/
















































































































































































Text
ПРОЕКТИРОВАНИЕ
ДИФФЕРЕНЦИРУЮЩИХ
И ИНТЕГРИРУЮЩИХ
ГИРОСКОПОВ
И АКСЕЛЕРОМЕТРОВ
Е.А.НИКИТИН
А.А.БАЛАШОВА
Е. А. НИКИТИН,
А. А. БАЛАШОВА
проектирование
дифференцирующих:
и интегрирующих
гироскопов
и акселерометров
ИЗДАТЕЛЬСТВО
«МАШИНОСТРОЕНИЕ»
Москва 1969
Scan: AAW;
DjVu: Dmitry7
УДК 629.13.054.6.001.12.001.4
В книге изложены основы расчета и проектирования
дифференцирующих, интегрирующих гироскопов и акселерометров
и дан анализ их погрешностей в различных эксплуатационных
режимах. Приведены простые расчетные формулы для
определения основных параметров этих приборов, а также их
инструментальных и методических погрешностей. В
зависимости от назначения прибора указаны требования к статическим,
динамическим и точностным характеристикам. Уделено
большое внимание описанию физической сущности и причин
появления рассмотренных погрешностей.
Книга предназначена для инженеров, работающих в
области проектирования и исследования гироскопических приборов
и систем, кроме того, она может быть полезна студентам,
аспирантам и преподавателям вузов соответствующих
специальностей.
Иллюстр. 107. Табл. 3. Библиогр. 26 назв.
Рецензент д-р техн. наук Е. В. Ольман
3-13-7
167-68
ПРЕДИСЛОВИЕ
Развитие современной авиационной и ракетной техники
немыслимо без автоматизации процессов стабилизации и
управления объектами. В качестве чувствительных элементов систем
автоматического управления и стабилизации летательных
аппаратов широкое применение находят дифференцирующие,
интегрирующие гироскопы и акселерометры. Точность работы
этих приборов, а также стабильность их статических и
динамических характеристик в значительной степени определяют
точность работы всей системы в целом.
В монографиях и учебных пособиях по прикладной теории
гироскопов и теории гироскопических приборов [8], [9], [10], [15]
рассматриваются уравнения движения и принцип работы таких
приборов, а также приводится анализ некоторых
инструментальных и методических их погрешностей. Вопросы расчета и
выбора параметров дифференцирующих и интегрирующих
гироскопов затрагиваются в перечисленных выше работах лишь
частично.
В предлагаемой вниманию читателя книге сделана попытка
собрать материал, необходимый инженерам при расчете,
проектировании и изготовлении рассматриваемых приборов.
Книга рассчитана на читателя, которому известны основные
понятия динамики твердого тела и прикладной теории
гироскопов, такие, как- закон момента количества движения, теорема
Резаля, кинетический момент гироскопа, гироскопический
момент и закон прецессии гироскопа.
В главе I книги рассмотрены вопросы расчета и
проектирования дифференцирующих гироскопов с двумя и тремя
степенями свободы. Дан вывод уравнения движения
дифференцирующих гироскопов и анализ возможных инструментальных,
методических и динамических их погрешностей. Рассмотрено
3
влияние нежесткости конструкции на частоту собственных
колебаний прибора.
Вопросы проектирования интегрирующих гироскопов и
влияние сжимаемости воздуха на передаточную функцию этих
гироскопов с пневматическим демпфированием и их
динамические характеристики рассмотрены в главе II, Кроме того,
большое внимание уделено здесь описанию поплавковых
интегрирующих гироскопов, изложены причины их дрейфа, а также
даны рекомендации по выбору параметров различных
элементов прибора.
Глава III посвящена проектированию, расчету и выбору
параметров, а также анализу погрешностей различных схем
акселерометров и гироинтегратора линейных ускорений.
Главы I и III настоящей книги написаны авторами
совместно.
Разделы 2.1, 2.2 и 2.3 главы II написаны А. А, Балашовой,
а разделы 2.4, 2.5, 2.6 и 2.7—Е. А. Никитиным.
Авторы выражают благодарность д-ру техн. наук Е. В. Оль-
ману за ценные замечания, сделанные им при рецензировании
рукописи.
Все критические замечания и пожелания читателей по книге
авторы просят направлять по адресу: Москва, К-51, Петровка,
24, издательство «Машиностроение».
ВВЕДЕНИЕ
В современных гироскопических и навигационных системах
стабилизации и управления дифференцирующие, интегрирую^
щие гироскопы и акселерометры используются как основные
чувствительные элементы систем, с помощью которых
определяются параметры движения объекта.
Дифференцирующие гироскопы, или гироскопические
измерители угловой скорости, предназначены для определения
угловой скорости вращения объекта вокруг какой-либо из главных
его осей и применяются как визуальные приборы и как
чувствительные элементы в системах автоматического управления и
стабилизации.
На современных сверхзвуковых самолетах
дифференцирующие гироскопы применяются в демпферах рыскания, тангажа
и крена для улучшения характеристик устойчивости и
управляемости, а в автопилотах — для введения в управляющую»
функцию сигнала, пропорционального угловой скорости. Кроме
того, гироскопические измерители угловой скорости находят
широкое применение в счетно-решающих приборах управления
и наведения самонаводящихся снарядов, а также в танковых и
самоходных установках, в авиационных прицелах для
выработки угла упреждения встречи снаряда с целью. На спутниках и
космических кораблях дифференцирующие гироскопы могут
быть использованы для демпфирования колебаний объекта
относительно центра его масс [8], [10], [28].
Гироскопические измерители угловой скорости с двумя
степенями свободы (обычно их называют датчиками угловых
скоростей ДУС) служат для измерения гироскопического момента,
развиваемого гироскопом при принудительных поворотах его
ротора в абсолютном пространстве. В гироскопических
измерителях угловой скорости с тремя степенями, свободы
используется их основное свойство — закон прецессии.
Интегрирующий гироскоп представляет собой
гироскопический интегратор угловой скорости обьекта, с помощью котоу
рого определяют угол поворота объекта путем интегрирования
составляющей его угловой скорости вокруг оси измерения.
Интегрирующие гироскопы находят применение как
чувствительные элементы в автопилотах и навигационных системах
управления.
5
Наиболее совершенными приборами данного типа являются
поплавковые интегрирующие гироскопы, которые в основном
применяются в инерциальных системах навигации для
построения гиростабилизированной платформы, воспроизводящей
выбранную систему координат инерциальной системы
[И], [16].
Основным элементом каждого гироскопического прибора
является гиромотор. Характеристики гиромотора во многом
определяют возможность создания качественного
дифференцирующего и особенно интегрирующего гироскопа. В современных
гироскопических приборах в основном применяются
электрические гиромоторы переменного тока с частотой питающего
напряжения 400, 500 и 1000 гц, которые представляют собой
трехфазные электродвигатели асинхронного или синхронного
(гистерезисного) типа.
Основной характеристикой любого гиромотора является
величина его кинетического момента Я. Кинетический момент
гироскопа равен произведению момента инерции / ротора
гиромотора относительно оси его вращения на собственную
скорость вращения Q.
Для получения максимального кинетического момента Я
электрические гиромоторы выполняют по обращенной схеме.
Статор гиромотора расположен внутри двигателя, а ротор —
снаружи. По своему конструктивному оформлению гиромоторы
делятся на гиромоторы открытого и закрытого типа. Последние
часто называют гироскопами или гироузлами.
В дифференцирующих гироскопах применяются гиромоторы
с кинетическим моментом Я от 5—10 Г-см-сек до 2000—
4000 Г-см-сек. В интегрирующих гироскопах применяются
гиромоторы с кинетическим моментом Я от 50—100 Г-см-сек
до 4000—6000 Г-см- сек.
Приведем основные качественные характеристики
гиромотора, которые влияют на точность работы дифференцирующих
и, интегрирующих гироскопов:
1) стабильность положения центра масс гиромотора;
2) стабильность величины кинетического момента Я
гиромотора.
Эти характеристики гиромотора не равноценны для
различных приборов. Для интегрирующего гироскопа, работающего в
схеме пространственной стабилизации гироплатформы, более
жестким является первое требование, так как смещение центра
масс гиромотора приводит к разбалансировке гироузла и
может вызвать дрейф платформы, пропорциональный этому
смещению. Малые колебания величины кинетического момента Я
гироскопа относительно его номинального значения хотя и
вызывают изменение величины дрейфа, при работе
интегрирующего гироскопа в режиме пространственной стабилизации
происходит осреднение дрейфа и малые колебания кинетического
6
момента мало сказываются на точности стабилизации.
Поэтому для интегрирующих гироскопов, работающих в режиме
пространственной стабилизации гироплатформ, второе требование
к его гиромотору является менее жестким.
Для гиромоторов дифференцирующих гироскопов, наоборот,
первое требование является менее жестким, так как
дифференцирующие гироскопы значительно уступают интегрирующим по
порогу чувствительности, а следовательно, и по допустимой
величине смещения центра масс гироскопа.
Второе требование для гиромоторов дифференцирующих,
гироскопов является более жестким, так как чувствительность
или крутизна выходной характеристики прибора
пропорциональна кинетическому моменту Н гироскопа. Поэтому точность
измерения угловой скорости дифференцирующим гироскопом
зависит от точности поддержания величины его кинетического
момента.
Для гиромоторов, используемых в гироскопических
интеграторах линейных ускорений, первое и второе требования
равноценны.
Кроме стабильности центра масс и стабильности
кинетического момента гиромотора, качество его характеризуется
следующими параметрами:
1) добротностью гиромотора. Добротностью гиромотора
называют отношение кинетического момента Н к весу G, равное
п Н ГГ-см-сек "1 #
~~g L т~у
2) жесткостью и равножесткостью конструкции гиромотора;
3) временем разгона;
4) временем выбега;
5) потребляемой мощностью;
6) временем готовности, т. е. временем, по истечении
которого гиромотор обеспечивает заданные точностные
характеристики прибора;
7) сроком службы.
Вопросы расчета и проектирования гиромоторов и выбора
их параметров достаточно полно и подробно освещены в
литературе [2], [25], [1], поэтому в данной книге они не
затрагиваются.
При рассмотрении вопросов проектирования и выбора
параметров дифференцирующих и интегрирующих гироскопов
предполагается, что гиромотор прибора выбран как готовый
элемент по заданным тактико-техническим требованиям,
предъявляемым к прибору. Автор лишь анализирует погрешности
приборов, которые могут быть вызваны нестабильностью центра
масс гиромотора из-за нежесткости и неравножесткости его
конструкции.
7
Акселерометры линейных ускорений предназначены для из*
мерения линейных ускорений движущегося объекта и
преобразования этих ускорений в сигналы, которые используются для
регистрации или управления траекторией движения объекта.
В автопилотах управляемых снарядов и ракет сигналы
акселерометров, пропорциональные траекторным ускорениям объекта,
используются для ограничения отклонения рулей по
допустимым перегрузкам [28].
В инерциальных системах навигации акселерометры и
акселерометры-интеграторы используются как чувствительные
элементы, с помощью которых определяют составляющие
ускорения и скорости движения центра масс объекта в выбранной
системе координат. Для этого они устанавливаются на гироста-
билизированную платформу, которая сохраняет положение
выбранной системы координат с высокой степенью точности во
времени. Чувствительным элементом акселерометров и
акселерометров-интеграторов, воспринимающим действие ускорений,
является инерционная масса, имеющая линейное перемещение
относительно корпуса, или физический маятник [5], [6], {15].
В зависимости от назначения к дифференцирующим, инте*
грирующим гироскопам и акселерометрам предъявляются
различные требования как с точки зрения их статических
характеристик (диапазона и точности измерения, линейности
характеристики, порога чувствительности, стабильности характеристик
и т. д.), так и динамических (частоты собственных колебаний,
степени затухания — демпфирования, полосы пропускания и
динамических ошибок в заданном диапазоне частот).
ГЛАВА
ДИФФЕРЕНЦИРУЮЩИЕ ГИРОСКОПЫ
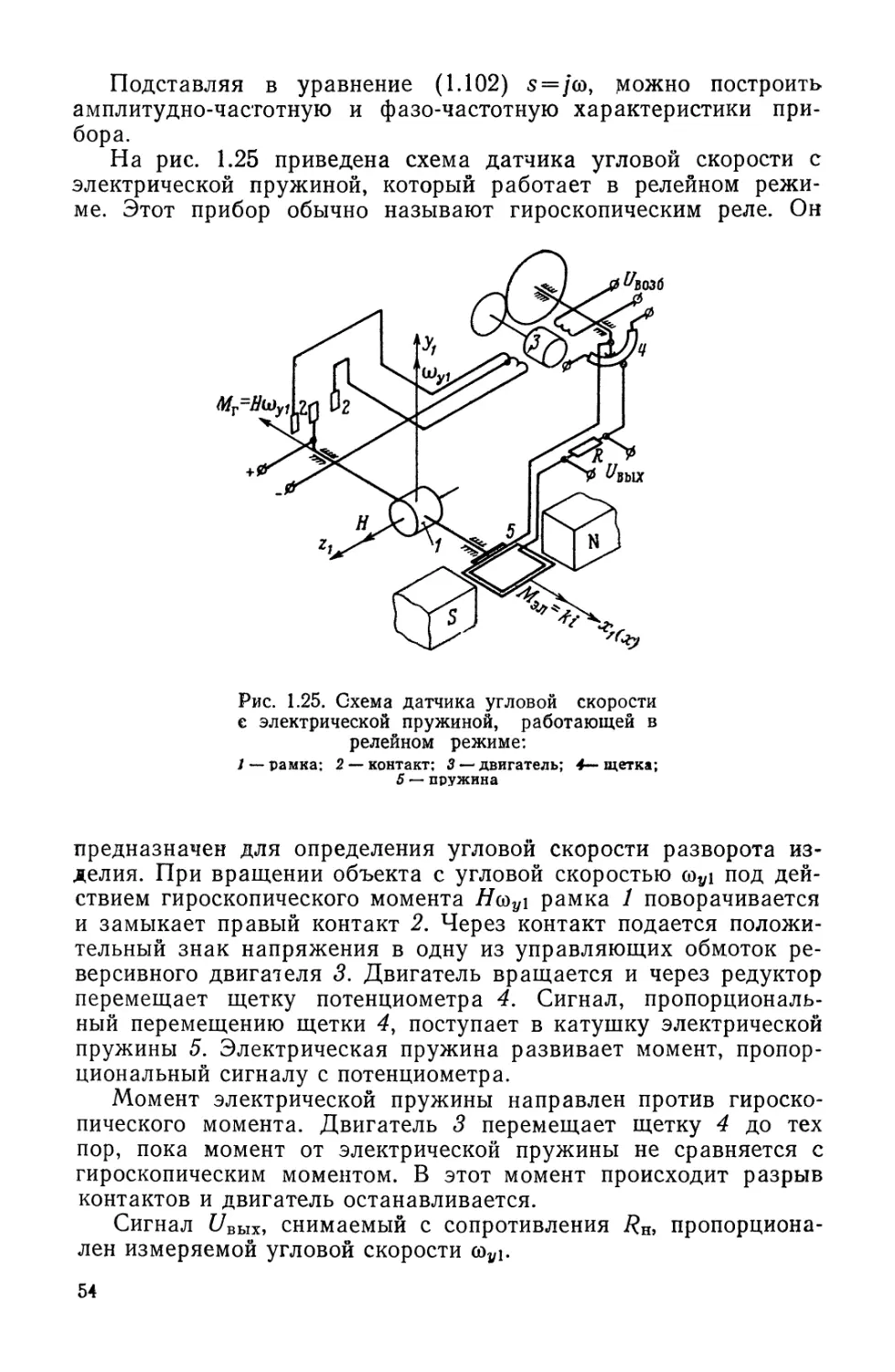
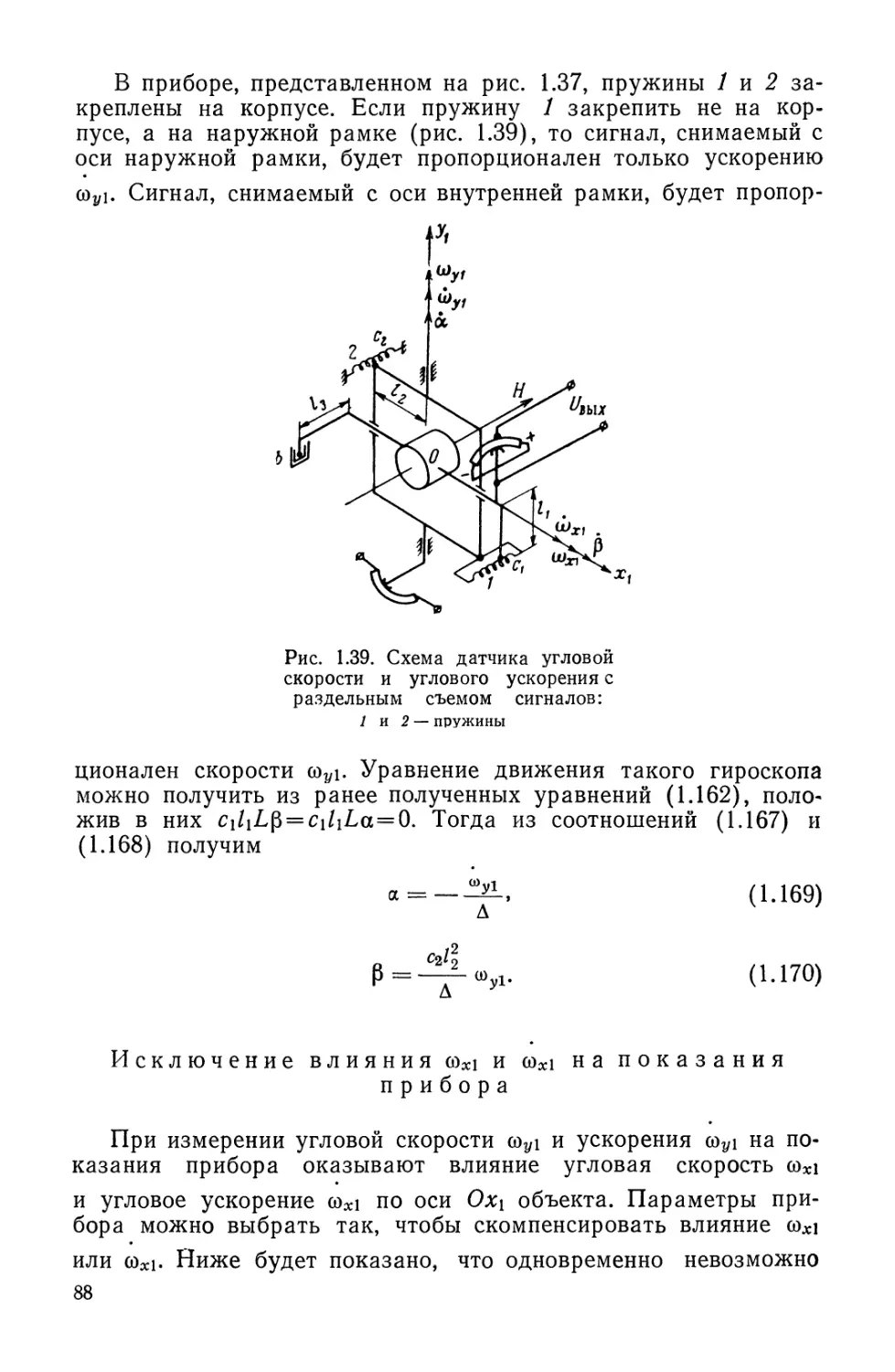
1.1. ДАТЧИК УГЛОВОЙ СКОРОСТИ (ДУС)
С МЕХАНИЧЕСКОЙ ПРУЖИНОЙ
Датчик угловой скорости представляет собой гироскоп с
двумя степенями свободы, движение которого вокруг оси гиро-
узла прибора ограничено упругой связью с корпусом прибора.
Кинематическая схема датчика представлена на рис. 1.1.
*v м
Рис. 1.1. Кинематическая схема датчика угловой
скорости:
хи У\, z\ — система координат, связанная с объектом;
ШХ1* ^yi' юг1 —проекции угловой скорости вращения
объекта на оси х\, у\. Z\\ х, у, z — система координат,
связанная с гироузлом прибора:
J — пружина; 2 — гироскоп; 3 — демпфер; 4 —
потенциометр; 5 — щетка потенциометра
Ось Ох совпадает с осью объекта Oxi и направлена вдоль
оси вращения гироузла прибора. Обычно ось Ох называют
выходной осью прибора. Ось Ох является осью собственного
вращения гироскопа, вдоль которой направлен вектор
кинетического момента Я. Так как в нулевом положении ось Ог совпа-
9
дает с осью объекта Оги то последнюю принято называть осью
поперечной угловой скорости.
Прибор предназначен для измерения скорости соу\ вращения
объекта вокруг оси Оух. Поэтому ось Оу{ называют осью
чувствительности, или измерительной осью, а также входной осью
прибора. При вращении объекта вокруг оси измерения Оу\ с
угловой скоростью (дУ1 относительно оси гироузла Ох возникает
гироскопический момент, который стремится совместить
кратчайшим путем вектор кинетического момента Н гироскопа с
вектором угловой скорости щх, вследствие чего гироузел
начинает вращаться в указанную сторону. Повороту гироузла
противодействует пружина У, упругость которой обозначим
через с.
По мере поворота гироузла под действием гироскопического
момента вокруг ее оси Ох будет деформироваться пружина, в
результате чего возникнет момент Мпр, препятствующий
отклонению гироузла. Когда момент Мпр достигнет величины
гироскопического момента Мт, рамка будет находиться в
равновесии. При этом выполняется равенство
Мпр = Мг.
Гироскопический момент равен
Afr = #(oylsin(#, юу1) = #o)ylcosp, (1.1)
где р — угол поворота гироскопа вокруг оси Ох от исходного
(начального) положения.
Для малых углов р момент от деформации пружины вокруг
оси Ох приближенно равен
А*„р = с/?р, (1.2)
где 1\ — расстояние от оси вращения Ох до линии действия
силы деформированной пружины.
В положении равновесия, приравнивая равенства (1.1) и
(1.2), найдем статическое значение угла отклонения рст
гироузла от исходного положения относительно оси Ох:
С12\$ст = H®yl C°S Рст,
откуда
#0>у1
При малом рст можно принять cos рст~1- Тогда
Я
cospcT. (1.3)
<оу1. (1.4)
cl\
10
Гаким образом, угол отклонения гироскопа рст
пропорционален измеряемой угловой скорости.
Для гашения собственных колебаний гироузла предусмотрен
демпфер о с удельной силой демпфирования Ь. Для
регистрации замеряемой угловой скорости в приборе предусматривается
какое-либо съемное устройство. В данной схеме используется
потенциометр 4. При повороте гироскопа вокруг оси Ох щетка
потенциометра 5, укрепленная на гироузле, скользит по
обмотке потенциометра. При этом выходное напряжение £/вых,
снимаемое со щетки и со средней точки потенциометра,
пропорционально углу поворота гироузла рст:
f/вых = £/с— = — ■ — «\i, (1.5)
2р0 2?0 ей У
где 2|Зо —угол намотки потенциометра;
Uc — напряжение, подводимое к потенциометру.
Из выражения (1.4) можно получить отношение угла
поворота гироузла относительно выходной оси к замеряемой
угловой скорости. Это отношение называется чувствительностью
прибора, или крутизной выходной его характеристики, и
обозначается через h:
h = bL^JL. (1.6)
<V cl\
Если в качестве выходного сигнала принимается
напряжение, снимаемое с потенциометра, то чувствительность прибора
h\ определяется соотношением
Уравнение движения прибора
Проекции угловой скорости объекта на оси гироузла, когда
он отклонен от начального положения на угол р, равны:
Шу = ^yl C0S P — ш21 S*n Р»
«>z = ^icosp + o)ylsinp.
(1.8).
При вращении гироузла относительно корпуса с угловой
скоростью р и угловым ускорением р на гироузел относительно
оси Ох действуют следующие моменты:
1. Инерционный момент М(х1\ равный
п
где co*i — переносное ускорение объекта;
/х—момент инерции гироузла (рамки) прибора
относительно оси Ох.
2. Момент М^\ развиваемый демпфером. При малых углах
Р момент от демпфера равен
м<2> = wip,
где b — удельная сила демпфирования;
/г — расстояние от оси вращения Ох до линии действия
силы демпфирования;
/2р — линейная скорость движения поршня относительно
цилиндра демпфера.
3. Момент М£3), развиваемый пружиной:
Мхг) = cl2$.
4. Сумма внешних моментов М<.4) =Мвр, которая включает в
себя момент сухого трения, несбалансированности гироузла
относительно оси Ох и другие моменты, вызывающие
погрешности.
5. Гироскопический момент М*.5) = МГ:
Мх5) *= — Ясоу = — Яшу1 cos р + Ниг1 sin p.
6. Инерционный момент центробежных сил
М6) = (Jz — Jу) (а)у1 cos р — а)й sin p)'(o)yi sin р + o)zl cos p) =
= («^ — Jy) (<°yl —^ — ®г\ —^ + ^yl^zl COS 2£J,
где Jy и Jz — моменты инерции гироскопа относительно осей
Оу и Oz.
Приравняв нулю сумму внешних и инерционных моментов,
действующих на гироскоп вокруг оси Ох, получим уравнение
движения гироузла
Jx (Р - <»xi) + Wip + ell P + Мвр - Яш^ cos p + Яшл sin p +
г/7 гч/ 2 sin2p 2 sin 2S , OQ\ л
+ (Jz — ^у) Ki "у1 - о) zt— + o)yl©elCOS 2P) - 0.
Оставляя в левой части члены, характеризующие
собственное движение, и перенося в правую часть возмущающие члены,
Ш
которые вызывают вынужденное движение гироузла, запишем
уравнение в следующем виде:
J J + blip + с/? р = Нту1 cos р — Яшг1 sin р + У>л — Мвр -
// г \ / 2 sin 2Р 2 sin 23 , по\ л ,лп\
— (Jz — Jy) Kl "^ — »zl -^ + ^уЛ1С052Р) = °* С1'9)
В полученном уравнении можно пренебречь инерционным
моментом центробежных сил, так как он во много раз
(минимум в два-три порядка) меньше гироскопических моментов,
порождаемых теми же переносными угловыми скоростями сэуЬ
cozi. В этом случае уравнение (1.9) примет вид
Jjfi + bit Р + cl2$ = H(oyl cos Р — Яо>л sin Р + jJoxl — Мвр. (1.10)
Так как прибор предназначен для измерения угловой
скорости щи то первый член правой части является полезным,
а остальные вызывают погрешности прибора. Сделаем оценку
погрешностей в определении угловой скорости и определим
основные характеристики прибора.
Инструментальные погрешности
Если в уравнении (1.10) принять, что (oxi = 0; G)zi = 0, то
получим
^Р + Ьф + cl \ Р = Яо>у1 cos Р — М
вр.
В реальных приборах угол р невелик и рюах не превышает
5—6°. Поэтому можно приближенно принять cosp=l. Тогда
уравнение примет вид
jJ + blt$ + cl2lfi=Ho>yl-MBr (1.11)
Если измеряемая угловая скорость щ\ = const, то после того
как собственное движение затухнет (Р = Р=0), из уравнения
(1.11) найдем равенство, определяющее статическое значение
угла р*ст:
Р:т=^-^=РеТ-АР) (1.12)
где Др = —-.
cl\
Из выражения (1.12) видно, что вредный момент Мвр,
действующий на гироузел прибора, вызывает погрешности в
измерении угловой скорости. Отношение вредного момента MBV к
гироскопическому моменту Нщ\ характеризует точность опре-
13
деления измеряемой угловой скорости, которая определяется в
процентах:
бсоу1 = -^- 100% =-^ 100%, (1.13)
РСТ Н<йу1
Если момент трения Мтр, действующий на гироузел
относительно его оси Ох, будет больше гироскопического момента
Нщ\ от измеряемой угловой скорости щи то отклонения гирр-
узла не произойдет. Поэтому величина момента трения Мтр
определяет порог чувствительности прибора.
Порогом чувствительности датчика угловой скорости
принято называть значение той минимальной угловой скорости
comin вокруг оси измерения, при которой гироскопический
момент больше момента трения, действующего на гироскоп вокруг
оси рамки, или равен ему:
MTD
<»ппп>^Г-. (1.14)
п
Необходимо отметить, что для датчиков угловой скорости с
механической пружиной порог чувствительности прибора
определяется соотношением (1.14) только в том случае, когда порог
чувствительности съемного устройства равен нулю. То есть
порог чувствительности датчика угловой скорости с
механической пружиной зависит как от момента трения,
действующего относительно оси гироузла прибора, так и от порога
чувствительности (или разрешающей способности) съемного
устройства. Так, если в датчике угловой скорости в качестве
съемного устройства применяется потенциометр, то порог
чувствительности прибора зависит не только от момента трения,
но и от разрешающей способности потенциометра. Для того
чтобы с прибора снять сигнал, гироскопический момент Нщ\
от измеряемой угловой скорости должен не только
превосходить момент трения, но и вызывать отклонение рамки на угол,
соответствующий минимальному сигналу с потенциометра.
Для того чтобы с потенциометра появился сигнал,
необходимо выполнить неравенство
Н(отт > MTV + с/?ДР,
откуда
">min> \ (1.15)
где Др — угол поворота рамки, соответствующий разрешающей
способности потенциометра.
Даже у датчиков угловой скорости с индуктивным съемом
сигнала есть некоторая величина Ар, которая зависит от реак-
14
тивного момента индуктивного датчика и уровня нулевого
сигнала.
Основной составляющей вредного момента, действующего
на гироскоп относительно оси гироузла, является момент сухого
трения в опорах гироузла. Для уменьшения момента трения
относительно оси гироузла, определяющего его порог
чувствительности, принимаются следующие меры:
1) применяют плоские пружины (пендельфедеры) в качестве
опор измерительного элемента прибора (рис. 1.2);
2) применяют комбинированный подвес, состоящий из тор-
сиона и гладкого подшипника (рис. 1.3). В данной конструкции
Рис. 1.2. Подвес гиро- Рис. 1.3. Подвес ДУСа на торсионе с
скопа на пендельфеде- гладким подшипником
pax
прибора гироузел с одной стороны крепят к корпусу прибора
с помощью торсиона. Торсион выполняет роль радиального и
осевого подшипников и пружины. Для того чтобы торсион имел
большую радиальную и осевую жесткость и малую жесткость
на скручивание, его изготовляют в виде крестовины. С другой
стороны гироузел крепят в корпусе с помощью гладкого
шарикоподшипника, который имеет значительно меньший момент
трения по сравнению с радиально-упорным
шарикоподшипником;
3) применяют гидростатическую разгрузку опор в
высокоточных приборах (рис. 1.4). Рамка гиромотора 2 в таких
приборах имеет форму герметического бачка 3. Корпус 4 прибора
заполняется жидкостью 1. Для компенсации температурного
расширения жидкости в конструкции прибора предусмотрен
сильфон 7. Давление на опоры 5 прибора в этом случае равно
разности весов поплавкового гироузла и вытесненного им
объема жидкости.
Если в идеальном случае вес поплавкового гироузла равен
весу вытесненного объема жидкости, то давление в опорах
прибора близко к нулю. Благодаря гидростатической разгрузке
опор и жидкостной смазке в них момент трения в опорах таких
приборов почти снимается.
15
При определении порога чувствительности датчика угловой
скорости следует иметь в виду следующее обстоятельство.
Благодаря тому, что гирЧжотор прибора всегда имеет некоторую
остаточную статическую и динамическую несбалансированность,
гироузел совершает малые высокочастотные колебания.
0 Увых &
Рис. 1.4. Датчик угловой скорости с жидкостным
заполнением:
1 — жидкость; 2 — гиромотор; 3 — бачок; 4 — корпус прибора; 5 —
опоры; 6 — датчик угла; 7 — сильфон
Остаточная статическая несбалансированность ротора гиро-
мотора может вызывать высокочастотные линейные колебания
гироузла вдоль оси Ох в пределах его осевого люфта, а
остаточная динамическая несбалансированность ротора —
высокочастотные колебания гироузла вокруг оси Ох. Вследствие этих
колебаний гироузла момент сухого трения, действующий
относительно оси гироузла прибора, меняет свое направление.
Поэтому при работающем гиромоторе момент трения примерно в
10—15 раз меньше момента трения покоя.
Обозначим через х\ у', zf главные оси инерции гиромотора.
При наличии динамической несбалансированности главная ось
Oz' инерции гиромотора не совпадает с осью вращения Oz.
Поэтому возникает момент центробежных сил МНб, стремящий
совместить ось ротора Oz' с осью вращения гиромотора Oz,
При вращении ротора с угловой скоростью Q относительно
оси Oz (рис. 1.5) момент Мн6 вращается также с угловой
скоростью Q и вектор его находится в плоскости хОу (рис. 1.6).
Проекция момента Мяб на ось Ох равна Mh6cosQ£ и вызывает
16
высокочастотные вынужденные колебания (с амплитудой,
измеряемой долями минут) гироузла вокруг оси Ох.
Приближенное уравнение движения прибора с учетом
момента трения и момента динамической несбалансированности
имеет вид
J Л + WiP + cl\ P = Яа>у1 — Мтр sign J3 —Мн6 cos Qt. (1.16)
Момент статической и динамической несбалансированности
ротора не должен превышать допустимого значения, так как
Рис. 1.5. Динамически не- Рис. 1.6. Положение в прост-
сбалансированный ротор ранстве вектора момента
он вызывает динамические нагрузки, действующие на опоры
прибора, и создает шумы, которые накладываются на основной
сигнал. Высокочастотные колебания приборов, вызванные
динамической несбалансированностью его ротора, являются также
небольшой погрешностью датчика угловой скорости.
Балансировочная характеристика датчика
угловой скорости
Несовпадение центра тяжести гироузла с осью Ох вызывает
появление погрешностей при измерении угловой скорости,
величина которых зависит от режима полета и направления
смещения центра тяжести.
В датчиках угловой скорости высокой точности качество
сборки и балансировки гироузла проверяют по его
балансировочной характеристике, которую снимают следующим образом.
Датчик угловой скорости устанавливают на поворотную
установку (рис. 1.7), так чтобы его ось гироузла была
ориентирована в горизонтальной плоскости в направлении север—юг,
а ось кинетического момента Н была вертикальна. В этом
положении записывают показание выходного сигнала. Затем
прибор поворачивают вокруг оси Ох гироузла на некоторый угол у.
например по часовой стрелке, и записывают соответствующее
17
ему показание выходного сигнала (рис. 1.8). Меняя угол
поворота у от 0 до 2я, снимают характеристику • UBblx=f(y). Если
обозначить через Дг смещение центра тяжести гироузла в
полозе/
Рис. 1.7. Начальное
положение датчика угловой
скорости для снятия
балансировочной характеристики
Рис. 1.8. К снятию
балансировочной
характеристики датчика
угловой скорости
жительном направлении оси Ог, а через Ау— в положительном
направлении оси Оу, то при произвольном угле у равновесие
гироузла будет определяться выражением
— GAz sin (у + Р) — GAy cos (у + p) + Ни sin ф sin (у +
+ Р) + Мпр = 0, (1.17)
где G — вес гироузла;
р — угол отклонения рамки, соответствующий
замеряемому выходному сигналу;
и и
Мпр—момент пружины прибора, Muv = c№$= RbTV ;
ht
и sin ф — вертикальная составляющая суточного вращения
Земли.
Учитывая, что угол р мал, им можно пренебречь по
сравнению с углом у. Тогда выражение (1.17) примет вид
— GAz sin у — GAy cos у + Ни sin cp sin у
/11
О
или
где
^вых#
hi
= GAl sin (у + Yo) — Нц sm ф sin у,
(1.18)
Д/
V Ay* + Az\ tgYo = ^.
18
Р1з выражения (1.18) следует, что величина UBUX=f(y)
пропорциональна разности момента небаланса и гироскопического
момента от вертикальной составляющей суточного вращения
Земли Функция ^^ + Ни sin <p sin у представляет собой гра-
фик балансировочной характеристики прибора.
Если шарикоподшипники гиромотора прибора имеют
предварительную затяжку и осевой люфт в гиромоторе отсутствует,
0В1
v -areas —-
Рис. 1.9. Балансировочная характеристика датчика
угловой скорости при нулевом осевом люфте
а конструкция гироузла — равножестокая, то балансировочная
характеристика имеет вид гармонической функции (рис. 1.9),
из которой определяется момент небаланса GM и угол yo, xa"
рактеризующий направление смещения центра тяжести. Если
же в подшипниках гиромотора прибора имеется осевой люфт,
то балансировочная характеристика имеет более сложный
характер, так как при переходе угла у через значения я/2 и Зя/2
гиромотор смещается по оси собственного вращения скачком
из одного крайнего положения в другое на величину осевого
люфта.
Если обозначить через
qx — Вес гироузла без ротора гиромотора;
М\ — смещение центра тяжести гироузла;
G2 — вес ротора гиромотора;
А/2 — осевой люфт гиромотора,
то равновесие гироузла прибора определяется равенством
GjA/i sin (у + То) + G2M2 sin y sign [sin ^ ^-)] =
um
hi
H + #i/sin(psinY.
(1.19)
19
Для приборов, в которых смещение центра тяжести из-за
нежесткости конструкции сравнимо со смещением центра
тяжести от небаланса, балансировочная кривая для гироузлов с не-
равножесткой конструкцией представляет собой сумму первой
и второй гармоник по углу у. Если балансировочная
характеристика прибора смещена относительно оси ординат, то это озна^
чает, что вокруг оси гироузла, кроме момента небаланса,
действует постоянный момент, пропорциональный величине
смещения балансировочной характеристики.
.В условиях круговой и линейной вибраций смещение центра
тяжести гироузла может появиться из-за нежесткости и нерав-
ножесткости его конструкции. Влияние круговой и линейной
вибраций на точность работы прибора будет рассмотрено на
стр. 163—168.
Погрешности при измерении угловой скорости могут
вызываться нестабильностью характеристик датчика угловой
скорости. Из выражения (1.7) видно, что на чувствительность hi
(крутизну выходной характеристики) прибора оказывает
влияние изменение параметров Я, с, /ь f/c, стабильность которых
определяется конструкцией прибора и условиями его работы.
Нестабильность этих параметров приводит к появлению
погрешностей.
Динамические погрешности
При использовании датчика угловой скорости в качестве
чувствительного элемента системы автоматической
стабилизации самолета или какого-либо другого объекта необходимо учи
тывать динамические характеристики прибора, так как они
влияют на динамику всей системы самолет — автопилот.
Чувствительный элемент должен выдавать в схему
автопилота сигнал, пропорциональный замеряемой угловой скорости,
без значительных его искажений по величине и по времени.
Уравнение (1.11) датчика угловой скорости для случая
Мвр=0 имеет вид
J J + blip + ci2$ = я©у1.
Поделив все члены данного уравнения на Jx, запишем его
в следующем виде:
Р + 2ЦР + (о^=^, (1.20)
20
где
2£CDC
2
(1)0 =
F = -
^
<
- >
•>*
6/|
w|
2/,
2 j/ /,df
(1.21)
где coo — круговая частота собственных недемпфированных
колебаний гироузла [1/сек]\ циклическая частота /о
собственных недемпфированных колебаний гироузла
равна
I'-z-tVQ**
|—степень затухания (демпфирования) собственных
колебаний прибора.
Положив в уравнении (1.20) 0)^=0, получим
дифференциальное уравнение, которое описывает собственное движение
гироузла прибора. Решение этого уравнения при £2<1 имеет
вид
р = ахе-ы^ sina>0]/l —lTt + а2е-Еш°' cos со0У 1 — 14,
где а\ и й2 — постоянные интегрирования, которые
определяются из начальных условий: при t=0 р= р0; Р= ро-
Если £2>1, то собственное движение системы будет носить
апериодический характер.
Таким образом, собственное движение гироузла
представляет собой постепенно затухающие колебания гироузла вокруг
положения равновесия (3 = 0. Частота coi собственных
затухающих колебаний гироузла равна
COi
соо/1 -£2,
а амплитуда колебаний уменьшается через каждый период
2тс£
в е раз, т. е. величина £ характеризует сте-
Т =■
со0
/1-£2
пень затухания (демпфирования) собственных колебаний
гироузла прибора.
Если обозначить ,через p(s) и (dVl(s) изображения функций
по Лапласу, т. е. пусть
21
P(*)*rP(*),
PW^rsP(s)-Po,
P(0^s2p(s)-Sp0-p0,
где Ро и Po—начальные значения координаты и ее скорости при
^=0, то уравнение (1.20), записанное в операционном виде для
изображений функций р и соуь имеет вид
( s2 + 2Ы08 + «о2) Р (s) = -т- <V Ф + (s + 2&°о) Ро + Ро-
JX
При нулевых начальных условиях (ро= Эо = 0) из
полученного уравнения найдем выражение для передаточной функции
прибора
W(s)= IJ^L^JL. ! ш (1>22)
<°yl (s) Jx S2 + 2£o>0S + tog
Определим амплитуду и фазу вынужденных колебаний гиро-
узла прибора, когда cd1/i = cd1/o sin at. Так как уравнение (1.20) —
линейное относительно координаты р, то вынужденное
движение гироузла датчика угловой скорости будем искать в виде
§ = Asm((dt — e), (1.23)
где А — амплитуда вынужденных колебаний;
8 — отставание колебаний гироузла по фазе от колебаний
объекта;
со — круговая частота возмущения.
Из выражения (1.23) определим р, р и подставим значения
в уравнение (1.20). Тогда получим
^([а>о — со2)cose + 2gco0o)sine] sino)^ -f A [2£u)0o)cose —
— (<oo — w2) sin e] cos at = — Wyo sin <ot.
J x
Приравняв в этом выражении коэффициенты при sin со/ и
cos со ^ в левой и правой частях, получим два уравнения для
определения постоянных А и г:
А [2Ео)0 cos е — (соо —■ со2) sin е] = 0,
А [(©о — ш2) cos s + 2&D0a> sin е] = — соу0.
^х
22
Решая совместно полученную систему уравнений, найдем
tge= f"0"
2g —
ci)0
со \2
^0 /
ИЛИ
arctg -^—, (1.24)
А =
Ншуо 1
cose [(">o—а)2)2 + 4^оа,21
fftoyo 1
'" /Ht)T+*(t)
(1.25)
Обозначим через Л0= «" амплитуду вынужденных
колено
баний при частоте возмущения со = 0. Отношение амплитуды
колебаний А к А0 обозначают через % и называют
коэффициентом динамической восприимчивости прибора, а в теории
автоматического регулирования — относительной амплитудно-ча-
сточной характеристикой прибора. Из уравнения (1.25)
следует, что
у L \ wo / J \щ
Выражения (1.24) и (1.25) показывают, что амплитуда А
вынужденных колебаний (или коэффициент К динамической
восприимчивости) и отставание вынужденных колебаний по
фазе 8 являются функциями отношения частоты возмущения к
частоте со0 собственных колебаний и степени затухания
(демпфирования) g. Разница между А и А0 является динамической
погрешностью измерения угловой скорости по амплитуде,
а 8 — динамической погрешностью по фазе.
На рис. 1.10, а и б приведены графики е=>М —, £) и % =
= — =/з (—, 6]|ИЗ которых следует, что амплитудные и фазо-
вые искажения вынужденных колебаний малы на начальном
23
участке, когда собственная частота прибора со0 значительно
больше частоты возмущения со (частоты объекта), т. е. (о0>(о.
При проектировании приборов для конкретных объектов
разработчику в техническом задании обычно задают макси-
Hi
г
е
а)
ъ=бж^
\ 5)
J
-0,2
-0,5
в)
Рис. 1.10. Амплитудные (а) и
фазовые (б) искажения датчика угловой
скорости. Реакция датчика угловой
скорости на единичное
воздействие (в)
мально возможную частоту ,/тах колебаний объекта. Если
датчик угловой скорости предназначен для использования в
качестве чувствительного элемента демпфера рыскания (крена или
тангажа) или автопилота, то его собственная частота /0 (или
юо) выбирается в пределах
©о
2*/0>(8- Ю)2тг/тах = (8 ~ 10)соп
Для более точных приборов задается полоса частот, в
пределах которой динамические погрешности прибора не должны
превышать допустимой величины. В этом случае частота
собственных колебаний прибора выбирается по допустимым
динамическим ошибкам. Степень затухания (демпфирования)
собственных колебаний датчиков угловой скорости обычно выбирают
в пределах g = 0,4-^0,8. С точки зрения наименьших
динамических ошибок и качества переходного процесса степень
затухания (демпфирования) выбирают равной 4=0,707 (70%
демпфирования). При g=0,707 гироузел имеет наименьшее время
переходного процесса при единичном возмущении (рис. 1.10,в).
При размещении датчиков угловой скорости на самолетах и
ракетах, где датчики используются как чувствительные
элементы систем автоматического управления, необходимо учитывать,
что самолеты и ракеты не являются абсолютно жесткими
телами [10], [11].
24
Корпусы современных самолетов и ракет под действием
аэродинамических сил во время полета* совершают упругие из-
гибные колебания (рис. 1.11). Упругие колебания корпуса
объекта искажают аэродинамические характеристики самолета
(ракеты) по сравнению с его характеристиками без упругих
деформаций. Кроме того, чувствительные элементы системы
Рис. 1.11. Упругая линия летательного аппарата
автоматического управления воспринимают угловые
деформации, вызванные упругими колебаниями, и подают их в качестве
ложных управляющих сигналов для отклонения рулей. Частота
первого тона упругих колебаний объекта, который является
основным, обычно бывает значительно ниже частоты
собственных колебаний датчика угловой скорости. Поэтому, если датчик
угловой скорости расположить на борту объекта в узле
(точка а) упругой оси его корпуса, он будет замерять не только
угловую скорость колебаний объекта относительно его центра
масс, а и угловую скорость изгибных колебаний корпуса.
Отклонения рулей, вызванные сигналом с датчика угловой скорости,
пропорциональным угловой скорости изгибных колебаний, могут
быть причиной, вызывающей усиление этих колебаний. Для того
чтобы датчик угловой скорости не чувствовал угловой скорости
изгибных колебаний, его необходимо размещать на объекте в
точке пучности (точка Ь) упругой линии.
Влияние нежесткости конструкции
датчика на частоту собственных колебаний
Нежесткость конструкции прибора или нежесткое его
крепление к объекту приводит к снижению частоты собственных
колебаний прибора при работающем гиромоторе по сравнению с
расчетной частотой. Влияние нежесткости конструкции датчика
угловой скорости на частоту его собственных колебаний
рассмотрим на приборе (рис. 1.12), подшипники 'ротора которого
имеют ограниченную жесткость.
Обозначим через р угол отклонения рамки прибора, а через
<xi — угол отклонения оси гироскопа в плоскости рамки
вследствие упругих деформаций в главных опорах прибора.
Угловыми отклонениями ${ оси гироскопа относительно оси Ох
вследствие упругих деформаций оси ротора будем пренебрегать
в виду их малости по сравнению с отклонениями р самой
рамки.
25
Составим уравнения малых колебаний рамки относительно
оси Ох и ротора гироскопа относительно оси Оу при отсутствии
демпфирования:
где
(1.27)
Jv—экваториальный момент инерции ротора
гироскопа относительно оси Оу;
k2 — приведенная жесткость оси ротора и его
подшипников по углу;
kx = cl\ — приведенная жесткость пружины рамки по
углу р.
Характеристический
полином для системы уравнений
(1.27), записанный в виде оп-
№i ределителя А, равен
Рис. 1.12. Датчик угловой скорости
с нежесткими подшипниками ротора
Д =
Jxs2 + kx; —Hs
Hs; Jys2 + k2
Развернув полученный определитель и приравняв его нулю,
получим характеристическое уравнение системы (1.27)
JxJy? + (Jykx + Jxh + я2) s2 + kxk2 = о
или
JxJy 3*
+ (^+y*+£)s2 + **=0-
(1.28)
Из уравнения (1.28) при жесткости &2, стремящейся к
бесконечности (£2->oo), получим
Jxs2 + кг = 0.
(1.29)
26
Уравнение (1.29) является характеристическим уравнением
собственных недемпфированных колебаний рамки при
абсолютной его жесткости.
Определим корни уравнения (1.28), когда к^фоо\
$1,2= —
с2 _
Jyki + Jxk2 + Я2 / (Jyh + Jxh + Я*)*
2JxJy V 4JxJy
Jykl + Jxk2 + № / (JykX + Jxk2 + #2)2
2Vy ~ [/ 4Vy
k\k2
T T
JxJ у
k\k2
*x'Jу
(1.30)
Так как жесткость й2 хотя и не равна бесконечности, но
достаточно велика, то приближенно можно принять
V (</А + J Л + Я2)^ - 4У,Уу*1*2 =
(УЛ + ^А + Я2)
1 —
(УЛ + /А+Я2)2
:(УА+^А + ^2)
1 —
2JxJvkikz
(Jyki + Jx^ + H^*
Равенства (1.30) в этом случае примут вид
si, 2 = —- •
*i*
1«2
/yAi + УдЛг + Я2
S3, 4 = ~
Jyki + JJb + H*
JxJ у
+
kxk%
Jyki + J^ + W
Jyki + JJu + H*
JxJу
Из выражения (1.31) найдем
h
\
■fx + Jy-T +
k2 k2
(1.31)
(1.32)
Так как k2^k\, a H2>Jyk, то приближенно можно принять
Sl, 2 = ± l / = • (1.33)
\
1 J + —
27
Корни 5i,2 характеризуют частоту основных медленных
колебаний прибора. Из выражения (1.33) видно, что при &2-^°°
частота колебаний рамки определяется корнями Si,2 из уравнения
(1.29) и совпадает с расчетной.
При нежесткой конструкции, когда й2¥=°о, частота
собственных колебаний рамки согласно (1.33) падает с уменьшением
жесткости k2. Физическую сущность этого явления можно
объяснить следующим образом. При отклонении гороскопа
относительно оси Ох с угловой скоростью р вокруг оси Оу на ротор
гироскопа действует гироскопический момент Яр по часовой
стрелке, если смотреть с положительного конца оси Оу. Под
действием этого момента опоры и ось ротора гироскопа будут
деформироваться так, что, если пренебречь инерционным
моментом Jya\ как малым, будет выполнено равенство
ЯР+ 6^ = 0, (1.34)
т. е. гироскопический момент будет уравновешиваться упругим
моментом от деформации элементов гироскопа.
Из отношения (1.34) следует, что
<*!= — —- р.
Если угловая скорость р — переменная, то угловая скорость ai
будет равна
Н д
#2
Угловая скорость ai создает вокруг оси Ох гироскопический
момент
который вызывает такое же инерционное сопротивление, как и
момент /^p.
Уравнение движения рамки прибора относительно оси Ох в
этом случае имеет вид
(Лг + ^)Р + ЭД = 0. (1.35)
Частота собственных колебаний из уравнения (1.35)
определяется корнями (1.33).
Корни s3,4, определяемые из соотношения (1.32),
характеризуют высокочастотные колебания рамки и ротора, вызванные
28
нежесткостью конструкции прибора и инерционными членами,
порождающими нутационные колебания:
S3, 4 =
h k2 Н* г
Jx J у JXJ у
.±«1
/ ko 4- —
1 Ч^
(1.36)
Погрешности от переносного ускорения u>xi
Если в уравнении (1.10) принять AfBp=0; (ozi = 0; cosp=l,
то оно примет вид
Jjfi + bit P + cl\ p = Hnyl + JxuxV
(1.37)
Наличие момента Jx(uxi вызывает погрешности в показаниях
прибора. При 0)^ = const погрешность Ар в угле отклонения
рамки, вызванная переносным ускорением сохь будет равна
дб -- У*03*1 = шх1
cl\
(1.38)
Для уменьшения погрешностей прибора от переносного
углового ускорения (Dxi необходимо стремиться проектировать
прибор с минимально возможным моментом инерции Jx- Это
приводит не только к уменьшению, погрешностей от переносного
углового ускорения со^ь но и к повышению собственной частоты
прибора, что улучшает его динамические характеристики. В
некоторых конструкциях указателей
поворотов, где не предъявляется
высоких требований к
динамическим характеристикам прибора,
погрешности от переносного
углового ускорения coxi
компенсируются с помощью
мультипликатора, который представляет собой
следующее устройство (рис. 1.13).
В корпусе прибора на оси 02
Рис. 1.13. К компенсации
инерционного момента от
переносного углового ускорения:
1 — гироузел; 2 — ротор; 3 —
зубчатая передача: 4 — маховичок
29>
устанавливают маховичок 4, соединенный с гироузлом /
прибора через зубчатую передачу 3. Маховичок 4 свободно
вращается около оси 02, а его центр тяжести совпадает с этой
осью.
При вращении объекта с угловым ускорением и>х\
инерционный момент гироузла вокруг оси Оь равный Jx(dxu вызывает
появление реактивной силы F^ в точке зацепления колес. Сила
F\= х хх направлена влево. Инерционный момент маховичка
/Mo)xi вызывает появление реактивной силы F2. Сила F% =
= hi(uxi/R2 и направлена вправо. Если /г1 = /72, то
/?i R* '
откуда следует, что
А=^. (1.39)
Таким образом, инерционные моменты гироузла и маховичка
от переносного ускорения co^i будут взаимно компенсироваться.
Однако следует иметь в виду, что введение в конструкцию
прибора такого компенсирующего устройства приводит к
увеличению приведенного момента инерции /пр при собственном
движении прибора:
J»P = Jx + Ju(^y. (1-40)
Уравнение движения рамки при выполнении соотношения
(1.39) имеет вид
ЛРР + ^Р+с/?р = Ясоу1. (1.41)
Из уравнений (1.40) и (1.41) следует, что увеличение
момента инерции приводит к снижению частоты собственных
колебаний прибора. Поэтому в датчиках угловой скорости
рассмотренный выше метод компенсации погрешностей от переносного
углового ускорения coxi практически не нашел применения.
Погрешности от перекрестной угловой скорости
Полагая в уравнении (1.10) Мвр = 0; (0x1 = 0, найдем
уравнение движения прибора с учетом перекрестной угловой
скорости 0)zi:
У J + bit Р + cl\ р = #coylcos P — Я(ол sin р. (1.42)
30
Если принять sinp^p; cosp^l, a co^i и cozi постоянными, та
при р=р = 0 получим
c/ipCT = Яоу1 — Яо)Лрст,
откуда следует
Рст = ; юУ1 = —- • — юУ1. (1.43)
А
Из соотношения (1.43) ясно, что перекрестная угловая
скорость o)zl приводит к изменению чувствительности прибора. Она
падает или возрастает в зависимости от знака угловой
скорости cozi. Ошибку в показаниях прибора от co2i можно учесть,,
если она постоянна. Если объект колеблется вокруг осей Оу\
и Ozi по гармоническому закону, то в показаниях прибора
появляется погрешность от перекрестной угловой скорости со2ь
Пусть
<°*i = <°*о sin (at — ф), (1.44)
где ©г/о и cozo—амплитудные значения угловых скоростей щъ
и ©zi;
Ф — фазовый сдвиг между co^i и (о2\.
Принимая sin p~P; cosp~l, уравнение (1.42) запишем в
следующем виде:
■fjrP + Ы2$ + di P = #°V sin at — РЯсо ZQ sin (at — ф)
или
Р + 2Бшор 4-u?p = i^sin<D* —^*L p sin (со/ —9). (1.45)
Для решения уравнения (1.45) используем метод
последовательного приближения. Для этого в первом приближении
вторым членом правой части уравнения (1.45) будем
пренебрегать.
В этом случае (1.45) преобразуется в уравнение (1.20),
решением которого является соотношение (1.23):
pj = Asin(iDt — e),
где Л и е определяются равенствами (1.24) и (1.25).
Для получения решения уравнения (1.45) во втором при-
31
ближении значение р во втором члене правой части заменим
через pi. Уравнение (1.45) при этом примет вид
p + 2Ea)op + (oo2P=^^sin^^-^^sin(co^ — s) sin(co/— ср).
(1.46)
Так как
sin (со/ — s) sin (со/ — cp) = (sin со/ cos s — cos со/ sin s) (sin со/ cos ф —
— cos со/ sin cp) = sin2 со/ cos e cos cp + cos2 со/ sin e sin cp —
— sin a>/ cos ш/ sin (e -f- cp) = — cos s cos ф cos s cos cp cos 2co/ 4-
-\ sin s sin ф 4 sin s sin cp cos 2<o/ — — sin 2co/ sin (s -f- ф) =
= — cos (e — cp) cos 2co cos (s -f- cp) = — sin 2co/ sin (e + ф),
то уравнение (1.46) запишем в виде
P+2fo>jJ + со02 Р = -у- °V>sin Ы - ^Г2 cos (s - ^ +
+ ял«>21со5(2а)^_е_(р)> (L47)
^ X
Решение уравнения (1.47) дает второе приближение
вынужденного движения по углу р:
ртт = A sin (со/ — е) — ^^ cos (в — ф) + А± cos (2co/-sx — Ф), (1.48)
2JX«20
где А\ и 8i — соответственно амплитуда и фазовый сдвиг
вынужденных колебаний прибора с двойной
частотой возмущения.
Второе приближение (1.48) показывает, что центр
колебаний прибора смещается от нулевого положения на величину
COS (8 — cp).
2/Х
Таким образом появляется постоянная составляющая ошибки в
показании прибора, когда объект колеблется одновременно
вокруг оси измерения и вокруг оси кинетического момента.
Следовательно, ошибка в показаниях прибора появляется как от
постоянной, так и от переменной перекрестной угловой скоро-
32
сти о>гь Чтобы уменьшить влияние угловой скорости cozi на
точность показаний, необходимо увеличить удельный момент
пружины cl2v благодаря чему уменьшается угол отклонения
рамки р.
Обычно для грубых приборов Ртах не превышает 5—6°.
В высокоточных приборах угол рЮах не превышает 0,5—1°.
Однако следует иметь в виду, что с уменьшением pmax
повышаются требования к съемному устройству прибора.
В тех случаях, когда погрешности от перекрестной угловой
скорости cozi вообще недопустимы, может быть использована
Рис. 1.14. Схема датчика угловой скорости со спаренными
гироскопами
схема датчика угловой скорости со спаренными гироскопами
(рис. 1.14), которая исключает погрешность от перекрестной
угловой скорости cozi и переносного ускорения co^ct. Выходные оси
0\Х и Otf! двух совершенно одинаковых гироскопов, соединены
кинематически через зубчатую передачу с передаточным
отношением i=l. Пружина, демпфер и потенциометр крепят на
одной из осей OiX или 02х\ Кинетические моменты #i и Я2
гироскопов направлены в противоположные стороны.
При наличии угловых скоростей (оу\ и cozi гироскопический
момент первого гироскопа относительно оси Ох равен
Мх = — Нг(иу1 cos Р + #i<o*i sin р,
а гироскопический момент второго гироскопа 2 относительно
оси Ох' равен
Мх1 = Я2о)у1 cos Р + H2(dzl sin p.
2 Никитин и др. 33
Так как гироскопы 1 и 2 связаны между собой
кинематической связью, то суммарный гироскопический момент Мг от двух
гироскопов, приведенный к оси 0\Х, будет равен
Мг = Мх — Мх1 = — (#х + Я2) соу1 cos Р + (Ях — Я2) ©л sin р. (1.49)
При Hi = H2 = H получим
Мг= — 2Яо)у1со5р. (1.50)
Инерционные моменты от переносного углового ускорения
созсь действующие вокруг осей О^х и 02х', соответственно равны
—Лс0)*1 и —/alCDxi. Так как моменты инерции Jx = Jx', то
приведенный инерционный момент равен нулю: —/3Co)3Ci+/3Co)xi = 0.
Уравнение движения прибора в этом случае будет иметь вид
ЛРР + Wi P + cl\ Р = 2Hcoylcos P, (1.51)
где /пр — приведенный момент инерции прибора относительно
оси Ох.
К недостаткам этой схемы датчика угловой скорости
следует отнести:
1) наличие механических элементов в кинематике прибора,
вводящих дополнительные моменты трения, люфты и т. п.;
2) увеличение момента инерции Jj^ = Jx+hf при /* = /*';
Jир = £Jх\
3) увеличение габаритов и потребляемой мощности.
В тех случаях, когда к динамическим характеристикам
прибора предъявляются невысокие требования, для исключения
влияния o)zi на показания прибора может быть применена схема
датчика угловой скорости с дополнительной следящей
системой, которая поддерживает ось гироскопа в положении,
перпендикулярном оси измерения. Схема такого прибора приведена
на рис. 1.15. На оси / гироскопа с двумя степенями свободы
смонтирован контакт 2, перемещающийся при повороте
гироскопа вокруг оси. Ох но контактным ламелям 3. Поводок 9
датчика закреплен между двумя спиральными пружинами 7У
смонтированными на специальной серьге S, соединенной с
ходовым винтом 5.
При вращении объекта, на котором установлен гироскоп с
угловой скоростью 0)^1 вокруг оси измерения прибора, гироскоп
повернется на некоторый угол р. Величина угла р определится
из равенства гироскопического момента и момента,
создаваемого деформированными пружинами:
Ясоу1 cos Р = clxz,
где деформация z пружин равна z = /ip.
34
Отклонившись от нулевого положения вместе с гироскопом
вокруг оси Ох, контакт 2 замкнется с одной из ламелей 3. Тем
самым электрическая цепь электродвигателя 4 окажется
замкнутой. Благодаря этому двигатель, а вместе с ним ходовой
винт 5 придут во вращение. Направление этого вращения вы-
Рис. 1.15. Схема датчика угловой скорости
с дополнительной следящей системой:
/ — ось; 2 — контакт: 3 — ламели: 4 —
электродвигатель; 5 — ходовой винт: 6 — датчик; 7 — пружина;
8 — серьга; 9 — поводок
бирается так, чтобы перемещение серьги 8 принудительно
Возвращало гироскоп в нулевое положение.
Подобное перемещение деталей прибора будет происходить
до тех пор, пока контакт 2 не займет нейтрального положения
между ламелями 3. В этот момент времени, соответствующий
возвращению гироскопа в исходное положение, ток в цепи
электродвигателя 4 прекратится, а серьга 8 остановится.
Положение серьги 8 будет смещено относительно нулевого положения
датчика 6, укрепленного на корпусе прибора на величину
деформации z пружин.
Деформация z пружин пропорциональна замеряемой
угловой скорости соуь Наличие следящей системы значительно
ухудшает динамические характеристики прибора, а
механическая передача от двигателя до указателя вносит погрешность в
точность измерения.
2* 35
Порядок расчета
Основными характеристиками датчика угловой скорости
являются следующие:
1. Диапазон угловых скоростей, в котором прибор должен
обеспечивать ее измерение (сотах—сощщ). Отношение comax/comm
называют добротностью прибора. Добротность прибора
является одним из основных параметров, характеризующим
качество прибора. Чем больше добротность датчика угловой
скорости, тем выше качество прибора.
2. Порог чувствительности прибора к замеряемой угловой
скорости.
3. Точность измерения угловой скорости.
4. Чувствительность прибора, или крутизна его выходной
характеристики h\. Вид выходного сигнала.
5. Частота |/0 = соо/2я собственнее недемпфированных
колебаний гироузла прибора и степень затухания g собственных
колебаний прибора.
6. Максимально допустимый угол рЮах отклонения гироузла
от нулевого положения. Величина угла рШах в основном
определяется заданной точностью измерения.
7. Источник питания.
8. Срок службы и хранения, габариты и вес прибора.
9. Время готовности прибора, т. е. время, по истечении
которого прибор готов к работе и обеспечивает измерение угловой
скорости с заданной точностью.
Кроме указанных параметров, прибор должен удовлетворять
общим техническим требованиям, обеспечивать нормальную
работу и точность измерения угловой скорости в заданных
климатических условиях и заданных условиях линейных и
вибрационных перегрузок.
Гиромотор, электрическую и конструктивную схему прибора
выбирают из заданных диапазона измерения, эксплуатационных
требований, габаритов и веса прибора. При этом диапазон и
точность измерения, а также заданный порог чувствительности
прибора и время готовности прибора в значительной степени
определяют выбор типа гиромотора, его кинетического момента
Я, электрической и конструктивной схемы прибора.
По заданным значениям f0 и рюах при выбранном гиромо-
торе с кинетическим моментом Я определяют необходимую
приведенную жесткость k\=^cl\ пружины по углу поворота рамки.
Необходимо обеспечить выполнение следующих двух
неравенств:
max»
f-^.-JLi/ifL>fft .
/О — о ~ о I/ г ^ /0 зад»
2я 2к У Jx
36
где Jx — приведенный момент инерции по оси рамки,
определяемый из конструкции прибора.
Приведенная жесткость пружины k\ = cl\ выбирается
большая из этих двух неравенств. При этом второе неравенство
будет выполняться автоматически. Определив приведенную
жесткость пружины, находим чувствительность прибора:
h = — = Pmax .
cl\ штах
Зная величины h и Ль определяют параметры съемного
устройства прибора.
По заданной степени затухания g согласно (1.21) находят
удельный коэффициент демпфирования Ы\ и геометрические
размеры демпфера прибора. После этого проводится
поверочный расчет прибора по выбранным параметрам, уточняется его
порог чувствительности, чувствительность, диапазон измерения,
точность измерения и динамические характеристики.
1.2. ДАТЧИК УГЛОВОЙ СКОРОСТИ
С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ
Принцип действия
Основной недостаток датчика угловой скорости с
механической пружиной заключается в том, что он представляет собой
измеритель незамкнутого типа, поэтому изменение параметров
преобразующих элементов прибора непосредственно влияет на
точность измерения. Ранее было показано, что выходное
напряжение, снимаемое с датчика угловой скорости с механической
пружиной (см. рис. 1.1), определяется соотношением (1.5). Из
выражения (1.5) видно, что изменение напряжения Uc питания
потенциометра непосредственно влияет на точность измерения
угловой скорости. Так как допуск на колебания напряжения Uc
бортовой сети достигает нескольких пррцентов, можно считать,
что точность измерения угловой скорости прибором с
механической пружиной будет находиться в этих пределах или даже
несколько превышать их. Кроме того, порог чувствительности
датчика угловой скорости с механической пружиной зависит от
разрешающей способности съемного устройства (потенциометра
или индуктивного датчика прибора). Поэтому создание
датчика угловой скорости с механической пружиной с большим
диапазоном измерения и с высоким порогом чувствительности
представляет весьма сложную техническую задачу.
Датчик угловой скорости с электрической пружиной
представляет собой измеритель, охваченный обратной связью.
Выходной сигнал £/Вых в таких приборах не зависит от колебаний
напряжения сети 0С, а порог чувствительности прибора опреде-
37
ляется только моментом трения Мтр вокруг оси рамки
прибора.
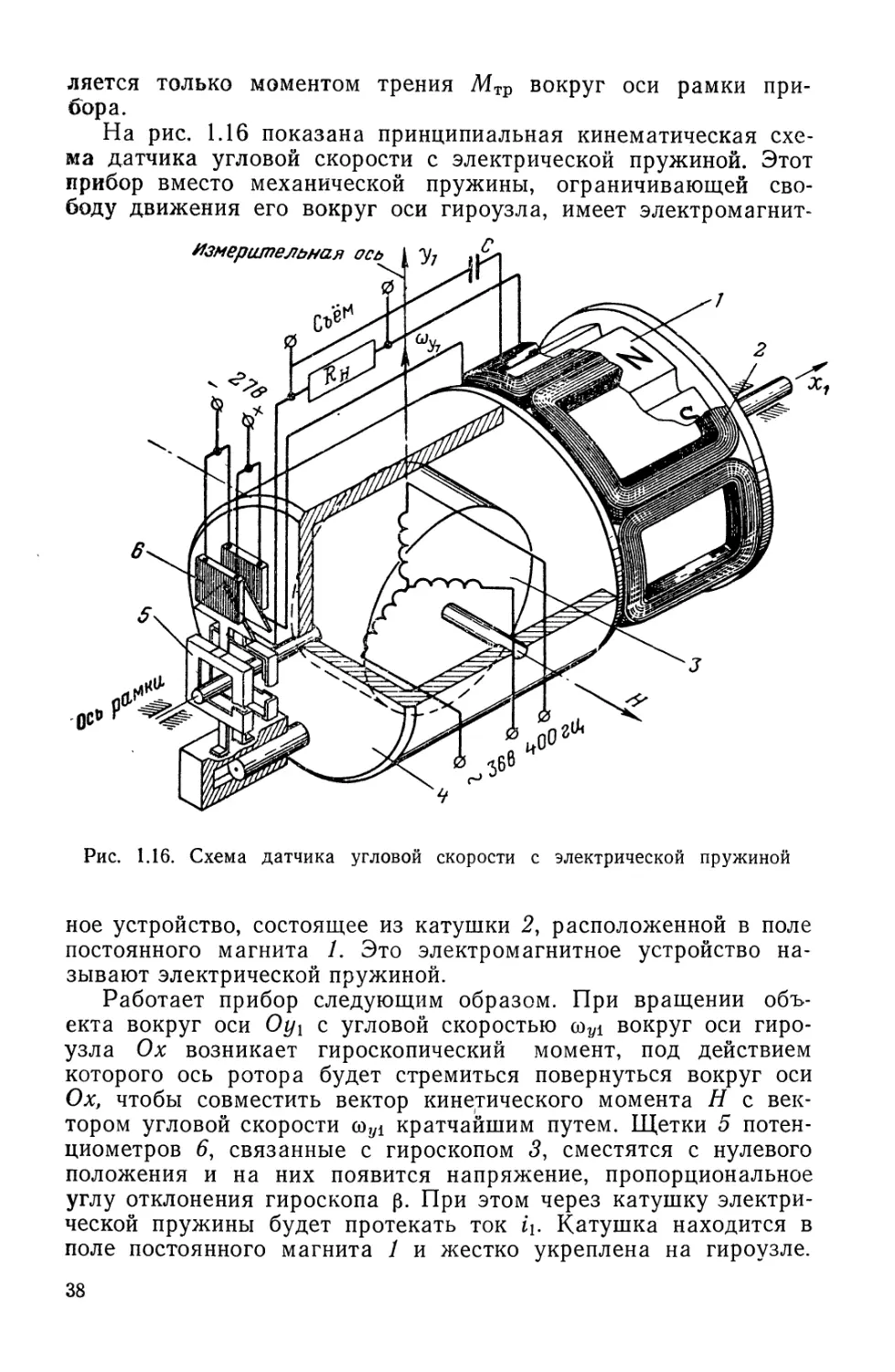
На рис. 1.16 показана принципиальная кинематическая
схема датчика угловой скорости с электрической пружиной. Этот
прибор вместо механической пружины, ограничивающей
свободу движения его вокруг оси гироузла, имеет электромагнит-
Рис. 1.16. Схема датчика угловой скорости с электрической пружиной
ное устройство, состоящее из катушки 2, расположенной в поле
постоянного магнита /. Это электромагнитное устройство
называют электрической пружиной.
Работает прибор следующим образом. При вращении
объекта вокруг оси Оу\ с угловой скоростью согд вокруг оси
гироузла Ох возникает гироскопический момент, под действием
которого ось ротора будет стремиться повернуться вокруг оси
Ох, чтобы совместить вектор кинетического момента Н с
вектором угловой скорости o)yi кратчайшим путем. Щетки 5
потенциометров 6, связанные с гироскопом 3, сместятся с нулевого
положения и на них появится напряжение, пропорциональное
углу отклонения гироскопа р. При этом через катушку
электрической пружины будет протекать ток ih Катушка находится в
поле постоянного магнита 1 и жестко укреплена на гироузле.
38
Благодаря взаимодействию тока i\ с магнитным полем
постоянного магнита катушка электрической пружины создает
момент вокруг оси Ох, препятствующий отклонению гироузла.
Если пренебречь инерционным моментом Jx$, то приближенно
можно записать, что гироскопический момент H(dyi
уравновешивается моментом от пружины k\i\ (угол отклонения гироузла
от нулевого положения считаем малым и принимаем cosp~l),
где k\ — крутизна моментной характеристики электрической
пружины по току.
Из равенства
kxix — Ныу1
найдем
ii = -T*yi. (Ь52)
Соответственно выходное напряжение UBhlx, снимаемое с
сопротивления jRh, равно
UBbl* = Rtih = ^<»yi> (1.53)
Из выражения (1.53) следует, что напряжение выходного
сигнала 0ВЫХ не зависит от колебаний питающего
напряжения Uc.
Физически это обстоятельство можно объяснить следующим
образом. Предположим, что напряжение Uc питания упало. При
этом ток в катушке i\ понизится. При уменьшении тока i\
гироскопический момент Ныу1 будет больше момента электрической
пружины k\i\. Под действием разности моментов (#<%i—kih)
гироузел начнет отклоняться до такого значения угла р, при
котором снова наступит ее равновесие, т. е. ток ^ достигнет
прежнего своего значения.
Следовательно, при колебаниях питающего напряжения Uc
будет меняться угол р отклонения гироскопа, а выходное
напряжение будет поддерживаться постоянным для определенной
угловой скорости (oyi. Это является очень важным
достоинством датчика угловой скорости с электрической пружиной.
Уравнение движения прибора
Приближенное уравнение движения гироузла прибора
(рис. 1.16) имеет вид
Jj + k&^H»^ (1.54)
где k\ii — момент, создаваемый электрической пружиной.
Для определения тока i± в катушке электрической пружины
39
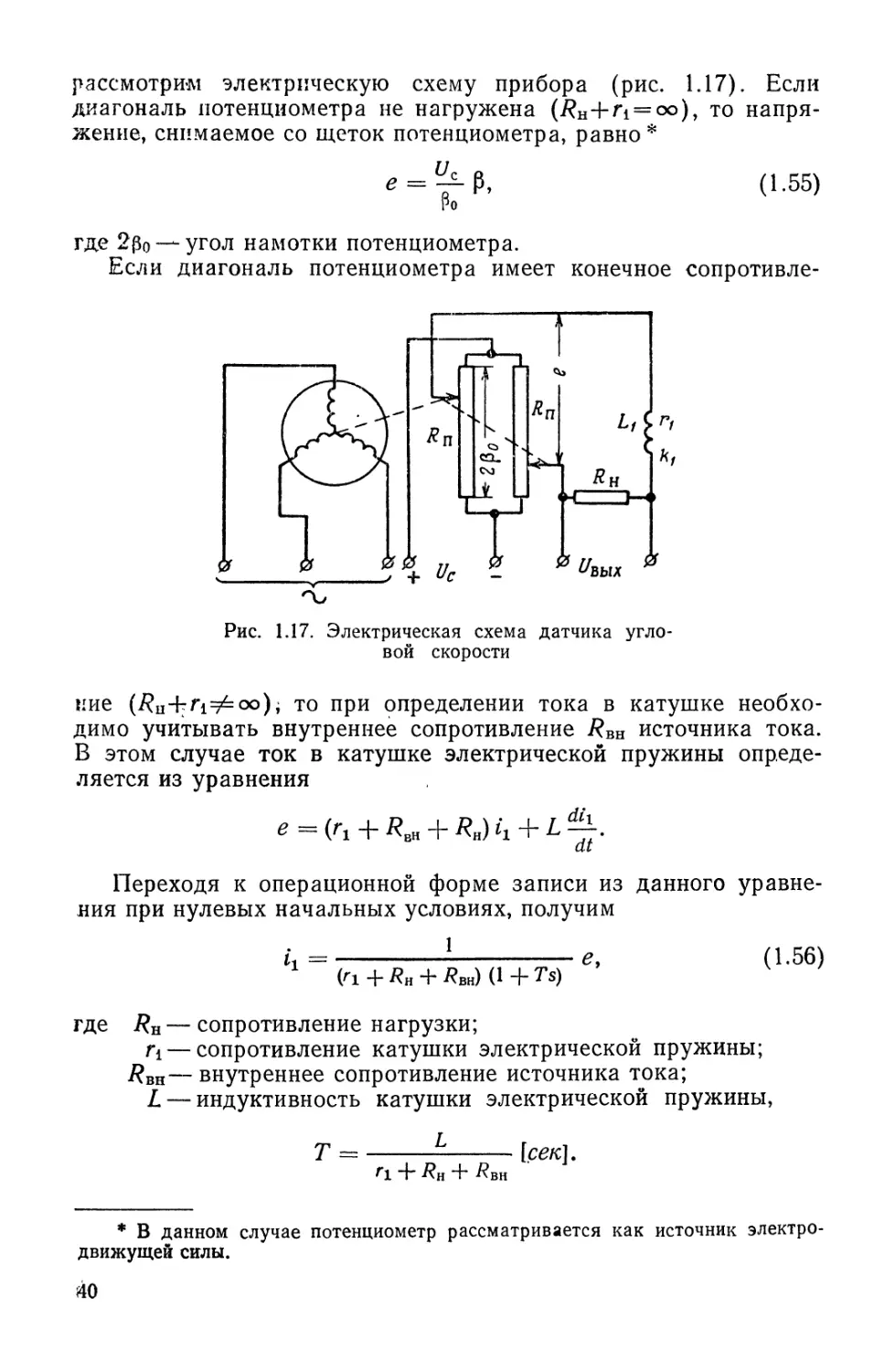
рассмотрим электрическую схему прибора (рис. 1.17). Если
диагональ потенциометра не нагружена (/?н+/"1 = °°), то
напряжение, снимаемое со щеток потенциометра, равно*
--£'•
(1.55)
где 2(5о-^угол намотки потенциометра.
Если диагональ потенциометра имеет конечное сопротивле-
ь*п
^
*П
00
-1 > Ч
I*/
0
Увых
О/
Рис. 1.17. Электрическая схема датчика
угловой скорости
кие (i?u+n¥=oo)i то при определении тока в катушке
необходимо учитывать внутреннее сопротивление RBH источника тока.
В этом случае ток в катушке электрической пружины
определяется из уравнения
е={гг + ^ + Яв)Ь + А
at
Переходя к операционной форме записи из данного
уравнения при нулевых начальных условиях, получим
1
и =■
(/-1+Лн + Явн)(1+Г*)
е,
(1.56)
где /?н — сопротивление нагрузки;
/Ч— сопротивление катушки электрической пружины;
Явн—внутреннее сопротивление источника тока;
L — индуктивность катушки электрической пружины,
Т = -
ri + Rn + Яв
[сек].
* В данном случае потенциометр рассматривается как источник
электродвижущей силы.
АО
Для определения внутреннего сопротивления источника тока
воспользуемся теоремой об эквивалентном генераторе. Щетки
потенциометра будем рассматривать как источник э. д. с,
имеющий внутреннее сопротивление RBH.
Определим сопротивление RBU между точками/1
и В (рис. 1.18), приняв сопротивление
источника питания бортовой сети равным
нулю. Поэтому точки питания
потенциометра между собой закорочены (рис.
1.19, а).
Отдельные участки плеч моста имеют
сопротивления
|ЧР»±Р).
где jRn — сопротивление одного плеча
потенциометра.
Схема сопротивлений более просто
представлена на рис. 1.19, б, согласно
которому внутреннее сопротивление /?Вн
Рис. 1.18.
Эквивалентная
электрическая схема
прибора
равно
«-^-Ф'}
(1.57)
Из соотношения (1.57) следует, что внутреннее
сопротивление является нелинейной функцией угла р. График i/?bh(P)
приведен на рис. 1.20
r(VP)
АР-
а)
1
1
•0В
%.'№>
р
ft fp°+p)
6)
wjh+p>
TfJfcV Щ(№
Рис. 1.19. К определению внутреннего сопротивления
Однако на практике при использовании датчиков угловой
скорости в автопилотах и других системах стабилизации^ ДУСы
работают у нулевого значения угла р. Поэтому приближенно
можно принять
D ,-w^n
(1.58)
41
Кроме того, /?вн обычно значительно меньше (r\+RH) и
влиянием угла р на изменение суммарного сопротивления
гх+Rk+Rbh в большинстве случаев можно пренебречь.
Уравнение (1.56) согласно соотношению (1.58) примет вид
(п + Rh + y) (!+Г5)
(1.59)
При движении катушки в поле постоянного магнита в ней
наводится э. д. с. в\. Поэтому в электрической цепи прибора
будет протекать дополнительный ток i\A. Полярность э. д. с. в\
2
—»
\
1 Л
I
^Рраб
Ро
р
lf+Чд
О
Рис. 1.20. Зависимость
внутреннего
сопротивления от угла Р
Рис. 1.21.
Эквивалентная схема
прибора с учетом э. д. с.
такова, что возникающий ток в электрической цепи ^д
порождает момент, препятствующий движению рамки.
Уравнение (1.54) движения гироузла прибора в этом случае
будет записано в следующем виде:
Jx$+ki(h + hjd = Hi»yi-
(1.60)
Эквивалентная схема электрической цепи прибора с учетом
э. д. с. в\ приведена на рис. 1.21.
Найдем значение тока i±R.
Согласно теореме наложения дополнительный ток /1Д,
протекающий в цепи катушки за счет э. д. с. ей записанный в
операционном виде при нулевых начальных условиях, равен
*1Д =
(ri + Rn + ^fjd+Ts)
(1.61)
42
Полный ток / в катушке электрической пружины равен
сумме токов i'i и /1Д:
i = i, + *1Д = i (e + ex). (1.62)
Момент, действующий на рамку, помещенную в магнитное
поле, при протекании через нее тока i равен
М = —— BoW^ai = lO-'BoW^ai = /^, (1.63)
откуда
^- Ю-^о^/ра, (1.64)
где Во — индукция в воздушном зазоре в гауссах;
W\ — число рабочих витков катушки;
/р — рабочая длина витка в см;
а — радиус катушки в см\
г — ток, протекающий в катушке, в амперах.
Э.д. с. е\, наводимая в рамке при движении ее в поле
постоянного магнита, равна
e1 = BQUWlV'10-8[e]7 (1.65)
где U — скорость движения проводника в магнитном поле,
и=4. (1.66)
Тогда
ех - B0l9Wa- 10-8J3 = lCM^p [в]. (1.67)
Учитывая равенства (1.55), (1.62) и (1.67), уравнение (1.60)
в операционном виде при нулевых начальных условиях
запишем в следующем виде:
Jxs* + ^ (10-^xS + -^
р = Ясо^. (1.68)
Положив в уравнении (1.68) Г=0 (в реальных приборах
индуктивность катушки электрической пружины мала и ею пре-
43
небрегают), определим частоту оо недемпфированных
колебаний прибора и степень затухания £:
СОл =-^
•у
2|ш0 =
UJn
^(/ч+Лн+y) '
10-^f
/ж('1 + *„ + ^)
(1.69)
Коэффициент | в этом приборе мал. Для получения
необходимого демпфирования в конструкцию прибора вводят
дополнительное демпфирующее устройство.
Из уравнения (1.68) следует
Р =
(l+rs)#<»yl
(1.70)
Учитывая значение i из соотношения (1.62), найдем
напряжение
Ян
U RMX Aut
('i+*. + Y)(1+J'i»
c^+f)"
или, учитывая (1.70),
^ вых
ri + Rn +
Rn
X
X
10-^s +
h")"""1
/„* (1 + Ts) + hl (lOr-Чца + У*-)
(1.71)
Из выражения (1.71) следует, что при 5 = 0 выходное
напряжение £/Вых не зависит от величины напряжения сети Uc.
Передаточную функцию W(s) прибора определим из
выражения (1.71):
U7(s) = ^-X
0)yl
Rnft
n + R« + ^
X
44
10—*Ais +
V,
X
Po
/,*» (1 + Ts) + - — (lQr-*klS + ^-)
, „ , «n \ Po /
(1.72)
n + Rtt + Y
Если индуктивностью L катушки можно пренебречь (Г=0),
передаточная функция примет вид
W(s)
ип
R»h
Oyl
10-%s+-f-
Po
ri+s, + <k v+ *■ (ям»+%)
ri + Rvi + '-
(1.73)
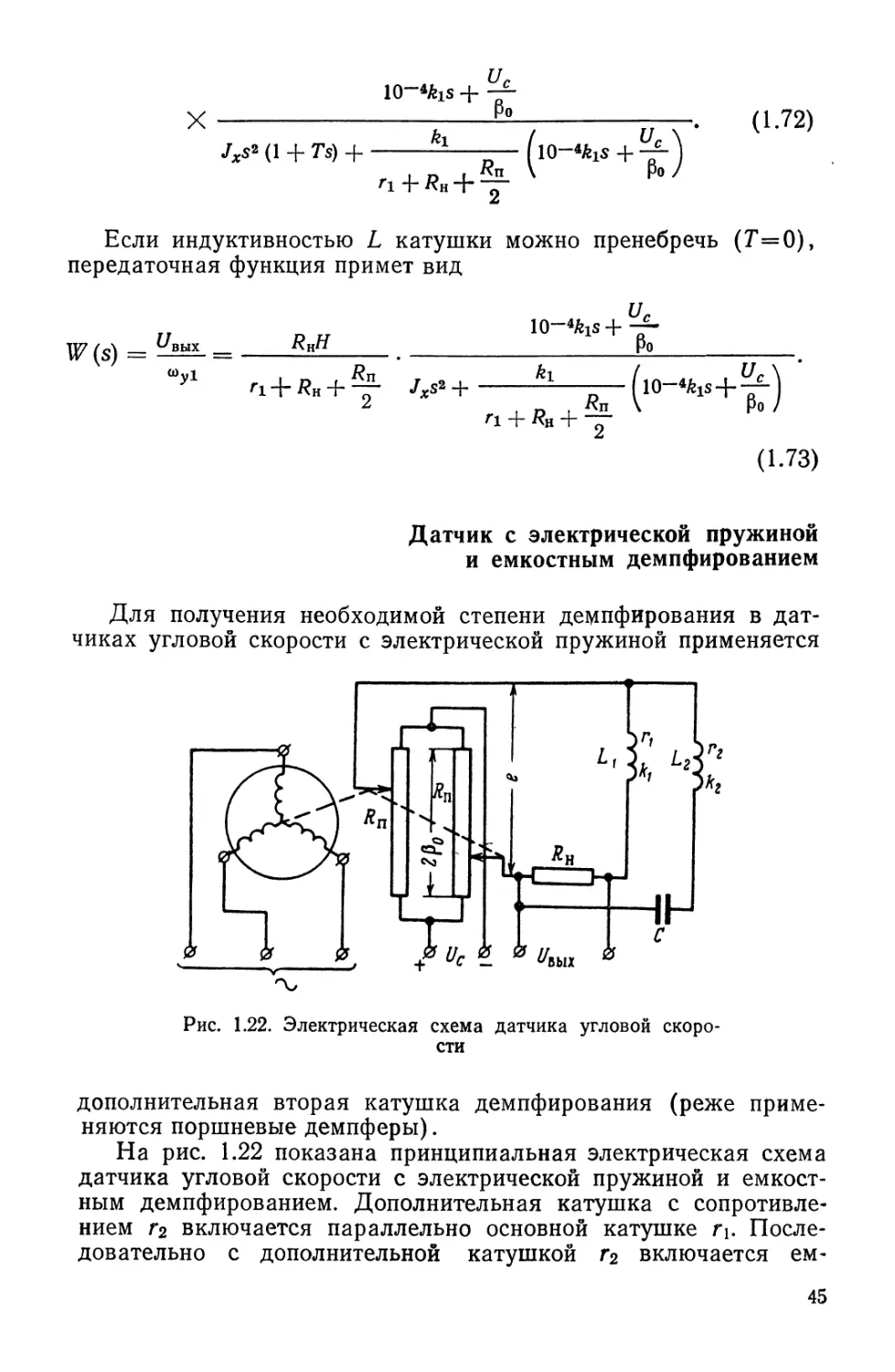
Датчик с электрической пружиной
и емкостным демпфированием
Для получения необходимой степени демпфирования в
датчиках угловой скорости с электрической пружиной применяется
Рис. 1.22. Электрическая схема датчика угловой
скорости
дополнительная вторая катушка демпфирования (реже
применяются поршневые демпферы).
На рис. 1.22 показана принципиальная электрическая схема
датчика угловой скорости с электрической пружиной и
емкостным демпфированием. Дополнительная катушка с
сопротивлением Г2 включается параллельно основной катушке г\.
Последовательно с дополнительной катушкой г2 включается ем-
45
кость С. Через емкость С и сопротивление г2 будет проходить
ток только в случае движения гироузла с некоторой угловой
скоростью р. При этом дополнительная катушка создаст
момент, пропорциональный угловой скорости р.
Уравнение движения прибора
Прежде чем составлять уравнение движения прибора,
рассмотрим его эквивалентную электрическую схему (рис. 1.23).
I
6
Рис. 1.23. Эквивалентная
электрическая схема датчика
угловой скорости
Величины е и RBn определим из соотношений
Общий ток i найдем из равенства
е
I =
Rbh +
ri + r2 + Rn+ (Li + L2) j* -\—
1
где
(ri + Rh + Liyco) ■ r2 + L2/«> + —7-j
ri+r2 + Rn + (Li + L2) /со + -
1
/cdC
= zt
(1.74)
(1.75)
Z — сопротивление внешней цепи в ом\
Z,2 —индуктивность катушки демпфирования в гн\
С — емкость цепи демпфирования в ф\
Гг — сопротивление катушки демпфирования в ом;
Силу тока i\ в первой катушке найдем из соотношения
n + Rn+ Li]»
(1.76)
46
или
и = е
Rbu +
(I + Ян + Li/o)) (r2 + L2/o> + -Т-7Г)
1 + /"2 + Дн + "7ТГ + (Ll + L2) /со
X
х-
1
(/-1 +/?н + Li/co) '
а ток *2 во второй катушке равен
е — IRbh
и--=
r2 + L2/o> + —
(1.77)
(1.78)
/соС
ИЛИ
и = е
1 —
Лв
(П + R* + LiM (r2 + La/o) + -Г7Г )
^BH +
а + ^2 + ^н + (^l+^2)/«
/»C
X
X
/cdC
1 + ra/coC + L2 (/<»>)»C
(1.79)
Обозначим:
s —- yco,
\
U
и =
«H + ri
П = (^н+/-1+г2)С,
T\ - L2C,
Тогда равенства (1.77) и (1.79) примут вид
(1.80)
и =
Явн (Г^ +T4s + 1) + (Я„ + n) (7V + 1) ( T|s2 + T2s + 1)
7*6 (TlS + 1) s
RBH(Tls* + TiS + 1) + (Я„ + П) (Tie+ 1) (7fs« +T,s + l)
■e, (1,81)
.(1.82)
47
Если учесть э. д. с. е\ и e2i наводимые в катушках прибора,
то в электрической цепи будут протекать дополнительные токи
*1д И £2д-
Уравнение (1.54) движения прибора в этом случае примет
вид
«/дгР + К (h + hfi) + h (h + *2д) = %,
(1.83)
Q
*ЬЧг,
где в\ — э. д. с, наводимая в катушке электрической пружины;
е2— э.д. с, наводимая в катушке емкостного
демпфирования;
i k2— крутизна моментной
характеристики катушки
емкостного демпфирования по току.
Для определения
дополнительных токов Пд и ^д составим
эквивалентную схему
электрической цепи прибора с учетом
э. д. с. в\ и е2 (рис. 1.24).
Пользуясь теоремой
наложения, найдем выражение
дополнительных токов «1Д и /гд, протека-
Рис. 1.24. Эквивалентная ющих в цепях катушек вследст-
^1?*че?!!^™ема датчика вие возникновения э. д. с. е{ и е2,
" с Учетом которые в операционной форме
при нулевых начальных условиях
имеют вид
it
угловой скорости
э. д. с. е\ и е2
«1Д =
^ Cs + rzCs + UC0 + 1) ех + Y ег
In+Rn+Lts) {riCs+LtCs* +l)+ ^-[(Lx+Ia) Cs»+(«,+ri+r^ Ce+1)
[ Tls* + (Tg + Г7) s + 1 ] ei + T,Sei
Rn
(1.84)
(Rtt+ri)(\+TlS)(Tls2+lT2?+l) + -f[Tl0 + Tts+l]
где
T, = ^-C
*2д'
(Ян + П + Us) (raC& + UCs* + 1) +
48
\?ш?_(Г18_+1)+ T4s] e2 + r7sei . { g5>
(Я„ + п) <Ti8+ 1) (T25s* + r2s + 1) + ^- [т*# + T4s+ 1]
Подставляя в уравнение (1.83) значения токов ц, мд, i% **2д
й переходя к операционной форме записи при нулевых
начальных условиях, получим
Jx [{К + гг) (TlS + 1) (Т& + T2s + 1) +
+ ^ [(Т& + TAs + 1)]}s»p + К i{Th2 + T2s + 1) e +
+ [T& + (Г, + Г7) s + l] ex + T,se2} + k2 {T6s (7\s +l)e +
+ [T6s (TlS +l)+ T7s] ez + 7>x) = {(/?„ + rt) (TlS +
+ 1) (7ls* + r2s + 1) + y (Th* + T,s + 1)} Я(оу1. (1.86)
Из соотношений (1.55) и (1.67)
Ро
ех = 10-4^р.
Аналогично определим
et=10r*kj. (1.87)
Подставим значение е, е\ и ег в выражение (1.86):
/* {(^н + Гх) (7\s + 1) (ГЬ2 + 7V + 1) + -^ [(71 sa+r4s+ 1)]} s*p+
+ ЦСгЬ» + 7-25+ i)-&. + [гЬа + (т* + г,)«+ 1] ю-*klS+
+ Т, • 10~' £2s2} р + *2 f r,s (7\s + 1) -^ + [?> (7\s + 1) +
+ T,s] 10-" £2s + Т,-10-" &lSaJp = {(#„ + ^(7*^-f l)(r|s8 +
+ T,s+l) + -^- (Tis* -f T4s + 1)} Яшу1. (1.88)
49
Если положить, что правая часть соотношения (1.88) равна
нулю, то найдем характеристическое уравнение движения
гироузла
{Jjc [(*„ + 'i) (Tis + 1) (71 s2 + T,s + 1) + -^- (Tl s2 + Tts + 1)] +
+ 2-10-" T^kt + 10-" k\ [Te (TlS +\)+ T,}\ s2 +
+ {10-* kUli s2 + (T2 + T4) s + 1] + kT6 (TlS + 1) -^-J s +
+ ^(rls2 + r2s+1)^=0. (1.89)
Po
При определении основных параметров прибора будем
пренебрегать индуктивностью L\ и L2, а также дополнительными
токами Ид и **2д, так как Lico и iL^co малы по сравнению с
омическим сопротивлением, электрической цепи прибора, a iin и
/1д<0#1 и i2.
Если положить Ь1 = Ь2 = 1\п=12р,= 0, то уравнение (1.89)
преобразуется к виду
Jx [(Ян + rx) (T2s + 1) + -|l (r4S + i) j S2 + ^ Jk s +
+ ^(r3s +1)4^ = 0
или
^[(^H + r1)72 + ^Lr4]s» + ^(-|i- + ^HH-r1)s2 +
\ Po Po / Po
Для реальных приборов коэффициенты при s3 обычно во
много раз меньше коэффициентов при s2, s и свободного члена
уравнения (1.90). Поэтому корни характеристического
уравнения (1.90) можно определить приближенно (но с большой
степенью точности), разбив его на два уравнения:
Jx[(R* + r1)Tt + ^TA]!? + Jx(-Bz- + RH + r1)*=0,(lM)
Jx (-^- + Як + гЛ s2 + (&2Гв + ВД-^-s + h-^- = 0. (1.92)
\ г / Ро Ро
Из уравнения (1.91) имеем
52 = 0
50
. (1.93)
~T,+ (RH + n)T2
Корень Si характеризует время разрядки или зарядки
конденсатора С в контуре электрической цепи. Парциальная
составляющая, характеризующаяся этим корнем, практически не
сказывается на основном движении- гироузла прибора.
Из уравнения (1.92) приближенно определим собственную»
частоту недемпфированных колебаний ооо
biUe
1/ /*P*(-£L + *h+'i)
и степень затухания £
(1.94)
2Sco0 = №« + №)"' f (1.95>
Wol-^T + Rn + ri
которые определяют основное движение гироузла прибора.
Из соотношений (1.95) и (1.94)
g = VTT, (kxT2 + к2т6)
л/ /;tMi(~+*h + 'i)
(1.96)
Из формулы (1.94) следует, что коэффициент k\ выбирают
из условия заданной частоты соо- Момент инерции при
конструировании желательно обеспечить минимальный.
Величину емкости С и коэффициент k2 выбирают из
заданной степени затухания g согласно формуле (1.96).
Крутизна характеристики прибора по току
Из уравнений (1.81), (1.84), (1.55), (1.65) выразим р через
сумму токов:
i = h + iu,
Si
. . , . T25s* + T2s+ 1 y
* = h + *1я e"£ X
-у- (Г| s* + T4s + 1) + (Я„ + /i) (Ti s+ 1) (T\ s*+T2s+l)
Po
Pi s2 + (T, + Г,) s + 1 ] 10-4 hs + 10-4 7,ft2s2
(Ян +'i) (TLs + 1) (Tg s* + T2s + i) + ^L(r| s2 +r4s + 1)
откуда
(Ян + П) (FlS + 1) (T\ s* + T2s + 1) + -^ (Tl S2 + 74s + 1)
i. (1.97)
(T§ s»+7«s+l) -^-+10-4 [kL [T25s+ (T2+r7)s-bl] +r7^2s} s
Подставляя это значение р в уравнение (1.88), получим
{Jx [(Д. + >*i) (7\s + 1) (Tl s2 + r2s + 1) + -&- (71 s*+TtS +1)] s2 +
+ fe!<(T25S2 + T2s4- 1)-^- + [7ls* + (Г2 + T7)s + 1] 10-^lS +
Po
+ 7> Ю-4 k2S2 > + k2 <T6s(TlS + 1) %l- + [TQs{TlS + 1) +
Po
+ T7s] 10-4 A2s + 7V 10-4 felS2 > J f = {(T25 s2 + T2s + 1) -^- +
+ 10"4s< k±[Tls2 + (T2-f T7)s + 1] + T7fe2s>}Яо>у1. (1.98)
При G>yi=-const из уравнения (1.98) для установившегося
значения тока i имеем
kxi = Яо)уЬ
откуда получаем крутизну ft2 характеристики прибора по току
h = -^- = — = const. (1.99)
Эта величина — одна из основных характеристик прибора — не
зависит от величины нагрузочного сопротивления Rn.
52
Зависимость диапазона измерения
от сопротивления нагрузки
Установившееся значение тока i определяется следующим
равенством:
<=Jk. \ р=-^£- ! р. (1.100)
Rm+n + R* Ро Дп Г, / Р
ыт
+ '1 + #н
Максимальное значение тока imax найдем при замере <%i max-
При этом р='Ро, поэтому уравнение (1.100) примет вид
ис
П + Ян
тогда -^- = ^ - Л2,
^yl max (^l + Rh) <°у1 max
ОТКуда Vmax = - , ' . . • (1.101)
('l + Rh) h2
Из последней формулы следует, что диапазон измерения
угловых скоростей зависит от сопротивления нагрузки RH.
Передаточная функция прибора
Воспользовавшись уравнением (1.98), запишем
передаточную функцию W(s) выходного напряжения по замеряемой
угловой скорости при нулевых начальных условиях:
W(s) = .и*т — Rlil -
»>yl <*>yl
RhH \(Т25 s* + T2s + 1) -^- +Ю-4 s {kx [Т\ s* + (Т2 + Т7) s+ 1] +T7k2s] J
Jx[(Rn + n) (T1S + 1) (7* s» + 72s+ 1) +-y-(^ s* + 7V + 1)J s* +
+ *i {(*1 sa + ^s + 0"^" + Iri s2 + Ft + T7)s + l] 10~4 kys +
+ T7. КГ4 k2sA + ^ (r6s {TlS + 1) —£- + [Tes (TlS +1)4- T7s] 1(Г4 £2s +
+ 7yi<r-4£is*} .
(1.102)
53
Подставляя в уравнение (1.102) 5=/со, можно построить
амплитудно-частотную и фазо-частотную характеристики
прибора.
На рис. 1.25 приведена схема датчика угловой скорости с
электрической пружиной, который работает в релейном
режиме. Этот прибор обычно называют гироскопическим реле. Он
Рис. 1.25. Схема датчика угловой скорости
е электрической пружиной, работающей в
релейном режиме:
1 — рамка: 2 — контакт; 3 — двигатель; 4— щетка;
5 — пружина
предназначен для определения угловой скорости разворота
изделия. При вращении объекта с угловой скоростью соУ1 под
действием гироскопического момента Н(ду\ рамка / поворачивается
и замыкает правый контакт 2. Через контакт подается
положительный знак напряжения в одну из управляющих обмоток
реверсивного двигателя 3. Двигатель вращается и через редуктор
перемещает щетку потенциометра 4. Сигнал,
пропорциональный перемещению щетки 4, поступает в катушку электрической
пружины 5. Электрическая пружина развивает момент,
пропорциональный сигналу с потенциометра.
Момент электрической пружины направлен против
гироскопического момента. Двигатель 3 перемещает щетку 4 до тех
пор, пока момент от электрической пружины не сравняется с
гироскопическим моментом. В этот момент происходит разрыв
контактов и двигатель останавливается.
Сигнал £/Вых, снимаемый с сопротивления i?H,
пропорционален измеряемой угловой скорости <%i.
54
ПРИМЕР ПОВЕРОЧНОГО РАСЧЕТА
А. Задание.
Провести поверочный расчет датчика угловой скорости, определив его
следующие характеристики:
а) крутизну h2 характеристики прибора по току;
б) диапазон измерения прибора;
в; частоту со0 собственных недемпфированных колебаний прибора;
г) величину емкости С, необходимую для обеспечения степени затухания
Б=0,707;
д) передаточную функцию W(s) выходного напряжения прибора по
замеряемой угловой скорости.
Б. Исходные данные для поверочного расчета.
1. Электрическая схема прибора (см. рис. 1. 22).
2. Питание гиромотора £/=36 в, 400 гц.
3. Гиромотор типа ГМ = 0,05, Н = 50 Г • см - сек.
4. Потенциометр:
— материал ПЭЗЛ = 91; 00,04;
— сопротивление /?п = 450 ом каждого потенциометра;
— угол намотки 2ро = 4°,4.
5. Питание потенциометра Uc=27 в.
6. Омическое сопротивление нагрузки /?Н = Ю0 ом.
7. Катушка электрической пружины намотана проводом ПЭЛ, 0 0,07,
имеет №4 = 1950 витков и сопротивление /*i = 435 ом.
8. Катушка емкостного демпфирования намотана проводом ПЭЛ, 0 0,05,
имеет №2 = 3450 витков и сопротивление г2= 1500 ом.
9. Рабочая длина витка обеих катушек равна /р = 3 см; средний радиус
намотки катушек равен а=1,45 см.
10. Постоянный магнит — двухполюсный с кольцевым ярмом. Индукция
в воздушном зазоре Во = 1100 гс.
11. Момент инерции гироузла относительно оси Ох его подвеса равен
/*=0,07 Г-см-сек2.
Уравнения движения, а также основные соотношения, определяющие
выходные характеристики прибора, приведены в пп. 2, 4—7 данного раздела.
При проведении поверочного расчета будем пренебрегать индуктивностью
катушки электрической пружины и катушки электрического демпфера ввиду
их малости.
а) Крутизна h2 характеристики прибора по току согласно (1.99) равна
/ Н
соу1 ki
По выражению (1. 64),
kx = Ю-"4 B0W! 2/ра = Ю-4-1100-1950-2- 3-1,45 = 910 Г-см/а.
Здесь мы берем удвоенную рабочую длину витка, так как в создании
момента участвуют два участка витка, расположенные в зазоре между ярмом
и северным и южным полюсами постоянного магнита.
Так как Я = 50 Г - см - сек, то
50 а ма
U2 = —r = 0,044— =0,78-
910 ' IIсек ' о /сек
б) Диапазон измерения прибора.
Согласно (1. 101) имеем
">ylmaX_(r1 + 4)A2*
55
Подставляя в это соотношение заданные значения Uc, Tu Rr и найденное
значение h2, получим
** »» = (435 + Ш) 0,044 = *,15 Х1сеК = 65 °/СеК-
Для определения порога чувствительности coyi mm прибора необходимо
найти момент трения вокруг оси подвеса гироузла.
в) Частота ©о собственных недемпфированных колебаний прибора
согласно (1.94) равна
+ 1)
Подставим в это выражение значение р0:
р0 = 2°,2 = -£— =0,0384 рад,
57,3
тогда
/ 910-27 г
сов=1/ = -/ 1,2-104= 109,5 1/шс,
|/ 0,07-0,0384(230 + 100+435) к ' '
03 а
2тс
г) Выбор емкости С, обеспечивающей степень затухания собственных
колебаний прибора £=0,707,
Согласно (1.96) имеем
VU'c [kxr2 + (ri±RH) k2] С
•ткуда
■/Uclkxr* + (n + #„) Ь\
Согласно исходным данным
^2== 10~8.цоо.3450-2-3-1,45= 1610 Г-см/а,
W'
ч/'
*i(y
Jx№i ("у"
+ Rk
+ Rt
Ч
i + ri)
0,7071/0,070,0384-910(230 + 100 + 435) n rr% trt_6 ^
C = ^rr-^ : - — l L =2,56-10 6ф = 2,56 мкф.
Y21 [910-1500 + (435 + 100) 1610]
д) Передаточную функцию W(s) прибора при нулевых начальных
условиях найдем из соотношения (1. 102). Так как Li = L2 = 0, то
7,1==Гз=Г5=0 и выражение (1.102) принимает вид
r(s)==jwifL = /?H^(s)—
<V (s) <v (s)
56
= RhH
1(Г4 [k± (7а + Т7) + k2T7] s* + (т2 -^- + Ю^4 *i W ^
V Ро / Ро
Jx [(П + Ян) T2 + ^-T,j s3 + [jx(Ru + ri + ^ + Ю-[Л? Т2+
к\ Тл + (h + к*)* Тч]} s2 + |W2 + *2Г8) -^- + Ю-4 ** 1 8 4
+ *!—*-.
РО
Учитывая заданные значения (7С, Ро, Я, ri, Ян, Rn, Tx и выбранные
значения k±t k2 и С,
получим
Г2 = Сг2 = 3,84-10-3 сек,
Т4 = С (п + г2 + #„) = 5,21• 10~3 сек,
7в = С (а + /?н) = 1.37- Ю-3 <до,
Т7 = С— =0,59-Ю-3 сек.
Передаточная функция W(s) в этом случае примет вид
4,98-10""* s2+2,79s+ 704
W (s) = 5000
0,23s3 + 54,6s2 + 4095,7s + 640640
Автоколебания датчика угловой скорости
При испытаниях приборов обнаружено, что датчики угловой
скорости с электрической пружиной и потенциометрическим
съемом склонны к автоколебаниям.
Для определения автоколебаний в исходное уравнение
движения прибора (1.83) введем следующие дополнения:
а) в уравнении движения рамки прибора учтем момент
трения Мри момент внешний М0, смещающий щетки
потенциометра с нулевого положения;
б) дополнительными токами нж и *2Д для упрощения
исследования будем пренебрегать.
Уравнение (1.86) в этом случае примет вид
^2[^(^s2 + T4s+l)+(i?H + r1)(r1s+l)(r25s2 +
+ T2s + 1)] р + ft, (Tls* + T2s + l)e + к2Т,(Тг8+ l)se =
-[-^(^s2 + r4s+l)+(i?H + r1)(r1s+l)(^s2 +
+ T2s + 1)] (Яшу1 + М0ТМ^). (1.103)
57
нелинейную
зависимость
Ьо
При определении автоколебаний будем считать, что 0)^1 = 0,
а М0 = const. Напряжение е на щетках потенциометра имеет
от угла поворота р гироскопа
(рис. 1.26). Для простоты
будем считать, что щетки
располагаются симметрично
относительно витков, причем из-за
внешнего воздействия Mq
щетки потенциометра смещены
на некоторый постоянный
угол Pi относительно нулевого
положения. Уравнение (1.103)
можно представить в виде
(1.104)
где Q(s) и
R(s)—операторные многочлены линейной и
нелинейной части уравнения
(1.103).
Решение для переменной р
ф=ш* будем искать в гармоническом
виде с учетом постоянной
составляющей:
Рис. 1.26. Зависим.эсть напряжения е
на щетках потенциометра от угла Р
(1.105)
где Л — амплитуда гармонической составляющей р*=Л sin -ф.
Формула гармонической линеаризации нелинейностей при
учете постоянной составляющей и первой гармоники
разложения в ряд Фурье нелинейной функции будет
F(h + As\ny) = F>(A, <■>, fc) +
(1.106)
где F°, q, qx — постоянная составляющая и коэффициенты
гармонической линеаризации.
Если периодическую составляющую обозначить через р* =
= Р—Pi. то (1.Ю6) можно представить в виде двух уравнений
Q(s) + /?(s)(? + -^-s)]p* = 0,
Q (0)^-^(0)^ = ^,
(1.107)
(1.108)
58
где Q(0), R(0)—свободные члены соответствующих
операторных многочленов.
Уравнение (1.107) описывает периодическое движение
системы (если оно возможно) по координате $*=Аъ'тЫ
относительно центра колебаний Рь Уравнение (1.108) описывает
зависимость центра колебаний Pi от внешнего момента М0.
Линеаризуя момент трения
ЛГ
4МТ
3 ъАи
■*Р*.
(1.109)
и учитывая, что <7i=0, приведем уравнения (1.107) и (1.108)
к виду
Jxs2 + kig(A,^)X
X
Т\ S2 + T2S + 1
Rn
+
'X
-~ (Т* s* + T<s+ 1) + (RH + n) (TlS + 1) (T\ s* + T2s + l)
+ k2q(A, ft)X
rt(Tis+.l)
-y- (T23 s2 + T4s + 1) + (#„ + rx) (TlS + 1) (T\ S2 + T2s+ 1)
4MT,
Яп
p* = o,
- = M0.
s +
(1.110)
(1.111)
+ Rh + П
Преобразуем уравнение (1.110):
<Jx (Я. + rj TXT\ s* + Я(ЯН + rx) (Tl + ТхТг) + -^ 71] Jx +
+ w- (*- + ri)^Js4 + {J* К+r'> (^ + r*> + -г-T J +
+ W К + '«) ^ + 7-Л) + ^ rf]} e» + {yx ( ^L + ^ +
+ <7 (Д, ft) (fex7l + ft^r^ + -^ [(/?„ + rx) (7\ + Tt) +
59
f- Г4]} s2 + [</ (A, ft) (fexT2 + £2Г6) +
^•(i?„ + /-1 + 4L)]s + g(^) p1)fe1>?» = 0. -(1.112)
2
4M
1 яА
Для определения автоколебаний в уравнении (1.112)
заменим s на /ю и приравняем в отдельности мнимую и
действительную части нулю:
Jx(Я. + П) ТгТ\ ш» - {jx [(/?„ + гО (7\ + Г2) + -^ Г4] +
+4жг К+г*> ^+вд+41- гз] } •»+
+ [9(Л,р1)(й1Г1 + ^Тв) + ^-(/?н + г1+41-)]<о = 0, (1.113)
{^[(^ + ''1)(7,б + ^2) + 4!-7,з]+^1(/?к + '-1)ПГ!}«)4-
-{jx(^-+R» + ^+q(А, ft)(fe^i + Й.ПГ,) +
+ ?H,Pi)*i = 0. (1.1.14)
В соответствии с рис. 1.26 постоянную составляющую F0
определим по формуле
2л
F° (A, ft) = -^ j f» (ft + Л sin ф) df
О
Опуская промежуточные выкладки, найдем
ро = А. \ш + arcsin6l~~6° —arcsin-^-1, (1.115)
где п — число витков, приходящихся на амплитуду
колебаний;
а — напряжение на щетках потенциометра,
приходящееся на один виток;
Ь]—угол намотки потенциометра, приходящийся на один
виток.
60
Из соотношения (1.111) находим
A*o(*H + -|L+ri)
а согласно рис. 1.26
F° в * Г1 L. 0-116)
р1=-у + лб!-6о- (1.117)
На основании формул (1.115) —(1.117) найдем смещения
pi и Ь0. Значение q(A, &) = \ Р($г-\-As'mty)sin<bdty после
О
соответствующих преобразований примет вид
«<* »--£[/'-№/'-е^)']-"-1
18)
Если амплитуда колебаний А<{Ь\—bo), то формулы (1.115)
и (1.116) примут вид
2я
— Гя (2/1 + 1) — 2 arc sin АЛ (1.Ц9)
2л l A ]
Таким образом, амплитуда Л и частота со автоколебаний,
а также |3i определяются соотношениями (1.113) — (1.118). Для
проведения дальнейших исследований преобразуем уравнения
(1.113) и (1.114). Используя соотношение (1.120), из
уравнения (1.113) найдем
4МТ. Г d I 4МТ. / d \
-;- •[<*. + п)(1*'+ ПТШ) +-%-Т*\ -—-(*. + П + -Т-)-
(АЛ + **Г,)
'* 0?н + 'l) Т<Г\ со* - У, Г(ЯН + п) (Т! + Г2) + -^- Г4] »2
(1.121)
61
А =
а из уравнения (1.114)
4Л1 Г р 1 4М
+ -^Г1 со | (/?„ + п) (Гг + Т2) + -f- Г4 J - -^- (/?„ + гх) Tir§ со»
Jx [ №н + 'l) (?1 + 7-Л) + ^ 7*] о>* - Jx (-^ + Ra + n) о>2
(1.122)
Влияние различных параметров
прибора на автоколебания
Влияние положения щетки относительно
витка потенциометра
(влияние параметра Ь0 и Ь\—Ь0)
Для определения влияния положения щетки относительно
витка потенциометра на автоколебания прибора необходимо
исследовать уравнение (1.118), которое для q(A, Pi) имеет
действительное значение при Ь0<А или при (Ь\—Ь0)<А.
Следовательно, автоколебания в приборе исчезают, если
выполняется условие
Ь0>А и (b, — b0)> A. (1.123)
Влияние момента трения Мтр в оси рамки
Для определения влияния Мтр на автоколебания прибора
положим для простоты, что (&i—Ь0)^А, приравняем
уравнения (1.121) и (1.122) и преобразуем к виду
т l/^-Ofy {[ki {K+ri) {Ti+n)+ki т"Ti ~
-(№ -f k,Te) (^l. + RH -f r^J + < (№ + fe2T6) X
X [(/?„ + rx) (Ti + 7\Г2) + ^- 71 ] - /ex (/?„ + M 7VT25 -
- {kj\ + hTJt) [(/?„ + rx) (7\ + Г2) + ^- Г4] > u>2 +
+ (hTl + kiTJTt) (Я. + г,) 7\Г§ со*} =
ш-х
x {«>» [(/?„ + Г1)(г25 + тхт,) + ^L-ri] - [rr + rt + ^-\\ +
€2
+ ^»{(К + г1)Т1П»*-
(R„ + ri)(T1 + T2) +
+
Rn
или
где
У A2 — bl^Ad,
(1.124)
(1.125)
£ <^ {-' [«■+->«+"•)+-г-1] - («■+*+ ^)|
4МТ,
+
d =
О) 1 (°Н
+ ri) ОД ш« ■
■[(Лн + 'l)
(Т1 + Т2)+-^-Г4
\
/
Ai (Лн + 'i) (Г1 + Г2) + h -^- Т4 - (А^, + А2Гв) № + tfH + nj
+
+ ' №Л + АцТ.) [(Я„ + п) (Т\ + ГЛ) + -^-Г§] - *i (Д„ +
+ г,) Т{Г\ - {hT\ + AjTiT.) [(Я„ + п) (71! + Т2) + -^- Г4] ^ »• +
+ (АгГ-| + НТ{Ге) (tfH + п) Т{Г\ Л .
(1.126)
Возведем обе части уравнения (1.125) в квадрат:
A* — bl=A*d*,
или
откуда имеем
A*(\—d*) = bl,
Ьа
Vi —&
(1.127)
Из соотношений (1.126) и (1.127) ясно влияние момента
трения на величину амплитуды автоколебаний.
При увеличении AfTp увеличивается коэффициент d и
уменьшается знаменатель V 1—d2 в формуле (1.127).
Следовательно, величина амплитуды А возрастает при увеличении
момента трения в приборе. Частота автоколебаний со при этом
будет уменьшаться.
63.
Влияние диаметра провода намотки
потенциометра
Параметр а — напряжение на щетках, приходящееся на
один виток, пропорционален диаметру провода намотки.
Учитывая это, из уравнений (1.121) и (1.122) следует, что
амплитуда автоколебаний увеличивается с увеличением диаметра
провода намотки потенциометра.
Влияние индуктивности катушек L\ и L2
Исследование уравнений (1.121) и (1.122) показывает, что
при увеличении значений L\ и L2 (Т\, Г3, Т$) амплитуда А
автоколебаний увеличивается. Покажем, что автоколебания при
Li = L2=0 отсутствуют. Для этого в уравнениях (1.121) и
(1.122) необходимо принять:
7\=—-—=-0,
Rn + ri
Т\ = L2C = 0.
При этом условии уравнения (1.121) и (1.122) примут вид
4МТ
.4= У- , (1.128)
J^[(RH + ri)T2 + -^-T^
А= l -—- . (1.129)
Покажем, что амплитуда А\, определяемая из уравнения
«(1.128), больше амплитуды Л2, полученной из уравнения
(1-129). Для этого найдем отношение амплитуд А\1А^ при
■МТр=0:
(AiTif *Л)(-у- + Ян + гЛ
64
'.(* + *r£-)(-!L+*. + '0
Rn
(R« + n) +
Tz
ki
Учитывая, что
Tz — r2C,
П = (^н + г1 + /-2)С,
т6=(К + Г1)с,
получим
A
и (и i , "n\., Rh + П Rn
Обычно k2>ki. Полагая &2=&i, легко убедиться, что
(1.130)
-4->1.
(1.131)
При М^ФО и k<{>k\ это неравенство усиливается и
свидетельствует о том, что амплитуды /li и Л2 не могут быть
равными, т. е. кривые, описываемые уравнениями (1.121) и (1.122),
не пересекаются. Следовательно, при Li = L2 = 0 автоколебания
в приборе отсутствуют.
Необходимо отметить, что для реальных приборов
индуктивность катушек L имеет порядок 0,01—0,02 гн.
Индуктивное сопротивление Leo при собственной частоте /=25 гц
((0 = 6,28-25 = 157) равно Leo = 0,02-157 = 3,14 ом, что
составляет примерно 1% от активного сопротивления катушки (п =
= 300 ом) и при обычных расчетах прибора его можно не
учитывать.
В заключение необходимо исследовать периодическое реше-
3 Никитин и др.
65
ние на устойчивость. Для устойчивости периодического
решения необходимо убедиться в справедливости неравенства
(Л) (ЛЛ _(«Л (UL\ >o
\дл Jn\d<»/u \д<* Jn\ зл Л '
где X и У — соотношения (1.114) и (1.113) соответственно.
Индекс «п» означает, что в результаты частных
производных необходимо поставить значения амплитуды и частоты
периодического решения. Чтобы убедиться в справедливости
последнего неравенства, необходимо подставить найденные
значения параметров, так как исследовать неравенство в
общем виде довольно трудно.
1.3. ДАТЧИКИ УГЛОВЫХ СКОРОСТЕЙ
С ЖИДКОСТНЫМ ЗАПОЛНЕНИЕМ
Датчики угловой скорости с жидкостным заполнением
имеют значительно лучшие эксплуатационные характеристики по
сравнению с «сухими» приборами. Приведем основные
характеристики.
1. Благодаря жидкостной смазке в подшипниках и
гидростатической разгрузке опор момент трения в них снижается до
незначительной величины.
2. Вынужденные колебания поплавкового гироузла,
вызванные динамической несбалансированностью ротора гиромотора
или какими-либо внешними факторами, хорошо демпфируются
и гасятся жидкостью.
3. Улучшается отвод тепловой энергии, выделяемой в
приборе. Благодаря этому допустимая плотность тока в датчиках
угла и момента прибора может быть увеличена.
Допустимое значение плотности тока для упругих токопод-
водов и потенциометров датчиков угловой скорости с
жидкостным заполнением в 2—3 раза превышает допустимые
значения плотности тока для «сухих» приборов.
4. Благодаря соприкосновению с жидкостью значительно
уменьшается износ потенциометров и «заволакивание» их
контактной поверхности.
5. Повышается вибропрочность токоподводов.
Принципиальная схема датчика угловой скорости с
жидкостным заполнением представлена на рис. 1.4. Угол отклонения
поплавкового гироузла относительно корпуса прибора
регистрируется с помощью датчика угла 6 (индукционного типа).
Усиленный сигнал датчика угла поступает на обмотки
электрической пружины (датчик момента). Выходной сигнал
снимается в виде напряжения 1/вых с сопротивления Rn.
Колебания поплавкового гироузла демпфируются за счет жидкостного
65
трения в тонком слое жидкости между цилиндрическими
поверхностями корпуса прибора и поплавкового гироузла.
Коэффициент жидкостного демпфирования В равен
В=-- 27zR4n^ [Г-см-сек], (1.132)
9816 J' ч '
где R — средний радиус зазора в см;
/п — длина поплавка в см;
б — зазор между поплавком и корпусом в см;
\i — коэффициент динамической вязкости в пз.
Плотность р и коэффициент динамической вязкости \i
жидкости зависят от ее температуры. Поэтому колебания
температуры рабочей жидкости вызывают изменения
коэффициента В и веса Gm вытесненного объема жидкости. Это
обстоятельство заставляет предусматривать в датчиках угловой
скорости высокой точности с гидростатической разгрузкой опор
специальную систему термостатирования, которая
поддерживает постоянную температуру рабочей жидкости.
В более грубых приборах, где гидростатическая разгрузка
опор осуществляется неполностью и система
термостатирования не предусмотрена, для поддержания постоянного
коэффициента демпфирования вводят электрическое демпфирование.
Жидкостное демпфирование в таких приборах составляет 10—
20% от электрического. Кроме того, в таких приборах для
уменьшения влияния изменения окружающей температуры на
коэффициент демпфирования прибора в качестве рабочей
жидкости применяют лигроин (примерно 70—90%) с небольшим
добавлением масла.
Схема датчика угловой скорости
с кинематической компенсацией
демпфирования прибора
На рис. 1.27 представлена одна из схем датчика угловой
скорости с жидкостным заполнением. Гиромотор 7 помещен в
герметичный ступенчатый поплавок 2. В направляющих
корпуса 3 расположена промежуточная ступенчатая втулка 4,
кинематически связанная с подвижным концом сильфона /.
В пространство между корпусом и поплавком заливают
жидкость 5. Демпфирование осуществляется за счет зазора
между ступеньками поплавка и втулки. Роль механической
пружины выполняет торсион 6. С другой стороны поплавок
крепят в подшипнике. Компенсация демпфирования
осуществляется следующим образом. Предположим, что повысилась
температура жидкости. При этом падает вязкость жидкости \х
и коэффициент удельного демпфирования В.
3* 67
Вязкость изменится от температуры по зависимости
а плотность — по зависимости
(1.133)
Р = Ро (1 — Ш), (1.134)
где fxo — коэффициент динамической вязкости жидкости при
рабочей температуре;
ро — плотность жидкости при рабочей температуре;
Y — удельный температурный коэффициент вязкости;
а — удельный температурный коэффициент плотности.
При увеличении температуры увеличивается объем жидко-
?ис. 1.27. Схема датчика угловой скорости с
, жидкостным заполнением:
1 — сильфон: 2 — поплавок: 3 — корпус: 4 — втулка;
5 — жидкость; 6 — торсион; 7 — гиромотор
сти, что компенсируется деформацией сильфона. Так как масса
тж жидкости остается неизменной, из соотношения
гож = роУо = р(Уо-!-ДУ)
можно определить приращение AV 'объема жидкости при
изменении температуры:
AV
Ро^о
-"-Чтгзг-,]-,,'л-
где V0—начальный объем жидкости при рабочей температуре.
При деформации сильфона вместе с его подвижным
концом перемещается втулка 4 на величину А1, значение которой
можно определить из соотношения
I Ь
где / — эффективная площадь сильфона.
68
(1.135)
За счет перемещения Д/ увеличивается общая длина
зазоров I.
Чтобы коэффициент удельного демпфирования В был
постоянным, соотношение (1.132) должно оставаться постоянным
при изменении температуры с точностью до величин второго
порядка малости:
или
YA*=!^Lf (1.136)
fJo
где /о—начальная длина зазоров.
Последнее соотношение трудно осуществить на практике.
Поэтому при проектировании ограничиваются частичной ком-
Рис. 1.28. Датчик угловой скорости с
коническим поплавком:
1 — сильфон; 2 — поплавок: 3 — корпус; 4 — втулка;
5 — жидкость: 6 — торсион; 7 — гиромотор
пенсацией изменения демпфирования и допускают колебание
демпфирования в заданных пределах. Одна из разновидностей
конструкции прибора подобного типа представлена на
рис. 1.28, где вместо ступенчатых зазоров зазор б предусмотрен
между конической поверхностью поплавка и втулки.
Демпфирование в этом случае регулируется изменением
величины зазора б (вместо длины I).
69
1.4. ВИБРАЦИОННЫЕ ГИРОСКОПЫ
Роторный вибрационный гироскоп
На рис. 1.29 приведена схема роторного вибрационного
гироскопа. Ротор / гироскопа, выполненный в виде обода,
свободно сидит на оси 2 и приводится во вращение валом
электродвигателя 3.
При работе прибора вал электродвигателя, а вместе с ним
и ротор гироскопа вращаются с^ постоянной угловой скоростью
Q. Если основание прибора неподвижно в пространстве, то
Рис. 1.29. Роторный вибрационный
гироскоп:
/ — ротор: 2 — осы 3 — вал электродвигателя.
главная ось инерции ротора гироскопа совпадает с осью
вращения вала электродвигателя. При вращении корпуса прибора
вместе с объектом, например вокруг оси Оу\ с угловой
скоростью coyi, вместе с корпусом прибора вращается и ротор
гироскопа, благодаря чему на него в отрицательном направлении
оси Ох\ действует гироскопический момент Нщ\.
Составляющая гироскопического момента Нщ\ cos Ш, действующая
вокруг оси Ох, вызывает отклонение ротора гироскопа вокруг
этой оси на угол р. При этом главная ось Ozo инерции ротора
гироскопа не будет совпадать с осью Oz\ его вращения, в
результате чего появляется инерционный момент центробежных
сил, который препятствует дальнейшему отклонению оси Ozq
ротора гироскопа.
Составим уравнения движения роторного вибрационного
гироскопа. Обозначим:
Q—угловая скорость вращения вала
электродвигателя;
70
В — удельный коэффициент момента
демпфирования, действующего на ротор гироскопа вокруг
оси Ох;
obi, cdvi — проекции угловой скорости объекта на его оси
Охх и Оуц
Р — угол поворота ротора гироскопа вокруг
оси Ох;
А о, Во, С0 — соответственно экваториальные и полярный
моменты инерции ротора гироскопа относительно
его осей Xq, уо, г0.
Мгновенные угловые скорости вращения ротора вокруг его
осей xq, у о, Zo равны:
Что = Р + (<*>*1cos &t + <°yi sin Qt),
<юу0 = Q sin p + (coyl cos Ш — сод-i sin Qt) cos p,
(o^o = Q cos P — (o>yl cos Qt — ®xl sin Qt) sin p.
Уравнение движения ротора гироскопа вокруг оси Ох0
имеет вид
-A^-(C0-BoKo«v-sjs = o.
Подставив в это уравнение значения сохо, со^о, cozo и
преобразовав его, получим
А>Р + В$ + (С0 - В0) Q2 -^ = - A0Q (шу1 cos Q* -
— 0)^ sin Qt) — (С0 — В0) Q (юу1 cos Qf — coxl sin Qt) cos 2p —
— Л0 (ш^ cos Qt + ©yl sin Qf) + (C0 — B0) X
X (<v cos Qt — o>xl sin Qt)2 ^L. (1.137)
Последние два члена правой части полученного уравнения
значительно меньше остальных членов правой части. Поэтому
их можно опустить. Кроме того, так как угол р мал,
приближенно можно принять sin2p«2p; cos2p«l.
При указанных допущениях уравнение (1.137) приближенно
запишется в виде
л0р + яр + (с0 - в0) ^2P = (Со + Л -
— B0)&(uylcosQt — uxlsmQt). (1.138)
71
Из уравнения (1.138) видно, что роторный вибрационный
гироскоп может быть использован для измерения угловых
скоростей вокруг осей Ох\ и Оу\ одновременно.
Вынужденные колебания ротора гироскопа по углу р
происходят с круговой частотой Q. Амплитуды вынужденных
колебаний ротора пропорциональны угловым скоростям одх\ и щи
а по фазе они сдвинуты между собой на угол я/2. Поэтому для
выделения сигналов, пропорциональных угловым скоростям оы
и щи в приборе на оси Ох необходимо иметь два
регистрирующих устройства, одно из которых выделяет составляющую
sin Qt, а другое — cos Qt.
Следует отметить, что ротор 1 гироскопа может соединяться
с валом электродвигателя 3 с помощью упругого вала. В этом
случае уравнение (1.138) движения ротора относительно оси
Ох0 принимает вид
А$ + ВР + [(С0 - В0) Q2 + k$ = (С0 + Л - S0) Q Ki cos Qt -
— ш^ sin 2/), (1.139)
где k — жесткость упругого вала по углу р.
Принцип действия вибрационного
гироскопа (гиротрона)
Вибрационный гироскоп (рис. 1.30) представляет собой
систему из двух инерционных масс лапок камертона 3, упруго
связанных между собой и с корпусом прибора. Центры
инерционных масс колеблются в противофазе от вибраторов 4 в
Рис. 1.30. Схема вибрационного
гироскопа (гиротрона):
/ —торсион; 2 — датчик; 3 — лапки камертона;
4 — вибраторы: 5 — датчик; 6 — выпрямитель;
7 — указатель: 8 — усилитель
72
одной плоскости симметрично относительно корпуса прибора
по зависимости
v = vQ sin o)0/,
где v0— амплитудное значение линейной скорости центра
массы лапок камертона;
coo — круговая частота вибрации лапок камертона.
Камертон крепят к основанию с помощью торсиона /. Осью
измерения или осью чувствительности прибора является
ось t/iyi.
Рассмотрим принцип работы прибора. Так как лапки
колеблются в противофазе, то при вращении основания вокруг
оси измерения со скоростью co^i появится поворотное ускорение
Ьрц=2тушу1 AWK=2^Wyf
Валки1
камертона
v=v0 sinu)0t
WK= 2vujyt TFn= 2mv(jJyj
Рис. 1.31. Направление скоростей и ускорений
лапок камертона
a = 2v(dyu которое направлено для левой лапки камертона вниз
(рис. 1.31),. а для правой — вверх. Соответственно инерцион-
ные силы Fm направлены вверх и вниз.
2mv&
уь
где Fm— инерционная сила, приложенная к центру масс
лапок камертона;
т — масса лапки камертона.
Эта пара сил создает относительно оси у\у\ момент
Мк = 2/тшо)у12#0,
(1.140)
где /?о — расстояние от оси крутильных колебаний у\у\ до
центров инерционных масс.
Момент Мк вызывает поворот камертона, скручивая тор-
СИОН.
73
Если обозначить через k жесткость торсиона, то
амплитуду колебаний а камертона определим из соотношения
откуда
4mR0vuyl = fex, (1-141)
AmR0v AmR0v0 sin co0r
a = —— «у = a>yl.
Таким образом, амплитуда колебаний а камертона
пропорциональна измеряемой угловой скорости, а фаза зависит от
направления скорости ыу\. Крутильные колебания инерционных
масс преобразуются в электрические колебания этой же
частоты с помощью датчика 2, статор которого жестко укреплен
на основании прибора, а ротор — на вилке камертона.
После усиления в усилителе 8 сигнал от датчика 2
поступает на вход фазочувствительного выпрямителя 6, в который
подается также опорное напряжение от датчика 5. С выхода
фазочувствительного выпрямителя 6 сигнал постоянного тока
поступает на указатель 7Х который градуируется в единицах
угловой скорости.
Приближенные уравнения движения гиротрона
При выводе уравнения движения гиротрона будем
полагать, что вибраторы вызывают колебания лапок камертона с
постоянной частотой и амплитудой, т. е. мгновенное значение
расстояния R центра масс лапки от оси у\У\ меняется по
зависимости
R = RQ — bRcoso>0t, (1.142)
где А/?— амплитуда вибраций лапок камертона.
Имея в виду, что момент инерции одной лапки камертона
относительно оси у\у\ равен mR2, получим следующее
дифференциальное уравнение колебаний гиротрона вокруг оси у\У\\
— [2mR2 (a + a>yi)] + Ba + ka = 4mRRuyl, (1.143)
где R = v—линейная скорость центра массы лапок гиротрона;
В — коэффициент демпфирования крутильных
колебаний гиротрона.
Параметры прибора выбираются так, что выполняется
условие AjR<7?p. Тогда из выражения (1.143) для случая, когда
соу\ = const, приближенно получим
2mR20a + Ba +ka = 4mi?0A/?(o0o)ylsin a>0*. (1.144)
74
Жесткость k торсиона выбирают так, чтобы выполнялось
условие резонанса
шк>=-|Д^=и>0' (1Л45)
где Окр — круговая частота крутильных колебаний камертона.
Условие (1.145) является условием такой настройки гиро-
трона, при которой частота вибраций лапок камертона
совпадает с частотой его крутильных колебаний.
При выполнении (1.145) уравнение (1.144) имеет следующее
решение для вынужденных колебаний:
а^4 mRoAR oysinoy. (1.146)
В
Существенным недостатком такого прибора является
нестабильность его характеристик. Старение и усталость упругих
элементов прибора приводит к расстройке прибора и
нарушению условия резонанса. Изменение коэффициента
демпфирования вызывает большие искажения выходного сигнала. Кроме
того, данная схема прибора имеет плохую виброустойчивость.
1.5. МАГНИТОГИДРОДИНАМИЧЕСКИЙ
ДАТЧИК УГЛОВОЙ СКОРОСТИ
Некоторые иностранные фирмы занимаются разработкой
гироскопа, в котором кинетический момент создается
вращающейся массой жидкости. Жидкая масса, заключенная в
полости, приводится во вращение вместе с полостью. Интересно
отметить, что при использовании жидкого ротора однородная
жидкая масса, целиком заполняющая полость произвольной
формы, по существу сбалансирована. Нестабильность
статической разбалансировки чувствительного элемента гироскопа
представляет собой один из основных источников
погрешностей. К тому же существует множество причин, порождающих
смещение центра масс.
К ним относятся: нестабильность материала, износ
подшипников, изменение толщины смазочного слоя, температурные
градиенты, механический сдвиг в сочленениях, а также
несимметрия температурного расширения.
Устранение различных источников разбалансировки
требует весьма дорогостоящих предварительных опытных
разработок, изготовления отдельных деталей с высокой точностью,
а также сложных и трудоемких испытаний и регулировок.
Полость, содержащая жидкую массу, не нуждается в высокой
точности изготовления для придания заданной формы, а
изменения формы после ее выполнения не влекут за собой разба*
75
лансировку. Для однородности жидкости важное значение
имеют перепады температуры, особенно в осевом направлении;
кроме того, внутри жидкого ротора не должно быть поплавков
и пустот, так как смещение центра тяжести любого такого
однородного включения порождает разбалансировку ротора
iSl(H)
Рис. 1.32. Схема магнитогидродинамического датчика
угловой скорости:
I — корпус; 2 — статор: 3 — зазор; 4 — втулка; 5 — отверстие;
6 — датчик давления
в целом. Полость, содержащая жидкость, может вращаться
или отдельным двигателем или специальным устройством. На
рис. 1.32 показан принцип действия
магнитогидродинамического измерителя угловой скорости.
В цилиндрическом корпусе / из материала с высокой
магнитной проницаемостью соосно располагается цилиндрический
статор 2 с обмотками, создающими вращающееся магнитное
поле в.кольцевом зазоре 3 между корпусом и статором. С
торцов кольцевой зазор замкнут двумя медными втулками 4, ко-
76
торые играют роль токосборных колец асинхронного
двигателя.
В кольцевой зазор 3 заливают ртуть, которая увлекается
вращающимся магнитным полем статора. Вращающаяся в
кольцевом зазоре ртуть представляет собой ротор гироскопа.
В каждом из торцов кольцевого зазора с ртутью имеется по
одной паре отверстий 5, расположенных на двух взаимно
перпендикулярных диаметрах. Каждая пара отверстий
сообщается с дифференциальным датчиком давления 6.
Найдем кинетический момент вращающейся ртути в
кольцевом зазоре. Если обозначить через
R — средний радиус кольцевого зазора;
б — ширину зазора;
L — высоту зазора;
у — удельный вес ртути;
Q — угловую скорость вращения ртути в зазоре,
то
Я = 2<к11*ЩЯ.
При наличии угловой скорости co^i вокруг оси у\ на ртуть
будет действовать гироскопический момент
Мг = Яо)уЬ
который заставит перетекать ртуть через верхние отверстия,
как показано на рис. 1.32. Это перемещение будет замеряться
верхним датчиком давления 6.
Отметим, что ртуть не будет перетекать через нижние
отверстия 5, так как гироскопический момент Н(ду\ не создает
перепада давлений около нижних отверстий. При наличии
угловой скорости (Ох\ вокруг оси Х\ появится гироскопический
момент
Мт = Них1,
который заставит перетекать ртуть теперь только через
нижние отверстия (рис. 1.32).
Перемещение Аг мембраны датчика 6 пропорционально
гироскопическому моменту
Az = пхМт,
или
Az = na)yi —для верхнего датчика;
Azi = n'(ux\ —для нижнего датчика,
где Aii, я, п! — коэффициенты пропорциональности.
Таким образом, прибор определяет скорость разворота по
Двум ОСЯМ ((Dai, ©i/l).
77
Если вместо датчика давлений 6 поставить цилиндр с
поршнем, то от избыточного давления поршень будет
перемещаться со скоростью Дг = ао)2/ь Откуда перемещение поршня
найдем из соотношения
t
Az = z0 +a§u>yidt.
о
В этом случае прибор определяет угол поворота изделия.
Линейное перемещение Дг датчика 6 можно преобразовать
в электрический сигнал. На рис. 1.32 для примера показан
съем сигнала £/Вых, пропорционального угловой скорости ыу\,
с помощью потенциометра.
1.6. ДАТЧИК УГЛОВОЙ СКОРОСТИ
НА БАЗЕ ГИРОСКОПА С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
Принцип действия
На рис. 1.33 представлена схема гироскопа с тремя
степенями свободы для измерения угловых скоростей (ду\ и ых\-
Предположим, что основание, на котором установлен прибор,
Рис. 1.33. Схема гироскопа с тремя
степенями свободы для измерения
угловых скоростей:
/ и 4 — моментные датчики: 2 и 3 —
потенциометры
вращается с угловой скоростью co^i вокруг оси у\. Так как
прибор представляет собой гироскоп с тремя степенями свободы,
то при развороте основания с угловой_ скоростью co^i гироскоп
будет стремиться сохранить вектор Н неподвижным в
пространстве. Щетка потенциометра 3 будет в первый момент вре-
78
мени вместе с вектором Н оставаться неподвижной, так как
она связана с внешней рамкой гироскопа.
Потенциометр 3, закрепленный на корпусе прибора,
повернется вместе с основанием на некоторый угол а. Сигнал,
пропорциональный углу рассогласования а, с потенциометра 3
поступит на моментный датчик 4, расположенный на внутренней
оси х гироскопа. В результате поступления сигнала
рассогласования моментный датчик 4 разовьет корректирующий момент
Ка такого знака, что относительно оси у\ возникает скорость
прецессии сопр гироскопа в направлении скорости щ\ разворота
изделия (основания):
(1)пр =
н
(1.147)
где К — крутизна моментной характеристики датчика.
Пока скорость прецессии сопр меньше скорости разворота
изделия щ\, угол рассогласования а будет увеличиваться.
При этом будет увеличиваться корректирующий момент Ка и
скорость прецессии
Ка
^ = —.
Когда скорость прецессии сопр сравняется со скоростью
разворота 0)^1, то на потенциометре зафиксируется постоянное
значение угла а = const, т. е.
Ка
откуда
«V = — = <V,
<х = -^. (1.148)
К
н
Таким образом, угол рассогласования а пропорционален
измеряемой угловой скорости юУ1.
Напряжение Ut\ = iRi, снятое с сопротивления /?i (рис. 1.33),
пропорционально измеряемой угловой скорости щ\9 так как
ток / пропорционален углу а:
1 = йдата, (1.149)
где /гдат — коэффициент пропорциональности потенциометра 3.
При измерении угловой скорости щ\ потенциометр 2 и
моментный датчик / поддерживают ось ротора перпендикулярно
оси наружной рамки у\. Если есть угловая скорость оы
изделия, то аналогично измерению угловой скорости co^i с
сопротивления /?2 можно получить сигнал, пропорциональный
скорости (Озсь
79
Уравнение движения прибора
Составим уравнения движения датчика угловой скорости
на базе гироскопа с тремя степенями свободы. Начало системы
координат OxxyiZx (рис. 1.34), связанной с изделием, совместим
с неподвижной точкой гироскопа.
Система координат Oxyz, жестко связанная с кожухом
гироскопа, в исходном положении совпадает с осями изделия
Рис. 1.34. Взаимное
расположение систем координат
объекта кожуха гироскопа
Ox\yxZ\. Произвольное положение системы осей Oxyz
относительно осей Ox\y\Z\ определяется углами аир.
Предположим, что основание имеет скорость щ\ вдоль оси
Оу\, Спроектируем переносную co^i и относительные скорости а
и р на оси х, у гироскопа:
<djc = —Р»
Юу = (coyl + a)cosp.
Прецессионные уравнения движения гироскопа
относительно осей х, у без учета вредных моментов примут
следующий вид:
— Я (а + соу1) cos P — /Са ^=0,
-яр—М- = о,
cos р
где К и К\ — крутизна моментных датчиков 4 и / по углу.
Принимая cos Р~1, получим
— Я(а+соу1) — Ка = 0, (1.151)
_Яр = /Схр. (1.152)
80
(1.150)
Необходимо отметить, что мы не учитывали запаздывание
в формировании моментов Ка и /CiP из-за индуктивности
обмоток управления двигателей. Однако запаздывания в
электрических цепях мало влияют на основное движение гироскопа,
и при анализе мы не будем учитывать их, как и инерционные
члены.
Уравнения (1.151) и (1.152) можно записать так:
На + К* = — Ясоу1, (1.153)
Яр + К^-0. (1.154>
Из уравнения (1.154) следует, что статическое значение
угла р равно нулю (рСт = 0), а из выражения (1.153) при щ\ =
=const получаем
осст= __а>у1. (1.155)
А
Отношение Н/К называют чувствительностью, или
крутизной выходной характеристики прибора. Соотношение (1.155)
было получено ранее из физических рассуждений [см.
уравнение (1.148)].
Знак «—» в выражении (1.155) означает, что отклонение а
гироскопа относительно основания получается с другим
знаком, чем на чертеже, т. е. гироскоп отстает от основания при
вращении последнего с угловой скоростью (o^i. Передаточная
функция прибора согласно (1.153) при нулевых начальных
условиях имеет вид
W
(—)--— ! . (1.156>
-SHH
Необходимо отметить, что датчики угловых скоростей на
базе гироскопа с тремя степенями свободы используются, как
правило, для измерения малых угловых скоростей в системах
управления и наведения. Погрешности в измерении угловой
скорости в рассматриваемых приборах вызываются в основном
вредными моментами (момент трения, разбалансировка и Др.)»
действующими на гироскоп по осям подвеса.
Применение гироскопа с тремя степенями свободы
в качестве датчика угловой скорости
Подобные приборы используются в авиационных прицелах.
На рис. 1.35 показана схема использования гироскопа при
наведении орудия на цель. Стрелок через визир / следит за
81?
целью, вращая основание 3 со скоростью щ\ вокруг оси Оу\.
Визир / крепят к гироскопу 2, а на основании 3 установлено
орудие. Гироскоп отстает от основания (орудия) на угол
упреждения СЬупр.
Из соотношения (1.155) в
установившемся режиме
_ Н
аупр — — °V'
Рис. 1.35. Датчик угловой скорости
прицела:
1 — визир; 2 — гироскоп: 3 — основание
Таким образом, основание, на котором установлено
орудие, вращается с углом упреждения аупр относительно визира,
направленного на цель. При постоянной дальности до цели
угол упреждения ауПр = const. При правильном выборе угла
упреждения ctynp снаряд попадает в точку встречи с целью. На
летательных аппаратах такая схема гироскопа удобна в тех
случаях, когда необходимо использовать прибор в двух
режимах:
— в режиме датчика угловой скорости;
— в режиме датчика угла.
Если на рис. 1.33 отключить моментный датчик 4, то
гироскоп будет работать как одноосный стабилизатор (в режиме
датчика угла). С потенциометра 3 в этом случае будем
снимать сигнал, пропорциональный углу поворота изделия г|)
вокруг вертикальной оси у\.
1.7. ГИРОСКОПИЧЕСКИЕ ДАТЧИКИ УГЛОВОЙ СКОРОСТИ
И УГЛОВОГО УСКОРЕНИЯ
Схемы приборов, основанные на базе датчиков
угловых скоростей
1. Сигнал, пропорциональный угловому ускорению, можно
получить с помощью датчика угловой скорости с механической
пружиной, если предусмотреть в приборе специальную катуш-
82
ку, расположенную в поле постоянного магнита (рис. 1.36).
При наличии ^угловой скорости o)yi гироскоп, стремясь
совместить вектор Я с вектором o)yi, повернется на угол р со
скоростью р. Так как катушка механически связана с гироскопом, та
e=*j-p=fcfwyf
0 %
Рис. 1.36. ДУС с механической пружиной и с
дополнительной катушкой
в ней появится напряжение е, пропорциональное скорости
движения прибора р:
е =г. &2р,
где k,2 — коэффициент пропорциональности.
Согласно (1.22) имеем
Р
н
н
V
Jx S* + 2gco0S + cog JX S2 -f 2gco0S + <og
(1.157)
(1.158)
Подставив значение р из (1.158) в (1.157), получим
k2H 1
е=
Jx s2 + 2ga)0s + o)2
(1.159)
Следовательно, выходное напряжение е, снимаемое с
дополнительной катушки, пропорционально угловому
ускорению СОг/1.
2. Если в датчике угловой скорости выходной сигнал
снимается в виде напряжения постоянного тока, то для получе-
83
-ния сигнала, пропорционального угловому ускорению, иногда
используют ячейку RC.
В датчиках угловой скорости с электрической пружиной
и емкостным демпфированием (см. рис. 1.16) ток i2 в цепи
катушки емкостного демпфирования пропорционален угловому
ускорению и его можно использовать как выходной сигнал
углового ускорения. Кроме рассмотренных способов получения
сигнала, пропорционального угловому ускорению на базе
датчиков угловой скорости, существует несколько схем
гироскопических приборов, в которых отклонение чувствительного
элемента (гироскопа) оказывается пропорциональным угловому
ускорению. Одна из таких схем рассмотрена в этом разделе.
Датчик угловой скорости и углового ускорения
на базе гироскопа с тремя степенями свободы
Ограничивая свободу вращения гироскопа с тремя
степенями свободы относительно обеих осей его подвеса, можно по-
\yf
Рис. 1.37. Схема датчика угловой
скорости и углового ускорения:
1 и 2 — пружины
лучить прибор, измеряющий одновременно угловую скорость
и угловое ускорение движения объекта.
Представим себе гироскоп, свобода вращения которого
вокруг осей tjx и х подвеса (рис. 1.37) ограничена пружинами
1 и 2 с жесткостью С\ и с?.. Если гироскоп вместе с объектом
вращается вокруг оси Оу\ с угловой скоростью щ\, то вокруг
84
оси Ох внутренней рамки гироскопа возникает
гироскопический момент Мт = Н(ду\, под действием которого гироскоп
стремится совместить ось собственного вращения с вектором
угловой .СКОрОСТИ (йу\.
В результате этого гироскоп поворачивается вокруг оси Ох
на угол р и деформирует пружину /. Пружина / создает
относительно оси Ох упругий момент, который уравновешивает
гироскопический момент Нщ\. Так как пружина / закреплена
на корпусе прибора, то она, кроме момента относительно оси
Ох, создает момент относительно оси Оу\ наружной рамки
и вызывает деформацию пружины 2 с жесткостью С2,
пропорциональную угловой скорости щ\. Если теперь угловая
скорость coyi объекта не будет постоянной, то угол р также будет
изменяться, причем угловая скорость р будет пропорциональна
угловому ускорению щ\. Наличие угловой скорости р вызовет
появление гироскопического момента Яр вокруг оси Оуи
который является причиной дополнительной деформации
пружины 2. Эта деформация пружины пропорциональна угловому
ускорению (о^ь Таким образом, суммарная деформация
пружины 2 пропорциональна угловой скорости co^i и угловому
ускорению 0)^1 объекта.
Уравнение движения прибора относительно оси Ох имеет
вид
Я(соу1+а) — c^-c^Lol — «§j» = 0, (1.160)
где с\ — жесткость пружины /;
U — расстояние от оси Ох до линии действия силы
от пружины /;
Ci'i2P — момент от пружины /;
C\l\La — момент относительно оси Ох появляется при
развороте гироскопа на угол а вокруг оси Оу\.
При повороте гироскопа на угол а появляется
сила от пружины 1, равная C\La, которая на
плече U относительно оси % создаст момент
С\1\Ьа (рис. 1.38);
Ь — удельная сила демпфирования;
h — расстояние от оси Ох до линии действия силы
демпфирования (до оси поршня).
Сумма моментов относительно оси Оу\ соответственно
равна
— ЯР— с2Ща — CiL(Ia + /iP)=0, (1.161)
где La — деформация пружины / при повороте
гироскопа на угол а вокруг оси Оу\\
85
/iP—деформация пружины / при повороте
гироскопа на угол р вокруг оси 0%;
d(La—/iP) —сила от пружины 1.
Преобразуем уравнения (1.160) и (1.161):
рппгхту-лппгмг^
Рис. 1.38. Деформации
пружин прибора при от-
1- клонении наружной
рамки на угол а:
1 и 2 — пружины
н н п
uyl>
ipj,\ — СХЩ а + Яр +CiIiiP = 0.
(1.162)
Главный определитель Л системы уравнений (1.162) равен
Д =
c\l\L
"я-' ~'\н + ~н~)
сг1\ + с\1?
^(^)
= s2-(^") +
я2
(c^ + c^s+^-fo/l + dL»)
s2 + -^-(c2/2 + ClL2)s +
я
я*
(1.163)
Для исследования собственного движения прибора
запишем характеристическое уравнение системы (1.162), для чего
необходимо приравнять нулю определитель Л этой системы:
или
s2 +
Д = 0
№
•s +
Я2
= 0.
(1.164)
86
Собственная
равна
частота недемпфированных колебаний соо
СОл
/:
ClCzl\l\
"I/2"
hh
н У 2
(1.165)
Из последнего соотношения ясно: чем больше
кинетический момент Н, тем меньше частота собственных колебаний
прибора соо.
С другой стороны, с точки зрения повышения
чувствительности прибора выгодно кинетический момент Н увеличивать,
но это снижает частоту «о. Следовательно, изготовить
высокочувствительный прибор по такой схеме довольно
трудно.
Степень демпфирования g прибора определяется из
соотношения
2^п =
6/2(c2/2 + dL2)
Я2
(1.166)
Определим решение системы (1.162) по координате а:
1 ы\
0;
С\1
Н Н
cxhL
s +
Н
°у1"
Н
(1.167)
Из уравнения 1(1.167) ясно, что сигнал, снимаемый с оси
наружной рамки, пропорционален угловой скорости и>у\ и
угловому ускорению 0)^1 объекта. В коэффициент перед coyi
входит значение Я. Отсюда следует, что направление вектора Н
не безразлично в этом приборе. Если направить вектор Н в
другую сторону, то вместо суммы сигналов, пропорциональных
0)^1 и coyi, получим разность их.
Аналогично определим решение системы (1.162) по
координате Р:
р =
c\l\L
ihL\
Н )'
*>yl
(с2/2 + ClL2); 0
С2/^+ CiL2
V
(1.168)
Из соотношения (1.168) следует, что сигнал, снимаемый
с внутренней рамки гироскопа, пропорционален угловой
скорости и>у\ вокруг оси Оу\.
87
В приборе, представленном на рис. 1.37, пружины 1 и 2 за-
креплены на корпусе. Если пружину / закрепить не на
корпусе, а на наружной рамке (рис. 1.39), то сигнал, снимаемый с
оси наружной рамки, будет пропорционален только ускорению
(йу\. Сигнал, снимаемый с оси внутренней рамки, будет пропор-
Рис. 1.39. Схема датчика угловой
скорости и углового ускорения с
раздельным съемом сигналов:
1 и 2 — пружины
ционален скорости щ\. Уравнение движения такого гироскопа
можно получить из ранее полученных уравнений (1.162),
положив в них CiliL$ = CiliLa=0. Тогда из соотношений (1.167) и
(1.168) получим
°yl
(1.169)
ft C2/2
р = 0)
yi-
(1.170)
Исключение влияния о)х\ и оы на показания
прибора
При измерении угловой скорости щ\ и ускорения щ\ на
показания прибора оказывают влияние угловая скорость соХ1
и угловое ускорение ыХ1 по оси Ох\ объекта. Параметры
прибора можно выбрать так, чтобы скомпенсировать влияние (Ojci
или (Ояь Ниже будет показано, что одновременно невозможно
88
скомпенсировать влияние co^i и co^i на показание прибора,
сохранив его назначение. При выполнении условий,
обеспечивающих одновременную компенсацию погрешностей от co^i и co^i,
прибор оказывается чувствительным только к угловой
скорости (ду\ и нечувствителен к угловому ускорению о)уь
Установим прибор на объекте так, чтобы ось наружной
рамки была отклонена назад на угол б, а ось внутренней рам-
Рис. 1.40. К установке датчика угловой
скорости и углового ускорения на объекте
ки соответственно приподнята в плоскости симметрии объекта
на угол б (рис. 1.40). Ось измерения Оу\ теперь не совпадает
с осью наружной рамки Оу, с которой снимается выходной
сигнал. Точку крепления пружины 1 к рычагу 1\ совместим
с осью симметрии объекта Ох\.
Для составления уравнения движения прибора определим
угловые скорости в проекциях на оси гироскопа (х, у):
^у = ^yicos 8 — <*>xi sin 8,
(«у = «>yi cos 8 — (лх1 sin 8,
фх = ®xl C0S 8 + ^yl Sln ^
<°x = ®xi cos 8 + со i sin 8,
(1.171)
(1.172)
где coxi и (ду\ — угловые скорости объекта по
соответствующим осям;
89
co*i и coyi — угловые ускорения объекта по
соответствующим осям.
Сопоставим прецессионные уравнения движения гироскопа
относительно осей х и у. При этом вредными моментами будем
пренебрегать. Относительно оси х уравнение моментов имеет
ьид
Я (о>у + «) — cxl2fi — сг1г1л — 6/§Р = 0, (1.173)
а относительно оси у
— Я(Р + юх) —Ca/la-dL^P + LaJ-^O. (1.174)
Главный определитель системы уравнений (1.173) и (1.174)
равен
Д =
с-^-(4'+4)
Cfc/g + Ы2
ИЛИ
А_„2 ЦзЫ2 + ^а)д, Ъ°А1\
Я2
Величина угла
Я2
cl]
Ы\
н я
(1.175)
или
S со
a =
б/;
я
cil
Н
(1.176)
Из последного равенства следует, что прибор реагирует не
только на измеряемую угловую скорость щ\ и ускорение щи
но и на перекрестные скорости co^i и ускорение оы объекта
(При 6 = 0 (Dx = (Oxi, 0)x = C03Ci, Щ = Щи Щ = Щ\)'
90
Используя равенства (1.171) и (1.172), преобразуем
последние два слагаемых числителя (1.176):
c\l\L . ci*i ahL I . h \
—ш'+—ш* =—(ш'+тш*) =
= Cl * [(OyiCosS — ок.! sin 8 -|—-((o^cosS + а>у, sin 8)1 =
__fi/iL_r ^cosS+AsinsJ+cox(—cos8 — sin8)l (1.177)
Потребуем, чтобы сомножитель при оы был равен нулю,
так как угол б можно выбрать любым. Тогда из соотношения
-^-cos8 — sin8 = 0 (1.178)
имеем
«tg8. (1.179)
Мы получили уравнение (1.179) компенсации угловой
скорости cojci. При выполнении условия (1.179) угол а равен
/2
S
а = -
\у^—~н~™х) ~н~~cos yl\ + Т" g /
А
/ bl\ \ ciliL
s \у + ~н~ ш*) "*—я~~cos 5t0yl ^ "*""tg2 S)
или
\ у Н х1 /fcos
ci/iL
S 1 cov -j со,, I -f- covi
аг= УУ tf X)+Hco.b * (1180)
В последнем выражении исключено влияние угловой
скорости сохь Однако угловое ускорение оы влияет на величину
угла а. Для того чтобы прибор не реагировал на угловое
ускорение coxi, необходимо дополнительное условие.
Преобразуем выражение в скобках уравнения (1.180):
Ы\ Ы\
toy Л o)jp = <*> icos 8 — ®х1 s*n 8 Л (^jcicos & "Ь ^yi s^n &) =
H H
= o)yl(cos8 4 —sinSJ + (—ACos8 ^-sins)©^. (1.181)
91
Для того чтобы на показание а не влияло значение со^ь
второе слагаемое (1.181) должно равняться нулю:
Ы2
—^-cos8 — sin8-0, (1.182)
откуда
tgS--^- (1.183)
Учитывая (1.183), первое слагаемое (1.180) примет вид
S(oyl cos 811 + -^- tg 8 J = s cos 8 (1 + tg2 3) шу1 = - Sl°yl
cos о
Если потребовать одновременного • выполнения условий
(1.179) и (1.183), то выражение для угла а будет
cihL
cos Ь Шу1 + Н cos 5 Шу1
2
Ы1(<Ь1\ + С11/) C!C2l2l2
s2 + 7Z " s +
Я2 Я2
wvi + ~—: шу1
cos S y H cos о
*i (^2 + ^l) cic2l\l\
s2 -\ s +
^ LH ^ Я2
coso
или
°yl
cos S c?>l2l\
s +
(1.184)
Я
Следовательно, движение вокруг оси наружной рамки
оказывается апериодическим и прибор реагирует только на
угловую скорость (Ог/i и не реагирует на угловое ускорение щи
которое прибор должен воспринимать. Таким образом, в данной
схеме нельзя осуществить одновременную компенсацию
перекрестного углового ускорения co^i и перекрестной угловой ско-
92
рости (Dxi. При одновременном выполнении условий
компенсации (Oxi и (0x1 прибор реагирует только на угловую скорость
(оу\. На практике выполняют обычно первое условие
компенсации угловой скорости о)Х1:
S L
Схема такого прибора не получила широкого
распространения.
ГЛАВА
II
ИНТЕГРИРУЮЩИЕ ГИРОСКОПЫ
2.1. ПРИНЦИП ДЕЙСТВИЯ И НАЗНАЧЕНИЕ
Интегрирующий гироскоп предназначен для измерения угла
поворота объекта, на котором установлен прибор, вокруг его
оси измерения. Устройство интегрирующего гироскопа
аналогично устройству датчика угловой скорости. Различие их со-
Рис. 2.1. Кинематическая схема
интегрирующего гироскопа:
1 — ротор гироскопа; 2 — демпфер; 3— датчик сигнала
стоит в том, что интегрирующий гироскоп не имеет упругой
связи по оси рамки прибора.
На рис. 2.1 показана принципиальная схема
интегрирующего гироскопа. Ротор гироскопа 1 с кожухом при наличии
угловой скорости щ\ поворачивается вокруг оси х. Поворот
происходит под действием гироскопического момента
— Л -
М = #a)ylsin(#, o)yl).
Этому повороту противодействует демпфер 2. Сигнал,
пропорциональный углу поворота гироскопа р, снимается с датчика
сигнала 3.
Приближенное уравнение прибора можно записать на ос-
94
новании уравнения датчика угловой скорости (1.10), если
учесть, что в данном приборе отсутствует пружина:
^Р + W1P = #оу. (2.1)
Если пренебречь инерционным членом, то приближенно
получим
P = -5r<V- (2-2)
После интегрирования в пределах времени от 0 до t
найдем угол поворота гироскопа относительно начального его
положения р0:
P-Po=J-J-«yi#=-tj£-f<v#. (2.3)
о о
Так как интеграл от угловой скорости объекта j щ\(И есть
не что иное как угол поворота объекта (г|)—г|)о) относительна
начального положения гро, то выражение (2.3) можно записать
в виде
Р-Ро = -^-(+-+о). (2.4)
Отсюда гироскоп получил свое название — интегрирующий.
Интегрирующие гироскопы, построенные на базе гироскопов с
двумя степенями свободы, можно разбить на две группы:
— «сухие» интегрирующие гироскопы, которые имеют
невысокую точность и в основном используются для стабилизации и
управления объектами;
— поплавковые интегрирующие гироскопы, к которым
предъявляются высокие требования по точности, применяются
для построения инерциальных систем и создания гиростабили-
зированных платформ.
2.2. ХАРАКТЕРИСТИКИ И ПАРАМЕТРЫ
Поделим все члены уравнения (2.1) на произведение Ы22:
t5+p=u"'1- <2'5>
Введем обозначения:
-Т — постоянная времени;
ьй
95
н и
=ft — чувствительность, или постоянная интегри-
Ы\
рующего гироскопа. (2.6)
Учитывая (2.6) из уравнения (2.5), записанного в
операционной форме при нулевых начальных условиях, получим
передаточную функцию угла поворота р прибора от угла
поворота объекта г|к
W (s) = -^- = 5 . (2.7)
w ф (s) Ts + 1 v
Амплитудно-частотная и фазочастотная характеристики
интегрирующего гироскопа могут быть рассчитаны по формулам
Л(о>)= г 1 (2.8)
ф(а>) = — arctg7V (2.9)
По уравнениям движения прибора, а также передаточной
функции и частотным характеристикам интегрирующего
гироскопа могут быть определены основные параметры прибора.
Такими параметрами являются чувствительность, диапазон
измерения, дрейф нуля, полоса частот неискаженных измерений
входного сигнала — угла поворота объекта.
Чувствительность интегрирующего гироскопа устанавливает
зависимость угла поворота объекта от угла поворота гироузла,
если не учитывать вредных моментов. Чувствительность
определяется как отношение установившегося значения угла
поворота гироузла к углу поворота объекта. Для повышения
чувствительности интегрирующего гироскопа необходимо, как это
видно из уравнений (2.1) и (2.6), увеличить отношение
кинетического момента гироскопа к коэффициенту демпфирования.
Однако предел увеличения чувствительности ограничивается
требуемым диапазоном измерения.
Так же как и для датчика угловой скорости,
результирующий угол поворота гироузла нельзя брать слишком большим
из-за возможного появления перекрестного эффекта —
реагирования интегрирующего гироскопа на угол поворота объекта
вокруг оси, перпендикулярной к оси измерения. Поэтому
максимальный угол поворота гироскопа рЮах приходится
ограничивать величиной в 5—10°. При заданном диапазоне измерения
угла поворота объекта г|)тах чувствительность гироскопа h
будет равна
h==bn*Lm (2.10)
'96
Вредные моменты, вызываемые несбалансированностью
прибора, моментами сухого трения, токоподводов и датчика
угла, приводят к появлению дрейфа — уходу прибора с
угловой скоростью
М
вр
н
(2.11)
где
Мвр — сумма вредных моментов, действующих на гиро-
узел вокруг его оси Ох;
содр — угловая скорость вращения объекта вокруг оси
измерения, гироскопический момент от которой
уравновешивает Мвр.
Для уменьшения дрейфа используют такие же меры, как и
для уменьшения остаточного сигнала датчика угловой скоро-
Рис. 2.2. К влиянию нежесткости
оси рамки прибора на его динамику
сти: взвешивание гироузла, уменьшение моментов нагрузки от
датчиков и токоподводов.
Диапазон частот неискаженного измерения угла поворота
определяется постоянной времени Т интегрирующего гироскопа.
Для интегрирующих гироскопов, которые применяются в
системах автоматического управления ракетами, величина этого
диапазона достигает более 20 гц. Постоянная времени Т
определяется заданным диапазоном частот входного сигнала и
допустимыми амплитудными и фазовыми погрешностями.
Нежесткость элементов конструкции интегрирующего гироскопа
приводит к увеличению постоянной времени Т прибора.
Так, для интегрирующего гироскопа (рис. 2.2) с упругой
осью гироузла прибора уравнения движения имеют вид
У^Р + WfP —Яа = Яа>у1>)
/г2а — Яр = 0,
Никитин и др.
(2.12)
97
где а — угол поворота ротора гироскопа относительно оси у
за счет упругих деформаций оси гироузла;
&2 — жесткость оси гироузла.
Положив в (2.12) о)г/1 = 0, получим уравнения собственного
движения системы
JJi + Ьф — #а = 0,
Разрешив эти уравнения относительно р, получим
(^+-^-)p + w|P = o,
откуда постоянная времени Тх прибора равна
Jx+-
74 = ■
ы\
(2.13)
2.3. ИНТЕГРИРУЮЩИЙ ГИРОСКОП
С ВОЗДУШНЫМИ ДЕМПФЕРАМИ
Наибольшее распространение из сухих интегрирующих
гироскопов получили гироскопы с воздушными демпферами.
На рис. 2.3 представлена схема интегрирующего гиро-
Рис. 2.3. Схема интегрирующего гироскопа с
воздушными демпферами:
1 — демпферы; 2 — обмотки управления; 3 — пружина;
4 — контакт; 5 — потенциометр
98
скопа с воздушными демпферами Д Прибор работает в
режиме интегрирующего гироскопа, когда с помощью контакта 4
отключена электрическая пружина 3. Электрическая пружина
введена в схему прибора по двум причинам.
Во-первых, она используется для установки прибора в
нулевое положение. Дело в том, что прибор в режиме
интегрирующего гироскопа не устанавливается в нулевое положение,
если он по каким-то причинам сместился из этого положения.
Поэтому на старте включается электрическая пружина
(замыкая контакт 4), которая при отсутствии угловой скорости щ\
приведет гироузел в нулевое положение. После старта
электрическая пружина отключается и прибор работает в режиме
интегрирующего гироскопа.
Во-вторых, во время управления объектом прибор
переключается из режима интегрирующего гироскопа в режим
датчика угловой скорости при включении контакта 4.
Таким образом, прибор может работать и как датчик угла
и как датчик угловой скорости. Такие гироскопы
устанавливаются на объекты, где возможны большие ускорения. В
качестве датчика угла на таких объектах целесообразнее
использовать интегрирующий гироскоп вместо свободного.
Интегрирующий гироскоп имеет меньшие размеры, может использоваться
в двух режимах и легче балансируется. На управляющую
обмотку прибора подается командный сигнал в режиме
управления объектом (контакт 4 замкнут). Под действием
управляющего сигнала и7щ> катушка развивает момент Aiiynp,
который вызывает отклонение гироскопа, и с потенциометра 5
поступит сигнал в автопилот для управления объектом.
Приближенное уравнение движения прибора (без
инерционного члена) запишется в следующем ,виде:
W|P + *i*ynp = Я*уь (2.14)
где /Упр — ток в катушке управления,
откуда
р ^ /ftoyi-fr'ynp (2.15)
После интегрирования
P-Po = -^TJ'(<V-|-<VnP)<tf. (2.16)
О
Сигнал, пропорциональный углу отклонения (рг—р0),
поступает в автопилот и вызывает разворот объекта с
программной угловой скоростью.
99
Уравнения движения интегрирующего гироскопа
с воздушными демпферами
Как известно, при изменении демпфирования
интегрирующего гироскопа меняется его чувствительность. На
демпфирование интегрирующего гироскопа с воздушными демпферами
сильно сказывается колебание плотности воздуха.
При расчете демпфера будем полагать, что в
установившемся движении секундный массовый расход воздуха через
щель между поршнем и цилиндром демпфера и капиллярную
трубку равен массовому секундному расходу воздуха в
полости цилиндра, происходящему вследствие перемещения
поршня и сжимаемости воздуха. Примем следующие обозначения:
G — массовое количество воздуха;
г — радиус капилляра;
/к — длина капилляра;
Ар — разность давления с двух сторон капилляра (или с
двух сторон поршня);
|li — коэффициент динамической вязкости;
R — средний радиус щели между цилиндром и поршнем;
б — зазор между цилиндром и поршнем;
1п — длина поршня;
/ — площадь поршня;
Уо — расстояние от дна цилиндра до поршня в исходном
положении;
у— расстояние от дна цилиндра до текущего положения
поршня;
Рь Pi—плотность и давление воздуха в цилиндре под
поршнем;
ро; ро — плотность и давление воздуха окружающей
атмосферы;
Г0 — абсолютная температура воздуха, соответствующая
давлению воздуха ро',
Ro — универсальная постоянная воздуха.
Секундный массовый расход воздуха через капиллярное
отверстие и кольцевую площадь поршня равен [17]
^--<*-*«**-£-(£+-£■). (2..7>
ИЛИ
dGx
dt
= _Cl(Pl_ft)PL±P?f (2.18)
где
Cl«-*L(JL+ -£?-). (2.19)
l^cp V o/K 6/n J
100
Знак «—» в выражении (2.18) показывает, что масса воздуха
под поршнем уменьшается, когда р\>ро\ jiCp — средняя
вязкость воздуха между jjti и \ю (\\\ и \io соответствуют р\ и /?0).
Масса G0 воздуха в цилиндре под поршнем в исходном
положении равна
G0 = V0p0,
где Vq — объем цилиндра под поршнем в исходном положении.
Так как
90- Р°
RqTo
то для изотермического процесса (Т0=const) масса воздуха
под поршнем в произвольный момент равна
Gx = G0 + AG = -L- (VlPl) = -L-(V0 + AV) {p0 + Ap), (2.20)
A(M 0 *MM О
где AG, AV и Ар — соответственно приращение массы воздуха,
его объема и давления под поршнем.
Полагая величины AG, AV и Ар малыми, из (2.20) с
точностью до величин второго порядка малости получим
№^-±-(V0Ap+p0AV). (2.21)
А(М 0
Продифференцировав (2.21) по времени, найдем секундное
приращение массы воздуха под поршнем
dAG _ 1 /т/ d&p . d/SV
= _L/Fo^+Poi^y (2.22)
dt R0T0 \ ° dt ио dt J V '
Сравнивая (2.18) и (2.22), получим
_ С1ьр Л±9^ = _L_ (Vo _f^_ + Po J^L)m (2.23)
H 2 T0R0 \ ° dt ^H° dt J V '
Из выражения (2.23) с точностью до величин второго
порядка малости следует
-clPoAp = V0-^+p0^-. (2.24)
dt dt
Так как AV=fAy, то —— = /—— и равенство (2.24) примет
dt dt
ВИД
J^^L + Ap==_±A^t (2.25)
cm dt Cl dt ч '
101
Введя обозначения —— = Гь — =п .и учитывая, что
схр0 сх
— = 12 —- , получим
dt dt
Tl«%-+Lp—rit-%-, (2.26)
at dt
где k — расстояние от оси демпфера до оси рамки прибора.
Из уравнения (2.26), переписав его в операционной форме
при нулевых начальных условиях, найдем
Ap = -nZ3 s P. (2.27)
74s-J- 1
Сила Fc сопротивления движению поршню равна перепаду
давления Ар, умноженному на площадь f поршня:
Fc = Др/ = - nfl2 -=^— Р. (2.28)
hs + 1
Так как в приборе два демпфера, то момент
демпфирования, действующий вокруг оси рамки прибора, равен
Мд-~-2*Уа = —2//аДр
и уравнение движения рамки прибора запишется в виде
^^-2//аДр = Яау. (2.29)
Таким образом, движение рамки интегрирующего
гироскопа с воздушными демпферами вокруг оси Ох описывается
системой уравнений (2.26) и (2.29). Разрешив эту систему
уравнений относительно Р, окончательно получим
JXT$ + j£ + 2/n/|p - Я7>у1 + Н*у1. (2.30)
Из уравнения (2.30), переписав его в операционной форме,
получим передаточную функцию прибора по угловой скорости,
которая при нулевых начальных условиях имеет вид
W(s)
<V KS) s \JxTxs* + Jxs + ЩпГ2\
(2.31)
где
102
P(s)
'yl (S)
H
2fnl\ s
T
H (Tis + 1)
s[jxTlS* + Jxs + 2fnl22]
Tis+l
■,[TlTs* + Ts+\)'
Jx
Ifnll '
Положив 7^1 = 0, из (2.31) можно получить передаточную
функцию прибора по угловой скорости без учета сжимаемости
воздуха. Для уяснения характера влияния сжимаемости
воздуха на работу прибора рассмотрим уравнение (2.30)
движения рамки прибора без учета момента инерции /х.
При Jx = 0 из (2.30) следует
2/л^==Я7>у1+#соу1
или
M^iyi + JLr%1. (2.32)
Интегрируя (2.32) по времени (при Ро = 0 и г|)0 = 0), получим
2fnll 2fnl\
где -ф = J myldt.
В этом случае прибор выдает сигнал, пропорциональный
углу г|) и угловой скорости coyi поворота изделия. Физически
это можно объяснить тем, что из-за сжимаемости воздуха под
поршнем демпфер проявляет пружинящие свойства. Таким
образом, демпфер, кроме своей основной функции, выполняет
еще роль «пружины». Поэтому на выходе прибора появляется
сигнал, пропорциональный щи как в приборе с пружиной
(ДУСе).
Физическая картина становится более ясной, если
обратиться к передаточной функции силы демпфирования (2.28):
Fc = —fnl2- s Q
Положим, что 5=/со, тогда
Tts+l
Fc = -fnl2-^—$. (2.34)
7ijo> + 1
При медленных движениях поршня со мало, а
следовательно, Гсо<С1 и приближенно можно принять
т. е. при медленных движениях поршня воздух под ним почти
не сжимается, так как успевает перетекать через щель и ка-
103
пиллярное отверстие, и мы имеем почти чистое демпфирование.
Прибор в этом случае работает как интегрирующий гироскоп
(без выдачи сигнала, пропорционального coyi).
В случае быстрых колебаний прибора Гсо^>1 из (2.34)
получим
т. е. сила сопротивления поршня пропорциональна углу
поворота р гироскопа, а не его скорости р. В этом случае воздух
не успевает вытекать из полости демпфера и вследствие его
сжимаемости демпфер работает как пружина, а прибор выдает
сигнал, пропорциональный угловой скорости coyi изделия.
В системах стабилизации и управления находят
применение интегрирующие гироскопы, в которых вместо воздушных
Рис. ,2.4. Схема интегрирующего
гироскопа с емкостным
демпфированием
демпферов используют электрическое демпфирование с
помощью какого-нибудь электромагнитного устройства.
На рис. 2.4 представлена схема прибора с демпфированием
через емкость. Для приведения прибора в нулевое положение
прибор включается в режим датчика угловой скорости. Для
этого шунтируется емкость С и на электрическую пружину Я
поступает сигнал, пропорциональный углу р и угловой
скорости р. Если разомкнуть шунт, то на электрическую пружину
будет -поступать сигнал, пропорциональный угловой скорости р.
Прибор в этом случае работает в интеграционном режиме.
104
Расчет и выбор параметров интегрирующего гироскопа с
демпфированием через емкость проводится аналогично расчету
датчика угловой скорости с электрической пружиной.
2.4. ПРИНЦИПИАЛЬНАЯ СХЕМА ПОПЛАВКОВОГО
ИНТЕГРИРУЮЩЕГО ГИРОСКОПА
Поплавковый интегрирующий гироскоп представляет собой
гироскоп с двумя степенями свободы, вращению которого
вокруг оси рамки противодействует момент, пропорциональный
скорости вращения. Принципиальная конструктивная схема по-
Рис. 2.5. Конструктивная схема поплавкового
интегрирующего гироскопа:
/ — гиромотор: 2 — поплавок: 3 — подшипники; 4 — корпус; 5 —
датчик момента: 6 — обмотка датчика температуры; 7 — гайки;
8 — датчик угла
плавкового интегрирующего гироскопа показана в упрощенном
виде на рис. 2.5.
Гиромотор 1 прибора жестко закреплен в герметическом
цилиндрическом поплавке 2 и образует с ним поплавковый
гироузел. Поплавковый гироузел прибора установлен в
подшипниках 3, расположенных в герметическом корпусе 4 прибора
так, что он может вращаться относительно корпуса прибора
вокруг выходной оси Х\. Корпус 4 на участке, охватывающем
поплавковый гироузел, имеет строго цилиндрическую форму.
На этом участке между поверхностью корпуса прибора и ци-
105
ликдрической поверхностью поплавка имеется небольшой
зазор б постоянной величины (0,1—0,2 мм).
Все свободное внутреннее пространство корпуса прибора
заполнено фтороорганической жидкостью с большой
плотностью р = 1,93-т-1,98 и большим коэффициентом вязкости.
Жидкость служит для гидростатической разгрузки опор
поплавкового гироузла, защиты опор прибора от ударов и вибраций и
для создания демпфирующего момента. Функции демпфера
выполняются наружной поверхностью поплавка 2, внутренней
поверхностью корпуса 4 и жидкостью, находящейся в зазоре
между этими поверхностями. Вязкость жидкости и величина
зазора выбираются так, чтобы при всех практически
возможных в процессе работы прибора скоростях поворота
поплавкового узла относительно корпуса прибора течение жидкости
в зазоре осталось ламинарным, а демпфирующий момент был
бы строго пропорционален скорости поворота поплавкового
узла. Для поддержания плотности и вязкости жидкости
постоянными в приборе предусмотрено автоматическое термоста-
тирование 16.
Обмотка 6 датчика температуры термостата намотана на
цилиндрической поверхности корпуса прибора. Объем
поплавкового гироузла выбран таким, что его плавучесть в
жидкости при рабочей температуре близка к нулю. Благодаря этому
осуществляется практически полная разгрузка опор, что
позволяет заменить шарикоподшипники каменными опорами и
добиться ничтожно малого по величине момента трения
в опорах.
Для того чтобы вокруг по выходной оси прибора не
возникало вредных моментов от переносных ускорений,
поплавковый гироузел должен быть тщательно отбалансирован. При
этом необходимо совместить центр тяжести поплавкового
гироузла с центром давления вытесненного им объема жидкости
с осью Х\. Гироузел балансируется относительно оси Х\
четырьмя гайками 7, навернутыми на четыре взаимно
перпендикулярных стержня с резьбой, закрепленных на оси
поплавкового гироузла. Для регистрации угла поворота поплавкового
гироузла служит датчик угла 8.
Датчик момента 5 поплавкового интегрирующего гироскопа
предназначен для компенсации постоянных вредных моментов
по выходной оси прибора и для прикладывания управляющего
момента по выходной оси гироскопа при работе его в режиме
пространственной стабилизации.
Осью чувствительности или осью измерения прибора
является ось у, перпендикулярная плоскости оси кинетического
момента гироскопа и выходной оси х.
Поплавковый интегрирующий гироскоп устанавливают на
платформу, которую он должен стабилизировать, так чтобы
106
его ось чувствительности у совпадала с осью стабилизации у\
(рис. 2.6).
Если платформа вместе с закрепленным на ней гироскопом
будет вращаться в пространстве вокруг оси у\ под действием
Рис. 2.6. Одноосный гиростабилиза-
тор с поплавковым интегрирующим
гироскопом
каких-либо внешних моментов, то вокруг оси х на поплавковый
узел будет действовать гироскопический момент Мг=Нхыу.
Под действием гироскопического момента поплавковый узел
начинает вращаться вокруг оси я с угловой скоростью р,
стремясь совместить вектор Н с вектором со^ь При этом
вращению поплавкового гироузла будет препятствовать момент
демпфирования поплавка
где В — коэффициент демпфирования поплавка.
Для малых углов Р и постоянной скорости coyi будет иметь
место равенство
107
Интегрируя (2.35), получим
г
P-p0=-jjcDyd/. (2.36)
О
Сигнал с датчика угла поплавкового интегрирующего
гироскопа, пропорциональный углу р, поступает в качестве
управляющего сигнала на двигатель разгрузки платформы
вокруг оси стабилизации.
Отношение Н/В кинетического момента гироскопа Н к
коэффициенту демпфирования В называют чувствительностью
прибора, или постоянной интегрирования. С точки зрения
точности стабилизации платформы постоянную интегрирования
h = H/'B прибора желательно увеличивать, однако увеличение
h ограничивается прочностью каменных опор поплавковых
приборов.
Рассмотрим прецессионные уравнения движения
поплавкового гироскопа и уравнения движения платформы вокруг оси
стабилизации.
Уравнение движения гироскопа вокруг осей х и у имеет
вид соответственно
£(3-Яа + Мупр = 0, (2.37)
FoJon-H^O (2.38)
и уравнение движения вокруг оси стабилизации
- ^оЛп - W (s) Р - Вга = 0, (2.39)
где Мулр — момент управления по выходной оси х
гироскопа;
а—угловая скорость платформы по оси
стабилизации;
F<m — давление в опорах поплавкового прибора;
Ion — расстояние между опорами поплавкового
прибора;
W(s) —передаточная функция цепи разгрузки;
В\ — коэффициент демпфирования по оси
стабилизации.
Из выражения (2.38) имеем
^оп = -^-Р. (2.40)
Значение р из (2.37) подставим в выражение (2.40):
Fon = ^_£iz^=A^Z±-. (2.4i)
108
Из выражения (2.41) следует, что с увеличением
постоянной интегрирования h прибора увеличивается давление в
каменных опорах. Поэтому для реальных приборов постоянная
интегрирования прибора ft=3-^-8.
2.5. ОСНОВНЫЕ ЭЛЕМЕНТЫ ПОПЛАВКОВОГО
ИНТЕГРИРУЮЩЕГО ГИРОСКОПА
Поплавковый гироузел и его балансировка
Поплавковый гироузел подвергается тщательному
уравновешиванию для совмещения его центра тяжести и центра
давления вытесненного им объема жидкости и совпадения их
У
/
1
/
1 ' г
\ °
\
\
Дх
т—*
\ Cm
X
\
\
\
/
/ 1
/
Си
' оп
Рис. 2.7. Определение дифферента поплавка:
/ — балансировочные шайбы
с осью вращения поплавка х, а также для приведения
остаточного веса или плавучести поплавка к нулю (рис. 2.7).
Следовательно, поплавковый гироузел, находясь в
жидкости требуемой плотности, должен обладать нулевой
плавучестью, не иметь дифферента относительно оси Ох и быть
уравновешенным относительно этой же оси.
Прежде чем производить балансировку, у поплавкового ги-
роузла устраняют его остаточный вес или плавучесть, которые
являются причиной появления давления в опорах, а
следовательно, и моментов трения. Остаточный вес или плавучесть
поплавка обычно устраняются с точностью до 0,1% его веса.
После того как поплавок взвешен, его балансируют для
обеспечения нулевого дифферента.
Расстояние Ах вдоль оси хх между линией действия силы
веса Gn поплавка и линией действия выталкивающей силы
Gjk вытесненного объема жидкости характеризует величину
дифферента поплавка по оси Ох. Наличие дифферента у по-
109
плавка приводит к увеличению реакции и неравномерной
нагрузки на опоры.
Давление F0Il на опору, вызванное наличием дифферента,
равно
^оп -= Щ^-г (2.42)
где /0ц — расстояние между опорами поплавка вдоль оси Ох.
Дифферент поплавка можно устранить с помощью
балансировочных шайб, которые располагаются на оси вращения
поплавка с правого и левого его торцов. Перенося шайбы раз-
Рис. 2.8. Положение Рис. 2.9. Совмещение
центра тяжести и цент- центра тяжести поплав-
ра давления относитель- ка и центра давления
но оси поплавка хх вытесненного объема
жидкости
личного веса с одной стороны поплавка на другую, можно, не
меняя его веса, устранить дифферент.
После того как поплавок взвешен и у него устранен
дифферент, приступают к балансировке поплавка относительно
оси Ох. Если центр тяжести и центр вытесненного им объема
жидкости не совпадают с осью вращения Ох (рис. 2.8), то
относительно оси Ох поплавка возникает момент
Mx^GA-GnzT, (2.43)
где гд — расстояние от оси Ох до центра давления;
zT — расстояние от оси Ох до центра тяжести.
Если балансировка поплавка такова, что гд = гт = 2, а
плавучесть его при рабочей температуре tp равна нулю (Gn=
= Ож), то момент Мх небаланса равен нулю (рис. 2.9).
Однако при отклонениях рабочей температуры жидкости
от номинального значения будет, изменяться плотность рж
жидкости, а следовательно, и величина выталкивающей силы Gm
вытесненного объема жидкости.
ПО
Температурный коэффициент расширения материала
поплавка во много раз меньше температурного коэффициента
жидкости. Поэтому при малых колебаниях рабочей
температуры жидкости можно считать, что положение центра тяжести
поплавка и центра давления вытесненного им объема
жидкости останутся неизменными.
Для тяжелых жидкостей, используемых в поплавковых
интегрирующих гироскопах, температурный коэффициент ат
плотности колеблется в пределах аж~ (0,8-М) • Ю-3. Тогда
изменение выталкивающей силы AGm вытесненного объема
жидкости будет равно
Лбж=--СжажДГ, (2.44)
где At0 — отклонение температуры жидкости от номинального
значения.
Как следствие изменения выталкивающей силы
вытесненного объема жидкости относительно оси Ох появится момент
АМХ разбаланса
АМХ = —вж • ажД/°г. (2.45)
Для того чтобы малые колебания рабочей температуры
жидкости не вызывали появления момента АМХ разбаланса,
Рис. 2.10. Сбалансиро- Рис. 2.11. Расположение баланси-
ванный относительно ровочных грузов поплавка
оси хх поплавок
необходимо центр тяжести поплавка и центр давления
вытесненного им объема жидкости совмещать с осью Ох (рис. 2.10).
В связи с этим поплавок проходит двойную балансировку.
Сначала производится балансировка без жидкости (на воздухе).
При балансировке поплавка на воздухе с осью Ох совмещают
центр тяжести поплавкового гироузла. Затем поплавок поме-
111
щают в жидкость с такой плотнрстью, которая соответствует
плотности жидкости при рабочей температуре, и балансируют
вторично.
При балансировке в жидкости положение центра тяжести
оставляют неизменным, а центр давления вытесненного объема
жидкости совмещают с осью вращения поплавка. Такую
балансировку производят с помощью четырех грузиков (рис. 2.11),
выполненных в виде гаек или винтов.
Для того чтобы при балансировке в жидкости можно было
менять только положение центра давления и оставлять
неизменным положение центра тяжести, балансировочные грузы
изготовляют с равными объемами, но из разного материала, или
с одинаковым весом, но с разным объемом.
Совмещение центра давления вытесненного объема
жидкости с осью вращения поплавка осуществляют следующим
образом. Предположим, что центр тяжести поплавка при
балансировке на воздухе был совмещен с осью Ох. Момент Мх
небаланса поплавка в жидкости равен *
Мх = GMzA.
Балансировочные грузики имеют одинаковые объемы V, но
разный вес G\ и 62. Тогда остаточный вес первого
AGi и второго Д(?2 грузиков в жидкости будут равны
*.-о.-Ъ.\ (2-46)
При ликвидации момента бшгд в жидкости необходимо не
нарушать балансировку на воздухе. Так как вес у грузиков G\
и G2 разный, то добавочные их смещения должны быть такие,
чтобы не нарушалась балансировка поплавка на воздухе, т. е.
момент относительно оси Ох от добавочных смещений Sz\ и
A^2 грузиков G\ и G2 должен быть равен нулю:
GxAzi —G2iz2 - 0. (2.47)
Определим теперь значения Azi и AZ2 из условия, что при
смещении грузиков на эти величины момент небаланса в
жидкости был равен нулю:
Мх =-- G^ + AGiAZi — AG2Az2 = 0 (2.48)
или, учитывая (2.46) и (2.47), найдем
G»A — ржУ(Дг1 — &**) = 0»
* Величина момента Мх небаланса и положение центра давления
вытесненного объема жидкости могут быть определены путем снятия
балансировочной кривой.
112
или
откуда получим
GA = P«VAzi(l--|-)I
(2.49)
Согласно (2.47)
Дг»
1_ ?mV(G2-Gi) '
G\ д„ _ GiGxza
G2 ~* ~ РжУ (G2 - Oi)
(2.50)
(2.51)
Таким образом, если смещения Az\ и Дгг грузов G\ и G2
удовлетворяют соотношениям (2.47) и (2.51), то центр тяжести
поплавка и центр давления вытесненного
им объема жидкости будут находиться
на оси его вращения.
Рассмотренная выше балансировка
прибора по совмещению центра тяжести
поплавкового гироузла и центра
давления вытесненного им объема жидкости
в реальных приборах может нарушиться
по следующим причинам.
1. Момент Мх статической
несбалансированности поплавкового гироузла при
незапущенном гиромоторе представляет
собой сумму момента Мх1
несбалансированности самого поплавкового гироузла
и составляющей Мх2 момента М0
статической несбалансированности ротора
гироскопа (рис. 2.12):
Мх = МХ1 + МХя9
где
M*2 = M0cos(p;
Рис. 2.12. Положение
центра тяжести
статически
несбалансированного ротора
центра тяжести
по отношению к
Мо — момент статической
несбалансированности ротора;
Ф — угол, характеризующий положение
ротора гироскопа в полости ух
оси у.
При балансировке прибора на воздухе с незапущенным ги-
ромотором устраняется суммарный момент Мх разбалансирова-
ния поплавкового гироузла. При работе прибора угол ф
меняется со скоростью собственного вращения гироскопа и
среднее значение составляющей Мх2 от момента статической разба-
113
лансированности ротора равно нулю. Вследствие этого центр
тяжести поплавкового гироузла смещается с оси Ох на
величину
Величину статической несбалансированности ротора
гироскопа в собранном приборе можно определить следующим
образом.
Прибор устанавливают в горизонтальной плоскости так,
чтобы ось z ротора гироскопа была вертикальна. Гиромотор
не запускается. Сигнал с датчика угла подается на датчик
момента прибора и по величине тока в датчике момента
оценивается величина вредного момента по выходной оси.
После замера момента по выходной оси на гироскоп
подается на короткое время питание так, чтобы ротор
повернулся вокруг своей оси на некоторый угол. После этого снова
снимается значение вредного момента по выходной оси.
Повторяя данную операцию многократно и имея в виду, что все
угловые положения ротора гироскопа равновероятны,
определим значение вредного момента по выходной оси без учета
момента статической разбалансировки ротора гироскопа:
х п
Тогда момент М0 статической разбалансировки ротора
гироскопа равен
лл Мх тах — Мх min
Чем больше будет произведено замеров, тем с большей
точностью можно определить значение М0.
2. Балансировка поплавкового гироузла на воздухе и в
жидкости обычно производится при нормальной температуре. При
разогреве прибора до рабочей температуры при его работе за
счет линейного расширения материала происходит деформация
поплавкового гироузла и положение центра тяжести и центра
давления вытесненного им объема жидкости может измениться.
Особенно это проявляется при изготовлении гиромотора и
бачка поплавковой камеры из различных материалов.
Деформации поплавкового гироузла вызываются также
местными перегревами и разогревом кожуха бачка из-за
вихревых токов, наводимых в нем вращающимся магнитным полем
гиромотора. Местные напряжения материала, которые возни-
114
кают при сваривании бачка поплавкового гироузла, также
являются причиной его деформаций.
Кроме того, следует иметь в виду, что материалы имеют
свойство с течением времени менять свои линейные размеры.
Поэтому для изготовления элементов поплавкового гироузла
надо использовать материалы, которые хорошо сохраняют
линейные размеры. Наилучшим таким материалом является
бериллий. Основные характеристики бериллия и других
материалов приведены в приложении (см. табл. 2).
3. Балансировку поплавкового узла могут нарушить
остаточные пузырьки воздуха, которые могут осесть на его
поверхность. Для устранения этой причины разбалансировки все
элементы прибора перед сборкой проходят технологическую
операцию по обезгаживанию. Жидкость перед заполнением также
обезгаживается и очищается от посторонних включений.
Заполнение прибора жидкостью производится под вакуумом, что
практически исключает образование пузырьков воздуха в
собранном приборе.
Система термостатирования прибора
Для поддержания постоянной температуры жидкости,
а также поплавкового гироузла в интегрирующих гироскопах
предусмотрено автоматическое термостатирование. Время,
требующееся на приведение прибора в рабочее состояние,
определяется периодом, необходимым
для достижения рабочего
стабильного температурного режима. Этот
отрезок времени достигает
значительной величины, и время
готовности поплавковых интегрирующих
гироскопов пока остается
достаточно большим, что сильно снижает
тактико-технические данные
прибора и объекта. Поэтому при
разработке конструкции поплавкового
интегрирующего гироскопа следует
обращать серьезное внимание на
его параметры, характеризующие
его как объект регулирования температуры.
Колебания температуры в приборе изменяют вязкость |ш и
плотность р жидкости. Примерная зависимость |ш и р
жидкостей, применяемых в гироскопах, от температуры представлена
графически на рис. 2.13, а математическая зависимость
изменения плотности р и коэффициента динамической вязкости \i при
малых колебаниях температуры выражается формулами
(1.134) и (1.133).
60°С
t°c
Рис. 2.13. График зависимости
М- и р от температуры
115
Изменение плотности р жидкости приводит к изменению
плавучести поплавка, вследствие чего изменяется .нагрузка на
опоры прибора. Кроме того, как указывалось ранее, изменение
плотности жидкости может привести к изменению балансировки
поплавка, если центр давления вытесненного объема жидкости
не совпадает с осью вращения поплавкового гироузла.
Изменение коэффициента динамической вязкости \х
вызывает изменение выходной характеристики прибора. Покажем
это на приближенном уравнении движения поплавкового
интегрирующего гироскопа, которое аналогично уравнению (2.1):
У,Р + Др = Яа>у1>
где В — коэффициент демпфирования, который согласно (1.32)
определяется размерами зазора и жидкостью.
Или, вводя обозначения (2.6), получим
Тр + Р=Ашу1. (2.52)
Постоянная времени поплавковых интегрирующих
гироскопов обычно находится в пределах Г= 0,002-f-0,005 сек, а
чувствительность h 1(или постоянная интегрирования прибора)
равна
h==H_^ 381/Го 53)
В 2ъргЧп
Пренебрегая значением Т, из уравнения (2.52) найдем
Для того чтобы результат интегрирования был точным,
кинетический момент Н и удельный коэффициент демпфирования В
должны быть постоянными. Но В является функцией
коэффициента |ш, величина которого, как следует из графика рис. 2.13,
сильно меняется от температуры. Рабочая температура
прибора, которая поддерживается системой термостатирования,
выбирается несколько выше возможной температуры
окружающей среды, чтобы был некоторый перепад между
температурой корпуса прибора и средой для обеспечения процесса
регулирования.
Так как приборы должны нормально работать при
изменении температуры окружающей среды от —60 до +50° С, а
температура среды в корпусе системы, в которой используется
поплавковый интегрирующий гироскоп, может быть выше
50° С за счет 'выделения тепла различными электрическими
устройствами системы, рабочую температуру прибора обычно
116
шх
выбирают в диапазоне 70—85° С. В этом диапазоне температур
коэффициент динамической вязкости |ш меняется незначительно
при колебаниях температуры. Благодаря этому
чувствительность h прибора практически остается постоянной величиной.
Система автоматического термостатирования прибора
состоит из термодатчика — чувствительного элемента
температуры, усилителя и обмотки
обогрева термостата,
выполняющего роль
исполнительного органа системы
автоматического
регулирования.
Обмотку термодатчика
наматывают на
цилиндрическую поверхность
специального стакана и
помещают в корпусе прибора
как можно ближе к
рабочему зазору поплавкового
прибора так, чтобы
температура обмотки
термодатчика соответствовала
температуре рабочей жидкости
прибора. Обмотка,
наматываемая обычно медным
проводом, является плечом
мостовой схемы (рис. 2.14).
Для исключения
трансформации ложных сигналов от посторонних магнитных полей
переменного тока и уничтожения магнитного поля самого
термодатчика iero обмотку целесообразно наматывать бифилярно.
Сопротивление термодатчика гт изменяется от температуры
по формуле
Рис. 2.14. Принципиальная
электрическая схема термодатчика:
гт — обмотка термодатчика; г1г г2, г3 —
постоянные сопротивления моста термодатчика
гТ ■■= гп(1 + Ш),
(2.54)
где 8 — температурный коэффициент сопротивления
материала провода;
гто — сопротивление обмотки термодатчика при рабочей
температуре жидкости;
At— отклонение температуры термодатчика от
регулируемой величины.
Питание моста обычно осуществляется напряжением
переменного тока.
Если температура обмотки термодатчика соответствует
рабочей температуре жидкости, мост сбалансирован. С
изменением температуры изменяется сопротивление гт обмотки термо-
117
датчика ив диагонали моста появляется напряжение, которое
поступает на вход фазочувствительного усилителя.
Сопротивления г\, г2, /*3 плеч моста располагают обычно в
усилителе или в корпусе прибора. Для того чтобы значения
сопротивлений п, \г2, гъ не изменялись при колебаниях
окружающей температуры, их изготовляют из константана или
манганина.
Фазочувствительный усилитель системы термостатирования
в большинстве случаев имеет релейный выход (рис. 2.15).
^%ИТ 0
Рис. 2.15. К включению обмотки
обогрева:
/ — обмотка реле: 2 — обмотка
термостата прибора
<
Рис. 2.16. Включение обмотки
разогрева Ri и подогрева R2
Реле, которым управляет фазочувствительный усилитель,
играет роль усилителя мощности. Обмотка обогрева термостата
подключается и отключается от напряжения питания через
контакты реле. Укладывают обмотку обогрева на цилиндрической
поверхности корпуса прибора и наматывают бифилярно так,
чтобы она не создавала магнитного поля.
Иногда на выходе усилителя ставят два реле (рис. 2.16).
В этом случае термостат делают из двух обмоток: обмотки
разогрева и обмотки подогрева. Менее чувствительное реле Pi
управляет обмоткой разогрева, а более чувствительное реле
Р2 — обмоткой подогрева. Такая схема применяется в том
случае, когда необходимо сократить время готовности прибора.
На графике рис. 2.17 показана кривая изменения
температуры термодатчика по времени. Температура в начале графика
плавно увеличивается путем постоянного включения обмоток
термостата. Пилообразная кривая получается в результате
включения и выключения обмотки термостата в процессе
поддержания температуры.
Точность работы системы термостатирования в значительной
степени зависит от взаимного расположения рабочего зазора,
обмотки термодатчика и обмотки обогрева. Обмотка обогрева
должна быть расположена по отношению к рабочему вазору
и обмотке термодатчика так, чтобы время прогрева жидкости
118
в рабочем зазоре и время прогрева обмотки термодатчика при
работе системы термостатирования у рабочей точки были
одинаковы или близки между собой при различных температурах
окружающей среды.
Иногда в целях уменьшения тепловой инерции между
обмоткой обогрева и термодатчиком обе обмотки располагают
в непосредственной близости на
цилиндрической поверхности
корпуса прибора. Однако в этом
случае система
термостатирования обеспечивает только
поддержание температуры обмотки
термодатчика и температуры
цилиндрической поверхности корпуса
прибора. Температура жидкости
в рабочем зазоре при колебаниях Рис 2у] г фик изменения тем-
окружающей температуры мо- пературы
жет значительно отличаться от
рабочей вследствие изменения теплоотдачи прибора ,через его
торцовые поверхности.
Амплитуда колебаний температуры жидкости в рабочем
зазоре около установившегося значения в результате
запаздывания системы термостатирования и ее тепловой инерционности
оказывается в этом случае также в несколько раз больше
амплитуды колебаний температуры на поверхности металла, на
котором расположены обмотки термодатчика и термостата.
Так, при поддержании температуры на поверхности металла
около установившегося значения в пределах ±0,1° С
температура жидкости в зазоре поддерживается с точностью
±•(0,34-0,5)° С.
Кроме того, на точность рабочей температуры жидкости
значительное влияние оказывают внутренние источники тепла
(гиромотор, датчики угла, и момента) прибора, а также
колебания частоты и напряжения питания фазочувствительного
усилителя и термочувствительного моста. Еще с более низкой
точностью поддерживается температура вдоль выходной оси
прибора.
Неполная симметрия конструкции, различная теплоемкость
деталей торцовых камер, различное количество тепла,
выделяемого датчиком угла и датчиком момента, и другие причины
приводят к тому, что температура торцовых камер
поплавкового прибора может отличаться на несколько градусов даже
при неизменной окружающей температуре.
Отвод тепла через торцовые поверхности прибора и
температура жидкости внутри него по этим причинам оказываются
неравномерными. Неравномерность температуры жидкости
внутри прибора приводит к изменению положения центра
давления поплавкового гироузла и к появлению конвекционных
119
потоков жидкости в приборе, что может являться одной из
причин появления вредных моментов по выходной оси прибора.
Для компенсации расширения жидкости при работе системы
термостатирования в конструкции поплавковых приборов
предусматривается сильфон. Размеры сильфона и его ход
рассчитываются из условия компенсации объемного расширения
жидкости поплавковой камеры от температуры хранения до
рабочей температуры.
При разогреве прибора или его охлаждении подпятники
прибора воспринимают значительные усилия из-за проявления
«поршневого эффекта». Проявление «поршневого эффекта»
связано с тем обстоятельством, что, например,, при разогреве
прибора приращение объема жидкости, расположенной в
торцовой камере поплавковой камеры с противоположной стороны
сильфона, должно компенсироваться перетеканием жидкости к
сильфону через узкую кольцевую щель между поплавком и
корпусом прибора.
Для перетекания жидкости через узкую кольцевую щель
на торцовых поверхностях поплавка должен возникнуть
значительный перепад давления. Результирующее усилие на
торцовой поверхности поплавка от перепада давления
воспринимается подпятником прибора, расположенным со стороны
сильфона. При охлаждении прибора усилие от перепада давления
воспринимается противоположным подпятником. Перепад
давления на торцовых поверхностях поплавка и результирующее
усилие можно определить, приравняв секундное приращение
объема жидкости торцовой камеры за счет изменения
температуры секундному расходу жидкости через кольцевую щель.
Для уменьшения перепада давлений и снижения осевых
усилий «поршневого эффекта» в конструкции прибора иногда
предусматривают проходные каналы (рис. 2.18). Поперечное
сечение проходных каналов и количество их определяется из
допустимого усилия на подпятник и интенсивности разогрева
прибора.
Датчики угла и момента
Для регистрации угла отклонения поплавкового гироузла
относительно корпуса прибора получили широкое применение
индукционные датчики с подвижным ротором типа микросина
и рамочные индукционные датчики.
Микросин (рис. 2.19) представляет собой индукционный
датчик с симметричным четырехполюсным статором и
двухполюсным ротором, с дугой полюса в 90°. Пакеты статора и
ротора микросина набирают из отдельных пластин
ферромагнитного материала, обладающего наименьшей петлей гистерезиса.
Пластины магнитопроводов статора и ротора должны быть
тщательно изолированы друг от друга.
120
На каждом полюсе статора имеется две обмотки, одна из
которых является обмоткой возбуждения, а вторая —
сигнальной. Все обмотки возбуждения соединены последовательно так,
что при питании их током возбуждения (/=400, 500 или
1000 гц) создают такую мгновенную намагниченность полюсов
статора, какая показана на рис. 2.19.
Каждый полюс статора представляет собой трансформатор
с магнитным потоком, величина которого изменяется в зависи-
Рйс. 2.18. Сечение поплав- Рис. 2.19. Схема микросина:
КОВОЙ Камеры С ПРОХОДНЫ- пи П2, Я3, ПА — катушки первичной об-
Ми каналами мотки: Ви В2, В3 В* — катушки вторичной
обмотки
мости от положения ротора по отношению к полюсу статора.
В нулевом положении полюса 1ротора перекрывают все полюса
статора одинаково. При отклонении ротора от нулевого
положения площадь перекрытия под двумя диаметрально
противоположными полюсами увеличивается, а под двумя другими —
уменьшается. При этом, если пренебречь геометрическими
погрешностями изготовления статора и ротора и предположить,
что эксцентриситет между ротором и статором равен нулю, то
суммарная площадь перекрытия под всеми четырьмя полюсами
будет оставаться неизменной. Благодаря этому общий ток
возбуждения для всех четырех катушек остается неизменным при
повороте ротора.
При увеличении перекрытия полюса статора магнитное
сопротивление магнитопровода данного полюса уменьшается,
в результате чего увеличивается магнитный поток,
пересекающий вторичную обмотку, а следовательно, увеличивается и
э. д. с, трансформируемая в ней.
Вторичные (сигнальные) обмотки также соединены
последовательно и образуют общую выходную обмотку (рис. 2.20).
121
При этом обмотки диаметрально противоположных полюсов
(разноименных) соединены согласно (катушки Bi и В3; В2 и
В4). Полученные таким образом две пары обмоток соединены
между собой встречно. Величина и фаза входного напряжения,
Рис. 2.20. Схема обмоток микросина:
а — взаиморасположение первичной и
вторичной обмоток: б — направление токов,
наводимых во вторичных катушках в один из
полупериодов
снимаемого с выходной обмотки, определяется величиной и
направлением угла поворота ротора микросина. Приближенная
эквивалентная схема магнитных цепей микроскопа без учета
потоков утечки представлена на рис. 2.21.
Ф,\
i
Ktf
Рис. 2.21. Схема магнитных цепей микросина:
(НС)х, (ЯС)2, (НС)3, (НС)4 — магнитодвижущие силы,
развиваемые первичными катушками в соответствующих полюсах; Rlt
Rz> *<з> °4 —сопротивления магнитным потокам воздушных
зазоров под соответствующими полюсами статора; Oj, Ф2, Ф3,
Л - магнитные потоки в соответствующих полюсах статора
Ф4
122
Уравнения магнитных цепей микросина имеют вид
ФЛ - Ф2#2 = (НС\ - (НС)2, )
Oi#i + o4#4 = (#Qi + (#c)4,
ф14-фа — Ф3— Ф4=0.
(2.55)
Уравнение электрической цепи возбуждения микросина
имеет вид
^ воз = 4п + ^i -—г- + Щ —*- + Ш1 —f + шх —-Ц (2.56)
аг аг at аг
где г—омическое сопротивление обмотки возбуждения
одного полюса;
W\ — число витков обмотки возбуждения одного полюса.
Имея в виду, что магнитодвижущая сила
(ЯС)=о>,*\
для микросина, у которого ток возбуждения всех катушек
одинаков, получим
(НС), = (НС)2 = (НС)3 - (НС), = щ?. (2.57)
Так как схема симметрична, имеем
Ri = R3', #2 =л4; Oi = ф3 и ф2 - ф4.
В этом случае, учитывая равенство (2.57), система
уравнений (2.55) преобразовывается к виду
(2.58)
откуда получим
ФЛ-
Фх
ф2
ФЛ
= Фз
= ф4
ФЛ =
= wj
= йУхг ■
— wji
= 0,
>
1
1
я2 '
(2.59)
Учитывая ('2.59), из уравнения (2.56) получим
tf ж» = 4л + Щ Rl + R* . -У-. (2.60)
в03 l RiR2 dt v
Магнитное сопротивление R воздушного зазора под полюсом
123
представляет собой обратную величину магнитной
проводимости G воздушного зазора под тем же полюсом:
R
Магнитная проводимость воздушного зазора между двумя
поверхностями может быть представлена как сумма магнитных
проводимостей отдельных участков воздушного зазора, на
которые он разбивается. Методика определения магнитной
проводимости воздушного зазора изложена в работах [1] и [3].
Проводимость ,воздушцого зазора под полюсом может быть
представлена в виде
Gi = G8 = C0(l-aP)fl
G8=G4 = G0(l+aP),J ^-bl)
где G0 — магнитная проводимость рабочего потока й
потоков рассеивания в воздушном зазоре полюса при
отсутствии угла поворота ротора;
а — коэффициент, характеризующий изменение
магнитной проводимости под полюсом при повороте
ротора микросина на угол р.
Учитывая соотношения (2.61), из (2.60) найдем
f/воз ==4« + a»2G0-£-, (2.62)
at
откуда получим
i = r Ub03 (2.63)
4^ + (2яД,0)2 '
где L0=Wi2Go—индуктивность катушки одного полюса;
/с—частота питания напряжения возбуждения.
Учитывая соотношения (2.61) и (2.63), из 1(2.59) найдем
ф ф 7G°(1~aP) ^, (2.64)
ф ф yod+flft ц (2.65)
Напряжение ивых, трансформируемое во вторичной обмотке
микросина, равно
U =а; ( d®* 1 йФ* йФ1 ^фз \ _- w wlGo 2Ф№воз _
вых 2\ dt dt dt dt J ~ 2 Vr*+(2n£L0)2
2nfL0 w2 ^^ {2M)
Угг2 + (2я/10)2 wi
где w2 — число витков вторичной обмотки одного полюса
124
Поделив 1(2.66) на ip, получим крутизну h выходной
характеристики |Микросина
2я/10
h
W2
У г* + (2я/1о)2 wi
aUB03 в/рад.
При малых размерах микро-
сина, когда на полюсе статора
не удается разместить две
обмотки, электрическую схему мик-
росина можно собрать по
мостовой схеме без вторичных обмоток
(рис. 2.22). Направление
включения обмоток и мгновенная
полярность полюсов в данной
схеме аналогична ранее
рассмотренной. Расчет магнитных и
электрических цепей может быть
выполнен также по ранее
рассмотренной методике.
Крутизна h выходной
характеристики микросина при
включении его по мостовой схеме
равна
(2.67)
Рис. 2.22. Схема включения
обмоток микросина по мостовой
схеме
/I-
, п aUB03 в/рад,
//* + (2nfL0)*
(2.68)
где все коэффициенты имеют те же значения, что и в
предыдущей схеме.
Рамочный индукционный датчик (рис. 2.23, 2.24)
предназначен для получения сигнала переменного напряжения,
величина которого пропорциональна линейному (угловому)
перемещению рамки датчика относительно статора. Для регистрации
угловых перемещений подвижную рамку датчика размещают на
некотором плече от оси вращения.
Основными достоинствами рамочного индукционного датчика,
благодаря которым он получил широкое применение в
прецизионных гироскопических приборах, является практически
полное отсутствие реактивного момента и малый уровень
нулевого сигнала при достаточно большой крутизне выходной
характеристики датчика.
Принцип действия рамочного индукционного датчика
основан на трансформации э. д. с. в подвижной сигнальной обмотке
(рамке), когда внутри ее проходит переменный магнитный
поток. Две катушки возбуждения создают магнитный поток в
неподвижном марнитопроводе датчика. Магнитопровод датчика
набирается из пластин ферромагнитного материала. Магнитные
125
потоки в рабочих зазорах магнитопровода направлены
навстречу друг другу и остаются неизменными по величине
независимо от перемещения сигнальной обмотки.
В среднем (нулевом) положении рамки датчика внутри
сигнальной обмотки проходят два встречных магнитных потока,
(7
У77Г
=J
zsza
I ' л —1
Уъых
г
ш
1
^
1+1
—1»
*{&
1
й
w
Рис. 2.23. Рамочный
индукционный датчик
Рис. 2.24. Схема соединения
обмоток рамочного датчика
равных по величине, вследствие чего результирующая э. д. с.
в сигнальной .рамке равна нулю. При перемещении рамки в
какую-либо сторону от нулевого положения внутри сигнальной
обмотки проходит результирующий магнитный поток, который
равен разности встречных магнитных потоков.
Величина э. д. £., трансформируемой в сигнальной обмотке,
пропорциональна результирующему магнитному потоку, а фаза
зависит от направления перемещения. Максимальная э. д. с,
наводимая в сигнальной обмотке, соответствует такому
положению рамки, при котором внутри нее проходит полный
магнитный поток одного воздушного зазора, а магнитный поток
второго воздушного зазора проходит вне катушки.
Крутизна выходной характеристики датчика зависит от
ампер-витков возбуждения и от числа витков сигнальной обмотки.
На рис. j2.25 приведена конструктивная схема рамочного
датчика с одним воздушным зазором. В воздушном зазоре
датчика расположены две сигнальные катушки, которые соединены
между собой встречно. При смещении катушек от
центрального (нулевого) положения с них снимается сигнал,
пропорциональный разности э. д. с, наводимых в каждой катушке.
126
Для того чтобы уменьшить влияние на выходные
характеристики датчиков углов вращающего магнитного поля гиро-
мотора и других внешних магнитных полей, микросины и
рамочные магнитные датчики целесообразно тщательно
экранировать.
Датчики момента, применяемые в поплавковых
интегрирующих гироскопах, как правило, работают на постоянном токе.
Рис. 2 25. Дифференциальный Рис. 2.26. Моментный датчик
рамочный датчик трансформа- с постоянным магнитом
торного типа
Наибольшее распространение в поплавковых интегрирующих
гироскопах получили моментные датчики, работающие по схеме
магнитоэлектрического прибора. В воздушном зазоре (рис. 2.26)
между магнитопроводом и полюсами магнита устанавливают
рамку, на которую подается управляющий ток.
При протекании постоянного тока через рамку на витки
действуют электромагнитные силы, которые и создают по оси
рамки момент. !Величина момента определяется по формуле
(1.75). Постоянный магнит и магнитопровод датчика крепят
неподвижно в корпусе прибора. Рамку крепят на поплавковом
гироузле. Управляющий ток на рамку подается через упругие
токоподводы. Иногда в целях уменьшения количества токопод-
водов к поплавковому гироузлу 'постоянный магнит и
магнитопровод датчика устанавливают на поплавковом гироузле, а
рамку прибора — неподвижно на корпусе прибора. Однако при
такой схеме датчика момента его необходимо тщательно
экранировать.
Магнитное взаимодействие между постоянным магнитом
поплавкового гироузла с ферромагнитными массами корпуса
прибора, магнитным лолем системы термостатирования и
другими внешними магнитными полями является причиной
появления дополнительных вредных моментов по выходной оси
прибора. Значительно меньше сказывается влияние внешних
127
магнитных полей на моментный датчик при использовании
многополюсного магнита. Теоретическая сторона этого вопроса
рассмотрена далее при анализе причин дрейфа поплавковых
приборов.
В качестве моментных датчиков поплавковых приборов
можно использовать микросин и рамочный датчик, которые
могут работать в этом случае как на постоянном, так и на
переменном токе. Напряжение постоянного (переменного) тока
постоянной величины 'подается на обмотки возбуждения, а
управляющие напряжения постоянного (переменного) тока на
сигнальные обмотки. Однако предпочтительней работать на
напряжении постоянного тока, так как напряжение
возбуждения переменного тока стабилизировать по фазе и амплитуде
весьма трудно.
В малогабаритных поплавковых интегрирующих гироскопах
в качестве датчика угла и датчика момента находит
применение дуалсин, который совмещает эти две функции. Статор дуал-
сина имеет 16 полюсов, на которых размещают обмотки
возбуждения и сигнальные обмотки датчика угла и момента,
а ротор дуалсина имеет 8 ярко выраженных полюсов.
Токоподводы поплавковых приборов
Питание гиромотора поплавкового гироузла, съем сигнала
с сигнальной обмотки датчика угла и подача управляющего
сигнала на обмотку датчика момента осуществляется через
токоподводы от корпуса прибора к поплавковому гироузлу.
Весьма важно, чтобы эти токоподводы практически были без-
моментными или имели пренебрежимо малые моменты. Этому
условию удовлетворяют тонкие ленточные токоподводы,
выполненные из высококачественного материала, имеющего малый
упругий момент и малые остаточные деформации.
В поплавковых интегрирующих гироскопах наибольшее
распространение получили ленточные токоподводы, форма
которых, представлена на рис. 2.27 и 2.28.
Упругие токоподводы поплавкового гироузла, несмотря на
их тщательное изготовление, создают по выходной оси прибора
упругий и постоянный моменты тяжения. Упругий момент токо-
подводов пропорционален углу р поворота гироузла.
Постоянный момент токоподводов обусловлен тем обстоятельством, что
токоподвод припаивают к поплавковому гироузлу и корпусу
прибора при нормальной температуре , (18—20°С) без учета
его удлинения при нагреве до рабочей температуры*. При ра-
* Для снятия постоянного момента токоподводы после припаивания
подвергают отжигу, пропуская через них электрический ток повышенной
плотности.
128
боте прибора за счет температурных деформаций токоподводов
они накладывают на поплавковый узел постоянные моменты.
Рис. 2.27. Упругий токоподвод Рис. 2.28. Упругий токоподвод
поплавкового прибора, имею- поплавкового прибора, имеющий
щий форму полуокружности форму «змейки»
Опоры поплавковых приборов.
Магнитные подвесы
Втулки и подпятники поплавковых приборов изготовляют
из камня (сапфира, рубина или агата), а цапфы гироузла —
из углеродистой стали или из карбида вольфрама. Цапфа и
внутреннее отверстие втулки должны иметь строго
цилиндрическую форму.
Несмотря на гидростатическую разгрузку, каменные опоры
поплавковых приборов являются весьма хрупким элементом.
Остаточный вес или плавучесть поплавкового гироузла,
магнитные натяжения и другие причины влияют на величину
нормального давления и момент трения в опорах прибора. Кроме
того, несоосность и перекос осей поплавкового гироузла и
корпуса прибора приводит к затиранию в опорах прибора, в
результате чего моменты трения возрастают.
Для уменьшения момента трения проходные камни и цапфы
гироузла тщательно шлифуют до 12—13-го класса чистоты
поверхности. Цапфы и внутренние отверстия проходных камней
должны иметь строго цилиндрическую форму, так как их
овальность может быть причиной «кажущейся» разбалансиров-
ки гироузла. Зазор между камнем и цапфой обычно не
превосходит нескольких микрон. Поэтому, если в рабочей жидкости
будут иметь место посторонние твердые включения, они могут
попадать в зазор между камнем и цапфой и вызывать резкое
возрастание момента трения и даже заклинивание гироузла.
Во избежание этого явления рабочая жидкость прибора должна
проходить тщательную фильтрацию. Кроме того, причиной
появления инородных включений в жидкости могут являться
5 Никитин и др.
129
резьбовые соединения гироузла и корпуса прибора, а также
плохая очистка деталей перед сборкой прибора.
Для точного центрирования поплавкового гироузла в
корпусе прибора и полного исключения момента трения вместо
каменных опор находят применение магнитные подвесы.
Магнитные подвесы воспринимают на себя остаточный вес или
плавучесть поплавкового гироузла и центрируют его относительно
корпуса прибора. Благодаря этому механический контакт опор
поплавкового гироузла полностью исключается.
Зазор между якорем и статором магнитного подвеса обычно
достигает десятка или нескольких десятков микрон, благодаря
чему вопросы заклинивания
поплавкового гироузла в
■0. опорах прибора практически
исключаются.
В качестве магнитных
подвесов используются
индукционные устройства
типа микросина,
электромагнитные характеристики
которых выбраны так, что
центральное положение
якоря подвеса относительно
полюсов статора являлось
положением устойчивого
равновесия.
Рассмотрим более
подробно принцип работы
магнитного подвеса. На рис.
2.29 приведена
принципиальная схема магнитного
подвеса. Статор магнитного подвеса представляет собой
симметричный четырехполюсный магнитопровод, набранный из
пластин ферромагнитного материала, на полюсах которого
расположены катушки возбуждения. Якорь магнитного подвеса
представляет собой цилиндрический диск, набранный из
ферромагнитного материала. Катушки полюсов статора питаются
Рис. 2.29. Схема соединения обмоток
магнитного подвеса
^в*
ф'1[>, ФгШ*г *Jfk Ф^[
I 1_ X—
Рис. 2.30. Схема электрических це- Рис. 2.31. Схема магнитных
цепей магнитного подвеса пей магнитного подвеса
130
напряжением переменного тока и подключены так, что имеют
мгновенную чередующую полярность, как показано на рис. 2.29.
Эквивалентные схемы электрических и магнитных цепей
магнитного подвеса приведены на рис. 12.30 и 2.31. Дри
дальнейшем исследовании будем полагать, что число витков w
и омическое сопротивление г всех катушек одинаковы. Тогда
уравнения таких электрических цепей магнитного подвеса будут
= п'3+~сГ \^dt + w
U =п4 + — [i^dt + w
U
U
dt
at
ЛФз
dt
d<S>i
dt
(2.69)
(2.70)
где последний член правой части в каждом из уравнении
представляет собой противо-э. д. с, наводимую в катушке
магнитным потоком соответствующего полюса; С — емкость
электрической цепи.
Уравнения магнитных цепей согласно рис. 2.31 имеют вид
ФЛ + ФЛ = (ясь + (ЯС)8>
Ф1Я1-ФЛ = (ЯС)1-(ЯС)8>
ФЛ + Ф4Я* = (НС)± + (ЯС)4,
ф1-Ф2+ф3-ф^ = 0,
где (НС) и [НС) 2, (ЯС)3, (ЯС)4 — магнитодвижущие силы,
развиваемые катушками
соответствующих
полюсов,
(HQ^wi; (2.71)
R2, i?3, R4 — сопротивления магнитному потоку воздушного
зазора дод соответствующим полюсом,
б—величина воздушного зазора между полюсом
статора и ротором;
f — площадь поперечного сечения полюса;
\i — магнитная проницаемость среды (воздуха)
зазора. В системе СИ |ш = 4я~7 гн/м;
3>2, Фз, Ф4 — магнитные потоки в соответствующих
полюсах подвеса в вб.
Обозначим через R0 сопротивление магнитному потоку
воздушного зазора, когда якорь магнитного подвеса находится в
5* 131
Ri
Я=-
Ф
геометрическом центре. Тогда при смещении якоря из центра О
на величину Дб под углом а к оси у сопротивления воздушных
зазоров магнитным потокам под полюсами будут
соответственно равны
Ь0 — А& COS a
R0(l — #cosoc),
о &2 ^0 — AS sin a n /1 „:„ \
#2 = -г =- : = #o(1 — *sma),
дя
й3 Ь0 -f- Ao cos a
■#0(1 + *COSa),
RA = ±=b + "Blna =R0{l+xstaa)9
где х=— относительное смещение якоря магнитного под-
ь
веса.
(2.72)
Из системы уравнений (2.69) найдем
U — w-
dt
U = ■
(-*)
4Ф2
dt
U—w
г +
Cs J
U—w-
йФ3
*я =
dt
hir)
U —w
1л =
1_
Cs
dd>4
dt
(2.73)
Учитывая (2.71) и 1(2.73), систему уравнений (2.70)
преобразуем к следующему виду:
\w*s + /?i (г + -^-)1 Фх + [а>% + Я2 (г +-^-)] Ф2 = 2и*/, |
[^ + ^(г + -^)]ф1-[^ + ^(г + -^)}Фз = 0) J (2j4)
[»% + R, (г + -±-)] Ф2 - [«Л + *4 (г + -£-)] Ф4 = 0,
фх — ф2 4- ф3 — Ф4 = 0.
132
Решение системы уравнений (2.74) дает
ф2 =
2ш
3 D
*«(r+")+a*
Rl(r+±yw>s
R:
i'+i)
+ W2S
[(Я2+Я4)(г + -^) + 2ш*5]г/, j
(я. + я^г+^ + ал]*/,
[(ЯхЧ-Я,)(г+^) + 2а*]1/,
(2.75)
где Я = (RtRzRs + ЯХЯ2Я4 + R1RsRi + Я2Я3Я4) (г + ~J +
1 ч*
Ф, =
шУ
+ 2 (ЯЛ + ЯХЯ3 + ЯХЯ4 + Я2Я3 + Я2Я4 + Я3Я4) w*s (1 + -±) +
+ 3 (Ях + Я2 + Я3 + Я4) да4*2 (г + -±) + 4ш653.
Подставляя в полученные выражения потоков значения
Яь Яг, Яз и Я4 из (2.72) и заменяя s=/co, получим значения
потоков в комплексной форме
rr r(l +xcosa) +}\l0u> ——— (l+xcosa)\ \
ф __шУ I О» Ч |
г (1 + *sina)-f-/ bo0* — "Г- (1 + *sina)
['(^-5г)+']{'(1-т) +
+'h-5r(';f)]}
г (1 — я cos а) + у L0<*> — 0 —-х c°s а)
L Ссо j
[i^_J.)+,]{,(I_i)+'
-•[^-^('Гт)]}
г (1 — х sin а) + / L0u> —- -—- (1 — х sin а)
L Са)_ J
K"-3r)4'('-f)+'
"h-zrt-T)]}
(2.76)
Фз-
«о
ф.
art/
«о
133
где L0=
ISP
Пользуясь системой уравнений (2.73), находим
соответствующие значения токов (в комплексной форме) в катушках
возбуждения полюсов статора
. /('-т)+'[('-"~'^)('~т)~'""';о'"]1^
" [Кч-кМ'(>-т)+ '
+ /U-0'
/,=■
Л
1-j')+i[(L°°-ih)(1-T)-Lo's'xs'ma}
[/(w.-^)HK-f)+
t +Ф-у(-т)]|
'-т)''1(^-Л('-т)+^5'п°]
-'[^-^O-f)]}
£/,
(2.77)
/
Таким образом, выражения (2.76) и (2.77) устанавливают
зависимости изменения токов в обмотках возбуждения
магнитного подвеса и соответствующих магнитных потоков в
зависимости от смещения якоря из центрального положения.
Центрирующая сила и жесткость
магнитного подвеса
Сила .Рэм электромагнитного притяжения, действующая на
якорь подвеса со стороны полюсов статора, равна изменению
магнитной энергии WQM, запасенной в воздушном зазоре 6 при
134
(2.78)
перемещении якоря на величину д8, т. е.
F _ dWm
9М~ дь '
Для случая, когда потоки рассеивания и утечки не
учитываются, а плоскости полюса статора и якоря можно принять
параллельными, формула (2.78) принимает вид
(2.79)
где Фи — магнитный поток через k-й полюс статора в вб\
J — площадь магнитного потока Фй. в м2;
[L — магнитная проницаемость зазора.
Имея в виду, что для комплексных величин имеет место
равенство
ф2 = фф*,
где Ф* — комплесно сопряженная величина Ф; из выражения
(2.76) согласно (2.79) найдем значение
электромагнитных сил в комплексной форме
= J_(**L\2 r2(1+^cosa)2 + [Lo"""^r(1+-"cosg)]
\
+
h- «н-ш
F,=
г 1 ",2
1 / wU \2 ^ (1 + X Sin ^ + 1°ш "~ "^^ + * Sin'
Co)
.-)]'
[(v
1 \2
Cu>
+
']{"('-t)
h-^O-f)]'}
+
r2 (1 — xcos
a)« + [
1
L0co
Co)
I2
— Я COS a)
(2.80)
(bo'
Ceo
+ I L0a>
_j_r2
1
0-t)
+
4 Ы \ Ro
l \2
r2 (1 —xsina)2+ L0o> ———(1 —л: sin a)
)'+"]{г,('-т) +
(-f)]'}
+ L0<»
135
Найдем результирующую электромагнитную силу FXi
действующую со стороны статора на якорь подвеса в направлении
его смещения:
_ 1 fwU\2
Ы \Ro)'
Fx =~- F1cosa -f- F2 sina —FgCosa —,F4sina
4-
Cu> J Co:
^-(^-ir)^]*
(2.81)
x
Lnu> — •
Ceo J C<»
1 \2 ;
_j_r2
Г "*"" C2a>2 J 4
Результирующая электромагнитная сила Fx, действующая
в направлении, перпендикулярном смещению якоря, равна
- Fx sin a + F2 cos a -J- Fg sin a — .F4 cos a = 0,
^;
Таким образом, при смещении якоря магнитного подвеса из
центрального положения со стороны статора на якорь в
направлении его смещения действует результирующая
электромагнитная сила Fx, знак которой зависит от соотношения
электромагнитных параметров системы.
Если г2 > (L0a> ) , то Fx согласно (2.81) направ-
V Со) / Са>
лена в сторону смещения якоря и центральное положение якоря
является положением неустойчивого равновесия. Этим
обстоятельством и объясняется появление сил магнитного
взаимодействия между статором и ротором в поплавковых приборах
при использовании в них в качестве датчика угла и момента
микросинов. Обычно емкость С в цепи возбуждения микросина
датчика угла не включают. В этом случае электромагнитные
силы взаимодействия отсутствуют только тогда, когда ось
ротора микросина будет совпадать с геометрическим центром
полюсов статора. При смещении ротора датчика от этого
положения появляется результирующая электромагнитная сила,
которая стремится сместить ротор дальше в направлении его
смещения.
Для того чтобы электромагнитные силы возвращали якорь
магнитного подвеса в исходное положение, необходимо
электромагнитные параметры системы выбрать так, чтобы
результирующая сила Fx была направлена в противоположную
сторону смещения Аб. Для этого получим неравенство
Lna) —
1
>Г2.
(2.82)
136
При выполнении условия (2.82) центральное положение
якоря магнитного подвеса является положением устойчивого
равновесия. Поэтому условие (2.82) называют условием
устойчивой работы магнитного подвеса.
На рис. 2.32 приведены графики тока i и электромагнитной
/ - —— г
Рис. 2.32. Графики
зависимости тока i и
электромагнитной силы от индуктивности
Рис. 2.33. К выбору рабочей точки
магнитного подвеса
силы FQM притяжения одного из полюсов магнитного подвеса
в зависимости от изменения индуктивности
Or
Электромагнитная сила имеет максимальное значение при
L*
rWC + 1
Со)2 '
(2.83)
Сравнивая выражения (2.82) и (2.83), видим, что
электромагнитные параметры магнитного подвеса должны быть
выбраны так, чтобы рабочая точка подвеса лежала на зарезонанс-
ном участке силовой характеристики (правее точки А), т. е.
L0w >L*o> =
Г2Ш2С2 -{- 1
Со)
(2.84)
Рабочую точку магнитного подвеса и соответствующую
настроечную емкость С выбирают по характеристике тока.
Якорь магнитного подвеса устанавливают в центральное
положение и снимают кривые изменения тока электрических цепей
подвеса в зависимости от величины емкости С (рис. 2-33).
Емкость С во всех четырех цепях должна изменяться одновре-
137
менно. Если электромагнитные параметры четырех полюсов
подвеса одинаковые, то кривые i=i(C) совпадают.
Положение рабочей точки А на кривой тока
характеризуется отношением г] активной мощности электрической цепи
при настройке ее параметров на данную точку к максимальной
активной мощности электрической цепи при резонансе:
i2 г I2
''max' ''max
где /о — ток в электрической цепи при центральном
положении якоря подвеса;
/шах — значение тока при резонансе.
Согласно (2.77)
/—/—/ — У — т — ^
•* п — 11Л — *ъс\ — i30 — i40 —
Тогда
Со)
■П = , (2-85)
откуда получаем
^Ю__Л_ = 1/1=ЛЛ (2.86)
Со> у 7)
Условие (2.82) устойчивой работы магнитного подвеса,
учитывая1^.86), представим в виде
или
(2.87)
(2.88)
где Ql= —— добротность магнитного подвеса.
г
Минимум функции правой части неравенства (2.88) имеет
место при г] = 0,5. Это соответствует случаю, когда магнитный
подвес настроен на вторую точку половинной мощности.
138
При t] = 0,5 условие устойчивой работы магнитного подвеса
имеет вид
QL «-*£_> 2.
U r
(2.89)
При настройке магнитного подвеса на вторую точку
половинной мощности (г} = 0,5) центрирующая сила магнитного
подвеса равна (рис. 2.34)
Рис. 2.34. Направление
центрирующей силы магнитного
подвеса
/UFu,
0<х<1
Рис. 2.35. Графики зависимости силы
центрирования Гц и жесткости Л'
магнитного подвеса от относительного
смещения якоря
, 2
F =.-p =J-(2*L\
(QL — 2) х
(2.90)
— 2) + 2] х*
Жесткостью К магнитного подвеса будем называть
отношение центрирующей силы \Fn к перемещению Дб:
^,,г -Рц _-_ ' (wUy
Ql-2
До 2^о0 \RorJ 1
[н/м].
1 +-Г (Ql-2) *2 + -7- IQlMl-2) +
8
+ 2]х*
На начальном участке, когда в знаменателе членами,
пропорциональными х2 и х4, можно пренебречь, жесткость Ко
будет равна
«.-5ДГ(^)'^-4^-
(2.91)
139
На рис. 2.35 приведены графики Fn и К в зависимости от
относительного смещения х. Центрирующая сила Рц магнитного
подвеса имеет параметрический характер. Так как £/=£/0sinco/,
где и0 — амплитудное значение напряжения, из (2.90)
получим
^
1 / wU0 \*,. п .. (Q, —2)х
— 2) + 2] х*
Приближенное уравнение движения поплавкового гироузла
с магнитными подвесами в радиальной плоскости (с учетом
центрирующей силы от. двух магнитных подвесов) имеет вид
^ + ^ + -J_№)2 (QL-2)(l-.cos2.0 ^
ад. ^о^; 1+_l(Ql_2)^2 + a.[Ql(Ql^2)+2]/
(2.93)
где т — масса поплавкового гироузла с учетом
присоединенной массы жидкости;
Ъ—удельный коэффициент демпфирования движения
поплавкового гироузла в радиальной плоскости
[см. формулу (2.160)].
Напряжение возбуждения U0 магнитного подвеса выбирают
из условия, чтобы максимальная индукция магнитного потока
В0 не превосходила допустимого значения ВДОш которое
выбирается так, чтобы магнитопровод подвеса работал до
насыщения.
Для контроля положения поплавкового гироузла
относительно корпуса прибора могут быть использованы сигналы,
пропорциональные изменению токов (или потоков) в обмотках
магнитного подвеса. Так, разница A/i,3 токов i\ и /3
характеризует смещение якоря магнитного подвеса в направлении 1 и
3-го полюсов.
Согласно (2.77) при т] = 0,5 имеем
2jQrUx cos а л v
А/,., «/,-/,- JL —- (2.94)
r(l+/){l-T + y[l + (QL-l)—J}
или, переходя к амплитудному значению, получим
А*1.з = ^ ХС05'\ (2.95)
л/1 + "J"{Ql~2)* + Y (Ql~2<& + 2) **
Для малых значений х приближенно можно принять
At13 = —^-xcosa, (2.96)
где #cosa — относительное смещение якоря магнитного подвеса
в направлении 1 и 3-го полюсов.
2.6. ДРЕЙФ ПОПЛАВКОВЫХ ИНТЕГРИРУЮЩИХ ГИРОСКОПОВ
Точность работы поплавковых интегрирующих гироскопов
проверяют на прецизионных стендах, представляющих собой
одноосный гиростабилизатор с точным оптическим устройством
для контроля угла его поворота. В качестве чувствительного
элемента стенда используется испытуемый поплавковый
интегрирующий гироскоп.
Дрейфом содр поплавкового интегрирующего гироскопа
называют скорость собственного самопроизвольного ухода
платформы стенда вокруг оси стабилизации.
При испытаниях дрейф поплавкового прибора разделяют на
две составляющие: постоянную и случайную. Величина посто-
I I б) в)
III
а)
Рис. 2.36. Стандартные положения поплавковых
гироузлов при определении дрейфа гироскопов
янной составляющей дрейфа поплавкового прибора зависит от
величины отрезка времени между запуском прибора и
моментом определения дрейфа, меняется для одного и того же
прибора от запуска к запуску и зависит от положения
поплавкового гироузла относительно поля силы тяжести. В связи с этим
постоянную составляющую дрейфа поплавковых
интегрирующих гироскопов определяют для трех стандартных положений
прибора (рис. 2.36).
В положении а выходная ось поплавкового гироузла
вертикальна, а ось кинетического момента Н и ось стабилизации
стенда находятся в плоскости горизонта. В положении б
выходная ось поплавкового гироузла и ось стабилизации стенда
141
находятся в плоскости горизонта, а ось кинетического
момента Я — вертикальна. В положении в ось кинетического
момента Я и выходная ось поплавкового гироузла находятся в
плоскости горизонта, а ось стабилизации стенда — вертикальна.
Случайная составляющая дрейфа представляет собой
среднеквадратичное отклонение скорости дрейфа отдельных замеров
от постоянной составляющей дрейфа.
Случайная составляющая дрейфа очень сильно зависит от
периода наблюдений. Так, для одного и того же прибора
случайная составляющая дрейфа при периоде наблюдения в 1 мин
будет значительно больше случайной составляющей при
периоде наблюдения 5 мин.
Второй способ определения точности работы поплавковых
интегрирующих гироскопов, который также находит широкое
применение, заключается в том, что интегрирующий гироскоп
включается в режим работы датчика угловой скорости. Сигнал
с датчика угла прибора подается через фазочувствительный
усилитель на датчик момента. Замеряя ток в датчике момента,
определяют величину вредных моментов вокруг выходной оси
прибора. Этот способ позволяет непрерывно наблюдать и
фиксировать изменение величины моментов, действующих на
гироскоп вокруг выходной оси прибора.
В зависимости от внешних возмущений суммарный дрейф
поплавкового прибора можно разделить на три разновидности
— не зависящий от ускорений,
— пропорциональный ускорению,
— пропорциональный квадрату ускорения.
Величина дрейфа гироскопа определяется суммой вредных
моментов Мвр, действующих на поплавковый гироузел вокруг
выходной оси прибора. В соответствии с разновидностями
составляющих дрейфа гироскопа вредные моменты, действующие
на поплавковый гироузел вокруг выходной оси, можно также
разделить на три группы.
1. Моменты, не зависящие от ускорений.
Эта группа вредных моментов включает в себя:
а) упругие моменты токоподводов, величина которых
пропорциональна углу поворота поплавкового гироузла. Кроме
того, токоподводы могут создавать постоянный по величине
вредный момент по выходной оси прибора;
б) моменты магнитного взаимодействия между
ферромагнитными массами поплавкового гироузла с внешним
магнитным полем, остаточным магнитным полем системы термостати-
рования, магнитным полем статора датчика угла. Наиболее
сильно проявляются эти моменты в поплавковых приборах,
имеющих датчик момента с подвижным магнитом;
в) реактивные моменты от индукционных датчиков угла
типа микросина. Моменты, не зависящие от ускорения, могут
быть приближенно оценены при испытании гироскопа, когда
142
выходная ось поплавкового гироузла вертикальна. В этом
случае неуравновешенность масс поплавкового гироузла не
вызывает появления момента относительно выходной оси.
Угловая скорость поворота платформы вокруг оси
стабилизации в этом случае будет равна сумме дрейфа гироскопа в
результате действия вредных моментов и проекции
горизонтальной составляющей суточного вращения Земли на ось
стабилизации. При развороте стенда с гироскопом вокруг
вертикальной оси на 180° проекция горизонтальной
составляющей суточного вращения Земли на ось стабилизации изменит
знак на обратный, а вредные моменты, вызывающие дрейф
гироскопа (за исключением момента магнитного
взаимодействия магнитно-твердого железа поплавкового гироузла с
внешним магнитным полем), сохранят знак неизменным. Тогда
среднее значение двух замеров будет характеризовать дрейф
гироскопа в результате действия вредных моментов, не
зависящих от ускорений.
2. Моменты, зависящие от ускорений.
Вредные моменты, пропорциональные ускорениям, можно
рассматривать как результат остаточной несбалансированности
поплавкового гироузла. Остаточный вес, или плавучесть
поплавка, а также наличие дифферента его вызывают моменты
трения в опорах прибора. Несовпадение центра тяжести и центра
давления вытесненного объема жидкости поплавкового
гироузла с его выходной осью приводит к появлению момента
небаланса вокруг этой же оси.
Момент несбалансированности поплавкового гироузла и его
дифферент в процессе работы прибора могут изменяться за
счет температурных деформаций поплавкового гироузла и его
элементов, изменения рабочей температуры и механических
деформаций поплавкового гироузла при изменении наружного
атмосферного давления, действующего на сильфон прибора.
К этой группе относятся и моменты, вызванные
конвекционными потоками жидкости при неравномерном температурном
поле жидкости в зазоре. Вредные моменты, действующие на
поплавковый узел вокруг выходной оси, от конвекционных
потоков жидкости не зависят от ее вязкости и пропорциональны
ее плотности и ускорению (см. стр. 157).
3. Вредные моменты вокруг выходной оси поплавкового
узла, пропорциональные квадрату ускорений, возникают в
результате неравножесткости и нежесткости его конструкции при
работе прибора в условиях постоянно действующих ускорений,
а также линейной и круговой вибрации.
2,7.. АНАЛИЗ ПРИЧИН ДРЕЙФА ПОПЛАВКОВЫХ ПРИБОРОВ
В данном параграфе дается анализ некоторых причин
дрейфа поплавковых приборов. Конечно, эти причины вызывают
погрешности и у других приборов непоплавкового типа, но для
143
поплавковых приборов (поплавковых интегрирующих
гироскопов, поплавковых прецизионных датчиков угловой скорости,
поплавковых акселерометров), к которым предъявляются очень
высокие требования по точности работы, рассматриваемые
причины очень существенны.
В более грубых приборах эти причины могут вызывать
погрешности, которые лежат в пределах точности измерения, и
их можно не учитывать.
Цель данного параграфа дать рекомендации для оценки
погрешностей приборов, вызываемых различными причинами.
Упругий момент токоподводов
При проектировании поплавковых приборов или анализе
их погрешностей необходимо оценить величину упругого
момента, действующего на поплавковый узел вокруг выходной
оси прибора от токоподводов. 'Углы поворота поплавкового
гироузла обычно малы и лежат в таких пределах, что
геометрическую форму токоподвода с достаточной степенью точности
можно считать неизменной. Определим упругий момент для
токоподвода (см. рис. 2.27).
При повороте поплавкового гироузла вокруг его оси на
малый угол »р 1в точке В заделки (пайки) на упругий токопод-
вод действует некоторый момент М (см. рис. 2.27), сила Р в
касательном и сила Q в нормальном направлении к токопод-
воду.
Примем систему координат ху с началом в точке А с осью х
в направлении ОА и осью у в перпендикулярном направлении
вверх. Тогда на элемент dS токоподвода бесконечно малой
длины действует изгибающий момент
Ms = М + Р (/ — х) — Qy, (2.97)
где 1=АВ.
Для токоподвода, имеющего прямоугольную форму сечения,
соотношения для упругих деформаций для элемента длиной dS
будут иметь вид
MsydS \2MsydS M^xctS \2MsxdS
dkx= = ; dA# = = , (2.98)
EJ Ebh* * EJ Ebh* V '
MsdS \2MsdS
EJ Ebh?
где x, у — координаты элемента dS токоподвода;
dAcp — угол поворота правого конца элемента
относительно левого;
dAx; dAy—перемещения правого конца, обусловленные
поворотом элемента dS токоподвода на угол dAcp;
144
b, h — линейные размеры поперечного сечения
токоподвода;
т ___ bh*.
j — «
12
Е — модуль упругости материала токоподвода.
Интегрируя уравнения (2.98) по всему контуру токоподвода^
и учитывая (2.97), получим
-^ [MjydS + Pj (I - х) ydS - QJj/2dSJ,
Д* = -
12
Ay = -¥- Щ xdx + Pj x (I - x) dS - QSxydSJ,
Дф = ■
12
Ebh3[MjdS + PS(l-x)dS-Q$ydS^
(2.99)<
где Ax; А{/ и Аф — представляют собой соответственно
перемещения и угол поворота правого конца
токоподвода, связанного с поплавковым гиро-
узлом относительно его левого конца,,
укрепленного на корпусе прибора.
Для малых углов р поворота поплавкового гироузла с
точностью до величин 2-го порядка малости можно считать, что
Д*=0; Ду=гцр; Дф = р. (2.100)
Уравнения (2.99) с учетом (2.100) примут вид
M\ydS -f PJ (/ —x)ydS — QSy*dS - 0,
Ebh3
M\ xdS + P\x{l—x)dS — Q^yxdS -^-гцр,
12
Щ dS + P]{1- x) dS - (tfydS = ^ p.
/ / /12
(2.101>
При вычислении интегралов в уравнениях (2.101) для малых
прогибов токоподводов можно не учитывать деформаций токо-
подводов и подставлять в указанные интегралы координаты
элемента dS, которые он имел до прогиба.
Для рассматриваемого токоподвода, имеющего форму дуги*
окружности радиуса R, текущие координаты х, у элемента dS
можно выразить через угол <ф:
где R-
I — х = R (1 + cos ф); у = R sin ф; dS = Rdty,
145
Имея в виду, что угол \|) меняется от нуля до я, получим
\dS = # Мф = «Я; JxdS =«R\
i о /
§ydS = R2] sin tyd<|> = 2R2; J yxdS = 2R3,
j{l—x)dS=R*j(\+cos <|>) d([i = яЯ2,
■xR3
(2.102)
№dS = R4 sin* №=--'^-,
t о 2
fx(/—*)MS= Я3|(1—cos2 4>)dS = — rctf3,
i о 2
j(/ —x)*/dS - #3J(1 + cos Ф) sin 4>dtj? = 2RS.
)
Учитывая полученные значения интегралов, представим
систему уравнений (2.101) в следующем виде:
2М + 2RP — — RQ = 0,
kM + kRP-2RQ = ^$.
Решение системы уравнений (2.103) дает
(2.103)
М =
ЕЬЬ? (16 — л2) R + ^ (к» — 8)
12
7ti?2 (U2 __ 8)
Р,
р = ЕШ_ 2(R-rJ
12 ' ~#» Р'
Q^
90
12 #2 (Я2 _ 8)
(2.104)
)
Момент МХ1 действующий на поплавковый гироузел при
повороте его на угол р вокруг выходной оси со стороны одного
токоподвода, равен
М = — М — Р = ЕШ Г (16-*2)# + Мя2-8)
х ц 12 L я^2(Я2 —8)
2М#-'ц)1р= Ebh* (16 - д») i?2_(r,2_8) Гц# - r2 (J[2 __ 8)
nR* JP 12 ' 7г#3(я2--8)
(2.105)
146
Таким образом, зная количество токоподводов поплавкового
узла, их размеры и возможный угол отклонения р, пользуясь
формулой (2.105), можно определить величину упругого
момента, действующего на поплавковый узел вокруг выходной
оси.
Влияние магнитных полей на работу
поплавкового прибора
При плохой экранировке прибора внешние магнитные поля,
взаимодействуя с ферромагнитными массами поплавкового
гироузла, создают вокруг его выходной оси момент, который
вызывает дрейф прибора.
Наиболее сильно проявляется влияние внешних магнитных
полей на работу поплавкового интегрирующего гироскопа, в
котором постоянный магнит моментного датчика укрепляют на
поплавковом гироузле. На магнит, расположенный в
однородном магнитном поле, действует вращающий момент Л1вр,
который стремится повернуть магнит по направлению внешнего
поля:
МВР = МиНsin<? (дин-см) =-^-sincp [Г-см], (2.106)
где Мш — магнитный момент магнита, равный
Мм = 2ml,
т — магнитная масса одного из полюсов,
сосредоточенная в его эквиполюсе;
2/ — расстояние между эквиполюсами;
Ф—угол между силовыми линиями поля и магнитной
осью магнита (рис. 2.37);
Я—напряженность внешнего магнитного поля.
Для снижения влияния внешних магнитных полей на работу
прибора целесообразно применять многополюсные магниты.
Так, применение шестиполюсного магнита практически
полностью исключает влияние внешнего магнитного поля.
Мысленно разобьем шестиполюсный магнит (рис. 2.38) на
три отдельные перекрещивающиеся друг с другом в точке О
двухполюсные (N—S) магниты. Будем считать, что все полюсы
магнита имеют одинаковые по величине, но чередующиеся по
знаку магнитные массы т, имеющие общую ось поворота.
Тогда суммарный вращающий магнитный момент,
действующий на шестиполюсный магнит в однородном магнитном поле,
равен
Мвр = MUH [sincp — sin(cp + 60°) + sin(cp + 120°)] =
= ММЯ[(1 — cos 60° + cos 120°) sincp -f
+ (sin 120° —sin 60°) cos ф] = 0. (2.107]
и:
Момент магнитного взаимодействия шестиполюсного
магнита с ферромагнитными массами «твердого» железа корпуса
прибора также значительно меньше, чем у двухполюсного
магнита.
Хорошие результаты дает также применение моментных
Рис. 2.37. Двухполюсный маг- Рис. 2.38. Шестиполюсный
пит в однородном магнитном магнит в однородно^ магнит-
поле ном поле
датчиков с четырехполюсным магнитом, диаметрально
противоположные полюса которого имеют одинаковую полярность.
Применение четырехполюсного магнита с чередующейся
полярностью полюсов нецелесообразно, так как его моменты
магнитного взаимодействия с внешним магнитным полем и
ферромагнитными массами корпуса прибора по амплитуде равны
моментам двухполюсного магнита.
Влияние эксцентриситета и перекоса
между осью вращения поплавкового гироузла
и осью цилиндра поплавковой камеры на моменты
трения в опорах прибора
При нулевой плавучести поплавкового гироузла и отсутствии
у него дифферента единственным источником момента сухого
трения в опорах прибора оказывается нормальное давление
в опорах от гироскопического момента МТ9 который возникает
при вращении поплавкового гироузла вокруг выходной оси с
угловой скоростью р (рис. 2.39).
Если обозначить через /оп — расстояние между опорами
прибора, то давление Fr в опорах от гироскопического момента
будет
Ft=-^- = 2L. (2.108)
148
Нормальное давление Fr в опорах прибора является
причиной появления моментов трения.
При вращении поплавка относительно поплавковой камеры
N
«Р,
—С -
L~«
\
^ 1 \
Iky t
»
jwn-p
Н V
Рис. 2.39. Направление давления в опоре
от гироскопического момента
в случае наличия эксцентриситета между ними (рис. 2.40) на
поплавковый гироузел действует гидродинамическая сила i7*,
равная
Рис. 2.40. Эксцентричное расположение
поплавкового гироузла в поплавковой камере
F= 1 е$ [Г],
981о3 r J
(2.109)
где F — гидродинамическая сила в Г\
[I — динамический коэффициент вязкости в пз\
г\ — радиус поплавка в см\
/п — длина поплавка в см\
* Выражение (2.109) для гидродинамической силы известно из
гидродинамической теории смазки.
149
е—эксцентриситет между поплавком и цилиндром
поплавковой камеры.
Эта гидродинамическая сила F действует на поплавок в
направлении, перпендикулярном линии центров ООи и
воспринимается опорами поплавкового прибора, в результате чего
давление F{ на каждую Из двух опор, вызванное
гидродинамической силой, будет
щ^ер (2Л10)
1 981оЗ
Сравним величину давления F\ с давлением Fv в опоре от
гироскопического момента, определяемым соотношением
(2.108):
Fi _ 3jqvrf /п/оп
Fr ~~ 981 б3Я
Имея в виду соотношение (2.53), получим
_£^= 1,5-^1. (2.111)
Fr hb*
Если, например, 6 = 0,15 мм, /оп=Ю0 мм, е = 0,005 мм, /i = 5, то
/у/?г = 6,6.
Из приведенного примера видно, что наличие
эксцентриситета между поплавком и цилиндром поплавковой камеры при-
Рис. 2.41. Перекос осей поплавка и поплавковой
камеры
водит к резкому возрастанию давления в опорах, а
следовательно, и моментов трения в опорах.
Рассмотрим теперь влияние на работу прибора перекоса
осей поплавка и цилиндра поплавковой камеры (рис. 2.41).
Обозначим через е угол между осью вращения поплавка Ох
150
и осью цилиндра Ох\ поплавковой камеры. Текущее значение
эксцентриситета е сечения на расстоянии х от начала
координат равно
е = xigs^xs. (2.112)
Поперечное сечение цилиндра поплавковой камеры в системе
координат yz, связанной с поплавком, представляет собой
эллипс, уравнение которого может быть записано в следующем
виде:
й,-«).«*■ +^,= 1> (2Л13)
где го — радиус цилиндра поплавковой камеры.
Учитывая, что y=rcosq), 2=г sin ф, где г — текущее
значение расстояния какой-либо точки на поверхности цилиндра
поплавковой камеры от оси х; ф — центральный угол оси z до
рассматриваемой точки, получим
(г cos 9 — ef cos2 s + г2 sin2 ф = r\,
или
г2 (sin2 ф + cos2 e c6s2 ф) — 2re cos2 s cos ф + e2 cos2 e = r20, (2.114)
Принимая приближенно cose^l, из выражения (2.114) с
точностью до квадратичных относительно s получим
г = г0 + е cos <p.
Тогда текущее значение зазора 6i между поплавком и
цилиндром с той же точностью будет равно
Ьг = г — гг = 8 + е cos ф = о + xs cos ф, (2.115)
где 8 = го—п.
Второй член в (2Л16) отражает влияние на зазор текущего
значения эксцентриситета s для данного сечения по оси Ох.
Выражение (2.115) показывает, что с точностью до величин
второго порядка малости профиль я-го сечения цилиндра
можно принимать за окружность.
Элементарная гидродинамическая сила d-Fz, действующая на
поплавок в направлении оси z в лс-м сечении на элементарной
его длине dx, может быть определена по формуле (2.109), где
/п надо заменить па dx:
dF ^*w±$edx.
z 9815»
151
Учитывая (2.112), получим
z 98163
Элементарная сила dFz действует относительно оси Оу на
плече х и создает момент
бтсрг
dMv = dFzx = —~± Вех2 dx. (2.116)
Интегрируя выражение (2.116) по х в пределах от —
до -| , получим выражение гидродинамического момента,
вызванного перекосом осей поплавка и цилиндра поплавковой
камеры:
у 981В»
Ре x2dx = ' п ер. (2.117)
Г J 2-98163 Y V '
Момент My воспринимается опорами поплавка. Давление 7*2
в опоре, вызванное наличием момента Му, равно
F2 = ' п еЗ. (2.118)
2 2-98163/оп r v '
Тогда, учитывая (2.63) и (2.108), получим
Для оценки величины соотношения (2.119) рассмотрим
пример. Пусть 1/п=60 мм\ в = 0,15 мм; е=0,0004; А = 5, тогда
-^- = 3,2.
Из разобранных примеров видно, что для обеспечения
качественной работы поплавкового прибора необходимо
тщательное центрирование поплавка относительно оси цилиндра
поплавковой камеры. Эксцентриситет или перекос ,оси поплавка
относительно оси цилиндра поплавковой камеры приводит к
тому, что опоры поплавкового прибора воспринимают
дополнительное давление, которое по своей величине может во много
раз превосходить давление в опорах, вызванное
гироскопическим моментом.
152
Тепловой дрейф поплавковых интегрирующих гироскопов
При наличии неравномерного температурного поля жидкости
в кольцевой щели поплавковой камеры могут возникнуть
конвекционные потоки жидкости, которые являются причиной
возникновения вредного момента вокруг оси поплавка.
Представим себе, что в кольцевой щели поплавковой камеры
Рис. 2.42. Положение точки Рис. 2.43. Приближенная схема
перегрева А в кольцевой щели' течения жидкости в кольцевой
щели
имеется точка А местного перегрева, так что температура
жидкости по кольцевой щели меняется по закону (рис. 2.42)
* = /0 + A*oCosq>, (2.120)
где t0 — номинальная температура жидкости;
Д/о —температура перегрева жидкости в точке А;
t—текущее значение температуры жидкости по
зазору.
При рассмотрении данного вопроса будем принимать
движение жидкости плоским, полагая £^ = 0. Кроме того, так как
толщина 6i кольцевого зазора между поплавком и цилиндром
поплавковой камеры много меньше радиуса Г\ поплавка,
радиальной скоростью vy движения жидкости и кривизной
траектории ее движения будем также пренебрегать.
Приближенная картина одномерного течения жидкости в
зазоре представлена на рис. 2.43.
Приближенное уравнение установившегося течения вязкой
жидкости в зазоре, полученное из уравнений Навье—Стокса,
имеет вид
vJb=z LJ^ + v/_^+^-\ (2.121)
z dz p dz ^ \ dz* dy* I 4
153
и должно удовлетворять уравнению неразрывности
д
dz
Ю = 0,
(2.122)
где
dz = rdy\
vz — скорость жидкости вдоль зазора;
Z — проекция массовой силы на ось Oz\
р — давление жидкости;
Z =gcos(cp+(po);
v — коэффициент кинематической вязкости жидкости
= J^-
Р
Будем полагать, что скорость движения жидкости в
кольцевой щели настолько мала, что жидкость всегда успевает
принять температуру, соответствующую данной точке. Тогда
текущее значение плотности р и вязкости жидкости \х будут
соответственно равны
Р = Ро (1 аА0 = Ро О — аА*0 COS ф),
^ = ^0(1 — Тд0 = М * — Т А*о cos <p),
(2.123)
(2.124)
где а — температурный коэффициент плотности жидкости;
у — температурный коэффициент вязкости жидкости.
Из уравнения неразрывности (2.122) после интегрирования
получим
Ш
(2.125)
Подставляя vz из (2.125) в (2.121), найдем
Р(у)
dz
Z —
+ v
[■
/вр\._ *£_
\дг } v dz*
№ + ■
1
р
др
dz
■ +
d*fti)
ду* J
(2.126)
Пренебрегая в уравнении (2.126) квадратичными членами
f2(y) 1-jA и произведением —у • —• как малыми, приближенно
получим
ду*
v dz
(2.127)
154
Так как правая часть уравнения (2.127) не зависит от у, то
после его интегрирования найдем
/«-(■f-*—V*)-£ + G»+C
и согласно (2.125)
(2.128)
■■-f[(-r-2—ь*)£+<*+4 (2129>
Уравнение (2.129) должно удовлетворять граничным
условиям:
при у = 0 vz = P/i,
при £/ = &i i>z = 0.
Подставляя (2.130) в (2.129), найдем
(2.130)
Ci =
PriP+f —
ар
и уравнение (2.129) примет вид
V / 2i
01
ар
dz
Z)y(y-61). (2.131)
Из условия сохранения вещества массовый расход Q
жидкости через сечение 6i остается постоянным и равен
Q = jpM</=f-P^-4(v
дР
dz
(2.132)
Из выражения (2.132) следует
dz *?
12!
FQ-
(2.133)
Учитывая, что dz=rd<$, перепишем уравнение (2.133) в
полярных координатах:
-^-Q. (2.134)
■i-.-^—^'iP + P*-
dcp
После интегрирования выражения (2.134) по ф в пределах
от 0 до 2я получим
2тс 2тс 2тс
р (2«) - р (0) = %г\ Ь j -£- dq) + Г1 j pzd? - 12Qrx j -£- Лр. (2.135)
155
Так как давление р имеет период 2л по ф, то р(2п) —р(0) =
= 0, а из выражения (2.135) найдем значение Q:
2* 2,
i bi i °
2х 12 2ic
0 = — г^0-—- + — (2.136)
4 2 2* 12 2ч Х '
- ^3
о J о
Касательное напряжение вязкой жидкости равно
v-^-ir- (2Л37)
Учитывая (2.131) и (2.133), найдем касательное напряжение
xyz на поверхности поплавка (у=0):
' &i 2p \ V dz V /
= -^ifo + 6Q-^. (2.138)
Момент Мх вязкого трения, действующий со стороны вязкой
жидкости вокруг оси х на поплавок, равен
К = riln J(v)*-o<*P = -4г5/„у^Лр +
о ou
2тс
+ 6Q/%f-S-dq> [Г-еж], (2.139)
0 *
где /п — длина поплавка.
Рассмотрим частные случаи.
1. р = 0; эксцентриситет е между корпусом прибора и
поплавком равен, нулю. Тогда 6i = 6 = /*o—/*i = const, Z=
= g-cos((p + (po).
Из выражения (2.136) следует
2тс
Г (1 — аА^0 cos ф) cos (ф + <р0) cfcp
q __ _ Poft3g о _. gpo^aA^o cos cpo .g 14Q4
12^о ' 2.тс " 24;а0 " V
j (1 — yAt0cosy) dep
0
156
Согласно (2.139) получим
2л
Mx = 6Q^^J(l-YA/0cosV)dV=12«^^Q-
= — /%*РоаД<оСО&Фо- (2.141)
Из выражения (2.141)' видно, что момент Мх не зависит от
вязкости жидкости \х. Это объясняется тем обстоятельством, что
расход Q жидкости обратно пропорционален ее вязкости. Из
выражения (2.141) также следует, что если точкой перегрева
является верхняя (фо= —) или нижняя (фо=——) точка
зазора, то конвекционные потоки жидкости справа и слева от
поплавка симметричны, а момент Мх, действующий на поплавок,,
равен нулю.
Пример: /п=6 см; п = 3 см; 6 = 0,015 см; Af0=0,5°C; cos<p0 =
= 1;арж= 1,5- Ю-3;
Мх = — 9-6-0,015-1,5- Ю-3 = 0,001 Г-см.
При кинетическом моменте гироскопа #=1000 Г-см-сек
тепловой дрейф содр гироскопа будет
соДр = -^- = 1 • Ю-6 1/сек « 0,2 град/час.
н
2. Точка перегрева лежит на линии центров 00{; р = 0;
Z = gcos (ф + ф0)> h = s + б cos ф.
Согласно (2.136) имеем
2тс
Q _ Po^g _0
j (1 — аА^о cos) cos (фо + ф) dq>
С 1 — уМ0 cos ф
J : г.*
12jx0 2x
(l + ^-cosf)
PobsgaAt0 cos фр
^НтУГЫ(тУ+Ь-т]
157:
Принимая приближенно
5
1'-(т)Тт[<(т)Ч*т1 =
= '+3(i)'+i(iK
получим
q = gp0aAfr)53cos(po ,2 142v
24,0[l+3(-f-)4-f(f)vA^o
Согласно (2.139) получим
Мх = 6Qr»/0-g-f '-ТА*.™,, ^ =
8 (41+TC0Sv
-■^w^{[--(f)T""-
-^['-(тУГЧ'-ШГ
Опуская члены ( —) , (~-) и т- Д-» получим
3 / е \2 е
1+т(т) +тЛ'т
Мх = "т- /■ i^SpoaA^o cos ф0
.^i^v+Kfiv^
«-=- r2/n8PoaA/0 [l _ -1 (-f-)2 - -f (т) 7^°] C0S фо' (2Л43)
Из выражения (2.143) видно, что второй член в квадратных
скобках, вызванный наличием эксцентриситета, несколько
уменьшает момент вязкого трения, а знак третьего члена зависит как
от знака эксцентриситета е, так и от знака перепада
температуры Ato.
Вынужденное движение поплавка
на поддерживающем слое жидкости
относительно корпуса прибора при линейной вибрации
Рассмотрим вынужденное движение поплавка в жидкости
при наличии вибрационных линейных перегрузок. При этом
смещением центра тяжести поплавка и его деформациями, вызван-
158
jy=jsinu)t
ными неравножесткостью и нежесткостью конструкции, будем
пренебрегать. Кроме того, примем, что поплавок имеет
некоторую плавучесть (положительную или отрицательную). Тогда
при наличии радиального зазора в
подшипниках прибора поплавок при
вибрации будет совершать в
жидкости вынужденные колебания
(рис. 2.44), амплитуду и фазу
которых необходимо определить.
В данном случае радиальной
vy и осевой юх скоростями
жидкости в зазоре между поплавком и
поплавковой камерой будем
пренебрегать, принимая, что при
движении поплавка вдоль линии центров
00х жидкость движется вдоль
зазора со скоростью Vq,.
Так как скорость аф жидкости
является непрерывной и
дифференцируемой функцией, а величина
зазора 6i<C/\ разложим скорость v9
в ряд Тейлора по степеням у:
Рис. 2.44. К движению
поплавка относительно
поплавковой камеры при линейной
вибрации
»,-<^.+(4H-.'+4{^U+- *'«>
Выражение (2.144) с точностью для членов 3-го порядка
малости по у должно удовлетворять граничным условиям
при у = О ^ф = — е sin cp,
при у = Ьг Vcp = О
и условию неразрывности
h Ф
J v<pdy = — г J e cos cpdcp + Q.
(2.145)
(2.146)
В выражении (2.146) Q = 0, так как Q может быть только
функцией времени, а для ф = 0 и ф=я Q = 0. Следовательно, для
любого сечения Q = 0.
Из выражения (2.146) имеем
Kb=o8l +4- (-^-)у=0ц+4- (-^U8?=-"*«<*■ <2-147)
Подставляя условия (2.145) в (2.144) и (2.147), получим
ду Jy=0
*!+ +
d*v„
ду* Л=о >
8? = esin<
(^f)y=o 6i +-Н^г),=о S? = -г^!пФ + Si*sin4>- |
(2.148)
159
Имея в виду, что 8\ = 6 — £ coscp, из системы уравнений
(2.148) найдем
т
бге БШф
ду Jy=o
4esincp
(5 — е coscp)2
( а% \ __ 12л? sin ф _
V ду* Л=о ~~
Ь — е cos cp
бе sin ф
(Ь — е coscp)3 (Ь — е coscp)2
(2.149)
(2.150)
Если учесть (2.149) и (2.150), выражение (2.144) примет
вид
v9 = —^sincp—
6re sin ф _
(Ь — е со5ф)2 ~ (Ь ■
4£_sinjp_l
— е созф)] ^ "•"
i Г 6resincp ЗеsinФ 1 2 ,9 lt-n
• l(S —есозф)3 (5 —есо5ф)2]^ ' ^.ioi;
Укороченное уравнение Навье — Стокса для движения
жидкости в зазоре имеет вид
+ <V
гдф
аР
гдср
д2и„>
(2.152)
Значение инерционных членов в левой части уравнения
(2.152) представим через приближенное значение скорости из
уравнения (2.151):
ду* р. \
др
гдср
р2 +Р
Ъ+ъ-?*-
dt
1 ( dp гЛ . ( Г 6resin©
гдф
12ге2 sin ф cos ф
4е2 sin
(5 — е cos cp)3
18ге'
Р-
ф cos ф 1 , Г Qre sin ф
coscp)2 J " ' [(В—есозф)3
гдф
4е sin cp
ф)2 ^ — е coscp
Зе sin ф
+
(Ь — е cos cp)2
+
. *^ге2 51'псрсб5ф бе2 sin ф cos cp "1 J (^>ш_ф
' (3-еcoscp)4 (Ь — е cosф)3 J^ J "•" ^ \ г
COS cp
+ 2
-+
6г
(S — £С05ф)2
22
(о — есозф)2
+
S — е cos cp
72r2
У +
36r2
1 +
60r
(b — ecostp)* (Ь— всозф)3
+
84г
24
ч(Ь — е cos ср)5 (5 — е cos ф)4 (5 — е cos ф)3
36г2 36г
У3 +
(Ъ—е cosср)б (Ь — еcosф)
-+—-—VI +
5 (5 — ecoscp)V J
е6 sind ф
г (Ь — ecos(p)2
90г
[_4(-
Зг
+
22
(5 — е coscp)2 (Ь— еcoscp)
- е cos cp
У' +
180r2
(S —e coscp)4
72/-2
(S — e cos cp)3
180
> —e cos cp):
■ +
160
+ -^ V-(—^ *L +
(о — е cos ср)2/ \(Ъ — е cos ф)6 (Ь — е cos ф)4
+ r 18 JH1- <2Л53>
(о —ecoscp)3/ J J
Пренебрегая в выражении (2.153) малыми членами,
содержащими е2 и е3, приближенно получим
df/2 [X \Г0ф ^ у Г Т{ ' L(b— ^СОБф)2
* lj,_[ * ? V]. (2.154)
о— есозф J L(s — есовф)3 (b —ecoscp)2J J
Интегрируя уравнение (2.154) дважды по у, получим
уточненное значение скорости v<p:
0,«JL/Je__pzV—^EJLfJt + -Lf—*
ф 2[j. \ гдф v J (j. 12 6 L(5 — ecos<p)2
* V--Ц—- - ]у* + с1У + с2,
(о — ecoscp)J 12 [(5 —ecoscp)3 (о — ecosф)2J
где С\ и С2 определяются из граничных условий (2.145):
с' —Г {-7k -fZ) <8 -«♦» + т^7 +
+-^['+4-?-«*]■
С2 = — в sin ф.
Тогда
vФ = -^- (-^ pZ) */ (у — 8 + е cos ф) 4- е sin ф (-—у- 1) +
2(j. \ г dcp J \ о — е cos ф /
pg sin у Л, o-ecoscp \ pg'siny Jj . _L[ 6r .
-*■ 2{л V 6 / 2р. \ 3 L(5 —ecoscp)2
+ — ]у— Г Ь2Ь2. (2.155)
В — есовф J \_(Ь — есовф)3 2 (о — есозф)2 J J
Учитывая уравнение (2.146) неразрывности, получим
из (2.155)
дР __ у . 12^rg sin у 6{xg sin ср 6 prg sin ф \ % s 'n
гду —№~Г (5_eC0Scp)3 (5_eCOScp)2 +X ' b —ecoscp — ЬОр^Шф.
Имея в виду, что >«1, приближенно получим
5 — е cos ср
dp _ n7 , ly-gsiny _6_ # .prg sin ср , - -fi.
rdq> ~~ р "f (5 — еcosср)* "^ 5 Ь—гсоэф ' l^-1^;
l/26 Никитин и др. 161
Массовая сила Z=—/sinсо/sinф,
тогда
дР . . . . , 12y-resincp , 6 ре sin© /Гк лг^
-*— = —rp/ sincofsinro + T^- -г, +-Е- ' -г1 — (2.157)
дф п т ' (о— ecoscp)3 ' 5 о — ecoscp v '
Гидродинамическая сила Fe, действующая со стороны
жидкости на поплавок вдоль линии центров, равна
2тс 2тс 2тг
Ре — ri/n \ Р c°s Ф^Ф = >*Л sin ФР — 'Уп —— sin cpdcp =
J I J rdy
о oo
2rc
=*— ЫЛ — sincpdcp, (2.158)
J dtp
о
где /п — длина поплавка.
Подставляя в (2.158) dp/dcp из (2.157), найдем
Fe = «r*laPj sin «rf - -l r\ln?e {-y- [ 1 - (-y)']~ Т -
"т[' + т(тЛ['-(т)Т+)-,2'Нт[' +
+T(f)T*-i['+s(f),][1-(f)r
Пренебрегая членами, содержащими множитель (е/б)2,
приближенно получим
Fe = ^n9jsinmt-±^^e---^^-i (2.159)
Уравнение движения поплавка вдоль линии центров имеет
вид
mn(e + jsiniut) = Fe.
Учитывая (2.159) и имея в виду, что пг\ /пр = ^ш (масса
вытесненного объема жидкости), получим
(шп + -|- ^ж y)s + ^1" *=* ~ (Шп ~~Шж^ isinщЛ (2Л6°)
Из уравнения (2.160) следует, что при радиальном движении
поплавка в поплавковой камере присоединенная масса жидко-
сти равна —тж —, а удельный коэффициент демпфирования
5 s
„ \2щг\1п
о поплавка в радиальной плоскости равен ——
162
Решение уравнения (2.160) дает
.. Am/со cos (o>t — X)
где
Дт = тп — тж;
12^rf/n
Результаты подсчетов для реальных приборов показывают,
что ё ничтожно мало по сравнению с /. Так, например, для
прибора с параметрами jut = 2,81 пз\ 6 = 0,015 см\ /*i = 4 см\ /п=5 см;
р = 1,96; Дга = 0,5 г и при со= 100 рад/сек. Из выражения (2.161)
приближенно получим
£ = — 1,3- Ю-6 / cos (at — X) см/сек2,
е== — -^ = l,3-10-10/cos(o>* — X) см.
Из приведенного примера видно, что амплитуда
вынужденных колебаний поплавка относительно его корпуса ничтожно
мала по сравнению с амплитудой вибраций его вместе с
корпусом прибора. Поэтому при анализе погрешностей
поплавкового прибора, вызванных внешней вибрацией, вынужденные
колебания поплавкового узла относительно корпуса прибора
можно не учитывать и проводить анализ погрешностей, как и для
сухого прибора.
Смещение центра масс гиромотора
при действии постоянных и вибрационных
ускорений, вызванное нежесткостью
его конструкции
При работе прибора в условиях действия ускорений в
результате нежесткости конструкции отдельных элементов прибора
происходит упругая разбалансировка его, которая является
причиной появления дополнительных вредных моментов по
выходной оси прибора.
Представим себе, что основание прибора (рис. 2.45)
движется с ускорением, проекции которого на оси Оу и Oz
соответственно равны jy и /2. Будем полагать, что гиромотор прибора
имеет конечную жесткость.
6* 163
Тогда упругое смещение центра масс гиромотора будет оп
ределяться следующими соотношениями:
Cz*c = — mplz,
СуУс=—тр1г
Ус И Zc
(2.162)
где
относительные смещения центра масс
гиромотора по осям Оу и Oz\
mp — масса ротора гиромотора;
су и cz — приведенные коэффициенты жесткости
гиромотора по соответствующим осям.
Из условий (2.162) следует
/*>
Ус = -
т
(2.163)
Момент, действующий на поплавок
вокруг выходной оси, равен
Мх = mpycjz — mfcly -*
,. . / 1 1
(2.164)
Рис. 2.45. К смещению
центра тяжести гиромотора
при двухкомпонентной
вибрации
Если
/у = /coscp,
/* = /sinq>,
где ф — угол в плоскости yz между осью Оу и направлением
действия ускорения /, выражение (2.164) примет вид
MX=<^(J L\Sin2q>.
2 V с2 су J
Момент Мх вызывает дрейф гироскопа
н
"#2
2#
( ) sin2cp
^ сг cv /
(2.165)
(2.166)
Из уравнения (2.166) видно, что дрейф гироскопа
пропорционален квадрату ускорения, с которым движется основание.
Выше было показано, что амплитуды вынужденных
колебаний поплавка относительно корпуса прибора при вибрации
настолько незначительны, что ими можно пренебрегать и
рассматривать уходы поплавковых приборов при вибрации, как и для
обычных «сухих» гироскопов.
Далее проводится исследование смещения центра масс
гироскопа поплавкового прибора в условиях эллиптической
круговой и линейной вибраций, вызванного нежесткостью конст-
164
рукции гиромотора. Показано, что при линейной (косой)
вибрации дрейф гироскопа вызывается только неравножесткостью его
конструкции. При эллиптической и круговой вибрациях у
прибора появляется дрейф даже при равножесткой конструкции.
Пусть на поплавковый прибор в плоскости (рис. 2.45)
действуют линейные вибрационные ускорения по оси Oz
а по оси Оу
jz = /iCOS«rf,
jy = /2 sin (ш/ + X),
где А, — фазовый сдвиг вибрационных ускорений.
Тогда смещение центра масс гиромотора будет определяться
следующими уравнениями:
mpzc + bxzc + czzc = — тр/х cos <
ЩУс + hyc + сугс = ~ ЩН sin И + х)>
(2.167)
где Ь\ и Ь2 — удельные коэффициенты демпфирования упругих
колебаний ротора гироскопа.
Решение уравнений (2.167) имеет вид
- Д COS (со/ — Цх)
УКо--¥+41К^
tgi*i-
(2.168)
Ус =
— /2 Sin (tot -f- ^ — 1^2)
K(4>-"a)2 + 4iii4>o>!!
4V-2
Э^^го0*
"20
— 0)2
(2.169)
где
2 У
£2 = '
61
2col0mp
2а)20/Пр
Момент Мзс, действующий на поплавок по выходной оси,
равен
М.
^c(/z + zc) — Mb + #)]mp
6 Никитин и др.
(2.170)
165
Учитывая (2.168) и (2.169), получим
Мх
ЩПН
sin (tot 4- fy cos (tot — [ii)
LK(»?o-»o2+«Mo°'
COS o>£ sin (W -|- ^ — ^2)
/(«
2
(20"
*)2 + 48
2 2
(2.171)
Таким образом, в общем случае дрейф гироскопа при
вибрации в плоскости yOz будет определяться следующим
выражением:
/Л _ Мх __ mvhh
Sin (tot + A) COS (tot — (М)
COS w£ Sin (o)^ + l — (А2)
Учитывая в этом выражении только постоянную
составляющую, найдем
Vi/2
"др
2/7
"(»10 - "2)Ко - "2)Ко - »1о) ~ ЧУю«2(4о -
-co2) + 4g|c|0a)2(^0-c2)
[Ко - "2)2 + «'"«И [Ко - -2)2 + 4б|4И
sinX-f
+ 2(о-
■ COS A
(2.172)
Sl^lO Ко — а)2)2 + ^2^2о(шш — ш2)2 +
+ 4£i$2">io"'2oo2 (gitoio + Ег^о)
[Ко - w2)2 + 4£Ко"2] [Ко - *2)2 + 4£^2>2]
Рассмотрим частные случаи.
1. Линейная вибрация (к=—; /i=/cos<p; /2=/sin<p). Это
соответствует линейной вибрации под углом q> к оси Oz.
Согласно (2.172) имеем
(«ю-мг)(<й1о-0,2)(щ:
о)-
°>дР =
трЯ8ш2Ф - 4£Ком2(>20 ~ м2) + ^"fo^Ko - ю2)
+ 4|^|0»2]
4Н
(2.173)
Характер дрейфа гироскопа при линейной (косой) вибрации
в зависимости от частоты приведен на рис. 2.46.
166
Из выражения (2.173) следует, что для равножесткой
конструкции гиромотора (cz=cy; сою=со2о = со0 и gi = g2) дрейф
прибора при косой вибрации равен нулю.
Физика дрейфа гироскопа, имеющего неравножесткую
конструкцию при косой вибрации, заключается в следующем.
Благодаря неравножесткой
конструкции линия смещения центра масс шДр|
гиромотора не совпадает с
линией действия ускорения. В
результате этого появляется
момент, который и вызывает дрейф
гироскопа.
Рис. 2.46. Зависимость дрейфа
гироскопа от частоты при косой
вибрации
2. Эллиптическая вибрация А,=0. (Если /1 = У2=/; А,=0, то
имеет место круговая вибрация.) Согласно (2.172) имеем
"др
/Ир/1/2
Н
>1о(4) - Ш2)2 + £2"2о(" 10 - <»2)2 +
-Г ^l^lO^O^2 (gl^lQ + %2щ2о)
[К-
»2)2 + 4£НИ [К - -2)2+4&4Н
(2.174)
Зависимость содр гироскопа от частоты о) при круговой
вибрации приведена на рис. 2.47.
Из выражения (2.169) следует, что при gi^O и h¥=0 уходы
от круговой и эллиптической вибраций присущи как равножест-
ким, так и неравножестким конструкциям гиромоторов. Так,
при сою = со2о= соо и £i = g2=£ из (2.174) получим
2mp/i/2g<ooo>
Я[(о)2_ 0)2)2 + 4£2о>2а>2]
(2.175)
Физику ухода гироскопа при круговой вибрации рассмотрим
для равножесткой конструкции гиромотора. Вектор ускорения
/ ~Vjz2+iy2 (Рис- 2.48) при круговой вибрации вращается в
плоскости yOz с угловой скоростью о).
Координаты мгновенного положения центра масс равно-
жесткого гиромотора согласно (2.168) и (2.169) равны
- _ ; COS И — р.)
-1/(0)2-0)2)2 + 4520)20)2
6* 167
Уе^—1'
sin (u>t — ^)
]/"(a)2_o)2)2+4g2a)2o)2
Тогда величина г = 00{ смещения центра масс гиромотора
будет
'=/02 + *2 = -
1/(0,2-0,2)2+41^
(2.176)
ft
Рис. (2.47. Зависимость дрейфа
гироскопа от частоты при круговой
вибрации
1
Рис. 2.48. Взаимное
расположение центра тяжести
гиромотора и .вектора
ускорений при круговой
вибрации
а направление смещения центра масс определится углом
Ус
или
tgP=-^=tg(CD/-Il)
P = K-iO.
(2.177)
Из выражения (2.177) получаем р==со, т. е. при круговой
вибрации центр масс равножесткого гиромотора смещается от
начала координат на величину г и вращается в плоскости уОг,
как и вектор ускорения [/ с угловой скоростью со.
Угол отставания |л направления смещения 00\ от вектора /
во вращательном движении для данной частоты остается
постоянным. Тогда, перенося вектор / в точку Оь определим
момент Мх, действующих на гироскоп:
Мх = — mpjr sin ji. (2.178)
Учитывая (2.176) и имея в виду, что
2£a>0a>
sin tJ- ^= —
К(.
«о*
из выражения (2.178), поделив его на Я, найдем значение юдр,
соответствующее выражению (2.175).
ГЛАВА 1¥¥
III АКСЕЛЕРОМЕТРЫ
3.1. НАЗНАЧЕНИЕ, ПРИНЦИП ДЕЙСТВИЯ
И УРАВНЕНИЕ ДВИЖЕНИЯ
Акселерометры являются датчиками линейных ускорений и
предназначены для измерения ускорения движущегося объекта
и преобразования его в электрический сигнал. Сигналы,
пропорциональные ускорению, используются для стабилизации и:
автоматического управления движущегося объекта на
траектории. Чувствительным элементом акселерометра служит
инерционная ,масса, воспринимающая ускорение движения объекта.
Принципиальная схема
акселерометра приведена на рис. 3.1.
Вдоль оси измерения х (или оси
чувствительности) прибора
акселерометр измеряет ускорение
движущегося объекта.
Инерционная масса 1 может
перемещаться относительно корпуса
прибора 2 по направляющей 3
вдоль оси х. Свобода движения
инерционной массы относительно
корпуса прибора ограничена
пружинами 5. Корпус прибора
установлен неподвижно на объекте.
При отсутствии ускорения vx
натяжение пружин одинаково и
инерционная масса
располагается в среднем положении. Во
время движения объекта с
ускорением vx под действием
инерционной силы масса 1 перемещается относительно корпуса прибора
на величину Дх, пропорциональную ускорению.
Перемещение Ах инерционной массы акселерометра
относительно корпуса прибора с помощью датчика сигнала 4
преобразуется в электрический сигнал. Для успокоения колебаний
инерционной массы относительно корпуса прибора служит
демпфер 6.
Рис. 3.1. Принципиальная
схема акселерометра:
/ — инерционная масса; 2 — корпус
прибора; 3 — направляющая; 4 —
датчик сигнала: 5 —пружина; 6 —
демпфер
169
Уравнение движения инерционной массы акселерометра
относительно корпуса прибора имеет вид
гаДл; + бДл; + cbx = mvx — FTp, (3.1)
где т —инерционная масса;
Ъ — удельный коэффициент демпфирования;
с — жесткость пружин;
Ftp — сила трения в направляющих, препятствующая
относительному движению инерционной массы.
Сила Ftp трения в направляющих инерционной массы вносит
погрешности в измерении ускорения движения объекта и
ограничивает порог чувствительности прибора.
Порогом чувствительности axmin акселерометра называют
минимальное ускорение, на которое он реагирует. Если сила
трения ^тр будет больше инерционной силы mvx от переносного
ускорения, то относительного движения инерционной массы не
возникает. Поэтому порог чувствительности прибора
определяется соотношением
ИЛИ . р
®х min ^ w '
(3.2)
Уравнение собственного движения чувствительного элемента
(инерционной массы) прибора получим из уравнения (3.1),
приравняв в нем правую часть нулю:
тАх + Ькх + скх = 0 (3.3)
или
Ал: + 2£и)0Дд; + со^Ах = О,
где со0= 1/ — круговая частота собственных недемпфи-
\ т
рованных колебаний;
Ь
6= т=~—степень затухания собственных колебаний.
2у cm
Чувствительностью акселерометра, или его крутизной
статической характеристики, называют отношение установившегося
значения перемещения чувствительного элемента к
замеряемому ускорению.
Из уравнения (3.1) при vx=const и FTP = 0 найдем
установившееся значение АхСТ перемещения чувствительного элемента
а т * 1
170
тогда
h=-r. (3.4)
т. е. чувствительность акселерометра обратно пропорциональна
квадрату его круговой частоты собственных колебаний.
Динамические погрешности акселерометра характеризуют
амплитудные и фазовые искажения замеряемого ускорения.
Если в уравнении (3.1) положить, что ^ = 0, a vx = vxo sin со/,
то вынужденное движение Д#Вын чувствительного элемента
определяется равенством
Ахвын = — vx0 sin (о/ — jx), (3.5)
■8/['-(t)T + *(t)"
где z=zzzzzz=zzzz======= коэффициент динамической вос-
/г /o)\2i2 / ^ \2 приимчивости прибора;
jx = arc tg —-—- отставание по фазе.
0)q СО2
Передаточная функция W(s) акселерометра имеет вид
W (s) = — = ! . (3.6)
Vx S2 + 2go)0S + cog
3.2. КЛАССИФИКАЦИЯ
Акселерометры отличаются друг от друга по принципу
действия, габаритам, весу, конструктивному оформлению,
диапазону измеряемых величин, чувствительности и т. д. Однако при
всем их многообразии можно указать основные признаки, по
которым акселерометры отличаются друг от друга.
1. По характеру зависимости между измеряемым
ускорением и выходным сигналом акселерометры бывают простыми,
однократно интегрирующими и двукратно интегрирующими.
2. По характеру перемещения инерционной массы
акселерометры можно разделить на две группы:
— с линейным перемещением подвижной системы (линейные
акселерометры);
— с угловым перемещением подвижной системы
(маятниковые акселерометры).
3. По способу подвеса инерционной массы (подвижной
системы) акселерометры можно разделить на четыре группы:
171
— с пружинным подвесом подвижной системы;
— с механическим подвесом подвижной системы в жестких
опорах (на подшипниках качения или скольжения, на призмах
И Т1^с 'гидравлическим (гидростатическим или
гидродинамическим) подвесом подвижней системы;
— с комбинированным подвесом подвижной системы.
В дальнейших разделах данной главы рассмотрены вопросы
расчета и выбора параметров некоторых типов акселерометров.
3.3. МАЯТНИКОВЫЙ ПОПЛАВКОВЫЙ АКСЕЛЕРОМЕТР
Конструктивная схема маятникового поплавкового
акселерометра представлена на рис. 3.2. Подвижная сист^
плавок) прибора выполнена в виде геометрически правильного
цилиндра 2, на полуосях которого жестко закреплены роторы
датчика угла 1 и датчика момента 3.
1 #вш *
Рис 3.2. Конструктивная схема маятникового по-
' f плавкового акселерометра:
/-датчик угла; 2 — цилиндр; 3 — датчик момента; 4 -
каменные опоры: 5—корпус
Поплавок прибора подвешен на своих полуосях в каменных
опорах 4 герметического корпуса 5, заполненного жидкостью,
удельный вес которой подбирается равным среднему
удельному весу поплавка с высокой степенью точности. Благодаря
этому обеспечивается гидростатическая разгрузка опор. Центр
тяжести поплавка и центр вытесненного объема жидкости не
совпадают с осью вращения поплавка (рис. 3.3). Ълагодаря
этому маятниковость Р1 прибора определяется следующим
равенством:
PI = G„yn — GMyx.
172
Имея в виду, что G„=Gm=G, получим
Р1 = в{уп-уж).
(3.7>
При наличии ускорения vz вдоль оси z вокруг выходной
оси х прибора, перпендикулярной плоскости чертежа, будет
действовать инерционный момент
Мх =
•яг(Уп — Уж)--
Р1
8
Маятниковость Р1 прибора выбирают из условия
обеспечения заданного порога чувствительности при наличии
возможных вредных моментов Мх вокруг
выходной оси прибора: «У|
Р1
g
t^min > Мш
х вр«
(3.8)
Под действием момента Мх поплавок
будет поворачиваться вокруг оси х. При
этом с датчика угла 1 (см. рис. 3.2)
сигнал, пропорциональный углу а поворота
поплавка вокруг оси х, поступит на мо-
ментный датчик 3 (электрическая
пружина). Моментный датчик создаст
момент, уравновешивающий возмущающий
момент Мх. Демпфирование собственных
колебаний поплавка осуществляется за
счет трения о жидкость.
Рис. 3.3. Положение
центра тяжести и
центра давления
поплавкового
акселерометра
Уравнение движения подвижной системы прибора имеет
вид
где Jx
... pi .
J jy. + Вое + Ы = vz cos a,
g
(3.9)
приведенный момент инерции подвижной системы
относительно оси х;
В — удельный коэффициент демпфирования;
k\ — крутизна характеристики моментного датчика по току;.
a — угол поворота поплавка вокруг оси х;
i — ток в обмотке моментного датчика.
Ток i в обмотке моментного датчика является функцией
угла а поворота подвижной системы. В общем случае
i^W^s)*, (ЗЛО)
где Wi(s)
Обычно
• передаточная функция цепи (датчик угла,
усилитель, моментный датчик).
Ts+\
173
где k2 — коэффициент усиления цепи (датчик угла,
усилитель) ;
Т — постоянная времени усилителя.
Если демпфирование собственных колебаний подвижной
системы о жидкость оказывается недостаточным, то на катушку
электрической пружины подают сигнал, пропорциональный
углу а и угловой скорости а.
Выражение (3.10) в этом случае запишется так:
'-*•■%$-■ <ЗЛ1>
где Тх—постоянная времени дополнительного демпфирования,
а уравнение движения чувствительного элемента прибора
примет вид
[^ + Bs + К %'_+* ]а = -^cosa, (3.12)
где K=k{k2.
В реальных поплавковых акселерометрах угол а мал и его
максимальное значение не превышает несколько десятков
угловых минут. Допустимое остах выбирают из заданной точности
измерения.
Из уравнения (3.12) для установившегося максимального
-значения а имеем
К - Pl '
*^amax ®z max COS amax
8
или
amax ~ "®z max COS 0tmax.
a2
Принимая приближенно cos amax = 1 r^— , получим
«max =h[l уЧ^тах. (3-13)
Из выражения (3.13) следует, что с увеличением атах
уменьшается крутизна характеристики прибора, а
следовательно, и падает точность измерения. Если задана точность
измерения (п %), то из (3.13) найдем
а2
max
1 Е£^< 1
100
или
100
174
«ш.х<т/Г-Йг- (ЗЛ4)
Если условие (3.14) удовлетворено, то в выражении (3.12)
для заданной точности измерения можно принять cosa^l.
Общий коэффициент усиления K=k\k2 обратной связи
(электрической пружины) выбирается из условия обеспечения заданного
диапазона измерения ускорений
K>~^-vzmK. (3.15)
Яатах
Динамические характеристики прибора выбираются так же,
как динамические характеристики датчика угловой скорости
с электрической пружиной.
Из уравнений (3.11) и (3.12) при cosa=l получим
зависимость выходного напряжения UBbIX от замеряемого ускорения:
^вых — ^н* — #2^н
Р1
(TlS + 1) VZ
g 1хТ83 + (1х + ТВ)8*+(В + ТгК)з + К
.(3.16)
Методические погрешности
Уравнение движения маятникового акселерометра при
наличии ускорения vz и vy (рис. 3.4) имеет вид
\Jxs2 + Bs + K
Tis+1 I Pi
Ts + \ J g
Если в уравнении (3.17) положить
cos a ^ 1, sin a ^ a, avz и vy
постоянными, то при a = a = 0
„ PI - PI '
Л a = vz vy a,
- v7 cos a
(3.17)
откуда
PI
K + vy
Из последнего соотношения яс-
Рис. 3.4. Схема действия сил,
приложенных к поплавку при
но, что перекрестное ускорение vy
приводит к изменению
чувствительности прибора (ИЛИ Крутизны СИГ- наличии ускорений vy и vz:
нала). Чувствительность падает 0l ~ центр давл^тя1: °2" центр тя"
или возрастает в зависимости от
знака vy. Если ускорение vz и vy меняются по гармоническому
закону и соответственно равны
175
vy = /2sin(o)^ —jx),
то при Г1 = Г2 = 0 уравнение (3.17) примет вид
PI PI
(./A.S2 -f- Bs + /С) а = Д sin arf cos a /2 sin (arf — jx) sin a.
(3.18)
Для отыскания решения по а в первом приближении в
правой части уравнения (3.18) примем .cosa«l, а sin a = 0. Тогда
(3.18) запишется в виде
(Jxs* + Bs + K) a. = — j\ sin Ы, (3.19)
g
где ai — значение a, соответствующее первому приближению.
Из уравнения (3.19) найдем
а1 = Ах sin (a)/ — [хх), (3.20)
где
Р/ Л1
Аг = -
gJx ]/K2-"2)2 + 4s4"2'
, 2ga)0a> 2 /С ot В
шп — а)4
Для отыскания решения по а во втором приближении
подставим в правую часть уравнения (3.18) вместо а значение ai
и примем приближенно
а2 Л2
cos ocj ^ 1 ^ 1 - sin2 (а^ — |хх),
sin aj ж aj == Лх sin (а>/ — [хх).
Тогда уравнение (3.18) примет вид
(JJ^ + Bs + K)au = ^L
Л2
1 — sin2 (<!>/ — [хх)
/iSinco/ —
PI
Аг]2 sin((ot — [x)sin(co^ — [хх), (3.21)
где ссц— значение а, соответствующее второму приближению.
Решение уравнения (3.21) дает следующее значение:
an
176
= Аг у 1 - -^-cos2^ + -^-(l-8cosVi)sinp-
, (8 —2Л?) sin pi — A? sin 3^
- arctg - ^ -
(8 — 2A\) cos p-i — A\ cos 3(Ji
PI
2gK
А Л2
+ -^A2cos(9M — ^ — \x1 — H)+~-j-Azsm(3^t — 2^ —ц3), (3.22)
где
л2= p/
gJx /(°o—И*+ 166*»|*
4|u)00)
tg|*«=-
>02-4o>*
д= "
^ ,/",
tg^3
"J/ (o)2~9cD2)2 + 36g2a)2a>2
6§o)0a)
со* — 9a)2
Из выражения (3.22) видно, что перекрестное ускорение
vy=^j2sm{^t—\y) вызывает смещение средней точки колебаний
акселерометра на величину —- ^i/2cos(|ui — juti), пропорцио-
2gA
нальную амплитуде перекрестного ускорения, и появление
гармонических колебаний с двойной частотой, амплитуда которых
равна — А2.
Для исключения погрешностей в показаниях прибора от
перекрестного ускорения vy может быть использована схема
двух акселерометров с противоположными маятниковостями
(рис. 3.5). В этой схеме один акселерометр имеет нижнюю
маятниковость, а другой — верхнюю.
Если параметры акселерометров совпадают, то уравнения
движения для них будут иметь вид
PI PI
(«/*s2 + Bs + К) ax = cos aw*! sin &t sin ajb sin (co£ — (i),
g g
pi pi
(Jxs2 -f Bs + K) a0 = cos a2]\ sin at + sin a2/2 sin (u>t — p).
g g
177
Решение этих уравнений имеет вид (3.22). Тогда суммарный
сигнал а, равный сумме показаний двух акселерометров, равен
W-
А2 А4
а = а1 + а2 = 2А1 I/ 1 -COS2^-) Ч1 + 8 COS2 ^ sin
2 64
at —
— arc tg
(8 — 2Л\)sin [xi — A2 sin Зщ
(8 — 2Л\) cos ;j4 — A\ cos 3{*i
+ — /43sin (Зш< — 2(X! — p,,,),
(3.23)
где Ль jlxi; Лз, |шз — имеют значения, определяемые
выражениями (3.20) и (3.22).
Рис. 3.5. Схема двух
акселерометров с противоположными
маятниковостями:
а — акселерометр с приведенной
нижней маятниковостью; б —
акселерометр с приведенной верхней
маятниковостью: И\ и Ц2 — центры
масс
Инструментальные погрешности
Появление вредных моментов вокруг выходной оси прибора
и нестабильность его выходной характеристики приводит к
погрешностям в показаниях прибора и к снижению точности
измерения замеряемого ускорения.
Причины, вызывающие появление вредных моментов вокруг
выходной оси акселерометра, —те же, что и ранее
рассмотренные для поплавковых интегрирующих гироскопов.
Основными из них являются остаточные моменты трения в осях
подвеса, моменты тяжения датчика угла, упругие моменты токо-
подводов, моменты магнитного взаимодействия
ферромагнитных масс поплавкового узла с внешними магнитными полями,
моменты от конвекционных потоков жидкости при
неравномерном температурном поле жидкости, изменение
чувствительности прибора за счет изменения рабочей температуры. Эти
причины анализируются во второй главе.
В виду вышеизложенного для поплавковых акселерометров
так же, как и для поплавковых интегрирующих гироскопов,
весьма существенны вопросы термостатирования прибора,
температурной симметрии и экранирования прибора от внешних
магнитных полей.
178
3.4. ИНТЕГРИРУЮЩИЙ АКСЕЛЕРОМЕТР*
С ГИДРОДИНАМИЧЕСКИМ ПОДВЕСОМ
На рис. 3.6 приведена схема интегрирующего
акселерометра с гидродинамическим подвесом. Корпус 5 акселерометра!
представляет собой герметичную цилиндрическую трубку, за-
1 e^j J> 1 \-
I 0 ^ 0 '
Рис. 3.6. Схема интегрирующего акселерометра с
гидродинамическим подвесом:
/ — двигатель; 2, 3 и 6— электроды-. 4 — поплавок; 5— корпус
полненную жидкостью. Внутри трубки находится поплавок 4»
который имеет форму цилиндра и является чувствительным
элементом прибора. Поплавок по отношению к жидкости
имеет некоторую избыточную плавучесть AG, благодаря чему
в статическом положении поплавок всплывает и прижимается1
к верхней стенке цилиндра.
При работе прибора цилиндрическая твубка приводится во
вращение от двигателя с постоянной угловой скоростью Q.
Под действием сил вязкого трения жидкость и поплавок
увлекаются и начинают вращаться. В результате вращения
жидкости возникают гидродинамические силы, которые центрируют
поплавок в центральной части прибора, благодаря чему
полностью исключается кулоново трение между поплавком и
корпусом прибора. Ось вращения поплавка устанавливается по
отношению к оси вращения корпуса прибора с некоторым
эксцентриситетом е (рис. 3.7), а скорость вращения Qi
поплавка—несколько меньшей скорости вращения корпуса прибора.
Возникающая при этом гидродинамическая сила Fn
центрирования действует на поплавок в обратном направлении
выталкивающей силы AG и уравновешивает ее.
179)
Рис. 3.7. Схема
расположения поплавка в
корпусе прибора
Для того чтобы соосное положение оси поплавка с осью
вращения корпуса прибора было положением устойчивого
равновесия оси поплавка, необходимо
Д£=£ж~£п размеры и форму последнего выбрать
так, чтобы было выполнено следующее
неравенство:
(Jx п - Л. п) - (Jx ж - Л. ж) > 0, (3.24)
где /зсд и /э.п—полярный и
экваториальный моменты
инерции поплавка;
Jxm и /эж—полярный и экватори-
альный моменты
инерции вытесненного
объема жидкости
поплавком.
Если неравенство (3.24) не
выполняется, то соосное положение оси поплавка
с осью вращения корпуса прибора является положением
неустойчивого равновесия. В этом случае при малейшем
отклонении оси поплавка от указанного положения она будет
стремиться отклониться дальше, в результате чего поплавок
заклинивается в корпусе прибора.
Осью чувствительности прибора является его ось
вращения Ох. При наличии ускорения vx на поплавок по
направлению оси х действуют следующие силы:
Fi = mnvx — инерционная сила, направленная в
противоположную сторону ускорения vx\
F2==mmvx— выталкивающая сила (сила Архимеда),
направленная по направлению действия
ускорения vx.
Так как масса тж вытесненного объема жидкости больше
массы тп поплавка, то результирующая сила равна
F = F2 — F1 = (тж — тп) vx = Amvx
(3.25)
и направлена в сторону действия ускорения vx.
Под действием силы F поплавок перемещается вдоль оси
вращения х. Движению поплавка препятствует сила
демпфирования, пропорциональная относительной скорости поплавках:
Amvx=bAx, (3.26)
где А* — скорость перемещения поплавка относительно
корпуса прибора;
Ь — удельная сила демпфирования.
180
Из выражения (3.26) следует
Д*=^Ч- (3.27)
Необходимо отношение Ат/b поддерживать постоянным.
Тогда после интегрирования выражения (3.27) получим
A* = -^jM/=^.<0, -vXo), (3.28)
О
где Ах — перемещение поплавка относительно корпуса
прибора, за время интегрирования от 0 до L
Таким образом, перемещение поплавка относительно
корпуса прибора пропорционально интегралу от ускорения (т. е.
пропорционально изменению скорости объекта за время
интегрирования). Для регистрации положения поплавка
относительно корпуса прибора может быть использован какой-либо
датчик положения емкостного, индуктивного или
электролитического типа.
На рис. 3.6 приведена схема интегрирующего
акселерометра с электролитическим съемом сигнала. Внутренняя
поверхность корпуса прибора выполнена из диэлектрика, а в
качестве жидкости используется электролит. Внутри камеры
размещены три электрода, два из которых 2 и 6 расположены на
торцовых поверхностях цилиндрической камеры, а третий
выполнен в виде кольца 3 и находится в середине
цилиндрической поверхности корпуса. От всех трех электродов сделаны
выводы наружу. Съем сигнала, пропорционального
перемещению поплавка, осуществляется с помощью мостовой схемы, два
плеча которой образованы сопротивлениями R\ = R2, а другие
два плеча образованы сопротивлениями электролита между
средним электродом и двумя торцовыми электродами. При
перемещении поплавка изменяются сопротивления электролита
между средним электродом и торцовыми электродами,
благодаря чему в измерительной диагонали моста появляется
сигнал f/вых, пропорциональный перемещению поплавка.
Точность интегрирующего акселерометра с
гидродинамическим подвесом сильно зависит от точности поддержания
постоянства угловой скорости вращения корпуса Qo, а также от
точности стабилизации рабочей температуры жидкости.
3.5. АКСЕЛЕРОМЕТР ДВОЙНОГО ИНТЕГРИРОВАНИЯ
Акселерометр двойного интегрирования (рис. 3.8)
представляет собой маятниковую систему. В качестве
чувствительного элемента используется статор 3 специального электро-
181
двигателя, который относительно своей оси вращения х имеет
маятниковость PL Маятниковость создается за счет
дополнительного груза 2, расположенного на статоре. В статоре,
выполненном в виде герметичного корпуса на
шарикоподшипниках, расположен ротор 1 двигателя. Статор двигателя с
ротором представляет собой поплавковый узел, который
Рис. 3.8. Акселерометр двойного интегрирования:
/ — ротор; 2 — груз; 3 — статор; 4 — датчик угла; 5 — усилитель;
6 — корпус, 7 — опоры
установлен на камневых опорах 7 в герметическом корпусе 6
прибора, заполненного тяжелой жидкостью.
Ось подвеса поплавкового узла совпадает с осью вращения
ротора двигателя. Плотность жидкости и размеры
поплавкового узла выбираются так, чтобы поплавковый узел при
рабочей температуре имел нулевую плавучесть. Осью
чувствительности прибора является ось z, перпендикулярная оси
подвеса х и оси у, которая направлена вдоль плеча маятника.
При действии ускорения vz вдоль оси z на статор
электродвигателя действует момент
Mx=-^-v2. (3.29)
Под действием этого момента статор отклоняется
относительно корпуса прибора вокруг оси х, вследствие чего с
датчика угла 4 снимается сигнал, поступающий на усилитель 5.
С выхода усилителя сигнал подается на обмотку управления
двигателя. В результате этого ротор двигателя начнет
вращаться с угловым ускорением, которое пропорционально ли-
182
нейному ускорению vZi действующему на маятник. Покажем
это, составив уравнения движения статора двигателя
относительно корпуса прибора и движения ротора двигателя.
Введем обозначения:
а—угол поворота статора относительно корпуса
прибора;
Ф — угол поворота ротора относительно статора;
/ст — момент инерции статора двигателя относительно
оси х;
/р — момент инерции ротора относительно оси х;
В\ — удельный коэффициент демпфирования
жидкости;
#2 — удельный коэффициент демпфирования ротора
двигателя.
Тогда уравнение движения статора запишется в виде
Уста + Вга = -™-Vg — УИДВ + Мтр + £2<Р, (3.30)
ё
где МдВ — момент, развиваемый статором двигателя под
действием управляющего сигнала;
Л4тр—момент трения в шарикоподшипниках ротора;
Д2ф — момент демпфирования вращения ротора.
Для ротора уравнение его вращения относительно оси х
имеет вид
JP ОР + «) = Млъ - Мтр - В2ф. (3.31)
Складывая левые и правые части уравнений (3.30) и (3.31),
найдем
(JP + Лт)« + Вр + Jpt = — vz. (3.32)
Если в уравнении (3.32) пренебречь собственным движением,
положив а = а = 0, то получим
Р1 •
ё
или
Ф = -у^-0,. (3.33)
Интегрирование уравнения (3.33) дает
Дер = Ф — фо = —— (Vz — vz0) = —— bvZ9 (3.34)
Jpe jp£
183
где фо — начальная скорость вращений ротора при /=0;
vz0 — линейная скорость объекта по оси измерения в
момент ^ = 0;
Аф— приращение скорости вращения ротора за время
интегрирования;
Avz — приращение линейной скорости объекта по оси
измерения за время интегрирования.
После интегрирования уравнения (3.34) найдем
t
Дф = Ф- Фо = -р- f ДМ* = -^-(5 -S0) = -г" AS' (3-35>
где Аф — угол поворота ротора за время
интегрирования;
AS — путь, пройденный объектом вдоль оси измерения
за время интегрирования.
Таким образом, выражения (3.34) и (3.35) показывают,
что с точностью до собственного движения статора приращение
скорости вращения ротора двигателя пропорционально
приращению линейной скорости объекта, а угол поворота ротора
двигателя за время интегрирования пропорционален пути,
пройденному объектом за время интегрирования по оси
измерения. Так как рассматриваемый акселерометр по своему
принципу является маятниковым, то ему присущи все ранее
рассмотренные погрешности поплавковых маятниковых
акселерометров.
3.6. СТРУННЫЙ АКСЕЛЕРОМЕТР
Принципиальная схема прибора приведена на рис. 3.9.
Инерционная масса 5 (т) растянута между двумя
одинаковыми струнами 2 и 6, каждая из которых своим свободным
концом закреплена в корпусе прибора. Эти струны
расположены на одной прямой, которая и является осью
чувствительности прибора (ось х). Для предохранения струн от
поперечного прогиба инерционную массу крепят к мембране 4,
имеющей малую жесткость в направлении оси чувствительности.
В этом приборе ускорение vx определяется через частоты
собственных колебаний струн. Известно, что частоты coi и о)2
собственных поперечных колебаний струн 2 и 6 связаны с их
натяжениями Fx и F2 следующими соотношениями:
П = -гт, (з.зб)
1 4mi/
z 4m±l
184
где пг\ — масса одной струны;
/ — длина струны.
При наличии ускорения vx\ разность между натяжениями
F\ и F2 будет определяться формулой
Fi — F2 = mvXl
(при оХ1 = 0 F{ = F2).
Используя (3.36), (3.37), (3.38), находим
tn tn N L Л/
(3.38)
Рис. 3.9. Принципиальная схема струнного
акселерометра:
/ — возбудитель: 2 и 5 —струны; 3 — датчики; 4 —
мембрана; 5 — масса
ИЛИ
4mi/ fa + /2) /f f ч
Vxt = l/i — /2).
(3.39)
В приборе предусмотрен возбудитель 1, который
возбуждает колебания струн строго определенной частоты. Датчики 3
определяют изменение частот coi и сог струн при наличии vx\.
Для практической реализации идеи струнного
акселерометра удобно поддерживать сумму частот (f\ + f2) постоянной.
В этом случае разность частот (f\ — f2) будет
пропорциональна величине ускорения vx\.
При разработке струнных акселерометров, как следует из
зарубежных источников, приходится преодолевать трудности
в основном технологического характера:
1. Материал струны должен цметь стабильные
характеристики (не должна меняться упругость со старением,
постоянные линейные размеры и т. д.) [3].
2. Хорошая заделка струны.
Акселерометры подобного типа, установленные на
американских ракетах «Атлас» и «Титан», имеют
чувствительность 10~6 g.
185
3.7. ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР
ЛИНЕЙНЫХ УСКОРЕНИЙ
Принцип действия
Для определения линейной скорости движения центра
масс летательного аппарата находят широкое применение
гироскопические интеграторы линейных ускорений. Входной
величиной таких приборов является линейное ускорение
движения объекта вдоль оси измерения. Замеряемое ускорение при-
Рис. 3.10. Принципиальная схема
гироскопического интегратора продольных ускорений
бором интегрируется, и отклонение прибора вокруг выходной
оси оказывается пропорционально приращению линейной
скорости объекта вдоль оси измерения за время действия
ускорения.
Гироскопический интегратор линейных ускорений (рис. 3.10)
представляет собой гироскоп с тремя степенями свободы,
который обладает маятниковостью Р1\ относительно оси
внутренней рамки у.
Чувствительным элементом прибора является смещенная
по оси собственного вращения гироскопа на плече k масса т
груза Р, а осью измерения — ось наружной рамки х. Сам
гироскоп с тремя степенями свободы в приборе играет роль
интегратора. Ось собственного вращения гироскопа
поддерживается в приборе, перпендикулярно оси наружной рамки с
помощью межрамочной коррекции, которая состоит из
контактного устройства К, расположенного на оси вращения внутрен-
186
ней рамки, и коррекционного двигателя Д, расположенного на
оси наружной рамки.
При отклонении оси гироскопа на угол р от положения,
перпендикулярного оси наружной рамки, с контактного
устройства на коррекционный двигатель поступает управляющий
сигнал. Под действием момента М($), развиваемого коррекци-
онным двигателем вокруг оси наружной рамки, гироскоп
начинает прецессировать вокруг оси внутренней рамки и
возвращается в первоначальное положение.
Прибор устанавливается на объекте так, чтобы ось
наружной рамки его (ось чувствительности) была параллельна или
совпадала с осью измерения. При наличии ускорения Vx\
Р '
вдоль оси Ох\ возникает инерционная сила F=—Vx\, которая
создает момент Му, действующий на гироскоп относительно
оси внутренней рамки:
My= — VXtkcos$,
(3.40)
где Vx\ — проекция кажущегося ускорения
наружной рамки.
Если ось Ох\ вертикальна, то
К = *х + 8>
объекта на ось
где vx—проекция ускорения объекта относительно
поверхности Земли на ось Оу\;
g — ускорение земного тяготения.
Под действием этого момента гироскоп начинает
прецессировать вокруг оси наружной рамки с такой угловой скоростью
а, что развивает при этом относительно оси внутренней рамки
гироскопический момент MT=Hacos$, равный и
противоположный моменту Му, вызвавшему прецессию.
Таким образом, можно записать следующее равенство:
PliVXlcos$ =#acosp.
Из этого равенства следует
Интегрируя (3.42) по времени, получим
t
■ - Phr§vXldt=-Z±-(vXl-vXo),
gff
gti
(3.41)
(3.42)
(3.43)
187
где ос, ао — текущий и начальный углы поворота гироскопа
вокруг оси Ох;
Ухи Ухъ — текущее и начальное значения кажущейся
скорости объекта в направлении оси Ох\.
Равенство (3.43) показывает, что угол (а—ао) поворота
гироскопа относительно оси наружной рамки пропорционален
кажущейся скорости движения объекта в направлении оси
наружной рамки. Для того чтобы ликвидировать
несбалансированность гироскопа относительно оси х, которую создает
смещенный груз Р, на наружной рамке укрепляют груз Q на
плече /г. Груз Q создает момент разбаланса относительно оси
наружной рамки, противоположный моменту разбаланса от
груза Р, а плечо h выбирают так, чтобы относительно оси
наружной рамки гироскоп был сбалансирован. При этом имеет
место равенство Pl\=='Ql2-
Если бы не было груза Q, то при ускорении Уу вдоль оси у
от груза Р относительно оси х возникал бы момент
ivix v у,
который явился бы дополнительным моментом нагрузки для
коррекционного двигателя Д. При наличии груза Q и малых
углах р этот момент близок нулю:
М,
= ("
Рк
-cos
$+ЩУу^— (P/i-Q«=0,
8 ' ё
где Уу — ускорение объекта вдоль оси у.
Уравнения движения прибора
Обозначим через Х\, У\, %\ систему координат, связанную
с объектом. Проекции угловой скорости и кажущегося
линейного ускорения объекта на оси
обозначим соответственно сохь
Щи COzi И VXU УуЬ Уг\-
Положение осей х, у, г,
связанных с внутренней рамкой
(кожухом) гироскопа относительна
осей Х\, у и Z\, определяется
углами аир (рис. 3.11).
х На рис. 3.12 представлена
схема действия сил и моментов
на гироскоп.
Найдем мгновенные значения
проекций угловых скоростей и
Рис. 3.11. Положение осей кожу- кажущихся линейных ускорений
ха *, у, г относительно осей ' J r
объекта хи у г, гх На 0СЯХ х> У> Z'
188
= (а + w^) cos p 4- (ci)^ sin а — o)Zl cos a) sin p,
co„ — a)
^COSoc + a)Zl sin a + jj,
= — (ш^ sin a — (dZi cos a) cos p + a sin p + ©^ sin p,
Vx =. VXl cos p — V2l cos a sin p + Vyx sin a sin p,
^y = Vyi cos a + VZl sin a,
Vz = V^ sin p + 1/Zl cos a cos p —Vyi sin a cos p.
P
D2/ COSOt
fly/» M(p) M&J
P • *
Рис. 3.12. Схема действия сил и моментов на гироскоп
Пренебрегая величинами второго порядка малости,
составим уравнения движения гироинтегратора относительно осей
внутренней и наружной рамок:
d
-Л
(Р + iiXl COS a + (dZj sin a) — B$ + H [(a + mXl) COS p +
+ <ogi sin a sin p — a)z cos a sin p] A k cos pi/* +
ё
P P
+ — kVyxsin a sin p l1VZt cos a sin p =F Ma = 0,
— </jq — (a + <*>*,) — H ((oyi cos a + o)2 sin a + j3) cos P — Bx a —
dt
— M (P) + M — — /x cos p (У„, cos a + VZi sin a) + — /x (1>й cos a +
g g
+ K2lsino)=0,
(3.44)
189
где J у — приведенный момент инерции гироузла
прибора относительно оси внутренней рамки;
JXl — приведенный момент инерции гироузла
прибора относительно оси наружной рамки.
Так как угол р мал, то приближенно можно
принять, что JXl= const;
±Ма, =FMp—моменты сухого трения относительно оси
внешней и внутренней рамок;
Мф) — момент коррекционного двигателя;
Ви В2 — удельные моменты жидкостного трения
относительно оси наружной и внутренней рамок.
Передаточный коэффициент
Передаточный коэффициент гироинтегратора определяет
статическую характеристику аСт = /(^^) прибора. Эта
характеристика связывает установившееся значение линейной скорости
объекта VXl с установившимся значением угла поворота
рамки (Хст-
Если в уравнении (3.44) положить, что угол р мал, cospss
«1, а
а = а = р = Р = V, = *х = со, = М • = Мр = О,
то при выполнении условия Pl\ = Qh из первого уравнения
(3.44) получим равенство (3.42), определяющее зависимость
между угловой скоростью поворота гироинтегратора вокруг оси
наружной рамки и ускорением движения объекта вдоль оси
чувствительности прибора:
i = —2LV,,. (3.45)
Коэффициент пропорциональности между а и VXl называют
передаточным коэффициентом, чувствительностью прибора или
постоянной интегрирования гироинтегратора. В дальнейшем этот
коэффициент мы будем обозначать через й3:
Нг = Щ ^-"М. (3.46)
gH I см ]
При нулевых начальных условиях (£ = 0, a=ao=0, VX =0)
^ = ^VXl = h3VXr (3.47)
Передаточный коэффициент /г3 можно определить как
отношение угла поворота гироскопа атах к измеряемой линейной
скорости Vxim3iX:
h3
v
v хг max
190
Для увеличения передаточного коэффициента hz необходимо
увеличивать дебаланс Р1\ и уменьшать кинетический момент Н
гироскопа. Однако увеличение коэффициента h3 понижает
точность гироинтегратора (понижается частота и увеличивается
амплитуда автоколебаний, а также погрешность от трения и от
разгрузочного двигателя).
Порог чувствительности.
Инструментальные погрешности
Величина вредных моментов, действующих на гироскоп
относительно оси внутренней рамки, определяет порог
чувствительности прибора. Так, если вредный момент, действующий на
гироскоп относительно оси внутренней рамки, определяется
моментом трения М$у то в установившемся движении получим
равенство
i = -^Vx1±-^- (3.48)
Если полезный момент —- VXl по абсолютной величине
меньше момента трения М$ ,то относительная скорость
прецессии а будет равна нулю. В этом случае гироинтегратор не
чувствует ускорения VXi. Положив в равенстве (3.48) а = 0,
получим соотношение, определяющее порог чувствительности
гироинтегратора по ускорению:
g p
или
VXlmm>—-
Вредные моменты, которые действуют по оси внутренней
рамки, и нестабильность параметров, от которых зависит
постоянная интегрирования прибора, порождают инструментальные
погрешности прибора. Так, если вредный момент относительно
внутренней рамки определяется моментом трения М$ , то
абсолютная погрешность Дон равна
м.
д% = —!1
1 н
или, учитывая (3.42) и (3.46), получим соотношение,
определяющее погрешность по скорости:
М-g м,
1 Ph h3H
191
Для снижения момента трения, действующего на гироскоп
относительно оси внутренней рамки, схему управления
двигателем межрамочной коррекции делают с релейной
характеристикой, что вызывает у гироинтегратора во время его работы
автоколебания. Благодаря автоколебаниям, совершаемым
гироскопом, происходит «ломка»
момента трения. Погрешности в
определении скорости,
вызываемые моментом трения, в этом
случае удается снизить до
незначительной величины.
На рис. 3.13 приведена схема
поплавкового гироинтегратора.
Момент трения в таком приборе
вокруг оси внутренней рамки
близок к нулю благодаря
гидростатической разгрузке камневых
опор поплавкового гироузла.
Маятниковость поплавкового
гироузла относительно оси у
создается за счет смещения его
центра тяжести по оси кинетического
момента на величину /ь а центр
давления вытесненного объема
жидкости поплавкового гироузла
совмещается с осью подвеса у.
Благодаря этому изменение
выталкивающей силы жидкости в
результате колебаний рабочей
температуры не вызывает изменения постоянной интегрирования
прибора.
Рис. 3.13. Принципиальная схема
поплавкового гироскопического
интегратора продольных
ускорений
Погрешность от угловой скорости объекта coxi
и перекрестного ускорения Vy{ и Vz\
Методические погрешности гироинтегратора вызываются
переносными угловыми скоростями и перекрестными
ускорениями объекта.
Из первого уравнения (3.44), положив в нем /У=В2=^=0,
найдем
« = -^Fx1+-^(Hz1cosa-l/Jflsina)tgp-
gn gti
— оо^ — (о)^ sin a — G)Zi COS a) tg p.
(3.49)
Из рассмотрения равенства (3.49) следует, что погрешности
в скорости прецессии а гироинтегратора, вызванные линейным
192
ускорением Vz\ cos a—V^sina и угловой скоростью (coxisina +
+ cozicosa), пропорциональны tg|3. Так как в гироинтеграторе
угол р поддерживается близким к нулю, то эти погрешности
невелики и ими можно пренебречь.
В этом случае из выражения (3.49) приближенно получим
; = -*£. v _«>Xi. (3.50)
Это равенство показывает, что замеряемому ускорению Vx\
пропорциональна абсолютная угловая скорость (a+coxi) гироинте-
гратора вокруг оси наружной рамки. Выходной же сигнал гиро-
интегратора пропорционален относительному углу (а—ао)
поворота гироскопа вокруг оси наружной рамки. Поэтому
наличие угловой скорости сох1 является причиной появления
погрешности Да2 в показаниях гироинтегратора:
t
Да2 = — f <oXldt.
о
Учитывая (3.42) и (3.46), найдем погрешность AV2 по
скорости, вызванную наличием угловой скорости (ох\:
t
ДУа = -f <М*- <3.51)
о
Для уменьшения этой погрешности объект, на котором
устанавливается гироинтегратор, должен стабилизироваться
относительно оси Х\ так, чтобы угловая скорость coxi была равна нулю.
Если же гироинтегратор установить на гиростабилизированную
платформу в пространстве, то погрешность (3.51) будет
определяться лишь дрейфом этой платформы вокруг оси х\.
Погрешность от жидкостного демпфирования
в осях подвеса и разгрузочного устройства
Рассмотрим влияние моментов жидкостного трения в осях
подвеса и момента разгрузочного двигателя на работу
гироинтегратора, ограничиваясь прецессионной теорией.
Момент Af(p) разгрузочного двигателя по оси х, если
принять для простоты линейную характеристику разгрузочного
устройства, определяется формулой
Л*(Р)=-Кр,
где К— крутизна разгрузочного двигателя.
193
Полагая в уравнении (3.44 j
а = р=ш21 =*taXl=V2i =Mp ^М-а -0; cos^l,
получим
a = — h3VXl +
н
К Q Вх
Н
Н
а.
(3.52)
Исключая из уравнения (3.52) переменную ,рг получим
относительно а следующее уравнение:
НК : KPh т, PhH
a + -
или
где
BiS2 + #*
•а = ■
{fP + Btfjg ' g(H* + BxB2)
»• • « ••
а + оа —OiV*, — o2V^,
Я/С
V,, (3.53)
о, =
g(ff*+BlB2)
HPh
g(m + B1B2)
(3.54)
или
a + oa = — a2 ( V^ +
(»*+i4
(3.55)
Проинтегрируем уравнение (3.55) при нулевых начальных
условиях. Если 0\/о2=о, то а = —GfcVxi и a = —ofcVxi.
Таким образом, угол поворота прибора пропорционален
скорости объекта (интегралу от продольного ускорения). В этом
случае прибор интегрирует ускорение без искажений. Если
0\/о2¥=о, то интеграл уравнения (3.53) будет равен
a = — a2VXt — VXlt (ox — са2) — koe—*] {VXJ) е?Щ —
-ov~a'JW)^.
(3.56)
Отметим, что величины k=K/H и BiB2/H2 обычно малы.
Поэтому интегралы (3.56), содержащие множители ko и а2, явля-
194
ются малыми величинами, которыми можно пренебречь. Тогда
(3.56) примет вид
а = — o2VXi — (ах — оа2) VXlt. (3.57)
Соотношения (3.54) преобразуем к виду
ПК Я k
Я2 + ВгВ2
Вф2
Я2
1 +
BiB2
я2
KPh
ё(Н* + Вф2)
К Ph
Я gH
khn
1
ВлВ
1^>2
Вфъ
= °hoi
Я2
Я2
PhH
В(Н*+Вф2)
Ph
£Я
Вф2
Я2
1 +
Я2
(3.58|
Так как
* 2 <1, то (3.58) можно представить в виде
Я2
*(i +
В1В2 Х-1
Я2
:й[1-1_1(1)-2-^.+
Я2
Я2
-Ч1--^)-1
(3.59)
Угол поворота гироинтегратора согласно (3.57), (3.58) и
(3.59) определяется соотношением
^1^2 \ Т/ /ь ^3
« =*s(l--^-)^.—С*.
или
а=Л<У
<З^Г
-/7 J?i^?_l/
Я2 ,
* JJ2 *l '
-kh3-^VXl
V4-
(3.605
Второй и третий члены уравнения (3.60) определяют
погрешность измерения кажущейся скорости Vx\ от коэффициентов
195
моментов демпфирования В{ и В2 и от удельной скорости
коррекции k.
Отметим, что погрешность, определяемая третьим членом
уравнения (3.60), зависит от пройденного пути. Поэтому в гиро-
интеграторе необходимо уменьшить трение в осях подвеса и
удельную скорость коррекции k.
Автоколебания гироинтегратора
Для повышения точности гироинтегратора как измерителя
линейного ускорения система разгрузки внешней оси выполнена
по релейной схеме, обеспечивающей автоколебания.
Рассматриваемая система стабилизации гироскопа является примером, где
автоколебательный режим полезен. При таком режиме
происходит «ломка» трения в осях подвеса, т. е. величина момента
сухого трения значительно уменьшается.
Проведем исследование автоколебаний системы (3.44) без
учета момента сухого трения, переносных скоростей сох±, <0zi и
ускорения Vz\ согласно методике, предложенной в книге [11].
При этих допущениях уравнения (3.44) примут вид
g
Приведем выражения (3.61) к одному уравнению с
переменой |3. Определяя из первого уравнения а и а и подставляя во
второе уравнение (3.61), получим
JJyJ+ (JXB2 + JyBJ р + (#2 + ВД р = - НМ (?) + ВХМЯ,
где
8
Обычно величина В\В2<.Н2, тогда, пренебрегая В\В2 по
сравнению с Я2, последнее уравнение в операционной форме при
нулевых начальных условиях запишем в следующем виде:
UJy& + (J 'jfit i-'JyB,) s2 + #2s] p = - НМ (Р) + ВгМя. (3.62)
Момент разгрузочного двигателя Af((3) есть нелинейная
функция от р. Примем данную функцию в виде идеальной
релейной характеристики (рис. 3.14), где т0 — величина момента
от двигателя.
Из-за наличия внешнего воздействия Мк центр колебаний
гироскопа по углу р будет смещаться на величину $\. Гармони-
196
(3.61)
ческая линеаризация для идеальной релейной статической
характеристики М(р) будет выполняться по формуле
М (р) - М° (Л, рх) + q (A, P0 (Р - рх), (3.63)
где
М°
—— arc sin -Щ-
n A
_ 4яг0 I /
Af(P)i
"У
-Ц
il.
яЛ l' A2
A — искомая амплитуда автоколебаний.
С учетом (3.63) уравнение (3.62) перепишется в виде
{JxJyss + (JXB2 + JyB,) s2 + H*s +
+ Hq}$ = -HM° + Hfa +BxMa.
(3.64)
Заменив 5 на /со в
характеристическом уравнении
JxJy& +[(^2 + JyBi) s2 + НН +
+ Hq = 0 (3.65)
и выделяя вещественную Х(А, соп,
Pi) и мнимую У (Л, (оп, Pi) части,
получим два уравнения для определения периодического реше
ния (для переменной Р)
Hq-iJxBt + JyBJtf^O,
Я2 — УЛ..о>? =0,
Р
Рис. 3.14. Характеристика
разгрузочного двигателя
JxJyK
НМ° = ЯХЛ1 „.
(3.66)
Третье уравнение (3.66) является частным решением
дифференциального уравнения (3.62) при р = Рь Здесь соп — частота
автоколебаний.
Уравнения (3.66) достаточны для определения амплитуды Ау
частоты соп автоколебаний и угла Рь Из второго уравнения
(3.66) видно, что частота автоколебаний гироинтегратора не
зависит от внешнего воздействия Ми
о>п=—?=- (3.67)
У JXJy
и равна частоте нутационных колебаний гироинтегратора.
Разгрузочный двигатель поддерживает нутационные
колебания, которые затухли бы при отключенном двигателе из-за
трения в осях рамок подвеса гироскопа.
197
При отсутствии внешнего воздействия (Ми=0) Pi = 0, а
коэффициент гармонической линеаризации
4 кА
Учитывая это и подставляя в первое уравнение (3.66)
значение соп из (3.67), получим формулу для определения амплитуды
автоколебаний при Ми=0:
А = 4"*о^Л . (3.68V
тсН (JXB2 + jyB0 '
Соотношения (3.67) и (3.68) позволяют выбрать параметры
подобных приборов. Для получения большой частоты и малой
амплитуды автоколебаний гироскопа желательно увеличивать
кинетический момент гироскопа, уменьшать момент инерции
рамок подвеса гироскопа, увеличивать демпфирование движения
гироскопа относительно осей подвеса и по возможности
уменьшать момент разгрузочного двигателя. Уменьшение момента
двигателя ограничено величиной момента трения и неточностью
балансировки гироскопа относительно оси внешней рамки.
Следовательно, необходимо добиваться малых трений в осях
подвеса и тщательной балансировки гироскопа с его рамками
относительно оси внешней рамки.
Влияние параметров гироинтегратора
на амплитуду А автоколебаний
и смещение центра колебаний Pi
Первое и третье уравнения (3.66) позволяют найти
зависимость изменения амплитуды А и смещения центра колебаний
Pi от параметров системы и внешнего воздействия Ми.
Подставив значения коэффициентов гармонической линеари^
зации в (3.66), запишем два уравнения для определения
зависимостей А = А(МИ) и р1 = р1(Ми):
иа+1#> ъ-аь. ]Л-(-Ь-)'.|
.2!^ агс sin-PL =5^..
я А г и
(3.69)
Из первого уравнения (3.69) следует, что автоколебания
гироинтегратора пропадут при некотором значении Ми=Мтах,
когда смещение центра колебаний станет равным значению
амплитуды, т. е. Pi=A. Тогда из второго уравнения (3.69) при
Pi=/4 получим формулу для определения предельно
допустимого момента, приложенного к гироинтегратору:
Мшах = -^\ (3.70)
198
При Mn>Mm3iX автоколебания в системе невозможны, так
как нарушается принцип работы гироинтегратора.
Из первого уравнения (3.69) с учетом значения соп видно,
что амплитуда автоколебаний будет иметь максимальное
значение при Pi = 0, когда Л1И=0:
Значение
ределится из
так как
<±гао«/лг«/у
■ ~ я (JXB2 + JyBi) H
(3.71)
амплитуды при любом значении 0^Ми^Мтах оп-
первого уравнения (3.69) по формуле
Л =
/-
'■ ^maxcosarcsin-^,
/ Pl\2
■ (—1 =cosascsin
A
(3.72)
Подставив из второго выражения (3.69) в уравнение (3.66)
значение
arc sin -> -.**"-
А 2Нт0
получим формулу для определения амплитуды автоколебаний
гироинтегратора в зависимости от внешнего момента:
Л = Лшах cos -^- при 0 < Ми < Мтак. (3.73)
Как видно, амплитуда автоколебаний изменяется в
зависимости от приложенного внешнего момента по закону косинуса.
Для определения Pi = Pi(MH) запишем выражение для р4 из
второго уравнения (3.69):
b = Asln-$**-. (3.74)
Подставляя значение А из (3.73) в (3.74) и выполняя
преобразования, найдем формулу для определения смещения
центра колебаний в зависимости от приложенного внешнего
момента:
fr= An?L Sin -J^Mii. при 0 < Ми < Мшах. (3.75)
2 Нт0
Как видно из (3.75), смещение центра колебаний изменяется
по закону синуса от внешнего момента МИч но с периодо?л,
в два раза меньшим периода изменения амплитуды автоколе-
199
баний. Максимальное значение смещения центра колебаний
будет
о _ Лпах jut __ Мтах
Ртах — ~ ПРИ Ши -• —-—.
Смещение центра колебаний р£ будет вызывать ошибку в
измерении момента Мк (или ускорения Vxi), если есть
ускорение Vyl.
Рис. 3.15. Принципиальная схема гироскопического
интегратора продольных ускорений
Так как угол р мал, то sin p^ijii и абсолютная ошибка в
измерении момента Л4И будет
AM = -^ KyiPi-
Если в гироинтеграторе ось кинетического момента
направлена по нормальной оси объекта (рис. 3.15), то смещение
центра колебаний Pi будет вызывать ошибку в измерении момента
Ми даже в том случае, если гироинтегратор установить на
стабилизированном в горизонте основании (при горизонтальном
полете), так как на гироинтегратор будет действовать
составляющая от силы земного тяготения.
Для малых углов смещения центра колебаний при условии
Pi=^4max/2 абсолютная ошибка гироинтегратора в измерении
момента
ш = £к§^ (з.7б)
200
Относительная погрешность гироинтегратора
ДМ
Ьм :=
Л1И
(3.77>
Если гироинтегратор использовать для измерения
горизонтальных инерционных ускорений, то внешний момент,
прикладываемый к гироинтегратору, будет пропорционален
инерционному ускорению:
M* = ^VXl. (3.78)
g
С учетом (3.75), (3.76) и (3.78) из (3.77) получим формулу
для определения относительной погрешности гироинтегратора в
измерении инерционных ускорений
<>м
gA_
2V„
sin
r xt Hm0
Максимальное значение относительной погрешности
гироинтегратора будет иметь место при Vxi = 0 (Ми=0). Это значение
определяется как предел величины 8М при стремлении Vxi к
нулю с учетом значения Лтах из (3.71):
2BiPhJxJy
8л!тах = Нт 8д| =
^ _,о (^52 + JyBV Н
(3.80^
Интегратор продольных ускорений ракеты V-2
Точность и дальность стрельбы баллистической ракетой в
значительной степени зависит от величины и направления
вектора скорости полета ракеты в момент выключения двигателя
(рис. 3.16). Выдерживание
определенного угла 6 наклона
вектора скорости к плоскости
горизонта обеспечивается в
системе управления ракетой
гирогоризонтом с
программным устройством по углу
тангажа.
Гироинтегратор
продольных ускорений системы
управления обеспечивает
определение скорости полета ракеты и
подает сигнал на выключение
двигателя при достижении
ракетой программной скорости.
Конструктивно
гироинтегратор выполнен так, что относи-
Рис.
3.16. Траектория движения
ракеты
201
тельно оси наружной рамки маятниковость равна нулю
(рис. 3.17). Это достигается тем, что ось подв-еса кожуха
смещена относительно плоскости его симметрии (этим
обеспечивается маятниковость относительно оси у), но ось наружной
Рис. 3.17. Устройство гироинтегратора продольных ускорений
ракеты V-2:
/ — рамка; 2 — кожух; 3 — ротор; 4 — статор; 5 — ось; 5 —контакты;
7 — двигатель;; 8 — арретир; 9 — первая контактная группа;
10—вторая контактная группа; //—кулачок; 12— диск; 13— рукоятка
установки дальности
рамки х проходит через центр тяжести кожуха; в результате
чего гироскоп сбалансирован относительно оси х.
Ротор 3 со статором 4 помещен в кожухе 2, который
вращается около оси 5. Сила веса ротора с кожухом создает
относительно этой оси момент. Ось 5 соединена с внешней рамкой 1,
которая имеет возможность вращаться относительно оси х. Че«
202
рез систему зубчатых колес вращение передается диску с
кулачками 11. Интегратор установлен на борту ракеты так, что
ось наружной рамки х совпадает по направлению с продольной
осью ракеты Х\, За несколько минут до старта гироскоп
раскручивается. В это время ось гироскопа закреплена неподвижно
при помощи арретира <§. На рис. 3.17 арретир вынесен в
сторону. Он состоит из электромагнита и двух планок. При подаче
в электромагнит сигнала (это происходит в момент отрыва
ракеты от стола) планка арретира освобождает ось гироскопа
и последний оказывается висящим на оси 5.
Интегратор настрдивается на определенную дальность
поворотом рукоятки 13 установки дальности. При этом диск 12,
имеющий контактное устройство, поворачивается на нужный угол
относительно кулачков 11. Когда ракета достигнет заданной
скорости, один из кулачков 11, замыкая контакт, подает сигнал,
который приведет к переключению двигателя на конечную
ступень, а затем второй сигнал — на полное выключение.
Для поддержания перпендикулярности оси гироскопа к оси
внешней рамки предусмотрено корректирующее устройство.
Если ось гироскопа отклонится вверх или вниз, замкнется
верхний или нижний контакт 6 и на двигатель 7 поступит сигнал
соответствующего знака. При этом на гироскоп будет
действовать момент относительно оси х. Этот момент заставит
гироскоп повернуться относительно оси 5 и занять положение, пер'
пендикулярное оси х.
При полете ракеты вдоль оси xt (оси наружной рамки
прибора) действует ускорение VXl, равное
VXl = ti cos (ft — 6) + g sin ft — vB sin (ft — 6),
где (Ф — 0) — угол атаки.
Момент Му, действующий на гироскоп вокруг оси
внутренней рамки:
Му = — [t>cos(ft — 6) +g-sinft — 08 sin (ft — в)].
8
Согласно (3.42) найдем
t
a — ct0 = —Г [vcos (ft — 6) + g sinft — a0sin(ft — 9)] dt.
gH J
0
Для того чтобы определить значение ркорости v полета ра*
кеты, в показания гироинтегратора необходимо ввести
соответствующие поправки. Это можно сделать, зная программные
значения ,&прогр = '&(0 и 0Прогр = 6(£). Причем скорость v будет
определена тем точнее, чем ближе будут совпадать текущие и
программные значения Фи0.
203
В заключение отметим, что если гироинтегратор,
выполненный по схеме рис. 3.17 установить на гиростабилизированной
платформе, то момент Му= Vx\ через опоры наружной
рамки передается на платформу (рис. 3.18). Причем вектор
момента относительно платформы вращается со скоростью вращения
Рис. 3.18. Возмущающий момент, действующий со
стороны гироинтегратора на платформу
гироинтегратора а относительно оси наружной рамки. Этот
момент создает возмущения вокруг осей гиростабилизатора и
вызывает дополнительные погрешности платформы.
Преимущество указанной схемы по сравнению со схемой рис. 3.10
заключается в том, что этот гироинтегратор имеет меньший момент
инерции относительно оси наружной рамки, так как (рис. 3.17)
нет дополнительного груза Q. Гироинтегратор, представленный
,на рис. 3.10, не создает возмущающих периодических моментов
.относительно платформы гиростабилизатора.
ПРИЛОЖЕНИЯ
Приложение 1
ТАБЛИЦА ЕДИНИЦ РАЗЛИЧНЫХ ВЕЛИЧИН И ПЕРЕВОДНЫХ
КОЭФФИЦИЕНТОВ
Метрические единицы измерения
Коэффициент для приведения
к единицам CU
Ангстрем (А)
Микрон (мк)
Миллиметр (мм)
Сантиметр (см)
I. Механические единицы
/. Длина
МО"1» м
1-10-6 м
МО"3 м
ЫО-2 м
Квадратный миллиметр (мм2)
Квадратный сантиметр (см2)
Кубический миллиметр (мм3)
Кубический сантиметр (см3)
Литр (л)
Карат метрический
Грамм (г)
Тонна (т)
Минута (мин)
Час (ч)
Секунда (")
Минута (')
2. Площадь
ЫО-б м2
Ы0~4 м2
3. Объем
ЫО-9 м*
1 • 10-е жз
1,000028- Ю-3
4. Масса
2-10"
ЫО"
ыо-
5. Время
кг
кг
60 сек
3600 сек
6. Плоский угол
п
648
я
Ю-3 ра^=4,848137-10-6 рад
— Ю-2 рад=2,908882-Ю-4 рад
108
205
Продолжение прилож. 1
Метрические единицы измерения
Градус (°)
Прямой угол (L)
Оборот (полный угол)
Коэффициент для проведения
к единицам CU
— рад=0,01745329 рад
180
JLpad=1,570796 рад
2тс рад=6,283185 рад
Оборот в секунду (об/сек)
Колебание в секунду
Период в секунду (пер/сек)
Оборот в минуту (об/мин)
Килогерц (кгц)
1 см/сек
1 км/час
7. Частота
> 1 гц
1/60 гц
МО3 гц
Линейная скорость
0,01 м/сек
1
м/сек=0,2778 м/сек
3,6
1 см/сек2
1 км/ч-сек
9. Линейное ускорение
0,01 м/сек2
0,2778 м/сек2
10. Угловая скорость
Градус в секунду (град/сек)
Оборот в секунду (об/сек)
Оборот в минуту (об/мин)
1 т/м3
1 кг/дм3
1 г/см3
1 кг/л
1 г/мл
— рад/се/с=0,01745329 рад/сек
180
2гс рад/сек=6,283185 рад/сек
рад/сек=0,1047197 рад/сек
1 л«3//п
1 дм3/кг
1 сл«3/г
30
//. Плотность
Ы03 /сг/ж3
11999,972 кг/м3
12. Удельный объем
МО"3 м3/кг
206
Продолжение прилож. 1
Метрические единицы измерения
1 л/кг
1 ял
Коэффициент для приведения
к единицам CU
1 1,000028-Ю-"3 м3/кг
1 г/сек
1 кг/мин
1 см3/сек
1 м3/час
1 л/сек
1 г/см2-сек
13. Массовый расход
ЬЮ-"3 кг/сек
16,607-Ю-3 кг/сек
14. Объемный расход
1-10-е мъ/сек
277,8-10-6 Мз/Сек
1,000028-10-3 м3/сек
15. Массовая скорость
I 10 кг<м2-сек
1 (П
1 (кГ)
1 (дин)
1. (стен)
1 кг/м3
1 г/см3
1 дин/см3
1 /сГ-ж
1 Г-сж
1 дин-см
1 кГ-м-сек2
1 Г-см-сек2
1 дин-см-сек2
1 am
1 /сТ/ок2
1 /сГМ2
1 лш вод.
ст.
1 Г/с/и2
1 л* вод. ст.
1 лш рт. ст.
16. Сила (в тоя числе сила тяжести)
9,80665-Ю-3 н
9,80665 н
1 -10—5 н
1-Ю3 к
17. Удельная сила тяжести (удельный вес)
9,80665 н/м3
9,80665-1О3 н/м3
10 н/м3
18. Момент силы
9,80665 н-м
9,80665.10"5 н-м
1 -10—7 н-м
19. Динамический момент инерции
9,80655 кг-м2
9,80665-Ю-5 кг-м2
1-10"7 кг-м2
20. Давление
[98066,5 н/м2
[9,80665 н/м2
98,0665 н/м2
9,80665 кн/м2
133,322 н/м2
207
Продолжение прилож. 1
Метрические единицы измерения
Коэффициент для приведения
к единицам CU
21. Работа и энергия
1 эрг (дин-см)
1 Г-см
1 кГ-м
1 вГП'Ч
1 эрг/сек
1 Г-см/сек
1 кГ-м/сек
1 вт
1 кГ/(м-сек)
1 пз (пуаз)
1 дин-сек/см2
1 кГ-сек/м2
1 см2/сек
1 cm (стоке)
1 ест (сантистокс)
1 ж/ел
1 jwa
1 а-сек
1 а-ч
1 а/сж2
1 а/мм2
ЬЮ-7 дяе
9,80665-Ю-5 дж
9,80665 дж
3600 drw
22. Мощность
ЬЮ-7 em
9,80665-Ю"
9,80665 вт
1,00019 вт
23. Динамическая вязкость
1 н-сек/м2
1 0,1 н-сек/м2
9,80665 н-сек/м*
24. Кинематическая вязкость
МО-4 м2/сек
ЫО-6 м/сек2
II. Электрические и магнитные единицы
/. Сила то/са
1-10-6 а
МО"3 а
2. Количество электричества (заряд)
1 /с
3600 к
Плотность электрического тока
1-104 а/м2
1-106 а/^2
4. Электродвижущая сила (э. д. с), разность электрических потенциалов,
электрическое напряжение
1-10~б в
\ мкв
1 мв
1 вт/а
1 -10"
1 в
208
Продолжение прилож. 1
Метрические единицы измерения
Коэффициент для приведения
к единицам CU
1 ав
1 а/см
1 ав/см
1 эрстед (э)
1 мкгн
1 мгн
1 в -сек /а
1 пф
1 ммкф
1 к/в
1 ком
1 Мол*
1 в/а
1 сш-сл*
1 ом-мм2/м
1 Л4/Сбб
1 Л!бб
1 в-сек
1 бб/ж2
1 бб/СЖ2
6.
5. Электрическая емкость
МО"12 0
МО"» ф
1 *
Электрическое сопротивление
ЫО3 ол*
ЫОб ол*
1 ож
7'. Удельное электрическое сопротивление
Ь 10"~2 OM-M
1 • 11"~6 ом-м
8. Магнитный поток
1-10-6 яб
ЫО-3 бб
1 вб
9. Магнитная индукция
1 /7М
ЫО4 тл
12,
10. Магнитодвижущая сила
I 1 а
11. Напряженность магнитного поля
100 а/м
79,5775 а/м
Индуктивность и взаимная индуктивность
1-10-
ыо-
1 2Я
2tt
гн
13. Абсолютная магнитная проницаемость и магнитная постоянная
1,256637-10-6 гн/м
1 ед. абс. магн. прониц.
СГС, СГСМ и СГС (х0
1 ед. магн. сопр.
СГС, СГСМ и СГС [х0
75.
1 вт-сек
1 бт-ч
1 квт-ч
14. Магнитное сопротивление
79,5775-106 а/вб
Электрическая энергия и работа
1 дж
3600 дяе
3,6-106 дж
209
210
Приложение 2
ХАРАКТЕРИСТИКИ НЕКОТОРЫХ МАТЕРИАЛОВ
-—^.^^ Материал
^_ т, « Нержавеющая Технический Магниевый Алюминиевый
—^_^ Бериллий сталь титан сплав сплав
Характеристика ~^-^^^ отожженная
Удельный вес — 1,84—1,85 7,9 4,5 1,8 2,8
см
Модуль упругости Е — (2,9-нЗ, 1)• Ю4 1,82-10* МО4 0,455-Ю4 0,735-Ю4
мм2
Стареет или нет Нет Нет Нет Стареет Стареет
Коэффициент температурного линейного расшире- (10-*-12)-К)-6 12-10-6' 8,5-10—6 24- 10—е 22- 10~~б
ния 1/град
Коэффициент теплопроводности х -^ 0,32—0,38 0,053 0,039 0,32 0,35
град-см-сек
Теплоемкость *"*" 0,42-0,47 0,122 0,13 0,25 0,21
кГ-град
Удельная прочность — - — 33,5J 7,5 10,5 12,7 9
I ) III
211
Приложение 3
НЕКОТОРЫЕ ХАРАКТЕРИСТИКИ СОВРЕМЕННЫХ ИНОСТРАННЫХ ПРИБОРОВ
Датчики угловой скорости
Диапазон Порог Собственная
Наименование и тип прибора измерения чувствит. частота /0 Степень затухания £ Вес г
град! сек град! сек гц
Поплавковый датчик угловой скорости ±30 0,06 25 0,7-1-0,2 566
Поплавковый "датчик угловой скорости FT8 1 рад/сек — 65 1,0 690
Датчик угловой скорости При жидкостном ПО
демпфировании
GN = 40 Н = 39 Г-см-сек 400 0,01 76 0,6
GN = 60 H = 39 Г-см-сек 600 0,01 76 при 25°С ПО
Т2008-1А-10 10 — 19"~23 0,4—0,8 730—770
Т2008-1А-29 29 0,023 17—20 0,4—1,0 730—770
Kearfott
Т2008-1А-90 90 0,09 33—38 0,4-1,2 730-770
Т-2008-1А-114 114 — 37-41 0,8-1,2 730-770
Акселерометры
Наименование и тип
прибора
Маятниковый
акселерометр F-2401
Линейный акселерометр
LA-800
Маятниковый GG56C
Маятниковый
А-141-02
А-200, А-300
Порог
чувствительности
8,
5-10-5
1-10-4
1-10-4
5-10-5
Точность
измерения
%
0,01
0,005 до lg
при 0,1 (l+10g)
0,01
Диапазон
измерения
а
±20
1—80
±10
±15
±20
Собственная
частота /0
гц
180
90
Вес
Г
113
90
180
200
74
Интегрирующие гироскопы
Тип
прибора
МИГ
GG37
G-1-H5
G1-T1-B
Кинетический
момент Н
Г-сМ'Сек
102
1020
30
1800
Гиромотор
—
—
На
подшипниках
На газовых
подшипниках
Вес
Г'
220
2043
2835
1587
Дрейф в град/
не
зависящий от
ускорения
—
—
3
циональный g
0,5
0,05
3,0
час
циональный g2
—
—
0,18
Потребляемая
мощность
вт
2,5
—
3
6
ЛИТЕРАТУРА
1. Асе Б. А., Жукова Н. И., Антипов Е. Ф., Детали и узлы
авиационных приборов и их расчет, изд-во «Машиностроение», 1966.
2. Бабаева Н. Ф., Ерофеев В. М., Сивоконенко И. М,
Хованский Ю. М, Я в л е н с к и й К. Н., Детали и элементы
гироскопических приборов, Судпромгиз, 1962.
3. Г о р е н ш т е й н И. А., III у л ьм а н И. А., С а ф а р я н А. С, Инер-
циальная навигация, изд-во «Советское радио», 1962.
4. Д а н и л и н В. П., Гироскопические приборы, изд-во «Высшая
школа», 1965.
5. Д р е и п е р С. К-, Приборная техника и инерциальное наведение,
«Вопросы ракетной техники», 1961, № 2.
6. Ишлинский А. Ю., Механика гироскопических систем, Изд. АН
СССР, 1963.
7. Одинцов А. А., Проектирование электроэлементов гироскопических
устройств, изд-во «Высшая школа», 1962.
8. П а в л ов В. А., Теория гироскопа и гироскопических приборов, изд-ва
«Судостроение», Л., 1964.
9. Пельпор Д.. С, Гироскопические приборы и автопилоты, изд-во-
«Машиностроение», 1964.
10. Пельпор Д. С, Б р а с л а в с к и й Д. А., Гироскопические
чувствительные элементы и акселерометры, Сб. под редакцией В. В. Солодовнико-
ва «Основы автоматического регулирования», т. II, «Элементы систем
автоматического регулирования», ч. I, «Чувствительные, усилительные и
исполнительные элементы», Машгиз, 1959 г.
11. Пельпор Д. С, Дифференцирующие и интегрирующие гироскопы,
Сб. под редакцией В. В. Солодовникова, «Основы автоматического
регулирования», т. II, «Элементы систем автоматического регулирования», ч. II
«Корректирующие элементы и элементы вычислительных машин, ГНТИ
Машиностроительной литературы, Машгиз, 1959.
12. Попов Е. П., Динамика систем автоматического регулирования,
Гостехиздат, 1954.
13. Попов Е. П., Пальтов И. П., Приближенные методы
исследования нелинейных автоматических систем, ГИФМЛ, 1960.
14. Проблемы инерциальной навигации, Сб. статей под редакцией
Н. И. Борисова, ИЛ, 1961.
15. Р и в к и н С. С, Теория гироскопических устройств, Судпромгиз, ч. I,
1962, ч. П. 1964.
16. С л ом я иски й Г. А., Пряди лов Ю. Н., Поплавковые
гироскопы и их применение, Оборонгиз, 1958.
17. Тихменев С. С, Элементы точных приборов, Оборонгиз, 1956s
18. Феодосьев В. И., Синя рев Г. Б., Введение в ракетную
технику, Оборонгиз, 1956.
19. Ф р и длен дер Г. О., Козлов М. С, Авиационные
гироскопические приборы, Оборонгиз, 1961.
20. Чистяков Н. И., Электрические авиационные приборы,
Оборонгиз, 1950.
21. Шляндин В. М., Элементы автоматики и счетно-решающие
устройства, изд-во «Машиностроение», 1967.
213^
22. Б у р д у н Г. Д., К а л а ш н и к о в Н. В., Стоцкий Л. Р.,
Международная система единиц, изд-во «Высшая школа», 19(?4.
23. Д е лектор ский Б. А., Мастяев Н. 3., Орлов И. Н.,
Проектирование гироскопических электродвигателей, изд-во
«Машиностроение», 1968.
24. К о в а л е в М. П., М о р ж а к о в С. П., Т е р е х о в а К. С,
Динамическое и статическое уравновешивание гироскопических устройств, изд-во
«Машиностроение», 1965.
25. В а с k e r s, A Magnetic Journal Bearing Philips Technical. Rev.
1960/1961, vol. 22; No. 7, p. 232.
26. В r e a z с a 1 e J. В., M e 11 w г a i с h С. G., Dacus E. N, Factors
Limiting a Magnetic Suspension System, J. of applied Phisics, 1958,
vol. 29, No. 3.
27. Ишлинск'ий А. Ю., Инерциальное управление баллистическими
ракетами, изд. «Наука», 1968.
28. Л о к к А. С, Управление снарядами, Гостехтеоретиздат, 1957.
29. Ц и г л е р Г., Проблемы гироскопии, сборник статей, изд. «Мир»,
1967.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Введение 5
Глава I. Дифференцирующие гироскопы 9
1.1. Датчик угловой скорости (ДУС) с механической пружиной ... 9
Уравнение движения прибора 11
Инструментальные погрешности 13
Динамические погрешности 20
Влияние нежесткости конструкции датчика на частоту собственных
колебаний 25
Погрешности от переносного ускорения ®Xi 29
Погрешности от перекрестной угловой скорости 30
Порядок расчета 36
1.2. Датчик угловой скорости с электрической пружиной 37
Принцип действия 37
Уравнение движения прибора 39
Датчик с электрической пружиной и емкостным демпфированием . 45
Зависимость диапазона измерения от сопротивления нагрузки . . 53
Автоколебания датчика угловой скорости v 57
Влияние различных параметров прибора на автоколебания ... 62
1.3. Датчики угловых скоростей с жидкостным заполнением ... 66
Схема датчика угловой скорости с кинематической компенсацией
демпфирования прибора 67
1.4. Вибрационные гироскопы 70
Роторный вибрационный гироскоп 70
Принцип действия вибрационного гироскопа '(гиротрона) ... 72
Приближенные уравнения движения гиротрона 74
1.5. Магнитогидродинамический датчик угловой скорости .... 75
1.6. Датчик угловой скорости на базе гироскопа с тремя степенями
свободы 78'
Принцип действия 78
Уравнение движения прибора 80
Применение гироскопа с тремя степенями свободы в качестве
датчика угловой скорости 81
1.7. Гироскопические датчики угловой скорости и углового ускорения . 82
Схемы приборов, основанные на базе датчиков угловых скоростей 82
Датчик угловой скорости и углового ускорения на базе гироскопа
с тремя степенями свободы 84
Глава II. Интегрирующие гироскопы 94
2.1. Принцип действия и назначение 94
2.2. Характеристики и параметры 95
2.3. Интегрирующий гироскоп с воздушными демпферами 98
Уравнения движения интегрирующего гироскопа с воздушными
демпферами 100
2.4. Принципиальная схема поплавкового интегрирующего гироскопа . 105
2.5. Основные элементы поплавкового интегрирующего гироскопа . . Ю9
Поплавковый гироузел и его балансировка 109
Система термостатирования прибора 115
Датчики угла и момента 120
Токоподводы поплавковых приборов 128
Опоры поплавковых приборов. Магнитные подвесы 1-29*
Центрирующая сила и жесткость магнитного подвеса 134
215
Стр.
2.6. Дрейф поплавковых интегрирующих гироскопов 141
2.7. Анализ причин дрейфа поплавковых приборов 143
Упругий момент токоподводов 144
Влияние магнитных полей на работу поплавкового прибора . . 147
Влияние эксцентриситета и перекоса между осью вращения
поплавкового гироузла и осью цилиндра поплавковой камеры на моменты
трения в опорах прибора 148
Тепловой дрейф поплавковых интегрирующих гироскопов . . . 153
Вынужденное движение поплавка на поддерживающем слое
жидкости относительно корпуса прибора при линейной вибрации . . 158
Смещение центра масс гиромотора при действии постоянных и
вибрационных ускорений, вызванное нежесткостью его конструкции . 163
Глава III. Акселерометры
3.1. Назначение, принцип действия и уравнение движения .... 169
3.2. Классификация 171
3.3. Маятниковый поплавковый акселерометр 172
Методические погрешности 175
Инструментальные погрешности 178
3.4. Интегрирующий акселерометр с гидродинамическим подвесом . . 179
3.5. Акселерометр двойного интегрирования 181
3.6. Струнный акселерометр 184
3.7. Гироскопический интегратор линейных ускорений 186
Принцип действия 186
Уравнения движения прибора 188
Передаточный коэффициент 190
Порог чувствительности. Инструментальные погрешности . . .191
Погрешность от угловой скорости объекта ых и перекрестного
ускорения. Vyi и V21 192
Погрешность от жидкостного демпфирования в осях подвеса и
разгрузочного устройства 193
Автоколебания гироинтегратора 196
Влияние параметров гироинтегратора на амплитуду А
автоколебаний и смещение центра колебаний 3i 198
Интегратор продольных ускорений ракеты V-2 201
Приложения
1. Таблица единиц различных величин и переводных коэффициентов 205
2. Характеристики некоторых материалов 210
3. Некоторые характеристики современных иностранных приборов 211
Литература 213
Евгений Александрович Никитин, Антонина Алексеевна Балашова
ПРОЕКТИРОВАНИЕ ДИФФЕРЕНЦИРУЮЩИХ
И ИНТЕГРИРУЮЩИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ
Редактор Л. И. Шейнфайн Художник Н. Т. Дворников
Технический редактор А. Я. Дубинская Корректор Е* П. Карнаух
Сдано в набор 3/IV 1968 г. Г-67505 Подписано в печать 21/1 1969 г. Формат бОХЭО1/^
Бумага тип. № 2 Печ. л. 13,5 Уч -изд. л. 12,25 Бум. л. 6,75
Тираж 3700 экз Цена 80 коп Тем. план 1968 г., № 167 Изд. зак. 2105 Зак № 1031
Издательство «Машиностроение», Москва, К-51, Петровка, 24.
Московская типография № 6 Главполиграфпрома
Комитета по печати при Совете Министров СССР
Москва, Ж-88, 1-й Южно-портовый пр , 17.