/



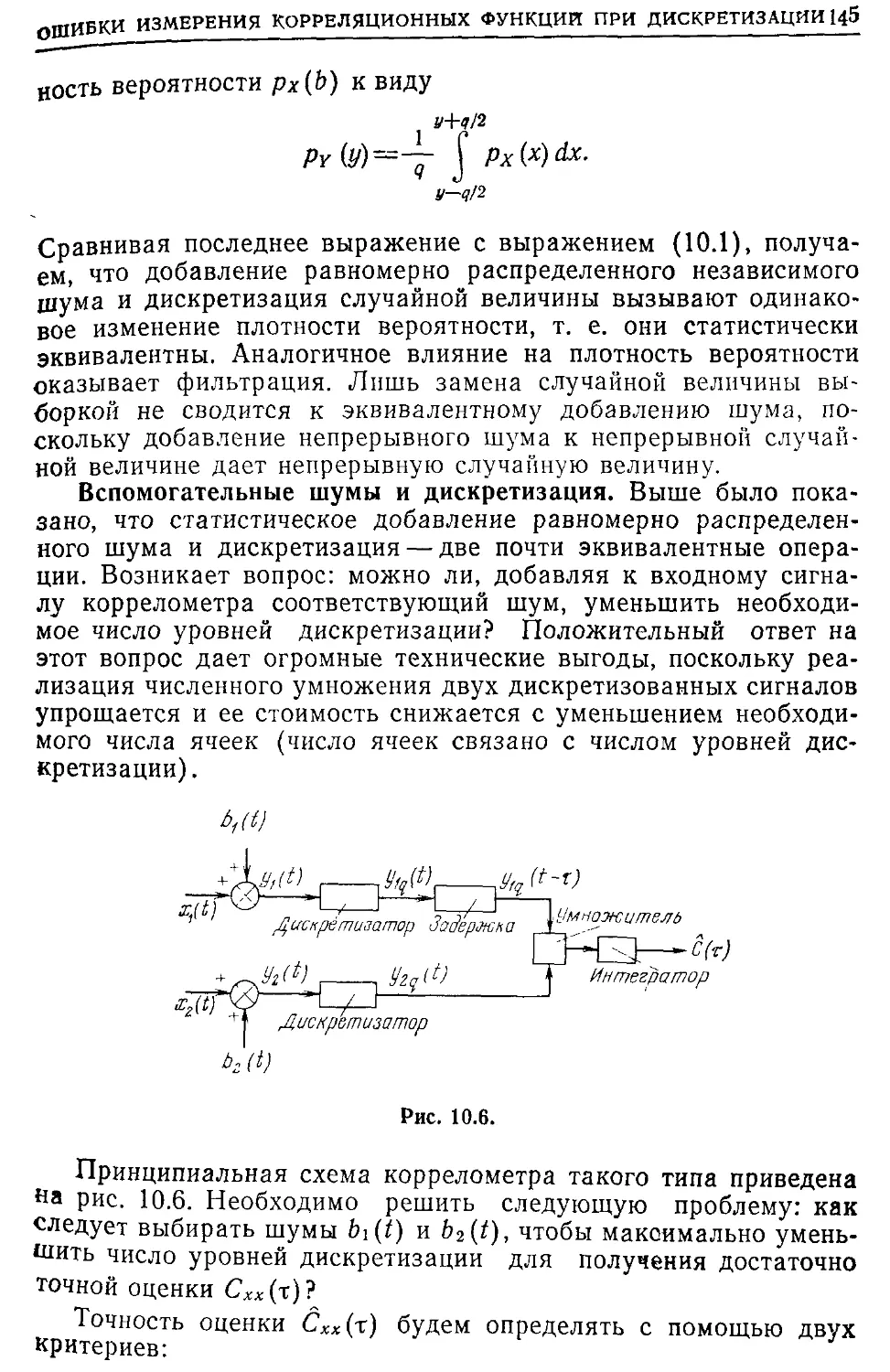





Text
Methodes
et techniques
de traitement
du signal
et applications
aux mesures
.physiques
Tome '
PRINCIPES GENERAUX
ET METHODES CLASSIQUES
par
J. MAX
Licencie es Sciences
Ingenieur E.S.E.
a\ec la collaboration de
L. AUDAIRE, D. BERTHIER, R. BIGRET, J.-C. CARRE,
H. CHEVALIER, B. ESCUDIE, A. HELLION, J.-L. LACOUME,
M. MARTIN, R. MIQUEL, PH. PELTIE, M. TROTTOT, R. VERGNE
Prefaces de L. NEEL et M. CORDELLE
TROISIEME EDITION
revue et augmentee
MASSON
Paris New York Barcelone Milan Mexico Rio de Janeiro
1981
Ж. Макс
Методы
и техника
обработки
сигналов
при
физических
измерениях
В 2-х томах
1 ОСНОВНЫЕ ПРИНЦИПЫ
И КЛАССИЧЕСКИЕ МЕТОДЫ
ПЕРЕВОД С ФРАНЦУЗСКОГО
канд. физ.-мат. наук А. Ф. ГОРЮНОВА
и канд. физ-мат. наук А. В. КРЯНЕВА
ПОД РЕДАКЦИЕЙ
Д-ра физ.-мат. наук Н. Г. ВОЛКОВА
Москва «Мир» 1983
ББК 32.86
М 17
УДК 681.511
Макс Ж.
М 17 Методы и техника обработки сигналов при физических
измерениях: В 2-х томах. Пер. с франц. — М.: Мир, 1983. —
Т. 1. 312 с, ил.
Первый том книги французских специалистов посвящен математическим ме-
тодам обработки сигналов, основанным на идеях корреляционного и спектрального
анализа. Изложены вопросы фильтрации и дискретизации сигналов, свойства кор-
реляционных функций и спектральных плотностей и способы их измерения для
различных типов сигналов. Специальное внимание уделяется анализу погрешно-
стей, возникающих на всех этапах обработки.
Для специалистов, создающих системы автоматизации физических экспери-
ментов, инженеров, аспирантов и студентов, специализирующихся в области из-
мерительной техники, радиофизики и квантовой оптики.
2402020000-335
М 159-83, ч. 1 ББК 32.86
041@1)83
Редакция литературы по новой технике
© Masson, Paris, 1981
© Перевод на русский язык, «Мир», 1983
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Предлагаемая вниманию читателя книга написана Ж. Максом и специа-
листами ряда французских научно-исследовательских учреждений. Их имена
и работы достаточно известны научной общественности, что служит опреде-
ленной гарантией качества книги.
Интерес к методам обработки сигналов существенно возрос в последние
годы. Это объясняется, во-первых, интенсивным развитием вычислительной
техники. ЭВМ в настоящее время обладают такими возможностями, что они
позволяют реализовать очень сложные алгоритмы обработки. Хотя многие из
методов, лежащих в основе этих алгоритмов, были известны давно, их прак-
тическая реализация стала возможной лишь с появлением быстродействую-
щих ЭВМ. Это относится, например, к различным интегральным преобразова-
ниям, в частности к преобразованию Фурье. Во-вторых, интерес к методам
обработки вырос в связи с бурным развитием производства интегральных
схем и микропроцессоров, на основе которых можно создавать специализи-
рованные устройства для обработки данных, обладающие большим быстро-
действием и высокой точностью обработки. Во многих случаях микропро-
цессоры являются элементом измерительной установки и обеспечивают
возможность обработки в реальном времени, осуществляя, таким образом, совме-
щение процесса измерения и обработки. Богатые вычислительные возможности
оказали заметное влияние на развитие самих методов обработки, вызвав к
жизни целый ряд задач, решение которых ранее было невозможно. К ним
относится, например, изучение нестационарных случайных процессов.
Все эти факты нашли отражение в книге или повлияли на ее содержа-
ние. Основной особенностью книги следует считать ее ориентацию на специа-
листов, работающих в самых разных областях науки и техники. Можно даже
сказать, что она в большей степени ориентирована на специалистов в тех
областях, в которых подобные методы обработки еще не нашли широкого рас-
пространения. В известном смысле книга служит призывом к внедрению
методов обработки в практику.
Авторы поставили перед собой цель — охватить довольно широкий круг
вопросов, связанных с обработкой сигналов, начиная от математических основ
и кончая техническими решениями и многочисленными приложениями к фи-
зике, биологии, машиностроению, медицине и т. д. Такая широта делает ее
полезной для самых разнообразных специалистов. Этому способствует также
стиль книги. Все используемые основные понятия (в том числе такие, как пре-
образование Фурье, свертка и т. п.) очень подробно объясняются и иллюстри-
руются, что позволяет прочесть книгу с пользой и тем читателям, которые
вследствие характера своей деятельности немного забыли математические
выражения, но нуждаются в развитии методов обработки. Многие выводы
сопровождаются подробными выкладками, при необходимости авторы гово-
рят о тонкостях метода и подводных камнях, которые могут ускользнуть от
внимания не очень проницательного читателя.
Практическая ценность книги состоит также в большом количестве фор-
мул, пригодных для непосредственного использования при обработке сиг-
налов.
Главы книги, посвященные описанию технических средств, предназначены
в основном для пользователей аппаратуры, но не разработчиков: достаточно
обстоятельно описываются принципы работы приборов и устройств, взаимо-
связи между элементами и узлами, но не излагаются конкретные технические
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
реализации. Такой подход, на мой взгляд, правилен, если учесть, что аппара-
тура обычно покупается и для ее правильной эксплуатации достаточны лишь
общие представления о ней. В книге приведены технические характеристики
некоторых приборов.
Большая часть книги посвящена приложениям спектрального и корреля-
ционного анализов. Выбор применений весьма широк, хотя далеко не исчер-
пывает всех возможностей этих методов анализа. Выбранные примеры
настолько характерны, а результаты, полученные с помощью описываемых ме-
тодов, настолько убедительны, что любой заинтересованный специалист, про-
читавший книгу, легко сможет понять, как использовать методы обработки
сигналов в его конкретной области и каких результатов можно ожидать.
Книга будет полезна специалистам, работающим в самых разнообразных
областях науки и техники, включая физику, химию, биологию, медицину, ма-
шиностроение и др. Она может быть использована в качестве учебного по-
собия студентами соответствующих специальностей при изучении курсов, по-
священных методам обработки данных.
Н. Г. Волков
ПРЕДИСЛОВИЕ К ПЕРВОМУ И ВТОРОМУ ИЗДАНИЯМ
Мне очень приятно представить читателям монографию Ж. Макса, посвя-
щенную основным методам и технике обработки сигналов и их применениям
при физических измерениях. Автор книги — сотрудник Высшей электротехни-
ческой школы и руководитель отдела «Обработка сигналов» Лаборатории
электроники и информационной техники Центра ядерных исследований в Гре-
нобле, что свидетельствует о его высокой компетенции в рассматриваемой об-
ласти. Эта область в настоящее время чрезвычайно актуальна. Ученые и ин-
женеры все больше и больше занимаются проблемой извлечения максимума
информации из результатов измерений. Но интересующие их сигналы всегда
сопровождаются шумами, носящими случайный характер, и поэтому важно
найти методы выделения сигналов на фоне шумов. Проблемы, которые инте-
ресовали раньше только военных специалистов в области пеленгования и от-
части геофизиков, начинают играть большую роль теперь для всех физиков.
Кроме того, многие явления, такие, например, как пластическая деформа-
ция материалов, гистерезис ферромагнитных материалов и особенно эффект
Баркгаузена, могут быть с успехом рассмотрены как случайные явления. Сле-
довательно, случайные функции представляют также большой интерес при
изучении этих явлений.
Содержание книги — итог многолетней работы ученых Центра ядерных
исследований в Гренобле, результаты которой нашли многочисленные приме-
нения в промышленности, а также широко используются учеными и инжене-
рами при создании и эксплуатации измерительной аппаратуры.
Основой для монографии послужил курс лекций, прочитанный автором
в нескольких технических вузах, а также материал по научно-техническому
обмену, который обсуждался на семинарах группы пользователей обработки
сигналов, проводимых два раза в год в Гренобле. Автор в единой форме
представил необходимые сведения для специалистов (число которых непре-
рывно растет), использующих при исследованиях методы и технику обработки
сигналов. Четкое и ясное изложение сложных понятий и явлений облегчает ее
чтение и понимание. Практические вопросы и теоретические выкладки всегда
взаимосвязаны.
Фундаментальные понятия вводятся с помощью только необходимого для
этого математического аппарата, а элементарный математический уровень
книги делает ее доступной для студентов, инженеров, техников и исследовате-
лей различного профиля.
Три главы книги посвящены фильтрации, функции неопределенности и
мгновенным спектрам. Именно в этой области наиболее глубоко разработаны
методы, которые будут находить все более многочисленные применения по
мере общего технического прогресса и позволят в недалеком будущем создать
простую аппаратуру для обработки комплексных функций.
Я уверен, что книга будет широко использована студентами, учеными,
инженерами и даст им возможность изучить область знания, в развитие ко-
торой французские ученые вносят существенный вклад.
Луис Неел
Лауреат Нобелевской премии по
физике, профессор
ПРЕДИСЛОВИЕ К ТРЕТЬЕМУ ИЗДАНИЮ
Книга Ж. Макса, посвященная основным методам и технике обработки
сигналов и их применениям при физических измерениях, была впервые изда-
на в 1972 г. и к настоящему времени стала классическим трудом. Ее пере-
издание является важным событием в области методов обработки сигналов.
Автор существенно переработал и дополнил книгу новыми теоретическими и
экспериментальными результатами, привлек к работе над книгой специалистов,
работающих как на частных предприятиях, так и в национальных и между-
народных исследовательских лабораториях.
В настоящее время, когда обработка сигналов быстро переходит от этапа
теоретических исследований к этапу технических приложений, следует отме-
тить важность и актуальность предложенных автором методов. Последние
найдут применение при вычислениях точности получаемых результатов, когда
это необходимо, и даже тогда, когда полученные результаты непредсказуемы,
но подтверждаются экспериментально. Отметим, в частности, гл. 14, которая
посвящена спектральным окнам и которая позволяет читателю разобраться в
недостаточно изученных до сих пор вопросах. В книге особое внимание уде-
ляется взаимности временного и частотного представлений, лежащих в основе
обработки сигналов, что помогает выработать у читателя навыки обращения
с этими понятиями.
В новом издании большое место уделено оптическим методам обработки
сигналов, на которых основаны новые устройства, в частности проекторы на
жидких кристаллах. Следует отметить актуальность материала новой главы,
посвященной широко распространенным в настоящее время спектральным
анализаторам, которые отличаются от коррелометров, рассмотренных в преды-
дущих изданиях. Важна также новая глава, в которой рассмотрены вибрации.
Исследование вибраций составляет одно из основных применений теории об
работки сигналов.
Все внесенные в новом издании добавления полезны, и следует поблаго-
дарить Ж. Макса за его труд, дающий возможность ознакомиться с самыми
последними достижениями в этой быстро развивающейся области науки.
Мишель Кордель
Директор Лаборатории электроники и ин-
формационной техники при Комиссариате по
атомной энергии
ПРЕДИСЛОВИЕ АВТОРА
Третье издание книги почти в два раза превышает по объему первое изда-
ние, вышедшее в 1972 г. Это объясняется быстро возрастающей ролью мето-
дов обработки сигналов в науке и технике. Цель этого издания прежде всего
служить рабочим аппаратом для инженеров и ученых во всех областях науки.
Часть книги посвящена теоретическим вопросам, которые необходимы не
только для понимания содержания самой книги, но которые дают возмож-
ность читателю определять пределы применимости предлагаемых методов по
обработке сигналов и создавать, когда это возможно, новые методы. В том
случае, когда подробное изложение какого-либо вопроса не имеет прямого
отношения к обработке сигналов, мы даем только краткий обзор, основанный
на физике рассматриваемого вопроса. Это в первую очередь относится к гла-
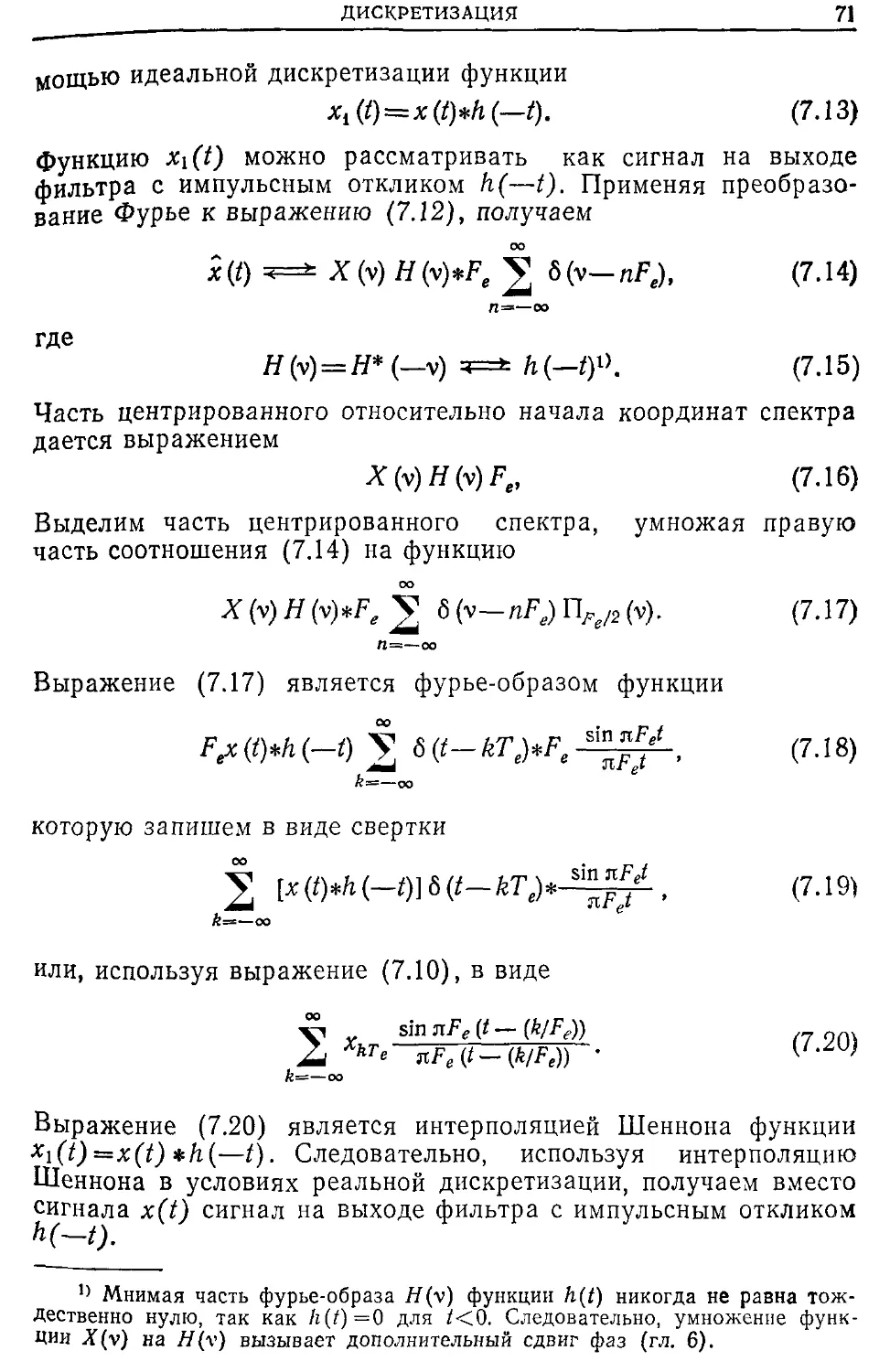
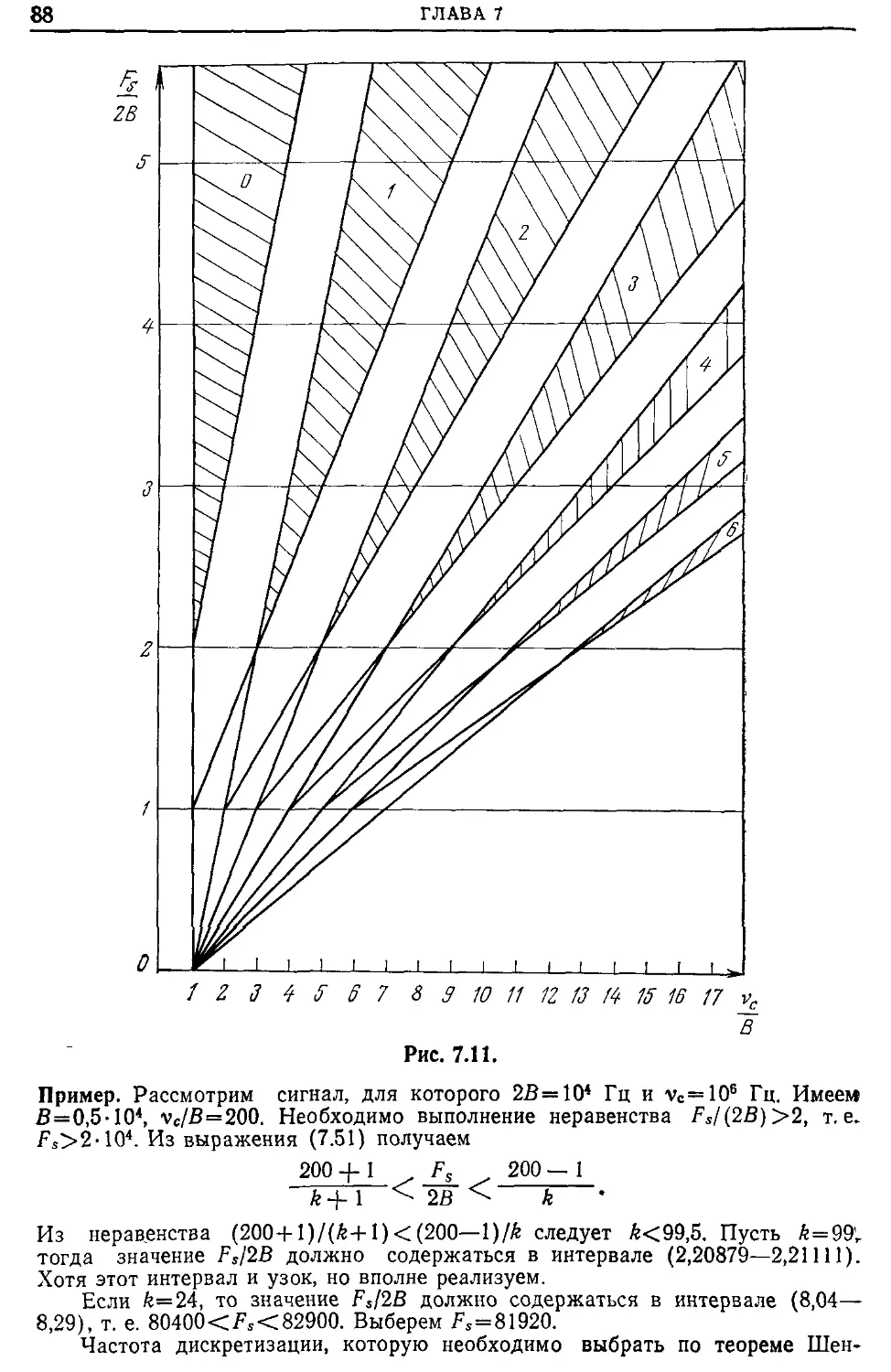
вам 2—8 и 11. Гл. 7 расширена, так как проблемы дискретизации имеют
огромное значение, поскольку неправильное применение дискретизации приво-
дит к непоправимым искажениям сигнала. В гл. 9, 10 и 12 подробно иссле-
дуются ошибки при обработке сигналов и точность того или иного метода.
Анализ этих ошибок позволяет увеличить отношение сигнал/шум, что являет-
ся целью обработки сигналов.
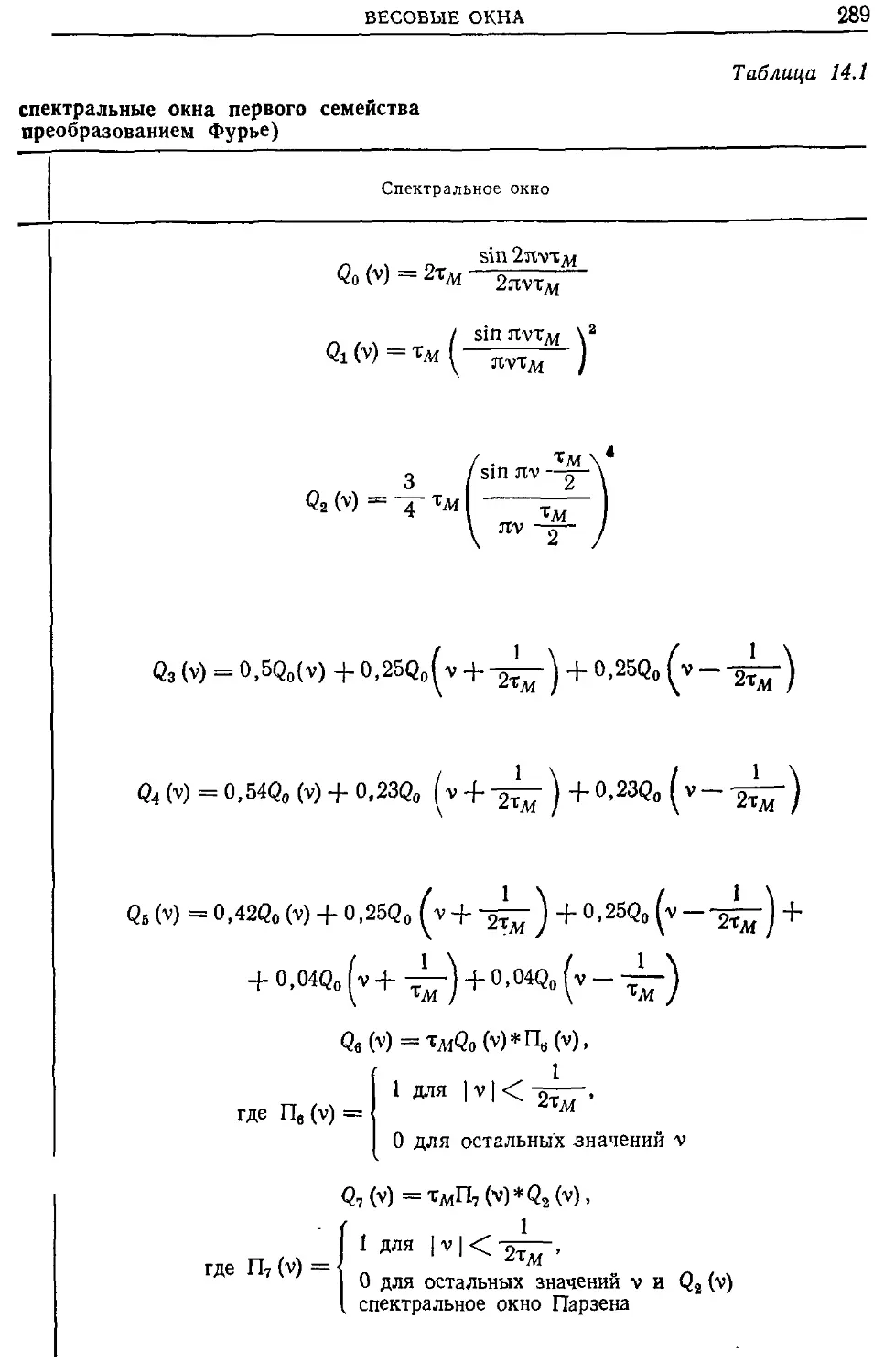
Изучение методов спектрального анализа в гл. 13 продолжено в гл. 14,
посвященной изучению спектральных окон. Важность этой главы велика, по-
скольку большинство систем обработки сигналов состоит из различных
спектральных окон и для выбора подходящей системы необходимо иметь раз-
личные критерии, с помощью которых осуществляется выбор.
В томе 2 описываются устройства, которые наиболее часто используются
при обработке сигналов (многоканальные анализаторы (гл. 15), синхронные
детекторы (гл. 16), фильтры (гл. 17)), реализация которых возможна при
современном уровне технологии. В гл. 18 и 19 рассмотрены различные типы
коррелометров и анализаторов спектра. Оптические методы спектрального ана-
лиза кратко изложены в гл. 20. В гл. 21 приведено несколько примеров при-
менения описанных в книге методов. К сожалению, в этой главе не рассмотре-
ны наиболее интересные примеры успешного применения методов, поскольку
они представляют военный или промышленный секрет (например, обнаружение
подводных лодок и самолетов, управление процессами в химической промыш-
ленности). В гл. 22 показано значение применения методов обработки сигна-
лов для изучения вибраций. Наконец, гл. 23—25 посвящены давно известным
методам, но которые только в последние годы нашли применение благодаря
большому техническому прогрессу, и особенно после создания интегральных
схем. Функция неопределенности, имеющая широкое применение, мгновенный
спектр, который при спектральном анализе используется наиболее часто, и,
наконец, новые методы спектрального анализа рассматриваются для случая,
когда время наблюдения сигнала очень мало (в этом случае говорят о кратко-
временных сигналах или о неполных рядах).
К сожалению, мы не могли здесь рассмотреть некоторые методы, кото-
рые были созданы за время выхода книги из печати.
Основное занятие людей должно было
бы заключаться в том, чтобы возвра-
щаться мысленно в школу и вспоминать,
о чем они думали до того времени, ко-
гда им было сказано, что надо зараба-
тывать на жизнь.
ВВЕДЕНИЕ Бакминстер Фуллер
В любом случае есть только один спо-
соб правильно вести спор: надо снача-
ла хорошо понять, о чем идет речь.
Платон
Трудно и, более того, невозможно дать сжатое и приемле-
мое для всех определение обработки сигналов. Относительно
недавно появилось выражение «методы и техника обработки
сигналов», причем используемые методы и техника, конечные
цели которых многочисленны и часто различны, находят все
большее применение во многих областях.
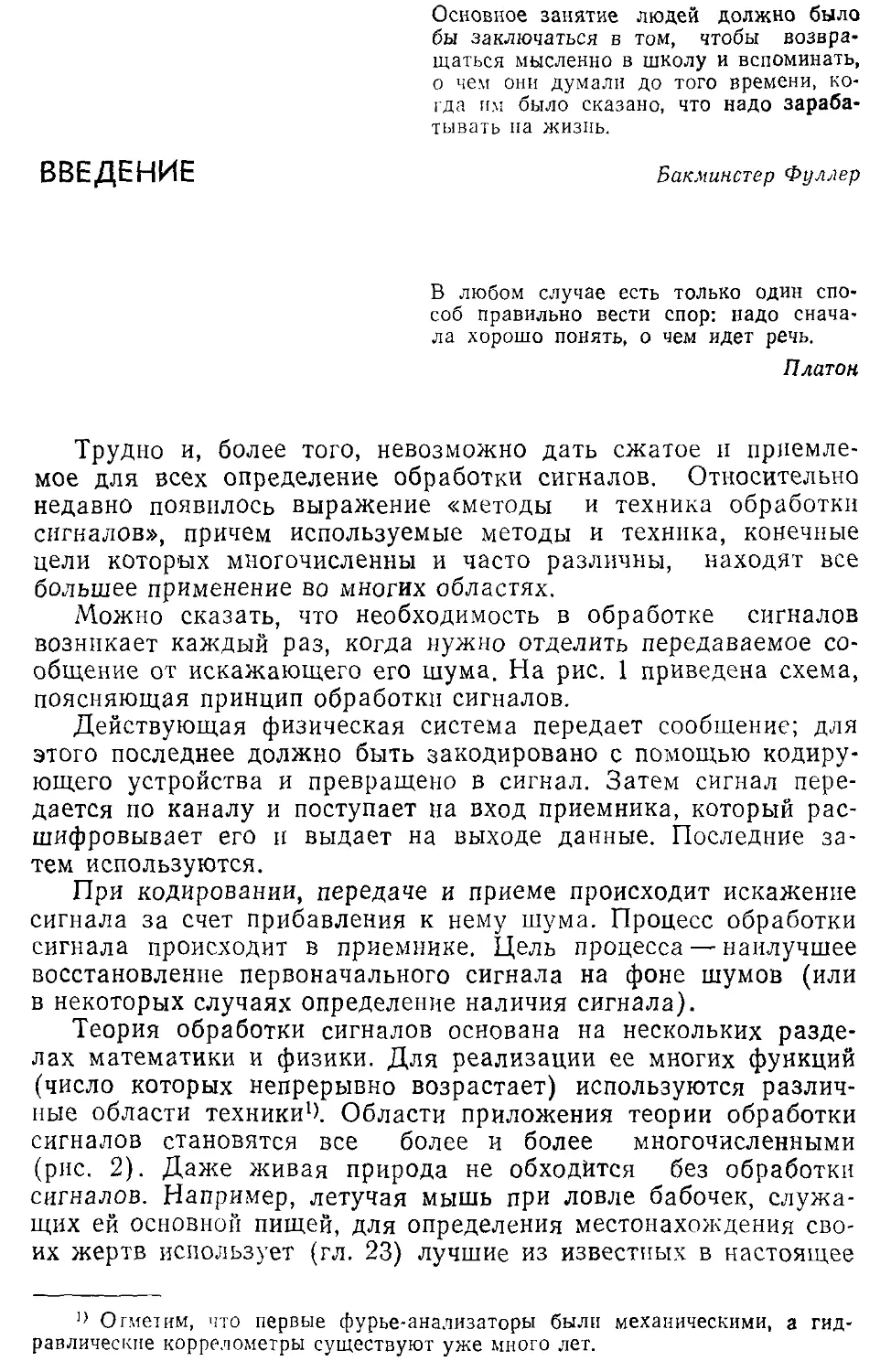
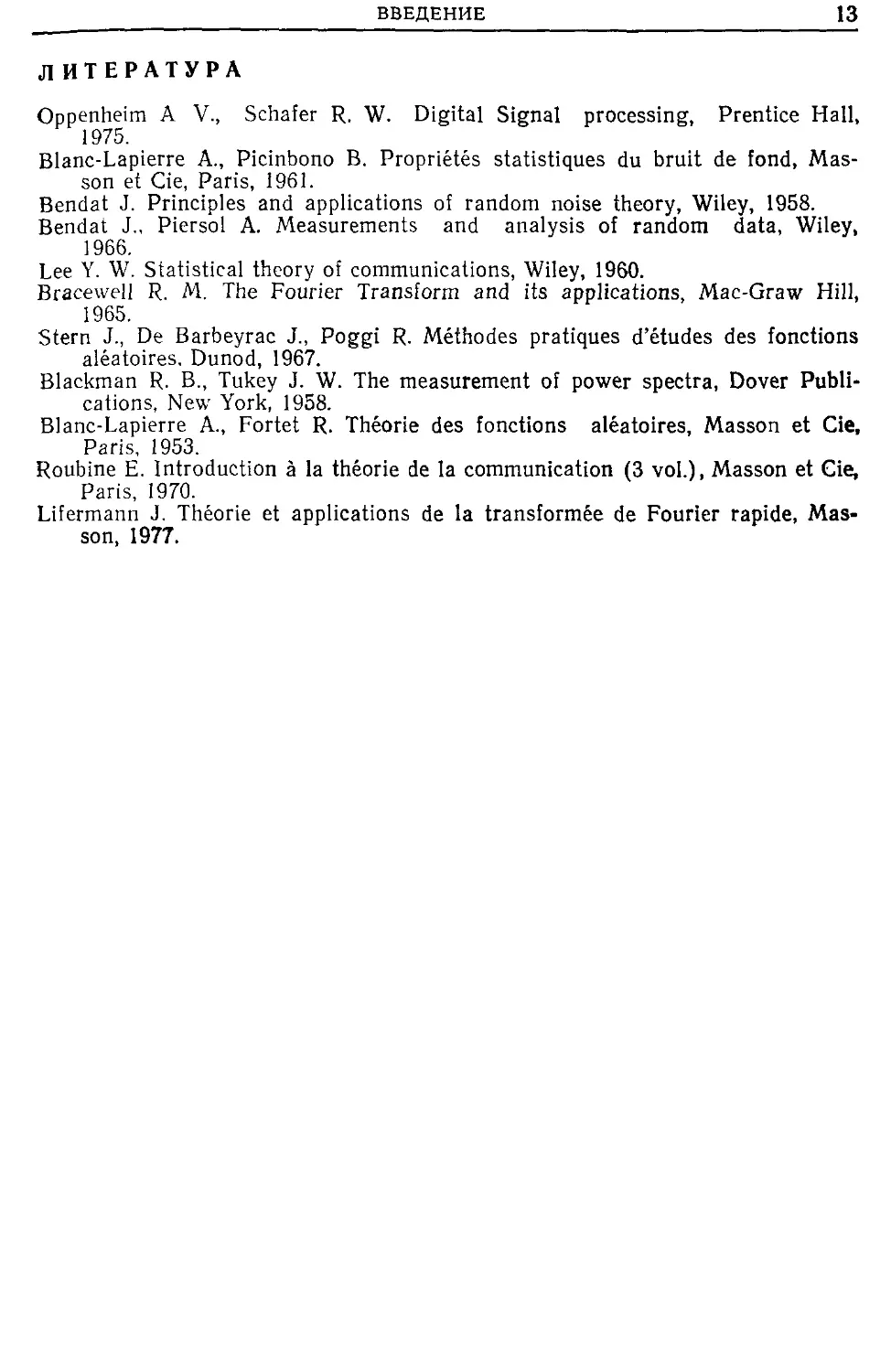
Можно сказать, что необходимость в обработке сигналов
возникает каждый раз, когда нужно отделить передаваемое со-
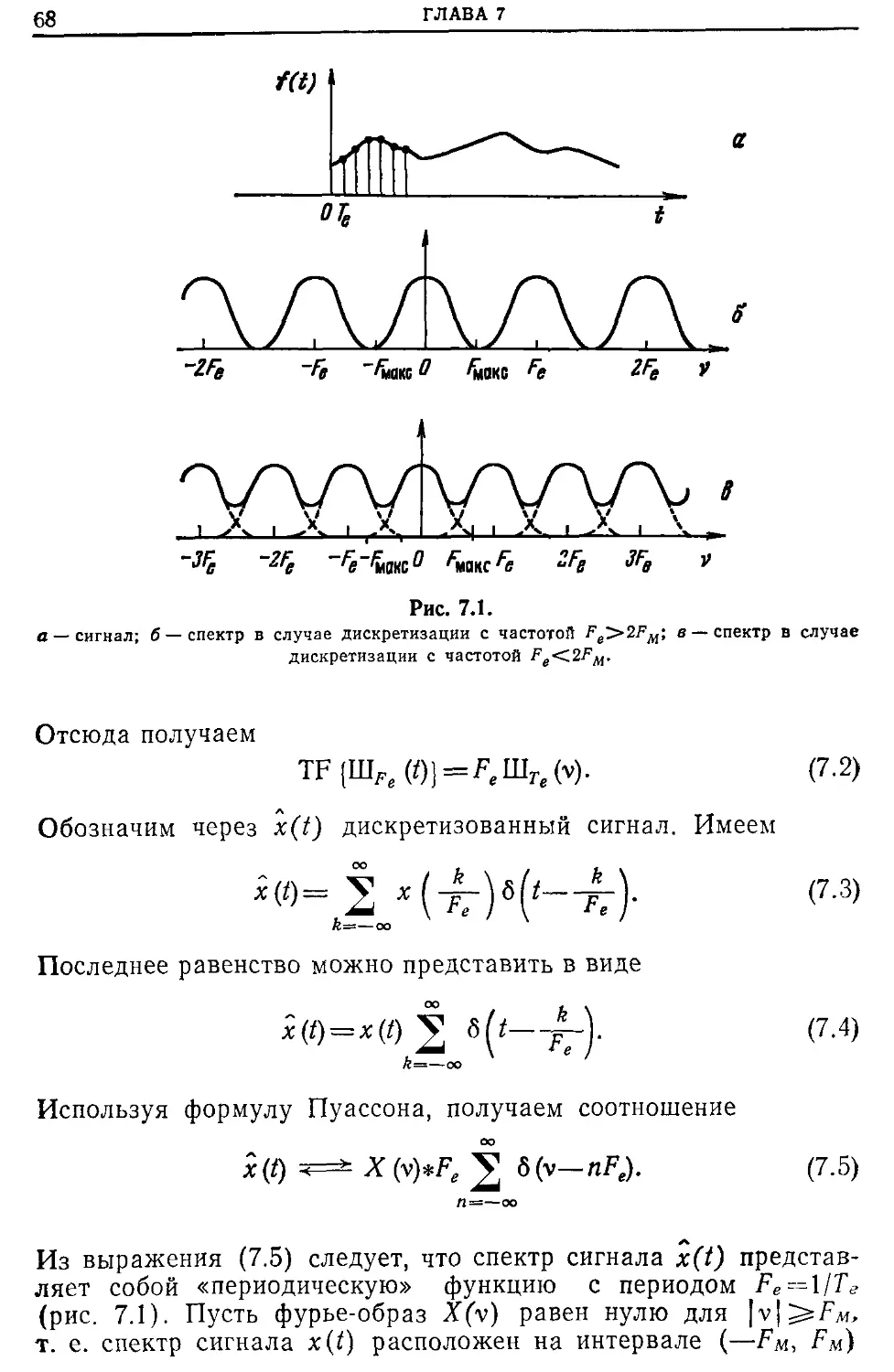
общение от искажающего его шума. На рис. 1 приведена схема,
поясняющая принцип обработки сигналов.
Действующая физическая система передает сообщение; для
этого последнее должно быть закодировано с помощью кодиру-
ющего устройства и превращено в сигнал. Затем сигнал пере-
дается по каналу и поступает на вход приемника, который рас-
шифровывает его и выдает на выходе данные. Последние за-
тем используются.
При кодировании, передаче и приеме происходит искажение
сигнала за счет прибавления к нему шума. Процесс обработки
сигнала происходит в приемнике. Цель процесса — наилучшее
восстановление первоначального сигнала на фоне шумов (или
в некоторых случаях определение наличия сигнала).
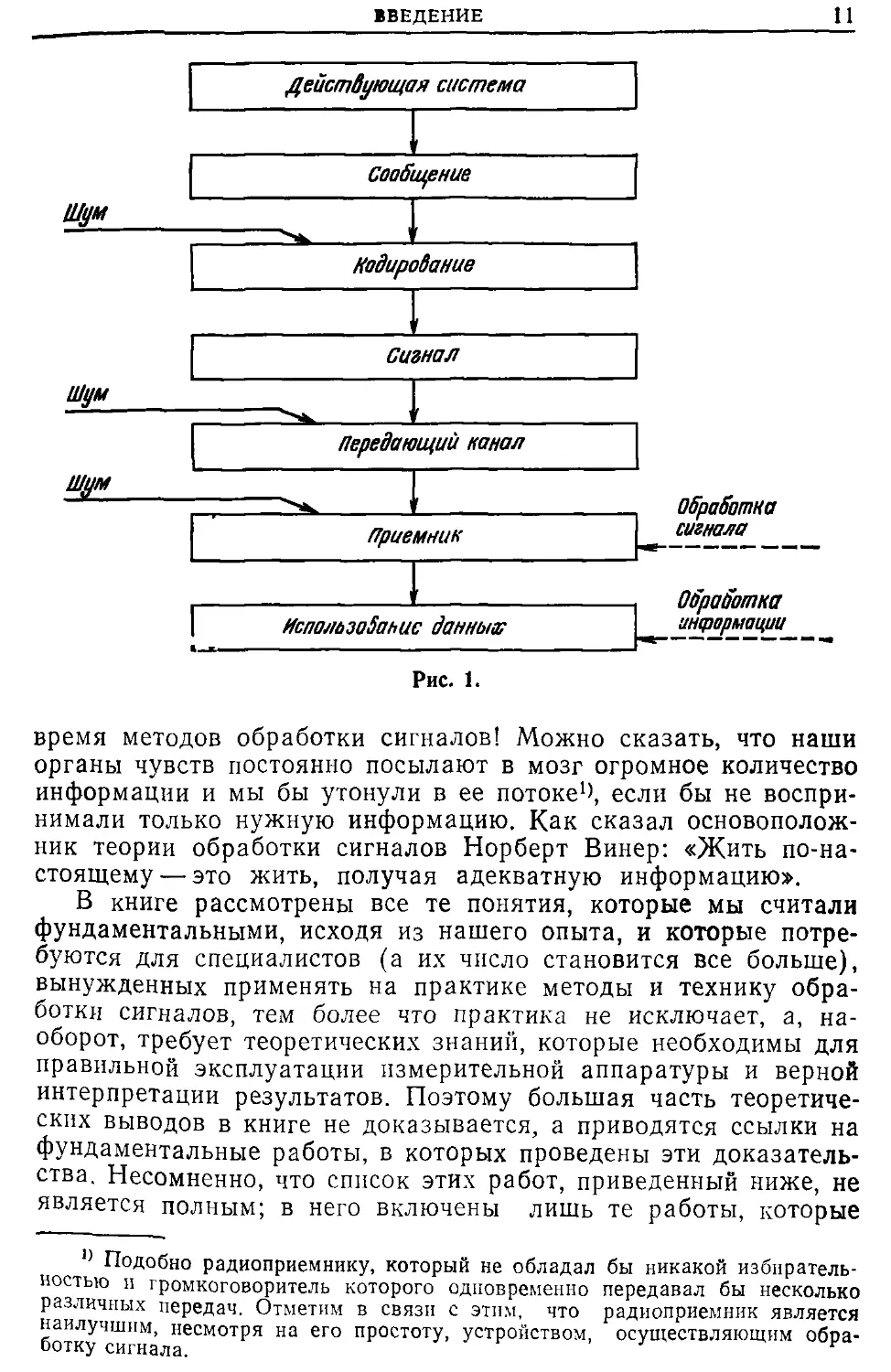
Теория обработки сигналов основана на нескольких разде-
лах математики и физики. Для реализации ее многих функций
(число которых непрерывно возрастает) используются различ-
ные области техники1). Области приложения теории обработки
сигналов становятся все более и более многочисленными
(рис. 2). Даже живая природа не обходится без обработки
сигналов. Например, летучая мышь при ловле бабочек, служа-
щих ей основной пищей, для определения местонахождения сво-
их жертв использует (гл. 23) лучшие из известных в настоящее
>> Отметим, что первые фурье-анализаторы были механическими, а гид-
равлические коррелометры существуют уже много лет.
ВВЕДЕНИЕ
11
Дейстдующая система
Сообщение
Шум
Кодирование
Сигнал
Шум
Шиш
Передающий канал
Приемник
Обработка
\ __ сигнала
Использо5анис данных
Обработка
ин/рармации
Рис. 1.
время методов обработки сигналов! Можно сказать, что наши
органы чувств постоянно посылают в мозг огромное количество
информации и мы бы утонули в ее потоке1', если бы не воспри-
нимали только нужную информацию. Как сказал основополож-
ник теории обработки сигналов Норберт Винер: «Жить по-на-
стоящему— это жить, получая адекватную информацию».
В книге рассмотрены все те понятия, которые мы считали
фундаментальными, исходя из нашего опыта, и которые потре-
буются для специалистов (а их число становится все больше),
вынужденных применять на практике методы и технику обра-
ботки сигналов, тем более что практика не исключает, а, на-
оборот, требует теоретических знаний, которые необходимы для
правильной эксплуатации измерительной аппаратуры и верной
интерпретации результатов. Поэтому большая часть теоретиче-
ских выводов в книге не доказывается, а приводятся ссылки на
фундаментальные работы, в которых проведены эти доказатель-
ства. Несомненно, что список этих работ, приведенный ниже, не
является полным; в него включены лишь те работы, которые
!) Подобно радиоприемнику, который не обладал бы никакой избиратель-
ностью и громкоговоритель которого одновременно передавал бы несколько
различных передач. Отметим в связи с этим, что радиоприемник является
наилучшим, несмотря на его простоту, устройством, осуществляющим обоа-
оотку сигнала.
12
ВВЕДЕНИЕ
Рис. 2.
наиболее близки по общему содержанию книги. Кроме того,
в конце каждой главы в случае необходимости приводятся
ссылки на другие работы, отражающие те или иные частные
вопросы.
В книге описывается также аппаратура, которую выпускает
промышленность и которая используется для многочисленных
целей как в исследовательских лабораториях, так и в заводских
условиях.
Я приношу благодарность всем моим товарищам, сотрудни-
кам и друзьям, которые оказали мне неоценимую помощь при
практической реализации теоретических методов.
ВВЕДЕНИЕ 13
Л ИТЕРАТУРА
Oppenheim А V., Schafer R. W. Digital Signal processing, Prentice Hall,
1975.
Blanc-Lapierre A., Picinbono B. Proprietes statistiques du bruit de fond, Mas-
son et Cie, Paris, 1961.
Bendat J. Principles and applications of random noise theory, Wiley, 1958.
Bendat J., Piersol A. Measurements and analysis of random data, Wiley,
1966.
Lee Y. W. Statistical theory of communications, Wiley, 1960.
Bracewell R. M. The Fourier Transform and its applications, Mac-Graw Hill,
1965.
Stern J., De Barbeyrac J., Poggi R. Methodes pratiques d'etudes des fonctions
aleatoires. Dunod, 1967.
Blackman R. В., Tukey J. W. The measurement of power spectra, Dover Publi-
cations, New York, 1958.
Blanc-Lapierre A., Fortet R. Theorie des fonctions aleatoires, Masson et Cie,
Paris, 1953.
Roubine E. Introduction a la theorie de la communication C vol.), Masson et Cie,
Paris, 1970.
Lifermann J. Theorie et applications de la transformee de Fourier rapide, Mas-
son, 1977.
Глава
1
ФИЗИЧЕСКИЕ ПРЕДСТАВЛЕНИЯ
О ШУМАХ КАК О СЛУЧАЙНЫХ ПРОЦЕССАХ
Те, кто обладает здравым суждением,
знают, какая существует разница меж-
ду двумя похожими словами в зависи-
мости от того, в каком месте и при ка-
ких обстоятельствах эти слова употреб-
ляются.
Паскаль
Поскольку основные физические процессы, для исследова-
ния которых используются методы обработки сигналов и мето-
ды корреляционного анализа, являются случайными, рассмот-
рим здесь представления о случайных процессах (они не так
уж просты, как могут показаться с первого взгляда).
Существует множество физических процессов, для которых
зависимость наблюдаемых величин от внешних условий уста-
навливается с помощью легко обнаруживаемых законов. На-
пример, напряжение на выходе линейного фильтра может быть
представлено в виде функции параметров фильтра и эволюции
входной величины, причем значение напряжения на выходе:,
вычисленное на основе этой функции, будет тем более точным,
чем точнее известны параметры фильтра и эволюция входной
величины.
Движение частицы под действием некоторых сил можно лег-
ко вычислить и полностью «предсказать», если известны на-
чальные условия и «движущие силы».
Однако в отличие от процессов, рассмотренных выше, су-
ществуют такие процессы (и они многочисленны), для которых
наблюдаемые величины не могут быть выражены через началь-
ные условия и «движущие силы» с помощью простых законов.
Рассмотрим, например, шум в электрическом контуре. Если
мы попытаемся связать мгновенную величину напряжения шу-
ма с движением электронов (явлением, которое порождает этот
шум), то сразу же столкнемся с проблемой, неразрешимой
в настоящее время и теоретически (из-за соотношения неопре-
деленности, например), и практически (из-за огромного числа
одновременно решаемых уравнений). Если же мы хотим коли-
ПРЕДСТАВЛЕНИЯ О ШУМАХ КАК О СЛУЧАЙНЫХ ПРОЦЕССАХ 15
чественно оценить шум, то будем вынуждены характеризовать
его величинами, отличающимися от мгновенных значений на-
пряжения. Этими величинами являются статистические харак-
теристики шума.
Рассмотрим другой пример случайного процесса — игру в
кости. Теоретически можно «предсказать» результат бросания
игральных костей, но для этого необходимо знать полный набор
физических и геометрических характеристик игральных костей и
поверхности, на которую их бросают, начальные условия бро-
сания и т. д. Если бы все эти исходные данные можно было
легко измерить, а вычисления достаточно быстро выполнить, то
в игре не было бы элемента случайности. Возможно, что в срав-
нительно недалеком будущем исключение случайности в этой
игре станет реальностью. Именно невозможность на практике
получить все исходные данные и на их основе вычислить про-
стым способом конечное состояние системы заставляют нас рас-
сматривать результат бросания игральных костей как случай-
ный процесс.
Аналогичная ситуация возникает в термодинамике при рас-
смотрении поведения газа, заключенного в оболочку. Газ состо-
ит из огромного числа элементарных частиц, движущихся за
счет взаимных столкновений. Движение каждой частицы теоре-
тически может быть определено, если известны начальные поло-
жения и скорости всех частиц. В настоящее время получить та-
кой объем исходной информации о частицах газа практически
нельзя, но, если бы мы даже и располагали этой информацией,
ее дальнейшее использование невозможно, так как полученная
система уравнений оказывается чрезвычайно сложной.
Итак, процессы, точные законы которых не могут быть ис-
пользованы для их описания, мы вынуждены рассматривать как
случайные. Следовательно, название «случайный» носит в опре-
деленном смысле временный характер, поскольку процесс пере-
стает быть случайным, как только для его описания можно ис-
пользовать точные законы, которым он подчиняется.
Теория случайных функций дает нам мощное средство для
исследования явлений, точные законы которых не могут быть
использованы непосредственно, путем изучения результата дей-
ствия точных законов. Такие явления встречаются во всех об-
ластях науки: метеорологии, медицине, экономике, биологии
и т. д.
Рассмотрим речь — процесс, существенно отличающийся от
предыдущих. Образование звуковых волн, с помощью которых
передается речь, является процессом сложным и не подчиняется
простым законам, что придает ему характер случайного. Но
слово «случайный» здесь может принимать и другое значение,
поскольку речь предназначена для передачи информации. На-
чиная фразу, говорящий полиостью знает, что он скажет в
16 ГЛАВА 1
дальнейшем. Поэтому продолжение фразы не является случай-
ным для говорящего. Слушатель же не знает, что будет произ-
несено говорящим, он не может «предвидеть» фраз говорящего,
кроме окончания некоторых слов. Для слушателя фразы, про-
износимые говорящим, носят характер случайного.
Отметим, что эта невозможность предсказания непосредст-
венно связана с определением информации. Сообщение, которое
могло бы быть полностью предсказуемо адресатом, не дало бы
последнему никакой информации и считалось бы шумом. Сле-
довательно, сообщение будет сигналом или шумом для адреса-
та в зависимости от того, может или не может адресат извлечь
из сообщения информацию. Из этого следует, что физически
чрезвычайно трудно отличить шум от сигнала. Важно заранее
определить, как будет извлекаться информация из сообщения,
а это зависит от выбранного кода, с помощью которого переда-
ется информация от отправителя к адресату.
Таким образом, всякий сигнал при определенных обстоя-
тельствах может быть рассмотрен как случайный, в то же вре-
мя шум может содержать много информации.
В заключение рассмотрим еще один пример. Ток ионизаци-
онной камеры, помещенной в активную зону ядерного реакто-
ра, позволяет измерять уровень мощности реактора. Точное из-
мерение осложняется тем, что на ток, определяемый уровнем
мощности реактора, накладываются флюктуации. В этом слу-
чае непрерывный уровень тока есть сигнал, а флюктуации тока
являются шумом, который и порождает ошибки в измерениях.
Если же исследовать только флюктуации тока ионизационной
камеры, то можно извлечь очень полезную информацию о дина-
мических характеристиках реактора, например вычислить мо-
дуль передаточной функции. В этом случае флюктуации пред-
ставляют собой источник, богатый информацией, т. е. будут вы-
полнять роль сигнала.
Из приведенного примера следует, насколько определения
информации и случайности являются двусмысленными и неточ-
ными. Определение, которое удовлетворит математика, будет
непригодным для физика; определение, которое могло бы одно-
временно удовлетворить и математика, и физика, не будет при-
емлемым для биолога, и т. д. Читатель может быть удивлен и
даже разочарован тем, что здесь не приводятся четкие и точные
определения, но не будем забывать, что «любое сжатое опреде-
ление часто несет в себе причину его деградации...» (Буланже).
Можно сказать, что сигнал отличается от шума наличием
полезной информации, шум же содержит лишь такую информа-
цию, которая нас не интересует по крайней мере в настоящий
момент. Поэтому перед каждым измерением и обработкой сиг-
нала необходимо ответить на вопрос: что будет приниматься в
качестве сигнала, а что — в качестве шума?
ПРЕДСТАВЛЕНИЯ О ШУМАХ КАК О СЛУЧАЙНЫХ ПРОЦЕССАХ 17"
Попытаемся определить, что будем понимать в дальнейшем
под случайным процессом или случайной функцией (хотя в
математике эти два понятия различаются). Назовем процесс
случайным, если невозможна его полностью идентичная повтор-
ная реализация. Согласно этому определению, периодический и
переходный процессы (например, импульсный отклик фильтра)
не являются случайными, а шум усилителя относится к случай-
ным процессам.
Необходимо отметить, что на практике трудно четко разде-
лить процессы на случайные и неслучайные (детерминирован-
ные). Например, на импульсный отклик усилителя и на выход-
ной сигнал генератора часто накладываются шумы. Поэтому
теоретики попытались использовать ранее разработанные ме-
тоды исследования случайных процессов для изучения детерми-
нированных процессов. Оказалось, что методы и техника обра-
ботки сигналов применимы как к случайным процессам, так и
к неслучайным.
В своей книге «Theorie des Fonctions Aleatoires» Андре Блан-
Лапьер и Робер Форте указали на связь между интуитивными
представлениями и теоретическими понятиями в этой области.
Приведем отрывок из их предисловия к книге:
«В определенном смысле можно сказать, что введение понятия случай-
ной функции было продиктовано практикой. Изучение метеорологических
процессов, турбулентности жидкости, явления флюктуации в электрических
цепях, известных под названием фоновых шумов, и т. д. привело к необхо-
димости расширения понятия функции, используемого в классическом мате-
матическом анализе, для учета случайного характера явлений. Такое расши-
рение привело к понятию случайной функции.
Случайная функция х, зависящая от параметра t и определенная на не-
котором множестве испытаний, для каждого фиксированного испытания 8
есть классическая функция". Но эта функция изменяется от испытания к
испытанию, что и порождает ее случайный характер. Если зафиксировать
величину параметра t, то значения х будут зависеть только от испытания, т. е.
в этом случае х — случайная величина. Часто используемая запись x=x(t, e)
обозначает двойную зависимость х от параметра t и от испытания е.
Специалисты по метеорологии, гидродинамике, радиоэлектронике и другие
нередко применяют неслучайные функции, прибавляя к ним некоторое случай-
ное слагаемое. Например, физик, регистрируя на осциллографе напряжение
слабых токов как функцию времени, отмечает появление фонового шума в
виде функций с иррегулярным изменением, который накладывается на регу-
лярные сигналы, соответствующие сильным токам.
Специалисты в области теории вероятностей использовали другой подход.
Они искали такое расширение понятия случайной величины, которое было бы
применимо к случайным процессам достаточно общей природы, что и привело
к введению понятия случайной функции.
Из сказанного выше следует, что в изучении теории случайных функций
заинтересованы специалисты многих областей науки и техники»
То есть неслучайная функция. — Прим. перев.
ПРЕОБРАЗОВАНИЕ
ФУРЬЕ
Мой друг, что говорить о нас:
Ни вы без меня, ни я без вас.
Мария Французская
Существуют два способа описания произвольного сигнала.
Первый способ основан на математическом представлении сиг-
нала в виде y = f(t), где независимая переменная t — время.
Математическое представление сигнала по второму способу
имеет вид Y=F(v), где независимая переменная v — частота
(размерность v обратна размерности t). Эти два представления
сигнала связаны друг с другом преобразованием Фурье. Следо-
вательно, использование методов обработки сигнала требует
знания свойств преобразования Фурье. Этим объясняется вклю-
чение данной главы в книгу.
Отметим, что вводимое здесь преобразование Фурье над
функциями времени может быть применено и для функций
других переменных. Например, если независимая переменная—¦
длина, то переменной, аналогичной частоте, будет величина,
обратно пропорциональная длине и т. д.
2.1. Преобразование Фурье периодических функций
Если x(t) — периодическая функция от t с периодом Т, то ее
можно представить в виде
или
где vo=l/7\
Коэффициенты ап, Ьп вычисляются по формулам
B.1)
B.2)
Глава 2
ПРЕОБРАЗОВАНИЕ ФУРЬЕ 19
или спектра фаз
Отрицательные значения п введены с целью упрощения записи
формул. Если x(t)—вещественная функция,то а-п=ап иЬ-п —
= —Ьп.
Важно отметить, что спектр периодической функции с пе-
риодом Т дискретен и минимальное расстояние между точками
спектра на оси частот равно vo=l/T. Следовательно, спектр со-
стоит из частот, кратных vo=l/7\
2.2. Преобразование Фурье непериодических функций
Непериодическую функцию можно рассматривать как пре-
дел периодической функции с периодом Т при Т—v,oo. Тогда
частотный интервал vo=l/T стремится к нулю и спектр стано-
'> В левой и правой частях равенства B.9) один и тот же символ X ис-
пользуется для обозначения разных величин. На наш взгляд, левую часть луч-
ше обозначить X (у). — Прим. ред.
Если принять
Спектральная функция X(nv0) (в общем случае комплексная)
может быть представлена в виде спектра амплитуд
B.3)
B.4)
B.5)
B-6)
B.7)
B.8)
B.9)
B.10)
Справедливы также формулы1)
то
20 ГЛАВА 2
Функция X(v) называется фурье-образом функции x(t).
Обычно используют символическую запись"
*(*L=fc*(v). B.13)
В общем случае функция X(v) — комплексная и ее действитель-
ная и мнимая части вычисляются по формулам
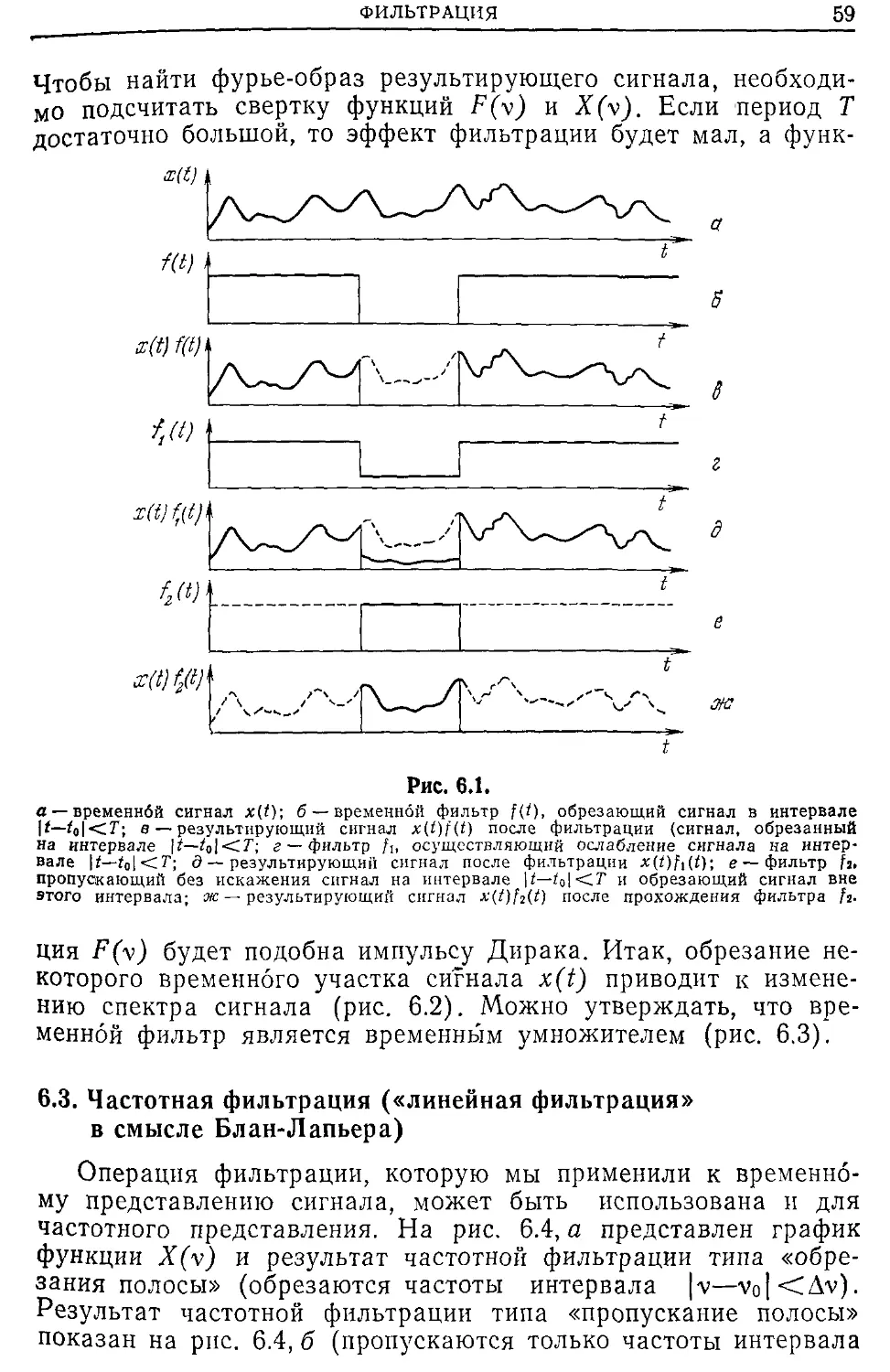
Рис. 2.1.
цию полагают равной нулю вне интервала @, Т) (рис. 2.1). Ес-
ли функция действительно равна нулю вне @, Т), то в этом
случае можно вычислить спектр с любой заданной точностью.
" Вместо ч± используют также символы ~ и др. — Прим. перев.
вится непрерывным:
Спектр амплитуд и фаз записывается соответственно в виде
2.3. Преобразование Фурье физических функций
Функции, используемые в физике, известны лишь на огра-
ниченном интервале @, Г). Для их доопределения на всю вре-
менную ось используют два способа. По первому способу функ-
B.11)
B.12)
B.14)
B.15)
B.16)
B.17)
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
21
Рис. 2.2.
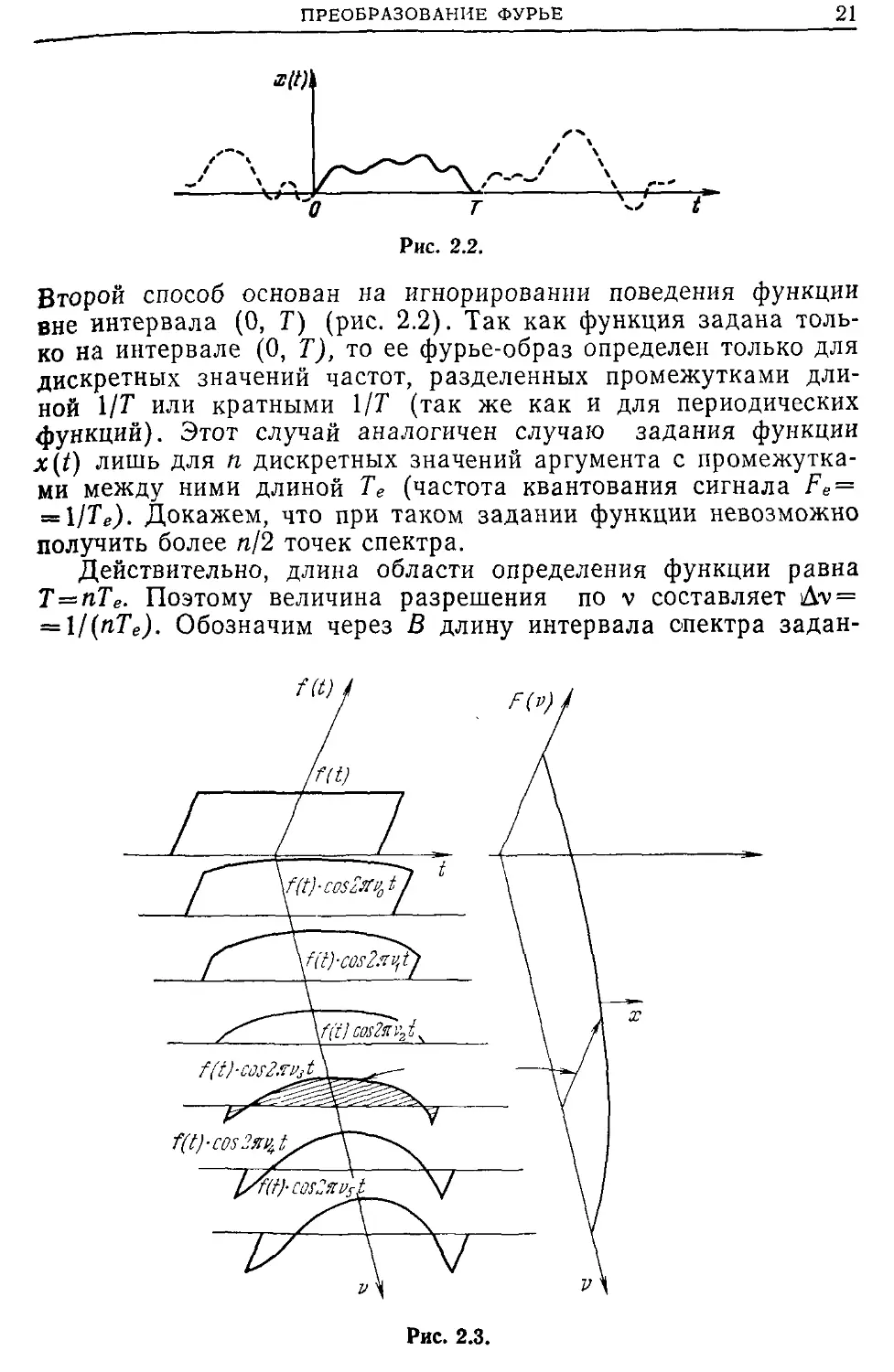
Второй способ основан на игнорировании поведения функции
вне интервала (О, Т) (рис. 2.2). Так как функция задана толь-
ко на интервале (О, Т), то ее фурье-образ определен только для
дискретных значений частот, разделенных промежутками дли-
ной 1/71 или кратными 1/Г (так же как и для периодических
функций). Этот случай аналогичен случаю задания функции
x(t) лишь для п дискретных значений аргумента с промежутка-
ми между ними длиной Те (частота квантования сигнала Fe =
= 1/Те). Докажем, что при таком задании функции невозможно
получить более я/2 точек спектра.
Действительно, длина области определения функции равна
Т=пТе. Поэтому величина разрешения по v составляет Av =
= 1/(пТе). Обозначим через В длину интервала спектра задан-
Рис. 2.3.
22
ГЛАВА 2
ной функции. Тогда Fe^2B (гл. 7). Имеем
Fe=l/Te = 2aB, а>1.
Отсюда Av=l/(nTe)=2aBln.
Поэтому максимальное число точек спектра равно BfAv =
= п/2а=п/2, если а=1. Итак, вся информация о функции со-
держится в этих /г/2 точках спектра, совокупность которых об-
разует фурье-образ периодической функции с периодом Т, по-
лученной путем периодического продолжения с периодом Т
исходной функции вне интервала (О, Т).
Если вычислить kn/2 точек спектра (k — натуральное число),
то расстояние между двумя соседними точками спектра будет в
k раз меньше и, следовательно, период продолжения исходной
функции будет в k раз больше. Новая периодическая функция с
периодом kT совпадает с исходной функцией x(t) на интервале
(О, Т) и равна нулю между Т и kT. При неограниченном увели-
чении k дискретный спектр этой функции стремится к непре-
рывному спектру функции, рассмотренному выше.
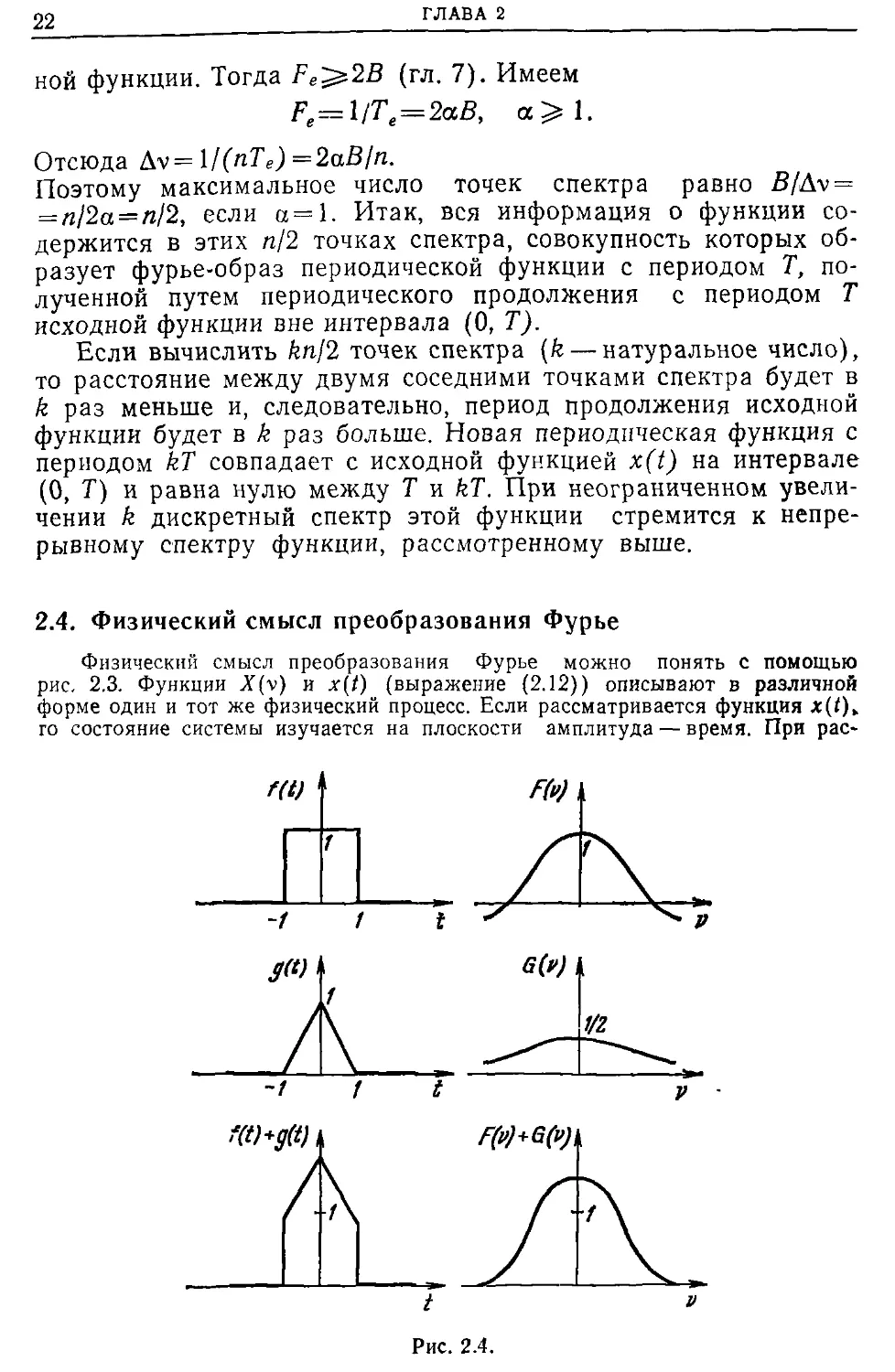
2.4. Физический смысл преобразования Фурье
Физический смысл преобразования Фурье можно понять с помощью
рис. 2.3. Функции X(v) и x(t) (выражение B.12)) описывают в различной
форме один и тот же физический процесс. Если рассматривается функция ж (О»
го состояние системы изучается на плоскости амплитуда — время. При рас-
Рис. 2.4.
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
23
Рис. 2.5.
может быть известна с неограниченно точной локализацией независимой пе-
ременной v на оси частот.
Аналогично, если восстанавливается функция x(t) по известной Х(\), то
необходимо знать весь спектр, в том числе и для бесконечно больших частот.
Из формул B.11) и B.12) следует, что это также соответствует неограничен-
но точной фильтрации.
Итак, для вычисления точного значения x(t) в фиксированный момент
времени t необходимо располагать неограниченной частотной полосой. Мы
сталкиваемся здесь с одной из форм общего принципа неопределенности —
познание окружающего мира возможно лишь в условиях «неточного» его опи-
сания.
смотрении же функции X(v) состояние системы изучается на плоскости
амплитуда — частота.
Для вычисления значения Х(\) при фиксированном значении v=vj необ-
ходимо подсчитать вклад всей функции x(t), соответствующий частоте v<. Это
означает, что производится неограниченно точная фильтрация. Такая фильтра-
ция физически нереализуема (разд. 6 9). Следовательно, функция Х(у) не
. . 1 . С /..I
24
ГЛАВА 2
2.5. Условия существования преобразования Фурье
Известно, что для существования преобразования Фурье функции f(t)
достаточно выполнение следующих трех условий:
1) f(t) —ограничена при /?(—оо, +оо);
2) f(t) —абсолютно интегрируема на (—оо, оо);
3) число точек разрыва, максимума и минимума функции f(t) конечно.
Выполнение этих трех условий не является необходимым для существо-
вания прямого и обратного преобразования Фурье.
Можно доказать, что если f (t) квадратично суммируема (f(t) ? L2 (—°°,
оо)), то для f(t) существуют прямое и обратное преобразования Фурье. Квад-
ратичная суммируемость функции f(t) означает, что /(/) и F(v) соответству-
ют сигналу с ограниченной энергией. Поскольку любой физический процесс
регистрируется на конечном промежутке времени, последнее условие всегда
выполнено.
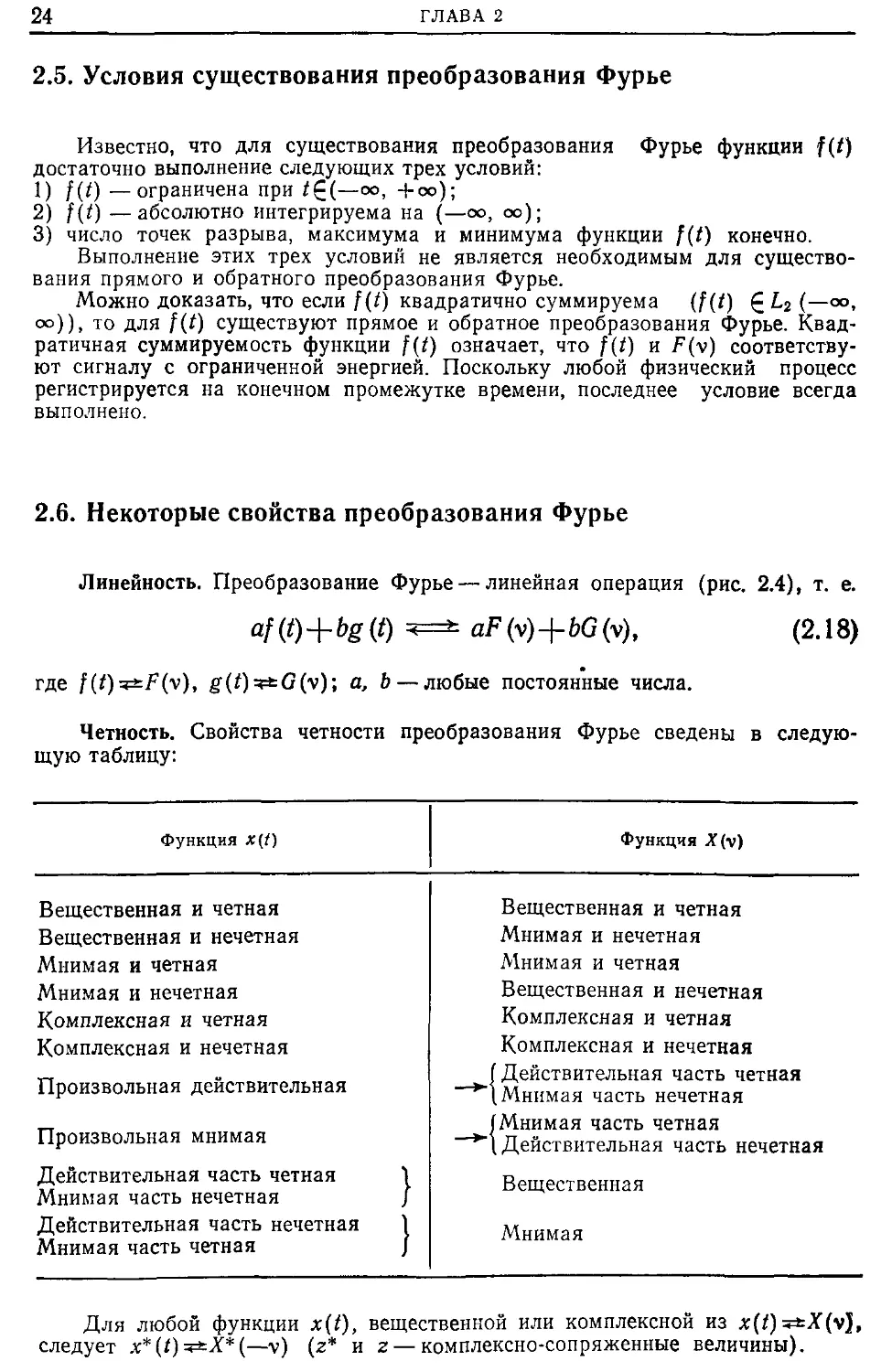
2.6. Некоторые свойства преобразования Фурье
Линейность. Преобразование Фурье — линейная операция (рис. 2.4), т. е.
of @ + Н @ ^=* aF (v)+bG (v), B.18)
где f(t)^^F(v), g(t)**G(y); a, b — любые постоянные числа.
Четность. Свойства четности преобразования Фурье сведены в следую-
щую таблицу:
Функция x(t)
Вещественная и четная
Вещественная и нечетная
Мнимая и четная
Мнимая и нечетная
Комплексная и четная
Комплексная и нечетная
Произвольная действительная
Произвольная мнимая
Действительная часть четная
Мнимая часть нечетная
Действительная часть нечетная
Мнимая часть четная
}
)
Функция X(v)
Вещественная и четная
Мнимая и нечетная
Мнимая и четная
Вещественная и нечетная
Комплексная и четная
Комплексная и нечетная
[Действительная часть четная
*~\Мнимая часть нечетная
(Мнимая часть четная
*~\ Действительная часть нечетная
Вещественная
Мнимая
Для любой функции x(t), вещественной или комплексной из x(t)~*X(v],
следует x*(t)**X*(—y) (z* и z — комплексно-сопряженные величины).
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
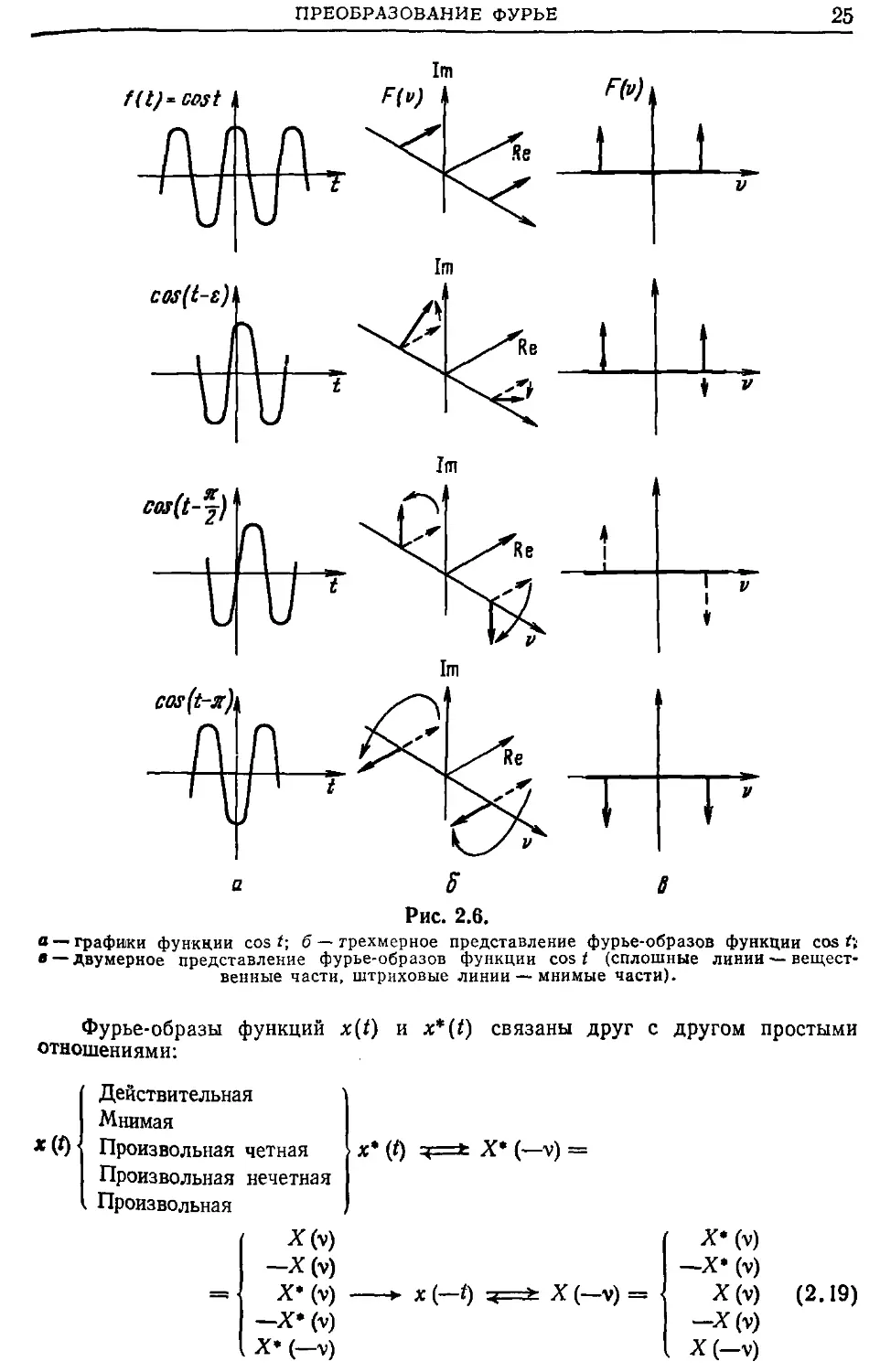
25
fit)-cost
а — графики функции cos t; б — трехмерное представление фурье-образов функции cos ft
в — двумерное представление фурье-образов функции cos t (сплошные линии — вещест-
венные части, штриховые линии — мнимые части).
Фурье-образы функций x(t) и x*(t) связаны друг с другом простыми
отношениями:
х@
Действительная
•Мнимая
Произвольная четная
Произвольная нечетная
Произвольная
26
ГЛАВА 2
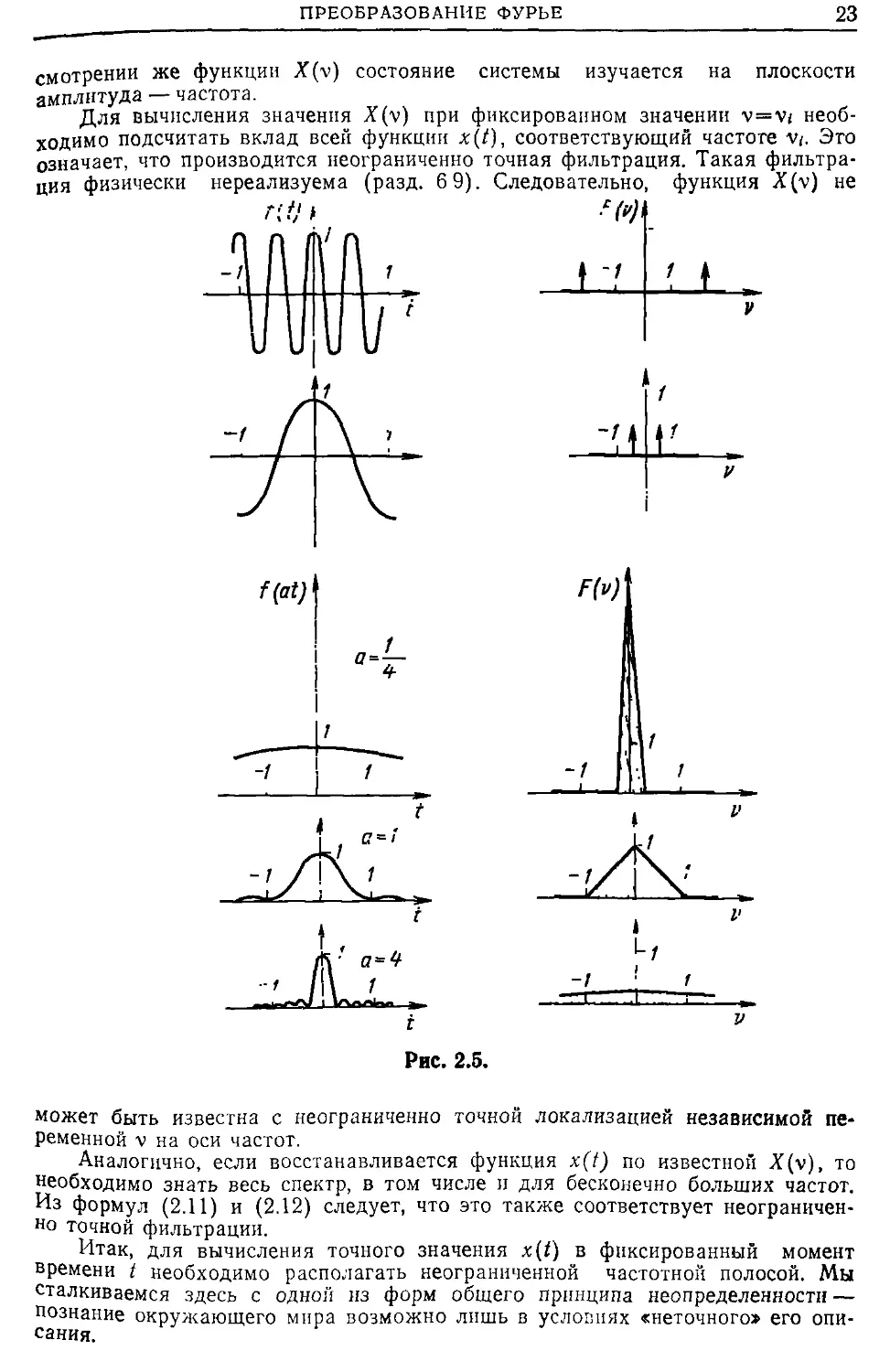
Подобие. Если f(t)**F(v), то
/(а*)ч=* l/(|a|)F(v/a).
B.20)
Из выражения B.20) следует, что увеличение масштаба времени приводит
к уменьшению масштаба по оси частот, и наоборот. На рис. 2.5 приведено не-
сколько примеров, иллюстрирующих свойство подобия.
Смещение. Если }(t)+±F(v), то
B.21)
B.21а)
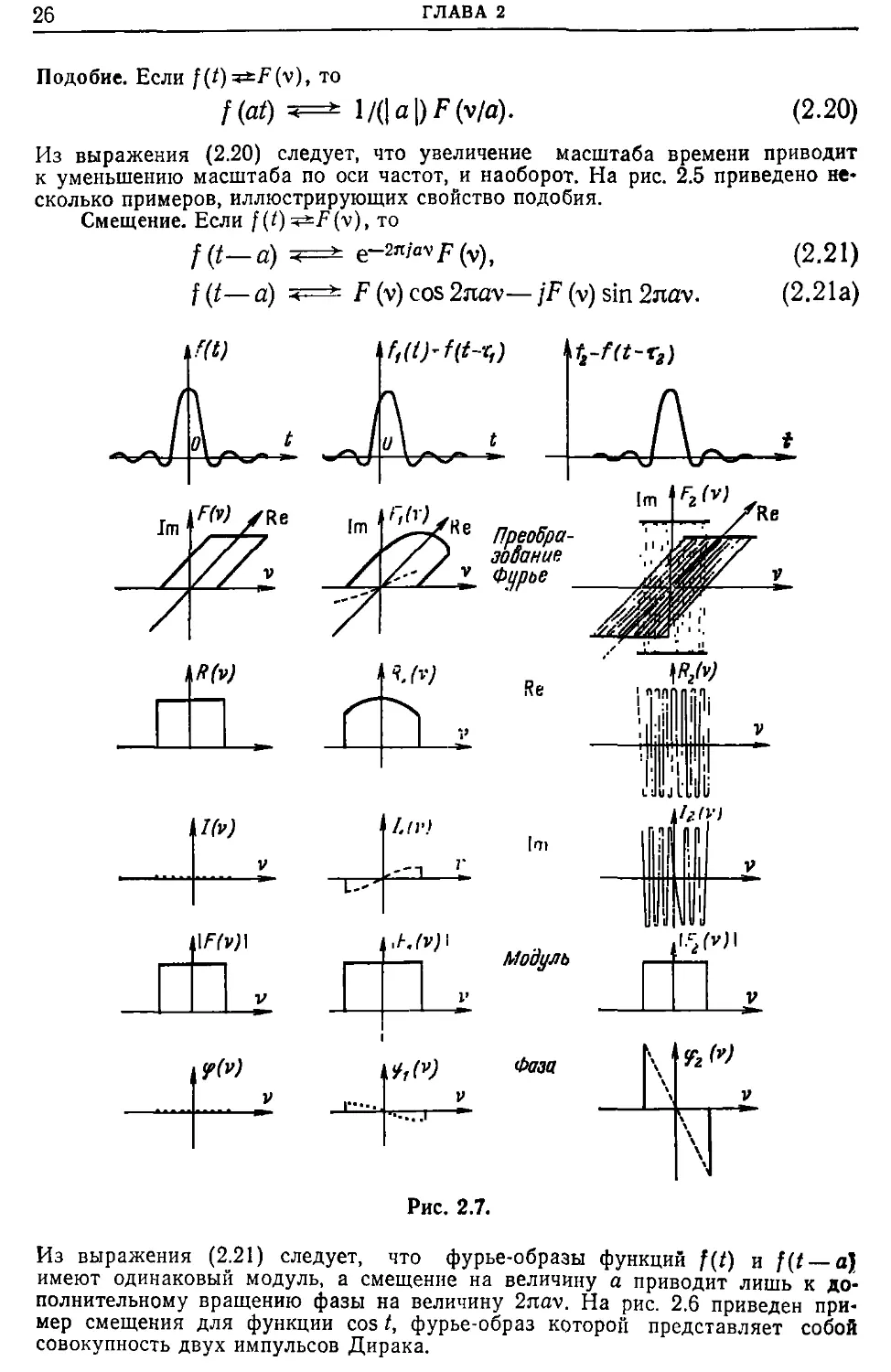
Рис. 2.7.
Из выражения B.21) следует, что фурье-образы функций f(t) и f(t — a)
имеют одинаковый модуль, а смещение на величину а приводит лишь к до-
полнительному вращению фазы на величину 2nav. На рис. 2.6 приведен при-
мер смещения для функции cos t, фурье-образ которой представляет собой
совокупность двух импульсов Дирака.
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
27
Малое смещение аргумента по отношению к величине области, где физи-
ческая функция отлична от нуля, вызывает небольшую деформацию действи-
тельной и мнимой частей фурье-образа. Если смещение велико, то оно приво-
дит к появлению колебаний фурье-образа. На рис. 2.7 рассмотрен случай
функции sin t/t, фурье-образ которой — селектирующее окно. Свойство смеще-
ния обратимо, т. е. F(v — a)^{t)<z2n'at.
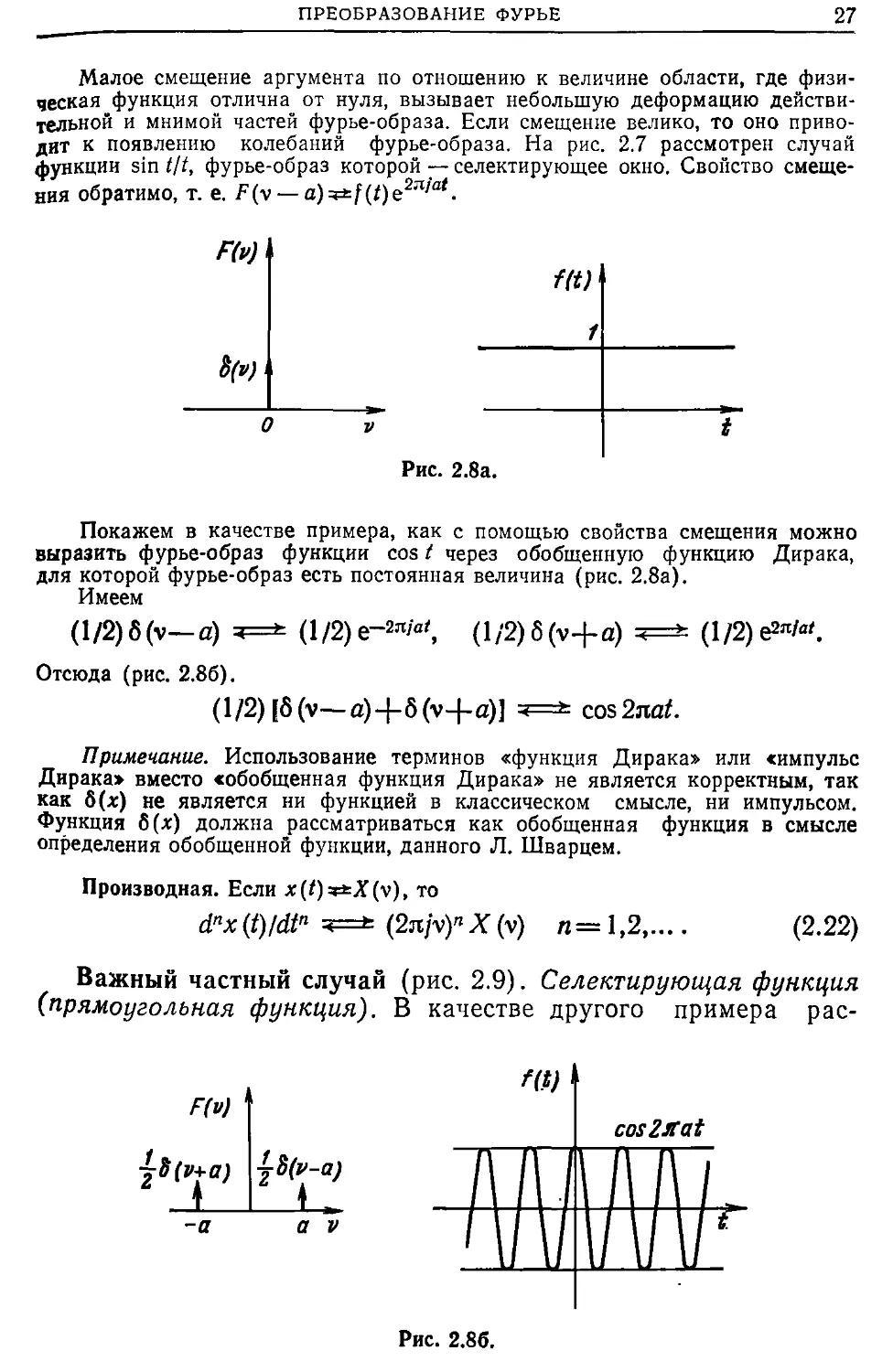
Рис. 2.8а.
Покажем в качестве примера, как с помощью свойства смещения можно
выразить фурье-образ функции cos t через обобщенную функцию Дирака,
для которой фурье-образ есть постоянная величина (рис. 2.8а).
Имеем
Примечание. Использование терминов «функция Дирака» или «импульс
Дирака» вместо «обобщенная функция Дирака» не является корректным, так
как 6(*) не является ни функцией в классическом смысле, ни импульсом.
Функция б(*) должна рассматриваться как обобщенная функция в смысле
определения обобщенной функции, данного Л. Шварцем.
Производная. Если х(О5**•X'(v), то
dnx(t)/dtn *=± Bnjv)nX(v) л=1,2,.... B.22)
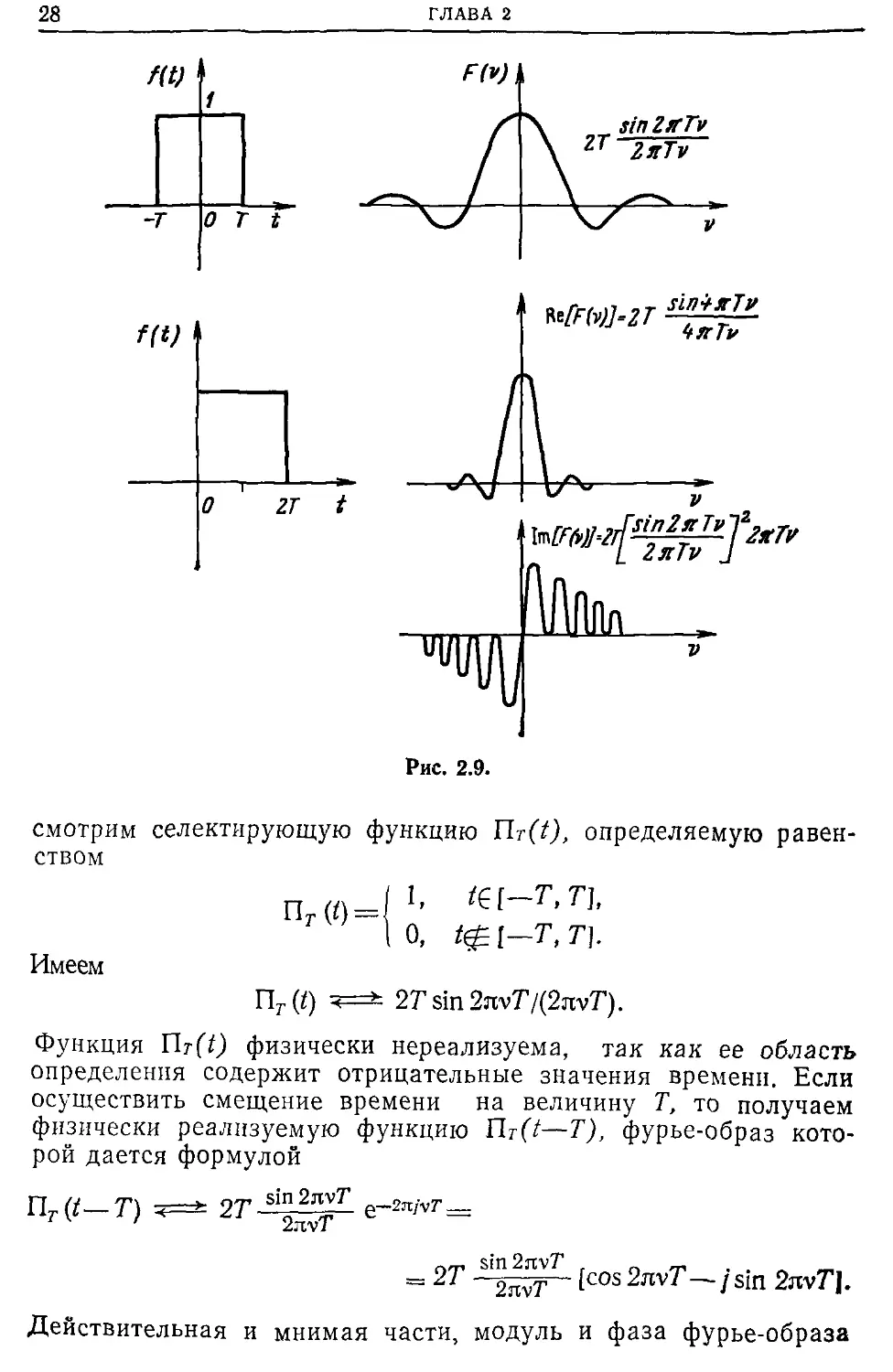
Важный частный случай (рис. 2.9). Селектирующая функция
(прямоугольная функция). В качестве другого примера рас-
Рис. 2.86.
Отсюда (рис. 2.86).
28
ГЛАВА 2
Рис. 2.9.
Функция YlT(t) физически нереализуема, так как ее область
определения содержит отрицательные значения времени. Если
осуществить смещение времени на величину Т, то получаем
физически реализуемую функцию Пт((—Т), фурье-образ кото-
рой дается формулой
Действительная и мнимая части, модуль и фаза фурье-образа
смотрим селектирующую функцию Пг(Х), определяемую равен-
ством
Имеем
ПРЕОБРАЗОВАНИЕ ФУРЬЕ 29
функции YlT(t—Т) записываются соответственно в виде
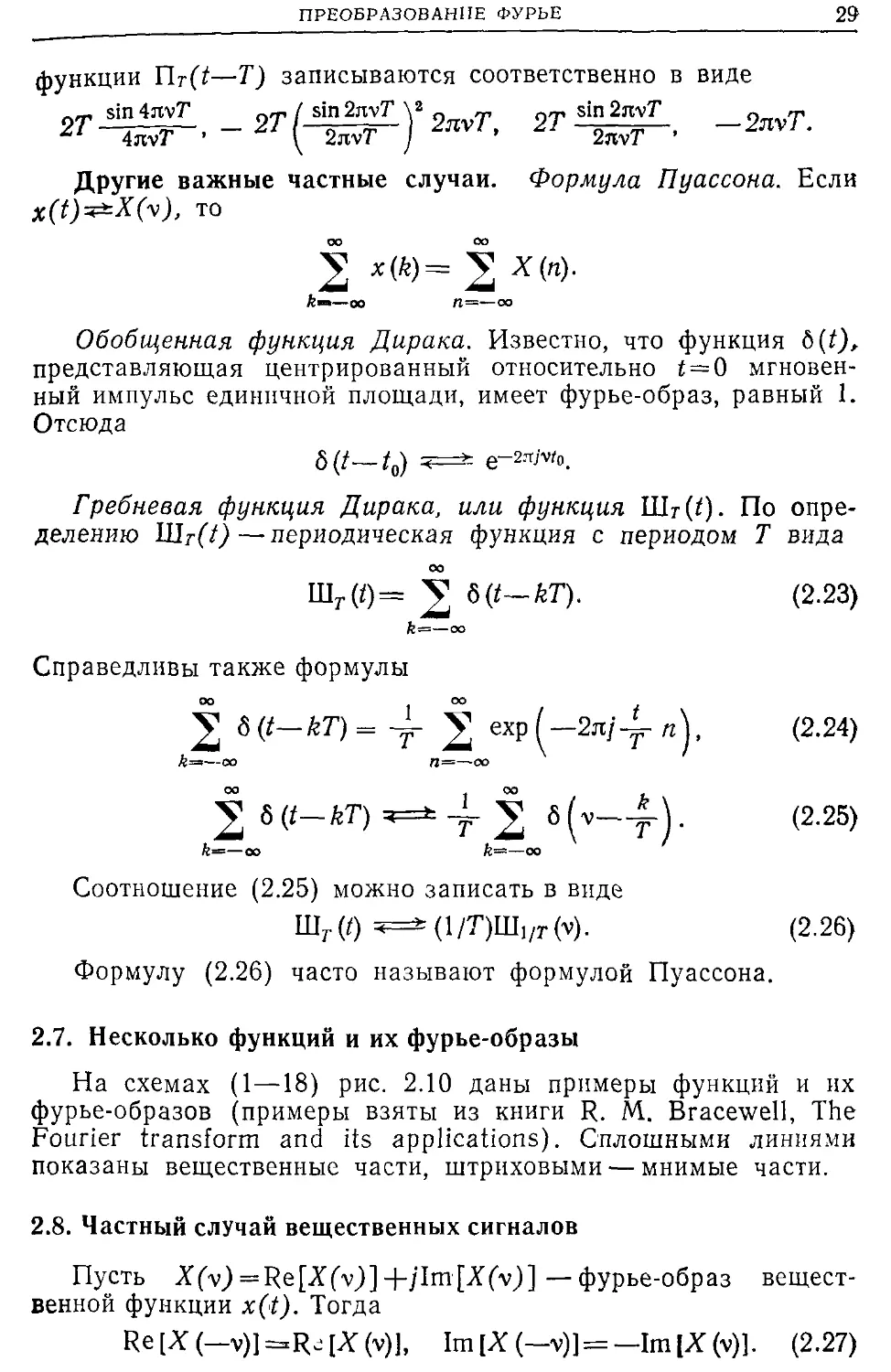
Другие важные частные случаи. Формула Пуассона. Если
Обобщенная функция Дирака. Известно, что функция b{t),
представляющая центрированный относительно ? = 0 мгновен-
ный импульс единичной площади, имеет фурье-образ, равный 1.
Отсюда
Гребневая функция Дирака, или функция Шг@- По опре-
делению Ulr(t) — периодическая функция с периодом Т вида
Справедливы также формулы
Соотношение B.25) можно записать в виде
B.23)
B.24)
B.25)
B.26)
Формулу B.26) часто называют формулой Пуассона.
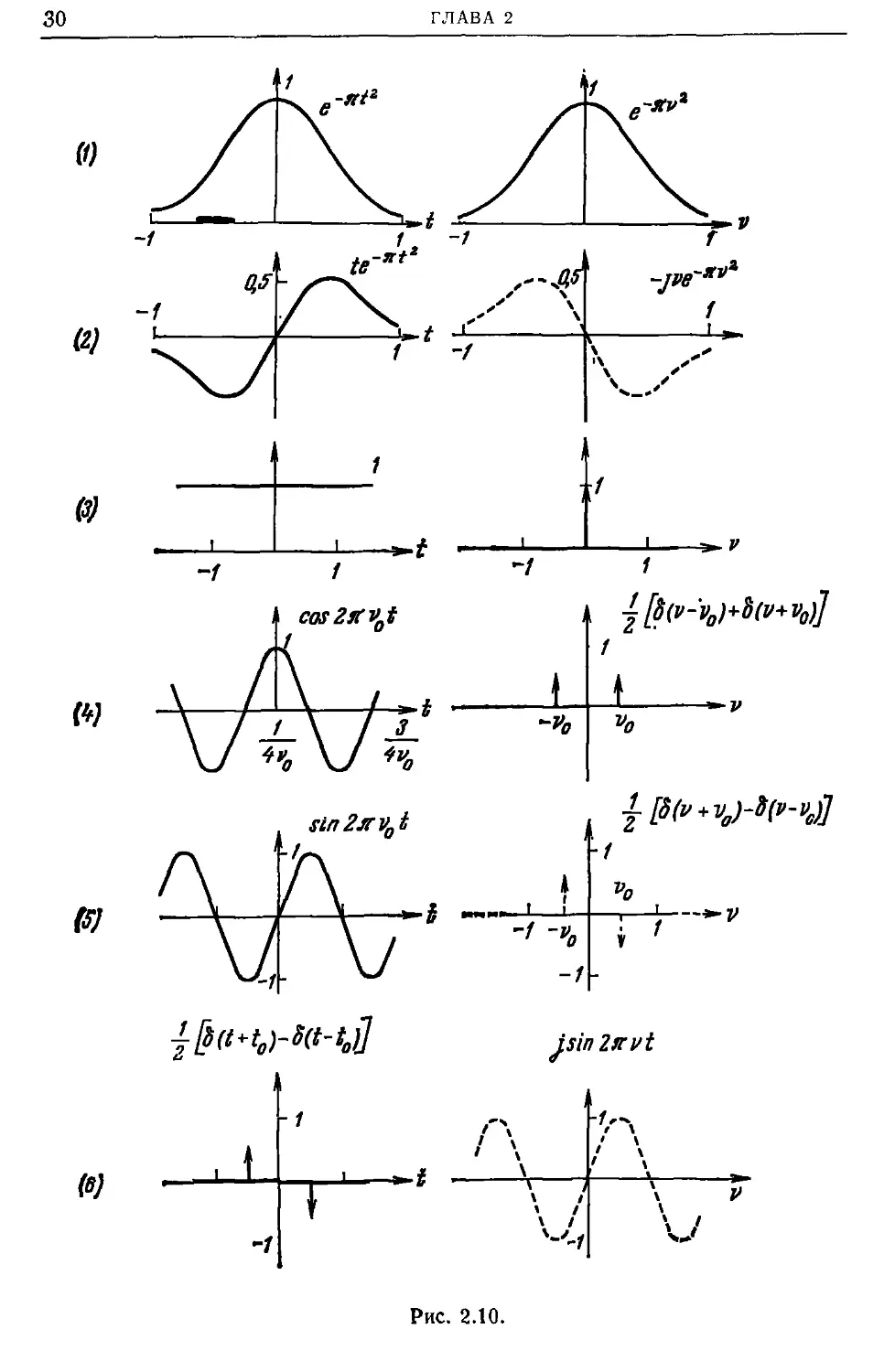
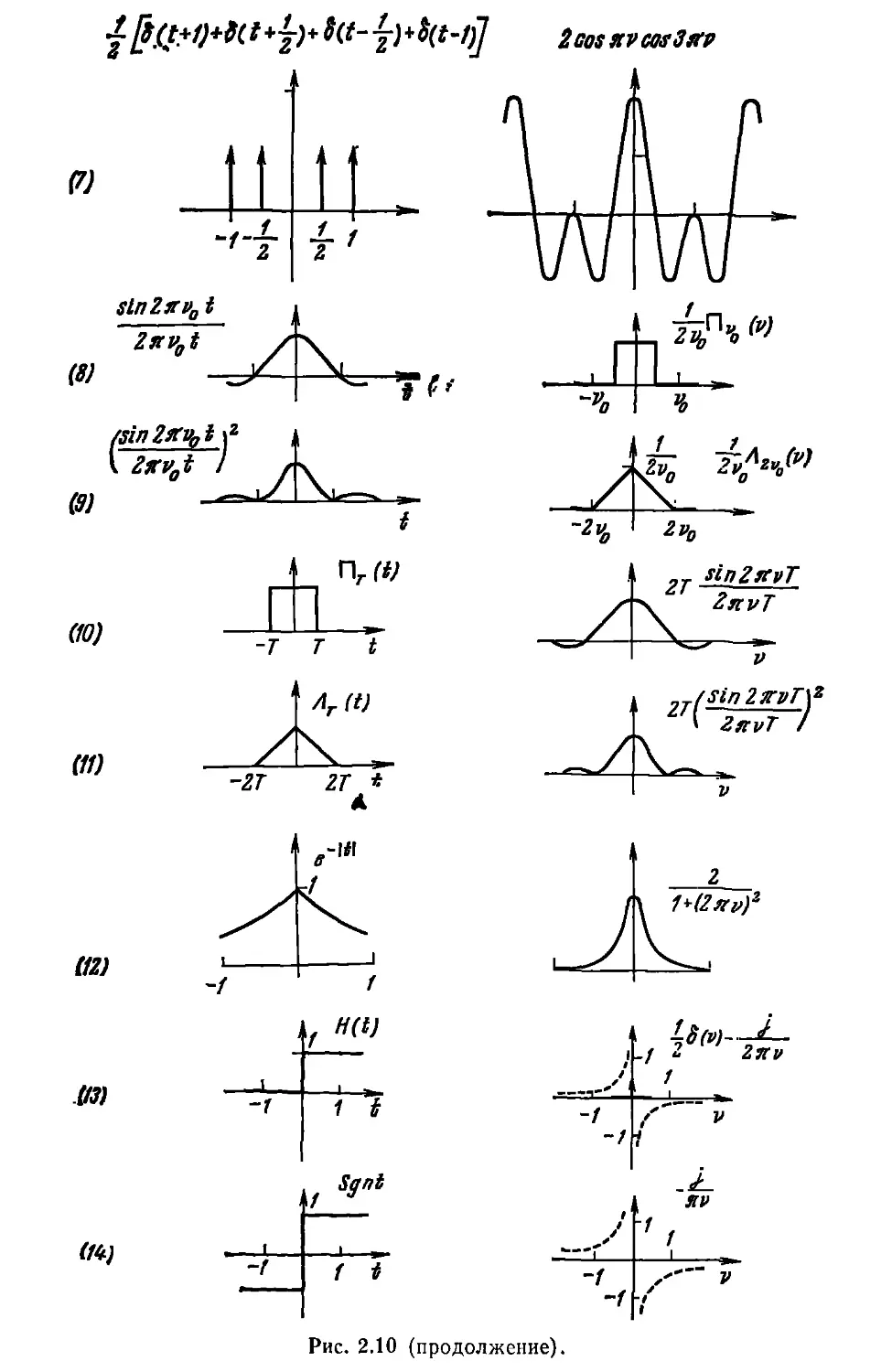
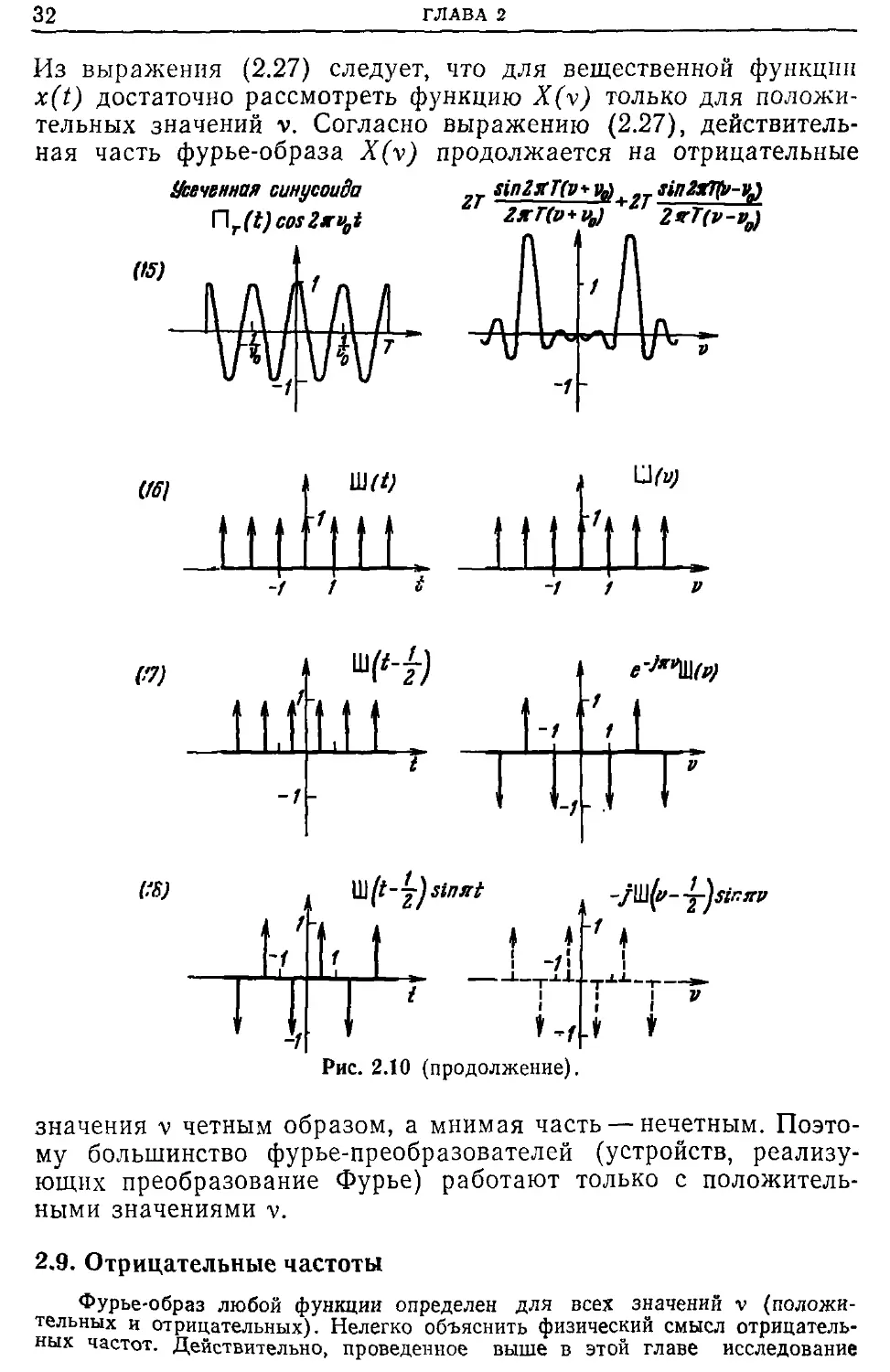
2.7. Несколько функций и их фурье-образы
На схемах A—18) рис. 2.10 даны примеры функций и их
фурье-образов (примеры взяты из книги R. M. Bracewell, The
Fourier transform and its applications). Сплошными линиями
показаны вещественные части, штриховыми — мнимые части.
2.8. Частный случай вещественных сигналов
Пусть X(v)=Re[X(v)]-\-jlm[X(v)]—фурье-образ вещест-
венной функции x(t). Тогда
B.27)
ГЛАВА 2
Рис. 2.10.
Рис. 2.10 (продолжение).
32
ГЛАВА 2
Рис. 2.10 (продолжение).
значения v четным образом, а мнимая часть — нечетным. Поэто-
му большинство фурье-преобразователей (устройств, реализу-
ющих преобразование Фурье) работают только с положитель-
ными значениями v.
2.9. Отрицательные частоты
Фурье-образ любой функции определен для всех значений v (положи-
тельных и отрицательных). Нелегко объяснить физический смысл отрицатель-
ных частот. Действительно, проведенное выше в этой главе исследование
Из выражения B.27) следует, что для вещественной функции
x(t) достаточно рассмотреть функцию X(v) только для положи-
тельных значений v. Согласно выражению B.27), действитель-
ная часть фурье-образа X(v) продолжается на отрицательные
ПРЕОБРАЗОВАНИЕ ФУРЬЕ 33
предполагало, что частоты могут быть разных знаков. В то же время все
классические спектральные анализаторы и фурье-преобразователи вычисляют
спектр и фурье-образы только для положительных частот. Может показаться,
что в этом заключено противоречие, но на самом деле его нет. Когда неко-
торое устройство вычисляет фурье-образ физической функции, оно оперирует
с вещественными функциями (полученными при измерениях), без мнимых
составляющих. Используя затем соотношения B.27), можно определить фурье-
образ для отрицательных частот. Неучет части фурье-образа, соответствую-
щей отрицательным частотам, может привести к большим погрешностям.
Рассмотрим, например, фурье-образ функции
Для вычисления фурье-образа комплексной функции (этот случай имеет
место при использовании обратного преобразования Фурье) приходится по-
следовательно вычислять мнимую и действительную части, применяя форму-
лы B.27).
2.10. Аналитический сигнал
Поскольку на практике фурье-образ рассматривается толь-
ко для положительных часто.т, необходимо построить такой сиг-
нал zx(i), соответствующий x(t), чтобы фурье-образ zx(v) =
TF[zx(t)] тождественно равнялся нулю для v<0 и был равен
2X(v) для v^O. Функция zx(i) будет комплексной и Re[zx(t)] =
—x(t). Поэтому
Звездочка означает операцию свертки (см. гл. 5). — Прим. ред.
Поскольку функция x(t)—нечетная, фурье-образ — мнимая функция и
Фурье-преобразователь вычисляет часть фурье-образа, соответствующую по-
ложительным частотам:
Часть, соответствующая отрицательным частотам, имеет вид
Поэтому фурье-образ принимает форму
Легко проверить, что для фурье-образа справедливо равенство
34 ГЛАВА 2
Из выражений B.29) и B.30) следует равенство
zx(t)=x(t)-jTH[x(t)]. B.31)
Величина zx(t) называется аналитическим сигналом, соответст-
вующим x(t).
Поскольку x(i) *l/nt*±—jX(v) -signv, то для вычисления
преобразования Гильберта достаточно осуществить фильтра-
цию сигнала при помощи фильтра с характеристикой —/signv.
Фильтр с частотной характеристикой —/singv осуществляет
фазовое смещение положительных частот на —90° и отрица-
тельных частот на +90°. Поэтому преобразованию Гильберта
соответствует фильтр, осуществляющий фазовое смещение на
угол л/2.
2.11. Почему выбрано преобразование Фурье?
Почему для частотного представления сигналов было выбрано преобра-
зование Фурье, т. е. разложение по синусам и косинусам? Может быть, лучше
производить разложение по сигналам другой формы, например прямоуголь-
ной? Ответ на эти вопросы прост: разложение по синусам и косинусам было
выбрано потому, что синусы и косинусы — собственные функции линейного
фильтра, т. е. эти функции не изменяют своей формы при прохождении через
линейный фильтр.
¦> V.P. — главное в смысле Коши значение интеграла.
Функция
где
удовлетворяет этим условиям. Для Zx(v) справедливы соотно-
шения
По определению x(t)*l[nt — преобразование Гильберта функ-
ции x(t):
Zx(v)=X(v)+X(v)signv,
B.28)
B.29)
B.30)
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
35
2 12 Физическая реализация фурье-образа.
Преобразование Фурье в оптике1)
В когерентной оптике преобразование Фурье имеет физическую реализа-
цию Действительно, любая дифракционная оптическая система с помощью
когерентных волн ставит в соответствие освещенному объекту его изображение
на некоторой плоскости, определяемой законами геометрической оптики,
и двумерный фурье-образ на плоскости, опреде-
ляемой законами дифракции. Следовательно, об- °
разование изображений и преобразование Фурье —
два проявления одного и того же явления, назы-
ваемого дифракцией.
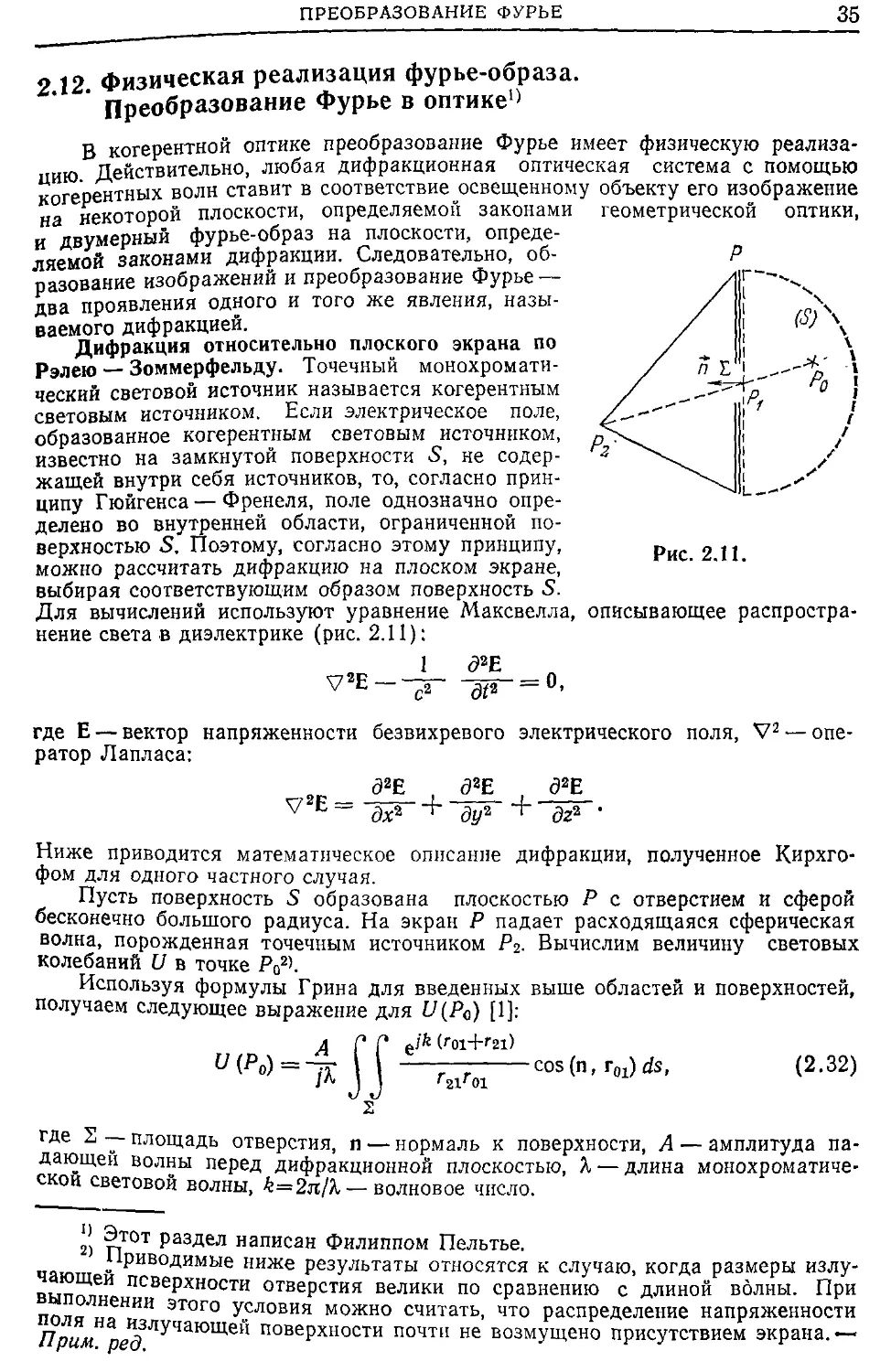
Дифракция относительно плоского экрана по
Рэлею — Зоммерфельду. Точечный монохромати-
ческий световой источник называется когерентным
световым источником. Если электрическое поле,
образованное когерентным световым источником,
известно на замкнутой поверхности S, не содер-
жащей внутри себя источников, то, согласно прин-
ципу Гюйгенса — Френеля, поле однозначно опре-
делено во внутренней области, ограниченной по-
верхностью S. Поэтому, согласно этому принципу,
можно рассчитать дифракцию на плоском экране,
выбирая соответствующим образом поверхность 5.
Для вычислений используют уравнение Максвелла, описывающее распростра-
нение света в диэлектрике (рис. 2.11):
Рис. 2.11.
Ниже приводится математическое описание дифракции, полученное Кирхго-
фом для одного частного случая.
Пусть поверхность S образована плоскостью Р с отверстием и сферой
бесконечно большого радиуса. На экран Р падает расходящаяся сферическая
волна, порожденная точечным источником Рг- Вычислим величину световых
колебаний U в точке Р02'.
Используя формулы Грина для введенных выше областей и поверхностей,
получаем следующее выражение для U(P0) [1]:
B.32)
где 2 — площадь отверстия, п — нормаль к поверхности, А — амплитуда па-
дающей волны перед дифракционной плоскостью, Я — длина монохроматиче-
ской световой волны, *=2я/Я —волновое число.
1\ Этот раздел написан Филиппом Пельтье.
Приводимые ниже результаты относятся к случаю, когда размеры излу-
вьшшТн1! псвеРХН0СТИ отверстия велики по сравнению с длиной волны. При
поля Haif" ЭТ0Г° Условия можно считать, что распределение напряженности
Прим, 7, ?ЗЛУчаюш-е" поверхности почти не возмущено присутствием экрана.—
где Е — вектор напряженности безвихревого электрического поля, V2 — опе-
ратор Лапласа:
36
ГЛАВА 2
Отметим, что сферическая волна, испускаемая источником Рг. описывает-
ся выражением А(е1кг 1/Г21).
Если экран освещается произвольным монохроматическим источником, то,
используя принцип линейной суперпозиции, величину U(Po) можно разложить
на составляющие, соответствующие конечному или бесконечному множеству
точечных источников:
где
B.33)
B.34)
U(Pi)—величина световых колебаний в точке Pi излучающей поверх-
ности.
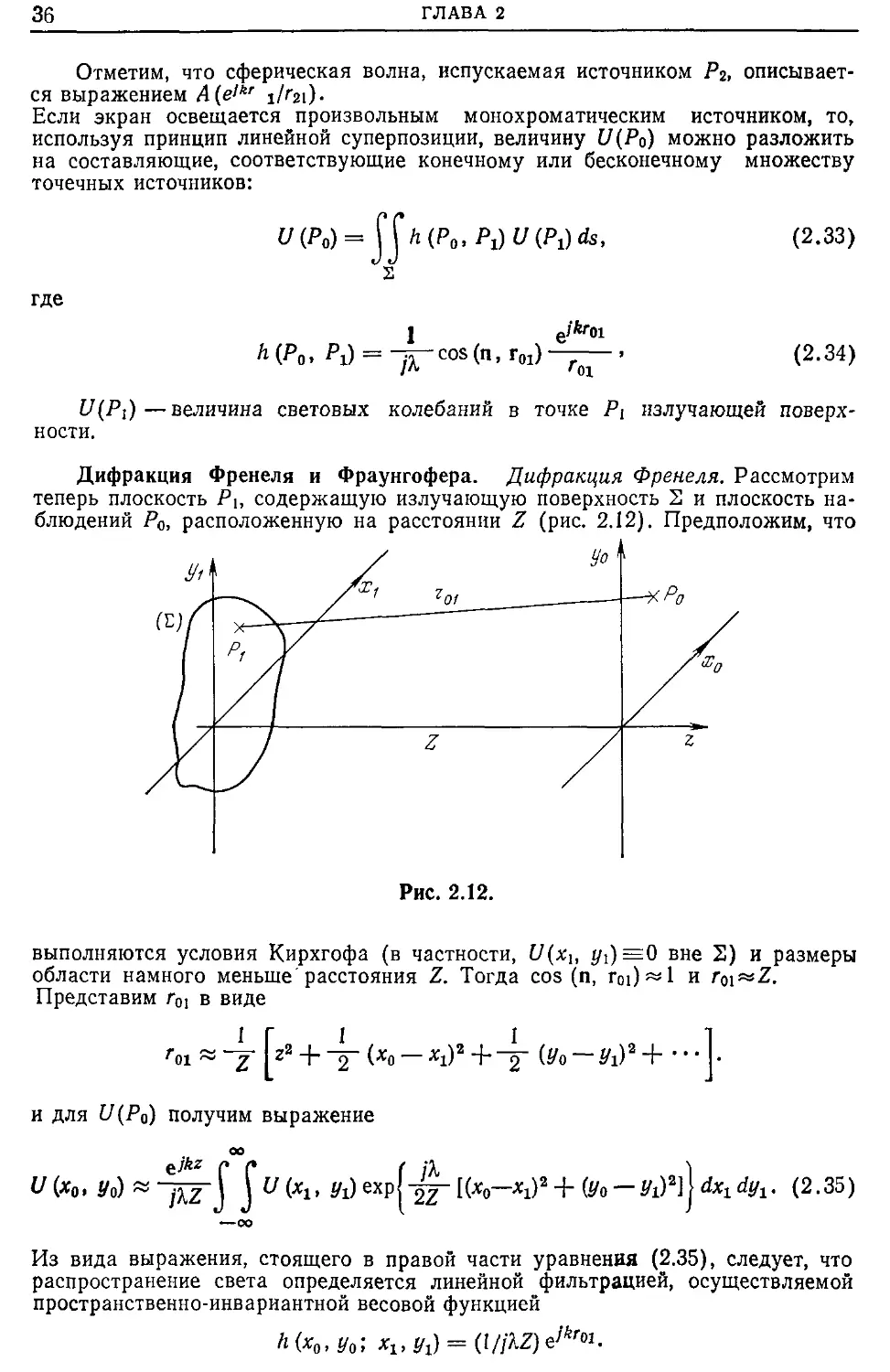
Дифракция Френеля и Фраунгофера. Дифракция Френеля. Рассмотрим
теперь плоскость Ри содержащую излучающую поверхность 2 и плоскость на-
блюдений Pq, расположенную на расстоянии Z (рис. 2.12). Предположим, что
Из вида выражения, стоящего в правой части уравнения B.35), следует, что
распространение света определяется линейной фильтрацией, осуществляемой
пространственно-инвариантной весовой функцией
выполняются условия Кирхгофа (в частности, U(xu (/0=0 вне 2) и размеры
области намного меньше расстояния Z. Тогда cos (n, roi)«l и roi«Z.
Представим гп в виде
и для U(P0) получим выражение
Рис. 2.12.
B.35)
ПРЕОБРАЗОВАНИЕ ФУРЬЕ
37
B.36)
Выражение B.36) с точностью до множителя представляет собой фурье-об-
раз распределения поля на поверхности 2 как функцию пространственных
частот fx и fy.
Замечание 1. В условиях дифракции Фраунгофера отсутствует комплекс-
ный коэффициент усиления, поскольку нарушено условие пространственной
инвариантности поля (выражение для U{x0, г/о) нельзя представить в виде
свертки).
Замечание 2. Для рассматриваемых на практике оптических частот усло-
вие Z»fe(xi2 + (/i2)/2 выполняется крайне редко. Действительно, для
X=6-10~7 м (красный свет) и излучающей поверхности размером 2,5 см имеем
2>1600 м.
Рис. 2.13.
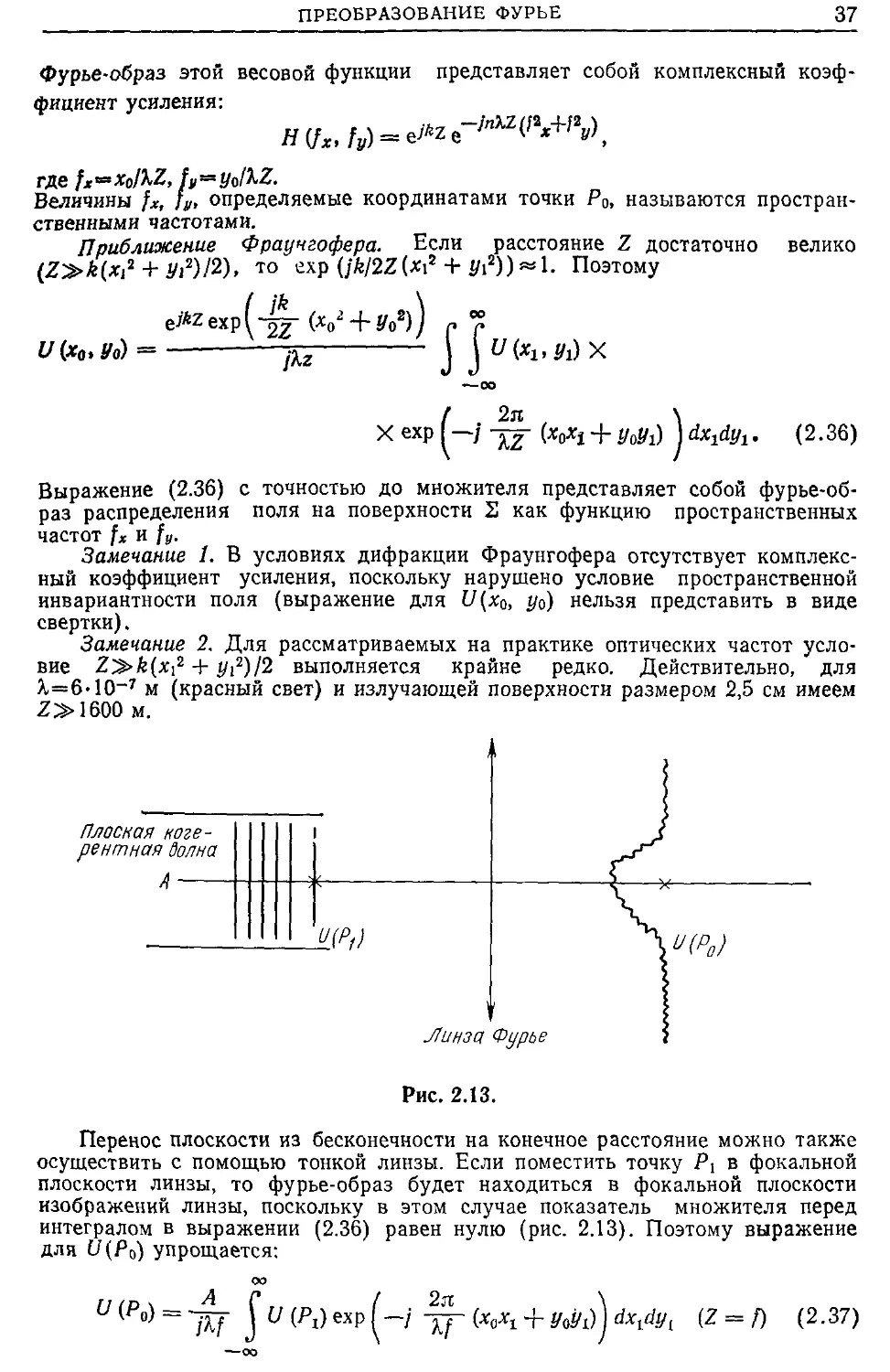
Перенос плоскости из бесконечности на конечное расстояние можно также
осуществить с помощью тонкой линзы. Если поместить точку Р{ в фокальной
плоскости линзы, то фурье-образ будет находиться в фокальной плоскости
изображений линзы, поскольку в этом случае показатель множителя перед
интегралом в выражении B.36) равен нулю (рис. 2.13). Поэтому выражение
для 0(Рй) упрощается:
Фурье-образ этой весовой функции представляет собой комплексный коэф-
фициент усиления:
где /х=ХоА?, Л,=2ЛД2.
Величины fx, fy, определяемые координатами точки Ро, называются простран-
ственными частотами.
Приближение Фраунгофера. Если расстояние Z достаточно велико
(Z>A(ati2 + ^2)/2), то ехр(/й/22(х1г + |/12))«1. Поэтому
B.37)
38 ГЛАВА 2
Функция U(P0)—двумерный фурье-образ функции распределения U(P\).
Очень важным является то обстоятельство, что здесь мы имеем возможность
дать физическую интерпретацию фурье-образа. Это в свою очередь позволяет
наблюдать спектр либо визуально, либо с помощью оптического детектора
(фотодиода, видикона и т. д.).
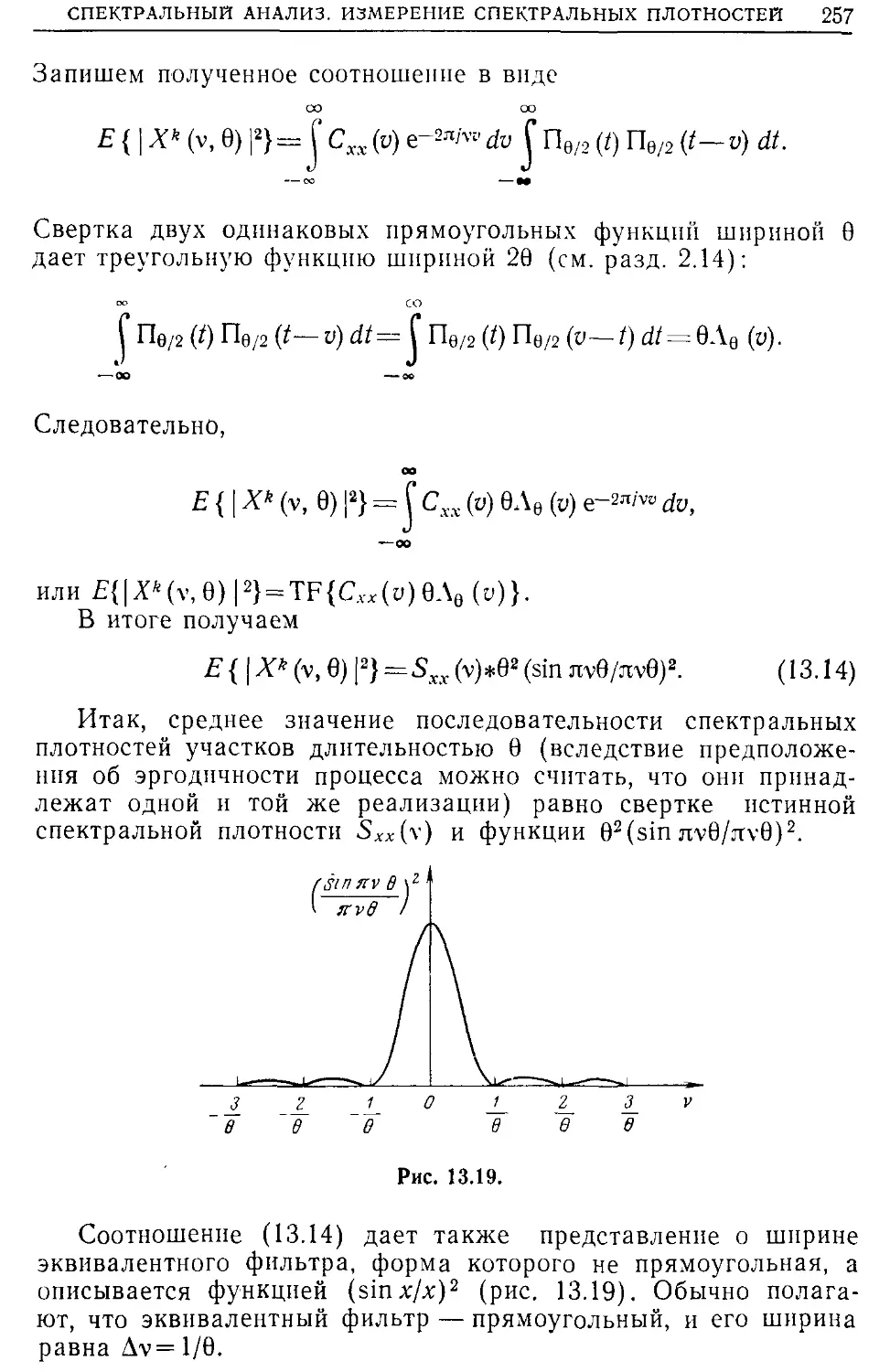
2.13. Свойства функции sin*/*
В разд. 2.6 показано, что фурье-образ функции
где
Поэтому
Сделав замену переменной, получаем
Используя равенство
получаем
откуда
Из теоремы Парсеваля (разд. 3.4 гл. 3) следует равенство
B.38)
B.39)
B.40)
B.41)
B.42)
ПРЕОБРАЗОВАНИЕ ФУРЬЕ 39
Для функции Il.Fe/2(v) справедливо равенство
или
Итак, множество функций s'm(x—nk)f(x—mk), 6 = 0,1,...
образуют ортогональную систему.
2.14. Лямбда-функция (Л)
Рассмотрим свертку двух идентичных прямоугольных функ-
ций nFe,2 (v):
Осуществляя преобразование Фурье над обеими частями ра-
венства B.43), получаем
или эквивалентное равенство
Поскольку Te=l/Fe и sin?jT = 0, то из выражения B.45) следу-
ет равенство
Из равенства
Разность Fe—\v\ запишем в виде Fe(l — |v|/iv) =
=FeAFe(v), где
B.44)
B.45)
B.46)
B.47)
B.48)
40
ГЛАВА 2
получаем
или
Аналогично
B.49)
B.50)
B.51)
ЛИТЕРАТУРА
1. Goodman J. W. Introduction a 1'optique de Fourier et a l'holographie, Mas-
son.
2. Franfon Holographie, Formation et traitement des images, Masson, 1972.
мощность
И ЭНЕРГИЯ СИГНАЛОВ
Нет ничего практичней хорошей теории.
К. Левин
Любая передача информации связана с передачей энергии.
При любом измерении объект измерения теряет часть энергии,
снимаемой измеряемым устройством. Следовательно, понятие
мощности сигнала является чрезвычайно важным.
3.1. Временная мощность
Мгновенная мощность сигнала. Рассмотрим произвольный
комплексный сигнал x(t)—a(t)-\-jb(t), где a(t), b{t)—вещест-
венные функции. Мгновенная мощность сигнала p(t) определя-
ется равенством
Глава
3
Если функция x(t) вещественна (случай физических сигналов),
то
Энергия сигнала равна интегралу от мощности по всему про-
межутку существования сигнала.
Если мощность рассматривается как функция времени
(рис. 3.1), то ее называют временной мощностью или просто
мощностью. Мощность может быть представлена также как
функция частоты. В этом случае она называется частотной
мощностью (рис. 3.2) или спектральной мощностью. Спектраль-
Средняя мощность на промежутке длиной Т подсчитывается
по формуле
C.2)
C.3)
42
ГЛАВА 3
ную мощность называют часто спектральной плотностью или
спектром.
Названия «временная мощность» и «частотная мощность»
хотя, к сожалению, и используются редко, но более правильно
отражают соотношение между временным и частотным пред-
ставлениями сигнала по сравнению с распространенными назва-
ниями «мощность» (в случае временного представления) и
pdh.
Рис. 3.1.
«спектральная плотность» (в случае частотного представления).
Отметим также, что, подобно частотной мощности, временная
мощность является плотностью. Действительно, любое измере-
ние энергии, если мощность конечна, производится на интерва-
ле ненулевой длины (At или Av). Поэтому измеряются не p(t)
или S(v), а величины
Энергия сигнала на интервале длиной At в окрестности t0 вы-
числяется по формуле
C.4)
Полная энергия сигнала дается выражением
C.5)
Пусть два произвольных в общем случае комплексных сигнала
х@> У@ взаимодействуют друг с другом. Тогда мощность
МОЩНОСТЬ И ЭНЕРГИЯ СИГНАЛОВ
43
взаимодействия равна
Функции pxy(t) и pyX(t) связаны соотношением
C.6)
C.7)
C.8)
Рис. 3.2.
Если оба сигнала вещественны, то
PXy(t) = Pyx(t) = x(t)y(t).
Аналогично определяется средняя мощность на интервале Т:
C.9)
C.10)
Имеем
Энергия взаимодействия на интервале А^ в окрестности точки
t0 дается равенством
C.12)
Полная энергия взаимодействия двух сигналов вычисляется по
формулам
C.13)
C.13а)
44
ГЛАВА 3
C.15)
C.16)
C.17)
Пусть по крайней мере один из сигналов x(t), y(t) являет-
ся переходным, т. е. равен нулю вне некоторого конечного ин-
тервала (tQ, t\). В этом случае среднюю мощность определить
нельзя, так как, согласно выражению C.14), она стремится к
нулю при Т—^-.оо1). Энергия же для этого случая вычисляется
по формуле
3.2. Частотная мощность.
Спектральная плотность мощности. Спектр мощности
Мощность сигнала может быть рассмотрена также как
Функция частоты. При таком рассмотрении ее обозначают
п 1) Здесь имеется в виду средняя мощность на всей временной оси.—
"Рим. перев.
В случае неограниченного промежутка времени средняя мощ-
ность взаимодействия двух сигналов может быть определена с
помощью предела
Аналогичная формула применяется и для вычисления средней
мощности одного сигнала.
Можно показать, что в случае неограниченного промежутка
времени единственным корректным определением средней мощ-
ности взаимодействия является определение по формуле C.14).
Если оба сигнала вещественны, то
C.14)
C.18)
C.19)
C.20)
Обозначим через Sxy(v) спектральную мощность взаимо-
действия двух сигналов x(t) и y(t). Функция Sxy(v) может при-
нимать комплексные значения, даже если x(t), y(t) веществен-
ны. Энергия взаимодействия в полосе частот Av в окрестности
v0 дается равенством
C.23)
C.24)
Энергия сигнала в полосе частот Av в окрестности vq
равна
МОЩНОСТЬ И ЭНЕРГИЯ СИГНАЛОВ
Если X(v) — фурье-образ функции x(t), то
Из последнего выражения следует, что функция Sxx(v)—ве-
щественна и неотрицательна. Полная энергия сигнала вычисля-
ется по формуле
Используя равенство C.20), получаем
C-21)
C.22)
Полная энергия взаимодействия равна
Выше были введены две временные мощности взаимодействия.
Аналогично существуют две спектральные плотности взаимо-
действия, которые сопряжены друг с другом:
Sxy(v)=S*yx(v). C.25)
Пусть X(v) и Y(v) — фурье-образы функций x(t) и y(t). Тогда
S^)=Xj[y)Y*(v). C.26)
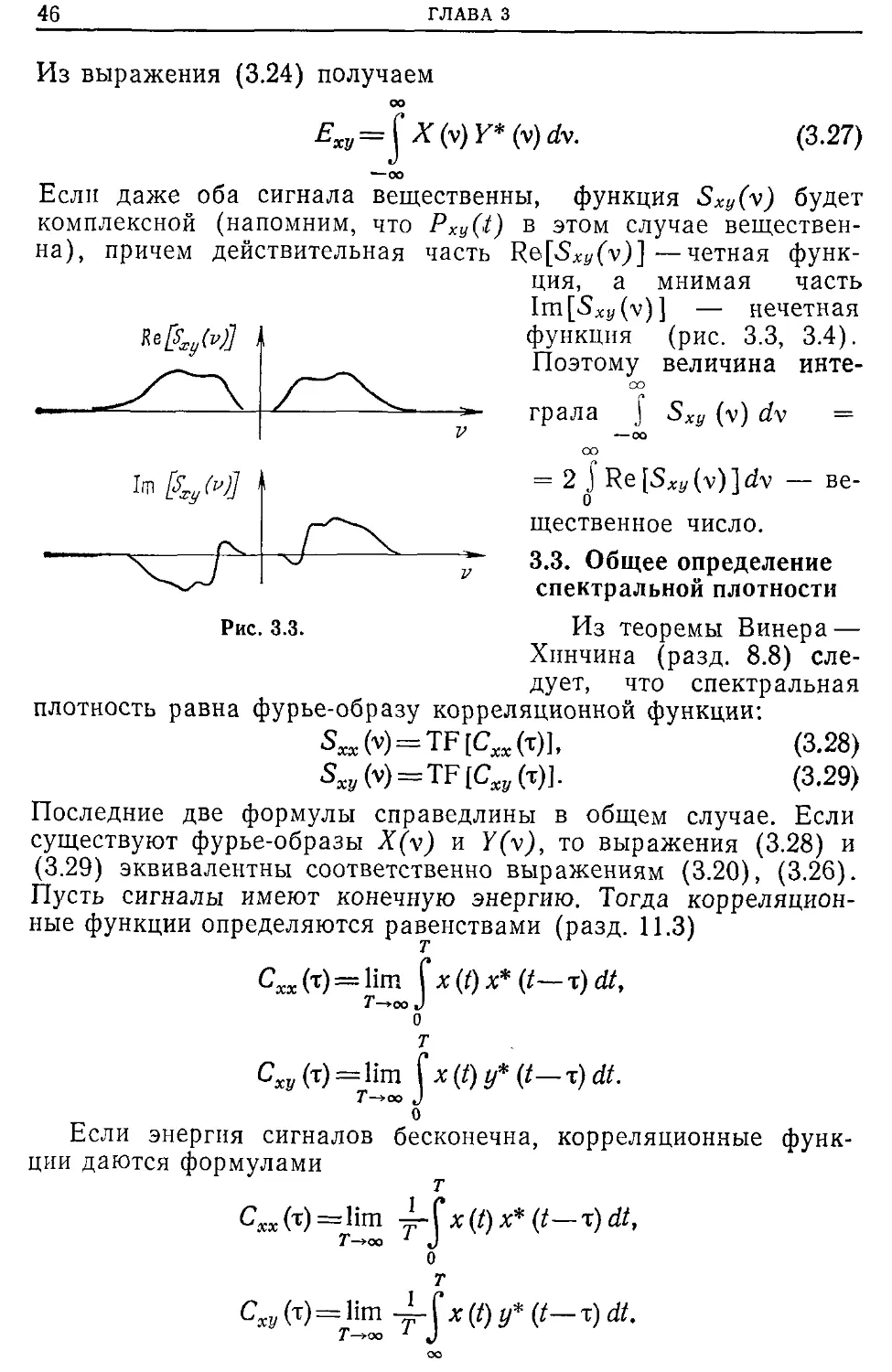
46
ГЛАВА 3
C.27)
Если даже оба сигнала вещественны, функция Sxy(v) будет
комплексной (напомним, что PXy(t) в этом случае веществен-
на), причем действительная часть Re[5^(v)] —четная функ-
ция, а мнимая часть
Im[5xy(v)] — нечетная
функция (рис. 3.3, 3.4).
Поэтому величина инте-
грала
щественное число.
3.3. Общее определение
спектральной плотности
Из теоремы Винера —
Хинчина (разд. 8.8) сле-
дует, что спектральная
плотность равна фурье-образу корреляционной функции:
Sxx(v) = 7F[Cxx(x)], C.28)
Sxy(v) = TF[Cxy(T)]. C.29)
Последние две формулы справедлины в общем случае. Если
существуют фурье-образы X(v) и Y(v), то выражения C.28) и
C.29) эквивалентны соответственно выражениям C.20), C.26).
Пусть сигналы имеют конечную энергию. Тогда корреляцион-
ные функции определяются равенствами (разд. 11.3)
Если энергия сигналов бесконечна, корреляционные функ-
ции даются формулами
Из выражения C.24) получаем
Рис. 3.3.
МОЩНОСТЬ И ЭНЕРГИЯ СИГНАЛОВ
47
Рис. 3.4.
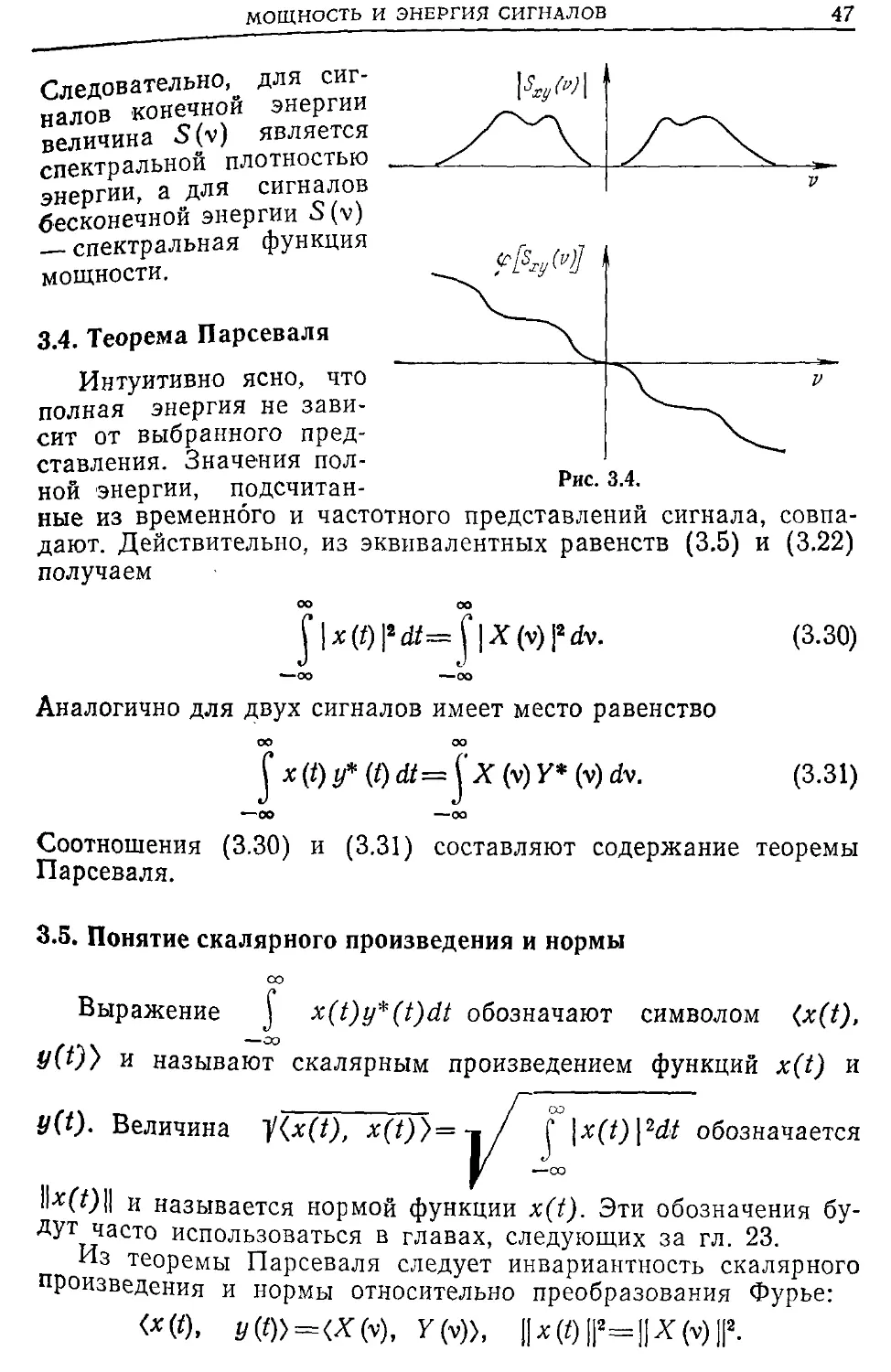
Следовательно, для сиг-
налов конечной энергии
величина 5(v) является
спектральной плотностью
энергии, а для сигналов
бесконечной энергии 6(v)
— спектральная функция
мощности.
3.4. Теорема Парсеваля
Интуитивно ясно, что
полная энергия не зави-
сит от выбранного пред-
ставления. Значения пол-
ной энергии, подсчитан-
ные из временного и частотного представлений сигнала, совпа-
дают. Действительно, из эквивалентных равенств C.5) и C.22)
получаем
C.30)
C.31)
обозначается
«х@\\ и называется нормой функции x(t). Эти обозначения бу-
Дут часто использоваться в главах, следующих за гл. 23.
Из теоремы Парсеваля следует инвариантность скалярного
произведения и нормы относительно преобразования Фурье:
<*(9. 0(9>=<*(v), Y(v)), |И9||*=ЦЛ»||".
Аналогично для двух сигналов имеет место равенство
Соотношения C.30) и C.31) составляют содержание теоремы
Парсеваля.
3.5. Понятие скалярного произведения и нормы
У@. Величина
Выражение
обозначают символом (x(t),
У(О) и называют скалярным произведением функций x(t) и
Глава 4
ПРЕОБРАЗОВАНИЕ
ЛАПЛАСА
где бо>О настолько велико, что интеграл в правой части равенства D.3)
сходится. Число бо>0 называется показателем сходимости".
Преобразование Лапласа представляет интерес для изучения переходных
режимов, поскольку последние равны нулю для <<0 (?=0 соответствует мо-
менту времени, при котором начинается возмущение, порождающее переход-
ный процесс) в силу принципа причинности: следствие не может предшество-
вать причине.
Преобразование Лапласа — рабочий инструмент физиков и специалистов
в области автоматического регулирования. Другой причиной использования
преобразования Лапласа является его применимость для тех функций, у ко-
" Такое определение показателя сходимости не совсем корректно. Пока-
зателем сходимости функции f(t) называется наименьшее число б<>, для кото-
рого |/G) | <Ме~6о', ^>0. Вместо названия показатель сходимости используют
также характеристический показатель, или показатель Ляпунова. — Прим.
перев.
Будьте осторожны при переходе желез-
нодорожных путей! Проходящий поезд
может скрывать поезд, движущийся по
другому пути.
Совет управления французских на-
циональных железных дорог.
4.1. Определение
Напомним, что фурье-образ функции f(t) дается формулой
и F(v) существует только в случае сходимости интеграла в правой части
равенства D.1). Если же интеграл расходится, то его можно сделать сходя-
щимся, заменив показатель экспоненты — 2njv комплексным числом
р = -б0 —23X/V, D.2)
где бо>О. Показатель р называется комплексной частотой. Если же функ-
ция f(t) равна нулю при t<0, то получаем преобразование Лапласа, опреде-
ляемое формулой
D.1)
D.3)
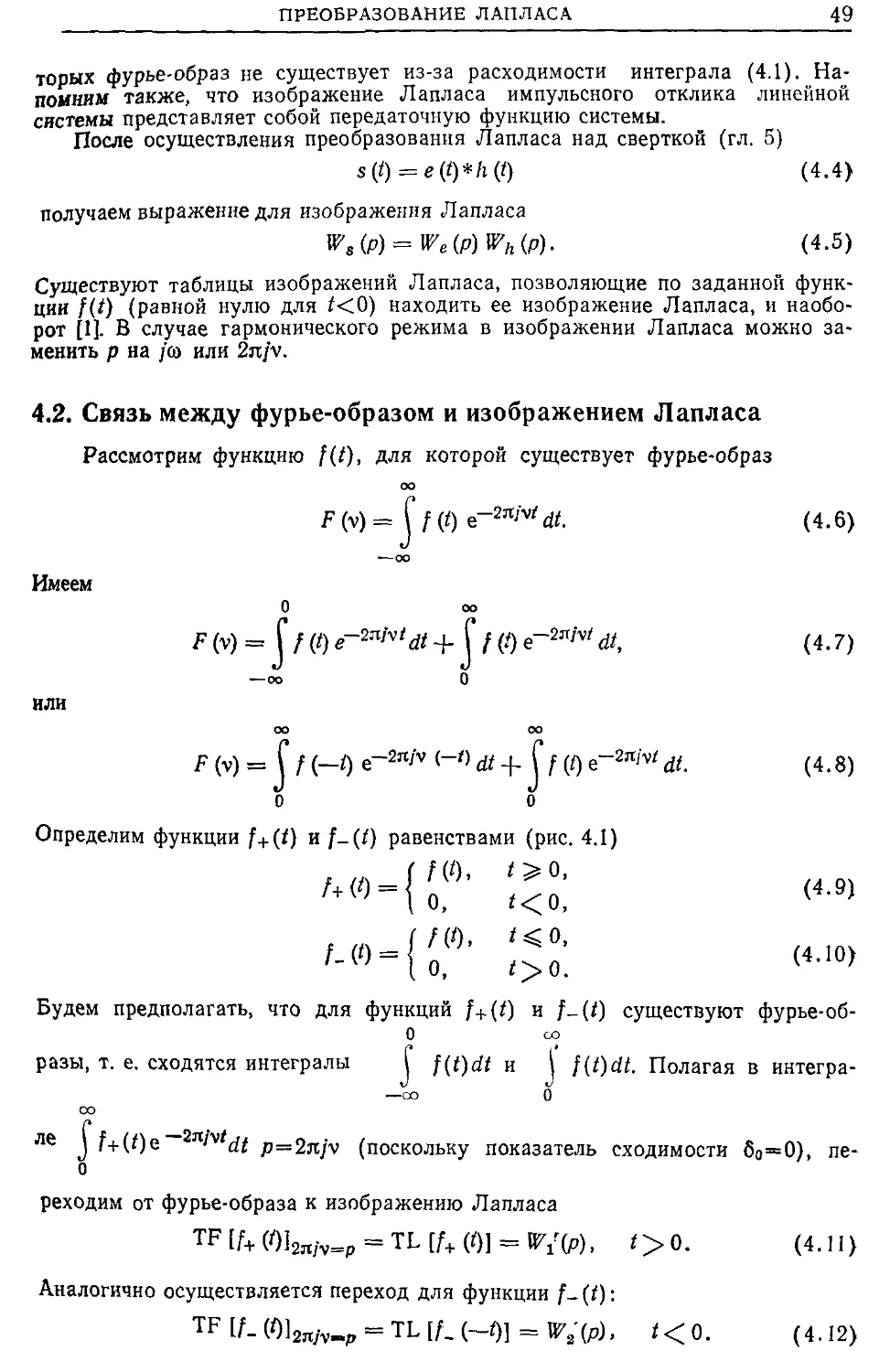
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 49
торых фурье-образ не существует из-за расходимости интеграла D.1). На-
поиним также, что изображение Лапласа импульсного отклика линейной
системы представляет собой передаточную функцию системы.
После осуществления преобразования Лапласа над сверткой (гл. 5)
s(Q = e(Q*ft@ D.4)
получаем выражение для изображения Лапласа
Ws(p) = We{P)Wh(p). D.5)
Существуют таблицы изображений Лапласа, позволяющие по заданной функ-
ции f(t) (равной нулю для t<0) находить ее изображение Лапласа, и наобо-
рот [1]. В случае гармонического режима в изображении Лапласа можно за-
менить р на /и или 2n/v.
4.2. Связь между фурье-образом и изображением Лапласа
Рассмотрим функцию f(t), для которой существует фурье-образ
Имеем
или
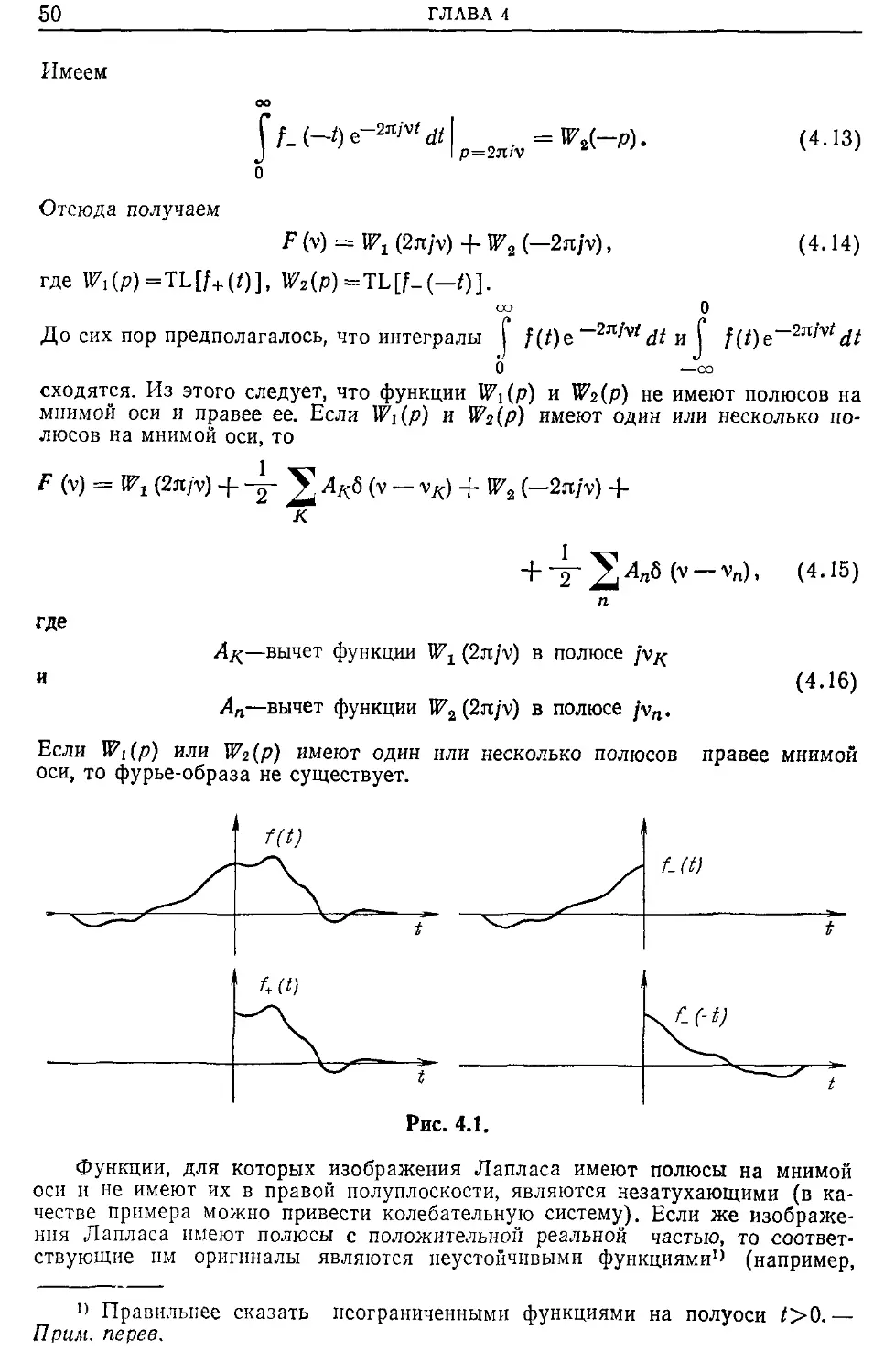
Определим функции f+(t) и f-(t) равенствами (рис. 4.1)
D.6)
D.7)
D.8)
разы, т. е. сходятся интегралы
D.9)
D.10)
Будем предполагать, что для функций /+(/) и /-(/) существуют фурье-об-
Полагая в интегра-
(поскольку показатель сходимости бо=О), пе-
D.П)
D.12)
реходим от фурье-образа к изображению Лапласа
Аналогично осуществляется переход для функции
50
ГЛАВА 4
Имеем
D.13)
D.14)
Отсюда получаем
где
и
Ац—вычет функции Wt Bn/v) в полюсе jv%
Ап—вычет функции W2 Bn/v) в полюсе jvn.
D.15)
D.16)
Если Wi(p) или Wi(p) имеют один или несколько полюсов правее мнимой
оси, то фурье-образа не существует.
Рис. 4.1.
Функции, для которых изображения Лапласа имеют полюсы на мнимой
оси и не имеют их в правой полуплоскости, являются незатухающими (в ка-
честве примера можно привести колебательную систему). Если же изображе-
ния Лапласа имеют полюсы с положительной реальной частью, то соответ-
ствующие им оригиналы являются неустойчивыми функциями1' (например,
'> Правильнее сказать неограниченными функциями на полуоси t>0.—
Прим. перев.
где
До сих пор предполагалось, что интегралы
сходятся. Из этого следует, что функции Wi(p) и W2(p) не имеют полюсов на
мнимой оси и правее ее. Если Wt(p) и W2{p) имеют один или несколько по-
люсов на мнимой оси, то
ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 5t
переходный процесс неустойчивой системы). Отметим, что на практике по-
следние два случая встречаются редко. Поэтому для большинства функций
f(t) можно предполагать, что изображения Лапласа от f+(t) и f-(t) не
имеют полюсов в правой полуплоскости и на мнимой оси. Тем самым пред-
полагается справедливым равенство
F (у) = IFi Bft/v) -f W2 (—2n/v). D.17)
Рассмотрим три важных частных случая:
1. /@=0 для t< 0. D.18)
Этот случай соответствует импульсному отклику физически реализуемых си-
стем. Имеем
/_(-0 = 0 для <>0, D.19)
и поэтому
F(v) = WBnjv). D.20)
2. Функция {(/) — четная.
Имеем
/+@ = /_(-0- D.21>
Отсюда получаем
F (v) = W Bлjv) + Г (—2n/v). D.22 >
3. Функция /(f) —нечетная.
Имеем
мо = -м-о- D-23>
Поэтому
f (V) = Г Bn/v) — Г (—2я/г). D.24)
ЛИТЕРАТУРА
1. Holbrook G Laplace transform for electronic engineers, Pergamon Press,
1959.
Глава 5
СВЕРТКА
... Таким образом, мы находимся в по-
ложении человека, который может рас-
сматривать интересующий его предмет
только через стекла очков, оптические
свойства которых он не знает.
Макс Планк
5.1. Определение
Свертка—это операция, которая производится измерительными прибо-
рами и в результате которой получается размытое (неясное) изображение
изучаемого объекта. Изображение точки в любом оптическом приборе ни-
когда не бывает точкой, а представляет собой пятно. Размеры этого пятна
определяются качеством прибора. В оптическом приборе изображения двух
различных точек будут разделены только при условии, что расстояние между
точками превышает некоторую минимальную величину, определяющую воз-
можность разрешения.
Понятия свертки и разрешающей способности можно найти в любой
области науки и техники. Физик Жан Шаррон смог вычислить минимальное
расстояние, ниже которого принципиально невозможно различать наблюдае-
мые объекты с помощью применяемого измерительного прибора [1]. Известно,
что на выходе масс-спектрометра вместо абсолютно острого «пика> всегда
наблюдается некоторая кривая, степень «размытия» которой определяется ка-
чеством масс-спектрометра. Поэтому трудно, а иногда и невозможно разделить
два соседних острых пика. Аналогичная ситуация наблюдается в электронике,
где поступающий на вход амплитудного анализатора импульс бесконечно ма-
лой продолжительности на выходе анализатора приобретает форму сигнала
конечной ненулевой продолжительности (продолжительность выходного сиг-
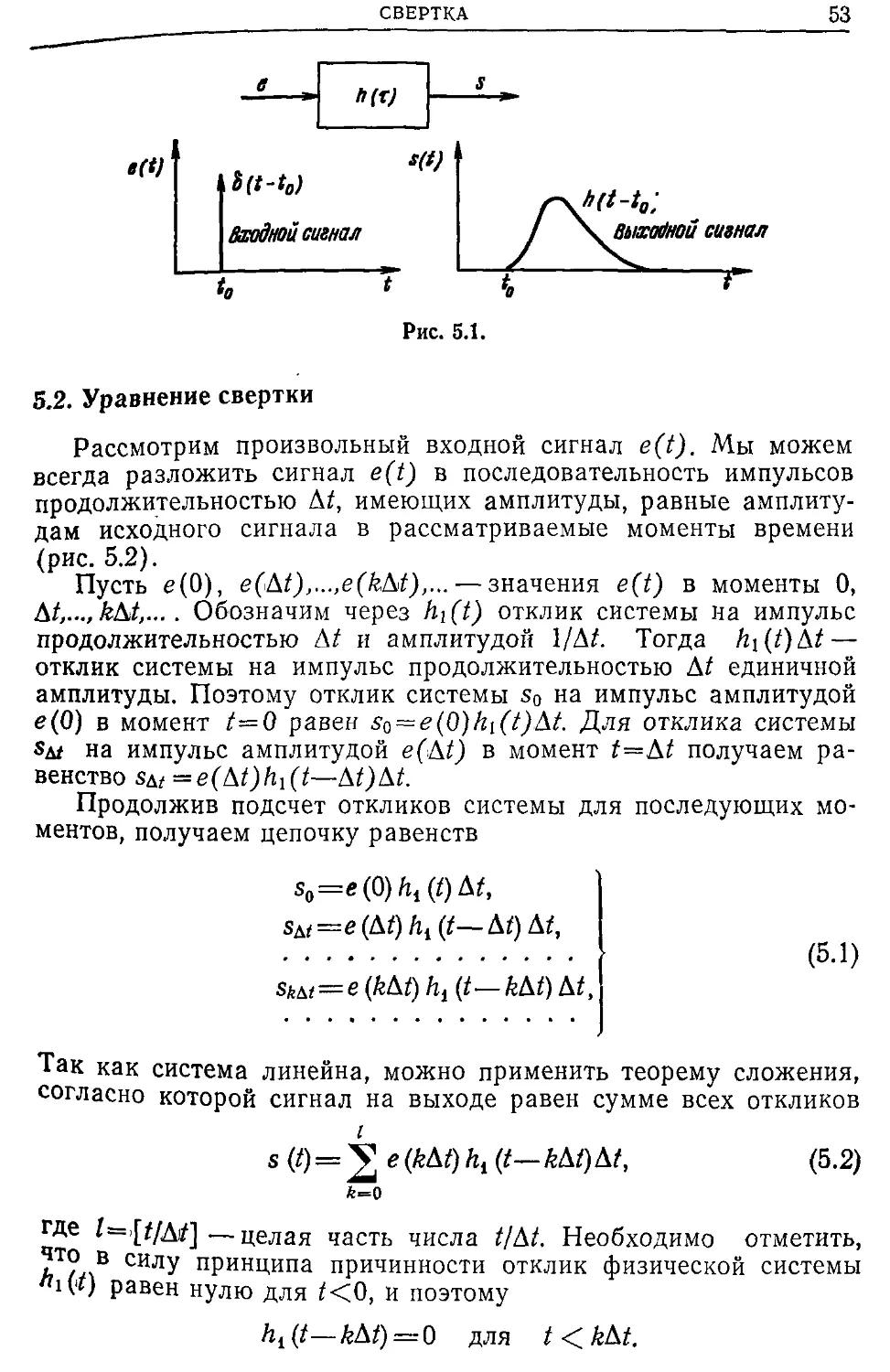
нала определяется шириной полосы пропускания прибора) (рис. 5.1).
Сигнал на выходе, соответствующий импульсу бесконечно малой продол-
жительности на входе, называется импульсным откликом. Поэтому любой
входной сигнал изменяет свою форму на выходе. Зная импульсный отклик h(t)
системы, предполагаемой линейной1' (в этом случае применима теорема сло-
жения сигналов), можно ли по входному сигналу e(t) рассчитать выходной
сигнал s(f)?
Решение этой задачи осуществляется с помощью свертки. Импульсному
отклику h(t) соответствует входной сигнал б@2>- Если импульсный сигнал на
входе смещен 6{t— to), то сигнал на выходе имеет форму h(t — to) с тем же
смещением to.
" Мы будем предполагать (кроме разд. 23.11), что линейные системы ста-
ционарны, т. е. их параметры не зависят от времени.
2) Функция б(/)—обобщенная функция Дирака, т. е. импульс бесконеч-
но малой продолжительности единичной площади (см. разд. 2.6).
СВЕРТКА
53
Рис. 5.1.
5.2. Уравнение свертки
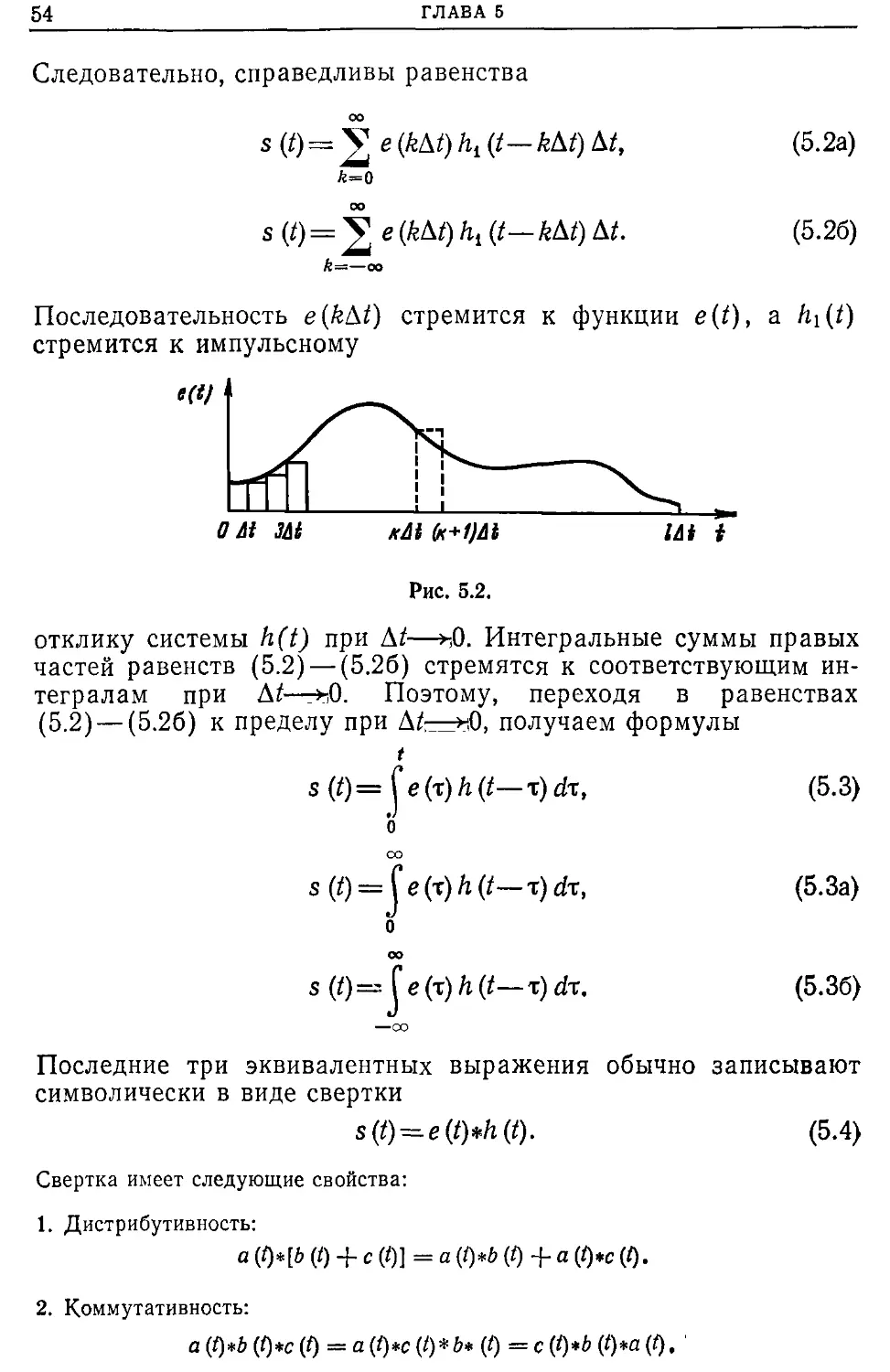
Рассмотрим произвольный входной сигнал e(t). Мы можем
всегда разложить сигнал e(t) в последовательность импульсов
продолжительностью At, имеющих амплитуды, равные амплиту-
дам исходного сигнала в рассматриваемые моменты времени
(рис. 5.2).
Пусть е@), e(At),...,e(kAt),...— значения e(t) в моменты О,
At,...,kA>t,.... Обозначим через h\(t) отклик системы на импульс
продолжительностью At и амплитудой I/At. Тогда h\(t)At —
отклик системы на импульс продолжительностью At единичной
амплитуды. Поэтому отклик системы s0 на импульс амплитудой
е@) в момент t=0 равен so = e(O)hi(t)At. Для отклика системы
s&t на импульс амплитудой e(At) в момент t—At получаем ра-
венство Sbt=e(At)hi(t—At)At.
Продолжив подсчет откликов системы для последующих мо-
ментов, получаем цепочку равенств
E.1)
Так как система линейна, можно применить теорему сложения,
согласно которой сигнал на выходе равен сумме всех откликов
где l~[t/At] — целая часть числа t/At. Необходимо отметить,
.т? в СИлУ принципа причинности отклик физической системы
"i(*J равен нулю для *<0, и поэтому
hl{t—kAt) = {) для t<kAt.
E.2)
54
ГЛАВА 5
Следовательно, справедливы равенства
E.2а)
E.26)
Последовательность e(kAt) стремится к функции e(t), a hi(t)
стремится к импульсному
Рис. 5.2.
отклику системы h(t) при А^—>-,0. Интегральные суммы правых
частей равенств E.2) — E.26) стремятся к соответствующим ин-
тегралам при А^—>iO. Поэтому, переходя в равенствах
E.2) — E.26) к пределу при Дг'г^-О, получаем формулы
E.3)
E.3а)
E.36)
Последние три эквивалентных выражения обычно записывают
символически в виде свертки
s(t) = e(t)*h(t). E.4)
Свертка имеет следующие свойства:
1. Дистрибутивность:
a (t)*[b @ + с (t)] = a (t)*b (f)+a {t)*c (Q.
2. Коммутативность:
a (t)*b @*c @ = a (t)*c (t)*b* (t) = с {t)*b (t)*a (f). '
СВЕРТКА 55
S. Ассоциативность:
[а @*6 (f)]*c (i) = a (t)*[b (t)*c @1 = a (t)*b (t)*c (t).
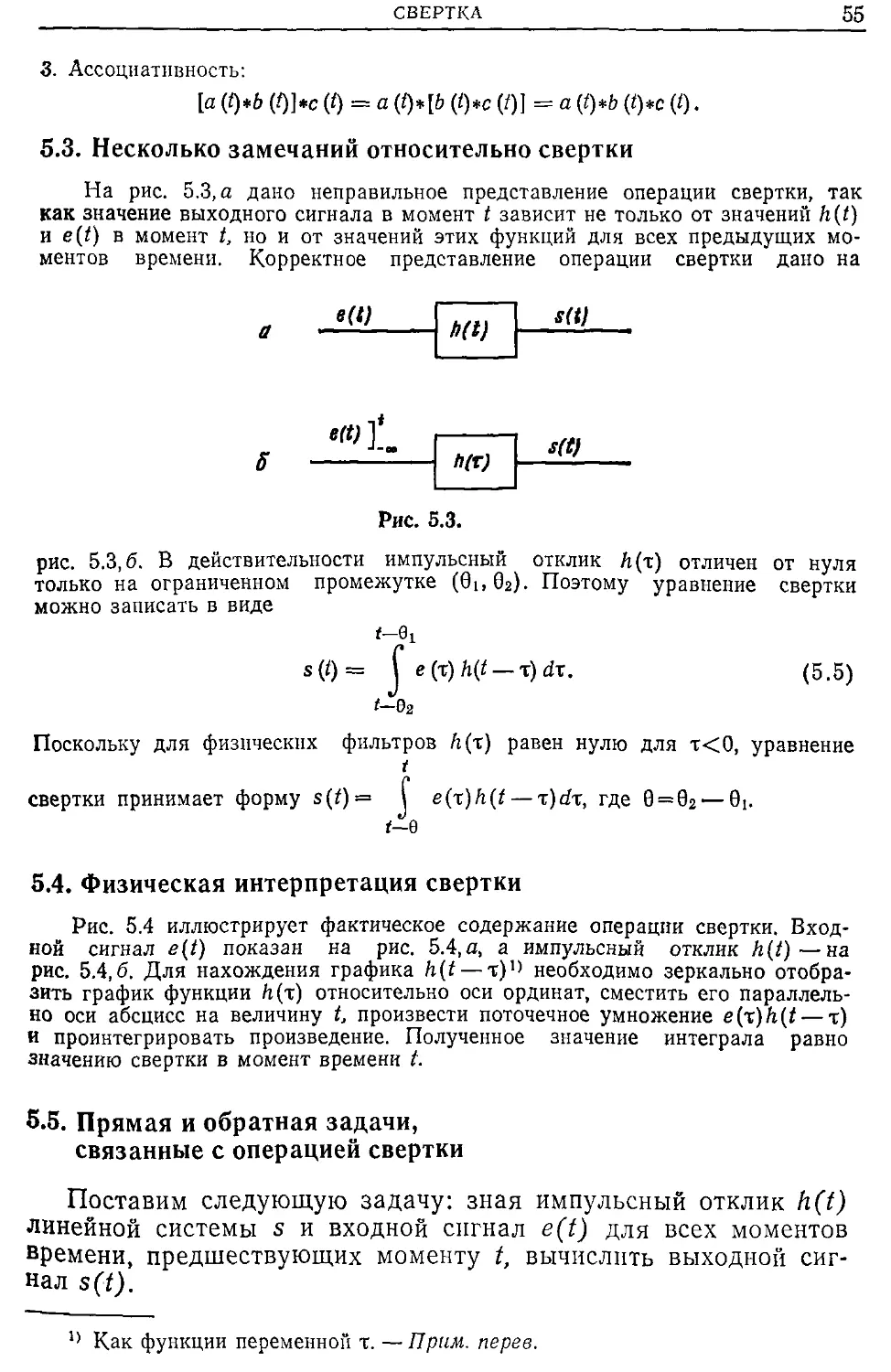
5.3. Несколько замечаний относительно свертки
На рис. 5.3, а дано неправильное представление операции свертки, так
как значение выходного сигнала в момент / зависит не только от значений h(t)
неA) в момент t, но и от значений этих функций для всех предыдущих мо-
ментов времени. Корректное представление операции свертки дано на
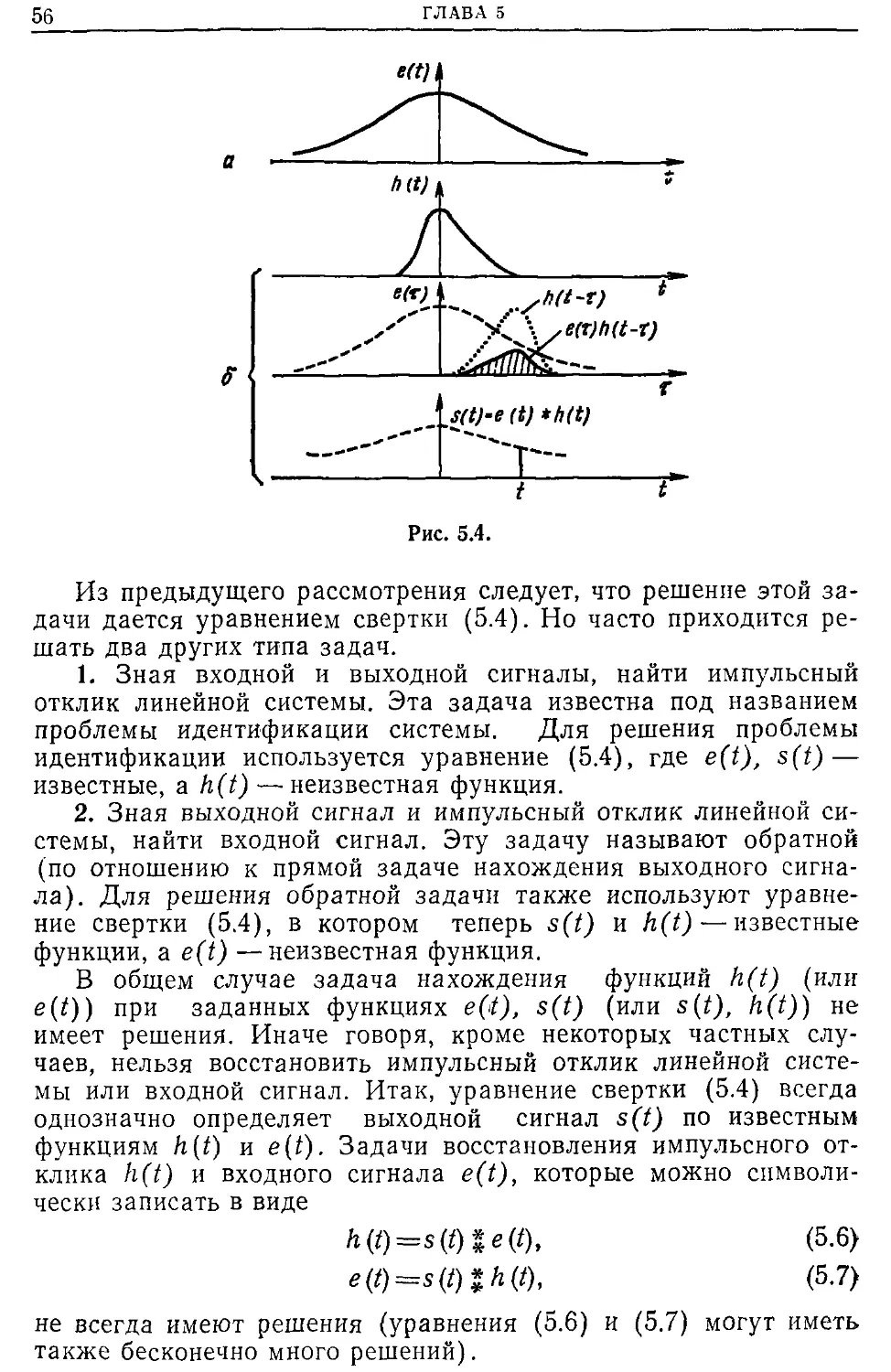
5.4. Физическая интерпретация свертки
Рис. 5.4 иллюстрирует фактическое содержание операции свертки. Вход-
ной сигнал e(t) показан на рис. 5А,а, а импульсный отклик h{t) — на
рис. 5.4,6. Для нахождения графика h(t — гI' необходимо зеркально отобра-
зить график функции /г(т) относительно оси ординат, сместить его параллель-
но оси абсцисс на величину t, произвести поточечное умножение e(x)h(t — т)
и проинтегрировать произведение. Полученное значение интеграла равно
значению свертки в момент времени t.
5.5. Прямая и обратная задачи,
связанные с операцией свертки
Поставим следующую задачу: зная импульсный отклик h(t)
линейной системы s и входной сигнал e(t) для всех моментов
времени, предшествующих моменту t, вычислить выходной сиг-
нал s(t).
11 Как функции переменной г. —Прим. перев.
Поскольку для физических фильтров Л(т) равен нулю для т<0, уравнение
свертки принимает форму s(t) =
Рис. 5.3.
рис. 5.3,6. В действительности импульсный отклик h(x) отличен от нуля
только на ограниченном промежутке (бьбг). Поэтому уравнение свертки
можно записать в виде
E.5)
56
ГЛАВА 5
Рис. 5.4.
Из предыдущего рассмотрения следует, что решение этой за-
дачи дается уравнением свертки E.4). Но часто приходится ре-
шать два других типа задач.
1. Зная входной и выходной сигналы, найти импульсный
отклик линейной системы. Эта задача известна под названием
проблемы идентификации системы. Для решения проблемы
идентификации используется уравнение E.4), где e(t), s(t) —
известные, a h(t) — неизвестная функция.
2. Зная выходной сигнал и импульсный отклик линейной си-
стемы, найти входной сигнал. Эту задачу называют обратной
(по отношению к прямой задаче нахождения выходного сигна-
ла). Для решения обратной задачи также используют уравне-
ние свертки E.4), в котором теперь s(t) и h(t) — известные
функции, a e(t) —неизвестная функция.
В общем случае задача нахождения функций h(t) (или
e(t)) при заданных функциях e(i), s(t) (или s(t), h(t)) не
имеет решения. Иначе говоря, кроме некоторых частных слу-
чаев, нельзя восстановить импульсный отклик линейной систе-
мы или входной сигнал. Итак, уравнение свертки E.4) всегда
однозначно определяет выходной сигнал s(t) по известным
функциям h(t) и e(t). Задачи восстановления импульсного от-
клика h(t) и входного сигнала e(t), которые можно символи-
чески записать в виде
h(t)=s(t)%e(t), E.6)
e(t)=s(t)*h(t), E.7)
не всегда имеют решения (уравнения E.6) и E.7) могут иметь
также бесконечно много решений).
СВЕРТКА 57
Казалось бы, разумно предположить, что, регистрируя оба
сигнала (входной и выходной), можно однозначно восстано-
вить импульсный отклик для реальной линейной системы, ис-
пользуя для восстановления соотношение E.6). Ведь импульс-
ный отклик для реальной линейной системы реально существует
и единствен! Однако операция восстановления h(t), даже если
она теоретически существует, не является устойчивой по от-
ношению к изменениям функций s(t) и e(t). Поскольку вместо
точных сигналов e(t) и s(>t) регистрируются сигналы e'(t) и
s'(t) с ошибками а@ и $(t), т. е. e'(t) = e(t)+a(t), s'(t) =
= s(t) + $(t), то решение уравнения h'(t)=\[s(t)+$(t)] $ [e(t) +
+to@]будет существенно отличаться от искомого решения h(t),
даже если ошибки измерения a(t) и p(t) малы. Если эту за-
дачу нельзя решить точно, то существуют методы, позволяю-
щие найти ее приближенные решения. Основное предложение
заключается в коррекции влияния ограниченности полосы про-
пускания измерительного прибора. Было предложено несколько
различных подходов [2—6] к решению этой задачи, которая
является не чем иным, как задачей, обратной задаче фильтра-
ции.
5.6. Свертка и преобразование Фурье.
Теорема Планшереля
Эта очень важная теорема утверждает, что преобразование
Фурье свертки двух функций равно произведению изображений
функций, составляющих свертку, и наоборот. Согласно теореме
Планшереля, справедливо соотношение
ЛИТЕРАТУРА
1. Charron J. Elements d'une theorie unitaire d'univers, La Grange Bateliere,
1962.
2. Biraud Y. Les methodes de deconvolution et leurs limitations fondamentales,
Revue de Physique appliquee, T. 11, mars 1976.
3. Cordier S., Biraud Y., Champallier A., Voutay M. A study of the application
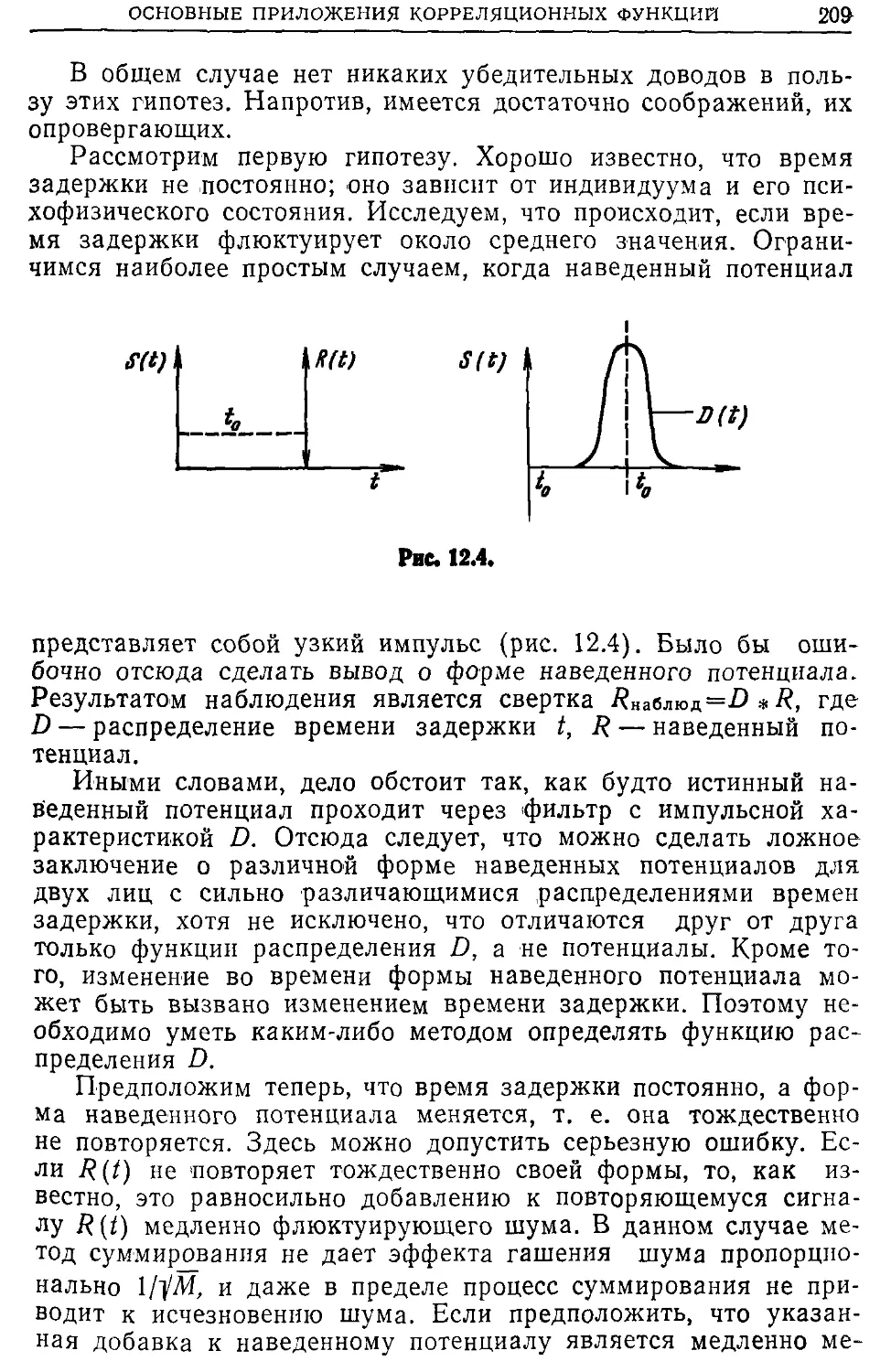
of a deconvolution method to scintigraphy, Phys. Med. Biol., 24, No. 3,
1979.
4. De Moment G., Saint F. Deconvolution discrete en temps reel, 8 erne collo-
que sur le traitement du signal et ses applications, NICE 1—5, 1981.
5. Tachoire H. et all. Thermogenese: application des filtrages electroniques et
numeriques inverses en calorimetrie a condution, Thermochimia acta 53,
1982.
6. Max J. Correction des erreurs dues aux caracteristiques dynamiques des
appareils de mesure, Automatisme, IV, No. 12, 1959.
Глава 6
ФИЛЬТРАЦИЯ
Невероятно, какое количество глупостей
может сказать за один день умный че-
ловек. И если я бы не молчал, я бы го-
ворил их, как всякий другой.
Анд ре Жид
6.1. Введение
Ниже мы будем рассматривать только линейные операции.
Следовательно, для этих операций будет справедлив принцип
суперпозиции. Говоря нестрого, осуществление частичной или
полной фильтрации означает создание препятствия для про-
хождения каких-либо объектов. Фильтр, помещенный в канал,
по которому движется жидкость, затрудняет проход тех или
иных тел, загрязняющих жидкость. При исследовании сигна-
лов временное и частотное представления сигналов использу-
ются настолько часто, что полезно еще раз рассмотреть эти
представления в связи с введением понятия фильтрации.
6.2. Временная фильтрация
В общем случае временная фильтрация определяется как
операция прерывания или ослабления сигнала (рис. 6.1). Пре-
рыватель, вмонтированный в громкоговоритель радиоприемни-
ка, и потенциометрический аттенюатор, регулирующий мощ-
ность звука, являются фильтрами.
Фильтрация сигнала x(t) с помощью фильтра сводится к на-
хождению произведения x(t)f(t). Фурье-образ X(v) сигнала x(t)
после временной фильтрации изменится. Для нахождения
фурье-образа результирующего сигнала достаточно использо-
вать теорему Планшереля. Имеем
F.1)
Рассмотрим прямоугольный фильтр f(t), подобный фильтру
(рис. 6.1, ej. Фурье-образ F(v) функции f(t) имеет вид
ФИЛЬТРАЦИЯ
59
Чтобы найти фурье-образ результирующего сигнала, необходи-
мо подсчитать свертку функций F(\) и X(v). Если период Т
достаточно большой, то эффект фильтрации будет мал, а функ-
Рис. 6.1.
а — временнбй сигнал x(t)\ б — временной фильтр f(t), обрезающий сигнал в интервале
|(-((|<Г; s — результирующий сигнал x(t)i(t) после фильтрации (сигнал, обрезанный
на интервале \t—tol<CT; г — фильтр /ь осуществляющий ослабление сигнала на интер-
вале \t—tal<T; д — результирующий сигнал после фильтрации x(t)ft(t); e — фильтр fj.
пропускающий без искажения сигнал на интервале \t—ta\<T и обрезающий сигнал вне
этого интервала; ж — результирующий сигнал x(t)f2(t) после прохождения фильтра ft.
ция F(v) будет подобна импульсу Дирака. Итак, обрезание не-
которого временного участка сигнала x(t) приводит к измене-
нию спектра сигнала (рис. 6.2). Можно утверждать, что вре-
менной фильтр является временным умножителем (рис. 6.3).
6.3. Частотная фильтрация («линейная фильтрация»
в смысле Блан-Лапьера)
Операция фильтрации, которую мы применили к временно-
му представлению сигнала, может быть использована и для
частотного представления. На рис. 6.4, а представлен график
функции X(v) и результат частотной фильтрации типа «обре-
зания полосы» (обрезаются частоты интервала |v—Vo|<Av).
Результат частотной фильтрации типа «пропускание полосы»
показан на рис. 6.4, б (пропускаются только частоты интервала
60
ГЛАВА 6
[v—vo|<CAv). Наконец, на
рис. 6.4, в дан пример произ-
вольной частотной фильтра-
ции, при которой сигнал X(v)
проходит через фильтр #(v),
что сводится к произведению
X(v)H(v). Однако нахожде-
ние произведения X(v)H(v)
не может быть реализовано
при временном представлении
сигнала, поскольку датчики
регистрируют функцию x(t).
В этом случае, используя тео-
рему Планшереля, можно пе-
рейти от произведения изоб-
ражений к свертке оригиналов
(рис. 6.5). Имеем
F.2)
F.3)
Рис. 6.2.
где XF(v)—фурье-образ сигнала после частотной фильтрации
H(v).
Примечание. Такой фильтр нельзя реализовать (разд. 6.5), поскольку
импульсный отклик существует для /<0. Для того чтобы фильтр можно было
реализовать, необходимо осуществить временное смещение, т. е. произвести
фазовый сдвиг функции F(v).
Следовательно, для реализации фильтрации необходимо про-
пустить сигнал x(t) через линейную систему с импульсным от-
кликом h{t)*±-H(v).
Тогда на выходе системы будем иметь результирующий
Рис. 6.3.
ФИЛЬТРАЦИЯ
61
Ряс. 6.4.
Рис. 6.5.
62 ГЛАВА 6
сигнал:
6.4. Связь между фильтрацией и сверткой
Из сказанного выше следуют два соотношения:
1. Временная фильтрация эквивалентна частотной свертке
(свертка фурье-образов).
2. Частотная фильтрация эквивалентна временной свертке
(свертка временных функций).
Существуют устройства, которые реализуют операцию сверт-
ки e(t)*h(t) (рис. 6.6). Следовательно, умножителю относи-
тельно преобразования Фурье соответствует свертыватель, и
наоборот (рис. 6.7).
Рис. 6.6. Рис. 6.7.
Примечание 1. Важно отметить, что при реализации отмеченных выше
различных типов частотной фильтрации производится операция свертки, так
как на практике сигнал всегда задается во временном представлении, а не в
частотном.
Примечание 2. Отметим также, что любое измерительное (передающее)
устройство не регистрирует (не передает) весь спектр частот. Даже самый со-
вершенный аппарат не воспринимает частоты выше некоторой максимальной
частоты FM. Итак, каким бы ни было измерительное устройство, спектр лю-
бого сигнала оказывается фильтрованным. Следовательно, любой реальный
сигнал x(t) можно представить в виде свертки наблюдаемого сигнала и ча-
стотной характеристики измерительного устройства.
Изменение временного представления сигнала x(t) будет при-
водить к изменению его частотного представления, и наоборот
(сразните рис. 6.5 и 6.2). Но поскольку сигнал x(t) всегда ре-
гистрируется на конечном промежутке времени, это приводит к
изменению спектра сигнала. Аналогично, поскольку регистри-
рующее устройство воспринимает только ограниченную полосу
частот, это вызывает изменение временного представления сиг-
нала.
F.4)
причем
ФИЛЬТРАЦИЯ 63
6.5. Физически реализуемые линейные фильтры частоты
Поскольку причина всегда предшествует следствию, невоз-
можно создать такой фильтр, импульсный отклик которого был
бы отличен от нуля для i<0. Следовательно, любая физическая
система имеет импульсный отклик h(t), удовлетворяющий ра-
венству
ft @ = 0 F.5)
для t<0 (рис. 6.8).
Рис. 6.8.
Имеем
А @ *=*= H (v) =Re (v)-t-/Im(v) = | H (v) | e-Л" <v>, F.6)
где qp(v) —не равна тождественно нулю.
Пусть e(t) и s(t)—соответственно входной и выходной сиг-
налы для фильтра и e(t)*±E(v) и s(t)+±S(v). Из равенства
s (v)=E (v) H{v) = E (v) | Я (v) | er/ф M. F.7)
следует, что любой реализуемый фильтр осуществляет сдвиг
фазы.
6.6. Идеальный фильтр
Каким должен быть фильтр, не осуществляющий сдвига
фаз? Фурье-образ импульсного отклика такого фильтра должен
быть вещественным. Из свойств четности преобразования
Рис. 6.9.
Фурье следует, что импульсный отклик фильтра должен быть
четной функцией, т. е. симметричен относительно оси ^ = 0
(рис. 6.9). Очевидно, что физическая реализация такого фильт-
ра невозможна.
64 ГЛАВА 6
6.7. Реализуемые непрерывные аналоговые фильтры [3]
Фильтры, конструируемые для непрерывных сигналов, состо-
ят из резисторов, конденсаторов, катушек индуктивностей и опе-
рационных усилителей. Входной и выходной сигналы для та-
ких фильтров связаны между собой интегро-дифференциальным
линейным соотношением с постоянными коэффициентами. При-
меняя к этому соотношению преобразование Лапласа, получим
передаточную функцию, представимую в виде отношения двух
полиномов переменной р:
6.8. Фильтры с линейным сдвигом фаз
Рассмотрим нереализуемый фильтр без сдвига фаз, импульс-
ный отклик которого hx(t)—симметричная функция относи-
тельно оси ? = 0. Предположим, что h\(t) отлична от нуля толь-
ко на промежутке (—0О, +1бо). Рассмотрим затем фильтр, им-
пульсный отклик которого h(t) получен из hi(t) с помощью
параллельного переноса (рис.
6.10). Имеем h(t)=hi(t—Q0),
Из вещественности и чет-
ности функции hi (t) следует
вещественность и четность
функции #i(v). Следователь-
но, сдвиг фазы для #(v) ра-
вен (p(v) =2:rtv9o, т. е. линеен
-низкочастотный фильтр 1-го рода; F.9)
— высокочастотный фильтр 1-го рода; F.10)
— низкочастотный фильтр 2-го рода; F.11)
-высокочастотный фильтр 2-го рода. F.12)
Следует иметь в виду, что класс реализуемых фильтров для не-
прерывных сигналов, т. е. сигналов без предварительной дис-
кретизации, имеет передаточную функцию только типа F.8).
Любая передаточная функция типа F.8) может быть пред-
ставлена в виде комбинации следующих четырех элементарных
передаточных функций:
F.8)
ФИЛЬТРАЦИЯ
65
относительно частоты v. Линейный относительно- частоты сдвиг
фаз не вызывает деформацию сигнала, поскольку в этом случае
для каждой гармоники производится сдвиг фазы на угол, про-
порциональный частоте. Поэтому все гармоники подвергаются
постоянному запаздыванию, не зависящему от частоты. Итак,
линейному сдвигу фаз при частотном представлении сигнала
соответствует запаздывание при временном представлении сиг-
нала.
6.9. Узкополосные фильтры
Характеристика узкополосного фильтра A(v) типа «пропус-
кание полосы» показана на рис. 6.11. Для нахождения сигна-
ла на выходе такого фильтра необходимо вычислить свертку
Рис. 6.11.
66 ГЛАВА 6
входного сигнала e(t) с оригиналом a(t):
А (у) =<=* a (t) = cos 2nf0t. F.13)
Но свертка a(t)*e(t) на интервале (—оо, -fo°) не существует.
Введем функцию
ai(t) = a(t)b(t). F.14)
На рис. 6.11 представлен также график функции b(t). Имеем
е @ *=* Е (v), a (t) =*=* A (v), F.15)
в (f)*at @ =?=^ ? (v) At (v), F.16)
i4!(v) = ^(v)*B(v). F.17)
Отсюда получаем
S(v) = E(v)[A(v)*B(v)]. F.18)
Из графического представления функции Ai(v) (рис. 6.11) вид-
но, что спектральные линии функции A(v) трансформируются в
фигуры конечной ширины. Из этого следует, что невозможно
сконструировать физический фильтр, осуществляющий пропус-
кание только одной фиксированной частоты.
6.10. Обобщение понятия фильтрации
Понятие фильтрации может быть распространено на многие
другие объекты науки и техники, если обобщить это понятие,
сохраняя свойство линейности фильтра и принцип суперпози-
ции. Можно сказать, что, по-видимому, не существует области
знания, где понятие фильтрации не может быть использовано в
той или иной мере.
Л ИТЕРАТУРА
1. Blanc-Lapierre A., Fortet R. Theorie des functions aleatoires (Chap. VIII).
Paris, Masson et Cie, 1960.
2. Max J. Generalisation de la notion de filtrage, Compte rendu du 5-e congres
international de cybernetique, Namur, 1967.
3. Bildstein P. Les filtres actifs, Editions Radio, 1976.
7
Поспешим: мы пассажиры в поезде вре-
мени. Момент времени, в который я го-
ворю, уже далек от меня.
Буало
7.1. Введение
Во многих случаях непрерывные сигналы, поступающие с
выхода измерительного устройства, не обрабатываются непо-
средственно, а сначала подвергаются дискретизации, т. е. на-
блюдаются только в определенные моменты времени. В общем
случае наблюдения производятся периодически через постоян-
ный промежуток времени Те. Тогда говорят, что осуществлена
дискретизация с частотой Fe = l/Te. Рассмотрим влияние дискре-
тизации на непрерывный сигнал.
7.2. Теоремы дискретизации
Доказательство теорем дискретизации легко проводится с
помощью временного и частотного представлений сигналов, что
служит еще одним подтверждением эффективности преобразо-
вания Фурье, связывающего эти два представления. При иде-
альной дискретизации время наблюдения сигнала бесконечно
мало, т. е. дискретизация осуществляется с помощью бесконеч-
но быстрых импульсов, совокупность которых образует так на-
зываемую гребневую функцию UI(t) (разд. 2.6).
Пусть задан сигнал x(t) и x(t)+±X(v). Осуществление дис-
кретизации x(t) с частотой Fe означает умножение функции
x(t) на сумму импульсов Дирака, разделенных промежутками
Te = \jFe. Такую сумму импульсов Дирака можно записать в
виде
G.1)
Известно, что
ДИСКРЕТИЗАЦИЯ
Глава
68
ГЛАВА 7
Рис. 7.1.
о _ сигнал; б — спектр в случае дискретизации с частотой Fe>2FM; в — спектр в случае
дискретизации с частотой Fe<2FM.
G.2)
G.3)
G.4)
G.5)
Из выражения G.5) следует, что спектр сигнала x(t) представ-
ляет собой «периодическую» функцию с периодом Fe-=-llTe
(рис. 7.1). Пусть фурье-образ X(v) равен нулю для \v\^FM,
т. е. спектр сигнала x(t) расположен на интервале (—FM, FM)
Отсюда получаем
Обозначим через x(t) дискретизованный сигнал. Имеем
Последнее равенство можно представить в виде
Используя формулу Пуассона, получаем соотношение
ДИСКРЕТИЗАЦИЯ 69
длиной 2Fm- Тогда справедлива теорема дискретизации (теоре-
ма Шеннона):
Для того чтобы периодическое повторение спектра, вызван-
ное дискретизацией сигнала, не изменяло повторяемый спектр,
необходимо и достаточно выполнение неравенства Fe^2FM.
Рассмотрим спектр сигнала x(t), который можно предста-
вить в виде
Из формулы G.7) следует важная теорема восстановления
(теорема ШеннонаH.
Если для частоты дискретизации Fe справедливо неравенст-
в0 Fe^2FM, где FM — наибольшая частота спектра функции
x(t), то функция x(t) однозначно восстанавливается по дис-
кретным значениям x(k/Fe)k = 0,±l
Умножая последнее равенство на прямоугольную функцию
П*-е/2 (Ч) (напомним, что функция nFe/2 (v) равна нулю вне
интервала (—Fe/2, Fej2)), получаем первоначальный спектр
К обеим частям равенства G.6) применим обратное преобра-
зование Фурье. Используя соотношение П^е/2 (v)+^Fesin nFetf
inFet, получаем
В последнем равенстве заменим x(t) согласно формуле G.3).
Имеем
Но
Поэтому
!) Эта теорема в отечественной литературе носит название теоремы Ко-
тельникова. — Прим. ред.
G.7)
G.6)
70 ГЛАВА 7
Функция sin nFe(t—(k/Fe))/nFe(t—(k/Fe)) называется ин-
терполяционной функцией Шеннона. Однако, как это уже отме-
чалось выше, рассмотренная дискретизация никогда не может
быть реализована, поскольку невозможно осуществить дискре-
тизацию с помощью измерений в бесконечно малый промежуток
времени.
Дискретизация последовательностью периодических импуль-
сов произвольной формы (рис. 7.2). На практике дискретиза-
ция осуществляется устройством, импульсный отклик которого
Рис. 7.2.
в отличие от обобщенной функции Дирака распределен на от-
резке ограниченной длины 9. Введем величину дискретизации
Поскольку функция h(t—kTe) равна нулю вне интервала (kTe,
Л^е+б), выражение G.8) можно записать в виде
G.8)
G.9)
G.10)
или
Соответствующее распределение, которое можно интерпретиро-
вать как распределение масс Хкте, сосредоточенных в точках
kTe, имеет вид
Отсюда
GЛ1)
G.12)
Из формулы G.12) следует, что функция x(t) получена с по-
ДИСКРЕТИЗАЦИЯ 71
Выражение G.20) является интерполяцией Шеннона функции
xi(t)=x(t) *h(—t). Следовательно, используя интерполяцию
Шеннона в условиях реальной дискретизации, получаем вместо
сигнала x(t) сигнал на выходе фильтра с импульсным откликом
4~t).
!) Мнимая часть фурье-образа H(v) функции h(t) никогда не равна тож-
дественно нулю, так как Л(/)=0 для t<0. Следовательно, умножение функ-
ции X(v) на H(v) вызывает дополнительный сдвиг фаз (гл. 6).
мощью идеальной дискретизации функции
функцию X\(t) можно рассматривать как сигнал на выходе
фильтра с импульсным откликом h(—/). Применяя преобразо-
вание Фурье к выражению G.12), получаем
G.13)
где
G.14)
G.15)
Часть центрированного относительно начала координат спектра
дается выражением
G.16)
Выделим часть центрированного спектра, умножая правую
часть соотношения G.14) на функцию
G.17)
G.18)
G.19)
G.20)
Выражение G.17) является фурье-образом функции
которую запишем в виде свертки
или, используя выражение G.10), в виде
72
ГЛАВА 7
Дискретизация с усреднением. В дальнейшем рассматрива-
ется дискретизация с помощью последовательности импульсов
конечной ширины. Таким импульсам соответствуют средние
значения функции в течение длительности импульса (рис. 7.3).
G.21)
Используя прямоугольную функцию Пе/2(О' которая равна 1 в
интервале (—8/2, 0/2) и нулю вне этого интервала, получаем
G.22)
G.23)
получаем выражение для дискретизованной функции
G.26)
Рис. 7.3.
Проведем вычисления, не используя полученные выше резуль-
таты. Имеем
Из равенства
G.24)
G.25)
Переходя в равенстве G.24) к фурье-образам, имеем
Из G.25) следует, что при усреднении X(v) заменяется функ-
цией
ДИСКРЕТИЗАЦИЯ 73
Сомножитель ехр(—2n/v8/2) приводит к сдвигу фазы, не изме-
няя модуль спектральной функции. Спектр Xi(v) получается us
спектра Х(\) с помощью функции фильтра, модуль и сдвиг фа-
зы которой равны соответственно sin nvQ/nvQ и —nv6.
Итак, фильтрация изменяет модуль спектра в sin jtvGArtvS раз.
Исследуем влияние такой фильтрации на модуль спектра.
Пусть Q = lTe, Я=^1, Fe = 2avMaKc, а:з=1. Коэффициент фильтра-
ции принимает вид sin [яЯ/2а) (v/vMaKc)]/[(n/2a) (v/vMaKC)]. Для
того чтобы влияние фильтрации было меньше одного процента
для всех частот вплоть до уМакс, необходимо выполнение неравен-
ства sin (nv/2a)/(nv/2a)^ 0,99. Отсюда получаем Я/а<;0,16.
Пусть а=1 (дискретизация с частотой Шеннона). Тогда
Я=^:0,16, т. е. ширина импульса дискретизации должна быть
меньше 16% расстояния между импульсами. Пусть a = 5. Тогда
Я^10,8, т. е. ширина импульса может составлять 80% расстоя-
ния между импульсами. Если влияние фильтрации уменьшить
до 0,1%, то 16% и 80%) следует заменить на 4% и 20%. Поэтому
влиянием ширины импульсов дискретизации пренебречь нельзя.
Исследуем теперь влияние сдвига фаз. Угол сдвига фаз в
радианах равен jtv9, или в градусах cp = 180v9. Поскольку Те =
= llFe=l/2vMaKC, Q = XTe, тоф = 180 (Я/2а) (v/vMaKc). Сдвиг фазы
Для vMaKc будет меньше 5°, если 180Я/2а<5°, т. е. Я/а<0,055.
Пусть, как и в предыдущем примере, Я/а = 0,16, что соответству-
ет ошибке в модуле не больше 1 %. Тогда сдвиг фазы для
vMaKc составит ср= 180°-0,08= 14,4°.
Блокирующая дискретизация. В момент времени kT0 произво-
дится дискретизация x(t) и запоминается ее значение, чтобы,,
например, иметь время для выполнения аналого-цифрового пре-
образования. Время 6', затраченное на хранение, может быть
намного меньше, чем длина интервала усреднения 0. Следова-
Таким образом, вместо X(v) используется периодическое
продолжение функции Xi(v) (рис. 7.4). Часть центрированного
относительно начала координат спектра равна
G.27)
74 ГЛАВА 7
тельно, в этом случае благодаря малой ширине импульса дис-
кретизации можно использовать результаты предыдущего раз-
дела, полученные для дискретизации с помощью импульсов
бесконечно малой ширины.
7.3. Дискретизация сигналов конечной длительности
^Рассмотрим сигнал xr(t), равный нулю вне интервала
'(—Т/2, Т/2). Сигнал Xr(t) можно получить из сигнала x(t) бес-
конечной продолжительности, умножая его на прямоугольную
функцию Uj/2(t):
Поскольку носитель функции1) (sin nv T)/nvT неограничен, но-
ситель функции XT(v) также будет неограничен. Неограничен-
ность носителя функции Xt(v) не позволяет провести дискрети-
зацию сигнала xr(t), так как в этом случае частота дискрети-
зации должна быть неограниченно большой. Следовательно,
строго говоря, нельзя осуществить дискретизацию сигнала ко-
нечной продолжительности. На практике предполагают, что но-
сители функций XT(v) и X(v) совпадают, т. е. спектры сигналов
xT(t) и x(t) определены в одинаковых областях. Какова вели-
чина ошибки, обусловленной таким предположением? Ошибка,
вносимая подобной аппроксимацией, оценивалась Шенноном,
а также Ландау и Поллаком [5]. Доказано, что для сигнала
продолжительностью Т вне интервала [—В, В] справедлива
формула
" Носитель функции есть замыкание множества точек, в которых функ-
ция отлична от нуля. — Прим. перев.
2) То есть ширина импульсов дискретизации бесконечно мала. — Прим.
перев.
Пусть носителем фурье-образа X(v) сигнала x(t) является ин-
тервал [—В, В], т. е. X(v)=0 для W<?[—В, В]. Тогда
Рассмотрим теперь сигнал неограниченной длительности со
спектральным носителем [—В, В], неусеченный и корректно
дискретизованный2'.
Можно доказать, что среднеквадратичная разность между-
функциями xN(t) и х'т{1), т. е. ошибка, вносимая усечением,
имеет порядок е2вт = 11ВТ, или среднеквадратичная ошибка
имеет порядок гВт=^1^ВТ. Отметим, что среднеквадратичная
ошибка является интегральной, а не локальной разностью меж-
ду Xx(t) и x'T(t)- Отметим также, что если дискретизация про-
ведена с частотой Шеннона Fe = 2B, то число точек N=TFe =
= 2ВТ. Если же, как иногда делается с целью более наглядно-
го представления дискретизованного сигнала, частота дискрети-
зации больше частоты Шеннона, то BT^.N/2. Следовательно,
чаще всего лучше выбирать BT = N/Fe, а не BT = N/2.
Итак, в большинстве случаев можно проводить дискретиза-
цию усеченного сигнала, предполагая, что носитель спектраль-
ной функции совпадает с отрезком [—В, В] и что ВТ велико.
Ясно, что необходимо проявлять осторожность при интерпрета-
ции полученных таким путем результатов.
7.4. Дискретизация фурье-образов
Для более точного вычисления фурье-образов обычно приме-
няются не аналоговые, а дискретные преобразователи Фурье,
кроме, конечно, преобразованных сигналов в оптике. Электрон-
ные и электрохимические преобразователи Фурье основаны на
дискретном изменении частоты при вычислении фурье-образов-.
Поскольку частота изменяется дискретно с шагом Av, возника-
ет проблема влияния дискретизации частоты для фурье-образов..
Для ее решения необходимо применять теоремы дискретизации.
Рассмотрим вещественный сигнал x(t) длительностью Т.
т. е. x(t)=0 вне интервала [0, Т] (рис. 7.5). Пусть существует
фурье-образ X(v):
ДИСКРЕТИЗАЦИЯ 75
Взяв только iV импульсов дискретизации, определим функ-
цию
Очевидно, что xN(t)—сигнал неограниченной длительности,
поскольку функция sin aFe{t— (k/Fe))/nFe(t~(k/Fe)) отлична
от нуля вне любого конечного интервала. Поэтому обычно про-
изводится усечение функции xN(t):
G.2?)
ГЛАВА 7
Согласно теореме Шеннона, шаг
дискретизации Av функции X(v)
должен удовлетворять неравенству
Av^l/r. Вычисление X(v) всегда
проводится путем раздельного вы-
числения Re[X(v)] и Im[X(v)].
Поэтому теорема дискретизации
должна быть применена отдельно к
Re[X(v)] и Im[X(v)]. Имеем
х (<) =,=* Re [X (v)]+/Im [X (v)]t G.29)
x(-t) *=* Re[X(-v)]+/Im[*(-v)]. G.30)
Используя свойства эрмитовой симметрии, запишем выражение
G.30) в виде
*(—9 =f==fc Re[X(v)) —/Im[X(v)].
Отсюда получаем два соотношения
Re[X(v)] =*=^ A/2) [x@+x (-/)],
G.31)
Im[X(v)] ^=^ A/2) [дс@-х(-01.
Из формулы G.31) видно, что носители оригиналов Фурье для
фурье-образов Re[X(v)j и Im[X(v)] совпадают с интервалом
[-Т, Т] (рис. 7.6). Следовательно, шаг Av' дискретизации функ-
ций Re[X(v)] и Im[X(v)] должен удовлетворять неравенству
Рис. 7.6.
Av'^l/27\ Легко видеть, что если носитель x{t) совпадает с ин-
тервалом [—Г/2, 7/2], то шаг Av дискретизации частоты может
удовлетворять неравенству Av^l/71.
Рассмотрим теперь модуль функции X(v). Имеем
\X(v)\**=*x(t)*x(-t).
Если носитель функций совпадает с интервалом [0, Т] (или
[—Г/2, Г/2]), то по определению свертки носитель произведе-
ния сверток функций x(t) и х(—t) совпадает с интервалом
[—Т,Т]. В этом случае носитель фурье-образа X(v) совпадает
с интервалом 2Г, и поэтому шаг дискретизации функций
\X{v) | или |Х(Ч')B должен быть меньше или равен 1/2Т. Пусть
ДИСКРЕТИЗАЦИЯ 77
дискретизованный сигнал известен в N точках временной оси.
Обозначим через Fe частоту дискретизации. Тогда расстояние
между соседними точками дискретизации Te=l/Fe, а длина ин-
тервала задания сигнала T — NTe. Предположим, что начало ко-
ординат расположено в середине интервала задания сигнала,'
Т- е. носитель сигнала совпадает с интервалом [—Т/2, Т/2].
Шаг дискретизации частоты должен удовлетворять неравен-
ству
Av< \/T=\/NTe=FefN.
HoFe=2aB, где а>1 и В — верхняя граница спектра. Поэтому
число точек N' дискретизации спектра (рассматриваются толь-
ко положительные частоты) равно N' = B/Av = BN[Fe = NI2a.
Следовательно, вся информация о фурье-образе сигнала содер-
жится в этих N/2a точках. Если же рассматривается модуль
спектральной функции |X(v)|, то число точек дискретизации
необходимо увеличить в два раза, т. е. N' = N/a.
Для правильного восстановления функций между точками
дискретизации, т. е. правильного интерполирования функций,
необходимо всегда выполнять данные условия относительно
числа точек дискретизации. Никогда не следует забывать, что
сигналы в общем случае не являются периодическими, и поэто-
му их спектр непрерывен.
7.5. Выбор частоты дискретизации на практике
Для ответа на вопрос: «Как следует на практике произво-
дить дискретизацию сигнала?» — необходимо знать, с какой
целью осуществляется эта операция; в целях дальнейших вы-
числений или в целях восстановления сигнала, например вос-
становления его непрерывного аналога.
Дискретизация в целях дальнейших вычислений. Рассмот-
рим функцию х(г) независимой переменной г. Для упрощения
дальнейших вычислений предположим (впрочем, это не изме-
няет дальнейших результатов), что носителем фурье-образа
X(\i)*+x(r) является интервал [—М,М]. Согласно теореме
Шеннона, шаг дискретизации Re должен удовлетворять нера-
венству Res^l/2M. Если дискретизация функции х(г) произ-
ведена при выполнении этих условий, то по значениям Xh =
=x(kRe) функции х(г) в точках дискретизации можно восста-
новить непрерывный сигнал х(г) для всех точек между точка-
ми дискретизации. Используя интерполяционную формулу Шен-
нона, получаем
G.32)
78 ГЛАВА 7
Итак, вычисление любых значений функции х(г) сводится к
вычислению только значений x(kRe) в точках дискретизации,
т. е. вся информация о функции х(г) содержится в точках дис-
кретизации.
Пример 1. Вычислим среднее значение функции х(г):
Но
G.33)
G.34)
Имеем
Изменив порядок интегрирования и суммирования, получаем
Поэтому
Отношение R/Re равно числу ./V точек дискретизации функции х(г). Получаем
окончательно
Пример 2. Вычислим корреляционную функцию
Имеем
ДИСКРЕТИЗАЦИЯ 79
Re
Но
Отсюда
Положим k — l = m. Тогда
где RIRe=M. Отсюда получаем выражение
Из него следует, что дискретизация сигнала приводит к дискретизации кор-
реляционной функции.
Пример 3. Вычислим фурье-образ функции х(г). Из выражения G.32) по-
лучаем
80 ГЛАВА 7
Последний интеграл есть фурье-образ функции sin (nlRe)(r — kRe)/(nlRe)(r~
—kRe).
Имеем TFfsin (n/Re)r/(n/Re)r]=Re П„„е(ц).
Следовательно,
Итак, для вычисления фурье-образа сигнала на интервале |n|^l/2i?e и вы-
числения х{г) для всех значений г достаточно знать значения сигнала только
в точках дискретизации при условии, что шаг дискретизации удовлетворяет
теореме Шеннона.
Дискретизация с целью восстановления непрерывного сигна-
ла. Хотя интерполяционная формула Шеннона G.7) теоретиче-
ски и обоснована, ее практическое применение, особенно при
приближенных вычислениях, затруднительно. На практике
важно знать минимальное расстояние между двумя соседними
точками дискретизации на временной оси, позволяющее приме-
нить достаточно простую интерполяционную формулу и тем са-
мым восстановить непрерывный сигнал. Наиболее простой яв-
ляется линейная интерполяция с последующим применением
низкочастотной фильтрации с целью сглаживания угловых то-
чек интерполяционной линии (такой тип интерполяции соответ-
ствует распространенному на практике методу получения гра-
фиков, когда экспериментальные точки соединяются вручную).
Следовательно, частота дискретизации зависит от допустимой
ошибки при восстановлении функции по ее дискретным значе-
ниям и, конечно, от формы сигнала. Эта ошибка может быть
" Здесь [х — непрерывная переменная. Отметим, что дискретный фурье--
образ определяется равенством
где
Окончательно получаем
Из последнего выражения следует, что фурье-образ Х(\х) равен нулю вне ин-
тервала [—l/2Re, l/2Re], где Re — шаг дискретизации сигнала х(г). Послед-
нее выражение можно записать также в виде'>
ДИСКРЕТИЗАЦИЯ 8Г
вычислена обычным способом, поскольку она не является стати-
стической.
Обозначим через s(t) и si(t) точный и восстановленный сиг-
налы. Пусть e=AsM(t)/sM(t) = {sm{t)-si(t))/sM(t), где в качест-
ве Sm@ берется максимальное значение s(t). Можно доказать,.
что для синусоидального сигнала частоты F частота дискрети-
зации Fe должна удовлетворять неравенству
F,>FB,2/Ve), G.35>
где е — допустимая ошибка. Если е = 0,01, то Fe^22F, т. е. ча-
стота дискретизации должна быть приблизительно в 10 раз.
больше частоты Шеннона.
Пусть спектр сигнала обрезан максимальной частотой Fc.
Доказано, что в этом случае также
Fe^FcB,2/Vz).
Например, если ошибка е^0,01, то должно быть Fe^22Fc.^
Можно доказать, что если в окрестности частоты среза Fe про-
водится ослабление спектра с помощью фильтра по закону
Fc/F B0 дБ на декаду), то должно выполняться неравенство-
Fe~^z22Fc, где Fc — частота среза фильтра, а не максимальная
частота спектра. Под максимальной частотой FM спектра сле-
дует всегда понимать такую частоту, когда можно пренебречь,
влиянием на сигнал всех частот, больших FM. При этом спра-
ведливо неравенство Fe^aFM B,2/~\/г), где а — коэффициент,,
учитывающий эффект обрезания спектра на частоте FM- На-
пример, для одного процента вклада этого эффекта получаем
а = У0,01=0,1. Полагая е = 0,01, получаем Fe^2,2FM, т. е. ча-
стота дискретизации оказывается почти равной частоте Шен-
нона.
7.6. Противомаскировочный фильтр
Если проведена дискретизация сигнала с частотой Fe, то-
как было показано выше, можно пренебречь частотами спект-
ра1), большими Fe/2. Кроме того, необходимо провести фильт-
рацию сигнала перед его дискретизацией2). Поскольку спект-
ральная плотность сигнала неизвестна, предполагается, что она
постоянна (белый шум). Пусть
#(v) = |#(v)|e-'<r<v> G.36>
— комплексное усиление фильтра. Рассмотрим белый шум,
" Более правильно вместо слова «спектр» использовать термин «спект-
ральная плотность» (см. разд. 8.7), поскольку слово «спектр» чаще исполь-
зуют при рассмотрении сигналов с ограниченной энергией, а не сигналов с не-
ограниченной энергией, которые в общем случае не имеют фурье-образ.
2> Ясно, что подразумевается непрерывный, т. е. аналоговый, фильтр.
82
ГЛАВА 7
спектральную плотность которого после фильтра обозначим че-
рез S(v). Известно, что S(v)=o2\H(v)\2 (разд. 11.5). Комп-
лексное усиление H(v) идеального низкочастотного фильтра
определяется выражением H(v)=UFe/2 (v). Известно, что реа-
лизация такого фильтра невозможна, поскольку его импульс-
ный отклик sin nFet/aFet не подчиняется принципу причинности.
Рис. 7.7.
Реализуемые непрерывные (т. е. аналоговые) фильтры имеют
комплексное усиление, отличное от характеристики идеального
фильтра. Допустим, что H(v)—характеристика некоторого реа-
лизуемого фильтра (рис. 7.7) и в качестве верхней границы
спектра взята частота В. Второе предположение сводится к
тому, что на интервале [—В, В] (или [О, В], если рассматри-
ваются только положительные частоты) ошибка в определении
спектральной плотности не должна превышать р%. Это означа-
ет, что на горизонтальном участке характеристики флюктуации
функции H(v) не должны превосходить р, а эффект маскиров-
ки должен быть не выше р%. Если частота дискретизации рав-
на Fe, то из рис 7.7 видно, что маскировка, которая воздей-
ствует на спектр частоты f, определяется из равенства (Fe/2)-\-
-\-(Fe/2)—f=Fe—f. Следовательно, для 0</<5 необходимо,
чтобы величина \H(Fe—f)\2 была меньше р%. Поскольку мож-
ДИСКРЕТИЗАЦИЯ 83
но предположить, что эффект маскировки максимален при ча-
стоте }=В, то
|#(Fe-.B)|2< 10-2p.
Если коэффициент а в равенстве Fe = 2aB известен, то по-
следнее неравенство принимает вид
|Я[Bа— 1)Б]|2< 10-2Э-
Поэтому, зная характеристику фильтра и допустимую ошибку
р, можно найти коэффициент а, который всегда больше 1. Зна-
чения коэффициента а сильно различаются для разных аппара-
тов (от 1,26 до 2). Очевидно, что, чем ближе а к 1, тем лучше
обрабатываются высокочастотные сигналы. Трудно дать реко-
мендации по выбору фильтра, поскольку «хорошего» для всех
случаев фильтра не существует. Например, фильтр Баттервор-
са [1] имеет наилучшее плато, но крутизна обрезания не яв-
ляется высокой. Напротив, фильтр Чебышева [1] имеет осцил-
ляции в районе плато, но его крутизна обрезания высоких ча-
стот является более высокой. По нашему мнению, наиболее под-
ходящим фильтром является фильтр Коэра [2] (эллиптический
фильтр). Эллиптический фильтр порядка п = 2т состоит из пи
ячеек, соединенных в виде каскада, причем передаточная функ-
ция каждой ячейки имеет вид
Характеристика эллиптического фильтра обладает бесконечным.1
ослаблением частоты f0 каждой ячейки и очень большим накло,-
ном в переходной зоне.
7.7. Физическая дискретизация.
Комбинированная дискретизация
Во многих случаях (в частности, в оптике и вообще при из-
мерении полей) для проведения дискретизации необходимо из-
мерять поток. Следовательно, поверхность датчика должна
иметь минимальную величину, чтобы можно было провести из-
мерение. Эта минимальная величина определяет минимальный
шаг дискретизации, который может не удовлетворять теореме
Шеннона. Можно искусственно увеличить частоту дискретиза^
ции, используя несколько идентичных разделенных дискретиза^
торов.
Рассмотрим случай двойной дискретизации. Пусть длина ин-
тервала интегрирования дискретизатора равна 0. Очевидно, что
минимальный период и максимальная частота дискретизации
равны Ге = 8 и /ге= 1/Э. Пусть второй идентичный дискретизатор
производит дискретизацию в моменты, сдвинутые по отноше-
Рис. 7.8.
Рис. 7.9.
нию к .первому на величину 8/2. Рассмотрим сумму выходных
сигналов этих двух дискретизаторов (рис. 7.8). Временная диа-
грамма представлена на рис. 7.9. Несложный подсчет показы-
вает, что x(t) можно записать в виде
G.37)
ДИСКРЕТИЗАЦИЯ 85
ПОЛОЖИМ Те/2 = Т'е- ТОГДЭ
Модуль передаточной функции равен V2(l+'cos 2лу(Те/2)) и
изменяется от 2 (для v = 0) до |2 (для v = 2/Te). Аналогично
можно рассмотреть дискретизацию с помощью трех, четырех и
более дискретизаторов.
Отсюда
Дальнейшие вычисления удобно провести, перейдя к фурье-
образам:
G.38)
G.39)
G.40)
Или
Если / — нечетное число, то 1+:(—1)' = 0. Поэтому слагаемые в
выражении G.40) для нечетных значений / равны нулю. Имеем
G.41)
G.42)
Из последнего выражения видно, что период дискретизации и
длина интервала «локального» усреднения равны Те/2 и дискре-
тизация осуществляется не над функцией x(t), а над сигналом
на выходе фильтра, передаточная функция которого имеет вид
86
ГЛАВА 7
7.8. Субдискретизация. Обобщение теоремы Шеннона [9]
Рассмотрим сигнал, спектральная плотность которого S(v)
равна нулю вне интервала (vc—B, vc+?) для положительных
частот и вне симметричного интервала (—vc—В, —vc-\-'B) для
отрицательных частот (рис. 7.10). Имеем
G.43)
Согласно теореме Шеннона, частота дискретизации Fe
должна быть выбрана большей или равной 2(\с-\-В). Тот факт,
что спектральная функция рассматриваемого сигнала равна ну-
лю вне введенных выше интервалов, позволяет использовать
частоту дискретизации Fs, значительно меньшую по сравнению
с частотой Fe, определяемой теоремой Шеннона. Ниже мы рас-
смотрим только положительные частоты, поскольку все резуль-
таты остаются справедливыми и для отрицательных частот.
Можно допустить параллельный перенос спектра в интер-
валах @, vc—В) и (vc-\-B, +oo) при условии, что отсутствует
даже частичное пересечение со спектром сигнала S4-(v) до дис-
кретизации (рис. 7.10). Такой перенос спектра S~(\), примы-
кающего справа к S+(v), получается после k-\-\ переносов на
расстояние Fs. Для переноса спектра S(v), примыкающего слева
к S+(v), требуется & .переносов длиной Fs (рис. 7.10). Если при пе-
реносах не происходит наложений, то спектры S"(v) hS+(v) яе
изменяются. При восстановлении начального спектра S(v) доста-
точно умножить получаемый после переносов спектр на сумму
двух прямоугольных функций, отличных от нуля соответственно
на интервалах (— ус—В, —vc+B) и (vc—В, vc + B). Число k на-
зывается порядком субдискретизации. Для нахождения частоты
дискретизации Fs необходимо использовать условие, что k и k-\-
+ 1 переносов S~(v) не дают пересечений с S+(v). Ясно, что
если нет пересечений с S+D>), то пересечения со спектром отсут-
Рис. 7.10.
ДИСКРЕТИЗАЦИЯ 87
Отметим, что для всех зон, в которых можно выбирать Fs, вы-
полнено неравенство FS>4B. Действительно, когда все перено-
сы являются смежными, неравенство FS^4B должно быть вы-
полнено, поскольку протяженность спектра S(v) равна 2В.
(Отметим, что общая протяженность спектра равна 2В-\-2В =
= 4В.) Итак, зная центральную частоту vc и длину спектраль-
ной полосы 2В функций S~(v) и S+(v) и используя уравнение
G.52), можно построить все зоны, внутри которых расположены
значения отношения FS/2B (рис. 7.11).
Наибольший интерес представляет выбор минимально воз-
можной частоты дискретизации. Такой выбор соответствует
ординате выше значения FS/2B = 2. Представляет также интерес
максимально возможное увеличение порядка субдискретизации,
так как это увеличение позволяет уменьшить число обрабаты-
ваемых дискретных значений сигнала.
Неравенство G.46) можно записать в виде
¦Субдискретизация возможна, если
т. е.
G.44)
G.45)
G-46)
G.47)
G.48)
G.49)
G.50)
G.51)
Отсюда получаем
ствуют везде. Пересечения отсутствуют, если выполнены нера-
венства (см. рис. 7.10)
Обозначим
Тогда неравенство G.48) принимает вид
Из последнего выражения следует, что fs = Fs/2B должна содер-
жаться между двумя прямыми
G.52)
88
ГЛАВА 7
Рис. 7.11.
Пример. Рассмотрим сигнал, для которого 2?=104 Гц и vc=106 Гц. Имеем
?=0,5-104, vc/.B=200. Необходимо выполнение неравенства FS/BB)>2, т.е.
Fs>2-104. Из выражения G.51) получаем
Из неравенства B00+1)/(?+1)<B00— l)/k следует &<99,5. Пусть 6=99;
тогда значение FS/2B должно содержаться в интервале B,20879—2,21111).
Хотя этот интервал и узок, но вполне реализуем.
Если fe=24, то значение FS/2B должно содержаться в интервале (8,04—
8,29), т. е. 80400<fs<82900. Выберем Fs=81920.
Частота дискретизации, которую необходимо выбрать по теореме Шен-
ДИСКРЕТИЗАЦИЯ 89
нона, равна Fe=l 005 000 Гц, т. е. более чем в 12 раз больше Fs. Таким обра-
зом,'число точек дискретизации будет значительно уменьшено за счет приме-
нения субдискретизации.
Если' выбрать fe=48,5, FsfBB) ? D,0606—4,10309), т. е. 40606
j-u<fs<41030 Гц. Выберем Fs=40960 Гц. Эта частота более чем в 24 раза
меньше частоты Шеннона. Более того, такая частота совместима со скоростью
работы аппаратуры, осуществляющей численную обработку сигналов, в то
время как частота Шеннона, равная 1 005 000 Гц, превышает верхнюю гра-
ничу совместимости.
Для восстановления сигнала, как было уже сказано выше,
достаточно умножить спектр дискретизованного сигнала на
сумму двух прямоугольных функций nBfv—VcJ+IIbCv+Vc). Эта
сумма есть фурье-образ функции 2B(sm 2nBt/2nBt) cos 2jivctf.
Следовательно, интерполяция осуществляется с помощью выра-
жения, модуль которого равен sin 2nBt/2nBt, а частота vc-
7.9. Заключение
Таким образом, если дискретизация проводится согласно
теореме Шеннона, то полностью сохраняется вся информация,
содержащаяся в сигнале. Как показал Боне [3], все утвержде-
ния этой главы можно применить к случайным сигналам. Одна-
ко для некоторых сигналов с шумами, в частности для задач
обнаружения или распознавания форм, развита новая теория,
значение которой, как нам кажется, огромно [4]. Согласно этой
теории, дискретизация проводится случайным образом, так что
расстояние между точками дискретизации выбирают случайно
по заранее выбранному закону распределения.
Технические средства, реализующие дискретизацию сигнала,
чаще всего представляют устройства аналого-цифрового преоб-
разования. Для более подробного ознакомления мы рекоменду-
ем работы [7 и 8], где эти проблемы освещены более полно.
ЛИТЕРАТУРА
1. Cazin J. F. Manuel d'applications CIL, Tome 3. Filtres actifs a amplifica-
teurs operationnels. Thomson — CSF division semi-conducteurs, 1974.
2. Bildstein P. Les filtres actifs, Editions Radio, 1976.
3. Bonnet G. Quelques problemes d'echantillionnage en traitement lineaire et
quadratique des signaux aleatoires, Annales des Telecommunications, 24,
N. 1, 2, 1969.
4. Bernard Lacaze, Echantillonage des processus de Kjnchine et ses applica-
tions, These de doctorat d'etat es science mathematiques, Universite Paul-
Sabatier a Toulouse, 1970.
5. Landau H. J., Pollak H. D. Bell System Tech. Journ., 41, 1295—1336
A962).
6. Shannon С. Е. Communication impressence of noise, Proc. IRE, 37, 10—21
A949).
7. Hoeschele D. F. Jr. Techniques de conversion analogique-digitale et digitale-
analogique, Masson et Cie, Paris, 1971.
8. Loriferne B. La conversion analogique-numerique numerique-analogique,
Compagnie Francaise d'editions, 1976.
9. Fauque J. M., Berthier D., Max J., Bonnet G. Analyse spectrale par correla-
tion, Rapport CEA, R —3672, 1969.
10. Picinbono B. Elements de theorie du singal, Dunod, 1977.
Глава
8
КОРРЕЛЯЦИЯ
И НЕКОТОРЫЕ ДРУГИЕ
ПОНЯТИЯ СТАТИСТИКИ
Физическая величина определяется более
точно уравнением, чем измерением. Но,
определяя ее из уравнения, мы, по сути
дела, отказываемся от познания истин-
ного значения данной величины. Сохра-
нение в то же время ее названия влечет
за собой неточности и недоразумения.
Макс Плана
8.1. Поиск «связи» между двумя физическими процессами
(явлениями), которые заданы физической величиной,
выражающей один из параметров процессов.
Случай, когда параметр может быть измерен,
если задано большое число реализаций процессов1'.
Средние значения ансамбля
Примеры физических процессов и их реализации. Рассмот-
рим семейство числовых функций одной и той же переменной
(например, времени), которые соответствуют физическим про-
цессам одной природы. Пусть xu(t) — функция этого семейства.
Функция Xh(t) может быть, например, напряжением шума в
электронной трубке. Тогда каждая функция Xh(t) представляет
напряжение шума в k-и трубке одной партии трубок. Функция
xh(t) может быть также электроэнцефалограммой людей с од-
ной и той же болезнью или представлять скорость ветра как
функцию высоты k. Наряду с семейством xk(t) можно рассмот-
реть другое семейство функций tjk(t), например напряжение
шумов в трубках другого типа, или электрокардиограммы боль-
ных, или, наконец, температуры в момент времени t на высо-
те k. Требуется установить связь между физическим процессом
Рх, порождающим семейство функций Xh(O (называемых реа-
лизациями процесса Рх), и физическим процессом Ру, порож-
дающим семейство функций ijk{t) (называемых реализациями
процесса Ру).
') В дальнейшем, кроме специально оговоренных случаев, рассматривае-
мые функции времени предполагаются вещественными, поскольку только та-
кие функции могут измеряться непосредственно.
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 91
Среднее значение ансамбля. Связь с математическим ожида-
нием. Если отмеченная выше «связь»1) существует, то должен
существовать такой параметр а, что с его помощью в фиксиро-
ванный момент времени tQ реализации процессов Ру и Рх «со-
вмещаются» наилучшим образом. Ясно, что значение парамет-
Рис. 8.1.
ра а может зависеть от выбранной пары [Xk(t), yk(to)] и индек-
са k. Поэтому более оправданно параметр а находить не из
минимума выражения
(8.1)
(8.2)
а из минимума выражения
Интуитивно ясно, что среднее значение будет более близко
к точному значению при увеличении числа реализаций. Следо-
вательно, в момент времени t0 должно быть рассмотрено боль-
шое число реализаций Xk(t0), yk(ta) (рис. 8.1). Выражение
(8.2) будет выполнено, если
т. е. а равно отношению средних значений x(t0) и y(t0). Из вы-
ражения (8.3) следует равенство е(а, to) = 0. Легко видеть, что
если число п реализаций неограниченно возрастает, то среднее
значение
11 Ниже будет показано (разд. 8.4), что термин «связь» выражает ин-
формационную связь.
(8.3)
(8.4)
92
ГЛАВА 8
стремится к математическому ожиданию E{x(t0)}. Если об-
ласть изменения Xk(to) разбита на равные интервалы длины q
(т. е. произведена операция дискретизации), то переменная
Xh(to) заменяется дискретной переменной, которая принимает
где р(х) — плотность вероятности (рис. 8.2).
и я —
я — достаточно малое положительное число. — Прим. перев.
Рис. 8.2.
только значения, кратные q. По определению математического
ожидания имеем1'
Выражение (8.5) можно записать также в виде
Одномерная плотность вероятности. Рассмотрим вероятность
того, что значение x(t0) принадлежит промежутку (mq, Gп+
-\-\)q) (выражение (8.5)). Если q стремится к нулю, то выра-
жение (8.5) представляет собой плотность вероятности. Обозна-
чим через р(х, dx) вероятность нахождения значений случай-
ной величины X на промежутке (х, x-\-dx). Пусть Р(х, dx) =
= p(x)dx. Функция р(х) называется плотностью вероятности.
Такое определение плотности вероятности широко используется
в теории вероятности. Поскольку всегда существует минималь-
ная возможная величина q, определяемая разрешающей способ-
ностью прибора, то на практике возможна регистрация вероят-
ности P(mq<x(to)<(m+l)q) =Р(т). Имеем
(8.5)
(8.6)
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ
93
Функция р(х) всегда удов-
летворяет условию нормиров-
(8.7)
Рис. 8.3.
Величина Р(т) является, оче-
видно, результатом «дискрети-
зации с усреднением» плотно-
сти вероятности (рис. 8.2).
Можно дать наглядную
физическую интерпретацию
такой дискретизации плотно-
сти вероятности (рис. 8.3).
Рассмотрим некоторую функ-
цию, график которой пред-
ставлен набором шариков,
свободно насаженных на ре-
шетку из горизонтальных и
параллельных стержней. Для
более точной реализации гра-
фика функции можно уменьшить расстояние между стержнями
и размеры шариков. Если повернуть решетку на 90° в верти-
кальное положение, то шарики, скользя вдоль стержней, упадут
вниз и совокупность шариков на всех стержнях даст аппрокси-
мацию графика плотности вероятности. По существу аналогич-
ная операция реализуется при построении гистограммы ампли-
туд с помощью комбинированного селектора (гл. 16).
Двумерная плотность вероятности. Можно рассмотреть ве-
роятность P[xi(ti), dxy x2(t2), dx2] того, что значения случай-
ных величин X\(t\) и x2(t2) содержатся соответственно в ин-
тервалах (хъ x\-\-dx\) и (х2, x2-\-dx2). Пусть P{xi(t\), dx\\
^2(^2), dx2) =PB)(*i, t\\ x2, ti)dx\dx2.
Тогда
(8.8)
Математическое ожидание произведения X\(t\)x2(t2):
Вероятность Р(т, п) события (mq<x<(m-\-\)q, nq<y<.
(8.9>
¦94 ГЛАВА 8
<(n+l)y) для двух случайных процессов х, у можно вычис-
лить по формуле
>> Величина 6, определяемая выражением (8.14), называется коэффициен-
том регрессии х относительно у. Аналогично можно определить коэффициент
регрессии у относительно х.
(8.10)
Многомерная плотность вероятности. Аналогично определя-
ется трехмерная, четырехмерная, я-мерная плотность вероятно-
сти. Можно доказать, что с возрастанием размерности п рас-
тет объем информации о случайном процессе, содержащейся в
п-мерной плотности вероятности.
Среднеквадратичное отклонение. Введенный выше параметр
а обладает одним существенным недостатком. Пусть средние
значения функций Xk(to) и t/h((o) равны нулю. Тогда, если даже
значения x(t0) и y(t0) различны, функция г(а, t0) равна нулю
для всех значений а. Поэтому введем другой критерий сравне-
ния. Чтобы критерий отражал суть явлений, он должен быть
связан с энергией, содержащейся в разности сигналов Xk(to)
и i)h(to) (разд. 8.7), поскольку в конечном счете нас интересует
в сигнале его энергия или мощность. Итак, рассмотрим вели-
Минимизация среднеквадратичного отклонения. Коэффици-
«нт корреляции. Найдем значение коэффициента Ь, минимизи-
рующее z(b, t0). Имеем
т. е.
Из выражения (8.13) получаем1'
(8.12)
(8.13)
(8.14)
(8.11)
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ
95
Из выражения (8.17) следует, что гМин = 0 для р = ±1. В случае
р=1 говорят, что процессы Рх, Ру полностью коррелируют в мо-
скому ожиданию произведения Xk(to)tjk(to):
Аналогично величины
Минимальное значение г(Ь, t0) определяется из выражения
(8.15)
(8.1б>
(8.17)
Обозначим
Тогда
мент времени г'о- Если р = 0, то
случае говорят, что процессы Рх, Ру не коррелируют в момент
времени /0. Величина р, характеризующая «связь» между дву-
мя процессами, называется коэффициентом корреляции. Вели-
чину
(8.18)
принято называть ковариацией.
Связь коэффициента корреляции с математическим ожида-
нием произведения и квадратов случайных величин. При
стремится к математиче-
п—яоо ковариация
(8.19)
мятся к математическим ожиданиям
стре-
где xm=mq, yn = nq.
¦96 ГЛАВА 8
До сих пор значения случайных функций x(t), y(t) рас-
сматривались для одного и того же момента времени t0. Мож-
но исследовать связь между этими значениями и для разных
моментов времени, например x(t0), y(t0—х). Тогда ковариация
1будет зависеть от смещения т:
') Рассмотрение центрированных случайных величин означает, что нас
интересуют только отклонения от средних значений. Более того, предваритель-
ное вычисление с помощью какого-либо устройства среднего значения позво-
ляет затем эффективнее использовать возможности измерительной аппара-
туры.
Cxy(t0, x) называется корреляционной функцией. Обычно вме-
сто x(t0), y(t0) рассматриваются центрированные случайные
величины x(to)=x(to)—mx(to), y(to)=y(to)—my(to), где
mx(t0)=E:[x(t0)], my(to)=E[y(to)]. Математические ожидания
центрированных случайных величин равны нулю, т. е. Е [x(t0) ] =
= E[y(to)]=O.
Имеем
(8.20)
¦Отсюда
тде C7H{to, т) =E[x{to)y(to—t)].
Итак, корреляционная функция двух случайных процессов
*U)> y(t) равна сумме корреляционной функции центрирован-
ных случайных процессов и произведения математических ожи-
.даний. Если процессы стационарны, то математические ожидания
ле зависят от момента времени, т. е. mx(t0)=mx, my(t0—т) =
= iny(mx, ту — постоянные величины). Поэтому для стационар-
лых случайных процессов
(8.21)
Ниже, за исключением специально оговоренных случаев, пред-
полагается, что рассматриваемые случайные величины центри-
рованы1'.
Стационарные процессы. Для многих случайных процессов
в пределах заданной точности можно предполагать, что сред-
ние значения, дисперсии, коэффициенты корреляции и корреля-
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 97
ционные функции не зависят от рассматриваемого момента
времени. Поэтому, если перечисленные выше характеристики
вычислены в момент времени t0, то они будут известны для все-
го временного интервала задания процесса, т. с. имеется воз-
можность «предсказания» величии некоторых характеристик
процесса. В этом случае можно в определенной степени пред-
сказать изменение процесса. Процессы, статистические харак-
теристики которых не изменяются с течением времени, называ-
ются стационарными. Почти во всех случаях под стационарно-
стью процесса подразумевают независимость от времени одно-
мерных и двумерных статистических характеристик процесса.
8.2. Величина, характеризующая «связь» между двумя
физическими процессами. Случай, когда известна
одна реализация физического процесса,
наблюдаемая в течение большого интервала времени
До сих пор предполагалось, что мы имеем большое число
реализаций в фиксированный момент времени одного и того же
физического процесса. Однако в большинстве случаев получе-
ние большого числа реализаций процесса невозможно. В каче-
стве примера рассмотрим измерение напряжения на выходе
усилителя.
Невозможно иметь большое число одинаковых усилителей,
но, даже если бы мы и располагали ими, измерение напряже-
ний в один и тот же момент времени на выходе всех усилителей
представляло бы сложную проблему. В подобных случаях лег-
ко осуществить только одну реализацию процесса, но для сколь-
ко угодно большого промежутка времени.
Попытаемся ответить на вопрос: можно ли установить связь
между двумя физическими процессами, зная лишь одну реали-
зацию x(t), y(t) этих процессов па промежутке длины T[tx—
—Т, ti] или [to, tQ + T]} Связь между двумя процессами можно
характеризовать, как это сделано было выше с помощью ко-
эффициента а, при котором значение разности x(t)—ay(t) яв-
ляется минимальным. Интуитивные соображения подсказывают,
что такой выбор коэффициента а позволяет наилучшим обра-
зом производить «наложение» функций x(t) и ay(t) на интер-
вале их задания. Следовательно, вместо вычисления мгновенных
значений разности z(t)=x(t)—ay(t) следует вычислить вели-
чину
Величина |zG)| принимает минимальное значение, равное ну-
(8.22)
98 ГЛАВА 8
Как уже было отмечено в предыдущем разделе при вычислении
среднего значения большого числа реализаций, сравнение двух
процессов с помощью только средних значений x(t) и y(t) не
всегда является содержательным, поскольку средние значения
могут быть равными, даже если x(t) и y(t) сильно отличаются
друг от друга.
г
Примечание. Строго говоря, величина z(t)—^p- \z(t)dt не является сред-
б
ним значением функции z{t). Среднее значение функции z(t) определяется
выражением
где x(t)y(t)—среднее временное значение произведения
и называется коэффициентом регрессии х относительно у. Ми-
нимальное значение |zG)|2 принято называть средним квад-
ратичным отклонением для х (t) и by(t).
лю, если a=x(t)/y(t), где
Величина z(t), измеренная на интервале Т, называется оценкой среднего
значения. Можно вычислить ошибку оценки среднего значения (гл. 9). Здесь
в целях удобства используется термин «среднее значение» вместо «оценка
среднего значения».
Более содержательный коэффициент, характеризующий
связь между двумя процессами, может быть получен с помо-
щью квадрата разности z(t). Для получения значения этого
коэффициента используем средние значения функций на интер-
вале их определения. Имеем
или
(8.23)
Величина коэф-
фициента Ь, при которой функция |zG)|2 принимает минималь-
ное значение, определяется из выражения
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 99
называется среднеквадратичным значением функции x(t).
Если x(t) центрирована, то среднеквадратичное значение на-
зывают дисперсией и обозначают а2х. Величину ах называют
среднеквадратичным отклонением случайной функции x(t).
Только что было отмечено, что равенство нулю коэффициен-
та корреляции р означает отсутствие корреляции между слу-
чайными функциями. Из отсутствия корреляции не следует не-
зависимость случайных функций. Но если р = 0, то с помощью
средних значений нельзя представить энергию взаимодействия.
Это очень важный вывод, подробное обсуждение которого про-
ведено в разд. 8.4. Отметим, что из независимости двух случай-
ных функций следует равенство нулю коэффициента корреля-
ции.
Как и для случая большого числа реализаций случайных
процессов, попытаемся сравнить две случайные функции x(t) и
y(t) после сдвига во времени. Рассмотрим две функции x(t)
и y(t—х) и коэффициент корреляции как функцию сдвига:
Имеем
Величина
называется коэффициентом корреляции.
Для среднего квадратичного отклонения получаем форму-
(8.24)
(8.25)
(8.26)
Если р=1, то случайные функции x(t), y(t) полностью корре-
лированы. Если же р = 0, то процессы не коррелируют между
собой. Как и в предыдущем разделе, величина
(8.27)
Коэффициент С(tQ, x) можно выразить через двумерную плот-
ность вероятности
(8.28)
100 ГЛАВА 8
Автокорреляция. Можно сравнить случайную функцию
x(t) на интервале ,[tf0, to+T] с той же функцией x(t—х), аргу-
мент которой смещен на величину %. Такое сравнение позволя-
ет по крайней мере качественно установить влияние предысто-
рии процесса на его дальнейшее развитие. Если, например,
x(t)—периодическая функция, а сдвиг т кратен периоду этой
функции, то получаем максимум «сходства» между x(t) и
x(t—т), т. е. модуль корреляционной функции принимает мак-
симальное значение. Это свойство автокорреляционной функ-
ции позволяет выявлять периодичность функции, возможно не
обнаруженную при первоначальном исследовании.
Стационарность. Если процесс стационарен, то его статисти-
ческие характеристики не зависят от местоположения рассмат-
риваемого промежутка времени. Следовательно, для стационар-
ных процессов автокорреляционная функция C(t0, х) не зави-
сит от начала отсчета ta:
(8.29)
(8.30)
Аналогично для двух стационарных процессов x(t) и y(t) кор-
реляционная функция Cxy(to, т) не зависит от t0:
Как уже говорилось выше (для случая большого числа реали-
заций случайного процесса), свойство стационарности позволя-
ет в какой-то степени «предсказывать» развитие процесса, ес-
ли известны «средние» характеристики. Например, в метеоро-
логии предсказание какого-либо природного явления основано
на анализе прошлого.
Пример корреляционной функции из физики. Рассмотрим
стационарное световое излучение. Если источник излучения не-
когерентен, то излучение описывается стационарной случайной
функцией x(t). Тогда световому излучению того же источника в
момент t—т соответствует стационарная случайная функция
x'(t)=x(t—т). Явлению интерференции будет соответствовать
функция X(t)=x(t)-\-x(t—х). Средняя энергия интерферен-
ции при запаздывании т определяется выражением
Отсюда получаем
(8.31)
(8.32)
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 101
Слагаемое С(х) определяет изменение средней энергии в зави-
симости от запаздывания т. Следовательно, автокорреляцион-
ная функция описывает форму интерференционных полос.
8.3. Эргодичность
Мы уже говорили выше, что в большинстве случаев более
удобно вычислять не средние величины, соответствующие боль-
шому числу реализаций, а величины, усредненные по времени,
поскольку гораздо легче получить одну реализацию случайного
процесса на достаточно большом временном интервале, чем
большое число различных реализаций этого процесса. В отли-
чие, например, от опроса общественного мнения, когда имеют
дело с большим числом реализаций, в физике, вообще говоря,
нельзя провести большое число одновременных измерений из-за
ограниченного числа измерительных устройств.
Поэтому возникает вопрос: будут ли одинаковыми резуль-
таты, полученные на основе анализа величин, усредненных во
времени, и величин, усредненных по множеству реализаций?
Доказано, что положительный ответ на этот вопрос имеет ме-
сто, если случайный процесс эргодичен.
Дадим физическую интерпретацию понятия эргодичности.
Выше было показано, что для выявления связи между двумя
случайными процессами необходимо рассмотреть большое чис-
ло реализаций в момент времени t0. Если число реализаций до-
статочно велико, то будет известно множество всех возможных
значений xk(to). Для того чтобы усредненные на достаточно
большом временном интервале величины, вычисленные на ос-
нове одной реализации x(t) случайного процесса, давали тот
же результат, функция x(t) должна принимать все множество
значений Xk(t0). Иначе говоря, случайный процесс эргодичен,
если в любой момент времени возможны любые значения, со-
вместимые с дифференциальным уравнением, которому удовлет-
воряет этот процесс.
На практике используется также понятие квазиэргодично-
сти. Процесс называется квазиэргодическим, если среди значе-
ний любого фиксированного множества случайных функций, со-
ответствующих нескольким реализациям одного случайного
процесса, найдутся такие, которые сколько угодно близки к
любому возможному значению. Основное преимущество эрго-
дических процессов состоит в том, что для таких процессов в
условиях ограниченного числа измерительных устройств сред-
ние по множеству реализаций можно заменять временными
средними.
Итак, среднее значение x(t), среднеквадратичное значение
x(it) и среднее значение произведения x(t)y(t) определяются
102 ГЛАВА 8
равенствами
где Т должно быть выбрано как можно большим (поскольку
точные значения средних величин получаются при Т—>-оо).
8.4. Коэффициент корреляции и теория информации
Важно отметить, что коэффициент корреляции и корреля-
ционная функция связаны с энергией взаимодействия процес-
сов, описываемых двумя случайными функциями x(t) и y(t')
с положительным, отрицательным или нулевым временным
сдвигом x — t'—/. Функции x(t) и y(t') могут совпадать, в этом
случае имеем автокорреляцию. Термин «энергия взаимодейст-
вия» является более обоснованным для отражения связи двух
случайных процессов, чем такие термины как «связь» или «за-
висимость». Действительно, изменение процессов на интервале
[0, Т] всегда можно представить в виде уравнений x = fi(t) и
г/ = /г(О- Исключая / из последних двух уравнений, получаем
зависимость между х и у. Поэтому нельзя считать, что х и у
независимы. Но если среднее значение произведения равно ну-
лю, то можно утверждать, что в среднем обмен энергией не
происходит, т. е. энергия взаимодействия равна нулю. Энергия,
передаваемая одним процессом другому в некотором интерва-
ле dt, компенсируется передачей энергии в противоположном
направлении в другом временном интервале. Эта глубокая
связь между коэффициентом корреляции и обменом энергией
физически обоснована и присуща самой природе процессов.
Обмен информацией невозможен без передачи энергии; хотя ко-
личество передаваемой энергии может быть и небольшим,
оно всегда отлично от нуля, в противном случае существовали
бы усилители бесконечно большой мощности. Если энергия
взаимодействия двух процессов равна нулю, то исследование
одного из них не дает никакой информации о другом.
Следовательно, если коэффициент корреляции двух процес-
сов равен нулю, то, хотя отсюда и не следует независимость
(8.33)
а функция корреляции равна
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ ЮЗ
процессов, среднее значение информации, которой обменива-
ются процессы, в этом случае будет равно нулю. Впрочем, важ-
но отметить, что количество информации о процессе х, содер-
жащейся в процессе у, связано с коэффициентом взаимной кор-
реляции этих двух процессов [1].
8.5. Практические замечания
Стационарность. Обычно ограничиваются стационарностью
2-го порядка, т. е. инвариантностью одномерных и двумерных
статистических характеристик. При исследовании физических
процессов обнаружить их стационарность чрезвычайно трудно.
Если вычислять средние по реализациям физического процес-
са, то иногда нельзя установить, достаточно ли число рассмат-
риваемых реализаций. Если же вычисляются временные сред-
ние, то интервал усреднения должен совпадать с интервалом
задания процесса. Следовательно, на практике можно устано-
вить стационарность только с определенной погрешностью. Это
означает, что статистические характеристики вычисляются на
временном интервале такой продолжительности Т, чтобы обес-
печить р%-ную точность этих характеристик (точные значения
характеристик могут быть получены только при Т—»-,оо). Затем
следует произвести вычисления на других временных интерва-
лах Т и убедиться, что разность значений характеристик не
превосходит величину, соответствующую р%-ной точности.
Предполагается, что длина временного интервала Т может
быть выбрана сколько угодно большой так, чтобы можно бы-
ло обеспечить сколько угодно большую точность (этот вопрос
рассмотрен в гл. 9).
Эргодичность. Не существует физического устройства, с по-
мощью которого можно было бы проверить по крайней мере
простым способом эргодичность исследуемых процессов. Всег-
да предполагается, что эргодичность имеет место, а затем по
полученным результатам апостериорно проверяется ее наличие.
Среднее значение ансамбля. Теоретическое определение
среднего значения дается формулой
На практике подсчитывается среднее значение конечного числа
реализаций, и точность результата может быть повышена путем
увеличения этого числа.
Временное среднее. Теоретическое определение среднего зна-
чения по времени дается формулой
104 ГЛАВА 8
Корреляционная функция. Корреляционная функция двух
случайных процессов, вещественных или комплексных, опреде-
ляется выражением
CXtt(T) = E{x(t)y*(t-x)}, (8.34)
где функция у* (t—т) комплексно сопряжена с y(t—т). Напом-
ним, что такое определение корреляционной функции связано с
понятием мощности, введенным в гл. 3. Для вещественных функ-
ций x(t) и y(t)
E{x(t)y*(t-x)}=E{x(t)y{t-i)}. (8.35)
Поскольку физические сигналы на выходе измерительных
устройств всегда вещественны, ниже мы будем использовать вы-
ражение (8.35). Если дополнительно имеет место эргодичность,
то
(8.36)
На практике всегда предполагается, что случайный процесс эр-
годичен, и поэтому в качестве определения корреляционной
функции принимается равенство (8.36). При фактическом же
вычислении корреляционной функции интервал усреднения всег-
да конечен, и, следовательно, корреляционная функция вычис-
ляется по формуле
(8.37)
8.6. Характеристические функции
Характеристические функции играют большую роль в теории
случайных функций. По определению характеристическая функ-
ция случайной величины представляет собой фурье-образ плот-
ности вероятности этой случайной величины:
(8.38)
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 105
Аналогично характеристическая функция двух случайных пере-
менных есть изображение двумерного преобразования Фурье
двумерной плотности вероятности:
(8.39)
Одной из основных причин введения характеристических функ-
ций является то обстоятельство, что различные средние величи-
ны могут быть легко найдены с помощью значений производных
характеристических функций в начале координат. Однако важ-
ное применение характеристических функций будет дано ниже
(разд. 9.2).
8.7. Спектральная плотность случайного сигнала
В разд 3.3 мощность рассматривалась как функция частоты.
На спектральном интервале бесконечно малой ширины dv в ок-
рестности частоты v она дается выражением S(v)dv. Мощность
на интервале j/vo—Av/2, vo+Av/2] вычисляется по формуле
(8.40)
(8.41)
Отсюда
Существует важная связь между спектральной плотностью мощ-
ности S(v) и временным представлением сигнала.
8.8. Связь между временными представлениями сигналов
и спектральными плотностями. Теорема Винера — Хинчина
Пусть x(t) —стационарная, эргодическая случайная функ-
ция. По определению корреляционной функции
Cxx(x)^E{x(t)y*(t-x)\.
Разделим ось частот на равные промежутки Av (рис. 8.4). Обо*
значим через Fk\v идеальный узкополосный фильтр, соответст-
вующий каждому интервалу разбиения. Частотная характери-
стика идеального фильтра (поскольку такой фильтр нереализу-
ем) определяется выражением
106
ГЛАВА 8
Рис. 8.4.
Обозначим через Xk(t) сигнал на выходе фильтра Fk^r если на
вход фильтра поступает сигнал x(t). Тогда
Отсюда
Поэтому
Рассмотрим автокорреляционную функцию функции Xk{t):
Рассмотрим сигнал
Функция
является фурье-образом функции
(здесь Hk{y)^hk{t)). Поскольку частотные характеристики
фильтра не пересекаются и смежны, справедливо равенство
Следовательно,
Но известно, что
1) hk(t) —импульсный отклик фильтра. — Прим. ред.
Следовательно, функция Sxx(v), определенная выше как фурье-
образ автокорреляционной функции Схх(х), действительно яв-
ляется спектральной плотностью по определению, даваемому
формулами (8.40) и (&41).
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 107
Из линейности фильтров следует равенство
где hk{t)—импульсный отклик фильтра Fk\v, Имеем
TF [Cxkxk (т.)} = TF{CXX (т)} TF [Chkhk (т)}.
Обозначим через Sxx(y) фурье-образ автокорреляционной
функции Схх (т):
TF {СхШ (т)} = Sxx (v) TF {Chkhk (т)>.
Известно, что d,khk (x)=hk(x)*hk(—T).
Отсюда
Поэтому
Окончательно получаем
Положив в последнем равенстве т = 0, имеем
Но известно, что
108 ГЛАВА 8
Рассмотрим теперь две эргодические стационарные случай-
ные функции x(t) и y(t). Обозначим через Xk{t) и tjk{t) сигна-
лы на выходе двух идентичных фильтров, на вход которых по-
ступают сигналы x(t) и y(t). Имеем
Cxkvk(T)=E{xk(t)yk*(t-x)} =
Используя теорему Фубини, заменим порядок применения опе-
раторов Е и f :
Поскольку функция h(t) не является случайной, получаем
Из стационарности процессов x(t), y(t) следует равенство
Поэтому
Положим t—9=г, б—а = Л. Имеем
Известно, что
Отсюда
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ 109
Следовательно, функция Sxv{v), определенная как фурье-образ
корреляционной функции Сху(х), характеризует распределение
на оси частот мощности взаимодействия, т. е. Sxy(v) является
спектральной плотностью взаимодействия.
Итак, справедливы выражения: S(v) =TiF{C(t)}, Sxx(v) =
=TF{C«(t)}, Sxy(v)=TF{Cxy(x)}, S9X(y)=TF{CyX{T)},
SXy(v)=S*yx(v).
8.9. Функция связи
Функция связи двух стационарных случайных функций x(t)
и y(t) определяется выражением
В гл. 12 и 13 даны применения функции связи.
8.10. Распределение Гаусса,
или нормальное распределение
Нормальное распределение вероятностей, играющее важную
роль в теории и приложениях благодаря его интересным свой-
ствам, можно определить либо с помощью плотности вероятно-
сти, либо через характеристическую функцию. ./V-мерная плот-
ность вероятности распределения Гаусса
Поэтому
Если #(v)—прямоугольная функция, заданная на промежутке
'[vo—Av/2, Vo + Av/2], то
по
ГЛАВА 8
'Л'1
NZ-'-^NN
\Сы\ является алгебраическим дополнением определителя \С\,
соответствующим элементу Cki- Элементы Ckk = o2k-
Характеристическая функция нормально распределенной
ЛЛмерной случайной величины имеет вид
где
Здесь ink — моменты 1-го порядка (средние); ты — моменты
2-го порядка, ти=<т2г (дисперсии). Все моменты распределения
Гаусса выражаются через моменты 1-го и 2-го порядков. В част-
ности, для одномерного случая
Пусть х=х—m — центрированная случайная величина. Тогда
где jin— момент и-го порядка.
Если число п — нечетное, то подынтегральная функция в по-
следнем равенстве нечетная, и поэтому Е{х2р+1} =0.
Пусть л=2р — четное число. Имеем
где \С\ —определитель ковариационной матрицы
КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИСТИКИ Ш
Вычисляя последний интеграл по частям, получаем ц,4 = 3а4.
Аналогично вычисляем
ц6 = 3-5-ав, ц2р = 3-5...Bр-1)а^.
Для нецентрированной случайной величины х=х+т имеем
м _Е{?_|_т)*} =
Используя последнюю формулу, можно вычислить моменты лю-
бого порядка. Например, для первых 6 моментов имеем М\ = т,
М2 = т2 + а\ М3 = т3 + 3та2, Af4=4a4 + 6m2<72 + /n4, М5 = 15тст4 +
+ 10т3а2 + т5, М6 = 15о& + 45т2о4+15т4о2 + т6.
8.11. Спектральная плотность и центрирование сигналов
Рассмотрим стационарную случайную функцию x(t), среднее
значение которой равно от. Имеем x(t)=x{t)+m, где x{t) —
центрированный сигнал. В разд. 8.1 было показано, что
Используя теорему Винера — Хинчина, получим
Sxx(v)=S7~(v)+m26(v).
Следовательно, спектральная плотность нецентрированного сиг-
нала отличается от спектральной плотности центрированного
сигнала слагаемым m28(v). He следует смешивать две матема-
тические операции: центрирование (приводящее к нулевому
среднему значению) и устранение «постоянной составляющей»
(приводящее к нулевому значению функции Sxx(v) при v = 0).
Центрирование с помощью высокочастотного фильтра приводит
к устранению и «постоянной составляющей», и среднего значе-
ния, отличного от нуля.
ЛИТЕРАТУРА
1. Fazioliah M. Reza An introduction to information Theory, Mac-Graw Hill,
1961.
2. Susskind A. D. Notes on analog-digital conversion techniques, Wiley, 1957.
Отсюда
Глава У
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ
КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ И
СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ
Понимать то, что мы знаем, и познавать
то, чего мы не знаем, — вот истинная
наука.
Конфуций
При измерении сигналов возникают ошибки двух типов:
• ошибки оценки или статистические ошибки, появление ко-
торых связано с заменой бесконечного интервала усреднения
интервалом конечной протяженности;
• систематические ошибки, происхождение которых связано
с неточной реализацией математических операций (сложение,
умножение, кодирование и т. д.) с помощью физических средств.
Мы рассмотрим главным образом «ошибки дискретизации»,
обусловленные ограниченным числом элементов при цифровом
кодировании. Эти ошибки подробно изучены в гл. 10.
9.1. Оценка средних значений
Ошибка оценки. Пусть x(t)—случайная функция перемен-
ной t. По определению средним значением функции x(t), имею-
щей бесконечное число реализаций Xk(t), является величина
mxit) = E{xh(t)}. (9.1)
Если случайный процесс x(t) эргодичен и стационарен, то сред-
нее значение (выражение (9.1)) множества реализаций может
быть подсчитано по формуле
Следовательно, точная величина среднего значения может быть
вычислена либо с помощью бесконечного числа реализаций
xk(t), либо на основе регистрации сигнала x(t) на временном
промежутке бесконечной длины. Если среднее значение подсчи-
тывается на основе конечного числа реализаций или на основе
регистрации сигнала на конечном временном промежутке, то
(9.2)
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ЦЗ
вместо точной величины среднего значения получаем ее оценку
л
Шх.
Нет никакого основания считать заранее, что тх = тх. Заме-
на тх оценкой тх приводит к ошибке оценки.
Смещенность оценки. Говорят, что оценка тх смещена, если
Е{тх}фтх.
Имеем
Используя теорему Фубини, изменим в выражении (9.4) по-
рядок применения оператора Е и операции интегрирования:
т
Поскольку E{m^}=mx— постоянная величина, получаем
т. е. оценка тх не смещена (в разд. 9.7 будет рассмотрена сме-
щенная оценка).
Дисперсия оценки. Оценка тх отличается от точного значе-
ния тх дисперсией случайной величины тх:
Уаг{тх} = Е{(тх-Е{тх}П. (9.6)
Часто дисперсию смешивают со среднеквадратичным смеше-
нием:
Eqm{mx} = E{(mx~mxy}. (9.7)
Дисперсия и среднеквадратичное смещение совпадают, если
оценка тх не смещена, т. е. Е{тх}=тх.
Вычислим
(9.3)
(9.4)
(9.5)
114
ГЛАВА 9
Известно, что
Е (const) = const, ? {const ф} = const ?{ф}, (9.8)
где const—-постоянная величина. Поэтому
Чю{т:}=Е{т*}—т*. (9.9)
Для вычисления Е{тх2} используем эргодичность и стационар-
ность случайного процесса x(t). Получаем равенства тх =
Отсюда
(9.10)
(9.11)
Используя теорему Фубини, получаем
о о
Известно, что
Е {х (и) х (v)} =Е {х (и) х (и- (и- v))} = Cxx (и- v),
где Схх{и—v)—автокорреляционная функция случайного про-
цесса x(t), вычисленная для значения аргумента и—v. Поэтому
т т
Е {mx>}=^r f f Схх (и-v) dudv. (9.12)
о о
Вычислим интеграл более общей формы, чем в правой части
равенства (9.12) (этот интеграл мы будем рассматривать в
разд. 12.1 и 12.2):
(9.13)
Выполним замену переменных и—v = x^2, u + v=y^2 и найдем
x=A2/2)u—{J2/2)v, #=(У2/2)и+(У2/2I>. Якобиан, соответст-
вующий этой замене переменных, равен
т. е. dudv — dxdij и
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 115
Если обозначить x^2 = z, y]/2=z', то
Для вычисления интеграла
о о
но использовать формулу (9.14), положив g(u + v)=g(z') = 1,
G(z')=zr. Тогда
Вычислим границы интегрирования. Из рис. 9.1 видно, что необ-
ходимо рассмотреть отдельно случаи х>0 и х<0.
Получаем
Пусть G(z') —первообразная функция g{z'). Тогда
Последнее равенство можно записать в виде
Рис. 9.1.
Используя Л-функцию (выражение B.48)), получаем
» Схх(х)=гхх{т) = Схх{х) -тх\
Пб ГЛАВА 9
Рассмотрим корреляционную функцию центрированной случай-
ной функции x(t)=x(t)+mx:
Известно, что E{x(t)}=E{x(t—т)}=0, поэтому') Схх(х) =
= Схх(х) +тх2. Из выражений (9.12) и (9.16) следует равенство
Используя формулу (9.9), получаем
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
117"
Из выражений (9.17) и (9.15) находим
(9.18>
Итак, для вычисления дисперсии оценки тх необходимо-
знать корреляционную функцию СХх(т). Полученный результат
является частным случаем более общего утверждения: для вы-
числения дисперсии оценки статистического момента порядка гк
необходимо знать моменты порядка In.
Выражение (9.18) можно записать в следующем виде:
Рис. 9.2.
= С*т@)/2В, поскольку ах2 = С'х-х-@). Поэтому получаем фор-
мулу
(9.19>
(9.20>
поэтому получаем
Если функция Sjt(v) мало изменяется 1в области, где нельзя.-
пренебречь величиной
Пусть x(t), для которой вычисляется оценка среднего значе-
ния, представляет собой белый шум, пропущенный через низко-
частотный фильтр с полосой В (рис. 9.2). Тогда S77{v)—ax2l2B=
Если тхф0, то
118 ГЛАВА 9
Последнее выражение справедливо для белого шума, пропу-
щенного через идеальный низкочастотный фильтр. Предполо-
жим, что она справедлива и для общего случая. Из выражения
(9.19) следует, что среднеквадратичнное отклонение е оценки
тх равно
где В — полоса пропускания фильтра, Т — длина отрезка интег-
рирования.
9.2. Оценка корреляционных функций
Общее выражение для корреляционной функции имеет вид
Cxg(x)=E{x(f)y(t-x)}. (9.22)
Если сигналы эргодичны и стационарны, то
(9.21)
Смещенность оценки. Используя теорему Фубини, получаем
:Итак,
т. е. оценка Сху{х) не смещена.
Дисперсия оценки корреляционной функции [2—5]. Так же,
жак в разд. 9.1, получаем равенства
(9.23)
(9.24)
ОЦЕНКА ОШИВОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ Ц9'
Итак, осталось вычислить двойной интеграл.
Из выражения (9.27) видно, что дальнейшее вычисление являет-
ся сложным, поскольку необходимо знать статистический момент
четвертого порядка Е{х(и)у(и—%)x(v)y(v—т)}. Эта сложность-
сохраняется и в общем случае, так как для вычисления диспер-
сии оценки момента некоторого порядка необходимо знать мо-
менты более высокого порядка. Дальнейшие вычисления можно
осуществить для классического случая, когда x(t) и y(t) —слу-
чайные гауссовы процессы. Известно, что для гауссова процесса
моменты любого порядка выражаются через моменты первого и
второго порядков.
В частности, можно показать, что для четырех случайных,
нормально распределенных величин U, V, W, Z справедливо ра-
венство
Используя это равенство, подынтегральное выражение
Е{х(и)у(и—t)x(v)y(v—т)} в выражении (9.27) можно разло-
жить на следующие составляющие:
(9.28)
Предположим, что по крайней мере одна из случайных функций
центрирована. Тогда D=0. Известно, что
, Поэтому
•120 ГЛАВА 9
Обозначим Cxx(v—u)Cyy(v—u)+CyX(v—u—x)Cxy(v—u+x) =
= f{v—u, т). Тогда
т. е.
Поэтому Var{Cxy(x)}—>-0 при Т—>-оо.
Итак, оценка Сху(х) состоятельна. По определению оценка
Сху{х) состоятельна, если Е{\Сху(х)—Сху(х)\2}—* ПРИ неог-
раниченном возрастании объема выборки.
При достаточно большом Т справедлива формула
Из формулы (9.15) получаем равенство
Предположим, что функции Cxx(z), Cyy(z) и Cxy{z)Cyz(z) яв-
ляются интегрируемыми на всей числовой оси. Тогда
Для автокорреляционной функции имеем приближенное равен-
ство
Полагая т=0, получим
Для достаточно больших т справедливы соотношения
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 121
—оо
поэтому
Для дальнейших вычислений необходимо наложить на случай-
ный сигнал x(t) дополнительные условия.
Пусть x(t) ¦—белый шум, ширина полосы которого равна В.
Тогда
Используя формулу (9.34), получаем
Первое слагаемое интеграла запишем в виде
Известно (разд. 2.13), что
(9.36)
Поэтому
Второе слагаемое интеграла запишем в виде
-J22 ГЛАВА 9
Введем новую переменную z—т—м, тогда
I
Поэтому для второго интеграла получаем
Итак,
Полагая т = 0, получим Var{C^@)}/C2^@) = 1/ВГ.
Если |т|>0, то \СххBх)\^Схх{0) и
Последнее равенство после нормировки принимает вид
Следовательно, дисперсия оценки Схх(х) ограничена сверху
числом 1/ВТ.
Некоторые авторы, в частности Бенда [4], исследовали слу-
чаи высокочастотных, низкочастотных и полосовых фильтров
первого и второго порядков. Произведя довольно сложные вы-
числения, они показали, что для достаточно больших значений
ВТ (превышающих 1000) справедлив аналогичный результат.
Следовательно, можно предполагать, что для всех случаев
справедливо неравенство
(9.37)
.Из (9.37) следует, что среднеквадратичное отклонение меньше
или равно е = Схх@)/^ВТ. По-
этому, если оцененная корре-
ляционная функция является
центральной линией полосы
шириной ±Схх@)/~^ВТ (рис.
9.3), то эта полоса образует
доверительную область для
истинной автокорреляционной
функции с доверительной ве-
роятностью 68%.
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 123<
Взаимная корреляционная функция. Из выражения (9.33),.
следует, что Var{Cxy{x)} является суммой двух интегралов:
Произведя сложные вычисления при ранее сделанных предполо-
жениях, получаем неравенство
Здесь, как и выше, дисперсия нормирована по отношению к
мощности сигналов. Нам кажется, что такая нормировка
является более обоснованной, чем использование некоторыми
авторами отношения Var{C.VA(T)}/C2.v,,(T), поскольку последнее
отношение неопределенно при Сху(%)—>-0.
Примечание. Из формулы
следует, что, зная ошибку оценки корреляционной функции, можно вычислить
ошибку оценки среднеквадратичного значения сигнала x(t).
9.3. Оценка спектральных плотностей
Измерение спектральной плотности. Предположим, что реа-
лизован идеальный фильтр FVo. av с центральной частотой v0,
ширина полосы пропускания которого равна Av (рис 9.4). Вход-
ной сигнал x(t) после прохождения фильтра принимает вид
y(t) =xfv0. av {t) =xF(t). Если на временном отрезке Т оценить
среднее значение квадрата модуля |г/@|2> то получим оценку
мощности сигнала x(t) в полосе частот [v0—к> vo-f V~ ] • За-
тем повторим эту операцию для частот vo, vi, vo, ..., уп. Блок-схе-
ма метода измерения представлена на рис. 9.5.
Величина смещения. В результате
измерения будет получена \H(v)\ i ^
величина
Если время
Г неограниченно, то ошибка оценки
отсутствует, и в этом случае получаем Рис. 9.4.
124
ГЛАВА 9
где
(9.40)
•Функция Sxx(vo, Av) равна Sxx{vo) только при бесконечно ма-
лом Av, что невозможно реализовать физически. Поэтому из
выражения (9.40) следует, что имеется смещение.
Рис. 9.5.
Описанный выше процесс измерения по существу является
дискретизацией функции SXx(v) с помощью операции интеграль-
ного усреднения с шагом Av. Поэтому достаточно использовать
полученные выше результаты временной дискретизации, пере-
нося их в частотную область. Отметим, что смещение оценки
наблюдается при измерении любой плотности: спектральной,
плотности вероятности, обычной плотности вещества (точечной,
.а не средней плотности). Итак, мы получаем Sxx(vo, Av, T) =
Известно, что для т = 0
и
Поскольку спектр сигнала xF(t) принадлежит отрезку
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 125
¦ I ¦! '— — МП II I III '-.I 11 - I II .^-_——
Итак, появление смещения связано также с интегральной дис-
кретизацией1'. В дальнейшем рассматривается величина Sxx(v,
Av), которую для сокращения записи будем обозначать симво-
лом S.,.r(v).
Ошибка оценки. Вычислим ошибку оценки Sxx(v):
Используем выражение (9.28) с переменными U=V—Xf{u),
W=Z=xF(v). Если функция x(t) центрирована, то E{U} =
=E{V}=E{W}=E{Z}=0. Отсюда
!) В определенных случаях при субдискретизации спектральной плотно-
сти нельзя пренебречь смещением, так как пренебрежение им приводит к боль-
шим искажениям (разд. 13.4).
Следовательно,
Следовательно,
126 ГЛАВА 9
Интегрируя последнее выражение, находим
Следовательно, необходимо вычислить автокорреляционную
функцию фильтрованного сигнала, которая зависит от характе-
ристик фильтра. Предположим, что рассматриваемый фильтр
является идеальным и центрирован относительно частоты vo с
шириной полосы пропускания Av (рис. 9.4). Тогда
(9.41)
(9.42)
Если время Т велико, то
(9.43)
(9.44)
где
Имеем
(9.45)
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 127
Отсюда
(9.46)
Очевидно, что вместо точечной плотности вероятности мы по-
лучаем плотность, усредненную на интервалах разбиения. Этот
вывод является общим для любой плотности1'.
]) Здесь можно использовать результаты разд. 13.4 относительно величи-
ны смещения.
Предположим, что эта операция повторена для всех частот v.
Тогда
(9.47)
(9.48)
Для среднеквадратичного отклонения получаем
где Т — длина промежутка интегрирования, Av — полоса пропу-
скания фильтра.
Можно показать, что выражения (9.45), (9.46) справедливы
и для неидеальных фильтров.
9.4. Оценка одномерной плотности вероятности
Напомним, что плотность вероятности р(х) определяется ра-
венством p(x)dx = Prob{x<.x(t) ^.x + dx}, где dx принимает ма-
лые ненулевые значения Ах.
Для получения гистограмм всегда используют дискретизацию
сигналов. Пусть дана выборка х\, ..., xN объемом N и Xk не кор-
релируют друг с другом (т. е. E{xkXi}=0, k^=l). Тогда [7]
где Nx{x—^-<xk-<x + ~} равно числу членов выборки, удов-
Д v Д у
летворяющих неравенству х—g~<#*<*+-<r > a
128 ГЛАВА 9
Дисперсия о2р величины Р(х, Ах) определяется, как показа-
но в работе [7], выражением
0р2 = A/Л')BД/Ах),
где 2А —длина промежутка изменения x(t).
Если все N членов выборки независимы и x(t) дискретизо-
вана на п уровней, то 2А/Ах = п. Тогда o2p=n/N. Если проверка
гипотезы независимости членов выборки затруднительна, то
лучше использовать формулу о2р—п/2ВТ (замечание в разд. 9.8).
9.5. Последовательное вычисление среднего значения
и дисперсии
Введение. Итак, можно предполагать, что среднеквадратич-
ная ошибка и дисперсия оценки имеют соответственно порядок
1/у.ВГ и 1/ВТ. Если рассматривают, как это часто бывает, дис-
кретные сигналы, то рекомендуется вычисление дисперсии про-
водить рекуррентно.
Пусть x(t)—непрерывная случайная величина. Тогда сред-
нее значение тх и дисперсия о2х определяются выражениями
где р(х) —плотность вероятности случайной величины х.
В общем случае величина р{х) неизвестна, но можно оценить
тх и о2х по выборке N независимых и, следовательно, некорре-
лированных наблюдений. Поэтому дискретизации соответствует
замена непрерывной случайной величины x(t) дискретной вели-
чиной Xk, для которой известно N реализаций Х\, Х2, ..., Xk, .-.,
Xn= {xn}. Тогда среднее значение
(9.51j
(9 51а)
(9.52)
(9.49)
(9.50)
среднее значение выборки
дисперсия
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 129
дисперсия выборки
Мы предполагали, что /V случайных реализаций независимы,
т. е. E{xkXi}=0, кф1; Xk—Xk—tnx, xt = xi—тх — центрированные
случайные величины (разд. 8.1).
На практике часто справедливы приближенные равенства1':
Следовательно, оценка тх не смещена. Вычислим дисперсию
оценки:
(9.52 а)
Средние значения. Из выражения (9.51а) имеем
(9.55)
Имеем
Поэтому
Но E{\xk\2} =в2х. Окончательно получаем
(9.56)
!) Правая часть выражения не равна E(XkXi) в обычном смысле; она
представляет собой результат повторного усреднения величины E(xkxi) по
всем значениям разности k—/. Обычно эта величина близка к 0 даже при на-
личии корреляции. Следовательно, по этому выражению нельзя судить о на-
личии корреляций. — Прим. ред.
130 ГЛАВА 9
Дисперсия. По определению величина смещения Ь{вх2}
оценки а2х равна Е{а2х—а2х}. Запишем ее в виде
(9.57)
(9.58)
Используя равенство
и выражение
(9.56), получаем
Отсюда
Учитывая выражения (9.55), (9.56) и (9.58), получаем ра-
венство Е{а2х}=а2х— (o2x/N), или
(9.60)
(9.61)
Следовательно, величина смещения оценки а2х равна
Несмещенную оценку получим, если вместо -
возьмем
Вычислим дисперсию оценки
(9.62)
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 131
Предполагая, что все хк подчиняются закону распределения Га-
усса, и используя формулу (9.28), получим
Отсюда
Если реализации выборки независимы, то E{xkXi}=0 для кФ1,
и поэтому
Итак, А
Отсюда
Для достаточно больших N получаем
Последовательное вычисление среднего значения. Обозначим
Имеем
Отсюда
Рекуррентное равенство (9.63) позволяет последовательно опре-
делить mx(N+l), зная mx(N) и xn+u
Последовательное вычисление дисперсии. Из выражения
(9.62) получаем
ю.кяъ
132 ГЛАВА 9
Отсюда
Для достаточно больших N справедливо выражение
m(N+l)ttm(N), поэтому выражение (9.64) можно записать
в виде
Это выражение наряду с другими можно использовать для вы-
числения дисперсии.
Последовательное вычисление дисперсии позволяет реализо-
вать метод вычисления ошибки и проследить за ее изменением.
Один из часто используемых методов состоит в том, что вычис-
ляется приближенное значение ВТ или необходимое число реа-
лизаций N=2BT, обеспечивающее заданную точность оценки, а
затем вычисляется дисперсия или среднеквадратичная ошибка.
Примечание. Если имеются вычислительные средства обработки сигна-
лов, то необходимо всегда производить последовательное вычисление дис-
персий. Для этого потребуются только небольшие дополнительные изменения
в программе обработки сигналов. Такая процедура позволяет не только вы-
числять статистическую ошибку, но и обнаруживать сбой в аппаратуре и
неправомерность основных предположений относительно обрабатываемых
сигналов.
9.6. Физическая интерпретация дисперсии
Рассмотрим нормально распределенную случайную величи-
ну ф, плотность вероятности которой
где т=Е {<$}. Имеем
(9.64)
Вычисляя интеграл в последнем равенстве, получаем Var{<p} =
=<т2. Следовательно, для гауссовой переменной дисперсия о2
или среднеквадратичная ошибка о связана с «шириной» кривой
Гаусса. Чем больше а, тем больше кривая Гаусса вытянута и
ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
133
со л А
сплющена (поскольку |/?(ф)й?ф = 1) (рис. 9.6). Поэтому, чем
—оо
больше <т, тем больше вероятность получить значения ср, суще-
ственно отличающиеся от среднего наиболее вероятного значе-
ния т.
Рис. 9.6.
Дисперсия или среднеквадратичная ошибка (которая являет-
ся квадратным корнем из дисперсии) характеризует «рассеива-
ние» возможных значений.
Для гауссовой переменной величина среднеквадратичной
ошибки е используется на практике для построения доверитель-
ных интервалов. Вероятность того, что ошибка оценки располо-
жена в интервале [•—г, е], равна 0,68. Если доверительная ве-
роятность выбирается равной 0,9, т. е. 90%, то ошибка принад-
лежит интервалу [—еь ei], где st = 1,64 е. Аналогично для до-
верительных вероятностей 0,95 (95%) и 0,99 (99%) ошибка бу-
дет лежать в интервалах е2 = ±1,96е и 8з = ±2,6е. Никогда не
следует забывать, что дисперсия и среднеквадратичная ошибка
являются не детерминированными ошибками, а параметрами,
определяющими гауссову вероятность ошибки.
134 ГЛАВА 9
9.7. Идеальный интегратор и низкочастотный фильтр
Во всех предыдущих рассуждениях предполагалось, что ин-
тегрирование на интервале [О, Т] производится с помощью
идеального интегратора:
г
где
Во многих случаях проще использовать не интегратор, а
низкочастотный фильтр RC с временной постоянной Q=RC.
Следовательно, необходимо выяснить влияние величины вре-
менной постоянной 8 на ошибку оценки.
Вычисление смещения. Пусть h(t)—импульсный отклик
фильтра RC. Тогда среднее значение сигнала f (t) на временном
интервале [О, TD], вычисленное с помощью фильтра, определяет-
ся выражением
гдеА@ = A/6)ехр(-*/е).
Используя теорему Фубини, получим
Следовательно, величина смещения равна mexp(—7V9). Для
71О>76 величина относительного смещения меньше 0,001, а для
Гд>9,50 она меньше 10~4.
Вычисление дисперсии. Имеем
ОЦЕНКА ОШИБОК ИЗМЕРЕНИИ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 135
Если Cff(u—v) удовлетворяет сформулированным выше ус-
ловиям, то
Пусть 45»1/9, т. е. 4В9>1. Тогда
Если 71д>6 (на практике достаточно 71D>46), то
При использовании идеального интегратора дисперсия имеет
значение, равное f? ' Следовательно, применение
.#С-фильтра, временная постоянная которого равна 0, эквива-
лентно интегрированию на промежутке длиной 28.
При численной реализации экспоненциальная (скользящая)
¦средняя величина, определяемая числовым рекурсивным фильт-
ром (гл. 19) у(п) = A— а)х(п) +ау(п—1), имеет дисперсию
A-—а2)а2х и смещение та". Часто полагают а=ехр(—7V8),
где Те — период дискретизации.
Итак, числовой фильтр эквивалентен непрерывному фильт-
ру с временной константой RC = Q.
136 ГЛАВА 9
9.8. Дискретные сигналы
Число дискретных значений или произведение ВТ? Достаточ-
но часто ошибку оценки представляют как функцию числа дис-
кретных значений N сигнала. Замена произведения ВТ числом
jV/2 правомерна только для двух случаев:
1. Если выборочные значения независимы, т. е.
E{x(kTe)x(lTe)}=0 для кф1, или С*х(т)=0 для \х\^Те.
2. Если сигнал дискретизован без супердискретизации. Дей-
ствительно, T = NTe и Те=\/2аВ, где N— число дискретных
значений, а а — коэффициент супердискретизации. Поэтому
BT=NI2a, и если а>1, то BT<N/2.
Следовательно, во всех случаях лучше использовать произ-
ведение ВТ.
Влияние типа дискретизации сигналов на корреляционную
функцию. Пусть h(t) —импульсная характеристика дискретиза-
ции. Рассмотрим два случая:
1. Дискретизация двумя вводами. Доказано [6], что в этом
случае функция дискретизации h(t) не оказывает влияния на
корреляционную функцию при условии, что h(t)=O при t^Te
(т. е. носитель функции h(t) ограничен сверху числом Те).
2. Дискретизация одним вводом. (Дискретизован только
один ввод, например случай гибридного коррелометра). Как по-
казано в работе [6], корреляционная функция в этом случае
определяется выражением Ci(x) — C(x)*h(x). Следовательно,
имеет место фильтрация корреляционной функции с помощью
устройства, осуществляющего дискретизацию.
Л ИТЕРАТУРА
1. Keyen Ch., Moore A. D. Modified digital correlator and its estimation errors,
IEEE Transactions of information theory.
2. Knowles J. В., Tsui M. T. Correlating devices and their estimation errors.
Journal of applied physics, 38, No. 2, 1967.
3. Bonnet G. Les correlateurs utilisant la quantification des signaux. Traite-
ment du signal, Cours d'etfe OTAN, Marine Nationale, 328, 1962.
4. Bendat J. Principles and application of random noise theory, Wiley,
1958.
5. Berthier D. These d'ingenieur-docteur, Rapport CEA, 3842.
6. Bonnet G. Correlateur hybrides a echantillonnage, Annales des telecom-
munications, 24, No. 7—8, 1969.
7. Bendat J., Piersol A. Measurement and analysis of random data, Wiley,
1966. [Имеется перевод: Бендат Дж, Пирсол Л. Измерение и анализ слу-
чайных процессов. — М.: Мир, 1970.1
Глава
10
ОШИБКИ ИЗМЕРЕНИЯ
КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
ПРИ ДИСКРЕТИЗАЦИИ СИГНАЛОВ
Высокая степень развития рационально-
го интеллекта у человека привела к зна-
чительной и печальной потере возмож-
ностей его интуиции, которая так необ-
ходима сегодня для дальнейшего раз-
вития.
Жак Моно, Случайность
и необходимость
Тот, кто не допускает ошибок, не спо-
собен познать истину.
Рабиндранат Тагор
В гл. 9 предполагалось, что необходимые для вычислений
математические операции реализуются идеально. Когда мы за-
писывали выражение
то молчаливо предполагали, что операции умножения
jc(t)y(t—т) (идеального аналогового умножения) и интегриро-
вания осуществляются без ошибок. Однако известно, что на
практике все чаще и чаще аналоговые операции умножения и
интегрирования заменяются численным умножением и интегри-
рованием (после аналого-цифрового преобразования). При ог-
ромном количестве исходных данных (когда величина ВТ равна
106—108 и более) для вычисления корреляции необходимо найти
способ уменьшения числа символов для записи каждого слова,
т. е. осуществлять кодирование с минимальным общим числом
символов. Следовательно, очень важно изучить влияние дискре-
тизации.
10.1. Статистическое изучение влияния дискретизаций
Постановка проблемы. Прежде всего мы изучим влияние
дискретизации на корреляционную функцию, а затем покажем,
что некоторые полученные результаты применимы и в более
138 глава ю
общем случае. Общая структура дискретного коррелометра мо-
жет быть представлена в виде блок-схемы, приведенной на
рис. 10.1. Это устройство осуществляет оценку Схх(х,Т) = Схх(х)
истинной автокорреляционной функции Схх(х). Оценка отлична
-CD
Рис. 10.1.
в общем случае от истинного значения по двум причинам:
1. Поскольку сигнал x(t) по предположению стационарен и
эргодичен, то
Однако при вычислении оценки интервал интегрирования Т не
может быть бесконечным, и, следовательно, мы получаем
Схх (т) = Схх (т, 7). Ошибка, порожденная такой заменой, была
изучена в гл. 9.
2. Очень трудно реализовать запаздывание для непрерывных
сигналов и очень легко — для дискретизованных сигналов. По-
этому наиболее часто рассматриваются дискретные сигналы.
В этой главе мы изучим ошибку, обусловленную дискретизацией
сигналов.
Дискретизация случайной величины. Определение. Пусть х—
случайная величина. Дискретизацией величины х называется
отображение х—>-x = nq для х^[(п—2~)<7, (n~b~~o)el]> где Я —
шаг дискретизации и п — натуральное число.
Плотность вероятности дискретизованной случайной величи-
ны. Пусть р(х) ¦—плотность вероятности величины х. Изучим
влияние дискретизации на р(х).
По определению величины х имеем
A0.1)
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ ПРИ ДИСКРЕТИЗАЦИИ 139
Но
Отсюда
Следовательно, плотность вероятности дискретизованной слу-
чайной величины х записывается в виде
Отсюда
A0.2)
Из последнего выражения следуют два эффекта (рис. 10.2)
влияния дискретизации на р(х):
1) эффект фильтрации с помощью фильтра-интегратора на
интервале q, импульсный отклик которого равен П?/г;
2) эффект дискретизации с шагом q, т. е. влияние дискрети-
зации с помощью дискретизатора-интегратора.
Характеристическая функция дискретизованной случайной
величины. Напомним, что характеристическая функция случай-
ной величины х определяется равен-
ством
Из этого равенства следует соотноше-
ние между фурье-образом TF{p(x)}
плотности вероятности и характери-
стической функции TF{p(x)} =
Рис. 10.2.
J40 ГЛАВА 10
<=М(—2яи). Используя формулу A0.2), вычислим характерис-
тическую функцию М(и) дискретизованной случайной величины.
Запишем выражение A0.2) в виде
Выражение A0.4) позволяет обнаружить по спектру1* плотно-
ети вероятности два эффекта влияния дискретизации, о кото-
рых говорилось выше в связи с дискретизацией плотности веро-
ятности:
• эффект фильтрации (рис. 10.3), соответствующий умноже-
нию функции М(и) на величину F(u)= , \1 ;
• эффект дискретизации, соответствующий суммированию
спектра после фильтрации с периодичностью 2n/q:
" Термин «спектр» использован здесь в смысле независимой переменной
фурье-образа, а не в смысле спектральной мощности или спектра энергии,
часто используемых при обработке сигналов.
Используя теорему Парсеваля и фурье-образ гребневой функ-
ции Дирака, получим
Перейдем в равенстве A0.3) к фурье-образам:
Положив — 2ли' — и, получаем искомое выражение
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ HI
Очевидно, что дискретизация не изменяет существенно М(и)
в окрестности точки ы = 0, кроме случая, когда MBkn/q) «О
для 1гфО, т. е. когда повторяемый таким образом спектр не вос-
станавливается через промежуток, длина которого больше по-
ловины периода (рис. 10.4). Это замечание будет нами исполь-
зовано в дальнейшем, когда мы распространим его на случай
двух случайных величин.
Рис. 10.3.
Рис. 10.4.
Дискретизация двух случайных величин. Обобщения. Для
того чтобы получить сведения о влиянии дискретизации на мо-
мент второго порядка (с целью использования их для корреля-
ционной функции), мы изучим статистические воздействия
дискретизации на двумерную случайную величину (хи xi). Не-
обходимые выкладки аналогичны выкладкам предыдущего
раздела. Поэтому мы даем лишь окончательные формулы и
обращаем внимание на интересующие нас результаты.
Совместная плотность вероятности и характеристическая
функция двух дискретизованных случайных величин. Используя
предыдущие обозначения для двух случайных величин х\ и х3,
дискретизованных с шагами q\ и ^2, получаем формулы
A0.5)
A0.6)
Влияние дискретизации на момент второго порядка и на кор-
реляцию двух случайных величин. Воздействие фильтрации и
дискретизации. Поскольку выражение A0.6) аналогично выра-
жению A0.4), то справедливы все предыдущие заключения о
142 ГЛАВА 10
воздействии фильтрации и дискретизации на характеристиче-
скую функцию.
Достаточное условие равенства нулю ошибки дискретизации
для момента второго порядка. Согласно известной формуле тео-
рии вероятности, имеем
A0.7)
В большинстве случаев коэффициентом а можно пренебречь, и
предыдущая формула для ДС(т) принимает вид
Из выражений A0.6) и A0.7) следует, что выполнение условия
A0.8)
для любых k, 1Ф0 и любых «1, и2 достаточно для выполнения
равенства E{xi-x2}=E{xi-x2}.
Связь между корреляционными функциями двух дискретизо-
ванных и недискретизованных сигналов. Если равенства A0.8)
не выполнены, то между E{xix2} и E{xiX2} существует более
сложная связь. Рассмотрим два случайных стационарных про-
цесса x\(t) и x2(t). Для нахождения соотношения между истин-
ной корреляционной функцией
С (*)=?{*! @*2 С"*)}
и корреляционной функцией дискретизованных сигналов С(т) =
=E{xi(t)x2(t—т)} можно использовать полученные выше фор-
мулы A0.6) и (Ю.7) (для сокращения записи иногда Схх(х)
обозначают С(х), если такое обозначение не может вызвать не-
однозначного толкования).
Бонне, используя формулы A0.6) и A0.7), провел соответ-
ствующие вычисления и получил равенства
где а = 4 ехр(—2л2o2/q2),
A0.9)
A0.9a)
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ 143
с точностью до бесконечно малых величин более высокого по-
рядка.
Этот важный результат можно интерпретировать следующим
образом. В любом коррелометре с двумя входами дискретиза-
ция с шагом q эквивалентна последовательному умножению на
yi—а и добавлению двух независимых шумов с дисперсией
q2/n2 и корреляционной функцией ДС(т) на каждом входе.
Итак, схемы, представленные на рис. 10.1 и 10.5, эквива-
лентны.
x,(t)
Рис. 10.5.
Данный результат согласуется с результатом, полученным
Блан-Лапьером: добавление к сигналу шума с точки зрения ста-
тистики эквивалентно некоторой дискретизации сигнала.
Из формулы A0.9) следует, что ошибка дискретизации вход-
ных сигналов зависит от отношения q[a. Приведем в качестве
примера результаты по дискретизации, полученные Бонне [6]:
1) УЬ^Г«1—5-10-9«1 и ДС(т)/С(т)<1%, когда р(т)>
>0,95;
2) yi—a«l—Ю-2 и AC(x)/C(tXl%, когда р(т)>0,65.
Дискретизация с помощью конечного числа разбиений. При
всех предыдущих вычислениях предполагалось, что число дис-
кретных значений бесконечно. В действительности такое пред-
положение нереализуемо и максимальный уровень дискретиза-
ции ограничен сверху конечным числом А. Последнее означает,
что каждый раз, когда величина сигнала превосходит Л, ему
приписывается значение, равное Л. Эта процедура эквивалентна
усечению плотности вероятности на интервале [—А, Л]. Сово-
купности вероятностей, содержащиеся на интервалах (—оо,
—Л) и (Л, + оо), -«проектируются» в точки —Л и Л. Ошибка,
порожденная процедурой усечения, будет мала, если «проекти-
руемые» совокупности вероятностей «малы». Порядок величи-
ны, характеризующей,- «проектируемые» совокупности вероятно-
J44 ГЛАВА 10
стей, может быть оценен с помощью неравенства Чебышева
РгоЬ{|х| ~^А) ^.о2/А2, из которого следует, что ошибка, обус-
ловленная заменой бесконечного числа дискретных значений
конечным числом, зависит от отношения а!А. Согласно Бонне
[6], этой ошибкой можно пренебречь, если Л>3а.
Итак, мы показали, что ошибка, порожденная дискретиза-
цией, уменьшается с уменьшением отношения k\=q/o. Кроме
того, ошибка, порожденная конечностью числа дискретных зна-
чений, уменьшается с возрастанием отношения ki=A/o. Следо-
вательно, уменьшение полной ошибки всегда соответствует уве-
личению отношения n = k2lki=A/q, которое равно общему числу
уровней дискретизации.
Частный случай. Коррелометр с двумя уровнями дискретиза-
ции (коррелометр с совпадением полярности, коррелометр с
подрезанием, коррелометр Фарана и Хилла). В этом частном
случае предыдущие формулы принимают относительно простой
вид [8]:
% *, W =Ш агс sin Р (*)> A0-10)
где р(т) —нормированная корреляционная функция:
Р(* =(CXlX2 (t))/VCXlXl(Q)CX2X2@). A0.11)
В тех случаях (они довольно многочисленны), когда достаточ-
но вычислить нормированные корреляционные функции, переход
от С*7*2 (т) к Р(т) осуществляется с помощью простого соот-
ношения
р(т) = ап[(я/2)С—(т)]. A0.12)
10.2. Коррелометры с вспомогательными шумами
Статистическая эквивалентность добавления шума и дискре-
тизации. Пусть X — случайная величина с плотностью вероятно-
сти рх(х) и Ь — случайный шум с равномерной плотностью ве-
роятности рь(Ь)=—П,/2 (Ъ). Предположим также, что X и b не-
зависимы, т. е. р(х, Ь)=рх(х)рь(Ь). Образуем новую случайную
величину Y = X + b. Известно, что плотность вероятности случай-
ной величины Y определяется выражением
Итак, добавление к случайной величине X независимого рав-
номерно распределенного шума Ь преобразует исходную плот-
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ ПРИ ДИСКРЕТИЗАЦИИ 145
ность вероятности рх{Ь) к виду
Рис. 10.6.
Принципиальная схема коррелометра такого типа приведена
На рис. 10.6. Необходимо решить следующую проблему: как
следует выбирать шумы bi(t) и b2(t), чтобы максимально умень-
шить число уровней дискретизации для получения достаточно
точной оценки Схх(х)?
Точность оценки Схх(х) будем определять с помощью двух
критериев:
Сравнивая последнее выражение с выражением A0.1), получа-
ем, что добавление равномерно распределенного независимого
шума и дискретизация случайной величины вызывают одинако-
вое изменение плотности вероятности, т. е. они статистически
эквивалентны. Аналогичное влияние на плотность вероятности
оказывает фильтрация. Лишь замена случайной величины вы-
боркой не сводится к эквивалентному добавлению шума, по-
скольку добавление непрерывного шума к непрерывной случай-
ной величине дает непрерывную случайную величину.
Вспомогательные шумы и дискретизация. Выше было пока-
зано, что статистическое добавление равномерно распределен-
ного шума и дискретизация — две почти эквивалентные опера-
ции. Возникает вопрос: можно ли, добавляя к входному сигна-
лу коррелометра соответствующий шум, уменьшить необходи-
мое число уровней дискретизации? Положительный ответ на
этот вопрос дает огромные технические выгоды, поскольку реа-
лизация численного умножения двух дискретизованных сигналов
упрощается и ее стоимость снижается с уменьшением необходи-
мого числа ячеек (число ячеек связано с числом уровней дис-
кретизации).
146 ГЛАВА 10
• оценка Схх{х) должна быть несмещенной, т. е. E{Cxx(r)}=s
= Схх(х), где Схх{х)—точное значение автокорреляционной
функции;
• отклонение функции Схх(х) относительно Схх(х) должно
быть минимальным, т. е. Var{Cxx(%)}=E{\Cxx(x)—Схх(х)\2}
имеет минимальное значение.
Необходимые и достаточные условия выполнения первого
критерия рассматриваются в следующем разделе, а исследова-
ние дисперсии выходного сигнала проведено в разд. 10.4.
10.3. Условия на вспомогательные шумы,
при которых отсутствует смещение оценки
корреляционной функции
Общие условия. Характеристическая функция двух сигналов
yiq и tjiq после добавления шума и дискретизации дается выра-
жением, аналогичным выражению A0.6), в котором М(щ, и2)—
характеристическая функция МУ1У2 (ии и2) сигналов у\ и у%
после добавления шума, но до дискретизации. Условие отсутст-
вия смещения за счет коррелометра записывается в виде
С(х) = Е {хух2} =Е {yiqy2q}.
Это условие будет выполнено, если имеют место равенства
?{х1ха}=?{^2}, A0.13)
Е{у1у2} = Е{у1ду2я}. A0.14)
Из равенства A0.13) получаем E{xiX2}=E{(xi + bi) (х2 + Ь2)} =
= Е{х\Х2} +E{x\bi}-\-E{x2b\} +E{b\b2}. Если шумы b\ и Ь2 цент-
рированы и независимы между собой и по отношению к сигна-
лам Х\ и х2, то равенство A0.13) выполнено. Кроме того, для
характеристической функции случайных величин г/i и у2 будет
справедливо равенство
MVlvt ("i» "г) =MXiX2 (щ, и2) Mbi (Ui) Mb2 (u2). A0.15)
Условия выполнения равенства A0.14) следуют из формул, по-
лученных в разд. 10.1, и из равенства A0.15). Эти условия име-
ют следующий простой вид (для q\=q2 = q):
MbiBkn/q) = 0, Mb2Bln/q) = 0, A0.16)
где k, / — любые целые числа (кф1).
Итак, мы получили условия, налагаемые на два вспомога-
тельных шума, при выполнении которых оценка корреляционной
функции не смещена:
• шумы центрированы;
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ 147
. шумы независимы между собой и по отношению к входным
сигналам (независимость в смысле теории вероятности);
• характеристические функции удовлетворяют равенствам
A0.16).
Шумы, удовлетворяющие равенствам A0.16). Поскольку
выбранный шум центрирован, можно предполагать, что плот-
ность вероятности рь(Ь) —четная функция. Тогда характеристи-
ческая функция Мь(и) будет вещественной и четной. Кроме то-
го, как и для любой характеристической функции, выполнены
условия Мй@) = 1, |Л1ь(ы)|^1. Следовательно, с учетом ра-
венств A0.16) и предыдущих предположений характеристиче-
скую функцию можно представить в виде
(символ *ге означает свертку функции с собой п раз). В частно-
сти, если п=0, то pb(b) —l/qnq/2(b).
Вывод. Добавление к входным сигналам равномерно распре-
деленных на отрезке [—ql2, q/2] шумов не вызывает смещения
оценки корреляционной функции. Такой вывод полностью согла-
суется с результатами разд. 9.1 (гл. 9), поскольку, как мы уже
доказали, добавление равномерно распределенных на отрезке
{—q/2, qj2] шумов эквивалентно дискретизации с шагом q.
Этот результат имеет огромное практическое значение, так
как легко генерировать именно равномерно распределенные
шумы.
10.4. Вычисление дисперсии. Состоятельность оценки
Определение точности коррелометра. Устройство, осуществ-
ляющее обработку сигналов в цифровой форме, оперирует с
дискретизованными сигналами. Поэтому получаемая оценка
со
где П — символ произведения, F(u)—непрерывная функция,
F@)~=0, \F(u)\^l. Из равенства Е{Ь} = (дМь/ди)и=о = 0 сле-
дует F'@)=0.
Для частного случая, когда «&=« для любых k и F(u)=sl,
можно доказать, что
Отсюда
ГЛАВА 10
корреляционной функции имеет вид
A0.18)
Предположим, что вспомогательные шумы удовлетворяют усло-
виям предыдущего раздела и, следовательно, коррелометр не
дает смещения, т. е.
E{C(k,N)}=C(k). A0.19)
При выполнении этих условий дисперсия оценки C(k, N), кото-
рая характеризует суммарное «рассеивание» возможных значе-
ний относительно точного значения, запишется в виде
z>=E{\C(k,N)-C(k)\*}. A0.20)
Вычислим значение последнего выражения, которое представ-
ляет собой среднюю ошибку измерений.
Вычисление дисперсии ошибки. Подставим в выражение
A0.20) равенства A0.17) и A0.18). Учитывая равенства A0.19)
и E{C(k)} = C(k) (поскольку C(k)—неслучайная величина),
имеем
в то время как точное значение определяется равенством
При выполнении условий, налагаемых на шум, выше было
доказано равенство E{y2q(n)yi4(n+k)}=E{x2(n)xi(n+k)}. По-
кажем теперь, что при выполнении дополнительной гипотезы
относительно шума справедлива формула
Е {Уг„ И yiq (m+ft) y2q (я) yiq (n+k)} =
= E{x2(m)xl (/n-f-&)x2(n)xi (n+k)}, A0.22)
где тфп.
Для этого выразим левую часть выражения A0.22), которая
представляет собой момент четвертого порядка, через характе-
ристическую функцию М4УЧ(ии и2, и'\, и!г) совокупности случай-
A0.21)
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ 149-
Ямеем
A0.23)
Обозначив через Мцх характеристическую функцию совокуп-
ности случайных величин x\{m + k), х2(т), xl(n+k), Х2(п), по
аналогии с выражением A0.6) получаем равенство
где М^у определяется выражением A0.24). При вычислении-
производной каждого слагаемого правой части A0.24) появля-
где через Мы(щ, и'\) и М&2(и2, и'г) обозначены характеристиче-
ские функции совокупностей случайных величин b\(m + k),
bi(n + k) и Ь2(п), Ь2(т).
Предположим, что члены последовательности значений слу-
чайных шумов Ь\ и Ъг независимы (в частности, из этого сле-
дует, что шумы Ъ\ и Ь2 являются широкополосными). Тогда
M4l(«J,u1')=Mftl(«1)^»1. («!'),
Mb2 («2- «2') =Mb2 (И2) Mb,' (И2')-
Из исследований, проведенных в работе [1], вытекает, что
ошибка е в этих условиях будет минимальной. Ниже мы будем
считать, что наше предположение выполнено, и рассмотрим его
применение для одного идеального предельного случая. Нам
осталось вычислить выражение
A0.24).
|50 ГЛАВА 10
ются выражения двух типов: выражение вида
A0.25)
и выражения, содержащие смешанные производные ниже чет-
вертого порядка от функции М4х и первые производные других
слагаемых.
Если положить «i = «2=u'i = «'2=0, то с учетом условий
A0.8) все члены равны нулю, кроме одного, для которого
k,=l—m = n=Q. Этот единственный ненулевой член, имеющий вид
A0.25), равен
Тогда из выражений A0.23) и A0.24) следует справедливость
доказываемого соотношения A0.22).
Поэтому') с учетом выражения A0.25) имеем
Используя стационарность, получаем равенства, справедливые
для любого р:
1} Так как выражение A0.22) справедливо только для тФп при вычис-
.лениях, приводящих к соотношению A0.26), осуществляется раздельная груп-
пировка членов двойной суммы с одинаковыми индексами суммирования в
лростую сумму.
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ 151
Интерпретация. Ошибка и сходимость. Выражение A0.26)
можно записать в виде e2 = ei2 + e22, где
Если в коррелометр не добавляется шум и не осуществляется
дискретизация, то tj\q=X\, y^q—x^ и 82 = 0, e=8i. Следовательно,
ошибка 8i не связана с использованной техникой для расчета
корреляции (добавление шума и дискретизация). Эта ошибка
корреляционной функции обусловлена только конечностью вы-
борки, т. е. наблюдением сигнала на промежутке конечной дли-
ны. Это первый тип ошибки, изученный выше в гл. 9 (статисти-
ческая ошибка).
Из выражения A0.27) следует, что точное значение ei зави-
сит от статистических моментов четвертого порядка входного-
сигнала. Ошибка 82, напротив, зависит от выбранной системы.
Действительно, выражение E{y22q@)y2iq(k)—x22@)xi2(k)} за-
висит не только от входных сигналов, но и от способа их обра-
ботки (добавления шума и дискретизации). Следовательно,
ошибка 82 определяет качество коррелометра.
Сходимость. Когда объем выборки стремится к бесконечно-
сти, обе ошибки ei и Е2 стремятся к нулю. В этом случае гово-
рят, что имеет место сходимость коррелометра. Ошибка ei—ИЗ
при N—*оо вследствие ее статистического характера. Напро-
тив, 82—И) при N—>-оо лишь при выполнении условий, налагае-
мых на шум и гарантирующих несмещенность оценки за счет
коррелометра. Это непосредственно следует из выражения
A0.28), поскольку для стационарных сигналов математическое
ожидание, входящее в выражение A0.28), ограничено. Оценка
корреляционной функции с помощью коррелометра будет тем
лучше, чем более точное значение оценки получается на выбор-
ках небольшого объема. Поэтому следует искать такую систему,
для которой ошибка 82 наиболее быстро стремится к нулю с воз-
растанием N.
Окончательно получаем
A0.26)
A0.28).
152
ГЛАВА 10
Рис. 10.7. Числовой коррелометр.
10.5. Практические приложения
Мы видели, что для получения оценки автокорреляционной
-функции можно использовать несколько методов.
1. Числовой коррелометр. Сигналы на двух входах можно
закодировать некоторым числом бит (рис. 10.7). Напомним, что
при дискретизации оценка автокорреляционной функции смеще-
на. Для распределения Гаусса можно вычислить смещение. Из
выражения A0.9а) следует равенство
1
A0.31)
где 2Л — максимальная амплитуда вспомогательного шума.
Рис. 10.8.
A0.29)
A0.30)
Выражение A0.29), которое является приближенным, дает
оценку смещения с точностью до 10~8. Если число уровней равно
двум, то опять производится оценка корреляции с подрезанием
(см. разд. 10.1).
2. Гибридный коррелометр. На один вход коррелометра по-
дается без запаздывания непрерывный сигнал, а на другой
вход — вспомогательный шум. Затем берется знак суммы
(рис. 10.8). В этом случае У2Ч=х2 и формула A0.26) принимает
вид
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ ПРИ ДИСКРЕТИЗАЦИИ 153.
Поэтому имеем
или
A0.32>
где р(т)—истинная нормированная автокорреляционная функ-
ция, N — используемое для вычислений число дискретных зна-
чений.
Отметим, что в таком коррелометре вспомогательный сигнал
Ь\ наиболее часто формируется с помощью центрированной сту-
пеньки, которая достаточно хорошо удовлетворяет требованию
равномерного распределения шума (разд. 9.3), но не удовлет-
воряет требованию независимости выборочных значений. По-
скольку выражение A0.27) справедливо для независимых выбо-
рочных значений (белый шум), то выражение A0.32) в этом
случае дает только приближенное значение ошибки.
3. Коррелометр с совпадением полярности и добавлением
шума. В таком коррелометре на два входа вводятся два вспомо-
гательных независимых шума и берется знак суммы (рис. 10.9)
Рис. 10.9.
(кодирование с одним разделением на двух уровнях). Имеем
где
Эта система чрезвычайно проста, и, следовательно, стоимость
системы оценки корреляции мала. Действительно, умножение в
154
ГЛАВА 10
Рис. 10.10.
системе сводится к произведению знаков, которое легко реали-
зуется с помощью логической схемы Исключающее ИЛИ.
Из выражения A0.28) получаем
A0.33)
Отсюда
Как показано в работе [2], сходимость для такого типа корре-
лометра немного хуже, чем для гибридного (для белого шума
объем выборки должен быть примерно в три раза больше, что-
бы получить одинаковую точность значения корреляционной
функции в нуле). Однако реализация такого коррелометра на-
много проще, поскольку он может быть полностью составлен из
логических схем.
4. Числовой коррелометр с добавлением шума. В таком кор-
релометре вспомогательные шумы добавляются на каждом вхо-
де, а затем суммарные сигналы численно кодируются
(рис. 10.10). Ошибка для такого коррелометра определяется
выражением
Замечание. Из всех приведенных коррелометров только коррелометр
первого типа дает смещение оценки, для остальных трех ошибка стремится
к нулю при неограниченном увеличении объема выборки.
A0.34)
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ 155
Рис. 10.11.
Коррелометр первого и
четвертого типов образуют
плотность вероятности сиг-
нала на интервале [—V, V],
что порождает дополни-
тельную ошибку (рис.
10.11). Неучитываемая
часть при таком усечении
меньше erfc(V/ay2). В об-
щем случае предполагается, что е<10-3, если V>3a. Здесь
На рис. 10.12 приведена ошибка корреляционной функции в
Рис. 10.12.
556
ГЛАВА 10
нуле С@) как функция чис-
ла бит, используемых для
кодирования. Кривая А со-
ответствует классическому
числовому коррелометру.
Ошибка зависит только от
числа бит для кодирования.
Кривые В, С, D, Е и F со-
ответствуют числовому кор-
релометру с добавлением
шумов, когда объем выбор-
ки равен соответственно
102, 10\ 106, 108 и 1010.
Каждый из предложен-
ных типов коррелометров
обладает различными тех-
ническими преимуществами
и недостатками по сравне-
нию с другими. Следова-
тельно, для выбора конк-
ретного типа коррелометра
необходимо знать условия (продолжительность, спектр сигнала
и необходимую точность результата).
Представляет интерес один частный случай, когда требуется,
чтобы систематическая ошибка была меньше ошибки оценки.
Из предыдущих вычислений следует, что оптимальный коррело-
метр с точки зрения компромиссного удовлетворения всех тре-
бований должен добавлять вспомогательный шум на каждом из
двух входов, а затем производить кодирование сигналов и вы-
числять знак G уровней дискретизации). Из рис. 10.13 видно,
что в этом случае ошибка дискретизации меньше ошибки оцен-
ки. Для того чтобы ошибка оценки равнялась 10~4 (что соответ-
ствует объему выборки 108), для коррелометра с классической
дискретизацией требуется кодирование с 8 входами B56 уров-
ней), в то время как коррелометр с добавлением вспомогатель-
ных шумов с двумя входами и вычислением знака дает меньшую
ошибку.
10.6. Важное замечание
До сих пор рассматривались два случайных сигнала, для ко-
торых среднеквадратичная ошибка оценки имеет порядок 1/УВГ
или 2/yiV, если сигналы дискретизованы с частотой Шеннона.
Можно показать, что для сигнала и шума отношение сигнал/шум
(увеличение этого отно_шения и является целью обработки сиг-
нала) имеет порядок fJV или УВТ.
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ ДИСКРЕТИЗАЦИИ]57
В некоторых случаях, например при измерении биологиче-
ских потенциалов, значение отношения сигнал/шум, равное не-
скольким десяткам, является достаточным. Тогда1) систематиче-
ская ошибка может быть очень большой и даже неприемлемой
(рис. 10.12). Например, результаты измерения биопотенциалов
с помощью устройства, осуществляющего кодирование с одним
вводом после добавления шума, будут получены с очень боль-
шой ошибкой. Поэтому необходимо обращать большое внимание
на влияние используемого объема выборки или, в общем слу-
чае, на произведение ВТ.
10.7. Замечание относительно генераторов
вспомогательных шумов
Вспомогательные шумы могут быть «белыми» в области рас-
сматриваемых частот. Такие шумы с заданной плотностью ве-
роятности можно генерировать с помощью резисторов. Следует
отметить в этой связи работы группы применений случайных
электронных процессов Национального политехнического инсти-
тута в Тулузе под руководством проф. Хоффмана. Однако вспо-
могательные шумы могут быть также «псевдошумами», генери-
руемыми с помощью двоичных последовательностей псевдослу-
чайных величин по следующей схеме:
1. С помощью р двоичных переменных генерируется последо-
вательность псевдослучайных чисел S(i). Число членов этой по-
следовательности выбирается максимально возможным и, как
известно, равно 2р—1.
2. По множеству N двоичных пе-
ременных S{i), S(t+1) S(i+p— 1)
для всех i=\, ..., 2"—1 образуется
число, которое по определению равно
амплитуде b(i) генерируемого шума.
Псевдослучайный сигнал Ь (i)
можно легко получить в виде напря-
жения следующим образом:
• Смещающий регистр из р эле-
ментов замыкают на него себя с по-
мощью схемы Исключающее ИЛИ,
что позволяет получить максимальное
число членов последовательности слу-
чайных чисел (разд. 12.6).
Когда число N мало. —Прим. пере».
Рис. 10.14.
158
ГЛАВА 10
Состояние р регистров
через равные промежутки
времени представляет дво-
ичное число, которое пере-
водится в соответствующее
ему напряжение путем ана-
лого-цифрового преобразо-
вания с помощью совокуп-
ности сопротивлений R—2R
согласно схеме, приведен-
ной на рис. 10.14 (р = 7).
Число членов последовательностей для двух вспомогатель-
ных шумов равно: 27—1 = 127 для р = 7 и 29—1 = 511 для р = 9.
Полученное распределение псевдослучайных чисел равномерно,
поскольку каждое из 2р—1 равноотстоящих чисел будет полу-
чено только один раз. Вычисление автокорреляционной функ-
ции с помощью ЭВМ осуществляется в соответствии с теорети-
ческой схемой вычислений, предложенной ниже. И наконец, при
наличии небольшой корреляции между двумя последовательно-
стями псевдослучайных чисел в первом приближении можно их
рассматривать как независимые.
Теоретические расчетные формулы для автокорреляционной
функции с использованием вспомогательных «шумов». Пусть
S(i)—генерируемый псевдослучайный сигнал. Известно, что
автокорреляционная функция такого сигнала определяется вы-
ражением (рис. 10.15):
Используемый «шум» порожден последовательностью псевдо-
случайных чисел S(i):
Вычислим автокорреляционную функцию С (г) сигнала b(i):
Рис. 10.15.
ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ ПРИ ДИСКРЕТИЗАЦИИ 159
Положив l = k' + r, m=k—i и n = l—i, получаем
Все, что было сказано выше о корреляционных функциях,
можно распространить на другие статистические параметры
(например, функцию неопределенности (гл. 23)) и многие дру-
гие расчеты. Эти вопросы рассматривались на I Международ-
ном симпозиуме по стохастическим вычислениям, который со-
стоялся в 1978 г. в Тулузе (Франция).
Л ИТЕРАТУРА
1. Коfman W. Contribution a la mesure de la fonction d'ambigulte, These d'in-
genicur-docteur, 1972.
2. Bourcux F. Contribution a l'etude des erreurs dans l'analyse spectrale par
correlation (These), 1973.
3. Kofman W., Chaudourne S. Etude d'un correlateur utilisant deux sources de
bruits auxihaires, Onde electrique, 53, No. 6, pp. 216—223, 1973.
4. Keyen Ch., Moore A. D. Modified digital correlator and its estimation errors,
IEEE Trans, of information theory.
5. Knowles J. В., Tsui M. T. Correlating devices ant their estimation errors,
/. of Appl. phys., 38, No. 2, 1967.
6. Bonnet G. Les correlateurs utilisant la quantification des signaux, Cours
d'ete OTAN, Marine Nationale, 1962.
7. Berthier D. These d'ingenieur-docteur, Rapport CEA, 3842.
8. Picinbono B. Sur certains problemes concernant la detection des signaux
faibles, Annales des Telecommunications, 16, No. 12, 1961.
Отсюда окончательно получаем
Если предположить, что ф^=0 для всех k = 0, то из выражения
,A0.35) следуют приближенные равенства
Глава
ОСНОВНЫЕ СВОЙСТВА
КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
И СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ
Введение
Мы разбили множество функций на три класса: 1) случай-
ные стационарные функции (имеется в виду стационарность 2-го
порядка1'), которые не содержат периодичностей и моменты 1-го
и 2-го порядка которых не зависят от начала отсчета времени;
2) периодические функции; 3) переходные функции, которые не
содержат периодичностей и для которых выбор начала отсчета
времени имеет существенное значение.
Ниже мы будем рассматривать центрированные сигналы, т. е.
сигналы с нулевым средним значением. Напомним (разд. 8.11),
что в случае центрированных сигналов к корреляционной функ-
ции центрированного сигнала следует добавить произведение
тхту средних значений, а к спектральной плотности ¦— произве-
дение mxmy8(v), где 6(v)—импульсная функция Дирака.
') Это означает, что математическое ожидание процесса не зависит от
времени, а ковариация значений процесса в моменты t\ и tj зависит только
от t\ — ti. В отечественной литературе более распространен термин «стацио-
нарный процесс в широком смысле». — Прим. ред.
11.1. Центрированные случайные стационарные функции,
обладающие свойством эргодичности
Определение. Автокорреляционной функцией называется
функция
A1.1)
Теория, мой друг, суха,
Но зеленеет жизни древо.
Гёте
II
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 161
Были определены также спектральная плотность (мощности)
SM(v) = TF{Cx,(x)}, A1.2)
взаимная корреляционная функция
и взаимная спектральная плотность (мощности)
Sxu(y>) = TF{Cxu(T)}. A1.4)
Ниже, если не оговорено противное, будут рассматриваться
вещественные временные функции, т. е. такие, которым соответ-
ствуют вещественные корреляционные функции.
Свойства автокорреляционной функции. Автокорреляционные
функции обладают рядом свойств, которые мы приведем без
доказательства.
1. Четность:
CxxW = Cxx(-t). A1.5)
Из этого свойства следует, что достаточно определить автокор-
реляционную функцию только для положительных (или отрица-
тельных) значений т, а затем можно продолжить эту функцию
четным образом на отрицательные (положительные) значения т.
Из четности автокорреляционной функции вытекает, что ее
фурье-образ содержит только косинусоидальные члены преоб-
разования:
A1.3)
2. Автокорреляционная функция имеет максимум при т=0.
Если хфО, то
|сл,(т)Ксчх@). (П.6)
Отметим, что величина
представляет собой среднее значение квадрата, или дисперсию,
или квадрат эффективного значения, или среднюю мощность
функции x(t).
3. При неограниченном росте т автокорреляционная функция
случайного центрированного сигнала стремится к нулю
СдД>.)-0 A1.7)
162 ГЛАВА И
Следовательно, для любого положительного е>0 существует
такое положительное тм> что при условии |т|>тм выполняется
неравенство |С«(т)|г^е.
Свойства спектральной плотности. Поскольку Схх(х) —веще-
ственная четная функция, то спектральная плотность Sxx(v)
также является вещественной четной функцией. Поэтому
—оо U
Это фундаментальное соотношение позволяет переходить от
спектральной плотности мощности к автокорреляционной функ-
ции и наоборот. Важное приложение соотношения A1.8) рас-
смотрено в гл. 13, в которой мы покажем, что целесообразнее
всего определять спектральную плотность по автокорреляцион-
ной функции.
Если сигнал не содержит постоянной компоненты, т. е.
Sxx@)=0, то из выражения A1.8) следует,что f Схх(т)dx = 0.
—ОО
Наиболее часто центрирование сигнала достигается высокоча-
стотной фильтрацией. В этом случае, как показано в разд. 8.11,
отсекается постоянная составляющая, и, следовательно, алгеб-
раическая площадь, ограниченная графиком автокорреляцион-
ной функции центрированного сигнала, равна нулю. Этот ре-
зультат имеет важное практическое значение.
Взаимная корреляция двух случайных функций. Применяя
корреляционный оператор к двум различным случайным функ-
циям, получим взаимную корреляционную функцию
A1.8)
Очевидно, что паре функций x{t) и y(t) соответствуют две кор-
реляционные функции. Вторая взаимная корреляционная функ-
ция определяется аналогично:
A1.9)
A1.10)
Приведем без доказательства некоторые свойства взаимных
корреляционных функций.
Если заменить т на —т, то
Сху(х)=Сух(-х). A1.11)
В общем случае взаимные корреляционные функции не облада-
ют свойством четности или нечетности и не имеют максимума
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 163
при т = 0. Взаимные корреляционные функции двух случайных
центрированных функций стремятся к нулю при г—>-оо
Схв(ос)=Сих(оо) = 0. A1.12)
Кроме того, для любых значений т справедливо неравенство
\Cxu(r)\^~\Cxx@) + Cvy@)}. A1.13)
Если две случайные функции независимы, то при любом време-
ни корреляции соответствующие взаимные корреляционные
функции тождественно равны нулю. Обратное утверждение не-
верно.
Взаимный спектр. Взаимная спектральная плотность. По
аналогии со спектральной плотностью мощности фурье-образ
взаимной корреляционной функции называют взаимной спект-
ральной плотностью мощности, или взаимным спектром:
1F{Cxy(x)}^Sxy(v). A1.14)
В общем случае Sxy(v) —комплексная функция, так что
Произведение Sxy(v)dv определяет мощность взаимодействия в
полосе частот (v, v + Av) и, как мы видели, тесно связано с об-
менной информацией между случайными величинами x(t) и
y(t) в этой полосе. Очевидно, что если Сху(х)—вещественная
функция, то Sxy(v) обладает эрмитовой симметрией1*.
Белый шум. На практике широкое применение находит слу-
чайный процесс, называемый белым шумом, спектральная плот-
ность мощности которого постоянна по всему диапазону частот.
Мощность белого шума не зависит от частоты, и его автокор-
реляционной функцией будет б-функция Дирака. Реально бе-
лый шум не существует; но если спектральная плотность шума
постоянна внутри полосы, пропускаемой системой, то такой шум
можно считать белым (рис. 11.1). Это условие всегда выполни-
>> То есть S*xy(\)=SXy(—v). Символ * означает комплексное сопряже-
ние. — Прим. ред.
A1.15)
A1.16)
164
ГЛАВА И
мо, так как не существует систем с бесконечной полосой пропу-
скания. Автокорреляционная функция такого шума отличается
от 6-функции: ее графиком будет очень узкая кривая, ширина
которой мала по сравнению с временем корреляции (рис. 11.2).
Рис. 11.1.
Рис. 11.2.
Примечание. Спектр рассмотренного шума ограничен со стороны высоких
частот, поэтому подобный шум не совсем «белый» и его часто называют «ро-
зовым» шумом. Эта терминология заимствована из оптики. Известно, что
белый свет содержит все цвета. Если отфильтровать длинноволновую часть
спектра, т. е. наиболее высокие частоты, то свет теряет голубые тона и при-
обретает розовую окраску. Аналогично говорят, что шум окрашен, если он
не белый, т. е. соответствующая спектральная плотность мощности не по-
стоянна.
Гауссов шум. Плотность вероятности этого шума опреде-
ляется выражением
A1.17)
где о2—дисперсия шума, т — его среднее значение.
Гауссовы процессы обладают характерным свойством:
любой такой процесс полностью определяется своими статисти-
ческими характеристиками 1-го и 2-го порядка. То есть можно
вычислить все моменты, зная лишь моменты 1-го и 2-го порядка.
Этим объясняется выбор гауссовых процессов в качестве гипо-
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
165
тезы при расчетах, содержащих погрешности оценок и требую-
щих вычисления моментов более высоких порядков (разд. 8.10).
Кроме того, согласно центральной предельной теореме, сумма
произвольных случайных процессов стремится к гауссову про-
цессу при возрастании числа слагаемых. Сходимость оказывает-
ся настолько быстрой, что если число слагаемых больше 5 или
6 то результирующий процесс очень близок к гауссову.
Рис. 11.3.
Пуассоновский шум. В ядерной физике часто встречается
шум другого типа, порожденный импульсами, распределенными
по закону Пуассона. Вероятность появления п импульсов в ин-
тервале 0 равна
A1.18)
где К—параметр закона Пуассона, или средняя частота.
Из рис. 11.31' видно, что автокорреляционные функции по-
следовательностей импульсов, распределенных по закону ^Пуас-
сона и имеющих либо постоянный знак (положительный или
отрицательный), либо случайный знак, по существу не отлича-
'» На рис. 11.3 приведены графики автокорреляционных функций процес-
са x(t)*=2Ak6(t—tk), представляющего собой последовательность б-функ-
ций, где {tk} — не зависящая от {А*} пуассоновская последовательность точек
на оси t с интенсивностью потока К- В 1-м случае Ak=\(k = G, ±1, ±2, ...).
Во 2-м случае {Ak} является последовательностью взаимно независимых оди-
наково распределенных случайных величин с нулевыми математическими ожи-
даниями. В 3-м случае А2к=1, А№+\= — 1 (*=0, ±1, ±2...). См., например,
книгу: Горяинов В. Т., Журавлев А. Г., Тихонов В. Н. Статистическая радио-
техника. Примеры и задачи, М.: Сов. радио, 1980, стр. 205—243. — Прим.
перев.
166 ГЛАВА П
ются одна от другой; если же знак импульсов чередуется, то вид
корреляционной функции существенно иной. Наличие распреде-
ления импульсов с чередующимся знаком увеличивает «память»
вероятностного процесса, так как знак последующего импульса
определяется знаком предыдущего; именно это приводит к
«уширению» графика автокорреляционной функции.
11.2. Периодические функции
Автокорреляционная функция и спектральная плотность. По
определению автокорреляционная функция периодической функ-
ции с периодом Г[ равна
A1.19)
где п — целое число. Эта автокорреляционная функция обладает
рядом свойств, из которых мы приведем лишь основные. Она
является четной:
Схх(т)=Схх(-т), A1.20)
имеет минимум при т=0:
IC.xtoKC^O) A1.21)
и Схх@) представляет собой квадрат эффективного значения
исходной функции.
В данном случае применима теорема Винера — Хинчина, по
которой корреляционная функция является фурье-образом
спектра мощности, и наоборот:
TF{Cx:c(t)}=Sx». A1.22)
Но если X(v) есть фурье-образ x(t), то
TF{Cxx(x)}=X(v)X*(v), A1.23)
TF{Cxx(r))=\X(v)\\ A1.24)
Sxx(v) = \X(v)\*. A1.25)
Символ X* обозначает функцию, комплексно сопряженную с
функцией X. Кроме того, справедливы следующие соотношения:
A1.26)
A1.27)
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 167
Так как x(t)—периодическая функция, то ее спектр дискретен
и интегрирование сводится к суммированию
Отсюда вытекает важное свойство функции Схх(х): автокорре-
ляционная функция периодического сигнала имеет тот же ос-
новной период, что и сигнал x(t), и содержит все частоты этого
сигнала, и только эти частоты. Действительно, как мы только
что видели, фурье-образ автокорреляционной функции представ-
ляет собой спектр мощности и поэтому равен квадрату фурье-
образа самой функции. А это означает, что автокорреляционная
функция содержит все частоты функции x(t), и только эти ча-
стоты.
Амплитудный спектр автокорреляционной функции пред-
ставляет квадрат амплитудного спектра данной функции
(разд. 2.2). Фазовый спектр автокорреляционной функции тож-
дественно равен нулю. Таким образом, автокорреляционная
функция сохраняет частотную информацию и теряет фазовую
информацию. Итак, хотя автокорреляционная функция периоди-
ческого сигнала сохраняет периодичность сигнала, она дает
искаженный образ сигнала, и это искажение тем больше, чем
богаче частотами сигнал. Очевидно также, что существует бес-
конечно много функций, имеющих одну и ту же автокорреля-
ционную функцию, а именно все функции с одним и тем же ос-
новным периодом и одинаковым амплитудным спектром, но с
разными фазовыми спектрами.
На рис. 11.4а, 11.46, 11.4в приведены графики некоторых
часто встречающихся функций и соответствующих им автокор-
реляционных функций.
Из рассмотренного выше следует, что выбор начала отсчета
для функции f(t) не влияет на автокорреляционную функцию,
так как изменение яачала отсчета приводит к общему сдвигу
фазы в каждой периодической составляющей функции f(t).
A1.28)
A1.29)
где vi = l/7\. Разлагая x(t) в ряд Фурье
получим
168
ГЛАВА 11
Периодическал /рцккция f(t)
АВтокорреллционная функция С(т)
Рис. 11.4а.
Периодически/! функция f(t) Автокорреляционная функция С(т)
Рис. 11.46.
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
169
Взаимная корреляция двух периодических функций с одина-
ковым основным периодом. Пусть Т\ — общий период функций
x(t) и //(/), тогда
Из этих выражений видно, что корреляционная функция двух
периодических функций с одним и тем же основным периодом
есть также периодическая функция с тем же основным перио-
дом. Произведение X(n\i) У*(nvi) представляет собой спектр
мощности взаимодействия двух функций, которое обусловлено
информацией, относящейся к одной из функций и содержащей-
ся в другой. Это означает, что две функции, являясь независи-
мыми, могут обмениваться энергией, равной в среднем нулю, а
следовательно, и информацией, среднее значение которой также
равно нулю (например, функции sin2jiv/ и cos2jtvO-
A1.30)
A1.31)
170 ГЛАВА 11
Взаимная корреляция двух периодических функций с различ-
ными периодами. Пусть x(t) и y(t)—периодические функции с
периодами Ti и Т2 соответственно. Их можно рассматривать как
две новые функции с периодами пТ\ и тГ2, такими, что пТ\ =
= tnT2 = T'. Тогда очевидно, что взаимная корреляционная функ-
ция этих периодических функций будет иметь в качестве основ-
ного период биений Т'. При этом
Связь между корреляцией и сверткой в случае периодиче-
ских функций. Взаимная корреляция и свертка функций x(t) и
y{t) определяются соответственно выражениями
Видно, что операция свертки аналогична корреляции и отличает-
ся от нее инверсией аргумента в одной из функций. Осуществляя
преобразование Фурье свертки, получим
?F{yxy(x)}=X(nvi)Y(nv1).
Отсюда уХу(х)=уУх(-х).
Если одна из функций четная, например x(t), то X*(nvi) =
= X(n\i), и можно сделать вывод, что операции свертки и кор-
реляции тождественны. В данном случае корреляция может
быть интерпретирована как линейная фильтрация.
Взаимная корреляция произвольной периодической функции
с гребневой функцией того же периода. Пусть p(t) —гребневая
функция с периодом Т (разд. 2.6). Эта функция равна нулю
всюду, кроме точек t=nT, где п — целое. Так как p(t) —четная
функция, то результаты операций свертки и корреляции p(t) и
x(t) будут тождественны. Известно, что свертка периодической
функции x(t) с гребневой функцией того же периода дает функ-
цию x{t)\ следовательно, тот же результат получается и для
корреляции. Таким образом, операция взаимной корреляции пе-
риодической функции x(t) с гребневой функцией того же пе-
риода приводит к функции x{t).
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 171
Пределы интегрирования при вычислении корреляции в слу-
чае периодических функций. Мы определили корреляционную
функцию с помощью интеграла по промежутку (—Т/2, Т/2).
Поэтому во избежание ошибок необходимо ограничивать пре-
делы интегрирования одним периодом. Однако в случае перио-
дической подынтегральной функции интегрирование можно
распространить на промежуток, длина которого равна произ-
вольному целому числу периодов. Если длина промежутка не
равна целому числу периодов, то ошибка будет тем меньше, чем
больше периодов содержится в промежутке интегрирования.
Итак, можно брать такой промежуток Т', длина которого вели-
ка по сравнению с периодом Т. Таким образом, мы приходим к
интегралу с бесконечными пределами. В разд. 12.1 и 12.2 мы
исследуем случай, когда автокорреляционные функции и вза-
имные корреляционные функции периодических сигналов вы-
числяются посредством интегралов по промежутку, длина кото-
рого не равна целому числу периодов.
11.3. Переходные функции
Определение переходной функции. Переходной (или аперио-
дической) называется функция, которая не содержит периодич-
ностей и значения которой существенно зависят от выбора на-
чала отсчета времени. Следовательно, переходная функция не
является стационарной (например, импульсная характеристика
линейной системы).
Фурье-образ и спектр переходной функции. Переходную
функцию (которая не является периодической) нельзя разло-
жить в ряд Фурье, однако, по крайней мере теоретически, мож-
но представить интегралом Фурье. Таким образом, переходные
функции обладают непрерывным спектром (спектральной плот-
ностью).
Если x(t) —переходная функция, то
где X(v) ¦—спектр функции x(t). В общем случае X(v) —комп-
лексная функция:
A1.32)
A1.33)
A1.34)
172
ГЛАВА II
Модуль
и аргумент
A1.35)
функции X(v) называются соответственно спектральной плот-
ностью амплитуды и спектральной плотностью фазы. Итак, мож-
но сказать, что функция x(t) представляет собой сумму беско-
нечного множества синусоид с всевозможными частотами и
бесконечно малыми амплитудами. С другой стороны, для опре-
деления фурье-образа этой функции нужно располагать всеми
ее значениями от —оо до +оо, что физически невозможно.
В действительности функция x(t) определена на конечном ин-
тервале (—772, Т/2). А это означает, как мы уже видели, что
спектр определен с точностью, не превосходящей 1/Г по часто-
те (или 2п/Т по круговой частоте). На практике, например,
величину Т выбирают так, чтобы вне интервала длительностью
Т модуль импульсной функции не превосходил р% своего
наибольшего значения. Иногда определяют Т, исходя из нера-
венства
Можно также связать интервал (О, Т) (или (—772, Т/2)) с
комплексным спектром функции x(t).
Итак, функция x(t), определенная при всех значениях /,
рассматривается на интервале (—Т/2, Т/2). Это эквивалентно
умножению x(t) на прямоугольную функцию Пг/2@> равную 1
на интервале {—Т/2, Т/2) и нулю вне его (рис. 11.5). Как было
показано в гл. 6, подобная процедура приводит к искажению
комплексного спектра функции x(t).
Если W(v)—фурье-образ прямоугольной функции, опреде-
ляемый выражением W(v)=T(smnvT/n,vT), то спектр усечен-
Рис. 11.5.
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
173-.
ной функции x{t)
Рис. 11.6.
Физически реализуемые переходные функции. Имеются в ви-
ду переходные функции, равные тождественно нулю при /<0.
В этом случае предпочтительнее использовать преобразование
Лапласа: многие типичные переходные функции нельзя пред-
ставить интегралом Фурье, тогда как их изображение Лапласа
существует. Примером подобной функции является
_(cos/, f>0,
У~[0, /<0.
Выше было показано, что применение преобразований Фурье
и Лапласа к функциям, обращающимся в нуль при /<0, при-
водит к одному и тому же результату. Преобразование Лапла-
са является весьма удобным математическим аппаратом, име-
ются достаточно полные таблицы оригиналов и изображений,
и физики часто используют это преобразование при расчете пе-
реходных процессов.
Автокорреляция и спектральная плотность энергии переход-
ной функции. Как и для случайных и периодических функций,
положим в основу определения автокорреляционной функции
переходной функции три операции: трансляцию вдоль времен-
ной оси, умножение и интегрирование. Однако в данном случае
мы не делим результат интегрирования на время интегрирова-
ния, так как интеграл1'
A1.36)
" Здесь и в выражении A1.37) подразумеваются действительные процес-
сы (см. разд. 3.3). — Прим. ред.
174 ГЛАВА 11
сходится и его среднее значение (по времени) стремится к
-нулю.
Автокорреляционная функция (выражение A1.36)) обла-
дает следующими свойствами: четная функция Схх(т) = Схх(—т.)
(согласно выражению A1.20)), достигает наибольшего значения
при т = 0, т. е. \Схх(т)\^Схх@) (согласно выражению A1.21)),
и стремится к нулю с ростом т, так что СХх(°о)=0.
Фурье-образ автокорреляционной функции TF{C^(t)} =
= S.v.v(v). Отсюда следует соотношение \X(v)\2=Sxx(v). Функ-
ция S.v.r(v) называется спектральной плотностью энергии пере-
ходной функции. Следует отметить, что здесь идет речь именно
о спектральной плотности энергии, а не мощности. Это ясно с
физической точки зрения, ибо понятие мощности для переходной
функции, не равной нулю на малом интервале времени, теряет
смысл".
Отметим, наконец, что
11 Это следует также из определения автокорреляционной функции (вы-
ражение A1.36)), где отсутствует множитель 1/7\ — Прим. ред.
Автокорреляционные функции часто встречающихся переход-
ных функций приведены на рис. 11.7. На нем даны графики пе-
реходных функций, используемых в теории следящих систем;
мы определяем эти функции с помощью преобразования Лап-
ласа
Взаимная корреляция и взаимная спектральная плотность пере-
ходных функций.
По определению
A1.37)
Фурье-образ взаимной корреляционной функции представ-
ляет собой спектр энергии взаимодействия двух функций x(t)
и y{t). Выше мы уже установили, что такой спектр свя-
зан с энергией, которой обмениваются функции x(t) и y{t):
A1.38)
ОСНОВНЫЕ.СВОИСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
175-
Рис. 11.7.
176 ГЛАВА И
Взаимные корреляционные функции обладают следующими
.свойствами;
A1.41)
Важность этого свойства состоит в том, что последнее позво-
ляет определить корреляцию сигналов, представляющих собой
линейные комбинации произвольных функций (случайных, пе-
риодических, переходных).
Так как преобразование Фурье — линейная операция, то
A1.39)
A1.40)
Корреляция и свертка вещественных переходных функций.
Выражение A1.37) для взаимной корреляционной функции мо-
жет быть записано в виде
Таким образом, корреляция двух функций х и у является сверт-
кой хну при условии, что произведена инверсия аргумента
функции у. Так как для вещественных сигналов У(—v) = Y* (v),
то преобразование Фурье приводит к соотношению
11.4. Дистрибутивность операций вычисления корреляции
и спектральной плотности
A1.42)
а для одного сигнала
имно некоррелированны (и только в этом случае), будем иметь
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 177
11.5. Связь между входным и выходным сигналами линейной
однородной во времени системы при условии,
что входной сигнал является случайным
и стационарным 2-го порядка
Линейная фильтрация. В гл. 6 дано определение линейной
фильтрации и соответствующей математической операции, ко-
торая называется сверткой. В случае линейного фильтра
уравнение свертки связывает предшествующие по времени зна-
чения входного сигнала с его значением на выходе в данный
момент посредством импульсной характеристики, которая пол-
ностью описывает линейную систему. Импульсная характери-
стика является откликом на мгновенный импульс единичной
площади (фактически продолжительность импульса должна
быть малой по сравнению с длительностью импульсной харак-
теристики, т. е. переходной функции). Напомним, что преобра-
зование Лапласа импульсной характеристики определяет пере-
даточную функцию линейного фильтра. Напомним также, что
свертке двух функций, зависящих от времени, соответствует
обычное произведение в пространстве частот, и наоборот.
Формулы для средних значений. Пусть h(t)—импульсная
характеристика фильтра,тогда
Следовательно,
Таким образом, сред-
нее значение y(t) равно среднему значению x(t), умножен-
ному на алгебраическую площадь. Отсюда следует также, что
линейный фильтр преобразует стационарный сигнал 1-го поряд-
ка таким образом, что свойство стационарности сигнала сохра-
няется. Кроме того, известно, что
Если #@)=0, т. е. если фильтр отсекает постоянную состав-
" Напомним, что x(t) является стационарным процессом, т. е.
E{x(t — и)} = E{x(t)}=const, и поэтому это выражение может быть вынесено
из-под знака интеграла. — Прим. ред.
178
ГЛАВА И
ляющую, то среднее значение y(t) равно нулю при любой
функции x(t). Подобный фильтр оказывается центрирующим
(разд. 8.11) и высокочастотным.
Интерференционные формулы. Рассмотрим два линейных
фильтра Fi и F2 с импульсными характеристиками Ы (/) и
Рис. 11.8.
Рис. 11.9.
h2 (t) и комплексными усилениями #i (v) и Н2 (v) соответствен-
но (рис. 11.8). Найдем взаимные корреляционные функции для
По теореме Фубини
Полагая 0—u = z, найдем
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
179
Полученное выражение можно записать в виде
Отметим, что
Тогда
В результате находим
A1.43)
A1.44)
A1.45)
A1.46)
A1.47)
A1.48)
A1.49)
A1.50)
A1.51)
A1.52)
A1.53)
A1.54)
Два параллельно соединенных фильтра (рис. 11.9). Если в
формулах A1.43) и A1.47) положить Xi{t)=x2{t)=x(t), то по-
Аналогично выводятся формулы
Переходя к фурье-образам, найдем
Аналогично вычисляются функции вида
В итоге получаем следующие выражения:
J80 ГЛАВА 11
лучим
Сум W = CXX (x)*At (т)*^* (-т), A1.55)
Аналогично выводятся соотношения
Свт « = С,Х (T)*/rt* (-т)*Л2 (т), A1.57)
Synn (y)=S™ М Я1* М Я2 (v), A1-58)
С,1Х(т) = Сл.ж(т)*й1(т), A1.59)
SyiX(v) = Sxx(v)Hi(v). (И.60>
Соотношения между входным и выходным сигналами в «линей-
ной системе (рис. 11.10). Если в соотношении A1.55) положить
У\ = Уг=у и /zi = /i2 = A, то оно примет вид Суу(х)=Схх(х) * h(x)
•Л* (—т) или
Cyv(x) = Cxx(T)*Chh(T), A1.61)
а соотношение A1.59) запишется в виде
Сух(х)=Схх(х)*1Пх). A1.62)
Переходя в пространство частот, получим
Syy(v) = Sxx(v)\H(v)\\ A1.63)
Svx{y) = Sxx(y>)H{v). A1.64)
Соотношения A1.61) и A1.62) интерпретируются следующим
образом. Автокорреляционная функция выходного сигнала пред-
ставляет собой свертку автокорреляционной функции импульс-
ной характеристики системы и автокорреляционной функции
входного сигнала. Интеграл свертки, связывающий вход и вы-
ход системы, устанавливает такую же связь между автокорре-
ляционной функцией входного сигнала и взаимной корреляци-
онной функцией входного и выходного сигналов.
Напомним, что если фильтр стабильный, т. е. его переда-
точная функция W(p) не имеет полюсов на мнимой оси и пра-
вее ее, то W(p)=H(pl2nj).
Соотношения A1.61) — A1.64) упрощаются, если автокорре-
ляционная функция входного сигнала является б-функцией Ди-
рака, т. е. если СХх(х)т8(х). При этом условии соотношения
Рис. 11.10.
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 181
A1.61) и A1.63) принимают вид
Cyy(T)^Chh{r), A1.65)
Syy(v)tt\H{v)f. A1.66)
Иными словами, если автокорреляционная функция входного
сигнала может быть представлена 6-функцией, то фурье-образ
автокорреляционной функции выходного сигнала равен квадра-
ту модуля передаточной функции:
TF{Cyy(T)} = \H(v)\*=--.\WBnjv)\*.
Безусловно, методом, использующим автокорреляционную
функцию входного сигнала, можно найти только модуль пере-
даточной функции (этот метод не дает никакой информации о
ее фазеH. Фазу можно определить по кривой усиления, при-
меняя метод Боде — Байяра. Этот способ не очень удобен, так
как он требует много вычислений. Однако в ряде случаев, на-
пример для систем, в которых сдвиг фазы мал, вполне доста-
точно определить модуль передаточной функции (т. е. кривую
усиления), так как знание модуля дает важную информацию
о системе.
Фильтрация белого шума. Из сказанного выше следует, что
при прохождении белого шума через линейную систему с ма-
лым сдвигом фаз с передаточной функцией W(p) автокорреля-
ционная функция выходного сигнала, фурье-образ которой ра-
вен |WBn/v)|2, дает достаточную информацию о четырехпо-
люснике. В связи с этим полезно иметь набор кривых усиления,
отвечающих автокорреляционным функциям белого шума, про-
пущенного через стандартные фильтры. Несколько характерных
кривых приведено на рис. 11.11. Часто оказывается удобным
рассматривать стационарный шум 2-го порядка (по предполо-
жению центрированный), заданный с помощью автокорреляци-
онной функции С(т) и спектральной плотности S(v), как белый
шум, пропущенный через фильтр, модуль комплексного усиле-
ния которого удовлетворяет условию |#(v) 12=5(v). Автокор-
реляционная функция этого шума равна TF{\H(v) \2} = С(х).
Взаимная корреляция между входным и выходным сигнала-
ми. Идентификация процессов. Если Схх (т) т б (т), то соотно-
шения A1.62) и A1.64) преобразуются к виду
Cyx(T)»h(i), AI.67).
Syx(v)^H(v). A1.68)
Итак, если на вход линейной системы подать сигнал, авто-
корреляционную функцию которого можно представить 6-функ-
!) В разд. 12.8 показано, что предпочтительнее (когда это возможно).
отыскивать |#(v)|2 исходя из соотношения \Sxy(v) \2!\Sxx(v) I2.
182
ГЛАВА И
цией, то взаимная корреляционная функция между входным и
выходным сигналами будет равна импульсной характеристике
системы. Этот важный результат применяется для практическо-
го определения переходных функций и идентификации процес-
сов. Соответствующий метод подробно изучен в разд. 12.6.
Детерминированные сигналы. Результаты гл. 10.5 примени-
мы также и к детерминированным сигналам, если надлежащим
образом определить корреляционные функции (разд. 11.2 и
11.3).
Рис. 11.11
ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 183
Нелинейные системы. Методы, описанные выше, применимы
только к линейным системам. В настоящее время ведутся рабо-
ты по исследованию нелинейных систем. Однако еще слишком
рано делать выводы о практическом значении полученных ре-
зультатов.
Единственным методом изучения нелинейных систем пока
является метод линеаризации в окрестности рабочей точки. При
этом исследуется импульсная характеристика системы в малых
окрестностях сначала одной рабочей точки, затем другой. Это
дает возможность определить элемент характеристической кри-
вой вместе с ее касательной в окрестности рабочей точки.
В данном случае особенно полезен корреляционный метод, так
как он позволяет возбуждать систему сигналом очень малой
амплитуды и наблюдать за ней в течение большого промежутка
времени.
Глава
12
ОСНОВНЫЕ ПРИЛОЖЕНИЯ
КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
И СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ
Трудности существуют в природе для то-
го, чтобы гений исследователя проявил-
ся наиболее ярко.
Пьер Буль (Е=тс2)
Сила — в воображении.
Герберт Маркузе
Прежде чем перейти к решению практических задач, рас-
смотрим основные приложения корреляционных функций и
спектральных плотностей. Хотя число основных приложений
сравнительно невелико, последние служат источником решения
разнообразных практических задач. Мы рассмотрим следующие
основные приложения: обнаружение и выделение сигнала на
фоне шума; обнаружение скрытых периодичностей; получение
спектральных плотностей энергии на основе корреляционной
функции с помощью теоремы Винера — Хинчина (и наоборот);
определение динамических характеристик линейных систем, ко-
герентности и сдвига между сигналами.
Важное замечание. Дуальность времени и частоты приводит
к тому, что любой результат, полученный путем использования
корреляционных функций, может быть получен также с по-
мощью спектральных плотностей. При проведении практиче-
ских расчетов требуется выбрать одну из переменных — время
или частоту. Во многих случаях можно сделать этот выбор,
руководствуясь простым соображением: «.узкий» во времени
сигнал является протяженным по частоте, и наоборот.
12.1. Обнаружение периодического сигнала
на фоне помех с помощью автокорреляции
Обнаружить сигнал на фоне помех означает ответить на во-
прос: существует сигнал или нет? Задача определения его фор-
мы при этом не ставится.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 185
Основы метода. Пусть p(t)—периодический сигнал с неиз-
вестным (основным) периодом Т\ и b(t)—шум. Рассмотрим
суперпозицию
x{t) = p(t)-\-b{t). A2.1)
Для упрощения предположим, что p(t) и b(t) центрированы,
т. е. их средние значения равны нулю, тогда сигнал x(t) также
будет центрирован. С точки зрения физики эта гипотеза вполне
естественна, так как на практике всегда исключают постоянную
компоненту, чтобы не «загромождать» измерительную аппара-
туру, шкала (или динамический диапазон) которой всегда огра-
ничена.
Автокорреляционная функция в данном случае определяется
выражением
г
Cxx(x) = lim -i- f [p(t) + b(t)]\p(t-T) + b(t-T)]dt. A2.2)
О
В силу свойства дистрибутивности корреляционного оператора
имеем
Cxx{x)=Cpp{x)+Cbb(x)+Cpb(x)+Cbp (х). A2.3)
Можно считать, что шум b(t) и сигнал p(t) независимы. При
этом условии корреляционные функции Срь(х) и СьР{х) тожде-
ственно равны нулю (с точностью до погрешностей оценок,
обусловленных конечным временем интегрирования). Автокор-
реляционная функция шума Сьь(х) стремится к нулю с возра-
станием т (разд. 11.12); следовательно, для достаточно боль-
ших значений т (больших по модулю некоторого ti) величина
Съь(х) практически равна нулю (с точностью до погрешности
оценки). Значение ti, начиная с которого автокорреляционную
функцию Сьь{х) можно положить равной нулю, зависит от ха-
рактеристик шума, и в частности от его спектральной плотно-
сти: чем шире полоса частот шума при заданной полной мощ-
ности, тем быстрее убывает автокорреляционная функция. Итак,
при |t|>ti в выражении для автокорреляционной функции пе-
риодического сигнала остается только одно слагаемое:
Схх(т)=Срр(х). A2.4)
В действительности
Схх(х)=Срр(х) + г(х), A2.5)
где ошибка е(х) тем меньше, чем больше время интегрирования
Т (или временная константа усредняющего низкочастотного
фильтра).
Итак, описанный метод позволяет обнаружить периодиче-
ский сигнал на фоне шума.
186 ГЛАВА 12
В разд. 11.2 показано, что если периодический сигнал с пе-
риодом Т\ разложить в ряд Фурье
'' Так как автокорреляционная функция не зависит от фазы, то нет необ-
ходимости учитывать начальную фазу синусоидального сигнала.
то его автокорреляционная функция будет представлена рядом
A2.6)
A2.7)
Из последнего выражения следует, что форму сигнала таким
методом восстановить невозможно, так как в этом случае опре-
деляется лишь квадрат его модуля, а информация о фазе пол-
ностью теряется. Очевидно, что форма остается неизменной и
может быть восстановлена, если p(t) —синусоидальный сигнал.
Увеличение отношения сигнал/шум при обнаружении сигнала
с помощью корреляции. Пусть х(t)=Kcos2nft+b(t)—сигнал1),
содержащий шум. Для упрощения записи обозначим 2я/=со.
Будем считать, что шум b (t) центрирован и является стацио-
нарным процессом 2-го порядка со спектральной плотностью
Sbb{t). Исходя из определения автокорреляционной функции
находим ее оценку
Вычислим теперь Е{СХХ(%)} и Var{C**(t)} (как в гл. 9).
Вычисление Е{Схх(х)}. В данном случае выражение
может быть представлено в виде суммы следующих трех сла-
гаемых:
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 187
вследствие стационарности b(t). Следовательно,
что можно также записать в виде
Так как шум b(t) центрирован, то эти два последних слагае-
мых равны нулю. '
или
Если произведение a>T = 2nfT=2n(TITi), где Т\ — период сигна-
ла, достаточно велико, то
A2.10)
Вычисление Уаг{Схх(х)}. Согласно выражению (9.9),
Вычислим Е{\Схх{т:) |2}. По определению имеем
что приводит к математическому ожиданию двойного интеграла:
188 ГЛАВА 12
Освобождаясь от скобок, получим 16 слагаемых, каждое из ко-
торых является математическим ожиданием одного из 16 двой-
ных интегралов. Все эти интегралы вычисляются по (теореме
Фубини. Один из интегралов содержит детерминированную
функцию Я4 cos со «cos со v cos со (и—т) cos со (о—т), а остальные
содержат моменты 1, 2, 3 и 4-го порядков функции b(t). По-
скольку шум b(t) центрирован, моменты 1-го порядка обраща-
ются в нуль. Если дополнительно предположить, что b(t) —
гауссов шум, то обратятся в нуль все моменты нечетного поряд-
ка (разд. 8.10). В результате остается шесть моментов 2-го по-
рядка и один момент 4-го порядка.
Таким образом, вычисление Е{\СХХ{%) |2} сводится к вычис-
лению восьми двойных интегралов:
1
A2.11)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 189
При этом I=Ii + l2-'rh+h + h + h + h + h. Нетрудно убедиться
в том, что
Вычислим сумму /3 + /4. Имеем
Поскольку b(t)—гауссов шум, то, согласно выражению (9.28),
получаем
Вычислим теперь интеграл 1\. Так как
то
Этот интеграл был уже 'найден при вычислении математиче
ского ожидания Е{Схх(г)}. Таким образом,
A2.12)
Вычислим интегралы h и /7. Эти два интеграла имеют одно и
то же значение:
A2.13)
190 ГЛАВА 12
Следовательно,
j»
Учитывая соотношения A1.14) и A1.15), получаем
Вычислим интеграл /5. Получаем
A2.14)
A2.15)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 191
Применяя формулы (9.14) и (9.15), найдем
Вычислим интеграл 1%:
или, согласно выражению (9.14),
Итак, получаем в результате
A2.17)
A2.16)
192
ГЛАВА 12
A2.18)
Три последних слагаемых входят в сумму дважды, но с проти-
воположными знаками, поэтому они взаимно уничтожаются.
Положим T = nTi + aTu где |а|<1. Если п достаточно велико,
т. е. промежуток интегрирования содержит достаточно большое
число периодов искомого сигнала, то можно пренебречь сла-
гаемыми, содержащими sin шГ/соГ. Тогда
т
то
Поскольку (разд. 2.14)
A2.19)
A2.20)
A2.21)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 193
Учитывая, что Сьь{х) стремится к нулю с увеличением Т, по-
лучаем в результате два слагаемых:
или
Если предположить, что Sb&(v) мало изменяется в области, где
величина (sin nvTInvTJ существенно отлична от нуля, то
Предполагая, что спектральная плотность шума b(t) постоян-
на в полосе частот (—В, В), получим Sbb(f)=o2/2B и
Первое слагаемое можно записать в виде
A2.23)
A2.24)
где а2 — дисперсия шума.
При тех же допущениях легко вычислить интеграл
Действительно, исходя из соотношений
и учитывая равенство Парсеваля
найдем
A2.22)
]94 ГЛАВА 12
Окончательно имеем
Замечание. Может показаться невозможным обнаружить пе-
риодический сигнал с помощью метода вычисления автокорре-
ляции, если отношение сигнал/шум на входе коррелометра
слишком мало. Тем не менее существует способ увеличить это
отношение. Он состоит в разбиении всего спектра на полосы
путем фильтрации. Предположим, что шум b(t) мощности о2ь
имеет постоянную спектральную плотность в рассматриваемой
спектральной полосе. Если эту полосу разделить на две равные
части, то мощность шума в каждой из них будет равна '/га2*,
при делении на четыре части мощность в одной части будет
xUo'2b- Отсюда видно, что разбиение исходной полосы на четыре
Отсюда вытекает соотношение
Отношение сигнал/шум до вычисления корреляции было равно
A2.26)
Это отношение после вычисления корреляции оказывается рав-
ным
A2.27)
A2.28)
Увеличение отношения сигнал/шум по мощности, которое обо-
значим RsjRe—G, определяется формулой
A2.29)
Из последнего выражения следует, что увеличение отношения
сигнал/шум, достигнутое путем вычисления автокорреляции,
пропорционально 2ВТ и зависит еще от отношения сигнал/шум
на входе коррелометра. Если Re^h, то Gm2BTRe. Из форму-
лы A2.28) следует также, что автокорреляция увеличивает от-
ношение СИГНал/шуМ ТОЛЬКО При УСЛОВИИ BT>1/2Re-
Примечание. Усиление по «амплитуде» будет равно
A2.29а)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 195
равные части дает увеличение отношения сигнал/шум на входе
на 12 дБ.
При работе в реальном масштабе времени необходимо, что-
бы каждой полосе соответствовал свой коррелометр. Выполне-
ние этого условия может показаться трудным и дорогостоящим,
однако с появлением коррелометров на интегральных схемах
это препятствие вполне преодолимо. Если предположить, что
разбиение спектра на полосы осуществляет система из 10 или
100 параллельно соединенных коррелометров, то это приводит
к увеличению отношения сигнал/шум на входе на 20 или соот-
ветственно на 40 дБ.
12.2. Обнаружение периодического сигнала с известным
периодом на фоне шума
Основы метода. Итак, предположим, что основной период Т\
сигнала известен. Рассмотрим взаимную корреляцию сигнала
x(t)=p(t)+b(t) с вспомогательным сигналом P{t), основной
период которого также равен 7V
A2.30)
A2.30а)
или
Так как функции P(t) и b(t) независимы, то функция Сър рав-
на нулю (с точностью до погрешности оценки), следовательно,
СхР(т)^СрР(т). A2.31)
Взаимная корреляционная функция Срр{%) двух периодических
сигналов с одинаковым основным периодом 7\ будет также
периодической с тем же основным периодом. Отметим, что
функция P(t) центрирована и имеет период 7\ (никакие другие
условия на нее не налагаются). Таким образом, имеется боль-
шая свобода выбора P(t)\ для ее построения можно исходить,
например, из автокорреляционной функции для x(t).
Метод обнаружения сигнала с помощью взаимной корреля-
ции имеет ряд достоинств. Например, соотношение A2.3) со-
держит функцию Сьб(т), стремящуюся к нулю с возрастанием
т, но отличную от нуля в начальный момент времени. Функция
Сьь{т) не входит в соотношение A2.30), благодаря чему мож-
но проводить измерения при малых значениях т. В выражении
A2.3) содержатся три слагаемых, порождающих ошибку:
?ьь(т), СьР{%) и СрЬ{%), тогда как в выражении A2.30) имеет-
ся только одно слагаемое Сьр(г). Можно ожидать, что этот ме-
тод даст большое увеличение отношения сигнал/шум по срав-
196 ГЛАВА 12
нению с автокорреляционным методом. К сожалению, довольно
часто мы не знаем достаточно точно значение периода функ-
ции p{t).
Увеличение отношения сигнал/шум при обнаружении перио-
дического сигнала на фоне шума методом измерения его взаим-
ной корреляции с периодическим сигналом той же частоты. Для
упрощения выкладок допустим, что оба периодических сигнала
являются монохроматическими. Пусть
x(t)=Xcos2nft-{-b(t),
где по предположению b(t)—стационарный процесс 2-го по-
рядка со спектральной плотностью Sbb{v). Рассмотрим взаим-
ную корреляцию x(t) с периодическим сигналом y{t) =
= acos2nf\t, имеющим период 2\ = l/fi. Одна из взаимных кор-
реляционных функций определяется соотношением
Аналогично определяется другая функция:
. A2.32)
A2.32а)
Свойство СХу(х) = СуХ(—т) не обязательно выполняется для
оценок:
A2.33)
A2.33а)
или в более подробной записи:
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
197
Положим
A2.34)
A2.35)
A2.36)
где Ci (т) и С2 (т) — взаимные корреляционные функции двух
периодических сигналов. Отметим, что в выражении для Ci(x)
сигнал частоты /i запаздывает по отношению к сигналу часто-
ты /, а в выражении для С2(т) запаздывающим является сиг-
нал частоты /. Величины С\ (т) и С'ч (т) представляют собой
взаимные корреляционные функции шума b(t) и периодического
сигнала.
Рассмотрим сначала взаимные корреляционные функции
Ci(t) и Сг(т). Вычислим интеграл
Это выражение можно записать в виде
Аналогичным образом находим C2(x)=M2COsBnfx+<B), где
М2 и ф2 находятся из Mt и <pi перестановкой / и /ь
Очевидно, что М\ и М2 обращаются в нуль при услови?
T=k\/fi = klf. Таким образом, Ci(t) и ^(т)—периодически*
функции с частотами /i и / соответственно.
После простых, но громоздких тригонометрических преобразо-
ваний находим
198 ГЛАВА 12
и при Т—уоо Мг = М22—кг2А,2/4. Этот результат получается
также при T=kl\\.
Найдем теперь взаимную корреляционную функцию b(t) и
о cos 2nf\t.
Имеем
Если функция C'i(t) не равна тождественно нулю, то она пе-
риодична (с частотой /i), т. е. C"i(t)=C"i(t—kT\), где Ti = l/fu
Это следует из тождества
Если [ф{\, то амплитуды Мх и М2 стремятся ж нулю при
стремлении Т к бесконечности. Если же f=fi, то
A2.37)
A2.38)
которое становится очевидным, если учесть, что cos 2ixfi (t—t) =
^cos2nfi(t—т—kTi).
Необходимо отметить, что нами доказана периодичность
оценки взаимной корреляционной функции шума и периодиче-
ского сигнала частоты f\, а также периодичность взаимной кор-
реляционной функции двух периодических сигналов на любом
временном промежутке (кроме промежутка, длина которого
кратна обоим периодам). Подобный результат не мог быть
предсказан заранее.
Найдем E{C'i(%)}\
A2.39)
где mb=E{b(t)}.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 199
Полученное выражение является периодической функцией
периода Тп оно обращается в нуль, если T=kTi. Само собой
разумеется, что E{C'i{%)} = 0, если E{b(t)}=0. Найдем
Var{C'i(t)}:
или
A2.41)
Делая те же допущения, что и в предыдущем разделе, найдем
а усиление по амплитуде G'=y2BT.
Напомним, что увеличение отношения сигнал/шум является
случайной величиной. Вероятность того, что эти величины при-
мут значения, определенные полученными формулами, равна
68%').
" Это справедливо в предположении, что оценка С/(т) является случай-
ной, подчиняющейся нормальному закону. — Прим. ред.
Выкладки, аналогичные проделанным в предыдущем разделе,
приводят к следующему результату:
В предположении, что b(t)—центрированный сигнал, а Т ве-
лико по сравнению с Ти получим
A2.40)
Отношения сигнал/шум до вычисления корреляции и после вы-
числения равны соответственно Re = №l2o2 и
A2.43)
A2.44)
Усиление отношения сигнал/шум по мощности равно
200 ГЛАВА 12
Заключение. Из приведенного исследования взаимной корре-
ляционной функции, полученной интегрированием по промежут-
ку конечной длины, нельзя сделать никаких выводов о сущест-
вовании периодического сигнала. В самом деле, корреляцион-
ная функция (на конечном промежутке интегрирования) перио-
дична (выражения A2.37) и A2.38)), но это, однако, не озна-
чает присутствия периодического сигнала. Чтобы извлечь по-
добную информацию, необходимо знать временную эволюцию
взаимной корреляционной функции. Если амплитуда ее перио-
дической компоненты уменьшается с ростом Т, то можно счи-
тать, что сигнал не содержит периодической составляющей.
В противном случае можно предполагать наличие такой со-
ставляющей. Кроме того, в любом случае представляет интерес
измерение дисперсии и исследование ее эволюции во времени.
Нельзя ограничиваться только нахождением корреляционной
функции. Нужно обязательно определять зависимость оценки
корреляционной функции от времени и одновременно с этим
вычислять ее дисперсию.
Замечание 1. При нахождении достаточно простых формул
для погрешностей оценок делают ряд упрощающих допущений.
Однако не следует переоценивать полученные при этом выра-
жения: к ним надо относиться как к оценкам порядка соответ-
ствующих величин. Более предпочтительно проводить непосред-
ственные оценки дисперсий, что современная вычислительная
техника позволяет делать сравнительно легко.
Замечание 2. Как показано в разд. 9.8, для оценки усиления
целесообразно использовать произведение ВТ, а не объем N
выборки при дискретизации.
12.3. Выделение сигнала на фоне шума. Усреднение
Основы метода. Рассмотрим снова периодический сигнал.
Но теперь нас будет интересовать не только обнаружение, но и
выделение его на фоне шума, т. е. восстановление формы сиг-
нала.
В разд. 10.2 мы видели, что взаимная корреляция периоди-
ческого сигнала с гребневой функцией Ш(/) того же периода
дает исходный сигнал. Пусть функция Ul(t) (разд. 2.6) имеет
период Т\. Рассмотрим функцию
СхШ(г)=Срш(т:)+Сьш(г). A2.45)
С точностью до погрешности оценки Сйш(т)=0, Срш(т)=р(т).
Следовательно, Схш(%) =р(х) (с той же точностью). Мы полу-
чаем, таким образом, способ выделения сигнала из шума.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 201
Увеличение отношения сигнал/шум. Пусть x(t)=s{t)+b(t).
Взаимная корреляция функций x(t) и Ш(/) равна
Обозначил! целую часть отношения T/Tt через М, тогда
Так как s(x) — периодическая функция с периодом Ти то
/1=(М/ГM(т).
Интеграл h представляет собой остаточной шум, так как он
равен нулю только при бесконечно большом Т. Если Т имеет
конечное значение, то дисперсия интеграф, являющаяся дис-
Представим Схш(х) в виде суммы двух слагаемых:
Интеграл h можно записать в виде
Отсюда следует, что
или
где
и
202 ГЛАВА 12
Персией оценки СхШ(т), равна
Полученное выражение можно записать в виде
или
Так как E{b(x+kTl)b(T+nT1)} = Cbb((k—n)T\), то в предполо-
жении, что корреляция Сьь{и) равна нулю при \и\^.Тх, полу-
чим
Среднеквадратичное отклонение будет равно (\/Т)уМоь.
Сравнивая отношение сигнал/шум Re= \s(t) \2/а2ь до вычис-
ления корреляции и Rs=(l/T2)M2\s(t) \2/(l/T2)Mab2 после вы-
числения корреляции, найдем увеличение отношения сиг-
нал/шум G=M, где М — число периодов, и усиление по ампли-
туде С = ^М.
Если Т — полное время интегрирования, а Т\ — период сиг-
нала, то
или
где F\ — основная частота, т. е. самая низкая частота сигнала.
Выделение повторяющегося сигнала на фоне шума в случа-
ях, когда известны моменты появления самого сигнала или свя-
занного с ним вспомогательного сигнала. В общем случае эта
задача содержит два аспекта: 1) обнаружение сигнала; 2) вы-
деление сигнала с наименьшей ошибкой.
Отметим два частных случая, когда нет необходимости уста-
навливать присутствие сигнала:
а) сигнал периодически повторяется через промежуток вре-
мени Го без изменения формы:
A2.46)
A2.46а)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
203
б) периодический сигнал обнаруживается всякий раз не не-
посредственно, а через предшествующее ему событие с извест-
ным временем появления (рис. 12.1).
Очевидно, что оба этих случая (периодический сигнал и
сигнал, связанный со стимулятором s(t)) не имеют принципи-
ального различия. В целях упрощения выкладок предположим,
Рис. 12.1.
что реализуется первый случай. Метод, который будет изучен,
известен под названием метода усреднения (или накопления
данных). Укажем два наиболее важных его приложения:
• получение импульсной характеристики системы по откли-
ку, который представляет собой импульсную характеристику,
искаженную шумами;
• физиологические процессы, где имеют дело с изучением
наведенных потенциалов.
При исследовании физиологических процессов измеряют раз-
ность потенциалов, которую изменяют в ходе процесса, исполь-
зуя для этого внешнюю контролируемую причину, называемую
стимулятором. Так обстоит дело в электроэнцефалографии,
электромиографии, электрокардиографии, электрокортикогра-
фии и др. Промежуток времени, в течение которого действует
стимулятор, предполагается достаточно малым. Время между
действием стимулятора и появлением отклика (говорят также
«наведенного отклика») называется временем задержки (или
мертвым временем). Оно равно временному сдвигу в импульс-
ной характеристике.
204 ГЛАВА 12
Сформулируем две основные гипотезы, к которым, однако,
нужно относиться с осторожностью (тем более что нет простых
способов проверки их законности):
• сигнал повторяется тождественно, т. е. без изменения
формы;
• сигнал жестко связан во времени со стимулятором, т. е.
время задержки считается постоянным.
Основы метода усреднения. Предполагая, что высказанные
гипотезы справедливы, рассмотрим периодический сигнал r(t),
содержащий шум b(t). В электроэнцефалографии этим шумом
будет электроэнцефалограмма, соответствующая нормальному
режиму1', а также всегда возможные помехи.
Условия, налагаемые на шум b(t). Прежде всего предполо-
жим, что шум является стационарным процессом 2-го порядка,
т
так что его среднее значение /n=(l/T)j b(t)dt, средняя мощ-
'' То есть в отсутствие сигнала. — Прим. ред.
ность
и автокорреляционная функция
инвариантны относительно транс-
ляции вдоль временной оси.
Предположим также, что шум центрирован, т. е. его сред-
нее значение равно нулю, а спектр не содержит постоянной со-
ставляющей. В этом случае дисперсия Оь2 равна средней мощ-
ности Р, а аь называется эффективным значением шума.
Очевидно, что определенные выше средние значения ш, оь2,
Сьь{х) тем ближе к точным, чем больше Т. Выражение
Усреднение. Итак, рассмотрим сигнал x{t) =r(t) +b{t). Так
как r\t) —периодическая функция с периодом То, то
при любом целом k.
Запишем отношение сигнал/шум в виде р= |г(/) |/аб. Мы
ввели отношение сигнал/шум по амплитуде, так как именно с
этой величиной имеет дело исследователь.
Пусть М — число импульсов стимулятора за некоторый про-
межуток времени. Рассмотрим сумму М соответствующих сиг-
представляет собой оценку величины
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 205
налов, деленную на М:
Положим t = ti, O<ii<io, тогда
A2.48)
A2.49)
Вследствие периодичности г(/<—kT0)=r(ti). Следовательно,
A2.50)
отсюда вытекает равенство
Найдем E{z(ti)}:
Изменив порядок операций суммирования и усреднения, полу-
чим
A2.51)
A2.51а)
Так как b(t) — центрированная функция, то
Вычислим '
Отметим, что
тогда
A2.52)
A2.53)
A2.54)
06
ГЛАВА 12
Таблица 12.1
0
1
2
3
4
;
м—з
М—2
уИ—1
0.
С@)
С(-1)
С(-2)
С(-3)
С(-4)
СC—Ж)
СB-М)
СA-М)
1
СО)
С@)
С(-1)
С(-2)
С(-3)
2
СB)
СA)
С@)
С(-1)
С(-2)
3
СB)
СA)
С@)
С(-1)
4
СB)
СA)
С@)
М—3
С@)
С(-1)
С(-2)
Л1—2
СA)
С@)
С(-1)
М— 1
С(М—1)
С(М—2)
CGW—3)
С(М—4)
С(/И-5)
СB)
СA)
С@)
Эта двойная сумма может быть преобразована (табл. 12.1) в
сумму трех слагаемых:
*=о
Поскольку Сьъ(ХТо) =С6б(—КТ0), то
или
Если автокорреляционная функция шума равна нулю при
любом времени запаздывания по модулю, большему пли равно-
му Тп. ТО
A2.56)
A2.55)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
207
Если при этих условиях отношение сигнал/шум до усредне-
ния было равно \r(t)\/ob, в результате усреднения оно стало
равным
Рис. 12.2.
Если же, напротив, автокорреляционная функция шума не
равна нулю для |т|^Т0 (рнс. 12.2), то
В этом случае отношение сигнал/шум на выходе определяется
выражением
Мы пришли к классическому результату, согласно которому
отношение сигнал/шум умножается на }1М.
A2.57)
A2.58)
Таким образом, если автокорреляционная функция стано-
вится достаточно малой через несколько периодов То, уменьше-
ние отношения сигнал/шум не будет существенным. Поэтому
первоначальная гипотеза о том, что шум не коррелирован для
времен, больших То, не является обязательной. Можно, следо-
вательно, допустить, что в результате суммирования М сигна-
лов отношение сигнал/шум умножается на )Ш. Это означает,
что если при М= 100 усиление равно 10, то при М— 1000 оно до-
208
ГЛАВА 12
полнительно увеличится только в 3,16 раза, так как У1ООО =
=У10У1б= 10X3,16.
Ошибки, обусловленные природой шума. Итак, увеличивая
число М, мы могли бы получить сколько угодно большое значе-
ние отношения сигнал/шум. Однако число М ограниченно. Ес-
тественно, возникает вопрос: можно ли при фиксированном М
увеличить отношение сигнал/шум? Единственный способ добить-
ся этого состоит в увеличении этого отношения на входе ин-
тегратора. А этого можно достичь путем уменьшения эффектив-
ной величины шума Оь, входящей в знаменатель дроби
\r(t)\/ob- Чтобы уменьшить аь, надо применить фильтрацию.
Однако проведение фильтрации вслепую связано с риском иска-
зить форму сигнала r(t). Поэтому желательно было бы знать
спектральную плотность |i?(v)|2 сигнала r(t), чтобы использо-
вать такой фильтр, параметры которого были бы подобраны в
соответствии с |/?(v)]2 (проблема оптимального фильтра).
Однако расчеты показывают, что улучшение отношения сиг-
нал/шум подчиняется логарифмическому закону, и если удастся
сделать фильтр, близкий к оптимальному, то дальнейшее его
усовершенствование за счет более тщательной подгонки пара-
метров не дает ощутимого эффекта.
Так как обычно форма сигнала бывает известна заранее, то
его спектральную плотность находят с помощью преобразова-
ния Фурье. Исходя из этого, можно изготовить такой фильтр,
который исключит все частоты, находящиеся вне спектральной
полосы сигнала r(t) (рис. 12.3).
Рис. 12.3.
Классические интеграторы не позволяют провести необходи-
мые измерения формы сигнала. Однако все чаще появляются
приборы, с помощью которых эту процедуру можно выполнить.
Осуществить после этого необходимую фильтрацию уже не-
сложно.
Ошибки, обусловленные неприменимостью выдвинутых ги-
потез о свойствах сигнала. Напомним эти гипотезы:
• время задержки между актом стимуляции и появлением
сигнала постоянно;
• сигнал тождественно повторяет свою форму.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
20»
В общем случае нет никаких убедительных доводов в поль-
зу этих гипотез. Напротив, имеется достаточно соображений, их
опровергающих.
Рассмотрим первую гипотезу. Хорошо известно, что время
задержки не постоянно; оно зависит от индивидуума и его пси-
хофизического состояния. Исследуем, что происходит, если вре-
мя задержки флюктуирует около среднего значения. Ограни-
чимся наиболее простым случаем, когда наведенный потенциал
Рис 12.4.
представляет собой узкий импульс (рис. 12.4). Было бы оши-
бочно отсюда сделать вывод о форме наведенного потенциала.
Результатом наблюдения является свертка ^Наблюд=.О *R, где
D — распределение времени задержки t, R — наведенный по-
тенциал.
Иными словами, дело обстоит так, как будто истинный на-
веденный потенциал проходит через фильтр с импульсной ха-
рактеристикой D. Отсюда следует, что можно сделать ложное
заключение о различной форме наведенных потенциалов для
двух лиц с сильно различающимися распределениями времен
задержки, хотя не исключено, что отличаются друг от друга
только функции распределения D, а не потенциалы. Кроме то-
го, изменение во времени формы наведенного потенциала мо-
жет быть вызвано изменением времени задержки. Поэтому не-
обходимо уметь каким-либо методом определять функцию рас-
пределения D.
Предположим теперь, что время задержки постоянно, а фор-
ма наведенного потенциала меняется, т. е. она тождественно
не повторяется. Здесь можно допустить серьезную ошибку. Ес-
ли R(t) не повторяет тождественно своей формы, то, как из-
вестно, это равносильно добавлению к повторяющемуся сигна-
лу R(t) медленно флюктуирующего шума. В данном случае ме-
тод суммирования не дает эффекта гашения шума пропорцио-
нально 1ЦМ, и даже в пределе процесс суммирования не при-
водит к исчезновению шума. Если предположить, что указан-
ная добавка к наведенному потенциалу является медленно ме-
210 ГЛАВА 12
няющейся функцией, т. е. соответствующий ей спектр занимает
полосу, меньшую, чем спектральная полоса наведенного потен-
циала, то тогда можно надеяться на улучшение с помощью
фильтрации. Но верно ли это предположение? Можно лишь
утверждать, имея в виду аналогию с электрооптикой, что пара-
метры системы зависят от времени, т. е. система нестационар-
на, и что метод усреднения в данном случае, строго говоря, не-
применим. Если же его все-таки применить, то получится не
истинный наведенный потенциал, а некоторое среднее значение
(в очень широком смысле) потенциалов, которые мы рассмат-
риваем.
Вывод, который можно сделать в настоящее время, состоит
в том, что метод усреднения — один из самых плодотворных;
хорошо известно его успешное применение. Однако надо пом-
нить, что для его применения требуется выполнение ряда усло-
вий. И если получаемые результаты оказываются в некотором
•смысле «странными», то надо в первую очередь пересмотреть
эти условия.
Принцип действия многочисленных интеграторов описан в
гл. 16.
12.4. Обнаружение скрытых периодичностей
Часто сигнал, в действительности непериодический, содер-
жит скрытые периодичности. Рассмотрим сигнал в виде двоич-
ного кода с несущей частотой F = l/0. Такой сигнал будет изо-
бражаться импульсами, каждый из которых представляет еди-
ницу ]). Длина интервала между импульсами может принимать
значения, кратные несущему периоду 6. Таким образом, длины
интервалов не являются совершенно случайными, так как при-
нимаемые ими значения могут быть равны только /С0, где К —
целое положительное число. Отсюда вытекает, что автокорре-
ляционная функция периодична с частотой F = l/Q.
Кодированный сигнал x{t) может быть представлен после-
довательностью импульсов (по предположению мгновенных),
разделенных промежутками 0 и имеющих коэффициенты 0 или 1:
и Отсутствие сигнала означает передачу нуля. — Прим. ред.
A2.59)
Найдем автокорреляционную функцию кодированного сигнала
x(t). Согласно определению A1.1), автокорреляционная функ-
ция будет равна
A2.60)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 211
Если а = 0, то величина
'' ai. =«i2. так как а^ равно 0 или 1. — Прим. ред.
Полагая t—XQ = t', получим
Для вычисления интеграла воспользуемся известным свойст-
вом обобщенных функций
A2.61)
A2.62)
Пусть N — целая часть отношения Г/8. Если промежуток ин-
тегрирования [—/U3, Т—^8] в выражении A2.61) содержит
точку f = 0, т. е., если Os^A^N, то
A2.63)
A2.64>
A2.65>
A2.66>
Таким образом,
Полагая ц = К—>а и учитывая, что
будем иметь
Обозначим
212
ГЛАВА 12
представляет собой вероятность того, что любой коэффициент
принимает значение 1:
Рм = РтсЬ[аь=1]. A2.67)
Если а=^=0, то Ры дает вероятность того, что at, и ак-а прини-
мают значение 1:
/>te=Prob [а* = 1; ая_а=1]. A2.68)
Поскольку а\ и ах—а независимы, то
РгоЬ[ая, = 1; аь_а = 1] =
=Prob [ах = 1 ] Prob [дл-а = 1J =(Prob [ак = 1 ]J. A2.69)
Можно допустить, что коэффициенты а% двоичного сигнала
принимают значения 0 и 1 примерно одинаковое число раз, т. е.
РгоЬ[ая = 1] = 72. Отсюда Рхв =Уг и P\a=*lU для ат=Ю.
Рис. 12.5.
В результате автокорреляционная функция запишется в ви-
де (рис. 12.5)
где штрих у знака суммы означает, что а^О.
A2.70)
Примечание. Если вместо б-функций взять импульсы ненулевой шири-
ны е, то каждой «линии» прежней автокорреляционной функции соответ-
ствовал бы равнобедренный треугольник с основанием 2е. Такая автокорре-
ляционная функция представлена на рис. 12.6.
Рис. 12.6.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
213
12.5. Получение спектральных плотностей
по корреляционным функциям
Решение этой задачи (и обратной) вытекает из теоремы Ви-
нера —Хинчина:
C(t)*=*S(v). A2.71)
Применение этого метода рассмотрено в гл. 13.
12.6. Измерение динамических характеристик
(переходных функций, импульсных характеристик)
линейных систем. Идентификация процессов
Основы метода. Предлагаемый здесь метод основан на не-
посредственном применении результатов разд. 11.5. Пусть S —
линейная система. Известно, что такая система описывается
Рис. 12.7.
импульсной характеристикой h(t), преобразованием Лапласа
которой является передаточная функция. Входной сигнал e(t)
преобразуется системой в сигнал s(t), причем сигналы на вхо-
де и выходе связаны между собой сверткой
A2.72)
или символически
s(t)=e(t)*h(t). A2.73)
Пусть Сее(х)—автокорреляционная функция входного сиг-
нала e{t), a Ces(x)—взаимная корреляционная функция сиг-
налов e(t) и s(t). Эти функции связаны тем же уравнением
свертки, что и сами сигналы:
Ces(x) = Cee(x)*h(x). A2.74)
Если Cee{t) можно заменить функцией Дирака 6(т), то из вы-
1) Предполагается, что e(t)=h(t)=Q при t<0. — Прим. ред.
214 ГЛАВА 12
ражения A2.74) следует
Ся(т) = Л(т). A2.75)
Итак, если автокорреляционная функция входного сигнала
ведет себя как б-функция, то взаимная корреляционная функ-
ция входного и выходного сигналов равна импульсной характе-
ристике системы (рис. 12.7). Назовем тест-сигналом такой сиг-
нал, который позволяет получить импульсную характеристику
системы.
Сравнение с прямым импульсным методом. Может показать-
ся, что описанный метод не имеет никаких преимуществ по
сравнению с классическим импульсным методом (рис. 12.8).
Однако необходимо отметить, что при импульсном анализе
энергия Е импульса равна площади, ограниченной его графи-
ком, т. е. /8IJ (рис. 12.8). Энергия Е, безусловно, ограничена,
так как, с одной стороны, амплитуда / сигнала должна быть не-
большой, чтобы можно было применить гипотезу о линейности
системы, с другой стороны, должна быть малой ширина 9, что-
бы данный импульс был подобен б-функции (ширина 0 должна
быть мала по сравнению с «продолжительностью» импульсной
характеристики (рис. 12.9,6)). Поскольку энергия, которой
располагают при измерениях, невелика, то из-за фоновых шу-
мов, всегда сопровождающих измерения, точность оказывается
низкой (рис. 12.10).
В корреляционном же методе энергия, равная То2, ничем не
ограничена (кроме времени интегрирования Т), поэтому точ-
ность измерений получается гораздо большей (рис. 12.11).
Изучение системы в процессе работы. Большим преимущест-
вом корреляционного метода при определении импульсной ха-
рактеристики является то, что этот метод применим в процессе
работы системы: тест-сигнал b(t) подается на вход одновремен-
но с входным сигналом x{t) (рис. 12.12).
Так как x(t) и b{t) независимы, то Cbsx(x) = 0, следова-
тельно,
С" (Ь+ь) Ы^Сьь № СО- A2-76)
Если же Сй»(т) »6(т), то
СЬ(,я+,ь)ъН(т). A2.77)
]) Если импульс имеет произвольную форму, но ту же длительность 9, та
о
?= je(/)d/.
о
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
215
Рис. 12.8.
Рис. 12.9.
в —случай неправильного выбора импульса; б — случай правильного выбора импульса.
Рис. 12.10.
Рис. 12.11.
216
ГЛАВА 12
Таким образом, мы располагаем средством определения им-
пульсной характеристики системы в процессе ее работы, пода-
вая на вход такой тест-сигнал b(t), что СЬь (т) да б (т). Кроме
того, можно подать тест-сигнал достаточно малой мощности,
чтобы он практически не вносил искажений в работу системы.
Рис. 12.12.
Система, подверженная возмущениям. Корреляционный ме-
тод применим также к системам, подверженным возмущению
p{t), которое приводит к появлению третьей компоненты в вы-
ходном сигнале s(t) (рис. 12.13). В данном случае1)
Сь (V4+»,) W =Сьь (*)«* (*)• A2.78)
Если Сьь{%) да5(т), то
См,я+,6+.р)(т) = Л(т). A2.79)
Это практически единственный метод, позволяющий изме-
рить импульсную характеристику с помощью одного полного
измерения. Точность измерений при прочих равных условиях
зависит только от времени интегрирования Т (времени, в тече-
ние которого проводится измерение корреляционной функции).
Кроме того, амплитуда тест-сигнала может быть такой малой,
как это необходимо, что является очевидным преимуществом
метода, так как тест-сигнал подается на вход работающей си-
стемы.
Изучение процесса путем простого наблюдения. Корреляци-
онный метод применим также в том случае, когда нельзя поль-
зоваться тест-сигналом и приходится ограничиваться наблюде-
ниями на входе и выходе системы. Если функции Се5(т) и
Сее{х) известны, то импульсную характеристику получают, ис-
ходя из свертки
С„(т) = С„(т)*к(х).
'> Предполагается независимость возмущения от шума b(t). — Прим. ред.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
217
Соответствующие расчеты несложно запрограммировать1). Если
бы мы применили уравнение свертки непосредственно к сигна-
лам на входе и выходе s(t)=e(t)*h(t), то для получения удов-
летворительной точности должны были бы численно обработать
выборки для s(t) и e(t) очень большого объема, в то время как
Рис. 12.13.
предварительная обработка корреляционных функций приво-
дит к значительному уменьшению данных, подлежащих обра-
ботке при решении уравнения свертки. Кроме того, корреляци-
онный метод избавляет нас еще от одной трудности: при отыс-
кании функции h(t) по функциям s(t) и e(t) некоторый мо-
мент времени te берется в качестве начального, однако он не
соответствует тому моменту, при котором s(t) и e(t) имеют ну-
левые значения. В связи с этим нужно учитывать энергию, на-
копленную системой [I]2'.
Необходимые характеристики тест-сигнала. Псевдослучай-
ный сигнал (двоичный сигнал).
Тест-сигнал должен быть таким, чтобы соотношение
С4,(т)=Си(т)*Л(т)
сводилось к выражению
т. е.
h(T)*Cbb(x)^h(r)k.
A2.80)
A2.81)
A2.82)
" Здесь речь идет об операции, обратной свертке. Ее выполнение, как
известно, сопряжено с большими трудностями. Однако в данном случае зада-
ча упрощается, так как функции Ces(x) и Сее(т) могут быть определены с
достаточной точностью (т. е. отношение сигнал/шум будет достаточно ве-
лико).
2) Следует учесть, что решение интегрального уравнения 1-го рода,
в частности типа свертки, является неустойчивым. Для повышения устойчи-
вости используется метод регуляризации (см., например: Тихонов А. Н., Арсе-
нин В. Я. Методы решения некорректных задач. — М.: Наука, 1979). —-
Прим. ред.
218
ГЛАВА 12
Таким образом, необходимо, чтобы свертка h(x) и Сб&(т) не
изменяла функцию h(x). В пространстве частот условие A2.82)
принимает вид
H(v)Sbb(v)^kH(v), A2.83)
т. е. Sbb(v) ~k. Это условие должно быть обязательно выпол-
нено на промежутке, где функция H(v) отлична от нуля. Так
Рис. 12.15.
как для всех физических систем #(v) имеет ограниченную об-
ласть определения (нет бесконечных частот), то #(v)=0 для
|v|^vMaKc (рис. 12.14). В пространстве времени это условие
означает, что СЬь(т) должна быть много уже /г(тг) (рис. 12.15).
Для дальнейшего нам понадобятся результаты гл. 7, отно-
сящиеся к дискретизации сигнала. Рассмотрим функцию
со
К\(\) =X(v)*2s(v—nFe). Умножая Х\(\) на прямоугольную
функцию ширины Fe, мы снова получим функцию Х(\) при ус-
ловии, что X(v) =0 при |v| >/?е/2.
Рис. 12.16.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 219
Аналогично, рассматривая вместо h(x) функцию fti(r) =
со
=/г(т)*^й(т—kT), которая представляет собой периодиче-
k=—co
•ское повторение функции Л(т) с периодом Т (рис. 12.16), мы
можем получить из нее /г(т.), если h(г) =0 для т^гГ.
Итак, на промежутке @, Т) функция hi (т) =
OJ
= /i(t)*2j6(t—kT) совпадает с /г(т). Следовательно, если име-
ется тест-сигнал, которому отвечает функция Сьь(х)ж
tt^b(x~kT), то его можно использовать при условии Т>
>2тыакс, где Тмакс такое значение т, что /г(т)=О при |т|^
^^Тмакс*
Периодическая функция 2б(т—kT) с периодом Т не явля-
k~—со
ется уже корреляционной функцией случайного сигнала (шу-
ма), а соответствует периодическому сигналу. Итак, тест-сиг-
нал b (t) должен удовлетворить следующим необходимым усло-
виям:
• автокорреляционная функция сигнала Ъ {t) должна иметь
период, превосходящий заданную величину;
• периодически повторяющийся элемент автокорреляцион-
ной функции должен представлять достаточно узкую кривую
(рис. 12.17).
Сигнал b(t), удовлетворяющий этим условиям, не является
случайным, однако в данном случае он ведет себя как случай-
ный. Поэтому b(t) называют псевдослучайным сигналом. Ока-
зывается, псевдослучайный сигнал гораздо легче генерировать,
чем случайный сигнал, особенно в области низких частот.
Существует, безусловно, много различных сигналов, авто-
корреляционные функции которых удовлетворяют сформулиро-
ванным выше условиям. Мы рассмотрим один из них — сигнал,
который особенно просто реализуется на практике. Этот сигнал
Рис. J2.17.
220 ГЛАВА 12
образован последовательностью импульсов переменной шири-
ны, причем ширина каждого импульса является целым кратным
некоторой минимальной ширины 8 [2—4]. Амплитуда импуль-
сов равна А (причем знаки импульсов чередуются таким обра-
зом, чтобы сигнал был центрирован), а длины промежутков
Рис. 12.18.
между последовательными положительными (или отрицатель-
ными) зубцами также кратны величине 0 (рис. 12.18). Доказа-
но, что из этих импульсов (попеременно положительных и отри-
цательных) можно составить такие конечные последовательно-
сти длины NQ, что соответствующая автокорреляционная функ-
ция будет изображаться графически равнобедренным треуголь-
ником с основанием 29. Если одну из таких последовательно-
стей продолжить периодически на всю ось времени, то соответ-
ствующая автокорреляционная функция будет изображаться
треугольниками, периодически повторяющимися с периодом
W9 (рис. 12.19).
Генерирование таких сигналов осуществляется довольно про-
сто с помощью обычного сдвигового регистра, замкнутого на
себя определенным образом. Если регистр содержит п разря-
дов и имеет несущую частоту F, то автокорреляционная функ-
ция генерируемого сигнала представляет собой последователь-
ность треугольников с основанием 2/F = 20, периодически повто-
ряющихся с периодом Т=B"—l)Q = NQ. Отсюда следует, что
изменение тактовой частоты отражается на ширине периодиче-
ской компоненты автокорреляционной функции, а изменение
числа разрядов сдвигового регистра влияет на отношение пе-
риода к ширине.
Важные замечания. 1. Автокорреляционная функция псевдо-
случайного сигнала, который в действительности является пе-
риодическим, определяется интегралом
Эта функция изображается треугольником только тогда, когда
промежуток интегрирования равен периоду или целому числу
периодов. В противном случае автокорреляционная функция
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
221
будет иметь иной вид. Это означает, что нецелесообразно брать
слишком большие значения Т=Bп—1)9 (т. е. слишком боль-
шое число п разрядов регистра), так как промежуток интегри-
рования может оказаться не равным периоду, что приводит к
серьезным ошибкам (см. замечание 3).
Рис. 12.19.
В действительности значение Т выбирается таким образом,
чтобы оно было сравнимо с длиной возможного промежутка
интегрирования и с максимальным временным сдвигом авто-
корреляционной функции, который желают получить. При этом
Т должно быть больше максимального временного сдвига, что-
бы не проявилась периодичность автокорреляционной функции,
период которой равен Т.
2. Одна из проблем, возникающих на практике, заключает-
ся в определении ширины 0, т. е. подходящей тактовой частоты.
Распространенная и наиболее опасная ошибка связана с тем,
что часто не решаются брать слишком малое значение 6, а бе-
рут большие значения, чтобы наблюдать отклик системы. Выше
говорилось о том, что автокорреляционная функция псевдослу-
чайного сигнала представляет собой последовательность равно-
бедренных треугольников с основанием 20. Предположим для
упрощения записи, что высота треугольников равна 1/0, и рас-
смотрим треугольник, находящийся в начале координат, считая,
что он один представляет автокорреляционную функцию. Его
фурье-образ равен (sinnv0/nv0J. Для наблюдения импульсной
характеристики системы необходимо, чтобы в области, где со-
отношение S(v)^^C(%) отлично от нуля, функция (sinnv0/jtv0J
была бы близка к 1. Пусть vMaKc — верхняя граница S(v).
Предположим, что уменьшение vMaKc, обусловленное
(sinnvQ/nvQJ, равно 10% A дБ). Тогда
(sin nvMaKC0/nvMaKC0)a= 0,90.
ОтСЮДа \'Макс0 = О,18, 0 = O,18/vMaKC И /Г=1/0 = \'„акс/О,18«
« 5,5\'„акс, т. е. тактовая частота псевдослучайного сигнала
должна быть в 5,5 раз больше vMaKc-
222 ГЛАВА 12
Если бы для vMaKc взяли 3 дБ вместо 1 дБ, то получили бы
(sin nv^KCQ/nvmKCBJ = 0,70.
Отсюда у„акс 9 = 0,32, 6 = 0,32/vM,KC и F = l/8 = vMaKc/0,32«3vHaicc,
т. е. требуемая тактовая частота должна быть в 3 раза больше
верхней границы спектра системы.
Если же потребовать, чтобы уменьшение л'макс не превосхо-
дило 1%, ТО (sinnVMaKc8/nVMaKc6J = 0,99 И VMaKc6 = 0,05, F =
= 1/е=Тмакс/0,05 = 2(Ьмакс.
3. Поставим еще один вопрос, менее важный, но интерес-
ный: как определить число импульсов конечной последователь-
ности, формирующей сигнал? Если длительность искомой им-
пульсной характеристики равна хм, то нужно, чтобы Bп—1)8>
>Тм. Отсюда 2"— \>%mF и тем более 2п>тм^. Следовательно,
nln2>ln(T.MF) и п>1п(тм^)/1п2.
Итак, число п разрядов сдвигового регистра должно быть
больше ln(x.w/7)/ln2. Как было сказано выше, автокорреляци-
онная функция псевдослучайного сигнала изображается тре-
угольником только при интегрировании по промежутку, длина
которого равна целому числу периодов B"—1H последова-
тельности; не следует брать этот период предельно боль-
шим, нужно ограничиться наименьшим п, превосходящим
]n(xMF)/ln2. Остается еще одна неизвестная величина — это
хм. Ее выбирают, руководствуясь условиями задачи, и затем
проверяют правильность выбора каким-либо несложным изме-
рением.
Реализация псевдослучайного, или двоично-кодированного
сигнала с помощью сдвигового регистра. Рассмотрим полином
f(X) степени п
f(X)=ao+aiX-\-a2X*+ ¦ ¦ ¦ + akX* + ¦ ¦ ¦ +апХ\
коэффициенты по, аи яг, ..., ак, ..., ап которого принимают толь-
ко два значения: 0 и 1. Назовем полином неприводимым, если
он не делится ни на какой другой полином положительной сте-
пени того же типа.
Рассмотрим теперь сдвиговый регистр с п разрядами,
представляющий собой совокупность триггеров, в которой каж-
дый управляющий импульс синхронизатора вызывает переход
триггера с номером k в состояние, в котором находился триггер
с номером k—1, и переход триггера с номером k+\ в состоя-
ние, в котором находился k-й триггер. Мы предполагаем, что
сдвиговый регистр имеет отрицательную обратную связь по мо-
дулю 2. Это означает, что на его вход подается результат
сложения по модулю 2 выходных символов, содержащихся в
некоторых вполне определенных разрядах. Напомним, что
¦сложение по модулю 2 осуществляется по правилу: 0 + 0 = 0,
1+0=1, 0+1 = 1, 1 + 1 = 0.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 223-
При соответствующем выборе обратных связей мы получим
последовательность максимальной длины Т=Bп—1)8, где
б — тактовый период. Автокорреляционная функция этой после-
довательности (при условии интегрирования по целому числу
периодов 7) будет изображаться равнобедренными треугольни-
ками с основанием 20, повторяющимися с периодом Т. Выбор
обратных связей определяется неприводимыми полиномами ге-й
степени. Эти полиномы приведены в таблицах в восьмеричной
форме (в восьмеричной системе счисления) [4]. Чтобы опреде-
лить их коэффициенты, надо перейти в двоичную систему, что
очень просто сделать заменой каждой цифры числа в восьме-
ричной системе ее значением в двоичной системе.
Пример. Пусть дано число 42103 в восьмеричной системе.
Совершая переход в двоичную систему, найдем
в восьмеричной системе 4 2 10 3
в двоичной системе 100 010 001 000 ОП
Соответствующий полином имеет вид
Степень двойки 14 13 12 11 10 9 8 7 6 5 4 3 2 1 О
1 000 1 000 1 0000 1 1
Полином X™ +Х" +Хв +Х +1
Это означает, что для реализации обратной связи по модулю 2'
надо взять выходы ячеек с номерами 1, 6, 10, 14.
Число разрядов П „ Число разрядов Полином
сдвигового J^hhou системе сдвигового в восьмеричной
регистра меричнои системе регистра системе
— — 18 '1000201
2 *7 19 2000047
3 *13 20 '4000011
4 '23 21 '10000005
5 *45 22 '20000003
6 '103 23 '40000041
7 '211 24 100000207
8 435 25 '200000011
9 *]021 26 400000107
10 '2011 27 1000000047
11 '4005 28 '2000000011
12 10123 29 *4000000005
13 20033 30 10040000007
14 42103 31 *20000000011
15 * 100003 32 40020000007
16 210013 33 '100000020001
17 '400011 34 201000000007
224
ГЛАВА 12
Эти полиномы приведены в книге 1[4]. Звездочка означает,
что данному полиному соответствуют только две обратные свя-
зи. Такой регистр довольно просто конструируется с использо-
ванием двоичного полусумматора.
Другие примеры. Сдвиговый регистр с 11 разрядами. Тако-
му регистру отвечает полином 4005. Переходя в двоичную си-
стему
5 = 101, 0=000, 4 = 100,
получаем 100 000 000101, т. е. полином Хп+Х2+1. Схема ре-
гистра приведена на рис. 12.20.
Рис. 12.20.
Так как Fh и Fe изменяются не непрерывно, а скачком, а Мх
и М2 — целые числа, то добиться выполнения этого равенства
очень трудно, или даже невозможно. Таким образом, в общем
случае не удается выбрать промежуток интегрирования, длина
которого равна целому числу периодов псевдослучайного сигна-
Рис. 12.21.
Сдвиговый регистр с 13 разрядами. По таблице находим
полином 20033. Переходя в двоичную систему, находим число
010000000011011, а затем полином Х13 + Х4 + Х+1. Схема ре-
гистра приведена на рис. 12.21.
Трудности формирования псевдослучайного сигнала. Авто-
корреляционная функция псевдослучайного сигнала изобража-
ется треугольником только при интегрировании по промежут-
ку, длина которого равна целому числу периодов. Период ра-
вен B"—1) (l/FH), где 1/.FW = 8 — тактовый период.
Вычислительный блок цифрового анализатора содержит 2*
слов сигнала, представленного в дискретной форме, следующих
с частотой Fe, следовательно, должно выполняться равенство
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 225
ла. Поэтому неизбежны ошибки при вычислении автокорреля-
ционной функции псевдослучайного сигнала, а следовательно,
и при вычислении его спектральной плотности, которая не мо-
жет быть принята равной 1. Эту ошибку нетрудно свести к не-
скольким процентам. В разд. 12.8 будет описан такой способ.
Он состоит в делении взаимного спектра Sxu(v) входного и вы-
ходного процессов на спектр SXx(v) входного процесса. После
этой процедуры нет необходимости полагать Sxx(v) = l.
Заключение. Описанный метод идентификации процессов
применим почти ко всем системам (в электротехнике, химии,
гидравлике, механике и т. д.). Одна из характерных особенно-
стей метода заключается в возможности проведения измерений
параметров системы во время ее работы. Это достигается ис-
пользованием тест-сигналов очень малой амплитуды. Этот ме-
тод применим даже к нелинейным системам и дает возмож-
ность измерить их динамические характеристики в рабочей точ-
ке. В область его применения входят также различные процес-
сы (механические, электрические, пневматические, химические),
какой бы спектральной полосой они ни обладали. Таким обра-
зом, данный метод является весьма плодотворным и имеет раз-
нообразные приложения. Он был уже апробирован при изуче-
нии характеристик химических процессов и механических сис-
тем в самолетостроении (моторов, крыльев и несущих плоско-
стей) . Одно из интересных приложений данного метода нашло
применение в ядерной физике для определения функции Грина
некоторой среды (разд. 21.1).
12.7. Измерение когерентности
Определение. Когерентность двух функций x(t) и y(t) оп-
ределяется соотношением
где
A2.84)
226 ГЛАВА 12
Примечание. Некоторые авторы определяют когерентность соотноше-
нием
\Sxy(v)\/VSxx(v)Syy(v). A2.85)
Функция когерентности позволяет определить ту часть
спектра, в которой x(t) и y(t) когерентны, т. е. ту область час-
тот, в которой процессы, представленные функциями x{t) и
y(t), обмениваются информацией.
Случай линейных систем. Пусть у (t)—выходной сигнал ли-
нейной системы с импульсной характеристикой h{t), фурье-об-
раз которой #(v). Тогда
Можно показать, что
причем
A2.86)
т. е. x(t) и y(t) полностью когерентны.
Если x(t) и y(t) не коррелированы, то Сху(х)=0, но тогда
и Sxy(v)^0, и функция когерентности также равна нулю. Если
функция когерентности не достигает значений 0 и 1, то это мо-
жет происходить по следующим причинам:
1) на измерения x(t) и y(t) накладывается шум;
2) кроме входа x(t) система имеет еще один вход, влияю-
щий на выхйд;
3) система, связывающая x(t) и y(t), не вполне линейна.
12.8. Применение когерентности к измерению
передаточных функций линейных и однородных
во времени систем. Спектральная лупа
Смещение спектра. В предыдущем разделе показано, как
получить импульсную характеристику или передаточную функ-
цию (комплексное усиление), возбуждая систему сигналом,
близким к белому шуму. В этом случае измерение импульсной
характеристики сводится к измерению взаимной корреляцион-
ной функции СуХ{х) между входным и выходным сигналами, а
измерение комплексного усиления — к измерению взаимного
спектра Syx(\). Однако эти измерения обладают двумя ошибка-
ми: погрешностью оценки (см. гл. 9) и ошибкой, обусловленной
тем, что спектр Sxx(\>) входного сигнала, строго говоря, не яв-
ляется постоянной величиной в рассматриваемой области час-
тот (разд. 12.6).
По-видимому, ошибку второго типа можно было бы скомпен-
сировать (хотя бы частично), если учесть истинные значения
Sxx(\). Что касается погрешности оценки, она будет тем боль-
ше, чем меньше Av (ширина эквивалентного фильтра) (разд.
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЯ 227
13.8), что следует из равенства (разд. 9.3)
Отсюда вытекает, что смещение будет больше в той части
спектра, где имеется «узкая линия» (резонансная система с ма-
лым затуханием). Для уменьшения смещения надо уменьшить
Av, т. е. увеличить точность анализа. На первый взгляд это ка-
жется невозможным, так как все N точек спектра распределе-
ны по спектральной полосе, которую нужно анализировать. Од-
нако существует метод «спектральной лупы» (см. ниже), кото-
рый состоит в замене соответствующей частоты и в сосредото-
чении N исследуемых точек в полосе шириной Bjk с границами
(т—\)Bjk, rnB/k, где l^m^fe. В результате степень точности
анализа определяется отношением Av/k. Хотя при этом систе-
матическая ошибка уменьшается, но возрастает погрешность
оценки и уменьшается отношение сигнал/шум. Ниже мы убе-
димся, что можно уменьшить и систематическую ошибку, и по-
грешность оценки, вычисляя передаточную функцию как отно-
шение взаимного спектра входного и выходного сигналов и
спектра входного сигнала.
Применение функции когерентности. В гл. 11 выведено фун-
даментальное соотношение
С,п(т)-Сдл.(т)*Л(т),
Таким образом, чтобы получить приемлемую дисперсию,
нужно ограничить Av снизу некоторой минимальной величиной.
Мы будем, следовательно, иметь не Syx{v), a
A2.87)
что порождает систематическую ошибку для спектральной плот-
ности. В разд. 13.4 будет показано, что смещение, определенное
выражением
оказывается равным
т. е.
228
ГЛАВА 12
имеющее в пространстве частот следующий вид:
Так как Sxx(v)—вещественная функция, то
= \Syx(v)\/Sxx(v) и (fH(v)=q,Syx (v).
Рассмотрим снова функцию H(v)—Syx(\)jSxx(v). Величины
Syx(v) и Sxx(v) определяются с некоторыми ошибками, но эти
ошибки не независимы. Ниже мы исследуем погрешность
оценки
что
Погрешность оценки функции когерентности. Доказано [5],
A2.89)
Из этого соотношения вытекает, что погрешность оценки IYv(v)
тем меньше, чем ближе к 1 функция когерентности. Из табл.
12.2 видно, как уменьшается величина ,1} У,ХУ1 по сравне-
нию с ,а'', ,\\1 = ~^гг~ с приближением tyx(v) к 1. Из табл.
12.2 видно, что погрешность оценки функции когерентности,
когда эта функция близка к 1, много меньше погрешности оцен-
ки спектральной плотности. Даже при значениях АхТ, равных
нескольким единицам, оценка когерентности оказывается до-
вольно точной.
Таблица 12.2
0,6
0,7
0,8 0,85
0,90 0,91 0,92 0,93
0,53
0,94
8- Ю-3
0,26
0,95
5- Ю-3
0,1
0,96
3 Ю-3
5 Ю-2
0,97
2- Ю-3
2,2-Ю-з
0,98
8-10-"
1,8-10-2
0,99
2-Ю-4
,4- Ю-2
0,995
5-Ю-5
1,0- 10-а
0,999
2-Ю-»
Отсюда следует, что
A2.88)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ 229
Погрешность оценки H(v). Доказано [5], что погрешность
оценки H(v) определяется формулой
или
A2.91)
Если спектральная плотность сигнала постоянна в интере-
сующей нас полосе, можно считать, что систематическая ошиб-
ка Ьхх равна нулю. С другой стороны, при этих условиях
|5y.v(v)| отличается от Syy(v) постоянным множителем, поэто-
му byxttbyy, и мы имеем Tyx(v) =IV(v) (l + byy). Таким обра-
зом,
или
A2.92)
A2.90)
где Av определяет точность анализа, IY*(v) —оценка функции
когерентности. Из формулы следует, что погрешность для
j //(v) | тем меньше, чем ближе к 1 оценка IV (v).
Общая ошибка для Tyx(v) состоит из двух ошибок: погреш-
ности оценки и систематической ошибки. Мы исследуем систе-
матическую ошибку, так как именно она может оказаться бо-
лее существенной, поскольку она не уменьшается с увеличени-
ем промежутка интегрирования.
Пусть byx,bxx, byy — систематические ошибки соответственно
для Syx(v), Sxx(v), Syy(v). Так как по определению смещения
то
Аналогично
Следовательно,
230 ГЛАВА 12
Мы получили совершенно неожиданный результат: диспер-
сия абсолютной величины функции #(v) тем меньше, чем мень-
ше ширина Av анализируемой полосы. Поэтому для измерения
передаточной функции нужно иметь эквивалентный фильтр с
предельно узкой полосой пропускания1'.
Из рассмотренного выше вытекает следующая методика
быстрого и эффективного получения передаточных функций.
Надо:
1) возбудить систему таким сигналом, спектральная плот-
ность которого была бы возможно ближе к постоянной в той
области, где по предположению передаточная функция не рав-
на нулю;
2) измерить #(v), исходя из отношения взаимного спектра
Syx(x) и спектра Sxx(v), т. е. H(v)=Syx(v)/Sxx(v);
3) измерить когерентность TyX(v) = \Syx(v)\2/Sxx{v)Syy(\);
4) выбрать результаты измерений, соответствующие тем
частотам, при которых когерентность близка к 1.
Если выбрать частоты, при которых когерентность больше
0,9, то погрешность оценки окажется в 50 раз меньше погреш-
ности, полученной классическим методом; при одинаковых по-
грешностях время интегрирования будет в 50 раз меньше того
времени, которое необходимо по классической методике.
Системы, с близко расположенными резонансными линиями.
Комплексное усиление таких систем содержит узкие зоны, в ко-
торых спектральная плотность принимает большие значения
(для простоты мы называем эти зоны «линиями»). Задача
спектрального анализа состоит в том, чтобы эти линии не были
пропущены при расчете спектра. Ведь не исключено, что рас-
четные точки спектра будут расположены достаточно далеко от
линий. Конечно, этого можно избежать, если соответствующим
образом осуществить дискретизацию спектральной плотности.
Но это не всегда удается.
Кроме того, надо помнить о систематической ошибке, воз-
никающей при расчете спектра. Как было показано, эту ошиб-
!) Это заключение неверно в том случае, когда |H(v)| определяется из
соотношения \Н(х) \-=S2y!/(v)/S2xx(v); здесь дисперсия намного больше.
Если Тух(\)ж1, а величина Ьуу мала по сравнению с 1, то
Выше мы уже говорили, что byy=Av2Syy"(v)/24Syy(v). Следо-
вательно,
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
231
ку можно уменьшить, уменьшая Av, но тогда возрастает по-
грешность оценки (разд. 9.9), т. е. мы сталкиваемся с двумя
противоречивыми условиями.
Если применить метод, описанный в предыдущем разделе,
и исходить из отношения Syx(v) и Sxx(v), то величину Av мож-
но выбрать настолько малой, чтобы разделить две соседние
линии. Но если вместо Av=2B/N мы захотим взять меньшее
значение Av-=2B/kN, то должны будем рассчитать kN точек
спектра, что существенно снижает ценность метода.
На практике предпочитают сгруппировать N точек в полосе
шириной 2B/k около некоторой частоты vo. Это достигается
простым приемом: в пространстве частот производится трансля-
ция путем умножения цифрового сигнала на cos 2nv0t—у sin 2лл>о/.
Этот способ называется методом спектральной лупы1'.
Метод спектральной лупы. Рассмотрим вещественный сиг-
нал x{t). Его спектральная плотность будет вещественной чет-
ной функцией (рис. 12.22). Предположим, что спектральная
Рис. 12.22.
плотность Sxx(v) ограничена полосой (—В, В), и осуществим
дискретизацию x(t) с частотой Fe = 2B и дискретизацию SXx{v)
с шагом Av = 2B/N. Применим метод спектральной лупы в ок-
рестности частоты vo, задавшись точностью анализа Av. Анали-
зируемая полоса будет иметь ширину NAvi = 2Bit т. е. Bt =
= (N/2)Avi.
Умножая x{t) на e-2jt/v°', получим комплексный сигнал
х\ (t) = х(t) e~~2"iVot, действительная и мнимая части которого
соответственно равны x(t)cos2K\-0t и x(t)s\n2n\ot (рис. 12.23).
'* Его называют также зум-эффект. Слово «зум» по звучанию совпадает
с немецким som, обозначающим фотообъектив с переменным фокусным рас-
стоянием, изобретение которого принадлежит французскому обществу «Зум-
Бертье»
232
ГЛАВА 12
Так как анализируемая полоса ограничена частотами ±Ви
где Bi = NAvJ2, то для ее выделения надо произвести фильтра-
цию сигнала. Пусть h(t)—импульсная характеристика низко-
Рис. 12.23.
частотного фильтра с частотой отсечки В\ (рис. 12.25). Фильт-
рация сигнала математически эквивалентна его свертке
с импульсной характеристикой: xi{t)ah{t)=Re{xi{t)*h(t)} +
Рис. 12.24.
Если X(v—v0) есть фурье-образ X\{t), то (рис. 12.24)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ
233
+ jlm{x1(t)*h(t)} = X2{t). Схема этой операции приведена на
рис. 12.26.
Так как частота дискретизации x{t) равна 2В, то ту же ча-
стоту имеют Re{x2(t)} и Im{x2(t)}. Однако для дискретизации
сигнала x2(t) достаточно взять частоту 2Ви так как протяжен-
ность спектра x2(t) равна 2Bt. Если Bx — B\k, то дискретизацию
Рис. 12.26.
сигнала x2(t) можно осуществить, если из дискретизации сиг-
нала xx(t) брать каждую k-ю точку. Такую фильтрацию не-
сложно получить с помощью трансверсального фильтра (реа-
лизующего операцию свертки) с очень небольшим числом опе-
раций. Например, для реализации цифрового фильтра, точность
пропускной полосы которого +0,04 дБ, достаточно осущест-
вить 16 сложений и 6 умножений независимо от сужения поло-
сы, которое мы хотим иметь. К комплексному сигналу, отфильт-
рованному таким образом, применяется затем классический ал-
горитм быстрого преобразования Фурье. Общая схема процесса
представлена на рис. 12.27.
Следует отметить, что если для x2{t) берется произведение
ВТ, то для x{t) вместо ВТ надо брать произведение B{T = BT]k.
Что касается дисперсии погрешности оценки спектральной
плотности X2(t), то она возрастет в k раз. Следовательно, метод
Рис. 12.25.
234
ГЛАВА 12
Рис. 12.27.
спектральной лупы не улучшает оценку, как это было при ис-
пользовании отношения взаимного спектра к спектру самого
сигнала.
12.9. Измерение временного сдвига двух сигналов
Рассмотрим два случайных стационарных сигнала, отличаю-
щихся только множителем и сдвигом фаз: x = b(t) и y = ab(t—0).
Как определить сдвиг фаз 0? Рассмотрим автокорреляционную
функцию
или
Отсюда следует, что предел равен aCxx(Q—т). Так как автокор-
Ее можно записать в виде
A2.95)
ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИИ 235
реляционная функция имеет максимум при нулевом сдвиге, то
функция Схх(х) достигает максимума при 0 = т. Таким обра-
зом, сдвиг равен тому значению аргумента, при котором авто-
корреляционная функция достигает максимального значения.
Однако здесь могут возникнуть трудности, если автокорреля-
ционная функция слабо убывает на расстоянии порядка 8 от
начала координат. В этом случае целесообразно перейти к
фурье-образам:
Syx (v) = TF [Сух (т)] = TF [аСхх @ -т)],
TF [аСхх (Э- т)] = «TF [Схх (т)] er^ve _ A2.96)
или
SBac(v)=«S«(v)erWve. A2.97)
Если сигналы x(t) и y(t) вещественны (например, физиче-
ские сигналы на выходе датчиков), то Sxx(v)—вещественная
четная функция. Следовательно, фазовый сдвиг функции Si/X(v)
определяется только множителем e-2lt/Ve. Таким образом,
измеряя взаимный спектр сигналов x(t) и y(t), получим
I5»*(v) | =u\Sxx(v) | и (fyx(v) =2nv6. Отсюда
в=-щ-ъ*М- A2-98)
Так как (pyx{v) определяется с точностью до kit, то этот метод
особенно удобен при малых значениях ср, т. е. при малых зна-
чениях сдвига фаз. Но именно в этом случае нельзя найти с
достаточной точностью максимум автокорреляционной функ-
ции. Напротив, если сдвиг фаз 9 велик, то расчет, основанный
на преобразовании Фурье, оказывается малопригодным.
Л ИТЕРАТУРА
1. Miskhin, Braun, Adaptative Control Systems, Mac-Graw Hill, 1900.
2. Stern Valat, Cazemajou, Generation d'un creneau pseudo-aleatoire, Rapport
CEA R2230.
3. Zierler N. Linear recurring sequences, J. Soc. Industr. Appl. Math., 7.31.48,
1900.
4. Peterson W. W. Error correcting codes, Wiley, 1961.
5. Bendat J. S., Piersol A. G. Measurement and analysis of random data, Wi-
ley, 1971. [Имеется перевод: Бендат Дж., Пирсол Л. Измерение и анализ
случайных процессов. — М.: Мир, 1972.]
6. Max J., Gonon G , Sonrel С. Filtre numerique demi-bande, Note technique.
Centre d'Etudes Nucleates de Grenoble, LETI MCTE, 1979.
Глава
13
СПЕКТРАЛЬНЫЙ АНАЛИЗ.
ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ
ПЛОТНОСТЕЙ
Эти семь лучей происходят из одного,
прошедшего через призму; они распола-
гаются на белом экране в строгом по-
рядке, и каждый занимает часть спектра.
Исаак Ньютон, Математические
начала натуральной философии
Цветы будущего — в семенах настоя-
щего.
Китайская пословица
13.1. Наглядное представление спектральной плотности
Пусть x(t)—некоторая переменная величина и t — незави-
симая переменная (например, время). Рассмотрим частотный
узкополосный фильтр F (по предположению идеальный) с по-
лосой пропускания Av, центральная частота которой v0. Усиле-
ние такого фильтра равно 1 для частот внутри полосы
и нулю — вне ее (рис. 13.1). Пропустим x(t)
через фильтр F и измерим среднюю мощность выходного сигна-
ла. Обозначая через XF(t) выходной сигнал (рис. 13.2), для
средней мощности получим выражение
Так как фильтр пропускает только часть спектра сигнала,
/ Av , Av \
содержащуюся в полосе (vo , voH 1, то мощность сигна-
\ 2 2" /
ла на выходе
A3.2)
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 237
Величины, определенные выражениями A3.1) и A3.2), пред-
ставляют собой мощность одного и того же сигнала, поэтому
Согласно теореме Винера — Хинчина (разд. 8.8), TF{SXx(v)} =
= Cxx(v), т. е.
Рис. 13.1.
Рис. 13.2.
Рис. 13.3.
Полагая т = 0, получим
Рис. 13.4.
Таким образом, величина Sxx(v), входящая в выражение A3.2),
является спектральной плотностью.
Для определения Sxx(v) нужно устремить к нулю ширину
Av полосы, пропускаемой фильтром F. Но фильтр с предельно
узкой полосой пропускает такой слабый сигнал, что его прак-
A3.5)
238 ГЛАВА 13
тически нельзя измерить (кроме, конечно, случая, при котором
сигнал содержит периодическую компоненту с частотой v0).
Единственной измеримой величиной будет мощность сигнала,
пропущенного через фильтр с полосой пропускания конечной
ширины Av.
Пусть Sxx(v, Av)—среднее значение Sxx(v) в полосе
Определение спектральной плотности одного сигнала x(t) мож-
но распространить на случай двух сигналов x(t) и у(t), вводя
не только спектральные плотности Sxx(v) и Syy(v), но и взаим-
ные спектральные плотности (взаимные спектры) SXy(v) и
Syx(v). Взаимные спектральные плотности являются комплекс-
ными функциями; в случае вещественных сигналов они облада-
ют свойством эрмитовой симметрии.
Случай вещественных сигналов. Фурье-образы, если они су-
ществуют, и спектральные плотности вещественных сигналов
обладают свойством эрмитовой симметрии. Благодаря этому
свойству достаточно найти соответствующую спектральную
плотность только для положительных частот.
Иногда вместо S(v) вводят спектральную плотность
тогда (рис. 13.3)
Это означает, что нужно осуществить дискретизацию Sxx (v)
с помощью соответствующего устройства, включающего ин-
тегратор. Проводя фильтрацию совместно с измерением сред-
ней мощности для различных центральных частот vb V2, ...,
..., Vft, ..., va? фильтра, получим N значений спектральной плотно-
сти (рис. 13.4).
Sxx(\)dv дает полную мощность сигнала x(t)y
Интеграл
-мощность сигнала в полосе частот (vb V2).
A3.6)
Видно, что ^(f) —спектральная плотность аналитического сиг-
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 239
нала, соответствующего вещественному временному сигналу
(разд. 2.10).
Ниже мы будем употреблять символ S(v) вместо S(v, Av)
и опускать индексы хх и уу, если это не помешает пониманию
текста.
13.2. Влияние фильтрации, обусловленной дискретизацией
спектральной плотности
Мы имеем в виду фильтрацию с помощью фильтров с нену-
левой шириной полосы пропускания. Нетрудно понять, что та-
кая фильтрация дает сглаженный спектр. Действительно, этот
результат довольно нагляден, так как усреднение функции
SXx(v) внутри каждой полосы Av уменьшает ее осцилляции
внутри этой полосы.
Следовательно, автокорреляционная функция умножается на
sin nxAv/mrAv и затем повторяется периодически. Если мы хо-
тим, чтобы фильтрация, обусловленная дискретизацией и усред-
нением, мало влияла на спектральную плотность, нужно, что-
бы ее фурье-образ оставался почти неизменным, т. е.
Cxx{v) (sin jtxAt)/(nTAv) ttCxx(x).
Выше мы уже установили соответствующее условие: Av^
^1/2тм, которое запишем в виде Av=1/2cztm и cc^l.
Рис. 13.5.
Если применить преобразование Фурье к обеим частям ра-
венства
то получим соотношение (рис. 13.5)
240 ГЛАВА 13
Отсюда следует, что 1/а^0,16, т. е. «^6,2.
Таким образом, изменение спектра будет малым, если осу-
ществить его дискретизацию с частотой в 6 раз большей, чем
частота Шеннона. Это требует в 6 раз больше фильтров, поло-
сы пропускания которых в 6 раз уже. Трудности очевидны.
13.3. Дискретизация спектральной плотности,
реализуемая на практике
На практике не всегда удается выполнить предыдущее ус-
ловие, так как число значений спектральной плотности, кото-
рое можно рассчитать, ограничено аппаратурой и в общем слу-
чае заранее фиксировано. Если N — число расчетных значений,
В — ширина анализируемой полосы, то шаг дискретизации
Av — B/N. Очевидно, что этот шаг не будет, вообще говоря, со-
ответствовать условиям теоремы Шеннона. И хотя точки спект-
ра определяются точно, тем не менее нет никакого способа най-
ти спектральную плотность между ними. Здесь возможны не-
приятные последствия, как, например, при решении довольно
известной задачи отыскания острых пиков на кривой спект-
ральной плотности. Случаи потери пиков иллюстрируются на
рис. 13.6, где представлены «графики» спектральной плотности,
соответствующие дискретизации с тремя различными шагами.
13.4. Систематическая ошибка при измерении
спектральной плотности
Тот факт, что мы измеряем
Если изменение автокорреляционной функции не должно
превышать 1%, то необходимо выполнение неравенства
вместо Sxx(vk), ведет к систематической ошибке. Действи-
тельно,
A3.7)
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 241
Рис. 13.6.
Следовательно, E{Sxx(vk, Av)}=ASxx(vk). Напомним, что смеще-
ние оценки X величины X определяется выражением В{Х} —
= Е{Х}—Х, а нормированная ошибка смещения определяется
формулой Ь{Х} = (Е{Х}—ХIХ. Таким образом,
A3.7а)
242 ГЛАВА 13
Разложим функцию Sxx(v) в ряд Тейлора в окрестности \к
и ограничимся тремя первыми членами разложения:
где
Итак, ошибка смещения, определенная формулой A3.7а),
будет равна
Подставляя это разложение в соотношение A3.7), получим
Отсюда следует, что
Нормированная ошибка смещения дается выражением
A3.8)
A3.8а)
Этот результат подтверждает очевидный факт: относитель-
ная ошибка смещения тем больше, чем больше кривизна кри-
вой спектральной плотности, т. е. сильнее сказывается «изре-
занность» формы графика.
13.5. Измерение спектральной плотности
Измерение спектра состоит в определении тем или иным
способом достаточного числа дискретных значений Sxx{v), со-
ответствующих различным значениям v: vi, V2, V3, •••, vn- В за-
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 243
висимости от степени сложности измерительных устройств име-
ются различные способы получения результатов.
Поточечные измерения. Сигнал x(t) длительностью Т пред-
варительно записывают на магнитную ленту. Затем определяют
значение Sxx(vi), воспроизводят сигнал и определяют Sxx(v2)t
после этого снова воспроизводят сигнал и находят Sxx(x3) и
т. д. до тех пор, пока не получат Sxx(vn). Этот метод, теорети-
чески безукоризненный, связан с длительными расчетами, так
как для вычисления N точек спектра необходимо воспроизвести
записанный сигнал N раз. Поэтому нельзя сразу получить ре-
зультат анализа, а приходится ждать по меньшей мере в тече-
ние времени AT после прохождения сигнала.
Автоматические измерения. Пусть длительность сигнала рав-
на Т. Метод состоит в том, что сначала вычисляют Sxx(v\) на
участке длительностью 8, затем находят значение Sxx{v2) на
участке такой же длительности и т. д. вплоть до iV-ro значения
v (скользящий фильтр). Может показаться, что этот метод
сразу дает результаты анализа, однако следует учесть, что
каждая точка спектра рассчитывается на участке сигнала дли-
тельностью 0, не превосходящей T/N. Но это означает, что при
обработке спектра используется не вся длительность Т сигнала,
а лишь ее часть Q — TJN. В результате вместо ошибки е=1/У7"Ду
получается ошибка ef=\/~}/QAv = i/N/yTAv = EiN, т. е. в уг/б»
w^N раз большая.
Можно проводить расчет по участкам спектра. В память вы-
числительного устройства помещают часть сигнала длитель-
ностью 6 и рассчитывают ./V точек спектра. После окончания
расчета освобождают память и помещают в нее другую часть
сигнала длительностью 9 и снова рассчитывают спектр. Проде-
лав эту процедуру п раз, находят средний результат. Если вре-
мя расчета спектра каждой части сигнала длительностью 9
равно 9', то такой метод равносилен обработке части сигнала
длительностью л9, а общее время анализа равно я0 + п0'. Так
как полная длительность сигнала равна Т, то л(9 + 0')=Г. Та-
ким образом, используется доля сигнала 0/@ + 0')- Если зна-
чение 0' сравнимо с 0, то точность вычислений будет низкой.
Вместо ошибки e=l/yAvr получается ошибка е/=1/уДл'л9. Ес-
ли 0/ = а0, то /20A+та)=Т и 8/ = еУГ+а.
Методика обработки спектра приобретает особую важность
в тех ситуациях (довольно многочисленных), когда длитель-
ность сигнала не такая большая, как этого хотелось бы. Про-
должительность сигнала обычно ограничена, и ее надо исполь-
зовать наилучшим образом. Например, при испытаниях самоле-
та в критических режимах полета опыт можно продлить до
244
ГЛАВА 13
p[H(v)] <
30 с. Если использовать
0,01 или 0,1 этой величины,
то точность расчета будет
неприемлемой. Следова-
тельно, нужно проводить
обработку в реальном вре-
мени.
Автоматические измере-
ния в реальном времени.
Обработка проводится в
текущее время и пол-
ностью используется полез-
ная часть сигнала, т. е.
время Т, входящее в оцен-
ку точности вычислений,
представляет собой полное
время, а не его долю. Простая схема анализатора, работающего
в реальном времени из параллельно соединенных одноканаль-
ных анализаторов, описана в разд. 19.1.
13.6. Спектральный анализ методом фильтрации
Общие соображения. Спектральный анализ методом фильт-
рации наиболее естествен и нагляден, однако его выполнение
сопряжено с рядом трудностей. Одна из них, обусловленная
дискретизацией, присуща, как мы видели, в той или иной сте-
пени всем современным методам анализа.
Основные трудности связаны с реальными фильтрами: их
частотные характеристики не являются абсолютно стабильны-
ми. Импульсные характеристики фильтров должны быть ве-
щественны и физически реализуемы, т. е. /t(?)s==O при ?<0 (ус-
ловие причинной связи между событиями). Рассмотрим, напри-
мер, фильтр с частотной характеристикой #(v) = nAv/2(v). Ему
соответствует импульсная характеристика h(t) =sinnAvt/nkvt,
которая не является физически реализуемой, так как отлична
от нуля при tf<0. Кроме того, из вещественности функции h(t)
следует, что H(v) обладает свойством эрмитовой симметрии
(рис. 13.7):
)H(v)\=}H(-v)\, <p(v) = -cp(-v).
Измерение спектральной плотности (собственного спектра)
сигнала. Пропустим сигнал x(i) через фильтр с импульсной
характеристикой hk(t) и комплексным усилением #&(v). Обо-
Рис. 13.7.
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 245
Так как Sxx(v) —четная функция (рис. 13.9), то в результате
будем иметь
На рис. 13.10 приведена блок-схема устройства, позволяю-
щего получить энергию сигнала в полосе (v^—Av/2, va + Av/2).
Рис. 13.10.
Измерение взаимной спектральной плотности (взаимного
спектра) методом фильтрации. Пусть x(t) и y(t)—веществен-
ные функции. Их взаимная спектральная плотность, или вза-
Рис. 13.8. Рис. 13.9.
значая результат фильтрации через Xk{t), будем иметь
A3.9)
Предположим, что \Hk{v)\ при положительных v является
прямоугольной функцией ширины Av с центром v*. График
функции \tlk{v)\ легко получить, учитывая ее четность (рис.
13.8).
Таким образом,
246
ГЛАВА 13
имный спектр, определяется соотношением
Рис. 13.11.
причем Syx(v) =Sxy*(v). Функция Sxy(v) в общем случае явля-
ется комплексной
Вследствие эрмитовой симметрии функции
Отметим, что из вещественности функции x(t) и y(t) выте-
кает вещественность функции Сху(х). Отсюда следует, что
Таким образом, необходимо ввести отрицательные
частоты, так как иначе получилось бы, что
лексное число.
Пропустим х (t) и y(t) через два одинаковых фильтра
(рис. 13.11), затем сформируем произведение xFk (t) и yFk(t)
и после этого осуществим интегрирование. Известно, что
комп-
Пусть \Hk(v)\ имеет при положительных v ту же форму, что
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 247
и в предыдущем случае. Так как вещественным фильтрам со-
ответствуют четные функции \Нк{\) |, то
Вследствие эрмитовой симметрии Sxy{v) получим
Действительную часть взаимной спектральной плотности
можно получить с помощью устройства, блок-схема которого
приведена на рис. 13.11.
Вычисление мнимой части (в квадратурах) взаимной спект-
ральной плотности. Мы умеем осуществлять операции фильтра-
ции и интегрирования вещественных сигналов. В пространстве
частот этот набор операций эквивалентен интегрированию с ве-
сом.
Чтобы операция вида
часть функции Sxy(v), где
|#(л>)|2 = 0 для остальных значений v, необходимо, чтобы
Sxy1 (v) удовлетворяла условиям (рис. 13.12):
Из этих условий следует, что Sxyl(v)=—j signvSxy(v).
Действительно, пусть
тогда
248
ГЛАВА 13
Рис. 13.12.
Отсюда
Поэтому надо положить Sxyl(v) =—jsign\Sxy(v).
Таким образом, S^'Ov) является результатом фильтрации
SX!/(v) с помощью фильтра, частотная характеристика (или
комплексное усиление) которого равна
Графики функций |#(v)| и <p//(v) приведены на рис. 13.13.
Чтобы получить в пространстве частот функцию Sxyx(v),
в пространстве-времени нужно иметь функцию
Обозначим hl(t) фурье-образ функции —/signv. Функцию
hl (t) можно интерпретировать как импульсную характеристику
фазосдвигающего фильтра со сдвигом фаз на —90°. Следова-
тельно,
Обозначим через Xх(t) и yl{t) результаты фильтрации x{t)
и y(t) соответственно фильтром с импульсной характеристикой
hx (t). Будем иметь
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 249
или &хв(т) =E{x(t)yl(t-
—т)}. Отсюда находим,
что С1ху(х) = СХ1у(х) =
= Cxyi{x).
Итак, чтобы получить
Oxgit) (а следователь-
но, и S[xy(v)), достаточ-
но осуществить сдвиг фа-
зы на —я/2 в одном из
сигналов (x(t) или y(t)).
Отметим, что H(v) об-
ладает эрмитовой сим-
метрией, следовательно,
h(t) — вещественная
функция; но #(v) —мни-
мая нечетная функция,
поэтому h(t) будет так-
же нечетной. Отсюда
следует вывод: h(t) —
физически нереализуемая функция, так как из свойства
h(—/) =—h(t) следует, что h(t) не равна нулю тождественно
при ?<0. Но это означает, что фильтр, сдвигающий фазу на
—л/2, физически невозможен. Однако можно создать прибли-
женную модель такого фильтра. На практике изготавливают
фильтры со сдвигом фазы, близким к —(я/2) для узкого диа-
пазона частот.
В частности, гармонический сигнал, например cos2nvo^, при
сдвиге фазы на —я/2 превращается в cos{2nv0t—я/2). Но, по-
скольку
—cosBnv0t—|-J = —sin 2nv0t=:~- -J- cos 2nvot,
в данном частном случае фазовращающий контур на —я/2 яв-
ляется обычным дифференцирующим контуром.
Рис. 13.13.
Рис. 13.14.
250
ГЛАВА 13
Замечание. Так как фурье-образ функции —/ sign v равен
— \/2nt, то результатом фильтрации x(t) с помощью фильтра
с комплексным усилением —/signv будет свертка
*(*)*(—1/2л/), т. с. *(/)= — vV.P. \'х(и)^~. Полученное вы-
ражение определяет с точностью до знака преобразование
Гильберта функции x(t). Итак, фильтр, сдвигающий фазу на
—л/2, «выполняет» преобразование Гильберта. Схема устрой-
ства для получения мнимой части взаимной спектральной плот-
ности приведена на рис. 13.14.
Рис. 13.15.
На рис. 13.15 приведена схема устройства, позволяющего
получить действительную и мнимую части взаимной спектраль-
ной плотности.
13.7. Измерение спектральной плотности
методом фильтрации
Основы метода (см. гл. 19). Одноканальный анализатор
(рис. 13.16). Рассмотрим идеальный фильтр (на практике—•
фильтр, максимально приближающийся к идеальному в задан-
Рис. 13.16.
спектральный анализ, измерение спектральных плотностей 251
ном диапазоне частот) с импульсной характеристикой hVOiAv (t).
Это означает, что фурье-образ функции ftVo, av@ TF{AVo, av(O) =
/ Av Av \
— nVOi AV (v) будет равен 1 в полосе Ivo—~y> vo+~) и 0—
вне ее. Пропустим через фильтр сигнал x(t), и пусть xF(t) —
результат фильтрации. Если подать xp{t) на квадратор, преоб-
разующий XF{t) в \xF(t) |2, а затем на интегратор, то на выхо-
де будем иметь
Итак, для вычисления значений спектральной плотности Sxx{v)
для некоторого набора частот необходимо выполнить операции
фильтрации, возведения в квадрат и усреднения для каждой
из частот. Функция Sxx(v) получается в дискретной форме. Так
как для вычисления N точек спектра требуется выполнить ука-
занную процедуру N раз, то для обработки сигнала его необ-
ходимо предварительно записать на регистрирующее устройст-
во. Это исключает обработку в реальном времени.
Система фильтров. Для обработки сигнала в реальном вре-
мени используют систему фильтров (рис. 13.17) или переходят
Рис. 13.17.
к сжатому масштабу времени. В первом случае нужно иметь N
фильтров со строго одинаковым усилением и шириной Av по-
лосы пропускания, а частоты vi, \2, •••, v# должны быть строго
фиксированы. Это очень трудная техническая задача, так как
практически невозможно, за исключением нескольких частных
случаев, изготовить тождественные фильтры, отличающиеся
только центрированной частотой. Если же использовать более
сложные фильтры с местными гетеродинами, то устройство бу-
дет слишком дорогим.
252
ГЛАВА 13
Анализатор спектральной плотности мощности со сжатым
масштабом времени (разд. 19.1). Сигнал преобразуется в циф-
ровую форму, и его часть, содержащая К дискретных значе-
ний, вводится в запоминающее устройство. Затем эта часть счи-
тывается со скоростью много большей скорости записи, преоб-
разуется в аналоговую форму и пропускается через фильтр
F(vQ, Av), соединенный последовательно с квадратором и ин-
тегратором. При каждом следующем считывании меняют час-
тоту vo и после N операций получают jV точек спектра выбран-
ной части сигнала длительностью В. Для измерения частоты
\'о удобно использовать тот же фильтр с местным гетеродином
на входе. Можно осуществлять фильтрацию сигнала после счи-
тывания с запоминающего устройства и в цифровой форме, ис-
пользуя для этого цифровой фильтр.
Так как обрабатывается участок сигнала длительностью 9,
то для достижения достаточной точности необходимо выпол-
нить описанную процедуру п раз, так чтобы nQ = T. Если N счи-
тываний с запоминающего устройства могут быть выполнены
в течение периода Те дискретизации сигнала x(t), то система
работает в реальном времени.
Изменение масштаба времени создает определенные неудоб-
ства. Необходимо существенно уменьшать (по крайней мере в
500 раз) скорость ввода дискретных значений сигнала x(t)
в записывающее устройство по сравнению со скоростью вывода
при ускоренном считывании. Это ограничивает ширину полосы
сигналов (примерно до 50 кГц), которые могут быть обработа-
ны анализатором со сжатым масштабом времени.
Расчет взаимных спектров. Описанное выше фильтрующее
устройство становится менее удобным, если его применять для
Рис. 13.18.
спектральный анализ, измерение спектральных плотностей 253
измерения взаимных спектров, так как необходимо удваивать
значительную часть аппаратуры (это видно из рис. 13.18 и
13.16).
13.8. Дискретное преобразование Фурье и измерение
спектральных плотностей [2, 6, 7]
Сигналы с конечной энергией (и малым значением ВТ).
В данном случае фурье-образы сигналов существуют и спект-
ральные плотности находятся непосредственно из соответству-
ющих преобразований Фурье:
Здесь предполагается, что можно найти фурье-образ любого
сигнала x(t); однако при современном уровне аппаратуры это
не всегда можно сделать. Мы в состоянии определить фурье-
образ лишь коротких сигналов, т. е. сигналов, определяемых
небольшим числом точек (обычно не больше 4096), т. е. про-
изведение ВТ много меньше 2048. Действительно, если Fe— ча-
стота дискретизации, то Fe = 2aB при а^=1, следовательно,
верхняя граница В спектра связана с N соотношением N = FL.T =
2аВТ. Отсюда BT = N/2a. Так как а всегда больше 1, а нередко
много больше 1, то произведение ВТ невелико.
Когда мы на практике используем численный расчет, то в
блок вычислительного устройства помещаем N слов закодиро-
ванного сигнала. Если Те — период дискретизации, то может
показаться, что длина NTe этих слов равна длине сигнала, од-
нако не очевидно, что произведение NTe совпадает с длитель-
ностью сигнала до его кодирования. Действительно, пусть
xe (t) —группа слов сигнала x{t), длина которой 8 = ЛТе, тогда
Хотя спектр X(v) ограничен, тем не менее из-за множителя
sin jtv0/jtv0 спектр Xq (v) имеет бесконечную протяженность.
Поэтому теоретически невозможно дискретизировать усеченный
сигнал.
Как же поступают при отыскании фурье-образа N слов, на-
ходящихся в блоке вычислительного устройства? Рассмотрим N
последовательных дискретных значений сигнала x(t), дискре-
тизованного с частотой Fe=\/Te. Фурье-образ этой группы из N
слов определяется формулой
По определению Fe, данному в теореме Шеннона, частоты
A3.11)
254 глава 13
Таким образом, этой ошибкой не всегда можно пренебречь;
если положить, например, iV=1024, а частоту дискретизации
увеличить в 5 раз, то е= A0/1024) »10^2. Следует отметить, что
это среднеквадратичное отклонение не оценивает наибольшее
значение разности функций x(t,N) и x{t) Пе/2G).
Случайные стационарные сигналы и сигналы с большим зна-
чением ВТ. Среднее значение xak{t). Рассмотрим случайный
стационарный двумерный процесс x(t,e), обладающий свойст-
вом эргодичности. Пусть xk(t) =x{t, Ek) —какая-нибудь реали-
большие vN = Fe/2, не дают существенного вклада в спектр
x(t), и мы их не учитываем, принимая X(v, iV)==0
для v^s(/V2). Итак, X(v, /V)=0 для v^Fe/2 и X(v, N) =
N
=2lx(kTe)nFe/2{v)e~2jlivkre. Но поскольку nFe/2(v) служит
.фурье-образом функции (sin nFet/nFet)Fe, то nFe/2(v)e~2lt/vftr<?
является фурье-образом функции (sinnFe(t—kTe)/nFe(t—
—kTc))Fe.
Поэтому
или
Таким образом, X(v,N) является фурье-образом сигнала
x(t,N), который определен выражением
Так как носитель функции (smnFe{t—kTe)lnFe{t—kTe))Fe не
¦ограничен, то из полученного выражения следует, что носитель
сигнала x(t, N) также не ограничен, т. е. его длительность бес-
конечна. Это означает, что x{t,N) не может быть частью длины
NTe ограниченного по длительности сигнала x(t), т. е. хЦ,Ы)Ф
В работе [8] показано, что среднеквадратичное отклонение
разности x(t,N) и хв (t) равно по порядку величины l/BNTe,
где В — протяженность спектра сигнала для положительных
частот. Если Fe = 2aB, то Te=ljFe=lJ2aB, так что среднеквад-
ратичное отклонение
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 255
зация этого процесса. Выделим временной участок длитель-
ностью 0 реализации дг/;:
или xok(t)=xk(t) Пе/2@.
Вычислим математическое ожидание величины хо&(/):
найдем
или
Спектральная плотность. 1. Среднее значение фуръе-обра-
зов1). Пусть xek(t)+±Xk(v, 9). Очевидно, что участок конечной
длительности 9 всегда имеет фурье-образ:
Меняя порядок операций усреднения и суммирования (в пред-
11 Имеется в виду последовательность, /г-й член которой является фурье-
образом некоторого участка реализации с номером к, причем длина участка
фиксирована и не зависит от k\ усреднение проводится по /; — Прим персе.
т. е. ?{.to* @ } = ?{** @ Н^-
Следовательно, «среднее» значение по участкам xek{t) равно
среднему значению по реализациям xk{t)\ при этом предпола-
гается, что число участков бесконечно велико. Вследствие эрго-
дичности процесса среднее значение можно найти, производя
усреднение по последовательным участкам одной и той же реа-
лизации xk (t).
Дисперсия XQk(t). Имеем
Учитывая, что
так что
256 ГЛАВА 13
положении, что выполняются условия квадратичной сходимо-
сти), получим
Но E{xk(t)xk(u)} является автокорреляционной функцией x(t):
Итак, если реализация xk(t) —центрированная функция, то
среднее значение фурье-образов функций xe*(t) равно нулю.
Если среднее значение xk(t) отлично от нуля, то среднее значе-
ние фурье-образов равно функции sin nvQ/nvQ (центрированной
в нуле) с множителем тхв.
2. Среднее значение квадратов модулей фурье-образов. По
определению имеем
Меняя порядок операций усреднения и интегрирования, получим
поэтому
При
Положим t—u = v, тогда
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 257
Запишем полученное соотношение в виде
A3.14)
Итак, среднее значение последовательности спектральных
плотностей участков длительностью 9 (вследствие предположе-
ния об эргодичности процесса можно считать, что они принад-
лежат одной и той же реализации) равно свертке истинной
спектральной плотности Sxx{\) и функции 62(sin nv6/nv9J.
Рис. 13.19.
Соотношение A3.14) дает также представление о ширине
эквивалентного фильтра, форма которого не прямоугольная, а
описывается функцией (sinx/л;J (рис. 13.19). Обычно полага-
ют, что эквивалентный фильтр — прямоугольный, и его ширина
равна Av= 1/6.
Свертка двух одинаковых прямоугольных функций шириной 6
дает треугольную функцию шириной 29 (см. разд. 2.14):
Следовательно,
или E{\X"(v,Q)\2} = TF{Cxx(v)Q\{v)}.
В итоге получаем
258 глава 13
Очевидно, что результат
применим лишь при п—»-оо.
Примечание. Если Sxx(v) мало меняется в интервале
A3.15)
где п — число участков, по которым производится усреднение
спектральных плотностей.
Здесь предполагается, что участки не коррелированы. По-
добное допущение можно считать верным благодаря тому, что
современные системы дают возможность выбора длительности
этих участков.
Так как длительность каждого участка равна 0, то полная
продолжительность сигнала иб = Г, поэтому
Отсюда
Естественно, что всякий раз, когда выполняется какая-либо
оценка, необходимо иметь представление о погрешности этой
оценки. С этой целью вычислим дисперсию X(v, 6). Имеем
Выражение для E{\Sxkxk (v, 0) |2} записывается в виде
Чтобы вычислить моменты 4-го порядка, сделаем упрощаю-
щее предположение: допустим, что сигнал имеет гауссово рас-
пределение. Тогда можно найти моменты любого порядка, исхо-
дя из моментов 1-го и 2-го порядков. Вычисления дают следу-
?ПТТТМЫ Г\РЮ\Т TTkTQT"
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 259
Поскольку 1/6 является шириной полосы пропускания эквива-
лентного фильтра, получаем хорошо известную формулу
Дискретизация. Как показано в гл. 7, дискретизация вре-
менных сигналов должна осуществляться в соответствии с тео-
ремой Шеннона. Аналогичная задача возникает при дискрети-
зации спектра. При вычислении спектральных плотностей с по-
мощью дискретного преобразования Фурье ширина полосы сиг-
нала, которую можно обработать в реальное время, будет тем
больше, чем быстрее вычисляется фурье-образ. Кроме того,
точность анализа тем выше, чем больше длительность 0 участ-
ков сигнала. А так как Q = NTC = N/Fe, то, очевидно, точность
анализа возрастает с уменьшением частоты дискретизации вре-
менного сигнала, что находится в соответствии с теоремой
Шеннона. Скорость вычисления фурье-образа зависит от числа
точек, в которых определяются его значения. Поэтому для
ускорения обработки сигнала желательно брать возможно
меньшее число таких точек, руководствуясь при этом теоремой
Шеннона.
Допустим, что взято N точек сигнала. Тогда, согласно алго-
ритму быстрого преобразования Фурье, нужно определить зна-
чения спектра в N/2 точках полосы (О, В) или вследствие сим-
метрии— в N точках полосы (—В, В). Пусть частота дискре-
тизации сигнала равна Fc. Тогда Fe = 2aB при а^1 и мы на-
ходим
Q=NTe=N/2aB.
Следовательно, ширина полосы, на которую нужно настроить
аппаратуру, составляет Av = 2B/N.
Можно ли утверждать, что дискретизация спектра сделана
корректно? Для ответа на этот вопрос воспользуемся теоремой
Шеннона. Пусть Sxx(v, 0) —спектральная плотность, которую
нужно рассчитать. Применяя преобразование Фурье к соотно-
шению
S^v,e)=Sxx(v)*(^-)V, A3.15a)
получим
Ста(т,0)=Схх(т)Ле(тH. A3.16)
Если Схх(х)=0 для |т|^тм, где Тм = Э, то нужно выбрать
шаг дискретизации Av^1/2tm, т. е. 2B/Ns^.\/2tm, или N^4BjM.
Таким образом, величина N, или число слов, вводимых в
вычислительное устройство, зависит от ширины спектра и «ши-
260
ГЛАВА 13
рины» корреляционной функции сигнала. Если значение хм не-
известно и мы лишь знаем, что С*х(х, 8)=0 при |т|^0, то
2B/Ns^l/2Q. Следовательно, 2B/N^aB/N при а>2.
В этом предельном (и, безусловно, реальном) случае нуж-
но осуществить дополнительную дискретизацию временного
сигнала, увеличив частоту по меньшей мере в 2 раза. Кроме то-
го, не следует забывать, что речь идет об определении спект-
ральной плотности x(i) [см. выражения A3.3) и A3.14)].
Визуализация спектра. Очень часто возникает потребность
«начертить» спектральную плотность в виде графика, чтобы
«видеть» спектр. Однако следует помнить, что наш глаз — весь-
ма несовершенный интерполятор (в основном 1-го порядка) и
не способен выполнить интерполяцию Шеннона. Мы видели,
что наибольшая точность анализа получается, если осущест-
вить дискретизацию сигнала с частотой Шеннона, т. е. если
брать коэффициент и как можно ближе к 1. В этом случае со-
ответствующая дискретизация спектра оказывается такой, что
коэффициент а' также близок к 1. При таких условиях невоз-
можно выполнить визуально качественную интерполяцию спект-
ра, которая была бы близка к интерполяции Шеннона, т. е.
Рис. 13.20.
спектральный анализ, измерение спектральных плотностей 261
Рис. 13.21.
W — число дискретных значений сигнала; N' — число дискретных значений спектра.
соответствующая интерполяционная функция была бы равна
Без этой достаточно сложной интерполяции мы рискуем полу-
чить неправильное представление о форме спектра (рис. 13.20),
а в более простых случаях —неверное представление о локали-
зации спектральных линий (рис. 13.21). Правильная визуаль-
ная оценка спектра возможна лишь при увеличении числа рас-
считываемых точек спектра по сравнению с числом дискретных
значений участка сигнала. Следует отметить, что быстрое пре-
образование Фурье (БПФ) не решает эту задачу. Действитель-
но, если сигнал дискретизован с частотой Fe и содержит N дис-
кретных значений (слов), то применение БПФ дает N/2 значе-
ний (слов) спектра (в области положительных частот) с шагом
дискретизации Av = FeIN.
262 ГЛАВА 13
Таким образом, для визуальной оценки спектральной плот-
ности энергии следует использовать интерполятор1) либо рас-
считывать больше точек спектра (в 4, 8, 16 раз) по сравнению
с числом дискретных значений сигнала.
Увеличение частоты дискретизации временного сигнала не
дает положительного результата из-за снижения точности ана-
лиза, так как Av=\/Q = 2aB/N растет с ростом а. Наряду
с этим при увеличении частоты дискретизации временного сиг-
нала нужно уменьшить длительность 0 его участка, ибо число
слов в вычислительном устройстве в общем постоянно, а это
приводит к росту ошибки.
Измерение взаимных спектральных плотностей (взаимных
спектров). Рассмотрим сигналы x(t) и y(t). Для каждого
участка xk{t) и yk(t) находим
Xh (v, 0) -Re [Xh K0)] +/ Im [Xh (v, 0)],
A3.17)
Yh (v, 0) =Re \Yh (v, 8)]+/ Im \Yk (v, 0)].
Затем определяем спектральные плотности
S^ (v) =? { | Re [Xh (y, 0)] |2+1 Im [Xh (v, 0)] |»} A3.18)
и аналогично Syy(v), а также взаимные спектральные плотности
Sxy (v, 0) =*Re [Sxy (v, 0)] +/ Im [Sxy (v, 0)J,
где
Re [Sw (v, 0)]=? {Re [Xk (v, 0)] Re [Yh (v, 0)]-
-Im[Xft(v,0)lIm[Kft(v,0)]},
Im \SXff (v, 0)] =E {Re [*ft (v, 0)] Im [Yh (v, 0)] +
+ReIFft(v,0)]Im[^ft(v,0)]} A3.19)
и аналогично Syx(v, 0).
13.9. Вычисление автокорреляционных функций и взаимных
корреляционных функций по спектральной плотности
Мы ограничимся рассмотрением автокорреляционной функ-
ции, так как результаты непосредственно распространяются на
взаимные корреляционные функции. Уже отмечалось, что авто-
корреляционную функцию можно получить на основании тео-
1 По-видимому, интерполяционные устройства до сих пор не использу-
ются, хотя в недавних работах [9] показано, что проблема применения интер-
поляторов для визуализации спектров не является сложной.
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 263
ремы Винера — Хинчина, применяя обратное преобразование
Фурье к спектральной плотности:
TF-i{SMe(v)} = Csee(v). A3.20)
Если спектр определяется численно, то в результате получает-
ся не Sxx(v), а в соответствии с выражением A3.15а) функция
?. / ч о / \ I sin nv6 \! й.
Применяя к этому соотношению преобразование Фурье, что
уже было проделано при выводе формулы A3.16), найдем
Схх (т) = TF<-« {Sxx (v)} =СХХ (т) ЭЛе (т).
Иначе говоря, если мы хотим получить автокорреляционную
функцию, исходя из спектральной плотности, то должны потре-
бовать, чтобы выполнялось условие Cxx{x)QAe (т) = Схх(т).
Рис. 13.22.
Рис. 13.23.
Следовательно, необходимо, чтобы Схх(х)=0 при |т|^т.м,
где Тм<С8, т. е. длительность 9 участка x(t) должна быть мно-
го больше времени корреляции сигнала (рис. 13.22). Это усло-
вие делает практически невозможным получение автокорреля-
ционной функции по спектральной плотности. Требования мож-
но ослабить, если отыскивать автокорреляционную функцию в
виде отношения
Сяэс(т) = Схж(т)/(9Ле(х)).
Очевидно, что это отношение имеет смысл, если Схх(х)=0 для
|т|^Тм, где Тл}^9 (рис. 13.23), т. е. длительность 9 участка
сигнала должна быть больше или равна времени корреляции
сигнала. Из этого условия вытекает, что величина 0 должна
быть достаточно большой, т. е. следует брать возможно мень-
шую частоту дискретизации. Возникающие при этом трудности
уже обсуждались в разд. 13.8. Отметим также, что ошибка,
обусловленная делением фурье-образа спектра на функцию
Ле (т), возрастает на «хвосте» корреляционной функции. Во из-
бежание этого часто используют спектральные весовые функ-
264 ГЛАВА 13
ции (гл. 14). Однако систематическое их применение приводит
к неправильной интерпретации результатов, поэтому использо-
вать весовые функции надо крайне осторожно.
13.10. Явление Гиббса
Выделяя участок сигнала, мы получаем функцию xk(t), зна-
чения которой в концах промежутка в общем случае отличны
от нуля и не совпадают между собой. Поэтому преобразование
Фурье применяется либо к непрерывному сигналу с одной или
двумя точками разрыва, либо к периодическому сигналу (ал-
горитм быстрого преобразования Фурье периодически продол-
жает сигнал), который имеет разрывы в точках, являющихся
концом предыдущего и началом последующего отрезка при пе-
риодическом продолжении функции xk{t). Наличие разрывов
ведет к появлению осцилляции в фурье-образе. Это явление,
называемое явлением Гиббса, физически объясняется тем, что
разрывы сигнала приводят к возникновению в его спектре вы-
соких паразитных частот. Эти помехи можно частично пода-
вить, применяя спектральные весовые функции.
13.11. Корреляционный метод спектрального анализа
Основы метода. Теорема Винера — Хитина. Этот метод ос-
нован на теореме Винера — Хинчина, согласно которой спект-
ральная плотность является фурье-образом автокорреляцион-
ной функции
A3.21)
A3.22)
Мы можем определить значения автокорреляционной функ-
ции в конечном числе точек промежутка, концы которого опре-
деляются максимальным сдвигом ±|тм|, т. е. мы получаем
функцию С'(т) = С(т)Пхл(т).
Переходя к фурье-образам, находим
Взаимный спектр определяется формулой
Так как Схх(х)—четная функция, то спектр не содержит
мнимой компоненты:
спектральный анализ, измерение спектральных плотностей 265
Функция sin 2пухм/2пухм определяет фильтрацию спектральной
плотности. Отсюда следует, что ширина эквивалентного фильт-
ра равна Av= 1/2тм.
Дискретизация. В разд. 9.5 мы видели, что дискретизация
сигналов x(t) и y(t) в соответствии с теоремой Шеннона позво-
ляет получить автокорреляционную функцию без дополнитель-
ных ошибок по формуле
A3.23)
A3.24)
где
Ниже мы покажем (примечание к разд. 18.4), что разреша-
ется дискретизовать автокорреляционную функцию с тем же
шагом (по переменной т), что и сигнал (по переменной t).
Оптимальная частота дискретизации. Мы не можем опреде-
лить значения автокорреляционной функции для сдвигов от
—оо до оо. Коррелометр измеряет корреляционную функцию
для конечного числа точек, соответствующих такому же числу
различных сдвигов. С помощью коррелометра на N точек с ин-
тервалом между точками Те корреляционная функция опреде-
ляется на промежутке (—Хм, Хм), где Xm=(N—1)Те. Если авто-
корреляционная функция определяется на промежутке
(—Хм, %м) длиной 2(N—l)Te = 2NiTe, то точность анализа не
превосходит l/2NiTe. Следовательно, надо стремиться к тому,
чтобы значение 2NiTe было наибольшим. Так как N\ фиксиро-
вано, то следует брать возможно большее Те, т. е. возможно
меньшую частоту Fe (безусловно, в соответствии с теоремой
Шеннона).
Как это ни странно, наибольшая определенность спектра со-
ответствует такому расположению точек на графике корреля-
ционной функции, при котором точки возможно дальше отстоят
одна от другой. На рис. 13.24 приведены примеры наилучшего
распределения точек.
Число точек спектра. Пусть В — ширина спектра сигнала
x(t), представленного в дискретной форме с частотой Fe — 2aB.
Поскольку спектральная плотность является фурье-образом
функции Схх(х) и так как Схх{х) определена на промежутке
2(N—\)Те, где N — число точек коррелометра, то нужно дис-
кретизовать Sxx(v) с шагом Av<(l/2(yV—\)Те) или Av<
<aB/(N-\).
266
ГЛАВА 13
Рис. 13.24.
наименьшее число
точек спектра (в обла-
сти положительных ча-
стот), которые надо
рассчитать, равно
B/Av=(tf— l)/a. Ко-
нечно, для визуально-
го исследования спек-
тра надо иметь гораз-
до большее число то-
чек (разд. 7.5).
Преимущество кор-
реляционного метода
по сравнению с мето-
дом статистического
усреднения состоит в
том, что преобразова-
ние Фурье применяет-
ся только один раз;
поэтому не обязатель-
на быстрая его реали-
зация. Но если нет не-
обходимости в быстром преобразовании Фурье, можно вычис-
лить столько значений спектральной плотности, сколько нужно
для достаточно качественной визуальной оценки спектра, или
же можно применить метод спектральной лупы, распределяя
точки на том участке спектра, где это необходимо.
Весовая функция. В неблагоприятных случаях, а именно при
анализе спектров, имеющих, с одной стороны, большую протя-
женность, а с другой — узкие пики, разрешающая способность
анализирующего устройства может оказаться недостаточной.
График 5 (v), который при этом получается, более чувствителен
к паразитным колебаниям. В такой ситуации корреляционная
функция берется с множителем — весовой функцией. Эта функ-
ция не увеличивает разрешающую способность, но она сглажи-
вает паразитные колебания, благодаря чему можно отделить
истинные пики от ложных (при этом часть истинных пиков мо-
жет быть потеряна).
Итак, следует иметь в виду, что любая весовая функция,
сглаживающая спектр, не только уменьшает паразитные осцил-
ляции, но и делает спектр менее точным. В связи с этим нуж-
но применять весовую функцию с особой осторожностью; си-
стематическое ее применение не рекомендуется. В сомнитель-
ных случаях желательно проводить все расчеты не только с ве-
совой функцией, но и без нее.
спектральный анализ, измерение спектральных плотностей 267
13.12. Корреляционный анализатор спектра
Совокупность коррелометров и устройства, осуществляюще-
го преобразование Фурье, образует анализатор спектра. Одно и
то же устройство, реализующее преобразование Фурье, может
-быть присоединено к коррелометрам различных типов. С по-
мощью подобного анализатора можно рассчитать спектры, вза-
имные спектры, автокорреляционные функции, взаимные корре-
ляционные функции. Современные анализаторы позволяют об-
рабатывать сигналы с частотами до 100 МГц. Имеются, напри-
мер, анализаторы, расчитывающие спектры в диапазоне от 0
до 100 МГц в реальном времени.
Теперь при анализе сигналов не удовлетворяются просмот-
ром результатов, а все чаще проводят их математическую об-
работку. Для этой цели нужна вычислительная машина (впол-
не пригодна мини-ЭВМ). На вычислительной машине нетруд-
но рассчитывать преобразования Фурье для перехода от корре-
ляционных функций к спектральным плотностям. Корреломет-
ры относятся к внешним устройствам ЭВМ так же, как и вы-
числительные блоки быстрого преобразования Фурье. Отметим,
что коррелометры увеличивают в 1000 раз ширину полосы, ко-
торую можно обработать в реальном времени.
13.13. Точность определения спектральной плотности,
полученной преобразованием Фурье корреляционной
функции [1]
Влияние погрешности оценки корреляционной функции.
Пусть Схх{х) —оценка корреляционной функции Схх(х). Функ-
цию Сжх(х) можно записать в виде
A3.25)
где y(t)—погрешность оценки. Переходя в пространство час-
тот, будем иметь
A3.26)
В практических расчетах ограничиваются вычислением
*Схх{х) при т^0. Значения при отрицательных х получаются на
основе свойства четности функции Схх(х). Рассмотрим F(v) =
268 ГЛАВА 13
= TF{y(t)}. Так как у(х) ¦—вещественная четная функция, то
Пусть Т — длина промежутка интегрирования, тогда им-
пульсная характеристика интегрирующего фильтра будет рав-
на 1 на промежутке (О, Г) и 0 вне промежутка, т. е. Л(т) =
откуда
В результате получаются оценки дисперсии @,783/7Av) <C
<es2(v) <i2/TAv и среднеквадратичного отклонения
@,885/yTAv) <es(v) < A,44/уГА^). Можно принять
B,(v) = l/y'TAv. A3.29)
A3.27)
Теперь находим Е{у(т)} = 0 и ?{r(v)}=0. Простые, но гро-
моздкие вычисления величин E{y(xi)y(x2)} и ?{|T(v)|2} для
гауссова процесса [1] дают
В пространстве частот имеем
где Av — ширина эквивалентного фильтра, равная 1/тм, и хм—
максимальный сдвиг для коррелометра. Из полученного соот-
ношения определяем
Так как максимальное и минимальное значения отношения
sinu/u равны соответственно 1 и —0,217, то
спектральный анализ, измерение спектральных плотностей 2Ш
Мы приходим к тому же результату, что и в случае измерения
спектральной плотности методом фильтрации [выражение
(9.48)].
Важное примечание. Сравнение формул (9.48) и (9.37) показывает, что
мы имеем в одном случае 1ЦВТ, а в другом l/YAvT. Если В — ширина по-
лосы, a Av — точность анализа, то Av=j3//V, где N — число точек спектра.
Следовательно, для корреляции вс=1/уВГ, а для спектральной плотности
Ss = 1 /УДvT = 1 /У(В/?)Т^уЩвТ= есулл~так что es=ec"|/iVT
Предположим, например, что корреляционная функция измерена с точ-
ностью ес=5% (это позволяет определить «на глаз» вид графика функции).
Если теперь рассчитать 100 точек спектра (коррелометр со 100 точками),
то получим 8s=10ec=50%- Для коррелометра с 400 точками es=2Oec=lOO°/o.
Таким образом, для спектрального анализа необходимо вычислить кор-
реляционную функцию на промежутке длиной Т, соответствующей Av=l/62,
а не ВГ=1/е2.
Опыт показывает, что эти результаты внушают пессимизм и кажутся па-
радоксальными в том смысле, что спектральный анализ с помощью корреля-
ции приводит к большей погрешности оценки, чем методы прямого преобра-
зования Фурье или фильтрации.
Влияние систематической ошибки при определении корреля-
ционной функции на спектральную плотность, полученную пре-
образованием Фурье [1]. Исследуем теперь случай, когда авто-
корреляционная функция задана N+1 значениями, каждое из
которых определено с ошибкой Ь(х). Будем предполагать, что
ошибки, соответствующие разным значениям, между собой не-
зависимы. Здесь идет речь о систематических ошибках (разд.
10.4). Допустим, что коррелометр дает значения
Схх (лт,) =СЖХ (ят,) + Ь (лт(), A3.30)
где tj — приращение сдвига (период дискретизации корреляци-
онной функции). Пусть О^п^Я и Nxi=xm. Применим преоб-
разование Фурье к обеим частям соотношения A3.30):
!) Неравенство справедливо лишь больших N. — Прим. ред.
По предположению ошибки независимы, следовательно, некор-
релированы, поэтому
Отсюда вытекает оценка')
A3.31)
A3.32)
270 ГЛАВА 13
Эти соотношения были экспериментально проверены Фоком
[5]v
Трудно сделать общие выводы из последнего соотношения,
так как величина ошибки зависит от точности анализа Av. От-
метим все же, что если при уменьшении Av (в рамках теоремы
Шеннона) точность анализа возрастает, ошибка значительно
увеличивается, так как уменьшается избыточность дискретных
значений Схх(х).
Частные случаи. Белый шум. В этом случае Схх (г) = б (х),
<S**(v) = l, ei2(v) = (ti/Av)o»2. Поскольку l/2Nxi=Av, то ei2(v) =
= 2Nii2Gb2. Итак, ошибка пропорциональна числу точек корре-
лометра, но корреляционная функция равна нулю всюду, кроме
т = 0, поэтому все эти точки не играют никакой роли.
Корреляционная функция почти совпадает с синусоидой
(фильтр с очень узкой полосой). В этом случае ei2(v) = 2т,%&2/ЛГ.
Ошибка уменьшается с ростом числа точек. Это естественно,
так как чем дольше длится периодический сигнал, тем точнее
удается определить его характеристики — частоту и амплитуду.
Между этими крайними случаями имеются всевозможные
промежуточные. В частности, моделирование показало, что для
осциллирующих и «умеренно» затухающих С(х) имеет место
соотношение ei2(v) = 2xt2Gb2, т. е. нет зависимости от N.
В заключение отметим, что влияние ошибки при переходе
от корреляционной функции к спектральной плотности в очень
большой степени определяется формой спектра. Сомнительным
является утверждение, что ошибка пропорциональна ~]/N, так
как в ряде практических случаев такая зависимость от N не
дает даже правильного порядка величины.
тогда Av[S^(v)]2ei2(v) <.х\вь2, т. е.
Допустим, что дисперсия b(nxi) не зависит от индекса I (это
предположение хорошо выполняется в случае систематических
ошибок): E{[b{nXi)]2} = Ob2 для всех i. Следовательно,
Av?{|fi(v)|2}<t,-(Tft2.
Положим
Учитывая соотношение 1/2./Vtj=1/2tm=Av, где Av — ширина эк-
вивалентного фильтра, получим
СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 271
Важное примечание. Приведенные выше рассуждения имеют непосред-
ственное отношение к процедуре перехода от сигнала x(t) к его фурье-обра-
зу X(v) (разд. 13.2). Если значения функции x(t) определены с систематиче-
ской ошибкой 1%, какое влияние окажет эта ошибка на фурье-образ X(v)?
Проведенные рассуждения служат лишь первым приближением решения
проблемы. Для более точного ответа на поставленный вопрос потребовались
бы значительные усилия.
Вычисления, выполненные в этом и предыдущем разделах, показывают,
что ошибка в определении корреляционной функции проявляется впоследствии
по-разному в зависимости от того, систематическая ли это ошибка, или по-
грешность оценки. Однако гипотезы о характеристиках этих ошибок мало
отличаются. Оба результата совпадают только для белого шума. Что касает-
ся других случаев, то замечание, приведенное выше, подтверждает, по-види-
мому, выводы, сделанные здесь для общего случая. По всей вероятности,
ошибка в расчете спектральной плотности окажется существенно меньше, если
иаходить спектр с помощью преобразования Фурье корреляционной функции.
13.14. Замечания по поводу применения
спектральных анализаторов.
Определение оптимальной частоты дискретизации
Может показаться, что высказывания, сделанные в этой
главе, логически противоречивы. Действительно, чтобы достичь
наилучших результатов анализа спектральной плотности сигна-
ла x(t), нужно осуществить дискретизацию с частотой, равной
(или несколько большей) удвоенной частоте сигнала. Это пред-
полагает, что мы уже знаем верхнюю границу спектра. Но цель
Рис. 13.25.
272 ГЛАВА 13
анализа как раз и состоит в том, чтобы определить спектр, а
следовательно, его верхнюю границу.
Если из-за незнания наибольшей частоты сигнала частота
дискретизации будет существенно занижена, то результат
спектрального анализа будет неверным (произойдет наложение,,
или маскировка, частот). Мы сейчас опишем простой способ
контроля правильности дискретизации с помощью спектраль-
ного анализатора.
Максимальная частота, которую берут при анализе спект-
ра, равна vN=Fe/2=l/2Te, a Fe = 2aFM, где FM — верхняя гра-
ница спектра и a^sl. Следовательно,
Vm=<*Fm, S(yM)=S(aFM),
при этом, по определению FM, величина S(aFM)=0. Итак, мы
приходим к выводу, что в последней точке спектральная плот-
ность должна быть равна нулю.
Возможны три случая. На рис. 13.25, а приведен график
спектральной плотности, которая не обращается в нуль в по-
следней точке (в большинстве случаев кривая даже растет
при подходе к этой точке, что указывает на наложение частот).
Это означает, что частота дискретизации слишком мала. На
рис. 13.25,6 представлен спектр, протяженность которого зна-
чительно меньше протяженности рассчитываемого спектра. От-
сюда следует, что частота дискретизации слишком велика и что
возможности аппаратуры (с точки зрения разрешающей спо-
собности) не использованы полностью. На рис. 13.25, в приве-
ден график, верхняя граница которого близка к максимальной
частоте рассчитываемого спектра. Видно, что дискретизация
сделана правильно, анализатор используется оптимальным об-
разом. Итак, непосредственно по измерению спектральной
плотности с помощью анализатора можно судить о том, пра-
вильно или нет сделана дискретизация.
Напомним, что точность анализа определяется частотой
дискретизации. Пусть ./V — число точек коррелометра, Fc =
= 1/Ге=1/тг — частота дискретизации, тогда точность анализа
Av=l/2iVre, протяженность анализируемого спектра Б = 1/27\.=
= /У2.
Если находить протяженность анализируемого спектра с по-
мощью преобразования Фурье сигнала, дискретизованного с
частотой Fe, то снова получим B = Fe/2.
ЛИТЕРАТУРА
1. Hellion A., Escudie В., Мах J. Etude de 1а precision des procedes experimen-
taux actuels de calcul des densites spectrales energetiques et des fonction*
de correlation, Annales des telecommunications, 26, 78, 231—314 A971).
спектральный анализ, измерение спектральных плотностей 273
2. Gold В., Rader С. М. Digital processing of signals, Mac Graw Hill, New
York, 1969.
3. Berthier D., Fauque J. M., Max J., Bonnet G. Analyse spectrale par correla-
tion, Rapport CEA, No. R 3672.
4. Max J., Fauque J. M.. Berthier D. Les correlateurs dans le traitement des me-
sures et l'analyse spectrale, Bulletin d'instrumentation scientifique et techni-
que du CEA, No. 143, 1969.
5. Fauque J. M. These d'ingenieur — docteur, Faculte des Sciences de Grenoble,
1970.
•6. Oppenheim A. V., Ronald W., Schaffer. Digital Signal Processing, Prentice
Hall, 1975.
7. Lifermann J. Theorie et allpications de la transformation de Fourier rapide,
Masson, 1977.
8. Landau, Pollak, Bell System tech. Journal, 41, 1295—1336.
¦9. Jourdain G. Comparaison de differentes methodes de reconstitution d'un sig-
nal fourni sous forme echantillonnee, Annales des Telecommunications, 28,
No. 1—2, 1973.
Глава 14
ВЕСОВЫЕ ОКНА1'
Когда бы я ни смотрел в окно, этот пря-
моугольник света рождает во мне целый
мир мыслей.
Ж. Барбе Д'Оревильи, Дьявольщина
14.1. Некоторые общие соображения
Регистрация или непосредственная обработка сигналов яв-
ляется процессом, имеющим конечную длительность. Аппарату-
ра, регистрирующая сигнал, и вычислительное устройство (если
информация обрабатывается не сразу), осуществляющие пред-
варительную обработку сигнала, функционируют в течение ко-
нечного времени. Так, например, корреляционная функция на
выходе коррелометра или вычислительного устройства определе-
на на промежутке (—Хм, %м)- Аналогично при использовании
преобразования Фурье выделяется участок сигнала длитель-
/ е е\
ностью (—у, у). При оценке спектральной плотности мощно-
сти методом фильтрации сигнал подается на вход системы в
течение времени 9: I—у, ~^\. Во всех случаях обрабатывается
часть сигнала, определенная на промежутке 9. Это равносиль-
но умножению сигнала на прямоугольную функцию, называе-
мую естественным временным окном. Эта функция равна 1, ес-
А А
ли t0—-2-<^<^о + - или —Тм<т<тм, и 0 для остальных зна-
чений t или х. Временному окну в пространстве частот соответ-
ствует спектральное окно Qo(v), форма которого зависит от 0-
или 2тм и используемой аппаратуры.
Таким образом, оценка спектральной плотности подвергает-
ся возмущению Qo(v) =TF{nfl /г(*)} или TF{n^(T)}. Для
уменьшения этого эффекта на естественное временное окно на-
кладывают еще одно, так называемое временное весовое окно
f{t). Носитель этого окна принадлежит промежутку длиной 9,
и можно сказать, что окно 1Ъ/2@ заменено новым.
1) Глава написана Жан-Клодом Карре.
ВЕСОВЫЕ ОКНА 27
Для расчета спектральной плотности используется часть
корреляционной функции или сигнала в соответствии с выбран-
ной методикой. В зависимости от того, в какой области — вре-
менной или частотной — рассматриваются окна, их называют
временными или частотными. Напомним, что умножение на ок-
но в одной из областей соответствует свертке с образом окна
в другой:
x(t)f(t)*=*X(v)*Q(v).
Мы изучим применение некоторых наиболее важных времен-
ных окон для оценки спектральной плотности, полученной ме-
тодом коррелограмм (из корреляционной функции), методом
периодограмм (прямым преобразованием Фурье), методом
фильтрации с последующим возведением в квадрат и интегри-
рованием.
Для упрощения записи формул предположим, что сигнал
имеет аналоговое представление. В связи с этим будем прене-
брегать эффектами, обусловленными переходом к цифровой
форме сигнала или весовой функции, а также влиянием числа
дискретных значений, взятых на данном участке сигнала.
14.2. Окна, связанные с преобразованием Фурье
Рассмотрим сигнал x\{t), определенный на промежутке
/ 9 6 \
(—Т»~2~) формулой x{t)fo{t)=Xi(t), где fo(t)—естественное
временное окно.
По определению /о(О=Пв/2(О—прямоугольная функция:
Функцию Пе/г(О можно представить также в виде разности
/ в \ / 0\
Ц'+ ~2Г^у~~21' где ^W — единичная функция, равная.
( 1, г>0,
U(t)=\ 1/2, t=0,
(О, t < 0.
В пространстве частот будем иметь X(v)*=*x(t). Xi(v)^
**X(v)*Qo(v)*±Xi(t), где
г, / \ q sin nv9 . Т-, ...
Qo (v) =e —^g- =*=* Пе/2 @-
276 ГЛАВА П
Функция Qo(v) называется естественным частотным окном.
Эта функция имеет положительные и отрицательные выбросы;
отрицательные выбросы могут давать нежелательные эффекты.
Чтобы уменьшить их влияние, многими авторами были предло-
жены различные весовые, или корректирующие (с помощью
сглаживания) функции f(t).
Каждому временному окну f(t) соответствует вполне опре-
деленное частотное окно Q(v)+*f(t).
Частотное окно должно удовлетворять следующим усло-
виям:
• оно должно иметь возможно более узкий центральный
пик;
• число выбросов должно быть небольшим, а их амплиту-
да — малой;
• отрицательные выбросы, если возможно, должны отсутст-
вовать.
Временные весовые окна, которым отвечают частотные окна
с указанными свойствами, образуют первое семейство весовых
функций. Частотное окно, соответствующее временному окну,
есть фурье-образ функции f{t).
14.3. Окна, используемые в методе коррелограмм
(Влияние ограниченной длительности известной части
корреляционной функции)
Корреляционная функция, полученная с помощью вычисли-
тельного устройства или коррелометра, определена на проме-
жутке длиной 2хм. Предположим, что она известна на интерва-
ле (—хм, хм)- Мы исследуем влияние параметра хм, т. е. мак-
симального корреляционного сдвига, на спектральную плот-
ность энергии.
Допустим, что нам известна несмещенная оценка Ст(т) не-
прерывной корреляционной функции1) на промежутке (—хм, хм):
?{Ст(т)}=С(т)/0(т),
где fo (т) == ПХм (т)—естественное временное окно. Переходя
к фурье-образам, найдем
Sm(v)=S(v)*Q0(v).
Мы получаем оценку Sm(v) спектральной плотности в виде
свертки S(v) с естественным спектральным окном Qo(x), кото-
" То есть функция задана не в дискретной, а в аналоговой форме.—
Прим. перев.
ВЕСОВЫЕ ОКНА 277
рое является непрерывной функцией и определяется выраже-
нием
Qo (v) = 2тЛ, sin 2л\'тЛ,/2л\-тЛ1.
Ширина этого окна тем меньше, чем больше хм. Если хм
неограниченно возрастает, Q0(v) стремится к 6-функщш. Иног-
да вводят ширину окна как удвоенное расстояние от максиму-
ма до 1-го нуля; по этому определению ширина равна 1/2тм-
Часто функцию sinx/x аппроксимируют треугольником той же
площади и высоты. Ясно, что основание треугольника равно
1/тль а ширина на половине высоты равна 1/2тм. Все особенно-
сти графика 5(v), проявляющиеся на промежутке, длина кото-
рого меньше ширины окна, исчезают при переходе к S,,,(v) [1].
Отсюда следует, что операция свертки приводит к сглаживанию
спектра. Кроме того, боковые выбросы оказывают заметное
влияние на спектр и могут порождать паразитные осцилляции
в окрестности острого резонанса. Чтобы искажения спектра
были минимальны, функция S(\) должна медленно меняться
внутри окна Qo(v). Таким образом, невозможно различить две
частоты, разность которых меньше 1/тм. Боковые выбросы у ес-
тественного спектрального окна нежелательны. Для устранения
этого недостатка многие авторы предлагали ввести другие ве-
совые функции и спектральные окна. При этом делались попыт-
ки построить такие весовые функции, которые имели бы воз-
можно меньшую абсолютную величину боковых выбросов и как
можно меньше искажали бы спектр. Был предложен ряд весо-
вых функций, одни из которых позволяли осуществлять коррек-
цию корреляционной функции Ст(х), другие — коррекцию либо
С„,(т), либо спектральной плотности Sm(v), полученной из
Ст(х) преобразованием Фурье. Эта операция представляет со-
бой коррекцию с помощью сглаживания.
Если f(x) —временное весовое окно, то фактически мы име-
ем
Ст(т)/(т)=С(т)/0(т)/(т).
Функции f(x) принадлежат первому семейству весовых функ-
ций, используемых для коррекции сглаживанием в случае пре-
образования Фурье сигнала, определенного на промежутке
(—Т, Т).
14.4. Окна, применяемые в методе периодограмм
(Влияние ограниченной продолжительности анализируемой
части сигнала)
Нам предстоит рассмотреть спектральную плотность, полу-
ченную усреднением квадратов модулей фурье-образов участ-
ков сигнала. Мы изучим влияние ограниченной продолжитель-
278
ГЛАВА 14
ности каждого участка на спектральную плотность мощности.
Эта задача возникает в случае применения системы последова-
тельно соединенных устройств для преобразования Фурье, воз-
ведения в квадрат и усреднения или при обработке сигнала на
регистрирующем вычислительном устройстве с помощью логи-
ки, -основанной на преобразовании Фурье.
Пусть х(t)—случайная стационарная функция 2-го поряд-
ка. Выделим участок сигнала длительностью 6:
Для упрощения выкладок положим ^ = 0. Тогда хв @ =
=*@М0.
Следовательно,
и применим преобразование Фурье
Теперь можно найти спектральную плотность средней мощ-
ности
которая определяется из соотношения для S(v):
Так как наблюдение сигнала x(t) продолжается в течение
конечного времени, то исходную функцию x{t) надо умножить
на временное окно. Если не сделано никакой коррекции, то
ВЕСОВЫЕ ОКНА 279
При этом мы учли, что E{x{u)x(v)} = C(u—v). Полагая и—v — x
и принимая во внимание, что С (и—и)=С(т)—корреляцион-
ная функция, получим
где
Полученное выражение может быть записано в виде
где Fd{v) —фурье-образ функции fa{t). Итак, спектральное ок-
но равно с точностью до множителя 1/8 квадрату фурье-образа
весовой функции при условии ее четности. Это свойство часто
используют для вычисления значений Qa(v).
Временные весовые окна, применяемые для оценки спект-
ральной плотности на основе прямого преобразования Фурье,
образуют второе семейство корректирующих (с помощью сгла-
живания) функций.
где
Таким образом, оценка спектральной плотности шума равна
свертке спектральной плотности мощности S(v) и спектраль-
ной плотности Qd(v) временного окна fd(t). Другое приближе-
ние построено в гл. 13, где рассмотрено влияние конечной дли-
тельности сигнала (случай естественного окна) на среднее зна-
чение квадратов модулей фурье-образов.
Во многих случаях функция fd(t) является четной, поэтому
Отсюда вытекает, что
280 ГЛАВА 14
14.5. Окна, применяемые в методе фильтрации
с возведением в квадрат и усреднением
(Влияние конечной длительности анализа)
Оценку спектральной плотности мощности можно получить
также, пропуская сигнал через фильтр с очень узкой полосой
с последующим возведением в квадрат и усреднением. Будем
считать, что сигнал подается на анализирующее устройство и
обрабатывается в течение конечного времени. Пусть это будет
случайный стационарный процесс 2-го порядка x(t), воздейст-
вующий на анализатор в течение времени 0:
Обозначим импульсную характеристику узкополосного ана-
лизирующего фильтра через h(t, f0). Тогда
где C(u—v)=E{x(t—u)x(t—1>)} — корреляционная функция пе-
ременной и—и=т. Если обозначить
Для упрощения записи примем, что 4 = 0. Так как наблюдение
сигнала продолжается в течение времени 8, то xa(t)=x(t)ff(t).
Если не введено никаких весовых функций, то
Это выражение можно записать в виде
ВЕСОВЫЕ ОКНА 281
то
Положим Qf(v) =TF{Ff (т)} и обозначим через H(v) переда-
точную функцию фильтра. Вспоминая, что P(f)=2S(f) и что
H(f) существует только при />0 (разд. 13.1), будем иметь
Учитывая, что
найдем
Это выражение можно записать в виде
где положено
Функция Pr (f) представляет собой свертку спектральной плот-
ности мощности P{f) шума со спектральной плотностью Qf(f)
временного окна fa{t).
Отметим, что Qf{v)=Qd(v). Функции f(t)—весовые функ-
ции второго семейства.
Замечания. 1. Только в случае прямоугольного и очень уз-
кого фильтра H(f) шириной Af
282 ГЛАВА 14
2. Если использовать анализаторы с сжатым масштабом
времени и осуществлять фильтрацию, то в соответствующем
математическом аппарате появляются несимметричные времен-
ные окна. Они состоят из симметричной функции и финитной1)
функции вида е~а' или А—Bt с носителем [—0/2, 0/2]. Этот
вопрос мы не рассматриваем в данной книге.
14.6. Основные характеристики временных
и спектральных окон
Из изложенного выше следует, что три основных метода
получения оценки Smiv), в которых используются естественные
или временные весовые окна, приводят в пространстве частот
к свертке функции S(v) и спектрального окна Q(v). Чтобы
иметь возможность сравнивать и выбирать весовые функции,
необходимо ввести какие-либо простые параметры, характери-
зующие функции f(t) и особенно Q(v). Прежде чем переходить
к классическим определениям, напомним некоторые свойства
окон, и в частности нормировку временных окон.
Нормировка временных весовых окон. Пусть дана спект-
ральная плотность, значения которой не зависят от частоты:
со
5(v) = l (белый шум). В этом случае |Q(v)dv=l. Отсюда вы-
—со
текает следующее свойство весовых функций первого семей-
ства:
и/@) = 1.
Именно в этом содержится объяснение того, что временная
весовая функция должна принимать значение, равное 1 при
т=0. Мы примем такую нормировку для весовых функций, ис-
пользуемых в методе коррелограмм.
Рассмотрим вещественные и четные функции второго семей-
ства. Пусть Afd(t)—временное окно, Aqa(v)—соответствую-
щее спектральное окно, тогда
'> То есть функция с ограниченным носителем. — Прим. перев.
Следовательно,
ВЕСОВЫЕ ОКНА
283
Отсюда
т. е.
Такая нормировка принята для временных весовых окон, ис-
пользуемых в методах периодограмм и фильтрации.
В расчетах можно брать либо Afd(t), либо fd(t) с последу-
ющим умножением результата на А2.
Площадь окна Q(v). Потеря информации. Если S(v)=6(v),
TOSm(v)=Q(v).
Следовательно, в данном случае
т. е. сохраняется полная мощность.
Рис. 14.1. Площадь окна Q(v) и потеря информации.
В практических расчетах ограничиваются вычислением пло-
щади (рис. 14.1)
где +vp и —vp соответственно 1-й положительный и 1-й отрица-
тельный нули функции Q(v).
284
ГЛАВА 14
Пусть
Параметр р называют обычно потерей информации. Этот пара-
метр, возможно выбранный не очень удачно, определяет долю
энергии, соответствующую площади боковых выбросов.
Ширина полосы пропускания центрального пика функции
Q(v). Имеется несколько определений ширины полосы пропу-
скания узкополосного фильтра. Поскольку спектральное окно
эквивалентно некоторому фильтру, соответствующему опреде-
ленному временному окну, то эти определения можно распрост-
ранить и на спектральные окна. Введение понятия ширины
Рис. 14.2. Ширина полосы пропускания по уровню половинной мощности.
спектрального окна является весьма полезным, так как позво-
ляет сравнить различные весовые функции.
Ширина полосы пропускания по уровню половинной мощно-
сти.
Обозначим (рис. 14.2) 5i = vi—V2, где Q(vi) =Q(v2) =¦
= A/2) Q @). Эта полоса пропускания соответствует изменению
мощности на 3 дБ. Действительно, значения спектральной
плотности, представленной в форме свертки б-функции Дирака
и спектрального окна, в точках vi и V2 на 3 дБ меньше ее мак-
симального значения, соответствующего центральной частоте.
Примечание. Пусть Se(v) и Ss(v)—спектральные плотности соответ-
ственно на входе и выходе системы. Тогда в случае фильтра H(v) имеем
ВЕСОВЫЕ ОКНА 285
а в случае спектрального окна Q(v) имеем
5s(v)=5e(v)*Q(v).
Определяя ширину полосы, мы полагаем, что Se(v)—белый шум в слу-
чае фильтров и б-функция Дирака в случае спектральных окон.
Эквивалентная шумовая полоса пропускания. Эквивалент-
ная шумовая полоса пропускания определяется выражением
где В2 — ширина полосы пропускания такого прямоугольного
спектрального окна, которое пропускает сигнал с той же дис-
персией, что и данное спектральное окно при воздействии на
него сигналом со спектральной плотностью C6(v):
Это ширина полосы пропускания такого фиктивного прямо-
угольного окна, которое пропускает сигнал с той же статисти-
ческой ошибкой, что и данное спектральное окно при воздейст-
вии на него сигналом со спектральной плотностью, представ-
ленной б-функцией.
Другие характеристики спектральных окон. К основным ха-
рактеристикам спектральных окон Q(v) относятся:
• амплитуда Q@), выраженная в безразмерных единицах
(амплитуда, соответствующая центральной частоте);
• В\ — ширина на половине высоты в безразмерных едини-
цах;
• положение 1-го положительного выброса в безразмерных
единицах;
• относительная амплитуда 1-го положительного выброса:
Q A-й положительный Bbi6poc)/Q@);
• положение 1-го нуля (если он существует): Q(vp)=0,
vp — в безразмерных единицах;
Эквивалентная статистическая полоса пропускания. Эквива-
лентная статистическая полоса пропускания определяется вы-
ражением
286 ГЛАВА 14
• положение 2-го нуля (если он существует): Q(vp')=O,
vp> — в безразмерных единицах;
• положение 1-го отрицательного выброса (если он сущест-
вует) ;
• относительная амплитуда 1-ро отрицательного выброса
(если он существует): Q A-й отрицательный выброс)/Q@);
• потеря информации
• потеря информации р;
• В2 — ширина эквивалентной шумовой полосы пропуска-
ния;
• В3 — ширина эквивалентной статистической полосы про-
пускания.
Безразмерной единицей для первого семейства является
vTm, а для второго семейства v9.
Существуют также и другие характеристические параметры.
Приведем некоторые из них:
• Bi = 2vp — ширина полосы пропускания центрального пика;
. Di=-
• ?>2 =
• ?>з=
4~ ?4 естественного окна
BA-й положительный выброс)
• отношение — щ» L-J—, выраженное в деци-
,, , _ . A-й положительный выброс)
беллах, т. е. 10 lg -1 щ ^—>—;
• потеря информации, выраженная в децибеллах:
a) lOlg(l-p) и б) lOlgp;
• наклон огибающей боковых выбросов, выраженный в де-
цибеллах на октаву;
• центральный пик спектрального окна характеризуется
также шириной и эксцессом, для оценки которых используются
отношения QA/4t«)/Q@), Q(l/2t«)/Q@) и QA/t«)/Q@) для
спектральных окон первого семейства и отношениями
Q(l/26)/Q@), Q(l/8)/Q@) для спектральных окон второго се-
мейства (эти отношения могут быть выражены в децибеллах).
ВЕСОВЫЕ ОКНА 287
Замечание. Отношение Q(l/28)/Q@), иногда называемое
«сглаженностью» спектрального окна, характеризует точность
измерения амплитуды. Действительно, при обработке сигнала,
например, методом периодограмм, точность анализа равна
Av=l/9. Отношение Q(l/26)/Q@) =Измеренная амплитуда/
/Максимальная амплитуда служит характеристикой точности
измерения амплитуды.
Разделение двух пиков. Разрешение. Разделение двух
соседних пиков, или резонансных линий, зависит от качества
оценки Sm(v) функции S(v) и, следовательно, от временного
окна. Ширина основания центрального пика окна равна 2vp =
= ?4. Условие разрешения двух пиков с близкими амплиту-
дами и центральными частотами vi и V2 записывается в виде
неравенства [4]: v2—vi^2vp = S4- Этому условию удовлетво-
рить труднее, если спектральное окно ближе к прямоугольному,
и легче, если окно ближе к треугольному. Оно неприменимо, ес-
ли две резонансные линии соответствуют существенно различ-
ным мощностям. Однако это скорее свойство применяемого
временного весового окна, а не практическое правило.
Оценка спектральной плотности с помощью временного ок-
на. Смещение. Оценка спектральной плотности одним из трех
классических методов имеет вид
Е {Sm(v)}=Sm(v)=S(v)*Q(v).
Ей соответствует смещение
b{Sm(v)}=S(v)*Q(v)-S(v).
Полезно напомнить, что оценка называется сходящейся, или
корректной, если Sm(v):—bS(v) при 6—ноо или хм—»-°о. Если
временному окну отвечает спектральное окно Q(v), которое
стремится к 6(v) при 6—>-оо или хм—*°°, то b{Sm(v)}-^>-Q, т. е.
оценка корректна.
14.7. Первое семейство временных весовых окон
(Коррелограмма. Преобразование Фурье)
Естественное временное окно. Такому окну соответствует
спектральное окно
Q (v) = 2хм sin 2mxM/2nvxM.
В табл. 14.1 и 14.2 указаны некоторые характеристики вре-
менных и спектральных окон этого типа.
288
ГЛАВА 14
Основные весовые функции и
(Коррелограмма с последующим
Временнбе окно
Естественное
Бартлетта
Парзена
Хеннинга
Хемминга
Блекмана
Макса, Фока, Бертье
Карре — Руйе
(первое)
Весовая функция
/1 для |x|<xM,
\ 0 для остальных значений г
1— ~- Для |t|<%,
/i СО = М
0 для остальных значений т
2A-^KДля-^-<|т|<тм,
0^'для остальных значений т
1
0,5 1 +cos %\ Для |t[<xm,
0 для остальных значений т
0,54 + 0.46cos -—для |т|<Тль
0 для остальных значений X
h (х) =
0,42 + 0,5 cos -—+0,08 cos ——
для 1т|<т^
0 для остальных значений т
/в (г) =
SinHT/T^
ЯТ/ТЛ! ^ lXf<XM,
0 для остальных значений т
f sin ят/тм
0 для остальных значении т
где /2(т)
—
временнбе окно Парзена
ВЕСОВЫЕ ОКНА
289
Таблица 14.1
спектральные окна первого семейства
преобразованием Фурье)
Спектральное окно
290
ГЛАВА 14
где /о — модифицированная функция Бесселя ну-
левого порядка
Временное окно Бартлетта. Первая коррекция в расчетах
спектра принадлежит Бартлетту [2, 5] A950 г.). Она состоит
в умножении Ст(х) на треугольную функцию
В табл. 14.2 приведены некоторые параметры функции
Qi(v). Отметим следующие отличия Qi(v) от Q0(v): наиболь-
шая высота в 2 раза меньше; расстояние между первым нулем
и абсциссой, соответствующей максимуму, в 2 раза больше;
уменьшение первых выбросов (все они положительны) состав-
ляет
Эту функцию можно записать в виде
где FIi(t) —прямоугольная функция шириной Тм-
Функции /j (т) соответствует спектральное окно
ВЕСОВЫЕ ОКНА 291
Продолжение
Спектральное окно
Q7,(v)=x^n7,(v)*Q1(v),
11 Для IvK-gr—,
О для остальных значений v и Qx (v)
—спектральное окно Бартлетта
Весовое окно Парзена. Этой корректирующей функции, вве-
денной Парзеном в 1961 г. [6], соответствует спектральное ок-
но, обладающее только положительными выбросами (сравните
с окном Бартлетта) очень малой амплитуды. Временное окно
Парзена определяется следующим образом:
Эту функцию можно представить в виде
к W = (П2 (т)*П2 (т)*П2 (т)*П2 (т)) J?-= (Л2 (т)*Л2 (т))^-,
где П2(т) —прямоугольная функция шириной тм/2 и Лг(т) —
треугольная функция шириной %М-
Функции /г(т) соответствует спектральное окно
Наибольшие значения Qi{v) и Qo(v) равны соответственно
0,75 и 2 (табл. 14.2). Уменьшение первого выброса характери-
где Qo (v) — естественное спектральное окно
Q9(v) вычисляется с помощью фурье-преобразо-
вания функции /э(т)
Таблица 14.2
Спектральное окно
Естественное
Бартлетта
Парзена
Хеннинга
Хемминга
Блекмана
Макса, Фока,
Бертье
Карре— Руйе
(первое)
Карре — Руйе
(второе)
Лапласа — Гаусса
Кайзера — Бесселя
Амплитуда централь-
ного пика Q@) в еди-
ницах х м
2
1
0,75
1
1,08
0,84
1,179
0,658
0,774
0,833
0,823
Характеристики основных спектральных окон
Ширина f?i на полови-
не высоты в единицах
0,60
0,89
1,28
1,00
0,91
1,14
0,87
1,44
1,12
1,12
1,15
Положение 1-го поло-
жительного выброса в
единицах vt^
1,22
1,44
2,84—2,88
1,72
1,41
1,75
1,50
2,91
—
2,34
1,88
Амплитуда 1-го поло-
жительного выброса
Q A-й выброс)/0@)
0,128
0,047
0,0017
0,0084
0,00155
0,00122
0,0200
0,00176
0,00157
0,000283
Положение 1-го нуля
в единицах VT^
0,50
1,00
2,00
1,00
1,00
1,50
0,82
2,16
(минимум]
—
1,74
1,52
Положение 2-го нуля
в единицах VT^j
1,00
2,00
4,00
1,50
1,30
2,00
1,29
4,06—4,09
(минимум)
—
2,10
1,74
первого
Положение 1-го отри-
цательного выброса в
единицах VT^j
0,72
—
—
1,19
1,09
2,22
1,00
.
_
1,91
1,59
семейства
Амплитуда 1-го отри-
цательного выброса
Q A-й выброс)/<3@)
—0,217
—
—
—0,027
—0.0062
—0,00106
—0,0479
—0,00137
—0,000447
Потеря информации
1—Р
1,178
0,903
0,997
1,013
1,004
1,000
1,024
0.9971
0,993
1
1
Потеря информации
—17,8
9,7
0,3
— 1,3
—0,4
-J- ¦
—2,4
—
—
Ширина В2 эквивалент-
ной шумовой полосы
пропускания в едини-
цах vxM
0,50
1
1,33
1
0,926
1,19
0,848
1,52
1,292
1,200
1,215
Ширина Вз эквивалент-
ной статистической
полосы пропускания
в единицах vr^f
0,50
1,50
1,85
1,33
1,26
1,64
1,11
2,12
1,96
1,69
1,68
*) Берется площадь до первого минимума.
ВЕСОВЫЕ ОКНА 293
зуется отношением Q2 A-й Bbi6poc)/Q2@) =0,00167. Из равен-
ства Q2{Bl/2)/Q2@) = 1/2 следует, что ширина центрального пи-
ка равна jBi/2= 1,28 (в безразмерных единицах).
Весовое окно Хеннинга. Ван Ханн предложил еще один тип
спектрального окна [2], которое носит имя Хеннинга. Корре-
ляционная функция Ст{%) умножается на весовую функцию
или
/4 (т) = @,54+0,46 cos m/xM) f0 (т),
а соответствующее спектральное окно определяется выраже-
нием
Функции /3(т) соответствует спектральное окно
Это окно довольно часто используется в расчетах спектраль-
ной плотности. Его можно применить к функции Ст(х), обра-
зуя произведение /зСОС/пЫ =С3(т), преобразование Фурье ко-
торого дает сглаженный спектр мощности S3(v) или к функции
Sm(v) по формуле
По сравнению с графиком Qo(v) график Q3(v) в 2 раза бо-
лее «плоский». Уменьшение 1-го положительного выброса опре-
деляется отношением Q3 A-й выброс)/Q3@) =0,00843.
Весовое окно Хемминга. Весовая функция Хеннинга была
улучшена Хеммингом. Весовое окно Хемминга имеет вид
Как и в предыдущем случае, весовую функцию /4(т) можно
применить как к Ст(х), образуя произведение С4(т) =
= Ст(т)/4(т), так и к Sm(v):
294 ГЛАВА 14
Весовое окно Блекмана. Весовое окно Блекмана имеет сле-
дующий вид i[2]:
Спектральное окно, которое ему соответствует, определяется
выражением
Замечание. Весовые функции Хеннинга, Хемминга и Блекма-
на являются частными случаями [2] функции
Весовые окна Макса, Фока, Бертье. В 1968 г. Макс, Фок и
Бертье ввели новую весовую функцию. Они руководствовались
стремлением удовлетворить в общем противоречивым требова-
ниям: уменьшить выбросы и при этом как можно меньше
«сплющить» окно. Функция, которую они применили для кор-
рекции Сш(т), имеет вид
где Пб(т) равна 0 для |т|>Тм и 1 для |т|<;тм. Соответству-
ющее спектральное окно можно записать в виде
где Fl6(v)—прямоугольная функция шириной 1/Bтм). Функ-
ция Il6(v) усредняет боковые осцилляции функции Qo(v) в по-
лосе частот (—1/tM, 1/тм). С помощью U(x) определяют функ-
цию С6(т) =f6(t)Cm(T), преобразование Фурье которой дает
сглаженный спектр Se(v).
Первое весовое окно Карре — Руйе. Чтобы уменьшить боко-
вые выбросы и в то же время сохранить приемлемую разреша-
ющую способность, была предложена следующая весовая функ-
ция:
ВЕСОВЫЕ ОКНА 295
где Ь(т) —временное окно Парзена. Ее можно представить в
виде
где Л2(т)—треугольная функция шириной %м. Функции 1т{х)
соответствует спектральное окно
где Q2(v)—спектральное окно Парзена, n7(v)—прямоуголь-
ная функция шириной 1/2 хм. Так же как и в предыдущем слу-
чае, функция П7 усредняет осцилляции Qi(y) в полосе частот
(—1/тм, 1/тм).
Отметим, что по сравнению с Qo(v) функция Qi{v) имеет в
три раза меньшее максимальное значение, не имеет отрицатель-
ных выбросов и нулей (имеет только минимумы) и обладает
меньшими первыми выбросами:
где f\ (т) — временное окно Бартлетта. Запишем эту функцию
в виде
где Ai (т) — треугольная функция шириной 2хм- Соответствую-
щее функции fr{x) спектральное окно определяется соотноше-
нием
где Qi(v)—спектральное окно Бартлетта, TIt(v) =Ur (v) —
прямоугольная функция с носителем [—1/2 Хм, 1/2тм].
Отметим, что спектральное окно Q7' (v) не имеет ни нулей,
ни выбросов и представляет собой положительную убывающую
функцию.
Замечание. Весовые функции Макса, Фока, Бертье и f7(x)
являются частными случаями временного окна
и соответствующего спектрального окна
где /#2(v)—временное окно, равное 0 для |t|>Tai, Qy\(v) —
Второе весовое окно Карре — Руйе. Исходя из тех же целей
была предложена еще одна весовая функция
296 ГЛАВА 14
спектральное окно, равное 0 для |v|>l/2tM. Отсюда следует,
что /г/2 (т) может быть прямоугольной функцией (ср. с Mt)).
либо функцией Бартлетта (ср. с fr(x)), либо функцией Парзе-
на (ср. с Ыт)) и т. д. Аналогично Qyi(v) может быть либо
прямоугольной функцией (ср. с Qe{v) и с Qt(v)), либо тре-
угольной функцией, либо сверткой A(v)*A(v) и т. д.
Весовые окна в форме кривой Лапласа — Гаусса. Окно та-
кого типа описывается функцией
и
то
В табл. 14.2 приведены характеристики спектрального окна
<Э8^)для i = 3.
Замечание. Временное окно f$(x) является частным случаем
весовой функции
где значения параметра у лежат в диапазоне 0—0,5. Предыду-
щая функция получается при y=0,5.
где ? — величина обрезания кривой Лапласа — Гаусса, изме-
ренная в единицах среднеквадратичного отклонения, П8(т) =
=/о(т) — прямоугольная функция. Следовательно, тм = ?0, t,—
=%м/о, так что
Так как фурье-образы функций ехр(—0,5(т/сгJ) [7] и /0(т)
равны соответственно
ВЕСОВЫЕ ОКНА
297
Весовое окно Кайзера — Бесселя. Весовая функция Кайзе-
ра — Бесселя, введенная в 1963 г. [8], имеет вид
где /о •— модифицированная функция Бесселя нулевого поряд-
ка, параметр р изменяется в пределах 2я—Зге, Пэ(т:)=Ыт) —
естественное временное окно.
Характеристики спектрального окна для C=9 приведены в
табл. 14.2.
Другие весовые функции. Мы приведем еще несколько весо-
вых функций, которые применяются в специальных случаях.
Функция
совпадает с функцией Бартлетта при а=1; при а —2 ее называ-
ют параболической или функцией Велыпа. Параболическому
временному окну
соответствует спектральное окно
Отметим, что Qn@) =4тм/3 для v = 0.
Весовое окно
при р—1 переходит в окно Хеннинга
Временное окно Папулиса [9] определяется выражен
-298
ГЛАВА 14
Основные весовые окна второго
Временное окно
Весовая функция
Естественное
Треугольное
(окно Бартлетта)
Парзена
Тьюки
(окно Хеннинга)
Хемминга
Блекмана
Макса, Фока, Бертье
Карре — Руйе
(первое)
ВЕСОВЫЕ ОКНА
299
Таблица 14.3
семейства (периодограмма)
Значения
параметров
А2
Спектральное окно
Уъ
1,93
3,71
1,63
1,59
2,67
2,52
1,81
3,28
1,49
2,06
2,22
4,25
300
ГЛАВА 14
Временнбе окно
Весовая функция
Карре — Руйе
(второе)
Лапласа — Гаусса
Кайзера — Бесселя
Примечание. Величины ОзМ—Qj(v) берутся из табл. 14.1 при т^=9/2.
Ему соответствует спектральное окно
с высотой пика Ql3@) =8%м/п2.
14.8. Второе семейство временных весовых окон
(Метод периодограмм)
Естественное временнбе окно. В этом классическом случае
Соответствующее спектральное окно
где qe (v) —фурье-образ функции Пв/2(т).
Отметим, что такой же результат получится, если вычислить
фурье-образ функции
ВЕСОВЫЕ ОКНА
301
Продолжение
Значения
параметров
А2
Спектральное окно
1,98
1,84
1,83
3,92
3,39
3,36
Q'd (v) вычисляется с помощью преобразования Фурье функции
Следовательно, функция Fd{%) подобна весовой функции Барт-
летта при условии Тдг = 0, а спектральные окна при том же ус-
ловии совпадают: Qi(v) = Qa0 (v).
В табл. 14.3 и 14.4 приведены характеристики временных и
спектральных окон второго семейства.
Временное треугольное окно. В данном случае сигнал умно-
жается на весовую функцию
аналогично окну Парзена в методе коррелограмм: при хм = В
Qd(v) = (^2/3)Q2(v).
Обычно полагают Л] = 1. Естественнее принять Лi2=3 и А\ =
=УЗ, так как тогда непосредственно получается спектр Sm(v)
без поправочного множителя. Мы затрагиваем здесь вопрос
Соответствующее ей спектральное окно
Естественное
Треугольное
Парзена
Тьюки
Хемминга
Блекмана
Макса, Фока, Бертье
Карре — Руйе
(первое)
Карре — Руйе
(второе)
Лапласа — Гаусса
Кайзера — Бесселя
Основные спектральные окна второго семейства (Периодограмма)
Таблица 14.4
Спектральное окно
Амплитуда цент-
рального пика
Qrf @) в едини-
цах 8
Ширина В, на по-
ловине высоты в
единицах v9
Положение 1-го по-
ложительного вы-
броса в единицах
ve
Амплитуда 1-го по-
ложительного вы-
броса Q rf A-й вы-
брос)^ @)
Положение 1-го ну-
ля в единицах v8
Положение 2-го ну-
ля в единицах V0
Потеря информа-
ции 1— р
Потеря информа-
ции р, %
Ширина В2 эквива-
лентной шумовой
полосы в единицах
Ширина Вз эквива-
лентной статисти-
ческой полосы в
единицах \"9
ВЕСОВЫЕ ОКНА
303
f'dl(t)--
Отметим, что функция Q'd2 (v) не имеет отрицательных выбро-
сов, но обладает нулями.
Весовое окно Тьюки. Весовое окно Тьюки представляет со-
бой окно Хеннинга и определяется выражением
Ему соответствует спектральное окно
Этой функции отвечает спектральное окно
нормировки временных окон:
" Л. "А
Весовое окно Парзена. Иногда изучаемый сигнал умножают
на весовую функцию Парзена, записывая ее в виде
Спектральное окно в этом случае определяется формулой
Весовое окно Хемминга. Временное весовое окно Хемминга
определяется функцией
304 ГЛАВА 14
В табл. 14.3 и 14.4 приведены выражения для основных
ФУНКЦИЙ /d/@ И Qdi'(t).
14.9. Исследование спектра в простом случае
Если некоторый участок спектра S(v) имеет форму
Лб(\-—vo), то при переходе к оценке Sm(v) этот участок изо-
бразится кривой AQ(v) с центром в vo. Существует несколько
методов оценки максимальной мощности подобных участков
спектра, полученного фурье-преобразованием коррелограммьь
Метод, принадлежащий Штерну [10], состоит в делении мак-
симальной амплитуды, которая соответствует частоте vo, либо
на 2хм в случае естественного окна, либо на хм в случае весо-
вых окон Бартлетта и Хеннинга. Действительно,
который равен ЛA—р). Этот способ дает систематическую
ошибку (в процентах), равную 100 р.
Реальные спектры содержат резонансные пики, которые
нельзя описать функцией A8(v—vo). Для описания пика подби-
рают более или менее сложную функцию P(v), при этом
P(vo)=A. Тогда, как известно, Sm(v)=P(v)*Q{v) с макси-
мальным значением между А и AQ@)xm. Но так как
Классический метод заключается в вычислении интеграла
где Qi(v) —нормальное спектральное окно Хемминга при хм =
=е/2.
Другие весовые функции. Не имеет смысла приводить выра-
жения для других весовых функций fdt{t) и Qdt{t). Функции
fdi (t) получаются из соответствующих функций первого семей-
ства при тм = 9/2, а спектральные окна Qd/(v) определяются
соотношением
ВЕСОВЫЕ ОКНА 305
то можно записать
где 2vp' —ширина исследуемого пика функции S,n(v)
Bv/>2vp). В этом случае ошибка не превосходит Ар, поэтому
обычно используют данный способ.
Замечания. 1. Мы рассмотрели только изолированный резо-
нансный пик. На практике имеют дело с пиками, распределен-
ными по спектру, вид которого слабо зависит от частоты.
2. Спектральное окно в большей или меньшей степени иска-
жает спектр в окрестности пика. Это всегда надо иметь в виду
при спектральном анализе.
3. Естественное окно дает хорошее разрешение, но деформи-
рует спектр в окрестности острого пика. Напротив, весовое ок-
но Кайзера ¦— Бесселя обладает плохим разрешением, но мало
влияет на форму спектра в окрестности пика.
4. Потеря информации может быть и положительной и отри-
цательной. Для временного окна р<0.
5. Устранение искажений, вызванных отрицательными вы-
бросами, связано с обрезанием спектра. В связи с этим было
предложено второе весовое окно Карре — Руйе без отрицатель-
ных выбросов, свойства которого близки к свойствам окна Ла-
пласа — Гаусса.
14.10. Выбор весовой функции
Выбор весовой функции представляет собой довольно труд-
ную задачу, при решении которой определяющими факторами
являются
• метод оценки спектра (коррелограммы, периодограммы);
• способ обработки спектра (аналоговый, цифровой, комби-
нированный);
• конечная цель (разделение по частоте соседних пиков,
определение мощности резонанса, наибольшая статистическая
точность измерений, минимальное искажение общей формы
спектра, оценка функции когерентности).
Следует помнить, что хотя большинство весовых окон име-
ют небольшие выбросы и обладают приемлемой разрешающей
способностью, однако любое спектральное окно сглаживает
спектральную плотность. Выбранное окно должно максималь-
ным образом отвечать необходимым критериям. Если оценка
спектральной плотности получается с помощью корреляционной
функции или непосредственно преобразованием Фурье, то при
одном и том же весовом окне влияние выбросов на форму
306 ГЛАВА 14
спектра в окрестности пика в 1-м случае будет больше, чем во
2-м. С другой стороны, ширина окна Qa(v) на половине его вы-
соты больше соответствующей ширины окна Q(v) при tm = 9.
Если применяется прямое преобразование Фурье, то одна из
функций — f(t) или 5 (v) — должна быть нормирована, иначе
теряется информация о мощности. Только несколько весовых
окон — окна Бартлетта, Парзена и Карре — Руйе — используе-
мых в методе коррелограмм, не имеют отрицательных выбро-
сов.
По характеристикам спектральных окон (Ви В2, В3, р и
т. д.) и по характеристикам изучаемых явлений (требуемое
разрешение пиков по частоте и по мощности и т. д.) — и только
по этим характеристикам — можно выбрать весовую функцию,
отвечающую наилучшим образом выбранному методу обработ-
ки. В качестве первого приближения часто используют естест-
венное окно; оно обеспечивает наилучшее разрешение, хотя и
искажает спектр из-за наличия выбросов. Затем, руководству-
ясь видом спектра и целью исследования, подбирают подходя-
щее временное окно (или два, а иногда и несколько, если это
возможно). При численной обработке спектра может оказать-
ся, что узловая точка (целое число шагов по частоте) в точно-
сти совпадает с пиком. В этом случае лучше всего применить
окно с плоской вершиной, помня, однако, что разрешающая
способность при этом уменьшается.
Для разделения пиков, сильно различающихся по мощности,
но с не очень близкими частотами, целесообразно использовать
временные весовые функции, которым соответствуют спектраль-
ные окна Q(v) с небольшим числом выбросов или без них.
В большинстве случаев форма пиков на кривых спектральной
плотности описывается функцией (резонанс 2-го порядка):
Л«(а,о»-а,у + 4Б».о>" ГД6 <°==2П^
При подборе наиболее подходящей весовой функции было бы
весьма целесообразно руководствоваться не только методикой
обработки спектра, но и зависимостью от параметров А и В,
которую надо предварительно изучить.
Следует исключить оценку функции когерентности по спект-
ральным плотностям, которые имеют отрицательные значения,
обусловленные выбросами функции Q(v). В этом случае надо
применять окна Бартлетта, Парзена и окна Карре-—Руйе.
В заключение отметим, что нет общего практического пра-
вила выбора весовых функций. Эту задачу надо решать в каж-
дом конкретном случае в соответствии с поставленной целью,
руководствуясь характеристиками спектральных окон (табл.
14.1—14.4).
ВЕСОВЫЕ ОКНА 307
ЛИТЕРАТУРА
1. Fauque J. M., Berthier D., Max J., Bonnet G. Analyse spectrale par corre-
lation, Rapport CEAR. 3672, 1969.
1'. Fauque J. M. Etude et realisation d'un analyseur de densite spectrale ener-
getique, Rapport.
2. Blackman R. В., Tukey J. W. The measurement of power spectra, Dover pub.,
N. Y., 1958.
3. Bendat J. S., Piersol A. G. Random data: Analysis and Measurement Pro-
ceedures, Wiley, 1971.
4. Kunt M. Principes et applications de la transformation de Fourier rapide,
EPF de Lausanne, Rapport 71.03.
5. Bartlett M. S. Periodogram Analysis and continuous spectra, Biometrika, 37,
1—16 A950).
6. Parzen E. Mathematical considerations in the estimation of spectra, Techno-
metr., 3, 67—190, 1961.
7. Champeney D. C. Fourier transforms and their physical applications, Aca-
demic Press, 1973.
8. Kaiser J. K- Design Methods for Sampled data filters, Allerton conf., Cir-
cuit System Theory, 1963.
9. Papoulis A. Minimum bias windows for high resolution spectral estimates,
IEE Trans., 1, 19, 1973.
10. Stern J., de Barbeyrac J., Poggi R. Methodes pratiques d'etudes des fon-
ctions aleatoires, Dunod, 1967.
11. Carre J. C, Roullier F. Fenetres temporelles et fenetres spectrales, Rap-
port CEA.
ОГЛАВЛЕНИЕ
Предисловие редактора перевода 5
Предисловие к первому и второму изданиям 7
Предисловие к третьему изданию 8
Предисловие автора 9
ВВЕДЕНИЕ 10
Глава 1. ФИЗИЧЕСКИЕ ПРЕДСТАВЛЕНИЯ О ШУМАХ КАК О СЛУ-
ЧАЙНЫХ ПРОЦЕССАХ 14
Глава 2. ПРЕОБРАЗОВАНИЕ ФУРЬЕ 18
2.1. Преобразование Фурье периодических функций ... 18
2.2. Преобразование Фурье непериодических функций ... 19
2.3. Преобразование Фурье физических функций .... 20
2.4. Физический смысл преобразования Фурье 22
2.5. Условия существования преобразования Фурье .... 24
2.6. Некоторые свойства преобразования Фурье 24
2.7. Несколько функций и их фурье-образы 29
2.8. Частный случай вещественных сигналов 29
2.9. Отрицательные частоты 32
2.10. Аналитический сигнал 33
2.11. Почему выбрано преобразование Фурье? 34
2.12. Физическая реализация фурье-образа. Преобразование
Фурье в оптике 35
2.13. Свойства функции sin х/х 38
2.14. Лямбда-функция (Л) 39
Глава 3. МОЩНОСТЬ И ЭНЕРГИЯ СИГНАЛОВ 41
3.1. Временная мощность 41
3.2. Частотная мощность. Спектральная плотность мощности.
Спектр мощности 44
3.3. Общее определение спектральной плотности .... 46
3.4. Теорема Парсеваля 47
3.5. Понятия скалярного произведения и нормы .... 47
Глава 4. ПРЕОБРАЗОВАНИЕ ЛАПЛАСА 48
4.1. Определение 48
4.2. Связь между фурье-образом и изображением Лапласа . 49
Глава 5. СВЕРТКА 52
5.1. Определение 52
5.2. Уравнение свертки 53
ОГЛАВЛЕНИЕ
30?
5.3. Несколько замечаний относительно свертки .... 55-
5.4. Физическая интерпретация свертки 55
5.5. Прямая и обратная задачи, связанные с операцией свертки 55
5.6. Свертка и преобразование Фурье. Теорема Планшереля . 57
Глава 6. ФИЛЬТРАЦИЯ 58-
6.1. Введение 58
6.2. Временная фильтрация 58
6.3. Частотная фильтрация («линейная фильтрация» в смысле
Блан-Лапьера) 59
6.4. Связь между фильтрацией и сверткой 62'
6.5. Физически реализуемые линейные фильтры частоты . . 63
6.6. Идеальный фильтр 63
6.7. Реализуемые непрерывные аналоговые фильтры ... 64
6.8. Фильтры с линейным сдвигом фаз 64
6.9. Узкополосные фильтры 65
6.10. Обобщение понятия фильтрации 66-
Глава 7. ДИСКРЕТИЗАЦИЯ 67
7.1. Введение 67
7.2. Теоремы дискретизации 67
7.3. Дискретизация сигналов конечной длительности ... 74
7.4. Дискретизация фурье-образов 75
7.5. Выбор частоты дискретизации на практике .... 77
7.6. Противомаскировочный фильтр 81
7.7. Физическая дискретизация. Комбинированная дискрети-
зация 83
7.8. Субдискретизация. Обобщение теоремы Шеннона ... 86
7.9. Заключение 891
Глава 8. КОРРЕЛЯЦИЯ И НЕКОТОРЫЕ ДРУГИЕ ПОНЯТИЯ СТАТИ-
СТИКИ 90
8.1. Поиск «связи» между двумя физическими процессами (яв-
лениями), которые заданы физической величиной, выра-
жающей один из параметров процессов. Случай, когда
параметр может быть измерен, если задано большое число
реализаций процессов. Средние значения ансамбля ... 90"
8.2. Величина, характеризующая «связь» между двумя физиче-
скими процессами. Случай, когда известна одна реализация
физического процесса, наблюдаемая в течение большого
интервала времени 97
8.3. Эргодичность 101
8.4. Коэффициент корреляции и теория информации . . . 102
8.5. Практические замечания ЮЗ
8.6. Характеристические функции 104
8.7. Спектральная плотность случайного сигнала .... 105
8.8. Связь между временными представлениями сигналов
и спектральными плотностями. Теорема Винера — Хинчина 105
8.9. Функции связи 109
8.10. Распределение Гаусса, или нормальное распределение . 109
8.11. Спектральная плотность и центрирование сигналов . . . Ш
Глава 9. ОЦЕНКА ОШИБОК ИЗМЕРЕНИЙ КОРРЕЛЯЦИОННЫХ
ФУНКЦИЙ И СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ . . . . П2
9.1. Оценка средних значений 112
9.2. Оценка корреляционных функций 118
9.3. Оценка спектральных плотностей 123
310
ОГЛАВЛЕНИЕ
9.4. Оценка одномерной плотности вероятности . . . . 127
9.5. Последовательное вычисление среднего значения и дис-
персии 128
9.6. Физическая интерпретация дисперсии 132
9.7. Идеальный интегратор и низкочастотный фильтр . . . 134
9.8. Дискретные сигналы 136
Глава 10. ОШИБКИ ИЗМЕРЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ ПРИ
ДИСКРЕТИЗАЦИИ СИГНАЛОВ 137
10.1. Статистическое изучение влияния дискретизации . . . 137
10.2. Коррелометры с вспомогательными шумами .... 144
10.3. Условия на вспомогательные шумы, при которых отсутст-
вует смещение оценки корреляционной функции . . . 146
10.4. Вычисление дисперсии. Состоятельность оценки . . . 147
10.5. Практические приложения 152
10.6. Важное замечание 156
10.7. Замечание относительно генераторов вспомогательных
шумов 157
Глава 11. ОСНОВНЫЕ СВОЙСТВА КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
И СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 160
Введение 160
11.1. Центрированные случайные стационарные функции, обла-
дающие свойством эргодичности 160
11.2. Периодические функции 166
11.3. Переходные функции 171
11.4. Дистрибутивность операций вычисления корреляции и спек-
тральной плотности 176
11.5. Связь между входным и выходным сигналами линейной
однородной во времени системы при условии, что входной
сигнал является случайным и стационарным 2-го порядка 177
Глава 12. ОСНОВНЫЕ ПРИЛОЖЕНИЯ КОРРЕЛЯЦИОННЫХ ФУНКЦИЙ
И СПЕКТРАЛЬНЫХ ПЛОТНОСТЕЙ 184
12.1. Обнаружение периодического сигнала на фоне помех с по-
мощью автокорреляции 184
12.2. Обнаружение периодического сигнала с известным перио-
дом на фоне шума 195
12.3. Выделение сигнала на фоне шума. Усреднение . . . 200
12.4. Обнаружение скрытых периодичностей 210
12.5. Получение спектральных плотностей по корреляционным
функциям 213
12.6. Измерение динамических характеристик (переходных функ-
ций, импульсных характеристик) линейных систем. Иденти-
фикация процессов 213
12.7. Измерение когерентности 225
12.8. Применение когерентности к измерению передаточных
функций линейных и однородных во времени систем.
Спектральная лупа 226
12.9. Измерение временного сдвига двух сигналов .... 234
Глава 13. СПЕКТРАЛЬНЫЙ АНАЛИЗ. ИЗМЕРЕНИЕ СПЕКТРАЛЬНЫХ
ПЛОТНОСТЕЙ 236
13.1. Наглядное представление спектральной плотности . . . 236
13.2. Влияние фильтрации, обусловленной дискретизацией спек-
тральной плотности 239
ОГЛАВЛЕНИЕ 31Г
13.3. Дискретизация спектральной плотности, реализуемая на
практике 240
13.4. Систематическая ошибка при измерении спектральной плот-
ности 240
13.5. Измерение спектральной плотности 242
13.6. Спектральный анализ методом фильтрации 244
13.7. Измерение спектральной плотности методом фильтрации 250
13.8. Дискретное преобразование Фурье и измерение спектраль-
ных плотностей 253
13.9. Вычисление автокорреляционных функций и взаимных кор-
реляционных функций по спектральной плотности . . . 262'
13.10. Явление Гиббса 264
13.11. Корреляционный метод спектрального анализа .... 264
13.12. Корреляционный анализатор спектра 267
13.13. Точность определения спектральной плотности, полученной
преобразованием Фурье корреляционной функции . . . 267
13.14. Замечания по поводу применения спектральных анализато-
ров. Определение оптимальной частоты дискретизации . 271
Глава 14. ВЕСОВЫЕ ОКНА 274
14.1. Некоторые общие соображения 274-
14.2. Окна, связанные с преобразованием Фурье 275'
14.3. Окна, используемые в методе коррелограмм .... 276
14.4. Окна, применяемые в методе периодограмм .... 277
14.5. Окна, применяемые в методе фильтрации с возведением
в квадрат и усреднением 280
14.6. Основные характеристики временных и спектральных окон 282
14.7. Первое семейство временных весовых окон .... 287
14.8. Второе семейство временных весовых окон 300
14.9. Исследование спектра в простом случае 304
14.10. Выбор весовой функции 305.
УВАЖАЕМЫЙ ЧИТАТЕЛЬ!
Ваши замечания о содержании книги,
ее оформлении, качестве перевода и дру-
гие просим присылать по адресу: 129820,
Москва, И-110, ГСП, 1-й Рижский пер.,
д. 2, издательство «Мир».
Ж- Макс, Жан-Клод Карре,
Филипп Пельтье
МЕТОДЫ И ТЕХНИКА
ОБРАБОТКИ СИГНАЛОВ
ПРИ ФИЗИЧЕСКИХ ИЗМЕРЕНИЯХ
В 2-х томах
том 1
Старший научный редактор И. М. Андреева
Младший научный редактор М. В. Архипова
Художник Е. Н. Урусов
Художественный редактор Е. Л. Безрученков
Технический редактор Е С. Потапенкова
Корректор Е. Г. Литвак
ИБ № 3363
Сдано в набор 24 12 82
Подписано к печати 30.06.83
Формат бОХЧО'.'ю. Бумага типографская № 2.
Гарнитура латинская. Печать высокая.
Объем 9,75 бум. л. Усл. печ. л. 19,50.
Усл. кр-отт. 19,50 Уч.-изд л 17,43.
Изд. № 20/2109. Тираж 15 000 экз.
Зак. 932 Цена 1 р 50 к.
ИЗДАТЕЛЬСТВО «МИР»
Москва, 1-й Рижский пер., 2.
Московская типография № И
Союзполиграфпрома при Государственном
комитете СССР по делам издательств,
полиграфии и книжной торговли.
Москва, 113105, Нагатинская ул., д. 1.