
(П1.37)
где А = {ц\ + /х|)Дт2.
П1.8. Квадратичная форма при законе Гаусса
Иногда требуется вычислить ПРВ у = хтАх, где А — симмет¬
рическая п х п матрица, ах — вектор гауссовсого распределения и
х ~ 7V(y,K).B общем случае это сложная задача. Рассмотрим неко¬
торые простейшие случаи.
1. Если А = К-1 и y = 0, то
хтК-1х ~ Хп- (П1.38)
424
Приложения
(П1.39)
2. Если А = К 1 и у i- 0, то
хтК-1х ~ Хп (^)>
где Л = утК~1у.
3. Если А — идемпотентная матрица (А2 = А) ранга г, К = I,
а у = 0, то
хтАх~Хг- (П1.40)
П1.9. Распределение Вейбулла
В литературе имеется несколько разновидностей записи распре-
1. [170]
W(x) = a(Aa;)“-1e-(Ax)“;
F(x) = 1 - е_(Аж)“, х^О.
(П1.41)
На рис. П1.8 изображена
ПРВ W(x) при А = 1 [170]: 1 -
а = 0,5; 2 — а = 1 (показатель¬
ный закон); 3 — а = 2 (закон Ре-
Рис. т.8 Среднее значение и диспер¬
сия равны соответственно [170]
тх = АГ(1 + 1/а); ст2 = А2[Г(1 + 2/а) - Г2(1 + 1/а)]. (П1.42)
Мода
Zmod = А(а - 1)1/q.
2. [85, 175]
W(x) = Лоаа;“_1е_Аожа; х > 0, а > 0, а > 0; (П1.43)
F{x) = 1 — е_ло;с“;
тх = Л0Г(1 + 1/а); а2 = (Л0)-2/“[Г(1 + 2/а) - Г2(1 + 1/а)];
-Г - /0> 1-
mod " \ (Ло)-1/“(1 - 1/а)1/01, а > 1;
тк = Е(хк) = (A0)“fc/“ - аГ(1 + к/а).
3. [157,173]
= Т (f )A_1 е_(ж/Ь)А; х > 0, 6 > 0, Л > 0, (П1.44)
Приложения
425
где b — параметр масштаба, Л — параметр формы, эта форма рас¬
пределения Вейбулла эквивалентна предыдущей, если взять Ао = Х/Ь
и а = А.
4. [156]
W(x) = ~ — ^ е“1п2(х/хт)а ^ х > 0, а > 0; (П1.45)
Хп
тх = Е(х) =
(In 2)1/«
Г(1 + 1/а);
[Г(1+2/а)-Г2(1 + 1/а)];
ж [(ln2)V«
хп — медиана распределения; а — параметр формы, указывает сте¬
пень асимметрии ПРВ.
П1.10. Распределение Стьюдента
Распределение Стьюдента с v степенями свободы (t-распределе-
ние) имеет вид
-(I/+1J/2
W(x) = к„ 1 +
где kv -
х*
К
v
v + 1
7Г1У \ 2
Функция распределения
\/(1 + х2/v)vArl
г©-
, X е (-00, оо),
Sv{t)= P{tv<t)= к„ ( (i+ —
J — оо \ ^
dx.
В частности, при v - 1 Si(t) = 0,5 +
+ 7r-1arctg£, что является функцией
распределения Коши.
Справедливы свойства:
1) S„(t) + S„(-t) = 1„ т.е. ПРВ
W(x) симметрична относительно нуля
(рис. П1.9) [188];
2) P(tv < 0) = P(t„>0) = Я(0) =
= 0,5.
Выполняется соотношение
-4-2 0 2
Рис. П1.9
4 х
A(t | v) = P(\tu\ <t) = kv J f 1
x*
dx = 2Sv{t) - 1.
-t\ n
Если v —у oo, то распределение Стьюдента сходится к нормаль¬
426
Приложения
ному распределению N(0,1):
S„(t) -» Soo(t) = Ф(«) = —1= [ e~x2,2dx.
V 2тГ J — оо
Поэтому
lim A(i | i/) = —[ e~u2/2 du = A(t).
v->oo \/2тГ J-t
Моменты CB mn = E(t”) существуют только при n <v, при
этом моменты нечетного порядка равны нулю, а моменты четного
порядка выражаются формулой [37, 58]
1 • 3 • • • (2п — 1)
v > 2п.
(г/ — 2)(z/ — 4) • • • (г/ — 2гг) ’
Отсюда в частном случае получается выражение для дисперсии
v
D(tu) =112 =
iy-21
v> 2.
Утверждение 1. Распределение Стьюдента является распределе¬
нием вероятностей СВ tv = Xj у/х1 jv, ГДе ^ ~ iV(0,1). причем X
и х2 независимы.
Доказательство этого утверждения приводится, в частности, в
[154].
Таким образом, справедливо соотношение [58]
^В[\\
A(t | v) = Р
-1 ft
X
L
1+2-
V
Vx2/v
2 \ (iH-l)/2
dx = 1 — Iu
v_ 1
2 ’ 2
где u = vj{y+ t2)\ /n(a, 6) — неполная бета-функция.
Пример П1.1 [170]. Пусть ХЬ...,ХП — независимые одинаково
нормально распределенные СВ с параметрами а и a [X* ~ A^(a,a2)],
причем а и а независимы. Тогда статистики
X=l-±Xi- S2=-\±{X1-X)2
п г—' п — 1 z—'
г=1
г—1
являются наилучшими несмещенными оценками параметров а и a ,
причем X и 52 статистически независимы.
Так как СВ Y = у/п(Х - а)/а подчиняется стандартному нор¬
мальному закону [Y ~ N(0,1)], а СВ s2 = Xn-i распределена по
закону хи-квадрат с п—1 степенями свободы, то в силу их независи-
Приложения
427
мости и согласно приведенному утверждению 1 дробь
у/п(Х — а)/сг _ у/п(Х - а)
подчиняется распределению Стьюдента с v - п—1 степенями сво¬
боды.
Нецентральное ^-распределение [58]
х ехр
ya»(i,£
v52
2{v + х2)
-i nt
f
J —с
V + X2
HK
Sx
\Jv2 +
{y+1)/2
dx,
параметр
1 f 2
где x = —“т^; Hhv(u) = — (t — иУе~г /2dt\ 5
v + t v\ Ju
нецентральности.
Аппроксимация нецентрального ^-распределения [58]
1 + yjt 2/2v
1.11. Q-функция Маркума
Функция Маркума Q = Qv(a,7) представляет собой правосто¬
роннюю вероятность СВ, распределенную по закону Райса и является
эквивалентом формулы (П1.37) [см. (7.14)].
Запишем распределение Райса (иногда оно называется нецен¬
тральным распределением Релея) в виде
1
q(oL,x) = хехр
:(ж + а2)
(П1.46)
Тогда правосторонняя вероятность
пОО
Q(a, /3) = Р{х > /3) = / q(a,x)dx (П1.47)
J0
называется (5-функцией Маркума. Ее свойства:
Q(a,0)= 1;
-ft2/2
(П1.48)
(П1.49)
Q(o,/3)
Положив /3 = 0, по условию нормировки Q(a, 0) = 1 (П1.48) получим
значение интеграла
f
Jo
9 1 9
хе-аж _еЬ /2а.
а
(П1.50)
428
Приложения
п=О
Г рафики Q-функция Маркума изображены на рис. П1.10 и П1.11,
где параметром кривых служит ОСШ d2 = а2/2.
Наряду с Q-функцией Маркума в теории обнаружения использует¬
ся и так называемая обобщенная функция Маркума [22] TV-го порядка
1
Используя эту формулу, можно получить значение интеграла [22]
который является производящей функцией полинома Лагерра Ln(x)
[178, с. 190, ф-ла (17)]
Отсюда находятся моменты СВ X четного порядка [22]
В частных случаях [22]
Справедливы соотношения [22]:
где In(z) — модифицированная функция Бесселя n-го порядка.
Эта функция может быть записана в эквивалентной форме
При этом ПРВ имеет вид
Q(or,0)f %
Рис. П1.10
Рис. П1.11
При переходе от (П1.56) к (П1.57) использовались подстановки
V= ^х2, у= 32, S= ^а2.
Производящая функция моментов СВ v имеет вид преобразова¬
430
Приложения
ния Лапласа от ПРВ (П1.58) [22]:
Г°° /^ч(^-1)/2
Г°° 0 /?;N(iV-l)/2
h(z) = E(e~zv) = / e~zve~ (-J IN-1(2y/S^)dv =
6 exP = 7Г—ТмехР • (П 1.59)
(1 + z)N K\1 + z) (1 + z)N \ 1+ z
Справедливы соотношения [22]
oo / \ к
QN(a,P)=A I) W)’ (nL6°)
k=l—N '
N-l / o\n
QN(a,p) = Q(a,p) + A £ I In(ap), (П1.61)
П— 1 ' '
где A = exp [-|(a2 + /32)].
П1.12. Гамма-распределение
Плотность распределения CB X имеет вид
Щх) = х>0- (П1-62)
Принадлежность СВ X к гамма-распределению обозначается так:
X - G(a,/3).
Среднее значение и дисперсия СВ X выражаются в виде
Е(х) = тх = а/3, varX = а2 = а/32. (П1.63)
Моментная функция СВ X
Ф (*) = 1/(1-/3£)а. (П1.64)
Иногда удобно записывать гамма-распределение в виде [153]
съ
W(x) = 7xb-1e-ca;l(x), 7 = —. (П1.65)
При b = 1, Г(1) = 1, и гамма-распределение вырождается в по¬
казательное распределение
W(x) = се~сх, (П1.66)
или по (П1.62) (при а = 1)
W(x) = ^е~х/0- (П1.67)
Согласно (П1.64) для показательного распределения моментная
функция имеет вид
Ф(0= 1/(1-/31). (П1.68)
Приложения
431
Замечание 1. Пусть имеется сумма независимых одинаково рас¬
пределенных СВ
причем каждое слагаемое распределено по показательному закону с
одним и тем же параметром /3. Тогда ПРВ суммы — это гамма-
распределение
Функция распределения СВ X выражается через неполную гамма-
функцию [170] (при /3 = 1, а = 1)
Гамма-распределение используется в теории обнаружения сигна¬
лов при их некогерентной обработке.
Так, например, в (14.35) статистики Dc имеют показательное
распределение, а сама сумма z имеет гамма-распределение (П1.70)
(при 1//3 = Л). Поэтому ВЛТ Qo определяется формулой
Для ВЛТ Qo = 10 р, где р = 1,12, и при 1 ^ ^ 150 полу¬
чены численные значения порога h, которые сведены в таблицы [21,
180, 181].
Замечание 2. В форме Пирсона неполная гамма-функция имеет
вид [22, 23]
и тогда ВЛТ может быть выражена через эту функцию [22]
При быстром релеевском фединге, когда флуктуации амплитуды
N
(П1.69)
(П1.70)
(П1.71)
j-e ydy,
(П1.72)
где h0 = Xj.
Формулу (П1.72) можно представить в виде [22]
(П1.73)
(П1.74)
Qo = 1 — I{N~ll2ho, N — 1).
(П1.75)
432
Приложения
Q с/
0,9995
Qd
0,9995
0.998
0,998
0,99
0,98
0,95
0,9
0.8
0,99
0,98
0,95
0,9
0,8
0,6
0.4
0,6
0,4
0,2
ОД
0.05
0,2
ОД
0,05
0,01
0.01
0,001
0,0001
d
0,001
0,0001
5 10 15
Рис. П1.12
5 10 15
Рис. П1.13
независимы от импульса к импульсу (случай 2 Сверлинга) вероятность
обнаружения Qd находится по формуле, аналогичной (П1.73) [21, 22]
где hi = /г0/(1 + s2); s2 — среднее частное ОСШ по мощности; ft0 —
порог, определяемый по (П1.73) [21, 180, 181].
Сравнивая (П1.76) и (П1.12), замечаем, что справедливо равен¬
ство [58]
На рис. П1.12 изображена зависимость Qd = f(d) [22] при Q0 =
= 10~6, N = var, d = _д/(D2), (D2) = 2Ns2 — среднее общее ОСШ.
Величину ОСШ d можно определить по тем же таблицам, что
и порог ho [21, 180, 181]. Например, задаваясь Qd = Ю~р, р= 1,
2, 3, по таблицам при N = 100 находим соответственно hi = 133;
124,7; 133,77, что при h0 = 154,9 (при Q0 = 10~6,_N = 100) нахо¬
дим s2 = 0,37; 0,24; 0,1587. Тогда получим ОСШ d = 8,6; 6,9; 5,6
(см. штриховые линии на рис. П1.11).
Пример П1.2. Используем таблицы правосторонней вероятности
Q(x2 I v) хи-квадрат распределения [34, 58] при N = с = 20, v = 2с =
= 40; т = ft0/(l+ s2) = hi, когда при Q0 = 10_6, hQ = 48,8. Положив
d = 10, находим s2 = 2,5, тогда hi = т = 13,9 « 14 и х2 = 2т =
= 28. При v = 40, х2 = 28 по [38] получим Qd = <2(28 | 40) = 0,9235
(см. штриховые линии на рис. П1.12).
(П1.76)
Приложения
433
При больших N для приближенных расчетов Qd = Q(x2 I v)
можно пользоваться приближенными соотношениями [58]
Q(x2 I v) ^ Q(xi), xi = у/2\2 - \/2v - 1, v > 100, (П1.78)
Л 2 '
Q(x2 \ v) & Q(x2), x2=3\Г-
Для сравнения с рассмотренным случаем быстрого фединга при¬
водится рис. П1.13, на котором изображены графики зависимости
Qd = /(d), d = VS [22], S - общее ОСШ пачки из N импульсов
при Qo = 10-6.
Зависимости рис. П1.13 характеризуют прием нефедингующего
сигнала при релеевском распределении помехи. Сравнивая рис. П1.12
и П1.13, замечаем, что при значительных величинах N зависимости
Qd от ОСШ на рис. П1.12 и П1.13 практически совпадают (см. штри¬
ховые линии на рис. П1.12 и П1.13), что означает, что при больших N
ослабляется вредное влияние фединга на вероятность обнаружения.
Произведем расчет по формуле (П1.78). Возьмем N = 100, d =
= 10, получим s2 = 0,5 при Qo = Ю-6 (рис. П1.12), ho = 154,9 = 155,
тогда hi = 103,33, х2 = 2hi, и = 2с = 200, хг = 20,33 - 19,77 =
= 0,36, Q(a?i) = Q(0,36) « 0,36. Аналогично по формуле (П1.79) по¬
лучим х2 = 0,33 и Q(x2) ~ 0,37 (см. штриховые линии на рис. П1.12).
В условиях примера П1.2 при N = 20, v = 40, х2 = 28, получим
Qd = Q(-l,5) = Ф(1,5) = 0,9332, т.е. величину близкую к точной.
П1.13. Бета-распределение
Бета-распределение (рис. П1.14) имеет вид
W(x) = ^ xQ~1(l - ж)^"1,
выз)
где 1 ^ а < оо, 1 ^ /3 < оо, В(а, /3)
— бета-функция.
Среднее значение и дисперсия
СВ X
а
0 ^ х ^ 1,
(П1.80)
ГЛх =
а + /3’
а/3
(а+ /3)2(а + /3+ 1)’
(П1.81)
Функция распределения СВ X
выражается через неполную бета-
функцию [58, 170]
Рис. П1.14
434
Приложения
Ix{a, b) = Ba>b(x) = —X— Г ta~\ 1 - tf-1 dt, O^x^l.
v) Jo
(П1.82)
Замечание 3. Функция бета-распределения Ва,ь(х) позволяет вы¬
числять значения биномиального распределения согласно соотноше¬
нию [170] (а = т\ b = п)\
т
Вп-т,т+1 = £ СУ (1 - р)п~к. (П1.83)
к—О
2. Аналитический сигнал
Пусть /(£) некоторый вещественный сигнал. Его Фурье-спектр
/оо
f(t)e~iutdt. (П2.1)
-ОО
Справедливо свойство
/оо
f(t)eoJtdt= F*(w). (П2.2)
-ОО
Рассмотрим вещественный сигнал /(£) со спектром F(uj). По /(£)
можно получить сигнал /а(£), который сохраняет всю информацию в
F(cj) при / = сл)/2тт ^ 0, но который не будет иметь никакой избыточ¬
ной информации при / < 0. Простейший такой сигнал имеет спектр
Fa(u)= F(w)[l+sgn(/)], (П2.3)
где
Тогда
sgn (/) = < 0, /= 0; (П2.4)
{2F(uj) при / > 0;
F(0) при / = 0; (П2.5)
0 при / < 0.
Сигнал /а(£) со спектром (П2.5) называется аналитическим сиг¬
налом, соответствующим вещественному сигналу /(£).
Поскольку /а(£) имеет спектр (П2.5), который не удовлетворяет
условию симметрии (П2.2), требуемому для вещественного сигнала,
то аналитический сигнал является комплексным. Сигнал /а(£) явля¬
ется аналитической функцией переменной t, если t взять комплексной
t = tf + it". Это видно из следующей записи:
пОО
ш = 2 / [Fi(w) + iF2(cj)]eiujt dt = U(t) + i/a2(t),
Jo
где F(u) и fa(t) разделены на вещественную и мнимую части.
Приложения
435
Используя формулу Эйлера
eluJt = cos ut + isincjt,
легко показать, что удовлетворяются уравнения Коши-Римана
Следовательно, fa(t) — аналитическая функция комплексной пере¬
менной t.
Из определения (П2.3) вытекает важное свойство аналитического
сигнала, а именно:
Поскольку д(Ь) вещественная функция и так как спектр G(u) =
= F(oj) при неотрицательных частотах, свойство симметрии (П2.2)
гарантирует равенство G(oj) = F(uj) повсюду, так что g(t) = f(t) и
равенство (П2.6) тем самым доказано.
Пример П2.1. Пусть задан вещественный сигнал
d _ _d_ _ d
dt,Ui- dt„h2\ dt„Ui- dt,
(П2.6)
g(t) = Re[/a(t)] = ^[/a (t) + /*(<)]
(П2.7)
Запишем преобразование Фурье
/оо
f*(t)e~iutdt= [Fa(-w)]*,
-OO
Поэтому с учетом (П2.3) по (П2.7) получим
од = ыт = + [Fa(-W)]*} =
при / ^ 0.
(П2.8)
436
Приложения
Тогда
/.,‘)-’Ге-л^-(*г)‘+5(i-f?)'
По (П2.6) /(£) = Re[/a(£)]. В этом примере Fa(cj) терпит раз¬
рыв при uj = 0. Преобразование Фурье от (П2.9) представляет собой
интеграл, сходящийся к [Fa(0+) - Fa(0~)]/2. Определение (П2.4) со¬
ответствует этой величине.
Узкополосные сигналы
Основное применение аналитического сигнала — его использова¬
ние для узкополосных сигналов. Узкополосный сигнал возникает при
модуляции несущей информационным сигналом. Рассмотрим сигнал
f(t)= a(t) cos[ujct + (p(t)\ (П2.10)
Хотя любой сигнал f(t) может быть представлен в форме (П2.10),
будем иметь в виду, что a(t) > 0 и изменяется медленно по сравне¬
нию с периодом несущей 1//с.
Полезно записать (П2.10) в виде
f{t) = Rel/We^4], (П2.11)
где величина
/(t) = a(i)e‘v(t) = x(t)+ i y(t) (П2.12)
называется комплексной огибающей вещественного сигнала /(£). Ее
модуль — вещественная огибающая
a(t) = \f(t)\ = ^x2(t)+ y2{t). (П2.13)
Фаза представляет угловую модуляцию сигнала (П2.10)
<p(t) = arctg[y(<)/a:(<)]. (П2.14)
Предположим, что вещественная огибающая a(t) — функция ам¬
плитудной модуляции колебания (П2.10) — имеет полосу В, кото¬
рая меньше, чем несущая частота /с: В/2 < /с, как показано на
рис. П2.1,а (Л(о>) = 5[а(£)]).
По выражению (П2.10) находим спектр модулированного колеба¬
ния (рис. П2.1,6)
F(w) = д ^ei(wct+v) + |e~i(Wct+v) = ig[/eiWct + =
- ~ + (ш + шс)]}> (П2.15)
так как
g[/*e~iWct] =
Приложения
437
Й")1
-/с -В/2 В/2 /с /
в)
Рис. П2.1
оо
/оо р оо
7*e-i("+"«)* dt = / /е‘
-оо Ы-оо
= F*[-(w+ wc)].
По (П2.5) с учетом (П2.15) получим
Fa(w) = 2F(w) = F(w - wc).
Отсюда
F(w) = Fa(w + шс)
(рис. П2.1,в). Тогда
f(t) = /а(<)е'
-iu>c£
(П2.16)
(П2.17)
Отсюда следует, что комплексная огибающая вещественного сигнала
может быть выражена через аналитический сигнал. Вещественная
огибающая a(t) имеет вид
<t) = \~т\ = \Ш\. (П2.18)
Пример П2.2. Пусть несущая coscoct модулируется импульсом
a(t) = te~l, t ^ 0. Спектр модулирующего сигнала
1
A(f)= Г
J о
te-ee-iwt dt -
(1 + iw)2’
Спектр модулированного сигнала
Поэтому
F(u) = ~ Wc) + + Шс)1-
F(u> — u>c) = 2 F(u>) = F&(lj) = A(u> — wc).
(П2.19)
(П2.20)
438
Приложения
Преобразование Гильберта
Аналитический сигнал соответствующий вещественному
сигналу /(£), определен по (П2.3) посредством его спектра
Fa(w) = ^(ш)[1 + sign(/)].
Этот спектр запишем в виде
Fa( u) = F(w) + fF(w), (П2.21)
где
F(oj) = Я (cj)F(cj), (П2.22)
причем
H(cj)= -isgn (/). (П2.23)
Функция sgn (/) определена по (П2.4).
Система с передаточной функцией (частотной характеристикой)
ff(cj) называется преобразованием Г ильберта функции /(£). Посколь¬
ку sgn (0) = 0, то фильтр с ЧХ Н(оо) имеет нулевой отклик по посто¬
янному току.
Преобразование Г ильберта f(t) любого четного сигнала является
нечетной функцией. Это свойство следует из (П2.21), (П2.22):
»{/(-*)} = Н-ы) = = -H{lj)F{lj) = -S{jfa)},
так как
/ОО POO
f(t)e'ut dt = / f(-u)e~iMUdu= F(oj).
-oo J —oo
Таким образом,
K-t) = -Ш (П2.24)
Аналогично для нечетной функции f(t)
%{f(~t)}== H{-w)F(-w) = -H(w)[-F(w)] = H{w)F(w),
и, следовательно,
K-t) = Ш (П2.25)
Для вещественного сигнала f(t) спектр его F(u>) обладает сим¬
метрией (П2.2). По (П2.23) получим
F(-cj) = H(-u)F(-u) = isgn (f)F*(w) = H*(cu)F*(u>) = F*(u).
Следовательно, f(t) — вещественная функция. По (П2.21)
Ш = т + if(t). (П2.26)
Приложения
439
Отсюда получим
до = Re/aW;
(П2.27)
По (П2.17) и (П2.26) следует
?(*)=
(П2.28)
Таким образом, амплитудная модуляция (вещественная огибаю¬
щая) a(t) сигнала (П2.10) с учетом (П2.18) может быть выражена
в виде
Пример П2.3. Рассмотрим вещественный сигнал (П2.8), его ана¬
литический сигнал задается (П2.9). Тогда преобразование Гильберта
от f(t) согласно (П2.27) имеет вид
По (П2.22) замечаем, что спектр гильбертова преобразователя
имеет бесконечную полосу, поэтому импульсная характеристика h(r)
нуждается в доопределении конечным процессом. Для этого необхо¬
димо использовать соответствующий интеграл обратного преобразо¬
вания Фурье в смысле его главного значения
Этот интеграл снова имеет вид несобственного интеграла в смысле
его главного значения.
Гильбертов преобразователь согласно (П2.23) обладает свойством
(П2.29)
По (П2.22) функцию f(t) можно представить сверткой
(П2.30)
h(t) = lim / е a^#(w)elu,t df = lim 2 / e '
a^o J~T a_*°
тогда по (П2.30) выразим преобразование Гильберта
e af smuitdf = —
(П2.32)
1
= isgn(/)= -H(u), f¥ 0. (П2.33)
Я(ш) sgn (/)
440
Приложения
По (П2.22) находим обратное преобразование Гильберта
(П2.34)
Отсюда следует
(П2.35)
Здесь * — знак свертки, а интеграл снова понимается в смысле глав¬
ного значения.
Вычисление преобразования Гильберта (П2.32) и обратного пре¬
образования (П2.35) во временной области и с использованием сверт¬
ки аналитически довольно сложно. Эта процедура может быть вы¬
полнена путем дискретизации исходного колебания с последующим
использованием дискретной свертки, или цифрового фильтра с соот¬
ветствующей импульсной характеристикой, то есть дискретной версии
1/nt. С другой стороны, может быть использовано быстрое преобра¬
зование Фурье (БПФ) для вычисления спектра сигнала, подлежащего
преобразованию. Сначала используется гильбертов преобразователь
(П2.23), чтобы получить спектр преобразования Гильберта, затем ис¬
пользуется обратное БПФ, по которому находятся отсчеты функции
Узкополосные случайные процессы
Как и детерминированные сигналы, СП тоже может быть узкопо¬
лосным. Это означает, что ЭС СП занимает относительно узкую по¬
лосу вблизи высокой несущей частоты. По аналогии с (П2.10) пред¬
положим, что СП имеет вид
где несущая частота /с > В/2, а В — двусторонняя полоса, содер¬
жащая спектр относительно медленно изменяющихся параметров мо¬
дуляции a(t), cosip(t). В дальнейшем будем полагать, что СП имеет
нулевое среднее значение E[n(t)\ = 0. Как и в (П2.12) комплексная
огибающая СП n(t) с использованием амплитудной и фазовой моду¬
лирующих функций имеет вид
Действительная и мнимая части x(t) и y(t) комплексной огибающей
n(t) называется синфазной и квадратурной составляющей шума n(t).
Как и в детерминированном случае
|a(f)| = Vx2{t) + y2(t): <p(t) = arctg[y(t)/x(t)]. (П2.38)
Ш
n(t) = a(t) cos[wc£ + ip(t)]
(П2.36)
n{t) = a(t)elv^ = x(t) + i y(t).
(П2.37)
Приложения
441
Используя (П2.17) и (П2.26), комплексную огибающую (П2.36)
получим в виде
n(t) = na(t)e~luJt = [n(t) + in(^)]e_1Wct. (П2.39)
Сравнивая (П2.37) и (П2.39), получим
x(t) = n(t)coscjct + n(i)sincjct;
(П2.40)
■y(t) = fl(t) COSDct — n(t) sin U3ct.
Известны следующие соотношения для КФ:
Rnnir) = Дп(г), Rnnir') ~~ Rnir)*
Rnn( о) = i?nn(0) = 0; i?n(r) = Дп(т).
Рассмотрим КФ синфазной x(t) и квадратурной ?/(£) составляю¬
щих шумового процесса n(t). По (П2.40) получим
Rx(r) = E[x(t)x(t - т)] = E[n(t)n(t — т)] cosujct cosujc(t - т)+
+ i?[n(t)n(t—т)] cos uct sin uc(t—т)+ F[n(£)n(£—r)] sin Dct cosuc(t—r)+
+ F[n(t)n(^-r)]sincjc^sincjc(t-r) = —n^—- {cos[cjc(2^-t)]+ coscjc£}+
+ {sin[cjc(2£ — r)] — sincjc£} + —■ -- {sin[ejc(2t + r)] + sincjc£}+
(t)
+ —^—{coscjct — cos[cjc(2£ — т)]} = i?n(r) coscjct+Йп(т) sin cjct.
(П2.41)
Аналогично можно показать справедливость следующих соотно¬
шений:
Ry(r) = Rx(r) = Rn(т) cosujct + ^n(r)sincjcr; (П2.42)
RXy(r) = Rnij) sincjct — Rn{j) coscjct; (П2.43)
Ryx(r) = -Rti(t) sin CJCT + Йп(г) C0SCJCT = —Rxy{r). (П2.44)
Если средние значения процессов не равны нулю, КФ заменяется
на КВФ и тогда
#у(т) = #ж(т) = i^n(r) coscjcr + ATn(r) sin wcr; (П2.45)
^®з/(т) = = Kn(r) s\n ujct - Кn(r) coscjOqT. (П2.46)
Можно получить некоторые следствия из приведенных формул.
По (П2.41), (П2.43) получим
i?n(r) = Rx(t) coscjct + Rxy(r) sin gjct. (П2.47)
Из (П2.42) следует, что, если n(t) — стационарный СП, то стационар¬
442
Приложения
ны и СП x(t) и y(t) и наоборот, по (П2.47): если стационарные СП
x(t) и y(t), то и n(t) — стационарный СП.
Если СП n(t) имеет нулевое среднее значение (E[n(t)\ = 0), то
нулевые средние значения имеют n(t), x(t) и y(t). По (П2.42) получим
равенство дисперсий
*1 = Rx( 0) = Ry( 0) = а2у. (П2.48)
Аналогично по (П2.47) следуют равенства
а2п = Rn(0) - Rx(0) = а2 = а2. (П2.49)
Поскольку x(t) и y(t) вещественные СП, то Rxy(r) = Ryxi-т). Вме¬
сте с (П2.44) получим
Rxy(-r) = -RyX(-T) = -RXy(r). (П2.50)
Отсюда следует, что взаимная КФ квадратурных составляющих не¬
четная функция параметра т. Следовательно,
Rxy( 0) = -Д*у(0) = 0. (П2.51)
Так что отсчеты x(t) и y(t) в один и тот же момент времени некор¬
релированны.
Далее пусть узкополосный процесс (П2.36) имеет симметричный
ЭС
Sn(uc + Acj) = Sn(u)c — Acj), 0 ^ Acj ^ ujc. (П2.52)
При дополнительном условии
Sn(u) =0, uj ^ 2со с, (П2.53)
можно показать, что не только выполняется равенство (П2.51) и так¬
же и равенство Rxy(r) = 0, при этом квадратурные составляющие
некоррелированы в том смысле, что x(t) и y(t') некоррелированные
СВ при любых значениях t и t!.
Чтобы показать это, рассмотрим соотношение (П2.43).
Спектральная плотность Sn{d) = 5[#п(т)]. а из свойства пре¬
образования Гильберта следует, что при условии Sn(и) = 5[#п(т)]
справедливо соотношение
Sn(w) = -i sgn (f)Sn(uj). (П2.54)
Тогда по (П2.43) получим
С ( \ Шс) Sn(iO + CJc)
оху{ы) = 2j +
. ,sgn (/ - fc)Sn(uj - сос) + sgn (/ + fc)Sn(uj + ис)
+ i . (112.55)
Приложения
443
Это соотношение можно привести к виду
Sxy(w) = i[5„(о; - шс) - Sn(u + шс)], |/| < /с. (П2.56)
Отсюда при условии (П2.52) получим Sxy(u) = 0, Rxy(r) = 0. Сле¬
довательно,
Rn(r) = Rx(r) coscjct; (П2.57)
Sn(u) = [^(cj — coc) + + cjc)]/2. (П2.58)
Определение комплексной огибающей
В случае сигнала (П2.10) полезна комплексная огибающая
(П2.12), особенно если необходимо производить вычисления, исполь¬
зуя отсчеты модулированного сигнала. В данном разделе рассмотрим
несколько способов определения комплексной огибающей
/00 = a(t)elip{t) = x(t) + i y(t) (П2.59)
вещественного сигнала
f(t) = Re[7(£)e1Wc*] = a(t) cos[uct + ip(t)]. (П2.60)
Как и на рис. П2.1, предположим, что вещественная огибающая
a(t) имеет двустороннюю полосу частот В, такую, что /с > В/2.
Причем часто полагают /с В/2.
В принципе можно использовать аналитический сигнал, как он
представлен в (П2.17) и (П2.26):
/00 = /аМе-1Ыс‘ = [f(t)+ i/(f)]e_1“ct = [f(t)coswct + /(£) sinwc;t]+
+ i[f(t)coswct - f(t)s\nujct] (П2.61)
Преобразование Гильберта по (П2.32) можно выразить в виде
f(t) = (1/тTt)f(t).
Однако преобразование Гильберта особенно неудобно при вычис¬
лениях во временной области . Поэтому используется частотное пред¬
ставление соотношения (П2.61). Особенно это удобно, если исходный
сигнал f(t) дискретизирован и найдено его преобразование Фурье при
помощи БПФ. По (П2.3) и (П2.16) находим
jP(cj) = Fa(cj + ujc) = [1 + sgn (/ + fc)\F(co + cjc). (П2.62)
Таким образом, процедура включает в себя дискретизацию f(t),
вычисление БПФ, удвоение положительной по частоте части спектра,
сдвиг спектра влево на несущую и вычисление обратного БПФ. Такой
подход имеет очевидный недостаток, так как f(t) должна дискрети¬
зироваться по крайней мере с частотой /д = 2(/с+ В/2), что означа¬
ет достаточно высокую частоту, если /сдостаточно велика. Однако,
можно показать, что этот недостаток только кажущийся.
444
Приложения
В процедуре, которая часто используется в аналоговой технике,
если /с > В/2, в этом случае непосредственно по (П2.60) находим
2f(t)cosujct = a(t)[cos(p(t) + cos(2cjc£+ ф)].
Первое слагаемое имеет полосу частот |/| < В/2 в то время, как
второе слагаемое занимает полосу при частотах ±2/с.
Используя ФНЧ, достаточно легко выделить составляющую
(П2.59)
x(t) = R ef(t) = a(t)cos(p= 2[f(t)cosuct]HH, (П2.63)
где индекс «нч» обозначает низкочастотную фильтрацию колебаний
в квадратных скобках. Таким же способом легко показать справед¬
ливость соотношения
y(t) = a(t) sin (р = -2[f(t)s\nujct]H4. (П2.64)
Умножение модулирующего колебания f(t) на несущую cos a)ct оправ¬
дывает термин синфазная составляющая для колебания x(t), а умно¬
жение на sinejjct со сдвигом по фазе на 90 градусов несущей приводит
к термину для y(t) — квадратурная составляющая.
3. Модели Сверлинга [189]
Эффективная площадь рассеяния (ЭПР) флуктуирующей цели
является случайной величиной, которая характеризуется своей ПРВ.
Случай 1. Первая модель Сверлинга соответствует цели с мед¬
ленными флуктуациями амплитуды и с релеевским ПРВ амплитуды
отраженного сигнала
W(u)= ± ехр и> 0. (П3.1)
В этом случае М сигнальных амплитуд федингуют вместе (друж¬
но), от цикла к циклу сканирования [171] с общим распределением
отраженного сигнала (П3.1).
В этом случае цель представляется в виде совокупности п точеч¬
ных элементов, среди которых нет преобладающего отражателя.
При этом распределение частного ОСШ имеет вид [22]
ww= |ехр(-^), №2)
тогда ПРВ ЭПР является экспоненциальной [153]:
И^эф) = 2~2 ехР (-§£) : стэф > о. (ПЗ.З)
Так как величина ЭПР аэф пропорциональна квадрату амплитуды
Приложения
445
и2. Общее ОСШ S также подчиняется экспоненциальному распреде¬
лению [22]
W(S) = e~s/~s/S, О, (П3.4)
где S = Ms2 — среднее значение общего ОСШ.
Случай 2. В этом случае М сигнальных амплитуд федингуют
независимо, и по-прежнему отраженный сигнал имеет релеевское рас¬
пределение. Этот случай соответствует цели с более быстрыми, чем
в случае 1, назависимыми флуктуациями амплитуды от импульса к
импульсу.
Таким образом, это модель флуктуирующей цели при независи¬
мости ЭПР от импульса к импульсу. Предполагается, что ЭПР флук-
туируюет согласно ПРВ (ПЗ.З) [171]
W{a) = iexp(-?V (П3.5)
сг \ сг/
где а — среднее значение ЭПР.
Общее ОСШ S в этом случае имеет гамма-распределение [22]
ИЧ5). —Ц.. S' 9. (П3.6)
v ' (M-1)\S' \S'j м K }
Случай 3. Это модель флуктуаций от одного цикла сканирования
к другому, как в случае 1 [171]. Здесь, как и в случае 1, М сигналь¬
ных амплитуд федингуют вместе (дружно). Частное ОСШ d имеет
распределение
w(d)= ^e~d2/2s\ (П3.7)
Общее ОСШ S имеет следующую ПРВ:
W(S) = Ще-28/'3. (П3.8)
Случай 4. В этом случае М сигнальных амплитуд флуктуируют
независимо от импульса к импульсу, как в случае 2. Частная ОСШ
имеет ПРВ в виде (П3.7). Общее ОСШ имеет ПРВ [22]
№СТ=рм^(!Г"1е-^' *~Ш (пз-9)
Замечание 1. Во всех четырех случаях ПРВ W(S) имеет гамма-
распределение вида
w(f!)mT*'’!• S'E(S)■ (пз-10)
Тогда в каждом из случаев надо положить к = 1,М, 2,2М.
446
Приложения
Случай 5. Часто нефлуктуирующую цель относят к случаю 5
Сверлинга (или случаю 0). В этом случае предполагают амплитуду
отраженного сигнала неизвестной при отсутствии флуктуаций ЭПР.
Замечание 2. В случаях 1 и 2 предполагается, что в состав це¬
ли входит большое число независимых отражателей, причем ни один
из них не доминирует. В случаях 3 и 4 предполагается, что в соста¬
ве цели имеется один доминирующий нефлуктуирующий отражатель,
совместно с другими независимыми отражателями с меньшей интен¬
сивностью отражения.
В случаях 1 и 2 огибающая отраженного сигнала имеет распреде¬
ление Релея, в случаях 3 и 4 огибающая сигнала имеет распределение
хи-квадрат. Обобщенная формула для ПРВ ЭПР может быть записа¬
на в виде [157, 158]
1 * AS’oV-1 ( kSiЛ
"'««-(ГпгаЫ ехр(-х)' (пз'п)
4. Приближенные формулы для Q-функций
Маркума
При значительных ОСШ d= v справедлива асимптотическая фор¬
мула [184]
Q(v,u)= 1-Ф (u~v--^) = 1-Ф(—7)= 1-<3(7) = Ф(7), (П4-1)
где 7 = v + ^ — u; u = \/2v0; v = d; d — ОСШ; v0 — порог, опре¬
деляемый из условия
г00 £zi тк
Qo = / W0(x) dx=J2^mTT= QI (П4‘2)
Jvo k=0
где с = и/2 = N\ m - у2/2 = v0.
Величина m = табулирована в [21, 180, 181].
Результаты расчета вероятности обнаружения [22]
рОО
Qd= Wi(x) dx = Q(d, V2v0) (П4.3)
Jv 0
приведены в табл. П4.1. В этой таблице первые два значения Qd =
= 9,4-10-4 и Qd - 1,64• 10—2 взяты по таблице [184] при пороге vo =
= 13,8155; y/2vo = 5,2565 ~ 5,26 и ОСШ d = v = 2; d = 3. Третье
значение Qd = 0,538 вычисляется по соотношению [184]
Q(u,u) = 0,5[1 + е~и210{и2)] (П4.4)
Приложения
447
Таблица П4.1
d
2
3
5,26
8
9
Qd
9.4-10-4
1.64-10-2
0,5379
0,9975
0,9999
с использованием асимптотической формулы
еж
1о(х) =
у/2ттх
(П4.5)
при х = и2 = d2. Последние два значения вероятности обнаружения
Qd вычислены с использованием соотношения (П4.1)
Qd = 0(7); 7 = d + ^ - уДщ = d + ^ - 5,2565,
когда при d = 8. 7 = 2,806, 0(7) « 0,99749 « 0,9975 и при d= 9,7 =
= 3,806 0(7) « 0,999927. Приведенные данные табл. П4.1 соответ¬
ствуют кривой при 7V= 1 на рис. П1.13 (нефедингующая цель).
Вероятность обнаружения при N > 1 рассчитывается по форму¬
ле [22]
рОО
Qd= Wi(x)dx = Qw(d, \/2г^), (П4.6)
Jv о
где
f°° /x\N~1
QN(a,/3)= J x[~) exP
-|(*2+a2)
или
-~{*2+f32)
N-l
k=1
iN-i(ax) dx, (П4.7)
QN(a,P) = Q(a,/3) + exp
При a = f3 отсюда находим
QN(a,a) = hi + e-“2/0(a2)] + e-“2 £ Ik(a2) =
JV-1
k=1
N-l
= Q(at,a) + e “ ^ Д(<*2),
(П4.9)
fc = l
где учтено соотношение (П4.4).
При N = 5 приближенное значение вероятности обнаружения
можно оценить при помощи формул (П4.4) и (П4.5), а также фор¬
мулы (П4.9), используя вместо второго слагаемого его приближенное
выражение:
^e-d27fc(d2)«4-^=. (П4.10)
ti dV2n
448
Приложения
При N = 5 порог v0 = 23,4415; \/2г^ = 6,8456 = /3, полагая
d = \/2щ = 6,8456, по (П4.10) получим 4^= = 0,23308. Тогда
Q(d,d) = 0,5(l+ = 0,529.
Итого по (П4.9) Qd - 0,529 + 0,233 = 0,762 (см. отсчет Qd на
рис. П1.13).
Аналогичные расчеты можно осуществить при d - 10, если со¬
отношение (П4.8) преобразовать с учетом (П4.5) и (П4.1)
05(а,й»Ф(7)+е-<-«^(£)
(П4.11)
где 7 = 10+ 1/20 - /3 = 10,05 - 6,8456 = 3,2, Ф(7) = 0,9993;
ехр
-^х-Р)2
= ехр(-4,975) = 6,91 • 10--5;
= t(~)k =
■V RO'TT ^ \ rv I
0,3989 0,78
0,0817.
V68,456 0,46
В результате получим
Qd= Q5(a,f3)= 0,9993+ 6,91-10“3-8,17-КГ2 = 0,9993+ 0,000565 =
= 0,999865 « 0,9999
(ср. с отсчетом Qd на рис. П1.13).
Для рассматриваемого случая в [191] приводится аналитическая
формула К. Хелстрома (N > 100)
Q~\Qd)
N
d2 + N
Q~\Qo) -
d2
2VN
(П4.12)
При ВЛТ Qo = Ю_6, Q_1(<2o) = 4,75342, d = 10 и N = 200 и
500 соответственно получены значения Qd ~ 0,16 и 0,01 (см. штрихо¬
вые горизонтальные линии на рис. П1.13). Как следует из рис. П1.13,
рассчитанные значения Qd являются оценками истинных значений Qd
снизу.
Вероятность обнаружения может быть выражена через неполную
функцию Торонто [23, 185]
Tu(m,n,r) = 2 г
_ 9r,n-m+le-ri
Тогда
Qd - 1 -
ru 2
/ Zm~ne-z In(2rz)dz.
Jo
2N — 1,N — 1, —=
V2\
(П4.13)
(П4.14)
Литература
1. Рут В.Л. Введение в теорию обнаружения сигналов в шуме //
ТИИЭР. 1970. Т. 58, т 5. С. 8-22.
2. Рут В.Л. Заметки (преимущественно исторического характера)
о развитии теории обнаружения сигналов и оценивания их параметров
// ТИИЭР. 1987. Т. 75, т 11. С. 7-11.
3. Kailath Т., Poor V.D. Detection of stochastic processes // IEEE
Trans. 1998. V. IT-44, т 6. P. 2230-2259 (перевод см. Дополнение).
4. Вудворт Ф.М. Теория вероятностей и теория информации с
применениями в радиолокации. Перевод с англ. под ред. Г.С. Горели¬
ка. — М.: Сов. радио, 1955. — 128 с.
5. Котельников В.А. Теория потенциальной помехоустойчиво¬
сти. — М.: Госэнергоиздат, 1956. — 151 с.
6. Амиантов И.Н. Применение теории решений к задачам обна¬
ружения сигналов и выделения сигналов из шумов. — М.: изд. ВВИА
им. Н.Е. Жуковского, 1958. — 252 с.
7. Davenport W.B., Root W.L. An introduction to the theory of
random signals and noise. — N.Y.: McGraw Hill, 1958. Русский перевод:
Девенпорт В.Б., Рут В.Л. Введение в теорию случайных сигналов и
шумов. Пер. с англ. под ред. Р.Л. Добрушина. — М.: ИЛ, 1960. — 468 с.
8. Helstrom C.W. Statistical theory of signal detection. — N.Y.: Per-
gamon press, 1960. — 364 p. Русский перевод: Хелстром К. Статистиче¬
ская теория обнаружения сигналов / Пер. с англ. под ред. Ю.Б. Коб¬
зарева. — М.: ИЛ, 1963. — 431 с.
9. Теория передачи электрических сигналов при наличии помех.
Сб. переводов под ред. Н.А. Железнова. — М.: ИЛ, 1953. — 288 с.
10. Вайнштейн Л.А., Зубаков В.Д. Выделение сигналов на фоне
случайных помех. — М.: Сов. радио, 1960. — 447 с.
11. Прием сигналов при наличии шума. Пер. с англ. под ред.
Л.С. Гуткина. — М.: ИЛ, 1960. — 343 с.
12. Прием импульсных сигналов в присутствии шумов. Пер. с ан¬
гл. под ред. А.Е. Башаринова и М.С. Александрова. — М.: ИЛ, 1960.
13. Гуткин Л.С. Теория оптимальных методов радиоприема при
флуктуационных помехах. — М.: Госэнергоиздат, 1961; 2-е изд. — М.:
Сов. радио, 1972. — 448 с.
14. Фалькович С.Е. Прием радиолокационных сигналов на фоне
флуктуационных помех. — М.: Сов. радио, 1961.
450
Литература
15. Бакут П.А., Большаков И.А., Герасимов и др. Вопросы стати¬
стической теории радиолокации / Под ред. Г.П. Тартаковского. Т. 1. —
М.: Сов. радио, 1963. — 426 с.; Т. 2, 1964. — 1080 с.
16. Ширман Я.Д., Голиков В.Н. Основы теории обнаружения ра¬
диолокационных сигналов и измерения их параметров. — М.: Сов. ра¬
дио, 1963. — 278 с.
17. Тихонов В.И. Статистическая радиотехника. — М.: Сов. ра¬
дио, 1966. — 678 с.
18. Marcum J.l. A statistical theory of target detection by pulsed radar
// IRE Trans. 1960. V. IT-6, т 2. P. 59-114.
19. Шахтарин Б.И. Об учете корреляционных свойств шума при
оценке параметров сигнала // Труды ВВИА им. Н.Е. Жуковского.
1966. Вып. 1157. С. 182-189.
20. Шахтарин Б.И., Сизых В.В. Оптимальное обнаружение и
оценка параметров сигналов. Руководство к решению задач по курсу
«Статистическая радиотехника». — М.: Изд-во МГТУ, 1990. — 72 с.
21. Амиантов И.Н. Избранные вопросы статистической теории
связи. — М.: Сов. радио, 1971. — 416 с.
22. Helstrom C.W. Elements of signal detection and estimation. —
N. Jersey: Prentice Hall, 1995. — 586 pp.
23. McDonough R.N., Whalen A.D. Detection of signals in noise. 2nd
ed. - N.Y.: Academic Press, 1995. — 485 pp.
24. Kay S.M. Fundamentals of statistical signal processing. Detection
theory. V. II. N. Jersey: Prentice Hall, 1998. — 560 pp.
25. Ширман Я.Д., Голиков В.Н., Бусыгин И.А. и др. Теоретиче¬
ские основы радиолокации. Учебное пособие для вузов. — М.: Сов.
радио, 1970. — 560 с.
26. Тихонов В.И. Оптимальный прием сигналов. — М.: Радио и
связь, 1983. — 320 с.
27. Вальд А. Последовательный анализ. — М.: Физматгиз,
1962. - 320 с.
28. Теория связи. Пер. с англ. — М.: Связь, 1972. — 392 с.
29. Bussgang J.J., Middleton D. Optimum sequential detection of
signals in noise // IRE Trans. 1955. V. IT-1, т 6. P. 5-18. Русский пере¬
вод: Бусганг Дж., Мидлтон Д. Оптимальное последовательное обна¬
ружение сигналов в шуме, гл. IV, с. 123-159 [11].
30. Бакулев П.А. Степин В.М. Методы и устройства селекции дви¬
жущихся целей. — М.: Радио и связь, 1986. — 288 с.
31. Бакулев П.А., Басистов Ю.А., Тугуши В.Г. Обработка сигна¬
лов с постоянным уровнем ложных тревог // Известия вузов. Серия
«Радиоэлектроника», 1989. Т. 32, т 4. С. 4-15.
32. Papoulis A. Probability, random variables and stochastic processes,
3nd ed., N.Y.: McGraw-Hill, 1991. — 666 pp.
Литература
451
33. Koberston G.H. Computation of noncentral F distribution (CFAR)
detection 11 IEEE. V. AES-12 Sept., 1976. P. 568-571.
34. Rickard J.T., Dillard G.M. Adaptive detection algorithms for mul¬
tiple - taget situations // IEEE Trans. 1997. V. AES-13. P. 338-343.
35. Ritcey J.A. Performance analysis of the censord mean - level
detector // IEEE Trans. 1986. V. AES-12. P. 443-454.
36. Репин В.Г. Тартаковский Г.П. Статистический синтез при
априорной неопределенности и адаптация информационных систем. —
М. Сов. радио, 1977. — 432 с.
37. Крамер Г. Математические методы статистики. Пер. с англ.
под ред. А.Н. Колмогорова. — М.: ИЛ, 1948. — 613 с.
38. Большее Л.Н., Смирнов Н.В. Таблицы математической ста¬
тистики. — М.: ВЦ АН СССР, 1968. — 474 с.
39. Вопросы статистической теории радиолокации / Под ред.
Г.П. Тартаковского. — М. Сов. радио, Т. 1, 1963; Т. 2, 1964.
40. Scharf L.L. Lytle D.W. Signal detection in Gaussian noise of
unknown level: an invariance application // IEEE Trans. 1971. V. IT-17,
т 4. P. 404-411.
41. Кендалл Дж. Стюарт А. Статистические выводы и связи. —
М.: Наука, 1973. - 899 с.
42. Леман Е. Проверка статистических гипотез. — М.: Наука,
1964. - 408 с.
43. Левин Б.Р. Теоретические основы статистической радиотех¬
ники. Кн. 3. — М.: Сов. радио, 1976. — 288 с.
44. Акимов П.С., Евстратов Ф.Ф., Захаров С.И. и др. Обнаруже¬
ние радиосигналов / Под ред. А.А. Волосова. — М.: Радио и связь,
1989. - 288 с.
45. Корадо В.А. Об оптимальном обнаружении сигналов при воз¬
действии помехе неизвестными параметрами // Радиотехника и элек¬
троника. 1969. т 2, С. 239-248,
46. Schweppe F.C. Evaluation of likelihood fuctions for Gaussian sig¬
nals // IEEE Trans. 1965. V. IT-11, т 1. P. 61-70.
47. Томас Д.Б. Непараметрические методы обнаружения сигна¬
лов // ТИИЭР. 1970. V. 58, т 5. С. 23-31.
48. Kassman S.A. A bibliografy on nonparametric detection // IEEE
Trans. 1980. V. IT-26, т 5. P. 595-602.
49. Gibson J.D., Melsa J.L. Introduction to nonparametric detection
with applications. — N.Y.: Academic press, 1975. — 241 pp.
50. Ван Трис Г.Л. Теория обнаружения оценок и модуляции. Пер.
с англ. под. ред. В.И. Тихонова, Т. 1. — М.: Сов. радио, 1975. — 343 с.
Т. 3. Под. ред. В.Т. Горяйнова, 1977. — 662 с.
51. Сосулин Ю.Г. Теория обнаружения и оценивания стохастиче¬
ских сигналов. — М.: Сов. радио, 1978. — 320 с.
452
Литература
52. Ван Трис Г.Л. Приложение методов переменных состояния в
теории обнаружения // ТИИЭР. 1970. V. 58, т 5. С. 55-72.
53. Кайлатс Т. Метод порождающего процесса в применении к
теории обнаружения и оценки // ТИИЭР. 1970. V. 58, т 5. С. 82-99.
54. Kassam S.A. Signal detection in non-Gaussian noise. — N.Y.:
Springer, 1987. — 234 pp.
55. Kalman filtering and neural networks, ed. by S. Haykin. — N.Y.:
J. Wiley, 2001. - 284 pp.
56. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез
радиотехнических устройств и систем. 2-е изд. испр. — М.: Радио и
связь, 2004. — 608 с.
57. Poor H.V. An introduction to signal detection and estimation. 2nd
ed. — N.Y.: Springer, 1994. — 398 pp.
58. Справочник по специальными функциями с формулами, гра¬
фиками и математическими таблицами. Пер. с англ. под ред. М. Аб-
рамовица и И. Стиган. — М.: Наука, 1979. — 830 с.
59. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, ря¬
дов и произведений. — М.: Физматгиз, 1962. — 1100 с.
60. Шахтарин Б.И. Случайные процессы в радиотехнике. 2-е изд.
испр. и дополн. Ч. 1. Линейные системы. — М.: Радио и связь, 2002. —
568 с.
61. Хорн Р., Джонсон Ч. Матричный анализ. — М.: Мир, 1989. —
655 с.
62. Канатников А.Н., Крищенко А.П. Линейная алгебра. — М.:
Изд-во МГТУ им. Н.Э. Баумана, 2001. — 335 с.
63. Middleton D. Canonically optimum threshold detection // IEEE
Trans. 1966. V. IT-12, т 2. P. 230-243.
64. Миддлтон Д. Очерки теории связи / Пер. с англ. - М.: Сов.
радио, 1966. — 160 с.
65. Middleton D. Threshold detection in non-Gaussian interference
environments // IEEE Trans. Elecromagnet. Compat. 1984. V. EC-26.
P. 19-28.
66. Kay S.M. Fundamentas of statistical signal processing. V.l. Esti¬
mation theory. — N.Y.: Prentice Hall, 1993.
67. Буссганг Д.Д. Приложение методов последовательного анали¬
за к задачам радиолокационного обнаружения // ТИИЭР. 1970. v. 58,
т 5. С. 138-151.
68. Вальд А. Статистические решающие функции // В кн.: По¬
зиционные игры / Под ред. Н.Н. Воробьева. — М.: Наука, 1967.
69. Ширяев А.Н. Статистический последовательный анализ. —
М.: Наука, 1969.
70. Таблицы распределения Релея-Райса // Л.С. Барк, Л.Н. Боль-
шев, П.Н. Кузнецов, Л.П. Черенков. — М.: ВЦ АН СССР, 1964 — 246 с.
Литература
453
71. Middleton D. Some general results in the theory of noise through
nonlinear devices // Quarterly of Applied Mathematics. 1948. v. 5, т 4.
P. 445-498.
72. Selin I. The sequential estimation and detection of signals in
normal noise // Information and Control. 1964. v. 7, т 4. P. 512-534;
1965. v. 8, т 1. P. 1-35.
73. Тихонов В.И., Миронов М.А. Марковские процессы. - М.: Сов.
радио, 1977. — 488 с.
74. Башаринов А.Е., Флейшман Б.С. Методы статистического по¬
следовательного анализа и их радиотехнические приложения. — М.:
Сов. радио, 1962. — 352 с.
75. Хелстром К. Последовательное обнаружение. Гл. 7. с. 288-
302 [28].
76. Розанов Б.А., Власов И.Б. Последовательное обнаружение
сигналов. Гл. 4, с. 202-266 [77].
77. Акимов П.С., Бакут П.А., Богданович В.А. и др. Теория об¬
наружения сигналов / Под ред. П.А. Бакута. — М.: Радио и связь,
1984. - 440 с.
78. Башаринов А.Е. Флейшман Б.С. Применение метода последо¬
вательного анализа в системах двухзначной передачи при релеевских
флуктуациях интенсивности сигналов // Радиотехника и электрони¬
ка. 1959. Т. 4, т 2. С. 155-160.
79. Middleton D. Non-Gaussian noise models in signal processing for
telecommunications: new methods and results for class A and class В noise
models // IEEE Trans. 1999. V. IT-45, т 4. P. 1129-1149.
80. Валеев В.Г. Обнаружение сигналов в негауссовских помехах.
Гл. 5, с. 266-325 в кн. [77].
81. Turin G.L. Error probability for binary symmetric ideal reception
through nonselective slow fading and noise // PIRE. 1958. V. 46, т 9.
P. 851-857.
82. Константинов П.А. Помехоустойчивость систем связи с то¬
нальной манипуляцией при идеальном приеме // Радиотехника. 1961.
Т. 16, т 11. С. 18-25.
83. Антонов О.Е. Оптимальное обнаружение сигналов в негаус¬
совских помехах // Радиотехника и электроника. 1967. Т. 12, т 4.
С. 579-587.
84. Антонов О.Е. Оптимальное обнаружение сигналов в негаус¬
совских помехах. Обнаружение сигналов с неизвестной амплитудой и
фазой // Радиотехника и электроника. 1967. Т. 12, т 5. С. 727-735.
85. Тихонов В.И., Шахтарин Б.И., Сизых В.В. Случайные про¬
цессы. Примеры и задачи. Т. 1. Случайные величины и процессы. —
М.: Радио и связь, 2003. — 400 с.
454
Литература
86. Гаек Я., Шидак 3. Теория ранговых критериев. Пер. с англ. —
М.: Наука, 1971. — 376 с.
87. Хеттманспергер Т.П. Статистические выводы, основанные на
рангах. Пер. с англ. — М.: Финансы и статистика, 1987. — 335 с.
88. Карлил Дж.В. Непараметрические методы в теории обнару¬
жения. Гл. 8. с. 308-339, кн. [28].
89. Sheskin D.J. Handbook of parametric and nonparametric statisti¬
cal procedures, 2-nd ed. — N.Y. Chapman and Hall/CRC, 2000. — 900 p.
90. Голубев С.В., Тихонов В.И., Шахтарин Б.И. Обработка ра¬
диосигналов корреляционными методами. Обзор. — М.: 1999. — 70 с.
91. Шахтарин Б.И. Случайные процессы в радиотехнике. Цикл
лекций. — М.: Радио и связь, 2000. — 584 с.
92. Акимов П.С. Непараметрическое обнаружение сигналов. —
М.: Изд-во МВТУ им. Н.Э. Баумана, 1980. — 98 с.
93. Wolff S.S., Thomas J.B., Williams T.R. The polarity-coincidence
correlator: a nonparametric detection device // IRE Trans. 1962. V. IT-8,
т 1. P. 5-9.
94. Горяйнов С.Б., Павлов И.С., Цветкова Г.М. и др. Математи¬
ческая статистика. Учебник для вузов. 2-е издание, стереот. — М.:
Изд-во МГТУ им. Н.Э. Баумана, 2002. — 424 с.
95. Nonparametric detection: theory and applications / Eds. S.A. Kas-
sam, J.B. Thomas. Strondsburg, P.A. Dowden, 1980. — 348 p.
96. Акимов П.С. Непараметрическое обнаружение сигналов // Ра¬
диотехника. 1977. Т. 32, т 11. С. 17-30.
97. Акимов П.С., Ефремов B.C. Оптимальное ранговое после¬
довательное обнаружение импульсного сигнала // Радиотехническая
электротехника. 1975. Т. 20, т 11. С. 2286-2296.
98. Акимов П.С. Ефремов B.C. Ранговая последовательная про¬
цедура обнаружения импульсного сигнала // Радиотехника и электро¬
ника. 1975. Т. 20, т 1. С. 118-122.
99. Акимов П.С., Ефремов B.C. Адаптация ранговой последо¬
вательной процедуры обнаружения // Радиотехника и электроника.
1977. Т. 22, т 5.
100. Акимов П.С. Адаптация ранговой бинарной процедуры обна¬
ружения // Изв. вузов. Радиотехника. 1979. Т. 22, т 7. С. 31-37.
101. Акимов П.С. Ефремов B.C. Журков Л.П., Косолапое А.С.
Реализация непараметрического рангового обнаружителя // Радио¬
техника. 1976. Т. 31, т 7. С. 95-97.
102. Акимов П.С., Кубасов А.Н. Ранговое обнаружение оптиче¬
ского сигнала // Изв. вузов. Сер. Радиоэлектроника. 1977, т. 20, т 7.
С. 29-35.
Литература
455
103. Акимов П.С., Ефремов B.C. Ранговое обнаружение сигнала
с большим динамическим диапазоном // Радиотехника. 1978. Т. 33,
т 4. С. 66-69.
104. Акимов П.С., Ефремов B.C., Кубасов А.Н. Об устройчивости
непараметрического теста при некогерентной обработке // Радиотех¬
ника и электроника. 1978. Т. 23, т 6. С. 1164-1173.
105. Акимов П.С., Ефремов B.C., Кубасов А.Н. Об устойчивости
последовательной ранговой процедуры обнаружения // Радиотехника
и электроника. 1978. Т. 23, т 7. С. 1427-1431.
106. Акимов П.С., Сенин А.И., Соленов В.И. Сигналы и их обра¬
ботка в информационных системах. — М: Радио и связь, 1994. —
256 с.
107. Розанов Б.А. Последовательное обнаружение сигналов:
Учебн. пособие. — М.: Изд-во МВТУ, 1978. — 28 с.
108. Communications and networks: a survey of recent advances. Eds
I.F. Blake and H.V. Poor, N.Y.: Springer-Verlag, 1986. — 430 p.
109. Tantaratana S. Sequential detection of a positive signal. Ch. 7,
pp. 157-196 [108].
111. Богданович В.А., Вострецов А.Г. Теория устойчивого об¬
наружения различения и оценивания сигналов. 2-е изд., испр. — М.:
Физматлит, 2004. — 318 с.
112. Кассам С.А., Пур Г.В. Робастные методы обработки сигна¬
лов: Обзор // ТИИЭР. 1985. Т. 73, т 3. С. 54-110.
113. Poor H.V. Robustness in signal detection. Ch. 6. P. 131-156
[108].
114. Masreliez C.J., Martin R.D. Robust Bayesian estimation for linear
model and robustifying the Kalman filter // IEEE Trans. 1977. V. AC-22.
P. 361-371.
115. Kassam S.A. Lim T.L. Robust Wiener filters // J. Franklin Inst.
1977. V. 304, т 4/5. P. 171-185.
116. Vastola K.S., Poor H.V. Robust Wiener-Kolmogorov theory //
IEEE Trans. 1984. Vol. IT-30, т 2. P. 316-327.
117. Capon J. Optimum coincidence procedures for detecting weak
signals in noise // IRE Intern. Conv. Record. Part 4. 1960. P. 154-166.
118. Capon J. A nonparametric techniques for the detection of a
constant signal in additive noise // IRE WESCON Conf. Rec. Part 4.
1959. P. 92-103.
119. Tantaratana S. Thomas J.B. On sequential sign detection of a
constant signal // IEEE Trans. 1977. т IT-23. P. 304-315.
120. Lee Y.W. Statistical theory of communications. — N.Y.: Wiley,
1960.
456
Литература
121. Armstrong G.L. The effect of dependent sampling on the perfor¬
mance of nonparametric coincidence detectors // Ph. D. diss. Oklahoma
State Univ. Still water, 1965. — 129 p.
122. Kendall M.G. Rank correlation methods. 4-th ed. — N.Y.: Hafner,
1970. Русск. пер.: Кендал М. Ранговая корреляция. — М.: Статистика,
1974. - 214 с.
123. Корадо В.А. Захаров С.И. Оптимальное обнаружение сиг¬
нала на фоне помех с неизвестной интенсивностью, гл. б, с. 83-110,
кн. [44].
124. Корадо В.А. Захаров С.И. Обнаружение сигнала на фоне
случайных стационарных помех с неизвестным спектром мощности,
гл. 7, с. 110-158, кн. [44].
125. Корадо В.А. Оптимальное обнаружении детерминированных
сигналов со случайными параметрами на фоне помех с неизвестной
интенсивностью при условии постоянства ложных тревог // Радио¬
техника и электроника. 1968. Т. 13, т б. С. 1115-1118.
126. Борисов В.К., Зинчук В.М., Лимарев А.Е. и др. Помехоза¬
щищенность систем радиосвязи с расширением спектра сигналов мо¬
дуляцией несущей псевдослучайной последовательностью / Под ред.
В.И. Борисова. — М.: Радио и связь, 2003. — 640 с.
127. Харисов В.Н., Бенев В.Н. Адаптивная фильтрация нормаль¬
ного марковского процесса с неизвестным математическим ожидани¬
ем и дисперсией // В кн.: Научно-методические материалы по ста¬
тистической радиотехнике. Под ред. В.И. Тихонова. — М.: ВВИА им.
Н.Е. Жуковского, 1979. С. 145-153.
128. Лайниотис Д.Г. Разделение — единый метод построения
адаптивных систем. I. Оценивание. С. 8-27; II. Управление. С. 74-93
// ТИИЭР. 1976. Т. 64, т 8.
129. Грищенко Н.С., Гусаров А.И., Логинов В.П., Севостьянов
К.К. Адаптивное оценивание. Ч. II // Зарубежная радиоэлектроника.
1985. т 3. С. 3-26.
130. Стратонович Р.Л. Принципы адаптивного приема. — М: Сов.
радио, 1973. 141 с.
131. Перов А.И. Статистическая теория радиотехнических си¬
стем. Учебное пособие для вузов. — М.: Радиотехника, 2003. — 400 с.
132. Левин Б.Р. Теоретические основы статистической радиотех¬
ники. Кн. 2, изд. 2-е перераб. и доп. — М.: Сов.радио, 1975. — 392 с.
133. Стратонович Р.Л. К теории оптимальной нелинейной филь¬
трации случайных функций // Теория вероятностей и ее применение.
1959. Т. 4, т 2. С. 239-242.
134. Стратонович Р.Л. Применение теории процессов Маркова
для оптимальной фильтрации сигналов // Радиотехника и электрони¬
ка. 1960. Т. 5, т 11.
Литература
457
135. Сосулин Ю.Г. Оптимальное обнаружение некоторых негаус¬
совских сигналов в шуме // Изв. АН СССР. Техническая кибернетика.
1965. т б.
136. Стратонович Р.Л. Сосулин Ю.Г. Оптимальный прием сиг¬
налов на фоне негауссовских помех // Радиотехника и электроника.
1966. Т. 11, т 4. С. 497-507.
137. Сосулин Ю.Г. О некоторых задачах обнаружения и нелиней¬
ной фильтрации сигналов при наличии помех // В кн.: 3-я конфе¬
ренция по теории передачи и кодирования. Секция 4. — М., 1967.
С. 10-17.
138. Сосулин Ю.Г. Некоторые вопросы обнаружения и фильтра¬
ции сигналов на фоне помех марковского типа. Негауссовские помехи
// Радиотехника и электроника. 1968. Т. 13, т 4.
139. Кульман Н.К., Стратонович Р.Л. Фазовая автоподстройка
частоты и оптимальное измерение параметров узкополосного сигна¬
ла с непостоянной частотой в шуме // Радиотехника и электроника.
1964. Т. 9, т 1.
140. Тихонов В.И. Шахтарин Б.И. Сизых В.В. Случайные про¬
цессы. Примеры и задачи. Т. 3. Оптимальная фильтрация, экстрапо¬
ляция и моделирование. Учебное пособие для вузов. — М.: Радио и
связь, 2004. — 408 с.
141. Балакришнан А.В. Теория фильтрации Калмана. Пер. с ан¬
гл. — М.: Мир, 1988. — 168 с.
142. Казаков В.А. Введение в теорию марковских процессов и
некоторые радиотехнические задачи. — М.: Сов. радио, 1973. — 232 с.
143. Пугачев B.C., Синицын И.Н. Стохастические дифференци¬
альные системы. Анализ и фильтрация. Изд. 2-е доп. — М.: Наука,
1990. - 632 с.
144. Kailath Т. An innovation approach to least-squares estimation.
Part I. Linear filtering in additive white noise // IEEE Trans. 1968, V. AC-
13.
145. Ройтенберг Я.Н. Автоматическое управление. Учебное по¬
собие для вузов. 3-е изд. перераб. и доп. — М.: Наука, Физматлит,
1992. - 576 с.
146. Стратонович Р.Л. Условные марковские процессы и их при¬
менение к теории оптимального управления. — М.: МГУ, 1966.
147. Сейдж Э., Меле Дж. Теория оценивания и ее применение в
связи и управлении. Пер. с англ. — М.: Связь, 1976. — 496 с.
148. Иванов В.А. Голованов М.А., Крутько П.Д. Теория автомати¬
ческого управления. Ч. IV. Статистическая динамика автоматических
систем (семинары). — М.: Изд-во МГТУ, 1995. — 100 с.
458
Литература
149. Мареха А.С. Оптимальная фильтрация фазоманипулирован-
ных сигналов с замираниями // Радиотехника и электроника. 1986.
Т. 31, т 12. С. 2426-2430.
150. Сосулин Ю.Г. Фильтрация и обнаружение марковских сиг¬
налов при неполной априорной информации // Радиотехника и элек¬
троника. 1969. Т. 14, т 12.
151. Сосулин Ю.Г., Мерзляк М.Г. Вопросы сходимости адаптив¬
ных алгоритмов обнаружения и оценивания стохастических сигналов
// Изв. АН СССР. Техн. кибернетика. 1975. т 4.
152. Горяйнов В.Т., Журавлев А.Г., Тихонов В.И. Статистическая
радиотехника. Примеры и задачи. Учебн. пособие для вузов; Под ред.
B.И. Тихонова. — 2-е изд., перераб. и доп. — М.: Сов. радио, 1980. —
544 с.
153. Шахтарин Б.И. Случайные процессы в радиотехнике. 3-е
изд., перераб. Т. 1. Линейные преобразования. — М.: Гелиос АРВ,
2006. - 464 с.
154. Шахтарин Б.И. Случайные процессы в радиотехнике. Т. 2.
Нелинейные преобразования. — М.: Гелиос АРВ, 2006. — 448 с.
155. Красненкер В.М. Стабильные методы обнаружения сигна¬
лов на фоне помех (обзор) // Автоматика и телемеханика. 1980. т 5,
C. 65-88.
156. Minkler G., Minkler J. CFAR. — Baltimore: Magellan Book Com¬
pany, 1990. — 374 pp.
157. Barkat M. Signal detection and estimation. 2-nd ed. — London:
Artech House, 2005. — 692 pp.
158. Бакулев П.А. Радиолокационные системы. Учебник для ву¬
зов. — М.: Радиотехника, 2004. — 320 с.
159. Hansen V.G. Constant false alarm rate processing in search radar
// Proceedings of the IEEE 1973 International radar conference. London,
1973, p. 325-332.
160. Бессекерский В.А., Небылов А.В. Робастные системы авто¬
матического управления. — М.: Наука, 1983. — 240 с.
161. Rohling Н. Radar CFAR thresholding in clulter and multiple target
situations // IEEE Trans 1983. V. AES-19, т 4. P. 608-621.
162. Rohling H. New CFAR processor based on order statistic //
Proceedings of the IEEE 1984 International radar conference. Paris, 1984,
p. 38-42.
163. Хьюбер П. Робастность в статистике. — М.: Мир, 1984. —
304 с.
164. Tantaratana S., Thomas J.B. Relative efficiency of the sequent¬
ial probability ratio test in signal detection // IEEE Trans. 1978. V. IT-24,
т 1. P. 22-31.
Литература
459
165. Tantaratana S., Poor H.V. Asymptotic efficiencies of truncated
sequential tests // IEEE Trans. 1982. V. IT-28, т 6. P. 911-923.
166. Tantaratana S., Thomas Y.B. On sequential sign detection of a
constant signal // IEEE Trans. 1977. V. IT-23, т 3. P. 304-315.
167. Bayraktar E.f Poor H.V. Qnikest defection on a minimum of
disorder times // Proceeding of the 44th IEEE Conference on Decision
and Control, and the European Control Conference 2005. Seville, Spain,
Dec. 12-15, 2005, p. 326-331.
168. Ширяев А.Н. Об оптимальных методах в задачах скорейшего
обнаружения // Теория вероятностей и ее применения. 1963. Т. 8,
т 1. С. 26-51.
169. Gini F.f Farina A., Greco М. Selected list of references on radar
signal processing // IEEE Trans. 2001. V. AES-37, т 1. P. 329-359.
170. Вероятность и математическая статистика. Энциклопедия. —
М., 1999. — 910 с.
171. Справочник по радиолокации в 4-х т. / Под ред. М. Скони-
ка; пер. с англ. под общей редакцией К.А. Трофимова. Т. 1 Основы
радиолокации; под ред. Я.С. Ицхоки. — М.: Сов. радио, 1976. — 455 с.
172. Levanon N. Detection loss due to interfering targets in order
statistics CFAR // IEEE Trans. 1988. V. AES-24, т 6. P. 678-681.
173. Shor M, Levanon N. Performance of order statistics CFAR //
IEEE Trans. 1991. V. AES-27, т 2. P. 214-224.
174. Nitzberg R. Analysis of the arithmetic mean CFAR normalizer
for fluctuating targets // IEEE Trans. 1978. V. AES-14, т 1. P. 44-47.
175. Айвазян С.А., Мхитарян B.C. Теория вероятностей и при¬
кладная статистика. 2-е изд., испр. Т. 1. — М.: Юнити-Дана, 2001.
656 с.
176. Kay S.M. Robust defection by autoregressive spectrum analysis
// IEEE Trans. 1982. V. ASSP-30, т 2. P. 256-269.
177. Оводенко А.А. Робастные локационные устройства. — Л.:
Гос. унив., 1981. — 184 с.
178. Бейтмен Г., Эрдейи А. Высшие трансцендентные функции.
Т. 2 / Пер. с англ. под ред. Н.Я. Виленкина. — М.: Наука, 1966. — 295 с.
179. Barton D.K. Radar system analysis and modeling. — London:
Artech House, 2005. — 535 p.
180. Трухачев А.А. Анализ процедур и алгоритмов обнаружения
сигналов. — М.: Радио и связь, 2004. — 247 с.
181. Pachares J. A table of bias levels usefull in radar detection
problems // IRE Trans. 1958. V. IT-4, т 1. P. 39-45.
182. Мельник Ю.А. Самолетные радиолокационные бомбоприце-
лы и радиолокационные станции перехвата. — М.: Воениздат. 1954.
460
Литература
183. Теоретические основы радиолокации / А.А. Коростылев,
А.Ф. Клюев, Ю.А. Мельник и др.; под ред. В.Е. Дулевича. — М.: Сов.
радио, 1978.
184. Фалькович С.Е. Оптимальное обнаружение сигналов на фоне
помех неизвестной интенсивности // Радиотехника и электроника.
I960, т 9. С. 1539-1541.
185. Сагон Г. Численный метод расчета неполной функции То¬
ронто // ТИИЭР. 1966. Т. 54, т 8. С. 99.
186. Дмитриенко А.Н., Корадо В.А. Характеристики обнаружения
пакета независимо функтуирующих импульсов на фоне гауссовской
помехи с неизвестной интенсивностью // Радиотехника и электрони¬
ка. 1967. т 7. С. 1272-1274.
187. Дмитриенко А.Н., Корадо В.А. Характеристики обнаружения
пакета независимо функционирующих импульсов на фоне гауссовской
помехи с неизвестной интенсивностью // Радиотехника и электрони¬
ка. 1968. т 9. С. 1700-1701.
188. Куликов Е.И. Прикладной статистический анализ. — М.: Ра¬
дио и связь, 2004. — 376 с.
189. Swerling P. Probability of detection for fluctuating targets //
IRE Trans. I960. V. IT-б, т 2. P. 269-308.
190. Обработка экспериментальных данных с использованием
компьютера / Под ред. С. Минами; Пер. с япон. Ю.Н. Чернышова. —
М.: Радио и связь, 1999. — 256 с.
191. Helstrom C.W. Statistical theory of signal detection. 2nd ed.,
revised and enlarged. — N.Y.: Pergamon press, 1968. 467 p.
192. Poor V.H. Robust matched filters // IEEE Trans, on information
theory. 1983. Vol. IT-29, т5. P. 677-687.
193. Кузнецов В.П. Устойчивое обнаружение при неточно извест¬
ном сигнале и спектре нормального шума // Радиотехника. 1976.
Т. 31, т 3. С. 12-19.
Оглавление
Предисловие 3
Введение 5
Часть I. Обнаружение и различение сигналов (классическая
версия)
Глава 1. Проверка статистических гипотез при обнаружении
(различении) сигналов 7
Задачи 19
Глава 2. Обнаружение полностью известных сигналов (дискрет¬
ные процессы) 22
2.1. Обнаружение сигнала в белом шуме 22
2.2. Обобщенные согласованные фильтры 32
2.3. Применение алгоритмов обнаружения 37
2.4. Линейная модель сигнала 45
Задачи 47
Глава 3. Обнаружение полностью известных сигналов (непре¬
рывные процессы) 52
3.1. Обнаружение сигнала при аддитивном шуме на
входе 52
3.2. Обнаружение сигнала при коррелированном шуме
на входе 62
3.3. Характеристики обнаружения 67
Задачи 74
Глава 4. Обнаружение сигналов при наличии случайных (неиз¬
меряемых) параметров 82
4.1. Методы обнаружения 82
4.2. Характеристики обнаружения 92
4.3. Характеристики обнаружителя 102
4.4. Учет коррелированности входного шума 105
Задачи 107
Глава 5. Последовательное обнаружение 111
5.1. Последовательные многошаговые алгоритмы про¬
верки простой гипотезы против простой альтернативы 111
462
Оглавление
5.2. Последовательный алгоритм Вальда 113
5.3. Асимптотическая относительная эффективность. 118
5.4. О длительности последовательного испытания ... 124
Задачи 137
Часть II. Обнаружение сигналов в условиях неопределенности
Глава 6. Обнаружение сигналов при неизвестных параметрах .. 139
Задачи 162
Глава 7. Обнаружение гармонического сигнала с неизвестными
параметрами в гауссовском белом шуме 168
Задачи 175
Глава 8. Обнаружение сигналов при негауссовских помехах — 176
8.1. Негауссовские распределения 176
8.2. Обнаружение детерминированных сигналов 179
8.3. Обнаружение детерминированных сигналов с неиз¬
вестными параметрами 188
Задачи 200
Глава 9. Непараметрические методы обнаружения сигналов— 203
9.1. Статистики непараметрических алгоритмов обна¬
ружения сигналов 203
9.2. Свойства знакового алгоритма обнаружения сиг¬
налов 221
9.3. Свойства обнаружителя Вилкоксона 235
9.4. Двухканальные системы обнаружения сигналов... 243
9.5. Ранговые алгоритмы обнаружения стохастического
сигнала 259
Задачи 268
Ответы к задачам 273
Глава 10. Адаптивный прием сигналов 280
10.1. Постановка задачи адаптивной фильтрации 280
10.2. Показатели качества адаптивных систем фильт¬
рации 281
10.3. Адаптивная нелинейная оптимальная фильтрация
при наличии постоянных параметров 286
Часть III. Обнаружение случайных сигналов
Глава 11. Обнаружение гауссовских сигналов на фоне гауссовско¬
го белого шума (непрерывные процессы) 305
Глава 12. Обнаружение случайных сигналов (дискретные про¬
цессы) 312
Оглавление
463
12.1. Энергетический приемник 312
12.2. Обобщение: сигнал коррелированный гауссовский
случайный процесс 317
Глава 13. Совместное обнаружение и фильтрация марковских
сигналов 333
13.1. Рекуррентная связь отношения правдоподобия и
апостериорной плотности сигнала 333
13.2. Обнаружение и фильтрация марковского нормаль¬
ного сигнала на фоне аддитивной помехи с независи¬
мыми значениями 338
13.3. Связь функционала отношения правдоподобия с
оценками сигнала по критерию минимума среднего
квадрата ошибки 340
13.4. Метод порождающего процесса 342
13.5. Общие алгоритмы (непрерывное время) 344
13.6. Гауссовское приближение 352
13.7. Применение алгоритмов гауссовского приближе¬
ния к задаче синтеза систем 356
Глава 14. Обнаружители с постоянным уровнем ложной тревоги 370
14.1. Классические модели обнаружителей 370
14.2. Обнаружители с постоянным уровнем ложной
тревоги с релеевском распределении помех 376
14.3. ПУЛТ-процессоры с нерелеевским распределени¬
ем помехи 391
14.4. Другие разновидности ПУЛТ-процессоров 398
14.5. Непараметрические ПУЛТ-процессоры 400
Глава 15. Робастные методы фильтрации 403
Приложения 416
1. Основные законы распределения вероятностей 416
2. Аналитический сигнал 434
3. Модели Сверлинга 444
4. Приближенные формулы для Q-функций Маркума.. 446
Литература 449
Адрес издательства в Интернет WWW.TECHBOOK.ru
Учебное издание
Шахтарин Борис Ильич
ОБНАРУЖЕНИЕ СИГНАЛОВ
Учебное пособие для вузов
3-е издание, исправленное
Компьютерная верстка Ю. Н. Чернышова
Обложка художника В. Г. Ситникова
Подписано в печать 23.03 2015. Формат 60x90/16 Уел. печ. л. 29. Тираж 500 экз. (2 завод. - 100 экз.)
ООО «Научно-техническое издательство «Горячая линия-Телеком»
Б. И. Шахтарин
ОБНАРУЖЕНИЕ СИГНАЛОВ
Рассмотрены основы теории обнаружения сигналов и ее
основные направления от классического подхода, включая
последовательное обнаружение, до разделов, касающихся
обнаружения сигналов при априорной неопределенности,
включая непараметрическое обнаружение (знаковые об¬
наружители, обнаружители Вилкоксона, Манна-Уитли и др.
с примерами АОЭ обнаружителей) и адаптивный прием.
Приводятся алгоритмы обнаружения случайных сигналов на
основе приемников Стратоновича-Сосулина и приемника
Швеппе. Рассмотрены обнаружители с постоянным уровнем
ложной тревоги и примеры робастных обнаружителей.
Для студентов старших курсов и аспирантов.
Сайт издательства:
www.techbook.ru