/





























































































































































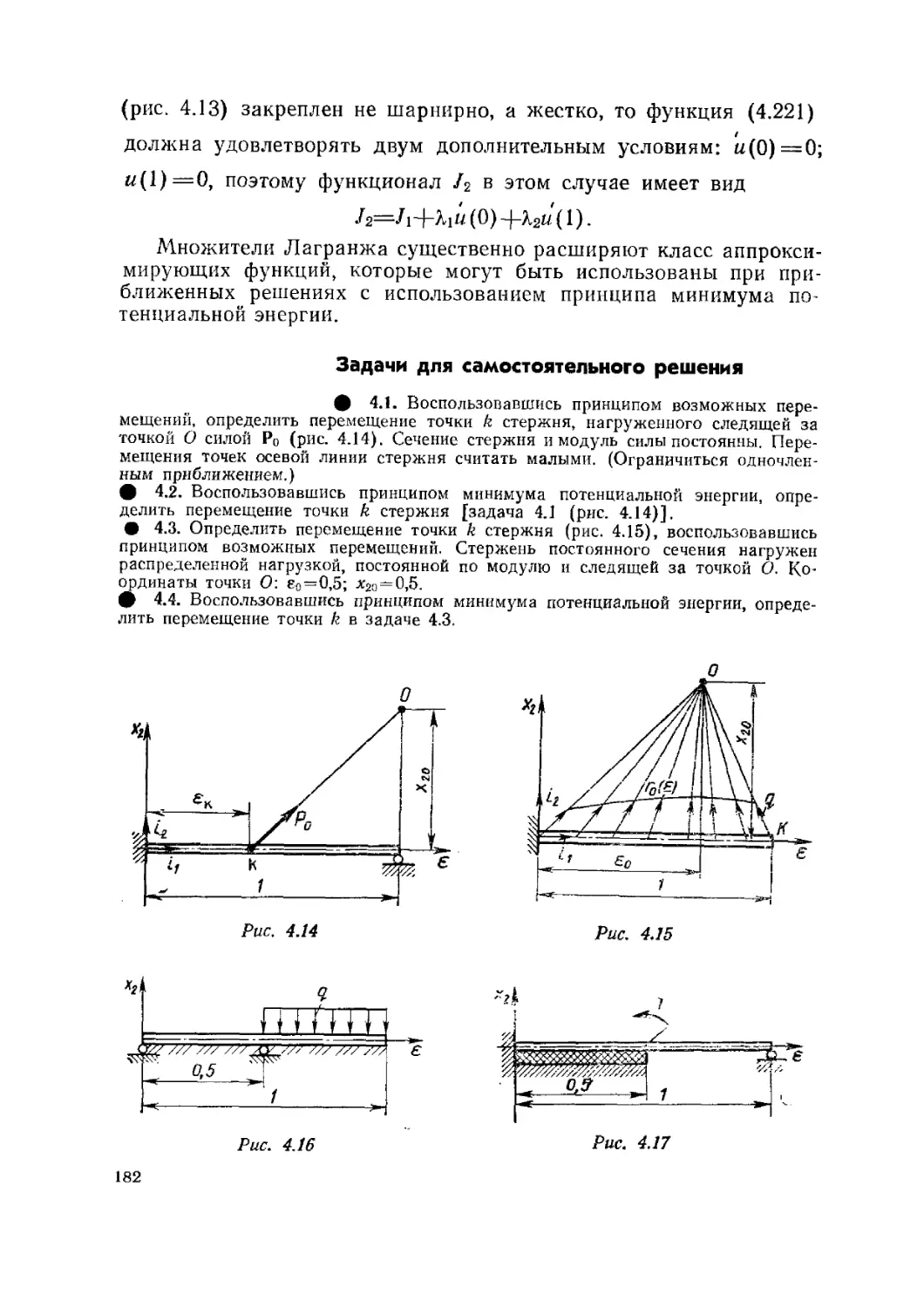
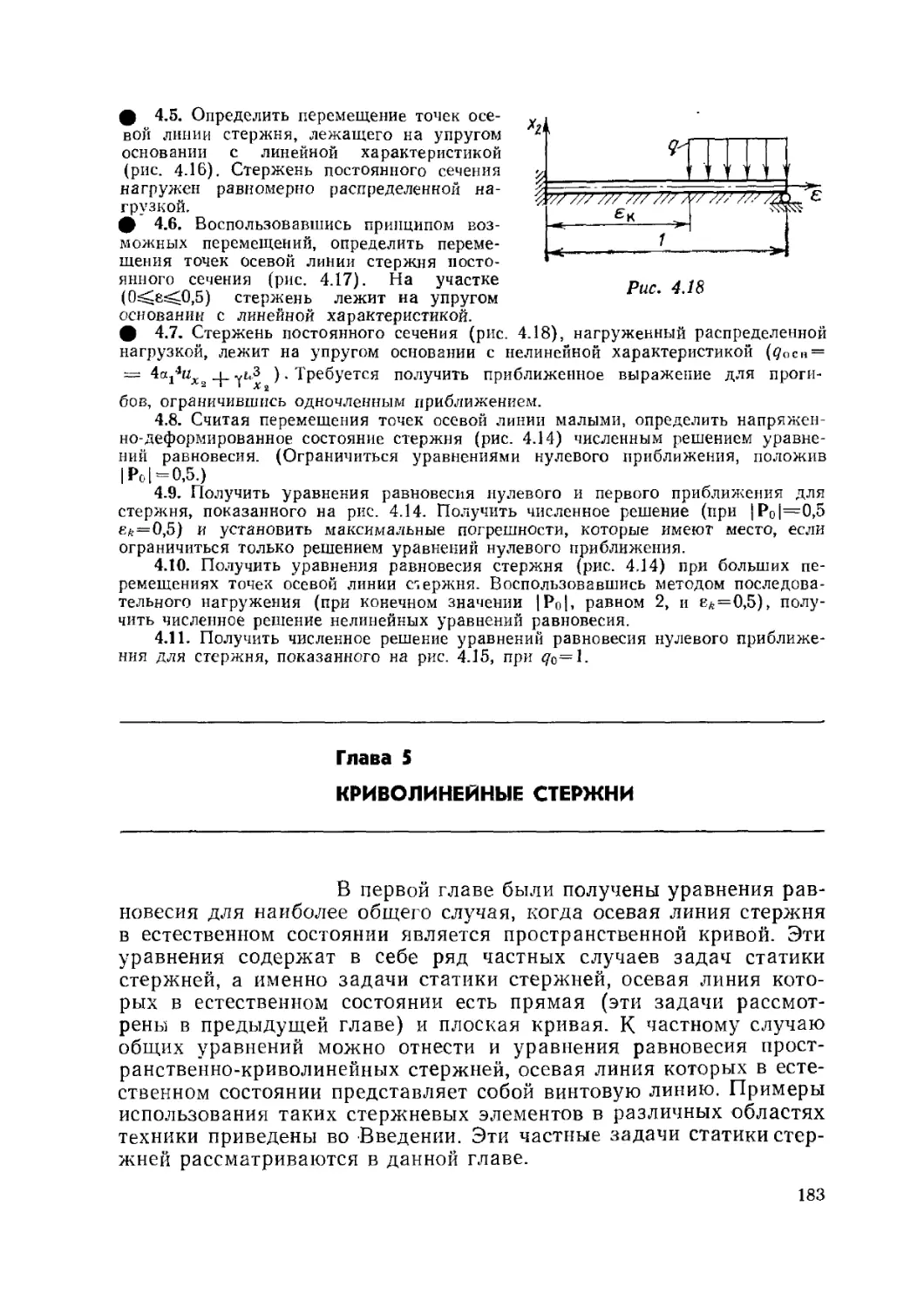






























































































































Text
В. А. Светлицкий
МЕХАНИКА
СТЕРЖНЕЙ
I
В двух частях Часть
СТАТИКА
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебника
для студентов высших
технических учебных заведений
.1Й
Москва
„Высшая школа" 1987
ББК 30.12
С 24
УДК 531.8
Рецензенты:
кафедра динамики и прочности машин Харьковского ордена
Ленина политехнического института им. В. И. Ленина (зав.
кафедрой — д-р техн. наук, проф. С. И. Богомолов); чл.-кор.
АН Латв. ССР д-р техн. наук, проф. Я. Г. Пановко
(Ленинградский ордена Ленина кораблестроительный институт)
Светлицкий В. А.
С 24 Механика стержней: Учеб. для втузов. В 2-х ч.
Ч. 1. Статика. —М.: Высш. шк., 1987. —320 с: ил.
В первой части учебника изложены основные положения
статики стержней, методы вывода уравнений равновесия в нелинейной
и линейной постановке, методы численного интегрирования
уравнений равновесия. Рассмотрены задачи статической устойчивости
пространственно-криволинейных стержней при больших перемещениях.
Изложены основные положения теории взаимодействия стержней с
внешним и внутренним потоками воздуха или жидкости. Большое
внимание уделено прикладным задачам статики стержней из
различных областей техники и их решению численными методами с
использованием ЭВМ.
2105010000(4309000000) —328 ББК 30.12
С 001(01)-87 2,~87 , 605
© Издательство «Высшая школа», 1987
Г
ПРЕДИСЛОВИЕ
Учебник посвящен механике стержней —
одному из разделов механики твердого
деформируемого тела. Некоторые разделы
механики стержней рассматриваются в ряде
учебных дисциплин: строительной механике,
теории колебаний, теории аэроупругости,
теории устойчивости. Эти дисциплины и близкие
к ним по содержанию входят в программу
многих технических специальностей вузов
страны. Отсутствие учебника, где с единых
теоретических позиций рассматривались бы
необходимые для читаемых дисциплин
разделы механики стержней, приводит к
повторениям и большому расходу лекционного
времени на вывод основных уравнений.
Задачи статики и динамики
пространственно-криволинейных стержней частично
рассмотрены в монографиях [1, 11, 13, 14J,
но в учебной литературе, например [15, 16,
19], им уделено мало внимания, несмотря
на то что они очень часто встречаются
в инженерной практике.
Основой учебника послужили лекции,
читаемые автором студентам специальности
«Динамика и прочность машин» в МВТУ
мм. Н. Э. Баумана.
Учебник состоит из двух частей: часть 1 —
«Статика»; часть 2 —«Динамика»,— изданных
в двух книгах. В первых разделах обеих книг
изложены теоретические положения
соответственно статики и динамики стержней.
Вторые разделы посвящены прикладным
задачам: рассмотрено большое число примеров
из разных областей техники,
иллюстрирующих практическое применение теории и
методов расчета.
3
Учебник содержит конкретные примеры и
их решения с использованием ЭВМ, а также
задачи для самостоятельного решения.
Широкое внедрение в расчетную практику мощной
вычислительной техники позволяет проводить
расчеты упругих элементов с минимальным
числом допущений при переходе от реального
элемента к расчетной схеме и тем самым
существенно повысить точность расчетов.
Использование ЭВМ позволяет получить не
только большой объем числовых результатов,
н© и приводит к качественно новым методам
подготовки задач к решению с отказом
от ряда традиционных преобразований
уравнений статики или динамики, которые
раньше считались необходимыми, например
сведение системы уравнений к одному уравнению.
Задачи, к которым дано решение в конце
книги, отмечены знаком •.
В Приложении приведены краткие
сведения из векторного анализа,
дифференциальной геометрии, теории обобщенных функций,
необходимые при выводе как уравнений
равновесия (часть 1), так и уравнений движения
(часть 2).
Автор считает своим долгом выразить
глубокую благодарность сотрудникам
кафедры «Динамика и прочность машин» ХПИ
(зав. кафедрой — д-р техн. наук, проф. С. И
Богомолов) и чл.-кор. АН Латв. ССР д-ру техн.
наук, проф. Я- Г. Пановко за большую работу
по рецензированию рукописи и критические
замечания, которые помогли устранить
многие недостатки изложения.
Численное решение ряда примеров
выполнено В. А. Янкиным, которому автор
приносит благодарность.
Замечания и пожелания по улучшению
книги можно присылать по адресу: 101430,
Моска, ГСП-4, Неглинная ул., д. 29/14,
издательство «Высшая школа».
Автор
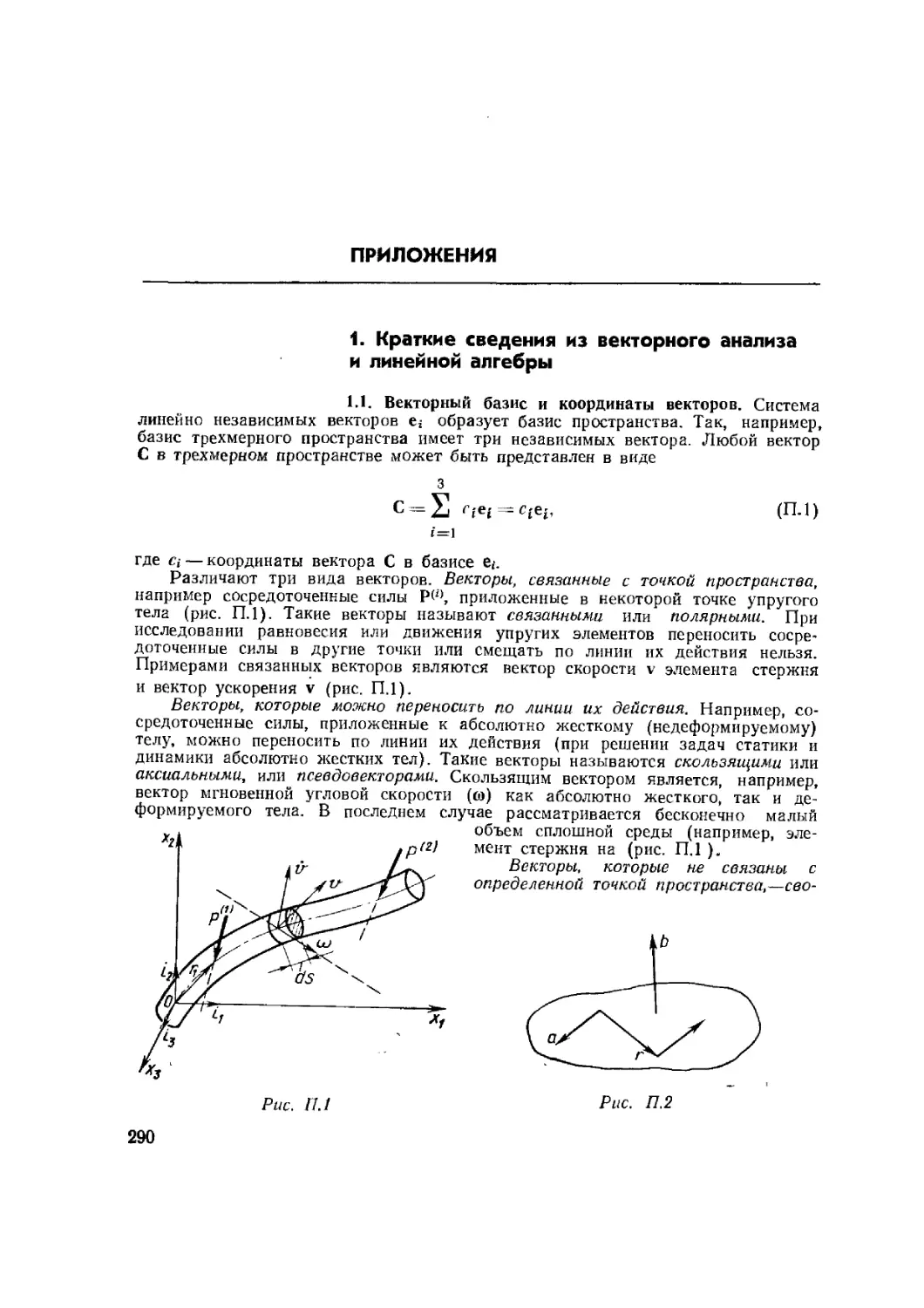
ВВЕДЕНИЕ
Стержни имеют очень широкое применение
в различных областях техники: в различного рода машинах,
строительных конструкциях и приборах. Наиболее разнообразно
применение стержней в приборах. Они используются в качестве
чувствительных элементов в акселерометрах и частотных датчиках,
механических низкочастотных фильтров — в электронной технике,
а также в качестве аккумуляторов механической энергии.
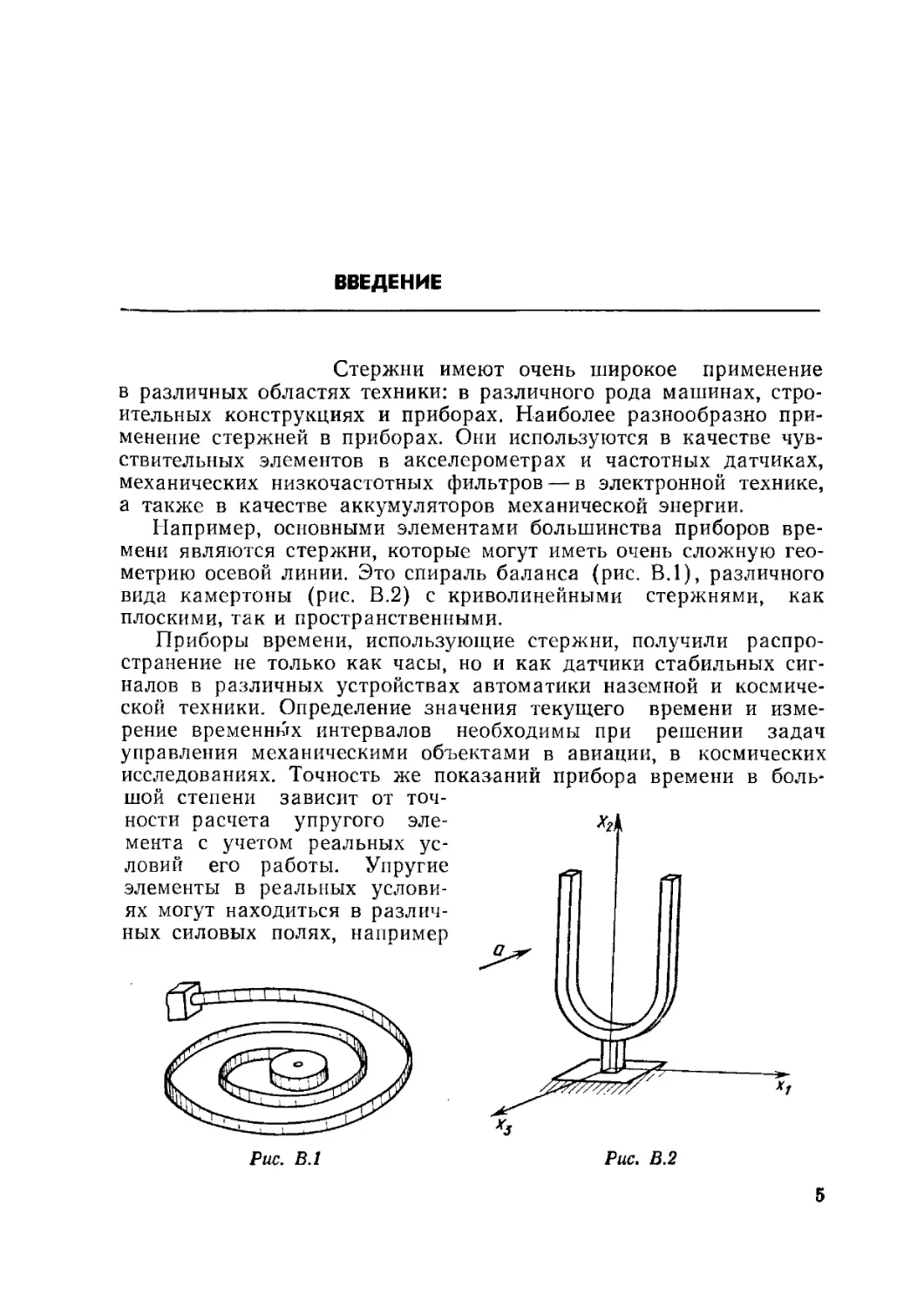
Например, основными элементами большинства приборов
времени являются стержни, которые могут иметь очень сложную
геометрию осевой линии. Это спираль баланса (рис. В.1), различного
вида камертоны (рис. В.2) с криволинейными стержнями, как
плоскими, так и пространственными.
Приборы времени, использующие стержни, получили
распространение не только как часы, но и как датчики стабильных
сигналов в различных устройствах автоматики наземной и
космической техники. Определение значения текущего времени и
измерение временных интервалов необходимы при решении задач
управления механическими объектами в авиации, в космических
исследованиях. Точность же показаний прибора времени в боль*
шой степени зависит от
точности расчета упругого эле- Л>Д
мента с учетом реальных
условий его работы. Упругие -_
элементы в реальных услови- fj
ях могут находиться в
различных силовых полях, например
Рис. В Л
Рис. В.2
на ускоренно движущемся объекте, на вибрирующем основании
и т. д. Инерционная нагрузка, действующая на упругий элемент,
может существенно изменить его основные характеристики,
например частотные. Кроме того, упругий элемент, находящийся на
ускоренно движущемся объекте, может потерять
устойчивость. Поэтому практический интерес представляет
определение критических ускорений объекта, при которых возможна
статическая потеря устойчивости, например потеря устойчивости
плоской формы спиральной пружины (см. рис. В.1). Дело в том,
что потеря устойчивости, например выход спирали из плоскости,
может произойти при больших предварительных деформациях
стержня в плоскости, что требует решения нелинейных уравнений
равновесия.
Развитие техники выдвинуло много новых прикладных задач,
относящихся к статике и динамике стержней, в частности:
исследование прочности гибкого проводника при управлении
движущимся объектом (рис. В.З), исследование стационарных режимов
(и их устойчивости) движения ленточного радиатора и
баллистической антенны (рис. В.4), технологические процессы смотки или
намотки провода, нити, проката. Так, например, скорость
движения полосового проката (рис. В.5), который может
рассматриваться как стержень, в настоящее время достигает 30...40 м/с.
При таких скоростях пренебрегать динамическими эффектами
нельзя.
Пространственно-криволинейные упругие элементы,
сводящиеся к расчетной модели стержня, являются составной частью
многих машиностроительных конструкций. Они используются для
различных целей, например для передачи усилий и моментов (или
для реализации заданного движения) в системах, использующих
гибкие валы (рис. В.6). На рис. В.6 сечение О является входом,
а сечение К — выходом. При программном управлении
исполнительным механизмом машины часто бывает необходимо, чтобы
сечение вала К поворачивалось во времени, повторяя заданный
поворот сечения О, причем в процессе работы механизма само
положение сечения К в
пространстве может сильно изменяться (на
рис. В.6 возможное положение
сечения К показано пунктиром). При
изменении положения выхода из-
Рис. В.З Рис. В.4
■я
6
Рис. B.S Рис. В.6
меняется напряженное состояние гибкого вала, что может внести
рассогласование в процесс копирования углов i}0 и #*;.
В системах амортизации используются пружины различной
конструкции, в том числе и пружины, представляющие собой
пространственно-криволинейные стержни, такие, например, как
показанные на рис. В.7 и В.8. На рис. В.7 показана цилиндрическая
пружина, которая может быть как с постоянным а0 (рис. В.7,а),
так и с переменным а (рис. В.7,6) углом подъема витков.
На рис. В.8 показана коническая пружина (пунктиром
показаны возможные варианты поверхности, на которые навивается
стержень). Конические пружины, или пружины с образующей
поверхностью, представляющей собой поверхности вращения как
с положительной, так и отрицательной гауссовой кривизной
(рис. В.8), позволяют получать различные упругие
характеристики. В зависимости от геометрии пружины можно в очень большом
диапазоне изменять ее упругие характеристики, но для этого
необходимо иметь соответствующие методы расчета.
Теория пространственно-криволинейных стержней необходима
не только для расчета стержней, которые в естественном
состоянии (до нагружения) имели пространственную форму (клк, наприг
мер, пружины, показанные на рис. В.7 и В.8), но и для исследо-
Рис. В.7 Рис. В.8
7
Рис. В.9
вания статики и статической
устойчивости стержней,
которые в естественном
состоянии имели плоскую
криволинейную или
прямолинейную форму.
Много теоретически
интересных и практически
важных задач статики и
динамики стержней возникает
при исследовании
взаимодействия стержней с
потоком воздуха или жидкости.
Учет сил взаимодействия
стержня с внешним потоком
приводит к более сложным
задачам по сравнению с традиционными. Основная трудность при
решении этих задач заключается прежде всего в том, что очень
сложно получить информацию о силах, действующих на
находящийся в потоке стержень. Это вызвано тем, что стержни, например
провода линии электропередачи, тросы, находящиеся в потоке
(рис. В.9), могут сильно отклоняться от первоначальной
(показанной пунктиром) равновесной формы, а от формы осевой линии
стержня —угла фя между касательной к осевой линии стержня
(вектором ei) и вектором скорости потока (v0) — зависят
возникающие аэродинамические силы qa.
На рис. В.10—В.18 приведены примеры стержневых элементов
конструкций из разных областей техники, взаимодействующих
с потоком жидкости или воздуха. На рис. В. 10 показана якорная
система удержания плавающих объектов. Якорные тросы в ряде
случаев рассматривать как абсолютно гибкие стержни нельзя, так
как они обладают значительной жесткостью на изгиб и кручение.
На рис. В. 11 приведена система для охлаждения жидкости,
которая протекает в трубках (система охлаждения реакторов). Трубки
с жидкостью находятся в потоке. Для более интенсивного
охлаждения трубки должны быть с очень тонкими стенками, поэтому
аэродинамические силы, зависящие от скорости потока v0, могут
вызвать большие напряжения в трубках (в статике) или вызвать
колебания трубок из-за срыва
вихрей Кармана. На рис. В. 12
показан стержень (модель
крыла) в потоке воздуха. При
некоторой скорости потока воздуха или
жидкости возможна потеря
устойчивости крыла (статическая
потеря устойчивости называется
Рис. В.10 дивергенцией, динамическая по-
8
Рис. В.П
теря устойчивости —
флаттером).
Широкое
распространение имеют стержни
(трубопроводы), заполненные
потоком жидкости.
Внутренний поток жидкости при
пространственно -
криволинейной форме стержня
нагружает его как
статическими силами при
стационарном потоке жидкости,
так и динамическими — при
нестационарном потоке. На
рис. В.13—В.15 показаны
стержни, использующиеся
для перекачки жидкости или топлива. При технологических
операциях обработки резанием (сверление, растачивание) для
охлаждения режущей части инструмента используется охлаждающая
жидкость, которая под большим давлением движется внутри
сверла (рис. В. 16). На рис. В. 17 показана лопатка, в которой для
охлаждения имеется канал, заполненный потоком жидкости. На
рис. В.18 показана заправка самолета в воздухе. В этом случае
стержень (шланг) взаимодействует как с внешним потоком
(воздухом), так и с внутренним потоком (жидкостью).
Особое место в механике стержней занимают прямолинейные
стержни, которые являются частным случаем криволинейных
стержней. На рис. В. 19 — В.23 приведены примеры элементов
конструкций из разных областей техники, которые при расчетах могут
рассматриваться как прямолинейные стержни. На рис. В.19
показан стержень, лежащий на упругом основании. Упругим
основанием не обязательно должен быть грунт. Упругим основанием могут
быть различного рода упругие прокладки (рис. В.20)
(амортизации В.12
Рис. ВАЗ
Рис. В.14 Рис. В. 15
Рис. В.16 Рис, В.17
Рис. В. 18 Рис. ВЛ9
торы), предназначенные для выравнивания эпюры контактных
сил, действующих на основание, или уменьшения динамического
воздействия на основание (в динамике).
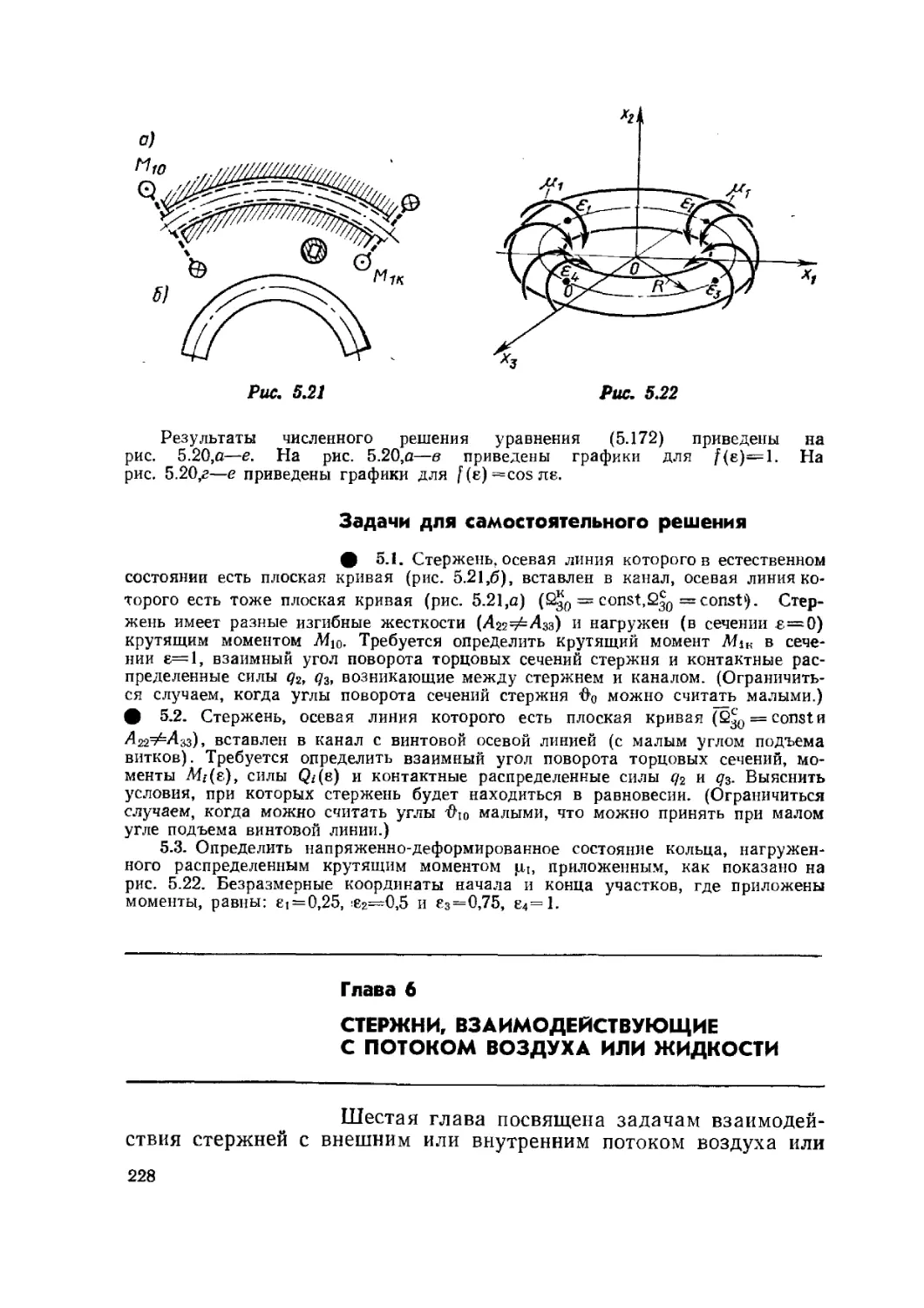
На рис. В.21 показано сверло, которое при сверлении
нагружается сосредеточенной сжимающей силой Р и сосредоточенным
крутящим моментом Т. Режимы резания (сверления) должны быть
10
,(')
выбраны такими, чтобы сверло не ,*>| /■- >о(г1
потеряло устойчивости. Это
особенно важно в технологических
задачах глубокого сверления для
больших отношений l/d (l/d>
>*150). Потеря устойчивости
сверла приводит к искривлению
осевой линии отверстия. Основ- Рис^ В2о
ная особенность данной задачи
заключается в том, что
положение главных осей сечения стержня (хг(1\ *з(1)) по отношению к
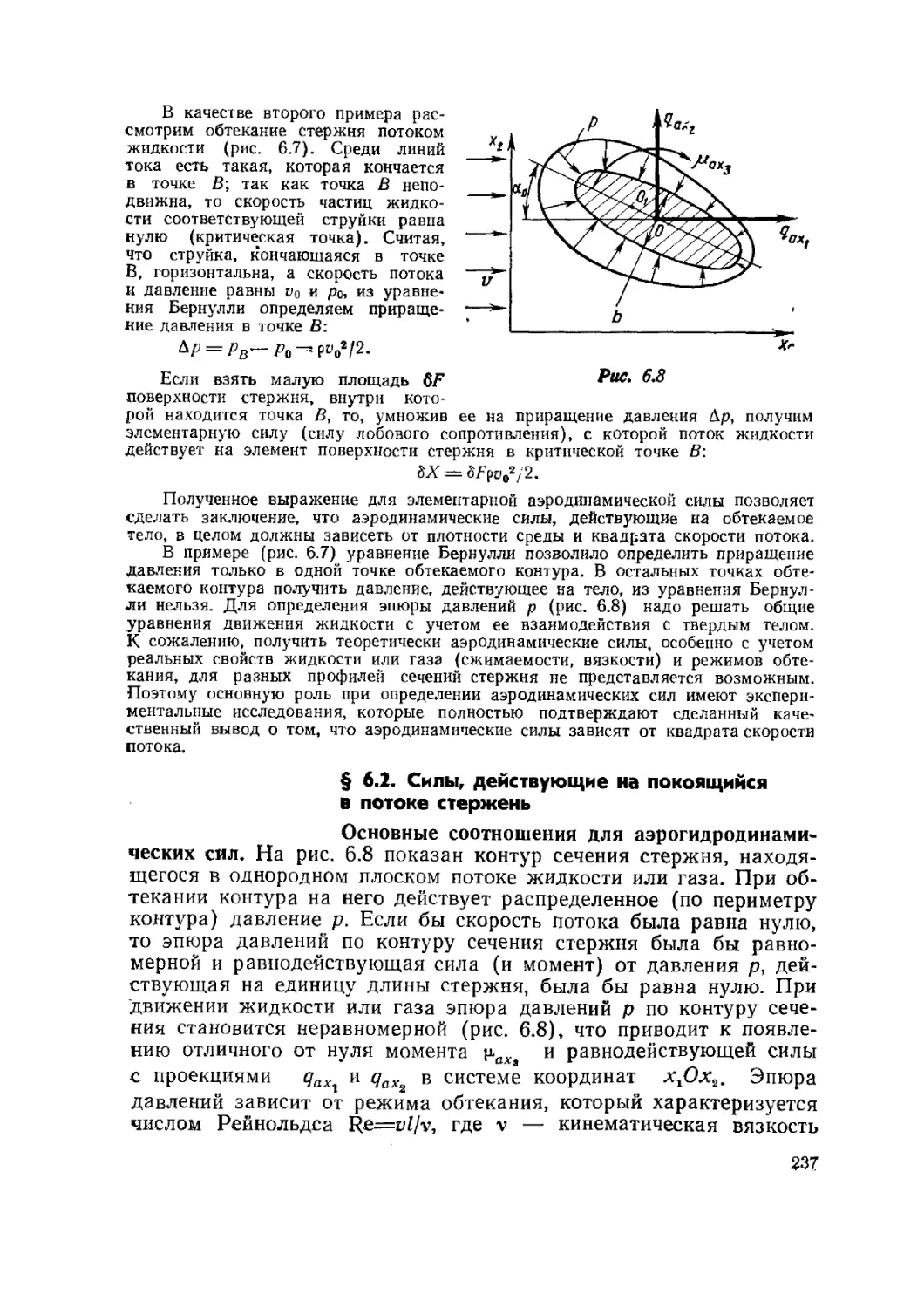
декартовым осям (x2f л:3) зависит от координаты xi. На рис. В.22
показан прямолинейный стержень, находящийся в потоке
жидкости или воздуха. Внешний поток, обтекающий стержень, приводит
к появлению распределенных аэродинамических сил (qa) и
распределенного аэродинамического момента (ца), которые при
определенных условиях могут вызвать потерю статической
устойчивости стержня в потоке.
Более подробно задачи взаимодействия стержней с внешним
потоком воздуха или жидкости рассмотрены в § 6.2. На рис. В.23
показан прямолинейный стержень (упругий элемент прибора),
находящийся на вращающемся диске. Стержень нагружен
распределенной нагрузкой, модуль которой равен
■торт2,
где т0 — масса единицы длины стержня.
Для нормальной работы прибора необходимо, чтобы прогибы
стержня в рабочем диапазоне угловых скоростей со были малыми.
Дело в том, что при некоторых значениях со>со* (где со* —
критическое значение угловой скорости) прогибы стержня могут быть
очень большими. Для
определения прогибов
стержня при со>со* надо
рассмотреть нелинейную
систему уравнений
равновесия стержня.
Все перечисленные
задачи, несмотря на то что
они взяты из разных
областей техники,
относятся, как уже говорилось
выше, к механике
стержней и поэтому могут
быть рассмотрены с
единых теоретических
позиций.
11
Рис. В.21
Рис. В.22
Рис. В.23
Так как специальные курсы, где имеются разделы,
относящиеся к механике стержней, читаются после курса сопротивления
материалов, в котором излагаются метод сил и метод перемещений,
поэтому в учебнике эти методы не рассматриваются. Считается,
что эти, ставшие традиционными, методы известны.
Раздел первый
ТЕОРЕТИЧЕСКИЕ
ОСНОВЫ
Глава 1
УРАВНЕНИЯ РАВНОВЕСИЯ
СТЕРЖНЕЙ
В первой главе изложены методы вывода
уравнений равновесия для наиболее общего случая
пространственно-криволинейных стержней. При выводе используется
векторное исчисление, позволяющее получить уравнения в наиболее
компактной форме записи, удобной при преобразованиях.
Используются две системы координат: неподвижная (декартова) и
подвижная (связанная с осевой линией стержня). В зависимости от
конкретных условий задачи выбор системы координат может
существенно упростить уравнения и их решение.
Подробно рассмотрены различные частные случаи уравнений
равновесия при больших (нелинейные уравнения) и малых
(линейные уравнения) перемещениях точек осевой линии стержня.
§ 1.1. Векторные уравнения равновесия
Основные определения и допущения
механики гибких стержней. Стержнем называется тело, у которого
размеры поперечного сечения малы по сравнению с длиной и
радиусом кривизны осевой линии. Осевой линией стержня
называется линия, соединяющая центры тяжести площадей поперечных
сечений стержня. Принято различать два вида осевых линий
стержня: осевую линию ненагруженного стержня,
характеризующую его естественное состояние, и осевую линию нагруженного
стержня, или «упругую» осевую линию. Основная особенность
гибких стержней заключается в том, что осевая линия нагруженного
стержня может сильно отличаться от осевой линии естественного
состояния стержня, но при этом его деформации подчиняются за-
13
кону Гука. В дальнейшем рассматриваются задачи геометрически
не линейные, но физически — линейные. Как известно, для задач,
физически и геометрически линейных, справедливы принцип
независимости действия сил (принцип суперпозиции) и принцип
неизменности начальных размеров, т. е. перемещения, возникающие
при деформации, столь малы, что форма и размеры стержня
остаются практически неизменными. Если же рассматриваются
задачи геометрически нелинейные, то оба эти принципа перестают
быть справедливыми, что существенно осложняет решение задач
статики.
При выводе уравнений равновесия стержня принимаются
следующие допущения:
1) поперечные нормальные сечения стержня, плоские до
деформации, остаются нормальными и плоскими и после деформации
(гипотеза Бернулли), т. е. сдвиги не учитываются;
2) размеры поперечного сечения считаются малыми по
сравнению с длиной стержня и радиусом кривизны оси стержня;
3) осевая линия стержня считается нерастяжимой;
4) справедлив принцип Сен-Венана, который утверждает, что
различные, но статически эквивалентные, локальные нагрузки
вызывают в стержне (если не учитывать местные напряжения
вблизи точки приложения нагрузки) одно и то же напряженное
состояние.
В связи с принятым допущением о том, что материал стержня
подчиняется закону Гука, решения задач справедливы, если
максимальные нормальные напряжения, возникающие в стержне,
остаются меньше предела пропорциональности для данного материала.
При исследовании статики стержня введем две ортогональные
системы координат; неподвижную декартову с единичными
векторами ij, относительно
которой определяется
положение стержня, и подвижную
с единичными векторами е*
(рис. 1.1), жестко
связанную с осевой линией
стержня. Длина дуги s осевой
линии стержня отсчитывается
от некоторой
фиксированной точки, выбор которой
произволен. Связанные оси
могут быть ориентированы
произвольно, но для
получения более простых
уравнений равновесия и движения
целесообразно их
ориентировать следующим образом:
начало координат поме-
Рис. 1.1
14
стить в центр тяжести площади поперечного сечения стержня,
одну из осей, например ось, определяемую единичным вектором ei
(рис. 1.1), направить по касательной к осевой линии стержня в
сторону возрастания координаты s, а две другие оси — по
главным центральным осям сечения. Оси, связанные с главными
осями сечения, называются главными (в отличие от естественных).
На рис. 1.1 показаны два положения стержня: положение 1
соответствует ненагруженному состоянию (естественному),
положение 2 — нагруженному состоянию. Под действием медленно
нарастающих сил Р,- и моментов Т; (рассматривается статика)
стержень, деформируясь, переходит из состояния 1 в состояние 2.
Из рис. 1.1 следует, что упругие перемещения могут быть
настолько большими, что форма осевой линии нагруженного стержня
может как угодно сильно отличаться от первоначальной. Внешние
силы в процессе деформации стержня могут также сильно
изменяться по направлению (на рис. 1.1 направления векторов Р; и Т,
в момент приложения к стержню показаны пунктиром).
Для решения нелинейных задач статики гибких стержней
необходимо знать поведение внешних нагрузок в процессе
деформации стержня, а также необходимо учитывать изменение краевых
условий, например перемещение шарнира (рис. 1.2). Конечное
состояние гибкого стержня будет различным, если, например,
нагружать стержень в одном случае «мертвой» силой («мертвой»
называется нагрузка, сохраняющая при деформации системы свое
направление), а в другом — следящей, т. е. силой, которая в
процессе деформации стержня сохраняет свое направление по
отношению к стержню, например образует неизменные углы с
подвижными осями. В более общем случае нагружения на стержень
кроме сосредоточенных сил и моментов могут действовать и
распределенные силы и моменты.
Вывод векторных уравнений равновесия стержня. Рассмотрим
элемент стержня длиной 6s и нанесем все действующие на него
силы (рис. 1.3). На рисунке
приняты следующие
обозначения: Q — вектор внутренних
усилий, равный Q=Qiei+ q
+Q2e2+Q3e3, где Qi — осевая
сила, Q2 и Qs —
перерезывающие силы; M=Miei+M2e2+ м
+М3ез — вектор внутренних —■—
Рис. 1.2 Рис. 1.3
15
моментов, где Mi — крутящий момент, М2 и М3 — изгибающие
моменты; qh q2, q3— проекции вектора q распределенной (внешней)
нагрузки на связанные оси; \iu |ц2, ц3—проекции вектора |ш
распределенного (внешнего) момента на связанные оси.
Направления осей натурального триэдра, определяемые единичными
векторами е2 и ез, совпадают с направлениями главных осей сечения
стержня. Элемент находится в равновесии; следовательно, сумма
всех сил и сумма моментов равны нулю, что дает два векторных
уравнения:
(in:
О, (1.2)
(1.3)
0. (1.4)
В векторной форме записи уравнения инвариантны по
отношению к любой системе координат. Для перехода от уравнений (1.3),
(1.4) к уравнениям, записанным через компоненты векторов в
каком-либо базисе, необходимо представить векторы в виде
разложения по векторам данного базиса. В уравнениях (1.3), (1.4)
неизвестными являются векторы Q, М и ei; известными —
распределенные нагрузки q и jut, сосредоточенные силы и моменты,
приложенные к стержню (см. рис. 1.1), и условия закрепления
стержня. Сосредоточенные силы и моменты можно ввести в
уравнения (1.3) и (1.4), воспользовавшись ^-функцией Дирака
(основные свойства обобщенных функций приведены в
Приложении 4). В результате получим следующие уравнения равновесия:
и
-^-+q + £ Р<'>8 (5-s,) = 0; (1.5)
^L+etXQ+H + jT^fi^-sO^O, (1.6)
v=l
где Si и sv — соответственно координаты точек приложения
сосредоточенных сил и моментов. В уравнения (1.5) и (1.6) входят
распределенные силы q и распределенные моменты jn, которые
могут действовать не по всей длине, а лишь на части стержня.
Для последнего случая они могут быть представлены с
использованием функции Хевисайда, т. е.
q=q(s)[H(s)-H(s-Si)};
li=lx(s)[H(s)-H(s~sv)]t
где И — функция Хевисайда (см. Приложение 4). Выражения для
q и [ш можно записать и без функций Хевисайда в виде
dQ+qds—0;
dM+dseiXQ+|mds=
или
Не
16
_|q{s)^0, 0<s<s£;
lq(s) = 0, s>s£;
__ (ln(s)^O, 0<s<sv;
l|i(s) = 0, s>sv.
Уравнения (1.5), (1.6) справедливы для случая, когда в
начальном состоянии стержень не нагружен. Система уравнений
(1.5), (1.6) не является полной, так как определить Q и М из
этой системы в общем случае нельзя. Дело в том, что в уравнение
(1.6) входит единичный вектор ei, положение которого в
пространстве неизвестно, так как оно зависит от деформации стержня.
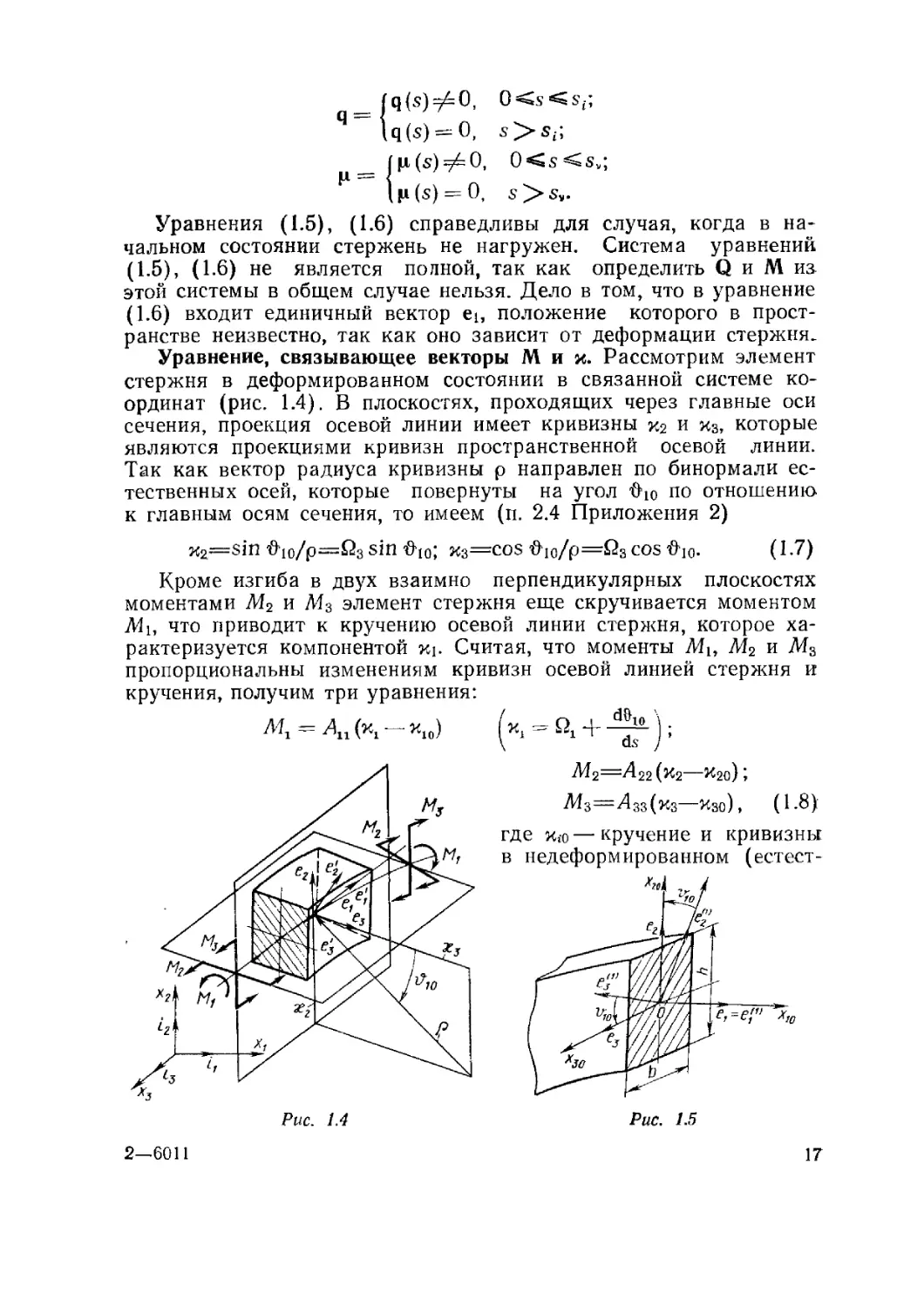
Уравнение, связывающее векторы М и к. Рассмотрим элемент
стержня в деформированном состоянии в связанной системе
координат (рис. 1.4). В плоскостях, проходящих через главные оси
сечения, проекция осевой линии имеет кривизны и2 и хз, которые
являются проекциями кривизн пространственной осевой линии.
Так как вектор радиуса кривизны р направлен по бинормали
естественных осей, которые повернуты на угол Фю по отношению
к главным осям сечения, то имеем (п. 2.4 Приложения 2)
K2=sin #10/p=Q3 sin #ю; k3=cos #10/p=Q3 cos #10. (1.7)
Кроме изгиба в двух взаимно перпендикулярных плоскостях
моментами М2 и М3 элемент стержня еще скручивается моментом
М\, что приводит к кручению осевой линии стержня, которое
характеризуется компонентой к\. Считая, что моменты Ми М2 и М3
пропорциональны изменениям кривизн осевой линией стержня и
кручения, получим три уравнения:
^i = Ai(*i-*»o) (x' = Qi + -lf):
Рис. 1.4 Рис. 1.5
2—6011
17
венном) состоянии; Qy — кручение осевой линии стержня; Аи—
жесткости при кручении и изгибе, которые для стержня
переменного сечения зависят от s.
Напомним, что собой представляют величины Ли:
где Е, G — модули упругости соответственно первого и второго
рода; JX2t J*a—моменты инерции сечения стержня относительно
главных осей х3о, *2о: для сечения прямоугольной формы (рис. 1.5)
Jxt0 = b'h/12; JX30~h3b/V2; /к — геометрическая характеристика
сечения при кручении: для бруса прямоугольного сечения JK=$b3h
(h>b; р — коэффициент Сен-Венана [18]).
На рис. 1.5 показаны две системы связанных координатных
осей: естественная система с базисом {е;(1)} и система осей,
связанных с главными осями сечения (оси х2о, *зо) с базисом {et}.
Столь простая зависимость (1.8) внутренних моментов Mf от
приращений величин Ki возможна только в главных осях, в чем и
заключается их преимущество по сравнению с другими осями.
Система уравнений (1.8) может быть записана в виде одного
векторного уравнения (в базисе {е,})
М= Л(х — и/)), (1.9)
где
Аи 0 0 "
А= 0 л22 0 . (1.10)
Аи
0
_ 0
0
■"22
0
о -
0
"зз_
Следует подчеркнуть, что вектор ио(1) не равен вектору ко,
характеризующему начальное состояние стержня (см. Приложение 3).
Вектор ко известен в базисе {ег0}:
Xo=Kioeio+K2oe2o-f-K3oeso. (1.11)
Чтобы найти приращения кривизн А%, входящих в уравнения
(1.8), надо считать, что вектор и0(1) при деформации стержня
остается без изменения в связанной системе координат (в базисе
{е*}), что имеет место, если его проекции в этой системе
координат не меняются. В этом случае
Ио(1) = и»ое* = хюе1 + иа.,е>-г-и3(£г (I-12)
Получим уравнение (1.9) в декартовых осях в базисе {i/}:
М-2ЛЦ1;. (1-13)
Так как [см. (П.58)] i/=L(1)e/, или
iy = S А?**, (1-Й)
то, подставив (1.14) в (1.13), после преобразований получим
M=Lt1>M*. (1.15)
18
Подставив (1.15) в уравнение (1.9), получаем
МХ=%МХЛ. (1.16)
Уравнение (1.16) устанавливает связь между проекциями
вектора М в декартовых осях и приращениями кривизн (х,—хю)
в связанных осях.
Уравнение, связывающее векторы хи^. Вывод уравнения,
связывающего векторы х и -&, приведен в п. 2.5 Приложения 2:
k = L1-^+Lx0(i>,
6s
(1.17)
где L и Li — матрицы (П.44) и (П.122) [см. Приложения].
Уравнение (1.17) можно представить в форме, удобной при
преобразованиях, вычитая из обеих его частей вектор хо(1)-'
х
*о(1) = U
<л®
6s
-f-Цх/) (L.-L-E),
(1.18)
где Е — единичная матрица. Воспользовавшись уравнением (1.9),
получим
,1^+Цхо(1)-А-,М = 0.
1 6s^
(1.19)
Векторное уравнение перемещений точек осевой линии
стержня. Получим уравнение для вектора перемещений и. Из рис. 1.6
следует
u=r—r0 (u=Mie«). (1-20)
Продифференцировав (1.20) по s, получим
du dr dr0
6s
ds
6s
= ^
'JO'
где ею (а также e20 и e3o) —орты базиса в недеформированном
состоянии стержня. Считаем,
что недеформированное состоя- А>|
ние стержня известно, т. е.
известны вектор хо, таблица
направляющих косинусов и
матрица L0, связывающая базис
{е,-0} с базисом 0,-}:
е/„ - /?ji/. (1-22)
где J0.. — элементы матрицы L0.
Единичные векторы е,- связаны г*з
с векторами е(0
соотношениями
ей==/йреро (£рэ — *vpCv),
о* 1»
где lkp— элементы матрицы L [матрица (П. 44)], которые зависят
от трех неизвестных углов: §i, Ог и ■Оз, т. е.
Исключив из (1.21) ею, получим следующее уравнение в
базисе {et}:
^-=(1-^)^-/^-^, (« = £"Д (1"23)
или (если перейти к базису {его})
-^-=(Л1 — 1)е10 + /„его + /„ew (u-g«iee,-0 J. (1.24)
Уравнение (1.23) [или (1.24)] дает возможность определить
относительные перемещения точек осевой линии.
Получим уравнение перемещений точек осевой линии стержня
для вектора и в декартовых осях в базисе {I,}, воспользовавшись
матрицей преобразования L0 базиса {iy} к базису {е;о}. В этом
случае имеем [см. (П. 58)]
e,= (L0)'LTli; e10=(L°)Ti1. (1.25)
Из уравнения (1.21) с учетом (1.25) получаем
-^- (L°f(LT - Е) I, = 0, (1.26)
ds
где
з
u = 2 иф
Уравнение (1.26) позволяет определить компоненты их
вектора перемещений и в декартовой системе координат (абсолютные
перемещения). Если стержень в естественном состоянии был
прямолинейным, то в этом случае L°=E и уравнение (1.26)
принимает вид
—_(ЬТ-Е)1г = 0, (1.27)
ds
ИЛИ
du
ds
(^-1)^-^,-/,.1, = 0. (1-28)
Приведение уравнений к безразмерной форме записи. Введем
новые величины, положив
5=е/;~я=я/7Л33(0); М=М//Л33(0);
20
Ц=ц/7Лзз(0);
Q=Q/2/^33(0); х=х/; Л«(е)=Л«(е)/Лз8(0);
Р(0=р(0/2/л3з(0); Т<*>=Т<*)//Л33(0), (1.29)
где величины со знаком тильды наверху являются безразмерными;
Лзз(0) —значение изгибной жесткости в начале координат.
Входящая в уравнения (1.5), (1.6) б-функция имеет размерность
длины в минус первой степени, поэтому при переходе к безразмерной
координате е (см. Приложение 4) имеем
*['(-^-)1= у «(в-в,), (1.30)
где 6 — безразмерная функция.
Подставив (1.29) в уравнения (1.5), (1.6), (1.9), (1.19), (1.23)
и (1.26), после преобразований получим систему нелинейных
уравнений равновесия стержня в безразмерной форме (значок тильды
в безразмерных величинах опущен) *:
п
-~ + q + JJP<'>$(e-ei.) = 0; (1.31)
/=1
-^.+eiXQ + »i+J]TwS(e-e,) = 0; (1.32)
M = A(x —x0<l>); (1.33)
L2— -г-Ци^ — A"1M = 0 (L, = L — E); (1.34)
de
du 4^-1)^+^, + /,^, = 0: (1.35)
ds
du
,(L°)T(LT —E) 1, = 0. (1.36)
dc
В уравнении (1.35) вектор u представлен через проекции в
связанных осях:
з
/=»
в уравнении (1.36) —через проекции в декартовых осях:
з
u = 2 "*А-
/=1
* В дальнейшем во всех главах книги уравнения приводятся в
безразмерной форме.
21
Полученная система пяти уравнений (1.31) — (1,35) [или
(1.36)] содержит пять неизвестных векторов: Q, М, ft, х и и.
Рассмотрим более подробно полученную систему нелинейных
векторных уравнений равновесия
пространственно-криволинейного стержня.
Уравнения (1.31), (1.32) справедливы для любого базиса,
т. е. являются инвариантными по отношению к координатным
системам. Уравнения (1.33) — (1.35) справедливы только в
связанных осях (в базисе {е/}). В уравнениях (1.31) и (1.32)
можно взять векторы, связанные как с неподвижной системой
координат
3 3 3
Q = £ Qc//; q = 2 я*}\\ Р(0 = S О,
/=1 /=1 /=1
так и с подвижной системой координат
о=s «л= ч = 2 чы p<i|=2 p/i)e'-
/-1 /=i /=i
В уравнениях же (1.33), (1.34), (1.35) векторы М, ф, и, к0(1) и и
связаны только с базисом {еу}, т. е.
3 3 3
м = 2 мы * = 2 w *v1}=2 *w
i=i /=i /=i
3 3
о = Е V/; "^2 «/в/-
/=i /=i
Если уравнение (1.35) справедливо только; в связанной
системе координат, то уравнение (1.36) справедливо только в
декартовой системе координат. Ранее было показано, как от
уравнения, связанного с базисом {е/}, перейти к уравнению,
связанному с базисом {i,} [см. уравнение (1.16)]. Аналогичным
образом можно получить и уравнение (1.34), связанное с базисом
(Ь^Г'АЦ ~+(UI>)-,AL1xe(1) - Мх = 0. (1.37)
Более подробно об уравнениях равновесия с использованием
базисов {е/} и {i/} см. в § 1.3.
Краевые условия. Возможные краевые условия при решении
уравнений равновесия стержня можно разбить на два класса:
однородные и неоднородные. Для пространственно-криволинейного
стержня общее число краевых условий равно 12 [6 условий на
левом (при е==0) и 6 условий на -правом (при е=1) конце
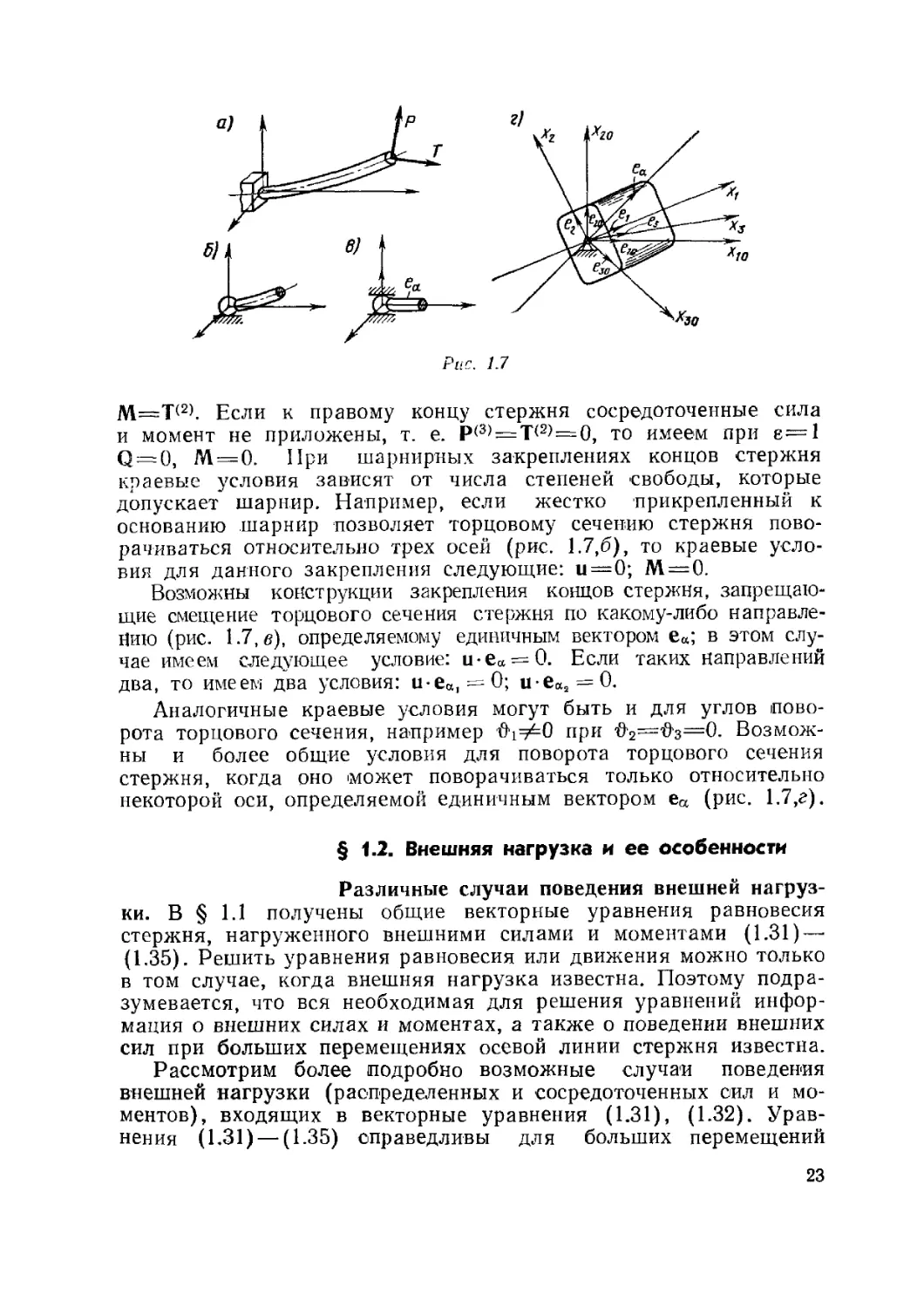
стержня]. Для консольного стержня (рис. 1.7,а) имеем следующие
краевые условия: 1) е=0 и = 0, #=0; 2) при е=1 Q = P(3\
22
Рис. 1.7
М=Т<2). Если к правому концу стержня сосредоточенные сила
и момент не приложены, т. е. Р<3> = Т<2> = 0, то имеем при 8=1
Q —О, М = 0. При шарнирных закреплениях концов стержня
краевые условия зависят от числа степеней свободы, которые
допускает шарнир. Например, если жестко прикрепленный к
основанию шарнир позволяет торцовому сечению стержня
поворачиваться относительно трех осей (рис. 1.7,6), то краевые
условия для данного закрепления следующие: и = 0; М = 0.
Возможны конструкции закрепления концов стержня,
запрещающие смещение торцового сечения стержня по какому-либо
направлению (рис. 1.7, в), определяемому единичным вектором е«; в этом
случае имеем следующее условие: u-ea = 0. Если таких направлений
два, то имеем два условия: и-еа, — 0; и-е«2 = 0.
Аналогичные краевые условия могут быть и для углов
поворота торцового сечения, например fti^O при #2=#з=0.
Возможны и более общие условия для поворота торцового сечения
стержня, когда оно может поворачиваться только относительно
некоторой оси, определяемой единичным вектором еа (рис. 1.7,г).
§ 1.2. Внешняя нагрузка и ее особенности
Различные случаи поведения внешней
нагрузки. В § 1.1 получены общие векторные уравнения равновесия
стержня, нагруженного внешними силами и моментами (1.31) —
(1.35). Решить уравнения равновесия или движения можно только
в том случае, когда внешняя нагрузка известна. Поэтому
подразумевается, что вся необходимая для решения уравнений
информация о внешних силах и моментах, а также о поведении внешних
сил при больших перемещениях осевой линии стержня известна.
Рассмотрим более подробно возможные случаи поведения
внешней нагрузки (распределенных и сосредоточенных сил и
моментов), входящих в векторные уравнения (1.31), (1.32).
Уравнения (1.31)-(1.35) справедливы для больших перемещений
23
Рис. 1.8
стержня под действием внешних сил, поэтому необходимо знать,
как ведут себя внешние силы в 'Процессе нагружения стержня:
остаются ли они при деформировании стержня постоянными по
направлению и модулю (рис. 1.8,о), т. е. являются «мертвыми»
(например, силы тяжести), или сохраняют свое направление по
отношению к связанным осям (рис. 1.8,6), т. е. являются
следящими. Рассмотренные два случая поведения внешней
нагрузки являются наиболее простыми.
В общих векторных уравнениях равновесия и движения характер
поведения внешней нагрузки при выводе уравнений роли не играет.
Поведение внешней нагрузки играет существенную роль при записи
уравнений, связанных с конкретными базисами, например с базисами
{et} или {\j}, и особенно при записи уравнений в скалярной форме,
которая используется при численных методах решения. Если внешняя
нагрузка «мертвая» и уравнения равновесия стержня записываются
в проекциях на неподвижные (декартовы) оси в базисе {^-}, то
проекции сил P(l), Т^}, q (j, не зависят от деформированного состоя-
*/ / ' х'
ния стержня (P(t), T(J} ~ всегда постоянные величины; л. w —за-
X. X. 4Xf х}
данные функции). Если нагрузка следящая, то проекции внешних сил
на неподвижные оси зависят от деформированного состояния стержня.
На рис. 1.9 приведен пример следящей силы Р. Внутри
пустотелого консольного стержня движется жидкость со скоростью
w. На конце стержня имеется участок, повернутый на угол а,
что приводит к появлению сосредоточенной силы Р, зависящей
от скорости потока жидкости и сохраняющей свое направление
в базисе {е;} (при 8=1). На рис. 1.10 схематично показана
технологическая операция сверления глубоких отверстий (ю —
угловая скорость вращения сверла). При потере статической
устойчивости стержня или при малых изгибных колебаниях стержня
(сверла) можно считать, что главная часть момента резания
(крутящего момента Т^ является следящим крутящим моментом. '
На рис. 1.11 приведен пример, где реализуется следящая
распределенная нагрузка q. По пространственно-криволинейному
24
Рис. 1.9
Рис. 1.10
трубопроводу (пустотелому стержню круглого сечения) движется
идеальная жидкость со скоростью w (|w|=const). В этом
случае на стержень со стороны потока действует распределенная
нагрузка, направленная всегда по главной нормали к осевой
линии стержня,
mw*
е21
р(=)
(1.38)
где т — масса жидкости, приходящаяся на единицу длины
стержня; р(е) —текущий радиус кривизны осевой линии стержня.
Если стержень нагрузить силой Р, показанной на рис. 1.11
пунктиром, то изменится кривизна осевой линии стержня и
изменится в соответствии с (1.38) распределенная нагрузка q.
Направление вектора q по отношению к осевой линии стержня при
любых деформациях всегда остается неизменным (qj|e2). Это
пример следящей распределенной нагрузки, когда направление
вектора q в связанной системе координат остается неизменным
при деформировании стержня, а модуль jq{ зависит от
деформированного состояния стержня [модуль распределенной
нагрузки зависит от кривизны
осевой линии стержня (1.38)].
Рассмотрим этот случай более
подробно на примере следящей силы
Р; в связанной системе координат
где Pi— постоянные величины
(постоянные только в базисе {е,}).
Рис. 1.11
25
Переходя к неподвижной системе координат, получим
р=2 р^=2 p*h
i=\ /=1
где
P^irt/Wlj-l. 2, 3), (1.39)
/=i
где /i/(1) — элементы матрицы L<!) [формула (П. 57)].
Соотношения (1.39) можно представить в векторной форме
записи (П. 60):
px==(UDyp, (1.40)
Проекции Рх зависят от tlq (е), поэтому не являются
постоянными величинами.
Аналогичным образом записываются и распределенные
нагрузки:
или
qjc=(L(i))Tq; ^=(L(i))T^
Для «мертвой» силы Р имеем
з
Р = £ Ру„
где Я* —известные постоянные величины (в базисе {i;.}). Так как
I, = s «К
то в базисе {е(} получим
p=Spa (^ = 2^)-
t=l V /=1 /
Проекции Я,-, выраженные через известные проекции Рх
зависят от деформированного состояния стержня.
26
Для «мертвых» распределенных нагрузок проекции в
связанной системе координат запишутся так:
/=i 1=1
где ^. и р.Л/ —заданные функции. В векторной форме «мертвые»
силы, записанные в базисе {е;},
4 = L<1)qx; ii=L^tix; P=L<i>PA-; T=U»TX. (1.41)
Рассмотрим несколько примеров сил, сохраняющих
неизменным свое направление в декартовых осях. Как уже было сказано,
к этим силам относятся силы тяжести, но возможны
«мертвые» силы, не связанные с силами тяжести. На рис. 1.12
показана цилиндрическая пружина (например, упругий элемент
акселерометра), находящаяся на ускоренно движущемся с
ускорением а объекте. В этом случае стержень нагружен
распределенной нагрузкой
q = am0=aiim0 (а=|а|),
сохраняющей свое направление и модуль в базисе {i/} при
любых деформациях пружины. В связанных осях получаем
q = 0/(1^,+ <41Ч + ай!}ез.
В качестве следующего примера рассмотрим стержень,
связанный с вращающимся диском (рис. 1.13). Это пример, когда
декартовы оси вращаются относительно оси, сохраняющей свое
направление в пространстве, в данном примере относительно оси
х2. В этом случае на стержень действует распределенная
нагрузка
q = r«)am0(r = г*,»1 + гХл\з),
где то —масса единицы длины стержня. Так как уравнения рав-
'Рис. 1.12 рис. 1.13
27
новесия стержня для данной задачи наиболее 'Простой вид
принимают во вращающихся декартовых осях xi, то вектор q,
выраженный через проекции в этих осях, т. е.
q=xio2m0ii+A'3to2moi3,
сохраняет по отношению к вращающимся осям свое направление
(остается всегда в плоскости Х\Ох^)у изменяясь при деформации
стержня по модулю. Это пример «мертвой» нагрузки по
отношению к одной из декартовых осей.
Вектор q можно записать и через 'проекции в связанном
базисе {е,}, используя матрицу L(1) перехода от базиса {i/} к
базису {е,}:
q ~ х^тй (iffe, + ЙЧ + ЙРе.) + *,»Ч (4¾ + Й'е2 + /fi'e,),
или
q^ixffl +х№)т,р>Ъ1 + {х11&) + xr3/^)m0m2e2 +
+ (^+^)/^0^4-
Поэтому при записи нелинейных уравнений равновесия стержня
в скалярной форме как в неподвижной, так и в связанной
системе координат следует оговаривать характер поведения
внешних нагрузок.
В прикладных задачах возможны и более сложные случаи
поведения внешних нагрузок, когда часть нагрузок,
приложенных к стержню, являются следящими, а часть — «мертвыми»,
или когда только отдельные проекции нагрузок являются
следящими или «мертвыми». На рис. 1.14 показан консольный
стержень, на конце которого установлен реактивный двигатель. В
результате стержень нагружается двумя силами: силой тяжести
Pi — «мертвой» силой и силой тяги Р2 — следящей силой.
Возможны и случаи (рис. 1.15), когда линия действия внешней силы
в процессе нагружения стержня должна проходить через
фиксированную точку (точка А). В этом случае проекции силы как
Рис. 1.14 Рис. LIS
28
в неподвижной, так и в связанной системе координат зависят
от деформированного состояния стержня. Модуль силы в
данном примере остается постоянным и равным mg.
Определение приращений векторов внешних нагрузок.
Выражения для приращений векторов внешней нагрузки (q, \i, P(f) и
T<v)) при непрерывном деформировании стержня необходимы при
численном решении нелинейных уравнений равновесия стержня,
когда требуется явное выражение для компонент нагрузки.
Приращения векторов внешней нагрузки необходимы и при
определении критических нагрузок при решении задач статической
устойчивости стержней. В дальнейшем считается, что силы,
приложенные к стержню, и геометрические параметры, входящие в
выражения для приращений сил, приведены к безразмерной
форме Частные случаи определения приращений векторов
изложены' в Приложении 3. Там же (приведен случай определения
приращения вектора при малых углах поворота связанных осей
[формула (П. 159)].
Рассмотрим случай более сложного поведения внешней
нагрузки, когда внешняя сила, приложенная к стержню, следит за
фиксированной точкой пространства (рис. 1.16).
Ограничимся случаем, когда сосредоточенные и
распределенные силы и моменты постоянны по модулю. На рис. 1.16
показано два положения стержня: 1 и 0. Индексом 0 отмечено
исходное положение стержня до нагружения его силой Ро- Рассмотрим
наиболее общий случай, когда конечное положение стержня
определяется из нелинейных уравнений равновесия, т. е. компоненты
вектора и считать малыми нельзя. Векторы Р0 и Р могут быть
Рис. 1.16
29
представлены в виде
Ро = |Р„|ег0; Р = |Р0|ег>
где tr0 и ег — единичные вжторы, совпадающие по направлению
с векторами г0 и г: г0 = [г0|еГо; г = |г|ег.
Приращение вектора Р (рис. 1.22)
ДР^Р — Р/),
или
ДР = [Ро1(ег-еЯ;) = |Р„|Дег.
Вектор ej-l*—это вектор еГо, который остался неизменным по
отношению к базису {е,}, поэтому он в базисе {е;} имеет те же
компоненты, что и в базисе {е1^}, т. е.
<' = Е Рл.
где ft = (еГ1>, е,-0)— компоненты вектора еГо в базисе {е;0}.
Вектор АР надо представить в базисе {е,-}, поэтому единичные
векторы ejP и ег тоже надо представить в базисе {е;-}. Сначала
получим выражения в базисе {е,} для вектора еГо:
ero = r0/|r0I (r0 = R00 — R0);
если вектор г0 известен в базисе {i/}, то в базисе {е/0} его
можно записать в виде r0e=L0r0, где L0 —матрица перехода от
базиса {i/} к базису {е,0}, поэтому имеем
ero = L°r0/|rol.
Для вектора ег имеем
er=r/|r| (r = r0—u);
компоненты вектора и при решении уравнений равновесия
получаются в базисе {еу}, поэтому вектор г0 надо представить в
этом же базисе. Вектор г0 задан в базисе {i/}, поэтому в базисе
{е7} r0(1)==LL0r0, где L — матрица перехода от базиса {е;0) к
базису {е4}. После преобразований получаем следующее выражение
для единичного вектора ег:
|LLoro-u|
Окончательно получаем выражение для приращения вектора Р:
\ I LL4 — и | | г01;
30
Аналогичные выражения получаются и для приращений
векторов Aq, Aji и AT:
LL»rft-u L°r0
Aq = lQol(
'о
)LL°r0-u| |r0j
(1.43)
^ |H4,4|Liore-u| |,e|J»
AT = |T0|f Шга~" --^ V (1.45)
1 0Ч|Шг0-и| jr0| У
В выражения (1.42) — (1.45) входит матрица L, элементы
которой определяются при решении уравнений равновесия стержня
(элементы матрицы L0 считаются 'известными, так как они
характеризуют естественное состояние стержня до нагружения).
Элементы 1ц матрицы L (см. in. 1.6 Приложения 1) зависят от
углов поворота связанных осей О/. Для сосредоточенных сил к
моментов элементы 1ц зависят от углов поворота осей, связанных,
с точкой приложения сил и моментов 0/(е/с). Для
распределенных сил и моментов элементы матрицы L, а также и матрицы L0'
есть функции координаты е. Полученные выражения для
приращения сил и моментов необходимы при численном решении
нелинейных уравнений равновесия стержня, когда используется
метод последовательных нагружений.
Рассмотрим частный случай, когда перемещения точек осевой
линии стержня и,- и углы поворота #/ малые. При малых углах.
поворота .матрица [см. (П. 47)]
L=£-fALb (1.46)
поэтому модуль вектора r=LL°ro—и с учетом (1.46) можно-
представить в виде (сохраняя слагаемые, линейно зависящие от
AL,, и)
J = | LL40 - и | = V\ L°r012 + 2 (L°r0Aa), (1.47)
где Aa=ALiL°r0—и. Разложив правую часть (1.47) в ряд и
ограничившись линейной частью, получим
У = Л[1+^ (Ь°г0-Да)] (Л =*= |L«r01 = | г0|). (1.48)
Выражение (1.42) с учетом (1.46) и (1.48) после
преобразований приводится к следующему соотношению:
или (так как L^AL^X =- 0)
ДР = |Ро|[-^(е,0и)-^-+ДЬАо]. (1.49)
где
ero = LV|L°r0| = LVir0l. (1 -50)
31
Из (1.50) следует, что вектор еГо задан в базисе {е;0}. При
определении приращений сосредоточенных сил Р(/) и моментов
T<v> матрица L0 есть матрица преобразования базиса {i/} к
базису {вго}, связанному с конкретной точкой вк (точка К на
рис. 1.16) осевой линии стержня, т. е. элементы матрицы L0
зависят от ек. Единичный вектор еГс, входящий в выражение (1.49),
зависит от координаты ек. точки приложения силы Р0.
Если стержень нагружается следящей за точкой О
распределенной нагрузкой q0 (рис. 1.16), то матрица L0, а также
единичные векторы efo (е)= L°(e)r(e)/|r(e) | зависят от осевой
координаты е. Приведем без вывода выражения для малых
приращений Aq, Ajli и ДТ:
All - | ix01 [-^- (e,0u) - ■£+ALA.]'
ДТ = | T.I [-х(ег0и)-|+ДЦего]-
(1.51)
(1.52)
(1.53)
В .пдятий в выражения (1.51), (1.52) единичный вектор еГо есть
Пункты от координаты е. Вектор е,-0, входящий в выражения (1.49)
и (1.53), зависит от ек— координат точек приложения силы Р0
и м ;мента То.
В качестве примера получим выражения для проекций вектора ДР на
связан!: ые и:и. Введем обозначения ег для проекций вектора еЛ . В результате
^получаем
з
(1.54)
; = 1
3
др3 = -т (S %л )-х+^01+»1^-.
/=1
При численном решении уравнений равновесия более удобно
приращения векторов представить линейно зависящими от
векторов и и д. Например, для системы (1.54) имеем
АР = В(Щ+В&и, (1.55)
где
0 ~еГоъ еГо2
*(1)= еГо3 0 -еГо1
—еГо2 еГох 0 _
32
5<2> =
(er0— l)lA eroier02JA етЛег,ъ\А
еГо1еГо2!Л (<2— 1)M er^rJA
eroiero2lA eroser02JA (^2n3- VIA
В задачах статики стержней, взаимодействующих с внешним
потоком воздуха (см. гл.6), приращения сил зависят и от первой
производной вектора перемещений и, т. е. приращения сил могут
содержать и слагаемое вида Лр(2)и'*.
Аналогичные выражения могут быть получены и для
остальных приращений векторов:
Дч=СС1>#+а2>и;
Д|и=С(3>#+С<4>и; (1.56)
AT=BWft+BWu.
Полученные выражения (1.55), (1.56) для приращений сил
и моментов при малых перемещениях осевой линии стержня от
его естественного состояния используются в дальнейшем при
решении уравнений равновесия стержня.
§ 1.3. Уравнения равновесия в связанной
и декартовой системах координат
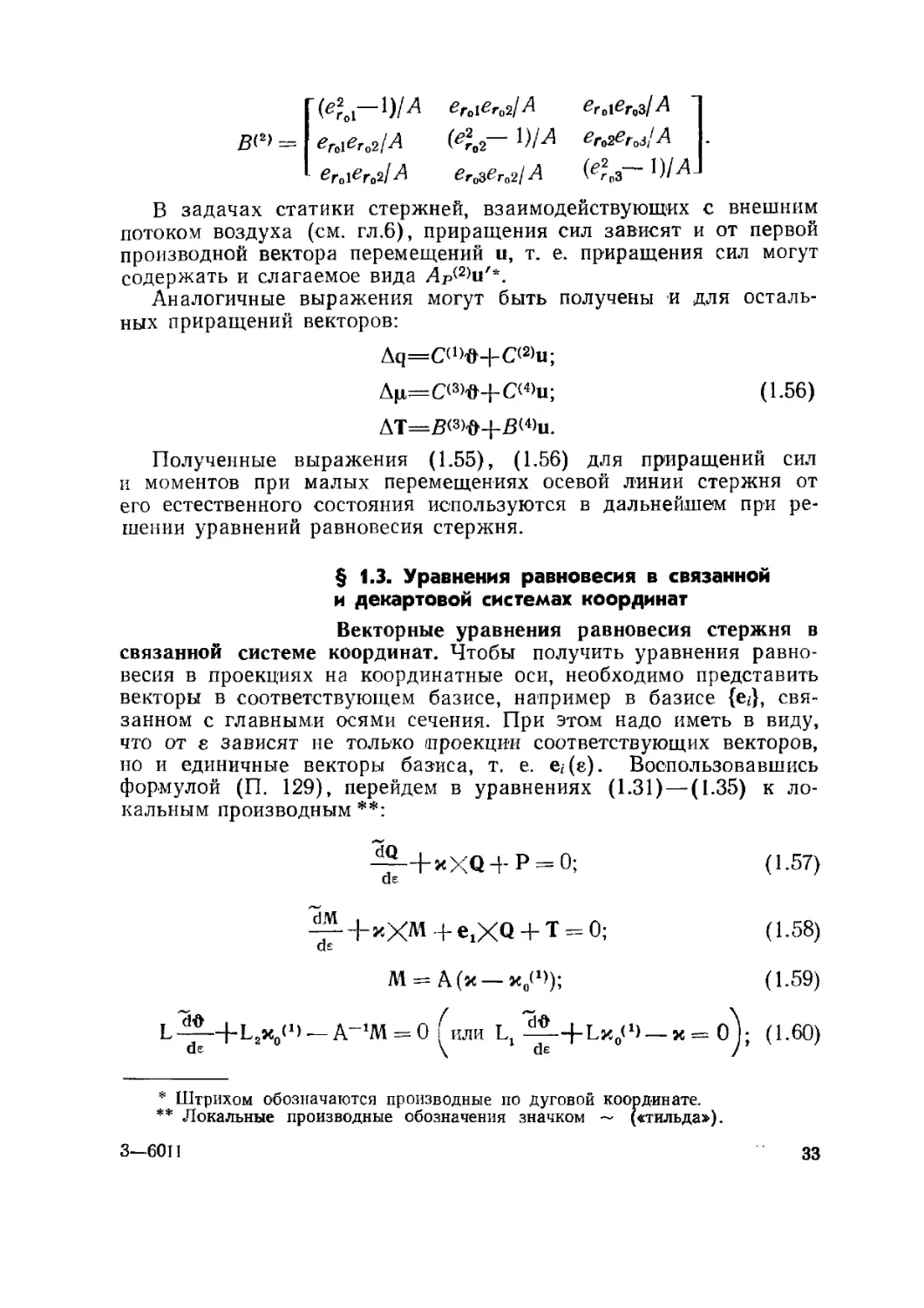
Векторные уравнения равновесия стержня в
связанной системе координат. Чтобы получить уравнения
равновесия в проекциях на координатные оси, необходимо представить
векторы в соответствующем базисе, например в базисе {ej,
связанном с главными осями сечения. При этом надо иметь в виду,
что от в зависят не только (проекции соответствующих векторов,
но и единичные векторы базиса, т. е. е;(е). Воспользовавшись
формулой (П. 129), перейдем в уравнениях (1.31) — (1.35) к
локальным производным**:
de
'dM
dQ '-xXQ+P = 0; (1.57)
fzXM+e1XQ + T = 0; (1.58)
as
М = Л(и — и^1)); (1.59)
L -^-+1^0- A~1M = 0f или Ц -^-+1^)-x«0 J; (1.60)
* Штрихом обозначаются производные по дуговой координате.
** Локальные производные обозначения значком ~ («тильда»).
3—6011
33
du
de
-+Au-h (fn — 1)еж H-/B1e8 + /31e3 = 0,
где
P = q + S Р«')8(е-е|);
/=i
<Л>5
T=ji+2 T"8(e-e,);
(1.61)
(1.62)
(1.63)
v=l
L,=
COS02COS0-3 0
—sin&3 1
sin0-2cos0-3 0
—sin$2
0
cos&2
"cos02cos03 — 1
cos 02 sin &3 cos 0г + cos 0S sin 9-3 sin $x —"
— sin 02 cos &J
cos&gSinQ-!
sin9-2sin0-3 sin 0-, +
-{- cos 0-2 cos &x— 1
-г- sin &2 sin 8^
—sin $3 cos $j cos 03 — 1
sind2cos&3 sinO-aSinO-gCosO-! -
— cos 0£ sin 0-j
Входящие в уравнения (1.57) и (1.58) силы и моменты qr
P(t), |Л и T(v) в наиболее общем случае могут зависеть от
перемещений точек осевой линии стержня и,- и углов поворота
связанных осей #/. Аналитическая зависимость векторов нагрузки от
щ и ■#/ в каждой конкретной задаче считается
известной. Более подробно о возможном поведении нагрузки было
сказано в § 1.2. Например, если нагрузка следящая, то компоненты
векторов q, P<f), ц и T*v) в связанных осях остаются неизменными
при любых конечных перемещениях щ точек осевой линии
стержня и любых конечных углах поворота ft/ связанных осей.
Если силы «мертвые», а используются уравнения равновесия;
в связанных осях (1,57) — (1.61), то следует использовать
соотношения (1.41). При выводе уравнений и преобразованиях для
любых сил и моментов приняты обозначения, которые
использовались в § 1.1 и 1.2, т. е. q, PW, jn, T<v). В дальнейшем при
решении прикладных задач в зависимости от конкретных сил
приводятся дополнительные соотношения для сил и моментов,
учитывающие особенности их поведения при нагружении стержня.
Уравнения равновесия стержня в проекциях на связанные оси.
В большинстве задач исследование равновесия стержней более-
удобно проводить, используя уравнения в проекциях на
связанные оси. Кроме того, в связанных осях компоненты Qi и М(-
векторов Q иМ имеют четкий физический смысл (Qi — осевая сила;
Q2 и Q3—перерезывающие силы; М\ — крутящий момент; М2,.
М3 — изгибающие моменты). В проекциях на связанные оси из
уравнений (1.57)— (1.6м с учетом (1.62) и (1.63) получаем
34
(опуская знак тильды в обозначении локальной производной)
п
-IT+Qi*. - ^ + Q* + J] *V'»8(e - .,) = 0; (1.64)
de
dQ3
-jp+to - Q&+^3 + 5] Р.<'« (* - ■/) = 0;
6M
P
l+M3«2 - M2x3 + JV+ VI ?1V,8 (. - .„) = 0;
<шя
+Atf1«,-Af,icl-Qe+ ^ + 2^8(.-80-0: (1.65)
de
v=l
diW, P
^+^ - M,xE + Q2 +>, + JJ 7?>8 (. - .v)« 0;
M1 = All(a1 — xJ0); М2 = А£(и2 —x£0); iW, = /4зЕ(и3 — иг0); (1.66)
«! = f-"3- +Ko) cosv£cosv2 ^-sinv2 + (sinv2sinv1 +
+ cos Vj cos v2 sin v,) x20 + (cos v2 sin v3 sin vt — sin v8 sin vt)kj0; .
и„ = —^--(-^-+^ ) sinv^cosv.cosvjXg,, + cos v, sin v,x,0; (1.67)
\ dE J
de
и3 = ——cos v2 + I—^-+и10) sin v2cosv3 + (sin va sin v3 cos vt—
— cos v 8 sin Vj) и20 + (cos v2 cos v1 + sin v2 sin v2 sin v,) x30;
d«j
de
d«,
-+^-^ + ^--1 =0;
2
+«,«„ — «,X!+/21 = 0; (1.68)
de
j-ИгХ,— и1х2 + /31=0.
d«8
ds
Входящие в уравнения (1.66), (1-67) величины чц0 считаются
известными.
3* 35
В дальнейшем введем для проекций сил и моментов,
входящих в уравнения (1.64), (1.65), обозначения
Pi = Qi + 2p,li)*(*-*tY>
i=l
Ф)
/ = 4/+2 Т!*(*-**) (/=1. 2' 3)"
(1.69)
(1.70)
V=rl
Исключая из уравнений (1.65) Mi, получим еще один
вариант записи системы уравнений (1.65):
d ИнК — Хю)] + Д,(и. — изо)^2 — Дя(и8 — и8оК + Г, = 0; (1.71)
d
de
d
de
1Д2 (»4 — и20)] + Д1 («1 — и10) *3 — Д3 К — *зо) «1 ~ Q3 + Тг = 0;
[Д. (X3 — ««)] + Д* («2 — «l0) И1 — Д» («I — *lo) >«2 + Q2 + ^3 = 0.
Частные случаи уравнений равновесия стержня в связанной
системе координат. Рассмотрим нелинейные задачи изгиба
первоначально искривленного стержня постоянного сечения
следящими силой и моментом, приложенными к торцу (рис. 1.17).
Сосредоточенные силы и моменты, приложенные в конечных
сечениях (при е=1), можно учитывать и через краевые условия.
В этом случае они в уравнения равновесия не входят и системы
уравнений (1.64), (1.71) принимают следующий вид:
dQx
de
dQ,
-|-Q»«2--Q«K, = 0;
H^-Q^^O;
(1.72)
Рис. 1.17
Рис. 1.18
36
de
Л„ -^-К — ИМ) + Ai К — *nK — Л.К—«.o)Xi-<?.=°J ^L73)
de
Аз "Г" ^Хз — «so) + А* (И8 — *20) «1 " Ai (*i — ию) «2 + Q2 = 0-
de
Уравнения (1.67) и (1.68) в этом частном случае остаются без
изменения.
Если стержень был нагружен только моментом Т (Р = 0)
(рис. 1.17), то в уравнениях (1.72) и (1.73) следует положить
Q1==Q2=Q3=0, что приводит к следующей системе уравнений
относительно та:
Аг -тН-( А» — А*) % = 0;
A,-^-+(A,L-A,)««.-0; (1-74)
de
А,4^+(Л-"^^х^а
d£
Если стержень в естественном состоянии был прямолинейным
(рис. 1.18), т. е. к,-0=0, то из (1.67) и (1.68) получаем уравнения
v = J5s_ cos »ч cos &3 — ~^3- sin &2;
1 ds 3 ds
d&2 d0, . _ /1 т^ч
зса =—f—-^-sin &3; (1.75)
de as
X, = — COS ft. -4 — Sin &2 COS ft,;
3 ds de
A1-7—+(A,-A.K*,=0;
as
A2^+(A1-A3)v^-Qs = 0; (^6)
A* -^-+( AE- Ai)*i*. + Q£ = 0-
de
Входящие в уравнения (1.75) углы Ф,- (для первоначально
прямолинейного стержня) ■— это углы, характеризующие поворот
связанного базиса {е,} относительно базиса {i/} декартовых осей.
Рассмотрим в качестве примера прямолинейный стержень, у
которого /422=A3=const, например стержень круглого или
квадратного сечения. Стержень нагружен силой Р и следящим
крутящим моментом Т (рис. J.18). В этом случае система (1.76)
имеет вид
dfcij
А 1 — О-
37
Дг -тЧ-И» - A»№. -¾ - о; С1-77)
de
Да -^- ~ (Ai - A.) «i^ + Q, = 0-
de
Интегрируя первое уравнение системы (1.77), имеем
xi=Ci=const. (1-78)
Так как при е—1 xi=7'i/Ab то c\=TijAn.
Из (1.78) следует, что при следящем крутящем моменте,
приложенном к торцу первоначально прямолинейного стержня
постоянного сечения с равными изгибающими жесткостями, при
любом его отклонении силой Р, приложенной к торцу, крутящий
момент постоянен по всей длине изогнутого стержня.
Если прямолинейный стержень (рис. 1.18) нагружен на
свободном конце сосредоточенным следящим моментом Т
произвольного направления (Р=0), то в этом случае Qi=0. Так как
момент Т — следящий, то его проекции Тс в базисе {ег} при
деформации стержня не изменяются, поэтому из первого уравнения
системы (1.77) получаем %i = 7yAi = const. Оставшиеся два
уравнения системы (1.77) легко интегрируются, и в результате
получаем
и2=С1 cos <хе+с2 sin ae; (1.79)
«з=—C\ sin ae-\-c2 cos ae,
где a=(i4n-A22)Tl/(AnA22).
Находим C\ и c2 из краевых условий при е=1: зная, что к2=
= 7УЛ22; из—ТУАг, из системы (1.79) получаем
с, =—— cos а — sin a; с„ = ——sin а, А — cos a.
А А А А
Л22 "22 Л22 Л22
Определив компоненты щ, к2 и х3 вектора и, получаем
систему трех уравнений для определения углов &:
——cosfkcosd, — sm$a— к, = 0;
de 3 de 2 1'
sin&3 — к2 = 0; (1.80)
sin 6-., cos fr3 —x3 = 0,
или
«И*
de
d&2
de
-cos$2
+ -
dfl
d9,
de
d93
de
-+i
de ' U 1X^0, (1.81)
где Li-1 — матрица, обратная матрице Ц (П. 122). Решая
систему (1.80) численно при нулевых начальных условиях (при
8=0 #/(0)=0), для данного примера определяем Ф;(е).
38
Найдем теперь перемещения точек осевой линии стержня
(рис. 1.18). Так как стержень до нагружения моментом Т был
прямолинейным, то при определении перемещений воспользуемся
уравнением (1.21), приведенным к безразмерной форме записи
-£-=е, -е„. (1.82)
Для рассматриваемого частного случая прямолинейного стержня
при определении перемещений можно в уравнении (1.82) не
переходить к локальным производным. В рассматриваемом
примере базисы {\j} и {е;0} совпадают, поэтому
eio=ii, е1=/цМ-И1212-К1зЬ,
где 1ц — элементы матрицы L, определяемые как
/n=cos 02 cos Ф3; /i2=cos Ф2 sin Ф3 cos Oi+sin Ф2 sin fy;
;13==cos -&2 sin Ф3 sin fti—sin Ф2 cos fti.
Из (1.82) получаем
£i_=cos&Ecos&3— I;
de
Л5
:cos &2 sin &3 cos 8-t + sin &2 sin 8-,; (1.83)
de
^i—cos&aSinS-gSmS-! — sin ft, cos &r
ds
В данном примере имеем 9-^ = 8^; &jc2 = 0-2; &A-a = &3. Интегрируя
уравнения (1.83), находим абсолютные перемещения точек осевой
линии стержня. В рассматриваемом примере при е = 0, их (0) = 0.
Решение нелинейных уравнений равновесия стержня для
более сложных случаев нагружения представляет значительные
трудности и в аналитической форме записи, как правило, его
получить нельзя. В таких случаях используют методы
численного решения.
Векторные уравнения равновесия стержня в декартовой
системе координат. Нелинейные уравнения равновесия стержня в
связанных осях удобны при решении многих конкретных задач
и особенно, когда стержень нагружен следящими силами,
проекции которых известны именно в связанной системе координат.
В том случае, когда проекции внешних сил известны в
декартовой системе координат, можно воспользоваться уравнениями
равновесия в декартовых осях. Конечно, всегда можно силы,
заданные в одной системе координат, записать в любой другой.
Связанные оси являются более эффективными при исследовании
равновесия стержня, так как «физическое» уравнение (1.9),
устанавливающее связь между внутренним моментом и приращением
вектора к, при упругих деформациях стержня в базисе {е;} имеет
39
простой вид. Как правило, уравнения в декартовых осях имеют
более сложный вид, особенно когда осевая линия стержня есть
пространственная кривая.
Введем индекс х для обозначения векторов в базисе {i,},
например Qx = "Щх \j, Мд,, Рх, Т*, q*, (1,ит. д., а также напомним
основные формулы [см. (П. 59) и (П. 60)] преобразования векторов
при переходе к новому базису, например при переходе от базиса
{i/} к базису {е,}, т. е. a = L(1)a*, или при переходе от базиса
{ег} к базису {i/}, т. е. лх= (Ul>)Ta.
Рассмотрим общие векторные уравнения (1.31)-(1.35). В
декартовой системе координат полная производная совпадает с
локальной, поэтому уравнения (1.31) и (1.32) по форме записи
остаются без изменения, но входящие в эти уравнения векторы
есть векторы в базисе {i/}, т. е.
dM
-Р* = 0; (1.84)
dE
где
+'XW)\XQx + 'Ix = 0, (1-85)
P* = q*+ 2 Р/>8(в-ег.); 1X =цх+2 Ti*>S(E-sv).
i=i v = l
Как следует из вывода, уравнение (1.33) связано с базисом
{ti}, поэтому при переходе к базису {i,} получим [см. уравнение
(1.16)]
Мх=(и1>)тА(и—*0(1)). (1-86)
Уравнения (1.34) и (1.35), связанные с базисом {Ь}, были
получены ранее [см. уравнения (1.37) и (1.36)]:
d#-+L -'Ци/Э-Ьr'A-'L^M, = 0; (1.87)
dE
du
-(ИМ*-L")^ ^0. (1.88)
dE
Уравнения равновесия в проекциях на декартовы оси. В
проекциях на декартовы оси уравнения (1.84) — (1.88) (в тензорной
форме записи) имеют такой вид:
dQ
-Ji+P,. = 0(/=1, 2, 3); (1.89)
de 1
—i+e^/ffiQ^ + TXj = 0; (1.90)
^+«4-^4=0; (Ь91)
40
где
Мх. = 1уМ^Лъ — xVo); (1.92)
-^-(/^-0 = 0, (1.93)
Р*,. = <7*у+2 Р^5 (в — е,);
/=1
^.-^.+2 7f>8(e-ev);
/}v\ /}v —соответственно элементы матриц L = Li~ L2 и L —
Более подробная запись, например, уравнений (1.89) и (1.90)
имеет такой вид:
п
+^+5^8(^-^)=0:
+^+53p^5(s"e')=0;
dE
Г=1
n
(=1
Р
^ + /(,)Q -/(,)Q + ** +yjn;)S(£-ev) = 0;
ds
P
dAf.
^+/(1,Q ^/(1)Q +fx + У. Tgb (e - e„) = 0;
de ' 13 ^*i 11 ^*s ' Г^а ' /J
mXs , HI)
P
, + /(1)Q -~/(1,Q + ц +^.7^6(8-8,) = 0.
v = I
В зависимости от конкретных задач могут использоваться
уравнения как в связанных, так и в декартовых осях.
§ 1.4. Уравнения равновесия при малых
перемещениях и малых углах поворота
Уравнения равновесия в связанной системе
координат. Рассмотрим частный случай уравнений равновесия
пространственно-криволинейного стержня, когда компоненты век-
41
торов u, Ах=х~х:0) и # можно считать малыми. Наиболее
наглядно основные особенности уравнений равновесия при малых
перемещениях точек осевой линии стержня и малых углах
поворота связанных осей видны на примере уравнений, записанных
в связанных осях.
Рассмотрим нелинейные уравнения равновесия (1.57) — (1.61):
dQ ■ "Ч'Л • " "- (1.94)
(1.95)
(1.96)
L,— -Цх0(1>— А~1М = 0 (Z.2 = L —Е); (1.97)
d
du
d£
dM ,
d, +;
M
L2x0(1)
-|-л/\^-г
«Xм+«
= A(x-
— A-4VI:
iiXQ+T
«o(1));
= 0 {L2 =
= 0;
L —
■E);
fxXu + (/„ - l)e, + /tles + /Me, = 0. (1.98)
ds
Считаем, что при нагружении стержня (причем внешние
нагрузки могут быть любыми) компоненты векторов #, и и приращения
вектора и (Ди=и—хо(1)) можно рассматривать как малые
величины, а компоненты векторов Q и М считать малыми нельзя.
Векторы q, P(v\ jx и T(v), от которых зависят Р и Т в процессе
нагружения стержня, в общем случае могут изменяться как по
модулю, так и направлению, т. е. могут быть представлены в виде
q = q0-fAq; р(О=Р0<о+др<*); j1 = ju.0-fAju; TCv> = T0<v>+AT<v>, где
векторы с индексом 0 соответствуют абсолютно жесткому стержню
(компоненты векторов q0, Ро('\ № и T0(v) известны); векторы Aq,
APW, Ajui и AT<V) есть приращения векторов внешних сил,
зависящие от перемещений точек осевой линии стержня и углов
поворота связанных осей. В общем случае они могут быть
представлены в виде [обобщенный вариант соотношений (1.55) и (1.56)]
Aq^C^u + CWu'+COfl;
АРС) = Bt-(2)U + B('3>u' + B/'W;
Лц = C<5>u + Сг<6>и' + C<4>#; (1.99)
AT(w) = BiB)u + B!6)u' + B£4,d.
В Приложении 3 подробно рассмотрен частный случай
[соотношение (П. 159)], когда приращение произвольного вектора а
зависит от малых углов поворота связанных осей. Из уравнений
(1.94), (1.95) получаем
~--f*o(1)XQ+^XQ т-Р0+АР = 0; (1.100)
-^-+«о(1)ХМ-г-^^Х^-ге1ХО + Т^4-АТ = 0, (1.101)
42
где
Po = q0 + S Po(''>8(s-e,-); AP = Aq-b У ДР<'>8(е_.|);
Т. = M-o + 2 T°V)5 (£ - £^; ДТ = ДЦ + 2 ДТЫ5 (e - e„).
Метод определения направляющих косинусов вектора ею и
компонент вектора хо для случая, когда уравнение осевой линии
стержня (естественного состояния стержня) записано в
декартовых осях, изложен в Приложении 5.
Уравнения (1.100), (1.101) являются точными нелинейными
уравнениями, так как в них сохранены произведения
неизвестных векторов AxXQ, АхХМ, причем, как уже указывалось,
компоненты векторов Q и М (в отличие от компонент вектора Ах)
не являются малыми. Но если компоненты вектора Ах можно
считать малыми по сравнению с компонентами вектора хо(1), то
произведения AxXQ, АхХМ можно приближенно положить
равными нулю. В этом случае получаем при решении уравнений при-
ближенные значения векторов Q, М. Следует заметить, что
пренебречь произведением векторов AxXQ и АхХМ можно только
в том случае, когда х;-0=И=0. Если же х/о=0, то в произведениях
векторов AxXQ и АхХМ Для линеаризации уравнений
равновесия надо использовать начальное напряженное состояние
стержня, вызванное силами, которые не изменяют его
прямолинейной формы. Например, для сил, вызывающих только осевое
усилие Qio и крутящий момент Мы,
AxXQ = AxXQi0er, АхХМ=АхХМше1.
Уравнения (1.94) и (1.95) принимают следующий вид (в
базисе {еу}):
^-+x0XQ + Р0 + АР = 0; (1.102)
dM
■х0ХМ + e,XQ+ Т0 + ДТ = 0.
(1.103)
Уравнение (1.96) при малых приращениях кривизн Дх;-
принимает вид
М=АДх. (1.104)
При малых углах поворота связанных осей матрицы Lb L и
L2 запишутся так:
Lt =
1 0
о о
-&,
о
1
1 8% —&,
«■. 1
^
_ Ь, -^ 1
L2 =
0
—а,
8-, —6"
о ^ I
43
Так как компоненты вектора Ф малы, то в уравнении (1.97)
можно положить L^tf/de^dtf/de, т. е. Li = E. В результате
уравнение (1.97) при малых углах fh- можно преобразовать к виду
d# +и0Х# — А~гМ = 0. (1.105)
При малых углах #, имеем 1п—1^0; /21=—Фз; /31^^2,
поэтому уравнение (1.98) принимает вид (полагая при малых U/
xXu~XoXu)-
-»-+x0Xu-0^+^, = 0. (1.106)
de
Входящие в уравнения (1.104)-(1.106) векторы #, Ли и и
являются приближенными, т. е. #=#; Лия^Ли; и«и.
Уравнения равновесия нулевого приближения в связанной
системе координат. Введем для векторов, удовлетворяющих систе-
ме уравнений (1.102) — (1.106), верхний индекс 0: Q=Q(°>; М —
— М(0> и т. д.), а систему уравнений равновесия
^+к„ХО(0, + Ро + АР,0,)=0; (1.107)
ОБ
dM(°) .
-^+и0ХМ»°) + Тс+АТ< > =0; (1.108)
М(°> = АДх<°>; (1.109
i*^ _l ио><ЧИ0> — A-W) = 0; (1.110)
de
^-+x0Xu'0>-ft1<°.,e» + ft2t0)e1-0 (1.111)
назовем системой уравнений равновесия нулевого приближения.
Приращения векторов сил (1.99) в уравнениях (1.107), (1.108)
нулевого приближения зависят от и(0) и и'(0) и Ф(0). Если силы
следящие, то их приращения в связанной системе координат
равны нулю: Дя<о)=АРСО(0)=д111(0)=дТ(у)(0)==о, поэтому АР<0>=ДТ(°)=
=0.
Компоненты вектора ф(0) есть малые углы поворота
связанных осей относительно своего естественного состояния. Вектор
и(0) характеризует смещение точек осевой линии стержня
относительно естественного состояния. Векторные произведения,
входящие в систему уравнений (1.107)-(1.111): xoXQ(0); ХоХМ<0);
хоХ'б40*; иоХи(0), можно представить в виде (на примере хоХ
XQ(0); см. п. 1.3 Приложения 1)
*оХО(0)=АиО(°>,
где
А.=
44
0
Хяо
—Кп
"~кзо
0
^13
^21
~~'ii\0
0
В результате получаем следующую систему четырех
дифференциальных векторных уравнений с неизвестными векторами Q(0>,
jyl(0)> u(0) и 0(0).
-^Р-+ AXQ<0) + Р0 + АР(0) = 0;
dM(°)
ds
■f АХМ<°> + AXQ(°) -f T0 + AT'°) = 0;
de
du(°)
de
+ АХЖ0> — A-1M<°) = 0:
4-Axu<°) + A1O(0> = 0,
(1.112)
(1.ПЗ)
(1.114)
(1.115)
где
A,=
"0 0 0"
0 0—1
0 1 0
Уравнение (1.109) позволяет после определения М<0)
определить Ли(0).
В проекциях на связанные оси получаем следующие
уравнения нулевого приближения:
dQx(<>)
de
dQ2(0)
f x20Q3i°) -«вА(1) +Ло + A^(0) = 0;
de
dQ3(°)
f хДО -x10QE<°> + Я20 + ДРап = 0; (1.116)
de
■f x,^0» - k»Qi(0) + P30 + AP3<°) = 0;
E^ + X|.Af,i») - x30M2<°> + T10 + АГ/) = 0;
de
de
dMs(°)
de
fj^M^) — xltM3(°)~Q3(0)4-rro + Ar2(°) = 0; (1.117)
ut?i _lx aio)„v At0) —
, ~Лго"з Лз(Г2
de
лп
^(°) = 0;
d92(°>
de
сШ°)
4-X &Г)_И A (0) —/И (°)=0-
«22
de
M3'°) = 0;
^3
(1.118)
45
6иг(°)
4-»wV0)-*3o"2(0)=0;
(3^(0)
+ад»О)-ЗД(0,-А(О)==0;
(1.119)
du2(°)
de
+*10«2<0>-зд<0>+&2<°> =0,
или в тензорной форме записи
Щ(°)
de
+*&**&№+ Р,оч+&Рр = 0;
(1.120)
(Ш;(«)
5-+^1^0^.^^-8,/3,(°) +63/Q2(°) + 7\0 + ДГ/°> =0; (1.121)
-^-+е/*<**А(0)—Z— = °;
<Ц-(°)
de
Ьлл-,0)-Мэ,э) + М2(0) -о,
(1.122)
(1.123)
где
Г/. + АГ/(°) = Гл/0 + Дц/(«) +Е ЙЧАГ1",(Щ)8^г»). (1.125)
v=i
Уравнения равновесия нулевого приближения в декартовой
системе координат. Получим уравнения равновесия стержня при
малых обобщенных перемещениях и,- и Ф/ с использованием
нелинейных уравнений (1.84) — (1.88). В декартовых осях
уравнения (1.84) и (1.85) принимают вид
dCU°>
de
+Р,0+ДР/» = 0;
dM^(o)
ds
fALQ,(°> + TJrt,4-ATJf(°) = 0I
(1.126)
(1.127)
где
(Uly\XQxm ~ (L° AXQ*(0) = AlQ,<°>; Al
0 /° /°
/° 0 i°
fi /° 0
Входящие в матрицу AL элементы /,-/° есть элементы матрицы
L0 (матрицы преобразования базиса {iy} к базису {е,0}, связанному
с естественным состоянием стержня).
46
При малых углах поворота связанных осей можно считать,
что M(°> = L0Mx<°>, поэтому уравнение (1.86) принимает вид
JVU(°)=(L°)TAAx(°>. (1.128)
Уравнение (1.87) в декартовых осях можно представить в
виде (так как M=L0MJC)
i*i!L . AXW°> — А^М^^О (At1' -A-XL°). (1.129)
de
Окончательно получаем следующую систему векторных
уравнений, связанных с базисом {i/}:
ds
dMv(O)
de
+Р,0+ЛР/>> = 0;
-|-AX-&(G) — At1>Mx(°)=0;
duy(°)
(1)
de
f.Ai1)dt°) = 0,
(1.130)
(1.131)
(1.132)
(1.133)
где
Al!> =
~$ /S. —I?
'-31 *21
0 /° /°
u 132 — *22
0/° /°
В проекциях на декартовы оси получаем следующую систему
уравнений:
dQ<°>
<>
de
dQi°?
f-P^o + AP^-0;
(1.134)
■+РХЛ + ДР*а = 0;
^!_4- *° Q(0) - /° Q(0) + ^,о + ДУ*. = 0;
1% 1/0/)(°) /0 л№> 1 Т Л- ЛТ — О
*з _L /0 П<°> /° П<°> XT l. ЛТ — O
(1.135)
47
3 о
^_*,А<°> + *,Л<°'- V ±- м% = 0;
de iU Ап
d9a<°)
11
3 ,o
de
dfts(°)
*.A<°> - *A<0) - 2 ^Г Ж*? = 0; (I Л36)
/=1
3 -0
de
/=1
de
-*2
-f-&^(0)"&^(0) = 0; (1.137)
de
de
Определение приращений внешней нагрузки. Рассмотрим
более подробно возможные выражения для приращений векторов
внешних сил (Aq, ДР('>, Дц и AT(V>), входящих в Др(°> и ДТ<°).
При малых перемещениях щ осевой линии стержня и малых
углах Ф/ поворота связанных осей можно считать, что внешние
нагрузки изменяются мало, т. е. их можно представить в виде,
как это и было сделано в данном параграфе, р(1')=р0(«)_|_др(»><о).
ТМ=Т0м+ДТМ<°>; q=qo+A^°>; jm=u,o+Aji<0>, где Р0«>, V*», q0,
ц0— векторы, компоненты которых известны; ДР(1)(°\ At(v>(°>, Aq(0),
Дц(0) — приращения векторов, компоненты которых можно
рассматривать как малые величины. В общем случае компоненты
векторов ДРо(1)(0), AT0(V)(0), Aq(0) и A|ti(0) зависят от известных
компонент соответствующих векторов Ро(,), T0(v), qo и ц0 и от
компонент векторов и и Ф [см. (1.55) и (1.56)].
Рассмотрим случай, когда нагрузки являются «мертвыми»,
т. е. их компоненты в декартовых осях остаются неизменными.
Тогда в связанных осях {е/0}, например, вектор P0(!") = L°P.,;(/), где
L0 — матрица перехода от базиса {i;} к базису {е/0}; Рж(!) —
вектор, компоненты которого равны Р{х)]. При переходе к базису
{е/}, связанному с деформированным состоянием стержня, имеем
PC*-> = LL°P*<'>, (1.138)
где L — матрица перехода от базиса {е,о} к базису {е,}. При
малых углах Фу- матрицы L = E+ALi, где
ДЬ,=
" 0
—&,
_ *.
»,
0
-&,
-&,
а,
0
(1.139)
48
или
В результате соотношение (1.138) принимает вид
PC") = Р0('"> + ДРС") = Р0<£> + В/'Ю,
где
В^ -
30
20
р(0
*30
о -РЦ>
р(0 n(0
^20 *~Ч0
о
(1.140)
(1.141)
(1.142)
Аналогичные выражения можно получить и для векторов q,
|ш и ТМ:
qWq0 + Aq; ц = ц0 + Дщ Т<'> = Tj'> + ДТЧ
Здесь
Aq^C^A; Д|а = 0')«; ДТ(0 = В^Ъ,
(1.143)
где
0^) =
0
<?50
—<?2 0
—<7»о 4
0 -
Ям
В?-
20
"Яго
0
!
~ 0
71(v)
1 30
— 7
20
с<а> =
" 0
t*io
~Ho
0
_ ^20 ^10
•p(v) г
—1 30 J
0 -
T(v)
20
_i 10
о
•
^20
—»10
,-4
v.'
(1.144)
(1.145)
Например, проекции вектора q на связанные оси
<71=<7ю+<72о#з—?зо#2;
^2=^20+^30^1-^10^3:
^3 = ^30+^10^2-^20^1-
В уравнениях равновесия нулевого приближения (1.112),
(1.113) приращения векторов Aq(°>, ДР<1'Х°), Дц(°>, T<v»°),
входящих в ДР<°) и ДТ(0>, зависят от Ф(0>, т. е.
Дч(0)=С{1)^{0); Др(«(°)==В,-<1)#<°);
Д|г<°>=С<3>#<°>; ДТ^)<°> = В,«)#С°).
(1.146)
Аналогичные выражения для приращений можно получить,
если нагрузка зависит от вектора перемещений и.
Возможно и более сложное поведение внешней нагрузки,
когда векторы сил следят за некоторой точкой (см. рис. 1.16). Этот
случай поведения внешней нагрузки был рассмотрен в § 1.2.
Полученное из системы уравнений нулевого приближения решение
4—6011
49
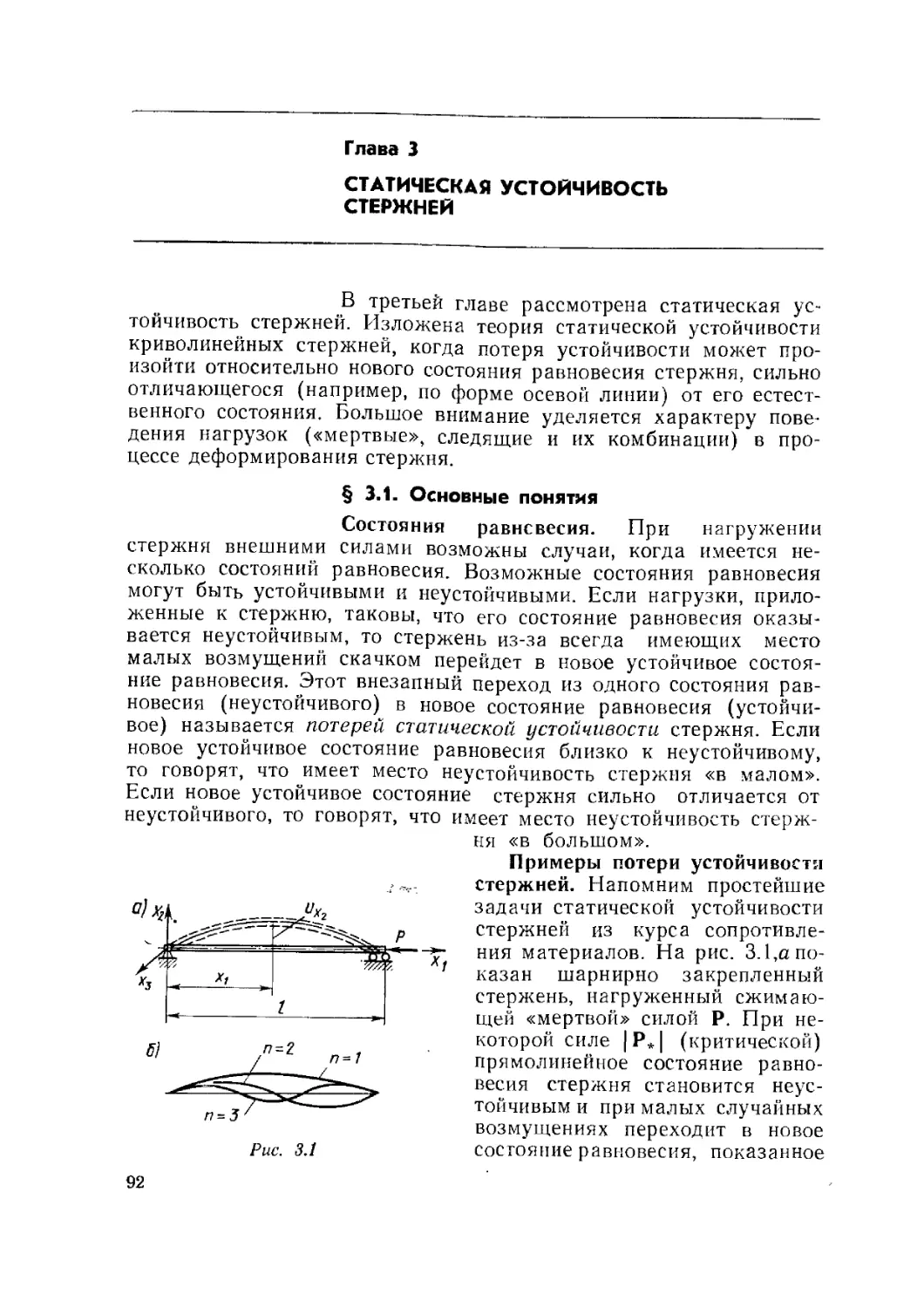
^Q(«)j м<°>, d<°>, Дх(0), u<°>) можно уточнить; положим Q =
^QW-f-QO); M = M(°>+M<i>; U = U(0)_|_U(D; 0=0.(0)+ #(1); Л\Ч> =
= АДи(1), где векторы с индексом 1 назовем векторами первого
приближения. Компоненты векторов Q(1) и М(1) в отличие от
компонент векторов Q(0) и М(0) можно считать малыми
величинами.
Уравнения равновесия первого приближения в связанной
системе координат. Рассмотрим уравнение (1.94), в котором
положим Q=Q(0)+Q(D; х = и0+Ди(0)+Ди(1); Р = Р0+ДР(°>-}-ДР<п.
-Уравнение (1-94) есть некоторый вектор Ь, равный нулю:
b = ^ + xXQ + P = 0. (1.147)
de
При любых изменениях входящих в уравнение (1.147) векторов
юно должно быть тождественно равно нулю, поэтому, если
векторы получили малые приращения, из (1.147) получим
(ограничившись линейной частью)
Ь=Ьо4-ЛЬ=0,
.или
Ьо-0; (1.148)
ДЬ=0. (1.149)
Проделав соответствующие преобразования, получим из
ч{1.148) и (1.149) два уравнения:
b0=^ + xoXQ(0> + Po + AP,0, = 0; (1.150)
de
дь = ^!L_j_k0(°>XQ(1> -ЬДи(1>Х<*,0) + ди(0)ХО(0,+Др(1) = °.
de
(1.151)
,тде и0(°>=:и04- Aki°K \
В уравнении (1.151) неизвестными являются Q(1) и Ди(1);
векторы Q(0) и Дх(0) находятся из уравнений нулевого приближения.
Поступая аналогичным образом с остальными уравнениями
.системы (1.95) — (1.98), получим две системы уравнений нулевого
и первого приближения.
1. Система уравнений нулевого приближения [совпадающая с
системой (1.130)-(1.133)]
dQ;°)
de
dM(°)
-Ь"oXQ( »+Ро + ДР,а)=0; (1.152)
de
dft(°)
f-«0XM<0) +e2XQ(0j + T0 + ДТ(°) = 0; (1.153)
f-xoX'0(O) — A-1M<°) = 0 (Ди<°) = A-W)); (1.154)
^-+и0Хи<°> + A,# °> = 0. (1.155)
SO
Например, для «мертвых» сил приращения векторов,
входящих в ДР(°> и ДТ(°) (ограничимся случаем, когда приращения
зависят только от вектора #), определяются так:
ДЧ(°> = О1^'0); ДР<1> <°> = В^ЬЕМ^З(е — 8/);
(1.156)
Дц(°) =Oi)<K°);i_AT(v) (0) = В<3)#<°>8(е —ev),
поэтому имеем
п
ДР<°>= 0^0(^+2 ВЛ'т°^(е~~51);
/=1
(1.157)
ДТ(°) = 03)^°)4-2 ВР^^в — ев)
(для следящих нагрузок Дя(°>=ДРш<0>=Дц<0>=ДТМ(°>=0).
2. Система уравнений первого приближения
л
^^-т-Ио(0)ХО(1) + Ди(1)ХФ10) = - Aq(1) — Ax(°>XQ(0) — У]др('>(1>8{.;
(=1
(1.158)
—-fx/iXMl1) + Ди(1)Х^°) + A^1» = — Дц<*> —
P
-Ди(°)ХМ(°) — У] ДТЫ (1)6V; (1.159)
^^-+k0(°)X'Oi(1)-~A-1M(1) =0 (Ди*1) = A-W»); (1.160)
de
^i^+x^Xu'1) + A-^1) = 0.' (1.161)
de
Например, для «мертвых» сил приращения векторов,
входящих в ДР(1) и AT1*, равны
Aqt1' =Afl#<1'; ДР<£)(1) = А}/,#(г)8(е — е£);
Дц^^А^1); AT(vK1) = Aj-v)e(1)8(s —ss), (1.162)
поэтому
п
др(1) = О1)^1) + 2 В,*1 W'Jfi (е — s,.);
i=i
4* 51
ДТ*1»--= 0^)^) +2 ВРЧК^е —ev) (1.163)
v=l
<для следящих сил Aq^^A^^AP^^AT^^O).
Уравнения первого приближения можно представить в
следующей форме записи:
dQ(i)
-f-Ai^Qt1» + A^AyJ1) -f- ОНИ1' = — Ди<°>ХО(0)
-ГВ^'ЧЗ^-е,); (1.164)
de
P
-.yjBi^MSfe—ev); (1.165)
^^+Af)#(i)_A-IM(1)=-0 (Дх^1) = A-W1)); (1.166)
dE
(1.167)
где
A.
(0)
x
0
^30
v(0) V(0)
0
"«20 «10
y^Q —
0 Q3(0) —Q2(0)l
v(0)
0
■ Д(0) —
№
W^. + Ax/»));
Г 0 M3<°> — M2(°)
M2i°) —Mt<4 0
В проекциях на связанные оси получаем систему уравнений
первого приближения следующего вида:
п
/=i
52
de
+ k (qirpw - «7, ДО) = QViWi-Q^totW -
n
-^ k (P&4(1) - pg, V>)s (*- ei);
(1.168)
;=i
de
+ ft ^,o*8(I) — *чЛ(,>) = М8<0)Ди,(0) — Ms<°>Ax2<°> —
-J] Л (7&V> - 7¾^1)) S (в - 8¥);
v=l
<Ш.<1)
A/t(14SJ - Mg(1>x!o) + M^&xW ~ Mw&tif)
-J] * (7¾ V» - 7¾V>)5 (s - sv);
(1.169)
dAf.(i)
de
-M/biff — М^Ъей1 + М^Дх/1» — M/0^*1* +
_2] Л (^oV> - ^ioV») § (* - ^);
v=rl
dft-(i)
de
bV1^—^1^ ^-M1«1> = 0; (1.171)
»22
de Л33
53
as
^+И1(^_и^)хй)_^> = 0; (1.172)
da3<1} , ,.(1)-,(1) „1 „О) , ad) n
_J_W2 Xjo — W(l)«20 + W2 — U.
В уравнениях (1.168) и (1.169) введен множитель k,
который, если силы следящие, следует положить равным нулю. Для
неследящих сил, например «мертвых», множитель k следует
положить равным единице. В тензорной форме записи имеем:
de +e/fepVxft0Vp +Vft ДИр +¾^ )=eJklQk Ди* —
i=l
dMY-(i
i=l
/Л| A t ^ fern kO m y n
£=1
de /A' feo t 2* 3 ' 3» 2
Аналогичным методом можно получить систему уравнений
равновесия для второго приближения и т. д. Приведем
уравнения для /г-го приближения:
^^+Ai"-,)Q(rt) +AJr!)Ax(,I)+ C(1)*(n) =
de
n
= ~Ди(п-1)Х<И,ь,)_ V^ B/W1^-; (1.173)
-fA?-1^ +аХГ1,Дк(А) + A.Q^-f (W» =
p
- - Ax"-,,XM,"-,,-\] Bi3)0(B,8v; (1.174)
dM(")
ds
v = l
54
d#(ft)
ds
Mt") = AAx(n>;
+A(n-i)^(")_A-iM(rl)==0;
du(ft)
de
(i»-l> (n)
(«)
Н-АГ^ЧМ1 =o,
(1.175)
(1.176)
(1.177)
а-де
n— 1
Q("~») = V Q(i')
/=0
«—1
n-1
д («-D _
/=0 /=0
n—1
ди^-1) = 2 A*(/);
/=1
-x,^1) и'"""1) 0
(х/^^х^ + Дх^-1»);
K~l)=
Ai?-j =
0
-Q3(n-1J
Q^1)
0
^M^"1)
M2i"-M
Q,^1»
0
—Qi(n-1>
M^"-1)
0
—M/""1)
-Q,*»-1)
Q^-1)
о
-Jw^-1)'
Mi(n-i)
0
/ n~l \
[шп~1)= 2<?*(/) ;
V /=0 /
/ Л-1 \
1^^) = 2 Mk0)\
V /=0 /
Методы численного решения уравнений нулевого и
последующих приближений изложены в гл. 2. Во многих прикладных
задачах, а также в учебных курсах, как правило, ограничиваются
исследованием системы уравнений (1.107) — (1.111),
соответствующей нулевому приближению без оценки справедливости
принятого допущения о малости перемещений осевой линии стержня
и углов поворота связанных осей и малости компонент векторов
qw и j\\(i>. Система уравнений (1.158) — (1.161) [или в
координатной форме записи (1.168) — (1.172)] позволяет оценить
погрешность решения в зависимости от принятой точности, если
ограничиться только уравнениями нулевого приближения.
Например, если определены компоненты векторов Q/(1), М,-<1), w/(1), Ф^1*
и Дх^1), то -можно определить максимальные (по модулю) на
интервале интегрирования О^е^е^ отклонения
max So =max
J
Q;(0) + 0/(41
; max 5Дх. =
maxSAf =
Дху{«» + Дху(1)
ДхуС0)
М{(0) +M}W
M;i°)
55
и установить максимальную относительную погрешность, которая
получается, если ограничиться только уравнениями нулевого
приближения:
max AQ. = (max S0.— 1) 100°/0; max AM — (maxЬм.— \) 100%;
тахДд*. = (тах5Дх.— I) 100%.
Если выполняются условия
maxAg <Д; max Ам.< А;...; тахАДу.<Д (/=1, 2, 3), (1.178)
где А— допустимая в данных расчетах погрешность, то
решением уравнений нулевого приближения можно ограничиться. Если
хотя бы одно из неравенств (1.178) нарушается, то решение
уравнений нулевого приближения не удовлетворяет необходимой
точности и следует брать решение, равное сумме решений уравнений
нулевого и первого приближения, т. е. Qi = Q,{0) \-Qj0>y Af;-=M/(0,-j-
+Af/<1); ..., но при этом возникает тот же вопрос об оценке
точности суммарного решения. Чтобы оценить точность суммарного
решения, следует рассмотреть уравнения второго приближения»
которые можно получить аналогично уравнениям первого
приближения. В результате получим выражения для неизвестных Q,=
= Q/(0) + Q/l,) + Q/(2); M^MfM + MjM+MjM, ... и соответствующие
им значения maxAQ., max Am., ... .Далее проверяем выполнение
неравенств
maxAQ.<A; тахАм <Д;.... (1.179)
Если неравенства (1.175) выполняются, то можно считать, что
суммарное решение (Q/=Q/(0)+Q/(1)+ ...) удовлетворяет
требуемой точности решения.
Уравнения равновесия первого приближения в декартовой
системе координат. Уравнения равновесия нулевого приближения
в декартовых осях — см. уравнения (1.130) — (1.133). Если
нагрузка «мертвая», то компоненты векторов q^o, Рхо , М^о и Tio\
входящих в Р-со и Тх0, в декартовой системе координат остаются
постоянными при любых перемещениях точек осевой линии
стержня, поэтому приращения этих векторов (Aqx(°), АРЖ<*)(0),
Ajnx(0) и ATx(vH0)) равны нулю, что приводит к более простым
уравнениям первого приближения. При выводе уравнений
равновесия первого приближения необходимо знать приращения
элементов матрицы L(1) в зависимости от углов #^=^^)-1-^(1).
Напомним, что элементы матрицы L(1> устанавливают связь между
базисами {е/} и {{,}. Матрица преобразования L(1) может быть
представлена в виде
L(1)=LL(°)=ALL(°>, (1.180)
56
"~ fO
или И1) =- [l\)]] =
112 + 8-3/22 ~ ^2½
/22 + 84/32 ~ ^342
'32 + &2Ч2 •— 0^ 1 '22
{1.181)
Из (1.181) следует, что матрицу U1) можно представить в
следующей форме записи:
TjD^LW+ALO, (1.182)
'll + 0-3^21 — &2'з1
/з1 + О^/ц — Э4/21
1\ з + О'з^гз — ^Ызз
4з+ ^ 1^33 — &3/13
/33 + 8^13— 0-1/23
(!)l
где ди1> = [ДЩ'] =
■9-,/21 — 8-,/31 8-,/22 — 84/32 8-,/23 ■— 9-Е/з;
2*32
_(Mll 0^21 8-2/l2 8^/22 ^13 ^1^3,
В уравнение (1.85) входит матрица L(1)T=L°T+AL(1>, которую
можно получить транспонированием соотношения (1.182).
Если рассматриваются нулевое и первое приближения, то
^=0/(^+0/^, поэтому матрицу AL(1) можно представить в виде
ДЬ<Х> = ДЬ/) + ДЬ/1» (ДЬ(')Т = ДЬ0(])Т+ AL/H,
где матрицы AL0(1) и ALi(1) зависят от углов Ф/0) и О/1*
соответственно.
Из уравнения (1.84) получаем уравнение первого
приближения:
ds
-+ЛР/> = 0.
(1.183)
Из уравнения (1.85) при подстановке в него выражений МЛ. = МЛ.°-Т-
+ МХ^); QX = QX(0> + QX<1}; L<1> = L(°) + AL0(1) + ALi<1) и
соответствующих преобразований получаем уравнение первого
приближения:
*M-}+(Ai + Aze) Q/> + Alq№ + AT<v) (,) = -(ALWJXQx™,
Qe
где (1.184)
/°Q<0)-/°Q(0) " "'" "
Alq =
A« =
0
0
_0
0
33 *2
1° Q{0)
31^*8
32 X»
/°Q<0)
/°Q
(0)
0 n(0) -1
22 "■*:, 23^*
/°Q(0J-/°Q
21^*2 22^* i J
/° Qx0)
l(0J
/°Q(0)-/°Q(0)
<, (ОЪО о (0),0 о (0)/0 Я(0)Л
V2 '33 »3 t23 W3 ^22 ^2 432
V3 »23 — ^2 ^33 U
0,(0)/0 o<0)/0
»2 *3l 0-3 £21
57
Из уравнений (1.86) — (1.88) получаем уравнения первого
приближения:
MJI) = L0TAAx(1);
(1.185>
dft(i)
de
—А^1) - A-1 (L° + Lo{1>) М^^ — A-'Alai»11» = А^Д^^М/*);
de
(1.18б>
(1.187>
где
А/м =
о 2 ?*м™ -S У&1
7=1
з
/=1
-2 4^7 2 й^/ °
-2 4лй°» о s й/м?;
/ 1
/=1
Если нагрузка «мертвая», то ДР^0)=АРЙ(1>=ДТЛ:(0)=ДТ<,>=0.
Если внешняя нагрузка q, P(I), |li, T<v> следящая и известна в
связанной системе координат, то в декартовой системе координат
эти векторы (или часть из них) могут быть представлены в виде
(ограничимся записью только для вектора q)
f=i
/=i
/=i \i=i
3
/=i /=i
/=i
3
где
где
A^ =
^.o = S ^'A; A^- = 2 ^^ или
1 i=l ' £=1
q = (L0)Tq0+AL,ju (0 = fM°>+ 0(1)).
<7а</з1—^3o^21 <73</ll —<7«$1 Qihl —ЯгА\
Яг с/з2 — Яъ ^22 ЯзА 2 — Ях & Ях о^22 — Я 2 J12
_ <?2</зз — Яг о^23 <73 оМЗ — Яг </зз 4^ 0^23 — <72</l3
(1.188)
(1.189)
58
Аналогичные выражения можно получить и для приращений
остальных векторов (ДР('>, Afi и AT(V>), т. е.
ДР(;)==АЙ,(«(0) + *(1));
Aja = ALiX (fl(°) + «к*)); дт('") = Aff (#<0) + #(,)), (!-19°)
где матрицы Alp, ALv. и А£г аналогичны матрице Aig (1.189).
В результате получаем следующие выражения для
приращений сил АРх(0), ДР*(1) и моментов ДТУ°>, ДТУ1^ входящих в
уравнения (1.130), (1.131), (1.183), (1.184):
п р
дрх<°> = Aiq*(°) + 2 А$#(0); дт*(0) = AL^(°) + 2 Atf #<0);
i=l
v = l
др^> = A^t1» + 2 А$ #(1); АТ*(1) = Ai^(1) + 2 Afr'*0
i=l
v = l
(1.191)
Напомним, что для сокращения слагаемых, входящих в
уравнения равновесия, рассматривались только приращения
нагрузок, зависящие от вектора #. В более общем случае приращения
нагрузок могут зависеть и от вектора и; в § 1.2 были получены
эти соотношения (1.55) и (1.56). Поэтому в том случае, когда
приращения нагрузок зависят и от # и от и, правые части
соотношений (1.156), (1.157), (1.162), (1.163), (1.191) будут
содержать аналогичные по форме записи слагаемые, зависящие от
векторов и(0) и и(1>.
Задачи для самостоятельного решения
# 1.1. Из общих уравнений равновесия в проекциях на
связанные оси (1.64) — (1.66) получить уравнения равновесия стержня, осевая
линия которого до и после нагружения остается плоской кривой (рис. 1.19).
Прежде чем перейти к выводу уравнений равновесия, следует выяснить условия,
при выполнении которых равновесие возможно (т. е. выяснить необходимые и
достаточные условия того, что при нагружении стержня перемещения точек
осевой линии стержня будут лежать в плоскости чертежа).
Рис. 1.19
Рис. 1.20
59
ф 1.2. Получить уравнения равновесия в связанной системе координат для
кругового (плоского) консольного стержня, нагруженного сосредоточенной
«мертвой» силой Р<и и следящей распределенной нагрузкой q (рис. 1.20). Силы PfllHCj
лежат в плоскости чертежа; сечение стержня круглое, т. е. осевая линия стержня
при нагружении будет плоской кривой. Перемещения точек осевой линии стержня
можно считать малыми (ограничиться уравнениями нулевого приближения).
ф 1.3. Получить уравнения равновесия для кругового консольного стержня
(рис. 1.21), находящегося на ускоренно движущемся объекте (считая
перемещения точек осевой линии стержня малыми), для случая, когда вектор ускорения
объекта а параллелен плоскости ххОх2 (ограничиться уравнениями нулевого
приближения). На стержне имеется сосредоточенная масса т, которую можно
считать точечной. Масса единицы длины стержня равна т0. В естественном
состоянии осевая линия стержня есть плоская кривая, лежащая в плоскости чертежа
(в плоскости х1Ох2).
ф 1.4. Получить выражения для распределенных сил, действующих на
стержень, в связанной системе координат при больших перемещениях точек осевой
линии стержня. Стержень круглого сечения, прямолинейный в естественном
состоянии (рис. 1.22), находится на вращающемся с угловой скоростью го
объекте. Ось вращения объекта перпендикулярна плоскости чертежа и проходит
через точку О.
ф 1.5. Получить выражения для проекций следящей силы (рис. 1.23) в
неподвижных и связанных осях.
ф 1.6. Определить напряженное состояние кольца круглого сечения,
нагруженного распределенным крутящим моментом jii (рис. 1.24), постоянным по
модулю.
ф 1.7. Определить зависимость угла поворота сечений кольца (рис. 1.24)
произвольного сечения (А32ФА22) в зависимости от и,,.
Рис. 1.23 Рис. 1.24
60
Глава 2
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ
РАВНОВЕСИЯ СТЕРЖНЯ
Во второй главе изложены методы
численного решения уравнений равновесия (нелинейных и линейных).
Для решения нелинейных уравнений равновесия рассматривается
приближенный метод последовательного нагружения, когда на
каждом шаге нагружения решаются линейные уравнения.
Основная сложность при решении уравнений заключается в
том, что задачи статики стержней относятся к двухточечным
краевым задачам, когда решение должно удовлетворять
определенным условиям в начале и в конце интервала
интегрирования, в отличие от одноточечных краевых задач — задач Кошиг
когда все условия, которым должно удовлетворять решение,
известны в начале интервала интегрирования. Поэтому хорошо
разработанные методы решения систем дифференциальных линейных
(и нелинейных) уравнений для одноточечных задач использовать
для решения двухточечных задач в общем случае нельзя. В
настоящее время имеется ряд методов численного решения
линейных двухточечных задач (имея в виду стержни), которые
получили распространение в расчетной практике: метод начальных
параметров, метод прогонки [2], метод конечных элементов [15].
Точное аналитическое решение линейных уравнений равновесия
стержня, например (1.112) — (1.115), возможно только для
случая, когда элементы матрицы Аи — постоянные числа [этот
случай будет рассмотрен в § 5.2, где изложены теория и методы
расчета винтовых стержней (цилиндрических пружин)]. Для
уравнений с 'переменными коэффициентами возможны только
численные или приближенные методы решения.
§ 2.1. Интегрирование линейных
уравнений равновесия
Интегрирование уравнений равновесия
нулевого приближения. В § 1.4 были получены общие уравнения
равновесия стержня нулевого приближения в связанной [уравнения
(1.112)-(1.115)] и в декартовой [уравнения (1.130)-(1.133)]
системах координат, справедливые для любых внешних
нагрузок. Рассмотрим решение уравнений равновесия для различных
случаев поведения внешней нагрузки.
Следящие силы. При следящих нагрузках наиболее
простыми для программирования являются уравнения в связан-
61
ных осях (1.112)-(1.115)
dQ(0)
ds
d#(°>
+ AXQ<°>=-P0;
+AJW<°> + ^(^) = -T0;
ds
du(°)
_^Ax#v°) — A-1M<°) = 0;
■f-A.ufJ + A^0» =0.
(2.1)
(2.2)
(2.3)
(2.4)
Представим систему (2.1) — (2.4) в виде векторного уравнения:
где
Y<°) =
Q(°)
ц(°)
yW-l-A^Y^^fW,
А, 0 О
А.,
О
О
О
А,
f(°) =
(2.5)
— Т
О
О
А(о)== А, А., О
О —А-1 Ах
О О А,
В общем случае элементы матрицы А<°> зависят от е, поэтому
решить уравнение (2.5) можно только численным методом.
Решение линейного векторного неоднородного уравнения имеет вид
Y<°>=K(e)C+Y,<«4(e), (2.6)
где К(е)—фундаментальная матрица решений однородного
уравнения; С — вектор начальных данных; Y^0) — частное решение
неоднородного уравнения. Компоненты вектора начальных
данных С определяются из краевых условий на концах стержня (при
£=0 и при 8=1).
Рассмотрим алгоритм численного определения матрицы К(е)
и частного решения \^°\ Матрица К(е) может быть получена
из решения однородного уравнения
Y'(0)_j-A<0>Y(o> = 0, (2.7)
которое решается 12 раз при следующих начальных условиях:
0
0
1)
1
0
*
б
; 2)
0
1
0
0
; 3)
0
0
1
0
0
12)
(2.8)
Каждое частное решение, соответствующее
чальным условиям, дает столбец матрицы К(е)
зультате принятого метода ее определения удовлетворяет уело
вию К(0)=Е.
указанным на-
которая в ре-
62
Частное решение уравнения (2.7) можно получить двумя
способами: численным решением уравнения (2.8) при нулевых
начальных данных и с использованием матрицы Грина.
Остановимся более подробно на втором способе получения частного-
решения линейных дифференциальных уравнений. Частное
решение уравнения (2.5), если воспользоваться методом вариаций
произвольных постоянных, можно представить в виде
Y/» (е) = f К(е)К~х (/г) ft0» (/г) dh,
(2.9>
где К-1 {h)—матрица, обратная фундаментальной матрице К (ft);
входящая под знак интеграла в правой части выражения матрица
G(e, Л)=К(е)К_1(^) называется матрицей Грина. В более
подробной записи частное решение имеет вид
^)(8) = -J К (OK-1 (А)
Яо(А)
0
0
dh—'jK(e)K-*(A)X
о
X
2Р«
(£)8<;>
р
WsN
2 То 8
v=l
о
о
d/z = — Ф„ — Ф.
(2.10>
Рассмотрим слагаемое, содержащее 6-функции. В
соответствии со свойствами б-функций (см. Приложение 4) получаем
вектор Ф:
Ф = ]К(е)К-1(А)Х
£ Рв(')5(А_е£)
X
1=\
S T(v)8(ft —е„)
. о
о
dft
аКИК^ЫРо^НСе-в!)
i=i
р
2K(e)K^(ev)Tjv)H(£-ev)
v=l
о
о
-(2.11)
63
Вектор Ф равен сумме векторов Ф(1) и Ф(г,>, зависящих от Р0(/)
и Т0Ы, т. е.
Ф(е) = 2 ф|')(е)Н(е-в/) + £ ФЫ (*)Н(е - ev), (2.12)
( = 1 v = l
которые изменяются в зависимости от е следующим образом:
Л,п, ч /° при е<е'";
{) 1К(е)К-,(н1-)Ро<1> при в>«£;
при e<ev;
Д(е)К^ЫТо¥) при 8>ev.
Частное решение, зависящее от q0 и цо, проще получить
решая неоднородное уравнение при нулевых начальных данных:
-Чо
ФЫИ-Г0
Y4-BY<°)=fn<°>
f/> =
В результате получаем
п
Y1(°)(e) = — Ф0— 2 Ф<1'>
О
о
■S фЫ>
(2.13)
(2.14)
I =1 v=l
где Ф0 — частное решение уравнения (2.13). Следует
подчеркнуть, что для определения частного решения, зависящего от 6-
функции, требуется только знать обратную матрицу К_1(^) Для
дискретных точек, что легко получить параллельно с
определением фундаментальной матрицы К(е).
Для определения компонент вектора С получаем два
соотношения:
Y(0)(0) = C; (2.15)
YW(1) = K(1)C+Y1(°)(1). (2.16)
Для стержня, в общем случае, имеется 12 краевых условий —
по шесть на каждом из .концов стержня, поэтому для каждого
конца стержня получаем шесть уравнений. Рассмотрим в
качестве примера случай жесткого закрепления концов стержня.
В этом случае должны выполняться следующие однородные
краевые условия: 1) е = 0; и<°>(0) =#<°>(0) =0; 2) в=1; и<°>(1) =
=^(0)(1)=0.
Из уравнения (2.15) получаем
Y<°> (0) =
Q<°)(0)
Mt°)(0)
0
0
Ci
с*
с 12
Ч2Л7)
€4
Из (2.17) следует, что с7=с$— ... =Ci2=0. Оставшиеся шесть
неизвестных находятся из системы шести неоднородных
алгебраических уравнений, получаемых из уравнения (2.16):
Kfi + К..с* + k^f, + Kfi% + ^,£, + klmtca + У(Д - 0; (2.18)
где kif — элементы матрицы К(1); У\л — компоненты вектора
Yi<°>(lj. Определив из системы (2.18) с/, получаем решение
системы уравнений равновесия стержня нулевого приближения в
форме (2.6). Изложенный метод численного интегрирования
линейных уравнений (двухточечных задач) справедлив для любых
краевых условий.
«М е р т в ы е» силы. При нагружении стержня «мертвыми»
силами наиболее удобными для численного решения являются
уравнения равновесия в декартовых осях, в которых проекции
сил при любых перемещениях стержня остаются постоянными.
Уравнения равновесия стержня нулевого приближения в
декартовых осях [уравнения (1.130) — (1.133)] для «мертвых» сил
принимают следующий вид:
de
de
dft<°>
0;
de
fAiQ/^ + T^-O;
. A*u<°> — A^M «°> = 0:
de
(2.19)
(2.20)
(2.21)
(2.22)
Систему уравнений (2.19) — (2.22) можно представить в виде
одного векторного уравнения, как это было сделано для
уравнений (2.1)-(2.4):
¥^>+А,С>Ух<»> = !,<•>,
(2.23)
где
(0) —
х —
QXP)
U.r(0)
• А <°> =
г °
А,
0
0
0
0
—А"1
0
0 0 1
0 0
Ах 0
AL 0
; !,*>> =
—р
„1
0
0
хо
■ хо
Алгоритм решения уравнения (2.23) полностью совпадает с
алгоритмом решения уравнения (2.5).
Систему уравнений (2.19)-(2.22) можно решать и несколько
иначе, учитывая, что уравнение (2.19) не зависит от остальных
5—6011
65
уравнений. Интегрируя уравнение (2.19), получим
8
^(0, = -J'P,„d/z+CQ, (2.24)
о
ной ^-вект°Р' Равный вектору Qx(«) при е =0. В более
подробной записи имеем к
Q,<°> (в) = _ j q^d/г - J К>Н (в - в,) + CQ>
О г = 1
ИЛИ
0^)(8) = 0^(^ + (¾. (2.25)
Из уравнения (2.20) находим Мл<°>;
M^°)(e) = JAL[f, +£РЙ)Я(А-в/) + C<,]dA + C„,
о
или
М,( °> (*) = Mg) (в) + Cqs + См. (2.26)
Из уравнения (2.2) определяем ф(°>:
^°)(в) = К(&)(в)С& + jG("(e, Л)А-1МЖ(«»КА)(1А,
или
где
или
где
#<°> (е) = К(В) (в) С, + D& + D2CM + blf (2.27)
D1== JG(e, A)A-'AdA; D2 = fG(8, А)А~МА;
о о
8
b^jGfe, AjA-MMJ^AjdA.
о
Определив #(°> из уравнения (2.22), находим и/°>:
и,<°> (е) = К<и> (в) Сн + j G(«) (s, A) AL (A) #(°) (A) dA,
о
ихт (в) = К<"> (*) С, + D,C» + D4CQ + D,CM + b2, (2.28)
D3 = | GA.K^dA; D4 = J GA^dA;
66
Ds = j GkLD2dh; b2 = GAtt^dA.
о 0
Входящие в уравнения (2.25)-(2.28) произвольные векторы
Cq, См, Са и Си определяются из краевых условий.
Произвольные силы. Рассмотрим уравнения нулевого
приближения при произвольных силах, приращения которых
линейно зависят от векторов обобщенных перемещений
[соотношения (1.99)]. Ограничимся уравнениями в связанных осях
[уравнения (1.112)-(1.115)]
iS!!i i A^QC) + р^+дрс) = 0; (2.29)
de
dM(0) + АХМ<°) + A&w + J<°> + АТ<0' = 0; (2.30)
f Ax#<°> — A-XM(°) = 0; (2.31)
^- + A u<°> + A^t0) = 0. (2.32)
de *
Для упрощения записи уравнений рассмотрим случай нагруже-
ния стержня кроме распределенных нагрузок q и ц одной
сосредоточенной силой Р и одним сосредоточенным моментом Т. Тогда
приращения АР(0> и ДТ<°> для общего случая равны [см. (1.99)]
+ (B(1W0)+B(2)u(°)+B(3)u,W)6(e—еР); (2.33)
ДТ(°)=С(4>#<0>+О5>и(0>+О6>и/(°>+
+ (B<4>#<0>+B<5>u<u>+B<6>u'(°>) б (е-ът). (2.34)
Вектор и/(0) из соотношений (2.33) и (2.34) можно исключить,
воспользовавшись уравнением (2.32), что приводит к следующим
выражениям для ДР<0) и ДТ<°>:
ДР(0> = CjV0) + Cf V0) + В^% (е - ер) + В2и(0)8 (в - ej; (2.35)
ДТ<0) = C£3)fl(0) + C(V0) + Bi3)#(0)6 (s - eT) + Bi4)u(0)6 (в - ет), (2.36)
где
CSn = C(1>-C(3)Ai; CS2) = С<2)-С(3)Д
C(3> = C(3) _ C(6) Ai. C(4) = C(4) _ С(6)д
Bj" ^ B(1) - B(3)Ai; B<2> = B(2) - B(3)A:
B(3) = B(3, _ B(6)Ai. B(4, = B(4) __ B(6)A^
5* 67
Систему уравнений (2.29)-(2.36) с учетом выражений для
приращений сил можно записать в виде векторного уравнения
Y/(°)-j-A(0)Y(°)=f(0),
(2.37)
где
А<°> =
ж о <т а*
А, К С^ С<4>
0 —А"1 Ах 0
О О А* А
-_P(C)_(b<V°4b|)2Ju(Vi
_т<°>-(Bi/V^ bJV°H
О
О
Вектор f<°> можно представить в следующем виде:
fioWo+BjWefE—ep)+B2Y<°>6(e—ет-),
f(°) =
(2.38)
где
fo =
В,=
__р(°)
Т<°)
О
о
Решение уравнения (2.37) имеет вид
О 0 в&"
0 0 Bi3)
0 0 0
0 0 0
0
0
0
0
; В2 =
о о о Eh
0 0 0 В(04)
0 0 0 0
0 0 0 0
(2)-
\(°> = К (в) С + J G(e, A)ff0+ ВД<')£(/г- ep) + B2Y(°)S (h - er)]dA,
или
Y»c) = K(e;C+jGfe,/i)dA-f0|G(Mp)B1(£f)Y'°)(8p)H(s-£p) +
где
+ G(e, eT)B,(eT)Yi°)(eT)U(s —*T),
G(e, вР)=К(е)К-1(вр); G(e, er)=K(e)K-!M.
(2.39)
Частное решение, соответствующее вектору f0, можно получить
не используя матрицу Грина G. Для этого достаточно решить
неоднородное уравнение (при нулевых начальных данных) Y'<°>-f- »
68
-f-A(0)Y(U)=f0. Так как матрица К(е) при е=0 является единичной,
то при однородных краевых условиях шесть компонент вектора С
равны нулю. Остальные шесть компонент находятся из краевых
условий при е=1.
Интегрирование уравнений равновесия первого приближения.
Рассмотрим уравнения первого приближения, например уравнения
(1.164) — (1.167) для «мертвых» сил, когда приращения Aq, Ajw,
ДР<1'> и ЛТ(у) не равны нулю. Систему линейных уравнений
(1.164) — (1.167) можно представить в векторной форме:
Y/(i)4-A(1>(e)Y(1>=f(1).
(2.40)
Уравнение (2.40) отличается от уравнения (2.37) тем, что
компоненты вектора f(1> зависят не только от компонент О/0)
вектора Ф(0) нулевого приближения, но и от компонент Ф/1* вектора
Ф(1) первого приближения (неизвестного вектора). Рассмотрим,
например, первую компоненту /i(1) вектора f(1> (в дальнейшем для
упрощения записи ограничимся случаем, когда приращения
векторов нагрузок зависят только от вектора ft):
fi"=(-?..-£ p^ll>) »»0)+(-я»+i ptfwW'-
\(=1
Аналогичный вид имеют и остальные компоненты /г(1), /з(1), • • -
..., f6(1) (компоненты f7(1),..., /i^ равны нулю), поэтому вектор f^
можно записать в виде
п р
и=1
+2 <^"8w'Yll'4-2 Ф^8('Ч°\
(2.41)
i = \
v = l
где Фо(1) — вектор, компоненты которого зависят от компонент
векторов нулевого приближения;
ф£'> =
0 ...
0 ...
0 ...
0 ...
0
рО)
р<0
...
Р$ Р$ о
о p|S} о
-piS} о о
0
0
0
...
0"
0
0
...
69
о
о
о
о
ф^=
0
0 ..
0 ..
0 ..
0
'зо
• —'20
—1 30
0
T(v)
J 10
0
Т$ 0 0 0
—7Й> 0 0 0
0 0 0 0
Общее решение уравнения (2.40) имеет вид
Y(l>=K(e)C+Y1(l>. (2.42)
Метод итераций, позволяющий уточнить матрицу К(е), будет
изложен позже. Частное решение Yi*1) можно представить в виде
[использовав (2.41)]
Yin = Yio1 + 2 К (в) К"1 (в,) Ф1Р1)*0) (в() Н (в - е/) +
«=1
+ 2 К (в) К"1 ОО ФРУ0» (зJ Н(г- ev) +
+2 к и к-1 (в/) фУ }y(U (S/) я (£ - в|) +
г=1
+2 К(в)К-1К)Ф^,^(1)(е)Я(в-^, (2.43)
v=]
где Yl^ определяется из решения уравнения Y'(Ij) + AfI,Y(1)— Фд1*
при нулевых начальных данных.
В более компактной форме записи имеем
Yi1' (в) = YiJ> (в) + 2 Gj/> (s) Y'°> (si} Hl + J G?' («0 Y(0) (в„) Я +
+2 G^(e) Y{1,(e,)//, +2 G^(s)Y(I) (*„)", (2.44)
или
/=1
v=l
itOvf1)
Yiu - via + 2 <#>Yf} (»/)я<- + 2 G'V)Y(1) W Я. (2-4¾
i=i
v=l
где уЩ = Yii> + £ Gj,'>Y«" (.,) Я; + 2 G^Y"» (.,) Я
i-1
v=l
70
Шесть компонент вектора С находим из краевых условий: при
е=0
Y(D(0)=EC (Yi*1) (0)=0). (2.46)
Остальные шесть компонент вектора С находим из системы
уравнений следующего вида:
Y(I)(l)-K'(I)C + Yi1,(l); (2.47)
Yt,4el)=K(e1)C + V>(ei); )
Yl'Ife.l-KfeJC-hV'fg;
[ (2.48)
Y<,>(ep)-K(8p)C4-Y1<,)(e(i) (p=l, ....v).,
Из уравнения (2.47) получаем шесть скалярных уравнений
с неизвестными с,- (/=1, 2,...,6), #/(1)(е£) (/=1, 2, 3; /=1, 2,...,/г),
t37(1>(ev) (./=1, 2, 3; v=l, 2, .. .,р), т. е. число неизвестных N=6+
-h3p4-3n.
Каждое из уравнений системы (2.48) дает три скалярных
уравнения, содержащих неизвестные углы Ф/'^е,-) (t = l, 2, ..., п),
07(|>(е*) (v=l,..., р), т. е. уравнения (2.48) дают 3 (я+р)
скалярных уравнения. В результате из системы (2.47), (2.48) находим
все N неизвестных и получаем общее решение уравнения (2.40),
удовлетворяющее краевым условиям, и дополнительно находим
углы #/(1)(ей) поворота векторов сил и моментов относительно
связанных осей.
Рассмотрим более подробно в качестве примера алгоритм решения, когда
к консольному криволинейному стержню приложены одна сосредоточенная сила
PW (в сечении Е\) и один сосредоточенный момент Т*1* (в сечении ъ%, %>6i)-
Имеем следующие краевые условия: 1) е=0, 11^)=-0(^=0: 2) е=1, 00=1^(^=0,
поэтому в векторе С компоненты Ci, с$, ..., ci2 равны нулю. Общее решение
(2.43) в данном случае
Y(» = KC + YU» (е) +Q») (е) \V\tJ Же-е,) + G»> (е) Y<]> (Ч) Я(е-в2).
Получим уравнения для определения оставшихся компонент си ..., се
вектора С и компонент векторов #(^(^) и 0(1)(8S). При е=1 получаем шесть
уравнений:
в 3
/=1 k=i
з
+ 2 (в^КМсв-н^Ы-о (1 = 1, 2...6),
где (Kjjj)i —компоненты вектора YjJJ; {gp)1,/. (g^b. / —элементы матриц
°Р и G$\
71
При e=ei и е=е2 имеем еще шесть уравнений (для рассматриваемого
частного случая, когда приращения нагрузки зависят только от вектора #):
6
^(=1)=2 kmi(H)cf+(y[lH^))m [т = 7, 8, 9); (2.49)
/=1
б з
^ы =2 кт}Ыч + (У^ыи + 2 Up](^)т. б-40)ы +
3
*=1
где ^!,(ч)=-»1(,,(^); ^!)(ч) = ^(^): П^Ы = ¾1^¾) (' = '. 2).
При получении уравнений (2.49) и (2.50) полагалось Н (0)=0.
Определение фундаментальной матрицы решений К(е)
методом итераций (методом Пикара). Общее решение системы
линейных неоднородных уравнений имеет вид (2.6) Y(e)=K(e)C-f-Yi(e),
где матрица К(е) удовлетворяет однородному уравнению
^ + A(s)K = 0 (К(0) = Е). (2.51)
Интегрируя уравнение (2.51), получаем
К (е) = — J А (А) К (Л) dh + Е. (2.52)
о
Соотношение (2.52) позволяет использовать итерационный
процесс уточнения матрицы К(е) (метод Пикара). Метод получения
матрицы К(е) изложен ранее. Обозначим матрицу К(е) в первом
приближении индексом 1, т. е. К(1)(е)- Подставив К(1)(е) в правую
часть соотношения (2.52), получаем второе приближение матрицы
К(е):
S
К2 (е) = — f A (h) К<х> (h)6h+ Е. (2.53)
о
Для k-ro приближения получаем
Е
К<А) (е) = — f A (h) К<*^> (h) dh + Е. (2.54)
о
Если при k-м приближении элементы матрицы K(ft) удовлетворяют
заданной точности
| *(*> _*<*-! >
ч ч
I *«
100% < А,
ч
то матрицу K(fe)(e) можно считать решением уравнения (2.51)
72
Б данном варианте метода
итераций получается
матрица К (е) сразу для всего
интервала интегрирования
(O^e^l). В силу
особенностей исходной системы
уравнений может оказаться,
что процесс итераций, когда
используется весь интервал
изменения е, плохо
сходится. В этом случае можно
интервал изменения е
разбить на п подынтервалов и
для каждого из этих
подынтервалов получить матрицу К(е). Из (2.54) получаем
К(А'>(£) = — j А(А)К(*1_,) (A)dA + Е,
о
Рис. 2.1
(2.55)
где е, — значение независимой переменной, соответствующей
концу первого интервала.
Для второго интервала
J^a) (~\ „ГА (h\ 1Г<*«-1> (U\ AU I U^i)
(г) = _ J A (AjK(*,-|) (A) dA + K(
(2.56)
Sl
'(*l)
где К*1'—это матрица К(е), которая на интервале 0<e<et
удовлетворяет заданной точности; k\ — число итераций на первом
интервале.
Для m-го участка интегрирования имеем
K<v =
"т
— J
А(А)К(*т !)(А)с1А + К(А'п П.
(2.57)
/71—1
Рассмотрим несколько примеров численного интегрирования уравнений
равновесия. На рис. 2.1 показан криволинейный стержень, осевая линия которого
удовлетворяет уравнению эллипса
[(xl-a)/a]2+(x2/b)3=l. (2.58)
Считается, что в уравнение (2.58) входят безразмерные величины. Стержень
нагружен распределенным крутящим моментом ^ej, распределенной нагрузкой
<?2е2 и сосредоточенной силой Р3е3. Найдем напряженно-деформированное
состояние стержня, ограничившись уравнениями нулевого приближения, которые для
данного примера принимают следующий вид (считая нагрузку следящей):
Q{0) - %40) = 0;
Qf4 *8oQi0,-<7atf(e-о,5)=0;
^ = ^8(=-0,5):
(2.59)
73
if j°> _ *30M f> + ih [//(e) -//(e- 0,5)] = 0;
ii<°> + *30MJ°> - Q<°> = 0; (2.60)
Л1<°> + <#» = 0;
&0) + «so»f0) ~ -~ = 0; (2.61)
Л22
V}-!
4<°> - ^- = 0;
J33
^0) + wi0)-930)=0; (2.62)
В уравнения (2.59) — (2.62) входит кривизна осевой линии стержня Хзо(е),
которую необходимо определить. Для определения >i3o воспользуемся методом,
изложенным в Приложении 5. Дифференцируя (2.58), имеем
х[(хх-~ a)/q2-\-x2x2/bz=0. (2.63)
Так как xj удовлетворяет уравнению
^2 + ^ = 1, (2.64)
то имеем два уравкения^для определения х, и х2. Определяем х2 из (2.63):
^=-М-у,-в)^(А2)- (2.65)
Из уравнения (2.58) находим Хч\
Ха = &|/1 — (х1~а)2/а2- (2,66)
Исключая л:2 из соотношения (2.63), а затем х2 из уравнения (2.64),
получаем после преобразований уравнение для определения л^:
l/ я2—(Xt—а)2
*i~* У a4_(a2_62)(Xi_^)a -0- (2.67,
Из уравнения (2.67) определяем х, (при £ = 0 хх = 0). 31аях,, определяем хг
и х,, а затем х2 из (2.66), х2 из (2.65) и х.г.
Определив вторые производные х;-, находим кривизну и30:
Из0=1/хЧ+х>-
74
На рис. 2.2 показаны графики X\, x2 и хзо в зависимости от дуговой
безразмерной координаты в для безразмерных значений о=0,4, Ь = 0,224.
При решении уравнений числовые значения безразмерных сил принимались
равными: </2=2; P3=l,5; [ii = 2; |J.i = 4. В уравнениях (2.59) и (2.60) при решении
можно перейти к новой независимой переменной еi = 1—е, так как при ei=0
значения Q,<C) и М/<°> известны (они равны нулю). Уравнения (2.61), (2.62)
решаются в зависимости от е, так как при 8 = 0 и ву и щ известны {они равны
нулю).
На рис. 2.3 показаны проекции осевой линии стержня на плоскости Х\Охг
(рис. 2.3,й) и Х\Охг (рис. 2.3,6). При построении графиков использовались
полученные из решения системы уравнений (2.59) — (2.62) перемещения н,-(е), по
которым определялись перемещения ик в декартовых осях:
3
uXj = ^_i ui' ij >
( = 1
где l\ ■' — элементы матрицы L(0). На рис. 2.3,а, б показаны также
перемещения их. произвольной точки К осевой линии.
На рис. 2.4,а—г приведены графики изменения Q/{e), М,(е) и Ф;(е).
В качестве второго примера рассмотрим стержень, показанный на рис. 2.5,а.
Стержень имеет круглое сечение, поэтому при нагружении силами, лежащими
в плоскости Х\Ох2, осевая линия стержня остается плоской кривой.
Распределенная нагрузка <72=<?2о£.
Рассмотрим уравнения нулевого, первого и второго приближений. Нагрузки,
приложенные к стержню, следящие.
Уравнения нулевого приближения:
<&0, + *8oQi0) = <?2 -Р8(е- 0,5);
J^i°» + Qi0> = 0 (Mf =Дх(з°^);.
Р<°>-Л*<0>=0;
^+-3o«i0)-&30) = 0.
Уравнения первого приближения
q[» - (¾1^ - о|0)Ч1) - Qi0,A40);
^)^^(1) = 0:
75
X/,X2
1
О
-1
К
^\*'
1 °'5-^Л
'0.1
0,1
м=г
0,U fi = 4y
4г^—
\\
'*i
к Ч
Рис. 2.2
Рис. 2.3
О)
Qi.Qz
0,8
О
в)
1
О
-7
-2
6)
\/*
0/\^
0,5 £
,м.
/Ч
мз
0,5
Из
1,5
0,75
О
0,5
О
2)
-0,5'
Рис. 2.4
0,5
/V,
ъ
jOK
0,5
где xi°> = *30 + Ах<°>.
При решении уравнений нулевого и первого приближений можно
использовать прием, изложенный в предыдущем примере, когда часть уравнений решается
с переходом к новой независимой переменной 8[=1—е. Решение уравнений
нулевого, первого и второго приближений должно удовлетворять одним и тем же
76
Рис. 2.5
краевым условиям. Уточненные значения неизвестных, например при решении
уравнений нулевого и первого приближений, следующие:
S^ = &(0)+&(1). ty) = uy»+n\» (i = l, 2).
Уравнения второго приближения:
д(2)_^х(1)_д(Пдх(2) = ^'Д^);
^2)+Qi2)*fi,+41,A42)=-Qi1)A41,:
и-2>_х(1), (2) — О-
1 — 30 2 — '
^)+хй>в12)_в(2)=0,
где x(D = х30 + Лх^0)+Д4,); Д*3П = Д*з0) + ДхзП-
Уточненные значения неизвестных:
Qi2>-2^
^2) =
ft=0
k=0
*2,=E i": <f>=2»r.
ft^O
ft=0
a)
Qi
2
1
0
d'°>
0,5
pr
——
мя
%5
%
W
0,2
0
0,2
0,1
0
5)
a)
Si
а
0,5
Рис. 2.6
**Z^
"y/"^*'
Для значений безразмерных
нагрузок ¢20 = 2, P2=l на рис.
2.5,6 показаны формы осевой
линии стержня, соответствующие
нулевому— 0, первому — 1 и
второму — 2 приближениям.
Из графиков видно, что
перемещения точек осевой линии
стержня, соответствующие
нулевому приближению (кривая с
индексом 0), отличаются от их
уточненных значений (кривая с
индексом 1). Например, модуль
полного перемещения точки Д' (рис.
2.5), соответствующий первому
приближению, отличается от
модуля перемещения нулевого
приближения на 25%. Второе
приближение практически не
отличается от первого приближения и
при требуемой точности расчета
1% соответствует точному
численному решению.
На рис. 2.6,а,б приведены
графики изменения Qi(e), Q2(e),
Л13(е), соответствующие разным
приближениям. Из приведенных
графиков следует, что для
принятых безразмерных значений
модулей сил максимальная
погрешность решения уравнений
нулевого приближения, которая
оценивается по значению Qz в
сечении е=0, равна
1,20 —0,75. ft
'100% =60%.
max
0,5
^
У
*
о,г
0,1
в)
1 е
0,75
На рис. 2.7,а—в приведены
графики перемещений щ и w2 и
угла поворота f>3 для нулевого и
первого приближений. Второе
"приближение практически не
отличается от первого.
Из рассмотренных примеров
следует, что нулевое приближение
может приводить к большим
погрешностям. Чтобы оценить
возможные погрешности, необходимо
как минимум решать и уравнения
первого приближения.
§ 2.2. Интегрирование уравнений
равновесия стержня, имеющего
промежуточные опоры или заданные
перемещения ряда сечений
Стержень с промежуточными шарнирными
опорами. Рассмотрим стержень (рис. 2.8,а), имеющий промежу-
^
!#?
К
0,5 1
Рис. 2.7
0,5
78
точную шарнирную
опору. При нагружении
стержня в шарнире
возникает сосредоточенная
сила R (реакция,
показанная на рис. 2.8,а
пунктиром). Эту
сосредоточенную силу можно
включить в число
внешних сил Р<'>,
приложенных к стержню. Сила R
неизвестна, но имеется
дополнительное условие—
перемещение точки
осевой линии стержня с
координатой ею равно
нулю, т. е.
и<0>(ею)=0. (2.68)
Рассмотрим частное
решение, которое при
наличии дополнительной
сосредоточенной силы R
будет теперь равно
о) щ
v<°>
Ml
Y
(0)
+ jK(e)K
о
где Y^0) — вектор, полностью совпадающий с (2.9). В
соответствии со свойствами 6-функции из (2.69) получаем
Yi?>^Yr + K(1,Rtf (£-е«0) (К(0 -KOOIT1 Ю). (2.70)
Общее решение уравнения (2.6) с учетом R имеет вид
№=К (в) C+Y^+KWRtf (в—в10) - (2.71)
Решение (2.70) должно удовлетворять 12 краевым условиям
и дополнительным трем условиям (2.68) а/<°>(ею)=0 (/=1, 2, 3).
Для определения 15 неизвестных имеем 15 уравнений:
при е—0 (шесть уравнений)
Y<°>(0)=EC; (2.72)
при е=1 (шесть уравнений)
Y<°>(l)=K(l)C+Y,<°>(l)-fK(l)R; (2.73)
при е=ею (три уравнения)
Y<u> (е,о) =К (е10) С+Y,<°> (е,0). (2.74)
Ъ
79
Если при е=0 краевые условия однородные, то шесть
компонент вектора С равны нулю. Определив произвольные постоянные
и компоненты реакции R, получаем общее решение системы
уравнений равновесия стержня с учетом промежуточной шарнирной
опоры. Этот метод легко обобщить на стержень с любым числом
промежуточных опор. Изложенный метод можно рассматривать
как обобщенный метод Крылова для
пространственно-криволинейных стержней.
Стержень с промежуточными упругими опорами. На рис. 2.8,6
показан пространственно-криволинейный стержень с
промежуточной упругой связью, линейная жесткость которой cR, угловая — ст.
При нагружении в сечениях стержня, связанных с упругими
элементами, возникнут сосредоточенные реакции: силы и моменты,
которые, воспользовавшись б-функциями, можно ввести в
уравнения равновесия. Рассмотрим наиболее простой случай упругих
связей, когда на обобщенные перемещения (линейные и угловые)
точек крепления связей дополнительных ограничений не
наложено, т. е. когда можно положить
R<" =- c^u(£i); T(vJ=- cfv)<Xev),
где cRw и ct{v) — матрицы (3X3), элементами которых являются
жесткости, характеризующие упругие связи. Возможны и более
сложные зависимости реакций упругих связей от компонент
векторов и и #, например когда реакция зависит только от
перемещений в заданном направлении, т. е.
R(£)=-ci£)ui0,f (2.75)
где tt(x= (u(0)ea) ea (ea — единичный вектор заданного
направления).
з
Так как еа —V ^iee*o» т0 (2.75) можно преобразовать к виду
i = l
R(0 = - с!гОК.1110), (2.76)
где
,2 , , /. 1. ~
К.-
В этом случае уравнение нулевого приближения (2.5) зависит
от обобщенных перемещений, так как вектор f(0) (полагая, что
«la «la «2a «la«3a
«2a «Ь «2a «2a «3a
(2.77)
80
стержень нагружен только распределенными нагрузками)
определяется как
f(°)
— q0-
— Vo-
- 2 cVV°%.
/=i
~2 ср&°%
v=l
0
0
(2.78)
Воспользуемся при решении уравнения (2.5) формой записи
для вектора f(0) (2.41), которая использовалась при решении
уравнения (2.40), полагая
fw ^¢(0) + £ ф}/>б<£>у(0)4-2 Ф^6(1"У(0), (2.79)
( = 1 v=l
где Фо0)—вектор, зависящий от qy и (а0; Фр() и Фг )—матрицы,
равные
0 ... 0(с}/))1.1в(сУ,)2.11(^,),л1
о ... 0(с¥\.„(с¥\ллсП,* : <2-80>
о о
фУ» =
Ф1?)
о
о
0"
о
0 ... 0 (сР^&ЛМ*)» о о о
О ... 0 (<*>)„ (<£>)„ (с?»),, 0 0 0
О ..-0(^),,(^),.(^).,0 о о
о о
(2.81)
Общее решение уравнения (2.71) принимает вид
Y^KC + YiS'-J Gi/^Y^Ci)",—S G^ (в) Y(0) («„)//„
i—l v=l
(2.82)
где
Gy4s) = K(S)K~l (^)ФУ1; G^e^KHK^feOe*". (2.83)
6—6011 81
Вектор С и часть компонент
векторов Y(0)(e,-)(H/(0)(ef)) и
Y<0) (ev) (и/0) (ev)) определяются
методом, аналогичным
рассмотренному в начале данного
параграфа.
Стержень с заданными
перемещениями ряда сечений. В
практике часто возникают задачи
определения начального состояния
рис 2.9 стержня, вызванного
принудительными перемещениями
(линейными или угловыми) дискретных сечений стержня. Подобные
задачи возникают при монтаже упругих элементов, когда из-за
технологических погрешностей точки крепления упругого элемента не
совпадают с расчетными. На рис. 2.9 пунктиром показано
естественное состояние стержня. При сборке сечение k пришлось
принудительно сместить (вектор ик) и стержень принял форму,
показанную на рис. 2.9 сплошными линиями. Требуется
определить Q и М. Считая, что компоненты вектора uk есть малые
величины, воспользуемся уравнениями нулевого приближения (1.112) —
(1.115) или уравнением (2.5), в котором следует положить f<°>=0,
поэтому получаем (2.6) в виде
Y<°>=K(e)C. (2.84)
Для определения компонент вектора С имеем следующие
краевые условия:
1) е = 0, *(0»=u(0) = u(0) = 0(Y?, = yS0, = ... = y!20, = 0);
2) е=1, М<°>(1)=0 (У4(°)=У5^=Уб(0)=0); и<°>(1)=:11А.
Из краевых условий при е=0 следует с7=£8= ... =с]2=0.
Краевые условия при е=1 дают систему шести линейных
неоднородных уравнений для определения оставшихся шести компонент
вектора С (сь с2,..., с в).
На практике возможны случаи, когда при сборке требуется
принудительно сместить два (и более) сечения стержня с
последующим определением напряженного состояния стержня.
§ 2.3. Метод последовательных нагружений
при решении нелинейных уравнений
равновесия стержня
Уравнения равновесия на каждом этапе на-
гружения стержня. В § 2.2 были изложены методы интегрирования
уравнений равновесия стержней при малых перемещениях точек
осевой линии стержня. Эти алгоритмы можно использовать и для
82
приближенного численного решения уравнений равновесия при
любых конечных перемещениях точек осевой линии стержня при
последовательном нагружении стержня малыми внешними силами,
считая, что при каждом нагружении перемещения точек осевой
линии стержня и приращения внутренних силовых факторов (Q,-
и Mi) являются малыми. Этот вариант численного решения
нелинейных уравнений приводит при каждом дискретном увеличении
нагрузки к линейным уравнениям, эквивалентным уравнениям
первого приближения. Для т-го нагружения стержня внешние
силы равны
yi{m) = pmji; qT] = pmq; P(0 {m) = pmP(l); T<v) {m) = pmT(v), (2.85)
где P< 1 определяет часть общей нагрузки на каждом этапе
нагружения; т — номер этапа нагружения. Например, Р—0,1, т. е.
на каждом этапе нагружения стержень нагружается внешними
силами, равными Vio от их конечных значений.
Рассмотрим различные варианты уравнений равновесия в
зависимости от особенностей внешней нагрузки на каждом этапе
нагружения стержня.
Следящие силы. Если решаются уравнения равновесия,
записанные в связанной системе координат, то при следящих
силах на каждом этапе стержень нагружается силами fiq, pPfe>, (Зц,,
(3T<V>, которые от обобщенных перемещений (tij и Фу) не зависят.
В этом случае правая часть уравнений равновесия известна.
Левые части уравнений для т-го этапа нагружения аналогичны
уравнениям первого приближения, т. е. могут быть представлены
в таком виде:
(2.86)
dM(m)
de
+ Af"'1)M(m) 4- АЙ^Ди^ + A,Q(m = — pi* — V pT(v)6,
V!
(2.87)
M<m) = АДк<т>; (2.88)
-—- +Af-1)#(m,-Ax(m)=:0; (2.89)
йи(т)
de
+ АГ_1)и(т) + А^(т) = 0; (2.90)
6*
83
где
А
(m-1) __
О
Из''72-1)
О
к/"-1)
-V
т—\\
*!<
m—1(
О
т—1
хлт~*
>=*/.+£
Дх/*>
*=1
Ам
L Qs'"1-') —0>_1> О
О Дс"-1» —Дс*-1)"
—Дс"-1) О Де*-1»
Д7"-1) — Дс*"1) О
т—\
Q/(»-i>= JJ Q.<*>
A=I
w—]
У^.С71-1)
s
k=l
Млк)
Элементы матриц A[m !), Aq" 1} и А(м 1) известны из решения
уравнений равновесия на предыдущих этапах нагружения стержня.
«Мертвые» силы. Векторы qx, Px{i), [ш*, TVV> известны в
базисе {i/}, поэтому в базисе {е/} они могут быть представлены
в виде q=L<1>q^; РЮ=и1>РхЮ; (a=L<V; 1^)=1^)1^), где D1) —
матрица (П.57) перехода от базиса {i/} к базису {е/}.
Так как при деформировании стержня «мертвая» нагрузка по
отношению к связанным осям меняет свое направление, то
проекции векторов q, Р('>, |ш и T<v) на связанные оси зависят от
приращения углов #/ (углов, характеризующих взаимное положение
векторов е;о и е*/). Матрица преобразования базиса {i/} к базису
{е/} имеет вид L(1)=LL°, где L0 — матрица преобразования базиса
{i,} к базису {е/0}, характеризующему естественное состояние
стержня; L — матрица преобразования базиса {ег0} к базису {et},
характеризующему состояние стержня на т-м этапе нагружения.
Элементы матрицы L(/(/) зависят от углов
т
>;-р),
Ь- = У
и i, т Ал
р=1
где Ф,-(р) —малые углы поворота базиса (е/*3)} (р= 1,...,т) при
каждом этапе нагружения. Матрицу L можно представить в виде
(для m-го нагружения)
L=Lm=ALmL^-1>,
(2.91)
где ALm — матрица преобразования базиса {е/(т-1)} к базису
84
^1 *-2 ^3
1
fr<ffl>
-e-im> l
.d,«m)
-Vm)
-&s<m)'
l
= E+AUm>.
(2.92)
Элементы матрицы Um~X) зависят от углов
«Wi-2 *Jf
p=i
L(p)
Углы Ф/р) (p== 1,..., m—1) определяются из решения уравнений
равновесия на предыдущих т—1 этапах нагружения. Матрица
Lm(1) для m-го нагружения
Lm(1)=(E4-AL(m))L(m-1)L°=L(m-1)L°+AL(№^L(ffl-1)L0.
(2.93)
Значит, в случае «мертвых» сил на m-м этапе нагружения на
стержень действует нагрузка
Aq<m)=L(m-1>L°pq*+AL<m>L<m-1>L0PqJe;
AjlC")=L(m-1)L0p^+AL(m>L(m-1)L0p^;
AT(V)(m)=L(m-i)LopTx(v)+AL(m)L(^-1)LcPTx^. (2.94)
Слагаемые в (2.94), зависящие от матрицы AUm\ можно
представить в виде
P(AL(m4^-Vq,) = pA<rVm);
о (AL(-)L(—VPin) - рА$ (m-u#(,n);
р (bL{m)L{m-l)L°nx) = pAgT1 Wm);
p(AL(m)L(w-l)L°liy)) = pA^ ^1 Wm>,
^де
А<Г!) =
4*
0
^3/ qx]
3
i- /=1
3 3
,(m-l).
,(»"-!).
/=i /=i
3
0 VI „C"-U
S 4Г"<
XI
/=1
0
*;
/=i
85
0
2 c$rl)p$
/=1
3 3
- /=1 /=1
3
0 ^n „(m-n
/=i /=i
о _2 ci7-l)^'/
/=i
о
AJT»
-2 'Г V/ 2 ^ >
/=i /=i
*/
2 CU Pxi
/=l
3
,<m-l).
0
,(»*-»>.
^2/ ^- 2 Ci> ***/
- /=1 /=1
-2 *з7~^'
/=i
Jatk =
0
2 47-1^ о
/=i
3 3
^2/ -/ xf Zl C4 l xj
-2 'irv,
/=i
0
S(m—l)-rn(v)
t-2/ J jc/
/=1
3
2(m— l)T(v)
Cl/ '*/
/=1
0
— }
=1
/=1
¢57-^- элементы матрицы C{m~l) = L^V».
Уравнения равновесия стержня на m-vi этапе нагружения при
действии «мертвых» сил имеют вид
dQC")
ds
+ Ain-1]Q{m) + А£"_1)Дх(т) + i3A<rUfl(m)=
= - Р \] АЙ (т~]ty^ - pC^V - р V C(m-,)Pii) ei; (2.95)
t=i (=i
dM(m)
^-- + Af~ "M*"» + рАЙГ"***"^ - p Vkfi {m~Vm)8 -
=i
p
- pom-')^- p J] С^Т^б,; (2.96)
v=I
M<m> = АДи<т>;
(2.97)
86
dft;m>
due7')
+ А^-1)в(т)_Дх(ш) =0;
+ A(m-I)u(m)+A^(m)==0
(2.98)
(2.99)
Интегрирование уравнений равновесия. На каждом этапе на-
гружения уравнения равновесия (2.86) — (2.90) или (2.95) — (2.99)
являются линейными, т. е. могут быть представлены в виде,
например, системы (2.95) — (2.99) после исключения Дх(т):
Y('«)-{-A<m-1)Y(m)=pf(m-1>,
(2.100)
где
у<т) =
М(ш>
и(ш)
А<
т—г
А
(т-\)
X
А,
0
0
Ag""1^-1
О
а^ЧаХг^а-1 о
-А"1 А[т-1)
0 А,
О
О
0
д(™—1)
j<m_,) =
2 (АЙ(т-1,*(т) +C(m-1)Pi')j8(B-Ei)-C(m-1,q,
р
-2 (А
(v) (т-1)А(т)
гя;
#v
i(m—l)7(v)
7<*>)8(е-е)-С(
ш—1)
^*
О
О
Решение уравнения (2.100) можно представить в виде
YC*>=K(m)C<m>-f-Yi(w>. (2.101)
Метод численного определения фундаментальной матрицы
решений К(т) изложен в § 2.1. Если свойства системы уравнений
таковы, что среди элементов фундаментальноой матрицы есть
быстрорастущие элементы (точнее, элементы — частные решения,
содержащие быстрорастущие части), то компоненты вектора С(т) из
краевых условий при е=1 будут определены с большой ошибкой
[из-за плохой обусловленности определителя системы
алгебраических уравнений, зависящего от элементов матрицы K(m)U)]-
Рассмотрим метод уточнения матрицы фундаментальных
решений, использующих метод Пикара (см. § 2.1). Фундаментальная
87
матрица K(m) удовлетворяет уравнению
1^/(т)_|_Д(т-1)^(т);_0?
из которого получаем
К'т> = — J А<т-'ттШ + Е.
(2.102)
Считая, что фундаментальную матрицу К(т), полученную методом
начальных параметров, можно рассматривать как первое
приближение, из (2.102) получаем уточненное значение матрицы К(т>
(второе приближение), т. е.
К(т) (*> = _ f A<m~'' К(,И) (1) d-Л + Е.
(2.103)
Продолжая процесс итерации, находим
йч
max
100%.
1411 \ '
где р — номер итерации. Если max б(-;- удовлетворяет неравенству
6/;^Д, то получаем решение с заданной точностью.
Уточненное значение фундаментальной матрицы К(е) для
каждого этапа нагружения можно также получить, разбив
интервал интегрирования на р подынтервалов (как это было сделано
в § 2.2). Для каждого из подынтервалов имеем
(2.104)
V —1
Определив для каждого из подынтервалов интегрирования
уточненное значение матрицы Kv(m)(8)» находим уточненную
матрицу К(т>(е) Для всего интервала интегрирования для m-го этапа
нагружения. Определив К(т)(е), находим (K(rn)(Ei))-1 и (K(m)(ev))_1,
входящие в частное решение.
Метод последовательных приближений при решении
нелинейных уравнений равновесия. Для пространственно-криволинейного
стержня имеем систему пяти нелинейных уравнений [уравнения
(1.57)-(1.61)]
dQ + FT (Q, М, х, 0, u) = Ьр,
dM
+ F2(Q,M, x, 0, u) = br;
dfl
.0),
L^+FJd.M, xfiu) = 0;
de
du
de
+ F4(*, *) = 0;
(2.105)
88
M=A(x—x0(I)). (2.106)
Уравнения (2.105) при известных х и О/ становятся линейными
(при линейной зависимости внешней нагрузки от векторов #, и' и
и), поэтому можно использовать следующий алгоритм численного
решения системы (2.105). В первом приближении считаем, что
х=хо и углы Ф/о известны. Система (2.105) принимает вид
T^+*.XQ(,) + Р(«"\ u'"\u<") = bp;
^^+*0 ХМ01+6^0^+1(0^, им.н{") = Ът; (2-'07)
+ L^1(L„«S)-A-1M(1))-0;
"+»,Х»"Ч</fi' - l)e, + /8'e, 4 flS'e, =0.
где Цо\ L20— матрицы, элементы которых зависят от известных
углов &/0; /д* — элементы матрицы L(0), зависящие от углов &/0.
Определив из получающейся линейной системы уравнений
неизвестные, в том числе и вектор М^\ находим из уравнения
(2.106) вектор х(1>, соответствующий первому приближению:
»е(1)=А-1М(1)+хо(1). (2.108)
Определив х(1), находим следующие приближения Q(2), М<2),
ft<2>, и<2>:
^+x'"XQ(24P(^u'(2),u(2)) = bp;
^Р- + х(1> X М<2> + е, X Q<2) + Т (*<2). и'(2), и<2>) = Ьг;
d*<a» 1 п\ 1 m (2109)
где Ln , L21 — матрицы, элементы которых зависят от углов 9-/
^о)(1)—элементы матрицы L(0), элементы которой зависят от углов
■0/(1). Решения уравнений (2.107), (2.109) и последующие прибли-
89
Рис. 2.10
жения должны удовлетворять
одним и тем же краевым
условиям. Число приближений
зависит от принятого требования
к точности решения.
Рассмотрим пример численного
решения нелинейных уравнений
равновесия стержня. На рис. 2.10
показан криволинейный стержень,
нагруженный следящими силами. В
отличие от задачи, рассмотренной в §2.1,
стержень нагружен силой Р^' = Р3е3,
перпендикулярной плоскости XiOx2.
Воспользуемся уравнениями
(2.86) — (2.90), которые для каждого
этапа нагружения (ограничимся
тремя этапами) в более подробной
записи имеют вид
dQ(i)
de
fA{0)Q(1)+Ag,,Ax(1)= _ pq_pp(i)£(e_ 0,5)—рР(8)й(е—1); (2.110)
dMiM
de
-f-A£0)M(i) + AJJW1) + AtQtO) = 0;
(2.111)
Mi'^AAxf1);
(2.112)
dfl(')
ds
+Af )*(1>_Ди<») = 0;
(2.113)
du(")
ds
-HaJ0)u(1> + a1«(1) = o.
(2.114)
Для безразмерной нагрузки P2=2; Рз=2; <?o=3 рассмотрим три шага
нагружения. В конце третьего шага нагружения нагрузка достигла заданных значений
(т. е. р^О.ЗЗ).
На первом шаге нагружения матрицы AS?' и А}®' есть нулевые матрицы.
Матрица А*0' зависит от кривизн х{0, характеризующих естественное состояние
ссевой линии стержня. В рассматриваемом примере имеем х30 = 1/7?; х10 = к20 = 0.
Уравнения (2.110) и (2.111) интегрируются от свободного конца стержня,
где известны краевые условия для Q(l> и М<*>. Уравнения (2.113) и (2.114)
интегрируются от заделки, где известны значения компонент векторов 0!1> и и(1>.
После определения вектора Ди^Х1) (соответствующего первому приближению)
и векторов QtW), М*1»1) и т. д. уточняется матрица А^°\ элементы которой
90
берутся равными
^^^xso + M";
^°><1>=Дк<1>; *{°'<»>=д«|".
Система (2.110) — (2.114) решается второй
раз с уточненной матрицей А^0) *1).
Определяются векторы 0(1) (2), М{!) (2) и т.д.
Снова уточняется матрица А^0'(2', элементы
которой теперь равны
Х<°> (2) = Дх(2): xj0)(2)
Ч2).
*2 — ^rv2 ,
При заданной точности решения
(0,05%) на каждом шаге на гружен ия
потребовалось четыре итерации. На рис. 2.11
показаны проекции осевой линии стержня
на плоскости х\Ох2 и хгОх3
соответственно, на первом, втором и третьем шагах
нагружения.
На рис. 2.12,0 приведены графики
изменения перерезывающих (Q2 и (¾) и
осевой {Qi) сил (компонент вектора Q).
Изменения в зависимости от координаты е
проекции вектора М показаны на рис. 2.12,6.
На рис. 2.12,е, г приведены графики
изменения компонент векторов О и и.
о;
2
1
-1
~2
-J
6) %
0,5
0
-0,5
&
6}
/Л
^Г
/ 0,5
f
Л
Qs
—""""-"Ч
Mi
1,5
1
е р,5
-0,5
-1
-1,5
г)
-1
X °'5
-~ 5""
^\ 1
X £
^4^¾
Ui
0,5
0,25
О
Рис. 2.12
Глава 3
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
СТЕРЖНЕЙ
В третьей главе рассмотрена статическая
устойчивость стержней. Изложена теория статической устойчивости
криволинейных стержней, когда потеря устойчивости может
произойти относительно нового состояния равновесия стержня, сильно
отличающегося (например, по форме осевой линии) от его
естественного состояния. Большое внимание уделяется характеру
поведения нагрузок («мертвые», следящие и их комбинации) в
процессе деформирования стержня.
§ 3.1. Основные понятия
Состояния равновесия. При нагружении
стержня внешними силами возможны случаи, когда имеется
несколько состояний равновесия. Возможные состояния равновесия
могут быть устойчивыми и неустойчивыми. Если нагрузки,
приложенные к стержню, таковы, что его состояние равновесия
оказывается неустойчивым, то стержень из-за всегда имеющих место
малых возмущений скачком перейдет в новое устойчивое
состояние равновесия. Этот внезапный переход из одного состояния
равновесия (неустойчивого) в новое состояние равновесия
(устойчивое) называется потерей статической устойчивости стержня. Если
новое устойчивое состояние равновесия близко к неустойчивому,
то говорят, что имеет место неустойчивость стержня «в малом».
Если новое устойчивое состояние стержня сильно отличается от
неустойчивого, то говорят, что имеет место неустойчивость
стержня «в большом».
Примеры потери устойчивости
стержней. Напомним простейшие
задачи статической устойчивости
стержней из курса
сопротивления материалов. На рис. 3.1,а
показан шарнирно закрепленный
стержень, нагруженный
сжимающей «мертвой» силой Р. При
некоторой силе | Р* | (критической)
прямолинейное состояние
равновесия стержня становится
неустойчивым и при малых случайных
возмущениях переходит в новое
состояние равновесия, показанное
92
на рис. 3.1,а пунктирными линиями, которое мало отличается от
исходного. Следует отметить, что предположение о том, что
состояния равновесия неустойчивое и устойчивое при Р* близки друг
к другу, позволяет описать состояние равновесия стержня после
потери устойчивости линейными уравнениями. Если получающиеся
из линейных уравнений критические нагрузки действительны, то
можно считать, что принятое предположение о близости
возможных форм равновесия является обоснованным. Если критические
нагрузки из линейных уравнений определить нельзя или они
получаются мнимыми, то это говорит о том, что или указанное
предположение неверно, или смежного состояния равновесия вообще
нет. В этих случаях надо рассматривать или нелинейные
уравнения, считая, что перемещения точек осевой линии стержня и
повороты сечений стержня после потери устойчивости являются
конечными, т. е. рассматривать неустойчивость «в большом», или
исследовать устойчивость движения стержня вблизи исходного
состояния равновесия.
Вернемся к примеру. Считая, во-первых, что перемещения
точек осевой линии стержня малы, во-вторых, что потеря
устойчивости стержня происходит в плоскости чертежа (рис. 3.1,#), можно
получить следующее линейное уравнение равновесия стержня:
£ + -£-*, = о (Д, = я; ). (3.1)
Решение этого уравнения
х2 = с1 cos kxt + £2 sin k х1 (k = ]/Я/Д3)
должно удовлетворять двум краевым условиям: 1) Xi=0, х2=0 и
2) Xi = l, х2=0, — это приводит к условию sink/ = 0, откуда
получаем
Р,=Ркр=/г2лМ3з//2. (3.2)
Из полученного выражения для критической силы следует, что
имеется бесконечно много сил (п=\, 2, 3,...), для каждой из
которых возможна своя форма осевой линии стержня при потере
устойчивости. На рис. 3.1,6 показаны три математически
возможные формы равновесия стержня, соответствующие трем значениям
п (я=1, 2, 3).
Наименьшая критическая сила (при г?™1) называется
критической силой Эйлера:
PKV=P =яМзз//2. (3.3)
Соответствующее этой силе решение уравнения (3.1) имеет вид
х2=сi sin(nz/t), (3.4)
т. е. перемещения точек осевой линии стержня могут быть
определены только с точностью до постоянного множителя с\. Это
общее свойство решений линейных уравнений, описывающих дефор-
93
мированное состояние стержня после потери устойчивости. В
линейной постановке можно только определить точные значения
критических сил, а малые прогибы стержня остаются
неопределенными. Но так как потеря устойчивости во многих прикладных
задачах недопустима (при любых прогибах после потери
устойчивости), то при проектировании достаточно рассчитать критические
силы, чтобы избежать этого явления.
На рис. 3.2 показано кольцо, нагруженное радиальной
равномерно распределенной нагрузкой q0. При достижении критического
значения (q0=qKP) кольцо теряет устойчивость. Новая форма
равновесия показана на рис. 3.2 пунктиром. Потеря устойчивости
плоской круговой формы кольца может привести к
пространственной равновесной форме — выходу осевой линии кольца из
плоскости чертежа.
Большой практический интерес представляют задачи
устойчивости предварительно напряженных стержневых элементов
конструкций. На рис. 3.3 тонкой линией показан прямолинейный
стержень, который был нагружен силой Р (следящей или «мертвой»),
а затем шарнирно закреплен. После этого стержень был нагружен
распределенной нагрузкой q (следящей или «мертвой»); при
расчете таких конструкций требуется определить критическую
нагрузку q, при которой стержень может потерять устойчивость.
Штриховыми линиями на рис. 3.3 показаны (качественно)
возможные равновесные формы осевой линии стержня после потери
устойчивости.
На рис. 3.4 показана плоская спиральная пружина баланса
часов, предварительно нагруженная изгибающим моментом Т. Для
нормальной работы механизма необходимо, чтобы осевая линия
пружины оставалась плоской, что будет выполняться, если момент
|Т| меньше критического.
На рис. 3.5 показана цилиндрическая пружина (например,
пружина акселерометра), нагруженная сжимающей силой Р=та,
где а — ускорение объекта. При некотором ускорении (критиче-
Рис. 3.2 Рис. 3.3
94
Рис. ЗА Рис. 3.5
ском) пружина может потерять устойчивость, что приведет к
дополнительному осевому смещению массы т при том же ускорении
|а|, т. е. к ошибке в показаниях прибора.
В дальнейшем состояние стержня, соответствующее моменту
потери устойчивости, будем называть критическим. Оно
характеризуется критической формой стержня и критической нагрузкой.
В отличие от простейшей задачи потери устойчивости, когда
форма стержня (рис. 3.1) или кольца (рис. 3.2) при нагружении
остается неизменной до потери устойчивости, может иметь место
потеря устойчивости и относительно деформированного состояния
стержня (рис. 3.3, 3.4).
§ 3.2. Уравнения равновесия стержня
после потери устойчивости
Векторные уравнения равновесия стержня
после потери устойчивости в связанной системе координат. Для
получения линейных уравнений равновесия стержня после потери
устойчивости, считая, что имеет место потеря устойчивости «в
малом», полагаем Q=Q*-j-Q0; М=М*+М0; q=q*-f Aq; |u=|Lu-f Ац;
х=х*+Ах, где звездочкой отмечены векторы, соответствующие
моменту потери устойчивости; Q0, М0, Ах, Aq и Д|и— приращения
соответствующих векторов при переходе стержня в новое
равновесное состояние.
Так как при потере устойчивости «в малом» предполагается,
что новая равновесная форма стержня близка к критической, то
приращения векторов Q0, М0, Ах, Aq, АР^, А|и и AT<V> можно
считать малыми. Рассмотрим два состояния элемента стержня
(рис. 3.6): 1 — критическое и 2 — после потери устойчивости.
В состоянии 2, т. е. в базисе {е*}, векторы со звездочкой берутся
в виде (например, Q*(1) и М**1))
3 3
/=1 /=1
95
3*
Q=q"}+aG. где Q*j и M*j — проекции векто-
Ч\. е,,/ ,п ров в базисе {е,*}, поэтому
М=М++АМ q^d^q^ м.<')^М*.
При потере устойчивости
приращения получают как векторы,
характеризующие напряженное
состояние стержня (Q и М), так и
векторы, характеризующие его
форму (деформированное
состояние), в частности приращения по-
*_ лучает вектор к, поэтому для вы-
*i вода уравнений равновесия
стержня относительно приращений
J векторов следует взять векторные
Рис. 3.6 уравнения, записанные в
подвижной системе координат (в
базисе {е,}). Воспользуемся
системой уравнений (1.57) — (1.61), из которой, сохраняя только сла-
гаемые, линейно зависящие от приращений векторов, и исключая
уравнения, соответствующие критическому состоянию равновесия,
после преобразований получаем следующую систему уравнений:
dQ0
de
+ Дх X Q*(1) + **(,) X Qo + ар = 0;
dM0
de
+ ДиХЛУ,> + и.'1>М0 + eiXQo + AT = 0;
Mr
АДи;
at
du
de
■+ х/'Хи-ЬМ -=0.
(3.5)
(3.6)
(3.7)
(3.8)
(3.9)
Входящие в систему уравнений (3.5) — (3.9) векторы со звез
дочкой определяются из уравнений
de
+ х#ХО. + Р. - 0;
+ ««#ХМ, + еиХО# + Т#=0;
М, = А(х,-ко<,0;
*^=L
I и <]>-
(ЗЛО)
(З.П)
(3.12)
(3.13)
^ + к. X ц» + tfu* - 1) е1# f /S1,e,s + /31we,, = 0, (3.14)
где е;* — векторы базиса {е*}, соответствующие критическому со-
96
стоянию стержня; Li*, L* — матрицы, элементы которых зависят
от углов 0/*<1) поворота базиса {е;*} относительно базиса {е/о}.
Напомним, что матрица А (матрица жесткостей) имеет
безразмерные элементы Ац, равные А1,-=(Ан)р/(Азз(0))р, где {Ац)р —
размерные жесткости; (А3з(0))р—размерная изгибная жесткость
(Азз)р при е=0. Если стержень постоянного сечения, то А3з=1 и
матрица А (с безразмерными элементами) имеет вид
Аг
0
0
0 0
Л22 0
0 1
Следует заметить, что углы Ф/*(1) и ®i — компоненты векторов
#*(1) и ft— это разные углы. Углы ft, не являются «продолжением»
углов -в7*(1) при потере устойчивости стержня.
Итак, из системы нелинейных уравнений (3.10) — (3.14), метод
числового решения которых изложен в § 2.3, определяются
векторы Q*, М* и и*, входящие в систему линейных уравнений (3.5) —
(3.9).
Исследование потери устойчивости предварительно
деформированного стержня существенно осложняется тем, что форма
стержня при непрерывном его деформировании, относительно которой
возможна потеря устойчивости, заранее не известна. Наиболее
наглядно это видно на примере спиральной пружины (см. рис. 3.4):
критическая форма пружины, показанная пунктиром, сильно
отличается от ее формы в естественном состоянии. В АР и AT [см.
уравнения (3.5), (3.6)] входят приращения внешних сил АР(1"\
Aq, AT<V> и Aji, учитывающие изменения направления и модуля сил
при переходе стержня в новое равновесное состояние.
Определение приращений векторов сил и моментов. При
определении критических нагрузок из системы уравнений (3.5) — (3.9)
необходимо иметь выражения для приращений векторов сил
(АР<1'>, Aq) и моментов (АТ^, Aja) в явном виде. Рассмотрим
возможные случаи поведения нагрузок.
Следящие силы. В этом случае имеем
AP(O=Aq=AT<v>=AjA=0.
Случай нагружения системы следящими силами наиболее
простой с точки зрения записи уравнений (3,5), (3.6). Однако, как
следует из частных задач, не всегда при действии следящих сил
имеет место статическая потеря устойчивости [3, 17]. Возможна
и потеря устойчивости равновесия с переходом системы в
движение относительно этого состояния равновесия. В этом случае
определить критические силы из уравнений равновесия, как правило,
нельзя. В подобных задачах для исследования устойчивости
состояния равновесия требуется рассматривать уравнения движения
7-6011
97
системы относительно состояния равновесия. (Более подробно об
этом написано в гл. 3 второй части книги.)
«М е р т в ы е» силы. В этом случае имеем [см. (П. 159) ]:
ДР(|, = АК}*(«,); (3.15)
Aq=Af##(e); (3.16)
AT(v) = A^O(sv); (3.17)
Дц=Ацд(е). (3.18)
Полуследящие силы. Полуследящие — это силы,
принимающие при потере устойчивости промежуточные значения между
следящими и «мертвыми». В этом случае имеем (ограничимся
уравнением для AP<'>)
ДР(0 = EpAi> (fii); Ер = \{ait)P\ (О < (a„)P< 1), (3.19)
где Ер — диагональная матрица, элементы которой для следящих
сил равны нулю, для «мертвых» сил равны единице.
Силы, зависящие от вектора перемещений, его
первой производной по е и углов поворота сечений. В этом
наиболее общем случае приращения векторов сил и моментов могут
быть представлены в таком виде [см. уравнение (1.99)]:
Aq^C^W + C^u-f-C^u'; (3.20)
ДР<£> = в!> + Bf.2,u + BgV; (3.21)
Дм, = CJ*)® + C*<s>u + C*<6>u'; (3.22)
AT(v) = В!> + B{#5)u + B<*V. (3.23)
Более подробный вывод соотношений для приращений сил и
моментов приводится в § 3.4.
Примеры сил, зависящих от первой производной вектора
перемещений и, рассмотрены в гл. 6 (задачи статики взаимодействия
стержней с внешним потоком воздуха или жидкости).
Преобразование уравнений к виду, удобному для
интегрирования. Уравнения (3.5) — (3.9) представим в форме записи, удобной
для численных методов решения, для этого векторные произведения
запишем в виде ДхХО*(,)= AQ Дх; xw(,>XQ0 = A. Q0; ДхХ%(,,=
= Ам#Ди; ^ХМ0 = АМ0; elXQ0 = A1Q0; x/'Xu-A^u; и#С>Х
X^^V, где
\.=
о
А —
о м.
ч*
-м,
о
-М
м
2*
1#
1*
о
г о
Х8*
0
иэ«.
0
0 -
1
i
К2*
~*i*
0
01
—1
0
*
98
После преобразований получаем следующую систему уравнений
dQo + Ах Q0 + А0 А-'М0 + ДР = 0;
de
dM0
de
+ А М0 + Ам A-W. + AaQ0 + ДТ = 0;
м*
dj»_
de
+ А§-А-'Мо=0;
^+А,ви + А1Ф = 0.
ае *
(3.24)
(3.25)
(3.26)
(3.27)
Систему уравнений (3.24) — (3.27) можно представить в виде
векторного уравнения
Y'+AY + b(u, и\Ф) = 0,
(3.28)
где
Qo
м0
и
; А =
"А А„ А"1
0 —А-1
0 0
0
0
А
А,
0 "
0
0
А
дч+2 ДР(Ч
Р
(v)j
д^+2 дт s
.=1
о
о
Следует подчеркнуть, что для всех возможных случаев
поведения сил после определения конкретных выражений для компонент
приращений векторов AP(l'\ Aq, AT(v) и Дц, входящих в вектор Ь,
уравнение (3.28) будет однородным. Численные методы
определения критических сил (или критических перемещений)
рассмотрены в § 3.5.
В проекциях на связанные оси система (3.24) — (3.27) имеет
следующий вид:
^¾. ^ __%* Моз _ к Q + Q + Др = 0;
de А22 А33
de А1Л Л33
dE ""Лц
Ж
01
%^M02-x2sQ01 -Ьи^СЗо, + ДР3 = 0;
122
7*
99
сШ01 , М
М<
de
М0, — -&- М03 — ииЖ 01+ кй*М0,+ Д7\= 0;
Лоо "5
»22
»33
^-^М0, + ^M03 + x3,M01-^M03-Qe, + Ar2 = 0; (3.30)
•и
1зз
йМ
03
Af
2*
de
М
Мц
01
^02 — *2*AL + Xw-AT01+ Q02+ ^,= 0;
»11
т22
dfl, Af,
de
03
'33
— ^A+«iA=0;
(3.31)
Au
de
d«,
de
dug
de
— «1*«1 + *1*W2 + ^2 — 0-
(3.32)
Уравнения (3.29)-(3.32) являются наиболее общими
уравнениями, позволяющими исследовать статическую устойчивость
стержней «в малом» для случаев как постоянного (j4u=const),
так и переменного {АцФсоъъХ) сечения и любого поведения
внешней нагрузки.
§ 3.3. Потеря устойчивости плоского
криволинейного стержня
Стержень, осевая линия которого до потери
устойчивости есть плоская кривая. Для частного случая, когда при
нагружении стержня [например, спиральная пружина (см.
рис. 3.4)] его осевая линия остается плоской кривой, имеем
Mi*=M2*=0; Q3*—0; xi*=x2i*=0, поэтому матрицы км^, А^, Ак >
входящие в систему уравнений (3.24) — (3.27), равны
ко~
ГО
0
[Qsx
о -
0
-Qlx
-Q**]
Qix
0
1
;V =
1
Г °
-M»
0
M»
0
0
0
0
0
100
[I
"0 -*3* о"
A. =lxs О 0
^0 о 0,
При потере устойчивости плоской формы система уравнений
[частный случай системы (3.29) — (3.32)] принимает следующий
вид:
dQoi Qz*
М
03
de
dQo3
de AS3
dQo3_l_Ql
'33
@2* Л/Г Q
de
МО1-^М02+Д/>3 = 0;
41
'22
01
M,
de
■xMfMM+^Af0, + A7'1«0;
»22
AM
02
de
+ %№M,
M
3*
3*-irJ01
M
01
Q03 + ДГ2 = 0;
dM
Hi
03
de
+ Q02+A719 = 0;
(3.33)
(3.34)
d9x jW
de
d9a
de
M
01 -««»,
0;
02
f^i = 0;
■"28
d6- M
^8
03
de
-0;
43
(3.35)
d«x
~dT
^a*W2 ^1
dwa
~dT
+ «s«i —&. = 0;
d«.
de
+A = o.
(3.36)
Если приращения внешней нагрузки APjt АГ;- зависят от щ, bj
(/=1, 2, 3), то система уравнений (3.33) — (3.36) является
зависимой, т. е. при потере устойчивости плоская осевая линия стержня
становится пространственной кривой. Если приращения нагрузки
A<7i, Д<72, A/Yf), АРг(0, Аиз, A?YV), входящие в ДР.,-, АГ/, зависят
только от ии и2 и Ф3, а А^з, ДРзш, А^ь Am<2, A7Vv) и A7VV> зависят
от иъ, $1 и "&2, то система уравнений (3.33) — (3.36) распадается на
две независимые системы:
101
Ik
^-+^ M03 + x«Qel + Д.?, + 2]ДР,<'">8Ш -0; (3.37)
i=i
d^03
de
r
»=1
de Л8 de de
л
i^a_+_^Moi __ _|* мог + Д?3 + V!ДР,<Ч<> =0;
de Аг A2 LA
i—\
d^01
de
r
- xl0MM + Дц, + J] Д7Г>8Ы = 0; (3.38)
cM0a
de
P
+ ^oM01-AQ03+ Дц2+ J ^^v)5(v) = 0;
*=i
de yqx de л2 «e
Система уравнений (3.37) дает возможность определить
критическую нагрузку, при которой происходит потеря устойчивости
в плоскости; система (3.38) дает возможность определить
критическую нагрузку, при которой происходит потеря устойчивости
относительно плоскости.
Если при нагружении стержня до критического состояния
внешняя нагрузка увеличивается пропорционально с
коэффициентом пропорциональности n(jx<7b piY'* и т. д., где qu Pj{i) —
известные значения), то критическое состояние зависит от одного
параметра— ря*. В этом случае потеря устойчивости в плоскости и
относительно плоскости будет характеризоваться двумя разными
критическими значениями коэффициента р: ji*j— при потере
устойчивости в плоскости и f.i*2 — при потере устойчивости
относительно плоскости. Если qi, Р/'\ \а, 7yv) — расчетные значения
компонент векторов нагрузки, которые стержень должен
«выдержать» не теряя устойчивости, то это будет иметь место, если |u*i.>
102
Если же наименьший из критических значений коэффициентов
[Л*,- меньше единицы, то стержень потеряет устойчивость «ли в
плоскости, или относительно плоскости в зависимости от того,
какой из коэффициентов jj,*/ меньше единицы (при нагрузке меньше
расчетной).
В качестве примера получим уравнения для определения критического
момента [Т.| для спиральной пружины (см. рис. 3.4) со свободным концом
(сечение К)- Для этого наиболее простого случая вектор Q* равен нулю.
Существенную роль при определении критического момента играет его
поведение после потери устойчивости. Если момент Т=Г31з не меняет своего
направления после потери устойчивости, т. е. момент «мертвый», то
ДТ = ^4)дй(е-1)=: -ГдАО^-г-^зЛО^. (3-39)
Из уравнений (3.29) — (3.32) получаем следующую систему уравнений для
спирального стержня переменного сечения:
dQoi п _
de
+ *3*Qoi = 0; (3.40)
dQ02
de
dQoa
de
dAV_;.
de
d^02 (№**
An
«3*)^о1-^оз + г3Л8(е-1) = 0; (3-41)
de
de Au 3* 2
dQ, Мпй
1T~1^+ K"*ei = 0: ( *
22
_dO^_AfM
de A33
de
d«2
— хз*к2 —- U;
«■ + *8*«1 = 0; (3.43)
de
+ »a = 0
dt/g_
de
В частном случае, когда сечение стержня постоянно, Л3з=1- Критический
изгибающий момент Тз* входит в уравнения (3.40) — (3.43) также и через
критические значения параметров М3* и х3*- Для следящего момента следует
положить АТ=0.
103
Устойчивость плоской формы кольца. В качестве еще одного
примера применения уравнения (3.33) — (3.36) при исследовании
потери плоской формы рассмотрим кольцо, нагруженное
распределенной (постоянной по модулю) нагрузкой (см. рис. 3.2).
Кольцо постоянного сечения, поэтому Л3з=1. В этом случае имеем
С?з* = (?2*=0; Mi*=Af2* = 7W3*=0; х3*=1//?°; xi*=>C2*=0, где
/^0=^//= 1/(2я)—безразмерный радиус. Из (3.29)-(3.32)
получаем следующую систему уравнений:
de R0
Qo2 = —Д^;
dQ
02
de R°
Ь^г Qn + Qi Aa = - M» (3.44)
, — „ lvl0t "V3»
de
*22
-5f-SrM-=0!
^+J-Mtl-Qil = 0; (3.45)
dM
03 +QOE = 0;
ds
de Ли Я0
*!l„3l-)-_La =0; (3.46)
de Л2а Я<> i
dO
de
Ча-o;
d«, 1 n
de Re E
dtt* -f—^-$3=0; (3.47)
*2
de #°
de Й
Входящее в уравнения (3.44) осевое усилие Qi* определяется
из уравнения (3.10) при х*=1//?°; Р*<*> = 0, т. е. Qi* =—q2*R°.
Уравнения (3.44) — (3.47) позволяют определить критическую
нагрузку q* в самом общем случае ее поведения (следящая,
«мертвая», зависящая от перемещений осевой линии стержня).
Если нагрузка следящая, то Aqi = Q и из системы (3.44) — (3.47)
получаем две независимые подсистемы уравнений такого вида:
104
^Si_ J- Qo2 = 0; iSs-+— Q01 + Q1WM03 = 0;
^ + 0.. = 0:
de
d*>3
ds
-M„3 = 0; (3.48)
da, 1 n
de R° г
*£«.+-!_„_&-0;
de ^^° X
dQ,
03
22
de Л
dAf01 1
^* M =0*
de & °2
dM
02
+-Lmoi-QO3 = 0; (3.49)
de RQ
de Au R°
de Л2а /?<» * de *
Система уравнений (3,48) позволяет определить критическую
нагрузку д2*, при которой кольцо теряет устойчивость, оставаясь
в плоскости (форма кольца после потери устойчивости показана
на рис. 3.2 пунктирной линией). Система уравнений (3.49)
позволяет определить критическую нагрузку, при которой возможна
потеря устойчивости кольца с выходом из плоскости.
Для определения критической нагрузки д2*, при которой
кольцо теряет устойчивость в плоскости чертежа, достаточно
рассмотреть первые три уравнения системы (3.48). Исключая из этих трех
уравнений Qoi и Моз, получаем уравнения относительно Q02 вида
d2Q
02
d6, +(j^-«»)ft.-0. (3.50)
Решение уравнения (3.50)
Q02=Clcos /ee-f-c2sin ke (k2=l/(R°) 2—Qu/?°)
должно удовлетворять условиям периодичности, т. е. Qo2(0) =
— QoiO); Qo2(0)=Qo2(l), что приводит к системе однородных
уравнений
105
(cos&—l)ci-r-sin£c2=0;
—k sin kci-\-(cos k—l) c2=0. (3.51)
Приравняв определитель системы (3.51) нулю, получим cos k—
—1 = 0, откуда Л=2лп, или (так как Qi* =—q2*R°)
V(R°)2+q2*R°=4n2n2.
Критическая безразмерная нагрузка
q2*=[4n2n2(R0)2— l]/(R°)\ (3.52)
Размерная критическая нагрузка
{Я2*)р=Й2*Аш/12={п2— 1)Л33/£3 (R°=R/l=l/(2n)). (3.53)
При п=2
(<Ыр=ЗЛ33/#3 (3.54)
получим критическую нагрузку, при которой возможна потеря
устойчивости с выходом из плоскости.
Рассмотрим систему уравнений (3.49). Исключая
трех уравнений М0\ ,и <5оз, получим
d2^02 j_ ( l Qu
из первых
de2
н
1
•22
М02=0.
(3.55)
Уравнение (3.55) аналогично уравнению (3.50), поэтому приведем
конечный результат (размерную критическую нагрузку)
(<Ыр=ЗЛ22/Я<
(3.56)
(3.54) и (3.56) для
<.А22, то кольцо по-
перемещения точек
Из сопоставления полученных выражений
критической нагрузки q2* следует: 1) если Л33
теряет устойчивость в плоскости чертежа, т. е
осевой линии стержня относительно плоскости равны нулю; 2)
если А^^>А22, то кольцо потеряет устойчивость с выходом из
плоскости чертежа (перемещения точек осевой линии в плоскости
чертежа равны нулю — проекция осевой линии стержня после
потери устойчивости на плоскость чертежа есть окружность); 3) если
Аж=А22, то кольцо теряет устойчивость и в плоскости чертежа, и
относительно этой плоскости (все три компоненты вектора
перемещений и отличны от нуля).
Рассмотрим случай, когда вектор q при потере устойчивости
остается параллельным своему начальному направлению (рис.
3.7). Для определения критической нагрузки q* необходимо
получить выражение для приращений компонент вектора Aq. В
Приложении [см. соотношение (П. 159)] было получено выражение
для приращения вектора а, неизменного по направлению и
модулю, в случае изменения положения связанных осей при малых
углах поворота. Из соотношения (П. 159) следует
Aq = #2*ft3ei—<72*ftie3.
(3.57)
106
<*"^Г^
Рис. 3.7
В результате получаем две системы независимых уравнений
[из системы (3.44)-(3.47), аналогичной (3.48) —(3.49)]:
de
Щ
01
de
dOoa
!rQCE + ^A = c;
1
de
R°
6M03
ds
dS.
Qoi + 0»ЛГм = 0;
+ Qo2 = 0;
-^L__L, =0;
i-AJOJ-0;
d«, (
K°
tf°
«,-»,=0;
(3.58)
dvoa ^i *
M
de
02
<7*A = 0;
*22
dAJ
01
de
— Mn9 = 0;
Я°
02
6M
03
+ -i-M01-QO3 = 0;
Д0
de Лп Я0 2
d»2 A?
02
1
r ^ = 0;
de Л22 R*
dw4
+ u2 = 0.
(3.59)
K7
Исключая из первых четырех уравнений системы (3.58) Q0],
Q02 и Ф3, получим уравнение относительно М03:
^^+(-^4^)^^ + ^^.,^0. (3.60)
Решение уравнения (3.60) должно удовлетворять условию
периодичности, поэтому полагаем
Моъ=с sin 2ппе. (3.61)
Подставив (3.61) в уравнение (3.60), после преобразований
получаем выражение для критической радиальной нагрузки
(в размерном виде)
q2*=n2A33/R\ (3.62)
Из (3.62) следует, что имеются два возможных значения для
критической нагрузки q2*t соответствующих значениям п=1 и п =
= 2. При п=1 кольцо смещается как жесткое целое, сохраняя
круговую форму. При п=2 кольцо, теряя устойчивость,
деформируется, принимая форму эллипса (без смещения точки О).
Определим критическую нагрузку, при которой возможна
потеря устойчивости с выходом осевой линии кольца из плоскости
для случая, когда вектор q2* дри потере устойчивости остается
неизменным по направлению (параллельным своему начальному
направлению). Из трех уравнений системы (3.59) исключаем Q03 и
Моь что приводит к уравнению
— \Мп+ (——--^|Ж0,1. (3.63)
Из второго, четвертого и пятого уравнений системы (3.59)
исключаем Afoi и #2, что приводит к уравнению
&," - ( + ——) М02 + — ftt = 0. (3.64)
Из уравнения (3.64) исключаем Oi (воспользовавшись
уравнением (3.63) Qi* = — q2*R°):
^^ 4^0)2 A22 j I 4~\R°A1J ' (R>)*\ os V }
Полагая M02=A sin 2лле, после преобразования из уравнения
(3.65) получаем
<?2*=(я2—1)2Л22/[(п2+Л22/Л„) (Я0)3]. (3.66)
Размерное значение критической нагрузки
(Ыр=*72*Лззр//3=(«2-1)2Л22Р/[(д2+
+A22/An)R3] (R°l=R), (3.67)
где Л33р, Л22р — размерные изгибные жесткости; R — размерный
радиус.
108
»х =
Наименьшее значение критической нагрузки имеет место при
п=2:
(^)р=9Л22р/[(4+Л22/Л11)^3]. (3.68)
Критическое значение нагрузки #2* можно найти из систем
уравнений (3.48), (3.49), (3.58), (3.59), не сводя эти системы
уравнений к одному уравнению, как это было сделано при
решении. Так как все неизвестные (Q03, М0] и т. д.), входящие,
например, в систему уравнений (3.59), должны удовлетворять условию
периодичности, то можно положить, что
Чоз — Dic ' Jvlvi — D2C » тог — D3c у (3 691
а^вУ*27"08; Ъ2 = ВьеЦ2жп)е; и3 = Beei{2ltfl)\
Подставив (3.69) в систему (3.59), получим систему
алгебраических линейных уравнений относительно Bi вида (в векторной
форме)
нв=о,
где
В,
Б,
Н =
2ът
0
—1
0
0
0
0
2тт
1/Я°
-1/А
0
0
-QiJA
—i/tf°
2tmi
0
-i/A
0
—я**
0
0
2тт
1//?°
0
0
0
0
-1/#°
2-пгй
1
0
0
0
0
0
2-кт
в =
в..
Определитель матрицы Н должен быть равен нулю (чтобы Bi
были отличны от нуля), т. е. D = detH=0. Воспользовавшись
правилом раскрытия определителей, получим
D = 2ът
2-кт
\jR°
-1/А
О
и окончательно
2izni /Г(4*2яг)2 —
—1/R0
2-кт
О
-1/А
0
0
2ш1
\IR°
0
0
—1//г°
2izni
0 —QiJAi— qs* о
2-кт —1/R0 О О
—1/А 0 2тзд—1/Я°
О —1/А» W 2чсга
D
(#°)а
-(4nV) + —1 - —
Г4л3/г^о
'22
(3.70)
найденные
Из (3.70) после преобразований получаем ранее
значения (3.66) для критической нагрузки.
Устойчивость плоской формы стержня при наличии
дополнительных связей. Ограничимся примером, показанным на рис. 3.8.
При изгибе стержня в плоскости xiOx2 упругая связь не работа-
109
'J^J
Рис. 3.8
R), которое считается известным, т. е.
|R| = |e/}-u^|c,
ет. При потере устойчивости
стержня с выходом из плоскости
появляется сосредоточенная сила R
(реакция связи), приложенная в сечении
К. Пусть стержень нагружен
следящим изгибающим моментом Г=
— Гзез. При малых перемещениях
точек осевой линии стержня
реакция R по модулю равна
произведению жесткости связи с (упругая
связь с линейной характеристикой)
на проекцию перемещения точки К
на направление реакции (вектора
(3.71)
где е/? — единичный вектор направления реакции.
Если упругая связь представляет собой, например,
цилиндрическую пружину, ось которой перпендикулярна плоскости х\Ох2,
то из (3.71) получаем (в этом случае е# = —i3 и е3 = 1з)
R
= |— н-ик\с=иъсу
R=— usch.
В общем случае имеем
е/?= 2&i/.
где ^ — известные величины.
Так как уравнения равновесия (3.5) — (3.9) записаны в
связанных осях, то вектор е# следует представить тоже в связанных
осях. Воспользовавшись соотношением (П.59), получаем вектор
е# в базисе {е,-}:
е^-и1^ (1^ = LL°),
где L^3) — матрица преобразования базиса {е;-} к базису {е^}; L0—
матрица перехода от базиса {ij} к базису {е;-*}. Элементы
матрицы L0 зависят от углов ft,-* поворота связанных осей,
соответствующих моменту потери устойчивости. В связанных осях модуль
реакции
R
е»>-иЛ | с
("* = 2 "**/)•
или
IR| = [ Vl>eR-uK\c.
по
В базисе {е,} вектор
При малых перемещениях точек осевой линии стержня
компоненты вектора R могут быть представлены в виде
8
Д/ = - 2 №*,(**) (^1.2- 3>*
или
*< = -( 2Ъ/Мв>)8 (•-»*)■
При преобразованиях и численном решении вектор R удобно
представить в виде
R=—Ги(е)б(е—е*), (3.72)
где Г — матрица с элементами -у^.
В рассматриваемом примере имеем Qu—Q2*=0; М3* = 7'з*-
Уравнения равновесия стержня после потери устойчивости при
произвольном поведении момента Т принимают следующий вид
[ограничимся уравнениями (3.40) при AD^O; уравнения (3.41) —
(3.43) остаются без изменения]:
*—-k-Qc^W-^);
de
dQoa
de
dQos _
+ ^Qm = R2b(£-sK); (3.73)
de
= #з8 (£ — SK)-
Уравнения (3.73) можно преобразовать к более удобному
виду, полагая
■"33
Так как ЛJз* = 7,*, то получаем следующую систему уравнений:
з
3
dQ02
+ ^- Qoi + "aoQoi = J] Y./«^ (e - e^); (3.74)
de
/=1
111
_dAf„
de
AM
02
de
AM,
03
de
-^0. + ^(^1) = 0:
- + Xso^o, - Qo* + ДГ.»(в -1)^0; (3.75)
de ^ Л33 '
d99 Мло . T
02
d e ла лзз
d93 _ ^03 = Q.
+ J-*_&l+xio&i==0; (3.76)
de A3S
de A33 ъ г0
■T^ + "Г" "i + Vt - », = 0; (3.77)
de Л33
-^- + &2 = 0.
de
Основная особенность данной системы уравнений заключается
в том, что в уравнения (3.74) входят слагаемые, зависящие от
неизвестных перемещений точки приложения реакции R.
Аналогичные задачи статики при наличии упругих и жестких
промежуточных связей, наложенных на стержень, были рассмотрены в § 2.2,
где были приведены уравнения равновесия с учетом реакции
связей и методы ,их решения.
Основное отличие задач статики стержней с промежуточными
связями, рассмотренных в § 2.2, от задач статической
устойчивости стержней с промежуточными связями заключается в том, что
в задачах устойчивости неизвестными являются внешние силы (их
критические значения). Численные методы определения
критических значений нагрузок для стержней с промежуточными связями
изложены в § 3.5.
§ 3.4. Определение приращений нагрузок
при потере устойчивости
Силы, следящие за точкой пространства.
Рассмотрим несколько примеров определения приращений
сосредоточенных сил, следящих за некоторой точкой О. В предыдущих
параграфах данной главы были приведены примеры потери
устойчивости кольца, нагруженного равномерно распределенной
нормальной (до потери устойчивости) нагрузкой qo=<72ero, которая
после потери устойчивости оставалась или (первый случай) нор-
112
мальной к осевой линии стержня, или (второй случай)
параллельной своему начальному направлению. Рассмотрим третий случай,,
когда нагрузка qo следит за центром кольца — точкой О (см.
рис. 3.7). Следует отметить, что все эти случаи имеют одну
общую особенность, а именно: до потери устойчивости форма
осевой линии стержня остается неизменной. Это наиболее простые
случаи. Как уже раньше указывалось, возможны случаи потери
устойчивости стержня при непрерывном его деформировании,
когда к моменту потери устойчивости форма осевой линии стержня
может существенно отличаться от начальной. Определение
приращений сил, соответствующих этому более сложному случаю, см.
в § 1.2. В рассматриваемом случае имеем [уравнение (1.48)]
A=|L°R|-=^ (R=r0);
L° =
cos cp sin
?
0~
sin 9 cos Cp 0
0 0 1_
L°R =
0
R
0
; alx =
> &ro —"
0
1
0
~ 0
К
-». о
. h -K
; u =
uv
«a
W3
.
-V
к
о.
(3.78)
После преобразований из (1.51) получаем
Aq - 1 Qo I [ (- ^- + *.) е, - (^- + ^) е,] = Д?А - Д№. (3.79)
Рассмотрим случай, когда при деформировании стержня силы
остаются неизменными по направлению и модулю (рис. 3.9).
В этом случае приращение вектора Ро зависит от углов поворота
связанных осей, т. е. P=LPo, поэтому
др=ЬРо—Ро= (L—Е) Ро. (3.80)
При малых углах поворота связанных осей имеем [с учетом
(1.46)]
ДР = ДЬ,Ро=[(Ро20з—
-Роз#2) ei + (—Poi03+Po3fli) е2 +
+ (Poi^2-Po2^i)e3]. (3.81)
Например, для кольца,
нагруженного распределенной
нагрузкой, при таком
поведении q0 получаем
Aq = ^3ei—<?2die3, (3.82)
что совпадает с ранее
полученным выражением (3.57).
Силы, следящие за
пространственной прямой (линия Рис. з.9
8—6011
ИЗ
действия сил остается при
нагружении стержня
ортогональной этой прямой).
Рассмотрим случай,
когда силы следят за
некоторой прямой в пространстве
(линия А—А на рис. 3.10),
оставаясь в плоскости,
перпендикулярной этой прямой.
^ Примеры таких сил приве-
х* дены на рис. 3.11 и 3.12. На
рис. 3.11 показан стержень,
вращающийся относительно
оси х2. При потере
устойчивости плоской формы
стержня распределенная нагрузка q всегда перпендикулярна оси х2. На
рис. 3.12 показан стержень, находящийся в магнитном поле.
Распределенные силы притяжения магнита (при малых
перемещениях точек осевой линии стержня после потери устойчивости)
можно считать перпендикулярными А—А. В этом примере
распределенные силы имеют направление, противоположное силам,
возникающим при вращении стержня (рис. 3.11). Кроме того, в этих
примерах (рис. 3.11 и 3.12) модуль сил после потери устойчивости
не остается постоянным, так как зависит от радиуса г.
Получим выражения для приращения вектора Ро, следящего
за прямой А—А, линия действия которого при деформировании
стержня остается в плоскости, перпендикулярной этой прямой (см.
рис. 3.10). На рис. 3.10 показаны два состояния элемента
стержня: / — естественное и 2 — нагруженное. При переходе элемента
стержня из состояния / в состояние 2 под действием силы Р0
положение силы Ро относительно связанных осей (базиса {е;})
изменяется на величину ДР,
определяемую по формуле
ДР = (Р-Р<1,)=[ |Р0|(ег-ей})1,
(3.83)
Рис. 3.11 Рис. 3.12
114
где
(i)
е,=
Щг0 + ЯЙ!-и
LL% + LLOR0 _и|
^
L°r0
В выражение для единичного вектора ег входит неизвестный
вектор R00l, который зависит от вектора и. Так как г0 и г
перпендикулярны линии А — А, то вектор Rqo, может быть представлен в
виде (см. рис. ЗЛО)
1Ц = (еА-и)ед,
или (в базисе {е;})
RS;> = (LL°eA.u)LL°e,.
Окончательно получаем
Ш>г0+ (И,°ед.и)Шел — и
ДР.= !Ро|[-
| LL<>r0 + (LL0t^-u)LL% —и |
L% 1
|г0| J"
(3.84)
Матрицы L и L0, входящие в полученное выражение (3.84) для
приращения ДР, зависят от координаты гк — точки приложения
сосредоточенной силы Ро. Аналогичные выражения получаются и
для приращений Aq, Дц и AT:
ДТ = |Т,
Г LLor0 -
j l LL°r0
+ (LL%.u)LL% —u
L°rn
+ (LL»e/1.u)LL»e/1-u|
LL°r0+ (LL°eA-u)LL<>eA— u
| 1ХоГо + {Ш>ед-и)Ш>ед — u |
LL»r0 + (Ш>ед-и)Ш>ел — u
| LL<>r0 + (Ш>ел-и)Шед — u 1
*o l J
L°r0
L°r0
(3.85)
(3.86)
(3.87)
Приращения сосредоточенных сил, следящих за прямой, при
малых отклонениях стержня от исходного состояния. Получим
выражение для ДР0 при малых перемещениях точек осевой линии
стержня и малых углах поворота связанных осей.
Воспользовавшись выражением (1.46) для матрицы L, преобразуем выражение
(3.87), сохраняя только слагаемые, линейно зависящие от
матрицы ALi и вектора и. После преобразований получаем следующее
выражение:
ДР
ДЦе,0+4-«-0е*-и^0ел--Г-
- (ег1>д) (VeAu) еГо + — (еГ(и) еГо
А
1
(3.88)
Рассмотрим пример, показанный на рис. 3.13. Кольцо
находится в плоскости х\Ох2. Прямая А—А перпендикулярна плоскости
8*
115
кольца. В данном примере имеем
0
0
1
;ч =
0
1
0
Матрицы L0 и L соответствуют матрицам (12.1) предыдущего
примера. Из (3.88) получаем
ДР-1 Pol [(^-^-)^-^,]. (3.89)
В плоскости кольца поведение силы Qo эквивалентно
поведению силы, следящей за центром кольца, поэтому A^i получим
такое же, как в предыдущем примере.
Приращения сосредоточенных сил, следящих за точкой
пространства, при больших перемещениях стержня относительно
естественного состояния. Получим выражение для приращения сил в
случае, когда потеря устойчивости происходит относительно
деформированного состояния стержня, которое существенно
отличается от его естественного состояния. Ограничимся случаем, когда
силы постоянны по модулю и следят за некоторой точкой Oi
(рис. 3.14). Модуль силы Р*<]> после потери устойчивости
остается неизменным, т. е. |Р*(1)| = |Р*|. На рис. 3.14 показано три
положения элемента стержня, к которому приложена
сосредоточенная сила Р0. Требуется определить АР, которое, как следует из
р.ис. 3.14, равно
ДР= |Р»|(ег-е«> (3.90)
Соотношение (3.90) аналогично ранее рассмотренным случаям,
когда деформацией стержня до потери устойчивости
пренебрегали. Отличие заключается в том, что теперь вектор ег =е^*
определяется из решения нелинейных (если, до потери устойчивости
перемещения точек осевой линии стержня большие) уравнений
Пб
равновесия. Так как уравнения равновесия (3.5) — (3.9) после
потери устойчивости записываются в базисе {е/}, то и вектор ДР
надо получить связанным с этим базисом. Находим единичный
вектор er :
ег. = г J { г# | (г* = L0L°r0 — u J,
где Lo — матрица перехода от базиса {е/0} к базису {е^*}; L0 —
матрица перехода от базиса {ij} к базису {е;о}. Находим
единичный вектор ег:
ег=г/|г| (r = Lr*—и),
где L — матрица перехода от базиса {е/*} к базису {tj}. В
результате получаем
L(L0Loro-u.)—ii L0Lofo
ДР = I Р„
'[■
(3.91)
| L{L0D>r0-u,) —u[ |L0L%.
Рассмотрим частные случаи выражения (3.91) при малых
отклонениях стержня при потере устойчивости от деформированного
состояния. Так как вектор и* считается известным, то в (3.91)
можно положить
LoLor0—u*=b.
При малых углах поворота связанных осей и малых
компонентах вектора и правую часть выражения (3.91) можно представить
в виде
Ь+ Да b
ДР:
b + Да ] |а
где Да = ДЦЬ — и. Полагая вектор Да малым, имеем
(3.92)
1
Ь + Да
J_
1
1
Л2
(ЬДа)
04= | Ь I ).
Окончательно из (3.92) получаем выражение для приращения
силы Р при малых углах поворота связанных осей и малых
перемещениях точек осевой линии стержня:
АР - I Р. | [Дь,еь —j - еь (е^ДЬ^) + -L еь (еьи)], (3.93)
где еь=Ь/|Ь|.
Приращения сосредоточенных сил, следящих за точкой
пространства, при малых перемещениях стержня относительно
естественного состояния. Рассмотрим случай, когда углы поворота
связанных осей и перемещения точек осевой линии стержня до
потери устойчивости можно считать малыми, т. е. компоненты вектора
и* малы, а матрица Ь0 = Е+ДЬю, где
Г °
га
о
— а-,
20
I»
— Э-.
10
О
117
■frio — малые углы поворота связанных осей при нагружении
стержня до критического состояния. В этом случае из (3.91) получаем
др= [ р | I <Е + ALiWE + AL,0)LQr0-и»-и] „
_ (Е + АЧо)Ь%-и^ J
I (Е-Ь AL10)Lor0 —и* 1 /'
или -после преобразований
ар« I р. I [дМг,-7 + 7^,и)е4 <3-94>
Правая часть выражения (3.94) не зависит от ДЬШ и и*, т. е.
малые углы поворота связанных осей и малые перемещения
точек осевой линии стержня до потери устойчивости на критические
силы, следящие за точкой 0\ (рис. 3.14), влияния не оказывают.
Полученное выражение (3.94) для приращения силы Р* совпало
с выражением (1.49) для случая, когда деформации стержня до
потери устойчивости не учитывались.
§ 3.5. Численное определение критических
нагрузок
Форма осевой линии стержня в критическом
состоянии совпадает с ее формой в естественном состоянии.
В этом случае, наиболее простом для численного определения
критических нагрузок, напряженно-деформированное состояние
стержня в критическом состоянии определяется из линейных
уравнений равновесия.
Определение критических нагрузок сводится к
последовательному решению двух линейных уравнений:
Y*+A*Y* = b*; (3.95)
Y+A(Y*)Y+b(Y*, Y)=0. (3.96)
Уравнение (3.95) является частным случаем системы
уравнений (3.10) — (3J 4). Уравнение (3.96) есть уравнение (3.28).
Вектор b зависит от приращений векторов нагрузки, которые в общем
случае зависят от векторов #,11 и и" [соотношения (3.20) — (3.23)].
Вектор и' можно исключить из соотношений (3.20) — (3.23),
воспользовавшись уравнением (3.27), и получить выражения для
приращений векторов нагрузки, зависящие от векторов ф и и.
Выражения для приращения векторов произвольных распреде-
ленных нагрузок после исключения вектора и из соотношений
(3.20) и (3.22) принимают вид
Aq=Citt+C2u; Д(1=Сз*+С4и,
118
где
Г — Г(1) Г<3 А ■ Г — Г(2) Г(3)Д •
c,=cr'-ci6,Ai; cs=c:6»-c:6»a„.
Вектор b, входящий в уравнения (3.96), для рассматриваемого
случая можно представить в виде
~0 О С, С2~
О О С3 С4
Ъ== О О О О
_о о о 0_
В результате получаем однородное уравнение
Y+BY=0 (В=А+С). (3.97)
Из уравнения (3.95) определяется вектор Y*,
характеризующий напряженно-деформированное состояние стержня в
критическом состоянии, который входит в уравнение равновесия стержня
(3.96) после потери устойчивости. Уравнение (3.96) после
преобразований (явного представления вектора b через приращения
компонент векторов нагрузки) является однородным уравнением.
Значения нагрузки, при которых решение уравнения (3.96)
удовлетворяет краевым условиям задачи, являются критическими.
Методы численного решения линейных уравнений равновесия
были изложены в § 2.3. Эти методы требовали определения
фундаментальной матрицы решений К(е), так как использовалась
запись решения в виде
Y = K(e)C+Yb
Методы уточнения фундаментальной матрицы К(е) изложены
в § 2.1. Эти методы решения можно использовать и при решении
уравнений (3.97).
Для определения критических нагрузок из уравнения (3.96)
необходимо вычислить вектор Y* с заданной точностью. Этот
вектор можно получить, уточняя матрицу К(е) (см. § 2.1), но этот
вариант требует значительного времени счета, и если сама
матрица К(е) не нужна, то этот вариант численного определения
вектора Y* нецелесообразен.
Рассмотрим вариант численного определения вектора Y* с
использованием метода итераций. Из уравнения (3.95) получаем
Y» = - j A.Y.dA + j b# dft + Y*0. (3.98)
Если известно приближенное значение вектора Y*, например Y*(0),
то из (3.98) получаем первое уточнение вектора Y*:
Yil) = -J АХ0) d h 4- \ К d A + Yff. (3.99)
Q0
U
= CY.
119
Для однородных краевых задач часть компонент вектора Y*0
равна нулю (это следует из краевых условий при е=0).
Оставшиеся компоненты вектора Y*0 находятся из однородных краевых
условий при е=1. Для т-го приближения имеем
Y(n.) = _ j Aj^-i )d/z + Jb^d/I + Y<™>. (3.100)
Если при m-м приближении компоненты вектора Y*(m)
удовлетворяют требуемой точности
max
»/ ,1
у{т)
ШО Vo
то вектор Y*t*») можно считать решением уравнения (3.95).
Возникает вопрос: как выбрать нулевое приближение вектора
Y*(0), без которого невозможен процесс итераций? В качестве
нулевого приближения можно взять вектор Y*<0), полученный с
использованием метода начальных параметров, т. е. вектор
Yi0) = K(e)C + Yie, (3.101)
удовлетворяющий краевым условиям задачи. В этом случае надо
только один раз численно получить матрицу К(е). Для большей
наглядности рассмотрим случай, когда имеет место
пропорциональное увеличение нагрузки с коэффициентом
пропорциональности р. Тогда для каждого заданного |3(/"> находим вектор Y*(m>.
Определив вектор Y* для заданного значения p(j), решаем уравнение
(3.96), которое приводится к однородному уравнению
Y+BY = 0, (3.102)
поэтому
Y = K(e, р</>)С (К(0, р«))«Е). (3.103)
Матрицу К(е) можно уточнить, воспользовавшись методом
итераций:
К<т>(е> р('>) = — $ВК(т_1>(й, Р{/,)<1Л + Е.
Получив матрицу К (в, Р(/)). удовлетворяющую заданной точности
решения, из однородных краевых условий при е=1 получаем
систему шести однородных уравнений (шесть компонент вектора С
равны нулю из краевых условий при е=0) с точностью до
индексов:
6
2ML Р(/)К=0 (/==1, 2,..., 6). (3.104)
/=1
Система (3.104) имеет нетривиальное решение, если ее
определитель равен нулю:
det|D|=0. (3.105)
120
Значение p(J}, при котором определитель D обращается в нуль,
является критическим значением множителя (3*, а
соответствующие нагрузки q* = P*q0; Н-* = Р*Цю; P*(i) = (3*P0(<); TVv>=p *T0(v) —
критическими. Если q0, ju,o, Ро({) и T0(v) — нагрузки, которые
должен выдержать стержень, не теряя устойчивости, то критическое
значение коэффициента пропорциональности должно быть
больше единицы, т. е. р*>1.
Рассмотрим более подробно алгоритм получения
определителя на примере консольного стержня, нагруженного
сосредоточенной силой и сосредоточенным моментом. Для консольного
стержня с приложенными к торцу (в сечении е=1) сосредоточенной
силой Р и сосредоточенным моментом Т имеем следующие
краевые условия для вектора Y: 1)е=0; ft = u=0; 2) е—1; Q0 —АР;
М0 = АТ, или (считая, что АР и AT зависят только от и(1) и #(1)
Q0(l) = B*(2)u(l)+B^%(l); Mo(l)=B*<4>#(l)+B*<5>u(l).
Из краевых условий при е=0 получаем с7~с8= --. = Ci2 = 0.
Уравнения для определения оставшихся Ci {си с2, ...,с6),
получающиеся из краевых условий при е=1, рассмотрим более подробно.
Представим решение (3.103) в виде (с учетом найденных
значений с7,..., Ci2)
Y =
Q0
м0
#
u
ГК(11) К(,2) K(1S) К(14) п
I К(21) К(22> К(г8) К(24)
I К<31} К(32) К<33) К(34)
L К{41) К(42) К<43) К(44)
О1»
о
о
(3.106)
где К<г7) — блочные матрицы размером 3X3;
О1)^
ог> =
Из (3.106) получаем
Q0 = K<uCtD+K(l2)Ct2>;
Мо = К(21)С(1)+К(22)С(2);
u = K(41>C(1>+K<42,C<2>.
(3.107)
Из отношений (3.107) следует, что для определения
критических нагрузок для консольного стержня достаточно определить
шесть первых столбцов фундаментальной матрицы решений К(е),
121
решая шесть раз уравнение (3.102) при следующих начальных
условиях:
Y<*> =
1
0
О
О
Y<2> =
О
Y<e) =
Из краевых условий при 8=1 следуют два векторных
уравнения:
(К(П)_в*(2)К(41>—B*(]>K(31)) С(!>+ (К{12)—B*d>K(32)—
—В*(2>К(42))С<2> = 0;
(К;(21)_в4(4)К(31)—В*(5>К(41>) С<[>+ (К(22)—В*<4>К(32)—
—В*(5>К(42))С<2>=0,
или
D
D.
12
21 ^22 J
О1)
О2)
-о,
где
Dn=K<n>—В^Ю31*—В*<2>К{41);
D12=K(12)—В*^!^—В*<2>К(42>;
D21=K(21)—B*(4>K(3I>—В*(5>К<41>;
D22=K(22)_Ba(4)K(32)_Ba(5)K(42)_
Критические значения нагрузок (коэффициента 0*) находятся
из условия
D = det
D„ D
'ii
12
LD21
D
22
= 0.
Форма осевой линии стержня в критическом состоянии
отличается от ее формы в естественном состоянии. Основная
особенность потери устойчивости криволинейных стержней относительно
деформированного состояния заключается в том, что заранее не
известно их критическое напряженно-деформированное состояние,
в частности форма осевой линии стержня, которая может сильно
отличаться от формы осевой линии в естественном состоянии.
Например, когда определяется критическая нагрузка для
прямолинейного в естественном состоянии стержня, то считается, что и в
122
критическом состоянии стержень тоже остается прямолинейным.
Аналогично считается и при определении критических
распределенных нагрузок для кольца, когда в критическом состоянии
форма кольца та же, что и в естественном состоянии. В этих случаях
{когда до потери устойчивости форму стержня можно считать
совпадающей с ее естественной формой) все параметры,
характеризующие геометрию осевой линии стержня [и/0(е)] и положение
главных осей стержня [#?0(е)], известны. Известны также и
внутренние силовые факторы Q/o(e), Af/0(e), которые находятся из
уравнений равновесия (из уравнений нулевого приближения).
При потере устойчивости относительно деформированного
состояния (например, потеря плоской формы изгиба спиральной
пружины; см. рис. 3.4) необходимо предварительно определить
критическую равновесную форму стержня [уравнения (3.10) —
(3.14)], от параметров которой (и*, Q*, М*) зависят линейные
уравнения равновесия стержня [уравнения (3.24) — (3.27) или
уравнение (3.28)] после потери устойчивости. Так как
критическая форма стержня заранее не известна, то требует проверки
устойчивость всех состояний равновесия при непрерывном
увеличении нагрузки. При решении нелинейных уравнений равновесия,
рассмотренных в гл. 2, нагрузки, приложенные к стержню, были
известны, поэтому, воспользовавшись одним из возможных
методов численного решения уравнений равновесия (например,
методом, использующим поэтапное нагружение), можно получить
векторы, характеризующие напряженно-деформированное состояние
стержня, соответствующее заданным нагрузкам.
При исследовании устойчивости стержня нагрузки неизвестны
и требуется найти такие нагрузки, которые удовлетворяют
нелинейным уравнениям равновесия (3,10)-(3.14) и линейным
уравнениям (3.24) — (3.27) при однородных краевых условиях.
Численное решение уравнений (3.10) — (3.14) для каждого шага на-
гружения изложено в § 2.3. Возможны различные варианты на-
гружения стержня: а) пропорциональное увеличение нагрузок;
б) последовательное нагружение, например вначале стержень
нагружается силами, при которых нет потери устойчивости, а затем
дополнительно нагружается или распределенной нагрузкой, или
сосредоточенной силой или моментом. Возможны, конечно, и
более сложные варианты нагружения, когда стержень
дополнительно нагружается несколькими силами или моментами
(распределенными или сосредоточенными). Во всех перечисленных
случаях можно выделить одну нагрузку и, увеличивая ее, довести
стержень до критического состояния. Это существенно при численном
счете, когда надо определять собственные значения (критические
силы) краевой задачи.
Рассмотрим алгоритм определения критических нагрузок при
пропорциональном их росте (с коэффициентом
пропорциональности Р). После получения решения с заданной точностью для т-го
123
шага нагружения [решение системы (3.10) — (3.14)] определяется
фундаментальная матрица решений уравнения (3.100) К(е) и
проверяется выполнение условия (3.103). Определив из системы
нелинейных уравнений (3.10) — (3.14) напряженно-деформированное
состояние стержня, соответствующее m-му шагу нагружения,
решаем уравнение (3.96) и проверяем выполнение условия
обращения в нуль определителя системы однородных уравнений (3.105).
Если условие (3.105) выполняется, то значение коэффициента
пропорциональности |3(m>=J30m является критическим значением
Р*, а соответствующая ему нагрузка — критической. Если
определитель системы (3.104) в нуль не обращается, то следует
рассмотреть напряженно-деформированное состояние, соответствующее
(т+1)-му шагу нагружения с последующей проверкой
выполнения условия (3 105). Если знак определителя системы (3.104)
изменился на противоположный по сравнению со знаком
определителя, соответствующего m-му шагу нагружения, то критическое
значение коэффициента пропорциональности находится между
значениями р<т> и рс™"1).
Методом последовательных приближений можно с заданной
точностью получить критическое значение |3*.
Определение критических нагрузок для случая, когда
сосредоточенные нагрузки приложены в произвольных сечениях
стержня. Рассмотрим стержень, нагруженный распределенной
нагрузкой, сосредоточенной силой Р и сосредоточенным
моментом Т, приложенными соответственно в сечениях ер и ег. В этом
случае после исключения и' из соотношений (3.21), (3.23)
получаем
AP=B1ft+B2u; ДТ = В3Ф+В4и,
где
В2 = В* — В* Ая#;
f5,-Bi6>A_
B1 = Bin —Bi3,Ai;
B3 = B:4,-Bf6,Ai:
Вектор b определяется как
b = CY+CPY6 (e—ер) +CrY6 (e—er)
B4 = B
где
0 0 В,
0 0 0
0 0 0
0 0 0
вЕ-
0
0
0
; Cr-
"0 0 о о -^
0 0 в, B4
0 0 0 0
0 0 0 0
Уравнения равновесия стержня (3.96) с учетом
сосредоточенной нагрузки можно представить в виде
Y+BY=—CpY6 (е—ер) — Ст\6 (е—ег) . (3.108)
Решение уравнения (3.108):
Y=K(e)C+F1Y(e/>)tf(e—Ep)+F2Y(er)//(e—ег), (3.109)
124
где
F1=K(e)K-1(ep)CP; F2 = K(e)K-f(er)Cr.
Слагаемое K(e)C удобно представить в виде
"К(11) К(12) К(13) К(14)
К(в)С =
о1»
О8)
О4'
К*41) . . К<44>
где K(ii) — матрица размером 3X3.
Аналогично (через блочные матрицы) можно представить и
матрицы Fi и F2. Решение (3.109) должно удовлетворять краевым
условиям (при е=0 и е=1) и дополнительным условиям:
1) е=ер, ft=ft(ep); u = u(eP);
(3.110)
2) 8=8г, ft=ft(er); u=u(er).
Для большей определенности рассмотрим консольный
стержень, для которого: 1) е=0, ft=u = 0; 2) е=1, Qo=M0 = 0. Из
краевых условий при е=0 получаем С(3) = С(4> = 0. Из краевых
условий при е=1 получаем
Kd')(i)c(i)+K(12>(l)C(2)+F103)(i)^(ep) +
+F1(14)(l)u(8p)+F2(13)(l)^(8r)+F2(1441)u(er)=0;
(3.111)
K<2i) (1) со>+К(22) (1) C<2>+F,(23>ft (ер) +
+Fi<24>u (ер) +F2<23> (1) ft (ет) +F2<24>u (ег) =0.
Кроме условий (3.111) должны выполняться условия (3.110)
(для определенности примем гР<Сгт):
При 8 = 8р
ft (ер) =К(31) (ер) C^)-f-K(32) (ер) С<2>;
при е=Ег
и (Вр) = К<41> (еР) С<1>+К<42> (ея) С<2>;
ft (ет) = K<3i) (ег) с(0+к(32) (ет) С<2>+
+Fj<33> (ет-) ft (еР) +Fi<") (ег) и (вР);
(3.112)
(3.113>
и (вт) =К(41) (ет-) С<»+К(42> (ет) С<2>+
+Fi<«> (ет) ft (еР) +Fj(44) (ет) и (еР).
Система шести векторных однородных уравнений (3.111) —
(3.113) содержит шесть неизвестных векторов: C(t>, С(2), ft(eP),.
u(eP), ft(er), u(Er).
Систему (3.111) — (3.113) можно представить в виде
однородного векторного уравнения
<Ds=0, (3.114)
125-
где
s=s[C<«>, С<2\ #(еР), u(ep), ф(вг), u(er)].
Числовые значения компонент векторов нагрузки (q*u М-*/»
.Р*/, Т*)), при которых определитель матрицы Ф обращается
в нуль, являются критическими.
Если нагрузка увеличивалась пропорционально, то из условия
<det[<D]=0 находим критическое значение коэффициента
пропорциональности и соответствующую ему критическую нагрузку.
Задачи для самостоятельного решения
ф 3.1. Спираль находится на ускоренно движущемся
•объекте (рис. 3.15). Вектор а ускорения объекта параллелен оси Xi. Требуется
получить систему уравнений, необходимую для определения критических
нагрузок (в данном случае критического значения модуля ускорения а).
ф 3.2. Спиральный стержень находится на вращающемся с угловой
скоростью to основании (рис. 3.16). Требуется получить линейные уравнения
равновесия стержня после потери устойчивости для двух случаев: когда форма осевой
линии стержня при потере устойчивости мало отличается от естественной
формы; когда форма осевой линии в критическом состоянии стержня существенно
■отличается от формы в естественном состоянии.
ф 3.3. На рис. 3.17,6 показано кольцо, нагруженное следящей
распределенной нагрузкой ¢, которое было получено из прямолинейного стержня (рис.
3.17,а). Требуется выяснить, зависит ли критическое значение модуля вектора
|qj (для следящей нагрузки) от предварительного напряженного состояния
кольца (от изгибающего момента Мао).
ф 3.4. Определить критическую нагрузку q (рис. 3.14,6) для случая, когда
:вектор q при потере устойчивости остается параллельным своему начальному
направлению (с учетом начального напряженного состояния). Рассмотреть два
случая потери устойчивости кольца: 1) в плоскости чертежа; 2) относительно
.плоскости.
Рис. 3.15 Рис. 3.16
Э 26
о)
Рис. 3.17 Рис. 3.18
3.5. Круговой стержень находится на ускоренно движущемся объекте
(рис. 3.18). Вектор ускорения объекта а параллелен оси xt. Стержень несет
сосредоточенную точечную массу т. Требуется получить уравнения равновесия-
стержня после потери устойчивости, считая, что критическая форма стержня
совпадает с естественной формой, т. е. Кз* = 1/^° (R°=l/Ro)-
Раздел второй
ПРИКЛАДНЫЕ
ЗАДАЧИ
Глава 4
ПРЯМОЛИНЕЙНЫЕ СТЕРЖНИ
Четвертая глава посвящена прикладным
задачам статики прямолинейных стержней. Прямолинейные
стержни, точнее — элементы приборов, машин и конструкций,
сводящиеся к расчетной схеме прямолинейного стержня, имеют очень
широкое распространение в инженерной практике. Ряд примеров
таких элементов конструкций приведен во Введении.
Многие задачи механики стержней, с которыми приходится
сталкиваться инженеру-расчетчику, не поддаются точному
решению. К таким задачам, например, относятся задачи статики и
динамики стержней с переменным сечением и нелинейные задачи. Для
решения подобных задач приходится использовать приближенные
методы, как численные, так и аналитические. Часто оказывается,
что полученные точные решения из-за чрезвычайной сложности
записи являются практически бесполезными для математической и
-физической интерпретации или численных расчетов, т. е.
приходится для получения нужной информации все равно прибегать
к упрощениям или к аппроксимациям полученных решений. Среди
приближенных методов решения уравнений равновесия
наибольшее распространение получили методы, использующие
вариационные принципы механики.
В данной главе изложены методы точного и приближенного
решения уравнений равновесия с использованием обобщенных функ-
дий, позволяющих эффективно решать задачи статики
прямолинейных стержней с учетом сосредоточенных сил и промежуточных
опор.
J 28
§ 4.1. Стержни, прямолинейные
в естественном состоянии
Традиционный метод вывода уравнений
равновесия. Уравнения равновесия для прямолинейного в
естественном состоянии стержня в простейших задачах, когда осевая линия
стержня — плоская кривая, а нагрузки — «мертвые», можно
получить традиционным методом, который излагается в курсах
сопротивления материалов и строительной механики. Если стержень
естественно закручен (см. рис. В.21) и нагружен внешними
силами и моментами со сложным поведением (например, следящими
за нормалью к осевой линии, или следящими за некоторой точкой
пространства, или зависящими от перемещений точек осевой
линии стержня, и т. д.), то традиционным методом получить
уравнения равновесия довольно сложно. Для подобных задач их
существенно проще получить из общих уравнений равновесия (1.31) —
(1.35) или (1.57) — (1.61) как частный случай для прямолинейных
(в естественном состоянии) стержней.
На рис. 4.1,а показан стержень прямоугольного сечения,
нагруженный распределенной нагрузкой q = q2e2o (на участке ei^e^l),
сосредоточенными силами Р<1)=Рш(1)ею, Р(2)=—Рг(2)его и
сосредоточенным моментом 1^)=7^30. Векторы его и е3о связанных осей
направлены по главным осям сечения (в исходном состоянии e2oll>2
и езоРз), поэтому осевая линия стержня при нагружении будет
плоской кривой, лежащей в плоскости Х\Ох2.
Ограничимся пока случаем, когда перемещения точек осевой
линии стержня малы. Мысленно выделим элемент стержня и
рассмотрим его равновесие (рис. 4.1,6) с учетом всех сил,
действующих на этот элемент. Так как проекции сил остаются неизменными
в декартовых осях, то целесообразно и уравнения равновесия
получить в этих осях. Считаем, что сечения стержня остаются при
деформации стержня плоскими и ортогональными осевой линии
стержня, т. е. деформации сдвига не учитываются.
а) Ц 61
D\
н^че
-dl
£
у?
i-Mr
П £ * 4
■20
J'_J'-JLJ1-!LJ;
d£
J!)
1 _. /1
X,
-,0 £,
D<1)=n<"p
Рис. 4.1
9—6011
129
Проецируя силы на оси х\ и #2, получаем
Q, + ^ de) cos(&3 + dft3)-Q,cosft3-
dQ2
Qa + ^2 da ) sin (ft, + dftj + Q2 sin fts + /¾1.¾ (s - 1) de = 0; (4.1)
"(
{Q, + ^1 de) sin(ft3 + d 0,)-(¾ sin a, +
+ (Q, + ^2 de) cos (0, + dftj - Q2 cos ft3 - qxds - P%> 8 (е_гг) de=0.
(4.2)
В уравнения (4.1) и (4.2) введены сосредоточенные силы, хотя
они к выделенному элементу и не приложены, но любую
сосредоточенную нагрузку можно представить в виде распределенной (qP
на рис. 4.2), которая при предельном переходе «стягивается» к
ограниченному участку действия 2Де. Более подробно это изложено
в Приложении 4. Из уравнений (4.1) и (4.2) при малых Ф3
получаем
dQ1 d
de
de
(QA)+O(*-l) = 0;
(4.3)
d^ + A (QA) _ q _ p*> 6 (e _ e2) = 0 (ft, = fe) . (4.4)
de de 2 \ de J
Уравнения (4.3) и (4.4) пока являются нелинейными, так как
в них входят произведения искомых функций Qi*&z и (ЗгФз-
Напомним, что уравнения (4.3) и (4.4) — это уравнения равновесия в
проекциях на декартовы оси, выраженные через проекции вектора
Q на связанные оси Qi и Q2. Для получения линейных уравнений
приходится вводить дополнительные допущения.
Из уравнения (4.3) получаем
Q 1=0А -¾^ (е-1) + 0,о- (4.5)
Если силы Р(2) и q приводят
к силе Q2 одного порядка с
силой Р(1), то слагаемым Q2#3
можно пренебречь (так как #3
мало), т. е.
Q1^_PiV//(e--l) + Q10. (4.6)
Так как за сечением, где
приложена сила Р[\\ осевая сила
Qt равна нулюДто из (4.6)
получаем QlQ=P%, т.е. Q^Pl^
— const.
Рис. 4.2
130
Определив Qlt из (4.4) получаем линейное уравнение
^ + flii)ik_ _/>«»«(._.,>» о.
de as
'ДГ2
Из уравнения равновесия моментов
+ ^в»-М,+ (q, + Ум- й.) йе + П" (• - .,)de = О
as ^ d е /
следует
dM3 , П I т(1)
(4.7)
М.
ds
+ Qt + ni'8(>-O = 0.
(4.8)
В уравнение (4.8) входит сосредоточенный момент,
приложенный в сечении с осевой безразмерной координатой ез, который
аналогично силе Pi2? может быть представлен в виде некоторого
распределенного момента и3 (рис. 4.3), который при предельном
переходе («стягиваясь» к сечению ез) дает сосредоточенный
момент 7У1).
Дифференцируя уравнения (4.8) и исключая -dQ2/de [используя
уравнение (4.4)], получим
-¾ _ ± Q, <±) + д + Р<|> 8 (. - .J + Г?'» (. -. j = 0. (4.9,
de2 d£ \ de / а
Так как Мз=Л33Аиз; Axs^dfts/de^d^/de2, то окончательно
получаем уравнения равновесия прямолинейного стержня при малых
перемещениях точек осевой линии:
d3 /. d%2_\ р<1) d*«a_ , п 1Р(2)ЙГр р ^ Д-
+ }1!>8(в-в1)=0. (4.10)
Уравнения равновесия можно получить, представив Q через
проекции в декартовых осях: Q = QXl^ + Q*A (рис. 4.4). В этом
Ы
Lin
/
Рис. 4.4
9*
131
случае получаем два линейных уравнения вида
6,,=^ + Pi1! 8 (а - 1) = 0 (Qr, = Q.cos »3 - Оа Sin ft,); (4.11)
^-^-^-^8(-^) = 0 (Q«. = Q1smdi + Qfcos»I), (4.12)
но уравнение моментов (4.8) теперь будет нелинейным:
^ + 0..-0.,0. + 7^8(.- e3) = 0(Q2 = Oc,-Q*A). (4.13)
Так как Q* находится из независимого уравнения (4.11)
Ох, = -№ («- 1) + 0xl0 (Qx,o = P?h.
или
О - Р{1)
4xt — *xt »
то уравнение (4.13) становится линейным и после исключения
Qx„ Мз, Фз получим уравнения, совпадающие с уравнениями
(4.10). Определив из уравнения (4.10) и2 (и первые три
производные «г), последовательно находим ф3» Л!3 и Qi, <3г-
В гл. 1 было получено уравнение равновесия сил (1.31) в
инвариантной форме записи:
и
^+q+£p<('>S(e-e/) = 0; (4.14)
»"=1
уравнения равновесия (4.11) и (4.12), полученные из
рассмотрения равновесия элемента стержня (рис. 4.4), есть проекции
уравнения (4.14) на декартовы оси.
Возможна и еще одна форма записи уравнения равновесия,
если перейти к связанной системе координат [базис (еь ег) на
рис. 4.4]:
+ *XQXq +J] Р(1) »(•-*.-) = 0. (4Л5)
de
Векторы сил (q, Р(1) и Р<8>) в базисе {ej имеют вид
Ч = — qXl sin йге, — qXa cos &,ег;
P<*> = _ p£> s\nbfit - PiKcos&.e,;
или (при малом угле Оз)
132 .----
(4.16)
(4.17)
В проекциях на связанные оси получаем два уравнения [х=
= (<HWde)i8]:
Ьх = -^ - Q, ^— Я*?* + pi& (— I) - P%W (« - ^) = 0; (4.18)
K=^- + Qx ^-^ -^8(.-0-^^,8(.-1) = 0. (4.19)
Если бы внешние силы (q, Р(1>, Р<2)) были следящими, т. е.
q——<у2е2; P(1)=Pi^ei; Р(2)=—/у2>е2, то уравнения равновесия
(4.18) и (4.19) имели бы вид
-^-3,-^- + /^-1) = 0:
de d£
■*b-+<h^-4.-PP4—J-o.
as a e
Чтобы получить уравнения (4.18) и (4.19) из уравнений (4.11)
и (4.12), надо воспользоваться преобразованием координат.
Уравнения (4.11) и (4.12), возвращаясь к векторной форме, можно
записать в виде
b = ЬхХ + bxj9 = 0.
Так как (при малом угле Ф3) ii=l-ei—^2; 12=^1+1-62, после
преобразований [с учетом выражений для QXo— см. (4.11) и
(4.12)] получим
b=.&iei+62e2=0,
или
6, = ^ + ^.^. = 0: bs = bXi—bXtb3 = 0.
Можно, конечно, и оставить уравнения равновесия в виде
системы уравнений первого порядка, что более удобно при
численном решении. В этом случае можно получить следующую систему
уравнений:
& + /*>£»_, -Я»4(._.j-0; (4.20)
de Аэз 2
^JrQ2 + nl)He-e3) = 0; (4.21)
йМ
de
i!»-_ ^5- = 0; (4.22)
de Л33
de
», = 0. (4.23)
В зависимости от конкретных задач в дальнейшем
используются как уравнение равновесия стержня (4.10), так и система
уравнений (4.20)-(4.23).
Многие прикладные задачи статики прямолинейных стержней
требуют решения более сложных уравнений, когда осевая линия
133
стержня при нагружении становится пространственной кривой. Это
имеет место, например, при нагружении естественно закрученного
стержня (см. рис. В.21) нагрузкой, перпендикулярной осевой
линии стержня.
Уравнения равновесия прямолинейных стержней как частный
случай общих уравнений равновесия. Как уже указывалось, для
более сложных задач статики прямолинейных стержней
эффективен метод вывода уравнений равновесия из общих нелинейных
уравнений.
В гл. 1 были выведены нелинейные уравнения равновесия
стержня в связанных и декартовых осях, которые позволяют
получать уравнения равновесия для различных частных случаев
с учетом всех особенностей стержня и нагружающих его сил.
Прямолинейные стержни являются частным случаем
криволинейных стержней, осевая линия которых в естественном состоянии
есть прямая.
Для прямолинейного стержня, у которого главные оси сечений
совпадают по направлению с декартовыми осями,
х0О>=0 (k10=x2(F=X3<f=0); И°> = Е;
для естественно закрученного стержня (например, сверла)
"10 0 "
L(0) = 0 cos&10 sin&10
.0 —sin&10 cos&l0_
где Фю(e) — известная функция. Случай, когда cHho/de^O, будет
рассмотрен в § 4.3.
Нелинейные уравнения равновесия, когда осевая линия
нагруженного стержня — пространственная кривая.
При больших пространственных перемещениях точек осевой
линии стержня относительно естественного прямолинейного
состояния уравнения равновесия стержня получим из системы уравнений
(1.57)-(1.61).
а) В связанных осях
dM
4-*XQ + P = 0; (4.24)
de
M
-t-xXM + eiXQ-i-T-O; (4.25)
= Ax (x = (xt + ^-) et + x2e9 + хве.) ; (4-26)
L,— — ^-JM = 0; (4.27)
134
-^- +*X" + (^-1)6, + /^, + /,^, = 0. (4.28)
Приведенная система уравнений (4.24) — (4.28) равновесия
первоначально прямолинейного стержня отличается от общих
уравнений равновесия (1.57) — (1.61) только тем, что уравнения (1.59)
и (1.61) системы (1.57) — (1.61) не содержат вектора и0(1)-
Для естественно закрученных прямолинейных стержней имеем
A*i = A,(«i + -^); Л?а = Д,х,; Mt = Aux„ (4.29)
где Фю (е) — угол, характеризующий положение главных осей
сечения стержня относительно естественных осей.
В проекциях на связанные оси получаем систему уравнений —
частный случай систем (1.64) — (1.68):
dQ,+Q3^™^3+^ = 0;
+ Q1u3-Q3x1 + P2 = 0; (4.30)
+ Q,»4-Qi*. + J\ = 0;
de
dQa
de
de
6MX
de
+ M3k2~yW2k3 + 7\ = 0;
+ yH2K1-M1x2 + Q2+7'3 = 0;
-^- + M^3 - ЛГ^ - Q3 + Г2 = 0;.. (4.31)
de
de
ЛГ£ = Д-,х£ (/=1, 2,3); (4.32)
кх = —- cos &2 cos d sm o-a;
de de
«, = -fi_ ^ sin»,; (4.33)
de de
d!k ft . du. . ft _
к, = —- cos ft, -1 sin &. cos ft,;
3 de ' d e S
-Г" + иг%г — и2к3 + /n — 1 = 0;
CI t —-_
du
de
de
+ ^3-^3^+7,^0; _ (4.34)
+ u^ — «,и2 + /E1 = 0,
135
где
п р
( = 1 v=l
б) В декартовых осях [частный случай уравнений (1.84) —
(1.88)]
dQ* + Р, =* 0; (4.35)
de
dM
А + 0Л)ХО* + Тх = 0; (4.36)
Мх = LTAx; (4.37)
—-Ы'А-ЧЬМ^О; (4.38)
de
du
_(LT-E) 1, = 0, (4.39)
de
где векторы с индексом х: представлены через проекции в
декартовых осях, т. е. ах — аж it + ах i„ + #*3V
Нелинейные уравнения равновесия стержня, когда осевая
линия нагруженного стержня — плоскаякривая.
а) В связанных осях [частный случай уравнений (4.30) —
(4.34)]
"" - Q.*> + *\ =» 0; ^- + (2^, + ^-0-, (4.40)
„ *• + Q, + Г, = 0; (4.41)
ас
Мя = АЛ; (4.42)
ik __ м* = 0; (4.43)
йщ
de
dua
— и2кв + hi — l = 0 (/u = cos &,);
+ ^,+/^= 0 (/ai = —sin&3).
(4.44)
de
В декартовых осях
+ Р„=0; ^+^,=0; (4.45)
dQx dQ.
^T^ + И** - U' de
dM
£•- + cosbtQXt — sin&.Q,, + Tx% = 0; (4.46)
*' =0; (4.47)
de
d6, Af
de
*33
136
^.- cos8-,+ l=0;
,"' (4.48)
££_ — sin 8-, = 0.
Для стержней постоянного сечения следует положить Лзз=1-
§ 4.2. Прямолинейные стержни при малых
перемещениях и малых углах поворота
Векторные уравнения. При малых перемеще*
ниях ut и малых углах поворота -0* связанных осей можно считать
приращения кривизн Axj малыми. Для прямолинейного стержня
и0=0, поэтому к=Ах и из уравнений (4.24)-(4.28) получаем:
4^- + Д»<ХО + Ро + АР = 0; (4.49)
CU
■^+Д«ХМ + е1ХС1 + Т0+ДТ = 0; (4.50)
а е
М = АДи; (4.51)
dO
de
du
de
— А-1М = 0; (4.52)
■ + A& =- 0, (4.53)
где
ДР = ДЧ+ SAP(/>S(e-e(.);
AT = Ail + 2AT 5(s—e;).
»=i
(4.54)
Исключая u' из выражений (3.20) — (3.23) для приращений Aq,
ДР(г), A[x, AVV\ которые в общем случае зависят от и, и' и 0, по*
лучаем
Aq=Citf+C2u;
ДР(0=В1(1>О+В2(1')и;
(4.55)
Арл=Сз'0'-т-С4и;
AT(V>=B3(V>#+B4<v>u.
Подставив выражения (4.55) в уравнения (4.49) и (4.50),
получаем систему пяти векторных уравнений (4.49)-(4.53) с пятью
неизвестными векторами: Q, М, Дх, *ии.
~ й ■. 137
В общем случае векторы Q и М считать малыми (в отличие от
векторов и, Дх и #) нельзя, поэтому система дифференциальных
уравнений (4.49) — (4.53) даже при малых и, # и Ах является
нелинейной. В § 1.4 были получены уравнения нулевого
приближения, в уравнениях равновесия сил и моментов которых
принималось х^хо*1', что эквивалентно условию Дх^О, поэтому слагаемые,
содержащие Дх, принимались равными нулю: ДхХО=ДхХМ^0.
Это можно было принять, так как для криволинейного стержня
можно считать, что хд^Дх^. Для прямолинейных стержней xjo=0,
и поэтому нет оснований без дополнительного анализа
пренебрегать в векторных уравнениях слагаемыми ДхХО; ДхХМ.
Уравнения равновесия в связанных осях. Прежде всего
необходимо оценить нелинейные слагаемые, входящие в векторные
уравнения (4.49) и (4.50). Чтобы выяснить, как поступать с
нелинейными слагаемыми, рассмотрим уравнения (4.49) — (4.50) в
проекциях на связанные оси:
dQl + Ax2Q8 - Ak3Qz + Ло + Д/\ = 0; (4.56)
+ Ax.Qi - Дх^з + Р20 + АР2 = 0; (4.57)
+ ах&2 - ДХ& + Ло+А/\ = °; (4-58)
- + Ах2Ж3 - Дх3М2 + Т, 0 + Д7\ = 0; (4.59)
dQa
ds
de
d
de
<Ш3
где
+ ДхэМх - Дх^ - Q3 + Т20 + ДГ2 = 0; (4.60)
л f дх.ж, - дх2мх + q2 + riD + дг. = 0; (4-61)
de
^, = 4^. (4-62)
п п
*/. = <7/о 4- S pio s (£ ~ *i); АР/ = Ч + S <П 8 (в - *,);
(=1 «=1
р р
Г/. = iv + 2 т%> 6 (в - е,); дг, = д^ + S A71v) 8(* - £>)-
u=l v = l
Из уравнения (4.56) получаем
8 Е
Qx = - J (Дх£2 - ДхД + АР) d/z - J P10d/i + Q100.
о о
или
Qi = Qio+AQi,
где AQi — малая величина. Если проекции сил на направления ка-
138
сательной к осевой линии равны нулю (Р10=0), то осевая сила Q\
является малой величиной и поэтому в уравнениях (4.57) и (4.58)
слагаемыми Ax3Qi и A^Qi можно пренебречь. Если же Р\с=фО, то
нелинейные слагаемые можно принять равными
Axi(Qio+AQi)=lAwQio (*=2, 3).
Слагаемые AX2Q3 и АхзС?2, входящие в уравнение (4.56), —
величины первого порядка малости (так как Q2 и Q3 считать малыми
нельзя), и не учитывать их в уравнении (4.56) можно только в
том случае, когда они малы по сравнению с другими слагаемыми,
например с Рю. Если же Р10=0, то слагаемые, входящие в
уравнение (4.56), одного порядка, так как APi линейно зависит от щ а
#,-, которые считаются малыми, и поэтому не учитывать слагаемые
Ду^з и Ax3Q2 некорректно.
Если силы следящие (ДРр=0) и, кроме того, Рю=0, то уравне-
нение (4.56) становится независимым от остальных уравнений. Так
как в этом случае Ахг, Аи3, С?2 и Q3 определяются из остальных
уравнений, то
Q, = AQt = AQ100 + j (bn3Q2 - AxaQ3) <JA- (4-63)
0
Из (4.63) следует, что при P10=dAP]—О Qt есть малая величина
первого порядка, поэтому в уравнениях (4.57), (4.58)
произведениями, содержащими AQi, можно пренебречь.
Если силы не следящие (APi^O) и APi линейно зависит от щ
и Ф?-, то уравнение (4.56) следует рассматривать совместно с
остальными уравнениями (4.57) — (4.61), но тогда уравнение (4.56)
из-за нелинейных слагаемых АхгФз и ДкзС?2, которые одного
порядка малости с АР], будет нелинейным. Не учитывать слагаемые
АкгФз и АкзФг в этом случае можно только при
Ax2Q3«wAx3<?2<APi (Щ, fy). (4.64)
Проверить выполнение условия (4.64) можно решив систему
уравнений (4.56) — (4.61) без нелинейных слагаемых. Если условие
(4.64) выполняется, то пренебрежение нелинейными слагаемыми в
уравнении (4.56) допустимо, если условие (4.64) не выполняется,
то пренебрегать нелинейными слагаемыми нельзя, т. е. система
уравнений (4.56) — (4.61) остается нелинейной даже при малых
отклонениях точек осевой линии стержня от прямой.
Рассмотрим нелинейные слагаемые в уравнениях (4.57), (4.58),
зависящие от А^ь Из уравнения (4.59) с учетом (4.62) получаем
е е
М^Аг^г-- jKA.-^UAH.Ax.-ATJdft- \Т10М + МШ, .
о 6
или
Мх = Д/и, = Ж10 4- Ш\1} + ЛМ{2\ (4.65)
139
где
о о
в
AAlS2) = - J (Ап - Д2) Ax2A«3dA;
о
AMi<'> и AMi(2> можно рассматривать соответственно как величины
первого и второго порядка малости, поэтому AMi(2) при получении
линейного уравнения (4.59) можно пренебречь, т. е. для
прямолинейных стержней всегда можно считать, что М1=ЛпДх1=Мю+
-f-AMi(l>. Поэтому слагаемые в уравнениях (4.57) и (4.58),
содержащие Аиь определяются так:
\ Ап Ап } Аг1
Если проекция Г10 момента Т0 на направление касательной к
осевой линии стержня равна нулю и, кроме того, момент Т0
следящий (Мю=0 и АГ1=0), то получаем из (4.65)
Дк, = -L Ш, = - -L f (Д, -Д2) Дх.Дх.аЛ. (4.66)
т. е. Ак\ есть малая величина второго порядка малости и
слагаемыми A*iQ2 и AxiQ3 в уравнениях (4.57) и (4.58) можно
пренебречь. Для стержня круглого сечения (Л22—-Дзз) получаем Akis=
Для неследящих моментов, когда ДГ^О, при 710=0
нелинейными слагаемыми AxiQj пренебречь нельзя и уравнения (4.58),
(4.59) остаются нелинейными.
Рассмотрим уравнения (4.60) и (4.61), которые с учетом (4.62)
имеют вид
Аз) Д*1А*3 — Q3 + тъ* + дг2 = 0;
(4.67)
А1)Дх1Дх1 + Ф. + Г10+Д7-, = 0.
Если 7,io=A7'i=0, то Aki (4.66) есть величина второго ■ порядка
малости и поэтому слагаемыми, содержащими произведения
AxiAx2> AxiAx3 в уравнениях (4.67), можно пренебречь (это
слагаемые третьего порядка малости).
Если имеются следящие моменты с отличными от нуля
проекциями на направления касательной к осевой линии стержня (ТюФ
ФО), то в этом случае Аи1=Мю//4ц и поэтому слагаемые,
содержащие произведения AxiAx2, AxiAx3, следует сохранить.
Если моменты не следящие, но такие, что Тю=0, то в этом
случае ДГ^О и момент Alt не равен нулю, но его можно считать
de
+ (А,-
+ (Л
22
но
малым, т. е. Mi—AMi—AuAxi. Тогда имеем [см. (4.60) и (4.61)]
Ax3Mt — Ах,Мь = Л]1~Лз3 Дк3ДМ, «* 0;
Д^Л* 2 — Ди2Ж1 - Ли2^Ли Дх2 ДМ, ^ 0,
что приводит к уравнениям
d Е -^22-^33
de
Q. +7,0+^^ = 0; (4.68)
-^ + 3. + ^. + ^.==0.
И последний случай: Т10=£0; АТгфО. Здесь имеем
поэтому
Дх,--1-(Ж10 + ДЛ!1),
Т~ (Л, - A J Дх3 (Ж10 + AM,) ^ -L (Д, - Д,) М1вДх,; (4.69)
7-(A.-Ai)^.(Aiie + AAIJ ^ -^-(/1,-4,)^^, (4.70)
Из рассмотренных частных случаев возможных выражений для
приращения Axi следует, что слагаемыми в уравнениях (4.60),
(4.61), содержащими произведения Ak\Mj, можно пренебречь
(кроме случая, когда 7\о=^0), поэтому уравнения (4.60), (4.61)
являются при 7^0=0 всегда линейными.
При Тю^О (Мю==Тю) имеем Ауц—Мю/Ап, т. е. Ах\ известно,
поэтому слагаемые Ак\М} линейно зависят от неизвестных
проекций момента Mj (/=2, 3).
Из уравнений (4.56) — (4.61) получаем уравнения равновесия
сил и моментов для двух случаев: 1) Qio=Mio=0; 2) Qio^O,
1-й случай: Qw—Miq=0. Уравнения равновесия для этого
случая таковы:
dQl + Д*2<23 - Ak3Q2 -т АР, *= 0;
+ дхд - д-^Qa + р* + *Л - о; (4-71)
dE
de
^1 + AXiQg _ Ak2Q, -f Ряо + ДР3 = 0;
d e
141
dMt
dAf,
+ AxsM3 — Дх3М£ -f Д7\ = 0;
de
de
+ АХзМ, - Д^М, - Q3 + Г10 + AT0 = 0; (4.72}
+ ДvW2 - Ди^ + Q2 + T30 + ДГ3 = 0.
Уравнения (4.71), (4.72) нелинейные, что существенно
усложняет их решение. В уравнениях (4.72) сохранены слагаемые АщМи
которыми при 7/io=Mio=0 можно пренебречь, что и будет сделано
при получении уравнений нулевого приближения. В (4.72) эти
слагаемые сохранены для того, чтобы можно было получить
уравнения первого и последующих приближений.
Для решения уравнений (4.71), (4.72) [совместно с
остальными уравнениями (4.51) — (4.53)] можно воспользоваться
приближенным методом, рассмотрев уравнения нулевого и первого
приближений, которые для общего случая
пространственно-криволинейных стержней были получены в § 1.4.
Напомним, что уравнения равновесия сил и моментов нулевого
приближения не учитывают приращений компонент вектора х,
т. е. в уравнениях (4.71), (4.72) следует положить Д%=0. В
результате получаем уравнения нулевого приближения:
^L- + ЛРр» = 0; i^L + Р„ + ЬРУ = 0; (4.73)
de
+ Р10 + ДРГ-0;
de de
dQ<°>
-4-1-
30
*"]!!. + ЛГУ" = 0; -^-- 0Г+7-!0 + дП°' = 0; (4.74)
de de
'3
de
+<Й0) + т;0+дП0) = о,
где
ДР<0) = bqf + 2 ДР<('><0) 5 (e - в,);
Д7{0) = Д^0)+2А^К0)5(в-г,).
v=l
Для прямолинейного стержня приращения компонент Aq{°\ Д}1(.0>
др(О(0) и_ Д7'.5-*>*0>, как правило, зависят от иг, иъ и Ьг, Ь3, а от ^ и
142
и1(и1 = 0) не зависят, т. е. могут быть представлены в виде
Д<7<°> = Cg)«№) _|_ С(1)„з0) _|_ С(2)&(0) Ц, С(1)&(0).
ДРГ')(0) = Ф?А«i0) + (*}?), «i0) + (b%\ ЪР + (b%\ »f; (4.75)
AfiJO = C}4)«(0) 4- C(4)U(4) 4- C(3)&(0) _j_ C<|)&10>;
Ш/ =(0/2)vt'2 -T-(0/3jvW3 -\~\Oj2hV2 ~h (&/3 )v О-З •
Уравнения (4.73), (4.74) решаются совместно с уравнениями
(4.51)-(4.53) нулевого приближения, которые имеют следующий
вид:
М(°> = АДх<г>; (4.76)
ш°] -^А-1М(°) = 0; (4.77)
+ ^9-(0) = 0. (4.78)
de
du(°)
de
Из системы уравнений (4.73), (4.74), (4.76), (4.78) можно
выделить следующие две подсистемы уравнений:
de
d.y<0)
1 + Д7?) = 0; (4.79)
f(0) _ Л Л«.№>-
de Л
= 0;
it
—!—= 0;
■^Л + Р. + Д^-О; -^ + P,„+A/f> =0;
^lL _ q<« + Тго+ АТУ = 0; i^L + 0^ + 7-,. + ^-0:
de de
de Л29 de
= 0; —5__—^- =0; (4.80)
22 Ub ^33
de de
143
Подсистему уравнений (4.80) с учетом соэтношений (4.75) можно
представить в виде векторных уравнений:
dQ(°)
de
dMf)
de
dO(«»
dE
du(°)
dE
+ Ро-ЬДР<°) = 0;
+ A1Q(°)-r-T0-bAT<0»=0;
+ ^^) = 0,
(4.81)
где
M(°
A,
) =
0
1
*
yw2<°>
/w
(°)
3
—г
0
?
; #(°)
A
.
:—-
V
22
. 0
8-,(0)
и 2
^
l>)
•
0 '
Av-
J
Q(0)
Г/ <°>
u<°> =
-"2
. 3 t
Q2(0)
Q3(0)
; P- =
V
7
P ,
20
^0
Tn =
0
T
1 20
/'
SO
Определив из (4.81) u2{0), «з(0), #2(0) и Фз*0*, которые входят в
APi(0) и А7"^0) [соотношения (4.75)], при /=1 из системы (4.79)
определяем Qi<°>, ЛГ,<°>, Axi и #i<°> (Wl(°) = 0).
Систему уравнений (4.81) с учетом (4.75) можно представить
в виде
Y<°)-f A<°>Y(0)=f<°>?
(4.82)
где
Y(°) =
Q(°>
(О)-:
U
А<°) =
О
Cj L2
О С3 Q
"О
К
О —А"1 О О
О О А, О
f(°) =
— Pt°)—В^0) —B2u<°>
Т'°> —В,<И°>
О
о
В4и<°>
Элементы матриц Вь В2, В3 и В4 содержат множители б(е—е>)
и б(е—&v), поэтому эти слагаемые перенесены в правую часть
уравнения (4.82).
Если нулевое решение требует уточнений или когда
приращения ДР<°>, ДТ(°) зависят от угла Оь следует рассматривать полную
систему уравнений (4.73), (4.74), (4.76)-(4.78), не разделяя ее
144
на две подсистемы, как это было сделано для случая, когда
приращения ДР<°> и ДТ(0> от #j не зависят. В этом случае в векторной
форме записи получаем
dQ(°)
ds
dM(°)
+ А10Р0+ДР(°) = 0;
-Ь A, Q(°) -f А10Т<°> -Ь ДТ<°) = 0;
de
М(°) = АДх(°>;
d$(°)
(4.83)
de
du(°)
de
— А-1М(°) = 0;
-т-А1#<°) = 0,
или (с учетом выражений для АР(0) и ДТ(0>)
Y(°)-j-A<°>Y(0>=f(0>,
где
Y<°>^=
Q<°>
М<°>
#(°)
ц{°)
А =
"0
А
о
о
о
о
с,
-А-1 0 О
О
А, О
(4.84)
f(°) =
-AieP0-B1#<°)-Bau(°)
-А10Т0-Вз^>-В,и(°)
О
.0
• А —
гО 0 Oi
0 1 0
.0 0 1.
В отличие от (4.82) в уравнении (4.84) векторы QS°\ М<°>, <И°> и
и<°) имеют три компоненты.
Получим из уравнений (4.71), (4.72) уравнения первого
приближения, положив Qj=Qi<°>+Qt(1); Дх»=Дх»<°>-ЬДх1-<1>; APi=APi<0>+
+ ДР,<1>; М{=М^+МУ; АТг=АТ^ + АТР\ После
преобразований, пренебрегая величинами второго порядка малости, получаем:
^^- + Ax.WQ,*1) — An3t°)Q2W + Ах,'1^/0» — Ah^QJ0* + АР (1) =
de
dQ2(*)
de
de
= Ax3<°>Q2<°> —Ax2(°>Q3(°);
+Ax3(0)Q1(1)~Axii0)Q3(1) + Ax3(1)Q1(0)—Ax1(1)Q3{°)4-AP2(1) =
= — Ax3<°)Q1<0) + Ax/JQ.t0»;
U.85)
+ Ax1(°)Q2(1) — Ax^Q^M Ax/^Q^0) —Axa(,)Ql(°)+AP,{,)=
= — Ax/'Q^0) — AXjWQ^0);
10—6011
145
de
d.-Vy1)
de
de
= Ди3(0>Ж.2<0> — Дк2<0>Ж3(0>;
+ Ax^Q^ — Дхх(0 >Q3(,> + Axs(1)Qi,0) — AW* —
— Q/1) 4- Д7У1) = Дх/0^0) — Дх,*0^0);
-4-Дх^Ж^1) — Дк^Ш/» + Ди1<1>УИ8(°) —
(4.86)
— Ди^Ш^1» + Q2<2> 4- ДТа = A^2(:,)^i(0) — Д^(0)М2'°).
Уравнения (4.85), (4.86) в векторной форме совместно с
уравнениями (4.51) — (4.53) составляют полную систему уравнений
равновесия первого приближения:
dQ(1) _|_ Af'Qt1* -f А^А-1М<1)ДР<1) = — A-'Mci X[Q(0>;
de
dM(i)
+ Ai^MO) + AffA-W1) + AjQ»1) + ДТ'1) = A-!M«°)XM<ei;
de
М(1> = АДх»1);
dfl(i)
(4.87)
dt
dut1)
de
— A-W-O:
где
Ai0) =
Дк,<°) — Дх2<°>
Дкх<°>
О
— Ди3(0) О
L Ди,1°> —Ди^
О
—М,(°> о
о
Ак0) -
Ям =
Ж3(°> —МЕ(°)
ЛМ")
Ж2<°> —Ж/0»
О
А, =
Q2(0)^.Qi(0) о J
0 0 О
0 0—1
1 1 о
2-й случай: Qio#0 и М\вФ0. Из уравнения (4.56) и (4.59)
получаем
Ql=Qio+AQi; Мх=М10+ЬМи
где
8 с
о о
e e
ЛГ10 = - J Tludh -i- M100; AM^-^ (Дх2М3 - Ди8Ма) d/z + AM10.
146
Так как AQL и A.Mi мож- хг1[
но считать малыми, то в
(4.57), (4.58) и (4.60), ^
(4.61) вместо Qi и Mi мож- §
но взять Qio и Мм, которые
определяются из уравнений
Т = ТюЧ
сШ1П
de
+ Рго = о;
+ т10 = о,
г гх,о Ч
(4.88)
Рис. 4.5
где
Ло=^« + S^ete-e,.); ^ = ^0+2^8(6-8,). (4.89)
Интегрируя уравнения (4.88) с учетом (4.89), получим
е rt
Qio = - f Я><№ - 2 А(о} Я (в - е,) + Q1O0; (4.90)
о
е
г=1
Р
Л*ю = - J ^ - 2 ^V ^ <* - **) + ^гоо- (4-91)
0 v=l
Произвольные постоянные Qioo и ЛТ10о определяются в
зависимости от условий закрепления торцовых сечений стержня.
Например, для случая, показанного на рис. 4.5, имеем
1
Qio(0) = Q100 = \ q10M + /¾ + Pi?o ;
6
При AJio^O имеем Ах]==МюМц и из уравнений (4.57), (4.58),
(4.60) и (4.61) получаем уравнения нулевого приближения:
de
dQ2(°>
+ Р10 + ДЛ<°» = 0;
М
+ Ax3<0)Q10--^Q3(°> + Р20+ ДРЙ<°> = 0;
ае уЭп
$&!!>_ + ^Q2(°) - Ax2<°>Q10 + Рзо + АР3(0) = 0;
(4.92)
de
111
de
^^1 + Дха(°)Л110 — -^- М,(°) — Q3(0) + Уи + A7V0) = 0; (4-93)
de Дп
™fl + !^1£. Мг<о) _. д^оу^ q2(0) + 7\,0 + Д7у°> = 0.
de Ах1
10*
147
Если ДР,-<°> и Д7у0) не зависят от Oi<°> (ы,(°)=0), то из систем
(4.92), (4.93) и уравнений (4.76)-(4.78) получаем две
подсистемы уравнений, аналогичных (4.79) и (4.80).
dQ,(<>)
+ Р1О+ДР1»«) = 0;
de
de
М,<°) = ^„Д^С); (4.94)
dy°) __ Луо> _ 0.
de Лп
do.(°) Л
de
^- + A^(0)Q ^™Q>(0) + P2o + ДЯа(0) = 0;
^-A^>Q10+^Q2i») +P80 + A/y» - 0;
ae лп
^P - Ди,сЩ10 + -^- M,<°> + Q,o + Л. + W> = 0;
de^- ^""=0; " (4.95)
dS3° M8(°)
de Л8Я
d«2(°)
= 0;
de
-Vе» = 0;
+ &.(•> =0;
de
Mtw = Д2ДхЕ(°) (Дх2<°> = d&gi°>/de);
M3(°> = ДяДх8<°) (Ди3<°> - dfts(°>/de).
Выражения для приращений АЯ/0) и ,Д7у°> полностью
совпадают с выражениями, приведенными в системе уравнений (4.73),
(4.74), которые с учетом соотношений (4.75) можно представить
в векторной форме, ограничившись для упрощения записи одной
сосредоточенной силой и одним сосредоточенным моментом:
ДТ«°)=Сз^О)+С4и(0)+Взв<0)+В4и(0), (4.96)
где векторы ф<°>, и<0} имеют соответственно по две компоненты
О2(0>1 Фз<0) и иг(°>, w3(0), а матрицы Q и В,- — второго порядка.
148
В векторной форме система уравнений (4.95) с учетом (4.96)
[Имеет вид [аналогичный (4.81)]
-^-- AQkA*(0) + А — Q(0) + Р(0) -г-С,^0) + С2и(°> -
= — В^0) —В,и<° >;
dM(°J
+ ДЦ(°> — А^Ш*) + Ах -^- M(°)-f Т<°) + С3«<°» +
de Л,
Ml
4- C4u<°> = — В3#<°> __ £4u<°>;
(4.97)
d*(«)
— A^M^^O;
du(°)
+ Л1#(°) = 0; M<°) = ЛДи<°>,
Элементы матриц Bi, B2, B3 и В4 содержат б-функции, и
поэтому слагаемые, содержащие эти матрицы, перенесены в правые
части уравнений. При решении система (4.97) рассматривается как
система неоднородных уравнений. Более подробно решение
аналогичных уравнений, содержащих 6-функции, было изложено в гл. 2.
Уравнения равновесия в декартовых осях. Запишем уравнения
в виде
d<b
+ Р, + ЛР* = 0;
(4.98)
<Ш
А"Х
- (&3Q*. + ад*,) h + (ъ&г — Q*.) h + (0«
+ Т,0 + АТХ = 0;
Ах =. А-ХЬМХ;
d#
ds
dux
de
— A-,LMJC = 0;
+ ^1,-0,1, = 0,
где
1
-ft,
ft3
1
ft,
ft,
■ ft
1
и
ft3QOi,+
(4.99)
(4.100)
(4.101)
(4.102)
Уравнения (4.100) и (4.101) есть уравнения в связанных осях,
но выраженные через проекции вектора М в декартовых осях. Как
уже говорилось в § 1.3, такой смешанный вариант уравнений,
использующий базисы {ij} и {ej}, для преобразований и численного
решения является наиболее удобным. Для «мертвых» сил
Aq*=Дця=Д Р*<*>=ДТУ*>=0.
149
Б проекциях на декартовы оси из (4.98) — (4.102) получаем
систему уравнений такого вида:
-¾. + Рхл + APXl = 0;
йО
** + Р„о + ДР„ = 0; (4.103)
£г~ + ^.о + Д^. = 0.
jc
de
- — №, - &2Q*2 + ТхЛ + ДГ,, = 0;
^M-dAi-Q*. +^so + A^+ ^(^о + Д^Жв-еО^О; (4.104)
«Ш,
v=I
p
^- + Q„ -№, + ^8o + Ди„ +5] (¾ + AnV)8(8-sv)=0;
v = l
д^ = -у- (AfXl - »sMx, + &.Л*,,);
Ди. = -7- (МХл -f Mk. — btMxJ; (4.105)
Ак3 = -1- (M,3 - d-,MXl + ^М, j;
■"зз
^—j- (MXl -Ъ3МХ< + »Д8) = 0;
-^---7- №. + Mb, - ЪгМх.) = 0; (4.106)
de A22
^L _ J_ щ,, _ ^Mxi + &.M* J = 0;
de Л33
dM" =0; d^ — &3 = Q; _^ + &а = 0. (4.107)
d e de d e
При линейной зависимости Aqx и ДР* от ux и 8-¾ уравнения
(4.103) линейные. Уравнения (4.104)—(4.107) нелинейные, так как
они содержат произведения $,¾.. и Ъ,МХг а считать Qx и Мх
малыми нельзя, поэтому необходимо оценить нелинейные
слагаемые. Из уравнений (4.103) следует
QXj = QXJ о + *QX,,
где AQX. —малая величина, поэтому в уравнениях (4.104) следует
150
положить
•А. = »А*; *А. = &А,о- адЖ1 =»А10;
Считая произведения ^ЛГ^. малыми по сравнению с AfXft, из
(4.105), (4.106) получим линейные уравнения. Если у>х 0ф0 и Тх\1ф0,
то слагаемыми &tQ , §2QX , Al\,» A^iV в первом уравнении системы
(4.104) по сравнению с ^„[и Г можно пренебречь и это
уравнение [становится независимым от остальных уравнений системы
(4.103)—(4.107). Из первого уравнения системы (4.103), если
пренебречь Адх и Д/3*?. можно для любых краевых условий определить
Qx ~QxQ, так как это уравнение становится независимым от
остальных уравнений. В результате из (4.103) — (4.107) получаем
следующие две системы независимых уравнений:
^ + Pxi0=0;
i?L_^«!L=0; (4.108)
de А„ '
^ = 0;
*i0
de
t=i
^Г + »Al0- <i.+ ^ао+ Д*Ч+ J] <Г& + ArtVj 8(„ =0;
dM
ds
de + Ql - * АЛ+ ^Bo + 4, + J] (^о+ АТ<V) 8(.> = 0;
£i (4.109)
* *з __ Q. 2_ *а Q.
de А22 ' de Л33
de ' de
151
Полученная система уравнений (4.109) дает возможность
определить компоненты неизвестных векторов Q, М, Ли, Оиив
декартовых осях.
§ 4.3. Естественно закрученные
прямолинейные стержни
Нелинейные векторные уравнения равновесия.
Для естественно закрученных стержней имеем
de
xo{1)XQ=xi0(e,XQ);
xo(1)XM=xi0(eiXM),
поэтому из общих векторных уравнений равновесия (1.57) — (1.61)
получаем:
CJQ +xXQ + P = 0; (4.110)
-^L + xX*l + O<Q + T = 0; (4.111)
М=А(и — %luej; (4.112)
L, -?- + Цкл — A-M =0; (4.113)
de
^-+ «Xu + (/„-1)^+/,^+ /,^,=0. (4.114)
de
Линейные векторные уравнения равновесия. При малых
отклонениях стержня от прямолинейной формы имеем
х=ио(1)+Дх; Р=Р0+АР; Т=Т0+ДТ,
поэтому из уравнений (4.110) — (4.114) получаем:
7+^(^X0)+ Д*ХО+Р„+ДР = 0; (4.115)
de * "
Т- +»Чв(е1ХМ) + Дх х М + е, X Q + Т0 + ДТ = 0; (4.116)
de
М = АДх; (4.117)
—+^Д#—А-'М^О; (4.118)
ds
^ + ^0^+^ = 0(^=^. (4.119)
В уравнения (4.115) и (4.116) входят АР и AT (4.54), которые
в общем случае зависят от и и # [соотношения (4.55)].
Рассмотрим нелинейные слагаемые AxXQ; ДхХМ, входящие в уравнения
152
(4.115) и (4.116). Если проекции векторов Р0 и Т0 на направления
касательной к осевой линии стержня не равны нулю, то
ДиХО^юСЛиХеО+ДхХ^ег-НЗзез); (4.120)
ДиХМ=М1о(АиХе1)+ЛиХ(М2е2+М3ез), (4.121)
где Qio=.Pio; Mio=7io- Для получения линейных уравнений
вторые слагаемые в правых частях соотношений (4.120) и (4.121)
следует положить равными нулю, что приводит к следующим
приближенным равенствам:
AxXQ^QioCAxXe!); A*XNWM10(A«Xei).
Более подробно нелинейные слагаемые, входящие в уравнения
равновесия стержней при малых отклонениях от прямолинейной
формы, рассмотрены в § 4.2.
В результате из (4.115), (4.116) получаем следующие линейные
уравнения:
dQ
de
dM
+ и,0 (ех X Q) + Ою(Д* X ej +Р0 + ДР = 0; (4.122)
А +^e(e1XM)+Af10(AxXe1) + e1XQ + T0+AT = 0. (4-123)
Уравнения равновесия в проекциях на связанные оси. Система
уравнений (4.122), (4.123), (4.118), (4.119) для естественно
закрученного прямолинейного стержня в проекциях на связанные оси
запишется так:
^- - »wQ. + Ьк&го + Ло + ДР,- 0; (4.124)
ds
^- + *ioQ10 - д*Ао + рзо + др3 = о Л = *„);
de
dM1
de
dM
+ ^o+ Д7\ = 0;
d
йМ
-Ъ[0Мг + ДХ.АГ» — Q. + т™+ ДТ'^О; (4.125)
i + fti'oM, — Ax,M10+ Q2 + Tsa + ^,=0;
de
dO, Afj _
de An
= 0;
ik_^s_^=0; (4.126)
ds " s AM
ds Aa3
153
d»i _n-
ds '
^--*»Р,-&. = 0; (4.127)
de
de
+ x10w2+&a=0.
Система уравнений (4.124) — (4.127) содержит как частные
случаи уравнения большого числа прикладных задач статики
прямолинейных стержней.
Получим уравнения равновесия для сверла (см. рис. В.21), которое потеряло
устойчивость. Ограничимся случаем, когда Рш и Тю следящие, и предположим,
что возможна статическая форма потери устойчивости. Из уравнений (4.124),
(4.125) получим [уравнения (4.126), (4.127) остаются без изменения]:
dQl -Р10в(г_1)=0; (4.128)
de
de
dQg
x10Q„ - Дх„Р10 = 0; (4.129)
de
f*ioQ2 + A*2P]0 = 0; (4.130)
+Tlfl8(e-1) = 0; (4.131)
de
-~-xi5,Ai3-Qs = 0; (4.132)
3 H~xj*)jMa + Qa = 0; (4.133)
de ' 10
dftio _ T
ds An
xjj> = ^^-^. (4.134)
Из (4.128) и (4.131) следует Qi = —P10; Л^ЛГю, что использовано в
уравнениях (4.129), (4.130), (4.132), (4.133) и соотношении (4.134). Из первых урав-
нений систем (4.126) и (4.127) получаем #i=.Mio/>lii=const; «i = 0. Оставшиеся
восемь уравнений можно (для численного решения) записать в векторной форме
(исключив Аи2 и Дхз):
Y-fAY=0, (4.135)
где
Y=(Q2, Q3, М2, Ма, <Ь, ©*, «й «з)т;
154
A =
0
10
0
t
0
0
0
0
— x10
0
— 1
0
0
0
0
0
0
p»
«82
0
*10~ A
1
A22
0
0
0
pio
■"83
0
-(-7^]
0
0
5" I
■^33
0
0
0
0
0;
0
0
x10
0
0
0
0
;o,
: t
0
— X10
0
— 1
0
0
0
0
0
0
0
0
x10
—
0
0
1 i \
' 0
0
0
0
I
— XjQ
0 __
В частном случае, когда Фю= const; Л33=1 (стержень постоянного сечения),
исключая из системы (4.128)—(4.133) неизвестные [используя уравнения (4.126),
(4.127)], можно получить систему двух уравнений относительно Ы2(0) и «з(0)
следующего вида:
ИМ» + 1)2*и-ЛМ
ds3
[(1 + 2Л22)2«20 - ЗЛТ10х10 _ P10]
d%<°>
ds*
•Ц'
(0)
- [(^j + l)2x^0 - 3M10x10 - 2P10] xl0 -^-+
+ [АЮ*?0 --^10^10 — *>«] x?o40> - <72 = °;
(4.136)
d%<°> d^05 <*2<40)
3 [(Л22+ l)2x10—ЛГ10]-Г^--[(2Лаа+ l)2xf0-3Afldx10-P10]—rr+
ds4
dsa
dsa
+ [(1 + Л22)2х2и _ЗУИ10х10-2Р10] xl0
d40)
-f-+ Иаа*2
de
10
- ^10¾ - Рю\ xio40> -^ = °.
где x10
de +An
Полученные уравнения (4.136) позволяют определить критические значения
осевой силы Р10 и крутящего момента MiQ.
§ 4.4. Прямолинейные стержни, лежащие
на упругом основании
Силы, действующие на стержень. Как уже
указывалось, стержни, контактирующие с упругим основанием или
с упругим слоем (см. рис. В. 19, В.20), имеют широкое распростра-
155
^"ПТ'ГПТГ*г
•гхг1г
нение в технике. На рис. 4.6,
4.7 приведены примеры, ког-
у>Р да требуется учитывать си-
, * I Y лы> возникающие между
стержнем и средой или
силовыми полями, в которых
находится стержень. На
рис. 4.6 показан трубопро-
Рис. 4.6 вол-> предназначенный для
перекачки жидкости и
лежащий на упругом грунте. При
его изгибе между стержнем
(трубопроводом) и
основанием возникают
распределенные силы, зависящие от
вертикальных смещений иХа
стержня.
Основная особенность
задач статики стержней,
контактирующих с упругой
средой, заключается в том,
Рис. 4.7 что при отклонении осевой
линии стержня от
естественного состояния (как для начально прямолинейных, так и начально
криволинейных стержней) появляются распределенные силы,
зависящие в общем случае от вектора перемещений и точек осевой
линии стержня, т. е. q = q(u). Когда характеристика упругого
основания линейна, то
q =
KS'V
когда нелинейная, то
В гл. 1—3 было показано, что во многих прикладных задачах
приходится иметь дело с силами и моментами (распределенными
и сосредоточенными), которые зависят от перемещений точек
осевой линии стержня и отуглов поворота связанных осей: q = q(u, #);
jn=fA (u, #). При малых перемещениях точек осевой линии стержня
и малых углах поворота связанных осей эти силы (например, q и
ц) можно представить в виде [см. (4.55)]
q=C!#+C2u; ji=C3#+C4u,
т. е. статика стержней, лежащих на упругом основании, есть
частный случай ранее рассмотренных задач статики при С2=Сз=С4=
= 0 и
0 0 0
С,= 0 — k о
0 0 0
156
На рис. 4.7 показан стержень, на которьи действуют
распределенные силы q(xl и qi2? притяжения магнитов (/ и //).
В естественном состоянии, если стержень находится посредине
между полюсами магнита, на него действуют уравновешенные рас_
пределенные силы притяжения q{xlJo = qi%- Если к стержню
приложить нагрузку (например, сосредоточенный момент Тх на рис. 4.7),
то при изгибе стержня силы притяжения магнитов станут разными
(й* > fl1*?). и если принять, что их% < а, то можно получить выра-
ражение для равнодействующей сил притяжения, линейно зависящей
от « , т. е.
q*. = qii* — qg* = ^*А- (4.137)
В этом примере (рис. 4.7) при отклонении стержня от
положения равновесия возникает распределенная нагрузка, направленная
от положения равновесия, а в случае стержня, лежащего на упругом
основании (см. рис. 4.6), при отклонении от положения равновесия
возникают силы qx \2, направленные к положению равновесия.
Уравнения равновесия. Уравнения равновесия для стержня
переменного сечения, лежащего на упругом основании, при малых
перемещениях точек осевой линии являются частным случаем урав-
нений (4.98)-(4.102) при Г,|0 = 1^ = <7,i0 = 0; Р^О; Д^ =
= — kur :
■»3
Ъ + я*<Р <е - е«) - Ч. + pxJ (• - *р) = 0: (4-138>
Ш*1 + Q*-&Л>о + V*,o Н (■ - £„) + П'> (в - шт) = 0; (4.139>
de
d&3 МХл =(). (4.140)
de ЛЗЭ
do
"*«
de
&з = 0, (4-141)
где k=koPJAto<M — безразмерный коэффициент {k0 — размерный
коэффициент жесткости основания).
Систему уравнений (4.138)-(4.141) можно свести к одному
уравнению
(А.Я.)" - РхЛш + Ы** = ^ (£ ~ е«) +
+ ^,о« (в — в,) - 7^8 (в - вт) - ^ (в - ■*). (4-142)
Для стержней постоянного сечения безразмерная изгибная
жесткость Лзз=1, тогда уравнение (4.142) превращается в уравнение
157
с постоянными коэффициентами:
где
их, — QlQuXt + kuXi — b,
(4.143)
Уравнения (4.142) и (4.143) удобны при решении
приближенными методами, когда надо получить аналитическое решение
(приближенные методы решения уравнений равновесия прямолинейных
стержней изложены в § 4.5).
Функции Крылова. Рассмотрим наиболее простую задачу
статики прямолинейного стержня постоянного сечения, лежащего на
упругом основании, при равном нулю осевом усилии [уравнение
(4.139) приР*1О=0]:
u£ + 4a{u„ = 6. (4.144)
Полагая иХз = и0еи, получим (для однородного уравнения)
характеристическое уравнение %* + 4а* = 0, корни которого Я12 =
== ± (I—1)а4; Д3р#= ± (« + 1)аж. В результате получаем решение
однородного уравнения (4.144):
их = С\ё~^х% cos а,е + с2е*1* sin ars +с3е*1г cos аге -f-"
+ с4еа1Ш sin al8 = c,k{V (e) + rf .(e) + сЛв) + с**:!? (e).
Так как для стержня постоянного сечения (при Qj0=0)
то уравнение (4.144) эквивалентно системе четырех уравнений
первого порядка
^x, + «„'=6,; (4.145)
поэтому фундаментальная матрица решений для однородной
системы (4.145) _
"'(0) '/,'(0) 'Г(О)
К(в>(*) =
ЛГ k
12
13
'#!> XS» W
w т k\v
kl4
_k\V *!? С *8' _
158
Матрица К(0)(е) при е=0 не является единичной, что не совсем
удобно при дальнейших преобразованиях. Фундаментальные
матрицы решений однородных уравнений, как правило, не
удовлетворяют условию К((0)(0)=Е. но из частных решений &ij<0)(e) всегда
можно составить линейные комбинации
(О)
Ме) = 2*В'(*)^
(4.146)
>=i
и выбрать произвольные множители bvi такими, что при е=0
матрица К(0) с элементами &^(0) будет единичной.
Числовые значения коэффициентов bvi можно определить
следующим образом. Любая матрица вида К=К(0)(е)В, где В —
постоянная матрица, также является решением однородного
уравнения. Матрицу В нужно выбрать такой, чтобы при е=0 матрица
К(0) была единичной; для этого достаточно взять матрицу В
равной обратной матрице К°(0), т. е.
К(б)=К°(е) [КЛО)]-1. (4.147)
После преобразований получаем
'Кг -аД4 ~WK3 -2аг*Кш
К2
К(е)=1*г/] =
2я,
_Кз_
Кл
к,
2ах
2ах2
-аД4 -2а^К3
Кг
2а,
К,
(4.148)
где Кг — функции Крылова:
/(i^chaiecosaie;
/G^chaiesincne+sh cnecosaie; (4.149)
/Сз—sh aiesin aie;
/C4=ch aiesinaie.
Для определения функций Крылова имеются таблицы.
Производные функций Кг связаны с функциями соотношениями
/C^—aj/^; К"\=—2сц2Кз; К"\ = —№К*
К'2=2щКи ^2=-2^2/(4-, К№,2=— 4«13^з;
/C's^aiKs; /С*з=2оы2/Сг, К'"ъ=-2ai3K4;
KU=2avKb\ K"4=2ai2K2, K'"4==4a,3Ki.
(4.150)
Решение уравнений равновесия для стержня постоянного
сечения. При преобразованиях и численном решении, например при
159
определении матриц перехода, удобнее представить уравнения
(4.145) в векторной форме:
где
Y =
Q
хъ
&з
Ux,
—
lit
~Ux
II
Ux
хя
1
Ux
Ха
Ux
х»
;■ А =
Y+AY=
0 0
I 0
0 —1
0 0
=ь,
0
0
0
-1
—4at4
0
0
0
(4.151)
; ь=
О
о
(4.152)
bi=-QKJl{
= — Г*,о8 (£ - £г) - Н.^8 (е - ej.
Рассмотрим общий метод решения неоднородного уравнения
(4.151). Вначале получим решение однородного уравнения (4.151),
полагая
г(0)
Ylu' = Y0eA8,
(4.153)
что приводит к характеристическому уравнению относительно Я:
det [ЕЛ+А]—о, или ЯД-ркц4—0, корни которого
h,2=±(i— 1)аь Яз,4==Ь(1Ч-1)а1. (4.154)
В результате получаем четыре независимых решения (вектора):
Y(l) = YiV"; Y{2,=YjVae;
Y(3> = Yrs)e>.,. Y(4, = Y(4,exie>
(4.155)
Компоненты векторов Y0(l) находятся из системы
алгебраических уравнений [E^,-+A]Y0<J"J=0, или
х№
01
^»=0;
(4.156)
^•^02 —^оз =0;
адф+ ^=0:
-4аМ!>+ ^^^-0.
Найдем из системы (4.156) УЦ*, Коз', ^oi* в зависимости от У&*:
^ 02 — Л:Х 01 »
»ЧО
2V(0.
W - (А,т,";
(4.157)
.(О _
\3V(*')
У0Г = -(Я,ГП1
Входящий в полученные выражения для компонент векторов Yo°
множитель Yq\ является произвольным и его можно взять любым,
160
например Koi* = 1 —Н *- Четвертое уравнение системы (4.156) с
учетом третьего уравнения (4.157) обращается в тождество. Полагая
Yq/ -=(Yq1[))1 +i(Yo)\, так как корни Xt—комплексные числа,
получаем, что и решения уравнений (4.156) также будут комплексными
числами.
После преобразований из системы (4.157) получаем
■ о —
1
—2at
2a/
О
+ «"
1
О
—2а/
—4а/
V<2)_
»0 =
1
2аг
2а/
0
+ «
1
0
—2а/
— 4а/
V<3> —
«О —
1
0
—2а/
4а/
+ i
1
2аг
2а/
0
1 «о —
1
0
—2а/
4а/
+ *
1
—2аг
2а/
0
[(4.158)
Подставив (4.157) в соотношения (4.155), после преобразований
получаем комплексные собственные векторы
Y<*> =(^)), + 1(^))2, (4.159)
действительная и мнимая части которых удовлетворяют
однородному уравнению (4.151).
Зная собственные векторы \а\ получаем две фундаментальные
матрицы, столбцы которых есть действительные и мнимые части
векторов Y<J). Эти матрицы отличаются друг от друга только
порядком чередования столбцов. В результате получаем
фундаментальную матрицу решений однородного уравнения (4.151) вида
К(е)-
e~aiE (cos KjE — еа'6 (cos a^ +
— sinaje) +sinaTe)
2a/e~aie X
X (cosaj£+ 2a^ttie(cos ajE—
+ 31110^6) — Sino^)
4afe-IIie Sin a±e _4ajea,e sin c^e
<?ai8(cosalS —
— sinaje)
—2a2ea'e x
X (cos ate +
+ Sin axe)
4a5e<XlEC0Sale
e a,8(C0S axe +
+ sin ocje)
— 2al£-aie X
X sin axe
2a^-a'E(sinaie—
— cos aje)
—4«Je-a*E X
X COS OtjE
(4.160)
Элементы полученной матрицы K(e) есть линейные
комбинации ранее полученных четырех частных решений k\p{&). Матрица
11—6011
161
K(e) (4.160) при е=0 не равна единичной, но ее всегда можно,
воспользовавшись, например, преобразованием (4.147), привести
к матрице, которая при е=0 является единичной. В дальнейшем
считается, что фундаментальные матрицы решений К(е) при е=0
являются единичными. Такой матрицей является матрица (4.148).
Рассмотрим теперь решение неоднородного уравнения (4.151),
которое имеет вид
Y(0) = Y0 + Y/f=K(s)C +jK(s — /i)bd/z. (4.161)
о
Для правой части уравнения (4.154) компоненты вектора \н равны
У И! = - I knH (h ~ £.) Я*ЛМ - { М (h ~ «/>) Рх,о & -
о о
-j kj2H(h-e^X30dh- IkjMh-ejT^dh. (4.162)
о о
или
Yhj^ViJv + V^p + UhI + ViJt (/=1.2,3,4, ...), (4.163)
где
о
в
о (4.164)
Е
d/z
d/г;
б
e
C/a)r= — p/t8(A— ег)Г*яо
Выражения (4.164), зависящие от сосредоточенных сил и
моментов, равны
C/i), = - *Л К«Р) Р*^ (£ - ^ (4 165)
или, переходя к функциям Крнлова,
^ гг)Р = - ^.Л (*ie/>) Н (£ - SP): (У-)Р = - -^ К* (*г*Р) Я (в - вр);
Cu)p = --¾^^. К£р) Н (£ - £р)' 0«>Р = - ^ ** ^вр) Н (£ - ^
(4.166)
162
(J12)r-= &J KA (а^т) H (s— er); (J22)T=—T'Кг (a^) H (e— er);
(Аг)г = 4г~ K* (aier) H (s — ег); (/4в)г = ^- /Ca (а,ег) Я (e — er).
(4.167)
Воспользовавшись выражениями (4.150), связывающими
функции Крылова с их производными, после преобразований получим
выражения для интегралов, входящих в (4.162), зависящих от
распределенной нагрузки qx 0 и распределенного изгибающего
момента v.x 0 (при qx 0 = const v>x0 = const):
(АЛ = -^-1^, м -x к«д]я (e -e«);
(Ax), = -14 X (ate) - Ks (¾¾)] " (* - efl);
(АЛ = - 5*rF** (M - ^ (¾¾))H (e -**);
(^1)9 = ^1^1(^)-^1(^1^(8-6^ (4.168)
<A«l = - ^ I*i (¾6) - *. КенЛЯ (£ - V;
(AE), — ^ [K, (alS) - K2 (alSJJ Я (s - 8|J;
(;-V = - 5F I*» (a,e) - K3 (a^)] H (e _ s^};
(A«V =- £^-1*« (<V) - *♦ («i^I И (* - ^)-
Окончательно получаем следующее общее решение уравнения
(4.151) в скалярной форме (обобщенное на случай, когда к
стержню приложено несколько сосредоточенных сил Р{г) и
сосредоточенных моментов T{v)):
у!=О*.=2 V/ + (АЛ+2 (AJi° + (А*ь+2 (AJ?};
/=1 i=l v=l
у.= Л*„=2 V/ + (Ai),+S (^)^+(A^ + S ^^
/=1 '=1 -=i (4.169)
у. - v, = 2 V/ + (A;),+2 (Ai)if) + (A,). + 2 ^v>;
/=1 i=l v=l
^ = ^.=2 V/ + (AJ, + 2 (Ai)k°+(/«).*+ 2 ^-^-
/=1 *^1 v=I
где ktj — элементы фундаментальной матрицы (4.148) решений
11* 163
ULZ
P
i If if и
/ тхгр LZ
JL!!JL-Lj!.
>/\/// //'/ /// ////h^//////// /// ///^Z*xx
0,5
Рис. 4.8
*zk iRj _ . однородного уравнения
(4.151), выраженные
через функции Крылова.
Произвольные
постоянные ch входящие в
соотношения (4.169),
определяются из краевых
условий. Найдем в
качестве примера значения
с/, соответствующие
условиям закрепления
стержня на рис. В.19. Введем для слагаемых в (4.169), зависящих от
внешней нагрузки, обозначения YHj (/=1, 2, 3, 4). При е = 0 имеем
У2(0)=0; У4(0)=0, поэтому с2 = с4 = 0 (так как YHj (4.163)) при
8=0 равны нулю). Для оставшихся С\ и с3 получаем два
уравнения [при е = 1: 1) У2"(1) = 0; 2) У4(1)=0]:
К К) сх + К (aj с3 = — Ym (1); Q
Кг KR + fe43(a,) Cz = —Ym{\).
Решения уравнений равновесия для стержня, имеющего
промежуточную опору. Возникающую при нагружении стержня внешней
нагрузкой реакцию в опоре Ri отнесем к внешним силам (рис. 4.8).
Из краевых условий при е=0 для случая закрепления,
показанного на рис. 4.8, имеем с3=с4—0; ПРИ е=1 получаем из (4.169) два
уравнения:
К К) С, + k22 (а,) с2 - - Q0 [Кз (а,) - К, (0,5а,)] - ^ К2 (0,5а,);
где k2l^K2!(2al); k22=Ku Ku = k,/(4a^); £42=/(3/(2a,3).
В уравнения (4.171) входят три неизвестные: сь с2 и Ri. Третье
уравнение получим из условия е=0,5; иХз^=0:
y4(0,5)=/e4i(0,5ai)ci+fe42(0,5ai)c2=0.
Изложенный метод решения уравнений равновесия стержня
с промежуточной шарнирной опорой, лежащего на упругом
основании, является весьма эффективным и может быть использован
при любом числе опор. Этот метод легко обобщить и на случай,
когда промежуточные опоры упругие. В этом случае реакция
опоры
/?('") = — си хЬ(е — в;).
В общем решении (4.169) получаем дополнительные слагаемые,
аналогичные второму соотношению системы (4.164):
(Jil)^)=^kjlcuxb(h^ei)6hl
164
или после преобразований
(/,^ = ^,(8,)^,(^8,)//(8-8,):
v(0
(/jfc" - CU,, (B,)K4 (0,8,) Я (8 - 8,),
где
Например (рис. 4.8), если бы вместо шарнирной опоры была
упругая опора, то/?j — — cUj, S(s — 0,5) и для определения двух
постоянных Си с2 имели бы два уравнения:
2¾
^(0,5^)1^(0,5^,+ ^(O.SaJcJ;
^iW^iT-^K)^
^5-1^(^-^(0^)1
4a^
Я. (°>5*i) [*41 (0,5a,) cx + kiS (0,5a,) с J.
Решение уравнений равновесия для стержня переменного
сечения. Рассмотрим уравнения равновесия (4.138) — (4.141) стержня
переменного сечения, лежащего на упругом основании. Решить эти
уравнения можно только численными методами, поэтому
представим систему (4.138) — (4.141) в виде векторного уравнения
где
Q
ft
и
; А =
0
1
0
0
Y+A(e)Y=b,
0 0
0 — Р Г1
1/Л.И о
0 1
~k
0
0
0
; ь =
К
0
0
(4.172)
Ъ* = ~ T*J (£ ~ Вт) " *Х#Н (£ - %)■
Напомним основные результаты, полученные в § 1.4. Решение
уравнения (4.172) при произвольной правой части имеет вид
Y = К (в) С+ j К (в) К~г (h) b (ft) 6h = Y<°> + Yw.
165
Вектор b можно представить в виде
Ъ^ЪдН (h—вд) +Ьц# (А—ей) +ЬРб (h—eP) +br6 (h—гт),
поэтому
t г
\н = j G (а, Л) b,d/z+ J G (е, /г) b^dA + G (е, в J bptf (в - ер) +
+ G(s, еГ)ЬГЯ(е — ет),
где
G(e, Л)=К(е)К-ЧЛ);
G(e, ер)=К(е)К-,(ер);
G(e, er)=K(e)K-|W-
Методы численного определения матрицы К(е) изложены в
гл. 2.
§ 4.5. Приближенные методы решения задач
статики прямолинейных стержней
Принцип возможных перемещений. При
решении задач статики и динамики стержней очень эффективными
являются методы, использующие принцип возможных перемещений
как для решения линейных, так и для решения (что особенно
важно) нелинейных задач. Напомним формулировку принципа
возможных перемещений, которая дается в курсе теоретической
механики: необходимое и достаточное условие равновесия системы,
подчиненной стационарным идеальным связям, заключается в
равенстве нулю работы сил, приложенных к системе, на всех
возможных перемещениях системы. {Идеальными называются такие
связи, сумма работ реакций которых на любом возможном
перемещении системы равна нулю.)
Аналитическая запись принципа возможных перемещений
имеет вид
М-J ^-^-) = 0, (4.173)
где ЬА — работа сил F,- на возможных перемещениях бп. Если
силы F( консервативны, т. е. могут быть представлены через
общую потенциальную функцию (потенциальную энергию системы)
U(XjW) в виде
^i0 = - ГТь (/=1.2.3;i= 1,2,..., л),
х1 дхЛ1)
166
то из (4.173) получаем
п
ЬА = — V ( — 8*/> + -^—Ьх2^ + -^- 8jc3<M = —S£/ = 0,
£J \dxxC> * Ле2о дх8(Ч /
(—1
или
б £/=0, (4.174)
где 6t/ — вариация потенциальной энергии системы, а условие
(4.174) есть условие экстремальности потенциальной энергии в
положении равновесия системы, т. е. из принципа возможных
перемещений следует, что необходимое и достаточное условие
равновесия системы с идеальными связями под действием
консервативных сил совпадает с необходимым (но недостаточным) условием
экстремума потенциальной энергии.
Принцип возможных перемещений может быть использован для
приближенного решения задач статики стержней наряду с более
привычным решением дифференциальных уравнений равновесия.
Для этого необходимо обобщить этот принцип так, чтобы его
можно было распространить на упругие системы. Для упругих систем,
например стержней (или в более общем случае для
деформируемых систем), необходимо принимать во внимание не только
работу внешних, но и работу внутренних сил, возникающих при
отклонениях упругой системы от исходного состояния. Остановимся
более подробно на понятии возможного перемещения для
стержней. Возможным (или виртуальным) перемещением называется
всякое малое перемещение точек осевой линии стержня из
исходного состояния без нарушения связей, наложенных на стержень.
Например, для стержня, показанного на рис. 4.9, любая
функция Ьу{г), мало отличающаяся от функции у (г) и
удовлетворяющая тем же краевым условиям, что и функция у {г), может
рассматриваться как возможные перемещения для точек осевой
линии стержня. Любое возможное перемещение бу(е) стержня
является непрерывной функцией.
Рассмотрим, как формулируется принцип возможных
перемещений для произвольно нагруженного стержня (рис. 4.9), который
до приложения внешней нагрузки был прямолинейным. При
приложении нагрузки (Р, Т и q) стержень изгибается, в связи с чем
силы совершают работу, которая переходит в энергию
деформации стержня. Пренебрегая по- yv
терями энергии, вызванными
внутренним трением в
стержне, имеем U=A, где U —
энергия деформации стержня; А —
работа внешних сил.
Применительно к деформируемым
системам принцип возможных
перемещений формулируется Рис. 4.9
167
следующим образом: если деформируемая система
находится в равновесии под действием внешних сил, то работа этих
сил на возможных перемещениях, вызванных деформациями
системы и совместимых со связями, наложенными на систему, равна
работе внутренних сил на этих же деформациях, т. е.
6А=:6£Л (4.175)
Работа ЬА есть работа внешних обобщенных сил, приложенных
к конструкции, на возможных перемещениях точек приложения
этих сил.
На возможных перемещениях внешние силы сохраняют свое
значение, поэтому работа каждой из сил равна произведению силы
на обобщенное возможное перемещение, т. е.
где Qft —- обобщенная сила; 6у& — возможное обобщенное
перемещение. Под обобщенными силами подразумеваются
сосредоточенные силы Р<*> и моменты T<v>; под обобщенными возможными
перемещениями 5yft — линейные перемещения 6и(г) и углы
поворота Шу) связанных осей. Для распределенных сил и моментов
(q и ju) работа на возможных перемещениях
*<?*
ejx2
И = j (q8u) dft; 8^ = | (ц8А) dft,
(4.176)
E?i
>i
где egj, ejij — координаты начала и конца участков, на которых
действуют распределенные нагрузки.
Получим в качестве примера выражение для работы сил,
приложенных к стержню, лежащему на упругом основании (рис. 4.10).
Введем для безразмерных прогибов обозначение щ (как это было
сделано в предыдущих главах). Работа внешних сил на
возможных перемещениях
ЬА = — РЫ (es) + ТЬи (ej — j qbu dft — j qoCiibu dft,
s2 0
"h
4 ;1 ^7 » И U И И
Рис. 4.10
где q0Cl—k4u.
Покажем, что из условия
(4.175) можно получить
уравнения равновесия стержня.
Для этого стержень, лежащий
на упругом слое (рис. 4.10),
нагрузим растягивающей
осевой силой Qio- Потенциальная
энергия стержня и ее
вариация, вызванная возможными
168
деформациями, соответственно равны
1
U = -L§A,fidh; (4.177)
о
1
bU=\Ajubudh. (4.178)
о
Работа внешних сил на возможных перемещениях
1
ЬЛ = — РЬи (е3) + ТЬи (ej — f ?8«Я (ft — s2) d/l —
о
l / l \
— (VuSudfc — SlQle~l W/г),
0 ^ 0 '
или (с учетом б-функций)
i i i ~
6Л = — Р {bub(h~s5)dh—T Г 6и8 (Л — ^)dA —■ \qH{h — ejbudh —
О 0 0
1 1
— f &4и8«с1Л — Q10 fuSudft. (4.179)
о о
Интегрируя (4Л78) по частям, получим
1 l \ \ it
f Ajubudh = AjuhL — (A33u)' Ъи I + j (Д3 w)" 8«dft.
О 0 0 0
Свободные слагаемые в силу краевых условий равны нулю.
Аналогично проинтегрировав последнее слагаемое в (4.179),
получим
1 /11»/
Q10 f ubu dh ■= Q10 (и Ьи) — f ubu dh.
о оо
Приравняв выражения для bU и бЛ, после преобразований имеем
J \(А33и)" + k*u + РЬ (h - s3) + Г8 (А - в,) +
о
+ qH (A —s2) — Q10«J8wdft = 0. (4.180)
Так как возможное перемещение би является произвольной
функцией, не равной тождественно нулю, то из (4.180) следует
(Ajil)"-Qj+k4u + P8(e-e3) + 78(6-80 + ^(8-е,) = 0. (4.181)
169
Полученное выражение (4.181) есть уравнение равновесия
стержня для случая, показанного на рис. 4.10.
Выражение (4.180) можно представить в более компактной и
общей форме записи:
1
j" L (и) budh = 0, (4.182)
о
где L(u) — уравнение равновесия стержня, например уравнение
(4.181). Если и является точным решением уравнения равновесия,
то L(u)=0. Если же и не является решением уравнения
равновесия (задано приближенно), то соотношение (4.182) является
дополнительным интегральным условием (кроме краевых условий),
которому должно удовлетворять приближенное выражение для и.
Если в уравнение равновесия L(w)=0 подставить приближенное
решение ип, то L(un) =^=^0, где qu имеет размерность
распределенной нагрузки, поэтому из (4.182) получаем
1
г-
J qjbudh = 0,
о
т. е. работа появляющейся распределенной нагрузки qn при
принятом приближенном решении ии на возможных перемещениях
осевой линии стержня би должна быть равна нулю.
Условие (4.182) является основным соотношением для
приближенного решения задачи о равновесии прямолинейных стержней.
Представим прогиб и в виде ряда
п
"п= Зад и. (4-18з)
где at — произвольные числа; Vi{e) •— функции (известные),
удовлетворяющие геометрическим и физическим краевым условиям.
Возможные перемещения точек осевой линии стержня естественно
искать в виде функции, подобной прогибам, т. е.
п
где Sbi — независимые произвольные величины.
Подставив (4.183) и (4.184) в (4.182), получим
п i
2 86£- \ L (ед) и,- d h = 0. (4.185)
i=\ о
Так как величина 66/ независимая, то из (4.185) получаем систему
уравнений вида
1
Г/.(ед)оус1й = 0. (4.186)
о
170
V
*ЯЯТ'-
Рис. 4.11
Для линейных уравне- ^j;
ний равновесия из (4.186) а)
после интегрирования
получим систему линейных
алгебраических
уравнений относительно а4:
Yiaifii = ci (/ = 1, 2 п).
При получении
приближенного решения
использовалось выражение
(4.183) с известными
функциями £>i(e).
Естественно возникает вопрос, как эти функции получить. Очень
эффективными для получения приближенных решений являются
степенные функции, удовлетворяющие краевым условиям и условиям
ортогональности. Изложим метод получения таких функций на
примере стержня, показанного на рис. 4.11,а. Чтобы получить
отличное от нуля выражение для безразмерного прогиба v, надо
взять число слагаемых степенного ряда на единицу больше числа
граничных условий:
v\ (е)—а0+а1Е-\~а2Е2-~\-азг3-\-а&*.
Удовлетворив краевым условиям и полагая 04=1, получим
функцию
vt =
JL83 +JLe*.
2 2
(4.187)
Эта функция при изменении е в интервале (0, 1) больше нуля
(рис. 4.11,6). Получим вторую функцию 1>г(е), взяв на одно
слагаемое больше:
и2—а0+«1&+^2е2Н-азе3+«4е4+а585.
Полагая а5= Ь получим
v2 = ,• + ay - (-L + ± а,) .■ + (-L + -L а,) Л (4.188)
В выражение (4.188) входит произвольный параметр а4,
который можно определить, потребовав, чтобы их и V2 были
ортогональны на интервале (0, 1), что дает
1
Г vtvt dh = ctc4 + bt — 0, или д4 = —2,2535.
После вычислений получаем
и2=е5—2,2535е4+1,1337е3+0,1198е2.
(4.189)
171
Функция v2(e) на интервале (О, 1) один раз обращается в нуль
(рис. 4.11,в). Для и3(е) возьмем семь слагаемых; функция и3
будет содержать два свободных параметра а4 и а5 (полагая а6=\),
которые находятся из условий ортогональности:
J vtv3 d h = cua4 + £12яЕ -f ^ = 0;
о
l
J" u2u3 d h = с21а^ + £22я5 + b2 = 0.
о
l
Алгоритм получения необходимого числа функций Vi для
конкретной задачи (конкретных краевых условий) можно
запрограммировать для расчета на ЭВМ. В результате получаем
приближенное выражение для безразмерного прогиба в виде
п
"„(*)= 2 ад (0. (4-190)
где аг — произвольные константы. Возникает вопрос о точности
получаемых приближенных решений и о необходимом числе
слагаемых ряда (4.190). Так как точное решение отсутствует, то
получить абсолютную оценку сходимости приближенных решений
нельзя. Поэтому остается только возможность судить о сходимости
приближенных решений по относительным оценкам, сравнивая
между собой решения с различным числом слагаемых ряда (4.190).
Например, получив решения для двух приближенных выражений
U-a\=Ct\V\ И ^112=^1+^2¾ Найдем ИХ раЗНОСТЬ А«П1 = «п2—ии\.
Если максимальное значение Auni [на интервале (0, 1)] меньше
или равно допустимому, которое задается исходя из требований,
предъявляемых к точности решения, т. е. max | A«ni|^A%, где
Аид — допускаемая погрешность в решении, то можно считать, что
v2 есть решение исходной задачи. Если же max | Awni| >А«Д, то
следует получить решение для «113=^1 ^1+^2^2+^3^3 и сравнить его
с решением ип2, т. е. проверить выполнение условия
max |Ai/n2|=rnax j ип3—иП2 | ^Аид.
Решение unh, при котором выполняется условие
max |A«nfc_i|=max \unh—unk-i\^Aun, (4.191)
можно считать приближенным
ul определением прогибов стержня.
"~ Рассмотрим приближенное решение
уравнения равновесия шарнирно
закрепленного стержня, лежащего на
линейном упругом слое (рис. 4.12). В
качестве функций vi(e) можно взять
тригонометрические функции
—*L
Рис. 4.12 Vt(e)=sinine.
172
Уравнение равновесия стержня имеет вид (при v4зз = I)
aIV + £% + 76(e — ч) +Р8(е —е8) =0. (4.192)
Приближенное решение уравнения равновесия ищем в виде
п
ии — 2j a-t sin /да,
тогда возможный прогиб стержня
п
8и= V <^f s'n *ns-
i=i
В соответствии с принципом возможных перемещений получаем систему
уравнений
1
I L(«n)sln /тебе = 0 (/=1, 2,... , п),
или
(а;72)[(/л)4+&4]—У/я cos /ЛЕ1—Р sin /ле2=0,
из которой определяются неизвестные коэффициенты щ:
ctj=2{P sin jm2+Tjtt cos jstBi)/[(jn)4+k4].
В результате получаем приближенное решение уравнения (4.192) при
двучленном приближении:
2(Psinn£2 + 7,cosro1) 2(Psin27ie2 + Tcos2ne]) .
П Я* + Й« 16я* + £*
Изложенный метод приближенного решения уравнения
равновесия с использованием принципа возможных перемещений
потребовал сведения системы уравнений равновесия первого порядка
к одному уравнению четвертого порядка, что приводит к
громоздким промежуточным преобразованиям, особенно для стержней
переменного сечения и при нелинейной зависимости приращений сил
Д<7, Ajx, ДРг, AT от перемещения точек осевой линии и или от угла
■Оз- Например, для стержня переменного сечения (см. рис. 4.10)
(стержень нагружен дополнительной осевой силой Pi = Pio'i,
поэтому Q,0=P)0^=0) получаем следующую систему четырех
уравнений равновесия при следящих силах:
Ё^ . ^М3<°>+/гЧ(0)— о,Н{в — ег) — Р6(г — е3) = 0;
de А33
^ + Q2<°> + rS(s_ei) = 0;
(4.193)
-0;
dP8(°) М3(°)
йв А33
de
173
Первые два уравнения системы (4.193) получаются из уравнений
(4.92), (4.93) как частный случай при 7И10=0 для следящих сил.
Исключая последовательно #3(0), М3(0) и Ш°К получим уравнение
(4.181)
(Д^в>)" - Qio"2(0) + *V°> + Р& (* - О + Г8 (е - st) + ?# (s-a2)=0 ,
которое использовалось в качестве примера при выводе условия
(4.182), следующего из принципа возможных перемещений.
Рассмотрим метод приближенного решения системы уравнений
равновесия (4.193) без сведения ее к одному уравнению. В
векторной форме записи получим
О, (4.194)
-qH(e~e)t-Pb(s~e3)
О
О
В качестве приближенного решения уравнения (4.194) возьмем
вектор
Yn(e)=fliv(')(8), (4.195)
где ах — произвольный скалярный множитель; лД^(е) — вектор,
компоненты которого удовлетворяют краевым условиям задачи.
Например, функция v\(e) [см. (4.187)] и ее производные
удовлетворяют краевым условиям задачи (см. рис. 4.11), поэтому при
приближенном решении системы (4.193) для аналогичных краевых
условий можно взять вектор у('\ равный
ч
Для более точного приближенного решения можно взять вектор
Y в виде
т
Y„= 2 ***'>, (4.196)
174
L(Y)=Y-fAY-fb=
где
Y =
Q2(0J
&3<°>
u2w
; А =
О QJAn О О
10 0 0
0 _— 0 0
■"33
0 0—10
; Ь =
где
v('"> =
at
— v-t
a
Щ
4
Vi
vt
В качестве обобщенных возможных перемещений возьмем
вектор [ограничившсь пока одночленным приближением (4.196)]
6v=6biv<1>,
где 6b\ — произвольный скалярный множитель. Рассмотрим
скалярное произведение
/=(L-E(1>6v(l))=66l(L-E(1M1)), (4.197)
где
-0 0 0 1-|
0 0 10
0 10 0
Л 0 0 0J
Все слагаемые, входящие в скалярное произведение (4.197),
имеют размерность работы (если использовать первоначальные
уравнения равновесия до перехода к безразмерной форме записи).
Потребуем, чтобы работа была равна нулю, т. е.
1 1
Е<г> =
или
JKv^JB'M'J + Avi^E^M'O^ — bE^v'Mjcl/r. (4.198)
Из (4.198) находим а]=Ьу1Ъ2, где
6г = jbEW^d/*;
b2 = J (v^BW + Av^E^vOJd/L
Если взять двучленное приближение
Yn=a1v(1>+a2v(2),
то после преобразований получим систему двух линейных
неоднородных уравнений для определения а\ и а^.
175
Рассмотрим более сложную задачу, когда осевая линия
стержня не является плоской кривой, например если к стержню
приложен крутящий момент М\о. Уравнения равновесия для этого
случая получены в § 4.2 [уравнения (4.95)]. Представим эти
уравнения в виде двух векторных уравнений (ограничившись случаем
следящих сил):
L^Yi+A^+BiYa+bi^O;
La=Y2+AsY2+BsYi+b2=0.
(4.199)
(4.200)
где
Yx =
bt =
р
1 20
т
1 30
0
0
Q2<°
)
;в1 =
Y2 =
b2 =
р
1 30
т
0
0
; а1 =
"0 QJA3S 0 0-
10 0 0
о -i/л, о о
_0 0 —1 0_
»
--MJAx ° ° °'
о Л110(Л,-Л1)/(^пЛ.) о о
0 0 0 0
0 0 0 0_
Qa(0)
м2<°>
&2<0)
; В2 =
; А2 —
- о -QJA22 0 0-
—1 0 0 0
о -i/л, о о
0 0 1 0_
»
г
~MJAn 0 0 0-
0 М10(Аи-Ап)1(А33Ап) 0 0
0 0 0 0
0 0 0 0_
Приближенные выражения для Yi и Y2 (ограничившись
одночленным приближением) берем в виде
Y^^vO
>; Y2=&1utI>,
(4.201)
где
vf1) =
ш
Щ
u^> =
ш
ul
II
ux
1
иг
ux
Функции V\ и щ (и их производные) удовлетворяют краевым
условиям закрепления стержня соответственно в вертикальной Х\Ох2
176
и горизонтальной Х\Ох3 плоскостях. Возможные обобщенные
перемещения берем в виде
6v = 6civ<1>; <6u=6<7iti(l>.
Уравнение (4.199) после подстановки в него векторов (4.201)
умножаем на вектор E(1)6civ(L) и требуем, чтобы выполнялось условие
Ьсг j(Lx.E(])v<x))d^ = 0,
о
или
1 1
о о
1
-f^-ECM 1))dh = 0. (4.202)
о
Уравнение (4.200) умножаем на вектор Е^б^и^ и требуем,
чтобы выполнялось условие
i
8^ j'(Lst.E<1>u<1))d/i =0.
о
или
fl1J(Bav(1>-E(1)u(1))dA4-61J(u<1)E(1).u(M + Asu<1>-E<1>u(1))d/i +
0 о
I
+ 1(Ьг-Е^а^)6к = 0. (4.203)
о
В результате получаем два уравнения (4.202), (4.203) для
определения двух неизвестных щ и Ь\.
Принцип минимума потенциальной энергии. Один из
наиболее распространенных приближенных методов решения задач
статики упругих систем основан на принципе, утверждающем, что из
всех возможных равновесных состояний, которые может принять
упругая система под действием внешних статически
приложенных сил, она принимает такое состояние равновесия, в котором ее
потенциальная энергия имеет минимальное значение, т. е.
/=f/=min. (4.204)
При нагружении системы внешними силами из-за деформации
системы они совершают работу, которая переходит в потенциальную
энергию деформации системы, что приводит к дополнительному
условию
U=A, (4.205)
где Л — работа внешних сил. Условие (4.205) справедливо только
12—6011 177
для упругих систем, у которых при деформировании энергия не
расходуется на необратимые процессы. Например для стержня,
лежащего на упругом основании (рис. 4.12), имеем следующие
выражения для потенцальной энергии системы и работы внешних
сил:
1
U = -L( (А3зиг -f £Vj d h; (4.206)
о
A = -J- Ри (е2) + ~y Tu(Sl). (4.207)
Имеем вариационную задачу на условный экстремум, поэтому
рассмотрим вместо (4.204) функционал вида
jl = U-\-),(U—Л)=ех1Х, (4.208)
где А, — множитель Лагранжа. Для упругой системы, которая
подчиняется закону Гука, потенциальную энергию можно записать как
квадратичную функцию от перемещений точек приложения сил:
п п
^ЕЕт^"'"'' (4'209)
где щ — перемещения (линейные и угловые) сечений, где
приложены силы и моменты; сц — коэффициенты жесткости; п —
общее число приложенных сил и моментов. Работу внешних сил при
статическом нагружении можно представить в виде
п
где Rt — общее обозначение для сил и моментов.
Форма записи (4.210) для работы сил jR, справедлива только
для случая, когда перемещения совпадают по направлению с
направлением приложенных сил. В более общем случае работа
внешних сил
i=\
Для дальнейших преобразований важно, что потенциальная
энергия системы есть однородная функция второй степени, а
работа внешних сил — однородная функция первой степени.
Напомним основные свойства однородных функций (полиномов).
Однородными функциями называются функции, состоящие из слагаемых одного и того
же измерения. Например, функция
f(x, y)=x*-\-2xy-3y2
есть однородный полином второй степени. Если умножить х и у на общий
множитель t, то вся функция f(x, у) приобретает множитель t2. Если такую же опе-
178
рацию проделать с однородным полиномом m-й степени, то функция приобретает
множитель tm. Это свойство является основным при определении однородных
функций. Для однородной функции степени т справедливо тождество
f(tx, ty)=t>"f(x, у).
Предположим, что однородная функция {(х, у, z) степени т имеет непрерывные
производные по всем аргументам. Фиксируя аргументы Хс, уо, %, имеем
f(txo, ty0, tz0)=tmf{x0, у0, z0).
Дифференцируя левую и правую части по t, получим (используя правило
дифференцирования сложной функции)
df df df
дх~*° + 1^Уо +дг~Zo==t,n~lmf{Xo' Уо> Zo)- (4'2П)
Полагая в (4.211) t—l, получаем соотношение (теорему Эйлера)
df df df
—Г~*о + ~Г~ Уо + — г0 = mf(x6, у0, г0). (4.212)
дк оу дг
Условие экстремума функционала /] (4.208) в
рассматриваемом случае записывается в виде
dJl =(1+я)— Я—= 0 ¢ = 1,2,...,/0. (4.213)
дщ дщ дщ
Умножив (4.213) на щ и сложив соотношения, получим
(!+MK"<H£tu<ha <4-2,4)
В силу теоремы Эйлера имеем
/=1 i = l
поэтому из (4.214) получаем
(l+X)2U—XA=0. (4.215)
Так как A=U, то из (4.215) находим множитель Лагранжа Х=
=—2. Для упругих систем, подчиняющихся закону Гука, и для
внешних сил, работу которых можно записать в виде (4.209)
(например, для сил, имеющих потенциал), К=—2, поэтому можно
рассматривать функционал вида (без дополнительных условий)
Jl=2A—U=extr. (4.216)
Можно показать, что экстремум функционала (4.216) есть
максимум, поэтому экстремум функционала
Ji = U—2A (4.217)
есть минимум. Из принципа минимума потенциальной энергии
[функционала (4.217)], так же как из принципа возможных пере-
1мещений, может быть получено уравнение равновесия стержня.
12* 179
Полученное из принципа минимума потенциальной энергии
условие J\ = U—2Л = тт является очень эффективным для
приближенных решений задач статики стержней. Дифференциальные
уравнения, получающиеся при исследовании вариационных задач
{например, уравнение равновесия стержня), интегрируются в
конечном виде лишь в частных случаях. Поэтому возникает
необходимость в разработке методов приближенного решения
вариационных задач с использованием исходных функционалов [например,
(4.217)], не переходя к дифференциальным уравнениям. Такие
методы решения вариационных задач принято называть прямыми
методами.
Метод Ритца. Например, для прямолинейных стержней
функционал /i зависит от прогиба стержня и и первых производных и
и и, т. е.
/ и
Jl=Jl(u, и, u)=m'm,
поэтому представим и в виде ряда с неопределенными
коэффициентами
u==La,jV j(e),
где ctj — неопределенные коэффициенты; Vj(e) — известные
функции, удовлетворяющие только геометрическим краевым условиям
[в отличие от приближенного метода решения, использующего
принцип возможных перемещений, где необходимо, чтобы
аппроксимирующие функции vj(e) удовлетворяли как геометрическим, так
и силовым краевым условиям]. В качестве таких функций могут
быть взяты ортогональные полиномы, аналогичные (4.187) — (4.188)
(в данном случае более простые). После подстановки выражения
для и в функционал /i (4.217) получаем
J1=Ji(aj)=min,
что приводит к системе уравнений для определения неизвестных
коэффициентов щ
dJJda^O (/=1, 2, ..., я). (4.218)
Определив из (4.128) а,-, получаем приближенное выражение для и.
Получим б качестве примера приближенное выражение для прогибов стерж-
- ня для случая, показанного на рис. 4.12. Для определения J\ воспользуемся
ранее приведенными выражениями для U и А (4.206) — (4.207):
]
/1 = — Г (А33и* + kW)dh — Ри(в&) — Гк(еа). (4.219)
о
Ограничимся двучленным приближением, приняв
и=ах sin пе-\-а2 sin 2яе. (4.220)
180
Подставив (4.220) в выражение (4.219), после преобразований получаем из
условий (4.218) два независимых уравнения для определения а.\ и а^.
1
— (714 -f- ft4)a1 — Р sin ns2 + Тп cos те1;
1
( 16ti4 -f k4)a2 = Р sin 2та2 -J- Т2п cos 2пе,
или
2(Р sin таа -J- 7я cos Ttej)
2(Р sin 2ге2 + T2?tcos 2тид)
а* = 16^4 + й*
Приближенное решение с использованием множителей Лагран-
жа. Рассмотрим метод решения с использованием принципа
минимума потенциальной энергии, когда аппроксимирующие функции
удовлетворяют не всем геометрическим краевым условиям.
Например, для стержня, показанного на рис. 4.13, ищем
приближенное решение в виде ряда
k
и= 2«/sinm. (4.221)
/=]
Функции sin me удовлетворяют только двум краевым условиям
(е=0, w=0 и е=1, гг=0), а третьему условию (е=0, и = 0) они не
удовлетворяют. Конечно, можно получить функции иДе), которые
удовлетворяют всем краевым условиям [например, функции (4.187)
и (4.189)], но тригонометрические функции, входящие в
приближенное выражение (4.221), удобнее при вычислениях. Для того
чтобы учесть третье краевое условие, потребуем
k
и (0)= 2 fl^* cos аде 1.=0 = 0. (4.222)
(=1
Воспользовавшись множителем Лагранжа, рассмотрим
функционал
/з^Л-НМО).
Неизвестные коэффициенты а( находим из системы уравнений
^___^ , я^(0) = о,
да-ь да,{ ' da-t
Коэффициенты at линейно зависят
от множителя X: аг = а*оА+ап.
Подставив at в условие (4.222),
находим множитель %, а затем получаем
окончательные выражения для а{.
Если функции Vi(e) не
удовлетворяют двум краевым условиям,
например если при е=1 стержень
ил
Is
0,5
i
Рис. 4.13
181
(рис. 4.13) закреплен не шарнирно, а жестко, то функция (4.221)
должна удовлетворять двум дополнительным условиям: и(0)=0;
и(\)=0, поэтому функционал /2 в этом случае имеет вид
/2==/i+Xitt(0)+A,2«(l).
Множители Лагранжа существенно расширяют класс
аппроксимирующих функций, которые могут быть использованы при
приближенных решениях с использованием принципа минимума
потенциальной энергии.
Задачи для самостоятельного решения
Ф 4.1. Воспользовавшись принципом возможных
перемещений, определить перемещение точки k стержня, нагруженного следящей за
точкой О силой Р0 (рис. 4.14). Сечение стержня и модуль силы постоянны.
Перемещения точек осевой линии стержня считать малыми. (Ограничиться
одночленным приближением.)
ф 4.2. Воспользовавшись принципом минимума потенциальной энергии,
определить перемещение точки k стержня [задача 4.] (рис. 4.14)].
# 4.3. Определить перемещение точки k стержня (рис. 4.15), воспользовавшись
принципом возможных перемещений. Стержень постоянного сечения нагружен
распределенной нагрузкой, постоянной по модулю и следящей за точкой О.
Координаты точки О: 80 = 0,5; х20 = 0,5.
ф 4.4. Воспользовавшись принципом минимума потенциальной энергии,
определить перемещение точки k в задаче 4.3.
Рис. 4.14
Рис. 4.15
хги
нпи
Рис. 4.16
Рис. 4.17
182
*Zn
%
,- V v v v
W /// /// /// /// /// /// /// A
1
Рис. 4.18
ф 4.5. Определить перемещение точек
осевой линии стержня, лежащего на упругом
основании с линейной характеристикой
(рис. 4.16). Стержень постоянного сечения
нагружен равномерно распределенной
нагрузкой.
ф 4.6. Воспользовавшись принципом
возможных перемещений, определить
перемещения точек осевой линии стержня
постоянного сечения (рис. 4.17). На участке
(0^е^0,5) стержень лежит на упругом
основании с линейной характеристикой.
# 4.7. Стержень постоянного сечения (рис. 4.18), нагруженный распределенной
нагрузкой, лежит на упругом основании с нелинейной характеристикой (q0cn =
— ^ai4ux 4- y^3 ) - Требуется получить приближенное выражение для проги-
бов, ограничившись одночленным приближением.
4.8. Считая перемещения точек осевой линии малыми, определить
напряженно-деформированное состояние стержня (рис. 4.14) численным решением
уравнений равновесия. (Ограничиться уравнениями нулевого приближения, положив
I Pol =0,5.)
4.9. Получить уравнения равновесия нулевого и первого приближения для
стержня, показанного на рис. 4.14. Получить численное решение (при |Р0|=0,5
ей=0,5) и установить максимальные погрешности, которые имеют место, если
ограничиться только решением уравнений нулевого приближения.
4.10. Получить уравнения равновесия стержня (рис. 4.14) при больших
перемещениях точек осевой линии стержня. Воспользовавшись методом
последовательного нагружения (при конечном значении |Р0|, равном 2, и ^=0,5),
получить численное решение нелинейных уравнений равновесия.
4.11. Получить численное решение уравнений равновесия нулевого
приближения для стержня, показанного на рис. 4.15, при qo=l.
Глава S
КРИВОЛИНЕЙНЫЕ СТЕРЖНИ
В первой главе были получены уравнения
равновесия для наиболее общего случая, когда осевая линия стержня
в естественном состоянии является пространственной кривой. Эти
уравнения содержат в себе ряд частных случаев задач статики
стержней, а именно задачи статики стержней, осевая линия
которых в естественном состоянии есть прямая (эти задачи
рассмотрены в предыдущей главе) и плоская кривая. К. частному случаю
общих уравнений можно отнести и уравнения равновесия
пространственно-криволинейных стержней, осевая линия которых в
естественном состоянии представляет собой винтовую линию. Примеры
использования таких стержневых элементов в различных областях
техники приведены во Введении. Эти частные задачи статики
стержней рассматриваются в данной главе.
183
§ 5.1. Плоские криволинейные стержни
Уравнения равновесия для случая, когда
осевая линия стержня при нагружении остается плоской кривой.
Уравнения равновесия стержней, осевая линия которых при нагружении
остается плоской кривой, можно получить как частный случай из
общих уравнений равновесия, рассмотренных в гл. 1, если
положить (используя базисы {ej} и {ij}):
1) в базисе {е7}
Q = Qx> К + Qx* i2;
2) в базисе {ij}
Q = Q1e1 + Q£e2;
М = MXs L;
M = Мл.;
q = qXlh + Яхяк
q = яр* + q-^
ц = ^, i3;
n = м-,е,;
P(') = Pi*> i -f- piV i,;
)(0
(a
ро^яГ'^ + П'Ч;
X*,J) __ T<v): .
1 — 1 x* «3»
Ты = 7t»e ■
U = ^Ji + Ux\„
u = «^ + u8e2;
о = &a;
= M3;
x = >с313; (и, = щ = 0); и = к3е3, (их = х2 = 0);
х10 — >с20 — и;
^10 = ^20 = 0-
При плоской форме изгиба стержня матрицы L (П.44) и L0
(П.55) принимают вид (при fy = 0^=0 и Фю=$20 = 0)
L = [У =
COS&3
— sin&3
0
sin&3
cos&3
0
0
0
1
L° = [/?,] -
cos &з0 sin $30 0
— sin &s0 cos 8-30 0
0 0
?!
Напомним, что матрица L
к базису {е^}, матрица L0 ■
к базису {е(0}.
это матрица перехода от базиса {ei0}
это матрица перехода от базиса {i,-}
184
Нелинейные уравнения равновесия стержня в связанных осях.
Из системы (1.64) — (1.68) получаем следующую систему
уравнений:
dQi
lit
■Q,*.+ ^ + 5^/^==0:
£=1
(5.1)
d02
it,
+ Qa + ?2+5]^^)8i(') = o;
i—l
(5.2)
dM3
de
+ Q2 + ^3+5]nv)8(v) = 0;
(5.3)
Мз = А,,(х8 — x,0)^so = -^-, K.o = ^-);
(5.4)
de
M3 = x30;
133
(5.5)
d«i
~dT
«2^3 + A» — i = 0;
(5.6)
du2
~dT
+ Uji& + /21 = 0,
(5.7)
где ln—cos-bz, /21 = 3^-03-. ^з —
угол между касательными к
осевой линии стержня до и после
нагружения (рис. 5.1). Система
семи уравнений (5.1) — (5.7)
содержит семь неизвестных: Q\, Q2, Lz[
Ms, иа, #з, мь "2.
Нелинейные уравнения
равновесия в декартовых осях. В том
случае, когда внешние нагрузки
заданы в неподвижных осях,
удобнее воспользоваться
уравнениями равновесия (1.89) — (1.93)
Рис. 5.1
185
в проекциях на неподвижные оси:
п
de
dQx2
de
! + <7*.
+ <?*2
i-l
i-l
(5.8)
(5.¾
f^_ + (ijn +/„&) Qxl - (/„& + /124) Q„ +
cl03 AIX d^
de Лаз ds "" '
-^r- - Cn'?i + /1^1) + A = 0;
d«„
(/„& + /„&) + & = 0,
где
(5.11)
(5.12)
(5.13)
(5.14)
(5.15
(U?i + /,2¾ = cos (8-3 + &30); /?i = ccs030;
(/„ /?2 + /1£&) - sin (&3 + &зо); 4 = sin a30.
Уравнения (5.10), (5.12) и (5.13) с учетом соотношений (5.14),
(5.15) принимают вид
i^!-. + cos (d, + К) Qx* - sin (ft, + К) Qxt + ц, +
P
+ 2^(6-6.) = 0,- (5.16)
-crs(&s+dj4-cos&eo = 0; (5.17).
de
dur
—^ sm(&3 + &30) +sin &, ,, = 0. (5.18)
Наглядный пример распределенных сил, компоненты которых заданы в
неподвижных осях, — спиральный стержень, находящийся на ускоренно (с
ускорением а) движущемся объекте (см. рис. В.1). В этом случае на спираль действует
распределенная нагрузка
2
q = m0a = 2 <?*//-
1=1
или
q=mc j а | cos а ■ ii-f-m01 а ] sin а • i2.
186
Представленная форма записи уравнений равновесия стержня
как системы нелинейных уравнений первого порядка удобна при
численном решении. Возможна и несколько иная форма записи
уравнений (5.8) — (5.13) через проекции вектора Q в связанной
системе координат:
de de de de
тогда
n
6
(qA - qA) + ?*.+$] p£s (£ -e<) = °; (5-2°)
de
n
{qX+qA) + ?*, + S ***"8 (£ - ei) = °; (5-21)
6M
^fL + Q. + ^1 +JnV8(e-e,) = 0; (5.22)
v=l
/d*\, d&30\ / / _ ft
M*s = Л, (^ — ^7]; .^ = cos &8; Ar2=sinft8; (5.23)
Хг~- X10, -j- X2 ^2(,. (O.Z'+J
de ! 10' de
Определив из системы (5.20) — (5.23) неизвестные Qly Q2) МХз,
$s, хг и х2, находим перемещения точек осевой линии: и = х1 —
— *io + «Xl0; "*, = ■*» — х*« + иХя0> W нЖ10, «^ — начальные данные.
Если при е = 0 перемещения стержня запрещены [и (0) = 0], то
Wx,0 = Uxs0 = 0-
Рассмотрим в качестве примера консольно закрепленный криволинейный
стержень постоянного сечения с сосредоточенной массой (рис. 5.1). Пунктиром
показано естественное состояние стержня. Уравнение осевой линии стержня
в естественном состоянии считается известным [#io(e), х2о(е) и Озо(е)]. При
ускоренном движении с постоянным ускорением стержень нагружается
распределенными силами q = m0ai2 и сосредоточенной силой Р = Мш2. где а —
ускорение. Требуется определить новое равновесное состояние стержня и внутренние
силовые факторы (Q\, Q2 и Мх ).
Безразмерные значения q и Р равны
т<лР Mai2
Л33(0) 2 Чх**' Л33(0) 2 *-8'
где qx =/770х'3/Л33(0); Рх = Mal2t'A33(0). Для стержня постоянного сечения
безразмерная изгибная жесткость равна единице (Л33 = 1)
Интегрируя уравнения (5.8)— (5.9), получаем (при qx = Рх = 0)
д^=С1; QX2= -qx*-PxH{*-*x)+C* (5.25)
187
Так как при е= 1 (свободгый конец стержня) QK = Qx = О, то Сг = 0, С2 =
= <?„ + Pr , поэтому
Рассмотрим уравнения (5.11) и (5.16), которые, если ввести новое неизвестное
^31 = ^3+^30. можно преобразовать к виду
djV+Cos?3j^2( 1~-е)+^ -рХшЩ'-ч)]=>о; (5-27)
ds
du4 , d04n
de x* de
Решение уравнений (5.27) осложняется тем, что задачи механики стержней
являются двухточечными, т. е. необходимые для определения произвольных
постоянных краевые условия заданы в двух сечениях стержня (при е = 0 и 8=1).
В рассматриваемом примере при е=0 известно значение f>3o (и Оз): #3 (0)=0.
Второе условие: на свободном конце стержня при е = 1 Мх (I) =0, поэтому при
решении нелинейной системы уравнений (5.27) можно брать произвольные значения
Мх (0) и определять [решая систему уравнений (5.27) от 0 до 1] Мх (1).
Значение Мх (0), при котором Мх (1) = 0 [и соответствующее значению Мх (0) в3(е)]>
дает решение задачи. Число последовательных приближений зависит от выбранного
начального приближения для Мх (0). Например, для рассматриваемой задачи можно
взять выражение
V) = p(l-V№ + ViM) (P<'J.
где Xik, Xim — безразмерные координаты.
Определив Оз(в), находим координаты точек осевой линии стержня из
уравнений
dx, dx2
=cos0g; =sinQ-3,
de
интегрируя которые получаем
где
в с
xt = \ cos ft3ds + С3; х2 = 1 sin Ogds -(- С4.
о 6
В рассматриваемом случае при е=0 Xi=x2=0, поэтому Сз=С4=0,
Перемещения точек осевой линии стержня
их^ = хх х10; их^ —х2 х20,
*10 = ) C°S ^30dS *20 = J sin *W*£-
0 0
Для определения осевой Qi и перерезывающей Q2 сил воспользуемся
соотношениями (5.19)
QXi = QlXl — Q2x2; QXa = QjX2 + Q2Xj,
откуда находим
Qi = Qx*i + Qx**; Q2=~ Qx*% + Qx*i-
188
В рассматриваемом примере Qx — 0, поэтому окончательно получаем
Qi = QxX2 = {qXz(l-e)+PX2-PxH(e-4)]sm%;
(5.28)
02 - Qx*i = [чХш{ 1-*)+РХ2- РХлЩ*-Ъ)\ cos »,.
На рис. 5.2, а — в приведены графики изменения Qlt Q2 и Мх для ряда
значений безразмерных параметров дх , Pt (при условии М = т01). Безразмерная
координата Ei положения массы М на оси стержня при численном счете бралась
равной 0,5. Графики изменения Qi и Q2 (рис. 5.2,а, б) имеют разрывы в
сечении (e = Ei), где приложена сосредоточенная сила Рх . Приведенные на
рис. 5.2,о—в графики /, 2, 3 и 4 соответствуют следующим значениям
безразмерной нагрузки:
1—PX =<7V =0,5; 2 — Pr = qy = 1; 5 — Рх = qx =^ 1,5; 4—Pr = qx =2.
На рис. 5.2,г показаны формы осевой линии стержня при тех же значениях
а)
7,75
1,5
1,15
1
0,75
0,5
0,25
О
6)
Мх3
1,5
1
0,5
0
6}
0,25 0,5 0,75 £
3,5
3
2,5
2
1,5
1
0,5
О
1i
-и
^3
л
4
U 3
,Л
г)
0,25 0,5 0,75 £
^ч
X,
'3
^-7
3^
4
ч
У^1
1
1
0,15
0,5
0,25
0,25 0,5 0,75 £ 0,15 0,5 0,75 Xt
Рис. 5.2
189
Рис. 5.3
нагрузок. Начальная форма осевой линии стержня была задана в виде 03о=
""^качестве второго примера рассмотрим упругий элемент регулятора
угловой Скорости вращения (рис. sV). В этом случае можнс^^^з^ться
симметрией упругого элемента и рассмотреть только его половину (рис. 5.30) -от
тоткизакрепления А до точки В, где находится сосредоточенная масса М, в
сечении В запрещен угол поворота упругого элемента. На упругий элемент деи-
ствуют распределенная нагрузка
У v q-m0(u2(>;2+^fl)'2
и сосредоточенная сила
p=^M(i)2X2Kh-
Переходя к безразмерной форме записи, полагая со=Л где Ро= [АгЬ/{т^)У>2,
получим
q = q——=to2(X2-f ^о)'г;
■"33
р /2 I
2 А
33
М
т01
«2*2К*2>
(5.29)
гпр брзпязмепные величины обозначены знаком «тильда».
Д Из ypSeHHfi (5 8)-(5.18) с учетом (5.29), опуская знак .тильда» получаем
следующую систему уравнений:
de
^f+«2(x? + До) = 0;
m.
.М" =0;
ля
d^
d£
L+cos03QJt2-sine-3QJCi = 0;
de
dx2
de
-cosdg — 0;
sin % = 0.
(5.30)
(5.31)
(5.32)
(5.33)
(5.34)
(5.35)
190
h
о,г
0,1
2
1
\
о)
6}
0,25 0,5 0,75 Xf
Рис. 5.4
;
0,5
о
-0,5
-1
0,25 0,5 0,75 £~1,5
Рис. 5.5
2
1
1
I
2
0,15
0,5
0,75
£
Для системы уравнений (5.30)-(5.35) имеем следующие краевые условия: 1) 8 =
= 0, Xl=x2=^ = 0; 2) 8=1,03=0, QXa = Pi2.
Рассмотрим упругий элемент (рис. 5.3,а) со следующими размерными
параметрами: /=10 см, b=\ см, /t = 0,2 см, Ro = 5 см.
Система нелинейных уравнений (5.30)-(5.35) решается численно с
использованием метода последовательного нагружения.
На рис. 5.4 показаны равновесные формы половины упругого элемента для
двух значений угловой скорости: / — со = 60 и 2 — ¢0=80. На рис. 5.5,а, б
приведены графики /, 2 изменения QXi и МХа для этих же значений со.
Уравнения равновесия для случая, когда осевая линия стержня
при нагружении становится пространственной кривой. Уравнения
равновесия для этого случая отличаются от общих уравнений
равновесия, полученных в гл. 1, только тем, что в этом случае вектор
ио(1) и матрица L0 равны
х0(') = ад; L0
COSd30 Sill&ao 0
sinfl\n ccs&,ft 0
о
о
1
поэтому
М\=Ацхи М2~А22К2, М3— Лзз(хз—хзо)
(*!=fii +
Jl
de
к& = Q3 sine-1P
x3 ^QgCosO-J,
что практически не приводит к упрощению уравнений равновесия
(1.64) — (1.68), поэтому эти уравнения здесь не приводятся.
Уравнения равновесия при малых перемещениях точек осевой
линии стержня. Получим уравнения нулевого и первого
приближений в проекциях на связанные оси для случая, когда перемещения
точек осевой линии стержня и углы поворота сечений являются
малыми, а осевая линия при нагружении остается плоской
кривой.
Уравнения равновесия нулевого приближения:
^-"зоЗЛ + Ло-О;
de
(5.36)
191
de
dAf3<°)
<Ш°)
de
-L-m^^o (M3(°) = д3дк3<0));
ae
Уравнения равновесия первого приближения:
а ё
de
d.V*.(i)
de
-H-Q,^)--A7-,;
й%(4 1
-^0 = 0 ^,^) = Л.Дх*1));
de A33
dM/i)
de
— x3o^(1) = 0;
dKg(i)
de
ivV'i-^'-o.
(5.37)
(5.38)
(5.39)
(5.40)
(5.41)
(5.42)
(5.43)
(5.44)
(5.45)
(5.46)
(5.47)
Система уравнений нулевого приближения в векторной форме
где
Y<04-A<°>(e)Y<0> = f<°>,
Y(«)=(Q1(0), Q2<o, М3<°>, W°K Щ(°\ и2«»)*;
Р°>=(—Рю, -Лю, -Гад, О, О, 0)';
(5.48)
'30
A(°)(s) =
"О
'Л
О
О
v3 0
о
1
о
0 0 0
0 0 0
0 0 0
1
о
о
о
о
'30
о о
Лзз
0 0 0 0 0 —и
0 0 О 1 кяо О
Система уравнений первого приближения в векторной форме
Y(D+AfI>(e)Y(1>=ff1>, (5.49)
где YO)=(QxO)t Qa(D, М30), QJ1K Ul(i)f U2(i))T;
192
ft1)—
"„APi+Q2(0)AK3<o,"
-AP-Q/iA^)
-A^
0
0
0
J
0 -
^30
0
0
0
0
~^зо
0
1
0
0
0
A<')(e) =
A Ч*°
лзз
•"33
0 о
-; °
•"33
0 0
0 —1
0
0
0
0
0
^30
0
0
0
0
— Kj
с
'30
д^Ч 2^4^-^+ 2^'>№0);
i=i
j=i
дяг =
s
piS^t'
л Ч<0)
- s
0<''>Ы0);
AT. = 0-
k/=I
В качестве первого примера рассмотрим стальной стержень, находящийся
в магнитном поле (рис. 5.6). На стержень действуют распределенные силы
притяжения qe = ?лг20(г0)12, зависящие от расстояния между точками осевой линии
стержня и поверхностью магнита. Под действием этих сил стержень продеформи-
рует и займет новое положение (показанное на рис. 5.6 пунктиром), что
приведет к изменению (по модулю) распределенных сил q(r0—г), так как изменится
расстояние между точками осевой линии стержня и магнитом. В декартовых осях
направление вектораq = qx\z остается неизменным, т. е. нагрузку можно считать
«мертвой», но по модулю она изменяется, т. е. Aq=£0. Получим выражения для
Aq, считая, что перемещения точек осевой линии стержня малые. Так как силы
притяжения зависят только от расстояния между точками осевой линии стержня
и плоскостью магнита, параллельной плоскости хгОх3, т. е. от |г| (рис. 5.6), где
|г[=г0— «Х2,то, разложив QXi{r0 — uXz) в ряд, получим (в линейном
приближении)
**, = ?*.о +
&я.
«2
дг
Поэтому
( dq*>
(5.50)
г-То
(5.51)
Если при решении воспользоваться
уравнениями в связанной системе
координат, то для вектора Aq
получаем следующее выражение:
Aq=q—q0(1).
(5.52)
Рис. 5.6
13—6011
193
Чтобы получить bsq в базисе {е;}, надо представить векторы q и qo(1) в этом
базисе:
3 з
4=2 W=2 QX2(h'ti)Ci;
вектор Чо'4 имеет в базисе {е;} те же компоненты, что и в базисе {е/о}, т. е.
з з
4
!) = S Wi = S ?,и(А'е£о)ег
(=1
i=l
Для того чтобы представить вектор h в базисе {е/}, воспользуемся матрицей
преобразования базиса {i/} к базису {e/JL^^LL0, где L0 — матрица
преобразования базиса {if} к базису {е;0}; L — матрица преобразования базиса {е;0} к
базису {е;}. Элементы 1ц матрицы L0 считаются известными, а матрица L при
малых углах поворота связанных осей (см. Приложение 1) определяется так:
L
Г 1 *>з -VI
= \ -h 1 »1,
поэтому вектор i2 в базисе {е;} запишется как
з з
!*=2 'йЧ-=2 z/2)e/ + <4&з- 4¾)¾ +
Аналогично получаем вектор i2 и в базисе {е,-0}:
3
/=1
Поэтому из (5.52) получаем [с учетом (5.50)]
3 з
/=i /=1
или после преобразований с учетом выражения (5.53)
Дч « да*, (2 '/2е/) + <W2V3 - 4¾)¾ +
в векторной форме
где
(5.53)
Aq^O^-fC'^u,
с|"
0 —^.«а0^32 QxzOl22
о 1°
32
о
-а 1°
l'xt0 '12
Ухг0122 Чх-О1
12
; С(*) =
/22^1 )e3J
"о «г}2
0 al°22
_ о й4
0 '
0
0
(5.54)
(5.55)
•
194
В качестве второго примера определения
приращения нагрузки, зависящей от перемещений
точек осевой линии стержня, рассмотрим плоский
криволинейный стержень, находящийся на
вращающемся основании (рис. 5.7). Пунктиром
показано деформированное состояние стержня. Так
как
q0 = m0<o2p0; q = m0to2p; p = p0 -f- u.
TO
Aq = q—qo = moW2u,
(5.56)
со
где m0 — масса единицы длины стержня; со —
угловая скорость вращения диска.
Рис. 5.7
Получим уравнения равновесия стержня, осевая линия
которого при нагружении становится пространственной кривой.
Уравнения равновесия нулевого приближения получаем из
системы (1.116)-(1.119):
dQ2(°)
de
dQ3(°)
+ />,«, = 0;
-^,0 +7\0 = 0;
d
d^j(°)
d£
de
!"b!!i +¢,..) + 7-,.-0:
de
d^t0)
de
d02("J
de
dft3(°)
de
d«,(°)
■ —Дх3(°)=0;
de
dff2(°)
de
df/3(°)
de
+ &2<°> = o,
(5.57)
(5.58)
МЛ = AiA*!10*; М2'°) = ДгДх2(°ь M3(°> - Д3Дх3<°>; (5.59)
(5.60)
(5.61)
13*
195
где
П р
^ = ^+^/^¾ Г/о^/о+2т<-^> (*=1, 2, 3). (5.62)
i—1 " v=l
Уравнения равновесия первого приближения получим из
уравнения (1.168) — (1.169) для неследящих сил:
ч'=1 / V=i
—г г изо Qi ——— Mi + ——Ms — q10h -+- <?зо^1 =
ue An A33
+
+ Qf»AHi0>-Qi°'AKf»; (5.63)
+ ( S^o's''»J «4''!+ p,^!0)-pX>+Q^ax!0' -Qi°V0>;
i^Ko)<,_M(o>u4.,+Mo,Ax«,)_^ofto,+biau)=|j7.&,6(.,W,,_
v=l '
- ( S rii'8'" J 8*' > + Vf > - 7-,^°»- МЦ»Ь40) + <>Д*«»;
= (| 7-fi>»">) »|" - ( S rfi'»"'W - rso»r + r,j»J0) +
+ ^^-^,0^ (5.64)
^ + МГДКГ> -<>Д^' - ^0»['> + „,.»<■> + QO) =
= -1 S ЯДО")»1" + ( 2 W') »5" + 7-!0&Г - r.jjjf» +
\v=l I \v=l /
ч-л^0)ди10)-л110)дхГ;
196
Ax\l) =
A,
м:\
ы1) =
Afi°;
Д4П
■M1'; (5.65)
'22
'33
de ' 30 1
cm3<i) l
^Л1<'>=0;
(5.66)
'22
de
йиг (1)
— —— M»> = 0-
As 3
'33
30 2 '
dU2{1) , ,,(1),,(1) ft(l)
ds
^aW-o^O;
(5.67)
de
4!) = o.
Компоненты векторов первого приближения (Qj(l), Mj<l> и т. д.)
должны удовлетворять тем же условиям, что и компоненты
векторов нулевого приближения. Систему уравнений нулевого
приближения (5.57) — (5.61) можно представить в виде векторного
уравнения ,
Y<°>+A<°> (е) Y(°>=f<0>, (5.68)
где \«М4Р, <g\ $». Mf\ Mf, Mf, dp, в?>. 6p».
«i(0>, w2<°>, w3<°>)T;
f(0>—(_
C)W =
-Pio,
- 0
x30
0
0
0
0
0
0
0
0
0
0
—Pm.
x30
0
0
0
0
1
0
0
0
0
0
0
—Рзо,
0
0
0
0
— 1
0
0
0
0
0
0
0
— ^10,
0
0
0
0
x30
0
1
An
0
0
0
0
0
—TV),
0
0
0
_x30
0
0
0
1
1
■^22
0 -
0
0
и
-T
0
0
0
0
0
0
0
p
1
^33
0
0
0
30, 0,
0
0
0
0
0
0
0 -
x30
0
0
0
0 -
o,
0
0
0
0
0
0
"x30
0
0
0
0
-1
o,
0
0
0
0
0
0
0
0
0
0
1
0
o,
0
0
0
0
0
0
0
0
0
0
xso
0
0, 0 )!»;
0 О'
0 о
0 0
0 о
о о
0 I»
о о
о о
о о
v 0
— x30
о о
о о
197
Аналогично можно записать и уравнения первого приближения
(5.63)^(5.67):
Y^+AW (8)^)=10). (5.69)
Вектор f(1) зависит от решения уравнения (5.68), а также от углов
Oj(,) первого приближения поворота связанных осей в сечениях.
§ 5.2. Пространственно-криволинейные
стержни
Винтовой стержень. В технике получили очень
широкое распространение различные
пространственно-криволинейные упругие элементы, использующиеся в качестве аккумуляторов
энергии, чувствительных элементов, частотных датчиков и т. д.
Большое распространение имеют упругие элементы,
представляющие собой винтовые стержни (см. рис. В.7) —цилиндрические
пружины. Возможны и другие формы пружин, если при навивке
использовать не круговой цилиндр, а, например, коническую
поверхность (см. рис. В.8) или поверхность, представляющую собой тело
вращения {пунктирные линии на рис. В.8).
Винтовой стержень (см. рис. В.7) может иметь постоянный
(a0=const) и переменный {а^Фconst) угол подъема винтовой
линии. В первом случае кривизна £2зо и кручение К2ю осевой линии
стержня постоянны и равны [см. (П.104), (П.105) в Приложении]
Qio—sinaoCOsaoAfto; ^3o=cos2a0//?o {Ro=Rooll), (5.70)
где I — длина осевой линии винтового стержня. Во втором случае
для определения £h(e) и йз(е) надо знать уравнение осевой линии
стержня #i0(e); зная это уравнение, по формулам (П.91) и (П.100)
определяют значения Qi и Q3, характеризующие геометрию осевой
линии стержня в естественном (ненагруженном) состоянии.
С другой стороны, при расчете цилиндрических пружин (как
для ao=const, так и для а0=£const) имеют место два типа задач:
1) статика цилиндрических пружин, когда изменения параметров
(АОь Да, ARo, ЛЯ), характеризующих геометрию винтового
стержня, можно считать малыми, — линейная теория цилиндрических
пружин; 2) когда изменения Qit a0, Ro и Н при нагружении
считать малыми нельзя -— нелинейная теория цилиндрических
пружин. В первом случае (линейная теория) для решения задач
статики винтового стержня при любых вариантах нагружения
[симметричного (см. рис. В.7,а) или несимметричного (см. рис. В.7,6)]
можно воспользоваться уравнениями нулевого приближения
(1.107) —(1.111) (в базисе {ei0}), полученными в § 1.4. Во втором
случае (нелинейная теория) следует использовать общие
нелинейные уравнения, полученные в § 1.3.
В дальнейшем принято, что задачи статики винтовых стержней
физически линейные, т. е. деформации стержня связаны с
напряжениями линейными соотношениями. Случай симметричного на-
198
5}
Рис. 5.8
гружения цилиндрической пружины (сосредоточенными силами,
приложенными к торцам) при малых деформациях, как наиболее
простой, детально исследован, например, в [11]. Следует
заметить, что симметричное и несимметричное нагружения при
определении малых деформаций пружины приводят к разным по
сложности задачам. При симметричном нагружении малые изменения
кривизны и кручения (AQi, Л£Ь) можно считать постоянными, в
то время как при несимметричном нагружении они зависят от
дуговой координаты s. В результате нагружения внешними
симметричными силами винтовой стержень остается винтовым
стержнем, но с другими геометрическими параметрами (R, a, Q\, из)-
Это возможно для длинной (по сравнению с диаметром D)
пружины, когда влиянием закрепления концов стержня можно
пренебречь, или для винтового стержня, когда концы стержня могут
свободно перемещаться в плоскости, перпендикулярной осевой линии
стержня. В этом случае в уравнение равновесия войдут неизвестные
(постоянные) кручение fii и кривизна Q3, диаметр D и угол а1 (рис.
5.8,а), причем можно, не используя уравнений равновесия,
определить приращения Н, а и D (А#, Аа и AD) как при малых их
значениях, так и при больших.
При нагружении цилиндрической пружины с закрепленными
концами симметричными силами (при больших АН) ось стержня
перестает быть винтовой цилиндрической линией, т. е. щ и к3
зависят от 5 (рис. 5.8,6).
Линейная теория цилиндрических пружин. Рассмотрим случай
симметричного нагружения винтового стержня (рис.
5.9,а). При нагружении цилиндрической пружины силой Р и
моментом Т, действующими в плоскости, перпендикулярной осевой
линии, в поперечных сечениях стержня возникают момент М и си-
199
CC^OC
Рис. 5.9
ла Q, причем значения компонент векторов М и Q в связанных
осях зависят от геометрии пружины (от D и а) и характера
закрепления концов стержня.
В ряде случаев закрепления стержня внутренние силовые
факторы М и Q можно найти, не прибегая к дифференциальным
уравнениям равновесия как при симметричном, так и несимметричном
нагружении. Считая, что a^ao=const и D=D0=const (т. е.
пренебрегая деформацией пружины в уравнениях равновесия),
проецируем все показанные на рис. 5.9,6 силы и моменты на связанные
оси. В результате получаем шесть алгебраических линейных
уравнений равновесия с шестью неизвестными Qj и Mj (/=1, 2, 3). Эти
уравнения равновесия справедливы для любого угла а0 (как
постоянного, так и переменного). В этом случае для определения
осадки пружины Д# и угла взаимного поворота торцов Д-ф можно
(опять не прибегая к дифференциальным уравнениям)
воспользоваться методом Мора [17]. Изложенный вариант решения
задачи статики винтового стержня без решения дифференциальных
уравнений равновесия возможен только при условии, что никаких
ограничений на осевое смещение верхнего торца пружины и его
поворот не наложено. В противном
случае (например, когда поворот
торца пружины запрещен) задача
становится статически неопределимой и для
ее решения (в общем случае) надо
1 использовать дифференциальные
уравнения равновесия.
Рассмотрим более подробно
случай симметричного нагружения
цилиндрической пружины (рис. 5.9,а)
при <%=const (при малых перемеще-
Рис. 5.10 ниях точек осевой линии стержня, ко-
200
гда нет ограничений на осевое перемещение и угол поворота
торцового сечения стержня, — статически определимая задача), На
рис. 5.10 показаны винтовая линия и ее развертка на плоскости.
При постоянном угле подъема а0 развертка осевой линии на
плоскости есть прямая, поэтому получаем формулу, связывающую угол
подъема с:0, длину стержня / и высоту Н0 (безразмерную)
цилиндрической пружины: ■ i
tfo=sina0 (Я0=Яоо//). (5.71)
Можно получить еще одно соотношение, связывающее
геометрические параметры пружины (рис. 5.10):
tg ao==HQO/ (nDooi)=HQ/ {nDoi) (D=D00/l), (5.72)
где i — число витков пружины. Центральный угол
aj)0=2m' = cosao//?o (Ro—Roo/t). (5-73)
Если стержень, из которого изготовлена пружина, имеет
круглое или квадратное сечение, то главные оси сечения и естествен-*
ные оси можно считать совпадающими, поэтому ^20=^20=0- При
малых перемещениях осевой линии винтового стержня можно
считать, что изменения АН, Да и AR тоже есть малые величины (та«
же, как и изменения AQi и Д£2з), поэтому в линейном
приближении можно из (5.70) — (5.73) получить следующие соотношения
(считая, что стержень нерастяжим, т. е. /—const):
A#0=cos аоДа; (5.74)
ц ^ L Sin аоДа — cos а0ДЯ0 (ARQ = ^); (5.75)
Ro Ro \ * /
ДО. = — cos 2а0Да — ^^-° AR0; (5.76)
1 #о 2#о2
= _ 2Sina0coSa0Aa _ cos^_0 д/? (5J?)
#о Ro2
Из уравнений (5.76) и (5.77) находим AR и Да:
Aa=R0{AQi—AQ3tga0); '- ■,
ARq=—R02AQ3 (1—tg2 a0) — 2RJAQ, tg a0. :'\
Зная Да и AR, находим ДЯ0 и Д-ф:
Д#о=соб a0Ro (AQi—ДОз tg ao); ь
Дф = sin a^Q, -1 AQ3.
2cos a0
Определив из уравнений равновесия (1.107)—(1.111) Aki и Дхз,
находим Д#0 и Дф для случая (см. рис. 5.9,а), когда конец
пружины может свободно поворачиваться, что имеет место в статически
определимых задачах. Изменения кручения (Д£Ь) и кривизны
(ДОз) связаны с крутящими и изгибающими моментами
соотношениями (приведенными к безразмерной форме записи)
AQi=MJAu; Д£3=МзМзз.
201
Рис. 5.11
Для статически определимых задач внутренние силовые
факторы в стержне можно определить из уравнений равновесия части
пружины. Так, например, для пружины, показанной на рис. 5Л1,а,
имеем:
М\ = PR cos сг+ Т sin а;
М3= Т cos а—PR sin а;
Qj = Psina; Q3=P cos а;
где а и R зависят от внешних сил, приложенных к пружине,
поэтому задача о напряженно-деформированном состоянии
цилиндрической пружины в точной постановке является нелинейной, но
при малых перемещениях точек осевой линии стержня можно
положить a^cio и R^zRq. Поэтому получаем
Mi=PR0 cos а0-\~Т sin a0;
М3 — Tcosao—P/?0sina0; (5.78)
Qi=Psinao; Q3=P cos a0.
Определив Мь M3 и Qb последовательно находим AQb Д£>3 и
Д#о и Дгр. Если взаимный поворот торцов пружины запрещен, то
в этом случае под моментом Т следует понимать реактивный
момент, для определения которого имеем дополнительное уравнение
Дф = sin a0AQt ■] - AQ3 = 0.
2COS a0
Случай, когда главные оси сечения стержня не совпадают с
естественными осями. На рис. 5.11,6 показана отсеченная часть
цилиндрической пружины, сделанной из стержня, сечение которого
имеет разные моменты инерции (когда А^фА^)-
Рассмотрим винтовой стержень (при А^фА^), У которого #ю=
= const. Вектор х, выраженный через проекции на главные оси,
имеет вид
Sin 2a ... COS2 a . Л ,л\ , COS2 a ...
к =-- -^- e,*1» + — sinfriA*1) + —cos^e/).
202
При нагружении пружины (рис. 5.11,6) угол Ql0 в общем
случае может измениться на величину ДФю, поэтому приращения
компонент вектора х(Дхг) равны:
^t = ^f- + -~cos2^a-^^-Mi0; (5.79)
Л*, = -(~^ +^M)Sin»10+ ^со5»,Л.; (5.80)
А* =- (^Л« +^ Д«с) cos»,.--^isin»,/»w (5.81)
Уравнения равновесия в проекциях на главные оси
записываются следующим образом (в безразмерной форме записи):
М = -^- = (PR0cosa0 + Tsma6); (5.82)
М2 = —- = (Tcosa^ — PR0s'ma0) sin&10; (5.83)
М3 = -A!3L = (Tcosa0 — P/?0sina0)cos»10; (5.84)
J33
Q1 = Psina0; Q2 = — Pcosa0sin&10; Q3 — Pcosa0cosd10. (5.85)
Из уравнений (5.80) и (5.81) можно получить следующее
выражение:
Ax2cosu1P— Ди3sin&10 - cos2k° Дд10. (5.86)
Подставив в (5.86) выражения для Дх2 и Дхз из уравнений (5.83)
и (5.84), имеем
(Т cos aG — PR0 sin a0) (A22 — Л33) cos &10 sin dt« = cos8 a° Aft10. (5.87)
Из соотношения (5.87) следует, что при постоянном угле Фю
приращение Д^ю тоже есть постоянная величина, поэтому
производная Дф10 по 8 равна нулю и приращение Axi определяется по
формуле
_ COS2O0 Дя _ Sin^ gg
1 Я0 2#02 °
Из системы (5.80), (5.81) можно получить выражение
Д*2 sin *10 + Дх3 cos *„ = - S-^ Да - -^S- ДЯ0, (5.89)
которое совместно с (5.88) дает возможность определить Да и
ДДо:
Да—i?0 [Д^1— (Ахз cos дю+Д>С2 sin #io)tg сю];
ARq=--Rq2 (Дх3 cos O,o + Ди2 sin ф,о) (1—tg2 a0) — 2R<? tg a0 Axi.
203
Зная Да и &RG, находим АН и Д^:
• AH=R0 cos а0 [A«i— (Дхз cos 0ю+Дх2 sin 0io)tg a0];
A^ = sin ci.QAx1 -\ (Ди3 cos &10 + Ди2 sin &1C).
2c OS a0
Рассмотрим случай, когда #ю зависит от е. При переменном угле
От(е) приращение
ДХ1 = -E^bs. + £^¾) дя - ^5¾ Д#0. (5.90)
1 de ' R0 2/V *
Из соотношения (5.87) находим
ДФи>(е)=с sin 20Ю (е),
где
С = —^- (A22-AS3)(T cos a0-P7?0 sin a0).
2COS2 a0
Подставив выражение для Д0Ш в соотношение (5.90), получаем
совместно с выражением (5.89) систему уравнений для
определения Да и AR0:
Ах, = 2c»10cos2&i0+ —cos2<%0Aa щГ^°;
а ■ о . к л sin 2а0 COS2 а„ . D
Ди2 sm &10 + д*з cos &10 —* Да —-JL Д/?0,
откуда
Да=Я0 [Axi—2с0'ю cos 201О— (Дх2 sin 0ю+Аиз cos 0ю)tg а0];
ARo=—Ro2 (Дх2 sin 0w-j-Ak3 cos 01О) (1— tg2 а0) —
—2Яо2(Ди1—2c0'mcos 20io)tgao.
Приращения Да и ARo зависят от 8, поэтому приращения Д#0
и А*ф определяются интегрированием:
i
ДЯ0 = со5а0[ Aade;
о
i
Дф«_££МдЯ^в-^ГДа(1е.
Г tf02 J Ro J
о о
Элементарная нелинейная теория цилиндрических пружин.
Реальные нагрузки (имеются в виду в данном пункте только осевая
сила Р и момент Т, действующие, как показано на рис. 5.1) могут
быть такими, что считать приращения Да, AR и т. д. малыми
нельзя. Конечные приращения безразмерных геометрических
характеристик пружины в этом случае будут равны:
A#o=sin a—sin ao; (5.91)
204
Дф =ф;_ ф0 = ^ _ ср; (5.92)
^ = 0,-^. = 5^.,^: (5.93)
Лйа = О, - О,. = ^ - "fi. (5.94)
Так как рассматривается задача геометрически не линейная,
но физически — линейная, то связь между Mi, М3 и AQi, ДЙ3 та же
(см. решение линейной задачи):
AQi=MiA4„; AQ3=M3/A33. (5.95)
Соотношения (5.91) — (5.94) — справедливы при условии, что,
деформируясь, пружина остается винтовым брусом с постоянными
(новыми) геометрическими характеристиками a, D, Q\ и £23, что
возможно, если стержень имеет постоянное сечение (Лзз—1), a
торцовые витки пружин могут свободно деформироваться
(перемещаться) в плоскости, перпендикулярной осевой линии пружины.
Используя соотношения (5.95) и уравнения (5.78), (5.93), (5.73),
получим два уравнения для определения двух неизвестных
величин а и R:
sin 2а sin 2а0 РR Т ,- ос.
_ 2 — cos а0 -\ sin а; (5.96)
cos*a_ EwLs^T'cosa-Wcosa. (5.97)
Определив из (5.96), (5.97) а и /?, находим все величины,
характеризующие напряженно-деформированное состояние
цилиндрической пружины при больших перемещениях.
Исключив R из уравнений (5.96) и (5.97), можно получить
выражение для Р в зависимости от параметра а. Например, для
частного случая, когда 7/=0, из (5.96), (5.97) получаем
cos3 a COS a0 + Sin a sin a0
P = -i- sin (a - a0) Л" l rr-. (5.98)
^° cos a f cos2 a + sin2 a J
Un J
Соотношение (5.98) совместно с (5.91) дает возможность получить
характеристику пружины АН(Р). Соотношения (5.96) и (5.97)
справедливы (при сжатии) до определенного угла а, при котором
все витки пружины сомкнутся. Качественный характер зависимости
АН от Р (при 7=0) с учетом больших перемещений показан на
рис. 5.12 (для стержня круглого сплошного сечения). Кривая /
соответствует сжатию, кривая 2 — растяжению. Изложенная
теория цилиндрических пружин, позволяющая получить расчетные
соотношения в конечной аналитической форме, охватывает очень
ограниченный класс нагрузок (в основном это для осевой силы и
205
Рис. 5.12
&Hi „ i момента T, показанных на рис. 5.11). В
более сложных случаях нагружения, когда
внешние силы направлены не по оси
пружины или когда пружина находится в
различных силовых полях, при определении
напряженно-деформированного состояния
стержня надо решать дифференциальные
^. уравнения равновесия. Поэтому рассмотрим
р общий метод расчета цилиндрических
пружин как для простых случаев нагружения,
так и для сложных.
Интегрирование линейных уравнений равновесия винтового
стержня. Если винтовой стержень используется в качестве
чувствительного элемента, например акселерометра, он нагружается
распределенными силами, причем вектор q распределенных сил
может иметь произвольное направление. В этом случае определить
напряженно-деформированное состояние винтового стержня можно
только решая систему дифференциальных уравнений. Если
рассматриваются малые перемещения точек осевой линии, для
определения напряженно-деформированного состояния стержня можно
использовать уравнения равновесия нулевого приближения (1.107) —
(1.111), ПОЛОЖИВ JLl(F=0:
(5.99)
dM(°)
de
+AXM{°) -J- A^0) =- V t(v)s(v);
t^l
dft(Q)
de
4- Ax#<°> — A^JW0) = 0 (M<e> = АДх(°>);
du(f)
dE
4- Axu'°) + А^<0) = 0.
(5.100)
(5.101)
(5.102)
Если -940=0 или -Oio^const и /la^const, то уравнения (5.99) —
(5.102) есть линейные уравнения с постоянными коэффициентами,
так как в обоих этих случаях элементы xi0 матрицы
Лх—постоянные числа и, например, при -thc^const равны:
■ cossa0sin&10; щ0 = cos2aocos9-10.
^10 —
Яо
■Sina0cosa0;
ИЕО —
При решении системы (5.99) — (5.102) воспользуемся методом
последовательного интегрирования уравнений. Полагая Q(°>=Ce**,
получим det [Ак+ЯЕ]=0, или в развернутом виде
А'+ (х?0+*& + *&)*=<).
206
Корни этого уравнения:
Подставив в ?12,з выражения для к,о, получим
*8,= ±aD=±«-H^.
Получим частные решения однородного уравнения (5.99),
соответствующие корням Xi. Для корня A,i=0 получаем систему
однородных уравнений относительно си (компонент вектора С) вида
Х30С[2-Г*20С13=0;
изоСп—xioCi3=0; (5.103)
Из (5.103) получаем (положив Сц=1)
Ci2=«2oMio; С13=У-30/^Ю, (5.104)
т. е. частное решение, соответствующее корню к\=0, есть
постоянный вектор Ci с компонентами (5.104).
Компоненты вектора С, соответствующие остальным двум
значениям ta,3i находятся из системы уравнений
±1%оС21—Х30С22+Х20С23 = 0;
«soC2i±iXoC22—«юС2з=0; (5.105)
—Х20С21+^ЮС22 ± йОС23=0.
Положив ¢21 = 1. из первых двух уравнений системы (5.105)
получаем (для корня Kl==-\-iko)
с
22
( Д0«1П + *20*Зо) (^0*20 + *10*Зо)
f х10*30 + ^0*2о)
или
где
_ *зо I -_^р_ (t"^o*tc + *эохзо) (г^о*20 + кю*зо)
23 2 2 i i2 2 \
ХЮ *Ю («10*30+ Л0*20>
с22-сЦ> + Ц22>; cg> + fcg> = с,„
/-(1)- ЧЮ*20 . „ (2) — *0*8Д._ ■
22 — ~~ 2 , 2 ' 22 2 , .2
*20 + «з) "20 + *30
-М) '10*30 • г(2)— ^^-
£23 - 2,2' 23 х2 , х2 *
*20 + »30 20 + "30
207
Для корня Яз=—#*о имеем следующие значения c3i (положив
Cai=l):
С — r(l) _L />(2). р = г(1) _|_ ,>(2)
С32 — ^32 ^"-32' 633 — сзЗ +^33>
где
C(1)_C(I). ¢(2)- С(2). с(1)==с(1). с(2>__с(2)
^32 С22 ' ^32 22 ' С33 С23 ' ^33 ^23 •
Окончательно получаем общее решение однородного уравнения:
Q0= a Ci+c2 (С2<!> cos к0е—С2<2> sin Х0е) +
+с3 ((V1) sin Л0е+С2<2> cos ^0е), (5.106)
где Ci — произвольные постоянные;
С-2 =
1
С22
L23
, Ь2 —
0
22
с23
; Сз0 =
1
c(i)
L22
С23
. Г(2) —
. <^3 =
0
^22
с23
Решение уравнения (5.99) после всех преобразований можно
представить в виде
Q(0)=Ki(e)C,
где
КЛв)-
1
"20
„(1)
И(П
cos Я„е
sin ЯЛе
£<2J COSЛ0е—cg> sinЯ0е £<У sin V+42)cos V
'22
22
'22
cl\> cos Я0е— eg) sin Л0е £&> sin A0e+d£} COS Я0е
(5.107)
C =
В скалярной форме
Qjt°)=ci+Cs c°s 1ое+Сз sin Яое;
(5.108)
Qi0» = сг ^ + Г2 (i?g) cos Я0е - eg) Sin Я0е) + <7S (¾) sin *0<+ cg> COS Я0е);
(5.109)
V
qW) = ^ j^ + Ci (C(,) cos Я0е - C™ sin Я0е) + cs (eg) sin XQe + eg) COS Я0е).
(5.110)
Полученные выражения для Q/0' справедливы для любых углов
do подъема винтовой линии.
Получим фундаментальную матрицу К(е), удовлетворяющую
условию К(0)=Е:
К (е) = Кх (е) КГ1 (0) = А Н- В cos Я0е + С sin Я0е. (5.111)
208
После преобразований получаем следующие матрицы А,
В и С:
хю/ О Х10И20/^0
А =
В =
С
^20^3()/½
= -!- А
^0
^8 0^10/½ ^30^20/¾
X2oXio/^o К10 т~ хзоМо
_ ^10^30/^0 ^20^30/¾
— *зоМо ° ИюМо
К20/Я0 ^io/^j ^
или после преобразований
sina0cosa0sin&10 sin a0cosa0cos&10
A =
cos2ansin&incos0-
sina0cosa0sin&10 cos2 a0sin20-10
.sina0cosa0cosO-10 cos2a0sin9-10cos&10 cos2a0cosa&10
гю
B=
cos2a0 —sina0cosa0sind10 —sma0cosa0cosdie
—sina0cosa0sin&10 sin2a0+cos2a0cos2 &10 —cos2a0sin&10cos&10
-—sina0cosa0cosd10 —cos2 aosin0-locos&l0 sin2a0 + cos2a0sin2S-10.
0 cosa0cos6-10 —cosa0sin&10
C= —cosa0cosO-10 0 sina0
cosa0sind10 —sina0 0
В частном случае, когда главные оси совпадают с естественными осями,
#10=0, Q20=0 и матрица Ki(e) принимает вид
L ^3()/¾ о
cos А0е sin А0е
О Л0 cos X0e/S3o
cosA0e/(2]0Q3(,) О
]
Фундаментальная матрица Ко (в), удовлетворяющая условию К(0)=Е, для
этого частного случая:
1 _ Q*
—- (2^ + ¾ cos А0е)
Q30
Ke(0
V
^20 . ,
—— - sin A0s
^0
Sin А0е
COS Х0е
?U&0
V
(1 —cos A0e)
2ю
sin hz»
-±—- (1 — cosA0e) ---—sm^e
V A0
r2-(23<^?QcosA0s)
14—6011
209
Определив фундаментальную матрицу решений (5.111), можно
получить общее решение неоднородного уравнения (5.99) в виде
Q<°> = КСОС^ jK(e-A) -q0+ SPj'^A-e,) dA. (5.112)
Воспользовавшись выражением (5.111), получаем
Q(:> = K(e)C1 + AU~q0+ ^Р408(Л-е,.) d/i-
— BjcosA^e —A) -q0+ SpJ'^A-sJ dA-
e Г л
■C$sinAe(e —Л) —q0+ 2Pi°8(A-e,) dA. (5.113)
о L '=i
Аналогично получаем решение уравнения (5.1G0)
М(°>
• г р
= K(*)C2 + J К (в—A) -A1Q(°)+ 2tJv,8(0 dA. (5.П4)
Полученные выражения (5.113), (5.114) позволяют в ряде
случаев получить решение (выражения для компонент векторов Q(0)
и М(0)) в аналитической форме записи. При численном решении
уравнений (5.99), (5.100) частные решения можно получить,
решая исходные уравнения при нулевых начальных данных.
Рассмотрим несколько примеров с определением внутренних сил
Qi^ и моментов Мг<°>. На рис. 5.13 показана цилиндрическая
пружина, которая находится на ускоренно движущемся объекте.
Ускорение а совпадает по направлению с осью пружины. Главные оси
сечения стержня (наиболее общий
случай) не совпадают с
естественными осями. На стержень действует
распределенная нагрузка
q0—безразмерная сила инерции, равная т0а13/Азз,
то — масса единицы длины стержня.
Распределенная нагрузка,
выраженная через проекции на естественные
оси,
qo=t?sinaoei+^cosaoe3 (<7=|qo|)-
Переходя к главным осям сечения,
получим (рис. 5.13)
qo=q sin aoe'i+^ cos a0 sin -e-ioeVr-
+ q cos ao cos Фюе'з-
В данном случае при е=0 Q<0)(0) =
Рис, 5.13 =0, что приводит к Ci = 0, и из
210
(5.113) получаем (Ро<*) = 0)
Е
Q(0) = _jK{e — h)qdh,
о
или, воспользовавшись выражением (5.111),
ее е
Q<°>=— A Jq0d/г — в|со5Я0(е — h)q0dh — С J sinA0(e — h)qudh.
0 0 о
Интегрируя, получаем
Q(0)=_Aqi-Bq2-Cq3,
(5.115)
где
Qi = 2 (<7iie/)=(<7s sina0)e/ + (qs cos a0sin&J e2' + (qe cos a0cosfr10)e3';
/=i
Я* = J] (<72A') = (<7 J" sinaosin20ej e/ +
/=1
•+ q I — cos a0 sin $10 sin Я0е \ e2'
<7 cos a0 cos Oj 0
sin Я„е
)e,';
q3
j fo„e/)
/=i
<7 Sin a0
(1 — cos20s)
e/ +
+
q cos
--4 ^-(1 — cos Я0е) e/ +
у cosaoCos0lo(l-cosAQe)]e/.
В частном случае, когда главные оси сечения совпадают с естественными
осями, для Q<°> получаем выражение
Qo = ^0(E)C1-j,K0(E-^)qdA,
о
(5.116)
где К0(е — А) =
ГТ Й + eIo cos ^о(£-^)) "Г1 sin ?v0(e - ft)
2,
*10*80
V
[1—cos А0(е — Л)]
с30
sin Л0(г— /г)
Цю^зо_
- V
[1 —COS Л0(е — ft)]
cos Л0(е — /г)
*J0
ю
sin А0(е— /г)
Sin Х0(г —А) — [2¾ + 5¾ COS \{е — ft)]
V
или после упрощений [использовав выражения (5.70) для и10 и х30]
1
sin2 a0 + cos2 a0 X COS a0 sin A0( z — h) sin2 a0 [ 1 —
— cos A0(e — ft)]
K0(e ft) = —cos a0 sinA0 (s — ft) cosA0(e—ft) sina0sinA0(s — ft)
1
sin2 l0 [ 1 — —Sin a0 sin a0 (e—h) cos2 a0 -{- sin2 a0X
Xcos A0(e — ft)
— COsA0(e — ft)]
(5.117)
14*
211
После преобразований из (5.116)
получаем (при Сх = 0)
Ql0) = — <?£Sina0;
Q<°> = 0; Qf = -f* cos о,.
W В качестве второго примера
рассмотрим вращающуюся
цилиндрическую пружину (рис. 5.14).
В этом случае винтовой стержень
нагружен распределенной
нагрузкой <7о (в безразмерной форме),
равной £)т0о)2/3/(2Л3з). Вектор qo направлен против главной
нормали осевой линии стержня, поэтому
1111
Рис. 5.14
<Ь
qe2 [q=r. 1 q3 |
m0<o2D/3 \
2А
яз
)•
Переходя к главным осям, получим
qo~<7 cos dioeV—Я sin #i0e'3.
В этом случае <\и входящие в решение (5.115), равны
qi=^e cos ftioe'a—Qz sin #i0e'3;
q2 =
- 10 sm Я0ее/ — ——L° sin Я„ее/:
^o " ^0
'•О^З :
„s = S2««L.(i _cos v)e; _!*2b(1 _cos V)«,'.
В частном случае, когда #10=0 (а главные оси совпадают с естественными
осями, т. е. к2о=0), из (5.115) после преобразований получаем:
2.
Q\0)= -ТТ^1-005^)- -9/?0(l-cosX0e);
<7Яо
COS а
sinA°e;
о
Qa] = TV ?(* — cos *ое) = 9¾ tg ссо( 1 — cos *0s).
V
(5.Н8)
(5.119)
(5.120)
Проекция вектора Q<°> на ось л^ в данном примере должна
быть равна нулю, т. е.
0Й» = (Q<°> • U - Qi0) (е, • U + <Й0) (е, • у - 0.
Покажем, что это имеет место: так как Qiocosao—Q3osinao=0, то
ч(0)
Д
*ю
Qiy =z — —— q sin a0 (1 — cos Я0е) + —И- ^cos a<)(i _'Cos Я0е) =
V
V
= (Q10cos a0—Q30 sin a0) —- (1 — cos Я0е) = 0
V
212
На рис. 5.15 показана
цилиндрическая пружина, нагруженная
сосредоточенными силами Р(1) и Р<2>,
приложенными в сечениях с координатами
e=ei = 0 и е=б2. Требуется
определить Qi{0)(e) (ограничимся частным
случаем, когда главные оси
совпадают с естественными осями).
Сосредоточенные силы, выраженные через
проекции на естественные оси,
равны
P(i)==p(i)sina0e1+
+ P(1>cosa0e3 (PO)=|p(i)|;
Рис. 5.15
Р(2)=_р(2) sin aoCl_р(2) соэаоез (Р&=\ Р(2)|).
Из (5.112) получаем
е
Q(o> = — j К0(е — h) [Р*1» Ь{К) + Р<8>8 (h — ejjd/z;
о
в скалярной форме
е в
Q.(°> = — РО) sinа0 j kn (s — h)b(h)dh — Pi1)cos a0 $£/s(e—h)b(h)dh+
o о
в
+ /><a>sina0$Me —А)8(Л —es)dA +
о
в
+ Я2) cos a0 j kis (s — h)b{h — e2)dh.
о
Используя свойство 6-функции (см. Приложение 4)
ь
J/(«)8(e-e*)dB = /(Bjt) (fl<8ft<&),
a
получаем
Qj(o)=_p(i) sin aok.{ (e)_p(i) cos aoMe) +
+P<2> sin aofeл (e—e2) Я (e—e2) +P(2) co|s -a^js (e—e2) Я (e—e2),
где #(e—8ft) — функция Хевисайда. Функцию Хевисайда при
записи решения можно и не использовать, если условиться (как
обычно и делается в курсах строительной механики), что функции
kji(e—&h) отличны от нуля только при е—efe>0, а при е—еь<0
Переходим к определению момента М(0) и векторов и(0) и ф(0).
Общее решение уравнения (5.100) можно представить в следующей
213
записи:
M(°> = K(e)C2+f К(е— h) \—А^)+ 2 Tov) S (/г — ev) \dh, (5.121)
или [воспользовавшись решением для Q<0) (5.112)]
М<°> = К (=) С2 + J К (в —h) А, К (h) С, + j К (ft — *) х
" 1 £ Г р 1
х —Qo+ 2ро°Ч*-^л: --JK(e-/i) 2ToV>s(ft-sv) d/г.
(5.122)
Получим выражения для М(0) для рассмотренных примеров.
В случае, показанном на рис. 5.13, имеем T0(v) = 0; М(°>(0)=0
(С2=0), поэтому из (5.121)
в
М<°> = — I К (е — h) A, Q<°> d h. (5.123)
о
С учетом полученных значений Q,<°) (5.117) в частном случае Фю=0 вектор
AjQ(C9=—Q3<°>e3, поэтому из (5.123) получаем
е
М<°>= Г K{e~-h)Q{30)tsdh,
о
или в скалярной форме -^
е
М[°)=\ Aia(e-A)Qj°>dA= -Л £ *-£* +
0
sin2 ап
+^02 -(l-COSa„e);
COS а0
J cos a0 V ^o /
0
e
Л«з0>= \ k3S{t — h)Qif)dh = — -^cos^sinc^2 — j^-2-(1 — cos X0e)-
6
Для вращающейся пружины (см. рис. 5.14), например в частном случае,
когда ^20=^10=0,
Мр = — f k[2Q^dh -f f fci3Q{30)dh (i = 1, 2, 3), (5.124)
6 о
где (% ' и Qi ' определяются соотношениями (5.119) и (5.120); кц—элементы
матрицы (5.117).
214
Определив М<°>, находим
Ш°>=А-1М<°\
Из уравнения (5.101) находим вектор ф^:
е
Ф<°> = К(е)С, +§K(e—h)A-lW0>dh. (5.125;
о
Вектор перемещений и определяем из уравнения
е
ц(°> = К (в) С4 — J К (в — Л) АгО<°> d ft. (5.126)
о
Полученные интегралы (5.112), (5.121), (5.125), (5.126)
содержат четыре произвольных вектора Ci, С2, С3 и С4 или двенадцать
произвольных величин (компонент векторов Cj), равных сумме
краевых условий на концах стержня (по шесть условий на каждом
конце). Например, для пружин, показанных на рис. 5.14, 5.15 при
Е=1 (жесткая заделка конца), имеем u(0) (1)=0, #(0)(1)=0 и для
определения С4 и С3 получаем два алгебраических векторных
уравнения [(5.125) и (5.126)]:
1
К(1)С3 = — |'К(1— h)Arlm9)dh;
6
1
К(1)С4= Jk(1—A)A1*(e)dA.
о
Для определения осевых перемещений (по оси jct) точек
осевой линии стержня достаточно рассмотреть скалярное
произведение
з з
Полная величина сжатия (или растяжения) пружины
з
ДЯ- S«S0,W(e;i,).
(=1
Окончательно получаем следующую систему векторных
соотношений, представляющих собой решение системы (5.99) — (5.102)
(для случая #10== const):
Q<e>-K(e)CI + jK(«-/i) -q0+ Spil)8(A-*J ИА: (5л27>
0 L i=l J
M'^K^C^JKIe-J-A.Q10^ 2тГ«(А-М dA;(5.128)
о L v=i I
215
Ax<°) = A-:Mt°); (5.129)
#<°> = К(e)C3 + j К (e — /г) A- M<°) d Л; (5.130)
о
Е
U(0)_K(e)C4 — j К (в — A)A1<H°)d/z. (5.131)
о
Система (5.127) — (5.131) представляет наиболее общее решение
задачи о напряженно-деформированном состоянии цилиндрической
пружины при малых обобщенных перемещениях (u.j, -&j) для
случая, когда главные оси сечения не совпадают с естественными
осями (при условии Oio^const).
Цилиндрическая пружина с переменным углом подъема cto(e).
Получим геометрические характеристики винтовой линии с
переменным углом наклона а0. Декартовы безразмерные координаты
точки В осевой линии стержня (рис. 5.16) равны (выраженные
через угол ф)
л:1=/(ф); х2=Яо cos ф; *3=#osin(p (Ro=Rooll). (5.132)
Для винтовой линии с постоянным углом подъема координата
Х\ (безразмерная) линейно зависит от параметра q(xi=<£). При
нелинейной зависимости X] от ф винтовая линия имеет
переменный угол подъема <х'о(е), например
х, = г?Ф+&1ф2, (5.133)
где Ь и Ь\ — постоянные коэффициенты; угол ф есть функция от
безразмерной дуговой координаты е.
Если развернуть винтовую линию с постоянным углом подъема
на плоскость {х\=Ъу)у то осевая линия стержня получится прямой
(рис. 5.17). Для случая, когда Х1=Ьф+б1ф2, осевая линия стержня
на плоскости отлична от прямой. В зависимости от значения
безразмерного коэффициента Ь\ можно получить различные варианты
Рис. 5.16 Рис. 5.17
216
винтовой линии с переменным углом подъема (рис. 5.17). Угол ср
связан с безразмерной координатой е соотношением
= j ^х? + х* + х3г d
?■
(5.134)
Подставив в (5.134) выражения для х2 и х3 из (5.132) и хх из
(5.133), получим
ф
« = J V4' + (*> + 2619)2 d «р,
о
или после интегрирования и преобразований
+ Я02 In (6 + 26l9 + VK + (b + 2b1?f) -
- [ь VR^+T2 + R02 In [b + i/^TT^)]}-
При линейной зависимости x\ от ф (когда a=consit)
координата е линейно зависит от ср
Для определения кривизны fi3o и кручения Q!0 осевой линии
стержня воспользуемся формулами
°зо(<?)-
_ V (Х!2+*'
*22 + *32) (V + *Д* + У38) — (*)*! + *2*2 + 3¾¾)
Ою(*)-=3
JE^T'
ьи
e*> l
(н*
+
1
/
V
+
/
*8")
/
*1
хл
III
X,
1
х%
II
14
xs
1
х$
II
л3
III
xs
Подставив в эти выражения производные от xit заданных
соотношениями (5.132), получим
Я*. = #0
/
я02 + f + Г/W + j'):
3/2
»4
(5.135)
^о=(/+/)/(/?о2 + /2 + Р). (5-136)
Для сечений с разными главными моментами инерции щ
находятся по формулам
_ авц>
и,
de
+ Q10; ^2 = Q30sind10; K3 = fi30cos&10.
В формулы (5.135) и (5.136) входят производные по параметру
«р. Например, для случая, когда х\ задано формулой (5.133), по-
217
]3/2.
лучаем
Gso - Я о VRo2 + (Ь + 2ЗД2 + 4V/[/C + (6 + 2адЕ]3
Зависимость e от гр позволяет при численном счете получить
зависимость Qi0 и Q30 от е, что необходимо для решения уравнений
равновесия. При переменном угле подъема винтовой линии
матрица Аи зависит от е, поэтому возможен только численный метод
решения системы (5.99) — (5.100). Рассмотрим один из
возможных вариантов численного решения.
Представим систему уравнений (5.99)—(5.100) в виде одного
векторного уравнения
dY(0) +A<°)(s)Y<0> = i<°)(e), (5.137)
de
где
Y(°) =
Q<°>
M<°>
u<°>
f(°) -_=
-q0+ SPi'}8(e-»i)
2TSv)e(s-sv)
v=l
о
0
A(°)(e) =
г A
A
о
о
On
0
о
0 0
А 0
-л-1 А
о а
Решение уравнения (5.137) имеет вид
y<o)(e)==Y1+Y(,>,
где Yi=K(e)C — решение однородного уравнения (5.137); Y<'> —
частное решение неоднородного уравнения (5.137). Алгоритм
численного определения векторов Yb Y(1) и С изложен в § 2.1.
§ 5.3. Гибкий стержень в жестком канале
Формулировка задачи. Гибкие стержни
(гибкие валы) широко используются в технике для передачи вращения
(кинематической связи) или передачи крутящего момента
(силовой связи) от сечения А (входа) к сечению В (выходу) (рис.
5.18,а). Считаем, что стержень практически без зазора входит в
жесткий пространственно-криволинейный канал. Для нормальной
работы устройства требуется, чтобы при плавном повороте сечения
218
Рис. 5.18
А поворот сечения В
также происходил плавно.
Однако оказывается, что
это не всегда имеет место
и при плавном повороте
сечения А сечение В
может поворачиваться с
резкими изменениями
угла, т. е. возможны
неустойчивые режимы
копирования входа [10].
Стержень может
иметь любое сечение с
равными (Л22=Лзз) и
неравными (Л22#Л3з) изгибными жесткостями. Считается, что
вращение стержня при работе механизма происходит с очень малыми
угловыми скоростями, поэтому динамическими эффектами
пренебрегаем. Известны следующие данные: 1) Qfo, Озо-, &Го —
геометрия осевой линии канала и положение главных осей сечения
канала [канал может иметь сечение с разными моментами инерции
относительно главных осей (рис. 5.18,6, в)]; 2) Qi0) Q30, *ho —
геометрия осевой линии и положение главных осей стержня в
естественном состоянии, где величины с индексом «к» характеризуют
канал, а величины с индексом «с» — стержень.
Уравнения равновесия. Получим общие уравнения равновесия
в связанной системе координат криволинейного в естественном
состоянии стержня, находящегося в криволинейном жестком канале.
Для этого воспользуемся системой уравнений (1.64) — (1.66),
полученной в § 1.3, без сосредоточенных сил и моментов:
dQx
uQ2
d5
de
+ Q3*a —Qa«3 + <7i = °;
Ч-Qr^—Q3X1 + ?2 = 0;
+ Q2^— Q,Ks-r-<7e=0;
(5.138)
(5.139)
(5.140)
(5.141)
(5.142)
(5.143)
Afi=i4u(xi—ию); М2=А22Ы—Х2о)', М3=Лзз(хз—изо). (5.144)
Система уравнений (5.138)-(5.144) является нелинейной, так
как от неизвестного угла $io зависят и Mj, и щ.
dAfg
de
AM.
de
+ M& — М,кж — Q3 + ц, = 0;
*- + М2щ — М,щ + Q2 + м.3 = 0;
219
Входящие в уравнения (1.64) — (1.66) xt в данном случае
равны:
и, = Q*0 _j_ ——; Щ = изо sin &ю; х3 = Qso cos &?о, (5.145)
de
где Q/o — компоненты вектора Дарбу, связанного с осевой линией
канала. Аналогичные выражения имеем и для стержня:
dOc '; "**
ъ10 = 0[о + —^; xM==Qa)Smaw; x>o = Qmcos^0i (5.146)
de
где Q/o — компоненты вектора Дарбу, связанного с осевой линией
стержня в естественном состоянии.
Моменты M-jt возникающие в стержне после его внедрения в
канал,
M^aJq^ + ^-Q',0-^-); (5.147)
\ de de у
М2 = Д2 (Q3Ko sin »f0 - Q&, sin ftfo); (5-148)
M3 = Ass № cos &Го - Ою cos efi,). (5.149)
Для стержня постоянного сечения Л3з=1-
Если канал имеет сечение, как на рис. 5.18,6, то все три
момента известны. Если канал имеет круглое сечение (рис. 5.18,<з), то
моменты Mj неизвестны, так как неизвестным становится угол т)юк.
В этом случае угол т)]ок='бчо, где Фш — неизвестный угол,
характеризующий положение главных осей сечения стержня,
внедренного в канал, относительно естественных осей, связанных с осевой
линией канала. В канале круглого сечения стержень имеет
возможность свободно поворачиваться относительно оси. В дальнейшем
рассматривается канал, имеющий круглое сечение.
Рассмотрим более подробно нагрузки, действующие на
стержень при его медленном движении в канале. Одна из
особенностей задач статики стержней, находящихся в жестком канале,
заключается в том, что силы взаимодействия между стержнем и
поверхностью канала (<7j и щ) неизвестны. Если стержень
вращается и движется вдоль оси канала, то все три компоненты векторов
q и jn, если учитывать силы трения, отличны от нуля. Если стержень
только вращается, то q\, \i2 и |лз равны нулю. Распределенный
крутящий момент |Xi зависит от сил трения. Если трение не учитывать,
то |ii=0. С учетом сил трения
где f — коэффициент трения.
Учет сил трения существенно осложняет решение уравнений,
так как уравнения (5.138) — (5.140) и (5.141) — (5.143) оказывают-
ся связанными (через р,ь зависящий от q2, <?з). Без учета сил трения
эти две системы уравнений могут рассматриваться последовательно,
что существенно упрощает их решение. Трение можно учесть
методом последовательных приближений, например определив д2 и
<?з без учета трения (при ^ = 0), а затем из уравнения (5.141) после
подстановки в него выражений для Mi определить угол Ф10 с
учетом |Л].
Уравнение равновесия стержня без учета сил трения.
Подставив в уравнение (5.141) при pi=0 выражения для моментов
(5.146) — (5.148), при рг—^з^О получим уравнение относительно
угла §ю:
Ь10 + ^ (Мю) Sin гЬ10 — х- ОзАо cos Ь\0 sin Ь1й +
+ ^-Q3KoQ3osin^0cos&10 = -йГо + Йо +$1о- (5.151)
Определив из уравнения (5.151) #ю, с учетом конкретных
краевых условий находим щ и моменты Mj [соотношения (5.145),
(5.146), (5.149), где вместо $юк следует взять угол Фю] и из
уравнений (5.142) и (5.143) определяем Q2 и Q3, затем из уравнения
(5.138) определяем Q\ и из уравнений (5.139) и (5.140) находим
<72(е) и <?з(е). Если необходимо оценить влияние сил трения, то,
определив q2 и q-M находим pi(e) (5.150) и снова решаем систему
уравнений (5.138) — (5.148) в той же последовательности, но теперь
уравнение (5.151) будет содержать в правой части известную
функцию juli (е).
Частные случаи уравнения равновесия (5.151) при Л22#^зз
(стержень имеет разные изгибные жесткости).
1. Осевая линия канала есть пространственная кривая, а)
Осевая линия стержня в естественном состоянии есть плоская кривая.
В этом случае будут иными только геометрические
характеристики осевой линии стержня х;о (5.146), которые равны (стержень не
имеет естественной крутки): к10=х2о=0; кзо=^зо; &io = 0.
Уравнение (5.151) принимает вид
«1в + {Лз1а*22) №)2 sin 2010 - -^- £№со sin *10 = - ЙГо. (5-152)
Моменты Mi равны:
Мг = Ai (Qfo + ^~ ) ; М2 = ЛйАко sin &10;
Ms = Д3 № cos &10 — Qw).
б) Стержень прямолинейный в естественном состоянии (и/о=
=0). В этом частном случае уравнение (5.151) [или (5.152)]
принимает вид
*10 + Лзз27пЛ22 №)2 sin 2&I0 = - Й,. (5.153)
221
Моменты Mi равны:
М1=А11(оГо + ^); Ma = A22Q3osin&IO; M3 = ^0cosd10.
2. Осевая линия канала есть винтовая линия. В этом случае
QK0=const.
3. Осевая линия канала есть плоская кривая, а осевая линия
стержня есть пространственная кривая. В этом случае Qfo = 0;
Моменты Mi равны (для пространственно-криволинейного
стержня):
\ de ds /
М2 = A2(Q30sin»10 —Qsosin&io);
М% = Д8 (Qso cos &10 — Q30 cos &Ю).
4. Осевые линии канала и стержня есть плоские кривые с
разными радиусами кривизны. В этом случае Qf0 = ^fo =^ &fo = 0.
Уравнение равновесия [частный случай уравнения (5.152)]
ft'i° + Аз3ыА*2 №)а sin2fr10—^р-Ц&& sin&10 = 0. (5.154)
Моменты Мг- равны:
Mt = ДЛ0; ^f2 = AAKosin^10; M3-A33№cos9-10 —йзсо).
Частные случаи уравнения равновесия (5.151) при Л22=Дзз
(стержень имеет равные изгибные жесткости).
1. Для пространственно-криволинейного стержня из уравнения
(5.151) получаем
»» - Т^ Q*(A sin»10 = - ЙГо + Ф0. (5.155)
2. Для плоского стержня [из уравнения (5.152)] при 87о = 0
А2
hi
3. Для прямолинейного стержня [из уравнения (5.153)]
*10 = —Й>. (5.157)
4. Осевая линия канала есть винтовая линия. В этом частном
случае в уравнениях (5.155) — (5.157) следует положить Qm=0.
222
£10 - ^ <&*& sin »i. = - Ою- <5"!56)
Определение крутящего момента м,(1}
при Л22=^зз- Выясним, в каких
случаях крутящий момент в
стержне постоянен по всей длине
стержня (рис. 5.19):
Mt =aJqR0 + -^Л = const. (5.158)
Выполнение условия (5.158)
возможно в следующем случае: Рис. 5.19
Gfo (*) + --^ = const = clt или *b. = Cl- Q?0 (в).
Это возможно для прямолинейного в естественном состоянии
стержня, когда Qio = Q30 =0- В этом случае все три уравнения
(5.155) — (5.157) имеют вид
d10--£fc. (5-159)
Из (5.159) получаем
^ю ==ci — ^1о, или Qio + &10 = с1 = const.
Если осевая линия канала — винтовая линия, то из (5.159)
получаем уравнение -0^0=0, или Ф'ю^const, но в этом случае и
Йк) = const, поэтому
Мг = Д, (Q?0 + К) = const, (5.160)
т. е. для прямолинейного стержня при Л22=^зз крутящий момент
Mi как для пространственно-криволинейной осевой линии канала,
так и для плоской осевой линии всегда постоянен.
Рассмотрим более подробно несколько частных случаев
равновесия первоначально прямолинейного стержня при Л22—^зз,
нагруженного только осевыми силами (см. рис. 5.18,а). В этом
случае крутящий момент М^ равен нулю и из (5.160) получаем
уравнение для определения угла Фю
d&10/de = —Q?o(e).
из которого находим
»10=-Juio(A)<ift + dlwl. (5-161)
Если ось канала есть винтовая линия (Q"0 = const), то получаем
*10 = -ЙУов + <и. (5Л62)
Если положить, что при е=0 й10=0, то #то=0 и тогда угол Фю=
= — Q\qs.
223
В общем случае, когда Qfto=£ const, из (5.162) получаем
зависимость угла #цэ от е. Определив угол #io(e), находим изгибающие
моменты М2 и М$:
Mt = Aa^osmblo; Me = AsQHbcosft10. (5.163)
Из выражений (5.163) следует, что в сечениях при 8=0 и е=1
возникают сосредоточенные моменты М3(0), М2(1) и М3(1),
соответственно равные:
М3 (0) = ДАко (0); Мл(\) - A33Qgo d) sin Ml)".
M,.(l)==i4MflS,(I)cosd10(l).
Дело в том, что упругий стержень контактирует в сечениях А и В
с абсолютно жесткой поверхностью канала.
Из уравнений (5.142) и (5.143) получаем [с учетом полученных
выражений (5.163) для М2 и М3]
Q3 « ^dfcsind^o + 4Acos&10-^-; (5.164)
Q2 = — AAcos&t0 + A,3Q3K0 sin 0^-^. (5.165)
Из выражений (5.164) и (5.165) следует, что при е=0 и е= 1
к стержню приложены сосредоточенные силы, например в сечении
А [при#10(0)=0]
Q, (0) = - As А (0); Q3 (0) = - Л33£Ш>
Для определения Qi(e) рассмотрим уравнение (5.138) при q\ =
=0, из которого следует
4 = —6м$юА«- (5.166)
Интегрируя (5.166), получаем
Из полученного выражения (5.167) для Q[ следует, что если в
сечении В внешняя осевая сила отсутствует, т. е. при е=1 Qi(l) =
=0, то для сохранения равновесия стержня в канале надо
приложить в сечении А осевую силу Р, равную
Я ^ _Qi(0) = J&-p&(0)p —4й-[£&(1)р.
Из уравнений (5.139) и (5.140) находим q2 и qz:
<72 = -4-^KoCos8-10^-{№(l)]2-№HJ2};
224
Для канала, осевая линия которого есть винтовая линия, из
(5.164), (5.165) получаем
Q3 = A3Q3oCos&10&10;
Q, = AsQa>sin&10£10.
Угол dio в этом случае равен (5.162), поэтому
Q3 = — ААКАКо COS fr10 (г);
Q2 = ~ AsQ3K0fimsin&10(s).
Осевое усилие из (5.166) Ql=const, так как Изо = 0.
Из (5.139) и (5.140) определяем проекции контактного
давления:
?г--Aз^зкo(¾гcosQ;coe;
?3 = — А3А (Qm)2 sin fif0e.
Модуль распределенного нормального контактного давления
I Ч I = Уйг + Яг* = 4¾ (ВД2 = СОП81.
Если осевая линия канала есть плоская кривая [напомним, что
рассматривается равновесие прямолинейного в естестенном
состоянии стержня, который нагружен только осевыми силами (см. рис.
5.18,а) при Л22=Лзз], то в этом случае, так как ^f0=0, $J0=0,
Q£0 (е)#0, из (5.160) и (5.163) получаем Afi=0; М2=0; М3=
=Азз ^зо-
Из выражения для М, следует, что в сечениях А и В возникают
сосредоточенные моменты, равные As3Q*o(0) и Л83Йзо(1)-
Соответственно из уравнения (5.143) находим
Q. = -A,$o(e). (5.168)
Из уравнений (5.138) и (5.139) находим Qi и qz:
Яш --= *А + \- Аз Шг + QA (5-170)
где Q10 = As(^3o(l))2/2. Произвольная постоянная Q10 получена из
условия (^{1)=0.
Из полученного выражения (5.168) для Q2 следует, что в
сечениях А и В возникают сосредоточенные силы, соответственно
равные — Л336зо(0) и — Д3<2зо(1).
15—6011 225
Найдем осевую силу Р, которую надо приложить к стержню,
чтобы он находился в канале в равновесии. Из (5.169) получаем
при Qi (1)=0
я=-^[№(0))2-№(1))2].
Сила Р равна нулю в случае 0&о(0) = Йзо(1)- Если Йзо(0)<&зо(1), то
сила Р будет иметь противоположное показанному на рис. 5.18, а
направление.
Если Изо = const (осевая линия канала представляет собой часть
окружности), то получаем
М9 = Д8Йзо — const; Q2 = 0; Qt = 0; q2 = 0.
Полученный результат (#2=0) объясняется тем, что в этом
частном случае имеет место чистый изгиб сосредоточенными
моментами, возникающими в сечениях Л и Б. В этом случае кривизна
осевой линии стержня хзо равна кривизне осевой линии канала
£2зо» поэтому контактное давление между поверхностью канала и
стержнем отсутствует.
Рассмотрим пример численного решения уравнения равновесия стержня,
находящегося в жестком криволинейном канале и нагруженного крутящими
моментами, приложенными к торцовым сечениям.
Осевые линии канала и стержня есть плоские кривые с безразмерными
радиусами кривизны, соответственно равными Q3=Q3af(e), где £Ззо=6 и Изо=5.
Безразмерные жесткости равны Лзз=-^22:=1; Лц=0,5.
В этом случае
du10
«1 = ——; «2 = 2зsin V; *з = 2зcos V;
dft
^1 = ^11-Г~; M2 = A22Q3smb10; Af3 = Qscos»10 — xM. (5.171)
de
Из (5.141) получаем уравнение относительно угла -&10 (при А22=Азз):
d2$ А
-^-^- %>ЗД (ФШ»]0 = 0. (5.172)
Получим решение уравнения (5.172) для следующих функций f(e): /(е)=1
и /(e)=cos3te, где 0:¾½¾ 1.
Уравнение (5.172) должно удовлетворять краевым условиям (см. рис. 5.18,с):
е = 0; ff10 = 0; *£l!LA =Ml(Q).
de
Положим, например, ^(0)=0,1. Из решения уравнения (5.172) при е=1
определяем крутящий момент, который надо приложить к стержню, чтобы он
был в равновесии, и взаимный угол поворота торцовых сечений.
Определив #10(8), последовательно находим из уравнений системы (5.138) —
(5.144) компоненты Mj вектора М [соотношения (5.171)], компоненты Q/
вектора Q и компоненты д2, qa вектора q контактной распределенной нагрузки:
<Эз=-М2+М 1*3—М&т.;
226
a)
Ml
10
5
0
- 5
-10
В)
WO
zoo
0
-200
-wo
0,2
\0Л
"j\
/\f'
№
W
'0,8
61
Oi
3D
0
-30
-50
;/
0,7 \
<%
I
W
~b
e
■
IQI Y~\
У\ 0,4
N^p^-
i«3
J 0,6
К
\M
~*1$
i
=%
IF
\
i
!
0}
25
0
~25
-50
a*
Qz
oxS
'*
/0,б\
(Qfi
200
100
0
-700
-200
Рис. 5.20
S
bMLJ^,
к
IX
0,2
\
OA
..
^--у \
№f \
Л>8^
Qx = f (Qa*3— Q3*a)d/z + Q10;
о
Q2=—Q2—Ql^3+Qs^U
<?3=—Qs—C^i+Qi^;
iq|=^22 + <732 •
Можно принять, что при е=0 (^=0, поэтому Q10=0. В этом случае
необходимая для равновесия стержня в канале осевая сила при е=1 равна
Pt = Qt = J (Q2x3 — Q3x2)dft.
15*
227
а)
Рис. 5.21 Рис. 5.22
Результаты численного решения уравнения (5.172) приведены на
рис. 5.20,о—е. На рис. 5.20,о—в приведены графики для /(е)=1. На
рис. 5.20,г—е приведены графики для f(e)=cosne.
Задачи для самостоятельного решения
ф 5.1. Стержень, осевая линия которого в естественном
состоянии есть плоская кривая (рис. 5.21,6), вставлен в канал, осевая линия
которого есть тоже плоская кривая (рис. 5.2I,a) (¾ = const,2зо = const1).
Стержень имеет разные изгибные жесткости (А^фА^) и нагружен (в сечении е=0)
крутящим моментом -М10. Требуется определить крутящий момент AfiK в
сечении е=1, взаимный угол поворота торцовых сечений стержня и контактные
распределенные силы q2, <7з> возникающие между стержнем и каналом.
(Ограничиться случаем, когда углы поворота сечений стержня Фо можно считать малыми.)
ф 5.2. Стержень, осевая линия которого есть плоская кривая (2^0 = constH
/^22=7==-/4зз), вставлен в канал с винтовой осевой линией (с малым углом подъема
витков). Требуется определить взаимный угол поворота торцовых сечений,
моменты Mi(e), силы Qi(e) и контактные распределенные силы q2 и q3. Выяснить
условия, при которых стержень будет находиться в равновесии. (Ограничиться
случаем, когда можно считать углы Фщ малыми, что можно принять при малом
угле подъема винтовой линии.)
5.3. Определить напряженно-деформированное состояние кольца,
нагруженного распределенным крутящим моментом jlii, приложенным, как показано на
рис. 5.22. Безразмерные координаты начала и конца участков, где приложены
моменты, равны: ei=0,25, !е2=0,5 и е3=0,75, е4=1.
Глава 6
СТЕРЖНИ, ВЗАИМОДЕЙСТВУЮЩИЕ
С ПОТОКОМ ВОЗДУХА ИЛИ ЖИДКОСТИ
Шестая глава посвящена задачам
взаимодействия стержней с внешним или внутренним потоком воздуха или
228
жидкости. Рассмотрены задачи
статики стержней, находящихся в
потоке воздуха или жидкости,
с учетом аэро- или
гидродинамических сил, действующих на
стержень. Приводятся соотношения,
позволяющие определять
проекции распределенных
аэродинамических сил для произвольного
направления скорости потока, ко- лх3
торые, в свою очередь, позволяют „ 61
численным решением уравнений
равновесия определять
напряженно-деформированное состояние стержня. Изложены основные
положения теории и получены уравнения равновесия стержней
(трубопроводов), позволяющие определять
напряженно-деформированное состояние стержней, вызванное внутренним потоком
жидкости.
Учет сил взаимодействия стержня с внешним потоком приводит
к более сложным задачам по сравнению с задачами,
рассмотренными в предыдущих главах. На рис. 6.1 показан элемент стержня,
находящийся в потоке воздуха произвольного направления
(скорость потока Vo) с действующими на него
аэрогидродинамическими силами qc, qn и qi. Стержни, находящиеся в потоке, могут очень
сильно отклоняться от первоначальной (без потока) равновесной
формы, а от формы осевой линии стержня (угла фа между
касательной к осевой линии стержня — вектором ei на рис. 6.1 и
вектором местной скорости v0 потока) зависят аэродинамические
силы. Получить общие аналитические выражения для возникающих
аэродинамических сил, учитывающих непрерывное изменение этого
угла в процессе нагружения стержня потоком, можно только
экспериментально-теоретическим методом путем обобщения
экспериментальных данных частных случаев обтекания стержня потоком.
Основная сложность задач взаимодействия стержней с потоком
заключается в том, что отсутствует необходимая информация об
аэродинамических силах, которые зависят как от профиля
обтекаемых стержней (как правило, плохообтекаемых), так и от
ориентации осевой линии стержня относительно направления потока.
При больших скоростях потока равновесные формы стержней с
малой жесткостью могут сильно отличаться от естественных форм,
что приводит к нелинейным задачам статики стержня в потоке.
Обычно при рассмотрении статики стержней в потоке
подразумевается, что обтекание стержня потоком является стационарным
(без срывов), что справедливо только в определенном диапазоне
скоростей потока для стержней круглого сечения и стержней с
обтекаемым профилем. Для стержней прямоугольного или
треугольного поперечного сечения поворот сечения относительно осевой линии
229
стержня может привести к резкому изменению аэродинамических
сил, например qn, qb показанных на рис. 6.1. Следует отметить,
что разделение задач взаимодействия стержней с потоком на
задачи статики и динамики (для большого интервала скоростей потока)
является условным, так как при больших числах Рейнольдса
имеет место отрывное обтекание и чистой статики нет, но форма
стержня, относительно которой он колеблется из-за сил Кармана, может
быть Определена из уравнений равновесия стержня, если
рассматривать аэродинамические силы qn и q! при данной скорости
потока как статические.
§ 6.1. Основные положения
аэрогидромеханики
Переменные Лагранжа и Эйлера. Возможны
два основных вида движения жидкости или газа: установившееся
и неустановившееся. Если в любой точке пространства давление,
плотность, модуль и направление скорости частиц движущейся
среды во времени не изменяются, то такое движение жидкости или
газа называется установившимся. Если эти параметры потока в
данной точке изменяются во времени, то такое движение
называется неустановившимся. Существует два метода описания
движения жидкостей и газов, использующие переменные Лагранжа или
переменные Эйлера. Метод Лагранжа позволяет изучить
движение каждой индивидуальной частицы сплошной среды; метод
Эйлера позволяет изучить изменение параметров движущейся среды
(давление, плотность, скорость) в данной точке пространства без
исследования поведения каждой индивидуальной частицы в
отдельности.
Переменные Лагранжа. Объектом изучения по методу
Лагранжа служат отдельные частицы жидкости, рассматриваемые
как отдельные материальные точки (рис. 6.2). Изучение движения
сплошной среды с использованием переменных Лагранжа
заключается в решении следующих задач: 1) определение поведения во
времени векторных (скорость v,
ускорение v) * и скалярных (плотность р)
величин, характеризующих движение
индивидуальной частицы и изменение
ее плотности; 2) определение
изменений тех же величин при переходе от
одной индивидуальной частицы к
другой. Для изучения движения частиц
жидкости надо их как-то отметить, что
можно сделать, связав каждую части-
YA
ШУЛ)
"(XLO> W
*J
Рис. 6.2
* Точками обозначаются производные по
времени.
230
цу в начальный момент времени U с точкой пространства, которая
задана, например, тремя декартовыми координатами xi0 (рис. 6.2).
В любой другой момент времени t координаты частицы
определяются функциями
Xi(t)=Xi(Xw, х2о, х3о, 0. (б-1)
т. е., с точки зрения Лагранжа, аргументами, определяющими
значения векторных и скалярных функций, характеризующих
движение сплошной среды, являются переменные Хт и t, которые и
получили название переменных Лагранжа.
Компоненты векторов скорости v и ускорения v частицы,
плотность и давление определяются следующими формулами:
х, = а*'(^' " ; (6.2>
d2Xi{X;0, t)
X; = —
.- «. ■ <6-3>
р=р(*зо, 0; (6-4>
p=p(xjQ, t). (6.5)
Следует подчеркнуть, что под частицей (или материальной
точкой) среды понимается не математическая точка, т. е. бесконечно
малая величина, а физическая точка, имеющая конечный, но
малый по сравнению с общим объемом, занимаемым сплошной
средой, объем. Объем индивидуальной частицы может при движении
изменяться (но масса, заключенная в этом объеме, остается
постоянной), что приводит к изменению плотности р.
Переменные Лагранжа удобны для описания движения
сплошной среды, когда рассматриваются малые отклонения частиц от
их начального положения, например малые колебания сплошной
среды.
Переменные Эйлера. По методу Эйлера объектом
изучения являются изменения векторных и скалярных величин
относительно неподвижной точки пространства, заполненного
движущейся жидкостью. Если по методу Лагранжа наблюдатель мысленно
связывал себя с частицей и, двигаясь с ней, смотрел, что
происходит с данной конкретной частицей, то по методу Эйлера
наблюдатель связывает себя с неподвижной точкой пространства и
смотрит, как изменяются векторные и скалярные величины во времени
перед его глазами. Метод Эйлера позволяет изучить: 1) изменение
во времени векторных и скалярных величин в фиксированной
точке пространства; 2) изменение этих величин при переходе к
соседним точкам пространства, т. е. аргументами с точки зрения Эйлера
являются текущие координаты точки xi и время / (переменные
Эйлера; рис. 6.2):
v=\(Xi(t), /); p=p(Jfi(0, t)\ p=p{Xi{t), t). (6.6)
231
Метод Эйлера позволяет определить векторные и скалярные поля,
характеризующие движение жидкости (поле скоростей v,
ускорений v, плотности р, давления р).
Так как в методе Эйлера векторные и скалярные величины
зависят от текущих координат частицы, то полная производная по
времени, например скорости v, равна:
з
= + ? X,. (6.7)
Слагаемые, входящие в правую часть соотношения (6.7), имеют
следующий физический смысл: dv/dt — частная производная
скорости по времени (при фиксированных значениях координат),
характеризующая изменение производной скорости v в данной
точке; dv/dXi — частные производные, характеризующие изменение
вектора скорости при переходе в соседнюю точку пространства в
фиксированный момент времени.
При использовании переменных Лагранжа полные производные
по времени совпадают с частными производными, так как xj0,
определяющие частицы, от времени не зависят, т. е. dv/dt=dv/dt.
Метод Эйлера в азрогидромеханике получил более широкое
распространение, чем метод Лагранжа, так как наибольший интерес
в прикладных задачах представляет информация о векторных и
скалярных полях, характеризующая движение жидкости, а не
информация о движении индивидуальных частиц жидкости.
Векторным полем называется часть пространства,
характеризуемая векторной величиной, например скоростью частиц
жидкости v, которая является функцией координат Xi(t). Для
графического изображения векторного поля введено понятие векторных
или силовых линий, которые имеют определенный физический
смысл. Векторной или силовой линией векторного поля
называется кривая (линия), в каждой точке которой касательная совпадает
с направлением вектора поля в этой точке (рис. 6.3). Через
каждую точку А векторного поля проходит одна векторная линия, ка-
Рис. 6.3 Рчс. 6.4
232
сательная к которой совпадает по
направлению с вектором, например,
скорости v частицы жидкости. При
изучении движения жидкости или
газа силовые линии называются
линиями тока. Если скорость в
точке А равна нулю, то такие точки
называются критическими, так как
направление линии тока в этой
точке неопределенно (неоднозначно).
Линии тока дают очень
наглядное представление о мгновенном
распределении скоростей в раз- Рис. 6.5
личных точках пространства,
заполненного движущейся жидкостью или газом, и особенно при
обтекании тел, находящихся в потоке (рис. 6.4). При установившемся
режиме движения (и обтекания) жидкости или газа линии тока
совпадают с траекториями частиц (рис. 6.3). В аэрогидромеханике
используется понятие реальной струйки жидкости или газа вместо
абстрактной линии тока. Если при установившемся режиме
движения жидкости выделить замкнутый контур F (рис. 6.5),
охватывающий линии тока (траектории частиц жидкости), то получим
некоторую «трубку», заполненную движущейся жидкостью, которая
называется струйкой. При исследовании обтекания различных тел
(профилей) используется метод разделения (мысленного) потока
на отдельные струйки, позволяющий получить наглядное
представление о сложном течении жидкости или газа в пространстве. При
этом сложная задача исследования трехмерного потока может быть
сведена к более простой задаче исследования движения
одномерного потока. К каждой струйке можно применить основные законы
сохранения массы и сохранения энергии и с помощью
соотношений, выражающих эти законы, провести анализ взаимодействия
тела с жидкостью или газом.
Основные законы аэрогидродинамики. Уравнение
неразрывности. В соответствии с законом сохранения массы через
каждое поперечное сечение струйки при установившемся движении
в единицу времени протекает одна и та же масса жидкости или
газа, т. е.
pu(s)/7(s)=const, (6.8)
где р — плотность жидкости; v(s) — модуль скорости (средняя
скорость жидкости, движущейся в трубке); F(s) — площадь
сечения струйки. Для несжимаемой жидкости p=const, и поэтому
получаем
vF=cons\. (6.9)
Соотношение (6.8) [и (6.9)], полученное из представления
о движении жидкости в виде струек, справедливо, например, при
233
движении идеальной жидкости в трубопроводе переменного
сечения F(s), т. е. условие (6.8) является не локальным, а
интегральным, так как содержит конечную площадь F.
Получим уравнение неразрывности в переменных Эйлера,
справедливое в точке пространства. Рассмотрим элемент жидкости,
имеющий массу $m=p6v, где 8v — элементарный объем. При
движении жидкости масса элементарного объема остается
неизменной, т. е.
p6f = po6yo=const, (6.10)
где р0> б^о — значения плотности и объема в начальный момент
времени t0.
Взяв полную производную от соотношения (6.10), получаем
А+Р!ЁЙЙ. = о. (6.И)
dr ovat
Входящее в (6.11) отношение
d(8o)
Svdt
характеризует собой скорость относительного изменения
элементарного объема (скорость относительного кубического расширения
жидкости) в данной точке. В теоретической гидромеханике
показывается, что это отношение равно дивергенции вектора v в этой
точке:
d(St> ..
——- = divv =
8vdt
Так как (в переменных Эйлера)
з
Sdvx.
£=■! + £1г*< ^-^- (613)
то из (6.13) окончательно получаем уравнение неразрывности:
Для несжимаемой жидкости (p=const) из (6.14) получаем
следующее уравнение неразрывности:
дох dvx dvx
—-*- + -=-*- + -д-1 = 0. (6.15)
дхг ' дх2 дх3 v '
Уравнение Бернулли. На рис. 6.5 показан элементарный
объем жидкости, движущийся со скоростью v. Для идеальной
жидкости трение между соседними струйками отсутствует,
поэтому на выделенный элементарный элемент жидкости действуют си-
234
ла тяжести и разность давлений (умноженных на площадь
сечения элементарной струйки AF), поэтому получаем следующее
уравнение движения:
pdsd/7 —— = -^—5-d sd/7 + pgdsdF,
dt д
или (переходя к переменным Эйлера)
/ dv , dv us\ dp „ л „.
*br+-^^) = —t+n- (6Л6)
где v = vt1; = v\ p-=pel; g =—g\2; et—единичный вектор, на-
правленный по касательной к осевой линии струйки (к траектории
частиц жидкости, образующих струйку).
Перейдем в (6.16) к локальным производным
-^- + o>Xv+^^ + (xXv)y] = -4£-->«XP-pg<V(6-17)
dt os J ds
При установившемся режиме движения жидкости струйка
сохраняет свое положение в пространстве, а векторные и скалярные
величины (v, р, р), характеризующие поток жидкости, не зависят
от времени, т. е. dv/dt—О; ш=0, поэтому из (6.17) получаем
уравнение
Р —— ие, + ру2х3е2 = — ~- е, — и3/?е2 — pgi2. (6.18)
ds os
Умножив скалярно уравнение (6.18) на еь получим
_Lp_i_(^) + -^ + P£ _**■_=: о, (6.19)
2 ds у ' ds * ds к
где dx2/ds—(\2-el). Интегрируя уравнение (6.19), получаем
уравнение Бернулли
~ + Р + ?g*2 = const,
или
^f +Рг + 9gx, (0) = -f- + р + Р№, (6.20)
где V\, р\, лгг(0) ~ значения скорости, давления и координаты Х2
в сечении 1 (рис. 6.5). Из (6.20) следует, что при установившемся
движении идеальной несжимаемой жидкости сумма кинетической
(pi>i2/2) и потенциальной (p-\-pgx2) энергий единицы объема
жидкости есть величина постоянная.
Для неустановившегося режима движения жидкости ——~^ьк),
[но при сохранении положения струйки в пространстве (со=0)]
235
получаем уравнение
5 ~
const.
(6.21)
Уравнение справедливо для трубки, если скорость зависит
только от времени, а от координаты s не зависит, что для
несжимаемой жидкости имеет место тогда, когда сечение трубки остается
неизменным. В этом случае из (6.21) получаем
(6.22)
dv
= const.
Уравнение (6.22) можно использовать при исследовании
нестационарного движения жидкости в трубопроводах.
Рассмотрим несколько примеров применения уравнения Бернулли. На рис. 6.6
показан резервуар с трубопроводом, по которому вытекает жидкость. Требуется
определить скорость истечения v и изменение давления в трубопроводе
[давление в произвольном сечении с координатой x2(s)]. Внутри сосуда все линии
тока (струйки) начинаются со свободной поверхности А; начальная скорость
нулевая, а давление р0 равно атмосферному. Одна из таких струек показана на
рис. 6.6. Из трубопровода частицы жидкости вытекают со скоростью v (давление
на выходе в данном примере равно р0)-
Рассматривая сечение В трубопровода, получаем из уравнения Бернулли
соотношение
pv£
-=Р£<Ал— Ад),
(6.23)
из которого определяем v. Так как считается, что жидкость несжимаема, а
сечение трубопровода постоянно, то скорость v во всех сечениях трубопровода
постоянна, поэтому, воспользовавшись уравнением Бернулли для произвольного
сечения, получаем соотношение
Po + PghA = ?gx2(s) +
pv*
p{s).
(6.24)
Из (6.24) с учетом соотношения (6.23) получаем
P(s)~Po + pg[bB—Xz(s)].
Следует отметить, что установившееся движение жидкости в рассмотренном
примере возможно только при условии, что уровень жидкости в резервуаре
остается практически неизменным (Аа —
= const).- Если это условие не
выполняется, то имеет место неустановившееся
движение жидкости в трубопроводе,
исследовать которое [определить v(t) и p(s, t)]
можно, воспользовавшись уравнением
(6.22).
\шш//Мшшшш
Рис. 6.6
Рис. 6.7
236
В качестве второго примера
рассмотрим обтекание стержня потоком
жидкости (рис. 6.7). Среди линий
тока есть такая, которая кончается
в точке В; так как точка В
неподвижна, то скорость частиц
жидкости соответствующей струйки равна
нулю (критическая точка). Считая,
что струйка, кончающаяся в точке
В, горизонтальна, а скорость потока
и давление равны v0 и ро, из
уравнения Бернулли определяем
приращение давления в точке В:
&Р = Рв~ А> =» Руо2/2-
Рис. 6.8
Если взять малую площадь 6F
поверхности стержня, внутри
которой находится точка В, то, умножив ее на приращение давления Д/5, получим
элементарную силу (силу лобового сопротивления), с которой поток жидкости
действует на элемент поверхности стержня в критической точке В:
дХ = SFfu0*/2.
Полученное выражение для элементарной аэродинамической силы позволяет
сделать заключение, что аэродинамические силы, действующие на обтекаемое
тело, в целом должны зависеть от плотности среды и квадрата скорости потока.
В примере (рис. 6.7) уравнение Бернулли позволило определить приращение
давления только в одной точке обтекаемого контура. В остальных точках
обтекаемого контура получить давление, действующее на тело, из уравнения
Бернулли нельзя. Для определения эпюры давлений р (рис. 6.8) надо решать общие
уравнения движения жидкости с учетом ее взаимодействия с твердым телом.
К сожалению, получить теоретически аэродинамические силы, особенно с учетом
реальных свойств жидкости или газа (сжимаемости, вязкости) и режимов
обтекания, для разных профилей сечений стержня не представляется возможным.
Поэтому основную роль при определении аэродинамических сил имеют
экспериментальные исследования, которые полностью подтверждают сделанный
качественный вывод о том, что аэродинамические силы зависят от квадрата скорости
потока..
§ 6.2. Силыг действующие на покоящийся
в потоке стержень
Основные соотношения для
аэрогидродинамических сил. На рис. 6.8 показан контур сечения стержня,
находящегося в однородном плоском потоке жидкости или газа. При
обтекании контура на него действует распределенное (по периметру
контура) давление р. Если бы скорость потока была равна нулю,
то эпюра давлений по контуру сечения стержня была бы
равномерной и равнодействующая сила (и момент) от давления р,
действующая на единицу длины стержня, была бы равна нулю. При
"движении жидкости или газа эпюра давлений р по контуру
сечения становится неравномерной (рис. 6.8), что приводит к
появлению отличного от нуля момента цах и равнодействующей силы
с проекциями дах и qax в системе координат хгОх2. Эпюра
давлений зависит от режима обтекания, который характеризуется
числом Рейнольдса Re=vl/v1 где v — кинематическая вязкость
237
жидкости или воздуха; / — характерный размер тела, например
диаметр круглого сечения стержня.
Явный вид выражений для сил qax и момента \ъах получить тео-
ретически сложно, однако структуру формул — вид зависимости qaXi
и l^ox. от основных параметров, характеризующих взаимодействие
тела с потоком, — получить можно, воспользовавшись теорией
размерностей.
Рассмотрим наиболее простой случай взаимодействия тела с
жидкостью, когда сжимаемостью среды и вязкостью можно
пренебречь. В этом случае к основным параметрам можно отнести
скорость потока v, плотность р, характерный размер обтекаемого
тела /. Представим, например, дах в следующей форме записи:
bx^csWr. (6.25)
где с„(1) — безразмерный коэффициент, а, Ь, с •— неизвестные
числа. Левая часть соотношения (6.25) имеет размерность силы,
значит, и правая часть должна иметь размерность силы, т. е.
LMT-2=c„<1) (LT-1)а (L~3M) bLc, (6.26)
где L — размерность длины; М — размерность массы; Т —
размерность времени. Из соотношения (6.26) получаем уравнения для
определения неизвестных величин а, Ь, с: 1=а—ЗЬ-}-с; 6=1; а=2.
В результате получаем (с=2)
Яа^срроЧ*. (6.27)
Формула (6.27) для аэродинамической силы зависит от
квадрата характерного размера тела, в качестве которого можно взять
минимальную площадь сечения единицы длины стержня, например
для стержня круглого сечения l2=\-d, где d — диаметр стержня.
Для сечения стержня, показанного на рис. 6.8, можно положить
l2=\-b, где b — поперечный размер сечения стержня. В
результате получаем выражение для силы qaX\
9^ = 24^ if-= C„lfL, (6.28)
где сп — безразмерный коэффициент лобового сопротивления
стержня.
Качественный вывод, полученный при определении
элементарной силы сопротивления в критической точке В (рис. 6.8), о том,
что аэродинамические силы зависят от плотности потока и
квадрата скорости, подтвердился.
Аналогичные выражения можно получить для силы qax и момента
Ця*д:
Я^-с.Л?.; (6.29)
238
Pax^Cm1-^-. (6.30)
Входящие в правые части выражений (6.28) — (6.30)
аэродинамические коэффициенты сп, cL и ст зависят от характера
обтекания (числа Рейнольдса) и от угла атаки eta (рис. 6.8) для сечений,
имеющих оси симметрии. Эти коэффициенты определяются
экспериментально.
Для стержня круглого сечения при обтекании его потоком
аэродинамический момент \xaxS не возникает, а аэродинамические
коэффициенты сп и cL в определенных интервалах изменения числа
Рейнольдса сохраняют постоянные значения [5, 6, 7]. При
обтекании стержня некруглого поперечного сечения (рис. 6.9) при
произвольной ориентировке одной из главных осей инерции сечения
относительно направления вектора скорости потока v0 возникают
кроме сил qn и qL и аэродинамические моменты р,а. Из
экспериментальных исследований обтекания стержней следует, что вектор
[ха может быть представлен в виде
VLa=\llaeu (6.31)
т. е. основную роль играет возникающий при обтекании подобных
профилей крутящий момент
ц =С ^-
г'га "ти о *
где ст — аэродинамический коэффициент, определяемый
экспериментально (см. § 6.3); vn — нормальная к осевой линии стержня
составляющая скорости потока.
Для профилей, показанных на рис. 6.10,а, б, в, г, все
аэродинамические коэффициенты существенно зависят от угла атаки аа
(более подробно об этом написано в § 6.3).
Определение проекций аэродинамических сил на декартовы оси.
Определим проекции аэродинамических сил для частного случая
направления скорости потока v0, когда вектор Vo параллелен
плоскости Х\Охз (см. рис. 6.1). В этом случае вектор
у0=Уо cos а • ii+t»о sin а • h,
где а — угол между векторами ii и ev
[14].
На рис. 6.1 показан элемент стержня
круглого сечения с действующими на не- ч,
го аэродинамическими распределенными "^
силами. При произвольном угле между \.
касательной к осевой линии стержня ei \
и вектором Vo модули аэродинамических
сил равны
%
Рис. 6.9
239
Рис. 6.10
1
I Я« I = — cn? d vn* (vn = 1 v0 I sin cpj;
[ Qj | = — ^pd^2 (o1= | v0 | costpj,
(6.32)
(6.33)
где cn, C\ — аэродинамические коэффициенты; vn — нормальная
составляющая скорости vo; vj — проекция скорости v0 на
направление касательной. Угол фл определяется из соотношения
(v„-e,) i ' .
cos ф„ = —j i— = хл cos я4-£ sin a.
Та I v0 [ l '
Определим проекции вектора лобового сопротивления qn на
неподвижные оси. Вектор qn должен удовлетворять следующим
условиям:
(qn-e1)=0 fe.-S^-U;
qn{evXet)=0,
(6.34J
(6.35)
где ev — единичный вектор, совпадающий по направлению с
вектором потока Vo.
Условие (6.35) означает, что три вектора еь Сг> и qn должны
лежать в одной плоскости. Это следует из того, что направление
вектора qn должно совпадать с направлением вектора v«. Допол-
240
нительно к соотношениям (6.34) и (6.35) имеем условие (6.32),
которое можно представить в виде
I ч„ Is = С, + «L. + С. = &sin* ?.(?«. = т р d».') • <6-36)
где </—компоненты вектора в неподвижных осях. В развернутом
виде соотношения (6.34) и (6.35) дают следующие выражения:
ЦпН ^~ + Япх2 ¥*- Л- ЯпН -^ - 0; (6.37)
1 ds 2 as 3 us
Япх, ~ sin a + <7„- f ^1 cos а -^- sin а) — q -^- cos а = 0. (6.38)
1 ds 2\ds ds j 3 ds
Система трех уравнений (6.36)'—(6.38) дает возможность
определить три неизвестные компоненты дпх,. Решая уравнения
(6.36) — (6.38) совместно, определяем проекции вектора qn на оси
неподвижной декаотовой системы координат (опуская
промежуточные преобразования):
Qnxx = Я по sin <?а (cos а _ -~i- cos <j>0 j ; (6.39)
Япх2 = — <7«оsin ?д cos 9« -^--; (6.40)
^ as
Япх3 = Япо^п ?а (sin а —cos <рД (6.41).
Определим проекции вектора касательной силы qi на
неподвижные оси. Проекции силы qi на неподвижные оси имеют вид.
*«, = (Чг-h) = I <Ь ! (ei• У </ - 1, 2, 3). (6.42>
Из уравнения (6.42) получаем выражения для компонент
касательной аэродинамической силы:
Ягх, = <7iooCOS2^-^-sgn(cos?J ^100 = -^ р d v*^; (6.43>
9i/2 = ^ооcos2 <pa -~5. sgn (cos <ря); (6.44>
2 as
dx
Ягх3 = <7юо cos2 9e --* sgn (cos q>fl). (6.45)
3 ds
Проекции осевой аэродинамической силы qi содержат
множитель sgn (соБ'фо), учитывающий направление вектора qi:
если sgn (cos <pa) >0, то qi=|qio|ei;
если sgn (cos<po)<0, то qi=—|qio|ei-
Компоненты полной аэродинамической нагрузки, действующей
на единицу длины стержня круглого сечения, в декартовых осях
16—60U 241
нравны
Яахх = Япо sm «pe (cos а — х, cos <р J + q^ cos2 <ра; (6.46)
<7а *2 = — — <7„0 sin 2<?ах2 + <7104 cos2 <ра; (6.47)
^с^з = ?«о Sin ?а (Sin « — *з cos <рс) + <710 COS2 <j>a4. (6.48)
ггде
<7«o = — cnp dv02; ql0 = <7100sgn(cos <j>J.
Определение проекций вектора полной аэродинамической
нагрузки на связанные оси. Для стержня круглого сечения
з
»=1
>где
qi=<7ioo cos2 фа sgn (cos фо) ei=^icr, (6.49)
3
q« = № + <73e3 = 2?njB/i/. (6-5°)
Из (6.50) следует
=== I Ё aw,»/1 e2; *7» = I £ 0»*,■/ j ез.
шли ^
9г == Qnx^21 "T" ^^ 22 "• Яп*з23 »
тде Щ\ Щ* — элементы матрицы L(i) (П. 57).
Выражения для компонент аэродинамических сил (qnXi, qlXt)
удобнее для дальнейших расчетов иметь в безразмерной форме
.записи, полагая
ЯаХ1=Яах11'1А*Ф)-
-В результате получаем выражения для проекций
аэродинамических сил на связанные оси в безразмерной форме (индекс
«тильда» в безразмерных величинах опущен):
Яахх = ql0Xt cos2 <pe -j- qno sin <pfl (cos a — ^ cos <pa); (6.51)
<7a*a = <7ioi2 cos2 ?G — -g- <7n0*. sin 2<pc; (6.52)
.242
Qax* = ЯмРьcos2 ?o + Qno sin ?a (sin a — x3 COS <pfl),
(6.53>
где
0Ю = -£* , L s£n (cos ?fl); Qno= -½
Лзэ(0)
2 Л33(0)
Рассмотрим пример определения аэродинамических сил Я\х., Япх. и Я и
действующих на круговой стержень (рис. 6.11) круглого сечения при произвольном-
(в плоскости XiOx3) направлении скорости потока жидкости. В выражения для
аэродинамических сил (6.39)—(6.41), (6.43) — (6.45) входят х{ (направляющие
косинусы вектора ej), которые зависят от формы осевой линии стержня. В данном
примере считается, что отклонения точек осевой линии стержня от их
естественного состояния малы и ими можно при определении аэродинамических сил пре-
4
небречь. Воспользуемся методом определения Xj, изложенным в Приложении 5..
Уравнение осевой линия стержня в естественном состоянии считается
известным. В данном случае
(Х1-Яо)я + *2а = Яов (До =!/«)> (6-54).
где Xi, Re — безразмерные величины. Дифференцируя (6.54) по е, получим
(*!—Ro)X\ + *а*а = 0. (6.55>
Осевая линия стержня есть плоская кривая, поэтому
Х1Я + хяа=1. (6.56>
Воспользовавшись уравнением (6.54), исключаем Хч из уравнения (6.55):
(хг —Я0)хх + VR02— (ti —/?0)2 х2 = 0. (6.57>
Из уравнения (6.57) находим х2 и исключаем х2 из уравнения (6.56), в
результате получаем
Х3=1//?о2-(^-Я0)2/#02-
Интегрируя уравнение (6.58), по-
лучаем Х\ и х\ в зависимости от
безразмерной дуговой координаты г. Из
уравнения (6.56) находим х?-
(6.58)
V = V 1 — V = (*, — R0)/R0.
Данная задача была решена для
следующих числовых значений
параметров, входящих в выражения для
безразмерных проекций
аэродинамических сил:с„ = 1; Ci=0,l; 7=200 см;
р=10-6; ^=10см; £=2-10 кг-см-2;
Л33(0)=4-10-1 кг-см-«.
16*
Рис. 6.11
243
¢4
0,7
6)\
J
!
< -30°
-45°
-60е
0,6
0,6
0.2
0Л
0.6
0,8
0,2
-'5m\ \
0Л
о
0.6
W,
^e
-
Рис. 6.12
На рис. 6.12,c, б приведены графики изменения qlx для ряда углов а при
fjv0}=103 см-с-1. На рис. б.13,а, б, в приведены графики изменения Qnx. для тех
лее углов. Изменение проекций аэродинамических сил q/ по длине стержня в
связанной системе показано на рис. 6.14,а, б, в. Изменение модуля
аэродинамической силы, действующей на стержень в зависимости от безразмерной
координаты б, показано на рис. 6.15. Полученные выражения для аэродинамических сил
позволяют из уравнений равновесия стержня определить Q/, Mf, Оу и щ
(напряженно-деформированное состояние стержня).
Определение напряженно-деформированного состояния стержня.
При определении аэродинамических сил было принято, что
деформациями стержня можно пренебречь, т. е. считалось, что входящие
в выражения для аэродинамических сил x'j соответствуют
естественной форме стержня. Поэтому для определения
напряженно-деформированного состояния стержня воспользуемся уравнениями
.нулевого приближения (1.116) — (1.119):
de
dQg(°)
de
de
-*3oQ*(0,=
= — q*\
(6.59)
244
о}
1Л
0.7
0,6
0,3
о
-0,3
~0,6
-0,9
VnJ°'
\-30
-15°
о
\т60
о
ОЛ
ОЛ
0,6 0,8
\s~50°
-30^==.
0,2
fb5*
■Z^a =-7,
о>*^
Г
0,6
0,8 a
Рис. 6.13
^-*10Мг<°> = 0;
сШ2(0)
+ хзоМИ0)-дз(°) = 0; ^^ + Q2(«) = 0;
(6.60)
«dftjfO)
■*.Л(в)
А '
d6*w + **<•>
de
^ = 0; (6.61)
^22
d»3(°)
•^33
245
о)
If to*
1,5
1,0
0,5
у-Ж
/х=-Ю°
^-«лХ
<£^Ч
4^.
0
5}
0,9
О
~0,9
-1,8
V Ъ0
-о,ц
-0,8
-1Л
0,2 0,<* 0,6 0,8
-45°
■ ol=-15°
-^^>
0,2
#4
0,6
0,8 €
*^
0,2
0,4 0,6
0,8
^0.=-15°
г-30"
-60°
и^Е!
Рис. 6.14
de
->с301/21°) = 0;
dtts'0)+зд(0)-&8(0>
de
de
-0;
+ &2<0)=0.
(6
Уравнения (6.59), (6.60) J^-fO
интегрируются при нулевых
начальных данных. На рис.
6.16,а—е приведены графики ^
Q/°> и Mf0) для ряда углов а.
В уравнениях (6.61) и (6.62) W
удобнее перейти к новой
независимой переменной ei= С'5
= 1—е, после чего уравнения
(6.61), (6.62) интегрируются °
при нулевых начальных
данных. На рис. 6.17, 6.18
приведены графики для 0/(0), м/0). аа{0)-
Определение аэродинамических сил для некруглых сечений
стержней. Рассмотрим сечение стержня, отличающееся от
круглого (см. рис. 6.9, 6.10). Экспериментальные исследования в этом
cc=-ts\
-60°
-45°
-30°
ол
0Л 0,6
Рис. 6.15
0,8
QI
(О) т
-ол
-0,4
-0.6
S)
4V
0,9
0,6
0,3
д)
О
/rfV
0,5
5)
ъ=-45°//
^а=-75"
у^-45°
"~\с=-Г5°
0,6
0,3
о
-0,3
фо3 2}
"Voc=-W
0'5jf
r\-15°
0.5
0,3
0,2
0, г
О
П?Ш5
у^-45°у
-—-"^оН!?
е)
0,5
J^-45°
^Na=-/5'
0,5
247
**ю*
0,5
О
-0,5
-0,2
-0,4
-0,6
-0,8
\
\
^ \
0,5 е
к. а—45"
а»-»*-^^
0,5
4аю"
■ол
■0,8
0. = -45°
=^
-15°
0,5
->^а=-ЛГ
\ а=-45°
ч ^
Рис. 6.17
случае позволяют определить две аэродинамические силы: силу
лобового сопротивления qn и подъемную силу qL, действующие в
плоскости, перпендикулярной осевой линии стержня, и зависящие
от нормальной составляющей скорости vn (см. рис. 6.10,а). Сила
q„ совпадает по направлению с направлением вектора vn; сила qL
(подъемная сила) перпендикулярна силе qn. Направление силы qL
зависит от знака угла атаки ай, поэтому qb= | qz, | еЛ sgn аа, где
£ь — единичный вектор, совпадающий по направлению с
вектором qL.
Как показывают экспериментальные исследования,
аэродинамические коэффициенты сп и cL этих сил зависят от угла атаки «а.
Модуль каждой из этих распределенных сил в безразмерной
форме равен
<7«,
= — с
2 ""1 Л33{0) '
Qll =
где d(l) — некоторый характерный
размер, например для стержня прямо-
е угольного сечения можно взять eft1* —
=h (см. рис. 6.9).
248
В отличие от силы qn Для
стержня круглого сечения (6.32), где
аэродинамический коэффициент сп
постоянен, для стержня
произвольного сечения аэродинамический
коэффициент с2п зависит от угла
атаки а« [5].
В связанных ссях векторы qn и
qL имеют вид
+ I Q«x I COSaa-e3; (6.64) Рис. 6.19
4L= I Qi I cosaa-sgnaa-e8— | qL \ sinaa-sgnaa-e3.
В декартовых осях имеем
Qn, = £ Япх1; qL = I S qLx. i/ sgn aa. (6.65)
/=i \/=i ' '
Получим выражение для угла атаки аа. Угол атаки при
произвольном положении базиса {е^} относительно вектора скорости
потока vo (рис. 6.19) — это угол между вектором нормальной
составляющей скорости потока v„ и вектором е3, направленным по
оси симметрии сечения. Вектор vn определяется как
Vn=(vo-e2)e2+ (Уо-е3)ез~Уп2е2+ип3ез.
Так как vn2=\vn\ sinaa, то sinaa=(vo*e2)/|vn|.
Вектор vo определяется как
v0=^o cos a• ii + Uo sin a ■ i3.
Окончательно получаем
cos a-4{* + sina-/^
sin aa =
(6.66)
K(C0S a./^>-}-Sin a./<^)a+ (cos a./^)+sin a-/gV
где /jj> — элементы матрицы D1» (П.57).
Получим выражения для проекции векторов^,, и qL в декартовых
осях (6.65). Вектор q„ (аналогично вектору q„ для стержней
круглого сечения) удовлетворяет следующим условиям:
! Q«t I = снqHsin*?e (дЯ1 = -f ^). (6.69)
(6.67)
(6.68)
249
Система уравнений (6.67), (6.68) полностью совпадает с системой
уравнений (6.34), (6.35), поэтому выражения для qn х полностью
совпадают с выражениями (6.39) — (6.41), в которых надо в qn0
[см. (6.36)] вместо сп подставить сп] [и умножить на /3Мзз(0),
чтобы получить выражения для проекций в безразмерной форме].
Получим выражения для проекций подъемной силы q^ в
декартовых осях. Вектор q^ должен удовлетворять следующим
условиям (функцию sgn аа учтем в конечных выражениях для qLx)'-
qr.-e,=0; (6.70)
qL-env=0; (6.71)
i*i-^-"V(u=-rgg). <a72>
или
ЯьхвЬг + 4LxeH + qLxeH = 0;
Я1Х1 + lb, + С8 = Ml Sifl2 ?«)"■
В уравнение (6.71) входит единичный вектор еп«, совпадающий
по направлению с вектором v„, поэтому предварительно найдем
его компоненты ех в декартовых осях.
Вектор env должен удовлетворять следующим условиям:
епгге1=0; tnv' (eu'Ci)=0; |enr|:=l.
В более подробной записи получаем систему трех уравнений с
тремя неизвестными ех.(ех. — компоненты вектора е„и):
' ' ' Г\
— sin ая^ -j-(sin a ^— cos ax3) ex -j- cos ax;.^ = 0; (6.74)
e2 + e2 4-e'2 = 1.
Система уравнений (6.74) аналогична системе (6.34) — (6.36),
поэтому после преобразований получаем
ех =cosa — Xjcos^;
v3
250
eXi = -^2 cos <pa; (6.75)
ex — — sin a — x,cos<j>a.
Из системы (6.73) определяем qLx (с учетом знака угла атаки):
QlXi = — 4lcl sln?a\ sgnfla;
Qlx^ — 4lcl sin?aA2 sgn a2; (6.76)
^3 = ^Lsin<PAsgnaa,
где
t
exx,; (6.77)
После преобразований выражений (6.76) с учетом (6.77) и
(6.75) можно получить следующие формулы для qLx :
Яьхг = 4lcl sin Ча sb a x2 sgn fla;
qLx2 — qLcL sin <pa (sin ал\ — cos ax3) sgnaa; (6.78)
4Lxa - 4lCL Sin ?o C0S a4 Sgn V
Входящий в полученные выражения для проекций
аэродинамической силы qL коэффициент cL(aa) зависит от угла атаки и
формы сечения стержня. Как уже указывалось выше, зависимость от
угла аа можно получить только экспериментально.
Экспериментально полученные графики, устанавливающие зависимость
аэродинамических коэффициентов cni, cL и ст для ряда сечений,
приведены в § 6.3. При численном решении уравнений равновесия
стержней, нагруженных аэродинамическими силами, достаточно
иметь числовые значения сь в зависимости от aa, что и получают
при обработке экспериментальных данных. Для стержня, который
под действием аэродинамических сил и моментов деформируется,
угол атаки aa=aao+aai, где aao — начальный (известный) угол
атаки; aai — дополнительный угол атаки, вызванный деформацией
стержня, который определяется из решения уравнений равновесия
стержня в потоке. Выражение для угла aai при малых
перемещениях точек осевой линии стержня и малых углах поворота
связанных осей выводится дальше [см. соотношение (6.85)].
В связанной системе координат проекции полной
аэродинамической силы qa для стержней некруглого сечения, имеющих ось
симметрии, равны:
?1=М; (6.79)
"i — exJC5
"2 ■ ^Х„Х1
251
Я* = 2 (4», + Яп*; + qLx) /<J>; (6.80)
<7з= 2^-/ + 4-/+^.)^, (6.81)
/=i '
где /j-}'—элементы матрицы U1* (П.57).
Определение приращений аэродинамических сил при малых
перемещениях точек осевой линии стержня. В предыдущих
пунктах были получены выражения для аэродинамических сил,
справедливые для любых перемещений точек осевой линии стержня.
Аэродинамические силы зависят от направляющих косинусов
вектора еь т. е. от
* / i
*j — XJQ ~Ь ЫХ;
I
где Xjo — направляющие косинусы ею, характеризующие естест-
венную форму осевой линии; их — изменения направляющих
косинусов (в общем случае конечные) из-за действия
аэродинамических сил.
Рассмотрим частный случай, когда перемещения точек осевой
линии стержня можно считать малыми. Получим выражения для
приращения проекций аэродинамических сил, вызванных малыми
перемещениями точек осевой линии стержня. Считая, что при
малых перемещениях точек осевой линии приращения компонент
аэродинамических сил также являются малыми, положим:
ЯПХ. = ЧПХ;0 + Д?**/,
где Aqix., Aqnx. и Aq. —малые величины.
J ; /
Для стержня круглого поперечного сечения (для которого С\ =
= const, cn = const, cL — 0) это допущение возражений не вызывает.
Для стержня некруглого сечения это допущение (что малые
перемещения точек осевой линии стержня приводят к малым изменениям
компонент аэродинамических сил) справедливо, если малые
перемещения точек осевой линии стержня приводят к малым
изменениям коэффициентов сп, сь и ст. Ограничившись линейной частью
разложения приращений в ряд Тейлора, получим:
з
dQix,
S—iix,- t ^~ dqnx.
—L Дхк; A, =JJ_I
*=i дх* *к=*«е к5 дХк
AxK;
XK~ *K0
252
3 %*
^=Sir
iS ^к
A*H
jck=j:ko
В более подробной записи имеем:
1. Для стержня круглого сечения (c^const, c„=const, cL=0y
ы»,=£
dq.
д^х/ дcosya . V4lxi \\
A^= 2
a<7"*/ dsin?a
к=1 дак
+
дхк
Ак.
•^к--^ко
После преобразований (для случая, когда вектор vo
параллелен плоскости XiOxz) получаем:
Aft*! = ftocos <рао (2iJ0cos а + cos <ро0) + ин +
-f<710 2cos 9о0 sin ах10и*3;
Д<7,*8 = 2<710cos 9fl0cos ахйоиЖ1 + <y10coss 9G0"*2 +
+ 2<?10cos <pfl0 sin a'xtJuxj (6.82>
Д?1*8 = 2<710cos cpo0cos aiS0M^ + <710cos <?a0 (cos <?a0 + 2sin ojcj ux^
Л _ _ _ /x10 cos a cos 2yQ0 — cos yo0 cos3 a __ sin2ya0 \ *
^ ~ Qn ° [ ^ 2 ) U*i +
+ 9lie sin a Aocos2yco-cosvc((cosa4 J, .
где
Д<7«д2 = ЧпоЪо cos a|^0 «^ — qn0 sin <paocos <prt043 +
. ' . cos 2ya0 '
* Упо^т Sin ОС gjn Ид-з,
COS Ct ' *
A<7«*q = QnoTw^r- (^30cos2<pG0 — sin?o0cos<pa0)«^ -f
sin Vao
+ <7
no
sin ct(x30 cos 2yo0 — sin a cos ya0)
sin f c0
cos фа0=л:1о cos а-г-*зо sin a-
sin2ya0 1 '
"1 j "*»»
(6.83>
253
Полученные соотношения (6.82), (6.83) можно представить в
векторной форме, удобной при преобразовании уравнений и при
численном счете:
Aql«=A<1)u«; Aq„«=A<2>ux. (6.84)
(Элементы матриц А(1) и А(2) легко определить по уравнениям
-(6.82), (6.83).)
2. Стержни некруглого сечения, имеющие ось симметрии.
Для таких сечений сп1 и cL зависят от угла атаки аа и при
малых изменениях угла атаки относительно заданного могут быть
.представлены в виде
дсПл д dcL
даа Аао; CL-CL0^ даа
Да
а'
Получим выражения для Даа в зависимости от малых углов
поворота базиса {е,} относительно базиса {е70}- В выражение для
угла атаки (6.66) входят элементы /2!\ 4з\ й!\ из' матрицы L{1)
(П.57). Матрица Ь(!)=1Х<0), где L<°> — матрица (П.55)
преобразования базиса {ij} к базису {е_,о} (базис {ej0} связан с
естественным состоянием стержня); L — матрица преобразования базиса
{е^о} к базису {е7}. Элементы 1(ц матрицы L(0> считаются
известными. При малых углах поворота связанных осей матрица L
«(П.46) определяется так:
L = е,
1
L К
Ъ*
А
■ft,
1 J
33 равны:
(0)q /(0).,
(6.85)
Поэтому элементы liW 4з\ /31* и /(|)
hi — hi + ^31 v1— in v31
h3 — ht -f- h'6 Vj —/13 v3,
/d) _ /(0) /f0)o 1 /(0)a .
hi = hi — '21 ■b'l -r hi v2,
/0) __ /(0) /(OJq . .(0)¾
'33 = *зз — h3 ^1 + 42 «v
Выражение для sin aa (6.66) с учетом соотношений (6.85) после
разложения в ряд с сохранением только линейной части равно
sin аа = sin 000 + ^1^1 +^2+сз^з,
тде
1 D
Др(^1 —bi)
D2
^2 =
афь
Cs =
#0#2
fl0 = cos аЙ? + sin а/2?;
G1 = cosa/|?) + 8^101/33^
D2 ' D
60= cosa/^ + sina^S ;
£>! = cos alff -f- sin a®;
:254
аг = cos al{$ + sina/gJ; b2 - cos a/{?) + smal[f;
D = Vaj + V-
Так как sin aa=sin aa0+cos aaoAaa, то
сЛ + с2Ь2 -f c3%
Aaa—
COS a,
(6.86>
OO
где cosaao=bolD.
Приращения проекций аэродинамических сил <7n х- и <7/.х. с учетом*
изменения угла атаки Aaa равны
deJnixi w^ dq"ixi '
K=1 к (6.87>
дЧхг Л d(?Lx:
к=1
U
дхк
хк*
После преобразований получаем:
MniH = Soo 4^- <СA + С»д« + *»*»> ^^ (C°S a - *10 C°S ?J +
r/y10cosacos2ya0 — cosya0cos2a sin2<Eao\^ ,
X10cos2<j)c0 —cos<fDOcosa * 1
+ sin a : uXn ,
sinya0
^V2 = -Vl^ ^^ sm?eocos<peo*ie +
+ ^. (*„cos a^^ ^ - sin 9a0 cos ?аЯ3 + -4 sin a ^^ u^ \
(6.88>
A<7«x*3
?"i°o -S5T ^^ sln ?ао (sm a~~-*30 cos ?«o) +
+ ^° i sin ¥fl0
COS <J> a0
COS ОС ,'
(*30cos 2<pao — sin fa0 cos <pao) «^ +
_J_ fsin a(y30 cos 2ya0 — sin a cos yc0) _ sin 2ya0\ ^ 1.
\ sin ffa0 2 / xz\'
255*
Ml*. = <# -a; TT^TT sin <pao sin ajcso+^20 sin ?ao sin aw —
"■ doa cosyfl0
— 9¾¾ sln a (viocos2 a + sin a cos ал:3о) ux —
' < 11
— 4°LCL0 S'ltl aXw (Xso S1"n2 a + SI*n a C0S я*ю) "* ;
^. = й -gS7 cos ¥fl0 sln *«■» (sm «10 - cos ax30) +
+ Я1С%\(~~ sin a*iHi + cos a*»oA + sin a sin <pao) t^ +
+ (— sin axl0A2 + cos ак30А2 — cos sin <po0) u^J;
a?l*. =^l-^ ^ sin<paocosa*20-f
{6.89)
L да-a COS<fo0
+ №% (Sln ?a° CCS ЯЦхя — A**o COS ЯЫ^ — ASX20COS OUxJ,
1 ' '
Я"Де ^„100 = — pd(,42J Япх* ^ qnlWfnxv A = *i0cos2 a + sin acos ax30;
A = -^30 sin2 я + sin acos ax1Q; c°L0 = cL0 sgn aa0.
В векторной форме
Aq^ = A<3>0 + A<2>ux; Aq£ = А^й + Af5>u*. (6.90)
Полученные выражения для аэродинамических сил (6.84) и
'(6.90) дают возможность определить напряженно-деформирован-
здое состояние стержней, взаимодействующих с потоком жидкости
мили воздуха.
В качестве примера определим напряженно-деформированное состояние
прямолинейного естественно закрученного стержня, находящегося в потоке
жидкости (рис. 6.20) произвольного направления в плоскости Х\Охг. Сечение стержня
имеет ось симметрии. В естественном со-
\ стоянии стержень имеет непрерывно изме-
\У° \ няющийся по длине угол атаки аао=Фю(е)
ц.т. ц.ж.
Рис. 6.20
\, ■ i При нагружении стержня распределенной
' ° г аэродинамической силой qi, и
аэродинамическим моментом iia=='jiaiei из-за
деформаций стержня появится дополнительный
угол атаки 0lt поэтому полный угол
атаки
Ota = CCao + ftl=#lCrHh •
' Ограничимся случаем, когда
перемещения точек осевой линии стержня и
угла поворота связанных осей при
нагружении аэродинамическими силами явля-
256
ются малыми. Примем, что изгибная жесткость стержня Л22 относительно оси,
перпендикулярной оси симметрии сечения, много больше изгибной жесткости
стержня Л33 относительно оси симметрии и крутильной жесткости Ап. Поэтому
их t>2 и Дх2 можно положить равными нулю. Для прямолинейного стержня при
малых перемещениях их :¾¾ и, кроме того, можно считать, что 4^¾¾. =0.
Рассмотрим наиболее общий случай, когда центр тяжести сечения стержня
не совпадает с центром жесткости (см. рис. 6.19).
Воспользуемся общими уравнениями равновесия (4.124) — (4.127),
полученными в § 4.3, которые для рассматриваемого примера принимают следующий
вид:
-^Ч-?! + A<7i = 0; (6.91)
6Q2
dQ3
«з+ЛхА + ^ + Л^^О; (6.92)
ds
-ад2 + <73 + Л<73 = 0; (6.93)
dAJ,
Нч = 0; (6.94)
Q3 = 0; (6.95)
2 + Qa = 0; (6.96)
M,
7^ = 0; (6.97)
-0; (6.98)
d$4 Af„
_i__JL=0 (Л*8 = Л88Дхя); (6.99)
dM2
de
6M,
de
de
-Ь10м3
M,oM
(1¾
ds
d02
33
d«2
~d7
dw,
-^-== 0; (6.100)
■— h = 0; (6.101)
d«3
de
-0. (6.102)
Уравнения равновесия (6.91) — (6.102) получены в осях, связанных с линией
центров жесткости. В предыдущих задачах считалось, что центр жесткости и
центр тяжести сечения совпадают, или считалось, что линии действия
распределенных сил и моментов q и |г сосредоточенных сил Р<'"> и моментов T*v'
пересекают линию центров жесткости. Аэродинамическая нагрузка приводится к центру
тяжести сечения, поэтому при приведении ее к центру жесткости сечения
появляется дополнительный распределенный момент ii<f=qaXa (а =—ое3), поэтому
полный распределенный момент, входящий в уравнение (6.94),
где [Паи ц<л — моменты, зависящие от естественного угла атаки Ою", Aiici и
17—6011
257
ДМ<71 — приращения моментов, зависящие от приращения угла атаки, вызванного
изгибом и кручением стержня потоком жидкости. Так как ?д=4^+^2^2+9363, то
HQ=q2aei—qiae2=HQ\ei—1^2¾ и тогда момент
|Лю=ИсоС/п sin2 фа sgn aa-\-q2a, (6.103)
где Цао = Р(Ит^/2.
Компоненты qi равны [частный случай выражений (6.79)—(6.81)]
3
Яг = 2 (Ягхю + ЯП1хр + Чир +4*,*. + &QLxЛУ' (6-104>
3
Яь = Л (Qixfl + Ятхл + QlxA + A-7rtlX. + AqLx)l[i),
/=1
где l\y — элементы матрицы L(i), равные l^ — l] /^ = ^0 + ^ 4^ ~
— —(^10 + ^1); /33 = 1. В рассматриваемом1 примере имеем: xl0 — 1; х2о = Хзо =
' ' ос
= и — ttx =0; cos 9оо = cos а; s*n 9оо — s'nа! приращение угла атаки (6.85)
Да0 = 9,, поэтому после преобразований из (6.104) получаем
Я% = ВД + ^Ао — ЯП1о sin а cos а4ся;
о *-
где ^=^0 + ¾ ^J sin*а.
Проекция fli равна
<7i = <7ю cos2 a sgn (cos а).
Получим выражения для момента \\й так как
дст
то из (6.103) получаем
У-1 - ^2¾ + ^ю — a<7Wlo sin а cos а"**>
где К2 = fifl0 m sin2a + c/(x.
dafl
Из уравнения (6.91) определяем Qi:
e
0
При e=l Qi = 0, поэтому
Q,=9l(l-e).
Из уравнения (6.93) определяем Q3:
Сз = J kbQs. & ~ J Я3 dh + Q».
258
Так как Q3 в уравнении (6.92) умножается на малую величину йю, то (при
е=1, Q3=0)
Q3= -98(1-0== —flnio8in8a (l —О-
В результате из системы (6.91) — (6.102) получаем систему уравнений:
Q2 + —— ^(1-0+ Кх% — qniQ S in a. cos <х93 = — ^Ло — 6io<7„l0 si"2 а (! ~ еУ>
-"33
Щ — *ю^8 = — <7rtl0 sin2 а (1 —е);
A^ + Q2 + 910M2 = 0;
9,
».
0;
*и
ЛГ,
= 0.
*зз
В векторной форме
где
Y+AY-b,
Q2
мг
м2
^
•i
»з
I
0 0
0 0
0 0
1 0
Ап
С
0
ь =
0
0
0
к
0
0 -
-*Ло~
-¾
^(1-0
■^33
0
-*м
0
0
i °
^,osin2a(1' Е)°ю
-/сАо
i0 sin2 а (1-е)
0
0
0
>
Кг — (?л os'n aCos а
К a —я<7п о sin а Cos а
0 0
0 0
0 0
0 0
(6.105)
(6.106)
17*
259
Решение уравнения (6.106):
У=К(г)С+\н.
(6.107)
Алгоритм численного решения уравнения (6.106) изложен в гл. 2. В
рассматриваемой задаче решение (6.107) должно удовлетворять следующим
краевым условиям: 1) е=0, т}1 = Ф3=0; 2) е=1, Q2=Ml=Mi = M3 = 0.
Определив 03, находим перемещения точек осевой линии стержня их ;
uX2 = j*M!'.
и*г -ю
На рис. 6.21,а, б, 6.22, 6.23,а—г приведены результаты численного решения
уравнения (6.106) для трех значений скорости потока v0: / — 5-Ю3; 2—104-
3— 15-Ю3.
Числовые значения параметров, входящих
в уравнение (6,106), равны:
а = 30=; сх = 0,1; cni0 = 1; дп±0 = cnt0q0;
а — 0,05; dcmfdaa -— 1; dcL/daa = 3;
Лц=°.6; q0=?d(i)v0*/2 = 3. Ю-» о0»; gl0 = с^;
начальный угол атаки 910—0,25г.
Пунктиром показаны графики, полученные
для частного случая, когда qi = 0. Результаты по-
£ зволяют оценить погрешность, которая
получается, если при афп}2 не учитывать осевую
аэродинамическую силу |q(|.
260
О 0,5 € 0 0,5 £
Рис. 6.23
§ 6.3, Уравнения равновесия пустотелого
стержня, заполненного потоком жидкости
Векторные уравнения равновесия. В реальных
конструкциях могут быть использованы пустотелые стержни
различной формы сечения, например эллиптической или
прямоугольной (рис. 6.24) и др. Поэтому уравнения равновесия получим для
произвольной формы сечения пустотелого стержня. Считаем, что
стержень заполнен стационарным потоком идеальной
несжимаемой жидкости.
Рассмотрим отдельно элемент стержня (рис. 6.25,6) и
заполняющую его жидкость (рис. 6.25,а) со всеми силами,
действующими на них. Элемент жидкости имеет скорость движения w0(w0=
-=Woei), где wq — осредненная по сечению скорость частиц
жидкости. Воспользовавшись принципом Даламбера, получаем
следующее уравнение:
_a(P^)_f+ d^^o (Po = /,oF)> (6.108)
где F — площадь сечения трубки; р0 — давление жидкости; т2 —•
261
н
Рис.
6.24
f
i «/ ^ / e,Fe,+(!(P9Fe,}
poFJjJ^j^!0>
6} ^^Я
// f
/>«С
""'^ vLj^
dm^
6.25
JM + dM
Q+dQ
(6.109) получаем (при .F=const)
масса жидкости,
приходящаяся на единицу длины
стержня; / —
распределенная сила взаимодействия
''j£t'J жидкости со стержнем. Для
идеальной жидкости вектор
f всегда лежит в плоскости
векторов е2, е3 (как в
статике, так и в динамике),
т. е. ортогонален вектору еь
Так как скорость движения
жидкости Wo зависит от
двух переменных, то
находим полную производную по
времени (используя
переменные Эйлера):
dt dt ds
Если стержень
находится в равновесии, а модуль
скорости движения
жидкости постоянен
(стационарный режим движения
жидкости), то dv?o/di=0 и из
dwn
w„
дег
«>охяоеа.
(6.110)
dt " ds и ои"' V }
Для элемента стержня можно получить следующее уравнение
равновесия с учетом сил веса стержня и жидкости:
i = \
(6.111)
Исключая из уравнений (6.108) и (6.111) вектор f, получим
ds ds ^J
или
dQ(')
ds
+ v+q+ 2^^(5-^.)=0 Iv = (Wt + wJg], (6-П2)
где введено обозначение
Q(1)=(Qi-/5o-m2^02)e1+Q2e2+<?3e3.
262
Для идеальной жидкости справедливо уравнение Бернулли,
связывающее давление ро со скоростью жидкости w0:
ты* +{M5* = const>
™ 2F F
или (для стержня с постоянной площадью сечения F)
Р0 + — m*v£}o + mtgKM = const.
Уравнение равновесия моментов, действующих на элемент
стержня, имеет вид
^--r-(eIXQ) +И+ 2^8(8-8,) = 0, (6.113)
v=l
где jn — внешний распределенный момент, действующий на
стержень, например распределенный аэродинамический момент,
вызванный внешним потоком жидкости или воздуха, в котором
находится стержень. Так как в уравнение равновесия (6.112) входит
вектор QC), то и в уравнении (6.113) перейдем к вектору Q(1),
воспользовавшись равенством eiXQ=eiXQ(1), т. е. уравнение (6.113)
может быть записано в виде
-^- + (е, X Q(1)) + I* + JJ Tf<) S(s — s0 = 0. (6.114)
Среди сосредоточенных сил P(i), приложенных к стержню,
могут быть как внешние силы, так и силы, вызванные потоком
жидкости (рис. 6.26). В этом одна из особенностей задач статики и
динамики стержней, заполненных потоком жидкости. На рис. 6.26
показаны сосредоточенные силы Р(2), Р(3), представляющие собой
реакцию потока жидкости в местах резкого изменения
направления движения, например в местах, где участки стержня стыкуются
под некоторым углом 2(3 (рис. 6.27). Воспользовавшись теоремой
об изменении количества движения жидкости (и учитывая силы
Рис. 6.26 Рис. 6.27
263
Р0 от давления в жидкости), получаем следующее выражение для
модуля сосредоточенной силы (рис. 6.27):
| P(K>j=2P0cos pH-2m2^02cos $=2{P0-j-m2w02) sin (a/2).
Направление силы Р<к> показано на рис. 6.27. Сосредоточенные
и распределенные силы, вызванные потоком (на криволинейных
участках трубопровода возникают распределенные силы, равные
по модулю m2W02Ks, где кд, — кривизна осевой линии стержня),
нагружают стержень. Вызванное потоком жидкости начальное
напряженное состояние стержня существенно влияет на его частотные
характеристики, что при исследовании задач динамики следует
обязательно учитывать. Полученные уравнения равновесия (6.112)
и (6.114) справедливы как для случая, когда форма осевой линии
стержня при нагружении внешними силами практически остается
без изменения, так и для случая, когда форма равновесия при
приложении внешних сил существенно отличается от исходной
(например, для стержней с малой жесткостью). В первом случае
вектор еь входящий в уравнение (6.114), есть известная функция
координаты s с известными проекциями в декартовых осях; во
втором случае вектор ei неизвестен и для определения Q и М
уравнений (6.112), (6.114) недостаточно; для решения задач статики
необходимо рассматривать деформации стержня.
Уравнения для вектора перемещений и точек осевой линии
стержня (1.61) и уравнение, связывающее векторы и и # (1.60),
остаются без изменения. Уравнения в безразмерной форме полу-
чим, положив (см. § 1.1): s=/e; О=ОЛ3з(0)//2; х=и//; М=
MVL433(0)/i; q=ql33(0)//3; Ц=цЛ33//2; \=уА^; Аи=АцАы(0);
Р0=р.сА33Ц2; Р«>=Р<'">Л33//2; T^=V^A33/l- w0=w0lPu Рг=
=[i433(0)/(m,+m2)f*]^:
После преобразований для стержня постоянного сечения
получаем следующую систему уравнений равновесия стержня с учетом
потока жидкости в безразмерной форме (значок «тильда» в
безразмерных величинах опущен):
п
^ + Y + q+JP(I,8(e-O = 0; (6.115)
i — l
■^ + (еж X Q«*>) + М -т- J] Тг^ б (е — е.) =, 0; (6.116)
v = l
М = А(х —х;]>); (6.117)
L1-^- + Lx0(1)_x = 0; (6.118)
-^- + (Л, — 1) еж + /»е, + /вже, = 0. (6.119)
264
где
Q(1> = iq (Ро + П{<)\et -f Q2e2 + Q3e3) [пх = ^-). (6-120)
Система уравнений (6.115) — (6.119) отличается от системы
уравнений (1.57) — (1.61) только вектором Q(l), у которого первая
компонента Qi(1) зависит от скорости жидкости и давления (6.120),
и наличием среди сосредоточенных сил Р(,) сил, вызванных
потоком жидкости.
По форме записи системы уравнений (1.57) — (1.61) и (6.115) —
(6.119) тождественны, поэтому методы численного решения
уравнений равновесия стержня без потока жидкости, изложенные в
гл. 2, могут быть полностью использованы и для решения задач
статики стержней, заполненных потоком жидкости [с учетом того,
что краевым условиям должна удовлетворять компонента Qi, а не
Qi(1> (Qi(1)=Qi-(/WW))].
Уравнения равновесия стержня в связанной системе координат:
п
-^- + xXQ(,) + Y + q+J)P(1)S(^- ^) = 0; (6.121)
р
-^- + х X М + е, X <*<'} + V- + J Т< v> S (е - е„) = 0; (6.122)
ц^1+^,,(^- « = 0; (6.123)
-?- + иХи + (/11-1)е1Ч /йе8+/81е, = 0; (6.124)
М = А(х~~ к,/1)). (6.125)
Уравнение (6.121) можно записать со слагаемым, зависящим
от потока жидкости, в явном виде:
п
dQ
+ xXQ-^XI(^o + Vo2)e1i+Y + qy!P(£)«(^-^) = 0-
tie ^j
(6.126)
Решив систему уравнений (6.121)-(6.125) с учетом краевых
условий, находим осевое усилие в стержне:
Q=Qi(1>+Po+rti«>o2.
Уравнения равновесия прямолинейного стержня, нагруженного
потоком жидкости. Рассмотрим частный случай уравнения
равновесия, когда стержень в естественном состоянии прямой, например
сверло, которое охлаждается внутренним потоком жидкости.
Задачи взаимодействия прямолинейного стержня с внутренним и
265
-с
w////)//$^
i
§
ш
Рис. 6.28
внешним потоком жидкости возникают
при бурении нефтяных и газовых
скважин (рис. 6.28). Промывочная жидкость
приводит в движение турбобур и выносит
на поверхность породу. При наличии на-
'///////////, чальной случайной малой кривизны ко-
// лонны бурильных труб поток жидкости
может привести к значительным
поперечным отклонениям осевой линии колонны,
что может явиться причиной аварии.
В § 4.3 были получены уравнения
равновесия естественно закрученного
стержня (4.124) — (4.127) в проекциях на
связанные оси. С учетом потока жидкости
изменятся только уравнения (4.124), где
вместо Qio надо взять Qw—(Po + «i^o2),
поэтому получаем:
ы
+ Р10 + АР, = 0;
(6.127)
-&loQ3 + Ax3(Qlo-iPo-^o2)+P20 + AP2 = 0; (6.128)
a7+K&-^AQ1o-Po-n1wi)2)-hP30 + {iP;i = 0. (6.129)
Остальные уравнения (4.125) — (4.127) остаются без изменения.
Систему уравнений (6.127)-(6.129) и (4.125)-(4.127) можно
свести к двум уравнениям четвертого порядка, которые, например,
при $0=const для стержня постоянного сечения имеют следующий
вид:
АЛУ + ИА, + Аз) 2410 - М10] щ - ЦА„ + 2А22) 24?о - ЗМ, Д 0 +
+ Q10 - Ро — ЗД,8] к ~ I (Л, + Аз) 2Йо - ЗЛ* 10ft10 + 2 (Q10 — Р0 —
- ад,') J 410и3 + (А,$> ~ Л*1 Ао + 0ю - Яо - ад,') Йо и, = 0; (6.130)
A.«3V-КЛ. + Аз)2&10-MJи-\(Д,Ч 2Л33)2$,-ЗМ10&10 + Q10-
- Р, „ — ад,'] и. +1 (А. + Аз) 2«& - ЗМ10&10 + 2 (Q10 - Р0 -
—/^Шо1)]*^ +(^А-МДо+ ^10-^0-¾^1) »Ю«. = °- (6.131)
Для стержня постоянного сечения А^=\.
Рассмотрим несколько частных случаев уравнений (6.130),
(6.131).
266
1. Стержень не имеет естественной крутки #ю=0 (сверло для
глубокого сверления) при А^фА-^ъ (Лзз=1):
wr-Mj3-(Q10-^-«iO^-0; (6.132)
fijg + Mjtt + (Q10- Р0- /vO и, - 0. (6.133)
2. Стержень нагружен только осевой силой (Qio^O, Мю=0):
4V~ (Q^o-Po- «хО w2 - 0; (6.134)
AzzulV - (Q10 - P0 - "><)«, = 0. (6.135)
Уравнения (6.132) — (6.135) позволяют определить критические
значения параметров потока жидкости, при которых возможна
статическая потеря устойчивости. Ограничимся в качестве примера
определением критических значений Р,0* и ау0* из уравнения (6.134).
Считаем, что осевое усилие Qio известно. Кроме того, положим
k2=—Q10+pQ+mwo2. (6.136)
Решение уравнения (6.134):
и.2—С\ cos &е+с2 sin ke-\-Cze-\-C4.
Для шарнирно закрепленного стержня имеем е=0; u^=U2=0;
е=1; ti2—U2=0, поэтому ci=C4=0. Из краевых условий при е= 1
получаем два уравнения с2 sin ^-(-с3=0; c2sin&=0, из которых
следует sin&=0 (k=nn).
Окончательно из (6.136) получаем (при п=1)
(Р0, + //^) = ^4-0,, (6.137)
Из (6.137) следует, что стержень, заполненный потоком
жидкости, может потерять устойчивость и при растягивающей силе.
ЗАКЛЮЧЕНИЕ
Механика стержней, в основе которой лежат
фундаментальные науки, непрерывно развивается как в
теоретическом, так и в прикладном направлении.
Многие традиционные методы расчета стержней сохранили свое
значение и в настоящее время. Однако появление новых
материалов, новых конструкций машин и приборов, рассчитанных на
эксплуатацию при высоких скоростях и нагрузках, потребовало
внедрения в расчетную практику новых методов расчета,
ориентированных на широкое применение вычислительной техники.
Использование новейших достижений в области математики и
механики твердого деформируемого тела позволяет решать
сложные и практически важные задачи, число которых непрерывно
растет.
Рассмотреть в учебнике все возможные частные задачи,
относящиеся к механике стержней, практически невозможно, поэтому
изложение материала ограничено основными задачами, которые
имеют наиболее широкое распространение в тех областях техники, для
которых готовят специалистов в технических вузах. В данном
учебнике такими основными задачами являются задачи статики
(первая часть), динамики (вторая часть) «физически линейных»
нерастяжимых элементов машин, приборов и конструкций,
сводящихся к расчетной схеме стержня.
В данном учебнике не рассматриваются задачи строительной
механики стержневых систем, так как они подробно изложены в
учебниках и учебных пособиях, см., например: Строительная
механика/ Под ред. А. Ф. Смирнова. М., 1981; Дарков А. В.,
Шапошников Н. Н. Строительная механика. М., 1986; Спицина Д. Н.
Строительная механика стержневых машиностроительных
конструкций. М., 1977.
Ряд задач, относящихся к статике стержней, остались
нерассмотренными, но необходимый для их решения теоретический
материал в книге содержится. Эти задачи могут быть использованы
в качестве тем научных работ, курсовых и дипломных проектов.
К таким задачам, например, относятся:
1. Статика криволинейных биметаллических стержней. Для
знакомства с основами теории биметаллических стержней можно ре-
268
комендовать книгу С. Д. Пономарева, Л. Е. Андреевой «Расчет
упругих элементов машин и приборов» из серии «Библиотека
расчетчика» (М., 1980). В этой книге рассмотрены прямолинейные
биметаллические стержни постоянного сечения, но алгоритм вывода
основных соотношений можно обобщить и на случай
криволинейных стержней переменного сечения.
2. Термоупругие задачи статики стержней, в том числе и
биметаллических стержней. В реальных условиях упругие
стержневые элементы могут нагреваться, что может вызвать существенное
изменение их напряженно-деформированного состояния. Учет
температуры в уравнениях равновесия стержней может быть сделан
студентами самостоятельно.
3. Расчет стержней с учетом пластических деформаций. Учет
пластических деформаций приводит к «физически нелинейным»
задачам, которые рассматриваются в книгах, посвященных теории
пластичности, например в учебнике Н. Н. Малинина «Прикладная
теория пластичности и ползучести» (М., 1975).
РЕШЕНИЯ ЗАДАЧ
К главе 1
ф 1.1. а) Необходимым условием «плоской»
деформации стержня является требование, чтобы линии действия сил, приложенных к
стержню, лежали в плоскости, в которой находится осевая линия стержня, а
векторы моментов, приложенных к стержню, были ортогональны этой плоскости.
Это условие является необходимым и достаточным для стержней круглого и
квадратного сечений (почему?). Для стержня произвольного сечения этого условия
недостаточно. Необходимо, чтобы выполнялось еще одно условие — одна из
главных осей сечения должна лежать в плоскости, в которой находится осевая
линия стержня.
б) Уравнения равновесия. Если осевая линия стержня есть плоская кривая,
то в этом случаем имеем: Х]=з<2=0; Хю=И2о=0; jMi = M2=0; С?з=0; f)i=t>2=0.
Из системы уравнений (1.64) — (1.68) получаем:
п
^7—0я*з+ 9i + 2я*(/)8 (e-Ef) =0;
п
dQ2
^ №,+ 9я + ][]/У'')8<е-е,)=0;
«=i
p
^ + Q* + H + Jj4v>*(*-*J=0;
M3 = A33(xs x30);
dj>8 ,
хз— . ~гхзо>
— — к3и2 — cos 93 + 1 — 0;
d«2
+ *3U\ — s'n ^3 == 0-
ф 1.2. Воспользуемся общими уравнениями равновесия стержня при малых
перемещениях (нулевого приближения) в проекциях на связанные оси (1.116) —
(1.119), из которых при ^10=^20=0: изо=1/#о; Mi=M2=Q?,=^2=^=Us^0 (см.
задачу 1.1) получаем следующие уравнения:
~Г— ^- + P]0 + A*V°> = 0; (1)
270
dO,(0) Q,(°>
de #0
d + Q2<°) - 0; (3)
de
dOa(°) Лу°)
d£ A 33
d^C) u2(°)
(4)
= 0; (5)
de tf0
d«2(°) в,(°) л
-Л-_4_1__ 6,(0) = 0. (6)
Рассмотрим более подробно выражения для проекций сил, входящих в
уравнения (1), (2). В общем случае следящая распределенная нагрузка q может
иметь две компоненты, т. е. q=<7lei—|~^7е2. Поэтому, воспользовавшись
соотношением (1.24), имеем (с учетом того, что распределенная нагрузка действует не по
всей длине стержня)
Р19 + АР<0) - ql0H (е - ек) + (/>Ц) + AP[l>) 6 (е - ^); (7)
P20 + APi0) = q20H(z-zK) + (P<J> + АР<1}) «(*-**)• {8)
Сила Р(1> — «мертвая», поэтому при деформировании стержня ее проекции
в связанных осях будут изменяться. Так как перемещения точек осевой линии
стержня и углы поворота сечений стержня считаются малыми, то,
воспользовавшись соотношениями (1.140), имеем
2
где l\y ~ элементы матрицы L*1* (П.57), которая для рассматриваемого случая
(плоской деформации стержня) равна
*зо — V0) sin930 sin Э30 — V°) cos ha
L(i)
Г cos 0;
L — sin 4
*>зо ~Л(0) cos &30 cos030 — 63(°) sin 930 j
(10)
Поэтому имеем
PJD = Pjj> + др|о» = ^ cos 030 + РЖ1 sin %a + (P*2 cos fl30 - PXi sin 930) fl<°>;
(")
P2U = pio} + APi0) - - PXl sin 6зо + РЖ1со8 *>30 - (PXi cps 930 +
+ PX2sin030)9(°), (12)
где -0^°) — малый угол поворота сечения К стержня относительно ненагружен-
ного состояния; #3о— угол поворота связанных осей при е = ек (см. рис. 1.26).
Подставив выражения для сил (II), (12) в уравнения (1) и (2), получим
систему шести линейных уравнений первого порядка с переменными
коэффициентами относительно шести неизвестных: Qi<°>, фг(0), -Мз(0). «i(0), ^2(0)-
# 1.3. Уравнения равновесия полностью совпадают с уравнениями,
полученными в задаче 1.2, кроме проекций сил. Получим выражения для проекций сил.
Так как вектор ускорения а не лежит в плоскости чертежа, то форма осевой
линии стержня в нагруженном состоянии будет пространственной кривой. При
малых углах поворота связанных осей матрица L(I) (П.57) имеет вид
271
L(i) =
1
-»8
a2
&3
1
-¾
— :
»1
1
Lo.
где L° — матрица (П.55).
В рассматриваемом случае осевая линия стержня есть плоская кривая,
поэтому ф10 = О20 = 0, ©зо^О, т. е.
L° =
cos 930
sin Й30
0
sin930
cos 930
0
0
0
I
Матрица преобразования базиса {'/} к базису {е;}
-I
ИЧ = е
2
cos
h i2
>3o~93sin930 sin930 + 93cos9S0
Фяп cos *}aft— sin &
J30
30
J30
COS &чп — &q Sin 9.
30
$2 cos U30 + 9j sin 930 92sin$30— fljcos^g,, 1
Получаем выражения для единичных векторов Ii,2 в связанном базисе:
\х = (cos 930 — % sin ftgoJej — (sin &30 + 9з cos 930)ег + (Э2 cos 9зо + 9i sin &3о)е3;
1*2 = (sin *}80 + &3 cos 930)el + (cos &30 — % sin 930)еа + (¾ sin &зо -¾ cos &30)е3.
Распределенная нагрузка в неподвижных осях
q = щах^х + т0аХ2ц = qx^ + qx^,
где ах.— известные величины. В связанных осях проекции вектора q равны:
Я\ = Яхх cos &зо + <7-v2 sin »зо + ( — Яхх sin 9зо + <7*2 cos 930)&3;
<7г = — <?*, sin 930 + gXa cos 930 — (qXy cos 930 + qx^ sin &30) 93;
<7з = (Ях1 s'n 930 — qX2 cos ^)¾ + (^ cos 930 + <7Xa sin Э30)92.
или
Аналогичные выражения получаем и для сосредоточенной силы Р:
з
Р = ma = PJCiil + Рх2!2 = I] Я/е/,
/=i
где (ограничимся выражением для Р4)
Pi = рх1 cos &30 + Рх2 sin Э30 + ( — **, sin 930 + Я*2 cos &30) *)„.
Получим теперь уравнения равновесия стержня в связанной системе
координат. В рассматриваемом случае -8-10 = ^20=05 Кю—з*го = 0; x,ao=l/Ro, поэтому
из системы (1.116) — (1.119) получаем следующую систему уравнений нулевого
приближения:
dQ[°>
ds
+ 9ю + Мг + (P10 + АР^Цг—t^) = 0;
272
dQ<°> Q^_
dQ<°)
^0
cU
dAf<°> M°>
■ =0:
de R0
dAf(°> Ж(°)
d, ' i?0""Q3
2 +-^--Qf-o;
dJM<°>
'3
de
+ QS°> = 0;
= 0:
и
de i?0 Л
de + /?0
122
d&<°> M°>
3 -^-=0-
ds A3S
d«j°>
«№>
ds #,
о
d4°> wj°>
de ^ Д0 3
3 +»i°> = 0.
ds
# 1.4. Из рис. 1.28 следует
q = m0w2Q=mcco2 (xih—ai2+u), (u=—uxtx—«2e2).
В данном случае матрица L°=E, так как базисы {i,} и {ej0} совпадают.
При конечных углах поворота связанных осей в плоскости чертежа матрица
L(i) =
поэтому имеем
COS U3 SlnWg
-sin ft4 cos Эч
i,—cos Озв]—sin 03в2; i2 = sin $3ei+cos ^2-
Окончательно получаем следующие выражения для проекций qt:
qi^mCM-(Xi cos$3—asin^)—«i;
qz = —m0b)2(Xi sin Ф3 + о cos &з)~u2.
IS—6011 273
ф 1.5. Воспользуемся результатами, приведенными в § 1.2. Вектор г равен
(рис. 1.29)
r=|r[er = r0+u=— ai2+XiKh-hu{xiK = £K).
Представим и через проекции в неподвижной системе координат:
и = щег -f «2е2 = (Mi cos &з— и2 sin 63)^ -f (ut sin bs + и2 cos 9a)i2 =
= uxth + ux2h-
Единичный вектор
1
«V = тут КХ1К + "j^Hj + ( — й + «v2)«2] = «*, «i + eX2i2>
где 1 r j =|/U1/C + uXi)* + ( — a + и*2)2.
Так как P<1)=|P0|er, то в неподвижных осях получаем
Р^= |Pol^Ii+ |Pfll«*,ii.
или в связанных осях
Р(1> = I ро I [(^1cos9g + ^2sin&3)e1+ ( — eXj sin &3 + e*scos&s)e2].
Выражения для проекций силы Р(1) нелинейно зависят от проекций
перемещений (uXj или щ) и от угла Фз-
ф 1.6. Из условий симметрии следует, что при скручивании кольца угол
поворота сечений ©ю от е не зависит, т. е. Oic^const. Осевая линия стержня
остается плоской кривой, поэтому к, = хю=Х2о=0; Х2=изд sin f}to; Из=><зс cos Фю.
Внутренние моменты постоянны и равны: Mt=0; Л12=Л3зИзо sin т)ю; Л13 =
=Лзз(^зс cos f}10—кзо). Из второго и третьего уравнений системы (1.64)
получаем
Q2 = Q3=0. (13)
Из первого уравнения системы (1.65) получаем
М3х2—M2x3 + fxi = 0. (14)
Подставив в (14) выражения для щ и Mjt получим
^33«50(COS Gio — ]) sin 9ю — Лв*!о C0S 9ю sin 6,0 + 1¾ = О,
или
— Дм*зо sin 6,0 + ^ = 0. (15)
Из (15) определяем угол ©ю в зависимости от |LXi:
sin$i0 = H,t/(A3S4o)' (16J
ф 1.7. При ^22=7^33 из первого уравнения системы (1.65) после
преобразований получаем уравнение для определения т>ю
(Л33 — Л22)4о cos *ю sin ho — ^33*30 sin &ю + J*i = 0. (17)
Значение угла #ю*, при котором jii достигает максимальной величины,
находится из уравнения
Лзз cos f),o*— (Л33—Л22) cos 2f>10* == 0.
Из (17) следует, что ■0,1О=зг момент Цг становится равным нулю, что
соответствует неустойчивому, «вывернутому наизнанку» состоянию кольца. Этот
результат совпадает с ранее известным результатом для кольца при Л22=Л3з.
274
К главе 3
# 3.1. Спираль может потерять устойчивость с
выходом из плоскости чертежа. Уравнения равновесия стержня, соответствующие
критическому состоянию (для случая, когда осевая линия стержня есть плоская
кривая), могут быть получены как частный случай из общих векторных
уравнений (3.10)—(3.14). В проекциях на связанные оси уравнения равновесия,
соответствующие критическому состоянию спирали, имеют следующий вид:
de
de
— x3#^2* l" Ч1!* — ^j
+ *3*Qi.* + ?2* = 0;
dM
3*
de
de
■3*
l33
-0;
0)
da
i*
de
з*"а*
= 0:
de
+ *:
3*ul*
.»,
3*
0.
Для стержня постоянного сечения (Л3з=1) возможны два случая. Если
при критическом состоянии форма осевой линии стержня мало отличается от
ее естественного состояния, то можно принять, что Хз*=1/рс°(б); Фз* = Фзо (в)►
где ро°(е) —безразмерный радиус кривизны осевой линии стержня (ро° и г%с —
известные функции е). В этом случае система уравнений (1) является линейной.
Проекции распределенной нагрузки:
<?i*=(qc-eio)=(7o('i-eio);
<72*=<7o(ii-e2o); <7с="*о|а|.
Матрица перехода от базиса {[,} к базису {е,0}
е
е
:'■[
з
h
COS®
30
-sinS30
0
h
sin&
cos 6.
30
30
1 J
(2)
поэтому получаем
q^ — qa cos fh,„; q2*=qc sin ■&,
30-
Уравнения равновесия стержня после потери устойчивости [частный случай
уравнений (3.33)—(3.36)] имеют следующий вид (для стержня постоянного
сечения):
dQ,
01
de
dCo2
de
dQo3
V2*J"03
— Qos + A^i-C
Po
+ QH'08 + —Q01 + APa=0
Q2*
d^
Af,
01
Hi
Pou
a.*
/i22
02
+ ДЯ,
(3)
18*
275
<Ш,
01
Ро"
^02 +
м
3*
*22
М02 = 0;
йМ.
02
-t-—Ц
м
3*
Рои
01"
AM
03
de
0]
'01
"и
1
'W01 —Qos = 0;
ds
d£
41
Po°
Л1
02
1
»22
Po°
d93
— — У
de
03
di/j
1
de
— ^4
Fo1'
d«,
w,
■ ».
0;
= 0;
0;
+ % = 0.
Спираль нагружена «мертвой» нагрузкой, поэтому ЛЯ,- будут отличны от
нуля, и так как нет распределенного момента |ы и сосредоточенных сил и
сосредоточенных моментов, то ДР,=Д<7|"; ДГ/ = 0.
Получим выражения для Д<7г-. Вектор Aq — q— qgt1), где q^q^; q^1)^
з
Представим вектор i] в базисе {e,}, связанном с равновесным состоянием
стержня после потери устойчивости (осевая линия стержня после потери
устойчивости показана на рис. 3.17 пунктиром).
Матрица (П.57) перехода от базиса {i/} к базису {е;} L(')=LL0, где L0 —
матрица перехода от базиса {i/} к базису {е/с}; L — матрица перехода от базиса
{еу0} к базису {е/}. Считая, что углы поворота связанных осей можно считать
малыми, имеем
L =
1
L 9.
—ft
1
2
»1
1 -«
поэтому
L(i) = LL(0) = е
[;
«1
cos&30—03sin030
iB
sin %0 + &3 cos 030
cos %0—&3 sin &30
0a sin $30—9j cos 930
-9gcos930 — sin930
-&2 cos &30+9j sin %0
В базисе {e/} вектор q0 имеет вид:
qc=9(cos ^зо—^з sin O3o)ei+<70(—#з cos f>30-
—sin Ф3о)е2-}-<7о(т}2 cos Озо+^i sin r)30)e3,
276
]
(4)
(5)
поэтому
Aq =—g0O3 sin f}3oei—Qo®3 cos Озое2 +
+ q0 {r>2 cos d30 + ©i sin f>30) e3, (6)
т. е. проекции вектора приращения нагрузки АР,, входящие в уравнения (3),
равны:
APi=A<?i = — qc #з sin d30;
АР2 = Д<72= —</о^з cos г>30; (7)
АРЙ = А<7з= <7ofti sin т>зо+<7о^2 cos #зо.
Если форма осевой линии стержня в критическом состоянии мало
отличается от ее формы в естественном состоянии, то система уравнений (1), (3)
позволяет определить модуль критической распределенной нагрузки qc*.
Критическая нагрузка есть собственное значение однородной краевой задачи для
системы уравнений равновесия (3).
Определив критическое значение нагрузки, следует проверить выполнение
использованного предположения о малости перемещений и, точек осевой линии
стержня и малости угла поворота т}3 связанных осей при нагружении стержня,
решив для найденного значения критической нагрузки систему линейных
уравнений (1). Если из решения следует, что и,- и f}3 малы, то найденное
собственное значение краевой задачи является критической нагрузкой, а критическое
состояние стержня практически совпадает с его естественным состоянием. Если
предположение о малости обобщенных перемещений не выполняется, то надо
решать нелинейную систему уравнений равновесия (1), где y,z* и т}зо = т>з*
являются неизвестными, с последующим определением критических нагрузок.
# 3.2. Уравнения, характеризующие критическое состояние, совпадают с
уравнениями (1) задачи 3.1. Если форма осевой линии стержня в критическом
состоянии мало отличается от формы осевой линии стержня в естественном
состоянии, то в уравнениях (1) следует положить Хз* —1/ро°; т)з* = т)зо.
Уравнения равновесия стержня (см. рис. 3.18) после потери устойчивости
отличаются от уравнений (3) задачи 3.1 только выражениями для приращений
компонент распределенной нагрузки, поэтому рассмотрим их вывод.
Распределенная нагрузка в неподвижных осях с учетом перемещений осевой линии
стержня равна (рис. 3.18) для случая, когда перемещениями точек осевой линии
стержня до потери устойчивости можно пренебречь,
q=m0tu2(ro+ii) =тоО)2(х1о11+Х2о12)+гао(о2(и1е1+и2е2+Изез), (8)
где xi0 — координаты точек осевой линии стержня в естественном состоянии
{известные функции е). Приращение вектора q
Aq = q—q0tt>.
Получим компоненты вектора q0 в связанных осях, воспользовавшись
матрицей перехода L0 от базиса {i;} к базису {е,о}:
qo = moO)2(xi0i 1+^2012) = m<yUi2{xio cos f}30-f-
+*2о sin f>3o)eio+m0to2(—xw sin f>30-i-X2o cos O30)eM. (9)
Из (9) следует
qw = m0(a2(xio cos O30+X20 sin t)30);
(720=то(й2 (—Jfio sin ft3o+*2o cos ^so). (Ю)
Вектор qo(1) равен
qoU) = <7ioei + v"2oe2. Ul)
Матрица перехода от базиса {i/} к базису {е;} (4) получена в задаче 3.1.
Воспользовавшись матрицей (4), получаем вектор q в базисе {е/}:
277
4 = <7ioei + <7гое2 + т0<аЦх20Ь3 cos 030 — X,0&3 sin &30)ej -f
+ m0<o2( — х20Ъя sin %0 — x109 3 cos Q30)e2 + m^ [x ,,(¾ cos f>30 — »t sin »30) +
3
-f x20(&2 sin 030 — O^osOgoJegH- £m6aaa/ej. (12)
/= I
Вектор Aq определяется так:
з
Aq = q — <710et — q20e2 = JJ Aqfj, (13)
/=1
где
A<7i = m0'W2 [«i + (x2o cos f}3o—x[0 sin ^30)^3];
A<72=/7T,(o2[«2—(xi0 cos f)3o+x2o sin T>so)t}3];
А<?з = т0со2[«з—(хю sin O30—x20 cos #30)^1 +
+ (xm cos #30 + x20 sin ft3o) v>2].
(14)
Получим выражения для приращений kqi в случае, когда форма осевой
линии стержня существенно отличается от формы в естественном состоянии.
В этом случае
qo=moto2(xioii + x2ci2+ai*e1*+U2*e2*), (15)
где е,-* — единичные векторы связанных осей, характеризующие критическое
состояние стержня; «[«— перемещения точек осевой линии стержня,
соответствующие критическому состоянию.
Для определения напряженно-деформированного состояния стержня в
критическом состоянии решается система (I) (задача 3.1) нелинейных уравнений
равновесия. Получим выражения для проекций нагрузки q^, входящих в
систему (1). Для этого надо записать вокторы i,- в базисе {е/*}- Матрица перехода
от базиса {i/} к базису {е;-*}
L.(,) = L,L°, (16)
где L0 — матрица переходов от базиса {i/} к базису {е,о}; L,
да от базиса {е,с}, к базису {е;*}. Матрица L* запишется так:
матрица перехо-
L((> =
*-.=
COS Og*
— sin&3„
0
COs{ug0-f93*)
— sin(»M + »s*)
n
sinSg* 0*
cos %% 0
0 1
*
sin(930 + %t)
cos(fM + »3.)
0
0"
0
I.
поэтому
В результате получаем вектор <7о* в базисе {еу*}:
<7о* = тосо2{[хю cos (Фзо+Фз*) +
+x20sin (т>зо+г>з*)+«1*]е1* +
+[—Хю sin (т>зо+т)з*) +х2о cos (f>30-f
+ ^3.)+"a*]e2.}.
Найдем приращения вектора q после потери устойчивости:
278
(17)
где
ДЧ = q — qJJ) ЧШ= J] Яы el* ] •
q=mo(o2(ro-f-u*) +т0ы>2и=Ца* + т0ы2и.
(18)
(19)
Чтобы получить приращения компонент вектора Aq в базисе {е/}, надо
вектор q0* представить через проекции в этом базисе. Воспользуемся матрицей
перехода от базиса {е,*} к базису {е/} при малых углах поворота связанных
осей (матрица L в задаче 3.1). В результате имеем
поэтому
Тогда
где
е [ * = е, — 03е2+03е3; е2* = 03е i + е2—О, е3,
qo*=9io*ei+(72o*e2+ (<72о*03+ ^00)^1)6,+ (—¢10,, 03+тоШ2ы2)е2+
+ (Qio^2—^20*^i + тф>2иг) ез.
&q= (.mQto2Ui + q2o±ft2)ei-i-(ino(i>2U2—qwift3)e2+
+ (т0<о%—q2o*®i + <?ю*02) e3,
410* = /71оО)2[«1*+Х1оСОз(Озо+08*)+Х2оЗт(Озо + Оз.,)];
<?2o* = mcrW2[w2*—лгю sin(03o+03:,)+x2o cos(O30+O3*)].
(20)
(21)
(22)
(23)
0 3.3. Возможны два случая потери устойчивости кольца: в плоскости
чертежа и относительно плоскости чертежа. Рассмотрим каждый из этих случаев.
При потере устойчивости кольца в плоскости чертежа для определения
критической нагрузки воспользуемся системой уравнений (3.48). Система уравнений
(3.48) от момента М30 не зависит, т. е. критическая нагрузка, при которой
возможна потеря устойчивости в плоскости кольца, от начального напряженного
состояния не зависит.
Для определения критической нагрузки, при которой возможна потеря
устойчивости относительно плоскости кольца, воспользуемся уравнениями (3.49).
Уравнения (3.49) надо дополнить слагаемыми, зависящими от момента Мзс-
Эти слагаемые входят в общую систему уравнений (3.33) — (3.36), из которой
как частный случай были получены системы уравнений (3.48) и (3.49):
dQ03 _Qi* м
de
122
02 = 0((^=-^0):
AT.
сШП1 1 д,чп ,
ds Я» °2^ Л23 02
<ш,
па
1
^[R° 01
М.
30
М.
01
Qo3 = 0;
(1)
Ml
ds А31 R° 2 '
d&o М
de
02
128
-—»,=0;
dUg
de
+ &a = 0.
Из первых трех уравнений системы (1) получаем уравнение
1 {Ап + Аа) ^зо , Яш*&_
Д)2 +
Л"ю = 0. (2)
,(Я°)а Д°ЛиЛ22 ЛиЛ22' Л22
Решение уравнения (2) должно удовлетворять условиям периодичности, что
приводит к следующему уравнению для определения q^*'.
cos £=1, (3)
где
/;
1 (Ли + Л2й) , Af|o <72*Я°
(W Д°АИ8а АИ22 Л2
Критические значения <?2* равны (/е=2лп) [так как Рс=1/(2я) и Af3o=l/#°]
. о Г, 2 м , Лп + Л22-! ]
Ф 3.4. Стержень нагружен «мертвой» нагрузкой, поэтому приращения
нагрузок APi. входящие в линейные уравнения равновесия (3.33), будут отличны от
нуля. Приращения моментов Д7\ в данной задаче равны нулю. Уравнения
равновесия стержня после потери устойчивости приведены в задаче 3.1 [система
(3)]. Получим выражения для ДР,:
ДРу=Л^+ДР/0б(е—е().
Выражения для приращений компонент распределенной нагрузки были
получены в задаче 3.1:
Aqi = ~qosiw&So^ (<7o=aomo);
Aq2 = — <?о cos ФзоФз;
Aqs = qo sin #30Фч+<7о cos ¢30¾.
Остается получить приращения компонент сосредоточенной силы, которые
по форме записи аналогичны Д<?,-, т. е.
APi^^-Po sin u30(ei)^3(ei) (Р0 = аот);
ДЯ2=—Р0 cos #30(6,)^3(61):
AP3=PosinO3o<ei)0,(e,)+Pocos03o(ei)02(ei).
Уравнения равновесия [ограничимся только первыми тремя уравнениями
системы (3) в задаче 3.1] стержня имеют такой вид:
d£ — Q2A3 — -^- Q02 — Яо sin %0Ъ3 = Р0 sin^s8 (£ — h) '>
dQo2 . Л „ . I
+ Q1A3 + ~Г— Ooi — <7o cos Ь30Ц3 = P0 cos 030д%е(г — ^);
——- -r —— jM0l — — Moz + ^ sin &308j + Qo cos 9g0&a =
U~ ЛП ^22
= — P0 sin »80^8(6 — El> + P0 cos «309я8 (e - 4).
К главе 4
# 4.1. Получим уравнения равновесия стержня. При
малых перемещениях вектор u = U2t2= их\2, поэтому можно воспользоваться
уравнениями равновесия в проекциях на декартовы оси (4.103) — (4.107)
(частным случаем этих уравнений);
280
0«. + ^, + ^,=0:
^, + 3,,-^. = 0:
»e - ^, =0(^,, = Д*.);
«.
6. = 0.
(5)
Рис. 1
В дальнейшем считается, что все величины приведены в безразмерной форме.
Безразмерная координата х\ обозначена е.
Получим вкражегия д~я Рх 0 и ДРЛ.. Прд изгибе стержня вектор Р равен
(рис. 1)
Р=1Ро|ег,
где
(r = r0 + u)-
Так как
! го + « I
то при малых «JK «меем
поэтому вектор
Го + U | ^:/0 ( 1 + -^f ^,) (/0 ^ ]/" 4l0 + rLo)'
или (сохраняя только слагаемые, линейно зависящие от их )
rjKiO rJCiOrje20
х,0 г
"*,Hi +
ro3 "*V " \ rr
jc,0 j
r 0
^v. i *2«
Из (6) с учетом выражения для ег (11) получаем:
рх.п= ! Ро IT- ' ^*яо-1но(—
х,0'
ДР.
«Ч»8
х.О
°\Ux '<
ЛР* =ipoi —г-и =а^ \
(6)
(7)
(в)
(9)
(10)
(И)
(12)
(13)
(1 )
281
поэтому уравнения (1) и (2) принимают следующий вид:
QXl + pXlo8(e-*k)-wX38(z-4) = o; (15)
<?*, + pxsb <е ~ Bk) + аФхг 8 (в - Ч) = 0. (16)
Проекция внутреннего усилия Qx входит в уравнение (3) с малым множителем #3,
поэтому слагаемым, содержащим их в уравнений (15), можно пренебречь. В
результате получим
Так как при е = 0 Qx = Рх 0, то получаем
Q*. = ^0-^,0^^-^- (17)
Сведем систему уравнений (16), (3)—(5) к одному уравнению
L="™-PXloll-N(£-zk)}uX2-a28{z-ek)uX2-PxJ{t~ek)=0. (18)
Краевым условиям задачи удовлетворяет функция Vi (4.187), поэтому
приближенное решение уравнения (18) ищем в виде
/5 3 \
"iu.=*<vt= сх (е4-~£3+ 77 (19)
а возможные перемещения точек осевой линии стержня берем равными
6u=6bVi. (20)
В соответствии с принципом возможных перемещений получим уравнение для
определения Ci.
сх
j (t'JV-/^(1-^)¾ ^-^(¾) -p*2oM£ft)=0. (21)
ф 4.2. В данной задаче работу совершает (при малых вертикальных
перемещениях) только проекция силы Р на ось х2, поэтому функционал /i равен
1
Л = — J A33u*<ih - PX2u(ek). (22)
о
При малых перемещениях осевой линии проекцию Рк можно взять равной
Рхш = РХ2о = I Р I ,, Х?° -Т-- (23)
Функцию »1 берем в виде
5 3
fi=*4- — е3+ — е3- (2*)
Подставив приближенное выражение «n=aiD( (ограничившись
одночленным приближением) в (22), после преобразований получим
ях ^0,06/^0,/Л33. (25)
ф 4.3. Для решения задачи можно воспользоваться уравнениями (1)—(5)
(см. задачу 4.1). Получим выражения для проекций распределенной нагрузки
282
на декартовы оси хх = е и х2, вывод которых полностью совпадает с выводом
проекций для сосредоточенной силы Р в задаче 4.1. Только теперь радиус г0
и его проекции есть функции е, равные
^0 = /^0(-)+^0^), (26)
где г^в(е) =г0 — е; ГХг0(г) = *20 = Const-
Выражения для проекций распределенной нагрузки и их приращения равны:
Яхх0 = Яа——\ Qx2o = %——, (27)
1 Го га
л?*, = — 9о XlV° «^ = — М£)и*а; (28)
ro
&Ях2= <?oVJ — Ti =«s(e)"j»
2 \ /"о2 / /"о
Уравнения равновесия стержня имеют следующий вид:
Wxt
ds
dQx2
ds
dAT
ds
+ -7 ГХ1°
1 V0
■+0o -
/"о
SL + Qx,-
de
— fli»jea
- + «9«x2
,з = °;
-»8=0.
—
=
0;
o-
0;
(29)
(30)
(31)
(32)
(33)
d, - (34)
Слагаемым в уравнении (30), содержащим их можно пренебречь (так
как Qx в уравнений (32) умножается на малый угол Фз); в результате из
уравнения (30) получим
Q*,o= - 0о f -^- <*Л + ct = <?„ К(=о —=)а + 4) + «1-
При е — 1 Qx 0(1) = 0, поэтому
<V = ¢0 (1Лео-£)я + 4, - 1Л^0-1)2 + 4,)- (35)
Систему уравнений (31) — (34) можно свести к одному уравнению вида
L = «iY - Q.,i0«V2 - a2«.Va - ?„ i^L = 0. (36)
ro
Функцию fi(e) возьмем в виде
Vl(e)=6e2—4е3+е4, (37)
которая удовлетворяет всем краевым условиям задачи. Полагая пах =civl{e)
и 8u=6avu в соответствии с принципом возможных перемещений получим
уравнение для определения с:
283
о
или
1
1
9a^L(unX2)vtdh=0, (38)
ci f (v\J — QxJvx-~a2vx)v16h — qfi J 1^±- &#-0. (39)
0 0 °
4.4. В данной задаче удвоенная работа внешних сил равна
1 1
\ (WxMdh = J W*,dA•
где
х20
4Xio = Vo
У(ео-02+4>
Функционал /j равен
x-«B„_dft
If/, Г *2o"*2aft
Полагая (ограничившись одночленным приближением) иПд.2 =aii>i(i>j=6e2—4е3+
-he4), из условия dJi[dai=0 определяем ай
а\ — ^0-^20 I
1 / , 1
Z V{e<>-flf+X\
2
20 / О
# 4.5. Можно воспользоваться уравнениями равновесия (4.138) — (4.141), в
которых надо положить Рх^ = /?; Р^ = цХ;)0 = гЩ — 0; Лм = 1, где К — реакция в
шарнире.
В результате получаем
(43)
"je, —»3=0.
Система уравнений (43) совпадает с уравнением (4.151) (при &2=0),
поэтому можно воспользоваться фундаментальной матрицей (4.148), элементы
которой выражены через функции Крылова.
Решение системы (43) [с использованием (4.161)] имеет вид:
е
У=К(е)С + |к(б~-/1)МЛ, (44)
о
284
где
QX2
м*>
%
и*г
Y =
Из граничных условий при е=0 следует с2=С4=0.
Воспользовавшись общими выражениями (4.161)—(4.168) для решения
неоднородного уравнения, получим
Ях2о
Е
h) bd/i =
2а,
Y 1^(^)-^(0^0,5)1//(8-0,5) -
-^(0,-0,5)//(6-0,5)
"2^
~4^~
[K3(alS)-^(<xx.0,5)]//-
fl
2ax
/C2(ar0,5)//
[*T4(«iE)-*a(«i-0.5)]//-
/?
2&12
K3(ar0,5)//
?1 [JC^e) -^(0^.0,5)] Я-
4cx15
4a,8
К4(аг0,5)Я
(45)
(46)
В скалярной форме записи из (44) получаем
Y) = Qx2 = kucx + ft13c3 + У ни
У 2 — ^*3 = ^2if ] + *азсз ~Ь У Н2\
УЪ ~ "3 =■ "31с1 + &33С3 ~Ь *#3>
^4 = ИА-2 r= ^41^1 + ^34f 3 Г *tf4i
где kn=Ku ^г=/Г2/(2а,); к^Кя/фа?); /г4[ = ^/(4(1,3); /г13 = -2а,2/С3; &2з =
=—а^; Азз=/Сь £43=/(2/(20^).
Определяем с,, с3 и /? из условий: 1) е = 1, ¢^ = 0, MXs~ 0; 2) е=0,5
Из (46) получаем систему неоднородных уравнений для определения с1г
Cs и Я:
^(^,)^-2^^(^)^-^,(^.0,5)^=-
^1 — aiK*{ai)ca — - R=
Чх2о
2«i2
<7хо0
Г^К)-^(«1-о.5)]; (47)
2a,
2аг
*Г«К-0,5) *Га(<уО,5)
4a, d
2ax
2aj3
C3
[/СзЮ-^зК-0,5)];
285
Ф 4.6. Уравнение равновесия стержня имеет вид (если свести систему
уравнений равновесия к одному уравнению)
L = и™ + 4a}Mjfi [//(£)-//(е -0,5)] + rj5(s- 0,5) = 0.
**г1 Приблизительная форма упругой линии
показана на рис. 2, поэтому
приближенное решение уравнения ишем в виде
ипх2 =в2У2(е), где
7 уй(е)=е5—2,2535е4+1,1337£3 + 0,П98е2.
В соответствии с принципом возможных
перемещений имеем
1 »
«я f {^У + 4о.}о8[^/(А)-//(А-0,5)]}уяс1А+Jr^dA^O,
«ли
1
а, \ {v™ + 4af га \Н (h) - // (А - 0,5)]} у,<И - 7^¾ (0,5) = 0.
о
Б результате получаем
Г,Л (0,5)
а» =
1
С {о™ + 4aj4t»2 [Я (A) —H(h — 0,5)]} и2 dft
ф 4.7. Уравнение равновесия стержня
I = и^ + 4af%2 + Т< - ^у/(е - 0,5) = 0.
В качестве приближенного решения берем
«и*, =fli»i(e)*
а-де
у,(е)=2е4—5е3+3е2.
Коэффициент ai находим из кубического уравнения
1 1 1
V | Tox4h + ai j (^IV + 40^,)0^ — 0я2о [ t»xdA -= 0.
0 0 6
К главе 5
ф 5.1. Для решения задачи можно воспользоваться
^уравнением (5.154), которое при малых углах fho принимает вид
QK
»ю + -г- Клзз - л22) ^£0 - л332^] а10 = о, < i)
286
или
^,0 + ^10 = 0- (2>
Выражение в квадратных скобках в уравнении (1) может быть как
больше, так и меньше нуля, поэтому в уравнении (2) перед вторым слагаемым
приведено два знака: плюс и минус. Моменты Mi равны:
Л1,=Ливи; М2 = А2&% sin 9l0; MB = ASB (Q*0cos&10 — 0¾). (3>
Возможны два значения момента Мъ:
М3 = А33 (fi^cos^o-Q^,); (4).
М3 = Л33 (¾ cos *10 + QlQ). (5>
При малых углах die имеем:
Л^ = Ли910; М2 - Л^»10; Af3 = Аи (Q*, - й£,).
Рассмотрим случай, когда в уравнении (2) слагаемое берется с плюсом.
Решение уравнения (2):
■6-10=^1 cos &e+c2sin кг. (6)
Так как требуется определить взаимный угол поворота, то можно считать, что
при 8=0 fho=0, поэтому С[=0.
Из второго условия находим Сг:
Ли»10(0)=Л!10; c2 = -f-. {7у
ft/iu
В результате получаем
»10 (£) =jf~ sin ks- <8>
Угол поворота сечения стержня при 8=1 (а это и будет взаимный угол
поворота) равен
Afio
b10(\) = -~smk. (9).
kAn
Крутящий момент М\к равен
Mi* = .Miocos &. (10)»
Из полученного выражения для M\k можно выяснить, когда моменты Мш и
Mlk равны. Из (10) следует, что Ml0=Mik при &=0, т. е.
/g30
An
'30
1(A3S-~AS2)Q"-AS3Q10] = 0. (И)-
ьзо Лзз*зо
Параметр k обращается в нуль в двух случаях
d30
^)=0и Л22-=Л33; (12).
(Лз — Ая2) 2зо
(13>
133 ок
к30
287
Первый случай (12) (когда стержень прямой) был рассмотрен в § 5.3 для
общего нелинейного уравнения равновесия (5.154), которое при А22=АЪЪ и
^зо =0 совпадает с уравнением (2). В первом случае крутящий момент
постоянен по всей длине стержня. Во втором случае (справедливом только при
малых углах the) моменты равны только в торцовых (конечных) сечениях
стержня.
Для определения q2 и q3 воспользуемся уравнениями (5.142) (5.143) и
(5.139), (5.140). Из уравнений (5.142) и (5.143) находим Q2 и Q3 [для
случая (4)]:
<?2 = (Лзз — А22 + Лп) £2£0 sin »10610; (14)
Q3 = (А22 - А33 + Ап) Щ0 cos %0Ъ10 + A33Q$10. (15)
Выражения (II) и (12) справедливы для любых углов Ою- При малых углах
получаем
Q2 = {А22 - А22 + Ап) 2^!До =¾ 0;
*Эз ~ I (^22 ^33 Г -^ц) ^30 "Т" ^ЗЗ^ЗСМ Ю-
Из уравнения (5,138) получаем Q i —0, или Qi—const. Стержень в канале
может находиться в равновесии без приложения торцовых осевых сил, т. е. при
Q.=0. Определив Qu находим q2 и qs и, зная Q2 и Qs, из (5.139) и (5.140)
находим
q2= — Q2 — ¢1^3+^1 == °;
<?з — —Чз — QsKi + Qi*2 = ks —— sin fcs,
где Ks = (A22— ^33 + ^11) 2з0 = ^332j0 - Модуль контактного давчения | q | =
= I 9e I -
ф 5.2. Воспользуемся уравнением (5.152), которое при малых углах
принимает вид:
»ю + -^[Мзз - ^1)¾ - ^.8¾] 9w = ° <16)
[уравнение (16) совпадает с уравнением (1) задачи 5.1].
Моменты Mi в данном примере равны:
Мл = ,4,,(¾+ &10); М2=А2ЛЧ0Ъ10, М9 = А33(Я«0~Щ0).
Решение уравнения (16) при краевых условиях: е = 0, Ф10=0, Mi{0) =
= М,о — имеет вид (см. решение задачи 5.1)
е10=—^-sinfee, (17)
где
k = у -j^ [(А33 - Л22) J& - Л3^3С0] •
288
Определяем Q2 и (¾ из уравнений (5.142) и (5.143):
<Ээ=ЯзФ io+A%; Q2 = K&i0, (18)
где
^3 = (^22 ^33 + Ац) ^30 "Ь ^33%0»
*« = ^¾¾ - л33^3ко - ^зco)^ю; (19)
/V6 = (Ли лаа) ^зо^ю*
Определяем из (5.138) Q\.
4 = -ВДь-*■ №-й3Со)1 »м- (20)
Интегрируя уравнение (20), получаем
^ = -j^*.cosfc + <3ie, (20
где
К6 = (Аг2 - Л33) ft)2 5¾ + <Лзз - ^22 + ^11)¾¾¾). I22)
Если при е=1 Qi=0, то из (21) получаем
Q,=^IMe)-Mi)l- (23)
Из полученного выражения для Qi следует, что для равновесия стержня
необходимо к одному из торцовых сечений приложить осевую силу. Например,
чтобы в сечении е=1 осевая сила была равна нулю (в сечении В на рис. 5.28),
то надо в сечении А приложить силу Р, равную
Р = ~^ГГ^е(1-Созй). (24)
Определяем q2 и Цъ из уравнений (5.139) и (5.140):
¢2 =
К* - Кь + K3Q«0 - -£*- (¾ - Q3C0) -^- cos fo +
+ -7s-(¾ ~ 2зо) ^ cos Й + i^ej,;
Модуль распределенной силы [ q | = ]/~я£ + <7за
19—6011
ПРИЛОЖЕНИЯ
1. Краткие сведения из векторного анализа
и линейной алгебры
1.1. Векторный базис и координаты векторов. Система
линейно независимых векторов е* образует базис пространства. Так, например,
базис трехмерного пространства имеет три независимых вектора. Любой вектор
С в трехмерном пространстве может быть представлен в виде
(П-1)
где Ci — координаты вектора С в базисе е,-.
Различают три вида векторов. Векторы, связанные с точкой пространства,
например сосредоточенные силы Р<г), приложенные в некоторой точке упругого
тела (рис. П.1). Такие векторы называют связанными или полярными. При
исследовании равновесия или движения упругих элементов переносить
сосредоточенные силы в другие точки или смещать по линии их действия нельзя.
Примерами связанных векторов являются вектор скорости v элемента стержня
и вектор ускорения v (рис. П.1).
Векторы, которые можно переносить по линии их действия. Например,
сосредоточенные силы, приложенные к абсолютно жесткому (недеформируемому)
телу, можно переносить по линии их действия (при решении задач статики и
динамики абсолютно жестких тел). Такие векторы называются скользящими или
аксиальными, или псевдовекторами. Скользящим вектором является, например,
вектор мгновенной угловой скорости (ш) как абсолютно жесткого, так и
деформируемого тела. В последнем случае рассматривается бесконечно малый
объем сплошной среды (например,
элемент стержня на (рис. П.1 ).
Векторы, которые не связаны с
определенной точкой пространства,—сво-
Рис. П.1
Рис. П.2
290
бодные векторы. Примером свободного вектора является вектор b момента
пары сил а (рис. П.2).
В записи суммы слагаемых в формуле (П.1) использовано принятое в
тензорном исчислении правило: знак суммы можно не писать, если в формуле есть
два одинаковых индекса. Такие индексы называются немыми. Немые
(повторяющиеся) индексы можно заменять на любые другие индексы.
Неповторяющиеся индексы называются свободными.
Если базисные векторы взаимно ортогональны и модули их равны единице,
то они называются ортами прямоугольной системы координат. В механике
стержней получили широкое распространение неподвижные декартовы оси хи
x2i х3 (рис. П.З) и подвижные ортогональные оси х'и х?2, x's, связанные с
осевой линией стержня. Принята правая система координат, т. е. система
координат, когда оси переходят одна в другую поворотом против часовой стрелки
(например, на рис. П.З хх переходит в х2 поворотом относительно оси хъ против
часовой стрелки). Базисные векторы неподвижных декартовых осей обозначены
\j, базисные векторы подвижных декартовых осей — е,-.
На рис. П.З показаны два положения стержня: начальное (ненагруженное)
и деформированное после приложения силы Р. Например, вектор перемещения
и (рис. П.З) в связанной системе координат может быть представлен в виде
з
Наряду с прямолинейными декартовыми для записи уравнений и их
решений используются ортогональные криволинейные координаты: цилиндрические,
сферические и т. п. Например, при движении гибкого стержня по
цилиндрической поверхности наиболее удобными координатами для записи уравнений
являются цилиндрические координаты. На рис. П.4 показаны цилиндрическая
система координат и соответствующий базис {ei}(ez, ег, е?). Более подробно о
криволинейных осях сказано в п. 2,8.
Как уже указывалось, векторная форма записи уравнений равновесия или
движения стержня инвариантна по отношению к координатным системам,
однако при численных методах решения уравнений всегда переходят к
скалярной форме записи уравнений, которая зависит от выбранной конкретной системы
координат. От удачного выбора координатной системы существенно зависит
эффективность решения задачи. Основное отличие ортогональных
прямолинейных координатных осей с базисом {iy} от ортогональных криволинейных с
базисом {ej (рис. П.4) заключается в том, что базисные векторы i/ не зависят
Рис. ПА
19* 291
Рис. П.З
от точки пространства, а базисные векторы et изменяют свое направление при
переходе в другую точку пространства.
1.2. Скалярное произведение векторов. Скалярным произведением a b двух
векторов называется произведение их модулей на косинус угла между
векторами, т. е.
a-b = |a| |b|cos(a7b). (П.З)
Соотношение (П.З) позволяет определить угол между векторами:
соз(аГь)--^--; (П.4)
|а||Ь |
это имеет смысл только при выполнении условия
la-bl
|a||b
или
1, (П.5)
|a-b|^|a]jb|. (П.6)
Скалярное произведение, как следует из его определения, обладает
свойством коммутативности (перестановочности), т. е.
ab-ba. (П.7)
Необходимое и достаточное условие ортогональности векторов а и b
имеет вид
ab=0. (П.8)
Для единичных векторов ортогонального базиса в соответствии с (П.8)
справедливы следующие соотношения:
е'-е<=8Ио, ТфЧ <п-9>
где Ьц — символы Кронекера. Если, кроме того, |е/|=1, то базис называется
ортонормированным. Используя соотношения (П.9), скалярное произведение
двух произвольных векторов можно выразить через их проекции в
ортогональной системе координат:
з
a-b = (a£e(-) (b}ef) = {аф,) (е£-.е/) =2 аФь =4*>u (П. 10)
1=1
где й{, bi — проекции векторов а и b на координатные оси.
Рассмотрим скалярное произведение векторов си d:
с=Аа, d=Bb, (П.11)
где А и В — квадратные матрицы, т. е.
m,= (c-d) = (Aa-Bb). (П.12)
Можно показать, что возможны эквивалентные формы записи для
скалярного произведения (П.12):
mi = BTAab; m, = a-ATBb, (П.13)
где Ат, Вт — транспонированные матрицы, которые часто используются при
выводе и преобразовании уравнений равновесия и движения стержня. Если
векторы а и b равны, то скалярное произведение (П.12) представляет собой
квадратичную форму.
292
1.3. Векторное произведение двух векторов. Вектор- с к
ным произведением aXb двух векторов называется вектор
с = аХЬ, направленный перпендикулярно плоскости, в
которой лежат векторы а и b (рис. П.5), в ту сторону,
откуда поворот от первого сомножителя ко второму на мень-
ний угол виден против хода часовой стрелки, и равный по
модулю площади параллелограмма, построенного на этих
векторах, т. е.
|c| = |al|b|sin(a, b).
(П.И)
Рис. П.5
Из определения векторного произведения следует, что вектор с —
скользящий, если векторы а и b — связанные, и связанный, если один из векторов а или
b—скользящий. Так, например, вектор v линейной скорости материальной точки
тела (связанный вектор) есть векторное произведение радиуса-вектора г
(связанного вектора) и угловой скорости вращения тела о (скользящего вектора):
v=wXr. (П.15)
Если векторы а и b параллельны, то
aXb=0. (П.16)1
При перестановке сомножителей векторное произведение меняет знак, т. е.
аХЬ=—ЬХа. (П.17)
Вектор с, равный векторному произведению векторов а и Ь, можно
представить в виде определителя
с = аХЬ —
а1 а2 а3
(П. 18)
Ь] ь2 ь3
Из (П.18) следуют такие выражения для компонент с,- вектора с:
с1=а2Ьг—а3Ь2; c2=a3£>i—а\Ьг; сг=ахЬ^—а2Ъ\. (П. 19)
Для единичных векторов ортогонального трехмерного базиса {ej в
соответствии с определением векторного произведения справедливо соотношение:
efXe/=eyfcefc,
(П.20)
где Eijk — символы Леви-Чивита, равные нулю, если среди индексов i, j, k
имеются одинаковые; единице, если i, j, k различны и следуют в порядке 123, 312,
231; минус единице, когда порядок следования чисел отличен от предыдущего,
т. е. 213, 321, 132. С использованием символов ъцк векторное произведение
(П.18) можно записать в виде
Ci=EukCtjbk.
(П.21)"
В качестве примера векторного произведения найдем момент Т силы Р<1),
приложенной к стержню (рис. ГТ.1), относительно точки О. Если ввести
обозначение г, для радиуса-вектора точки приложения силы, то момент
T = riXP(1)-
(П.22)
При исследовании статики стержней, когда деформациями стержня в
уравнениях равновесия можно пренебречь, а также при исследовании статической
устойчивости часто один из векторов векторного произведения (П.18) известен
293
(например, вектор а), тогда векторное произведение (П. 18) удобно представить
в виде
с=АЬ, (П.23)
где А — матрица вида
А =
0 -
а3
а2
-«з
0
«1
а2
—а1
0
(П.24)
1.4. Смешанное или скалярно-векторное произведение трех векторов.
шанное произведение трех векторов записывается в виде
Сме-
(П.25)
с(аХЬ) =
(П.26)
(П.27)
B=c-(aXb),
или в виде определителя
С\ С2 С3
ах а2 а3
Ьх Ь2 Ь3
В частном случае, когда все три вектора лежат в одной плоскости,
с-(аХЪ)=0.
Скалярно-векторное произведение обращается в нуль и в том случае, когда
два вектора одинаковые, например с=а:
а-(аХЬ)=0. (П.28)
Введенные символы Леви-Чивита представляют собой смешанное
произведение единичных ортогональных базисных векторов:
еу*=еНе/Хе*). (П.29)
1.5. Двойное векторное произведение. Двойное векторное произведение
записывается в виде
d=aX(bXc), (П.ЗО)
или
ax(bxc) = (a-c)-b—(a-b)-c. (П.31)
Рассмотрим два вектора, получающиеся из (П.31) циклической
перестановкой векторов a, b и с, т. е.
е=ЬХ(сХа) = (Ь-а)-с—(Ь-с)-а (П.32)
и
1=сХ(аХЬ) = (с-Ь)-а— (с-а)-Ъ. (П.ЗЗ)
Сложив векторы d, е и I, получим тождество (тождество Лагранжа)
аХ (ЬХс) +ЬХ (сХа) +сХ (аХЬ) =0. (П.34)
1.6. Преобразования базисных векторов. Для того чтобы найти положение
стержня в пространстве для деформированного состояния, например вектора и
(рис. П.З), и положение базиса, связанного с осевой линией стержня {е*},
необходимо предварительно выбрать систему отсчета, например систему
координат Xi. Однако, при исследовании статики и динамики упругих элементов под
действием нагрузок часто более удобными являются координаты, связанные
определенным образом с самим упругим элементом, например координаты,
определяемые базисом {ег0} на рис. П.З. При решении уравнений равновесия
стержней (или уравнений движения, когда рассматривается динамика)
возникает необходимость перехода от одной системы координат к другой, что требует
знания основных операций преобразования базисных векторов.
Получим выражения, позволяющие переходить от одного ортогонального
базиса к другому. Пусть {е,}(/=1, 2, 3)—некоторый базис в трехмерном
пространстве, определяющий направления связанных координатных осей, а {е,-г} —
базис, связанный с тем же сечением стержня до нагружения его внешними си-
294
лами (см. рис. П.З). Каждый из векторов базиса {е,} можно разложить по
векторам исходного базиса {ei0}:
ei=fneio + /i2e2C+^i3e3o;
е2=/г^нгИгавгс + ^зо".
63 = /з1еЮ + /з2б2С + ^33^30,
или
*
3
е£ = 2 'i/e/o = ^/e/0(i = I, 2,3), (П.35)
/=1
где 1ц — проекции базисных векторов е^ на направления, определяемые
векторами е/о. В системе уравнений (П.35) коэффициенты 1Ц образуют матрицу
L =
*21 ^22 '23 >
191 'яа 'я.ч
(П. 36)
131 ^82 '33
которая называется матрицей линейного преобразования базиса {егс} (матрицей
перехода от базиса {е/0} к базису {е/}).
Соотношения (П.35) можно записать в более компактной форме:
ег=Ьте10, (П.37)
где LT—транспонированная матрица.
При обратном преобразовании базиса {ej к базису {ей} имеем
его = Lef.
В качестве примера найдем матрицу преобразования L при произвольном
смещении и повороте тройки базисных векторов (рис, П.6). Так как при
поступательном смещении координатных осей базисные векторы совпадают с
исходными, то можно рассмотреть только преобразование, связанное с поворотом
базисных векторов. Произвольный поворот координатных осей можно
представить как три независимых поворота. Рассмотрим поворот исходных
координатных осей относительно оси, совпадающей с направлением вектора е[0, на
положительный угол $i (рис. П.6,а), в результате получим
1 i=eiC;
i'2=cos fh -e20+sin -0] • e30;
iV=—sin ©1 ■ e2c+cos fti ■ e3o-
(П.38)
Рис. П.6
295
Соответствующая матрица перехода
V
Ц =1
VI
е30 е20 е30
О
1
О COS &!
L0 —sin *,
Элементы матрицы L^
О '
sin^ . (П.39)
У L0 —sln^ cosOj-
, так же как и элементы любой матрицы пово-
можно рассматривать как направляющие косинусы
рота координатных осей,
между векторами базисов {е,} и {ij.
Второй поворот на положительный угол Ф3 осуществим относительно оси,
совпадающей с направлением вектора £3 (рис. П.6,6). При этом
V=cosfta.I,' + sin»8-V;
у = — sin &S-V +cos &s- V;
(П.40)
•з — '3
Соответствующая матрица перехода
1я
V
COS
i2'
sin94
J3
cos &3
0
(П.41)
sin03
13 0
Наконец, последний поворот координатных осей осуществим относительно
оси, совпадающей по направлению с вектором «"г—е2, на положительный угол
t>2 (рис. П.6,е), после чего базисные векторы \"i совпадут с векторами е,.
Соответствующая матрица перехода имеет вид
(П.42)
Общая матрица L перехода от базиса {е(0} к базису {е*} (матрица
преобразования) при повороте координатных осей равна произведению матриц Ll&a,L&a
и Lt
V
' COS %
0
sin в»
!2
0 ■
1
0
l3
— sin 9½-
0
cos Oo *
'вг
hi — Lft2L&a4,'
(П.43)
или
«Чо
L = e2
(П.44)
^20 e30
cos -O-g sin % cos &j-f- cos % sin 9a sin $t —
-fsinOgsin^ —sin02cos0j
cos Ba cos % cos ©з sin ^
sin $2 sin ^з cos $i sin ^£ sin ^з sin ^i "t"
—cos $a sin 9^ + cos 92 cos 0j
Возможен поворот координатных осей и в другой последовательности,
например т>2—^з—*Qi (рис. П.7); здесь углы ®i называются самолетными углами.
Матрица перехода от базиса {е;о} к базису {ej} для самолетных углов
"cos Э2 cos 9-3
— sinQs
_sin % cos %
h—Cn
cos &« COS % —
-20
sin 93cos &2 +
—sin 9j sin 93 sin b2 -[-sin ^ cos 03 s in 02
— cos &j sin 93 cos &j cos &3
cos&3sin02+ sin&3sinft2 —
.-f-sin 0a sin 93 cos S2 —sin 9j cos &3 cos 83
сзо
—cos 0j sin02
sinQj
cos 9j cos 02
(П.45)
296
Углы f},-, входящие в элементы матриц
L (П.44) и (П.45), — это разные углы. При
малых углах поворота матрицы (П.44) и
(П.45) принимают вид
или
где
ею
1
"20
S
&3
1
езо
-»1
AL=E + ALi,
е
ю
ei
ДЦ = е2
е5
0
-в,
]•
е20
в.
3
з 0
L *. -Л
с30
-V
0 J
Р«с. Я.7
Покажем, что матрицы L [см. (П.44) и (П.45)] удовлетворяют условию
L-' = LT, (П.48)
где L-1—обратная матрица.
Рассмотрим соотношения (П.37): исключая е;с, получаем e; = LLTe;=Ee{,
т. е. LLT=E, откуда следует L~l=LT. Так как LL-1=LLT—Е, то элементы 1ц
матриц L (П.44) и (П.45) удовлетворяют следующим шести условиям:
/2 _l /2 i ;2 _ 1.
Ml ^ '12^ М3— 1'
/2 _i_ ,2 i г2 1.
'21 ~*~ '22 "т" '23 ~ ''
или
Так как
то получаем
еще
шесть
/2 _L/2 -J-/2 — !•
131 ^ *32 ■ 'зз~ 1>
luhi + I12I22 + ^1з1гз=0;
^1^31 + W32 4-^23^3 = 0;
/з1^П+^32^12 + ^33^13=0,
lijlki — Oik-
LTL=E,
дополнительных условий:
(П.49)
(П.50)
(П.51)
Матрица преобразования L базисных векторов позволяет установить связь
между компонентами вектора а в разных базисах
di=^akolik,
(П.52)
где ак о— компоненты вектора а в базисе {ei0}; щ — компоненты вектора а в
базисе {е,}.
Соотношения (П.52) можно представить в векторной форме записи:
a=La0. (П.53)
297
Рис. 11.8
Если требуется выразить
компоненты вектора а в базисе {ef0} через
компоненты в базисе {ei}, то из (П.53)
получаем
a0 = LTa. (П.54)
Матрицы L устанавливают связь
между векторами базисов {е<0} и {ег},
связанных с произвольным сечением
стержня (см. рис. П.З), до и после
нагружения стержня силами.
Получим матрицу L0 преобразования
базиса {i/}, который совпадает с
базисом {е/оо}, связанным с осевой линией
прямолинейного стержня (рис. П.8), к
базису {е;с}, связанному с осевой
линией криволинейного стержня. Базис {е,о}
характеризует естественное состояние стержня до нагружения. Соответствующие
углы поворота обозначим f>°/. Матрицу Lc получают аналогично матрице L:
cos V sin V cos V + ccs &2° sin 03° sin V—"
+ sin 02° sin &/
COS ftj0 cos ft3°
sin 02° sin a3° cos V -
— cos 92° sin V
Получим матрицу перехода от базиса {i;} (или, что то же, от базиса {еу0о})
к базису {е;-} (рис. П.8). Так как
е/о-^ + ^2 + ^/3^: (П56)
L° =
COS ©2° COS ftg°
— sin %°
sin 92° cos 030
sin 92° cos bj°
cos V sin V
sin V sjn Vsin V +
+ cos Vе °s V
(П.55)
то, исключая из (П.56) e/o, получим
3 з
Ч
= 2-» 2j ki^-j *v = 2j
»d).
/«)
/ = 1 v=l
где Щ; — элементы матрицы
L^LIA (П.57)
Напомним, что матрица L° — это матрица с известными элементами,
характеризующими пространственную форму осевой линии в ненагруженном
естественном состоянии; L — матрица, характеризующая изменения осевой линии
стержня в нагруженном состоянии по отношению к его естественному состоянию.
Если в естественном состоянии стержень прямолинейный, то L°=E.
Зная матрицу Ul\ получаем соотношения, связывающие векторы базисов
{еу} и {i/}, аналогичные соотношениям (П.37):
е7= (L< '>)Ti,= (L°)TLTi,-. (П.58)
Матрица (П.57) позволяет определить компоненты щ вектора а в базисе
{е;} (введем для этого вектора обозначение ае), зная его компоненты ах. в
базисе {i;}, т. е.
или в скалярной форме
-Ю)ах
(П.59)
а1 =2 а*}14-
i=i
298
Справедливо и обратное преобразование:
а*=(Ь0>)тае. (П.60)
Полученные соотношения (П.59) и (П.60) позволяют при преобразованиях
уравнений переходить от одной координатной системы к другой.
2. Основные положения дифференциальной
геометрии
2.1. Геометрическое значение производных
радиуса-вектора. Рассмотрим две точки А и В, соответствующие двум значениям аргумента
s и s+As, на плоской кривой, являющейся годографом вектора г (рис. П.9).
Приращение радиуса-вектора г
Ar=ri—г=АВ.
С уменьшением As точка В стремится к точке А, а вектор АВ (секущая),
вращаясь относительно точки А, переходит в вектор А, направленный по
касательной к кривой в точке А, поэтому
Дг
lim
дя^-о As
dr
т. е. производная векторной функции r(s) по ее скалярному аргументу s есть
вектор, направленный по касательной к кривой.
Покажем, что модуль вектора А равен единице. При малой величине As
дуги кривой ее можно рассматривать как дугу окружности радиуса р
(соприкасающаяся окружность) (рис. П.9), поэтому
I Дг I , I р sin ДОо
| А | = lim — = lim ■ 2
As-s-0 I As I a$2-s.o| pA92
Окончательно получим
dr
= 1.
ds
= e,
(П.61)
Покажем, что производная от вектора eL есть вектор, ортогональный е^
Так как ei-ei=l, то, дифференцируя это выражение, получим
(-*)-
С
(П.62)
откуда следует, что вектор deL/ds ортогонален вектору ei, а значит, совпадает
по направлению с вектором е2. Производная вектора е! по s
Ае,
е2. (П.63)
dei ,. Де1 ..
— hm —*= hm
ds as^.0 As
Так как Aei =
(П.63) получаем
d2r_dei_ 1_
ds2 ds p
As-»0
As
:At)2|eij, a As=A,6'2p, то из
(П.64)
2.2. Пространственная кривая.
Касательная к пространственной кривой определяется
так же, как и для случая плоской кривой.
В отличие от плоской кривой (рис. П.9) к
касательной в точке Л для пространственной
кривой (рис. П. 10) можно провести
бесчисленное множество нормалей, лежащих в
Рис. П.9
299
*3
Рис. П.10
Рис. U.tl
плоскости а, нормальной к вектору et. Возьмем точку В (рис. П.II), близкую
к А. Пространственную дугу АВ можно приближенно считать дугой плоской
кривой. Плоскость р, проходящую через касательную AM и точку В, можно
считать плоскостью, в которой лежит дуга АВ. В пределе при стремлении точки
В к А эта плоскость займет строго определенное положение, которое
характеризуется тем, что кривая наиболее плотно прилегает к этой плоскости. Эта
плоскость называется соприкасающейся плоскостью к пространственной кривой
в точке А. Главной нормалью к пространственной кривой в точке А называется
нормаль AN, расположенная в соприкасающейся плоскости. В каждой точке
пространственной кривой имеется единственная главная нормаль, поэтому
целесообразно один из векторов подвижного базиса (вектор е2) связать с этим
направлением, тем самым становится определенным и направление вектора е3,
так как все три вектора должны образовать правую систему координат.
(Отрезок AL, ортогональный главной нормали, называется бинормалью, и
направление вектора е3 совпадает с направлением бинормали). Такие связанные оси
называются естественными осями.
Дугу АВ можно приближенно считать дугой соприкасающейся окружности,
лежащей в соприкасающейся плоскости. Ее центр находится на главной нормали
к кривой. Покажем, что вектор, равный второй производной от радиуса-вектора
г, лежит в соприкасающейся плоскости. На рис. П.11 в точке А кривой показана
соприкасающаяся плоскость р\ Возьмем точку В на кривой, близкую к точке А.
Кратчайшее расстояние точки В от плоскости Р равно
М = е3-АВ=е3-(г1— г), (П.65)
где е3 — вектор, ортогональный плоскости |3. Разложим п в ряд Тейлора:
или
/. •• As2 - As3
ДА = е3-1 г As + г -j- + г ~^~+- ■
// As2 /// Дь3
Дй = (es-r) As + (е3- г) —- + (е3-г) -^—Ь
6
Вектор г' ортогонален вектору е3, поэтому (r'=ei)
" As* ,,, As3
ДА = (е3-г) — -f (е„т ) — +.
(П.66)
(П.67)
(Л.68)
300
Вектор г ортогонален вектору ej, значит Дй будет минимальным (т. е. кривая
наиболее плотно прилегает к плоскости |3 в точке касания), когда е3-г=0, а это
возможно в том случае, если вектор г ортогонален вектору ei, т. е. лежит в
соприкасающейся плоскости. В соприкасающейся плоскости для проекции дуги
АВ существует соприкасающаяся окружность, поэтому, по аналогии с плоской
кривой, имеем
fir de, I
£L L=—еа, (П.69)
ds2 ds p
только в формуле (П.69) р — это радиус кривизны пространственной кривой.
Радиус кривизны есть радиус соприкасающейся окружности (лежащей в
соприкасающейся плоскости). Кривизна кривой обращается в нуль (радиус
кривизны обращается в бесконечность) в точках перегиба. Радиус кривизны не
зависит от выбранной системы координат, в которой рассматривается кривая
линия, т. е. является инвариантной величиной.
2.3. Производные базисных векторов. Рассмотрим производные единичных
векторов ej по координате s. Так как производная от вектора по скалярному
аргументу есть вектор, то представим его в виде разложения по базисным
векторам {ej. Определим пока положение только одного единичного вектора еи
направив его по касательной к кривой, например к осевой линии стержня
(рис. П.10):
з
dej «~1
—=2j *I/«V = *;/ег (п-7°)
i=i
где *лц—элементы некоторой матрицы [иг/]. Покажем, что матрица [х,-/] косо-
симметрична, т. е. х,7=—Щи Умножив скалярно (П.70) на е*, получим
de,-
-rLeA = x/Jfe. (П.71)
ds
Так как е,--^=6^, то после дифференцирования по s имеем
i^eft + ^ei=0, ,1,.72,
откуда в соответствии с (П.71) получаем
Щк=—хм. (П.73)
Из (П.73) следует
и« = 0 (i=l, 2, 3), (П.74)
т. е. матрица [х,;] имеет всего три независимых элемента:
0 — *з *2*1
х3 0 — хх . (П.75)
\Н}]
-у.» х, О
*2 л1
Элементы матрицы [х,;] характеризуют геометрию кривой, с которой
связан трехгранник осей. Геометрический смысл величин щ, >с2 и щ
устанавливается в п. 2.4. Аналогичные выражения можно получить и для производных
векторов базиса {его}:
det-0
-^ = xi/oep0. (П.76)
Вместо матрицы [щ] можно перейти к вектору и (и х0) и выражения для
производных (П.71), (П.76) записать в виде
de$
-^- = 9eXei = eA/i*;-eA 0* = *уе/); (П.77)
3€1
us
;ХоХе0~ еЯр»ирОе"0>
где
А
S w
(П.78)
(П.79)
/=1
В развернутой форме записи, например для (П.77), получаем следующую
систему трех соотношений:
de,
(П.80)
2.4. Геометрический смысл компонент вектора к,. При выводе соотношений
(П.80) никаких ограничений на векторы е2 и е3 не накладывалось, поэтому
соотношения (П.80) являются наиболее общими. Для естественных осей из
соотношений (П.80) имеем (в этом частном случае для вектора и введено
обозначение Q)
ds
de2
us
de3
— x8e2~"
— ~- XJ еЯ
— Х2е1
" x2e8'
-г-*л;
- х^е2-
de,
1
ds
' вч — --чС
Зс2
Qae;
3-
(П.81)
откуда следует, что Q2—0, a Q3=I/p, т. е. компонента £23 вектора Q есть
кривизна пространственной кривой. Окончательный вид производных единичных
векторов естественных осей:
de,
1 :2яе,
ds
Ь3Ь2>
ds
= — S3ex + £ге3;
ds
— зс^Сд»
Формулы (П.82) — (П.84) называются формулами Серре-Френе.
Осталось выяснить геометрический смысл компоненты Qi.
ортогонален вектору ез, кроме того, он лежит в плоскости а,
соприкасающейся плоскости р\ поэтому из рис. П.10 имеем
(П.82)
(П.83)
(П.84)
Вектор de3/ds
ортогональной
т. е.
de3
ds
= lim(
As-К) '
'Дe3^
< As j
1 e8 =
— lim
As-yO
d9]0
As
e2^ -
d910
ds
-2'
ds
(П.85)
(П.86)
Компонента £3j характеризует кручение кривой (мера уклонения кривой от
соприкасающейся плоскости).
Вращение естественных осей при движении начала (точки А) по кривой
характеризуется вектором Я, который называется вектором Дарбу. Вектор
Дарбу Q имеет только две компоненты Qi и £23 (£22=0) в отличие от общего
случая, рассмотренного в п. 2.3, когда все три компоненты Ki отличны от нуля.
302
Вектор П лежит в плоскости, перпендикулярной соприкасающейся плоскости
Р (рис. П.12).
В п. 2.3 был получен вектор х, характеризующий поворот произвольного
базиса при перемещении по кривой линии, например базиса, у которого е2 и
е3 направлены не по главной нормали и бинормали к кривой линии (как у
естественных осей), а по главным осям сечения стержня. Такой базис {е,} показан
на рис. П. 13. Главные оси (е2 и ез) повернуты на угол f)10 относительно
естественных осей. Найдем компоненты вектора х в главных осях сечения стержня.
Матрица перехода от базиса {е',} к базису {е,} имеет вид
е1
I
0
0
е2
0
cos 0,0
— sin010
е3
0
sin*^
cos 910
L<1> = e8' 0 cos9j0 sinP10 . (П.87)
e3'L0 —sin010 cos &10-*
Поэтому, перейдя в выражении (П.79) к базису {е,}, получим
x=Kiei + QS sin т)юе2+йз cos €Коез. (П.88)
Входящая в выражение (П.88) компонента щ представляет собой сумму
двух величин: кручения осевой линии стержня fii и скорости вращения главных
осей относительно естественных осей df>10/ds, т. е.
*i = £i + ^T-- (П.89)
ds
Угол -Ою может быть вызван деформацией стержня, но может быть и не
связан с деформацией, как, например, для естественного закрученного стержня
(сверла). Получим выражения для кривизны Q3 и кручения Qj через декартовы
координаты точки кривой, используя естественный базис. Так как
d2r
— = о3е8' (г = хЛ + х2\2 + Hh), (П-90)
то
^»
d2r
ds2
-f x22 -f x32;
в частном случае плоской кривой (при ;с3 —0)
Яа^Ухх* + х2\
(П.91)
(П.92)
*М
Х2п
hn
Л?
\
-^-
Рис. П.12
Рис. ПАЗ
303
или, полагая x2(xi) (х2 есть функция от xt), имеем
3 dXl2 / [ ^ Ux J
2 1
3/2
(П.93)
Для плоской кривой можно получить еще одно выражение для кривизны
QS', так как
dx, dx2
—— = cosy; — = sin?,
о? ds
то, дифференцируя (П.94) по 5, получим
..1 ..I
х, = — — sin у; х2 — — cos<p.
Р Р
Умножив соотношения (П.94) на (П.95), получим
.. .. 1 .... 1
cos2 у, х2 хх =
У'х ^2 —
р
— sin2<p.
р
Из соотношений (П.96) получаем
й-З == V Р == ^-1^2 Х2 Х|.
Так как
1 .. 1
е2 = 7Г г; ез = (ei X е2)
»3
Q.
(гХг),
а кроме того, из третьего уравнения системы (П.84) следует
—ег-е3=&1,
то для кручения Qx получаем формулу
Г(гХг[ 1_
Qj =
(г)5
(=1
Xj Х2 Х3
С2 Xg
X] х2 х3
(П.94)
(П.95)
(П.96)
(П.97)
(П.98)
(П.99)
(П.100)
В качестве примера найдем значение кривизны и кручения для винтовой
линии (рис. П. 14) (например, осевой линии цилиндрической пружины).
Координаты точки В:
Xi=rsin(p; x2=r<$tga; Xs=rcosq>. (П.101)
Так как хг связано с длиной дуги AB=s соотношением
s= ? j/ra + г'tg* а = 9/С (K = r Vl +tg2tt) (П.102)
(где а — угол подъема винтовой линии), то, переходя к параметру s, получим:
s 5 s
X^-^rSin —; Х2 = Г~ tga; Х3 = Г COS—
л К
к
(П.103)
Подставив выражения для производных от xt по s в (П.97) и (П.100),
после преобразований имеем
г 1
^я
ех
Га + Г2 tg2 a г
Г tga 1 Sin 2a
Г2 + гя tg2 a ~ r 2
cos2 a = const;
= const,
(П.104)
(П.105)
304
2.5. Уравнения, связывающие щ с
углами ■&/. При перемещении трехгранника осей
по пространственной кривой оси
поворачиваются по отношению к первоначальному
положению. Новое положение осей, как это было
показано в п. 1.8, можно определить с
помощью трех независимых углов Фь f>2 и Ф3,
поэтому и вектор у., характеризующий
изменение положения осей, должен зависеть от
этих углов. Получим эти зависимости,
воспользовавшись (П.70), (П.76) и
соотношениями
е£ = 'ье*о; ev0 = lk№' (П.106)
Дифференцируя е;, имеем [с учетом (П.70)]
de£ dli* , , dev0
бТ Cv0 ь ~бТ ~ W/e*- (П.107)
Рис. П.14
6s
Исключая из (П.107) ev0 и dev0/ds, имеем [используя (П.106) и (П.76)]
det- _d/--.
6s 6s 'ravem + ^\£RpvxpOe"0 = eft/£x/e&-
Исключая tno^lkn&k, окончательно получаем
det _d^\
6s
(П.108)
(П.109)
Дважды встречающиеся индексы можно заменять на любые другие (новые),
например в первом слагаемом левой части можно v заменить на п, в результате
получим
1 ' ' ' ' ' ■ (П. ПО)
us
lktl + /iv£fiPvXpO/ftn) efc = ektt*ph
откуда
*.
/Iх/
Kl =
d/
£ft
+enp Jtvxpn *An
Найдем, например, выражение для щ. Полагая k~3, i=2, имеем
(П.Ill)
*t =
d/
2И
ds
+ Ertpv^2vxp0 J ^зп
61
21
ds
-|_ £
lpv^2vKP0 J ^31
+
+ (^ + £2Pv'2**po) '» + ("^f + V'avv) '»■ (П-112)
Выражения для вторых слагаемых в скобках равны
eipv^2vXpO — *23Х20
*22Х30>
В результате имеем
61
21
ds
-Г*23х20
E2pv/2vXpO — ^21х30 ^23Х1(Ь
E3pv'2vXpO ~ '22ХЮ '21*20'
6L
(П.113)
,)^31+(-
^22х30 ^31 ~Ь
122
6S
T^21XJ
80'
" '23х10
*32 ~Г"
*~Г1 j I" *22Х10 'г!Х20 1 >
20—6011
(П. 114)
305
или
61
и,=
21
^31 +
61
22
^32 +
d/
23
^зз + ('гг'зз — 'гз^82)хю +
ds 0i ' ds "м ' ds
+ (^23^31 'г]'зз)Х20 "T" (^2l'32 '22^3l)>C30' (11.115)
Проделав аналогичные выкладки, получим выражения для *t2 и Кг-
61
ds
si d'
32
ds
*12 +
d/
33
ds
^13 + (Wl3 Wj2)ZJ0 + (^33^11 ^31^13)^20 +
+ ('ак,2 'з2^и)хзо^
(П.116)
61
11
dZ12 d/]3
о j ^21 + ~, ^22 + ~Z ^23 + (^12^23 /13^22)^0 + (^13^21 'ц'2з)Х20 +
6s 6s ds
+ (fll'32 — f12^l)x30- (П- l 17)
Подставив в (П.115) — (П.117) вместо /,;- их выражения через углы $\, $2
и Фз, получим
и1 =
d0,
-х10 cosft2cos&3
6%
■ sin &2 + (sin 92 sin &j +
ds ' iU / " " ds
+ cos &2 s*n &з cos $1)5½ + (cos ^2 sin ^3 s*n ^i — s*n ^2 cos ^l)v-30l
(П.118)
6b,
Щ
-\- xl0 1 sin 63 + c,os O3COS ^,«20 + cos % sin^ix3o- (П.П9)
ds \ ds I
6§3 I d6, i
x, = cos 02 + +xio sin ^2cos \ + (sin ^2 sin &з cos &i —
ds \ ds /
— cos92sin01)x20 + (cos&acos^ + sin92sin,% sin&x)x30. (П. 120)
В выражениях (П.118) — (П.120) углы #1, $2 и #3 отсчитываются от
положения осей {ei0}, характеризующих естественное состояние стержня, которое
принято за начальное. Систему соотношений (П.118) — (П.120) можно записать
в виде одного векторного, которое удобно при преобразованиях;
где
x=rLi__-+Ut(i> (*(»>= x.0ez).
sin 0,
(П.121)
»1
&2
h
; 4 =
cos Э2 cos 03
— sin03
sin &2cos Ь3
0
1
0
cos Э,
dfl
ds
%
(П.122)
ds
■—локальная производная.
Вектор Xo(1) не равен вектору х0, который характеризует геометрию кривой
в начальном состоянии. Вектор и0(1) имеет компоненты в базисе {е,}, равные
компонентам вектора х0 в базисе {е,о}. Выражение (П.121) дает возможность
установить, как изменяется вектор и0, характеризующий геометрию кривой, если
геометрия кривой в начальном состоянии (¾¾) известна.
Найдем вектор и0, характеризующий начальное состояние кривой, считая,
что по отношению к декартовой системе координат {i,} известно положение
базиса {его} в каждой точке кривой (рис. П. 14), т. е. известна матрица L0 (П.55).
306
Для векторов е/о имеем
efo— 2j ' / pip -
Единичные векторы i от s не зависят, поэтому, дифференцируя е,о по s,
получим
de,0 d'?P
=-г- L =
ds 6s "р-^^/^0 ■
Так как ip = 'fePefto> то после преобразований выражения (П. 123) получим
(П. 123)
В более подробной форме записи:
d/
(ю
de
21 1° +
*31 +
d/
ds
■о
22 1° +
d/1
de
23 /0
33»
(П. 124)
(П. 125)
d/
31
d/
о
32
'20
— d£ 'll + A. ZI2 +
dl
о
de М2-Г d£ '13,
d/
0
щ12
XM- d£ <21 + de "22
/° 4-
d*
0
13
de
'23»
ИЛИ
d0,° d03°
Xin = cos y2° cos §03 — —— sin 02°;
40
ds ds
d&2° d»,°
(П. 126)
*20 —
ds
d{*s°
хяп = —:— cos &a° -f
*30
ds
ds
dy
ds
sinV;
■ sin02°cosSjO.
Систему (П.126) можно представить в векторной форме:
"cosVcos&g0 0 —
«0 = Ц0
d-d0
ds
, где L,°
sin'Og
]
(П.127)
-sin03° 1 О
_Sinft2°COSy 0 cos02°
2.6. Производная вектора в связанной системе координат. Дифференцируя
вектор а по s, получим
з з
da
dat-
d<?
■%^t°< +
s
af
def
~dT
(П. 128)
t=i t=i
Учитывая соотношения (П.70), из (П.128) получим
da da
ds ds
■f«Xa.
20"
(П.129)
307
где d/ds— локальная производная, характеризующая изменение вектора а в
подвижной системе координат. Если компоненты вектора и известны, то удобнее
для преобразований вектор хХа представить в виде
О -хя
ИХ» = А^а, где Ах =■
О —кх
:, О
(П.130)
Для естественных координат (когда у. есть вектор Дарбу) матрица Ах
равна
А.
0
0
■~bbq
о
0 —2,
2,
0
(П.131)
Следует иметь в виду, что матрицы Ах (П.130) и (П.131) являются
вырожденными, так как их определитель равен нулю. В результате имеем
следующее выражение (при известных х,-) для абсолютного вектора а:
da da i А я
as as
(П. 132)
Полученные выражения производных единичных векторов е/ (П.80) и
произвольного вектора а (П. 132) через локальные производные используются при
записи уравнений в связанной системе координат.
3. Приращения компонент векторов
при изменении положения связанных осей
3.1. Приращения проекций векторов в связанной
системе координат. При выводе уравнений равновесия и движения стержня требуется
определять приращения компонент векторов внутренних и внешних сил и
моментов и векторов, характеризующих положение и форму стержня в пространстве.
На рис. П. 15 показано два положения базиса, связанного с осевой линией
стержня: с — начальное и б-—конечное. При перемещении базиса {е;0} в
пространстве вектор а0 может изменяться как по направлению, так и по модулю.
При выводе уравнений равновесия или движения в связанной системе
координат необходимо знать изменения
проекций вектора, т. е.
**п
а)
Дйг=а,-—а,-о,
(П.133)
Рис. П.15
где а,о — проекции вектора ао в
исходной системе координат (рис. П.15,а);
at — проекции вектора а в новом
положении координат (рис. П. 15,6).
Приращения Aui могут быть как малыми, так
и конечными.
Для преобразований уравнений
более удобно иметь дело не с
компонентами Да,-, а с вектором Да (рис. П.15,6"):
Да = а—а0. (П. 134)
Векторы а и ао заданы в разных
базисах, т. е.
з з
а=2 арг, го=2 д'<>е/о, (П. 135)
l—\ i — \
308
поэтому из {П.134) получить соотношения (П.J33) нельзя. Чтобы соотношения
(П. 133) были компонентами вектора Дал надо ввести вектор а0(1), равный
3
.О)
£ at-0ej (а{01) фа0).
(П. 136)
где о,-0 — компоненты вектора а0 в базисе {е,о}- Поэтому при определении
приращений векторов в связанных осях следует рассматривать векторы вида
Да=а—а0<'>. (П.137)
При исследовании статической устойчивости стержней требуется
определять приращения внешней нагрузки, которая, например, при потере стержнем
устойчивости остается по модулю неизменной, а изменяет только свое
направление по отношению к подвижной (связанной системе координат, т. е. |а0| =
= |а|). Если считать, что состояние о (рис. П.15,о) соответствует критическому
состоянию равновесия стержня, а состояние б— новому состоянию равновесия
стержня после потери устойчивости, то требуется определить приращения
компонент вектора а при условии, что |al = ja0|. В этом случае приращения
компонент вектора а вызваны только изменением направления вектора а0 по
отношению к связанной системе координат при переходе в новое состояние. Вектор
а, представленный в базисе {е,} через компоненты в базисе {е;0}, равен (см.
п. 1.7)
a=La0. (П.138)
Вычитая из вектора (П.138) ао^, получим приращение Да вектора а в
базисе {еу}:
Aa = La0—а0<п, (П.139)
где а0(1) = Еас, поэтому
Да=(Ь- Е)а0, (П.140)
где [для матрицы L вида (П.44)]
"cos 02 cos &з — 1 cos ^2 s*n ^з cos ^1 "Т~
-j- sin &2 sin йг
L — E= — sin93 cos 0Х cos b3 — 1
sin $2 cos 03 sin ^2 sin ft3 cos Gx —
— cos 92 sin ^i
cos &2 sin G3 sin Gj —
— sin 9a cos &x
cos ид sin 9j
sin&2 sinGgSin^j -f-
+ cos 92 cos b-x — 1
Выражение (П.140) для приращения вектора а дает возможность
определить приращения компонент вектора а<з при любых углах поворота О/
трехгранника связанных осей.
Рассмотрим случай, когда углы поворота связанных осей малые [матрица
(П.46)]:
О 0Ч
Да =
-ея
о
■в.
о
?о>
(П.141)
или
Да = (^3020-^2030)61+(-03010+^^30)62+
+ (^2010-^1020)63-
(П. 142)
Если компоненты Оу0 известны, а углы ft,- неизвестны, то вектор Да удобно
представить в виде
Да=СО, (П.143)
где
L
0
#30
О2о
—«30
0
«10
«20 "I
—«ю
о J
* =
*i
%
Ь
309
J
Выражения для приращений векторов необходимы при выводе уравнений
равновесия, когда при деформировании стержня направления и модуль нагрузки
изменяются.
4. Элементарные обобщенные функции
4.1. 6-Функция. Рассмотрим функцию Ф (г), имеющую
максимум при г—0 и быстро убывающую с ростом z (рис. П. 16). Получим
<х>
<£(z)dz=l. (П. 144)
-со
Сформулированным условиям удовлетворяет много функций, например
Ф1(2> = ~ГтЦ; ®&)=V=e~Z*- (П. 145)
тс 1 -\- г2 У тс
Преобразуем функцию F\, увеличив ее значение при z=0 в т раз,
одновременно сжав ее по оси z также в т раз, что эквивалентно введению новой
функции вида
ф(шг)= Г1 Ш . (П. 146)
На рис. П.16 показано качественное поведение функции Ф\(тг) для ряда
значений т{т>\). Функция G)i(mz) при любом т удовлетворяет условию
(П. 144). При неограниченном увеличении т получаем функцию со следующими
свойствами (рис. П.17):
|0, z<0;
lim Фх(тг) = 6(г)=1оо, z = 0; (П. 147)
f(z)dz = I,
(П. 148)
где 6{z) —функция Дирака. Из {П. 148) следует, что размерность б-функции
[6(z)]=l/[z].
S(z)k
Рис. П.16
О Z
Рис. П. 17
310
4.2. 6-Функция безразмерная. При переходе к безразмерным уравнениям
(в частности, к безразмерной независимой переменной) приходится иметь дело
с б-функциями вида б(ае), где е — безразмерная переменная. Покажем, что
справедливо следующее равенство:
S(ae) = r-S(E).
)а\
(П. 149)
Рассмотрим интеграл от 6(e):
ос
ОС
Г e(E)de= [\а\8(ав)йе.
—со
-со
При а>0 имеем
ОС
со
(a?(fls)ode= le(£l)dea=l (е, = fle);
—оо
-CD
при а<0
00
00
-со
00
f |л|е(ае)бг= — C«(aE)ade=- f«(e1)d?1= С с (£1)ds1 = 1,
-со —со оо —00
—СО
т. е. функция |а|6(ае) удовлетворяет всем свойствам б-функции.
Аналогичным образом могут быть введены и функции, являющиеся
производными от б-функции, например б'(е):
lim 4Y(/nE)=e'(E). (П. 150)
т-»оо
График O'i(rae) при конечной т показан на рис. П.18 (качественно).
Для п-й производной функции F\ при т—>-оо получаем
lim Ф}"> (me) = д(п)(Е).
«-»00
Естественным обобщением введенной функции является функция смещения
относительно начала отсчета, например Ф][т(е—бо)] (рис. П.19), для которой
при т-—^оо справедливо условие
со
$•<—.)
d£= 1.
(П. 151)
-оо
Ъ'^Щ
f(£)b
Рис. П. 18
f(£)
£0-£, У
8(е-е0)
-f(£D\
\^o~£i
О £
Рис. П.19
311
4.3. Функция Хевисайда. Рассмотрим функцию, связанную с б-функцией
условием
Со
Я(ё— е0)= fs(s —efl)de. (П. 152)
—оо
Введенная функция Н(г—е0) (функция Хевисайда) имеет следующие свойства:
0. е<£(,;
#(е-=•) = {-£-. * = ъ (П. 153)
Из (П. 152) следует
{- ^=S(s-s0). (П. 154)
dz
Интеграл от функции Я(е—е0) равен
е s
J Ще -4)UZ = J Я(Е - £o)de = (е— е0)//(е - *„) ■ (П- 155)
4.4. Линейные операции с использованием б-функции. Рассмотрим интеграл
вида
' = Jf(e)S(£-Eo)dz, (П. 156)
—оо
где /(e) —непрерывная функция. Наглядное представление о значении этого
интеграла можно получить из рис. П. 19, из которого следует, что
подынтегральное выражение в (П.156) отлично от нуля только на интервале (eD—Ei, 80 + 61),
где 8i — малая величина. В пределах этого интервала функция f(e) практически
сохраняет неизменное значение, равное f(&o), т. е. ее можно вынести из-под
интеграла и получить
оо
' = гЫ fs(s —£0)d£ = f(e0). (П. 157)
—со
Из предыдущих рассуждений следует
f(e)6(e—eo)=f(e0)fi(e—80). (П. 158)
Интеграл с переменным верхним пределом
е
/= Jf(e)5(e-Ce)d6=f(ee)//(E_Co). (П. 159)
—оо
4.5. Интеграл, зависящий от производной б-функции. Используя правило
интегрирования по частям, можно получить
00 00
J'f(e)S're_Eo)de=f(e)e(e_eo) | ^ - j f'(e)8(e— *„)&,
—00 —00
ИЛИ
00
$f(e)a'(*-e0)de= -f (¾). (П. 160)
—00
312
Для общего случая
00
Jf(e)8(«)(e_eo)de=(_l)«f(»)(Eo). (П.161)
—оо
При переменном верхнем пределе получаем
е
l f(£)5'(e _s0)de = f(е)в(е — е0) - f'(Eo)tf (е- *0). (П. 162)
—оо
Использование обобщенных функций позволяет весьма эффективно решать
задачи статики (и динамики) стержней, нагруженных сосредоточенными или
кусочно-непрерывными силами.
5. Определение направляющих косинусов
единичного вектора, касательного к осевой
линии стержня
5.1. Осевая линия стержня есть плоская кривая. При
решении задач статики криволинейных стержней необходимо знать
направляющие косинусы x'j(s) единичного вектора еь касательного к осевой линии
стержня в зависимости от дуговой координаты s (или безразмерной координаты
e=s//). Кроме того, необходимо знать щ(е) и Из(е)-
Уравнения осевой линии стержня можно представить в виде
f[xu Jfc)=0, (П.163)
где х{ — декартовы координаты точек осевой линии стержня. В дальнейшем
считается, что Xi являются безразмерными величинами. Дифференцируя (П.163)
по е, имеем
df df
л7*+а*ч' = 0- (П164)
Производные Xj по е удовлетворяют условию
xJ2 + Xa2=l. (П. 165)
Из системы двух уравнений (П. 164) и (П.165) находим х\ и х'<ь'-
df
дх
*i'= — 2 - = ^(¾. х2). (П. 166)
V \дхг
дх2
df
xs' = Ч = F2(xlt х2) (П. 167)
/(«Ч
' df \\( df у
дх2 J
В результате, получаем систему двух нелинейных дифференциальных
уравнений (П. 166) — (П. 167), из которых определяются */(е) и я'/(е). Определив
Х/(е), получаем
*3(e) = l/(V)2+(*2")2- (П. 168)
313
Рассмотрим пример. На рис. П.20 показан
круговой стержень. Уравнение осевой линии стержня
имеет вид
*ai+(*2—Я°)2 = Я° (Я° = Я/0. (П.169)
Дифференцируя (П.169) по е, получаем
Xi*'i+(*2—Д°)*'2 = 0. (П.170)
Так как (х\)2+(х'2)2=1, то
х'=1——^-; х-'=——. (П. 171)
1 R° R0
Рис. П.20 * ' \ Д°
Решение уравнения (П.172):
Xi=C! cos е/#°4нс2 sin е//?°.
Находим х2:
Из системы (П. 171) получаем уравнение
*i"+ f-^rV ^1 = 0- (П. 172)
*2 = Я° + -^- sin s//?o.
/?°
cose//?0.
(П.173)
(П. 174)
Находим произвольные постоянные из условий е=0, JCj = 0, хг—0, с1==0,
с2=/?°. Окончательно получаем следующие выражения для *i(e) и х2(е):
*i=tf° sin е//?°; x2=R°—R° cos е/#°.
Дифференцируя (П.175) по б, имеем
x',1=cos e/i?°; x'2=sine/R°.
Угол #з(е) (рис. П.20) в зависимости от е равен
^з(е)=8//?°.
(П.175)
(П. 176)
(П.177)
5.2. Осевая линия стержня есть пространственная кривая. Уравнение осевой
линии пространственно-криволинейного стержня можно представить в виде
системы двух уравнений
fi(xu х2, *з)=0; (П. 178)
Ы*ь х2, х3)=0.
Дифференцируя (П. 178) и (П. 179) по 8, получаем два уравненния:
з
1=1
3
Е
/-1
Xj
dXf '
0:
(П.179)
(П. 180)
(П.181)
Производные х'у должны удовлетворять уравнению
з
/=1
(П.182)
314
Из системы трех уравнений (П. 180) — (П. 182) находим x't (/=1, 2, 3):
x'\ = Fl{xu х2, х3);
x'2^F2(xu хъ хв); (П.183)
x'3=Fs(Xu х2, х3).
Решая систему уравнений (П.183) (задача Коши), определяем Xj[e), а
затем х'/(е), х" и х{". Кривизна и кручение осевой линии пространственно
криволинейного стержня равны
2.(0« У I (V)2;
зд =
S*2
. /=1
Xj Х2 -%
^ 111 ^111 v tit
Jvy л 2 Ло
(П.184)
(П.185)
В уравнения равновесия входит вектор и (вектор Дарбу Й, записанный
через проекции на главные связанные оси) —соотношение (П.88)
х= Qx +
d&
10
de
ех -f Q3 sin 030e2 + S3 cos 030e3 =
где х: = 2, +
d9.
10
de
x2 = Q3sin930;
<3 = 23cos930; 9g0 — заданный yroi.
Направляющие косинусы (а также Qt и Q3) характеризуют геометрию
осевой линии стержня, и без их знания невозможно проинтегрировать уравнения
равновесия.
Список литературы
1. Алфутов Н. А. Основы расчета на устойчивость упругих систем. М.,
1978. —311 с.
2. Балабух Л. И., Алфутов Н. А., Усюкин В. И. Строительная механика
ракет. М., 1984.— 392 с.
3. Болотин В. В. Неконсервативные задачи теории упругой устойчивости,
М,. 1961. —339 с.
4. Бояршинов С. В. Основы строительной механики машин. М., 1973.—
456 с.
5. Графский И. Ю„ Казакевич М. И. Аэродинамика плохообтекаемых
тел. Днепропетровск, 1983.— 116 с.
6. Девнин С. И. Гидроупругость конструкций при отрывном обтекании. Л.,
1975.— 194 с.
7. Казакевич М. И. Аэродинамическая устойчивость надземных и висящих
трубопроводов. М., 1977.—200 с.
8. Ляв А. Математическая теория упругости. М., ОНТИ НКТП, 1935.—
674 с.
9. Норден А. Б. Дифференциальная геометрия. М., 1948. — 215 с.
i0. Пановко Я. Г., Губанова И. И. Устойчивость и колебания упругих
систем. М., 1979.—384 с.
11. Пономарев С. Д., Андреева Л. Е. Расчеты упругих элементов машин и
приборов. М., 1980.—326 с.
12. Пономарев С. Д., Бидерман В. Л. и др. Расчеты на прочность. М.,
1956. —Т. 1—3.
13. Светлицкий В. А. Механика гибких стержней и нитей. М., 1978.— 222 с.
14. Светлицкий В. А. Механика трубопроводов и шлангов. М., 1982.—279 с.
15. Смирнов А. Ф., Александров А. В., Лащенков Б. Я., Шапошников Н. Н.
Строительная механика (стержневые системы), М., 1981.—512 с.
16. Спщина Д. Н. Строительная механика стержневых
машиностроительных конструкций. М., 1977. — 248 с.
17. Феодосьев В. И. Избранные задачи и вопросы по сопротивлению
материалов. М., 1973.—399 с.
18. Феодосьев В. И. Сопротивление материалов. М., 1974. — 559 с.
19. Филин А. Б. Прикладная механика твердого деформируемого тела. М.,
1978. Т. 2. —616 с.
20. Фын Я. Ц. Введение в теорию аэроупругости. М., 1959. — 524 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аэродинамические силы 237, 238,
242
для некруглых сечений 247—
252
определение приращений 252—
256
Аэродинамическая сила лобового
сопротивления 238
касательная 241
подъемная 248
Базис векторный 18, 281
Безразмерные уравнения 20
векторные 20, 39
— — в проекциях 34, 40
Бернулли уравнение 234—237
Вектор Дарбу 293
— единичный 14
Векторное поле 232
Внешняя нагрузка 15
«мертвая» 15, 24
произвольная 28
■ следящая 15, 24, 25
Движение жидкости установившееся
230
неустановившееся 230
Законы аэрогидродинамики 233
уравнение Бернулли 234
— неразрывности 233
Интегрирование уравнений
равновесия 61
при нагрузках «мертвых»
65—67
произвольных 67—69
■ следящих 61—65
линейных 61
нелинейных 82
Координатные оси главные 15
декартовы 21
— — естественные 15
Коэффициенты аэродинамические 239
Краевые условия 22, 23
Критическая сила 93
численное определение 118—
Эйлера 93
Лагранжа множители 178, 181, 182
— переменные 230
Линия тока 233
Локальная производная 33, 299
Матрица Грина 63
Метод итераций (Пикара) 72, 73
— последовательных нагружений
82—90
приближений 88
— Ритца 180
Методы приближенные 166
принцип возможных
перемещений 166—168
— минимума потенциальной
энергии 177, 178
Множители Лагранжа 178, 181, 182
Осевая линия 13
кривизна 17
кручение 17, 18
перемещения 31
углы поворота 31
естественная 13
упругая 13
Переменные Лагранжа 230
— Эйлера 231—233
Потеря устойчивости 92
приращения сил и моментов
97, 98, 112—118
уравнения равновесия 96, 99,
100
плоского криволинейного
стержня 100, 109
плоского кольца 104
Приращения векторов внешних
нагрузок 29—33
проекции 32
Принцип Даламбера 261
Пружины цилиндрические 198
126
317
Пружины цилиндрические 198
линейная теория 199—204
нелинейная теория 204—206
■ с переменным углом подъема
216—218
Силы (нагрузки) 23, 29
— аэродинамические 237
— «мертвые» 98
— полуследящие 98
— следящие 97
Символы Кронекера 283
— Леви — Чивита 284
Система координат 13
неподвижная (декартова) 13,
14
-— ■— подвижная (связанная) 13, 14
Стержень 13
— естественно-закрученный 152
— винтовой 198, 199
уравнения равновесия 206
— в потоке воздуха или жидкости
228
— гибкий в жестком канале 218
уравнения равновесия 219
— криволинейный 183
— на упругом основании 155
— переменного сечения 165
— плоский криволинейный 184
уравнения равновесия 184—198
— пространственно-криволинейный
6, 198
Стержень
пространственно-криволинейный 6, 198
уравнения равновесия 21
вывод 13—23
в декартовых осях 39—
41
— связанных осях 33—
39
— — нулевого приближения
44—48
первого приближения
51—54
— прямолинейный 9, 128
уравнения равновесия 131, 133
вывод 129—137
— пустотелый, заполненный потоком
жидкости 261
— с промежуточными опорами 78
уравнения равновесия 79
Теорема Эйлера 179
Угол атаки 239
Устойчивость статическая 92
■— плоского криволинейного стержня
100
Формы равновесия 93—95
Формулы Серре-Френе 293
Функции Крылова 158
Функция Дирака (б-функция) 16, 301
— Хевисайда 16, 303
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 5
РАЗДЕЛ ПЕРВЫЙ
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
Глава 1. Уравнения равновесия стержней 13
§ 1.1. Векторные уравнения равновесия 13
§ 1.2. Внешняя нагрузка и ее особенности 23
§ 1.3. Уравнения равновесия в связанной и декартовой системах
координат ... 33
§ 1.4. Уравнения равновесия при малых перемещениях и малых углах
поворота 41
Задачи для самостоятельного решения 59
Глава 2. Интегрирование уравнений равновесия стержня .... 61
§ 2.1. Интегрирование линейных уравнений равновесия 61
§ 2.2. Интегрирование уравнений равновесия стержня, имеющего
промежуточные опоры или заданные перемещения ряда сечений . . 78
§ 2.3. Метод последовательных нагружений при решении нелинейных
уравнений равновесия стержня . . .82
Глава 3. Статическая устойчивость стержней 92
§ 3.1. Основные понятия 92
§ 3.2. Уравнения равновесия стержня после потери устойчивости . . 95
§ 3.3. Потеря устойчивости плоского криволинейного стержня . . . 100
§ 3.4. Определение приращений нагрузок при потере устойчивости . . 112
§ 3.5. Численное определение критических нагрузок П8
Задачи для самостоятельного решения . - 126
РАЗДЕЛ ВТОРОЙ
ПРИКЛАДНЫЕ ЗАДАЧИ
Глава 4. Прямолинейные стержни 128
§ 4.1. Стержни, прямолинейные в естественном состоянии .... 129
§ 4.2. Прямолинейные стержни при малых перемещениях и малых
углах поворота 137
§ 4.3. Естественно закрученные прямолинейные стержни 152
§ 4.4. Прямолинейные стержни, лежащие на упругом основании . . 155
§ 4.5. Приближенные методы решения задач статики прямолинейных
стержней 166
Задачи для самостоятельного решения , 182
319
Глава 5. Криволинейные стержни 183
§ 5.1. Плоские криволинейные стержни 184
§ 5.2. Пространственно-криволинейные стержни 198
§ 5.3- Гибкий стержень в жестком канале 218
Задачи для самостоятельного решения 228
Глава 6. Стержни, взаимодействующие с потоком воздуха или
жидкости 228
§ 6.1. Основные положения аэрогидромеханики 230
§ 6.2. Силы, действующие на покоящийся в потоке стержень . . . 237
§ 6.3. Уравнения равновесия пустотелого стержня, заполненного
потоком жидкости 261
Заключение 268
Решения задач 270
Приложения 290
1. Краткие сведения из векторного анализа и линейной алгебры . . 290
2. Основные положения дифференциальной геометрии 299
3. Приращения компонент векторов при изменении полижения
связанных осей .... 308
4. Элементарные обобщенные функции 310
5. Определение направляющих косинусов единичного вектора,
касательного к осевой линии стержня 313
Список литературы 316
Предметный указатель 317
Учебное издание
Валерий Александрович Светлицкий
МЕХАНИКА СТЕРЖНЕЙ
Часть первая
СТАТИКА
Заведующий редакцией А. 5. Дубровский
Редактор Л. Н. Шатунова
Младший редактор Т. Ф. Артюхине
Художественный редактор Л. К. Громове
Технический редактор Т. А. Новикова
Корректор Г. И. Костикова
ИВ № 661В
Изд. № ОТ—542. Сдано в набор 16.12.86. Подп. в печать 02.06. 87.
Формат 60^88716 Бум. тип. № 2. Гарнитура литературная. Печать офсетная.
Объем 19,6 усл. печ. л. 19,6 усл. кр.-отт: 18,70 уч. изд. л.
Тираж 9700 экз. Заказ № 6011 Цена 95 коп,
Издательство «Высшая школа», 101430, Москва, ГСП-4, Неглинная ул., д. 29/14.
Ордена Октябрьской Революции н ордена Трудового Красного Знамени МПО «Первая
Образцовая типография имени А. А. Жданова» Союзполиграфпрома при Государственном
комитете СССР по делам издательств, полиграфии и книжной торговли. 113054, Москва,
т Ц
ш