/







































































































Text
1
И. П. БРАТУХИН
АВТОЖИРЫ
ТЕОРИЯ и РАСЧЕТ
j О Н Т И Я К Т П СССР 1934 ГОСМАШМЕТИЗДАТ
> С К В А ЛЕНИНГРАД
ОГЛАВЛЕННЕ
Обозначения . . .............................................................. 3
Предисловие автора ............................................................ 7
Введение*'..................................................................... 8
Г in а в а 1. Краткий обзор развития автожира.................................. 9
Глава 2. Теория ротора........................................................ 38
§ 1. Авторотация несущего винта-ротора..................................... 38
§ 2. Сйды и моменты на роторе............................................... 41
§ ;3 . Движение лопастей.................................. . • . • 42
§ 4. Компоненты скорости воздуха относительно плоскости вращения ротора . . 46
§ 5. Скорость воздуха относительно лопасти ротора..........................,47
§ 6. Элементарные силы и элементарный крутящий момент лопасти...... 49
§ 7. Формулы полных сил ротора............................................. 51
§ 8. Уравнение махового движения лопасти.................................. 54
§ 9. Уравнение нулевого крутящего момента ................................. 56
§ 10. Периодическое изменение угла взмаха лопасти и угла атаки сечения лопасти ....... .......................................................... 58
§ И. Поляра ротора ......................................................... 60
§ 12. Выбор параметров и влияние их на характеристики ротора................. 63
§ 12. Сравнение ротора автожира и крыла самолета............................ 70
Глава 3. Аэродииамическнй расчет автожира.................................... 75
§ 1. Поляра автожира.................................................... 75
§ 2 Построение кривой потребных тяг (кривая Пэно) для горизонтального по* лега автожира.............................................................. 78
§ 3. Планирование и вертикальный спуск автожира...................... . 86
§ 4. О выборе диаметра к коэфицяента заполнения ротора при проектировании автожира . ...................,.................................... 86
§ 5. О выборе площади и угла установка неподвижного крыла.................... 88
Гл рва 4. Устойчивость и балансировка автожира................................ 9S
§ 1. Условия плавной работы ротора......................................... 93
§ 2. Управляемость автожира и ротора......................................... 94
§ 3. Собственная устойчивость авюжира........................................ 96
§ 4. Моменты на головке ротора .............................................. 96
§ 5. Расчет продольной статической устойчивости н балансировка автожира ... 97
§ б. Поперечная балансировка автожира...................................... 108-
‘ ' "’* оити И.,.™,.,
I <
Ф< I Н I Ь e Cq Со
Обозначения
Размеры автожира
— радиус ротора.
— радиус сечения лопасти,
г
— — относительный радиус сечения лопасти.
— ширина лопасти.
- число лопастей.
, тт , гс
— коэфициент заполнения ротора. При прямоугольных лопастях * = -
— расстояние горизонтального шарнира от оси ротора.
— размах неподвижного крыла.
— удлинение неподвижного крыла.
— площадь неподвижного крыла.
— площадь хвостового горизонтального оперения автожира.
— плошать плоской пластинки, эквивалентной вредному сопротивлению автожира.
— расстояние горизонтальной хвостовой поверхности до центра тяжести.
— расстояние центра тяжести автожира от оси ротора.
— расстояние центра тяжести автожира от плоскости вращения ротора.
— угол установки лопастей, измеряемый от плоскости вращения.
— угол установки неподвижного крыла, измеряемый от плоскости вращения ротора.
— угол между осью пропеллера и плоскостью вращения ротора.
- угол установка стабилизатора, измеряемый от плоскости вращения ротора.
- угол бокового наклона оси ротора.
Скорости и углы
- число оборотов ротора в минуту.
— угловая скорость вращения ротора.
— отаосатедьная скорость сечения лопасти.
— скорость парашютирования автожира.
— индуктивная скорость.
— угод атаки сечения лопасти.
- угол атаки ротора и автожира (угол между плоскостью вращения ротора и поступательной скоростью автожира).
- угловое положение лопасти, измеряемое от заднего положения лопасти.
- угол взмаха лопасти, измеряемый от плоскосш вращения.
- среднее значение угла взмаха лопасти (угол конусности ротора).
- коэфициент при созф в выражении для угла взмаха.
- коэфициент при sin ф в выражении для угла взмаха.
- поступательная скорость автожира.
Гвш i — v— осевая скорость сквозь диск ротора.
и
UH
V cos *
— — характеристика режима ротора.
3
U — составляющая относительной скорости элемента лопасти, лежащая в плоскост-и, нормальной к пр дольной оси лопасти,
ф — угол, составляемый направлением скорости U с плоскостью вращения ротора:
17, = U cos ф,
Us = U sin ф.
V = + — результирующая поступательной скорости V и индуктивной ».
V — относительная скорость воздуха у хвостового оперения.
ак — истинный угол атаки неподвижного крыла.
Д{ — угол скоса потока у крыла (от ротора).
0МЛ — угол планирования автожира.
Д»’м — скос потока у хвоста, создаваемый ротором.
Дг"^ — скос потока у хвоста, создаваемый неподвижным крылом.
Д» — скос потока у хвоста при планировании автожира.
. . жя
Д» — скос потока у хвоста при моторном полете.
а — истинный угол атаки у хвоста.
О — угол отклонения руля высоты.
Силы, действующие на автожир
р.в — обратное качество профиля лопасти.
Т — тяга ротора.
Н — продольная сила ротора,
S — поперечная сила.
Jf — крутящий момент ротора-
Р — подъемная сила.
Q — лобовое сопротивление.
Cv ~ коэфициент подъемной силы автожира.
Ск — коэфициент лобсвого сопротивления автожира.
р — массовая плотность воздуха.
6 — среднее значение коэфипиевта лобового сопротивления профиля лопасти при X = ©о.
А — тангенс угла наклона кривой Су по а для профиля лопасти при X — со.
ApnBs(QJ3)1
fcpn/is(SJ3)1
— коэфициент тяги ротора.
— коэфициент продольной силы ротора.
S
kpnRPtQR)* — коэфициент поперечной силы ротора.
m — погонная масса лопасти.
д —• ускорение силы тяжести.
(?о — полный вес автожира.
А рей*
X = —-------- массовая характеристика лопасти.
— момент инерции лопасти относительно оси горизонтального шарнира лопасти. (Э\ — статический момент веса лопасти относительно оси горизонтального шарнира,
— коэфициент подъемной силы ротора.
СХр — коэфициент лобового сопротивления ротора.
/С* \
I I — величина, обратная качеству ротора.
' у 'р
^проф — мощность, затрачиваемая на преодоление профильного сопротивления ротора. Д Сук — коэфициент подъемной силы неподвижного крыла, отнесенный к
4-
коэфипиент лобового сопротивления неподвижного крыла, отвесенный к рп2?8РЧ коэфипиент подъемной силы ротора и крыла.
коэфипиент лобового сопротивления ротора и крыла.
а
: —-да— коэфипиент вредного сопротивления.
коэфидиент подъемной сиды модели автожира (без ротора), отнесенный к ряйа78.
коэфидиент лобового сопротивления модели автожира (без ротора), отве-сенный к рпД2!78
потребная тяга пропеллера.
нагрузка на единицу ометаемой поверхности.
коэффициент •сопротивления ротора при парашютировании.
момент па головке ротора относительно оси zz.
момент на головке ротора относительно оси хх.
коэфипиент момента тангажа автожира.
коэфициенс момента ротора относительно ц. т.
коэфипиент момента крыла относительно ц. т.
коэфипиент момента тяги пропеллера относительно ц. т.
коэфипиент момента от хвоста относительно ц. т.
коэфнцнопт момента модели автожира (без ротора) относительно и. т.
реактивный момент пропеллера.
коэфипиент момента крена при планировании автожира.
коэфипиент момента крена при моторном полете.
f_________
f =________ъ_______
’ >tpiBs(Q/i)ae '
в Строка Напечатано Должно быть По чьей вине
снизу сверху
( 1 в табл. 1 (стр. 34 — 45). в табл. 1 (стр. 34 — 35). тип.
1 16 ... углы атаки лопастей углы атаки сечения лоласгей ред.
1 9 ...инерции вращения и момента и момента реп.
1 чертеж 54 Q7? ред.
! в формуле для иу пропущен порядковый иомер 11 ред.
3 фиг. 53 Ув1пф U sin ф авт
V cos ф U cos ф
1 фиг. 57 то же самое авт
1 10 dMt = (о — Су ф) y-RtHrdrU* = dMi = (о — С уф) р' IPrdrU* = ред.
= v№rdr(W*--A&fi) = c/?2rdr(ot’8 — 4вд5 Г’2 —
— А ф'-и*)
2 формула 22 ®iP- ли. авт.
а 2 G, членом / с, [членом КОрр.
.7 15 . С„= { р’Г • • = - . • /
>0 5 плоскости и вращения тоскости вращения £ ред.
И в формуле тип.
V cos ip*№V'
31 17 и Cv Ур Чр СУр и % корр.
62 формула (45) 6 К 5= 1 + За* к s=m? <4е) авт. корр.
75 в изменить распределением изменит распределение ред.
78 6 множитель 8 уравнения (50) множитель в уравнении ред.
<—81 сверху расчета авто липа 9 жира Таблиц* 9 расчета автожира тин.
91 30 при этом условии площадь т. е. площазь ред.
Пй 1 2 ДСН и дч дс„4 в АСЧ ред.
00 1 = 5,73 • 3 = 57,33 ред.
Братухи а. Автожиры, теория и расчет
Предисловие автора
Отсутствие литературы на русском языке по вопросам теории и расчета автожира и значительный интерес к этим вопросам у работников авиации обусловили появление этой книги. Хотя основной темой ее являются вопросы теории и расчета автожира, но для полноты представления о нем мы сочлм необходимым дать в первой главе краткий исторический обзор его развития.
Вторая глава содержит теорию автожира Глауэрта—Локка в той форме, которая удобна для применения ее при практических расчетах. В третьей и четвертой главах, включающих аэродинамический расчет и расчет продольной статической устойчивости автожира, те части расчета, которые аналогичны с расчетом самолета, опущены с соответствующей оговоркой, так как предполагается, что читатель знаком с этого рода расчетом.
Поскольку эта книга является первой, излагающей вопросы теории и расчета на русском языке, нам пришлось ввести в изложение ряд новых терминов и обозначений. Вместе с тем английские обозначения, относящиеся к теории ротора, за небольшим исключением нами сохранены.
Вопросы расчета автожира новы и еще не подвергались в достаточной мере экспериментальной проверке, поэтому не исключена возможность, что некоторые допущения и предположения, излагаемые в книге, могут не отвечать в полной мере существу дела. Возможно также, что книга не лишена недочетов как в своей компановке, так и в введенной терминологии. Поэтому мы будем благодарны за все указания и замечания, которые найдут возможный сделать читатели. .Корреспонденцию просьба направлять по адресу: Москва, Центральный аэродинамический институт, ЭАО, Секция особых конструкций.
В заключение выражаю благодарность инж. Лаписову запомошь, которую оп оказал мне при составлении книги, предоставив в мое распоряжение записи моих лекций.
И. П. Братухин 1932 г.
Октябрь
Введение .
Автожир представляет собой летательную машину тяжелее воздуха. С точки зрения конструкции артожир можно назвать самолетом с вращающейся несущей поверхностью, так как последней является авторотирующий (свободно вращающийся) вннт-ротор большого диаметра м малого геометрического шага, расположенный над фюзеляжем так, что ось его нормальна (илп близка к нормали) оси фюзеляжа. Авторотирует винт-ротор от воздействия потока воздуха, возникающего при движении машины. Необходимая тяга для сообщения автожиру поступательного движения создается винтомоторной группой, ничем не отличающейся от винтомоторной группы самолета. Авторотирующий винт-ротор, как несущая поверхность, выгодно отличается от неподвижного крыла прежде всего тем, что он не ммеет на больших углах атаки критического состояния, обусловленного у неподвижного крыла нарушением обтекания профиля (срыв струй). Это обстоятельство делает автожир гораздо безопаснее самолета. Так, если при потере скорости самолет, теряя подъемную силу н управляемость, беспорядочно падает или переходит в штопор, то у автожира его несущая поверхность—ротор—при потере скорости не сразу перестает вращаться в силу инерции; уменьшение же подъемной силы ротора, вызванное потерей скорости и оборотов, заставит автожир перейти в парашютирующий спуск, при котором восстановятся и обороты и подъемная спла ротора. Так как ротор автожира в полете все время находится в состоянии вращения, то наиболее эффективные сечения его лопастей даже при малых поступательных скоростях автожира имеют относительные скорости, достаточные по величине для того, чтобы ротор развивал подъемную силу, равную весу машины.
Благодаря этому, а также указанному выше отсутствию критического состояния для всего ротора на больших углах атаки автожир приобретает такие летные качества, которых лишен обычный самолет с неподвижными крыльями. Этм качества следующие:
1. Малая посадочная горизонтальная скорость, которую при соответствующем управлении в моцент посадки можно свести к пулю.
2. Возможность крутых спусков с пробегом после посадки в 2—5 м.
3. Малый разбег перед взлетом. При наличии приспособления для предварительного раскручивания ротора разбег у существующих автожиров уменьшается до 30—50 м.
4. Большой диапазон горизонтальных скоростей без потери высоты. При правильно выбранном роторе отношение максимальвой скорости к минимальной у автожира может достигать 4,5—5,0, тогда как у самолетов примерно той же нагрузки на 1 л. с. это отноЩенпе бывает порядка 2,5—3.
Глава и е р в а я
Краткий обзор развития автожира
Идея применения авторотирующего винта в качестве несущей поверхности и ее блестящее практическое осуществление, несмотря па ряд больших трудностей, принадлежат испанскому мнж. Де-ля-Сиерва.
Главная трудность при использовании авторотирующего винта как несущей поверхности заключалась в той, что в полете, когда плоскость
вращения винта совпадает с направлением поступательной скорости или наклонна к нему под некоторым углом г (фиг. 1), при винте с жестким креплением лопастей появляются значительные по величине опрокидывающие моменты—поперечный, относительно оси хх, м продольный, относительно оси zzt стремящиеся опрокинуть аппарат нанок и назад.
Существование поперечного момента объясняется теи, что две противо положные лопастн винта, при их перпендикулярном положении к поступательной скорости, находятся в разных относительных скоростях потока, т. е. лопасть, идущая по движению машины, имеет на радиусе г в плоскости вращения относительную скорость -f- Vcos i, а лопасть, идущая попя!но,---2г— V cos i\ поэтому и аэродинамическая сила лопасти, работающей в сумме скоростей (2г V cos z), и момент ее относительной оси хх больше, чем таковые же у лопастм, находящейся в разности скоростей. В результате
9
возникает указанный поперечный момент, стремящийся опрокинуть винт в сторону лопасти, идущей попятно
Продольный момент появляется за счет того, что вызванный самим авторотирующим винтом скос потока неодинаков по всем) ометаем'пп винтом
Фиг 2
диск) В передней части диска (по полету) он меньше, чем в задней, так как, отклонившись в передней части диска, поток, следуя далее, отклоняется дополнительно, поэтому сечения на радиусе г двух противоположных лопастей, расположенных, например, по направлению поступательной скорости, работая равных почтп относительных скоростях, пмеют разные углы атаки У сечения передней лопасти угол атаки больше, чем у сечения задней и, следовательно, больше и аэродинамические силы. Отсюда момент полной аэродинамической силы относительно оси 22 передней лопасти больше,^чем задней, ра-зность между ними и представляет собой продольный момент, стремящийся запрокинуть винт назад
Существование М(/_ и в особенности первого (поперечного), делает полет автожира с жестко прикрепленными лопастями ротора неустойчивым. Для устранения этого в первом своей автожире, построенное в начале 1920 г., Снерва применяет в качестве несущей поверхности не один ротор, а два, монтированные на одной вертикальной оси н вращающиеся в противоположные стороны (фиг. 2).
Лопасти роторов у этого аппарата были деревянные пустотелые Каждый ротор имел 4 лопасти диаметром 6 м и шириной 0,3 м. Профиль лопасти был слегка вогнутый. Для автожира был использован старый фюзеляж самолета Дюпердюссен с мотором Рон в 60 л с Вес аппарата равнялся приблизительно 360 кг
Предполагалось, что два ротора, поставленные соосно, при вращении в разные стороны исключат поперечный опрокидывающий момент; продольный же момент предполагалось уравновесить хвостовыми поверхностями. При испытании аппарат не смог оторваться ог земли. Основной недостаток такой несущей системы заключался во взаимном влиянии роторов—нижний ротор 10
вращался со скоростью почти вдвое меньшей, чем верхний; благодаря атому полностью исключить поперечный момент не удалось. Кроле того, аппарат имел очень большое лобовое сопротивление.
В 1921 г Сперва пытается найти решение проблемы автожира с одним ротором, в связи с чем строит автожир .V 2 (фиг 3).
В этой попытке он исходит из того соображения, что кажущийся угол
атаки данного сечения лопасти, когда последняя
машины, меньше, чей koi да она движется попятно (фиг. 4), т. е. а3 > а^. Коэфипиент подъеиной силы возрастает с возрастанием угла атаки (до критических углов), а так как угол атаки сечении лотсти изменяется противоположно изменению относительной скорости, то Сперва думает добиться для любого углового положения Постоянства произведения С ТР, для чего делает 3-лопастныЙ винт с сильно закрученными лопастями с плоским профилем. Каждая лопасть была выполнена, как обычное крыло, с лонжероном и нервюрами из дерева
Для постройки автожира № 2 был использован фюзеляж самоле*а Зоммер с мотором Рон 80 л. с. Этот второй экспериментальный автожир оторвался от земли на несколько дециметров, но не дал ожидаемой боковой устойчивости. Сие|ва приписал эту неудачу не самому методу исключения поперечного
идет вперед по движению
Это неравенство справедливо не при любом угле атак л ротора, например при* = О,
п
момента, а деформации нерасчаленных лопастей. Поэтому вслед за вторым автожиром он проектирует автожир № 3, па котором ставится ротор с пятью расчаленными лопастями (фиг. 5). На нем был поставлен мотор Рон более мощный, чем на автожире № 2, а именно 110 л. с. Увеличить боковую устойчивость Сперва предполагал у этою аппарата еще и созданием
пары на хвосте, для чего руль глубины был сделан из двух независимых друг от от друга частей, позволявших их перекашивание. Автожир № 3 был не более устойчив, чем первые два. Он поднялся на 2 м, опрокинулся и сломался.
В 1922 г. Сиерва находит, наконец, решение задачи уничтожения опрокидывающих моментов, возникающих у авторотирующего несущего винта. Это решение заключалось в креплении лопастей ротора к его втулке 12
не жестко, а шарнирно, причем лопасти получали своооду махового движения в плоскости, проходящей через ось ротора и продольную ось лопасти. В полете такие лопасти, удерживаясь центробежной силой почти в пло
скости вращения под влиянием асимметричного относительного потока, Делают периодические взмахи, чем автоматически досылается стабилизация на авторе шрующем винте1.
Автожир № 4, построенный в 1922 г. по этому принципу (фиг. 6), дал удовлетворительные результаты. Ротор его диаметром 8 м имел четыре лопасти. Фюзеляж—от самолета Зоммер, мотор Рон 80 л. с., полный вес 500 кг. На фиг. 7 показан способ присоединения лопасти а, укрепленной на кольце Ь болтом е (шарнир). Кольпо 5 СВООО1НО вращается вокруг оси /*; болт е позволяет осуществлять маховое движение; 8 — подтяжка для ограничения свеса
Фиг. 7.
лопасти.
Автожир № 4 первоначально был снабжен приспособлением для боко
вого управления, позволяющий пилоту наклонять всю вращающуюся сиср му. Такое управление оказалось неудачным, и вмесю него были поставлены по бокам фюзеляжа два несущие элерона, укрепленные на концах горизонталь-
Фиг, 8.
ной расчаленной балки (фиг. 8).
В январе 1923 г. летчик Спенсер ва автожире № 4 < делал сначала несколько взлетов до 10 м высотой, а затем прямые полеты во ьею длину аэродрома. 31 января ему удалось сделть замкнутый круг длиной в 4 км на высоте 25 м в течение 3,5 мин.
Этот автожир показал возможность крутых спусков II носодок почти без пробега.
В том же году Снер-
ва строи г новый автожир № 5, сходный с № 4.
Однако он разбился во время рулежкп но аэродрому. Авария показала, что взятый профиль лопастей неудовлетворителен ввиду того, чю он давал боль
1 Маховое движение лопастей и аэродинамический эффект его б>дут рассмотрены ниже.
13
шое перемещение по хорде центра аэродинамического давления; црн некоторых углах атаки это могло вызывать опасное скручивание лопасти, что и имело место при аварии. После этого Сиерва применяет на последующих аппаратах сииметрнчный двояковыпуклый профиль Геттинген 429, у которого центр давления практически почти не перемещается.
В конце 1923 г. военное ведомство Испании субсидирует работы Сиерва, причем проводятся исследования в аэродинамической трубе. После этих исследований Сиерва строит шестой по счету автожир С-6. Фюзеляж для С-6 был взит от школьного самолета Авро; мотор-Рон 110 л. с. Ротор имел D = 10 м. По конструкции аппарат эют был похож на № 4. 12 декабря 1924 г. на этом автожире был совершен перелет протяжением в 12 км при скорости полета около 100 км/час. Перелет происходи! на высоте 40—60 Ио сообщениям прессы скорость его вертикального спуска равнялась в момент посадки 5 м/сек.
В 1925 г. Сиерва выпускает новую машину С-6 бис, имевшую некоторые конструктивные улучшения. Диаметр ротора был увел'чен до 10,5 м, мощность оставтена прежняя. Для автожиров С-4, С-6, С-6 бис требовался очень длинный раз>ег (больше, чем требует самолет), прежде чем ротор достигал необходимого для взлета числа оюр-тов Это обстоятельство выдвигало перед конструктором задачу — создаж приспособление, позволяющее раскручивать ротор на месте.
У машин С-б и С-6 бис Сиерва пытается довольно примитивно решить эту задачу. Каждая лопасть на *асстоянии 1/e R от втулки была снабжена снизу стержнем, пара’дельным оси ротора. На такие четыре стержня наматывался трос, который после трех пли четырех оборотов пропускался в кольцо, укрепленное сверху руля направления; далее трос прикреплялся посредством комбинации тяг к колышкам, вбитым в землю. Таким образом автожир, двигаясь вперед, сам раскручивал рогир, как волчок; разбег благодаря этому сильно сокращался. Ввиду неконсгр^кгцвн 'сти этого приспособления оно на следующих аппаратах Сиерва не применяется.
14
4
Большой интерес автожир вызвал после удачных показательных полетов в Фарнбороу (Англия) и 1925 г., во время которых были выявлены основные его преимущества: 1) безопасность от потери скорости, 2) малая посадочная скорость, 3) возможность спуска под крутым углом и 4) достаточная
I
собственная устойчивость в воздухе, делающая управление автожиром менее напряженным, чем самолетом. Приблизительно с 1926 г. Сиерва работает над дальнейшим развитием конструкции автожира уже в Англии, где создается фирма Сиерва автожир К0 (в Лондоне).
1928 г. является для автожира годом больших успехов и широкой популярности. На автожире С-8 II Сиерва 18 сентября перелетает из Лондона в Париж, через Ля-Манш, и производят ряд удачных полетов в Европе.
С-8 II (фиг. 9 и 10) имел мотор Армстронг-Сид iefi 180 л. с.; для него был
использован фюзеляж Авро. Фиг. ю.
Полный вес машины равнялся
1100 кг. Ротор диаметром 12м имел 4 лопасти. Профиль лопастей — Геттинген 429. Крепление лопастей ротора кроме горизонтального шарнира имело еще вертикальный шарнир, позв мяющий лопасти двигаться в пюсвости вращения (назначение его будет разъяснено ниже). Лопасти былп связаны в плоскости вращения тросами г включенными в них аиортизаторами. В этой машине
>00
Норма льи спуск
'~'^с вь'соть' I20Q м
'ч Прибытие Высота <50 «
I Па р а ш ю т и р ц ю ш ии
УтлусРвО’ Нормальнее
' ппониопвоние
Начали свдс-Ьа Л^Ьь'сото 200 •>
Приближение к выбран-"\^месту посадки
D Посадка в С-Иигпевер
Принижение *
посадки
Ч Посадка в Аббевиле III Посадка в
Cnyctf 50-hO"
Фиг 11.
было введено также небольшое неподвижное крыло с элероном для бокового управления. С-8 II имел следующую характеристику:
Максимальнаи скорость 170 км!час.
Минимальная скорость 35 км)час.
Максимальная вертикальная скорость подъема у земли 3,33 м!сех.
15
Фиг. 12.
Перелет на этом автожире Лондон — Париж был интересен своими посадками. На фиг. И даны диаграммы трех посадок. Диаграмма I дает
спуск, характерный для автожира, диаграмма II—спуск, не отличающийся ют самолетов. Автожир С-8 II показал возможность спуска под углом от 87° (официально зарегистрирован) до нормального планирования.
В 1929 г. заканчивается опитая стадия развития автожир?, и он из машины экспериментальной превращается в машину практического применения.
Начиная с 1930 г., развитие конструкции автожира иде? быстрым темпом. В начале 1930 г. Компания автожиров Сперва в Лондоне выпускает
17
2 и П Братухив
Фиг. 16
Фиг. 17.
автожир С-19 Мк III, который начинает строиться серийно. На автожире этого типа было совершено в том же году много больших перелетов по Европе, во время которых он показал себя машиной удовлетворительной в эксплоа-тации. На фиг. 12 и 13 видны основные конструктивные особенности С-19Мк III. Во-первых, хвостовое горизонтальное онерение выполнено в виде бипланной коробки (стабилизатор и руль глубины отделены друг от друга).
Фаг. 19.
На концах стабилизатора п руля глубины укреплены килевые поверхности с рулями поворота. Такая конструкция хвоста сделана в целях раскручивания ротора для взлета, которое происходит здесь следующим образом. Стабилизатор и руль высоты ставятся в положение, показанное на фиг. 14 (для этого имеется соответствующее управление из кабины пилота). Образующаяся таким образом наклонная поверхность будет отклонять кверху *
поток воздуха, создаваемый пропеллером Этот поток п будет раскручивать ротор. Действие потока усиливается с возрастанием числа оборотов ротора Таким способом рогор раскручивается до 70—80сб/мин, затем горизон аль-ные хвостовые поверхности ставятся в нормальное положение, и автожир, пробежав не более 40—60 м (в зависимости от встречного ветра), взлетает (при взлете ротор имеет 100—ПО об/мин.).
Автожир С-19 Мк HI имел неподвижные крылья. Концы их были отогнуты вверх из соображений поперечной устойчивости машины при скольжении в бок.
Втулка ротора С-19 МкШ имела тормоз, которым летчик пользовался шпосле приземления для торможения ротора. Пои отсутствии тормоза ротор продолжает по ннерцпи вращаться после посадки автожира и создает опасность опрокидывания его при большом ветре.
Широкая колея колес в 2,7 м сделана для того, чюбы при посадке с малой скоростью и креном, при высоком положении ц. т. автожир не мог опрокинуться на бок. Ход масляной амортизации у С-19 Мк III равен 240 -м п. Такой большой ход необходим для поглощения живой силы при крутых посадках автожира с вертикальной скоростью порядка 4,5— 5 м)сек. Широкая колея и большой ход амортизации присущи всем современным автожирам.
На фиг. 15 показана посадка автожира с С-19 МкШ под крутым углом в 20 м от ангара.
20
Фиг. 20.
Фиг. 16 изображает автожир на поплавках, который был сконструирован Компанией автожиров Сиерва в 1930 г. Автожир на поплавках при испытаниях дал хорошие результаты.
Параллельно с развитием автожиростроения в Англии возникает и развивается автожиростроение в CACUI. Здесь были основаны три фирмы: Питкерн, Келлет и Буль (первые две возникли в 1929—1930 гг., третья в 1931 г.); первые две строят автожиры сериями.
Фиг. 21.
На фиг 17—20 изображены автожиры Пи1керна РСА-2 и РА-18. Автожир РСА-2 до сих пор является одной из лучших машин по своим летным качествам. На фиг. 21 и 22 изображен автожир фирмы Келлет, который по схеме почти не отличается от автожиров Питкерна.
Новое, что внесли в конструкцию автожира американские фирмы, это— механический запуск (так называемый механический пусковой стартер), повлиявший благоприятно на распространение автожира Заключается он в том, что мощность, необходимая для раскручивания ротора на земле берется от мотора и посредством системы конических передач и сцеплений передается ротору. Когда достигается нужное число оборотов ротора, близкое к нормальным оборотам в полете, стартерный механизм выключается, и автожир после небольшого разбега взлетав!.
Механический стартер применяется на всех американских автожирах, причем стартерные механизмы и втулки для роторов в САСШ производит специальная фирма. На фиг. 23—26 показаны установка стартера и отдельные части кабана ротора
В 1931 г. фирмой Буль выпущен автожир несколько необычной конструкции с толкающим винтом (фиг. 27). Предназначен был этот автожир для наблюдения н аэрофотосъемки. Общая схема конструкции этого автожира видна из фмг. 28.
1 Подробности конструкции американских автожиров можно найти в статье „Три коммерческих автожира", помещенное в журнале „Aviation** за июль 1931 г Перевод ©той статьи напечатан в журнале „Самолет" 1931 г., А» 11—12
28
Фиг. 22
В конце 1931 г. Сперва выпускает две новые машины С-19 MkIV и С-24, которые изображены на фиг. 29—31. В этих автожирах Сперва переходят от 4-лош*стного ротора к 3-лопастному. Тросы, поддерживающие лопастн, и тросы, соединяющие лопасти между собой, на этих машинах отсутствуют; амортизующее устройство для поглощения резких колебаний лопастей в плоскости врадц'ния перенесено к корням лопастей.
Фиг. 33.
Удаление тросов и образование кабана за одно целое с крытой кабинкой в автожире С-24 привело к шачительному уменьшению вредного сопротивления и к повышению летных качеств машины При моторе мощностью в 120 л. с и весе 810 кг максимальная скорость С-19 достигала 180 шс/чае.
В автожирах С-19 MkIV и С 24 Сиерва использует американский опыт и применяет для раскручивания ротора механический пусковой стартер (фиг. 32>.
У автожира С-19 Мк IV для удобства транспортировки лопасти ротора сделаны складывающимися назад вдоль фюзеляжа (фиг. 33) Этот автожир получил свидетельство Воздушного министерства Англии и допущен для пассажирскою транспорта, летных школ п спортивных обществ. В данное время он находится в серийном производстве. Автожир С-19 Мк 1\ строит также немецкая фирма Фокке-Вульф.
24
Фиг. 266.
Фиг. 2бв.
'I'Hi. 30.
Фяг 28.
Фиг. 33.
Фиг. 34.
Фиг. 32.
Судя по последним журнальным сообщениям, автожир все больше и больше завоевывает к ce6q внимание: появляются новые автожиростроительные фирмы, и есть основания полагать, что при-
менение автожира не ограничится гражданской авиацией, но распространится и в авиацию военную, над чем работают сейчас как в Англии, так и в Америке.
В последнее время (1932 г.) появился оригинальный автожир CL-1O, построенный французской фирмой Диоре и Оливье Как видно из фиг 34, 35 и 36, в этом автожире неподвижные крылья и руль высоты отсутствуют; имеется небольшой стабилизатор. Управление же автожиром как продольное, так и поперечное, производится наклоном оси ротора.
Такое управление ииеет преимущество перед элеронами и рулем высоты в том, что оно остается эффективным при малой поступательной скорости аппарата и в особенности при крутых спусках.
Лопали ротора автожира CL-1O могут складываться назад, а так как К' ыльп у него отсутствуют, то получается очень малый габарит, что делает удобным его перевозку по земле и хранение. Автожир CL-1O имеет мотор Иобджой 75 л. с , диаметр ротора 9,8 м, вес конструкции с мотором 280 кг, полный вес 490 кг.
Автожир CL-10 при испытаниях потерпел аварию бтаюдаря ошибке пилота, причем пилот фирмы Диоре-Оливье М. Мартин разбился За все время развития автожира это первая авария с человеческой жертвой.
В конце 1932 г. американская ф рма Нитке рн выпустила 4-местный пассажирский автожир РА-19 с закрытой кабиной (фиг. 37, 38 и 39).
Наиболее интересные особенности этого типа следующие
1) Изменение в полете наклона о и ротора спереди назад, что дает возможность ваивыгоднейшич образом балансировать автожир я управлять им на всея диапазоне скоростей горизонталью го полета н при крутом спуске.
2) Свободнонесущее неподвижное крыло без отгиба конца.
3) Тянущий винт с переменным в полете
шагом.
Характеристики РА-19 приведены в табл. 1 (стр. 34—45).
80
Фяг. Вб
Фиг. 38.
13 '6 -
3 II. П. Братухяи
Фиг. 42.
TAB
СССР Англия
Ц АГ И Компания автожиров Сперва
:ЭА 4ЭА С-19 ЫкШ|С-19 Мк IV С-24
/
Полный вес, кг ........ 970 1368 635 660 Т75 1
Вес пустой машины, Ki . . . . 737 970 453 490 582 !
Полезней груз, га ...... 233 398 182 170 193 ;
Число мест • . . 2 2 2 2 2
Мотор . Титан М-26 Дженет- Дженет- Джипси-Ш 1
Меджер Меджер
Мощность, л. с 230 300 105 105 120 !
Нагрузка на 1 л с 4,22 4,55 6,03 6,3 6,45 ।
Диаметр ротора, 12 13 10,7 10,4 10,4 j
Плошадь, ометаемая ротором, л* 113,0 132,5 89,7 85,0 85,0 |
Нагрузка на 1 ж2 поверхности,
ометаемои ротором ..... 8,5 10,^1 7,05 7,7/ 9,1
Число лопасти ротора . . 4 4 4 3 3
Коэфициент заполнения ротона
(отношение площади лопастей
к площади, сметаемой рото-
ром ) . . 0,1145 0,1058 0,095 — —. ।
Способ раскручивания ротора j
перед взлетом Аэродин. Механ Аэродин. Мехак. Механ. |
Нормальное число оборотов ро-
тора в полете, об/мин .... 145 151 160 — —
Максимальная скорость, км/час . 16 ' 170 161 164 185 j
Минимальная скорость без сни- i
жения, км час Меньше 50 45 40 40 40 I
Потолок, л 4500 4600 4000 3600 — 1
Максимальная вертикальная ско«
рость подъема у земли, м/сек . 4,2 4,0 4,1 3,2 3,0
Разбег, .V 50-60 — — 30 47
Площадь неподвижного кры-
ла, ж2 ... . ..... 5,34 6,2 3,89 — —
Отношение площади неподвиж-
ного крыла к сметаемой пло-
щади ротора, °/0 .... 4,73 4,68 4,32 — —
Площадь элеронов, ж2 1.138 1,77 1/.2 — — ;
Отношение площади элеронов к
площади ротора, % .... 1,0 1,33 1,24 — —
Площадь горизонтального опере-
НИЯ, ж2 2,55 2,918 2,815 — —
Отношение площади горизонталь-
ного оперения к площади ро-
тора, 0 о 2,26 2,2 3,14 — --
Площадь стабилизатора, .«2 . . 1,15 1,°С8 1,39 — —
Отношение площади стабилиза-
тора к площади всего горизоп-
тального оперения, °,0 . . . 45 41,5 49 —
Площадь руля высоты, м2 . 1,4 1,71 1,425 — —
Отношение площади руля высоты
к площади горизонтального
оперения, °,в ЕК 55 58,5 51 —
34
ЛИЦА 1
С А С ш Франция
Фирма I В ТК 0 р и Фирма Келлет Фирма
РАА-1 РС-2 РА-18 РЛ-19 К-2 К-3 CL-10
790 1350 855 1830 1000 1030 908 490
520 950 1215 705 700 635 280
270 400 — 615 295 330 273 210
2 3 2 4 9 2 2
Киинер Райт Канцер Райт Ковтинен- Киннер Континен- Побджой
таль таль А-70
125 300 160 420 165 210 165 75
6,3 4,5 < 5,34 4,35 6,06 4,9 5,53 6,5
11,3 13,8 12.4 15,44 12,5 12,5 12,8 9,8
100 141,9 120 187 117,8 120,2 118.3 75
8,25 9,51 7,13 9,8 8,93 8,58 7,65 6,53
4 4 4 4 4 4 4 3
0,1 0,098 - 0,083 — 0,107 0,093 — 0,045
Мехав. Механ. Механ. Механ. Механ. Механ. Механ. Механ,
145 135 — 133
148 198 — 193 160 176 152 165
__ 40 40 30
— 5400 — — — — — —
5,3 —
— — — 80 — 50 — —
4,84 8,35 - — 9,29 9,2 - -
4,8 5,5 __ 7,8 7,68
1,4 2,62 — — , 2,18 — — —
1,4 1,3 — — 1 1,8 — — —
2,06 3,26 — - 1 3,3 - - -
2,15 2,3 2,8
0,84 1,48 — — 1,3 — — —
41 4 5,5 39,5
1,22 1,78 — — 2,0 — — —
59 54,5 - - 60,5 - - —
3*
35
СССР
А н i л н я
Ц Л Г II Компания автожиров Сиерва
2ЭА 4ЭА С-19 Мк1И С-19 Мк IV С-24
Площадь вертикального оперения, м2 Отношение площади вертикального оперения к площади ро-тора, 2,15 1,67 1,99
1,9 1.26 2,2
Площадь киля, it2 1,29 0,804 1,34 —
Отношение площади киля к общей площади вертикального оперения, °/0 60 48,2 62,3
Площадь руля направления, м2. 0,86 0,868 0,75 —
Отношение нлощадп р^ля направления к площади вертикального оперения, 0 40 51,8 37,7 - -
3S
Продолжение табл. 1
<! РАД-1 и р м а Г РС-2 и т к е р н РА-18 А С РА-19 ш Фирма К-2 Келлег К-3 Фирма Куль Франция CL-1O
0.826 0,826 0,334 40,4 0,492 59,6 1,42 0,96 0,72 50,8 0,70 49,2 - — 1,18 0,962 0,474 40,7 0,7 59,3 - - -
У нас в СССР автожир появился впервые в 1929 г. Он был сконструирован инженерами Камовым и Скрежинским и построен Осоавиахимом. На фиг. 40 изображен этот автожир, или „вертолет*4. как он был назван авторами проекта. По своей схеме он подобен автожиру С-8 II. Для него тоже был использован фюзеляж Авро, но мотор установлен более мощный—Титан 230 л. с. Летные испытания вертолета, происходившие в 1930 г., дали следующие результаты: потолок 450.и, максимальная скорость 110 км/час, минимальная 35 км/час.
Независимо от группы, работавшей над вертолетом в 1930 г., Секция особых конструкций ЭАО ЦАГ11 предприняла проектирование автожира „2ЭА“. За схему для 2ЭА был взят автожир С-19 Лк III. Автожир 2ЭА (фиг. 41, 42) был построен в конце 1931 г. Летные испытания его дали весьма удовлетворительные результаты (см. табл. 1).
В 1932 г. Секция особых конструкций ЭАО ЦАГИ сконструировала и выпустила второй автожир 4ЭА с механическим запуском (фиг. 43 и 44). Данные этого автожира приведены также в табл. 1.
Глава вторая
Теория ротора
Удачное развитие конструкции авюжира повело к теоретическим изысканиям по несущему авторотирующему винту-ротору.
Так, например, в 1926 г. появилась работа Пистолези1. В 1927 г. была опубликована Глауэртом теория автожира2. В 1928 г. ее развил и дополнил Локк3. Можно также указать на несколько работ итальянских аэродпнамиков (Ферарри, Пистолези,' Уго-де-Каряа), относящихся к работе винта в боковом потоке и частично затрагивающих авторотирующие винты, однако все они, за исключением указанных работ Глауэрта и Локка, рассматривают работу авторотирующих винтов с лопастями, не имеющими махового движения, и, стало быть, не вполне аналогичную с работой ротора автожира.
В настоящей главе мы намерены изложить теорию ротора Глауэрта— Локка, так как, на наш взгляд, она хотя и несколько громоздка по своему математическому выражению, зато дает удовлетворительную сходимость расчетных данных с данными летных испытаний и, кроме того, позволяет охватить работу ротора всесторонне благодаря удачному включению в анализ его работы периодического махового движения лопастей.
Изложению теории Глауэрта п Локка необходимо предпослать некоторые общие соображения о причинах авторотации ротора.
§ 1. Авторотация несущего виита-ротора
Выше было сказано, что несущий винт-ротор пр^ движении автожира свободно вращается — авторотирует. Состояние устойчивой авторотации несущего винта является абсолютно необходимым условием при всех возможных летных режимах автожира, потому что необходимая подъемная сила развивается только на авторотирующем винте. Кроме того, лопасти ротора, при наличии шарнирного креплени/ к втулке, могли при отсутствии достаточной скорости вращения закинуться вверх иод действием подъемной силы ввиду недостаточной величины распрямляющей их центробежной силы.
Для выяснения явления авторотации рассмотрим сначала случай вертикального парашютирования ротора, свободно вращающегося в прямом направлении (т. е. когда лопасть движется носиком профиля вперед). Такой
1 .Aerotecnice* № 6, октябрь 1926 г.
2 .Reports, and Memoranda* № 1111,
3 .Reports and Memoranda" № 1127.
38
режим ротора аналогичен режиму ветряной мельницы, работающей при нулевом крутящей моменте на валу. На фиг. 45 дано сечение лопасти ротора на расстоянии г от оси вращения. Относительная скорость этого элемента И7 (являющаяся геометрической суммой окружной скорости вращения Qr, скорости парашютирования 70 и индуктивной скорости и) составляет с хордой профиля угол атаки а. Аэродинамическая сила элемента лопасти, как известно, отклонена от перпендикуляра к относительной скорости W в сторону направления относительной скорости воздуха на arc tgfiA (где ^,= 1^).
Угол отклонения аэродинаиической силы от перпендикуляра к плоскости вращения в общем случае можно выразить так:
а—arctgp-к — нц-0. (1)
Если аэродинамическая сила F отклонена вперед по движению от перпендикуляра к плоскости вращения, как на фиг. 45, то вращение ускоряется; в эюм случае
а — arctgp-к >0. (1')
Когда сила -F отклонена назад a-arctg |_j от перпендикуляра к плоскости вра- ' щения, то вращение тормозится.
Тогда
a^arc tgp« < Н. (1")
Наконец, когда F параллельна оси вращения и ее проекция на плоскость вращения равна нулю, тогда на элементе нет ни ускоряющей, ни замедляющей силы и это будет условием установившейся авторотации для элемента, которое выразим уравнением:
а — arctgp« = 0. (1"')
Это уравнение справедливо для любого элемента лопасти, хотя, понятно, все элементы лопасти не находятся одновременно в одинаковых условиях, так как вдоль лопасти выражение а — aretgp,.-— 0 будет меняться. При этом аэродинамические силы на некоторых элементах лопасти будут стремиться ускорить вращение, а на других замедлить; поэтому для парашютирующего ротора установившееся вращение наступит тогда, когда результирующая аэродинамическая сила лопасти будет перпендикулярна плоскости вращения; при отклонении результирующей вперед пли назад возникнет, соответственно, ускорение или замедление вращения.
Для ротора, плоскость вращения которого составляет с поступательной скоростью автожира угол г° (обычно малый при горизонтальном полете), условия авторотации для элемента лопасти могут быть тоже представлены выражениями (Г), (1") и только в этом случае выражение arctgp% будет меняться не только вдоль лопасти при данном угловом положении Ф, но и для данного сечения опм будут другими при другом угловом положении лопасти. Поэтому условием установившейся авторотации для ротора
39
в этом случае будет равенство нулю суммарного крутящего момента от всех лопастей при любом угловом положении их. (потерями на трепне во втулке ввиду их малости пренебрегаем).
Выражение (1) указывает на зависимость авторотации от угла 0 установки лопастей; очевидно, что не всякий угол установки лопасти для данного ее сечения будет способствовать авторотации. К сожалению, пока нет точного метода, с помощью которого можно было бы сразу определить, обеспечивает ли данный угол установки лопасти авторотацию ротора в пря-
бых режимах, может быть построена диаграмма, дающая зависимость выражения а— arctgp-s от угла атаки а. Для построения такой диаграммы требуется только поляра профиля для бесконечного удлинения (бесконечное удлинение берется согласно теории винтов). На фнг 46 приведена диаграмма авторотации профиля Геттпнген 429. Если на эту диаграмму нанести прямую tm, параллельную осп абсцисс и отстоящую от нее на величину,равную углу установки 0, то разность иежду ординатами кривой а — arctgp.K н прямой аа будет выражать соотношение (1), т. е.
а — arc — 0 Jo.
При данном угле 0 установки лопасти указанная диаграмма дает два значения угла атаки профиля—и а2,—при которых имеет место равенство а — arc tg <л); — ё, т. е. установившаяся авторотация. Однако только меньшее значение будет давать авторотацию устойчивую. В самом деле, допустим малое произвольное увеличение угла атаки сечения, вызванное, 40
например, случайным замедлением вращения. Для устойчивости вращения необходимо, чтобы возникла ускоряющая вращение сила, которая увеличила бы окружную скорость, что, в свою очередь, уменьшило бы угол атаки. Это требование равносильно тиму, чтобы выражение « — arctgp.,. — 0 возрастало прп возрастании а. На диаграмме .лому условию удовлетворяет учанок, в котором находится значение аг; прп угле же атаки «2 авторотация неустойчива потому, что на участке, прилежащем к этому углу, величина а — arctgp-к—0 убывает с возрастанием а.
Из диаграммы авторотации профиля Геттинген 429 видно, что предельное значение угла установки В, при котором, невозможна авторотация ротора в прямом направлении при любом режиме автожира, равно примерно 7°. Высота заштрихованной части диаграммы дает запас авторотации, а интервал между ах и аа— диапазон углов атаки, при которых на сечении имеются ускоряющие вращение силы. Профиль, пиеющий больший запас авторотации при данном угле установки и большой интервал а2 — аь выгоднее с точки зрепия авторотации. Если построить диаграмму авторотации ио данным продувки профиля па углах атаки от 0 до 180е, то она даст 01вет, в каком на травление в прямом или обратном, будет вращаться винт, падающий с высоты (если он до падения не вращался), при данном угле установки.
тзчно так же очевидным будет то, что ротор, не раскрученный па месте, вращается при пробеге автожира по аэродрому перед взлетом в прямом направлении.
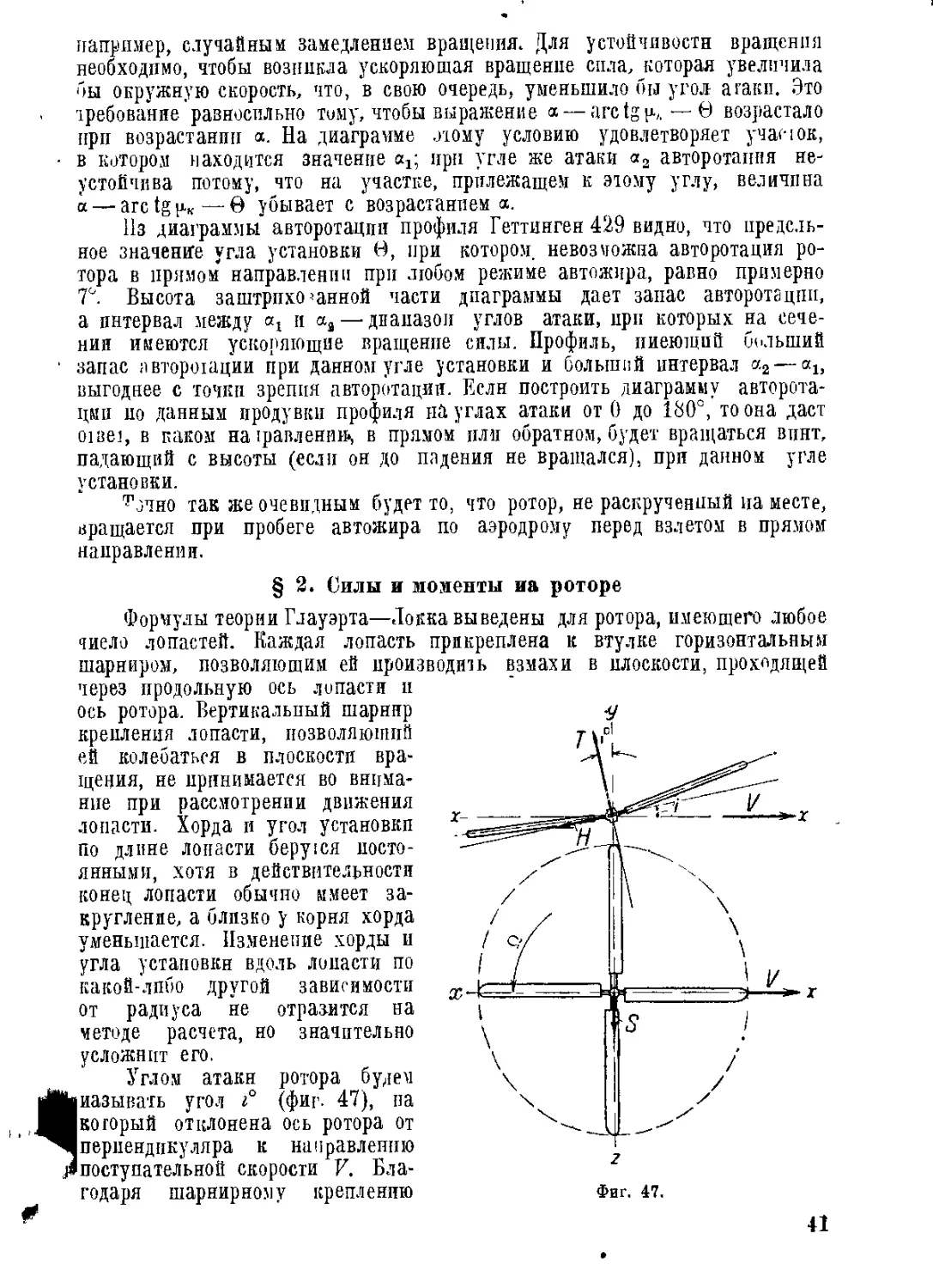
§ 2. Силы и моменты на роторе
Формулы теории Глауэрта—Локка выведены для ротора, имеющего любое число лопастей. Каждая лопасть прикреплена к втулке горизонтальным шарниром, позволяющим ей производить взмахи в плоскости, проходящей
через продольную ось лопасти и ось ротора. Вертикальный шарнир крепления лопасти, позволяющий ей колебаться в плоскости вращения, не принимается во внимание при рассмотрении движения лопасти. Хорда и угол установки по длине лопасти беру!ся постоянными, хотя в действительности конец лопасти обычно имеет закругление, а близко у корня хорда уменьшается. Изменение хорды и угла установки вдоль лопасти по какой-либо другой зависимости от радиуса не отразится на методе расчета, но значительно усложнит его.
Углом атаки ротора будем [называть угол (фиг- 47), па который отклонена ось ротора от перпендикуляра к направлению 'поступательной скорости V. Благодаря шарнирному креплению
Фиг. 47.
41
лопастей результирующая аэродинамических сил, действующих на ротор, пройдет всегда через центр втулки (расстояниями горизонтальных шарниров от оси ротора можно пренебречь).
Полную аэродинамическую силу ротора можно будет в общем случае разложить на следующие 3 компонента;
1) Т—тягу, направленную по оси ротора. За положительное направление считается направление вверх;
2) Н — продольную силу, лежащую в плоскости ух и перпендикулярную оси ротора. Продольная сцла всегда направлена в сторону, обратную двнженцю машины;
3) S — поперечную силу, перпендикулярную первым двум. Направление поперечной силы в сторону лопасти, направление окружной скорости которой совпадает с поступательной скоростью машины, будем считать положительным.
Кроме этих сил па роторе при неустаяовившейся авторотации будет • крутящий момент. При установившейся авторотации он равен для всего ротора нулю, хотя для каждой отдельной лопасти он может быть и не равен нулю. Обозначим крутящий момент через М и будем считать его положительным, если он тормозит вращение ротора.
Поперечный и продольный моменты благодаря шарнирному креплению лопастей невелики по величине (они имеются за счет нецентрального расположения горизонтальных шарниров), и их мы jiaccMOTpiiM в гл. IV.
Определение компонентов полной аэродинамической силы на роторе ведут методом подсчета сил по элементам лопастей (метод, широко применяемый в расчете винтов), рассматривая их как элементы крыла. Для этого подсчета необходимо знать относительную скорость и истинный угол атаки у. каждого сечения лопастн при любом угловой ее положении, поэтому мы прежде всего должны выяснить движение лопастей.
§ 3. Движение лопастей
Каждая лопасть ротора при полете автожира имеет три вида движения:
1) поступательное движение вместе со всей машиной со скоростью V, 2) вращательное вокруг осп ротора при установившейся авторотации с постоянной угловой скоростью 2 и
3) периодическое маховое движение относительно горизонтального шарнира ГШ, (фиг. 48).
Первые два вида движения достаточно ясны и не нуждаются в каком-либо. пояснении. Рассмотрим лишь маховое движение. Это движение прм установившейся авторотации происходит благодаря асимметрии относительного потока, обтекающего лопасть в плоскости вращения. В самом деле, из фиг. 46 видно, что кажущаяся скорость воздуха относительно какого-либо сечения лопасти будет выражаться через Qr -J- Fsiii 6 (отсчет б ведется от заднего положения лопасти по вращению). Если две противоположные лопа-ти расположатся перпендикулярно к направлению поступательной скорости V, то для одной пт них скорость будет 2г 4- 7, а для другой 2г— V. Прн жестком креплении лопасти это ведет к появлению поперечного опрокидывающего момента. При шарнирном же креплении лопасти она будет в случае симметричного потока (случай парашютирования ротора) 42
приподниматься над плоскостью вращения на угол £ = const, пеличияа которого определяется из условия, что момент от тягн относительно ГШ должен быть равным моменту от центробежной силы. В этом случае никакого махового движения лопастей не будет.
В случае несимметричного потока, имеющего место тогда, когда плоскость вращения ротора составляет с поступательной скоростью угол меньше 90°, лопасти будут иметь маховое движение. Возникает и поддерживается опо стедующнм образом.
За один оборот лопасти кажущаяся относительная скорость для любого сечения лопасти будет изменяться по закону qt Н- V в1и ф. С изменением относительной скорости будут изменяться тяга и момент от тяги относительно ГШ. Так, например, при сительная скорость возрастает, момент от тяги тоже будет стремиться возрасти, но, возрастая, он будет поднимать лопасть вверх на угол р с угловой скоростью относительно ГШ. Эта скорость уменьшит истинные углы атаки сечения лопасти, что приведет к уменьшению тяги и момента от тяги. Двигаясь далее от у к сечения лопасти будут иметь уменьшение относительной скорости, но благодаря инерции махового движения лопасть будет продолжать подниматься. Достигнув в каком-то угловом положении (которое находится между г. ц 3/а тс) максимального угла взмаха р, лопасть далее при попятном движении от тс до 2тс в еялу уменьшения скорости, а стало-быть, и тяги будет опускаться. Скорость этого опус,
углы атаки < лопастей, что приведет к увеличению тяги и момента от тяги.
Итак, за одпн оборот лопасть поднимется и опустится, т. е. взмахнет. Это маховое движение выравнивает тягу и момент от тяги противоположных лопастей. Величина угла взмаха р определяется из условия равенства нулю суммы моментов относительно ГШ, которая составляется из момента от тяги, момента от веса лопасти, момента от центробежной силы няерцпн вращения-и момента от сил инерции взмаха.
При установившейся авторотации ротора маховое движение лопасти делается периодическим и установившимся, и угол взмаха будет непрерывной и периодической функцией ф; его можно выразить в общем случае рядом Фурье с любой степенью точности:
р = —ахсозф — djSinф—a2cos2ф—&азш2ф—. . . — апсоз*мф—Ьж81ппф;
но достаточно хорошее приближение можно уже получить, если сохранить в ряде Фурье первые гармоники. При сохранении следующих гармоник анализ работы ротора делается неимоверно сложным и громоздким по своему
математическому выражению *, поэтому мы будем пользоваться следующим уравнением для утла взмаха:
? = «о — «jcos^ — ijsiu'e- (2)
На фиг. 49 изображены согласно этому уравнению углы взмаха для угловых положений лопасти 0, 90. 180, 270°. откуда видно, что заданное
Фиг. 49.
уравнением (2) маховое движение эквивалентно наклону плоскости вращения ротора назад на угол аи вбок (в сторону лопасти, идущей вперед) на угол bi и одновременному отклонению всех лопастей вверх на угол ай (угол конусности ротора). Иными словами, можно сказать, что лопасть описывает коническую поверхность вокруг некоторой оси. отклоненной от действительной назад и вбок.
Очевидно, что лопасть, вращаясь вокруг этой новой осп. будет иметь момент от центробежной силы относительно ГП1 постоявным (так как угол «о—одни для всех угловых положений), а стало-быть, и момент от тяги будет тоже постоянным для всякого углового положения и равным моменту от центробежной силы1 2. Это обстоятельство является показателем автоматического исключения поперечного н продольного моментов на авторотирующем роторе при асимметричном потоке благодаря шарнирному креплению лопастей.
Указанные наклоны плоскости вращения назад п вбок при шарнирном креплении лопастей ротора можно объяснить еще следующим образом.
Еа фиг. 50 взяты на радиусе г два сечения противоположных лопастей, стоящих перпендикулярно погону. Сечения совмещены. Сечение А находится в сумме скоростей, а сечение В в разности. Направления двп-жеиий показаны стрелками. Чтобы моменты сил противоположных лопастей
1 Об исследовании махового движения лопасти в общем виде см. „Reporls and Memoranda’ Л» 1127.
2 Этого нельзя было бы сказать, если бы мы в уравнение для угла взмаха включили вторые гармоники.
44
были равны, нужно, чтобы лопает двигались в новой плоскости вращения, имеющей со старой плоскостью вращения угол а^. тогда сечение А будет иметь кажущийся угол атаки 0 —а сечение В—угол 6 + аг.
Фпг. 51 представляет наложенные сечения С и D, взятые hi радиусе г от осп вращения двух противоположных л-шастей, расположенных по дви-
жению.
При угле атаки В ротора, за счет угла конусности ротора а0, сечение С. находящееся впереди, будет иметь момент от тяги ‘относительно втулки больший, чем сечение D: отсюда для равенства пх необходимо, чтобы лопасти пошли по новой плос-
кости вращения, которая составила • Фиг. 50.
бы со старой плоскостью угол
В этом случае сечение С будет имен» кажущийся угол атаки О — Ьъ а сечение D— угол
Наклон плоскости вращения ротора назад на угол ал п вбок на угол осуществляется автоматически маховым движением лопастей благодаря их
шарнирному креплению.
В дополнение можно сказать, что маховое движение лопасти по своему эффекту на истинный угол атакп сечения почти эквивалентно дей-
Фиг. 51.
щения будет находиться в третьем (начало отсчета, как на фиг. 47). полоящние этих точек можно легко водную от р и приравнять нулю:
ствию кулачкового механизма, дающего такое периодическое изменение угла установки лопасти (жестко закрепленной и поворотной вокруг продольной оси), при котором продольный и поперечный моменты на роторе равны нулю1.
Из уравнения (2) и фиг. 4Н можно установить, что самая высокая точка ртзх''диска вра-
квадранте ометаемого лопастями круга а самая низкая—в первом. Угловое определить, если выть первую произ-
-зт —ел sin Ф — cos'L=0: а-\> 1 • 1
отсюда
= arc tg .
(3)
Напишем уравнения угловой скорости и углового ускорения махового движения; для "чего возьмем 1 н 2-ю производные от угла р [уравнение (2)] по времени. Так как при установившейся авторотация
1 Подробнее об этом см. .Reports and Memoranda" № 1127.
45
то угловая скорость:
—Q (й! sin Ф — cos (4)
угловое ускорение:
= Й2 («1 cos + b1 sin С). (5)
Выяснив характер махового движения и задавшись вероятным законом изменения угла взмаха, можно перейти к рассмотрению скоростного поля относительно плоскости вращения, а потом и относительно сечения лопасти.
§4. Компоненты скорости воздуха относительно плоскости вращения ротора
Поступательную скорость V ротора, имеющего угол атаки t°, можно разложить яа две составляющие (фиг. 52): нормальную к осн ротора, лежащую в плоскости вращения1 V cos г, и параллельную осп ротора—V sin?.
Помимо скорости V воздух относительно плоскости вращения ротора пмеет индуктивную скорость (скорость, вызванную ротором) V.
Направление индуктивной скорости можно приближенно установить, исходя из следующих соображений. Согласно теореме о количестве движения направление индуктивной скорости будет прямо противоположно направлению полной аэродинамической силы ротора, а так как глав-и 8 малы по сравне-
Н
ным компонентом последней является тяга (силы нию с Тк, то, стало-быть, можно считать, что индуктивная скорость направлена по осп ротора.
Гак как установить действительный закон распределения индуктивной скорости по диску трудно, то делается допущение, что она постоянна во всех точках ометаемого диска. Величина индуктивной скорости зависит от той массы воздуха, которая подвержена действию ротора.
1 Плоскостью вращения ротора считается плоскость, перпендикулярная оси ротора и проходящая через центр втулки.
Индуктивную скорость в плоскости ометаемого диска Глауэрт предложил определять нз следующего уравнения:
Т=2^Я2рГ, (6}
где V есть результирующая поступательной скорости F и индуктивной v (фиг. 52), равная:
Г F2cos2/+(Ksin/—v)8. (7)
Формула (6) является логическим обобщением уравнений количества движения для винта и крыла. Действительно, для винта радиуса R, дающего тягу Т, уравнение количества движения будет:
Г = 21’тгй2р71,
где Vi—скорость воздуха сквозь диск винта, a v— индуктивная скорость в плоскости диска. Уравнение нормальной индуктивной скорости для крыла с полуразмахом Z п подъемной силой Р, эллиптически распределенной по размаху, будет:
Р = 2i ~t2 р у.
В том и другом уравнениях аэродинамическая сила равна произведению удвоенной индуктивной скорости на массу, и в обоих случаях масса равна произведению плотности па площадь круга (для крыла, построенною на размахе как на диаметре) и на скорость воздуха сквозь этот круг.
Можно из вышесказанного заключить, что при равных подъемных силах для ротора и крыла с размахом, равным диаметру ротора, индуктивные скорости будут считаться равными при равных поступательных скоростях. Вышеуказанные допущения, касающиеся величины распределения по диску и направления индуктивной скорости, являются основными в анализе работы ротора. Окончательно компоненты скорости воздуха относительно диска будут: 1) осевой с учетом индуктивной скорости, постоянный по всему оме-таеиому диску:
и = Fsin i — v ~ a-QR, (Я)
' и
где X = QR>
2) нормальный к валу, постоянный по всему ометаемому диску:
Fcosz = p^2jR, (9)
где и. = есть характеристика режима ротора.-
§ 5. Скорость воздуха относительно лопасти ротора
Рассмотрим скорость воздуха относительно элемента лопасти dr, отстоящего от оси ротора на расстояниии г; лопасть имеет угловое положение л угол взмаха р. Взятый элемент кроме скоростей, расмотренных в § 4, имеет еще угловую скорость вращения 2 вокруг оси ротора и угловую скорость махового движения . Относительную скорость воздуха у элемента разложим на две составляющих-, на радиальную, направленную по продольной оси лопасти, и на лежащую в плоскости, нормальной к продольной оси
47
юпасти. Последнюю составляющую мы обозначим U. Радиальной слагающей скорости при подсчете аэродинамической силы на элементе пренебрегаем н считаем, что аэродинамическая сила лежит в плоскости, нормальной оси лопасти, и зависит только от слагающей скорости в этой плоскости, т. е от U. Обозначим угол, составляемый скоростью V с плоскостью вращегил,
через ф (фаг. 53) и разложим скорость V на:
1) компонент, лежащий в плоскости вращения и считающийся положительным, если он встречает элемент лопасти с носика:
U cos ф = Ц,;
2) компонент, нормальный первому ч считающийся положительным, если он проходит сквозь диск снизу вверх:
rsmp5= иу.
PQRcos^ "-СЖсозФр
l/sinp
Фиг. 5В.
Эди компоненты выразятся (фиг. 54)
Ur = DTcos ф = 2r + и.2 В sin <
где 2г —окружная скорость вращения элемента, ^2 В sin ф - лроек-’яя y.QB = Feos i па направление компонента, г =~ — относительный радиу« г = Г В.
UtJ= D’ sin ф — х 2 R— г—Йсовф,
гдех 2 R = и есть осевой компонент скорости воздуха относительно плоскости вращения; ввиду .чалого угла 9 1 х 2 В взят вместо величины х QB cos 3:
' — тангенциальная скорость махового движения; ^2^cos4— проек-
ции р-2 В па направление компонента Гу; ввиду малости згла р sin р принят равным углу.
Компонент Uv после подстановки р и ~ из уравнений (2) и (4) примет следующий вид:
= 2 В р—f^rsin^ —(«оу. —rdj) cos ф + р.соз 2 ф 4-
+ >и81В2?].
1 Наибольший угол взмаха лопасти в действительности при установившемся движении бывает иорядка [О—i2a. *
48
В дальнейшем для определения аэродинамических сил на роторе нам потребуются следующие величины. U*-, Ux Uy\ Uy2.
Напишем их выражения, сохранив в них только постоянные члены м первые гармонические члены }гла Ф:
= +W'Sin )}. (12)
17,17* = 22 Л2|Д г — я, г2 + J «jh2 jsin^ +
4- (6;r2 — ar_,|л i- 4 -jb^jcosi ]. (13)
V,! = 'J2/.,2|z2 + ai*(~r°- +-|.на) +4«o21'-2 «о *!?'»' + 8>i’(-p + |1‘2)+ + •'<.«[ ;i — (ixa1r + i<h2 H' — ^-9 » + у «oti2)sln ') +pz&l>'— 2«<7O|X + + 61 «I Iх » — у «о «I ?2) cos') j. (14)
§ 6. Элементарные силы и элементарный крутящий момент лопасти
Зная скорости воздуха относительно элемента^ лопасти dr, определим элементарные силы и элементарный крутящий момент. Для выражения сил и момента в аналитической форме необходимо сделать следующие допущения
1. #гол д) (фиг. об) считается малым.
Тогда
У cos 4 = U,= П, 1
Usin<f>= и, = фИ,] (1Э)
Эти формулы перестают быть справедливыми по мере приближения к корню лопасти, и особенно в той области диска, где она движется понятно. На фиг. 55 представлена эпюра скорости Ux. Круг диаметра d, нанесенный пунктиром, является геометрическим местом нулевых скоростей н ограничивает область оме-таечого диска, где воздух набегает па лопасть с задней кромки и где угол ф приближается к те.
Ошибка, вносимая при подсчете зависит от величины d или, что’ тоже,
QR-Vcosi,
Фиг. 55.
па элементе в указанной области, d
г режииа р, так как о = р ; чем
больше р, тем больше уменьшение точности. Глауэрт предложил считать пределом применения формул, построенных на указанных выше допущениях, такое значение р, когда еще компонент скорости Vx будет положительным на внешней половине лопастей, движущихся попятно, т. е.
pS0,5.
4 И ГТ Брагухая
49
2. Коэфициент подъемной силы профиля лопасти, взятый при бесконечном удлинении, считается прямо пропорциональным углу атаки. Для сииме!ричного профиля он выразится так:
Cs = Аа,
где Л — коэфициент пропорциональности; так как согласно фиг. 53
а = в + ф, С, = А(& + ф).
(W)
Фиг. 56.
Иа фиг. 56 даны характеристики профиля Геттинген 429 для Х = оэ, откуда видно, что прямая пропорциональность Су углу атаки профиля нарушается, когда угол атаки возрастает до критического значения и выше (для профиля Геттинген 429 критический угол ~9°). Допущение Су = Аа. перестает быть справедливым в той же области, где несправедливо и допущение первое.
3. Действительные коэфициенты лобового сопротивления для профиля (при X = со) заменяются их средним значением 8:
% = 8. (17)
Теперь можно перейти к определению сил и крутящего момента на элементе Rdr одной лопасти, находящемся на расстоянии rR от оси ротора (фиг. 57).
60
а) Элементарная тяга будет равна:
dTj = (Cv cos ф + 3 sin ф) р eRdrU*, где с — ширина лопасти ротора.
Заменим С согласно формуле (16) и примем cos$ равным единице (ввиду малости угла ф). Произведение 8sin ф отбросим, как очень малое.
Тогда
dTi = ApcRdr + фи1).
Принимая во внимание равенства (15), получим;
= APcRdr(0Ux2 + UJJj. (18)
b) Элементарный крутящий момент:
dMA = (3 — Сг$) pcR2rdrU2 = pcRtrdrtbU2 — Afyffy- /J (j ’
Принимая во внимание равенства (15), получим:
dMi = pcR2rdr^U2— A&UXUV — AUV2). (19)
с) Элементарная продольная сила (фиг. 58) выразится так:
d-Щ == ~ dMt sin О — ^dTt cos Ф. (20)
d) Элементарная поперечная сила:
dZ?! == — — dJW1coS’b-- pdl^sinty . (21)
>‘R
§ 7. Формулы полных сил ротора
Имея выражения для элементарных сил, нетрудно получить полные вилы одной лопасти, а затем м ротора.
4* 51
Тяга. Тягу одной лопасти получим, если проинтегрируем уравнение (18) по г = ~ в пределах от 0 до 1, заменив в нем выражения U‘ и UrUt пз уравнений (12) и (13):
Тг = fdTt —AfRу(0 LT? + U,UB)dr =
= ApcR3^ p+ -i- .Арк sin
+ xr +
+ У <W2 + У «il12) sin 4 +(V2 — a„i>.r +
+ y- b#2) cos') ] dr = A(-L + -L u.2 +
+ H sin <») + + (жр- — — + У sin Л +
+ i T ~T + Г cos4 = +
4—J- © + ~2~ 4“ [p- (^ + ‘
- % (t - 4 -a)] sin ф + [4 (i+4 ^г) - 4 cos 4
(22)
Для получения полной средней гягн ротора, имеющего z лопастей, иы должны просуммировать тяги отдельных лопастей. При суммировании по 4 или 3 лопастям периодические члены выражения (22) с sin •'/ и совф в полную среднюю тягу не войдут, так как взаимно уничтожатся х. Полная тяга ротора будет равна:
Т= -^у'7'#) = ггрЛ32М[-|- +-гВ(1 + Т“2)]- (23)
и
Формула (22) для тяги одной лопасти неточна, так как в ней нет вторых и высших гармонических членов угла которые не были нами включены в выражения Ux2 и UXUU. На полную же среднюю тягу (23) вторые и высшие гармонические члены угла 6 не повлияют.
Если в формулу (23) ввести коэфициент заполнения fc. являющийся отношением поверхности всех лопастей к ометаемлму диску и который для прямоугольных лопастей выразится: «
, __zcR___ zc
к ~ пк
1 Например, при 4 лопастях сумма членов с sin будет;
Sin Ф = sin 4»! + sin (tpi + 2’) + S1° 4" sin G* + 4 = Sin d -i- cos i —
— sib — cos ф — 0.
62
то получим:
где
Т = k^R^QR)2 t,
1 ~ &ртД'(2В)! Л[ 2 + 3 ®(1 + s I12;]
(24)
(25)
является абсолютным козфициентом тяги, отнесенной к квадрату окружной скорости, плошади ометаемого диска, плотности воздуха м коэфмциситу заполнения ротора. _
Продольная сила- Интегрируя уравнение (20) по г (подбавив предварительно йгИр dTx и 3 из (2), (18) и (19) и заменив U/-, V,V^ V* из формул (12), (13) и (14)], а затем суммируя по z лопастям, получим полную продольную ему ротора:
+ 441 - 4 И + 4^+4 и ++2+«s-w- m
-44-4 4]-
Вводя коэфициент заполнения к, мы получим окончательно: H=k?vR2(QRf h, , (27)
где h есть коэфициент продольной силы, равиый:
"“4444—4 + 4^ + 44 + ]
+ 4^ + 4 (2й2“+и12 -"Л - “44 - 4 41 i <г8)
Поперечная сила, Интегрируя уравнение (21) по г п суммируя затем ио г лопастям, получим среднюю поперечную силу:
5 == Л. /dSx = гсР14Н2 + 4 +9 + j
о о । (29)
9 / «МЛ 3 / , 1 ОлЛ./и 21 9\) I
+ ^4+t)-T9«o4+ Ve)+-r(1-44) 1
ли
S == kpitR:(QR)z s,
Для того чтобы определить козфмцпенты тяги продольной и поперечных сил по формулаи (25), (28) и (30), необходимо установить связь между величинами, входящими в эти уравнения,—р, х, а0, alt дъ О, А и 3, а при данных 0, А, 3 н заданном режиме ротора и найти т, а0> at, Ъг.
63
Это мы можем сделать, воспользовавшись уравнением махового движения лопасти и условием равенства нулю крутящего момента ротора при установившейся авторотации.
§ 8. Уравнение махового движения лопасти
Уравнение махового движения напишем, исходя нз условия равенства нулю суммы моментов всех сил лопастн 'относительно горизонтального шарнира, а именно (фиг. 59):
Л R ft К . ' .
J*dTtr— j*tnardr—J 8Q2r2mdr— j mdr = 0, 0 0^0 0
где:
m — погонная масса лопасти, я
J‘ dTtr — момент от тяги, о в
J'mqrdr — момент от собственного веса лопасти, о я у»
j ^Q2r2mdr— момент от центробежной силы, о
ми .
/ ~~ mdr -- момент от сил инерции махового движения. ' 6
Обозначим следующие интегралы через:
f ingrdr= G\, о
/ r-tndr = Д,
V
64
ц является моментом инерции лопасти относительно горизонтального шарнира. Тогда уравнение махового движения примет вид-.
Л
fdTtr— р — 1г = 0. о
Подставляя сюда значения 3 и из уравнений (2) и (5), получим:
R
сП\т — Gt — ajt S2 = 0, (32)
б
откуда видно, что если в уравнение для угла р включены только первые гармонические члены, то момент от тяги относительно горизонтального шарнира является постоянным и независящим от углового положения ло-васти.
Найдем выражение для момента тяги относительно горизонтального шарнира путем интегрирования выражения по г от 0 до Д взяв dT\ мз формулы (18):
Л* 1
У*dT-^ф Лрс^у*(8С7/+ Ux Uy) rdr ~
б б
= Лрсй422 "У Р2?' + sin '? ) + хг* +
+ (zur — ар*3 + — ap.2r) sin о + (b^—a^r* +
-И “г )cos dr = + "Г °(1 + '
+ (Нт ~ + v +
Ят-т + тМсоЧ = лг,с/.>»и2;A + -L 6(1 +(х2)+ Ца^ + А-е)-— «1 (1----Гн'2)] !,“'!'+т[61(1 + 4- Н2)— У «оР-] “Sit
(33)
Подставляя полученное выражение в уравнение (32), будем иметь окончательный вид уравнения махового движения:
Лк-В‘22 + 4 6 (1 + 1‘2) + |[ги + 4 е )-at (1 - 4 р/)] sin 4 +
+ 4р1(1 + 4“ З2 !--Г — <?, —a0ltO3 = (I.
55
Это уравнение должно удовлетворяться при любом угловом что возможно только при существовании следующих уравнений:
+ k е(1 + — «J — «„Z/2 = О;
' + т (1—г“г) = |);
bi (1 + 1*2) —г * = °-
Из этих уравнений коэфициенты а0, av bt определяюгся и в так:
положении/
(34)
через х, у-
(35)
угол конус-
где 7 = ------отвлеченная величина, которой пропорционален
ности ротора а0.
Когда 7 = 0, то «о = 0 !!=&! = О (если пренебречь величиной и это соответствовало бы бесконечно тяжелый лопастям, при которых ротор не ииел бы угла конусности и не имел бы завала набок.
В действительности ; равна от 8 до 12.
§ 9. Уравнение нулевого крутящего момента
Средний крутящий момент ротора равен:
2* 1
у<г4 у‘(а и*—лв uj;,— я г-/) гл~г = о о
1 2 > г «ф ?,>8 / И 1 1 1
- -r«oV+ V “t( 1 + 2 " 2
При установившейся авторотации крутящий момент ротора должен быть равен нулю. Приравнивая выражение для крутящего момента ротора нулю, получим уравнение нулевого крутящего момента: -z
56
Подставляя в это уравнение вместо а0, а ь их выражения из формулы (35) членом в выражении для я0 можно пренебречь), мы после некоторых преобразований получим окончательно:
^(г’ + 4е){з®(1 + 41х2)+4«|'1 + |г)(
Это уравнение .второй степени относительно ж, и из него определяется щ при определенных А и о, свойственных данному профилю, при взятом угле установки 9 (в радианах) и при каком-либо выбранном режиме
Если в правой части уравнения (36) сохранить только первый член, то уравнение будет соответствовать сличаю жестко закрепленных лопастей.
Уравнение (36) иожно, преобразовав, представить еще в следующем виде, более удобном для решения:
+ + (36')
где
После определения х все коэфициепты сил ротора при данном и становятся известными, а также известным делается маховое движение, так « как определяются а0, аъ Ьг из уравнения (Зэ).
Коэфициент поперечной силы ротора S, полученный подстановкой значения х при данном {л в уравнении (30), едва ли будет соответствовать коэфициепгу поперечной силы действительного ротора, так как все формулы теории автожира выведены из предположения, что индуктивная скорость по всему ометаемому диску постоянна. В действительности же она имеет периодический закон распределения. На иалых углах атаки по аналшми с крылом, имеющим эллиптическое распределение циркуляции, индук тпвная скорость будет возрастать от передней части диска к задней,"а стало-быть,
осевая скорое:ь сквозь диск будет тоже меняться, убывая спереди назад, что эквивалентно увеличению угла конусности ротора. Увеличение же угла л0, в свою очередь, влечет увеличение наклона на бок плоскости вращения ротора [уравнение (35)]. Поперечная сила сильно зависит от величины наклона в бок и поэтому, определяя ее из условия равномерного распределения индуктивной скорости по диску, мы делаем ошибку, величину которой трудно определить.
На величину тяги и продольной силы возрастание индуктивной скорости на диске спереди назад влияет незначительно.
§ 10. Периодическое изменение угла взмаха лопасти и угла атаки сечения лопасти
Для выяснения махового движения па разных режимах и изменении угла р по а так же для выяснения влияния махового движения на истинный угол атаки а сечения по вышеприведенным формулам сделан подсчет для ротора, имеющего следующие употребительные в практике параметры:
т = Ю; 0 = 2°.
Профиль лопасти ротора—симметричный, Геттинген 429, и для него принято А — 3, 6 = 0,006 (об оценке величин Лио будет сказано ниже).
Результаты подсчета представлены в следующих графиках: на фиг. 60 изображены кривые р, ~ и по ф, характеризующие маховое движение лопасти при режиме р =. 0,4 х.
Рожам взят произвольно.
58
5»
Фиг. 61 и табл. 2 дают значения коэфициентов аъ ряда Фурье для угла взмаха р в зависимости от и (при подсчете коэфициентов й0 по формуле (35) величиной пренебрежено). По кривым видно, что с возрастанием и (скорость увеличивается) угол коиусности а0 убывает, ио углы наклона плоскости > вращения назад и вбок Ъг с увеличением р. увеличиваются.
На фиг. 62 построены кривые действительных углов атаки а для сечений лопасти 0,5 R и R в зависимости от Ф при режиме и = 0.4. Угол а подсчитывался по формуле:
а = е + ф о. е + arc tg . (37)
Ux и Uv брались по уравнениям (10) и (11).
Сплошные кривые соответствуют шарнирно-крепленой лопасти, а пунктиром—жестко крепленой. В случае жестких лопастей истинные углы атаки а подсчитывались по уравнению (37), но величина Uy, в него входящая, бралась соответственно [жестко крепленой лопасти. Из сравнения этих кривых видно влияние шарнирного крепления на изменение истинного угла атаки сеченпя. При угловом положении когда лопасть находится в сумме скоростей, угол атаки а благодаря маховому движению сильно уменьшается и, наоборот, при |-7г, когда лопасть находится в разности скоростей,—увеличивается.
*
§ 11. Поляра ротора
Для аэродинамического расчета удобно отнесенные к поступательной скорости V,
иметь характеристики ротора, т. е. коэфициенты подъемной силы и лобового сопротивления ротора. Определение коэфициентов подъемной силы и лобового сопротивления, а также качества ротора при определенном угле атаки ротора, а стало-быть и получение поляры, можно вести двумя следующими способами.
Способ непосредственного подсчета. Под, емная сила •и лобовое сопротивление ротора (фиц. 63) выражаются через тягу Т и продольную силу Н следующим образом:
Р= Tcosi — -Hsiuz;)
ио- Q=rTsiD« + -ffcos/. j
Если подъемную силу и лобовое сопротивление ротора отнести кркЯ2Г2 и вместо Т и Н подставить их значения из уравнений (25) и (27), то полу-60
Hi
чатся абсолютные коэфициенты подъемной силы и лобового сопротивления ротора:
_ Р Tcosi— Hsmi Acos’i /. , . .\J
‘8 г):| (39)
r Q _ sin t 4-Я cos t _k cos» t ft in , . , \ I pnfl’V» у.»
Чтобы определить O’ и CX}i нужно знать кроне t и h еще и угол атаки г при соответствующем
Для определения угла ? при данном « воспользуемся уравнением (8) и я= xQR ~ V sin i — v или
V sin i — xQR 4- v.
Заменив в ней v из уравнения (6) и разделив на V cos i, будем иметь:
Kcosi+ ИсозгряК» Г.’
Принимая во внииание уравнения (7), (8) и (9) и заменяя Т согласно уравнению (25) через fc*R2(Pfl)2«£, получим:
tg I = - + + , (40) •
откуда определяется угол i для данного и, если уже определены х и t. Способ -подсчета Су* и С по уравнению (39) связан с очень громоздким вычислением коэффициента продольной силы h [уравнение (28)].
Способ подсчета поляры ротора ио балансу мощности. При установившейся авторотации ротора крутящий момент равен 0, поэтому мощность, затрачиваемая на ротор, движущийся с поступательной скоростью V, будет равна QV (где Q—лобовое сопротивление).
Затрата мощности идет в основном по двум путям:
1) тяга ротора Т создает индуктивную скорость и на создание этой индуктивной скорости затрачивается мощность Т-т,
2) на профильное сопротивление каждый элемент лопасти затрачивает мощность CxQcRdrlI\ а среднее значение затраты мощности для ротора с z лопастями будет выражаться:
2г. 1
= i / ^fc^Udl-U’. о о
Уравнение для баланса мощности будет:
2- 1
Z' = C^eRdr Us + vT. (41)
О 6
Потерю на профильное сопротивление можно вычислить, взяв вместо Сх среднее профильное сопротивление 8.
61
В первом приближении 1 относительная скорость равна:
U = QR (г 4- [1 sin*}), и тогда
^роф = f f ^cSd r U3 = f <tyj SpcB‘Q3 (r + }i Sin |)3dr =
0 0 об
= jcp^S’-L 8(1 + 3р.2) = Я2(2 Я)3 ~ 8(1 + Зр2). (42)
Подставляем выражение (42) в уравнение баланса (41), тогда:
Q V = Л> Я2 (2Я)3± 8 (1 + Зр2) + vT.
Если мы разделим обе части уравнения на PV, то получим выражение для величины, обратной качеству ротора, причем вместо Р= Tcosz — -Hsinг будем считать Р = Tcos i. Это вполне допустимое приближение, так как -ffsin г близко к нулю при малых углах г, а при больших углах г продольная сила делается очень малой по сравнению с Т.
Итак:
QV = XpitR>(2B)»a(l 4- ЗрЛ) vT _ 0(1 4- Зр.8) L у
PV 42'cost И ТсоьгУ ” 4p.t ' t'cos»'
Ecih вместо v подставить его значение из уравнения (6), то окончательно пеличина, обратная качеству ротора, будет выражаться так:
\ ...... Q ЗД kt
Р 4pf 2р.Ур.3 4- х2
С другой стороны, пз уравнений (39) она равна:
/ С г \ _ t sin t h cos i _ г~ t /., icost— 7i sint h '
* } I------^tg *
откуда
Преобразуем выражение (39) для CVp следующим образом:
TT/cos3!/, h . .\
-=—^г-41- (45)
С достаточной для практики точностью можно пользоваться следующим выражением для CVp:
С‘>Р = cos'' ~ 05')
1 Осевой скоростью и и радиальной p.2Rcos} пренебрегается. Об учете радиал!-
вой скорости в водсч'те потери на профильное сопротивление см. „Reports and Memo-
randa* 1111; приложение 1.
62
Теперь мы имеем все необходимые формулы для вычисления коэфи-циеита подъемной силы и лобового сопротивления по балансу энергии.
Вычисление нужно вести в такой последовательности, определив х для данного р. по уравнению (36), вычисляем: 1) t по формуле (25), 2) затем (тИ по уравнению (43), 3) далее i из уравнения (40). 4) С из уравне-' ,/ р с "
ния (45) или (45'), ib наконец, 5) по С и определяется Сх.
Этот способ вычисления не требует подсчета коэфициента продольной силы по формуле (28;, благодаря чему вычислительная работа сокращается. Нужно все же отметить, что изложенный способ баланса энергии будет давать несколько преувеличенное качество ротора, так как все возможные потери учесть нельзя.
§ 12. Выбор параметров и влияние их на характеристики ротора
Качество ротора и коэфициент подъемной силы зависят, как это видно из уравнения предыдущего параграфа, от следующих параметров:
8 — среднего профильного сопротивления,
А— тангенса угла наклона кривой С* по а для профиля лопасти, к — коэффициента заполнения.
9 — угла ущановкн лопасти и м / A pcR* \
7отвеченной величины Н ——j—1.
Степень влияния каждого параметоа на характеристики ротора установить непосредственно из уравнений трудно, поэтому ниже сравниваются характеристики ротора при разных зиаченаях одного параметра и прп соответственно равных других. Характеристики ротора для такого сравнения подсчитывались по способ у баланса энергии. За исходные параметры приняты А = 3, 8 = 0,006, в=2°, /с =0,1 и 7=10. Результаты подсчетов сведены в табл. 3—8 и изображены иа графиках (фиг. 64—68). Пунктирные кривые относятся к ротору с исходными параметрами, а остальные кривые к ротору с параметрами, отличными от исходного, и имеют соответствующие надписи.
Сравнивая соответствующие кривые, можно видеть степеиь влияния каждого параметра на величины качества и коэфнциент подъемной силы.
Прп аэродинамической расчете ротора приходятся делать вьп'ор А и 5 по характеристике профиля лопасти. Не вполне удачный выбор этих величии может привести к ошибке в определении характеристик ротора.
Выбор параметра А для данного профиля лопасти можно сделать довольно легко по графику Су по а для профиля при л = со, так как А есть коэфнциент пропорциональности С* углу а до критического угла атаки. Величина А для всех теоретических профилей согласно теории крыла в плоско-параллельном потоке равна z, для действительных профилей она будет меньше. Гак, например, для профиля Геттинген 429 величина А = 3. Из фиг. 64 видно, что небольшая ошибка в определении А не скажется значительно на характеристике ротора.
Гораздо менее определенен выбор 8 ко фициента среднего профильного-сопротивления, а между тем он, судя по кривым фиг. 65, сильно влияет на качество ротора. При выборе 8 надо исходить прежде всего из того, что он должен быть больше коэфициента лобового сопротивления профиля иа малых
углах’атаки, так как коэфициент 8 должен учесть увеличение лобового сопротивления на лопасти, движущейся попятно, когда угол атаки, как было выше указало, на некотором участке может быть очень большим и когда имеет место срыв струи.
Коэфициент 8 для подстановки в уравнение нулевого момента можно брать приблизительно на 50% больше коэфициеита лобового сопротивления, соответствующего малым \глам атаки профиля. Проверкой правильности выбора 8 отчасти может служить следующий способ.
Потеря мощности на профильное сопротивление при данном и выражается в общем виде так: 2л
Rcdrua =kr:R2 ? <2fi)s £fd
0
+ p.siQ'l')3dr.
«4
2it 1
Величину l‘d v J С_, {.r 4- p sin *!o8 dr можно вычислить графоана-b о
литически, беря для каждого сечения г и углового положения > свое Сг по характеристике профиля1 соответственно истинному углу атаки сечения, причем последний нужно вычислять по уравнению (37). Обозначив величину
Фиг. 65.
J Продувку профиля аадо ямегг. -при этом ив возможно большем ца&аазове углов атаки.
65
через II, можно найти, какие среднее профильное сопротивление 6 соответствует вычисленной графоаналитически потере на профильное сопротивление при данном р:
Япроф = k-R2p(RQfII = /скй2р(2й)’ - 8 (1 + Зр2), откуда
Если величина 8, определенная из этого уравнения, будет близка к взятой в уравнении (36), то, стало-быть, и выбор сделан правильно. KciaTii, при этих подсчетах, когда будут определяться истинные углы атаки, обнаружится и предел пригодности допущений § 6 настоящей главы.
У большинства существующих автожиров лопасти имеют профиль Геттинген 429 и для него средний коэфициент профильного сопротивления можно брать 8 = 0.006.
66
Параметр 7 можно определить, имея конструкцию лопасти, по формуле: Лер в4
7 = -т^-
Небольшая разница между проектной и действительной величинами
Влияние угла установки 8 на качество и Су ротора значительно (фиг. 67). Чем больше 0, тем больше и качество, но увеличению 6 есть предел, определяемый запасом авторотации (см. § 1).
Английские опыты с моделью ротора автожира1 подтвердили зависимость авторотации от угла установки; так, например, модель ротора, имеяугол
1 „Reports and Memoranda* .V 1154.
GT
установки 0 = 2'. могла авторотировать на углах атаки от 2 до 22° (диапазон углов который позволяла экспериментальная установка). При угле установки 0-=3° та же модель ротора могла авторотировать только на углах атаки выше 12°. У действительного ротора уюл установки в, при котором ротор не автоготирует на малых углах атаки, будет, надо думать, больше, чем у модели (должно сказаться влияние масштаба»
В практике употребительные углы установки лопасти ротора — от 2е до 3° Выше этих значений иЭги не сде'Дует, так как несмотря на то, что для лопастей обычно берется профиль с постоянным центром давления и лонжерон проходит через центры давления сечения, все же закручивание лопасти ие исключено п концы ее могут получить вместе с закруткой угол установки, нежелательный с точки зрения авторотации
Коэфициент заполнения к влияет на качество незначительно (фиг 68) ио С ротора, в особенности на малых углах, прямо пропорционально к. 68
Числи оборотов ротира р минуту при том же угле атам и одной и той же поступательной скорости с уменьшением коафициента заполнения увеличивается.
Для лопастей, имеющих закругленные концы м сужение в корню на небольшой длине, величина А* должна вычисляться по формуле:
причем величина с берется соответствующей ширине на большой части длины лопасти (соображения о выборе к приведены в следующей главе).
В § 3 было оговорено, что пренебрежение вторыми и высшими гармоническими членаии в выражении угла взмаха р не повлияет значительно на качество ротора Для подтверждения этого на фиг. 69 даны для сравнения
fc 0^-
Цч
03
1Г
0,0
оя од
Фиг. 70.
характеристики ротора. Пунктирные кривые подсчитаны по формулам, которые соответствуют углу взмаха со вторыми гармониками, т. е.
р == я0 — a cos ф — b sin ф— a cos 2Ф — Ъг sin 2ф, а сплошные—по формулам, приведенным в данной главе (все остальные допущения в том и другом случае одинаковы).
Следует отметить в заключение, что эксперименты с моделью1 ротора -0 = 1,5 м. производившиеся в 1928 г. в аэр‘динамической ipyoe Национальной физической лаборатории в Англии, дали результаты, хорошо совпадающие с результатами, полученными подсчетом для того же ротора по теории Глауэрта и Локка.
§ 13. Сравнение ротора автожира и крыла самолета
На фиг. 70 даны характеристика ротора, имеющего параметры А = 3, о — 0,006, f = 10, 0 = 2°, к = 1,0 и характеристика моноцланно-. о крыла, имеющего размах, равный диаметру ротора, и относительное удлинение л=6. Крыло имеет тот же профиль."что и лопасть ротора автожира (Геттинген429), причем коэфипиент подъемной силы крыла в целях сравнения от- ' несен к плошади круга, ометаемого ротором.
Приблизительное значение индуктивного сопротивления, отнесенного к С нанесено ‘на фиг.Ч>8 пунктиром; оно будет одинаково для обеих несущих поверх ностей ci-гласно § 1.
Из сравнения характеристик ротора и крыла следует.
Максимальное качество ротора меньше макспмальпого качества крыла более чем в 2 раза, благодаря чему автожир хуже самолета в скороподъемности и в потолке.
В пояснение того, что максимальное ка-максимальное качество крыла,
Of
О
чество ротора должно быть меньше, чем можно привести следующие соображения.
У крыла при некоторых углах агакн результирующая аэродинамическая сила наклонена вперед от перпендикуляра к хорде крыла, тогда как у ротора на всех углах атаки результирующая аэродинамическая сила наклонена от оси ротора назад.
.Reports and Memoranda* № 1154.
70
ч Таблица 2
Значения коэфициеитов ряда Фурье в градусах для угла взмаха .. = а0 — ctj-cos > — bi sin i
Параметры ротора: Л -- 3; о = 0,000; У " 20; у — 10
р- 0 0,1 0,2 0,3 0,4 0.5
а3 9,2 9,0 8,5 7,9 7,0 6,1
а1° 0 0,78 1,49 2,25 2,87 3,45
bi° 0 1,2 2,24 3,03 3,45 3,63
Таблица 3
Параметры ротора: А = 3? о -= 0,006; 8 = 2°; у — 10; k = 0,1
V cos г | 0 0 0,07 1 0,1 0,2 0,3 0,4 0,5
л: 0,022 0,0215 , 0,02 0,0175 0,013 0,0664 0,0004
1 0,067 0,0674 0,07 0,0632 0,059 0,0528 0,0474
С’ 0,59 0,8 1,77 4,73 7,12 8,24 8,33
59,33° 44° 28,6е 9,45° 4,35° 1,88’ 0,5’
h 0,006 0,0075 0,01 0,044 0.0635 0,0885 0,1113
С.и ри 0,356 0,-15 0,455 0,148 0,0635 0,0327 0,019
Параметры ротора: А = Таблица 4 2,86; о = 0,006; 8 = Пт- 10; k = 0,1
V . OS > 0,05 0,07 0,1 0,2 0,3 0,4 0,5
X 0,0224 0,0221 O/.217 0,0188 0,0139 0,0073 0,0008
ф 0,0653 0.652 О,Об48 0,0621 0.0577 0,0516 0,0469
0,618 58,63° 0,9 43,5° 1,81 28° 4,71 9,67° 7,04 4,48° 8,1 1,97° 8.24 0,67°
0,0005 0,011 0,016 0,0396 0,063 0,089 0,1104
»/> 0,366 0,51 0,446 0,148 0,063 0,032 0,0184
Параиетры ротора: А — 3.14; 6 = 0,006; 8 = = 2-'; 7 = 10; fe = 0,l
V cos i "= 0,05 0,07 0,1 0,2- 0,3 0,4 0.5
X 0,0203 0,0204 0,0202 <',0173 0,012 0,0060 0,0004
t' 0.0689 0,0690 1 0,0688 0,0658 0,0603 0,0547 0,0507
(с1) 0,59 59,17° 0,95 44,15° 1,78 28,28° 4,7 9,72° 7,03 4,12° 8,2 1,8° 8,8 0,63°
h 0,006 0,012 0,0169 0,04 0,07 0,0905 0,1025
% 0,370 0,524 0,470 0,158 0,064 0,0325 0,0203
71
Таблица &
Параметры ротора: А=$; о ~ 0,004, н — 2°: ' = 10: k -- 0,1
V cos i U QR~ 0,05 0,07 0,1 0,2 0,3 0,4 0,5
X 0,0166 0,0164 0,0161 0,0131 0,0077 0,0018 0,0035
t 0,0607 0,0613 0,061 0,058 0,0512 0,0459 0,0428
f Cx \ 0,68 0,85 2,12 5,92 9,1 10,5 11,1
55,8lc 40,16° 24,55° 7,86° 3,1° 1,08е 0,1*
h 0,0032 0,6043 0,0066 0,0294 0,0556 0,076 0,089
Cnr 0,431 0,56 0,456 0,140 0.0561 0,0282 0,0170
Параметры ротора: A 3; t = e = 2°; f = fc = 0,l
Г cGS г *~~sir (1,05 0.07 0,1 0,2 0.3 0.4 1 0,5
J 0,02€0 0,258 0,0253 0,0220 0,017' 0,011 0,005
t 0,0739 0,0738 0,0734 0,0700 0,0663 0,0597 0,0555
_ __ a, Hi a 0,60 0,75 1,57 4,05 6,08 7,03 7,3
t 61,54° 47,3° 31,8° 10,5 5,5° 2,63° 1,22°
h t 0,0069 0,0109 0,0202 0,0575 0,068 0,096 0,115
% 0,320 0,470 0,458 0,160 Таблица 6 0,072 0,037 0,022
Параметры ротора: A = 8; о = 0,006; н = 2°: x = 5 ; ft = o,l
I'COS ’ a ” sHF 0.05 0,07 0,1 0,2 0,3 0,4 0.3
X 0,0218 0,0215 0,021 0,018 0,0135 0,008 0,002
t 0,0675 0,674 0,067 0,064 0,06 0,0552 0,051
. 0,59 1,1 1,77 4,72 7,22 8,5 9,00
69,3° 44,0° 28,6° 9,65° 4,48° 2,13е 0,81 °
ш 0,0092 , 0,0155 0.0405 0,0595 0,0802 0,107
0,356 0,513 ! 0.450 0,150 0,0665 0,0347 0,0204
Параметры ротора: A — 3: i -= 0,006; e = 2 ; ' = 12, k =0,1
V cos i * alT 0,05 0,07 0,1 0,2 0,3 0,4 0,5
X 0,0216 0,0213 0,0208 0,0177 0,0122 0,0057 U,0012
t 0,0674 0,0672 0,0666 gjt>635 0,058 0,0517 0,0462
0,58 1,1 1,81 4,74 7,'(7 8,13 8,15
59,48° 43,16° 28,13е 9,51 ° 4,17° 1,73° 0,4"
0,0064 0,0104 0,018 0,0518 0,068 0,0825 0,1159
c,„ 0,356 0.534 0,457 0,153 0,063 0,032 0,0185
7»
Таблица 7
Параметры ротора: А = 3s о — 0,006: Н = 0; у — 10; А == 0,1
V cos < * - -ЦТГ 0,05 0.07 0,1 0,2 0.3 0,4 0,5
х 0,0315 0,0314 0,0311 0,0300 0,028 f 0,0258 0,0232
t (&Л 0,0473 0,0471 0,0466 0,045 0,0422 0,0387 0,034b
0,67 0,9 1,815 4,13 5,73 6,4 6,31
56,06’ 41,5’ 28,07° 11,65° 6,7° 4,72" 3,68°
Л 0,0016 0,0061 0,015 0,0347 0,066 0,073 0,095
(,*п 0,33 0,404 0,318 0,105 0,0464 0,0238 0,0140
Параметры ротора: А — 3; о = 0,006; Й = 3е; у - 10; А — 0,
V cos / * ~ИЯ~ 0,05 0,07 0,1 0,2 0,3 0,4 0,5
X 0,0184 0,0179 0,0173 0,0124 0,0055 —0,0033 -0,0107
1 0,0801 0,0797 0,079 0,0738 0,0674 0,0599 0,0572
\c«4 0,52 62,22° 0,8 46,16е 1,69 29,65° 4,7 9,15’ 7,6 3,2° 9,9 0,6е 9,72 —0,58г
h 0.0017 0,0063 0,0166 0,0505 0,0753 0,0905 0,1132
% 0,324 9,542 0,51 0,174 0,014 0,037 0,0205
Таблица 8
Параметры ротора: А = 3; о = 0,006; 8 = •’°; 7 = 10, k = 0,06
Г cos t >*=“u/r 0,05 0,07 0,1 0,2 0,3 0,4 0,5
X 0,0218 0,0215 0,021 0.0175 0,013 0,0064 — 0,0004
t 0,0675 0,0674 0,067 0,0632 0,059 0,0528 0,047 4
(p- 1 0,83 1,45 2,32 5,55 7,87 8,72 8,61
49,87° 35,16е 22,35° 7,67° 3,6° 1,48е 0,28’
h 0,005 0,01 0,017 0,0445 0,0637 0,0883 0,111
Cy 0,431 0,452 0,317 0.092 0,0388 0,0197 * 0,0114
Параметры ротора: A = 3; & — 0,006; О - 2°; 7 = 1 0; А = 0,11
V cos i 0,05 о,от О.1 0,2 0.3 0,4 0,5
V 0,0218 0,0215 0,021 0,0 175 0,013 0,0064 -0,0004
I 0,0675 0,0674 0,067 0,0632 0,059 0,0528 0,0474
/£s \ \CJP 0,46 0,7 1,43 4,11 6,52 7,81 8,08
г 65,42’ 51° 34.25" 11,2е 5,1е 2,23° 0,71е
h 0,002 0,0057 0,014 0,0435 0,0632 0,0885 0,111
% 0,272 0.482 0,525 0,208 0,092 0,046 0,0266
73
2. Из сравнения харектеристик особенно ясно видно основное преимущество ротора, заключающееся в отсутствии у него внезапного кршпче-ского состояния на больших Су в противоположность крылу.
3. Ввиду того что максимум качества роюра соответствует малым углам атаки и малому C}J, то при очень малых С„ качество роюра может быть близко к качеству крыла. В таком случае, при малой нагрузке на 1 л. с., автожир может не уступить в быстроходности самолету с\оп же нжрузкой на 1 л. с., ввиду того что последний для полета с максимальной скоростью благодаря излишне большой несущей поверхности (взятой из ус'овия допустимой посадочной скорости) принужден будет лететь, имея угол атаки, соответствующий малому Су, при котором крыло имеет низкое качество.
«
Глава третья
Аэродинамический расчет автожира
Аэродинамический расчет автожира делается с целью определения еге летных характеристик, как то: 1) горчюнтыьных скоростей — максимальных и минимальных, без снижения; 2) потолка; 3) скороподъемности; 4) скорости по траектории при крутом планировании.
§ I. Поляра автожира
Для выполнения аэродинамического расчета автожира необходимо вычислить поляру все о авг-жира. Почти все существующие автожиры помимо основной несущей поверхности — ротора — имеют еще небольшое неподвижное крыло, расположенное под роторои. Поэтому прежде всего
в нашу задачу должно войти определение поляры комбинированной несущей поверхности, состоящей из роюра и крыла; очевидно, что, имея такую поляру, будет легко цолхчить поляру всего автожира простым прибавлением вредного сопротивления к лобовому сопротивлению ротора и крыла.
Если подходить строго к этой задаче, то необхо(имо было бы учесть взаимное влияние ротора и крыта. Йо если учет влияния
ротора на крыло, выражающийся в скосе потока у крыла благодаря наличию индуктивной скорое! и, вызванной ротором, более пли менее определен, то влияние крыла на работу ротора (которое возможно лзменшь распределением осевых скоростей на ометаемом диске ротора) учесть трудно. Поэтому мы ограничиваемся учетом влияния ротора на крыло. Это приближение допустимо еще и по той причине, что подъемная сила крыла у большинства существующих автожиров составляет от веса автожира примерно 8—10% на малых скоростях и 25—30% на максимальных скоростях.
7&
Так как плоскость крыла отстоит от плоскости вращения ротора обычно не больше чем на х/3 радиуса ротора, то можно считать, что индуктивная скорость, вызванная ротором в плоскости крыла, такова же по величине и направлению, как и в плоскости ротора. Тогда скорость воздуха относительно крыла (фиг. 71Т будет выражаться двумя компонентами: \&R — нормальным к оси ротора и .rQR— направленным по оси ротора.
Результирующая, скорость воздуха относительно крыла будет составлять с хордой крыла угол атаки1
3 + arctg (47)
где е— угол установки крыла по отношению к плоскости вращения ротора.
Угол скоса потока у крыла будет:
Д/ = / — arc tg <48)
Величина результирующей скорости будет равна согласно уравнениям (7) (Ь) и (9);
1"= 272/^+.г2“
Углом атаки автожира будем считать угол атаки / ротора.
Подъемная сила п лобовое сопротивление неподвижного крыла при данном режиме ротора и (или угле атаки г) выразятся (фиг. 71) так:
Р* = cos Д i — С,кsin Д /)os (V')2, (
QK = iCk/os Д i + sin Д /)ps(7')2 '
где S’ — площадь крыла, С,1К н CXh берутся по характеристике профиля крыла при том удлинении X, которое оно имеет, и при угле атаки, вычисленном по формуле (47).
Солы Р и Q совпадают по направлению с силами Рр, и поэтому разделив правые и левые части уравнений (49; на рп722 Г2, получим коэфв-циенты подъемной силы и лобового сопротивления крыла, отнесенные к оме-таемой площади ротора и скорости полета К:
4<.« = (A-. cos 41 - С’>. sln 4 ’)I
' 4<\= (0VCOSA/+ <?^В|ПД/) j
На небольших углах атаки автожира, примерно то 1п\ т. е. при горизонтальном моторном полете, можно принять
и тогда
4С„='^ + С.„4’)^-j
(50')
7« -
Коэфициента подъемной силы и лобового сопротивления несущей системы, состоящей из ротора и крыла, будут равны:
с++.-4 + ^Л- I <Х^,. = <л, + лс;„. I
На фиг. 72 дано сравнение кривых качеств ротора и несущей системы, состоящей из ротора и крыла, причем крыло имеет профиль серии АЦАГИ, угол установки г=2°, площадь крыла составляет 6% от площади, ометае-мой ротором.
Из сравнения вид- ь. но. что постановка неподвижного крыла уве- о личивает качество несущей системы автожира.
Если иы имеем £
дело с предварительным расчетом, то для полу- 6 чения поляры автожира необходимо подсчитать суммарное вредное со- 4 противление всех остальных частей автожира. Коэфипиент его 2 выразим так:
С\=0,64^_ (52) О
где з—эквивалентная вредному сопротивлению пластинка.
Считая, что детали автожира (фюзеляж, хвоет, подкосы и т. д.) не являются несущими, получим коэфицпеят подъемной силы п лобового сопротивления автожира:
Д 1
С1 = о.„ + Д& +0,64 4=. <53)
Подсчет вредных сопротивлений производится так же, как в случае аэродинамического расчета самолета.
К сожалению, пока еще нет продувок модели автожира с ротором и проверочный расчет можно произвести используя только продувку модели автожира без ротора.
При обработке эксперимента удобнее полученные силы при продувке модели относить к ометаемой поверхности ротора (в масштабе модели).
Коэфициенты подъемной силы и лобового сопротивления автожира будут равны:
77
Коэфнциеаты Д ^VMOd и д С*Мод ПРН ЛанаоМ Угле атаки автожира i вычисляются подобно коэфициентам Д С* и Д СХк при помощи уравнений, аналогичных уравнениям (47) (48) и (50), в последней вместо Су и Сх нужно брать С и Сг^ из продувки.
Если результаты продувки модели отнести к площади, ометаемоЙ ротором, то множитель 8 уравнении (50) будет равен единице.
§ Построение кривой потребных тяг (кривая Пенб) для горизонтального полета автожира
Имея поляру автожира, мы мажем приступить к вычислению и построению кривой погребных тяг для горизонтального полета у земли.
Ввиду того что автожир мпжес совершать горизонтальный полет прн больших углах атаки (благодаря тому, что у него нет срыва струй, как у самолета), тяга его винта будет давать вертикальную слагающую (фиг. 73) и уравнения установившегося равномерного горизонтального полета для автожира при определенном угле атаки i напишутся так:1
Go = V2 4~ ф' sin(£ — т), |1
Ф - cosO'— t) = СхркК2 V2, I где Go—полный вес автожира, Ф—потребная тяга пропеллера, т—угол между осью пропеллера и плоскостью вращения ротора (плоскостью вращения считается плоскость, перпендикулярная к оси ротора).
Отсюда определяем погребную скорость горизонтального полета автожира:
ТГ Г GO / I
|/ (5Ь)
и потребную тягу пропеллера: ф G - _________1 _
”Cy[1 + ^ts )]cos(/-r)' (57j
На иалых углах атаки эти формулы принимают обычней в#д, встречающаяся при аэродинамическом расчете самолета: х
V =
Т t'jpnA2 ’
Определив V и Ф для ряда углов атаки i, мы построим кривую Пеяо автожира для горизонтального полета у земли. '
Для горизонтального полета автожира на высоте, как и для самолета, строить кривую потребных тяг нет нужды, а нужно ввести для оси абсцисс дополнительные масштабы для различных высот 2.
1 Считается, чго все силы приложены к центру тяжесш автожира исумма моментов от всех действующих сил равна нулю.
2 Чесалов, Ащ'тдинамическдй расчет Библиотека авиационного инженера. Само-
Зная скорость V горизонтального полета автожира при определенном угле атаки г, а стало-быть, и определенном режиме ротора, легко получить число оборотов ротора из формулы:
V cost
ад’-
Угловая скорость ротора будет равна:
2=^. (58)
Число оборотов ротора в мивуту:
Для определения числа оборотов ротора па высоте нужно в формулу (59) подставить V— скорость горизонтального полета на высоте при данвом
режиме.
Тягу Т в продольную силу Н ротора можно определить, тая £2, по формулам (24г) и (44).
Ниже (табл. 9) дан ход аэродинамического расчета горизонтального полета на при мере автожира 2-ЭА ЦАРИ, имеющего следующие основные данные:
Вес = 950 кг.
Ротор V = 12 .ч.
Угол установки
лопастей ротора в = 2°.
Массовая характеристика лопасти 7 = 8.
Коэф.|циент заполнения к~ 0,1145.
Профиль лопасти—Геттввген 429; для него взяю А =- 3, 8 = 0,006.
Отношение площади крыла к ометаемой площади ротора:
~ = 0,0473. n R2 1
Удлинение крыла I = 7.
Профиль крыла—серии А ЦАГИ.
Угол установки крыла е=0,5".
Ось пропеллера составляет с плоскостью вращения ротора угол т=6,5°.
Если бы не было продувки модели автожира без ротора, ю ход расчета изменился бы только в части вычисления поляры всего автожира, т. е. С и Сх автожвра вычислялись бы не по формуле (54), а по формуле (53).
79
Таб < । Ход аэродинамического расчета авто Гднца' Алжира (величиной р. задаются)
1 1 Fcosi ! I , I ' ;i QB °’07 1 °’086 0,1 ( 0,12 , | OjI5 0195 2 0,0049 j °-0074 «>01 O.OI44 ; 1 0,0225 ' 0,038 0,24 0,0576 0,2827 0,08 0,3463 0,012 0,4 o,016 0,4473 0,20 0,51 0,26
_ Вычисление но лиры ротора
3 Х-ЩГ °'0213 0,02212 0,02095 О,О2О2О5[ 0,01955) 0,01795 4 ‘=А [Т + 8 9(1+ I 0,007 .“'°671 °'066Я °'0664 ’ ' 0,0654, 0,0638 . 0(1 + Зр.2) , м 0.3246 0,265 0,23128 0,195 ' 0,1632 , 01343 В kt 29)V + ^- °'745 °'5048 0,3148 0,20055 0,1652 0,09592 - X 1 ‘ р, °.3«4 0,2465 0,2095 0,1708 0>13 0092 | 8 > 1V' + j! 1,049 0,‘°13 0,3843 °’4313 °'2952 0,18792 ’ ' , 1 40.4° 36,917° зо,3° 23.34° 16,45“ , 10,633° 1 _ +3Р-“) , 4‘ \с,!г +24)VJ-- 1,0696 0,7698 0,606 0,455 °-3284 ».2322 u * ' , ,/С'И, 0,009,3 0,0117 0,01375 °'0202 0,0302 , 0,0410 1 + (р" *€‘ ' 1 •> с kf c4s* /. Л . \ । К Ч '- I1' tL'‘ ! °-193 °-5235 о,486в 0,4049 о,2905 0>I8I0 11 C1f = C’r ( cf)z, °'530 °'40299 °,2948 0,1844 ' 0,0954 0 Ml3 0,016 0,0619 0,1174 0,06147 0,0661 0,12757 7,2° 0,1789 0,0502 0,1194 0,02136 0,0139 1 0,01045 0,0073 1 0,00435 1 i 0,05994 0,568 0,0542 ‘ 0,05205 0,1087 j 0,1035 ; 0,1028 0,103 0,0429 1 0,0272 ( 0,0194 0,0149 0,0491 ' 0,03017 0,01825 0 00994 0,092 1 0,0573 0 0376 1 0,0248 ! 5,266° 1 3,283° 2,17° 1,417° i : 0,1516 0,1307 0,1222 0,1179 0, 588 0,0729 O,Oi>37 0,0928 1 0,0843 | 0,0573 , 0,0362 0,0297 | 0,01277 j 0,0070181 0,001405 0,003501 0,0005 0,0492 0,1028 0,0108 0,00098 0,01178 0,66° 0,1136 0,1016 \ 0,02127 0,002416
, Вычисление ио лиры авт01:ира
14 “ — е -г (ar(J tg 57,3 24,1" 13,1° 11,6° 1 9,9 '- 1 15 4'“’“ (arc tg~) 57,3 22,8° 23,1° 18,5° | 13.7 = 16 *CVm»o 0.029 0,027435 0,028176 0,027391 11 лС*м<* М1& 0,022350 0,018534] 0,014418 18 Ч == (\ + °’052 0,550925 0,514776, 0,432291 19 4+ 0>549 0,425346 0,313334^ 0,198818 Ш 20 I 1,055 о,771 0,608 ! 0,46 ' 1 " II 7,845° 9,1° 0,02456 0,010245 0,314909 0,106245 0,3365 6 5,7е 5,4° 0,020136 0,008286 0,20113( 0,04983 0,248 И. П. Братух 4,26’ 3,3° 3,5’ 2,44° 0,0163 0,014267 0,007066 0,006494 0,135797j 0,098567 0,02842б’ 0,019284 0,2095 | 0,1957 2,22° 1,55’ 0,010885 0,006109 0,064585 0,013127 0,2032 1,54° 1,108° 0,009152 0,005946 0,045352 0,010351 0,2282 1,07° 0,851° 0,0063 0,00587 0,3600 0,00937 0,2605 0,55° 0,618° 0,00492 0,005803 0,026241 0,008219 0,313 81
Вычисление кривой потребных т
21 39,9° 30,417° 23,8° 16,84°
22 с_ / 1 0,7307 0,829 0,888 0,937
V i + )
23 у с1/ ®° 8,27 9,155 10,149 11,756
с V cv?*R2
24 0 Су cos (t — т) 691,7 585.81 498,17 400.72
25 QR — И 81,4 86,25 87,6 89,9
26 Зо QR п = - • Я It 129,6 137,4 139,8 143,2
27 T-=kt ^r.R2{QR)% 719 807,5 830 870
На фиг. 74 показана иодель автожира 2-ЭА (без ротора), а на фиг. 75 — результаты ее продувки (отнесенные к площади, омётаеиой ротором), примененные практически при проверочном расчете автожира 2-ЭА. Фиг. 76 изображает поляры автожира 2-ЭА и ротора, построенные по данным 12,
Фиг. 74.
13, 18 и 19-й строк табл. 9. На фиг. 77 изображена кривая Пено для автожира 2-ЭА с нанесенными на нее характеристиками располагаеиых тяг винтомоторной группы (мотор Титан 230 л. с., п — 1600 об/иин).
Характеристика винтомоторной группы автожира, с учетои взаимного влияния винта и фюзеляжа, строится приеиами, принятыин при аэродина-82
(кривая Пено) нрк Go — 950 нг
Продолжение табл. 9
9,95е 4,13° 0,7° — 1,234° — 3,215° —4,33° — 5,083° —5,84е
0,973 0,991 0,995 1,002 1,005 1,008 1,012 1,016
14,112 18,1135 22,178 26,152 32,410 38,800 13,721 50,82
307,22 231,84 197,11 186,69 195,52 220,63 254,32 310,39
90,2 91,3 91,5 92,1 93,45 96,95 97.98 99,2
143.8 145,3 146,2 147 148,8 154,3 156 158
861 859 840 824 8025 8245 807 781
мическом расчете самолетов, так как условия работы тянущего винта на автожире те же, что и на самолете; за исключением тех режимов полета автожира, когда ось тянущего винта его может составлять со ско-
ростью V угол порядка — 25р (ем. Пено для 2«ЭА), т. е., когда виит находится в косой обдувке (случай, не имеющий места в расчете самолета). Влияние косой обдувки на коэфициент полезного действия винта учесть
б’
83
затруднительно нз-за отсутствия соответствующих характеристик работы винта, но малая скорость обдувки винта на автожире позволяет думать, что влияние косой обдувки будет невелико, и им можно пренебречь.
Расчетную скорость для подбора винта нужно считать 0,9 Ита1, хотя в некоторых случаях она может быть понижена ввиду требования большей, скороподъемности. Вообще же для автожира, имеющего большой диапазон скоростей, может быть выгодна постановка винта с переменным в полете шаго'*
Определение потолка, вертикальных скоростей и скороподъемности (построение барограммы) автожира делается методами, принятыми в аэродинамическом расчете самолета. На фиг. 78 даны диаграмма вертикальных скоростей п барограмма для автожира 2-ЭА. Необходимо отметить, что сходимость результатов аэродинамического расчета автожира с данными летных испытаний вполне удовлетворительная. Это в достаточной мере проверено на автожирах 2-ЭА и 4-ЭА, а также на последующих конструкциях автожиров ЦАГ11.
Из вышесказанного можно сделать вывод, что аэродинамический расчет автожира, основанный на теории Глауэрта —Локка и наших предположений, изложенных в § 1 о совместной работе ротора и крыла, дает оценку летных качеств автожира, близкую к действительности.
84
Фиг. 77.
Фиг. 78.
8&
§ 3. Планирование и вертикальный спуск автожира
Автожир, если оа соответствующий образом сбалансирован, иожет совершать крутые планирующие спуски при больших углах атаки, так
диаграмма углов планирования автожира 2-3А- в зависимости от углов его атаки; из нее видно, что во время планирующего спуска автожира на углах атаки от 20° и выше ось ротора его расположена почти вертикально.
Скорость планирования по траектории определяется из условия равенства веса н полной аэродинамической силы автожира (фиг. 80):
Go~ Cao~R2V2, отсюда ___
v = 1Л~5Г. = V СаркВ»
__~\f cos
- V Csp«R=-
Подставляя в формулу (59) скорость планирования из уравнения (61 >. получим обороты ротора прп планировании
30 Vni cos i ,CiY.
'll =-----Б— . (62)
ft [Л Й v '
Вертикальная составляющая скорости планирования будет равна:
(63)
По графику (фиг. 79) видно, что, уиеныпая угол атаки г автожира, мы будем приближаться к режииу пикирования и, наоборот, увеличивая
как для него, в отличие от самолета, не существует критического угла, при котором начинаются срыв струй на крыле и резкое уменьшение подъемной силы, и нет опасности штопора прп потере скорости.
Угол планирования при данном угле атаки i определяется из поляры автожира; оа равен углу, который составляет вектор С, с осью Су (фиг. 76): e„=arctg£'. (60)
На фиг. 79 дана
86
угол атаки г, мы будем приближаться к режиму парашютирования (вертикальный спуск).
Оставляя пока вопрос о возможности управления автожиром при парашютировании, отметим, что вертикальный или почти вертикальный спуск его принципиально возможен благодаря наличию ротора, который в этом режиме подобен парашюту. Судя по журнальной литературе, вертикальный сп\ск не раз проделывался автожиром, как в Англии, так и в Америке. Скорость вертикального спуска является весьма важной характеристикой автожира, но методов, позволяющих теоретически определить ее вероятную величину, до сих пор нет.
Если бы мы знали вероятное значение коэфициента сопротивления ротора при парашютировании, то скорость парашютирования (вертикальный спуск) можно было бы легко определить из уравнения, аналогичного уравнению, выражающему сопротивление воздуха движущемуся в нем телу. При установившемся парашютировании сила сопротивления воздуха (тяга ротора) будет равна весу автожира и уравнение для определения скорости парашютирования будет следующим:
(«О
где Ио—скорость парашютирования, w — нагрузка на единицу ометаемой поверхности ротора, Схп— коэфициент сопротивления при парашютировании.
Максимальное значение коэфициента сопротивления при парашютировании С*п по опытам с моделями авторотирующих винтов, проведенным в аэродинамических трубах различных стран колеблется от 0,524 до 0,81 \ причем в этих результатах отсутствуют поправки на влияние стенок трубы.
Локк и Бетеман, распространяя вихревую теорию на винты малого шага1 2, построили на основе анализа опытных кривых тяги винта эмпирическую кривую, по которой максимальный коэфициент сопротивления при .парашютировании может достигать 0,8.
Летные испытания американского автожира 3 при нагрузке на ротор w = 8,5 кг/м2 дали вертикальную скорость при вертикальном спуске 10,7 м/сек, что соответствует коэфвциенту сопротивления при парашютировании (7xrt = 0,63. Из вышеизложенного следует, что вопрос о величине коэфициента сопротивления при парашютировании автожира пока еще не получил окончательную ясность и требует дальнейших летных испытаний, экспериментов в трубе и теоретических изысканий.
Для расчета конструкции автожира на крутую посадку определение вертиказьной скорости можно приближенно делать по следующей эмпирической формуле, полученной по данным существующих автожиров:
Vo = 1,64 Vw- (65)
1 Изаксон, Работа воздушного впата на режиме авторотации. Труды ЦАГП, выи. 47.
2 Локк и Бетеман. „Reports and. Memoranda** № 1014.
3 Reports NAG'A, № 434, 1932 г., а также „Техника воздушного флота'1, № 7, 1933 г. Реферат иаж. Квашнина В. К. „.Тетные испытания американского автожира*1.
87
§10 выборе диаметра и коэфициента заполнения ротора при проектировании автожира
Если при проектировании автожира имеются в виду его основные характерные качества, как то: крутой угол посадки и низкая минимальная скорость горизонтального полета без снижения, то выбор диаметра ротора нужно делать, задавшись такой нагрузкой ш на единицу поверхности ометаемого диска ротора, при которой вертикальная скорость крутой посадки была бы безопасна. Величины нагрузки на оме-таеиую ротором поверхность порядка 8—10 кг!м2 удовлетворяют этому условию (в существующих машинах нагрузка лежит в этих пределах).
Выбрав w н зная, приблизительно, полный вес автожира, определяем диаметр ротора: __
(66)
Коэфициент заполнения ротора можно выбирать, исходя из максимальной горизонтальной скорости, которую можно получить при данной мощности. Максимальные скорости горизонтального полета автожира ограничиваются нагрузкой на единицу ометаемой ротором поверхности и коэфициент заполнения. Действительно, допустим, что максимальную горизонтальную скорость автожир будет иметь при режиме ротора р. = 0,5. Этот режим соответствует углам атаки ротора, близким к нулю, и качеству ротора, близкому к максимальному (см. табл. 3—8).
Подъемную силу ротора можно считать равной при малых углах атаки тяге ротора:
Р ~ ktp~ R2 (QR2). (67)
Так как максимальную скорость при этом предположенмм автожир имеет при р = 0,5, то
2^-2 Ушах (68)
(cos2 '/ принят равным единице ввиду малого угла ?). Подставляя в уравнение (67) вместо М ее значение из уравнения (68), получим:
(67')
где — коэфициент-тяги ротора при р = 0,5.
С другой стороны,
Р= (70(1-=), (69)
где — полный вес автожира, $ — коэфициент, учитывающий долю полного веса автожира, которую несет неподвижное крыло при максимальной скорости.
Выражение для максимальной горизонтальной скорости получим окончательно: _____
V =1/. (70)
ma’ Г 4Нг k 7
Величина ; зависит от размеров и угла установка енеподвижного крыла. В существующих автожирах $ встречается в пределах от 0,25 до 0,32.
Пз уравнений (70) видно, что чем меньше к, тем больше максимальная скорость. С уменьшением к растет немного также н качество ротора; ио уменьшать к можно только до известного предела из соображений нроч-88
пости лопасти, так как при малом коэфициенте заполнения получаются очень малая хорда и малая высота сечения лопасти (обычно относительную толщину профиля берут равной 10—13%, так как при большей величине качество его ухудшается \
Мало влияя на качество ротора на углах атаки, при которых происходит горизонтальный полет с минимальными скоростями без снижения, коэфициент заполнения сильно влияет на Су ротора (фиг. 68), а стало-быть, и на минимальные скорости горизонтального полета (чем больше к, тем меньше минимальная скорость).
Из формулы (70) видно, что для повышения максимальных горизонтальных скоростей автожира можно увеличивать w, но большое увеличение w может привести к потере основных летных достоинств автожира—крутых посадок, малых посадочных скоростей и малых i оризонтальных скоростей без снижения.
Приведенные выше соображения о скоростях автожира не связаны с его мощностью. При определенной заданной мощностп (когда проектирование ведется под определенный мотор) приходится, в зависимости от задания, на которое проектируется автожир, делать расчет в нескольких вариантах, меняя w н к.
§ 5. О выборе площади и угла установки неподвижного крыла
Неподвижное крыло в автожире играет существенную роль, хотя в принципе и не является необходимым, так как автожир мог бы летать и без неподвижного крыла—при наличии бокового управления, примером чего может служить французский автожир Ляоре — Оливье (фиг. 34).
Постановка неподвижного крыла выгодна прежде всего потому, что качество несущей системы, состоящей из ротора и крыла, выше, чей качество одного ротора. Кроме того, при соответствующем подборе площадп и угла установки неподвижного крыла можно достичь почти одинаковых оборотов ротора на большом диапазоне полетных режимов. С точки зрения плавности работы ротора на всех полетных режимах и плавности перехода с одного режима на другой постоянство оборотов ротора является желательным, и американские конструкторы автожиров считают его одним из основных соображений при выборе площади и угла установки неподвижного крыла.
Если при выборе площади крыла ставить целью получение постоянных (или близких к постоянным) оборотов ротора при возможно большом диапазоне режимов горизонтального полета, то это можно приближенно сделать следующим образом.
Число оборотов ротора определяется из уравнения:
G, = G^R2V2.
Подставляя в него вместо величины V2 ее выражение через угловую-скорость ротора:
1 Уменьшать к можно еще путем уменьшения числа лопастей, например, с 4 до 3. Двухлопастные роторы применять не рекомендуется, так как они могут не обеспечить плавной работы ротора,
8»
получим:
G. = G r,r. A« <2;!l ,
® у‘ cos’ г \ 30 / 5
откуда
,, 301/ G "\f cos2г
-V -C^’ <71>
где Cy — коэфициент подъемной силы автожира, который приблизительно можно выразить так:
С,=^+^+».)Л <72>
где А'—коэфициент пропорциональности коэфициента подъемной силы неподвижного крыла углу атаки при взятом удлинении X, S — площадь крыла, <х0—абсолютное значение угла атаки крыла в радианах, при котором С>*=0.
Первый член выражения уравнения (72) представляет собой коэфициент подъемной силы ротора, а второй — коэфициент подъемной силы крыла.
Для того чтобы обороты ротора былп постоянны, необходимо согласно уравнению (71) соблюсти следующее равенство:
cos2 г .
—т = COnSt.
Нринниая во внимание уравнение (72), получим:
t COS i + Л',7— (-2- + г +%) = const
UI
Z + Y Г д, = const, (73)
где
Z = t cos z,
1’=-t'- “ —
К cos’ i \ p. ' ° /
Если в интервале ja2 — справедливо уравнение (73), то для каких-либо двух режимов, находящихся в этом интервале, можно написать такое равенство:
откуда определяем площадь крыла:
s z2 — zx п Да “ Fj — Y2 '
(74)
На всем диапазоне летных режимов добиться одинаковых оборотов невозможно, поэтому нужно ограничиться таким диапазоном, на которой происходит горизонтальный (моторный) полет.
Пример. Ротор имеет параметры А=3; о = 0,006; 0 = 2°: т = 10: №0,1.
90
Крыло — ЦАГИ серии А, с относительной толщиной 0,12 и относительным удлиненней >. = 7; А' = 2,3; щ, = 1,8'; угол установки крыла е = 2°.
и 0,5 0,4 0,3 0,2 0.1
Z 0,04739 0,05274 0,05882 0,0623 0,05884
Y 0,393 0,302 0,228 0,141 0,0795
= 0,0592;
1)
^0,5----
8
— А
2)
= 0,0083;
3)
гЛ2
-м
= 0,0588.
Z.
Берем величину равной приблизительно 0,06; при этом условии площадь крыла будет составлять 6% от ометаемой ротором площади. На фиг. 81 показано изменение величины, пропорциональной числу оборотов ротора, в присутствии неподвижного крыла выбранной площади и без крыла.
Очевидно, величина ^а = = 0,06 удовлетворяет в диапазоне режимов от [л — 0,5 до р. — 0,2 условию одинаковых (или почти одинаковых) оборотов ротора.
Если принять во внимание несущую способность хвостового оперения на птих режимах, то найденная величина площади неподвижного крыла должна быть несколько меньше.
На фиг. 82 дан график, показывающий, какую долю веса всего автожира будет нести неподвижное крыло, имеющее = 0,06 (данные ротора и крыла те же, что н в числовом примере).
Конечно, условие одинаковых оборотов ротора на боль
шом диапазоне режимов не является отходить при выборе площади крыла, новка крыла большой площади может настолько разгрузить ротор на макси
91
категоричеекич я но надо иметь в
можно от него виду, что поста-
мальных скоростях горизонтальною полета, что возникнет опасность потери ротором оборотов. Угол установки крыла нужно брать таким, чтобы истинный угол его атак» при максимальных скоростях автожира был близок
к углу максимального качества профиля крыла. На американских автожирах угол установки крыла 2°. В помещенной в конце гл. 1 табл. 1 приведены размеры неподвижных крыльев для некоторых существующих автожиров.
Глава четвертая
Устойчивость и балансировка автожира
§ 1. Условия плавной работы ротора
Плавность в работе ротора иа всех полетных режимах автожира является необходимым требованием, так как неровности и тряска, передаваясь на остальные части машины, будут влиять на прочность конструкции, регулировку ротора и других деталей. За неимением достаточного эксплоатаци-онното опыта придется пока ограничиться предварительными соображениями об условиях плавной работы ротора.
Во-первых, ротор должен быть тщательно сбалансирован так, чтобы относительно своей оси он имел статический момент равным нулю. Так как лопаетп ротора крепятся к втулке шарнирно, то балансировку можно производить двумя способами.
Первый способ. Балансируют ротор целиком, так же как обычные винты, для чего лопасти крепят к специальной втулке жестко. Втулка насажена па ось, лежащую горизонтально в шариковых подшипниках; лопасти расчаливаются в плоскости вращения.
Второй способ. Балансируют лопасти по отдельности, добиваясь того, чтобы они были равного веса и чтобы центры тяжести их находились точно на одинаковых расстояниях от корня. Второй способ наиболее прост в эксплоатапии, так как не требует, какпервый, специального приспособления и помещения с высоким потолком.
Неровность в работе ротора может быть от неодинаковых углов установки лопастей, так как разница в этих углах заставляет лопасти двигаться в разных плоскостях, что вызывает колебания в величине компонентов сил ротора за один оборот. Эти колебания и создают неровность в работе ротора. Принимая это во внимание, в креплении лопастей ротора к втулке должно быть предусмотрено приспособление для точной регулировки угла их установки. При установке лопастей нужно учитывать возможную закрутку лопастей, могущую получиться или при изготовлении их или за счет деформаций.
Лопасть в своем креплении к втулке имеет помимо горизонтального шарнира еще и вертикальный, позволяющий ей колебаться в плоскости вращения. Вертикальный шарнир введен с целью избежать изгиба лопасти в плоскости вращения, могущего возникнуть от следующих причин: 1) периодического крутящего момента, который может при больших р достигать больших величин, м 2) момента от инерционных сил абсолютного движения лопасти. От расстояния вертикального шарнира от оси ротора зависят
93
устойчивость лопасти в плоскости вращения и плавность работы ротора, так как это расстояние влияет на колебания - лопасти около вертикального шарнира. Удачное местоположение вертикальных шарниров для каждой данной конструкции ротора — свое, так как оно зависит от массовой характеристики лопасти, числа лопастей ротора, от того, в какой мере ограничены колебания лопастей какимп-либо упругими ограничителями и сзязаны ли лопасти друг с другом тросами. Американские конструкторы автожиров сообщают S что они, решая эту задачу экспериментально и математически (решение задачи не опубликовано), пришли к выводу, что плавность в работе ротора зависит от отношения периода собственных колебаний лопасти в поле центробежных сил к периоду оборота ротора. Так, например, для 4-лопастного ротора, имеющего междулопастные растяжки, плавность получается при нечетном отношении.
В табл. 10 даны расстояния вертикальных шарниров от оси ротора для некоторых из существующих автожиров.
Таблица 10
Название автожира Расстояние вертикального шарнира от оси ротора, м Диаметр ротора, м Число оборотов ротора в минуту Примечание
РАА-1 .... 0,102 11,2 145 Все роторы 4-ло-
РСА-2 .... 0,197 13,8 135 оастяые имеют
Келлет .... 0,159 12,5 133 междулопастные
2-ЭА 0,160 12,0 150 соединяющие
4-ЭА 0,160 13,0 160 тросы
В целях поглощения усилпй в плоскости вращения ротора, могущих возникать прп его запуске, при переходе с одного режима на другой и при сильных порывах ветра, междулопастные тросы крепятся не непосредственно к лопастям, а к рычагам демпферов (поглотителей). В 3-лопастпых роторах амортизирующее приспособление помещено около вертикальных шарниров.
§ 2. Управляемость автожира п ротор
Рассмотрим, каким образом воздействия руля глубины и элеронов передаются на ротор и переводят его плоскость вращения в нужный режим пли, вернее, как при подвесных лопастях (шарнирное крепление) плоскость вращения ротора следует за фюзеляжем при наклонах последнего. Возьмем для рассмотрения 4-лопастпый ротор. Предположим, что автожир нужно перевести с угла i на больший угол атаки г’, для чего рулем глубины создается кабрярующпй момент, который будет поворачивать фюзеляж около центра тяжести машины. Плоскость, проходящая через горизонтальные шарниры (нормальная к оси ротора), будет поворачиваться при этом одновременно с фюзеляжем на один и тот же угол. Лопасти, расположенные в первый момент воздействия перпендикулярно к фюзеляжу, повернутся вместе с фюзеляжем и изменят кажущиеся углы атаки; лопасть, идущая
1 .Aviation ‘Engiuering“, 1931, апрель.
94
вперед по движению машины, будет иметь увеличение углов атаки сечений и будет двигаться в новой плоскости, имеющей с траекторией полета угол меньше г, а лопасть, идущая попятно, будет иметь уиеныпение углов атаки сечения и будет далее двигаться тоже в новой плоскости. Лопасти же, расположенные вдоль фюзеляжа (фиг. 83), в первый момент воздействия не будут поворачиваться — их плоскость вращения ие будет следовать сразу за поворотом головки, и они будут сохранять тенденцию двигаться в старой плос-
кости вращения; в следующий иоиент, переходя в другое угловое положение, они будут подвергаться повороту вокруг своих продольных осей в в результате через некоторое малое время (доля секунды) плоскость вращения всех лопастей примет нужный угол атаки. Тожесаиое будет и при боковом управлении. Отсюда мы видим, что плоскость вращения ротора следует за фюзеляжем при повороте последнего и что ротор с шарнирно креплеными лоластяии никаких неудобств в управление автожиром не вносит.
§ 3. Собственная устойчивость автожира
Благодаря шарнирному креплению лопастей ротора автожиру присуща собственная статическая устойчивость в форме маятниковой устойчивости, проявляющаяся в особенности при крутых спусках. Действительно, результирующая аэродинамических сил всегда проходит через втулку ротора, которую можно рассматривать как точку привеса для всего автожира. Центр тяжести автожира лежит под втул, ой, отстоя от нее по высоте довольно значительно (например, у 2-ЭА расстояние между втулкой и ц. т. равно 1,5 м). Колебания, свойственные маятнику, не будут иметь места в автожире; они будут погашаться возникающей на головке ротора восстанавливающей парой благодаря тому, что горизонтальные шарниры крепления лопастей не
95
находятся в центре втулки, а разнесены по бокам ее. Нафиг. 83 показано образование восстанавливающей пары, приближенно равной произведению центробежной силы на плечо d—dx при внезапном отклонении осп ротора. Эта восстанавливающая пара появляется при колебании автожира в любой плоскости, проходящей через ось ротора, и обеспечивает в значительной степени устойчивость автожира, как в продольном, так и в поперечном направлениях.
Величина восстанавливающей пары зависит от расстояния е горизонтального шарнира лопасти от оси ротора. Чем больше е, тем больше величина пары и тем больше устойчивость, однако большое расстояние нежелательно, так как это вызывает увеличение веса втулки. Кроме того, боль-
шое расстояние горизонтального шарнира от оси ротора приводит к появлению больших моментов на головке ротора при установившемся режиме горизонтального полета х, которые «пришлось бы компенсировать рулевыми поверхностями. В существующих автожирах горизонтальные шарниры
отстоят от оси ротора на минимальные, на-Таблпца 11 сколько это позволяет конструкция, расстояния.
------;----------- В табл. И даны расстояния горизон-
' Расстояние Нарзане авто- ^горизонтального жира шарнира в м ' от оси ротора
РАА-1 .... । 0,07
РСА-2 .... । 0,086
2-ЭА.........I 0,08
4-ЭА.........1 0,08
тальных шарниров от оси ротора для некоторых из существующих машин.
Необходимо указать еще на одно обстоятельство, важное с точки зрения устойчнвостп автожира,—это то, что благодаря шарнирному креплению свойственный вращающимся винтам жироскопический эффект в виде опрокидывающих моментов в роторе не проявляется, так как лопасти моментов на машин} не
передают.
Стоит отметить, что автожир менее чувствителен в полете на малых
скоростях к порывам ветра, чем самолет, в силу не только своей устойчивости, но и того факта, что относительные скорости, а стало-быть, и силы
у лопасти ротора изменяются меньше от порыва ветра, чем у крыла саио-лета, потому что относительные скорости (прп одинаковой скорости полета) у сечения лопасти ротора автожира в среднем больше, чем у крыла самолета.
§ 4. Моменты на головке ротора
На головке ротора при установившемся режиме полета помимо сил Т, Н и S будут моменты относительно осей zz и лх (оси проходят мерез центр втулки), так как при наличии расстояния е (фиг. 84) равнодействующа^ аэродинамических спл ротора не проходит через центр втулки.
Подсчет этих моментов довольно прост. Обозначив через F проекцию равнодействующей всех сил одной лопасти на направление, параллельное оси ротора при любом угловом ее положении.
Тогда, приняв cos р=1, получим:
Л = (75)
<)
1 См следующий параграф.
«6
Первый член предстанет тягу одной лопасги, второй инерционную силу махового движения, а трешй вес лопасти,
Сила приходит через горизонтальный шарнир, и моменты ее относительно осей zz и хх будут:
О»Л = #,(?• COS’J.I 17(.)
(mr)i ~F1e • sin 6.|
Подставляя в эти уравнения вместо силы 1<\ ее выражение (75), заменив в нем пред-1 варите ль но величину J* dT о
шачением из (22), а ~ из (5) и суммируя ио г лопастям, получим средние моменты:
т‘ = г с Р R32»е А [|( 1 + ] =
= кр-/<'-(а R^ef-
(77)
'« = Sep R3 <ЛА [ ( Н + - £ (1 - А ] =
^K^Rt (Q R (78)
Л = I (79)
r.=4 M0+ж) ~ -й1 -4-2Z‘cVs ]• j
Величина моментов w. п m, при лачпоч режиме р прямо пропорциональна расстоянию гнризопiального шарнира е до от ротора.
Для роюра автожира 2-ЭА имеющего расстояние е = 0,''8, при режиме 0,5, числовая величина моментов на головке будет: w. = — 25,7 кг 1м; = 16 кг/м.
§ 5. Расчет продольной статической устойчивости и балансировка автожира
Как по целям, так и по методу расчет продольной статической устойчивости и балансировка автожира не имеют принципиального отличия oi расчета устойчивости и балансировки самолета.
7ИП. Бри; х <п
97
Расчет продольной устойчивости и балансировка автожира должны тоже включать и себя: подбор площади хвостового горизонтального оперения, его удлинения, угла установки, расстояния от центра тяжести и центровку машины, исходя из необходимости получения на всех летных режимах: а) устойчивости, условием которой является > 0, б) управляемости при отсутствии чрезмерного давления на ручку при уравновешивании автожира отклонениями руля высоты и отсутствии давления на ручку при полете на главной режиме.
Но в расчете продольной устойчивости и балансировки автожира встречаются затруднения, которых нет в расчете самолета. Первое затруднение состоит в том, что необходимо удовлетворить требованиям устойчивости и управляемости при двух сильно разнящихся друг от друга режимах автожира— горизонтальном полете с максимальной скоростью на малых углах атаки м полете с малыми скоростяии на больших углах атаки, например нрп крутом спуске, в пределе вертикальном, когда автожир уподобляется парашюту и эффективность хвостового оперения спльно уменьшается. Для разрешения этого затруднения приходится применять в автожирах горизонтальное оперение, отличающееся от самолетного соотношением между рулем высоты и стабилизатором,—в автожире площадь руля высоты больше площади стабилизатора. Кроме того, стабилизатор делается поворотным в полете. Такое хвостовое оперение при соответствующей центровке может быть достаточный для устойчивости и управления при крутом спуске и удовлетворительным при горизонтальной полете.
Второе затруднение автожира состоит в том, что ц. т. автожира лежит довольно высоко под осью фюзеляжа благодаря значительному весу ротора, удаленному далеко вверх от осп фюзеляжа. Чтобы избавиться от резкой разницы в ба тансировке при моторном полете и планировании с выключенным моторои, приходится ось тянущего винта наклонять вниз так, чтобы тяга пропеллера проходиia через ц. т. или близко от него. Точное определение скоса потока у хвоста, а стало-быть, эффективности хвоста автожира, при моторном полете еще более затруднительно, чем у самолета, так как никаких эксперименталных данных для этого пока нет. Положение неподвижного крыла автожира влияет на балансировку, м его (положения) выбор дополняет указанные выше трудности расчета устойчивости и балансировки автожира.
Излагаемый нами расчет продольной устойчивости и балансировкм является приближенным н еще не подвергся в достаточной мере практической проверке за исключением проверки на автожире 2-ЭА, которая дала удовле-ворительные результаты.
При расчете продольной устойчивости и балансировки удобнее оперировать ие с абсолютный!! величинами моментов, действующих на автожир, а с их коэфициентами, вычисляя последние следующим образом:
где V—скорость полета, a R — радиуса ротора.
Определи прежде всего моменты, действующие на автожир от ротора, крыла, тяги винта и хвостового оперения при таком взаиморасположении ц. т. автожира, ротора, крыла, хвоста и осп пропеллера, как это изображено на фиг. 85.
98
3d положительный момент условимся считать момент, уменьшающий )гол атаки автожира.
Момент от ротора. Момент от ротора будет равен:
= Тх—Ну. + ?«,,
где х и у—расстояния ц. т. до оси ротора и плоскости, перпендикулярной оси ротора, проходящей через центр втулки. Подставляя вместо Т и Н и тг их значения из формул (24), (27) п (77), получим:
Mp = k?KR\SR)\tx — hy + fze). (81)
Коэфициент момента от ротора будет равен:
Фиг. 85.
Значения t cos2 i и ~ при данном и берутся из таблицы аэродинаии» ческого расчета автожира.
Из выражения (81) видно, что, изменяя х переносом оси ротора параллельно себе, иы иожеи сильно изменить момент от ротора. При предварительной балансировке этим и нужно пользоваться. Величину у менять труднее из-за необходимости сохранения определенных расстояний между плоскостью вращения ротора и килем, а также плоскостью вращения ротора и плоскостью вращения пропеллера.
Момент от неподвижного крыла. Силы неподвижного крыла можно свести к двуи силам—нормальной и касательной к хорде. В коэфициентах это выразится так: 4
А СГк = А Сук cos г 4- А СХк sin г;
&CtK = А Схк cos i — A sin /;
AC, и ДЛм уже подсчитаны при аэродинамическом расчете но формулам (50) или (50'). Если эти силы отнесены к переднему концу хорды крыла,
7* 99
то будет еще аэродинамический момент. Его коэфициент Сет дается продувкой. Если аэродинамический момент отнести к площади ротора, радиусу ротора и скорости полета, то его коэфициент будет выражаться:
<83>
где 5 — площадь крыла,
Ъ — хорда крыла,
С„ нужнд брать из продувкп крыла, учитывая скос потока от ротора, т. е. соответствующий истпнному углу атаки крыла (47), V берется согласно $ 1 гл. III.
Момент сил неподвижного крыла относительно центра тяжести автожира будет равен:
Мк = ДСткР^7?2 72Л — ЛС^рк-В2 V*p Ч- Д Ctр л R* V*q, где р и q— плечи сил крыла.
Коэфициент момента крыла относительно центра тяжести автожира будет:
= £+ЛС(,|. (84)
Момент от тяги винта. При моторном полете момент от тяги пропеллера будет равен:
Лф = ф . т, где т — плечо силы тяги пропеллера.
Коэфициент момента от тяги пропеллера подсчитывается так:
с =_______
К'тФ yr.№V*R‘
Для горизонтального полета Ф нужно брагь по формуле (57).
Момент от хвосто .ого оперения. Сначала определим относительные скорости и истинные углы атаки горизонтального хвостового оперения.
При полете с выключенным мотором (планирование) скос потока у хвоста будет создаваться ротором и неподвижным крылом. ^Скос потока у хвоста, создаваемый ротором, можно считать равным скосу потока в плоскости вращения ротора, т. е.
Дг'„ = г— arctg —.
Скос потока у хвоста, создаваемый неподвижным крылом, можно выразить приближенно согласно теории крыльев г:
. tr, у зз „
Д г ,, = 51 ,о ь9 , где I — размах крыла, S—площадь крыла.
Заменяя согласно уравнению (50'; через ДСУ. получим:
Л i”„ = 5,73 - Д = 172 (?)2Л ,
1 Г лауэрт, Основы теории крыльев и винтов, ГПТИ, 1931 г., стр. 123 160
Полный скос потока у хвоста при планировано» автожира будет равен
Д/” = Лг'„ + Лг"л = / —arctg -2 + 1721-5)’Д C’v (85)
Истинный угол атаки у хвоста при планировании (когда автожир имеет угол атаки /) будет равен:
ar/ — i + ф — А/
пли
a„ = ¥ + arc(gi‘-172(5 )гдСг>1 (86)
где <р—у гол установки стабилизатора по отношению плоскости вращения ратора. Югнисптелытую скорое«ь потока у хвоста принимаем равнойпо величине относительной скорости в плоскости вращения ротора, т. ел
тг Т7. Vcos i —
v« = 1 = V . (87)
При полете с работающим мотором величина относительной скорости и екос потока пзменяня благодаря скорости отброшенной струи пропеллером.
Скорость сбрасыва-
ния будем считать согласно Л /
теориям идеального про- I /
пеллера равной:
Ошосительную скорость у хвоста при моторном полете можно выразить приближенно, как алгебраическую сумму относительной скорости V' и скорости отброшенной струи пропеллером:
Г«= V + Г'(/1 +2.8-1)= г /1+2В . (88)
Скос потока у хвоста в случае моторного полета можно выразить приближенно согласно фиг. 86 так:
” ("]/1+2Л 1 /1 + 2В' + /1 + 2В
Г / R \2
arc Щ - — 1 — (-у- ) А С;
/1+2В
(89)
101
Тогда истинный угол атаки у хвоста при моторном полете (когда автожир имеет угол атаки ?•) будет равен:
или
а1в = г + ?-Дг^
arcfg- _ т— 172(^-У А С
/1 4-2Я
(90)
Для подсчета момента хвоста необходимо иметь характеристики хвоста, т. е. кривые C»rt по а.
Момент от хвоста в общем виде будет равен:
где — площадь всего горизонтального оперения, L —расстояние ц. т. от точки на хвостовом оперении, которая отстоит на 1/3 полной хорды от передней кромки хвостового оперения.
Коэфициент момента от хвоста
/"• _ -Л^ггв _ у-, Sxe L / Vze\2 , Q 4 >
рг.Рй ~ ’ ‘У1-’
нужно строить по углам атаки i автожира при разных отклонениях руля высоты 9. При подсчете Cmje для какого-либо режима автожира, т. е. угла актаки г, нужно СЯ;гв взять соответственно истинному углу атаки хвоста, получающегося при данном режиме, так: при безмоторном полете—по формуле (86), при моторном—по формуле (90).
Точно так же в первом случае 7^ нужно взять по формуле (87) и во втором случае по формуле (88).
После того как определены все моменты относительно ц. т. автожира, расчет продольной устойчивости ведется далее, как и в случае самолета, т. е-на кривые коэфпциентов моментов от хвоста наносятся кривая суммы коэ-фициентов всех остальных моментов с обратным знаком. Тогда суммарный коэфицмент момента всего автожира, равный-.
при планировании
при моторном полете
ст~Стр 4-СМк 4- Оп1ф 4- С„1хв ч
будет выражаться при заданных углах атаки автожира и отклонения руля разностью ординат двух кривых — кривой и кривой суммы коэ-фпцпентов всех остальных моментов.
Выше был изложен предварительный расчет продольной устойчивости. Если имеется продувка на Ст модели автожира без ротора при разных отклонениях руля высоты, то, используя результат продувки, иожно произвести проверочный расчет продольной устойчивости и балансировки автожира следующим образом.
На планирование. Считаем, что поток воздуха у крыла фюзеляжа, хвостового оперения и других деталей подвергается одинаковому скосу от ротора.
102
Тогда коэфициент момента всего автожира без ротора при данном угле aiann автожира i и данном угло отклонения в руля высоты будет равен: с>с^(^У’ <92>
где С„1мод есть коэфициент момента модели, отнесенный к ометаемому диску ротора (полученный продувкой модели) и соответствующий углу атаки модели. равному:
z = arc tg
(если отсчет углов атаки при продувке модели велся от линии, перпендикулярной оси ротора);
7гв берется согласно уравнению (87).
Коэфицпент суммарного момента всего автожира будет равен:
^^Wp + ^«0
и его можно получить графически при любом угле атаки автожира i и любом угле отклонения руля путем построения известной диаграммы. Для одного из автожиров такая диаграмма для планирования изображена на фиг. 87.
На моторный полет. Так как крыло почти не подвергается скосу от пропеллера, то из СтмоЬ сначала нужно вычесть коэфициент момента от
103
крыла, посте чего коэфициент моченга хвоста (вместе с фюзеляжем и всеми остальными деталями кроме крыла, которые игела модель) при данном }гле атаки автожира i и данном угле отклонении 6 руля высоты будет равен
где С'тяод—коэфициент момента модели без коэфициента момента крыла, соответствующий углу атаки од< тп, равному:
arc tg:-
3=. + ?+ .
/1+^В
9
Написанное выражение для непшного угла атави модели является выражением (90), в которое не включен скос потока о г неподвижного крыла.
К,, берется согласно уравнению (88); построив по формуле (93) кривые Стг, по i при разных углах отклонения п наложив на эти кривые кривую суммы коэфициептов моментов от ротора врыла п тяги пропеллера, получим графически окончательные моменты всего автожира при любом угле атаки г и любом угле отклонения руля 0. На фиг. 88 изображена 104
подобная диаграмма для ми юркого иолета, относящаяся к тому же автожиру что и диаграмуа фиг. 87.
Из диаграмма видно, под каким максимальным углом может производи 1ь автожир планирующий спуск при данных размерах оперения и центровке. В случае фиг. 87 максимальный угол планирующего спуска при <о == 0 равен 31,5°.
Имея, например, диаграмму фиг 87, можно построить балансировочную кривую, т. е. кривую зависимое)!! угла откюнения 9 руля высоты от угла атаки автожира г, беря то знамение а для данного 9lf при котором кривая моментов всего автожира без ротора, отмеченная значением 9, пересекалась с Kpir-’fi момепюв ротора, отложенных с обратными знаками.
Расчет продольной статический устойчивости автожира можно вести также, пользуясь другими метотами. В частности очень удобно и выгодно в смысле экономии времени делать проверочный расчет продольной статн-яеской устойчивости методом Б. И. Юрьева, примсняемдм в случае расчета самолета *
рой статической продольной устойчивости автожира можно считать, как в случае самолета, положительный коэфициент устойчивости , опрс-делямый из диаграмм фиг. 87и 88, но для автожира пока нельзя указать гра ниц допустимых величин .
Имея продувку хвоста на шарнирные моменты и зная .передаточное число" управления, легко определить величину давления на ручку управ-
1 Самолетостроение, Библиотека авиационного инженера, изд ГПТИ, [931 < , /ул (
105
тения. При проектировании автожира размерами горизонтального оперении •приходятся задаваться, исходя из разиеров горизонтальных оперений существующих автожиров. В табл. 1 приведены размеры горизонтального оперения для некоторых автожиров в процентах от ометаемой площади ротора и также площади руля высоты и стабилизатора в процентах от всего горизонтального оперенпя.
На фиг. 89 даны результаты продувки типичного для автожира изолированного горизонтального хвостового оперения (площадь руля составляет 56,7% от полной поверхности горизонтального оперения). Этой диаграммой можно пользоваться при предварительных расчетах продольной устойчивости ч балансировки. На фиг. 90 даны размеры и сечения этого оперепия.
Площадьдегго горизонт. опер^5го=0,17^мг
Плоимадь рум............$р 0,099
Фиг. 90.
На фиг. 91 даиы кривые коэфициентов шарнирных моментов для оперения фиг. 90.
Расстояние хвоста от оси ротора почти у гсех машин в среднем 30— 33% от диаметра ротора. Такое положение хвоста берется в целях получения лучшей управляемости на больших углах атаки автожира (в таком положении хвост подвергается в действительности наиболее эффективному воздействию потока воздуха, вызванного р пором). Расположение крыла и оси ротора относительно ц. т. автожира нужно делать в зависимое; и от тех режимов, на которых желают, чтобы автожир был управляем и устойчив.
В автожире, диаграммы устойчивостей балансировки которого приведены на фиг. 87—88, ц. т. лежит впереди оси ротора, я = 0,06 л*, у = 1,62 м, носик крыла имеет координаты р = 0,52 м, q = 0,725 м, крыло дает каб-рирующяй момент. Горизонтальное оиерение указанного автожира отстоит от оси ротора на 32% диаметра ротора и составляет 2,2% площади ротора.
Такое взаиморасположение ц. т. оси ротора и крыла дает, как это видно из фиг. 87, хорошую устойчивость, но не дает автожиру возможности делать 106
планирующих спусков круче, чем под углом вИЛ= 31,5°, при угле отклонения руля 9 « 30°.
Для того чтобы обеспечить автожиру возможность крутых или почти вертикальных спусков (при употребительных размерах горизонтального хвостового оперения), необходимо помещать крыло так, чтобы центр давления его на малых углах атаки лежал немного позадицентра тяжести автожира, т. е. чтобы крыло создавало небольшой пикирующий момент
Ось ротора должна при этом отстоять от центра тяжести на 4—6 см. Такая центровка будет давать также удовлетворительную балансировку и устойчивос1ь при моторном полете,
В отношении устойчивости и балансировки автожир чрезвычайно чувствителен к смещению центра тяжести, поэтому необходимо при меняющейся центровке проверять продольную устойчивость и балансировку на возможную переднюю н возможную вадпюю центровки.
1 Так делается в американских конструкциях.
107
§ В. Поперечная балансировка автожира
Если ось ротора и ц. т. автожира лежат в плоскости симметрии автожира (фиг. 92), то при установившемся прямолинейном полете на автожир будут действовать следующие кренящие момент:
1) момент на головке ротора согласно уравнению (78):
тг~ крх _Й2(2 Л)2е fx;
и
3) при моторном полете реактивный момент пропеллера, равный:
М = — 71С>,2 - .
ЯР ’ п
Поперечная сида S направлена в сторону лопасти, идущей вперед по движению машины, т. е* в ту сторону, в которую происходит завал плоскости (вернее, конической поверхности) вращения лопастей на угол (см. гл. 2). Так как сила S в большей своей доле создается благодаря наклону плоскости вращения вбок на угол blt то ее приближенно для целей боковой балансировки можно считать равной:
£= ТЬЪ (94)
Поперечная сила будет сносить и кренпть автожир вбок. Для уменьшения сноса и крена от поперечной силы ось ротора паклоняют на угол tj в сторону, обратную завалу плоскости вращения, т. е. -в сторону лопасти, идущей попятно (фиг. 93).’ наклоняют так, чтобы центр втулки лежал в плоскости симметрий.
Величину угла *) нужно брать близкой величине угла &й завала плоскости вращения вбок на средних режимах р. На существующих автожирах угол т) наклона оса ротора вбок берется от 1,5 до 2,5°.
108
Окончательный момент крена при полете с выключенным мотором будет ранен:
К = Ту(Ь^^~тх. (95)
(за положительный момент крена считаем тот, который стремится кренить ротор в сторону лопасти, идущей вперед). Коэфициент его будет равен:
При моторном полете будет еще реактивный момент пропеллера, противоположный по направлению вращению самого пропеллера. Для получения наименьшего момента крена при главном режиме полета, и в особенности на режиме взлета х, направление врашеппя ротора надо брать такое же, как у пропеллера (если смотреть от пилота); тогда момент на головке ротора будет противоположен реактивному моменту пропеллера и окончательный коэфициент момента крена при моторном полете будет равен:
М
тз” 6'Язс (9^
Для уменьшения поперечного крена от поперечной силы и момента па головке на некоторых американских автожирах оси ротора дан небольшой наклон т) в 1° и линейное боковое смещение в 2,5 см в стор ну лопасти, идущей по движению машины.
На автожире ЦАГН 2-ЭА конструкция головкп такова, что позволяет ось наклонять на любой угол с целью выяснения влияния наклона ц на боковую управляемость.
Несмотря на предварительный наклон оси ротора, все же поперечное скольжение не исключено, в особенности при крутых планированиях, когда поступательная скорость мала, и если еще ирм этом имеется боковой ветер.
1 Поперечная сила up.i взлете тоже направлена в сторону лопасти, идущей вперед, и значительна по величине.
109
Поперечная устойчивость в случае бокового скольжения создаеи лаю| даря неподвижным крыльям, для чего последние имеют V и отогнутые концы. У автожиров Питкерна V = 5° и концы отогнуты на 35°; длина ото1Ьутых концов 0,6 м. Отогнутые концы кроме динамической i оперечной устойчивости создают дополнительную устойчивость пути, что является не,лишним, так как из-за конструктивных затруднений площадь киля на авт&жире приходится делать небольшой.
Боковое управление в автожире осуществляется элер1 нами. Размеры элеронов для некоторых из существующих автожиров даны в табл. 1.;
При горизонтальном моторном полете с малой скоростью и даже крутых планированиях на больших углах атаки благодаря большому скосу потока от ротора элероны еще работают удовлетворительно, но прн строго вертикальном спуске (если это позволяет продольная балансировка) или близком к вертикальному эффективность элеронов пропадает из-за отсутствия поступательной скорости
Но обычно, как выше указывалось, продольная балансировка делДется такой, что автожир может делать крутые, но не вертикальные, спуски и потому всегда будет иметь поступательную скорость, а стало*быть, и боковое управление. Для достижения хорощей управляемости ла режимах крутых ц вертикальных спусков на некоторых из последних автожирах осуществлено продольное и боковое управление путем непосредственного наклона оси ротора. Такое управление эффективно при любых относительных скоростях автожира.