/




























































































































































































































































































































































































Author: Кривошапко С.Н.
Tags: строительство инженерных сооружений теоретические основы строительства строительство строительная механика
ISBN: 978-5-06-005754-6
Year: 2008




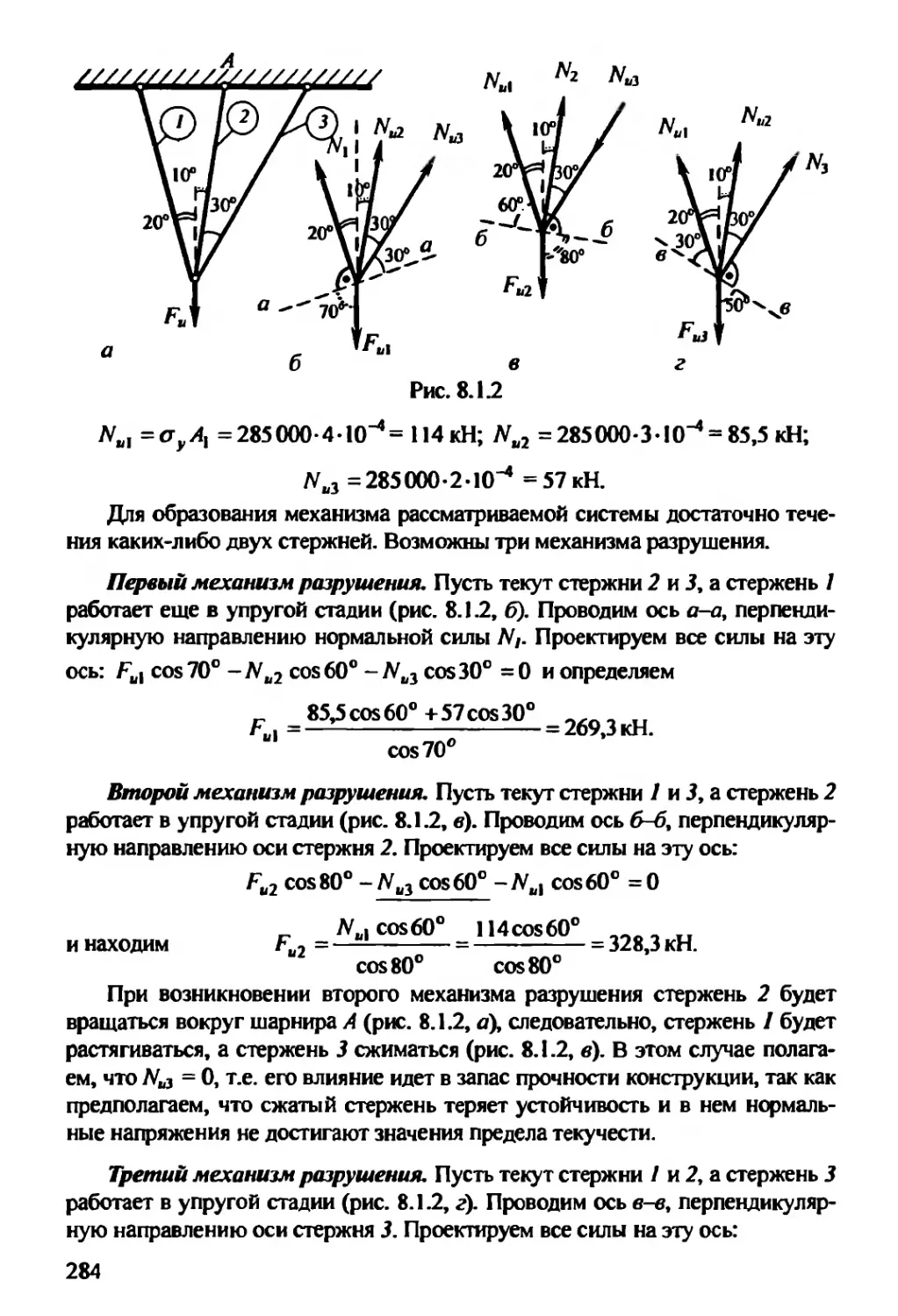
Text
____ _ I
\\я высших ИМДУ
И0Ы!Ы\3\ВСД]НПП
Ki
C.H. Кривошапко u‘ _t
Строительная механика: Я
ЛЕКЦИИ, СЕМИНАРЫ, J6
РАСЧЕТНО-ГРАФИЧЕСКИЕ РАБОТЫ
С.Н. Кривошапко
Строительная механика:
лекции, семинары,
расчетно-графические работы
Допущено
Министерством образования и науки
Российской Федерации
в качестве учебного пособия
для студентов высших учебных заведений,
обучающихся по направлениям подготовки
и специальностям в области техники
и технологии
Москва «Высшая школа» 2008
УДК 624.0
ББК 38.112
К 82
Рецензенты:
кафедра сопротивления материалов МГТУ «МАМИ» (зав. кафедрой канд. техн.
наук, проф. НА. Крамской)-,
С.И. Трушин (д-ртехн. наук, проф. кафедры строительной механики МГСУ)
Кривошапко С.Н.
К 82 Строительная механика: лекции, семинары, расчетно-гра-
фические работы: Учеб. пособие/С.Н. Кривошапко. — М.:
Высш, шк., 2008. — 391 с.: ил.
ISBN 978-5-06-005754-6
В учебном пособии, состоящем из трех частей, отражены основные вопро-
сы курса строительной механики. Первая част ь содержит 36 лекций по статике,
динамике и устойчивости стержневых систем. Изложение материалов одной
лекции охватывает два академических часа.
Во второй части материал, изложенный в лекциях, иллюстрируется кон-
кретными примерами. Традиционно этот материал рассматривается и обсужда-
ется на семинарах и практических занятиях.
Третья часть содержит 15 расчетно-графических и курсовых работ, которые
студенты должны выполнить самостоятельно, следуя типовым решениям,
приведенным во второй части учебного пособия.
Для студентов и преподавателей высших технических учебных заведений, а
также для слушателей факультетов повышения квалификации, преподавателей
технических вузов, проектировщиков и инженеров.
УДК 624.0
ББК 38.112
ISBN 978-5-06-005754-6 © ОАО «Издательство «Высшая школа», 2008
Оригинал-макет данного издания является собственностью издательства
«Высшая школа», и его репродуцирование (воспроизведение) любым способом без
согласия издательства запрещается.
ПРЕДИСЛОВИЕ
Материалы 36 лекций охватывают основы курса строительной механи-
ки, читаемого в технических вузах.
Такие классические темы, как «Статически определимые балки», «Пло-
ские статически определимые фермы», «Трехшарнирные арки», «Определе-
ние перемещений в упругих системах», «Расчет статически неопределимых
систем методом сил», «Расчет статически неопределимых систем методом
перемещений», «Основы динамики сооружений», изложены подробно. Ос-
тальные разделы знакомят читателя с основами расчета стержневых систем
на устойчивость, дают понятие о неупругом деформировании и расчете кон-
струкций на упругом основании.
В некоторых вузах ряд разделов, включенных в книгу, составляет только
часть содержания самостоятельных дисциплин «Динамика сооружений»,
«Устойчивость упругих систем», «Теория пластичности». Эти дисциплины
охватывают более широкий круг вопросов, чем предложенный в данном
учебном пособии.
Для изложения материалов одной лекции преподавателю потребуется
два академических часа. Практические навыки в решении конкретных задач
строительной механики читатели могут приобрести, изучая материалы вто-
рой части книги «Практические занятия по темам лекций» этой же книги. В
формулировках большинства задач и курсовых работ используется Между-
народная система единиц (СИ).
Третья часть книги содержит 15 расчетно-графических и курсовых ра-
бот, выполнение которых позволит проверить степень усвоения студентами
материалов лекций и семинаров.
Данное учебное пособие не заменяет собой учебник по строительной
механике, а только дополняет его.
Книга написана для студентов и преподавателей высших технических
учебных заведений. Она также может служить пособием для проектировщи-
ков и инженеров, изучающих и использующих в практической работе мето-
ды строительной механики.
Материалы книги можно использовать для обсуждения на факультетах
повышения квалификации преподавательского состава технических вузов.
Часть 1. Тексты лекций
Лекция 1
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
В первых двух лекциях будет рассмотрена статика абсолютно твердых
тел. Статика является разделом курса теоретической механики, в котором
изучают способы приведения системы сил к простейшему виду и условия
равновесия материальных тел. Под равновесием понимают состояние покоя
по отношению к другим материальным телам или движение по инерции, т.е.
равномерное и прямолинейное движение.
Материалы, излагаемые в первых двух лекциях, обычно дают в курсе
«Теоретической механики», но этот раздел тесно связан с курсом «Строи-
тельной механики» и будет нелишним его кратко повторить.
К числу основных понятий статики относится сила. Действие силы на
тело зависит от ее абсолютной величины, направления и точки приложения,
т.е. сила F - векторная величина. Единицы измерения силы - ньютон (Н),
килоньютон (кН) и килограмм (кг). Совокупность действующих на тело сил
называется системой сил.
Аксиомы статики
Аксиома 1. Твердое тело под действием двух сил находится в равнове-
сии тогда и только тогда, когда эти силы равны по величине и направлены
вдоль одной прямой в противоположные стороны.
Аксиома 2. Результат действия системы сил на абсолютно твердое тело
не изменится, если к ней прибавить уравновешенную систему сил.
Следствие из первых двух аксиом: точку приложения силы можно пере-
носить вдоль линии действия силы.
Аксиома 3. Две силы, приложенные к телу в одной точке, можно заме-
нить одной равнодействующей силой, приложенной в той же точке и изо-
бражаемой диагональю параллелограмма, построенного на этих силах как на
сторонах (рис. 1.1).
Аксиома 4. Jlpa тела действуют друг на друга с силами, равными по ве-
личине и противоположными по направлению (рис. 1.2).
Эти две силы не образуют уравновешенной системы сил, так как они
приложены к разным телам. При составлении уравнений равновесия необхо-
димо учитывать только внешние силы, действующие на конструкцию.
Fi
С <У 3> ,r I Fi,
—
Рис. 1.1
F - опорная реакция p
Рис. 1.2
4
Связи и их реакции
Все то, что ограничивает перемещения данного тела в пространстве, бу-
дем называть связью. Сила, с которой данная связь действует на тело, пре-
пятствуя тем или иным его перемещениям, называется силой реакции, или
реакцией связи. Направлена реакция связи в сторону, противоположную той,
куда связь не дает перемещаться телу.
Рассмотрим основные виды связей.
1. Гладкая поверхность или опора. Если пренебречь трением, то такая
поверхность не дает телу перемещаться по направлению общей нормали к
поверхностям соприкасающихся тел в точке их касания (рис. 1.3, а). Реакция
R опоры направлена по общей нормали к поверхностям соприкасающихся
тел и приложена в точке их касания. Когда одна из соприкасающихся по-
верхностей является точкой, то реакция направлена по нормали к другой
поверхности (рис. 1.3, б).
2. Нить не дает телу удаляться от точки подвеса нити. Реакция R натя-
нутой нити направлена вдоль нити к точке ее подвеса (рис. 1.4).
3. Шарнирно неподвижная опора (подшипник).
Тело, опирающееся на землю с помощью этой опоры,
может только поворачиваться вокруг оси шарнира (в
плоскости чертежа), поэтому реакция связи R может
иметь любое направление в плоскости, перпендику-
лярной оси шарнира, причем равнодействующая R
обычно раскладывается на две составляющие опорной
реакции Rs и Ry (рис. 1.5).
Рис. 1.5
4. Стержень, собственным весом которого пре-
небрегают, нагруженный на концах, работает только на
растяжение или сжатие. Реакция R стержня будет на-
правлена вдоль оси стержня (рис. 1.6).
5. Шарнирноподвижная опора (подвижный шар-
нир). Реакция подвижного шарнира R направлена пер-
пендикулярно плоскости, на которую опираются катк
подшипника (рис. 1.7).
Рис. 1.6
6. Жесткая заделка (защемление). Эта связь исключает поступательное
движение и поворот опоры в плоскости хОу. Реакция заделки представляется
составляющими И и Н по осям координат и опорным моментом М(рис. 1.7).
5
Аксиома связей. Всякое несвободное
тело можно рассматривать как свобод-
ное, если отбросить связи и заменить их
действие силами реакций этих связей.
Знать реакции связей необходимо для
построения эпюр изгибающих момен-
тов, поперечных и нормальных сил кон-
струкции.
МЕТОДЫ ПРЕОБРАЗОВАНИЯ СИСТЕМ СИЛ
Проекции силы на ось и плоскость
Проекцией силы на ось называется скалярная величина, равная длине
отрезка, заключенного между проекциями начала и конца силы, и взятая со
к.
Рис. 1.8
знаком плюс, если направление силы совпадает с направлением оси.
Для сил. изображенных на рис. 1.8, полу-
чаем
Fx = F cos a; Rx - -R cosP = R cos <p
x т.е. проекция силы на ось равна произведе-
нию модуля силы на косинус угла между
направлением силы и положительным на-
правлением оси.
Если сила перпендикулярна оси, то ее проекция на ось равна нулю. Про-
екции силы на любые параллельные и одинаково направленные оси равны
друг другу.
Проекцией силы F на плоскость называется вектор Fiy, заключенный
между проекциями начала и конца силы F на эту плоскость (рис. 1.9). Таким
образом, в отличие от проекций силы на ось проекция силы на плоскость
есть величина векторная. По модулю
Ы = Гху =Mc°s<P
где <р - угол между направлением силы F и ее проекции Fxy.
Практически всегда приходится раскладывать силу F на составляющие
Fy и Fs: FX = F cos tpcosp;
Fy = Fcosipsinp; F: = F sirup
причем очевидно, что
F = ^FX +Fy +FZ ,
Если известны проекции силы на
оси координат, то вектор силы мож-
но построить, пользуясь правилом
параллелепи педа.
6
Равнодействующая сходящихся сил
Рис. 1.10
Сходящимися называются силы, линии действия которых пересекаются
в одной точке (рис. 1.10, а). Система сходящихся сил эквивалентна системе
сил, приложенных в одной точке.
Система сходящихся сил имеет равнодействующую R, равную геомет-
рической сумме (главному вектору) этих сил и приложенную в точке их пе-
ресечения (рис. 1.10, б):
r = fi+f2+...+f„.
Очевидна следующая теорема:
Проекция вектора суммы R на какую-нибудь ось равна алгебраической
сумме проекций слагаемых векторов F, на ту же ось.
Равновесие системы сходящихся сил
Для равновесия приложенной к телу системы сходящихся сил необхо-
димо и достаточно, чтобы равнодействующая этих сил была равна нулю:
R = 0.
Абсолютная величина равнодействующей системы сходящихся сил оп-
ределяется формулой R = <Jr^ +Ry+Ri, где Rx, Ry, Rz - значения проекций
равнодействующей на координатные оси х, у, z. Так как под корнем стоит
сумма положительных слагаемых, то R обратится в нуль только тогда, когда
одновременно Rx = Ry = Rz = 0, т.е. когда
EFlx=0; EF„=0; Е^ =0, (1.1)
где Fty, F,z — проекции сходящихся сил на соответствующие оси коорди-
нат. Равенства (1.1) выражают необходимые условия равновесия свободного
тела, находящегося под действием сходящихся сил.
Приведем без доказательств теорему о трех силах, которая может пона-
добиться при рассмотрении некоторых задач строительной механики.
Если свободное твердое тело находится в равновесии под действием
трех непараллельных сил, лежащих в одной плоскости, то линии действия
этих сил пересекаются в одной точке.
Обратное утверждение не имеет смысла, следовательно, теорема о трех
силах выражает необходимое, но не достаточное условие равновесия сво-
бодного тела под действием трех сил.
7
Лекция 2
ВРАЩАТЕЛЬНОЕ ДЕЙСТВИЕ СИЛ
Под действием сипы твердое тело может наряду с поступательным пе-
ремещением совершать вращение вокруг какого-нибудь центра. Вращатель-
ный эффект силы характеризуется ее моментом.
Моментом силы F относительно центра О называется величина, равная
произведению модуля силы на длину плеча, т.е.
MO=±FA (рис. 2.1).
Момент силы измеряется в Нм или в кгм. Момент силы име-
ет следующие свойства:
1. Момент силы не изменяется при переносе точки приложе-
ния силы вдоль линии ее действия (см. рис. 2.1).
2. Момент силы относительно центра О равен нулю тогда.
Рис. 2.1 когда сила равна нулю (F = 0) или когда линия действия силы
проходит через центр O(h = 0).
Момент равнодействующей плоской системы сходящихся сил относи-
тельно любого центра равен алгебраической сумме моментов слагаемых сил
относительно того же центра
Пара сил
Парой сил называется система двух равных по модулю, параллельных,
но противоположно направленных сил, действующих на твердое тело. Пару
сил нельзя заменить одной силой, эквивалентной паре. Пара сил сообщает
телу вращательное движение. Кратчайшее расстояние d между линиями дей-
ствия сил, образующих пару, называется плечом пары (рис. 2.2).
Величина т, равная произведению модуля одной из сил F
пары на ее плечо tZ, называется моментом пары, т.е.
т = ±Fd.
Единица измерения момента пары сил - Н-м или кгм.
Повторим некоторые теоремы, выражающие свойства пары
сил:
Рис 2 2 1пары сил не изменится, если эту пару сил пере-
местить в другое положение в плоскости ее действия.
2. Действие пары сил на тело не изменится, если плоскость пары сил
переносить параллельно самой себе.
3. Действие пары на тело не изменится, если изменить силу F и плечо d
пары сил, но так, чтобы момент пары т остался неизменным.
Пару сил часто изображают круговой стрелкой, указывающей направле-
ние поворота, не изображая сами силы (см. рис. 2.2). Рядом со стрелкой ука-
зывают значение момента пары сил т.
Две пары сил, лежащие в параллельных плоскостях и имеющие одина-
ковые моменты, называются эквивалентными.
8
Сложение пар сил, лежащих в одной или параллельных плоскостях
Для оценки суммарного вращательного эффекта всех пар сил, перене-
сенных в единую плоскость их действия, достаточно алгебраически сложить
моменты этих пар:
m = ml + т2 + ...+тп = ^mlt
«=1
где т - алгебраический момент суммарной пары сил.
Момент силы относительно оси
Пусть имеется твердое тело, которое может вращаться вокруг оси z под
действием силы F, приложенной в точке А (рис. 2.3). Проведем через точку
А плоскость хОу, которая пересекает ось z в точке О. Разложим силу F на
составляющие F2 и F^, где Fx> - проекция силы F на плоскость хОу. Вращать
тело вокруг оси Oz может только состав-
ляющая Fxy.
Моментом силы относительно оси
называется алгебраический момент т
проекции этой силы на плоскость, пер-
пендикулярную оси, относительно точки
пересечения оси с этой плоскостью (см.
рис. 2.3), т.е.
Ш, = ±Fxyh
Рис. 2.3
Момент силы относительно оси равен нулю, если I) сила параллельна
оси; 2) сила пересекает ось.
СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ,
РАСПОЛОЖЕННЫХ В ОДНОЙ ПЛОСКОСТИ
Равнодействующая R двух действующих на твердое тело параллельных
сил, направленных в одну сторону, равна по модулю
сумме модулей слагаемых сил, им параллельна и на-
правлена в ту же сторону, причем линия действия
равнодействующей проходит между точками прило-
жения слагаемых сил на расстояниях от этих точек,
обратно пропорциональных силам.
Используя обозначения рис. 2.4, имеем
R = F, + F2; AB/F2 = BC/F}.
Равнодействующая двух действующих на твердое тело параллельных
сил, направленных в разные стороны, равна по модулю разности модулей
слагаемых сил, им параллельна и направлена в сторону большей силы. Ли-
ния действия равнодействующей проходит вне отрезка, соединяющего точки
приложения слагаемых сил, на расстояниях от этих точек, обратно пропор-
циональных силам.
9
Рис. 2.5
лись условия:
Используя обозначения рис. 2.5, имеем
при F2 > F, R = F2 - Fj; AB/F2 = BC/Ft.
УСЛОВИЯ РАВНОВЕСИЯ
ПЛОСКОЙ СИСТЕМЫ СИЛ
Для равновесия любой плоской системы сил необ-
ходимо и достаточно, чтобы одновременно выполня-
R = 0;A/o = 0, (2.1)
где R - равнодействующая всех сил; О - любая точка плоскости. Вытекаю-
щие из вышеприведенных двух равенств аналитические условия равновесия
можно получить в трех различных формах.
1. Основная форма уравнений равновесия. Условия (2.1) будут выполне-
ны, если
EFU =0, l.Fiy=G, ZA/o(Ff) = 0.
Для равновесия произвольной плоской системы сил необходимо и дос-
таточно, чтобы суммы проекций всех сил на координатные оси х, у и сумма
их моментов относительно любой точки О, лежащей в плоскости действия
сил, были равны нулю.
2. Вторая форма условий равновесия. Для равновесия произвольной пло-
ской системы сил необходимо и достаточно, чтобы суммы моментов всех
этих сил относительно любых двух точек Л и В и сумма их проекций на одну
ось, не перпендикулярную прямой АВ, были равны нулю:
ЪМА (F,) = 0, ЕЛ/Н (F,) = 0, EF„ = 0.
3. Третья форма условий равновесия. Цдя равновесия произвольной пло-
ской системы сил необходимо и достаточно, чтобы суммы моментов всех
этих сил относительно любых трех точек А, В и С, не лежащих на одной
прямой, были равны нулю:
ЕЛ/ДЕ,) = 0, SAf/j(Ff) = O, EA/C(F,) = O.
Пример 1. Определить опорные реакции бруса, нагруженного силой F и
закрепленного в точке А
Рис. 2.6
неподвижным шарниром и опирающегося на вы-
ступ В.
Решение. Применим основную форму уравне-
ний равновесия:
ЪМА = Fa - /?J(2a)2 +(2а)2 = 0,
т.е. ₽ = f/(2V2);
EF„ = И А- Я sin 45° =0, НА = F/4;
EFly = VA - F+ Fcos45° =0, VA = 3F/4.
10
Лекция 3
ОСНОВНЫЕ ПОНЯТИЯ СТРОИТЕЛЬНОЙ МЕХАНИКИ
Наука «Сопротивление материалов» занимается в основном изучением
прочности, устойчивости и жесткости преимущественно отдельных элемен-
тов сооружений.
Объектом изучения в строительной механике будет целое сооружение.
Задачи строительной механики состоят в разработке методов определения
усилий в сооружениях и их перемещений, а также в исследовании устойчи-
вости и жесткости сооружений.
Строительная механика широко использует методы теоретической ме-
ханики. Большую роль в решении современных проблем строительной ме-
ханики играют аналитические и численные методы, которые изучают в кур-
се высшей математики.
Для последнего времени характерно использование матричного исчис-
ления, итерационных методов. В строительной механике нашли применение
как аналитические, так и численные методы при решении конкретных задач.
А вот графические и графе - аналитические методы применяют все реже.
Основные элементы плоских сооружений: стержни и пластинки.
Стержнем называют прямолинейный элемент, у которого размеры по-
перечного сечения малы по сравнению с длиной. Арка - криволинейный
брус, закрепленный двумя концами. Балка представляет собой прямолиней-
ный брус, работающий на изгиб.
Пластинкой называют элемент, ограниченный двумя плоскостями, один
размер (толщина) которого мал по сравнению с двумя другими.
Оболочка - конструкция, ограниченная двумя криволинейными поверх-
ностями, расстояние между которыми мало по сравнению с другими разме-
рами. Другими словами, оболочка - это искривленная пластинка.
Под идеальным шарниром будем понимать узловое соединение стерж-
ней, в котором не возникает сил трения и усилия на стержни передаются
строго через центр шарнира.
Расчетной схемой называют идеализированную, упрощенную схему
действительного сооружения, в которой отражены его основные свойства.
Стержневым сооружением называют систему соединенных между со-
бой стержней, которая неподвижно прикреплена к земле и предназначена
для восприятия заданной нагрузки.
Строительная механика и сопротивление материалов используют одни и
те же гипотезы: I) об идеальной упругости тела; 2) о непрерывности строе-
ния материи; 3) об изотропности материала; 4) об однородности материала;
5) гипотезу Бернулли о плоских сечениях бруса при деформации; 6) о пло-
скостном законе распределения нормальных напряжений в брусе; 7) о неза-
висимости действия сил при малых деформациях; 8) о пропорциональности
напряжений и деформаций (закон Гука).
11
КИНЕМАТИЧЕСКИЙ АНАЛИЗ СООРУЖЕНИЙ
Сооружения должны быть геометрически неизменяемы, т.е. сохранять
геометрическую форму, заданную при возведении. Геометрически неизме-
няемые сооружения могут менять форму только в результате деформаций
стержней.
Степенью свободы системы называется число независимых геометриче-
ских перемещений, определяющих ее положение. Степень свободы W опре-
деляется по формуле Чебышева (1870):
W = 3D-2UJ-C0, (3.1)
где D - число дисков; III - число простых шарниров; Со - число опорных
стержней. Если W> 0 - система подвижна (рис. 3.1), если tV < 0 - система
может быть неизменяемой и неподвижной с лишними связями, если W = 0 -
система может быть неизменяемой и неподвижной с необходимым числом
связей (рис. 3.2). Формула (3.1) является необходимым, но не достаточным
условием. Она дополняется анализом геометрической структуры системы.
При кинематическом анализе сооружений используется ряд понятий:
1) плоская кинематическая цепь - подвижное соединение нескольких
дисков, которые перемещаются параллельно одной плоскости;
2) кинематическая пара - кинематическая цепь из двух дисков;
3) низшая кинематическая пара - кинематическая пара, относительное
движение обоих дисков которой является наиболее связанным, а
траектории всех точек - совершенно однообразными (рис. 3.3).
a)W = 2 6)D=\,UJ = 0; в) D = 2; Ill = \\ г) D ~ 3; 111 = 2;
t))D=l;ZZ/=O;Co = l; W=2 e) D = 3 ,Ш = 2 ,CQ = \ ; W = 4
Рис. 3.1
12
a)D = 1;Ш = О;Со = 3; б)П = 3;Ш = 3; в) D = 2; Ш = 1; Со = 4;
Ж=0 Co = 3;fF = O fF = O
Рис. 3.2
Изменяемость системы Г есть степень свободы уменьшенная на 3, т.е.
Г=^-3. (3.2)
В основе образования геометрически неизменяемых систем лежит шар-
нирный треугольник. Соединяя диски по правилу треугольника, можно по-
лучить сложные геометрически неизменяемые фигуры.
Простой шарнир Ползун
Рис. 3.3
В геометрически неизменяемой системе каждый следующий узел дол-
жен крепится к предыдущему двумя стержнями.
Мгновенно изменяемые системы имеют малую подвижность и непри-
годны в качестве сооружений (рис. 3.4).
При проектировании сооружений следует придерживаться следующих
правил:
а) при прикреплении нового узла двумя стержнями осевые линии стерж-
ней не должны располагаться на одной прямой, т.е. три шарнира не должны
находиться на одной прямой, как, например, на рис. 3.4, о;
б) стержни, соединяющие диски, не должны пересекаться в одной точке.
13
На рис. 3.4, б опорные стержни пересекаются в мгновенном центре враще-
ния О;
в) два диска можно соединить шарниром и стержнем, причем стержень
не должен пересекать шарнир, как это показано на рис. 3.4, в\
г) стержни, соединяющие диски, не должны быть параллельными. На
рис. 3.4, г три соединительных стержня параллельны между собой.
Перемещение мгновенного центра вращения (полюса) и его скорость
равны нулю.
РАСЧЕТ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ СООРУЖЕНИЙ
При расчете сооружений необходимо определить:
1. Реакции между дисками, в том числе и опорные реакции.
2. Внутренние усилия в любом сечении каждого диска (изгибающие мо-
менты, нормальные и поперечные силы, крутящие моменты).
3. Поперечные сечения всех дисков.
4. Деформации во всех точках сооружения.
По характеру расчета сооружения разделяются на статически определи-
мые и статически неопределимые.
Статически определимыми сооруже- у.___________________ S
ниями называют сооружения, в которых все Л д г/
внутренние усилия можно определить с по- /4 дг Ni) у
мощью уравнений статики. Осадки опор, ---—
размеры поперечных сечений, физические ^ = 3-2 21-4 = 0-
свойства материалов, температурные воз- _ дг ”= д- дг = /у = ?
действия в уравнения равновесия не входят 1 2 ’ 1 2
и поэтому на величину внутренних усилий Рис. 3.5
не влияют. При отсутствии внешней нагруз-
ки внутренние усилия в статически определимых сооружениях равны нулю.
Если этого нет, то система мгновенно изменяема (рис. 3.5).
Многопролетные статически определимые балки
Многопролетные статически определимые балки (рис. 3.6, а, в) пред-
ставляют собой систему простых балок. Для упрощения расчета многопро-
летные балки представляют в виде поэтажных схем (рис. 3.6, б, г).
Присоединенной балкой называют балку, которую можно удалить без
нарушения неизменяемости оставшейся части. Присоединенную систему
можно рассчитывать независимо от оставшейся части, причем опорные ре-
акции присоединенной балки будут служить внешними силами для остав-
шейся.
Однопролетные балки, составляющие многопролетную статически оп-
ределимую балку, могут быть сплошными или в виде ферм.
При проектировании многопролетных балок без защемленных концов
должны выполняться следующие правила:
14
1) в каждом пролете может быть установлено не более двух шарниров;
2) пролеты с двумя шарнирами должны чередоваться с пролетами без
шарниров;
3) пролеты с одним шарниром могут следовать один за другим, начиная
со второго пролета (см. рис. 3.6).
Лекция 4
УЧЕТ ПОДВИЖНОЙ СТАТИЧЕСКОЙ НАГРУЗКИ
Изучение подвижной нагрузки начнем с единичного груза Р = 1, который
медленно перемещается по сооружению без динамического воздействия,
сохраняя свое направление.
График, изображающий закон изменения какого-либо одного фактора
(изгибающего момента, поперечной силы, опорной реакции) для одного оп-
ределенного сечения в зависимости от положения единичного груза, кото-
рый без толчков и ускорений медленно движется по сооружению, называет-
ся линией влияния этого фактора.
Построим линию влияния опорной реакции RA балки, изображенной на
рис. 4.1, а. Запишем:
-а < х < 1 + Ь\ ЦМВ = RAl-P(l-x) = Q, откуда RA =(l-x)/l,
поэтому при х = 0 имеем RA = I, при х = 7 находим RA = 0; при х = -а опреде-
ляем Ra = (I + о)/7 и, наконец, при х = I + Ь определяем RA = -b/l. Строим ли-
нию влияния опорной реакции RA (рис. 4.1, б).
Аналогичные вычисления проводим для линии влияния опорной реак-
ции RB: £ МА = RBl-Рх = 0, откуда RB = х//(рис. 4.1, в).
Построим линию влияния изгибающего момента М} в сечении 1.
Пусть груз Р = 1 переместился влево от сечения 1. Отбросим левую
часть балки и рассмотрим оставшуюся правую часть: Mi = Rrfj - с), т.е. ли-
ния влияния Mi может быть получена из линии влияния опорной реакции RH
15
(рис 4.1, в) путем умножения ее на величину (/ - с). Таким образом, построе-
на линия влияния изгибающего момента Мх в сечении 1, когда единичный
труз Р = 1 перемещается по левой части балки ( -а < х < с).
Предположим теперь, что груз переместился вправо от сечения 1, тогда,
рассматривая только левую часть балки, имеем Мх = RAc. т.е. линия влияния
может быть получена из линии влияния опорной реакции RA (рис. 4.1, б)
путем умножения ее на величину с. Таким образом, построена линия влия-
ния изгибающего момента в сечении 1, когда единичный груз Р = 1 переме-
щается на участке с < х < I+Ь.
Построим линию влияния поперечной силы Qt в сечении 1. Пусть груз
находится слева от сечения 1, тогда из рассмотрения правой части находим:
Qi = ~Rb* т.е. линия влияния Qt есть линия влияния опорной реакции RB, взя-
16
тая с противоположным знаком. Если груз Р = 1 находится справа от сечения
1, тогда из рассмотрения левой части получаем: Qx = RAy что действительно
для правой части балки (рис. 4.1, д).
Эпюры определяют опасное сечение при заданной нагрузке. Линия
влияния определяет опасное положение нагрузки для данного сечения. Ли-
нии влияния можно строить тремя способами: статическим, кинематическим
и деформационным. В этой лекции рассмотрен только статический метод.
Линии влияния многопролетных статически определимых балок строят-
ся на основании линий влияния однопролетных балок (рис. 4.2).
| Линия влияния Rt
\Пиния влряния Rc
Присоединенная балка
Рис. 4.2. Линии влияния двухпролетной
статически определимой балки
ЗАГРУЗКА ЛИНИЙ ВЛИЯНИЯ
Действие вертикальных сосредоточенных сил
Пусть для однопролетной балки построена линия влияния изгибающего
момента в сечении 1 (рис. 4.3). Тогда для определения изгибающего момента
в сечении 1 от действия трех сосредоточенных сил необходимо записать:
Mt = + ГхУг + ГзУз-
В общем виде влияние вертикальных сосредоточенных сил можно
учесть с помощью формулы:
=Ё F.y,'
1
(4-1)
2-С. 11. Крмвошяпко
17
где st - может быть или изгибающим моментом, или поперечной силой, или
опорной реакцией; п - число действующих сосредоточенных сил.
Действие сплошной неравномерно распределенной нагрузки
Пусть на рис. 4.4, б изображена линия влияния какого-либо фактора.
Тогда dsk = qxdxyx, sk = jqxyxdx. (4.2)
ь
Если qx = const = q, то из формулы (4.2) получаем
sk =q\yxdx = qA(btc),
b
где A(b,c) - площадь участка линии влияния, вдоль которого распределена
нагрузка.
Действие сосредоточенного момента
Пусть требуется определить какое-либо усилие по его линии влияния.
если на балку действует только со-
средоточенный момент т. Заменим
сосредоточенный момент т парой
сил т = Fa, тогда по формуле (4.1) и
согласно рис. 4.5 имеем:
Si = Fyx - Fy2 = F(yx -y2) =
= Fa(yx -ут}1а = Fa tga = m tga.
Таким образом, усилие получается
как произведение момента т на тан-
генс угла наклона прямолинейного
участка линии влияния (при возрас-
тании ординат - знак плюс).
Рис. 4.5
18
Лекция 5
ЛИНИИ ВЛИЯНИЯ ПРИ УЗЛОВОМ ДЕЙСТВИИ НАГРУЗКИ
Пусть требуется построить линию влияния изгибающего момента в се-
чении к (рис. 5.1, о), если груз Р = I перемещается по балке I-2-3-4. Пусть
груз Р = 1 движется по балке 2-3, тогда
„ d-x „ х
Rx =---, R2=-i
1 d 2 d
но Rx и R2 действуют на балку 5-6, тогда согласно формуле (4.1) лекции 4
имеем
Мк = + Z?zy2 = РУ =У.
Учитывая, что >>) и у2- числа, получаем уравнение прямой линии на уча-
стке 2-3:
y = (d- x)y\/d+xy2/d=j(x).
Линия влияния поперечной силы Qk в сечении к показана на рис. 5.1, в.
Линия влияния R2
Линия влияния
Рис. 5.1
Линия влияния Мк
Линия влияния Qk
R, * ! i
2*
19
Рис. 5.2
При действии на сооружение узловой на-
грузки надо на обычную линию влияния сне-
сти узлы и между этими точками провести
прямые линии.
В дальнейшем понадобится следующая
теорема:
если система сил расположена на прямо-
линейном участке (рис. 5.2), то ее можно за-
менить равнодействующей, т.е.
s* = Fjy, + Fjyz + Fjy3 + ... + Fy, = Ryo,
где R - равнодействующая сил Fh
НЕВЫГОДНОЕ ЗАГРУЖЕНИЕ ЛИНИЙ ВЛИЯНИЯ
Пусть дана линия влияния какого-либо фактора (рис. 5.3), тогда на осно-
вании теоремы, приведенной выше, имеем
$к ~ *1У. + Л2у2 + &зУз - X yt.
i=l
(5.1)
Рис. 5.3
Предположим, что все силы сдви-
нулись вправо, тогда
5* + = Ri(yt + Ду,) +
+ R2(y2 + Ду2) + К3(у3 - Ду3). 1 '
Вычтем из выражения (5.2) значе-
ние фактора (5.1):
Д$А = К,Ду, + Я2Ду2 - Я3Ду3.(5.3)
Согласно рис. 5.3 имеем
Ду, = Дг tga„
где i =1, 2, 3. Подставляя Ду, в фор-
мулу (5.3), получаем
Д?А = Ax(^tga, + F2tga2 - F3tga3) -
= &x£/?,tga,. (5.4)
i I
Предположим, что на рис. 5.4 изо-
бражен трафик изменения 5*. Рассмотрим точку Sk
Если Дх>0, то получаем, что Sk уменьшается, т.е. < 0. Следователь-
но, формула (5.4) дает
Л
^Fjga, <0.
I I
(5.5)
20
Если же Ar < 0, то 5* тоже уменьшается
или AS* < 0, а из формулы (5.4) получаем
>0. (5.6)
и
Чтобы £ F, tga, меняла знак, необходимо,
г I
чтобы при сдвижке грузов менялись значения
R,. Это возможно, когда один из грузов нахо-
дится в вершине линии влияния. Этот груз на-
зывают критическим. Задачу решают методом
попыток, т.е. постепенно все грузы ставят на
Рис. 5.4
вершину линии влияния.
Рассмотрим треугольную линию влияния (рис. 5.5). Систему грузов F,
установим так, чтобы один из грузов был в вершине. Тогда
А/*' ~ Rnea Rnp + ^кр-
Пусть грузы переместились вправо, тогда на основании условия (5.5)
Рис. 5.5
^Jr»tgal + F^tga! > tga2, или
запишем:
^jretgoi - (Кпр + FKp)tga2 < 0, или
^neetga, (LF- F«B)tga2 < 0,
или F^^tga, + tga2) < EFtga2. (5.7)
Согласно рис. 5.5 имеем
tgai = Л/о, tga2 = h/b.
Подставим эти значения в формулу
(5-7):
RM(h/a+h/b)<hLF/b,
откуда находим
R^dZF/l. (5.8)
Рассмотрим сдвижку грузов влево,
тогда на основании формулы (5.6) по-
лучаем
(^лев + F'Kp)tga1 > (SF — /?лев — FKp)tga2,
или (Rm + ОДВД + tga2) > EF-tga2.
Окончательно из последнего выражения определяем
/?nce + FKp>lF(a//). (5.9)
В общем случае задача решается в следующем порядке:
1) по всей длине / находят EF; 2) проверяют выполнение неравенств
(5.8) и (5.9); 3) если эти неравенства не выполняются, то берут за F^, другую
силу F, и одновременно проверяют, не меняется ли EF.
21
Лекция 6
ПЛОСКИЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ ФЕРМЫ
Фермой называют стержневую систему, остающуюся геометрически
неизменяемой после условной замены ее жестких узлов шарнирами.
В фермах стержни соединены в узлах или на болтах, или на сварке, т.е.
жестко. Однако, как показывают сравнительные расчеты, при действии на
ферму узловой нагрузки усилия в ферме с шарнирными узлами и жестки-
ми узлами мало отличаются. Например, усилия в идеальной ферме с шар-
нирами на 10% больше усилий в болтовых фермах. Будем рассматривать
только фермы с идеальными шарнирами. В таких фермах при узловом
действии нагрузки в стержнях будут возникать только сжимающие или
растягивающие усилия.
Кроме плоских ферм, у которых оси всех стержней расположены в
одной плоскости, применяются пространственные фермы, оси стержней
которых не лежат в одной плоскости.
Классификация ферм
7. По назначению:
а) фермы пролетных строений мостов; б) крановые фермы; в) фермы
каркасов промышленных зданий; г) фермы башенного типа.
2. По характеру опорных закреплений:
а) балочные; б) арочные; в) консольные; г) неразрезные.
3. По очертанию опорных поясов:
а) фермы с параллельными поясами; б) фермы с полигональными поя-
сами.
4. По системе решетки:
а) фермы с треугольной решеткой; б) шпренгельные фермы; в) фермы
с раскосной решеткой; г) многорешетчатые фермы; д) фермы с ромби-
ческой решеткой.
5. По методу расчета:
а) статически определимые; б) статически неопределимые.
До определения усилий в стержнях ферм необходимо вычислить об-
щее число неизвестных п: п = С + Со, где С - число стержней фермы, Со -
число опорных стержней. Для каждого узла фермы составляются два
уравнения равновесия: Ех = 0 и 'Ey = 0, следовательно, общее число урав-
нений равно 2 У, где Y - число узлов. Таким образом, для статически опре-
делимой фермы необходимо выполнение условия:
2У=С + С0 или № = 2У-С-С0. (6.1)
Формула (6.1) дает возможность провести кинематический анализ.
В структурном анализе надо доказать, что диски фермы соединены
между собой по закону жесткого треугольника.
22
Аналитические методы расчета ферм
Для расчета простых ферм применяются различные методы. Рассмот-
рим их на конкретном примере (рис. 6.1).
Метод вырезания узлов
Вырежем узел 4 (рис. 6.1) и рассмотрим его равновесие (рис. 6.2):
Еу = s43cos45° + 2F= 0, откуда s43 = -2F/cos45°,
знак (-) показывает, что стержень 3-4 сжат, следовательно, на рис. 6.2 не-
обходимо изменить направление усилия s43. Затем составляем
Ex = -s42 + s43cos45° = 0, тогда s42 = s43cos45° = 2F.
В дальнейшем следует применить следующий
порядок вырезания узлов: узел 3, узел А, узел 1. Если
в узле сходятся три стержня, из которых два направ-
лены одинаково и нет нагрузки, то усилие в отдельно
направленном стержне равно нулю (рис. 6.3).
При вырезании узлов необходимо, чтобы число
неизвестных усилий в нем не превышало двух.
Метод моментных точек
Проведем сечение I-I и отбросим левую часть
фермы (см. рис. 6.1). Для оставшейся части точка 3
будет моментной:
ЕЛ/3 = Vb а - s42 а = 0, тогда s42 = Vb = 2F.
Метод полного сечения (способ проекции)
Рассмотрим сечение 1-1. Отбросим левую часть, а
для оставшейся части составим условие:
Еу = -s32sin45° - F + Vb = 0, откуда
532 = (-F+ rA)/sin45° = F/sin45°.
Рис. 6.3
23
Метод двух или нескольких сечений
Делается два или несколько сечений, составляются уравнения статики
и совместно решаются.
Метод замкнутых сечений
Делается замкнутый разрез, ко-
торый пересекает некоторые стер-
жни два раза. Усилия дважды пе-
ресеченных стержней в уравнения
статики не войдут (рис. 6.4). На-
пример, для замкнутого сечения,
показанного на рис. 6.4, имеем:
= s3b + Уьа = 0, а s3 = V^a/b.
Метод замены стержней
Путем замены стержней ферма
превращается в простую, которая
кладется в основу расчета. Например, на ферме, показанной на рис. 6.5, с,
убираем стержень 1-2, а его влияние заменяем фиктивной внешней силой
X и ставим дополнительный стержень, усилие в котором обозначим через
W3. Усилие X(рис. 6.5, б) определяется из условия, что N3 = 0.
Положим X = I и нахо-
дим /V3, а усилие в фик-
Рис. 6.5
тивном стержне только от
внешней нагрузки обозна-
чим через /V3. В этом
случае запишем:
/V3 = /V'- +7V3X = O,
тогда X--N3 IN3, по-
сле чего определяем уси-
лия в остальных стержнях.
Расчет ферм с
составными элементами
Если заменить один или
несколько стержней фермы фермочками, то получим ферму с составными
(сложными) элементами. Предположим, что в дополнительных узлах фер-
мочки нагрузки нет, тогда, заменяя составные стержни прямолинейными.
находим сжимающие или растягивающие усилия в них, и эти усилия, на-
правленные по прямой, соединяющей главные узлы фермы, будут внеш-
ними силами для фермочек. Если нагрузка имеется и в промежуточных
узлах фермочки, то находятся опорные реакции фермочки, передающиеся
на узлы фермы.
24
Лекция 7
ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ УСИЛИЙ В СТЕРЖНЯХ ФЕРМ
Линия влияния усилия в стержне фермы представляет собой график
изменения усилия в рассматриваемом стержне, когда груз Р = I медленно
движется по нижнему или верхнему поясу фермы без толчков и ускоре-
ний. Тот пояс фермы, по которому движется единичный груз, называется
грузовым поясом. узел 7
Рассмотрим ферму, показанную на
рис. 7.1. Для построения линии влия-
ния опорной реакции Rb необходимо
взять
ЪМ\ = Д/ - Рх = О, тогда Rh = х/1.
Аналогично запишем
Z.Ml2 = RJ - Р(1 - х) = 0, откуда
Д> =(7-хЛ
Для построения линии влияния
усилия 575 в стержне 5 7 проведем раз-
рез 1-1. Предположим, что груз справа
от сечения. В этом случае рассмотрим
левую часть фермы:
1Л/6 - ДЗd + s75r = 0, или s75= -R^dlr,
т.е. линия влияния 575для правой части
есть линия влияния Д, умноженная на
3J/r и взятая со знаком (-).
Предполагая, что груз Р = 1 слева
от сечения 1-1 и рассматривая равнове-
сие правой части фермы, находим
1Л/6 = ДЗd + s75r = 0, или j75 = -Rbidlr.
Сечение 1-1 можно использовать
для построения линии влияния усилия
5S6. Если единичный груз справа от
сечения, то из рассмотрения левой час-
ти фермы определяем:
ЕЛ/1 = 556с = 0, или 556 ~ 0.
Если груз Р = I слева от сечения,
то рассматривая правую часть, получа-
ем: ЕЛ/1 = RtJ+ ssf)c = 0, или 55б = -Д//с.
Для построения линии влияния
усилия 576 в стержне 6-7 вырежем узел 7 (рис. 7.1) и рассмотрим его рав-
новесие при условии, что грузовой пояс - нижний (рис. 7.2):
; Линия влияния S75
Линия влияния 556 ;
25
Ъх = 575cosa - 579cosa = 0, поэтому s75 - s79;
Еу = -576 + (^75 + 579)sina = 0, или s76 = 2s75sina,
т.е. линия влияния усилия заесть линия влияния
П z I
1 2 4^/6 8 10 12
14
3.
Г13
II
: 6 м-6 = 36 м
л
; Линия влияния Rt>
Л. вл.Зм (верхний грузовой пояс)
3
Л. вЛ-Sto (нижний грузовой пояс)
3
Л. ew.s45'(верхний грузовой пояс
5/4Г©ГтЫтгг^^
G 5/4
е 5/4
J7. вл. $о] (верхний груз, пояс)
Рис. 7.3
Рис. 7.2
усилия £75, умноженная на 2sina и
взятая со знаком (+), так как в
стержне 6-7 - растяжение.
Построим несколько линий
влияния усилий в стержнях фермы
с параллельными поясами, пока-
занной на рис. 7.3.
Линия влияния усилия 546.
Пусть грузовым является верх-
ний пояс. Проведем сечение 1-1.
Груз - справа, рассмотрим левую
часть:
ЕЛ/5 = RaV2 + 5464 = 0, а 546 = -3/?о.
Груз - слева, рассмотрим пра-
вую часть фермы:
ЕЛ/5 = /?/24 + 5464 = 0, а 546 = -6Rb-
Аналогично строится линия
ВЛИЯНИЯ усилия 54б при нижнем
грузовом поясе, только в левую
часть фермы входит участок от
узла 0 до узла 5, а в правую часть
- от узла 13 до узла 7.
Линия влияния усилия 545.
Грузовой пояс - верхний. Про-
ведем сечение II - II. Груз - спра-
ва, рассмотрим левую часть:
Еу = Ra - 545coso = 0,
тогда 545 = /?0/cosa = 5/^/4.
Груз слева, рассмотрим правую
часть:
Еу = /?ft + 54Scosa = 0,
поэтому 545 = -Rh /cosa - -5/?ft/4.
При езде по нижнему поясу пе-
редаточная прямая будет в преде-
лах участка 3-5.
26
Лекция 8
РАСЧЕТ ШПРЕНГЕЛЬНЫХ ФЕРМ
Шпренгельные фермы образовываются из простых ферм путем введе-
ния дополнительных стержней, работающих на местную нагрузку. Фермы
с простой решеткой без дополнительных стержней называют основными.
Шпренгели, представляющие собой элементы грузового пояса, называют-
ся грузовыми, а представляющие собой элементы другого пояса - негрузо-
выми (уме. 8.1).
В шпренгельной (составной) ферме может быть три типа стержней:
I) основные - элементы основной фермы (рис. 8.1, а- стержни, обозна-
ченные как ос.). Усилия в этих элементах определяются расчетом ос-
новной фермы. Эти усилия не меняются при включении в ферму
шпренгелей;
2) дополнительные - элементы шпренгеля, работающие только на мест-
ную нагрузку, т.е. на нагрузку, приложенную в пределах их пролетов
(рис. 8.1, а- стержни, обозначенные как д.). Усилия в них могут быть
найдены из условий равновесия, составляемых для отдельных частей
шпренгеля, который при этом можно рассматривать как самостоя-
тельную двухопорную ферму;
3) сложные - элементы шпренгеля, работающие и на местную, и на лю-
27
бую нагрузку (рис. 8.1, о - стержни, обозначенные как с.).
На рис. 8.2 даны примеры шпренгельных ферм. Ферму, представлен-
ную на рис. 8.2, а, можно назвать также фермой с составными элементами.
8ftsin^ рИс. 8.3
28
Расчет этих ферм рассмат-
ривался в лекции 7.
Рассмотрим построение
линий влияния усилий в
стержнях фермы, показан-
ной на рис. 8.3.
Пусть требуется постро-
ить линию влияния усилия
s33. Проведем сечение I -1.
Предположим, что еди-
ничный груз Р = I справа
от сечения I - I, тогда из
рассмотрения левой части
получаем:
Ey = Ffl-^3cos<p = 0,
*зз =H0/cos<p.
Если груз Р = I слева от
сечения I - 1, то
Еу = Vb + s33 cosip = О,
s33 = -Vb I cos<p.
Воспользуемся сечением
I - I и для построения ли-
нии ВЛИЯНИЯ усилия S34.
Пусть груз справа от сече-
ния:
ЕМ2 = Ио//4-$34Л = 0,
Vol
тогда S34 =—.
4h
Если же груз слева от
сечения, то, рассматривая
правую часть шпренгель-
ной фермы, получаем
ЕЛ/2 = РлЗ//4-$34А = 0,
Для построения линии
влияния усилия So вырежем
узел 1 (рис. 8.3, а). Если груз Р = I находится в точке
I, тогда so = 1, а если в точках А или 5, то so = 0.
Рассмотрим построение линии влияния усилия sb
Если груз Р = 1 находится в точке Л, то естественно,
что sf = 0, а если единичный груз Р = I находится в
точке 5, то из рассмотрения линии влияния s0 имеем,
что so = 0, а используя рис. 6.3 лекции 6, получаем,
что и Si = 0.
Предположим, что груз находится в точке 1. Про-
ведя сечение II - II (рис. 8.3, а) и рассматривая рис.
8.4, запишем ЕЛ/А> = s15fc -1 • / / 8 = 0, откуда находим
s13 = //(8Л). Рассматривая узел I, определяем: sw = sl5.
И наконец, рассматривая узел А, вычисляем
Er = sH + sicosa = 0,
Рис. 8.4
si = -sM/cosa = -s15/cosa = -//(8/jcosa).
откуда находим
Линии влияния so и Si подтверждают, что дополнительные элементы
шпренгеля работают только на местную нагрузку.
ТРЕХШАРНИРНЫЕ АРОЧНЫЕ ФЕРМЫ
Трехшарнирная арочная ферма - распорная ферма. Ферма имеет две
шарнирно неподвижные опоры и ключевой шарнир (рис. 8.5, а). Опорные
реакции VA НА, Нв определяются из четырех уравнений равновесия:
Хм^=0; 5>e=o; wc=0; 2>=о-
Главная особенность этих ферм - это возникновение осевых усилий в
каждом стержне фермы при узловой нагрузке. Построение линий влияния
усилий в стержнях трехшарнирной фермы осуществляется как для обыч-
ной фермы. Определить продольные усилия в стержнях фермы можно,
рассмотрев равновесие каждой половины фермы отдельно (рис. 8.5,6).
29
Лекция 9
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ АРКИ
Арочные системы возникли как архитектурно-строительные формы при
возведении дворцов, соборов, мостов и акведуков. В настоящее время они
также находят широкое применение в мостах, промышленных и обществен-
ных зданиях, в вокзалах, выставочных павильонах и других сооружениях.
В строительной практике встречаются арки трех основных видов: трех-
шарнирные (рис. 9.1, о), двухшарнирные (рис. 9.1, 6) и бесшарнирные (рис.
9.1, в).
Арки можно классифицировать по очертанию их осей: круговые, пара-
болические, эллиптические и т.д.
Основными характеристиками арки являются ее пролет / и стрела подъ-
ема /
Трехшарнирная система, в том числе трехшарнирная арка, есть стати-
чески определимая система. Опорные реакции раскладываются на верти-
кальные составляющие VA, VB и распоры НА, Нв. Если на арку действует
только вертикальная нагрузка, тогда НА = Нв = Н (рис. 9.2, о).
Рис. 9.2
Пусть на арку действует толь-
ко вертикальная нагрузка, тогда
УА = П = H = M°clf,
где VA,VB ~ реакции простой
балки (рис. 9.2, б); М” - момент
левых или правых сил относи-
тельно ключевого (замкового)
шарнира С.
Изгибающий момент, попе-
речную и нормальную силы в
сечении х-х трех шарнирной ар-
ки можно определить по форму-
лам (рис. 9.3):
Мх = М°г - Ну,
Qx = QX cost?-Н sin<р;
Nx = -Qx БШф-ЯсоБф. (9.1)
30
В арках по сравнению с однопро-
летной балкой резко уменьшается из-
гибающий момент, что видно из пер-
вой формулы системы (9.1).
Если левую опору арки поместить
в начало системы координат х, у, тогда
ось круговой арки радиусом R можно
задать формулой
у = +
где Л = /2/(8/) + //2.
Ось параболической арки описы-
вается формулой у = 4fx(l - х)//2.
Рис. 9.3
Линии влияния трехшарнирных арок
Рассмотрим построение линий влияния вертикальных опорных реакций
VA и VB. Рассматривая рис. 9.4, определяем
ЪМ А = Гв/-1*х = 0, тогда VB =х/1,
ЪМв=Уа1-\ (!-х) = ^ т.е. VA=(l-x)/l.
Полученные формулы дают возможность построить линии влияния вер-
тикальных опорных реакций VA и VB (рис. 9.4). Эти линии влияния идентич-
ны соответствующим линиям влияния простой однопролетной балки.
Составим уравнение равновесия:
М(: =[^/|-l (/1-x)]-/jf = O, а Н =
М?
Линия влияния распора И строится по ординатам линии влияния изги-
бающего момента Л/£ в сечении С однопролетной балки, которые необхо-
димо разделить на величину стрелы подъема f арки (рис. 9.4).
Из первой формулы системы (9.1) имеем, что
Мк=Мк-Нук.
Линия влияния изгибающего момента Мк в сечении к арки показана на
рис. 9.5, б.
Из второй формулы системы (9.1) имеем
Qk = &°cosV*-//sinpA.
Эта формула дает возможность построить линию влияния поперечной
силы в сечении к (рис. 9.5, в).
И наконец, последнюю формулу системы (9.1)
Nk = -Qk sinф* -Нcosp*
31
можно использовать для построения линии влияния нормальной силы в се-
чении к арки (рис. 9.5, г).
Последняя формула показывает, что линию влияния Л/* можно получить,
суммируя ординаты линии влияния Qk sin <рА и Н cos<pA .
Линии влияния Мк, Qk, Nk можно построить также способом нулевой
точки. Нулевые точки Fx, F2, F3 показаны на рис. 9.5, а.
Например, при построении линии влияния Мк необходимо (рис. 9.5, б):
1) на левой опорной вертикали отложить абсциссу о*;
2) спроецировать нулевую точку Fx на ось абсцисс и соединить вершину
опорной ординаты ак с проекцией нулевой линии Fx на ось абсцисс;
3) снести по вертикали сечение к и шарнир С на полученную прямую ли-
нию;
4) соединить получившиеся точки т и л с опорными нулями.
Построение линий влияния Qk, Nk способом нулевой точки показано на
рис. 9.5, в, г.
32
Л е к и и я 10
ОСНОВНЫЕ ТЕОРЕМЫ
ОБ УПРУГИХ ЛИНЕЙНО ДЕФОРМИРУЕМЫХ СИСТЕМАХ
Приложение нагрузки к любому сооружению вызывает его деформацию.
В реальных случаях нагрузка возрастает медленно. Плавное приложение
нагрузки называется статическим.
Упругой системой называют такую систему, которая после удаления
нагрузки возвращается в начальное недеформированное состояние.
Линейно деформируемыми системами называются такие, в которых пе-
ремещения и деформации выражаются линейными однородными функциями
внешних сил F,.
Например, для рис. 10.1 имеем IF >
A = aF, (10.1) дУ* —— -----V
где a - коэффициент, зависящий от ма- X [/
териала, схемы и размера сооружения. рис jq ।
Увеличим нагрузку F на dF. Это
вызовет увеличение перемещения на JA. Составим выражение элементарной
работы dW, отбрасывая при этом бесконечно малые величины второго по-
рядка малости:
dW = (F + dF)d& = FdA + dF db. » F dt^ но JA = a- dF, тогда dW = Fa dF и
F F
IV = JaF-dF =a fFdF =aF2 12,
о о
а с учетом формулы (10.1) получаем теорему Клапейрона:
для сосредоточенной нагрузки F: W = FbJ2\
для сосредоточенного момента М: IV = Л/&/2, где & - угол поворота
поперечного сечения стержня;
д ля распределенной нагрузки q: W = qS/2, где S - площадь эпюры пере-
мещения на участке действия этой распределенной нагрузки.
При вычислении работы применяется принцип независимости действия
сил, например, работа внешних сил, изо-
браженных на рис. 10.2, равна
+ F2A2
2 2 2 2
Выразим работу внешних сил через
внутренние усилия. Рис |0 2
Подсчитаем элементарную работу
нормальных сил N (рис. 10.3)
NAx N Ndx N2dx
dlV—-----—-------—------;
N 2 2 EA 2EA
работу поперечных сил Q (рис. 10.4), полагая, что tg у - tyldx » у,
3 С. 11. Крпвишапко
(10.2)
33
.... @ .f. Qd* т Qd*Q л Q2dx
d*V 2 2 7dx 2 G 2 G k A k 2GA ' ( >
где к - поправочный коэффициент, учитывающий неравномерное распреде-
ление касательных напряжений т по поперечному сечению. И наконец, под-
считаем элементарную работу изгибающих моментов М (рис. 10.5):
Суммируя три результата (10.2) - (10.4), получим значение элементар-
ной работы от внутренних сил:
dw
2ЕА 2GA 2 El
Формула (10.5) для системы брусьев примет вид
ДгЛ Л'г Q2 dx ^,[M2dx
(Ю.5)
(Ю.6)
3% 1% 96%
На основании закона сохранения энергии W = U, где U - потенциальная
энергия.
Подсчеты показывают, что для системы, работающей на изгиб, первый
член формулы (10.6) составляет около 3%, второй - около 1%, третий - по-
рядка 96%.
Принцип возможных перемещений
Рассмотрим систему в состоянии равновесия под действием заданных
сил. Возможными перемещениями называются ничтожно малые упругие
перемещения, вызываемые какими-либо силами, температурой или переме-
щениями опор, которые по своему характеру принимаются как бесконечно
малые.
Когда система совершает возможные перемещения, величина и направ-
ление внешних и внутренних сил, отвечающих ее исходному состоянию,
остаются неизменными, а поэтому их работа будет без коэффициента 1/2.
34
Теорема о взаимности работ (теорема Бетти)
Введем обозначение Д„,„ - перемещение в направлении силы юи» от си-
лы «л». Под перемещением будем понимать смещение и угол поворота, а
под силой - силу и момент. Рассмотрим два состояния (рис. 10.6), для кото-
рых
или
И^ЛДц/2, 1Ги = Г2Д22/2,
Приложим к балке последовательно сначала силу Fb а затем силу F2
(рис. 10.7, а), тогда
FK= Ии + ^22 = FjAu/2 + Г,Д12 + F2A22/2.
(Ю.7)
Состояние II
Рис. 10.6
Рис. 10.7
Приложим обе силы одновременно (рис. 10.7, б), в этом случае
W = ^(Дн + Д12У2 + + Д21)/2. (10.8)
Приравнивая выражения (10.7) и (10.8), получим теорему о взаимности
работ (теорему Бетти)'.
возможная работа внешних или внутренних сил первого состояния на
соответствующих перемещениях второго состояния равна возможной работе
внешних или внутренних сил второго состояния на соответствующих пере-
мещениях первого состояния, т.е.
F|A|2 = F2A2b или = Wu. (10.9)
Теорема о взаимности перемещений (теорема Максвелла)
На основании теоремы о взаимности работ (9) имеем F|5i2 = F^j, но
если принять, что F[ = F2 = I, тогда получаем <5!2 = <521, или в общем виде
= (Ю.Ю)
з- 35
Перемещение точки приложения первой единичной силы по ее направ-
лению, вызванное второй единичной силой, равно перемещению точки при-
ложения второй единичной силы по ее направлению, вызванному первой
единичной силой.
Лекция 11
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ. ИНТЕГРАЛ МОРА
Рассмотрим два состояния (рис. 11.1). Составим выражение работы
т.е. работы силы F2 = I на перемещении А21:
Состояние II
^2i = F2A2l = A2l. (11.1)
Согласно формуле (10.7) лекции 10 получаем
^|2 =^-^11-^22, (11.2)
где
^‘fM2dx A'fW2* v-'r Q2*
M, N, Q- это моменты, нормальные и попереч-
ные силы от суммарного действия сил Fx и F2
(рис. 10.7 лекции 10), т.е.
рис Цд M = A/i + M2,/V-/V1 + /V2,^ = Q1 + ^2. (11.3)
Значения (11.3) подставляем в формулу для
определения FF, а результат и выражения для и W22 - в формулу (11.2).
В итоге получим
Мм.ЛМг A'fW,W2<fc ^‘r.QiQidx
(11.4)
а с учетом равенства (11.1) имеем
10 £/ Z.J £Л Z.J GA
где черточки показывают, что эти значения возникают от единичных сил.
Формулу (11.5) можно записать в общем виде:
ЕЛ GA •
(116)
Выражение (11.6) - это формула для определения перемещений в кон-
кретном сечении конструкции или интеграл Мора (формула Мора).
При расчете балок и рам учитывают влияние только изгибающих мо-
ментов Л/, а влиянием N и Q пренебрегают.
36
Центр тяжести С
Рис. 112
Правило Верещагина
Интеграл произведения двух функций, из которых одна линейная, а дру-
гая - произвольная, равен площади произвольной функции, умноженной на
ординату из прямоугольной функции, лежащей под центром тяжести площа-
ди произвольной функции.
Например, имеем две эпюры момен-
тов Мр и Л/] (рис. 11.2), тогда по формуле
(11.6) получаем при использовании пра-
вила Верещагина:
Д.Л= (11.7)
I о
Запишем еще три положения, выте-
кающие из правила Верещагина: ,
1. Ордината ус должна быть взята из’
прямолинейной эпюры. Если обе эпюры -
прямолинейные, то ординату ус можно брать из любой.
2. Перемножаемые эпюры не должны иметь изломов. При их наличии
эпюры необходимо перемножать по
участкам.
3. Для перемножения двух прямо-
линейных эпюр (рис. 11.3) можно
использовать формулу:
Рис. 11.3
i
— \M.M,dx =
Eli '
= ——(2ас+2bd + ad + cb).
El 6
Пример. Пусть дана балка, за-
груженная равномерно распреде-
ленной нагрузкой q (рис. 11.4). Вы-
числим прогиб балки в точке С при
ее изгибной жесткости El = const.
Рис. 11.4
37
При расчете учитываем только влияние изгибающих моментов, поэтому
принимаем интеграл Мора в виде (11.7):
д = (П.8)
с / El Е1
2 2 ’ 1 2 * Mh 3 2 8 24 ’ Ус 32 '
где MF
Вычисляем перемещение Д< с помощью интеграла Мора (11.8):
Лс=А"(и
с Е1 Д 2 2 ) 2 384£/
Вычислим перемещение с помощью интеграла Мора (11.8), но с ис-
пользованием правила Верещагина при перемножении эпюр:
д /иУс 2 qZ3 5/ 5»74
С El Е1 24 32 384£/
Лекция 12
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЯ СЕЧЕНИЯ СТЕРЖНЯ
ПЛОСКОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ СТЕРЖНЕВОЙ
СИСТЕМЫ ПРИ ДЕЙСТВИИ ВНЕШНЕЙ НАГРУЗКИ
Данную тему рассмотрим на конкретных примерах.
Пример /. Определим прогиб конца консоли (рис. 12.1). Построим гру-
зовую эпюру моментов Л4 и эпюру изгибающих моментов от единичной
силы, приложенной на конце консоли Мх (рис. 12.1). Используя правило
Верещагина, имеем
( El Е1 2 3 3£/
Пример 2. Определим горизонтальное
смещение точки С рамы, изображенной на
рис. 12.2. Все стержни рамы имеют посто-
янную жесткость на изгиб £/.
Определим опорные реакции рамы:
£х=Г-Я = 0, т.е.
Л/г = VAaFh = 0, откуда VA = Fh/a.
Теперь легко построить эпюры изгибаю-
щих моментов от внешней нагрузки (Л4) и
от единичной силы Р = 1, приложенной в
точке С по направлению искомого горизон-
тального смещения ( ). Затем получаем
38
Знак (-) в ответе означает, что горизонтальное смещение точки С и на-
правление единичной силы Р = 1 не совпадают.
Пример 3. Определим горизонтальное перемещение точки В изогнутого
бруса от действия сосредоточенной силы Г(рис. 12.3).
Для криволинейного бруса изгибающий момент в произвольной точке С
можно записать в виде
MF = -F7?sin<p (0<(р<л).
Если приложить единичную силу в точке В по направлению действия
внешней сосредоточенной силы F (в направлении искомого перемещения),
то Mt = -1 - A? sin <р (0 < <р < л) и тогда горизонтальное перемещение точки В
при учете только изгибающего момента будет
Рис. 12.3
39
Найдем горизонтальное перемещение точки В при учете только нор-
мальных сил Np, в этом случае
Nf = -F sirup, /V, =-sin(p,
в ’ ЕЛ > ЕА I ЕЛ 2ЕА
Учтем влияние поперечной силы QF на величину горизонтального сме-
щения этой же точки В:
Qp = -F cos (р, Q, = - cos (р,
д7(0 = Д^д = Л£с^Ч^Р = *™й_«п2<р'|"
в > GA ' GA GA U 4 Jc 2GA
Горизонтальное перемещение точки В при учете изгибающего момента,
нормальных и поперечных внутренних сил будет
дГОр _ nFR3 nFR t nFR
B ~ 2EI, +2EA+ 2GA
Если учесть, что для прямоугольного поперечного сечения 1г = bh3l\2,
A ~bh,a также, что G = 0,5Е/( 1 + v), то
А^М) _itFR3\2 2Ebh = <Я?
A?’(/V) 2Ebh3 TtFR ’
A^W) = лЕЯ312 2bhE = 6 ГяУ
А7(0 2Ebh3 АлЕЯ2(1 + у)~ *(l + v)UJ ’
Таким образом, если (R/h) > 1, то при определении горизонтального пе-
ремещения влиянием нормальных и поперечных сил можно пренебречь.
Пример 4. Определить угол поворота <рв узла В ломаного стержня по-
стоянного поперечного сечения с жесткостью на изгиб Е/(рис. 12.4).
Прикладываем в узле В
Рис. 12.4
единичный момент т = I и
строим единичную Мх и
грузовую Мр эпюры.
Применяя правило Вере-
щагина, находим:
-l[2qa2 1
В Е1[3 8 2
^q^l^EI).
40
Лекция 13
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЯ СЕЧЕНИЯ СТЕРЖНЯ
ПЛОСКОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ СТЕРЖНЕВОЙ
СИСТЕМЫ ПРИ ТЕМПЕРАТУРНЫХ ВОЗДЕЙСТВИЯХ
И ПРИ СМЕЩЕНИИ ЕЕ ОПОР
Температурные перемещения
Перепишем интеграл Мора (11.6) из лекции 11 в виде
i _ / _ i _
=Е +£Кд»*(н.п
ООО
(см. рис. 10.3 -10. 5 лекции 10). Формулой Мора в приведенном виде можно
пользоваться для определения перемещений системы, вызванных действием
температуры. Если верхнее волокно элемента стержня нагрето на а ниж-
нее - на /2 градусов Цельсия, то, при-
нимая прямолинейный закон распре-
деления температуры по высоте попе-
речного сечения, будем иметь (рис.
13.1) для симметричного поперечного
сечения:
' 2
h
где a - температурный коэффициент линейного расширения.
Деформации сдвига в элементе от действия температуры не возникают.
Подставив найденные значения Дх, и ДЗ, в выражение (13.1), получим
формулу для нахождения температурных перемещений:
+ (13.2)
Предполагается, что вдоль каждого стержня заданное изменение темпе-
ратуры одинаково и высота h каждого элемента системы постоянна по всей
его длине.
Если стержневая система содержит только прямолинейные или ломаные
стержни постоянного сечения, то формула (13.2) может быть переписана в
более простой форме:
дт/=уак_11йп+уа|^!2з)пй. (13.3)
где и - площади единичных эпюр Мт и Nm. Если деформации
элемента длиной dx от температуры и от единичной силы аналогичны, то
41
знак соответствующего члена формулы (13.3) будет положительным, если
деформации будут не совпадать, то необходимо брать знак (-).
Пример 7. Определить горизонтальное перемещение подвижной опоры
В при изменении температуры по рис. 13.2, а. Высоту поперечного сечения
принять h = /10.
Строим единичные эпюры Мт и Nm (рис. 13.2, б, в) от приложенной в
точке В в направлении искомого перемещения единичной силы Р = 1.
Затем определяем площади единичных эпюр:
для ригеля: Q^ = ob/2, = 1а = а; для стойки: Q^ = b2/2, О^ = Ь2/а.
Определяем температурные параметры:
для ригеля: = 40°, t2 = 10°; для стойки ti = 20°, t2 = 10°.
По формуле (13.3) находим:
20°+ 10° b2
+а-----------
2 а
40°-10° 1 , 40°+10° 20°-10° b2
=-а----------ab+a---------а-а-----------
h 2 2 h 2
ригель стойка
= а(-150Ь-3552/а + 25о).
Знак (+) нужно поставить перед членом с , так как изменение темпе-
ратуры вызывает удлинение стойки и ригеля, так же как и действие единич-
ной силы (см. рис. 13.2, в). Перед членом с стоит знак (-), так как тем-
пературное воздействие вызывает удлинение внешних волокон ригеля и
стойки (см. рис. 13.2, а\ а изгибающий момент Л/Тоот действия единичной
силы, наоборот, вызывает укорочение внешних волокон (см. рис. 13.2,6).
При определении перемещений от действия на сооружение температуры
нельзя пренебрегать членом формулы, зависящим от продольной силы.
Рис. 13.2
42
а) Состояние I б) Состояние II
Рис. 13.3
Определение перемещений от осадки опор
Осадки опор могут быть случайными (просадки грунта, оползень, раз-
мыв грунта) при отсутствии нагрузки на сооружение или могут возникать
под действием нагрузки в результате податливости основания.
Перемещения от случайных осадок опор
Пусть шарнирно подвижная опора рамы, изображенной на рис. 13.3, а,
переместилась вертикально на величину Д. Определим вертикальное пере-
мещение точки к. Для этого создадим единичное состояние данной системы
и в направлении искомого перемещения Д* приложим силу Р = 1 (рис. 13.3,
б). Опорную реакцию, возникающую в том же опорном стержне, перемес-
тившимся вертикально на величину Д, обозначим через R. Составим уравне-
ние равновесия (рис. 13.3, б):
ZMA = Pl-R-2l = 0
и находим опорную реакцию R =1/2.
На основании теоремы о взаимности ра-
бот для двух состояний, показанных на рис.
13.3, а, б, составим условие:
Wi2 = Wji, или
0 = (РД*-ЯД),
откуда находим Д* = R Д = Д/2.
Работа сил первого состояния на пере-
мещениях второго состояния = 0, так
как сил в первом состоянии нет.
Второе слагаемое правой части форму-
лы Бетти взято с отрицательным знаком, так
как направления силы R и перемещения Д не совпадают.
При перемещениях опор статически определимого сооружения по на-
правлениям опорных закреплений внутренние усилия в сооружении не воз-
никают.
Таким образом, для определения перемещения или угла поворота, воз-
никающего в статически определимом сооружении от смещения его опор в
направлении опорных закреплений, необходимо:
1) выбрать единичное состояние сооружения, считая смещающуюся опо-
ру неподвижной;
2) загрузить сооружение в направлении искомого перемещения единич-
ной силой или моментом;
3) определить реакции в тех опорных связях единичного состояния, ко-
торые по условию задачи смещаются;
4) составить выражение работы сил единичного состояния на перемеще-
ниях действительного и приравнять эту работу нулю;
5) решить полученное уравнение относительно искомого перемещения.
43
Перемещения от нагрузки, вызывающей упругие осадки1
Пусть под действием нагрузки q трехшарнирная рама получает равные
вертикальные осадки опор (рис. 13.4, а)
где ко - коэффициент оседания опоры (или жесткость упругого основания,
Н/м, которая численно равна силе, вызывающей единичное смещение).
Найдем вертикальное перемещение ключевого шарнира С, учитывая
только влияние изгибающих моментов Л/Дрис. 13.4, б).
Приложим единичную силу Р = 1 в шарнире С по направлению искомо-
го перемещения и строим единичную эпюру Мк (рис. 13.4, в).
Применим теорему о взаимности работ
^12=^21, или
£ |^^Ж=Р ДС-2Р Д = ДС-2РД,
откуда находим
а) Состояние I ' в) Состояние 11
Рис. 13.4
Таким образом, перемещение нагруженного сооружения при наличии
осадок опор вычисляется через возможную работу внутренних сил единич-
ного состояния на перемещениях в действительном состоянии и возможную
работу реакций единичного состояния.
1 Пример взят из учебника Н.К. Снитко «Строительная механика». - М.: Высшая
школа, 1980.-С. 130-131.
44
Лекция 14
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ
ПЛОСКИХ СТЕРЖНЕВЫХ СИСТЕМ МЕТОДОМ СИЛ
Статически неопределимые плоские стержневые системы
Статически неопределимой стержневой системой называют такую
геометрически неизменяемую стержневую систему, в которой некоторые
реакции связей и усилия М, N, Q не могут быть определены с помощью урав-
нений статики, а определяются из дополнительных уравнений неразрывно-
сти деформаций.
Связи по своему значению могут быть абсолютно необходимые и услов-
но необходимые или лишние. При удалении абсолютно необходимых связей
система становится геометрически изменяемой. При удалении лишних свя-
зей система сохраняет геометрическую неизменяемость.
Иногда различают внешне статически неопре-
делимые и внутренне статически неопределимые
системы. Внешне статически неопределимой назы-
вают такую систему, которая имеет только лишние
опорные закрепления (рис. 14.1, а). Как известно,
число необходимых опорных стержней равно трем.
Внутренней статически неопределимой плоской
системой называют систему, прикрепленную к ос-
нованию лишь тремя опорными стержнями и обла-
дающую лишними связями, введенными для соеди-
нения ее стержней (рис. 14.1, б). Указанное разде-
ление является условным.
77777
Рис. 14.1
Свойства статически неопределимых систем
I. Усилия в них возникают от внешней нагрузки, от изменения температу-
ры, смешения опорных или других сечений, неточности сборки и усадки
материала.
2. Усилия в статически неопределимых системах зависят от геометриче-
ских размеров поперечных сечений и свойств материала (от Е, G).
3. После удаления п лишних связей п раз статически неопределимая систе-
ма сохраняет свою геометрическую неизменяемость.
Расчет статически неопределимых плоских стержневых систем
методом сил
При расчете по методу сил за неизвестные параметры необходимо при-
нимать реакции связей или внутренние усилия в определенных сечениях
стержневой системы. В этом случае степень статической неопределимости,
т.е. число лишних связей Л, определяется по формуле
Л=ЗКу-Ш,, (14.1)
45
где Kv - число условных замкнутых контуров; Ш3 - число простых шарниров
между дисками, включая землю. Примеры подсчета лишних связей приведе-
После определения степени статической неопределимости выбирается
основная система, которая кладется в основу дальнейшего расчета. Основ-
ная система должна быть статически
определимой. Для этого разрезают все
лишние связи, а отброшенные связи за-
меняют реакциями X, (рис. 14.3).
Затем записываются условия, что
перемещения в направлении отброшен-
ных связей равны нулю или пропорцио-
нальны реакциям связи соответственно
Заданная система Основная система
Рис. 14.3
для жестких или упругих связей. Таким
образом, при п лишних неизвестных Xt,
Х2,..., Х„ получают систему п уравнений с п неизвестными:
61Л| + 812X2 + ••• + 6|»Лл + Аи = 0;
821X1 + 822X2 + + ЬгпХп + 0;
831X1 + 833X2 + . •• + 8з„Хл + Аз/г = 0;
8nIX, + 6и2Х2 + ... + 8„Х + Алл = 0, (14.2)
где согласно сокращенному интегралу Мора, имеем
= X J „ 8л = X J—77— 8<> = X J-77-(|4-3>
Cft £-»/ Cii
Система уравнений (14.2) называется каноническими уравнениями мето-
да сил. Например, первое уравнение системы уравнений (14.2) показывает,
что перемещение точки основной системы, где приложена неизвестная сила
Х|, в направлении этой силы должно быть равно нулю. В этом уравнении 6ц
- перемещение в направлении силы Xi от силы Х\ = 1; б)2 - перемещение в
направлении силы Xt от силы Х2 = 1; 6Ь, - перемещение в направлении силы
Xi от силыХ„ = 1; Ап. - перемещение в направлении силы X] от внешней на-
грузки.
Решая канонические уравнения (14.2), определяем неизвестные усилия и
46
реакцииХь Х2, ...,Хт после чего строятся эпюры М, N, Q, определяются не-
обходимые перемещения и деформации.
Пример. Построить эпюры изгибающих моментов, поперечных и нор-
мальных сил для рамы, изображенной на рис. 14.4, а.
Имеем Л = 1. Рама один раз статически неопределима. Записываем ка-
ноническое уравнение: 8])%! + Д1/Г =0, откуда определяем Xt =-A1F/8H.
Рис. 14.4
47
Вычисляем коэффициенты канонического уравнения:
5
1
" ~ Е1
2—2.54.5.4.5
2 3
550. Л
ЗЕ1 ’ Л,Л I
10F
Е1
а затем находим величину горизонтальной опорной реакции Х| = 0,6 кН.
Теперь можно приступить к построению эпюры изгибающих моментов
(рис. 14.4,6), используя формулу
М = + MF = 0,6Л/, + MF.
Определив остальные опорные реакции, строим эпюры поперечных
(рис. 14.4, в) и нормальных (рис. 14.4, г) сил.
Проверка правильности эпюр М, Q, /V
Статическая проверка
Для всей рамы в целом, ее узлов и отдельных, произвольно выделенных
частей рамы должны выполняться условия статического равновесия.
Например, для рамы, изображенной на рис. 14.4, о, согласно проведен-
ному расчету получены опорные реакции VA = VB = F/2 и Н = 0,6 кН (см.
рис. 14.4, д), следовательно,
Еу= VA + rB-F=0,Zx = //-/7=0.
Проводим сечение / - /, отбросим левую часть рамы (см. рис. 14.4, д), а
действие отброшенной части заменим соответствующими значениями М, N,
Q, взятыми из эпюр М, N, Q. Для оставшейся части составим уравнения рав-
новесия:
Еу = 5,5 +Рв-11 =0; Lx = 0,6-/7 = 0; ЕЛ/0 = -3 + F-2 + Н5-VB -4 = 0.
Проверка подтвердила правильность полученных результатов.
Деформационная проверка
На рис. 14.4, а, д показана один раз статически неопределимая рама.
Окончательная эпюра изгибающих моментов для этой рамы приведена на
рис. 14.4, б. Очевидно, что горизонтальное перемещение точки В (правой
опоры рамы) должно быть равно нулю. Чтобы проверить это, необходимо
перемножить две эпюры Мх и М:
д^Р = —ГН. .1 .з-2+-(2-5.3-2-5-8-5-8 + 53)+
е Е/[ 2 3 6V 7
+—(-2-5-8 + 2-5-3 + 5-3-5-8) =0.
6 J
Таким образом, деформационная проверка в общем случае проводится в
таком порядке:
I. Отбрасываем лишние опорные связи, перемещения по направлению
которых по условию задачи равны нулю, и переводим заданную стати-
чески неопределимую систему в статически определимую систему.
48
2. По направлению каждой отброшенной связи прикладываем единич-
ную силу (или момент).
3. От каждой единичной силы (или момента) строим единичную эпюру
изгибающих моментов М,.
4. Умножая эпюры Л/, на окончательную эпюру изгибающих моментов
М, определяем перемещения в полученной статически определимой
системе по направлению каждой отброшенной связи.
Если перемещения по направлению каждой отброшенной связи равны
нулю, то это свидетельствует о правильности окончательной эпюры изги-
бающих моментов.
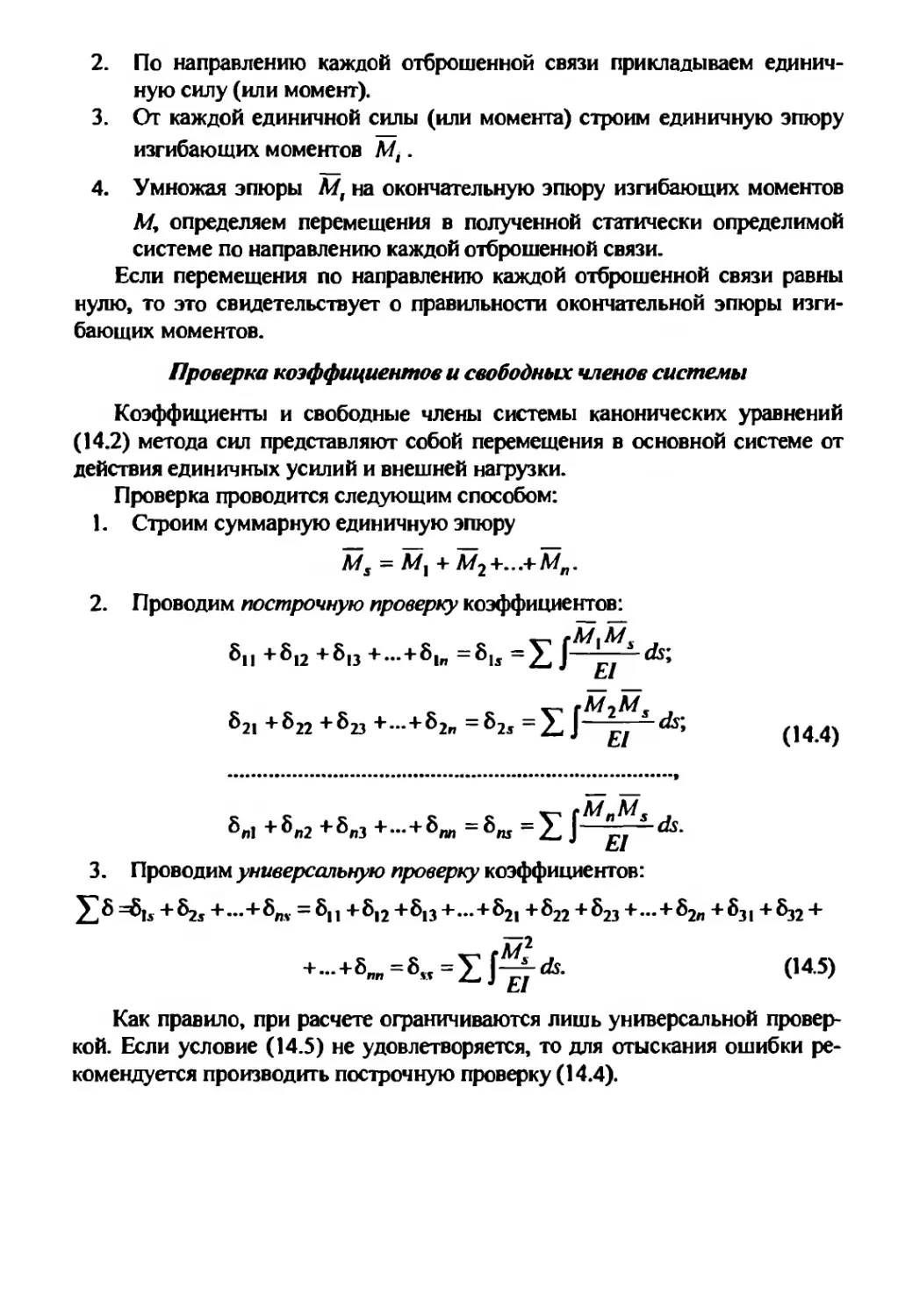
Проверка коэффициентов и свободных членов системы
Коэффициенты и свободные члены системы канонических уравнений
(14.2) метода сил представляют собой перемещения в основной системе от
действия единичных усилий и внешней нагрузки.
Проверка проводится следующим способом:
1. Строим суммарную единичную эпюру
м5 = л/, + м2+...+м„.
2. Проводим построчную проверку коэффициентов:
5ц +8,2 +8|3 +...+8|„ = 8Ь =£ |
8j, +822 +823 +-+62„ =8js = £ J (14.4)
8„1 +-+8„ =8Ю =
3. Проводим универсальную проверку коэффициентов:
+—= 8,, + 812 +8,3 +...+82, +822 + 633 +...+82я +83, +832 +
+...+8rm=8„=^f^-A. (14.5)
Как правило, при расчете ограничиваются лишь универсальной провер-
кой. Если условие (14.5) не удовлетворяется, то для отыскания ошибки ре-
комендуется производить построчную проверку (14.4).
Леки ия 15
ГРУППИРОВКА НЕИЗВЕСТНЫХ ПРИ РАСЧЕТЕ
СИММЕТРИЧНЫХ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ
Будем считать раму симметричной, если ее геометрическая схема имеет
ось симметрии и жесткости симметрично расположенных стержней равны
друг другу.
Пусть имеем симметричную раму, показанную на рис. 15.1, о, для кото-
рой число лишних неизвестных Л = 3-4 - 8 = 4. При расчете этой рамы с по-
мощью основной системы, показанной на рис. 15.1, б, необходимо составить
и решить четыре уравнения с четырьмя неизвестными.
Будем иметь в виду, что симметричная и обратносимметричная эпюры
при перемножении дают нуль. Кроме того, учтем, что от симметричных
внешних усилий будут симметричные эпюры, а от обратносимметричных
усилий - обратносимметричные эпюры.
Для получения симметричных и обратносимметричных эпюр принима-
ют за неизвестные усилия не отдельные силы, а группы сил.
Примем за неизвестные не силы Xlt Х2, Х3, Х4 (рис. 15.1, б), а группы сил
Z|, Z2, Z3, Z4 (рис. 15.1, в). Сопоставив две основные системы, изображенные
на рис. 15.1, б, в, можно установить между неизвестными X, и Z, следующие
зависимости:
X2=Z2-Z3; X3=Z2+Z3; X4=Z4-Z!,
50
которые могут быть представлены в виде:
Эпюры изгибающих моментов от единичных групповых сил Z, = 1 изо-
бражены на рис. 15.1, г. В результате проведенной группировки неизвестных
система канонических уравнений
61 |Z« + 6^+ 613Z3 + 614Z4 + Д|/.-=0;
&1Z1 + 622Z2 + + 624Z4 + Лгя = 0;
631Z1 + b^Z.2 + 633Z3 + &4Z4 + Дзг= 0;
S^Zi + 642Z2 + 643Z3 + 844Z4 + ^4F = 0,
распадается на две независимые системы (подчеркнутые коэффициенты ё9
будут равны нулю):
61 |Z| + 6^3 + Д1/: = 0; 6z2Z2 + 624Z4 + Д2г = 0;
631^1 + 633Z3 4- Дзг = 0; 842Z2 4- 844Z4 + &4Г- = 0, (15.1)
в одну из которых войдут симметричные (Z2, Z4), а в другую - обратносим-
метричные неизвестные (Zb Z3).
Объем вычислений благодаря этому уменьшается в несколько раз.
Симметричные и обратносимметричные нагрузки
При действии только симметричной или только обратносимметричной
нагрузки на симметричное сооружение задача еще более упрощается. В этом
случае можно выбрать такую основную систему, что не только все единич-
ные эпюры, но и грузовые эпюры будут симметричны или обратносиммет-
ричны и тогда не только многие из коэффициентов при неизвестных но и
некоторые из свободных членов Д^ системы канонических уравнений (15.1)
окажутся равными нулю.
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ
Канонические уравнения метода сил при расчете статически неопреде-
лимой системы на действие температуры имеют вид:
611Х.+612У24-,..4-81^; + д1/ = 0;
62|Аг| 4- ЬхгХг + ••• + &2пХ„ 4- Дг/ - 0;
6„i%i 4- 8^Хг + ... + 8„Л„ 4- Д,, = 0, (15.2)
где Д„ - температурные перемещения в основной системе по направлениям
лишних неизвестных усилий Х|,Х2,..., Хп (формулы (13.2), (13.3) лекции 13).
Пример 1. Трехпролетная неразрезная балка постоянной высоты h под-
вергается нагреванию верхних волокон на /° (рис. 15.2). Построить эпюру
моментов от температурного воздействия на балку при £/ = const.
51
f
balEU(5h)
Рис. 15.2
Составим канонические уравнения
метода сил, предварительно опреде-
лив Л = 3-4 - 10 = 2, тогда
8| р¥] + 811Л2 + Ль ~ 0;
62Л1 + S22A2 + А,, = 0; (15.3)
e I Г1 2/ . 2 2/
11 £/[2 3 3 3
1 21 2 2/1 12/’ _к .
2 3 3 3 J 27 Е1 22
*б12 3 3 3 3 + 3 3 +ЗзГ
1 / , 2 2/1 21/3 с
2 3 3 3 J 54Е/ 21
а ' 1 2/ ,, /2 А
А., = -а------3/ = -а/ — = А2,.
*' Л 2 3 h 21
Решая систему двух уравнений
(15.3), определяем
Х|=Лг = 6а/£//(5й/)
и строим эпюру изгибающих момен-
тов М, (рис. 15.2) от температурного воздействия на балку.
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
НА ПЕРЕМЕЩЕНИЕ ОПОР
Осадка опор вызывает дополнительные усилия, если при этом происхо-
дит смещение опор по направлениям лишних связей.
Пример 2. В качестве иллюстрационного примера рассмотрим раму,
показанную на рис. 15.3, а. Штриховой линией показано положение рамы,
после того как ее правая опора сместилась по горизонтали, вертикали и,
кроме того, повернулась на угол у. На рис. 15.3, б показана основная систе-
ма, где лишние неизвестные усилия X, действуют по направлениям заданных
перемещений опоры. Таким образом, канонические уравнения метода сил
представятся в виде:
8П*| + 812*2+ =а-
821*1 + 822*2+ 831*3 = -Ь;
831*1 + 832*2 + 833Л3 = ф.
(154)
52
Например, второе уравнение сис-
темы (15.4) выражает мысль, что пе-
ремещение точки А в направлении
неизвестной силы Х2 от силы Хх
(<5ziAj), плюс перемещение этой же
точки в направлении силы Х2 от самой
же силы Х2 (<522^2)» плюс перемещение
точки в направлении силы Х2 от мо-
мента Х3 (йЛ) должно быть равно
а) Заданная система б) Основная система
Рис. 15.3
реальному смещению правой опоры в направлении силы Х2, т.е. Дл = -Ь.
Знак минус в правой части второго уравнения
объясняется тем, что направление силы Х2 про-
тивоположно направлению заданного смеще-
ния опоры по вертикали.
Коэффициенты 5У вычисляются обычным
путем. После этого из системы канонических
уравнений (15.4) находим неизвестные усилия
Хь Х2, Х3 и строим эпюры изгибающих момен-
тов, нормальных и поперечных сил.
Пример 3. При осадке промежуточной опо-
ры двухпролетной неразрезной балки в ней
возникнут внутренние изгибающие моменты
(рис. 15.4). Отбросим мысленно эту опору и
заменим ее действие силой Xt. Учитывая, что
балка один раз статически неопределима, за-
пишем каноническое уравнение в виде:
Рис. 15.4
бнХ^-Д,, тогдаА^-Д,/^!, где 5Н -/3/(6£/), Л1 = -€£/Д,/А
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
В СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМАХ
Для определения перемещений произвольной точки стержневой стати-
чески неопределимой системы необходимо построить эпюру изгибающих
моментов от действия внешних нагрузок или иных факторов.
Затем в точке, где определяется перемещение, приложить единичную
силу в направлении искомого перемещения. Единичная сила прикладывается
в основной статически определимой системе и строится эпюра моментов от
____________________ д/ д/
этой единичной силы М,. После перемножения эпюр £ J dx = ts.,h
найдем искомое перемещение Д<А.
Тот же ответ получим, если единичную силу приложить в соответст-
вующей точке заданной статически неопределимой стержневой системы, но
в этом случае потребуются более сложные вычисления.
53
Лекция 16
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ АРКИ
Как отмечалось в лекции 9, арки бывают трех основных типов: трехшар-
нирные, двухшарнирные и бесшарнирные. Вопрос о преимуществах и целе-
сообразности применения той или иной конструктивной формы арки на
практике решается исходя из конкретных условий работы и эксплуатации
сооружения.
Двухшарнирные арки
Двухшарнирная арка состоит из криволинейного диска, соединенного
двумя шарнирно-неподвижными опорами с землей (рис. 16.1, а). Она явля-
ется один раз статически неопределимой системой.
В двухшарнирных арках толщина обычно убывает от середины пролета
к опорам, что увязывается с видом эпюры моментов. Для двухшарнирной
арки обычно пользуются уравнением в форме / = 7ocos(p, где Iv - момент
инерции в замке (вершина арки), ф - угол, образуемый касательной к оси
арки с горизонталью.
Расчет двухшарнирной арки проводится по методу сил. Заданная и ос-
новная система показаны на рис. 16.1, а, б. Для отыскания распора Xt соста-
вим каноническое уравне-
ние, выражающее условие
равенства нулю горизон-
тального перемещения под-
вижной опоры (рис. 16.1, б):
б|1Х|+Д|£=0, (16.1)
где Ajp - горизонтальное
перемещение левой опоры
от действия внешней на-
грузки в основной системе.
Из уравнения (16.1) опреде-
ляем
Д', =-Д17,-/6П; (16.2)
Рис. 16.1
(S) Ы (S) (4)
Для двухшарнирной арки имеем (рис. 16.1, в)
54
Л/1 = -у, N} = -cosip, Qi =-sincp.
В этом случае из формул (16.3) и (16.4) находим
_ \у2 , Sfcos2 Ф j , Sfsin2 Ф j
8" = /йЛ+/-ЕГЛ+Л/-аГЛ;
(') (5) (4)
(16.5)
(16.6)
(16.7)
Вычислив 6|Ь Д1Л, по формуле (16.2) находим величину распора Х\. Ес-
ли на арку действует только вертикальная нагрузка, то Х} = НА = Нр = Н.
Внутренние усилия определяются по формулам
М= Q=Qf+Q\Xx\ N = Nl. +NxXl. (16.8)
Принимая во внимание формулы (16.5) и выражая внутренние усилия в
арке основной системы через усилия в простой балке (рис. 16.1, г)
М F = М°\ QF =Q° coscp; NF =-Q° sincp, (16.9)
формулы (16.8) можно представить в виде
М =М° -yXt =М° ~уН\ Q-Q° coscp-Л] sin ср = 0° cos ср -Н sin ср;
N = -Q° sincp-Хх cos ср = -\QV sin ср + H cos ср). (16.10)
Если арка представляет собой кривой брус малой кривизны, т.е. при
/М>8,
где h - наибольшая высота сечения, то в формулах (16.6), (16.7) можно пре-
небречь последними слагаемыми, учитывающими влияние поперечных сил.
Для пологих арок, для которых /// < 1/6, имеем NF = -^°sincp. Здесь sincp
много меньше единицы, поэтому можно пренебречь влиянием NF в формуле
(16.7) и проводить вычисления по упрощенной формуле
<161|>
(S)
Пренебрегать же влиянием продольной силы Л/( при нахождении гори-
зонтального перемещения не всегда возможно.
Поскольку арка во многих случаях представляет собой основную часть
дорогого и очень ответственного сооружения, то не следует игнорировать
без анализа влиянием отдельных внутренних сил при определении переме-
щений.
Двухшарнирные арки с затяжкой
За основную систему может быть принята криволинейная балка с пере-
резанной затяжкой (рис. 16.2, 6). Взаимное смещение сечений разреза за-
тяжки для основной системы равно нулю, поэтому каноническое уравнение
метода сил имеет вид
5,,%, +A,f =0, (16.12)
55
б) Заданная система б) Основная система
Рис. 16.2
где 6ц - взаимное смещение сечений разреза по направлению силы Xt от
действия силы Xt = 1; - то же, от внешней нагрузки.
Выражение для A1F будет то же, что и для аналогичной двухшарнирной
арки (16.7) или (16.11). Для перемещения <5ц добавляется влияние удлинения
затяжки длиной / в состоянии Xt = 1:
А/ = 1-//(£эЛ3),
где ЕзА3 - жесткость затяжки на растяжение. Следовательно, будем иметь
£ц = — (16.13)
>Е1 > ЕА Е,Л,
итогда Х| =-А|Г/5ц. (16.14)
Распор в двухшарнирной арке с затяжкой будет всегда меньше, чем рас-
пор в двухшарнирной арке, так как знаменатель формулы (16.14) всегда бу-
дет больше знаменателя формулы (16.2).
Бесшарнирные арки
Бесшарнирная арка -трижды статически неопределима (рис. 16.3, а).
Рис. 16.3
56
Рассмотрим расчет симметричной арки. За основную систему можно
принять любую из показанных на рис. 16.3, б, в, г. Как будет установлено в
дальнейшем, основная система, изображенная на рис. 16.3, г, является луч-
шей. В этой системе используют невесомые и абсолютно жесткие консоли
длиной с. Так как из условия равновесия Xi = Н, то неизвестное Xt называют
распором. Система канонических уравнений метода сил примет вид:
8цХ| + 812X2 ^IF ~ ^21-^1 "^^22^2 + &2F = 833Х3 + ^3F ~
Моменты Л/, и Л/2 в произвольном сечении арки можно представить в
виде Л/, = -1(с-у); М2 = 1 (рис. 16.3, д. е).
Подберем длину консоли с так, чтобы 5\г было равно нулю, то есть
612 = |—!—-ds = - [—-ds = Q,
i El i El
где 5 - вся длина арки. Принимая во внимание симметрию арки, запишем
s/2 . s/2
-с [ — = J —<Zs = O,
0J и 0J El
откуда определяем длину жесткой консоли:
(16.15)
Таким образом, принимая длину жесткой консоли с по формуле (16.15),
будем получать 8,2 = 621 = 0 и тогда система трех канонических уравнений
еще более упростится и примет вид:
8ИХ, + AIF =0; 822X2 +A2F =0; 833Х3 + A3F =0. (16.16)
Влиянием , £?3 и NF. Qr. пренебрегаем. Тогда
Л/| =-(с-у)-, = —coscp; М2 =1; Л/3 =±х; 7V3 = -sirup;
s!2
о _ j'f (с~ у)2 COs2 Ф с _ /7 Л .
8,1 J ~ЁГ*2 / “ЁГ*’ 22 2 / ы’
6„=2'j^-d,+2]^-ds-, (16.17)
О Ы о
a,f=- <16'8)
0 £,/ о 0
Подставляя выражения (16.17), (16.18), определяемые точным или при-
ближенным интегрированием, в канонические уравнения (16.16), находим
лишние неизвестные Xh Х2 и Х3. Затем переходим к вычислению усилий в
произвольном сечении арки и построению соответствующих эпюр.
57
Лекция 17
НЕРАЗРЕЗНЫЕ БАЛКИ
Неразрезной балкой называют брус, который перекрывает два или более
пролетов и неразрывно связан с опорами (рис. 17.1). Неразрезные балки эко-
номичнее разрезных, так как в них меньше изгибающие моменты. Основной
недостаток неразрезных балок - их большая чувствительность к неравно-
мерной осадке опор. По крайней мере, одна из опор неразрезной балки
должна быть заделкой или шарнирно неподвижной, остальные опоры могут
быть шарнирно подвижными или шарнирно неподвижными. Расчет нераз-
резной балки на шарнирно неподвижных опорах при действии только верти-
кальной нагрузки ничем не отличается от расчета такой же балки на одной
неподвижной и остальных подвижных опорах.
Число лишних неизвестных подсчитываем по формуле
Л = -^ = С0-ЗП = Со-3. (17.1)
Л=5-31=2 । ^Л=6-3 1=3
j 77 = 8-31=5 Г q 77=8-31=4
з т т * *—т т
Рис. 17.1
В качестве основной системы выберем совокупность однопролетных
шарнирно опертых балок с неизвестными опорными моментами.
Запишем систему канонических уравнений (рис. 17.2):
+Si2^2 +—+51*^* +д1г =°;
52|^| +^22^2 + — + &21Л +Д2Г =01
5нХ] +5*2^2 +—+А*Г =0,
где к - число отброшенных связей. Из рассмотрения единичных эпюр следу-
ет, что в каждое из канонических уравнений (17.2) будет входить по три не-
известных (см. рис. 17.2), только в первое и последнее - по два неизвестных:
+ $12^2 =0;
^21-^1 '^'^22'^2 +^23-^3 + &2F = 0,
632^2 +^33^3 +^34 ^4 + ^3F = 0»
^njn-\^n-\ + &mX„ +^г».л+1^п+1 + Дл/- ”
+^кк^к + ^kF “0.
(17.3)
58
Рис. 17.2
Перемещения будем подсчитывать по формуле
(|74>
или, пользуясь правилом Верещагина, получим
Я = 1.1./ 1._1_ = _Л_.
лл-! 2 " 3 Е1п 6Е1п ’
X =1.1./ 1.—1—4.1.]./ 2 1
2 ” 3 Е1„ 2 "+I 3 £/п+1
Я =1]/ 1 1 -
лл+! 2 л+1 3 £/^ 6£/и*
д = l^flL+l^^±± = A_+AtL (17.5)
’ EIn /„ £/и+1 /л+1 £/„ £/г+1
где Qn и Q.„, / - площади эпюр моментов Mh в п-й и (п + 1 )-й однопролетных
балках от внешней нагрузки; а а„ и Ь„,/ - расстояния от центров тяжести
этих эпюр до (п - 1)-й и (п + 1)-й опор соответственно. Параметр В* пред-
ставляет собой правую фиктивную опорную реакцию в п-м пролете при за-
гружении его распределенной нагрузкой в виде эпюры моментов в я-й одно-
59
пролетной балке, а Ли+1 - левая фиктивная опорная реакция в (и+1)-м проле-
те при загрузке его распределенной нагрузкой в виде эпюры моментов этой
однопролетной балки.
Подставляя значения коэффициентов (17.5) в канонические уравнения
(17.3), запишем в общем виде
Ifl ^И-1 | 61 6|+1 | J Ifl+l ^п+1 J J ^и+1 _ Q (17 6)
6£/„ ЗЕ 6EIn+l Е1„ Е1п+1 " ‘
Чтобы подчеркнуть, что за неизвестные Xt приняты опорные моменты
М„ в дальнейшем будем вместо X, писать М,. Кроме того, умножим уравне-
ние (17.6) на 6Е1, тогда
Окончательно последнее уравнение представим в виде
М„.,С+2М„(С +С,) + =-б|^=.+^1|, (17.7)
\ 'л+1 /
где/»'=-^-7 и
1п ‘п+\
приведенные пролеты; / - момент инерции
поперечного сечения любого пролета.
Уравнение трех моментов (17.7) или уравнение Клапейрона было выве-
дено в 1857 году. Если моменты инерции в пролетах - постоянные, то урав-
нение (17.7) принимает вид
Л/и-|/и+2Л/л(/л+/и+1) +
^Ai+i4i+i -6(^ +<>) (П.8)
После определения неизвестных опорных моментов строят эпюры изги-
бающих моментов и поперечных сил, используя формулы
M.=MF+Mn.x^ + M^- (17.9)
ln ln de h
где х - расстояние от левой опоры соответствующей однопролетной балки
до рассматриваемого сечения этой же балки.
Эпюра изгибающих моментов неразрезной балки состоит из эпюр изги-
бающих моментов однопролетных балок, нагруженных соответствующей
внешней нагрузкой и вычисленными опорными моментами.
Прогибы в неразрезной балке и-го пролета определяют как в однопро-
летной балке при наличии опорных моментов М„ и заданной пролетной
нагрузки.
Пример 1 (рис. 17.3). Построить эпюры изгибающих моментов и попе-
речных сил для трехпролетной неразрезной балки постоянного поперечного
сечения.
Запишем уравнения трех моментов (17.8) для рассматриваемой балки:
60
п = 1: Л/о/, + 2Mt -6(5)* + А2 );
м = 2: Л/)/2 +2Л/2(/2 +/3) + Л/3/3 =-6(52 +Л3).
Учитывая, что Л/о = М3 = 0, а также, что 5f = В2 = А2 = 0, запишем два
вышеприведенных уравнения как
2Л/)(37)+Л/22/ = О,
Л/)2/ + 2Л/2(3/) =-6(Л3),
где
3 3 /3 12 2Z 24
Окончательно имеем:
ЗЛ/, + М2 =0 и
Л/j +ЗЛ/2 = -ql2 !Ъ.
Решая полученные два
уравнения, находим:
м =£_ м
1 64 ’ 2 64 '
Затем определяем по-
перечные силы по каждому
участку:
И| 64 И2 32
Пример 2. Построить
эпюры изгибающих момен-
Я
Рис. 17.3 64
тов и поперечных сил для однопролетной балки, показанной на рис. 17.4.
Запишем уравнение трех моментов (17.8) при п = 1:
+2Л/)(/| +/2) + Л/2/2 — —6(5) + Л2), или 2М\1 — —6Л2,
у А ~ Оу 4 ~ /
i
Рис. 17.4
3 8 2 24
Затем находим
6Л2 а!2
м>=-^г=--т
и строим эпюры М и Q (см.
рис-17-4)- >6-ot kzl
Лекция 18
ПОСТРОЕНИЕ ЛИНИЙ ВЛИЯНИЯ В НЕРАЗРЕЗНЫХ БАЛКАХ
Для построения линий влияния нужно, чтобы сила Р = 1 прошла по всем
пролетам балки. В определенный момент времени эта единичная сила будет
находиться в одном пролете, а все остальные пролеты будут оставаться неза-
груженными. Если загружен один пролет неразрезной балки, то эпюра мо-
ментов имеет вид, показанный на рис. 18.1.
„ , м. , м2 , м3
Левые фокусные отношения-. кх =-------, к2 =------,А3 =-------;
Л/о Л/| М2
. Л/4 М5 . М6
правые фокусные отношения: к5 = --т—, ^6 =_Т7~>^7 =~~77~= с0-
М3 Mf, м2
Рис. 18.1
Введем новые понятия. Абсолютная величина отношения Л//Л/„.| и-го
незагруженного пролета при загрузке одного из правых пролетов называется
левым моментным фокусным отношением и-го пролета, т.е.
*»=-—
*4-1
Абсолютная величина отношения М„.х/М„ и-го незагруженного пролета
при загрузке одного из левых пролетов называется правым моментным фо-
кусным отношением п-го пролета, т.е.
(18.1)
Рис. 18.2
• К
к =-—-
" М,
Рассмотрим два смежных пролета
при загрузке одного из правых пролетов
(рис. 18.2). Запишем уравнение трех
моментов (17.7) из лекции 17 для проле-
тов п - 1 и и:
(182)
Cl *4-3 +2(/*_| <-Г„М„ =0.
Разделив полученное уравнение на M„.h будем иметь
С. +4')+4‘ "=о. или-^+ХС, +C)-iX =о.
62
откуда
(18.3)
Формула (18.3) представляет собой
рекуррентную формулу для определения
левого моментного фокусного отноше-
ния л-го пролета (АД если известно фо-
кусное отношение (л - 1)-го пролета.
Аналогично, рассматривая п и п + 1
пролеты, можно получить формулу для
определения правого моментного фо-
кусного отношения
Al =-Mt / Мо = -~М1 /0 = оо
к0 =оо,Л, =2+0(2-1/00)//) =2
На рис. 18.3 даны примеры опреде- рис j g
ления левых фокусных отношений.
Составим уравнения трех моментов (см. формулу (17.7) лекции 17) для
пролетов и - 1 ии и для пролетовп, п + 1 (рис. 18.4):
+2/wn_1(/;_I +гп)+м„гп =-6ia;
+2М„(С +/;+1)+Л/и+1С =-ЫВ'„Ип. (18.5)
Рис. 18.4
Подставим формулы
”"2 ’
^и+1
в уравнения (18.5), а резуль-
тат разделим на 1п, тогда
получим Мп-1(—1 +2^-+-^- | + Л/„ =-6^ ;
I /„*„- С CJ inin
Мп-1 + 1^2+2^ —=
I ln IM 'Л
С учетом выражений (18.3) и (18.4) последние две формулы принимают
вид: к„ + Мп=-6-у~и М„_х + к*„ Л/„ = -6-^, откуда
*п *п
6 Апкп Вп 6 Впкп Ап
-------z---» = »----------•
ln knkn-\--ln кпкп-\
(18.6)
63
Рассмотрим пролет неразрезной балки, в котором находится единичная
сила Р = I (рис. 18.5). Опорные моменты будем находить по формулам
(18.6), где фиктивные опорные реакции А* и Я* определим из уравнений
равновесия = 0 и ЕМ„ = 0 в виде
. = z 2 w(l + v) = = 4- v) = w(t _ w)(2 - w);
6 6
В’ = ^-0W, гае P(a) = Hl+«) = «(l-«2). (18.7)
6 6
Рис. 18.5
Л/.
Подставляя формулы (18.7) в выражения для
определения опорных моментов (18.6), получим
р(ц)-Л*а(ц)
1
(18.8)
Для практических расчетов можно заранее со-
ставить таблицу, где будут приведены значения
аЦи) и Д(м), вычисляемые по формулам (18.7), при
делении пролета на 10 частей. В этом случае шаг
Рис. 18.6
параметра и необходимо брать равным 0,1.
Кинематический метод построения моделей линий влияния
С помощью кинематического метода без вычислений можно построить
модели линий влияния различных усилий. Моделью всегда будет являться
эпюра прогибов от единичного усилия, действующего по направлению от-
брошенной связи (рис. 18.6).
64
Лекция 19
ПРИБЛИЖЕННЫЕ МЕТОДЫ РАСЧЕТА
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ
Усилия в статически неопределимых системах зависят от соотношений в
размерах поперечных сечений. Важно обоснованно задаться размерами по-
перечных сечений. Для этого и служат приближенные методы расчета. При-
ближенными называют такие методы расчета, при применении которых вво-
дится больше упрощений, чем в классических методах расчета. Дополни-
тельные допущения дают возможность сократить объем вычислений и ис-
ключить решение систем канонических уравнений.
Консольный метод (расчет на горизонтальную нагрузку)
Метод дает быстрое решение с возможной ошибкой 100 - 200%. Приме-
няется для предварительного определения сечений.
Малопролетная высокая рама заменяется консольной балкой, нагружен-
ной узловой горизонтальной нагрузкой. Усилия в стойках определяются по
формуле
П,=Му, у, (19.1)
где М - изгибающий момент, как в консольной балке, для сечения, прове-
денного через середины стоек (рис. 19.1, б); у* - расстояние от нейтральной
оси до оси стоек (рис. 19.1, в); At - площадь поперечного сечения стойки;
Н Кривошппко
65
I = Л]_У]2 + А2у1 +...+А'у} - момент инерции сечения рамы (рис. 19.1).
Нулевые точки в эпюре изгибающих моментов рамы располагают в се-
редине пролетов ригелей и высот стоек (рис. 19.1, а). На первом этаже нуле-
вую точку в эпюре изгибающих моментов располагают на расстоянии 2А/3
от нижней заделки. Относительно этой же точки определяется М для форму-
лы (19.1).
Получив значения в стойках, из условия равновесия определяют попе-
речные и нормальные силы в ригелях и строят эпюры М, N, Q.
Пример 1. Рассчитать консольным методом двухпролетную трехэтаж-
ную раму, показанную на рис. 19.2. Рама имеет одинаковое поперечное се-
чение для всех стоек (Л = А).
Определяем положение нейтральной оси:
Sa А9 + А6 + А0 с
s---------=5м-
Вычисляем момент инерции сечений стоек относительно нейтральной
оси z, пренебрегая моментами инерций сечений стоек относительно местных
осей zf. 12 = 1 = ЪЦ + ly2 А, « £у2 А/ = Л(52 +12 +42) = 42Л.
Усилия в стойках находим по формуле (19.1):
20-2-5-Л 20-6-5Л , л __
7V13 =--------= 4,76 кН; Nn =-----------= 14,29 кН;
13 42/1 12 42/1
ж, 20-933-5/1 „ в, -20-2-1/1 „
7V.. =-----------= 22,2 кН; =--------------= -0,95 кН;
11 42/1 23 42/1
ж, -20-61-/1 ,, ж, -20-9,33-1-/1 ААА „
TV22 =---------= -2,86 кН; W21 =-------------= -4»44 кН;
42/1 42/1
/V33 = -3,81 кН; /V32 = -11,43 кН; 7V31 = -17,78 кН.
Откладываем эти значения на эпюре /V (рис. 19.2, в).
На эпюре М отмечаем нулевые точки. Вырезаем узел В. Действие от-
брошенной части заменяем внутренними усилиями (рис. 19.3, а).
Из рассмотрения рис. 19.3, а находим Qp3 = -N\3 = -4,76 кН, а из условия
Мс =£?i3‘2 - 7V.3-3 = 0 находим £>1з = 7,14 кН. Тогда
Lx = NP} - е.з + 20 = 0 и Np3 = Ql3 - 20 = -12,86 кН.
Далее определяем Мр = -2 = 14,28 кН. Откладываем это значение из-
гибающего момента в узле В.
Проводим прямую линию через полученные точки и нулевые точки (рис.
19.2, б) ригеля РЗ и стойки 13. Затем, рассматривая узел Д определяем
Qpt = -3,81 кН; Q33 = 2,86 кН; NP6 = -2,86 кН; Мд = £33-2 = 5,72 кН-м.
Рассматривая равновесие узла Е рамы (рис. 19.2, а), находим
= Ю кН; моменты на концах средней стойки М= 14,28 + 5,72 = 20 кН-м.
Узел, показанный на рис. 19.3, б, должен находиться в равновесии.
66
Рис. 19.2
Следовательно, 'Ey = /Vl3 - Nl2 - Qp? = 0» тогда Qn = -9,53 кН.
Из условия, что точка К - нулевая точка, имеем
67
б VV|2= 14,29 кН
Л13 = 4,76 кН
О.. = 7.14 кН
Мк = 6i3*4 + Qp? '3 +NP2 -2 = 0, откуда находим нормальную силу NP2 = 0.
Поперечная сила Qi3 = 7,14 кН была определена ранее. Затем из рис.
19.3, б определяем поперечную силу Qtf- Qi3= Qn = 7,14 кН.
Продолжая вычисления аналогичным образом, строим эпюры изгибаю-
щих моментов М, нормальных N и поперечных Q сил (рис. 19.2, б. в, г).
Метод моментных нулевых точек (расчет на горизонтальную нагрузку)
Этот метод более точен по сравнению с консольным методом.
В основе метода лежат следующие допущения:
I. Ветровая нагрузка, распределенная непрерывно по высоте рамы, за-
меняется узловой.
2. Нулевые моментные точки принимаются посередине высот стоек,
для стоек первого этажа - на расстоянии 2/^/3 от нижней заделки.
3. Сумма вышележащих горизонтальных сил для каждого этажа рас-
пределяется по стойкам пропорционально отношению моментов
инерции стоек и кубу их высоты
(19.2)
где С„ = /„ /Л^; EF- сумма вышележащих горизонтальных сил.
4. Построив эпюры моментов в стойках, строят эпюры в ригелях.
Изгибающие моменты в ригелях у крайних узлов определяются из усло-
вий равновесия узлов. У средних узлов рамы сумму моментов в примыкаю-
щих к узлу стойках распределяют по смежным пролетам ригеля пропорцио-
нально их погонным жесткостям.
Пример 2. Рассмотрим верхний этаж рамы, изображенной на рис. 19.2.
Пусть все стойки этажа имеют одну высоту h и одинаковый момент инерции
/ (рис. 19.4, а). Для верхнего этажа имеем
С„ = Си = С23 = С33 = //Л3; EF = 20 кН; ZC, = ЗС„ = 3//А3, тогда
йз=&=е»=^=т=^кн.
68
Эти значения поперечных сил откладываем на эпюре Q (рис. 19.4, в).
Прикладывая поперечные силы в нулевых точках соответствующих сто-
ек, определяем изгибающие моменты в стойках (рис. 19.5, о).
Рассматривая равновесие узлов В иД, определяем изгибающие моменты
в ригелях в этих точках (рис. 19.5, а). Затем вырезаем узел Е (рис. 19.5, б).
Известный изгибающий момент в стойке 23, равный 13,34 кН-м, распределя-
ем по ригелям РЗ и Р6 пропорционально их погонным жесткостям:
h>r>
где 1р„ - длины ригелей. Тогда /де = 2//6 = 1 / 3; in = 2//3 или iP6 / iP3 = 2.
F
Рис. 19.5
б
В этом случае МЕЛ = 2Л4д, но МЕд+ МЕЯ = 13,34 кН-м, откуда
МЕн = 4,45 кН м, а Ml:jl = 8,9 кН м.
Зная изгибающие моменты в ригелях, находим соответствующие попе-
речные силы в этих же ригелях:
Л 13,34 + 4,45 Л 8,9 + 13,34 „
QP3 =----г = -2,96 кН; QPb = = -7,41 кН.
о 5
При определении поперечных сил применялось правило знаков для по-
перечных сил.
Затем можно найти нормальные силы Nk и М2з из условий равновесия
узла £ (рис. 19.5,6);
£> = 0 -> NP6 =-6,67 кН; £> = 0 -> JV23 =4,45 кН.
По аналогии рассматриваем нижележащие этажи рамы.
69
Метод распределения моментов
Н.М Вернадского (1929 г.) - X. Кросса (1932 г.)
Этот метод является методом последовательных приближений. В про-
цессе расчета постепенно проводится устранение противоречий между ос-
новной и заданной системами.
При расчете необходимо соблюдать следующий порядок расчета:
I. Заданная рама (рис. 19.6, а) путем введения подвижной заделки во
все жесткие узлы превращается в систему отдельных стержней - ос-
новную систему (рис. 19.6, б).
Рис. 19.6
2. Во всех стержнях основной системы строятся эпюры моментов от
внешней нагрузки. При этом условия равновесия = 0 для каждо-
го узла рамы, где п - число узлов рамы, не будут выполняться (рис.
19.6, б).
3. Вычисляется неуравновешенный момент R, в каждом узле, прило-
жив который можно добиться равновесия узла. Например, для рис.
19.6, б имеем Я2 = -Г//8; R3 = F//8 -ql2l 12; Л4 = ^/2/12.
Неуравновешенный момент, стремящийся повернуть узел по ходу
часовой стрелки, будем считать положительным.
4. Для всех стержней определяются коэффициенты распределения
h,=-—---------- = V7-> 0«)
70
где т - число жестко соединенных в рассматриваемом /-м узле стержней.
Погонные жесткости находим как
EItJ
itJ =----для введенной упругой заделки;
iu =------для шарнирного закрепления;
ч
Е1Ч
itJ =----для неподвижной заделки.
Например, д ля стержней узла 2 (рис. 19.6, б) имеем
• = 3 Е/21 3 £2/ = 3£/. • =L.^2L=EL=
‘2l 4* /21 4 21 4/ ’ '26 2 1^ 2h 21 *25’
. _ E2I El v. . 15Е/
'23 Zjlm -‘21 +,25 +/26 +,23
По формуле (19.3) находим:
ЗЕ/
»*’ =^-=-jSQ =°* и25=им=о,13; нв =0.53.
~7Г
5. Освобождаем от защемления узел и, к которому приложен неурав-
новешенный момент и распределяем этот момент по стержням,
сходящимся в узле и, пропорционально коэффициентам распределе-
ния^.
Опорные моменты, уравновешивающие момент находим
как M„j=n„jRtr
Например, для узла 2 (рис. 19.6, б) получаем
Fl FI
м2\ = А21R2 = = 0.25F/; М26 = p26R2 = 0,13у = 0,016F/;
Л/23 = 0,066F/; Л/25 = Л/26.
6. Одновременно с уравновешивающими моментами (в освобожден-
ном узле) на противоположных концах возникнут вторичные мо-
менты защемления с обратным знаком (рис. 19.6, в) по сравнению с
Mv. Для нашего случая (рис. 19.6, в):
V32 = —Л/гз/2; Л/ц = ~^25^ ит.д.
7. После распределения моментов в узле п накладывают на него за-
щемление и переходят к соседнему узлу (например, узел 3 на рис.
19.6, б). В этом узле повторяется операция, т.е. распределяются не-
уравновешенный момент R3 и вторичный момент Л/32, пришедший
от уравновешивания узла 2.
71
Распределив указанным способом моменты во всех узлах, получают пер-
вый цикл распределения. Циклы распределения повторяются до тех пор, пока
неуравновешенные моменты, действующие на защемление, будут столь ма-
лы, что устранение защемлений из всех узлов не повлечет за собой практи-
чески существенных дополнительных моментов. Обычно бывает достаточно
3-4 циклов.
Метод Б. Лозера (расчет на вертикальную нагрузку)
Сложная рама разбивается на более простые статически неопределимые
рамы (рис. 19.7). Выделенные более простые рамы рассчитываются с приме-
нением фокусных отношений и с использованием для загруженного пролета
формул (18.6) лекции 18.
Рис. 19.7
После определения всех изгибающих моментов в узлах выделенной схе-
мы переходят последовательно к рассмотрению остальных систем. Оконча-
тельную эпюру моментов получают суммированием эпюр, построенных для
отдельных систем.
Основные допущения метода:
1. При действии вертикальной нагрузки не учитываются горизонтальные
смешения узлов.
2. Учитывается лишь влияние стержней, смежных с загруженным проле-
том, что позволяет выделить из рамы самостоятельную систему.
3. Моментные фокусные отношения для стержней, примыкающих к за-
груженному (если дальние концы этих стержней жестко связаны с узлами
рамы), приближенно принимаются равным 3, а фокусные расстояния - %
длины стержня, при шарнирном закреплении к = °о, При заделке (напри-
мер, концы стержней жестко заделаны в фундамент) к = 2, а фокусное рас-
стояние равно 1/3 длины стержня.
72
Лекция 20
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ ПЛОСКИХ
СТЕРЖНЕВЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
При расчете статически неопределимых систем методом перемещений
за неизвестные Z, принимаются углы поворота жестких узлов и их линейные
перемещения. Следовательно, общее число неизвестных п будет равно сум-
ме неизвестных углов поворота жестких узлов пу и их неизвестных линей-
ных перемещений пл, т.е.
П = Пу + пл.
Жестким считается такой узел, в котором концы, по крайней мере, двух
Рис. 20.1
Для определения независимых линейных перемещений узлов необходи-
мо ввести во всех узлах рамы, включая опорные заделки, шарниры. Если при
этом получится геометрически изменяемая система, то необходимо поста-
вить дополнительные опорные стержни, чтобы восстановить геометриче-
скую неизменяемость системы. Число дополнительных опорных стержень-
ков будет совпадать с числом пл неизвестных линейных перемещений узлов.
Число неизвестных углов поворота и их линейных перемещений называ-
ется степенью кинематической неопределимости системы при расчете ее
по методу перемещений.
При расчете методом перемещений система расчленяется на однопро-
летные статически неопределимые балки. Это достигается введением в нее
пу «плавающих» заделок, препятствующих только повороту жестких узлов
рамы и пл опорных стерженьков, препятствующих линейным смещениям
этих жестких узлов. В «плавающих» заделках возникают только опорные
моменты, а в дополнительных опорных стерженьках по одной сосредото-
ченной опорной реакции.
Рассмотрим, например, раму, изображенную на рис. 20.2, а.
Чтобы получить основную систему метода перемещений, необходимо
поставить три «плавающие» заделки и два опорных стержня (рис. 20.2, б).
Эта система пять раз кинематически неопределима при расчете ее по мето-
73
а) Заданная система б) Основная система
Рис. 20.2
ду перемещений, но три раза статиче-
ски неопределима при расчете ее по
методу сил.
При наличии в раме горизонтальных
и вертикальных стержней рекомендует-
ся вводить горизонтальные и верти-
кальные, а не наклонные, опорные стер-
жни. Это упростит расчет рамы.
В статическом отношении основная
система метода перемещений отличает-
ся от заданной тем, что в ней появляют-
ся реактивные моменты во введенных заделках и реактивные усилия в до-
бавленных стержнях. Эти моменты и усилия будут равны нулю, если повер-
нуть введенные заделки на углы, равные действительным углам поворота
заданной системы, и сместить жесткие узлы на действительные линейные
перемещения этих узлов в заданной системе в направлении дополнительных
опорных стержней.
Эти замечания берутся за основу при составлении статических уравне-
ний метода перемещений, которые называют также каноническими уравне-
ниями метода перемещений.
Составим систему канонических уравнений метода перемещений для
рамы, показанной на рис. 20.3, а. На рис. 20.3, б представлена ее основная
система, где Zx - действительный угол поворота узла В заданной рамы; Z2 -
то же, для узла С; Z3 - действительное линейное горизонтальное смешение
узла С рамы.
Система канонических уравнений метода перемещений рассматривае-
мой три раза кинематически неопределимой рамы имеет вид:
гп^1 +г12г2 +г132з =0;
r2)Z) + г22^2 +г2323 +R2F =
r31Zj +r32Z2 + r33Z3 + R3p =0,
где Г] । - реактивный момент в заделке 1 от ее поворота в направлении Zj на
а) Заданная рама
б) Основная система
Рис. 20.3
74
угол, равный единице (Z, = 1); г12 - реактивный момент в заделке I от пово-
рота заделки 2 в направлении Z2 на угол, равный единице (Z2 = 1); г13 - реак-
тивный момент в заделке 1 от перемещения по горизонтали опорного стерж-
ня 3 (Z3 = 1) на величину, равную единице; г3! - опорная реакция в дополни-
тельном опорном стержне 3 от поворота заделки 1 на угол, равный единице
(Z| = 1); Г33 - опорная реакция в стержне 3, возникающая от горизонтального
смещения этого стержня на единицу (Z3 = 1); RlF - реактивный момент в за-
делке I от внешней нагрузки; R2F = 0 - реактивный момент в заделке 2 от
внешней нагрузки; R3F - опорная реакция в дополнительном стержне 3 от
внешней нагрузки и т.д.
В общем виде можно сказать, что rtJ - реакция i-й введенной связи от
единичного углового или линейного смещения J-й введенной связи; RlF -
реакция в i-й введенной связи от внешней нагрузки.
Построение эпюр изгибающих моментов
в однопролетных статически неопределимых балках
Для определения коэффициентов канонических уравнений метода пере-
мещений необходимо для ускорения расчетов предварительно определить
опорные реакции в статически неопределимых однопролетных балках, на-
груженных наиболее часто встречающимися видами внешней нагрузки, и
опорные реакции, возникающие от углового или линейного смещения одной
из опор балки и от температурных воздействий.
Рассмотрим два примера построения эпюр изги-
бающих моментов.
/. Поворот заделки на угол ф в однопролетной
балке с одним защемленным, а другим шарнирно
опертым концом (рис. 20.4, а).
Решим задачу методом сил. Каноническое урав-
нение метода сил имеет вид
SijA'i =ф,
откуда находим X, = ф/, где (рис. 20.4, в)
тогда Л, = ЗфЕ/ И.
Составим уравнение равновесия для заданной
балки (см. рис. 20.4, а):
YMB = Xt-VAl = 0, VA=Xlll^EIIl2=Vll.
Таким образом, определены опорный момент и
опорные реакции. Если принять <р = 1, то
ЗЕ/ ЗЕ/
' “Г"~ I ; ГУ~ /2 •
Рис. 20.4
75
2. Перемещение шарнирно подвижной опоры на величину А в однопро-
летной балке с одним защемленным и другим шарнирно опертым концом
(рис. 20.5, а).
Решаем задачу методом сил. Принимаем основ-
ную систему в виде консоли (рис. 20.5, 6), строим
эпюру Л/!, определяем (рис. 20.5, в)
Р
3EI
и записываем каноническое уравнение метода сил
бцЛГ] = А, откуда определяем = A/6]j, тогда
%| = ЗДЕ///3.
Теперь можно построить эпюру изгибающих мо-
ментов М (рис. 20.5, г).
El = const В
в
Рис. 20.5
5i
3£/
Принимая А = I, находим г„ = ——
1ES18
ЗЕ/
I2 ‘
Аналогично можно построить эпюры изгибающих
моментов и определить опорные реакции в однопро-
летной балке с двумя заделанными концами при по-
вороте или смещении одной заделки, а также по-
строить эпюры М в однопролетных статически не-
определимых балках при любом внешнем воздейст-
вии. Имеются специальные таблицы, где даны эпюры изгибающих моментов
и опорные реакции однопролетных статически неопределимых балок от дей-
ствия на них внешних нагрузок, температурных воздействий и от смещения
опор.
Пример. Построить эпюры изгибающих моментов Л/, поперечных Q и
нормальных N сил для рамы, показанной на рис. 20.6, а.
Решение. Принимаем основную систему (рис. 20.6, 6), строим эпюру
изгибающих моментов от единичного угла поворота (Z| = 1) введенной за-
делки (рис. 20.6, в) и от внешней нагрузки (рис. 20.6, г). Определяем реак-
Рис. 20.6
76
тивные моменты во введенной заделке:
6Е/ ЗЕ/ 9Е/ да1
гп------+--------’ r\f-—•
а а а 8
Реакции гм и Rlf. находятся из рассмотрения равновесия вырезанной
плавающей заделки (ЕЛ/Я = 0) (рис. 20.6, д, е).
Из канонического уравнения метода перемещений rHZ, + RXI. =0 для
рассматриваемой один раз статически неопределимой рамы находим угол
поворота узла В заданной рамы: Zf = -/?ц/гц = да/(Т2ЕГ).
Складывая две эпюры М = A/|Z, +MXF, строим эпюру изгибающих
моментов М для заданной рамы (рис. 20.7, а), а затем эпюры поперечных Q и
нормальных N сил (рис. 20.7, в, г), предварительно определив опорную реак-
цию Vc (рис. 20.7, б):
Мв =-^— =V(a~— , Затем из 1у = 0 найдем .
в 24 2 24 24
Л е к ц и я 21
ТЕОРЕМА О ВЗАИМНОСТИ РЕАКЦИЙ
На основании теоремы о взаимности работ работа внешних сил состоя-
ния i на перемещениях состояния j равна работе внешних сил состояния j на
перемещениях состояния i:
но WtJ = ryl, Wjj = ryl, следовательно, r9 = rJt.
Последнее равенство выражает теорему о взаимности реакций, которая
формулируется следующим образом: реакция в /-й связи от единичного
смешения j-й связи равна реакции в у-й связи от единичного смещения /й
связи.
ГРУППИРОВКА НЕИЗВЕСТНЫХ
ПРИ РАСЧЕТЕ СИММЕТРИЧНЫХ РАМ
Система канонических уравнений метода перемещений п раз кинемати-
чески неопределимой рамы имеет вид:
77
Г11^1 +Г12^2 +-+rln^n +Я1К “О;
r2|Zi +r22z2 +...+r2nzn+/?2f = °;
~^rn2^2 + rnn^n + RrF 0.
При расчете симметричных рам методом перемещений, так же как и при
расчете методом сил, желательно применить группировку неизвестных.
В этом случае эпюры изгибающих моментов от единичных смещений
концов однопролетных балок основной системы будут только симметрич-
ными или обратносимметричными. В результате канонические равнения
метода перемещений распадутся на две независимые системы с симметрич-
ными и обратносимметричными неизвестными, что значительно облегчит
дальнейший расчет.
Пример. Рассмотрим симметричную П-образную раму, нагруженную
сосредоточенной силой F (рис. 21.1, о); El = const для всей рамы.
Решение. Выбираем основную систему и группируем неизвестные на
симметричные Z2 и обратносимметричные Zb Z3. Строим эпюры изгибаю-
щих моментов от единичных смещений (рис. 21.1, б, в, г) и от внешней на-
грузки (рис. 21.1, д). Вычисляем реакции во введенных связях:
9£/ 18£/ 5£/ 10£/ 3£/ 6£/
Гц-2-----------; г22 -2-----------; Г|3--2—
а а а а а а
6EI Л _ _ Л _ _ Fa Fa
Г33 - ; rl2 - r2l - 0; r23 - r32 - Oj RlF - ^3F - ^2F - ~ JT-
a 8 4
78
в которых подчеркнутые коэффициенты равны нулю, благодаря применен-
ной группировке неизвестных. В результате система канонических уравне-
ний распадается на две независимые группы:
г--г‘-л
f22Z2 +Л2+ =0, Z2 =-/?2F /r^ = fl2F/(40E/).
Строим окончательную эпюру изгибающих моментов Л/, применяя фор-
мулу М = M2Z2 + MF,jum вычисления моментов в характерных сечениях
рамы (рис. 21.2):
3EI a2F 3aF „ 2EI a2F Fa 3aF
A а 40E7 40 A a 40EI 8 40
2EI a2F aF = laF
a 40E/ + 8 " 40
Рис. 21.2
По эпюре моментов М, применяя формулу
Журавского Q = dM/dx, легко построить эпюру
поперечных сил Q (рис. 21.2), а затем, используя
метод вырезания узлов (рис. 21.3), строить эпюру
нормальных сил N.
Проверка. Проверка правильности вычисле-
ния коэффициентов системы канонических урав-
нений метода перемещений выполняется анало-
гично проверке коэффициентов при расчете рам
методом сил. Например, проведем универсальную
проверку, для чего построим эпюру Ms (рис. 21.4)
Л?, =Л7, + М2 + М3
I К»
' зг If
1_ _40 2
2> = -F/2-/C = 0;
ACw = -F/2;
Ex = 3F/40 + NAB = 0;
Nar = -3F/AQ.
Рис. 21.3
и вычислим riX = Ery =rl}+rl2+rl3 + r2l + r22 + r23 + r31 + r32 + r33 =
18Е/ 6Е/ „ 10Е/ 6Е/ El( o 12 6
--------r-2 + +-— = —28 + —
a a a-a a \ о a
79
Затем вычисляем
Л2.М2+2.М2-2-— —
6 1л/ ( fl / а а
1 ЗЕ/ 2 ЗЕ/
2 о2 3 а'
Рис. 21.4 Рис. 21.5
Универсальная проверка
^=-^jMMDds =
подтвердила правильность полу-
ченных значений коэффициентов
rv канонических уравнений.
Можно сделать дополнитель-
ную проверку. Например, прове-
рим, что горизонтальное пере-
мещение опоры D (см. рис. 21.1,
а и рис. 21.5) равно нулю:
I Г1 3aF 2 „ „ а („ 3aF „ 7aF 3aF laF
—--------а— д-2+2----2-2----д-2------д+----а------д
Е/[2 40 3 2-61 40 40 40 40 JJ
= 0.
Лекция 22
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ МЕТОДОМ
ПЕРЕМЕЩЕНИЙ НА ДЕЙСТВИЕ ТЕМПЕРАТУРЫ
Температурное воздействие на каждый стержень рамы всегда можно
свести к симметричному и обратносимметричному воздействию.
Пусть стержень АВ с симметричным поперечным сечением нагрет на h
сверху и на /2 снизу (рис. 22.1, д), причем /i > t2. Это несимметричное темпе-
ратурное воздействие сведем к симметричному воздействию (рис. 22.1, б) и
обратносимметричному (рис. 22.1, в). Если суммировать эти воздействия, то
получим для верхнего волокна
zi +t2 | fi ~f2 _f
2 2”
/| +/2 ^1 ~ ^2
для нижнего волокна -— -----5—- = t2,
2 2
что соответствует условию задачи (см. рис. 22.1, л).
При симметричном температурном воздействии происходит только из-
80
менение длины стержня (см. рис. 22.1,6):
где а - температурный коэффициент линейного
расширения.
При обратносимметричном воздействии стер-
жень искривляется, но длина его остается прежней,
так как температура оси стержня не изменяется.
Взаимный поворот сечений по концам стержня
АВ можно определить по формуле
полученной ранее при расчете статически опреде-
лимых стержневых систем в лекции 13. Здесь h -
высота поперечного сечения стержня, - пло-
щадь единичной эпюры моментов М,.
Для рассматриваемого стержня (см. рис. 22.1, г)
Площадь Пду берется со знаком (+), так как изгибные деформации от
температуры и от единичного момента совпадают.
При расчете рам методом перемещений в ее основной системе возмож-
ны два типа однопролетных балок. Рассмотрим балку с заделкой и шарнирно
подвижной опорой (рис. 22.2). Балка подвержена обратносиммелричному
нагреву: бцХ, +Alf =0;
д aAzn а(/,-/2) /2
k h м h ' 2 ’
= -Т^_ = 9,. (Z1 -Z2)J M =
O| ] 2hl
По аналогии можно рассчитать на обратно-
симметричный нагрев два раза статически не-
определимую балку с жесткой заделкой на од-
ном конце и температурной заделкой на другом
(рис. 22.3).
За£/(/] ~/2)
2h
Рис. 22.2
6 С. II. Кривошапко
81
VI *2/' **
-^-1^/2 Г
Ra Яд I
IIOIIIIII
осЕ/(/, -t2)lh
(m)Ra=Rb = 0
Дальнейший расчет рамы методом перемещений на
действие температуры проводится обычным путем,
т.е. записываются канонические уравнения метода
перемещений:
rnZ| + rl2Z2 + ...+ rlnZ„ + Rlt +/?], =0,
r»\Z\ +rln^2 + —+ rnn^n +Rnt + RfU ~ 0»
где коэффициенты rtJ вычисляются обычным путем;
Рис. 22.3 /?2,, ...,R'„t- реакции, возникающие во введен-
ных связях при симметричном нагреве стержней рамы
и определяемые по эпюре моментовМ,; Ry, R2l, реакции, возни-
кающие во введенных связях при обратносимметричном действии темпера-
туры на основную систему, определяются по эпюре моментов М". Решая
систему и канонических уравнений, находим п неизвестных углов поворота
и линейных смещений узлов рамы (Z„), а затем строим эпюру изгибающих
моментов в заданной раме по формуле
М = М, Zj + M2Z2 +... + MnZn + M't + Л/Д
РАСЧЕТ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ НА СМЕЩЕНИЯ ОПОР
Методику определения усилий и моментов, возникающих в раме при
смещении ее опор, рассмотрим на конкретном примере (рис. 22.4).
Для решения заданной системы достаточно решить одно уравнение:
rii^i + *ic =0»
где /?и; - реакция во введенной за-
делке, возникающая при вертикаль-
ном смещении шарнирно непод-
вижной опоры на величину с.
Опорный момент Rxc определяется
по эпюре моментов Мс.
Из канонического уравнения на-
ходим
z - 3ic =
1 г„ ~Л7, V
Дальнейший ход решения произ-
водится по известной схеме. На-
пример, эпюра изгибающих момен-
Рис. 22.4
тов М (рис. 22.4) строится по формуле
M = MXZX + МС.
Затем для построения эпюры поперечных сил Q необходимо использо-
вать зависимости Журавского (dM/dx = Q). По эпюре Q строится эпюра /V.
82
Лекция 23
НЕУПРУГОЕ ДЕФОРМИРОВАНИЕ
Ранее, в курсе сопротивления материалов, в основном использовался
метод расчета по допускаемым напряжениям. Прочность изделия считалась
обеспеченной, если напряжение в опасной точке не превосходило допускае-
мого напряжения (расчетного сопротивления).
Фактический коэффициент запаса прочности п определялся как отноше-
ние предела текучести сгу к фактическому напряжению сг.
п = с /и.
В ряде случаев более правильно расчеты на прочность при действии ста-
тических нагрузок вести с учетом пластических деформаций, а запас проч-
ности вычислять как отношение предельной нагрузки Fu к фактически дейст-
вующей Г: о о
n=Fu IF.
Для определения предельной нагруз-
ки будем применять методы теории пре-
дельного равновесия. Будем считать, что
конструкции выполнены из идеально р^с 23 । рис 23 2
пластических материалов, которые могут
быть упругоидеально пластическими (рис. 23.1) и жесткоидеально пласти-
ческими (рис. 23.2).
Когда напряжение достигает значения о^, говорят, что конструкция «те-
чет» без возможности увеличения напряжений, а деформация е становится
неопределенной.
Предельным значением нагрузки называется такое значение нагрузки
действующей на конструкцию, при котором невозможно дальнейшее ее уве-
личение, а деформации соответствуют горизонтальному участку на рис. 23.1
и рис. 23.2. Значение предельной нагрузки для конструкции из жесткоиде-
ально пластического и из упругоидеально пластического материала одно и
тоже.
Предельная нагрузка для стержневой системы
Для растянутого элемента конструкции предельное нормальное усилие Nu
равно
(23.1)
Nu =оуА,
где А - площадь поперечного сечения элемента.
Предельная нагрузка Fu всегда соответствует превращению конструкции
в механизм. Для определения предельной нагрузки применим методы, опре-
деляемые статической теоремой предельного равновесия. Согласно этой
6*
83
теореме предельная нагрузка является максимальной из всех значений на-
грузки, удовлетворяющих условиям равновесия.
В машиностроении вместо формулы (23.1) применяют формулу
Nu = п^ПзСуА. (23.2)
где И| - коэффициент, учитывающий качество обработки изделия, его раз-
мер, концентраторы напряжений; «2 - коэффициент однородности материа-
ла; и3 - коэффициент условий работы, учитывающий степень ответственно-
сти детали.
Пример 1. Определить предельную нагрузку Fu для стержневой систе-
мы, показанной на рис. 23.3. Предел текучести материала стержней принять
оу=2900 кг/см2.
Рис. 23.3
Решение. Пусть течет стержень / (рис. 23.3, о), тогда
= °уА = 2900 -1,5 = 4350 кг.
Спроектируем все силы на ось т-т (рис. 23.3, б):
У^ т_т = cos40° - Ful cos70й = 0, откуда находим
_ Arulcos40r’ 4350-0,766
F, = ——----=— ------------= 9743 кг.
cos70° 0Д42
Если же предположить, что течет стержень 2, то будем иметь
= ° уА2 = 2900-2 = 5800 кг.
Спроектируем все силы на ось к-к (рис. 23.3, в):
У^ к_к = cos40° - Fu2 cos 60° = 0, откуда определяем
. Ле^ = ~:766 = 8886кг
"2 с<вб0° 03
Таким образом, получили два значения предельной нагрузки:
FU| = 9743 кг и Fu2 = 8886 кг,
84
из которых истинное значение предельной нагрузки будет наименьшим:
Fu = Fu2 } = min{9743; 8886} = 8886 кг.
Предельная нагрузка для балок
Напряженное состояние изгибаемых конструкций (балок) определяется
величинами изгибающих моментов. При плоском поперечном изгибе изги-
бающий момент, согласно рис. 23.1; 23.2 и 23.4, в, г, не может быть больше
момента текучести'.
Ми = fayd4y = ay jyd4=ay(Szl +Sz2) илиЛ/„ = <jyWzp/, (23.3)
А А
где и Szi - соответственно статические моменты верхнего и нижнего по-
лусечения относительно нейтральной оси z; Wzpt - пластический момент
сопротивления.
dA
а б в гу~Ь у
Рис. 23.4
Например, для прямоугольного поперечного сечения (см. рис. 23.4, в, г):
.Л Л bh1 w
М. =ч„-Ь-— = чу — =
т-е. <23-4>
Положение нейтральной линии z (см. рис. 23.4, г) определяется из усло-
вия равновесия ^х = суА1 -оуА2 = 0, откуда At = Яг, следовательно, ней-
тральная линия z делит площадь поперечного сечения на две равновеликие
части. Если две равные площади At и А2 имеют центры тяжести на расстоя-
нии yi и Уг от нейтральной оси z, то предельный момент определится форму-
лой
В балках при достижении наибольшими изгибающими моментами зна-
чений Ми образуются пластические шарниры (см. рис. 23.4, в). В этом случае
изгибающий момент в сечении равен предельному Ми и не может увеличи-
ваться, а деформирование балки далее происходит при постоянном значении
изгибающего момента в пластическом шарнире.
85
Практически, однако, состояние полной пластичности, показанное на
рис. 23.4, в, не может возникнуть, так как деформации в крайних волокнах
будут становиться достаточно большими и в них появится эффект упрочне-
ния. Таким образом, предельный пластический момент, вычисляемый по
ранее приведенным формулам, может рассматриваться как приближенная
величина. Так как в реальных балках Ми редко определяется точно, то при-
ближенное определение его величины достаточно для практических целей.
Статически определимая балка имеет предельную нагрузку, соответст-
вующую образованию пластического шарнира в наиболее напряженном се-
чении, когда балка превращается в механизм.
Статически неопределимая стержневая система или балка при разруше-
нии тоже превращается в механизм. При этом в балках или рамах необходи-
мо образование стольких пластических шарниров, сколько требуется для
превращения их в механизм.
Пример 2. Дана стальная однопролетная шарнирно опертая балка, на-
груженная по пролету равномерно распределенной нагрузкой q = 20 кН/м,
расстояние между опорами / = 3 м.
Подобрать сечение прокатной двутавровой балки, если сг^т = 240 МПа,
и определить, во сколько раз необходимо увеличить равномерно распреде-
ленную нагрузку q, чтобы в балке образовался пластический шарнир. При-
нять предел текучести стали су = 285 МПа. Собственным весом балки пре-
небречь.
Решение. Определяем максимальный изгибающий момент в середине
пролета балки:
.. gi1 20-з2 .............
^тах ~ g “ g ~ 22.5 кН • м.
Находим необходимый момент сопротивления поперечного сечения
балки:
zn.min
&adm
22,5 106
240000
= 93,75 см3.
По таблице сортаментов «Двутавры стальные горячекатаные» выбираем
двутавр №16 с W:= 109 см3 и статическим моментом площади полусечения
относительно нейтральной оси г - S-1= \2= 62,3 см3.
По первой формуле (23.3) находим момент текучести
Ми = o-/2SzI) = 285000 2 62,3 IО'6 =35,51 Кнм.
И наконец, определяем п = MJ = 35,51/22,5 = 1,58.
Следовательно, если равномерно распределенную нагрузку q =20 кН/м
увеличить в 1,58 раза, то в середине пролета в поперечном сечении балки
возникнет пластический шарнир и балка превратится в механизм.
86
Предельная нагрузка при кручении
Предельным состоянием для идеально пластического материала будет
такое, при котором касательные напряжения во всех точках поперечного
сечения станут равными пределу текучести тЛ (рис.23.5). Выражение для
предельного крутящего момента как результирующего момента, возникаю-
щего в поперечном сечении (см. рис. 23.5) от внутренних касательных на-
пряжений г,, имеет вид
Рис. 23.5
Рис. 23.6
(23.5)
(23.6)
(23.7)
=ту(2прфр = ^~
о 3
где Wppt - пластический момент сопротивления при кручении, который для
сплошного круглого поперечного сечения вычисляется по формуле
w - 2я,~3 -
з |2 ’
а для кольцевого сечения с наружным D и внутренним d диаметрами - по
. зчяО3 d
формуле Wpp! = (1 -с )-^зр где с = —
Пример 3. Стальной стержень круглого сечения диаметром d = 5 см,
жестко закрепленный с обоих концов, нагружен крутящим моментом Ми
(рис. 23.6, о). Определить предельный крутящий момент, если предел теку-
чести материала стержня при кручении гг=150 МПа.
Решение. В предельном состоянии в поперечных сечениях стержня воз-
никают предельные крутящие моменты Тю равные
Т, = — т =3’14'0?05> 150000 = 4,91 кНм.
12 ” 12
Выделим часть стержня сечениями /-/ и //-// (рис. 23.6, б). На оставшую-
ся часть стержня в предельном состоянии кроме момента Ми действуют мо-
менты Ти, приложенные по торцам оставшегося участка и направленные в
сторону, противоположную Ми. Составим уравнение равновесия:
Мх = Ти - Ми+Ти =0 или Ми = 2Т„.
Окончательно величина предельного внешнего крутящего момента бу-
дет Ми = 2Ти = 2 -4,91 = 9,82 кН м.
87
Лекция 24
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ
НА ПРЕДЕЛЬНУЮ НАГРУЗКУ
Тему рассмотрим на примере простой прямоугольной рамы, изображен-
ной на рис. 24.1. Все элементы этой рамы предполагаются однородными,
одинакового поперечного сечения в пределах одного участка и из одного
материала. Узлы рамы считаются жесткими, стойки жестко защемлены в
опорах. Внешние сосредоточенные силы монотонно увеличиваются, пока не
произойдет разрушение.
Будем учитывать три возможных механизма разрушения рамы: балоч-
ный, боковой и комбинированный механизмы.
Решать задачу будем методом, определяемым кинематическими теоре-
мами теории предельного равновесия, по которой работа, выполненная
внешней нагрузкой, приравнивается к работе, накапливаемой в пластических
шарнирах. Из этих равенств находится предельная нагрузка Fu.
На первом этапе расчета вычисляются моменты текучести, которые мо-
гут возникнуть на опорах, в жестких углах рамы и под внешними сосредото-
ченными силами. Влиянием нормальных и поперечных сил пренебрегают.
Для прямоугольных поперечных сечений имеем (рис. 24.1, б):
Ми] =—су = °’2'0*3 285-I03 =1282,5кН-м;
4 4
.0.2-(U 03)22g5.,03=,^g кН.м
4 4
Боковой механизм разрушения показан на рис. 24.2. Он появится при
появлении четырех пластических шарниров. В узлах рамы следует брать
Л41, так как Ми\ < Ми2, т.е. четыре пластических шарнира возникнут в стой-
ках. Составим условие равенства работ внешних и внутренних сил:
88
Запишем геометрическое соотношение: tgG, = Д, //3 »6,, откуда нахо-
дим Дв = /30ь
Полученное выражение подставим в формулу для вычисления Ful:
4Л^ = 4Л^,=±1Ж5 = 2850кН
“ и3е, иэ 0,6-3
Балочный механизм разрушения показан на рис. 24.3. Он возникает при
появлении двух шарниров в стойках и одного шарнира в ригеле под верти-
кальной внешней силой Fu2.
Составим условие равенства работ внешних и внутренних сил:
fu2-a2 =Л/И, -е2 +л/и1 -е3 +л/и2(©2 +е3)=(е2 +е3хл/и1 +ми2\ или
(е2+е3хл/и1+л/и2)
—£—•
Запишем геометрические соотношения (см. рис. 24.3):
tg®2 =-7а-«б2. т.е. ©2 =^-; tgG3 =^-«е3, т.е. 03=7^-
Ч Ч 12 *2
Полученные значения углов 62 и 63 подставляем в формулу для вычис-
ления предельной нагрузки Fu2:
Fu2 = ^2^1+^2^Ь)(Ми1+Ми21 = (2 +1^282,5 +1846,8)=2347 кН.
Комбинированный механизм разрушения представлен на рис. 24.4. Он
появляется при появлении трех пластических шарниров в стойках и одного в
ригеле под вертикальной силой F&. Составим условие равенства работ:
Fu3-д5+kFu3-Д3 = л/и1 -204Ч Л/И1(е4 +е5)+л/и2(е4 +е5), или
л/,,(зе4+е5)4-л/.г(е4+е5)
89
Рис. 24.4
Запишем геометрические соотношения (см. рис. 24.4):
Д« Д< Д, Д,
tg©4= —«©4, т.е. ©4=-^-; tge4=-^-«©4,T.e. ©4 = —,
Ч Ч ‘3 *3
Д3 Д< /3 Д« Д<
— =—, или Д3 =—Д5 и, наконец, tg©5 =—~©5, ©5 =—.
h h Л h h
Полученные значения углов 64, ©5 и перемещения Д3 подставляем в фор-
мулу для вычисления предельной нагрузки F^:
F Л/Ц|(ЗД5 ZZ, + Д5 //2)+Мц2(Д5 //, + Д5//2)
1/3 Д5+АД5/3//,
_ 1282,5(3/2+1 /4)+1846,8(1 /2 +1 /4) _
— “ — I 7 1 V КГ1.
1+0,6-3/2
Таким образом, получены три значения предельной нагрузки, из кото-
рых истинное значение будет наименьшим:
Fu = min{Ful; Fu2; Fu3} = min{2850 кН, 2347 кН; 1910 кН} = 1910 кН.
Когда внешние сосредоточенные силы FvikF, монотонно увеличиваясь,
достигнут значения Fu и £FU, произойдет разрушение рамы по типу комби-
нированного механизма (см. рис. 24.4).
Прямоугольные рамы, воспринимающие горизонтальную и вертикаль-
ную нагрузки, подвергались множество раз экспериментальным исследова-
ниям. Было установлено, что предельная нагрузка, предсказанная расчетом
по разрушающим нагрузкам, обычно близка к нагрузке, при которой наблю-
дались чрезмерно большие прогибы.
Бакер (J.F. Baker) и Хейман (J. Heyman) провели серию экспериментов
над небольшими рамами. Их результаты были затем подтверждены опытами
Бакера и Родерика (J.W. Roderick), которые исследовали рамы в натураль-
ную величину.
В дальнейшем испытанием натурных рам занимались Шиллинг (C.G.
Schilling), Шутц (F.W. Schutz) и Бидл (L.S.Beedle).
90
Лекция 25
ПОНЯТИЕ ОБ УСТОЙЧИВОМ И НЕУСТОЙЧИВОМ РАВНОВЕСИИ
Системы под действием нагрузки должны находиться в состоянии ус-
тойчивого равновесия. Это означает, что если какие-либо случайные причи-
ны выведут систему из состояния равновесия, то после удаления этих при-
чин система должна вернуться в первоначальное положение.
Статической устойчивостью сооружений называется способность со-
оружения в нагруженном состоянии сохранять заданную ему форму равно-
весия. Выход системы из состояния равновесия при некоторой заданной
форме называется потерей устойчивости этой формы равновесия. Нагрузка,
при небольшом превышении которой возможен переход к новой устойчивой
форме равновесия, называется критической нагрузкой.
В лекции рассматриваются только консервативные задачи устойчивости.
Силы, действующие на консервативные системы, обладают двумя свойст-
вами:
- величина и направление каждой силы зависит только от положения
системы;
- работа сил на перемещениях системы не зависит от пути следования
сил, а зависит лишь от начального и конечного положений каждой
силы.
Первая задача на статическую устойчивость - задача Эйлера (1744 г.)
была решена методом интегрирования уравнения упругой линии критиче-
ского состояния стержня с шарнирным закреплением концов
с результатом
,2 >
где п = I; 2; ...; E/mjn - минимальная жесткость стержня на изгиб; / -длина
стержня.
В целях безопасности расчетная (допускаемая) нагрузка F^ должна
быть меньше критической Fajm = Fc/ns, где ns - коэффициент запаса при рас-
Неустойчивое равновесное состояние Устойчивое равновесное состояние
Рис. 25. 1
91
чете на устойчивость. Коэффициент запаса устойчивости принимается
несколько большим коэффициента запаса прочности, так как необходимо
учитывать дополнительные неблагоприятные обстоятельства: возможная
начальная кривизна стержня, возможный эксцентриситет действия нагрузки
и др.
УСТОЙЧИВОСТЬ СИСТЕМ с одной
ИЛИ НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Число возможных форм неустойчивого равновесия определяется степе-
нью свободы системы. Под степенью свободы системы понимается число
независимых геометрических параметров, необходимых для определения с
их помощью положений всех точек системы, потерявшей устойчивость.
В данной лекции будем рассматривать системы, состоящие из абсолют-
но жестких звеньев, связанных между собой упругими связями.
В системе с п степенями свободы возможны п форм неустойчивого рав-
новесия, но из них практически вероятна лишь одна, остальные возможны
при создании соответствующих условий. В системе с п степенями свободы
существует п критических сил, причем каждому значению критической силы
соответствует определенная форма неустойчивого равновесия. Рассмотрим
два метода для определения критических сил: статический и энергетический
методы.
Статический метод (метод равновесия)
Статический метод основан на рассмотрении условий равновесия систе-
мы в деформированном состоянии. Проиллюстрируем статический метод на
примере системы с одной степенью свободы (рис. 25.2). Элементы системы
- бесконечно жесткие. Жесткость упругой связи равна Гц. Жесткость упру-
гой связи, численно равна силе, которая вызывает
перемещение связи на единицу длины в направле-
нии этой силы.
Запишем уравнение равновесия для потерявшей
устойчивость системы:
= RA -U-Rb -I = 0, откуда находим
Ra = RB /2 = «1Л1 ^2.
Кроме того, известно, что
Л/, = Fcra} -RAl = O, тогда Fcr = RAlI at,
или после подстановки значения RA = Ra(oi), полу-
ченного ранее, окончательно находим
Fcr=rHZ/2.
Энергетический метод
Энергетический метод основан на использовании теоремы Лагранжа -
Дирихле, согласно которой из всех перемещений, удовлетворяющих задан-
92
Рис. 25.2
ным граничным условиям, перемещения, удовлетворяющие условиям устой-
чивого равновесия, придают полной потенциальной энергии системы мини-
мальное значение.
Порядок расчета
1. Задаются уравнением новой формы равновесия при малом отклонении
в виде нескольких членов ряда, удовлетворяющих краевым условиям:
y = Z^A(x). (25.1)
k=l
Задаваясь той или иной функцией у, удовлетворяющей заданным гра-
ничным условиям, можно приближенно определить критическую силу. При
выборе функции кинематические граничные условия (прогибы и углы пово-
рота сечений) должны быть удовлетворены обязательно, а статические гра-
ничные условия (изгибающие моменты, поперечные силы) - желательно, но
не обязательно.
2. Вычисляют полную потенциальную энергию системы при переходе из
новой формы равновесия в первоначальную:
,, I eM2dx 2 vr- л ,о£.
~2 ЕЛ +2^Г"°’ crJc k'
Уравнение (25.2) можно записать в другой форме, для этого примем во
внимание дифференциальное уравнение упругой линии балки El^' = М.
Находим величину А* (рис. 25.3):
d&k =dr-dccosa = djr(l-cosa) = dr2sin2(a/2)»2dc(a/2)2 = a2dr/2~
» y,2dxH.
I I
Окончательно получаем А* =—|(у')2^с
2 о
Подставляя полученные значения М и А* в форму-
лу (25.2), получаем вторую форму записи полной по-
тенциальной энергии:
G f£/z(Z)2 А Д f r„O2 J(y')2 А. (25.3)
tga = у* ~ а
Рис. 25.3
3. Определяем экстремальное значение потенциальной энергии из урав-
нений:
^ = 0; ^ = 0;
dat да2 дап
(25.4)
4. Приравнивая детерминант из коэффициентов при параметрах ап нулю,
определяем критические силы, число которых равно числу параметров ап.
Если в формулу (25.3) внести точное выражение ординаты у искривленной
оси, то получим точное значение критической силы.
93
Пример I. Вычислить Fcr для стержня, показанного на рис. 25.4. Примем,
что стержень при потере устойчивости изгибается по синусоиде
. tlx , ст тис _ ап2 . тис
у = asm— .тогда у =—cos—, у =------— sin—.
Вычисляем значение потенциальной энергии по формуле (25.3):
Лгг Л2
2 21
„2 4 „2„2
= \^^-~EI-^-Fc
4/3 4/
dV 0,9ап* ап2 _ Л
Затем вычисляем ----=-------— Е1----Fcr = 0, откуда находим
да I3 21
1,8л 2 £/ 17,7£/
Рис. 25.4
Точное значение Fcr для
стержня, изображенного на
рис. 25.4, будет
17,б2£/
Выбор уравнений криволинейной формы равновесия различных стерж-
ней с разнообразными граничными условиями можно производить по специ-
альным справочным таблицам.
Если стержневая система состоит из абсолютно жестких звеньев с
EI = оо, то формула (25.2) принимает вид
Ч» f О.П. и = -YF„^k. (25.5)
' к21=1 *=’
г» Пример 2. Определить критическую силу для
\ I стержня, показанного на рис. 25.5. Для рассматривае-
00 мого стерЖНЯ полная потенциальная энергия опреде-
Л ляется по формуле (25.5):
U = rxxa2/2-Fcr А,, но Д, =а2//2,
Рис. 25.5 причем tga =а\П~ а, тогда А] = a2 /(2Z).
Подставим полученное выражение в формулу потенциальной энергии:
I/ = ГцЯ12 !2-Fcra2 1(2Г), затем dU/дах =rnax -Fcral И = 0 и Fcr -ги1.
94
Лекция 26
РАСЧЕТ ПЛОСКИХ РАМ НА УСТОЙЧИВОСТЬ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
При расчете рам на устойчивость методом перемещений принимаются
следующие основные гипотезы:
1. Нагрузка передается на узлы рамы и до потери устойчивости изгиба
нет.
2. Стержни рамы считаются нерастяжимыми.
3. Расстояние между узлами при деформации не меняются.
4. При расчете учитываются только те продольные силы, которые были
до потери устойчивости.
5. Все внешние силы возрастают пропорционально одному параметру.
Л77Т Fi =3aq/2 = 3FI2
F2 = aq = F
а) Заданная система
б) Основная система
Рис. 26.1
Общий ход решения задачи на устойчивость рамы при узловом действии
нагрузки следующий. В качестве неизвестных в сжато-изогнутой раме при
ее отклонении в искривленное состояние принимаются углы поворота узлов
и их линейные смещения. Как и в классическом расчете рам на прочность
методом перемещений, неизвестные параметры обозначаются через Z,.
На рис. 26.1 показаны заданная рама и ее основная система, за которую
принимается рама с введенными фиктивными защемлениями жестких узлов
и дополнительными опорными стержнями. Число введенных заделок и
опорных стержней равно степени статической неопределимости рамы при
расчете ее по методу перемещений. Рама, изображенная на рис. 26.1, три
раза статически неопределима. Здесь Z2, Z3 - неизвестные углы поворота
узлов, Z| - неизвестное линейное смещение.
В искривленном состоянии каждое каноническое уравнение метода пе-
ремещений выражает условие равенства нулю полной упругой реакции, вы-
званной всеми неизвестными перемещениями Z,. Для общего случая система
канонических уравнений метода перемещений при расчете на устойчивость
имеет вид
95
Гц7) + rl2Z2 +...+rlnZn -0;
r21^1 + r22Z2 +—+r2nZn =°J
(26.1)
rnlZl + rn2Z2 + — +r'№iZ'i =°-
Так как рамы не имеют пролетной нагрузки, то реакции во введенных
заделках от пролетной нагрузки будут равны нулю, т.е. свободные члены
канонических уравнений классического метода перемещений будут равны
нулю (Д,г= 0).
В недеформированном состоянии система уравнений (26.1) имеет реше-
ния: Zi = Z2 = ... = Zn= 0. Нам этот случай не подходит. Кроме того, система
п однородных линейных уравнений с п неизвестными имеет решение, от-
личное от нулевого (тривиального) решения Z1 = Z2 = ... = Z„ = 0. в том и
только в том случае, если D = detfrj = 0, т.е.
(26.2)
При расчете на устойчивость все гу будут переменными. Элементы гу
матрицы жесткости являются функциями одного параметра v: rtJ =
Минимальный корень vmin уравнения (26.2) даст возможность опреде-
лить критическую нагрузку Fcr. Решение трансцендентного уравнения (26.2)
в большинстве случаев является арифметически непростой задачей и требует
привлечения ЭВМ. В случае небольшого числа неизвестных Zn использова-
ние специальных таблиц позволяет решать задачи устойчивости вручную.
Рассмотрим методику вычисления коэффициентов гу Пусть требуется
определить реакцию г,, во введенной заделке для стержня, противоположный
конец которого шарнирно оперт (рис. 26.2). На стержень действует продоль-
ная сила F, и кроме этого повернем введенную заделку на угол, равный еди-
нице (А = 1).
Если пренебречь влиянием поперечных и нормальных сил, то формула
перемещений Мора будет иметь вид
A.(F.0=Zf^A,
где Mf = Mq + Fk (26.3)
Mq - изгибающий момент от поперечной (пролетной) нагрузки; у - прогиб
стержня.
Запишем дифференциальное уравнение упругой линии балки
Ely" = MF = -Мо - Fyt или у' + —у = -^2.
v Ei El
96
2 •
Вводя обозначение к =—, получаем дифференциальное уравнение
£/
вида
• л2 MQ
у' + ку =----
EI
решение которого у = A cosAx+ В sin кх+у, (26.4)
где у- частное решение дифференциального уравнения. Подставляя фор-
мулу (26.4) в выражение (26.3), находим
М/. — Mq + F-(A cos Ах + В sin Ах+у) = Mq + A cos Ax + В sin Ax + Fy, (26.5)
где обозначено A = AF, B = BF.
Если эпюра изгибающего момента Mq от поперечной нагрузки изменя-
ется по закону прямой, то у = -Mq / F, а формула (26.5) даст
MF = Я cos Ах + В sin Ах. (26.6)
а б) Состояние / в) Состояние 2 2
Рис. 26.2
Расчетную схему рассматриваемого стержня, изображенного на рис.
26.2, а, можно представить в виде равноценного стержня, показанного на
рис. 26.2, б. Примем стержень, представленный на рис. 26.2, б, за первое со-
стояние, а стержень, показанный на рис. 26.2, в, - за второе состояние. Тогда
согласно теореме Бетти rti -8п = 1-Д, откуда получаем известное выраже-
ние г„ =1/ б
Следовательно, для определения реакции г„ необходимо предварительно
вычислить угол поворота <5„ от действия единичного момента и продольной
силы F (см. рис. 26.2, в). Для этого построим эпюру М, от действия единич-
ного сосредоточенного момента (рис. 26.2, г).
7 С. II. Крииошипко
97
Изгибающий момент Л4, возникающий от действия внешней нагрузки,
описывается формулой (26.6). Для нашего случая эта формула принимает
вид (рис. 26.2, в): MF = A cos кх + В sin кх.
Для определения постоянных интегрирования А и В поставим два гра-
ничных условия: при х = 0 имеем MF = 0, поэтому /1 = 0,
прих = /имеем MF =1, т.е. 1 = В sin JW, следовательно, В = 1/sinAZ.
Окончательно получаем: MF = sin fcr/sin kl.
И наконец, используем формулу перемещений Мора:
с 1 Г77 17 J 1 rsinfcr х , if sin к! . Л
=— \MFM.dx = —------------dx =--------------1 coski L
El* h ' El*smkl I Elklsmkly к )
v2
Введем новый параметр v = kl и обозначим <рх (v) =------,
3(l-v/tgv)
1 3EI v2
т°гДа ru = =——--------—- = 3/^ (v),
I 3(l-v/tgv)
где принято i = El И - погонная жесткость на изгиб;
<26-ч * * 7’
- введенный ранее параметр.
Упругие реакции г„ часто встречающихся сжато-изогнутых стержней
приводятся в специальных таблицах.
Пределы изменения параметра v
При любых способах закрепления концов стержня обобщенная формула
Эйлера для определения критической нагрузки имеет вид
Fcr (26.8)
(р/ )
где р - коэффициент приведения длины стержня ( 0,5 < р < 2 ), зависящий от
I способа закрепления концов стержня.
YИз формулы (26.7) также можно опре-
д р = 0,5; у = 2л F делить критическую силу:
S p=2;v = ^ (269)
ч Сравнивая формулы (26.8) и (26.9), на-
Рис. 26.3 ходим, что v = л / р.
Принимая во внимание, что 0,5 < р < 2, получаем пределы изменения
параметра v: л / 2 < v < 2я, или 1,57 < v < 6,28 (рис. 26.3).
98
Лекция 27
УСТОЙЧИВОСТЬ ПЛОСКОЙ ФОРМЫ ИЗГИБА БАЛОК
В балках, работающих на изгиб в одной плоскости, высота
поперечного сечения обычно превышает ширину (рис. 27.1).
Если осевые моменты инерции относительно главных осей
существенно отличаются друг от друга (/. » /Д то плоская
форма изгиба балок становится неустойчивой. Балка начинает
изгибаться в двух плоскостях и при этом поперечные сечения
поворачиваются на некоторые углы. Потеря устойчивости
может привести к разрушению балки.
Устойчивость тонкой полосы при чистом изгибе
Рассмотрим устойчивость балки с постоянным по длине рис 27.1
сечением при чистом изгибе (рис. 27.2). Балка опирается на
идеальные шарниры, позволяющие свободно поворачиваться в плоскости
изгиба хОу. Кроме того, будем считать, что на опорах предусмотрены уст-
ройства, позволяющие свободно поворачиваться относительно оси у, но пре-
пятствующие повороту относительно продольной оси х.
Введем обозначения: Е1г - изгибная жесткость относительно оси z; Е1У -
изгибная жесткость относительно оси у\ GIj - жесткость при кручении; G -
модуль сдвига; /j - геометрическая характеристика крутильной жесткости.
Величина для прямоугольного сечения может быть определена по форму-
ле: I<i = ab\ где коэффициент а определяется по таблице в зависимости от
отношения сторон h/b или по формуле, предложенной С.П. Тимошенко:
Запишем два дифференциальных уравнения изгиба в двух плоскостях:
99
d2u
~лг~~ЁГу
и дифференциальное уравнение кручения в упругой стадии:
dx~ GId
(27.1)
(27.2)
Перемещение и и угол поворота 0, возникающие в момент потери устой-
чивости, входят в два последних уравнения, которые и подлежат рассмотре-
нию. Согласно рис. 27.2 находим
du
М., = Л/sin 6 = ЛЮ, Мх. =Msin0 = A/-p = ArtgP = -A/—.
dx
Подставим значения М yf и М х. в формулы (27.1), (27.2):
d2u _ _ MQ . dQ _ М du
Продифференцируем второе уравнение системы (27.3)
j2e = м d2u
dx2 GId dx2
(27.3)
В полученное выражение подставим вместо d2uldx2 ее значение из
первого уравнения (27.3):
J20 М MB M2Q d2Q 2л л
dx2 GId Ely GIdEly dx2
- 2^2
где введено обозначение п =-----------.
GIdEIy
Решение полученного дифференциального уравнения будет иметь вид:
6 = A cos пх + В sin пх. &ТА)
Для определения постоянных дифференцирования А и В поставим гра-
ничные условия: при х = 0 имеем 6 = 0, т.е. получаем А = 0; при х = / имеем 0
= 0, т.е. получаем 0 = Bsinnl.
Второе условие будет выполняться при В = 0 или при sinn/ = 0.
Случаю В = 0 соответствует плоский изгиб без потери устойчивости,
поэтому принимаем sinw/ = 0, т.е. nl = кл, где к = 1; 2; 3;....
Практическое значение имеет наименьший корень при к = 1, поэтому
второе граничное условие записывают в виде
nl = п, т.е. Л///^GIdEIy = л,
откуда находим критическое значение сосредоточенных моментов, дейст-
вующих на опорах: Mcr = ^GldEIynll.
100
Устойчивость балки прямоугольного сечения
под действием поперечной нагрузки
Рассмотрим устойчивость балки под действием сосредоточенной силы
F, приложенной в середине пролета (рис. 27.3). Дифференциальные уравне-
ния изгиба в двух плоскостях и кручения в упругой стадии имеют вид (27.1)
и (27.2). Согласно рис. 27.3 находим:
М = —sm 0х =—х;
* 2 2
=yd=y(u-jrtgp)=-^p-x^l
2 2 2 \ ах)
Подставляем значения М у, и М в формулы (27.1), (27.2):
d2u FQ .
<fc2 " Е1„ ~ 2Е1у *’
dQ _ Мх> _ F ( ЛЛ
~dx~~GI^~ 2Gld С *1/
Продифференцируем второе уравнение системы (27.5)
d2G _ F (du du Fx d2u
~dx* ~ 2GId \dx~~dx~X~d^ J 2Gld dx2 ’
(27.5)
В полученное выражение подставим вместо d2uldx2 ее значение из
первого уравнения (27.5):
J20 Fx FQ F2x2 л
—----------------x=---------e, или
dx2 2GId 2Ely 4GIdEIy
101
^?+*Че=о, (27.6)
d^2
где £ = x/l - безразмерная величина; к - безразмерный коэффициент
4GIdEIy
Решение уравнения (27.6) можно получить в виде
б = ЛФ(Л, О + ВТ(*, О, (27.7)
где Ф, *Р - функции, представляющие собой бесконечные ряды
Ф(АЛ) = 1—— к2 +—^--------Л4-------------к6 +...; (27.8)
Ъ 3-4 3-4-7-8 3-4-7-8-1112
е5 г9 к!3
ЧЧ*Л) = £-—*2 +—2--------Л4------------к6 +.... (27.9)
4-5 4-5-8-9 4-5-8-9-12-13
Для нахождения произвольных постоянных интегрирования А и В, необ-
ходимо поставить граничные условия:
при* = 0, т.е. при £ = х/1 = 0, имеем 0 = 0, т.е. А - 0;
при х = //2, т.е. при £ =х/1 = 'Л, имеем dQldt, = 0 т.е. BdVId^ = 0.
Исследуем второе граничное условие:
__________________________?L_+J=0,
di ( 4 4-5-8 4-5-8 9-12 J
где m = k*/\6.
Принимая, что В # 0, и ограничившись тремя членами ряда, получим
квадратное уравнение
т2 -40/и +160 = 0,
минимальный корень которого т = 5,508.
к2 F2!4
Окончательно из равенства т =— =-----------= 4,508 определяем
16 MGIdEIy
значение критической силы
S-^OSG/aE/, 16>9g
F« =--------р----------p-Vc/4£/y
Если вместо трех членов ряда учесть шесть членов, то получим т =
= 4,482, что незначительно отличается от т = 4,508.
Примечание. На реальной лекции можно ограничиться выводом диф-
ференциального уравнения устойчивости (27.6), указав, что это уравнение
решается в степенных рядах (27. 7).
102
Лекция 28
РАСЧЕТ КОНСТРУКЦИЙ НА УПРУГОМ ОСНОВАНИИ
Для расчета конструкций на упругом основании ис-
пользуются разнообразные методы расчета. Например, для
вычисления напряжений в основании массивных абсолют-
но жестких сооружений можно применить формулы со-
противления материалов:
_2V Mz
а~ A~WZ'
где для рис. 28.1 необходимо принять N = -F, М2 = Fa,
Wz = bh2/6.
Напряжения в основании можно определить по фор-
мулам теории упругости, как для жесткого штампа. ис‘
Рассмотрим расчет балок на упругом основании с применением гипоте-
зы о пропорциональной зависимости между реакцией и осадкой основания.
Эта гипотеза относительно свойств грунта была предложена Н.И. Фуссом в
1801 г. и применена Винклером в 1867 г. к балкам на упругом основании.
РАСЧЕТ БАЛОК НА УПРУГОМ ОСНОВАНИИ
Согласно гипотезе Фусса - Винклера, реакция упругого основания в
каждой точке пропорциональна прогибу балки:
р = -кцуЬ = -ку,
где b — ширина балки; у - просадка основания; ко - постоянный для данного
основания коэффициент (коэффициент постели). Он равен реактивному
давлению на единицу площади, вызывающему осадку грунта, равную еди-
нице. Эти коэффициенты определяются из опытов и имеют размерность
кг/см3 или кН/м3. Они изменяются в очень широких пределах ( от 0,1 до 1500
кг/см3) и приводятся в специальных таблицах. Величина к = к^Ъ называется
погонным коэффициентом постели.
Моделью винклеровского основания может служить ряд пружин одина-
ковой жесткости, опирающихся на абсолютно жесткое основание и дейст-
вующих независимо одна от другой. Второе допущение теории: упругое ос-
нование одинаково работает на сжатие н на растяжение. Следовательно, ги-
потеза Фусса - Винклера недостаточно верно отражает работу упругого ос-
нования и иногда не подтверждается опытом.
Дифференциальное уравнение упругой линии балки имеет вид
d2y _ М
dx2 ~~Ё1'
дифференцируя которое два раза, получаем Е1 —— = —— = q (28.1)
dx4 dx2
103
Для ненагруженного участка балки единственной распределенной на-
грузкой будет отпор упругого основания, т.е.
q~p=—ky. (28.2) Подставляя значение (28.2) в формулу (28.1), получим El — + Jty = O. (28.3) dx4 Введем обозначение а = j и приведем уравнение (28.3) к ви-
ДУ у/Г+4а4у = 0. (28.4) Общее решение уравнения (28.4) имеет вид
у = eax(/lcosajf-i-fisinajf)+e (С cos ах + D sin ax). (28.5)
Произвольные постоянные А, В, С, D определяются из граничных усло-
вий. Коэффициент а является основной характеристикой жесткости балки
на упругом основании.
Введем безразмерную величину А. = о/, благодаря которой можно клас-
сифицировать балки: длинные балки, если А. > л; короткие балки, если
л/4 < 2 < абсолютно жесткие балки, если А. < л/4.
Расчет бесконечно длинной балки, лежащей на сплошном упругом
основании, загруженной одной сосредоточенной силой
Балка считается бесконечно длинной, если расстояние от края нагрузки
до ближайшего его конца более 1,5л/а. Упругая линия бесконечно длинной
балки симметрична относительно точки приложения груза F, поэтому будем
104
рассматривать одну половину балки с началом координат в точке приложе-
ния груза. В длинных балках влияние сосредоточенного груза с расстоянием
затухает. Так как при х -> <х> прогиб и кривизна оси балки равны нулю, то
решение (28.5) можно упростить
у = e~°x(Ccosax + Dsmax). (28.6)
Для определения постоянных интегрирования поставим граничные ус-
ловия: y* = Q прих = 0 и Q = dM I dx = Ely” = -F 12тг.¥же прих = 0 (всере-
дине балки, но справа от оси у, рис. 28.2, а).
Из первого граничного условия получаем -С + D = 0, или С = D. Второе
граничное условие принимает вид
£/(4a3Cecu cosax)x=0 = -F /2 и тогда С = -£/(8а3£/).
Окончательно формула (28.6) принимает вид
у —---—e-<u(cosax + sin ar), кроме того, (28.7)
8а3£/
М = Е1у” =——e-ax(sinax-cosar), Q = Ely" = -—е~ах cosax. (28.8)
4а 2
На рис. 28.2, б представлены эпюры, построенные по формуле (28.7).
Длина, через которую появляются нулевые значения у, М. Q, будет опреде-
ляться равенством х = л/a. По формулам (28.7), (28.8) строятся эпюры для
правой половины балки. Эпюры у и М - симметричны, а эпюра Q - косо-
симметрична относительно начала координат. Если на балку действуют не-
сколько сосредоточенных сил, то момент в соответствующем сечении равен
сумме моментов, вызываемых каждой силой.
Рис. 28.3
При загружении равномерно распределенной нагрузкой q по закону не-
зависимости действия сил можно написать (рис. 28.3):
, qdx _ог
dy. =—2-—е (cos ax+sin ах);
* «а3Е1
Ул = рИл + {‘Ьл = ~^(2~е °* <Х№аЬ~е sin ас) (28.9)
0 0
Распределенная нагрузка <у, приложенная к балке, считается положи-
тельной, если она направлена вверх.
105
Лекция 29
РАСЧЕТ КОРОТКИХ БАЛОК НА УПРУГОМ ОСНОВАНИИ
Под действием приложенной нагрузки балка на упругом основании бу-
дет прогибаться, причем в зоне сжатия осадка основания равна прогибу бал-
ки у. В действительности основание получает не только упругие, но и оста-
точные деформации, но будем считать, что грунт работает лишь в пределах
упругих деформаций. Зависимость между интенсивностью давления р и
осадкой у принимают линейной:
р = -к&Ь,
где коэффициенты постели ко приводятся в справочниках или определяются
исходя из решения для грунтовой среды как упругого полупространства по
. . Ео
формуле kG =----,
где Eq - модуль деформации грунта основания; ро - коэффициент Пуассона
для основания; S- площадь передачи давления (до 10 м2); со — поправочный
коэффициент, зависящий от отношения длины балки / к ее ширине b (при-
мерно 0,8).
В лекции 28 было дано решение для ненагруженного участка балки на
упругом основании. Если обозначить внешнюю нагрузку через qo, то урав-
нение упругой оси балки будет иметь вид
_,А
EI -4 = -75- - Р+4Ь = -!<У+Чо.
dx cbr
или Ely,v + ky = qG. (29.1)
Общее решение однородного уравнения имеет вид
у = (A cos ах + Esin ах)+е~ах (Сcos ах + Dsin ах),
гдеа=Й7 [i]-
А.Н. Крылов предложил вместо этого интеграла при-
нимать решение в форме: у = АА^ + ВВ^ + СС^ + DD^, (29.2)
где А^ = сЦ cos В^ = у(ch£ sin Е, + sh£cos £); ± sh£ sin
^=i(ch^sin^-sh^cos^); £ = ах. (29.3)
Легко убедиться, что предложенные Крыловым функции удовлетворяют
следующим условиям:
/^(0) = 1; 4(0) = 0; А”(0) = 0; А?(0) = 0;
Е^(0) = 0; BJ(O) = 1; fiJ(O) = 0; Е^(0) 0;
СД0) = 0; С'(0) = 0; Cj(O) = l; С£(0) = 0;
106
Df(0) = 0; ££(0) = 0; DJ(O) = O; E£(O) = 1. (29.4)
Таблица производных функций Крылова
Функция •4
А^ = ch£cos£ -AB(
В^ = ^(ch£sin £ + sh^cos^) ->C{
C4=|sh£sin£ A( ->D{
= ^(ch£sin £ - sh£cos£) ci At
Исследуем общий интеграл (29.2). Поставим краевые условия для балки,
изображенной на рис. 29.1. Для левого конца балки будем иметь (рис. 29.1):
при х = 0 прогиб j(0)=уо = А т.е. А = у0;
при х = 0 угол поворота сечения у'(0) = <pG = аВ, или В = <р0 / а ;
при х = 0 изгибающий момент Мо = EIy”(O) - Екз^С, или С = Мо /(а2Е1\
и наконец, прих = 0 поперечная сила Qo = E(f”(O) = E/a3D, откуда
О = &/(<?£/).
4
Рис. 29.1
Подставляем полученные значения постоянных коэффициентов А, В, Су
D в общее решение (29.2) однородного уравнения (29.1). Принимая во вни-
мание, что решение дифференциального уравнения (29.1) есть сумма общего
решения (29.2) однородного уравнения (29.1) и любого частного решения
уравнения (29.1), запишем решение для случая поперечной нагрузки (см.
рис. 29.1) в виде:
A . ^0 D ^0 п . Г> , V С V Г> ,
° 4 a * а2Е/ 4 а3Е/ * ^*а2Е7 " ^а3Е/ J
107
у'-фо^ ~4ayoDt. ~
аы а Е1 а±А a EI
-4aq(Dbt -Dbl)/k;
М = М„^ -4а2 Е1у^-4aEI<foDi + ’ЕМА-1~'£.^В/-
-4a2Elq(Cb} -Сьг)1к-
Q = Q>\ -4а3 Е1уйВ^~ 4а2 Е1^-4аМп1\-4а£ MD„ ~Y.FAf~
-4а>Е1Ч(Вы-Вьг)1к, (29.5)
где Aa=A^=abt)-, С„ =C5(lj = am); D, = Z\((j = <x-/) и т.д.
Отпор грунта находится из формулы р = -ку.
Пример. Записать уравнения, необходимые для построения эпюр проги-
бов у, изгибающих моментов М и поперечных сил Q, возникающих в балке
на упругом основании. Левый конец балки жестко заделан (рис. 29.2).
Для балки, показанной на рис. 29.2, поставим очевидные краевые усло-
вия: уо=(ро=о,
т.е. в заделке прогиб и угол поворота сечения балки равны нулю.
На противоположном, правом, конце балки имеем:
М, = М& = al) = 0; Qi = Q(£ = al) = 0, (29.6)
т.е. изгибающий момент и поперечная сила равны нулю. Запишем последние
две формулы (29.5) с учетом краевых условий (29.6):
Mi = -М0А, Л В, -—Bb=0; Q,= V0A, + 4aM0D, -FAb = 0.
a a
f/o=Qo=^---------г
4 В, D, + А?
Из системы двух уравнений находим неизвестные опорные реакции:
4BbD[ + AbAt _ F (AbBt -AtBb)
» Mo — - .
a ^B,D, У A2)
Принимая во внимание, что
можно записать уравнения
Рис. 292
теперь
(29.5) для рассматриваемой балки и
построить соответствующие эпюры
у, MtQ,pc выбранным шагом Дх.
108
Лекция 30
РАСЧЕТ БАЛОК НА УПРУГОМ ОСНОВАНИИ
ПО МЕТОДУ И.А. СИМВУЛИДИ
Для расчета балки на упругом основании уже использовалось диффе-
ренциальное уравнение четвертого порядка (уравнение упругой линии бал-
ки):
Е1^ + Р,=<к. <30.1)
ах
где EI - жесткость балки на изгиб; у - вертикальное перемещение нейтраль-
ной оси балки; рх - распределенная реакция со стероны основания; q0 - за-
данная активная нагрузка. Здесь величины у и рх являются неизвестными. За
начало координат принимается левый конец балки.
Реакция основания рх на балку задается в виде алгебраической функции
третьей степени:
где L - длина балки; а0. а2, а3 - неизвестные параметры, зависящие от
жесткости балки, ее длины, модуля деформации основания Eq, коэффициен-
та Пуассона основания Pq и балки р, характера и расположения нагрузки. Это
дает возможность регулировать давление грунта рх в нужных пределах пу-
тем соответствующего подбора жесткости и длины балки.
Известная внешняя нагрузка записывается в виде
?0=Zi^/O)+ZiL4+Xi73.f.. (30.3)
где/(z) - известная, как угодно распределенная нагрузка; М, - внешние изги-
бающие моменты; F, - сосредоточенные силы; Г/3/ - мгновенный прерыва-
тель первого порядка; - мгновенный прерыватель второго порядка; Г^К|
-двусторонний прерыватель. Остальные обозначения показаны на рис. 30.1.
Если подставить значения рх (30.2) и <?о (30.3) в дифференциальное урав-
нение упругой балки (30.1) и проинтегрировать его четыре раза, то получим
формулу для определения прогиба балки у. В эту формулу будут входить
восемь неизвестных величин: четыре параметра а0, о3 и четыре произ-
вольных постоянных интегрирования.
По методу Симвулиди для вычисления восьми неизвестных постоянных
необходимо поставить следующие условия:
1) уравнение равновесия = 0; 2) уравнение равновесия ЕМО = 0;
3,4) при х = 0 и при х = L должно быть у" - 0;
и четыре условия контактности балки с грунтом:
109
5) равенство прогибов балки и грунта на левом конце балки:
6) равенство ординат обеих кривых (ординат изогнутой оси балки и просад-
ки грунта) в середине балки;
7) равенство площадей, образованных ординатами обеих линий деформаций
(балки и грунта);
8) равенство третьих производных обеих функций прогибов в середине бал-
ки.
где
Решив систему восьми уравнений с восемью неизвестными, получим
(8252 -34а)Л -13440Да
°0 " 13440 + 29а
а2 _ (5188 +63а)Л +1344019а
3 13440 + 29а
! » = Т Z jf(z)dz-X J/U)dz + из I/> = 0;
lHI lKI J
c = p-|x {/(zjzdz-X f/(z)zdz+XF^-SM.b ™zmo=0;
к=-| E f/uxi-z)*-! j/(zXi-z)<fe+EF,(z.-/3,)+E4 ;
at _(2С-ЛХ1280-а)-8#а.
3 " 2048 + а
a3 (2C-/lX384+a)+4Wa
10 2048 + а * 1 1
*К1
*ni *ki
. LI2 LI2
* = r£ro'2 f/(*)<&-№ \f(z)dz^r^F, + K ;
L I I
'hi 'ki
L
110
l I J'
t ‘hi Kl
£rj'4(t/-2~/b)+£r'"F, (f-/2~/J1
B=~ Z J/(Z)^-^-Z
7Hf 7KI
♦Уг,и~'а)4+—/с-иг’1:
' 4! 48 J
l-u2 nEobL3 nEobL3 ,
a = —--------« — ----, b - ширина балки.
l-g? El El
При решении конкретных практических задач необходимо учитывать,
что при определении константы W нужно учитывать влияние только тех на-
грузок, которые расположены на левой половине балки. Например, первый
член формулы для определения W равен нулю (Гр 72 = 0 ), если начало рас-
пределенной нагрузки находится за пределами левой половины (на правой
половине), т.е. если /w L/2. В этом случае и второй член этой формулы
будет равен нулю (Г^72 =0). Аналогичные требования необходимо предъ-
являть и к остальным членам этой формулы, а также к членам формулы для
вычисления константы N.
Таким образом, прерыватель Г0Л/2 = {О; 1}.
Зная четыре константы До, аь а2» и интегрируя два раза дифференци-
альное уравнение четвертого порядка (30.1), находим
Л_|Ч,,Г п A2"' (*-L'2)2to2 (х-Ы2)\
C_[_(2z-1)-—(l(4+34,)_Kj+_ —+
L ч. у . у .
Hl Kl
“Zr/„ )/(»Х*-г)<Ь+Ег»м
^ni lKi
Ill
где все введенные прерыватели могут принимать значения только 0 или 1.
Например, Г, = 0, если сечение х, в котором определяется М или Q,
лежит за пределами конца распределенной нагрузки, т.е. сечение находится
правее конца нагрузки (х > /и). В другом случае = 1, если рассматривает-
ся сечение х балки, лежащее в пределах участка, где находится распреде-
ленная нагрузка.
Порядок расчета:
1. Все приведенные в лекции формулы получены для балки (полосы)
шириной 1 м. Если балка имеет ширину 6, то внешнюю нагрузку необходи-
мо пропорционально привести к ширине 1 м. Назначаем величину момента
инерции балки /. При заданном модуле деформации грунта Е& модуле упру-
гости балки Е и длине балки L находим значение гибкости а.
2. При заданной расчетной схеме находим значения вспомогательных
констант А, С, К, W, Ви N.
3. Подставляем найденные значения А, С, К, W, В, N и а в формулы
(30.4) и получаем значения параметров а^, ah а2, а3.
4. По вычисленным ординатам (30.2) строим эпюру рх. Если в какой-
либо точке балка отстанет от грунта, т.е. появятся отрицательные ординаты
реакций грунта, то для устранения этого необходимо изменить расчетную
схему балки или показатель гибкости и заново определить параметры а0, аь
а2, а3.
5. Находим значения поперечных сил и изгибающих моментов в любом
сечении балки, т.е. строим соответствующие эпюры М и Q. Для получения
окончательного результата для балки шириной b необходимо результаты
умножить на расчетную ширину балки Ь.
Дополнительные указания. Для того чтобы левый конец балки не отста-
вал от грунта, необходимо выполнить условие
Рх=о =(a0+fl2)-(fli +*3)>0.
Для того чтобы правый конец балки не отставал от грунта, необходимо
выполнить условие
Рх=/. = (flo + fl2 ) + (fli +а3)^°-
Для того чтобы середина балки не отставала от грунта, необходимо вы-
полнить условие
Рх=1.12 = а0 - °-
Если ширина и толщина балки не заданы, то ее размеры предварительно
определяются из условия распределения реакции рх по линейному закону.
112
Лекция 31
ДИНАМИЧЕСКОЕ ДЕЙСТВИЕ НАГРУЗОК
Теория расчета сооружений долгое время базировалась на предположе-
нии статического действия сил. Предполагалось, что силы, прилагаемые к
упругой системе, растут настолько медленно, что в каждый момент времени
можно считать внешние и внутренние силы взаимно уравновешенными.
В таком состоянии все точки тела будут находиться на неизменных рас-
стояниях друг от Друга, а исследования основываются на началах статики
абсолютно твердого тела.
Появление механизмов, учет землетрясений привело к необходимости
изучения сооружения в состоянии движения. Динамика сооружений харак-
теризуется движением их элементов во времени. Характер движения зависит
от свойств материала и вида внешних воздействий.
Будем рассматривать системы, обладающие совершенной упругостью.
При этом будем считать, что деформации систем малы по сравнению с ос-
новными размерами системы, и поэтому задачи будем решать на основании
уравнений сопротивления материалов, вводя в них силы инерции.
Динамическая нагрузка - это нагрузка, при действии которой силы
инерции сооружения будут настолько велики, что их надо учитывать при
расчете.
Силы инерции. Принцип Даламбера
При динамической нагрузке любой элемент конструкции в каждый мо-
мент времени можно рассматривать как находящийся в состоянии равнове-
сия под действием внешних сил, включая опорные реакции, усилий и сил
инерции. Это положение носит название принципа Даламбера.
Таким образом, к действующим на сооружение внешним силам нужно
добавить силу инерции'.
F, = ma [Н, кН], (31.1)
где F, - сила инерции, направленная в сторону, противоположную ускоре-
нию; т - масса тела, кг. Масса и сила инерции - объемные силы. Если из-
вестны силы инерции, то можно применить для определения внутренних
усилий моментов метод сечений.
При расчете стержневых систем объемные силы инерции за- А/у
меняют силами инерции, распределенными по длине стержня: 1
р, = рЛд [Н/м], (31.2) 4-
где Pi - интенсивность распределенной инерционной нагрузки; р
- плотность материала, кг/м3; А - площадь поперечного сечения; |М
а - ускорение, м/с2. I
Пример I. Груз весом G поднимают вверх с ускорением a. On- I
ределить напряжение в канате, пренебрегая его весом (рис. 31.1). *
Решение. Определяем массу груза т = G/g, тогда, согласно Рис. 31.1
8 С II. Крииошапко
113
формуле (31.1), имеем F,= та = Ga/g. Запишем уравнение равновесия:
'£y = H-G-Fi =0, откуда N = G + F, =G+^ = G^l+-) = kdG,
где kd - динамический коэффициент. Он показывает, во сколько раз увели-
чивается нагрузка на канат по сравнению со статически приложенной на-
грузкой. Далее
N Gl l
^ = — = — kd=kdccm.
A A
Таким образом, динамические напряжения выражаются через статиче-
ские.
Пример 2. Записать уравнение движения балки, представленной на рис.
31.2.
Решение. Обозначим через Pt = fly) = у/8ц дополнительную реакцию
балки, где 8ц - перемещение в направлении 1 от силы, равной 1, тогда
Рис. 312
= Р, - Ft = 0, a F, = та =
и окончательно
У
<*п
d2y
dt2
0.
Пусть имеем невесомую балку с сосредото-
ченным посередине пролета грузом массой т
(рис. 312). В этом случае
2 / = I
3 4 48Е/
Подставляем последнее выражение в диф-
ференциальное уравнение и получаем уравне-
ние движения балки:
“ 0
a2 mi3 ’
Решая это однородное дифференциальное уравнение, можно найтиу =у(0-
6,
Основные виды динамической нагрузки
1. Неподвижная вибрационная нагрузка возникает
вследствие неуравновешенности вращающихся частей
машин (рис. 31.3).
_. Л 2ли пп. Г рад]
Угловая скорость маховика 6 =--= — -— - чис-
60 30 I сек]
т = Fig
ло оборотов за 2л секунд, п - число оборотов в минуту. Рис. 31.3
114
„ c mv2 F(6F)2 F62r . r , ,
Центробежная сила: Fn =-----=--------=------, где v - Vr [м/с] -
r gr g
скорость по окружности радиусом r; F - вес неуравновешенных частей; г -
эксцентриситет точки приложения неуравновешенного веса,
Fyn = F^\nQt\ Fm = Fjcoset.
2. Возмущающие силы инерции при закономерном движении масс ма-
шины: движение поршня, эксцентриков. В этом случае возмущающие силы
обычно изменяются по синусоиде.
3. Ударная нагрузка (забивание свай,
кузнечный молот).
4. Нагрузка, возрастающая от нуля до
определенного значения, а потом ос-
тающаяся постоянной (рис. 31.4).
Рис. 31.5
Рис. 31.4
5. Кратковременно действующая нагрузка (рис. 31.5).
6. Подвижная нагрузка (движение транспорта).
7. Сейсмические нагрузки (определяются по осциллограмме).
Динамические задачи, приводимые к задачам
статического расчета систем
При решении ряда динамических задач можно пренебрегать влиянием
деформаций системы на распределение в ней ускорений, а следовательно, и
на распределение инерционных сил. Рассмотрим одну такую задачу.
Пример 3. Пусть брус весом G
поднимается с ускорением а (рис.
31.6). Тогда вес единицы длины бруса
будет равен q = G/Z, а интенсивность
распределенной инерционной нагруз-
ки будет определяться из формулы
р, = та = aq/g.
Максимальный изгибающий мо-
мент и максимальная поперечная сила
будут в середине бруса в точке при-
крепления троса (рис. 31.6):
„ . .1 I f да}/2
Wmax=(9 + P,)--- = ^+yj- =
I ~1
#———*——--%
ишшшттпшт »
Рис. 31.6
I g) 8 8
&а«=[<7 + ^и = *Л = *^-
I g )2 2
8*
115
Лекция 32
УДАР
Удар - это соприкосновение двух тел, из которых одно или оба облада-
Рис. 32.1
ют кинетической энергией. Рассмотрим случай продоль-
ного удара груза по неподвижному телу.
Пусть груз весом G падает с высоты h на неподвижный
стержень (рис. 32.1). Введем следующие допущения:
1. Напряжения при ударе не превосходят предела про-
порциональности.
2. Тела после удара не отделяются друг от друга.
3. Масса стержня считается малой по сравнению с мас-
сой падающего тела.
4. Энергией, переходящей в теплоту, пренебрегаем.
Приравняем работу падающего груза и потенциальную
энергию деформации при сжатии неподвижного стержня:
AE/lV / Д2Е4
Z J 2ЕА 21
С(й+л)=гЛ^=^
J 2ЕА 2ЕА
Перепишем это равенство:
д2-2^д-2^~л=о, но Д«и=-^. тогда д2-гд^д-гд^л = 0,
откуда Д = Д^ +^2ст + 2ДСП1й =Д J 1+ 1 = Д^.
I V J
Перед корнем квадратным берем только знак (+). Если последнее равен-
ство умножить на Е//, тогда получим
а = аот 1 + J1+-^ =aOTV (32.1)
I V Д«п )
Из последней формулы видно, что чем больше Д^, тем меньше кл сле-
довательно, тем меньше динамические напряжения (при прочих равных ус-
ловиях). При сжимающем ударе во избежание продольного изгиба динами-
ческие напряжения не должны превышать критические напряжения.
Аналогичный вид имеют формулы и для случая изгибающего удара,
только за Ддп необходимо принимать прогиб балки под действием груза ве-
сом G. Запишем два представления работы падаю-
. R1 С щего груза (рис. 32.2):
Л—Т G(h+E) = Gkdbl2.
,0 Проведем некоторые преобразования:
Рис. 32.2 Д 2,1
116
тогда д( I-|=-Л, или Д2-2Дс„Д-2Дся,Л = 0, откуда
Л 2^)
Д = Лот+7д2га+2Дтй=дЦ1+^1 + ^1 = Д„Л,. (32.2)
Таким образом, для изгибающего удара получили ту же формулу, что и
для сжимающего удара по неподвижному стержню (рис. 32.2).
Частный случай. Пусть h = 0, тогда kd = 2, а согласно формулам (32.1) и
(32.2): A = 2A™;o = 2<w
Пример 1. Проверить прочность конструкции, на которую с высоты 0,5м
падает масса т = 20 кг (рис. 32.3). Поперечное сечение конструкции - пря-
моугольное 5x10 см, R = 1 м; Е = 2-10” Па, = 160 МПа.
Решение. Проводим статический расчет:
Mh = -FT?sin (р (0 < (р <я), Л/щад = -mgR = -20-9,8-1 = 196,2 Нм.
Найдем перемещение точки А от статически приложенной силы F:
J(-/^sinфХ-^sin<р)ЛЛр =^~ Jsin2 Ф<Лр =
Elz 0 Llz 0
= 7и£/?3Г(р sin2<pV mgR3 я = 20-9,81-1-3,14 12
Elz U 4 Jo " E/z 2 ~ 2-1011-0,05-0,l3-2
Определяем динамический коэффициент:
Конструкция не разрушится.
Пример 2. На ломаный стержень
прямоугольного поперечного сечения 5x10 см с высоты h = 0,5 м падает
груз массой 20 кг. Стержень из материала с модулем продольной упругости
Е = 2- Ю" Па. Определить динамический прогиб в точке А (рис. 32.4).
Решение. Строим соответствующие эпюры моментов (см. рис. 32.4) и
117
/и = 20 кгф
Рис. 32.4
определяем
Дсп. Е1
1F
3EI.
2 3
2-0,5-3-2-1011-0,05-0,1:
7F к
7-20-9,81-12 ......^d 3E1Z d'
Пример 3. Определим нормальные напряжения, возникающие от удара
грузом массой т = 20 кг,
падающим на стержневую
систему с высоты Л = 0,5 м
(рис. 32.5, а).
Решение. Пользуясь мето-
дом вырезания узлов, опре-
деляем нормальные усилия
в стержневой системе, воз-
никающие от статического
приложения груза в точке
удара В (рис. 32.5, б): Nx = mg/cos45°; N2 = mg.
Затем определяем нормальные усилия в стержневой системе от единич-
ной силы, приложенной в точке удара (рис. 32.5, в):
7V| =1 /cos45°; N2 =1.
Длина наклонного сжатого стержня системы: /= l/cos45°= 1,41 м.
Используя интеграл Мора и правило Верещагина, вычисляем вертикаль-
ное перемещение точки удара В:
3,82/ис
=-------, а затем и нормальные напряжения по формуле (32.1) при
ЕА
Л = 5 см2; Е=2-10,,Па:
к^ = 12,5; о1х/ = kJ^IA = - 6,94 МПа; Огд = k^-JA = 4,9 МПа.
^+-^-1,41-—*-
, cos 45° cos 45'
118
Лекция 33
УПРУГИЕ СОБСТВЕННЫЕ КОЛЕБАНИЯ
СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Упругими колебаниями называют движения упругих тел, представляю-
щие собой периодические отклонения их относительно положения равнове-
сия. Колебания, вызванные некоторым начальным воздействием и совер-
шаемые затем под действием собственных сил упругости, называют свобод-
ными или собственными.
Колебания, происходящие под воздействием внешних периодических
сил, называются вынужденными.
Существенным отличием динамических методов расчета от статических
является введение нового параметра - - времени /, которое участвует в урав-
нениях либо в явном виде, либо в виде производных от неизвестных функ-
ций по времени.
В динамических расчетах важным понятием является число степеней
свободы системы (И} - наименьшее количество независимых геометриче-
ских параметров, определяющих положение всех масс системы в произволь-
ный момент времени. Системами с одной степенью свободы будут такие, у
которых для полной фиксации их геометрического состояния в любой мо-
мент времени достаточно знать один параметр, например положение опре-
деленной точки.
Рис. 33.1
В этой лекции рассмотрим задачи на незатухающие свободные колеба-
ния систем с одной степенью свободы без учета собственной массы систе-
мы. При колебаниях реальных систем действуют силы сопротивления, кото-
рые ведут к затуханию колебаний.
Простейшим видом колебаний являются гармонические колебания, ко-
торые описываются тригонометрическими функциями синуса или косинуса,
например, y = /losin(©/4-(j)), (33.1)
где Ло - амплитуда, т.е. максимальное значение
обобщенной координаты у при колебаниях сис-
темы (рис. 33.2); со - круговая частота свобод-
ных колебаний (число колебаний за 2л секунд);
(cat + ф) - фаза колебаний; ф - начальная фаза
колебаний, т.е. фаза в момент времени t = 0.
Промежуток времени между двумя последу-
119
ющими отклонениями упругой системы от положения равновесия одного
знака называется периодом колебаний и обозначается буквой Т.
Рассмотрим свободные колебания груза с массой т, подвешенного на
стержне длиной / (рис. 33.3). Применим принцип Даламбера:
д7 с М .. 6ЕА д в 1/
Д/ = б =—, откуда находим =, где бц =— - перемеще-
ЕА I бн ЕА
ние от силы, равной 1 в направлении этой силы, б - отклонение тела от по-
ложения равновесия.
Формула (31.1) лекции 31 принимает вид:
d26
F = та = —т——.а уравнение равновесия Т.у - N - F = О,
dr
б J26 _ J26 2к _
запишем в виде —+т —— = 0, или —— + со б = О, где
б.I dt2
Рис. 33.3
(33.2)
- круговая частота колебаний. Для рассматриваемого примера (рис. 33.3)
формула (33.2) может быть представлена в виде
со
(33.3)
Решение дифференциального уравнения второго порядка будем искать в
виде
6 = Af cos coz + Z?sin coz или 6 = Ao sin(coz+cp) (33.4)
- уравнение гармонического колебания (33.1), где Ah В, Ао, ф - произволь-
ные константы, причем Ао - наибольшее отклонение груза (амплитуда, рис.
33.2) от положения равновесия, остальные параметры указаны в коммента-
риях к формуле (33.1). Имеем
J5
v = — = Лосо cos(coz + ф) - скорость колебания.
dt
Поставим начальные условия* в начальный момент времени Z = 0 имеем
б = бо, тогда Л081пф = 6о» или вшф = бо/Ао- Кроме того, пусть в начальный мо-
мент времени будет v = Vq, т.е. ЛоСОСОБф - Vq, или совф - ц/(^с<о).
В этом случае получаем 1§ф = 6o<o/v0-
б2
Далее, полагая, что sin 2 ф+cos2 ф = —у
Aq AqO
V©
находим
120
Смещение массы <50 и ее скорость v0 при / = 0 принято называть началь-
ными возмущениями. Таким образом, колебания называются свободными,
если они вызваны только начальными возмущениями, полученными систе-
мой.
Из формулы (33.3) имеем co(r + Т) + <р - (со/ + ф) = 2л, откуда получаем
Т -2л/со
- полный период колебаний, который не зависит ни от бо, ни от v0- Круговая
частота со (33.2) также не зависит от начальных условий.
Вышеприведенные формулы справедливы и для балок, только там <5Н -
прогиб балки от единичной силы.
С энергетической точки зрения свободные незатухающие колебания ха-
рактеризуются непрерывным переходом кинетической энергии движения
массы в потенциальную энергию деформации системы, и наоборот.
Пример I. Определить круговую частоту и период собственных колеба-
ний груза, подвешенного к стержню (рис. 33.4), Е = 2105 МПа.
_ 2-Ю5-106-1-Ю"4 1л3 _|
Решение: (o = J--------------= 10 с
A = 1см2
m =20 кг
V 20-1 ’ s
т.е. происходит 1000 полных колебаний за 2л се- —
кунд. Для вычисления со применялась формула
(33.3) для продольных колебаний стержня. -
Затем находим период колебаний
2л 2-3,14
Т = — =---------------«0,006 с.
со 1000
Пример 2. Определить круговую частоту изгибных колебаний консоль-
ной балки с грузом (рис. 33.5). Сечение консоли -
прямоугольное b*h = 5* 10 см, поэтому
Рис. 33.4
т = 20 кг
Рис. 33.5
12 ‘
Модуль упругости материала стальной балки
Е2105МПа.
Решение- После сообщения массе начального
возмущения и v0 она начнет совершать свобод-
ные колебания. На консоль будут действовать две
силы: сила инерции и сила упругости.
Сила упругости характеризуется коэффициентом податливости:
6.
1 Е1{2 3 ) ЗЕГ
Круговая частота определяется по формуле (33.2):
Р-21011 0,05-0,1’
со = J---------------------- 353 с .
12
20
121
Лекция 34
ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Пусть на систему с одной степенью свободы действует дополнительная
сила, изменяющаяся по периодическому закону:
F(z) = Fo sin fiz,
где Fo - максимальное значение силы; П - угловая частота колебания допол-
нительной силы. В этом случае уравнение равновесия (см. лекцию 34) без
учета сил сопротивления примет вид:
8', + со28 =—sinflz. (34.1)
т
Решение дифференциального уравнения (34.1) принимается в виде
8=8+б\
где решение однородного уравнения 8 =/lsin(coz+ ф) нам известно из пре-
дыдущей лекции, а частное решение будем искать в виде 8* = CsinDz, где С-
амплитуда колебаний вынуждающей силы Fo.
После подстановки частного решения в дифференциальное уравнение
(34.1) и сокращения на sinQz получаем
с(со2 -П2)= Fo Im, откуда находим
с _ ^0 ___________________ ^0^11
/и(со2-П2) /исо2(1-П2/со2) 1-П2/со2
Окончательно получаем
8 = A sin(coz + ф)+— sin Hz. (34.2)
---------- l-fl2/co2
собственные вынужденные
колебания колебания
Если учитывать силы сопротивления, то собственные колебания доволь-
но быстро затухнут, а останутся только вынужденные колебания.
8 = F°S|' sin fiz ......sin Dz — bmkd sin flz, (34.3)
1-П2/а2 1-П2/<о2
где kd =----------- - динамический коэффициент, (34.4)
1-П2/<о2
который показывает, во сколько раз амплитуда С вынужденных колебаний
больше статического перемещения вызванного максимальным значени-
ем вынуждающей силы Fo.
122
Резонанс
Если П = со, то, согласно формуле (34.4), имеем kd =<*>. Если учитывать
силы сопротивления, то динамический коэффициент kd * со, но будет очень
большим. Явление резкого увеличения амплитуды колебаний при П = со на-
зывается резонансом, а само совпадение частот условием резонанса.
Рост амплитуд сопровождается соответствующим ростом напряжений,
возникающих в колеблющихся элементах, поэтому вопросы резонанса при
расчете конструкций имеют важнейшее значение. Анализ аварий показыва-
ет, что именно резонанс является причиной большинства аварий при вынуж-
денных колебаниях.
Если частоты со и П близки по значению, то необходимо увеличить этот
разрыв, изменяя собственные со и вынужденные Q частоты колебаний путем
конструктивных мероприятий. Чтобы добиться более заметного снижения
динамического коэффициента kj (34.4), целесообразнее изменять частоты в
сторону увеличения отношения Q/со. Этого можно достичь, изменяя жест-
кость колеблющейся системы или применяя виброгасители.
Кратковременное состояние резонанса, как правило, опасности не пред-
ставляет, так как амплитуда колебаний за короткий промежуток времени не
успевает достичь больших значений.
Затухание колебаний
Как уже отмечалось, под действием различных сил сопротивления сво-
бодные колебания будут затихать (рис. 34.1). Согласно гипотезе Voigt при-
мем, что внутренние силы трения при колебаниях пропорциональны скоро-
сти движения (вязкое трение):
Я = a v = -а—, (34.4)
где а - постоянный коэффициент для
данного материала, равный величине
сопротивления при скорости v = 1м/с.
Чем больше скорость, тем больше
сопротивление. Это соответствует дей-
ствительности. Например, колебания в
воде подчиняются этому закону.
Рассмотрим систему с одной степенью свободы (рис. 34.2). Составим
уравнение равновесия:
б t/8 J26
£у = Лсвята-F-F,-/? = 0, или-----mg + ct— + т—— = 0, или
8П dt dr
8 a r/S Л n
—-----g+----r+—Г = 0’ 1011
/ибн т di dt
123
d26 _ dS 2e ~ a
м /v =г11Л ——+ 2л—+ co 8 = g, где 2n = —,
a i^c^u rtlo dt2 л m
V О 2 1
r= _ co =-------круговая частота.
& /и5ц
P - ma _ m В дальнейшем будем пренебрегать силой F
' и окончательно получим
и d8 йгЪ _ d8 2с п
R=-a~ —- + 2л— + со 8 = 0. (34.5)
dt dt2 dt
Рис 34 2 Уравнение (34.5) называется уравнением
колебании с затуханием.
Имеют место два случая.
1. Случай малого сопротивления (система со слабым демпфированием)
при о > п имеет решение в виде
у = sin^V©2 -n2t + ср J,
где А, е "* - амплитуда колебаний. Из приведенной формулы следует, что
колебания происходят с уменьшающейся амплитудой и с частотой
cd, =Vco2 -л2.
Начальное значение амплитуды А, и начальную фазу колебаний нахо-
дят из начальных условий. Например, можно поставить следующие началь-
ные условия: при / = 0 —»у = уо и dy/dt = а0. Тогда получим
Л _ L,2 . +ЛУо)2 ___________Jo
Л _ 31 Jo + 5 5 » <Р — arcsin ——.
V со -л А
Скорость затухания характеризуется отношением двух амплитуд, заме-
ренных через один период:
6И А,е-“ ет еПТ
Бя+1 А,е~^ е-ы-е-пТ
причем параметр Л = 1п(<5я / 8п+1) = 1пепТ =пТ называется логарифмиче-
ским декрементом колебаний.
2. При сильном демпфировании (л > со) решение дифференциального
уравнения (34.5) принимается в виде
Константы At и В определяются с помощью начальных условий, а дви-
жение не является периодическим, поэтому здесь нет понятий со, и Т.
Случай сильного демпфирования имеет место при создании искусствен-
ных устройств гашения колебаний.
124
Лекция 35
УПРУГИЕ СОБСТВЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Как отмечалось в лекции 33, числом степеней свободы в механике назы-
вают число независимых параметров, определяющих положение всех точек
системы. Очевидно, что для систем с многими степенями свободы описание
процесса колебаний будет более сложным по сравнению с системой с одной
степенью свободы. Все реальные стержневые конструкции из упругих мате-
риалов имеют бесконечное число степеней свободы, но при решении кон-
кретных задач можно ввести упрощения. Во многих случаях можно пренеб-
речь массой стержневой конструкции по сравнению с массами, находящи-
мися на этой конструкции. Можно также пренебречь инерцией каждой от-
дельной массы при ее вращении. Часто пренебрегают перемещениями, вы-
званными продольными деформациями стержней, по сравнению с переме-
щениями, вызванными изгибом конструкции.
Рассмотрим реальную консольную балку с массой на конце, которая
имеет бесконечное число степеней свободы ГУ (рис. 35.1, а). Если пренеб-
речь массой балки, то рассматриваемая система будет иметь шесть степеней
свободы (рис. 35.1, б). Пренебрегая инерцией массы при ее вращении, мож-
но уменьшить число степеней свободы Й'до трех (рис. 35.1, в).
Если пренебречь перемещениями массы вдоль оси балки, то число сте-
пеней свободы станет равным двум (рис. 35.1, г). Для плоской конструкции
число степеней свободы становится равным единице (рис. 35.1, д).
Определение числа степеней свободы для плоских стержневых систем
На рис. 35.2 показаны плоские невесомые стержневые системы с сосре-
доточенными массами т,. При определении числа степеней свободы И7 сис-
темы принималось, что продольные деформации стержней системы отсутст-
вуют.
125
Собственные колебания систем с п степенями свободы (W = и)
Рассмотрим собственные поперечные колебания балки с п точечными
массами (рис. 35.3, а). Поперечное перемещение 5, каждой массы можно
получить как результат действия системы сил инерции Fh, F^ ...»Fn.
Рис. 35.3
Si ~ ^i>8|i +^2/8|2 +—+ ^81я;
б2 = + F2i822 + •+ ^82я; q5
8И = ^||8И| + /^,6я2 +—+ Fmbm.
Запишем выражения для каждой силы инерции:
Fb =-/«18; = -/W|J28,/df2; F2f =-то2б;; .... Fnl=-mn^
которые подставим в систему уравнений (35.1):
8I = -т|8|6|| -/и28$812 -...-/ия6яб1я;
б2 =-лИ|6[б21 -/и262б22 -...-/иябяб2я;
8Я =-/И16[8я1 -/и2б2бя2 “•••
Решение системы уравнений (35.2) будем искать в виде
б* = Ак sin(cof + ф), (35.3)
полагая, что все отклонения происходят в одной фазе (ф = const).
Подставляем значения (35.3) в формулы (35.2). Полученные соотноше-
ния сократим на sin(co/ + ф).
В результате получим систему однородных алгебраических уравнений
относительно амплитуд колебаний Л2,..., А„:
126
(/WjCO^,! -1)^ + /И20)2612Л2 + ••• +тп0)2^1пАп = °>
/И|С02821Л| + (/и2©2822 -1)Л2 +...+/иясо282яЛя =0;
(35.4)
/И1СО26Я|Л| +т2(о2дп2А2 +...+(тя(о28яя -1)ЛЯ =0.
Система (35.4) будет иметь решения, отличные от нуля, если определи-
тель, состоящий из коэффициентов при Ак, будет равен нулю, т.е.
/И]©2^]]-! /и2со2512 /иясо281я
/И|©2821 /и2(о2522 -1 /ия©282я
/И|(025я1 /и2ш28я2 лиясо28яя-1
Уравнение (35.5) - алгебраическое уравнение и-й степени относительно
о2. Корни этого уравнения находятся способом попыток или графическим
способом.
Система с двумя степенями свободы
Рассмотрим систему с двумя степенями свободы. В этом случае уравне-
ние (35.5) принимает вид:
/и1ю2б11-1 /и2со26|2
/И]Ю2б21 т2о 8и-1
= М|М2 (8|[822 —б12)© —(/И|8ц+/и2822)ш +1 = 0,
откуда определяем
2 +т2^22)±Щт1^П+т2^22)2 ~4т1т2(^н^22 ~^12)
С02д —----------------------------------- . (35.6)
2ш|/и2(8ц822 —б|2)
По формуле (35.6) определяем два значения круговой частоты: низшую
Ш1 И ВЫСШУЮ 0)2.
Уравнения (35.4) для системы с двумя степенями свободы имеют вид:
(m(©28|| -1)^1 +/и2ю2812Л2 =0;
/и1©2821/11 + (т2ш2822 -1)Л2 =0,
(/И|СО 8ц —1) + т2о 812 — = Oj
или Al (35.7)
/И|(о2821 +(m2<o2S22 -1)—= 0.
А
Из любого уравнения системы (35.7) можно найти отношение амплитуд
А^Ас.
127
Л2 1 /И|(0 бц /И|(0 Sjl
/и2(о2812 1-/и2со2822
(35.8)
Каждой форме колебаний отвечает своя частота колебаний. Подставляя
в формулу (35.8) значение со = оь или со = соь можно найти соответствую-
щую главную форму колебаний.
а)<0 = <0| «4 б)<о = Ш2
Под главной формой колебаний понимают форму отклонений системы,
соответствующую данной частоте, для которой sin(cof/ + (р) = 1. Например,
для низшей частоты ©j имеем (рис. 35.4, о):
А? 1-/И|СО.2б|. Л
—1 =------L2! = v2' н™ А* = V2lA,f (35-9)
At /И2(0|8|2
для высшей частоты а>2 имеем (рис. 35.4, б):
— = - = у22 или >l2 = v22/lI. (35.10)
At /и2со2б12
Для любых двух форм собственных колебаний должно выполняться ус-
ловие взаимной ортогональности. Этот вопрос будет рассматриваться на
практических занятиях (см. ч. 2, разд. 11).
Рассмотрим систему с п степенями свободы. Для получения формы соб-
ственных колебаний, которая соответствует /-й частоте собственных колеба-
ний, нужно подставить значение о, в любые (л - 1) уравнения системы (35.4)
и найти отношения
совокупность которых называют собственным вектором
=k v2, v3, ... vrar,
по компонентам которого можно изобразить /-ю форму собственных коле-
баний. Таких векторов будет п штук:
Всего можно построить п форм собственных колебаний.
128
Лекция 36
СВОБОДНЫЕ КОЛЕБАНИЯ БАЛОК
КАК СИСТЕМ С РАСПРЕДЕЛЕННОЙ МАССОЙ
Стержневые системы с распределенной массой - это системы с беско-
нечно большим числом степеней свободы. В качестве примера рассмотрим
балку с равномерно распределенной массой интенсивностью
m=ql g = pA [кг/м],
где q - вес 1 пог. м. балки, Н/м; р - плотность материала балки, кг/м3; А -
площадь поперечного сечения балки, м2.
Запишем дифференциальное уравнение упругой линии балки, известное
из курса сопротивления материалов:
й2у М
дх2 ” Е1г
где М - изгибающий момент в произвольном сечении балки; у = у(х, t) -
уравнение изогнутой оси балки.
На основании теорем Д.И. Журавского имеем
д2М _dQ
дх2 дх
где р - интенсивность инерционной распределенной нагрузки, которая мо-
жет быть выражена через погонную массу т (равномерно распределенную
массу)
(36.1)
(36.2)
(36.3)
или
(36.4)
, _д2у
Р т dt2‘
Продифференцируем дважды по параметру х уравнение (36.1), а в ре-
зультат подставим значения (36.2), (36.3):
д*у 1 д2М 1 ___т д2у
8х4 ~ Е1г дх2 ~ Е1г Р~ Е1г а2 ’
dt2 rn ftr4
Уравнение (36.4) - дифференциальное уравнение свободных колебаний
балкм. Уравнение - линейное, четвертого порядка, в частных производных.
Рассматривался случай малых колебаний, в предположении, что малые ко-
лебания происходят в главной плоскости изгиба и размеры поперечного се-
чения незначительны по сравнению с длиной балки.
Ограничимся отысканием только решений, которые определяют стоячие
волны, т.е. форму изгиба, не зависящую от времени.
При такой форме колебаний решение дифференциального уравнения
(36.4) может быть представлено в виде произведения
9- С. Н Криношяпко
129
у = Х(х)7Ц). (36.5)
Подставляя производные от выражения (36.5) в уравнение (36.4), полу-
чим
Elz 1 I д2Т
рА X дхл ~ Т dt2 '
Это может иметь место, если левая и правая части равенства - постоян-
ные числа (константы). Обозначив константу через со2, запишем
^+со2Т = О; (36.6)
dt2
d^X_^_x^ (36.7)
dx Elz
Дифференциальное уравнение (36.6) имеет следующее решение:
T(r) = asin(cor + ф0 ), (36.8)
где а - амплитуда и фо - фаза колебаний определяются из начальных усло-
вий.
Решение уравнения (36.7) примем в виде
Х(х) = Ci sin кх+С2 cos Ax+C3shfcc+C4chAx, (36.9)
где Ci, С2, Сз, С4 - постоянные интегрирования, определяемые из граничных
условий, а
q=mg
Рис. 36.1
к-^- (36ло>
Значение к должно быть определено из
одного из граничных условий.
Пример 1. Рассмотрим однопролет-
ную шарнирно опертую балку (рис. 36.1,
о), следовательно, прогибы Х(х) и изги-
бающие моменты
d2X
M(x)=Elz —
на опорах должны быть равны нулю, поэтому
при х = 0 —► Х(х) = 0 и cfXldx2 = 0; при х = / —» Х(х) = 0 и <?X/dx2 = 0;
т.е. Jf(x = 0) = C2 + C4 = 0 и d ^Х2==-^ = -к2С2 +к2Сл =0,
dx
или С2 = С4 = 0; далее Х(х = 1) = С\ sin kl+C3shkl = 0,
d- ~ = -к2С\ sin kl + k2C3shkl = 0, или С3 = 0; sin£/ = 0.
dx2
130
Но если sinA/ = 0, то А/ = ил, или
, ил
к = —
(36.11)
где п - произвольное целое число. Следовательно,
х ~ . лях
Х(х) = С\ sin-j-.
Приравнивая значения к (36.10) и (36.11), получим выражение
рЛсо2 и4л4
из которого определяем круговые частоты собственных колебаний балки:
<>«
п= 1,2,3,
Каждой частоте соответствует своя форма колебаний. На рис. 36.1, б
показаны формы стоячих волн, соответствующие трем низшим частотам.
Пример 2. Определить спектр частот свободных колебаний консольной
балки с равномерно распределенной массой (рис. 36.2).
Для определения констант Ct, С2, С3, С4, входящих в уравнение (36.9),
имеем следующие граничные условия:
х = 0—* Х(х) = 0 и dX/dx = 0’t x = /-*^A7dr2 = O и cPX/dx^O.
Выполнение граничных условий для заделки приводит к выражениям:
Граничные условия на краю х = I после подстановки в них полученных
значений С2 = -С4; Q = -С3 принимают вид
(sin к!+shA/)C3 + (cos kl + chA/)C4 = 0;
(cos kl+chA/)C3 + (- sin kl+sh A/)C4 = 0.
Имеем систему двух однородных уравнений с двумя неизвестными С3 и
С4. Эта система имеет решения, если
l(sin kl + shA/) (cos Id+chA/)
|(cosA/ + chA/) (-sinAZ + shAA
Раскрывая определитель, получаем cos klchkl ~ -1.
Корни этого уравнения будут:
, 1,875 , 4,694 , 7,855
*i-—; к2 г, к, ....
Этим корням соответствуют частоты (см. уравнение (36.10)):
61,9
0.
©1 =А]
q=rng = рА
шишш
Рис. 362
рЛ
9*
131
Часть 2. Практические занятия по темам лекций
Раздел 1
СТАТИКА ТВЕРДОГО ТЕЛА
(по материалам лекций 1,2)
Задача 1.1. Найти значение модуля и направление равнодействующей
сходящихся сил, показанных на рис. 1.1.
Решение. Определим проекции равнодействующей R системы сходя-
щихся сил на координатные оси х и у (рис. 1.1):
Rx = 2Fcos45“ + l^Fcos30“ -Fcos45° = 2,006F;
Ry = 2Fsm45’-l,5Fsin30e + Fsin45“ =1,371F.
Значение модуля равнодействующей определяем по формуле
R = Jr1+R* = д/2,0062+1,3712F = 2.43F.
Определяем угол наклона а равнодейст-
вующей R к положительному направлению
оси х:
/Ч«С
Рис. 1.2
Rx 2,006F
, cosa = —=---------= 0,8255, или
I 1,5F R 2,43F
Рис11 a = 34,36°.
Задача 1.2. Пренебрегая весом стержней, найти силы, сжимающие или
растягивающие стержни АС и ВС, которые образуют кронштейн, показан-
ный на рис. 1.2. К шарниру С кронштейна под-
вешен груз F.
Решение. Реакции в стержнях кронштейна
направлены вдоль стержней, поэтому силу F
необходимо разложить по направлениям АС и
ВС. Из рис. 1.2 определяем:
Wвс sin a = F, или /Vвс = F/sin a;
tga = F/Nac , или NAC = F/tga.
Задача 1.3. По проекциям трех сходящихся сил
Flx =6 кН,
F2x =ЗкН,
F3x =5 кН,
найти их равнодействующую.
Решение. Определяем проекции равнодействующей R системы трех
сходящихся сил на взаимно ортогональные оси х, у, z:
Fly = 3KH, FIx=12kH,
F2> = -7 кН, F2z = 1 кН»
F3j, = 2kH, F3z =-8kH
132
Rx=XF* =6+3 + 5 = 14 кН;
Яу=5Х=3-7+2 = -2кН;
Rz =Xf»2 =12 + 1-8 = 5kH.
Значение модуля равнодействующей определяем по формуле
R = ^Я2+Я2+Я2 = д/142 +(-2)2 +52 =15 кН,
тогда модуль проекции равнодействующей на координатную плоскость хОу
можно будет определять по формуле (рис. 1.3):
/?_, = flcosa,
z
где a - угол между равнодействующей
R и плоскостью хОу.
Но, с другой стороны, имеем
= J142 + (-2)2 =14,14 кН.
Сравнивая два последних выраже-
ния, находим
Rxv 1414
cos a = —— =-----= 0,9428, т.е. a = 19,5 .
R 15
Угол р между проекцией Rxy и положительным направлением оси х
определяем из выражения (рис. 1.3) Rxy cosp = Rx :
cosP = -^£- = —= 0,99, или Р = 8,Г.
R^ 14,14
Задача 1.4. Определить опорные реакции балки, нагруженной сосредо-
точенными силами и моментом, как показано на рис. 1.4.
Решение. Используем вто-
рую форму условий равнове-
сия (см. лекцию 2).
По теореме Пифагора оп-
ределяем h = 2-^2 м.
Запишем первое условие
равновесия:
^МА = 10-2+5-272+6-Гв -8 = 0, откуда находим Гв = 5,02кН.
Второе условие равновесия имеет вид
^Мв = va -8-10-6-5-2V2+6 = 0, откуда определяем VA = 8,52 кН.
133
И наконец, из уравнения равновесия
Fu = Н А -5 cos 45е = 0 определяем опорную реакцию НА = 3,54 кН.
В качестве проверки применим неиспользованное уравнение равнове-
i:
У у = VA -10 -5sin 45“ + Vg = 8,52 -10-5-0,7071 + 5,02 s 0.
Задача 1.5. Невесомая горизонтальная балка АС прикреплена к стене
шарниром А и опирается на опору В (рис. 1.5, а). К ее концу С шарнирно
прикреплен невесомый брус СЕ, опирающийся на выступ D. Требуется оп-
ределить реакции опор.
Решение. Расчленим систему на две части и рассмотрим равновесие ка-
ждой части отдельно (рис. 1.5, б, в).
Составим уравнения равновесия для стержня СЕ (рис. 1.5, б):
£ Мс = F-За-ND- 2ау[2 = 0, откуда находим ND= 3-/2F / 4;
YFiy=Vc+NDcos45c-F = 0, т.е. =F/4;
F^ = Нс - Nd sin 45“ = 0, откуда определяем Нс - 3F/4.
Запишем уравнения равновесия для балки АС (рис. 1.5, в), принимая во
внимание аксиому 4 (лекция 1):
2Х = Нл-Нс =0, т.е. Нл = Нс; ^мл =vb -2a-Vc -Зо=0,
откуда определяем VB=3F/i;^MB = -2a-Vc a = 0, или = K72 = F№.
Для проверки полученных значений опорных реакций используем усло-
вия равновесия EF^ = 0 для всей конструкции (см. рис. 1.5, а):
ZF^ = ~FA+ +/Vdcos45°-F = 0.
134
Раздел 2
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
(по материалам лекций 3-5)
2.1. Загрузка линий влияния
статически определимых одмопролетных балок
Задача 2.1.1. На рис. 2.1.1, а показана однопролетная балка, загружен-
ная линейной распределенной
нагрузкой q и сосредоточенным
моментом т.
На рис. 2.1.1, б представлены
соответствующие эпюры попе-
речных сил Q и внутренних
изгибающих моментов М.
На рис. 2.1.1, в показаны ли-
нии влияния опорных реакций
Ял, изгибающих моментов в
сечениях х = /, х = 21 и попереч-
ной силы в сечении х = 21.
Используя линии влияния,
представленные на рис. 2.1.1, в,
проверить значения опорных
реакций RA, Rb, указанные на
рис. 2.1.1, а, и на эпюрах изги-
бающих моментов и попереч-
ных сил (рис. 2.1.1, б) в соот-
ветствующих сечениях балки.
Решение. На балку действу-
ют сплошная равномерно рас-
пределенная нагрузка q и со-
средоточенный момент т, по-
этому для определения опорной
реакции RA необходимо значе-
ние распределенной нагрузки q
умножить на площадь участка
линии влияния опорной реак-
ции RAi находящейся под этой
нагрузкой. Полученный резуль-
тат необходимо сложить с про-
изведением внешнего сосредо-
точенного момента т на тан-
генс угла (а < 0) наклона линии
влияния Ra.
135
„ i+i/3o, ( П i+i/3o, ,2 1
RA=q—2l+n\--j = g—2l-ql - = Ч1.
Аналогично поступаем при вычислении опорной реакции RB, только ис-
пользуем линию влияния опорной реакции RB:
12 ->4
R.=q—-2l+ql2 — = ql.
" 2 3 3-4/
В этом случае тангенс угла наклона а линии влияния опорной реакции
RB берется со знаком (+).
Используя линию влияния изгибающего момента М в сечении х = /, вы-
числяем значение этого изгибающего момента в сечении х = I однопролет-
ной балки:
При вычислении М(х = /) принимаем во внимание, что тангенс угла а
наклона линии влияния М(х = /) на правом конце балки берется со знаком (-).
Положительное направление наклона линии влияния показано на линии
влияния RB.
Полученное значение изгибающего момента в сечении х = I совпало со
значением изгибающего момента в этом же сечении, взятом из эпюры мо-
ментов (см. рис. 2.1.1,б).
Используя линию влияния изгибающего момента М в сечении х = 2/,
вычисляем значение этого изгибающего момента в сечении х = 21 однопро-
летной балки (см. рис. 2.1.1, а):
М(х = 2Г) = q-~ = 0.
Зная линию влияния Q(x = 2Г), можно вычислить поперечную силу в
этом же сечении балки, возникающую от действия заданных внешних нагру-
зок (см. рис. 2.1.1, а):
В последней формуле значение площади участка линии влияния Q(x =
= 2[) под внешней распределенной нагрузкой q взято со знаком (-).
Задача 2.1.2. Пусть эпюры поперечных сил и изгибающих моментов для
заданной однопролетной балки (рис. 2.1.2, а) построены заранее (рис. 2.1.2,
б). По правилам, изложенным в лекции 4, строим линии влияния опорных
136
реакций RA, RB (рис. 2.1.2, в), изгибающих моментов в сечениях С и Д (рис.
2.1.2, г) и поперечных сил в сечении С (рис. 2.1.2, д) и в любом сечении Е на
участке СД балки (рис. 2.1.2, ё).
Требуется, используя линии влияния, вы-
числить опорные реакции для заданной од-
нопролетной балки и значения внутренних
изгибающих моментов и поперечных сил в
соответствующих сечениях этой же балки.
Решение. Для определения опорных ре-
акций балки, внутренних изгибающих мо-
ментов и поперечных сил в заданных сече-
ниях загрузим соответствующие линии
влияния заданными внешними сосредото-
ченными силами Fy и F2.
- Для определения опорных реакций RA и
RB загрузим их линии влияния:
RA = Fr0,6-F20,2 =
= 2F-0,6-F-0,2 = F;
=Fi-0,4-F2-0,8 =
= 2F-0,4-F-0,8 = 0.
- Для определения изгибающих моментов
в сечениях С и Д (см. рис. 2.1.2, а) загрузим
заданными сосредоточенными силами их
линии влияния:
Л/с =Fr 0,6/-F2-0,2/ =
= 2F-0,6/-F-0,2/ = F/;
Мд =Fr0,2/-F20,4/ =
= 2F-0,2/-F -0,47 = 0.
- Для определения поперечной силы на
участке АС балки построим линию влияния
поперечной силы QAC в сечении, находя-
щемся на бесконечно малом расстоянии
влево от сечения С (см. рис. 2.1.2, а). Со-
гласно материалам лекции 4 эта линия
влияния будет иметь вид, представленный
на рис. 2.12, д. Загрузим линию влияния Qc
внешними сосредоточенными силами:
QaC = Сс.слева = ” ^2 ~
= 2F-0,6-F-0,2 = F.
137
- Для определения поперечной силы на участке СД балки построим линию
влияния поперечной силы QE в произвольном сечении Е (рис. 2.1.2, а). Со-
гласно материалам лекции 4 эта линия влияния будет иметь вид, представ-
ленный на рис. 2.1.2, д. Загрузим линия влияния QE внешними сосредото-
ченными силами:
Qe =Сс,спраВа = (-0,4)- F2-0,2 =-2F-0.4-F 0,2 =-F.
Все полученные значения совпали с соответствующими значениями
этих же факторов, представленных на рис. 2.1.2, а или на эпюрах М и Q (см.
рис. 2.1.2, б).
Задача 2.13. На рис. 2.1.3 представлены эпюры поперечных сил и изги-
бающих моментов для консольной балки, нагруженной внешними нагрузка-
ми. На этом же рисунке показаны линии влияния опорной реакции VA, опор-
Линия влияния Н
Линия ВЛИЯНИЯ Мц
«шт—
Линия влияния Qb
Рис. 2.1.3
ного момента МА, изгибающего момента Мв
и поперечной силы QB в сечении В балки.
Определим опорные реакции в заделке, из-
гибающий момент и поперечную силу в се-
чении В, используя соответствующие линии
влияния.
Решение. Построение линий влияния,
изображенных на рис. 2.1.3, не вызывает
особых трудностей. Необходимо только
помнить, что линия влияния - это график,
изображающий закон изменения определен-
ного фактора (опорной реакции, изгибаю-
щего момента или поперечной силы) в зара-
нее выбранном сечении в зависимости от
положения единичного груза, который дви-
жется по балке.
Для определения опорных реакций балки,
внутренних изгибающих моментов и попе-
речных сил в заданных сечениях загрузим
соответствующие линии влияния заданными
внешними нагрузками.
Например, загрузим линию влияния И/
VA -<7(l l)+zn O F l =4-3-1 кН
Определяем опорный момент МА.
=-4-2,5 + 2 + 6 = -2кН-м.
Загружая внешними нагрузками линию влияния MBt находим:
138
=^-l.|.|^i»l-F0=-4|+2 = 0;
=9^~llJ=-y=-2KHM.
Определяем поперечную силу в сечении В:
Белова =(К-11) = ^кН; ^.справа = ?(-1 * 0 +^0-F(-l) = + 3 =-1 кН.
Все полученные значения совпали с соответствующими значениями этих же
факторов, представленных на рис. 2.1.3.
Задача 2.1.4. Имеется однопролетная
балка, загруженная двумя сосредоточенны-
ми моментами и т2 (рис. 2.1.4, а). Для
этой балки построены эпюры моментов М и
поперечных сил Q (рис. 2.1.4, б).
Построение линий влияния опорных
реакций (рис. 2.1.4, в), изгибающего момен-
та в сечении С (рис. 2.1.4, г) и поперечной
силы в этом же сечении (рис. 2.1.4. д) не
вызывает трудностей. Методика их по-
строения описана в лекции 4.
Требуется, используя линии влияния,
вычислить опорные реакции для заданной
однопролетной балки и значения изгибаю-
щего момента и поперечной силы в сечении
С этой же балки.
Решение. Для определения опорных
реакций балки, внутреннего изгибающего
момента и поперечной силы в сечении С
загрузим соответствующие линии влияния
заданными внешними сосредоточенными
моментами т1 и т2. Таким образом, будем
иметь:
/И1 = т т2 = 2т
Линия влияния Мс 1
Рис. 2.1.4
т 2т т
139
2.2. Многопролетные статически определимые балки
Существуют следующие правила для проектирования многопролетных
статически определимых балок, не содержащих заделанных (защемленных)
концов:
1) в каждом пролете должно быть установлено не более двух шарни-
ров;
2) пролеты с двумя шарнирами должны чередоваться с пролетами без
шарниров;
3) пролеты с одним шарниром могут следовать один за другим, начи-
ная со второго пролета.
2. 2.1. Построение эпюр изгибающих моментов и поперечных сил
для многопролетных статически определимых балок
Задача 2.2.1. Построить эпюры изгибающих моментов М и поперечных
сил Q для балки, изображенной на рис. 2.2.1, а.
Решение. Показываем схему взаимодействия элементов балки, т.е. стро-
им поэтажную схему (рис. 2.2.1, б). Расчет начинаем с построения эпюр М и
Q для присоединенной балки, расположенной на поэтажной схеме выше
всех.
В нашем случае первой рассмотрим присоединенную балку № 1 (рис.
2.2.1, в). Определяем ее опорные реакции:
^МА = 4A-RB -2 = 0, откуда находим RB = 2 Кн;
£ Мв = 4-3- Ra -2 = 0, откуда находим RA = 6 Кн.
Проверим полученные результаты: = —4 + /?„ -RB = -4+6 - 2 = 0.
Зная опорные реакции, легко построить эпюры Мх и Qt (рис. 2.2.1, в).
Переходим к рассмотрению следующей присоединенной балки - балки
№ 3. Так как балка обладает симметрией, то Re = Rk = 2 кН,
Л4шх = М(в центре) = qflZ = 1кНм (рис. 2.2.1, г).
И наконец, рассматриваем основную балку-балку № 2. На нее действует
сосредоточенный момент т = 3 кН-м, а также опорные реакции RB и RE при-
соединенных балок № 1 и 3, передающиеся на основную балку в противопо-
ложном направлении (рис. 2.2.1, д). Определяем опорные реакции основной
балки:
= 2А-3- RD-2 + 2-3 = 0, откуда находим RD = 2,5 кН;
= 2-3-3-Rc-2 + 2 1=0, тогда ^.- = 2,5 кН.
Проверим полученные результаты:
Yy = 2-Rc+RD-2 = 2-2t 5 + 2,5-2 = 0.
Теперь можно построить эпюры изгибающего момента М2 и поперечной
силы Qi (рис. 2.2.1, д).
140
.F = 4 кН 1
L 1м V 2м >/ 1 м iz 2м i/ 1 m */ 2м
а) Заданная система X zi zi X Zi : :
lF p
! JL №’ A =£ Z .A №3 хД, ! Л хе, о T D ! •
б) Поэтажная схема
2 кН/м
Кй = 2кН
з кн-м:
2 кН :
!2кН ; 1 кНм
4 кН-м
Kf-2kH| як = 2кН
2 кН
Э
2 кН
^; = 2,5kH ] 2 kH m| r [/?o = 2,5kH
ieii 2khL : i кн-м; 2 кН : ф| II
0,5 кН
d
j4iкН-м • v । кН ।
IWIIIIlillll2^, ,^[Wl
4 кН
.* ! 1 кН-м
..............
°,5 кН ?t<
Рис. 2.2.1 2KM
м
г
И наконец, соединяем вместе построенные эпюры М, и Qt, показанные на
рис. 2.2.1, в, г, д, и получаем окончательные эпюры MhQ (рис. 2.2.1, е) для
заданной балки.
Задача 2.2.2. Построить эпюры изгибающих моментов М и поперечных
сил Q для балки, изображенной на рис. 2.2.2, а.
Решение. Показываем схему взаимодействия элементов балки, т.е. стро-
им поэтажную схему (рис. 2.2.2, б). Расчет начинаем с построения эпюр Л/4 и
С?4 для присоединенной балки № 4, расположенной на поэтажной схеме вы-
ше всех.
Определяем ее опорные реакции:
^ML =2-3-RM -2 = 0, откуда находим RM = 3 кН;
52 Мм = 2-1 - -2 = 0, откуда находим RL = 1 кН.
Проверим полученные результаты: £ у = -2+= -2+3 -1 = 0.
Теперь можно легко построить эпюры изгибающих моментов Л/4 и попе-
речных сил Q4 для балки К» 4 (рис. 2.2.2, г).
Составляем уравнения равновесия для присоединенной балки № 3:
У^МК = /?£2-4 + 1-1 = 0, откуда находим /?£= 1,5 кН;
52 МЕ = RK 2 -4 +1 -3 = 0, откуда находим RK = 0,5 кН.
Проверим полученные результаты: J2 у = 1 + /?^ - = 1 + 0,5 -1,5 = 0 и
приступаем к построению эпюр М3 и Q3 для балки № 3 (рис. 2.2.2, г). На-
пример, определяем
Мк(слева) = 2 = —3 кН • м; М у(справд) -1’1 = 1 кН • м;
Qek = ~re = -1,5кН;0К£ =-1кН.
Рассмотрим присоединенную балку № 2, нагруженную линейной рас-
пределенной нагрузкой и сосредоточенной силой 1,5 кН. Эта сосредоточен-
ная сила появилась от действия опоры Е балки № 3 и равна по величине
опорной реакции RE балки № 3, но направлена в противоположную сторону
(рис. 2.2.2, в).
Из уравнения равновесия
52Мс = 0-3-1,5-1,5-3-/?D-1 =0 определяем Rd = 4,5 кН,
а затем составляем следующее уравнение равновесия:
52 MD = 0-1-0,5-0-21 + 1,5-2-/?с -1 = 0 и находим Rc = 0.
Таким образом, нагрузка от присоединенных балок № 2,3 и 4 не переда-
ется на основную балку № 1.
Проверим полученные результаты:
52 у = -0-3 + Rd +1,5 = -6+4,5 +1,5 = 0.
142
Рис. 2.2.2
На участке DE балки № 2 поперечная сила проходит через нулевое зна-
чение, следовательно, на этом участке необходимо вычислить экстремальное
значение изгибающего момента.
Запишем выражение для изгибающего момента в произвольном сечении
участка DE\
М2х = 1,5х-дх2 /2 = 1,5х-х2, тогда dMх2 Idx = 1,5-2х = 0,
т.е. при х = 0,75 м изгибающий момент на участке DE будет иметь экстре-
мальное значение. Вычисляем изгибающий момент в этом сечении:
М2 (х = 0,75) = 1,5 • 0,75 - 0,752 = 0,56 кН • м
и откладываем его в масштабе на эпюре М2 (рис.2.2.2, г).
Остается определить изгибающий момент в сечении на опоре D:
MD --^-1-0,5 = -1 кН-м.
Далее строим эпюру Q2 лля балки № 2 (рис.2.2.2, г).
На основную балку № 1 действует только сосредоточенная сила 6 кН
(рис. 2.2.2, в). Очевидно, что максимальный изгибающий момент будет в
середине пролета балки: = RA-2 = 3-2 = 6 кН-м. Далее строим эпюру
поперечных сил Qi для этой же балки.
Соединенные вместе эпюры М, для отдельных балок представляют со-
бой эпюру изгибающих моментов М для заданной многопролетной балки. И
соответственно соединенные вместе эпюры Qt для отдельных балок пред-
ставляют собой эпюру поперечных сил Q для заданной балки (рис. 2.2.2, г).
2. 2.2. Построение и загрузка линий влияния
статически определимых многопролетных балок
Линии влияния опорных реакций, внутренних поперечных сил и изги-
бающих моментов для многопролетных статически определимых балок со-
стоят только из прямолинейных участков.
Задача 2.23. Построить линии влияния для опорных реакций, для изги-
бающих моментов и поперечных сил в заданных сечениях балки, показанной
на рис. 2.2.3, а.
Построим линию влияния опорной реакции Rc основной балки. Если
единичный груз Р = 1 движется по балке BE, то линия влияния реакции /?<
строится так, как это было показано на лекции 4 для простой консольной
балки (см. рис. 4.1). Далее проводим линию влияния через нулевые значения
на опорах А и К (рис. 2.2.3, 6). Таким образом, линия влияния опорной реак-
ции Rc представляет собой непрерывную ломаную прямую линию.
Если единичный груз Р = 1 движется по присоединенной балке АВ и
требуется построить линию влияния опорной реакции RA, то эта линия влия-
ния строится так же, как линия влияния соответствующей опорной реакции
для простой однопролетной .балки с консолью (рис. 2.2.3, в). За пределами
присоединенной балки АВ линия влияния опорной реакции RA не строится,
144
так как при нахождении единичного груза на основной балке АВ опорная
реакция RA будет равняться нулю.
Пусть требуется построить линии влияния изгибающих моментов в се-
чениях 1-1, П-П и Ill-Ill.
Линия влияния изгибающего момента Л/м в сечении 1-1 основной балки
BE в пределах этой балки строится как для простой двухконсольной балки
BE (см. рис. 4.1). Затем продолжаем эту линию влиянию в обе стороны, про-
водя ее через нулевые точки на опорах А и К (рис. 2.2.3, г). Этот же порядок
используется для построения линии влияния поперечной силы в сечении
Рис. 2.2.3
ю с
145
I-I основной балки (рис. 2.2.3, д). Значения ординат любых точек на линиях
влияния находятся из подобия соответствующих треугольников. Например,
рассмотрим линию влияния Л/м. Запишем отношение, вытекающее из подо-
бия двух треугольников (Дш/ и Дорг):
pr st pr-ot b-U2 b
— =—, откуда находим st = — =----=—.
or ot or I 2
Построение линии влияния изгибающего момента Мц.п в сечении П-П
основной балки BE начинаем с построения линии влияния в пределах участ-
ка от сечения П-П до сечения Е, длина которого равна с (рис. 2.2.3, е).
Если единичный груз находится в сечении П-П, то в этом сечении изги-
бающий момент Л/п-п будет равен нулю. Если же единичный груз находится
в сечении Е, то изгибающий момент Л/ц.ц в сечении П-П будет равен
Л4-п = -1 с = -с. Показываем это на рис. 2.2.3, е.
Линию влияния изгибающего момента Л/цып в сечении П1-Ш строим как
для простой однопролетной одноконсольной балки. За пределы присоеди-
ненной балки линия влияния не выходит, так как при движении единичного
груза в пределах многопролетной балки ВК изгибающий момент в сечении
Ш-1П не возникает.
Предположим, что рассматриваемая многопролетная балка загружена
внешней нагрузкой, как это показано на рис. 2.2.3, з.
Для определения опорных реакций Rc и RA загрузим линии влияния
опорных реакций Rc и RA (рис. 2.2.3, б, в):
^=Ff-|]+(-m)<-,8a)+«f-lo’5/]=^,4+34-24=-:2>5,<H;
V 4J \ 2 J 422
R =F~ = 6 кН.
А 2
Используя загрузку линии влияния Л/ц.ц, находим изгибающий момент в
сечении П-П (рис. 2.2.3, е):
мн-п =
Если взять с = 1 м, то Л/1Ы1 = -2 кН-м.
Для определения изгибающего момента Л/щ-ш используем линию влия-
ния Л7ц]_ц] (рис. 2.2.3, ж):
Мш-т МИ-ш<е=//2)=~=-2кН м.
Ранее для балки, изображенной на рис. 2.2.3, з, была построена эпюра
изгибающих моментов (рис. 2.2.1, е). Сравнивая значения опорных реакций
и изгибающих моментов, вычисленных с помощью линий влияния, со значе-
ниями, полученными при помощи уравнений равновесия, можно убедиться,
что они совпали.
146
Задача 2.2.4. Построить линии влияния для опорных реакций, для изги-
бающих моментов и поперечных сил в заданных сечениях балки, показанной
на рис. 2.2.4, а.
ь
' > Z п ^т-гТТТТЛ^ТГПТ uj
• е \к т 1 1 1 1 1 I 1 в • в 1 в • в 1 в 1 в J в
1 8 1 В 1 В 1 8
некоторых сечениях простых однопролетных балок определяются автомати-
чески. Ординаты линий влияния для всех остальных сечений многопролет-
ной балки находятся из отношений сторон подобных треугольников.
Например, рассмотрим линию влияния опорной реакции RB. На опоре В
ордината линии влияния RB равна единице. Запишем условие подобия для
треугольников ДеА/ и Ьетп'.
kl ек
— =—, откуда находим тп = kl-em/ek=1 -31/21 = 1,5.
тп ет
Из подобия треугольников &mns и bsop получаем, что
тп ор 1,5 ор .
— = — или------=—, т.е. ор = 3.
ms os 1/2 I
Предположим, что заданная балка (рис. 2.2.4, а) загружена внешней на-
грузкой, которая показана на рис. 2.2.4, в.
Определим опорную реакцию RBt возникающую в нагруженной балке,
для чего загрузим внешней нагрузкой линию влияния RB:
/?£,=F1-0,5+|.l,5^-|.32.9+m^+F2(-0,75) =
= 6-0,5+—-2 - 3-2 + 4—-2 0,75 = 3 кН.
2 1
Определим опорную реакцию RA, возникающую в нагруженной балке,
для чего загрузим внешней нагрузкой линию влияния RA:
RA=Fl0,5~0,5~q^llq+n\
= 6-0,5-0,25-2+2-—+2-0,25 = ЗкН.
2
Сравнивая значения опорных реакций, вычисленных с помощью линий
влияния, со значениями, полученными с помощью уравнений равновесия
(рис. 2.2.2), можно убедиться, что они совпали.
Задача 2.2.5. Построить эпюры изгибающих моментов и поперечных
сил для многопролетной статически определимой балки, изображенной на
рис. 2.2.5, а.
Проверить полученные результаты, подсчитав их значения с помощью
соответствующих линий влияния.
Решение. Проведем кинематический анализ многопролетной балки.
Имеем количество жестких дисков -0 = 5, количество шарниров - Ш = 4,
число опорных стержней - Со = 7, следовательно, степень свободы системы,
определяемая по формуле Чебышева, будет
И/ = ЗО-2Ш-С0 = 3-5-2-4-7 = 0.
+ F20,25 =
148
Рис. 2.2.5
Таким образом, рассматриваемая многопролетная балка является стати-
чески определимой.
Поэтажная схема балки состоит из трех ярусов (рис. 2.2.5, б).
Общие эпюры изгибающих моментов М и поперечных сил Q будут со-
стоять из соответствующих эпюр пяти простых балок.
Построение эпюр начинаем с присоединенной балки DE. Затем строим
эпюры изгибающих моментов и поперечных сил для присоединенных балок
второго яруса BD и ЕК. Опорные реакции вышележащей балки DE переда-
ются на нижележащие балки второго яруса.
Балки BD и ЕК нагружены пролетной равномерно распределенной на-
грузкой. Вычислим экстремальные значения изгибающих моментов в проле-
тах этих балок.
Пролет ВС балки BD с одной консолью:
Мх = 3,214х - 1,6х2 / 2, dMx / dx = 3,214 - 1,6х = 0, откуда х = 2,01 м,
тогда М^вс = 3,214-2,01-1.6-2,012/2 = 3,23 кНм.
Пролет FK балки ЕК с одной консолью:
Мх = 1,03х-1-х2/2, dMx/Л = 1,03-х = 0, откудах= 1,03м,
тогда = 1,03 • 1,03 -1,032 / 2 = 0,53 кН - м.
Откладываем эти значения на эпюре М(рис. 2.2.5, в).
Опорная реакция RB балки BD передается на основную балку АВ через
шарнир В в направлении, противоположном опорной реакции RB присоеди-
ненной балки BD.
Аналогично, опорная реакция RK балки ЕК передается на основную бал-
ку KL через шарнир К в направлении, противоположном опорной реакции RK
присоединенной балки ЕК.
Построение эпюр М и Q в основных балках АВ и KL не вызывает труд-
ностей.
На рис. 2.2.5, г построено несколько линий влияния. При их построении
используется поэтажная схема балки (рис. 2.2.5, б) без внешней нагрузки.
Рассмотрим подробно построение линии влияния опорной реакции Rc.
Когда единичный труз Р = 1 находится в точке В, опорная реакция Rc = 0.
Следовательно, ордината в точке В линии влияния Rc равна нулю.
Если Р = 1 находится на опоре С, то, очевидно, что Rc ~ 1 - Откладываем
это значение, как ординату в точке С. Проводим прямую линию через полу-
ченные точки В, с ординат и продлеваем эту прямую вправо до конца балки
BD (до точки d). Из подобия треугольников находим ординату в точке £>,
которая будет равна Dd = 1,321. Затем точку d линии влияния соединяем с
точкой £, потому что, когда единичный груз находится в точке Е балки,
опорная реакция Rc равна нулю. Дальнейшее перемещение единичного гру-
за вправо по балкам ЕК и KL не будет вызывать опорную реакцию Rc.
150
Для определения поперечной силы (fa в сечении I-I основной балки АВ
загрузим линию влияния 0ц (рис. 2.2.5, г) внешней нагрузкой:
С/-/ = 1,6-i• 1 -5,6 +1,6^-| -0,32-1,8^+5(-0,16) = 3,219 кН.
Разница в значениях (fa, полученных по линии влияния и по эпюре мо-
ментов (рис. 2.2.5, в), обусловлена выбранной точностью вычислений и со-
ставляет 0,16%.
Вычислим опорную реакцию R& используя ее линию влияния:
Rc = 1,321 -(5,6+1,8)+5-0,66 = 11,12 кН.
Разница в результатах, полученных с применением линии влияния и
по эпюре моментов составляет
Определим изгибающий момент Ми в сечении 1-1 основной балки АВ от
действия внешней нагрузки. По эпюре изгибающих моментов М находим:
= — откуда bfa = -2,57 кН-м.
-7,714 2,4
Загружая внешней нагрузкой линию влияния Mi h находим
Л/,_, = 1,6^-^0,8-5,6^ + 1,6-|о,257-1,8+5-0,1285 = -2,57 кН-м.
И наконец, с помощью линии влияния Л/ц.ц вычисляем изгибающий мо-
мент Мп.п в сечении П-П балки DE. Под силой 5 кН ордината линии влияния
Mi-п будет равна 0,3, следовательно,
Л/ц.ц = 5-0,3 = 1,5 кН-м.
На эпюре моментов М (рис. 2.2.5, в) в этом же сечении вычислено, что
Л/ц-н = 1,5 кН-м, т.е. результаты совпали.
Раздел 3
ПЛОСКИЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ ФЕРМЫ
(по материалам лекций 6-8)
Задача 3.1. Определить продольные усилия в стержнях фермы (рис. 3.1)
от действия внешних узловых сосредоточенных сил F= 38,4 кН.
Построить линии влияния для трех отмеченных знаком (||) стержней
фермы и определить в них продольные усилия, используя загрузку линий
влияния внешней нагрузкой.
Решение. Обозначим цифрами узлы фермы (рис. 3.1, а).
Проведем формальный кинематический анализ. Определим степень сво-
боды системы W:
№ = ЗД-2Ш-С0 =3-21-2-30-3 = 0,
где Д = 21 - число дисков (стержней) фермы; Ш = 30 - число простых шар-
ниров; Со = 3 - число опорных стержней. Число простых шарниров в каждом
узле фермы на рис. 3.1, а показано дважды подчеркнутыми цифрами. Имеем
FK = 0, следовательно, рассматриваемая ферма - статически определимая
стержневая система. Кроме того, она геометрически неизменяема, так как
стержни сгруппированы в шарнирные треугольники и каждый следующий
узел крепится к предыдущему шарнирному треугольнику двумя стержнями.
Рассматриваемая ферма не является мгновенно изменяемой системой, так
как три опорных стержня не пересекаются в одной точке.
Переходим к определению опорных реакций:
^МА = KB38,4-F-5-6,4-F-4-6,4-F-3-6,4-F-2-6,4-F-6,4 = 0,
откуда VB = 96 кН. Полученное значение опорной реакции можно получить
проще, учитывая симметрию фермы и симметричность приложения внешней
нагрузки:
= VB - 5F / 2 = 2,5Г = 2,5 • 38,4 = 96 кН.
Вычислим тригонометрические функции углов между стержнями фермы
(рис.3.1, а).
Длина стержня Л-1: lM = у/б,42 +6,2 2 = 8,91 м, тогда
sin а = — = 0,6958; cosa = — = 0,7183. (1)
8,91 8,91
Длина стержня 1-2: /12 = 7(9,3-6,2) 2 +6,42 =7,11м, тогда
sin р=9’2~**2= 0,436; cosP = y^ = 0,9. (2)
Длина стержня 3-7: /37 = 7^3 2 +6,42 = 11,29 м, тогда
152
64 93
sin у = —-— = 0,5669; cos у = —-— = 0,8237. (3)
11,29 11/29
Вычисление нормальных усилий в стержнях фермы. Приступаем к вы-
числению продольных усилий в стержнях фермы. Ука-
жем на ферме (рис. 3.1, б) знаком (О) нулевые стержни:
1-6, 3-8 и 5-10.
Вырежем узел А фермы и рассмотрим его равновесие
(рис. 3.2): X У = va + Nм sin а = 0,
=-VA /sin а = -96/0,6958 = 137,97 кН;
Zx = 7v/icosa + 7VH6 =0.
Рис. 3.2
NAf> = cos a = 137,97-0,7183 = 99,1 кН.
Очевидно, что усилие в стержне 6-7 будет: N67 = 99,1 кН.
Проведем сечение I-I и отбросим правую часть фермы (рис. 3.3). Соста-
вим уравнение равновесия оставшейся части фермы:
153
Хи= ^12 sin(a+P)+99,lsina+96cosa-38,4cosa = 0,
ж, -99,1 sin а-96 cos а -99,1-0,6958 -96 0,7183 + 38,4-0,7183
sin а cos Р+cos а sin Р 0,6958 • 0,9+0,7183- 0,436
= -117,44 кН.
Из рис. 3.3 очевидно, что sin(a + Р) = А / /17, но /п = 1А1 = 8,91 м, где In -
длина стержня 1-7, тогда
h - lAl sin(a + р) = /Л1 (sin a cos р + cos a sin р) =
= 8,91(0,6958 • 0,9 + 0,7183 • 0,436) = 8,37 м.
Тригонометрические функции углов а
г и fl были вычислены ранее и представ-
лены в виде формул (I) и (2).
Для нахождения усилия TV12 можно
использовать и метод моментных точек:
£Л/7 = 96-12,8 -38,4-6,4 + ?Vi2-Л = 0,
7Vi2 = (38,4-6,4- 96-12,8)/8,37 =
=-117,44 кН.
Результаты, полученные двумя путя-
ми, совпали.
Для вычисления усилия в стержне 1-7
фермы (см. рис. 3.1) составим уравнение
Ху = 9б-38,4 + Л/12 sinp-?V17 sina = 0,
96 - 38,4-117^0,436^
1 0,6958
Полученные усилия указываем на схеме фермы, показанной на рис. 3.1,
б. На схеме показываем реальное направление усилий в стержнях, т.е. знак
(-) перед усилием показывает, что стержень сжат, а знак (+), что стержень
растянут.
Проведем сечение П-П и отбросим правую часть фермы. Рассмотрим
равновесие оставшейся части (рис. 3.4):
ХЛ/3 = 96-6,4-3 -38,4-2-6,4 - 38,4-6,4-?V789,3 = 0, /V78 = 118,92 кН;
£Л/7 =96-12,8-38,4-6,4 + 7V23-9,3 = 0, TV23 =-105,7кН;
2> = 96-38,4-2 + W73cosr = 0, =^^- = -23^^.
Для вычисления усилия в стержне 2-7 проведем сначала сечение П-П
(рис. 3.1, о), отбросим правую часть фермы, а для оставшейся части запи-
шем:
38,4 кН
/л1 = 8,91 м
А
CLJJ \
99,1
7
96 кН
Рис. 3.3
равновесия (рис. 3.3):
154
£y = 96-38,4-2-9,2sinot-?V27 =0, или W27 = 12,8кН.
Усилия во всех остальных стержнях фермы принимаются исходя из
симметрии фермы и внешних нагрузок.
Построение линий влияния продольных сил в стержнях фермы. Присту-
паем к построению линий влияния нормальных сил в стержнях фермы, от-
меченных знаком (||) на рис. 3.1, а На рис. 3.6, б показаны линии влияния
опорных реакций фермы.
Для построения линии влияния усилия в стержне 1 -2 проведем сечение
I-I. Пусть груз слева от сечения I-I. Рассмотрим равновесие правой части
(рис. 3.6, в):
У>7 = VB -4-6,4 + ?VI2 -Л = 0, Nn = -Ув -25,6/8,37 = -3,058Ув.
Следовательно, необходимо ординаты линии влияния Ув умножить их на
величину -3,058. Так как единичный груз находится слева от сечения 1-1, то
заштриховываем участок линии влияния от точки А до точки 1 (см. рис. 3.6,
а и рис. 3.6, в).
Пусть единичный груз справа от сечения I-I. Рассмотрим равновесие
левой части фермы без единичного груза:
= УА -12,8+7V12 -Л = 0, т.е. Nn = -УА 12,8/8,37 = -1,53Гл.
Умножаем ординаты линии влияния УА на (-1,53) и заштриховываем
участок от точки В до точки 2 (рис. 3.6, в).
Из подобия треугольников вычисляем ординаты линии влияния Ni2 под
всеми узловыми точками. Например, подточкой 2 фермы будет у2.
у2 4-6,4
^=6^’откулаЛ=|’02-
Загрузим построенную линию влияния внешними сосредоточенными
силами F:
?VI2 = 38,4(-0,51 -1,02 - 0,765 - 0,51 - 0,255) = -117,5 кН.
155
Результаты для усилия Ni2, вычисленные по линии влияния Ni2 и по ме-
тоду сечений, почти совпали (-117,5 ~ -117,44).
Для построения линии влияния Nn воспользуемся опять же сечением 1-1
(см. рис. 3.6, а). Когда груз справа от сечения, рассмотрим равновесие ос-
тавшейся левой части фермы:
Vy = VA+ Nn sin p- NX1 sin a = 0, Nn = S'n .
sin a
Таким образом, ординаты линии влияния опорной реакции VA необхо-
димо сложить с ординатами линии влияния Nx2j умноженными на sinP = 0,436,
а полученный результат разделить на sina = 0,6958 (см. формулы (1), (2)).
Полученная линия влияния построена на рис. 3.6, г.
156
Определим, например, ординату линии влияния под точкой 2 фермы:
/У17(под точкой 2) = О^7-1.02-0-^ = WI9.
0,6958
Откладываем ординату 0,319 под точкой 2 (рис. 3.6, г) и проводим пря-
мую линию через полученную точку и точку с нулевой ординатой под точ-
кой В.
Если единичный груз слева от сечения I-I, то из равновесия правой части
фермы получаем
Vy = 1/лsinP + Ni? sina = 0 или = ^|2
sin а
Определим ординату линии влияния под точкой 1, так как груз нахо-
дится слева от сечения:
д, , -0^10,436- 0,167
Л^/под точкой 1) =----5^958-----= “^^6.
Откладываем ординату -0,56 под точкой 1 фермы на рис. 3.6, г и прово-
дим прямую через полученную точку и точку с нулевой ординатой под опо-
рой А. Штрихуем полученную левую часть линии влияния Nn. Далее соеди-
няем точки с ординатами -€,56 и 0,319. Из подобия треугольников вычисля-
ем ординаты под оставшимися угловыми точками фермы.
Загрузим линию влияния
/V17 = 38,4(-0,56+ 0,319+ 0^3925 + 0,1595 + 0,07975) = 9,12 кН.
Полученная разность в значениях составляет 0,9%. Она получилась
из-за потрешностей при округлении промежуточных числовых значений.
Для построения линии влияния продольной силы /V37 в стержне 3-7 необ-
ходимо провести сечение Ш-Ш. Пусть единичный груз Р = 1 справа от сече-
ния, рассматриваем равновесие левой части:
^у-УА + W37 cosy = 0, тогда Л37 =-VA lccsy = -VA /0,8237.
Таким образом, ординаты линии влияния VA делим на 0,8237, затем от-
кладываем их на графике (рис. 3.6, д) и штрихуем правую часть по отноше-
нию к сечению Ш-Ш, так как единичный груз - справа.
Пусть груз Р = 1 - слева от сечения Ш-Ш, тогда рассматриваем равнове-
сие правой части фермы:
£y = VB-N31 cosy = 0, тогда Ny, = VB /cosy = VB /0,8237.
Делим ординаты линии влияния опорной реакции VB на 0,8237, отклады-
ваем их в соответствующих точках (под узлами 1 и 2 фермы) и штрихуем
левую от сечения Ш-Ш часть линии влияния TV37 (рис. 3.6, д). Точки с орди-
натами 0,404 и -0,607 соединяем прямой линией.
Загрузим полученную линию влияния /V37:
TV37 = 38,4(0,202+0,404 - 0,607 - 0,404 - 0,202) = 38»4(-0,607) = -23,31 кН.
Результаты, полученные двумя методами, совпали.
157
Задача 3.2. Определить продольные усилия в стержнях фермы (рис. 3.7.
а) от действия внешних узловых сосредоточенных сил, а = 1,5 м.
Построить линии влияния для стержней фермы, отмеченных знаком (||).
и определить в них продольные усилия, используя загрузку линий влияния
внешней нагрузкой.
Решение. Обозначим цифрами узлы фермы (рис. 3.7, а).
Размерность усилий в стержнях фермы - кН
Рис. 3.7
Определяем опорные реакции:
£Л/5 = Гв-4д+6-2д-14-2д = 0, Гя = 4кН;
Рис. 3.8
£Л/|3 = ^-4о-6-6о-14-2о = 0, Гл=16кН.
Проверим полученные результаты: ^у = 1/А+Ув-6-14-С.
Для вычисления усилий в стержнях фермы применим метод вырезания
узлов или метод сечений, принимая во внимание, что в любом случае число
неизвестных усилий должно быть не более двух.
Вырежем узел 1 (рис. 3.7. а и рис. 3.8):
у = -6 + Nl2 sin 45° = О, /Vl2 = 8,485 кН;
= c°s454-/V|3 =0, Ni3=-6kH.
Следовательно, стержень 1-2 растянут, а стержень 1-3 фер-
мы сжат. Показываем это на схеме фермы (рис. 3.7, б).
Проведем сечение 1-1, отбросим правую часть фермы и рассмотрим рав-
новесие оставшейся левой части (рис. 3.9):
158
Xx = N1A -6 = 0, N2A =6кН;
£у = -6-Лв=0, W„=-6kH.
Проведем сечение П-П (рис. 3.10):
^МА = 6-2д + #35-д = 0, #35 =- 12 кН;
^у = -6+N^ cos45° =0, #34 =8,48 кН.
Таким образом, стержень 3-5 сжат. Зачеркива-
ем неправильное направление нормального уси-
лия в стержне 3-5 и показываем правильное на-
правление на рис. 3.10 и на схеме фермы (см. рис.
3.7, б). Стержень 3-4 растянут.
Проводим сечение III-1II (см. рис. 3.7, а и 3.11):
= -4+16+#* sin45° =0,
Рис. 3.9
Рис. 3.12
#* = -10/sin45° = -14,14 кН;
£>5 =6-20-^46-о = 0, #46=12кН;
= 6-Зв- 16о+#57 о = 0,
#57 = -2 кН.
Проводя сечение IV-IV (см. рис. 3.7, а)
и рассматривая равновесие левой остав-
шейся части фермы, получаем
#45 = -6 кН.
На схеме фермы (см. рис. 3.7, б) по-
казываем, что стержень 4-5 сжат, а усилие в нем равно 6 кН.
Проводя сечение V-V (см. рис. 3.7, а) и рассматривая равновесие левой
или правой части фермы, получаем: N67 = 10 кН.
На следующем этапе расчета проводим сечение VI-VI и рассматриваем
равновесие оставшейся левой части фермы (рис. 3.12):
= 6-3а-16о-#68о = 0,
Мл = 2 кН;
£Л/8 =6-4о- 16-2д+#79-о = О,
#79 = 8 кН;
£_y = -6+16 + #78sin45° =0,
Nn—14,14 кН;
Из рис. 3.7, а очевидно, что
#79 = #9-11 = 8 кН.
Проводим сечение VI1-V1I. Отбра-
сываем левую часть, а уравнения равновесия составляем для оставшейся
правой части фермы (рис. 3.13):
159
Xx = W,.1(1-2 = 0, /V8_i()=2kH;
= W^nSin 45°+4 = 0,
Ht-ц =-5,66 кН.
Проводим сечение VIII-VIII и отбрасыва-
W«-io io |2
4 кН
Рис. 3.13
W|Q.|2 = 0
ем левую часть фермы. Принимаем во вни-
мание, что стержень 10-12 будет нулевым
стержнем, т.е. /V10-12 = 0.
Запишем уравнения равновесия для оставшейся
правой части фермы (рис. 3.14):
£> = ^ю-1з sin 45° +4 = 0,
, 2Vi0.13 = -5,66kH;
ZA/10=4o-/Vi1_I3g = 0,
! а 4 кН Nh_13=4kH.
рис з И наконец, проводим сечение IX-IX и, рассматри-
вая равновесие правой части фермы, запишем
у = VB - Л^10_! । = 0, откуда находим /VI0.| । = Рв = 4 кН (см. рис. 3.7).
Все оставшиеся стержни будут нулевыми стержнями. Они отмечены на
рис. 3.7, б знаком (О). Таким образом, продольные усилия во всех стержнях
фермы определены.
Построение линий влияния усилий в стержнях фермы. Построение ли-
ний влияния опорных реакций фермы не вызывает трудностей. Они пред-
ставлены на рис. 3.15,6.
Загрузим внешней нагрузкой линии влияния опорных реакций фермы
(см. рис. 3.7, а и 3.15, б):
VA = 6-1,5 + 14-0,5 = 16кН; VB = 6(-0,5)+15-0,5 = 4кН.
Полученные значения совпали с ранее вычисленными значениями опор-
ных реакций.
Построим линию влияния нормального усилия TV24 в стержне 2-4 фермы
(рис. 3.15, а). Пусть единичный груз Р = 1 находится справа от сечения I-I,
тогда, рассматривая равновесие левой части фермы, получаем, что продоль-
ное усилие N24 = 0. Предположим, что груз Р = 1 находится в точке 2 фермы.
Составим уравнение равновесия для левой части:
Л/3 = N2A • 1,5 = 0, откуда П24 = 0-
И наконец, пусть единичный груз находится в точке 1 фермы, тогда,
проводя сечение I-I и рассматривая равновесие левой части, запишем:
£Л/3 = \а-N24-a = 0, t.c.N24 = 1.
Под точкой I фермы откладываем на линии влияния N24 (рис. 3.15, в)
ординату 1. Соединяем прямой линией полученную точку с точкой под уз-
лом 2 фермы, ордината которой равна нулю.
160
Загрузим полученную линию влияния N2a‘ А24 = 6-1 = 6 кН.
Построим линию влияния усилия Л/(б8 (рис. 3.15, а, г). Предположим, что
единичный груз находится справа от сечения П-П, тогда из условия равнове-
сия левой части фермы получим:
11 С. II. Крин<ш:.и:ко
161
-a+N№-a=dt т.е./V68 = -Гл.
Таким образом, правая часть линии влияния N№ будет аналогична пра-
вой части линии влияния опорной реакции И/, но противоположна по знаку
(рис. 3.15, г).
Пусть единичный груз - слева от сечения П-П, тогда, рассматривая рав-
новесие правой части фермы, получим
-3o + /V68-o = 0, т.е.^ = -ЗКв.
Таким образом, левая часть линии влияния будет представлять собой
линию влияния опорной реакции VB, все ординаты которой умножены на
величину (-3).
Загрузим внешней нагрузкой (рис. 3.7, а) линию влияния (рис. 3.15, г):
^ = 61,5 + 14(-0,5) = 2кН.
Вычисленные двумя способами значения продольного усилия совпа-
ли по величине и знаку.
Начинаем построение линии влияния N-n. Проведем сечение П-П. Пред-
положим, что груз - справа, тогда, рассматривая левую часть фермы, имеем
£> = K4+TV7esin45e =0, т.е. ^=-r//sin45° = -l,414r/.
Если единичный груз слева, то, рассматривая правую часть фермы, по-
лучаем ^у = VB -Л^78 sin 45° = 0, т.е. Nn= Ke/sin45° = 1,414ИЙ.
Полученная линия влияния N-n представлена на рис. 3.15, д. Загрузим ее
внешними сосредоточенными силами (см. рис. 3.7, а):
N-n = 6(-0,7071) + 14(-0,7071) = -14,14 кН.
Для построения линии влияния N79 опять же можно использовать сече-
ние П-П. Единичный груз - справа, тогда
Y.Mt=yA-2a-Nna = 0,
откуда получаем Nn= 2 И/. Единичный груз - слева, тогда
XM8=rB.2a-W„O = 0,
откуда получаем N79 = 2VB. По полученным ординатам строим линию влия-
ния /V79 (рис. 3.15, е) и загружаем ее внешними сосредоточенными силами:
/У79 = 6(-1)+14-1 = 8 кН.
Для построения линии влияния /V|3 нужно рассмотреть случаи, когда
единичный груз находится в двух точках: 2 (или 3) и 1. Когда единичный
груз находится в точке 2 (или 3), то /VI2 = 0 и Л\3 = 0. Если же груз Р = 1 на-
ходится в точке 1, тогда, вырезая узел 1 фермы, получаем:
^/ = -l + /V12 sin45° =0, т.е. Ni2 = l/sin45°= 1,414(рис. 3.15, i/);
х = N|3 + /V12 cos 45° = 0, откуда находим = -1 (рис. 3.15, ж).
По полученным результатам строим две линии влияния: линии влияния
Л|2 и Мз (рис. 3.15, ж, и).
162
Если единичный груз движется по верхнему поясу фермы (рис. 3.15, а),
то стержень 8-9 всегда будет нулевым, если же груз перемещается по ниж-
нему поясу, то в момент, когда он будет находиться в точке 9 фермы, в
стержне 8-9 появится продольная растягивающая сила, равная единице. При
нахождении груза Р = 1 во всех остальных узловых точках нижнего пояса в
стержне 8-9 продольной силы не будет. Показываем это на линии влияния
Лм(рис. 3.15, з).
3.1. Расчет шпренгельных ферм
Методика определения продольных усилий и построение линий влияния
усилий в стержнях шпренгельных ферм не отличается от методик, приме-
ненных ранее для расчета простых ферм.
Задача 3.3. Определить продольные усилия в стержнях фермы (рис.
3.16, а) от действия внешних узловых сосредоточенных сил.
Построить линии влияния для стержней фермы, отмеченных знаком (||),
и определить в них продольные усилия, используя загрузку линий влияния
внешней нагрузкой.
Решение. Обозначим цифрами узлы фермы (рис. 3.16, а).
2F
Определяем опорные реакции:
^МА = Fa+2F2a + F3a-VB-4a = 0, VB=2F\
YMB=VA-4a-2F-4a-F3a-2F-2a-Fa = (), VA =4F.
Вырезая узлы А и В, и рассматривая их равновесие, легко
получить, что MAi = -4F; /VB5 = -2F; a NM = =
Аналогично, вырезая узлы 2 и 4 фермы, получаем, что
4F
Рис. 3.17
Агь - А47 - -F; Nn - /V23i - ^45-
Вырежем узел 1 (рис. 3.17): ^у = 4F-2F-NX6 cos45° = О, А16 = 2,828В;
= Л16 sin 45° + Nl2 = 2F + Nn = 0, Nn = -2F.
Согласно ранее установленному факту получаем Nt2 = N23= -2F.
Показываем все найденные усилия на схеме фермы (см. рис. 3.16, б).
Вырежем узел 5 (рис. 3.18):
£ у = 2F - NS1 sin 45° = О, NS1 = 2$2XF;
£x=N45 +/V57 sin45° =0, N4S = -2F.
Согласно ранее установленному факту получаем
Л^45 = Л/34 = -2F.
Для нахождения усилий в стержнях 6-3 и 6-8 можно выре-
зать узел 6 и рассмотреть его равновесие, но можно и провести сечение 1-1,
отбросить правую часть фермы и рассмотреть равновесие левой (рис. 3.19):
”45 5
Рис. 3.18
Рис. 3.19
= (4F-2F)-2a-Fa-H№l* =0,
где /36 - длина стержня 3-6. Используя теорему Пи-
фагора, имеем: а2 + а2 откуда находим
/36 = ^2а = 1,414а
Теперь можно вычислить усилие N№:
N» = 3aF/(l,414a) = 2,122F.
Запишем еще одно уравнение равновесия:
J>8 = (4F-2F)-2a-F-a+/V63 -2F-2a = Q.
Очевидно, что 1Ы = 1а = 1,414а, тогда
/V63 = aF/( 1,414а) = 0,7071F.
Проверим результаты, рассматривая равновесие
узла 6 (см. рис. 3.16, б):
£x = -2,828Fcos45° +0,7071 cos 45° +2,122Fcos45° =0,0011*0.
Проводим сечение II-1I и запишем уравнения равновесия для правой
части фермы (рис. 320):
£Л/3 =2F2a-Fa-NVJ =0,
£Л/8 = 2F-2a-Fa-2F-2a + /V37-/87 =0.
Ранее было получено /37 = /% = 1,414а, поэтому
N„ = 3oF/(l,414a) = 2,122F.
Имеем /87 = /37 = 1,414a, поэтому
N„ = aF/( 1,414a) = 0,7071F.
Все усилия в стержнях фермы определены.
Построение линий влияния усилий в стержнях
фермы (рис. 3.21). Линии влияния опорных реакций
фермы строятся обычным путем (рис. 3.21, б).
Построим линию влияния усилия /V63. Для этого
проведем сечение I-I (рис. 3.21, а). Пусть единичный груз справа от сече-
164
ния И, рассматриваем равновесие левой части фермы:
Ё Л/, = /V63/16 = 0, тогда N63 = О,
т.е. участок линии влияния N63 от точки В до точки 3 будет иметь только
нулевые ординаты. Предположим, что единичный груз слева от сечения I-I,
тогда, рассматривая равновесие правой части, получаем:
ХЛ/1=Л'бз/>в->,»-4С = 0,
или /V63 = 2,829V&
Загрузим линию влияния N63:
W63 = 0,707F.
Воспользуемся сечением I-I для
построения линии влияния /V23.
Пусть груз Р = 1 - справа от се-
чения, рассмотрим равновесие ле-
вой части фермы:
XM6=l'Aa+Naa = 0,
Aa=-IV
Если же груз Р = 1 - слева от
сечения, то необходимо рассмот-
реть равновесие правой части
фермы:
'£M6=VB-3a+NnO = 0,
/V23 = —ЗИд.
Линия влияния /V23 представлена
на рис. 3.21, г. Загрузим ее внеш-
ней нагрузкой (см. рис. 3.16, а):
N23 = F(-0,75) + 2F(-0,5) +
+ F(-0^5) = -2F.
Полученные двумя способами
результаты совпали.
Построим линию влияния уси-
лия N&. Пусть единичный груз
справа от сечения I-I, тогда рас-
сматриваем равновесие левой час-
ти:
ЕЛ/3=^-2О-^./36=0,
Nf* = 2оМзб = 2оМ1,414о) =
= 1,4141/.
Если же единичный груз слева
от сечения I-I, то, рассматривая
равновесие правой части фермы,
в
получаем:
Линия ВЛИЯНИЯ г/
Линия ВЛИЯНИЯ Уц
0,707!
б
2,829
Линия влияния Na ;
; о,75 -• :
г J Линия влияния ^23
Tt Г~~—-4-0 >7072
| 0Д5рГХ^>|^=:
д
______________________[0j536
Линия влияния ;
Линия ВЛИЯНИЯ Л/57 ; I »061
Ж
Линия влияния ^47
। ।
з Линия влияния /V45
Рис. 3.21
165
£Л/3 = Гв-2о-/У68-/36 =0Лб8 = 2оМзб = 2оГД1,414о)= 1,414ГЙ.
По полученным результатам строим линию влияния Мы (рис. 3.21, д).
Загрузим полученную линию влияния
= F0»3536 + 2F 0,7072i-F-0,3536 = 2,I22F.
Проведем сечение П-П, предположим, что единичный груз слева, следо-
вательно, рассмотрим равновесие правой части фермы. Для того чтобы по-
строить линию влияния W57, составим уравнение:
= Кл -W57 cos45° =0, откуда/V57 = 1,414КД.
Умножаем все ординаты линии влияния Уц на 1,414 и штрихуем ту ее
часть, что находится слева от сечения П-П, так как по предположению еди-
ничный груз - слева (рис. 3.21, е). Теперь предположим, что единичный груз
находится в точке 5 фермы. Составляя условие Ту = 0 для части фермы, на-
ходящейся справа от сечения П-П, получаем /V57 = Cl-
Загрузим построенную линию влияния М57 внешними сосредоточенными
силами (рис. 3.16, а):
N57 - 2F0 + F-0,3536 + 2F0.7071 + F-1,06 = 2,838F.
Для построения линии влияния N47 в грузовом шпренгеле 4-7 нужно рас-
смотреть два положения единичного груза: Р = 1 - в узле 4 (Л47 = -1) и в
других узлах фермы (N47 = 0), (рис. 321, ж).
И наконец, построим линию влияния N4i. Воспользуемся сечением П-П.
Единичный груз - слева, из равновесия правой части фермы получаем
2>,=/V45 -2a+rB -2o = 0, Л«=ГВ.
Груз в точке 5, из условия равновесия правой части фермы получаем:
5> = 1-1-JV„cos45” =0, №, = 0; £х = ЛГ45 =0.
Следовательно, под точкой 5 на линии влияния N45 ордината должна
быть равна нулю (рис. 3.21, з). Проводим передаточную прямую через точки
с ординатой 0,75 (под точкой 4 фермы) и ординатой 0,0 (под точкой 5 фер-
мы).
Загрузим внешней нагрузкой линию влияния /У45:
N45 =F-0,25+2F0,5 + F0,75 = 2F.
Таким образом, все поставленные задачи в примере 3.3 решены.
32. Трехшарнирные арочные фермы
В трехшарнирных арочных фермах ее диски представляют собой тоже
фермы. Такая система состоит из двух ферм, связанных между собой одним
общим шарниром. Каждая диск-ферма опирается на шарнирно неподвижные
опоры, поэтому в опорах помимо вертикальных реакций будут возникать
горизонтальные опорные реакции - распор. Опоры могут быть на одном
или разных уровнях.
166
Для определения усилий в стержнях трехшарнирных арочных ферм
применяются те же методы, что и при расчете простых ферм: метод выреза-
ния узлов, метод сечений, метод моментных точек и т.д.
Задача 3.4. Определить продольные усилия в стержнях трешарн ирной
арочной фермы (рис. 3.22, а) от действия внешних узловых сосредоточенных
сил.
Построить линии влияния для стержней фермы, отмеченных знаком (||),
и определить в них продольные усилия, используя загрузку линий влияния
внешней нагрузкой.
167
Решение. Обозначим цифрами узлы фермы (рис. 3.22, а).
Определяем опорные реакции:
YMA = F a+2F.2a + 2F 3a + F-4a-VB 5a = bt VB=3F\
^Мв =-F 4a-2F-3a-2F‘2a-F a+VA -5о = 0, VA = 3F;
Мс(спраеа) = F-a + H-2g-Fb-2g = 0, H = 2,5F.
Вырезая узлы А и Bt находим:
NM = = -3.536F; NAl =NB1= -0,5F.
Вырезая узлы 1 и 7, вычисляем:
Л14 = 0,707F =/V78; Nl2 = -0,5F = /V67.
Рассматривая равновесие узла 6, находим: = -F; NC6 = -0,5F.
Вырежем узел 4. Предварительно вычислим тригонометрические функ-
ции угла р (рис. 3.22, о), рассматривая треугольник 2-С-4:
tgp = 2а / а = 2; Р = 63,4°; sin Р = 0,894; cos Р = 0,446,
тогда
£x = 3,356Fsin45o -0,707Fsin45° + NA5 sinP = 0, N45 = -2,237F\
£у = 3.356F cos 45° +O.707F cos45° + TV24 - 2,237F cos p = 0, N2A = -2F.
Проводим полный разрез I-I. Рассматриваем равновесие левой части
фермы:
£Л/5 = 2,5Fl,5a-3F-2fl-W23G/2i-FG = 0, /V23=-2,5F.
Рассматривая равновесие узла 3, находим: N& = -2,5F; N3i = -2F.
Вырежем узел 2; £ у = -F+2F -N2S cosР = 0, Л25 = 2,24F. Условие
Lx - 0 можно использовать для проверки значений усилий, сходящихся в
узле 2.
Проводя разрез П-П и отбрасывая правую или левую часть фермы, мож-
но из условия Еу = 0 установить, что усилие = 0.
Сечение Ш-Ш дает возможность записать условие равновесия Еу = 0 для
правой или левой части фермы и вычислить Ася = -2,828F.
Таким образом, усилия во всех стержнях фермы определены. Их значе-
ния и действительные направления представлены на рис. 3.22, б.
Построение линий влияния усилий в стержнях фермы. Вначале строим
линии влияния вертикальных опорных реакций (рис. 3.23, б). Загрузив эти
линии влияния, получим значения опорных реакций:
VA = F0,8 + 2F0,6+2F-0,4+F0,2 = 3F.
Затем переходим к построению линии влияния распора Н = НА = Нв.
Пусть единичный груз находится слева от шарнира С. Рассмотрим равнове-
сие правой части фермы:
Mc=VB 2a-H 2a = ^ Н = VB.
168
Нез С
б
Линия влияния N
Линия влияния VA ;
: 0,2;
/*5С
\Н24
1,5
0,2:
в
0,8484;
г
1,119
Линия влияния А/$с
д
; 0,4476 ! 0,2238
0,2J________' 0,1
6
0,5а
Линия влияния Г
Линия влияния Н
0,2238!
е
Р = 63,4
НА=НВ = Н
,хт~г । 1 1.1.; t— ; Линия влияния TVjc
! Линия влияния Л87
з Линия влияния Na
Рис. 3.23
Если же груз справа от шарнира С, то рассматриваем равновесие левой
части фермы:
Mc=VA3a-H-2a = 0, H=WAI2.
Линия влияния Н представлена на рис. 3.23, в. Загрузим эту линию
влияния внешней нагрузкой, показанной на рис. 3.22:
Н = FO,2 + 2FO,4+2FO,6+FO,3 = 2,5F.
Для построения линии влияния усилия проведем сечение 1-1. Если
груз Р = 1 - справа от сечения, то необходимо рассматривать равновесие
левой части фермы:
= Нл-2а + Нм1и =0, т.е. NM=-2aHJlu,
но /м =т/2о2 = 1,414а, тогда NM = -1,414//. Умножаем ординаты линии
влияния Н на (-1,414) и строим линию влияния Затем штрихуем ту ее
часть, которая находится справа от сечения I-I, так как по предположению
там находится единичный груз (рис. 3.23, г).
Для построения оставшейся части линии влияния NA4 предположим, что
единичный груз находится в точке 1 верхнего пояса фермы (рис. 3.23, а).
Тогда получаем, что VA = 1; из условия, что Мс =0, находим НА = 0. Затем,
вырезая узел А и рассматривая его равновесие, получаем NA4 = 0. Отклады-
ваем эту ординату на линии влияния NA4 под точкой 1 фермы. Далее прово-
дим передаточную прямую, соединяющую две точки с ординатами 0 и
0,2828, что находятся под точками 1 и 2 фермы.
Загрузим внешней нагрузкой линию влияния NA4:
NM= F( 0,2828)+2F(-0,5656)+2F(-0,8484) + F(-0,4242) = -3,535F.
Проводя разрез 1I-I1, получим возможность построить линию влияния
усилия Nsc- Единичный груз справа, отбрасываем правую часть и рассматри-
ваем равновесие левой части фермы:
= +^5С sin Р = О, N5C=-1,1191V
Если единичный груз слева, то из рассмотрения равновесия правой части
фермы получаем:
^ =1,119^.
Линия влияния ASc показана на рис. 3.23, д. Загрузим эту линию влияния
внешними сосредоточенными силами, показанными на рис. 3.22:
/V5C = F • 0,2238 + 2F • 0,4476 + 2F(-0,4476) + F(-0,2238) = 0.
Сечение П-П пригодится и для построения линии влияния усилия No.
Пусть единичный груз - справа от сечения, тогда
Ymk = HA(2a-llK)-NKlIK =0,
170
где liK - расстояние от точки 1 до моментной точки К:
tgP =
За
Iik
За
tgP
За
~2
= 1,5о.
кк ~
Таким образом, /V^ = j * — Н А = О^ЗЗЯ.
Единичный груз - слева от сечения П-П, тогда рассматриваем равнове-
сие правой части фермы:
= HB 3a + NC3 a = 0y или Nc3 = -3H.
Загрузим полученную линию влияния, показанную на рис. 3.23, е:
Нсз = F(-0,6) + 2F(-1,2)+2F • 0,2 + F • 0,1 = -2,5F.
Результат получился тот же, что был получен ранее (рис. 3.22, б).
Проведем полный разрез Ш-Ш. Построим линию влияния Ni7. Когда
единичный груз находится слева от этого сечения, необходимо рассмотреть
равновесие оставшейся правой части:
V -Н
Mc=HB-2a-VB-2a+N„-lc,=0. N„ =2а-±-----------(VB-Я)1,414,
'С8
где /се = -Jia. Таким образом, для построения линии влияния Nw для левой
части фермы относительно сечения ПЫП нужно из ординат линии влияния
VB вычесть ординаты линии влияния Я, а результат, умноженный на величи-
ну 1,414, принять в качестве ординат для соответствующих точек линии
влияния /V87 (рис. 3.23, ж).
Для построения передаточной прямой в границах точек 6-7 предполо-
жим, что груз Р = I находится в точке 7
верхнего пояса фермы. Из рассмотрения
правой относительно сечения Ш-Ш части
фермы (рис. 3.24) находим Н= 0; VB = 1, а
из условия равновесия X Мс = 0 находим
Л87 = 0. Таким образом узнаем, что, если
единичный груз в точке 7, тогда усилие
Я87 в стержне 8-7 фермы равно нулю. По-
казываем это на линии влияния За-
гружая линию влияния Я87, получаем
N„ = F0,707 = 0,707F.
Для построения линии влияния усилия
Ябв необходимо рассмотреть два положе-
ния единичного груза: груз - в узле 6 и
груз вне узла 6. Линия влияния усилия представлена на рис. 3.23, з.
Поставленная в условии задачи цель полностью выполнена.
171
Задача 3.5. На рис. 3.25 изображена трехшарнирная арочная ферма, на-
груженная горизонтальными и вертикальными сосредоточенными силами.
Показаны также значения и реальные направления продольных усилий в
стержнях фермы.
Требуется самостоятельно определить усилия в стержнях фермы и све-
рить полученные результаты с представленными на рис. 3.25.
Указания. Решение задачи начинать с определения опорных реакций
VR, Ид и Ня. Затем последовательно вырезаются узлы Л, 1,2, 3 и составляют-
ся уравнения равновесия для каждого из них, из которых определяются со-
ответствующие продольные силы в стержнях фермы.
После этого необходимо провести полные разрезы I-I и П-Il и вычислить
усилия Ися и /Vc7, Net соответственно. Затем для проверки полученных зна-
чений усилий можно вырезать узел С и рассмотреть его равновесие (Ех = 0;
Еу = 0). Вырезая узел 4, находим Nqa = NA5 и После этого желательно
вырезать узел В и составить уравнения его равновесия.
Затем остается рассмотреть равновесие узла 5 (Ех = 0) и найти значение
усилия 7V57. Для проверки результатов можно рассмотреть равновесие узла 7
и убедиться в выполнении уравнений равновесия (Ех = 0; Еу = 0).
172
Раздел 4
ТРЕХШАРНИРНЫЕ АРКИ
(по материалам лекции 9)
В практике встречаются различные по форме и виду трехшарнирные
арки. Если конструкция состоит из двух сплошных брусьев криволинейного
очертания, соединенных между собой шарниром, то конструкция называется
аркой. При ломаном очертании оси сооружение обычно называют трехшар-
нирной рамой (см. рис. 5.7). Встречаются также арки, образованные из двух
ферм, соединенных между собой общим шарниром. Такие системы носят
название трехшарнирных ферм (см. раздел 3.2).
Задача 4.1. Определить опорные
реакции трехшарнирной арки, изобра-
женной на рис. 4.1.
Решение. В шарнирно неподвиж-
ных опорах А и В возникают горизон-
тальные Л/л, Нв и вертикальные Ил,
опорные реакции. Для вычисления
вертикальной опорной реакции VB
составим уравнение равновесия:
= VBl-q\2 6 = Q,
откуда определяем Рис. 4.1
VB = (10-12-6)/24 = 30 кН.
Затем определяем вертикальную опорную реакцию УА:
£Л/в=Рл/-9-12-18 = 0, Гл = 90кН.
Рассмотрим уравнение равновесия:
Xx = HA-HB=Qt т.е. НА = НВ = Н.
Помимо использованных уравнений равновесия
^>„=0. ^>„=0 и £х = 0,
в трехшарнирной арке имеется возможность составить дополнительное
уравнение Мс = 0, которое показывает, что в ключевом шарнире С момент
сил, лежащих по одну сторону от него, равен нулю.
Составим уравнение Мс = 0 для правой половины арки (рис. 4.1):
Л/с = VB Л2-Нв • f -0, откуда находим /4 = 30-12/6 = 60 кН.
Если составить уравнение Мс = 0 для левой части арки, то получим тот
же результат:
Мг =УА -12-НА • /-<7-12-6 = 0,откуда находим НА = 60 кН.
Опорные реакции трехшарнирной арки определены.
173
Задача 4.2. Построить эпюры изгибающих моментов поперечных
Qy и нормальных /V сил для трехшарнирной (фуговой арки, показанной на
рис. 4.2, а.
При расчете принять q = 3 кН/м, Ft = F2 = 10 кН, / = 24 м, /= 6 м.
Решение. Определим опорные реакции УА, Ив, для чего рассмотрим
3 III
'LMA=VBl-F1-l-Fl--q-- = ^ откуда VB = 14,75 кН;
4 2 4 8
= ^/-9Я^+|/1-Г,4-г/ = 0.откуда Кл = 23^5 кН.
4\8 4 J 2 4
Составим условие: ЕX = НА-Нв=0, тогда НА = НВ = Н. Горизон-
тальные опорные реакции И определяем из уравнения Е = 0, состав-
ляемого при рассмотрении только правой части арки:
=VB--F2--Hf = 0, откуда// = 19,5 кН.
2 4
Аналогичный результат получим, если рассмотреть только левую часть
арки.
Найдем вертикальные опорные реакции RA, RB простой балки, показан-
ной на рис. 4.2, б. Предположим, что на балку действует та же нагрузка, что
и на арку. В этом случае найдем RA = VA, RB = VB.
В общем виде внутренние усилия в произвольном сечении 0<х<,1
трехшарнирной арки выражаются через внутренние усилия Л/°, (7° соот-
ветствующего сечения простой балки по формулам:
Mz = М° - Ну; Qy =Q° cost?-Нsin <р; N = -(££ sin <p+ H costp), (4.1)
где <p - угол между касательной к оси арки в точке х = const и горизонталь-
ной линией х Для использования формул (4.1) необходимо предварительно
записать аналитические выражения для изгибающих моментов М°, попе-
речных сил ££ для каждого участка простой балки (рис. 4.2, б):
0<х<6м: Q°yl =VA-qx = 23^5~3x; M°zJ =VAx-qx2 I2=2325x-\,5x2;
6м<х<12м: = VA -qll4 = 525;
Mzll = Vax -ql(x-l/%)/4 = 5,25x + 54;
12 м <.x£ 18 m: Qyjn = VA -qll4~Fx = -4,75;
Кш = Глх -tf(x-//8)/4- F^x-l/2) = -4,75x4-174;
18m<x^24m: Q°jy =VA-qU4-Fx-F2 =-14,75;
=rj4x-<7/(x-//8)/4-F1(x-//2)-F2(x-3//4) = -14,75x + 354.
174
По полученным формулам вычисляем Л/®, Q? для простой балки с ша-
гом I м. Результаты заносим в табл. 4.1.
По условию задачи арка очерчена по окружности, следовательно, ось
арки имеет ординату
у = f - Л+7л2-(х-//2)2(4.2)
/2 j- 24 2 6
где радиус арки вычисляется по формуле R = —-+=-+— = 15 м.
8/ 2 8*6 2
Для рассматриваемого случая формула (4.2) примет вид
у = -9+7225-(х-12)2.
Рис. 4.2
175
Таблица 4.1
м л/2°. кНм <5- кН м tg<p COSV 51Пф Л/г, кН-м С/- кН кН
0 0 23Д5 0 1,33 0,6 0,8 0 -1,65 -30,3
1 21,75 20,25 1Д 1,08 0,68 0,73 -1,61 -0,53 -28,1
2 40,5 17,25 2,1 0,9 0,74 0,67 -2,02 -0,14 -26
3 56,25 14Д5 3 0,75 0,8 0,6 -2,25 -0,3 -24,2
4 69 11Д5 3,69 0,63 0,85 0,53 -2,93 -0,88 -22,5
5 78,75 8Д5 4Д7 0,53 0,88 0,47 —4,45 -1,8 -21,1
6 85,5 5Д5 4,75 0,44 0,92 0,4 -7,08 -2,99 -20
6 85,5 4,75 0,44 0,92 0,4 -7,08 -2,99 -20
7 90,75 5,14 0,35 0,94 0,33 -9,52 -1,55 -20,1
8 96 5,46 0,28 0,96 0,27 -10,4 -0,14 -20,2
9 101,2 5,25 5,7 0,2 0,98 0,2 -9,84 1Д4 -20Д
10 106 5,87 0,13 0,99 0,13 -7,89 2,6 -20
11 111,7 5,97 0,07 0,998 0,07 -4,6 3,93 -19,8
12 117 6 0 1 0 0 5Д5 -9,5
12 117 6 0 1 0 0 -4,75 -19,5
13 112Д 5,97 -0,07 0,998 -0,07 -4,1 -3,44 -19,8
14 107,5 5,87 -0,13 0,99 -0,13 -6,89 -2,11 -20
15 102.7 -4.75 5,7 -од 0,98 -од -8,34 -0,75 -20,1
16 98 5,46 -0,28 0,96 -0Д7 -8,41 0,62 -20,1
17 93,25 5,14 -0,35 0,94 -0,33 -7,02 2,02 -20
18 88,5 4,75 -0,44 0,92 -0,4 -4,08 3,45 -19,8
18 88,5 4,75 -0,44 0,92 -0,4 -4,08 -5,72 -23,77
19 73,75 4Д7 -0,53 0,88 -0,47 -9,45 -3,45 -24,1
20 59 3,69 -0,63 0,85 -0,53 -12,9 -0,21 -24,4
21 44,25 -14,75 3 -0,75 0,8 -0,6 -14,3 -0,1 -24.5
22 29,5 2,1 -0,9 0,74 -0,67 -13 2 -24,4
23 14,75 1Д -1,08 0,68 -0,73 -8,61 4Д7 -24,1
24 0 0 -1,33 0,6 -0,8 0 6,75 -23,5
Находим значения у с шагом 1 м. Результаты записываем в табл. 4.1.
Затем с шагом 1 м вычисляем значения tgcp, cosy и sirup по формулам:
. dy //2-х 1
= I =; cos <р = ; sin <р = tgy - cos у. (4.3)
Л V*2 -(х-//2)2 V1 + tg24>
И наконец, по формулам (4.1) находим значения внутренних усилий,
возникающих в арке. Например, в сечении х = 0 имеем
у = о, Q° = 23,25 кН; М° = 0, siny = 0,8; cosy = 0,6; Н = 19,5 кН.
Подставляя эти данные, взятые из первой строки табл. 4.1, в формулы
(4.1), определяем:
M/x = G) = 0-19,50 = 0; Qy(х = 0) = 23,25 0,6-19,5 0,8 = -1,65 кН;
N(x = О; = - (23,25 0,8 + 19,5 0,6) = -30,3 кН.
Полученные результаты записываем опять же в первую строку табл. 4.1.
Затем повторяем все вычисления с шагом Дх = 1 м.
При вычислении внутренних усилий необходимо помнить, что в мес-
176
тах приложения сосредоточенных сил значения поперечных Qy и нормаль-
ных /V сил изменяются скачкообразно.
Рассмотрим сечение арки х = 12 м (точка С на рис. 4.2, а). Величины
Qy и N в сечении х = 12 - 0 м, принадлежащем второму участку, приведены
в табл. 4.1. Но сечение х = 12 + 0 м одновременно принадлежит и третьему
участку, поэтому определяем Qy и Л по формулам (4.1) при условии, что
Qy берется в сечении х = 12 м третьего участка простой балки:
еу(х = 12) = -4,75-1-19,5-0 = -4,75 кН;
N(x = 12) = - (-4,75-0 + 19,5-1) = -19,5 кН.
Аналогичные вычисления проводим для сечения х = 18 м, после чего
приступаем к построению эпюр М~, Qy, /V для арки (рис. 4.2, г).
Из рассмотрения эпюр внутренних усилий арки можно сделать вывод,
что наиболее опасным будет поперечное сечение х = 21 м с
Л4шах= 14,3 кНм и Л/ = -24,5 кН.
Как показывают эпюры на рис. 4.2, изгибающие моменты и поперечные
силы, возникающие в поперечных сечениях трехшарнирной арки, значи-
тельно меньше усилий, возникающих от той же нагрузки в балке такого же
пролета.
Задача 4.3. Построить эпюры изгибающих моментов MZi поперечных
Qy и нормальных /V сил для трехшарнирной параболической арки, показан-
ной на рис. 4.3. Ось параболической арки очерчена по кривой
у = 4xf(lx) /1\ где/=6м,/ = 24 м.
При расчете принять
<7 = 3 кН/м; Fi=F2=10kH; tgcp = 4Д/-2х)/Л
a sin^, cos^ вычисляются по формулам (4.3).
Указание. При решении задачи использовать методику, рассмотрен-
ную в примере 42.
Ответ: эпюры Qy,N показаны на рис. 4.3.
Задача 4.4. Построить эпюры изгибающих моментов Л/2, поперечных
Qy и нормальных N сил для трехшарнирной эллиптической арки, показан-
ной на рис. 4.4. Ось эллиптической арки очерчена по кривой
у = /7/2-4(х-//2)2 //, tgcp = 407//(/Z2-x)/y,
где/= 6 м, / = 24 м. При расчете принять q = 3 кН/м; F, = F2 = 10 кН, a sincp,
coscp вычисляются по формулам (4.3).
Указание. При решении задачи использовать методику, рассмотрен-
ную в примере 4.2.
Ответ: эпюры Л/г, Qy, /V показаны на рис. 4.4.
12-е. Н. Kpnuoin
177
Рис. 4.3
Рис. 4.4
Задача 4.5. Определить опорные реакции круговой трехшарнирной ар-
ки, показанной на рис. 4.5. Арка нагружена горизонтальной распределенной
нагрузкой q и вертикальной сосредоточенной силой F.
Решение. Для вычисления вертикальных опорных реакций составим два
уравнения равновесия:
’£iMJ,= —+6F-V2yB=0. = —кН;
2 ' В 24 12 3
2 24 12 3
Для проверки полученных результатов составим условие равенства ну-
лю суммы проекций всех сил на вертикальную ось: Ту = VA + - F= 0.
Изгибающий момент в шарнире С равен нулю. Запишем это условие
178
для правой части арки:
Mc = 6VB-HBf=0,
тогда Нв = 9,5 кН.
Для левой части арки ус-
ловие Мс = 0 примет вид
Мс = 6 VA - НА f-qfrl = О,
откуда НА = 1,5 кН.
Для проверки результатов
расчета составим неиспользо-
ванное уравнение равновесия:
Er = НА-Нв + qf= 1,5-9,5+ 2-4 = 0.
Все опорные реакции вычислены.
Задача 4.6. Построить линии влияния опорных реакций параболической
трехшарнирной арки, а также линии влияния изгибающего момента М*, по-
перечной Qk и нормальной fy сил в сечении К (рис. 4.6, а). Загружая линии
влияния заданными внешними сосредоточенными силами, вычислить соот-
ветствующие опорные реакции и внутренние усилия, возникающие в арке в
сечении К под действием внешней нагрузки.
В качестве проверки полученных результатов вычислить те же опорные
реакции и внутренние усилия с применением уравнений равновесия.
Решение. По условию задачи арка - параболического очертания, следо-
вательно, уравнение ее оси примем в виде:
_ 4xf(/-x) х(24-х)
У~ I2 24 '
Вычислим тригонометрические функции угла наклона щ касательной к
оси арки в сечении К (х = 18 м):
(еф4=^ = ^=^=_0>5; cos94=-^J==^=;
* '2 '2 #^7
sin(?к = tg<pk cos<pA = -0,5coscpA. (1)
Для построения линий влияния опорных реакций арки и линии влияния
изгибающего момента Мк в поперечном сечении К воспользуемся материа-
лами лекции 9 и нарисуем без вывода вышеуказанные линии влияния (рис.
4.6, б, в, г).
При построении линии влияния изгибающего момента Мк в сечении К
необходимо принимать во внимание, что точка с линии влияния Мк должна
лежать на одной вертикали с нулевой точкой FM.
Можно доказать, что для трехшарнирной арки, очерченной по квадрат-
ной параболе, площадь линии влияния Мк равна нулю для любого сечения К.
179
у\ 1 10 кН. 1 1 \ 1_ 20кН| J
ЗЕ \о и А ^>0 а у Линия влияния Ув в 1 Линия влияния VA в Линия влияния Н г Линия влияния Л4 cosip* 0 Линия влияния Q* cosip* е sin^* = - 0,5cosip* Линия влияния - //sin <р4 ж Линия влияния Qt Линия влияния - 0,5Q^ cos и Линия влияния Nt * < ? '<*%% *. .г 1 (J ,& Й!1Ц1. с*. л iiJ /1 г и nil1 A \ ъ_ . . t °7 J i 1 .ip . ...c-K \ \ 4¥ ’ I 't "'I j ’ t' «и 4?:. ='1ш nL' ' И
Загрузим линии влияния опорных реакций (см. рис. 4.6, б, в):
VR = 10 • 0,25+20 • 0,5 = 12,5 кН; VA = 10 • 0,75+20 • 0,5 = 17,5 кН;
Н = 10-0,5+20 1 = 25 кН. (2)
Определим ординаты линии влияния изгибающего момента Мк в сече-
нии К. Откладываем ординату о* = 6 в точке d. Найдем абсциссу нулевой
точки с, как абсциссу точки пересечения двух прямых АС и ВК (рис. 4.6, а).
Предварительно определяем
tga=—= 0,5; ^p=H^J^-.8) = 3 =
12 6 6-24 4
Уравнение прямой линии AC: уАС=xtga = 0,5х
Уравнение прямой линии ВК: увк =18- xtgP =18- 0,75х
Приравнивая уАС = увк, т.е. 0,5х = 18 - 0,75х, находим х = 14,4 м.
Из подобия треугольников babe и heed (рис. 4.6, г) получаем:
9,6/6 = 2,4/afc, т.е. ab = 1,5 [м].
Нахождение ординаты /и* = 2,25 не представляет трудностей.
Выше ординаты угловых точек линии влияния найдены с использовани-
ем геометрических формул. Для нахождения этих же ординат можно ис-
пользовать формулу, приведенную в лекции 9:
Mk = М° -Hyk = М° -4,57/,
т.е. из ординат линии влияния изгибающего момента Мк в сечении К про-
стой двухопорной балки пролетом / вычесть ординаты линии влияния рас-
пора Н (рис. 4.6, в), умноженные на постоянный коэффициент, равный орди-
нате у*= 4,5 [м] сечения К арки (рис. 4.6, а).
Проверим условие равенства площадей линии влияния Л4 с разными
знаками:
|-^1,5(12 + 2,4)| = | 2,25(6+3,6), т.е. 10,8 = 10,8.
Загрузим линию влияния Мк внешней нагрузкой:
Мк =10 0,75+20-1,5 = 37,5кН-м. (3)
Ординаты линии влияния поперечной силы Qk вычислим по формуле,
приведенной в лекции 9. В эту формулу подставим значение (1):
й = Qi C0S4>t - Нsin <pt = Qi cosip, - = Qi coscp, + H
Следовательно, необходимо ординаты линии влияния Qk простой од-
нопролетной балки с пролетом / умножить на cosip* (рис. 4.6, д), ординаты
линии влияния распора Н умножить на постоянное число, равное cos<p*/2
(рис. 4.6, е), а затем сложить ординаты в точках с одинаковыми абсциссами.
В результате получим линию влияния поперечной силы Qk (рис. 4.6, ж). За-
грузим ее внешними силами: Qk = 0.
181
Ординаты линии влияния нормальной силы Nt вычислим по формуле,
приведенной в лекции 9. В эту формулу подставим значение (1):
АГ* =Р* sincp^ +Hcos(p* =e*(-^^)+Hcos(pA +Нсо5фА.
С помощью полученного выражения строим линию влияния Nk (рис. 4.6,
з, w), загружая которую внешними сосредоточенными силами, находим ве-
личину сжимающей нормальной силы в сечении К:
Nk =10-|со5ф* +20~сояфА =—j=7 = 28kH.
(4)
В качестве проверки вычислим опорные реакции арки и внутренние
усилия в поперечном сечении /С, используя уравнения равновесия и метод
сечений.
Определяем опорные реакции (рис. 4.6, а):
^МА = VB-24-20-12-10-6 = 0,или VB = 12,5 кН;
=УА • 24-20-12-10-18 = 0,или VA = 17,5 кН;
''£х = НА-Нв =0, т.е. Нл= Нв = Н\
мпран =ув.\2-Н-6 = 0. откуда 7/=25 кН.
Как видно, полученные значения опорных реакций совпали со значе-
ниями (2), вычисленными с применением линий влияния.
Проведем сечение К (рис. 4.6, о), отбросим левую часть арки и рассмот-
рим равновесие правой части (рис. 4.7):
ХЛ/к=Л/а+Я-4,5-Гд-6 = 0,
откуда находим Мк = 37,5 кН-м.
Ранее по формуле (3) был получен тот же
результат.
Для получения величины поперечной силы в
сечении К составим условие (см. рис. 4.7):
La =С*+^ВСО8ф*-ЯяПф*=0,ИЛИ
Qk =Hsmqk-VB созф* =
= 25 • 0,5 cos ф*-12,5-cos ф* =0.
С помощью линии влияния Qk (рис.4.6, ж)
был получен тот же результат.
Для получения величины нормальной силы Nk в сечении К составим ус-
ловие равенства нулю всех сил на направление нормальной силы Nk.
+ув sin<P* +НСО5Ф* =0,
или Nk =-Hcos(pk -РдБШф* =-25со8ф* -12,5-0,5 cos фА =28 кН.
Формула (4) дала такой же результат.
182
Раздел 5
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В УПРУГИХ СИСТЕМАХ
(по материалам лекций 10-13)
5.1. Определение перемещений сечения стержня плоской статически
определимой стержневой системы при действии внешней нагрузки
Задача 5.1. Определить прогиб балки в сечении К. Жесткость балки на
изгиб-Е/ (рис. 5.1).
Решение. Решим задачу двумя методами. Сначала используем диффе-
ренциальное уравнение упругой линии балки: Ely’ = М. Составляя условия
равновесия ЪМА = 0 и £А/В = 0, находим опорные реакции: VA = 0,25qa; VB =
- 1,25^о. Балка состоит из двух участков, поэтому записываем два диффе-
ренциальных уравнения упругой линии балки, по одному для каждого уча-
стка. Дважды интегрируем каждое дифференциальное уравнение.
Таким образом, будем иметь:
Участок 1 (0 < х < 2а):
Ely’ = -VAx = -0,25^аг,
Efy\ = -0,125qax2 +C;
E/yt = -0,125<7tzr3 13 + Cx + D.
Поставим граничное условие: у/ = О при
х - 0 и находим D = 0. Кроме того, на опоре
В (при х = 2а) имеем у, = 0. В этом случае
получаем C = qc?!6.
Участок II (2о < х < За):
Efy’tt =MU =-yAx + VB(x-2d)-q(x-2d)2 12 =
= ~0,25qax+1,25до(х - 2а) - 0,5д(х - 2а)2;
Е^, = -Д125<7ах2 +l,25qa(x-2a)2/2-0,5q(x-2a)3/3+С;
Е/ун =-0tl25qax3/3+0t625qa(x-2a)3/3-0^(х-2а)4 /12+Сх.
Окончательно получаем
Уп +М*-2я)3 -(х-2о)4 +4о34
Сечение К принадлежит второму участку, поэтому, применяя формулу
для прогибов второго участка, находим значение прогиба в сечении Kz
Ук =y„(x = 3a) = ^j\rO(21a2) + 5a(df-(af+Adi-3a]=-1-^. (I)
Знак (-) означает, что перемещение сечения К произошло в направле-
нии, обратном направлению оси у (см. рис. 5.1).
183
Второй способ определения перемещения предполагает применение ин-
теграла Мора. Используя ранее полученные значения опорных реакций, по-
строим эпюру изгибающих моментов для заданной балки (рис. 5.2, а):
Mi = -Г>1х = -0,25^аг,
Ма =-Рих+Кв(*-2<1)-<?(*-2о)2 12 =
= -0,25^+1,25<7О(Х - 2а) - 0,5^(х -2а)2.
По условию задачи требуется определить вертикальное перемещение
сечения К, поэтому помещаем в это сечение единичную силу (рис. 5.2, б) и
строим эпюру изгибающих моментов от этой силы (рис. 5.2, в):
Х7,=-О,5х; Ма = -0,5х + 1,5(х-2о).
Далее вычисляем прогиб в сечении К, используя интеграл Мора:
д 2?ЛМАл+3?^!!^п.л =
I EI 2 EI
=—] j(-Q,25qax)(-Q,5x)dx+ j[-0,25^ar + l,25^(x-2o)-
[о 2а
{3Зо
O.lZSgo^J +<?||-0,5х3-
3 Io 2°
1о
-\3f5a2(x-a)+4^ax2]dx}= (2)
' 24£/
Знак (+) перед результатом говорит о
том, что прогиб сечения К происходит в
направлении единичной силы (рис. 5.2,
б). Величина прогиба (2) совпала с его
значением (1), полученным с использо-
ванием дифференциального уравнения
упругой оси балки.
Выше представлены вычисления с
применением интеграла Мора. Если при
вычислении интеграла Мора применять
правила Верещагина, то математические
выкладки значительно упростятся:
Ьк=ъ(^а'.2а.1а+
2 3 '
+у0,5</а -а-—а
Ugg4
24Е/
(3)
184
Задача 5J. Определить горизонтальное смещение опорной точки В ло-
маного стержня (рамы), изображенного на рис. 5.3, а, Жесткость на изгиб
двух участков рамы показана на этом же рисунке.
Решение. Строим эпюру изгибающих моментов М от действия внешней
равномерно распределенной нагрузки q. Для этого предварительно опреде-
лим опорные реакции:
А =VEa-qaal2 = Q, VB = qa!2‘,
£х = Я=0, Я=0;
^MB=VAa-qa-al2 = Q, VA = qa!2=VB.
Для эпюры изгибающих моментов имеем МА = Мв = Мс = 0. Максимальный
изгибающий момент будет в середине пролета СВ (рис. 5.3, б):
Так как требуется определить горизонтальное смещение опорного сече-
ния В, прикладываем в этом сечении (рис. 5.3, в) горизонтальную единичную
силу Р = 1 и строим эпюру моментов от этой силы, предварительно вычис-
лив опорные реакции:
^МА = Лво-1-2о = 0, 7?в = 2;
£х=//л-1=0, нл=\-,
^Мв=Яла-Нл-2а = 0, Кл = 2.
Jlpn эпюры изгибающих моментов, возникающих от действия единичной
силы, имеем: МА = Мв = 0; Мс = -2а (рис. 5.3, г).
Рис. 5.3
185
Перемножая эпюры М и М на соответствующих участках рамы, нахо-
дим горизонтальное перемещение опорной точки В:
Площадь эпюры, ограниченной квадратной параболой, ее абсцисса цен-
тра тяжести приведены в табл. 5.1.
Для проверки определим горизонтальное перемещение опоры В с помо-
щью интегрирования интеграла Мора:
= 2^7 J<y*~X-2x)A=-|- +ж’)Л=
Q Q X X X/-/J Q
Задача 5.3. Определить горизонтальное смещение и угол поворота
<рв опорного сечения В ломаного стержня, изображенного на рис. 5.4, а.
Жесткость на изгиб двух участков ломаного стержня показана на этом
же рисунке.
Решение. Строим эпюру изгибающих моментов М от действия горизон-
тальной сосредоточенной силы F= 2 кН, приложенной на опоре В.
186
Предварительно определим опорные реакции (рис. 5.4, о):
Цма = ГВ-2-24 = 0, Гв = 4кН;
Хх = Н-2 = 03 Я=2кН;
= Гл-2-2-4 = 0, Гл = 4кН.
Для эпюры изгибающих моментов имеем (рис. 5.4, б):
МА = МВ = 0; Мс = -2 4 = -8 кНм.
Затем строим эпюры моментов от единичного момента т = 1 (рис. 5.4, в)
и единичной силы Р = 1 (рис. 5.4, г), приложенных в сечении В.
Перемножая по способу Верещагина эпюры М и Мх, вычисляем угол
поворота <рв сечения В:
„в __!_( 8.2.1.
в 2Е1\2 3 ) 3EI
Результат получился со знаком (+), следовательно, сечение повернулось
в направлении единичного момента (см. рис. 5.4, в).
Перемножая по способу Верещагина эпюры М и М2, вычисляем гори-
зонтальное перемещение Дв₽ опорного сечения В:
—8-4-—4
7 з ,
2 Л 160
—4 =-----.
3 ) 3EI
Горизонтальное перемещение имеет знак (+), что означает совпадение
направлений единичной силы и горизонтального перемещения опорного
сечения (см. рис. 5.4, г).
187
Задача 5.4. Загрузим ригель рамы, изображенной на рис. 5.4, о, допол-
нительно линейной равномерно распределенной нагрузкой q = 4 кН/м и оп-
ределим горизонтальное перемещение А д₽ опоры В (рис. 5.5, а).
Решение. Определяем опорные реакции (рис. 5.5, о):
Х/И>1=Гв.2 + 2-4-9-2-1 = 0, Гв = 0; £> = //2-0, Н = 2 кН;
ХЛ/д =^-2-2-4-9-2-1 = 0, ^ = 8кН.
<7 = 4 кНм
1111 111 2 кН
2Е/ £
Гд = 0
Е1
2м
//=2 кН
А
= 8 кН
Рис. 5.5
С
Для эпюры изгибающих моментов имеем (рис. 5.5, б):
МА=МВ = 0; Мс = -2-4 = -8 кНм,
причем участок эпюры на участке СВ очерчен по квадратной параболе.
Построение эпюры изгибающих моментов от горизонтальной единичной
силы Р = 1, приложенной в сечении В (рис. 5.5, в), не вызывает трудностей.
Она показана на рис. 5.5, г.
Перемножая эпюры М и М по правилу Верещагина, находим искомое
горизонтальное перемещение А1^5 опорного сечения В:
*7 =
8 = 152
Е/ ~ ЗЕ/
Задача 5.5. Определить максимальный прогиб консольной балки, пока-
занной на рис. 5.6, если жесткость балки на изгиб - EI.
Решение. Вычисляем максимальный изгибающий момент в балке на
опоре:
188
Мл = Л/—, = —ql ’—I — ———.
Л 2 3 6
Эпюра изгибающего момента в балке показана на рис. 5.6, б. Она очер-
чена по кубической параболе, поэтому площадь эпюры изгибающего момен-
та согласно табл. 5.1 будет:
1 ql3
Am “ Al =~7^тах
4 24
Эпюра моментов, возникающих от дейст-
вия вертикальной единичной силы, представ-
лена на рис. 5.5, в.
Ордината ус этой эпюры, находящейся
под центром тяжести эпюры изгибающих мо-
ментов, возникающих под действием внешней
нагрузки, находится из подобия соответст-
вующих треугольников эпюры от единичной
нагрузки:
Используя правило Верещагина находим значение прогиба на конце
балки:
* 1 Л 1 «/’ 4, ql3
к Е1 м ЛС £/ 24 5 30£/
Задача 5.6. Стальная рама, выполненная из двутавровых стержней с
осевым моментом инерции сечения 1г = 350 см4, моментом сопротивления
Wz = 58,4 см3 и площадью поперечного сечения А = 14,7 см2, нагружена го-
ризонтальной распределенной нагрузкой q (рис. 5.7, а).
Проверить по максимальному нормальному напряжению 0^ прочность
трехшарнирной рамы и определить горизонтальное и вертикальное переме-
щения шарнира С рамы.
В расчетах принять: Е = 2,06-105 МПа; Ry = oaJm = 240 МПа.
Решение. Определяем опорные реакции трехшарнирной рамы:
Хмл =^-6-9-31,5 = 0; Гв = ЗкН;
Хл/в=Гу, 6-9-3 (3 + 1,5) = 0; Гл = 9кН;
= Я-3-Гв-3 = 0; Н= VB = 3 кН.
В качестве проверки полученных результатов проверим выполнение
дополнительного условия:
М™ = -/7-3 + ^-3-9-31,5 = 0.
Теперь можно приступать к построению эпюры изгибающих момен-
тов, возникающих от действия внешней нагрузки (рис. 5.7, б).
189
Рис. 5.7
На участке DC эпюра изгибающих моментов будет очерчена по квадрат-
ной параболе. Проверим этот участок на экстремум функции:
М.^^х-Н-З-дх2/*
-^L = VA-qx; х = —^- = —= 2,25м;
дх Q 4
4-2 252
тогда K,dc(* = 2,25) = 9-2,25-3-3-------£— = 1,125кН-м.
Отмечаем это на эпюре изгибающих моментов (рис. 5.7, 6). Определение
значений изгибающих моментов в угловых точках рамы не вызывает труд-
ностей.
Из рассмотрения рис. 5.7, о и б делаем вывод, что наиболее опасно сече-
ние D в верхней части левой стойки рамы. Следовательно,
^inax.D
или в числах
190
910
14,710
910~3
58,4-10~6
= 6,12+154,1 = 160 МПа < tradm = 240 МПа.
Таким образом, прочность рамы обеспечена.
Переходим к определению вертикального перемещения шарнира С ра-
мы. Приложим в этом шарнире вертикальную сосредоточенную единичную
силу Pi = 1 и построим эпюру изгибающих моментов (рис. 5.7, в).
Перемножая эпюры М и Мх, находим вертикальное перемещение шар-
нира С:
двфт =2_(19.з.1^5.2+19.3~1,5--—-3 -1,5+-9-3-—1,5
3 л2 3 J 8 2 , 2 3
стержни AD и ВК стержень CD стержень СК
47,25
EI
-----------*-------- = 0,065 м = 6,5 см.
2,0610s-103 .350-10"®
Для вычисления горизонтального смещения шарнира С приложим гори-
зонтальную единичную силу Р2 - 1 в этом шарнире, построим эпюру изги-
бающих моментов М2 (рис. 5.7, г) и перемножим эпюры М и М2 :
д^>=2-[19-3-1Л+19-3-1.5--^-3-и5--9-3-и-
с £7^2 3 2 3 3 8 2 2 3
стержень AD стержень CD стержень СК
--9-3 -1,5] = -— (б,75) =-----------=-^?---------=- = -0,0094 м =-0,94 см
к 2 3 ) ЕГ 2,06'105-103-350'10-8
стержень ВК
Знак (-) показывает, что горизонтальное перемещение шарнира С про-
исходит в направлении, противоположном направлению горизонтальной
единичной силы Р2 = 1 (рис. 5.7, г).
Задача 5.7. Определить горизонтальное и вертикальное перемещения
точки D ломаного стержня постоянного поперечного сечения с постоянной
жесткостью на изгиб EI (рис. 5.8).
Решение, Строим эпюры изгибающих моментов от внешней нагрузки
(рис. 5.8, о), от вертикальной единичной силы Pt = 1 (рис. 5.8, б) и горизон-
тальной единичной силы Р2 = 1 (рис. 5.8, в). Естественно, единичные силы
Pi = 1 и Р2 = 1 прикладываются в сечении D, вертикальное и горизонтальное
перемещения которого необходимо определить по условию задачи.
191
Рис.5.8
Перемножая эпюры М и М\ по правилу Верещагина, находим верти-
кальное перемещение точки D:
ДТ=-^[|’'у'+|(2'1+2Л6Л6 + 1-3,6+3,6 1)+3,6-2w] = ^.
Перемножение двух трапециевидных эпюр М и Мj на участке ВС лома-
ного стержня произведено с использованием формулы, приведенной в лек-
ции 11. Длина участка ломаного стержня ВС равна 3 м.
Для вычисления горизонтального перемещения точки D ломаного
стержня необходимо перемножить по правилу Верещагина эпюры изгибаю-
щих моментов М и М2 (рис. 5.8):
A-=±[|(2.|.0 + 2.3,6.W + |.l,5+0.3,6)+3,6.2.^]^.
Перемножение трапециевидной и треугольной эпюр М и М2 на участке
ВС ломаного стержня произведено с использованием формулы, приведенной
в лекции 11.
Задача 5.8. Определить угол поворота сечения С ломаного стержня с
постоянной жесткостью на изгиб EI (рис. 5.9, а).
Решение. Строим эпюру изгибающих моментов, возникающих от дейст-
вия внешней сосредоточенной силы F (рис. 5.9, б). Эту эпюру можно по-
строить, не вычисляя предварительно опорные реакции на опоре А.
По условию задачи необходимо вычислить угол поворота сечения С ло-
маного стержня, поэтому прикладываем в этом сечении единичный момент
т = 1 (рис. 5.9, в) и строим эпюру изгибающего момента (рис. 5.9, г).
Теперь необходимо перемножить эпюры М и М :
192
1 Г. а _ ,\1 if Fa2 Fa2 .
(pc -— 1—Fo+—(2Fal-2Fal + Fal-Fal) =— ---- =---(рад).
E/[ 2 6 V 7J £/^ 2 J 2Е/ ’
Направление угла поворота сечения С совпадает с направлением еди-
ничного момента в сечении С (рис. 5.9, в).
Задача 5.9. Определить вертикальное перемещение точки D кронштейна
(рис. 5.10). Жесткость на растяжение (сжатие) стержней системы постоянна
ЕА = const, где А - площадь поперечных сечений стержней.
Рис. 5.10
В стержнях системы, изображенной на рис. 5.10, возникают только нор-
мальные усилия растяжения или сжатия, поэтому интеграл Мора для такого
вида стержневых конструкций принимает вид
1=1 п
13 С. И. Кри11<>п1апк<
193
где и - число стержней системы (см. лекцию 11).
Решение. Определяем усилия в стержнях конструкции:
£ у = -5 - Ы1Х cos 30° = 0, тогда = -5/cos30° = -5,77 кН;
£х = Ndb + cos 60° = 0, откуда находим NDB = -tyzcos60o = 2,89 кН.
Строим эпюры нормальных сил от внешней нагрузки (рис. 5.10, б) и от
единичной вертикальной силы Р = 1 (рис. 5.10, в).
Перемножая по правилу Верещагина эпюры N и N , определяем верти-
кальное перемещение точки D:
ДТ=-^[2.89|0Л78 - 5.77-2 (-1.,54)]=^±^ = -^.
ЕА ЕА ЕА
При перемножении эпюр принималось во внимание, что длина стержня
BD равна 1 м, а стержня CD -2 м.
5.2. Определение перемещений сечения стержня плоской
статически определимой стержневой системы
при смещении ее опор
Задача 5.10. Имеется трехшарнирная рама (рис. 5.11). Предположим,
что правая шарнирно неподвижная опора сместилась вниз на величину Д.
Определить вертикальные и горизонтальные перемещения угловых то-
чек рамы и шарнира С.
Решение. Создадим единичные состояния данной системы и в направ-
лении искомых перемещений 8, приложим единичные силы (см. рис. 5.11).
194
Опорные реакции, возникающие в том же опорном стержне, перемес-
тившимся вертикально на величину А, обозначим через R.
Определим вертикальное перемещение шарнира С. Для этого приложим
в шарнире вертикальную единичную силу, составим уравнение равновесия
(рис.5.11, б):
ZMA = \a-R2a = 0
и находим опорную реакцию R = 1/2.
На основании теоремы о взаимности работ для двух состояний, показан-
ных на рис. 5.11, а, б, составим условие:
^,2=^21, или 0 = (1-5,-Я Д),
откуда находим = R Д. = Д/2.
Работа сил первого состояния на перемещениях второго состояния Wx2
равна нулю, так как сил в первом состоянии нет. Слагаемые правой части
формулы Бетти берутся с отрицательным знаком, если направления силы и
перемещения не совпадают.
При перемещениях опор статически определимого сооружения по на-
правлениям опорных закреплений внутренние усилия в сооружении не воз-
никают.
По аналогии, для вычисления горизонтального перемещения ё2 в на-
правлении определяемого перемещения прикладываем единичную силу, оп-
ределяем опорную реакцию R и составляем условие о взаимности работ для
двух состояний (рис. 5.11, в):
О =-!• бз + ОДД, откуда находим 62 = ДИ.
Знак (+) в ответе означает, что направление перемещения б2 на рис. 5.11, а
выбрано правильно.
Для определения перемещения 63, согласно рис. 5.11, г, необходимо со-
ставить следующее условие:
О = 1- 5з - 1-Д, откуда находим 83 = Д.
Из рис. 5.11, д следует, что для определения перемещения ё4 следует
составить условие:
О = 1 • б4 - /?-Д = 64, откуда получаем б4 = 0.
На рис. 5.11, е показаны все вычисленные перемещения и показано по-
ложение стержней рамы после осадки ее правой опоры вниз на величину Д.
При решении задачи не учитывались удлинения (укорочения) стержней ра-
мы от действия единичных сил, так как их величины намного меньше пере-
мещений точек стержней от смещения опор.
Задача 5.11. Определить горизонтальное и вертикальное перемещения
точки В ломаного стержня при повороте заделки А на угол ф (рис. 5.12).
Решение. вычисления вертикального перемещения точки В прикла-
дываем в этой точке вертикальную единичную силу (рис. 5.12, б) и опреде-
ляем опорные реакции в заделке А.
13*
195
Рис. 5.12
Затем на основании теоремы о взаимности работ для двух состояний,
показанных на рис. 5.12, a, б, составляем условие
О = -оф + 1-5], откуда находим S( = а<р.
Для вычисления горизонтального перемещения точки В прикладываем в
этой точке горизонтальную единичную силу (рис. 5.12, в) и определяем
опорные реакции в заделке А.
Затем на основании теоремы о взаимности работ для двух состояний,
показанных на рис. 5.12, о, в, записываем условие
О = оф - 1 -бг, откуда находим = °Ф-
Полученные значения перемещений и ё2 справедливы для очень малых
углов поворота ф.
Вычислим точные значения перемещений и ё2 и установим погреш-
ность вычислений.
Длина воображаемой линии АВ =a*j2 (рис.5.12,о) при повороте заделки
не меняется. Из рис. 5.12, о очевидно, что угол между линией АВ и горизон-
тальной линией равен 45°. После поворота опоры на угол ф на такой же угол
повернется линия АВ. Угол между новым положением линии АВ и горизон-
тальной линией станет равным 45° - ф (рис. 5.13).
Тогда точные значения перемещений точки В мо-
гут был» вычислены по формулам:
6] = a-Jl sin 45° - ajl sin(45° -ф) =
= 0^2 (sin 45° - sin 45° cos ф+cos 45" sin ф);
62 = a-Jl cos(45" - ф) - a-Jl cos 45° =
- 0-^2 (cos 45° cos ф+sin 45° sin ф - cos 45" ).
Если в последних формулах ввиду малости угла ф принять совф = 1, а
5тф = ф, то получим Б| = оф и Ъг = оф. Эти результаты и были получены
при использовании теоремы о взаимности работ для двух состояний.
196
Следовательно, погрешность вычислений определяется возможностью
принятия допущений
Sin ф « ф, СО8ф«1.
5Л. Определение перемещений сечения стержня
плоской статически определимой стержневой системы
при температурных воздействиях
В этом разделе будут рассмотрены стержневые системы, содержащие
только прямолинейные стержни постоянного поперечного сечения, поэтому
будет применяться интеграл Мора для случая температурных воздействий в
более простой форме:
A = Za —2—Qj>’
где a - температурный коэффициент линейного расширения; Г| - температу-
ра нагрева верхнего (наружного) волокна стержня; 12 - температура нагрева
нижнего (внутреннего) волокна стержня; £1^ и £1^ - площади единичных
эпюр М и N .
Задача 5.12. Определить горизонтальное перемещение шарнирно под-
вижной опоры В рамы при изменении температуры по рис. 5.14, а. Высоту
поперечного сечения ригеля принять hi = а/10, а ширину колонны в плоско-
сти рамы - Л2 = л/20.
Решение. Строим единичные эпюры М и N (рис. 5.14, б, в) от единич-
ной силы, приложенной в точке В в направлении искомого горизонтального
перемещения.
Стержневая система содержит только прямолинейные стержни постоян-
ного сечения, поэтому применяем упрощенную форму интеграла Мора.
197
Определяем площади единичных эпюр:
ригель CD: CD=2a-a = 2а2; CD = 1 • а = а;
стойки АС и BD: Q.-j ... =2а-2а/2 = 2а2; От? ... = дп =0.
Выпишем температурные параметры:
для ригеля: /| = 40°; t2 = 20°; для стоек: г, = 30°; 1г = 20°.
Затем вычисляем горизонтальное перемещение опоры В:
= а!^2^ -QHLtjO)о. 2.а (30 -20) 2д2 =
в Л, 2 Л2
4---------X-----------4________V J
ригель CD стойки АС и BD
= af—2о2 -30G+-— 2л2) = 1170оа.
Ig/10 а/20 J
Определим горизонтальное перемещение узла D рамы, рассмотренной
ранее (см. рис. 5.14, а). Размеры поперечных сечений рамы и ее температур-
ный режим оставим прежними (рис. 5.15, а).
Прикладываем горизонтальную единичную силу в узле D рамы, опреде-
ляем опорные реакции и строим эпюру изгибающих моментов М (рис. 5.15,
б) и эпюру нормальных сил 7V (рис. 5.15, в).
Затем вычисляем горизонтальное смещение точки D рамы, применяя
упрошенную формулу для вычисления температурных перемещений, полу-
ченную на основании интеграла Мора:
198
чЛ 2 2 >
ригель CD
^Z^.l2a.2a_a<30±^.2.2e + a<30±20).2.2fl = 570aa.
2 2 > V 2 у >
стойка АС стойка BD
Задача 5.13. Вычислить горизонтальное смешение подвижной опоры В
составной балки, у которой нижние волокна нагреты на 20°, а верхние - на
40°С (рис. 5.16). Требуется также определить вертикальное перемещение
шарнира С. Высота балки постоянна по длине и равна Л.
Рис. 5.16
Решение. Прикладываем единичную горизонтальную силу к шарнирно
подвижной опоре В и единичную вертикальную силу в шарнире С. Строим
единичные эпюры Л/ (рис. 5.16, 6) и М (рис. 5.16, в). Используя упрощен-
ный вариант интеграла Мора, вычисляем горизонтальное перемещение опо-
ры В (рис. 5.16,6):
дтор 40+ 20 _ _ _Л
Д н = -а--------1 • За = -90оа.
в 2
В последней формуле принят знак (-), потому что деформации элемента
АСВ от температуры (удлинение) и от единичной силы (укорочение) не сов-
падают.
От вертикальной единичной силы, приложенной в шарнире С, возникает
только изгибающий момент, поэтому интеграл Мора для нахождения темпе-
ратурных вертикальных перемещений шарнира С примет вид:
40 - 20 1О о 40 2
Д^Т = а---------2а-2а =—аа2.
с h 2 h
Знак (+) в результате показывает, что направление вертикального пере-
мещения шарнира С совпадает с направлением единичной вертикальной
силы (см. рис. 5.16, а).
199
Задача 5.14. Вычислить вертикальное перемещение шарнира С трех-
шарнирной рамы. Размеры стержней рамы и температурный режим указаны
на рис. 5.17, а. Из рисунка видно, что наружные волокна стержней AD и DC
нагреты на 40°С, а внутренние волокна этих же стержней нагреты на 20°С.
Внутренние и внешние волокна стержней СК и КВ нагреты на 20°С.
Решение, Прикладываем к шар-
ниру С вертикальную единичную
силу, вычисляем опорные реакции
и строим единичные эпюры изги-
бающих моментов Л/ (рис. 5.17, 6)
и нормальных сил 7V (рис. 5.17, в).
Подставляя значения площадей
соответствующих участков еди-
ничных эпюр Л/ и Л/ в формулу
интеграла Мора, находим значе-
ние вертикального перемещения
шарнира С:
дГ4".11,5.3_40±20.0,5.3 + ".11^3-^00,5.3-
с Ч °*2 2 2 0,3 2 2
20 + 20Л__ 20 +20 г1
---- — 0,5 • 3----— 0,5 • 31 - 225а [м].
Моментные (подчеркнутые) компоненты интеграла Мора взяты со зна-
ком (+), так как единичная эпюра моментов показывает, что в стержнях AD,
DC растянутые волокна будут находиться снаружи рамы и температурное
воздействие вызывает удлинение внешних волокон этих стержней .
Если принять, что стойки и ригель рамы изготовлены из стали, то коэф-
фициент линейного расширения а= 12010 7 °C ’.
В этом случае получим
Д^ = 225а = 225 -120 -10 "7 = 0,0027 м = 0,27 см.
200
Раздел 6
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДОМ СИЛ
(по материалам лекций 14-19)
6.1. Расчет статически неопределимых
плоских стержневых систем методом сил
Задача 6.1.1. Для рамы, изображенной на рис. 6.1.1, о, построить эпюры
изгибающих моментов Л/, поперечных Q и нормальных ТУсил. Дать провер-
ку полученных результатов.
Решение, Представленная на рис. 6.1.1, а рама является два раза внешне
статически неопределимой стержневой системой, что подтверждается фор-
мулой Л = ЗЛСу-Шэ =3-1-1 = 2.
На рис. 6.1.1, б показана статически определимая основная система, по-
лученная из заданной отбрасыванием двух опорных стержней. Действие от-
брошенных связей заменяем неизвестными усилиями Xt и Х2. Направления
сил Xi и Х2 должны совпадать с направлениями опорных реакций отброшен-
ной шарнирно неподвижной опоры С. Затем строим эпюры изгибающих мо-
ментов в основной системе от единичных сил Ху = 1 (рис. 6.1.1, в), Х2 = 1
(рис. 6.1.1, г) и от внешней нагрузки (рис. 6.1.1, б).
При двух лишних неизвестных Х2 имеем систему двух канонических
уравнений:
^21-^1 +622-^2 "*’^2F = О*
С помощью правила Верещагина вычисляем коэффициенты канониче-
ских уравнений:
Подставляем найденные значения коэффициентов в систему двух кано-
нических уравнений и, решая эту систему, находим
Теперь можно приступить к построению эпюры изгибающих моментов
М в заданной системе, используя формулу М = MxXl+M1X2+M F, или
201
применяя обычную методику построения изгибающих моментов, принимая
во внимание, что опорные реакции опоры С известны (рис. 6.1.1, е).
Рис. 6.1.2
Рис. 6.1.1
202
Зная эпюру изгибающих моментов и опорные реакции в шарнирно не-
подвижной опоре С, легко построить эпюры поперечных Q (рис. 6.1.1, ж) и
нормальных N сил (рис. 6.1.1, з).
Проверим полученные результаты.
Рассмотрим равновесие рамы в целом (рис. 6.1.2):
Ю г. п F F „
— F-F-= Qr, Уу = — —— = 0;
9 9 ^22
.. F10 F
Мс =---+—F-3 +—2-F-4 = 0.
с 3 9 2
Проведем деформационную проверку. Очевидно, что горизонтальное
перемещение опоры С равно нулю. Чтобы проверить это, необходимо пере-
множить две эпюры Mt и Л/(рис. 6.1.1, в, е):
^ = У(^^Л=—D-3-3--—+—Гз-З-—-2-3-—F-3*—F+3*—1Ъо.
с , J El El 2 3 3 6^ 3 3 3 3 JJ
Таким образом, эта проверка тоже свидетельствует о правильности оконча-
тельной эпюры изгибающих моментов М(см. рис. 6.1.1, е).
Универсальная проверка коэффициентов. Вычисляем сумму всех коэф-
фициентов двух канонических уравнений метода сил:
я я я я_27 о6 8 _ 53
Ху 11+12+21+22 £/ 2*£/ + з£/ за-
строим суммарную единичную эпюру (рис. 6.1.3):
Ms = Л/[ + М2 •
Проводим универсальную проверку коэффициентов:
У Г^Л = -Ц-(2-11+2-3-3 + 1-3 + 31)+-3-3 -з1 = —^Уб„.
EI ЕЁ[б' ’ 2 3 j ЗЕ/ Д '
Универсальная проверка подтвердилась, поэтому построчную проверку
коэффициентов 5tf можно не прово-
дить.
Определим угол поворота в
сечении В (см. рис. 6.1.1, а). Для:
этого в сечении В основной систе-
мы приложим единичный сосредо-
точенный момент т = 1 (рис. 6.1.4)
и построим эпюру изгибающих мо-
ментов.
Перемножая по правилу Вере-
щагина эпюры М (см. рис. 6.1.1, е) и
Мт (рис. 6.1.4), находим искомый
угол поворота: ^ис- 6.1 -3
Рис. 6.1.4
203
Фв =
El б(.
2 F 2
1 + 2-F-1-—-1+-F1
V—
) 3E1
2 —-
3
3 3 3
Знак (+) показывает, что принятое направление единичного момента т
совпадает с действительным поворотом сечения В (см. рис. 6.1.1, а).
Задача 6.1.2. Построить эпюры изгибающих моментов Л/, поперечных Q
и нормальных /V сил для статически неопределимой стержневой системы,
показанной на рис 6.1.5, а. Все стержни системы имеют одинаковую жест-
кость на изгиб ЕЕ
8
Рис. 6.1.5
204
Решение. Очевидно, что система один раз статически неопределима.
Отбрасываем горизонтальный опорный стержень D, а его действие заменяем
силой A'i (рис. 6.1.5, б). Каноническое уравнение метода сил будет иметь вид
Бп^, + Д1/Г =0, откуда находим X, = -Д1/г/Бп.
Чтобы вычислить коэффициенты канонического уравнения, необходимо
предварительно построить эпюры Л/^рис. 6.1.5,в) и Л^(рис. 6.1.5, г).
Применяя при перемножении эпюр правило Верещагина, находим:
4_.
еГ
с I L I , п 2 , I о о 2 '
Б„ =— 2 —1-2—1+-2-2—2
11 2 3 2 3
2 2 11
1-2—2+-1-2---1-2-
3 3 2 2
Е1
Л,Г Е/^2
а затем находим неизвестную опорную реакцию Xt - -Д1/г /Бн = — кН.
6
Учитывая, что Xt = -HD = (-1/6) кН, запишем уравнения равновесия для
всей стержневой системы (рис. 6.1.5, а):
\х= НА-HD = 0, откудаНА = (1/6)кН;
^МА =q 2 l + HD-2-Vc-4 = 0, т.е. Vc =(13/12)кН;
£Л/С =^-2-3-Яо-2-Ки-4 = 0, или VA =(35/12)кН.
Зная опорные реакции, легко построить эпюры М, Q, N (рис. 6.1.5, д. е.
ж). Наклонная линия на эпюре поперечных сил проходит нулевую точку,
следовательно, в этом сечении будет экстремальное значение изгибающего
момента. Вычислим его:
Мх = VAx-qx2 /2; dMxldx = VA-qx = 0, откуда
x = VJq = (35/24)м = 1,46м,тогда =Л/Х(х = 1,46) = 2,13кН-м.
Поставленная задача выполнена.
Деформационная проверка. Определим вертикальное перемещение точ-
ки С (рис. 6.1.5, а). Для этого приложим в точке С статически определимой
системы, полученной из заданной отбрасыванием вертикального опорного
стержня С, вертикальную единичную силу (рис. 6.1.5, з). Построим эпюру
изгибающих моментов. Перемножая две эпюры М и М,, находим искомое
перемещение:
= ±[1.1.2.24-1.'1.2.22_2.^.2.I+1.'3.2.22L().
Е/[2 3326 338 2 6 3 )
Ответ служит подтверждением правильности эпюры М (рис. 6.1.5, д).
205
Задача 6.13. Построить эпюры изгибающих моментов Л/, поперечных Q
и нормальных 2V сил для плоской симметричной статически неопределимой
рамы, показанной на рис. 6.1.6, а. Определить вертикальное перемещение
Д^1 и угол поворота фк сечения К.
Решение. Подсчитаем степень статической неопределимости системы
при расчете ее методом сил:
Л = ЗКу-Ш3 =3-3-4 = 5.
На рис. 6.1.6, б представлен один из вариантов основной системы, полу-
ченный из заданной системы отбрасыванием пяти лишних связей. Учитывая
симметричность рамы, проведем группировку неизвестных (рис. 6.1.6, в).
Таким образом, от группы неизвестных сил Z2 и Z4 будут обратносиммет-
ричные эпюры изгибающих моментов, а от группы сил Zb Z3 и Z5 - симмет-
ричные.
Запишем в общем виде систему пяти канонических уравнений метода
сил:
SuZj +6|2Z2 + 813Z3 +6|4Z4 +615Z5 + АИ =0;
^21^1 +&22^2 + 8^Z3 +S24Z4 +825Z5 +Д2/г = Oj
531^1 +632Z2 + 833Z3 + 834Z4 + 835Z5 + A3f =0;
54iZ, +642Z2 +643Z3 + 844Z4 + 845Z5 +Д4/г =0;
8j|Z| +652Z2 +653Z3 +654Z4 +855Z5 + Д5/Г = 0, (6.1.1)
где подчеркнутые коэффициенты fy будут равны нулю. В результате прове-
денной группировки система пяти канонических уравнений (6.1.1) распадет-
ся на две независимые системы
+ ^15-^5 +A’if =0;
63|Zj + 833Z3 +635Z5 +ДЗЛ- =0;
83]Z| +653Z3 +655Z5 =0; (6.1.2)
822Z2 +624Z4 +A2F =0;
842^2 + 844Z4 +A4jt =0, (6.1.3)
в одну из которых вошли симметричные (Zb Z3, Z5), а в другую - обратно-
симметричные неизвестные (Z2, Z«).
Разобьем заданную внешнюю нагрузку на симметричную и обратносим-
метричную (рис. 6.1.6, г).
Построим эпюры изгибающих моментов от единичных значений сим-
метричных неизвестных Z| = I (рис. 6.1.6, d), Z3 = 1 (рис. 6.1.6, е) и Z5 = 1
(рис. 6.1.6, j/c).
Вычислим коэффициенты канонических уравнений (6.1.2) метода сил
для симметричной задачи:
206
Рис. 6.1.6
дат
655=2
1.4 з 2 4
2 3 *3*3
2 3 3 3
1.2.2-- —
2 3 3 3.
3,16 ।
Е27-б1
2 2
3*3
2
3
= 8,743.
EI ’
208
23,11
El ’
S35
-I-З-----
2 3 3,
1,33
El ’
Построим эпюру изгибающих моментов в основной системе (рис. 6.1.6,
з) от симметричной нагрузки (рис. 6.1.6, г) и вычислим свободные члены
канонических уравнений (6.1.2) для симметричной задачи:
2604,39.
EI ’
A^=2T_!_f_140-4-ll—(2*40*1 + 113,3'1)| = -———;
3F |_£2/1 3 J £7-6' J £/
Д!=2Г—Г2-—-113,3 +—-4o)+-J— [1.1.4-113,3] +
5F 1_£/-6< 3 3 ) Е21\2 3 3 )
+_1_(1 2 2 2 50^ । 3,16 <2 50 2 t г 50Л~| _ 592,3
+ £Ц2 3 З’ 3 J+ £2/-б1 ’ 3 3+ ’ 3 JJ £/
Таким образом, система канонических уравнений (6.1.2) принимает вид:
138,67Z, - 20Z3 + 23,1 IZ5 + 2604Д9 = 0;
- 20Z, + 6Z3 - I33Z5 - 246,66 = 0;
23,11Z( -1,33Z3 +8,743Z5 +592,3 = 0.
Решая полученную систему трех уравнений, находим
Zx =-19,33 кН; Z3 =-27,98 кН-м; Z5 = -20,9кН-м.
Теперь можно построить эпюру изгибающих моментов Л/С1Ш (рис. 6.1.6,
и) в заданной системе от симметричной нагрузки (рис. 6.1.6, г), используя
для каждого узла рамы формулу
Мсим =MXZX + M3Z3 +M5Z5+M'f.
Далее можно вычислить все опорные реакции в заданной раме от сим-
метричной нагрузки. Например, известен изгибающий момент в точке £,
тогда
МЕ = -8,14 = -Нв-4, откуда Нв - 2,035 кН (рис. 6.1.6, и).
Кроме того, рассматривая левую часть фрагмента рамы, можно записать
М Е = -Va 3 - 27,92+19,33 - 4 -1 - 4 - 2 = -27,8,
откуда определяем Va = 3,13 кН.
14 С. 11. Кривошапко
209
Проведем кинематическую проверку полученных результатов для рамы,
натруженной симметричной нагрузкой, для чего перемножим эпюры МА
(рис. 6.1.6, к) и Л/сим (рис. 6.1.6, и):
= у г^^Симф = _1_Г2.1*1.4.1+1(_2-27,981 + 2 9,34 1 +
El, Е2/[з 8 6V
+ 9,34 -1 -1 • 27,98)]+ — - - (2 • 934 • 1 - 8,14 -1) = 0.
El 6
210
Перемножение двух эпюр МА и Л/С1Ш показало, что угол поворота опо-
ры А (см. рис. 6.1.6, а) равен нулю, что соответствует действительности.
Теперь рассмотрим обратносимметричную задачу и построим эпюры
изгибающих моментов М2 и М4 от единичных обратносимметричных сил
Z2 = 1 и Z4 = 1 в основной системе метода сил (рис. 6.1.7, л, 6).
Вычислим коэффициенты канонических уравнений (6.1.3) для обратно-
симметричной задачи:
_ 138,67. _ 20 _ 6
622 “611 “—» 624 --77» 644-633-—•
На рис. 6.1.7, в представлена эпюра изгибающих моментов в основной
системе метода сил от обратносимметричной нагрузки.
Вычислим свободные члены канонических уравнений (6.1.3) для обрат-
носимметричной задачи:
Таким образом, система канонических уравнений (6.1.3) принимает вид.*
138,67Z2 -20Z4 +3760 = 0;
-20Z2+6Z4-313,3 = 0,
решая которую, определяем Z2 = -37,72 кН; Z4 = -73,51 кН • м.
Строим эпюру изгибающих моментов (рис. 6.1.7, г) в заданной раме от
обратносимметричной нагрузки, используя для каждого характерного узла
рамы формулу:
^обрсим. =M2Z2 +M4Z4 +Мр.
Например, момент на опоре А будет равен МА = Z4 = -73,51 кН -м;
в сечении Р: МР = -4 • (-37,72) +1 • (-73,51) - 40 = 37,37 кН м;
в углу Е: МЕ = -4 • (-37,72) -180=-29,12 кН-м.
Проведем кинематическую проверку. Определим горизонтальное пере-
мещение опоры Я, для чего построим эпюру изгибающих моментов от еди-
ничной горизонтальной силы, приложенной в сечении А статически опреде-
лимой рамы, полученной из заданной рамы (рис. 6.1.7, д). Перемножим две
эпюры Л4бр сим (см. рис. 6.1.7, г) и МА (см. рис. 6.1.7, д):
= =J -2*3737*4 + 4 *7331)1+
211
14*
[-2-4-37,37+2-29,12-4-37,37-4+4-29,
Е/-6
-4-4-29,12 | -0.
2 3 J
Проведенная проверка показала, что горизонтальное перемещение опоры
А заданной рамы равно нулю, что соответствует действительности.
Чтобы построить эпюру изгибающих моментов М в заданной раме (см.
рис. 6.1.6, а) от заданной нагрузки, необходимо сложить две эпюры Мы* (см.
рис. 6.1.6, и) и Л/обрсии (см. рис. 6.1.7, г). В результате (Л/ = Мти + Л/обрхим)
получим эпюру, изображенную на рис. 6.1.8, а
Статическая проверка. Рассмотрим равновесие заданной рамы в целом.
Для этого спроектируем все силы на горизонтальную ось (рис. 6.1.8,6):
£х = -57,05 -9,31-5,24-18,39+10-4 +50 = 0.
Деформационная проверка. По условию задачи угол поворота опоры А
(см. рис. 6.1.6, а) равен нулю. Чтобы это проверить, необходимо перемно-
жить две эпюры МА (см. рис. 6.1.6, к) и М (см. рис. 6.1.8, а):
к- tMAM . 1 Г2 10-42 я , 4/ о , ,Л1 лп о
аь =У I—^—ds =------------------4-1+ — (-2-1-101,49+2-1-46,71-
™ ZLJ Е1/ £2ф 8 б'
-1-101,49 + 1-46,71)]+—-(2 1-46,71-37,26-1)^0.
EI 6
Деформационная проверка подтвердила правильность полученных ре-
зультатов.
Приступаем к построению эпюр Q и N. Используя теорему Журавского
(Q = dM/dx) для каждого стержня рамы, на основании эпюры изгибающих
моментов М (рис. 6.1.8, а) легко построить эпюру поперечных сил Q (рис.
6.1.8, в), например:
е,£=_ 4^+37,26 _2О)99КН
4
Поперечные силы в вертикальных стержнях длиной 4 м будут численно
равны соответствующим горизонтальным опорным реакциям (рис. 6.1.8, б).
Чтобы построить эпюру нормальных сил 7V, необходимо провести до-
полнительные вычисления.
Вертикальные опорные реакции (27,99 кН и 16,34 кН) для боковых вер-
тикальных стержней рамы будут численно равны поперечным силам в гори-
зонтальных стержнях рамы. Составим два уравнения равновесия для опре-
деления двух оставшихся вертикальных опорных реакций:
=-101,49-27,99-3--6-16,34-9 + 10-4-2 + 50-6 = 0,
откуда Vc = 7,91 кН;
=-101,49-27,99-9 + Кв-6-16,34-3 + 10-4-2 + 50-6 = 0,
или VB = 3,74 кН.
212
Проверка. Спроектиру-
ем все силы на вертикаль-
ную ось:
=-27,99+3,74+7,91 +
+1634 = 0.
Теперь легко опреде-
лить нормальные силы
практически во всех стер-
жнях рамы (рис. 6.1.8, г).
Чтобы найти нормаль-
ные усилия в стержнях
двухшарнирной рамы TMS
(рис. 6.1.8, 6), рассмотрим
ее отдельно (рис. 6.1.9).
Горизонтальные опор-
ные реакции (26,36 кН и
23,63 кН) двухшарнирной
рамы находим по эпюре Q
(рис. 6.1.8, в). Затем запи-
шем уравнения равнове-
сия:
^Мт = Г56-50-2 = 0,
20,9
т.е. Vs= 16,67 кН;
^>=-*7+^=0,
или Гг= Vs= 16,67 кН.
Проведем сечение /-/.
Рассмотрим правую часть
двухшарнирной рамы (рис.
6.1.9 и 6.1.10, а):
tga = 1/3; sin а = 0,3165;
cosa = 0,9494
и составим уравнение рав-
Рис. 6.1.8
Рис. 6.1.9 (кН)
213
новесия: £ 0 = £?] +16,67 cos а + 23,63 sin а = 0, т.е. Qt = -23,3 кН.
Полученный результат совпал с результатом, полученным благодаря
формуле Журавского (рис. 6.1.8, л, в):
52,73+20,9 R
1 3,16
Далее (рис. 6.1.10, а): £ = TVj +23,63cosa -16,67 sin a = 0, или
Л, =-17,15 кН.
Рассмотрим фрагмент двухшарнирной рамы, выделенный двумя сече-
ниями I-I и П-П (рис. 6.1.9, 6.1.10, б):
S W2 = ^2 +17,15cos2a +23,3sin2a = 0, откуда находим N2=-27,74 кН.
Статическая проверка. Проверим равновесие узла U( рис. 6.1.9):
=-8,34sinа-23,63 + 27,74cosa =0; £у = 0 (рис. 6.1.10,в).
Определим вертикальное перемещение сечения К (см. рис. 6.1.6, а). По-
строим предварительно эпюру изгибающего момента Мк от вертикальной
единичной силы (рис. 6.1.11) в статически определимой раме, полученной из
заданной рамы. Перемножая эпюры М (см. рис. 6.1.8, а) и М к (рис. 6.1.11),
находим вертикальное перемещение сечения К:
Д^1 =—I -(-2-3,52-0,75 + 20,98-0,75)—(2-3,52 0,75 + 28,03 0,75) =
EI |_ 6 6 J
= 6,55/(Е/).
Чтобы определить угол поворота
в сечении /С, нужно построить эпю-
ру изгибающих моментов от еди-
ничного момента, приложенного в
сечении К (рис. 6.1.12):
Фк = ^[^(2^2 0.5-20,98 ОД)-
- (2 3,52 0,5 + 28.03 0,5)1 = ^(рал).
о J Ы
214
6.2. Расчет статически неопределимых стержневых систем
на действие температуры
При изменении температуры элементов статически неопределимых сис-
тем в них возникают внутренние усилия и моменты. При равномерном на-
гревании всех элементов внутренне статически неопределимой системы до-
полнительных напряжений не возникает. Не возникают дополнительные
усилия и во внешне статически неопределимых системах, когда температур-
ное воздействие вызывает перемещение по направлению безусловно необ-
ходимых связей, в которых возникают статически определимые реакции.
Так, при равномерном нагревании неразрезной балки, имеющей одну непод-
вижную опору, температурная деформация происходит свободно и, поэтому
дополнительных внутренних температурных усилий не будет.
Перемещения сечений системы получаются суммированием перемеще-
ний от действия температуры и перемещений от лишних неизвестных в ста-
тически определимой (основной) системе, полученной из заданной системы.
Однако соответствия между положением растянутых волокон и ординатами
эпюры изгибающих моментов не будет.
В лекции 13 получена формула для определения перемещений сечения
плоской рамы, содержащей только прямолинейные стержни постоянного
сечения, при действии температурных воздействий:
где и - площади единичных эпюр Мт и Nm.
Задача 6.2.1. Определить горизонтальное и вертикальное перемещения
угла С статически неопределимой рамы при изменении температуры по рис.
6.2.1. Высоту поперечного сечения принять h = а/10. Температурный коэф-
фициент линейного расширения - а.
Решение. Определим степень статической
неопределимости:
Л = ЗКу-/£/, = 31-2=1,
т.е. заданная рама один раз статически неопре-
делима при расчете ее по методу сил.
Каноническое уравнение метода сил при
расчете один раз статически неопределимой
рамы на действие температуры имеет вид
бцХ । +Д1г =0.
По эпюре М । (рис. 6.2.2, б) определяем £и:
1 Г1 , 2, 1, , 2
— -b-a—b+—bb—b
El]2 3 2 3
Si
ЗЕ/
215
Определим температурное перемещение узла С основной системы (рис.
6.2.2, п) по направлению лишней неизвестной опорной реакции для чего
построим предварительно эпюры Мj и ЛГ1 (рис. 6.2.2, б, в):
л 1/
20-10 _ 20+10 _ 40-10 40+10
------^i7 +-----------------^17 +-------
h M' 2 h 2
Л/,
Г 1 ,2 ,ГЬ, 301Л 1 L „
al---10—b +15—6------10—ba+2
[ a 2 a a 2
Перепишем каноническое уравнение:
—+a(25a-!506-3562 /a) = 0,
3EI
а (-3562/a-1506+25a).
откуда находим
5a(5o-306-762 /о)3£/
b2(a+b)
Теперь можно построить эпюры М = Q и N =А'1ЛГ1. На рис.
6.2.3, а-в представлены эпюры M,Qv\N при b = а, т.е. при Aj = 240а£//о2.
240aEZ/a
По условию задачи требуется оп-
ределить вертикальное Д^7 и гори-
зонтальное Д^ перемещения угла С
рамы (см. рис. 6.2.1), поэтому постро-
им две эпюры ,N%P' (рис. 6.2.4)
и М^, N™' (рис. 6.2.5).
Перемножая эпюру М (см. рис.
6.2.3, а) на эпюру Л/^фис. 6.2.4) и
1 , 1
Рис. 6.2.4
складывая результат с температурным вертикальным перемещением основ-
ной системы (см. рис. 6.2.4), получим значение вертикального перемещения
угла С заданной рамы:
= о20 + 10 ( а= 15аа
2
Перемножая эпюру М (см.
рис. 6.2.3, а) на эпюру Мг°р (рис.
6.2.5) и складывая результат с
температурным горизонтальным
перемещением основной системы
(см. рис. 6.2.5), получим значение
горизонтального перемещения уг-
ла С заданной рамы:
дго₽ =
J_p 240а£/
Е1\2 а
2 I
а—а+—
3 2
240а£/ 2 20-10 1 2
------а—а -а--------а +
а 3 J h 2
20+10
20+10 , 40-10 1 2
+а-------1-а-а--------а =-25аа.
2 h 2
Для контроля можно вычислить горизонтальное перемещение шарнирно
неподвижной опоры В и убедиться, что оно равно нулю.
Задача 6.2.2. Построить эпюры изгибающих моментов, поперечных и
нормальных сил для ломаного стержня постоянного поперечного сечения с
жесткостью на изгиб £/, участок ВС которого подвержен температурному
воздействию (рис. 6.2.6, а). Участок ВС ломаного стержня имеет высоту Л.
Решение, Система один раз статически неопределима. Отбрасывая гори-
зонтальный опорный стержень на опоре D, получим основную систему (рис.
6.2.6, б). Для заданной системы каноническое уравнение метода сил будет
иметь вид
$11^ 1 +Дд = 0.
217
В направлении отброшенной горизонтальной связи прикладываем еди-
ничную силу X] = 1 и строим эпюры изгибающих моментов Му и продоль-
ных сил /V, (рис. 6.2.6, в, г).
Вычисляем коэффициенты канонического уравнения:
8п = Z=0,^g ;
Ak =a^-^O,6flfl+^p-l-aj = ^-“o,6a2 +30oj = -450aa
Определяем неизвестную опорную реакцию:
Определив легко построить все необходимые эпюры: М = A/jX,, (?,
N = NlXl (рис.6.2.7).
535,71аЕ//о
892,86аЕ//а2
218
Задача 6.2.3. Построить эпюры Л/, Q, N для статически неопределимой
стальной рамы, подверженной действию горизонтальной сосредоточенной
силы F= 1 кН и температурному воздействию (рис. 6.2.8, а). Стержни сталь-
ной рамы - постоянного симметричного поперечного сечения с осевым мо-
ментом инерции / = 198 см4 и высотой Л = 10 см, температурный коэффици-
ент линейного расширения стальных стержней а = 12010' °C1, модуль уп-
ругости Е - 2,06-105 МПа.
Решение. Определяем степень статической неопределимости рамы при
расчете ее методом сил:
Л = ЗКу-Ш3 = 3\-\=2.
Таким образом, основная система получается отбрасыванием двух лиш-
них связей. Действие отброшенных связей заменяем неизвестными усилия-
ми Х\ и Хъ Направления сил Xt и Х2 совпадают с направлениями отброшен-
ных опорных реакций (рис. 6.2.8, б).
Строим эпюры изгибающих моментов и нормальных сил в основной
Рис. 6.2.8
219
системе от действия единичных сил *i = 1(рис. 6.2.8, в), Х2 = 1(рис. 6.2.8, г) и
от внешней нагрузки (рис. 6.2.8, Э).
При двух лишних неизвестных будем иметь систему двух канонических
уравнений метода сил:
5]]*| + ^|2*2 + ^IF + Д|/ =Ф
&2)*| + $22*2 +&2F + ^21 ~
Используя правила Верещагина, вычисляем коэффициенты канониче-
ских уравнений, имея в виду, что EI = 407,88 кН-м2:
5 =— (2 -2-2 -2+21-2^ — = 22,88-Ю-3 —;
" Е1\ 2 3 ) 3EI кН
6,2 Е/12
б22 —
2
>1 = —= 7,3610’3—;
J Е1 кН
11.1-2
2 3
= 5,7210’3—;
кН
Д,Г’Ё7
— 2-2-2
.2 3 ,
— = -3,27-10‘3
ЗЕ/
A2F =—[-12-2-1 | = -— = -4,910‘3м;
2F El{ 2 ) EI
Л,/ =a^^7^[2’^2‘2+2,]+^^b,j=I825a=,825',20 I°_7 =
= 21,9-Ю"3 м;
д Г40-10Л о lfIl 40 + 10 , „ 40+10. J Г30 51
д =а-------- 1-2+-1-1 +------12------12 = а-------=750а =
21 L h I 2 J 2 2 J [ОД 2J
= 750-120-10"7 =0,009 = 9-10"3м.
Перепишем систему канонических уравнений после подстановки в них
вычисленных значений коэффициентов:
22.88Х) +7,36*2 +(-3,27+21,9) = 0;
7,36*! + 5,72*2 + (-4,9+9) = 0.
Решая эту систему уравнений, находим: Хх = -0,996 кН; *2 = 0,565 кН.
Используя формулы
Л/ = Л71*1+Л72*2+Л/Л-; N = NlXl+N2X2+NFt
легко построить эпюры Л/, N, а затем и Q (рис. 6.2.9).
220
63. Расчет статически неопределимых систем на осадку опор
Осадка опор внешне статически неопределимых систем вызывает до-
полнительные усилия, если при этом происходят смещения по направлению
лишних связей.
Задача 63.1. Определить изгибающие моменты, поперечные и нормаль-
ные силы, возникающие от горизонтального смещения на величину с шар-
нирно подвижной опоры С (рис. 6.3.1, а). При расчете принять а = 2 м; Ъ =
= 1,5 м; жесткость на изгиб всех стержней заданной системы El = const.
Решение. Заданная система один раз статически неопределима (рис.
6.3.2,6), поэтому каноническое уравнение метода сил будет иметь вид
бнХ) =с,
где (рис. 6.3.1, в)
El 2 2 3 2 2 3 J Е/{2 3) EI
Находим горизонтальную сосредоточенную опорную реакцию опоры
С: X] =с/бн -сЕ11\^ и строим эпюры изгибающих моментов М (рис.
6.3.1, г), нормальных N и поперечных Q сил (рис. 6.3.1, Э).
Задача 63.2. Определить горизонтальное перемещение шарнирно под-
вижной опоры В рамы, представленной на рис. 6.3.2, а, при заданном пово-
роте заделки А на угол ф. Рама состоит из стержней с постоянной жестко-
стью на изгиб (Е/= const).
Решение. Заданная рама два раза статически неопределима при расчете
по методу сил (рис. 6.3.2, 6). Система канонических уравнений будет иметь
вид:
221
где коэффициенты 6,7 определяются на основании эпюр изгибающих момен-
тов Mi и М2 от единичного момента Xt = 1 и силы Х2 =1(рис. 63.2, в, г).
222
6 = —fl-2o-l+—a-
11 El ‘
6i2 =621 =— I l-2o — 2a+—
El ‘
2 3
Используя правила Верещагина для интеграла Мора, вычисляем
)~ЗЕГ
. 2 „
____ -1-а—2а
2___2 3
8o2 ,
’ 3EI ’
к 1 Г1 -> 2 о ' э 2 о W
627 =— — -2а-2а—2а+--2а-а—2а =--------.
22 Е!\2 3 2 3 J EI
Подставляя полученные результаты в систему двух канонических урав-
нений метода сил, находим
= ^Е/, Х2 = ~?-Е1.
а а2
Зная опорные реакции Xt, Х2, строим эпюру изгибающих моментов М
(рис. 6.3.3, а) с использованием формулы
л/ = л7|Аг1+л72лг2
для вычисления изгибающих моментов в характерных узлах рамы, или вы-
числяя недостающие три опорные реакции на опорах А и В (рис. 6.3.3, б) с
дальнейшим построением эпюры М обычным способом по участкам. Затем
строим эпюры поперечных (рис. 6.3.3, в) и нормальных (рис. 6.3.3, г) сил.
По условию задачи требуется определить горизонтальное перемещение
Дшарнирно подвижной опоры В (см. рис. 6.3.2, а).
Рис. 6.3.3
223
Для определения ДГдР построим эпюру изгибающих моментов Мв от
единичной горизонтальной силы Р = 1, приложенной на опоре В (рис. 6.3.4,
а) основной системы. Затем перемножим эпюры М (рис. 6.3.3, а) и Мв (рис.
6.3.4, а) по правилу Верещагина:
1
— —\2-2й'—Е1 — 2а-Ell
U [ 6 t 5о 5а )
+-'—Е1-а-2а
2 5а
= а<р/5.
Ответ получился со знаком
(+), следовательно, опора В
переместится в направлении
единичной силы Р = 1 (рис.
6.3.4, а и 6.3.2, о).
Проверка. Очевидно, что
горизонтальное перемещение
опоры С равно нулю:
Д^ =0. Проверим это по-
ложение, для чего построим
соответствующую эпюру
Мс (рис. 6.3.4, 6), которую
умножим по правилам Вере-
щагина на эпюру М (см. рис.
6.3.3, о), тогда
дгор
2а ( _ 3<р _ 9ф „Л 1 3<р __ 2_
— 2-2а-Е1-2а—~Е1 +-—аЕ1—2а
6 \ 5а 5а ) 2 5а 3
= 0.
Проверим это же положение, но с использованием основной системы,
показанной на рис. 6.3.5, а. Примем во внимание, что в качестве основной
системы может быть взята любая статически определимая рама, получаемая
отбрасыванием лишних двух связей заданной рамы (см. рис. 6.3.2, а).
Построим для выбранной основной системы эпюру изгибающих момен-
тов Мс (рис. 6.3.5, 6), определим горизонтальное перемещение опоры С от
внутренних изгибающих моментов
1 2а ( 9ф 3<р Л Л
-2-2а—-Е/~-~Е/-2а
Е/ 6 { 5а 5а J
= 2оф,
и рассмотрим два состояния (рис. 6.3.5, в), для которых теорема о взаимно-
сти работ (теорема Бетти) принимает вид:
= Wbi, или 0=1- Д?» + 2а ф, откуда Д^ = -2 а-ф.
Окончательно получаем:
224
р= 1
с
Р=1
с
Рис. 6.3.5
ДГс₽ = дои + дСф =2«ф-2аФ = 0.
Последнюю формулу можно интерпретировать следующим образом.
Вначале поворачиваем основную систему вокруг опоры А на заданный угол
Ф (рис. 6.3.5, в) и с помощью теоремы Бетти находим горизонтальное пере-
мещение Д^узла С. Затем к повернутой основной системе прикладываем в
сечениях С и В сосредоточенные силы, равные по величине и направлению
опорным реакциям в этих сечениях (см. рис. 6.3.3, б), и определяем переме-
щение узла С, возникающее от действия этих сил. Окончательный ре-
зультат будет равен сумме двух перемещений Д^, и Д™^ -
Обе проверки (см. рис. 6.3.4, б и 6.3.5) подтвердили правильность полу-
ченных результатов.
Задача 6.33. Построить эпюры изгибающих моментов и поперечных
сил для двухпролетной балки, натруженной равномерно распределенной
нагрузкой q = 4 кН/м, и с заданным вертикальным перемещением средней
опоры на величину с = 5 см (рис. 6.3.6, а).
Определить максимальное нормальное напряжение, возникающее в бал-
ке. Балка имеет прямоугольное поперечное сечение Ь * h = 5 * 10 см, модуль
упругости материала балки Е = 2105 МПа, = 240 МПа.
Решение, Балка один раз статически неопределима при расчете по мето-
ду сил. Основную систему выбираем, отбрасывая среднюю опору и заменяя
ее действие неизвестной силой Хх (рис. 6.3.6, б).
Каноническое уравнение метода сил будет иметь вид
^11-^1 +Д1Г =с»
где, согласно эпюре Мх (рис. 6.3.6, в), получаем
lo С. II Кри ноп;;п:
225
q = 4 кН/м
A 3 м
*i
*i=l
1/2
«и =—(
" El {2
-1,5-3-1,5
? 3
4,5
ei
Построив грузовую эпюру изгибающих
моментов Му для основной системы (рис.
6.3.6, г), находим
2
AjF -
lU.3.2I8 + 2.±3i.3.L5
El 2 3 3 8 2
1,5 i/2
_ 67,5 _ 5 <76 4
, ~ El ~ 384E7 '
Каноническое уравнение примет вид
4,5 у 67,5 _
El El
откуда находим
v ( Ы,5\Е1 cEl 67,5
л. = c-----— =-------------=
1 t El J 4,5 4,5 4,5
0,05-2 Ю5 -103 0,05-0,13 67,5 _
4,5 12 4,5
= -5,74 кН.
Учитывая симметрию, определяем:
VA=VB =(4-6-5,74)/2 = 9,13 кН.
Вычисляем изгибающий момент на сред-
ней опоре (рис. 6.3.6, д):
Мс = МхХх +MF =1,5-(-5,74) +18 =
= 9,39 кНм.
Запишем формулу для вычисления изги-
бающего момента в первом пролете балки в
сечении на расстоянии х от опоры А:
Мх = VAx-qx2 /2 = 9,13х-2х2, тогда <Ш4)х = 9,13-4х = 0; х = 2,28м.
Находим максимальный пролетный момент:
Л/max = М(х = 2,28 м) = 9,13-2,28 - 2-2,282 = 10,42 кНм.
На основании полученных результатов строим эпюру изгибающих мо-
ментов (рис. 6.3.6, д) и поперечных сил (рис. 6.3.6, е).
Максимальное нормальное напряжение в балке будет в сечении с мак-
симальным изгибающим моментом = 10,42 кНм (рис. 6.3.6, д), тогда
О»» =^= 10-3 =125МПа<а^ =240 МПа,
0,05 О,Г
где Wz = 6А2/6 - момент сопротивления сечения.
226
6.4. Статически неопределимые арки
Расчет статически неопределимых арок производится методом сил.
В настоящее время расчеты арок осуществляются численными методами
на ЭВМ по типовым программам. Но хотя бы один раз в жизни студенту
необходимо рассчитать арку вручную, чтобы почувствовать влияние тех или
иных параметров арки или метода сил на ее напряженно-деформированное
состояние.
Все обозначения в разделе 6.4 приняты как в лекции 16.
6.4.1. Двухшарнирные арки
Достоинством двухшарнирных арок по сравнению с трехшарнирными
является их большая жесткость ввиду отсутствия ключевого шарнира. При
любом очертании двухшарнирной арки возникновение в ней изгибающих
моментов неизбежно. Рациональным очертанием оси арки является такое,
при котором расчетные напряжения в поперечных сечениях арки будут наи-
меньшими.
Двухшарнирная арка - один раз статически неопределимая конструкция.
При действии на арку только вертикальной нагрузки ее распор (горизон-
тальная опорная реакция) определяется по формуле
Н = Х^ =— А|/? /8ц,
s ..2
где
4 2
г COS ф
J ЕА
jsin2 Ф
о GA
cos фЛ/j,-
ЕА
pin <pQF
Д GA
(s)
При расчетах вручную для определения перемещений £ц и А|/. приме-
няют численный метод интегрирования, т.е. представленные выше формулы
заменяют приближенными:
„у* -As _ cos2 фс--As -As
11 El EA ’ if - Z Ei
Последние две формулы записаны в предположении, что арка не тол-
стая, пологая (J71 < 1/6) и представляет собой кривой брус малой кривизны
(R/h > 8).
Задача 6.4.1. Построить эпюры изгибающих моментов, поперечных и
нормальных сил в параболической арке постоянного поперечного сечения
Ь х h = 0,4 м х 0,5 м с пролетом / = 12 м, стрелой подъема/= 2 м; нагружен-
ной сосредоточенными силами F= 12 кН и равномерно распределенной на-
грузкой q = 5 кН/м (рис. 6.4.1).
Решение. Ось параболической арки зададим уравнением
y = 4Jx(l—x)/l2.
13
227
q = 5 кН/м
12 кН
12
Для определения переме-
щений пролет арки разбива-
ем на 12 частей и в середине
каждого участка определяем
4Лср(/-Хср) .
Ус₽ =------------> ДЬ
2
kH-mi
•кН!
кН
Рис. 6.4.1
= 1,118 м;
6 7
= 12м
•кН
кН-м!
+ Ду2,
COStPcp = Дх/Ду,
sin фср
необходимые для проведе-
ния численного интегриро-
вания. Например, в рассмат-
риваемом случае:
Рис. 6.4.2
Xj = 1 м; х2 = 2м; х3 = Зм ;
2-Х] = 1м;
—— = 1,5м;
2
У1 =^х1(12-х1) = 0,61м;
12
у2 =^-?х2(12-х2) = 1,11м;
12
дР|-2 = Уг~У\ =0,5м;
-2, ср —
1^2 Х1-2.ср(12 - *|-2,ср) ~
= 0,88 м;
228
Вычисление перемещений 5П и Дц?
Таблица 6.4.1
№ точки № участка х, м 1 1 II Дг, м Ду» м Уср, м л* s sin фср COS фср /ср’ Д« cos2 (р- As Л/°ср, кН-м 3 о*
0 0 0 0,5547 0,8321 0
1 0-1 0,61 1 11 1 0,61 0,32 1,171 0,5207 0,8537 0,120 0,853 16,5 6,183
1 о 1 -2 1 7 1 0,5 0,88 1,118 0,4472 0,8945 0,866 0,895 49,5 48,7
Z 2-3 Z 1,1 J 1 0,39 1,32 1,073 0,3633 0,9316 1,870 0,931 82,5 116,85
3 3 1,5 0,3162 0,9487 99
А 3-4 1,78 1 04 1 0,28 1,65 1.039 0,2696 0,9629 2,829 0,963 108,87 186,65
С 4-5 4 с 1 0,16 1,88 1,013 0,1580 0,9875 3,580 0,988 124,87 237,82
э 5-6 Э 1 0,06 1,99 1,002 0,0599 0,9982 3,968 0,998 135,87 270,93
6 6 2 0,00 1,00 139,5
7 6-7 1,94 1 70 1 -0,06 1,99 1,002 -0,0599 0,9982 3,968 0,998 135,87 270,93
0 7-8 7 0 1 -0,16 1,88 1,013 -0,1580 0,9875 3,580 0,988 124,87 237,82
О 8-9 о 1, /5 1 -0,28 1,65 1,039 •0,2696 0,9629 2,829 0,963 108,87 186,65
9 9 1,5 -0,3162 0,9487 99
1 Л 9-10 1,11 Л £1 1 -0,39 1,32 1,073 -0,3633 0,9316 1,870 0,931 82,5 116,85
IU 11 10-11 10 1 1 1 -0,5 0,88 1,118 -0,4472 0,8945 0,866 0,895 49,5 48,7
11 11-12 11 и,о1 1 -0,61 0,32 1,171 -0,5207 0,8537 0,120 0,853 16,5 6,183
12 12 0 -0,5547 0,8321 0
Всего 26,466 11,256 1734,3
Таблица 6.4.2
Вычисление изгибающих моментов М, поперечных Q и нормальных У сил в двухшариирной арке
И S № участка 1 1 II У ср, м sin фср COS Фер ЛСр, кН-м 2%, кН 0Оер81Пфер сл 8 £ । о? и d’<b ins ц- -^d) SCO = 0 ^=-(еРср8тфСр+ + Н COS Фер)
0 0 0,5547 0,8321 0 33 18,305 27,459 0 -8,57 -72,35
0- 1 0,61 1,11 0,32 0,5207 0,8537 16,5 33 17,183 28,172 -4,28 -5,65 -72,63
1 2 1-2 0,88 0,4472 0,8945 49,5 33 14,758 29,519 -7,66 0,47 -72,86
2-3 1,32 0,3633 0,9316 82,5 33 11,989 30,743 -3,23 7.15 -72,5
3 1,5 0,3162 0,9487 99 33/21 10,4/6,6 31,3/19,9 1,58 10,77/-0,61 -72,05/-68,26
4 5 3-4 1,78 1,94 1,65 0,2696 0,9629 108,87 18,5 4,988 17,814 1,71 0,3 -67,53
4-5 1.88 0,1580 0,9875 124,87 13,5 2,133 13,331 2,77 3,07 -66,27
5-6 1,99 0,0599 0,9982 135,87 8,5 0,509 8,485 6,62 4,59 -65,34
6 2 0,00 1,00 139,5 6/-6 0/0 6/-6 9,60 6/-6 -64,95/-64,95
6-7 1,94 1,78 1,99 -0,0599 0,9982 135.87 -8,5 0,509 -8.485 6,62 -4,59 -65,34
7 8 7-8 1,88 -0,1580 0,9875 124,87 -13,5 2,133 -13,331 2,77 -3,07 -66,27
8-9 1.65 -0,2696 0.9629 108,87 -18,5 4,988 -17,814 1,71 -0,3 -67,53
9 1,5 -0,3162 0,9487 99 21/-33 6,6/10,4 -19,9/-31,3 1,58 0,61/-10,77 -68,26/-72,05
9-10 1,11 0,61 1.32 -0,3633 0,9316 82,5 -33 11,989 -30,743 -3,23 -7,15 -72,5
10 10-11 0,88 -0,4472 0,8945 49,5 -33 14,758 29,519 -7,66 -0,47 -72,86
11 11-12 0.32 -0,5207 0,8537 16,5 -33 17,183 -28,172 -4,28 5,65 -72,63
12 0 -0,5547 0,8321 0 -33 18,305 8,57 -72,35
Примечание. Таблицы 6.4.1 и 6.4.2 можно объединить в одну, что в этом издании не позволяет сделать формат книги.
sinФ1-2CD = ~ = 0,4472; cos(p12= Ar- = —= 0,8945;
1 2’ф As,_2 1,118 , P AsI 2 1,118
затем вычисляем произведения:
П-2,ср ^1-2 = 0,882 1,118 = 0,866;
cos2 ^1-2,ср ’^12 = 0,89452 -1,118 = 0,895;
<-2.ср=ЗЗх1_2>ср =49,5 кН-м;
И-2.ср ЛС2.СР ^1-2 =0,88-49,5-1,118 = 48,7.
Результаты подсчета сводятся в одну строку (участок 1-2) таблицы 6.4.1.
Аналогично заполняются все остальные строки этой таблицы. После запол-
нения всей таблицы производят суммирование результатов по трем столб-
цам, в результате чего определяются
-As = 26,466; £cos2 -As = 11,256; -Л/“ As = 1734,264.
Затем вычисляем жесткости на изгиб и на растяжение:
El = Е— = Е-*0’5 = 0,0042Е; ЕА = Ebh = Е-0,4-0,5 = 0,2Е.
12 12
И наконец, определяем перемещения:
g у у ros2 26,466 t 11,256 6357,71,
11 Е1 ЕА ~ 0,0042Е+ 0,2 Е Е ’
д у^К^ 1734,264 412920
И Е/ Е0.0042 Е
И наконец, вычисляем распор Н = -Д1Г /5Н =64,95 кН.
Теперь можно приступить к заполнению табл. 6.4.2, в трех последних
столбцах которой получаем значения изгибающих моментов Л/, поперечных
Q и нормальных N сил, по которым строим соответствующие эпюры (см.
рис. 6.4.1). При заполнении табл. 6.4.2 следует особое внимание обращать на
сечения арки, где приложены сосредоточенные внешние силы F, так как в
этих сечениях на эпюрах Q и N будут скачки.
Задача 6.4.2. На рис. 6.4.3 показана арка, натуженная распределенной
нагрузкой и сосредоточенными силами. На этом же рисунке представлены
эпюры изгибающих моментов Л/, поперечных Q и нормальных W сил. Эпю-
ры построены по результатам численного расчета на ЭВМ.
Расчет проведен при следующих параметрах:
/ = 24 м; /= 6 м; F= 10 кН; q = 3 кН/м;
арка прямоугольного поперечного сечения: b х h = 0,6 * 0,8 м; Ах = 1м.
Требуется рассчитать арку в табличной форме с Ах = 2м и оценить по-
грешность вычисления.
231
Рис. 6.4.3
6.4.2. Бесшарнирные арки
Задача 6.43. Рассчитать бес-
шарнирную круговую арку по-
стоянного поперечного сечения
на гидростатическую нагрузку
(рис. 6.4.4, а).
Согласно рис. 6.4.4, а и в
имеем:
dy = dssincp;
dr = dscos<p; x = rsin<p;
y = r-rcos<p; ds = rdy\
sina = //(2r); cosa = (r
qs = gdssin<p = qdy\
qy = qdscosip = qdx.
По формуле (16.15) лекции
16 находим
a /а
с = |(г - г cos <р)г(Лр / frtftp =
О /О
= r(l-sina/a).
Формулы (16.17) дают:
Л/j =-(^-p);^i =-cos<p;
Qi = sin де M2 =-l;
/V2 =Q2 =0, M3 =x;
N3 = sin <p; Q3 = cos <p;
e dx
Рис. 6.4.4
232
MF = ~2^2 ~-2^2sin2<₽+r2 -2''2cos9+r2cos2<p)=
= -^(2r2 -2r2 cos<p)= -^r2(l-cos<p).
Подставляя полученные параметры в формулы (16.17), (16.18), находим
необходимые коэффициенты
_ 2г3 f a sin2 а sin 2а | 2г (а sin2а
Oil —---1----------1------Н---1 —I-------к
EI ^2 а 4 J ЕД2 4 /
. 2qr* | а sin2 а sin 2а | _ а
EI 1^2 а 4 J о Е! &
а Л 2/. ч „ з a-sina
A2F =2jgr (l-cos<p)-^ = 2gr3———; A3F =0.
0 El tA
Затем из формул (16.16) определяем неизвестные Xlt Х2 и Х3 = 0 и стро-
им эпюру изгибающих моментов
M = MtXt + M2X2+MF.
При неучете обжатия арки, т.е. если в формуле для <5Н пренебречь
подчеркнутым слагаемым, получим Л/= 0, = 0,7V = </г. В этом случае про-
дольная сила в любом сечении арки будет равна интенсивности радиальной
нагрузки, умноженной на радиус.
Задача 6.4.4. Для бесшарнирной арки параболического очертания,
показанной на рис. 6.4.5, а, определить опорные реакции НА, VA, МА левой
опоры А. Задачу решить, заменяя интегрирование приближенным методом
суммирования.
Решение. Основную систему выбираем, разрезая арку в ключе (верши-
не), опускаем абсолютно жесткие консоли до упругого центра и приклады-
ваем к ним неизвестные силы Хь Х3 и сосредоточенный момент Аг.
Длина жестких консолей для параболической арки с законом изменения
моментов инерции поперечных сечений по закону / = /ср/cos^ определяется
по формуле с =/3 = 4/3 = 1,333 м.
Применяя приближенный метод интегрирования, разделим арку на 16
равных частей (Ar = 1 м). На каждом участке кривую ось арки заменим пря-
мой (As = Ax/cos<p). Для упрощения расчета начало координат поместим в
упругом центре и направим ось х влево, а у - вниз. Уравнения единичных
моментов будут иметь вид (рис. 6.4.5, б):
Л/1=1.г = г> Л/2=-1; Л73=1х = х.
Определим перемещения от единичных сил и внешней нагрузки в ос-
новной системе:
233
8,,=—Уу2; 8а-----—У|2 ; 8„=—Ух2;
El^ 22 El^ Elv Е1„
A1F = ~Г, £уМр'’ Д2Г = ~~гГ~’ blF=~——XX^F'
"ср "ср "ср
ТОГда Х.=-^; Х2=^; Х,=^.
1У 16 z>
Примем уравнение оси параболической арки в виде
Ул = ^Jxa(1-xa)H2j где х = 8-хи, у = 4-уА-с; xAt ^координаты
сечения арки в системе координат с центром на опоре А (рис. 6.4.5, б).
Рис. 6.4.5
Хо Уо Уо х2 *о MF УоМР *OMF Хд
0,5 -1,318 1,74 0,25 -0,63 0,84 -0,32 7,5
1,5 -1,193 1,43 2,25 -5,63 6,72 -7,45 6,5
2,5 -0,943 0,89 6,25 -15,63 14,74 -39,08 5,5
3,5 -0,568 0,32 12,25 -30,4 17,87 -106,4 4,5
4,5 -0,068 0,01 20,25 -46,4 3,16 -208,8 3,5
5,5 0,556 0,31 30,25 -69,4 -38,58 -318,7 2,5
6,5 1,307 1,71 42,25 -95,4 -124,68 -610,7 1,5
7,5 2,182 4,76 56,25 -121,4 -264,89 -910,5 0,5
-0,5 -1,318 1,74 0,25 0 0 0 8,5
-1,5 -1,193 1,43 2,25 0 0 0 9,5
-2,5 -0,943 0,89 6,25 0 0 0 10,5
-3,5 -0.568 0,32 12,25 -0,45 0,26 1,57 П.5
45 -0,068 0,01 20,25 -1,95 0,13 8,77 12,5
-5,5 0,556 0,31 30,25 -3,45 -1,91 18,97 13,5
-6,5 1,307 1,71 42,25 -4,95 -6,43 32,17 14,5
-7,5 2,182 4,76 56,25 -6,45 -14,07 48,37 15,5
Окончательно: Xt = 18,22 кН; Х2 = -25,13 кНм; Х3 = -6,34 кН. Опорные
реакции опоры А определяем из условий равновесия левой полуарки:
VA = 19,66 кН; НА = ХК = 18,22 кН; МА =-9,96 кНм.
234
6.5. Расчет неразрезных балок с помощью уравнений трех моментов
Уравнение трех моментов (уравнение Клапейрона) для балки постоянно-
го поперечного сечения имеет вид
Ч.-Л +2Л/„(/„ + (6.5.1)
где параметры /„ а„ bh Mh со, показаны на
рис. 6.5.1 и в лекции 17.
Задача 6.5.1. Построить эпюры изги-
бающих моментов и поперечных сил для
двухпролетной балки, показанной на рис.
6.5.2, а. Балка нагружена сосредоточенной
силой F.
Решение. В качестве основной системы
возьмем систему двух однопролетных ба-
лок, полученную из заданной системы
включением шарнира в опорное сечение В
(рис. 6.5.2, 6).
Запишем уравнение трех моментов
(6.5.1) применительно к рассматриваемой
основной системе (рис. 6.5.2, б) при п = 1:
Л/о/,+2^,(7,+/2)+Л/2/2 =
fljlOj 62(l)2
Л h
или 2Л/1(/1 +/2) = -6(а1с)1 //]), т.е.
откуда находим М} = Я.
В последних формулах через ах обозна-
чено расстояние от левой опоры первого
пролета балки до центра тяжести эпюры из-
гибающего момента, построенной для пер-
вой балки основной системы (рис. 6.5.2, б);
- площадь эпюры моментов первой бал-
ки основной системы.
Откладываем значение изгибающего
момента Мх = -3F//32 на эпюре изгибающих
моментов М (рис. 6.5.2, в).
Рис. 6.5.2
235
Затем любым из известных методов строим эпюру изгибающего момен-
та для первой однопролетной балки основной системы, учитывая воздейст-
вие внешней силы F и найденного опорного момента Мх.
Например, запишем условие, что момент на правой опоре первой балки
равен вычисленному моменту Мх.
„ п . rJ ЗЯ „ В
Мх = RAl-F—-——, из которого находим RA
Зная значение Ra, вычисляем изгибающий момент в сечении D
М =R L = llp.L = — /7 (рис.6.5.2,в)
D 2 32 2 64
13 19
и поперечные силы QAD = RA = — F, QDB = RA -F = F.
Эпюра изгибающих моментов для участка ВС неразрезной балки будет
ограничена наклонной прямой линией (рис. 6.5.2, в), поэтому поперечную
силу на этом участке можно найти, используя формулу Журавского:
Qbc = (рис-6-5.2, г)-
По формуле Журавского следует, что поперечная сила численно равна
тангенсу угла наклона прямой линии эпюры моментов на участке ВС.
Задача 6.5.2. Построить эпюры изгибающих моментов и поперечных
сил для двухпролетной неразрезной балки постоянного поперечного сече-
ния. Балка изображена на рис. 6.5.3, а. Проверить правильность построен-
ных эпюр.
Решение. В качестве основной системы возьмем систему однопролет-
ных балок, полученную из заданной системы включением шарниров в опор-
ные сечения и введением фиктивного дополнительного пролета вместо су-
ществующей жесткой заделки в сечении А (рис.6.5.3, б). Примем, что длина
фиктивного первого пролета равна нулю, т.е. 1Х = 0. Таким образом, основная
система представляет собой систему трех однопролетных шарнирно опертых
балок.
Действие сосредоточенной силы F на консоли последнего пролета будет
учитываться введением сосредоточенного момента Л/3 = -F-1 = -2кН-м.
Для решения задачи необходимо составить два уравнения (6.5.1):
л = 1: 2Ml(/I+/2)+A/2/2=-J^-|;
12 7. . (6.5.2)
л = 2: M1/2 + 2A/2(/2+/3) + MJ/J = -^^. + ^lj
Все необходимые для расчета геометрические параметры показаны на
236
Рис. 6.5.3
рис. 6.5.3, б, в. Для упрощения расчета эпюры изгибающих моментов для
третьего пролета с /3 = 3 м построены отдельно для сосредоточенного мо-
мента т = 6 кН-м и для сосредоточенного опорного момента Л/3 = -2кНм
(см. рис. 6.5.3, в).
Подставим числовые значения в формулы (6.5.2):
2М, (2) + Мг 2 = -t^l 12 • loj/2 J
Л/|2+2Л/2(2+3)+Л/33 = -^р|21Оу2+^-2^3-0+|Ъ1,5-1^Уз^
откуда находим = -7,71875 кН-м; М2 - -4,5625 кН-м. Откладываем эти
значения моментов и момент в точке С (Мс = М3 =-2 кН-м) на эпюре изги-
бающих моментов М (рис. 6.5.3, д).
Затем строим эпюру изгибающего момента для однопролетной шарнир-
но опертой балки, перекрывающей участок АВ и нагруженной опорными
моментами Мъ М2 и распределенной нагрузкой q (рис. 6.5.3, г).
Составим уравнение равновесия:
ХЛ/В =-7,72 + ^2-20-2-1 = 0,
откуда находим RA = 21,58 кН. Устанавливаем, что QA = Ra = 21,58 кН; за-
тем находим £^(слева) = RA - ql2 = 21,58 - 20-2 = -18,42 кН. На участке АВ
поперечная сила проходит через нулевое значение, следовательно, в преде-
лах этого участка будет экстремальное пролетное значение изгибающего
момента. Запишем формулу для вычисления изгибающего момента в сече-
нии на расстоянии х от опоры А (см. рис. 6.5.3, г):
Mx=RAx-Mi -^х2/2 = 21,58х-7,72 - 20х2/2,
затем dMx /«£с = 21,58 - 20х = 0, откуда находим х = 1,08 м. И наконец,
определяем Мх(х = 1,08) = 3,9 кН-м. Откладываем все полученные значения
на эпюрах М и Q (рис. 6.5.3, д, е).
Рассматривая однопролетную балку на участке ВС, нагруженную опор-
ными моментами Л/2, и сосредоточенным моментом т (см. рис. 6.5.3, б),
достраиваем эпюры М и Q.
Проведем проверку построенных эпюр М и Q. Рассматривая эпюру Q,
принимаем во внимание, что там, где приложена сосредоточенная сила, на
эпюре Q будет скачок, равный величине этой силы. Следовательно, согласно
эпюре Q, получаем
Ra = 21,58 кН; RB= 18,42- 1,15 = 17,27 кН; = 1,15 + 2 = 3,15 кН.
Составим уравнение равновесия для всей неразрезной балки (рис. 6.5.3, а):
£> = 21,58-20-2 + 17,27+3,15-2 = 0
и убеждаемся, что оно удовлетворяется тождественно, что подтверждает
правильность полученных результатов.
238
В качестве еще одной проверки можно проверить выполнение очевидно-
го условия, что прогиб на опоре В неразрезной балки равен нулю. Для этого
приложим единичную силу в сечении В статически определимой балки, по-
лученной из заданной балки отбрасыванием двух шарнирно подвижных
опор ВиС (рис. 6.5.3, ж). Строим эпюру изгибающих моментов Мх от этой
единичной силы, а затем, применяя интеграл Мора и правило Верещагина с
формулой перемножения трапеций, находим
1 I2 9 90 92 I
Дв=— -(2-7,72-2 + 2-4,56-0+7,72-0 + 4,56-2)-------2-1 =0.
EI I 6 3 8 1
Эта проверка также подтвердила правильность полученных результатов.
Задача 6.53. Построить эпюры изгибающих моментов и поперечных
сил для трехпролетной балки, изображенной на рис. 6.5.4, а. Жесткости на
изгиб для каждого участка балки указаны на рис. 6.5.4, а.
Решение. Неразрезная балка имеет разную жесткость на изгиб по длине
балки, следовательно, вместо формулы трех моментов (6.5.1) необходимо
применять формулу:
+ 2Л/п(у-/„/п+|) + —— Л7п+|/п+| =
, - (6.53)
_ f + I 1
Vn ln+l )
где / - момент инерции поперечного сечения любого пролета балки. В рас-
сматриваемом примере примем, что / = Ц = /3, тогда /2 =2/ (рис. 6.5.4, б, в).
Запишем уравнения трех моментов (6.5.3) для рассматриваемой балки:
п = 1: 2^,(1/,+у-/2)+у-Л/2/2=0;
л = 2:
или л = 1: 2М1(2+±4)+±М2 ‘4 = 0;
л = 2: ±М14+2М2(±4+2)-2-2 = 4.
Решая систему двух уравнений, находим
М, =—— кН-м; М2=— кН-м.
1 15 2 15
Откладываем эти значения моментов и М3 = -2 кН м в соответствующих
точках эпюры изгибающих моментов заданной неразрезной балки,
239
соединяем прямыми линиями полученные точки и получаем эпюру изги-
бающих моментов М (рис. 6.5.4, г).
Рис. 6.5.4
23/15 кН
Помня, что поперечная сила численно равна тангенсу угла наклона пря-
мых линий, ограничивающих эпюру М (рис. 6.5.4, г), находим значения по-
перечных сил по участкам (рис. 6.5.4, д):
2
G=--kH; Q2
15 + I5j4
15 )2
23 .1
----кН.
15
Знаки поперечных сил определяются направлением наклона прямых
линий эпюры М.
Затем по эпюре Q определяем опорные реакции неразрезной балки:
2 2 17
----кН; RB= — +— = — кН;
А А 15 в 15 3 15
240
Проверим полученные результаты, для чего составим уравнение равно-
весия (см. рис. 6.5.4, а):
^Л-2 = 0.
15 15
Ху=~
2 7
15 +15
Задача 6.5.4. Построить этпоры изгибающих моментов и поперечных
сил для трехпролетной неразрезной балки постоянного поперечного сечения.
Балка и внешняя нагрузка на нее показаны на рис. 6.5.5, а.
Ь
0,125 кН
0,25 кН
.............Lilian
1,375 кН
Рис. 6.5.5
Решение. Трехпролетная неразрезная балка с консолью имеет постоян-
ную жесткость на изгиб, поэтому будем использовать уравнения трех мо-
ментов в виде (6.5.1). На рис. 6.5.5, б показана основная система, полученная
из заданной балки, введением двух опорных шарниров. Запишем уравнения
трех моментов (6.5.1) для рассматриваемого случая (рис. 6.5.5, б, в):
п= 1: Л/о/, +l2) + M2l2 =0;
л = 2: Mtl2 +2М2(!2 +Z3) + A/3Z3 =-б[(2/3)(-2)/2],
16 С- Н. Кривошапко
241
или 2Л/|(2 + 4) + Л/24 = 0; Л/14 + 2Л/2(4 + 2)-2-2 = 4, откуда находим
=-0,25кН м; М2 =0,75 кН м.
Откладываем известные значения изгибающих моментов на эпюре М и
соединяем все полученные точки прямыми линиями (рис. 6.5.5, г).
По эпюре М находим тангенсы углов наклона прямых линий, которые
численно равны поперечным силам на соответствующих участках:
Слв=-^=-(Ц25кН; ggc = = 0.25кН;
2 4
Qcd = = -1,375 кН (рис. 6.5.5,д).
По эпюре Q вычисляем опорные реакции трехпролетной неразрезной
балки (рис. 6.5.5, д, а):
Ra = -0,125 кН; RB = 0,125 + 0,25 = 0,375 кН;
/?с = Ч0,25 + 1,375) = -!,625 кН; RD= 1,375+ 2 = 3,375 кН.
Для проверки полученных результатов составим уравнение равновесия:
X у = -0,125 + 0,375 -1,625 + 3375 - 2 = 0.
Рассматривая эпюры на рис. 6.5.4 и 6.5.5, можно сделать определенные
выводы о влиянии жесткости балки на изгиб на распределение М и Q по
длине балки.
6.6. Расчет неразрезных балок методом сил
Задача 6.6.1. Построить эпюру изгибающих моментов и поперечных сил
для двухпролетной балки, показанной на рис. 6.6.1, о.
242
Решение. Для определения опорных реакций Ra Rr> Rc составим урав-
нения равновесия:
^MA=RC2I + RBI-F-0,5/ = 0, откуда Rc = 0.25F- 0,5Fe;
52 мс = Ra2/ + Rbj“FW = 0, откуда RA = 0,75F-0,5/?в.
Для определения трех опорных реакций Ra Rb, Rc имеем систему двух
уравнений. Каноническое уравнение метода сил имеет вид
+Дц7 = 0,
где Xj - одна из неизвестных опорных реакций; бц- перемещение от еди-
ничной силы в направлении отброшенной опорной реакции Д|/?- пере-
мещение в направлении отброшенной опорной реакции Ху от внешней на-
грузки.
Отбросим одну лишнюю опорную реакцию RB = Xt. В результате полу-
чим однопролетную балку, показанную на рис. 6.6.1, б. Для полученной од-
нопролетной балки строим эпюру изгибающих моментов MF от внешней
силы F.
Предварительно находим ЕЛ/О = 21RC -0,5/F = 0, откуда Rc = 0,25F. Да-
лее записываем ЕЛ/С = 2lRa - 1,5/F = 0, откуда определяем R^ = 0,75F.
Для построения эпюры MF достаточно определить изгибающие момен-
ты в трех точках (рис. 6.6.1,6): Ма = Мс= 0; Md = 0J5F-0£l= 0,375F/.
Для определения прогиба Д)Г в точке b построим эпюру изгибающих
моментов Mt от единичной силы, приложенной в направлении отброшен-
ной опорной реакции RB (рис. 6.6.1, в). Используя правило Верещагина, вы-
числяем интеграл Мора. Разбиваем эпюры MF и Mt на три участка так, что-
бы в пределах одного участка не было переломов эпюр. Перемножаем по-
следовательно участки:
A1F = -—|-0,375F/-0,5/-0^5/+—[2 0,375F/0^5/ + 20^5F/0^/ +
EI (2 36
+ O,375F/-O^/ + O,25F/O^5/]+|o^5F//|o^/| = -^^-.
Для определения перемещения <5ц необходимо умножить по правилу
Верещагина эпюру М, саму на себя:
= — (-0,5/-/--0,5/)= —.
11 Е1\2 3 ) 6EI
Подставляя полученные результаты в каноническое уравнение метода
сил, находим
16*
243
% Лв=_Л!,=ПЯ^ = 016875Г.
<МЕ1-Р
Из полученных ранее выражений вычисляем остальные опорные реак-
ции:
Rc = 0,25F-0,5/?e = 0,25F- 0^ 0,6875F = -O,09375F;
Ra = 0,75F- 0,5/?B = 0,7 5F-0,5-0,6875F = 0.40625F.
Положительные значения опорных реакций показывают, что предвари-
тельно выбранные их направления правильны (рис. 6.6.1, а), а отрицатель-
ные значения показывают, что выбранные без расчета направления опорных
реакций необходимо заменить на противоположные, как, например, у опор-
ной реакции Rc.
Зная опорные реакции, легко построить эпюру изгибающих моментов М
(рис. 6.6.1, г):
МА = МС=К М; = Я10,5/ = 0,203125F/; Мв = RJ = -0,09375/7,
а также эпюру поперечных сил Q.
Qm = Ra, Qdb = Ra-F = 0.59375F;
Qbc = ~Rc = 0,09375F.
Задача 6.6.2. На рис. 6.6.2, а пока-
зана двухпролетная балка, загружен-
ная сосредоточенным моментом т.
Требуется построить эпюры изги-
бающих моментов М и поперечных
сил Q.
Решение. Балка один раз статиче-
ски неопределима. На рис. 6.6.2, б
приведена основная система, полу-
ченная из заданной отбрасыванием
лишней опоры. На рис. 6.6.2, в пред-
ставлена эпюра Л/, от единичной си-
лы X] = 1 и эпюра от действия со-
средоточенного момента т.
Каноническое уравнение метода сил
имеет вид
6цХ| +Д1/7 =0.
Вычисляем коэффициенты канони-
ческого уравнения:
11 EI 2 2 3 2 6ЕГ
Рис. 6.62
244
Д|/7 -
Z.2” /
3 2 6
тогда
т - п / л т'
2---+ 2 0-т+—т+0—
,22 2 2,
A1F l2m ЬЕ1 Зт
6Н ~ 4EI р ~ 21 ~ в'
Зная опорную реакцию RBt из ЕМ А = Rc 21+ т + RBl - 0 находим
«с=-—.
С 4/
Гт
4Е/’
а из ЕМС = RA2l-m + RBI - 0 определяем RA =--(рис. 6.6.2, г).
4/
Таким образом, МА = 0;Мв = -т!(4Г)1 = -т!4\ Мс = т. Откладываем эти
значения на эпюре М (рис. 6.6.2, д) и соединяем соответствующие точки
прямыми линиями. Затем строим эпюру поперечных сил (рис. 6.6.2, е).
Задача 6.63. Построить эпюры изгибающих моментов и поперечных
сил для трехпролетной балки, показанной на рис. 6.6.3.
Решение. Балка является два раза статически неопределимой по методу
сил, поэтому отбросим две лишние связи (опоры), а их действие заменим
сосредоточенными силами Хх иХ2.
Канонические уравнения метода сил примут вид:
611^1 +6|2^2 +Д1к =0;
^21^1 '^'^22'^2 +&2F = О’
Строим для основной системы эпюры изгибающих моментов Мх и М2
от единичных сил Хх = 1 и Х2 = I, а от внешней нагрузки - эпюру Мь.
Вычисляем коэффициенты канонических уравнений:
4/3 - 8 -8 -
ад- 8и"8"-
8,
2/,2 2/Д2/2/ 2 2/
з’з 3+23 3 3
2 3 3 3 6
7/’
2/ /_+2 _Z 2? + 2/ 2/+£ £ =_
3 3+ У 3 + 3 ' 3 +3*зЛ”18Е/’
a,f ”й
1^.2^^./ +qp.hL + 2^lL
23 3 38 3 238 2
11«Г. А -А
’1ад’ и 2F’
Подставляя полученные значения в систему двух канонических уравне-
ний, находим Хх = Х2 = 1,1^/; затем строим эпюру изгибающих моментов М
по формуле
233 386
245
Рис. 6.6.3
М =МхХу + М2Х2 +М,..
Например, изгибающие мо-
менты в сечениях А и В будут:
МА = -— \,\ql--\,\ql + ql2 =
= -0,1^/2;
MB=-~lAql-jtlql+ql2 =
= -QAql2, т.е.МА = Мв.
Далее можно определить, на-
пример, опорную реакцию Rc,
принимая во внимание, что
МА = -0,19/2 = Rcl-^—f
откуда Rc = 0,4<у/.
Переходим к вычислению по-
перечных сил:
Qc ~ ~ W,
Qa (слева) = Rc-ql- -Gfiql\
Qa (справа) = QA (слева) + RA =
= 0,59/.
Наклонные прямые линии на
эпюре Q будут параллельны.
Далее находим экстремальное
значение изгибающего момента в
первом пролете:
Мх = Rcx-qx2 /2;
dMx /dx-Rc -qx-Q,
т.е.x = 0,4/,тогда Mx(x = 0,4/) = 0,0&?/2.
Находим максимальный пролетный изгибающий момент во втором про-
лете (пролет АВ):
— — II > al2 1
M№j^ =М,Х, + М2Х2 +MF = --ЦЧ1--1,\Ч1+Ч12 + Y = 0,025Ч12.
Z о
Все остальные значения изгибающих моментов принимаются, исходя из
симметрии эпюры Л/, а значения поперечных сил - с учетом обратной сим-
метрии эпюры Q (рис. 6.6.3). Для проверки результатов можно составить
уравнение равновесия: Еу = Rc + Ra + Rb + Rd - 3^/ = 0.
246
6.7. Расчет неразрезных балок методом фокусов
Задача 6.7.1. Найти положение моментных фокусов и построить эпюры
изгибающих моментов М и поперечных сил Q от загружения первого проле-
та трехпролетной неразрезной балки равномерно распределенной нагрузкой
q (рис. 6.7.1, а). Неразрезная балка имеет постоянное сечение по всей длине.
Решение. В неразрезной балке загружен только один пролет, следова-
тельно, можно применить метод фокусов. Вычисляем левые моментные фо-
кусные отношения.
В лекции 18 было получено, что левое фокусное отношение для первого
пролета рассчитываемой балки равно двум, т.е. =2; далее, применяя
формулу Л„=2
находим
Л
4
23 Рис. 6.7.1
247
Применяя формулу к„ = 2 +
находим правые моментные
• м2 м2
фокусные отношения: А3 =——— = —
*г’=2+г1
*21
7
2
*1 = 2+-
Учитывая симметрию, вычисляем фиктивные опорные реакции и В*х
первого загруженного пролета (рис. 6.7.1,6):
I 2ql} 1 2 3-22
— ----— — • — ---—1.
2 3 8 1 2 3 8
Применяя формулу (18.6) лекции 18 для вычисления опорных моментов
загруженного пролета (п = 1), находим
... 12?
м 6 Ахкх -Вх _ 6 7
А =В,
31 „
----кН-м;
23
—— кН - м.
23
— кН • м.
23
Mi -1 2 2-38_i
7
м 6 Вхк}-А’ 6 1-2-1
/1 Л|А| -1 2 2.3?-1
7
Далее, учитывая, что Мп = -Мп_х /к*, определяем
По полученным значениям опорных моментов строим эпюру изгибаю-
щих моментов М (рис. 6.7.1, в), а затем, используя формулу Журавского
(dM/dx = Q), строим эпюру поперечных сил Q (рис. 6.7.1, г).
Задача 6.7.2. Найти положение моментных фокусов и построить эпюры
изгибающих моментов и поперечных сил при действии на балку сосредото-
ченного момента т, расположенного на правой крайней опоре С двухпро-
летной неразрезной балки (рис. 6.7.2).
Решение. Для решения задачи необходимо определить только левые
моментные фокусные отношения по формуле (18.3) лекции 18:
А, = со; k2 = 2+(///)(2-0) = 4.
248
Из рис. 6.72 очевидно, что Мг = Мс = ту тогда
Мх = -М21к2 = -т/4.
Изгибающий момент на левой
крайней шарнирно неподвижной опо-
ре А (рис. 6.7.2) равен нулю, т.е.
Мо = МА = 0.
Соединяем полученные ординаты
на эпюре М прямыми линиями. По
эпюре М легко построить эпюру попе-
речных сил Q, используя формулу
Журавского (dM/dx = Q\ согласно ко-
торой поперечная сила есть тангенс
угла наклона прямых линий эпюры из-
гибающих моментов.
Рассматриваемая двухпролетная
Рис. 6.7.2
балка уже была рассчитана методом сил (см. задачу 6.6.2). Результаты, по-
лученные двумя методами, совпали.
Задача 6.7.3. Построить эпюры изгибающих моментов М и поперечных
сил Q от загружения одного из пролетов четырехпролетной неразрезной бал-
ки сосредоточенной силой Г(рис. 6.7.3, а).
Решение. Вычисляем необходимые левые и правые фокусные отноше-
ния балки постоянного поперечного сечения:
*•=“= *>=2+т(Ч)=5: *’=2+МЧ)=2Л
*>24Н)=з-
Согласно рис. 6.7.3, б вычисляем фиктивные опорные реакции Ау и By
однопролетной балки, загруженной нагрузкой типа эпюры изгибающего мо-
мента М:
. 1 Я , Я2 D.
Ay — — •—•/'--By.
3 2 2 4 3
После этого переходим к определению опорных изгибающих моментов
М2 и Му загруженного третьего пролета по формулам (18.6) лекции 18:
^.2,9- —
М2 ------- = -0,1957*7; Му=~— —4----------— = -O,185F7.
2 27 2,9-3-1 3 21 2,9-3-1
Затем, используя формулы для определения левого фокусного отноше-
ния, находим
249
Рис.6.7.3
Мо = М4 = 0; М. = = °*195/Г- = 0,04F/ (рис. 6.7.3, в).
к2 5
Рассматривая отдельно третий пролет балки, нагруженный сосредото-
ченной силой F и опорными моментами Мг = -0,195F/ и М3 = -0.185Г/, мож-
но определить опорные вертикальные реакции этой балки:
Г2 = (справа) = 0.505F и V3 = -Q3(aieea) - 0,495F,
а также изгибающий момент в середине балки под силой F, равный
^ = 0,31^.
Затем, используя формулу Журавского, находим поперечные силы для
первого, второго и четвертого пролетов (рис. 6.7.3, г):
м. мх +|Л/2| |м3|
eoi=-7± = 0>027Fi £i2=-----4^ = -0,235F; £34 = >-2! = 0,185F.
/i /2 /4
Проверим правильность построения эпюры М. Очевидно, что верти-
кальное перемещение точки 2 заданной четырехпролетной балки равно ну-
лю. Для проверки этого положения используем интеграл Мора.
Приложим в точке 2 статически определимой балки, полученной из за-
данной отбрасыванием второй, третьей и четвертой опор (рис. 6.7.3, 0), еди-
ничную силу F = 1 и построим эпюру изгибающих моментов М 2. Для оп-
ределения вертикального перемещения точки 2 перемножим эпюры М и
М2, используя правило Верещагина:
Д2 =-^^-^0,04F/l,5/-y/+^-(-2-0,04F// + 0,195F//)J = 0.
Таким образом, одна из возможных проверок показала правильность
полученных результатов.
250
6.8. Построение линий влияния
в статически неопределимых балках
Для удобства построения линий влияния в статически неопределимых
многопролетных балках заранее составляется таблица значений коэффици-
ентов a(t/), Р(ц), которые вычисляются по формулам (18.7) лекции 18.
Таблица 6.8. /
и 0.1 0.2 оз 0,4 0,5 0.6 0.7 0.8 0,9
а(и) 0.171 0.288 0357 0384 0375 0336 0,273 0.192 0,099
рао 0.099 0.192 0.273 0336 0375 0384 0357 0288 0,171
Задача 6.8.1. Построить линии влияния опорных моментов М2, Mi, про-
летного момента М„ поперечной силы Qx и опорной реакции R2 на шарнирно
подвижной опоре 2 для трехпролетной балки постоянного поперечного се-
чения (рис. 6.8.1, а).
Решение. Определим моментные фокусные отношения по формулам
которые для рассматриваемого случая принимают вид:
Построим линию влияния опорного момента М2 (рис. 6.8.1, а).
Разбиваем каждый пролет балки на десять частей и составляем расчет-
ную таблицу 6.8.2. Таблица составлена следующим образом.
Груз в I-м пролете:
*2 7 Груз во 2-м пролете: М2=М„(п = 2) __2^ а(1/)-Л,Р(1/)= 2-2 а(ц)-2р(ц) 7 ЛХ-I 7 2(38/7)-! -0,058[a(i/)-2p(i/)]. ./2^)-^)]Ла(и)~4Р(ц)] л2л2-1 H.Z-i 4 2 0,464[a(i/)-2,75P(i/)].
251
0,087 0,239
Груз в 3-м пролете:
М2=М 1(„ = 3) = /, W-frW =3P(u)-«a(u) =3 IX^/^-aW ,
3 Мз-1 (46/11)-®-! 46/11-1/00
=-3 • 1 la(i/) / 46 = - 0,717a(i/)-
М3 11
Груз на консоли: М2~- = - М3 ~ = -0,239 М3.
Опорный момент М3 вычисляется обычным способом. Например, при
« = 0,1 имеем М3 = -Р-и1=~\-0,1-1=-0,1; при«= 1: М3 = -Pul= -1-1-1 = -1.
Таблица 6.8.2
и Груз в l-м пролете: М2 = = -6,058[<х(и)-2р(и)] Груз во 2-м пролете: М2 = = 0,464[а(и)-2,75Р(«)] Грузе 3-м пролете: Mi=-0,717a(u) Грузна консоли М2=0^39и
0,1 0,00157 -0,047 -0,123 0,0239
0.5 0,0218 -0304 -0,269 0,1196
1 0,00 0,00 0,000 00390
По аналогии строится линия влияния опорного момента Mt (рис. 6.8.1,
в). Рассмотрим движение единичного груза по неразрезной балке.
Груз в 1-м пролете:
а(Ю-W =2a(u)-2P(U) =0>2029|?(ц)_2р(и)],
Л, *,’-! 2-(38/7)-1 1 "
Груз во 2-м пролете:
м I ^-k^u) В(п)-(7/2)а(п)
2 Мг-' (11/4X7/2)-!
= 0,463ф(и)-3.5а(“)]-
Груз в 3-м пролете:
м =_^2- =_______Li Р(ц)~Лз*а(ц)^ 3 P(«)-co-a(iQ
' *2 *2 3 Мз’-1 (Н/4) (46/11)-оо-1
= Л =—а(и) = 0,2609а(«).
11 46/11 23
Груз на консоли:
А2 *2 I *3 J Мз k2k3 (11/4X46/11)
Значение ординат в некоторых точках линии влияния опорного момента
М\ представлены на рис. 6.8.1, в.
253
Рассмотрим построение линии влияния изгибающего момента Мх в про-
извольном сечении второго пролета. Считаем, что линии влияния Mt и М2
уже построены. Рассматривая только часть основной системы в виде про-
стой балки (рис. 6.8.1, д), получаем на основании формул (17.9) лекции 17
при п - 2:
Мх = М°х + Mi !^+м2 —.
h. h
Линия влияния Мх показана на рис. 6.8.1, е. Она строится наложением
трех линий влияния: Мх - линии влияния изгибающего момента в сечении
х простой однопролетной балки; линии влияния опорного момента Mh уве-
личенной в (4 - х)/4 раз, и линии влияния опорного момента М2, увеличен-
ной в х/4 раз.
На основании формул (17.9) лекции 17 при п = 2 имеем
(«« О
*2
где Qx - линия влияния в разрезной однопролетной балке (рис. 6.8.1, ж).
В нашем случае это пролет 1-2. Таким образом, линия влияния Qx полу-
чается складыванием трех линий влияния: линии влияния Qx в разрезной
однопролетной балке 1-2, линии влияния опорного момента М2, разделенной
на /2, и линии влияния опорного момента Му разделенной на (-/2). Постро-
енная линия влияния поперечной силы Q* в сечении х = const второго про-
лета показана на рис. 6.8.1, з.
Если известны поперечные силы в сечениях ki и кг (рис. 6.8.1, о), тогда
Qkr -Qu +Я2, откуда определяем
^2 ~Qkr ~Qkl*
т.е. для построения линии влияния опорной реакции R2 необходимо из орди-
нат линии влияния поперечной силы Qkr вычесть ординаты линии влияния
поперечной силы Qu.
Для рассматриваемого примера (рис. 6.8.1, и)
Qkr = А° +——линия влияния поперечной силы справа от опоры 2,
h
Qkt = ~В2 ——— линия влияния поперечной силы слева от опоры 2,
h
где В2 - линия влияния правой опорной реакции однопролетной балки с
пролетом /2 (рис. 6.8.1, эк?); А® - линия влияния левой опорной реакции од-
нопролетной балки с пролетом /3.
254
Формула для Qu получена на основании формулы (6.8.1), которая запи-
сана для случая совпадения сечения х с сечением Затем необходимо запи-
сать формулу (17.9) при и = 3 и применить ее для случая совпадения сечения
х с сечением кг В итоге получим формулу для линии влияния Qu-
Линия влияния опорной реакции R2 показана на рис. 6.8.1, к.
Учитывая вышесказанное при построении линии влияния опорной реак-
ции Л2» можно записать общую формулу линии влияния любой опорной ре-
акции Rn:
R - я° । j л° ^п+\ ~
'я . •
*я *я+1
Задача 6.8.2. Построить линии влияния опорных реакций RA, RB, опор-
ного момента МА, пролетного момента Мс и поперечной силы Q( в сечении
С однопролетной статически неопределимой балки постоянного поперечно-
го сечения (рис. 6.8.2, а).
Решение. Решим задачу статическим методом, т.е. с применением
уравнений метода сил.
Задача один раз статически неопределима, следовательно, каноническое
уравнение метода сил будет иметь вид
где за Xi примем неизвестный опорный момент МА (рис. 6.82,б).
Построим эпюры изгибающих моментов от действия сосредоточенного
опорного момента Xt = 1 (рис. 6.8.2, в) и от подвижной единичной силы Р = 1
(рис. 6.8.2, г). Вычисляем:
<У" £/(2
3£/*
Д]/7 ~
2-^7
2 1 3 1
/ )
= *L22(2Z_x).
6/£/
Тогда опорный момент МА можно вычислить по формуле
у х(/-хХх-2/)
<J|| 2I2
Полученная формула будет уравнением линии влияния МА, так как х -
расстояние от опоры А до единичной силы Р = 1. Задавая х различные значе-
ния в пределах 0 < х < /, строим линию влияния МА (рис. 6.8.2, д). Найдем
максимальное значение ординаты линии влияния МА, для чего приравняем
нулю первую производную: dM/dx = 0, что даст
255
У2 - 2Zx +2/2/3 = 0, откуда находим x = 0,42/. Второй корень квадратичного
уравнения х = 1,58/ нам не нужен. Таким образом, будем иметь
МАта (х = 0,42/) = -0,192/ (рис. 6.8.2, д).
Следовательно, когда единичный груз Р = 1 будет на расстоянии 0,42/ от
левой опоры балки (заделки), то в заделке будет возникать наибольший
опорный момент, равный МА = -0,192/.
Построим линию влияния опорной реакции /?л, для чего составим урав-
нение равновесия:
256
XMB=MA^Al-P(l-x)=O,
откуда определяем
п 1-х „ 1-х х(1-х)(х-2Г) х3-Зх2/ + 2/3
А I А I 2/3 2/3
Это и есть уравнение линии влияния опорной реакции RA.
Задавая х различные значения в пределах 0 < х < /, строим линию влия-
ния RA (рис. 6.8.2, е).
Получить уравнение линии влияния RB можно из уравнения равновесия
для всей балки (рис. 6.8.2, a): Еу = RA+RB-\ = 0, т.е.
Линия влияния опорной реакции RB показана на рис. 6.8.2, ж.
Построим линию влияния пролетного момента Мс. Пусть сила Р = 1 на-
ходится справа от сечения С, тогда, отбрасывая правую часть балки, запи-
шем значение момента MCt рассматривая только левую часть балки:
Mc=Ma + RaL.
Таким образом, чтобы построить правую от сечения С часть линии
влияния Мс, необходимо ординаты линии влияния МА сложить с соответст-
вующими ординатами линии влияния RA, умноженными на 1/2 (рис. 6.8.2, з).
Пусть единичная сила - слева от сечения С, тогда, рассматривая правую
часть балки, запишем
т.е. линия влияния Мс левее сечения С будет как линия влияния RB, все ор-
динаты которой умножены на 1/2 (рис. 6.8.2, з).
И наконец, осталось построить линию влияния поперечной силы Qc в
сечении С (рис. 6.8.2, и). Если груз справа от сечения, то, рассматривая ле-
вую часть балки, имеем Qc = RA. Если единичная сила слева от сечения С,
то, рассматривая правую часть балки, получаем
Qc = ~Rb-
Используя построенные линии влияния, определим опорные реакции,
момент в заделке, пролетный момент под точкой приложения сосредоточен-
ной силы F= 10 кН и построим эпюры изгибающих моментов и поперечных
сил для однопролетной статически неопределимой балки, показанной на рис.
6.8.3. Для этой балки на рис. 6.8.2 построены линии влияния всех искомых
сил и моментов.
Определяем опорную реакцию RA. Для этого необходимо взять на линии
влияния Ra (рис. 6.8.2, е) ординату 47/128, лежащую под точкой приложения
силы F, и умножить эту ординату на величину силы F= 10 кН:
17 С. Н. Кринон.вгко 257
RA = — -10 = 3,67 кН.
128
Аналогично находим
RB = —10 = 6,33 кН;
в 128
МА =—4-10 = 4,69кНм.
А 128
Зная опорные реакции, легко по-
строить эпюры изгибающих моментов
М и поперечных сил Q (рис. 6.8.3),
например:
MD =Кц 1 = 6,ЗЗкНм; Qad = Ra =
= 3,67 кН; &в = -/?в = -€,ЗЗкН.
Задача 6.83. Используя линии влияния, определить опорные реакции в
статически неопределимой балке, показанной на рис. 6.8.4. Построить эпю-
ры изгибающих моментов и поперечных сил.
Рис. 6.8.4
Решение. Для рассматриваемой балки на рис. 6.8.2 построены линии
влияния опорных реакций RA, RB, опорного момента МА и пролетного изги-
бающего момента Мс.
Определяем опорную реакцию RA. Для этого необходимо значения со-
средоточенных внешних сил Ft и F2 умножить на соответствующие ордина-
ты линии влияния Ra, лежащие под
этими силами (см. рис. 6.8.2, е), а ре-
зультаты сложить:
11 47
Ra = 10 — -5— = 5,04 кН.
А 16 128
Аналогично находим:
р = 10 — -5 — = -0,04 кН;
в 16 128
3 15
МА =10—8-5--------8 = 10,31кН-м;
16 128
Мс = 10 — 8-5 — 8 = 9,84кН-м.
с 32 256
Определяем изгибающий момент в
сечении D: MD = RB-2 = -0,08 кН м.
Осталось построить эпюру Q (рис. 6.8.4):
Олс = Лл = 5,04кН; QCd = Ra-F, = -4,96кН; Q№ = -RB = 0,04кН.
258
Раздел 7
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
(по материалам лекций 20-22)
При расчете статически неопределимых систем методом перемещений
за неизвестные принимаются углы поворота и линейные смещения узлов
системы.
Система л канонических уравнений метода перемещений имеет вид
rllZl + rnz2 +—+rlnZn +Rif
r2lZl+r22Z2 + — +r2nZn +^2F = $
rnlZX +rn2Z2 + — + rmZn +^nF =
где Гу - реакция в 7-й связи, возникающая от поворота или перемещения на
единицу у-й связи; RlF - реакция в 7-й связи, возникающая от внешней на-
грузки. Значения г|у и Ru берутся из вспомогательной таблицы (табл. 7.1).
Решая систему л канонических уравнений, находим л неизвестных углов
поворота и линейных смещений Zt + Z„.
Таблица 7.1
(Опорные реакции и эпюры изгибающих моментов статически
неопределимых однопролетных балок, возникающие при повороте или
смещении одной из опор)
Схема балки и реакции
Схема балки и реакции
Мв = Ы/1
6i/l
Примечание, i = £7/7- погонная жесткость балки на изгиб.
259
Таблица 7.2
(Опорные реакции и эпюры изгибающих моментов статически
неопределимых однопролетных балок, возникающие от внешней нагрузки)
Схема балки и реакции Схема балки и реакции
мА /712 q MB = q?/\2 RA = qlrt. RB = qlW ^_= ab2F‘ .2 ab2F/l2 I MB = (?bF/l2 RA = b2F(2a+tyf а b
<?'2| o;f>F
121 1 12 Г 1 . I J I1
б Г ? B = abF(a+WQ.l2)
V т/2 |^ = 3/m/(2Z) 1 I— m 4 RA = bF(2f-^-at)l(2e)
Таблица 7.3
(Опорные реакции и эпюры изгибающих моментов статически неопредели-
мых однопролетных балок, возникающие от неравномерного нагрева)
Схема балки и реакции
Схема балки и реакции
Примечание, h - высота поперечного сечения балки; а - температурный коэффициент
линейного расширения
260
7.1. Расчет неразрезных балок методом перемещении
Задача 7.1.1. Построить эпюру
изгибающих моментов М и попереч-
ных сил Q для двухпролетной балки,
показанной на рис. 7.1.1, а.
Балка постоянного поперечного
сечения нагружена сосредоточенной
силой F.
Решение. Кинематическая неоп-
ределенность балки равна единице. За
неизвестный параметр примем угол
поворота Zi в точке В (рис. 7.1.1, б).
Основная система получается
введением дополнительной заделки
на опоре В. В результате заданная
двухпролетная балка разбивается на
две однопролетные статически неоп-
ределимые балки.
Записываем каноническое урав-
нение метода перемещений:
rnZj +RlF =0,
которое показывает, что реактивный
момент во введенной заделке, возни-
кающий от действия внешней нагруз-
ки и поворота узла В, равен нулю.
С помощью табл. 7.1 строим эпю-
ру моментов Л/, (рис. 7.1.1, в) от при-
нудительного угла поворота Z| = 1.
С помощью табл. 7.2 строим эпю-
ру Mr (рис. 7.1.1, г) от действия
внешней сосредоточенной силы F.
Переходим к определению коэф-
фициентов канонического уравнения.
Для нахождения реактивного мо-
мента гц - момента в сечении В, воз-
никающего от поворота сечения на
угол, равный единице (Zi = 1), выре-
жем узел В и из условия его равнове-
сия находим (рис. 7.1.1, в)
„ ЗЕ/ 6Е/
Гц =2----=-----.
" / /
Рис. 7.1.1
261
Для определения реактивного момента RtF необходимо рассмотреть рав-
новесие узла b в эпюре Mf. (рис. 7.1.1, г), откуда находим
Положительные направления реактивных моментов г(| и RiF должны
совпадать с выбранным направлением угла поворота Zx.
Полученные значения г( । и /?н подставляем в каноническое уравнение и
находим
Я2
1 r„ 32EI'
Затем строим эпюру моментов ZXMX, получаемую из эпюры Мх путем
умножения всех ее ординат на величину Zt (рис. 7.1.1, д). И наконец, строим
окончательную эпюру изгибающих моментов М (рис. 7.1.1, е), складывая две
эпюры: ZXMX (рис. 7.1.1, д) и Л4 (рис. 7.1.1, г), т.е.
М =ZlMl+Mp.
Затем, используя формулу Журавского, можно построить эпюру попе-
речных сил (7 (рис. 7.1.1, е).
Эта же балка была рассчитана методом сил (см. рис. 6.6.1). Как видно из
рис. 6.6.1 и 7.1.1, результаты полностью совпали.
Задача 7.1.2. Построить эпюру изгибающих моментов и поперечных сил
для двухпролетной балки, показанной на рис. 7.1.2, а. Балка постоянного
поперечного сечения нагружена сосредоточенным моментом т на опоре С.
Решение. Кинематическая неопределенность балки равна единице, сле-
довательно, необходимо использовать каноническое уравнение
rii^i +^if =0-
За неизвестный параметр Z\ примем угол поворота сечения В (рис. 7.1.2,
б). Принимая угол поворота Z| = 1, строим эпюру (рис. 7.12, в), а затем
эпюру Л4(рис. 7.1.2, г).
Определяем реактивные моменты во введенной заделке:
„ т „ ЗЕ/ 6Е/
г"-2~г-—
Подставляя полученные значения Гц и RiF в каноническое уравнение
метода перемещений, находим
7
1 _L2£/ _
Затем строим эпюру моментов Zj Л/1, получаемую из эпюры Л/1 путем
умножения всех ее ординат на величину Zx (рис. 7.1.2, д). И наконец, строим
262
окончательную эпюру изгибающих
моментов М (рис. 7.1.2, е), склады-
z.:
Рис. 7.1.2
Основная система \ 3EI/1 Гц
Z1=1
и Л/Г(рис. 7.1.2, г), т.е.
М = ZtMx + MF.
Используя формулу Журавско-
го, построим эпюру поперечных сил Я™
Qfyvic.l.\2>e). б
Эта же балка была рассчитана
методом сил (см. рис. 6.6.2). Как
видно из рис. 6.6.2 и 7.1.2, результа-
ты полностью совпали.
Задача 7.1.3. Построить эпюру
изгибающих моментов и попереч-
ных сил для трехпролетной балки, в
показанной на рис. 7.1.3, а. Крайние
пролеты балки постоянного сечения
нагружены равномерно распреде-
ленной нагрузкой.
Решение, Кинематическая не-
определенность балки равна двум,
следовательно, для решения задачи
необходимо использовать систему
двух канонических уравнений:
rllZl + rl2Z2 + ^IF =0’
r2lZl +r22Z2 + R2F =0-
За неизвестные параметры Z(
Z2 принимаем углы поворота сече-
ний В и С (рис. 7.1.3, б).
Принимая угол поворота Zi =1,
строим эпюру Мх (рис. 7.1.3, в).
Принимая Z2 =1, строим эпю-
ру М2 (рис. 7.1.3, г).
Эпюру Mf. (рис. 7.1.3, б) строим
с помощью табл. 7.2.
Определяем реактивные момен-
ты во введенных заделках:
4Е/ 8Е/
Г11 “2----—~r22* г\2~г2\~
5т
. _ <Иг. R _ч1г
[<г—i7- „
263
RA=RAZl+Ro=^
Подставляя полученные
значения реактивных момен-
тов в систему двух канониче-
ских уравнений, находим
Z, =-Z2=-^-.
1 2 12EI
Затем строим окончатель-
ную эпюру изгибающих мо-
ментов Л/, складывая в харак-
терных сечениях балки три
значения: MXZX, Af2Z2 11 ^4-
(рис. 7.1.3, е),т.е.
м- MXZX + M2Z2 + MF.
Например, вычислим значе-
ние изгибающего момента в
сечении А балки:
2EI ql2 ql1
М л =-----ZI ч---=----,
I 12 9
справа от сечения В:
_4£7 2Е1 ql2
М11 -----it] 4---Х2 —----
В I 1 I 2 36
ИТ.Д.
Эпюру поперечных сил (рис.
7.1.3, е) можно строить раз-
личными способами или с по-
мощью комбинации разных
способов. Например, можно
использовать табл. 7.1, в кото-
рой также указаны опорные
сосредоточенные реакции.
Определим с помощью таб-
лицы опорную реакцию в ле-
вой заделке (сечение А):
\gI
12EI 2 12
Определим ту же опорную реакцию с помощью построенной эпюры
изгибающих моментов М (см. рис. 7.1.3, е). Значение изгибающего момента
в сечении В балки известно и равно Мв = -д/2/36.
Разрежем балку в сечении В и отбросим правую часть.
264
Из условия равновесия оставшейся левой части находим
ql2 _ . , / ql2 _ Iql ~
Мв^-^-^Кл1-^-=-^,опува RA=-^- = Q„.
На участке ВС поперечная сила, согласно формуле Журавского, равна
нулю. Разрезая балку в любом месте участка ВС и отбрасывая правую часть
балки, запишем:
Qbc = BA-ql + RB = 0,
п , п , 7д/ 5q/
откуда находим RB = ql-RA = ql —.
Зная опорную реакцию RB, легко закончить построение эпюры Q:
MD=-^- = -~- + RA3l-ql(2l + ^)+RB2l + Rcl-^-t
откуда определяем Rc = 5qll\2.
Поставленная задача решена методом перемещений. Если бы эта задача
решалась методом сил, то пришлось бы решать систему пяти уравнений с
пятью неизвестными, так как задача была бы пять раз статически неопреде-
лимой.
7.2. Расчет плоских рам методом перемещений
Задача 7.2.1. Построить эпюры изгибающих моментов Л/, поперечных Q
и нормальных N сил для рамы, изображенной на рис. 7.2.1, а. Как изменятся
эпюры Л/, Q, N, если все стержни рамы будут иметь одинаковую жесткость
на изгиб (EI = const)?
Решение. Рама является дважды статически неопределимой при расчете
ее методом сил и дважды кинематически неопределимой при расчете мето-
дом перемещений. Возьмем за основу метод перемещений. На рис. 7.2.1, б
показана основная система метода перемещений. С помощью табл. 7.1 стро-
им эпюры моментов от единичного углового перемещения Zi = 1 (рис. 7.2.1,
в) и от единичного линейного смещения Z2 = I (рис. 7.2.1, г), а с помощью
табл. 7.2 - от внешней нагрузки (рис. 7.2.1, д).
Система канонических уравнений метода перемещений дважды кинема-
тически неопределимой рамы имеет вид:
ГП^1 + /12^2 + = Ф
r21Z| + T22Z2 + ^2F =0»
где
3EI 8Е/ 8Е/ \2Е1
а 1,6а а ’ Г|2 (1,6а)2
^=r2I; R„^
1,00
2 4 £7 3EI 27 EI „ 5^-1,6а Л ,
<22 =-------г +-------г =-----г I Еуг =-------------+ а* 1,6а = 0,боа.
(1,6а)3 (1,6а)3 (1,6а)3 2Г 8
265
0,27qa
Рис. 7.2.1
0,29ga
Рис. 7.2.2
Решая систему двух канонических уравнений
MZ1_Z^z2=0;
а 1,6а2
7,5£7 27Е/ 7 _
-----7 +------Г ^7 + 0,6(70 = О,
1,6а2 (1,6а)3
аа аа
определяем Z^-0,09-^-; Z2 =-0,156-^-.
Следующим этапом расчета является построение эпюры изгибающих
моментов в заданной раме ст заданной нагрузки с применением формулы
M = MtZ}+M2Z2 +Мр
для характерных узлов рамы (рис. 7.2.1, е). Затем строится эпюра попереч-
ных сил Q (рис. 7.2.1, ж), по которой легко определить опорные реакции
(рис. 7.2.1, з). Зная опорные реакции, легко построить эпюру нормальных
сил N (рис. 7.2.1, и).
Статическая проверка. Составим уравнения равновесия для всей рамы
Ех = 0, Еу = 0 (рис. 7.2.1, з). Они выполняются, следовательно, задача решена
правильно.
Переходим ко второй части задачи. Повторим весь расчет, но с учетом,
что все стержни рамы имеют одинаковую жесткость на изгиб (рис. 7.2.2).
Реакции гп, г12, определялись при рассмотрении равновесия выре-
занного узла 1 (ЕЛ/= 0), а г2!, ги, R2F - из уравнений равновесия Ех = 0 всей
основной системы ( см. эпюры , М2, MF на рис. 7.2.2).
Из системы двух канонических уравнений метода перемещений
^.Z1__^Z2=0;
а (1,6а)2
6EI 15EI „
------7 Z. 4-----Z2 + Ofiqa = 0
(1,6O)2 (1,6а)3
находим
Z, = -0,096^-; Z2 =-0,225^-,
' EI 2 EI
а затем строим эпюры Л/, Q, N (рис. 7.2.2).
Сравнивая две группы эпюр (рис. 7.2.1 и 7.2.2), можно сделать некото-
рые выводы о влиянии жесткости на изгиб стержней рамы на распределение
внутренних усилий и моментов в раме.
Задача 7.2.2. Построить эпюры изгибающих моментов, поперечных и
нормальных сил для плоской статически неопределимой рамы, изображен-
ной на рис. 7.2.3, а.
Решение. Подсчитаем число неизвестных параметров при расчете рамы
методом перемещений (рис. 7.2.3, б):
268
И = Пу 4- пл = 3 + 1 = 4.
Учитывая симметрию ра-
мы, проведем группировку
неизвестных Z, (рис. 7.2.3, 6)
и разобьем заданную на-
грузку на симметричную и
обратносимметрич ную.
Запишем в общем виде
систему канонических урав-
нений метода перемещений:
ruzi + rl2Z2 + rl3Z3 + rl4Z4 +
^|Z] + r22Z2 +ги23 +ruZ4 +
+^+^ = 0;
Г3|Л +г31г1 + r33^3 + r34^4 +
+ =0;
r41^l + r42^2 + r43%3 +r44^4 +
где подчеркнутые коэффи-
циенты равны нулю благо-
даря проведенной группи-
ровке неизвестных. Таким
образом, в результате груп-
пировки неизвестных систе-
ма четырех канонических
уравнений распалась на две
труппы независимых урав-
нений:
ruZ, +R™= 0
- симметричная задача и
г22г2 + г23г3 + r24Z4 + = $
r32Z2 4- r33Z3 + r34Z4 + = 0;
*42^2 + r43Z3 + r44Z4 + ^4F* = ®
- обратносимметричная за-
дача.
Группировка неизвестных
б) Основная система
2Е//4 EU2
Рис. 7.2.3
Построим эпюры моментов от единичного значения симметричного не-
известного Zx = 1 в основной системе (рис. 7.2.3, в) и от симметричной внеш-
269
ней нагрузки (рис. 7.2.3, г\ см. табл. 7.2 и рис. 17.4 лекции 17).
Находим реакции во введенных заделках:
=2Рг+^]=4£/; r'f =52=1°- тогда =-—=-^i-
V 4 о 7 гп
Теперь можно построить эпюру изгибающих моментов в основной сис-
теме от симметричной нагрузки: Л/сим = A/1Z1 + Л/^им(рис. 7.2.3, д).
Проведем проверку коэффициента при неизвестном Zx канонического
уравнения для симметричной задачи:
Ms =ЪМ, гм=Ъгу=ги\
А^=2Ш2.И.НП™.2.ИП
^>ЕЦ J EI, 2 2 2)
+ —-Е/-6-Е/1 = 4Е/=ги.
E2I 2 3 J
Построим эпюры моментов ст единичных значений обратносимметрич-
ных неизвестных (Z2 = 1, Z3 = 1, Z4 = 1) в основной системе метода переме-
щений (рис. 7.2.4, at б, в) и от обратносимметричной нагрузки (рис. 7.2.4, г).
Находим реакции во введенных заделках и опорном стержне:
r22 = 2[EI + EI] = 4EI- г23 = 0 = г32; г24 = -2(6Е/ / 42 ) = -ЗЕ// 4 = г42;
г33 =ЗЕ//4 + Е/ = 7Е//4; =-ЗЕ//32 = г43;
'•«=2 ^ + 2.^ + ^ = ^Е/; =2-5 = 10; Я3^=0; =^>.
Реакции г2г, Ъз, г2а, Пз, гзд, Rm?, Rm? находились при рассмотрении
равновесия вырезанных узлов 2 или 3, а опорные реакции Гм, R^? опреде-
лялись при рассмотрении равновесия (Ех = 0) всей основной системы в це-
лом. Например, согласно рис. 7.2.4, г имеем
Ех = 10-2-l-8-2-5-2 + 5-2 + /?$> =0, т.е. R^ =^J.
Подставляем полученные результаты в труппу канонических уравнений
обратносимметричной задачи:
4Z2--Z4+—= 0, -Z3-—Z4=0, --Z2-—Z3+ —Z4-—= 0
2 4 4 Е/ 4 3 32 4 4 2 32 3 128 4 Е/
_ 0,92 _ 0,45 _ 8,406
и определяем Z2 =----; Z3 =----; Z4 =----.
EI EI EI
Проверим коэффициенты rif канонических уравнений для обратносим-
метричной задачи.
Универсальная проверка заключается в проверке тождества
270
г"=ЧтГЛ’ где
М5 =ZM,=M2+M3+M4
(рис. 7.2.4, д),
rss = ^r,j ~ rll + r23 + r24 + r32 +
+ r33 +r34 +r42 +r43 +Г44 =
= 4E/+0--E/+0+-E/-—-
4 4 32
3r, 3 51 571 ,
—EI---EI+---EI~---EI.
4 32 128 128
Умножаем эпюру Ms саму
на себя, применяя правила Ве-
рещагина (см. лекцию 11):
2-ЕЛ-Е/ +
. 8 8
о EI EI 5 EI\ 1
+2------2—Е/----—
8 8 8 8 ) EI
1 1 г, г 2 гг
-----Е/-6—EI
E2I 2 3
+2 - —Е/-8 - —Е/ —
2 64 3 64 EI
\ EI 2 EI
2------6------
2 2 3 2
1.21£/.8.2.21£/._1_
2 32 3 32 E2I
571
128
Универсальная проверка
подтвердила правильность вы-
числения коэффициентов для
обратносимметричной задачи.
Теперь можно построить
эпюру изгибающих моментов
от обратносимметричной на-
грузки в заданной системе,
используя формулу
Рис. 7.2.4
271
Л^обр = Miz2 + M3Z3+M4ZA + M^P (рис. 7.2.5).
Складывая две эпюры Л/С|Ш (см.
рис. 7.2.3, д) и Л4бр (см. рис. 7.2.5),
получим эпюру изгибающих мо-
ментов от заданной нагрузки в
заданной системе (рис. 7.2.6, а).
Применяя формулу Журавского
dM/dx = Q,
легко построить эпюру попереч-
ных сил Q (рис. 7.2.6, б).
На основе эпюры Q строится
эпюра нормальных сил N (рис.
7.2.6, в). Например, для определе-
ния нормальной силы NAB в ригеле
АВ (см. рис. 7.2.6, в) необходимо
сделать сечение 1-1 (рис. 7.2.6, б) и
рассмотреть равновесие правой
части рамы (рис. 7.2.7):
Ех = -НАВ + 9,95 - 2 -8 - 0,98 = 0,
откуда определяем NAB = -7,03 кН.
Рассматривая рис. 7.2.6, легко
определить все опорные реакции
(рис. 7.2.8). Проведем статиче-
скую проверку расчета, для чего
составим уравнения равновесия:
Ex = -12,86 - 0,049 - 0,056+9,95 +
+ 20-2-8-0,98 = 0;
Еу = 0,57-0,61-0,22+0,26 = 0.
Проведем дополнительную ста-
тическую проверку. Вырежем узел
С и рассмотрим его равновесие
Рис. 7.2.6 (см- Рис- 7-2-8 и 7-2-9).
Рис. 7.2.7 (кН) Рис. 7.2.8 (Опорные реакции; кН, кН-м)
272
Er = 7,09 - 7,03 - 0,056 = 0, „
v -плэо n mo — л ””
= 0,03о — 0,038 = 0 Характер изогнутой оси рамы
Рис. 7.2.9 (узел С) Рис. 7.2.10
На основании эпюры М (см. рис. 7.2.6, а) можно показать характер де-
формации рамы (рис. 7.2.10).
Задача 7.2.3. Построить эпюры внутренних моментов и усилий в раме,
показанной на рис. 7.2.11, о, и определить углы поворота сечений А и В. Все
стержни рамы имеют постоянную жесткость на изгиб EI = const.
Решение. Рама два раза кинематически неопределима при ее расчете по
методу перемещений. Основная система метода перемещений представлена
на рис. 7.2.11, б.
Строим эпюры моментов от единичных углов поворота Zi = 1 (рис.
7.2.11, в), Z2 = 1 (рис. 7.2.11, г) и от действия внешней нагрузки (рис. 7.2.11,
д). Вычисляем коэффициенты гу, RlF канонических уравнений метода пере-
мещений:
rllZl + rl2Z2 + RIF =0; r2lZl +r22Z2 + R2F =0,
т.е. Гц = ЗЕИа + ЛЕИ a = lEUa = r^', rn = 2EHa = r2ii R\f~ -Rif= laFIXB,
а затем определяем неизвестные углы поворота сечений А и В'.
Рис. 7.2.11
18 С. Н. Кривстаи ко
273
За2 F
Z, = -Z2 =------.
1 2 80Е/
Проверим свободные члены канонических уравнений. Проверка этих
грузовых коэффициентов сводится к подтверждению тождества
где M'p - эпюра от нагрузки в статически определимой системе, получен-
ной из заданной системы устранением лишних связей, в том числе обяза-
тельно тех, реакции в которых определяются.
Для рассматриваемой рамы: Rsp = RXF + /?2г = /16 - 3aF /16 = 0.
Эпюра Ms, получаемая от сложения единичных эпюр Л/1 и М2, пред-
ставлена на рис. 7.2.11, е ( М s = МХ + М2).
Эпюра М'р показана на рис. 7.2.12. Перемножая
две эпюры Мх и М'р по правилу Верещагина, полу-
чим
am z
aF!2
„ *М M'F J Л „ л
У |— F ds = 0 = RSB = 0.
Z- J E/k V
7 9 i э Таким образом, грузовые коэффициенты вычис-
ис' ’ лены правильно.
Далее можно приступить к определению значений изгибающих момен-
тов в характерных сечениях и узлах заданной рамы по формуле
М = Л/jZj + M2Z2 + Мр (рис. 7.2.13, а).
Соединяя соответствующие ординаты, строим эпюру изгибающих мо-
ментов для заданной рамы от заданной нагрузки.
Используя теорему Журавского Q = dM/dx, строим эпюру поперечных
сил (рис. 7.2.13, б), на основании которой вычисляем значения нормальных
сил в стержнях рамы (рис. 7.2.13, в).
Рис. 7.2.13
274
73. Расчет статически неопределимых балок и рам
на действие температуры
Задача 7.3.1. Построить эпюры M,QviN для рамы, подверженной тем-
пературному воздействию (рис. 7.3.1, а). Высоту поперечного сечения рамы
принять А = а/10.
Температурный коэффициент линейного расширения - а.
г) Симметри
ЗЕ/а
----Л/
\2h
д)Обратносимметричный
нагрев
Рис. 7.3.1
б) Основная система
Решение. Рама один раз кине-
матически неопределима. Ее основ-
ная система показана на рис. 7.3.1,
б.
Каноническое уравнение метода
перемещений имеет вид
Гц7| + Rj, +/?2г
где Гц = 6Е//а (рис. 7.3.1, в); Ry -
опорный момент, возникающий во
введенной заделке при симметричном действии температуры; R^ ~ опор-
ный момент в той же заделке при обратносимметричном действии темпера-
туры на основную систему.
Определим удлинения стержней рамы от изменения температуры (сим-
метричный нагрев):
д 40 + 10 д 20 + 10 z Л
Д1 = а—-—а = 25оа; Д2 = а—-—а = 15аа (рис. 7.3.1, б).
Теперь с помощью табл. 7.1 можно построить эпюры изгибающих мо-
ментов M't (рис. 7.3.1, г) от симметричного нагрева, тогда
п, ЗЕ/ ЗЕ/ д ЗЕ/ ЗЕ/ ЗОЕ/ t ч
Ry =----— Д2 +—=----------—15оа + ——25аа =--------а (рис. 7.3.1,г).
а а2 а2 а а
Рассмотрим обратносимметричный нагрев. В этом случае будем иметь
Д/, = 40-10 = 30°; Д/2 =20-10 = 10°.
С помощью табл. 7.3 строим эпюру изгибающих моментов М” в двух-
однопролетных балках от неравномерного нагрева (рис. 7.3.1, д). Следует
275
18*
отметить, что растянутая при изгибе зона располагается по стороне меньше-
го приращения температуры.
Находим реактивный момент во введенной заделке:
= ЗИаДгк_Зйа^ = ЗШ(зо |0)=30По
11 2h 2h 2й ' ' Л
Подставляем полученные значения в каноническое уравнение метода
перемещений:
6EI ЗОЕ/ ЗОЕ/ Л 6 30 300
----Z, +----а+----а = 0, или —Z] +—а+---а =0,
a a h а а а
T.e.Z] = -55a.
Строим эпюру изгибающих моментов М = MtZt + Л/, + М* в заданной
системе (рис. 7.3.1, е). Построение эпюр Q и N производится обычным путем
и не вызовет трудностей.
Эта же задача была решена ранее методом сил (см. задачу 6.2.1). Как
видно из рис. 6.2.3, а и 7.3.1, е, эпюра изгибающих моментов получилась
одинаковой в обоих случаях, что и должно быть.
Задача 7.3.2. Построить эпюры изгибающих моментов и поперечных
сил для трехпролетной балки, подверженной температурному воздействию
(рис. 7.3.2, а). Высоту балки принять h = //10.
Решение, Симметричное воздействие температуры не вызовет в балке
внутренних усилий, так как опорные стержни не препятствуют горизонталь-
ному смещению сечений балки. Следовательно, внутренние усилия будут
вызываться обратносимметричным нагревом.
Балка два раза кинематически неопределима (рис. 7.3.2, б), поэтому сис-
тема двух канонических уравнений метода перемещений имеет вид:
ruz\ +rnz2 +Ru
r2lZl +r22Z2 + R2t =0»
где, согласно рис. 7.3.2, в, получаем
ЗЕ/ 4Е/ 7Е/ 2Е/
г..=—; '•2,=—=П2.
из рис.7.3.2, г имеем г22 = ТЕ! //, а применяя табл. 7.3 и рассматривая рис.
7.32,д, находим А/, =30-20 = 10°, А/2 =30-10 = 20°,
| 5Е/а 50Е/
Г h ~ / а*
210оЪ_^
2 ) I
20-
п. Е!а д ЗЕ/a д Е/
h 2h h
EIci д ЗЕ/а д
Л2,__—2V2+ — 2V,_-.
Перепишем систему канонических уравнений метода перемещений,
предварительно подставив в них полученные значения коэффициентов:
276
IE! 2EI 50Е/
__Z14.__z2+—a=°:
2EI _ IE! 50Е/ _
_-Z1+ — Z2-—a=0.
Решая эту систему двух уравнений,
определяем Z,=-Z2=-10a и строим
эпюру изгибающих моментов
М = MXZ{ + M2Z2 + М’ (рис. 7.32, е)
и поперечных сил Q (рис. 7.3.2, ж) в за-
данной балке.
Задача 7.3.3. Построить все необхо-
димые эпюры внутренних усилий для ра-
мы, показанной на рис. 7.3.3, а.
Решение. Эпюры моментов от еди-
ничного угла поворота Z| = 1 опоры 1 и
горизонтального смещения опоры 2 на
единицу (Z2 = 1) (рис. 7.3.3, б) показаны на
рис. 7.3.3, в, г, соответственно.
Система канонических уравнений ме-
тода перемещений имеет вид
+г12%2 +^и
г21^! + г22^2 +^2Г + ^2f = ®>
где коэффициенты гч вычисляются обыч-
ным путем по рис. 7.3.3, в, г:
ЗЕ/ 4Е/ 5.5Е/
Гц — F — j
/ 1,6/ /
6Е/ 3,75Е/
ГП “ (1,6/)2 " 1,6/2 ~Г2'’
= 12Е/ ЗЕ/ 15Е/
ГП ~ (1,6/)3 + (1,6/)3 ” (1,6/)3 ’
/?,', , R2i - реакции во введенных связях от
А/, = 10° А/2=10° А/, = 10°
+30° +30° +30°
д)Обратносимметричный нагрев
е'. S~\\W)EIa/r,
Рис. 7.3.2
симметричного действия температуры; RXtt R2l - то же, но от обратносим-
метричного действия температуры, для определения которых определим
сначала удлинения всех стержней рамы (рис. 7.3.3, д):
Aq| — CL —— 1,6/— 0,8ct/(/| +/2)» ^23 = Aqi» А|2 = О. /.
Затем с помощью табл. 7.1 и рис. 7.3.3, д строим эпюру изгибающих мо-
ментов в основной системе от действия симметричного нагрева (рис. 7.3.3, е)
ТП
р у j j симметричный нагрев
и определяем реактивный момент из уравнения равновесия ЕЛ/, = 0 для вы-
резанного узла 1
6£/ д 3£/a(/j+/2)
,2 = 1.62/
из уравнения равновесия Ех = 0 для всей основной системы (рис. 7.3.3, е)
находим
12£/ _ 3,75£/a(rj+r2)
~-------Г А|2 ~----------------•
(1,60 1,б2/2
По табл. 7.3 строим эпюру изгибающих моментов в основной системе от
обратносимметричного воздействия температуры (рис. 7.3.3, ж) и вычисля-
ем реакции во введенных связях:
3£/а(Г| -r2) £/a(Z) -t2) _ £/a(/j -r2)
' 2h h 2h
R. 3Ela.(ti-t2) l,5£/a(r, -r2)
2/ 2Л1,6/ 1,6/Л
278
WTTTTT
Подставим полученные значения коэффициентов в систему двух кано-
нических уравнений:
3,75£/, ( 3£/а(<| +<2) । £/а(/, -<2)
I ' 1,6/2 2 1,62/ 2А
3,75£/ 15£/ 3,75£fafr| +h) IjgWi
1,6I2 l + (l,603 2 1,62/2 + 1.6/A
Для дальнейшего расчета примем, что /i = 10°, t2 = Oth = //10. Решая сис-
тему двух уравнений, находим
Zj = -28,08а; Z2=-39,59а/.
Определив угол поворота Z| узла 1 и горизонтальное линейное смеще-
ние Z2 шарнира 2, можно построить окончательную эпюру изгибающих мо-
ментов в заданной раме (рис. 7.3.4, а) по формуле
л/ = л/jZj + a72z2 + /и;+л/;,
эпюру поперечных (рис. 7.3.4, б) и нормальных (рис. 7.3.4, в) сил.
7.4. Расчет статически неопределимых балок и рам
на заданные смещения опор
Задача 7.4.1. Определить внутренние усилия в двухпролетной неразрез-
ной балке постоянного поперечного сечения, возникающие при вертикаль-
ном смещении правой шарнирно подвижной опоры С на величину с
(рис.7.4.1, а).
Решение. Каноническое уравнение метода перемещений для один раз
кинематически неопределимой балки имеет вид (рис. 7.4.1, б)
279
в с rj|Z| + —0,
* 1 1,5/ Н где Ric - момент во введенной за-
а* делке, возникающий при вертикаль-
ном смещении опоры С. Согласно
/Чг 1 рис. 7.4.1, в получаем
б: , Основная система А 4Е/ ЗЕ/ 6Е/
• ^T^Zi = 1 1 1 1 11 / и/ / ’
• 1 1 1 -4 По рис. 7.4.1, г определяем о F1
!2Е/// 1 т 1 1 R'C~ 1,5/2*
в ; ЗсЕ! 1 1 1 Подставив полученные значения
П 5Л2 ГГТТТг^ гн и /?и в каноническое уравнение
а— |||| ГгТтт-г^ метода перемещений, находим
<№)cEI\
^444сЕ/ d; I2 (л?) 0,59сЕ///3
1 1 1 1Ш II1 1 1
lliaiH : \&сЕиР е; ! 0,444сЕ///2 j @
\1Я , t 0,59cE///3/j 1,ЗЗсЕ/// | f 92cEI/p 1
Опорные реакции
Рис. 7.4.1
7 R\C C
' 4,5/*
Окончательно эпюра изгибающих
моментов для заданной балки стро-
ится по формуле
М = Л/, Zj + Мс (рис. 7.4.1, д).
Эпюра изгибающих моментов М
дает возможность построить эпюру
поперечных сил Q (рис. 7.4.1, е). По
эпюрам М и Q находим опорные
реакции двухпролетной балки (рис.
7.4.1, ж).
Статическая проверка заключа-
ется в проверке уравнений равнове-
сия для всей балки (рис. 7.4.1, ж):
V- EI z Л х Л
MA = -^c(l,92/-0,59-2,5/)=0,444^
Задача 7.4.2. Построить необходимые эпюры внутренних усилий, кото-
рые могут возникнуть в ломаном стержне, если опора В переместится верти-
кально вниз на величину с (рис. 7.4.2, а). Все участки ломаного стержня
имеют постоянную жесткость на изгиб (Е/=const).
Решение. Представленная на рис. 7.4.2, а два раза кинематически не-
280
определимая рама уже рассматривалась ранее в задаче 7.2.3, поэтому основ-
ную систему, эпюры Л/, и Л/2 возьмем на рис. 7.2.9. В той же задаче вы-
числены значения
1Е1 2EI 7EI
~ I Г12 - Г21 - ; г22 - •
а а а
Необходимо построить также эпюру Мс (рис. 7.4.2, б) и определить ре-
активные моменты, возникающие в заделках при смещении опоры В верти-
кально вниз на величину с:
ЗсЕ1 ЗсЕ1
К1С -----К2С - 7~-
а а
Канонические уравнения метода перемещений
r2iZ) +r22Z2 +^2C - °
примут вид:
Z^Z|_^z2_2£«=o;
а а а2
а а а2
решая которые, находим:
Z|=-Z2=^
5a
281
Теперь можно построить эпюру изгибающих моментов в заданной раме
от заданного смещения опоры В:
M = MtZ} + M2Z2 + Мс (рис. 7.42, в).
Затем строим эпюру поперечных сил (рис. 7.4.2, г) и эпюру нормальных
сил (рис. 7.4.2, д).
Для определения нормальных сил в горизонтальных стержнях рамы вы*
режем фрагмент рамы (рис. 7.4.2, а) и составим для него уравнения равнове-
сия (рис. 7.4.2, е):
£>=-ЛГи+ЛГВ =0. т.е.
— 6сЕ1 „ 6сЕ1 „ „ ЗсЕ1
£J>’ = —ч—^в +—г = 0» откуда находим ;
5а 5а 5а
= NAa-^^-+^f = O, или АС, = 0 = NB.
5а 5а2
Таким образом, поставленная задача решена.
Проведем кинематическую проверку полученных результатов и убедим-
ся, что вертикальное смещение правой шарнирно неподвижной опоры D
равно нулю (Д^" = 0) •
Для этой проверки необходимо дополнительно построить эпюру изги-
бающих моментов Мп от вертикальной единичной силы, приложенной в
сечении D статически определимой рамы, полученной из заданной рамы
отбрасыванием лишних связей (рис. 7.4.3), причем в качестве лишней связи
необходимо обязательно принимать опорный стержень, который по условию
задачи смещается на заданную величину.
Затем, перемножая по правилам Верещагина эпюру изгибающих момен-
тов М в заданной раме (см. рис. 7.42, в) на единичную эпюру М D (рис.
7.4.3), находим вертикальное перемещение опоры D заданной рамы:
Рис. 7.4.3
дТ= —
D EI
1 2 2 6с£/ Л 1
-а*------=- + 0—
.2 3 5а2
2 6с£/)
3 5а2 J
0.
282
Раздел 8
НЕУПРУГОЕ ДЕФОРМИРОВАНИЕ
(по материалам лекций 23,24)
8.1. Предельная нагрузка для стержневой системы
Задача 8.1.1. Определить предельную нагрузку для стержневой систе-
мы, показанной на рис. 8.1.1. Предел текучести материала стержней принять
оу = 285 МПа. Балку АВ считать абсолютно жесткой (Е/ = оо ).
Решение. Пусть «течет» стержень 1 (рис. 8.1.1, о). При таком предполо-
жении в стержне 1 должно возникнуть напряжение, равное пределу текуче-
сти Оу (рис. 8.1.1,6), следовательно,
Л^, = = 285-103-2-10”4 =57кН.
Так как в стержне 1 появляются очень боль-
шие растягивающие деформации, то конструк-
ция превращается в механизм. Балка АВ придет в
движение и начнет поворачиваться вокруг точки
В. Запишем уравнение равновесия (рис. 8.1.1, б):
S*/e = W.i-4-F.r3 = Q.
откуда находим
Ful =42Vbl /3 = 4-57/3 = 76 кН.
А теперь предположим, что «течет» 2-й
стержень (рис. 8.1.1, в), тогда
Ли2 = =285-103-Ы0и =28»5кН.
В этом случае появится возможность враще-
ния балки АВ вокруг точки А. Отсекая верхнюю
часть конструкции, составим уравнение равнове-
сия (рис. 8.1.1, в):
Х"л=Л'.2-4-£1,21=0,
откуда находим Гь2 = 4Nu2 = 4-28,5 = 114 кН.
Таким образом, получили два значения пре-
дельной нагрузки, из которых истинное значение
будет наименьшим:
Fu = mm{FL1;F„2} = {76;114} = 76кН.
Задача 8.1.2. Определить предельную на-
грузку Fu для системы стержней (рис. 8.1.2, а).
Дано Л| = 4 см2, А2 = 3 см2, А3 = 2 см2 Оу = 285 МПа.
Решение. Определим предельные нормальные усилия, которые могут
возникнуть в стержнях системы:
283
Рис. 8.12
Nul =oyAi = 285 000-4-10"4 = 114кН; Nu2 = 285000-3-10“4 = 85,5 кН;
Nu3 = 285 000-2-10-4 =57 кН.
Для образования механизма рассматриваемой системы достаточно тече-
ния каких-либо двух стержней. Возможны три механизма разрушения.
Первый механизм разрушения. Пусть текут стержни 2 и 3, а стержень /
работает еще в упругой стадии (рис. 8.1.2, б). Проводим ось а-а, перпенди-
кулярную направлению нормальной силы Nh Проектируем все силы на эту
ось: Ful cos 70° -Nu2 cos 60° ~Nu3 cos 30° = 0 и определяем
f,=«*^^Z^=2693kH.
cos70‘
Второй механизм разрушения. Пусть текут стержни I и 3, а стержень 2
работает в упругой стадии (рис. 8.1.2, в). Проводим ось б-б, перпендикуляр-
ную направлению оси стержня 2. Проектируем все силы на эту ось:
Fu2 cos 80° -Nu3 cos 60° -Nui cos 60° =0
и находим
. ^,cos60° IMcoseO»
*2 —-----------—----------— Kn.
cos 80° cos 80°
При возникновении второго механизма разрушения стержень 2 будет
вращаться вокруг шарнира А (рис. 8.1.2, а), следовательно, стержень / будет
растягиваться, а стержень 3 сжиматься (рис. 8.1.2, в). В этом случае полага-
ем, что = 0, т.е. его влияние идет в запас прочности конструкции, так как
предполагаем, что сжатый стержень теряет устойчивость и в нем нормаль-
ные напряжения не достигают значения предела текучести.
Третий механизм разрушения. Пусть текут стержни / и 2, а стержень 3
работает в упругой стадии (рис. 8.1.2, г). Проводим ось e-е, перпендикуляр-
ную направлению оси стержня 3. Проектируем все силы на эту ось:
284
Fb3cos50° -NWIcos30° -/V„2 cos 60° =0,
откуда
A;, cos 30е 4-cos 60е
cos50°
= 220 кН.
Истинное значение предельной нагрузки будет наименьшим из получен-
ных трех нагрузок Ful, Fbi Fb3:
Fu = min{Fbl,Ftt2.Fb3} = min{269,3; 328,3; 220} =220 кН.
Задача 8.1.3. Дана плоская шарнирно-стержневая система, состоящая из
абсолютно жесткого бруса BD, опертого на шарнирную опору О (рис. 8.1.3).
Брус BD прикреплен к двум стержням BBt и СС( с помощью шарниров. Пло-
щади поперечных сечений стержней ВВХ и CCt принять равными А. Предел
текучести материала стержней BBt и CCt - Оу. Определить предельную на-
грузку F„.
Решение. Пусть «течет» стержень ОД,
т.е. в нем возникает нормальная внутренняя
сила Nui = (ТуА- Однако при этом конструкция
не придет в движение, т.е. возможный меха-
низм разрушения не проявляется.
Предположим, что одновременно «по-
текли» два стержня (BBt и (ОД), тогда в них
возникнут одинаковые предельные нормаль-
ные силы:
Мл = ОуА; Nu2 = СуА.
По условию задачи стержни имеют оди-
наковые площади поперечных сечений А.
Конструкция начнет вращение вокруг
точки О (рис. 8.1.3, б). Составим уравнение
равновесия в начальный момент времени:
SA/o = ^2-1 + 7V1i1-2-Fu-3 = 0
и находим значение предельной нагрузки
“ 3 3'
Задача была решена методом, определяемым статическими теоремами
теории предельного равновесия. Решим эту же задачу методом, определяе-
мым кинематическими теоремами теории предельного равновесия. В этом
случае будут использоваться формулы для определения работ W внутренних
и внешних сил F:
W/=FA,
где А - путь, пройденный силой F. Работа вычисляется без коэффициента
285
1А (см. теорему Клапейрона), так как движение конструкции начинается, ко-
гда силы достигли своего предельного значения и во время движения оста-
ются постоянными.
м у______м j/ м и На рис. 8.1.4 изображено положение абсо-
ду | J J лютно жесткой балки BD до начала движе-
* 2 ел- __С Р ния и ее положение через некоторое время
В "'. Р ——□'Ал после начала движения. При появлении воз-
Д/1 w
можного механизма разрушения стержневой
Рис. 8.1.4 конструкции стержни ВВ{ и СС\ начинают
удлиняться. В какой-то момент времени по-
сле начала движения они удлинятся на величины Д/2 и Д/( соответственно, а
точка D сместится на величину Ду (рис. 8.1.4).
Рассматривая подобие соответствующих треугольников схемы, изобра-
женной на рис. 8.1.4, можно записать следующие соотношения:
ДА Д/, ДА Дг
—-=—т.е. Д/. = 2ДА, —- = —т.е. Дг = ЗД72.
12 1 2 1 3 h 2
Составим условие равенства работ внешних (Fb) и внутренних (А^ь А^)
усилий (см. рис. 8.1.3, а):
FuAf = Nu2&12 +А^И|Д/|, или Fu -ЗД/2 -<jyAAl2 +ауА-2Д12,
откуда получаем значение предельной нагрузки:
ЗАсг ДА
=—^—=Atr>-
зд/2
Результаты, полученные двумя способами, совпали.
Задача 8.1.4. Определить предельную нагрузку Fu для стержневой сис-
темы, представленной на рис. 8.1.5, а. При расчете принять предел текучести
Рис. 8.1.5
материала стержней оу = 285 МПа, брус
BD - абсолютно жесткий.
Решение. Из рассмотрения рис. 8.1.5
очевидно, что возможный механизм раз-
рушения конструкции, изображенной на
рис. 8.1.5, появится, если «потекут» одно-
временно два стержня (1 и 2).
Определим предельные нормальные
силы Nul и Nu2-
Nul =ауА, = 285 103-5 10^ =142,5кН;
Nu2 = °УА2 =285 1О31О1О“4 =285кН.
Составим уравнение равновесия отсечен-
ной части конструкции (рис. 8.1.5,6):
XA/e=Wrfl + W.2-3-F.-W = 0.
286
из которого найдем значение предельной сосредоточенной внешней силы:
_ 142,5 + 285 3
Fu =---------------= 665 кН.
1,5
Решим эту же задачу методом, определяемым кинематическими теоре-
мами теории предельного равновесия.
На рис. 8.1.6 представлено положение балки BD (см. рис. 8.1.5) до и по-
сле возникновения механизма разрушения. Определим соотношения между
удлинениями Д/2 и ЛА двух стержней и перемещением Деточки приложения
внешней нагрузки:
ДА 1 ДА 1
— = -, т.е. Д/2 =ЗД/); —- = —, откуда Дг = 1,5Д/,.
Д/2 3 Дг 1,5
Составим условие равенства работ внутрен-
них Nuh Nu2 и внешних Fu сил (рис. 8.1.6):
откуда получаем значение предельной нагрузки:
_ 142,5А/, + 285-ЗА/,
ги —--------------------= 005 кН.
“ 1,5Д7,
Результаты, полученные двумя способами,
совпали.
Рис. 8.1.6
Д/2
8.2. Предельная нагрузка для балок
Задача 8.2.1. Дана статически неопределимая балка постоянного прямо-
угольного поперечного сечения (рис. 8.2.1, а).
Рис. 8.2.1
287
Определить предельную нагрузку FM если предел текучести материала
балки сгу = 285 МПа.
Решение. Определяем предельный изгибающий момент (момент текуче-
сти):
Ми = с — = 285 000^^-= 285 кН м.
у 4 4
Для балки, нагруженной сосредоточенными силами, эпюра изгибающих
моментов изображается ломаной линией (рис. 8.2.1, б). Пики эпюры момен-
тов будут находиться в заделке и в точках приложения сосредоточенных
сил. В этих сечениях и могут возникать пластические шарниры. В рассмат-
риваемом случае возможны два механизма разрушения балки.
Первый механизм разрушения. Предположим, что пластические шар-
ниры образовались в заделке и в сечении на расстоянии Л = 3 м от заделки
(рис. 8.2.1, в). Составим уравнение предельного равновесия для всей балки
(рис. 8.2.1, в):
ЦМл = К -FM +/2)+^>(/| +/2 +/3) = 0
и для правой части балки (рис. 8.2.1, г):
^л/с = к+г„/2-гЯ1(/2+/})=о.
В результате получена система двух уравнений с двумя неизвестными
величинами Fui и К0):
-13Fbl +10Гя =0;1
«.+^„,-7^=0, J
решая которую, находим первое значение предельной нагрузки Fui:
17 17
?ui “ К = —285 = 95 кН.
Второй механизм разрушения возможен при возникновении пластиче-
ских шарниров в заделке и в сечении на расстоянии /3 = 3 м от правой опоры
(рис. 8.2.1, д). Составим уравнение предельного равновесия для всей балки
(рис. 8.2.1, 0):
У, мл = M„-2F„2/,-FM +l1')+VB2<li +11 +/з) = 0
и д ля правой части балки (рис. 8.2.1, е): Мк = Ми - VB2l3 = 0.
В результате получена система двух уравнений с двумя неизвестными
величинами Fu2 и
Ми-13Fu2 + 10Кд2 =0;)
Ч,-зкЯ2=о, J
решая которую, находим второе значение предельной нагрузки F^:
288
F = — м =—285 = 95 кН.
39 3
Истинным значением предельной нагрузки должно быть наименьшее из
Fu и но в нашем случае обе предельные нагрузки равны, следовательно,
Fu = min{Fbl, Fu2}= min{95; 95} = 95 кН.
Задача 8.2.2. Пусть дана однопролетная статически неопределимая бал-
ка, нагруженная двумя сосредоточенными
силами (рис. 8.2.2). Материал балки - сталь
с пределом текучести ау - 285 МПа. Балка
имеет прямоугольное поперечное сечение
АхА>=0,2 м х0,1 м.
Требуется определить предельную на-
грузку Fu.
Эта задача была решена в примере 8.2.1
методом, определяемым статическими тео-
ремами теории предельного равновесия.
Решим эту же задачу методом, определяе-
мым кинематическими теоремами теории
предельного равновесия. В этом случае бу-
дут использоваться формулы для определе-
ния работ IV внутренних и внешних сил F и
моментов М:
W=FAhW=M©, (8.2.1)
где А - путь, пройденный силой F; © - угол
поворота сечения.
Решение. Первый механизм разруше-
Рис. 8.2.2
ния образуется при возникновении пластических шарниров в сечениях А и
С. Составим уравнение равенства работ внешних и внутренних усилий:
2FlIAj + Fw1A2 = Ми®' + Л/Д©, +©2). (8.2.2)
Учитывая малость углов, запишем (рис. 8.2.2, а):
rg0] «©, « A, //,, откуда А, = ©,/, =3©], далее (g©2 «©2 «А,/(/2 +/3),
откуда ©2 = Д) /7 = 3©, П.
Из подобия треугольников (рис. 8.2.2, а) определяем
3©,3_9
7 ”7
©,.
h +h
Полученные выражения подставим в уравнение равенства работ (8.2.2):
2Ful -3©! + Fbl90, /7= Ми®' + Л/Д©, +3©, /7),
откуда и определяем предельную нагрузку FbI для первого варианта разру-
шения балки (рис. 8.2.2, а):
19 С. II. Кии
289
Fkl = — Ми =1.0Л °*22 285 000 = 95 кН.
51 3 4
Полученный результат совпал с результатом, полученным в примере
8.2.1.
Рассмотрим второй возможный механизм разрушения балки. Он будет
при возникновении пластических шарниров в сечениях А и К (рис. 8.2.2,б).
Составим уравнение равенства работ внешних и внутренних сил:
2Fu2 д4 + f„2 д3 = мие3 + Ми(е3 +о4). (8.2.3)
Согласно рис.8.2.2, б с учетом малости углов О, запишем
tg©3 » О3 » Д3 /(/j + Z2) = Д3 /7,откуда Д3 =7©3; lg©4 »О4 » Д3 /Z3,
откуда О4 = 703 //3 = 7О3 /3.
Из подобия треугольников (рис. 8.2.2, б) определяем
Д3 /.+/2 Д3А Д33 7О3-3
= откудад4=7ЛЛ-=-2--------2----зе3.
Д4 /j *|+^2 7 7
Полученные выражения дляД3,Д4,04 подставим в уравнение работ
(8.2.3) для второго возможного механизма:
7Fu2 -ЗО3 + Fu2 703 = Л/ИО3 + Л/ь(03 +7О3 /3),
откуда и находим предельную нагрузку Fu2:
= 95 кН.
Окончательно получаем:
Fu - min{Fui, F,a}= min{95; 95}= 95 кН.
Задача 8.2.3. Определить предельную нагруз-
ку для балки постоянного сечения, показанной
на рис. 8.2.3, если /| = /2 = /, EIZ = const по всей
длине балки; иу - предел текучести материала
балки; - пластический момент сопротивле-
ния.
Решение. Эпюра изгибающих моментов М
рассматриваемой неразрезной двухпролетной
балки будет содержать только ломаные линии
(рис. 8.2.3, б). Пики эпюры моментов будут на-
ходиться на средней опоре и в точке приложе-
ния сосредоточенной силы. В этих сечениях и
могут возникнуть пластические шарниры. В
рассматриваемом случае возможен один меха-
низм разрушения балки (рис. 8.2.3, в). На участке BD балки будут находить-
ся три шарнира, следовательно, конструкция превратится в механизм.
290
Определяем предельный изгибающий момент (момент текучести):
Мы =<TyWI4>,.
Составим уравнение предельного равновесия для правой части балки
(рис. 8.2.3, г):
Емс =(/oy-W, =0, откуда VD =^-.
и для всей балки: £ Мв = Fu - VDl2 -Ми =0, откуда
Рис. 8.2.4
6М*
/2 /2
Решим эту же задачу методом, определяемым кинематическими теоре-
мами теории предельного равновесия. Составим уравнение равенства работ
внешних и внутренних сил (рис. 8.2.4):
ГИД = ЗМЬ6.
Принимая во внимание, что
tge=—=—«е,
/2/г /2
запишем формулу равенства работ внешних и
внутренних сил в виде
ГвД = ЗМи2Д//2,
откуда находим значение предельной внешней нагрузки: Fu = ——
Результаты, полученные двумя способами, совпали.
Задача 8.2.4. Определить двумя методами предельную нагрузку для
один раз статически неопределимой балки (рис. 8.2.5, а) постоянного попе-
речного сечения (рис. 8.2.5, б).
Решение. Построим эпюру изгибающих моментов для рассматриваемой
балки. Отбрасываем правую шарнирно подвижную опору. К полученной
статически определимой консольной балке прикладываем единичную силу в
сечении С и строим эпюру М (рис. 8.2.5, в). Затем строим грузовую эпюру
Л4 (рис. 8.2.5, г).
Каноническое уравнение метода сил для рассматриваемого случая будет
иметь вид<5'цЛ1 +Д1Л =0,где коэффициенты <5Н, Ди- определяются с при-
менением правила Верещагина:
19*
291
тогда
ди
-2 /—-2 - 0-/ 0-- —
2 2 2 2
5FZ3
48Е/„ ’
Ди 5F/3 3£/g 5 F
6И 48£/„ р 16 ’
где 1К - осевой момент инерции поперечного сечения (рис. 8.2.5, б) относи-
тельно оси zo проходящей через центр тяжести всего поперечного сечения.
Зная Jfj = Vc, легко построить эпюру изгибающих моментов М для ста-
тически неопределимой балки (рис. 8.2.5, д). Наибольший изгибающий мо-
мент будет в сечении А у заделки.
При увеличении нагрузки F пластический шарнир сначала возникнет у
заделки А (рис. 8.2.5, е), но при этом несущая
способность балки не будет исчерпана, так как
еще не появится механизм разрушения. После
дальнейшего увеличения нагрузки пластичный
шарнир появится в сечении В под силой. В мо-
мент появления второго пластического шарни-
ра система обращается в механизм (три шарни-
ра на одной прямой) (рис. 8.2.5, е).
Составим уравнение равновесия для всей
балки:
и для ее правой части (рис. 8.2.5, ж):
YMB=Mu-RcI/2 = 0.
Из второго уравнения находим Rc = 2М,Д.
Подставим полученный результат в первое
уравнение равновесия:
Л/ъ+2A/l/Z/Z-Fl/Z/2 = 0,
откуда находим
292
с 6М„ ба,^
-=~г=—1—•
Вычислим пластический момент сопротивления сечения балки (см.
рис. 8.2.5, б). Нейтральная линия в зоне пластического шарнира разделяет
поперечное сечение на две равновеликие площади, т.е. в нашем случае ней-
тральная линия z находится на уровне сопряжения полки со стенкой.
Ордината центра тяжести площади полки - у, = 2,5 см, а ордината цен-
тра тяжести площади стенки -у2 = 10 см, следовательно,
^z.pZ = 5zl + *^z2 = АУ1 +^2У2 =
= 20-5-2,5 + 20-5-10 = 1250 см3 =0,00125м3.
Таким образом, предельная нагрузка при / = 2 м и су = 280 МПа будет
62№40Ч25401 = 1050кН_
“ 2
Решим эту же задачу, составляя условие равенства работ внешних и
внутренних сил (рис. 8.2.5, з):
Fb-Д = ЗЛ/И-0, т.е. Е|/=ЗЛ/и0/Д.
Запишем геометрическое соотношение:
Д ЗЛ/ИД 6Ми
tgG =---~ 0, тогда F =--------=------.
1/2 и (//2)Д /
Результаты, полученные двумя методами, совпали.
83. Предельная нагрузка для рам
Задача 83.1. Определить предельную нагрузку для рамы, изображенной
на рис. 8.3.1, а. Стойка и ригель рамы имеют одинаковые поперечные сече-
ния.
Решение. В соответствии с кинематической теорией из всех возможных
механизмов разрушения действительным будет тот, который соответствует
минимальной нагрузке. Эта минимальная нагрузка и будет являться пре-
дельной.
На рис. 8.3.1, б - г показаны три возможных механизма разрушения и
действующие на них внешние силы и моменты текучести Ми (предельные
изгибающие моменты).
Составим для каждого механизма разрушения уравнение равенства ра-
бот внешних сил и предельных изгибающих моментов:
1-й возможный механизм разрушения:
F.^=M.6^Mae^2M.6x-,
2-й возможный механизм разрушения:
293
механизм разрушения механизм разрушения механизм разрушения
Рис. 8.3.1
+ 27^2^2 ~Ми&2 ~2М и&2*
3-й возможный механизм разрушения:
fl3a3 +2fl3a3 / 2=л/„е3 +мие3 =2мие3.
Из рассмотрения рис. 8.3.1, б - г получим необходимые геометрические
соотношения:
Полученные значения углов 0, подставляем в уравнения работ:
Д. 2Л/„
Л,|Л1 =2Л/иу, откуда Ful
ЗГ.2Д2 =2Л/„^-, откуда F„2 =^-;
2F„3A3 = 2Л/„^-, откуда Г_3 =^~.
Истинным значением предельной нагрузки будет наименьшее из FM.
г _ . , . [2Ми 2Ми Л/Д_Л/И
Fu —nun{FV], Fb2,Fu3] min| * 3/ ’ 2/ J 2/ '
Действительным механизмом разрушения рамы будет механизм, изо-
браженный на рис. 8.3.1, г.
294
Раздел 9
УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
(по материалам лекций 25-27)
9.1. Расчет на устойчивость систем
с одной или двумя степенями свободы статическим методом
Задача 9.1.1. Дана стержневая система с двумя степенями свободы (рис.
9.1.1). Стержни - абсолютно жесткие (£/ = <»). Определить величину силы
F = выводящую систему из начального положения равновесия.
Решение. Все три звена стержневой системы в начальном положении
лежали на одной прямой линии АВ. Когда сила F достигла критического
значения F^, система потеряла устойчивость и заняла положение ломаной
линии ACDB. Запишем два уравнения равновесия для системы, потерявшей
устойчивость:
X мв = R~гп~ri\a2 ‘I= о»
+RB ~rIlflI ~гпа2 =®»
тогда из первого уравнения равновесия находим
Ra=——
А 3
а из второго RB =ги(О| + a2)-RA = г11(о1 + а2)~
где п 1 - жесткость упругой опоры.
Наличие шарниров С и D позволяет поста-
вить еще два условия (рис. 9.1.1):
Мс=Рсгах-КА1 = Рсгщ-^^.ги1 =
Мп = — RBl = Fc,a2 -21±^-r„l =
(1)
Последние два уравнения являются одно-
родными относительно at и а2, следовательно,
чтобы система рассматриваемых двух уравне-
ний имела решение, необходимо приравнять
нулю детерминант, составленный из коэффици-
ентов при at и а2:
295
Рис. 9.1.2
^~r„l
’Г11'
-Г11'
f7 2 /
FCT ^Г|1^
него значение FcrI. В этом случае получим
откуда получаем
^-|г"//^Чг"/2=о-
Последнее уравнение имеет два корня:
^,.1 = “ П |Л Fcr,2 = П lZ-
За расчетное значение критической си-
лы принимается минимальное значение,
т.е.
Fcr =Fcr,\ =rnU3.
Найдем формы неустойчивого равнове-
сия, отвечающие каждой из критических
сил. Для этого возьмем любое из уравне-
ний (1), например первое, и подставим в
1 ,
—гн/о2 =0, или -а{ =
°2-
D =
Полученный результат ~at = а2 показывает, что расчетной критической
силе F„,i соответствует обратносимметричная форма потери устойчивости
(рис. 9.1.2, а).
Подставляя значение Ffr 2 в первую формулу (1), определяем
Следовательно, критическая сила F^ вызывает симметричную форму
потери устойчивости (рис. 9.1.2, б).
Задача 9.1.2. Два бесконечно жестких стержня связаны между собой
шарниром (рис. 9.1.3) и оперты на упругие пружины, жесткость которых
равна А. Определить критическое значение сжимающей силы.
Решение. Решим поставленную задачу статическим методом с помощью
уравнений равновесия для отклоненного состояния. Для этого рассмотрим
систему, показанную на рис. 9.1.3, в отклоненном состоянии, т.е. после по-
тери устойчивости. В отклоненном состоянии на упругих опорах возникнут
опорные реакции Ra = ках и Rb = ka2t где к - жесткость упругих связей (пру-
жин), равная силе, вызывающей единицу деформации упругой связи (пру-
296
Рис. 9.1.3
жины). Будем считать, что к - известная величина. Составим условие равно-
весия моментов относительно точки О'.
’£Mo=Fcra1-Rl>2l+Rat = 0,
а после подстановки в полученное выражение значений опорных реакций Ra
и Rbполучим
fl|(*7) + a2(FCr-2*7) = O.
Составим также условие равенства момента нулю в шарнире А в откло-
ненном состоянии:
М/! =
а после подстановки в полученное выражение значения опорной реакции Rb
получим
al(Fcr)+a2(Fcr~kl) = Q.
Таким образом, имеем систему двух однородных уравнений с двумя не-
известными геометрическими параметрами at и а2, следовательно, определи-
тель, составленный из коэффициентов при неизвестных at и о2, должен быть
равен нулю:
= 0.
\Н Fcr-2ki
к Гсг-Н
Раскрывая определитель, получим уравнение второй степени
F2-3k!Fcr+k2l2 =0,
решения которого имеют вид: Fcr = \$kl± 1,12А7,
откуда находим два значения критической силы:
Fcri = 0,38Л/ и Fcr2 = 2,63kl.
Окончательно принимаем F„ = 0,38Л7 как наи-
меньшую критическую силу, вызывающую потерю
устойчивости.
Задача 9.1.3. Определить критическую силу для
абсолютно жесткого стержня, показанного на рис.
9.1.4. Жесткость упругой опоры обозначена через к.
Решение. Предположим, что стержень потерял
устойчивость и занял новое положение. После поте-
Рис. 9.1.4
297
ри устойчивости на опоре А возникнет опорная реакция RA = kat где а - от-
клонение вершины стержня от устойчивого положения в горизонтальном
направлении. Составим условие равенства нулю изгибающего момента в
шарнире В: Мв = Fcra-ka-l = 0, откуда находим значение критической си-
лы Fcr = kl.
Задача 9.1.4. Определить критическую силу для абсолютно жесткой
системы, показанной на рис. 9.1.5. Жесткость двух упругих опор одинакова
и обозначена через к.
Решение. Пусть система потеряла устойчивость и заняла новое положе-
ние, обозначенное на рис. 9.1.5 пунктирными прямыми линиями.
В результате потери устойчивости на опорах возникнут опорные реак-
Рис. 9.1.5
ции R = ка, где а - вертикальное
отклонение концов горизонтально-
го участка системы. На такое же
расстояние а переместится в гори-
зонтальном направлении верхний
конец системы вместе с критиче-
ской силой. Запишем условие ра-
венства нулю суммы моментов в
точке О:
5>о=Гсга-Я-2/ = 0,
откуда находим значение критиче-
ской силы:
Г__ = 2Rlla = 2kalla = 2kl.
9.2. Расчет на устойчивость систем с одной или двумя степенями
свободы энергетическим методом
Задача 9.2.1. Определить значение критической силы с помощью энер-
гетического метода для абсолютно жесткой системы, изображенной на рис.
9.2.1. Жесткость двух упругих связей одинакова и обозначена через к.
Решение. Пусть система потеряла устойчивость и заняла новое положе-
ние. Так как стержни абсолютно жесткие, то они не будут изгибаться, а ос-
танутся прямыми. В результате потери устойчивости на упругих опорах воз-
никнут опорные реакции R = Ла, где а - вертикальное отклонение концов
горизонтального участка системы. На такое же расстояние а переместится в
горизонтальном направлении верхний конец системы вместе с критической
силой Fcr, а в вертикальном направлении перемещение верхнего конца сис-
темы составит (рис. 9.2.1)
Д=/ -/cosa = /(1 - cosa)=/2sin2 у ~ /^^ =
298
Кроме того, имеем, что
tga = all я a,
откуда а = cd, В этом случае фор-
мула для вычисления полной по-
тенциальной энергии системы при
переходе из новой формы равно-
весия в первоначальную примет
вид
U = -2RaFcK =
2
=^2k(?-Fcrb = kl2a2 -Fcra2l12.
Затем дифференцируем значение
потенциальной энергии по независимому параметру а:
— = 2*72a-F„a/=O.
да
Из последнего выражения определяем Fcr = 2kl. Такая же величина кри-
тической силы была получена в примере 9.1.4 статическим методом.
Задача 9.2.2. Определить энергетическим методом критическую силу в
системе с одной степенью свободы, представленной на рис. 9.2.2. Звенья
системы бесконечно жесткие. Жесткость упругой опоры равна Гц.
Решение. Запишем значение полной потенциальной энергии системы,
потерявшей устойчивость:
U = ^L-Fa.A.
2 “
Выразим А через at:
А = 2(/ -1 cos a) = 2^2 sin 2 у = 4/ = a 2/,
А « /, поэтому tga = О] // » а, тогда А = а2 И.
Подставим значение А в формулу потенци-
альной энергии:
2 1 Z 2 сг Г
dU - 2°i Л
затем вычисляем -----= °iri 1 _ --= О»
dat /
откуда определяем Fcr =ги1/ 2.
Работа опорной реакции вычисляется с коэффициентом А, так как опор-
ная реакция возрастает от 0 до /?я = atrt ,.
299
Задача 9.23. Определить величину критической силы для абсолютно
жесткой системы, представленной на рис. 9.2.3. Жесткость опорной пружи-
ны равна Гц.
Решение. Составим выражение для потенциальной энергии:
Рис. 9.2.3
гдеД = 2/(1-cos а)
4/—— = ct2/, но
4
8
из треугольника ДЛВС имеем tga = ~ » a, тогда
Д = <52//
и формула потенциальной энергии принимает вид:
1 r «2 г «2
(7= — Г.1О — г„—.
2 II СГ z
В этом случае ^- = rn6-2Fcr — = 0, а
дЬ /
Решим эту же задачу статическим методом, для
чего составим уравнение равновесия:
= Fcra-rliil = Fcra-rlxall2 = 0,
из которого находим значение критической силы: Fcr = гпП2. Как видим,
результат получился один и тот же, что и должно быть.
Задача 9.2.4. Применим энергетический метод к стержневой системе с
двумя степенями свободы, изображенной на рис. 9.2.4.
Решение. Рассмотрим опускание верхнего конца /-го абсолютно жестко-
го стержня. В задаче 9.2.1 было получено, что
2
Л, -atll2y ноtga, = a/l = а„ поэтому Д, =—.
Таким образом, для трех стержней будем иметь
А а л л °|2 . (й2 -°|)2 . °2 _ °2 . а2 а1а2
1 2 3 2/ 2/ 2/ / / /
Запишем формулу полной потенциальной энергии системы, потерявшей
устойчивость (рис. 9.2.4):
300
Учитывая, что в формулу потенциальной энергии входят два независи-
мых геометрических параметра at и а2, приравняем нулю две производные
от U по at и а2:
ди , „ г(2а' <4 П. ди - „ F (2а* Л
dfl] \ I I ) оа2 V * • )
Для двух однородных относительно параметров at и а2 уравнений необ-
ходимо выполнить условие равенства нулю детерминанта из коэффициентов
при at и а2:
Раскрывая определитель, находим
Fj-|(r|>+ra)ff-c,+|r1,rn/2=O.
Последнее уравнение при гп = г22 имеет два
корня:
За расчетное значение критической силы
принимается минимальное значение, т.е.
FCr = Fcrl = r\J/3. Формы неустойчивого рав-
новесия системы, отвечающие каждой из кри-
тических сил, находятся по аналогии с методом,
описанным в задаче 9.1.1.
Рис. 9.2.4
93. Расчет на устойчивость систем с бесконечным числом
степеней свободы статическим и энергетическим методами
Задача 9.3.1. Определить критическую силу для прямого стержня, нахо-
дящегося в упругой среде с коэффициентом податливости, равным к (рис.
9.3.1). Жесткость стержня на изгиб - EI.
EI
Решение. Уравнение криволинейной формы равновесия прямого стерж-
ня берем в виде
. тпх
У = отзт — .
Для вычисления полной по-
тенциальной энергии предвари-
тельно необходимо вычислить
производные у’ и у":
/ P = ty
Рис. 9.3.1
301
а затем
J(,,fe2;
о " о 2/ о z
Подставляя полученные значения в формулу
у=5 )£/,(Г)2 A+|ir„a1 f(/)2 dx,
находим
„=4
4 V
Из последнего выражения определяем
_ «V и2 пгЕ!
I т п I
^-m4n4+kl-Fcl
El 4 4 .. г т2П2 | _
—/пл + kl-Fcr-------- = 0.
/3 /J
„2, kl*
E/n4m2)'
где m - число полуволн при потере устойчивости. Значение /л, при котором
F„ равна минимальному значению, зависит от коэффициента податливости к
упругого основания (Н/м2). При малом к можно принять т = 1.
Продолжим исследование и предположим, что F^x = F^T2, тогда
. Л/4 л kl4 , 4Е1п4
ЕЛг4 ЕЛг44 /4
г с , 4ЕЛг4
Таким образом, если к < —-—, то необходимо принимать т = 1,
если к > —-—, то т > 1.
/4
Задача 93.2. Определить значение критической силы для ломаного бру-
са, изображенного на рис. 9.3.2, а. Вертикальная часть ломаного бруса - аб-
солютно жесткий стержень, а горизонтальная часть - стержень с жесткостью
на изгиб, равной Elz.
Решение. Пусть система потеряла устойчивость и заняла новое положе-
ние, показанное на рис. 9.3.2, а пунктирными линиями. Так как вертикаль-
ный стержень абсолютно жесткий, то он не будет изгибаться, а останется
прямым. Заменим основную стержневую систему (см. рис. 9.3.2, а) равно-
ценной балкой на двух опорах, заменив действие отброшенной части сосре-
доточенным моментом т = Fcta и силой Fcr (рис. 9.3.2, б).
На рис. 9.3.2, в изображена эпюра изгибающих моментов, возникающих
в балке от действия сосредоточенного момента т.
302
Согласно рис. 9.3.2, а находим
,2j
Д = h-Acosa = А(1 -cosa) = A2sin2— »
Для вычисления критической силы применим энергетический метод и
запишем уравнение полной потенциальной энергии для ломаного стержня,
потерявшего устойчивость:
,, I v ,мг<ь 1л 2 а_ д । \м^ I 'f а/2ф
U=2^^2^:-a' =2 f—+ " 1—F^~-
2
3
тогда
1 (Mdx с л 1
=— I-------£_Д =-----
2 о Е1Х " 2Е12
При вычислении интеграла применялось пра-
вило Верещагина для перемножения двух
эпюр.
Примем во внимание, что а = Atga = ha,
f,_/A2a2 г2 a2fl
Вычисляем первую частную производную
от потенциальной энергии U по геометриче-
скому параметру а, который характеризует
потерю устойчивости системы, и приравнива-
ем эту производную к нулю:
ди lh>a _2 „
---=------F..-a.hF„ = О,
да ЗЕ1. "
a2h
тп = aF
Fcr-aFe/l
a2h Ja?
6EI
откуда находим
5
hl
Определим F„ статическим методом.
Запишем дифференциальное уравнение
упругой линии балки (рис. 9.3.2,6):
EI zy” -М - -(F^a- Fcrax 11).
Решение дифференциального уравнения
получаем непосредственным интегрированием:
2
; у = А + Вх——— Fr
I Л 6£/, с
aFtr/l\
Рис. 9.3.2
al'
al
у' = B+-----F
2EI, с
Рассмотрим граничные условия: при х = 0 имеем у = 0, т.е.
_ . al2 al2
О = А------Г„, или А=-------F’
6EF cr 6E!Z
303
, al alF„
при х = 0 имеем у = а, т.е. В+----Fcr = а, тогда В =--— + а,
2EI z 2EI z
и, наконец, при х = / имеем у = 0, т.е. О = А + В/, или В = -А/1.
Получилось, что произвольная интегрирования В имеет два значения.
Приравняем их друг к другу:
_ а! А л а!2 „
В =------F„ + a =----, откуда находим А =------Fr. -al.
2E1Z " I 2EIZ "
Теперь произвольная интегрирования А имеет два значения, приравняем
al2 al2 cd2
их: А =------Fcr -----Fcr -cd, или----Fcr = cd, откуда находим
6EI z 2EIZ 3EI z
™z л 3Ei
Fcr -----а, но a = a/h, поэтому F =---
al hl
Статический и энергетический методы дали один и тот же результат.
Задача 9.33. Вычислить критическую силу для стержневой системы,
состоящей из двух абсолютно жестких стержней и одного стержня с жестко-
стью на изгиб, равной £/(рис. 9.3.3).
Решение. Воспользуемся энергетическим методом. На рис. 9.3.3, а
пунктирными линиями показана система, потерявшая устойчивость. Вычис-
лим предварительно
ju. a2H Н( аУ а2
A = f/-Hcosa = //(l-cosa) = //2sin2—«А/ =------=— — = .
2 2 2\Н) 2Н
Затем запишем уравнение полной потенциальной энергии системы, по-
терявшей устойчивость:
2CJ EI
Построим эпюру изгибающих моментов для правой стойки. На эту стой-
ку передается сила Л от горизонтального бесконечно жесткого ригеля.
Рис. 9.3.3
304
От этой силы X верхний конец правой стойки отклоняется на величину
а. На рис. 9.3.3, б показана эпюра изгибающих моментов в правой стойке, на
рис.9.3.3, в — эпюра изгибающих моментов от единичной силы. Составим
интеграл Мора для вычисления горизонтального перемещения а:
1X112, XI3 v ЗаЕГ
-------1 =---, откуда находим X = ——.
2 EI 3 ЗЕ/ 7 /3
Таким образом, окончательная эпюра изгибающих моментов М в правой
стойке будет иметь вид, показанный на рис. 9.3.3, г. Подставив значение пе-
ремещения Д и применив правило Верещагина для вычисления интеграла от
перемножения эпюр Л/, запишем формулу потенциальной энергии в виде
l'fA/2<fr _______1_П ЗоЕ/ 2 ЗоЕ/) о2 Зо2Е/ o2F„
2> EI " 2Е/(У /2 3 /2 J "2Н 2/3 2Н '
Продифференцируем по геометрическому параметру а полученное вы-
ражение для U и приравняем результат к нулю:
dU
да
3aEI aF ЗН
—-------— = 0. откуда Fc, =—И.
9.4. Расчет плоских рам на устойчивость методом перемещений
Для сокращения времени на расчет плоских рам на устойчивость мето-
дом перемещений приведем необходимые для этого формулы
и таблицу вспомогательных функций (табл. 9.4.1) для построения эпюр из-
гибающих моментов и определения опорных реакций в статически неопре-
деленных однопролетных балках от перемещения и поворота опорной за-
делки и действия продольной силы. Кроме того, создадим таблицу, где зара-
нее вычислены значения функций фь фг, ф3, ф4, т]|, т]2 и т]3 в зависимости от
величины параметра v (табл. 9.42).
Задача 9.4.1. Определить значение критической силы для ломаного
стержня, представленного ни рис. 9.4.1, а.
Решение. Система один раз статически неопределима при расчете по
методу перемещений, поэтому основная система получается путем введения
одной дополнительной связи - заделки в жестком узле с неизвестным углом
поворота Z|.
Каноническое уравнение метода перемещений будет иметь вид
TjjZ] =0, но Zx *0, следовательно, Гц = 0.
Задаемся условием, что угол поворота введенной заделки равен едини-
це (Zj = 1), и строим эпюры моментов в стойке и ригеле основной систе-
мы (рис. 9.4.1, б) согласно табл. 9.4.1.
20 С. II. Кршюшяпко
305
Таблица 9.4.1
б) Основная система
Рис. 9.4.1
В ригеле нет продольной силы, поэтому он не будет терять устойчи-
вость, следовательно, для него v = 0, а все вспомогательные функции <р(, (р2,
фз, Ф4, Пь Лг и т]з будут равны единице.
Из рассмотрения равновесия узла получаем
гн = E2I + E/<p2(v) = 0,
откуда находим фз(г) = -2. Из табл. 9.4.2 узнаем, что функция фг(г) = -2, ес-
ли параметр v = 5,66. Теперь по одной из формул (9.4.1) можно определить
значение критической силы:
_v2£/_5,662E/
F"-~^—~2EL
Вычисляем коэффициент приведения длины стойки
и=-=|^=о,555.
v 5,66
т.е. стойка работает в условиях, близких к полному защемлению ее верхнего
конца.
Задача 9.4.2. Определить величину критической нагрузки для системы,
представленной на рис. 9.4.2, а. Жесткости стоек и ригелей указаны на ри-
сунке.
Решение. Система три раза статически неопределима при расчете по
методу перемещений. Необходимо установить две заделки в жестких узлах
(рис. 9.4.2, б).
Задаемся единичными углами поворотов во введенных заделках и в со-
ответствии с материалами табл. 9.4.1 строим эпюры моментов в однопролет-
ных статически неопределимых балках (рис. 9.4.2, в для Z| = 1 и рис. 9.4.2, г
для/2 = 1).
Канонические уравнения метода перемещений примут вид:
+Г|2^2 =0, |/|1 Г|2 I
для которых должно выполняться условие = 0.
r2iZj +г22^2 =0, |г21 Г2г|
Вычисляем реакции в заделках:
г„ =^ + Е/4ейР2И = и[|+7<Р2(‘’))
EI 4 г-, 1 I г-г
r12 ~г21 ~ 2 ’ г22 ~ & + 2 ~ 7
Подставляем полученные значения реакций в определитель, составлен-
ный из коэффициентов при неизвестных углах поворота Zf:
tn ri2 I _^4 (?)+2 26 = 0, откуда находим ф2 (v) = -2,51.
21 *221 49
По материалам табл. 9.4.2 устанавливаем, что равенство <p2(v) = -2,51
307
20*
Рис. 9.4.2
удовлетворяется при v = 5,75. Теперь можно вычислить значение критиче-
ской нагрузки
EI =Qfil2EI.
_ v2EI 5,752
72 - 72
Коэффициент приведения длины стойки высотой 7 м, нагруженной про-
дольной силой F, будет
И = - = = 0,59.
v 5,75
Значение критической силы для стойки длиной 5 м в предположении,
что ее гибкость больше предельной гибкости (X > ХсЛ, можно вычислить по
формуле Эйлера:
Fcr =^-^- = ^-Е1^9Е1.
(М-5)2 (1-5)2
Таким образом, стойка длиной 5 м потеряет устойчивость первой.
Задача 9.43. Определить критическое значение осевой силы, дейст-
вующей на неразрезную балку, показанную на рис. 9.4.3, а.
Решение. Воспользуемся методом перемещений. Основная система по-
казана на рис. 9.4.3, б. На рис. 9.4.3, в показана эпюра моментов, построен-
ная в соответствии с данными табл. 9.4.1.
Из канонического уравнения метода перемещений r(1Z| = 0 получаем
EI EI
гн = 0, или 3/l<p1(vI)+3/2vI(v2) = 3y-vI(vl)+3—ф!(г2) = 0. (а)
Выпишем параметры:
С учетом последних двух фор-
мул уравнение (а) принимает вид
ф] (v)+0,5ф1 (2v) = 0. (6)
Уравнение (б) решается мето-
дом подбора. Примем v = 2. В этом
случае
Ф((2) = 0,6961;
ф,(2р) = ф, (4) = -2,1726.
Теперь уравнение (б) примет вид:
3z2(p,(v2)
Рис. 9.4.3
0,6961 + 0,5(-2,1726) = -0,3902 / 0.
309
Следовательно, при v = 2 условие (б) не выполняется. Следуя методу
последовательных приближений, примем v = 1,93. Тогда формула (б) дает
0,7271 + 0,5(-1,4542) = 0.
Таким образом, v = 1,93 есть корень уравнения (б). Окончательно:
v2£/_ 1,932 Е/ 3.72Е/
/2 /2 /2 ’
л 3,14 ,л 3,14 ЛО1_
ц. - - = 1,63; ц2 =— = —-— = 0,815.
1 v 1,93 2 v2 2 1,93
Задача 9.4.4. Определить величину критической нагрузки для системы,
представленной на рис. 9.4.4, а. Ригели системы абсолютно жесткие, высота
стоек равна h, сечения всех стоек одинаковы и имеют осевой момент инер-
ции, равный /.
Решение. Расчетная схема (основная система) представленной рамы
показана на рис. 9.4.4, б. Здесь же представлены эпюры моментов и показа-
ны опорные реакции, построенные в соответствии с данными табл. 9.4.1.
Каноническое уравнение метода перемещений имеет вид rnZt = 0; Z|/ 0,
поэтому получаем Гц = 0, где Гц - опорная реакция во введенном опорном
стержне, возникающая от его горизонтального смещения на единицу (Zt = 1).
Из условия равенства нулю проекций всех сил на горизонтальное на-
правление имеем (рис. 9.4.4, б)
. 3i 3i . ч 3/ . . _ z .
'll =3-y + -7Tli(vI)+~yTlI(v2) = 0. (a)
h h h
310
Предварительно рассмотрим v, = h
тогда уравнение (а) принимает вид -Hi(v) = 0, или Лi(v) = -1,5.
h h
Используя табл. 9.4.2, определяем v = 2,45. Окончательно находим
_ v2E/ 2,452Е/ 6,01£/ п 3,14
h2 h2 h2 V 2,45
Задача 9.4.5. Определить критическое значение силы Г, действующей на
раму (рис. 9.4.5, а).
Решение. Основная (расчетная) система показана на рис. 9.4.5, 6. Кано-
нические уравнения для данной рамы принимают вид
rUZl + rl2Z2 =0*>
r2iZ] +Г22г2 =0-
Для деформированного состояния необходимо выполнить условие
I'll ,12 I _г2_0
I-'ll'22 г12 “U-
|'*2I Г22|
Для определения элементов матрицы построим эпюры моментов и по-
кажем опорные реакции, возникающие от единичного угла поворота введен-
ной заделки (Z| = I) и от единичного горизонтального смещения введенного
опорного стержня (Z2 = 1). Определим реакции во введенных связях:
311
Гц = 3»+4йр2 (v); r21 = rI2 = -у Из(v) = -уФ4(О; r22 = q2 (v)-
Полученные значения г,к подставляем в выражение (а) и получаем
[З/ + 4/ф2 (v)]y^ П2 (v) - “7-Ф4 (v) = 0, или [3 + 4ф2 (v)}q2 (v) = Зф J (v). (б)
Решаем полученное трансцендентное уравнение методом подбора пара-
метра v, который изменяется в пределах 0,57 < v < 6,28.
Примем v = 2,4. Используя табл. 9.4.2, находим значения фг(2,4), Лг(2,4),
ф4(2,4) и тогда уравнение (б) примет вид 2,588 /2,428. Примем далее v = 2,46;
в этом случае уравнение (б) будет иметь вид 2,3879 = 2,4. Следовательно,
значение v = 2,46 можно принять за корень уравнения (б) и тогда
v2E1 2,46 2 Е/ 6,05 Е/ п 3,14 ,00
F"~^т^г1-28-
Таблица 9.4.2
V фД*) ФгМ ФзМ ФдМ Oi(v) n2(v)
0,60 0,9757 0,9879 1,0061 0,9940 0,8557 0,9640
0,80 0,9565 0,9785 1,0169 0,9893 0,7432 0,9360
1,00 0,9313 0,9662 1,0172 0,9832 0,5980 0,8999
1,10 0,9164 0,9590 1,0209 0,9797 0,5131 0,8988
1,20 0,8998 0,9511 1,0251 0,9757 0,4198 0,8557
1,30 0,8814 0,9424 1,0297 0,9715 0,3181 0,8307
1,40 0,8613 0,9329 1,0348 0,9669 0,2080 0,8035
1,50 0,8393 0,9227 1,0403 0,9619 0,0893 0,7744
1,60 0,8152 0,9116 1,0463 0,9585 -0,0381 0,7432
1,70 0,7891 0,8998 1,0529 0,9508 -0,1743 0,7100
1,80 0,7606 0,8871 1,0600 0,9447 -0,3194 0,6747
1,57 0,8227 0,9150 1,0444 0,9582 -0,0010 0,7528
2,00 0,6961 0,8590 1,0760 0,9313 -0,6372 0,5980
2,02 0,6891 0,8560 1,0777 0,9299 -0,6710 0,5899
2,04 0,6819 0,8530 1,0795 0,9285 -0,7053 0,5817
2,06 0,6747 0,8499 1,0813 0,9270 -0,7399 0,5734
2,08 0,6673 0,8468 1,0831 0,9256 -0,7749 0,5650
2,10 0,6597 0,8436 1,0849 0,9241 -0,8103 0,5566
2,12 0,6521 0,8404 1,0868 0,9226 -0,8461 0,5480
2,14 0,6443 0,8377 1,0887 0,9210 -0,8822 0,5394
2,16 0,6364 0,8339 1,0907 0,9195 -0,9188 0,5307
2,18 0,6284 0,83063 1,0926 0,9180 -0,9558 0,5219
2,20 0,6202 0,8273 1,0946 0,9164 -0,9931 0,5131
2,22 0,6119 0,8239 1,0967 0,9148 -1,0309 0,5041
2,24 0,6034 0,8204 1,0987 0,9132 -1,0691 0,4951
312
Продолжение табл. 9.4.2
V ^(v) *7i(v)
2,26 0,5948 0,8170 1,1008 0,9116 -1,1077 0,4859
2,28 0,5861 0,8134 1,1030 0,9099 -1.1467 0,4767
2,30 0,5772 0,8095 1,1051 0,9083 -1,1861 0,4675
2,32 0,5681 0,8063 1,1023 0,9066 -1,2260 0,4581
2,34 0,5589 0,8026 1,1095 0,9049 -1,2662 0,4486
2,36 0,5496 0,7990 1,1118 0,9032 -1,3062 0,4391
2,38 0,5401 0,7952 1,1141 0,9015 -1,3481 0,4295
2,40 0,5804 0,7915 1,1164 0,8998 -1,3896 0,4198
2,42 0,5205 0,7877 1,1188 0,8980 -1,4316 0,4100
2,44 0,5105 0,7838 1,1213 0,8963 -1,4740 0,4001
2,46 0,5003 0,7799 1,1236 0,8945 -1,5169 0,3902
2,48 0,4899 0,7760 1,1261 0,8927 -1,5603 0,3801
2,50 0,4793 0,7720 1,1206 0,8908 -1,6040 0,3700
2,52 0,4685 0,7679 1,1311 0,8890 -1,6483 0,3598
2,54 0,4576 0,763 1,1337 0,8871 -1,6930 0,3495
2,56 0,4464 0,7597 1,1363 0,8853 -1,7381 0,3391
2,58 0,4350 0,7555 1,1390 0,8834 -1,7838 0,3287
2,60 0,4234 0,7513 1,1417 0.8814 -1,8999 0,3181
2,62 0,4116 0,7470 1,1445 0,8795 -1,8785 0,3075
2,64 0,3996 0,7427 1,1473 0,8776 -1,9236 0,2968
2,66 0,3873 0,7383 1,1501 0,8756 -1,9712 0,2860
2,68 0,3748 0,7339 1,1530 0,8736 -2,0193 0,2751
2,70 0,3621 0,7295 1,1559 0,8716 -2,0641 0,2641
2,72 0,3491 0,7249 1,1589 0,8696 -2,1171 0,2531
2,74 0,3358 0,7204 1,1619 0,8675 -2,1667 0,2419
2,76 0,3223 0,7158 1,1650 0,8655 -2,2169 0,2307
2,78 0,3085 0,7111 1,1681 0,8634 -2,2676 0,2194
2,80 0,2944 0,7064 1,1712 0,8613 -2,3189 0,2080
2,82 0,2801 0,7016 1,1744 0,8592 -2,3703 0,1965
2,84 0,2654 0,6967 1,1777 0,8571 -2,4231 0,1849
2,86 0,2504 0,6918 1,1810 0,8549 -2,4761 0,1733
2,88 0,2352 0,6869 1,1844 0,8527 -2,5296 0,1615
2,90 0,2195 0,6819 1,1878 0,8505 -2,5838 0,1497
2,92 0,2036 0,6768 1,1913 0,8483 -2,6386 0,1378
2,94 0,1873 0,6717 1,1948 0,8461 -2,6939 0,1258
2,96 0,1706 0,6666 1,1984 0,8438 -2,7499 0,1137
2,98 0,1535 0,6613 1,2020 0,8416 -2,8066 0,1015
3,00 0,1361 0,6561 1,2057 0,8393 -2,8639 0,0893
3,02 0,1182 0,6507 1,2095 0,8370 -2,9219 0,0769
3,04 0,1000 0,6453 1,2133 0,8346 -2,9806 0,0645
313
Продолжение табл. 9.4.2
V 0>i(v) ^(v) *7i (v) ^(v)
3,06 0,0812 0,6398 1,2172 0,8323 -3,0400 0,0520
3,08 0,0621 0,6343 1,2211 0,8299 -3,1001 0,0394
3,10 0,0424 0,6287 1,2251 0,8275 -3,1609 0,0267
3,12 0,0223 0,6230 1,2292 0,8251 -3,2225 0,0139
3,14 0,0017 0,6172 1,2331 0,8225 -3,2849 0,0008
3,16 -0,0195 0,6115 1,2376 0,8202 -3,2480 -0,0119
3,18 -0,0412 0,6057 1,2419 0,8177 -3,4120 -0,0250
3,20 -0,0635 0,5997 1,2462 0,8152 -3,4769 -0,0381
3,22 -0,0864 0,5937 1,2506 0,8127 -3,5426 -0,0513
3,24 -0,1100 0.5877 1,2551 0,8102 -3,6092 -0,0646
3,26 -0,1342 0,5816 1,2597 0,8076 -3,6767 -00780
3,28 -0,1591 0,5753 1,2644 0,8050 -3,7452 -0,0915
3,30 -0,1847 0,5691 1,2691 0,8024 -3,8147 -0,1051
3.32 -0.2110 0.5627 1,2739 0,7998 -3,8851 -0,1187
3,36 -0,2662 0,5498 1,2838 0,7945 -4,0294 -0,1463
338 -0,2950 0,5432 1,2889 0,7918 -4,1032 -0,1603
3,40 -0,3248 0,5366 1,2940 0,7891 -4,1781 -0,1743
3,42 -0,3556 0,5298 1,2939 0,7863 -4,2544 -0,1884
3,44 -0,3873 0,5230 1,3046 0,7835 -4,3319 -0,2026
3,46 -0,4202 0,5161 1,3100 0,7808 -4,4107 -0,2169
3,48 -0,4542 0,5091 1,3156 0,7780 -4,4910 -0,2312
3,50 -0,4894 0,5021 1,3212 0,7751 -4,5727 -0,2457
3,52 -0,5259 0,4949 1,3269 0,7723 -4,6560 -0,2603
3,54 -0,5637 0,4877 1,3327 0,7694 -4,7409 -0,2749
3,56 -0,6030 0,4804 1,3387 0,7665 -4,8275 -0,2897
3,58 -0,6438 0,4730 1,3447 0,7635 -4,9159 -0,3045
3,60 -0,6862 0,4655 1,3509 0,7606 -5,0062 -0,3194
3,62 -0,7304 0,4579 1,3571 0,7576 -5,0985 -0,3344
3,64 -0,7764 0,4502 1,3635 0,7546 -5,1930 -0,3495
3,66 -0,8244 0,4424 1,3700 0,7516 -5,2896 -0,3647
3,68 -0,8746 0,4345 1,3766 0,7485 -5,3887 -0,3800
3,70 -0,9270 0,4265 1,3834 0,7455 -5,4904 -0,3954
3,72 -0,9819 0,4184 1,3902 0,7424 -5,5947 -0,4105
3,74 -1,0395 0,4102 1,3973 0,7392 -5,7020 -0,4264
3,76 -1,0999 0,4019 1,4044 0,7361 -5,8124 -0,4421
3,78 -1,1694 0,3985 1,4117 0,7329 -5,9262 -0,4578
3,80 -1,2303 0,3850 1,4191 0,7297 -6,0436 -0,4736
3,82 -1,3008 0,3764 1,4266 0,7265 -6,1649 -0,4896
3,84 -1,3753 0,3676 1,4344 0,7232 -6,2905 -0,5056
3,86 -1,4542 0,3588 1,4422 0,7199 -6,4208 -0,5217
314
Продолжение табл 94.2
” 1 | | | | *71W |
3,88 -1,5379 0,3498 1,4502 0,7166 -6,5560 -0,5379
3,90 -1,6269 0,3407 1,4584 0,7133 -6,6969 -0,5542
3,92 -1,7216 0,3315 1,4668 0,7099 -6,8437 -0,5706
3,94 -1,8228 0,3221 1,4653 0,7065 -6,9973 -0,5871
3,96 -1,9311 0,3126 1,4840 0,7031 -7,1583 -0,6037
3,98 -2,0474 0,3030 1,4928 0,6946 -7,3275 -0.6204
4,00 -2,1726 0,2933 1,5019 0,6961 -7,5060 -0,6372
4,02 -2,3079 0,2834 1,5111 0,6926 -7,5947 -0,6541
4,04 -2,4546 0,2734 1,5205 0,6891 -7,8951 -0,6710
4,06 -2,6142 0,2632 1,5302 0,6855 -8,1088 -0,6881
4,08 -2,7887 0,2529 1,5400 0,6819 -8,3375 -0,7053
4,10 -2,9802 0,2424 1,5501 0,5783 -8,5835 -0,7225
4,12 -3,1915 0,2310 1,5603 0,6747 -8.8497 -0,7399
4,16 -3,6876 0,2101 1,5815 0,6673 -9,4563 -0,7749
4,18 -3,9821 0,1990 1,5925 0,6635 -9,8062 -0,7925
4,20 -4,3156 0,1878 1,6037 0,6597 -10,1956 -0,8103
4,22 -4,6514 0,1763 1,6151 0,6559 -10,6329 -0,8281
4,24 -5,1370 0.1647 1,6269 0,6521 -11,1295 -0,8460
4,26 -5,6514 0,1529 1,6388 0,6482 -11,7006 -0,8641
4,28 -6,2608 0,1409 1,6511 0,6443 -12,3669 -0,8822
4,30 -6,9946 0,1287 1,6636 0,6404 -13,1580 -0,9005
4,32 -7,8960 0,1164 1,6765 0,6364 -14,1168 -0,9188
4,34 -9,0303 0,1038 1,6896 0,6324 -15,3088 -0,9372
4,36 -10,5023 0,0910 1,7031 0,6284 -16,8388 -0,9558
4,38 -12,4906 0,0780 1,7168 0,6243 -18,8854 -0,9744
4,40 -15,3267 0,0648 1,7310 0,6202 -21,7801 -0,9931
4,42 -19,7037 0,0514 1,7454 0,6160 -26,2159 -1,0120
4,44 -27,3522 0,0377 1,7602 0,6119 -33,9234 -1,0309
4,46 -44,1472 0,0238 1,7754 0,6077 -50,7778 -1,0500
4,48 -111,005 0,0076 1,7910 0,6034 -1,0691
4,50 228,018 -0,0048 1,8070 0,5991 221,2681 -1,0884
4,52 56,9881 -0,0194 1,8234 0,5946 50,1780 -1,1077
4,54 32,7955 -0,0344 1,8402 0,5905 25,9250 -1,1272
4,56 23,1297 -0.0496 1,8574 0,5861 16,1985 -1,1467
4,58 17,9247 -0,0651 1,8751 0,5817 10,9328 -1,1665
4,60 14,6696 -0,0809 1,8933 0,5772 7,6163 -1,1861
4,62 12,4399 -0,0969 1,9120 0,5727 5,3251 -1,2060
4,64 10,8159 -0,1133 1,9311 0,5681 3,6394 -1,2260
4,66 9,5794 -0,1301 1,9509 0,5636 2,3409 -1,2461
4,68 8,6058 -0,1471 1,9711 0,5590 1,3050 -1,2662
315
Продолжение табл. 9.4.2
V 0i W 03 М ₽д(0 *71W W
4,70 7,8187 -0,1645 1,9920 0,5543 0,4554 -1,2865
4,72 7,1687 -0,1823 2,0134 0,5496 -0,2574 -1,3069
4,74 6,6223 0,2004 2,0355 0,5449 -0,8669 -1,6274
4,76 6,1564 -0,2190 2,0581 0,5401 0,3962 -1,3481
4,78 5,7538 -0,2379 2,0815 0,5352 -1,8623 -1,3688
4,80 5,4024 -0,2572 2,1056 0,5304 -2,2776 -1,3896
4,82 5,0925 -0,2770 2,1304 0,5255 -2,6516 -1,4106
4,84 4,8171 -0,2972 2,1560 0,5205 -2,9914 -1,4316
4,86 4,5704 -0,3179 2,1823 0,5155 -3,3027 -1,4528
4,88 4,3480 -0,3390 2,2095 0,5105 -3,5901 -1,4740
4,90 4,1463 -0,3601 2,2375 0,5054 -3,8570 -1,4954
4,92 3,9624 -0,3828 2,2665 0,5003 -4,1064 -1,5169
4,96 3,6384 -0,4288 2,3273 0,4899 -4,5621 -1,5602
4,98 3,4948 -0,4527 2,3592 0,4846 -4,7720 -1,5821
5,00 3,3615 -0,4772 2,3923 0,4793 -4,9718 -1,6040
5,02 3,2373 -0,5023 2,4264 0,4739 -5,1628 -1,6261
5,04 3,1211 -0,5281 2,4618 0,4685 -5,3461 -1,6483
5,06 3,0122 -0,5546 2,4984 0,4631 -5,5223 -1,6706
5,08 2,9097 -0,5818 2,6364 0,4576 -5,6925 -1,6930
5,10 2,8130 -0,6099 2,5757 0,4520 -5,8570 -1,7155
5,12 2,7215 -0,6387 2,6165 0,4464 -6,0166 -1,7381
5,14 2,6348 -0,6683 2,6580 0,4407 -6,1718 -1,7609
5,16 2,5523 -0,6989 2,7028 0,4350 -6,3229 -1,7838
5,18 2,4737 -0,7304 2,7485 0,4292 -6,4704 -1,8068
5,20 2,3987 -0,7629 2,7960 0,4234 -6,6147 -1,8299
5,22 2,3268 -0,7964 2,8455 0,4175 -6,7559 -1,8532
5,24 2,2580 -0,8311 2,8969 0,4116 -6,8945 -1,8765
5,26 2,1918 -0,8669 2,9506 0,4056 -7,0307 -1,9000
5,28 2,1282 -0,9039 3,0065 0,3996 -7,1648 -1,9236
5,30 2,0668 -0,9422 3,0648 0,3935 -7,2965 -1,9474
5,32 2,0075 -0,9819 3,1257 0,3873 -7,4266 -1,9712
5,34 1,9502 -1,0231 3,1894 0,3811 -7,5550 -1,9952
5,36 1.8947 -1,0658 3,2560 0,3748 -7,6819 -2,0193
5,38 1,8407 -1,1102 3,3258 0,3685 -7,8074 -2,0436
5,40 1,7884 -1,1563 3,3988 0.3621 -7,9316 -2,0679
5,42 1,7374 -1,2044 3,4755 0,3556 -8,0547 -2,0924
5,44 1,6877 -1,2544 3,5560 0,3491 -8,1768 -2,1171
5,46 1,6392 -1,3066 3,6407 0,3425 -8.2980 -2,1418
5,48 1,5918 -1,3611 3,7297 0,3358 -8.4183 -2,1667
5,50 1,5455 -1,4181 3,8236 0,3291 -8,5378 -2,1917
316
Окончание табл 9.4.2
V <^(v)
5,52 1,5001 -1,4778 3,9226 0,3223 -8,6567 -2,2169
5,54 1,4556 -1,5404 4,0272 0,3154 -8,7750 -2,2422
5,56 1,4118 -1,6061 4,1378 0,3085 -8,8927 -2,2676
5,58 1,3689 -1,6753 4,2551 0,3015 -9,0099 -2,2932
5,60 1,3266 -1,7480 4,3794 0,2944 -9,1268 -2,3189
5,62 1,2849 -1,8249 4,5116 0,2873 -9,2432 -2,3447
5,64 1,2438 -1,9060 4,6523 0,2801 -9,3594 -2,3707
5,66 1,2032 -1,9920 4,8024 0,2728 -9,4753 -2,3968
5,68 1,1631 -2,0834 4,9628 0,2654 -9,5910 -2,4231
5,70 1,1235 -2,1803 5,1346 0,2580 -9,7065 -2,4495
5,74 1,0453 -2,3944 5,5173 0,2428 -9,9373 -2,5028
5,76 1,0067 -2,5129 5,7313 0,2352 -10,0525 -2,5296
5,78 0,9683 -2,5403 5,9628 0,2274 -10,1678 -2,5566
5,80 0,9307 -2,7776 6,2139 0,2195 -10,2831 -2,5837
5,82 0,8923 -2,9262 6,4872 0,2116 -10,3985 -2,6111
5,84 0,8546 -30875 6,7858 0,2036 -10,6139 -2,6386
5,86 0,8170 -3,2634 7,1132 0,1955 -10,6295 -2,6662
5,88 0,7795 -3,4560 7,4737 0,1873 -10,7457 -2,6939
5,90 0,7421 -3,6678 7,8726 0,1790 -10,8612 -2,7219
5,92 0,7047 -3,9022 8,3161 0,1706 -10,9774 -2,7499
5,94 0,6674 -4,1629 8,8122 0,1621 -11,0938 -2,7782
5,96 0,6300 -4,4550 9,3705 0,1535 -11,2105 -2,8066
5,98 0,5926 -4,4844 10,0034 0,1449 -11,3275 -2,8352
6,00 0,5551 -5,1593 10,7269 0,1361 -11,4449 -2,5639
6,02 0,5175 -5,5899 11,5613 0,1272 -11,5628 -2,8928
6,04 0,4798 -6,0898 12,5344 0,1182 -11,6807 -2,9219
6,06 0,4419 -6,6779 13,6832 0,1091 -11,7993 -2,9512
6,08 0,4039 -7,3000 15,0598 0,1000 -11,9187 -2,9806
6,10 0,3656 -8,2334 16,7388 0,0907 -12,0377 -3,0102
6,12 0,3271 -9,2938 18,8314 0,0812 -12,1577 -3,0400
6,14 0,2883 -10,6480 21,5110 0,0717 -12,2782 -3,0699
6,16 0,2492 -12,4387 25,0636 0,0621 -12,3993 -3,1001
6,18 0,2096 -14,9199 29,9968 0,0523 -12,5210 -3,1304
6,20 0,1700 -18,5895 37,3064 0,0424 -12,6433 -3,1609
6,22 0,1299 -24,5760 49,2493 0,0324 -12,7863 -3,1916
6Д4 0,0893 -36,0974 72,2693 0,0223 -12,8893 -3,2225
6,26 0,0482 -67,4754 134,9870 0,0121 -13,0143 -3,2536
Примечание. Промежуточные значения функций q>i(v), 4>KV). Фз(*)» <P*(v)» 4«(v) и ИХ*) нахо-
дят методом линейного интерполирования.
317
9.5. Устойчивость консольной балки прямоугольного
поперечного сечения под действием сосредоточенной силы
Устойчивость тонкой полосы при чистом изгибе и устойчивость одно-
пролетной балки прямоугольного поперечного сечения под действием попе-
речной нагрузки были рассмотрены на лекции 27. Рассмотрим еще один
случай расчета балки на устойчивость.
Задача 9.5.1. Получить расчетное дифференциальное уравнение устой-
чивости консольной балки, нагруженной на свободном конце силой F. Вы-
сота балки больше ее ширины, так что !г»ly.
Решение. При расчете балки на устойчивость используются два диффе-
ренциальных уравнения: дифференциальное уравнение упругой оси балки
при ее изгибе из плоскости балки (плоскость xOz)
и уравнение кручения в упругой стадии
* = (6)
A G/„
Согласно рис. 9.5.1 находим формулу для вычисления изгибающего мо-
мента Му‘:
Л/у = FQx
и крутящего момента Мх. относительно оси х' (рис. 9.5.1):
М, =-FJ = -F(5-w-xtgP) = -F|5-w+x—
318
где d- плечо силы F относительно оси х'; S = const - отклонение конца кон-
соли в направлении оси z; 0 - угол между осью х', касательной к оси кон-
сольной балки в отклоненном состоянии и осью балки до потери устойчиво-
сти.
Координата х отсчитывается от конца консоли в сторону ее опоры - за-
делки.
Подставим полученные значения в формулы (а) и (6):
d2u _ Му _ FxO .
~лг"ЁГу~~ЁГу'
dQ Му F С du} , 4
— = —— =-------o-w+x—L (в)
dx GId G!d\ dx)
Продифференцируем по параметру x второе уравнение системы (в):
d2Q ____F Г du ___—x— (г)
dx2 GId dx dx dx2 ) GId dx2
Значение cPuldx2 из первого уравнения системы (в) подставим в уравне-
ние (г):
<Z20 Fx FxQ F2 2n
dx2 GId EIy GIdEIy
Последнее уравнение представим в виде
4+-^л=0.
Л2 GIdEly
Это и есть искомое дифференциальное уравнение устойчивости кон-
сольной балки, натруженной на конце сосредоточенной силой.
Уравнение решается в функциях Бесселя. Для определения двух посто-
янных дифференцирования необходимо будет поставить два граничных ус-
ловия:
при х = 0 имеем Л/х = 0,
dQ _ dd _
т.е. Мж = GId — = 0, или — = 0
dx dx
и при х = / получаем 6 = 0.
319
Раздел 10
РАСЧЕТ КОНСТРУКЦИЙ НА УПРУГОМ ОСНОВАНИИ
(по материалам лекций 28-30)
10.1. Расчет балок на упругом основании по А.Н. Крылову
Значения коэффициента постели Ль сильно меняются в зависимости от
влажности фунта и примесей в нем. В таблице 10.1 приводятся ориентиро-
вочные значения Ло-
Таблица 10.1
Общая характеристика Материал основания ко, кг/см'
Грунт малой плотности Грунт средней платности Грунт плотный Грунт весьма плотный Грунт твердый Грунт скалистый Искусственное основание Строительный материал Плывун, насыпной песок, мокрая размягченная глина Песок слежавшийся, насыпной гравий, влажная глина Плотно слежавшийся песок, плотно слежавшийся гравий, щебень, глина малой влажности Твердая глина Известняк, песчаник Твердая скала Свайное основание Кирпич, бутовая кладка, бетон 0,1 -0,5 0,5-5 5-10 10-20 20-100 100-1500 5-15 400-600 800-1500
Задача 10.1.1. Вычислить произвольные постоянные интегрирования,
входящие в формулы, необходимые для построения эпюр прогибов у, изги-
бающих моментов М и поперечных сил £2, возникающих в балке на упругом
основании (рис. 10.1.1).
Решение, Для балки, показанной на рис.
10.1.1, поставим очевидные граничные ус-
ловия: Мо = 0, Qg = 0 при х = 0
и М{ = 0, Qi = 0 при х = 1.
Используя формулы (29.5) лекции 29, по-
лучаем
к к F
М, =~—y0Ci-—<p0Di--------Bh =0;
a2 a3 a
к к л
Qt =----Уов1----г<Рос/ ~FAt = °> гда Л = 4a4 £7.
a a
Решив эту систему двух уравнений, находим:
. rfl г°2 Ab^i ~BbBi
° Л ’ ° Л с} - BtD{
Теперь можно записать уравнения (29.5) для рассматриваемой балки и
построить соответствующие эпюры у, М, Q, р с выбранным шагом Дх.
320
Задача 10.1.2. Для деревянной балки с Е = 105 кг/см2, лежащей на упру-
гом основании с коэффициентом постели ко = 4 кг/см3, записать уравнения
прогибов, изгибающих моментов и поперечных сил, если поперечное сече-
ние балки b * Л = 20 * 20 см; / = 4 м;^ = 2000 кг/м; F= 4000 кг.
Решение. Вычисляем к = к0Ь = 4-20 = 80 кг/см2;
a = «>.!С
V4E/ V4 105-204
= 0,011—.
см
Поставим граничные условия для определения начальных параметров в
уравнениях (29.5) лекции 29: Мо = Qo = 0 (рис. 10.12), затем
Mt = Лфг = /) = -4a2£fy0C, -4а£йр0О/ --В^-Со5/) = О;
а к
Q,=Q(x = n = -^EfyoB,-4a2EkpQCt - FA^- B05l) = 0,
откуда находим
а -G^o,3/ “Я ~fio.5/)”(Q “Q.5/K/ _
Jo = - т F---->------ + ,----------S---------------= -0*2355 см»
к Cf-DtBt к Ci-DjB,
Фо _ 01 я “Q.5/)~(fi/ ”fi0,5/)Q _лП| IO„..
а к Cj-DtBt к Cf-D^
Теперь запишем уравнения прогибов по участкам согласно формуле
(29.5) лекции 29 (рис. 10.1.2):
0 < х < 0,5/: у = -О,2355Л^ -0,0119^ +дЩ -1)/Л;
0,5/ < х < 0,7/: у =-0,2355/Q -0,0119^ +дЩ-Ax^t)lk\
0,7lSx<.l:y~ -0.2355Л, -0,0119B{ +f (А( - D^,,.
Л a EI
Далее можно записать уравнения изгибающих моментов, дважды про-
дифференцировав уравнения прогибов и раз-
делив результат на Ё/.
Те же самые уравнения можно получить
из общих формул (29.5) лекции 29. Уравне-
ния поперечной силы по участкам можно
получить, продифференцировав выражения
изгибающих моментов, или из общих фор-
мул (29.5) лекции 29.
Для построения эпюр М и Q необходимо
вычислить эти величины, принимая значения
х через определенные интервалы.
21 С. II. Криы>шап1.1>
321
10.2. Расчет балок на упругом основании по И.А. Симвулиди
Задача 10.2.1. Балка постоянного прямоугольного поперечного сечения
b * h= Iх 0,5 м длиной L = 10 м нагружена на правом конце равномерно
распределенной нагрузкой q (рис. 10.2.1, а).
Построить эпюры реакции ос-
нования рп изгибающих моментов
М и поперечных сил Q.
Рис. 10.2.1
Решение. По формулам, приве-
денным в лекции 30, вычисляем
значения вспомогательных кон-
стант:
^ = 1|9<Ь=|(£-/,) = 0,79;
Lt / Lt
=0,4559;
1 L
K = --$q(L-z)dz =
Ln 2L 2L |y
= _<7(^-4)2 =~0 245gL;
2L
j42 (L/2-z)3^ 9 (£/2-г)4Г2 9(L/2-/J4 9 .
La Я 1-2-3 6L4 4 |z 24£4 15000*
fq(L Z) dz+-K-WL5 =
1-2-3-4 48
'h
322
_ I gd-z)5!4 £4 ^(£/2-/,)4£, =
L5 24-5 | 48 2L 24L4
1 k(L-/„)5 t’ .,2 9t(i/2-/,)4l 377q
= ё[—^-Ч9ё(1-и----------------------24---J =
По формулам (30.4) лекции 30 вычисляем значения параметров До, аь а2г
а3:
(8252 - 34а) • № +13 440-377 • 10-5 qa
ап ---------------------------------*
13440+ 29а
at = (2 0,455g-0,7gX1280-a)+8-0,045ga
3 " 2048+а
а2 _ (5188+63а )-0,7g-13 440-377-10~5 got
3 13440+29а
о3 _ (2 - 0,455g - 0,7gX384 +а) - 4 - 0,045ga
10 “ 2048+а
Л с (1-р2)я£0£3*
Определим показатель гибкости: а =-----------, предполагая, что
(1Р?)£/
основанием является суглинок с Ео = 450 кг/см2; яо = 0.37, а материал балки
(железобетон) имеет Е = 352 000 кг/см2; и = 0,17. Кроме того, по условию
задачи: h = 0,5 м; b = 1 м; / = 6Л3/12 = 1 -0,5 v 12 = 0,0104 м4. Тогда
(1-0,172)-3,14-450-103-1 „л
a = ------—---------------= 434;
(1-0,372)-352 000-0,0104
ао = 0,67g; Of = 0,405g; а2=0,09g; а3 = 0,377g.
Подставляем полученные значения в формулу (30.2) лекции 30 и опре-
деляем реактивную реакцию со стороны основания:
рх = [0,67+0,08l(x-5)+0,0036(x-5)2 +0,003(x-5)3]g.
На рис. 10.2.1, б показано распределение реакции основания рх по длине
балки (0 <х< 10 м).
Подставляя значения a, аь а2, а3 в формулы, приведенные в лекции
30, получаем выражения для определения поперечных сил Q и изгибающих
моментов М в любом сечении балки (0<х<10м):
2 = [0335(2х 10)+2,09 +0,0405(х-5)2 +0,0012(х-5)3 +0,000754(х-5)4 -
-Ik(x-/K)]g:
М = (1,97 + [0,335 (X -10) + 2,018 )х + 0,0135 (х - 5)3 + 0,0003 (х - 5)4 +
+ 0,000151 (л-5)5 -Г/я —~2/и—}g.
21-
323
При записи выражений для определения Q и М принималось во внима-
ние, что прерыватель Г/и равен нулю.
Значения Q и М при различных значениях х показаны на рис. 10.2.1, в, г.
Прерыватель Г/Л( = 0 при 0 < х < /„ = 3 м и Г/н = 1 при 3m<x<L = 10m.
Задача 10.2.2. Балка постоянного прямоугольного поперечного сечения
b* h = Iх 0,5 м длиной L = 10 м нагружена сосредоточенной силой F (рис.
10.22, а).
предполагая, что основанием является суглинок с Ео = 450 кг/см2; = 0,37, а
материал балки (железобетон) имеет Е = 352 000 кг/см2; ц = 0,17.
Кроме того, по условию задачи:
h = 0,5 м; b = I м; / = bh3/\2 = 1 0,53/12 = 0,0104 м4.
324
Тогда
(1-0,172)-3,14-450-103-1
(1-0,372)*352 ООО* 0,0104
По формулам (30.4) лекции 30 вычисляем значения параметров аь, a2t
а3:
а (8252 - 34a)F / L + \3 440* 0,00591F» / L f F_ >
°0 “ 13440+29» ~ ’ L > ’
(2 0,7F/£-F/£X1280-»)+8 0,3F»/£ Л F
a, —--------------------------------= 0,556—;
2048+» L
a2 = (5188 + 63»)F/£-13440*0,0059IF»/£ = 075 £.
3 ~ 13440+29» ’ L'
a3 = (2-0,7F / L-F/£X384+»)-4*0,3F»/£ = 0?g F
10 ” 2048+» ’ £’
т.е. o0 = 1,07F/£; at = 1,668F/£; a2 = -$224F/L\ аз = -0,78F/£.
Значения oo, oh a2, a3 подставляем в формулу (30.2) лекции 30 и получа-
ем значение реакции основания:
рх = [1,07+0,3336(х-5)-0,00896(х-5)2 -0,00624(x-5)3]F / L.
На рис. 10.2.2, б представлена эпюра рх. Ординаты рх вычисляются обыч-
ным способом, например:
рх (х = 0) = [1,07 + 0,3336(-5) - 0,00896(-5)2 - 0,00624(-5)3 ]F / L = -0,042F IЦ
рх(х = Ю) -[1,07 + 0,3336*5-0,00896*52 -0,00624*53]F/L = \J3FIL
В материалах лекции 30 приведены общие формулы для вычисления
поперечных сил и изгибающих моментов. Эти формулы для рассматривае-
мой балки упрощаются и принимают вид:
„ l,07Fz, ,ч L (10 1.668F 3-<W24F'|.„,c.. 2 U 668F (х-5)2
I--------—J+WF+—Тг----------------
L? 2*3 £4 2*3*4 /3‘
+0,01668(х-5)2 -О,ОООЗ(х-5)3 -0,000156(x-5)4}-rniF;
Л/=—Г10*1,668—+5*0,224—-3*0,78—1+|-!^(x-£)-—flO-1,668—-
240\ / / I) [ 2£ 120l I
-3*0,78^0,3fI+^«<?^
I) J L2 2-3 Z3 2-3*4
--^^^•^y^--r/31F(x-0,7£) = F£{0,064 - 0.03545x + 0,00535г2 +
+0,000556(x-5)3-7,47*10"6(x-5)4-3,12*10’6(x-5)5}-r,3IFL(x-7)/10.
325
Прерыватель Г/31 равен нулю, если 0 < х < 7 м , и равен единице, если
рассматриваются сечения в пределах 7 м < х < 10 м.
Эпюры поперечных сил Q
и изгибающих моментов М в
балке представлены на рис.
10.2.2, в, г.
Задача 10.23. Железобе-
тонная балка прямоугольного
поперечного сечения
b х h = 1 х 0,4 м
длиной L - 30 м, лежащая на
грунте, нагружена распреде-
ленными нагрузками
qi = 10 кН/м и20 кН/м,
одной сосредоточенной си-
лой Fi = 40 кН и моментом
Mi = 8 кН м (рис. 10.2.3, а).
Требуется построить эпю-
ры реактивных давлений
грунта рл поперечных сил Q
и изгибающих моментов М в
балке, если
Ео = 450 кг/см2; = 0,37;
Е = 184 000 кг/см2; р = 0,2;
h\ = 0; /з1= 9 м; /Н| = 0;
41 = 9 м; /„г = 9 м; /^ = 30 м.
Обозначения и положи-
тельные направления внеш-
них нагрузок приняты по рис.
30.1 лекции 30.
Решение. По формулам,
приведенным в лекции 30,
вычисляем значения вспомогательных констант:
f91<fc-jg,i + f92<fe+F1 Ll{gi£-91(L-9)+g2(t-9)+40)=18333;
L lo 9 9 J L
1 fL L L 1 1 ( L2 £2 92
c=ц1 hzdz ~ fq'zdz + f%zdz+r=121 +
L lo 9 9 J L I z z z
326
£2 92 1
+?2(—у)+40-9-8^ = 9,941;
। (L L L ]
К = —-J J^(L - z)dz - J<7i(L - z)dz + J%(£ - z)dz+F^L -/3I) + Л/Д =
L lo 9 9 J
= y-«, ^^-+92^^-+4O(3O-9)+8| = -251,767;
. Г LI2 U2 LI2 1
N =—h- J^dt-1- J fydz+l- J^dz+l+ =
I 0 9 9 J
=y^-9i(|-9)+92(|-9)+40-25l767|=-0,0589,
1 f, Ч2 (L/2-z)3 , Ч2 (Z./2-z)3 , L'? (LI2-z)3 .
TV P 3! /**—3! ~<fe+|- Jft- 3,
tl.W|<^tl.f|(^LoW7;
’ 2 ’ 3! J
L [o 4! ' 4! 9 4! 3!
+ F. (-~9) +—K - WL51 = -0,092276;
1 4! 48 I
1-p2 лЕ^Ы? 1-0,22 3,14 450 Ь30312 A Q_,_ 4
a =----r--------------r-----------------— = 4,3263 -IO.
1-Ao2 EI 1-0,372 184000 1 0,43
Теперь можно приступить к вычислению коэффициентов о0» ah 05, а3:
(8252-34а)Л-13440Ва=2
0 13440+29а
1 2048 + а
3 (5188+бЗа)Л + 13440Ва = .
13440 + 29а
(2С-Л)(384+а)+4Мх
2048+а
= 12,671.
327
Чтобы построить эпюры поперечных сил Q и изгибающих моментов М,
необходимо использовать формулы, приведенные в лекции 30:
е=[5о (2х_£)_ А(10о,
[2 120 1 2 J L 2! L2 3!
j/(z)<b+Zr/Kj jAzXfc-
б<г бег
= [|0,582(2х-£)+265,53]-0,09853(х-£/2)2 -0,01258(x-L/2)’ +
+ 0,0009386(x-£/2)4 -r,uF, -gixtrM9l(x-9)-Ffc292(x-9);
Л/=^(КЦ +3о,)+[|(х-г)_А(1(ц +3ej)_K]x+^..(i^ +
-Zr«w f/(^Xx-z)dz+^r,Ki f/(zXx-z)<fe =
гш
= I90,96+[I0,582(x-L)+249,65]x-0,03284(x-L/2)3 -
-0,003145(x-£/2)4 + 0,0001877(x-£/2)5-Г6(^(х-9)-91 ^- +
(*“9)2 „ (*“9)2
+ ГЛ|91--------1^292------•
При записи формул для определения QhMдля рассматриваемой балки,
изображенной на рис. 10.2.3, было принято, что
Г/1( = 1, Г/и| = 1, Г/к2 = 0 в любом сечении балки, т.е. при 0 < х < L;
Г/п = 0,если 0<х<9м,и r/j( =1,если 9м<х<£;
Г/к1 = 0, если 0 <х <9м, и Г/к| =1, если 9м <х < L\
Г/и2 =0,если0<х<9м, и Г/н2 =1, если 9м<х<£.
На рис. 10.2.3, в, г показаны эпюры поперечных сил Q и изгибающих
моментов Л/, ординаты которых получены с шагом Дх = L/10 = 3 м.
328
103. Расчет балок на упругом основании методом сил
Приближенный расчет балки на упругом основании был предложен
Б.Н. Жемочкиным в 1937 году. По этому методу балка разбивается на рав-
ные участки длиной с. В пределах участка отпор грунта принимается посто-
янным (рис. 10.3.1, а\ а в середине участков ставятся абсолютно жесткие
опорные стержни (рис. 10.3.1,6).
Основная система получается при отбрасывании всех опорных стержней
и введении подвижной в вертикальном и горизонтальном направлениях за-
делки (рис. 10.3.1, в).
Кроме сил X, неизвестными также являются у0 - осадка подвижной за-
делки и ф>о ~ угол поворота заделки (рис. 10.3.1, в).
Канонические уравнения метода сил имеют вид:
БцХ। + 6|2Х2 +...+816X6 -у0 -0|<Ро +^if = $
65|Xi +852Х2 +...+б5бХб -у0 -о5<Ро +^sf “0;
WI +Бб2Х2 +...+ 5ббХ6 ~Уо -ОбФо +^6F ~ 0»
2/-1 . . „
где а, = с; ; = 1; 2;...; 6; а, - расстояние от левого края балки до силы
Xj. К каноническим уравнениям необходимо добавить еще два условия рав-
новесия:
329
^Fj-X,-X2-...-X6 =Gt XMtJ-X,ai-X2a2-...-Xtat=0. (2)
1 I
Первое условие показывает, что во введенной заделке отсутствует вер-
тикальная опорная реакция, а второе условие подтверждает отсутствие
опорного момента во введенной заделке.
Коэффициенты состоят из двух величин:
bia=bla+yh> О)
где 6)и - прогиб балки в направлении силы X* от единичной силы X, = 1; ykl -
осадка основания в направлении силы Хк от единичной силы X, = 1,
~a^ =
/L/ EL1 О OZSi
6£7 с ) с с ) 6EI
yb =J^-|-2-ln2)t/C+l-lnf4^— 1)+dI =—(Fb +d)
‘ n£0 | c 2xlc-\ c1 J J it£0
- когда точка приложения силы Хк вне участка с силы Х,\
_х, 1+2х/с
— 2— In-----
с \-2х!с
Ук1 пЕ,
- когда точка приложения силы Хк внутри уча-
стка с силы X (рис. 10.3.1);
D = const, или D = 21n(J/c)+2(i + ln2),
где d- расстояние от точки приложения силы X,
до произвольной точки на полуплоскости (рис.
10.3.2, б).
Формулы для вычисления осадки основания
уи (см. рис. 10.3.2, б) выводятся при рассмотре-
нии действия силы на упругую полуплоскость
при условии задания прогибов формулами Фла-
мана (для плоского напряженного и плоского
деформированного состояний).
Постоянный параметр D будет входить во все
перемещения <5to, поэтому будем считать, что
т = о.2 Еь
Ъь = Ък, +ук, =-J^Qok
6EI пЕ0
а слагаемое D!(nEo) вынесем из 6ktt но введем
330
дополнительное слагаемое в канонических уравнениях (I):
Sftl-A'i +642^2 + ... + &1скХ к 4-У А', ~Уо — ^лФо +^kF =®»
лЕ0
которые с учетом первого условия системы (2) можно записать в виде
+6*2^2 + ...+ЬккХк -у0-П*ф0+Д^ =0.
лЕ0
Умножим все коэффициенты полученного уравнения на лЕ0 и получим
+^*2^2 + —+&ккХк -Ко -я*Фо +Д*л =0, (4)
где 6h = aWh + Fh = af^-] 1+Fto. (5)
c ) c c )
nE0c3
причем следует принимать a = ----------при плоском напряженном состоя-
пЕ0с3(1-ц2)
нии и a = —-----------при плоском деформированном состоянии;
6Е/(1-ро)
Д*а (6)
С
Ко = лЕоуо “ Л/ “ ПРИ 071001(0,4 напряженном состоянии и
<7>
i-Ro
- при плоском деформированном состоянии; Уо - условная приведенная
осадка, Фо — 7сЕофо - при плоском напряженном состоянии и
фо=Г^Т<Р« <»>
•-Но
- при плоском деформированном состоянии; Фо- приведенный угол поворо-
та введенной заделки.
Задача 10.3.1. Железобетонная балка длиной / = 7 м, высотой 0,3 м, ши-
риной b = 1 м нагружена двумя одинаковыми сосредоточенными силами
F = 400 кН (рис. 10.3.3, а). При решении задачи принять, что модуль упруго-
сти основания Ео = 48 МПа, коэффициент Пуассона основания = 0,3; мо-
дуль упругости материала балки Е = 19 000 МПа.
Требуется построить эпюру реактивного давления, эпюру изгибающих
моментов и эпюру осадок балки.
Решение. Балку по длине разделим на семь участков: с = 1П = ТП = 1 м.
Расчетная схема и основная система показаны на рис. 10.3.3, б. Имеем
пять неизвестных параметров: Хь Х7, Х3, Х4, Ко.
Канонические уравнения и первое уравнение системы (2) примут вид:
331
8] |Xj + 8]2X2 + 813X3 + ^14^4 ~ Yf + ^IF ~ 0»
^21^1 + 822X2 + 823X3 + 824X4 -K| + A2f = <h
63|Д'i + 832X2 + 833X3 +834X4 -Kj +Д3/. =0;
841 X| + 842X2 +843X3 +844X4 — У| + A4/.- = 0;
-X, -x2-x3 -x4+f=o.
Параметр Fit, входящий в формулу для вычисления осадки основания
от единичной силы для упругого полупространства (рис. 10.3.2, б), возьмем
из заранее подготовленной табл. 10.1 при Ь/с= 1/1 = 1.
Перемещения 8fa определяются по формуле (5) 8to =a.Wh +Fh,rne
7tEoc3(l-p2) = 3,l4-48-l3(l-0,172)l2 = Q
6E/(l-p2) 6 19000 b033(l-0,32)
Тогда 8, j = 8j, -лЕ0 + F}, = 0 + 2-3,525 = 7,05; 812 = 2• 1,038 = 2,076;
X2, поэтому по табл. 10.1 при x/c =
8I3= 2-0,505 = 1,01;
8M = 2-0335 = 0,67;
бй=ари2р^рй =
с Д c c )
= 0,6452-2 + 3,125 + 0,505 = 5,3204.
При определении осадки основа-
ния 8to необходимо учитывать как
правые, так и левые силы, а при оп-
ределении прогибов балки учиты-
ваются только силы с одной сторо-
ны, так как заделка находится посе-
редине. Например, F& находим сле-
дующим образом: одна сила Х2 рас-
положена на расстоянии х = 0 от
силы Х2, поэтому по табл. 10.1 име-
ем F= 3,125, а другая сила Х2 нахо-
дится на расстоянии х = 2с от первой
fc = 2 получаем F = 0,505. Осадка ос-
нования F22 будет равна сумме двух значений F.
Далее вычисляем:
623 =0,6452-5 + 1,038 + 0,335 = 4,599; 824 =0,6452-8+0,505+0,251 = 5,9176;
&33 = 0,6452 -16 + 3,525 + 0,251 = 14,992; 834 = 0,6452 • 28 +1,038+0,2 = 19,3036;
644 = 0,6452-54 + 3,525+0,167 = 38,5328.
332
По формуле (6) определяем свободные члены:
= 0;Д2Л = -2 0,645240= -51,616, ДЗЛ =-5 0,6452-40 = -129,04;
Д4А =-8-0,6452-40 =—206,486.
Знак (-) для свободных членов принят потому, что прогиб от внешней
нагрузки направлен в противоположную сторону по сравнению с прогибом
от сил Xt.
Таблица 10.1
х/с Ль
b/c = 2J3 b/c= 1 Ь/с = 2 Ь/с=3 М? = 4 Ь/с=5
0 4,265 3,525 2,406 1,867 1,542 1,322
1 1,069 1,038 0,929 0,829 0,746 0,678
2 0,508 0,505 0,490 0,469 0,446 0,424
3 0,336 0,335 0,330 0,323 0,315 0,305
4 0,251 0,251 0,249 0,246 0,242 0,237
5 0,200 0,200 0,199 0,197 0,196 0,193
6 0,167 0,167 0,166 0,165 0,164 0,163
7 0,143 0,143 0,143 0,142 0,141 0,140
8 0,125 0,125 0,125 0,124 0,124 0,123
9 0,111 0,111 0,111 0,111 0,111 0,110
10 0,100 0,100 0,100 0,100 0,100 0,099
Примечание, х расстояние от точки, где определяется осадка, до середины
участка с; b - ширина балки.
Подставляем найденные значения коэффициентов и свободных членов в
канонические уравнения (4):
7,05*, +2,076*2 +1,01Хз +0,67*4 -Tj = 0;
2,076*! +5,32*2 +4,599*з +5,918*4-Yl -51,616 = 0;
1,01*! + 4,599*2 + 14,099*з +19,304*4 - Г, -129,04 = 0;
0,67*) + 5,918*2 +19,304*з + 38,533*4 У, - 206,464 = 0;
— *! —*2 -*з -^4 +400 = 0
и находим *, = 99,5 кН;*2 = 193 кН;*3 = 107,9 кН;*4 = -0,4 кН; Г, = 121,18.
Так как сил *, две, то полное значение реакции основания в середине
балки равно 2*1 = 199 кН. Находим интенсивность отпора грунта на каждом
участке:
pi =199/1 = 199 кН/м;р2 = 193/1 = 193 кН/м;р3 = 107,9/1 = 107,9 кН/м;
р4 = -0,4/1 = -0,4 кН/м.
Эпюра реакции основания показана на рис. 10.3.4, а. Зная отпор грунта и
внешнюю нагрузку, легко построить эпюру изгибающих моментов в балке
(рис. 10.3.4, б).
333
Для вычисления осадки необходимо каждую силу умножить на соответ-
ствующую функцию F*„ причем нужно учитывать как правые, так и левые
силы: Yt = 2^! F\, + 2Хг F12 + 2^3FI3 + 2Х 4 F14 =
=2 • 99.5 • 3,525 + 2193 1,038 + 2107,9 - 0,505 - 2 • 0,4 • 0,335 = 1211,8;
Y2 = 199-1,038+193-3,525+ 193-0,505+ 107,9-1,038+ 107,9-0,335-
-0,4 0,505-0,4 0,256 = 1130,18;
К3 =107,9-3,525+ (193-0,4)-1,038+199-0,505+ 193-0,335+ 107,9-0,251-
-0,4 0,2 = 772,42;
Г4=Ч),4(3,525+0,167) + 107,9(1,038+0,2)+193(0,505+0,2)+199-0,335=314,82
РI I р Для получения действитель-
-0,4 кН/м 1 I _о 4 кН/м НЫХ °СаЯ°К НаД° значения Г‘
’ ’ ’ ножить на величину
"1-//Q2 (1-Q32)
лЕос 3,14-48-Ю3 1
= 0,6037-10 5.
Таким образом, получим:
у, = 0,6037-Ю"5-1211,8-100 =
= 0,73 см;
у2 = 0,6037-Ю"5-1130,18-100 =
= 0,68 см;
у3 = 0,6037-Ю"5-772,42-100 =
= 0,47 см;
у4 =0,6037-Ю"5 -314,82-100 =
= 0,19 см.
Эпюра просадки грунта (оса-
дки) показана на рис. 10.3.4, в.
Примечание. В рассмотренной
задаче предполагалось, что со-
средоточенные силы F лежат в
вертикальной плоскости, про-
ходящей через ось балки, отно-
шение h/b = 0,3/1 = 0,3 - мало,
явленная для упругого полупро-
странства.
В случае если постоянная нагрузка расположена по всей ширине балки
или отношение h/b для балки достаточно велико, необходимо использовать
таблицу единичных осадок F*„ составленную для упругой полуплоскости,
или пользоваться формулами, приведенными в начале раздела 10.3.
334
Раздел 11
ОСНОВЫ ДИНАМИКИ СООРУЖЕНИЙ
(по материалам лекций 31-35)
11.1. Динамические задачи,
приводимые к задачам статического расчета
Задача 11.1.1. Стальной горизонтальный стержень постоянного попе-
речного сечения длиной / = 0,6 м равномерно вращается с постоянной угло-
вой скоростью п = 1000 об/мин вокруг вертикальной оси/-/(рис. 11.1.1, а).
Определить наибольшее нормальное растягивающее напряжение в
стержне, если плотность его материала р = 7,75 г/см3.
Решение, Вычислим интенсивность сил инерции р, в стержне (т.е. силу
инерции, отнесенную к единице длины), учитывая, что она равна массе уча-
стка единичной длины, умноженной на нормальное ускорение а„, т.е.
или, принимая во внимание, что
. 71 п
получаем р, = рЛ х.
Эпюра pt показана на рис.
11.1.1,б.
Продольная растягивающая си-
ла N в сечении, расположенном на
расстоянии х от оси вращения, рав-
на площади эпюры р, на участке от
сечения х до конца стержня, т е. в
рассматриваемой задаче - это пло-
Рис. 11.1.1
щадь трапеции:
Эпюра N показана на рис. 11.1.1, в. Наибольшее значение продольной
_ .. I . л2и2/2
сипы будет .
Определяем наибольшее растягивающее напряжение
nwx А 7200 7200 м2
335
Задача 11.1.2. Стержневая система, показанная на рис. 11.1.2, а, враща-
ется с постоянной угловой скоростью Q вокруг оси АВС.
Построить эпюру изгибающих моментов Ми от действия инерционных
сил и определить допустимое по прочности число оборотов в минуту, если
плотность материала стержней р = 7,75 г/см3, а допускаемое нормальное на-
пряжение Radm = 160 МПа.
Поперечные сечения стержней круглые диаметром d = 3 см, длина от-
резка я = 0,2 м.
Решение. Определяем интенсивность сил инерции р, в отдельных
стержнях.
Участок АВС. Силы инерции отдельных частиц стержня взаимно урав-
новешиваются и изгиба не вызывают, таким образом, р,А с = 0;
Участок CD. Силы инерции направлены вдоль оси стержня. На расстоя-
нии х от оси вращения интенсивность их будет равна
Рис. 11.1.2
p(jD = pAQ2x,
т.е. при х = 0 имеем р, D = 0,
а при х = а получаем = рАО?€.
Обозначим буквой q интенсивность
сил инерции в точке х = о, т.е.
9= А.ШЗХ
Участок DE. Так как этот участок
параллелен оси вращения, то интен-
сивность сил инерции на нем будет
постоянна и равна
рРЕ= q = const.
Эпюры инерционных сил, дейст-
вующих на рассматриваемую систему,
показаны на рис. 11.1.2, б.
Теперь можно приступить к опреде-
лению изгибающих моментов и по-
строению эпюры Ми.
На участке DE эпюра Ми - парабола, на участке DC - прямая, парал-
лельная стержню CD, на участке СВ - наклонная прямая и на участке АВ
также наклонная прямая (рис. 11.1.2, в).
Равнодействующая распределенной вдоль стержня CD инерционной на-
грузки pt равна площади эпюры т.е. в данном случае площади треуголь-
ника (7? = о^/2).
Из эпюры Ми видно, что максимальное значение изгибающего момента
будет в сечении В:
M,™ = l25qa2 =1,25р4Я2а\
336
Запишем условие прочности в виде !WZ< Radm, где осевой
момент сопротивления круглого поперечного сечения подсчитываем по
формуле Wz=0,1</3.
Таким образом, условие прочности имеет вид
1,25^п2 _ 1,25ртсЛ3П2
О,Id3 4 0,Id3
откуда находим допускаемую угловую скорость в рад'с
Q= I _ I 160-ю6 340~
V9,81po3 у 9,81-7,75-103-8-10-3
30Q 30-88,8 оло с,
и допускаемое число оборотов в минуту пadl„ =---=---------= 848 об/мин.
п 3,14
Задача 11.13. Требуется оценить прочность кольца с постоянной пло-
щадью поперечного сечения А и средним диаметром d. Кольцо вращается с
Рис. 11.1.3
Решение. Определяем интенсивность распределенной инерционной на-
р-Л-1П2Л pAQ2d
грузки: р, = та, = ---------= —.
Расчетная схема кольца представлена на рис. 11.1.3, б. В кольце возник-
нут растягивающие продольные силы N, которые можно определить, рас-
сматривая равновесие половины кольца (рис. 11.1.3, в), т.е. применяя метод
сечений:
V П Л/ 7 • 1 41" Л рЛО2</2 _
Zy = -2N + jp,-d<?sm<p = -p,d'(-ccs(ty0 =Pld = ^—---= 0,
о 2 2 2
откуда находим N = pAQ2d2 / 4.
Условие прочности для вращающегося кольца записывается в виде
od=N/A = pQ2d2/4<Ral„.
21 ‘ /4 С. Н. Кривошапко
337
11.2. Упругий удар
Несколько примеров расчета стержневых конструкций на ударные воз-
действия без учета массы ударяемого тела рассмотрены на лекции 32.
При необходимости учета массы тела, испытывающего удар, формула
для расчета динамического коэффициента принимает вид
где тт - масса падающего груза; т„р - приведенная масса тела, испытываю-
щего удар, причем = ат, где т - истинная (распределенная) масса тела;
а - коэффициент привидения распределенной массы к точечной.
Рис. 11.2.1
Коэффициент а определяется сравнением кинетической энергии тела с
распределенной и с точечной массами. Коэффициент привидения а зависит
от вида удара
(продольный, изгибный и т.п.) и от характера закрепления
концов стержня. Так, для консольной балки, испы-
тывающей продольный удар (рис. 11.2.1, о), а = 0,33;
для шарнирно опертой балки на двух опорах, испы-
тывающей удар посередине (рис. 11.2.1, б), а = 17/35;
для консольной балки, испытывающей изгибный
удар (рис. 11.2.1, в), а = 33/140 » 0,235 и т.д.
Задача 11.2.1. Груз весом F- 2 кН, скользя без
трения вдоль стального бруса, падает на приварен-
ную к нему жесткую пластину и вызывает ударное
растяжение бруса (рис. 11.2.2, а).
Площадь поперечного сечения бруса А = 5 см2, его
338
длина / = 1,8 м, модуль продольной упругости материала Е = 2105 МПа; вы-
сота падения груза Н равна 0,02 м. Требуется определить максимальное
нормальное напряжение в брусе в момент его наибольшей деформации.
Собственной массой стального бруса, испытывающего удар, пренебречь.
Решение. Определим величину Д„ (рис. 11.2.2, б)
. Fl 2-Ю3 1,8
А а =-----------------=--------------J-
ЕА 2,1-Ю11-5-10”4
Рассчитываем динамический коэффициент
= 3,43-IO"5 “.
= 14-
2 в’02- = 1 + VT169 = 35,2.
3,43-10”5
Определяем статическое нормальное напряжение
F 2-Ю3 А ,_6 Н
сг., = — =----------------- = 4-10 —- = 4 МПа .
А 5-10”4 м2
Находим максимальное динамическое напряжение
оцта, = о„ kj = 4-35,2 = 140,8 МПа.
Задача 11.2.2. Груз весом F = 200 Н падает с высоты И = 0,3 м посере-
дине на шарнирно опертую двухопорную деревянную балку квадратного
поперечного сечения со стороной а = 15 см и длиной / = 3 м.
Рассчитать запас прочности балки, если модуль продольной упругости
материала балки Е = 104 МПа. Предел прочности при расчете на изгиб при-
нять Rh = 20 МПа. Собственной массой балки пренебречь.
Решение. Проводим статический расчет, т.е. определяем максимальное
напряжение и перемещение в серединном сечении балки при нагружении ее
статической сосредоточенной силой F = 200 Н.
Максимальный изгибающий момент равен
„ F I 200 3 1СЛ11
=----=------=150 НМ.
max 2 2 2 2
Статический момент площади сечения равен
— = м3 =5,625-Ю’4 м3.
6 6
Определяем максимальное нормальное статическое напряжение
°— =^Г=^^=26-61°4^=0-266МПа-
Статическое перемещение посередине балки определяем по известной из
теории изгиба формуле
Рр рр рр 200-З3 . -
А „ =----=-------т---=------- =---7--7------ = 2,67 10 м.
48£/z 48£(о4/12) 4£g4 4-Ю4-106-0,154
217*
339
Рассчитываем динамический коэффициент
= 1+, 2 0,3 z = 1 + V2248 = 48
V 2,67-10"4
Находим динамическое напряжение оцтах = 0,266-48 = 12,77 МПа.
Запас прочности равен и = —-— = — = 1,56.
<4™ 12,77
Задача 11.2.3. Груз весом F = 200 Н падает с высоты Н = 0,3 м на шар-
нир С стальной рамы, показанной на рис. 11.2.3, а. Статически определимая
Рис. 11.2.3
рама выполнена из двутавровых
стержней с осевым моментом инер-
ции сечения /2 = 350 см4, моментом
сопротивления Wz = 58,4 см3 и пло-
щадью поперечных сечений стерж-
ней А = 14,7 см2. В расчетах при-
нять Е=2,06-105 МПа.
Требуется определить динамиче-
ский прогиб в шарнире С.
Решение. Строим эпюру изгиба-
ющих моментов MF в раме от стати-
ческого приложения груза весом
F = 200 Н в точке удара С (рис.
11.2.3, б) и от единичной силы Р = 1,
также приложенной в точке удара С
(рис. 11.2.3, в). Используя интеграл
Мора и правила Верещагина, вычис-
ляем вертикальное перемещение ДЛс
точки удара С, перемножая эпюры
и Л/р
Д5/Г = —(-300-3 — 1,5 | =
st'c EIZ\2 3 )
1800 1800
EIZ 2,06-Ю5-106-350-Ю-8
= 0,0025 м.
Вычисляем динамический коэф-
фициент:
. 11 20,30
1 + J1 +---—
V 0,0025
= 1+7241=16,52.
340
Таким образом, динамический прогиб шарнира С будет
А = АаАиС = 16,52 0,25 = 4,13 см.
113. Упругие собственные и вынужденные колебания систем
с одной степенью свободы
Задача 11.3.1. Требуется определить круговую частоту собственных
колебаний сосредоточенного груза F = mg =
- 3000 Н, приложенного на расстоянии 1,5 м от
левой опоры однопролетной балки (рис. 11.3.1,
а). Собственным весом стальной двутавровой
балки пренебречь. Осевой момент инерции по-
перечного сечения двутавра № 30 / = 7080 см4,
Е = 2,1105 МПа. Пролет балки /-6 м.
Решение. На рис. 11.3.1, б показана эпюра
моментов от единичной силы, приложенной в
месте расположения сосредоточенного груза F.
Вычисляем коэффициент податливости:
-1,1251,5 -1,125+-!,125-4,5 -1,1251 =—Г—
2 3 2 3 J EI [Н
5„ =
1
EI
Теперь можно определить круговую частоту собственных колебаний
сосредоточенного груза F:
| 1 ,9,81 гл-ю’^овою8 -I
и = J---= J—-------------------= 138с 1
V3000 2,53
_ гг 2л 2-3,14 ЛЛ.,
и период колебаний Т = — =-----------= 0,046 с.
со 138
341
Задача 11.3.2. Требуется определить круговую частоту свободных из-
гибных колебаний массы m - 40 кг, сосредоточенной в самой верхней точке
статически неопределимой
рамы, показанной на рис.
11.3.2, а, если предположить,
что все стержни рамы вы-
полнены из стального дву-
тавра № 30 с / = 7080 см4 и
модулем продольной упруго-
сти Е = 2,1 105 МПа. Собст-
венную массу стержней рамы
не учитывать.
Решение. Пользуясь ре-
зультатами задачи 6.1.1 раз-
дела 6, возьмем в готовом
22 С. Н. Кривели
виде эпюру изгибающих моментов в раме от действия единичной силы, при-
ложенной горизонтально в самой верхней точке рамы (рис. 11.3.2, б). Эта
эпюра получается, если принять F = 1 на рис. 6.1.1, е.
Умножая эпюру Л/j саму на себя, получим коэффициент податливости:
11 Е/[61 33 33 3 3) 2 3 23 3 3j 3EI
а затем и круговую частоту свободных колебаний массы т:
<0= I 1 f3£/ Ь-2,1 1011-7080-10~8
Ш Vm6n Vm-2~V 40-2
= 747с-1.
Задача 1133. На двух двутавровых балках Ms 30 посередине установлен
двигатель весом Q = 15 кН. Неуравновешенные массы двигателя условно
заменены вращающимся со скоростью п = 850 об/мин грузом Q2 = 200 Н,
радиус вращения которого Я=0,27м (рис. 11.3.3).
Проверить прочность балок, приняв их длину / = 2,2 м, модуль упруго-
сти материала балок Е = 2105 МПа, расчетное сопротивление стали изгибу,
растяжению по пределу текучести Ry = 220 МПа.
Решение. Выписываем из таблицы сортамента геометрические характе-
ристики поперечного сечения двутавровой балки № 30: осевой момент
инерции Iz = 7080 см4, момент сопротивления Wz = 472 см3 и устанавливаем
вес Qi одной балки: вес 1 м двутавра Ms 30 q = 365 Н/м, следовательно,
С, = ?/=365-2,2 = 803 Н.
В дальнейшем расчет проводим для одной балки.
Вычислим собственную круговую частоту колебаний со системы, для
чего воспользуемся формулой
| 1
a) = J--
Ут1фОц
342
где njnp - масса, равная сумме приведенной массы одной балки
"»i.np = ami=aQxlg
и половины массы двигателя (C?/(2g)), то есть
m =-f«2i +—] =—f0,5-803+^^1 = 805,45кг.
Д 2) 9,81\, 2 J
При расчете собственной частоты балки, как системы с одной степенью
свободы, в расчет вводится приведенная масса балки = атх.
Для балки на двух опорах коэффициент привидения а= 17/35 « 0,5.
Согласно рис. 11.3.4 имеем
_ 2 (I I I 2 I
11 I2 V2 V4
Таким образом, частота собственных колебаний системы равна
ш= I—'—= ---------------!-----— =281,56—.
Vmop8n 1/805,45-1,566-10“® С
Определяем частоту вынужденных колебаний:
n=2^ = »m = X14J50=
60 30 30
Находим границы резонанса:
^нижн = О,7со = 0,7 • 281.56 = 197 с’1;
=l,3<o = 13•28I,56 = 366c_,.
2,2
„ = 1,566-10~8.
48Е/2 48-2*10 - 7080-Ю”8
Рис. 11.3.4
Рассчитаем максимальное напряжение crsl в среднем сечении балки, на-
груженной статически приложенными силами Q/2 и Qx = qi.
Q.L
гг гт ГЛАд-гт (П \ ^max(C^2) A/max(<?) 4 2 8 _
_ (P+C,)-Z _ (15000+803)-2^ =92.,ое Н =92МПа
8-472,4-10”6 м2
Рассчитаем коэффициент нарастания вынужденных колебаний р по
формуле
р=г-|-=^-1—
I Q2 L 89,012
| со2 I 281,562
Вычислим динамический коэффициент^ используя формулу
kd
., д«(а) п
A.rt(aei)p’
22*
343
Рис. 11.3.5
где Aj/ft) - прогиб по середине балки, от статиче-
ской сосредоточенной силы Ро, равной силе инер-
ции груза Qifl'.
Я, = т.о = ^-П2Я.
2g
или, согласно рис. 11.3.5, имеем
л 2 (1 Q2q2jV I 2 Н Q^2r
EIz\2 8g ’2 3 4) 96EIzg ’
Mea)=Me/2)
прогиб по середине балки, нагруженной статиче-
ской сосредоточенной силой Qfl и равномерно рас-
пределенной нагрузкой q = Q\/1 = 803 Н, т.е.
л (со (е/2)<3, 5<#4 е/3 , sg|p <4е+5&Уэ
48 E/z 384Е/г 96EIz 3MEIz M4EIz
Определим отношение прогибов
Д„(&) = = 4-200-0,27-89,012 = 2 п
Ля(е.е>) («е+5й)« (4-15000 + 5-803)-9.81 '
Рассчитываем динамический коэффициент
. = u А«(С2) р = । + 2,72-1,126 = 4,07.
Д«(С.Й)
Проверяем выполнение условия прочности
оа = ‘ kd = *2 • 4’07 = 37,44 МПа < Ry = 220 МПа.
Таким образом, число оборотов двигателя п = 850 об/мин является безо-
пасным для прочности балок.
Используя условия задачи (кроме числа оборотов л), установим безо-
пасный по прочности балок режим работы двигателя, т.е. определим допус-
каемое число оборотов.
Решение. Используем формулу для определения отношения прогибов
ДА, (Q2 )/Да, (С, Ci)» не подставляя в нее числовое значение частоты Q воз-
мущающей силы:
= 4С2^2 _ 4 200 0,27 П2 _00(юшп2
Д,,(е.е,) (4e + 5fl)g (4-15000 + 5-803)-9,81 ’
Запишем условие прочности
Q2
= 9,2(1 + 0,000344 т-----------г) < Ry = 220 МПа.
|1 -Q2 /281,562|
344
Далее решаем неравенство, которое получается из предыдущего уравне-
ния:
1< 66607,7
Возможны два случая:
1-й случай: 1 < ^6607,7 -0,84, или П < 190,3 с-1;
Q2
2-йслучай: 1 666°7’7 4-0,84, или 0,16Q2 <-66607,7,
Q2
т.е. 2-й случай не имеет смысла.
На рис. 11.3.6 схематично показана
зона опасных режимов по прочности и
зона резонанса.
Допускаемое по прочности балок чис-
ло оборотов двигателя
п< —-О = — 1903 =1818 об/мин.
л 3,14
Проверим, что получится, если уменьшить в два раза неуравновешен-
ную массу двигателя, т.е. если принять, что Р? = 200/2 = 100 Н:
рЪ
(40+$й)« I
Зона опасных режимов по прочности
Зонарезонанса^^/
197с' 366 с1
190,3 с 1
Рис. 11.3.6
=9;
Q2
1 + 0,000172i-------------7
|l-Q2 /281,562|
<220 МПа.
Возможны два случая:
133215
1-й случай: 1<--------1,68, или Q<223c *;
Q2
2-йслучай: 1 <-2222*2+ 1.68, т.е. -0,68Q2 <-133215, или О>443сЛ
Q2
Зона опасных режимов по прочности
197 с* ! 366 с' J
223 с 1 443 с 1
Рис. 11.3.7
На рис. 11.3.7 схематично показаны зона опасных режимов по прочно-
сти и зона резонанса при 0 =100 Н.
345
11.4. Упругие собственные и вынужденные колебания систем
с двумя степенями свободы
Задача 11.4.1. Определить частоты собственных колебаний невесомой
балки с жесткостью на изгиб EI, на которой расположены две равные сосре-
доточенные массы т (рис. 11.4.1, а).
Решение. Перемножая соответствующие эпюры, вычисляем перемеще-
ния от единичных сил (рис. 11.4.1, б, в):
8 1 j ' 2 * , 1 j / 2
" Е/\2 2 2 3 2 2 2 3 2) ZE!’
812=±r^f2.'..o-2.I.l_2..'.+I.o)-12.I.2.lL_jL;
12 Е/[ 6 t 2 4 4 2 4 4 ) 2 4 2 3 4] 32Е/
8 _ 2 f1 f f 2 f)._ l-
22 E/U'4'2'3 4J 4SE/
Из уравнения (35.6) лекции 35 находим
cd? = 7,48-Ц-; со? = 82,15> откуда
тР тР
“,=2,73® “2=9,06^’
где со! и 0)2 ~ значения низшей и высшей
круговых частот собственных колебаний
балки.
Каждой частоте соответствует своя форма колебаний.
По формуле (35.8) лекции 35 находим отношение амплитуд Аг!А\ коле-
баний двух масс:
А2 1—Ш|С0| бц
Aj m2<j)?5|2
l-m-7,48-^ —
________m/3 8E7
Е/ f P
лл-7,48—-——
mP I 32EZ
Al /MjCDjSjj
EI I
1-^82,15,-----
mP SEI
EI I
m-82,15—-r-
ml I
P ]
32Е/ J
= -0,27 для низшей частоты coj;
- 3,6 для высшей частоты Шг-
Первая и вторая формы собственных колебаний балки показаны соот-
ветственно на рис. 11.4.2, а, б. Проверим условие ортогональности двух
форм собственных колебаний.
346
а при o)i имеем Л2 = -0,27Л1 б присо2 имеем Л2 = 3,6Л1
Рис. 11.4.2
Запишем собственные векторы:
Для системы с двумя степенями свободы условие ортогональности запи-
сывается в виде:
"»1V11VI2 +"»2V2IV22 =0,
которое для рассматриваемой задачи удовлетворяется тождественно:
m-1-1-т-0,27-3,6 «0.
Задача 11.4.2. Определим частоты собственных колебаний двух масс,
расположенных на раме с двумя опорами (рис. 11.4.3, с). Требуется также
записать собственные векторы и изобразить формы собственных колебаний
рамы.
Решение. Система имеет две степени свободы.
По направлению 1 могут перемещаться массы 2т и т, поэтому прини-
маем, что mj = 2т + т = 3 m. По направлению 2 может перемещаться только
масса 2m, поэтому записываем т2 = 2m.
Для определения коэффициентов 6ц, 622, Sj2 = 621 строим единичные
эпюры Л/j и Л/2(рис. 11.4.3, б, в). Вычисляем коэффициенты по правилу
Верещагина:
51
2
3
/1 = 0,667—;
) EI
5 =5 5/.!.! 2/1 = 0,3—;
12 21 Е1\2 3 ) EI
б22 =
——f-l,2/.I,2/.--I,2/l+—(—• 1,2/-1,5/-—-1,2/1 = 1,2—.
1,2Е/^2 3 ) Е1{2 3 J EI
Подставляем значения <5ц, <522> <$12, т2 в формулу (35.6) лекции 35 и
вычисляем частоты собственных колебаний:
347
Для получения формы собст-
венных колебаний, соответст-
вующей частоте coh подставим
в первое уравнение (35.8) лек-
ции 35 значение со\ и найдем
Аналогичные вычисления
проведем для круговой частоты
со2:
Чл)/^937-
Собственные векторы запи-
шутся в виде:
Проверим условие ортого-
нальности двух форм собствен-
ных колебаний:
miVnVi2 +m2v21v22 =
- Зт-1 • 1 +2ш-1,603-(-0,937) = 0.
Условие ортогональности удов-
летворяется. Первая и вторая
формы собственных колебаний
показаны соответственно на
рис. 11.4.3, г, д.
Задача 11.4.3. Определим
частоты собственных колеба-
ний двух масс, расположенных
на трехшарнирной раме (рис. 11.4.4, а).
Требуется также записать собственные векторы и изобразить формы
собственных колебаний рамы.
Решение. Система имеет две степени свободы.
348
По направлению 1 может
перемещаться только масса
т, поэтому принимаем, что
mi = т. По направлению 2
могут перемещаться обе мас-
сы, поэтому записываем
m2 = т + 1,5m = 2,5m.
Для определения коэффи-
циентов <5ц, <5n = <$21, <$22,
строим единичные эпюры
моментов Мх и М2 (рис.
11.4.4, б, в). Вычисляем ко-
эффициенты по правилу Ве-
рещагина:
8„ =03057^;
512 = 621 =0,0642—;
12 21 EI
Р
522 =0,407—.
22 EI
Подставляем значения 5ц,
622, 812, mi, т2 в формулу
(35.6) лекции 35 и вычисля-
ем частоты собственных ко-
лебаний:
со, =0,985 1-^;
\т!3
А2 ~ 0,088/11
Рис. 11.4.4
Ж
Для получения формы собственных колебаний, соответствующей часто-
те <0|, подставим в первое уравнение (35.8) лекции 35 значение (0| и найдем
vn ~ (^1 / )| = 1; v2i ~ (^2 ! Л )i = 4»52-
Аналогичные вычисления проведем для круговой частоты а>2.
V|2
= I; v22 =
= -0,088.
Собственные векторы запишутся в виде Г| =
349
Pt = PsinOr
1,5Е/ jc Е/ 1.2Е/
1.5Е/
1.5E/I
1,25/
1,25/
Рис. 11.4.5
Проверим условие ортогональности двух форм собственных колебаний:
mivnvi2 +m2v2iv22 = т’Ь1 + 2,5т- 4,52- (-0,088) = 0.
Условие ортогональности удовлетворяется. Первая и вторая формы соб-
ственных колебаний показаны соответственно на рис. 11.4.4, г, д.
Предположим, что в точке С трехшарнирной рамы приложена возму-
щающая гармоническая сила (рис. 11.4.5, a) Pt = Р sin 6/, где 0 - частота
вынужденных колебаний.
Будем считать, что отношение частоты вынужденных колебаний к низ-
шей частоте собственных колебаний а>| задано, например, к = G/tOj = 0,8.
Рассмотрим случай установившихся вынужденных незатухающих коле-
баний. Поперечное перемещение Ьк = Ак sinG/ каждой массы получаем как
результат действия двух сил инерции Fb, F2i и возмущающей силы Pt:
5| = FjjSjj + F2j812 + PtА|р; 82 = Fi^j + F^f^z + (a)
Подставляя значения сил инерции
Fkl = -ткЪ"к = -mk —z-(Ak sinGf) = mkG2Ak smQt = Xk sinG/,
dr --------
где Xk = т*02Л* - максимальное значение силы инерции F^ = Fh (/), значение
возмущающей силы Pt = PsinGf в систему двух уравнений (а), и сокращая
результат на sin 0t, получим:
Л) = -^- = A’jSj, + X2Sn + РА1г;
nijG
Л2 - ту-^|521 + Х2Ъ22 +РЬ2Р,
m2v
350
или I 5n — jx, + X2bi2 + ~ О»
к )
^1^21 + [$22--2 р2 +^2P =0- (б)
I /^2© J
Решая полученную систему двух уравнений (б), можно найти Xh Х2 -
наибольшие значения сил инерции.
Зная место приложения возмущающей силы Pt и единичную эпюру Мх
(рис. 11.4.4, б), можно построить эпюру изгибающих моментов от макси-
мального значения Р возмущающей силы Pt (рис. 11.4.5, б).
Вычисляем коэффициенты при неизвестных Xt и Х2 и свободные члены
для системы уравнений (б):
62 = (0,8ш, )2 = 0.82 -0,9852 = 0,621 ; 8„----Ц- = -1,307—;
' ml3 ml3 m,02 El
= = = -03057^;
Pl3
Д =P5 = 0,0642—.
2/2 2i E/
Значения 5ц, бц = Szj, 822 были определены ранее. Подставляем полу-
ченные коэффициенты в систему уравнений (б):
I3 I3 Р!3
-1,307 — Xi +0,0642—Х2 +0,3057--= 0;
ЕI El EI
I3 I3 Pl3
0,0642—X. -0,2382—X2 + 0,0642—= 0
EI EI EI
и находим Xi = 0.25/3; X2 = 0,337P. Теперь можно построить эпюру наиболь-
шего изгибающего момента Md от динамической нагрузки складывая
эпюры Л/jXj, М2Х2 и Мр. Md =MlXl +М2Х2 +МГ (рис. 11.4.6).
P+Xt=\t25P
0,594/7
Md= M}Xt +М2Х2 + МГ
Рис. 11.4.6
0,712Р/
0,712/7
351
Часть 3
Расчетно-графические и курсовые работы
Строительная механика, как и сопротивление материалов, относится к
комплексу прикладных научных дисциплин, посвященных методам расче-
та конструкций и сооружений на прочность, устойчивость и жесткость.
Выполнение расчетно-графических или курсовых работ является важ-
нейшей составной частью изучения дисциплины «Строительная механи-
ка». Их целью является углубленное усвоение программного материала,
приобретение навыков проведения инженерных расчетов, пользования
справочной литературой и выработка умения правильно оформлять техни-
ческую документацию.
Расчетно-графические работы охватывают наиболее важные темы
учебной программы изучаемой дисциплины.
Настоящий раздел книги содержит 15 расчетно-графических и курсо-
вых работ. Перед тем как приступить к выполнению очередной работы,
необходимо изучить материалы соответствующих лекций и внимательно
разобраться с порядком решения тестовой задачи, рассматриваемой в со-
ответствующем разделе второй части «Практические занятия по темам
лекций» пособия. В некоторых расчетно-графических работах даются
прямые ссылки на тестовые задачи.
Для каждой работы приводятся формулировка содержания задания,
расчетная схема и числовые данные в двух таблицах. Номер строки или
столбца с номером варианта задания и числовыми данными в каждой таб-
лице выбирается в соответствии с первой или второй цифрой двузначного
шифра студента. Это могут быть, например, две последние цифры номера
зачетной книжки студента.
Результаты работы оформляются в виде пояснительной записки,
включающей расчеты и графический материал.
Из формулировок содержания расчетно-графических работ видно, что
они должны выполняться классическими методами строительной механи-
ки. При желании можно предусмотреть выполнение тех же вариантов рас-
четно-графических работ дополнительно и численными методами, кото-
рые используются в стандартных компьютерных программах. Вторую
часть работы рекомендуется выполнять факультативно или в рамках дис-
циплин «Численные методы расчета конструкций», «Спецкурс строитель-
ной механики на ЭВМ», «Компьютерные методы расчета в строительст-
ве», читаемых в ряде вузов.
352
Расчетно-графическая работа № 1
РАСЧЕТ
МНОГОПРОЛЕТНОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ БАЛКИ
Содержание задания
Для многопролетной статически определимой балки требуется:
1. Выписать данные для своего варианта из табл. 1.1 и 1.2.
2. Начертить в масштабе схему заданной балки.
3. Провести кинематический анализ заданной балки.
4. Составить поэтажную схему балки и провести кинематический
анализ этой схемы.
5. Найти опорные реакции и построить эпюры М и Q для каждой
балки, входящей в поэтажную схему.
6. Построить эпюры М и Q для всей заданной балки.
7. Построить линии влияния опорных реакций для двух средних
опор и линии влияния М и Q в двух сечениях, расположенных в
первом пролете на расстоянии 0,2/| от левой опоры и во втором
пролете на расстоянии 0,4/2 от левой опоры.
8. Для неподвижной нагрузки найти с помощью линий влияния
опорные реакции для двух средних опор, М и Q в выбранных се-
чениях.
9. Считая нагрузку подвижной, найти с помощью линий влияния
наибольшее и наименьшее значения опорных реакций для двух
средних опор и наибольшее и наименьшее значения М и Q в вы-
бранных сечениях.
10. Составить таблицу, в которой для опорных реакций и для М и Q в
выбранных сечениях последовательно записать значение усилия
из статического расчета; значение того же усилия, определенного
по линии влияния при неподвижной нагрузке; наибольшее и наи-
меньшее значения того же усилия для случая подвижной нагрузки.
Таблица 1.1
№ строки Схема балки Fi, кН f2, кН 9ь кН/м 92. кН/м
1 I 50 10 10 8
2 II 60 12 12 9
3 III 70 14 14 10
4 IV 80 16 16 8
5 V 50 18 18 9
6 VI 60 10 10 10
7 VII 70 12 12 8
8 VIII 80 14 14 9
9 IX 50 16 16 10
0 X 60 18 18 8
Таблица 1.2
№ строки м /2. м /э» м
1 6 8 6
2 6 9 8
3 8 6 6
4 8 6 9
5 10 8 6
6 6 9 8
7 6 6 6
8 8 6 9
9 8 8 6
0 10 9 8
353
t*£
ии1лвд tjowHirauodno иязэнихвхэ ионхэиоЛю-юнк lotoej
Расчетно-графическая работа № 2
РАСЧЕТ ТРЕХШАРНИРНОЙ АРКИ
Содержание задания
Для трехшарнирной арки требуется:
1. Выписать данные для своего варианта из табл. 2.1 и 2.2.
2. Начертить в масштабе схему заданной арки с нагрузкой и схему
простой заменяющей балки с нагрузкой.
3. Определить вертикальные опорные реакции балки (), арки
(Г> и Гв) и распор арки Н.
4. На основании аналитических расчетов построить эпюры М”, Q°,
М„ Qy и TV на горизонтальной проекции арки.
5. Построить линии влияния Va, Vb, Н, Q* для сечения Л, нахо-
дящегося на расстоянии 0^25/ от левой опоры.
6. Получить величины Л/*, Qk, путем загружения соответствую-
щих линий влияния заданной нагрузкой и сравнить эти величины
со значениями на эпюрах Л/„ Qy и N.
7. Наметить опасное сечение и подобрать из условия прочности
— &admj » — ^adm.c
прямоугольное поперечное сечение арки при
= >0 МПа; аа(1тс = 14 МПа.
Таблица 2. /
№ строки Схема нагрузки 1, м /. м в и
1 I 12 4 2,2
2 II 12 5 2,4
3 III 18 4 2,6
4 IV 18 5 2,8
5 V 18 7 3,0
6 VI 24 5 3,2
7 VII 24 7 2,8
8 VIII 24 9 2,6
9 IX 36 6 2,4
0 X 36 11 2,2
Таблица 2.2
№ строки Очертание оси арки 9. кН/м F, кН
1 Круговое 22 11
2 Парабола 24 12
3 Круговое 26 13
4 Парабола 28 14
5 Круговое 30 15
6 Парабола 32 16
7 Круговое 34 17
8 Парабола 36 18
9 Круговое 38 19
0 Парабола 40 20
355
Поперечное сечение
арки
я
Ill
IV
V
я
1ШШШ. lUIIUIII.
Ш1ШШ 1' Ш1ШШ
'1 1 2^
ШШ1Ш1 ШШ1Ш
ШШШ|1 к ^Я 4ШШШ
4<7
VI
VII
III
IX
X
ппшш
ЩЩЩ||
ППШПЬш&ш
ШШШШ11Ш1Ш.
ч
1ШШШ
шшшв
ЬшшшЙШШШШШШЙ
Расчетно-графическая работа № 2
Расчет трехшарнирной арки
356
Расчетно-графическая работа № 3
РАСЧЕТ ПЛОСКОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ ФЕРМЫ
Содержание задания
Для плоской статически определимой фермы требуется:
]. Выписать данные для своего варианта из табл. 3.1 и 3.2.
Таблица 3. / Таблица 3.2
№ строки Схема фермы № панели 4 м
1 I 3 6,0
2 II 2 6,4
3 Ш 3 6,8
4 IV 4 7,2
5 V 5 6,0
6 VI 2 6,4
7 VII 3 6,8
8 VIII 5 7,2
9 IX 4 6,0
0 X 4 6,4
№ строки л, м * кН/м
1 9,0 40
2 9,3 50
3 9,6 60
4 9,0 70
5 9,3 80
6 9,6 40
7 9,0 50
8 9,3 60
9 9,6 70
0 9,0 80
2. Начертить в масштабе заданную схему фермы с распределенной
неподвижной нагрузкой и пронумеровать узлы фермы.
3. Провести формальный кинематический анализ.
4. Вычислить опорные реакции.
5. Начертить в масштабе заданную схему фермы и привести распре-
деленную нагрузку и опорные реакции к узловой нагрузке.
6. Определить усилия в стержнях заданной панели и записать усилия
во всех стержнях заданной панели от заданной нагрузки во втором
столбце табл. 3.3.
7. Построить линии влияния усилий в стержнях заданной панели
фермы.
8. По линиям влияния найти усилия в стержнях заданной панели от
заданной неподвижной нагрузки и записать их значения в третьем
столбце табл. 3.3.
9. По линиям влияния найти наибольшее и наименьшее значения
усилий в каждом стержне заданной панели oi подвижной равно-
мерно распределенной нагрузки интенсивностью 2q и длиной 3d и
записать значения этих усилий, соответственно, в четвертом и пя-
том столбцах табл. 3.3.
Таблица 3.3
Усилие От непод вижной нагрузки От подвижной нагрузки
по расчету по линиям влияния наибольшее наименьшее
1 2 3 4 5
221/ч—С- Н. Кривошапко
357
358
Расчетно-графическая работа № 4
РАСЧЕТ ШПРЕНГЕЛЬНОЙ СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ
ФЕРМЫ
Содержание задания
Для шпренгельной статически определимой фермы требуется:
1. Выписать данные для своего варианта из табл. 4.1 и 4.2.
Таблица 4.1 Таблица 4.2
№ строки Схема фермы № панели 4, м
1 I 3 6,0
2 II 2 6,4
3 III 3 6,8
4 IV 4 7,2
5 V 5 6,0
6 VI 2 6,4
7 VII 3 6.8
8 VIII 5 7,2
9 IX 4 6,0
0 X 4 6,4
№ строки л, м Я. кН/м
1 9,0 40
2 9,3 50
3 9,6 60
4 9,0 70
5 9,3 80
6 9,6 40
7 9,0 50
8 9,3 60
9 9,6 70
0 9,0 80
2. Начертить в масштабе заданную схему фермы с распределенной
неподвижной нагрузкой, пронумеровать узлы фермы и привести
распределенную нагрузку к узловой нагрузке.
3. Провести формальный кинематический анализ.
4. Вычислить опорные реакции.
5. Определить усилия в основных, дополнительных и сложных стер-
жнях заданной панели и записать их во втором столбце табл. 4.3.
6. Начертить в масштабе шпренгель заданной панели в виде фермы,
привести заданную равномерно распределенную нагрузку к узло-
вой нагрузке и найти опорные реакции.
7. Найти усилия в стержнях этого шпренгеля.
8. Построить линии влияния усилий в основных, дополнительных и
сложных стержнях заданной панели фермы.
9. Построить линии влияния усилий в стержнях шпренгеля заданной
панели.
10. По линиям влияния найти усилия в стержнях заданной панели от
заданной неподвижной нагрузки и записать их значения в пятом
столбце табл. 4.3.
11. По линиям влияния найти наибольшее и наименьшее значения
усилий в каждом стержне заданной панели от подвижной равно-
мерно распределенной нагрузки интенсивностью 2q и длиной 3d и
записать качения этих усилий соответственно в шестом и седь-
мом столбцах табл. 4.3.
360
Таблица 4.3
Усилие От неподвижной нагрузки От подвижной нагрузки
по расчету наибольшее наименьшее
в основных стержнях в дополнит, стержнях в сложных стержнях по линиям влияния
1 2 3 4 5 6 7
ОШПШШШППШПШШШШШШВ Я
23 С. Н. Кринош?
ПШШТШШПШШПШШШШПШП] q
Расчетно-графическая работа № 4
Расчет шпренгельной статически определимой фермы
362
Расчетно-графическая работа № 5
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ СЕЧЕНИЙ
СТАТИЧЕСКИ ОПРЕДЕЛИМОЙ РАМЫ
Содержание заданий
Для статически определимой рамы требуется:
1. Выписать данные для своего варианта из табл. 5.1 и 5.2.
2. Построить эпюры изгибающих моментов, поперечных и нормаль-
ных сил.
3. Найти горизонтальные перемещения сечений Е, В, вертикальное
перемещение сечения D и угол поворота сечения С.
4. Изобразить изогнутую ось рамы.
23*
363
Расчетно-графическая работа № 6
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ МЕТОДОМ СИЛ
Содержание задания
Для плоской симметричной статически неопределимой рамы требует-
ся:
1. Выписать данные для своего варианта из табл. 6.1 и 6.2.
2. Вычертить в линейном масштабе заданную систему.
3. Подсчитать степень статической неопределимости системы.
4. Выбрать основную систему метода сил с учетом симметрии рамы.
5. Разбить заданную нагрузку на симметричную и обратносимметрич-
ную.
6. Записать в общем виде систему канонических уравнений метода сил
отдельно для симметричной и обратносимметричной задачи.
7. Построить эпюры моментов от единичных значений симметричных
неизвестных в основной системе метода сил.
8. Вычислить коэффициенты канонических уравнений метода сил для
симметричной задачи.
9. Проверить эти коэффициенты.
10. Построить эпюру моментов в основной системе метода сил от
симметричной нагрузки.
II. Вычислить свободные члены канонических уравнений метода сил
для симметричной задачи.
12. Решая систему канонических уравнений, определить симметрич-
ные неизвестные.
13. Построить эпюру изгибающих моментов в заданной системе для
симметричной задачи.
14. Построить эпюры моментов от единичных значений обратносим-
метричных неизвестных в основной системе метода сил.
15. Вычислить коэффициенты канонических уравнений метода сил для
обратносимметричной задачи.
16. Проверить эти коэффициенты.
17. Построить эпюру моментов в основной системе метода сил от об-
ратносимметричной нагрузки.
18. Вычислить свободные члены канонических уравнений метода сил
для обратносимметричной задачи.
19. Решая систему канонических уравнений, определить обратносим-
метричные неизвестные.
20. Построить эпюру изгибающих моментов в заданной системе для
обратносимметричной задачи.
21. Построить эпюру изгибающих моментов в заданной системе от
заданной нагрузки.
22. Построить эпюры поперечных и продольных сил в заданной раме.
364
23. Найтн горизонтальные и вертикальные опорные реакции.
24. Сделать статические проверки расчета
25. Сделать кинематические проверки расчета
26. Вычислить юризонтальное перемещение Д™₽ и угол поворота <рк
сечения к.
Таблица 6.1
№ строки Схема /. м h, м
1 I 6 4
2 [I 4 5
3 III 7 6
4 IV 8 6
5 V 6 5
6 VI 4 4
7 VII 7 4
8 VIII 8 5
9 IX 6 6
0 X 4 6
Таблица 6.2
№ строки F, кН Я. кН/м /. А h
1 50 10 3/ 2/ 1
2 60 20 3/ / 21
3 70 30 4/ 2/ 3/
4 80 40 4/ / 3/
5 50 50 3/ 2/ 21
6 60 10 3/ / 1
7 70 20 4/ 2/ 1
8 80 30 4/ / 21
9 50 40 3/ 21 31
0 60 50 3/ / 21
365
366
Расчетно-графическая работа № 7
РАСЧЕТ ДВУХШАРНИРНОЙ ПАРАБОЛИЧЕСКОЙ АРКИ
Содержание задания
Для двухшарнирной параболической арки у = 4 fa(l - х) / /2 требуется:
1. Выписать данные для своего варианта из табл. 7.1 и 7.2.
2. Начертить заданную систему с нагрузкой.
3. Выбрать основную систему метода сил в виде криволинейного бру-
са на двух опорах.
4. Записать каноническое уравнение метода сил для этой системы и
выражения для вычисления коэффициентов канонического уравнения.
5. Составить аналитические выражения изгибающего момента и про-
дольной силы от единичной силы и вычислить коэффициент <5Н канониче-
ского уравнения.
6. Начертить однопролетную «заменяющую» балку для основной сис-
темы метода сил, загрузить эту балку заданной нагрузкой и составить ана-
литические выражения изгибающих моментов и поперечных сил для каж-
дого участка балки.
7. Вычислить свободный член Аи. канонического уравнения метода
сил.
8. Решить каноническое уравнение метода сил (найти неизвестное
опорное усилие А\).
9. Вычислить значения изгибающих моментов, поперечных и про-
дольных сил в характерных сечениях арки. Вычисления провести в таб-
личной форме.
10. Построить эпюры изгибающего момента и поперечной силы для
«заменяющей» балки. Построить эпюры изгибающего момента, попереч-
ной и продольной сил для двухшарнирной арки.
11. Построить эпюру нормального напряжения в наиболее напряжен-
ном сечении арки.
Таблица 7. / Таблица 7.2
№ строки Схема нагрузки /, м Z м Ь, м л, м
1 I 12 4 0,4 0,5
2 II 12 5 0,4 0,5
3 III 18 4 0,5 0,6
4 IV 18 5 0,5 0,6
5 V 18 7 0,4 0,6
6 VI 24 5 0,6 0,8
7 VII 24 7 0,6 0,8
8 VIII 24 9 0,6 0,9
9 IX 36 6 0,8 1,0
0 X 36 11 0,8 1,0
№ строки 4. кН/м кН
1 22 11
2 24 12
3 26 13
4 28 14
5 30 15
6 32 16
7 34 17
8 36 18
9 38 19
0 40 20
367
Поперечное сечение
арки
uuuuu
шииш
шиши
шииш
ШППШ
4д
uuuuul
ПШШШПШШШ
шиши
ШППШ
2g
пшшпппппш
2g J
жпшп q
Расчетно-графическая работа № 7
Расчет двухшарнирной параболической арки
шиши
ШППШ
ШШШТ
я
шшпп
3g
ШППШ
я
ипшш
я
пиши!
I..9
♦шииш
368
Расчетно-графическая работа № 8
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Содержание
Для плоской симметричной статически неопределимой рамы требует-
ся:
1. Выписать данные для своего варианта из табл. 8.1 и 8.2.
2. Вычертить в линейном масштабе заданную систему.
3. Подсчитать число неизвестных метода перемещений.
4. Выбрать основную систему метода перемещений с учетом симмет-
рии рамы.
5. Разбить заданную нагрузку на симметричную и обратносимметрич-
ную.
6. Записать в общем виде систему канонических уравнений метода
перемещений отдельно для симметричной и обратносимметричной задачи.
7. Построить эпюры моментов от единичных значений симметричных
неизвестных в основной системе метода перемещений.
8. Вычислить коэффициенты канонических уравнений метода пере-
мещений для симметричной задачи.
9. Проверить эти коэффициенты.
10. Построить эпюру моментов в основной системе метода перемеще-
ний от симметричной нагрузки.
11. Вычислить свободные члены канонических уравнений метода пе-
ремещений для симметричной задачи.
12. Решая систему канонических уравнений, определить симметрич-
ные неизвестные.
13. Построить эпюру изгибающих моментов от симметричной нагруз-
ки в заданной системе.
14. Построить эпюры моментов от единичных значений обратносим-
метричных неизвестных в основной системе метода перемещений.
15. Вычислить коэффициенты канонических уравнений метода пере-
мещений для обратносимметричной задачи.
16. Проверить эти коэффициенты.
17. Построить эпюру моментов в основной системе метода перемеще-
ний от обратносимметричной нагрузки.
18. Вычислить свободные члены канонических уравнений метода пе-
ремещений для обратносимметричной задачи.
19. Решая систему канонических уравнений, определить обратносим-
метричные неизвестные.
20. Построить эпюру изгибающих моментов от обратносимметричной
нагрузки в заданной системе.
21. Построить эпюру изгибающих моментов в заданной системе от
заданной нагрузки.
369
22. Построить эпюры поперечных и продольных сил в заданной раме.
23. Найти горизонтальные и вертикальные опорные реакции и опор-
ные моменты в заделках.
24. Сделать статические проверки расчета.
25. Сделать кинематические проверки расчета.
26. Вычислить горизонтальное перемещение А™р и угол поворота <рк
сечения к.
____________ Таблица 8.1 Таблица 8.2
№ строки Схема /. h.
1 I 4 4
2 II 4 5
3 III 4 6
4 IV 6 4
5 V 6 5
6 VI 5 4
7 VII 6 4
8 VIII 6 6
9 IX 3 6
0 X 3 4
№ строки кН Q, кН/м h h Л
1 50 10 31 21 /
2 60 20 31 1 21
3 70 30 4/ 21 31
4 80 40 4/ 1 31
5 50 50 31 21 21
6 60 10 31 1 1
7 70 20 41 21 1
8 80 30 41 1 21
9 50 40 31 21 31
0 60 50 31 1 21
Расчетно-графическая работа № 8
Расчет статически неопределимых рам методом перемещений
371
Расчетно-графическая работа № 9
РАСЧЕТ НЕРАЗРЕЗНОЙ БАЛКИ
Содержание задания
Для заданной неразрезной балки постоянного поперечного сечения
требуется:
1. С помощью уравнений трех моментов найти опорные моменты и
построить эпюры изгибающих моментов М и поперечных сил Q.
2. Показать на чертеже общий характер изогнутой оси балки.
3. Найти положение моментных фокусов и построить эпюры М и Q
от последовательного загружения пролетов каждой заданной на-
грузкой в отдельности.
4. Построить суммарные эпюры изгибающих моментов М и попе-
речных сил Q.
5. Подобрать сечение балки из двутавра.
6. Определить, во сколько раз нужно увеличить все нагрузки , чтобы
образовался первый пластический шарнир.
7. Построить линии влияния двух опорных моментов на соседних
опорах Я, В и линию влияния пролетного момента на расстоянии
0,4/ вправо от опоры А.
8. Загрузить линию влияния пролетного момента заданной нагруз-
кой и сравнить полученный результат с результатом п. 1.
Данные к задаче взять в табл. 9.1 и 9.2.
Таблица 9.1
№ строки Схема балки /<ь м м /2, м /з, м 2
1 I 1,0 5,0 8,0 5,0 6,0
2 II 1,2 6,0 7,0 4,0 -
3 III 1,3 - 6,0 5,0 7,0
4 IV 1,4 8,0 5,0 6,0 5,0
5 V 1,5 5,0 8,0 7,0 4,0
6 VI 1,6 6,0 7,0 8,0 5,0
7 VII 1,7 7,0 6,0 7,0 -
8 VIII 1,8 - 5,0 6,0 7,0
9 IX 1,9 5,0 8,0 5,0 6,0
0 X 2,0 6,0 7,0 4,0 5,0
Таблица 9.2
№ строки 1 2 3 4 5 6 7 8 9 0
F, кН 20 - 30 20 - 30 10 - 20 -
<7, кН/м 10 12 14 - 16 - 18 20 - 22
/и, кН м - 40 - 38 - 36 - - 34 -
372
Расчетно-графическая работа № 9
Расчет неразрезных балок
373
Расчетно-графическая работа № 10
ОПРЕДЕЛЕНИЕ ПРЕДЕЛЬНОЙ НАГРУЗКИ
Содержание задания
Для системы, состоящей из трех стержней (рис. 10.1), требуется:
1. Определить предельную продольную силу
для каждого стержня.
2. Задаться возможными механизмами разруше-
ния и изобразить каждый из них на чертеже.
3. Составить уравнение предельного равновесия
для каждого механизма и найти соответствующую
предельную нагрузку Fub Fu2 и Fw3.
4. Установить предельную нагрузку для систе-
мы Fu — {Fv|, Fи2ч Fuj} — Fитт-
Для один раз статически неопределимой балки
(рис. 10.2) прямоугольного поперечного сечения bxh требуется:
1. Найти предельный момент сечения балки Ми.
2. Задаться первым возмож-
ным механизмом разрушения
балки и составить два уравнения л
предельного равновесия (для 'L.
всей балки и для ее части). Л
Найти соответствующую пре- )f-
дельную нагрузку Fui.
3. Задаться вторым возмож-
ным механизмом разрушения балки и найти предельную нагрузку Fu2.
4. Установить предельную нагрузку для балки Fu= {Fub Fu2} = Fuimn.
Для трижды статически неопределимой рамы (рис. 10.3) требуется:
1. Найти предельный момент сечения стойки и ригеля М^ь-
2. Задаться боковым механизмом разрушения, изобразить его на чер-
теже, составить уравнение работ для него и найти соответствующую пре-
дельную нагрузку FuX.
374
3. Задаться балочным механизмом разрушения, изобразить его на чер-
теже, составить уравнение работ для него и найти соответствующую пре-
дельную нагрузку F„2-
4. Задаться комбинированным механизмом разрушения, изобразить
его на чертеже, составить уравнение работ для него и найти соответст-
вующую предельную нагрузку Fw3.
5. Установить предельную нагрузку для рамы
Fu ~ {^ь Fм2, Fiij} ~ FmnjH.
Данные к задаче взять из табл. 10.1 и 10.2.
Таблица 10.1
№ строки Щ, град 02, град в. см Аь см2 Аъ см2 Л, м
I 21 11 9,0 1,0 4,0 2,2
2 22 12 9,2 1,5 3,8 2,4
3 23 13 9,4 2,0 3,6 2,6
4 24 14 9,6 2,5 3,6 2,8
5 25 15 9,8 3,0 3,4 3,0
6 26 16 9,8 3,5 3,2 3,2
7 27 17 10 4,0 3,0 3,4
8 28 18 10,2 4,5 2,8 3,6
9 29 19 10,4 5,0 2,6 3,8
0 30 20 10,6 5,5 2,4 4,0
Таблица 10.2
№ строки Л, см к Оз, град 4, м Л. м Аз, см2 Р
1 16 0,5 41 3,0 2,1 1,2 1,1
2 17 0,6 42 3,2 2,3 1,4 1,2
3 18 0,8 43 3,4 2,5 1,6 1,3
4 19 1,0 44 3,6 2,6 1,8 1,4
5 20 1,2 45 3,8 2,8 2,0 1,5
6 21 1,5 46 4,0 3,0 2,2 1,6
7 22 2,0 47 4,2 3,2 2,4 1,7
8 23 2,5 48 4,4 3,4 2,6 1,8
9 24 3,0 49 4,6 3,6 2,8 1,9
0 25 3,5 50 4,8 3,8 3,0 2,0
Перед выполнением расчетно-графической работы № 10 необходимо
ознакомиться с материалами лекции 24.
375
Расчетно-графическая работа № 11
РАСЧЕТ ПЛОСКОЙ РАМЫ НА УСТОЙЧИВОСТЬ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Содержание задания
Для плоской статически неопределимой рамы требуется:
1. Нарисовать в масштабе заданную раму и показать действующие на
нее сосредоточенные силы, приложенные в узлах.
2. Определить степень статической неопределимости рамы при расче-
те ее методом перемещений и нарисовать основную систему.
3. Построить эпюры изгибающих моментов в однопролетных статиче-
ски неопределимых балках от единичных углов поворота во введенных
заделках и от единичных смещений введенных шарнирных опор.
4. Составить систему канонических уравнений метода перемещений.
5. Записать уравнение устойчивости и определить значение параметра
v, а затем и значение критической силы Fcr-
6. Определить коэффициенты приведенной длины стоек рамы.
Таблица 11.1
№ строки Схема рамы /ь м /г, м Ль м Л2,м
1 1 4 6 5 3
2 II 6 8 6 3
3 III 8 10 7 4
4 IV 10 12 8 4
5 V 4 6 9 5
6 VI 6 8 10 5
7 VII 8 10 12 6
8 VIII 10 12 10 5
9 IX 4 6 8 4
0 X 6 8 6 3
Таблица 11.2
№ строки а Р ///г
1 1 0 2
2 0 2 3
3 2 2 2
4 I 1 3
5 1 0 2
6 0 2 2,5
7 2 2 3
8 1 1 1,5
9 1 0 2
0 0 2 2,5
376
Расчет плоских рам на устойчивость методом перемещений
24 С. Н. Крикошяпк
377
Расчетно-графическая работа № 12
РАСЧЕТ БАЛОК НА УПРУГОМ ОСНОВАНИИ
ПО МЕТОДУ И.А. СИМВУЛИДИ
Содержание задания
Для расчета балки постоянного прямоугольного поперечного сечения,
лежащей на сплошном упругом основании, необходимо:
1. Выписать данные для своего варианта из табл. 12.1 и 12.2. Опреде-
лить значение гибкости а.
Таблица 12.1
№ строки Грунты Модуль деформации rpyirra Ео, кг/см2 Коэффици- ент Пуассона грунта Цо Модуль упру- гости материала балки к кг/см2 Коэффициент Пуассона материала балкид Длина балки L, м
1 Крупнооб- ломочные 260 0,27 96900 0,2 20
2 Пески 250 0,29 133000 0,2 22
3 Супеси 170 0,31 163000 0,2 24
4 Суглинки 450 0,37 184000 0,2 26
5 Глина 150 0,41 214000 0,17 28
6 Пески 340 0,29 235000 0,17 30
7 Супеси 330 0,31 275000 0,17 28
8 Суглинки 130 0,37 306000 0,17 26
9 Глина 280 0,40 331000 0,17 24
0 Крупнооб- ломочиые 240 0,27 352000 0,17 22
Таблица 12.2
№ п/п Ширина балки Ь, м Высота балки Л, м с, м dt м с, м Fb кН г2, кН Чъ кН/м <?2, кН/м /и, кН-м Номер схемы
1 1,0 0,4 2 4 2 20 10 8 10 4 I
2 1,0 0,4 5 4 2 22 12 10 12 5 II
3 1,0 0,5 3 3 4 24 14 12 16 6 III
4 1,0 0,5 4 4 4 26 16 10 14 7 IV
5 1,0 0,6 9 5 2 28 18 8 10 8 V
6 1,0 0,6 5 6 2 30 20 6 12 9 VI
7 1,0 0,8 4 5 4 28 18 4 8 10 VII
8 1,0 0,8 10 4 4 26 16 2 6 12 VIII
9 1,0 1,0 6 6 6 24 14 4 8 14 IX
0 1,0 1,0 10 4 6 22 12 6 12 16 X
2. Определить значения вспомогательных коэффициентов Л, С, К, IF, В
mN.
3. Вычислить величины параметров оь, аь а2, а3.
378
4. Построить эпюру ps реактивного давления грунта на балку.
5. Определить значения поперечных сил Q и изгибающих моментов М
в сечениях балки с шагом Дх - const и в характерных сечениях балки. По
полученным ординатам построить эпюры Q и М
6. Оценить возможность применения расчета для реальной балки, ле-
жащей на грунте.
24*
379
Расчетно-графическая работа № 13
РАСЧЕТ СТЕРЖНЕВОЙ СИСТЕМЫ
НА ДЕЙСТВИЕ ИНЕРЦИОННОЙ НАГРУЗКИ
Содержание задания
Стержневая система вращается вокруг оси АВ с постоянной угловой
скоростью п (об/мин).
Требуется оценить прочность стальной конструкции, состоящей из
стержней круглого поперечного сечения диаметром d. Плотность материа-
ла конструкции р = 7750 кг/м3, расчетное сопротивление стали растяже-
нию, сжатию изгибу по пределу текучести Ry = 220 МПа.
Для решения задачи необходимо:
1. Вычислить по участкам и показать на чертеже распределенные
внешние инерционные нагрузки.
2. Построить эпюры изгибающих моментов, поперечных и нормаль-
ных сил.
3. Пользуясь только эпюрой изгибающих моментов, определить мак-
симальное нормальное напряжение, которое сравнить с расчетным сопро-
тивлением стали растяжению, сжатию при изгибе по пределу текучести Rr
Влиянием поперечных и нормальных сил пренебречь.
Данные к задаче взять из табл. 13.1 и 13.2. Все необходимые материа-
лы д ля выполнения работы содержатся в задаче 11.1.2.
Таблица 13.1
№ 1 2 3 4 5 6 7 8 9 10
Схема 1 11 Ill IV V VI VII VIII IX X
Таблица 13.2
№ 1 2 3 4 5 6 7 8 9 0
а, см 20 20 25 30 35 40 45 40 35 30
4 см 2 2,5 3 3,5 4 4,5 4,0 3,5 3,0 2,5
п, об/мин 300 320 350 400 350 300 250 300 250 200
380
Расчетно-графическая работа №13
Расчет стержневой системы на действие инерционной нагрузки
381
Расчетно-графическая работа № 14
РАСЧЕТ БАЛОК НА ДИНАМИЧЕСКУЮ НАГРУЗКУ
Содержание задания
Двигатель весом Q укреплен посередине на двух двутавровых балках
(см. рисунок). Неуравновешенные массы двигателя условно заменены
вращающимся грузом Q2 с радиусом вращения R. Вес одной балки обозна-
чить через Двигатель работает при п0 об/мин. Требуется определить:
1. Является ли число оборотов двигателя безопасным для прочно-
сти балок?
2. Установить безопасный для прочности балок режим работы дви-
гателя (т.е. определить допускаемое число оборотов), исходя из
условия, чтобы при колебаниях наибольшие динамические на-
пряжения, возникающие в балке, не превышали величины рас-
четного сопротивления стали растяжению, сжатию при изгибе
по пределу текучести Ry = 220 МПа
Методика выполнения работы разбирается в задаче 11.3.3 раздела 11.
Таблица 14.1
№ строки 1. см R. см По. об/мин
1 250 30 1000
2 240 29 950
3 230 28 900
4 220 27 850
5 210 26 800
6 200 25 750
7 190 24 700
8 180 23 650
9 170 22 600
0 160 21 550
Таблица 14.2
№ строки Q. кН № двутавра Оъ Н
1 15 33 220
2 14 30 200
3 13 24 180
4 12 22 170
5 11 20 160
6 10 18 150
7 9 16 140
8 8 14 130
9 7 12 120
0 6 10 ПО
382
Расчетно-графическая работа № 15
РАСЧЕТ ПЛОСКИХ РАМ
С СОСРЕДОТОЧЕННЫМИ МАССАМИ НА ДЕЙСТВИЕ
СОСРЕДОТОЧЕННОЙ ГАРМОНИЧЕСКОЙ НАГРУЗКИ
Содержание задания
Дана плоская стержневая система с сосредоточенным массами, нахо-
дящаяся под действием гармонической возмущающей силы. При заданном
отношении частоты возмущающей силы к низшей частоте собственных
колебаний к = G/(0| требуется:
1. Начертить в линейном масштабе схему конструкции для своего ва-
рианта, обозначив на ней длины стержней и величины их жесткостей на
изгиб (ЕГ). Показать действующую гармоническую силу и величины со-
средоточенных масс.
2. Установить число степеней свободы системы при упругих колеба-
ниях. Подсчитать величины mi и т2.
3. Построить единичные эпюры моментов , М2, вычислить коэф-
фициенты 611, §12, ^22-
4. Вычислить частоты собственных колебаний соь со2-
5. Найти собственные векторы. Проверить условие ортогональности
главных форм собственных колебаний. Изобразить схематично эти формы.
6. Определить максимальные значения сил инерции Хь Х2 и построить
эпюру наибольшего изгибающего момента от динамической нагрузки.
7. Построить изогнутую ось стержневой конструкции для максималь-
ного изгибающего момента от динамической конструкции.
Данные к работе взять в табл. 15.1 и 15.2. Методика выполнения рабо-
ты разбирается в задаче 11.4.3 раздела 11.
Таблица 15.1
№ Схема конструкции О1 а2 аз Yi 72 Уз
1 1 1,о 1,2 1,4 1,0 1,2 0,6
2 II 1,4 1,0 1,2 1,2 1,0 0,8
3 III 1,2 1,4 1,0 1,0 1,4 1,0
4 IV 1,0 1,3 1,6 1,4 1,0 1,2
5 V 1,6 1,0 1,3 1,0 1,6 1,4
6 VI 1,3 1,6 1,0 1,6 1,0 1,6
7 VII 1,0 1,1 1,5 1,0 1,8 1,8
8 VIII 1,5 1,0 1.1 1,8 1,0 2,0
9 IX 1,1 1,5 1,0 1,0 2,0 2,2
0 X 1,0 1,4 1,7 2,0 1,0 2,4
383
Таблица 15.2
№ Pi Рз Рз РЮ PM к = 0/W|
1 1,4 1,0 1,2 Pcos Ot 0 0,7
2 1,2 1,4 1,0 0 Pcos Or 0,8
3 1,0 1,3 1,6 Pcos et 0 0,9
4 1,6 1,0 1,3 0 Pcos Or 0,8
5 1,3 1,6 1,0 Pcos Or 0 0,7
6 1,0 1,1 1,5 0 Pcos Or 0,6
7 1,5 1,0 1,1 Pcos Or 0 0,7
8 1,1 1,5 1,0 0 Pcos Or 0,8
9 1,0 1,4 1,7 Pcos Or 0 0,9
0 1,2 1,0 1,4 0 Pcos Or 0,8
384
385
ЛИТЕРАТУРА
1. Симвулиди И.А. Расчет инженерных конструкций на упругом осно-
вании. - М.: Высш, шк., 1968.
2. Снитко Н.К. Строительная механика. - Изд. 3-е. - М.: Высш, шк.,
1980.
3. Дарков А.В., Шапошников Н.Н. Строительная механика. - Изд. 8-е. -
М.: Высш, шк., 1986.
4. Анохин Н.Н. Строительная механика в примерах и задачах. - Ч. 1:
Статически определимые системы: Учеб. пос. - М.: Изд-во АСВ,
1999.
5. Кроткова Л. В. Учебное пособие к практическим занятиям по строи-
тельной механике. - М.: Изд-во АСВ, 1994.
6. Саргсян А.Е., Дворянчиков Н.В., Джинчвелашвили Г.А. Строительная
механика. Основы теории с примерами расчетов. - М.: Изд-во АСВ,
1998.
7. Трушин С. И. Основы метода конечных элементов: Уч. пособие. -
М.: МГСУ, 2000.
8. Копнов В.А., Кривошапко С.Н. Сопротивление материалов. Руково-
дство для решения задач и выполнения лабораторных и расчетно-
графических работ. - М.: Высш, шк., 2005.
9. Кривошапко С.Н. Строительная механика. Тексты лекций. - Ч. 1. -
М.: Изд-во РУДН, 2004.
10. Потапов В.Д., Александров А.В., Косицын С.Б., Долотказин ДБ.
Строительная механика: Кн. 1. Статика упругих систем/ Под ред.
В.Д. Потапова. - М.: Высш, шк., 2007.
11. Кривошапко С.Н. Сопротивление материалов. Лекции, семинары,
расчетно-графические работы. - М.: Изд-во РУДН, 2007.
СОДЕРЖАНИЕ
Предисловие.........................................................3
Часть 1. Тексты лекций
Лекция 1. Основные понятия и аксиомы статики....................... 4
Методы преобразования систем сил...................... 6
Лекция 2, Вращательное действие сил............................. 8
Системы параллельных сил, расположенных в одной
плоскости............................................. 9
Условия равновесия плоской системы сил............... 10
Лекция 3. Основные понятия строительной механики............... 11
Кинематический анализ сооружений..................... 12
Расчет статически определимых сооружений............. 14
Лекция 4. Учет подвижной статической нагрузки.................. 15
Загрузка линий влияния............................... 17
Лекция S. Линии влияния при узловом действии нагрузки.......... 19
Невыгодное загружение линий влияния.................. 20
Лекция 6. Плоские статически определимые фермы................. 22
Лекция 7. Построение линий влияния усилий в стержнях ферм..... 25
Лекция 8. Расчет шпренгельных ферм............................. 27
Трехшарнирные арочные фермы.......................... 29
Лекция 9. Статически определимые арки.......................... 30
Лекция 10. Основные теоремы об упругих
линейно-деформируемых системах....................... 33
Лекция 11. Определение перемещений. Интеграл Мора............... 36
Лекция 12. Определение перемещения сечения стержня
плоской статически определимой стержневой
системы при действии внешней нагрузки................ 38
Лекция 13. Определение перемещения сечения стержня плоской
статически определимой стержневой системы при
температурных воздействиях и при смещении ее опор................. 41
Лекция 14. Расчет статически неопределимых плоских стержневых
систем методом сил................................................. 45
Лекция 15. Группировка неизвестных при расчете симметричных
статически неопределимых рам......................... 50
387
Расчет статически неопределимых систем на действие
температуры........................................... 51
Расчет статически неопределимых систем на перемещение
опор.................................................. 52
Определение перемещений в статически неопределимых
системах.............................................. 53
Лекция 16. Статически неопределимые арки......................... 54
Лекция 17. Неразрезные балки..................................... 58
Лекция 18. Построение линий влияния в неразрезных балках......... 62
Лекция 19. Приближенные методы расчета статически
неопределимых рам..................................... 65
Лекция 20. Расчет статически неопределимых плоских стержневых
систем методом перемещений............................ 73
Лекция 21. Теорема о взаимности реакций.......................... 77
Группировка неизвестных при расчете симметричных рам. 77
Лекция 22. Расчет статически неопределимых рам методом перемещений
на действие температуры............................... 80
Расчет рам методом перемещений на смещения опор...... 82
Лекция 23. Неупругое деформирование.............................. 83
Лекция 24. Расчет статически неопределимых рам на предельную
нагрузку.............................................. 88
Лекция 25. Понятие об устойчивом и неустойчивом равновесии....... 91
Устойчивость систем с одной или несколькими степенями
свободы............................................... 92
Лекция 26. Расчет плоских рам на устойчивость методом
перемещений........................................................ 95
Лекция 27. Устойчивость плоской формы изгиба балок............... 99
Лекция 28. Расчет конструкций на упругом основании.............. 103
Расчет балок на упругом основании.................... 103
Лекция 29. Расчет коротких балок на упругом основании........... 106
Лекция 30. Расчет балок на упругом основании по методу
И.А. Симвулиди....................................... 109
Лекция 31. Динамическое действие на!рузок....................... 113
Лекция 32. Удар................................................. 116
Лекция 33. Упругие собственные колебания систем с одной
степенью свободы..................................... 119
Лекция 34. Вынужденные колебания систем с одной степенью
свободы.............................................. 122
Лекция 35. Упругие собственные колебания систем с несколькими
степенями свободы.................................... 125
Лекция 36. Свободные колебания балок как систем с распределенной
массой............................................... 129
388
Часть 2. Практические занятия по темам лекций
Раздел 1. СТАТИКА ТВЕРДОГО ТЕЛА
(по материалам лекций 1, 2).................... 132
Раздел 2. СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
(по материалам лекций 3-5)..................... 135
2.1. Загрузка линий влияния статически определимых
однопролетных балок............................ 135
2.2. Многопролетные статически определимые балки.. 140
2.2.1. Построение эпюр изгибающих моментов и поперечных сил
для многопролетных статически определимых балок...... 140
2.2.2. Построение и загрузка линий влияния статически определимых
многопролетных балок................................. 144
Раздел 3. ПЛОСКИЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ ФЕРМЫ
(по материалам лекций 6-8)..................... 152
3.1. Расчет шпренгельных ферм...................... 163
3.2. Трехшарнирные арочные фермы................... 166
Раздел 4. ТРЕХШАРНИРНЫЕ АРКИ
(по материалам лекции 9)....................... 173
Раздел 5. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В УПРУГИХ
СИСТЕМАХ (по материалам лекций 10-13).......... 183
5.1. Определение перемещений сечения стержня плоской статиче-
ски определимой стержневой системы при
действии внешней нагрузки...................... 183
5.2. Определение перемещений сечения стержня плоской
статически определимой стержневой системы при смещении
ее опор........................................ 194
53. Определение перемещений сечения стержня плоской
статически определимой стержневой системы при
температурных воздействиях..................... 197
Раздел 6. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДОМ СИЛ
(по материалам лекций 14—19)................... 201
6.1. Расчет статически неопределимых плоских стержневых
систем методом сил................................. 201
6.2. Расчет статически неопределимых стержневых систем
на действие температуры............................ 215
6.3. Расчет статически неопределимых систем на осадку опор. 221
6.4. Статически неопределимые арки................ 227
6.4.1. Двухшарнирные арки........................... 227
6.4.2. Бесшарнирные арки............................ 232
389
6.5. Расчет неразрезных балок с помощью уравнений трех ‘
моментов.............................................. 235
6.6. Расчет неразрезных балок методом сил............. 242
6.7. Расчет неразрезных балок методом фокусов......... 247
6.8. Построение линий влияния в статически неопределимых
балках................................................ 251
Раздел 7. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ
МЕТОДОМ ПЕРЕМЕЩЕНИЙ
(по материалам лекций 20-22)..................... 259
7.1. Расчет неразрезных балок методом перемещений..... 261
7.2. Расчет плоских рам методом перемещений........... 265
73. Расчет статически неопределимых балок и рам на
действие температуры............................. 275
7.4. Расчет статически неопределимых балок и рам на
заданные смещения опор........................... 279
Раздел & НЕУПРУГОЕ ДЕФОРМИРОВАНИЕ
(по материалам лекций 23, 24).................... 283
8.1. Предельная на!рузка для стержневой системы....... 283
8.2. Предельная нагрузка для балок.................... 287
83. Предельная нагрузка для рам...................... 293
Раздел 9. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
(ио материалам лекций 25-27).................... 295
9.1. Расчет на устойчивость систем с одной или двумя
степенями свободы статическим методом................. 295
9.2. Расчет на устойчивость систем с одной или двумя
степенями свободы энергетическим методом.............. 298
93. Расчет на устойчивость систем с бесконечным числом степеней
свободы статическим и энергетическим методами......... 301
9.4. Расчет плоских рам на устойчивость методом
перемещений...................................... 305
9.5. Устойчивость консольной балки прямоугольного сечения под
действием сосредоточенной силы................... 318
Раздел 10. РАСЧЕТ КОНСТРУКЦИЙ НА УПРУГОМ
ОСНОВАНИИ (по материалам лекций 28-30)........... 320
10.1. Расчет балок на упругом основании по А.Н. Крылову... 320
10.2. Расчет балок на упругом основании по И.А. Симвупиди. 322
103. Расчет балок на упругом основании методом сил.... 329
Раздел II. ОСНОВЫ ДИНАМИКИ СООРУЖЕНИЙ
(по материалам лекций 31-35)..................... 335
11.1. Динамические задачи, приводимые к задачам
статического расчета............................. 335
113. Упругий удар..................................... 338
390
113. Упругие собственные и вынужденные колебания систем
с од ной степенью свободы............................ 341
11.4. Упругие собственные и вынужденные колебания
систем с двумя степенями свободы..................... 346
Часть 3. Расчетно-графические и курсовые работы...........352
1 Расчет многопролетной статически определимой балки............ 353
2 Расчет трехшарнирной арки..................................... 355
3 Расчет плоской статически определимой фермы................... 357
4 Расчет шпренгельной статически определимой фермы.............. 360
5 Определение перемещений сечений статически определимой
рамы.............................................................. 363
6 Расчет статически неопределимых рам методом сил............... 364
7 Расчет двухшарнирной параболической арки...................... 367
8 Расчет статически неопределимых рам методом перемещений...... 369
9 Расчет неразрезной балки...................................... 372
10 Определение предельной нагрузки............................... 374
11 Расчет плоской рамы на устойчивость методом перемещений...... 376
12 Расчет балок на упругом основании по методу И.А. Симвулиди... 378
13 Расчет стержневой системы на действие инерционной нагрузки... 380
14 Расчет балок нединамическую нагрузку.......................... 382
15 Расчет плоских рам с сосредоточенными массами на действие
сосредоточенной гармонической нагрузки............................ 383
Литература.........................................................386
Учебное издание
Кривошалко Сергей Николаевич
СТРОИТЕЛЬНАЯ МЕХАНИКА: ЛЕКЦИИ.
СЕМИНАРЫ. РАСЧЕТНО-ГРАФИЧЕСКИЕ РАБОТЫ
Редактор Т.С. Костян
Внешнее оформление К. И. Мандель
Технический редактор Л. А. Маркова
Корректор В. В. Кожуткина
Изд. № РЕНТ-510. Подп. в печать 24.12.07. Формат 60х88’/16.
Бум. офсетная. Гарнитура «Ньютон». Печать офсетная.
Объем 24,01 усл. печ. л., 24,75 усл. кр.-отт.
Тираж 4000 экз. Заказ N? 19141 (кр smi.
ОАО «Издательство «Высшая школа»,
127994, Москва, Неглинная ул., 29/14, стр. 1.
Тел.: (495) 694-04-56
http://www.vshkola.ru E-mail: info_vshkola@mail.ru
Отдел реализации: (495) 694-07-69, 694-31-47, факс: (495) 694-34-86.
E-mail: sales_vshkola@mail.ru
Отпечатано в ОАО «Смоленский полиграфический комбинат».
214020, г. Смоленск, ул. Смольянинова, 1.