




































































Author: Жуков И.И. Алешков М.Н. Савин Н.В. Кукушкин Д.Д.
Tags: оружие вооружение артиллерийско-техническое имущество бронированные машины и специальные средства транспорта стрелковое оружие личное оружие боеприпасы и боевые отравляющие вещества управляемые и неуправляемые ракеты и реактивные снаряды военное оборудование военная техника
Year: 1972




Физические
ОСНОВЫ
РАКЕТНОГО
ОРУЖИЯ
Издание второе
переработанное
и дополненное
Ордена Трудового Красного Знамени
ВОЕННОЕ ИЗДАТЕЛЬСТВО
МИНИСТЕРСТВА ОБОРОНЫ СССР
МОСКВА —197 2
355 71 УДК 623.4(024)
Ф50
Авторский коллектив:
АЛЕШ КОВ .VI. #., кандидат технических наук: ЖУКОВ И. /Л,
доктор технических наук; САВИН Н. В., инженер;
КУКУШКИН Л. Д., кандидат технических наук, МАРКОВ О. II.,
канинат технических наук; ФОМИН Ю. Г., кандидат
технических наук
Ф50 Физические основы ракетного оружия. М., Воениз-
даг, 1972.
312 стр.
В книге 1илО/кены основы боевого применения ракетного оружия,
элементы leopHU полета, физические принципы реакгнниого движения, описаны
ракетные двигатели н топлива, системы управления и наведения ракет
различных классов.
Описаны принципиальное устройство ракет различных конструкции н их
осноиных агрегатов, а также устройство наземного оборудования и
испытания ракетных комплексом. Приведена классификация ракетного оружия.
Киша написана по материалам открытой отечественной и иностранной
печати.
1-12-4
105—72 355.71
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Достижения науки и техники за последние десятилетия
произвели коренной переворот в боевых средствах и формах ведения
войны. Особое, самостоятельное .место в развитии средств
военной техники принадлежит ракетному оружию различного
назначения.
Предлагаемая книга «Физические основы ракетного оружия»
является вторым, переработанным и дополненным изданием,
содержащим основные сведения и принципы устройства ракет всех
классов.
Книга состоит из двенадцати глав.
В главе I кратко изложена история развития ракетного
оружия, показаны роль и место его в вооруженной борьбе, даны
задачи, решаемые ракетным оружием различного назначения.
Главы 2, 3, 4, 5, 9, 10, II посвящены основам конструктивного
устройства ракет, двигательных установок, наземного
оборудования и испытаниям ракет и ракетных комплексов.
В главе 6 рассмотрены ракетные топлива, глава 7 посвящена
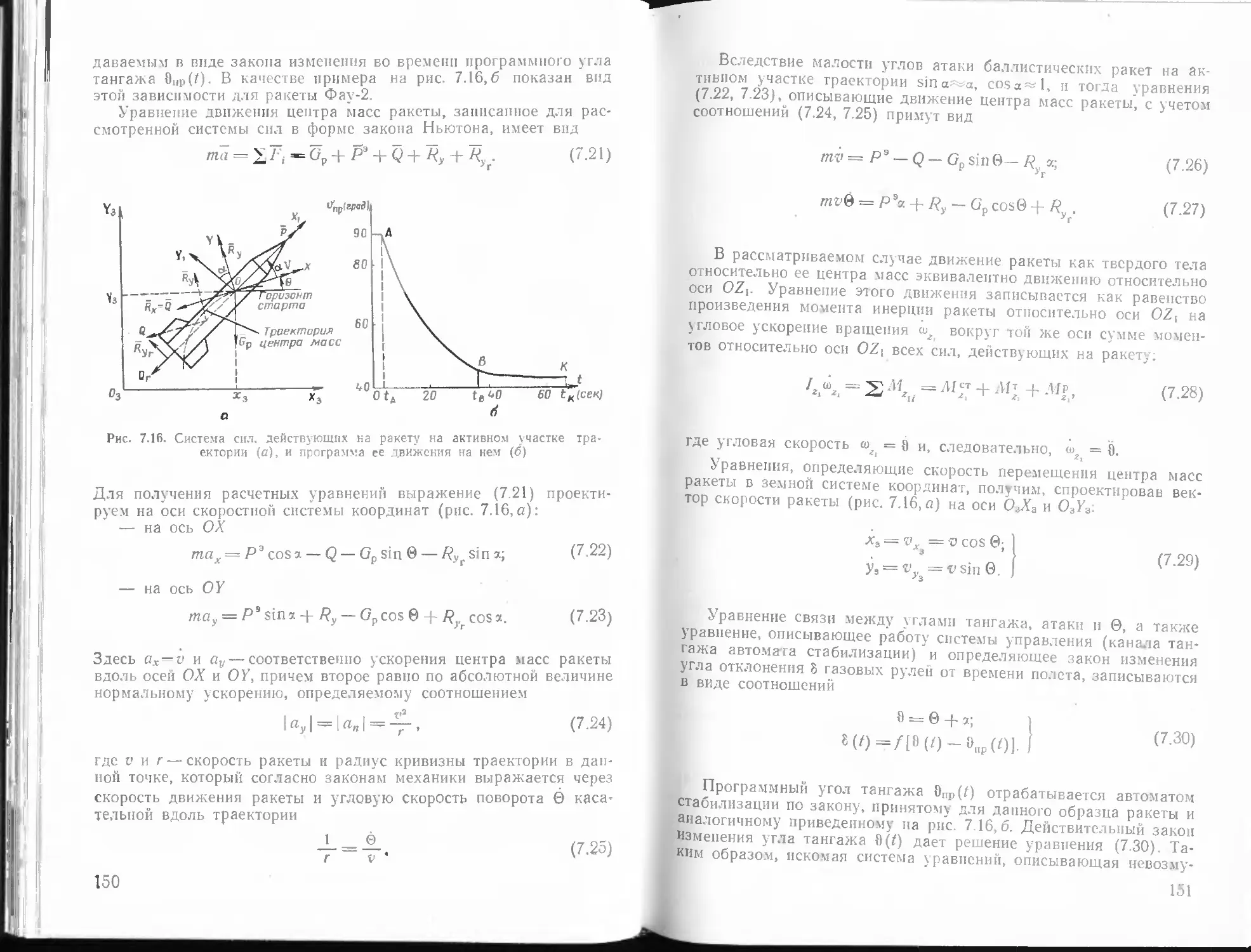
теории полета ракет и теории поправок.
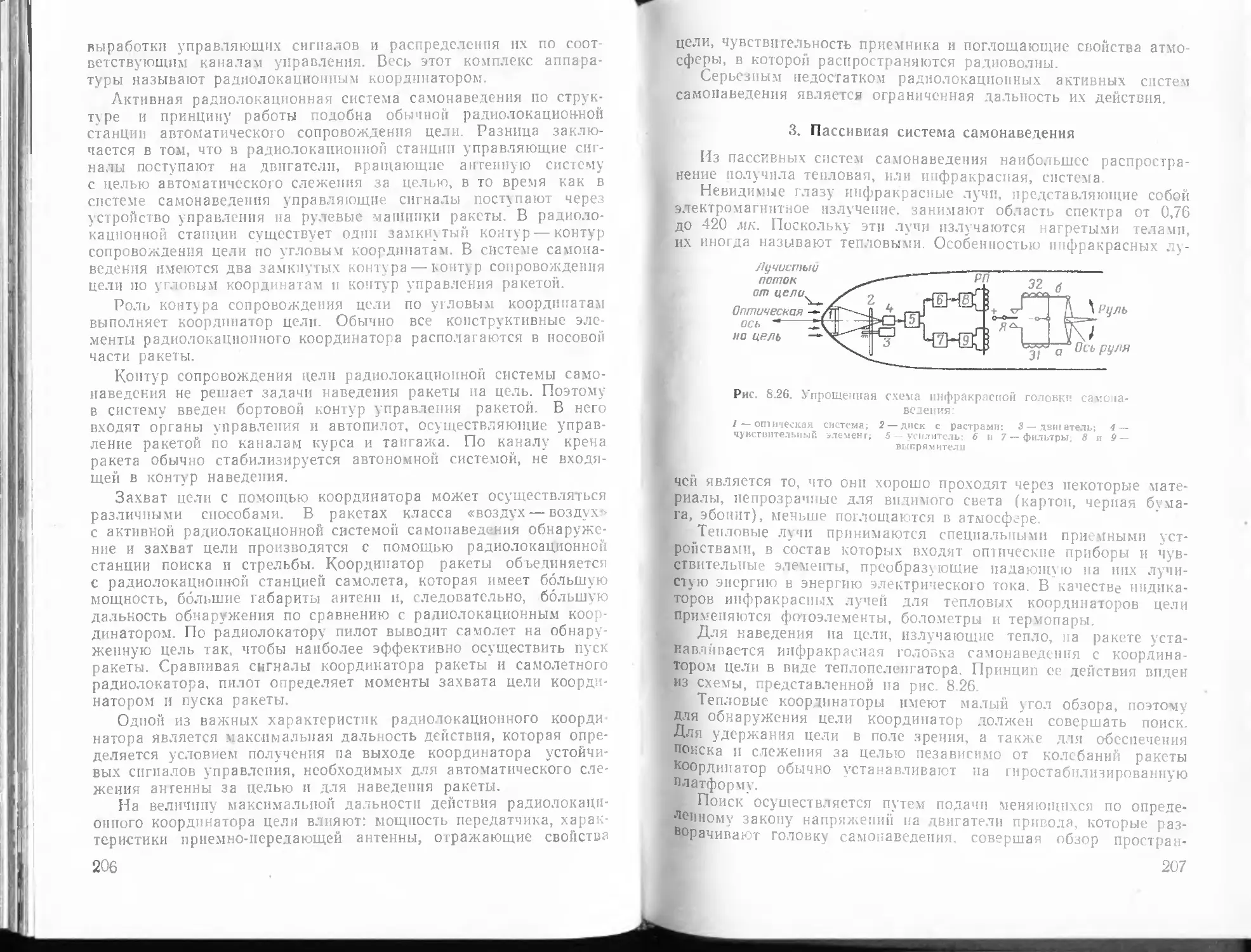
Глава 8 знакомит с системами управления ракет, наконец, в
главе 12 изложены основы устройства боевых частей различного
назначения.
Главы 1, 2, 9, 10, 11 написаны М. Н. Алешковым; главы 3 и 6—■
п- В. Савиным и И. И. Жуковым; главы 4, 5 — II. В. Савиным;
глава 7 —Д. Д. Кукушкиным и И. И. Жуковым; глава 8 —
Ю. Г. Фоминым и глава 12—0. П. Марковым.
1» 3
Книга рассчитана па офицеров, связанных с эксплуатацией
ракетного оружия, курсантов и слушателей воешю-учебных
заведений и всех, занимающихся ракетной техникой.
Все пожелания и критические замечания по содержанию книги
авторы просят направлять по адресу. Москва, К—160, Управление
Военного Издательства МО СССР.
Глава 1
БОЕВОЕ ПРИМЕНЕНИЕ РАКЕТНОГО ОРУЖИЯ
РАЗЛИЧНОГО НАЗНАЧЕНИЯ
1.1. ИЗ ИСТОРИИ РАЗВИТИЯ РАКЕТНОГО ОРУЖИЯ
В литераторе, посвященной ракетной технике, утверждается,
что родиной первых ракет являются восточные страны.
Наиболее яркие страницы из истории развития ракетного дела
связаны с русским периодом, относящимся к XV веку.
Для военных целей в XVII веке в России были созданы
пороховые зажигательные и осветительные ракеты.
В начале XIX века на вооружение сухопутных войск и военно-
морского флота России приняты первые пороховые фугасные и
зажигательные ракеты трех калибров, которые использовались в
войне с Турцией (1828-1829 гг.).
Более совершенные ракеты в России появились в середине
XIX века, успешно использованные при обороне Севастополя, в
Крымской войне (1853—1855 гг.).
В начале XX века русские ученые К. Э. Циолковский (1857—
1935 гг.) и И. В. Мещерский (1859—1935 гг.) заложили основы
новой науки — ракетодинамики.
Первые советские ракеты были созданы и испытаны
коллективом инженеров ЦАГИ и ГИРД в период 1920—1933 гг. Например,
в 1930 г. для авиации разработаны и испытаны 82- и 132-мм
ракеты.
В период 1923—1937 гг. велась разработка различных
двигателей для ракет.
В результате этих работ в 1939 г. Советская Армия получила
на вооружение ракеты нескольких типов. Первое применение эти
ракеты нашли в боях с японскими захватчиками на реке Халхин-
Гол в 1939 г. В боях с белофиннами (осень 1939 — зима 1940 гг.)
ракеты калибра 82 и 132 мм эффективно применялись
авиацией.
5
Ракетное оружие успешно применялось авиацией в воздушных
боях и наземными войсками для нанесения ударов по наземным
целям в годы Великой Отечественной войны 1941 —1945 гг.
Наряду с развитием авиационных ракет создавались ракеты,
запускаемые с земли. Так, к лету 1939 г. была отработана
пусковая установка на 16 ракет калибра 132 мм. Установка
монтировалась на шасси автомобиля, что обеспечивало высокую се
мобильность. Данный вариант пусковой установки и принят в основу
боевой машины «БЛ1-13», любовно названной нашими воинами и
народом «кагюшей» за ее мощные и точные удары по фашистским
захватчикам.
Позднее, в 1942 г., на вооружение Советской Армии поступили
тяжелые 300-лш реактивные мины «Л1-30», способные разрушать
любые сооружения полевого типа.
В этот же период (1941 —1942 гг.) в осажденном Ленинграде
были разработаны, изготовлены на заводах в условиях блокады и
применены на Ленинградском фронте тяжелые турбореактивные
фугасные мины «М-28» калибра 280 мм и зажигательные мины
«Д1-32» калибра 320 мм.
В заключительный период Великой Отечественной войны
ракетные подразделения Советской Армии, оснащенные реактивным
оружием, участвовали в боях на всех фронтах, а их залпы по
врагу открывали беспрепятственный путь нашим наступающим частям.
В послевоенные годы разработаны новые ракеты всех видов,
позволяющие надежно защищать завоевания Октября.
Благодаря неустанной заботе Коммунистической партии и
Советского правительства в СССР создана мощная
научно-техническая и производственная база, что позволило открыть новую
страницу в истории развития ракетной техники —эпоху космических
полетов.
1.2. РОЛЬ И МЕСТО РАКЕТНОГО ОРУЖИЯ В ВООРУЖЕННОЙ БОРЬБЕ
Относительная неуязвимость ракетного оружия и
результативность наносимых им ударов обусловили его совершенствование и
наложили серьезный отпечаток па развитие военной мысли и
разработку вопросов ведения современных войн.
Военные идеологи капиталистических стран полагают, что в
возможной войне в широких масштабах будут применяться
ядерное ракетное оружие и другие средства массового поражения
наравне с классическими видами вооружения. С этой целью на
основе достижений современной науки и техники в последние годы
во многих странах разрабатываются новые системы вооружения
с ракетами различной дальности, способные-доставлять к цели
ядерные боевые части большой разрушительной силы в течение
нескольких или десятков минут.
6
Строятся современные атомные подводные лодки, вооруженные
ракетами большой дальности, способные осуществлять пуск ракет,
находясь как в натводном, так и в подводном положении.
Разрабатываются ядерные бомбы, которые будут доставляться к цели
авиацией дальнего действия.
В соответствии с программами перевооружения многие
капиталистические страны оснащают свои вооруженные силы ракетным
оружием.
. По мнению военных специалистов капиталистических стран,
ракетное оружие способно на современном этапе самостоятельно
решать практически все задачи уничтожения различных объектов.
Они исходят из того, что это оружие является одним из
перспективных видов вооружения, так как имеет существенные
преимущества в оперативно-тактическом и техническом отношении по
сравнению с классическим вооружением, например ствольной
артиллерией, боевой авиацией и военно-морским флотом. Основными
преимуществами ракетного оружия они считают следующие.
Ракетное оружие имеет практически неограниченную дальность
действия — от десятков до нескольких тысяч километров.
В настоящее время в ряде стран приняты на вооружение или
разрабатываются вновь ракеты на дальности: до 40 км, от 40 до
250 км, от 250 до 800 км, от 800 до 2500 км, от 2500 до 5000 км,- от
5000 до 10 000 км и более.
Ракетами можно управлять в процессе их полета к цели,
благодаря чему значительно увеличивается эффективность
поражающего действия при нанесении удара.
Имея большие скорости полета и высокие траектории, ракеты
менее уязвимы по сравнению с другими средствами борьбы. Их
прорыв к цели, оснащенной сильной системой ПВО и ПРО, более
вероятен, чем прорыв военной авиации.
Благодаря большой скорости полета ракеты преодолевают
многие тысячи километров за несколько десятков минут.
Применение различных ракетных двигателей большой тяги
позволяет существенно увеличить мощность боевых частей как с
зарядом обычного снаряжения, так и с ядерным зарядом.
При этом отмечается, что эффективность применения ракетного
оружия во многом зависит от точности стрельбы, мощности
боевых частей ракет, характера целей, по которым наносится удар, а
также от вида ядерного взрыва (наземный или воздушный).
Количество ракет, необходимое для поражения тон или иной
Цели, при заданной величине надежности резко возрастает с
увеличением дальности их действия и существенно уменьшается с
увеличением мощности их боевых частей.
Ракеты можно запускать в любое время года и суток
независимо от метеорологических условий.
Наряду с положительными качествами ракетное вооружение
имеет и существенные недостатки:
~- громоздкость ракет большинства калибров;
7
— малая мобильность пусковых средств, особенно для раке?,
большой дальности;
— уязвимость стационарных пусковых систем;
— малая скорострельность некоторых типов ракетных
установок;
— недостаточная эффективность ракет при поражении
подвижных целей;
— демаскирусмость места пуска ракет;
— сложность производства ракет дальнего действия и
вследствие этого высокая их стоимость.
Однако постоянное совершенствование ракет и ракетных
комплексов в целом значительно уменьшило влияние этих
недостатков.
В зависимости от выполняемых в боевых условиях задач
ракеты принято делить на тактические, стратегические, ракеты
систем противовоздушной (ПВО) и противоракетной (ПРО)
обороны, ракеты противолодочной обороны (ПЛО).
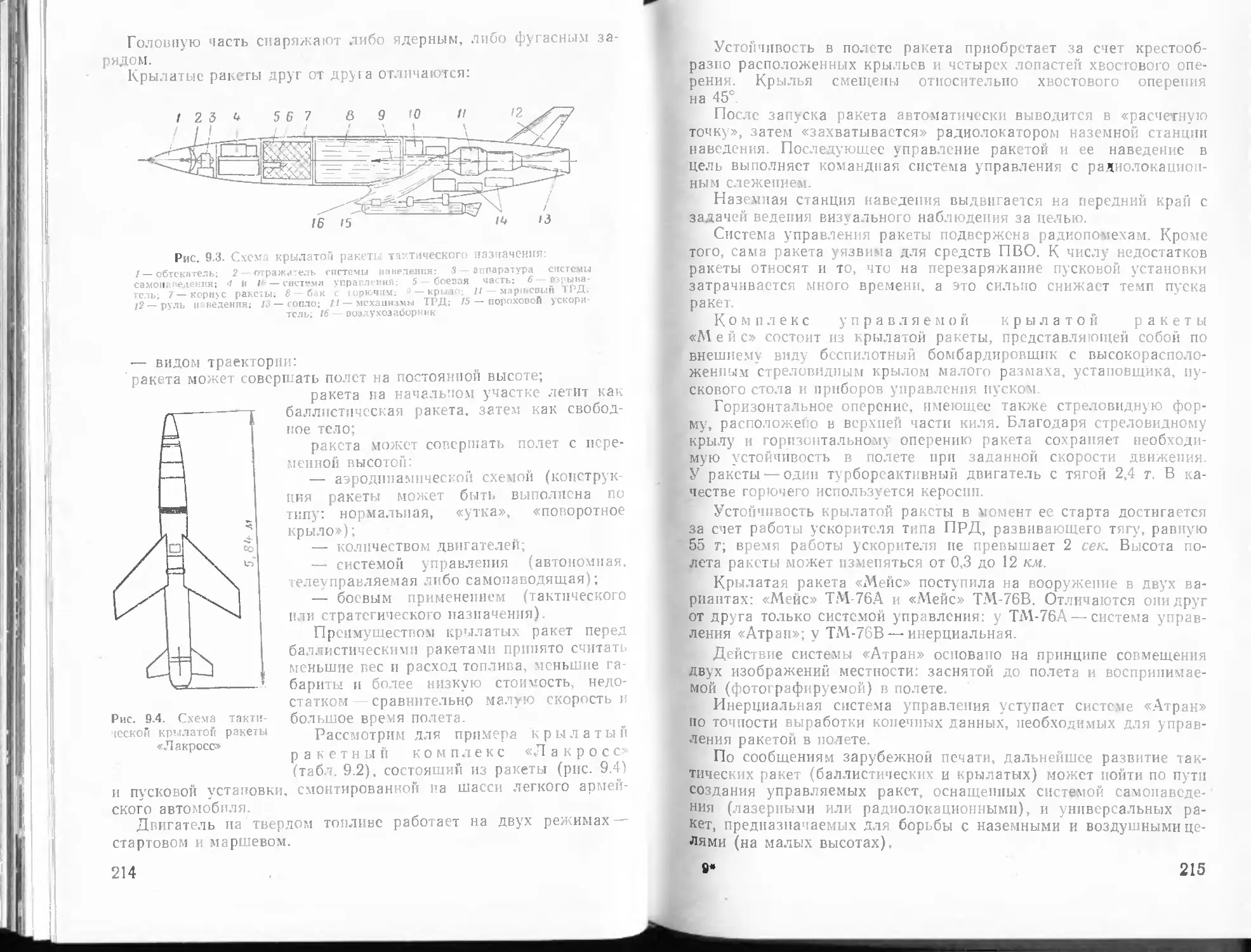
Ракеты тактического назначения имеют дальность
стрельбы до 1000 км. Эгог вид ракет используется непосредственно на
поле боя войсками, в боевых порядках и предназначен для
решения задачи в интересах общевойсковых частей и соединений.
К тактическим ракетам относятся: противотанковые управляемые
ракеты (ПТУР); ракеты, применяемые для стрельбы из
специальных ружей и безоткатных орудий: ракеты, запускаемые с
пусковых установок со многими или одиночными направляющими;
ракеты, используемые в интересах крупных войсковых
соединений.
К стратегическим ракетам относятся баллистические
ракеты средней дальности с досягаемостью от 1000 до 4000—5000 км
и большой дальности, в том числе и межконтинентальные с
досягаемостью свыше 5000 км.
Стратегические ракеты размещаются главным образом на
стационарных базах, но могут устанавливаться на подвижных
средствах: железнодорожных платформах, кораблях, подводных
лодках и специальных автомашинах.
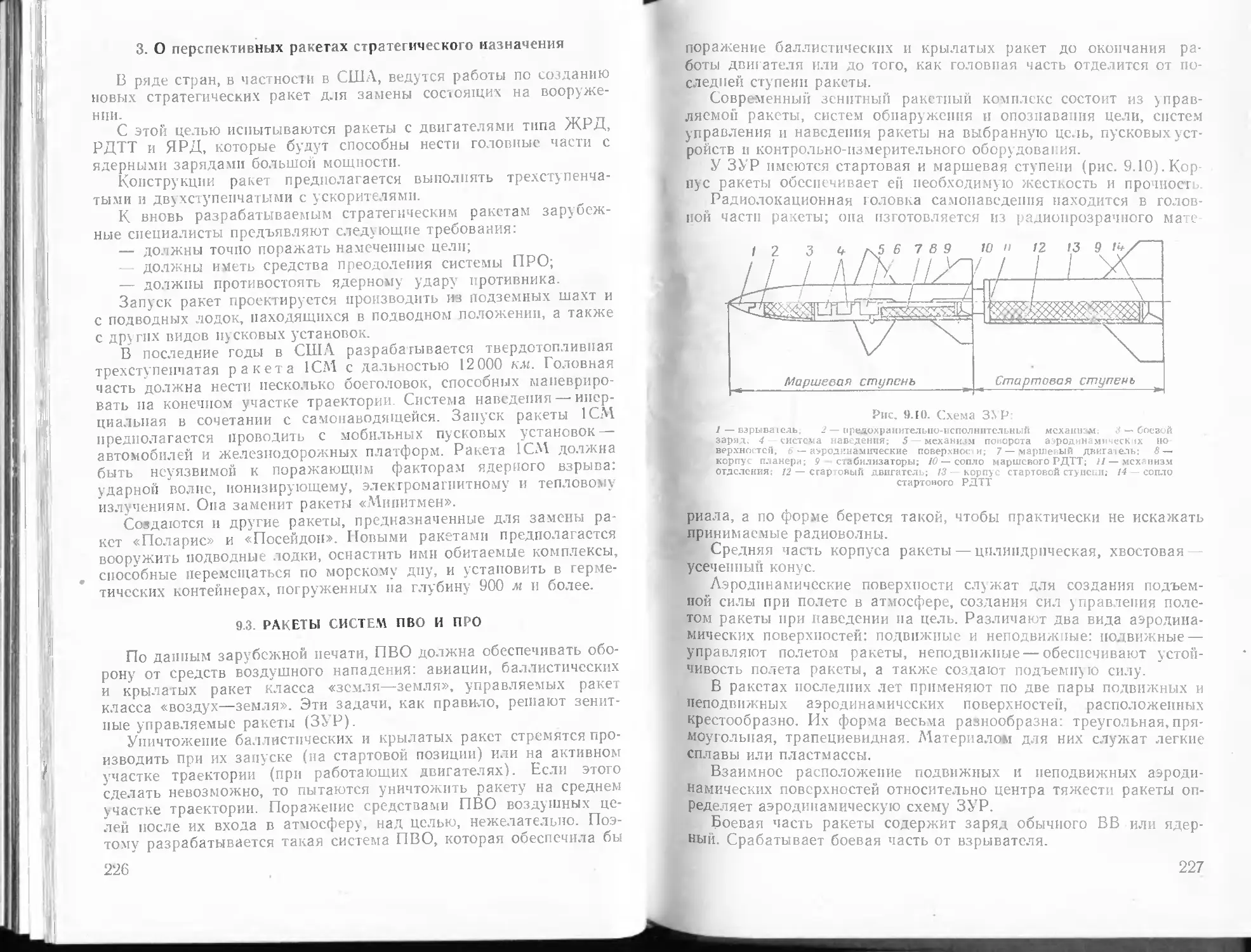
Ракеты систем ПВО и ПРО предназначены для борьбы
с воздушными целями: самолетами, боевыми головками ракет.
Противолодочную оборону (ПЛО) осуществляют с
помощью ракет и других систем вооружения, устанавливаемых на
авиационных, подводных и надводных средствах. В состав
авиационных противолодочных средств входят самолеты и вертолеты,
базирующиеся на противолодочных авианосцах.
1.3. ЗАДАЧИ, РЕШАЕМЫЕ РАКЕТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ
За рубежом считают, что в боевых условиях тактические
ракеты предназначаются для ведения борьбы с тактическими сред-
8
утвами ядерного нападения, живой силон, нахотящейся в
позиционном районе (районе сосредоточения) и на марше,
мотомеханизированными средствами и тапками, артиллерией всех видов,
долговременными оборонительными сооружениями и другими
целями противника, расположенными в сто тактической глубине.
• Возросшая роль танков и других подвижных бронированных
целей заставила зарубежных военных специалистов много
внимания уделить развитию противотанковых средств, в частности,
противотанковых ракет (ПТУР), имеющих необходимую дальность
прицельного огня, требуемую точность боя и бронепробнваемость,
высокую маневренность и возможность ведения огня из
укрытий.
За последние годы во всех зарубежных армиях ПТУР
получили широкое распространение благодаря тому, что имеют малый
вес, небольшие размеры, просты в боевом применении и легко
могут быть замаскированы па поле боя до их применения.
ПТУР применяются для стрельбы но переднему краю
противника, его танкам, мотомеханизированным средствам и другим
целям. На вооружении армий капиталистических стран — участниц
агрессивных блоков состоят ПТУР, как принято в литературе
говорить, двух поколений.
ПТУР первого поколения позволяют вести управляемый полет,
начиная со 180—600 м от места пуска. Следовательно, если цель
находилась ближе этого расстояния, то поразить ее такой
ракетой невозможно.
ПТУР второго поколения являются более совершенными. Они
имеют автоматизированную систему управления, которая
облегчает действия оператора, позволяет ему следить через оптический
визир только за целью. Эти ПТУР имеют небольшую
минимальную дальность стрельбы и значительно большую скорость
полета.
Для стрельбы на полную глубину тактической полосы в
зарубежных армиях применяются неуправляемые баллистические
ракеты. Подразделения, вооруженные этими ракетами, считаются
основной огневой ударной силой в составе современных
тактических соединений. По огневой мощи эти подразделения примерно
в сто раз превосходят артиллерийские подразделения при
применении ядерных зарядов.
Тактическое ракетное оружие дает возможность
успешно сочетать:
— относительно большую дальность стрельбы с необходимой
точностью;
— большую мощность действия заряда у цели с простотой и
легкостью конструкции;
— надежность действия ракет и малую уязвимость их с
относительной простотой конструкций пусковых устройств и большой
маневренностью.
9
Тактические ракеты могут применяться и для ведения борьбы
со средствами ядерного нападения противника, уничтожения и
подавления крупных объектов армейского и фронтового значения
(в частности, таких целей, как командные пункты), крупных
сосредоточений войск, армейских и фронтовых складов, аэродромов
тактической и транспортной авиации, стартовых площадок
стратегических ракет, железнодорожных узлов, станций снабжения и
других целен.
Па вооружении капиталистических стран ранее состояло до
десятка ракет указанного назначения.
В настоящее, время их число существенно сократилось за счет
разработки новых, более совершенных, имеющих лучшие боевые
характеристики.
Не заменяя полностью авиации, тактические баллистические и
крылатые ракеты могут привлекаться для выполнения всех
основных задач, возложенных па авиационные подразделения.
Все это вместе взятое делает тактическое ракетное оружие
весьма перспективным.
Ракеты стратегического назначения, по
заявлению военных кругов США, являются главным средством ведения
возможной войны.
Ракеты стратегического назначения принято делить на ракеты
большой и средней дальности действия.
Ракеты большой дальности предполагается применять для
массированных ударов по объектам, защищенным средствами ПРО и
ПВО и расположенным в глубине территории страны. К таким
объектам относятся ракетные, авиационные и морские базы,
крупные промышленные и административно-политические
центры.
Ракеты средней дальности предполагается применять для
нанесения ядерных ударов по узлам коммуникации, складам
ядерных боеприпасов, сосредоточениям войск, крупным аэродромам и
районам подготовки воздушпрдесантных операций.
В настоящее время все зарубежные стратегические ракеты
делят на ракеты первого и второго поколения.
Ракеты первого поколения (баллистические ракеты «Тор»,
«Атлас», «Титан-1» и крылатая ракета «Снарк») имеют много
конструктивных недостатков и обладают низкой боевой готовностью.
Вследствие этого указанные выше ракеты в настоящее время
сняты с серийного производства.
Ракеты второго поколения (баллистические ракеты «Титан-2»,
«Мипитмен-2», «Мипитмен-3» и «Поларис») имеют более высокую
боевую готовность и живучесть, которые достигаются:
— применением твердого топлива («Минитмен» и «Поларнс»)
или использованием долгохранимого жидкого топлива («Титан-2»);
— автоматизацией операций по контролю технического
состояния систем при предстартовой подготовке и пуске ракет;
10
— использованием непрерывно работающих бортовых систем
управления во все время боевого дежурства;
— запуском ракет из подземных пусковых шахт.
Дальнейшее совершенствование зарубежных стратегических
ракет ведется с целью повышения их неуязвимости. В частности,
изучаются и разрабатываются проекты космических
баллистических ракет, которые могли бы находиться в полете на очень
больших высотах в течение нескольких диен, прежде чем будут
использованы для поражения целей.
Современные средства нападения с воздуха вызвали
необходимость создания новых средств борьбы с ними. Такими средствами,
по мнению зарубежных специалистов, являются зенитные
управляемые ракеты (ЗУР) и антиракеты, входящие в системы ПВО
и ПРО, а также ракеты классов «воздух — воздух» и «воздух —
земля», запускаемые с различных видов самолетов.
Зенитные управляемые ракеты обладают большими
скоростями, дальностями и высотами полета, могут управляться
в полете и, наконец, имеют мощные головные части и могут
действовать в любых метеорологических условиях при полной
автоматизации всей системы противовоздушной обороны.
На ЗУР возлагаются следующие основные задачи:
— оборона наиболее важных объектов, промышленных
городов и районов от стратегических ракет, стратегической авиации и
крылатых ракет противника;
— борьба с самолетами противника, летящими на малых и
больших высотах;
— оборона кораблей, портов и морских баз от самолетов
противника, действующих на малых и средних высотах;
— оборона сухопутных войск и механизированных соединений
на поле боя от низколетящих воздушных средств.
Особое место среди средств нападения с воздуха, как считают
за рубежом, занимают стратегические ракеты среднего и дальнего
действия. Борьба с ними возлагается па силы и средства
противоракетной обороны.
Считается, что задачи системы ПРО состоят в том, чтобы
своевременно обнаруживать и уничтожать все атакующие ракеты с
ядерными боевыми зарядами на сравнительно большом удалении
от обороняемых объектов. С этой целью система ПРО оснащается
радиолокационными станциями дальнего обнаружения и
разведывательными спутниками для непрерывного наблюдения за
воздушным и космическим пространством, а также за поверхностью
земли.
В системе ПРО, содержащей антиракеты различного
назначения, используютсл ядерные заряды с тротиловым эквивалентом до
20 тыс. т.
Первой системой ПРО является система «Найк-Зевс». Однако
эта система не обеспечила падежного обнаружения ракет
противника среди других летящих вместе с ними ложных целей.
11
Второй системой ПРО является система «Пайк-Х»,
предусматривающая широкую оборону территории США от атакующих
стратегических ракет.
Ограниченный вариант этой системы получил наименование
«Септинел».
На систему ПРО «Септинел» возлагается задача отражения
атак одиночных и незначительных количеств головных частей.
В ее состав входят две антиракеты: «Спартан» и «Спринт».
Антиракета «Спартан» предназначается для перехвата
головных частей за пределами атмосферы, на удалении 640—740 км.
Антиракета «Спринт» должна перехватывать головные части
после {ix входа в атмосферу, па расстоянии 30—50 км от цели.
Предполагается также включить в систему ПРО проходящую
испытания антиракету «Хайбекс» для перехвата боевых головок
и других целей, летящих на высоте 15—20 км.
В США предполагается ввести еще одну систему ПРО: «Сейф-
гард»—для защиты баз стратегических ракет, баз потгюдпых
лодок и баз стратегических бомбардировщиков от ракетно-ядерного
удара.
Система обнаружения ПРО имеет своей задачей
заблаговременное предупреждение о нападении с воздуха и
своевременную выдачу данных на перехват и уничтожение воздушных
целей.
С этой целью система ПРО строится так, чтобы можно было
обнаруживать ракеты при старте и следить за их полетом по всей
траектории.
Обнаружение ракет в полете производится:
— но излучениям энергии летящей ракеты (инфракрасное и
световое излучение головной части, радиоактивное излучение
ядерного заряда, излучение работающего двигателя);
— по отражению энергии от летящей ракеты
(электромагнитное, световое, инфракрасное, звуковое);
— по возмущенной среде, которую пересекает летящая ракета
(возмущения в электромагнитном и гравитационном полях Земли
и в атмосфере).
Во всех случаях обнаружения ракет предпочтение отдается
радиолокационным средствам системы ПРО.
За последние годы в ряде капиталистических стран ведутся
работы по изысканию новых способов борьбы с баллистическими
ракетами и их головными частями. В частности, ставятся задачи:
— подрывать ракеты в полете на большом удалении от
охраняемого объекта с помощью электромагнитных излучений или
облака мелких частиц, например песка;
— отклонять траекторию летящей ракеты от заданной с
помощью узкого мощного луча радиоволн или потока частиц
высоких энергий;
— превращать с помощью электромагнитных излучений заряд
ядерной головной части в вещество, которое не обладает взрывча-
12
тЫми свопствами, или уничтожать его при помощи специального
устройства — так называемого «прожектора антиматерин».
В ряде капиталистических стран утвердилось мнение, что
основной ударной силой военно-морских сил должны стать
атомные подводные лодки, вооруженные ракетами и обладающие
высокой скоростью хода, достаточно большой глубиной погружения
и неограниченной дальностью подводного плавания.
В связи с этим надводные корабли всех классов и авиация
вооружаются ракетами, предназначенными для борьбы с
атомными подводными лодками. Строятся противолодочные авианосцы,
вертолетоносцы, крейсеры и ракетные катера. Разрабатываются
противолодочные самолеты и вертолеты.
Перед всеми этими средствами ставятся задачи:
— уничтожения атомных подводных лодок противника;
— охраны побережья и всей территории от атомных ударов
подводных лодок противника;
— высадки морских десантов для оказания помощи
сухопутным войскам;
— нанесения ядерных ударов но объектам противника,
расположенным на побережье и в глубине территории (промышленным
и административным центрам, военно-морским базам);
— обеспечения безопасности своих морских и океанских
коммуникаций.
Кроме того, па большинстве надводных кораблей и атомных
подводных лодках для ведения противолодочной борьбы имеются
противолодочные торпеды.
1.4. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К РАКЕТАМ
РАЗЛИЧНОГО НАЗНАЧЕНИЯ
Для решения боевых задач с наибольшей эффективностью
ракетный комплекс в целом и отдельные системы его и агрегаты
должны быть надежны в работе, просты в конструктивном,
технологическом и эксплуатационном отношениях (что дает
возможность развертывания поточного метода производства ракетного
комплекса); обеспечивать надежное длительное хранение
ракетного комплекса, и прежде всего ракет, с целью создания
необходимого запаса; гарантированная безотказность работы ракетного
комплекса при его транспортировке, подготовке к пуску и пуске.
Рассмотрим эти требования более подробно.
Высокая скорострельность. Как считают зарубежные
специалисты, это особенно необходимо ракетам тактического
назначения, так как они предназначены для непосредственной
поддержки войск и выполняют свою боевую задачу в ограниченное
Ремя, а в ряде случаев могут быть использовапы'для ведения огня
о непредвиденным целям. В этих условиях появляется пеобходи-
юсть в сокращении времени на подготовку к пуску и особенно к
13
повторному пуску ракет с тех же пусковых средств и тех же
позиций.
Боевая готовность ракет стратегического назначения также
должна обеспечиваться в максимально короткое время. Например,
боевая готовность ракеты «Минитмен-2», по некоторым данным,
доведена до 30 сек.
Для ЗУР, антиракет и ракет ПЛО время приведения в боевую
готовность, как утверждают иностранные специалисты, не должно
превышать 1—3 мин, а ракет ПЛО— значительно .меньше.
Высокая точность стрельбы требуется потому,
утверждают за рубежом, что большинство целен, по которым должны
вести огонь ракеты тактического назначения, малоразмерные.
Точность стрельбы приобретает особенно большое значение тогда,
когда стрельба должна вестись одиночными пусками ракет.
Считают, что скорость полета ракет должна быть
достаточно большой, чтобы их не могли перехватить авиационные либо
зенитные ракеты или антиракеты.
Большая скорость полета (по зарубежным источникам 4—
7 км/сек при общем полетном времени не более 15—30 мин)
стратегических ракет обеспечивает внезапность нападения и уменьшает
вероятность их уничтожения в воздухе антиракетами.
Исключительно важное значение скорость полета имеет для
ракет ПВО, ПРО и ПЛО, и это понятно, так как назначение
указанных ракет — поражение быстролетящих целей.
Система управления должна обеспечивать наведение,
ракет и а цель. Иными словами, как это следует из иностранных
источников, ракету необходимо «навести» на цель по заранее
вычисленным и заданным координатам и давать возможность в
полете вносить поправки в заданные установки, так как до пуска
трудно учесть влияние всех факторов.
Маневренность. По мнению иностранных специалистов,
это требование к тактическим ракетам вытекает из высоких
темпов наступления в современных операциях. Она достигается
применением самоходных пусковых установок повышенной
проходимости, обеспечивающих независимое перемещение с одних огневых
позиций на другие. Кроме того, к ракетам тактического
назначения предъявляется требование транспортабельности не только
средствами наземного транспорта, по и воздушного.
Стратегические ракеты, как правило, запускаются со
стационарных, так называемых «жестких», заранее построенных
ракетных баз. Однако в последнее время в зарубежной литературе
имеются сообщения о «кочующих пусковых установках»,
представляющих собой железнодорожные составы, курсирующие по
железным дорогам. Для ракет средней дальности создаются
подвижные пусковые установки.
Особенно высокой подвижностью, считают за рубежом, должны
обладать ЗУР. Это требование, естественно, не распространяется
па зенитные ракеты, находящиеся на стационарных базах и пред-
14
назначенные для защиты промышленных центров н отдельных
районов.
Подвижность ракет ПЛО зависит от скорости хода надводных
кораблей и подводных лодок, па которых ракеты установлены.
Считается, что дальность стрельбы тактических ракет
должна находиться в пределах от нескольких десятков километров
до 1000 км, т. е. дальность стрельбы определяется теми задачами,
которые должны решать эти ракеты на поле боя, а для
стратегических ракет дальность практически должна быть неограниченной.
Что касается дальности полета зенитных ракет и антиракет, то
иностранные специалисты утверждают, что она находится в
прямой зависимости от требований, предъявляемых системами ПВО
и ПРО, и определяется необходимостью поражения
приближающихся целей на гарантированных расстояниях от обороняемого
объекта.
Or головных частей ракет требуется большая
разрушительная сила. Поэтому головные части имеют либо обычное, либо
ядерное снаряжение.
Глава 2
ОСНОВАНИЯ УСТРОЙСТВА РАКЕТ
2.1. КЛАССИФИКАЦИЯ РАКЕТНОГО ОРУЖИЯ
На вооружении ряда современных зарубежных армий
находится большое количество боевых ракет различного назначения,
которые принято делить по следующим признакам: боевому
применению, месту пуска и нахождения целей, конструктивному устройстпу
(числу и способу соединения ступеней), типу двигателей и типу
системы управления. Рассмотрим подробнее принципы,
положенные в основу классификации ракетного оружия, принятые за
рубежом. В зависимости от боевого применения различают ракеты
тактические (ТР), сграгегические (СР), ракеты систем ПВО, ПРО и
ПЛО и, наконец, ракеты специального назначения
(метеорологические, исследовательские и др.)-
Деление ракет по месту пуска п месту нахождения целей дано
в табл. 2.1 с указанием наиболее важных целей, по которым
ведется стрельба.
По этому признаку все ракеты разбивают на четыре класса:
«земля ■— земля», «земля ■— воздух», «воздух — воздух» и
«воздух— земля». В зависимости от боевого применения каждый класс
ракет подразделяется еще на несколько подклассов.
Ракеты класса «земля—земля» приняты на вооружение
большинством армий капиталистических стран. Этот класс ракет имеет
несколько подклассов, каждый из которых решает своп вполне
определенные задачи. Наведение ракет на цель осуществляется с
помощью наземных средств, а также с помощью различных
радиосистем и автономных систем самонаведения, находящихся на
борту ракеты.
Ракеты класса «земля — воздух» состоят на вооружении в
основном в системах ПВО и ПРО и разрабатываются двух
типов— малой II большой дальности действия, а также малой н
большой досягаемости по высоте. Конструкция ракет этого класса
во многом зависит от дальности полета. Требования, предъявляе-
16
Таблица 2.1
K.iacc ракег и его
обозначение
«Земля —■ земля»
(Surface — to —
Surface)
SSM
(Surface — to —
Surface missile)
«Земля — воздух»
(Surface — to — air)
SAM
(Surface — to — air
missile)
«Воздух — воздух»
(Air — to — Air)
AAM
(Air — to — Air
missile)
«Воздух — земля»
Air — to — surface)
ASM
(Air — to — surface
missile)
Подк lace ракет и его
обозначение
«Земля — земля»
SSM
«Земля — корабль»
SSM
« Корабль —
корабль» SSM
«Корабль — земля»
SSM
«Корабль —
подводная лодка» SUM
«Подводная
лодка— корабль» USM
«Подводная
лодка— земля» USM
«Земля — воздух»
SAM
«Kopa6ib -воздух»
SAM
«Подводная
лодка — воздух» UAM
—
«Воздух — земля»
ASM
«Воздух—корабль»
ASM
«Воздух —
подводная лодка» AUM
Боевое применение
Стрельба с земли по
наземным и надводным целям
Стрельба с кораблей по
надводным и береговым целям
Стрельба с кораблей по
подводным лодкам, находящимся
в подводном положении
Стрельба с подводных лодок
по надводным и наземным
целям
Стрельба с земли по
воздушным целям
Стрельба с кораблей по
воздушным целям
Стрельба с подводных лодок
(в подводном положении) по
воздушным целям
Стрельба с самолетов по
самолетам, управляемым
ракетам н другим воздушным
целям
Стрельба с самолетов по
наземным и надводным целям
Стречьба с самолетов по
подводным лодкам,
находящимся в подводном
положении
2-622
17
мые к маневренности ракет данного класса, обычно значительно
выше, чем к ракетам других классов, в частности класса
«воздух — воздух», а это в свою очередь отражается на конструкции
всей ракеты. Наведение ракет осуществляется с помощью
теленаведения, самонаведения и комбинированным способом.
Ракеты класса «воздух — воздух» запускаются с самолета-
носителя по впереди летящей цели. Ими вооружаются
истребители, штурмовики, бомбардировщики, а также вертолеты.
Конструкция ракет данного класса обусловлена их расположением на
самолете-носителе. Особое внимание при размещении ракет иа
самолете обращается на то, чтобы ракета при запуске не имела
тенденции к развороту на свой самолет-носитель, а также не могла
отклоняться от заданной траектории полета под воздействием
боковых аэродинамических сил. Ракеты этого класса имеют
сравнительно малую дальность полета. Траектория их полета состоит из
активного участка и участка полета по инерции. Наведение ракет
па цель производится самолетом-носителем, некоторые типы
ракет — самонаводящиеся.
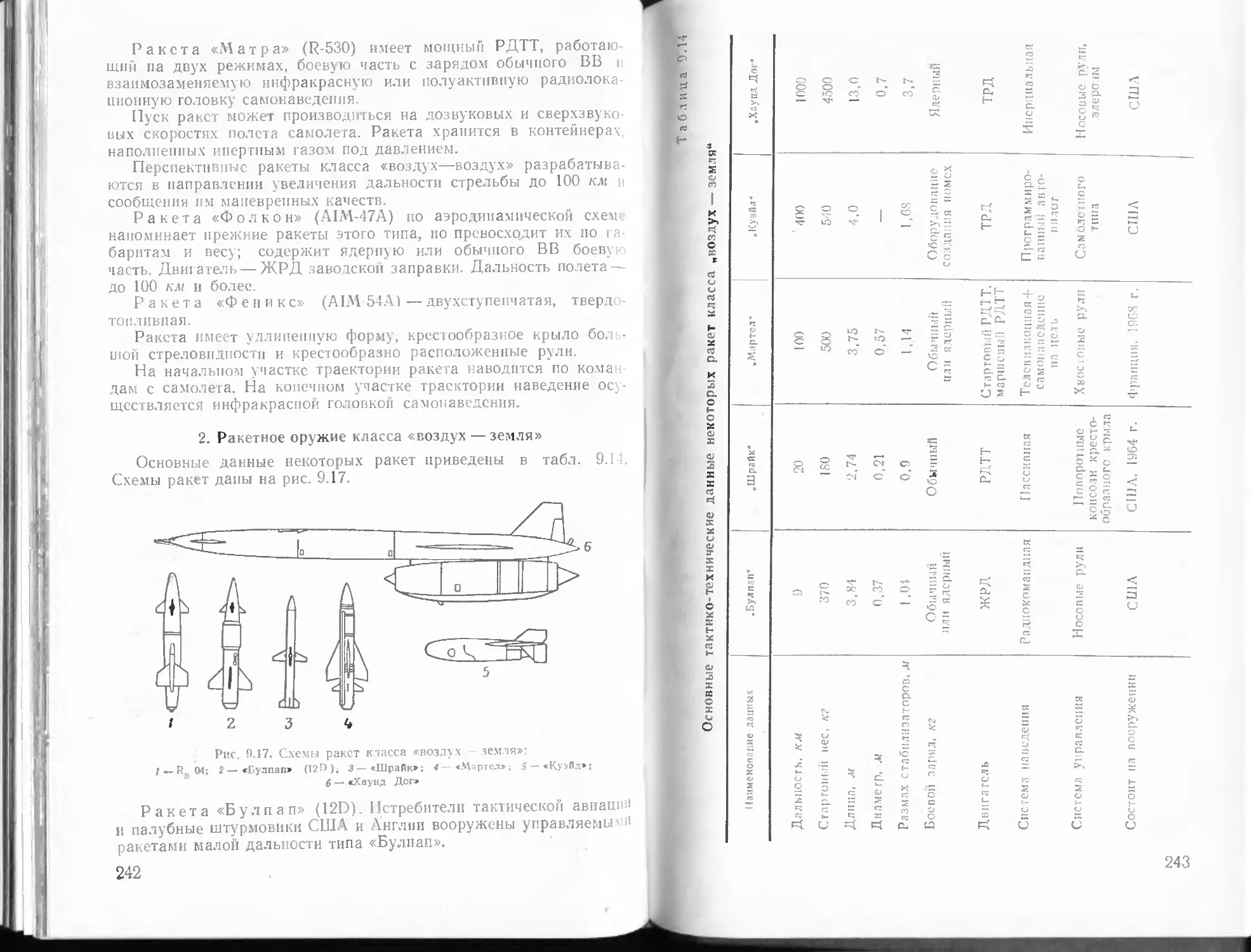
Ракеты класса «воздух —земля» используются для поражения
наземных и надводных целей, движущихся с малыми скоростями
по сравнению с воздушными целями. Расположение ракет на
самолете-носителе остается обычно таким же, как и ракет класса
«воздух — воздух». Конструкция ракеты и мощность ее двигателя
определяются дальностью полета.
Конструкция и форма ракет зависят от их назначения.
Баллистические ракеты, а также крылатые ракеты проектируются с
учетом всех факторов полета в условиях атмосферы, исходя из
которых и определяется рациональная нх конструкция.
Ракеты могут проектироваться как одноступенчатыми, так и
многоступенчатыми (составными). При этом под ступенью ракеты
принято понимать часть составной ракеты, обеспечивающую ее
полет на определенном этапе активного участка и состоящую из
топливного отсека с топливом, ракетной двигательной установки,
систем подачи топлива, органов управления, аппаратуры
управления, элементов конструкции и системы разделения ступеней. В
многоступенчатых ракетах ступени отбрасываются в полете в
определенной последовательности.
Способ соединения ступеней определяет конструктивную схему
ракеты.
По типу двигателя различают ракеты с жидкостными
ракетными двигателями (ЖРД), двигателями на твердом топливе
(РДТТ), комбинированными ракетными двигателями (КРД).
ядерными ракетными двигателями (ЯРД).
Наиболее широкое распространение получили ракеты, имеющие
ЖРД и РДТТ.
В современных ракетах, имеющихся за рубежом, применяются
два типа систем управления (СУ) полетом: инерциальные
(автономные) п комбинированные. Аппаратура инерциальной системы
18
j правления полностью размещена на борту ракеты, что и делает
се автономной, независимой от земли. Комбинированные СУ
состоят из автономной системы и аппаратуры радиоуправления
(РУ). Управление полетом осуществляется по командам,
передаваемым с наземного пункта радиоуправления на приборы,
установленные на борту ракеты.
Наконец, ракеты, рассмотренные по указанным выше
признакам, могут быть неуправляемые и управляемые.
Неуправляемые ракеты — это, как правило, ракеты
тактического назначения и авиационные.
Управляемые ракеты благодаря наличию системы управления,
мощной боевой части (БЧ) и мощному двигателю дают
возможность получить значительно большую дальность и более высокую
эффективность поражения целей в сравнении с неуправляемыми
ракетами. Поэтому управляемые в полете ракеты получили
широкое распространение во всех родах войск рята зарубежных
стран.
Приведенная классификация ракетного оружия соответствует
современному состоянию ракетного вооружения иностранных
армий и, естественно, не учитывает перспектив развития ракетной
техники.
2.2. ПРИНЦИПИАЛЬНЫЕ СХЕМЫ РАКЕТ
Ракетой называется беспилотный летательный аппарат,
совершающий движение за счет реактивной силы, возникающей при
отбросе части собственной массы. Отбрасываемая масса истекает
с большой скоростью из сопла двигателя летательного аппарата,
создавая реактивную силу прямого действия. Для полета
аппарата-ракеты не требуется обязательного наличия окружающей среды
(атмосферы).
Кривая, по которой происходит полет ракеты, называется
траекторией. Она состоит из двух участков: активного и пассивного.
На активном участке работает двигатель ракеты, создающий
реактивную силу. На пассивном участке ракета совершает полет по
инерции, т. е. как обычный артиллерийский снаряд. В целом
кривую полета ракеты называют баллистической траекторией, а саму
ракету называют баллистической ракетой.
Баллистические ракеты отличаются от других ракет, например
крылатых, отсутствием несущих поверхностей, предназначенных
Для создания аэродинамической подъемной силы при полете в
атмосфере.
Особенности конструкций ракет определяются их боевым
назначением, средствами .пуска, способами управления в полете,
принципами наведения на цель, а также дальностью стрельбы.
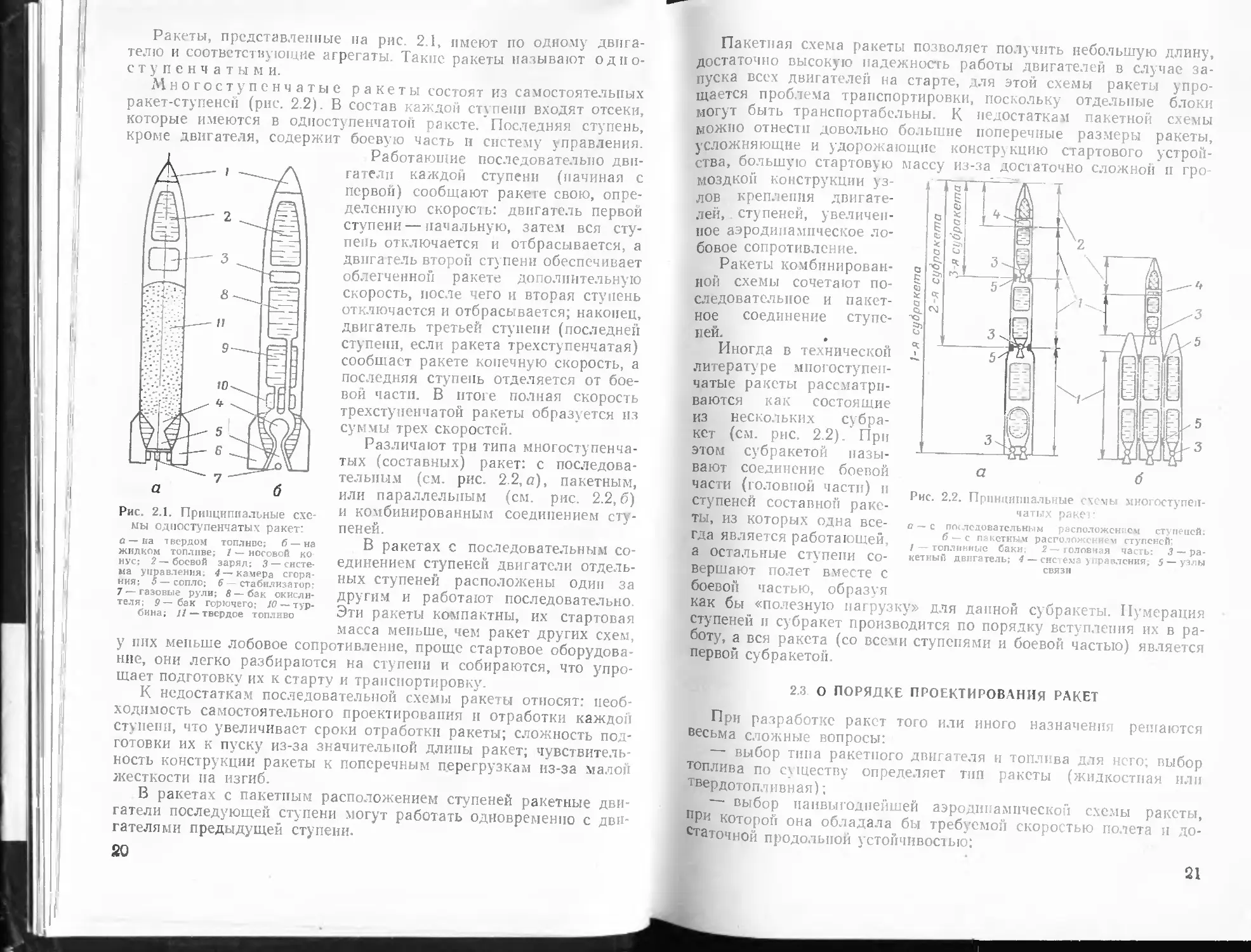
На рис. 2.1 даны две принципиальные схемы одноступенчатых
Ракет: одна — на твердом топливе (см. рис. 2.1,с), другая — на
Жидком (см. рис. 2.1,6).
2* 19
Ракеты, представленные на рис. 2.1, имеют по одному
двигателю и соответствующие агрегаты. Такие ракеты называют одно-
с т у п е н ч а т ы м и.
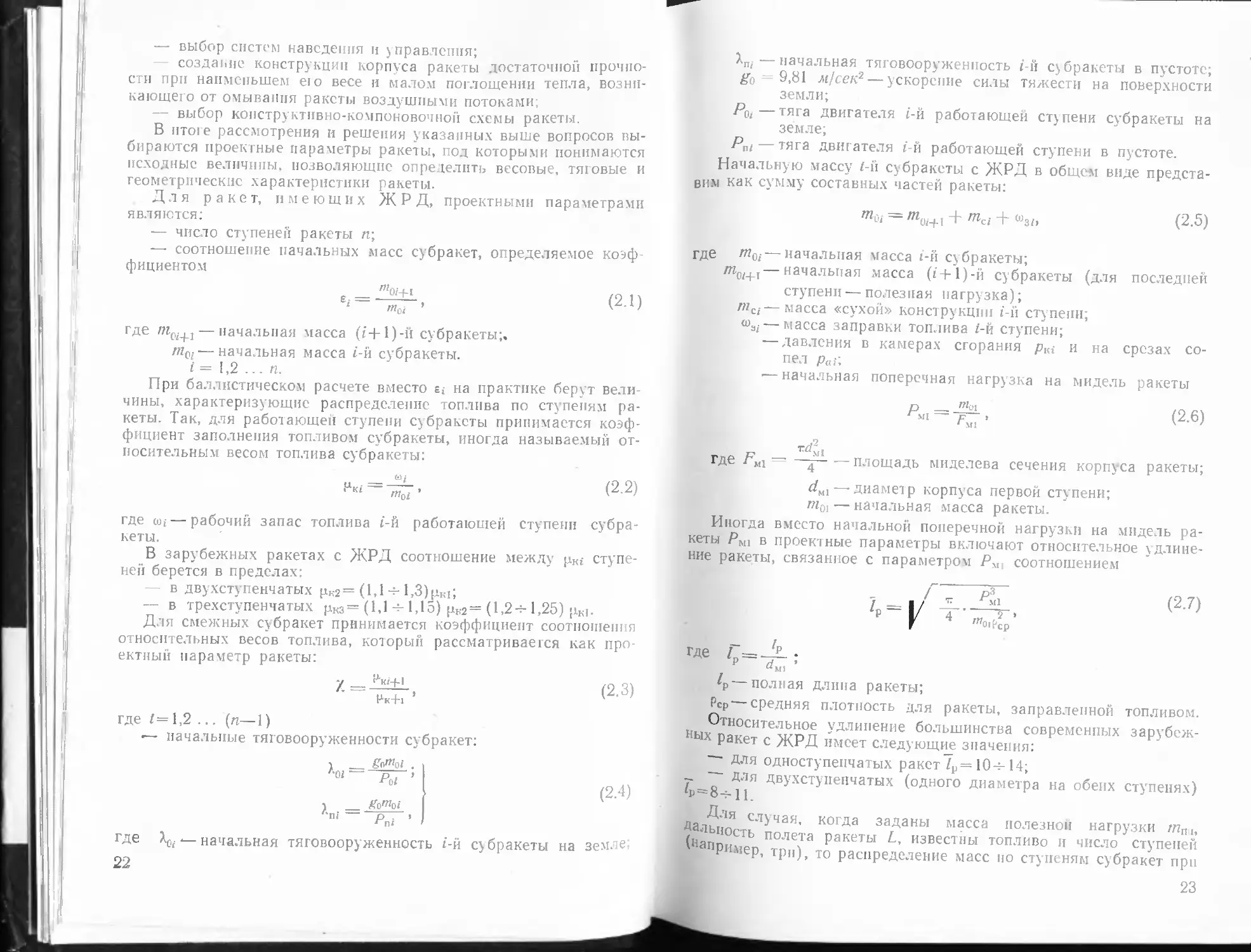
Многоступенчатые ракеты состоят из самостоятельных
ракет-ступеней (рис. 2.2). В состав каждой ступени входят отсеки,
которые имеются в одноступенчатой ракете. Последняя ступень,
кроме двигателя, содержит боевую часть и систему управления.
Работающие последовательно
двигатели каждой ступени (начиная с
первой) сообщают ракеге свою,
определенную скорость: двигатель первой
ступени — начальную, затем вся
ступень отключается и отбрасывается, а
Г~~1. —- з [~^=1 двигатель второй ступени обеспечивает
*—*—' "---L , облегченной ракете дополнительную
скорость, после чего и вторая ступень
отключается и отбрасывается; наконец,
двигатель третьей ступени (последней
ступени, если ракета трехступенчатая)
сообщает ракете конечную скорость, а
последняя ступень отделяется от
боевой части. В итоге полная скорость
трехступенчатой ракеты образуется из
суммы трех скоростей.
Различают три типа
многоступенчатых (составных) ракет: с
последовательным (см. рис. 2.2, а), пакетным,
или параллельным (см. рис. 2.2, б)
и комбинированным соединением
ступеней.
В ракетах с последовательным
соединением ступеней двигатели
отдельных ступеней расположены один за
другим и работают последовательно.
Эти ракеты компактны, их стартовая
масса меньше, чем ракет других схем,
у них меньше лобовое сопротивление, проще стартовое
оборудование, они легко разбираются на ступени и собираются, что
упрощает подготовку их к старту и транспортировку.
К недостаткам последовательной схемы ракеты относят:
необходимость самостоятельного проектирования и отработки каждой
ступени, что увеличивает сроки отработки ракеты; сложность
подготовки их к пуску из-за значительной длины ракет;
чувствительность конструкции ракеты к поперечным перегрузкам нз-за малой
жесткости на изгиб.
В ракетах с пакетным расположением ступеней ракетные
двигатели последующей ступени могут работать одновременно с
двигателями предыдущей ступени.
SO
Рис. 2.1. Принципиальные
схемы одноступенчатых ракет:
о — на твердом топливе; б — на
жидком топливе; / — носовой
конус: 2 — боевой заряд; 3 —
система управления: 4 — камера
сгорания; 5 — сопло; 6 — стабилизатор:
7 — газовые рули; 8 — бак
окислителя; 9— бак горючего;
10—-турбина; // — твердое топливо
Пакетная схема ракеты позволяет получить небольшую длину,
достаточно высокую надежность работы двигателей в случае
запуска всех двигателей на старте, для этой схемы ракеты
упрощается проблема транспортировки, поскольку отдельные блоки
могут быть транспортабельны. К недостаткам пакетной схемы
можно отнести довольно большие поперечные размеры ракеты,
усложняющие и удорожающие конструкцию стартового
устройства, большую стартовую массу из-за достаточно сложной п
громоздкой конструкции
узлов крепления
двигателей, ступеней,
увеличенное аэродинамическое
лобовое сопротивление.
Ракеты
комбинированной схемы сочетают
последовательное и
пакетное соединение
ступеней.
Иногда в технической
литературе
многоступенчатые ракеты
рассматриваются как состоящие
из нескольких
субракет (см. рис. 2.2). При
этом субракетой
называют соединение боевой
части (головной части) и
ступеней составной
ракеты, из которых одна
всегда является работающей,
а остальные ступени
совершают полет вместе с
боевой частью, образуя
как бы «полезную нагрузку» для данной субракеты. Нумерация
ступеней и субракет производится по порядку вступления их в
работу, а вся ракета (со всеми ступенями и боевой частью) является
первой субракетон.
2.3. О ПОРЯДКЕ ПРОЕКТИРОВАНИЯ РАКЕТ
При разработке ракет того или иного назначения решаются
весьма сложные вопросы:
— выбор типа ракетного двигателя и топлива для него; выбор
топлива по существу определяет тип ракеты (жидкостная или
твердотопливная);
— выбор наивыгоднейшей аэродинамической схемы ракеты,
пРи которой она обладала бы требуемой скоростью полета и
достаточной продольной устойчивостью;
Рис. 2.2. Принципиальные схемы
многоступенчатых ракет:
а —■ с последовательным расположением ступеней:
б — с пакетным расположением ступеней;
/ — топлинные Саки: 2 — головная часть: 3 —
ракетный двигатель; 4 — система управления; 5 — узлы
связи
21
— выбор систем наведения и управления;
— создание конструкции корпуса ракеты достаточной
прочности при наименьшем его весе и малом поглощении тепла,
возникающего от омывапня ракеты воздушными потоками;
— выбор конструктивно-компоновочной схемы ракеты.
В итоге рассмотрения и решения указанных выше вопросов
выбираются проектные параметры ракеты, пот которыми понимаются
пехотные величины, позволяющие определить весопые, тяговые и
геометрические характеристики ракеты.
Для ракет, имеющих Ж Р Д, проектными параметрами
являются:
— число ступеней ракеты п;
— соотношение начальных .масс субракет, определяемое
коэффициентом
т,
е.-:
Oi+l
т.
01
(2.1)
где mCi,: — начальная масса (t + 1)-н субракеты;.
rnCi — начальная масса /-Й субракеты.
i= 1,2 ... п.
При баллистическом расчете вместо Ei на практике берут
величины, характеризующие распределение топлива по степеням
ракеты. Так, для работающей ступени субраксты принимается
коэффициент заполнения топливом субракеты, иногда называемый
относительным весом топлива субракеты:
'Па.
(2.2)
где и; — рабочий запас топлива t'-й работающей ступени
субракеты.
В зарубежных ракетах с ЖРД соотношение между \iKi
ступеней берется в пределах:
— в двухступенчатых цК2= (1,1 -^ 1,3)р.ь-ь
— в трехступенчатых р.кз= (U + 1,15) рК2= (1.2-г-1,25) >iKi.
Для смежных субракет принимается коэффициент соотношения
относительных весов топлива, который рассматривается как
проектный параметр ракеты:
*=-£¥-. (2.з)
где /=1,2 ... \п—\)
— начальные тяговооруженности субракет:
gn"ki
V
к, =
Pol '
(2.4)
Ры '
где X0i — начальная тяговооруженность i'-й субракеты на земле;
22
Хп; — начальная тяговооруженность i-h субракеты в пустоте;
g0 = 9,81 м/сск2 — ускорение силы тяжести на поверхности
земли;
Ра—тяга двигателя 1-й работающей ступени субракеты на
земле;
Рп1 — тяга двигателя г'-й работающей ступени в пустоте.
Начальную массу 1-й субракеты с ЖРД в общем виде
представим как сумму составных частей ракеты:
mw = m0l+l + mcl + со3„ (2.5)
где /%—начальная масса i-й субракеты;
да0/+, — начальная масса (г+1)-й субракеты (для последней
ступени — полезная нагрузка);
та— масса «сухой» конструкции in ступени;
<o3i — масса заправки топлива 1-й ступени;
— давления в камерах сгорания ркг- и на срезах
сопел ра Г,
■—начальная поперечная нагрузка на мидель ракеты
Л»=-^-, (2.6)
' .41
где FMl = ~ площадь миделева сечения корпуса ракеты;
dm~ диаметр корпуса первой ступени;
гп0] — начальная масса ракеты.
Иногда вместо начальной поперечной нагрузки на мидель
ракеты ЯМ1 в проектные параметры включают относительное
удлинение ракеты, связанное с параметром Рт соотношением
(2.7)
где
^Р — полная длина ракеты;
Рср — средняя плотность для ракеты, заправленной топливом.
Относительное удлинение большинства современных
зарубежных ракет с ЖРД имеет следующие значения:
— для одноступенчатых ракет /р= 10-4-14;
Т — для двухступенчатых (одного диаметра на обеих ступенях)
<р=8-И1.
'р=
/,-|
/ _
К -г
"'ill
'"о.Е-ср
Дат слУчая- когДа заданы масса полезной нагрузки mm,
■> ьность полета ракеты L, известны топливо и число ступеней
пример, три), то распределение масс но ступеням субракет прп
23
известных значениях цк; и \щ может быть найдено из
выражений:
т 02 =
т„
)
O-^-^-o^j^'
и„
(1-л-;--Д-)-(1 + ftj[i„'
пи
т„
V '-П1 / )
(2.8)
где Лр Лл2,
Л'г3° — отношения масс хвостового и приборного
отсеков ступеней ракеты к начальной массе
ракеты;
&ъ &ъ *з — отношения масс двигательной установки к
начальной массе ракеты;
^ь ^2. ^з ~~ коэффициенты, учитывающие массы
топливного отсека и неиспользованного запаса
топлива в ступени.
Таким образом, для ракет с ЖРД в число проектных
параметров входят: га, •/., ),Пг, Рт, раи Р*\-
Проектирование ракет с ЖРД проводят примерно в такой
последовательности:
1. Выбирают конструктивную схему ракеты, исходя из ее
боевого назначения.
2. Определяют характеристики топлива и устанавливают
соотношение расхода окислителя и горючего.
3. Находят величины проектных параметров и определяют
программу движения ракеты на активном участке траектории.
4. Определяют удельные тяги двигателей ступеней (расчетом
или по таблицам).
5. Производят проектировочный и проверочный баллистические
расчеты с уточнением коэффициентов ^к,-, обеспечивающих
получение Lraax.
6. Выполняют весовой расчет ракеты (определяют стартовую
массу ракеты и массу субраксг).
7. Находят основные размеры и тяговые характеристики
ступеней ракеты.
Для ракет, имеющих РДТТ, принимают практически такую '/'-^
систему проектных параметров, за исключением коэффициентов
тяговооружеиности X* и относительного удлинения ракеты /р.
Вместо них вводятся относительные длины зарядов в ступенях
ракеты /3,- и скорости горения применяемых в этих ступенях ракеты
топлив щ.
24
В итоге проектными параметрами для ракет с РДТТ считают
п, ж, рт, Pat, ki, (ыртЬ, где рт — плотность твердых топлив.
Начальную массу i'-й субракеты с РДГТ в общем виде можно
представить как сумму составных частей ракеты
"hi = '%l+i + т№1 + т*. 01 + ™ы, (2.9)
где m0i — начальная .масса l-ii субракеты;
ты+г— начальная масса (i'-H)-ft субракеты (для последней
ступени — полезная нагрузка);
mwi — масса конструкции двигателя 1-й ступени;
mx.0.i—масса хвостового отсека i-й ступени;
го3/ —масса заряда топлива двигателя /-Й ступени.
При известных значениях ^к,- массы отдельных субракет
трехступенчатой ракеты с РДТТ находятся по зависимостям:
т°* (1-.VJ - (1+*■)»»« '
"g-O-.Vj-lW/ > (2Л°)
т
пи, =
(1 —Л',) — (I +*,)!*„,- )
В зарубежных трехступенчатых ракетах с РДТТ соотношение
между jiKi ступеней берется в пределах: jiK3= 0>0-г-1,05) цК2 =
= (1.0+1,1) ЦкГ.
При этом имеется в виду, что у всех ступеней ракеты
одинаковое топливо.
Проектирование ракет с РДТТ проводят примерно в такой
последовательности:
1. Выбирают конструктивную схему ракеты и топливо для нее.
2. Устанавливают программу движения ракеты на активном
участке траектории; выбирают величины проектных параметров.
3. Находят удельные тяги двигателей.
4. Вычисляют весовые коэффициенты ракеты.
5. Проводят проектировочный и затем поверочный
баллистические расчеты.
6. Находят весовые, тяговые и геометрические характеристики
ракеты.
2.4. СКОРОСТЬ ПОЛЕТА РАКЕТ
Траектория полета любой ракеты состоит из активного и
пассивного участков.
На активном участке траектории ракета движется с
работающим двигателем, а система управления обеспечивает заданные
араметры се движения. Затем двигатель выключают (при
достигни ракетой необходимой скорости), боевая часть отделяется от
25
ракеты и движется как свободно брошенное тело под действием
притяжения Земли.
В общем виде дальность полета ракеты выражается
зависимостью
L = L{v„ К, хк, ук). (2.11)
Из выражения (2.11) следует, что дальность полета ракеты
определяется координатами активного участка хк и /ук, углом 8К
(угол между вектором скорости и горизонтом в данный момент)
и в основном скоростью ракеты в конце активного участка
траектории vK.
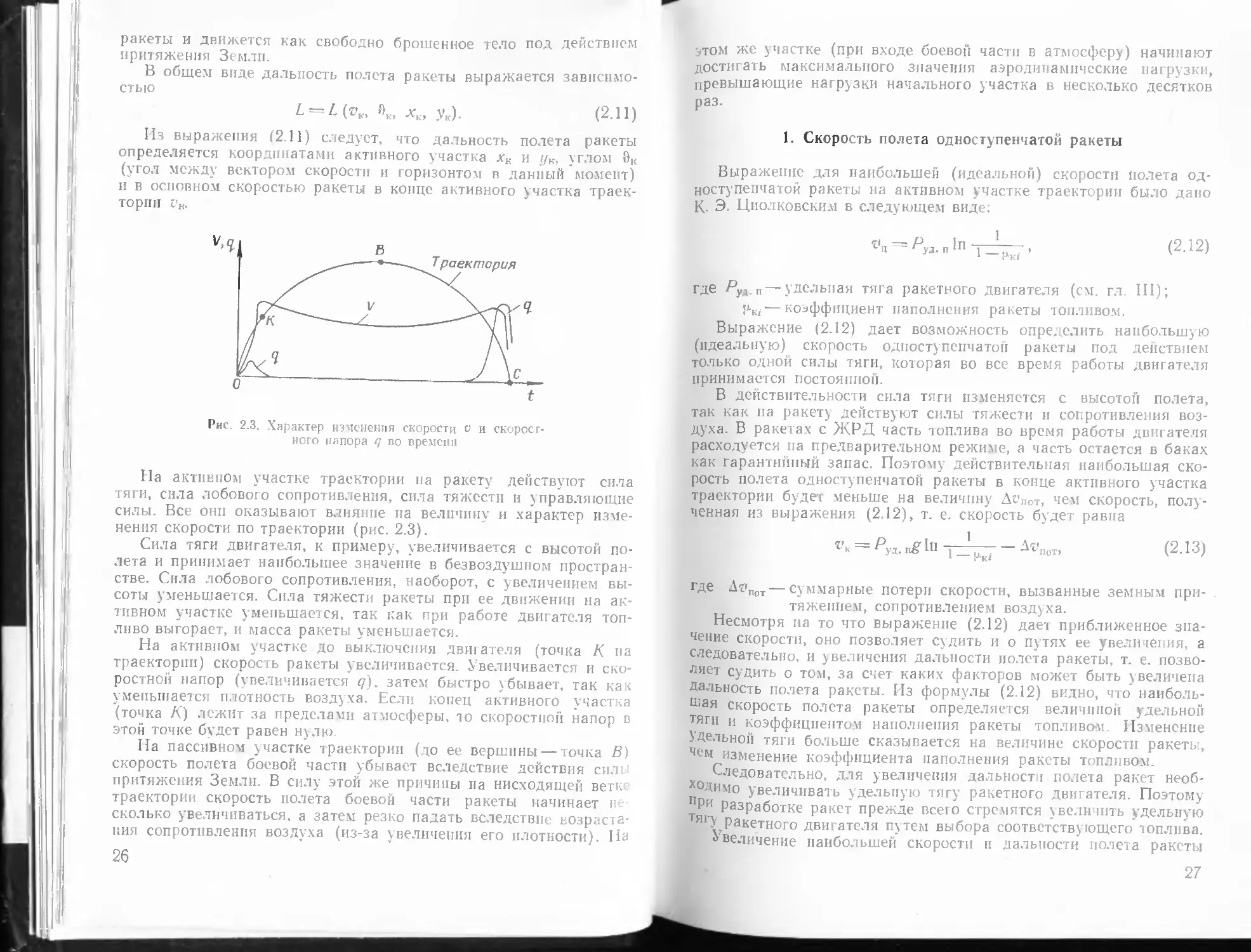
Траектория
Рис. 2.3. Характер изменения скорости v и
скоростного напора q no времени
На активном участке траектории на ракету действуют сила
тяги, сила лобового сопротивления, сила тяжести и управляющие
силы. Все они оказывают влияние на величину и характер
изменения скорости по траектории (рис. 2.3).
Сила тяги двигателя, к примеру, увеличивается с высотой
полета и принимает наибольшее значение в безвоздушном
пространстве. Сила лобового сопротивления, наоборот, с увеличением
высоты уменьшается. Сила тяжести ракеты при ее движении на
активном участке уменьшается, так как при работе двигателя
топливо выгорает, и масса ракеты уменьшается.
На активном \частке до выключения двигателя (точка К па
траектории) скорость ракеты увеличивается. Увеличивается и
скоростной напор (увеличивается q). затем быстро убывает, так как
уменьшается плотность воздуха. Если конец активного участка
(точка К) лежит за пределами атмосферы, то скоростной напор в
этой точке будет равен нулю.
На пассивном участке траектории (до ее вершины — точка В)
скорость полета боевой части убывает вследствие действия силы
притяжения Земли. В силу этой же причины на нисходящей ветке
траектории скорость полета боевой части ракеты начинает
несколько увеличиваться, а затем резко падать вследствие
возрастания сопротивления воздуха (из-за увеличения его плотности). Па
26
этом же участке (при входе боевой части в атмосферу) начинают
достигать максимального значения аэродинамические нагрузки,
превышающие нагрузки начального участка в несколько десятков
раз.
1. Скорость полета одноступенчатой ракеты
Выражение для наибольшей (идеальной) скорости полета
одноступенчатой ракеты на активном участке траектории было дано
К. Э. Циолковским в следующем виде:
^^^.nln-r^rr. (2Л2)
где Рул. п — удельная тяга ракетного двигателя (см. гл. III);
У-щ'—коэффициент наполнения ракеты топливом.
Выражение (2.12) дает возможность определить наибольшую
(идеальную) скорость одноступенчатой ракеты под действием
только одной силы тяги, которая во все время работы двигателя
принимается постоянной.
В действительности сила тяги изменяется с высотой полета,
так как на ракету действуют силы тяжести и сопротивления
воздуха. В ракетах с ЖРД часть топлива во время работы двигателя
расходуется па предварительном режиме, а часть остается в баках
как гарантийный запас. Поэтому действительная наибольшая
скорость полета одноступенчатой ракеты в конце активного участка
траектории будег меньше на величину Дипот, чем скорость,
полученная {13 выражения (2.12), т. е. скорость будет равна
где Л£'Пот — суммарные потери скорости, вызванные земным
притяжением, сопротивлением воздуха.
Несмотря на то что выражение (2.12) дает приближенное
значение скорости, оно позволяет судить и о путях ее увеличения, а
следовательно, и увеличения дальности полета ракеты, т. е.
позволяет судить о том, за счет каких факторов может быть увеличена
Дальность полета ракеты. Из формулы (2.12) видно, что
наибольшая скорость полета ракеты определяется величиной удельной
тяги и коэффициентом наполнения ракеты топливом. Изменение
Удельной тяги больше сказывается на величине скорости ракеты,
чем изменение коэффициента наполнения ракеты топливом.
Следовательно, для увеличения дальности полета ракет
необходимо увеличивать удельную тягу ракетного двигателя. Поэтому
пРи разработке ракет прежде всего стремятся увеличить удельную
ТягУракетного двигателя путем выбора соответствующего топлива.
Увеличение наибольшей скорости и дальности полета ракеты
27
можно также достичь путем увеличения коэффициента наполнения
ракеты топливом. Но при увеличении количества топлива в ракете
несколько увеличиваются ее размеры и вес, поэтому зарубежные
специалисты считают, что увеличение размеров ракеты 'не есть
лучший способ повышения дальности ее полета, так как при
больших размерах ракет ухудшаются условия их эксплуатации,
транспортировки и передвижения в боевых порядках.
2. Скорость полета многоступенчатой ракеты
Скорость полета многоступенчатой ракеты, как было сказано
выше, складывается из скоростей отдельных ступеней.
Приближенное значение скорости полета в конце активного
участка траектории определяется по формуле
«=л
*'к = 22 Л,. nJ 1п -у-*—- _ av (2.14)
где Рух. п,- — удельная тяга /-й ступени;
Р« ~ коэффициент наполнения двигателя 1-й ступени
топливом;
А^'пот — суммарные потери скорости на активном участке
траектории;
п — число ступеней ракеты.
В зарубежных источниках приводятся следующие величины
суммарных потерь скорости:
— для двухступенчатых ракет с ЖРД и трехступенчатых ракет
с РДТТ при дальности полета от 6 до 14 тыс. км
Avn,T -(0,22 -f- 0,18) *к;
— для одноступенчатых ракет с ЖРД и двухступенчатых ракет
с РДТТ при дальности полета от 2 до 6 тыс. км
^П0Т = (0,2о-=-0,15)^.
При равенстве сил удельной тяги двигателей всех ступеней
скорость полета ракеты в конце активного участка траектории
выражается зависимостью
°. = ^у,с*in n-^Hi-L-.-a-^) - А*«» (2-15)
где Pyi.cp— среднее значение удельной тяги двигателей всех
ступеней ракеты.
Многоступенчатые ракеты применяются для резкого
увеличения скорости, а следовательно, и дальности их полета.
28
Скорость ракеты к концу работы двигателя первой ступени
согласно формуле (2.13) будет равна
*'ki = Я i,п тЛ Дг,пот, (2-16)
где Руд! — удельная тяга двигателя первой ступени;
ftti—коэффициент наполнения двигателя первой ступени
топливом.
Затем в работу включается двигатель второй ступени, который
сообщает оставшимся ступеням ракеты дополнительную скорость,
величина которой равна
*«2 = VK1 + Я 2 1П -г— Д'1'пот. (2.17)
' l H-K2
где Яуд2— удельная тяга двигателя второй ступени;
[лк2—коэффициент наполнения двигателя второй ступени
топливом.
По окончании работы двигателя второй ступени и ее отделения
в работу вступает двигатель третьей ступени (ракеты, принятые на
вооружение за рубежом, имеют не более трех ступеней). На
последней, третьей, ступени устанавливается головная часть с
боевым зарядом.
Двигатель третьей ступени выключается, когда ракета
достигает расчетной скорости, обеспечивая головной части полег на
заданную дальность (полет до намеченной цели). Эта скорость
ракеты будет равна
*'кЗ = ^к2 + ^удз 1П ,Дкз - Д^пот- (2Л8)
Таким образом, полная скорость трехступенчатой ракеты
будет иметь вид
v, = vK3 = Яуд1 In -y-L- + Яуд2 In -^~- +
+ Руд31пт-^ AvnoX. (2.19)
Приближенное значение полной дальности полета ракеты,
вычисленное по скорости в конце активного участка траектории,
можно получить по формуле
L = (1,04 4-1,07) 222,4 arc tg ..." (2.20)
15,8 У 62,5-г*
В существующих многоступенчатых ракетах зарубежных стран
скорости головных частей, несущих боевые заряды, в момент
отделения от пвследнеи ступени двигателя сеставля;ет песквлько
километров в секунду, а дальности полета до цели могут
достигать 16 тыс. км и более.
Глава 3
ОБЩИЕ СВЕДЕНИЯ О ДВИГАТЕЛЬНЫХ УСТАНОВКАХ
РАКЕТ
3.1. ОСНОВНЫЕ КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ. КЛАССИФИКАЦИЯ
Двигательная установка (ДУ) ракеты предназначена для
создания тяги по реактивному принципу. В двигательную установку
включаются камера двигателя, топливные емкости, система
наддува, система подачи топлива и системы управления п
регулирования.
Камера двигателя — агрегат, в котором осуществляется
сжигание топлива и преобразование тепловой энергии
образующихся газов в кинетическую энергию струи для получения силы
тяги.
Топливные емкости (баки) предназначены для
размещения в них компонентов топлива, обеспечивающих работу
двигателя. В двигателях па твердом топливе роль таких емкостей
выполняет камера сгорания.
Система наддува — совокупность устройств,
обеспечивающих поддержание требуемого давления в топливных баках при
работе двигательной установки.
Система подачи топлива—совокупность устройств,
обеспечивающих подачу топлива из баков в камеру двигателя с
требуемым секундным расходом под необходимым давлением.
Системы управления и регулирования. Основные
нз них обеспечивают запуск и остановку двигательной установки,
поддерживают заданный режим работы камеры двигателя и
двигательной установки.
В ракетах на жидком топливе в двигательную установку
включают также и силовую раму, которая необходима для передачи
силы тяги на корпус ракеты, а также служит для правильной
установки двигателя относительно корпуса ракеты. Двигательную
установку без топливных емкостей и силовой рамы принято
называть ракетным двигателем.
30
Наиболее существенным признаком, по которому можно
разделить ракетные двигатели, является применяемое топливо, так как
физические и химические свойства топлива — носителя энергии —
в значительной степени определяют общее устройство
двигательной установки.
По этому признаку ракетные двигатели делят на две группы:
химические и ядерные ракетные двигатели.
Ракетные двигатели, использующие химическую энергию, в
зависимости от агрегатного состояния топлива делят на
жидкостные ракетные двигатели (ЖРД), ракетные двигатели
твердого топлива (РДТТ) и гибридные ракетные двигатели
(ГРД).
В качестве топлива для ЖРД чаще всего применяются топлива
раздельной подачи, состоящие из двух компонентов: горючего и
окислителя. Могут употребляться также и унитарные топлива,
представляющие собой химические соединения или смеси, которые
при определенных условиях способны разлагаться с выделением
тепла.
Двигатели, работающие на топливах раздельной подачи,
различают также по типу применяемого окислителя; например, азот-
нокислотные, кислородные и др. По способу подачи топлива в
камеру двигатели могут быть с насосной и вытееннтелыюй
системами подачи.
Кроме того, двигатели классифицируют по назначению, по
условиям эксплуатации и другим признакам.
РДТТ по способу размещения топливного заряда разделяют на
однозарядные и двигатели с разделенными зарядами. По способу
крепления заряда твердого топлива в камере двигателя различают
двигатели с вкладным (свободным) и двигатели со скрепленными
зарядами.
ГРД работают на топливах смешанного агрегатного состояния.
При этом различают двигатели на жидком окислителе и двигатели
на твердом окислителе.
В ЯРД используется энергия распада или синтеза ядер
ядерного топлива, которая затем преобразуется в кинетическую
энергию отбрасываемых частиц. Эти двигатели разделяют на двигатели
с те и л о об м сн н ы м реактором (реакторные) и
термоядерные.
3.2. ПАРАМЕТРЫ РАКЕТНЫХ ДВИГАТЕЛЕЙ
Основными параметрами, характеризующими степень
совершенства конструкции, экономичность и эксплуатационные качества
ракетного двигателя любого типа, являются сила тяги, удел ь-
ая тяга, удельный расход топлива и удельная
ыасса двигателя.
Сила тяги. Сила тяги, или тяга ракетного двигателя, есть
V Содействующая всех сил, приложенных к камере во время се
31
работы, за исключением сил тяжссгп и реакции опор. Это ози*1
чает, что тяга определяется силами, действующими со cropoi
газообразного рабочего тела на внутреннюю поверхность камера
и силами воздействия окружающей среды па ее наружную поверх
ность (рис. 3.1).
Уравнение для определения силы тяги Р при допущении об
одномерном течении газа по соплу камеры двигателя имеет вид
P = Gwt + F,(pt^pJ, (3.1)
давление),
тяги выра-
Рис. 3.1. Распределение сил давления па
внутренней и наружной поверхностях двигателя
где G — секундный массовый расход топлива, кг/сек;
tva — скорость газов на срезе сопла (скорость истечения),
м/сек;
Fa— площадь выходного сечения сопла, м2\
рл — давление газов на срезе сопла, Н/м2;
рк — давление окружающей среды (атмосферное
Н/м2.
При указанных размерностях правой части сила
жается в ньютонах.
Первый член правой части выражения (3.1), а именно GwR,
называется динамической составляющей, а второй член Fa(pa—
—рн) —статической составляющей силы тяги.
Как следует из уравнения (3.1), сила тяги зависит от высоты,
на которой работает двигатель. При этом с увеличением высоты и
уменьшением атмосферного давления ри сила тяги растет. Если
/?н = 0 (двигатель работает в пустоте), то тяга определится
Pn = Gwa + FdPa. (3.2)
Если Pa —Pm т. е. в сопле осуществляется полное (расчетное
для сопла) расширение газов от давления ро в камере до давления
ри окружающей среды, то статическая составляющая Fa(pa — р„) =
= 0, тяга
P = Gw.
32
(3.3)
Уравнение чля силы тяги (3.1) получено в предположении, что
вправление потока газов, истекающих из сопла, параллельно оси
.уйла. В действительности же, если в выходном сечении нанравле-
ие стенки сопла не параллельно оси, то и скорость потока,
направленная вдоль стенки, отклоняется от направления действия
силы тяги (рис. 3.2). Тяга двигателя опретеляется только
составляющей скорости, параллельной оси. При учете указанного
обстоятельства выражение для силы тяги примет вид
где =ррас — коэффициент потерь тяги на рассеивание потока ввиду
непараллельности истечения.
Рис. 3.2. Схема истечения в коническом сопло
Этот коэффициент определяется по формуле
1 + COS а
Тоас ' " о >
(3,5)
где а — половина угла конусности сопла.
Для применяемых профилированных или конических сопел угол
на выходе 2а находится в пределах 10—30°, а потери тяги на
рассеивание составляют 0,3—1,5%.
Иногда в практике для определения силы тяги используют
формулу
я-c/w (з.б)
где С — коэффициент реактивной силы, зависящий от показателя
адиабаты продуктов истечения и степени расширения
газа.
Если ДУ состоит из нескольких камер, то се тяга равна
суммарной тяге всех камер.
В двигательных установках с насосной подачей топлива
отработанный газ после турбины может выбрасываться через
специальное сопло и создавать некоторую дополнительную тягу ДР. С
учетом этого тяга ДУ составит
*v=5>< + ^.
1=1
гДе п — число камер двигателя.
(3.7)
33
Тяга измеряется в тоннах и килограммах или ньютонах и мега-
ньютонах.
Удельная тяга. Удельной тягой Руя называется отношение
тяги двигателя к секундному расходу топлива, сжигаемого в
камере.
Р =-£
или
^уч = и;з + -^-(Л-А). (3.8)
Если двигатель работает на расчетном режиме, т. е. при ра —
=ри, то
*>у, = к'.. (3.9)
Если ра¥=ри, то величину удельной тяги можно определить по
формуле (3.9), подставив в нее вместо действительной скорости
истечения ша некоторую условную скорость 1С';,ф, так называемую
эффективную скорость истечения газов из сопла, определяемую "по
формуле
«4 = ^'.+ -£(/>„-/>„). (3.10)
Следует различать удельную тягу камеры (камер) двигателя и
\дельную тягу двигательной установки. Чтобы установить удель-
н\ю тягу двигательной установки, надо тягу отнести к суммарному
расходу топлива, включая и дополнительный расход топлива,
например, на газогенерацию рабочего тела турбины Grr:
р
Рул.ду = с + С„ • (З.П)
Если обозначить через qrr — -~ относительный расход топлива
на газогенераторы, то формула (3.11) примет вид
р = И -^ Руд п 12)
Значение ^гг определяют расчетом или выбирают по
статистическим данным. Расход топлива на привод турбины составляет 1,5—
5,0% от расхода топлива на камеры сгорания, т. е. ^гг=0,015-f-0,05.
Меньшие значения относятся к двигателям большой тяги.
В ракетных двигателях твердого топлива пользуются не
удельной тягой, а единичным импульсом, под которым понимается пол-
34
иый импульс, отнесенный к одному килограмму массы твердого
топлива
т
\Pdt
А = -Чг-. (313>
Где " — полное время работы двигателя;
т — масса заряда твердого топлива.
Величина удельной тяги зависит от рода топлива и от
параметров процесса в двигателе. В современных двигателях на
жидком топливе удельная тяга составляет 2300—4200 —^—-
230—420 ), в двигателях твердого топлива 2000—2500
Л^- (200-250 «£^аЛ.
кг V кг I
Удельный расход топлива —это количество топлива,
расходуемое ракетным двигателем за секунду па каждый
килограмм тяги. Определяет экономичность работы двигателя,
является величиной, обратной удельной тяге.
Удельная масса двигателя. Под удельной массой
двигателя понимается отношение массы двигателя Мяв к
создаваемой им тяге на земле
^д»
|ДВ
р0
(3.14)
Очевидно, чем меньше удельная масса двигателя удв, тем более
компактен, экономичен и удобен данный двигатель. Для современ-
/Г?
ных ЖРД удельная масса составляет 0,001—0,004 —^- (0,01—
0,04 —„-1. Меньшие значения получаются у двигателей с большей
тягой и большие — у ЖРД с малой тягой.
Для качественной оценки РДТТ часто пользуются не удельной
массой двигателя, а коэффициентом качества
конструкции, под которым понимается отношение массы
конструкции двигателя (суммарная масса корпуса, днищ, сопел,
теплоизоляции, деталей крепления и т. д.) к массе топлива,
размещаемого на борту ракеты:
*»~- (315)
С увеличением размеров двигателя значение ядв уменьшается.
Для современных двигателей одноступенчатых ракет адв =
* 0,15-5-0,08 [48].
35
3.3. ДВИГАТЕЛЬНЫЕ УСТАНОВКИ НА ЖИДКОМ ТОПЛИВЕ
В зависимости от способа подачи компонентов топлива из
баков в камеру различают две возможные схемы двигательных
установок: с насосной системой подачи и с вытесни-
те л ь н о п.
ДУ с насосной системой подачи. По способу
использования газа, отработавшего в турбине, ЖРД делятся на
двигатели открытых схем, или двигатели без дожигания рабочего тела
турбины, и двигатели замкнутых схем, или двигатели с
дожиганием рабочего тела. В двигательных установках, работающих по
открытой схеме, рабочее тело после турбины выбрасывается в
атмосферу. При замкнутой схеме отработанное в турбине рабочее
тело поступает в камеру двигателя, где и дожигается, создавав
дополнительную тягу.
Каждая из названных схем в свою очередь может иметь ряд
разновидностей, которые отличаются или способом генерации
рабочего тела турбины, или способом наддува топливных баков.
На рис. 3.3, а изображена принципиальная схема ДУ с насос
ной системой подачи компонентов.
Насосы приводятся во вращение турбиной, рабочим телом
которой (ДУ взята для примера) являются продукты разложениг
унитарного топлива. Подобные ДУ часто называют двигателями
с парогазогенератором (ПГГ). В качестве топлива
газогенераторов могут применяться перекись водорода, нзопронилпитрат,
несимметричный диметилгидразин и др. ПГГ весьма надежны в
работе. При использовании в них перекиси водорода упрощается
проблема запуска всей двигательной установки. Существенным
недостатком ДУ с ПГГ является необходимость иметь на борту
ракеты третий компонент для питания ПГГ. что приводит к
потребности г> дополнительной емкости и отдельной системе
агрегатов и магистралей для заправки емкости и подачи рабочего тела
в газогенератор. Это усложняет ДУ и вызывает неудобства при
эксплуатации.
Вследствие этих недостатков парогазогенераторы вытесняются
жидкостными газогенераторами, работающими на тех же
компонентах топлива, что и основной двигатель. Компоненты топлива в
газогенератор подаются теми же насосами, что и компоненты в
камеру двигателя. При такой схеме питания турбины возникает
необходимость в специальном устройстве для начальной
раскрутки турбины при запуске ДУ. Наиболее простым и надежным
способом является раскрутка турбины с помощью порохового
аккумулятора давления (ПАД).
Схема ДУ, в которой газогенератор работает на основных
компонентах топлива, приведена па рис. 3.3,6. Для снижения
температуры рабочего тела турбины, а условия работы турбины
требуют, чтобы температура газов перед ней была не выше 1000—
1200° К [8], компоненты топлива подаются в газогенератор при зна-
36
чителыюм отклонении соотношения компонентов топтнва от сте-
хиометрического. Метод генерации газа при неоптимальном
соотношении компонентов приводит к неполному использованию
химической энергии топлива, что, несомненно, отражается на
экономичности двигателя.
Рис. 3.3. Схемы двигательных установок с насосной системой подачи:
а — с газогенератором на унитарном топливе; fi — с газогенератором на основных
компонентах; ; —баллон сжатого газа: г —пусковые клапаны; 3 —редукторы
давления; 4 — бачок с унитарным топливом; 5 — газогенераторы; 6 — турбина; 7 —
насосы; в—пусковые клапаны топливных магистралей: 9 — отсечные клапаны: 10 —
обратные клапаны- '/ — топливные баки; 12 — регулятор давленая в камере
двигателя: 13 — регулятор соотношения компонентов топлива: 14 — выхлопная труба
Рабочее тело для турбины можно получить и другими
способами, например, путем испарения одного из компонентов в тракте
охлаждения камеры двигателя.
ДУ открытой схемы. Двигательные установки,
приведенные на рис. 3.3, могут служить примером ДУ открытой схемы. Их
^достаток — непроизводительно расходуется энергия рабочего
Тела после турбины. Удельная тяга такой ДУ всегда меньше
^Дельной тяги камеры двигателя вследствие менее эффективного
37
использования компонентов, расходуемых на генерацию рабочего
тела турбины.
В этих ДУ трудно обеспечить повышение удельной тяги за счет
увеличения давления в камере двигателя, так как увеличение
давления в камере двигателя потребует соответствующего увеличения
мощности топливных насосов, а это в конечном счете приведет к
увеличению относительного расхода топлива на привод турбины.
S величснне же относительного расхода топлива в свою очередь в
соответствии с формулой (3.12) приведет к снижению удельной
тяги ДУ, несмотря на повышение
р удельной тяги камеры двигателя
"*i p вследствие увеличения в ней дав-
ления.
Начиная с некоторого
давления роопт потерн удельной тяги
ДУ за счет расхода топлива на
газогенерацию будут выше, чем
прирост се за счет повышения
давления в камере двигателя
(рис. 3.4). Предельное значение,
' РоОПП1 ^о/^о до которого рационально увели-
' чнвать давление в камере двига-
„ . , теля открытой схемы, составляет
Рис. 3.4. Изменение удельном тяги / кГ \
ДУ открытой схемы с ростом лав- 10—15 MIIJM2 I 100—150 ■ 3 )
лення р камере ^ '" '
[11]. Поэтому для повышения
экономичности использования
топлива целесообразно применять замкнутые схемы двигательных
установок.
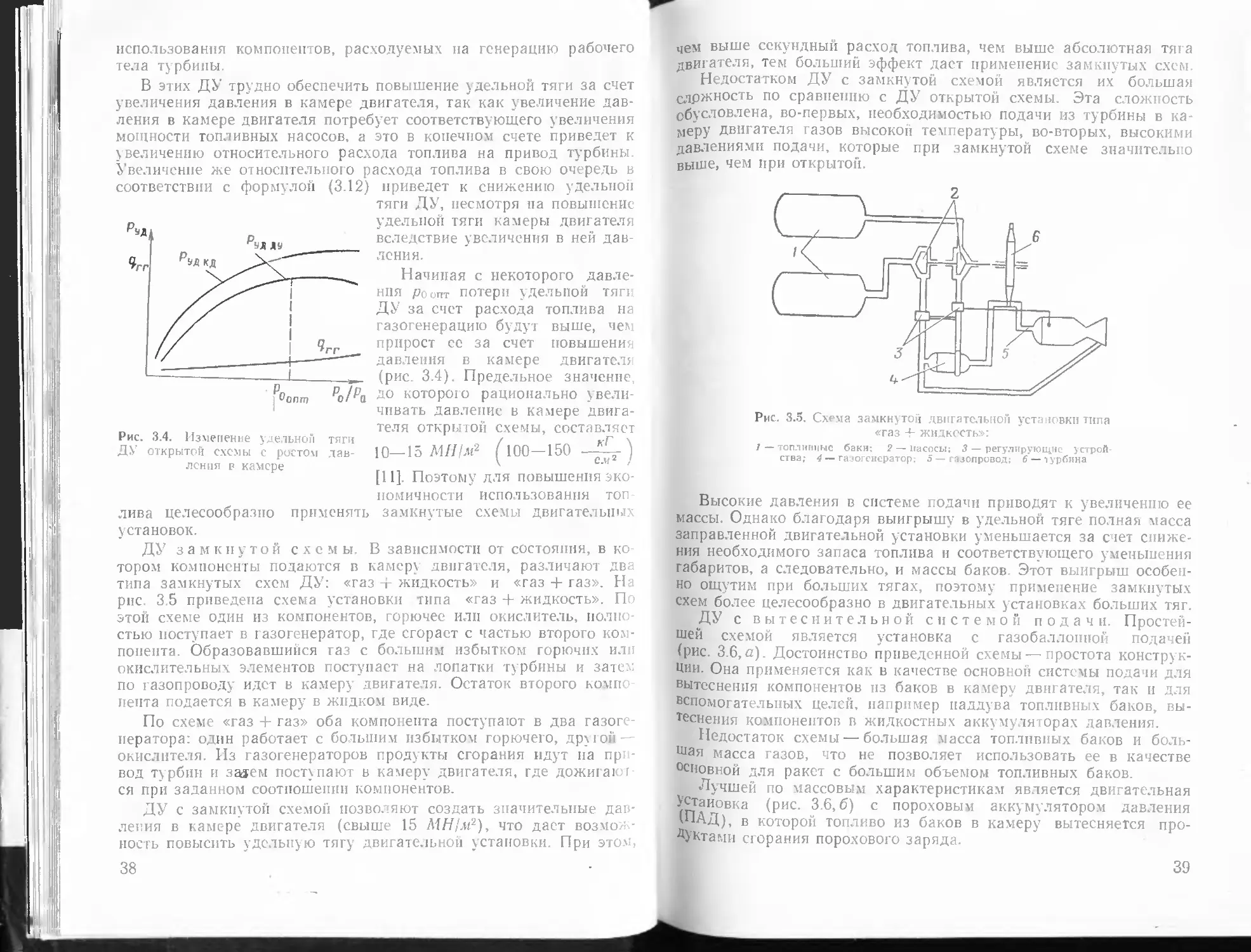
ДУ замкнутой схемы. В зависимости от состояния, в
котором компоненты подаются в камеру двигателя, различают два
типа замкнутых схем ДУ: «газ + жидкость» и «газ + газ». На
рис. 3.5 приведена схема установки гнпа «газ + жидкость». По
этой схеме один из компонентов, горючее или окислитель,
полностью поступает в газогенератор, где сгорает с частью второго
компонента. Образовавшийся газ с большим избытком горючих или
окислительных элементов поступает на лопатки турбины и затем
по газопроводу идет в камеру двигателя. Остаток второго
компонента подается в камеру в жидком виде.
По схеме «газ + газ» оба компонента поступают в два
газогенератора: один работает с большим избытком горючего, другой —
окислителя. Из газогенераторов продукты сгорания идут на
привод турбин и задем поступают в камеру двигателя, где
дожигаются при заданном соотношении компонентов.
ДУ с замкнутой схемой позволяют создать значительные
давления в камере двигателя (свыше 15 МН/м2), что дает
возможность повысить удельную тягу двигательной установки. При этом,
38
чем выше секундный расход топлива, чем выше абсолютная тяга
двигателя, тем больший эффект даст применение замкнутых схем.
Недостатком ДУ с замкнутой схемой является их" большая
сложность по сравнению с ДУ открытой схемы. Эта сложность
обусловлена, во-первых, необходимостью подачи из турбины в
камеру двигателя газов высокой температуры, во-вторых, высокими
давлениями подачи, которые при замкнутой схеме значительно
выше, чем при открытой.
Рис. 3.5. Схема замкнутой двигательной установки типа
«газ + жидкость-»:
1 — топливные баки; 2 — Насосы; 3 — регулирующие
устройства; 4 — газогенератор: 5 — газопровод; б — турбина
Высокие давления в системе подачи приводят к увеличению ее
массы. Однако благодаря выигрышу в удельной тяге полная масса
заправленной двигательной установки уменьшается за счет
снижения необходимого запаса топлива и соответствующего уменьшения
габаритов, а следовательно, и массы баков. Этот выигрыш
особенно ощутим при больших тягах, поэтому применение замкнутых
схем более целесообразно в двигательных установках больших тяг.
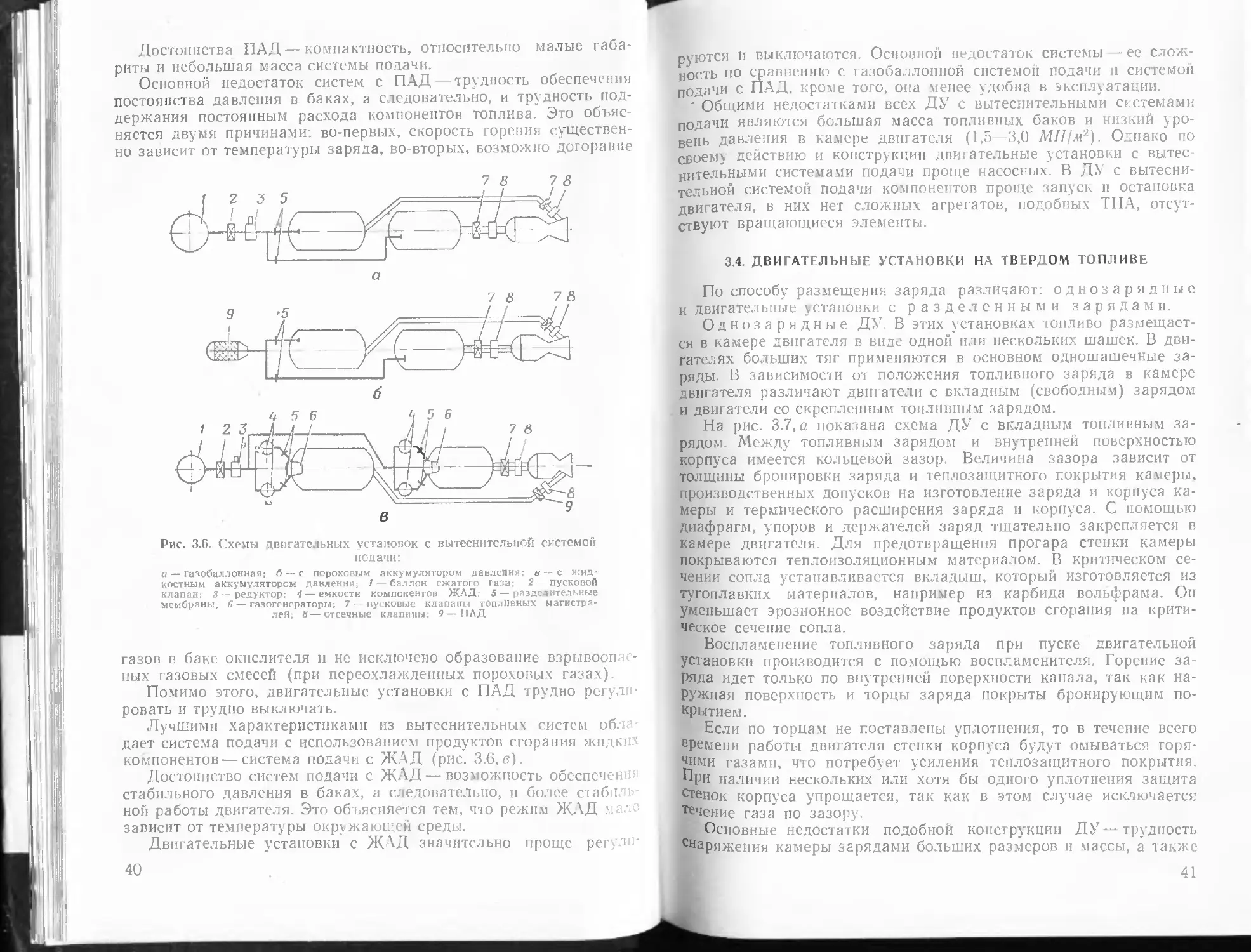
ДУ с в ы тесните л ьн ой системой подачи.
Простейшей схемой является установка с газобаллонной подачей
(рис. 3.6,а). Достоинство приведенной схемы — простота
конструкции. Она применяется как в качестве основной системы подачи для
вытеснения компонентов из баков в камеру двигателя, так и для
вспомогательных целей, например наддува топливных баков,
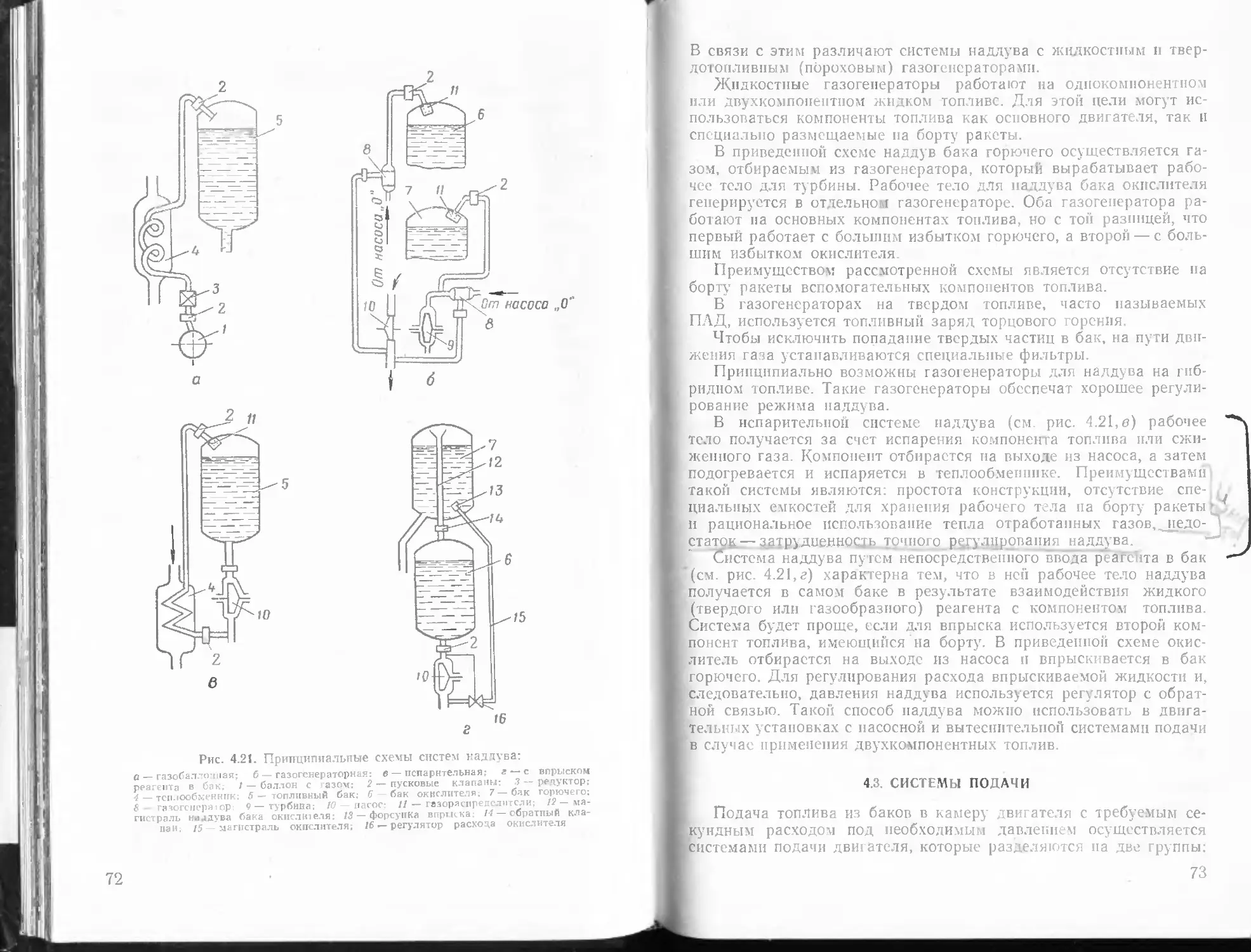
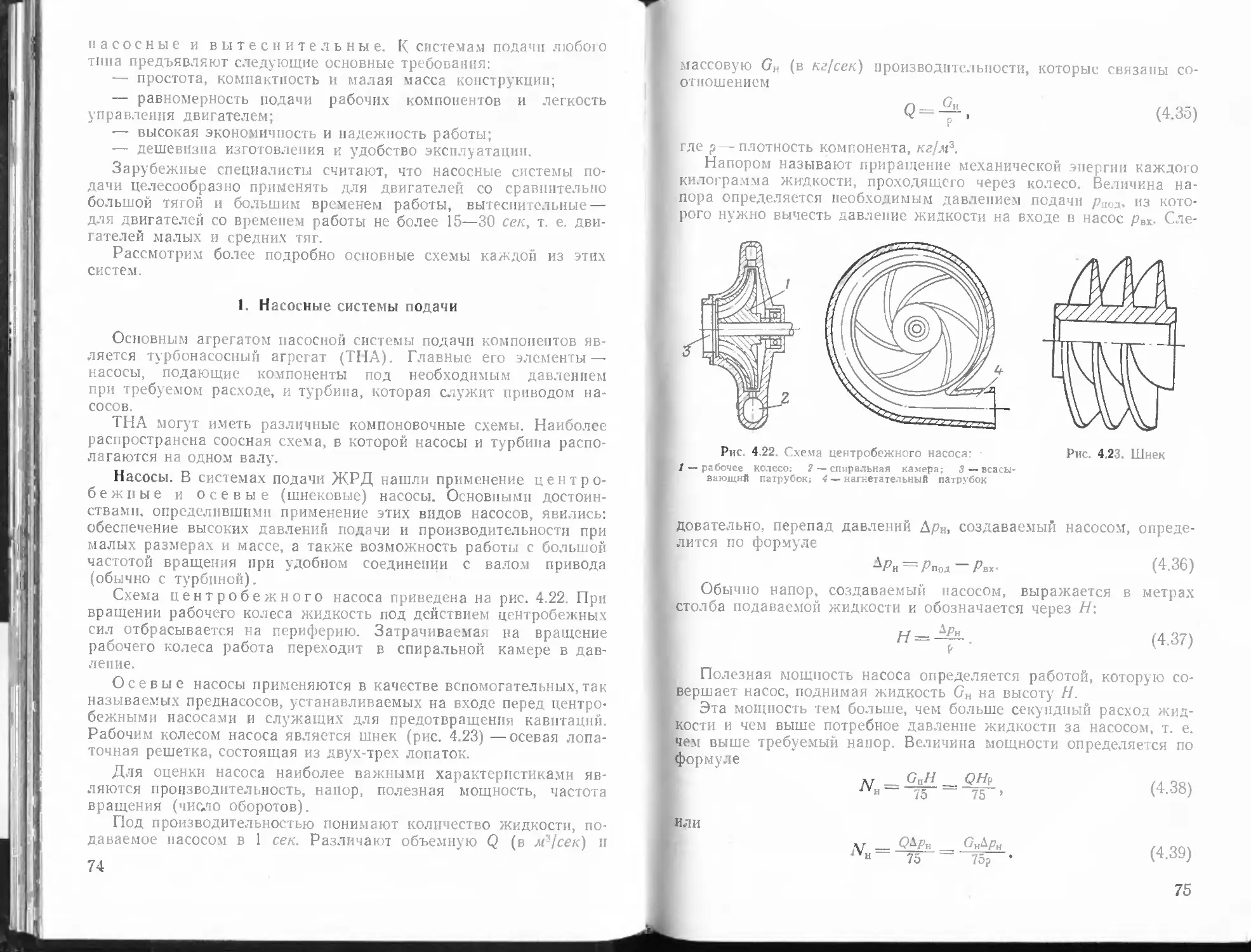
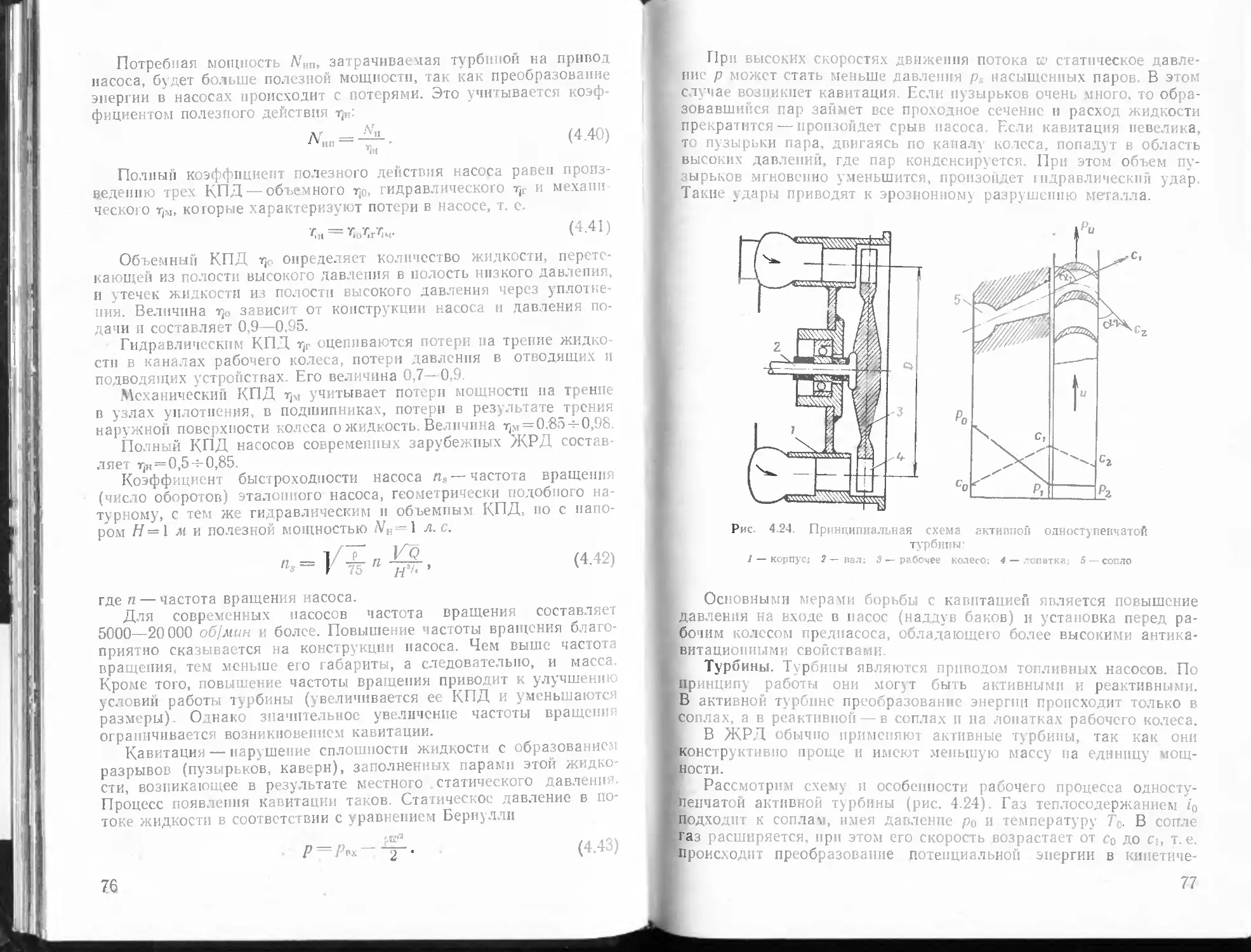
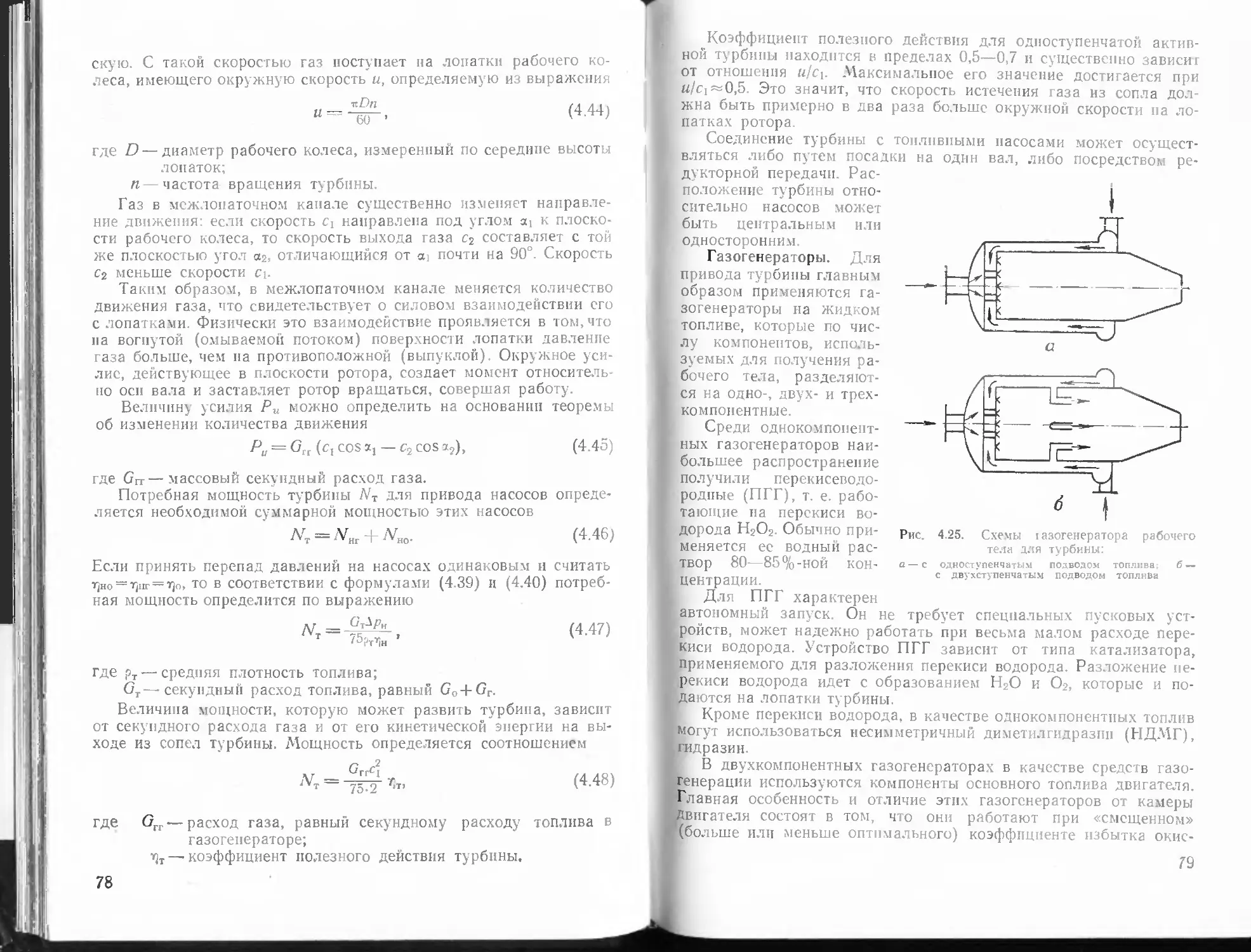
вытеснения компонентов в жидкостных аккумуляторах давления.
Недостаток схемы — большая масса топливных баков и
большая масса газов, что не позволяет использовать ее в качестве
основной для ракет с большим объемом топливных баков.
Лучшей по массовым характеристикам является двигательная
Ктаиовка (рис. 3.6,6) с пороховым аккумулятором давления
ШАД), в которой топливо из баков в камеру вытесняется
продуктами сгорания порохового заряда.
39
Достоинства НАД — компактность, относительно малые
габариты и небольшая масса системы подачи.
Основной недостаток систем с ПАД —трудность обеспечения
постоянства давления в баках, а следовательно, и трудность
поддержания постоянным расхода компонентов топлива. Это
объясняется двумя причинами: во-первых, скорость горения
существенно зависит от температуры заряда, во-вторых, возможно догорание
7 5 7 8
а
7 8 78
Рис. 3.6. Схемы пдшгателышх установок с вытсснитслыюй системой
подачи:
а — Газобаллонная: б —с пороховым аккумулятором давления; в —с
жидкостным аккумулятором давления; / — баллон сжатого газа; 2—пусковой
клапан; 3 — редуктор; 4 — емкости компонентов ЖЛД: 5 — раздетительные
мембраны; Б — газогенераторы; 7 — пусковые клапаны топливных магистра-
леи; 8—отсечные клапаны; 9—НАД
газов в бакс окислителя и не исключено образование
взрывоопасных газовых смесей (при переохлажденных пороховых газах).
Помимо этого, двигательные установки с ПАД трудно
регулировать и трудно выключать.
Лучшими характеристиками из вытеснительных систем
обладает система подачи с использованием продуктов сгорания жидких
компонентов — система подачи с ЖАД (рис. 3.6.в).
Достоинство систем подачи с ЖАД — возможность обеспечения
стабильного давления в баках, а следовательно, и более
стабильной работы двигателя. Это объясняется тем, что режим ЖАД мало
зависит от температуры окружающей среды.
Двигательные установки с ЖАД значительно проще регулн-
40
руются и выключаются. Основной недостаток системы — ее
сложность по сравнению с газобаллонной системой подачи и системой
подачи с ПАД, кроме того, она менее удобна в эксплуатации.
' Общими недостатками всех ДУ с вытеснительными системами
подачи являются большая масса топливных баков и низкий
уровень давления в камере двигателя (1,5—3,0 МН/м2). Однако по
своему действию и конструкции двигательные установки с
вытеснительными системами подачи проще насосных. В ДУ с вытесни-
тельиой системой подачи компонентов проще запуск и остановка
двигателя, в них нет сложных агрегатов, подобных ТНА,
отсутствуют вращающиеся элементы.
3.4. ДВИГАТЕЛЬНЫЕ УСТАНОВКИ НА ТВЕРДОМ ТОПЛИВЕ
По способу размещения заряда различают: однозарядные
и двига гельпые установки с разделенными зарядами.
Однозарядные ДУ. В этих установках топливо
размещается в камере двигателя в виде одной или нескольких шашек. В
двигателях больших тяг применяются в основном одношашечные
заряды. В зависимости от положения топливного заряда в камере
двигателя различают двигатели с вкладным (свободным) зарядом
и двигатели со скрепленным топливным зарядом.
На рис. 3.7, а показана схема ДУ с вкладным топливным
зарядом. Между топливным зарядом и внутренней поверхностью
корпуса имеется кольцевой зазор. Величина зазора зависит от
толщины бронировки заряда и теплозащитного покрытия камеры,
производственных допусков на изготовление заряда и корпуса
камеры и термического расширения заряда и корпуса. С помощью
диафрагм, упоров и держателей заряд тщательно закрепляется в
камере двигателя. Для предотвращения прогара стенки камеры
покрываются теплоизоляционным материалом. В критическом
сечении сопла устанавливается вкладыш, который изготовляется из
тугоплавких материалов, например из карбида вольфрама. Он
уменьшает эрозионное воздействие продуктов сгорания на
критическое сечение сопла.
Воспламенение топливного заряда при пуске двигательной
установки производится с помощью воспламенителя. Горение
заряда идет только по внутренней поверхности канала, так как
наружная поверхность и торцы заряда покрыты бронирующим
покрытием.
Если по торцам не поставлены уплотнения, то в течение всего
времени работы двигателя стенки корпуса будут омываться
горячими газами, что потребует усиления теплозащитного покрытия.
При наличии нескольких или хотя бы одного уплотнения защита
стенок корпуса упрощается, так как в этом случае исключается
Течение газа но зазору.
Основные недостатки подобной конструкции ДУ—трудность
Снаряжения камеры зарядами больших размеров и массы, а также
41
непосредственное воздействие горячих продуктов сгорания па
стенки камеры.
На рис. 3.7,6 изображена схема ДУ с топливным зарядом,
скрепленным с оболочкой камеры двигателя. Здесь топливная
масса заливается непосредственно в камеру, внутренняя
поверхность которой перед заливкой обрабатывается таким образом,
чтобы обеспечить хорошее сцепление ее с зарядом. Горение заряда
происходит но внутренней поверхности капала. При этом стенкг
камеры разгружаются от воздействия высоких температур и
давления.
Рис. 3.7. Схеуы двигательных установок на
твердом топливе:
а —с вкладным зарядом; б — со скрепленным зарядом;
1 — корпус; 2 — топливный заря I; 3—воспламенитель:
4 — тугоплавкий вкладмш; 5 — сопло: 6 — бронирующее
покрытие
Недостатком ДУ со скрепленным зарядом является
возникновение при изменении температуры значительных напряжений в
заряде вследствие разных коэффициентов линейного расширения
топлива и материала стенок камеры. Напряжения могут вызывать
появление трещин, а контроль за состоянием заряда осуществить
весьма трудно. Рассмотренная схема ДУ со скрепленным зарядом
не является единственной, возможны и другие схемы.
ДУ с разделенными зарядам и. В настоящее время
за рубежом ведутся работы по разработке двигателей, в которых
топливный заряд состоит из двух частей, размещенных в камере
друг за другом. Эти двигатели получили название двигателей с
разделенными зарядами. Схема такого двигателя показана на
42
рнс. 3.8. Заряды, как передний, так и задний, имеют совмещенные
по продольной оси центральные каналы, со стропы которых
происходит горение. Передний заряд имеет избыток горючего
компонента, а задний — окислителя. Заряды разделены дросселем,
представляющим собой кольцевую вставку типа диафрагмы, диаметр
проходного отверстия которой может меняться. Такая конструкция
ццигателя может быть применена тогда, когда компоненты
топлива но тем или иным причинам нельзя совместить в одном заряде.
Работа двигателя проста. При срабатывании воспламенителя
начинается горение переднего заряда. Продукты сгорания
поступают через очко дросселя к заднему заряду и воспламеняют его.
Рис. 3.8. Схема двигательной установки с
разделенными зарядами:
1 — заряд с избытком окислителя: 2 — заряд с избытком
горючего; 3 — воспламенитель; 4 — дроссель
Если уменьшить диаметр проходного очка дросселя, то давление
в передней камере возрастет, что увеличит скорость горения, а
вместе с тем и количество продуктов сгорания, содержащих
избыток горючего. Это в свою очередь обеспечит ускорение реакции
горения в задней камере, имеющей избыток окислителя, в
результате чего тяга двигателя возрастет.
Дросселированием можно изменять общую величину тяги.
Такой принцип обеспечивает регулирование тяги в пределах от 20
до 65% полной тяги. Двигатель выключается резким открытием
Дросселя, вследствие чего в передней камере образуется волна
разряжения, которая и приводит к гашению заряда.
Как отмечают зарубежные авторы, несмотря па сравнительную
простоту устройства двигательных установок па твердом топливе,
они требуют строгого соблюдения мер по уходу и обслуживанию
в процессе эксплуатации. В частности, при хранении особо важно
поддерживать определенную температуру, которая
устанавливается в зависимости от физических свойств топливного заряда,
стойкости его по отношению к низким и высоким температурам.
Поддержание температуры заряда в установленном диапазоне
Достигается путем термостатирования ДУ или всей ракеты в
специальном теплоизоляционном чехле (контейнере) с
обогревательными устройствами, расположенными па его внутренней
поверхности.
43
3.5. ДВИГАТЕЛЬНЫЕ УСТАНОВКИ НА ГИБРИДНОМ ТОПЛИВЕ
Ракетный двигатель, работающий па сочетании твердых и
жидких компонентов топлива, называют гибридным. Впервые
гибридный ракетный двигатель, работавший на топливе отверждеп-
ный бензин + жидкий кислород, был разработан в нашей стране
17 августа 1933 г. с этим двигателем состоялся успешный пуск
ракеты «ГИРД-09», достигшей высоты около 400 м.
Возможны следующие комбинации двигателей: жидкий
окислитель + твердое горючее, жидкое горючее + твердый окислитель.
Рис. 3.9. Схема чвигателыюн установки на гибридном топлпвег
/ — воспламенитель с самовоспламеняющимся компонентом: 2 — бак
жидкого окислителя; 3 — баллон со сжагым воздухом; 4—заряд
твердого горючего
На рис. 3.9 приведена схема ДУ па гибридном топливе с
принудительным воспламенением. Запуск двигателя осуществляется
путем впрыска пускового компонента /, который, попадая в канал
заряда твердого горючего 4, самовоспламеняется. В дальнейшем
туда подается окислитель, вытесняемый из бака сжатым газом.
В качестве примера самовоспламеняющегося гибридного
топлива можно указать на топливную пару: твердое горючее на основе
каучука с присадкой алюминия и окислитель трехфтористый хлор.
Изменением расхода жидкого окислителя можно регулировать
тягу в широком диапазоне. Возможен также режим работы с
рядом остановок и пусков прекращением или возобновлением подачи
жидкого компонента.
В настоящее время ГРД находится в стадии разработки. По
мнению зарубежных специалистов, для ГРД вполне достижимы
значения удельной тяги 3500—3700——— (350—370 — j [1].
Достоинствами ГРД по сравнению с ЖРД считают простоту н
компактность, а также удобство эксплуатации. Поскольку в
качестве окислителей предполагается применение жидкостей,
пригодных для длительного хранения, обеспечивается полная готовность
к пуску в течение длительного времени.
По сравнению с РДТТ гибридные двигатели выгодно
отличаются возможностью простого регулирования режима их работы-
В них практически исключается чувствительность к начальной
температуре топлива. Возможность охлаждать камеру и сопло
44
обеспечивает более длительную работу при любых температурах
продуктов сюрания.
В зарубежной печати отмечается, что основными проблемами,
тр\дность решения которых задерживает развитие ГРД, являются:
'— невысокая полнота горения, в результате чего
действительные значения удельной тяги могут быть существенно ниже
расчетных;
— неравномерность выгорания твердого компонента топлива
по длине камеры, приводящая к отклонениям характеристик
двигателя от требуемых.
И все же, несмотря па эти недостатки и трудности создания,
ГРД могут оказаться выгодными для относительно небольших
летательных аппаратов, отличающихся простотой и надежностью и
находящихся в постоянной готовности к пуску.
В качестве горючих для ГРД могут найти применение
различные полимеры, гидразин, лигий, бериллий, гидраты алюминия
(бора, бериллия) и др., а в качестве окислителей —- азотная
кислота, перхлорат аммония, фтор, четырехокись азота,
трехфтористый хлор и др.
3.6. ДВИГАТЕЛИ НА НЕХИМИЧЕСКОМ ТОПЛИВЕ
Работы по нехимическим ракетным двигателям, судя по
сообщениям иностранных источников, особенно интенсивно ведутся в
последние 10—15 лет. Предложено множество различных схем
подобных двигателей, как реально осуществимых, так и
принципиально возможных, но реализация которых представляется делом
отдаленного будущего.
Интерес, проявляемый к разработке указанных двигателей,
вполне понятен: энергия ядерного горючего во много раз
превосходит энергию химического топлива. В то время как для
ракетных двигателей на химическом топливе удельная тяга 450—
оии является предельным, ядерные ракетные двигатели
(ЯРД) уже на первом этапе их применения будут иметь удельный
импульс 800—850 кГ£ек .
Ядерную энергию в ракетных двигателях можно использовать
Двумя способами: использовать высвобождаемую энергию для
нагрева рабочего тела, которое затем расширяется в сопле, так же
как в обычном случае, или преобразовать ее в электрическую,
которую затем использовать для ионизации и разгона частиц
рабочего тела.
Рассмотрим подробнее ЯРД с нагревом рабочего тела, в
которых используется энергия деления атомного ядра.
Основной частью такого двигателя является реактор. В
зависимости от того, в каком состоянии находится ядерное горючее в
активной зоне реактора, различают двигатели с твердофазным,
*иДкометаллическим и газофазным реакторами. Наиболее близок
45
к осуществлению ЯРД с твердофазным реактором. Разработка
подобного двигателя осуществляется в США в соответствии с
программами «Ровер» и «Нерва». Программа «Ровер» направлена на
исследование и разработку реакторов для ЯРД, целью программы
«Нерва» является создание летного
' образца ядерного ракетного двигателя.
г Лётные испытания ЯРД «Нерва» с тя-
\ гой 34 т с ресурсом 1 ч
предполагается провести не позднее 1977 г. _
ЯРД с твердофазным
реактором. Принципиальная схема
такого двигателя приведена на рис. 3.10.
Жидкое рабочее тело подается
насосом 3 из бака / в активную зону //
реактора, где оно нагревается и
расширяется п сопле. Перед
поступлением рабочего тела в активную зону
оно используется для охлаждения
сопла 8.
Активная зона реактора — это
пакет тепловыделяющих элементов
какой-либо формы (чаще всего стержни
из тугоплавкого материала,
снаряженные делящимся веществом). В
активной зоне реактора на медленных
нейтронах помещается замедлитель,
снижающий скорость нейтронов до
величин, при которых они вызывают
деление ядерного горючего. Замедлителями
могут служить графит, окись
бериллия, тяжелая вода, керамические
материалы. Активная зона окружена
отражателем (из тех же материалов, что
и замедлитель), который возвращает
нейтроны, вылетающие из активной
зоны реактора.
Скорость реакции в реакторе
регулируется специальными системами.
Рабочие характеристики атомного
и обычного ракетного двигателеп
определяются одними и теми же
законами. Удельная тяга, к примеру-
также пропорциональна начальной температуре газов и обрати?
пропорциональна их молекулярному весу. Следовательно,
удельную тягу можно повысить, используя вещества с малым молеку
лярным весом. Веществами, возможными для использования в
качестве рабочего тела, могут быть водород с молекулярным весом--
аммиак, вода. Их применение обеспечивает повышение уделы!01'
46
Рис. 3.10. Схема двигателя
с тверчофазным реактором:
/ — бак; 2 —- поцводяшая
магистраль; 3 — турбоиасосный
агрегат; 4—внешний »кран; 5 — Kpi
Тика корпуса двигателя: в — корпус
двигателя; 7—напорная
магистраль; 8 —con.no; 9 —отбор
горячего газа турбины; 10 — линия
холодного водорода для снижения
температуры газа турбины; 11 ~
активная зона реактора; j2 —$к-
рап активной зоны; 13 — подводя-
шая viarHcipa.ib газа турбины;
И — регулятор мощности
турбины; 15 — отсечной клапан
турбины
тяги в три-четыре раза по сравнению с современными ракетными
двигателями при топ же температуре газов.
Основной технической проблемой создания ЯРД с
твердофазным реактором является достижение необходимой температуры
газов. В обычном двигателе она достигает ЗООСГС, при этом
температуру стенок применением охлаждения удается удерживать на
уровне 1000° С. Однако, чтобы нагреть газ до 3000е С в ядерном
реакторе, стенки реактора должны иметь еще более высокую тем-
7
Рис. 3.11. ЯРД с газообразной акгипиой зоной:
/ — реактор; 2—трубопроводы; 3 — заборник; 4 — трубопровод; 5 —
сопло; б — струя делящегося вещества: 7 — замедлитель отражатель
пературу. К сожалению, реакторных конструкционных материалов,
способных выдерживать такие температуры, нет. Наиболее
тугоплавким соединением урана является его двуокись (^.-1 = 2800°С).
Тепловыделяющие элементы реактора на основе окиси урана или
уран-вольфрамовых соединений могут позволить поднять
температуру в активной зоне до 2750—2800°С и обеспечить нагрев
рабочего тела до 2500° С. При такой температуре в ЯРД «Нерва»
достигается удельная тяга 825 '-'—■ Поэтому важной частью
программы по разработке ЯРД считаются изыскания
высокотемпературных материалов и топливных элементов. Как считают зарубежные
специалисты, современный уровень этих работ, а также специфика
ракетных двигателей (ограниченная продолжительность их
работы) позволяют повысить максимально допустимую температуру
активной зоны и, как следствие, повысить величину удельной тяги.
ЯРД с газофазным реактором. В этом двигателе
делящееся вещество изолировано от стенок реактора рабочим телом
(чаще всего водородом), которому и передается тепло,
возникающее при делении ядерного горючего. Делящееся вещество в
полости реактора находится в газообразном состоянии. В этом случае
рабочее тело, прокачиваемое через реактор, можно нагревать до
Ю 000° С и выше, что позволяет достичь удельной тяги в 1500—
—7к~-^а РИС- ^'" представлена одна из возможных схем
лРД с газообразной активной зоной.
Делящееся вещество (Ри239 или U235) подается в жидком виде в
Фактор 1, где оно нагревается благодаря реакции деления до тем-
47
пературы, значительно превышающей температуру испарени,,
ядерного горючего. Тепло к рабочему телу (водороду) передается
излучением. Для уменьшения смешивания потоков делящегося ве
щества и водорода в активной зоне реактора поддерживаются
постоянное давление и почти постоянные осевые скорости обоих
газов по длине реактора.
Активная зона окружена замедлителем-отражателем 7. Струя
делящегося вещества 6 улавливается заборником 3, установлен
ным по оси сопла 5. В заборнике 3 делящееся вещество
охлаждается и конденсируется при смешении его с холодным рабочим телом,
поступающим из бака через трубопровод 4, и через трубопроводы
2 направляется снова в активную зону. Нагретое рабочее тело
через кольцевой зазор между заборником и стенками сопла 5
поступает в сопло, создавая тягу.
В ЯРД может быть не один, а несколько тепловыделяющих
элементов, подобных описанному. Они могут быть расположены по
радиусу с выходом рабочего тела в общее сопло.
ЯРД с жидкой активной зоной. В двигателях
подобного типа может быть достигнута удельная тяга 1500—1800 — -~.
Водород вводится по касательной к цилиндрическому
толстостенному корпусу (рис. 3.12), и дальше по спирали газ движется в па-
правлении к оси ракетного двигателя и создает в камере вихревое
движение. Жидкое ядерное горючее, впрыскиваемое в некоторой
точке, вовлекается в это движение. Под действием создаваемых
специально центробежных сил оно отбрасывается к сгенкам и
создает здесь слой, в котором происходят реакции деления.
Продуваемый через слой водород нагревается и, истекая через сопло,
создает тягу.
В ЯРД с газообразной и жидкой активными зонами очень
трудно надежно удерживать делящееся вещество в камере, что
является существенным недостатком этих схем.
Следует отметить, что в настоящее время отрабатывается
только ЯРД с твердой активной зоной. Оценка перспектив
совершенствования этих двигателей показывает, что предельное значение их
удельной тяги (до 1200 — J ограничивается температурой
плавления наиболее тугоплавких материалов (4000° К). Реально
достижимая удельная тяга в таких системах с учетом вероятных
технологических усовершенствований 900 ———.Повышение
удельной тяги до 1300—1500 —'—— возможно в ЯРД с жидкой актив-
KZ
ной зоной и до 1500—2500 '"* —в ЯРД с газообразной а к-
KZ
тивной зоной. Однако работы над ЯРД с газообразной и жидкой
акцизными зонами находятся пока в стадии теоретического
анализа и экспериментального исследования гидродинамических
процессов и условий теплоотдачи рабочему телу.
48
Такое состояние работ зарубежные специалисты объясняют
тем, что в настоящее время не решена проблема борьбы с
потерями ядерного горючего (0,01—0,1 кг урана на 1 кг веса рабочего
тела).
Определенный интерес представляют также термоядерные
двигатели, которые вследствие очень высокого выхода энергии
при реакциях синтеза легких ядер считаются наиболее
эффективными из всех принципиально возможных в настоящее время
двигателей. Несмотря па то что управляемая реакция еще не
осуществлена даже в лабораторных условиях, успехи, достигнутые за
Рис. 3.12. Камера ядерного двшатсля с жидкометаллическим
реактором:
/ — графитовое пористое сопло: 2— графитовый торцоиыП блик: 3 —
корпус; 4 — жидкое делящееся вещество: 5 — отверстия подачи рабочего
тела: €—форсунки для впрыска я 1ерного топлива
последние тды в этой области, позволяют надеяться, что в
будущем ядерная энергия синтеза может быть использована в
ракетных двигателях. Теоретические расчеты показывают, что
максимальная удельная тяга термоядерного двигателя достигнет
примерно 105—106———.Рабочее тело такого двигателя будет
нагреваться до состояния плазмы.
Основные трудности конструирования термоядерных реакторов
заключаются в необходимости создания чрезвычайно высоких
температур (108—109°С), при которых может проходить термоядерная
Реакция, а также в удержании рабочего тела в состоянии плазмы
при этих температурах в течение времени, достаточного для
протекания реакций синтеза МО-5—Ю-3—г~~) . предотвращения
загрязнения термоядерного «топлива», управления реакцией, отводе
Огромного количества выделяющейся энергии.
3-622
Глава 4
УСТРОЙСТВО РАКЕТНЫХ ДВИГАТЕЛЕЙ
НА ЖИДКОМ ТОПЛИВЕ
4.1. КАМЕРЫ ДВИГАТЕЛЕЙ
1. Процессы, протекающие в камере двигателя
Камера двигателя — основной агрегат ДУ, в котором
происходит превращение химической энергии топлива в кинетическую
энергию струн газов, в результате чего и возникает реактивная
сила.
Компоненты топлива, вводимые в камеру двигателя, обладают
значительной энергией. Эта энергия топлива превращается в
тепловую в процессе горения, представляющего собой реакцию
взаимодействия горючего и окислителя, которая сопровождается
выделением большого количества тепла, в результате чего
температура продуктов сгорания повышается до весьма больших значений.
Процессу горения предшествуют подготовительные процессы:
распыление компонентов, их испарение и перемешивание. Эти
процессы протекают не строго последовательно, а накладываются
один на другой и оказывают взаимное влияние друг на друга. Тек
не менее в камере можно выделить условно несколько
характерных зон (рис. 4.1).
В зоне I, непосредственно примыкающей к внутренней
поверхности головки, происходит распад струек топлива на капли. Эту
зону называют зоной распыла. Другие процессы — испарение н
перемешивание — происходят в ней медленно.
В зоне II происходят интенсивное испарение и смешение
компонентов. Начннаются здесь и химические реакции, но скорость нх
мала из-за сравнительно низкой температуры. Эта зона условно
названа зоной испарения и смешения.
В зоне III интенсивно протекают химические реакции. Эта зона
условно разбивается на две области. Область до сечения т—tn
характерна тем, что в ней температура газа еще относительно
низка, а поэтому мала и скорость химических реакций. Испарение
50
и сгорание перемешанного топлива происходят не сразу, а
постепенно. Эгу область называют областью кинетического горения,
рост температуры приводит к резкому возрастанию химических
реакций, причем, начиная с некоторого значения температуры, все
топливо, которое уже смешано, сгорает мгновенно. Скорость
горения за сечением т—т зависит от скорости диффузии. Поэтому и
область называют областью диффузионного горения. Процесс
горения происходит преимущественно в диффузионной области.
Зона III называется зоной смешения и сгорания.
М/М0
Рис. 4.1. Схема протекания процессов в камере дви
гателя: *
JH.'AJr — относительное количество топлива
процесс; J -
и горение;
завершившего
распиливание; 2 — испарение; 3 — смешение
i — кинетическое горение; 5 — диффузионное
горение
Процессы, протекающие в камерах двигателей,
характеризуются следующими особенностями:
— камера двигателя имеет исключительно высокую теплона-
пряженность (109—10ш вт/мг) и температуру горения топлива
3000—4500° К;
— горение происходит при сравнительно высоких давлениях,
Достигающих значений 50—100 ата и более;
— время пребывания топлива в камере весьма мало и
составляет 0,002—0,005 сек.
2. Формы и размеры камер двигателей
В настоящее время нашли применение следующие основные
Формы камер двигателей: цилиндрические,
шарообразные и конические (рис. 4.2).
Цилиндрические камеры наиболее распространены. Они
Удобны и просты в изготовлении. В них легко осуществляется про-
3* 51
цесс смесеобразования. Применение их в многокамерных
двигательных установках облегчает компоновку связки (пакета)
двигателей.
Недостаюк цилиндрических камер — х\дшие прочностные
свойства и большая поверхность охлаждения по сравнению с
шарообразными при одном и том же объеме.
Шарообразные камеры (или грушевидные) имеют
меньшую поверхность при заданном объеме, что снижает их масс\
(вес) и облегчает организацию
охлаждения камер. Они более прочны, а поэтому
у них меньшая толщина стенок. Но
шарообразные камеры сложны в
изготовлении.
Применяются для двигателей
больших тяг, где определенный выигрыш в
весе наиболее заметен.
Конические камеры максимально
просты в изготовлении; недостаток их —
пониженная по сравнению с другими
камерами удельная тяга.
Геометрические размеры камер
двигателей устанавливаются из условия
обеспечения заданной тяги при возможно
больших значениях удельной тяги, т. е.
при возможно большем использовании
энергии, содержащейся в топливе.
Объем камеры горения (объем до
критического сечения) чаще всего
определяется по времени пребывания в ней
топлива и газообразных продуктов сгорания -:Пр. Это время должно
быть достаточным для полного завершения всех процессов,
протекающих в камере.
Расчетное выражение для определения объема камеры может
Рис. 4.2. Формы камер
двигателем:
а — цилиндрическая; б —
шарообразная; в — Коническая
быть представлено в виде
^к =
тпр
,GRTa
Ро
(4.1)
где G — секундный расход газа:
R — газовая постоянная продуктов сгорания;
?о и/Л) — температура и давление газов в камере.
Значение 1Пр зависит от вида топлива и качества
смесеобразования.
Другим параметром, который используется при определении
объема камеры, является приведенная длина L„v, представляющая
собой отношение объема камеры к площади критического сечения
сопла;
L = ij£- (4 2)
г гкр
52
откуда расчетная формула имеет вид
VK = I.n?FKV. (4.3)
Значение Lnp зависит от вида применяемого топлива и для
современных камер составляет 1,5—4,0 м.
Приведенная длина Lnv и время пребывания тПр —
пропорциональные друг другу параметры:
•^пР = А/-Пр, (4.4)
гте k — постоянная для данного вида топлива величина,
зависящая от теплотворной способности топлива и других параметров.
Иногда объем камеры определяют, исходя из значения
литровой тяги Рл, под которой понимается отношение тяги двигателя к
объему камеры:
*V=-£-, (4.5)
откуда
1/ — _
Р
VK = -~. (4.6)
Значение Рл зависит от давления в камере и для выполненных
зарубежных двигателей изменяется в пределах от 100 до
1000 кГ/л.
Из приведенных параметров наиболее целесообразно для
определения Vk использовать тПр и /Пр-
Для окончательного определения размеров камеры (имеется в
виду цилиндрическая камера) необходимо, кроме объема
^.определить еще диаметр камеры d0 или безразмерную площадь /к, иод
которой понимается отношение площади сечения камеры к
площади критического сечения сопла, т. е.
кр
Значение fK (или d0) не может быть установлено произвольно, так
как изменение /к ведет к изменению основных параметров
двигателя.
Известно, что уменьшение d0 (уменьшение F0/FKP) данной
камеры при неизменных значениях F1!p, угла выходной части сопла
и перепада давлений газа между началом камеры и выходным
сечением сопла приводит к падению давления в тон части камеры,
которая прилегает к соплу. А падение давления ведет в свою
очередь к снижению термического коэффициента полезного действия
камеры и к уменьшению скорости истечения газов из сопла и
пропорциональной ей удельной тяги.
_ На рис. 4.3 показано изменение относительной удельной тяги
^уд в зависимости от безразмерной площади /к при адиабатиче-
53
ском расширении газов в сопле. Под относительной удельной
тягой Руд понимается отношение Руч/^удк> причем Рул,,
соответствует F0 — оо.
Из приведенного графика следует, что при /к<2,5-ьЗ,0 падение
давления в камере начинает заметно сказываться па величине
удельной тяги. Поэтому при определении размеров камеры
принимают fi^ 3,0. Однако увеличение безразмерной площади более
чем в шесть — восемь раз не приводит к существенному
увеличению удельной тяги.
а 95
09
Рис. 4.3. Зависимость относительной утельной
тяги от безразмерной площади fv
Ориентировочно диаметр камеры для азотнокислотпых
двигателей можно определить по зависимости
d0 = (2,5 4-3,0)^, (4.8)
а для спиртово-кнелородных
d0=(2t3^-2,5)dKp. (4.9)
Дальнейшее увеличение do ведет к утяжелению камеры
двигателя.
3. Головки камер и форсунки для распыла топлива
Головка камеры двигателя служит для размещения устройств,
обеспечивающих ввод компонентов топлива в камеру и их
смесеобразование.
В ЖРД применяются плоские, сферические и
шатровые головки.
Плоские головки (рис. 4.4,о) наиболее распространены.
Преимущество их в простоте конструкции. Кроме того, они
позволяют достаточно хорошо обеспечить однородность концентраций
топлива по поперечному сечению камеры. Недостатки плоских
головок—относительно малая прочность и жесткость.
Сферические головки (рис. 4.4,6) нашли применение
в двигателях больших тяг. Достоинство их — высокая жесткость
54
конструкции. Недостаток — большая сложность конструкции.
Вследствие недостаточной площади для размещения форсунок
сферические головки
выполняются с предкамерами, что
усложняет конструкцию.
Шатровые головки
(рис. 4.4, в) применяются в
двигателях малых и средних тяг.
Преимущества их — большая, чем у
плоской головки, поверхность
для размещения форсунок и
хорошие прочностные свойства.
Недостатки — сложность
изготовления и неравномерное
распределение топлива по поперечному
сечению камеры.
Размещение форсунок на
головке должно способствовать
получению качественной топливной
смеси. Существует несколько
способов размещения форсунок
горючего и окислителя на головке
камеры двигателя:
шахматное, сотовое,
концентричное (рис. 4.5).
При шахматном
расположении форсунки горючего (на
рисунке обозначены крестиком)
и окислителя чередуются между
собой, при этом каждая
форсунка горючего окружена четырьмя
форсунками окислителя.
Недостаток шахматного размещения
состоит в том, что количество
форсунок горючего примерно равно количеству форсунок
окислителя, а так как окислителя в топливе всегда в два — четыре раза
Рис. 4.4
Схемы головок камер
двигателем:
а — плоская; б— сферическая; в —
шатровая: / — наружное днище; 2 —
среднее чнище; S — внутреннее днище; 4 —
форсунки горючего; 5 — форсунки
окислителя; 6 — внутренняя оболочка; 7 —
наружная оболочка; ■ S — клапан;
9—предкамера
X 9 X 9
Ф-Ж-
» Ф У Ф У
Ф х 6 х
+4
4>-Х Ф- Ж 4>
^Ф-*
-f-x
Рис. 4.5. Схемы размещения форсунок:
о —шахматное: б —союиое; о — концентричное
больше, чем горючего, то мощная струя окислителя плохо
смешивается со слабой струей горючего, что отрицательно сказывается
на качестве смесеообразования.
При сотовом расположении разница в расходах форсунок
окислителя и горючего меньше, чем при шахматном, что и
обеспечивает лучшее смесеобразование.
Концентричное размещение не дает существенных
преимуществ перед шахматным и сотовым в улучшении качеств
смесеобразования, но в некоторых
конструкциях этот способ расположения
упрощает подвод компонентов к форсупка>
Возможно и комбинированное
расположение форсунок на головке.
Форсунки должны обеспечить тонки
и однородный распыл компонентов пр
достаточно малом перепаде давленп
па них.
По принципу действия топливные фог
сунки разделяются на два вида: струп
и ы е. разновидностью которых являются
щелевые, и центробежные, кот(
рые в свою очередь могут быть тангеп
цнальпыми и шнековыми. По числу рас-
пыливаемых компонентов топлива одной
форсункой их разделяют па одноком-
понентние — дли распыла одного
компонента и двухкомпонептные,
предназначенные для одновременного распыла дв\\\ компонентов
топлива.
Струйные форсу н к и (рис. 4.6) представляют собой
сверления в теле форсуночной головки или специальных втулках.
У струйных форсунок малое гидравлическое сопротивление. "Педо
статкн их — сравнительно грубый распыл топлива, малый угс
конуса распыла (2а~ 10ч-15°) и большая дальнобойность стр\п.
Расход жидкости через форсунку определяется по формуле
Рис. 4.6. Истечение
компонента и^ струйной
форсунки
О =иГсГ2Л/,Р,
(4.10)
где
- коэффициент расхода, для струйных форсунок он равен
0,65—0,85;
Fc — площадь выходного сечения сопла, .и2;
Ар—перепад давления на форсунке (Н/м2), представляют!! -
собой разность давлений па входе в форсунку и выхо_.
из нее;
Р — плотность жидкости, кг/л3.
Щелевые форсунки представляют собой концентрические ш/
в головке. Отдельные щели могут располагаться с наклоном к оси
камеры для обеспечения соударения струй компонентов. Щслев
форсунки чаще находят применение в двигателях малых тяг, г
56
возможна установка одной двухкомпонентнон щелевой форсунки
в центре головки камеры. В этих форсунках легко регулировать
плошать щели для изменения подачи топлива.
Центробежные форсунки (рис. 4.7)—это форсунки, в
которых искусственно создается закрутка подаваемого через них
Рис. 4.7. Схемы центробежных форсунок:
а — тангенциальная; б— шнековая; J — вход компонента; 2 — шнек
компонента. После выхода компонента из сопла под действием
центробежных сил образуется топкая конусообразная пленка,
которая быстро распадается на капли.
Рис. 4.8. Движение жидко- Рис. 4.9. Схемы чпухкомпонеитных форсунок:
СТИ в центробежной фор- о —с внешним смешением компонентов; б —с внутрен-
сунке: ним смешением компонентов; / — вход окислителя;
. " _ 2—вход горючего
' — жидкость; 2 — газовый
вихрь
ские потери. По способу получения закрутки центробежные
форсунки разделяются на тангенциальные и шнековыс.
Принцип работы тангенциальной форсунки заключается в
следующем. Жидкость поступает в полость форсунки через входное
отверстие, ось которого перпендикулярна к оси форсунки, но не
Пересекается с ней (рис. 4.8). Благодаря такому входу жидкость
57
получает вращение. Скорость движения жидкости по мере ее
приближения к оси форсунки будет возрастать, а давление падать т.о
тех пор, пока не станет равным давлению окружающей среды, в
которую происходит истечение. Поэтому центральная часть
форсунки не будет заполнена жидкостью—в ней будет находиться
газовый вихрь. Течение жидкости будет осуществляться через
кольцевое сечение с внутренним радиусом г,„ и внешним гс.
В центробежной шнековой форсунке закрутка потока создается
шнеком, имеющим на поверхности винтовые каналы.
Двухкомпонснтныс форсунки (рис. 4.9) позволяют улучшить
смесеобразование, так как обеспечивают основное смешение
компонентов в жидкой фазе.
Недостаток их — конструктивная сложность. Двухкомпонентные
форсунки применяются в том случае, когда недостаточно места
для размещения одиокомгюнентных.
4. Сопло ракетного двигателя
Продукты сгорания, образовавшиеся в камере сгорания,
поступают в сопло, где происходит превращение тепловой энергии в
кинетическую энергию движения газов.
Скорость газового потока зависит от начального состояния и
физических свойств газа н определяется по формуле
где 7"0 и р0— начальные значения температуры и давления;
р— текущее значение давления;
к и Ц — показатель адиабаты и газовая постоянная.
Границей между малыми и большими скоростями является
скорость звука в газе. Скорость газового потока может быть больше
и меньше местной скорости звука. Но возможен случай, когда
скорость движения газа в каком-то сечении потока равна местной
скорости звука. Такое состояние потока называется критическим.
Сверхзвуковые скорости течения газа можно получить при
помощи сверхзвукового сопла, представляющего собой канал,
сечение которого сначала уменьшается, а затем увеличивается
(рис. 4,10).
Было обнаружено, что если через сопло пропускать газ так,
чтобы в самом узком сечении была критическая скорость, то в
дальнейшем, за горловиной, скорость потока начнет возрастать.
Если поток, текущий с дозвуковой скоростью, в сужающемся
канале ускоряется, а в расширяющемся замедляется, то
сверхзвуковой поток, наоборот, в сужающемся канале замедляется, а в
расширяющемся ускоряется.
В настоящее время наиболее распространенными типами сопел
(рис. 4.11) являются: конические, профилированные и
58
сопла с центральным телом, которые в свою очередь
разделяются на кольцевые сопла, сопла с полным внешним
расширением, сопла с частичным внутренним расширением и тарельчатые
сопла.
Конические сопла имеют закритнческую часть в виде
конуса с прямой образующей. Достоинство их — простота
изготовления. По экономичности работы они уступают профилированным
соплам и поэтому почти полностью вытеснены ими.
Профилированные сопла
имеют образующую закритической
части, выполненную по кривой,
совпадающей с линией тока газа.
Что касается сопел с
центральным телом, то
возможности их применения в ЖРД пока
только исследуются. Эти сопла
принципиально аналогичны соплам,
применяемым в воздушно-реактивных
двигателях.
Рис. 4.10. Форма сверхзвукового
сопла
Рис. 4.11. Типы сопел:
а — коническое; б —
профилированное; в — с центральным
телом (кольцевое сопло)
При любой форме сопла в нем неизбежны потерн удельной
тяги, которые в общем случае складываются из потерь на
рассеивание потока, на тренне, входных и др. Каждый из этих видов
потерь оценивается соответствующим коэффициентом
Р— ДР/
О;
(4.12)
где APj — уменьшение тяги от данного вида потерь.
Суммарный коэффициент потерь для современных сопел
составляет 0,95—0,96.
В целях уменьшения потерь на рассеивание потока
выполняется профилирование сопел, которое состоит в построении такой
формы закритической части, которая обеспечивала бы разгон
потока до заданной скорости и истечение его пучком, параллельным
59
оси камеры. Различают газодинамическое (идеальное) и
оптимальное профилирование.
При идеальном профилировании контур сопла изменяется очень
плавно и его образующая является линией движения потока газов
внутри сопла. Идеально спрофилированное сопло дает упелнчсиие
удельной тяги но сравнению с коническим на 3,5—4,5%, однако
при этом его длина возрастает в 1,5 раза. На практике нашли
применение оптимальные сопла, под которыми понимаются сопла,
обеспечивающие наибольшую тягу двигателя при определенных
условиях (длина, масса, FJF^p).
Конические участки
iZct,\rCKp
Рис. 4.12. Схема оптимального сопла
При этом выходная часть сопла выполняется с углами
раствора 2aj и 2а2, а линия перехода между ними строится по параболе
(рис. 4.12). Значения углов принимаются в пределах 2ai=50-4-80=,
2а2=Ю-ь20°. Радиусы скругления входной части сопла /?Скр =
= 1,5/?нР; 'сКр = 0,4о'/?кр.
б. Охлаждение камер двигателей
Процессы в камере двигателя протекают при высоких
температурах и давлениях, а продукты сгорания движутся со
значительными скоростями. Это увеличивает тепловые потоки от газа к
стенке камеры.
Интенсивность теплообмена характеризуется величиной
удельного теплового потока q, под которым понимается количество
тепла, проходящего через 1 м2 поверхности тела в единицу времени.
Тепло передается от газов к стенкам камеры двумя путями:
конвекцией п лучеиспусканием (тепловым излучением).
Конвективный теплообмен происходит при передаче тепла черс
жидкости или газы, а также от жидкости или газа стенке и
наоборот. Количество тепла, переданного конвекцией, будет тем больше
чем больше частиц подходит к стенке в единицу времени и чем
больше содержится в них тепла. Количество частиц, подходящих
к стенке, тем больше, чем выше скорость их движения.
60
Конвективный удельный тепловой поток, передаваемый от газа
стенке камеры, определяется но формуле
<?,, = *г (?". ~ ТС[) ' (4.13)
где ат—коэффициент теплоотдачи от газа стенке;
Т ^— температура торможения газа, соприкасающегося со
стенкой;
Тсг—температура поверхности стенки, обращенной к газу.
Коэффициент теплоотдачи щ определяет количество тепла,
переданного единице поверхности стенки в единицу времени при
разности температур газа и стенки в 1°. В общем случае величина аг
зависит от размеров газового канала, температуры поверхности
стенки 7\:г, скорости движения w, температуры и физических
параметров газа.
Для определения коэффициента теплоотдачи от газа стенке при
течении газа по цилиндрической трубе применяется формула
г;0,82 / Г \0,ЗЪ
ar = 0,0206C/)trteiXcr)0-,8-^-(7^) . С4-1*)
где с^ — теплоемкость продуктов сгорания при температуре
газовой стенки, дж/кг ■ град;
!Jcr—вязкость продуктов сгорания, Н-сек/м2;
О — расход топлива, кг/сек;
d—диаметр оболочки камеры по газовой поверхности, м.
Температура торможения газа Т^ учитывает выделение тепла
встедствис трения газа о стенку. Эта температура определяется по
зависимости
Г« = Г' + "2?-' <4-15)
где Тт—температура газа;
ср —средняя теплоемкость газа в интервале температур
Т -=- 7Y.
Конвективный тепловой поток достигает максимального
значения в критическом сечении сопла (рис. 4.13). Это объясняется тем,
что в этом сечении массовая скорость шр, как следует из
уравнения неразрывности, имеет наибольшее значение
Рост массовой скорости приводит к росту аг, а это в свою очередь
к увеличению qK.
Лучистый теплообмен зависит главным образом от
температуры и давления 1аза, причем в большей степени от температуры,
а также от состава газов, так как интенсивность излучения разных
61
молекул различна. Величина удельного лучистого теплового потока
определяется по закону Стефана-Больцмана
(4.17)
Я я— £эф£гс0 у ЮО ) '
где
Еэф"
е- ■
■ эффективная степень черноты стенки;
степень черноты газа;
коэффициент излучения абсолютно черного тела,
равный 4,9 ккал1м2• час■ град4 (5,67 дж/м2- сек град4).
Величина лучистого теплового
потока значительно меньше
величины конвективного. Наиболее
интенсивно лучеиспускание в
камере сгорания, т. е. там, где велика
температура газов. Лучистый
тепловой поток в камере сгорания
достигает (1,7-4-2,5) • 10е дж/м2-сек.
В сопле в связи с понижением
температуры газов величина
лучистого потока меньше.
Полный (суммарный)
удельный тепловой поток равен
Яс. = Яг + Ял-
Рис. 4.13. Распределение удельных
тепловых потоков но длине какеры
(4.18)
Иногда это уравнение
записывают в виде
Яс = *с
(ТЖ-ТС1), (4.19)
где «с — общин (суммарный) коэффициент теплоотдачи,
учитывающий действие конвекции и лучеиспускания.
В современных двигателях суммарный тепловой поток в
критическом сечении может достигать весьма значительных величин —
(20-4-60) ■ 10е ккал/м2-час [(23,3-4-69,7) • 106 вт/м2]. Из-за больших
тепловых потоков стенки камеры двигателя довольно быстро
нагреваются, и если не принимать никаких мер но их охлаждению,
они прогорят в течение очень короткого времени.
Задача охлаждения камеры двигателя заключается в том,
чтобы при заданных условиях работы двигателя (давлении в
камере ро, расходе охлаждающей жидкости Gox.n и температуре газов
Го) были удовлетворены следующие условия:
— температура газовой стенки должна быть ниже допустимой,
выбранной по соображениям прочности ТСГ<ТЯ0П;
— температура жидкости на выходе нз тракта охлаждения
(при наружном охлаждении) должна быть ниже температуры
кипения Tm<Ts-
Эти условия выполнимы, когда общий тепловой поток Q будет
меньше количества тепла, которое может поглотить жидкость, или
62
равен ему. Для обеспечения этого условия должно соблюдаться
неравенство
Q<G0^(TS~TBX), (4.20)
где G0X1—секундный расход охладителя;
с— теплоемкость охладителя;
7^—температура кипения охладителя при давлении в
охлаждающем тракте;
Т№— температура охладителя па входе в охлаждающий
тракт.
Охлаждающая жидкость
Рис. 4.11. CNe.ua наружного охлаждения:
1 — коллектор: 2 — охлаждающий тракт; 3 — внутренним
оболочка камеры: 4— наружная оболочка камеры
В настоящее время в жидкостных двигателях нашли
применение наружное, внутреннее и смешанное охлаждение.
Наружное охлаждение, простейшая схема которого приведена
на рис. 4.14, заключается в том, что жидкость, проходя по тракту,
образованному внутренней и наружной оболочками, охлаждает
стенки камеры. Наружное охлаждение разделяется па два вида:
проточное и циркуляционное.
При проточном охлаждении камера охлаждается
компонентами топлива, которые после нагрева в охлаждающем тракте
поступают в головку, а из нее через форсунки — в камеру сгорания.
В качестве охладителя используется тот компонент, который может
больше поглотить тепла. Проточное охлаждение является
наиболее распространенным и экономичным видом охлаждения. Здесь
все тепло, переданное от камеры охладителю, почти полностью
возвращается в камеру. Поэтому данный вид охлаждения иногда
называют регенеративным.
Циркуляционное охлаждение широкого распространения не
получило, так как при этой схеме предполагается размещение на
борту ракеты дополнительно охлаждающей жидкости, что
усложняет двигательную установку и эксплуатацию ракеты.
63
Рис. 4.15. Схема защитного действия
внутреннего охлаждения:
; — жнчкая пленка; 2 — паровой слой; 3 —
горячие газы
т,°к
Внутреннее охлаждение возможно или за счет омывання
внутренней поверхности камеры двигателя одним из компонентов
топлива, или за счет создания пристеночного слоя из топливной смеси
со значительным отклонением соотношения компонентов от стехно-
метрического.
Компонент (как правило, горючее) подается для омывання
внутренних стенок камеры через специальные пояса — пояса
охлаждения. Поступающая жидкость
под воздействием высоких
тепловых потоков
испаряется, и над слоем жидкости
создается защитный
паровой слой. В результате
получаются два защитных
слоя: жидкости и пара
(рис. 4.15). По мере
испарения слоя жидкости и
размывания парового слоя при
движении вдоль камеры
защитные свойства их
уменьшаются, однако в целом они
сохраняются на расстояниях
до нескольких сантиметров
от пояса.
Внутреннее . охлаждение-
путем отклонения в
пристеночном слое состава
топлива от стехиометрнческого
осуществляется за счет
размещения по периферии
головки форсунок горючего
В результате избытка
горючего в пристеночном слое
образуются продукты
неполного сгорания с понижепног
температурой, что снижает
теплоотдачу от газов стенке.
На рис. 4.16 приведен
график зависимости
температурь1 продуктов сгорания or
коэффициента избытка окислителя а. Как следует из графика,
снизить температуру продуктов сгорания можно, увеличив
коэффициент избытка окислителя или уменьшив его. На практике, как
правило, снижают этот коэффициент, так как увеличение его
создает сильно агрессивную среду в пристеночном слое.
Недостаток всех видов внутреннего охлаждения состоит в том.
что компонент-охладитель не полностью участвует в процессе
горения, а это снижает удельную тягу.
64
3000
2000
1000
0,5
1,0
1,5 2,0
Рис. 4.16.
Зависимость температуры
дуктов сгорания пт а
а.
про-
Наиболее целесообразным способом охлаждения считается
сочетание наружного и внутреннего, так называемое смешанное
охлаждение.
Имеются и другие способы защиты стенок камеры от прогара,
например покрытие стенок теплоизоляционным материалом,
нанесение абляционного покрытия.
Суммарный тепловой поток qc, определяемый по формуле (4.18),
поступает в стенку камеры двигателя. Благодаря
теплопроводности тепло передается через стенку и далее
путем конвекции охлаждающей жидкости,
проходящей по тракту охлаждения. При
установившемся режиме температура
стенки со стороны газа Тсг и со стороны
жидкости ТС;к будет постоянной (рис. 4.17).
Уравнение процесса теплопроводности
записывается в виде
?.
Яс — ? (' сг ' еж).
(4.21)
где X
среднее значение коэффициента
теплопроводности материала;
£ — толщина стенки камеры.
То же количество тепла отдается
стенкой охлаждающей жидкости
<7с = М^ж-7ж),
(4.22)
Я
где
от
Рис. '1.17. Схема
распределения температуры в
камере при наружном
охлаждении
ч. — коэффициент теплоотдачи
стенки жидкости;
Тк — температура охлаждающей жич
кости.
Рассмотрим влияние отдельных факторов на температуру стен
ки со стороны газа Тст. Из формулы (4.21) следует, что
7'сг = -
• '7с + Тс
(4.23)
Из этого выражения видно, что прн одних и тех же значениях
8, <7с и 7\.ж температура Т,г будет тем меньше, чем больше
коэффициент X. Поэтому для камер целесообразно применять
материалы с возможно большим коэффициентом теплопроводности.
Из выражения (4.23) также видно, что прн неизменных Гсж и
<?с температура Т(г будет тем меньше, чем меньше толщина
стенки 8. Следовательно, камеры двигателей желательно делать с
возможно меньшей толщиной стенки. Однако толщина стенки
определяется прежде всего допустимыми напряжениями.
Из тон же зависимости следует, что при одних и тех же X, 5 и
Qc температура газовой сгенки Тсг будет тем меньше, чем меньше
65
температура ТС1К. В свою очередь Тсж в соответствии с формулой
(4.22)
Тсж = ^ + Тж. (4.24)
Из этого соотношения следует, что температура Гсж
уменьшается с увеличением яж. Коэффициент аш зависит от массовой
скорости гЬжрж- Но так как для жидкости при установившемся
режиме рж = const, то коэффициент Яж зависит в значительной
степени от скорости движения охлаждающей жидкости и с ее
увеличением возрастает.
При постоянном расходе охлаждающей жидкости скорость ее
движения обратно пропорциональна зазору А (см. рис. 4.17)
между оболочками камеры. Следовательно, коэффициент
теплоотдачи увеличивается с уменьшением зазора Д. Однако необходимо
иметь" в виду, что уменьшение зазора ведет к увеличению
гидравлических потерь в'охлаждающем тракте, что требует увеличения
мощности системы подачи топлива.
Поскольку максимальные значения удельного теплового потока
приходятся на область критического сечения сопла, то в этом
месте создаются скорости движения охладителя до 50 ч/сек и более.
Значительное влияние на Тсг оказывают также давление и
температура в камере и режим работы двигателя. Увеличение
давления в" камере двигателя р0 приводит к росту массовой скорости,
что ведет к возрастанию конвективного потока, который- изменяется
пропорционально р°'8. Лучистый тепловой поток также
изменяется с изменением ро вследствие изменения черноты газа, но в
несколько меньшей степени, чем конвективный.
Рост температуры в камере двигателя Т0 ведет к возрастанию
конвективного и лучистого тепловых потоков, что также приводит
к возрастанию температуры Тст.
4.2. ТОПЛИВНЫЕ БАКИ И СИСТЕМА НАДДУВА БАКОВ
1. Конструктивные схемы и геометрические размеры баков
В зависимости от способа подачи компонентов топлива в
камеру двигателя различают два типа топливных баков:
нагруженные и разгруженные.
Нагруженные баки при работе двигателя находятся под
сравнительно высоким давлением (3,5—5,0 МН/м2). Это давление
всегда выше давления в камере двигателя на величину
гидравлических потерь. Такие баки применяются при вытеснительной
системе подачи топлива.
Разгруженные баки при работе двигателя находятся
под небольшим давлением (0.2—0,6 МН/м2), которое значительно
ниже давления в камере двигателя. Эти баки применяются в
двигателях с насосной системой подачи.
66
Наиболее распространенной схемой взаимного расположения
баков является раздельная (рис. 4.18). Основное достоинство ее —
простота технологии сборки. Недостаток—невозможность
рационально использовать свободное пространство между
баками.
В целях сокращения общей длины и уменьшения массы баков
их можно делать с одним общим днищем. Такая схема получила
название объединенной конструкции.
Кроме этих схем, баки могут компоноваться по схеме
концентричного расположения (бак в баке). В целях рационального
использования общего объема ракеты
применяются так называемые утопленные
конструкции, в которых камера двигателя размещается -»—Г"-\
непосредственно в баке (рис. 4.19). ^-■^-5-
Риг. 4.18. Схемы расположения баттв- Рис. 4.19. Утопленная
а — раздельное: б — объединенная конетрук- конструкция 6ЯКОВ:
/ — бак окислителя,- 2 —
бак горючего; 3 —
камера
С точки зрения прочности и уменьшения массы наилучшей
формой баков является шаровая. Однако такие баки имеют большие
поперечные размеры. Применение их целесообразно в
двигательных установках с малой тягой.
Наиболее широко применяются баки цилиндрической формы со
сферическими, эллиптическими или другими днищами. Чаще всего
днища выполняются по обводу, образованному плавно
сопряженными дугами нескольких окружностей, или эллиптическими.
Определение геометрических размеров баков начнем с полного
обьема бака соответствующего компонента, который складывается
из следующих составляющих: объема рабочего запаса Vv, объема
гарантийного запаса Vr, объема достартового расхода Улс, объема
воздушной (газовой) подушки Vuon и объема деталей,
размещаемых в баке AV. Таким образом,
V6 = Vp -г V, + 1'Дс + Vuox + W. (4.25)
67
Объем рабочего (расчетного) запаса Vv компонента в случае
постоянного расхода G за время работы двигателя определится
по формуле
Vr = ^, (4-26)
гче х—время работы двигателя с момента отрыва ракеты от
пускового стола до момента выключения, сек;
Р — плотность компонента, кг/м\
Объем гарантийного запаса IV включает в себя дополнительное
количество компонента, которое должно скомпенсировать
возможное увеличение по сравнению с рабочим запасом расхода
компонента на активном участке полета, в условиях возмущенного
полета и при отклонениях основных параметров ракеты (массы,тягн
двигателя) от номинальных значений. Обычно гарантийный запас
не превышает 2—3% рабочего запаса.
Объем достартогюго расхода Улс включает объем компонента,
расходуемого для работы двигателя от момента начала работы до
момента отрыва ракеты от пусковой установки. Этот расход
зависит от системы запуска двигателя. При ступенчатом запуске время
работы двигателя до отрыва ракеты составляет 2—3 сек, при
пушечном— 0,2—0,3 сек.
Объем воздушной (газовой) подушки Vn<m определяется, исходя
из условия, чтобы при максимальной температуре хранения
заправленной ракеты Гтах давление в баках не превышало
заданного Рбтах-
Расчетная формула для определения \7Под может быть получена
из уравнения состояния газа в почушке при максимальной и
минимальной температурах Гтах и ТтП компонента топлива
Vm,= V*HTauxB^Tmla), (4-27)
. го' max
"б max mill
где Vv—объем компонента, заправляемого в бак и равного Vp+
+ Vr+ 1'дг;
Р—коэффициент объемного расширения компонента;
р0— давление в баке при заправке;
Г —температура (максимальная), при которой хранится
заправленная ракета;
Л-iin—минимальная температура, при которой производится
заправка компонента.
Диаметр топливных баков определяется конструкцией н
назначением ракеты, а длина нх — потребным запасом топлива для
работы двигателя. При проектировании ракет в систему проектных
параметров входят начальная тпговооруженность Х0,
представляющая собой отношение стартового веса ракеты к тяге, и начальная
поперечная нагрузка па мидель ракеты Ря — отношение старто-
68
вого веса ракеты к площади мнчеля. Если параметры >,0 и Лч
выбраны, то т,иаметр бака (при условии равенства диаметра бака
диаметру ракеты) определится зависимостью
^б= J 4$^. (4.28)
Длина цилиндрической части бака, исходя из его
объема,определится по формуле
r.d6
где V'6 — объем бака за вычетом объема, занимаемого днищами.
Длина баков и их диаметр связаны соотношением
/:*=-£-. (4.30)
"о
Z-б называется относительной длиной. Для современных
зарубежных ракет L6 = 4-f-8 и более.
Как это следует из зарубежных источников, при выборе
относительной длины и диаметров баков необходимо учитывать
следующее:
— уменьшение диаметров баков (диаметра ракеты) возможно
лишь до предела, обеспечивающего размещение двигателей;
— с уменьшением диаметра уменьшаются потери скорости
ракеты на преодоление сопротивления воздуха;
— уменьшение диаметра нижней ступени позволяет выполнить
верхние ступени в одном калибре с нижней;
— наибольшие возможные диаметры ограничиваются
условиями транспортировки ракеты различными видами транспорта.
2. Арматура топливных баков
Элементы арматуры баков включают в себя ряд устройств,
обеспечивающих нормальную эксплуатацию н работу баков при
заправке и сливе компонентов, при хранении в заправленном
состоянии, при пуске и выключении двигателя. Сюда относятся топ-
лнвозаборные устройства, заправочные, дренажные и
предохранительные клапаны, указатели уровня, трубопроводы и другие
устройства.
Топливозаборные устройства должны обеспечивать
непрерывную подачу компонентов топлива из баков в камеру
двигателя. Перерыв в подаче топлива недопустим, так как это можег
вызвать остановку двигателя и даже его взрыв. Конструкция топ-
ливозаборных устройств зависит от типа ракеты. Так, для
баллистических ракет, не предполагающих резкого маневра, топливоза-
борное устройство представляет либо простую горловину с ворон-
когасителем, либо отстойник и заборную трубу (рис. 4.20,а,б).
69
В двигательных установках маневренных ракет и двигательных
установках, работающих в условиях невесомости, ставятся более
сложные топливозаборные устройства. Для ракет, при маневре
которых возникают боковые или отрицательные инерционные силы,
наиболее целесообразными будут вращающиеся или качающиеся
заборники.
Вращающийся забориик (рис. 4.20, в)—это отрезок трубы,
шарнирно укрепленный на заборном трубопроводе и
поворачивающийся по кругу вслед за жидкостью.
1
шш
Рис. 4.20. Схемы топливозаборных устройств:
с, б — с воронкогаситслем; е — вращающийся заборник: г —
качающийся заборник; / — вороикогаситель: 2 — отстойник:
3 — трубопровод; 4 — неподвижное колено; 5 — хобот; 6 —
снльфон
Качающийся, или хоботовый, заборник (рис. 4.20, г) состоит
из неподвижного колена и подвижного хобота, соединенных
между собой сильфоном. Пластины, укрепленные на конце хобота,
заставляют заборник следовать за жидкостью при ее
колебаниях.
3. Системы наддува топливных баков
Наддуваются топливные баки вводом в пространство над
уровнем топлива в баке газообразного рабочего тела повышенного
давления. Наддув осуществляется для создания на входе в насосы
напора топлива, необходимого для устранения кавитации и для
обеспечения нормальной работы топливных насосов, компенсации
продольных сжимающих усилий в тонкостенной оболочке
топливных баков из условия рационального осевого нагружения, а также
для предотвращения смятия тонкостепных баков атмосферным
давлением при расходовании топлива.
Величина давления наддува зависит от рода топливных
компонентов и характеристик насосов и определяется зависимостью
Аз = А.* - М? + -V. (4.31)
где рвх — потребное давление компонента на входе в насос;
нх—коэффициент осевой перегрузки;
ftv—высота столба компонента топлива;
70
Р — плотность компонента топлива;
Др—потери давления в трубопроводах от бака до входа в
насос.
Давление наддува обычно находится в пределах 0,2—0,6 МН/м2
(2—6 кГ/см2).
Рабочим телом для наддува служит газ (азот, воздух, гелий,
пары компонентов топлива, парогаз н др.), который имеется в
необходимом количестве иа борту ракеты или получается в
специальных газогенераторах из жидких или твердых компонентов.
Из иностранных источников известно, что в настоящее время
нашли применение следующие системы наддува: газобаллонная,
газогенераторная, испарительная и вводом реагента в бак
(рис. 4.21).
Газобаллонная система наддува, или система наддува с газовым
аккумулятором давления (см. рис. 4.21,о), применяется чаще
других. Существуют различные варианты этой системы. Для
увеличения удельного объема газа и, следовательно, уменьшения массы
системы рационально производить подогрев газа. Наиболее часто
в качестве источника тепла используются отработанные газы
турбины.
Такая система наддува сравнительно проста и надежна, не
требует дополнительных компонентов, что упрощает эксплуатацию.
Недостатком ее является сравнительно большая масса. Данная
система получила применение для ракет небольшой дальности, где
этот недостаток не так сильно проявляется.
Необходимый запас газа вычисляется но формуле
*-т-('-^)
где k — показатель адиабаты;
рб — давление наддува;
V6 — объем топливных баков;
Ra — газовая постоянная;
Га0 — начальная температура газа в баллоне;
Рю и рж — начальное и конечное давление газа в баллоне.
Обьем баллона определится зависимостью
" Рю — Рак V '
С учетом выражения (4.33) формулу (4.32) можно представить в
виде
Mn,= Vtl?f-. (4.34)
Газогенераторная система наддува (4.21,6) отличается от
газобаллонной тем, что в этой системе рабочее тело получается в
газогенераторах при сгорании жидкого или твердого топлива.
71
(%<
Cm насоса „О'
Рис. 4.21. Принципиальные схемы систем кадчува:
с — газобаллонная- б — газогенераторная: в — испарительная; г —с впрыском
реагента в бак; /-баллон с газом: 2 - пусковые клапаны: 3 - речуктор:
4 — теплообменник: 5 - топливный бак; 6 - бак окислителя: 7 - бак горючего:
5 газогенеря.ор; «-турбина; 10 - насос: // - газорасигедетчтели;
"-магистраль н.идлва бака окислителя: 13 - форсунка впрткка: И - обратный
клацай- 15 — магистраль окислителя; 16 — регулятор расхода окислителя
72
В связи с этим различают системы наддува с жидкостным и
твердотопливным (пороховым) газогенераторами.
Жидкостные газогенераторы работают на однокомнонентном
или двухкомпонентном жидком топливе. Для этой цели могут
использоваться компоненты топлива как основного двигателя, так и
специально размещаемые на борту ракеты.
В приведенной схеме наддув бака горючего осуществляется
газом, отбираемым из газогенератора, который вырабатывает
рабочее тело для турбины. Рабочее тело для наддува бака окислителя
генерируется в отдельном газогенераторе. Оба газогенератора
работают на основных компонентах топлива, но с тон разницей, что
первый работает с большим избытком горючего, а второй — с
большим избытком окислителя.
Преимуществом рассмотренной схемы является отсутствие на
борту ракеты вспомогательных компонентов топлива.
В газогенераторах на твердом топливе, часто называемых
ПЛД, используется топливный заряд торцового горения.
Чтобы исключить попадание твердых частиц в бак, на пути
движения газа устанавливаются специальные фильтры.
Принципиально возможны газогенераторы для наддува на
гибридном топливе. Такие газогенераторы обеспечат хорошее
регулирование режима наддува.
В испарительной системе наддува (см. рис. 4.21,в) рабочее
тело получается за счет испарения компонента топлива или
сжиженного газа. Компонент отбирается на выходе из насоса, а затем
подогревается и испаряется в теплообменнике. Преимуществами
такой системы являются: простота конструкции, отсутствие
специальных емкостей для хранения рабочего тела на борту ракеты
н рациональное использование тепла отработанных
газов,^недостаток— затрудиенность точного регулирования наддува.
Система наддува путем непосредственного ввода реагента в бак
(см. рис. 4.21,г) характерна тем, что в ней рабочее тело наддува
получается в самом баке в результате взаимодействия жидкого
(твердого или газообразного) реагента с компонентом топлива.
Система будет проще, если для впрыска используется второй
компонент топлива, имеющийся иа борту. В приведенной схеме
окислитель отбирается на выходе из насоса и впрыскивается в бак
горючего. Для регулирования расхода впрыскиваемой жидкости и,
следовательно, давления наддува используется регулятор с
обратной связью. Такой способ наддува можно использовать в
двигательных установках с насосной и вытееннтелыюй системами подачи
в случае применения двухкомпонентных топлив.
4.3. СИСТЕМЫ ПОДАЧИ
Подача топлива из баков в камеру двигателя с требуемым
секундным расходом под необходимым давлением осуществляется
системами подачи двигателя, которые разделяются на две группы:
73
j насосные и вы тесн ител ь ны е. К системам подачи любою
' тина предъявляют следующие основные требования:
— простота, компактность и малая масса конструкции;
I , — равномерность подачи рабочих компонентов и легкость
управления двигателем;
— высокая экономичность и надежность работы;
| — дешевизна изготовления и удобство эксплуатации.
Зарубежные специалисты считают, что насосные системы
подачи целесообразно применять для двигателей со сравнительно
I большой тягой и большим временем работы, вытеснительные —
для двигателей со временем работы не более 15—30 сек, т. е.
двигателей малых и средних тяг.
' Рассмотрим более подробно основные схемы каждой из этих
' систем.
I ! 1. Насосные системы подачи
I
| Основным агрегатом насосной системы подачи компонентов
является турбонасоснын агрегат (ТПА). Главные его элементы —
'[ насосы, подающие компоненты под необходимым давлением
| при требуемом расходе, и турбина, которая служит приводом на-
. | сосов.
I j THA могут иметь различные компоновочные схемы. Наиболее
распространена соосная схема, в которой насосы и турбина распо-
I лагаются на одном валу-.
Насосы. В системах подачи ЖРД нашли применение центро-
1 \ б е ж и ы е и осевые (шнековые) насосы. Основными достоин-
i' ствамп. определившими применение этих видов насосов, явились:
. , обеспечение высоких давлений почачи и производительности при
.', малых размерах и массе, а также возможность работы с большой
частотой вращения при удобном соединении с валом привода
II i (обычно с турбиной).
i ' Схема центробежного насоса приведена на рис. 4.22. При
вращении рабочего колеса жидкость под действием центробежных
сил отбрасывается на периферию. Затрачиваемая на вращение
рабочего колеса работа переходит в спиральной камере в дав-
|'i ление.
Ii| Осевые насосы применяются в качестве вспомогательных,так
( называемых преднасосов, устанавливаемых на входе перед центро-
| i бежными насосами и служащих для предотвращения кавитаций.
I Рабочим колесом насоса является шнек (рис. 4.23) —осевая
лопаточная решетка, состоящая из двух-трех лопаток.
| : Для оценки насоса наиболее важными характеристиками яв-
! ляются производительность, напор, полезная мощность, частота
'! вращения (число оборотов).
j Под производительностью понимают количество жидкости,
noil даваемое насосом в 1 сек. Различают объемную Q (в м1(сек) и
11' ,
74
I
I
■I.
массовую G„ (в кг/сек) производительности, которые связаны
соотношением
Q = -
р
(4 35)
где р—плотность компонента, кг/л3.
Напором называют приращение механической энергии каждого
килограмма жидкости, проходящего через колесо. Величина
напора определяется необходимым давлением подачн /?ПОд, из
которого нужно вычесть давление жидкости на входе в насос рвх. Сле-
Рис. 4.22. Схема центробежного насоса: ■
/ — рабочее колесо; ? —спиральная камера; 3 —
всасывающий патрубок; 4 — нагнетательный патрубок
Рис. 4.23. Шнек
довательно, перепад давлений Арн, создаваемый насосом,
определится по формуле
ЬРн—Рпоя—Рч- (4-36)
Обычно напор, создаваемый насосом, выражается в метрах
столба подаваемой жидкости и обозначается через Н:
Н:
(4.37)
Полезная мощность насоса определяется работой, которую
совершает насос, поднимая жидкость GH на высоту //.
Эта мощность тем больше, чем больше секундный расход
жидкости и чем выше потребное давление жидкости за насосом, т. е.
чем выше требуемый напор. Величина мощности определяется по
формуле
(4,38)
JV"~~ 75 ~ 75
или
,VH =
Qlp„ G^p„
75
75?
(4.39)
75
Потребная мощность Л'нп, затрачиваемая турбиной на привод
насоса, будет больше полезной мощности, так как преобразование
энергии в насосах происходит с потерями. Это учитывается
коэффициентом полезного действия tjh:
111
Полный коэффициент полезного действия насоса равен
произведению трех КПД — объемного г,о, гидравлического г|Г и
механического т]М, которые характеризуют потери в насосе, т. с.
"Г„ = 'loW (4.41)
Объемный КПД rjo определяет количество жидкости,
перетекающей из полости высокого давления в полость низкого давления,
и утечек жидкости из полости высокого давления через
уплотнения. Величина tj0 зависит от конструкции насоса и давления
подачи и составляет 0,9—0,95.
Гидравлическим КПД г)Г оцениваются потери на трение
жидкости в каналах рабочего колеса, потери давления в отводящих и
подводящих устройствах. Его величина 0,7— 0,9.
Механический КПД rjM учитывает потерн мощности на трение
в узлах уплотнения, в подшипниках, потерн в результате трения
наружной поверхности колеса о жидкость. Величина tjm = 0.85-=-0,98.
Полный КПД насосов современных зарубежных ЖРД
составляет rj„ = 0,5-0,85.
Коэффициент быстроходности насоса ns—частота вращения
(число оборотов) эталонного насоса, геометрически подобного
натурному, с тем же гидравлическим н объемным КПД, но с
напором Н—\ м и полезной мощностью NH=1 л. с.
*.= /&«-£!. <4-42>
где п — частота вращения насоса.
Для современных насосов частота вращения составляет
5000—20 000 об/мин и более. Повышение частоты вращения
благоприятно сказывается на конструкции насоса. Чем выше частота
вращения, тем меньше его габариты, а следовательно, и масса.
Кроме того, повышение частоты вращения приводит к улучшению
условий работы турбины (увеличивается ее КПД и уменьшаются
размеры). Однако значительное увеличение частоты вращения
ограничивается возникновением кавитации.
Кавитация — нарушение сплошности жидкости с образованием
разрывов (пузырьков, каверн), заполненных парами этой
жидкости, возникающее в результате местного статического давления.
Процесс появления кавитации таков. Статическое давление в
потоке жидкости в соответствии с уравнением Бернулли
f = /V4-if-. (4.43)
76
При высоких скоростях движения потока w статическое
давление р может стать меньше давления ps насыщенных паров. В этом
случае возникнет кавитация. Если пузырьков очень много, то
образовавшийся пар займет все проходное сечение и расход жидкости
прекратится — произойдет срыв насоса. Если кавитация невелика,
то пузырьки пара, двигаясь по каналу колеса, попадут в область
высоких давлений, где пар конденсируется. При этом объем
пузырьков мгновенно уменьшится, произойдет гидравлический удар.
Такие удары приводят к эрозионному разрушению металла.
Рис. 4.24. Принципиальная схема активной одноступенчатой
турбины:
/ — корпус; 1 — вал: 3 — рабочее колесо; 4 — лопатка; 5 — сопло
Основными мерами борьбы с кавитацией является повышение
давления на входе в насос (наддув баков) и установка перед
рабочим колесом предпасоса, обладающего более высокими антика-
витационными свойствами.
Турбины. Турбины являются приводом топливных насосов. По
принципу работы они могут быть активными и реактивными.
В активной турбине преобразование энергии происходит только в
соплах, а в реактивной — в соплах и на лопатках рабочего колеса.
В ЖРД обычно применяют активные турбины, так как они
конструктивно проще и имеют меньшую массу па единицу
мощности.
Рассмотрим схему и особенности рабочего процесса
одноступенчатой активной турбины (рис. 4.24). Газ теплосодержанием /"о
подходит к соплам, имея давление ро и температуру Т0. В соггле
газ расширяется, при этом его скорость возрастает от с0 до с\, т.е.
происходит преобразование потенциальной энергии в кинетиче-
77
скую. С такой скоростью газ поступает на лопатки рабочего
колеса, имеющего окружную скорость и, определяемую из выражения
« = ^. (4.44)
где D — диаметр рабочего колеса, измеренный по середине высоты
лопаток;
п—частота вращения турбины.
Газ в межлопаточном канале существенно изменяет
направление движения: если скорость ct направлена под углом ai к
плоскости рабочего колеса, то скорость выхода газа с2 составляет с той
же плоскостью угол аг, отличающийся от ai почти на 90°. Скорость
с2 меньше скорости с\.
Таким образом, в межлопаточном канале меняется количество
движения газа, что свидетельствует о силовом взаимодействии его
с лопатками. Физически это взаимодействие проявляется в том, что
на вогнутой (омываемой потоком) поверхности лопатки давление
газа больше, чем на противоположной (выпуклой). Окружное
усилие, действующее в плоскости ротора, создает момент
относительно оси вала и заставляет ротор вращаться, совершая работу.
Величину усилия Ри можно определить на основании теоремы
об изменении количества движения
Рц = Grr (с, cos *j — c2cos32), (4.45)
где Git—массовый секундный расход газа.
Потребная мощность турбины NT для привода насосов
определяется необходимой суммарной мощностью этих насосов
NT = NHr + NH0. (4.46)
Если принять перепад давлений на насосах одинаковым и считать
т]но = '»]иг~'чо> то в соответствии с формулами (4.39) и (4.40)
потребная мощность определится по выражению
'Эртчн
где рт — средняя плотность топлива;
GT—секундный расход топлива, равный G0 + Gr.
Величина мощности, которую может развить турбина, зависит
от секундного расхода газа и от его кинетической энергии на
выходе из сопел турбины. Мощность определяется соотношением
NT = -^4r„, (4.48)
75-2
где Grr— расход газа, равный секундному расходу топлива в
газогенераторе;
*)т — коэффициент полезного действия турбины.
78
может осущест-
посредством ре-
Коэффициент полезного действия для одноступенчатой
активной турбины находится в пределах 0,5—0,7 и существенно зависит
от отношения н/сь Максимальное его значение достигается при
ы/с!~0,5. Это значит, что скорость истечения газа из сопла
должна быть примерно в два раза больше окружной скорости на
лопатках ротора.
Соединение турбины с топливными насосами
вляться либо путем посадки на один вал, либо
дукторной передачи.
Расположение турбины
относительно насосов может
быть центральным или
односторонним.
Газогенераторы. Для
привода турбины главным
образом применяются
газогенераторы на жидком
топливе, которые по
числу компонентов,
используемых для получения
рабочего тела,
разделяются на одно-, двух- и трех-
компонентные.
Среди однокомпонент-
ных газогенераторов
наибольшее распространение
получили перекисеводо-
родпые (ПГГ), т. е.
работающие на перекиси
водорода Н202. Обычно
применяется ее водный
раствор 80—85%-ной
концентрации.
Для ПГГ характерен
автономный запуск. Он не требует специальных пусковых
устройств, может надежно работать при весьма малом расходе
перекиси водорода. Устройство ПГГ зависит от типа катализатора,
применяемого для разложения перекиси водорода. Разложение
перекиси водорода идет с образованием Н20 и 02, которые и
подаются на лопатки турбины.
Кроме перекиси водорода, в качестве однокомпонентных топлив
могут использоваться несимметричный диметилгидразин (НДМГ),
гидразин.
В двухкомпонентных газогенераторах в качестве средств
газогенерации используются компоненты основного топлива двигателя.
Главная особенность и отличие этих газогенераторов от камеры
Двигателя состоят в том, что они работают при «смещенном»
(больше или меньше оптимального) коэффициенте избытка окис-
Рис. 4.25.
Схемы i азогенератора
тела ;ыя турбины:
одноступенчатым подводом
: двухступенчатым подводом
рабочего
топлива;
топлива
б —
79
лителя. Это вызывается необходимостью получения газа с
температурой, приемлемой для рабочих органов турбины (порядка
1000—1300° К) [8].
По способу организации процесса получения рабочего гела
различают газогенераторы с одноступенчатым и двухступенчатым
подводом компонентов топлива (рис. 4.25).
При одноступенчатом подводе все топливо подается через
головку и в камере происходит сгорание при требуемом соотношении
компонентов. Такой тип газогенератора применяют тля легконспа-
ряющпхея и легковоспламеняющихся топлнв, для зажигания и
горения которых не требуется большого количества тепла и
высокой температуры.
При двухступенчатом подводе горючее подается в камеру
частично через головку с коэффициентом избытка окислителя
а~0,4-ь0,6 и частично через специальные форсунки
(периферийный пояс). На выходе из камеры общий коэффициент избытка
окислителя газа а = 0,15—0,20.
В трехкомпонентиых газогенераторах горючее и окислитель
подаются в соотношениях, близких к оптимальному а = 0,5—0,8.
Понижение температуры газа достигается вводом в камеру
третьего компонента (обычно воды).
2. Вытеснительные системы подачи
Различают три вида вытеснительных систем (рис. 3.6):
газобаллонные и системы с пороховым и жидкостным
аккумуляторами* давления.
Газобаллонная система подачи. В качестве
рабочего тела в этих системах могут быть использованы воздух, азот,
гелий и другие газы. Выбор газа зависит от природы компонентов
топлива, температуры, растворимости в них газа и от других
факторов. Наиболее часто применяют воздух как более дешевый из
газов, всегда имеющийся в достаточном количестве. Азот
применяется в тех случаях, когда компоненты топлива могут иметь
химическое взаимодействие с воздухом п нарушать нормальные
условия подачи. Гелии применяется при вытеснении сжиженных
компонентов, находящихся при таких низких температурах, при
которых воздух и азот конденсируются и растворяются в холодной
жидкости. Преимущество гелия перед другими газами состоит в
том, что он имеет меньший молекулярный нес, а следовательно,
при одинаковых условиях и меньшую плотность.
Необходимым элементом газобаллонной системы подачи
является редуктор давления, который обеспечивает постоянное дав-
* Аккумулятор давления и газогенератор являются однозначными
терминами, определяющими один и тот же агрегат. Термин «аккумулятор давления»
применяется в тех случаях, когда газ используется для вытеснения топлиьл.
Термин «газогенератор» применяется к источникам газа, служащего рабочим
телом для турбины [6].
во
ление газа в топливных баках и, следовательно, равномерную
подачу топлива в камеру двигателя. Это необходимо для
неизменного режима работы двигательной установки.
Газобаллонная система подачи применяется на ЖРД для
стартовых ракет, ускорителей, на экспериментальных установках и как
вспомогательная в других системах подачи.
Система подачи с пороховым аккумулятором
давления (ПАД). Эта система в отличие от газобаллонной
имеет меньшие габариты и массу. Источником рабочего тела,
вырабатываемого в пороховом аккумуляторе давления, является
заряд твердого топлива (пороха). Расчет порохового аккумулятора
сводится к определению потребной поверхности горения S„ и
толщины горящего свода заряда (шашки) Ln. При этом исходят из
равенства времени горения шашки и времени работы двигателя
при условии, что секундный объем газов Vra3, поступающих в баки,
должен быть равен объемному расходу компонентов топлива VTon.
Секундный объем газов, поступающих в баки, определится
Кю = -^, (4.49)
Рг
где 5П — поверхность горения заряда;
и — скорость горения твердого топлива;
рп — плотность твердого топлива;
рг — плотность газов при давлении подачи рб.
Па основании уравнения состояния газов можно записать
Pr=-g-. (4-50)
где R и Т—газовая постоянная и температура продуктов сгорания.
Подставив выражение (4.50) в уравнение (4.49) и решив это
уравнение относительно Sn с учетом равенства Vra3=VTVn, получим
*.Н^. (4-51)
Толщина горящего свода определяется, исходя из требуемого
времени работы двигателя ттах
L* = «W (4-52)
В зависимости от характера истечения газов пороховые
аккумуляторы подразделяются на сверхкрптнческие и докритические
(рис. 4.26). В сверхкритическом ПАД отношение давления рс к
давление в камере /?0 меньше критического или равно ему. В до-
критическом ПАД эго отношение больше критического, но разность
давлений ро—ра невелика и определяется потерями в подвозящих
трубопроводах. В сверхкрнтпческом ПАД газы проходят через
Дросселирующее сопло, в докритическом — сопла нет.
4—622
81
Сверхкритнческий ПЛД обладает достаточной устойчивостью
и способен работать без регулирующих устройств.
Докритический ПАД работает при давлениях в камере
сгорания, незначительно превышающих потребное давление подачи.
Благодаря этому докритические ПАД значительно легче
сверхкритических, что и обусловило применение их в системах подачи
ЖРД-
Система подачи с
жидкостным а к к у м у-
л я т о р о м давления.
Обычно ЖАД работают на
самовоспламеняющихся компонентах.
Для обеспечения требуемой
температуры газа (порядка
800—900° С) [49] па выходе из
газогенератора прибегают к
балластировке продуктов
сгорания одним из компонентов
топлива. Иными словами,
процесс горения топлива в ЖАД
протекает при таких значениях
коэффициента избытка
окислителя, при которых
обеспечивается заданная температура
газа на выходе из
газогенератора.
При этом газогенератор
бака окислителя работает с
избытком окислителя (а = 3-нб),
а газогенератор бака горюче-
с избытком горючего (а = 0,3 н-0,4).
Необходимый секундный расход компонентов топлива в
газогенераторе для каждого бака определяется по формуле
РсУсек
Рис. 4.26. Схемы пороховых
аккумуляторов давления:
с — сверхкритнческий; б — докритический;
/ — корпус; 2 — пороховая шашка; 3 —
воспламенитель; 4 — дроссельное сопло; 5 —
тр>бопровод: 6—клапан сброса давления
ГО
G„ =
RTr„
(4.53)
где
R
Рс— давление подачи, И/м2;
^сек—обьемный секундный расход компонента из бака,
мъ/сек;
и Т— газовая постоянная и температура газов, поступающих
в бак;
%— коэффициент, учитывающий тепловые потери.
Полный запас компонентов топлива для каждого блока подачи
определяется из соотношения
M=4>,Grr-c,
(4.54)
где ^ — коэффициент, учитывающий гарантийные остатки
топлива;
т—время работы двигателя.
82
Объем бачков под компоненты газогеперацни определится из
соотношения
У6шЧ = Ь-~, (4.55)
Ft
где ф2 — коэффициент, учитывающий свободный объем в бачках;
рт — плотность компонентов газогенерации.
ЖАД обладает тем преимуществом по сравнению с ПАД, что
может обеспечить более стабильное давление в топливных баках,
следовательно, и более стабильную работу двигателя. Это
объясняется независимостью режима ЖАД от температуры
окружающего воздуха и тем, что ЖАД является саморегулирующимся
аккумулятором давления. Расход компонентов топлива зависит от
перепада давлений между бачками с компонентами газогенерации
и основными топливными баками, а следовательно, изменение
давления в топливных баках будет автоматически вызывать изменение
расхода компонентов газогенерацин.
4.4. СИСТЕМЫ УПРАВЛЕНИЯ И РЕГУЛИРОВАНИЯ
Система управления и регулирования предназначена для
осуществления запуска, вывода на заданный режим, выполнения
программы функционирования и выключения двигательной установки.
Соответственно своему назначению система управления и
регулирования включает в себя устройства запуска и вывода на режим,
устройства поддержания режима и выключения двигательной
установки.
Принципиальные схемы систем управления и регулирования
существенно зависят от схемы и конструктивных особенностей
системы подачи двигателя и определяются типом и назначением
ракеты. Однако независимо от назначения и конструктивной схемы
двигательная установка имеет два характерных режима работы:
установившийся и неустановившийся.
При установившемся режиме параметры ДУ постоянны и
равны расчетным. При неустановившемся параметры во времени
изменяются. Этот режим характерен для запуска и выключения ДУ.
Рассмотрим работу ДУ на этих режимах.
1. Запуск двигательных установок
Под запуском двигательной установки понимается совокупность
операций и связанных с ними процессов, обусловливающих
переход двигателя от состояния стартовой готовности к работе на
установившемся режиме [6]. Запуск ДУ является наиболее
ответственным режимом работы. Наибольшее количество отказов и выхода
из строя ДУ (по зарубежным данным до 86%) происходит во
время запуска.
4» 83
Система запуска должна удовлетворять ряду требований,
наиболее важными из которых являются следующие:
— при запуске в камере не должно скапливаться большое ко-
| личество компонентов топлива, иначе в момент воспламенения
произойдет резкое нарастание давления,что может привести к
разрушению камеры;
— при запуске должен соблюдаться порядок поступления
компонентов. Желательно, чтобы в камеру двигателя вначале
подавался окислитель и с некоторым запаздыванием горючее. В этом
случае уменьшается возможность накопления топлива в камере
двигателя до его воспламенения;
• — запальное устройство должно обеспечивать необходимую
энергию для воспламенения топлива.
Перед запуском ДУ ракета должна находиться в состоянии
стартовой готовности, а именно: топливные баки заправлены ком-
; I понентамн топлива, подключены управляющие и расходные
коммуникации, обеспечивающие запуск, приведены в пусковую готов-
, ность системы автоматики и регулирования, обеспечивающие ра-
1 боту двигателя в полете, задана программа работы двигательной
j , установки.
| Основными операциями запуска ДУ являются: наддув
топливных баков до заданного давления, выведение системы подачи
топлива на пусковой режим, включение и вывод па заданный режим
вспомогательных систем двигателя и воспламенение топлива в ка-
:: j мере [6].
.' В зависимости от характера выхода двигателя на режим
различают плавный, ступенчатый и пушечный запуски.
При плавном запуске воспламенение происходит при
небольшом расходе топлива и с последующим сравнительно плав-
' ным нарастанием расхода до нормы. Плавный запуск характерен
[ : для двигателей малых и средних тяг с насосной системой подачи.
Ч Суть ступенчатого запуска состоит в том, что перво-
' начальное воспламенение осуществляется при небольшом расходе
топлива, а основной расход подается в уже работающую камеру.
При пушечном запуске сразу подается полный расход
топлива [11]. Однако в чистом виде пушечный запуск не применяется.
Запуски, близкие к пушечному, возможны при вытеснительных си-
! стемах подачи.
В современных двигателях осуществляется зажигание либо
пиротехническое, либо химическое, либо с помощью электрической
J] свечи.
I Пиротехническое зажигание производится при по-
! j мощи пиропатрона, который горит в течение нескольких секунд и
! даст факел высокой температуры (порядка 2000°С). После вос-
!| нламенення подается жидкое топливо сначала с небольшим расхо-
J дом с последующим увеличением до номинального.
I ;] Химическое зажигание осуществляется применением
I самовоспламеняющихся компонентов топлива. Этот способ прост,
84
поэтому и нашел широкое распространение. Он осуществим и в
ДУ, работающих на несамовоспламсняющихся компонентах. В этом
случае в камеру двигателя сначала надо подать
самовоспламеняющиеся компоненты и только после образования в камере мощного
факела подать основные компоненты топлива.
Электрическое зажигание применяется в двигателях
небольших гяг и производится с помощью искровой пли
факельной свечи. Этот способ удобно применять при ступенчатом запуске.
2. Регулирование двигательных установок
Чтобы обеспечить постоянство параметров или изменение их по
определенному закону, осуществляется регулирование режима
работы ДУ. Основными
регулируемыми параметрами являются
тяга двигателя (или давление в
камере) и соотношение
компонентов топлива. Рассмотрим
основные способы регулирования этих
параметров.
Регулирование тяги.
При постоянном соотношении
компонентов к тяга является
функцией секундного расхода
топлива G или давления в
камере двигателя ро и давления
окружающей среды ря. ПОСКОЛЬКУ /7ц—
независимый параметр, то
изменить тягу можно, влияя на G
или ро-
При необходимости
поддержания постоянного значения тяги
задача сводится к поддержанию
постоянным G или ро. Это может
быть достигнуто изменением
числа оборотов ТНА в двигателях с
насосной системой подачи и
изменением давления в баках при вы-
теснителыюй подаче топлива.
В качестве примера на рис. 4.27
показана принципиальная схема регулирования тяги за счет
изменения числа оборотов ТПА. Входным сигналом является давление
в камере ро, которое сравнивается с давлением подачи. Разность
давлений воспринимается регулятором /, который поставлен на
линии питания газогенератора 3. В зависимости от изменения
давления ро регулятор изменяет расход компонента топлива в
газогенераторе, что ведет к изменению числа оборотов пасосов 4 и по-
85
Рис.
4.27. Принципиальная
регулирования тяги:
регулятор тяги; 2 — турбина:
зогенератор: 4 — пасены
схема
3 — га-
дачи компонентов в камеру двигателя. Соответственно изменению
подачи топлива изменяются давление в камере и тяга двигателя.
При вытееннтелыюй подаче топлива давление ро сохраняется
неизменным только за счет поддержания расчетного давления в
топливных баках мри помощи редуктора давления или клапанов
избыточного давления.
Другим из возможных способов регулирования тяги является
способ изменения величины скорости истечения х'а путем
изменения площади критического сечения сопла F,;p. Это может быть
достигнуто путем размещения в критическом сечении
профилированного тела, перемещением которого вдоль оси камеры можно
увеличивать или уменьшать площадь критического сечения.
Однако из-за усложнения конструкции и трудности охлаждения
профилированного тела такой способ регулирования в ЖРД
распространения не получил.
Регулирование соотношения компонентов.
Проанализируем влияние непостоянства соотношения компонентов
топлива к на летные характеристики ракеты. Для простоты
анализа не будем учитывать аэродинамическое сопротивление и силу
земного тяготения. В этом случае скорость ракеты в конце
активного участка траектории в соответствии с формулой Циолковского
определится
«. », = Р,*." 1" Т~ = £ Ш Т^Г • (4-5б)
Двигатель обычно работает при оптимальном соотношении
компонентов топлива котп, обеспечивающем максимальную
удельную тягу для данного топлива, и любое отклонение к от
оптимального приводит к снижению удельной тяги Руд и, следовательно, к
снижению скорости сктах-
С другой стороны, если баки ракеты заполнены компонентами
топлива в соотношении /сопт, то режим работы двигательной
установки, отличающийся от Кот в ту или иную сторону, приведет к
снижению 1'ьтах еще по двум причинам: после прекращения
работы ДУ в одном из баков окажется остаток компонента топлива,
который увеличит конечную массу ракеты, т. е. уменьшит величину
[дк; время работы двигателя сократится по сравнению с заданным
вследствие более быстрого расходования одного из компонентов,
в связи с чем уменьшится суммарный импульс /с. В итоге при
отклонении к от оптимального величина гктах может заметно
уменьшиться против ожидаемого значения. Для регулирования
соотношения компонентов необходимо знать текущее его значение в
каждый момент времени. Это может быть осуществлено замером
действительных расходов компонентов, замером уровней в баках и
замером давления компонентов перед форсунками.
Чувствительный элемент регулятора может включаться в схему различно. На
рис. 4.28, а приведена схема, в которой измеряются действительные
расходы горючего и окислителя и их соотношение сравнивается с
86
расчетным. Отклонение соотношения от расчетного вызывает
сигнал регулирования, в зависимости от которого подача горючего
(или окислителя) через дросселирующее устройство изменяется
так, чтобы соотношение расходов компонентов стало заданным.
На рис. 4.28,6 показана схема регулирования к методом
измерения уровней компонентов в баках. Датчики уровня дают сигнал
о выработке компонента в регулятор. От регулятора сигнал
поступает на дросселирующее устройство, которое и обеспечивает за-
Рис. 4.2S. Принципиальная схема регулирования
соотношения компонентов:
а — с замером действительных расходов; б — с замером
уровней компонентов в баках; / — регулятор соотношения;
2 — дросселирующее устройство: 3 — датчики уровня
данное соотношение и, следовательно, одновременное опорожнение
баков.
Регулирование соотношения компонентов путем замера
давления перед форсунками горючего и окислителя основано на том, что
при неизменности давлений перед форсунками горючего и
окислителя (рф. г и Рф.о) соотношение компонентов топлива сохраняется
постоянным.
3. Выключение двигательных установок
Выключение ДУ есть совокупность переходных процессов,
происходящих в двигателе от момента подачи команды на выключение
До полного прекращения тяги. Выключение производится
принудительным (в заданной последовательности) прекращением подачи
87
топлива в камеру двигателя, а также рабочего тела для привода
ТНЛ или вытеснения топлива.
После закрытия отсечных топливных клапанов часть топлива
останется в полостях между клапанами и форсунками (рис. 4.29).
Это топливо будет поступать в камеру и догорать в ней, создавая
тягу. В результате изменения тяги во времени после закрытия
отсечных клапанов создается импульс тяги,
который воздействует па ракету. Этот
импульс называют импульсом
последействия. Величина его определится по
зависимости
/n=j Pd-.,
(4.57)
где
-время, при котором полностью
прекращается рабочий процесс в
камере;
~к— время подачи команды па
выключение ДУ;
Р— текущее значение тяги после
команды на выключение.
Импульс последействия тяги зависит от
многих факторов: величины тяги, времени
срабатывания клапанов, объема полостей,
заполненных топливом,температуры
компонентов. А гак как эти характеристики
изменяются от двигателя к двигателю и
являются случайными величинами, то и импульс
последействия тяги изменяется в широких пределах. Вследствие
того что после команды на выключение ДУ ракета становится
неуправляемой, то разброс импульса последействия тягп становится
одной из основных причин рассеивания скорости и координат конца
активного участка траектории.
Весь импульс последействия тяги (площадь под кривой Р(-.)
на рис. 4.30) можно представить в виде суммы
Рис. 4.29. Предфорсу-
ночные полост1т:
/ — ПОЛОСТЬ ОКИСЛИТЕЛЯ;
2 — полость горючего; 3 —
отсечные клапаны
/„ = /, + /2 + /, + /4
(4.58)
Рассмотрим составляющие полного импульса последействия.
Составляющая /) возникает в результате запаздывания
газообразования в момент подачи команды на выключение ДУ, так как в
камере имеется запас топлива. Время х\ принимается равным
времени превращения, т. с. ti = 0,003^-0,008 сек.
Составляющая /2 объясняется инерционностью срабатывания
топливных клапанов. Время -.2 определяется типом клапана: для
пневмоклапанов оно составляет 0,1—0,3 сек, для пироклапапов —
0,001-0,005 сек.
88
Составляющая /3 есть результат догорания компонентов,
поступающих в камеру из полостей (охлаждающий тракт, полость
головки и т. д.). Величина времени тз зависит от физических свойств
топлива, его температуры и изменяется в широких пределах-- от
нескольких до десятков секунд.
Составляющая /4 возникает из-за наличия рабочего тела в
камере двигателя в газообразной форме. Время -ц — время нстече-
Рис. 4.30. Характер изменения силы тяги после кешанлы
на выключение
пня последней порции продуктов сгорания, которое составляет
0,0015—0,005 сек.
Основными мерами уменьшения импульса последействия тяги
являются: уменьшение тяги в момент выключения, что приведет к
уменьшению всех составляющих; уменьшение объема полостей на
участке от отсечного клапана до форсунок; продувка камеры и
полостей в момент выключения; применение клапанов с малым
временем закрытия.
Глава 5
РАКЕТНЫЕ ДВИГАТЕЛИ НА ТВЕРДОМ ТОПЛИВЕ
5.1. ПРОЦЕСС ГОРЕНИЯ ТВЕРДОГО ТОПЛИВА
Начальное воспламенение топлива (см. рис. 3.7) вызывается
тепловым импульсом специального воспламенителя. В дальнейшем
горение поддерживается самим ходом процесса. Процесс горения
баллистптпых и смесевых топлнв различен: у баллиститного
топлива при нагревании внешнего слоя заряда до температуры 100—
120° С происходит первичное разложение компонентов топлива;
при дальнейшем повышении температуры на поверхности заряда
образуется вязкий слой, с поверхности которого испаряются
летучие составляющие.
Процессы в твердой фазе, которые протекают в очень тонком
слое толщиной 10~3—10~2 см, экзотермичны и заканчиваются при
температуре, лишь немного превышающей температуру заряда.
Разница между этими температурами при умеренных давлениях
составляет примерно 200—300° С.
После того как произойдет разложение твердой фазы (жидко-
вязкий слой относится к твердой фазе), реакция в газовой фазе
будет протекать в трех зонах (рис. 5.1).
В непосредственной близости к поверхности горения находится
зона /, где происходят экзотермические реакции (зона
газификации); 2 — зона подготовки горючей смеси
(подготовительная зона). Здесь образуются активные продукты без
выделения тепла, в связи с чем в этой зоне температура остается почти
постоянной. Скорость газообразования зависит от свойств топлива,
давления и температуры продуктов горения.
Когда в зоне 2 образуется достаточная концентрация активных
продуктов, образуется зона 3 — зона горения (ее еще
называют зоной пламени или зоной свечения). В конце температура
достигает максимального значения Т0, величина которой зависит
от рода топлива.
Горение смесевых топлив меньше изучено, чем баллиститпых.
90
Термическое разложение компонентов смесевого топлива в
поверхностном слое является, вероятно, не экзотермическим, а
эндотермическим процессом. Поэтому необходимость в подводе тепла от
зоны развитого горения увеличивается.
Разложение и газификация горючего и
окислителя протекают в общем случае
с различными скоростями и зависят от
природы компонентов.
Таким образом, специфической
стадией горения твердых топлив является
процесс разложения и газификации
твердой фазы. Этот процесс
существенно зависит от интенсивности
теплопередачи к поверхности твердого
топлива. Все факторы, увеличивающие
теплопередачу, ускоряют разложение
и газификацию поверхностного слоя.
Опыт показывает, что
протяженность несветящихся зон / и 2
существенно зависит ОТ Давления " Рис. 5.1. Схема горения бал-
ь лнетитного тверюго топлива
'i + /2 = -t, (5-1)
Ра
где /,, 12—протяженность зон, м\
&—некоторая постоянная, зависящая от состава топлива;
р0 — давление в камере двигателя, МН(м2.
Из формулы следует, что увеличение давления вдвое сокращает
размер зон в восемь раз и приближает зону горения к поверхности
твердого топлива. При понижении давления в камере двигателя
фронт пламени отдаляется от поверхности твердого топлива, что
снижает поток тепла к поверхности топлива. При некотором
давлении горение вообще может прекратиться, так как реакции
разложения не могут обеспечить самоподдержание процесса. Это
давление называют порогом устойчивого горения.
Основной характеристикой, определяющей процесс горения
твердого топлива, является величина скорости горения и. В общем
случае скорость горения измеряется толщиной слоя, сгоревшего в
единицу времени и выражается в см/сек или мм/сек.
Скорость горения топлива определяется его
физико-химическими характеристиками, давлением в камере двигателя р0,
начальной температурой заряда Ти и скоростью газового потока ш,
движущегося вдоль поверхности горения. Наиболее существенное
влияние па скорость горения оказывают давление и температура
заряда. Зависимость скорости горения от давления принято
называть законом горения топлива. Для низких давлений до 3—
8 МИ/м2 (30—80 кгс!см2) зависимость скорости горения от
давления выражается законом
и = И|А>\ (5.2)
91
где и — линейная скорость горения;
«! —постоянный коэффициент, зависящий от природы топлива
и начальной температуры заряда;
р — давление в камере двигателя;
v—показатель степени, зависящий от природы топлива.
Величина показателя степени v для современных ракетных топ-
лпв меняется в пределах 0,1—0,85. Более высокие значения (0,7—
0,85) характерны для баллистнтных топлив. Для смесевых v =
= 0,1 ч-0,5, поэтому п скорость горения их в меньшей степени
зависит от давления.
При более высоких давлениях (до 300 кГ/см2) закон горения
близок к линейному и выражается-формулой
а = А-\-Вр, (5.3)
где Л и В— коэффициенты, зависящие от состава топлива,
начальной температуры заряда, давления в камере и
некоторых других параметров.
Для смесевых топлив уравнение для скорости горения выглядит
иначе:
Здесь коэффициент а играет роль параметра времени реакции, а
коэффициент b — параметра времени диффузии. В практических
расчетах чаще пользуются зависимостью (5.2), которая дает
достаточную точность как для баллистнтных, так и для смесевых
топлив.
Следует заметить, что смесевые топлива горят устойчиво при
сравнительно низких давлениях порядка 15—70 кГ/см2.
Значения скоростей горения для баллистнтных тоалнв при
давлении в камере двигателя до 100 кГ/см2 находятся в пределах
0,8—2,7 см/сек, для смесевых (при давлении в камере до
70 кГ/см2) —в пределах 0,25—1,3 см/сек.
Учет влияния начальной температуры заряда на скорость
можно вести по зависимости
",,=»,, [1 +*„('! -'*)]. (55)
где t, — температура, при которой определяется скорость горения;
t, — температура, для которой известно значение скорости
горения данного топлива;
аи температурный коэффициент, характеризующий
изменение скорости горения топлива при изменении начальной
температуры заряда па 1°. Для различных составов
твердых топлив аи составляет 0,002—0,005.
Скорость горения большинства твердых топлив увеличивается
на 0,1—0,35% при росте начальной температуры па 1°. Переход
с г51= —40°С на tu = +40° С увеличивает скорость горения па 10—
92
25%, а в отдельных случаях и больше. Приведенные на рис. 5.2
кривые скорости горения для различных значений дав тения и иа-
хорошо иллюстрируют эту зависи-
, см/сек
'.В
1.2
0.8
0Л
чалыюн температуры заряда
мость.
Эрозионное горение.
Опытные данные, приводимые в
зарубежных источниках,
показывают, что с увеличением
скорости газового потока,
параллельного поверхности горения заряда,
скорость горения и
увеличивается до значений, превышающих ее
нормальную величину,
определяемую по формулам (5.2) и (5.3).
Такой режим горения
называется эрозионным г о р е-
и и е м.
Основная причина этого
явления состоит в том, что при омыва-
нии поверхности заряда
горячими продуктами сгорания
увеличивается теплоотдача непрореагиро-
вавшему топливу. Усиленный
подвод тепла к топливу
интенсифицирует химические реакции,
благодаря чему должна
увеличиваться скорость горения.
Приближенно скорость горения при эрозионном горении можно
определить по формуле
#
' /
ч
^
^
У
Z
'■?
о и-о
120 200
Рис. 5.2. Кривые скорости горения
в зависимости от давления для
различных значений начальной
температуры заря та:
/ - ' - + 60°С;' •?-<„= + 20-^С; 3 - <н =
= - 2(РС
и = и0[1 + Ав(та-та8)],
(5.6)
где и0 — скорость горения при отсутствии обдува;
k3 — коэффициент эрозии, зависящий от скорости газового
потока и давления в камере двигателя;
w — средняя скорость газового потока, параллельного
поверхности горения заряда;
wa — максимальная скорость потока продуктов сгорания, при
которой эффект эрозии не наблюдается, так называемая
пороговая скорость.
Коэффициент эрозии для топлив с низкой температурой горения
больше, чем для топлив, имеющих высокую температуру пламени.
Для смесевых топлив эрозионный эффект проявляется
значительно слабее, чем для баллистнтных. На рис. 5.3 показана
зависимость относительного увеличения скорости горения от скорости
газового потока. Опытным путем установлено, что эрозионное
горение свойственно лишь началу горения. С целью ограничения
эффекта эрозии увеличивают проходные сечения каналов в зарядах
твердого топлива.
93
Аномальное горение. В двигателях на твердом топливе
иногда наблючается прерывистое, состоящее из нескольких
вспышек с интервалом между ними от долей секунды до нескольких
секунд, неустойчивое горение, которое называют аномальным.
Причина возникновения аномального горения заключается в
уменьшении подвода тепла к нспрореагировавшему топливу. Как только
количество подводимого тепла становится недостаточным т.ля
нормального хода реакций, горение прекращается. Горение может
возобновиться, если топливный заряд прогреется и в камере будут
находиться газы воспламенителя.
Все факторы, способствующие уменьшению подвода тепла к
непрореагировавшему топливу, увеличивают возможность
появления аномального горения.
U0i >
А
и иг
/
i
"az^
и
01 ,
О 100 200 300 ЬОО US, /н/сек
Рис. 5.3. Зависимость относительного увеличения
скерости горения от скорости газового потока
Существенное влияние на скорость горения твердых топлнв
оказывает также технология производства топлива и заряда.
Прессованные баллиститные топлива имеют обычно анизотропную
структуру. В связи с этим скорость горения таких топлив в
направлении, параллельном направлению прессования, на 10—15%
выше, чем в перпендикулярном направлении. Скорость горения
смесевых топлив зависит от среднего размера зерна окислителя.
Уменьшение среднего размера окислителя ведет к повышению
скорости горения.
5.2. КОНСТРУКЦИЯ КАМЕРЫ ДВИГАТЕЛЯ
В камере двигателя размещаются заряд твердого топлива,
воспламенитель и ряд вспомогательных элементов. Камера состоит
из корпуса, соплового блока и переднего днища.
Корпус камеры является силовым элементом, воспринимающим
внутреннее давление и тепловые напряжения, которые возникают
в результате его нагрева при горении топливного заряда. Вместе
с тем он является частью корпуса ракеты и воспринимает
нагрузки, действующие на ракету во всех случаях ее эксплуатации.
94
Конструктивно корпус обычно выполняется в виде
цилиндрической трубы. Для изготовления корпусов в настоящее время
применяются углеродистые и легированные стали, алюминиевые,
магниевые и титановые сплавы и различные стеклопластики. Корпуса
могут быть литыми, штампованными и намотанными.
Литые корпуса выполняются обычно толстостенными и заодно
с передним днищем. Они используются для стартовых двигателей
и двигателей малых тяг. Их достоинство — простота изготовления,
а недостаток — большая масса.
Штамповкой отдельных секций с последующей их сваркой
изготовляются корпуса большого диаметра. После сварки
производится дополнительная механическая обработка. По прочности
штампованные корпуса превосходят литые.
Намоткой корпуса изготовляются из стальной ленты или
стеклопластиков. Применяется лепта толщиной 0,1—0,3 лиг при
ширине до 0,5 м. Лента наматывается на специальный каркас слоями,
количество которых может достигать двадцати и более.
Стеклопластики обладают высокой удельной прочностью и
чрезвычайно низкой теплопроводностью и поэтому являются
одновременно конструкционными и термоизолирующими материалами,
удовлетворительно работая в условиях кратковременного действия
температур порядка 2000—2500° С.
Толщина стенок корпуса зависит от давления в камере, его
диаметра и прочности материала и определяется по формуле
г = ^"Ч. (5-7)
гДе Ро— Давление в камере двигателя;
d0 — диаметр камеры;
ав — предел прочности материала на растяжение;
у; —■ коэффициент запаса прочности.
Длину корпуса камеры можно определить через объем топлива:
£к = —5-^ • (5-8)
iL __ F
4 ' кд. ев
где VT— объем топлива вместе с бронировкой;
FK,. сл — площадь свободного поперечного сечения камеры.
Объем топлива VT определяется в зависимости от величины
тяги, времени работы двигателя, типа топлива и давления в
камере.
Масса корпуса камеры без учета теплоизоляции определится из
выражения
MK = T.drlKtPv, (5.9)
где рм — плотность материала корпуса.
95
Заднее днище (сопловая крышка) н сопло (или сопла)
образуют сопловой блок камеры, который служит для формирования
потока продуктов сгорания на выходе из камеры двигателя.
Как показывают расчеты, применение многосоплового блока
вместо одного сопла ведет к сокращению длины двигателя и
снижению массы соплового блока, что является несомненным
достоинством, в то же время это приводит к некоторому снижению
удельной тяги.
Диаметр критического сечения сопла определяется по
зависимости
^«0,5]/-^, (5.10)
где н0—линейная скорость горения твердого топлива при
заданных условиях в данном двигателе, см/сек;
S„ — полная поверхность горения заряда, см2;
р() — рабочее давление в камере двигателя, кГ/см2.
Диаметр выходного сечения определяется в зависимости от dKV
и выбранного уширеиия s по формуле
rf. = <P, (5.11)
где s=1.5-*-2,5 — уширеине сопла.
Условие безотрывного течения газов по соплу ограничивает
допустимый угол раствора выходного конуса сопла величиной 2а =
= 2бч-30°.
Масса соплового блока пропорциональна суммарному
импульсу и может быть определена по зависимости
;Wc«Vc. (5-12)
где #с — коэффициент пропорциональности, IIсек;
/с — суммарный импульс, кГ-сек.
Для некоторых новейших конструкций коэффициент kr
получается равным (0,9ч-1.2) • Ю-4 1/сек, а для старых типов ои
составлял 2.5-Ю-4 \1сек.
Сопла выполняются неподвижными н поворотными.
Поворотные используются для управления вектором тяги. Неподвижные
сопла могут быть регулируемыми и нерегулируемыми.
Регулируемые сопла имеют устройства для изменения площади
критического сечения.
Па изготовление сопел идут материалы с высокой
теплопроводностью и высокой температурой плавления, например молибден,
графит, сплавы на основе молибдена, вольфрама и меди.
Применение этих материалов не исключает необходимости в защитных
покрытиях. Сопла к двигателям с малым временем работы (до
5—10 сек) изготовляют из малоуглеродистых сталей, обладающих
хорошей теплопроводностью и достаточной эрозионной стойкостью.
Пример конструкции сопла показан на рис. 5.4.
96
Па переднем днище, обычно в центральной его части,
размещается воспламепителыюе устройство. По периферии переднего
днища, если двигатель имеет систему отсечки, располагаются
сопла противотягн. К переднему днищу может крепиться
следующая ступень ракеты, приборный отсек, головная часть или носовой
обтекатель.
В большинстве конструкций передние днища выполняются
отдельно от корпуса камеры двигателя. Днища имеют сферическую
или близкую к не'й форму и изготовляются из стали. Могу г
изготовляться также из многослойного стеклопластика штамповкой.
В этом случае массу дпища по сравнению со стальным .можно
уменьшить на 30—40%.
Рис. 5.4. Конструкция сопла:
1 — стальная оболочка; 2 — стсклотекстолнтовая
оболочка; 3 — теплоизоляционные покрытия; Л —
графитовый вкладыш; 5 — вольфрамовое покрытие
Масса днищ может быть определена по формуле
'WaB = (U-M,2)^4BPllH1 (5.13)
где d0 — диаметр камеры двигателя;
о,и--толщина стенки днища;
Рдн — плотность материала днища.
Для фиксации заряда в осевом направлении, обеспечения
лучшего его горения и догорания частиц в камере без выброса
имеется диафрагма, которая конструктивно входит в сопловой блок.
Наличие диафрагмы несколько снижает характеристики
двигателя, так как она является источником дополнительного
внутреннего сопротивления и дросселирует поток газов.
При прочих равных условиях двигатель, ие имеющий
диафрагмы, более перспективен. Принципиально двигатель без
диафрагмы возможен. Крепление шашки в таком двигателе можно
осуществить при помощи специальных устройств, а выброс частиц
предотвратить за счет соответствующей конструкции сопловой
крышки.
97
5.3. ТОПЛИВНЫЕ ЗАРЯДЫ И ИХ КОНСТРУКТИВНЫЕ ФОРМЫ
При установившемся режиме работы двигателя количество
сгоревшего в единицу времени топлива, а следовательно, и
образовавшихся продуктов сгорания определяется по зависимости
О —Sup, (5.14)
где G—массовый секундный расход, кг/сек;
S—поверхность горения топливного заряда, -и2;
и — скорость горения топлива, м!сек\
Р — плотность топлива, кг/м3.
Придавая заряду различную форму, можно в известных
пределах регулировать его горение.
Различают три основных вида горения твердых топлив:
— прогрессивное,
при котором горящая
поверхность постепенно
увеличивается; в этом случае
сила тяги двигателя также
будет увеличиваться за счет
возрастания секундного
расхода;
— дегрессивное,
когда горящая поверхность
постепенно уменьшается;
сила тяги также будет
уменьшаться;
— горение при п о-
с т о я н н о й горящей п о-
в е р х н о с т и. которая
обеспечивает постоянство
секундного расхода и силы тяги.
времени для различных схем
Примером прогрессивного горения может служить горение с
внутренней поверхности полого цилиндрического заряда,
бронированного с торцов и наружной поверхности.
Дегрессивный характер горения наблюдается при горении
цилиндрической шашки по наружной поверхности.
Если обеспечить горение шашки по наружной цилиндрической
поверхности (дегрессивное горение) и по внутренней
цилиндрической поверхности (прогрессивное горение), то можно получить
постоянное значение силы тягн в процессе работы двигателя, так
как горящая поверхность в этих условиях будет оставаться
примерно постоянной. В ракетных двигателях управляемых
баллистических ракет стремятся обеспечить постоянство тяги на
траектории. Для утовлетворения этого, очевидно, необходимо иметь
постоянный секундный расход или постоянную поверхность горения.
98
Рис. 5.5. График зависимости силы тяги
от времени лля различных схем горения:
горение: ? — дегрессивное го-
1 — прогрессивное
ренне; 3 — горение
при постоянной поверхности
График зависимости силы тяги от
горения представлен на рис. 5.5.
Выбирая форму и поверхность горения, можно получить требуемый
закон изменения тяги двигателя во времени.
В настоящее время применяются заряды твердого топлива
самой разнообразной конфигурации. Но, несмотря на многообразие
форм зарядов, их можно объединить в две группы:
— заряды, горящие с торца;
— заряди, горящие по боковой
поверхности.
В случае торцового горения, которое
называют еще сигаретным, наружная
поверхность заряда покрывается специальным
составом, или бронируется (рис. 5.6).
Такой заряд имеет постоянную поверхность
горения 5, что обеспечивает постоянство
секундного расхода топлива. Однако
подобные заряды характеризуются малой скоро- Рис. 5.6. Заряд, горящим
стью газообразования и поэтому могут при- с торца:
МеНЯТЬСЯ ТОЛЬКО ДЛЯ Двигателей С МаЛОЙ / — бронировка; 2-поверх-
о ^ ность горения
тяюи, рассчитываемых га большое время
горения.
Для большинства ракетных двигателей применяются заряды с
поверхностью горения, образованной каналами различной формы.
На рис. 5.7, а показаны формы топливных цилиндрических заря-
Рис. 5.7. Некоторые схемы топливных зарядов:
а — с внутренними поверхностями горения; б —с внешними и смешанными
поверхностями горения
дов, бронированных по наружной поверхности. Горение зарядов
такой формы происходит только по внутренней поверхности.
Положительным качеством этих конструктивных форм зарядов
является то, что при работе двигателя стенки камеры защищены от
воздействия высоких температур самим же топливом.
На рнс. 5.7, б изображены формы зарядов с внешними боковыми
99
и смешанными поверхностями горения. В ряде случаев
бронирование заряда производится не по всей поверхности, а по части ее
длины. Комбинир\я бронированные и небронированные участки,
можно влиять на закон выгорания топлива.
Широкое распространение в зарубежных РДТТ получили одно-
канальные заряды со щелями (пропилами) небольшой ширины
(рис. 5.8, а). Подбором числа щелей п их относительной длины
можно добиться малого изменения поверхности горения шашки.
Компенсации прогрессивности формы трубчатого бронированного
заряда можно добиться также приданием части внутреннего
канала конической формы (рис. 5.8,6).
Рис. 5.8. Топливные заряды с постоянной
поверхностью горения:
о — uie.ieuoil заряд: б — трубчатый заряд с компен-
Рис. 5.9. Схема образе
папип остатков топлива
сационныч конусом
При выборе формы топливного заряда большое значение
придается той доле топлива, которая остается в конце горения после
разрушения заряда и не принимает участия в создании силы тяги.
Доля несгоревших остатков оценивается так называемым
коэффициентом остатка, который представляет собой отношение
площади поперечного сечения топливного заряда после выгорания на
глубину emin (рис. 5-9) к площади поперечного сечения камеры
двигателя:
'/о,
Г*.
(5.15)
где г— число несгоревших остатков;
/ост — площадь поперечного сечения одного остатка;
FKX — площадь поперечного сечения камеры двигателя.
При выборе формы топливного заряда стремятся обеспечить
как можно меньшее значение коэффициента остатка. Приемлемой
величиной k0CT зарубежные специалисты считают не более 0,03.
Важной характеристикой формы заряда является степень
заполнения зарядом объема камеры двигателя, под которой
100
понимают отношение массы топлива т к обьему камеры
двигателя Ук.я:
■*=т^-. <5-16>
^к. д
Иногда степень "заполнения зарядом объема камеры
характеризуют коэффициентом заполнения поперечного сечения
камеры
1 к. д
где Su— начальная площадь поперечного сечения заряда.
Из рассмотренных форм топливных
зарядов наибольший коэффициент заполнения
поперечного сечения камеры имеет сплошной
цилиндрический заряд, где е0=1. Высокое
значение коэффициента заполнения поперечного
сечения камеры имеют также цилиндрические
заряды с каналом в виде звезды, для которых
ео = 0,7-=-0,8 и более.
Топливные заряды выполняются
монолитными, секционными, блочными и составными
(сборными).
Монолитные заряды изготовляются путем Рис- 5-10- Секцноп-
отливки либо в специальные формы, либо не- ны" Т011ЛИВНЫЙ заРяД
посредственно в камеру двигателя.
Необходимая форма канала заряда получается за счег постановки в
отливочную форму профилированных стержней, извлекаемых
после затвердевания заряда. Отливка в специальных формах
обеспечивает возможность получения точной массы (веса) заряда, а
также требуемой формы н размеров. Отливка же непосредственно
в камеру двигателя снимает сложную технологическую
операцию— снаряжение двигателя.
Недостатком монолитных зарядов является возможность
появления в них внутренних трещин, которые возникают при хранении
заряда в условиях переменных температур, а также от действия
на нею внутреннего давления и сил инерции.
Секционные заряды (рис. 5.10) изготовляют также методом
отливки.
Составные заряды собираются из готовых элементов, которые
изготовляются заранее и каждый в отдельности. Комбинации
элементов позволяют собирать топливные заряды различного размера
и формы. Стандартизованные элементы называют модулями.
Для бронирования поверхности зарядов из баллиститпого
топлива применяют ацета! или этнлцеллюлозу. а для смесевого на
полисульфндной основе-—синтетический каучук в смеси с сажей,
пластификаторами и вулканизирующими добавками.
101
5.4. ТЕПЛОВАЯ ЗАЩИТА ОСНОВНЫХ ЭЛЕМЕНТОВ КАМЕРЫ
ДВИГАТЕЛЯ
L. сек
Высокие скорости движения продуктов сгорания по камере и
соплу и их высокая температура приводят к интенсивной передаче
тепла от газа стенкам камеры двигателя. Кроме теплового
воздействия, движение твердых частиц с высокой скоростью оказывает
эрозионное воздействие на конструктивные элементы камеры
двигателя.
Допускаемое время работы двигателя без тепловой защиты
крайне мало: от нескольких десятых долей секунды до нескольких
секунд. Основными
факторами, определяющими
предельное время работы
двигателя, являются: диаметр
камеры, коэффициент
температуропроводности
материала и давление в камере
двигателя. На рис. 5.11
приведена зависимость времени
работы двигателя без
тепловой защиты от диаметра
камеры d, рабочего
давления ро и температуры
горения топлива Т0.
Жидкостное охлаждение
двигателей на твердом
топливе считается
нецелесообразным из-за технической
сложности, поэтому в них
применяется тепловая
защита (пассивная или активная), которая обеспечивается
покрытиями из специальных материалов.
Пассивная тепловая защита обеспечивается термостойкими
покрытиями из материалов, сочетающих высокую температуру
плавления с низкой температуропроводностью и достаточной
стойкостью к эрозионному воздействию. В качестве материалов для
такого рола покрытий могут применяться тугоплавкие металлы
(молибден, вольфрам, тантал, ниобий и др.) или металлокерамика
(окись алюминия А1203 и окись циркония Zr02, нитрид бора BN,
карбиды вольфрама, кремния и Др.).
Металлические покрытия лучше, чем металлокерамическне,
снижают тепловой поток, по плохо сопротивляются эрозии. При
относительно коротком времени работы тугоплавкие покрытия
могут успешно противостоять нагреву до 3000° С.
Активная тепловая защита основана на поглощении
значительной доли подводимого к поверхности тепла при разрушении и
vhocc материала покрытия. Покрытия такого тина называют аб-
102
1+00 d мм
Рис. 5.11. Зависимость предельного
времени работы двигателя без тепловой
зашиты от диаметра камеры двигателя,
рабочего давления и температуры горения
топлива:
Т„ = 2600°С: 7-0 - 2000°С
лирующнмн *. Теплоизолирующие материалы, подвергающиеся
абляции, должны иметь малую теплопроводность, высокую
теплоту абляции, обеспечивать большое газообразование и обладать
хорошей сопротивляемостью к эрозии.
Активные покрытия делятся на покрытия с поверхностным и
внутренним уносом вещества. Первая группа покрытий
объединяет сублимирующие материалы и полимеры, которые
разлагаются без образования обугленного слоя. Эти покрытия состоят из
минеральных солей (сублимирующий материал) и органической
связки. Покрытие такого тина применено в снаряде «Онест Джон».
Полимеры типа каучуковой изоляции применены в качестве
теплозащитного материала в двигателе ракеты «Минитмсн».
Ко второй группе относятся материалы, состоящие из
неразрушающегося компонента (структуроносителя) и уносимого
компонента, являющегося теплопоглотителем. Наибольшее
распространение получили армированные пластмассы (обычно на основе
фепольных, кремнийорганических и других смол с наполнителями
из кварцевого волокна и других веществ).
Толщина теплоизоляционного покрытия при абляции зависит
от времени работы двигателя и может быть определена по
зависимости
йп = «ат, (5.18)
где иа—линейная скорость абляции, т. е. скорость перемещения
аблирующей поверхности в глубь материала;
z — полное время работы двигателя.
Наиболее теплонапряженпым элементом конструкции камеры
двигателя является сопло. Для понижения теплоиапряжешюстн
деталей сопел их изготовляют из материалов с высокой
теплопроводностью и высокой температурой плавления. Широко
распространенными материалами в зарубежном ракетостроении являются
молибден, графит, сплавы на основе молибдена, вольфрама и др.
Применение этих материалов не исключает необходимости в
защитных покрытиях.
Графитовые детали сопла защищают слоем карбида кремния,
а также покрывают слоем вольфрама, наносимого методом
плазменного напыления. Такое сопло надежно работает до
температуры газов не выше 3000° С. Для вкладышей применяют пироли-
тический графит (пнрографит).
Толщина теплоизоляционных покрытий на некоторых участках
корпуса камеры двигателя, на переднем и заднем днищах, а также
в сопле может доходить до нескольких десятков миллиметров. По
мере увеличения удельной прочности материала камеры двигателя
и уменьшения расчетного давления роль теплоизоляционных по-
* Термин «абляция» обобщает совокупность различных явлений,
возникающих при нагреве, термическом разложении и последующем уносе вещества с
поверхности твердого тела, омываемого горячим газовым потоком [1].
103
крытий в весовом балансе возрастает, что вызывает необходимость
применения наиболее эффективных теплоизоляционных
материалов.
5.5. ЗАПУСК И ВЫКЛЮЧЕНИЕ ДВИГАТЕЛЕЙ
Запуск и выключение двигателя являются наиболее сложными
стадиями его работы. Основное требование к запуску двигателя
заключается в обеспечении надежного п плавного выхота на основ-
нон режим работы.
Воспламенение основного заряда
осуществляется за счет сжигания в камере
дополнительного заряда, помещаемого в
воспламенителе. Масса заряда
воспламенителя зависит от размеров заряда твердого
топлива, его конструкции, а также
первоначального свободного объема в камере.
Ориентировочно массу заряда воспламенителя
можно определить по зависимостям
f с г
(5.19)
т3= 16 |
Рис. 5.12. Конструкция
пиропатрона:
/ — токопроводящип элек-
трот: 2 — изолятор; 3 —
пороховая мякоть: 4 — гшро
лряд: S — мем^
ФОЛЬГИ); 6 — НИ
вання
ipaiui (из
накали-
Л
где 5л—начальная поверхность горения
заряда:
А—плотность заполнения камеры
топливом:
т
, = (1,3 ч-2,0) KCD,
(5.20)
где Von — свободный обьем камеры двигателя.
В качестве топлив для воспламенителей используются черный
порох, двухосновные топлива, топлива па основе перхлората
аммония и др.
Воспламенитель обычно состоит из двух частей:
пиротехнического заряда, размещаемого в герметическом корпусе, и
пиропатрона (рис. 5.12), обеспечивающего поджнг заряда. Воспламенители
устанавливаются на переднем днище, в сопле и в канале заряда.
Воспламенение топливных зарядов возможно также
посредством впрыска в камеру двигателя самовоспламеняющихся
жидкостей. Однако при таком способе резко возрастает время
задержки воспламенения и наблюдаются большие выскокп давления.
В настоящее время применяются два метода выключения
(отсечки тяги): нейтрализацией действия тяги п гашением горящего
заряда твердого топлива.
Первый метод заключается в том, что в определенный момент
времени создается тяга, имеющая направление, обратное
нормально действующей тяге. Если такая обратная тяга будет равна по
величине действующей, то результирующая тяга, действующая па
104
ракету, будет равна пулю, что равносильно выключению
двигателя.
На рис. 5.13, а изображена схема нейтрализации тяги с
помощью реверсивных сопел. Во время работы двигателя реверсивные
т
Рис. 5.13. Схемы нейтрализации тяги:
а — с помощью реверсивных сопел; о — с помощью споилеров; / — реверсивные
сопла; 2 — споилеры
сопла перекрыты и истечение продуктов сгорания происходит
только через основное сопло. Когда же надо прекратить действие
тяги на ракету, открываются реверсивные сопла,
которые и создают тягу, равную основной по
величине, по противоположную по направлению.
Действие тяги прекращается через 50 мсек, что
позволяет регулировать конечную скорость
ракеты с точностью 10 м1сек [48].
Другой разновидностью нейтрализации
действия тягн является применение специальных
спонлеров (рис. 5.13,6). При подаче команды
на споилеры они поворачиваются вокруг своей
оси и отклоняют газовую струю на 90°.
Преимущество такого способа выключения —
обеспечение плавного понижения тяги двигателя, однако
споилеры подвержены сильной эрозии и
требуют мощных силовых установок для
приведения их в действие, что связано со значительным
утяжелением ДУ.
Второй метод выключения двигателя
основан на полном прекращении горения заряда.
Прекратиib горение заряда можно двумя
способами.
На рис. 5.14 показана конструктивная схема
гашения пламени и полного прекращения
горения путем подачи на горящую поверхность жидкости. Опытным
путем установлено, что для прекращения горения заряда массой
около 1 т требуется примерно 11 л воды.
Наиболее простым и эффективным способом прекращения
горения заряда следует считать способ, основанный на быстром
снижении давления в камере двигателя. Опытным путем было обна-
105
Рис. 5.14. Схема
гашения заряда
впрыском
жидкости
ружено, что существует критическая величина скорости
понижения давления в камере (dp/dt)lir, обеспечивающая окончательное
прекращение горения. Величина (dp/dt)Kp зависит от состава
топлива и рабочего давления в камере двигателя. Так, для смесевого
топлива на основе перхлората аммония и сополимера бутадиена
(dp/dt)Kp при рабочем давлении в камере 38 та составляет
5200 атм/сек. С ростом давления в камере двигателя величина
(dp/dt)
кр также увеличивается.
Принципиальная схема устройства, обеспечивающего сброс
давления из камеры двигателя, проста. В корпусе камеры имеются
окна, расположенные по ее боковой поверхности. При работе
двигателя эти окна закрыты. В требуемый момент окна открываются
и через них стравливается давление с требуемой скоростью. Такой
способ выключения двигателя обеспечивает фиксацию скорости
ракеты с точностью до 6—7 м/сек.
Рассмотренные методы выключения двигателей на твердом
топливе, естественно, не охватывают всех существующих в настоящее
время вариантов. Возможна и комбинация различных методов.
5.6. РЕГУЛИРОВАНИЕ ТЯГИ ПО ВЕЛИЧИНЕ И НАПРАВЛЕНИЮ
1. Регулирование тяги по величине
Система регулирования величины тяги ракетного двигателя на
твердом топливе должна решать две основные задачи: изменять
Рис. 5.15. Сечение заряда, обеспечивающего две ступени
тяги, и график двухступенчатою закона изменения тяги:
а — поперечное сечение заряда: б—график двухступенчатого
закона изменения тяги; / — топливо с высокой скоростью
горения; 2— топливо с низкой скоростью горения
величину тяги во времени по определенной программе и
поддерживать необходимую величину тяги независимо от случайных
факторов, вызывающих ее изменение.
Регулирование величины тяги можно достичь соответствующим
выбором характеристик твердого топлива и геометрии заряда.
Наиболее простым законом изменения тяги во времени является
двухступенчатый закон, соответствующий стартовому и
маршевому режимам двигателя.
106
На рис. 5.15, а показан заряд, состоящий из двух различных
топлив с разными скоростями горения. Внутренний слой имеет
высокую скорость горения и обеспечивает стартовый режим
работы двигателя, периферийный — медленно горящий, обеспечивает
маршевый режим, для которого характерно большое время работы
двигателя при низкой тяге (рис. 5.15,6).
Значительно сложнее поддерживать необходимую величину
тяги независимо от случайных факторов. Основным фактором,
обусловливающим непостоянство величины тяги, является
зависимость скорости горения
топлива от начальной
температуры заряда
(изменение скорости горения
топлива приводит к
изменению секундного
расхода G, а следовательно, и
величины тяги). Для
некоторых топлив
изменение начальной
температуры топливного заряда
на 50е С изменяет тягу
па 30%.
Как следует из
формулы тяги (P — Gu;a при
Ра=Ри), величину тяги
можно регулировать,
изменяя секундный расход
топлива G или скорость
истечения газов wa.
В настоящее время
рассматриваются три
возможных метода изменения величины тяги: изменением площади
критического сечения сопла Flip, возбуждением в камере
двигателя ультразвуковых колебаний газов, вводом в камеру
жидкости.
Изменение величины FKp приводит к изменению скорости wa.
Площадь критического сечения сопла F[{p можно изменять путем
перемещения вдоль оси сопла центрального профилированного
тела (рис. 5.16,о). Перед стартом центральное тело перемещается
вдоль втулки / путем навинчивания его на винт 3. На винте
наносятся риски, определяющие величину площади критического
сечения сопла.
Центральное тело может перемещаться и автоматически
(рис. 5.16,6). В таком сопле грибок находится с одной стороны
под действием сил давления газов, а с тругой — силы пружины.
Пружина оттарирована таким образом, что при изменении
давления в камере двигателя грибок передвигается, изменяя площадь
критического сечения сопла.
107
Рис. 5.16. Регулпоуечые сопла:
а — предварительно
русмос; / — втулка;
настраиваемое; 6 — авторегули-
2 — цситрльнос тело; 3—винт;
4 — грибок: 5 — пружина
Перемещение грибка можно осуществлять принудительно с
помощью специального привода. В этом случае FKp может
изменяться в соответствии* с любым законом регулирования.
Второй метод изменения тяги основан на том, что скорость
горения твердого топлива увеличивается, если на горящую
поверхность воздействовать колебаниями высокой частоты. Меняя
характер колебаний, можно воздействовать па скорость горения, а
следовательно, па расход топлива и тягу. В качестве источника
колебаний может быть использован генератор высокой частоты,
работающий на сжатом газе.
Можно также воздействовать па величину тяги вводом в
камеру двигателя жидкости. В этом случае изменяется не только
расход газа G, но и его параметры. Недостагок метода—-наличие
на борту ракеты жидкого компонента.
Кроме рассмотренных методов регулирования величины тяги,
возможно также поддержание постоянства тяги путем обеспечения
постоянной температуры заряда за счет гермостатироваппя
двигательной установки.
2. Регулирование тяги по направлению
Ракета может выполнять маневр относительно осей
стабилизации и изменить траекторию полета только при условии, если к ней
будет приложена сила, направленная иод углом относительно
положения касательной к траектории. Составляющая этой силы,
направленная по нормали к траектории, называется управляющей
СИЛОЙ Уупр.
Управляющая сила может быть создана следующими
способами:
— газоструйными пластинчатыми пли кольцевыми рулями
(дефлекторами);
— поворотом струи газов, истекающих из камеры;
— искусственным дифферентом тяги;
— газодинамическим отклонением струп.
Рассмотрим эти методы более подробно.
Пластинчатые газоструйные рули находятся в потоке газов с
момента запуска двигателя до конпа его работы. Для управления
ракетой по тангажу, рысканию и крепу необходимо иметь две
пары рулей, расположенных в двух взаимно перпендикулярных
плоскостях. Эти рули вызывают большие потерн па сопротивление,
что приводит к потере тяги. Кроме того, они интенсивно обгорают,
чему способствуют твердые частицы, содержащиеся в продуктах
сгорания (рис. 5.17,о,б).
От этих недостатков в значительной степени свободны
кольцевые рули (дефлекторы), которые представляют собой
центральную часть сферы (шара), вырезанную симметрично днаметр\
108
(рис. 5.17,б). Это кольцо может поворачиваться в
струе, за счет чего и создастся управляющее усилие.
Дефлекторы находятся в
потоке газов только в
течение времени, необходимого
для создания управляющих
усилий, вследствие чего они
не подвержены большой
эрозии. Но при использовании
дефлекторов велики потери на
лобовое сопротивление.
Поворот струи газов может
быть осуществлен
новоротными соплами (рис. 5.18) и
верньерными двигателями.
Управляющая сила Кущ-,
возникает при повороте сопла на
некоторый угол.
Преимущество этого метода —
относительно небольшие потери тяти,
недостаток — трудность
создания герметичных уплотнений,
препятствующих утечке газа в
области разреза сопла. Для
регулирования направления
тяги настоящий метод может
быть использован только в
двигателе с несколькими
соплами или в пакете камер.
Верньерные двигатели
устанавливаются обычно в
хвостовой части ракеты рядом
с основным двигателем и
крепятся на шарнирах. Поворот
их осуществляется
специальными приводами, связанными
с системой управления
ракеты.
Суть метода
искусственного дифферента тяги
заключается в том, что два сопла
(или несколько сопел) с
регулируемой по величине тягой
располагаются симметрично
продольной оси ракеты. Если
величину тяги одного сопла увеличить на АР, а
положенного уменьшить па такую же величину,
мент, который и заставит повернуться ракету в
истекающей
Рис. 5.17. Схемы газоструГп'ых и
кольцевых рулей'
а, б — газоструйные рули; в — кольцевой
руль (дефлектор); а — оогораеыый участи
Рис.
5.18. Схема устройства и
ствия поворотного сопла
дей-
симметрпчно рас-
то возникнет мо-
заданном направ-
109
Жидкость
или газ
Скачан
уплотнении
лени». Достоинством такой системы является отсутствие
дополнительных регулирующих устройств, так как для отклонения
вектора тяги используются те же
элементы, что и для регулирования тяги
по величине.
Недостаток—необходимость установки сопел под некоторым
углом к оси ракеты, что вызывает
потери тяги.
Метод газодинамического
отклонения струи основан па том, что ввод
постороннего вещества в
сверхзвуковую часть сопла (рис. 5.19)
вызывает появление скачка уплотнения,
за которым давление бу^ет больше,
чем перед скачком. Таким образом
появится управляющая сила Yyav,
стремящаяся повернуть ракету. Как
следует из иностранных источников,
для ввода в сопло могут
использоваться газы, забираемые из основной
камеры, жидкости (фреон, азотная
кислота и др.) н воздух из
атмосферы, если ракета летит в плотных
слоях.
Необходимо заметить, что
рассмотренные методы регулирования тяги и
по величине и по направлению могут
быть применены комбинированно как на ракете в целом, так и на
отдельных ее ступенях.
Рис. 5.19. Создание
управляющей силы при вводе
жидкости или газа в сверхзвуковую
часть сопла:
а — схема впрыска: б — схема
распределения лавления
Глава 6
РАКЕТНЫЕ ТОПЛИВА
6.1. ОСНОВНЫЕ ПОНЯТИЯ. КЛАССИФИКАЦИЯ
Ракетное топливо — вещество или совокупность веществ,
являющихся источником энергии и рабочего тела для РД.
Существуют: химическое ракетное топливо,
используемое в ЖРД, РДТТ, ГРД и др.; ядерное ракетное
топливо — для ЯРД.
Все существующие РД работают на химическом топливе,
использование ядерного рзкетного топлива только разрабатывается.
Рассмотрим подробнее химическое ракетное топливо.
В зависимости от агрегатного состояния они подразделяются
на жидкие и твердые. Промежуточную группу составляют топлива
смешанного состояния, так называемые гибридные топлива.
Жидкие ракетные топлива по условиям подачи их в камеру
двигателя делят на топлива раздельной подачи и унитарные.
Топлива раздельной подачи могут быть двух- и трехкомпонент-
ные. Наиболее широкое применение нашли двухкомпонентные
топлива, у которых горючее и окислитель размещаются в отдельных
баках и в камеру двигателя подаются раздельно. Достоинства
этих топлив — возможность регулирования процесса горения,
возможность применения одного из компонентов в качестве
охлаждающей жидкости и, наконец, их сравнительная безопасность при
хранении и в обращении. Недостаток — усложнение конструкции
двигательной установки.
Двухкомпонентные топлива делят на высококипящие и низко-
кипящие. К высококипящим относятся топлива, компоненты
которых (горючее, окислитель) имеют температуру кипения выше
25° С в условиях эксплуатации.
К низкокипящим относятся компоненты топлива, для которых
температура кипения ниже 25° С.
Хранение компонентов топлива в стационарных емкостях или
в баках ракеты под небольшим давлением, допускаемым прочно-
111
стью конструкции (обычно, единицы атмосфер), позволяет
эксплуатировать некоторые компоненты топлива с невысокой
температурой кипения, например четырехокись азота, как высококипя-
щий компонент.
Унитарные топлива разделяются на два класса: топлива,
состоящие из единственного химического вещества, и топлива,
составленные из двух (иногда и большего числа) жидких веществ,
растворенных друг в друге. Существенным недостатком унитарных
топлпв является то, что при определенном составе они
взрывоопасны.
Другим признаком классификации жидких топлнв является
разделение их на самовоспламеняющиеся и нссамовоспламеняю-
щиеся (принудительного воспламенения). Топлива, которые
воспламеняются при соединении окислителя с горючим даже при
минусовых температурах, называют самовоспламеняющимися.
Твердые ракетные топлива делятся на два класса: баллистит-
пые и смсссвые.
Баллиститные топлива представляют собой твердые растворы
органических веществ, молекулы которых содержат горючие и
окислительные элементы. Эти топлива называют также порохами,
коллоидными топливами, двухосновными топлнвамн.
Смессвые твердые топлива — это механические смеси горючих
и окислительных элементов, находящихся в раздельных фазах.
В гибридных топливах один из компонентов находится в жидком
состоянии, другой — в твердом. Эти топлива сочетают в себе ряд
достоинств топлив раздельной подачи, унитарных и твердых
топлнв. Например, плотность гибридных топлив может быть выше,
чем у жидких раздельной подачи; эти топлива позволяют
получить более высокие значения удельной тяги, чем твердые
топлива.
6.2. ТРЕБОВАНИЯ К РАКЕТНЫМ ТОПЛИВАМ
Прежде всего топливо должно обеспечивать достижение
ракетой заданной дальности полета при минимальной ее массе, а
также надежную эксплуатацию ракеты в самых разнообразных
условиях. Исходя из этого, к топливам предъявляются весьма
разнообразные требования.
Основные нз них сводятся к следующим:
— топливо при сгорании в камере двигателя должно
обеспечивать получение возможно большей удельной тяги;
— топливо должно иметь возможно большую плотность
(удельный вес). Действительно, как это следует из формулы К. Э.
Циолковского
112
чем выше значение удельной тяги, тем при прочих равных
условиях больше скорость ракеты в конце работы двигателя, а
следовательно, и больше дальность ее полета.
Удельная гяга в зависимости от типа топлива, степени
расширения газов в сопле и совершенства организации процесса в
камере двигателя определяется по формуле
/^=1,41) Д/№ (G-2)
где Ни — теплопроизводнтелыюсть топлива, дж/кг;
г1Т—термический КПД, учитывающий ту долю тепла,
которая преобразуется в кинетическую энергию газов на
выходе из сопла:
г(1—КПД, учитывающий потери па диссоциацию.
Большие величины удельной тяги, как это видно из
приведенной формулы, будут достигнуты, во-первых, при использовании
топлива с большой теплопроизводитслыюстью Йи, во-вторых, при
хорошей организации процесса расширения (характеризуется
коэффициентом г,т) и, наконец, при снижении потерь на
диссоциацию продуктов сгорания.
Более высокая плотность топлива при данной его массе
позволяет уменьшить габариты и массу топливных баков (камеры
двигателя для РДТТ) и увеличить коэффициент заполнения ракеты
топливом jik, что при прочих равных условиях обеспечит ракете
большую дальность полета.
Таким образом, основные требования к топливам можно
сформулировать в следующем виде: большой запас химической
энергии, хорошие термодинамические свойства продуктов сгорания и
высокая плотность.
Другими наиболее важными требованиями, выполнение
которых диктуется необходимостью упрощения конструкции ДУ и
условиями ее эксплуатации, считаются следующие:
1. Хорошие охлаждающие свойства хотя бы одного из
компонентов, т. е. достаточная теплоиоспршшчивость:
Q = c(TK)lu-Ta), (6.3)
где с—теплоемкость компонента;
Ткт— температура кипения компонента при давлении в
рубашке охлаждения;
Тн— температура компонента при входе в рубашку
охлаждения.
2. Возможно меньшая в широком интервале температур
вязкость компонентов при минимальном изменении вязкости (по
возможности одинаковое для обоих компонентов) с изменением
температуры.
3. Легкое и быстрое сгорание в камере двигателя, не
приводящее к взрывному горению — детонации.
5-622 ИЗ
4. Малый период задержки воспламенения, т. е. легкое и
безотказное воспламенение. Для самовоспламеняющихся топлиь период
задержки воспламенения не должен превышать 0,02—0,03 сек.
5. Пеагрессивпость компонентов по отношению к
конструкционным материалам.
6. Химическая и физическая стойкость компонентов топлива,
обеспечивающая длительное их храпение.
7. Нечувствительность к механическим и тепловым
воздействиям, достаточная для безопасного обращения при запуске
двигателя.
8. Нетоксичность.
9. Температура застывания компонентов жидкого топлива не
выше —40 -. 60° С, а температура кипения не ниже
+ 80-V-+100° С.
К твердым топлнвам предъявляются, кроме того, специфичные
требования, а именно:
1. Устойчивость горения при минимально возможном давлении.
2. Высокая механическая прочность заряда, исключающая его
разрушение под воздействием давления в камере двигателя и
инерционных нагрузок.
3. Постоянство скорости горения твердого топлива в широком
температурном диапазоне. Это обеспечит постоянство значении
основных параметров двигательной установки при различных
температурах пуска.
4. Достаточная эластичность твердого топлива, позволяющая
исключить появление в нем трещин при расширении или сжатии
стенок камеры двигателя от'нзменепия температуры.
Кроме перечисленных требовании, необходимо отметить и
такие, как небольшая стоимость топлива, несложная, безопасная и
экономичная технология изготовления топлива.
В настоящее время не существует такого топлива, которое
полностью удовлетворяло бы всем требованиям. Поэтому из большого
числа химических соединении выбираются такие комбинации,
которые при заданных условиях работы двигателя способны дать
наилучшие результаты.
6.3. ЖИДКИЕ РАКЕТНЫЕ ТОПЛИВА
1. Соотношение компонентов топлива
Для полного сгорания данного количества горючего требуется
теоретически вполне определенное наименьшее количество
окислителя. Следовательно, между компонентами топлива,
поступающими в камеру двигателя, должно устанавливаться определенное
соотношение.
Сгехнометрическим называется такое соотношение между
компонентами, при котором в топливе имеется количество окислителя,
минимально необходимое для полного окисления горючего. Это
114
соотношение характеризуется стехиомстрическим коэффициентом
к0, который показывает, сколько килограммов окислителя
требуется для полного окисления 1 кг горючего.
На практике в камеру двигателя компоненты топлива подаются
в ином соотношении, чем это требуется для теоретически полного
сгорания. Количество окислителя,
действительно подаваемого в
камеру двигателя на 1 кг горючего,
называется действительным
соотношением компонентов топлива и
характеризуется коэффициентом к,
который определяется из выражения
Й=-
(6-4)
гдеС?0-
горю-
секундныи расход
окислителя, кг/сек;
GT — секу ид пый р асход
чего, кг/сек.
Отношение действительного
соотношения компонентов топлива к
к стехиометрнческому /с0
называется коэффициентом избытка
окислителя и обозначается я:
к
Kq
(6.5)
Ракетные двигатели, как
правило, работают на топливах при
коэффициенте избытка окислителя,
меньшем единицы. Это объясняется
тем, что при «<1 двигатель
развивает наибольшую удельную тягу
(рис. 6.1). Увеличение удельной
тяги происходит вследствие
следующих причин.
Во-первых, при коэффициенте
избытка окислителя, меньшем
единицы, уменьшаются потери тепла
на диссоциацию продуктов сгорания
зуются продукты сгорания с малым
Рис. П.1. Зависимосль
теоретической удельной тяги некоторых
топлнв от а при различных
давлениях в камере двигателя:
J — керосин + 90%-ная азотная
кислота ; 2 — керосин + жидкий кислород
Во-вторых, при «<1 обра-
молекулярным весом
(газообразный водород и другие легкие газы), а следовательно, растет
газовая'постоянная R. И, наконец, при а<1 улучшаются условия
для смешения компонентов топлива, так как чем больше
отличается состав топливной смеси от стехиометрического, тем легче
осуществить перемешивание п получить стехиометрическнй состав
смеси для компонента, находящегося в недостатке. В результате
увеличивается полнота сгорания и, следовательно, повышается
Б*
115
удельное тепловыделение топлива, что в совокупности с
предыдущими факторами увеличивает удельную тягу двигателя.
По при сжигании горючего с недостатком окислителя в
продуктах сгорания остается несгоревшнй компонент и теряется
непроизводительно часть горючего. Поэтому уменьшение окислителя
в топливе относительно стехиометрического имеет рациональный
предел. В современных двигателях оптимальное значение
коэффициента яопт находится в пределах 0,7—0,9.
2. Окислители
Применяемые в настоящее время окислители разделяются на
следующие группы:
— аз от но кислот н ые: азотная кислота и се смеси с
окислами азота;
— кислородные: жидкий кислород и его соединения;
— ф т о р н ы е: фтор, фториды кислорода и хлора, окись фтора
и другие его соединения.
А'з от но кислотные окислители. Основным
представителем этой группы является азотная кислота HN03, Химически
чистая азотная кислота — бесцветная ядовитая гигроскопическая
жидкость, дымящаяся на воздухе, с сильно раздражающим
запахом.
Основные данные азотной кислоты 100%-ной концентрации
Плотность при температуре 15 -f- 20е С. . . . 1,51-103 кг/м3
Температура кипения +86° С
Температура замерзания —41,6е С
Чистая азотная кислота содержит 76% кислорода, что делает
ее мощным окислителем. При нагревании выше 1000° С она
разлагается по уравнению
2HNO., — Н20 + N3 + 2,50.,.
Окислительное действие ее основано на использовании
выделяющегося при разложении кислорода. Непосредственно па
окисление горючего идет 63,5% веса химически чистой азотной
кислоты.
Однако HN03 100%-нон концентрации химически неустойчива
и довольно быстро разлагается даже при комнатной температуре.
По этой причине применение ее в качестве окислителя затруднено.
В ракетных топливах используется техническая азотная
кислота, которая содержит 2-=-4% воды, а также окислы азота,
придающие ей окраску от желтой до красно-бурой. Основными
положительными свойствами азотной кислоты являются сравнительно
116
большая плотность, высокая температура кипения н приемлемая
температура замерзания.
Азотная кислота обладает и недостатками. Пары ее ядовиты,
а при попадании па кожу она вызывает тяжелые ожоги. Работа
с ней требует принятия мер предосторожности.
Азотная кислота весьма агрессивна по отношению к металлам
н другим конструкционным материалам.
Азогная кислота легко испаряется и имеет склонность к
самопроизвольному разложению, которое идет по уравнению
2HN03 -* К205 Н- Н20 -* 2К02 + Н20 -f- 0,5O2
с образованием воды, окиси азота и газообразного кислорода. Это
обстоятельство вызывает необходимость в емкостях для хранения
делать дыхательные клапаны или периодически стравливать из
них давление.
Для улучшения свойств азотной кислоты как окислителя к иен
добавляются различные присадки. Они могут вводиться для
повышения теплотворной способности топлива, повышения ее
плотности, уменьшения агрессивности, повышения активности по
отношению к горючим и, наконец, для снижения температуры замерзания.
В качестве присадок применяют кислородные соединения азота,
например -\г04 — четырехокись и N02 — двуокись азота, а также
серную кислоту и другие вещества.
Четырехокись азота \204 — богатый кислородом окисел,
применение которого в качестве окислителя затруднено из-за высокой
температуры замерзания (—11,2° С) и низкой температуры
кипения (+ 21° С). Введение четырехокисп в азотную кислоту
увеличивает теплотворную способность топлива, понижает температуру
замерзания, повышает стабильность при хранении (по сравнении
с азотной кислотой), плотность смеси получается больше, чем
каждого из составляющих компонентов.
Вместе с тем введение четырехокисп азота снижает
температуру кипения смеси по сравнению с азотной кислотой, что
ухудшает эксплуатационные свойства окислителя. В практике нашли
применение смеси, в которых содержание окислов азота находится
в пределах 15—30%. Для снижения коррозионной активности
азотнокислых окислителей в них ввочят ингибирующне добавки.
Такими добавками могут быть серная, ортофосфорная и плавиковая
кислоты, под и другие вещества.
Кроме азотной кислоты и четырехокисп азота, из азотных
соединений кислорода в качестве окислителя может быть
использован тетранитрометан С(N02)4, содержащий 65,3%) активного
кислорода. Это тяжелая (плотность 1,65- 103 кг/м3), подвижная,
прозрачная жидкость зеленовато-желтого цвета с резким
специфичным запахом.
Препятствием к широкому применению тстранптрометана в
ракетной технике являются его высокая температура замерзания
(+13,8° С) и взрывоопасность.
117
Кислородные окислители. Основным представителем
этой группы окислителей является жидкий кислород. Он
представляет собой прозрачную, голубоватую, легко подвижную жнткость.
Температура кипения при нормальном давлении —183°С,
температура затвердевания —218° С, плотность 1,14 -10я кг/м3. Обьсм
жидкого кислорода б 790 раз меньше, чем обьем
газообразного.
Жидкий кислород целиком участвует в процессе горения,
вследствие этого топлива па основе жидкого кислорода по сравнению с
топливами на основе других окислителей при одном и том же
горючем в энергетическом отношении более эффективны.
Главные эксплуатационные неудобства при применении
жидкого кислорода состоят в том, что он имеет очень низкую
температуру кипения, непрерывно улетучивается, его трудно хранить и
невозможно заблаговременно загравлять в ракету.
Чистый кислород пи в жидком, ни в газообразном состоянии
не взрывается. Одначо при взаимодействии жидкого кислорода с
органическими веществами образуются взрывчатые смеси,
чрезвычайно чувствительные к различным внешним воздействиям.
Другим представителем этой группы окислителей является
перекись водорода Н202. Топлива на основе перекиси водорода имеют
удельную тягу, близкую к топливам на основе азотных
окислителей. В связи с низкими эксплуатационными качествами
(недостаточная стойкость, токсичность и др.) она как окислитель не нашла
широкого применения (чаще применяется в качестве топлива для
получения рабочего тела турбины).
Фторные окислители. К этой группе относятся
элементарный фтор F2, мопоокись фтора OF2, трифторнд хлора C1F3 и
некоторые другие соединения фтора.
Жидкий фтор F2 представляет собой желтую жидкость. Он
беспрерывно кипит, выделяя чрезвычайно ядовитые пары. Фтор
практически соединяется со всеми известными горючими, образуя
самовоспламеняющиеся топлива. Топливо на основе фтора имеет
более высокие энергетические показатели, чем кислородное, только
при условии, что горючим компонентом является вещество,
богатое водородом. Поэтому жидкий фтор так же, как и другие фтор-
пые окислители, считается целесообразным применять с такими
горючими, как аммиак, гидразин, жидкий водород.
Моноокись фтора (фтористый кислород) OF2 — это наиболее
стабильное соединение кислорода с фтором. В жидком
состоянии— ярко-желтая жидкость. Эффективность топлив на основе
моноокиси фтора выше кислородных, но ниже фторных,
производство же ее сложнее, чем элементарного фтора. По токсичности
моноокись фтора не уступает фтору, однако высокая температура
кипения (по сравнению с кислородом) позволяет хранить
мопоокись фтора при условии охлаждения жидким кислородом иод
небольшим давлением в герметично закрытых емкостях, что
существенно облегчает его эксплуатацию и транспортировку.
118
Трифторнд хлора C1F3 представляет собой слегка зеленоватую
тяжелую, подвижную жидкость. Очень активный окислитель.
Многие органические вещества при контакте с ним воспламеняются.
Взаимодействие его с водой сопровождается взрывом. Токсичность
приравнивается к элементарному фтору.
3. Горючие
В качестве горючих нашли применение в основном сложные
вещества, в которых горючими элементами являются углерод и
водород. По своему составу эти вещества разделяются па четыре
группы: углеводородные, кислородоуглеводородные, азотноугле-
водородпые и азотноводородные.
Углеводородные горючие. Эти горючие представляют
собой продукты перегонки нефти, поэтому их иногда называют
нефтяными горючими.
Наибольшее распространение из этой группы получил керосин.
Как горючее он имеет существенные преимущества перед многими
другими углеводородами благодаря своей доступности н
дешевизне. Он может применяться в качестве горючего с окислителями
как на основе азотной кислоты, так и с жидким кислородом.
Керосин обладает хорошими эксплуатационными качествами, перевозка
и хранение его не вызывают трудностей.
Недостатками горючих нефтяного происхождения является
непостоянство химического состава, вследствие чего плотность,
вязкость и другие показатели меняются от партии к партии, что
оказывает влияние на стабильность работы двигателя.
Кислородоуглеводородные горючие. К ним
относятся спирты: метиловый, этиловый п изопроппловый. Спирты
менее эффективны, чем нефтяные горючие.
В настоящее время спирты почти полностью вытеснены из
ракетной техники более эффективными горючими.
Азотноуглеводородные горючие. К этой группе
относятся алифатические и ароматические амины. Алифатические
амины (диэтиламин, триэтиламин, этнлендиамин) представляют
собой подвижные, прозрачные, бесцветные или слегка желтоватые
жидкости, хорошо растворимые в воте.
К ароматическим аминам относятся анилин, толундпиы и кси-
лидины — красновато-коричневого цвета жидкости, плохо
растворимые в воде и хорошо смешивающиеся со спиртами и
алифатическими аминами.
Характерной особенностью аминов является бурное
взаимодействие с азотной кислотой и четырехокисью азота, приводящее, как
правило, к самовоспламенению.
Для улучшения физико-химических и пусковых характеристик
топлив применяются смеси из двух компонентов и более.
Наибольшее распространение получило горючее, состоящее из 50% трн-
этиламииа и 50% ксилнднна, носящее название «тонка-250». Это
119
горючее может применяться в качестве пускового горючего, но
может использоваться и в качестве основного, особенно в
двигателях, где важна стабильность горения.
Амины являются высокотокенчпыми продуктами, а поэтому при
работе с ними необходимо соблюдать меры предосторожности.
Азотноводородные горючие. Наибольшего внимания
пз этой группы горючих заслуживают гидразин п диметплгидра-
зии несимметричный.
Гидразин Ы2П4 получается из аммиака п представляет собой
при нормальных условиях бесцветную, дымящуюся на воздухе
жидкость с характерным аммиачным запахом. Гидразин является
наиболее эффективным и универсальным горючим, поскольку он
обеспечивает повышение удельной тяги в сочетании почти со всеми
окислителями.
Гидразин коррозионно активен, токсичен.
Несимметричный диметилгидразин (СНзЬ^ГЬ (НДМГ)
является производным гидразина; это бесцветная, прозрачная,
гигроскопическая жидкость. Особенность НДМГ—высокая
активность в реакциях с кислородом воздуха. Несимметричный
диметилгидразин обладает высокой термической стойкостью (разлагается
при температуре 700—800°С). В отличие от гидразина ни в
жидком состоянии, ни его пары не взрываются от ударов, очна ко он
легко воспламеняется на воздухе (температура воспламенения
1°С), поэтому он пожароопасен. НДМГ очень токсичен.
Основные характеристики гидразина и НДМГ
Гнтразнн НДМГ
Плотность при 20° С, кг!м3 1,01-10* 0,795-Ю3
Температура замерзания, °С
Температура кипения. ГС
Тснлспронзнодительность с кислородом, кджмг .
4. Основные характеристики топлив раздельной подачи
Для каждого горючего можно подобрать окислитель,
обеспечивающий наибольшую эффективность образуемого топлива. В
качестве примера в таблице приведены основные характеристики
некоторых топлив при /?о/ра = 40/1 при оптимальных значениях а.
2.0
113
8150
-58
63
9200
Окислитель
НХ03 98о/0-11ая
02 (жидкий)
Горючее
Керосин
Тоика-250
Керосин
НДМГ
аопт
0,9
0,9
0,7
0,8
*о
5.50
4.6
3,37
2.13
/"о. °К
ЗОоо
3045
3600
3500
Н-сек
кг
2250
2400
2750
2S00
Р.
1.36
1.32
1,00
1.02
120
Как следует пз таблицы, топлива на основе жидкого кислорода
имеют более высокую удельную тягу, чем топлива па основе азот-
нон кислоты. Однако низкая температура кипения жидкого
кислорода сдерживает его применение для ракет, требующих
заблаговременной заправки.
5. Унитарные топлива
В настоящее время унитарные топлива применяются лишь как
вспомогательные источники энергии для привода турбин, для
систем стабилизации полета, в качестве бортовых источников
энергии. Эти топлива не находят применения в качестве основных
вследствие того, что они не могут обеспечить приемлемых
значений удельных тяг.
Наибочьшес распространение в качестве вспомогательного
топлива получила перекись водорода. Кроме перекиси водорода могут
быть использованы нитрометап, окись этилена.
Перекись водорода. Наибольшее применение нашли
водные растворы перекиси водорода 80—90% концентрации.
Положительным свойством перекиси водорода является относительно
высокая. плотность, которая для 80 % -поп концентрации равна
1,35 - 103 кг/м3. При разложении перекиси получается парогаз
(смесь паров воды и кислорода) с температурой 450—500° С. Для
интенсификации разложения перекиси водорода применяют
катализаторы. Скорость разложения увеличивается с повышением
температуры перекиси водорода.
Органические вещества при контактировании с перекисью
водорода воспламеняются.
Хранение и транспортировка перекиси водорода производятся
в емкостях из чистого алюминия. Эти емкости должны
оборудоваться дренажными фильтрами.
6.4. ТВЕРДЫЕ РАКЕТНЫЕ ТОПЛИВА
Твердые ракетные топлива состоят из веществ, содержащих
атомы горючих и окисляющих элементов, и представляют собой
твердые унитарные топлива. Энергетические показатели твердых
топлив в настоящее время еще несколько- уступают жидким, но
благодаря физико-химическим свойствам и эксплуатационным
качествам они нашли широкое применение в ракетной технике.
Твердые топлива разделяются па два основных класса: бал-
лис т и т и ы е, или г о м о г е н и ы е, и с м е с е в ы е, или
гетерогенные.
Рассмотрим более подробно эти топлива.
121
1. Баллиститные топлива
Баллнститные топлива представляют собой растворы нитратов
целлюлозы в трудполетучих растворителях. Нитраты целлюлозы,
или нитроклетчатка, получаются обработкой целлюлозы смесью
азотной н серной кислот.
Они легко воспламеняются от открытого пламени и даже
небольшой искры. Горение происходит за счет активного кислорода,
содержащегося в них, н не требует подвода кислорода извне.
Нитраты целлюлозы являются твердыми волокнистыми веществами с
плотностью (1,66-5-1,67) • 103 кг/м3.
i По запасу энергии нитраты целлюлозы непосредственно могли
/ бы быть использованы в качестве топлива, так как содержат в
I себе горючие элементы и активный кислород. Однако из них нельзя
изготовить сплошные закономерно горящие заряды. Даже сильно
спрессованные пташки имеют поры, и горение нх происходит со
взрывом.
^ Чтобы можно было изготовить сплошные, механически прочные
заряды, нитраты целлюлозы обрабатывают растворителями н
пластификаторами.
Основными растворителями, которые широко применяются в
L производстве баллистптных топлив, являются нитроглицерин и
нитродигликоль.
Нитроглицерин по внешнему виду представляет собой
маслянистую бесцветную или слегка желтоватую жидкость. Это одно из
наиболее мощных взрывчатых веществ. По запасу энергии он
превосходит нитраты целлюлозы и является очень важной составной
частью топлива.
j Нитродигликоль является также взрывчатым веществом, по
1 менее чувствителен к механическим воздействиям, чем нптрогли-
\ церии.
При большом содержании нитроглицерина или питродиглпколя
ташки топлива получаются механически непрочными, склонными
к разрушению при низких и повышенных температурах,
баллистически недостаточно стабильными и с высокими эрозийными
свойствами. Поэтому в баллиститные топлива вводят пластификаторы,
регулирующие энергетические свойства топлив. Такими
пластификаторами являются днпитротолуол и дибутилфталат.
Для химической стойкости топлива в него добавляют
стабилизаторы (чаще всего цептралит).
В состав твердого топлива включаются также технологические
добавки: мел, который уменьшает внутреннее трение топливной
массы; вазелин и трансформаторное масло, которые снижают
давление при прессовании и улучшают процесс формования.
Г Баллиститные топлива имеют плотность в пределах
(1,54+1,62) • 103 кг/м3, температуру вспышки 180—220°С. Исполь-
J зуя их, можно достичь удельной тяги 2000—2400 ——— [27].
Горят они устойчиво при сравнительно высоких давлениях
(60 ата и выше), что приводит к утяжелению двигательной
установки.
В настоящее время, судя по зарубежным источникам, считается,
что баллиститные топлива достигли своего энергетическою
предела, исчерпали резервы дальнейшего совершенствования и, по •
всей вероятности, будут находить применение лишь в ракетах
тактического назначения, реактивных снарядах и для
вспомогательных целей. ■ __
2. Смесевые топлива
Смесевые твердые топлива представляют собой
механические смеси минеральных окислителей п горючих связующих
веществ.
В качестве окислителей таких топлив используются твердые в
нормальных условиях неорганические соли, содержащие большой
процент свободного кислорода. Обычно это соли хлорной и
азотной кислот: перхлорат аммония ХП4СЮ4, перхлорат калия KClOi,
нитрат аммония XH1NO3 и некоторые другие.
Наиболее распространенным окислителем в настоящее время
является перхлорат аммония.
Перхлорат аммония — белый кристаллический порошок;
чувствителен к удару н трению. В продуктах горения находится
хлористый водород НС1 — агрессивный ц ядовитый газ. Топлива на
основе перхлората аммония характеризуются высокой удельной
тягой 2200 + 2500 -^£ ( 220—250 -^-f— )
кг v кг /
В качестве связующих веществ в этих топлипах обычно
применяются высокомолекулярные синтетические соединения типа
каучука и пластмасс (например, полисульфнды пли тиоколы,
полиуретаны, полибутаднены п др.), а также тяжелые углеводороды
(например, битумы).
В смесевых топливах относительное содержание окислителя и
горючего можно изменять в широких пределах. Однако и для них
существуют ограничения, препятствующие достижению
оптимального соотношения горючих и окислительных элементов. Так при
значительном содержании окислителя, вследствие малой доли
горючего связующего, ухудшаются механические свойства
зарядов.
Смесевые топлива без добавок обеспечивают удельные тяги
того же порядка, что и баллиститные. В последнее время в
твердые топлива с целью повышения удельной тяги стали вводить
легкие металлы — алюминий, магнии, цирконий, бор и чругне.
Созданные смесевые топлива обеспечивают удельную тягу около
2500-^^ (250-^L).
кг \ кг I
123
Примерный состав смесевых топлив
Окислители (перхлорат аммония, перхлорат калия и др.) . . 60—80°,'0
Горючие связующие (каучуки, полиуретаны) 15—25".'()
Алюминий (порошкообразный) 10—200/0
Катализаторы и другие специальные добавки До 5%
Смсссвые топлива обладают хорошими упругими свойствами,
хорошо сопротивляются образованию трещин под действием
напряжении от термического расширения и сжатия.
Смесевые топлива устойчиво горят при сравнительно невысоких
давлениях (15—20 ата). Важнейшее преимущество смесевых
топлив— хорошие литьевые качества, поэтому блоки смесевых топлив
изготовляются огливкой. В настоящее время (по сообщениям
зарубежной печати) удалось получить заряды массой в несколько
тонн.
Ряд достоинств смесевых топлив являются потенциальными и
для превращения их в действительность требуются затраты
времени и усилий.
6.5. ПЕРСПЕКТИВНЫЕ РАКЕТНЫЕ ТОПЛИВА
Дальнейшее совершенствование ракетных двигателей —
повышение их эффективности и экономичности — требует разработки и
новых топлив, обладающих более высокими энергетическими
характеристиками. Рассмотрим некоторые из возможных путей
улучшения основных показателей ракетных топлив.
Перспективными окислителями для жидких топлив по
публикациям за рубежом в настоящее время считаются окислители на
основе жидкого фтора и его соединений, а перспективными
горючими— соединения бора с водородом.
Топливо «фтор + водород» является наиболее эффективным из
всех известных топлив, компоненты которых являются химически
устойчивыми веществами. Это топливо рассматривается как
естественное развитие и улучшение уже освоенного топлива «жидкий
кислород-|-жидкий водород». Удельная тяга (рш'ра = 70/[, я —
= 0,8) равна 3970 JL^l..
' ' кг
Комбинация «жидкий фтор +" гидразин» имеет высокие
значения удельной тяги и плотности. Специальные добавки, не
влияющие на энергетику, устраняют опасность разложения и взрыва
гидразина при использовании его для охлаждения. Удельная тяга
этой пары составляет Зэ70 .
1 кг
Комбинация «моноокись фтора 4- керосин» обеспечивает
получение удельной тяги более 3000 ^— .
Наибольший интерес как горючее представляет пентаборап
124
В.3Н9. Имеются сообщения об испытаниях в США двигателя на
пентаборапе и окислителе—концентрированной перекиси
водорода. Удельная тига этой пары около 3000 И'ССЕ f 309 .кГ'сек )
1 кг v кг }
Топливо «четырехокпсь азота + пеитаборан» имеет несколько
меньшее значение удельной тяги, по более высокую плотность п
пригодно для применения в ракетах с предварительной заправкой.
Повышение энергетических характеристик можно обеспечить
путем применения в качестве добавок в жидкие топлива легких
металлов, например алюминия, бериллия, лития, магния п др.
Одним из путей повышения энергетических возможностей
твердых топлив, и в частности смесевых, является введение в них
добавок, содержащих бериллий, гидриды металлов, металлоорганн-
ческне соединения.
Металлы повышают также и плотность (предполагается
довести до 2-Ю3 кг/м3). Однако для изготовления таких добавок
требуются порошки с диаметром от 1 до 0,1 мк.
В разработке находятся твердые топлива на основе перхлората
аммония с присадкой бериллия, которые смогут обеспечить
удельную тягу порядка 2500—2600 —^-. Изучаются возможности по-
вышения удельной тяги до 2700—2750 —'^- путем присадки к
кг -
твердым топлнвам гидрида алюминия и до 2900—2950 Н'сек
путем присадки гидрида бериллия. По мнению зарубежных сно
циалпетов, могут быть созданы твердые топлива с удельной тягой
о л t\t\ Н- сок
до 3400 .
кг
Глава 7
НЕКОТОРЫЕ ВОПРОСЫ ТЕОРИИ ПОЛЕТА РАКЕТ
7.1. ОБЩИЕ ПОЛОЖЕНИЯ
Теория полета ракет изучает их движение по траектории в
предположении, что известны зависимость действующих на ракету сил
от параметров ее движения и зависимости, описывающие работу
ее системы управления. Траектория ракеты — геометрическое
место точек ее центра масс, движение которого рассматривается как
движение материальной точки с массой, равной массе ракеты, под
действием всей системы сил, приложенных к ракете. Как тело
конечных размеров ракета в полете движется (вращается) и
вокруг центра масс под действием моментов сил, точки приложения
которых не совпадают с центром масс.
Основными задачами теории полета ракет являются:
а) расчет траектории при известных исходных данных,
б) отыскание оптимальных режимов движения ракеты п
соответствующих нм траекторий.
Теоретически изучить движение ракеты — значит составить в
выбранной для данного участка траектории системе координат
дифференциальные уравнения, описывающие движение центра
масс ракеты и самой ракеты относительно центра масс, а затем
найти и исследовать решения этих уравнений. В общем случае
движения ракеты траектория ее — пространственная кривая, не
лежащая только в одной вертикальной плоскости (плоскости
стрельбы). Расчет такой траектории очень сложен и производится лишь
при исследованиях движения ракет, требующих всестороннего
учета условий полета и высокой точности получаемых результатов.
При решении многих задач теории полета нет необходимости
исследовать пространственное движение ракет, поэтому на основе
ряда упрощающих допущений исследование сложного
пространственного движения ракеты заменяется исследованием трех
независимых друг от друга простых плоских движений в трех
плоскостях. В частности, для баллистических ракет в качестве таких
126
плоскостей обычно принимают плоскость стрельбы, боковую
плоскость (перпендикулярна к первой и касательно к траектории) и
плоскость, перпендикулярную к продольной оси ракеты.
Для характеристики качеств и особенностей различных типов
ракет их движение изучается в одинаковых (стандартных)
условиях, для чего в теории полета вводится понятие расчетной, или
нсвозмущенной. траектории. Певозмущснной траекторией
называется траектория, по которой перемещается при нормальных
(табличных) метеорологических условиях (т. е. условиях
стандартной атмосферы) центр масс ракеты, имеющей расчетные
параметры систем и агрегатов и номинальные (проектные) значения
геометрических размеров всех элементов ее конструкции. Условия
стандартной атмосферы рассмотрены ниже, а расчетными
значениями параметров (например, аэродинамических коэффициентов,
коэффициентов усиления системы управления, координат центра
масс и центра давления, веса, тяги, секундного расхода топлива
н т. д.) называются их величины, соответствующие проектному
номиналу.
Эти величины у реальной ракеты всегда отличаются от
расчетных вследствие технологических допусков на производство н
монтаж всех элементов се конструкции, допусков на заправку ракеты
компонентами топлива (для ракет с ЖРД), а также из-за отличия
действительных характеристик топлива от их расчетных значений.
Отклонения характеристик реальной ракеты от их проектных
номиналов (например, эксцентриситеты центра масс и вектора тяги,
аэродинамическая асимметрия ракеты и т. д.) приводят к
появлению дополнительных возмущающих сил и моментов, действующих
на ракету в полете. Реальные метеорологические условия полета
такой ракеты по траектории также отличаются от стандартных.
Поэтому в общем случае действительная траектория полета
ракеты всегда отличается от расчетной и называется возмущенной.
Рассмотрим траектории полета основных типов ракет класса
«земля— земля» и «земля—воздух».
Неуправляемые ракеты. Вся траектория такой ракеты
(рис. 7.1, о) лежит в плотных слоях атмосферы, поэтому
стабилизация ракеты в полете осуществляется при помощи хвостового
оперения. Траектория делится на активный и пассивный участки.
Участок О.Л, на котором работает двигатель, называется
активным, а участок КС — пассивным (па этом участке ракета летит
как свободно брошенное тело). Время полета на активном участке
траектории составляет примерно '/з полного времени полета
ракеты, а высота траектории — примерно 7з дальности полета.
Управляемые ракеты. Управляемые ракеты
предназначены для поражения неподвижных и подвижных (как наземных,
так и воздушных) целей.
ПТУР. Траектория их полета представляет собой сложную
пространственную кривую, высота которой даже на начальном участке
(рис. 7.1,6) не превышает 0,5—1% дальности стрельбы. Высота
127
же остальной части траектории полета ПТУР не превышает
высоты цели.
Характер траектории определяется методом наведения снаряда
на цель, взаимным расположением пусковой установки, наводчика
и цели, а также характером движения цели. Под методом
наведения принято подразумевать комплекс мероприятий по управлению
движением снаряда за время его движения по траектории до цели.
Возможная траектория спаряча при трехточечном (наводчик —
снаряд — цель) методе наведения и раздельном расположении
пункта наводки (ПН) п стартовой установки (СУ) показана на
рис. 7.1, е. Наводчик, выведя снаряд с помощью системы
управления последовательно в плоскость и на линию визирования, в
дальнейшем удерживает его на этой линии до попадания в цель.
Рис. 7.1. Траектории ракет:
о —неуправляемой баллистической; б —ПТУР (в проекции на плоскость стрельбы);
в — ПТУР (в проекции на плоскость горизонта)
ЗУР. Траектории ЗУР также зависят от метода наведения
ракеты на воздушную цель. Характер траектории при наветепип ЗУР
по лучу радиолокатора показан на рис 7.2, а. Такая траектория,
называемая иногда трехточечной (локатор — ракета — цель),
может иметь большую кривизну на отдельных участках, в силу чего
ракета при этом методе наведения может подвергаться в полете
значительным инерциальным усилиям и перегрузкам.
Аналогичный характер будет иметь траектория ЗУР, наводимой по «методу
погони». Кинематической особенностью такой траектории является
то, что касательная к ней (вектор скорости ракеты) все время
направлена на цель. В разновидности «метода погони» —
самонаведении с углом упреждения — система управления ракеты
непрерывно направляет ее продольную ось в некоторую упрежденную
точку встречи, за счет чего уменьшаются кривизна траектории и
величины перегрузок, действующих на ЗУР. Этот же эффект
достигается и при наведении ЗУР с помощью двух радиолокаторов
в упрежденную точку — точку встречи В. Характер траектории
зенитной ракеты, отвечающей этому методу наведения, показан на
рис. 7.2,6.
УБР. Траектория полета управляемой баллистической ракеты
состоит из активного 0аК (рис. 7.3) и пассивного KSC участков.
128
Форма активного участка траектории (или программа движения
ракеты па нем) определяется типом ракеты, дальностью
(диапазоном дальностей) ее стрельбы и видом старта. Полет
баллистических ракет может бьпь управляемым на всей траектории
(например, «Лакросс») или только на ее активном участке.
Рис. 7.2. Траектории ЗУР:
а — при наведении по лучу радиолокатора; б —при напеденш; в упрежденную точку
Характер траектории ракеты первого типа, имеющей смешан-
•ую систему управления, показан на рис. 7.4,6. Старт с
наклонных направляющих обеспечивает практически прямолинейный ак-
Рис. 7.3. Траектории управляемых баллистических ракет:
о —одноступенчатой с неотделяющенея головпоп частью; б —с отделяющейся
головной частью
тивный участок 03К. На пассивном участке управление полетом
ракеты осуществляется как автономной бортовой системой
управления, так и наземной станцией наведения СН (на участке ЛВС).
Полет в плотных слоях атмосферы позволяет в качестве органов
Управления наряду с газовыми использовать и аэродинамические
(воздушные) рули. Для повышения маневренности ракета обычно
129
снабжается крыльями, устанавливаемыми па корпусе се в районе
центра масс. В программу движения такой ракеты может быть
заложен маневр на траектории, которая в этом случае даже при
отсутствии возмущений будет сложной пространственной кривой.
Момент перевода ракеты в точке В в пикирование определяет
заданную дальность ее полета.
Если управление движением баллистической ракеты
осуществляется только на активном участке OdK (см. рис. 7.3), то
заданная дальность ее полета обеспечивается за счет выключения
двигателя в различных точках участка наведения.
Система управления дальностью полета на активном участке
непрерывно определяет некоторую функцию от текущих параметров
движения ракеты (так называемую управляющую функцию),
сравнивает ее с расчетной величиной, отвечающей заданной
дальности, и в момент их равенства подает команду на выключение
двигателя. Для тактических ракет наиболее распространенным
видом управляющей функции является так называемый функционал
отсечки тяги но пссвтоскорости. Па пассивном участке KSC
траектории (см. рис. 7.3) ракета (или ее отделившаяся головная
часть) движется, как свободно брошенное тело. Характер
траектории одноступенчатой ракеты с неотделяющепся головной частью
приведен на рис. 7.3,с, с отделяющейся головной частью — на
рнс. 7.3,6.
Если одноступенчатые ракеты имеют псотделяющуюся
головную часть, то скорости их полета в конце активного участка
траектории в зависимости от дальности и типа ракеты находятся в
пределах 600—1500 м,'сек. Высота точки выключения двигателя в
этом случае не превышает 20—30 км. У одноступенчатых раке г
с отделяющейся головной частью скорости и высоты полета в
момент выключения двигателя значительно большие и при стрельбе
па максимальные дальности могут достигать соответственно
2000—5000 м/сек и сотен километров.
Межконтинентальные ракеты могут быть двух- или
трехступенчатыми с отделяющейся головной частью. Скорости их полета в
момент выключения двигателя последних ступеней (отделения
головных частей) составляют несколько километров в секунду, а
высоты конца активного участка — несколько сотен километров.
Траектория глобальной ракеты (кривая 2) показана на
рис. 7.4, е. Сравнение ее с траекторией межконтинентальной ракеты
(кривая /), стартующей с той же позиции по той же цели,
показывает, что вследствие значительно большей дальности полета
глобальная ракета в конце активного участка траектории должга
иметь скорость и высоту больше, чем межконтинентальная. Это
может быть достигнуто либо за счет применения более мощных
двигателей, либо за счет увеличения количества ступеней ракеты
Угол наклона последнего отрезка активного участка траектории к
горизонту у глобальной ракеты меньше, чем у
межконтинентальной. Поэтому траектория глобальной ракеты значительно ближе
130
по своему характеру к траектории спутника Земли. Глобальная
ракета практически может поразить цель в любой точке Земли.
Если же на ракете установить аппаратуру, позволяющую
маневрировать траекторией, то подход ракеты к одной и той же цели
может быть осуществлен с различных направлений.
В зависимости от конструкции баллистической ракеты, се
системы управления и дальности стрельбы соотношение между
высотой траектории и дальностью полета ракеты колеблется от 7з—
'А (ПРИ малых и средних дальностях) до '/го (при больших
дальностях).
Рис. 7.4. Траектории ракет-
а — крплатоА; б — со смешанной системой управления; в — глобальной
Управляемые крылатые ракет ы принадлежат к типу
ракет, управляемых на всей траектории. Старт крылатых ракет
обычно осуществляется с наклонных направляющих при помощи
мощных стартовых ускорителей на твердом топливе. После набора
достаточной для устойчивого полета скорости ускорители
сбрасываются (точка В, рис. 7.4, о), и на всей остальной траектории у
крылатой ракеты работает лишь один маршевый двигатель
(обычно воздушно-реактивный). После набора заданной высоты полета
крылатая ракета переходит на горизонтальный полег, а при
подходе к цели—в пикирование. Высота полета этих ракет
колеблется от нескольких сотен метров до 10—20 км (характер траектории
крылатой ракеты показан на рнс. 7.4,а).
7.2. СИСТЕМЫ КООРДИНАТ, ПРИМЕНЯЕМЫЕ
ПРИ ИЗУЧЕНИИ ДВИЖЕНИЯ РАКЕТ
Для изучения движения ракеты по траектории необходимо
рассмотреть движение ее центра масс (как материальной точки с мас-
с°й, равной массе ракеты) и движение ракеты (как твердого тела)
131
относительно центра масс. Таким образом, чтобы однозначно
определить положение ракеты в любой точке траектории, надо задать
координаты се центра масс в выбранной системе координат,
положение продольной оси ракеты в пространстве и угол попорота
ракеты относительно эгой осн.
В теории полета для исследования движения ракет
используются следующие системы координат:
— земная 0.,X3YsZ3 и криволинейная O^XYZ;
— полярная Oirr,;
— геоцентрические OiX(j3Y03ZQ3 и OirBu,;
— скоростная OXYZ и связанная OX\Y]Zy.
Рис. 7.5. Системы координат:
а — земная, полярная, криволинейная п сзязь ее с земной; 6 — ннерциа.тьная
геоцентрическая; я —скоростная н связанная
В земной системе координат (рис. 7.5, а) рассчитываются
главным образол! активные участки траекторий. Начало системы
находится в точке старта Оя, ось ОяХэ направлена в плоскости горн-
зонта 0.,Xr.Z3 на цель, ось 03Yj перпендикулярна к плоскости горн-
зонта и образует с осью 03Х3 плоскость стрельбы OaX3Y3. Ось 03Z3
образует правую систему координат.
Криволинейная система координат (см. рис. 7.5, а)
используется при изучении движения центра масс ракет на дальностях
стрельбы более 50 км. Начало системы также в точке старта, ось
0:,Х — в направлении на цель по дуге большого крута Земли, а
координата у измеряется от поверхности Земли (принимаемой за
шар с радиусом /? = 6371 км) до центра масс ракеты по липни,
соединяющей его с центром Земли CV Ось 03Z3 направлена так же,
как и ось 03Z3 земной системы координат. Большим кругом
называется сечение Земли плоскостью, проходящей через точки старта,
цели и центр масс Земли.
132
Если при расчете в земной системе координат активных
участков с небольшой высотой точки выключения двигателя можно не
учитывать изменение ускорения #■ силы тяжести с высотой, то при
расчете траектории в криволинейной системе это изменение
учитывается, а направление вектора g принимается противоположным
радиусу-вектору г (рис. 7.5,а). Связь между прямоугольными и
криволинейными координатами вытекает из геометрических
соотношений треугольника АОО^.
x = #y; = /?arctg^—•; y=]rW + yY2 + x*-R. (7.1)
Расчеты но этим зависимостям показывают, что разность
координат х — х составляет при дальности полета 50 км 113 м, при
дальности 100 км — 432 м, а при дальности 300 км — 1060 м.
Следовательно, расчет траекторий на дальности выше 50 км
необходимо проводить в криволинейной системе координат, т. с.
учитывать кривизну Земли. Определение элементов траектории в обеих
системах производится путем численного интегрирования систем
дифференциальных уравнении, описывающих движение ракеты
под действием всей системы сил (в том числе и силы
сопротивления воздуха).
На пассивном участке траектории, лежащем в сильно
разреженных слоях атмосферы, можно при решении ряда задач
пренебречь сопротивлением воздуха и считать, что движение ракеты
происходит лишь под действием силы тяжести. В этом случае
используется полярная система координат О^г^ (см. рис. 7.5, а), в
которой удается получить конечные аналитические зависимости
для расчета элементов траектории, не прибегая к трудоемкому
численному интегрированию. Это и обусловило применение поляр-
поп системы при исследовании движения ракет на пассивном
участке траектории (по эллиптической теории). Полюс системы
выбирается в центре масс Земли, радиус-вектор г соединяет его с
центром масс ракеты, а полярный угол t] отсчитывается от земного
радиуса точки старта в сторону движения ракеты. Связь между
полярными и криволинейными координатами определяется
следующими соотношениями:
x = Rr,\ r=R+ у. (7.2)
Прямоугольная геоцентрическая OiXo3Y03Z03 и сферическая
геоцентрическая Olr\B1 системы координат используются при расчете
траекторий ракет с большими дальностями полета. Обе системы
являются пнерциальиыми, т. е. участвуют только в
поступательном движении Земли вокруг Солнца, перемещаясь за время полета
Ракеты практически прямолинейно п равномерно. Следовательно,
положение их осей не зависит от суточного вращения Земли и
механические явления в таких системах можно рассматривать, как
в неподвижных. Начало систем — в центре масс Земли, ось O]Y03
133
направлена по оси вращения Земли на север (рис. 7.5,6), ось
0[А'оз — на цель (в плоскости пуска), ось OiZ0z образует правую
систему координат. Положение ракеты в системе CV/.Bi
определяется (рис. 7.5, б) радиусом-вектором г, его долготой X и
геоцентрической широтой Bi. Движение в иперцнальных системах
координат иногда называют абсолютным в отличие от относительного
движения, которому соответствуют траектории, рассчитанные в
земной и криволинейной системах координат.
Начало связанной и скоростной систем координат совпадает с
центром масс ракеты (рис. 7.5,в). Связанная система используется
для определения положения ракеты в пространстве как тела
конечных размеров. В этой системе изучается движение ракеты
относительно ее центра масс. Ось ОХ{ совпадает с продольной осью
ракеты, ось 0\\ перпендикулярна к ней и лежит в главной
плоскости симметрии ракеты (плоскость вертикального оперения
баллистических и крылатых ракет или продольное сечение ракет
других схем, совпадающее на старте с плоскостью пуска). Ось OZi
перпендикулярна к первым двум и образует правую систему
координат. Положение осей связанной системы (а следовательно, и
ракеты как тела) в земной системе координат задается тремя
углами— тангажа, рыскания и крена. Углом тангажа 8 называется
угол между продольной осью ракеты и ее проекцией на плоскость
горизонта. Угол ф между осью OXi и ее проекцией па плоскость
пуска называется углом рыскания. Поворот ракеты вокруг ее
продольной оси характеризуют углом крена у, который представляет
собой угол между плоскостью пуска и плоскостью OX{Yi
связанной системы координат.
Угол 8>0, если ось OXt ракеты лежит выше своей проекции на
горизонтальную плоскость, проведенную через центр масс ракеты.
Угол у>0, если ракета повернулась вокруг осп ОХ\ против
часовой стрелки. Угол ф>0, если ось ОХ\ лежит правее своей
проекции на плоскость стрельбы.
Скоростная система координат используется для расчета
изменения вектора скорости центра масс ракеты в полете. Величина
скорости находится из решения уравнения движения центра масс
ракеты вдоль оси ОХ скоростной системы, а углы 6 и с,
определяющие положение вектора скорости в земной системе
координат,— из решения аналогичных уравнений движения вдоль осей
OY и OZ той же системы. Угол 0 — угол наклона вектора скорости
к местному горизонту; он положителен на восходящей ветви
траектории ракеты и отрицателен — на нисходящей. Угол о — угол
между вектором скорости центра масс ракеты и плоскостью
стрельбы; он положителен, если вектор скорости лежит левее плоскости
стрельбы.
Ось ОХ скоростной системы (см. рис. 7.5, е) направлена по
вектору скорости центра масс ракеты, ось OY перпендикулярна к ней
и лежит в главной плоскости симметрии ракеты, а ось OZ
перпендикулярна к плоскости OXY и образует правую систему коордн-
пат. Взаимное положение скоростной и связанной систем
характеризуется углами атаки и скольжения.
Угол атаки а—угол в главной плоскости симметрии ракеты
между ее осью ОХу и проекцией вектора скорости центра масс
ракеты на эту плоскость. Он положителен, если ось OXj лежит
выше проекции вектора скорости на главную плоскость симметрии.
Угол скольжения 3 — угол между вектором скорости центра масс
ракеты и его проекцией па главную плоскость симметрии. Он
положителен, если вектор скорости лежит правее этой плоскости.
В аэродинамике при изучении движения ракет в воздухе
используют допущение о так называемом обращении движения: сила
взаимодействия между неподвижным воздухом и летящей ракетой
принимается равной силе взаимодействия между неподвижной
ракетой и набегающим на нее с той же скоростью потоком воздуха.
В полете как скоростная, так и связанная системы координат
перемещаются вместе с ракетой. В обращенном движении они
неподвижны, а ось ОХ скоростной системы направлена по вектору
скорости набегающего невозмущенного потока.
7.3. СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ В ПОЛЕТЕ
Траектория ракеты в зависимости от задач и требуемой
точности исследования ее движения рассчитывается в абсолютной или
относительной системе координат с учетом всех или только
основных действующих на ракету сил. В общем случае при учете
вращения Земли система сил, действующих на ракету в абсолютном
движении, состоит из силы земного тяготения, силы тяги,
аэродинамической силы сопротивления воздуха и газодинамических сил
газовых рулен (или сил тяги управляющих двигателей).
Согласно правилу механики (так называемому принципу Да-
ламбера) уравнения движения ракеты в относительной системе
координат с учетом вращения Земли можно записать в той же
форме, что и уравнения абсолютного движения, если к системе сил
абсолютного движения добавить силу инерции Корнолиса и силу
инерции переносного движения (центробежную силу от вращения
Земли). Введя силу веса ракеты Gv как равнодействующую силы
земного тяготения и центробежной силы, получим следующую
систему сил, действующих па ракету, движение которой
рассматривается в относительной системе координат: сила тяги, сила веса,
сила сопротивления воздуха, газодинамические силы газовых
рулей и сила инерции Корнолиса. Хотя в силе веса вращение Земли
частично учитывается, под термином «учет влияния вращения
Земли» обычно понимают только учет действия силы Корнолиса (что
и будет принято в изложении последующих вопросов).
Сила тяги двигателя
Зависимость силы тяги Р от различных факторов представлена
Формулой (3.1).
135
Примерный характер зависимости Р от времени полета
баллистической одноступенчатой ракеты на активном участке
траектории показа» на рис. 7.8,6. Как правило, тяга стартовых
ускорителей крылатых ракет, снаряжаемых обычно твердым топливом,
значительно больше тяги маршевого двигателя. В аналогичном
соотношении находятся и тяги двигателей первой и последней
ступеней многоступенчатых ракет.
Сила веса
Сила веса ракеты Gp изменяется на траектории как за счет
выгорания топлива, так и за счет изменения ускорения силы тяжести
с высотой. Для ракет со средними
и большими дальностями стрельбы
учитывается еще н изменение этого
ускорения за счет изменения
географической широты вдоль траектории.
При постоянном секундном
расходе G топлива вес одноступенчатой
ракеты в полете меняется по
линейному закону (здесь GQ — стартовый
вес ракеты):
Gp(i) = G0~Ggt (7.3)
В пределах времени работы
двигательной установки одной ступени эта
зависимость справедлива и для
многоступенчатой ракеты, в целом же для
такой ракеты необходимо
дополнительно учитывать еще и скачкообразные изменения веса за счет
отделения отработавших ступеней.
Ускорение силы тяжести, как известно, представляет собой
геометрическую сумму ускорения силы земного тяготения гх и
центробежного ускорения к-'ц, вызванного вращением Земли (рис. 7.6).
Из-за малости центробежного ускорения географическая широта В
точки Ол незначительно отличается от ее геоцентрической
широты В{, а ускорение vj — от ускорения go. которое поэтому слабо
изменяется с изменением широты точки старта. Например, на
полюсе (с учетом сплюснутости Земли) g0=9,78 м/сек2, а на
экваторе— 9,832 м1сек2.
Ракеты с небольшими дальностями полета имеют
максимальные высоты траекторий значительно меньше радиуса Земли.
Полагая g~w. можно на основании закона тяготения Ньютона
получить следующую^ приближенную зависимость изменения
ускорения g с высотой у:
jKeamop
Рис. 7.6. Зависимость
ускорения силы тяжести от
шпроты точки старта
(У):
^~2i),
(7.4)
136
Расчеты показывают, что ускорение g на 1 км подъема
уменьшается на 0,0031 м/сек2, а па активном участке траектории (до высот
30—40 км) при расчетах, не требующих высокой точности, можно
полагать g(y)^gv.
Аэродинамическая сила
Аэродинамическая сила, или сила сопротивления воздуха, чей- \
ствуст на ракету лишь при полете в плотных слоях атмосферы, '
т. е. до высот около 80 км. Выше_ сопротивлением воздуха можно '
пренебречь и считать, что ракета летит в пустоте": В расчётах, не" \ j
требующих высокой точности, сопротивление воздуха учитывают * I
лишь до высоты 50 км. В этих пределах принята следующая схема .J *
строения атмосферы.
Нижний слон атмосферы высотой в среднем до 11 км
называется тропосферой. Здесь наблюдается интенсивное
перемешивание воздуха как вдоль поверхности Земли, так и по высоте.
Температура воздуха в тропосфере с ростом высоты падает и на
верхней ее границе в среднем равна —56° С. Слон воздуха в пределах
от 11 до 90 км называют стратосферой. Для нее характерно
отсутствие вертикальных перемещений воздуха с одновременным
ростом скоростей горизонтального ветра. В нижнем слое стратосферы
до высоты 30 км температура примерно постоянна (—56°С). При
дальнейшем подъеме она растет, так как па высотах то 50 км
лежат слои воздуха, богатые озоном, интенсивно поглощающим
ультрафиолетовую часть солнечного спектра. В слоях выше 50 км~~]
озона нет и температура воздуха вновь понижается, достигая на
верхпеп границе стратосферы в средних широтах северного полу- I
шарня — 70 -=-— 75° С.
Параметры реальной атмосферы (плотность, температура,
давление) постоянно изменяются по высоте, во времени и вдоль
поверхности Земли, трудно поддаваясь учету. Поэтомч при
исследовании движения ракет пользуются условной атмосферой,
распределение параметров которой по высоте принимается независимым
от времени года и суток.
Методы расчета аэродинамической силы R рассматриваются в
аэродинамике, ниже даны лишь краткие сведения о природе
аэродинамических сил, необходимые для понимания последующего
материала.
Суммарная аэродинамическая сила R, действующая на ракету
в полете, состоит из двух составляющих: силы трения и силы
давления. Первая вызвана вязкостью воздуха. В результате этого на
поверхности летящей ракеты образуется тонкий слой воздуха
(пограничный), в пределах которого и проявляется действие сил
вязкости как сил сцепления частичек воздуха с поверхностью ракеты
и между собой. Па преодоление этих сил тратится часть
кинетической энергии ракеты, что и можно рассматривать как
энергетическую основу силы трении. Сила трения зависит от скорости, вы-
137
соты полета ракеты и ее поверхности трения. Изменение углов
атаки н скольжения ракеты при скоростях полета до 1500—
1700 м/сек практически не сказывается на величине силы трения.
Схему возникновения силы давления /?д поясним на примере
обращенного движения ракеты. Пусть давление в набегающем на
нес с дозвуковой скоростью v потоке воздуха равно pi (рис. 7.7,6).
Опыт и теоретические расчеты показывают, что при полете ракеты
с углами атаки и скольжения, равными нулю, на поверхности ее
Рис. 7.7. Параметры нормальной артиллерийской атмосферы (а) и
сущность возникновения силы сопротивления давления (б)
головной части образуется зона повышенного давления (где
Р>Р\), а за донным срезом — зона пониженного давления (где
р<Рх). Разность суммарного давления на головную часть и дно
I и даст составляющую аэродинамической силы R— силу давления
/?д. В отличие от силы трения сила давления зависит от углов ата-
|| ки и скольжении, увеличиваясь с их ростом. Если а или р Ф 0, зоны
[ повышенного и пониженного давлений (рис. 7.7,6) охватывают
часть п цилиндрической поверхности, и /?-, как равнодействующая
всех внешних сил давления на поверхности ракеты возрастает
(относительно случая я=0 или {3 = 0). Таким образом силы /?д и
. R зависят от размеров и формы ракеты, скорости и высоты ее по-
i лета, величины углов атаки и скольжения. Аэродинамическая
. сила R как сумма сил трения и давления, распределенных по
поверхности ракеты, считается приложеннон в так называемом
центре давления ракеты СД. Если центр давления у
баллистической ракеты (рис. 7.7,6) расположен между ее центром масс п
донным срезом, ракета называется статически устойчивой, если
впереди центра масс — статически неустойчивой.
I 138
I!
i
При составлении уравнений движения центра масс ракеты
силы, действующие на нее, проектируются на оси скоростной
системы координат. Проекции силы R на оси OX, OY и OZ называют
соответственно силон лобового сопротивления Rx, подъемной Ry
и боковой Rz силами. Их расчетные формулы имеют вид
K^CtfS. (7.5)
Здесь множитель q = 0,5pv2 (v — скорость ракеты) имеет
размерность давления и называется скоростным напором, S —
характерная площадь ракеты, к которой отнесены коэффициенты
Ci(Cx,Cy,Cz) ее аэродинамических сил. Для осесимметричных
ракет за S принимается площадь мнделева сечения (сечение корпуса
ракеты в месте наибольшей толщины, перпендикулярной к
продольной оси ракеты). У крылатых ракет в качестве S берут
площадь крыльев в плане.
В качестве характеристики скорости ракеты обычно берется
не ее абсолютное значение, а безразмерная величина —число Маха
как отношение скорости ракеты к скорости звука в воздухе в
данной точке траектории. Из формулы (7.6) видно, что величины*"\
аэродинамических сил пропорциональны у2. В действительности I
это имеет место лишь при скоростях с числами М<!0,6._Это песо-J
ответствие расчетных формул действительной зависимости сил от
скорости полета, а также влияние на их величину углов атаки,
скольжения и размеров ракеты учитывается зависимостью
коэффициентов Сх, Су и Cz от М, я и 3 (площадь S является лишь
масштабом для этих коэффициентов и не характеризует полностью
влияния линейных размеров ракеты на величины
аэродинамических сил).
Для сил Rtl и Rz влияние высоты полета полностью учитывается
изменением плотности в формуле (7.6). Поэтому коэффициенты Су
и С, не зависят от высоты, а являются лишь функциями числа М и
соответственно углов атаки а и скольжения р. Для силы Rx в таком
случае пришлось бы брать показатель степени у плотности в
формуле (7.6) больше единицы, так как одна из ее составляющих —
сила трения — растет с высотой не прямо пропорционально
плотности, а быстрее. Для однообразия расчетная формула для силы
лобового сопротивления оставлена в том же виде (7.6), а в число
параметров, влияющих на коэффициент Сх (форма и размеры
ракеты, углы атаки, скольжения и скорость ее полета),
дополнительно введена высота полета.
На рис. 7.8,а показан характер зависимости коэффициентов Сх
и Су одноступенчатой баллистической ракеты от скорости и
высоты ее полета и угла атаки. Вследствие симметрии ракеты
зависимость коэффициента Сг от скорости полета н угла скольжения
аналогична зависимости Cv(M,a). Из рис. 7.8, с видно, что при
139
М<0,6 коэффициент Сх практически постоянен, т. е. здесь
формула (7.6) правильно отражает действительную зависимость силы
Rx от скорости полета (иногда эту силу обозначают Q).
Если силу лобового сопротивления записать в виде
Rx^Q = Bv\ (7.7)
то при Лт<0,6 показатель л = 2. В диапазоне чисел 0,6<Л1< 1,2
он достигает 4—6, а затем опять уменьшается до 2. Поскольку в
формуле (7.6) всюду п = 2, эго на данном участке учитывается
сильным возрастанием коэффициента Сх. При М>1,2 сила
лобового сопротивления пропорциональна скорости в степени п<2, и
при этих скоростях коэффициент Сх убывает.
Рис. 7.8. Зависимость коэффициентов С* и Су ракеты от скорости,
высоты се полета И угла атаки (а), аэродинамических сил и силы
тяги (б) от времени полета на активно^! участке траектории
Характер изменения сил Q и Ry в зависимости от времени
полета баллистической ракеты типа Фау-2 на активном участке
траектории показан на рис. 7.8,6. Максимальные значения этих сил
у баллистических ракет могут достигать нескольких десятков
тысяч ньютонов при скоростях полета, близких к скорости звука.
Максимум скоростного напора на активном участке не совпадает
по времени с максимумом силы лобового сопротивления. У ракет
с отделяющимися головными частями знание максимальных
значений этих величин необходимо для оценки прочностных
характеристик их корпусов. Аналогичная оценка для ракет с иеотделяющи-
мнея головными частями производится по величинам
максимальных аэродинамических сил на нисходящей ветви пассивного
участка в районе максимума скоростного напора (рис. 7.17,6).
Баллистические ракеты, управляемые только на активно:-1
участке, обычно имеют в качестве органов управления две пары
газовых рулей (рис. 7.9,с): горизонтальные (рули высоты)
обеспечивают разворот ракеты по углу тангажа, вертикальные (рули
направления) служат для управления по углу рыскания,
140
У противотанковых управляемых ракет наряду с системой
воздушных рулей (в этом случае ПТУР компонуется по так
называемой схеме «бесхвоегки», рнс. 7.9, в) в качестве органов управления
используются иитерцепторы (прерыватели потока). Это тонкие
пластинки, устанавливаемые посредине или на конце крыльев н
выдвигаемые в полете за их плоскости. За выдвинутым иитерцен-
тором образуется зона пониженного давления (зона срыва
потока), в результате чего на этом участке крыла возникает подъемная
сила (рис. 7.9,6), эквивалентная той, которая появляется на
отклоненном вниз па угол о от нейтрального положения руля
(показано пунктиром на рис. 7.9, б) тон же площади в плане.
Рис. 7.9. Органы управления ракет различных компоновочных схем:
а — баллистической ракеты; б — иитерцепторы ПТУР; в — ракеты но схеме «бес-
хвосткн»; г — поворотные крьыьи; о — ракеты по нормальной аэродинамической
схеме; е— ракеты по схеме «утка»
Органы управления ракет, выполненных по нормальной
аэродинамической схеме (рис. 7.9, д), представляют собой четыре
воздушных руля, расположенные попарно в двух взаимно
перпендикулярных плоскостях за ее несущими поверхностями (крыльями).
Во избежание аэродинамического «затемнения» (снижения
эффективности) рулей их плоскости развернуты (вокруг оси OXi) на 45э
относительно плоскостей крыльев.
У зенитных управляемых ракет для обеспечения высокой
маневренности в полете используется компоновка но схеме «утка»
(рис. 7.9, е) или же в качестве органов управления применяются
поворотные крылья (рис. 7.9,г). В первом случае воздушные рули
Расположены впереди крыльев и центра масс ракеты и
выполняют функции только рулей направления и высоты. При их
отклонении от нейтрального положения поток воздуха, набегающий на
Крылья, скашивается и создает на крыльях возмущающий момент
крена. Поэтому для управления движением такой ракеты по крену
На задних кромках ее крыльев обычно устанавливаются воздушные
141
рули крена (элероны). У ракет с поворотными крыльями центр
масс лежит впереди их органов управления, а у донного среза
корпуса ставятся небольшие стабилизаторы для обеспечения
статической устойчивости ракеты. Большая площадь новоротных
крыльев позволяет получить требуемые для управления полетом
аэродинамические силы А\,
■>кр
и /?,кр при
значительно меньших,
чем у воздушных рулен, углах поворота.
Органами управления крылатой ракеты обычно являются рули
высоты / (рис. 7.10,а), располагаемые па горизонтальном
оперении, руль направления 2 на
вертикальном оперении и эле-
3 __ (- у ^^s роны 3 на крыльях,
обеспечивающие разворот ракеты по
Рис. 7.10. Органы управления
крылатой ракеты
Рис. 7.11. Изменение
газодинамических сил рулен высоты
в полете
крену. У некоторых типов крылатых ракет руль направления
может отсутствовать, а управление движением их по
направлению осуществляется разворотом ракеты но крену с помощью
элеронов (рис. 7.10,6, вид спереди). Поскольку у крылатой ракеты
подъемную силу создают в основном крылья и она
перпендикулярна к их плоскости, при развороте ракеты на угол у подъемная
сила дает составляющую /?г на ось OZ скоростной системы
координат, под действием которой центр масс ракеты смещается по
направлению (рис. 7.10,6 — вправо).
Принципы управления с помощью поворотных (верньерных)
двигателей и поворотных сопел, пластинчатых и кольцевых рулен
(дефлекторов), а также методом газодинамического отклонения
реактивной струи были рассмотрены в главе V.
На пластинчатых газовых рулях, имеющих лишь одну степень
свободы и обтекаемых газовым потоком под углом атаки яр = о,
суммарная газодинамическая сила /?г Дает проекции на оси OA'i
142
(сила Qr) и OY\ (сила /?Уг) для рулен высоты и на оси O.Y, и OZ
(сила ftiT) для рулей направления. График силы Ry рулей
высоты одноступенчатой баллистической ракеты за время полета
на активном участке, а также зависимость сил Qr и Ry руля от
угла 5 его отклонения от нейтрального положения приведены на
рис. 7.11.
Сила Кориолиса
Сила Кориолиса К — следствие влияния вращения Земли на
полет ракеты, перемещающейся относительно Земли. Как известно,
сила инерции Кориолиса, действующая на тело (ракету) с
массой т, центр масс которого участвует одновременно в
поступательном движении относительно некоторой системы координат и
во вращательном движении вместе с ней, определяется
зависимостью
К =2mvQsin elt (7.8)
где v н Q — скорость ракеты в данной системе координат и
угловая скорость вращения этой системы (Земли);
Ej — угол между осью вращения Земли и направлением
скорости центра масс ракеты.
Сила К перпендикулярна к плоскости, проходящей через ось
вращения Земли и касательную к траектории, и направлена в
сторону, откуда совмещение касательной по кратчайшему пугн с осью
вращения происходит против часовой стрелки. Примером
проявления действия силы К является потмыв правых берегов рек,
текущих в северном полушарии в меридиональном направлении. Если
река гсчет на север, то сила /\ направлена па восток и
подмывается правый берег реки. В южном полушарии, наоборот,
подмываются левые берега рек.
Качественную картину влияния вращения Земли на полег
баллистической ракеты рассмотрим па частных примерах ее полета
по меридиональным и широтным (экваториальным) траекториям
(для пассивных участков). При стрельбе вдоль меридиана на
север с экватора (рис. 7.12,о) ракета в точке старта обладает
запасом вращательного движения с запада на восток, определяемым
расстоянием точки старта от оси вращения Земли. Расстояние
любой точки участка 03В траектории от этой оси больше, чем до
точки старта. Следовательно, количество вращательного движения
с запада на восток, необходимое для того, чтобы ракета
оставалась в плоскости меридиана па всем участке траектории, должно
быть больше, чем то, которое она получила в точке старта.
Поэтому за время полета на этом участке ракета отклонится от
плоскости стрельбы (плоскости меридиана) влево, на запач. На
участке ВС под действием тех же причин ракета отклонится вправо, но,
Поскольку участок ВС меньше, чем ОлВ, суммарное отклонение
Ракеты, вызванное вращением Земли, будет западным. При ана-
143
логичной стрельбе с больших широт участок OS меньше участка
ВС и ракета в точке начения С отклонится на восток. Таким
образом, при стрельбе вдоль меридиана вращение Земли приводит
только к боковым отклонениям.
При стрельбе вдоль экватора на восток (рис. 7.12,6) сила 1<о-
рнолиса смещает центр масс ракеты в направлении внешней
нормали к траектории. Следовательно,
реальная траектория (пунктирная)
пройдет выше траектории,
рассчитанной без учета силы Л', и ракета
полетит дальше. При аналогичной
стрельбе с востока на запад отклонение по
дальности вследствие влияния
вращения Земли будет недолетным. Таким
образом, на экваториальных
траекториях полета ракет вращение Земли
приводит только к отклонениям по
дальности. При более общем
сочетании широты точки старта п азимута
пуска, отличном от рассмотренных
частных случаев, влияние вращения
Земли на полег ракеты приводит к
отклонению точки падения как по
дальности, так и по направлению.
На активном участке траектории
вращение Земли может сказаться иа
работе приборов системы управления,
и суммарный эффект силы К за
время полета управляемой
баллистической ракеты может отличаться о;
рассмотренного.
Рис. 7.12.
Корио i;ica.
К вопросу о
вызываемой
силе
вра-
lHei:i[d'.i леяли:
а — стрельба вдоль черндиана;
О — стрельба вдоль экватора
Моменты, действующие на ракету
в полете
екпх (аэродинамических)
Точки приложения
аэродинамических сил (Q, R„ и R,), газодинамиче-
енл газовых (воздушных) рулей,
внутренних сил Кориолнса п дополнительных сил внешнего
давления воздуха, возникающих при вращении ракеты вокруг центра
масс и распределенных по се длине, не совпадая с центром масс
ракеты, создают моменты относительно его.
Линия действия силы тяги у баллистических ракет (кроме кры
лагых ракет, для которых момент от силы тяги учитывается^
обычно принимается проходящей через центр масс. Знание величин
моментов необходимо для решения уравнений, определяющих
вращение ракеты как твердого тела относительно центра масс, т. е.
относительно любой из осей связанной системы координат.
144
Из механики известно, что вращательное движение твердого
тела относительно оси, проходящей через его центр масс, под
действием моментов Л1£ от внешних сил описывается
зависимостью
h = ZM„ (7.9)
где / и Mi — момент инерции тела и моменты внешних сил
относительно оси вращения, a s — угловое ускорение вращения.
Если данное тело разбить на большое число малых частиц,
например на п, масса кажтой из которых равна ти то момент
инерции тела относительно выбранной оси вращения иодсчитывается
как сумма п произведений масс частиц на квадрат их расстояния
П ст оси вращения
п
/=2^- (7-ю)
Запишем выражение (7.9) для баллистической ракеты
относительно каждой из осей связанной системы координат. При этом в
правой его части надо взять сумму моментов относительно тех же
осей всех действующих на ракету сил, точки приложения которых
не совпадают с ее центром масс. Суммарные моменты
относительно осей ОХи OY\ и OZl соответственно называют моментами:
крена MXt, рыскания Mv , тангажа Л1 и, исходя из природы
вызвавших их сил, представляют в виде суммы следующих составляющих
М =М" + МТ +Мр.
*:< Z, ■ У. * г.*
(7.П)
В формулах (7.11) составляющие М?г представляют собой
стабилизирующие Мт — тушащие и Mf—управляющие моменты
относительно соответствующих осей. Их физическую сущность и
качественную зависимость от различных параметров рассмотрим
на примере момента тангажа Мг .
Стабилизирующий момент тангажа М^ создается
относительно центра масе ракеты, для которой угол атаки a =fc О, силы
лобового сопротивления Q и подъемная Ry приложены п центре
давления С па плече 1с = ОС. При полете ракеты с нулевыми углами
атаки подъемной силы не возникает, суммарная
аэродинамическая сила R = Q и линия ее действия проходит через центр
масс.
Поскольку при расчете траектории все силы, действующие па
ракету в полете, приводятся к центру масс, то по правилу
механики при параллельном переносе сил в новую точку их приложе-
6—622 145
ния, кроме сил, прикладываются и их моменты. Момент MlT сил Q
и Ry при их переносе в центр масс ракеты подсчитьтается по
зависимости
М» = Q/c sin а + Rylc cos а = (Сд. sin * + Су cos а) -*£5SI /c. (7.12)
По аналогии с выражением аэродинамических сил
стабилизирующий момент записывается в виде
^ = ^-^-5,,^, (7.13)
где т ~m*za — безразмерный коэффициент;
SM = 5 — мидель ракеты;
£к — длина ракеты.
Угол атаки ракеты на активном участке мал (отсюда sin<x~a,
cosa~l), и коэффициент Cv является его линейной функцией
СУ = С?. (7.14)
Из сравнения двух зависимостей для М<? получаем
коэффициент стабилизирующего момента тангажа в виде
т*. = (Сх + С;) lJLKo. = то« я. (7.15)
Величина М" v баллистических ракет может достигать не-
скольких десятков тысяч ньютон-метров; примерная его
зависимость от времени полета на активном участке приведена на
рис. 7.13. Момент Л4" стремится уменьшить угол атаки, т. е.
ракета статически устойчива и ее продольная ось стабилизируется
относительно вектора скорости центра масс. Степень или запас
статической устойчивости ракеты обычно характеризуют величиной
/с = /с/£к, характер изменения которой для баллистической ракеты
на активном участке показан на рис. 7.13. Максимум /с
соответствует примерно скорости полета М=»1. У баллистических ракет с
небольшой дальностью полета величина 7С на активном участке
колеблется в пределах 2—15%, но некоторые образцы ракет при
стрельбе на максимальную дальность, особенно при действии
возмущающих факторов, могут стать в конце активного участка
статически неустойчивыми.
Перемещение центра масс ракеты вдоль оси OXv в полете
определяется изменением распределения масс ракеты по мерс
выгорания топлива.
Отдельные образцы управляемых ракет (например, ЗУР) для
уменьшения их инерционности в полете делаются статически
неустойчивыми, т. е. центр давления у них находится впереди центра
масс. В этом случае момент М£Т называется опрокидывающим,
так как он стремится увеличить угол атаки. Стабилизация таких
146
ракет в полете относительно центра масс осуществляется уже не
аэродинамической силон ракеты, а органами управления,
"отклоняемыми по командам автомата стабилизации на дополнительные
(по отношению к требуемым программой полета) углы рыскания
и тангажа.
Относительно оси ОХ, аэродинамическая сила момента не дает,
поэтому в формулах (7.11) слагаемое М" отсутствует. Очевидно,
что на участках траектории выше
50—80 км полет ракет практически
не может быть стабилизирован с
помощью аэродинамических сил.
Управляющие моменты
относительно осей связанной системы
координат у баллистических ракет
создаются подъемными силами
соответствующих газовых (воздушных)
рулей. Строго говоря, силы лобового
сопротивления рулей также дают
составляющие моментов /№ и Mv , no
ими пренебрегают из-за их малосги.
Эти силы, называемые потерей тяги
на рулях, в уравнениях движения
ракеты обычно учитывают в так
называемой эффективной тяге Р-' = Р—4 QT.
Момент /И? создается силой /?„ pv-
лей высоты на плече /г — расстоянии
от центра масс ракеты до центра давления этих рулей. Величина
момента рассчитывается по формуле
Рис. 7.13. Изменение
стабилизирующего момента тангажа
статической устойчивости
ракеты в полете
и
^р, = я»Л = с„
рг«;
Ьр'г,
(7.16)
где рг, иа — плотность и скорость истечения газов из сопла
двигателя;
Sp — площадь руля в плане.
Рабочие интервалы углов 5 у баллистических ракет составляют
0—15°, форма же газовых рулей (см. рис. 5.17, в) выбирается из
условия обеспечения постоянства положения их центра давления
в полете. Под действием реактивной струи передняя кромка рулей
обгорает и у руля, приведенного на рис. 5.17, а, центр давления
Смещался бы назад. При оптимальной же форме руля (рис. 5.17, б)
обгорающие участки лежат по обе стороны от оси вращения руля
и положение центра давления (точки приложения сил Qr и Ryr)
стабилизируется.
Тушащие моменты баллистической ракеты невелики по
сравнению с остальными и при исследованиях, не требующих высокой
точности движения ракет, обычно не учитываются. У ракет же,
имеющих, кроме стабилизаторов, и крылья, тушащие моменты
6» 147
Хм у
существенны. Их не учитывают лишь при грубых оценочных
расчетах. Физическую сущность тушащих моментов рассмотрим на
примере тушащего момента тангажа жидкостной баллистической
ракеты.
Момент состоит из внешнего (аэродинамического) и
внутреннего тушащих моментов. В плотных слоях атмосферы внутренний
момент мал по сравнению с внешним, но при полете в сильно
разреженных слоях воздуха он приобретает самостоятельное значение
(1ак как внешний тушащий момент
практически отсутствует). Э)то особенно важно для
баллистических ракет с большими
дальностями стрельбы, конец активного участка
которых находится на большой высоте.
Если ракета летит со скоростью v и
одновременно совершает разпорот вокруг оси OZt
с угловой скоростью а>г , то каждая точка ее
поверхности будет иметь линейную скорость
вращения At'j вокруг эгон оси (рис. 7.14),
определяемую зависимостью
Avi = mi(xl — xt)), (7.17)
где л'о и Xi — соответственно расстояние от
теоретической вершины ракеты до ее центра
масс и рассматриваемого поперечного
сечения. Величина Диг зависит от радиуса
вращения (л-{ — л'о) и изменяется по длине ракеты.
Поэтому результирующая скорость каждой
точки поверхности ракеты как сумма
поступательной скорости центра масс и Av{ будет
различной, как будут различными и
приращения местных углов атаки для этих точек.
Наличие Да,- вызовет появление
дополнительных нормальных сил ^Ryih суммарный момент от которых
относительно центра масс и называется внешним тушащим
моментом.
Возникновение внутреннего тушащего момента Мтгс
обусловлено силами инерции Кориолиса, действующими на
перемещающиеся внутри ракеты частицы топлива и газов. Для рассмотрения
качественной картины явления выделим двумя поперечными
сечениями S (на расстоянии х,- от носа ракеты) элементарный объем
газа в сопле двигателя (рис. 7.15), перемещающийся вдоль оси
сопла со скоростью щ. Масса этого объема Дт = рг5Дх будет
участвовать в движении относительно корпуса ракеты и в переносном
(вращательном) движении вместе с ракетой вокруг оси OZ\.
Следовательно, на массу \т будет действовать элементарная сила
Кориолнса
(7.18)
Рис. 7.14. Схема
возникновения внешнего
тушащего момента
тангажа
jkAf. = 2±птжи1 sin 90° =. 2Апшгщ,
148
которая на плече *,■—х0 будет давать момент относительно центра
масс ракеты, гасящий угловую скорость си :
SM^^SKA^-Xo). (7.19)
Просуммировав элементарные моменты от сил AKi перемещения
топлива и газов на участках li и ^2 (рис. 7.18), получим полный
момент газового демпфирования по тангажу. В заключение
отметим, что расчетная формула для тушащего момента имеет вид,
. Рис. 7.15. Внутренним тушащий момент тангажа
несколько отличный от формул стабилизирующего н
управляющего моментов:
7.4. УРАВНЕНИЯ ДВИЖЕНИЯ РАКЕТЫ
Одной из основных задач теории полета является расчет
траекторий движения ракет. Се находят решением системы уравнений,
составленных применительно к выбранной системе координат.
Количество и характер уравнений зависят от требуемой точности
определения траектории, а значит, и необходимости учета влияния
тех или иных факторов па полет ракеты, а также от системы
координат, в которой рассчитывается траектория.
Уравнения движения ракеты на активном участке
траектории
При выводе уравнений будем полагать, что ракета движется в
плоскости стрельбы (плоскость 03Х3У3 земной системы координат),
вращение Земли не учитывается, а все силы, действующие на
ракету, приведены по правилам механики к ее центру масс
(рис. 7.16,а). Траектория управляемой баллистической ракеты на
активном участке относится к так называемым программным, за-
149
даваемым в виде закона изменения во времени программного угла
тангажа 8цр(?)- В качестве примера на рис. 7.16,6 показан вид
этой зависимости для ракеты Фау-2.
Уравнение движения центра масс ракеты, записанное для
рассмотренной системы сил в форме закона Ньютона, имеет вид
(7.21)
та = v /--. _ ор + Рэ + Q + Ну + \.
60 tK(ceK)
Рис. 7.16. Система сил, действующих ка ракету на активном участке
траектории (а), и программа ее движения на нем (б)
Для получения расчетных уравнений выражение (7.21)
проектируем на оси скоростной системы координат (рис. 7.16,а):
— на ось ОХ
тах = Рэ cos а — Q — Gp sin© — Ry sin а;
на ось OY
та.
Р'sina + /? — Gpcos © + /?,. cos*.
(7.22)
(7.23)
Здесь ах = и и ау — соответственно ускорения центра масс ракеты
вдоль осей ОХ и OY, причем второе равно по абсолютной величине
нормальному ускорению, определяемому соотношением
г '
I л, I = I а„ | = ■
(7.24)
где v и г —скорость ракеты и радиус кривизны траектории в
данной точке, который согласно законам механики выражается через
скорость движения ракеты и угловую скорость поворота в каса-
тельной вдоль траектории
_L = А
г v '
150
(7.25)
Вследствие малости углов атаки баллистических ракет на ак-
ГТ7 22°7 2^аСпТпи/РаеКТОрИИ Sin*~a' C0Sa~I- " Т0ГД* Уравнения
(/./А 1.16) .описывающие движение центра масс ракеты, с учетом
соотношении (7.24, 7.25) примут вид >четом
тЬ = Рэ - Q - Gp sin в- RyT, (7.26)
mv% = Р \ + Ry - Gp cosG + Ry . (7.27)
В рассматриваемом случае движение ракеты как твердого тела
относительно ее центра масс эквивалентно движению относительно
оси OZt. Уравнение этого движения записывается как равенство
произведения момента инерции ракеты относительно оси OZY на
угловое ускорение вращения <иг вокруг гон же оси сумме
моментов относительно оси OZ\ всех сил, действующих на ракету:
'А = S ЛЬи = Л1? + Щ, + -Ч. (7-28)
где угловая скорость а>г — $ и, следовательно, о>2 = 8.
Уравнения, определяющие скорость перемещения центра масс
ракеты в земной системе координат, получим, спроектировав
вектор скорости ракеты (рис. 7.16, а) на оси ОДа и 03Y3:
х3 = vx = V cos 0; 1
y, = vy = I'SinG. j
Уравнение связи между углами тангажа, атаки и 0, а также
уравнение, описывающее работу системы управления (канала
тангажа автомага стабилизации) и определяющее закон изменения
угла отклонения 8 газовых рулей от времени полета, записываются
в виде соотношений
8 = 6 + а; |
Программный угол тангажа 8пр(0 отрабатывается автоматом
стабилизации по закону, принятому для данного образца ракеты и
аналогичному приведенному на рнс. 7.16,6. Действительный закон
изменения угла тангажа 8(7) дает решение уравнения (7.30).
Таким образом, искомая система уравнении, описывающая невозму-
(7.29)
(7.30)
151
шейное движение управляемой баллистической ракеты на
активном участке траектории, имеет вид
гп-о = Р9 — Q — Gp sinO — R г;
mvB = Р9* + £>y-Gpcos © + К ;
/ 0 = Л1СТ + Л1Т '+Л1р;
а-, = v cos в; } (7.31)
ys=z>sin0;
»=0 + а;
8(0 = /[»(0-»пР(01;
w — tn0~Gt.
Эта система решается методом численного интегрирования.
Решая ее для кажтого момента полета ракеты на активном участке,
можно определить элементы траектории: у, 0, 0, х-л и у3.
Уравнения движения ракеты па пассивном
участке
По аналогии с системой уравнений (7.31) составим уравнения
движения ракеты для вертикальной плоскости (в плоскости OxXY
криволинейной системы координат) без учета вращения Земли,
т. е. без учета силы Кориолиса, для системы сил, приведенной к
центру масс ракеты (рис. 7.17,а).
После выключения двигателя ракета движется под действием
лишь двух сил—аэродинамической R и веса GpK=mKg (где /ик —
масса ракеты в момент выключения двигателя). Для простоты вы-
водоп допустим, что ракета летит с углом атаки, равным нулю, т.е.
при R — Q. Векторное уравнение движения ракеты в эгом случае
имеет вид
mKfl = Q + GpK. (7.32)
Проектируя его на оси ОХ и OY скоростной системы координат,
получим (рис. 7.17, о) по аналогии с уравнениями (7.26—7.27):
mjv 0
s-n<
—GpKcos©, J
(7.33)
где г 9 ■■
ускорение центра масс ракеты вдоль оси OY (нор
мальное ускорение);
152
О — угол наклона вектора скорости к горизонту точки
старта, связанный с углом его наклона к местному
горизонту и полярным углом Tj следующим
соотношением:
6 = 0 +у]. (7.34)
Из формулы (7.34) следует соотношение между угловыми
скоростями:
0 = 0-4- (7.35)
Нормальное ускорение ап зависит, как и в формуле (7.24) от
кривизны траектории, для определения которой надо отсчет углов
Рис. 7.17. Система сил, действующих на ракету на пассивном участке
траектории (а), н характер изменения ее скорости и скоростного напора на
траектории (б)
наклона касательной к траектории производить все время от
одного направления — горизонта точки старта. Поэтому во втором
уравнении (7.33) при вычислении ап и взята угловая скорость 0
поворота касательной к траектории относительно горизонта точки
старта, а не местного горизонта.
Зависимость, определяющая скорость движения центра масс
по оси OY, аналогична формуле (7.29)
y = p_ = tfsin0, (7.36)
а уравнение его скорости вдоль оси ОХ может быть получено
следующим образом. Если движение по оси ОХ рассматривать как
153
вращательное (по дуге большого круга Земли) вокруг центра
масс О] Земли, то скорость x = v- будет линейной скоростью
вращения, которая равна произведению радиуса вращения (радиуса
Земли R) на угловую скорость вращения ш = -ц:
^ = /^ = /fy. (7.37)
Вектор скорости центра масс ракеты в произвольной точке
пассивного участка траектории спроектируем на направление местного
горизонта (рис. 7.17,а), и тогда
■у cos 0.
v„
(7.38)
Скорость vn можно рассматривать также как скорость
вращательного движения центра масс ракеты вокруг центра масс Земли,
но при радиусе вращения 00, =#4-г/ (рис. 7.17,а), где у —высота
полета ракеты. Отсюда в соответствии с формулой (7.37) находим
R + v R+y v '
Подставив это выражение в формулу (7.37), получим
уравнение, определяющее скорость движения центра масс ракеты вдоль
оси 03Х:
x=V- = —— rcos0. (740)
R + v . у '
Введя во второе уравнение (7.33) соотношения (7.35) и (7.39) и
разделив почленно уравнения (7.33) соответственно на тк и mKv,
получим систему уравнений, описывающих движение центра масс
ракеты в рассматриваемом случае, т. е. при нулевом угле атаки
■g-sm©;
v==
тк
\v R+y!
У-
V Sin 0:
R + y
v cos 0.
(7.41)
В случае движения ракеты с утлом атаки, отличным от нуля,
уравнение (7.32) запишется в виде
тка = Q + Ry + GpK;
во втором уравнении (7.33) добавится член Ry
(7.42)
mKt'0 = #y-Gp(!cos0,
(7.43)
154
а система (7.41) примет вид
v = ^--g-si П0;
\v R+y I m*v
A" =
^ = ^sin 0;
R
(7.44)
R + y
V COS 0.
)
Уравнение движения ракеты относительно центра масс
аналогично уравнению (7.28), но, поскольку система управления ракеты
не работает, управляющий момент тангажа будет равен нулю
/ ш =/ » = Л1СТ + Л1Т. (7.45)
г, г, г, г, ' z, V /
Таким образом, полная система уравнений движения ракеты на
пассивном участке траектории при угле атаки, равном нулю, в
криволинейной системе координат имеет вид
О
it —
тк
-g-sin©;
0
\v R+y I "'kv
2. z. ' г, '
X =
у = v sin 0;
R
R + v
b = 0 + a.
V COS 0,
(7.46)
)
Эта система также решается методом численного интегрирования
и для каждого момента полета дает элементы пассивного участка
траектории — v, 0, у, х, 8 (или угол атаки). Анализ результатов се
решения показывает, что у траектории, лежащих в плотных слоях
атмосферы, т. е. в пределах 80 км, нисходящая ветвь круче
восходящей. Скорость в каждой точке нисходящей ветви пассивного
участка меньше, чем в соответствующих, т. с. имеющих ту же
высоту, точках его восходящей ветви. На рис. 7.17,6 показан в
качестве примера общий характер изменения скорости ракеты на таких
траекториях в функции от времени полета (vs и ts — скорость в
вершине траектории и время полета до нее, vK п /к — зги же
параметры в конце активного участка, а vr. и Т — в точке падения).
При решении ряда задач теории полета, когда не требуется
знание элементов траектории на всем пассивном участке, а
достаточно определить их лишь в нескольких точках с меньшей точно-
155
стыо, чем при численном интегрировании уравнений движения,
используются расчетные формулы так называемой эллиптической
теории.
Эллиптическая теория рассматривает движение центра масс
ракеты на пассивном участке как движение материальной точки
под действием только одной силы — силы веса Gpii (рис. 7.18,а).
Сопротивление воздуха и вращение Земли не учигываются, Земля
принимается за шар радиусом /? = 6371 км, а линия действия силы
веса — проходящей через центр масс Земли (т. е. ноле силы
тяжести принимается центральным).
К центру Зел,Ли
а
Рис. 7.18. Параметры эллиптической траектории (а) и влияние с,- (при
©к = 0) на характер траектории ракеты (б —эллипс и окружность, в
—гипербола)
Ввиду сложности выводы расчетных формул эллиптической
теории здесь не рассматриваются. Ниже приведены лишь
расчетные формулы для эллиптической дальности Х-^, высоты Уял
эллиптического участка траектории и времени полета 7"эл (рис. 7.18,а):
X =2r *к<рВк -
" к i-VK + tE*eK'
ПЛ-с sin2 С-)к.
У 1== -
Kl-(2-vK)vKcos2eK + (l-V(!) '
/"
Т" = п \ \-- V1Г (*о + е sin зо)
\~ — vk) ■ s«
(7.47)
(7.48)
(7.49)
где
«o:==arccos-
и •>* =
£кГк
gK—ускорение силы тяжести в точке К;
гк = R+ Ук— полярный радиус для точки К в
полярной системе координат;
е = у\ — (2—vK) vKcos'-'0K — эксцентриситет эллиптической
траектории.
156
По приведенным формулам рассчитываются элементы
пассивного участка траектории на отрезке KSKt (рис. 7.18, о),
принимаемого, таким образом, за дугу эллипса, остальная часть которого
находится внутри Земли, а учаленный от вершины 5 фокус
совпадает с центром Земли. Дальности А'эл по формуле (7.47)
соответствует^ дуга КК\ (рис. 7.18, а), причем высота точки К\ равна
высоте ук- По этой же формуле может быть рассчитана и отвечающая
этому участку траектории наземная дальность ХАв по дуге АВ,
если в формулу (7.47) вместо гк подставить радиус Земли R. *
Результаты расчетов по формулам (7.47—7.49) будут тем ближе
к параметрам траектории, рассчитанной по системе уравнений
(7.41), чем выше точка К и, следовательно, чем меньше влияние
сопротивления поздуха на полет ракеты. Например, если
двигатель выключен на высоте 20 км, то ошибка расчета дальности
Хлв = 300 км по формуле (7.47) составляет 8%, а при 50 км —
0,1%.
Исследования показывают, что если, не меняя высоты ук и
скорости vK ракеты в момент выключения твнгателя, изменять угол
наклона вектора скорости к горизонту 61;, то при некотором
значении угла 0К = 0* можно получить максимум дальности Аал.
Угол ©^ называется углом максимальной дальности и
определяется но формуле
tge; = Ki^v (7.50)
Каждой дальности Хял отвечает свой угол 0* причем с ростом
дальности величина его уменьшается. Например, при дальности
1000 км этот угол равен примерно 43°, а уже при дальности
5000 км — лишь 37,5е. Эллиптическая теория, кроме формул
(7.47—7.49), определяющих значение основных параметров
пассивного участка, имеет зависимости для расчета элементов
эллиптической траектории и в промежуточных точках.
Из рис. 7.18, а следует, что полная дальность полета на
пассивном участке равна
■Х„зс — ХАС = X 4В + Хвс. (7.51)
Дальность Хвс по поверхности Земли (туга ВС), отвечающая
участку траектории К\С, рассчитывается по формуле
Хвс- 1'кС2в" (K^sin'6K + 2£Kjv- vK sin 0j- (7.52)
Эллиптическая теория позволяет оценить величину первой и
второй космических скоростей. Анализ эллиптических траектории
показывает, что при эксцентриситете е>1 они представляют собой
гиперболу, при е—\ — параболу, а при е<1—эллипс (в частном
случае при е — 0 — окружность). При е=\ получим
(2 -vK)cos-'0K = O. (7.53)
157
Отсюда при любых углах 9К ¥= 90° будем иметь vK = 2 и при
rK = R получаем vK = V2K= 11,18 км/сек вторую космическую
скорость. Запущенная вблизи поверхности Земли (при 0к = б) с
начальной скоростью v0 = V2K ракета движется по параболе, выходит
из поля земного тяготения н обратно не возвращается. По мере
удаления от поверхности Земли (рис. 7.18, в) скорость v2K
уменьшается и примерно на высоте 318 км составляет около 10,9 км/сек.
Аналогичный анализ формулы для эксцентриситета при е>1
показывает, что для полета ракеты по гиперболе необходима
приземная скорость более 11,18 км/сек. Если принять е = 0 и для
простоты вк = 0, то путем несложных преобразований из выражения
для эксцентриситета получаем vK = vKV = 7,9 км/сек. Это первая
космическая (или круговая скр) скорость. При такой скорости
(если не учитывать сопротивление воздуха, а угол наклона
вектора скорости к горизонту принять равным нулю) ракета,
запущенная пблнзи поверхности Земли, будет облетать Землю по
круговой орбите, т. е. станет ее спутником (рис. 7.18,6). Расчеты
показывают, что по мере удаления от поверхности Земли величина
круговой скорости, необходимая для движения спутника по
круговой орбите, уменьшается и, например, для высоты 300 км
составляет около 7730 м/сек. При этом, если в момент выведения на
орбиту спутник имел скорость v2R>Vo>vKV, (для данной высоты над
поверхностью Земли), орбита его будет уже эллиптической.
(рис. 7.18,6), а точка выведения — перигеем, т. е. точкой
наименьшей высоты спутника над поверхностью Земли. Такова орбита у
советских спутников типа «Космос».
При скорости vK = v0<vKV траектория спутника будет
представлять собой эллипс, точка выведения К—апогей, т. е. точку
максимального удаления спутника от поверхности Земли. Траектория
спутника при этом пересечет поверхность Земли.
7.5. УСТОЙЧИВОСТЬ И УПРАВЛЯЕМОСТЬ РАКЕТЫ
Маневренность
Маневренностью ракеты называют способность совершать под
действием управляющих сил движение но криволинейной
траектории. Управляющими принято называть силы, приложенные к
центру масс ракеты, перпендикулярные (нормальные) к направлению
движения, т. е. вектору скорости ракеты, и способные изменять
направление ее движения. Управляющие силы или величины,
характеризующие их действие, будут определять и маневренность
ракеты. Сравнение ракет по маневренности и оценка ее
производятся по величине нормальных перегрузок
Ср
158
Величина щ (или Зтах— угла отклонения газовых рулен
высоты) зависит главным образом от предельно допустимого в
полете для данной ракегы угла атаки <хтах- При больших углах атаки
ухудшается статическая устойчивость ракеты, нарушается
линейный характер зависимости (одно из необходимых условий при
проектировании системы управления) моментпых характеристик от
углов атаки и существенно возрастает величина составляющей
аэродинамической силы по оси OYu по которой в основном
определяется запас прочности ракеты.
Для каждой ракеты величина аШах определяется
характеристиками системы управления, конструкцией ракеты и
аэродинамической формой, а также оптимальным соотношением между запасом
прочности и весом ракеты.
Оценка маневренности ракет производится обычно в процессе
ее проектирования. Выбором соответствующих характеристик
проектируемого образца обеспечивается возможность полета по
программной траектории. Увеличить маневренность ракеты, как это
следует из формулы (7.54), можно лишь за счет увеличения R
(практически за счет увеличения площади оперения). Но на
больших высотах полета, где роль аэродинамических сил снижается
(ограничения ятах по прочности и статической устойчивости
ослабевают), основным средством обеспечения маневренности
становится сила тяги.
Вид активного участка траектории определяется конструкцией
ракеты, ее системой управления, а также программой (рис. 7.16, б),
в спою очередь зависящей от первых двух факторов. Вид
программы, как утверждается в зарубежных источниках, определяется
при проектировании ракет, исходя из следующих положений.
1. Начальный участок программы должен соответствовать виду
старта. Обычно для баллистических ракет применяется
вертикальный старт ввиду простоты и удобства, а также значительно
меньших боковых перемещений ракеты в первые секунды полета, чем
при наклонном старте. Продолжительность участка 0(л
(рис. 7.16,6) определяется временем, необходимым для того, чтобы
ракета вышла на режим устойчивого полета. При небольших
скоростях полета — в первые секунды после отделения ракеты от
стартового устройства — стабилизирующий момент ракеты невелик
(так как мал скоростной напор х^— ), поэтому даже небольшие
отклонения газовых рулей приводят к появлению значительных
угловых скоростей поворота ракеты относительно центра масс. Это
вызывает нарушение расчетного характера движения в начале
участка программного разворота (рис. 7.16,6) и может привести
к тому, что ракета сойдет с программной траектории. Время полета
на участке OtA зависит от конструкции ракеты (например, для
Фау-2 оно составляло 4 сек).
2. Закон ЗпР(/) на участке ВК (рис. 7.16,6) должен обеспечить
максимальную дальность стрельбы и минимальное рассеивание.
159
Чтобы выполнить эти в известной степени противоречивые
требования, на участке ВК выдерживается оптимальная зависимость
впр(0> при этом угол в вблизи точки К берется близким к углу в*.
3. Стрельба по возможности должна во всем диапазоне
дальностей данного образца ракеты вестись с одним программным
механизмом (это существенно упрощает конструкцию системы
управления).
4. Программа должна соответствовать маневренным качествам
и прочностным характеристикам ракеты. Для обеспечения
прочности ракеты и устойчивости се полета участок околозвуковых
скоростей (М = 0,8-т-1,2), где скоростной напор достигает максимума,
ракета по программе должна проходить с минимальными или
нулевыми углами атаки.
«V.
Возмущения, действующие на ракету в пол
Понятие об устойчивости движения «i»-i
Траектория полета реальной ракеты отличается
траектории в результате воздействия на ракету ра^. ,
щающих факторов. Для данного образца ракеты на ка
ность полета существует область пространства, называем.,-.
есой траекторий, осью которой является певозмущенная или и
четная траектория. Вероятность выхода за пределы трубки люии.,
траектории, отвечающей практически возможному сочетанию
величин возмущений, достаточно мала. Сечение трубки плоскостью
горизонта в районе цели дает эллипс (или круг) рассеивания
ракеты (рис. 7.19, а). По времени действия на ракету эти факторы
делятся на кратковременные и постоянные.
К кратковременным возмущающим факторам, воздействующим
на ракету в течение сравнительно небольшого отрезка времени,
можно, например, отнести порывы ветра, кратковременные
нарушения режима работы двигателя («хлопкн»), ошибки установки
ракеты на стартовом агрегате, ложные токи в системе управления
и т. д. Возмущения такого рода нельзя учесть при подготовке
данных для пуска, поэтому они относятся к числу причин,
вызывающих рассеивание ракет. Примером постоянно действующих
возмущающих факторов можно считать отклонения конструктивных
характеристик ракеты от их расчетных значений в результате
допусков на изготовление и монтаж агрегатов, отклонения
метеоусловий полета от табличных, систематические ошибки работы
элементов системы управления, вращение Земли. Некоторые из
этих возмущающих факторов при подготовке пуска учитываются
(например, отклонение метеоусловий полета от табличных,
влияние вращения Земли), но этот учет сопровождается
определенными ошибками, поэтому действие данной группы факторов также
приводит п конечном счете к отклонению ракет от цели.
В качестве примера постоянно действующего возмущения, не
учитываемого при подготовке данных для пуска, рассмотрим влия-
160
ние перекоса линии действия силы тяги. Если ось камеры сгорания
двигателя оказалась смещенной относительно продольной оси
ракеты (например, в плоскости стабилизаторов I—III), то сила тяги
Р на всем активном участке будет на плече А давать относительно
центра масс возмущающий момент/W^, стремящийся развернуть
ракету вокруг оси OZx против часовой стрелки (рис. 7.19,6). Для
создания компенсирующего управляющего момента газовые рули
высоты будут повернуты на дополнительный угол относительно
программного угла отклонения 3Пр. Разложив вектор силы тяги по
направлениям осей O.Y] и OYu ^
видим, что поступательное
движение центра масс ракеты обес-
печнвяг-- меньшая (чем Р) сила
' „ss, а появившаяся
-» . тэерекосасостапляю-
*. - ; АР = Рsins будет
i T.j масс ракеты вниз
.су-, траектории. Все
ч*1-'- ifk° такому измене-
лобового сопротивлс-
.~и, эффективной силы
. , -^ времени набора требуемой
скорости vv и параметров конца
активного участка, что дальность
полета ракеты уменьшится.
У неуправляемых
баллистических ракет перекос (как и
эксцентриситет) силы тяги сильно
сказывается на рассеивании (причем по направлению больше,
чем по дальности). Для уменьшения этого влияния у таких ракет
на активном участке обычно осуществляется пропорот самих
ракет (с помощью вспомогательных двигателей) вокруг продольной
оси, что приводит к совпадению среднего положения линии
действия силы тяги с касательной к траектории.
Возмещающие факторы обычно разделяют па баллистические,
метеорологические и геофизические. К, основным факторам первой
группы относят отклонения от номинального (табличною)
значения таких параметров, как стартовый вес ракеты, секундный
расход и удельная тяга двигателя (удельный импульс топлива). В
качестве основных метеорологических возмущений принимают
отклонение температуры и давления воздуха от табличных и ветер.
Основными геофизическими возмущающими факторами являются
отклонение ускорения силы тяжести от табличного значения и
вращение Земли.
Степень влияния различных возмущающих факторов на полет
ракеты неодинакова и устанавливается с использованием
достаточно сложного математического аппарата при исследовании
устойчивости движения. Поэтому ограничимся лишь рассмотрением
161
Рис. 7.19. Трубка траектории (а) и
возмущающий момент от перекоса
силм тяги (б)
основных понятий и определений, связанных с решением данной
задачи.
Движение баллистической управляемой ракеты считается
устойчивым, если действие любых возможных возмущающих факторов
приведет к отклонению возмущенной траектории от
невозмущенной на величину, не превышающую некоторых пределов,
установленных, исходя из требований заданной кучности стрельбы,
прочности и управляемости ракеты. Обычно отдельно исследуется
устойчивость движения центра масс ракеты но траектории и
устойчивость вращательного движения ее вокруг центра масс как на
активном, так и на пассивном участке траектории.
На активном участке определяются отклонения угловых
параметров движения ракеты и органов управления от их расчетных
значений под воздействием возмущении. Это позволяет оценить
выполнение условий управляемости и прочности ракеты, а также
отдельные вопросы кучности стрельбы. На пассивном участке
оценивается влияние начальных условий движения, отклонений
конструктивных характеристик ракеты и условий полета па характер
колебательного движения ее относительно центра масс.
7.6. ОСНОВЫ ТЕОРИИ ПОПРАВОК
Поправки — это отклонения параметров от их номинальных
(табличных) значений, взятые с обратным знаком. Теория
поправок учитывает влияние лишь тех факторов, величины которых
можно достаточно точно определить либо аналитически, либо
путем специальных измерений. Возмущения, точность и
достоверность которых недостаточны, теорией поправок не учитываются и
относятся к причинам, вызывающим рассеивание.
При решении задач теории поправок используются гак
называемый метод разностей и метод дифференциалов. Рассмотрим их
сущность на примере определения отклонения полной дальности
стрельбы ракеты вследствие влияния различных возмущений па
активном участке траектории. Полная дальность в криволинейной
системе координат н при нормальных условиях полета равна сумме
дальности активного участка хк и пассивного Хтг, причем Хиас
будет в основном определяться следующими параметрами конца
активного участка:
vK,y*, ©к и CK = -j^-10\
где Си—баллистический коэффициент ракеты;
i = г х ',... —коэффициент формы ракеты, равный отношению
коэффициента Сх (функции лобового сопротивления воздуха) к
некоторой «эталонной» функции С Следовательно,
^==л-к + Л'пас(гк, Я> 0к, Ск). (7.55)
162
В результате воздействия возмущений параметры в конце
активного участка получат приращения Ax~l{, AvK, Ау~, Д0Ь. и АСК.
Полная дальность X, отвечающая таким условиям полета, будет
равна
X = [хк + Ахк) + XniC (vK + AvK, ук + Аук, 0К + Л©к,
Ск + ДСК). (7.56)
Для определения отклонения дальности, соответствующего
влиянию указанных возмущений на активном участке траектории,
по методу разностей надо из зависимости (7.56) вычесть
зависимость (7.55)
, uX = ixK + x„iC(-vK + wK, yK + syK, ек + лек, с\ + лск)-
- Хпк (vK, Я, ©к, Ск). (7,57)
Следовательно, при нахождении поправок методом разностей
рассчитываются элементы траекторий при действительных и
табличных условиях стрельбы, из первых вычитаются вторые н
результат с обратным знаком дает величину искомой поправки.
Метод разностей обычно применяется тогда, когда отклонения
параметров, определяющих условия полета (пли величины
возмущений), достаточно велики. В противном случае используется более
простой, хотя н менее точный, метод дифференциалов.
Так как приращения At'K, Аук, Л0К, АСК в методе
дифференциалов принимаются малыми, то, разложив второе слагаемое
зависимости (7.57) как функцию п ряд и отбросив члены, содержащие
величины второго и более высокого порядка малости, получим
Л'™ (?'к + &к, Ук + М>к, ©к + ^©к. Ск + АСК) SS
»*Мс К. ук, ©к. ск) + -^ м>к +
1/1-к
+ Jfe Лук + _Мр. Л0К + -&L АС,, (7.58)
дук №■« дСк
Подставив это выражение в формулу (7.57), получим
зависимость для расчета поправок в дальности по методу
дифференциалов
IX = Ахк = Щ^- AvK + &£- Аук + ^|iL Л0К +
(7.59)
Множители, стоящие перед приращениями \vK, Аук, Л6К, АСК,
Называются основными поправочными коэффициентами и по
физическому смыслу представляют собой отклонения дальности по-
163
лета при отклонении соответствующего параметра точки К {vK, ;/K,
6к или С„) на единицу (в которых измеряется соответствующий
параметр).
В связи с развитием электронновычпслптельных машин в
настоящее время широко используется при определении поправок
метод разностей. Этим же методом на основе численного
интегрирования систем дифференциальных уравнений движения ракеты
определяются и поправочные коэффициенты в зависимости (7.61).
В соответствии с этапами решения задач теория поправок
делится на два раздела: теорию поправок для активного и теорию
поправок для пассивного участка траектории. Теория поправок для
активного участка определяет отклонения элементов его конца,
вызванные возчействием за время полета на активном участке
отклонений конструктивных характеристик ракеты н условий полета
от нормальных. Теория поправок для пассивного участка
определяет отклонения от нормальных значений элементов пассивного
участка траектории, обусловленные отклонением параметров конца
активного участка и влиянием условий полета на пассивном
участке.
Основным методом решения задач теории поправок для
активного участка является метод разностей, по при известных
поправочных коэффициентах для параметров точки выключения
двигателя и небольших отклонениях параметров возмущенной
траектории для точки К от табличных поправки могут быть подсчитаны и
по зависимостям метода дифференциалов:
п
1=1 ''
п __
лУк— >к-^к-Т- Jtml до. Л'-i,
п .
Ах =~х А/ -4- ^ ^S- Д) •
1 = 1
п
/.1 j
В уравнении (7.60) X* учитываются условия полета
(температура воздуха, секундный расход топлива и т. д.), а ДХ,-—
отклонения их значений от табличных (т. е. возмущения). Частные
производные под знаком суммы - известные поправочные
коэффициенты. Отклонение времени работы двигателя Д/1: определяется из рс
164
(7.60)
тения уравнения, описыпающего работу системы управления
дальностью полета.
Если выключение двигателя происходит по псевдоскорости (см.
гЛ. VIII), то автомат управления дальностью подает команту на
отсечку тяги при равенстве действительной и расчетной величин
псевдоскорости (ипк = vllKl,).
Иначе это условие можно записать
>к 'кр
V* + \ g S- п Ь dt = vKp + f g si n »p dt, (7.61)
o" 6
где vm, vK, оПкр, -Ощ, — соответственно действительные и расчетные
значения псевдоскорости va и истинной скорости v в момент
выключения двигателя. По аналогии с (7.6) можно записать
п
A"i =v M 4- ^1-^-ДХ- (7 62)
/ -1
откуда, поскольку AvnK=vnK — vnKV = 0, получаем
п
Д^^-J-y-^f ДХ,, (7.63)
Подставляя это выражение в формулы (7.60), получаем их
окончательное выражение для случая управления дальностью по псеп-
доскорости.
Влияние начальных условий полета (отклонений параметров
конца активного участка) для пассивного участка на его дальность
оценивается по формуле (7.59), а на боковое отклонение в точке
падения — по зависимости
Дi = дiк + ^ГrIac) (7.64)
где z„ = ч)г. — боковая скорость центра масс ракеты в точке
выключения двигателя;
Тип,- ■— время полета ракеты на пассивном участке.
Основным методом учета влияния условий полета на пассивном
участке траектории на его параметры в любой точке также
является метод разностей. В этом случае (как и для активного
участка) перед интегрированием системы уравнений возмущенною
Движения ракеты необходимо точно определить расчетные
зависимости возмущающих сил и моментов, действующих на ракету в
полете, от условий полета и параметров траектории. В кратком
изложении основ теории полета, каким является эта глава, невозможно
привести подробное математическое обоснование современных
расчетных зависимостей теории поправок. Поэтому последующее
изложение материала направлено- главным образом на раскрытие
физической картины воздействия основных возмущений на полет
165
ракеты. Оценка этого воздействия для случая управления
дальностью по нссвдоскорости будет производиться по характеру
изменения полной дальности полета.
Влияние баллистических возмущений
Рассмотрим влияние отклонения стартового веса на полет
ракеты, приняв для определенности, что стартовый вес ракеты
больше табличного. Из первого уравнения системы (7.31)
— gsinQ
(7.65)
Рис. 7.20. Характер изменения скорости (а. г) и псевтоскорости (б) при
денствии возмущении и изменение С* при изменении упругости воз чуха (б)
следует, что у более тяжелой ракеты как скорость, так н
псевдоскорость на активном участке будут нарастать медленнее, чем \
ракеты с табличным весом (ур и v„p). При управлении дальностью
по псевдоскоростн. как это следует из уравнения (7.61),
выключение двигателя у ракеты с увеличенным стартовым весом
произойдет позже, а скорость п конце активного участка vK будет меньше
табличной сьг, (рис. 7.20,6). Следовательно, за счет влияния
увеличенного стартового веса (за время полета на активном участке)
ракета полетит па меньшую дальность.
Масса такой ракеты в момент выключения двигателя тк будет
166
больше, чем табличная. На пассивном участке, как это следует пз
первого уравнения системы (7.46)
v = — -g-—gsin9, (7.66)
"'к
отрицательное ускорение силы лобового сопротивления воздуха
(т. е. величина —-—) у более тяжелой ракеты будет меньше,
чем у ракеты с табличным стартовым весом. Следовательно,
скорость у более тяжелой ракеты будет убывать медленнее, и ракета
(за время полета на пассивном участке) полетит на большую
дальность. Этот эффект на пассивном участке, очевидно, будет тем
сильнее, чем большая часть траектории будет лежать в плотных
слоях атмосферы. Суммарный эффект влияния увеличенного
стартового веса на отклонение по дальности зависит от того, влияние
какого участка траектории будет преобладать, т. е. в конечном
счете тоже от дальности полета, так как величины активного и
пассивного участков определяются дальностью. При уменьшении
стартового веса ракеты рассмотренная по участкам траектории
картина его влияния будет обратной.
Влияние отклонения секундного расхода топлива можно
проследить по аналогичной схеме. Предположим, что он меньше
табличного. Следовательно, и величина силы тяги двигателя в любой
момент времени полета на активном участке станет меньше
номинальной. Тогда по уравнению (7.65) скорость v и псевдоскорость
vn будут нарастать медленнее (см. рис. 7.20, а, б). За счет влияния
уменьшенного секундного расхода на активном участке получим
Дрк = 1'к — ь'кр<0— ракета полетит на меньшую дальность.
Масса ракеты тк в точке К будет больше табличной, и это
приведет за время полета на пассивном участке к такому же эффекту,
как и при увеличенном стартовом весе. Суммарный эффект
влияния уменьшения секундного расхода на величину и знак
отклонения точки падения ракеты также будут зависеть от тальностн ее
полета.
Если, наконец, удельная тяга двигателя в пустоте меньше
табличной, то эффективная тяга двигателя
Р3 = РУъ п Gg - /■'.р„ - 4Qr (7.67)
за время полета на активном участке также будет меньше
расчетной.
Скорость ракеты будет нарастать медленнее, двигатель
выключится позднее (рис. 7.20, б, а), и ракета полетит на меньшую
дальность. Рассмотренные картины влияния отклонений секундного
расхода и удельной тяги будут обратными при изменении знаков
отклонений.
167
Влияние метеорологических возмущений
Рассмотрим случай, когда атмосферное давление ра больше
табличного. При этом предположении тяга Рэ будет меньше
расчетной, а плотность воздуха увеличится, значит, увеличится и сила
лобового сопротивления воздуха Q. Скорость ракеты (согласно
уравнению 7.65) станет нарастать медленнее (рис. 7.20, о) и в
точке К будет меньше расчетной. Ракета за счет влияния
увеличенного давления воздуха за время полета па активном участке
траектории полетит на меньшую дальность. В любой точке
пассивного участка увеличение силы Q также приведет (согласно
уравнению 7.66) к уменьшению скорости относительно ее значения при
табличной величине атмосферного тавлеиия, а следовательно, и
к недолету. Таким образом, увеличение давления воздуха на всей
траектории ракеты приводит к уменьшению дальности ее полета.
Изменение температуры воздуха влияет на параметры
траектории ракеты через изменение плотности и упругости (скорости
звука) воздуха. Рассмотрим это влияние для случая, когда
температура воздуха больше табличной.
В этом случае плотность воздуха, а следовательно, и сила
лобового сопротивления ракеты уменьшатся, что в соответствии с
уравнением (7.65) приведет к нарастанию скорости на активном
участке (см. рис. 7.20,г). Ракета в конце активного участка траектории
будет иметь большую скорость н полетит на большую дальность.
По росг температуры воздуха приведет к увеличению скорости
звука в воздухе и уменьшению числа Маха:
a = Vl,4gRT; М = -%-. (7.68,)
Следовательно, значения коэффициента Сх силы лобового
сопротивления (рис. 7.20,в) при повышенной температуре воздух.:
будут соответствовать уже значениям чисел Мг, а не Мь отвечай
щих табличной температуре. Поскольку средняя скорость ракеты
на активном участке сверхзвуковая (МСр>1), рост температуры
воздуха приведет к росту Сх (рис. 7.20,в) и силы лобового
сопротивления ракеты, т. е. закон изменения скоростей v и vn на актп
ном участке траектории будет соответствовать графика:'
рис. 7.20, а, б. Ракета в точке К будет иметь (за счет влияния те:'
нерачуры, сказывающейся через упругость воздуха) скорое
меньше табличной и. следовательно, не долетит до цели.
Па пассивном участке траектории, где средняя скорость полога
ракеты также сверхзвуковая, влияние отклонения температурь;
воздуха на дальность полета аналогично. Очевидно, что с росте
дальности полета, по мере выхода верхней части траектории 5а
пределы слоев атмосферы, это влияние будет ослабевать. Вектор
скорости ветра ic при оценке его влияния на полет ракеты обычко
раскладывается на продольную wx (в плоскости пуска) и
боковую i&i (перпендикулярную к плоскости пуска) составляющие.
168
Рассмотрим влияние продольного ветра, взяв для примера
попутный ветер (рис. 7.21,и). Величина силы Q ракеты определяется
ее скоростью vr. При отсутствии ветра скорость vr равна скорости
v относительно Земли, а при наличии ветра определяется
соотношением
vr = v — wx или vr = v — w2. (7.69)
Из рис. 7.21,0 видно, что vr меньше v, т. е. при попутном ветре
сила лобового сопротивления воздуха будет меньше, чем при
безветрии; ракета в конце активного участка (как это следует из
уравнения 7.65 и рис. 7.20, г) приобретет скорость vK больше
табличной, и полетит (за счет влияния tvx на активном участке) па
большую дальность.
Рис. 7.21. Влияние ветра (а, б) и отклонения ускорения сити
тяжести (в) на полег ракеты
В любой точке пассивного участка при попутном ветре сила
лобового сопротивления Q также будет меньше, чем при безветрии,
скорость ракеты превысит табличные значения, что и приведет к
еще большему увеличению дальности. Таким образом, попутный
ветер на всей траектории управляемой баллистической ракеты
приводит к увеличению ее дальности. Встречный ветер дает обратный
эффект.
Влияние бокового ветра рассмотрим для случая, когда он дует
слева. Поскольку wz<^ v, можно положить vr~v, т. е. боковой
Ветер значительного влияния па дальность полета не оказывает.
Вследствие обдува ракеты боковым потоком воздуха со скоростью
wz возникает боковая составляющая сила сопротивления воздуха
Rt (ркс. 7.21,6), приложенная в центре давления С и
разворачивающая ракету вокруг оси О У, против часовой стрелки.
Перенеся по правилам механики силу Н._ в центр масс, no.iv-
чим, что ракета (например, неуправляемая баллистическая) при
боковом ветре будет перемещаться по траектории с углом сколь-
Жеиия 3. На активном участке траектории, поскольку сила
R^> /^г_ (рис. 7.21,6), это приведет к смещению центра масс от
Плоскости" пуска в сторону, откуда дует ветер. На пассивном участ-
169
ке где P = Pz = 0, сила RZ будет сносить центр масс ракеты по
петру. Знак п величина суммарного бокового отклонения точки
падения такой ракеты от цели за счет действия бокового ветра
определяются ее конструктивными особенностями и соотношением
времени полета на активном и пассивном участках траектории.
Влияние геофизических возмущений
Рассмотрим влияние на полет ракеты ускорения силы тяжести.
Как видно из уравнений (7.67 и 7.68) и рис. 7.20, а, б, влияние
этого фактора на активном участке траектории аналогично
влиянию увеличенного стартового веса: двигатель ракеты выключится
при vK, меньшей табличной, и ракета за счет действия
повышенного по сравнению с табличным ускорения силы тяжести за
время tK полетит на меньшую дальность.
На восходящей ветви KS пассивного участка (рис. 7.21, в) при
увеличенном g скорость будет падать быстрее (см. первое
уравнение системы 7.46), чем иа табличной траектории и дальность
полета уменьшится. На нисходящей SC эффект будет
противоположным, а так как время полета по дуге SC больше, чем по дуге KS,
то влияние увеличенного ускорения g на пассивном участке
траектории, сказывающееся через изменение скорости ракеты, в
конечном счете приведет к небольшому увеличению дальности. Но, как
следует из второго уравнения системы 7.46, при большем g угол 0
иа всем пассивном участке возмущенной траектории убывает
быстрее, чем на табличной, т. е. возмущенная траектория проходит
ниже (рис. 7.21,/?) и будет недолет. Простой расчет показывает,
что это влияние преобладает над первым и, таким образом,
воздействие увеличенного ускорения па всей траектории приводит к
недолету.
Качественное влияние вращения Земли па полет ракеты для
частных случаев рассмотрено в разд. 7.3. Количественную оценку
в общем случае расположения траектории ракеты иа поверхности
Земли можно провести методом разностей, интегрируя системы
(7.31) и (7.46), в правых частях первых уравнений которых надо
учесть в качестве возмущающей силы силу Кориолнса.
Но зависимости общего вида, учитывающие влияние вращения
Земли на отклонение по дальности и по направлению, можно
получить и на основании упрощенных условий полета, например из
уравнений так называемой параболической теории,
рассматривающей движение центра масс ракеты на пассивном участке в пустоте
под действием только силы Gy,K = mKg. Кривизна Земли не
учитывается, и уравнения выведены в земной системе координат. Для
простоты вывочов отклонения по дальности АХ и по
направлению AZ, вызванные вращением Земли, будем рассматривать не в
точке падения С, а в точке Ль высота которой равна Ук
(рис. 7.22, а).
170
Уравнения певозмущепиого движения центра масс ракеты по
параболической теории записываются в виде
x = Q.ty==-g^ z = 0. (7.70)
Соответственно уравнения возмущенного за счет влияния силы
Кориолиса К движения определяются соотношениями:
хв = х + Лл=— сскх:
rPv*' N М
(7.71)
Экватор О,
а - 6 в
Рис. 7.22. К вопросу о влиянии сращения Земли на полет ракеты
Здесь ©„г, юк„, а>м—проекции ускорения силы Кориолиса па оси
земной системы координат (знак ьук противоположен знаку
силы К); хя, у в, 2В —ускорения возмущенного движения,
отличающиеся от ускорений невозмущенного, определяемых
уравнениями (7.70), на величину приращений ускорений, вызванных
действием силы К:
Хв — X "г -^Х,
Ув = У+ЬУ'
zB = z + д£
(7.72)
Вычитая из уравнений (7.71) почленно уравнения (7.70),
получаем так называемую систему уравнений возмущенного движения
центра масс ракеты в отклонениях:
их = —к\; v;
д_у = —даку;
Дг = —w
кг-
(7.73)
171
Проекции Wkx, Wkv, Wk определяются соотношениями:
(7.74)
а скорости tv, Uj/> vi получаются при интегрировании иевозмушен-
нон системы (7.70) с учетом того, что в начале пассивного участка
(при / = 0) они равны проекциям vK на оси земной системы
координат;
^. = -tVcos0K;
г\ = 0.
(7.75)
Проекции Qt угловой скорости вращения Земли на эти же осп
легко могут быть получены из рис. 7.22, б, где ось X' является
касательной к ыеричиану в точке старта:
&х ~ 2 cos В cos A;
&у = Q sin В;
&г~~Q cos УЗ sin Л.
(7.76)
Подставляя соотношения (7.74 и 7.75) в уравнения (7.73),
интегрируем их дважды и получаем отклонения возмущенной
траектории от невозмущенной в точке Ki, вызванные влиянием
вращения Земли (рис. 7.22,а):
1 tg0K 6 Уг.
2tg0K "у g-Q^
(7.77)
Суммарное отклонение по дальности (рис. 7.22, а) в этой
точке, вызванное действием силы К. будет равно
1 tg0K
(7.78)
Таким образом, искомые отклонения точки падения ракеты по
дальности и направлению за счет вращения Земли с учетом соот-
172
ношений (7.76) определяются по параболической теории
зависимости вида: '
ЛХ = "^~(l^07~- ^)^cosBsmA = CcosBsinAi
SZ = ^- Q sin В - ■*£■ Q cos В cos A =
— DsinB — E cos В cos A.
(7.79)
Поскольку- формулы (7.79) получены без учета силы
сопротивления воздуха, их точность при малых дальностях полета, когда
Рис. 7.23. Боковое отклонение точки
вследствие вращения Земли
паления
значительная часть пассивного участка траектории (или целиком)
лежит в плотных слоях атмосферы, будет недостаточно высокой.
С ростом дальности полета все большая часть пассивного участка
траектории будет выходить за пределы атмосферы и зависимости
(7.79) все точнее будут отражать количественное влияние силы К
на величины АХ и AZ.
Для качественной оценки влияния вращения Земли на знак
отклонений точки падения ракеты при различных сочетаниях
широты точки старта В и азимута пуска А удобно пользоваться
графиками, построенными по зависимостям (7.79). График \Х
(рис. 7.22, в) приведен только для северного полушария (для
южного — аналогичные кривые, симметричные относительно оси
ординат), а график AZ (рис. 7.23) —для всех значений широты
точки старта В.
1
Глава 8
СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТ
8.1. НАЗНАЧЕНИЕ И КЛАССИФИКАЦИЯ
Управление движением ракет применяется для повышения
точности пусков. Оно состоит из наведения и стабилизации ракеты,
выполняемых, как правило, автоматически с помощью комплекса
приборов, называемого системой управления.
В отдельных случаях применяется полуавтоматическое
наведение ракет, предусматривающее участие оператора.
Аппаратура наведения состоит из приборов для определения
координат ракеты и цели, вычислительных устройств для расчета
требуемой траектории движения ракеты, а также каналов связи
пункта управления с управляемым объектом.
Приборы системы стабилизации, называемые автоматом
стабилизации, располагаются только на борту ракеты. Автомат
стабилизации имеет несколько каналов, каждый из которых
осуществляет регулирование движения ракеты по одному из
параметров.
Параметрами стабилизации (регулирования) могут быть
величины, характеризующие положение ракеты относительно центра
масс (углы тангажа, рыскания и крена), а также величины,
определяющие отклонение центра масс от требуемой траектории.
Каждый канал автомата стабилизации представляет собой
замкнутую систему автоматического регулирования, работающую
по принципу устранения рассогласования между текущим
значением регулируемого параметра и его требуемым значением,
задаваемым системой наведения.
По принципу действия все системы управления (СУ), как и
системы наведения, можно разделить на четыре основные группы:
автономные, телеуправления (дистанционного управления),
самонаведения и комбинированные.
В автономных СУ сигналы управления вырабатываются
аппаратурой, размещенной на ракете. При этом аппаратура
управления после запуска ракеты не получает никакой информации ни с
174
командного пункта управления, ни от цели. При автономном
управлении наведение ракеты па цель может осуществляться по
программной траектории, заранее рассчитанной и введенной в СУ
перед пуском ракеты или по траектории, определяемой в процессе
полета с учетом текущих значении координат и параметров
движения ракеты относительно цели, координаты которой вводятся
перед стартом. Обычно автономное управление применяется в
ракетах класса «земля-—земля».
В системах телеуправления курс ракеты вырабатывается на
станции наведения, расположенной на командном пункте. Для
наведения ракеты по требуемой траектории команды управления
передаются на бортовую аппаратуру по каналу связи.
Основным преимуществом систем телеуправления по сравнению
с автономными является возможность изменения траектории
движения ракеты по сигналам с командного пункта. Это позволяет
эффективно использовать телеуправление в ракетах для
поражения подвижных, маневренных целей.
В ракетах с системами самонаведения устанавливается
аппаратура автоматического сопровождения цели, автоматически
определяющая положение ракеты относительно пели. Эта задача
выполняется головкой самонаведения, основным элементом которой
является координатор цели. При отклонении ракеты от заданного
направления п при образовании сигнала ошибки координатор цели
вырабатывает командные сигналы для автопилота. Автопилот с
помощью органов управления наводит ракету на цель.
Системы самонаведения обеспечивают наиболее высокую
точность наведения ракеты на цель, что важно для поражения
малогабаритных целей. Однако применение самонаведения
ограничивается разрешающими способностями аппаратуры обнаружения
цели на окружающем фоне и сравнительно малым радиусом
действия головки самонаведения.
Для наиболее полного использования положительных свойств
различных систем управления применяют комбинированные
системы. Примером такой комбинированной системы является
система, сочетающая принципы автономного управления и
самонаведения.
8.2. ЭЛЕМЕНТЫ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ
Все системы управления представляют собой различные
варианты регуляторов систем автоматического регулирования (САР).
Их функциональную блок-схему, например, применительно к
каналу тангажа автомата стабилизации баллистической ракеты
можно представить в виде, изображенном на рис. 8.1.
Как видно нз рисунка, основными элементами данной СУ
являются: измерительное, усилительно-преобразовательное и
корректирующее устройства.
175
Несмотря на большое многообразие систем управления, все они
включают одни и те же функционально необходимые элементы.
Остановимся на физических основах устройства и действия
наиболее характерных элементов систем.
L„.
Регулятор (система управления)
Чз/чсритель
ное
устройстве
Корректору
ющее
устройство
Усилительно
\прео6разовапкт\~\
иве устройство]
Исполнителе
ное
устройства
t^\^,fl,=KzS'
| Объект регулироеа^-
| ни я (ракета]
J_
Sit]
I
i i_: i
Рис. 8.1. Система угловой стабилизации ракеты по углу тангажа
1. Измерительные устройства
Измерительные устройства предназначены для измерения
отклонения (ошибки) регулируемой величины от ее программного
(заданного) или расчетного значения и преобразования этого
отклонения в управляющий сигнал (чаще всего в виде
электрического напряжения), пропорциональный измеренному отклонению и
с учетом знака.
Нами будут рассмотрены только наиболее часто встречающиеся
в системах управления ракет измерительные устройства.
Гироскопические приборы. Такими приборами являются:
— гироскопы направления — для определения угловых
отклонений колеблющегося объекта от заданного направления;
— гировертикали — для определения на подвижном объекте
стабильного направления истинной вертикали;
— дифференцирующие гироскопы и гиротахометры — для
определения производных от углового отклонения и измерения угловой
скорости движущегося объекта;
— интегрирующие гироскопы — для интегрирования ускорений;
— гнростабилизаторы — для стабилизации колеблющегося
объекта.
Рассмотрим принципы действия этих гироскопических
приборов.
Гироскоп направления, представляющий собой
трехстепенный свободный гироскоп, предназначен для создания
опорной системы отсчета, относительно которой можно было бы
измерять угловые отклонения: угол крена <р, рыскания ф и тангажа 0.
176
Для измерения углов крена и рыскания с целью выработки
управляющих сигналов при повороте ракеты вокруг продольной
оси и при ее отклонении от плоскости стрельбы применяется ги-
ровертикант (рис. 8.2), который расположен на ракете так,
что в исходном положении для пуска главная ось 4 гироскопа (ось
ротора) перпендикулярна
плоскости стрельба, плоскость
внешней рамки / параллельна
плоскости стрельбы или
совмещена с ней, оси 2 и 5
подвеса внешней и внутренней
рамок параллельны
соответственно осям Х0 и Y0
наземной системы координат.
Предполагается, что ракета
наведена на цель. С осью
внешней рамки 2 связан токосъем-
пик потенциометрического
датчика команд рыскания 6(Дк,).
При повороте ракеты по углу
рыскания ф потенциометр,
связанный с основанием прибора,
а следовательно, и ракеты,
будет перемещаться
относительно неподвижного
токосъемника и с датчика будет спят
сигнал Vc, пропорциональный
углу рыскания.
Аналогичная картина
происходит при повороте ракеты по
углу крена ф, но в этом случае
сигнал V.it пропорциональный
этому углу, будет снят с
датчика команд крена 7 (<#*').
При отклонениях ракеты по
тангажу и се развороте в
плоскости стрельбы никаких
относительных перемещений
элементов прибора не
произойдет, поскольку это движение совершается вокруг оси 7.х ракеты,
параллельной главной оси гироскопа, с которой совпадает вектор
кинетического момента гироскопа Н.
Управляющие сигналы К. и V,, , снятые с датчиков команд,
через усилительно-преобразовательные элементы угловой
стабилизации поступают на исполнительные элементы рулевых органов
ракеты.
Для измерения углов отклонения от задаваемого программного
7-622 177
Рис
8.2. Схема расположения
вертиканта на ракете:
внешняя рамка: 2 — ось внешней
гиро-
— рамкн:
3—основание; 4 — главная ось гироскопа;
5 — ось внутренней рамки (гиромотора); б —
датчик команд рыскання <Дк^,)', 7 —датчик
команд крена (Дк^)
значения угла тангажа в СУ используется гироскопический
прибор, называемый г и ро го р изо нто м (рис. 8.3).
Перед стартом ракеты гирогоризопт устанавлнвается_так, что
главная ось 4 гироскопа и совпадающий с ней вектор //
направлены параллельно плоскости стрельбы; плоскость внешней рамки/
перпендикулярна к
плоскости стрельбы; оси 2 и 5
подвеса и внутренней рамки
параллельны
соответственно осям Z0 и Yq -стартовой
системы координат.
Прибор имеет потенцио-
метрический датчик команд
тангажа (Дк э \ t
токосъемник которого установлен
на оси 2 внешней рамки /,
а сам потенциометр связан
с корпусом 3 прибора с
помощью ленточной
передачи 9 и кулачка 5
программного механизма. Принцип
снятия сигнала с датчика
команд но углу тангажа
пояснен на рис. 8.4.
Если рассогласование по
углу тангажа отсутствует,
токосъемники датчика
находятся в точках равных
потенциалов (Л—А) и
сигнал на выходе датчика
равен нулю. При отработке
программы кулачок 8 (см.
рис. 8.3) с помощью
ленточной передачи 9 повернет
диск и появится угол
рассогласования ДО, как это
показано на рис. 8.4.
Потенциал левого токосъемника
датчика появится сигнал V.-.■,
■*У
Рыскание
Рис. 8.3.
/ — внешняя
3 — основание;
ось внутренней
команд тангажа
ного
Схема расположения
зочта на ракете:
рамка: 2 — ось внешней
пфогори-
2 — ось внешней рамки;
4 —главная ось гироскопа; 5 —
рамки (гиромотора); 6 — датчик
{Дь'^ч 7 — привод программ-
механизма; 8 — кулачок программного
механизма; 9 — ленточная передача
станет выше правого. На выходе
пропорциональный отклонению Д9 = 9 — 9пр.
Сигналы датчика через усилительно-преобразовательные
элементы системы угловой стабилизации поступают на
исполнительные устройства рулевых органов (в плоскости, перпендикулярной
к плоскости стрельбы). Последние отклоняются, действуя на
ракету так, чтобы ликвидировать се отклонение по тангажу или
создать программный разворот в плоскости стрельбы.
11а рис. 8.5 изображен д и ф ф е р е н ц н р у ю щ и и гироскоп,
178
внешняя рамка которого жестко укреплена на корпусе подвижного
объекта. В данном случае степень свободы гироскопа
ликвидирована. Дифференцирующий гироскоп располагается на обьекте так,
чтобы ось внешней рамки совпадала с вектором угловой скорости
объекта шоб- В этом случае гироскоп одновременно участв\гет в
двух вращательных движениях: переносном с угловой скоростью
шоб и относительном с
угловой скоростью собственного
вращения Q. В результате
появляется гироскопический мо-
#\
Рис. 8.4. Программный
механизм н датчик команд
тангажа:
I — кулачок программного
механизма; 2 — ленточная передача
Рис. 8.5. Схема
дифференцирующего гироскопа
мент, направленный по оси X и равный Л1г = Яшоб cosp. Угол
отклонения р внутренней рамки обычно мал. Поэтому можно
принять COS (3^1.
Повороту внутренней рамки под действием гироскопического
момента Мт противодействует пружина 3, позволяя рамке
поворачиваться на небольшой угол (3, пока внешний момент пружины МПр
не будет равен гироскопическому моменту Мт. Момент пружины
зависит от ее жесткости и пропорционален степени деформации
пружины, а следовательно, и углу поворота гироскопа р. Угол
поворота гироскопа р б\дет пропорционален угловой скорости
вращения объекта (ракеты) ш0б или первой производной от угла а
Поворота объекта, т. е. шоб = ~тг- С помощью потенциометрического
или другого датчика этот угол преобразуется в электрический
сигнал. Таким образом, гироскопический прибор выполняет функции
Дифференцирующего устройства.
7»
179
Интегрирующий гироскоп (рис. 8.6) используется для
интегрирования как линейных, так и угловых ускорений. Ось У
внешней рамки карданова подвеса направлена вдоль продольной
оси объекта, а центр тяжести гироскопа (точка С) смещен
относительно неподвижной точки опоры О подвеса на величину / по
главной оси Z.
Трехстепенные интегрирующие гироскопы применяются в
системах управления ракет дтя измерения скорости на активном
участке траектории.
Гиростабилизаторы представляют собой
гироскопическую систему, включающую два гироскопа и более.
Рис. 8.6. Схема интегрирующего гироскопа
На рис. 8.7 изображена схема гиростабнлизатора, получившая
название гирорамы. Внешний момент от стабилизируемого
объекта воспринимается ие только гироскопом 1, по и специальным
стабилизирующим двигателем 2. Если инерционных свойств самого
гироскопа недостаточно, чтобы воспрепятствовать действию
внешнего момента, то он начинает под действием внешнего момента
прецессировать. Однако, прецессируя, гироскоп с помощью
датчика 3 создает сигнал, который после усиления в усилителе 4
дополнительно воздействует на двигатель 2, который и воспримет
действие внешнего момента. Таким образом, положение объекта,
стабилизируемого относительно оси Y, останется неизменным.
А к се л ь р о м етр ы. Для измерения ускорений в различных
видах СУ широко используются различного вида датчики
ускорений, называемые аксельрометрами.
Корпус аксельрометра 4 (рис. 8.8) крепится непосредственно
на ракете или на стабилизированной относительно ракеты
платформе. Аксельрометр представляет собой механическую систему
с одной степенью свободы,
180
При движении ракеты с некоторым ускорением х масса 1 (т)
как инерционное гело перемещается относительно корпуса 4,
сжимая пружину 2 и преодолевая сопротивление демпфера 3,
предназначенного для гашения колебаний. При этом корпус прибора
ориентируется в направлении, в котором должно быть измерено
Рис. 8.7. Схема гироскопической ра.мы
ускорение. Это направление, следовательно, должно совпадать с
осью чувствительности аксельрометра. Если с телом,
перемещаемым под действием ускорения, связать электрический датчик 5, то
можно снять сигнал в виде напряжения, пропорционального вели-
Рнс. 8.8. Схема аксельрометра
чине ускорения. Произведя двойное интегрирование с помощью
специальных вычислительных устройств 6, можно последовательно
получить скорость перемещения ракеты х и пройденный ею путь х,
или, другими словами, определить линейную координату по одному
из направлений, в котором ориентирована ось чувствительности
аксельрометра.
Другой конструкцией аксельрометра линейных ускорений
маятникового типа является схема с электродвигателем постоянного
тока (рис. 8.9). Маятник / укреплен па корпусе двигателя 2,
расположенного в прецезиопных шарикоподшипниковых опорах. При
181
действии ускорении маятник отклоняется и поворачивает корпус
двигателя вместе со статорной обмоткой. На якорь 3 подается
напряжение определенной полярной и. В результате взаимодействия
магнитных нолей при повороте корпуса двигателя возникает
противодействующий момент, который уравновешивает момент силы
инерции от линейного ускорения п возвращает маятник в
исходное положение.
Противодействующий момент
пропорционален приложенному к
якорю двигателя напряжению,
по величине которого можно
определить значение ускорения.
2. Усилительно-
преобразовательные устройства
Усилительно-преобразовательные устройства в СУ ракет
предназначены для усиления и
преобразования сигналов, снимае-
Рис. 8.9. Схема аксельро.четра-двн- ыых с измерительных устройств.
гателя Только усиленный до
определенной мощности сигнал можно
использовать для воздействия через исполнительные устройства
на органы управления ракеты.
Преобразование сигнала производится с целью устранения
помех, которые искажают полезный управляющий сигнал, для
перехода от сигнала на постоянном токе к сигналу на переменном токе
и наоборот, для согласования сигнала по фазе и частоте.
Поэтому в схемах усилитслей-преобразовагелей, в основе
которых лежат различного рода усилители (электронно-ламповые,
полупроводниковые, магнитные), предусматриваются устройства для
сглаживания помех, обеспечения сдвига по фазе, модулирования и
демодулпрования сигнала.
В усилительно-преобразовательных устройствах СУ ракет
находят применение схемы, сочетающие различные виды усилителей,
например электронные и магнитные, принципы работы которых мы
здесь не рассматриваем.
3. Исполнительные устройства
Управление движением ракеты осуществляется путем
изменения направления равнодействующей сил, приложенных к ее
центру масс. Наиболее просто это достигается поворотом ракеты
относительно центра масс по углам тангажа и рыскания. При этом
изменяются направление линии действия силы тяги и величина
боковой и подъемной аэродинамических сил.
1S2
Для поворота ракеты относительно центра масс используются
различные управляющие органы: воздушные и газовые рули,
поворотные камеры двигателей, новоротные сопла и другие
устройства.
Поворот рулей осуществляется с помощью рулевых машин,
которые вместе с рулями образуют рулевой привод, представляющий
собой исполнительное устройство СУ.
Считается, что рулевые машины должны иметь:
— высокий коэффициент усиления сигнала по мощности;
— малую инерционность, т. е. малое отставание по фазе угла
поворота руля от управляющего сигнала;
— высокий коэффициент полезного действия;
— небольшую массу н малые габариты;
— высокую надежность работы.
Наиболее полно всем этим требованиям, но мнению
зарубежных специалистов, удовлетворяют электрогпдравлнческне рулевые
машнцы, которые и нашли широкое применение.
4. Корректирующие устройства. Законы управления
Приборы СУ измеряют отклонения текущих параметров,
характеризующих движение ракеты, от их требуемых значений и
создают такие управляющие воздействия, которые сводят эти
отклонения к нулю.
Зависимость управляющих воздействии о (/) от сигналов
рассогласования е (/) отражает наиболее существенные свойства СУ и
называется законом управления.
Чем больше информации о движении ракеты используется в
законе управления, тем выше качество регулирования. Так,
например, если боковое движение ракеты осуществляется только
регулированием угла рыскания, то даже при абсолютно точном
выполнении системой управления этой функции не исключена
возможность бокового отклонения траектории ракеты от расчетной, так
как под действием возмущающих сил возможен параллельный снос-
ракеты без поворота ее относительно центра масс. Поэтому
точность управления боковым движением может быть повышена, если
при выработке управляющего воздействия наряду с сигналом
рассогласования по углу рыскания будет использоваться сигнал,
пропорциональный боковому отклонению центра масс ракеты от
плоскости стрельбы.
В общем виде закон управления представляет собой
функциональную зависимость
ЧО=/ЫО, «2(0, .... *„(')], <81)
гДе si (г), егСО. •••> еп(0~снгналы рассогласования по различным
f Параметрам движения ракеты.
Перец тем как сигнал рассогласования, определенный
измерительными устройствами СУ, подается на рулевые машины, он со-
183
ответствующим образом корректируется корректирующими
устройствами, которыми называют интегрирующие и дифференцирующие
устройства, выполняющие функцию преобразования измеренного
сигнала в управляющий сигнал.
Для измерения скорости изменения сигнала рассогласования п
СУ ракет применяются дифференцирующие гироскопы и
дифференцирующие электрические контуры.
Принцип работы дифференцирующего контура (рис. 8.10)
основан на том, чго сила тока, протекающего через конденсатор,
пропорциональна скорости изменения
«,
0-
>
Jex
R*
-0
JBblX
0-
I
напряжения на его обкладках:
i=cOQ, (8.2)
где с — емкость контенсатора.
Показанный на рисунке
контур осуществляет однократное
дифференцирование, а поэтому
носит название контура первого
порядка.
Эти контуры не могут
создавать опережение сигнала по фазе
более чем на 90°.
При значительной
инерционности рулевых машин, вносящих
существенное запаздывание
сигнала, фазоопережающие свойства дифференцирующего контура
первого порядка могут оказаться недостаточными. В этом случае
для коррекции системы применяют дифференцирующие контуры
второго порядка, состоящие из двух последовательно соединенных
дифференцирующих контуров первого порядка.
—0
Рис. 8.10. Схема
дифференцирующего контура
8.3. АВТОНОМНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
1. Принципы управления
Автономная система управления предназначена для управления
движением ракеты с помощью приборов, расположенных па борту
ракеты и не получающих в процессе работы никакой информации
ни от наземного командного поста, ни от цели. Управление
движением ракеты осуществляется по заранее заданной программе.
В соответствии с расчетной траекторией, обеспечивающей
поражение цели, в автономную СУ перед стартом вводится программа
изменения во времени координат центра масс ракеты или друп-л
параметров, характеризующих движение ракеты в пространстве
СУ измеряет текущие значения параметров движения, сравни
вает их с программными и создает такие управляющие возден-
184
ствия, которые приближают реальную траекторию полета ракеты
к расчетной.
Различают три типа автономных СУ: астронавигационные,
магнитометрические и ииерциальные.
Астронавигационные системы. В таких системах
текущие координаты ракеты определяются методом астрономической
обсервации. В основу метода положено измерение высоты
небесных светил, т. е. углов наклона линий визирования к местному
горизонту.
Если наблюдатель находится в точке Л, (рис. 8.11), в которой
поверхность Земли пересекается прямой, соединяющей центр
Земли со светилом, то высота све-
На 1-е
светило
Линия визирования
Зенит
На 2-е
светило
Пл гориз
тила будет равна 90°. По мере
удаления наблюдателя от
точки Л|, называемой
географическим местом светила,
высота светила /г, будет
уменьшаться вследствие изменения
положения местного горизонта.
На поверхности Земли
можно провести окружность, из
любой точки которой светило
будет наблюдаться на одной
и той же высоте. Центром этой
окружности является
географическое место светила,
которое можно рассчитать с
помощью астрономического
ежегодника. Радиус окружности
определяется высотой светила
и равен расстоянию в дуговых
единицах светила от зенита.
Измерив высоту одного
светила, можно определить на
поверхности Земли
окружность, на которой находится наблюдатель. Если измерить
одновременно высоту двух светил,- то можно построить две окружности,
пересекающиеся в точке, в которой пахотнтся наблюдатель.
Для измерения высоты светила в астронавигационных СУ
используются оптические углоизмерительные приборы, называемые
секстантами. Секстант устанавливается на гиростабилизированной
Платформе, воспроизводящей на борту ракеты плоскость
горизонта. Автоматическое слежение телескопа секстанта за светилом
обеспечивается с помощью следящей системы, в измерительном
устройстве которой используются фотоэлементы, реагирующие на
отклонение оптической оси телескопа от линии визирования на светило.
Измеренные текущие значения высот светил сравниваются с
программными значениями, соответствующими расчетной траекто-
185
Рис. 8.11. Определение координат ме-
ТОТ.ОМ астрономическом обсервации
рии. Сигнал рассогласования используется для коррекции
траектории ракегы.
Астронавигационные СУ могут обеспечить высокую точность
при стрельбе на большие дальности, так как ошибки предыдущих
измерений не влияют на ошибки последующих. На точность и
надежное гь астронавигационных СУ в значительной степени влияют
условия видимости. Этот недостаток несущественен для ракет,
траектория которых проходит в основном за пределами атмосферы.
Магнитометрические системы. В
магнитометрических системах для наведения ракеты на цель используется
явление земного магнетизма. Каждой точке околоземного пространства
соответствует вполне определенное направление магнитной
силовой линии. Следовательно, измерение координат ракеты
относительно Земли может быть заменено измерением характеристик
магнитного ноля Земли.
Для определения направления магнитной силовой линии
используются магнитные компасы с инклинатором.
Инклинатор представляет собой генератор постоянного тока,
полем возбуждения которого является магнитное поле Земли. Если
ось ротора инклинатора направить вдоль магнитных силовых
линий магнитного поля Земли, то его электродвижущая сила будет
равна пулю.
Наличие выходного напряжения свидетельствует об отклонении
оси ротора от направления магнитной силовой липни и может быть
использовано для автоматического ориентирования ротора в
магнитном поле Земли.
Измеренные текущие характеристики магнитного поля
сравниваются с программным», соответствующими расчетной траектории.
Сигнал рассогласования используется для управления движением
ракеты.
Точность работы магнитометрической СУ, как и
астронавигационной, не зависит от дальности стрельбы. Основными
источниками погрешностей являются непрерывное изменение параметров
магнитного поля Земли и неравномерность распределения
магнитного поля по поверхности Земли вследствие магнитных аномалий,
учесть которые очень трудно.
II н е р ц и а л ь н ы е системы управления. Текущее
положение ракеты в пространстве в ниерцнальных системах
управления определяется путем двукратного интегрирования ускорения,
измеренного аксельрометром инерционного типа.
Если программная траектория ракеты задается в
прямоугольной системе координат OXYZ, то для определения текущих
координат центра масс ракеты необходимо измерять и интегрировать
проекции ускорения на оси OX, OY и OZ.
С этой целью на гнростабилизированной платформе ракеты
устанавливают три аксельрометра таким образом, чтобы их оси
чувствительности были направлены вдоль осей системы координат
OXYZ. После двукратного интегрирования проекций vx, vy и vt но-
186
Лучают текущие координаты х, у и z. Разности между текущими и
расчетными значениями координат центра масс представляют
собой сигналы рассогласования, которые устраняются в процессе
регулирования движения ракеты.
Точность работы инерциальной системы управления в основном
зависит от точности измерения ускорения и его интегрирования.
Автономные инерциальные СУ несколько уступают в точности
астронавигационным системам. Их ошибки растут
пропорционально увеличению дальности стрельбы, что является следствием
накопления погрешностей при интегрировании ускорений.
В качестве примера, где наиболее часто реализуются
автономные системы управления, рассмотрим СУ баллистических ракет.
2. Системы управления баллистических ракет
Автономная система управления баллистической ракеты
состоит из автомата стабилизации и автомата управления
дальностью стрельбы. Автомат стабилизации обеспечивает движение
ракеты по расчетной траектории. Автомат управления дальностью
стрельбы выключает двигательную установку в тот момент
времени, когда параметры траектории (координаты центра масс х и
у, величина скорости v и угол бросания 9) достигнут требуемых
значений. После выключения двигательной установки управление
движением ракеты прекращается.
Автомат стабилизации представляет собой многоканальную
систему автоматического регулирования, осуществляющую
одновременное управление движением ракеты по нескольким параметрам.
В состав каждого канала входя г измерительный элемент,
корректирующее устройство, усилитель и рулевые машины с рулями.
Наиболее просто управление движением осуществляется в том
случае, если в качестве параметров регулирования па активном
участке траектории приняты углы тангажа, рыскания и крена.
Угол рыскания ф и угол крена 9 в процессе регулирования
поддерживаются равными пулю. Угол тангажа 0 изменяется по
определенной программе, за счет чего обеспечивается разворот ракеты в
вертикальной плоскости.
Программный поворот ракеты по углу тангажа не может
обеспечить точного ведения центра масс ракеты по расчетной
траектории, так как действие различных возмущающих сил может
привести к сносу ракеты в боковом и вертикальном направлениях без
поворота ее относительно центра масс. Для повышения точности
стрельбы, помимо стабилизации углового положения ракеты по
тангажу, рысканию и крепу, осуществляют стабилизацию центра
масс ракеты относительно расчетной траектории.
Параметрами регулирования в этом случае, кроме углов
тангажа, рыскания и крена, будут боковое г и нормальное у
отклонения цетра масс ракеты или боковая z и нормальная у скорости
187
перемещения центра масс ракеты относительно расчетной
траектории.
Дальность полета баллистической ракеты зависит от
параметров конца активного участка траектории: vK, 0K, хк, Ук- Управление
дальностью по всем этим параметрам затруднительно. В процессе
управления дальностью контролируется лишь соответствие vK
расчетному значению, так как погрешности в скорости наиболее
сильно влияют на рассеивание ракег по дальности. Управление по
скорости дает приемлемую точность стрельбы при сравнительной
простоте конструкции системы управления.
Автомат управления дальностью стрельбы в этом случае
включает в себя: устройство ввода расчетного значения скорости
ракеты t'i<P, измеритель текущей скорости v, счетно-решающее
устройство, сравнивающее v с vKV, а также исполнительпые элементы для
непосредственного выключения двигателя. Команда на
выключение двигателя выдается счетно-решающим устройством при
достижении скоростью расчетного значения.
В инерциальных системах скорость определяется путем
интегрирования ускорения. Ввиду того что полет ракегы происходит
в поле земного тяготения, показание аксельрометра не будет
соответствовать истинному ускорению ракеты относительно Земли.
На инерционное тело аксельрометра в полете действует сила
инерции /•"„, сила тяжести G и сила реакции опоры R (рис. 8.12, о).
Сила инерции пропорциональна ускорению ракеты v в
движении относительно Земли. Сила тяжести пропорциональна
ускорению земного тяготения. Реакция опоры уравновешивает силы
инерции и веса. В случае равновесия сил инерционное тело
аксельрометра будет двигаться вместе с ракетой.
Измерение ускорения сводится к измерению продольной
реакции опоры Rx, которая равна:
Я„ = /-'Вг, + G„ = т & +8™ °)- (8-3)
Таким образом, инерционный аксельрометр измеряет не истинное
ускорение t1, а так называемое кажущееся ускорение, или
псевдоускорение:
vn = v +#sin&. (8.4)
В результате интегрирования псевдоускорения получается
псевдоскорость
t
vu = v+[gsinbdt. (8.5)
о
Каждой дальности стрельбы соответствует при одном и том же
угле бросания вполне определенное расчетное значение псевдо-
188
скорости с'шф, отличающееся от истинной скорости икр на
величину Дир =
g sin & dt.
Поправка \vv рассчитывается заранее и учитывается при
составлении таблиц стрельбы.
В качестве измерителей псевчоскорости широко применяются
тяжелые гироскопы, удачно сочетающие в себе свойства
измерения и интегрирования ускорений.
Рис. 8.12. Интегратор продольных ускорений
Кинематическая схема одного из вариантов гироскопического
интегратора продольных ускорений представлена па рис. 8.12,6.
Перед стартом ракеты рукояткой / вводят по шкале расчетное
значение псевдоскоростп, при этом контактная rpvnna 2
смещается относительно кулачка 3 на угол ар, пропорциональный
расчетной скорости упкр.
В момент старта арретирующий электромагнит 4 втягивает
якорь и освобождает гироскоп. Под действием силы инерции и
силы тяжести гироскоп 5 начинает прецессировать относительно
оси внешней рамки карданова подвеса, совмещенной с
продольной осью ракеты. Скорость прецессии иир прямо пропорциональна
внешнему моменту, равному произведению силы Rr на плечо /
189
тяжелого гироскопа н обратно пропорциональна кинетическому
моменту Н ротора гироскопа.
-nP = -^- = -5-(^+^sinO). (8.6)
Угол прецессии диска 6, связанного с гироскопом зубчатой
передачей с передаточным числом i, будет пропорционален псев-
доскорости
а = ]' Кр dt = -^L[v + lg sin » dt) = ^j- v„. (8.7)
о \ о /
Когда угол прецессии а достигнет значения сср,
пропорционального расчетной псевдоскорости, кулачок 3 замкнет контакт 2, что
послужит сигналом выключения двигательной установки.
Для удержания оси ротора гироскопа в плоскости,
перпендикулярной к оси чувствительности интегратора, применено
корректирующее устройство, состоящее из контактного датчика 7, реле и
корректирующего мотора 8. Если ось ротора опустится, то
переключение контактного датчика вызовет срабатывание реле. Реле
подключит корректирующий мотор к источнику питания так,
чтобы создаваемый им момент вызвал обратную прецессию
гироскопа относительно оси внутренней рамки карданова подвеса,
а ось ротора гироскопа при этом возвратилась бы в плоскость,
перпендикулярную к оси чувствительности прибора.
8.4. СИСТЕМЫ ТЕЛЕУПРАВЛЕНИЯ
1. Принципы управления
Системы телеуправления позволяют непрерывно осуществлять
коррекцию движения ракеты в процессе се наведения на цель,
закон движения которой заранее неизвестен.
На командном пункте (КП) непрерывно измеряются
координаты ракеты и цели, параметры их движения, позволяющие в
каждый момент времени определить взаимное положение цели и
ракеты относительно КП. На основе этих данных вырабатываются
автоматически или с помощью оператора управляющие сигналы,
направляемые по каналам телеуправления на ракету.
Наблюдение и контроль за движением ракеты и положением
цели в процессе телеуправления могут осуществляться: визуально
оператором при помощи оптических приборов,
радиолокационными средствами, при помощи радионавигационных систем, путем
применения телевизионных устройств наблюдения.
На рис. 8.13 приведена блок-схема системы телеуправления,
в которой имеются два радиолокатора для определения текущих
координат цели и ракеты.
Передатчик станции сопровождения ракеты через передающею
антенну излучает импульсы электромагнитной энергии (импуль-
190
сы запроса), которые активизируют радиолокационный ответчик,
расположенный на ракете. С ответчика на радиолокатор
сопровождения ракеты поступают ответные импульсы. Таким образом
создается капал контроля ракеты и обеспечивается непрерывное
ее сопровождение по угловым координатам и по дальности. По
каналу контроля цели, создаваемому вторым радиолокатором,
определяются координаты цели и ее дальность.
Полученные координаты ракеты и цели поступают в счетно-
решающее устройство, которое решает задачу встречи ракеты
с целью и вырабатывает сигналы управления. Эти сигналы пре-
Координаты
Радио -
локационно»
станция
сопровождения
цепи
Счетно-
решающее
устройство^
Коорди
паты
Радио-
локаиионная
станция
ракеты сопровождения
ракеты
Канал
контроля
—7 цели
Канал
контроля
ракеть!
{Запрос
Ракета
Шифра -
тор
КП
(пункт управления)
К рулям
JCO^
Канал
управления
Рис. 8.13. Блок-схема системы телеуправления с двумя радиолокаторами
образуются, кодируются и излучаются антенной телеуправления.
На ракете сигналы принимаются приемником устройства
телеуправления и после дешифрации в виде команд управления
поступают на автопилот, который через рули воздействует па
ракету.
Такой вид телеуправления, когда координаты цели
определяются непосредственно на командном пункте, называется
командным телеуправлением с непосредственным контролем цели.
Рассмотрим систему телеуправления, когда определение
координат цели может осуществляться аппаратурой (например,
телекамерами), установленной на ракете. Блок-схема такой системы
приведена па рис. 8.14.
На ракете устанавливается телевизионный передатчик;
объектив телекамеры (ТК) воспринимает изображение цели. Это
изображение передается по линии канала связи на пункт управления,
где и воспроизводится на экране телевизионного приемника
(изображение LI). Оператор в процессе наблюдения за экраном
рукояткой управления (РУ) вырабатывает управляющие сигналы,
которые передаются на ракету через радиопередатчик на КП и
191
радиоприемник на ракете (канал управления), центр
изображения цели при эгом должен совпадать с центром экрана.
Особенностью командных систем телеуправления является то,
что формирование команд наведения осуществляется на
командном щпкте.
Управление ракетой может производиться также с помощью
радиолокационной станции по радиолучу. В этом случае сигналы
управления вырабатываются бортовой аппаратурой ракеты.
Г"
Экран
Y
0
X
PEBU- |
нный I
Те
JUOHHb
приемник
\0nepamop
I
IPaduo- I
передаю}—1
чин.
связи
Ракета
Телевизионный f\\
передатчик """Ц-К,
i N^
-т
Приём-] Авто-
пик ("" пилот "f"
Цель
КП
(пункт управления/
Рис. 8.14. Блок-с\ема п;гге«ы телеуправления, в которой координаты цели
определяются аппаратурой, установленном иа ракете
Поясним работу такой системы телеуправления па примере.
Станция на КП (рис. 8.15) осуществляет поиск, захват и
сопровождение цели. Она же формирует н радиолуч, направленный
на обнаруженную цель пли в некоторую упрежденную точку.
Аппаратура, расположенная па управляемой ракете, определяет
отклонение ракеты от равносигнальной линии и вырабатывает
сигналы управления, возвращающие ее к равносигнальной
чинии.
Кроме рассмотренных систем (командного управления и
управления по лучу радиолокатора), к системам телеуправления
относятся также радионавигационные системы наведения. Принцип
управления этих систем состоит в том, что координаты
местонахождения летательного аппарата определяются автоматически по
сигналам, поступающим с базовых станций наведения, а
управляющие сигналы вырабатываются приборами, расположенными
на летательном аппарате.
192
Таким образом, к системам телеуправления относятся
командные системы, системы наведения по радиолучу и
радионавигационные системы.
Раке та
Шифратор
Счетно -
решающее
устройство
гации-
лакацианная
станция
"*'ъг—~~
| ■ Радио- Дешисрра-
I ппириннк ~^" тпп
приемник
тор
Автв-
пилот
КП
{пункт управления)
Рис. 8.15. Блок-схема телеуправления по радиолучу
j К рулям | j
2. Системы командного управления
Для управления полетом ракеты в командных системах
телеуправления предусматриваются каналы управления в
вертикальной (по углу тангажа) и горизонтальной (по углу рыскания)
плоскостях. Для стабилизации ракеты по углу крена на пей
устанавливается автономная система управления.
Система командного телеуправления должна содержать канал
контроля (линию телеконтроля) и канал управления (линию
телеуправления).
В зависимости от вида используемой энергии контроль может
быть визуальным (при использовании видимых лучей), тепловым
и радиотехническим. Выбор средств контроля (наблюдения) за
положением цели определяется типом и характером цели.
В настоящее время лучшим средством автоматического
контроля за положением цели н ракеты являются радиолокационные
станции.
Каждая команда для передачи по линии связи преобразуется
в соответствующий сигнал. Это осуществляется в три этапа:
преобразование, кодирование и модуляция.
На этапе преобразования команда представляется в виде
линейных или угловых отклонений и преобразуется в электрические
величины (напряжение, силу тока).
Кодирование состоит в построении электрического сигнала
(команды) по определенному принципу.
Модуляция заключается в изменении соответствующих
параметров (амплитуды, частоты, фазы) переносчика команды по
линии связи в соответствии с передаваемой командой.
Преобразование и кодирование в линиях телеуправления
осуществляются с помощью специальной аппаратуры, а
модулирование— в передающем устройстве линии связи.
193
На ракете (приемном
пункте) процесс
превращения сигнала в команду
управления происходит в
обратном порядке:
демодуляция, которая
осуществляется в приемнике линии
связи, декодирование и
преобразование в селекторном
(разделительном)
устройстве. По линии связи с
командного пункта на
ракету будет непрерывно
передаваться большое число
сигналов, соответствующих
командам управления.
Поэтому каждому сигналу
необходимо придать
определенный, характерный
физический признак, чтобы на
приемном пункте можно
было различить сигналы
(команды) друг от друга.
Процесс образования из
сообщений (команд) раз-
чичных по содержанию
сигналов и процесс их
разделения и отбора
называются селекцией, а
устройство, осуществляющее
селекцию,— селекторным.
Селекторное устройство
на передающем пункте
называют кодирующим
устройством или шифратором, а
на приемном пункте —
декодирующим устройством
или дешифратором.
Кодирование может
осуществляться с помощью од-
нонмпульсных и
многоимпульсных кодов.
При одноимпульсном
коде значение команды
определяется параметрами
импульса (амплитудой,
частотой, фазой, длительностью).
Этот вид кода используется п простых системах
телеуправления.
В сложных системах телеуправления пользуются
многоимпульсным кодом. Здесь значение команды определяется
параметрами группы импульсов (числом и взаимным расположением
импульсов в группе и т. д.).
Устройства телеуправления могут применяться для передачи
как отдельных команд (прерывное управление), так и
непрерывных (непрерывное управление). При передаче отдельных команд
может, например, выдаваться разовая команда типа «включить —
/
А
г
Радиолокатор
сопровождения
цели и
ракеты
-^'
Счетно-
решающее
устройство
1
V
1
Командный
радиопередатчик
t
Рис. 8.17. Схема щиолучевой комащнон снаемы
(капала) телеуправления
в себя командный пункт,
и исполнительный пункт,
выключить», «больше — меньше», т. е- команда типа «да — пет».
Непрерывное управление обеспечивает передачу любого значения
команд от нуля до максимума.
Полная структурная схема линии
приведена на рис. 8.16. Она включает
или перечающую часть, линию связи
или приемную часть.
Не рассматривая детально элементы приведенной схемы,
остановимся подробнее на примере технической реализации системы
командного телеуправления.
Наиболее характерной и эффективной системой наведения
является автоматизированная радиолокационная система
командного телеуправления, применяемая для ракет класса «земля —
воздух».
В зависимости от числа радиолокаторов, входящих в систему,
их подразделяют на однолучевые (с одним радиолокатором) и
Двухлучевые (с двумя радиолокаторами).
В однолучевой системе (рис. 8.171 один и тот же
радиолокатор следит за движением цели и ракеты. В этом случае траекто-
195
рия движения ракеты должна все время находиться на линии
командный пункт — цель, т. е. на так называемом равносигпальном
направлении.
Положение ракеты относительно цели или равносигнальиого
направления определяется на экране индикатора сопровождения
цели и ракеты.
Чтобы облегчить одновременное сопровождение одним
радиолокатором целя и ракеты, па последней установлен радиолокаци-
Рис. 8.18. Схема командного пункта при радиолокационном контроле
движения ракеты и цели
онный ответчик. Радиолокатор сопровождения в этом случае
имеет два отдельных приемника для раздельного приема
сигналов от цели и ракеты. Это обеспечивает одновременное слежение
за двумя объектами. Данные от радиолокатора сопровождения
ракеты и цели (с выхода двух приемников) поступают в счетно-
решающее устройство. Выработанные сигналы передаются на
ракету специальным передатчиком по радиолинии.
Двухлучевая радиолокационная система — наиболее
совершенный и наиболее сложный вид командной системы.
Общая схема командного пункта при радиолокационном
контроле движения ракеты и цели представлена на рис. 8.18, а на
рис. 8.19 приведена функциональная схема этой системы, показы-
196
ваютая состав и взаимную связь радиоканалов, входящих в
систему управления.
Задача поиска цели возлагается на радиолокатор Р, дальнего
обнаружения самолета. За счет непрерывного вращения антенны
в горизонтальной плоскости (по азимуту j3) и за счет качания ее
в вертикальной плоскости (по углу места е) радиолокатор может
вести наблюдение за всей видимой небесной полусферой.
r' i
71 l vO^
3 i
ПУ и CP-ff %'%L-rr' P2I
з-г ж /з £ ■
■-и I "р I
Рц£цАц N
ц
Командный
I сигнал
Рис. 8.19. Функциональная схема системы командного наведения
ракеты класса «земля — воздух»:
1 — радиолокационная станция обнаружения цели (Pi); 2 — устройстио съема
данных Pi; 3 — силовой привод к антенне падновнзнра цели; 4— радночинир
цели U'i): 5 — счетно-решающий прибор (СРП): б — пусковая установка (ПУ):
7 — счетно-решающий прибор (CP-I): 8 — силовой привод к Ан,; 9 — радиовизир
ракеты; 10 — передающее устройство; // — приемное устройство; 12 — блок
угловых коорчнна г ракеты; 1.3— блок дальности; 14—индикатор; 15 —
счетно-решающее устройство (CP-III); 16— датчик команд; 11 — блок коррекции команч
управления; 18 — передающее устройство линии радиотелеуправлення; 19 —
трасса линии раднотелеуправлеиин; 20 — бортовая аппаратура ракеты (20. а —
ответчик; 20. б — радиоприемное устройс!ВО линии ра шотелеупрачления); 21 — трасса
радиоканала визирования ракеты (21, а —канал «запроса»; 21, б — канал
«ответа»); 22 — радиоканал визирования цели; Ан, — антенна радиовнзира
ракеты; Ahj — передающая антенна линии передачи ' команд
После обнаружения цели ее угловые координаты Уп, s„ через
устройство 2 съема данных в виде напряжений Ur" и U"
ПОСТУЧУ *у
пают на силовой привод 3 к антенне радиовизира цели 4.
Двигатели угла места и азимута этого радиовнзнра поворачивают
антенну так, что она оказывается направленной на цель. Радио-
197
визир цели 4 захватывает цель и следит за ней в течение всего
процесса наведения.
Положение цели определяется в земной системе координат,
центр которой связан с радиовизиром 4.
Радиолокатор Рг через счетно-решающий прибор 7 (CP-I)
управляет положением антенны радоивизира ракеты Ан, и
антенны передающего устройства линии радиотелсуправлепия.
Системы автоматического наведения ракет класса «земля —
воздух» обычно имеют индикаторы, на которых можно
наблюдать положение цели и ракеты в процессе наведения. Такие
индикаторы позволяют вести контроль за наведением ракеты на
цель и в случае необходимости осуществить переход от
автоматического сопровождения цели или ракеты к ручному (с участием
операторов). Часто возникает необходимость в таком переходе
при применении противником пассивных или активных помех.
После того как ракета окажется в зоне действия радновизира,
на экране индикатора 14 этого радиовизира появится
изображение ракеты в виде светящегося пятна. Поскольку ось антенны Ahi
направлена на цель, то изображение цели будет в центре экрана
индикатора 14, а отклонение отметки ракеты от центра экрана
будет пропорционально угловым составляющим ошибки
управления ракеты:
Дс = а — е
-> р -и- '
На основании определенных ошибок \3 и \s счетно-решающий
прибор 15 (CP-III) автоматически формирует команды
управления /.. , Д, , посылаемые па ракету с помощью антенны Ан2
радиопередатчика команд. Для того чтобы эти команды управления
соответствовали линейным составляющим ошибки управления,
напряжения с датчика команд 16 L\. , (/,.. пропускаются через
блок 17, усиление которого пропорционально дальности Др.
Перед каждым пуском необходимо правильно навести
пусковую установку 6 (ПУ), чтобы вывести ракету по кратчайшему
расстоянию в зону действия радиовизира ракеты. Эта задача
решается счетно-решающим прибором 5 (СР-П). На вход СРП
поступают координаты движущейся цели в виде электрических
напряжений U. и U , а с выхода снимаются сигналы £Л "
Ut , управляющие силовыми приводами ПУ. Силовые привод1.-
наводят пусковую установку в требуемом направлении, В общем
случае для уменьшения ошибки прицеливания может оказаться
необходимым учет расстояния до цели Д",,, а также скорости и
направления движения цели. Поэтому в СР-П. как показано па
рис. 8.19, дополнительно вводится напряжение U , пропорцио-
нальное дальности до цели.
198
Воздействуя на бортовую аппаратуру ракеты, команды,
переданные с пункта управления, буаут выводить ракету на линию
визирования, т. е. на линию, соединяющую пункт управления
с целью.
Могут применяться и другие методы наведения, при которых
работа счетно-решающего устройства 15 (CP-III),
вырабатывающего команды управления, будет осуществляться по другой
программе, и в этом случае в качестве исходных данных для его
работы могуг потребоваться не только величины отклонений A3
и As, но н сами значения координат цели и ракеты.
3. Системы наведения по лучу радиолокатора
Системы наведения по лучу радиолокатора (по радиолучу)
являются разновидностью систем телеуправления. Они состоят
из радиолокатора наведения, установленного па пункте
управления, и бортовой аппаратуры ракеты. Излучение радиолокатора
наведения принимается бортовой аппаратурой, которая
вырабатывает управляющие сигналы, заставляющие ракету лететь по
оси вращения луча радиолокатора (по равноенгналыгому
направлению).
Отличительной чертой систем наведения по лучу
радиолокатора является то, что в них отсутствуют устройство для передачи
командных сигналов и на посту управления система контроля за
положением ракеты относительно цели.
Существуют две разновидности таких систем телеуправления:
первая — с наведением ракеты на цель с помощью одного
радиолокатора (рис. 8.20) с автоматическим сопровождением цели,
вторая — с использованием двух радиолокаторов (рис. 8.21), один
из которых представляет собой обычный радиолокатор
сопровождения цели, а другой является передатчиком, создающим
вращающий луч, по которому летит ракета.
Система с одним радиолокатором. В этом
случае радиолокатор наведения является радиолокатором с
автоматическим сопровождением цели. Он состоит из передатчика,
приемника, антенны с вращающимся вибратором и антенных
приводов, поворачивающих антенну вслед за движущейся целью.
Антенна формирует зону облучения в виде конуса (рис. 8.22). Когда
говорят, что ракета наводится по лучу радиолокатора, то имеют
в виду наведение по оси зоны облучения.
Ракета, на которой установлен приемник с антенной, после
запуска попадает в луч и начинает принимать сигналы от
радиолокатора наведения. Антенна, установленная в хвостовой части
ракеты, направлена в сторону радиолокатора наведения и имеет
направленную диаграмму излучения. Принцип действия
установленной на ракете аппаратуры извещения подобен принципу
действия приемной части радиолокатора сопровождения цели. Если
199
Рис. 8.20. Оанолучевая система наведения ракеты по лучу
радиолокатора
Счетно ...
Радио- .Пусковая решающее^/Радиолокатор
^локатор *устанав- устрой-^^сопровождеиия
'поведения^ ка ство
'//.«',/.«*
&
■'ЦТ. <уЛТ '{WIT»! шД I 'yU
С
?
КЗ
цели
От радислока-
i | |ф (—(тара абэора
7, * ' /.w,/i» Ljyi'V,
Рис. 8.21. Двухлучевая сиаеча наведения ракеты по лучу
радиолокатора
200
на-
ракета летит по оси вращения луча в равносигнальной зоне, то
ее приемное устройство за период вращения луча принимает
сигналы одинаковой амплитуды. Всякое отклонение ракеты от этой
оси приводит к появлению амплитудной модуляции принимаемых
сигналов с частотой вращения луча. Амплитуда (глубина)
модуляции сигнала пропорциональна величине отклонения ракеты от
оси, а фаза его характеризует направление отклонения. Принятые
сигналы детектируются и при этом выделяется напряжение
сигнала ошибки. Управляющие напряжения вырабатываются в
результате сравнения напряжений сигнала ошибки с опорными
пряжениями *, которые формируются на
борту ракеты по данным станции
наведения. Для получения на ракете
опорных напряжений радиолокатор
наведения излучает специальные кодированные
сигналы. Сравнение фазы опорных
напряжений с фазой напряжения сигнала
ошибки дает возможность определить
направление смещения ракеты
относительно оси вращения луча и получить
соответствующие сигналы для
управления ракетой по каналам курса н
тангажа.
В системе наведения по лучу
радиолокатора ракета стабилизируется по
крену, а управление ведется по двум
каналам: курсу и тангажу. Стабилизация
ракеты по крену является необходимой,
так как нельзя допускать ее вращения
относительно продольной оси (если на
ракете не установлен специальный
раздатчик команд, при вращении ракеты будет происходить перепу-
тываиие каналов управления). Ракета при этом теряет
ориентацию в луче и становится неуправляемой. Цикл управления
закончится тогда, когда управляющие сигналы, поступив в
автопилот, а затем на органы управления (рулевые машинки и рули),
выведут ракету на равноенгнальное направление.
Для уменьшения ошибки наведения, особенно на предельных
дальностях, необходимо, чтобы радиолокационный луч был по
возможности более узким. Поэтому в такой системе используется луч
шириной or 3 до 0,5е. Однако из-за применения слишком узкого
луча возникают другие проблемы, например трудность попадания
Рис
мы
8.22. Разрез диаграм-
излученин
радиолокационной станции
* Опорные напряжения вырабатываются специальным генератором и
представляют собой два синусоидальных напряжения, частоты которых равны
частоте вращения луча, а фазы сдвинуты на 90° по отношению друг к другу,
причем фазы их строго привязываются к горизонтальному (по азимуту) и
вертикальному (по углу песта) направлениям вращения антенны.
201
ракеты в узкии луч прн запуске и повышение возможности
выхода ракеты из луча при быстрых перемещениях ее вследствие
резкого маневра цели.
Чтобы обеспечить попадание ракеты в луч, ее запускают со
стартовой установки, ориентированной (часто с помощью
специального счетно-решающего прибора) таким образом, чтобы
движение ракеты иа начальном участке происходило в направлении,
близком к осп луча. Чем лучше будет согласовано направление
полета ракеты при старте с направлением оси луча, тем меньше
будет переходный процесс после захвата ракеты и начала
работы бортовой системы управления и тем быстрее ракета выйдет
на ось луча.
Система с двумя радиолокаторами. В этом
случае радиолокатор сопровождения цели определяет координаты и
параметры движения цели и передает их в счетно-решающее
устройство, которое на основе этих данных не только рассчитывает
точку встречи ракеты с целью, но и вырабатывает
соответствующую программу движения луча радиолокатора наведения,
исключающую чересчур быстрое перемещение узкого луча в
пространстве.
Вместо радиолокатора сопровождения цели может
применяться оптическая система, которая выдает необходимые данные в
счетно-решающее устройство.
Системы наведения по лучу радиолокатора получили широкое
применение благодаря высокой надежности наведения. Они
применяются для ракет классов «земля — воздух», «воздух — воздух»
и «воздух — земля».
Дальность действия этих систем невелика н полностью
определяется дальностью действия радиолокаторов сопровождения
цели н наведения ракеты. Они мало зависят от
метеорологических условий.
Преимуществом этих систем является возможность наведения
на цель (или группу целей) по одному и тому же лучу
одновременно нескольких ракет. По поскольку луч радиолокатора,
сопровождающего цель, в течение всего времени полета ракеты
должен быть направлен на цель, то пока не закончится атака
одной цели, нельзя переходить к наведению ракет па другую
цель.
Недостатком системы наведений по лучу радиолокатора, так
же как и командной системы наведения, является то, что по мере
удаления ракеты ог радиолокатора, т. е. прн приближении ракеты
к цели, точность наведения уменьшается, в то время как именно
в этот момент требуется увеличение точности. Для устранения
этого недостатка при наведении ракет на удаленные цели
система телеуправления применяется в комбинации с системой
самонаведения, которая вступает в действие на последнем участке
полета ракеты.
202
8.5. СИСТЕМЫ САМОНАВЕДЕНИЯ
1. Принципы управления
Система самонаведения обеспечивает наведение ракеты на
цель с помощью аппаратуры, установленной на борту ракеты. Для
работы системы используется энергия, излучаемая целью или
отраженная от нее (рис. 8.23).
Основным элементом всей системы является головка
самонаведения (ГСП), которая имеет специальный чувствительный
элемент, воспринимающий энергию от цели, и координатор,
автоматически и непрерывно измеряющий координаты ракеты
относительно цели. Чаще всего координатор измеряет угловые огклоне-
\~Цель |
.,
i
i
i
i
Рис. 8.2J. Блок-схема системы самонаведения
ния цели от продольной оси ракеты (углы рассогласования), а в
некоторых более сложных системах дополнительно могут
определяться: дальность до цели, скорость изменения дальности и
угловая скорость поворота линии ракета — цель.
Устройство формирования команд управления вырабатывает
сигналы для корректировки движения ракеты, а устройство
управления преобразует эти сигналы в углы поворота рулей или
двигателей.
В зависимости от места расположения источника энергии,
используемого для головки самонаведения, системы самонаведения
могут быть активными, полуактивными и пассивными.
При активном самонаведении (рис. 8.24, а) цель
облучается первичным источником энергии, расположенным на
борту ракеты. Для выработки команд наведения используется
энергия, отраженная от цели. Из активных систем самонаведения
в настоящее время применяются лишь радиолокационные
системы. Комплект бортовой аппаратуры такой системы состоит из
радиолокационного передатчика, антенной системы, приемника,
счетно-решающего устройства для формирования сигнала
управления и приводов рулей.
Преимуществом активного самонаведения является то, что
ракета после пуска становится независимой от наземных средств
203
К рулим
I
I
I
1
Устройство
упровлсния
(автопилот)
Устройство
формирования команд
управления
Головка
самонаведения(ГСН]
комплекса. Этим самым обеспечивается возможность пуска
неограниченного количества ракет по очной или одновременно по
нескольким целям при сравнительно простых наземных средствах
комплекса.
К недостаткам этого вида самонаведения относят сложность
ГСН и ограниченную дальность ее действия.
в
Рис. 8.24. Схема работы системы самонаоедеиия:
о — активное: б — пассивное; в — полуактивнее: / — цель;
2 — ракета; 3 — станция подсвета (облучения); 4 —
облучающая энергия;. 5 — отраженная энергия
При по л у активном самонаведении (рнс. 8.24, е)
цель облучается первичным источником энергии, расположенным
Bfie ракеты. Обычно такой источник энергии располагается из
земле, корабле, самолете и т. п.
Для выработки команд наведения в этом случае также
используется энергия, отраженная от цели. Конструкция ГСН по
сравнению с головкой для активного самонаведения проще и легче,
так как в ее состав не входят передатчик.
Преимуществом полуактнвного самоЕ1аведения перед активным
считается значительно большая дальность действия. Это обьяс-
204
ияется тем, что па земле (корабле) можно разместить
значительно более мощный передатчик подсвета, чем в головке
самонаведения.
При пассивном самонаведении (рис. 8.24, б)
энергия для выработки команд наведения создается источником,
расположенным на самой цели, либо естественными облучателями
цели (Солнцем, Луной).
Принципы устройства и действия пассивной и полуактивной
головок самонаведения аналогичны. Наибольшее распространение
получила тепловая (инфракрасная) пассивная система
самонаведения.
Положительными качествами пассивных систем самонаведения
являются их сравнительная простота и скрытность действия.
Недостатками инфракрасных ГСП считаются ограниченная
дальность действия (несколько километров), зависимость работы
от направленности излучения цели, а также зависимость от
погодных условий.
Рассмотрим активную радиолокационную и пассивную
инфракрасную системы самонаведения.
2. Активная система самонаведения
Активная радиолокационная система самонаведения (рис. 8.25)
позволяет осуществлять наведение ракет в любых климатических
Схема
М
задержки
Приемник
Видео
усилитель
Селектор J
ПО ЙИИ*1
ности
Детектор \Усилитель\
сигналов ^сигналов
ошибки | ошибки
Антенна
,, \Двигатель\ ,
#=4°ращения U
оолучо
теля
ГенератщА
опорных
напряжений
Ограни
читет
Фазовый
\коммутатор
тангажа
Т
Привод
рулей
высоты
Ограни-]
читель
Фазовый
■ коммутатор\
курса
Привод
рулей
поворота
Рис. 8.25. Блок-схема активной радиолокационной
дення
системы самонаве-
Условиях и в любое время суток. Эта система состоит из
передатчика, приемника, антенного устройства, общего для передачи и
приема сигналов, антенного коммутатора, фазовых коммутаторов,
счетно-решающего прибора и других устройств, необходимых для
205
выработки управляющих сигналов и распределения их по
соответствующим каналам управления. Весь этот комплекс
аппаратуры называют радиолокационным координатором.
Активная радиолокационная система самонаведения но
структуре и принципу работы подобна обычной радиолокационной
станции автоматического сопровождения цели. Разница
заключается в том, что в радиолокационной станции управляющие
сигналы поступают на двигатели, вращающие антенную систему
с целью автоматического слежения за целью, в то время как в
системе самонавечення управляющие сигналы поступают через
\стройство управления на рулевые манишки ракеты. В
радиолокационной станции существует одни замкнутый контур — контур
сопровождения цели по угловым координатам. В системе
самонаведения имеются два замкнутых контура — контур сопровождения
цели но угловым координатам и контур управления ракетой.
Роль контура сопровождения цели по угловым координатам
выполняет координатор цели. Обычно все конструктивные
элементы радиолокационного координатора располагаются в носовой
части ракеты.
Контур сопровождения цели радиолокационной системы
самонаведения не решает задачи наведения ракеты на цель. Поэтому
в систему введен бортовой контур управления ракетой. В него
входят органы управления и автопилот, осуществляющие
управление ракетой по каналам курса и тангажа. По каналу крена
ракета обычно стабилизируется автономной системой, не
входящей в контлр наведения.
Захват цели с помощью координатора может осуществляться
различными способами. В ракетах класса «воздух — воздух ■>
с активной радиолокационной системой самонаведения
обнаружение и захват цели производятся с помощью радиолокационной
станции поиска и стрельбы. Координатор ракеты объединяется
с радиолокационной станцией самолета, которая имеет большую
мощность, большие габариты антенн и, следовательно, большую
дальность обнаружения по сравнению с радиолокационным
координатором. По радиолокатору пилот выводит самолет на
обнаруженную цель так, чтобы наиболее эффективно осуществить пуск
ракеты. Сравнивая сигналы координатора ракеты и самолетного
радиолокатора, пилот определяет моменты захвата цели
координатором и пуска ракеты.
Одной из важных характеристик радиолокационного коорди
натора является максимальная дальность действия, которая
определяется условием получения па выходе координатора
устойчивых сигналов управления, необходимых для автоматического
слежения антенны за целью и для наведения ракеты.
На величину максимальной дальности действия
радиолокационного координатора цели влияют: мощность передатчика,
характеристики нриемно-передающей антенны, отражающие свойства
206
цели, чувствительность приемника и поглощающие свойства
атмосферы, в которой распространяются радиоволны.
Серьезным Е1едосгатком радиолокационных активных систем
самонаведения является ограниченная дальность их действия.
3. Пассивная система самонаведения
Из пассивных систем самонаведения наибольшее
распространение получила тепловая, или инфракрасная, система.
Невидимые глазу инфракрасные лучи, представляющие собой
электромагнитное излучение, занимают область спектра от 0,76
до 420 .м/с. Поскольку эти лучи излучаются нагретыми телами,
их иногда называют тепловыми. Особенностью инфракрасных лу-
Лдчистпыи
поток
от цели
Оптическая —
ось —
на цель
Vaaa.
\Руль
Ось руля
Рис. 8.26. Упрощенная схема инфракрасной головки
самонаведения:
/ — оптическая система; 2 — диск с растрами:
чувспзителыгыГ: у.теменг; 5 — усилитель: Б и 7-
выпрямнтели
3 — двшатеть: 4—
фильтры; 8 и 9 —
чей является то, что они хорошо проходят через некоторые
материалы, непрозрачные для видимого света (картон, черная
бумага, эбонит), меньше поглощаются в атмосфере.
Тепловые лучи принимаются специальными приемными
устройствами, в состав которых входят оптические приборы и
чувствительные элементы, преобразующие падающую па них
лучистую энергию в энергию электрического тока. В качестве
индикаторов инфракрасных лучен для тепловых координаторов цели
применяются фотоэлементы, болометры и термопары.
Для наведения на цели, излучающие тепло, па ракете
устанавливается инфракрасная голопка самонаведения с
координатором цели в виде теплопеленгатора. Принцип се действия виден
из схемы, представленной на рис. 8.26.
Тепловые координаторы имеют малый угол обзора, поэтому
Для обнаружения цели координатор должен совершать поиск.
Для удержания цели в поле зрения, а также для обеспечения
поиска и слежения за целью независимо от колебаний ракеты
координатор обычно устанавливают па гнростабнлизированную
платформу.
Поиск осуществляется путем подачи меняющихся по
определенному закону напряжений на явигатели привода, которые
разворачивают головку самонаведения, совершая обзор простран-
207
ства по определенному методу. Как только лучистый поток от
цели попадает в поле зрения приемного устройства
координатора, электрический сигнал от чувствительного элемеЕгта
прекращает режим поиска н переключает двигатели привода
координатора в режим автоматического слежения за целью.
Дальность действия тепловой (инфракрасной) головки
самонаведения зависит от температуры и размера излучающей
поверхности, состояния атмосферы, конструктивных особенностей
координаторов, типа используемых чувствительных элементов и
колеблется от единиц до нескольких десятков километров.
Основным преимуществом теплопеленгациониых систем,
использующих инфракрасное излучение, является их высокая
разрешающая способность, которая значительно выше, чем у
радиолокационных.
Тсплопелснгатор с диаметром отражателя 7,5 см на
расстоянии 8 км в состоянии различить двигатели отдельных самолетов,
в то время как радиолокатор, работающий на волне 8 мм при
диаметре отражателя 30 см, способен различать цели на том же
удалении, отстоящие друг от друга на 400 м.
Кроме того, тепловые системы менее подвержены воздействию
искусственных помех по сравнению с радиолокационными
системами, однако возможность создания помех не исключается.
Глава 9
БОЕВЫЕ РАКЕТЫ ЗАРУБЕЖНЫХ СТРАН
Пользуясь классификацией, данной в гл. 2, кратко рассмотрим
устройство ракет различного назначения.
9.1. РАКЕТЫ ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ
1. Баллистические ракеты
Ракетный комплекс «О н е с т Джон» (табл. 9.1) состоит
из ракеты (MGR-IB), пусковой установки с одной направляющей,
смонтированной на двухосном или трехосном автомобиле, прицепа
с траверсой и автомобильного крана. Конструкция ракеты
(рис. 9.1) содержит пороховой ракетный двигатель с соплом,
четыре поворотных (малых) сопла, крестообразно расположенный в
хвостовой части стабилизатор и головную часть с ядерным
зарядом, зарядом обычного ВВ и взрыватель.
При пуске ракеты пороховой заряд ракетного двигателя
воспламеняется электрозапалом; продолжительность работы
двигателя около 5 сек.
Устойчивость ракеты в полете достигается за счет вращения ее
вокруг продольной оси от действия четырех поворотных (малых)
сопел, расположенных за боевой частью, и от стабилизаторов,
поставленных под некоторым углом к оси ракеты. Поворотные сопла
осуществляют вращение ракеты только на начальном участке
траектории, где ракета имеет еще незначительную скорость и где
она больше всего подвергается влиянию различных возмущающих
факторов.
Ракета достаточно проста по устройству, хотя вероятность
поражения ею целей считается недостаточной "(рассеивание ракет
при стрельбе на дальность 20 км составляет: по дальности — около
НО м, по направлению— 180 .и).
7s8—622
209
Таблица 9.1
Основные тактико-технические данные баллистических ракет
тактического назначения
Наименование
данных
Дальность
стрельбы (км):
наибольшая
наименьшая
Стартовый вес,
г
Вес боевой
части, т
Тип снаряжения
Тротпловып
эквивалент
заряда, кт
Диаметр, м:
боевой части
корпуса ракеты
Длина ракеты, м
Двигатель
Наибольшая
скорость, м/сек
Система
управления
Состоит на
вооружении
„Онест
Джон"
40
6
2,2
0.6S
Обычное,
ядерное,
химическое
15—20
0,76
0,5В
7,9
РДТТ
700
Неуправляемая
США,
1953 г.
„Литп
Джон"
20
3
0,45—0.36
0,115
Обычное,
ядерное
1.5
0,32
4,4
РДТТ
833
Неуправляемая
США,
1958 г.
.Лапе"
50
5
1.5
—
Обычное,
ядерное,
химическое
—
0,56
6.1
ЖРД
—
Инер-
цнальиая
США
„Плутон"
120
10
2,35
—
Ядерное
10-15
0,05
7.6
РДТТ
—
Инер-
цпальная
Франция
1969 г.
„Сержант"
140—160
45
4.58
0.725
Обычное,
ядерное,
химическое
—
0,5
10.5
РДТТ
(с тягой
22.7 т)
1000
Инер-
цпальная
США,
ФРГ
.Першинг"
740
185
4.5
—
Ядерное
—
1.0
10,5
РДТТ
1400
Ипер-
цнальиа
США,
ФРГ,
1964 г.
Для поддержания необходимой температуры порохового
заряда двигателя применяется специальный чехол с
электрообогревом н автоматической регулировкой температуры.
Чехол с двигателя снимается перед пуском ракеты.
Ракетный комплекс «Литтл Джон» (MGR-3A)
аналогичен составу ракетного комплекса «Онест Джои», кроме
пусковой установки, которая выполнена в двух вариантах —на
одноосном прицепе легкого типа и на гусеничном транспортере.
210
П\
[I
Рис. 9.1
1
7.
Схемы
/адш\
Ракета (см. рис. 9.1) состоит из порохового двигателя с
соплом, крестообразно расположенного в хвостовой части
стабилизатора, и головной части, снаряжаемой обычным ВВ или ядерным
зарядом.
Имея малый вес, ракетный комплекс «Литтл Джон» обладает
более высоким темпом стрельбы по сравнению с комплексом
«Онест Джон»; комплекс более мобилен и транспортабелен.
Ракета комплекса
«Ланс» (см. рис. 9.1) —
одноступенчатая, имеет
жидкостной ракетный
двигатель (ЖРД) с
двумя режимами работы —
стартовым и маршевым;
заправка двигателя
топливом производится в
заводских условиях.
Крестообразно расположенный
стабилизатор находится
в хвостовой части ракеты.
Запуск ракет «Ланс»
полагают производить с
пусковых установок
«Литтл Джон».
ВМС США
приступили к разработке ракеты
под названием «Си Ланс»;
ракета предназначается
для вооружения
надводных кораблей.
В ракетный
комплекс «Плутон» (см. рис. 9.1) входит управляемая
одноступенчатая ракета твердого топлива и наземное проверочно-пусковое
оборудование, размещаемые па гусеничном транспортере.
Ракета состоит из боевой части и ракетного двигателя
твердого топлива с двумя режимами работы — стартовым и
маршевым.
Стабилизация ракеты в полете осуществляется крестообразно
расположенными аэродинамическими рулями, находящимися в
хвостовой части ракеты и приводимыми в движение от
электрических приводов.
Ракетный комплекс RKT-30 общей огневой поддержки
сухопутных войск включает в себя ракету RKT-30, по внешнему
виду и основным характеристикам напоминающую ракету «Литтл
Джон». Ракета длиной 4,57 м и диаметром корпуса 0,3 м имеет
Двигатель твердого топлива. Головная часть снаряжается обычным
ВВ. Стабилизация в полете достигается за счет крестообразно
Расположенного стабилизатора. Дальность полета порядка 30км.
назна-
ракет тактического
чепия:
сЛнтт.1 Джон» ; 2 — «Ланс» : 3 — «Онест Джон»;
4 — «Плутон»
44
213
■43
пр
Ракетный комплекс «Сержант» состоит из ракеты
(рис. 9.2), пусковой установки и агрегатов наземного
оборудования. Ракета — одноступенчатая, твердотопливная, из четырех
отсеков: боевой части, системы управления, двигателя твердого
топлива и стабилизатора. Каждый отсек перевозится в герметичных
контейнерах.
В качестве топлива двигателя
применяется литая шашка, которая сгорает в
течение 30 сек; вес шашки 2,7 т.
Сборка ракеты осуществляется на
стартовой позиции расчетом, состоящим
из пяти человек, за 10 мин. Общее время,
необходимое для подготовки ракеты к
пуску, составляет 30 мин.
Ракетный комплекс «Пер-
ш и н г» (см. рис. 9.2) состоит из ракеты,
пусковой установки, станции проверки,
пульта управления батареей,
электросилового агрегата и узла связи,
оснащенного радиостанцией для
радиотелефонной и телетайпной связи с батареей.
-, Ракета — двухступенчатая с двигате-
-* ляын на твердом топливе на обеих
ступенях и с одинаковой силой тяги.
Первая ступень ракеты отделяется на
высоте примерно 12 км. При этом путем
мгновенного понижения давления в ка-
л I n I мере сгорания выключается двигатель.
/1 |Тд j \ С этой целью в камере сделаны отвер-
SJj^jjj £— А стия, которые открываются по
достижении ракетой заданной скорости. При
спаде давления разрываются
соединительные болты и первая ступень
отделяется от второй.
Заметим, что твердое топливо
устойчиво горит тогда, когда в камере
сгорания имеется достаточно высокое давление; при резком понижении
давления горение прекращается. Этот эффект и используется для
разделения ступеней.
Двигатель второй ступени выключается при открывании
заглушек в стенках камеры путем взрыва специальных пороховых
зарядов, когда ракета приобретает заданную скорость.
Боевая часть ракеты с системой управления расположена на
второй ступени. Она оснащена средствами преодоления ПРО.
Стабилизация ракеты в полете осуществляется с помощью
стабилизаторов первой ступени треугольной формы и
стабилизаторов второй ступени прямоугольной формы.
Конический носовой конус имеет специальное покрытие, кото-
212
Г 2
Рис. 9.2. Схемы
тактических ракет:
/ — «Сержант»; 2 — «Першинг»
рое наносится для предохранения корпуса ракеты от высоких
температур, возникающих при полете в атмосфере. При повышении
температуры покрытие постепенно разрушается и смывается
воздушными потоками.
Начаты исследования по созданию новой ракеты «Псршинг-2»
повышенной дальности, с головной частью, содержащей несколько
боевых головок и снабженной средствами преодоления ПРО.
2. Крылатые ракеты
Полет крылатых ракет (табл. 9.2) основан на использовании
аэродинамических сил, чем они и отличаются от баллистических
ракет, в которых аэродинамические силы служат для
корректировки траектории только на начальном участке.
Таблица 9.2
Основные тактико-технические данные крылатых ракет
тактического назначения
Наименование данных
Дальность полета, км:
наибольшая
наименьшая
Стартовый вес, т
Вес боевой части, т
Тип снаряжения
Длина ракеты, м
Диаметр корпуса, м
Размах стабилизатора пли
крыла, м
Двигатель
Наибольшая скорость
полета, м/сек
Система управления
Состоит на вооружении
Крылатые ракеты
.Лакросс"
32
8
1.07—0.92
0,2-1
Ядерное,
обычное
5.84
0,52
Пороховой
455
Радиокоманд,
с телеуиравл.
США
SE-12C0
90
25
1,0
—
3.5
ПВРД и 2
пороховых
ускорителя
275
Рачнокоманд.
(с земли)
Франция
..чейс-
2100
8,2
0.9
Ядерное
13,4
1.4
7,0
ТРД с
пороховым
ускорителем
280
Антономпая
США, 1S66 г.
Крылатые ракеты (рис. 9.3) состоят Е13 планера, двигателя,
головной части и системы управления.
9—г,22
213
Голош1\'ю часть снаряжают либо ядерным, либо фугасным
зарядом.
Крылатые ракегы друг or друга отличаются:
Рис. 9.3. Схема крылатой ракеты тактического назначения:
/ — обтекатель; 2 — отражатель системы нападения; ■? — аппаратура системы
самонаведения; 4 и 1С — система управления; 5 — боевая часть: 6—взрыва-
Tcib- 7—корпус ракеты. 8 — бак с юрючнч: э — крыло; /; — марп.свыи II Д.
,2 —'руль наведения: И —сопло; И — механизмы ТРД; /5 — пороховой
ускоритель; 16 — воздухозаборник
— видом траектории:
ракета может совершать полет на постоянной высоте;
ракета на начальном участке летит как
баллистическая ракета, затем как
свободное тело;
ракета может совершать полет с
переменной высотой:
— аэродинамической схемой
(конструкция ракеты может быть выполнена по
типу: нормальная, «утка», «поворотное
крыло»);
— количеством двигателей;
— системой управления (автономная,
телеуправляемая либо самонаводящая);
— боевым применением (тактического
или стратегического назначения).
Преимуществом крылатых ракет перед
баллистическими ракетами принято считать
меньшие вес и расход топлива, меньшие
габариты и более низкую стоимость,
недостатком— сравнительно малую скорость и
большое время полета.
Рассмотрим для примера к р ы латы и
ракетный комплекс «Л а к р о с с»
(табл. 9.2), состоящий из ракеты (рис. 9.4)
смонтированной на шасси легкого армей-
Рис. 9.4. Схема
тактической крылатой ракеты
«Лакросс»
и пусковой установки,
ского автомобиля.
Двигатель на твердом топливе работает на двух режимах —
стартовом и маршевом.
214
Устойчивость в полете ракета приобретает за счет
крестообразно расположенных крыльев и четырех лопастей хвостового
оперения. Крылья смещены относительно хвостового оперения
на 45°.
После запуска ракета автоматически выводится в «расчетную
точку», затем «захватывается» радиолокатором наземной станции
наведения. Последующее управление ракетой и ее наведение в
цель выполняет командная система управления с
радиолокационным слежением.
Наземная станция наведения выдвигается на передний край с
за чачей ведения визуального наблюдения за целью.
Система управления ракеты подвержена радиопомехам. Кроме
того, сама ракета уязвима для средств ПВО. К числу недостатков
ракеты относят и то, что на перезаряжание пусковой установки
затрачивается много времени, а это сильно снижает темп пуска
ракет.
Комплекс управляемой крылатой ракеты
«М е й с» состоит из крылатой ракеты, представляющей собой по
внешнему виду беспилотный бомбардировщик с
высокорасположенным стреловидным крылом малого размаха, установщика,
пускового стола и приборов управления пуском.
Горизонтальное оперение, имеющее также стреловидную
форму, расположено в верхней части киля. Благодаря стреловидному
крылу и горизонтальному оперению ракета сохраняет
необходимую устойчивость в полете при заданной скорости движения.
У ракеты — один турбореактивный двигатель с тягой 2,4 т. В
качестве горючего используется керосин.
Устойчивость крылатой ракеты в момент ее старта достигается
за счет работы ускорителя типа ПРД, развивающего тягу, равную
55 г; время работы ускорителя не превышает 2 сек. Высота
полета ракеты может изменяться от 0,3 до 12 км.
Крылатая ракета «Мейс» поступила на вооружение в двух
вариантах: «Мейс» ТМ-76А и «Мейс» ТМ-76В. Отличаются они друг
от друга только системой управления: у ТМ-76А— система
управления «Атран»; у ТМ-76В —инерциальная.
Действие системы «Атран» основано на принципе совмещения
двух изображений местности: заснятой до полета и
воспринимаемой (фотографируемой) в полете.
Инерциальная система управления уступает системе «Атран»
по точности выработки конечных данных, необходимых для
управления ракетой в полете.
По сообщениям зарубежной печати, дальнейшее развитие
тактических ракет (баллистических и крылатых) может пойти по пути
создания управляемых ракет, оснащенных системой
самонаведения (лазерными или радиолокационными), и универсальных
ракет, предназначаемых для борьбы с наземными и воздушными
целями (на малых высотах).
0# 215
3. Противотанковые управляемые ракеты (ПТУР)
Принципиальная схема конструкции ПТУР показана на рис.
9.5. Снаряд состоит из боевой части и взрывателя, реактивного
двигателя с соплом, планера (корпуса), органов стабилизации,
системы наведения и управления, воздушных рулей, крыла и
элеронов.
В большинстве известных ПТУР боевая часть содержит
кумулятивный заряд, способный пробивать мощную броню танка.
Па многих ракетах устанавливается по два двигателя —
стартовый и маршевый. Стартовый двигатель разгоняет снарят. до за-
9
Рис. 9.5. Схема ПТУР:
Л 8 — стабилизаторы: 2 — боемая часть; 3 — пороховой
двигатель; -1 — планер; 5 — приборы стабилизации;
6—система наведения и управления; 7 — нсидушные рули; 9 —
элероны; Ю — пзрынатель; // — сопло
ханной скорости, а маршевый — поддерживает или увеличивает
>ту скорость, обеспечивая полет снаряда до встречи с целью.
Продолжительность работы стартового двигателя изменяется
от 0,5 до 3 сек, а маршевого двигателя достигает 10 сек и более
(в зависимости от дальности) при скорости полета 100—
200 м/сек.
В ПТУР применяются реактивные двигатели трех типов:
пороховые, воздушно-реактивные и жидкостные. Наибольшее
распространение получили пороховые двигатели.
Планер (или корпус) снаряда включает в себя крылья, рули,
элероны и органы стабилизации и служит для создания
управляющих сил, необходимых для наведения снаряда па цель.
Форма крыльев разнообразная; они могут быть плоскими,
кольцеобразными и другого вида.
Большинство ПТУР оснащено воздушными рулями, ио
применяются также и газодинамические.
Управляются ПТУР по проводам и по радио; эти системы
управления называют телеуправляемыми. В некоторых ПТУР
применяется автономная система, которая управляет ракетой по
заранее намеченной программе.
Для удобства все известные ПТУР в иностранной печати раз-
216
делены на ракеты первого и второго поколения; схемы некоторых
из них показаны на рис. 9.6 и 9.7; тактико-технические данные
приведены в табл. 9.3 и 9.4.
гл
Рис. 9.6. Схемы ПТУР первого поколения:
1 — «Эптак»; 2—«Бантам»; 3- «Москнто» ; 4 — 5S-11
Деление ПТУР можно провести и по весу: на легкие, средние
и тяжелые.
~Г*\
А
един
Г\
у—?
Рис. 9.7. Схемы nTJ P второго поколения:
1 — «Милан»; 2 — «Сфингфайр»; 3 — «Хот»; 4 — «Шилсйла»
Большинство легких ПТУР являются индивидуальным
оружием, применяемым непосредственно на поле боя. Средние и
тяжелые ПТУР устанавливаются на автомобили, бронетранспортеры,
танки, вертолеты и другие подвижные средства.
217
Таблица 9.3
Основные тактико-технические данные некоторых ПТУР
первого поколения
Наименование данных
Дальность, м:
наибольшая
наименьшая
Общий вес (ракеты и
токовой установки), кг
Стартовый вес, кг
Вес головной части, кг
Длина, мм
Диаметр корпуса, мм
Скорость поле га, л/сек
Толщина пробиваемой
брони, мм
Двигатель
Наведение
Способ запуска
Состоит на
вооружении
Легкие
„Ковра"
1600
400
10
10
Кумул./2,7
950
100
85
500
РДТТ
По
проводам
С земли
ФРГ
„Москнто*
2400
360
28
12.5
Кумул./4
400
120
100
660
РДТТ
По
проводам
С земли
и in
транспортера
Италия,
Швейцария
„Энтак"
2000
400
17
12,2
Кумул./3,9
800
150
85
650
РДТТ
По
проводам
С
автомобиля
Франция
Средние
SS-I1
3000
500
30
30
Кумул..;8,1
1200
160
160
600
РДТТ
По
проводам
С
автомобиля
Франция
218
Таблица 9.4
Основные тактико-технические ъанные некоторых ПТУР
второго поколения
Наименование данных
Дальность, м:
наибольшая
наименьшая
Общий вес (ракеты и
пусковой установки), кг
Стартовый вес, кг
Вес головной "части, кг
Длина, мм
Диаметр корпуса, мм
Скорость полета, м/сек
Толщина пробиваемой
брони, мм
Двигатель
Наведение
Способ запуска
Состоит на вооружении
Легкие
„Милан"
2000
25
11
6, Г.
вв
750
103
180
—
РДТТ
По
проводам
С земли,
с
автомобиля
Франция,
ФРГ
Средине
.Хот"
4000
75
25
20
ВВ
1240
136
280
—
РДТТ
По
проводам
С танка,
с
автомобиля
Франция.
ФРГ
.Шнлейла"
яооо
—
27
18
ВВ/6,2
1140
152
220
500
РДТТ
Командное
С
транспортера,
с
автомобиля
США,
ФРГ
„Суинг-
<1аЯр"
3000
150
—
18
ВВ/7
1100
170
190
500
РДТТ
По
преподам
С танка,
с
автомобиля
Англия
Тяжелые
„Toy
ЗООП
—
72
17.4
3,8
1140
140
—
■-
—
—
С земли,
с
автомобиля
США
219
У ПТУР первого поколения управление в полете начинается с
350—600 м от места пуска. Следовательно, если цель находится
ближе этого расстояния, то поразить ее противотанковой раЕ<етой
становится практически невозможно.
Дальнейшее развитие ПТУР, по данным зарубежной печати,
может пойти по пути:
— увеличения дальности стрельбы и бронепробиваемости;
— улучшения точности стрельбы, особенно ночью и при плохой
видимости;
— повышения маневренности, уменьшения веса и габаритов;
— создания самоходных уста-
:i\u w
rffrj
'Л М L
новок;
— создания
систем.
универсальных
9.2. РАКЕТЫ СТРАТЕГИЧЕСКОГО
НАЗНАЧЕНИЯ
Баллистические управляемые
стратегические ракеты входят в
класс «земля — земля».
По дальности они
подразделяются па ракеты средней
дальности и ракеты дальнего
действия.
1. Ракеты средней дальности
I
Рис. 9.8. Схемы ракет
стратегического назначения средней дальности
1 — «Поларис А-2»; 2 — «Поларис А-З»;
3 — «Посейдон»
Основные данные ракет
приведены в табл. 9.5. Их схемы
даны на рис. 9.8.
Ракета «Поларис А-2»
принята на вооружение
подводных лодок. Она состоит из двух
ступеней с двигателями твердого
топлива. В носовой части ракеты
находится ядерный заряд. Камеры сгорания двигателей имеют по
четыре сопла с газовыми рулями. Сопла второй ступени —
пластмассовые с вкладышами из огнеупорного материала в критическом
сечении. Это дает уменьшение веса сопел до 30% по сравнению со
стальными.
Топливо обеих ступеней двигателей смесевое, твердое,
состоящее из полиуретана с присадками алюминия и перхлората
аммония. Заряды отливаются непосредственно в корпус ступени.
Управление ракетой в полете осуществляется за счет поворота
сопел.
На второй ступени ракета имеет реверсивные двигатели, сопла
которых направлены в противоположную сторону по опюшснию
к основным. Они регулируют величину силы тягп двигателя, а сле-
220
Таблица 9.5
Основные тактико-технические данные стратегических ракет
Средней дальности
Наименование данных
Наибольшая дальность
полета, км
Стартопый вес, т
Тип снаряжения
Тротиловый эквивалент
заряда, Мт
Длина ракеты, м
Диаметр корпуса, м
Количество ступеней
ракеты
Тип двигателей
Наибольшая скорость
полета (число М)
Высота траектории, км
Система управления
Состоит па вооружении
.Поларис Л-2"
2800
14,5
Ядерное
0,6
9,6
1,37
2
РДТТ
12
650
Ипсрцнальнаи
США. 1962 г.
.Поларис А-З"
4600
16
Ядерное
0.75—1
9,86
1.37
2
РДТТ
15
—
Ииерциальпая
США. 1964 г.
.Посейдон"
4600-6500
(в зависимости
от боевой
нагрузки)
27
Ядерное
2-3
10,4
1,83
о
РДТТ
—
—
Инерциальна-я
США, 1969 г.
дователыю, и конечную величину скорости (в пределах
±10 м/се к).
^правление ракетой в полете и наведение ее на цель
осуществляются с помощью инерциальной системы. Ракета снабжена
средствами преодоления ПРО.
Ракета «Поларис А-З» является третьей модификацией
ракеты «Поларис». Имеет увеличенную дальность действия и
увеличенную мощность ядерного заряда.
Увеличение дальности полета ракеты получено за счет
добавления топлива в двигатель первой ступени, снижения веса ракеты
путем применения в конструкции корпуса и двигателя пластмасс
и увеличения удельной тяги. Головная часть ракеты содержит три
боеголовки. Головная часть имеет обтекатель, который
сбрасывается после выхода ракеты за пределы плотных слоев
атмосферы.
221
В ракете «Поларпс Л-3» исполнительными органами системы
управления являются: на первой ступени — четыре поворотных
сопла и на второй ступени — устройство впрыска фреона в закрл-
тические части четырех сопел. Фреон поступает под давлением
сжатого азота.
Ракета «Посейдон» — более совершенный вариант ракеты
«Поларпс». Она предназначена для замены ракет «Поларис А-2»
и «Поларис Л-3».
Ракега —твердотопливная, двухступенчатая. Корпус каждой
сллпенн, сопла двигателей выполнены из стеклопластика.
Ракета имеет более совершенную аэродинамическую схему, чем
ракета «Поларис Л-3».
Головная часть ракеты содержит мощный ядерный заряд и
средства преодоления систем ПРО. Ядерный заряд может
состоять из нескольких боевых головок. Ведется разработка ядерного
заряда на 10 боевых головок н более.
Отделение головной части от второй ступени ракеты
осуществляется с помощью четырех реверсивных сопел, находящихся в
передней части корпуса второй ступени.
В РДТТ первой ступени принято смессвое твердое топливо, в
РДТТ второй ступени — двухосновное твердое топливо с высоким
удельным импульсом. Снаряжение корпусов двигателей
производится на снаряжателыюм заводе.
Собранная ракета со сборочного завода доставляется к месту
погрузки в подводные лодки в контейнерах. Перед установкой в
пусковую трубу подводной лодки ракета извлекается из
контейнера.
Па каждой подводной лодке устанавливается по 16 ракет.
Собранная ракета может храниться около 10 лет.
2. Ракеты дальнего действия
Основные данные ракет дальнего действия приведены в
табл. 9.6. Их схемы даны на рис. 9.9.
Ракета «Тита н-2» состоит нз двух ступеней и головной
части. Па обеих ступенях установлены ЖРД, работающие на высо-
кокипящем топливе, состоящем из горючего — «аэрозии-50» (смесь
1 : 1 безводного гидразина с несимметричным диметилгндразииом)
и окислителя — четырехокиси азота.
На первой ступени — два ЖРД с тягой по 97,5 т каждый; на
второй — один ЖРД с тягой 45,4 т. Температура в камере
сгорания достигает 3100° С.
Двигатель второй ступени включается еще до разделения
ступеней, при зтом газы двигателя второй ступени истекают через
отверстия в переходнике между ступенями. Для отделения первой
ступени от второй используются малые РДТТ с тягой по 34 кг.
Для получения расчетной скорости ракеты и изменения
направления ее полета в конце активного участка траектории использу-
222
Т а б 1 и ц а 9.6
Основные тактико-технические данные стратегических ракет
дальнего действия
Наименование данных
Наибольшая дальность
полета, км
Стартовый вес, т
Тип снаряжения
Трошловын эквивалент,
Мт
Длина, м:
I ступени
II ступени
III ступени
Диаметр, м:
I ступени
II ступени
III ступени
Количество ступеней
Тип двигателя
Наибольшая скорость
полета (число М)
Высота траектории, км
Система наведения и
управления
Состоит на вооружении
„Титан-2"
ГЗолее 11 500
150
Ядерное
10—20
31,4
21,3
Ю.1
3
3
2
ЖРД
28
1000
Инерциальпая
США, 1964 г.
.Миннтчен-2"
12900
31.8
Ядерное
2
18,2
1,88
3
P/iTT
22
1000
Инерциальпая
США, 1961 г.
.Миннтмен-З"
9S00
(расчетная
17 000 км)
35/1
Ядерное
2
18,2
1.8S
1.32
3
РДТТ
—
—
Инерциальпая
США
ются два верньерных РДТТ, расположенные в хвостовой части
второй ступени. В верньерных двигателях используется смесевое
топливо на основе полиуретана.
Ракета снабжена инерциальной системой наведения.
Исполнительными органами системы наведения являются шарннрпо
подвешенные сопла ЖРД первой и второй ступеней.
На основе ракеты «Титан-2» создано более пяти вариантов
ракет, предназначенных как для межконтинентальных запусков, так
и для вывода на орбиту спутников военного назначения.
Последним вариантом из этих ракет является ракета «Ти т а п-ЗМ»,
имеющая длину 32 м и стартовый вес 810 г. Ракета выполнена по
Двухступенчатой схеме с двумя стартовыми ускорителями. В
ракете применены титановые сплавы, что позволило уменьшить вес
223
II!
конструкции корпуса и двигателей до 40% первоначального и
увеличить за этот счет запасы топлива. Сообщается, что ракета
может доставить к цели мощный ядерный заряд в 17,2 т.
Ракета «Минитмен-2» является
основной ракетой дальнего действия.
Ракета — трехступенчатая,
твердотопливная. На первой ступени — РДТТ,
корпус стальной, на второй — РДТТ, корпус
стеклонластиковый, на третьей — РДТТ,
корпус из «спираллоя».
Корпус всей ракеты снаружи покрыт
теплозащитным слоем, который
предохраняет его от нагрева для возможности
старта из шахты.
РДТТ первой и третьей ступеней
имеют по четыре поворотных сопла.
РДТТ второй ступени имеет одно жестко
закрепленное сопло.
При работе двигателей первой и
третьей ступеней управление полетом
ракеты по тангажу, рысканию и крену
производится путем отклонения поворотных
сопел этих двигателей. Отклонение сопел
двигателя первой ступени достигается за
счет давления в гидравлической системе,
создающего вращающий момент. Сопла
двигателя третьей ступени отклоняются
о г давления в гидросистеме, создающего
также вращающий момент.
Гидравлические системы монтируются на нижнем
днище корпусов РДТТ между
соплами.
При работе двигателя второй ступени
управление полетом ракеты по тангажу
и рысканию достигается путем
отклонения вектора тяги этого двигателя.
Управление по крену осуществляется четырьмя
малыми управляющими соплами, работающими от порохового
аккумулятора давления (ПАД).
Во всех двигателях трех ступеней ракеты «Минитмен-2»
принято твердое топливо с высоким удельным импульсом:
—■ па первой ступени — топливо состоит из полибутадиена,
акриловой кислоты с присадками алюминия (горючее) и перхлората
аммония (окислитель); шашка твердого топлива изготовляется
литьем; двигатель развивает тягу 80 т;
— на второй ступени — литая шашка из полибутадиена с
присадками алюминия; двигатель развивает тягу 40 т;
— на третьей ступени — твердотопливная шашка из
224
г
Рис. 9.9. Схемы ракет
стратегического назначения
дальнего дейстпия:
; — «Мшштчен-2»; 2 — «Ти-
тан-2»
нитроцеллюлозы и нитроглицерина с примесью пудри алюминия и
перхлората аммония; двигатель развивает тягу 20 т.
Срок хранения снаряженной топливом ракеты 5 лет.
Ракета имеет головную часть с повышенной устойчивостью к
действию взрыва ядерных боеголовок антиракет.
Носок головной части выполнен из листового алюминиевого
сплава с теплозащитной оболочкой.
Отсек системы наведения расположен между третьей ступенью
и головной частью.
В системе наведения используется универсальное цифровое
вычислительное устройство, в памяти которого могут храниться
данные о нескольких целях.
По командам, выработанным вычислительным устройством,
производятся: управление полетом ракеты, разделение ступеней,
сбрасывание ложных целей и установка взрывателя в боевое
положение.
До запуска ракеты вычислительное устройство ведет
непрерывную проверку бортового оборудования, регулирование
температуры и атмосферы в шахте, регистрацию уровня воды на дне
шахты, проверку плотности закрывания крышек люков в шахту, а
также контролирует приборы управления запуском ракеты.
Ракета «Минитмен-3» в конструктивном отношении более
совершенна, чем ракета «Минитмен-2».
Ракета имеет усовершенствованную, с большим стартовым
весом и габаритами третью ступень. Первая и вторая ступени
остались такими же, какие приняты в ракете «Минитмен-2». На
третьей ступени, так же как на первой и второй, установлен РДТТ.
Корпус двигателя — стсклопластнковый. Двигатель имеет одно
жестко закрепленное сопло. При работе двигателя третьей ступени
управление полетом ракеты по тангажу и рысканию
осуществляется за счет ассиметрии силы тяги РДТТ. Управление по крену .
осуществляется управляющими соплами. Сопла смонтированы на
корпусе двигателя.
Головная часть ракеты содержит три ядерных боеголовки и
дипольные отражатели. Боевые головки предназначаются для
поражения одной крупноразмерной цели. Перед входом головной
части в атмосферу боеголовки отделяются, разлетаются и
продолжают полет к цели по разным траекториям. Наконец,
разрабатывается новая головная часть, способная нести до семи боеголовок.
Создаются ракеты «Мипитмеп-4» н «Мпнитмен-5».
Ракета «М и н и т м е н-4» будет трехступенча той,
твердотопливной. Вторую и третью ступени предполагается взять от
ракеты «Минитмен-3» или же от ракеты «Посейдон».
Ракету «М и н и т м е н-5» создают также трехступенчатой,
твердотопливной, но с одинаковым диаметром у всех
ступеней.
225
3. О перспективных ракетах стратегического назначения
В ряде стран, в частное!и в США, ведутся работы по созданию
новых стратегических ракет для замены состоящих на
вооружении.
С этой целью иснытываются ракеты с двигателями типа ЖРД,
РДТТ и ЯРД, которые будут способны нести головные части с
ядерными зарядами большой мощности.
Конструкции ракет предполагается выполнять
трехступенчатыми и двухступенчатыми с ускорителями.
К вновь разрабатываемым стратегическим ракетам
зарубежные специалисты предъявляют следующие требования:
— должны точно поражать намеченные цели;
— должны иметь средства преодоления системы ПРО;
— должны противостоять ядерному удару противника.
Запуск ракет проектируется производить из подземных шахт и
с подводных лодок, находящихся в подводном положении, а также
с других видов пусковых установок.
В последние годы в СШЛ разрабатывается твердотопливная
трехступенчатая ракета 1СМ с дальностью 12 000 км. Головная
часть должна нести несколько боеголовок, способных
маневрировать па конечном участке траектории. Система нападения —инер-
циальиая в сочетании с самонаводящейся. Запуск ракеты 1СМ
предполагается проводить с мобильных пусковых установок —
автомобилей и железнодорожных платформ. Ракета 1СМ должна
быть неуязвимой к поражающим факторам ядерного взрыва:
ударной волне, ионизирующему, электромагнитному и тепловому
излучениям. Она заменит ракеты «Минитмен».
Создаются и другие ракеты, предназначенные для замены
ракет «Поларис» и «Посейдон». Новыми ракетами предполагается
вооружить подводные лодки, оснастить ими обитаемые комплексы,
. способные перемещаться по морскому дну, и установить в
герметических контейнерах, погруженных па глубину 900 м и более.
9.3. РАКЕТЫ СИСТЕМ ПВО И ПРО
По данным зарубежной печати, ПВО должна обеспечивать
оборону от средств воздушного нападения: авиации, баллистических
и крылатых ракет класса «земля—земля», управляемых ракет
класса «воздух—земля». Эти задачи, как правило, решают
зенитные управляемые ракеты (ЗУР).
Уничтожение баллистических и крылатых ракет стремятся
производить при их запуске (на стартовой позиции) или на активном
участке траектории (при работающих двигателях). Если этого
сделать невозможно, то пытаются уничтожить ракету на среднем
участке траектории. Поражение средствами ПВО воздушных
целей после их входа в атмосферу, над целью, нежелательно.
Поэтому разрабатывается такая система ПВО, которая обеспечила бы
226
поражение баллистических и крылатых ракет до окончания
работы двигателя или до того, как головная часть отделится от
последней ступени ракеты.
Современный зенитный ракетный комплекс состоит из
управляемой ракеты, систем обнаружения и опознавания цели, систем
управления и наведения ракеты на выбранную цель, пусковых
устройств н контрольно-измерительного оборудования.
У ЗУР имеются стартовая и маршевая ступени (рис. 9.10).
Корпус ракеты обеспечивает ей необходимую жесткость и прочность.
Радиолокационная головка самонаведения находится в
головной части ракеты; она изготовляется из радиопрозрачного мате-
ч5 6 7 8 9
Рис. 9.10. Схема ЗУР:
1—взрыва1сль; '2—предохранительно-исполнительный механизм: 3 — Соезой
заряд; 4 — система наведения; 5 — механизм попорота аэродинамических
поверхностен; 6 — аэродинамические поверхности; 7—маршевый двигатель: 8 —
корпус планера; 9 стабилизаторы; 10 — сопло маршевого РДТТ; 11 — механизм
отделения: 12 — стартовый двигатель; /3—корпус стартовой ступени: 14 — сопло
стартового РДТТ
риала, а по форме берется такой, чтобы практически не искажать
принимаемые радиоволны.
Средняя часть корпуса ракеты — цилиндрическая, хвостовая —
усеченный конус.
Аэродинамические поверхности служат для создания
подъемной силы при полете в атмосфере, создания сил управления
полетом ракеты при наведении па цель. Различают два вида
аэродинамических поверхностей: подвижные и неподвижные: подвижные —
управляют полетом ракеты, неподвижные — обеспечивают
устойчивость полета ракеты, а также создают подъемную силу.
В ракетах последних лет применяют по две пары подвижных и
неподвижных аэродинамических поверхностен, расположенных
крестообразно. Их форма весьма разнообразна: треугольная,
прямоугольная, трапециевидная. Материалом для них служат легкие
сплавы или пластмассы.
Взаимное расположение подвижных и неподвижных
аэродинамических поверхностей относительно центра тяжести ракеты
определяет аэродинамическую схему ЗУР.
Боевая часть ракеты содержит заряд обычного ВВ или
ядерный. Срабатывает боевая часть от взрывателя.
227
Маршевый двигатель обеспечивает необходимую скорость,
дальность и высоту полета ракеты.
Стартовый двигатель (ускоритель) придает ракете
необходимую скорость полета па начальном участке траектории с целью
сокращения полетного времени ракеты.
В зарубежных странах на вооружение приняты три вида
комплексов ПВО и ПРО:
а) для обороны своих стран (комплексы входят в ПВО и ПРО
страны);
б) для обороны войск на поле боя (комплексы входят в
состав ПВО войск);
в) для обороны кораблей и других надводных среде™
1. Ракеты зенитных комплексов ПВО страны
Основные данные некоторых зенитных ракет, входя
плексы ПВО страны, приведены в табл. 9.7. у-\
Рис. 9.11. Схемы ЗУР ПВО страны:
/ — «Хоук» : 2 — «Тапденберд» ; 3 — «Блачхаунчэ
Зенитный ракетный комплекс «Хоук» (рис. 9.11)
предназначен для борьбы с самолетами и вертолетами па малых
и средних высотах,
ЗУР «Хоук» одноступенчатая, с РДТТ, работающим на двух
режимах тя'гн — стартовом и маршевом. Ракета сверхзвуковая.
В качестве топлива в двигателе приняты две шашки, разные по
форме и составу.
228
Таблица 9.7
Основные тактико-технические данные некоторых ЗУР ПВО страны
Наименование данных
.Хоук"
.Тандерёерд-2"
„Бладхауид-2"
Дальность, км
Высота
(наибольшая/наименьшая), км
'тарт./марш.), кг
скорость,
тя/марш.), м
диаметр
(стабплнзато-
м
i/маршсвыи)
заряд
на навечення
.а вооружении
35
18/—
590/-
750
5.1/—
0,36
1,25/1,25
РДТТ, РДТТ
Обычный
Полуактнвная,
самонаведение
США, 1959 г
6,3/-
0.53
4РДТТ/РДТТ
Обычный
Полуактнвная,
самонаведение
Англия, 19G5 г.
1S5
1000
8,5/7.7
0,55
4РДТТ/2ПВРД
Обычный
Полуактнвная,
самонаведение
Англия, 19G4 г.
Головная часть подрывается у цели радиовзрывателем.
Вероятность поражения цели одиночной ракетой 85%.
Стабилизация и управление ракетой в полете осуществляются
подвижными и неподвижными аэродинамическими поверхностями.
3 е и и т и ы й ракетный комплекс «Т а н д с р б е р д»
рассчитан для поражения сверхзвуковых целей, летящих на средних
и малых высотах (см. рис. 9.11).
Комплекс «Тандерберд-2» имеет мощные ракетные двигатели,
обеспечивающие получение большой дальности полета.
Зенитный ракетный комплекс «Б л а д х а у н д»
предназначен для борьбы со сверхзвуковыми воздушными целями на
высотах до 20 км (см. рис. 9.11).
Ракета «Бладхаунд-2» — двухступенчатая, сверхзвуковая, имеет
четыре отделяющихся стартовых твердотопливных двигателя и
одну маршевую ступень с двумя маршевыми ПВРД. На
маршевой ступени находятся две пары подвижных и неподвижных
аэродинамических поверхностей.
229
2. Антиракеты системы ПРО страны
О
ос
!
А
й-Ь
Для борьбы с головными частями ракет за рубежом
предполагают использовать ракетные комплексы, входящие в систему
ПРО с антиракетами (противоракетами).
Основные данные некоторых антиракет приведены в табл. 9.8.
Схемы антиракет даны на рис. 9.12.
Комплекс «Пайк-Зевс» должен вес™ борьбу с головными
частями стратегических ракет среднего и дальнего действия.
Комплекс стационарный.
Принципы ведения
стрельбы антиракетами
системы ПРО по
головным частим и другим
целям приняты практически
такими же, что п при
стрельбе по самолетам.
Различие состоит только
в том, что
радиолокационные средства ПРО
должны обнаруживать
цели с помощью РЛС
обнаружения па больших
дальностях (т.о 2400 км)
и высотах.
Антиракета «Напк-
Зевс» — трехступенчатая,
имеющая РДТТ па всех
ступенях.
На третьей ступени
находятся система
теленаведения, маршевый РДТТ
и ядерная боеголовка.
Управление полетом
производится отклонением
струи газов двигателя.
Перехват целей происходит на высотах 100—160 км.
Пусковая установка антиракеты «Найк-Зевс» подземная.
Комплекс «Найк-Икс» включает в себя антиракеты:
дальнего радиуса действия «Спартан» и ближнего радиуса действия
«Спринт» (см. рис. 9.12).
Антиракета «Спринт» предназначается для перехвата
целей на высотах до 15 км и более.
Антиракета — двухступенчатая, с РДТТ. Для сближения
антиракеты с целью на высоте 18 км требуется 4—5 сек.
Антиракета «Спартан» предназначается для стрельбы по
боевым головкам ракет среднего и дальнего действия на
дальностях более 640 км.
т
1
Рис. 9.12. Схемы антиракет ПРО страны:
У —«Спринт»; 2 — «Пайк-Зевс»; 3—«Спартан»
230
Таблица 9.
Основные тактико-технические данные антиракет ПРО страны
Наименование данных
„Найк-Зевс-
Комплекс „Наик-Икс"
.Спартан"
Боевая дальность, км
Наибольшая высота, км
Стартовый нес ракеты, кг
Наибольшая скорость,
м/сек
Полная длина, м
Диаметр корпуса, м
Размах стабилизатора
первой ступени, м
Двигатель
(стартовый/маршевый)
Боевой заряд
Система наведения
Состоит на вооружении
320
150
10 340
2300
14,8
1,17
2.5
РДТТ/РДТТ
Я черный
Радпокоманд-
пая
США
Белес С40
Более 150
11 310
15,2
1.1
3
РДТТ на всех
трех ступенях
Ядерный
Радиокомаид-
пая
США, 1965 г.
„СпрйНТ"
32 —1в
До 50
3400
8.2
1.4
РДТТ/РДТТ
Ядерный
Радиокомандная
США
Антиракета — трехступенчатая, с РДТТ и ядерным зарядом,
способным поражать головные части вне атмосферы.
Первая и вторая ступени имеют одинаковый диаметр. Это
позволило повысить тяговооруженность антиракеты и установить
более тяжелую головную часть.
На третьей ступени применен сферический РТ.ТТ,
обеспечивающий управление полетом за пределами атмосферы.
В антиракете предполагается применить полет с меняющейся
скоростью третьей ступени, что дает возможность перехватывать
маневрирующие цели на различных дальностях.
3. Зенитные ракетные комплексы ПВО войск
С целью обороны войск от нападения противника с воздуха
создаются войсковые подвижные и носимые зенитные ракетные
комплексы (табл. 9.9 и 9.10), действующие в составе войск. Схемы
их приведены на рис. 9.13.
231
о
I I I
! I
о
са
со
с
и
о
с;
с
S
с
X
1
I
S
с
о
1-
«
с
а
И
а
X
со
о
о
U3
I
«
с
са
а
а,
U
о
о
с
U
О,
О
о
о
а
с;
а,
ё О
о
=f е.
о -
ее
а,
о
>>
а
а
с
>1
с
с *
1
о
о
>>
t
>1
о
к 5 я
<3 О
с га е[
-S-K о
- к я
^: с га
<
a
5
ь
£■
сх
5
2S
О
§
«->
W
с
Q
о.
С
и
ЕС
С
о
с.
о
а
2
о
<
0>
га
и
о ^
С -
т. 0
< ■■*
га
О
о
a
н
S
о
о
U
232
N
Таблица 9.10
Основные тактико-технические данные некоторых подвижных
ЗУР ПВО войск
Наименование данных
Чанарэл"
„РоланГ
„Кроталь"
„Taftrep Кэт"
Дальность, км
Высота
(наибольшая/наименьшая), км
Вес (старт./марш.), кг
Наибольшая скорость,
М/'сек
Длина (полная/марш.),
м
Диаметр корпуса, м
Размах (стабнлпзато-
ров/рулен), -«
Двигатель
Боевой заряд
Система навеченпя
Состоит на
вооружении
70/—
2.8/-
0.127
РДТТ
Обычный
Иифракр.
iiaccnnii.
самонаведение
США
i
3/-
63/-
850
0,15
РДТТ
Обычиын
Радио-
командная
Франция.
1969 г.
10
3/0.5
75
750
2.9/-
0,18
0,41,0,34
РДТТ
Обычный
Радиокомандная
Франция.
1969 г.
.V
°i —
60/—
270
1.5/-
0,19
0,66/0.66
РДТТ
Обычный
Радио-
командная
Англия,
1967 г.
Войсковой комплекс «Чанарэл» создай для борьбы с
низколетящими целями. В комплексе использована ракета класса
«ьоздух — воздух» «Сайдунпдер 1С» с инфракрасной головкой
самонаведения.
Ракета — сверхзвуковая, без отделяющихся в полете частей.
Имеет маршевый РДТТ и боевую часть с зарядом обычного ВВ
и инфракрасный неконтактный взрыватель.
Пуск ракеты осуществляется после того, как инфракрасная
головка самонаведения произведет захват цели.
Недостатком комплекса считается то, что он может быть
применен только в хорошую погоду, когда может работать
инфракрасная головка самонаведения.
233
В о й с к о в о п комплекс «Р о л а н д» имеет сверхзвуковую
одноступенчатую, без отделяющихся в полете частей ракету с
РДТТ, работающим па двух режимах тяги: стартовом и марше
вом.
Вероятность поражения цели одной ракетой составляет 50%.
Стрельба ведется только при хорошей видимости.
Комплекс смонтирован на гусеничном самоходе.
Войсковой комплекс «К рота ль» предназначается для
обороны от пнзколетящнх сверхзвуковых самолетов и головныл
частей баллистических ракет.
/
\
Л
с
\\
^1
\
с*к /к
zdlt^
Поде и ж и ы е
V
Носи мые
Рис. 9.13. Схемы ЗУР ПВО войск
/ _ «Чапарэл»; 2 — «Роланд»; 3 — «Кротвль»; 4 — «Индиго»: 5 — «Ред
Ли»; 6—«Блоупайп»
Комплекс выполнен в трех вариантах: подвижном, полустацп-
онариом и корабельном.
Управление ракетой в полете производится при помощи
носовых рулей. Стабилизация ракеты осуществляется за счет
крестообразного неподвижного оперения, расположенного в хвостовой
части.
Ракета хранится в контейнере, при этом плоскости
стабилизатора убираются внутрь. После выхода ракеты из контейнера
плоскости под действием пружин выдвигаются наружу.
Пуск ракеты производится из контейнера.
Подвижный комплекс «Кроталь» размещен на четырех
транспортерах: на одном находится радиолокатор обнаружения, i-:a
трех установлены счетверенные пусковые установки с ракетам;;
н приборами наведения.
234
Радиолокатор обнаруживает цели размером 1 м2 па дальности
до 18 км. За 11 сек возможен пуск 12 ракет (попарно) по шести
различным целям.
Войсковой носимый комплекс «Ред Ли» содержит
ракету «Ред Ли» весом 8,2 кг и пусковое ружье (около 4,5 кг).
Па поле боя систему переносит одни человек на ремне, за
спиной.
Ракета—сверхзвуковая, имеет длину 1,22 м и диаметр 0,08 м\
двигатель — двухкамерный, твердотопливный с двумя режимами
тяги — предстартовым и маршевым.
На предстартовом режиме тяги ракета вылетает из ружья на
несколько метров. Маршевое топливо начинает сгорать, когда
ракета отлетает па безопасное для стреляющего расстояние.
На ракете крестообразно расположены подвижные и
неподвижные аэродинамические поверхности. Неподвижные поверхности
раскрываются после вылета ракеты из ружья. Подвижные
поверхности управляют полетом ракеты.
Боевая часть содержит заряд обычного ВВ и контактный
взрыватель, срабатывающий при встрече с целью.
Дальность стрельбы — 3,6 км; высота стрельбы—1,5 км.
Пусковое ружье состоит из стеклопластиковой трубы,
оптического прицела и ложи, в которой находятся источник питания,
зуммер и рукоятка со спусковым механизмом. Пусковое ружье
используется и для храпения ракеты.
Пуск ракеты становится возможным тогда, когда ее
инфракрасная головка самонаведения произведет захват цели. О
моменте захвата стреляющий оповещается сигналом зуммера. После
этого можно нажать на спусковой крючок, который включит
бортовой источник питания, произойдет воспламенение РДТТ, и
ракета вылетит из канала.
К недостаткам комплекса относят: стрельба ракетой по цели
ведется лишь вдогон, кроме того, ракета не поражает самолет с
выключенным мотором.
Войсковой комплекс «Блоупайп» в конструктивном
отношении и боевом применении напоминает комплекс «Ред Ай».
Вес комплекса 12,6 кг.
4. Зенитные ракетные комплексы ПВО кораблей
Все корабельные комплексы ПВО являются стационарными,
с автоматическими процессами заряжания пусковых установок
Для обнаружения целей используются РЛС кораблей.
Наиболее широкое распространение в военно-морских силах
США получили три комплекса:
235
— «Тэйлос»— для вооружения крупных кораблей, например
крейсеров;
— «Терьер» — для вооружения эскадренных миноносцев,
фрегатов, а также крейсеров и авианосцев;
— «Тартар» — для вооружения небольших кораблей, а также
крейсеров, эскадренных миноносцев и других кораблей.
Таблица 9.11
Основные тактико-технические данные некоторых ЗУР ПВО кораблей
Наименование данных
Дальность, км
Высота (напболыиая.'нан-
мсньшая), км
Вес
(стартовый/маршевый), кг
Наибольшая скорость,
MJCt'K
Длина
(полная/маршевая), м
Диаметр корпуса, м
Размах (стабплпзато-
ров/рулей), м
Двигатель
(старговый/маршевый)
Боевой заряд
Система наведения
Состоит на вооружении
„Тэйлос-
120
27/3
3175/1400
850
9.3/6.1
0.76
-/2,85
РДТТ/ПрВРД
Обычный,
ядерный
Радпокоманд-
ная, полуактив-
нос
самонаведение
США. 1956 г.
„Терьер-2"
37
19/0.6
1490/680
850
8.6/4.5
0.33
1,04,0.5
РДТТ/РДТТ
Обычный
По лучу.
полуакшвное
самонаведение
США, 1955 г.
„Тартар"
16
12/0,3
550
850
4.6
0,33
1.04/0,51
РДТТ
Обычный
ПолУактивнаи,
самонаведение
США, 1959 г.
236
Основные данные комплексов ПВО кораблей приведены в
табл. 9.11. Схемы ракет даны на рис. 9.14.
ГТ\
Рис. 9.14. Схемы ЗУР ПВО кораблей:
/ — «Тэйлос»; 2 — «Терьер»: 3 — «Тартар»
9.4. РАКЕТЫ ПРОТИВОЛОДОЧНОМ ОБОРОНЫ (ПЛО)
Основной ударной силой ВМС США считаются атомные
подводные лодки, имеющие более высокую скорость хода и большую
глубину в сравнении с подводными лодками начала второй
мировой войны.
Для борьбы с атомными подводными лодками в ряде стран
разработано и принято на вооружение несколько видов
противолодочных ракет.
Противолодочные ракеты применяются в авиации, на всех
надводных средствах и подводных лодках.
Основные данные некоторых ракет ПЛО приведены в табл. 9.12.
Схемы ракет даны на рис. 9.15.
Ракета «Лерок» принята на вооружение эсминцев. Она
состоит из двигателя твердого топлива, стабилизаторов, горпеды,
системы самонаведения, обтекателя торпеды и тормозного
парашюта торпеды.
237
-ги
т
Ракета «Малафон» состоит на вооружении эсминцев.
Ракета представляет собой самонаводящуюся торпеду, подвешепнук
к крылатому корпусу (планеру) с двумя РДТТ.
Запуск ракеты производится с пусковой установки эсминца.
В полете ракета управляется но заранее заданной программе и
по командам с эсминца.
После отделения горпеды от корпуса ракеты наведение ее на
цель производится системой самонаведения.
Ракета «Икара»
состоит иа вооружении
сторожевых кораблей.
Ракета имеет
укороченные крылья, элероны,
верхний и нижний хвостовые
стабилизаторы. Крылья и
стабилизаторы при хранении
ракеты снимаются.
Двигатель твердою топлива имеет
два режима тяги.
Боевой частью ракеты
является торпеда с ядерным
или обычным зарядом и
с акустической системой
самонаведения. Торпеда
подвешивается под корпус
ракеты.
После запуска ракеты
торпеда по сигналу системы
управления отделяется и
наводится на цель.
Ракета «С а б р о к>
предназначена для
вооружения подводных лодок.
Пуск ракеты
осуществляется из торпедного
аппарата. Двигатель начинает
работать тогда, когда
ракета находится еще в воде,
по баллистической траек-
И
4lb
<№
Рис. 9.15. Оемы ракет ПЛО:
«Малафон»: 2—«Икара»; 3 —«Лерок»-,
При выходе из воды ракета летит
тории.
После выгорания топлива ракетный двигатель отделяется, к
цели летит только боевая часть.
Ракета имеет автономную программную систему управления.
Боевая часть управляется инерциалькой системой; имеются
управляющие рули.
В сравнении с торпедой ракета имеет большую скорость
полета.
238
Таблица 9.12
Основные тактико-технические данные некоторых ракет ПЛО
Наи.меиоо«знис данных
.Асрок"
„Ма.ифон"
Наибольшая
дальность, км
Скорость поле га.
м/сек
Стартовый вес
(ракеты/торпеды), т
Вес босвон част, г
Боевой заряд
Диаметр
(раксгы/торпеды), м
Длина
(ракеты/торпеды}, м
Двигатель
Система наведения
Состоит на
вооружении
15
330
(в воде 16)
1,135,0.45
0,227
Обычный,
ядерный
0,76/0,3
4.57/3,96
РДТТ ■+
элсктро-
двпгагель
торпеды
Автономная,
самонаведение
торпеды
США,
1961 г.
17
1.3,0,52
0.1
Обычный
0,63
5,0
Две crVnCHli
РДТТ +
элек гро-
ЛЕшгаюль
торпеды
Радно-
командная,
акустнч.
(торпеды)
Франция,
1961 г.
.Икара-
25
0.3
Обычный
3.35
РДТТ
Автономная,
самонаведение
торпеды
Австралия
.Саброк"
50
1.8
Ядерный
0.53
6.4
РДТТ
Инерциаль-
ная
США
9.5. РАКЕТНОЕ ОРУЖИЕ ВОЗДУШНОГО БОЯ
Ракетное оружие воздушного боя, или самолетное ракетное
оружие, по своему назначению подразделяется на оружие
воздушного боя класса «воздух—воздух» и оружие класса «воздух-
земля».
1. Ракетное оружие класса «воздух—воздух»
Ракетами воздушного боя этого класса вооружены
истребители-перехватчики, палубные истребители и истребители
тактического назначения.
239
Все истребители оборудованы приборами, позволяющими
проводить поиск воздушного противника и вести с ним бон в ночных
и сложных метеорологических условиях вне видимости цели.
Основные данные некоторых ракет класса «воздух—воздух
приведены в табл. 9.13. Схемы ракет даны на рис. 9.16.
Ракеты имеют обтекаемую вытянутую форму с
расположенными по корпусу крыльями для создания подъемной силы. Рулч
\правления поворачивают ракету вокруг центра тяжести. Корпус
J i J U /111 I
A #> 4x
Рис. 9.16. Схемы ракет класса «воздух — воздух»:
; — «Фолкон»; 2— «Спарроу»; 3— «Ред Топ»; 4 —«Матра» (R-530)
ракеты, как правило, делится на секции, в которых находятся
двигатель твердого топлива, система управления и боевой заряд с
неконтактным взрывателем.
В ракетах применена система самонаведения.
Кроме системы самонаведения, применяются и другие системы,
которые размещаются как па самолетах, так и на самих ракетах-
Ракета «Фол коп»—-типичный образец управляемой
ракеты воздушного боя, которой вооружаются истребители. Эта
ракета может быть запушена по воздушной цели с дальности 8 кМ-
В настоящее время разрабатаио несколько вариантов этой
ракеты; отличаются они друг от друга в основном головками сам"'
наведения (тепловые, радиолокационные и другие) повышенно1-
помехозащищеиности.
Ракета «Спарроу-3» имеет полуактивную
радиолокационную головку самонаведения, работающую в режиме непрерывного
240
излучения. Пуск ракеты можно производить на дозвуковых или
сверхзвуковых скоростях самолета.
Управление ракетой по тангажу и курсу осуществляется
консолями крестообразно расположенного крыла.
Таблица 9.13
Основные тактико-технические данные некоторых ракет класса
„воздух — воздух"
Наименование данных
Дальность, км
Стартовый вес. кг
Скорость полета, м/сек
Боевой заряд
Потолок
самолета-носителя, км
Длина ракеты, м
Диаметр ракеты, м
Размах крыла, м
Двигатель
Система наведения
Система управления
Состоит на
вооружении
AIM-IF
„Фолкон"
1С
G8
1000
Обычный
21,3
2.1
0,17
0.61
РДТТ.
тяга
2,72 т
Инфракрасная
Поворотные за чипе
кромкп
крыла
ВВС США,
Канада,
Швеция
„Спарроу-3*
22
181
1000
Обычный
21
3.6G
0.2
1.0
РДТТ
Радиолокационная
полуактивная
непрерывного
излучения
Поворотные
КОПСОЛП
крыла
ВМС пВВС
США,
Англия.
Италия
„Рсц Топ"
13
136
1000
Обычный
—
3,5
0,23
0,9
РДТТ
Инфракрасная
Хвостовые
рули
ВВС и
ВМС США
„Матра"
18
1S5
750
Обычный
21
3,3
0.26
1.1
РДТТ
с двумя
режимами
гяги
Радиолокационная
пли
инфракрасная
Хвостовые
рули
Франция,
Австралия
Ракета «Ред Тон» имеет усовершенствованную
инфракрасную головку самонаведения, способную поражать цель на
любых курсах.
241
Ракета «Л\атра» (R-530) имеет мощный РДТТ,
работающий на двух режимах, боевую часть с зарядом обычного ВВ п
взаимозаменяемую инфракрасную или полуактнппую
радиолокационную головку самонаведения.
Пуск ракет может производиться на дозвуковых и
сверхзвуковых скоростях полета самолета. Ракета хранится в контейнерах,
наполненных инертным газом под давлением.
Перспективные ракеты класса «воздух—воздух»
разрабатываются в направлении увеличения дальности стрельбы до 100 км и
сообщения им маневренных качеств.
Ракета «Фол кон» (AIM-47A) по аэродинамической схем.-
напоминает прежние ракеты этого типа, но превосходит их но
габаритам и весу; содержит ядерную или обычного ВВ боевую
часть. Двигатель — ЖРД заводской заправки. Дальность полета —
до 100 км и более.
Ракета «Феникс» (А1Л1-54А)—двухступенчатая,
твердотопливная.
Ракета имеет удлиненную форму, крестообразное крыло
большой стреловидности и крестообразно расположенные рули.
На начальном участке траектории ракета наводится по
командам с самолета. На конечном участке траектории наведение
осуществляется инфракрасной головкой самонаведения.
2. Ракетное оружие класса «воздух — земля»
Основные данные некоторых ракет приведены в табл. 9.14.
Схемы ракет даны на рис. 9.17.
Рис. 0.17. Схемы ракет класса «воздух —земля»:
/ _ R 04; 2 — «Булпап» (12!' ); з — «Шрайк»: 4 — «Марте.» ; 5 — «Куэйл» :
S — «Хаунд Дог»
Ракета «Булпап» (12D). Истребители тактической авиации
и палубные штурмовики США и Англии вооружены управляемыми
ракетами малой дальности типа «Булпап».
242
•а-
о
t-
а
X
«
с
с
о
(-
о
к
<и
X
X
X
«
о
S
X
и
<и
в-
S
X
<и
I
о
X
К
X
X
ее
о
X
\.
с
ч
е*
я
X
■
,
с;
«
О
О
о
-~
Я
о
о
ю
■Ч-
о
с
со
~~
^\
f-
о
1
Г--
СО*
ее
^
£
57
s>4
<ъ *
>- о
£г •*
с „
е-
о с
S <-
о
=1
К—4
и
Си
t-
с с
и = =
С =
и
и
:~ -э
с -> "*
с 3 t-
— ю
■о —
СО О - -
.а с:
С *
С- £^-
f- сз
+ о
— О
: О о
3.
CJ
S
с;
о"
Е-
С-
Г)
3
~
с
с
г—
"^
с-*
и
fcf
O.I I
■я
E
с
u
НО
те
С-
[_
■ч-
iT>
э*.
<
■^
г 1
та со
со о ? £
—" — ,Я "*
О =
s-' f
о
С
3
о
3
«
>=t U =1 Р=[
с
о.
>с х
о
U
о
243
В боевых условиях летчик, обнаружив цель, переводит самолет
в пикирование и производит пуск ракеты. Далее, ведя наблюдение
в оптическим визир за ракетой и за целью, летчик при
обнаружении отклонения ракеты подае! команды по радио иа ракету,
которые принимаются се автопилотом, после чего ракета направляется
на цель.
Однако, как показал опыт агрессивной войны США во
Вьетнаме, 50% ракет после пуска не реагируют на команды наведения,
а потому и не попадают в цель.
Ракета «Ш р а й к» (45А) является противорадиолокационнон.
Она предназначена для поражения РЛС системы ПВО
противника.
Ракета «Map тел» в последнем варианте создана как про-
тиворадиолокацнонная с задачей применения в любых
метеорологических условиях по РЛС противника.
Ракета снабжена телевизионной системой наведения и
применяется па самолетах и вертолетах.
Ракета «Хаупд Дог» (AGM-28B) имеет наибольший
радиус действия в сравнении с вышерассмогреипыми. Это позволяет
поражать цель на большом удалении от защищаемых зенитными
ракетами объектов.
Ракета состоит па вооружении стратегических
бомбардировщиков.
Ракета выводится на цель с помощью иперциальноп системы
наведения. Курс и высота полета рассчитываются самолетной
счетно-решающей аппаратурой. Данные расчета вводятся в бортовую
аппаратуру.
О перспективе ракет класса «воздух — земля»
Из приведенных выше материалов видно, что ракеты класса
«воздух—земля» получили широкое распространение и их
совершенствованию уделяется большое внимание. Предполагается, что
оно пойдет по пути повышения мощности двигателей,
автономности наведения ракет на цель па конечном участке траектории
полета.
Глава 10
НАЗЕМНОЕ ОБОРУДОВАНИЕ
РАКЕТНЫХ КОМПЛЕКСОВ ЗАРУБЕЖНЫХ СТРАН
10.1. СОСТАВ НАЗЕМНОГО ОБОРУДОВАНИЯ И ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К НЕМУ
Для пуска ракет разрабатываются специальное оборудование,
агрегаты и приборы. От степени их совершенства зависит
боеготовность комплекса.
Наземное оборудование для ракет — комплекс агрегатов и
систем специального технологического оборудования стартового
комплекса и технической позиции. В соответствии с основными
операциями подготовки и пуска ракет наземное оборудование можно
разделить на следующие группы: пусковое, транегюртно-устано-
вочное, заправочное, грузоподъемное, стыковочно-монтажное,
обслуживания, наземное электросиловое испытательное, проверочно-
пусковое, специальное противопожарное.
Рассмотрим особенности каждого вида оборудования.
Тра и спортно-установочное оборудование.
Средства транспортировки предназначены для перевозки ракет с места
хранения на стартовые позиции. Перевозка может производиться
в герметичных контейнерах по железным, шоссейным и грунтовым
дорогам. Большинство контейнеров — цилиндрические,
выдерживающие значительные ударные нагрузки и вибрации.
Как считают зарубежные специалисты, транспортные средства
Должны обеспечивать:
— высокую скорость движения и проходимость;
— высокую плавность хода;
— надежное крепление ракет при перевозках на автомобилях
и тягачах, исключающее какое-либо их перемещение в
продольном, боковом и вертикальном направлениях;
— быстрое и удобное проведение работ при погрузке и
выгрузке;
245
— безотказную работу тормозных систем;
— быстрый переход из походного положения в боевое и
обратно;
— независимость поворота переднего хода относительно заднего
(для колесных машин);
— продольную гибкость поезда.
, Ракеты тактического назначения на боевые позиции достав-
| ляются автомобилями повышенной проходимости.
Стратегические (в частности, ракеты США) транспортируются
1 к стартовым позициям на транспортных тележках автомобилями
' повышенной грузоподъемности.
I Для снабжения ракетами кораблей и подводных лодок,
находящихся в море, используются специально оборудованные
f суда.
h< Установочное оборудование состоит из кранов
различной грузоподъемности, установщика ракет и транспортных
тележек.
, , Краны применяются при сборке и перегрузке ракет с трапс-
I портных средств па пусковые установки и в шахты.
\ Установщики используются па стартовых позициях для уста-
у' новки ракет на пусковой стол или в пусковую шахту.
Ч, Транспортные тележки, кроме транспортировки, могут быть
! использованы для временного хранения ракет или отдельных ее
!п ступеней.
i Заправочное оборудование обеспечивает заправку
ракет компонентами топлива и сжатыми газами. В состав
оборудования входят заправочные агрегаты, насосные и компрессорные
I станции, ресиверные, цистерны, арматура, трубопроводы и систе-
I мы дистанционного и автоматического управления процессами
заправки.
I' Электросиловое оборудование состоит из подвижных
:' или стационарных электростанций, которые снабжают электриче-
I' ским током системы и агрегаты наземного оборудования, и стан-
I ! ций зарядки аккумуляторных батарей, необходимых для питания
i бортовых приборов.
I Контрольное и испытательное оборудование
состоит из аппаратуры, объединенной в виде испытательных
станций, перевозимых на автомобилях.
Оно служит для испытаний приборов, агрегатов и ступеней, а
I также ракеты в целом иа технической и стартовой позициях.
1 Оборудование наведения осуществляет контроль за
i вертикализацией ракеты, наведение ее по азимуту.
} \ Проверочно-пусковое оборудование представляет
J собой наземную часть системы управления запуском и полетом
| ' ракеты, обеспечивающее предстартовую подготовку и подачу
I команд на пуск,
i Считают, что от пусковых установок требуется:
. 246
I .
II'
— безотказная работа всех механизмов установки при
подготовке ракет к пуску;
— простота в эксплуатации и при хранении;
— падежный запуск ракет в требуемый момент времени;
— наличие устройств па случай аварийных запусков.
10.2. НАЗЕМНОЕ ОБОРУДОВАНИЕ РАКЕТНЫХ КОМПЛЕКСОВ
ТАКТИЧЕСКОГО НАЗНАЧЕНИЯ
Как правило, ракеты тактического назначения запускаются с
подвижных пусковых установок, размещаемых па колесных
машинах или гусеничных тягачах, обладающих большой подвижностью
и проходимостью.
На большинстве установок перевозится подготовленная к
боевому применению ракета.
Наведение ракет производится с помощью вертикального и
горизонтального механизмов.
Применяются пусковые установки двух типов: вертикального
и наклонного пуска.
В установках для вертикального пуска имеется пусковой стол.
Вертикальное положение ракеты на пусковом столе достигается с
помощью специальных домкратов.
В пусковых установках наклонного типа пуск ракет обычно
производится при некотором угле возвышения.
Подъемное оборудование для ракет тактического назначения
включает в себя подъемные краны: стреловые —с изменяющейся
грузоподъемностью или козловые —с постоянной
грузоподъемностью. Кроме того, применяются универсальные погрузчики,
которые могут буксироваться с собранной ракетой на стартовую
позицию.
В заправочное оборудование входят средства
транспортировки компонентов топлива и средства получения и заправки
сжатого воздуха. Все эти средства монтируются на колесные
автомобили или на колесные прицепы.
Электросиловое оборудование комплексов обеспечивает
питание переменным или постоянным током приборов
проверочно-пускового оборудования, испытательных машин и позволяет
проводить зарядку бортовых аккумуляторных батареи.
Наконец, в состав некоторых ракетных комплексов входит
вспомогательное оборудование, состоящее из машин с ЗИП,
машин подогрева воздуха, противопожарных машин и др.
Рассмотрим наземное оборудование некоторых ракетных
комплексов.
Ракетный комплекс «Онест Джон». Пусковые и
транспортные средства ракетного комплекса состоят из самоходной
колесной пусковой установки, прицепа с траверсой и автомобпль-
н°го крана.
247
Пусковая установка имеет направляющую балку коробчатого
типа, механизмы наведения, прицельное устройство, систему элск-
1рооборудования и домкраты. Вся установка монтируется па
шасси трехосного автомобиля грузоподъемностью 5 г, способною
развивать достаточно высокую скорость движения и обладающего
необходимой проходимостью и маневренностью (рис. 10.1).
На перевод пусковой
установки из походного положения
в боевое затрачивается до
15 мин, а из боевого в
походное— до 5 мин.
Для выравнивания
пусковой установки перед пуском
ракеты применяются опорные
домкраты.
Перегрузка ракеты с
прицепа на пусковую установку
производится краном,
установленным на трехосном
автомобиле повышенной
проходимости грузоподъемностью 5 т.
Двухосный прицеп с
ракетой перевозится за
автомобильным краном до технической позиции, где ракета
перегружается на пусковую установку с помощью траверсы (рис. 10.2).
В последнее время этот прицеп заменен более совершенным, с
установленной на нем поворотной стрелой и талью.
Рис. 10.1. Ракета «Онест Джон» на
пусковой установке в боевом положении:
/ — поворотный механизм; 2 — ракета; 3 —
направляющая; 4 — подъемный механизм;
5 — опорные домкраты
Рис. 10.2. Ракета «Онест Джон» в транспортном положении:
/ — автокран; г —ракета: 3 — траверса; 4 — прицеп
Наконец, в некоторых выпусках пусковых установок
направляющая балка значительно укорочена и выполнена из двух
частей, которые при транспортировке складываются вместе. Это
позволило перевозить установку вместе с ракетой на вертолете.
С помощью прицельных устройств, поворотного и подъемного
механизмов направляющей балке с ракетой придаются
необходимые \тлы: возвышения (до 60°) и горизонтального поворота (до
±15°).
Перед пуском ракеты производится проверка приборов наведе-
248
ния, пускового электрооборудования, установок, заданных на
стрельбу, исправности механизмов установки и направляющей.
Расчет комплекса состоит из 5—7 человек. Для боевого
применения ракет созданы специальные дивизионы.
Ракетный комплекс «Литтл Джон». Пусковая
установка комплекса на одноосном колесном прицепе буксируется
автомобилем.
Рис. 10.3. Ракета «Литтл Джон» в боевом положении
на пусковой установке
Пусковая установка состоит из направляющей с ведущим
пазом, гидравлических механизмов наведения, рамы — основания с
домкратами и колесного хода. Установка имеет малые габариты
и вес, что позволяет ее перевозить в самолетах, вертолетах и
автомобилях (рис. 10.3). Вес ракеты с установкой не превышает
950 кг.
На самолетах и вертолетах ракета транспортируется вместе с
пусковой установкой.
Ракетный комплекс «Лакросс». Пусковая установка
комплекса смонтирована на шасси автомобиля (рис. 10.4).
Установка имеет поворотный и подъемный механизмы и
наземную аппаратуру управления. Наибольший угол возвышения 60е,
угол горизонтального поворота ±15°.
Боевой расчет комплекса состоит из 6 человек.
Время перевода ракеты из походного (горизонтального)
положения в боевое составляет 5—8 мин.
Общее время развертывания и подготовки к пуску ракеты не
превышает 30 мин.
10-622
249
1 ■-,- s,. 4
14 ^
■
-:.
f
f
I
*i
^
4f-
t
№V|I„"
«Ц >*
a*
л .#?
" ..*
™~C
.It.-.
-3 -%■.
АЧ
fc-
. ? А ^^*
-ti. -j-
v
-
->
* "
f
> v. \
i
ъ
.щ.
^;v
■-1
*r
П
- #
4?-
111 sf" лл*
"" Sft ^? v
'Л
*■ * "" :
Z:
\
.*
>-
'■
-i
'%'*
' У
Рис. 10.4. Крылатая ракета «Лакросс» на пусковой
установке в боепом положении
VV^Ss*
'-US'—ч(}
^r-:
.*. ^
Рис. 10.5. Ракета RKT-30 иа пусковой установке
в походном положении
250
Ракетный комплекс RKT-30. Пусковая установка
комплекса состоит из твух или трех направляющих, подъемного и
поворотного механизмов, электрооборудования и прицепа. Установка
монтируется на трехосном автомобиле повышенной проходимости
грузоподъемностью 5 т (рис. 10.5).
Ракета «Плутон». Пусковая установка смонтирована на
транспортере, базой для которого послужил средний французский
танк. Возможно, что этот танк будет заменен легким танком.
Пуск ракеты производится из контейнера, в котором она
транспортируется.
Ракета «Ланс» запускается с пусковой установки «Литтл
Джон». Однако не исключено, что будут созданы новые пусковые
установки.
Р а к е т и ы it комплекс «С е р ж а н т». Для пуска ракет
«Сержант» применяется подвижная пусковая установка на колесном
ходу в виде полуприцепа. Эта же установка используется и для
сборки отсеков ракеты, доставляемых на стартовую позицию в
специальных контейнерах. На полуприцепе смонтировано
подъемное \стройство для изменения положения направляющей,
предназначенной для пуска ракеты. Подъемное устройство содержит
сварную раму, направляющую, подъемный механизм,
газоотражательный щит, гидравлическую и электрическую системы.
Сварная рама снабжена двумя откидными опорами с
гидравлическими домкратами, предназначенными для горизонтирования
пусковой установки. Домкраты приводятся в рабочее состояние с
пульта управления. Газоотражагельный щит устанавливается па
земле.
Па этом же полуприцепе находятся кабина пуска и
управления полетом ракеты и газотурбинный силовой агрегат,
обеспечивающий электроэнергией все приборы пусковой установки.
Радиоэлектронная аппаратура, установленная в кабине, выбирает цель
и выдает данные на бортовую систему управления, а затем
автоматически осуществляет пуск ракеты.
При занятии огневой позиции полуприцеп отцепляется от
тягача и с помощью отдельной аккумуляторной батареи запускается
газотурбинный силовой агрегат. Одновременно устанавливаются
откидные опоры, переводятся в рабочее положение подъемный
механизм и направляющая, выполняется горизонтпрование пусковой
установки с помощью домкратов и ставится на землю
газоотражательный щит. Транспортные полуприцепы с отсеками ракеты
устанавливаются вдоль пусковой установки, после чего
производится ее заряжание с одновременной сборкой ракеты.
Первым на пусковую установку устанавливается двигательный
отсек, далее отсек аппаратуры системы управления, головной
отсек и последним присоединяется хвостовой отсек. Все они
соединяются друг с другом с помощью болтов. После сборки
начинается предстартовая проверка ракеты. В систему наведения
вводится программа полета, подготовленная счетно-решающим
10* 251
устройством, и осуществляется наведение пусковой установки по
азимуту.
Пуск ракеты производится под углом возвышения 75° к
горизонту (рис. 10.6).
Ракетный комплекс «Сержант» можно транспортировать по
воздуху. Он может быть применен в различных климатических
условиях.
Рис. 10.6. Ракета «Сержант» на пусковой установке в боевом
положении
С целью поддержания комплекса на уровне современных
требований ведется усиленная его модернизация. В первую очередь
модернизируется наземное контрольно-проверочное и пусковое
оборудование с целью повышения его надежности, боеготовности и
оснащения ракеты средствами преодоления ПРО.
Ракетный комплекс «П е р ш и н г». Пусковая установка
ракетного комплекса последней модификации «Першинг 1А»
монтируется на машины колесного типа повышенной проходимости.
Скорость передвижения агрегатов комплекса по дорогам увели-
252
чена до 85—90 км/час; на гусеничном ходу скорость движения
комплекса не превышала 65 км/час.
Ш V.'
Рис. 10.7. Транспортировка ракеты «Першинг 1\*
Ракета перевозится на стреле установщика в собранном виде.
На этом же полуприцепе перевозится и головная часть, полностью
готовая к стыковке с ракетой (рис. 10.7).
I
Ъ- -IT,.: -
Рис. 10.8. Ракета «Першинг 1А» в боевом
положении
Установщик с пусковым столом смонтирован на полуприцепе,
перевозимом колесным тягачом; все операции на установщике по
Переводу ракеты в боевое положение автоматизированы (рис. 10.8).
253
Контрольно-проверочное оборудование и все наземное
оборудование комплекса размещено па трех 5-тонных автомобилях
повышенной проходимости.
Ракетный комплекс «Мей с». Запуск крылатой ракеты
«Мсйс» производится из подземных стационарных укрытий или с
подвижных пусковых установок на колесном ходу,
транспортируемых за тягачом.
Время подготовки крылатой ракеты к пуску достигает 1 час.
Рис. 10.9. ПТУР на автомобиле:
/ — ПТУР SS-11: 2—пусковая установка
Для каждой пусковой установки принято иметь два боевых
расчета по 9 человек. Это, как утверждается, повышает боевую
готовность и позволяет держать ракеты в постоянной боевой
готовности.
Ракета поступает па стартовую площадку в собранном виде.
Перед пуском расчет заправляет ракету топливом и сжатым
воздухом, устанавливает стартовый двигатель, головную часть и
взрыватель, а затем проводит окончательные проверки.
Для проверки систем ракеты применяется специальная
аппаратура, смонтированная на подвижных пультах.
Пусковые средства ПТУР. ПТУР могут запускаться со
специальных пусковых установок, из транспортных контейнеров и
даже непосредственно с земли.
ПТУР SS-11 запускается с пусковых установок, монтируемых
на танках, автомобилях, вертолетах и бронетранспортерах.
Установки имеют довольно простую конструкцию (рис. 10.9).
ПТУР SS-12 запускается с пусковых установок, располагаемых
на земле под требуемым углом возвышения (рис. 10.10).
ПТУР «Харпои» устанавливается на тапках — но два снаряда
с каждой стороны ствола танкового орудия (рис. 10.11).
Пусковые устройства имеют механизмы горизонтального и
вертикального наведения. Однако кругового обстрела они не имеют.
Поворот осуществляется тайком.
254
В транспортном положении все ПТУР крепятся стопорными
механизмами, находящимися на пусковых средствах.
Рис. 10.10. ПТУР SS-I2 на пусковой
установке, находящейся на земле
Перед пуском ПТУР производится проверка аппаратуры
запуска и управления полетом, датчика команд, бортразъемов,
наземных и бортовых батарей.
Рис. 10.11. ПТУР «Харпон» на танке А.МХ
10.3. НАЗЕМНОЕ ОБОРУДОВАНИЕ РАКЕТНЫХ КОМПЛЕКСОВ
РАКЕТ СТРАТЕГИЧЕСКОГО НАЗНАЧЕНИЯ
1. Ракетные комплексы стратегических ракет средней дальности
Стратегическими ракетами средней дальности в основном
вооружены атомные подводные лодки. Пуск ракет может
производиться как в подводном, с глубины 25—30 м, гак и в надводном
2-55
положении. Перед пуском ракет подводная лодка ложится на
заданный курс и идет малым ходом до места старта.
Пусковые устройства ракет «Пол а рис». Ракеты
«Поларис А-2» и «Поларис А-3» на подводных лодках
устанавливаются в вертикальном положении в стальных герметических
пусковых трубах ракетного отсека (рис. 10.12).
Ракета устанавливается на качающейся опоре и удерживается
зажимным кольцом, смонтированным па этой опоре.
Рис. 10.12. Схема расположения пусковых труб па подводной
лодке:
1 — пусковые трубы. 2 — Ракета «Поларнс А*2»: -1 — баллон со сжатым
воздухом; 4 — крышки; 5-пост управления пуском ракег: в — реакторный
отсек
Пусковая труба находится в стальном стакане корпуса лодки
и соединяется со стенками 30-ю гидродомкратами, которые
амортизируют ударные нагрузки, возникающие при движении лодкн
и при" взрыве глубинных бомб около лодки. Перед пуском ракеты
труба в стакане закрепляется с помощью стопорных устройств.
Сверху пусковая труба закрывается пластмассовой заглушкой,
которая препятствует проникновению воды внутрь трубы до
запуска ракеты.
При выбрасывании ракеты из трубы заглушка выбивается
пиротехническим зарядом.
Ракета выбрасывается из пусковой трубы сжатым воздухом,
хранящимся в специальных баллонах.
Па некоторых подводных лодках принята установка,
использующая водяной пар.
256
Для проверки систем ракет принята автоматическая
аппаратура. Она ведет непрерывный контроль агрегатов ракеты, а также
проводит периодическую проверку систем пуска и управления
полетом.
Команда на пуск ракет подается с поста управления подводной
лодки.
Рис. 10.13. Ракеты «Поларис Л-3» (слева) и
«Посейдон» в пусковых трубах подводной лодкн
Со сборочного завода ракеты «Поларис» доставляются к
причалу вместе с головными частями по железной дороге или
шоссейным дорогам в алюминиевых контейнерах со съемной
крышкой. Для предохранения ракеты от ударов внутри контейнера
помещены пневматические амортизаторы.
Передняя часть контейнера может сниматься, что позволяет
извлекать при необходимости головную часть ракеты.
Перед укладкой в контейнер ракета помещается в
цилиндрический футляр.
У причала контейнер открывается. Ракета в футляре
извлекается краном из контейнера. Футляр стыкуется с верхом пусковой
трубы подводной лодки. Затем ракета на тросах опускается из
Футляра в пусковую трубу и герметически закрывается крышкой.
Срок хранения ракеты 5 лет.
257
Пусковые устройства ракет «Посейдон». Ракеты
устанавливаются в переконструируемые пусковые трубы ракет
«Поларис А-3». Па рис. 10.13 для сравнения показаны пусковые
трубы иодвочиой лодки с ракетами «Поларис А-3» (слева) н
«Посейдон».
Ракета выбрасывается из пусковой трубы водяным паром
установки, которая применялась для выбрасывания ракет «Поларис
А-3».
Со сборочного завода к причалам ракета доставляется в
специальных контейнерах.
Для установки ракет в пусковые трубы подводной лодки
применяются портальные краны.
В последнее время изучается возможность пуска ракет
«Посейдон» с наземных пусковых установок, железнодорожных
платформ и речных судов.
2. Ракетные комплексы большой дальности
Пусковые устройства ракет «Тита н-2». На стартовой
позиции имеются три пусковые шахты вертикального типа,
подземный пост управления, вентиляционный и входной колодцы
(рис. 10.14).
Глубина пусковой шахты 44,5 м. Шахта — двухстеииая:
внутренняя стенка— стальная труба, в которую устанавливается
ракета, внешняя — бетонная.
В шахте установлены выдвижные площадки для обслуживания
ракеты. Оборудование и ЗИП для обслуживания ракеты
расположены в нншах на девяти уровнях.
Сама шахта выполнена по концентрической схеме, что
позволило осуществить отвод газов по каналам между стенками
пускового стакана и стенками ствола шахты.
Шахта закрывается сдвигающейся железобетонной крышкой
весом 680 т. Для сдвига крышки применяется пороховой
аккумулятор давления (ПАД). Крышка может выдерживать давление
ударной волны ядерного взрыва с избыточным давлением до
14 кг/см2.
Ракета в шахту устанавливается кранами.
Пост управления защищен железобетонным колпаком
(высотой 15,8.м и диаметром у основания 12,8 м). Пост имеет три этажа.
Полы каждого этажа — на пружинах. На нижнем этаже
размещен склад запасных частей; на среднем — аппаратура для пуска
ракет и электрооборудование; на верхнем — помещение
операторов (для четырех человек).
Все подземные сооружения соединены между собой туннелями,
по которым проложены и электрокабели. В туннелях имеются
железобетонные шлюзы со стальными дверями, которые препятствуют
распространению ударной волны.
Стартовые позиции между собой и с постом управления
соединены проводной связью. Кроме того, они оборудованы
радиотелевизионной связью и автоматической системой сигнализации.
Для устранения коррозии ракет установлена система осушки
воздуха, которая создает в шахте постоянный микроклимат с
температурой + 16° С и относительной влажностью воздуха не
более 32%.
Рис. 10.14. Схема стартовой позиции ракеты «Титан-2»:
; — пост управления пуском: 2 — соединительный туннель; 3 — ход
сообщения: 4 — пускоиая шахга; 5 — вентиляционная труба; 6 — крыша шахты:
7 — ракета
Пусковые устройства ракет «М и н и т м е н».
Пусковая установка ракеты состоит из вертикальной пусковой шахты
и двухэтажного оголовка, выполненного в виде кольцевой камеры,
охватывающей верхнюю часть шахты (рис. 10.15). Внутренний
диаметр шахты 4 м, глубина 27 м. Корпус шахты железобетонный.
На бетонное дно толщиной 1,5 м положена стальная плита, на
которую опирается стальной цилиндр, являющийся пусковым
стаканом. Стальной цилиндр делится на нижнюю часть высотой 18 м
и верхнюю высотой 9 м (высота оголовка).
Пусковая шахта сверху закрывается стальной крышкой,
предохраняющей ракету и оборудование от воздействия ядерного
взрыва. Перед самым пуском ракеты (за 3 сек) крышка
сдвигается в сторону ио рельсовым направляющим.
259
Крышка пусковой шахты способна выдерживать избыточное
давление ударной волны ядерного взрыва до 21 кг/см2.
В оголовке шахты размещено пусковое обор> човаиие. В стенке
его имеется входная дверь для личного состава.
Ряс. 10.15. Схема стартовой позиции «.Мшштмен-2»:
а — шахта; 6 — центр управления; / — места аккумуляторных батарей; 2 —
оголовок: 3 — крышка шахты; 4 — люк входа и выхода; 5 — пусковой стол;
в — система подвески; 7 — помещения для оборудования: В — пост
управления; 9 — вспомогательные помещения: 10 — бункер
Вспомогательное оборудование помещается в железобетонном
бункере около пусковой шахты на глубине 13 м. Там же находятся
вспомогательный дизель — генератор с запасом топлива, система
кондиционирования воздуха и другое оборудование.
Рис. 10.16. Транспортировка первой (слева) и второй (справа) ступеней
ракеты «Мннитмен-2» на автомобилях
Транспортировка ступеней ракеты со снаряжательного завода
или с железнодорожной станции (с места разгрузки) на
техническую позицию производится па автомобилях. Для первой ступени
принят автомобиль с полуприцепом и фургоном, для второй и
третьей—автомобили с фургоном (рис. 10.16).
260
К пусковой шахте ракета доставляется в собранном виде, без
головной части и бортовой аппаратуры, которые привозятся на
стартовую позицию специальным транспортом.
Установка ракеты в шахту производится с помощью
установщика.
Внутри шахты ракета устанавливается па поворотном кольце,
укрепленном на трех амортизаторах.
В момент пуска истекающие из Двигателя ракеты газы
растекаются между корпусом ракеты и стенками шахты и выходят на
поверхность.
Бортовое электронное оборудование ракеты и пусковой шахты
проверяется автоматически. При обнаружении неисправности
дефектный узел или блок заменяется.
За 30 сек до пуска ракеты начинается отсчет времени
готовности. Одновременно проводится контроль пускового
оборудования с помощью вычислительной машины.
3. Перспективы развития наземного оборудования
для ракет стратегического назначения
Ближайшей задачей считается повышение неуязвимости
стартовых позиций. С этой целью предполагается, в частности, ракеты
«Минитмен» установить на железнодорожные платформы.
Считают, что железнодорожный состав из 3—5 ракет будет
перемещаться на расстояния до 2400 км. Пусковое и проверочное
оборудование такого комплекса разместится в одном вагоне.
Ведутся также работы по созданию подвижной пусковой
установки колесного типа. Такие установки могут повысить
неуязвимость ракет благодаря более частой смене стартовых позиций.
В настоящее время ведутся работы по улучшению старта
стратегических ракет. Дело в том, что на подъем' стратегической
ракеты из шахты и сообщения ей скорости до 300 м/сек расходуется
около 40% топлива. Это и заставило зарубежных специалистов
вести разработки «холодного старта» по образцу ракеты «Пола-
рис», запускаемой с подводной лодки, находящейся в подводном
положении.
Введение такого старта, как полагают, позволит увеличить
полезную нагрузку либо дальность действия. Энергией для
производства «холодного старта» послужит потенциальная энергия воды
или воздуха.
На этой основе разработаны три проекта пусковых установок:
водно-воздушная, водяная и воздушно-вакуумная.
Водно-воздушная пусковая установка состоит из пусковой
трубы и двух камер — нижней и верхней, установленных в воде.
Камеры разделены между собой диафрагмой. В нижнюю камеру
накачивают воздух, при этом уровень воды в ней несколько
понижается, а увеличившееся давление разрушает диафрагму.
Вследствие этого давление воздуха в камерах резко понижается, что
261
вызывает подъем водяного столба. Под действием
поднимающегося водяного столба ракета начинает двигаться вверх по трубе
(рис. 10.17).
Как считают за рубежом, исследования доказали, что водно-
воздушная пусковая установка является перспективной.
Другие два вида пусковых
установок находятся в стадии доработки
проектов.
Воздух
ВоЗЪ
-1 -
10.4. ПУСКОВЫЕ СРЕДСТВА РАКЕТНЫХ
КОМПЛЕКСОВ СИСТЕМ ПВО, ПРО И ПВО
КОРАБЛЕЙ
Существуют три вида пусковых
установок для ЗУР и антиракет: подвижные,
нолустационарные и стационарные.
Пуск ракет с этих установок
производится из наклонного или вертикального
".оложения.
Наклонный пуск ракет производится
с направляющих, обеспечивающих
необходимый поворот по азимуту и углу
возвышения. Вертикальный пуск
ракет производится с пусковых установок,
аналогичных установкам стратегических
ракет.
Вид пусковой установки определяется
прежде всего назначением ракет. Так,
например, если ракета состоит на
вооружении войсковых частей ПВО, то
применяются подвижные пусковые установки
(рис. 10.18).
Если же зенитные ракеты
предназначены для обороны определеннон части территории страны или
кораблей, то для них применяются стационарные пусковые
установки.
Полустационарные пусковые установки могут перемещаться
с одной позиции на другую. Для их перемещения требуются
предварительная подготовка огневой позиции и длительный демонтаж
и монтаж комплекса.
Заряжание рассмотренных выше пусковых установок может
быть ручным, механизированным либо автоматическим.
Ручной способ заряжания применяется в легких зенитных
комплексах. Механизированное заряжание производится с помощью
специальных механизмов при участии человека. Автоматическо.
заряжанне принято в стационарных комплексах.
262
Рис. 10.17. Схема подно-
воздушной пусковой \хта-
ИОВКИ:
/ — пусковая труПа; 2 —
ракета: 3—верхняя камера; 4 —-
чиафрагма; .5 — нихспчя
камера: 6 — начальный уровень
воды в нижней камере
!. Пусковые средства зенитных комплексов ПВО страны
3 с н и т н ы й ко м п л е к с «X о у к». Для пуска ракет «Хоук»
созданы три типа установок: стационарные, подвижные на
полуприцепе и самоходные. Ракеты комплекса вед\т огонь по
самолетам на малых и средних высотах (до 15 км).
Рис. 10.18. Подвижная пусковая установка:
/—платформа; 2— механизм наведения; 3—
направляющая: 4 — ракета; .5 — оенованис
Подвижные установки на полуприцепах рассчитаны на пуск
трех ракет с направляющими «нулевой» длины (рис. 10.19).
Установка позволяет вести стрельбу с ходу, что, по мнению
зарубежных специалистов, делает весь комплекс мобильным и удобным
в боевом применении.
Одновременно с установки можно запускать все три ракеты
с некоторым интервалом. Угол возвышения изменяется отО до 80°.
Сама конструкция установки простая, компактная и легкая.
Па стартовой позиции ракеты закрываются надувными
чехлами, при этом пуск ракет возможен без снятия чехлов.
На самоходных пусковых установках размещается по две
ракеты. Из установок данной конструкции создаются мобильные
подразделения для прикрытия войск.
Батареи ракет «Хоук» состоят на вооружении сухопутных
армейских подразделений, морской пехоты и ПВО страны по
охране важных объектов.
Зенитный р а к е т н ы и комплекс «Б омар к» —
стационарный, предназначен чля запуска одной ракеты, запускаемой
при угле возвышения, близком к 90°.
263
Зенитный pa к с т и ы i'r комплекс «Т а н т. е р б е р д»
выполнен в двух вариантах: стационарном и подвижном.
В стационарном варианте пусковая установка крепится на
горизонтальной бетонированной площадке, подвижная
располагается на любой площадке. Для проведения стрельбы установка
снимается с колесного хода и приводится в горизонтальное
положение при помощи домкратов.
\~~~ В обоих случаях устапов-
v ка с направляющей «нуле-
^у вой» длины и углом возвы-
' "\^ шения 50° рассчитана на
одну ракету. Наведение
пусковой установки производится
только по азимуту.
Заряжание
установки—механизированное с помощью крана
трапепортно - заряжающей
машины. На заряжание
требуется 2—3 мин.
Батарея зенитных ракет
«Тапдерберд» состоит из
системы обнаружения и
целеуказания, системы
управления ракетой, четырех
пусковых установок и
электрогенераторов (рис. 10.20).
Зенитный ракетный
комплекс «Б л а д-
х а у н д» разработай п двух
вариантах: стационарном и
подвижном.
В стационарном
варианте пусковая установка
крепится болтами иа бетонной
горизонтальной площадке, в подвижном — располагается на
двухосном колесном ходу (рис. 10.21), который на огневой позиции
перед стрельбой откатывается в сторону.
В обоих вариантах пусковая установка имеет направляющую
«нулевой» длины и рассчитана па с.ну ракету. Угол возвышения
пусковой установки 45°; заряжание — механизированное.
14-*
.^.
Рис.
10.19. ЗУР «Хоук» на пусковой
установке полуприцепа
2. Пусковые средства зенитных комплексов ПРО страны
Пусковые средства антиракеты «Найк-Зевс» стационарные,
рассчитанные на одну ракету. Угол возвышения установки
постоянный, близкий к 90°. Все работы на стартовой позиции
механизированы. Ракеты размещаются в подземных шахтах диаметром
около 4,6 м.
£64
Рис. 10.20. Состав зенитного комплекса «Тапдерберд»:
1— РЛС обнаружения целей; 2— РЛС облучения цели: 3— пост управления
пуском ракеты; 4 — ЗУР на подвижной пусковой установке; 5 — элекфогене-
ратор
ж
*■ Л&: Ш :
V
I
"at
Рис. 10.21. ЗУР «Бладхаунд» на подвижной пусковой
установке
265
Пусковые средства антиракет «Спринт» также
стационарные, подземные, шахтного типа. Внутри шахты
находится стальная труба, в которой на поршне аккумулятора
давления устанавливается антиракета. Снаружи шахта закрыта
колпаком весом 680 т.
Из трубы пусковой шахты антиракета выбрасывается
давлением газовой струи от порохового аккумулятора давления,
расположенного под поршнем.
Стартовый двигатель антиракеты включается в момент
выхода из пусковой шахты. После выгорания его топлива начинает
работать .маршевый двигатель.
На стартовую позицию к пусковой шахте антиракета
доставляется специальным транспортом.
3. Пусковые средства зенитных комплексов ПВО войск
3 с п и т п ы и комплекс «Ч а п а р э л» имеет пусковую
установку, смонтированную на гусеничном самоходе и рассчитап-
Рис. 10.22. ЗУР «Чанарэл» в боевом положении на
пусковой установке гусеничного типа
ную на пуск четырех ракет. Внутри самохода помещается
комплект запасных ракет (рис. 10.22).
Боевым подразделением комплекса является батарея, в кото
рую входит восемь самоходов.
Зенитный комплекс «Индиго» смонтирован на
колесном прицепе. Он рассчитан на пуск очередями 12 ракет.
Перед пуском ракет колеса отъединяются и установка
ставится на землю. Горизонтироваиие пусковой установки
производится с помощью домкратов.
Перевозится установка за тягачом колесного типа.
266
Зенитный носимый комплекс «Ре т. А й»
запускается из пускового ружья. Ружье состоит из пеклопластиковой
трубы, оптического прицела и ложи, в которой размещены
источник питания, зуммер и рукоятка с пусковым устройством. Общий
вес комплекса 12,7 кг. Ружье используется и для хранения
ракеты, при этом оно закрывается с концов крышками и наполняется
азотом. В боевых условиях комплекс переносит один человек на
ремне, за спиной.
На этом же принципе в
Англии разработан носимый
зенитный комплекс «Блоупайп».
4. Пусковые средства
зенитных комплексов ПВО
кораблей
Данные зенитные ракетные
комплексы предназначены для
противовоздушной обороны
кораблей. Все комплексы
стационарные. Их пусковые
установки выполнены
практически по одной схеме
(рис. 10.23).
Подача ракет па установку
из погреба корабля
производится с помощью лифта.
Заряжание автоматизированное,
при горизонтальном
положении направляющей. На
заряжание затрачивается около
30 сек.
По этому принципу
построены корабельные пусковые
установки зенитных ракетных комплексов
«Тартар».
Зенитным комплексом «Тэйлос» вооружены крейсеры.
Пусковая установка — спаренная, с изменяющимся углом возвышения
и механизированным заряжанием. Заряжание установки
производится при нулевом угле возвышения.
Рис. 10.23. Схема корабельной
пусковой установки ЗУР:
/ — основание: 2 — ЗУР; 3 — чержагель
ракеты; 4 — направляющая; 5 — механизм
горизонтальной павозки: 6—механизм
вертикальной наводки; 7 — вращающаяся часть
установки: £ — цапфа, 9 — гипромогор
«Тэйлос», «Терьер» и
10.5. ПУСКОВОЕ ОБОРУДОВАНИЕ РАКЕТ ВОЗДУШНОГО БОЯ
Пусковое оборудование ракет классов «воздух — воздух» и
«воздух — земля» устанавливается неподвижно па истребителях.
Истребителях-бомбардировщиках и других типах самолетов. Уста-
267
иовки просты по устройству и состоят из нескольких
направляющих. Па некоторых самолетах пусковые \с гаиовки состоят из
специальных подвесных непоявнжпых или выдвигающихся устройств
кассетного типа. Пусковая установка кассетного типа для
неуправляемых ракет показана на
рис. 10.24. Перед стрельбой
установка выдвигается из
самолета с помощью
привода; ракеты запускаются от
электрозапала.
Неуправляемые ракеты
наводятся на цель
оптическим или
радиолокационным прибором с
последующим разворотом корпуса
самолета. Однако некоторые
пусковые установки, постав-
лепные на вертолетах,
снабжены механизмами
наведения, что позволяет вести
стрельбу в некотором
секторе относительно
направления движения вертолета.
Управляемые ракеты, как правило, устанавливаются на
наружных пусковых устройствах несложной конструкции, имеющих
крепежные замки и пусковую автоматику.
I
Рис. 10.24. Выдвижная пусковая установка
кассетного типа для пуска неуправляемых
ракет
/^■<
*'* ..»'"**■' -♦ ■' * '*'■■ ' ■-
■■■';■■,■■?■ -♦.** .**< ■ .'■ * J
<Ы. 1$> 'Г&- ф? ■" ф ^ <( > *
" %*<1|- *-:"."""'""..'"
" '-,."•■> ъ" Vk "
Лг Г Л- ,, &
' & ' ' -8 Р ' * > ' ^' * " .*
'? *■.■*;< -^%*Л-- -.«--'и**'
-\
- г*
V*r*
Рис. 10.25. Перевозка ракеты к самолету на траиспортио-заря-
жяющей тележке
Крупные управляемые ракеты класса «воздух — земля»
подвешиваются к самолетам дальнего действия. На каждом
бомбардировщике подвешивается по две ракеты; подвеска неподвижная,
без направляющей, являющаяся только держателем ракеты-
268
Сбрасываются ракеты с самолета одновременно. Когда ракеты
отделятся от самолета, запускаются их дпшатели. Управление
полетом ракет осуществляется по команде с самолета.
Системы подвески на самолетах снабжены устройствами
аварийного сбрасывания ракет без включения их двигателей и без
взведения взрывателей боевых частей.
Транспортировка тяжелых ракет к самолетам производится
на специальных транспортно-заряжающих тележках (рис. 10.25).
Глава II
ИСПЫТАНИЕ РАКЕТ, РАКЕТНЫХ ДВИГАТЕЛЕЙ,
НАЗЕМНОГО ОБОРУДОВАНИЯ
Необходимость проведения испытании диктуется
требованиями безотказности работы как отдельных деталей, агрегатов,
приборов и систем, так и ракет и всего ракетного комплекса в целом.
Поэтому для каждой новой ракеты и ее наземного оборудования,
а также при серийном их производстве составляются специальные
программы испытаний с учетом реальных условий боевого
применения.
Программы испытаний элементов и систем, например
оценочные или контрольно-выборочные испытания, предназначены для
устранения тефектов проектирования, а также для выделения
узлов и элементов, имеющих дефекты производства пли сборки.
Устранение как дефектов проектирования, так и дефектных
узлов и элементов увеличивает вероятность выполнения системой
задания, для которого она предназначена.
11.1. ИСПЫТАНИЕ ДВИГАТЕЛЕЙ
Испытания ракетных двигателей проводятся с целью
получения надежной работы их при боевом применении. Под
надежностью ракетных двигателей (РД) принято понимать способность
двигателей выполнять заданные функции в условиях боевого
применения в течение требуемого промежутка времени.
Количественно надежность РД оценивается: вероятностью безотказной
работы, коэффициентом готовности, коэффициентом технического
использования, наработкой на отказ и др. Из перечисленных
критериев наиболее важным является вероятность безотказной
работы— это способность РД выполнять поставленные перед ним
задачи. Методы проведения испытаний и оценка надежности РД
определяются назначением, типом, применяемым топливом,
конструкцией и параметрами РД.
Испытания РД проводятся на специальных стендах, а также
при летных испытаниях.
270
В процессе испытаний двигателей можно условно выделить
несколько этапов. Вначале отрабатывается опытный образец. Па
этой стадии все детали двигателя изготовляются и испытываются
отяельно, а некоторые наиболее ответственные узлы и агрегаты,
такие, как камера сгорания и турбонасосный агрегат,
испытываются на специальных стендах.
При опытных и доводочных стендовых
испытаниях РД исследуются:
— варианты конструкции РД и их агрегатов, при этом
выбираются наиболее оптимальные из них (испытания могут
начинаться с моделей РД и заканчиваться испытаниями
отработанного РД);
— правильность функционирования РД и его агрегатов;
— работоспособность и ресурс работы РД при стендовых
испытаниях.
В процессе опытных и доводочных испытаний РД изменяют:
соотношение компонентов ракетного топлива, давление в камере
сгорания и газогенераторе, температуру компонентов топлива,
входные давления и другие параметры при различных их
сочетаниях и соотношениях.
Как правило, проводятся такие испытания с задачей выявить
качественную картину исследуемого процесса. В ходе таких
испытаний выбирается оптимальная конструктивная схема,
приближенно определяются параметры двигателя.
Контрольно-технологические испытания РД
являются официальными проверочными испытаниями. Они
проводятся на стендах и могут быть холодными либо огневыми.
Испытаниям подвергается каждый РД серийного производства.
При холодных испытаниях РД сгорания топлива в РД не
производится; работа агрегатов РД проверяется на модельных
жидкостях или газах. Па этих испытаниях проверяются прочность,
герметичность, правильность функционирования камер, насосов,
газогенераторов, автоматики и целого ряда других деталей.
Прочность РД и его агрегатов проверяется давлением,
создаваемым во внутренних полостях. Величина этого давления
обычно превышает рабочее давление на величину запаса
прочности. Давление создается какой-либо жидкостью, подаваемой во
внутренние полости РД.
Выдержав определенное время двигатель под давлением, его
тщательно осматривают на отсутствие трещин. Особое внимание
при этом обращают на сварные и паяные швы.
Испытания на прочность проводят в специальных боксах с
соблюдением необходимых мер безопасности.
Для обнаружения утечек при испытании двигателя па
герметичность можно использовать различные жидкости (обмыли-
вапие), термические и галогенные течеискатели, гелиевые масс-
спектрометры.
271
При использовании жидкостей для определения утечек
применяются главным образом водные растворы, обладающие
хорошими смачивающими свойствами и способностью образовывать
пузыри. Вещества наносятся непосредственно в местах сварочных
швов, соединений трубопроводов, установки фланцев. Метод
позволяет обнаружить утечку в Ю-4 см3/сек.
Принцип действия термического течеискателя основан на
различной теплопроводности газов, окружающих прибор. Эту
разницу воспринимает детекторный элемент электрической мостико-
вой схемы.
Гарантируемая точность способа составляет Ю-3 см3/сек.
Галогенный течеискатель реагирует на присутствие в
окружающей атмосфере галогенных соединений (фреона-12,
например).
Максимальная чувствительность прибора на фреоне
Ю-9 смя/сек, хотя на практике такая чувствительность не
достигается.
Наибольшей чувствительностью из всех течеискателей
обладает гелиевый масс-спектрометр, регистрирующий следы гелия.
Прибор или подсоединяют к паддутому гелием и помещенному
в вакуумную камеру двигателю, или присоединяют
масс-спектрометр к внутренней полости, а гелий подают с внешней стороны
двигателя.
Масс-спектрометром можно обнаружить утечку в Ю-8 —
10-10 см31сек.
Огневые испытания РД проводятся со сгоранием
топлива. При этих испытаниях определяются сила тяги РД и
температура в камере сгорания, определяются характеристики
ракетного двигателя и его агрегатов, работоспособность и ресурс работы
с максимально возможным в стендовых условиях приближением
к реальным условиям эксплуатации. Например, для проведения
огневых испытаний РДТТ в высотных условиях эксплуатации
используется стенд (рис. 11.1), оборудование которого позволяет
имитировать высоты более 40 км и обеспечивает температуры до
—85° С (двигатель, помещаемый в рабочую камеру, отделен от
«пространства», создаваемого эжекторными установками,
диафрагмой, которая разрывается после выхода двигателя па
режим).
Испытания двигателей па стенде проводятся также в
пределах, превышающих эксплуатационные; изменяются также
коэффициенты соотношения компонентов топлива (для ЖРД),
давление в камере сгорания и газогенераторе, температура
компонентов топлива (для РДТТ —температура заряда).
Измерение давлений при огневых испытаниях РД
производится специальными датчиками давления или манометрами,
температуры в камере сгорания измеряются термодатчиками
различных типов либо термопарами с электроизмерительными
приборами (потенциометрами), сила тяги — датчиком, воспринимающим
272
усилия тяги, которые затем электрическим или электронным
устройством преобразуются в сигналы электрического тока.
Контрольно-выборочные (типовые) испытания
РД являются сдаточными испытаниями серийной партии
двигателей; при этих испытаниях отдельно выбранные РД подвергаются
стендовой проверке на ресурс работы и соответствие замеренных
характеристик РД требованиям технических условий.
Специальные проверочные испытания РД
проводятся на стендах на серийных заводах. Они позволяют
проверить на стенде сохранение запаса надежности путем испытания
Рис. 11.1. Схема испытательного стенца:
/ — воздушные эжекторы; 2 — трубопровод для подвода сжатого
воздуха к эжекторам; 3 — заслонка; 4 — диффузор с водяным
охлаждением; 5 — диафрагма; 6 — испытываемый двигатель; 7 —
расширительная камера; S — подвижный трубопровод системы управления
пограничным слоем: 9 — выпуск газов; 10 — пароструйный эжектор
РД по расширенной программе на режимах, отличающихся от
эксплуатационных.
Стенды, на которых проводятся испытания двигателей, обычно
включают в себя: огневой бокс, где устанавливается двигатель,
помещение для баков с компонентами топлива, помещение для
обслуживающего персонала, где размещаются также приборы
для управления, измерительная и записывающая аппаратура.
Расстояние между этими помещениями зависит в основном" от
мощности двигателя и продолжительности запусков. В
зависимости от тяги испытываемых двигателей стенды могут быть
горизонтальные (для двигателей небольших тяг), вертикальные (рис. 11.2,
Для двигателей больших тяг) и наклонные.
Испытания ракетных двигателей заканчиваются летными
испытаниями, которым предшествуют стендовые испытания в
составе ракеты.
273
Летные испытания РТ.. При проведении этих испытании
на РД устанавливается радиотелеметрическая аппаратура
(телеметрические датчики и приборы), которая производит измерение
ы
т
\&icr
щ
*ю
***£
"^Ш
*$^*
•*-w-4*-■?■'.._ .5. * л*. ,- * u *
к*
-%W
if -L-4. *■
If*»:
ir
^i
Рис. 11.2. Испытательный стенд для больших ракетных двигателен
необходимых данных и передачу их на
наземные пункты, где эти
данные затем расшифровываются и оораоатываются. Иногда лы
ные испытания РД проводятся при контрольно-выборочных
испытаниях ракет, находящихся в серийном производстве.
274
11.2. ИСПЫТАНИЕ РАКЕТ
К ракетам и ракетным комплексам при их боевом применении
предъявляются требования но надежной работе всех его
элементов в процессе как подготовки к пуску, так и при пуске и полете
ракеты.
Высокая надежность ракет и ракетных комплексов
достигается в процессе проектирования, изготовления и опытной
отработки.
Основными направлениями повышения надежности ракет и
ракетных комплексов принято считать:
— улучшение качества производства и строгий контроль на
всех этапах изготовления;
— правильный выбор режимов работы аппаратуры;
— проведение испытаний систем и агрегатов, входящих в
ракетный комплекс, с имитацией условий полета;
— необходимость дублирования отдельных элементов и
систем бортовой аппаратуры;
— применение в бортовой аппаратуре автоматических схем
распознавания отказов элементов и замена неисправных
элементов способом переключения;
— контроль за работой систем в процессе полета.
Опытная отработка ракеты проводится в несколько этапов.
В хоче проектирования проводятся лабораторные и стендовые
испытания системы, которые подтверждают ее работоспособность
и позволяют получить приближенные количественные
характеристики основных параметров.
Затем в порядке подготовки к летным испытаниям проводятся
стендовые испытания ступени или всей ракеты.
Во время таких испытаний имитируются основные условия
полета. Кроме того, ракета подвергается многочисленным
автономным испытаниям, цель которых — накопить статистический
материал о надежности ракеты.
В дальнейшем ракета участвует в полигонных испытаниях в
составе ракетного комплекса.
Перечень испытаний, проводимых в процессе опытной
отработки ракеты (впрочем, как и всех остальных элементов
ракетного комплекса), настолько обширен, что не представляется
возможным даже все их перечислить. Ограничимся рассмотрением
некоторых из них.
Испытания при высок и х, средних и низких
температурах, испытания на тепловой удар и
испытание хранением проводятся в специальных
климатических камерах с заранее разработанным тепловым режимом.
Высокие температуры в камере задаются несколько больше
возможных температур, возникающих при полете ракеты.
При испытаниях определяются степень охлаждения
испытываемого объекта при относительной влажности до 10%. Ракета
275
V ~
г'-А: 1
выдерживается в камере в течение времени, в два раза
превышающего время полета ракеты. В продолжение испытаний и
после них ракета должна работать нормально.
Средние и низкие температуры в камере задаются, начиная
с самой низкой. Ракета выдерживается в камере определенное
время, после чего проверяется ее готовность к полету.
Одним из способов про-
s^- _..,; верки ракеты на
работоспособность при низких
температурах является
испытание
«переохлажденным дождем». PaKt
та опрыскивается водой
через форсунки с
обдуванием холодным воздухом.
При этом па поверхности
ракеты образуется
ледяной покров. На этих
испытаниях, в частности,
производится измерение
усилий на рулях ракеты
и проверяется
возможность доступа к
приборам ракеты (рис. 11.3).
Иногда температурные
испытания проводятся в
естественных условиях.
К примеру, недавно в
США завершился цикл
испытаний зенитной
управляемой ракеты «Ред
Ай» в арктических
условиях. В программу
испытаний входило
длительное хранение ракеты на открытом воздухе при температуре
—40° С. Прошедшие климатические испытания ракеты проверены в
работе, ракеты запущены по беспилотным мишеням.
Испытания на тепловой удар начинаются с самой низкой
температуры, устанавливаемой при хранении. Далее обьект
испытаний в камере нагревается до рабочей температуры за время,
равное половине времени, необходимого для выхода ракеты на
заданный режим. В этих условиях объект выдерживается в
продолжение времени, равного времени полета ракеты.
При этом объект испытаний должен работать нормально как
во время испытаний, так и после их окончания.
Испытание хранением проводится в климатических камерах.
Во время испытания температура меняется циклично от
предельной минусовой до предельной плюсовой. Число циклов уставов-
276
ь*-ч-
1.
ж '-'■
*-1
1 ■-* Л > ■■■■■ -^#f «"■" ■ -
. ■"■*' * * 'V:«i
» В ■ ж ж ■ Ъ •*•■
У s- ■ - '■*:'
щ' ^ *а ■* -л*ч
#■ *■ '■ „<Ц Лг *. ' ''
■"■■' '*. i* » ■
: "* a. S
""- - Л "* ч* т SMS*"
*■* т я. -4 1
J
f
%
.4
^
i-
-i
&
f
■^
Рис. 11.3. Корпус
«переохлажденным
ракеты после испытания
дождем». Проверяется
возможность доступа к приборам
ленной длительности строго определенное. По окончании
испытаний ракета осматривается и проверяется в работе.
Испытания на вибрацию — один из самых сложных
видов испытаний вследствие трудности создания условий вибраций
ракеты, аналогичных происходящим в условиях полета.
Вибрацией ракеты называются колебательные движения
отдельных элементов и систем конструкции ракеты, вызванные
работающим двигателем. Вибрация отдельных элементов
конструкции в жидкостных ракетах может возникать и вследствие
пульсации компонентов топлива в трубопроводах (частоты вибрации —
от нескольких единиц до 20 000 гц, перегрузки — до 100 g).
«/({/«
irty/t Трос
подвески
Вектор силы
вибратора
через ЦТ
'л TJ
Линия
■ оттяжки
Продольные
вибрации
Резиновая
подушка
Поперечные
вибрации
Рис. 11.4. Схема испытания ракеты па вибрацию
Для измерения вибраций устанавливают несколько приборов,
каждый из которых перекрывает определенный диапазон частот
и амплитуд.
Измерение вибраций низких частот производится
сейсмическими датчиками.
Измерение высокочастотных вибраций производится
пьезоэлектрическими датчиками.
Один из способов испытаний на вибрацию показан на рис. 11.4,
когда ракета подвешивается с помощью амортизационных
канатов или устанавливается па прокладках из мягкой резины,
расположенных в центре тяжести ракеты.
Результаты вибрационных испытаний используются при
анализе аэроупругости ракеты. Эти испытания позволяют определить
предельный срок службы деталей, узлов и систем.
Ракеты, устанавливаемые па кораблях, кроме указанных выше
испытаний подвергаются испытаниям на вибростенде
возмущающей силой в несколько тысяч килограммов. Таким испытаниям.
Например, подвергается ракета «Тэйлос» (рис. 11.5), входящая в
систему ПВО кораблей.
Вибрации ракет, возникающие при транспортировке, также
сказываются на их надежности. Так, при перевозке на
автомашинах по неровным дорогам ракета воспринимает значительные
толчки, которые вызывают колебания с перегрузкой корпуса
277
ракеты 9 g. Отдельные толчки достигают 20 g при частоте т.<
30 гц.
Поэтому ракета в процессе отработки подвергается и спы
Tail и ям транспортировкой.
Рис. 11.5. Внбростент для испытания ракеты «Тэйлпс» на
поперечные колебания
Характер изменения вибраций при различных видах перевозки
ракет показан на рис. 11.6. Из рисунка видно, что при
установлении эксплуатационного режима необходимо учитывать вид
транспортировки ракет, при котором конструкция испытывала бы
минимум вибрации. Из рисунка также видно, что наименьшие
перегрузки ракета испытывает при транспортировке водным путем-
При создании определенных условий (подрессоривание,
например) вполне приемлема транспортировка па значительные
расстояния по железным дорогам.
Перевозка ракет на большие расстояния автомобильным
транспортом нежелательна.
278
Наиболее желательной (если не принимать во внимание
воздействия вибраций случайного характера) считается перевозка
ракет по воздуху.
Испытания на акустические воздействия.
Основной задачей испытаний является проверка ракеты на
воздействие мощных акустических полей так как подобным образом на
нее воздействуют шумы во время старта ракеты и при переходе
скорости звука.
Рис. 11.6. Характер изменения вибраций при различных
вилах перевозки ракет
На ряс. 11.7 представлена типичная схема проведения
испытании ракет. Жидкий азот, при испытаниях находящийся в
хранилище, превращается в теплообменнике в газообразный и с
температурой около — 21° С подается в рупоры
электропневматических источников шума. Дистанционная система управления
позволяет следить за спектром и интенсивностью шума и
автоматически фиксировать акустические и вибрационные данные.
Испытания проводятся в специальных рсверберационных
камерах (рис. 11.8).
Испытательное оборудование позволяет имитировать
акустическое воздействие одновременно для двух характерных участков
движения — старта и полета с околозвуковой скоростью. При
этом одна часть ракеты находится в прямом акустическом поле,
а все остальные — в отраженном.
279
Испытания на удар (толчок) и постоянно
действующую нагрузку проводятся как на ракете в
собранном виде, гак и на отдельных ее частях и узлах.
При испытаниях на удар регистрируются величина и
продолжительность удара, характер его нарастания и спада,
направление, число ударов и наблюдаются изменения, происшедшие от
этих ударов в объекте испытаний.
Испытания проводятся либо на специально разработанных
машинах, либо на стандартных копровых и маятниковых установках.
ракета в собранном виде испытывается постоянно
действующими силами в направлении оси двигателя с превышением
предельной нагрузки па 15°/0, действующей в первый период работы
двигателя (в продолжение не менее 0,03 сек).
Отдельные части и узлы ракеты испытываются постоянно
действующими силами в направлении тяги при перегрузке в два раза
больше предельной тяги.
Кроме перечисленных выше испытаний проводятся испытания
на центрифуге. Необходимость подобных испытаний вытекает из
конкретных условий отработки ракеты.
Испытания на влияние влажности пр и д л и-
тельном хранении в различных климатических условиях
проводятся в широком диапазоне изменения окружающих
условий. Так, например, испытания па хранение проводятся:
— в тропических условиях при температуре от +29 до +35° С
и относительной влажности 70—95%; продолжительность
испытаний от 18 до 90 дней;
— па кораблях при температуре от + 21 до +27°С и
относительной влажности 70—95%; продолжительность испытаний от 1
до 6 месяцев;
— в подземных складах при температуре от +15,5 до +21° С
и относительной влажности 60—85%; продолжительность
испытаний от 2 месяцев до 1 года;
— в арктических условиях; продолжительность испытаний от
1 года до 5 лет;
— в условиях пустыни при температуре от +27 до +43° С и
относительной влажности 5—15%; продолжительность испытаний
от 1 года до 5 лет.
Статические и динамические испытания
ракетных конструкций. Статические испытания предназначены
для определения напряженно-деформированного состояния
испытываемых объектов, жесткости конструкции, а также несущей
способности (значения разрушающих нагрузок) конструкции в
расчетных случаях нагружения.
При динамических испытаниях определяются частота и форма
собственных колебаний, коэффициенты демпфирования, а также
проверяется прочность конструкции при действии динамических
нагрузок.
11-622 281
При определении разрушающих нагрузок в ходе статических
испытании способ нагружения различных элементов ракеты
имеет особенности. В частности, корпус головной части испыты-
вается на действие осевой силы и внешнего давления, что
соответствует расчетному случаю максимальной осевой перегрузки
при входе в атмосферу. Головная часть испытывается также на
совместное пагружение осевой силой, изгибающим моментом и
неравномерным внешним давлением, что соответствует
воздействию максимальной поперечной перегрузки.
Приборные, хвостовые отсеки ракеты, переходники нагружают
осевой силой и изгибающим моментом. Днища, корпуса, сопловые
блоки РДТТ, а также трубопроводы окислителя и горючего испы-
тываются внутренним давлением. Топливные отсеки внутренним
давлением доводят до разрушения, а также испытывают на
действие осевой нагрузки.
Устойчивость крупногабаритных тонкостепных объектов при
воздействии равномерно распределенного внешнего давления
определяют, помещая их в специальные гидравлические
установки. Если критическое внешнее давление не превышает одной
атмосферы, то нагрузка имитируется откачкой вакуумным насосом
воздуха из внутренней полости испытываемого объекта. При
испытаниях важно создать граничные условия закрепления, которые
идентичны или близки к реальным условиям эксплуатации.
Неравномерно распределенные внешние и внутренние
нагрузки ввиду сложности воспроизведения имитируются приближенно.
Топливные баки испытываются внутренним давлением
подаваемой под определенным давлением воды. При большой длиь*
баков испытываются отдельные секции, что делается для учета
действия инерционного гидростатического давления в условиях
больших полетных перегрузок.
Герметизация секций обеспечивается специальными днищами.
Осевые нагрузки на баки прикладываются через соседние отсеки
или специальные приспособления, имитирующие жесткость этих
отсеков.
Осевая нагрузка создается прессом с помощью гидравлических
силовозбуднтелеи и металлических тяг. Для более точного
определения разрушающих нагрузок при статических испытаниях
имитируют имеющийся в реальных условиях равномерный или
неравномерный прогрев отсеков корпуса ракеты. Это позволяет более
точно определить несущие способности конструкции.
Частота и форма собственных колебаний при динамических
испытаниях обычно определяются резонансным методом. В
плоскости колебаний изделия устанавливаются вибродатчики; в
плоскости, нормальной к плоскости колебаний, приклеиваются
деревянные бруски, через которые колебания объекта передаются на
виброскопы.
Плавным изменением частоты вибратора отыскиваются
частоты, резонансные с колебаниями конструкции. Процесс при это>'
282
фиксируется на фотопленку. Фазы колебаний могут быть
определены с помощью стробоскопов.
Анализ резонансных частот и форм позволяет установить
природу их возникновения, так как любая частота колебания
объекта зависит от упругости корпуса и упругости внутренних
элементов конструкции.
По результатам испытаний проводятся (при необходимости)
конструктивные изменения, доработки отдельных элементов и
агрегатов ракеты.
Ракетные конструкции испытывают также на прочность и
выносливость под действием динамической нагрузки. Испытания
проводят на специальных степсах, имитирующих
эксплуатационную нагрузку.
Как отмечалось выше, испытаний, которым подвергается
ракета в процессе отработки, много. Кроме уже перечисленных она
испытывается на сопротивление коррозии, плесени, на способность
противостоять солнечной радиации. В каждом конкретном случае
количество испытаний и их содержание при необходимости
меняется.
Все особенности проверок учитываются программами
испытаний, которые в конечном счете предназначены для обнаружения и
подтверждения наличия дефектов и, следовательно, для их
устранения. Опыт испытаний показывает, что дефекты выявляются на
различных этапах и при различных испытаниях. Этим и
объясняется их многочисленность и сложность.
Стендовые испытания
Эти испытания проводятся в порядке подготовки к
заключительным и наиболее важным испытаниям — летным. На стенде
испытываются или ступени ракеты, или ракета полностью (рис. 11.9).
Во время этих испытаний представляется возможность
исследовать:
■— запуск двигателя и работу системы подачи;
— настройку двигателя на заданную тягу;
— вибрации корпуса двигателя и ракеты;
— работу автомата стабилизации и углы отклонения
газоструйных рулей при работающем двигателе.
Одновременно при этих испытаниях отрабатывается комплекс
наземного оборудования, связанный с заправкой ракет
компонентами топлива, устанавливается последовательность
предстартовых испытаний и т. д.
Работы па испытательных стендах требуют оснащения
стендов автоматическими устройствами, осуществляющими
управление ходом испытания. Эта необходимость объясняется тем, что
число замеров, которые нужно выполнить, возрастает, поэтому
возникает опасность допущения ошибок в управлении различными
Системами стенда, измерительно-записывающей аппаратурой, объ-
11*
283
ектом испытания. Некоторые параметры, например, такие, как
температуру газовой струи на выходе из сопла, расходы компонентов
топлива и пульсирующие с высокой частотой давления, необходимо
записывать с большой скоростью либо на протяжении всего
испытания, либо в какие-то короткие отрезки времени. Именно
поэтому управление всеми операциями во время стендовых
испытаний производится с помощью автоматизированного контрольно-
распорядительного устройства. Это устройство осуществляет уп-
Рис. 11.9. Стенд для испытаний собранной ракеты
равление ракетой, всем наземным оборудованием и системами
вспомогательного оборудования. С его помощью проводятся также
контрольные проверки всех систем. Устройство следит за
последовательностью операций, удерживает ракету на стенде, управляет
работой двигателей, регулирует подачу воды и обеспечивает
согласование операций по времени.
Другим видом стендовых испытаний, получившим в последнее
время за рубежом широкое распространение, является
определение аэродинамических характеристик не на моделях
баллистических и крылатых ракет, а на образцах в их натуральную
величину с помощью ракетных тележек.
Для этого па местности прокладывают двойной рельсовый
путь длиной в несколько километров.
Испытываемая баллистическая или крылатая ракета крепится
к тележке, которая соединена со специальными весами, измеряю-
284
щими аэродинамические силы и моменты, действующие на нее
во время движения по рельсовому пути (рис. 11.10).
Остановка ракетной тележки с испытываемым объектом на
конечном участке рельсового пути производится с помощью
двигателей, реактивная сила которых направлена в обратную
сторону по отношению движения тележки, или с помощью желоба,
наполненного водой. В этом случае внизу тележки монтируется
заборнчк воды, который захватывает воду из желоба на конечном
участке рельсового пути и тем самым гормозит ее продвижение.
Рис. 11.10. Ракетная тележка с ракетой
Испытание авиационной ракеты на тележке при
сверхзвуковых скоростях показано на рис. 11.11. Для получения требуемой
скорости использован реактивный самолет, закрепленный на
тележке. Запуск ракеты производится в момент, когда самолет
развивает наибольшую скорость.
При испытаниях ракет на подобных приведенной на рис. 11.10
тележках можно определить нормальную и боковую силы,
моменты тангажа, рыскания, крена и характеристики
демпфирования относительно поперечной и продольной осей, отработать
системы управления, стартовые агрегаты и т. д.
Наряду с элементами конструкции ракеты особенно
тщательным и всесторонним испытаниям в тех же условиях подвергаются
элементы системы управления.
Во всех случаях особое внимание, как отмечалось выше,
уделяется испытаниям на вибрацию с высокой частотой, которая
возникает в корпусе ракеты при ее полете и из-за которой больше
всего наблюдается анормальных явлений.
Проведение испытаний ракет в собранном виде представляет
определенные трудности п обходится весьма дорого. Поэтому
283
перед проведением подобных испытаний двигатели ракет,
отдельные системы, приборы и ракета в целом неоднократно
проверяются.
Рис. 11.11. Ракетная тележка с самолетом, с которого
произвоштся запуск ракеты
Летные испытания
Целью летных испытании ракет является главным образом
выявление слабых мест п конструкции ракеты и в ее узлах,
которые не могли быть определены при стендовых испытаниях.
В ходе летных испытаний измеряются параметры:
— время подачи главной команды;
— время срабатывания каждого разрывного болта;
— время запуска каждого тормозного двигателя;
— момент появления отрицательной перегрузки ступени;
— момент отделения боевой части;
— относительный путь, пройденный боевой частью;
— три угловые скорости ступени и боевой части в момент их
отделения;
— интеграл проекции кажущегося ускорения на продольную
ось ракеты.
Чтобы получить такие измерения, ракету необходимо
оснастить датчиком относительного пути, датчиком импульса и
датчиком отрыва. Моменты прохождения команд фиксируются через
систему управления, а угловые скорости — гпроприборами
ракеты.
Для определения частот и форм колебаний при летных
испытаниях на ракете в нескольких сечениях устанавливаются вибро-
286
датчики, причем в каждом сечении, как правило, замер
вибрационных нагрузок выполняется вдоль трех осей. Из-за
невозможности одним типом датчика измерить вибрации в большом
диапазоне частот (от 10 гц до 10 кгц) в каждом сечении корпуса
устанавливаются низко-, средне- и высокочастотные датчики.
Кроме непосредственного определения характеристик
колебаний ракеты в ходе летных испытаний определяются некоторые
динамические нагрузки, вызывающие эти колебания. Так,
зондирование атмосферы позволяет получить некоторые данные о
скорости ветра, действующего иа ракету в полете. Измеряются
также параметры, характеризующие изменение тяги двигателя в
момент его запуска и выключения. Записываются процессы
отделения блоков ракеты, фиксируются параметры, определяющие
динамические характеристики системы управления и органов
управления. Полученные данные в дальнейшем дают возможность
рассчитать основные динамические нагрузки, действующие иа ракету
в полете.
Большое значение для определения условий пагруження
ракетных конструкций, для принятия необходимых мер для
теплозащиты узлов, агрегатов, отсеков, для знания условий работы
приборов системы управления и других агрегатов являются
температурные измерения, проводимые при летных испытаниях
ракет, для чего требуется установка десятков датчиков.
Давления в камерах сгорания РДТТ и ЖРД ракет, а также
в топливных баках при летных испытаниях замеряются
датчиками давлений.
Данные бортовых приборов посредством телеметрических
устройств постоянно передаются наземным приемным станциям, за
исключением тех периодов, когда проводить, телеметрические
измерения затруднительно (например, при входе ракеты или боевой
части в атмосферу). В этих случаях данные записываются на
магнитную ленту, которая спасается вместе с приборным
отсеком.
После обработки результатов, полученных при летных
испытаниях, производятся анализ и сравнение опытных данных с
расчетными. Если окажется, что при полете ракеты возникают
усилия и температуры большие пли меньшие, чем расчетные, то на
основе этого сравнения проводится перерасчет отдельных узлов,
а затем при необходимости вносятся уточнения в конструкцию
ракеты.
Для определения траектории полета ракеты в районе запуска
и в районе падения ракеты устанавливаются кинотеодолнты (не
менее трех в каждом районе), которые снимают на пленку полет
ракеты. При этих съемках ось кинотеодолита все время
направляется иа ракету. На каждом снятом кадре остаются отметки
углов по азимуту и высоте; все кинотеодолиты при съемках
синхронизированы во времени. Кроме того, наблюдение за полетом
ракеты может осуществляться радиолокаторами.
287
По данным кинотсодолитиых съемок и радиолокационных иа-
блютений вычисляется траектория полета ракеты на
наблюдаемых участках (начальном и конечном). Используя эти
наблюдения, определяется вся траектория полета ракеты.
Если видимость при запуске ракеты окажется недостаточной
и вследствие этого работа на кинотеодолитах будет затруднена,
наблюдение за полетом ракеты осуществляется с помощью
радиолокационных средств.
Летные испытания продолжаются до полной отработки всех
агрегатов и ракеты в целом.
П.З. ИСПЫТАНИЕ НАЗЕМНОГО ОБОРУДОВАНИЯ
Наземное оборудование, включающее весь комплекс устройств,
необходимых для проверки ракеты путем осмотра и испытаний
с целью выявления неисправностей, средства транспортировки
ракеты и поверочных устройств на стартовую площадку, а также
средства обучения персонала техническому обслуживанию ракет
при подготовке их к запуску и осуществлению самого запуска,
отличаются большой сложностью и многообразием. На его
совершенствование тратится не меньше средств, чем на разработку
самих ракет.
Все это оборудование до поступления в войска проходит
всесторонние испытания.
При разработке и испытании наземного оборудования новых
ракетных комплексов особое значение придается их надежной
работе. При этом под надежностью наземного оборудования
понимается вероятность безотказной работы агрегатов и систем в
заданное время.
Своевременность доставки ракет па стартовую позицию, их
подготовка и запуск зависят от надежности действия агрегатов,
систем и машин, входящих в комплекс наземного оборудования.
Особенно важное значение приобретает работа всего комплекса
наземного оборудования после транспортировки ракет на
большие расстояния с высокими скоростями движения. Это
вызывается тем, что сразу же по прибытии на стартовую позицию за
короткое время требуется произвести предстартовые испытания
собственно ракеты и ее системы управления и осуществить с
помощью наземного оборудования надежный запуск ее независимо
от климатических условий как при низких, так и при высоких
температурах.
Рассмотрим некоторые виды испытаний, способствующих
отработке надежных систем наземного оборудования.
Ходовые испытания (испытания пробегом). При
ходовых испытаниях подвижных средств ракетных комплексов
(наиболее распространенных) с помощью подвижных
измерительных станций проводят довольно сложные измерения для
определения:
2ЬЬ
— пути и скорости движения испытываемого объекта па
участках дорог различной проходимости;
— тяговых усилий на сцепных устройствах тягача и прицепа;
— напряжения в наиболее ответственных деталях и узлах;
— ускорения подрессоренных частей систем (при
вертикальных колебаниях систем);
9
§
%.'
Рис. 11.12. Запуск ракеты во время испытания
ракетного комплекса «Першинг-1 А»
— синхронности срабатывания тормозных устройств тягача
и прицепа, а также момента вступления в работу тормозной
педали тягача при торможении и ряда тругих характеристик.
Ходовые испытания обычно стремятся проводить в три этапа:
па первом определяются напряжения в деталях и системах; на
втором исследуется работа механизмов подрессоривання; на
третьем исследуется работа тормозов в движении по различным
участкам дорог и определяются тяговые усилия па сцепных
установках.
289
Климатические испытания. Наземное оборудование
проходит испытания в различных крайне неблагоприятных
климатических условиях. К примеру, при разработке нового варианта
системы «Першинг» на колесных машинах система была
подвергнута климатическим испытаниям. В первый период,
проходивший в северных районах, наземное оборудование
подвергалось длительному воздействию дождей, снега, обледенения. Во
Флориде оборудование испытывалось в условиях высоких
температур. Максимальная высокая температура, воздействию которой
подверглось оборудование, достигала при искусственных
условиях 100° С. При резких колебаниях температур и других
погодных условий проверялась надежность действия отдельных
компонентов системы. Заканчивались климатические испытания
проверкой пуском ракеты (рис. 11.12) с использованием прошедшего
испытания наземного оборудования.
Известно, что конструкция агрегатов и специальных
сооружении наземного оборудования должна обеспечивать
продолжительное хранение в состоянии, обеспечивающем постоянную
готовность для выполнения рабочих операций в условиях
длительного срока эксплуатации. Это требование можно выполнить,
применив специальные противокоррозионные покрытия,
соответствующие смазки, изготовив агрегаты из специальных материалов, не
подвергающихся коррозии под воздействием атмосферы и
метеорологических условий при соблюдении необходимых условий
хранения и сбережения техники. При отработке наземного
оборудования все эти вопросы принимаются во внимание. Правильность
конструкторских решений проверяется испытаниями на
длительное хранение, испытаниями на влияние влажности. Кроме
указанных еще многие испытания, которым подвергаются ракетный
двигатель, ракета в целом, применимы и к наземному оборудованию.
По данным произведенных при всех испытаниях измерений и
их последующей обработке и анализе представляется возможным
сравнить опытные данные с расчетными и дать оценку по
надежности конструкции испытываемого объекта наземного
оборудования.
Глава 12
ОСНОВЫ УСТРОЙСТВА БОЕВЫХ ЧАСТЕЙ
12.1. ОБЩИЕ СВЕДЕНИЯ ОБ УСТРОЙСТВЕ БОЕВЫХ ЧАСТЕЙ РАКЕТ
в головном
в которых
Боевая часть на большинстве ракет располагается
части, однако имеются ракеты, например крылатые,
боевые заряды размещаются в других
местах корпуса.
Основными элементами боевых
частей любых ракет являются:
взрыватель, предохранительное устройство,
боевой заряд и корпус боевой части
(рис. 12.1),
Корпус боевой части является
конструктивным и силовым элементом,
в котором размещаются боевой заряд,
взрыватель и предохранительное
устройство.
Корпус представляет собой
тонкостенную сварную металлическую
оболочку соответствующей формы,
подкрепленную шпангоутами. Материал
оболочки и ее толщина выбираются в
зависимости от прочности и
аэродинамического нагрева боевой части в
полете.
Для изготовления корпусов
возможно применение стеклопластика.
Особый интерес представляет стекло-
пластиковый материал, в состав
которого входят радиопоглощающие
материалы.
Задний торец корпуса закрывается герметичным днищем,
торое может иметь люк для снаряжения боевой части.
Рис. 12.1. Схема устройства
боевой части ракеты:
J — взрыватели; 2 — боевой заряд;
3 — предохранительное устройство;
4 — корпус боевой части
КО-
291
К корпусу боевой части относится и наконечник, который
изготовляется из термостойкого материала.
Боевая часть защищается от нагрева теплозащитным
покрытием, наносимым на внешнюю поверхность оболочки корпуса, в
ракетах малой дальности теплозащитное покрытие может и
отсутствовать.
В полете покрытие вначале аккумулирует тепло, поступающее
от пограничного слоя. При увеличении температуры на
поверхности покрытия до определенного значения начинается унос
частиц материала воздушным потоком и большая часть
поступающего извне тепла отводится от стенки уносимыми газообразными
или конденсированными частицами.
А
а 6 6 г д
Рис. 12.2. Формы боевых частей:
а — оживальная; й — коническая; е — коническая со сферическим
притуплением; г — коническая со сферическим притуплением и
расширяющейся конической «юбкой»; д — цнлиндро-коническая со
сферическим притуплением и конической «юбкой*
В качестве покрытий используются керамические или
органические материалы с термостойким наполнителем.
Теплозащитное покрытие должно быть такой толщины, чтобы
даже после уноса частиц на силовой оболочке оставался слой
материала, предохраняющий ее от разрушения вследствие большого
нагрева.
Как следует из зарубежных источников, при выборе
конструкции и внешней формы боевой (головной) части стремятся
удовлетворить следующие основные требования:
— возможность размещения в головной части боевого заряда
заданной массы и устройств, обеспечивающих его нормальное
функционирование;
— обеспечение наименьшего аэродинамического
сопротивления;
—■ простота изготовления.
По форме боевые части могут быть коническими, оживаль-
ными, параболическими и комбинированными (рис. 12.2),
представляющими сочетание нескольких форм.
Если исходить из условия, что диаметр основания и объем
головной части остаются неизменными, то при сверхзвуковых ско-
292
ростях полета наименьшим аэродинамическим сопротивлением
обладают головные части параболической формы, а наибольшим —
конической.
Головные части параболической и оживальной форм имеют
большие объемы для размещения заряда по сравнению с
коническими. Однако в ракетах с большой дальностью полета наиболее
широко применяются простые в изготовлении боевые части
конической и комбинированной формы. Это возможно, так как для
потери скорости на аэродинамическое сопротивление составляют
всего несколько процентов, поэтому небольшая разница в
аэродинамическом сопротивлении головных частей различных форм
существенной роли не играет.
Форма вершины (рис. 12.2, в, г, д) влияет па характер
аэродинамического обтекания боевой части. При полете со
сверхзвуковой скоростью перед притуплённой вершиной боевой части
образуется мощный скачок уплотнения, в котором значительная
часть энергии набегающего потока воздуха преобразуется в
тепловую энергию. В результате температура и плотность воздуха
за скачком повышаются, а скорость понижается. При заостренной
вершине интенсивность скачка уплотнения меньше, поэтому
плотность и скорость воздуха на границе пограничного слоя
изменяются в меньшей степени.
Тепловой поток от пограничного слоя к поверхности боевой
части зависит от плотности и скорости обтекающего воздушного
потока, поэтому при одинаковой скорости и высоте полета
тепловой поток к поверхности боевой части с притуплённой вершиной
меньше, чем к поверхности боевой части с заостренной вершиной.
Таким образом уменьшается аэродинамический нагрев боевой
части, что позволяет уменьшить толщину теплозащитного слоя и
тем самым снизить массу боевой части.
Притуплёнными боевыми частями целесообразно снабжать
ракеты большой дальности, а ракеты средней дальности могут
иметь боевые частя с заостренной вершиной. В последнем случае
аэродинамический нагрев играет значительно меньшую роль, в то
время как заострение вершины существенно уменьшает лобовое
сопротивление в результате чего скорость боевой части при
подходе к цели увеличивается.
Взрыватель. В зависимости от принципа действия
взрыватели подразделяются па контактные, дистанционные и
неконтактные.
Контактные взрыватели вызывают взрыв боевого заряда при
ударе о преграду (цель); применяются обычно в ракетах,
предназначенных для поражения наземных и морских целей.
Дистанционные взрыватели срабатывают на траектории полета ракеты
через определенное время после ее пуска. Срабатывание
дистанционных взрывателей обеспечивается специальным устройством,
отсчитывающим время полета ракеты до точки взрыва. Эти
устройства носят название дистанционных механизмов, которые мо-
293
гут быть пороховыми, механическими (часовыми) и
электрическими. Неконтактные взрыватели срабатывают, как правило, под
действием энергии, излучаемой или отражаемой целью. Их
применяют с целью повышения эффективности поражающего
действия боевых частей по наземным целям. Это достигается взрывом
боевой части нач поверхностью земли.
Для работы неконтактных взрывателей может быть
использована энергия электрического, магнитного и электромагнитного
полей, энергия звуковых колебаний, радиоактивного распада ядер
(гамма-лучей) и др.
Действие неконтактных взрывателей может быть также
основано па закономерном изменении некоторых параметров среды с
высотой (например, плотности воздуха; в этом случае
чувствительным элементом взрывателя является барометрический
датчик).
Однако электростатические, магнитные, акустические и
барометрические датчики мало применимы в современных ракетах
ввиду их низкой помехоустойчивости и недостаточно высокой
точности работы.
Наиболее полно удовлетворяют всем требованиям к
неконтактным взрывателям боевых частей ракет радиовзрыватсли,
которые для определения момента срабатывания используют
энергию радиоволн, отражаемых целью. Принцип действия
радиовзрывателей основывается на хорошо известных
радиолокационных методах измерения расстояния до объекта: частотном,
импульсном и фазовом. В соответствии с этим различают три
основных вида радиовзрывателей: с частотной модуляцией,
импульсные и допнлеровские радиовзрыватсли. При фазовом
методе для выделения рабочего сигнала в радиовзрывателе
используется эффект Допплсра, от которого и происходит название
взрывателя.
Предохранительное устройство является
промежуточным механизмом между взрывателем и боевым зарядом. Оно
замыкает детонационную цепь между взрывателем и боевым зарядом
только по истечении определенного заданного времени.
Дополнительное требование к предохранительному устройству иногда
заключается в самоликвидации боевой части путем подрыва боевого
заряда но истечении установленного времени или при
определенных условиях.
Однако основное назначение предохранительного устройства
состоит в разобщении детонацноппон цепи между взрывателем и
боевым зарядом, когда взрыв боевой части нежелателен.
Наиболее важным элементом боевой части является боевой
заряд. Устройство основных типов боевых зарядов будет
рассмотрено ниже.
По типу конструктивной связи боевой части с корпусом
ракеты во время полета различают отделяющиеся и неотделяющи-
еся боевые части.
294
Для отделяющихся боевых частей жесткая связь с корпусом
осуществляется только на активном участке траектории. В конце
его эта связь разрывается, после чего боевая часть и корпус
продолжают движение раздельно.
У иеотделяющихся боевых частей жесткая связь с корпусом
ракеты является постоянной на всей траектории полета.
Следует отметить, что у большинства тактических ракет
головные " части пеотделяемые, у всех стратегических
—отделяемые.
Для тактических ракет вопрос о необходимости отделения
боевой части зависит от типа двигательной установки и
максимальной дальности полета. Для ракет с РДТТ необходимость
отделения определяется совершенством способа выключения двигателя.
При недостаточном совершенстве способа выключения двигателя
точность ударов ракетами без отделения боевой части в полете
оказывается низкой.
Отделение боевой части также отрицательно сказывается на
точности ударов, однако рассеивание, обусловленное отделением
боевой части, существенно меньше рассеивания из-за
несовершенства способов выключения РДТТ.
Исходя из сказанного, в настоящее время за рубежом
считают, что тактические ракеты с РДТТ целесообразно создавать
с отделяемыми в полете головными частями независимо от
дальности полета.
Для тактических ракет с ЖРД решение вопроса о типе
головной части зависит от дальности полета. Ракеты с дальностью
полета 400—500 км имеют, как правило, неотделяемые боевые
части, поскольку такие ракеты обладают хорошей кучностью, а
отделение головной части к заметному выигрышу в пассивной
массе ракеты не приводит. Тактические ракеты с большей
дальностью (более 400—500 км) полета имеют отделяющиеся боевые
части. При этом достигается заметное снижение массы ракеты,
так как корпус рассчитывается только на действие нагрузок на
активном участке траектории.
Зарубежные специалисты считают также, что требование
повышения неуязвимости ракет к действию ПРО противника может
вызвать необходимость для всех тактических ракет иметь
отделяющиеся в полете головные части.
Существуют три класса систем отделения боевых частей:
тормозящие (притормаживанием ступени ракеты), расталкивающие
(расталкиванием ступени ракеты и боевой части) и
комбинированные (сочетающие первые два способа).
Торможение корпуса обычно осуществляется
твердотопливными (пороховыми) тормозными двигателями (рис. 12.3, а). Эти
двигатели симметрично располагаются в хвостовом или переднем
отсеке (приборном или переходнике).
Тормозные двигатели, создавая тягу, направленную в сторону,
противоположную движению ракеты, притормаживают ее кор-
295
пус, а боевая часть, предварительно освобожденная от связи с
ним, по инерции протолжает полет.
Торможение ракет с двигателями на твердом топливе во?
можно созданием сопел противотяги (рис. 12.3, б).
На ракетах, у которых отделение боевой части происходит в
достаточно плотных слоях атмосферы, торможение корпуса
возможно аэродинамическими силами.
Основное достоинство отделения боевой части методом
торможения корпуса ракеты заключается в возможности уменьшить
отрицательное влияние процесса
отделения и разброса импульса
последействия тяги на рассеивание. Но масса
такой системы оказывается довольно
значительной, что является ее
недостатком.
В качестве расталкивающих
устройств применяются пневматические,
пружинные или пороховые механизмы
(толкатели).
Источником энергии для
пневматических механизмов отделения (рис.
12.4, а) обычно служит газ под
давлением, отбираемый из иневмосистемы
ракеты.
Пружинные толкатели (рис. 12.4,6)
О выполняются в виде нескольких авто-
D „ ,0о г™,.,, ~ номных толкателей. При
освобождение. I2..3. Схемы торможения , „ v
ракеты-носителя: НИи связи боевой части с корпусом
о-тормозными двигателями: б- ПруЖИИЫ раЗЖНМЭЮТСЯ И раСТЭЛКИ-
соплами противотяги вают боевую часть и ступень ракеты
(рис. 12.5).
Пружинные толкатели являются самыми тяжелыми из
расталкивающих механизмов, но зато и самыми простыми.
Пороховые расталкивающие механизмы аналогичны
пневматическим, отличаются только тем, что давление создается газами
при сгорании небольшого порохового заряда. Это самый легкий
и компактный из расталкивающих механизмов. Однако
зависимость скорости горения от температуры заряда вызывает разброс
давления пороховых газов, а следовательно, и сил, развиваемых
механизмом.
Расчеты показывают, что расталкивающие механизмы при
приемлемой массе не позволяют получить силу для надежного
отделения боевой части в период последействия двигателя. Эти
механизмы рассчитывают так, что они вступают в действие по
окончании периода последействия тяги.
Недостатком этпх механизмов является большое рассеивание
боевых частей не только вследствие разброса импульса последей-
296
ствия тяги, но и сообщения боевой части нестабильной
дополнительной скорости при расталкивании.
Рис. 12.4. Пневматически:": и норохопой толкатели:
а — пневматический; б —пороховой; / — пружина поджатия; 2 —
шток с поршнем; 3 —корпус; 4 — пороховой наряд
Отделяющиеся боевые части крепятся к корпусу ракеты с
помощью быстроразъемных устройств в виде разрывных болтов и
направляющих штырей и шпилек.
Рис. 12.5. Пружинные толкатели:
/ — чека; 2 — пружина; 3 — стакан
12.2. ПРИНЦИПЫ УСТРОЙСТВА И ДЕЙСТВИЯ
РАЗЛИЧНЫХ БОЕВЫХ ЗАРЯДОВ
По характеру действия и типу боевого заряда боевые части
зарубежных ракет делятся на фугасные, осколочные, осколочно-
фугасные, кумулятивные, зажигательные и ядерные.
297
Фугасные боевые части (рис. 12.6) предназначаются
для разрушения различных оборонительных сооружений.
Действие фугасных боевых частей основано на превращении
химической энергии, заключенной во взрывчатых веществах, в энергию
ударной волны, распространяющейся во все стороны от точки
взрыва.
Эффективность ракет с фугасными боевыми частями зависит
от количества и мощности взрывчатых веществ, а также от
момента подрыва боевой части у цели.
Главным поражающим фактором фугасных боевых частей
является воздушная ударная волна, образующаяся при взрыве
боевого заряда.
Рис. 12.6. Схема устройства фугасной боепон части:
/—корпус; 2 — теплоизоляция; 3 — боевой заряд; 4 — дннше: 5 — донный
взрыватель; б — дополнительные детонаторы; 7 — головной взрыватель
Для расчета избыточного давления на фронте ударной волны,
распространяющейся в однородной и безграничной воздушной
среде, можно рекомендовать формулу
з з
Д;>ф = 0,084 -^f+ 0,27 J^- + 0,7-|-, (12.1)
где Л/?ф—избыточное давление на фронте ударной волны, МН/м2\
q—масса заряда тротила, кг. Для ядерных боевых частей
тротиловый эквивалент по ударной волне q — qyB- Tpo-
тиловый эквивалент ядерного взрыва по ударной волне
равен половине тротилового эквивалента;
R— расстояние от центра взрыва, м.
Для расчета радиусов зон разрушения от воздействия ударной
волны можно воспользоваться следующей формулой:
R» = KVq~, (12.2)
где Rb— максимальный радиус зоны разрушения, м\
kB—коэффициент, зависящий от типа сооружений, свойств
взрывчатых веществ и степени разрушения;
q — масса заряда взрывчатого вещества, кг.
298
Наибольший эффект разрушения воздушной ударной волной
наземных сооружений получается в случае наземного взрыва
заряда, поэтому фугасные боевые части имеют контактные
взрыватели мгновенного действия. В этом случае корпус боевой части
можно делать достаточно тонким, так как он не рассчитывается
на нагрузки при ударе о грунт.
В случае применения таких боевых частей для тактических
ракет с целью защиты боевого заряда от высоких температур,
возникающих в результате аэродинамического нагрева, корпус с
внутренней стороны может иметь слон теплоизоляционного
материала.
Учитывая высокую стоимость управляемых тактических ракет,
зарубежные специалисты утверждают, что использовать для них
фугасные боевые части экономически нецелесообразно, за
исключением случаев стрельбы по малоразмерным целям ракетами с
очень точно работающей системой управления.
Недостатками фугасных боевых частей являются также
быстрый спад давления во фронте воздушной ударной волны, быстрое
затухание волны в грунте и невозможность значительного
увеличения зоны их действия.
Осколочные боевые части предназначаются для
стрельбы по воздушным и наземным целям, включая боевую технику и
живую силу противника.
В соответствии с назначением осколочных боевых частей
основное требование, предъявляемое к ним, сводится к получению
максимального количества убойных осколков с возможно
большим радиусом их действия. Убойными осколками считаются
такие, которые способны на заданном расстоянии вывести из строя
предполагаемую цель или нанести поражение жизненно важным
частям небронированной боевой техники.
Как правило, осколочная боевая часть должна иметь
достаточно толстостенную оболочку и лишь такое количество
взрывчатого вещества, которое необходимо для дробления этой оболочки
на убойные осколки.
Если не принимать специальных мер. то при взрыве
осколочных боевых частей образуется некоторое количество
неодинаковых по массе осколков, из которых только часть способна
наносить действительное поражение. Установлено, что из общей массы
металла корпуса боевой части до 30—40% идет па образование
мелких осколков, не обладающих достаточной для поражения
цели энергией, т. е. фактически бесполезных с точки зрения
эффективности поражения цели.
Кроме того, при взрыве могут образовываться и крупные
осколки, обладающие избыточной для данной цели энергией. В
результате используется лишь сравнительно небольшая часть
металла оболочки корпуса. Ослабление энергии взрыва осколочных
боевых частей происходит примерно пропорционально
расстоянию, соответственно радиус действия изменяется пропорцио-
299
нально массе заряда. Поэтому можно при ограниченной массе
заряда достигнуть большей дальности действия осколочных
боевых частей по сравнению с фугасными.
Недостатком осколочных
боевых частей является то, что
причиняемые ими повреждения не
так значительны, как у фугасных
боевых частей, особенно на
больших расстояниях от центра
взрыва!
Для увеличения зоны
поражения осколками можно
использовать кассетные боевые части
(рис. 12.7). Такая боевая часть
состоит из большого числа
мелких снарядов (элементов),
каждый из которых имеет свой заряд
взрывчатых веществ. Элементы
выпускаются в воздух близко от
цели и при ударе о землю
подрываются. Площадь поражения у
кассетной боевой части
значительно больше, чем у обычной
осколочной той же массы.
Осколочные боевые части
применяются для тактических ракет.
Кумулятивные боевые части (рис. 12.8) используются
для поражения воздушных, бронированных наземных целей, для
уничтожения долговременных огневых точек и других форгифи-
Рис. 12.7
Кассетная осколочная
боевая часть:
1 — Соеьые элементы; 2 — корпус
Рис. 12.8. Кумулятивная боевая часть:
; —боевой заряд; 2 — донный детонатор; 3 — голобнон взрыватель
кационных сооружений. Сущность кумулятивного эффекта
заключается в том, что при детонации заряда с кумулятивной выемкой
образуется поток уплотненных продуктов взрыва, направленных
вдоль оси выемки, который принято называть кумулятивной
струей.
300
Пробивное действие взрыва кумулятивных зарядов
обусловливается динамическим воздействием струи продуктов детонации
на преграду.
Пробивное действие может быть усилено в 10—12 раз
покрытием поверхности выемки металлической облицовкой.
Объясняется это тем, что пробивное действие кумулятивных зарядов с
облицовкой осуществляется не продуктами взрыва, а
металлической кумулятивной струей, образуемой материалом облицовки.
Скорость металлической кумулятивной струи может достигать
десятков километров в секунду. В точке встречи струи с броней
возникает высокое давление, намного превосходящее предел
текучести материала брони. Под действием струи материал течет,
в результате чего металлическая кумулятивная струя врезается
в броню и материал ее раздвигается, образуя сквозную
пробоину или выбоину в плите.
Для достижения максимального эффекта кумулятивные
заряды должны подрываться на определенном наивыгоднейшем
расстоянии от цели с таким расчетом, чтобы кумулятивная струя не
успевала потерять своей монолитности и подходила к
поверхности цели под желаемым углом. Сложная задача для данных
боевых частей — создание взрывателя, так как он предназначен для
определения оптимального расстояния между боевой частью и
целью, на котором должен произойти взрыв.
Кумулятивная струя способна пробивать преграды большой
толщины и вызывать разрушения, поражения живой силы и
пожары. Недостатком кумулятивных боевых частей является малая
область поражения, вследствие чего они должны оснащаться
весьма точной системой наведения.
Кумулятивные боевые части широко применяются для ПТУР
и могут быть использованы для тактических ракет.
Боевые части зажигательного действия
предназначены для воспламенения целей. Они состоят из большого
числа готовых зажигательных элементов, разлетающихся в
разные стороны по определенному закону, обеспечивающему
наибольшую площадь поражения.
Зажигательные элементы содержат горючие смеси, которые
при воспламенении развивают температуру до 2000° С. В качестве
горючей смеси используются сплавы магния, термитные смеси,
фосфор, а также отвержденные бензин или нефть. Иногда
зажигательные элементы дополнительно снаряжаются небольшим
количеством обычного взрывчатого вещества с целью
разбрасывания горящей смеси на определенной площади.
Взрывательиое устройство может быть рассчитано на
проникновение зажигательных элементов внутрь цели, подобно
некоторым типам фугасных боевых частей, или на срабатывание их при
соприкосновении с поверхностью цели.
В армии США разработаны химические боевые части,
которые снаряжаются зарином или V-газом, и предназначены для
301
поражения живой силы. Такие боевые части имеются у ракет
«Онсст Джок» и «Сержант». Боевые части снаряжаются боевыми
элементами сферической формы, которые содержат около 0,5 кг
отравляющего вещества. Так, в боевой части ракеты «Онест
Джон» 364 элемента. Боевая часть вскрывается на высоте около
3 км, и элементы разбрасываются на площади около 1 кв. км.
Элементы срабатывают при ударе о поверхность земли и
поражают живую силу каплями и парами отравляющего вещества.
Однако, по мнению зарубежных специалистов, рассмотренные
типы боевых зарядов создают сравнительно небольшую зону
поражения. Наиболее действенным, по их мнению, средством
поражения наземных целей являются боевые части ракег с ядерными
зарядами.
12.3. ОБЩИЕ ПРИНЦИПЫ УСТРОЙСТВА
ЯДЕРНЫХ БОЕВЫХ ЧАСТЕЙ РАКЕТ
Действие ядерных боевых частей основано на использовании
внутриядерной энергии, освобождающейся при цепной реакции
деления тяжелых ядер (ядерное оружие) или термоядерной
реакции синтеза легких ядер (водородное или термоядерное оружие).
Различают три типа ядерных зарядов:
— заряды, вся энергия взрыва которых обусловлена цепной
реакцией деления ядер U-235, Pu-239 или U-233;
— заряды, энергия взрыва которых в основном (до 80—90°/о)
обусловлена термоядерной реакцией в дейгериде лития 3Li6iD2;
— заряды, энергия взрыва которых освобождается в
результате последовательного развития трех ядерных реакций: деления
ядер U-235, Pu-239 или U-233 (первая ступень); синтеза легких
ядер термоядерного заряда (вторая ступень); деления ядер U-23S
(третья ступень).
Основная доля энергии освобождается в результате деления
ядер U-238 нейтронами, выделяющимися при термоядерной
реакции синтеза. Энергия этих нейтронов около 14 Мэв, т. е.
значительно превышает пороговую энергию деления ядер U-238.
Использование в качестве делящегося вещества наиболее
распространенного изотопа U-238—важная особенность данного вида
оружия. Применение U-238 позволяет значительно увеличить
мощность ядерного взрыва и тем самым повысить боевую
эффективность ядерного оружия.
Рассмотрим более подробно устройство ядерных боевых
частей, использующих энергию деления тяжелых ядер (U-235 или
Pu-239).
Ядерные заряды. Основными элементами ядерного
боевого заряда, основанного на реакции деления, являются:
делящееся вещество (собственно ядерный заряд), отражатель нейтро-
302
нов, заряд обычного взрывчатого вещества и искусственный
источник нейтронов.
Ядерные заряды изготовляются из материалов, которые
способны делиться под воздействием нейтронов любых энергий.
Такими материалами являются U-235, U-233 и Pu-239. Заряд
ядерного горючего до момента взрыва должен находиться в подкри-
тическом состоянии.
Критичность заряда определяется коэффициентом
размножения нейтронов k, под которым понимается среднее значение
отношения числа нейтронов, производящих деление в одном
поколении, к числу нейтронов, производящих деление в предыдущем
поколении.
При k = 1 каждому нейтрону, производящему деление,
соответствует выход одного вторичного нейтрона, производящего
повое деление.
При этом реакции протекают с постоянной скоростью без
лавинообразного нарастания числа делений. Соответствующая
система называется критической.
Таким образом, считается, что система находится в
критическом состоянии в том случае, если в ней число нейтронов,
образующихся в результате деления, в точности уравновешивается
числом нейтронов, теряемых за счет утечки и поглощения. Масса
вещества, соответствующая этому состоянию системы,
называется критической.
При k < 1 развитие цепной реакции невозможно. Будучи
начата, она быстро затухает. Такая система носит название нодкри-
тической. Нахождение заряда делящегося вещества в ядерном
боеприпасе в подкритическом состоянии в процессе его
эксплуатации делает его безопасным, т. е. исключает возможность
ядерного взрыва при случайном попадании в него нейтронов.
Для вызова ядерного взрыва необходимо быстро перевести
заряд делящегося вещества из подкритического состояния в
надкритическое (k>\).
В такой системе число нейтронов, производящих деление,
лавинообразно нарастает в ходе ядерной реакции, т. е. происходит
взрыв.
Существуют различные методы перевода заряда делящегося
вещества из одного состояния в другое.
Надкритическую массу можно получить, если быстро
соединить два или несколько кусков ядерного горючего, масса
каждого из которых меньше критической (рис. 12.9, й). Это можно
сделать взрывом обычного взрывчатого вещества, при котором
один кусок делящегося материала, имеющий массу меньшую, чем
критическая, соединяется с другим таким же куском,
закрепленным в противоположном закрытом конце устройства.
Перевод в надкритическое состояние ядерного заряда
возможен также, если тонкую сферическую оболочку из делящегося
материала, цепная реакция деления в которой невозможна из-за
303
большой поверхности, а следовательно, и большой утечки
нейтронов, обжать взрывом заряда обычного взрывчатого вещества до
размеров шара с надкритической массой (поверхность при этом
резко уменьшается). Кроме того, под действием продуктов
детонации плотность делящегося вещества заметно возрастает. Этот
принцип называется имплозией — взрывом, направленным внутрь
(рис. 12.9,6).
Перевод ядерного заряда из подкрнтнческого в
надкритическое состояние необходимо производить как можно быстрее, иначе
реакция может начаться уже на границе критической области и
Рис. 12.9. Возможные конструкции ядерного боевого
заряда:
а — с получением надкритичности заряда сближением кусков
ядерного вещества; б — с получением надкритичности
увеличением плотности ядерного вещества; / — ле'.онатор; 2 — заряд
взрывчатого вещества: 3—заряд делящегося вещества; 4 —
источник нейтронов; о — отражатель нейтронов
взрыв охватит только небольшую часть заряда. Следовательно,
от скорости сближения отдельных частей в значительной степени
зависит полнота протекания реакции и, в конечном счете,
мощность взрыва.
При разработке ядерных зарядов стремятся созвать такую
конструкцию, которая обеспечивает наибольший коэффициент
использования делящегося вещества. С этой целью в ядерных
зарядах принимают все меры, позволяющие снизить величину
критической массы.
Кришческая масса зависит от вида делящегося вещества; так.
для Ри-239 она при прочих равных условиях значительно меньше,
чем для U-235.
Критическая масса может быть значительно уменьшена, если
заряд окружить оболочкой, способной возвращать (отражать)
нейтроны в зону реакции, т. е. уменьшать их утечку. Для этих
целен в ядерных зарядах имеется отражатель нейтронов. 1Ь
рис. 12.10 видно, что при достаточно толстом отражателе из
природного урана или бериллия (~ 5 см) критическая масса может
быть уменьшена в два раза и более.
На величину критической массы влияет и форма заряда
делящегося вещества. Наименьшая утечка нейтронов из системы пао-
304
Fe
людается у сферических зарядов. Поэтому зарядам делящегося
вещества придают сферическую форму.
Критическая масса может быть уменьшена за счет увеличения
плотности делящегося вещества. Известно, что критическая масса
обратно пропорциональна квадрату плотности делящегося
вещества. Если увеличить плотность в два раза, то критическая
масса уменьшится в четыре раза.
Однако для существенного увеличения плотности металлов
(делящихся веществ) требуются очень высокие давления (в
несколько миллионов атмосфер).
В имплозивной схеме
используются все основные
способы снижения величины
критической массы, в том числе и
заметное увеличение
плотности делящегося вещества,
поэтому данная схема наиболее
эффективна и экономична.
Каким образом в момент
обжатия делящегося вещества
или соединения его частей
начинается цепная реакция? Для
первого деления, которое
положило бы начало цепной
реакции, нужен хотя бы один
нейтрон.
Рассчитывать на
своевременное начало цепной реакции
при спонтанном делении ядер нельзя, так как это случается
сравнительно редко. Нейтронов в космических лучах тоже мало: через
площадку в 1 кв. см за 1 сек проходит в среднем около шести
нейтронов. Поэтому для обеспечения безотказности действия
ядерного заряда и ускорения развития цепной ядерной реакции,
а следовательно, для повышения коэффициента использования
горючего в ядерных боеприпасах применяют искусственные
источники нейтронов. Они включаются в момент соединения частей
заряда (в момент образования сверхкритической массы).
Для решения этой задачи используются малогабаритные
импульсные источники нейтронов. Они основаны на использовании
реакции между дейтерием и тритием
50
§ w
* fo
о: 30
Eg 70
g.*
* 10
0
\
- V^
_
'
-
*
2 U 6 8 10 1Z
Толщина отражателя , см
Рис. 12.10. Влияние толщины
отражателя из железа, урана и бериллия на
величину критической массы
сферического заряда (93,5%U-235 + 6,5% U-238)
jD'+J^oni + ijHe'.
(12.3)
Такой источник нейтронов состоит из ионного источника,
трубки, наполненной газообразным дейтерием, и мишени.
В источнике образуются ионы дейтерия, которые через
выводной канал попадают в ускоряющий промежуток. Здесь под
действием электрического поля происходит ускорение ионов дейте-
ЗОо
рия. Ускоренные ионы попа тают на мишень, пе и происходит
реакция между дейгерием и тритием с испусканием нейтронов.
Так как тритий — газ, то мишень представляет собой титановую
или циркониевую пластинку, насыщенную этим газом.
Такие источники нейтронов работают в импульсном режиме
с продолжительностью импульса 1—2 мксек и выходом 104—105
нейтронов в импульсе.
В термоядерных зарядах используется энергия,
выделяющаяся при синтезе легких ядер. Необходимым условием
осуществления реакции синтеза легких ядер является наличие
сверхвысоких температур.
Для получения высоких температур в термоядерных
боеприпасах используется энергия деления тяжелых ядер. Температура
и давление в зоне взрыва ядерного заряда оказываются вполне-
достаточными для протекания реакции синтеза. Таким образом,
с созданием ядерных зарядов впервые появилась возможность
инициирования искусственных термоядерных реакций путем
поджога термоядерной «горючей смеси» ядерным запалом (или
детонатором).
Взрыв ядерного детонатора продолжается всего несколько
микросекунд, поэтому в качестве искусственных взрывных
термоядерных реакций должны быть выбраны такие, которые
протекают с высокой скоростью при температуре в несколько десятков
миллионов градусов.
Изучение термоядерных реакций синтеза показало, что есть
лишь одна реакция, удовлетворяющая этому требованию,— это
реакция между дейтерием и тритием.
Поскольку изотопы водорода являются обязательными
составными частями термоядерного горючего, заряды, в которых
осуществляется инициирование реакции синтеза ядерным
детонатором, получили название водородных.
Однако дейтериево-тритиевая смесь не удовлетворяет
конструкционным и эксплуатационным требованиям к термоядерному
горючему. Для создания сравнительно компактных термоядерных
зарядов и получения высокой концентрации ядер необходимо
использовать п качестве термоядерного горючего конденсированные
системы (жидкие или твердые). Так, плотность жидкого водорода
равняется 70 кг/м3, т. е. почти в 800 раз выше плотности газа при
атмосферном давлении и комнатной температуре. Однако
использование сильно сжатого или жидкого водорода сопряжено,
естественно, с рядом дополнительных конструктивных
трудностей, например с необходимостью разрушать до взрыва стенки
системы, содержащей жидкий или сжатый водород.
Производство лития не представляет большой трудности: в
земной коре его содержится почти столько же, сколько мед"
(около 0,0065% по массе).
Образование нейтронов при взрыве ядерного детонатора
позволяет осуществить реакцию
306
зУ + оЯ'-ччЦз + аНе*, (12.4)
приводящую к образованию трития, который затем может
эффективно взаимодействовать с дейтерием:
.П' + ^ — ой' + гНе*. (12.5)
Образующиеся в этой реакции нейтроны имеют энергию около
14 Мэв. С началом реакции дейтерия с тритием температура в
зоне реакции резко возрастает (до 300 млн. град.), в результате
чего оказываются возможными и другие реакции, например
непосредственное взаимодействие ядер лития и дейтерия:
' sLie + iH2 —^Не*. (12.6)
Боевые части с термоядерным зарядом представляют собой
ядерный заряд, заключенный в объем, вокруг которого помещен
термоядерный заряд в виде дейтерида лития, заключенного в
специальный корпус.
Для увеличения мощности взрыва термоядерные боеприпасы
могут иметь оболочку из U-238, который делится под
воздействием быстрых нейтронов, образующихся в некоторых реакциях
синтеза.
Искусственная термоядерная реакция в боеприпасах
сопровождается колоссальным выделением энергии. Водородные
боеприпасы могут быть эквивалентны десяткам миллионов тонн
тротила и более.
В современных условиях одними из требований к боевым
частям тактических и стратегических ракет являются высокая
надежность действия и малая уязвимость в условиях
противоракетной обороны противника. Выполнение этих требований
особенно важно для ракет с ядерными и термоядерными боевыми
частями.
Стойкость ядерных боевых частей к поражающему действию
противоракеты повышается упрочнением корпуса, маневром
боевой части, постановкой специальных экранов, ослабляющих
действие взрыва, дублированием элементов взрывателыюго
устройства, созданием ложных целей и другими способами.
Уменьшение вероятности поражения противоракетами, как
считают за рубежом, может быть достигнуто применением
разделяющихся боевых частей.
В США разрабатываются два типа разделяющихся боевых
частей: рассеивающего, или кассетного, типа и разделяющиеся
(многозарядные) боевые части.
Боевые части кассетного типа оснащаются несколькими
ядерными неуправляемыми боеголовками, которые па нисходящей
ветви траектории отделяются от головной части и продолжают
Полет к цели по разным траекториям. Такие боевые части
предназначены для поражения одной крупноразмерной цели.
307
Разделяющиеся (многозарядные) боевые части снаряжаются
несколькими боеголовками, имеющими независимое наведение на
цель. Такая головная часть способна поразить не одну, а
несколько целей или способна нанести многократный удар по от.ной
цели, последовательно направляя на нее боеголовки.
Головная часть такого тина, помимо боеголовки с ядерным
зарядом, оснащается системой управления и двигательной
установкой, а также средствами преодоления ПРО.
ЛИТЕРАТУРА
1 Л л е м а с о в В. Е. и др. Теория ракетных двигателей. М.,
«Машиностроение», 1969.
2. Артиллерия и ракеты. Под редакцией Казакова К. П. М., Воениздаг, 1968.
3. Боднср В. Д., Козлов М. С. Стабилизация летательных аппаратов и
автопилоты. М., Оборонно, 1961.
4. Болгарски и Л. В., Щ у к и н В. К. Рабочие процессы в жндкоетно-реак-
тивных двигателях. М., Оборонно, 1953.
5. Браун бе к В. Основы ядерной физики. М., Лтомиздат, 1962.
6. Васильев А. П., Кудрявцев В. М. и др. Основы теории и расчета
жидкостных ракетных твнгателей. М., «Высшая школа», 1967.
7. Вермншев Ю. X. Основы управления ракетами. М., Воениздат, 1968.
8. Волков Е. Б. Жидкостные ракетные двигатели. М., Воениздат, 1970.
9. Дмитревский А. Л., Кошевой В. П. Основы теории полета. М.,
Воениздат, 1964.
10. Д м и т р с в с к и й А. А., Казаков ц с в В. П. и др. Движение ракет. М.,
Воениздат, 1968.
11. Добровольский М. В. Жидкостные ракетные двигатели. М.,
«Машиностроение», 1968.
12. Д обр о ле н с к и н Ю. П и др. Автоматика управляемых снарядов. М.,
Оборонгиз, 1963.
13. Доу Р. Б. Основы теории современных снарядов. М, «Наука», 1964.
14. Действие ядерного оружия. М., Воениздат, 1963.
15. Евдокимов Б. И. Противотанковое ракетное оружие. М., Воениздат, 1964.
16. Жаков А. М., Пигулевский Ф. А. Управление баллистическими
ракетами. М., Воениздат, 1965.
17. Кантор А. В. Аппаратура и методы измерения при испытаниях ракет. М.,
Оборонгиз, 1963.
18. Каргашев П. В. Боевые неуправляемые ракеты. М., Воениздат, 1968.
19. Кочетков В. Т. и др. Теория систем телеуправления и самонаведения
ракет. М., «Наука», 1964.
20. Крысенко Г. Д. Управление ракетными снарядами. М., Воениздат, I960.
21. Куров В. Д., Должаиский Ю. М. Основы проектирования пороховых
ракетных снарядов. М., Оборонно, 1961.
22. Кур котки н В. И., Стерлигов В. Л. Самонаведение ракет. М.,
Воениздат, 1963.
23. Конструкция управляемых баллистических ракет. Под редакцией Снню-
кова А. М. и Морозова Н. И. М., Воениздат, 1969.
24. Конструирование управляемых снарядов. Под редакцией Пакета А. Е. и
Рамсо С. М. М.. Воениздаг, 1963.
25. Космонавтика. Маленькая энциклопедия. М., «Советская энциклопедия», 1970.
26. Махин В. А. и др. Динамика жидкостных ракетных двигателей. М.,
«Машиностроение», 1969.
27. Мелькумоп Т. М. и тр. Ракетные двигатели. М., «Машиностроение», 1968.
28 Михайлов В. А., Пауменко И. А. Ядерная физика и ядерное оружие.
М., Воениздат, 1966.
3GQ
29. Морозов П. В. Ворьба с возтушно-космичеекнми целями. М., Военичт>т
1967. " дат-
30. Нейман Л1. Б. Лгомиая энергия. Нзд-по АН СССР, 1961.
31. Нелюбим Л. Л. Иллюстрированный военно-технический словарь. М., Воен
издэт, 1968.
32. Орлов Б. В.. Л1 а з и н г Г. Ю. Термодинамические н баллистические основы
проектирования ракетных двигателей на твердом топливе. М.,
«Машиностроение», 1964.
33. Патриксйцев М. В. Пуск управляемых ракет. М., Воениздат, 1963.
34. Переезда С. А. Зенитное управляемое ракетное ор\жие. М.. Военизлат
1968. " ' '
35. Половко А. М. Основы теории надежности. М., «Наука», 1964.
36. Портативные генераторы нейтронов в ядерной физике. М., Госаюмнзтат
1962. ' "
37. Проектирование и испытание баллистических ракет. Под редакцией Варбо-
ломеева В. II. и Копытова М И. М., Военизлат, 1970.
38. Пронин Л. Н. Баллистические ракеты. М., Воениздат, 1969.
39. Рожков В. В. Ракетные двигатели твердого топлива. М., Воениздат, 1963
40. Серегин А. В. Жидкие ракетные топлива. М., Военизлат, 1962.
41. Силантьев А. И. Твердые ракетные топлива. М., Воениздат, 1963
42. С инярев I. В., Добровольский М. В. Жидкостные ракетные
двигатели. -М., Оборонгпз, 1957.
43. Солнышко в Ю. С. Оптимизация выбора вооружения. М., Воениздат, 1968.
44. Суриков В. Т. Боевое применение ракет. М_, Воениздат, 1965.
45. Типугин В. И., В ей цель В. А. Радиоуправление. М., «Советское радио»
1962.
46. Чу ев Ю. В. Крылатые ракеты. М., Восннздаг, 1964.
47. Шапиро Я. М., М а з и и г Г. Ю., Прудников Н. Е. Теория ракетного
двигателя на твердом топливе. М.. Воениздат, 1966.
48. Шапиро Я. М., Мазннг Г. Ю., Прудников Н. Е. Основы
проектирования ракет на твердом топливе. М., Воениздат, 1968.
49. Шевелю к М. II. Теоретические основы проектирования жидкостных
ракетных двигателей. М., Оборонгиз, I960.
50. Шибаев Н. Ф. Борьба с ракетами. М., Воениздат, 1965.
51. Я годки и В. В., Хлебников Г. А Гироскопические приборы
баллистических ракет. М., Воениздат, 1967.
52. Ядерное оружие. М., Вг-ениздат, 1965.
53. Из истории ракетной техники. Л1_, «Наука», 1964
54. Журналы: „Missiles and Rockets", .'.Flight", „Interavia" „Aviation Week",
1965—1969 it.
Стр.
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию ... ....
Глава 1. Боевое применение ракетного оружия различного назначения 5
1.1. Из истории развития ракетного оружия • —
1.2. Роль и место ракетного оружия в вооруженной борьбе . 6
1.3. Задачи, решаемые ракетами различного назначения 8
1.4. Требования, предъявляемые к ракетам различного назначения 13
Глава 2. Основания устройства ракет 16
2.1. Классификация ракетного оружия —
2.2. 11ринцнпиальные схемы ракет 19
2.3. О порядке проектирования ракет 21
2.4. Скорость полета ракет ... . 2о
Глава 3. Общие сведения о двш а тельных установках ракет 30
3.1 Основные конструктивные элементы. Классификация . . —
3.2. Параметры ракетных двигателей . . . 31
3.3. Двигательные установки на жидком топлипе . . 36
3.4. Двигательные установки па твердом топливе ... . . . 41
3.5. Двигательные установки на гибридном топливе . .... 44
3.6. Двигатели на нехимическом топливе ... 45
Глава 4. Устройство ракетных двигателей на жидком топливе ... 50
4.1. Камеры двигателей . . —
4.2. Топливные баки и система наддува баков 66
4.3. Системы подачи ... . . 73
4.4. Системы управления и регулирования . . 83
Глава 5. Ракетные двигатели на твердом топливе 90
5.1 Процесс горения твердого топлива —
5.2. Конструкция камеры двигателя 94
5.3. Топливные заряды и их конструктивные формы 98
5.4. Тепловая защита основных элементов камеры двигателя . . . 102
5.5. Запуск и выключение двигателей ... 104
5.6. Регулирование тяги по величине и направлению 106
Глава 6. Ракетные топлива 111
С.1. Основные понятия. Классификация —
6.2. Требования к ракетным тонливам . 112
6.3. Жидкие ракетные топлива . 114
6.4. Твердые ракетные топлива 121
6.5. Перспективные ракетые топлива . . 124
Глава 7. Некоторые вопросы теории полета ракет 126
7.1. Общие положения
7.2. Системы координат, применяемые при изучении движения ракет 131
7.3. Силы и моменты, действующие на ракету в полете .... 135
7.4. Уравнения движения ракеты ...... 149
7.5. Устойчивость и управляемость ракеты 158
7.6. Основы теории поправок 162
311
Г .1 а в а 8. Системы управления ракет ....
8.1. Назначение и классификация . . -
8.2. Элементы систем управления раке г . . .
8.3. Автономные системы управления ....
8.4. Системы телеуправления ... .
8.5. Системы самонаведения . "
Глава 9. Боевые ракеты зарубежных стран . ...
9.1. Ракегы тактического назначения
9.2. Ракеты стратегического назначения .
9.3. Ракеты систем ПВО п ПРО
9.4. Ракеты противолодочной обороны (ПЛО)
9.5. Ракетное оружие во;лушного боя
Глава 10. Наземное оборудование ракетных комплексов
зарубежных стран . .
10.1. Состав наземного оборудопапня и требования,
предъявляемые к нему ....
10.2. Наземное оборудование ракетных комплексов тактического
назначения
10.3. Наземное оборудование ракетных комплексов ракет
стратегического назначения .... ....
10.4. Пусковые средства ракетных комплексов систем ПВО, ПРО
и ПВО кораблей
10.5. Пусковое оборудование ракет воздушного боя
Глава 11. Испытание ракет, ракетных двигателей, наземного
оборудования . .
1I.I. Испытание двигателей
11.2 Испытание ракет
II.3. Испытание наземного оборудования
Глава 12. Основы устройства боевых частей
12.1. Общие сведения об устройстве боевых частей ракет
12.2. Принципы устройства и действия различных боевых зарядов
12.3. Общие принципы устройства ядерных боевых частей ракет
Литература . . . .
Михаил Николаевич Алешков, Ипполит Иванович Жуков, Николай
Ванифатьевич Савин, Дмитрий Дмитриевич Кукушкин, Олег Павлович
Марков, Юрий Григорьевич Фомин
ФИЗИЧЕСКИЕ ОСНОВЫ РАКЕТНОГО ОРУЖИЯ
Редактор В. И. Перемышлеч
Обложка художника Афанасьева В. П.
Художественный редактор Прозоровская Р. И,
Технический редактор И. Я. Макарова
Корректор Г. С. Якимова
Г-1401С. Сдано в набор 10.1.Т1 г. Подписано в печать 26.5.72 г.
Формат бумаги 60Х901/,,. Печ. л. — 191,'.. Усл. печ. л. — 19,5. Уч.-нзд. л. — 19,823
Бумага типографская J\i 1. Тираж II 000 экз.
Изд. К 6/2417 Цена 1 р. 19 к. Зак. 622
Ордена Трутового Красного Знамени
Военное издательство Министерства обороны СССР
103160, Москва, К-160
2-й типография Воениздата
Ленинград, Д-бо, Дворцовая пл,, 10
Стр.
174
175
184
190
203
209
220
226
237
239
215
217
255
262
267
270
275
288
i91
297
302
309