/




























































































































































































































































































































































































































































































Text
СТРОИТЕЛЬНАЯ
механика
Под редакцией
профессора Ю. И. БУТЕНКО
Допущено
Министерством высшего и среднего
специального образования УССР
в качестве учебника
для студентов строительных
специальностей вузов
КИЕВ
•ВЫЩА ШКОЛА»
1969
ББК 38.112я73
С86
УДК 624.04 (075.8)
А в т о р и: Ю. И. Бутенко. Н. А. Засядько. ]С. Н. Кан|, Ю. П. Ки-
тов, В. П. Пустовойтов, G D. Фесик
Р е ц е н з е н т ы: д-р техн, наук Ю. В. Осетинский, д-р техн, маун
В. П. Паеелко, канд. техн, наук К. Д. Миртов
Редакционная группа литературы по строительству и архитектуре
Редактор Я. А. Белокриницкая
Строительная механика: Учебник для вузов/Ю. И. Бу-
С86 тенко, Н. А. Засядько, С. Н. Кан и др.; Под ред. ГО. И. Бу-
тенко. — K.I Выща шк., 1989. — 479 с.: шт.
ISBN 5-11-001968-1
Изложены методы расчета статически определимых и стати-
чески неопределимых стержневых систем и пространственных тон-
костенных конструкций. Приведены основные сведения по ис-
следованию их устойчивости и методам динамики сооружений.
Для студентов строительных специальностей вузов.
3302000000—248
С М2Г1~(04)—8V БЗ—3—17—80 ББК 38.112я73
ISBN 5-11-001968-1
©Ю. И. Бутенко и др..
1989
ОГЛАВЛЕНИЕ
Основные буквенные обозначения . ...........................................
Введение. Основные понятия ..............................................|<
1. Строительная механика как наука.......................................ц
2. Расчетная схема плоского сооружения и ее элементы....................14
3. Понятие о геометрической неизменяемости. Степени свободы. Стати-
ческая определимость ......................................................
4. Анализ геометрической структуры........................................
5. Мгновенная изменяемость .............................................23
6. Допущения, принимаемые в строительной механике . ....................25
Вопросы для самоконтроля ....................................- ... 26
Раздел 1
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СТЕРЖНЕВЫЕ СИСТЕМЫ 28
Глава /. Методы определения усилий от неподвижной нагрузки . . . 28
1.1. Метод сечений .....................................................28
1.2. Метод замены связей................................................31
1.3. Кинематический метод ..............................................34
1.4. Способ рассечения системы на стержни и узлы........................38
Вопросы для самоконтроля.................................................4<
Глава 2. Методы определения усилий от подвижной нагрузки......... 4{
2.1. Основные определения. Статический метод построения линки влияния . 41
2.2. Кинематический метод построения линий влияния . ... 45
2.3. Определение усилий по линиям влияния.........................47
2.4. Особенности построения линий влияния при узловой передаче на-
грузки ................................................................52
2.5. Расчет по эквивалентным нагрузкам............................53
2.6. Построение : огибающих Упюр ........................- .... 55
2.7. ’Матрицы* • влияния ...................* - i . « . i . ^ 55
Вопросы для самоконтроля , . . . • ....................... . . 58
Глава 3. Мкогопролетные статически определимые балки.................... 60
3.1. Образование многопролетной статически определимой балки ... 60
3.2. Рациональная расстановка шарниров ............................64
3.3. Линии влияния................................................65
Вопросы для самоконтроля ............................................. 67
Глава 4. Статически определимые фермы . . ..... . ... 67
4.1. Основные определения. Классификация ферм..................67
4.2. Способ вырезания узлов. Матричная форма вычисления усилий » . 70
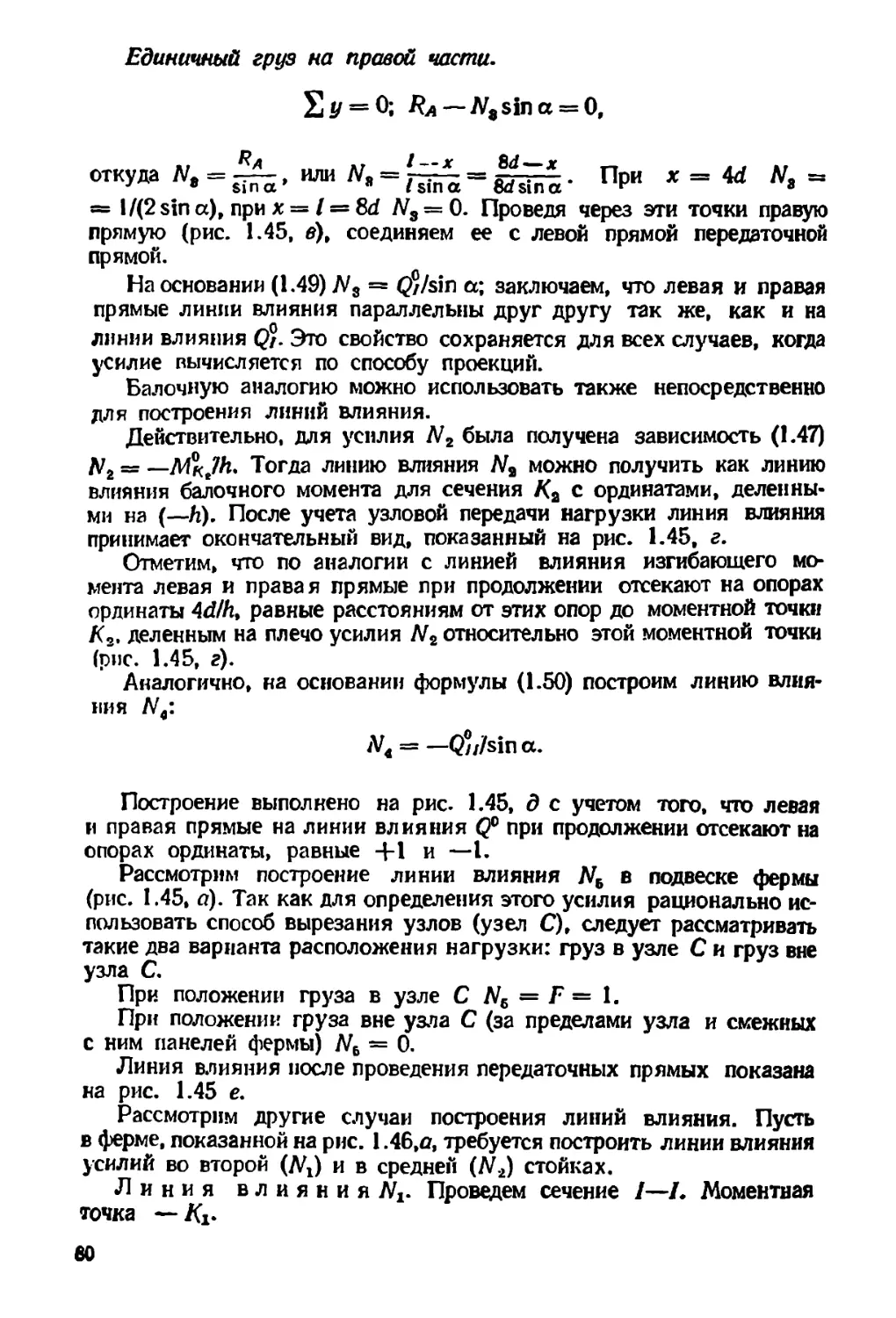
4.3. Способ моментной точки и способ проекций. Распределение усилий
в стержнях балочной фермы..............................................72
4.4. Определение усилий в стержнях сложных ферм.........................76
4.5. Линии влияния. Матрицы влияния ....................................78
3
4.6. Шпренгельные фермы ...........................................82
Вопросы для самоконтроля ................................я <• • • • 86
Глава 5. Распорные системы 87
5.1. Основные определения .........................................87
5.2. Расчет трехшарнирной арки на вертикальную нагрузку............89
5 3. Линии влияния реакций и внутренних усилий в трехшарнирной арке . 93
5.4. Кривая (многоугольник) давления. Рациональная ось арки .... 97
5.5. Напряжения в сечении арки. Ядровые моменты ........ 100
5.6. Расчет трехшарннрной арки на произвольно направленную нагрузку
Трехшарнирные рамы............................................... 102
5.7. Трехшарнирные арочные фермы ...........................* • • 103
5.8. Комбинированные и висячие системы............................105
Вопросы для самоконтроля......................................... 109
Глава 6. Основные теоремы для упругих систем. Определение перемещений 110
6.1. Работа внешних сил. Обобщенные силы и обобщенные перемещения НО
6.2. Работа внутренних сил ........................................«112
6.3. Потенциальная энергия. Матрицы податливости и жесткости . • .114
6.4. Теоремы о взаимности ................................* .... 117
6.5. Вычисление перемещений по методу Мора..........................119
6.6. Определение перемещений от температурных воздействий . . . 122
6.7. Перемещения от осадки опор . . . .'............................123
6.8. Линии влияния перемещений .....................................124
6.9. Определение перемещений с помощью упругих грузов .... 125
6.10. Матричная форма определения перемещений ........ 127
Вопросы для самоконтроля ............................................130
Раздел 2
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СТЕРЖНЕВЫЕ СИСТЕМЫ . .... 132
Глава 7. Метод сил ..................................*..............133
7.1. Расчет статически неопределимых рам методом сил...............133
7.2. Проверка правильности вычислений .............................141
7.3. Определение перемещений в статически неопределимых системах . .143
7.4. Особенности расчета симметричных систем .....................- 143
7.5. Расчет статически неопределимых ферм .........................148
7.6. Расчет двухшарнирной арки методом сил ........................149
7.7. Расчет бесшарнирной арки. Тонкостенные кольца ................152
7.8. Расчет статически неопределимых систем на действие температуры
и осадку опор ......................................................156
7.9. Расчет статически неопределимых систем на подвижную нагрузку
Линии влияния ................................................... . 159
7.10. Матричная форма метода сил ..................................162
7.11. Предварительно напряженные системы ........................163
Вопросы для самоконтроля ......................................... 165
Глава 8. Метод перемещений
...............................................167
8.1. Допущения. Количество неизвестных метода перемещений . . .
8.2. Сущность метода ..............................................
8.3. Вычисление коэффициентов и свободных членов канонических уравне-
ний перемножением эпюр. Проверка реакций.......................
8.4. Расчет симметричных систем методом перемещений................
8.5. Расчет рам с наклонными стойками..............................
8.6. Расчет на смещение опор и температурные воздействия...........
8.7. Метод перемещений в матричной форме...........................
8.8. Учет продольных деформаций.............•......................
Вопросы для самоконтроля ...................................... . . .
167
169
176
178
179
181
184
185
187
4
Глава 9. Смешанный метод. Сравнение методов расчета .... -188
9.1. Смешанный метод................................................188
9.2. Выбор метода расчета. Комбинированный способ ..................190
9.3. Способ уравновешивания узлов ..................................191
Вопросы для самоконтроля........................................... 195
Глава 10. Неразрезные балки..........................................196
10.1. Расчет на неподвижную нагрузку.................................196
10.2. Метод моментных фокусов .......................................198
ЮЛ. Расчет на подвижную нагрузку.....................................202
10.4. Неразреэная балка на упругих опорах............................205
Вопросы для самоконтроля ............................................207
Гладе 11. Пространственные стержневые системы .......... 208
11.1. Общие сведения. Геометрическая неизменяемость..................208
11.2. Пространственные фермы ........................................210
11.3. Пространственные рамы .........................................214
Вопросы для самоконтроля ............................................218
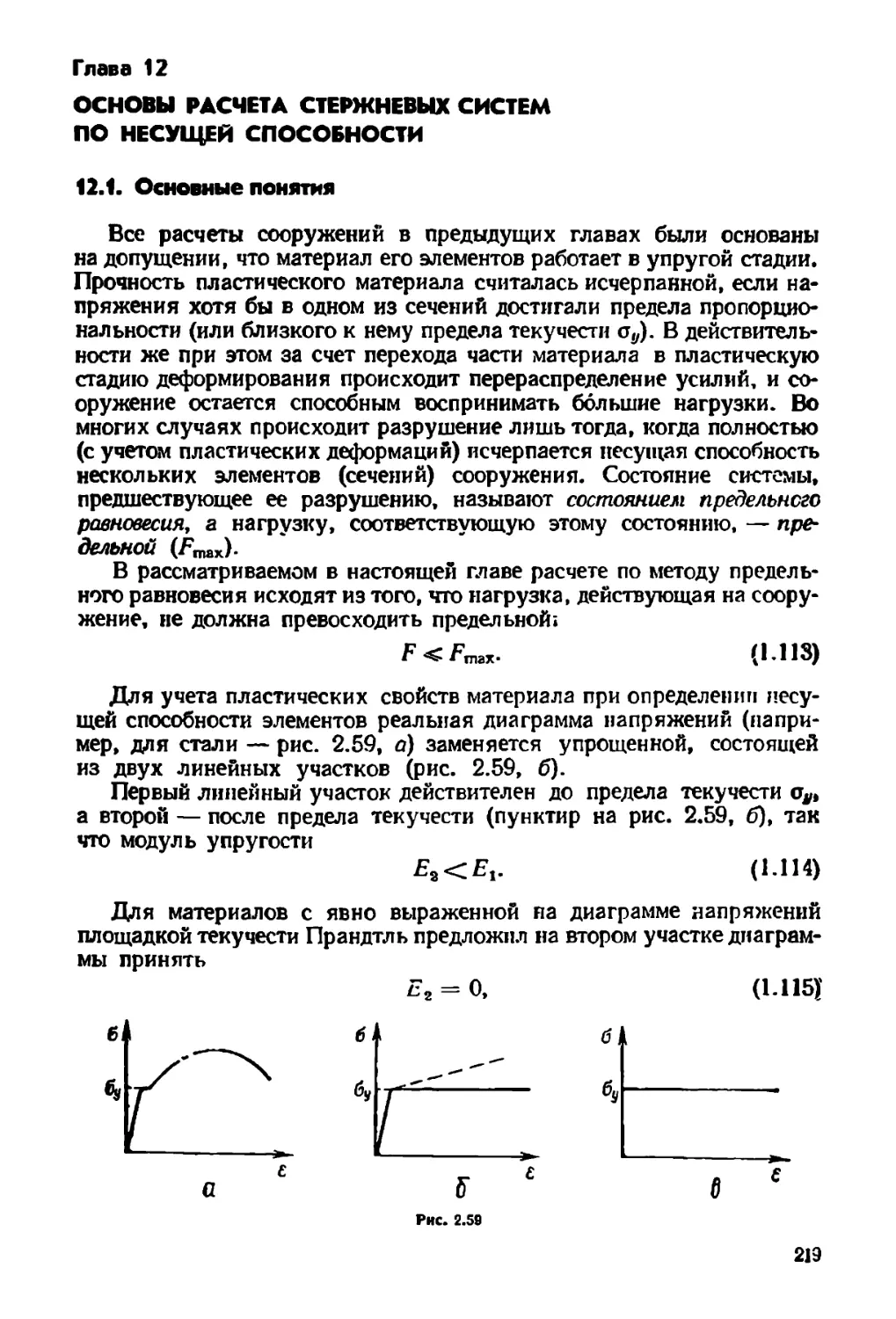
Глава 12. Основы расчета стержневых систем по несущей способности . . .219
12.1. Основные понятия .............................................219
12.2. Несущая способность сечения. Расчет статически определимых систем . 220
12.3. Расчет статически неопределимых систем .....................222
12.4. Расчет статически неопределимых рам.......................226
Вопросы для самоконтроля ............................................229
Глава 13. Некоторые современные проблемы теории сооружений .... 229
13.1. Понятие о статистических методах расчета и теории надежности соору-
жений ..........................................................229
13.2. Понятие о синтезе сооружений и расчете оптимальных систем . . 232
Вопросы для самоконтроля ............................................237
Раздел 3
ОСНОВЫ РАСЧЕТА ПРОСТРАНСТВЕННЫХ ТОНКОСТЕННЫХ СИСТЕМ 238
Глава 14. Основные вариационные принципы и методы строительной ме-
ханики ............................................................238
14.1. Понятие о вариационных принципах и их применении в задачах строи-
тельной механики ...................................................238
14.2. Основные вариационные принципы строительной механики . . . 243
14.3. Приближенные методы расчета, основанные на вариационных прин-
ципах ..............................................................246
Вопросы для самоконтроля ..........................................251
Глава 15. Основы метода конечного элемента (МКЭ) ..................251
15.1. Основные понятия. Расчет стержневых систем...............- . 251
15.2. Плоская задача теории упругости .............................260
15.3. Изгиб пластин ...............................................266
15.4. Особенности использования ЭВМ в расчетах по методу конечного
элемента ...........................................................270
Вопросы для самоконтроля ..........................................273
Глава 16. Расчет призматических оболочек и плитно-балочных систем . . . 273
16.1. Основные понятия и методика расчета .........................273
16.2. Определение реактивных усилий в отдельной пластинке вдоль узловых
линий от различных воздействий ................................275
5
lfj.3. Составление- системы канонических уравнений. Получение «лсончэтель-
ного решения задачи............................... . • • . я • . .
16.4. Основные допущения и уравнения вариационного метода расчета
призматических ортотропных складчатых систем ......
Вопросы для самоконтроля ......................................
8М S ШЙ- 8 I -ш о ns I
Глава 17. Расчет систем, состоящих из пологих оболочек двоякой кривизны
й -Сортовых балок ..................................................
17.1. Основные понятия и допущения..................................
17.2. Основные уравнения для пологой оболочки и их решение в двойных
тригонометрических рядах ...........................................
17.3. Определение усилий в бортовых балках .........................
Вопросы для самоконтроля ...........................................
Раздел 4
УСТОЙЧИВОСТЬ СООРУЖЕНИЙ . . .....................
Глава 18. Основные понятия. Методы исследования устойчивости упруг
систем ............................................................
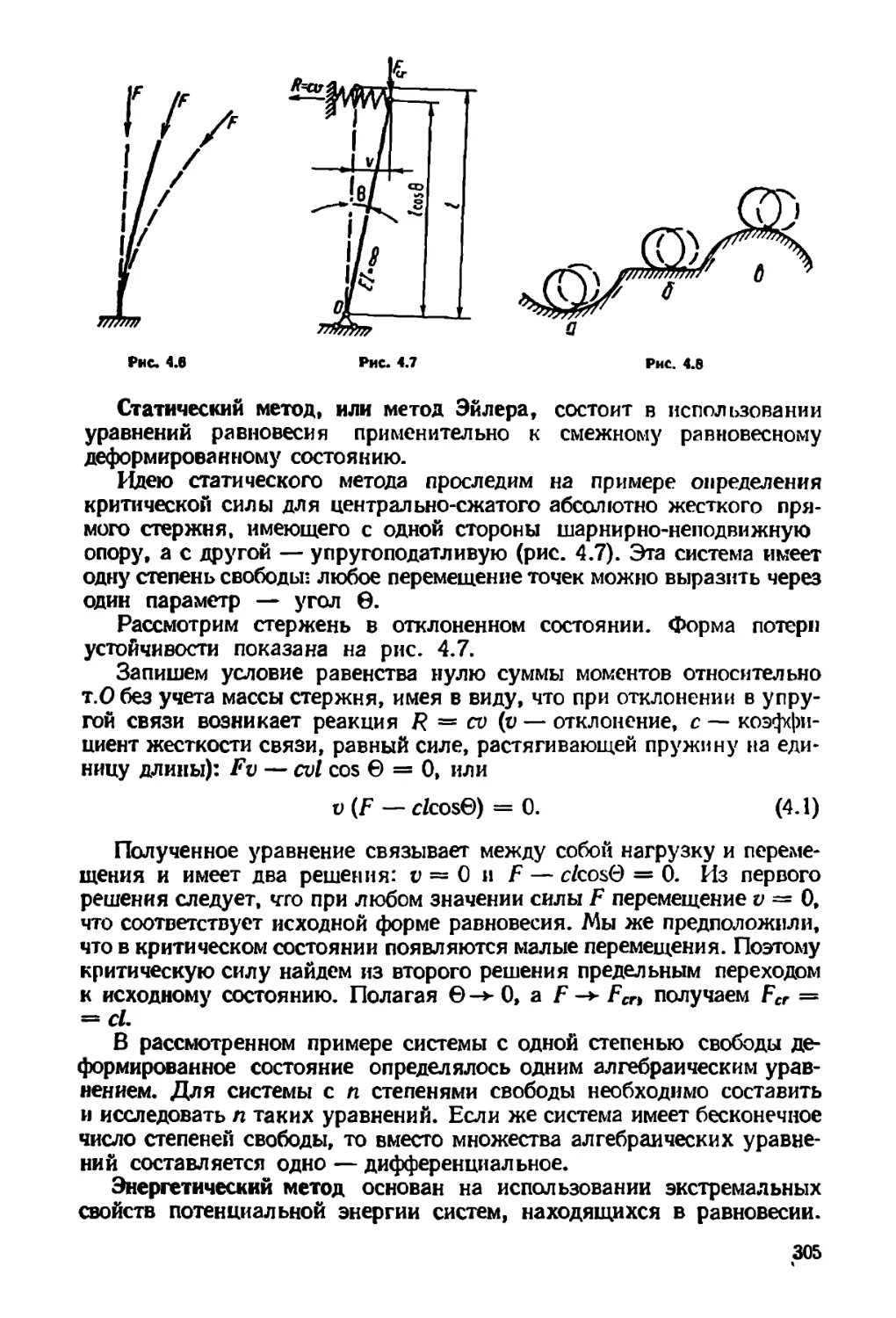
48. L Виды равновесия. Критическая нагрузка. Различные виды лоте
устойчивости деформируемых систем .................................
1₽2. Степени свободы в задачах устойчивости........................
I&3. Критерии устойчивости и методы определения критических сил
18.4. Устойчивость упругих систем с конечным числом степеней свободы
Вопросы для самоконтроля ..........................................
Глава 19. Устойчивость прямых сжатых стержней ........
19.1. Стержни постоянного сечения. Приятие о точном и приближен»
решениях ..........................................................
19.2. Стержни с упругоподатливыми опорами ..................... .
19.3. Дифференциальное уравнение равновесия четвертого порядка
19.4. Метод начальных параметров в задачах устойчивости ....
Вопросы для самоконтроля ..........................................
Глава 20. Приближенные методы исследования устойчивости сжатых стержней
20.1. Методы Ритца и Тимошенко ......................................
20.2. Метод Бубнова — Галер кина ....................................
20.3. Метод конечных разностей ......................................
20.4. Понятие об устойчивости систем при действии нагрузки, завися-
щей от нескольких параметров ........................................
Вопросы для самоконтроля ............................................
Глава 21. Более сложные случаи исследования устойчивости сжатых стерж-
ней .................................................................
21.1. Устойчивость сжато-изогиутого стержня при наличии поперечных на-
грузок ..............................................................
21.2. Устойчивость прямых стержней при действии сжимающих сил, при-
ложенных в пролете ..................................................
21.3. Устойчивость прямых стержней со ступенчато изменяющейся жестко*
стью при действии нескольких сил, приложенных по длине стержня
21.4. Стержни с непрерывно изменяющейся жесткостью ..................
21.5. Устойчивость стержня, связанного с упругим основанием . . . .
21.6. Влияние деформации сдвига иа критическую силу..................
21.7. Устойчивость составных стержней ...............................
2(.8. Устойчивость стержней с учетом упругопластической работы материала
Вопросы для самоконтроля ....................................
6
Глава 22. Устойчивость рам я арок . . . . . . . , . . .
'2&А. Основные положения ..........................• , . . , .
22.2. МетоД сиЬ’ в исСЛйДов’аГнИИ устойчивости рам ................
’22:3. Определение перемещений в -задачах устойчивости рам...........
22:4. Расчет рам на устойчивость методом перемещений ................
22.5. Вспомогательная задача метода перемещений. Определение реакций
для отдельного сжато-изогнутого стержня . ... . .
22.6. Устойчивость неразрезных сжатых стержней......................
22.7. Понятие о расчете упругих рам по деформированному состоянию . , .
22.8. Устойчивость круговых арок и колец .............................
Вопросы для самоконтроля ...... ......................
Глава 23. Устойчивость тонкостенных стержней и пластин «...
23.1. Дифференциальное уравнение устойчивости тонкостенного стержня .
23.2. Устойчивость сжатого тонкостенного стержня .............. . .
23.3. Устойчивость плоской формы изгиба ............................
23.4. Устойчивость прямоугольных пластин..............................
Вопросы для самоконтроля.............................................
Раздел 5
ДИНАМИКА СООРУЖЕНИЙ........................... ......................
Глава 24. Основные понятия ............................, . . . -
24.1. Динамические, нагрузки и их особенности ......................
2$.2. Силы, ‘ сопровождающие колебания ... ............... . .
24.3. Задачи и методы динамики сооружений ... 1......................
24.4. Понятие о степенях свободы системы ...........................
Вопросы для самоконтроля . ’. . .' . . . . '
Глава 25. Колебания систем с одной степенью свободы .........
Й5.1. Дифференциальное уравнение движения............................
25.2. Свободные колебаний ......................
25.3. Вынужденные колебания системы с одной степенью свободы . .'
25.4. Кинематическое возбуждение колебаний . .
25.5. Понятие о резонансе. Динамическим коэффициент . .
25.6. Учет‘сил сопротивления’ .................. ;•
Вопросы для самоконтроля ........................................
Глава 26. Колебания систем с несколькими степенями сообоаы ....
26.1. Дифференциальные уравнения движения системы при произволь-
ной нагрузке ........................................................
-26.2. Свободные колебания системы без учета затухании *.............
26.3. Спектр частот и форм собственных колебаний....................
26.4. Ортогональность собственных форм колебаний ....................
26.5. Вынужденные колебания систем. Действие гармонической нагрузки .
26.6. Действие произвольной нагрузки. Разложение движения системы по
формам собственных колебаний ....................................
26.7. Учет сил сопротивления .......................................
26.8. Понятие о динамическом методе расчета сооружений на сейсмические
воздействия ...................- -...................................
Вопросы для самоконтроля ............................................
Глава 27. Колебания систем с бесконечно большим числом степеней свободы
27.1. Дифференциальное уравнение продольных колебаний стержня . . .
27.2. Дифференциальное уравнение поперечных колебаний стержня • •
27.3. Свободные колебания. Балочные функции . ......................
27.4. Понятие об общем случае действия возмущающей нагрузки • • •
7
27.5. Решение в форме метода начальных параметров для случая гармо-
нического воздействия .....................................'...........
27.6. Расчет статически неопределимых рам на вибрационную нагрузку.
Определение частот и форм собственных колебаний ................
27.7. Понятие о расчете балок на действие подвижной нагрузки ....
Вопросы для самоконтроля ..............................................
Глава 28. Некоторые приближенные методы динамики сооружений . . .
28.1. Метод Релея .....................................................
28.2. Метод замены распределенных масс сосредоточенными . . . . .
Вопросы для самоконтроля ..............................................
Список рекомендуемой литературы........................................
з SSS § а
ОСНОВНЫЕ БУКВЕННЫЕ ОБОЗНАЧЕНИЯ
Л — площадь сечения
Ло — амплитуда вынужденных колебаний
Af t, —фиктивные реакции в i-м
пролете
b — ширина
D — цилиндрическая жесткость
D — матрица коэффициентов канониче-
ских уравнении метода сил
Е— модуль упругости
F — сосредоточенная сила
Fd— диссипативная сила сопротивления
Ft — возмущающая сила
f— стрела подъема арки
С — модуль сдвига
С — масса
g— ускорение свободного падения
п—горизонтальная реакция, распор
h — высота
1 — момент инерции
I/ — момент инерции при кручении
J—инерционная сила
i — радиус инерции
k — коэффициент жесткости
L — матрица податливости
— матрица влияния усилий в стер-
жнях фермы
I — длина, пролет
М — сосредоточенный момент, изгиба-
ющий момент
М — изгибающий момент от единичной
нагрузки, единичного лишнего
неизвестного
/И0 — балочный изгибающий момент
Mf — изгибающий момент от заданной
нагрузки
М— матрица изгибающих моментов
т — погонный момент
т —масса
т — погонная масса
N — продольная сила
N— матрица усилий в стержнях фермы
п — техническая частота
р—интенсивность давления
Q—поперечная сила
А— погонная поперечная сила
А —погонная (распределенная) попе-
речная нагрузка
R — реакции
R — матрица реакций
г — радиус
г — реакция от единичного воздействия
S — сила упругости
S — усилие, усилие в затяжке
s — криволинейная координата, дли-
на наклонного элемента
Т — число простых шарниров
Т — кинетическая энергия
Т — крутящий момент
Т — период колебаний
t — погонный крутящий момент
t— температура, приращение темпера-
туры
f, о — толщина тонкостенного влемента
U — потенциальная энергия, работа
внутренних сил
U — потенциальная энергия на едини-
цу длины
V — вертикальная составляющая уси-
лия, реакции
vty — прогиб
v — скорость движения
W —момент сопротивления сечения
W — работа внешних сил
Й7 — число степеней свободы
Wj — упругий груз в точке i
<|),ш— радиальное перемещение
X — лишнее неизвестное метода сил,
неизвестное усилие
х — координата
у — координата, ордината эпюры, ор-
дината линии влияния
Z — лишнее неизвестное метода пере-
мещений
6 — единичное перемещение
6 — логарифмический декремент коле-
баний
А—перемещение от заданной нагру-
зки
А — матрица перемещений
е — коэффициент затухания
т) — фаза вынужденных колебаний
G—угол поворота
© — частота возмущающей силы
X — гибкость
р, — коэффициент расчетной длины
стержня
9
v — коэффицпен! Пуассона
о — нормальное напряжение
т — касательное напряжение
со — круговая частота собстветяЛ ко
лебаний
со, Q —площадь эпюры, линии влияния
ЗНАЧЕНИЯ СМЫСЛОВЫХ ИНДЕКСОВ
6eg — начальный
сг — критический
end — конечный
f — фиктивный, нагрузка
кег — ядровый
I — левый
Ип — линейный
max — максимальный
min — минимальный
г правый
sup — верхний
Inf — нижним
iur —г угловой
Введение.
ОСНОВНЫЕ понятий
1. Строительная механика как наука
Строительной механикой называют науку, изучающую методы
расчета сооружений йй прочность, жесткость и устойчивость ври
различных воздействиях. По существу решаемых вопросов строитель-
ная механика тесно смыкается с такими науками, как сопротивление
материалов, теория упругости, теория пластичности.
Эти науки в отличие от строительной механики рассматривают
работу сооружений или их элементов, представляющих собой, как
правило, отдельные тела, при различных допущениях.
Теория упругости и теория пластичности ставят своей задачей опре-
деление напряженно-деформированного состояния в каждой точке
тела. При этом в теории упругости рассматриваются случаи, когда
материал сооружения работает в упругой стадии, а в теории пластич-
ности — в упругопластической стадии.
В сопротивлении материалов рассматривается работа отдельных
стержней, для которых вводится ряд допущений, позволяющих полу-
чить зависимости между деформациями и напряжениями во всех точ-
ках его произвольного плоского сечения.
Строительная механика изучает методы расчета сооружений, как
систем, состоящих из ряда связанных друг с другом стержней, а также
пластин, оболочек на основе упрощающих допущений.
Области применения каждой из перечисленных выше наук трудно
разграничить. Часто одну и ту же задачу можно одновременно отне-
сти к нескольким дисциплинам, а методы решения и допущения одной
из них используют в других дисциплинах. Так, в строительной меха-
нике широко используются положения сопротивления материалов
и теории упругости, а также методы других наук: теоретической ме-
ханики, математики, физики.
Строительная механика включает в себя статику, динамику и устой-
чивость сооружений.
Статика изучает вопросы расчета сооружений на прочность при
статических воздействиях. Обычно в ней выделяют три раздела: ста-
тически определимые и статически неопределимые стержневые систе-
мы, пространственные тонкостенные системы (оболочки). Динамика
исследует поведение сооружений при динамических воздействиях.
Вопросами причин разрушения систем до исчерпания прочности
составляющих ее элементов занимается устойчивость сооружений.
Строительная механика, как наука о прочности, выделилась по
мере развития из общей механики. Ее зарождение обычно связывают
с именем Галилео Галилея (1564—1642). В его работе «Рассуждения
»
и математические доказательства, касающиеся двух новых отраслей
науки» (1638) впервые сделана попытка систематизировать накоплен-
ные сведения о прочности сооружений. Некоторые положения, выска-
занные Галилеем, используются и в настоящее время в динамике,
моделировании сооружений, в теории изгиба балок. Однако правильной
теории расчетов на прочность Галилей не мог дать в силу общего недо-
статочного уровня развития наук, эксперимента. В частности, для
получения правильного решения задачи изгиба балки понадобилось
около 200 лет. Важную роль в этом сыграл установленный Р. Гуком
(1635—1703) закон пропорциональности между нагрузкой и деформа-
цией, а также работы Я. Бернулли (1654—1705) и др.
Развитию строительной механики в XVIII веке содействовали ус-
пехи в области механики и математики, особенно работы Л. Эйлера
(1707—1763) и Ж. Л. Лагранжа (1736—1813). Большое значение
имели также работы русского ученого М. В. Ломоносова (1711—1765),
открывшего закон сохранения материи, и талантливого механика-
самоучки И. П. Кулибина (1735—1818), разработавшего, в частности,
проект арочного моста пролетом 300 м через р. Неву.
Хотя к концу XVIII века уже были заложены теоретические осно-
вы строительной механики, она оставалась все еще оторванной от нужд
практики. К этому времени развивающийся капитализм испытывал
потребность в возведении крупных промышленных сооружений,
строительстве железных дорог. Интенсификация производства, внед-
рение в строительство дорогостоящего в то время металла вызвали
необходимость экономного расходования материала, а следовательно,
развития практических методов расчета сооружений.
Решительным поворотом к нуждам практики явилась реформа
строительной механики, осуществленная Л. Навье (1785—1836). Вме-
сто изучения разрушения сооружений он стал рассматривать их рабо-
чее состояние. При этом Навье исходил из того, что пропорциональ-
ность между напряжениями и перемещениями сохраняется вплоть до
разрушения. Хотя в действительности эта пропорциональность имеет
место лишь в пределах действия закона Гука, введенное предположе-
ние давало возможность определить ту нагрузку, «которой можно за-
грузить элемент без того, чтобы возникающие в нем изменения возра-
стали со временем».
Благодаря работам Навье, а также Коши, Сен-Венана и др. из
строительной механики в этот период выделилась и приобрела само-
стоятельное значение теория упругости.
Если в начале XIX века большое значение в строительной меха-
нике имели графические методы, то усложнение конструкций в конце
XIX — начале XX веков, появление сооружений из клепаного ме-
талла (мосты, резервуары, суда) обусловило развитие аналитических
методов. Важную роль в их разработке сыграли такие ученые, как
Г. Ламе (1795—1870), Б. Сен-Венан (1797—1886), Д. Максвелл (1831—
1879), О- Мор (1835—1918), Д. Релей (1842—1919), С. П. Тимошенко
(1878—1972).
В этот период выдвинулся ряд крупных русских ученых, создавших
отечественную школу строительной механики. Создателем теории
12
расчета мостовых ферм является русский инженер Д. И. Журавский
(1821—1891). Он также открыл наличие продольных касательных на-
пряжений в балке и получил формулы для их определения. X. С. Го-
ловин (1844—1904) известен своими работами по расчету арок, он
первый применил «начало наименьшей работы» в строительной меха-
нике. Н. А. Белелюбский (1845—1922) явился автором большого ко-
личества проектов выдающихся для своего времени мостов. Крупный
вклад в теорию устойчивости сделал Ф. С. Ясинский (1856—1899).
Большую роль в развитии строительной механики сыграли работы
В. Г. Шухова (1853—1939), Л. Д. Проскурякова (1858—1926),
И. Г. Бубнова (1872—1919), Н. П. Петрова (1836—1920).
Во второй половине XIX века появился новый строительный мате-
риал — железобетон. Его применение в сооружениях поставило в на-
чале XX века ученых перед необходимостью совершенствования мето-
дов расчета статически неопределимых систем. Благодаря работам
В. Л. Кирпичева, Н. С. Стрелецкого, А. А. Гвоздева, И. П. Про-
кофьева, Б. Н. Жемочкина, П. Л. Пастернака, И. М. Рабиновича,
Н. И. Безухова. В. В. Болотина и многих других создана стройная
система пригодных для широкого применения в инженерной прак-
тике методов расчета статически неопределимых систем.
Развитие в 20—30-х годах нынешнего столетия теории пластич-
ности позволило проследить поведение сооружения на всех этапах
его работы вплоть до разрушения. Исследования, выполненные в этом
направлен! и, создали предпосылки для разработки нового метода рас-
чета — по предельным состояниям. Этот метод получил распростра-
нение прежде всего в расчетах железобетонных конструкций благо-
даря работам советских ученых А. Ф. Лолейта и А. А. Гвоздева.
Советские ученые внесли свой вклад в совершенствование различ-
ных направлений строительной механики. Так, благодаря работам
П. Ф. Папковича, В. 3. Власова, А. А. Уманского, А. И. Лурье,
А. Л. Гольденвейзера, В. В. Новожилова и других ученых большое
развитие в нашей стране получила теория расчета оболочек и тонко-
стенных стержней. Ценные результаты получены в области расчета
балок и плит на упругом основании (в первую очередь в работах
А. Н. Крылова), в расчете сооружений на динамические нагрузки
и устойчивость. Большую роль в решении различных задач строитель-
ной механики сыграли также работы К. С. Завриева, А. Ф. Смирнова,
А. П. Синицына, Д. В. Вайнберга, В. А. Киселева, В. Н. Феодосьева,
А. П. Филина и многих других.
До середины XX века в строительной механике преобладало стрем-
ление к разработке относительно простых, а также приближенных
методов, требующих возможно менее сложных вычислений. Широкое
распространение ЭВМ в последние десятилетия обусловило коренной
переворот в строительной механике. Па первое место в оценке методов
расчета ставится теперь не простота их, а универсальность. Появля-
ется возможность большего приближения расчетных схем к реальным
сооружениям, широко применяются методы линейной алгебры, стати-
стические методы, математическое программирование, элементы топо-
логии.
13
Возможность автоматизации расчетов обусловила практически
полный отказ от графических методов. Зародились новые разделы
строительной механики: динамическая .'устойчивость, теория надеж-
ности, теория ползучести, неконсервативные задачи устойчивости,
нелинейная теория оболочек, оптимальное проектирование. Один"из
наиболее универсальных «методов строительной. механики — метод
конечных элементов — своим появлением обязан ЭВМ'/
Универсализация Методов строительной механики не означает
полного отказа от классических методов. Они являются тем фундацёк-
том. на который опирается наука, и тем инструментом, с помощью кото-
рого проверяется все новое. Актуальность классических методов строи-
тельной механики обусловливается также тём, что многие сооружения
представляют собой простые системы, дЛр': которых целесообразно
применять простые методы расчета.
Строительная механика — прикладная наука. Ее задачей является
разработка таких методов расчета, которые обеспечивают, с одной
стороны, надежность сооружения и, с другой стороны, их экономич-
ность. Требование экономичности конструкций становится особенно
важным в связи с принятым партией и правительством курсом на ин-
тенсификацию производства, перестройку экономики. Сегодня нельзя
представйть себе ни одного сколько-нибудь ответственного здания или
сооружения, возведенного по индивидуальному или типовому про-
екту, конструкции которого не были бы предварительно рассчитаны
на прочность, жесткость, устойчивость. Кроме того, в условиях ин-
тенсификации производства постоянно ставятся задачи расчета суще-
ствующих сооружений на повышенные нагрузки. Эти расчеты вы-
полняются на основе методов строительной механики и их изучение
является одним из основных этапов подготовки будущего инже-
нера-строителя.
2. Расчетная схема плоского сооружения и ее элементы
С точки зрения строительной механики сооружение представляет
собой тело или систему соединенных между собой тел, предназначен-
ных для восприятия внешних силовых или других воздействий и пере-
дачи их на основание.
Для обеспечения надежности сооружения, выполняют его расчет;
в ходе которого вычисляют внутренние усилия, напряжения, переме-
щения и проверяют условия прочности, жесткости, устойчивости.
Учесть в расчете все свойства и особенности реального сооружение
не представляется возможным, да в этом и нет необходимости, Доста-
точно сохранить лишь те из них, которые заметно влияют на резульг
таты расчета рассматриваемого сооружения. Принимаемое в расчета^
условное, идеализированное изображение реального сооружения и наг
грузок называют расчетной схемой.
В зависимости от цели расчета степень упрощения схемы сооружен
пня может быть различной. Например, каркас здания (рис. 1, а) пред*
ставляет собой пространственную систему стержней (рис. I, б), в кото-
рой продольные связи играют . второстепенную роль. Ими м<?жно
Г4
(тойка
Рис. 2
пренебречь, получив таким образом набор плоских систем — рам
(рис. 1, в). В свою очередь, решетчатый, ригель рамы иногда можно
еаменить сплошным стержнем эквивалентной жесткости (рис. 1, г).
Как видим, расчетные схемы одного и того же сооружения (рис. 1,
б, в, а) могут даже качественно отличаться друг от друга. Вообще,
число вариантов расчетных схем сооружения бесконечно велико. Воп-
рос о выборе той или иной схемы должен, решаться в зависимости от
назначения конструкции, цели расчета, требуемой точности результа-
тов и применяемых вычислительных средств.
В зависимости от соотношения геометрических размеров элемен-
тов, составляющих сооружение, различают: стержни (рис. 2, п),
у которых один размер (длина) значительно превышает два других;
аласгпины[(рнс. 2, б) и оболочки (рис. 2, в), у которых размеры по двум
направлениям больше третьего (толщины); массивные тела (рис. 2, г),
15
у которых все три размера одного порядка; тонкостенные стержни
(рис. 2, б), у которых все три размера разных порядков.
Системы, состоящие из стержней, называют стержневыми система*
ми, В расчетной схеме каждый стержень изображают осью — линией,
соединяющей центры тяжести его поперечных сечений. Сечение стерж-
ня при этом представлено интегральными геометрическими характе-
ристиками — площадью, моментом инерции и другими.
Сооружения разделяют на плоские, пространственные и плоско-
пространственные. Если оси всех стержней вместе с нагрузкой рас-
положены в одной плоскости, то сооружение называют плоским,
В плоскопространственных сооружениях оси стержней лежат в одной
плоскости, а нагрузка не лежит в ней. Каждое сооружение является
по существу пространственным, переход к плоским и плоскопростран-
ственным сооружениям делается с целью упрощения расчетов.
Отдельные стержни сооружения соединяются между собой в узлах
жестко (рис. 3, о) или с помощью шарниров (рис. 3, б). Шарниры при
этом считают идеальными, т. е. такими, в которых отсутствует трение.
Шарнир, приведенный на рис. 3, в, в отличие от шарнира нВ рис. 3, б,
называют неполным. В зависимости ст числа соединяемых стержней
различают простые и кратные шарниры. Простой шарнир (рис. 3,
б, в) соединяет два стержня, кратный (рис. 3, г) — три и более. Кратный
шарнир можно заменить рядом простых шарниров, присоединяя к од-
ному из стержней каждый последующий отдельным шарниром. Напри-
мер, шарнир, показанный на рис. 3, г, можно заменить представленным
на рис. 3, д. В общем случае для шарнира, соединяющего п стержней,
эквивалентное число простых шарниров
Т =п- 1.
В зависимости от способов соединения стержней различают систе-
мы с преимущественно жесткими соединениями — рамы (рис. 4, а),
системы только с шарнирными соединениями — фермы (рис. 4, б),
комбинированные системы (рис. 4, в).
Сооружение прикрепляется к земле или к другому сооружению
с помощью опор. Различают три основных вида опор плоских соору-
16
женим: шарнирно-подвижная опора (рис. 5, о), удерживающая от ли-
нейного перемещения вдоль опорного стержня; шарнирно-неподвиж-
ная спора (рис. 5, б), удерживающая от любых линейных смещений;
защемляющая неподвижная опора, или заделка (рис. 5, в), не допускаю-
щая как линейных, так и угловых смещений. Могут применяться
и такие опорные закрепления, как на рис. 5, г, а также упругие опоры
(рис. 5, д), у которых возможны упругие перемещения в направлении
закреплений.
Реактивные силы, появляющиеся в точках опирания, обычно изоб-
ражают в виде составляющих — реакций, число которых соответствует
количеству устраняемых независимых перемещений опорного сече-
ния. Так, в шарнирно-подвижной опоре действует одна реакция
(рис. 5, а) — /?, направленная вдоль опорного стержня, в шарнирно-
неподвижной— две, например, вертикальная — V и горизонталь-
ная — Н (рис. 5, б), в заделке — три: вертикальная — V, горизон-
тальная — Ни реактивный момент — М (рис. 5, в).
В зависимости от направления опорных реакций при действии
вертикальной нагрузки различают балочные системы (рис. 6, а, б),
у которых реакции вертикальны, и распорные (рис. 6, в), у которых
появляются горизонтальные составляющие опорных реакций, назы-
ваемые распором.
Одним из важных вопросов, решаемых при выборе расчетной схемы
сооружения, является выяснение характера и величины внешних
воздействий.
Среди них главное место занимают силовые воздействия, или на-
грузки. Они классифицируются по следующим признакам: по ха-
рактеру распределения — распределенные и сосредоточенные', по вре-
мени действия — постоянные и временные; по характеру приложения—
статические и динамические, подвижные и неподвижные.
17
Распределенные нагрузки бывают объемными и поверхностными.
Объемная нагрузка действует в каждой точке объема тела — гравита-
ционные силы, силы инерции и др. Поверхностные нагрузки появля-
ются в результате контакта с другими телами.
По своей сути все нагрузки являются распределенными— по объ-
ему или по площади поверхности тела. Однако, если размеры зоны
действия нагрузки малы по сравнению с размерами тела, она может
быть представлена в виде нагрузки, распределенной вдоль линии,
или. сосредоточенной силы, действующей в одной точке.
Постоянными называют нагрузки, которые действуют в течение
всего срока службы сооружения. Такой нагрузкой является, напри-
мер, собственный вес сооружения. Временные нагрузки действуют
в течение ограниченного промежутка времени. К ним относятся сне-
юЕые, ветровые нагрузки, вес оборудования и пр.
Постоянная нагрузка действует на сооружение в различных соче-
таниях с временными нагрузками. Каждое такое сочетание будем на-
зывать загружением.
Статическая нагрузка не изменяет своей величины или направле-
ния со временем. Динамическая нагрузка — это нагрузка, величина или
направление которой изменяются так, что появляющимися при этом
силами инерции нельзя пренебречь. Если изменение нагрузки вызы-
вает пренебрежимо малые силы инерции, то нагрузку можно считать
статической.
Неподвижные нагрузки — это нагрузки, не изменяющие своего поло-
жения на сооружении. К ним можно отнести вес сооружения и отдель-
ных его частей, вес стационарного оборудования и т. п. Примером
подвижной нагрузки может служить действие автомобиля или желез?
подорожного подвижного состава на мост.
Помимо нагрузок, сооружение может быть подвержено и другом
воздействиям, например, температурным, осадкам опор.
3. Понятие о геометрической неизменяемости.
Степени свободы. Статическая определимость
Всякое сооружение под нагрузкой деформируется, взаимное рас-
положение его точек изменяется. Если перемещения точек стержне-
вой системы возможны только за счет деформации ее элементов, то
система называется геометрически неизменяемой. Если форма системы
может меняться без деформации ее элементов, система называется
геометрически изменяемой. Геометрически изменяемые системы могут
оставаться неподвижными лишь при нагрузках частного вида, поэтому
они не применяются в сооружениях.
При проверке геометрической неизменяемости сооружения Доста-
точно рассматривать его как систему абсолютно жестких «тержней.
Например, шарнирно-стержневой треугольник (рис. 7, а) является
простейшей плоской геометрически неизменяемой системой, так как
при условии абсолютной жесткости стержней взаимное расположение
любых его точек строго фиксировано. Простейшим примером гео-
мётрически изменяемой системы может служить шарнирно-стерЖне-
№
I
a
5
Гмс. 7 Рис. 8
вой четырехугольник (рис. 7, 6). Дёйствительно, взаимное положение
составляющих его стержней может изменяться.
Для исследования подвижности системы жестких тел служит по-
нятие степеней свободы. Числом степеней свободы называют количе-
ство возможных независимых смещений точек системы. Иначе — это’
минимальное количество геометрических параметров, определяющих
взаимное расположение всех частей сооружения.
Назовем диском любую геометрически неизменяемую часть сбору*
жения. В частности, диском может быть стержень, массивное тело,
шарнирно-стержневой треугольник (рио. 7, о) на плоскости и 'пр.
Каждый диск имеет,на плоскости три степени свободы. ДействитеЛъ<-:
но, чтобы определить положение любой ёго точки, необходимо Задать
две ' координаты какой-либо точки и’ узловую координату любой
прямой, проходящей' через точку.
Соединения дисков между собой и опорные устройства огранили-'
вают возможность свободных перёме1цений дисков или, как говорят,
накладывают на сооружение связи. Количество этих связей в соедине-
нии соответствует числу устраняемых ими независимых перемещений.’
Так, при жестком соединении дисков устраняется возможность 'их
взаимных линейных и угловых смещений, поэтому такое соёдИпеНне
накладывает три связи, а число степеней свободы его равно нулю. Про-
стой шарнир накладывает две связи, устраняющие возможность вза-
имных линейных смещений дисков, и имеет одну степень свободы — их
взаимный поворот вокруг шарнира.
Аналогично устанавливается число связей и степеней свободы опор-1
ных закреплений. Шарнирно-подвижная опора накладывает одну связь
и имеет две степени свободы. Шарнирно-неподвижная опора наклады-
вает две связи, имеет одну степень свободы. Защемляющая неподвиж-
ная, опора (заделка) накладывает три связи. В таком закреплений
число степеней свободы равно нулю.
. Обозначив число дисков D, число простых шарниров Г, числб’
опорных стержней Со, можем на основании приведенных выше рассуж-
дений записать формулу Чебышева для определения числа степеней’
свободы плоской системы:
tt^=3D —2Г —Со. (I)
На основании полученного числа степеней свободы выполняется
кинематический анализ сооружения. Возможны три случая: W > О,
W = 0,, № < 0. Очевидно, что при W > 0 система является геометри-
чески изменяемой. Условия VF = 0 и V < 0 не всегда свидетель-
19
ствуют об обратном. Например, балка, показанная на рис. 8,— гео-
метрически изменяемая (возможное смещение балки показано тонкой
линией), однако для нее № = 3 • 3 — 2*2 — 6 = -—1 <0.
Для ферм, стержни которых можно представить как связи между
узлами, удобно пользоваться другой формулой для определения числа
степеней свободы:
Ц? = 2Г — С — Со, (2)
где У — число узлов, С — число стержней фермы.
Число степеней свободы тесно связано с понятием статической
определимости. Статически определимой называют геометрически
неизменяемую систему, усилия в которой определяются из условий
равновесия. Заключение о статической определимости может быть
сделано в зависимости от числа степеней свободы. Действительно, для
отдельного диска на плоскости число условий равновесия равно трем,
а для системы дисков без опор — 3D. В каждой связи, наложенной на
диск, действует некоторое усилие (в простом шарнире — две связи
и два усилия, в шарнир но-подвижной опоре — одна связь и одно уси-
лие и т. д.) Общее число связей между дисками равно 2Т 4- С©. Тогда
ври = 0 из формулы Чебышева получаем 3D = 2Т + С©, т. е.
число усилий во всех связях равно числу условий равновесия, и си-
стема является статически определимой. Следует отметить, что этот
вывод справедлив, если внутри каждого диска системы нет лишних
связей. В частности, рамы, имеющие в своем составе диски в виде зам-
кнутых контуров» могут оказаться статически неопределимыми и при
№ = 0.
Отрицательное значение числа степеней свободы (UZ <0) свиде-
тельствует о наличии лишних связей, т. е. о ее статической неопреде-
лимости.
4. Анализ геометрической структуры
Как указывалось выше, условия W = 0, W <0 являются необхо-
димыми, но недостаточными для определения геометрической неизменя-
емости сооружения. В связи с этим дополнительно должен быть прове-
ден анализ геометрической структуры системы {геометрический анализ).
В процессе этого анализа проверяют правильность соединения дисков.
Покажем основные способы образования геометрически неизменя-
емых систем, базирующиеся на простейшей геометрически неизменя-
емой системе — шарнирно-стержневом треугольнике.
1. Присоединение нового узла к геометрически неизменяемой
системе двумя стержнями, оси которых не лежат на одной прямой
(рис. 9, а).
2. Соединение двух дисков тремя стержнями, оси которых не па-
раллельны и не пересекаются в одной точке (рис. 9, б).
3. Соединение двух дисков стержнем АВ и шарниром С, не лежа-
щим на прямой АВ (рис. 9, а).
4. Соединение трех дисков тремя шарнирами, не лежащими на
одной прямой (рис. 9, г).
20
Рнс. 9
5. Соединение трех дисков шестью попарно непараллельными
стержнями (рис. 9, д). При этом точки пересечения пар стержней —
Oi-2» O2-3 и 01—э, являющиеся мгновенными центрами вращения дис-
ков и D2, Da и D3, Di и D3, не должны располагаться на одной
прямой.
6. Присоединение к системе, имеющей одну степень свободы,
триады — трех не лежащих на одной прямой стержней, соединенных
шарниром (рис. 9, е).
Проверим геометрическую неизменяемость систем, приведенных на
рис. 10.
Рис. 10, а. Рама содержит 3 диска — АВСК, КЕ, KFG, один
кратный шарнир в точке К (Т = 3 — 1 =5 2) и 7 опорных связей.
Число степеней свободы W 3 • 3 — 2*2 — 7 = —2 < 0.
Проверяем геометрическую структуру. Ломаный стержень АВСК
неподвижно связан с землей (заделка в т. Д), так же, как и стержень
КЕ (заделка в т. Е). Соединение стержней АВСК и КЕ в т. К шарни-
ром является лишним с точки зрения неподвижности стержней АВСК
и КЕ. Стержень KFG присоединен к неподвижным точкам шарниром
(в т. К) и опорным стержнем GH (к т. Н земли). Так как т. К не лежит
на прямой бА, то это соединение также неподвижно. Таким образом,
система геометрически неизменяема и статически неопределима
(Г <0).
Рис. 10, б. Ферма содержит 17 стержней, 10 узлов и 3 опорные
связи.
V = 2 • 10 — 17 — 3 = 0.
21
Схема фермы может быть получена последовательным присоедине-
нием узлов к шарнирному трехзвеннику (например, / — 2—3) парами
стержней, не лежащих на одной прямой, и далее прикреплена к земле
тремя непараллельными л не пересекающимися в одной точке .опор-
ными стержнями. Система геометрически неизменяема и статически
определима (IF = 0).
Рис, 10, в. Рассматривая каждый стержень как диск, получаем
Г = 9, Т = 10, Со = 7. Тогда IF — 3 • 9 — 2 • 10 — 7 = О. . .
Если бы стержни АС и ВС в т. С были соединены жестко, то систе-
ма стержней АС и ВС являлась бы неподвижной (соединение с землей
осуществляется тремя непараллельными и не пересекающимися в од-
ной точке опорными стержнями). В действительности же в т. С связь
шарнирная, поэтому система АВС имеет одну степень свободы. Точки
/( и Д' неподвижно связаны с землей. Присоединения точек Е и Е'
парами стержней, соответственно KE, EF и К'Е', E'F\ не изменяют
числа степеней свободы системы АВС. Точка G присоединяется к обра-
дованной системе с одной степенью свободы с помощью триады. Это
уменьшает число степенеГ! свободы системы на единицу. Таким обра-
зом, приведенная система является геометрически неизменяемой
и статически определимой (IF = 0).
Рис. 10, г. Число степеней свободы балки IF = 3 • 3 — 2-2 —
— 5 = 0.
Стержень АС, жестко связанный с землей, образует диск. Он гео-
метрически неизменяем, и опорный стержень в т. В лишний. К диску
АС и земле присоединен диск КЕ двумя стержнями (опорным в т. Е
и диском-стержнем КС). Такое соединение образует геометрически
изменяемую систему.
Помимо рассмотренного выше кинематического метода, для про-
верки геометрической неизменяемости можно применить и статиче-
ский метод. Противоречивость, возникающая при вычислении реакций
и усилий от нагрузки произвольного вида, является аналитическим
признаком геометрической изменяемости системы. Действительно, гео-
метрически изменяемая система при
произвольной нагрузке не может
находиться в равновесии. Попытка
применить условия равновесия для
расчета такой системы приводит
к несовместимый уравнениям. Так,
в балке, изображенной на рис. 11, Рис-н
из условия равенства нулю.момен-:
тов сил относительно левой опоры Получаем RB = Fall, а из условия
равенства нулю. изгибающего момента в точке. С — RB=.O
5. Мгновенная изменяемость
Рассмотрим систему, показанную па рис. 12, а. Систему можно
представить как три диска — АС, ВС и АВ (земля' — диск), соединен-
ные тремя шарнирами, поэтому она является геометрически неизме-
няемой. Проецируя силы, действующие в узле С, иа вертикальную
ось, получаем’
N = /7(2 sin а).
При а — 0 шарниры Я, В и С, соединяющие три диска (рис. 12, б)-,
располагаются на одной прямой. Тогда при приложении нагрузки
точка С в начальный момент получает возможность бесконечно малого
перемещения по общей касательной к траекториям движения, соот-
ветствующим вращению стержня АС вокруг т. Си стержня ВС вокруг
т. В. Такая система называется мгновенно изменяемой. Теоретически
подвижность мгновенно изменяемых систем бесконечна мала, однако
фактически перемещения в такой системе оказываются несравненно
большими, чем в геометрически неизменяемой системе.
Когда а = 0, усилия в стержнях системы (рис. 12, б) становятся
бесконечно большими. Эта особенность является общей для всех мгно-
венно изменяемых систем, поэтому они не могут применяться в соору-
жениях. Следует избегать также использования систем, близких по
геометрической структуре к мгновенно изменяемым.
Геометрическим признаком мгновенной из-
меняемости является неправильное располо-
жение связей в соединениях частей сооруже-
ния при достаточном их количестве. Напри-
мер, соединение двух дисков тремя стержнями,
оси которых параллельны или пересекаются
при продолжении в одной точке, образует
мгновенно изменяемую систему. В соединении
трех дисков признаком мгновенной изменяе-
мости является расположение мгновенных
центров вращения (в частном случае трех
шарниров) на одной прямой.
Аналитическим, или статическим призна-
ком мгновенной изменяемости является нал и-
Рае, л чие в системе бесконечно больших, неопреде-
23
Рис, 13
лепных (типа 0/0) или противоречивых усилий*. Простейшей на-
грузкой является исчезающе малая — нулевая нагрузка. В связи
с этим одним из способов проверки геометрической неизменяемости
служит способ нулевой нагрувки.
Проверим геометрическую неизменяемость фермы» показанной
на рнс. 13, с, применяя кинематический и статический методы.
Кинематический метод. Число степеней евободы фермы равно нулю
(IV7 = 0). Анализируя геометрическую структуру, выделим диски
1—2—4—5 и 7—6—9—10. Считая землю также диском, получаем
случай соединения трех дисков шестью стержнями! 4—6 и 5—7, А—2
и В—3, С—8 (и D—9. Однако в одной из пар стержни 4—6 и 5—7
параллельны друг другу — система мгновенно изменяема.
Статический метод. Прикладывая произвольную нагрузку Fx
и F2, проведем сечение /—/. Из условия равновесия левой части
получаем
£ Мо. = 0; N^t + = -Fxd.
Аналогично из условия равновесия правой части следует
£ Мо, = 0; - -F. . 2d.
Так как нагрузка произвольная, то Ftd #= Ft • 2d. Следовательно,
полученные уравнения являются противоречивыми и система мгно-
венно изменяема.
Применяя статический метод, проверим геометрическую неизме-
няемое! ь рамы, показанной на рис. 13, б.
Запишем условие равновесия для определения реакции Rbi
Y,MA^Fl/2+Re.0 = 0.
откуда
Rb=^(FI/2)/0.
При произвольном значении F Rb = =too, при F =0 RB — 0/0.
Рама является мгновенно изменяемой системой.
* Иначе, аналитическим признаком мгновенной изменяемости является
обращение в нуль определителя системы уравнений равновесия: det D = 0.
24
6. Допущения, принимаемые в строительной механике
Основные допущения, принимаемые в строительной механике,
можно разделить на две группы.
Первую группу составляют обычные для сопротивления материалов
допущения о свойствах материала! сплошность и непрерывность,
однородность, линейная упругость (справедливость закона Гука)
материала.
Ко второй группе относят допущения, касающиеся работы самого
сооружения. Это, в первую очередь, допущение о линейной деформи-
руемости сооружения, а также допущение о малости перемещений.
Обычно в строительной механике рассматривают линейно де-
формируемые системы, т. е. такие, у которых перемещения и нагрузки
связаны линейной зависимостью. Следствием этого допущения явля-
ется принцип независимости действия сил, в со-
ответствии с которым перемещение в упругой системе от действия
суммы сил (рис. 14, а) можно получить как сумму соответствующих
перемещений от каждой силы в отдельности (рис. 14, б, e)i
У(Г» F2) = t/(F1) + i/(F2). (3)
Отметим, что допущение линейной деформируемости предпола-
гает также наличие пропорциональной связи между силой и переме-
щением!
y&FJ-kytFJ. (4)
В зависимостях (3) и (4) вместо перемещения могут рассматри-
ваться любые факторы, описывающие напряженно-деформированное
состояние сооружения (напряжения, усилия, деформации, перемеще-
ния). Соотношения (3) и (4) справедливы и для других внешних воздей-
ствий: температурных, осадочных и пр. В этом случае термин принцип
независимости действия сил является неточным и его следует ваменить
более общим термином — принцип независимости воздействий,
В связи с необходимостью повышения точности расчетов в послед-
нее время повысился интерес к системам
с нелинейной связью перемещений и на-
грузок. Эта нелинейность может являть-
ся следствием нелинейности материа-
ла — физически нелинейная система или
определяться свойствами самого со-
оружения — геометрически нелинейная
система.
При действии нагрузки точки сис-
темы изменяют свое взаимное положе-
ние за счет деформации ее элементов.
В системе, показанной на рис. 15, стер-
жни АС и ВС под действием нагрузки
ваймут новое положение АС и ВС. При
этом угол наклона стержней изменится
25
на величину Да. Из условия равновесия
такой деформированной системы усиЛй’й
в стержнях.
2 sin (а + Да)* ®
Рнс*16 На основании, допущения о малости
перемещений последние являются* вел гь»
чинами второго порядка малости по отношению к геометрическим
размерам системы. Тогда в рассматриваемой системе Ла с а
и в выражении (5) можно принять sin (а + Ла) « sin а. Такая заме-
на означает, что вычисление усилий можно выполнить без учета пере-
мещений — по недеформированной схеме. Разумеется, этот вывод
справедлив лишь в пределах действия допущения о малости пере-
мещений.
Вопросы для самоконтроля
I. Что такое строительная механика и о чем ее отлкчие от сопротивления
материалов и других смежных дисциплин?
2. Каковы основные этапы развития строительной механики?
3. Какой вклад в развитие строительной механики внесли русские и совет-
ские инженеры н ученые?
4. Что характерно для развития строительной механики на современном
этапе?
5. Какова задача строительной механики и в чем ее важность?
6. Что такое расчетная схема сооружения? Какими соображениями руко-
водствуются при ее выборе?
7. Из каких элементов может быть составлено сооружение?
8. Как соединяются между собой отдельные стержни плоского сооруже-
ния?
9. Как различаются сооружения в зависимости от способов соединения
стержней?
10. Что такое кратный шарнир?
11. Назовите виды опор плоских сооружений. Каковы их кинематические
к статические свойства?
12. Приведите классификацию нагрузок. Какие другие воздействия может
испытывать сооружение?
13. Что называют числом степеней свободы сооружения?
14. Почему при проверке геометрической неизменяемости число степеней
свободы сооружения можно определять в предположении абсолютной жесткости
отдельных его частей?
15. Как определить количество связей в соединении дисков или в опоре?
16. Какая из формул — (1) или (2) — является общей?
17. Как геометрическая неизменяемость сооружения связана с числом сте-
пеней свободы?
18. Какая система называется статически определимой?
19. Как статическая определимость сооружения связана с числом степеней
свободы?
20. В каком случае и почему для проверки геометрической неизме-
няемости сооружения необходимо выполнить анализ его геометрической струк-
туры?
21. Перечислите основные способы образования геометрически неизменяе-
мых систем.
26
Каковы статические признаки геометрической изменяемости. сооруже-
ния?
23. Какие системы называют мгновение» изменяемыми?
24. Почему мгновенно изменяемые системы не применяют в сооружениях?
25. Каковы статические признаки мгновенной изменяемости сооружения?
26. Какие допущения о свойствах материалов принимают в строительной
механике?
27. Какие системы называют линейно деформируемыми? Каковы следствия
допущения о линейной деформируемости системы?
28. В каком случае можно выполнять расчет сооружения по недеформнруе-
мрй схеме?
Раздел 1
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СТЕРЖНЕВЫЕ
СИСТЕМЫ
Глава 1
МЕТОДЫ ОПРЕДЕЛЕНИЯ УСИЛИЙ
ОТ НЕПОДВИЖНОЙ НАГРУЗКИ
В общем случае в поперечном сечении стержня при действии на-
грузки появляются нормальные и касательные напряжения. Равно-
действующую этих напряжений в случае плоского напряженного со-
стояния заменяют двумя сосредоточенными силами — N и Q и сосре-
доточенным моментом М (рис. 1.1, о). Эти силы и момент называют
внутренними усилиями, а величины N — продольной, Q — попереч-
ной силами, М — изгибающим моментом. Внутренние усилия в се-
чении стержня могут быть выражены через заданную нагрузку. Тогда
с помощью формул сопротивления материалов легко получить значе-
ния напряжения в любой точке поперечного сечения. В связи с этим
определение внутренних усилий является одной из основных задач
при расчете стержневых систем.
В строительной механике для определения усилий в статически
определимых стержневых системах используют три основных метода:
метод сечений, метод замены связей и кинематический метод. Два
первых метода являются статическими, т. е. основаны на использова-
нии условий равновесия.
1.1. Метод сечений
Наибольшее распространение из-за простоты и удобства использо-
вания получил метод сечений. Его суть состоит в том, что после опреде-
ления опорных реакций систему мысленно разрезают на две части,
одну из которых (любую) отбрасывают, а ее действие на оставшуюся
часть заменяют неизвестными внутренними усилиями. Рассматривая
равновесие оставшейся части, находят внутренние усилия. Если в се-
чение попадает только один стержень. то все усилия могут быть опре-
Рис. 1.1
28
делены по известным правилам сопротивления материалов. Так, изги-
бающий момент равен сумме моментов сил, действующих на оставлен-
ной части, относительно центра тяжести сечения; поперечная сила —
сумме проекций тех же сил на нормаль к оси стержня, а продольная
сила — сумме проекций тех же сил на касательную к оси стержня.
Суммы рассматриваются алгебраические с учетом правила знаков,
приведенного на рис. 1.1, б.
В более сложных случаях, когда в сечение попадает не один, а не-
сколько стержней, для определения усилий составляется система
уравнений равновесия отсеченной части:
Е7И = 0, 2х = 0, £ц = 0. (1.1)
Сечение выбирается так, чтобы в него попало не более трех неиз-
вестных усилий. В этом случае все они могут быть найдены из решения
системы уравнений (1.1).
Для того, чтобы избежать совместного решения уравнений при
определении усилий, разработаны специальные способы составле-
ния уравнений равновесия: моментной точки, проекций и вырезания
узлов.
Способ моментной точки применяют тогда, когда линии действия
всех усилий, действующих в сечении, кроме искомого, пересекаются
в одной точке — т. т. Эта точка называется моментной. Тогда
в уравнение суммы моментов (2Л4т == 0) всех сил, действующих на
отсеченную часть, входит только одно искомое неизвестное усилие.
Способ проекций используют в том случае, когда можно выбрать
такую ось ц, на которую проецируются в нуль все усилия, действу-
ющие в сечении, кроме искомого. Тогда условие 2ц = 0 дает уравне-
ние для определения этого усилия. Для применения способа проекций
все усилия в сечении, кроме искомого, должны быть параллельны
друг другу, тогда ось ц — перпендикуляр к параллельным усилиям.
В частном случае в сечении могут действовать силы, линии дей-
ствия которых пересекаются в одной точке. Как известно, для такой
системы сил можно составить только два условия равновесия:
2% = 0, 2ц = 0, (1.1а)
поэтому число неизвестных усилий в таком сечении не должно превы-
шать двух. Если оси % и ц взяты произвольными, то в общем случае
неизвестные усилия будут найдены из решения системы уравнений
(1.1а). Более целесообразно направлять оси х и ц перпендикулярно
к неизвестным усилиям. Тогда каждое уравнение будет содержать
лишь одно неизвестное усилие. Описанный случай расположения уси-
лий обычно встречается при вырезании узлов, поэтому этот вариант
способа проекций называют способом вырезания узлов.
Например, в ферме, изображенной на рис. 1.2, а, для определения
усилия в стержне / вырежем сечением I—/ узел К. Выбрав ось ц
перпендикулярной к линии действия усилия W2 (рис. 1.2, б), спроеци-
руем на нее все силы:
2ц = F cos а 4- Aicos (90° — а — 0) = 0.
29
Тогда сразу находим При выборе других осей пришлось бы
решать систему двух уравнений.
Другой пример—рама (рис. 1.3, а). Для вычисления усилия
в стержне С — D проведем сечение J—/. Рассматривая правую часть
рамы (рис. 1.3, б), найдем сумму моментов сил относительно т. В,-
через которую проходят линии действия остальных неизвестных
усилий Nb~d и Qb-d'*
s Mb = —Fl — Nc-Dr = О,
откуда легко определяем Nc-d-
В некоторых случаях для упрощения вычислений удобно расчле-
нить систему на части и предварительно определить внутренние уси-
Hi *3
Ряс 1.6
лия в местах членения. Такое членение обычно выполняют по шарни-
рам с целью уменьшения числа усилий но концам частей систему (из-
гибающий момент в шарнире отсутствует). Например, в двухпролетной
балке, показанной на рис» 1.4, а, членение на отдельные элементы по
шарниру (рис. 1.4, б) дает возможность при вычислении усилий рас-
сматривать не всю балку, а ее составные части, что значительно упро-
щает расчет (следует учесть, что продольные силы во всех сечениях
балки — нулевые).
Действительно, для вычисления усилий в сечении К найдем предва?
рительно действующую в элементе CD поперечную силу Qc. С учетом
симметрии элемента получаем Qc « Rd = 3qll8.
31
Перейдя к элементу АС, определяем реакцию Ra:
1ме= Qcl/4 + Па1 = 0; Ил = —Qc/4 = -3qU32.
Теперь легко получить усилия в сечении Кх
Мк = RAU2 = —3?/2/64; QK = RA -= —3ql/32.
Обычно при расчете изгибаемых систем (рам, балок и др.) строят
эпюры внутренних усилий. Эпюра — это график изменения соответ-
ствующего усилия (М, Q или N) вдоль осей элементов сооружения.
Положительные ординаты эпюр Q и N откладывают перпендикулярно
оси стержня вверх, а положительные ординаты эпюры М — вниз,
так что эпюра изгибающих моментов всегда расположена со
стороны растянутых волокон. При построении эпюр на вертикальных
стержнях предварительно уславливаются для них о понятиях «верх»,
«низ».
В качестве примера на рис. 1.5 рассмотрено построение эпюр
внутренних усилий в раме. Разрезав раму (рис. 1.5, а) на две части
сечением 1—/, рассчитываем сначала правую, а затем левую часть
(рис. 1.5, б). Полученные эпюры М, Q и N приведены на рис. 1.5, в, г.
Для проверки рассматриваем равновесие узла Е (рис. 1.5, д) под
действием изгибающих моментов, продольных и поперечных сил.
При определении поперечных сил в сложных рамах могут быть по-
лезны формулы, получаемые из рассмотрения отдельного участка ра-
мы. Например, для стержня, загруженного поперечной равномерно
распределенной нагрузкой (рис. 1.5, е), из условий равновесия полу-
чаем
<2,=^ + ^^; Qr------------+ (1.2)
1.2. Метод замены связей
Для определения усилий в сечении К двухпролетной балки
(рис. 1.6, а) необходимо предварительно определить реакцию Ra-
Преобразуем схему, отбросив опорную связь в направлении Ra
и заменив ее действие силой Хг. Для сохранения геометрической не-
изменяемости поставим новую связь — опорный стержень в точке С
(рис. 1.6, б). Полученную систему будем называть преобразованной,
отброшенную связь — заменяемой, а новую связь — заменяющей.
Преобразованная система должна быть геометрически неизменяемой
и возможно более простой с точки зрения вычисления усилий.
Потребуем теперь, чтобы усилие в заменяющей связи было равно
нулю: Rc = 0. При выполнении этого условия усилия в преобразован-
ной системе равны усилиям в заданной системе.
Выполняем расчет преобразованной системы.
Для определения реакции Rc воспользуемся принципом незави-
симости действия сил: Rc = Rc, f4- Rc, i> где Rc, f — реакция от за-
данной нагрузки; Rc, i — реакция от силы Xv
32
рис. i.e
В свою очередь, на основе принципа пропорциональности Rc, i =
= Rc. iXp где ~Rc, i — реакция от силы Х± = 1.
Теперь можно записать, что
Rc = Rc, f + Rc, iXi = 0, (1«3)
откуда
Xt =—Rc, f/Rc, i- (14)
Значение Rc, f определяем, пользуясь рис. 1.6, в:
Аналогично, пользуясь рис. 1.6, а, находим Rc.ii
£/VU = Хх/ — Rc, il/4=0\ Rc, i = 4Хх = 4.
По формуле (1.4) находим Хг = — — —^ql и далее иско-
мые усилия в сечении К:
Мк = MK,f + Мк, iXt = 0 + (1 • 1/2) (—З9//З2) = —39/764;
<2к = Qk,i + Qk, iXx = 0 4- 1 (-З9//З2) = -39/732.
В преобразованной системе могут одновременно заменяться не-
сколько связей. Тогда усилия в них (Xv Х2» ...) будут определяться
решением системы уравнений типа (1.3).
Сравнивая решение по методу замены связей с ранее выполнен-
ным расчетом той же балки (рис. 1.4) методом сечений, приходим к вы-
воду, что последний является менее трудоемким. Однако существует
ряд задач, для которых расчет методом сечений требует совместного
33
решения большого числа уравнений равновесия. Применение метода
замены связей в таких задачах позволяет упростить расчет.
Например, в системе, приведенной на рис. 1.7, а, четыре реакции
в опорах нельзя найти из условия равновесия всей системы. Любое
сечение, разрезающее ее на две части, дает уравнение, которое также
содержит более трех неизвестных усилий.
Воспользуемся методом замены связей. Отбросим опорный стержень
в т. С и введем новую связь — опорный стержень в т. D (рис. 1.7, 6).
Выполнив расчет преобразованной системы на заданную нагрузку
(рис. 1.7, в) и на единичную силу Xl= 1 (рис. 1.7, г), находим ре-
акции в опоре D: Rd. f = F; RD, i = —0,5. Из условия отсутствия
реакции Rd в заданной системе Rd,i + Rd, = ® находим Х> =
= — Rd, f/~Ro, i= F/0,5 = 2F.
Таким образом, одна реакция вычислена, и дальше все остальные
усилия в системе можно найти, например, методом сечений.
1.3. Кинематический метод
Кинематический метод основан на применении принципа возмож-
ных перемещений. Применительно к упругим системам он формули-
руется так: если упругая система находится в равновесии, то сумма ра-
бот всех, внешних и внутренних сил системы на любых возможных пере-
мещениях равна нулю:
W+U = 0. (1.5)’
Возможными называют произвольные бесконечно малые переме-
щения, которым не препятствуют наложенные на систему связи.
Рассмотрим балку на двух опорах (рис. 1.8, а). Под действием
заданной нагрузки точки балки получают перемещения, в частности
34
точка приложения силы F,
сместится на величину уи.
Двойной индекс у перемеще-
ния расшифровывается сле-
дующим образом: первый ин-
декс «1» обозначает, что пере-
мещение направлено вдоль
линии действия силы Flt вто-
рой индекс «1» указывает, что
причиной, вызвавшей это пе-
ремещение, является та же
сила FP
Для определения опорной
реакции RB отбросим соответ-
ствующую опорную связь —
опору В (рис. 1.8, б). Полу-
ченная система является ме-
ханизмом — ее точки могут
Рис. 1.8
перемещаться за счет пово-
рота балки вокруг т. А. Пусть в результате такого поворота т. В сме-
стилась в направлении реакции 7?в на малую величину А. Эти переме-
щения являются возможными перемещениями механизма. Так как
перемещения малы, то можно считать, что в отклоненном состоянии
равновесие балки не нарушается. Иными словами, балка поворачи-
вается вокруг т. А как абсолютно жесткое тело, и работа внутрен-
них сил на этих перемещениях будет равна нулю:
U = 0.
(L6)
Из тех же соображений при определении работы внутренних сил можно
воспользоваться недеформированной схемой балки (рис. 1.8, в):
^ = F^1a + ^A. (1.7)
Теперь по условию (1.5) получаем уравнение работ
W 4- U = F^ia + ₽fiA = 0, откуда RB = —F, .
В полученном выражении присутствует отношение перемещений.
Это позволяет найти искомую реакцию, выразив одно перемещение через
другое. Рассматривая эпюру перемещений механизма (рис. 1.8, в),
из подобия треугольников находим ^д/А = (/ + d)/l и окончательно
Rb^-F^I + WL (1.8)
На основании изложенного можно сделать следующие гы воды
а) перемещения механизма, полученного после отбрасывания связи,
могут быть получены в предположении абсолютной жесткости состав-
ляющих его стержней, работа внутренних сил на этих перемещениях
отсутствует; б) так как усилие из уравнения работ выражается через
отношения перемещений, то вместо бесконечно малых перемещений
можно рассматривать конечные малые перемещения.
35
Знак минус в решении (1.8) указывает, что в действительности ре-
акция направлена в обратную сторону — вниз.
Вычисления в описанном методе несколько упрощаются, если
малое перемещение А принять за единицу.
Напомним, что при вычислении возможной работы сосредоточен-
ного момента М необходимо умножить его на угол поворота сечения
стержня в месте приложения момента:
W'=M<p, (1.9)
а возможная работа равномерно распределенной нагрузки равна
произведению ее интенсивности на площадь эпюры перемещений,
взятую в пределах этой нагрузки:
W = <7<о. (1.10)
При определении внутренних усилий кинематическим методом мож-
но применить эту же методику, если в сечении взаимодействие частей
стержня заменить тремя дискретными связями (рис. 1.9, а). Тогда дей-
ствие связи 1 эквивалентно действию изгибающего момента, а усилие
в связи 2 эквивалентно поперечной силе. Эти связи можно располо-
жить иначе (рис. 1.9, б). Теперь усилие в связи 3 заменяет продольную
силу. Устранение связей, соответствующих изгибающему моменту,
поперечной и продольной силе, в расчетной схеме изображается поста-
новкой устройств, приведенных на рис. 1.9, в, г, д.
Таким образом, для определения усилия кинематическим методом
необходимо: а) устранить связь, в которой действует искомое усилие,
и вместо нее приложить это усилие; б) сообщить полученному меха-
низму малое перемещение, при этом смещение в направлении отбро-
шенной связи можно принять за единицу; в) записать выражение ра-
боты сил, приложенных к системе, на полученных перемещениях
и приравнять его к нулю. Решение этого уравнения дает величину
искомого усилия.
Покажем вычисление изгибающего момента в сечении К двухпро-
летной балки (рис. 1.10, д).
Устранив связь постановкой шарнира в сечении К (рис. 1.10, б),
сообщаем полученному механизму единичное смещение в направлении
86
момента Мк — взаимный поворот концов разрезанного стержня. Из
геометрических соотношений с учетом малости угла поворота находим
необходимые для вычислений ординаты эпюры перемещений меха-
низма:
I . I Л 1 1 * //4 /
У В — g *§(Д) ~ g Л 2 ’ У^ 2 4 • Ус Ух /у2 8 '
Уравнение возможных работ имеет вид W = МкА 4- дсо = О, или
Мк + Я (J §) == °- Отсюда находим Мк == —ЗдР/64.
Применяя кинематический метод для определения усилий в стерж-
нях ферм (рис. 1.11, а), достаточно разрезать соответствующий стер-
жень, так как в нем действует единственное усилие — продольная сила.
Эпюру перемещений при смещении концов разрезанного стержня можно
построить с учетом положения мгновенного центра вращения дисков
Dx и О2 — Ol-г (рис. 1.11, б).
37
Из уравнения возможной работы И7 = • I 4- F1p1 — —
— ^з?/з — ^£/4 = 0 находят величину Nx. Вычисление ординат эпюры
перемещений узлов фермы в данном случае более трудоемко, чем для
банки.
Рассмотренные примеры позволяют сделать вывод о том, что кине-
матический метод рационально применять для вычисления отдельных
усилий в тех случаях, когда после устранения связи получают доста-
точно простой механизм.
1.4. Способ рассечения системы на стержни и узлы
Метод сечений является универсальным статическим методом для
определения внутренних усилий. При наличии определенных навыков
он позволяет достичь цели быстро и с минимальной трудоемкостью
счета. Однако в классическом виде метод сечений трудно поддается
формализации, что объясняется произвольной конфигурацией осей
и разнообразием нагрузок в той части системы, для которой записы-
ваются условия равновесия. Эти трудности можно преодолеть, если
применить расчленение системы на отдельные стержни и узлы. Будем
считать, что все сосредоточенные нагрузки приложены в узлах, а ос-
тальные нагрузки равномерно распределены в пределах отдельных
стержней. Теперь уравнения равновесия i-ro стержня (рис. 1.12, а)
в местном базисе, соответствующем осям Хь принимают стандарт-
ный ВИД!
S 1л = —М, beg + Ni. end + Qi, Ji = 0;
S ty e —Qi. beg + Qi, end + Qi. rfi — 0j (1 • 11)
У Mo = Mzt beg — end + Qi, endh — —% * =
Уравнения равновесия /-го узла (рис. 1.12, б) в общем базисе
(оси х, у) будут следующими:
38
S “ «.£*>Nl' **cosot' - S W*. wacosa* 4- £ Qi. b,t sin a, -
v * **• **#
~ №~i«D Qk' ,n‘'sin a‘ + fi.« = 0;
S S' = v E£) n‘- sin ~ Л\ end sin a,. — 01, beg cos a, 4.
+ <Л11)0*,"4<Х’®а* + ЛЛ' = 0: (1.12)
S M> “ a E ~ S M‘- •« - M> ~ °’
»• “£> (A. end)
Здесь знаки у сумм указывают, что суммирование распространяется
на стержни, начала (t, beg} или концы (k, end} которых находятся
в данном узле.
Записывая уравнения (1.11) для всех стержней и уравнения (1.12)
для всех узлов стержневой системы (в том числе и для концевых), при-
соединим к ним равенства, соответствующие заданным усилиям (на-
пример, равенство нулю изгибающего момента в шарнире).
Полученная система уравнений в качестве неизвестных содержит
внутренние усилия в начале и конце каждого стержня и опорные реак-
ции. Например, для рамы, показанной на рис. 1.13, уравнения равно-
весия стержней (1.11) будут следующими:
—A7lt beg + Nl, end = 0; —Ql. beg + <21. end = 0;
Mi, beg ~~ Ml, end 4~ Ql, endK = 0; (1 • 13а)
—N2, beg + M>. end — 0; —Q2, beg + ^2, end = 0;
—Qi, beg 4" Qi, end 4" ЯЦ
2
№, beg — Mt, tnd 4~ Qi, endh Я 2 =
X
Рис. 1.13
39
Аналогично составлены уравнения равновесия узлов:
Л/i, cos а 4- Qi, beg sin а + /4 = 0;
M, beg sin а — Qi, beg cos a -J- V, = 0;
Ml, beg — = 0;
—Ni. end cos а — Qi, end sin а — W2, end 4- N3, beg = 0;
end Sin ОС 4“ Ql» end COS tt 4“ Qi, end — Q3, beg = 0j (1.130)
—Mi, end — М2, end + М3, beg — M = 0;
Ni, beg = 0;
—M, end — /?s sin p = 0;
Q4» end + /?ftCOSP = 0j
M4, end ~ 0.
12 уравнений (1.13 a)' и 15 уравнений (1.136) вместе с условием ра-
венства нулю изгибающего момента в шарнире
Мз. end == 0 ИЛИ М4. beg = 0 (1.13в)
образуют полную систему 28 линейных уравнений для определения
24 внутренних усилий и 4 реакций. При этом реакции входят только
в уравнения равновесия опорных узлов, поэтому от них можно изба-
виться. Например, в уравнениях (1.136) реакции Hlt Vt и Mt встре-
чаются но одному разу. Соответствующие уравнения могут быть ре-
шены независимо ог остальных после определения внутренних усилий.
Аналогично можно отбросить и последнюю оставшуюся реакцию Rg,
Для этого предварительно необходимо преобразовать 13- и 14-е урав-
нения (1.136) к новому базису (оси хь, у&). Умножим первое из этих
уравнений на sin р, а второе — на cos Р и вычтем одно из другого.
Затем умножим уравнения соответственно на cos р и sin р и сложим.
В результате этих преобразований получаем новые уравнения]
M.enrfSinp + Q4.enz/C0sP4- = 0*. . ...
—W4. end cos ₽ 4- <?4. enrfSin р = 0, * * '
первое из которых также можно решать независимо от остальных.
Уравнения (1.13а), (1.13в) и оставшиеся уравнения (1.136) обра-
еуют полную систему для определения внутренних усилий.
Эту систему уравнений нетрудно записать в матричной форме:
C$ + F = 0, (1.15)
где С — матрица коэффициентов при усилиях (в рассмотренном при-
мере ее размер — 24 X 24); 5 — матрица внутренних усилий (при рас-
чете на одно загружение — матрица-столбец); F — матрица свобод-
ных членов — матрица нагрузок (при расчете на одно вагружение —
матрица-столбец).
40
Формирование матриц С и F выполняется по достаточно простым
правилам и может быть запрограммировано для ЭВМ так же, как
и решение системы уравнений (1.15):
5 = —C^F.
Расчет в матричной форме для ручного счета, как правило, не при-
меняется из-за своей громоздкости.
Вопросы для самоконтроля
1. Какие методы применяют для определения усилий в статически опреде-
лимых системах?
2. В чем сущность метода сечений?
3. Как определяют внутренние усилия, если в сечение попадает только
один стержень?
4. Какие способы позволяют рационально составить условия равновесия,
если в сечение попадает более одного стержня?
5. Для чего применяется членение системы на отдельные части по шарни-
рам?
6. Как определить поперечную силу на участке стержня, если известны на-
гибающие моменты на его концах?
7. В чем сущность метода замены связей?
8. Какие требования предъявляются к преобразованной системе?
9. Какой принцип механики лежит в основе кинематического метода? Сфор-
мулируйте его.
10. Как преобразуется система для определения усилия кинематическим
методом?
II. Чему равна возможная работа внутренних сил в механизме, полученном
после отбрасывания связи?
12. Какова особенность применения принципа возможных перемещений
к линейно деформируемым системам?
13. Как определяется работа сосредоточенного момента? Равномерно рас-
пределенной нагрузки?
14. В каких случаях применяется способ членения системы на стержни и
узлы? Почему?
Глава 2
МЕТОДЫ ОПРЕДЕЛЕНИЯ УСИЛИЙ ОТ ПОДВИЖНОЙ НАГРУЗКИ
2.1. Основные определения.
Статический метод построения линий влияния
Подвижная нагрузка с течением времени изменяет свое положение
на сооружении (нагрузка от мостового крана, автомобиля, железно-
дорожного подвижного состава и др.). Такая нагрузка в расчетной
схеме может быть представлена в виде перемещающейся одиночной
сосредоточенной силы, сосредоточенного момента, распределенной
нагрузки или системы связанных между собой нагрузок, в частности
сосредоточенных сил.
Перемещение нагрузки по сооружению, как правило, связано
с появлением сил инерции, для определения которых пользуются мето-
41
дами динамики сооружений. Во многих случаях силами инерции при
расчетах на подвижную нагрузку можно пренебречь, т. е. считать эту
нагрузку приложенной статически. Далее рассматривается расчет
именно на такую, статически приложенную, подвижную нагрузку.
Изменение положения нагрузки вызывает изменение усилий в со-
оружении не только от сечения к сечению, но и водном и том же сече-
нии. В связи с этим при расчете на подвижную нагрузку появляется
необходимость определения наибольших (наименьших) усилий в сече-
ниях. Эта задача может быть решена с помощью огибающих эпюр.
Огибающая эпюра представляет собой график, на котором показаны
границы изменения какого-либо усилия во всех сечениях при любых
возможных загружениях системы. Все эпюры соответствующего уси-
лия, например изгибающего момента, будут располагаться внутри этих
границ. Для построения огибающей эпюры необходимо построить
эпюры для каждого загружения постоянной и временными, в том числе
подвижными, нагрузками. С помощью этих эпюр находят расчетные
наибольшие и наименьшие усилия в каждом сечении и по ним строят
огибающую эпюру.
Такой расчет является трудоемким даже при наличии подвижной
нагрузки только одного вида, так как требует построения большого
числа эпюр для различных положений подвижной нагрузки. В связи
с этим метод огибающих эпюр в описанном выше виде применяется,
как правило, только в тех случаях, когда другие методы неприменимы,
например, при расчете нелинейно деформируемых систем. 5
При расчете линейно деформируемых систем на подвижную на-
грузку большое распространение получил метод линий влияния.
Линией влияния называют график, выражающий зависимость неко-
торого фактора (реакции, усилия в каком-либо сечении, перемещения
какой-либо точки и др.) от положения на сооружении единичной силы
постоянного направления.
Для сравнения напомним, чго эпюрой называется график зависи-
мости какого-либо фактора (внутреннего усилия, перемещения и др.)
вдоль осей сооружения от заданной неподвижной нагрузки. Таким об-
разом, в эпюре аргументом является переменная, определяющая
положение сечения, в котором вычисляется фактор, а нагрузка непод-
вижна. В отличие от эпюры в линии влияния сечение, в котором вы-
числяется фактор, остается неподвижным, а аргументом является
переменная, определяющая положение нагрузки (единичной силы) на
сооружении.
В связи с этим отметим, что, если понятие «эпюра опорной реак-
ции» является абсурдным (реакция действует в фиксированном сече-
нии, проходящем через опорный стержень), то линию влияния опор-
ной реакции нетрудно представить (см. ниже).
Применение линий влияния имеет смысл только для линейно
деформируемых систем. В таких системах нетрудно перейти от еди-
ничного усилия (усилия от единичной силы) к усилию от заданной
силы, а принцип независимости действия сил дает возможность про-
стым суммированием получить усилие от совместного действия ряда
нагрузок.
42
Расчет на подвижную нагрузку
методом линий влияния разделяет-
ся на две части: построение линий
влияния и определение усилий по
линиям влияния.
Для построения линий влияния
применяются те же методы, что и в
расчете на неподвижную нагрузку—
статические и кинематический. Ме-
тод замены связей используется
редко, поэтому под статическим ме-
тодом обычно подразумевается ме-
тод сечений.
В основном нагрузкой в соору-
жениях являются силы тяжести,
поэтому обычно при построении ли-
ний влияния в качестве нагрузки
принимается единичная сила, на-
правленная по вертикали вниз,—
единичный груз. Линия, вдоль ко-
торой единичный груз перемещает-
ся по сооружению, называется гру-
зовой линией.
Покажем применение стати- Рис |Л4
ческого метода к построе-
нию линий влияния в однопролетной балке. Пусть в балке, пока-
занной на рис. 1.14,с, требуется построить линию влияния
реакции Rb. Для этого установим единичную силу F в произ-
вольное положение, определяемое координатой х, и запишем усло-
вие равновесия балки:
£Мл = 0, Fx—Rb! = 0-
Отсюда находим
Rb = Fx/lt или RB — x/l.
(1.16)
График полученной зависимости дает искомую линию влияния Rb.
Так как выражение (1.16) устанавливает линейную связь между реак-
цией и положением единичного груза, то для построения графика вы-
берем две любые точки, например х — 0 и х = I. Соответствующие
значения реакции — Rb = 0 и Rb = 1. Проведя прямую через эти
точки (рис. 1.14, 6), получаем линию влияния Rb.
Остановимся на механическом смысле ординат построенной линии
влияния. Как следует из определения, каждая ордината этой линии
влияния представляет собой значение опорной реакции /?в, вызванной
единичной силой, расположенной на грузовой линии над этой орди-
натой.
Аналогично строится линия влияния другой реакции — Ra'.
SAJb = O, RaI — F(l—x) = 0.
43
Отсюда
Ra = F(l — x)1lt или Ra =(J — xVl. (1.17)
При x = 0 Ra = 1, при x = I RA^0.
Проведенная через эти точки прямая является линией влияния RA
(рис. 1.14, в). На конце консоли (при х=/4-с) она имеет ординату
Перейдем к построению линий влияния внутренних
у с и л и й в балке. При вычислении внутренних усилий методом сече-
ний рассматриваются силы, расположенные на одной из отсеченных
частей. В зависимости от того, находится единичная сила на рассмат-
риваемой части балки или на противоположной, она войдет или не
войдет в выражение для внутреннего усилия. Отсюда следует, что вы-
ражения для внутреннего усилия будут различными при положениях
единичного груза слева и справа от сечения и эти случаи расположения
подвижной нагрузки необходимо рассматривать отдельно.
Покажем построение линии влияния изгибающего
момента в сечении К той же балки.
Груз расположен слева от сечения Ki 0 «• х < а. Рассматри-
вая равновесие правой части балки, находим Мк = ₽вЬ, или, с уче-
том выражения (1.16),
Мк^хЬЦ. (1.18)
График уравнения (1.18) — прямая, проходящая через точки
х = 0, Мк ~ 0, х = а, Мк = аЫ1 (рис. 1.14, г). Эту прямую назы-
вают левой прямой (левая ветвь линии влияния).
Груз расположен справа от сечения К; с «х <; / + с. В этом
случае удобнее рассматривать равновесие левой части балки: Мк =
= Ra&, или, с учетом выражения (1.17),
Мк = а(1— х)/1. (1.19)
При х = аМк = а(1 — а)Ц — аЬН, при х = I Мк — 0. Через эти
две точки проводим правую прямую (рис. 1.14, г). Таким образом,
линия влияния Мк построена.
Отметим, что любая ордината линии влияния Мк представляет
собой величину изгибающего момента в сечении К при расположении
единичного груза над этой ординатой.
Построим линию влияния поперечной с и л ы в се-
чении К.
Груз расположен слева от сечения К? 0 Рассматривая
равновесие правой части балки, получаем Ок — —Ret или, с учетом
(1-16)
QK = ~xJl. (1.20)
При х = 0 Qk = 0, при х = a QK~ —all. Через эти точки на
рис. 1.14, д проведена левая прямая линии влияния Qk-
44
Груз расположен справа от сечения К: а < х « I 4- с. Из
условия равновесия левой части Qk = Ra, или с учетом выражения
(1.17)
<2к = (/-*)/*• (1.21)
При х = a Qk = (1 — g)/1 — ЬЦ\ при х = I = 0. Проведя через эти
Две течки правую прямую, заканчиваем построение линии влияния Qu
(рис. 1.14, д).
Каждая ордината построенной линии влияния дает величину по-
перечной силы в сечении К при положении единичной силы на грузовой
линии над этой ординатой.
Построенные линии влияния имеют характерные особенности,
позволяющие достаточно просто строить их без записи уравнений.
Действительно, линия влияния опорной реакции имеет под той опорой,
где действует эта реакция, ординату, равную единице, а под противо-
положной опорой — ноль.
Левые и правые прямые на линиях влияния внутренних усилий
проходят через нули под опорами. Левая и правая прямые на линии
влияния изгибающего момента пересекаются под сечением и при
продолжении отсекают под опорами ординаты, равные расстояниям
от этих опор до сечения.
Левая и правая прямые на линиях влияния поперечной силы
параллельны и при продолжении отсекают под опорами ординаты +1
и —1.
Следует отметить, что перечисленные свойства линий влияния
внутренних усилий имеют место при расположении сечения в пролете
балки. Для сечений в консольной части линии влияния М и Q имеют
иной характер (рис. J.14, е, ле), хотя и здесь взаимное расположение
левой и правой прямых удовлетворяет тем же условиям. Действи-
тельно, левая (нулевая) прямая на линии влияния Ml пересекается
с правой прямой под сечением L, а левая (нулевая) и правая прямые
линии влияния Ql параллельны друг другу.
Остановимся на размерностях ординат построенных линий влия-
ния. Как следует из выражений (1.16)—(1.21), ординатылиний влияния
опорных реакций и поперечной силы являются безразмерными вели-
чинами, а ординаты линии влияния изгибающего момента выража-
ются единицами длины. От обычных размерностей соответствующих
усилий единицы измерения рассматриваемых ординат отличаются
отсутствием размерности силы. Это можно объяснить тем, что приме-
няемая при построении линий влияния единичная сила — величина,
не имеющая размерности.
2.2. Кинематический метод построения линий влияния
Рассмотрим построение линии влияния реакции в правой опоре
однопролетной балки, изображенной на рис. 1.15, а. Как и при
расчете балки кинематическим методом на неподвижную нагрузку,
отбросим соответствующую опорную связь и ее действие заменим реак-
цией Rb (рис. 1.15, б). Сообщим «^слученному механизму возможное
45
Рис* 1.16
перемещение так, чтобы смещение в
направлении действия реакции соста-
вило 6/? (рис. 1.15, в). Этому переме-
щению соответствует смещение в на-
правлении единичной силы — ор-
дината эпюры перемещений механизма
в точке приложения силы F = 1. я
На основании принципа возмож-
ных перемещений запишем уравнение
. 1 сил, действующих на меха-
работы
низм:
откуда
— F6fi = О,
как величина 6Я не зависит
Так
от положения единичной силы, то из
полученного равенства следует, что вид линии влияния опорной
реакции совпадает с эпюрой перемещений рассматриваемого меха-
низма. Эту эпюр}' перемещений называют моделью линии влияния^
а величину б/? — ее масштабом. Для установления масштаба ис-
пользуем то обстоятельство, что при положении единичной силы над
опорой имеет место равенство fy, = следовательно, Яв = 1.
Окончательный вид линии влияния Rb показан на рис. 1.15, г.
Вычисление масштаба линии влияния можно упростить, если
сразу принять смещение по направлению искомого усилия равным
единице. Тогда = 1 и из (1.22а) получаем
(1.226)
«г
RB = bft.
На основании приведенных рас-
суждений устанавливаем такую по-
следовательность построения линии
влияния усилия кинематическим ме-
тодом:
1) отбросив связь, в направлении
которой действует искомое усилие,
превращаем систему в механизм;
2) сообщаем этому механизму ма-
лое перемещение по направлению дей-
ствия положительного усилия в от-
брошенной связи; соответствующая
эпюра перемещений механизма явля-
ется моделью линии влияния;
3) устанавливаем масштаб линии
влияния, для чего перемещение в на-
правлении отброшенной связи прини-
маем равным единице.
По этой методике на рис. 1.16 по-
казано построение линий влияния по-
перечной силы в сечении К двухпро-
летной балки.
Как и при расчете на неподвиж-
ную нагрузку, определение ординат Рис 117
эпюры перемещений иногда связано и ’
со сложными вычислениями. Однако во всех случаях кинематический
метод удобен для построения моделей линий влияния (без вычисле-
ния ординат). Так, на рис. 1.17 приведено построение вида линии
влияния усилия в стержне 1 фермы.
2.3. Определение усилий по линиям влияния
Вычисление усилий от заданной нагрузки по линиям влияния
называют загруженном линий влияния.
Загружение линий влияния выполняется по одним и тем же пра-
вилам независимо от того, для какого конкретно усилия и в каком
сооружении построена данная линия влияния. Поэтому будем рас-
сматривать загружение линии влияния произвольного усилия S
(в общем случае криволинейной).
Сначала покажем вычисление усилия по линии влияния от раз-
личных неподвижных нагрузок.
1. Неподвижная сосредоточенная сила F. По определению орди-
ната у линии_влияния S, расположенная под силой F, представляет
собой усилие S ог этой силы, равной единице. При заданном значении
силы F достаточно увеличить усилие S в F раз:
5 = yF. (1.23)
2. Неподвижная распределенная нагрузка q (лг) (рис. 1.18). Выде-
лим на расстоянии х бесконечно малый участок нагрузки длиной dx
47
Рис. 1.18
и заменим его равнодействующей д (х) dx. Воспользовавшись формулой
(1.23). получим усилие dS от этой элементарной нагрузки:
dS =* у (х) у (х) dx.
Для определения полного усилия S проинтегрируем обе части этого
выражения по длине загружения нагрузкой д (x)i
ь
S = \q(x)y(x)dx. (1.24)
Под интегралом в правой части (1.24) стоит произведение двух функ-
ций: q (х) и у (г), как и в интеграле Мора (J AlAldx). Поэтому для
вычисления интеграла могут быть применены известные из сопротив-
ления материалов (см. также гл. 6) приемы перемножения эпюр. На-
пример, если одна из функций — д (х) или у (х) — линейная, можно
воспользоваться правилом Верещагина. Если подынтегральная функ-
ция д (х) у{х) представляет собой полином не более чем третьей сте-
пени, то точное значение интеграла можно получить с помощью форму-
лы Симпсона.
В случае равномерно распределенной нагрузки д (х) == д — const
выражение (1.24) принимает следующий вид»
ь
S = y(x)dx. (1.25)
Интеграл в правой части (1.25) представляет собой площадь со линии
влияния S, взятую в пределах действия нагрузки, или
S=gto. (1.26
3. Неподвижный сосредоточенный момент М (рис. 1.19). Предста-
вим заданный момент в виде пары сил с плечом dx так, чтобы М =
= Fdx. Теперь воспользуемся формулой (1.23) с учетом принципа
независимости действия сил. Получаем
S = —Fy + F [у+ dy) = Fdy.
<8
Подставляя силу F = , найдем S = М , или
иХ ох
S=Mtga, (1-27)
где а — угол наклона касательной к линии влияния в точке приложе-
ния сосредоточенного момента М.
При выводе формул (1.23)—(1-27) сосредоточенная сила и распре-
деленная нагрузка были направлены вниз, а сосредоточенный мо-
мент — по часовой стрелке. Изменение направления нагрузок на про-
тивоположное, как и обычно, учитывается изменением их знака на
обратный. Знаки ординат у и площадей со принимают по линии влия-
ния, знак угла а — по обычным правилам: если касательная к линии
влияния проходит через первую или третью четверти координатной
плоскости, то угол ее наклона положителен, если через вторую или
четвертую — отрицателен.
4. Совместное действие различных неподвижных нагрузок. При
вагружении т сосредоточенными силами, п распределенными нагруз-
ками и t сосредоточенными моментами воспользуемся принципом неза-
висимости действия сил. Тогда
s= S Fm + S 4fi>l + S AUtga*. (1.28)
<«=1 /=1 fc=l
При загружении линий влияния подвижной нагрузкой обычно ста-
вится задача определения расчетного (наибольшего или наимень-
шего) усилия. При этом возникает вопрос о положении подвижной
нагрузки, при котором искомое усилие будет наибольшим или наи-
меньшим. Эти положения нагрузки называют невыгодными или опас-
ными. Наибольшее усилие определяют при загружении положитель-
ной линии влияния (положительного участка линии влияния), а
наименьшее усилие — при загружении отрицательной линии влияния
(отрицательного участка линии влияния). Так как эти случаи отлича-
ются друг от друга лишь знаком усилия, дальше будем рассматривать
определение только наибольшего усилия.
Вычисление наибольшего усилия существенно зависит не только
от вида подвижной нагрузки, но и от очертания линии влияния. Рас-
смотрим некоторые случаи загружения.
5. Загружение линии влияния 5 произвольного очертания подвиж-
ной сосредоточенной силой F. Решение в этом случае получается
просто. В соответствии с (1.23) при положении силы над некоторой
ординатой у
S = Fy.
но поскольку F == const, то наибольшему значению S соответствует
положение силы над наибольшей ординатой:
Smax = Ft/max- (1.29)
6. Загружение линии влияния 5 ломаного очертания подвижной
системой сил (рис. 1.20). Под подвижной системой понимают ряд сил.
49
РИС. 1.20
при перемещении которых их значения, направления и взаимное рас-
положение остаются неизменными (нагрузка от автомобиля, поезда
и т. п.).
Исследуем характер изменения усилия S при движении нагрузки.
Пусть заданная система сил находится на сооружении в положении,
показанном на рис. 1.20. Найдем усилие
S = 4- • • • 4- F+ • * + РпУп, или S — £ Fiyit
1=1
Сместим теперь систему сил вправо на некоторую величину А»
(рис. 1.20) так, чтобы каждая сила осталась в пределах того же от-
резка ломаной линии влияния. Новое усилие при смещенной на-
грузке
z=i
Приращение усилия, вызванное смещением сил,
Д$ = S,—S = £ Г/Д44. (1-30)
Так как каждая сила перемещалась в пределах прямолинейного от-
резка линии влияния, то
A^ = Axtg«f. (1.31)
Подставив выражение (1.31) в (1.30), получаем
Д$ = Дл: £ Fi tga,. (1.30а)
1=1
Анализируя уравнение (1.30а), приходим к выводу, что прира-
щение AS зависит только от tg at и поэтому его знак может измениться
только тогда, когда хотя бы одна из сил перейдет через вершину на дру-
гой участок ломаной. В частности, для изменения знака AS с плюса
60
ftr
ЭТОМ
сво-
на минус, соответствующего переходу
усилия через максимальное значение,
необходимо уменьшение хотя бы одной
из величин tg а,. Этому условию удов-
летворяют на рис. 1.20 вершины В,
С, Е, G, называемые выпуклыми.
Таким образом, наибольшему уси-
лию S соответствует такое положение
нагрузки, когда хотя бы одна из сил
находится над одной из выпуклых
вершин линии влияния. Эта сила и эта
вершина называются критическими.
Вычисление наибольшего усилия в
дится к определению усилий при таких положениях нагрузки, когда
хотя бы одна из сил подвижной системы находится над одной из выпук-
лых вершин линии вляиния. Из этих значений выбирается наиболь-
шее. Практически число рассматриваемых положений нагрузки
можно сократить, отбросив те из них, которые дают заведомо мень-
шие усилия.
7. Загружение подвижной системой сил линии влияния треуголь-
ного очертания. Пусть опасное положение подвижной системы сил
известно — известна критическая сила (рис. 1.21). Движение нагруз-
ки слева направо через опасное положение должно сопровождаться
изменением знака приращения усилия с плюса на минус. До тех пор,
пока нагрузка находится слева от опасного положения, критическая
сила вместе с расположенными слева от нее силами находится над
левой ветвью линии влияния, а правые силы — над правой. Тогда
смещению нагрузки на Ах соответствует приращение усилия
AS = Ах [(SF, + Fer) tg а + (SFr) tg ft > 0. (1.32)
Аналогично при смещении нагрузки вправо от оп асного положения
получим
AS = Ах [(SF/) tg a -H2F, + Fcr) tg fl < 0. (1.33)
Заменим в уравнениях (1.32) и (1.33) tga и tg 0, пользуясь сле-
дующими соотношениями: tg а == у/a; tg 0 = —ylb. После преобра-
зований неравенства принимают следующий вид:
Неравенства (1.34) позволяют путем подбора найти критическую
силу, соответствующую максимальному усилию от подвижной си-
стемы сил.
После определения критической силы необходимо установить
нагрузку в опасное положение и, пользуясь правилами загружения
линий влияния неподвижной нагрузкой» найти величину усилия Smax-
51
2.4. Особенности построения линий влияния
при узловой передаче нагрузки
Рассмотрим сооружение (рие. 1.22, с), состоящее из балки АВ,
называемой основной, и опирающихся на нее вспомогательных (второ-
степенных) балок 0—1, 1—2, 2—3 и т. д. Нагрузка приложена к вто-
ростепенным балкам и передается на основную в точках /, 2, 3, 4, назы-
ваемых узлами. При построении линий влияния усилий в основной
балке статическим методом появляются особенности, которые покажем
на примере линии влияния изгибающего момента в сечении К.
В первую очередь отбросим мысленно второстепенные балки
и, приложив единичную силу к основной балке, построим линию влия-
ния искомого усилия. Для этого, отложив под сечением ординату
ob/l, проводим через эту точку и нули на опорах правую и левую
прямые (тонкие линии на рис. 1.22, б).
Далее рассмотрим положение единичной силы на одной из второ-
степенных балок, например, на балке 1—2. Ее расчет выполняется неза-
висимо от основной и остальных второстепенных балок (рис. 1,22, в).
Находим опорные реакции: = (cf2 — x)ld2, R2 = x!d2. Они равны
no величине и обратны по направлению давлению, передаваемому от
балки 1—2 на основную балку (рис. 1.22, г). Давление от остальных
второстепенных балок отсутствует, так как они ненагружены. Для
Рве. 1.22
52
определения изгибающего момента от сил и Я2 (рис. 1.22, г) вос-
пользуемся построенной линией влияния основной балки. Загружая
ее, находим
AfK = Riyt + R&t = Уг
При x = 0 MK = yt, при x = d2 Мк = y2. Таким образом, при поло-
жении силы на второстепенной балке линия влияния выражается
прямолинейным отрезком, соединяющим ординаты линии влияния
основной балки под узлами. Тогда, выделив ординаты линии влияния
под остальными узлами, в том числе нулевые ординаты под узлами О
и 5, соединяем их отрезками прямых. Эти прямые называют передаточ-
ными прямыми. Полученная линия влияния является окончательной
линией влияния Мк (рис. 1.22, б).
Таким образом, при узловой передаче нагрузки необходимо сна-
чала построить линию влияния для основной балки, а затем ординаты
под смежными узлами соединить передаточными прямыми.
2.5. Расчет по эквивалентным нагрузкам
Эквивалентная нагрузка — это такая равномерно распределенная
нагрузка, которая вызывает такое же по величине усилие, как и подвиж-
ная система сил в ее опасном положении на сооружении.
Усилие от системы сосредоточенных сил и от распределенной
нагрузки вычисляется по формуле (1.28):
Sf = £ Fiye, Sa = qu>.
Если нагрузка эквивалентная (q = q^, то выполняется равенство
S Piyi =
откуда находим величину эквивалентной нагрузки
Если бы для каждой линии влияния величину qe необходимо было
вычислять по формуле (1.35), то введение понятия эквивалентной
нагрузки было бы бесполезным. Однако, оказывается, что для линий
влияния треугольного очертания одинаковой длины и с одинаковым
положением вершины независимо от величины ординат эквивалент-
ная нагрузка от одной и той же системы сил одинакова. Такие линии
влияния, отличающиеся лишь абсолютными значениями ординат, на-
зывают подобными (рис. 1.23). При одной и той же нагрузке для
первой линии влияния
„ _ S _ S F^
ъ-------- •
53
а для второй
Рве. 1.23
. __ S Fiy\ _ S ЪпУ1 __ S Fil4
4е — <0 ~~ П у 1/2 ~~ у Ift *
Действительно, <7е = ?е-
На основании этого свойства подоб-
ных линий влияния для стандартных
нагрузок составлены таблицы, в которых
даются значения qe в зависимости от
длины I загружаемой треугольной линии
влияния и коэффициента а, определяю-
щего положение ее вершины (а = all,
если а <Ь, и а = Ы1, если b < а).
В качестве примера приведена табл.
1.1 значений эквивалентных нагрузок от
железнодорожного подвижного состава.
Схема подвижной нагрузки приведена
на рис. 1.24. Все силы на схеме пропор-
циональны К — классу нагрузки, следовательно, величина эквива-
лентной нагрузки также пропорциональна /С. В связи с этим
в табл. 1.1 даны эквивалентные нагрузки qe при К = 1. Для за-
данного класса К нагрузки
Для определения наибольшего усилия 5 от подвижной системы
сил строят линию влияния этого усилия и по ее параметрам I и а
Таблица 1.1
Длина линии влияния. / м Эконявленпше нагрузки | при К « I Длина лиши ВЛИЯНИЯ Z, м Эквивалентные нагрузки при К = 1
а= 0 а=»0,5 <х = 0 <х s
1 50,00 50,00 50 11,51 10,07
5 20,77 18,17 60 11,01 10,00
10 17,81 15,58 80 10,46 10,00
20 15,05 13,17 100 10,20 10,00
30 13,36 11,69 120 10,09 10,00
40 12,25 10,72 140 10,04 10,00
64
с помощью таблицы находят qe. Далее, вычислив площадь со линии
влияния, получают
Зтах = Цеф.
Как видим, в этом случае отпадает необходимость определения
опасного положения нагрузки.
1.6. Построение огибающих эпюр
Как указывалось выше, огибающая эпюра показывает для каждого сечения
балки наибольшее и наименьшее значение внутреннего усилия — чаще всего,
изгибающего момента. Огибающие эпюры удобно применять при расчете балом
переменного сечения (особенно многопролетных), загруженных постоянной и не*
сколькими временными нагрузками.
При построении огибающей эпюры балку разбивают на ряд участков и в по*
лученных точках определяют расчетные наибольшие и наименьшие усилия
от совместного действия постоянной и невыгодного сочетания временных нагру-
вок. Для этой цели могут быть использованы линии влияния.
Пусть требуется построить огибающую эпюру изгибающих моментов при
действии на балку (рис. 1.25, а) постоянной нагрузки q и временной произвольно
распределенной нагрузки р ® 1.5*?. Разобьем балку на равные отрезки длиной
а ~ /)6 (количество отрезков назначают в зависимости от требуемой точности
расчета). Для каждого сечения построим линию влияния изгибающего момента
(рис. 1.25, б), при этом линии влияния Мо и Мй — нулевые. Загружая каждую
линию влияния нагрузкой р невыгоднейшим образом (так, чтобы площадь
линии влияния одного знака в пределах нагрузки была наибольшей), получаем
наибольший и наименьший изгибающий момент от временной нагрузки в каждом
из сечений. Например, для линии влияния невыгодные положения нагрузки
показаны на рис. 1.25, б, а соответствующие усилия
.. 5 I
max = р gd ~2 = 0,1042 qP;
(— . 2d\
mln =P\-------§----; = — 0,0139 qP.
Определив усилия от постоянной нагрузки, суммированием находим расчет-
ные усилия. Так, для сечения 1
и далее
1‘'¥)=0-0602
\ О 2 О 2 /
«'1 max = A!i + MlmaK = 0,1644 qP,
= Mt + Mt „,ln = 0.M62 ЧР.
Результаты остальных вычислений приведены в табл. 1.2 без множителя qP.
Отложив полученные значения в каждом сечении, соединяем между собой
отдельно наибольшие и отдельно наименьшие значения. Полученная огибающая
впюра Ме приведена на рис. 1.25, в (значения ординат приведены без множителя
Аналогично может быть построена огибающая эпюра поперечных сил.
1.7. Матрицы влияния
Полученные на рис.г1.25, б значения ординат линий влияния можно
представить в виде матрицы, каждая строка которой содержит ординаты
55
ez'i
Таблица 1.2
Изгибающие моменты Номер сечения
/ 2 3 4
ОТ ПОСТОЯННОЙ нагрузки М 0,0602 0,0926 0,0972 0,074!
от временной нагрузки ^гпах 0,1042 0,1667 0,1875 0,1667
^mln —0,0139 —0,0278 —0,0417 —0,0556
расчетные M_av max 0,1644 0,2593 0,2847 0,2408
4nln 0,0463 0,0648 0,0555 0,0185
Изгибающие моменты Номер сечения
5 б Z
от постоянной нагрузки м 0,0602 —0,0556 —0,0139
от временной нагрузки ^mex 0,1042 0 0
4nln —0,0694 —0,0834 —0,0208
расчетные ^max 0,1644 —0,0556 —0,0139
^mln —0,0092 —0,1390 —0,0347
соответствующей линии влияния (нулевые линии влияния Мо иМв
исключены):
"0 5 4 3 2 10 —1 —2 ”
0 4 8 6 4 2 0 —2 —4
0 3 6 9 6 3 0 —3 —6
/ = - — б 0 2 4 6 8 4 0 —4 —8
V 0 1 2 3 4 5 0 —5 10
0 0 0 0 0 0 0 —6 — 12
.0 00 0 0 0 0 О —6 _
Эту матрицу называют матрицей влияния изгибающих моментов.
67
Консоль Прев эя опора Пролет Положение сечеяяя
I : $ + л 1 1 •* с*э -
о ° ° о <=» о •: о о О о Легая опора
о о о - СО х х I КЗ х - Пролет
о : о ° о ГО 4ь. х 2 (п-3) 1 и~«) 2 1 КЗ
О <=> <=> о со <3> С*Э х 3(п—3) м 3* х л х CJ
: : : : : : •:
О О о о КЭ х х х т -
•
л X to : д' X <7Ь КЗ л А
О о о => X л 1 ю с» го 1
о : о о О ° О о о о О л Правая опора
о ° о А х 1 х X х 1 О X 1 л -F Консоль
е : О i 1 л X д 1 *₽ 1 о 1 X л t
о 1 9 X л 1 оз л <i—")е— | 1 а 1 ю 1 £ :• 1 <о 1 а» X 1 са
•
А : 1 з 1 л 3 1 ! X 1 а 1 3 —(Л—п) х А а 1 : х I 1 s 1 ОЭ э 1 X з А 1 э 1 е 3
Таблица 1.3
Матрицу влияния можно составить и без построения линий влияния.
Ее заполнение показано в табл. 1.3 при числе участков в пролете п
и общем числе участков т. Множитель перед матрицей, составленной
по табл. 1.3, равен din.
Кроме матрицы влияния моментов могут быть составлены также
матрица влияния поперечных сил LQ и матрица влияния продольных
сил Ln (для ферм, рам и других сооружений, имеющих продольные
силы в сечениях).
Матрица влияния моментов дает возможность получить значения
изгибающих моментов во всех сечениях балки (ординаты эпюры М)
от любой узловой нагрузки. Составим для этого матрицу узловых
нагрузок:
Fii Л>2 • • • ^12 * * * Fok Fik • • • Fot ••• Fu
Fn F/2 • * * Fik ••• Flt
Ffnl Fm2 * * * Fmk • • • Fmt_
в которой каждый столбец содержит значения сил в узлах балки
для отдельного за гружения (/ — число отдельных независимых за-
гружений).
Произведение матриц LmF дает матрицу М размером (т — 1) 6
столбцы которой содержат ординаты эпюры моментов от соответству-
ющего загружении:
M = LmF. (1.36)
Аналогично можно получить выражение для вычисления матриц
поперечных и продольных сил.
Вопросы для самоконтроля
1. Какая нагрузка называется подвижной?
2. Что называется грузовой линией?
3. Какая задача ставится при расчете на подвижную нагрузку?
4. Что называется линией влияния?
5. Что такое единичный груз?
6« Какие методы применяют для построения линий влияния?
7. В чем отличие линии влияния от эпюры?
8. В каких системах возможно применение линий влияния?
9. В чем сущность статического метода построения линий влияния?
10. Приведите зависимости опорных реакций балки от положения единич-
ного груза.
II. Что такое левая и правая прямые линий влияния?
12. Каковы свойства линий влияния опорных реакций, позволяющие .упро
стать их построение?
13. Каковы особенности расположения левой и правой прямых на линиях
влияния изгибающего момента? Поперечной силы?
14. Какой вид имеют линии влияния М и Q в сечении консольной часта
балки?
15. Каковы размерности ординат линий влияния?
59
16. В чем заключается сущность кинематического метода построения линий
влияния?
17. Что представляет собой модель линии влияния?
18. Что представляет собой ордината линии влияния?
19. Как определяется усилие от различных неподвижных нагрузок с по-
мощью линий влияния?
20. Как определяется по линии влияния наибольшее усилие от подвижной
сосредоточенной силы?
21. Что такое подвижная система сил?
22. Какому условию соответствует опасное загружение линии влияния
ломаного очертания подвижной системой сил?
23. Какая сила называется критической?
24. Как найти критическую силу для линии влияния треугольного очертания?
25. Как строят линии влияния при узловой передаче нагрузки?
26. Что такое эквивалентная нагрузка?
27. Какие линии влияния называют подобными?
28. От каких параметров линии влияния зависит величина эквивалентной
нагрузки?
29. Как используется эквивалентная нагрузка для определения наиболь-
ших усилий от подвижной нагрузки?
30. Какая эпюра называется огибающей?
31. Как строят огибающую эпюру?
32. Что называется матрицей влияния?
33. Как можн- составить матрицу влияния изгибающих моментов для
балки?
34. Назовите виды матриц влияния.
35. Как с помощью матрицы влияния определить ординаты эпюры изги-
бающих моментов?
Глава 3
МНОГОПРОЛЕТНЫЕ СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ БАЛКИ
3.1. Образование многопролетной статически определимой балки.
Расчет на неподвижную нагрузку
Балка является наиболее распространенным конструктивным эле-
ментом сооружений. Сравнивая между собой однопролетные балки
(рис. 1.26, а) и неразрезную балку (рис. 1.26, б) при действии, на-
пример, равномерно распределенной нагрузки, можно сделать вывод
о том, что неразрезная балка более экономична. Действительно,
из-за наличия опорных моментов наибольшие значения изгибающих
моментов в неразрезной балке, как правило, меньше, чем в однопро-
летных. А ведь именно моменты определяют размеры поперечных
сечений балки.
Однако у перазрезной балки имеются свои недостатки. Она явля-
ется статически неопределимой и поэтому в ней могут возникать до-
полнительные усилия при неточностях сборки, неравномерных осад-
ках опор и при неравномерном нагреве или охлаждении. Если учет
этих особенностей приводит к существенному удорожанию сооруже-
ния, балку делают статически определимой.
Поставим в каком-либо сечении неразрезной балки шарнир. Тогда
ее степень статической неопределимости понизится на единицу. Если
при этом шарнир поместить в сечении с нулевым изгибающим момен-
60
JI
ff 11 н 111 н । и । n 111 н»m н । н 11
Эпюра M
Рис. 1.26
том, например К (рис. 1.26, в), то распределение изгибающих момен-
тов останется таким же, как в исходной балке.
Если количество шарниров выбрать равным степени статической
неопределимости неразрезной балки, то число степеней свободы полу
ченной балки будет равно нулю. Такая балка с шарнирами в пролетах
является многопролетной апатически определимой балкой (рис. 1.26, г)
Иначе ее называют шарнирно-консольной балкой. Отметим, что для
статически определимой балки отпадает необходимость в удовлетворе-
нии условий совместности деформаций. Поэтому при постоянной на-
грузке появляется возможность смещением шарниров добиться даже
лучшего распределения изгибающих моментов по сравнению с нераз-
резной балкой. Однако на практике это свойство статически опреде-
лимой балки не имеет существенного значения, так как кроме постоян-
ной нагрузки на балку, как правило, действуют в различных сочета-
ниях временные нагрузки. Каждой такой нагрузке соответствует
свое наилучшее положение шарниров, которое одновременно не может
быть реализовано.
При проектировании шарнирно-консольной балки необходимо
решить вопрос о числе шарниров и их расположении.
Число шарниров получим из условия статической определимости
балки W = 0. Учитывая, что в балке количество дисков всегда на
единицу больше числа шарниров, по формуле Чебышева
W = 3 (Т + 1) — 2Т — Со = 0,
откуда
Т = Со — з.
(1-37)
61
PMC. 1.27
При расстановке шарниров по пролетам необходимо выполнить
требование геометрической неизменяемости. С учетом унификации
отдельных элементов балки обычно применяют два основных варианта
расстановки шарниров, показанных на рис. 1.27, а, б, хотя возможны
и другие, например, на рис. 1.27, е.
Для обеспечения г е о м е т р и ч е с к о й неизменяемо-
сти расположение шарниров должно удовлетворять следующим
требованиям:
в каждом пролете не может быть более двух шарниров;
в смежных пролетах не может находиться по два шарнира;
пролеты без шарниров не могут располагаться рядом;
в крайнем пролете при крайней шарнирной опоре не может быть
более одного шарнира;
в крайнем пролете при крайней защемляющей неподвижной опоре
должен быть хотя бы один шарнир.
Обычно расстояние от шарнира до ближайшей опоры составляет
от 1/7до 1/4 величины пролета по условию рационального распре*
деления изгибающих моментов.
Шарниры делят многопролетную балку на отдельные элементы.
Среди них выделяют основные и второстепенные. Основными называют
те элементы, которые остаются геометрически неизменяемыми при
удалении смежных элементов. Остальные элементы называются второ-
степенными. При удалении смежных элементов они становятся изменя-
емыми из-за недостаточного количества опорных связей.
Расчет шарнирно-консольной балки (рис. 1.28, д) можно выпол-
нить членением ее на отдельные элементы, как это было показано
в главе 1. Однако обычно поступают иначе: строят схему взаимодей-
ствия элементов — этажную схему, условно ваменяя шарниры шар-
нирно-неподвижными опорами (рнс. 1.28 б). Такая замена не изменяет
кинематическую схему сооружения, так как и шарнир и шарнирно-
неподвижная опора имеют одну степень свободы и две связи. Для по-
строения влажной схемы последовательно, например слева направо,
изображают отдельные элементы, располагая очередной элемент
выше, если предыдущий элемент геометрически неизменяем, и ниже,
если предыдущий элемент изменяемый.
На этажной схеме каждый элемент представляет собой однопролег-
ную балку, воспринимающую приложенную нагрузку и давление от
вышележащих элементов. Давление равно реакции в соответствующей
условной опоре вышележащего элемента и обратно по направлению.
(2
63
Начав с верхнего элемента и двигаясь сверху вниз по этажной схеме,
можно последовательно рассчитать все элементы (рис. 1.28, в) и по-
строить результирующие эпюры М и Q (рис. 1.28, а).
Отметим, что Некоторые элементы (Т3— TJ в изображении на этаж-
ной схеме (рис. 1.28, б) имеют две шарнирно-неподвижные опоры.
Однако по сути одна из этих опор имеет возможность смещаться
вместе с соседними элементами по горизонтали. Кроме того, горизон-
тальные связи играют роль лишь при определении продольных сил,
а этот расчет может быть выполнен без членения балки на элементы.
Аналогично объясняется кажущееся отсутствие горизонтальной связи
в элементе Тл — Е,
3.2. Рациональная расстановка шарниров
Различным положениям шарниров в многопролетной балке будут соответ-
ствовать различные варианты распределения изгибающих моментов. Рациональ-
ной расстановке шарниров должна соответствовать такая эпюра изгибающих
рис, 1.2»
64
моментов, при которой стоимость изготовления балки (стоимость или расход
материала) будут возможно меньшими.
Точное решение этой задачи является достаточно сложным. Поэтому важно
уметь с определенной приближенностью оценить рациональное распределение
моментов.
Далее будем считать рациональной такую эпюру изгибающих моментов,
при которой в каждом пролете абсолютные величины моментов будут возможно
меньшими.
Пусть в многопролетной балке (рис. 1.29, о) при некотором расположении
шарниров построена эпюра изгибающих моментов (риз. 1.29, б). Изгибающий
момент в некотором сечении К этой балки можно представить как алгебраиче-
скую сумму моментов, взятых по эпюре балочных моментов — под балочными
понимают изгибающие моменты, действующие в простых однопролетных балках
(рис. 1.29, д), и по эпюпе опорных моментов (рис. 1.29, г):
мк==/и2 + м'к,
т. е. эпюра изгибающих моментов представляет собой алгебраическую сумму
эпюры балочных моментов М° и эпюры опорных моментов:
/И = М04-ЛК (1.38)
Сложение эпюр можно выполнить графически, если на одной оси отложить
эпюру и перевернутую эпюру М' (рис. 1.29, д). Ординаты, заключенные между
этими эпюрами, представляют собой результирующие изгибающие моменты.
При смещении шарниров эпюра балочных моментов /И0 остается неизменной,
а все изменения результирующих моментов достигаются за счет эпюры опорных
моментов, которая представляет собой ломаную с вершинами на опорах. По-
этому можно поедложить следующий порядок построения рацио»
нальной эпюры MoPf (рис. 1.29, е):
I. Построить эпюру балочных моментов М°.
2. Начиная с пролета, имеющего наибольший пролетный момент (СО),
провести линию эпюры опорных моментов так, чтобы опорные моменты по концам
были равны наибольшему пролетному моменту и противоположны ему по знаку.
3. Переходя к остальным пролетам (в порядке убывания балочных мо-
ментов), из тех же условий поовести линии эпюры опорных моментов.
Нулевые точки полученной эпюры Mopt (рис. 1.29, е) дают места возможной
постановки шарниров. Один из вариантов рациональной расстановки шарниров
приведен на рис. 1.29, ж.
3.3. Линии влияния
Рассмотрим применение статического метода для построения
линий влияния реакций и внутренних усилий в шарнирно-консоль-
ной балке.
Пусть для балки, изображенной на рис. 1.30, а, требуется по-
строить линию влияния реакции опоры С. Построив этажную схему
(рис. 1.30, б), рассмотрим положение единичной силы на элементе
1\ — Т2. Так как остальные элементы при этом незагружены, давление
от них на балку Т\ — Т2 не передается, и линию влияния Rc можно
построить, рассматривая элемент 7\ — Т2 независимо от осталь-
ных (рис. 1.30, в).
Перенеся линию влияния Rc на общую ось (рис. 1.30, г), устанав-
ливаем силу F = 1 на соседнюю балку Т2 — Т9. Эта балка находится
выше на этажной схеме. Нагрузка от нее передается на балку 7\ — Т2
65
Рис. I.SO
через т. Т2 —через узел. Тогда по правилам узловой передачи на-
грузки откладываем под точкой D нулевую ординату (узел D нахо-
дится за пределами балки 7\ — Т2) и через эту точку и ординату у2
под узлом Т2 проводим прямую в пределах балки Т2— Т3.
Аналогично строим линию влияния в пределах элемента Т9 — Т4,
соединив ординату у3 (под узлом Т3) и ноль под узлом Т4.
При положении силы на элементе 7\ — С, расположенном ниже
предыдущего на этажной схеме, давление на балку 7\ — Т2 не пере-
дается, поэтому здесь линия влияния Ес нулевая, так же, как и в пре-
делах элемента А — Тх.
Так же строят и линии влияния внутренних усилий. Например,
для построения линии влияния первым рассматриваем элемент
А — 7\, где находится сечение К (рис. 1.30, д). Дальнейшее построе-
ние показано на рис. 1.30, е.
Построение линий влияния реакций и усилий в многопролетной
балке кинематическим методом выполняется по правилам, изложенным
в главе 2. Отметим еще раз, что особенно эффективно применение
этого метода для построения моделей линий влияния.
66
Вопросы для самоконтроля
1. Что представляет собой многопролетная статически определимая балка?
2. Каковы особенности работы многопролетной статически определимой
балки в сравнении с неразрезной балкон?
3. Как можно определить число шарниров в многопролетной статически
определимой балке?
4. Приведите два основных варианта расстановки шарниров в многопролет-
ной балке.
5. Каким требованиям с точки зрения геометрической неизменяемости
должно удовлетворять расположение шарниров?
6. Какие типы элементов различают в многопролетной статически опреде-
лимой балке?
7. Что такое этажная схема?
0. По какому признаку устанавливают взаимное расположение смежных
элементов на этажной схеме?
9. Каков порядок расчета многопролетной балки на неподвижную нагруз-
ку?
10. Что называется рациональной эпюрой изгибающих моментов?
11. Изменяется ли балочная эпюра изгибающих моментов при смещении
шарниров?
12. Как построить рациональную эпюру изгибающих моментов?
13. Какими методами можно построить линии влияния в многопролетной
балке?
14. В каком порядке строят линии влияния усилий в многопролетной
балке статическим методом?
Глава 4
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ ФЕРМЫ
4.1. Основные определения. Классификация ферм
Как известно, при работе стержня на изгиб нормальные на-
пряжения в поперечном сечении изменяются по линейному закону
(рис. 1.31, а). Наиболее напряженными при этом получаются крайние
волокна, а материал средней части недоиспользуется. Именно поэтому
в балках стараются основную часть материала сосредоточить в поясах,
максимально уменьшая размеры остальной части сечения (стенки).
Так появилось двутавровое сечение, наиболее приспособленное для
работы на изгиб (рис. 1.31, б).
При увеличении пролета для восприятия больших изгибающих
моментов высоту сечения приходится увеличивать настолько, что
расход материала на стенку балки становится преобладающим. В этом
случае удобно перейти от сплошного сечения к сквозному или решетча-
Рис. 1.31
>7
zdSE: ,
тому, когда вместо сплошной балки конструкцию изготовляют в виде
системы прямолинейных стержней (рис. 1.32, а). Такая система на-
зывается фермой.. Стержни в узлах фермы соединяют жестко: сваркой
(рис. 1.32, е), на заклепках или болтах. Однако из-за большой гибко-
сти стержней учет жесткости в соединениях стержней несущественно
сказывается на работе фермы. В связи с этим в расчетной схеме
фермы принимают, что во всех узлах стоят идеальные шарниры
(рис. 1.32, б).
В сооружениях, элементами которых являются фермы, как пра-
вило, предусматривают передачу нагрузки в узлы ферм, поэтому их
стержни работают только па растяжение — сжатие. Это обстоятельство
обусловливает большую экономичность ферм по сравнению с балками
за счет более полного использования материала при работе стержня
на растяжение. Действительно, в сечении растянутого стержня,
в отличие от изгибаемого, нормальные напряжения одинаковы во всех
точках, поэтому материал используется полностью.
По размещению и характеру работы в ферме выделяют пояса
и р е ш е т к у. Решетку образуют наклонные элементы — раскосы —
и вертикальные — стойки и подвески (рис. 1.32, б). Стойки работают
на сжатие, а подвески — на растяжение.
Фермы классифицируют по следующим признакам:
по назначению: мостовые (фермы пролетных строений мос-
тов, мостовых кранов), стропильные (фермы покрытий зданий и со-
оружений), фермы каркасов зданий и сооружений и другие, например,
фермы, являющиеся частью корпуса судна, самолета;
66
He>. в
Рис. 1.35
по условиям закрепления: балочные (рис. 1.33, а)",
консольные (рис. 1.33, 6), арочные, или распорные (рис. 1.33, в);
по очертанию поясов: фермы с параллельными поясами
(рис. 1.32, б), с треугольным (рис. 1.34, а) и полигональным
(рис. 1.34, б) очертанием поясов;
по системе решетки: фермы с простой решеткой —
треугольной (рис. 1.35, а), раскосные (рис. 1.35, б), полураскосные
(рис. 1.35, в); фермы со сложной решеткой — деухраскосные (рис. 1.35,
69
г), многораскосныеъ др.: фермы с составной решеткой — шпренгельные
(рис. 1.35, д) и другие фермы, у которых отдельные стержни являются
решетчатыми (фермами).
Расчет фермы состоит прежде всего в определении усилий в ее
стержнях. Для определения усилий применяются как статические,
так и кинематический методы.
Кинематический метод в расчете ферм используется в основном
для построения моделей линий влияния (см. главу 2).
Из статических методов наиболее широко применяется метод сече-
ний, а методом замены связей, из-за его трудоемкости, пользуются
лишь при расчете сложных ферм.
Метод сечений в зависимости от расположения и конфигурации
сечения, а также от типа применяемых уравнений равновесия реали-
зуется: способом вырезания узлов, способом моментной точки, способом
проекций, способом двух сечений, способом замкнутого сечения.
4.2. Способ вырезания узлов.
Матричная форма вычисления усилий
Способ вырезания узлов применяется для определения усилий
в фермах, расчетная схема которых может быть образована последова-
тельным присоединением узлов парами стержней (рис. 1.36, д).
В этом случае расчет начинают с двухстержневого узла, например,
с узла 1 (рис. 1.36, б), из условий равновесия которого находят усилия
М-2 и Затем переходят к следующему узлу, в который входят два
неизвестных усилия (узел 2 на рис. 1.36, в). Вычислив усилия 1У2-з»
Ata-о, продолжают рассматривать следующие узлы в таком порядке,
чтобы в каждом новом узле встречалось не более двух неизвестных уси-
лий (узел 5, узел 4, узел 5). После вычисления всех усилий остаются
неиспользованные условия равновесия (одно в узле 5 и два в узле 6).
Выполнение этих условий равновесия позволяет судить о правиль-
ности вычисления усилий.
В некоторых случаях для вычисления усилий не требуется запись
условий равновесия. Эти частные случаи расположения стержней и на-
грузки в узлах приведены на рис. 1.37 (во всех случаях на рис. 1.37
угол а не равен 0° или 180°).
Достоинством способа вырезания узлов является однообразие
вычисления усилий. К его недостаткам относят накопление погреш-
70
Рис. 1.37
костей счета при переходе от узла к узлу и необходимость вычисления
вспомогательных усилий при определении одиночных усилий.
Описанный выше способ вырезания узлов в классической форме
хорошо приспособлен к ручному счету. Однако он не является универ-
сальным, так как непригоден для расчета ферм с произвольным рас-
положением стержней. В связи с этим для расчетов на ЭВМ способ
вырезания узлов применяется в общем виде, с составлением полной
системы уравнений равновесия всех узлов, и может рассматриваться
как частный случай способа членения системы на стержни и узлы,
описанного в главе 1.
Действительно, из трех уравнений равновесия (1.11) для стержней
фермы остается только первое, превращающееся в тождество:
2х = -М + М=0.
Уравнения равновесия Л-го узла (1.12) также существенно упроща-
ются:
£ х = £ /V, COSOQ/г + =
S У = S sin + Pk, у = О,
где aid — угол между положительными направлениями усилий и оси к
в £-м узле фермы.
Полная система уравнений (1.39) в матричной форме записывается
аналогично (1.15):
C# + F = 0. (1.40)
При этом в матрицу усилий
ГЛ\1
*3
LNhJ
71
можно включиться
известных усилий).
усилия в опорных стержнях
(п— число всех
Матрица
Р'.Г
Ъ.у
F2, х
Г2, у
содержит составляющие узловых сил (л — число узлов, причем
2r?z — п).
Матрица С размером п X п, как видно из (1.39), состоит из значе-
ний cos а<Л, sin atkt а также нулей (для тех стержней, которые не
входят в &-й узел). В разработанных для ЭВМ алгоритмах”матрииа С
формируется автоматически через координаты узлов и данные о рас-
положении стержней.
Матрица усилий вычисляется решением уравнения (1.40)j
Н = —С~1Г. (1.41)
Для геометрически неизменяемых ферм матрица С всегда явля-
ется неособенной (определитель det С =/= 0), поэтому решение (1.41)
всегда существует.
Отметим, что матрица С является плохо обусловленной, так как
содержит большое число нулевых элементов. В связи с этим нахожде-
ние обратной матрицы С"1 часто затруднено.
Хорошие результаты дает прием, заключающийся в умножении
уравнения (1.40) на транспонированную матрицу Сг*. Тогда матрич-
ное уравнение (1.40) принимает следующий вид!
CtN + = 0, (1.42)
где G «= CZC, Fj = CrF.
При этом матрица Ci является хорошо обусловленной, все ее
элементы, лежащие на главной диагонали, больше нуля и превышают
но абсолютной величине побочные элементы в каждой строке.
Использование формулы (1.41) для ручного счета нецелесообразно,
так как связано с необходимостью обращения матрицы больших
размеров.
4.3. Способ моментной точки и способ проекций.
Распределение усилий в стержнях балочной фермы
При вычислении одиночных усилий в стержнях фермы более удоб-
ны способы моментной точки и проекций. Их применение рассмотрим
на примере балочной фермы с треугольной решеткой и подвесками
• Этот прием предложен Н. Г. Черненко.
72
Рис. 1.38
(рис. 1.38, о). Опорные реакции найдем из условия симметрии*
Пусть требуется определить усилия в стержнях четвертой слева
панели. Для вычисления этих усилий проведем сечение /—/, разре-
зающее три стержня, и мысленно отбросим правую часть фермы.
При вычислении усилия Nu следуя указаниям параграфа 1.1,
обратим внимание на то, что остальные разрезанные стержни пересе-
каются в точке Kv Тогда применяем способ моментной точки:
£Л/к, = 0, Ra-3d — F(2d + d) — Nth = 0. (143)
73
Решение уравнения (1.43) дает величину искомого усилия:
= 7,5 dlh.
Представляет интерес анализ уравнения (1.43). Если рассмотреть
балку (рис. 1.38, б) того же пролета, загруженную той же нагрузкой,
что и ферма, то изгибающий момент в сечении Ki
M°Kt = Ra 3d-F(2d + d). (1.44)
Заменив первые два слагаемых уравнения (1.43) соотношением
(1.44), получаем Мк, — /Vj/i = O, откуда
W, = Мк,т. (1.45)
На основании (1.45) можно заключить, что, во-первых, нижний пояо
фермы растянут, а во-вторых, усилия в элементах нижнего пояса
растут по мере удаления от опор к середине пролета фермы (следуя
закону изменения балочных моментов М°).
Аналогично применяем способ моментной точки для вычисления
усилия ATj*
£Л4к, = 0; RA-4d — F(3d + 2d + d) + Nh = 0. (1.46)
В последнем уравнении первые два слагаемые представляют собой
балочный моменте сечении К2; тогда выражение (1.46) принимает вид
Л4к. + ЛУ1 = 0,
откуда
= (1.47)
Таким образом, верхний пояс сжат, а усилия в нем так же, как
и в нижнем поясе, изменяются по закону балочных изгибающих
моментов.
Для вычисления усилия Ns воспользуемся способом проекций, так
как остальные разрезанные стержни параллельны:
Ra— 3F — 7VS sin ос = 0. (1.48)
Отсюда находим Л/8 = /7(2 sin ос).
Внешние силы, входящие в уравнение (1.48), можно выразить
через балочные поперечные силы. Действительно, по рис. 1.38, б
Qi = Ra — 3F, и уравнение (1.48) принимает вид — Л/8 sin а = 0,
откуда
/V8 = Qi/sina. (1.49)
Если проделать тот же путь вычислений для усилия (сечение
II—II), придем к аналогичному выражению
= — Qii/sina. (1.50)
На основании выражений (1.49) и (1.50) приходим к выводу, что
усилия в раскосах следуют закону изменения балочных поперечных
сил (убывают по абсолютной величине от опор к середине фермы).
74
Рис. I.S9
При этом восходящие раскосы (см. /У4) сжаты, нисходящие (/Vs) —
растянуты.
Чтобы завершить анализ распределения усилий в рассматриваемой
ферме, определим усилие в подвеске N6. Нетрудно увидеть, что узел С,
в который входит подвеска, соответствует частному случаю рис. 1.37,ei
= Г-
Очевидно, что все подвески работают в одинаковых условиях —
все они растянуты силой, приложенной в соответствующем узле
нижнего пояса.
Выполненный анализ позволяет провести аналогию между рабо-
той фермы и работой балки. Среди элементов фермы выделяются пояса,
воспринимающие балочные изгибающие моменты, и решетка, воспри-
нимающая балочную поперечную силу. Поэтому иногда фермы назы-
вают сквозными или решетчатыми стержнями в отличие от балок —
сплошных стержней.
Эту аналогию можно распространить и на другие фермы. На-
пример, для оценки работы поясов и раскосов фермы опоры ЛЭП
(рис. 1.39, а) на ветровую нагрузку можно, заменив ее стержнем
(рис. 1.39, б), по эпюрам М. и Q получить представление о работе эле-
ментов фермы.
Примером использования балочной аналогии может служить при-
менение ферм с полигональным очертанием поясов (рис. 1.38, в), В этом
случае увеличение высоты фермы к середине пролета позволяет сделать
распределение усилий в элементах поясов более равномерным.
Отметим, что для вычисления усилий в раскосах такой фермы
способом проекций, как правило, воспользоваться нельзя. Например,
для определения усилия N в раскосе третьей панели (рис. 1.38, в) про-
ведем сечение 1—I. Рассеченные яри этом стержни поясов не парал-
лельны и при продолжении пересекаются в т. К. Тогда применяем
способ моментной точки:
£Л4к = 0; RAa — F(a + d) — F(a+2d) + Nr = 0,
RAa~ F(2a^-3d) F(1,5q — 3d)
откуда N=------------------------.
76
4.4. Определение усилий в стержнях сложных ферм
Для ряда ферм применение рассмотренных выше способов (выреза-
ния узлов в классической форме, моментной точки, проекций) может
оказаться невозможным. В некоторых случаях решение можно полу-
чить, проведя сечение сложной конфигурации, например /—/, для
вычисления усилий в поясах полураскосной фермы (рис. 1.40).
В других случаях усилия можно’вычислить способом замкнутого се-
чения или способом двух сечений. Универсальным, но трудоемким
методом расчета сложных ферм является метод замены связей.
Способ замкнутого сечения применяют в тех случаях, когда в фер-
ме (рис. 1.41, а) можно выделить некоторый диск (/—2—3), связанный
с остальной частью фермы тремя стержнями (/—4; 2—5 и 3—6). Выре-
зав этот диск замкнутым сечением, рассматриваем его равновесие
(рис. 1.41, б). Применяя способ моментной точки, записываем
ЕМЛ = 0; Frl-N,^ = Q,
откуда N^ — Frt1r.
Дальнейший расчет может быть выполнен, например, способом
вырезания узлов.
Замкнутое сечение может рассекать и более трех стержней, если
другие стержни перерезаются дважды (в общем случае четное число
раз). Так, в ферме, показанной на рис. 1.42, о, замкнутое сечение,
вырезающее диск 1—4—5, помимо стержней 1—2, 3—4 и 5—6, пересе-
кает стержни 3—6 и 2—6. Однако в вырезанной части (рис. 1.42, б)
усилия Ns_e и в стержнях, разрезанных дважды, образуют само-
уравновешенные системы, которые не входят в уравнения равновесия.
Способ двух сечений рассмотрим на примере фермы, показанной
на рис. 1.43. Ни одно сечение в ферме не пересекает менее четырех
стержней. Обратим внимание на сечения 1—1 и 11—11. Каждое из них
рассекает 4 стержня, но два из них (2—7 и 3—6) повторяются. Приме-
няя способ моментной точки для части, отсеченной сечением /—/,
составим уравнение равновесия так, чтобы в него вошли лишь усилия
N2_7 и N8_0:
£ Мк, - 0; -Fr, + = 0. <1.51)
Аналогично запишем уравнение для
части, отсеченной сечением
//—//:
V = 0; —Refb —
--з N3-6^4 ~ О’
(1-52)
Решение системы урав-
нений (1.51) и (1.52) позво-
ляет найти величину уси-
76
5
лмй и М3_в. Дальнейший расчет фермы не представляет слож-
ности.
Метод замены связей для расчета ферм применяют в таком же
порядке, как и для балок (см. гл. 1). Например, для фермы, пока-
занной на рис. 1.44, а, один из вариантов ее преобразования приведен
на рис. 1.44, б. Обозначив усилия в заменяющем стержне /Vo./ (ог на-
грузки) и Not х (от X = 1), получаем уравнение
Мм + М),хХ = 0.
откуда находим усилие в заменяемом стержне
Х = -M.f/Wo, л-
Дальнейший расчет не представляет сложности.
П
Следует отметить еще раз, что уравнения (1.41) в матричной или
в классической форме приводят к решению задачи во всех случаях
расчета статически определимых ферм. Однако применение этих урав*
нений для ручного счета практически непригодно из-за большой раз-
мерности матрицы С.
4.5. Линии влияния. Матрицы влияния
При построении линий влияния обычно применяют статический
метод, а кинематическим методом, как правило, пользуются для по-
строения моделей линий влияния (см. главу 2).
Рассмотрим построение линий влияния усилий в стержнях балоч-
ной фермы (рис. 1.45, а) статическим методом. Нагрузка приложена
в нижнем поясе, т. е. грузовой линией является ось нижнего пояса.
Этот вариант приложения нагрузки называют ездой понизу. Выра-
жения для опорных реакций фермы полностью соответствуют балоч-
ным: = (Z — x)/Z, RB = x/Z.
«Пиния в л и я н и я /V]. Сечением /—7 разрезаем ферму на две
части и, соответственно, рассматриваем два случая расположения
нагрузки.
Единичный груз на левой части фермы. Способом моментной точки
получаем
£МА1 = 0; RB’5d-Nth = 0,
откуда Nf = /?в • 5d/ft, или, с учетом выражения для «=
— ЕУ
__ z h —Qhx.
При х = 0 Nf = 0, при х = 3d А\ = 15d/(8h).
Отметим, что вследствие узловой передачи нагрузки груз F = 1
находится на левой части при 0 < х < 3d. При дальнейшем смещении
вправо он будет передаваться и на правую часть, что не соответствует
принятому положению нагрузки.
Через полученные точки проводим левую прямую линии влияния
Nt (рис. 1.45, б).
Единичный груз на правой части.
Е Мк. = 0; — Ra -3d + Nth = 0,
.. D 3d / — x3d 3(8d~x)
откуда AZj = Ra j , или --.
При x=4d A\ = 3d/(2/i), при x=Z = 8d Д\ = 0.
Аналогично предыдущему, абсцисса x = 4d соответствует крайнему
положению груза на правой части фермы. Через полученные точки
проводим правую прямую (рис. 1.45, б). По правилам узловой переда-
чи нагрузки соединяем прямой левую и правую ветви линии влия-
ния. Этот отрезок называют передаточной прямой.
Отметим важную особенность построенной линии влияния. При
продолжении правой прямой она пересекается с левой прямой под мо-
ментной точкой Ki- Это свойство подтверждается соотношением (1.45)!
Nt = AfKjh
К
Рис. 1.45
е
и сохраняется для всех случаев, когда усилие вычисляется по способу
моментной точки.
Линия влияния N3. Сечение /—/
Единичный груз на левой части фермы. Применяя способ проекций,
получаем г
Li/ = 0; Rb 4- A^sincc = 0,
откуда N3 == —ттЛ» или /V» = —-^L__ _ х
s,na 8 /sma бЛкПг
При х 0 _ 0, при х = 3d = — о~?~ . Через эти точки
проводим левую прямую (рис. 1.45, в).
79
Единичный груз на правой части.
%у = &, Ял—JVjSina = O,
откуда N, = ^, или = При х - 44 N, =
= 1/(2 sin а), при х = I = 8d N3 — 0. Проведя через эти точки правую
прямую (рис. 1.45, а), соединяем ее с левой прямой передаточной
прямой.
На основании (1.49) 7V3 = (?//sin а; заключаем, что левая и правая
прямые линии влияния параллельны друг другу так же, как и на
линии влияния Q/. Это свойство сохраняется для всех случаев, когда
усилие вычисляется по способу проекций.
Балочную аналогию можно использовать также непосредственно
для построения линий влияния.
Действительно, для усилия Л/2 была получена зависимость (1.47)
Тогда линию влияния N9 можно получить как линию
влияния балочного момента для сечения с ординатами, деленны-
ми на (—h). После учета узловой передачи нагрузки линия влияния
принимает окончательный вид, показанный на рис. 1.45, г.
Отметим, что по аналогии с линией влияния изгибающего мо-
мента левая и правая прямые при продолжении отсекают на опорах
ординаты 4d//i, равные расстояниям от этих опор до моментной точки
К2, деленным на плечо усилия Л/2 относительно этой моментной точки
(рис. 1.45, г).
Аналогично, на основании формулы (1.50) построим линию влия-
ния
/V4 = —Qn/sin а.
Построение выполнено на рис. 1.45, д с учетом того, что левая
и правая прямые на линии влияния при продолжении отсекают на
опорах ординаты, равные 4-1 и —I.
Рассмотрим построение линии влияния Nb в подвеске фермы
(рис. 1.45, а). Так как для определения этого усилия рационально ис-
пользовать способ вырезания узлов (узел С), следует рассматривать
такие два варианта расположения нагрузки: груз в узле С и груз вне
узла С.
При положении груза в узле С = F = 1.
При положении груза вне узла С (за пределами узла и смежных
с ним панелей фермы) = 0.
Линия влияния после проведения передаточных прямых показана
на рис. 1.45 е.
Рассмотрим другие случаи построения линий влияния. Пусть
в ферме, показанной на рис. 1.46,а, требуется построить линии влияния
усилий во второй (Л\) и в средней (ЛЛ2) стойках.
Линия влияния Nt. Проведем сечение /—/. Моментная
точка —Kj.
60
Единичный груз на левой части фермы.
£МК, = О; Rb(c+1)— Wi(c + 2d) = 0;
in__р — ~~
"1- ><Bc+2d- I ттрм*
При к = 0 JVj = O, при х= 2d =
Единичный груз на правой части.
5Ж = 0; Ялс + ЛМс+2</) = 0;
N — р « - _ <** —* с
1 КАс + М ы c + 2d*
При x = 3d 2Vt = —2 (с 1^24) * ПРИ x==l = 6d /Vj — О. Линия влия-
ния Nf показана на рис. 1.46, б.
Линия влияния N2. Вырезав узел Е, находим
£х = 0, Nacosa — N4cosa = 0,
8J
откуда Afa = N^,
X у = 0; sinct4- JV4sina + N2 = 0,
откуда
/V2 = —sin a. (1.53)
Проведем вспомогательное сечение II—II и построим линию
влияния/^. При положении единичного груза на правой части
фермы
SMk, = 0; RB-3d + N,ra = 0, или М«,+ N3r„ = 0,
откуда N9 = —MJc3/rs.
Учитывая, что гэ = h cos а, строим линию влияния Л4°ка, умно-
жаем ее ординаты на — 1/(/г cos а) и учитываем узловую передачу на-
грузки. Полученная линия влияния Л7а приведена на рис. 1.46, в.
Тепе рь для построения линии влияния /У2 воспользуемся соотно-
шением (1.53). На основании (1.53) линию влияния (рис. 1.46, а)'
получаем умножением линии влияния /Уа на коэффициент—2 sin а.
Усилия в стержнях ферм по линиям влияния определяют по общим
правилам (см. гл. 2). В частности, для вычисления усилий от непо-
движной нагрузки могут быть использованы матрицы влияния. Форму-
ла (1.36) для ферм принимает следующий вид:
/V = Ln • Л (1.54)
где
Гц Л» ••• Гу
г, Г21 Гаа ••• F^t
Г —
« • • • ♦ • • е • « • •
Гт\ Fm2 • • • Fmt
— матрица нагрузок (узловых сил грузового пояса); т — число
узлов грузового иояса; t — число независимых загружений фермы;
Ln — матрица влияния усилий в стержнях фермы размером k X fe;
k — число стержней фермы; N — матрица усилий размером k X t,
каждый столбец которой содержит усилия во всех стержнях фермы от
соответствующего загружения. Каждая строка матрицы Ln содержит
ординаты линии влияния соответствующего усилия под узлами грузо-
вого пояса.
Отметим сходство выражений (1.54) и (1.41). Разница заключается
в том, что в (1.41) матрица усилий F содержит составляющие узловых
сил Fx и Fy для каждого узла, а в (1.54) матрица F содержит только
вертикальные нагрузки грузового пояса. В соответствии с этим мат-
рица Ln может рассматриваться как частный случай матрицы — С"1.
4.6. Шлренгельные фермы
Усилия в поясах фермы, как следует из выражения (1.45), обратно
пропорциональны высоте фермы. Поэтому при больших пролетах ферм
желательно увеличивать их высоту. В силу конструктивных требова-
32
Ряс. 1.47
Рис, 1.48
ний (размеры узловых фасонок) угол наклона раскосов а, как правило
не должен превышать 60°. Поэтому увеличение высоты фермы влечет,
за собой удлинение панели, а это в свою очередь приводит к увеличе-
нию размеров и массы элементов сооружения, обеспечивающих
узловую передачу нагрузки (плит — в стропильных фермах, балок
проезжей части — в мостовых).
Чтобы избежать удлинения панели, в грузовом поясе основной
фермы вводят промежуточные узлы с помощью дополнительных ферм—
шпренгелей, опирающихся в узлы основной фермы (рис. 1.47, о).
Стержни шпренгелей обычно совмещают со стержнями основной
фермы, получая шпренгельную ферму (рис. 1.47, б).
Особенностью шпренгелей является балочный характер их рабо-
ты. При вертикальной нагрузке они передают в узлы основной фермы
только вертикальное давление.
Конструкция шпренгелей может быть самой различной. На
рис. 1.48, а, б приведены расчетные схемы различных шпренгелей.
При этом шпренгели на рис. 1.48, а передают нагрузку в узлы грузово-
го пояса и называются одноярусными, в отличие от двухъярусных
шпренгелей (рис. 1.48, б), передающих нагрузку в узлы противо-
83
Рис. 1.49
положного пояса. Ферма с двухъярусными шпренгелями показана на
рис. 1.49.
Различают три типа стержней:
1. Стержни, входящие только в основную ферму. Усилия в них
вычисляют расчетом основной фермы (шпренгели отбрасывают, а при-
ложенную к ним нагрузку распределяют в узлы основной фермы).
2. Стержни шпренгелей. Усилия в них находят расчетом соответ-
ствующего шпренгеля как двухопорной фермы на местную на-
грузку.
3. Стержни, являющиеся общими для основной фермы и шпренге-
ля. Усилия в этих стержнях получают как сумму усилий, найденных
отдельно расчетом основной фермы и отдельно расчетом соответ-
ствующего шпренгеля.
Следует отметить, что при вычислении усилий разделение шпрен-
гельной фермы на основную ферму и шпренгели во многих случаях не
требуется.
Рассмотрим построение линий влияния усилий в стержнях шпрен-
ге ль ной фермы (рис. 1.50, а).
Линия влияния^. Рассматриваемый раскос является об-
щим для основной фермы и шпренгеля. Проведем сечение /—1 в задан-
ной ферме. Так как в сечение попало только три стержня, то усилие
можно найти сразу, без разделения фермы на основную и шпренгель.
Применяем способ моментной точки.
Единичный груз на левой части фермы.
£Л/к, = 0; /?в(с+0+^ = 0,
откуда ~ ~ 7 ~ ~• При х = 0
= 0, при x=4d =
J, при Л — tu IV 1----— .
Единичный груз на правой части фермы.
X = 0; Цдс — = 0,
откуда Nt = Ra ± ~ . При х = 5d = 7с/(12гД,
при х = I = 12d Nt = 0. * 1
Линия влияния, построенная по этим значениям, приведена на
рис. 1.50, 6.
Линия влияния^. Стержень 5—21 является стержнем
основной фермы. Проведем сечение II—//. Оно пересекает 4 стержня,
84
ft"у.™.™,
ЕЛ4Л1=0; Rb(c+O — JV2(c + 4d) = 0,
mKvna N - P^l+L - * 1+1 * c±12d
откуда л, —+ z£+w— I2d<.+ 4d •
Так как шпренгель не учитывается, то крайние положения единич-
ной силы должны быть взяты по узлам основной фермы.
При х = 0 W2 = 0, при x = 2d ^2 = £^±рЗ)-
Единичный груз на правой части.
£ Л4К1 = 0; Rac 4- N2(c + 4d) 0.
85
/а- жт г> с 1 — х с Y2d—х с
Отсюда Л/2 — —^7+43~ FT^Tdi2d“r+4de
При х = 4d N2 = — 3^4j}> при х = I = 12d N3 = 0.
Линия влияния N2 приведена на рис. 1.50, в.
Для построения линии влияния усилиями стержне
9—18 необходимо рассмотреть отдельно шпренгель (рис. 1.50, г).
При положении единичного груза на опорах шпренгеля все его стержни
не работают, N3 = 0. Усилие при загружении среднего узла 10
найдем из условия равновесия узла 9 (рис. 1.50, а);
— l/(2sina).
Учитывая, что шпренгель работает только на местную нагрузку,
строим по полученным данным линию влияния N3 (рис. 1.50, д).
Следует отметить, что в фермах с двухъярусными шпренгелями
выделяют еще один тип стержней — стойки основной фермы, для кото-
рых линии влияния при езде поверху и понизу различны.
Необходимость рассмотрения случаев езды поверху и понизу появ-
ляется по той причине, что при положении единичного груза в узлах
шпренгеля давление передается в узлы основной фермы, расположен-
ные в противоположном поясе. Для таких стержней на общей оси
строят липии влияния при езде понизу и поверху. Ординаты оконча-
тельной линии влияния под узлами основной фермы соответствуют
езде по грузовому поясу, а ординаты под узлами шпренгеля берутся
с линии влияния для езды по противоположному поясу. Соединив по-
лученные ординаты под смежными узлами передаточными прямыми,
получают окончательный вид линии влияния.
Вопросы для самоконтроля
I. Что называется фермой?
2. Какие усилия появляются в элементах <|>ерм и почему?
3. Почему фермы более экономичны по сравнению с балками?
4. Какие элементы различают в фермах?
5. По каким признакам классифицируют фермы?
6. Какие методы применяют для определения усилий в стержнях ферм?
7. Как применяется способ вырезания узлов для ручного счета? В чем до-
стоинства и недостатки этого способа?
8. Приведите частные случаи равновесия узлов.
9. Как можно применить способ вырезания узлов для расчета фермы с лю-
бым расположением стержней?
10. Какие матрицы необходимо составить для расчета фермы способом вы-
резания узлов в матричной форме? Какова размерность этих матриц?
И. Какие трудности могут встретиться при решении матричного уравне*
ння (1.40)? Как нх избежать?
12. В каком случае рационально определять усилия способом моментной
точки?
13. Как зависят усилия в поясах балочной фермы от ее высоты?
14. Как изменяются усилия в поясах балочной фермы вдоль ее пролета?
15. Когда удобно применять способ проекций? В чем отличие характера ра-
боты восходящих и нисходящих раскосов балочной фермы?
16. Как изменяются усилия в раскосах балочной фермы вдоль ее пролета?
17. Приведите примеры использования для расчета ферм балочные
усилий.
86
18. В каких случаях применяется способ замкнутого сечения?
19. Как применяется способ двух сечений?
20. Как применяется для расчета ферм метод замены связей?
21. Отличаются ли линии влияния опорных реакций балочной фермы от
опорных реакций балки?
22. Какие три части можно выделить в линии влияния усилия, определя-
емого способом моментной точки или способом проекций?
23. Как расположены по отношению друг к другу левая и правая прямые
линии влияния усилия, определяемого по способу моментной точки; по способу
проекций?
24. Как используется балочная аналогия для ускоренного построения ли-
ний влияния усилий в поясах и раскосах балочных ферм?
25. Как используются матрицы влияния для расчета ферм на неподвижную
нагрузку?
26. Из каких элементов состоит матрица влияния усилий в стержнях ферм?
27. Как составляется матрица нагрузок?
28. Что такое шпренгельная ферма?
29. С какой целью применяют шпренгели?
30. Чем отличается работа двухъярусных шпренгелей от одноярусных?
31. На какие типы делятся стержни шпренгельных ферм?
32. Каковы особенности определения усилий и построения линий влияния
в шпренгельных фермах?
33. Какой тип стержней дополнительно выделяют при построении линий
влияния усилий в стержнях ферм с двухъярусными шпренгелями?
Глава 5
РАСПОРНЫЕ СИСТЕМЫ
5.1. Основные определения
Стержень с криволинейной осью (точнее, брус малой кривизны),
показанный на рис. 1.51, а, является балочной системой. Действи-
тельно, при действии вертикальной нагрузки опорные реакции в такой
системе вертикальны и изгибающие моменты в ее сечениях будут та-
кими же, как в простой двухопорной балке. В отличие от балки в таком
брусе появляются значительные горизонтальные перемещения опор-
ной точки В. Если закрепить обе опорные точки неподвижно, то
Рис. 1.51
87
в опорах появятся горизонтальные составляющие опорных реакций
(рис. 1.51, б). Эти составляющие называют распором, а такую систему-
аркой. Происхождение термина «распор» связано с тем, что он соответ-
ствует тем силам, которые действуют на опорные устройства, стремясь
раздвинуть («распереть») их в горизонтальном направлении.
Распор создает в сечении арки момент, противоположный по зна-
ку моменту вертикальных сил. За счет этого изгибающие моменты в
арке уменьшаются по сравнению с изгибающими моментами в балке.
Вследствие кривизны оси арки и из-за наличия распора в ее сечениях
появляются значительные продольные силы. Т. е., по сути, в сравне-
нии с балкой деформация изгиба в арке частично заменяется деформа-
цией сжатия. Это обстоятельство дел зет арку более экономичной,
особенно при больших пролетах.
Системы, в которых при действии вертикальной нагрузки появля-
ются горизонтальные составляющие опорных реакций, называют
распорными. Кроме арок к ним относят рамы, арочные фермы,
комбинированные и висячие системы.
Арку, показанную на рис. 1.51, б, называют двухшарнирной.
Такая арка, как нетрудно убедиться, является один раз статически
неопределимой. Если опоры арки являются заделками, то арка назы-
вается бесшарнирной (рис. 1.51, в). Она трижды статически неопре-
делима.
Арка, показанная на рис. 1.52, называется трехшарнирной. Она
статически определима. Такие арки рассматриваются в этом разделе.
Точки опирания арки называют пятами, а точку, наиболее удален-
ную от пят (т. С на рис. 1.52), —замком. Кратчайшее расстояние ст
линии, соединяющей пяты, до замка называют стрелой подъема арки
и обозначают /. Отношение стрелы подъема к пролету арки называют
пологостью арки. При f/l < 1/4 арки обычно считают пологими.
Неподвижность опор двухшарнирной и трехшарнирной арки может
быть обеспечена также постановкой горизонтальной связи—за-
тяжки (рис. 1.51, а; 1.53, а). При этом затяжка может располагаться
выше уровня пят {повышенная затяжка) и может быть выполнена
ломаной. Эти варианты расположения затяжки для трехшарнирной
арки приведены на рис. 1.53, б, в. Усилие в затяжке по существу пред-
ставляет собой распор обычной арки. Арки с затяжками применяют
68
обычно в тех случаях, когда устройство опор, обеспечивающих вос-
приятие распора, становится неэкономичным (при слабых грунтах,
в покрытиях зданий).
Арку, пяты которой расположены в разных уровнях, называют
ползучей (рис. 1.53, а).
Ось арки чаще всего принимается очерченной по параболе или
по дуге окружности. Соответственно арки в этом случае называют
параболическими или круговыми (циркульными).
5.2. Расчет трехшарнирной арки на вертикальную нагрузку
Рассмотрим сначала определение опорных реакций. Как отмеча-
лось, эти реакции имеют вертикальные и горизонтальные составля-
ющие (рис. 1.54, а). Из условия х = НА — Нь = 0 следует, что
горизонтальные составляющие опорных реакций арки при вертикаль-
ной нагрузке равны между собой:
НА = НВ=Н. (1.55)
Величина Н является распором.
Для определения вертикальных составляющих реакций использу-
ют те же уравнения, что и в балке на двух опорах:
S МА = — — Г,а, ч- Vgl = О, (1.56)
откуда VB = (Ftaj + F^ajll-,
Y1MB=Fl(l — oj + Ft (I - a,) - VAl = 0, (1.57)
откуда VA = [F,(/ — aj + Ft(l — ajyi.
Реакции VA и Ve полностью соответствуют опорным реак-
циям однопролетной балки того же пролета, при той же нагрузке
(рис. 1.54, б). Поэтому эти реакции называют балочными.
Для определения распора используют условие равенства нулю из-
гибающего момента в промежуточном шарнире С. Этот момент можно
ваписывать для левых или правых сил:
S Меи 0 или S Мс,г = 0. (1.58)
69
Рис. 1Л4
Например, рассматривая левые силы, находим
YiMc.,^Va L-Fl(j-al)-Hf = O. (1.59)
Из полученного уравнения легко определить распор. Обратим
внимание на то, что первые два члена левой части уравнения (1.59)
представляют собой балочный изгибающий момент М°св сечении С
(рис. 1.54, б). Таким образом, получаем следующую зависимость:
Н = МЛсЦ. (1.60)
Отсюда следует, что распор уменьшается при увеличении стрелы
подъема.
Рассмотрим вычисление внутренних усилий в произвольном сече*
нии К с координатами центра тяжести х« и у« (рис. 1.54, а). Распо-
ложение этих усилий в сечении показано на рис. 1.54, в.
Как известно, изгибающий момент в любом сечении равен алгебра-
ической сумме моментов всех левых или всех правых сил. Запишем
выражение изгибающего момента в сечении К, рассматривай часть
арки, находящуюся слева от сечения:
Мк = Удхк — Л (хЛ — О1) — Нук,
или, с учетом введенного понятия балочного изгибающего момента
Мд = ~ Ft (хд — о2) получаем
Л4к = Л1д — Нук* (1.61)
00
Для определения поперечной и продольной сил в сечении К
запишем сумму проекций, например, левых сил соответственно на
нормаль и на касательную к оси арки. Угол наклона касательной к оси
арки в т. К обозначим <рк.
Qk = (Уд — FJ cos — Н sin Фк;
Nk = —(Va — Fi) sin Фк — H cos ф^.
В приведенных уравнениях выражение, заключенное в скобки,
представляет собой поперечную силу в сечении К, определяемую так
же,как в балке (рис. 1.54, б). Эту величину называют балочной попереч-
ной силой и обозначают Тогда выражения для поперечной и про-
дольной сил запишутся окончательно в таком виде:
Qk = Qk cos Фк — Н sin фя; (1.62)
NK = —Qk sin фк — H cos yK. (1.63)
Как следует из выражения (1.63), продольные силы в арке при дей-
ствии вертикальной нагрузки всегда сжимающие. В связи с этим ино-
гда в арке в отличие от других систем сжимающие продольные силы
считают положительными.
Выражение (1.61) подтверждает сделанное ранее предположение
о том, что изгибающие моменты варке меньше, чем в балке. Разница
в изгибающих моментах определяется наличием в арке отрицательного
момента — Ну к, создаваемого распором. Это обстоятельство делает
арку более экономичной системой, чем балка.
Представляет интерес анализ зависимости изгибающих моментов
в арке от ее стрелы подъема. Подставим в уравнение (1.61) выра-
жение (1.60). Получаем
Если ординаты у линейно зависят от f (у = с/), то изгибающий
момент при вертикальной нагрузке не зависит от стрелы подъема.
Например, для параболической арки, описываемой уравнением у =
= 4f/Fx (/ — х), получаем Мк = М« — Мс • 4х* (I — х*)//2.
В связи с этим для уменьшения расхода материала арки следует вы-
полнять пологими (чем меньше стрела подъема арки, тем меньше дли-
на оси арки). С другой стороны, при уменьшении стрелы подъема
растет распор и, следовательно, увеличиваются продольные силы
в сечениях арки (1.63). При малых значениях стрелы подъема про-
дольные силы могут стать преобладающими усилиями в арке. Это
обстоятельство может сделать решающим расчет пологой арки не на
изгиб, а на устойчивость.
При построении эпюр внутренних усилий в арке исходят из того,
что М, Q и N меняются по нелинейным законам (1.61),(1.62) и (1.63).
В связи с этим для построения эпюр ось арки разбивают на участки
(рис. 1.55, а), вычисляют в полученных точках значения Л4, Qt N,
91
откладывая их от горизонтальных осей и соединяя плавными кривыми
(рис. 1.55, б, в, г). Вычисление ординат эпюр удобно выполнять в таб-
личной форме.
Рассмотрим расчет арки с затяжкой (рис. 1.56). В соответствии
с опорными закреплениями эта арка является балочной системой,
реакции при вертикальной нагрузке вертикальны и определяются
так же, как в простой двухопорной балке.
Функцию распора в арке с затяжкой, как уже отмечалось, выпол-
няет усилие в затяжке. Для его определения рассечем арку сечением
92
I—I, проходящим через промежуточный шарнир С. Пользуясь одним
из уравнений (1.58), найдем усилие
S = Mc/f. (1.64)
Из полученного выражения следует, что усилие в затяжке действи-
тельно соответствует распору арки без затяжки.
При вычислении внутренних усилий в такой ^же можно пользо-
ваться формулами (1.61), (1.62) и (1.63), формально заменив в них И
на S:
Мк = М/< — S ук\
Qk = Q/c cos <рк — S sin ф/<; (1.65)
= — Q« sin Фк — S cos фК.
При расчете арки с повышенной затяжкой (рис. 1.57) следует иметь
в виду, что часть арки, расположенная ниже затяжки, работает как
брус малой кривизны. Приведем основные расчетные формулы:
S = М?//';
Мк, = Мвк„ '
Qk, К, COS if к,,
Nk, — —Qk, sin
Л4к, = Mk, —
Qk, = Qk, cos фк, — S sin q>K,;
Nk, = —Qk, sin фк, — S cos <рк.;
У к, = Ук, — (J — f')-
(1.66)
(1.67)
(1.68)
(1.69)
5.3. Линии влияния реакций и внутренних усилий
в трехшарнирной арке
Для построения линий влияния усилий в арке (рис. 1.58, а) удобно
применять статический метод. Вертикальные составляющие реакций
в опорах арки являются балочными. Их выражения Уд = (/ — х)//,
Vb = х/1 и сами линии влияния (рис. 1.58, б, в) полностью совпадают
с выражениями и линиями влияния опорных реакций в простой двух-
опорной балке.
Для построения линии влияния распора Н воспользуемся формулой
(1.60) Н = Mclf- Как видим, линию влияния Н можно получить де-
лением ординат линии влияния балочного момента построенной
для сечения в шарнире С, на стрелу подъема f. Тогда ордината этой
линии влияния в т. С (рис. 1.58, г)
/7 = //(4/).
Линию влияния изгибающего момента в сечении К построим на
основании (1.61) путем алгебраического суммирования двух линий
влияния: линии влияния балочного момента в этом сечении (рис. 1.58,3)
93
Рис. l^e
и линии влияния распора» умноженной на ординату сечения t/к. Сум-
мирование можно выполнить либо непосредственным вычислением ха-
рактерных ординат результирующей линии влияния, либо способом
наложения линий влияния.
При использовании способа наложения на общей оси строят линию
влияния балочного момента Мьк и линию влияния распора, умно-
женную на у к (рис. 1.58, е). Тогда ординаты, заключенные между эти-
ми линиями влияния, являются ординатами результирующей линии
влияния Мк. Остается вычислить их величины и построить оконча-
тельную линию влияния на горизонтальной осп (рис. 1.58, ас).
Более удобным способом построения линии влияния изгибающего
момента является способ нулевой точки.
Отметим, что на построенной линии влияния (рнс. 1.58, ж) отрезок
t — р является частью правой прямой линии влияния М$ и при
продолжении отсекает на левой опоре отрезок а. Этот отрезок (/ — р)
пересекает ось линии влияния в т. т. Найти т. т — значит, найти
положение силы F = 1 на арке, при котором изгибающий момент
/И к в 0. Для этого воспользуемся известной из теоретической меха-
ники теоремой о трех силах: система трех сил находится в равновесии
тогда, когда линии действия этих сил пересекаются в одной точке. Тре-
мя силами в нашем случае являются груз F = 1 и полные реакции
Ra и Rb.
Направление реакции RB найдем из условия равенства нулю изги-
бающего момента в шарнире С. Очевидно, что для выполнения этого
условия линия действия силы RB должна проходить через т. С. Ана-
логично находим направление реакции Ra. При нулевом значении из-
гибающего момента в сечении К линия действия этой реакции должна
проходить через т. К. Точка т', в которой пересекаются линии действия
этих сил, определяет положение третьей силы — единичного груза,
при котором Мк = 0 (рис. 1.58, а). Расстояние ит от левой опоры до
т. т* можно определить и аналитически, используя геометрические
соотношения:
““ = ^/(20)+/// • <17<»
Отсюда и вытекает сущность способа нулевой точки для построе-
ния линии влияния изгибающего момента
в т. К:
а) вычислив umt находят положение т. т\
б) отложив на левой опоре отрезок а, равный расстоянию от нее
до сечения К, соединяют полученную точку с т. т\
в) сносят на эту прямую точки К и С — получают точки t и р\
г) соединив т. t с нулем на левой опоре, а т. р — с нулем на правой,
получают линию влияния (рис. 1.58, ж).
При расположении сечения в правой полуарке построение выполня-
ют зеркально по отношению к описанному: в выражении (1 70) заменя-
ют а на 6, на правой опоре откладывают отрезок b и ит отсчитывают
от правой опоры.
95
Рис. 1.5»
Для построения линии влияния поперечной силы Ок
(рис. 1.59) воспользуемся выражением (1.62) Qk = Qk cos фк—
— Н sin фк-
Складывая алгебраически ординаты линии влияния Qk (рис. 1.59,6),
умноженные на совфк, с ординатами линии влияния распора, умно*
женнымн на 51Пфк> строим результирующую линию влияния Qk
(рис. 1.59, а).
Применение способа наложения для построения этой линии влия-
ния показано на рис. 1.59, в.
96
Рис. 1.60
Здесь также применим и способ нулевой точки. Средний отрезок
I — р линии влияния (рис. 1.59, в) пересекается при продолжении
с осью в т. q, находящейся ла расстоянии от левой опоры, и на этой
опоре отсекает отрезок cos <рк- Построения для определения положе-
ния единичной силы, соответствующего нулевой ординате средней
прямой, показаны на рис. 1.59, а. Здесь направление реакции RA
получено из условия равенства нулю поперечной сплыв сечении К
(параллельно касательной к оси арки в т. К), а направление Кв — из
условия равенства нулю изгибающего момента в шарнире С. Хотя
единичная сила при этом выходит за пределы среднего участка арки
КС, можно условно считать, что она передается на него с помощью
97
жесткой консоли. Из геометрических соотношений находим
= I tg <Рк 1/2+г// • (L71)
Для построения линии влияния Qk откладываем под левой опорой
арки ординату cos <рк и соединяем ее с нулем на расстоянии uQ от
опоры. Левую прямую проводим через ноль под левой опорой парал-
лельно среднему участку t — р линии влияния. Правая прямая сое-
диняет ординату под шарниром С с нулем под правой опорой.
Аналогично, по выражен ию (1.63) NK = —Q* sin Фк — Я cos фк
строят линию влияния A/к (рис. 1.60). Для этого алгебраически
суммируют ординаты линии влияния Ок (рис. 1.59, б), умноженные
на sin <рк» и ординаты линии влияния распора, умноженные на со$Фк.
Наложение линий влияния приведено на рис. 1.60, б, а оконча-
тельная линия влияния Nk показана на рис. 1.60, в.
Покажем применение способа нулевой точки для построения линии
влияния Nr. Средний участок i — р построенной линии влияния при
продолжении отсекает на левой опоре отрезок — sin фх и пересекается
с осью в нулевой точке п. При определении положения нулевой точки
среднего участка линии влияния реакцию RA направляют из условия
равенства нулю продольной силы в сечении К параллельно нормали
к оси арки в т. К. Реакция как и при нахождении Мк, QKt должна
действовать вдоль прямой ВС (рис. 1.60, п). Из геометрических соотно-
шений следует
и"= 1/(2-
Теперь построение линии влияния можно выполнить так. Отложив
под левой опорой арки ординату — sin <рк»соединяем ее с нулем на
расстоянии ип слева от опоры А. Левая прямая будет параллельна
полученному среднему участку t — р, а правая прямая соедияяет
ординату под шарниром С с нулем под правой опорой.
5.4. Кривая (многоугольник) давления. Рациональная ось арки
Рассмотрим арку (рис. 1.61, а), загруженную произвольной вертикальной
нагрузкой. В сечении К арки (рис. 1.61, б) действуют внутренние усилия, равно-
действующая которых — Разложим эту равнодействующую в точке, находя-
щейся под центром тяжести сечения, на вертикальную (Уд.) и горизонтальную
(НА) составляющие. Как следует из равновесия отсеченной части (рис. 1.61, 6),
— //, У/( = Q$ . Изгибающий момент в сечении равен моменту равнодей-
ствующей (или ее составляющих) относительно т.Л':
Мд = — (1.73)
Сравнивая это выражение с выражением (1.61), получаем равенство
— Нек =я NP, — Ну
откуда находим величину определяющую положение равнодействующей
в сечении К:
еА = рк_уи«///. (1Л)
98
Величины е для всех сечений можно получить графически, если на ось арка
(рис. 1.61, а) в соответствии с выражением (1.74) наложить эпюру балочных
моментов /И0 с ординатами, деленными на распор Н. Тогда точки многоугольни-
ка, представляющего график M°!Ht являются геометрическим местом точек
приложения равнодействующих для сечений арки. Этот многоугольник (в общем
случае — кривую) называют многоугольником (кривой) давления. При расчете
бетонных и каменных арок, в которых появление растягивающих напряжении
нежелательно, построение многоугольника давления является важной частью
расчета. Условием отсутствия растягивающих напряжений является расположе-
ние равнодействующей в пределах ядра сечения. Для проверки этого условия
достаточно нанести по обе стороны от оси арки границы ядра ее сечений и прове-
рить, находится ли многоугольник (кривая) давления в пределах этнх границ.
Как следует из формулы (1.61), эпюра изгибающих моментов в арке описы-
вается таким выражением:
/11 = др _ Ну. (1.75)
При заданных нагрузке, пролете и стреле подъема величина распора Я является
фиксированной, балочные моменты /И° определяются однозначно. Следователь-
но, изгибающие моменты в арке зависят от значений ординат оси арки. Варьи-
руя очертание оси, можно изменять эпюру моментов в арке.
9Э
Рациональной осью арки называют такую ось, при которой изгибающие мо-
менты во всех сечениях обращаются в нуль. Для рациональной оси из выражения
(1.75) следует, что
у = М>Ц1. (L76)
Таким образом, очертание рациональной оси повторяет очертание балочной
вторы изгибающих моментов. Как следует из (1.74), (1.76), при этом ось арки
совпадает с многоугольником (кривой) давления.
В частности, при действии равномерно распределенной нагрузки q уравне-
ние балочных изгибающих моментов имеет вид Af° — qx (I — х) t 2, а распор
И = = <?/2/(8/). Тогда из (1.76)
$/2-х(/-х) 4/
-pxU — *)-
Таким образом, при действии равномерно распределенной вертикальной
нагрузки рациональная ось арки очерчена по квадратной параболе.
Понятие рациональной оси имеет смысл лишь при расчете на постоянную
нагрузку. При догружении арки временными нагрузками изгибающие моменты
в общем случае уже не будут нулевыми.
5.5. Напряжения в сечении арки. Ядровые моменты
Нормальные напряжения в крайних точках сечения арки, симметричного
относительно нейтральной оси, определяются двучленной формулой внецентрен-
М N lt
кого сжатия о = — . Напряжения в верхней точке сечения
м Р
~ — W + А ‘ О-7?)
в нижней точке сечения
На основании (1.77) и (1.78) можно построить линии влияния наибольших
напряжений ох, о2. Например, на рис. 1.62, б показано построение линии влия-
ния напряжения Ot в сечении К как алгебраической суммы линии влияния Nr
с коэффициентом 11 Ar и линии влияния ТИд с коэффициентом VWr.
Линии влияния ох и о2 Дают возможность определить максимальные напря-
жения от подвижной системы сил, используя общие правила эагружения линяй
влияния.
К аналогичному результату при определении напряжений приводит исполь-
зование понятия ядровых моментов.
Рассматривая сечение К арки (рис. 1.63), разложим равнодействующую Рд
на продольную и поперечную силу и перенесем продольную силу в нижнюю
граничную т.Кх ядра сечения. При этом в сечении появляется изгибающий мо-
мент
MK, = HK(‘K + 'lur). (1-И)
называемый нижним ядровым моментом. Определяя теперь напряжения в верх-
ней точ-ке сечения арки, учтем, что продольная сила, приложенная на границе
яшра сечения, не вызывает напряжений в верхнем волокне. Получаем
----«К1/ГК. (I.8Q>
Изгибающий момент Мк можно определить непосредственно через внеш-
ние силы, рассматривая сумму моментов сил относительно точки /Q (₽ис. Ь62,а):
(WO
ЮС
Линия влияния этого момента показана на рис. 1.62, г. Наличие скачка под
т.К объясняется тем, что единичная сила переходит на средний участок арки
КС не и т./Съ а в т.К.
Аналогично могут быть получены формулы для верхнего ядрового момента
и для напряжений с2:
MKt = NK(eK-rker)', 0.79а)
o2 = MKt/W>; (1.60а)
= (1.81а)
При построении линий влияния ядровых моментов в пологих арках углом
наклона сечения к вертикали можно пренебречь. В этом случае выражения
для ядровых моментов принимают такой вид:
мк,^м°к-н (УК + '*„)
(1.82)
и скачок на линии влияния ядрового момента отсутствует.
5.6. Расчет трехшарнирной арки
на произвольно направленную нагрузку.
Трехшарнирные рамы
При действии на арку произвольно направленной нагрузки
(рис. 1.64) последнюю удобно разложить на вертикальные и горизон-
тальные составляющие. При вычислении реакций следует иметь
в виду, что их горизонтальные составляющие теперь не будут равны.
Действительно, £ к = На 4- Fix + F2х — Нв = 0, откуда На Нв.
Для определения реакций записывают следующие уравнения!
X Ма = 0, откуда находят У^; £ Мв = 0» откуда находят Уд;
X Мс,1 = 0, откуда находят На\ X Мс,г = 0, откуда находят Нь.
При вычислении внутренних усилий в сечениях арки необходимо
пользоваться общими правилами. Например, для сечения К (рис. 1.64)
Мк = Уд Хк — F\y(XK — oj— На у к — И\х(ук— у>);
Qk = (Уд — Fiy) cos фк — (На + Arsing»*;
Нк = (Fiy — Уд) sin фк — (НА + Fu)cos Ф*.
Рис, 1.В4
102
Расчет трехшарнирной
рамы (рис. 1.65) отличает-
ся от расчета других рам
лишь определением опор-
ных реакций. Их находят из
уравнений равновесия,
аналогичных уравнениям
равновесия трехшарнир-
ной арки. Эпюры внутрен-
них усилий строят на осях
рамы. При расчете трех-
шарнирной рамы на верти-
кальную нагрузку для оп-
ределения внутренних уси-
лий
могут быть использованы
РИС. 1.65
формулы (1.61),
(1.62), (1.63).
5.7. Трехшарнирные арочные фермы
Трехшарнирная арочная (рерма (рис. 166) представляет собой
трехшарнирную арку, полуарки которой выполнены в виде ферм.
Вертикальные реакции и распор определяются в арочной ферме так
же, как и в трехшарнирной арке или раме. Например, при верти-
кальной нагрузке (рис. 1.66) откуда Ve—3.5F;
= 0, откуда VA = 3,5 F; = 0, откуда НА — Нв : О,
откуда Н —
Усилия в стержнях определяют так же, как в обычной ферме. На-
пример, для вычисления усилия W (рис. 1.66) проведем сечение
1—1 и, найдя моментную точку т, запишем условие SMm — 0, откуда
нетрудно найти искомое усилие N.
Это усилие может быть выражено через балочный момент и распор:
М = —Mlnlr + Hh/r.
103
Этот прием используют при построении линий влияния усилий!
в стержнях арочных ферм. Для фермы, приведенной на рис. 1.67, щ
вертикальные реакции являются балочными. Их линии влияния
строят на основании зависимостей ^ = (/ — х)//, Vв = xll.
Линию влияния распора (рис. 1.67, б) получают так же, как в ар-
ке, пользуясь выражением Н — Me If.
Построим линию влияния усилия Nx в стержне фермы. Рассматри-
вая сечение /—/, запишем уравнение моментов правых сил относитель-
но моментной точки т:
— — Ntr = 0.
откуда Nl=^. — H у, или Ну.
Построение линии влияния и ее окончательный вид с учетом
узловой передачи нагрузки яриведены на рис 1.67, л
Ю4
Для построения линии влияния усилия проведем сечение
II—II. При положении груза справа от сечения
S У = У л — Nz sin а = 0, откуда 2Va — .
а J а sin a sin а
Эта линия влияния показана на рис. 1.67, г.
5.8. Комбинированные и висячие системы
Комбинированными называют системы, в которых объединяются
различные по роду работы конструкции. В основном в таких системах
сочетаются изгибаемые и сжатые (растянутые) элементы. Благодаря
наличию растянутых элементов изгибаемые разгружаются и расход
материала уменьшается. Примерами комбинированных систем явля-
ются арка с затяжкой (рис. 1.53, Q, б, в), балка со шпренгелем (рис.
1.68, а), цепь с балкой жесткости (рпс. 1.68, б).
Расчет комбинированных систем после вычисления опорных реак-
ций начинают с определения усилий в сжатых (растянутых) эле-
ментах.
Например, в арке с ломаной затяжкой (рис. 1.69, а) опорные
реакции VA и V в находят из условия 5] Мл = 0 и £ Мв— 0. Далее,
проведя сечение I — 1 через шарнир С, из условия J Mc,i ~0 (или
S ^с,г — 0) находят усилие N3 в среднем элементе затяжки. Для
определения усилий в остальных элементах затяжки и в подвесках
вырезают узлы Е (рис. 1.69, 6) и D (рис. 1.69 в). При этом суммы
проекций сил в узлах затяжки на горизонтальную ось дают таксе
соотношение:
N3 = N* cosaa « cos 04 = ... , (1.83)
откуда следует, что горизонтальные проекции усилий во всех элемен-
тах затяжки одинаковы. Эги проекции играют ту же роль, что и распор
в обычной арке, поэтому обычно обозначаются Н. Как следует из
(1.83), при симметричном очертании затяжки усилия в ней симмет-
ричны.
После вычисления усилий в элементах затяжки и в подвесках,
отсекая затяжку, рассчитывают арку на действие вертикальных сил
Nb, F и вертикальных составляющих V, усилия Л\. При этом вер-
тикальные реакции VA и Vb являются балочными, а роль распора
играет горизонтальная составляющая усилия
Рис, 1,68
103
Если необходимо определить усилия в одном лишь сечении арки,
например X, то удобнее воспользоваться следующим приемом. Рассе-
кая систему сечен ие^м //—//, проходящим через т. К (рис. 1.69,а),
раскладываем усилие в затяжке на вертикальную У2 и горизонталь-
ную Н составляющие. Теперь получим:
/И* — Мк — Нук\
Qk = (Qk — ^2) cos — Н sin q>K; (1.84)
Nk = —(Ок — VJ sin <рк — H cos <₽k-
Уравнения (1.84) могут быть использованы и для построения ли-
ний влияния. После подстановки У2 = Htg а2 и простых преобра-
106
зований получаем:
Мк == Мк — Нук'*
Qk = QkGOS4>k — H (sin <рк 4- tgcc2 cos <рк); (1 .S4a)
Nk —— (& sin фк — H (cos фк — tg а2 sin ф«).
Висячие системы (рис. 1.70) являются специфическими комбиниро-
ванными системами, в которых роль основной несущей конструкции
играют цепь или трос, а подвешенные к ним балка или ферма обеспе-
чивают жесткость сооружения.
При вычислении усилий в висячей системе разрезают трос над
опорами балки и вычисляют суммарные реакции VA 4- Ул и У в + У в »
представляющие собой балочные реакции. Дальнейший расчет выпол-
няют аналогично расчету комбинированной системы.
Разновидностью висячих систем являются вантовые фермы
(рис. 1.71, с). В таких фермах наклонные тяги (ванты) и подвески обыч
но выполняются в виде гибких тросов. При действии постоянной
и вре?1сннон нагрузок в элементах вантовой фермы появляются
только растягивающие напряжения. Благодаря этому устраняется
продольный изгиб стержней и появляется возможность применения
в элементах фермы высокопрочных материалов, что снижает массу
конструкции.
Вопрос о недопущении в элементах вантовпй фермы сжимающих
усилий решается с помощью линий влияния. Покажем построение
линии влияния усилия Ых в стержне АС.
Грузовой линией в ферме является ее нижний пояс. При этом в эле-
ментах нижнего пояса не возникает продольных усилий, в чем нетрудно
убедиться, проведя сечение через подвески и рассматривая равновесие
нижнего пояса.
Проведем сечение /—/и расположим груз F = 1 на правой части
фермы. В левой части фермы будет работать только стержень АС,
т е = о. Тогда моментной точкой для усилия Nt будет опорная
точка В, так как в ней пересекаются линии действия всех сил в правой
части фермы (усилия S' в растяжке и опорных реакций У в и У в), кроме
силы F == 1. Из уравнения равновесия 5] Мв == —+ Fx = 0 нахо-
дим Nv = xlrt.
107
Рис. 1.71
При х = О Nt = О, при х = Z/2 Л\ = U&J- По этим значениям
строим правую прямую линии влияния (рис. 1.71, б).
Когда сила F = 1 находится под т. К, в которой пересекаются на-
правления стержней AG и ВС, стержень АС выключается из работы
и Л\ = 0. Так как нагрузка на верхний пояс фермы передается через
узлы G и С, то между этими точками линия влияния должна быть
линейной. Соответствующая прямая проходит через ординату под уз-
лом С и ноль под т. К. При движении единичного груза левее г. G
линия влияния — прямая.
Участки линии влияния имеют разные знаки. Пусть площадь поло-
жительного внака равна а отрицательного — ®2. Тогда при дей-
ствии равномерно распределенной постоянной нагрузки q и временной
нагрузки р наименьшее значение усилия
Mmin = m — (Q + р) ©2.
По условию работы элемента только на растяжение
q — (Q + р)<оа > 0.
Отсюда получаем условие, при котором в стержне не может по-
явиться сжимающее усилие!
Таким образом, при проектировании вантовой фермы должно
учитываться соотношение между временной и постоянной нагрузками.
106
Вопросы для самоконтроля
1. Какие системы называют распорными?
2. Назовите основные элементы трехшарнирной арки.
3. Приведите типы трехшарнирных арок в зависимости от очертания оси,
наличия затяжки, расположения пят.
4. Какие уравнения равновесия используются для определения опорных
реакций?
5. Как зависит распор при действии вертикальной нагрузки от стрелы
подъема арки?
6. Как записывается выражение изгибающего момента в сечении арки от
вертикальной нагрузки?
7. Как получают выражения для определения поперечной и продольной
сил в сечении арки от вертикальной нагрузки?
8. Чем отличаются усилия в арке от балочных усилий?
9. Как зависят изгибающие моменты при действии вертикальной нагрузки
от стрелы подъема?
10. Чем отличается характер эпюры внутренних усилий в арке от балочных
эпюр?
11. В чем заключаются особенности расчета арки с затяжкой?
12. Когда рационально применять в сооружениях арки с затяжкой?
13. В чем состоит особенность работы частей арки, расположенных ниже
повышенной затяжки?
14. Отличаются ли линии влияния вертикальных составляющих опорных
реакций в трехшарнирной арке от балочных реакций?
15. Как построить линии влияния усилий в сечении арки способом нало-
жения?
16. Как построить линии влияния усилий в сечении арки с помощью нулевых
точек?
17. Как найти положение нулевых точек?
18. Сколько линейных участков содержат линии влияния внутренних уси-
лий в сечении арки?
19. Линии влияния изгибающего момента и поперечной силы в сечении арки
имеют на рис. 1.58, 1.59 участки двух знаков. Могут ли они быть однознач-
ными?
20. Может ли линия влияния продольной силы в сечении арки быть дву-
вначной? В каких случаях?
21. Что такое многоугольник (кривая) давления?
22. Как строится многоугольник давления?
23. В каких случаях и для чего требуется построение многоугольника (кри-
вой) давления?
24. Что такое рациональная ось арки?
25. Как очерчена рациональная ось арки при действии равномерно распре-
деленной нагрузки?
26. Совпадают ли рациональная ось и многоугольник давления?
27. Будут ли нулевыми изгибающие моменты от действия постоянной и вре-
менной нагрузок, если очертание оси подобрано рациональным для постоянней
нагрузки?
28. Как определяют наибольшие (наименьшие) нормальные напряжения
в сечении арки?
29. Что такое ядровый момент?
30. Как построить линию влияния ядрового момента?
31. В чем заключаются особенности вычисления реакций и усилий в трех-
шарнирных арках при действии произвольно направленной нагрузки?
32. Что представляет собой арочная ферма?
33. Как определяют опорные реакции в арочной ферме?
34. В чем заключается особенность построения линий влияния усилий
в арочной ферме в отличие от балочной фермы?
35. Что называется комбинированной системой? Приведите примеры комби-
нированных систем.
36. Что выполняет роль распора в арке с ломаной затяжкой?
>09
37. Через какие величины могут быть выражены усилия в арке с ломаной
вагяжкой?
38. Что такое висячая система?
39. Что является балочной реакцией при расчете висячей системы?
40. Что представляет собой вантовая ферма?
41. Каким условиям должны .удовлетворять усилия в элементах вантовой
фермы? Как проверять выполнение этих условий?
Глава 6
ОСНОВНЫЕ ТЕОРЕМЫ ДЛЯ УПРУГИХ СИСТЕМ.
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
Расчет на жесткость и устойчивость, расчет статически неопреде-
лимых систем связаны с необходимостью вычисления перемещений.
Наиболее общими методами определения перемещений в упругих си-
стемах являются энергетические, основанные на исследовании потен-
циальной энергии системы. Одним из применяемых для определения
перемещений в линейно деформируемых системах является рассматри-
ваемый в этой главе метод Мора.
Вывод формул для определения перемещений по методу Мора мо-
жет быть сделан на основе принципа возможных перемещений. Этот
принцип является универсальным законом механики, он, в частности,
используется при доказательстве основных энергетических теорем
для упругих систем.
Напомним формулировку принципа возможных перемещений
(см. параграф 1.3). Если система находится в равновесии, то сумма ра-
бот всех внешних и внутренних сил системы на любых возможных пере-
мещениях равна нулю.
Если работу внешних сил обозначить V7, а работу внутренних
сил — U, го принцип возможных перемещений можно выразить фор-
мулой
Г + V == 0 (1.85)
Как известно, возможным перемещением является произвольное
бесконечно малое перемещение, которому не препятствуют наложен-
ные на систему связи. Возможные перемещения отсчитываются от
состояния равновесия системы. При этом в силу их малости предпола-
гается, что условия равновесия системы не нарушаются, т. е. усилия
не изменяются.
Рассмотрим сначала определение работы внешних и внутренних
сил и некоторые теоремы для упругих систем.
6.1. Работа внешних сил.
Обобщенные силы и обобщенные перемещения
Как известно, работа вычисляется как произведение постоянного
по величине силового фактора на перемещение в направлении этого
фактора. Например, работа силы F равна произведению этой силы
ПО
на путь, пройденный в направлении силы; работа момента (пары сил)—
произведению момента на угол поворота в направлении этого момента
и т. д. Для общности рассуждений в строительной механике применяют
понятие обобщенной силы и обобщенного перемещения.
Обобщенной силой называют любую силу или группу сил (пару спл^
равномерно распределенную нагрузку, две силы, растягивающие или
сжимающие стержень, и другие комбинации нагрузок).
Обобщенным перемещением называют такое перемещение, на кото-
ром соответствующая обобщенная сила выполняет работу, т. е. это
множитель при обобщенной силе в выражении работы.
Обобщенную силу обозначают буквой F, а обобщенное перемеще-
ние — Ас двумя индексами: первый указывает точку и направление
перемещения (обычно этот индекс соответствует индексу обобщенной
силы, действующей в направлении данного перемещения); второй
индекс указывает причину, вызвавшую данное перемещение (сила,
температурное воздействие, смещение опор и пр.).
При решении ряда задач вместо действительных нагрузок вводят
единичные силы или моменты. Перемещения от этих нагрузок обозна-
чают б с теми же индексами, что и перемещения от произвольных по
величине нагрузок.
Как и прежде, будем рассматривать только линейно деформируемые
системы, т. е. системы, для которых зависимость между перемеще-
ниями и нагрузкой имеет линейный характер. Для таких систем спра-
ведливы следующие соотношения:
Д« = б«Л; (1.86)
А*7 = «П + 6<2 га + F3 + ... (1.87)
Работу впешнмх (внутренних) сил на возможных перемещениях
называют возможной работой внешних (внутренних) сил. Для линей-
но деформируемых систем при вычислении работ в выражении (1.85)
вместо бесконечно малых возможных перемещений могу г рассматри-
ваться малые конечные перемещения. В частности, в силу произволь-
ности возможных перемещений ими могут быть перемещения, вызван-
ные любой силой или группой сил.
Рассмотрим некоторую упругую сисхему (рис. 1.72), загруженную
статически приложенной силой Ft. Статический характер загруженпя
предполагает медленное возрастание значения силы от нуля так, что
ускорения точек системы малы и силами инерции можно пренебречь.
F-.
F, \С ; & — Рис. 1,72 "Йк Ди Д) Рис. 1.73 111
В результате вагружения система деформируется и точка приложения
силы перемещается в направлении силы на величину Дц. Зависимость
между силой и перемещением при статическом вагружении выра-
жается на графике прямой линией (рис. 1.73). Работа, выполняемая
силоГт Fr, соответствует площади заштрихованной части графика
Vu-p.Au (1.88)
и называется действительной работой силы Ft.
Если теперь к системе приложить дополнительно силу F2, то точка
приложения силы Ft получит дополнительное перемещение Д12. Сила
Ft при этом остается постоянной и выполняет работу
^12 = ^Д1а. (1.89)
Перемещение Д12 может рассматриваться в качестве возможного
перемещения т. С. Тогда работа U/12 будет являться возможной рабо-
той силы Ft.
Сравнив выражения (1.88) и (1.89), видим, что действительная
работа силы отличается от возможной работы коэффициентом 1/2.
6.2. Работа внутренних сил
Для определения работ внутренних сил рассмотрим ту же балку
на рис. 1.72. Так как система предполагается линейно деформируемой,
то для определения усилий и перемещений в ней можно воспользо-
ваться принципом независимости действия сил. Для этого рассмотрим
два состояния балки (рис. 1.74): в первом действует сила Flt а во вто-
ром — сила F2.
Выделим в балке на расстоянии х от левой опоры элемент длиной
dx. В первом состоянии по граням элемента действуют внутренние
усилия и Qi (рис. 1.75, с), во втором — М2 и Q2 (рис. 1.75, б). Эти
усилия в пределах элемента можно считать постоянными.
РЯС, 1.75
112
Действие усилий 7Иа во втором состоянии вызывает искривление
оси элемента так, что кривизна оси равна %2, а угол между его гранями
составляет vjdx (рис. 1.75, в). Поперечные силы Q2 вызывают сдвиг
(рис. 1.75, е) так, что величина взаимного смещения граней составляет
Теперь нетрудно записать возможную работу внутренних сил
элемента в первом состоянии на перемещениях второго состояния!
dUia = — М jXtdx — Qj y2dx. (1.90)
Знак «минус» объясняется тем, что усилия 7И1 и Qt являются
внешними по отношению к элементу, а внутренние усилия направлены
навстречу им, т. е. в сторону, обратную перемещениям у^х и y2dx.
Деформации %2 и у2 определяются известными из сопротивления мате-
риалов формулами
= 7 = = (1.91)
= dA—коэффициент, учитывающий неравномерность
(Л)
распределения касательных напряжений по сечению и зависящий от
формы поперечного сечения.
Подставляя выражения для у2 и Тз в (190), проинтегрируем обе
части уравнения по всей длине балки. В результате получим возмож-
ную работу 4/13:
= (1.92)
(О (О
В общем случае деформации плоской системы в уравнение (1.92)
добавляется работа продольных сил Af>. При этом следует учесть, что
оси системы могут иметь переломы и разветвления, а функции внутрен-
них усилий — разрывы. Поэтому, заменив переменную х переменной
s, пробегающей очертание осей системы, разобьем интеграл на сумму
интегралов. Тогда окончательно возможная работа внутренних сил
вапишегся так:
(/> Ю (/)
По аналогии с (1.93) можно записать действительную работу
внутренних сил первого состояния 4/п с учетом того, что деформации
в этом случае определяются усилиями Л^, Oj и и линейно растут
с увеличением нагрузки:
(О (0 (0
В дальнейшем знак (/) у интегралов, обозначающий, что интегри-
рование выполняется по всей длине каждого участка системы, будем
опускать.
Ш
6.3. Потенциальная энергия.
Матрицы податливости и жесткости
Величина полученная выше, представляет собой работу,
произведенную внутренними силами при загружении системы обоб-
щенной силой Fp Эта работа равна по величине и обратна ио знаку
потенциальной энергии деформации системы
С другой стороны, энергия деформации системы равна работе при-
ложенных к ней внешних сил, выполняемой при статическом загруже-
нии системы?
Е = W. (1.96)'
Для случая загружения системы двумя силами (Гх и Г2) выражение
(1.96) запишется так:
£ = 1F = (FxA1 + FsA8)/2,
или с учетом (1.86)
Е = (F? «и + FiF,fia + FtF^tl +
В общем случае действия п сил соответственно получаем
&i = F4" F26l2 4- •• • 4- Fn6m;
Да = F26214- F2622 + • • • + Fr&2n,
— Effini 4" Fa6«2 + ... -f- Fn6rmJ.
£ = (FXA, + FaA2 + ... + F„A„)/2 = (F? 6n + F.FA, +
4"-«-+FiFB6u+ FaFx621 + F|ti2a4* ... 4"FeFo62n + ... 4~FBFx6ni +
4- FnF2ti„2 +...+/* 6„„)/2. (1.98)
Величина 6« в (1.98) представляет собой перемещение вдоль i-й
силы от действия силы F* == 1. Набор перемещений dlk характеризуй
деформатнвные свойства системы в направлении внешних сил (подат-
ливость системы). Выражения (1.97), (1.98) удобно представить
в матричной форме!
Е = ^F7A = 1 FiDF,
(1-99)
(1.100)
где Д =
— матрица-столбец
перемещений,
114
-Fi-
Ft
-Fn.
— матрица-столбец
нагрузок,
6ц
631 6М ... бгп “матрица единичных
............. перемещений
’*....... {матрица податливости).
_бп1 0д2 *•• ®пл J
Индекс «7» при обозначении матрицы здесь и далее указывает опера-
цию транспонирования (замены строк столбцами и наоборот).
Понятие податливости тесно связано с понятием жесткости. Из
уравнения (1.86), опустив индексы, запишем
Г = |д = 6-1Д. (1.101)
Если 6 — перемещение от единичной силы, то обратная ему вели-
чина
г = С"1, (1.102)
как следует из (1.101), представляет собой силу, вызывающую единич-
ное перемещение. Действительно, при загружении, например, стержня
(рис. 1.76, а) осевой силой F = 1 его свободный конец сместится на
величину 6 « I! {Е Л), характеризующую податливость стержня.
Если потребовать, чтобы это перемещение было равно единице
(рис. 1.76, б), то соответствующая сила, очевидно, должна быть в 6 раз
меньше —F = 1/6, т. е. F = г = ЕАН. Эта величина характеризует
сопротивляемость стержня деформащым и называется погонной жест-
костью.
Равенству (1.102) соответствует обратное равенство
Ъ = г'\ (1.103)
Для выяснения механического смысла соотношений (1.102) и (1.103)
наложим на стержень в т. В связь
(рис. 1.76, в). При смещении этой
связи на величину 6 = 1 в ней по-
явится реакция, равная г. Поэтому
поюнную жесткость называют так-
же реакцией и, таким образом, ве-
личина, обратная реакции, являет-
ся податливостью системы с отбро-
шенной соответствующей связью.
В общем случае действия п сил,
если определитель det D Ф 0, из
выражения (1.99) получаем
F = D”1A. (1.104)
Рис. 1.76
115
Матрица D~\ обратная матрице D, называется матрицей жест-
кости, или матрицей реакций, и обозначается /?:
Г11 Г18 • •
• ?2п I
Гл1 ГЛ2 • •
(1.105)
Здесь rik — значение силы Flt вызывающей по направлению силы
Fk перемещение, равное единице, иначе—это реакция в г-й связи,
вызванная перемещением k-н связи на единицу.
Очевидно, при det/?=#=O справедливо обратное соотношение:
(1.106)
Понятие жесткости системы позволяет записать выражение потен-
циальной энергии (1.98) в другой форме. Действительно, представив
(1.104) в развернутой форме —
Ft — r 11Д1 г 12Д2 ИлДл!
^2 " 1 "Ь Д2 4" - г» Г2п^п*, __
— Гп1 Д1 4“ rп2^2 “F • • • 4- ппДл»
подставим полученные соотношения в уравнение потенциальной энер-
гии, выраженной через работу внешних сил!
Е=|(Г1Д1 + /чД,+ ... +Г„Д„) =
= 2 (Г11^1 + Г 12^1^2 + • • • + + f21^1^2 +
+ г22Д2 4- . - - 4- /*2лД2Дл 4- • • - 4- cni Д1Дл +
4-Гп2ДгДи4- ... 4-ГипДи). (1.108)
или в матричной форме
F=AT/?A. (1.109)
Анализ выражений (1.95). (1.98) и (1.108) позволяет сделать сле-
дующие ВЫВ0ДЫ1
1. Потенциальная энергия положительна» так как в выражения
(1.95) входят квадраты внутренних усилий М, /V, Q.
2. Потенциальная энергия является однородной функцией второй
степени усилий или перемещений.
3. К потенциальной энергии неприменим принцип независимости
действия сил. Иными словами — потенциальная энергия, вызванная
группой сил, не равна сумме потенциальных энергий, вызванных
каждой из сил в отдельности.
4. Значение потенциальной энергии не зависит от последователь-
ности загружения, а определяется исходным и конечным состояниями
упругой системы.
JJ6
6.4. Теоремы о взаимности
Рассмотрим два состояния упругой системы (рис. 1.74). Перемеще-
ния второго состояния являются возможными перемещениями этой
системы. Тогда на основании принципа возможных перемещений
получаем
(1.110)
Так как продольные силы в балке равны нулю, то третье слагаемое
в выражении работы внутренних сил обращается в ноль.
С другой стороны, перемещения первого состояния также могут
рассматриваться в качестве возможных перемещений для сил второго
состояния. Тогда
Правые части выражений (1.110) и (1.111) отличаются только
порядком записи сомножителей — внутренних усилий, следователь-
но, т/12 = tf21, w/I2 = if21.
В общем случае система может иметь несколько состояний, соот-
ветствующих различным загружениям. Тогда для любых двух состоя-
ний с номерами I и k справедливы соотношения
(1.112)
Эти равенства выражают теорему о взаимности работ (теорему
Бетти), которая можег быть сформулирована так: работа внешних
(внутренних) сил i-го состояния системы на перемещениях (деформа-
циях) k-го состояния равна работе внешних (внутренних) сил k-го
состояния той же системы на перемещениях (деформациях) i-го со-
стояния.
Из теоремы о взаимности работ вытекает ряд частных теорем.
Рассмотрим случай, когда упругая система загружена единичными
силами F( = 1 и Fk = 1. Применяя к этим двум состояниям системы
теорему о взаимности работ и стандартные обозначения перемещений,
получим равенств-! Fibik = FkSki, откуда
6тА=б/«. (1113)
Это уравнение выражает теорему о взаимности пере-
мещений (теорему Максвелла): перемещение точки
приложения i-й силы по ее направлению, вызванное действием k-u еди-
ничной силы, равно перемещению точки приложения k-й силы по ее на-
правлению, вызванному действием i-й единичной силы.
Рассмотрим теперь два состояния упругой системы (рис. 1.77), в
каждом из которых задано по единичному перемещению соответственно
ПТ
i-й и k-it связи. При этом в остальных связях статически неопре-
делимой системы появляются реакции, соответственно равные в fc-й
связи 1-го состояния Гм, в i-й связи Л-го состояния г«. Эти реакции
являются внешними силами и выполняют работу Wlk = rki&k, Wh —
= По направлению остальных реакций перемещения отсутст-
вуют, поэтому их работа равна нулю. На основании теоремы о взаим-
ности работ получаем или
'* = /*- (1114)
Таким образом, реакция в i-й связи, вызванная единичным переме-
щением k-u связи, равна реакции е k-й связи, вызванной единичным пере-
мещением iй связи (теорема о взаимности реакций).
Наконец, третий частный случай теоремы о взаимности работ
получаем при сравнении двух состояний системы, когда в одном из
них приложена единичная сила Ft = 1, а в другом задано единичное
смещение Л-й связи (рис. 1.78).
Так как в i-м состоянии связи остаются неподвижными, то работа
сил состояния k равна нулю; — 0. Тогда должна быть нулевой
и работа Wikt
= Fidik + гмАл = О,
откуда
= (1115)
Это равенство является выражением теоремы о взаим-
ности реакций и перемещений: перемеифние точки
116
приложения i-й силы по ее направлению, вызванное единичным сме-
щением k-й связи, равно по величине и обратно по знаку реакции
в k-й связи, вызванной i-й единичной силой.
Теоремы о взаимности находят широкое применение в расчетах
статически неопределимых систем, а также используются для построе-
ния линий влияния усилий и перемещений.
6.5. Вычисление перемещений по методу Мора
Пусть требуется определить перемещение Az некоторой точки
сооружения от действия заданной нагрузки (рис. 1.79, а). Рассмотрим
два состояния этого сооружения: первое — действительное состояние
при действии заданной нагрузки (рис. 1.79, а), второе— вспомога-
тельное, или единичное, состояние, в котором по направлению иско-
мого перемещения приложена единичная обобщенная сила (рис. 1.79,6).
Работа единичной силы на перемещениях заданного состояния
Wq=\'&i по теореме Бетти равна работе Wfl заданных сил на
перемещениях единичного состояния. Принимая во внимание, что
Wfi = — Uft, получаем на основании (1.93)
‘да+з-ад#. <«
где Л4, Q, N — усилия от заданной нагрузки; Л4/, Qt, N(—усилия
от единичной силы во вспомогательном состоянии.
Формулу (1.116) называют формулой Мора. С ее помощью можно
определить перемещение от нагрузки в плоской системе. Для этого:
1) определяют усилия М, Q, Д-7 от заданной нагрузки;
2) по направлению искомого перемещения прикладывают единич-
ную обобщенную силу;_
3) находят усилия Mt, N(, Qt от единичной силы;
4) выражения усилий подставляют в правую часть (1.116) и интег-
рированием вдоль осей всех элементов сооружения определяют иско-
мое перемещение.
В частных случаях формула Мора принимает более простой вид.
Так, при расчете ферм, в стержнях которых возникают лишь продоль-
ные усилия, первые два интеграла тождественно равны нулю. Тогда,
119
разбив оставшийся интеграл на сумму интегралов для отдельных
стержней, получаем
или, принимая во внимание постоянство усилий и жесткостей в преде*
лах каждого стержня,
4-Ё(М- <"”>
Здесь сумма распространяется на все стержни фермы, п — число
стержней.
На расчет систем с преобладающим изгибом — балок и рам — влия-
ние поперечных и продольных деформаций на перемещениях точек
сказывается незначительно. Поэтому для таких систем учитывают
лишь первый интеграл выражения (1.116), т. е.
= (1.119
Если разбить систему на участки постоянной жесткости, то
<мм>
В некоторых случаях вычисление интеграла J ММ ids можно
упростить. Например, если на участке постоянной жесткости одна из
эпюр изгибающих моментов (обычно единичная) прямолинейна
(рис. 1.80), то интеграл можно вычислить по правилу Верещагина.
Для этого продлим линейную эпюру М( до пересечения с осью
и в этой точке выберем начало координат. На расстоянии s ординаты
криволинейной и линейной эпюр соответственно равны М и у. Выра-
вим у через угол наклона а линейной эпюры; y = s*lga и подставим
в интеграл. Тогда
ds = J Ms tgads
120
или, вынеся tg а = const, получим
J MMt ds = tg а J Msds. (1.120)
Интеграл в правой части выражения (1.120) представляет собой
статический момент S2 эпюры М относительно оси z, проходящей
через начало координат. Если известна площадь эпюры М и коорди-
ната $0 ее центра тяжести, статический момент можно получить иначе:
S2 = J Msds == cos0.
Подставляя это равенство в (1.120), получим ^Mj/lids=tga-(i)so.
Но s0tga = y0f где у0— ордината линейной эпюры ~Mt под центром
тяжести эпюры М. Тогда окончательно приходим к такому равенству:
J MMtds = а>у„. (1.121)
Таким образом, интеграл §MM,ds равен произведению площади
© криволинейной эпюры на расположенную под ее центром тяжести
ординату у0 прямолинейной эпюры.
Такое вычисление интеграла называют перемножением эпюр по
правилу Верещагина. Результат перемножения положителен, если обе
перемножаемые эпюры М и Л4Г расположены с одной стороны от оси
(одного знака), и отрицателен при расположении эпюр по разные
стороны оси.
Правило Верещагина удобно применять в тех случаях, когда пло-
щадь и положение центра тяжести криволинейной эпюры находятся
достаточно просто. В общем случае более рационально воспользоваться
формулой Симпсона для численного интегрирования. В соответствии
с этой формулой определенный интеграл от функции ср ($) на отрезке
0 < $ < I можно приближенно найти следующим образом:
£ф(з)Л» + [ф(0) + 4ф(4) + ч> (Z)]. (1.122)
Зга формула основана на замене подынтегральной функции квад-
ратной параболой, поэтому в случае, если функция ср (s) действитель-
но квадратная парабола, выражение (1.122) дает точный результат.
Применяя формулу Симпсона для перемножения двух эпюр па
участке постоянной жесткости (рис. 1.81), получаем»
J MMtds = | (Mt, Mtj, + 4M,„ Mt^ + Me М^). (1.123)
Здесь индексы Ь, tn и е обозначают начало, середину и конец уча-
стка длиной I,
Как показывает анализ, формула (1.123) оказывается точной и в
случае, когда подынтегральная функция MMt— кубическая пара-
бола. Таким образом, в большинстве практически встречающихся
эпюр, когда одна из них линейна, а вторая — парабола не более
121
второй степени (при q = const), формула (1.123) дает точное значение
интеграла. В остальных случаях применение формулы Симпсона тре-
бует разбиения эпюр на участки достаточно малой длины.
6.6. Определение перемещений от температурных воздействий
Метод Мора может быть распространен на случай, когда причиной
перемещений в упругой системе является изменение температуры ее
элементов. Будем считать, что сечение элементов (рис. 1.82, а) имеет
вертикальную ось симметрии и температура по высоте сечения эле-
ментов меняется по линейному закону. В этом случае сдвиги от тем-
пературного воздействия отсутствуют. Принимая во внимание, что
представляет собой взаимный угол поворота граней бесконечно
, Nds
малого элемента стержня шр, а — изменение длины этого элемента
(eds), представим формулу (1.116) так:
+ ^Nttds. (1.124)
Пусгь изменение температуры нижнего волокна стержня составляет
tlt а верхнего — (рис. 1.82, б). Соответствующие деформации эле-
мента стержня длиной ds при условии неподвижности его левого конца
показаны на рис. 1.82, в. Изменение температуры нейтрального слоя
10 = . (1.125)
По рис. 1.82, в находим eds ~ od^ds,
= = aVi-Q ds
’ п п
(1.126)
Подставив выражение (1.126) в (1.124), получим формулу Мора для
темиералурных перемещений:
Ди = f a Mtds + J atj^ds. (1.127)
cttzds
Если систему можно разбить на участки, в пределах каждого из
которых a, h, и /в постоянны, то формула (1.127) принимает вид
Д„ = £ а J M.ds + at, J Ntds. (1.128)
Здесь интегралы представляют собой площади эпюр Mt и на
отдельных участках:
= J Mids, — J Nids. (1.129)
Теперь формула (1.128) принимает вид
А"=Ха^<йм+Еа/»<й«- <1лэо>
Для сечения с двумя осями симметрии (вертикальной и горизон-
тальной) lj/,1 = |(/2| =-£ ; = и
При выводе формулы (1.127) за tt принято изменение температуры
нижних волокон, т. е. тех волокон, которые растянуты положительным
моментом. При этом в формулах (1.130), (1.131) площади эпюр должны
быть взяты со своими знаками.
6.7. Перемещения от осадки опор
При смещениях опор (осадках) статически определимое сооружение
ванимаег новое положение (рис. 1.83) так, что его элементы не де-
формируются. Тогда перемещения точек сооружения можно определить
из геометрических соотношений — кинематическим методом. Напри-
мер, вертикальное перемещение т. К на рис. 1.83, а составляет
Д/с = £1 -Htges,
Рис, 1ЛЗ
123
или, в силу малости перемещений
А/с«^1 + ^з- (1.132)
В более сложных случаях для определения перемещений удобнее
применить статический метод, основанный на использовании прин-
ципа возможных перемещений.
Покажем применение статического метода на примере определения
вертикального перемещения т. Л (рис. 1.83, а). Для этого, как обычно,
приложим по направлению искомого перемещения единичную обоб-
щенную силу Fk (рис. 1.83, б). Появляющиеся при этом реакции
в опорных связях обозначим Ru R3.
Так как при смещениях опор элементы сооружения (рис. 1.83, а)
не испытывают деформаций, то возможная работа внутренних сил
единичного состояния (рис. 1.83, б) на этих перемещениях равна нулю:
UKc в о. Тогда на основании принципа возможных перемещений
получаем
УКс + №кс = — Rzcz — Rsca + в 0»
откуда при F/< = 1
Д« = £Лл. (1.133)
При использовании формулы (1.133) следует учитывать, что про-
изведение единичной реакции R{ на соответствующее смещение опор-
ной связи q будет положительным, если эга реакция и это смещение
имеют противоположные направления, и наоборот.
6.8. Линии влияния перемещений
В параграфе 6.2 рассматривалось определение перемещений от неподвиж-
ной нагрузки. При действии подвижной нагрузки величина перемещения зависит
от положения нагрузки на сооружении. В связи с этим при расчете сооружения на
жесткость появляется необходимость вычисления наибольших значений пере-
мещений. Решение задачи может быть получено с помощью линий влияния пере-
мещений.
Построение линий влияния перемещений покажем на примере консольной
балки (рис. 1.84, а). Пусть требуется построить линию влияния прогиба Ьц
конца этой балки. Установим нагрузку — подвижную единичную силу F в про-
извольное положение и построим эпюру Mf (рис. 1.84, б).
Затем построим эпюру изгибающих моментов Mi во вспомогательном состоянии
(рис. 1.84, в). Перемножая эпюры Mf и М„ находим
А 1 *4. 2 \ Jt2 (/ — х/3)
2 V~* + 3 х)- 2Е/
График этой зависимости показан на рис. 1.84, а, и представляет собой
искомую линию влияния 6^.
Эту же линию влияния можно построить иначе: как эпюру перемещений
балки под действием силы Ft» I, приложенной по направлению искомого пере-
мещения (рис. 1.84, д). Действительно, на основании теоремы о взаимности пере-
мещений bif » 6^. Этот способ особенно удобен для построения моделей линий
влияния перемещений. Например, для построения линии влияния взаимного
124
угла поворота сечений у шарнира С двухпро-
летной балки (рис. 1.85, а) прикладываем в на-
правлении искомого перемещения единичную
обобщен иную силу—два момента (рис. 1.85, б).
Эпюра перемещений от этой нагрузки дает
искомую линию влияния 6С/ (рис. 1.85, в).
Загружение линий влияния перемещений
неподвижной и подвижной нагрузками выпол-
няется по тем же правилам, что и загруже-
ние линий влияния усилий. При этом следует учесть, что линии влияния пе-
ремещений являются, как правило, криволинейными.
6.9. Определение перемещений с помощью упругих грузов
Пусть в некоторой упругой системе (рис. 1.86, о) в ряде точек определены
перемещения ус, ylf ... Откладывая эти величины от оси, перпендикулярной на-
правлению перемещений, соединим полученные точки отрезками прямых
(рис. 1.86, б). Чем больше число точек, в которых определены перемещения,
тем ближе будет построенная ломаная (в пределе — кривая) к эпюре перемеще-
ний заданной системы. По своему виду эта эпюра (рис. 1.86, б) напоминает
эпюру изгибающих моментов от сосредоточенных сил в некоторой балке
(рис. 1.86, о). На этом сходстве основан способ упругих грузов для определения
перемещений. Как правило, его применяют в тех случаях, когда требуется опре-
делить перемещение не одной, а ряда точек, т. е. по сути для построения эпюры
перемещений.
Рассмотрим упругую систему, например, балку (рис. 1.87, о). Разобьем
балку на участки и расставим всю нагрузку в точки на границах участков—
узлы. Ординаты, заключенные между начальным (незагруженным) и деформи-
рованным положениями оси балки, являются ординатами эпюры прогибов балки
Оц. Будем считать, что балка в пределах каждого участка не деформируется
(является жесткой), а все деформации сосредотачиваются в узлах (рис. 1.87, б).
Изменение угла между смежными участками балки обозначим в соответствии
с номерами узлов — ...» wt. Тогда, принимая во внимание малость уг-
лов , перемещение балки в узле I можно получить геометрически:
/—/
6, . « «Мо + + • • • = £ Wfr (1.134)
/=°
Выражение (1.134) по своей структуре соответствует изгибающему моменту
в некоторой фиктивной балке (рис. 1.87, в) при эагружении ее условными узловыми
125
силами, равными по величине углам поворота 1FO, 1Г2, ... Эти силы назы-
вают упругими грузами.
Для определения взаимного угла поворота участков в точке i воспользуемся
методом Мора. Единичная обобщенная сила в этом случае представляет собой
две пары сил с единичными моментами. Силы, составляющие одну из этих пар,
приложены к концам i-ro участка; силы другой пары — к концам (I + 1)-п>
участка (рис. 1 .87, д). Эта нагрузка является самоуравновешенной и вызывает
местные изгибающие моменты И. Перемножая эпюру М с эпюрой изгибающих
моментов Mf от заданной нагрузки (рис. 1.87, г) получаем
2МД_2И._1 di Mi(dt <4-1 \ . Л*/+, <4-1
+ Л ~ "ё1 з U'/+ £/* +1/+ "6“ ‘ £Л-ц
(1.135)
При равных дчинах участков и постоянной жесткости это выражение удобно
представить в таком виде;
=<(ч_
+ 2М< + Л1/ + 1
(1.136)
jS- 0
а
л-------ъ —=—f
Рис. 1.88
Таким образом, при загружении фиктивной балки (рис. 1.87, в) упругими
грузами (1.135) или (1.136) эпюра изгибающих моментов представляет собой
эпюру прогибов заданной балки.
При выборе фиктивной балки сле-
дует руководствоваться тем, что переме-
щения (углы поворота) заданного соору-
жения должны соответствовать изгиба-
ющим моментам (поперечным силам) фик-
тивной балки. Например, на рис. 1.88,6
показаны фиктивные балки для двух ба-
лок, приведенных здесь же (рис. 1.88,а).
126
Применение упругих грузов для построения эпюр прогибов криволинейного
стержня показано на рис. 1.89. Следует отметить, что применение формул (1.135)
или (1.136) ограничивается теми случаями, когда при вычислении перемещенвн
можно пренебречь продольными и поперечными деформациями. Для учета этих
деформаций при вычислении упругих грузов необходимо учесть в формуле Мора
все слагаемые:
127
Здесь /vin Qp Nt~ усилия от единичной системы сил, приложенной в <*м узле
(рис. 1.87, д), а /И, Q, N — усилия от заданной нагрузки.
В фермах узлы являются действительными точками переломов эпюры пере*
мещений. На рис. 1.90, а показано построение эпюры прогибов нижнего пояса
фермы. Вычисление упругих грузов выполняется по формуле Мора
п
где л — число стержней фермы; — усилия в стержнях от единичной системы,
расположенной в панелях, смежных с узлами i (рис. 1.90, 6).
При построении эпюры прогибов верхнего пояса следует учесть, что пере*
мещения надопорных узлов уже не будут равны нулю. В связи с этим в соответ-
ствующих сечениях фиктивной балки должны действовать изгибающие моменты,
равные по величине и обратные по знаку деформациям опорных стоек
(рис. 1.90, в). Единичные системы для вычисления упругих грузов должны при-
кладываться к верхнему поясу.
6.10. Матричная форма определения перемещений
Рассмотрим сначала определение перемещений в фермах. Пэ
формуле Л1ора
где
Это выражение легко может быть записано в матричной форме;
& — NTLN, (1.139)
N.
— матрица-столбец единичных усилий, содержащая
усилия в стержнях фермы от единичном силы, дей-
ствующей по направлению искомого перемещения;
N,
— матрица-столбец грузовых усилий, содержащая уси-
лия в стержнях фермы от заданной нагрузки;
EAi
0
0 ... 0
ЕАг '*
0 ••• ЁА,
— диагональная матрица, элементы ко-
торой представляют собой подат-
ливости стержней — их удлинения от
единичной силы. Эта матрица называется матрицей податливости.
Верхний индекс Т при обозначении матрицы указывает на операцию
транспонирования. _
В результате перемножения матриц /Vr, L и N получается мат-
рица-скаляр, содержащая один элемент — искомое перемещение.
N =
N =
’^Г
. 0
0
123
Формула (1.139) пригодна также для определения любого количе-
ства перемещений от различных нагрузок. В этом случае матрица
будет иметь столько столбцов, сколько определяется перемещений.
Каждый ее столбец будет содержать усилия от соответствующей еди-
ничной силы. Аналогично в матрице N число столбцов будет равно
числу различных загружепий и каждый столбец будет содержать
усилия от соответствующей нагрузки. Тогда в матрице
[Ан Д12 • • •
&21 А22 • • •
элемент А/* представляет собой /-е перемещение от k- го за гружения.
Рассмотрим теперь определение перемещений в изгибаемых систе-
мах.
Для t-ro участка такой системы, имеющего постоянную жесткость,
интеграл Мора определяется по формуле Симпсона
J = <Mi bMi. ь + 4Mf т + eMi eY
Матричная форма записи этого выражения аналогична (1.139):
Здесь
(1.140)
[Mt,b~
M[tfn —матрица-столбец (вектор) единичных моментов, со-
е J держащая значения изгибающих моментов от еди-
ничной силы, приложенной по направлению искомого перемещения,
в начале, середине и конце t-ro участка;
[м<,ь-
Mi, т — матрица-столбец (вектор) грузовых усилий, содер-
жащая значения изгибающих моментов в начале,
середине и конце t-ro участка от заданной нагрузки;
SEli 0 0 1
L< = 0 0 ill ЬЕЦ 0 0 (j GEfi_ 0 _0
жителей величину —взаимный поворот
действии единичных моментов на его концах,
называют матрицей податливости участка.
О О’
4 0 —диагональная матрица,
О 1 элементы которой со-
держат в качестве мно-
концов стержня при
Эту матрицу поэтому
129
Чтобы просуммировать интегралы для всех участков, составляют
блочные
м =
матрицы:
"М/
м.
— матрица-столбец единичных моментов, содержащая
векторы единичных моментов на всех участках
системы;
ти2
м9
м =
О
О
L =
— матрица-столбец грузовых моментов, содержащая
векторы грузовых моментов на всех участках си-
стемы;
О
О
О
О
— диагональная матрица податливости
системы, содержащая матрицы подат-
ливости всех участков системы.
Теперь формула для перемещений принимает следующий вид:
(1-141)
Д = М TLM.
Как и для ферм, формула (1.141)* пригодна для вычисления любого
числа перемещений от различных загружений при дополнении матриц
М и М соответствующими столбцами.
В заключение отметим, что в частных случаях линейных эпюр
Mt и Mt на_отдельных участках размерности соответствующих век-
торов Mit и матрицы Lt могут быть сокращены. Однако это
влечет за собой нарушение однообразия в заполнении матриц Jf, М
и L. Кроме этого, матрица L перестает быть диагональной. В связи
с этим предпочтительнее пользоваться приведенными выше полными
векторами M(t и матрицей Lt.
Вопросы для самоконтроля
1. Для каких целей необходимо вычислять перемещения?
2. Как формулируется принцип возможных перемещений для упругая
систем?
3. Что такое возможное перемещение?
4. Что такое обобщенная сила?
5. Что такое обобщенное перемещение?
6. Как зависят перемещения от нагрузки в линейно деформируемых си-
стемах?
7. Что понимается под статическим приложением нагрузки?
8. Как определяется действительная работа внешних сил?
9. В чем различие между действительной и возможной работой?
10. Как определяется возможная работа внутренних сил?
11. Чем объясняется наличие знака «минус» в выражении возможной ра-
боты внутренних сил?
12. Как получить действительную работу внутренних сил?
13. Как определяется потенциальная энергия деформации системы?
14. Как зависит потенциальная энергия от нагрузки? От перемещений?
130
15. Что такое матрица податливости системы?
16. Что такое матрица жесткости системы?
17. Как связаны между собой матрицы податливости и жесткости?
18. Каковы свойства потенциальной энергии?
19. Как формулируется и доказывается теорема Бетти о взаимности ра-
бот?
20. Сформулируйте и докажите теорему Максвелла о взаимности переме-
щений; теорему о взаимности реакций; теорему о взаимности перемещений и
реакций.
21. Как записывается формула Мора?
22. Какие два состояния системы необходимо рассматривать при опреде-
лении перемещений по формуле Мора?
23. Какой вид принимает формула Мора для ферм и для систем с преобла-
дающим изгибом?
24. Какие приемы применяются для вычисления интегралов Мора?
25. Когда можно применять правило Верещагина? Формулу Симпсона?
26. Как определяются перемещения от температурных воздействий?
27. Как устанавливаются знаки при вычислении температурных перемеще-
ний?
28. Появляются ли внутренние усилия в статически определимой системе
при осадке опор? При температурном воздействии?
29. Как определяются перемещения от осадки опор?
30. Как устанавливаются знаки при вычислении перемещений от осадки
опор?
31. Как построить линию влияния перемещения статическим методом?
32. Какая теорема используется при построении модели (вида) линии в о ня-
ня я перемещения?
33. В каком случае для определения перемещения удобно использовать
упругие грузы?
34. Какие упрощения вводятся при построении эпюры прогибов с помощью
упругих грузов?
35. Что представляет собой упругий груз?
36. Как определяются упругие грузы для изгибаемых систем?
37. Какая связь между заданной системой и фиктивной балкой?
38. Как определяются упругие грузы для ферм?
39. Какова особенность построения эпюр прогибов для ферм?
40. Какие матрицы используются при определении перемещений в фермах
в матричной форме?
41. Как изменяются исходные матрицы при определении нескольких пере-
мещений от различных нагрузок?
42. Какая формула используется для матричной записи перемещении
в изгибаемых системах?
43. Как составляются исходные матрицы при определении перемещений
в нагибаемых системах в матричной форме?
44. Когда удобно пользоваться матричной формой определения переме-
щений?
Раздел 2
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СТЕРЖНЕВЫЕ
СИСТЕМЫ
Статически неопределимыми называют такие системы, усилия
в которых невозможно определить е помощью одних лишь уравнений
равновесия.
Эю объясняется наличием в статически неопределимой системе
лишних связей, т. е. связей сверх минимального их числа, необхо-
димого для геометрической неизменяемости системы. Так, в раме,
приведенной на рис. 2.1, о, для обеспечения геометрической неизме-
няемости достаточно иметь три опорные связи, например, заделку в
т. Л, значит, две остальные опорные связи в т. В лишние.
Для обеспечения геометрической неизменяемости можно использо-
вать и другие опорные связи, например шарнирно-неподвижную опору
ft. В и одну из связей в т.Д. Тогда лишними будут две другие опор-
ные связи в т.Д. Следует отметить, что понятие лишние связи нельзя
понимать в буквальном смысле. Наличие этих связей делает систему
более жесткой и во многих случаях позволяет добиться более рацио-
нального распределения усилий.
Число лишних связей л, определяющих степень статической
неопределимости системы, можно выразить через число степеней сво-
боды системы?
п = -Г (2.1)
Так, для рамы, показанной на рис. 2.1, а, по формуле Чебышева
№ = 3D — 27 — Со = 3 • 1 —- 2 • 0 — 5 = —2, или п =»2.
Для рассматриваемой рамы характерным является то, что после
определения опорных реакций все внутренние усилия могут быть
Рис. 2.1
132
найдены из уравнений статики. Такую систему называют внешне
статически неопределимой. В отличие от нее в раме на рис. 2.1, б три
опорные реакции можно определить из условий равновесия. Однако
при определении усилий, например в сечении /—/, приходится раз-
резать замкнутый контур еще в одном месте (рис. 2.1, в). Получаем
статически неопределимую задачу, так как шесть усилий (рис. 2.1, в}
не могут быть найдены из трех условий равновесия. Такая система
называется внутренне статически неопределимой.
В большинстве случаев статически неопределимые системы содер-
жат как внешние, так и внутренние лишние связи.
Как видно из рассмотренного выше примера (рис. 2.1, б), замкну-
тый кошур без шарниров содержит три лишние связи (по числу недо-
стающих условий равновесия). Формула Чебышева не позволяет обна-
ружить такие лишние связи рам, поэтому для определения степени
статической неопределимоеги рам обычно применяют формулу
п = ЗК — Т + Со — 3, (2.2);
где Т и Со обозначают, как и в формуле Чебышева, соответственно
число простых шарниров и число опорных связей, а К — число
замкнутых контуров, образуемых стержнями рамы.
Для ферм, ввиду отсутствия жестких соединений стержней, соот-
ношение (2.1) всегда справедливо, поэтому, учитывая выражение (2),
получаем следующую формулу:
п = С-|-С0 —2Г. (2 3)
Как указывалось выше, для определения усилий в статически не-
определимой системе одних уравнений статики недостаточно. Допол-
нительные уравнения составляются на основе исследования переме-
щений сечений системы.
Таким образом, совокупность уравнений для расчета статически
неопределимой системы содержит ряд неизвестных усилий и переме-
щений. В линейно деформируемых системах между усилиями и переме-
щениями существует однозначное соответствие (гл. 6), поэтому все
силы легко выразить через перемещения и наоборот. В зависимости
оттого, какие величины (силы, перемещения или часть сил и часть пере-
мещений) принимаются за основные неизвестные, в строительной ме-
ханике выделяют три основных метода расчета статически неопредели-
мых систем; метод сил, метод перемещений и смешанный метод.
Глава 7
МЕТОД СИЛ
7.1* Расчет статически неопределимых рам методом сил
Метод сил является универсальным методом расчета статически
неопределимых систем. Его сущность и основные этапы расчета пока-
жем на примере рамы, приведенной на рис. 2.1, а.
133
Расчет начинается с установления степени статической неопреде-
лимости.
Замкнутые контуры и шарниры в рассматриваемой раме отсутству-
ют, поэтому по формуле (2.2)
п = 3» 0—0 4-5 — 3 = 2.
Следует отметить, что система заранее предполагается геометри-
чески неизменяемой, иначе необходимо дополнительно выполнить
геометрический анализ системы.
Итак, рассматриваемая рама дважды статически неопределима,
т. е. имеет две лишние связи, для определения усилий в которых необ-
ходимо составить дополнительные уравнения, — уравнения совмест-
ности деформаций. Эти уравнения получаюг из рассмотрения основной
системы.
Основной системой метода сил называют такую геомет-
рически неизменяемую и статически определимую систему, которая
получается из заданной ста гически неопределимой системы устране-
нием липших связей и заменой их усилиями. Эти усилия в «ришних
связях называют лишними неизвестными, или неизвестными метода
сил и обозначают X,, Х2.....Хп.
Как уже отмечалось, лишними могут считаться различные связи,
поэтому выбор основной системы нельзя сделать однозначно. Например,
для рассматриваемой рамы на рис. 2.2, а, б, в приведены различные
варианты основной системы, полученные отбрасыванием опорных
связей. Ниже будут рассмотрены и другие варианты основной систе-
мы, получаемые устранением внутренних связей.
Из всех возможных вариантов необходимо выбрать одну основную
систему. При этом рационально выбрать такую, в которой усилия
определяются возможно проще. С этой точки зрения выберем для рас-
чета основную систему, показанную на рис. 2.2, а.
В дальнейшем расчет заданной системы заменяется расчетом ос-
новной системы. Для того, чтобы такая замена была эквивалентной,
необходимо и достаточно, чтобы в основной системе перемещения
по направлению отброшенных связей (иначе, по направлению лишних
неизвестных) отсутствовали.
Для определения этих перемещений разложим всю нагрузку в ос-
новной системе на отдельно действующие лишние неизвестные и задан-
ную Нагрузку (рис. 2.2, а, д, е). Тогда перемещение в направлении
лишнего неизвестного Хг будет равно сумме перемещений! Ап — от
силы Xj (рис. 2.2, а), А12 — от силы Х2 (рис. 2.2, д), Ац — от задан-
ной нагрузки (рис. 2.2, е). По условию эквивалентности основной
и заданной систем это перемещение должно быть нулевым!
Au + AX2 + AiZ = 0. (2.4)
Аналогично для перемещения в направлении Ха запишем такое
уравнение:
А21 + Ди+Д2' = 0. (2.4а)
134
Рис. 2J2
Для того, чтобы выразить уравнения (2.4) и (2.4а) в явном виде
через лишние неизвестные, представим каждое из перемещений Д/д
от лишних неизвестных как произведение единичного перемещения
на величину соответствующего неизвестного Хм
Ап e А1я = б12Ха,
Д21 = Дг]Х1» Д22 = б22Х2.
Теперь уравнения (2.4), (2.4а) приобретают такой вид!
+ ^i2Xa + Дц =0; -
б21Х1-М22х2 + д2/ = о. * }
Эти уравнения выражают условия совместности деформаций и
навиваются каноническими уравнениями метода сил.
Таким образом, для определения двух неизвестных сил Х| и Ха
мы получили два уравнения (2.5).
Единичные (бп, 61а, 621, 622) и грузовые (Дц, Д2/) перемещения
можно найти с помощью формулы Мора. Так как рама является си-
стемой g преобладающим изгиб ом, то в формуле Мора достаточно учесть
только изгибающие моменты. Поэтому построим предварительно в
основной системе эпюры изгибающих моментов от каждого единич-
ного неизвестного и от заданной нагрузки (рис. 2.2, ж), т. е. от чех
воздействий, от которых необходимо найти перемещения.
Применяя правило Верещагина и формулу Симпсона, вычисляем!
= ETtl2 з 1 + ЁГ21М = ЗЁГ^ ЁГ^
= £А УЛ11
*“ = S J? J “ и;А 4 f fi=зет, 1
S,
Заметим, что перемещение б21 не вычислялось, так как на основа-
нии теоремы о взаимности перемещений =* б1а.
Подставив перемещения в канонические уравнения, получаем
такую систему!
I Р I М_\ у ±W v 5FP FPh п,
\3E7j + E/J 1 + 2EJi Ла 48£/i — 2£/^ — U,
ЬЧ У А’ v F,h* п
2£7г Л1 + ЗЕц Л2 4£/а — U.
Преобразуем систему, домножив каждое уравнение на Е/р
д_ Ph EI'\ X _1_ Л2/ £/1 У 5fP Fl*h Е11 П.
^ + P/!E/JXi+t ЁГ,х*~48---------Г ЁГ.с0}
ЛЧ E/t у Ла Elt v F№ EIt „
Т £7,Л1+ 3 ЁГХ*-----Г ЁТа = °-
И6
Как видим, в уравнениях вместо абсолютных значений жесткостей
участвуют лишь их отношения. Отсюда следует, что усилия в стати-
чески неопределимой системе не зависят от абсолютных значений
жесткостей элементов, а зависят только от отношений этих жестко-
стей.
Пусть в рассматриваемом примере £/1/(F/2) = 1 и h = I. После
подстановки этих соотношений и несложных преобразований при-
ходим к следующей системе уравнений!
ly f _L V _________ Л
|х1 + |х2-4 = о.
Решая эту систему любым известным способом, находим значения
11 9
лишних неизвестных Х1 = F; Х2 ~ gg F.
Переходя к определению окончательных усилий в заданной раме,
отметим, что поскольку при полученных усилиях Xt и Х2 канониче-
ские уравнения удовлетворяются, основная система действительно
эквивалентна заданной. Рассматривая основную систему (рис. 2.2,а|
при известных значениях сил Xt и Х2, легко определить внутренние
усилия и построить эпюры М, Q и N (рис. 2.2, з).
На основании рассмотренного примера можно наметить следующую
последовательность расчета статически неопределимых систем методом
СИЛ1
1. Определить степень статической неопределимости.
2. Выбрать основную систему.
- 3. Записать канонические уравнения.
4. Определить единичные и грузовые усилия в основной системе.
5. Определить коэффициенты и свободные члены канонических
уравнений.
6. Решить систему уравнений и определить лишние неизвестные.
7. Определить окончательные усилия в заданной системе.
Остановимся подробнее на отдельных этапах расчета статически
неопределимой системы методом сил.
Выбор основной системы. Как отмечалось выше; основная система
выбирается путем отбрасывания лишних связей. В начале раздела
было показано, что лишними могут быть как внешние, так и внутрен-
ние связи системы. Поэтому рассмотрим возможные способы устра-
нения связей,
1. Отбрасывание опорных связей осуществляется полным удале-
нием некоторых опор или заменой их опорами с меньшим числом свя-
зей. Реакции, действующие в направлении отброшенных связей, яв-
ляются лишними неизвестными. Отбрасывая по-разному опорные свя-
ви в раме (рис. 2.1, а), мы получали различные варианты ее основной
системы (рис. 2.2, а, б, в).
2. Постановка шарниров в промежуточных сечениях стержней
позволяет в каждом таком сечении устранить связь, соответствующую
137
изгибающему моменту. Эли моменты и являются лишними неизвест-
ными. Для рамы, приведенной на рис. 2.3, л, при выборе основной
системы необходимо поставить три шарнира (степень ее статической
неопределимости п — 3). Положение этих шарниров может быть
произвольным, удовлетворяющим требованию геометрической неизме-
няемости основной системы (рис. 2.3, б).
3. Рассечение стержня устраняет три связи, соответствующие
внутренним усилиям Л4, Q и N. Пример такого рассечения для рамы
(рис. 2.3, о) показан на рис. 2.3, в. В частных случаях рассечение
стержня по шарниру освобождает две связи (рис. 2.3, г), а рассече-
ние прямолинейного стержня с шарнирами по концам — одну связь
(рис. 2.3, д, е)
Среди связей статически неопределимой системы различают абсо-
лютно необходимые и условно необходимые связи. К абсолютно необхо-
димым относят связи, при удалении которых система становится гео-
метрически изменяемой. Примером такой связи может служить верти-
кальный опорный стержень в раме, приведенной на рис. 2.4, а. Дейст-
вительно, удалив е^о, получаем мгновенно изменяемую систему
(рис. 2.4, б). Для абсолютно необходимых связей характерна статиче-
ская определимость усилий в них. Так, в приведенном примере
(рис. 2.4, а) реакция Ув в вертикальном опорном стержне может быть
найдена из условия равновесия ЪМА — 0.
Исходя из изложенного, при выборе основной системы абсолютно
необходимые связи отбрасывать нельзя.
138
Рис. 2.4
Связи, при удалении которых система продолжает оставаться гео-
метрически неизменяемой, называют условно необходимыми. 0 рас-
сматриваемом примере такой связью является один из горизонтальных
опорных стержней. Система с отброшенным горизонтальным опорным
стержнем может являться основной системой метода сил (рис. 2.4, в).
Как следует из рассмотренных примеров, количество вариантов
основной системы может быть бесконечно большим. Для расчета выби-
рается один из них, обычно наиболее простой с точки зрения опреде-
ления усилий.
Канонические уравнения. Число канонических уравнений всегда
соответствует числу неизвестных. Эти уравнения записываются по
простым правилам: первые индексы перемещений соответствуют по-
рядковому номеру уравнения, а вторые — номеру неизвестного, при
котором данное перемещение является коэффициентом. Для п раз ста-
тически неопределимой системы канонические уравнения запишутся
так*
бпХ1 + 612Х2 4- ... 4- биХл 4* ••• + 8|ЛХЛ + Дц = 0;
821X1 + 82гХ2 + • • • + 8глХ* $2ПХп + Дг/ =
8/1X1 4- 8^Х2 4- .•. 4- 6/*Х* 4- • • • + 8/лХл + Д/f = 0; (2.6)
8«iXi + 8п2Х2 4- ... 4- bnkXk 4" • • • + 6ЛЛХЛ 4- Дл/ = 0.
Напомним, что канонические уравнения по физическому смыслу
являются условиями совместности деформаций. Левая часть х-го
уравнения представляет собой перемещение в основной системе по
направлению неизвестного Xt.
Определение коэффициентов и свободных членов канонических
уравнений. Коэффициенты канонических уравнений являются переме-
щениями по направлению лишних неизвестных от действия единичных
неизвестных.
Эти единичные перемещения можно определить по формуле Мора
где Mlt Nlt Qi и Mkt Nk> Qk — усилия в основной системе соответ-
ственно от лишних неизвестных Xt = 1 и Xft = 1.
139
В частности, как обычно, для систем с преобладающим изгибом
(балки, рамы) сохраняем в формуле (2.7) только первое слагаемое:
6л=у;у«,
или
(2.7а)
где /И£ и Мк—изгибающие моменты в основной системе соответст-
венно от лишних неизвестных Х£= 1 и Xfe=l.
Единичные перемещения, расположенные на главной диагонали
матрицы D коэффициентов канонических уравнений, называют глав-
ными перемещениями, остальные — побочными. Как следует из
(2.7а), главные перемещения всегда положительны. Действительно,
при А = /
6" = S?7j^ds>0-
Все побочные перемещения удовлетворяют условию взаимности
поэтому матрица D всегда симметрична.
Аналогично находят и свободные члены канонических уравне-
ний — грузовые перемещения По формуле Мора для систем с преобла-
дающим изгибом
<2-8>
где Mf — изгибающие моменты в основной системе от действия задан-
ной нагрузки.
Как обычно при вычислении перемещений по формулам (2.7а) и
(2.8) можно пользоваться правилом Верещагина и формулой Симп-
сона.
Построение эпюр внутренних усилий. Так как при найденных вна-
чениях лишних неизвестных условия совместности деформаций вы-
полняются, то теперь из расчета основной системы могут быть получе-
ны все искомые усилия заданной системы. Для этого удобно восполь-
воваться принципом независимости действия сил. Тогда для изги-
бающих моментов получаем
М = /И1 + М24- ... +Мп + Мь
или, принимая во внимание, что Xlt М2 = ТЙ2Ха, ..., Мп ==
= МпХп, приходим к следующему выражению:
М = ЯЛ'1 + М2Х2+ ... +«Л 4- Mf = S M,Xt + Mf (2.9)
/—1
140
Аналогично можно определить поперечные и продольные силы!
Q = СЛ + QtXt + ... + Q„Xn + Qi = S QiX, + <?/;
_ _ _ n _ (2 |0)
N = NlXi + N2X2 + ... +N„X„ + Nl~'£NlXl + Nf.
Обычно при построении эпюр Л4, Q, N r рамах поступают следу-
ющим образом. Сначала строят эпюры изгибающих моментов MtX[t
а затем суммированием по формуле (2.9) находят окончательную эпю-
ру М. Далее, используя формулы (1.2), определяют поперечные силы
и’етрояг эпюру Q. И, наконец, для определения продольных сил рас-
сматривают равновесие узлов рамы под действием заданных узловых
нагрузок, а также поперечных и продольных сил.
7.2. Проверка правильности вычислений
Сущность проверок покажем на примере изгибаемых систем. Для
этого построим суммарную единичную эпюру изгибающих моментов!
Ms = Mt + M2+ ... +7йл=ЕЯ-
Проверка единичных перемещений. Перемножим суммарную еди-
ничную эпюру в эпюрой Mfi
J^ds= JXM,(Ai> + 4+ ••• + M.)<fc=
=... +j‘±M/Mrtds=
= 6/1 4- 6(2 + • • . + 6fn.
Таким образом, результат перемножения суммарной и i-й единичных
эпюр дает перемещение по направлению i-й связи от совместного дей-
ствия единичных лишних неизвестных. Это перемещение равно сумме
коэффициентов i-го канонического уравнения»
= (2.11)
£=4
Эта проверка называется построчной. Она должна быть выполнена
для каждого канонического уравнения.
Взамен п построчных проверок может быть выполнена одна —
универсальная проверка, заключающаяся в перемножении суммарной
единичной эпюры самой на себя и проверке условия
6»=f¥’ds=SSe«- (212)
£—1 £—1
141
При проверке единичных перемещений рационально поступать
следующим образом. В первую очередь выполнить универсальную
проверку. Если она выполняется» перемещения найдены правильно.
Если нет — необходимо выполнить построчные проверки, дающие
возможность уточнить, в каком перемещении допущена ошибка.
Проверка грузовых перемещений выполняется перемножением
суммарной единичной и грузовой эпюр изгибающих моментов:
= + ... +MJds =
... +;%4л-а„+а,+ ... +а.„
Таким образом,
Д*=^^Л=ЕД^ (2ЛЗ)
,=1
Проверка окончательной эпюры изгибающих моментов выполня-
ется в двух вариантах: статическая и кинематическая. При статиче-
ской проверке вырезают узлы и записывают условия их равновесия
под действием узловых сосредоточенных моментов и изгибающих
моментов на концах стержней. Эта проверка является вспомогатель-
ной и выполняется автоматически при правильных эпюрах изгиба-
ющих моментов в основной системе и при выполнении кинематической
проверки.
Основной проверкой в методе сил является кинематическая про-
верка. Она может быть построчной или универсальной.
При построчной проверке каждая единичная эпюра моментов пере-
множается с окончательной эпюрой Л!. Тогда, например, для i-ro
перемножения получаем
J^ds = + Л?Л+ ... +AUG, + Mj)ds =
“J^T>A'>ds + ••• +J^X„ds + j'^-fds =
— + 6/2^2 +-+ ^in^n + Д/f = 0.
Таким образом, в результате перемножения каждой единичной эпюры
с окончательной эпюрой изгибающих моментов получается ноль:
A, = J^ds = °, t=l, 2, .... п. (2.14)
Суммируя соответствующие части уравнений (2.14), получаем
выражение, служащее для универсальной кинематической проверки
эпюры Mi
bt=^^ds = Q. (2.15)
i«e
7.3. Определение перемещений
в статически неопределимых системах
Для определения перемещения в статически неопределимой системе'
можно воспользоваться эквивалентностью заданной и основной си-
стем. Действительно, если условия совместности деформаций (канони-
ческие уравнения) выполняются, то перемещения в основной системе
соответствуют перемещениям заданной системы. Тогда, построив
в основной системе эпюру изгибающих моментов М от единичной силы,
приложенной в направлении искомого перемещения, находим по фор-
муле Мора
Л /Л lev
д = }~ETds< (2 >6)
где М — изгибающие моменты от заданной нагрузки, определяг'мь*
в статически неопределимой системе.
Интересно отметить, что при вычислении перемещения можно по-
ступить наоборот? единичные моменты М взять в статически неопре-
делимой заданной системе, а грузовые моменты М — в основной си-
стеме.
7.4. Особенности расчета симметричных систем
Статически неопределимая система является симметричной, если
выполняется симметрия не только ее осей и опорных закреплений, по
и симметрия жесткостей. Расчет таких систем существенно упрощается
прежде всего за счет обращения в нуль всех или некоторых побочных
единичных перемещений. Для реализации этих упрощений применяют
ряд приемов, простейшим из которых является выбор симмет-
ричной основной системы.
Рассмотрим раму, показанную на рис. 2.5, а. Рама имеет вертикаль-
ную ось симмегрии и загружена произвольной нагрузкой. Степень ее
статической неопределимости п — 3. Выберем основную систему, раз-
резав по оси симметрии ригель (рис. 2.5, б), и запишем канонические
уравнения?
+ 612-^2 4" «13^3 4" =
621X1 4" 622X2 4~ 623X3 Аз/ = 0; (2.17)
631X1 4- 632X2 4" 633X3 4- Аз/ = 0.
Построив в основной системе единичные эпюры Ми М2. М3
(рив. 2.5, в), обращаем внимание на то, что часть эпюр — М2, М3
и соответствующих неизвестных Х2 и Хэ симметричны («с»), а другая
часть — Му и соответственно X! — кососимметричны («кс»).
Как уже отмечалось, главные перемещения 6П, 6г2, 633 всегда по-
ложительны. При вычислении побочных перемещений нетрудно убе-
диться в том, что в результате перемножения симметричной и кососим-
метричной эпюр получается ноль. Тогда 612 = 61Э = 621 = 6ад = 0
и система (2.17) распадается на две части, одна из которых содержиг
143
Рис. 2Л
только симметричные, а другая — только кососимметричные неиз-
вестные:
4- ~ 0;
^22-^2 4" 623X3 4” ^2/ = 0» (2.17а)
632X3 ~Ь 633X3 4- Аз/ = 0» (2.176)
Это обстоятельство существенно облегчает расчет.
При частных видах нагрузок может быть получено дальнейшее
упрощение. Например, при симметричной нагрузке эпюра Л1/ сим-
метрична и результат ее перемножения с кососимметричной эпюрой
всегда равен нулю (Л]/ = 0). Тогда из первого канонического уравне-
ния следует, что при симметричной нагрузке кососимметричное не-
известное (в нашем случае XJ обращается в ноль.
При кососимметричной нагрузке из тех же соображений получаем
А2/ — Аз/ =• 0. Следовательно, при кососимметричной нагрузке
симметричные неизвестные (в рассматриваемой раме — Х2 и Ха) обра-
щаются в ноль.
Последние свойства статически неопределимых рам можно исполь-
вовать и при произвольной нагрузке. Для этого применяют разложение
нагрузки на симметричную и кососимметричную составляющие. Сущ-
ность этого приема поясняется схемой, приведенной на рис. 2.6.
При расчете рамы (рис. 2.5, о) с использованием симметричной ос-
новной системы (рис. 2.5, б) все побочные перемещения, кроме 62а,
равны нулю. Для обращения в ноль и этого побочного перемещения
применяют способ упругого центра. При выборе ос-
144
Рис. 2.6
новной системы для рамы (рис. 2.5, а), разрезав ригель по оси сим-
метрии, перенесем лишние неизвестные с помощью жестких консолей
в некоторую т.С (рис. 2.7, а). Так как консоли жесткие, условия
отсутствия взаимного перемещения их концов эквивалентны условиям
отсутствия взаимных смещений концов разрезанного стержня и имеют
вид (2.17).
Построив единичные эпюры изгибающих моментов (рис. 2.7, б),
отмечаем, что эпюра Мг по-прежнему кососимметрична, а М2 и М3
симметричны. Поэтому 612 = 621 = б13 — б31 = 0.
Найдем перемещение б2э:
^ = -£7,°'' 1 “£Т2 —-(2~а)/г • 1 • 2
и потребуем, чтобы оно обратилось в ноль; 623 = 0. Из этого условия
найдем длину консолей о:
_ А*/(Е/а)
С~//(£/1)4-2Л/(£/2)-
При нахождении т.С можно воспользоваться ее упругой интерпре-
тацией. Рассмотрим условное тонкостенное сечение, оси элементов
которого совпадают с осями заданной системы, а толщины элементов
равны величинам, обратным жесткостям (рис. 2.7, в).
Найдем для этого сечения положение центра тяжести yoi
„ 2Л/(£/2).Л/2 Л2/(Е/2)
*• А ~ 1/(Е1Д + 2hHEQ-ll{EI^ + 2h/(Eli)-
145
Рис. Z8
Таким образом, а ~ t/0 = SJA. Величина </0 совпадает с длиной кон-
солей а, поэтому т.С (рис. 2.7, о) называют упругим центром, а описан-
ный способ — способом упругого центра.
Этот способ применяют в основном для расчета симметричных си-
стем, представляющих собой один контур, не имеющий шарниров.
В тех случаях, когда в симметричной раме при выборе основной
системы отбрасывают связи, не лежащие на оси симмегрии, и эпюры
Mt становятся несимметричными, может быть применена группи-
ровка неизвестных. Эгот прием заключается в том, что
усилия в симметрично отброшенных связях (рис. 2.8) представляют
в виде двух групп вил, одна из которых (XJ симметрична, а другая
(Х2) кососимметрична. При этом перемещение 612 обращается в ноль
и канонические уравнения разделяются»
“F Л»/ в 0;
бааХа + Л22 = О. (2.19)
146
В некоторых случаях уменьшение трудоемкоеги расчета может
быть досгигнуто за счет применения геометрически изменяемых и ста-
тически неопределимых основных систем.
Например, при расчете замкнутого контура (рис. 2.9, а) па основа-
нии симметрии рамы и нагрузки устанавливаем, что изгибающие мо-
менты во всех узлах рамы одинаковы. Тогда в основной системе введем
во все узлы шарниры (рис. 2.9, б) и соответствующие изгибающие мо-
менты Xi примем за групповое лишнее неизвесгное. Хотя принятая
основная система геометрически изменяема, при ка.ждом отдельном
догружении она находится в равновесии и к ее расчету могут быть
применены уравнения статики. Эпюры Mlt соответствующие при-
нятой основной системе, показаны на рис. 2.9, в.
Выбор статически неопределимой основной системы покажем на
примере рамы, приведенной на рис. 2.10, а. Разрезая средний ригель,
147
получаем основную систему, состоящую из двух П-образных статиче-
ски неопределимых рам. Для построения эпюр в этой основной си-
стеме необходимо выполнить расчет каждой П-образной трижды ста-
тически неопределимой рамы на действие заданной нагрузки и единич-
ной горизонтальной силы 1. Трудоемкость расчета сокращается
за счет повторимости части вычислений в каждой одноконтурной раме.
В заключение отметим, что некоторые из описанных выше приемов
применяют и для расчета несимметричных систем.
7.5. Расчет статически неопределимых ферм
Расчет статически неопределимых ферм методом вил выполняется
в той же последовательности, что и расчет рам.
Степень статической неопределимости определяется по формуле
(2.3k
При выборе основной системы отбрасывание лишних «вязей можно
выполнить удалением опор (или заменой их на опоры с меныпим чис-
лом связей) и рассечением стержней. При этом, как и в рамах, для сим-
метричных ферм могут быть применены приемы разложения нагрузки
на симметричную и кососимметричную составляющие, группировки
неизвестных, выбора геометрически неизменяемой основной системы.
Так, на рпо. 2.11, а показано применение групповых неизвестных.
Для фермы, приведенной на рис. 2.11, б, выбрана геометрически изме-
няемая основная система. При этом в последней ферме из условия
равновесия среднего узла нижнего пояса следует, что = 0.
При вычислении единичных и грузовых перемещений в ферме,
как правило, известны не абсолютные величины жесткостей, а их соот-
ношения. Принимая жесткость какого-либо стержня или группы стер-
жней за основную £Л0, преобразуем формулы для перемещений так!
Ряс, 2,11
148
где Ntt Nkt Nf — усилия в стержнях основной системы от — 1, от
Xft= 1 и от заданной нагрузки.
После решения системы канонических уравнений и определения
лишних неизвестных усилия в стержнях заданной фермы находят
в соответствии с выражением (2.9):
N = £ NiXt + Nf.
t=i
Расчет фермы удобно выполнять в табличной форме (см. табл. 2.1).
В последней колонке табл. 2.1 выполняется кинематическая проверка
найденных усилий ЛГ. Действительно,
Д. = Х Л/1М/(Е/)) = О,
или, переходя к отношениям жесткостей, получаем
ЕДА = S NtNlAJA = 0.
7.6. Расчет двухшарнирной арки методом сил
Двухшарнирная арка (рис. 2.12, а) является один раз статически
неопределимой системой. Это можно увидеть либо используя формулу
(2.2), либо непосредственно сравнивая число опорных реакций (че-
тыре) с числом уравнений равновесия (три).
Основную систему для двухшарнирной арки выбирают обычно
отбрасыванием горизонтальной опорной связи и заменой ее лишним
неизвестным — распором
149
Внутренние усилия в произвольном сечении основной системы (Л
лишнего неизвестного — 1
Мг = — !/;Qi = — sin ф, Л\ = — cos ф. (2.21)
Как было показано в гл. 5» в трехшарнирной арке изгибающие
моменты меньше, чем в балке того же пролета. Эта особенность общая
для всех арок, в том числе и статически неопределимых. Следователь-
но, в арках деформации изгиба в общем случае уже не являются
преобладающими, как в балках, и при вычислении перемещений
в арке деформациями сдвига и осевого сжатия пренебрегать нельзя.
Запишем единичное и грузовое перемещения!
л _ fAli/Wids
J ~ЁГ~
С
Ь1 = )-ЁГ~
. CN^ds , f QiQjds.
“Г J EA f Jи ел *
CTi^fds C QiQfds
J £Л + J Iх “6Л-’
(2.253
где s — координата точки арки, отсчитанная вдоль ее криволиней-
ной оси.
Чаще всего сечение двухшарнирной арки выполняется перемен-
ным, чтобы момент инерции уменьшался ог замка к пятам, следуя за-
кону изменения изгибающих моментов.
Представим закон изменения моментов инерции сечений арки
в виде отношения /<>//, где /0 — момент инерции произвольного, на-
пример, замкового сечения.
Преобразуем выражения (2.22), домножив обе части равенств на
£/0. После подстановки в эти формулы единичных усилий (2.21)
получим!
Е/Д t [ У2 ds + f cos2 ф ds 4- f н sin2 ф ds; (2.23a)
t/ • < W<1
E/0Aif = — f yMf ds — f /V/ cosф ds — [pQ/ sin ф^°ds.
Часто аналитическое вычисление интегралов в (2.23а) является
трудоемкой, а иногда и неразрешимой задачей, поэтому интегрирова-
ние заменяют суммированием. Для этого разбивают арку на достаточ-
но малые участки As и находят значения всех величин, входящих в
1Б0
Таблица 25
уравнения (2.23а) для середин участков. Дальше применяют формулу
прямоугольников для численного интегрирования:
£/об1Х = */*"As + Xcos2<p As4- J]рsin2фAs;
ЕЦЬц = - h As-XNl0054>4
Fl
As—g<2/sin <p Д&
(2.236)
Расчет no формулам (2.236) удобно выполнять в табличной форме
(табл. 2.2).
По данным таблицы находим
Е/Д, = S, + £, + 3;
E7OAV S6 Р^б*
После подстановки перемещений 6П и Ац в каноническое урав-
нение получим лишнее неизвестное Хг = —Ац/6п. Дальнейший рас-
чет арки легко выполнить, пользуясь обычными формулами метода
сил:
М = 4- МхХх = Mf — yXt;
Q~Qf + Q,Xt = Qf — Xt sin ф; (2.24)
N = Nf 4- A\Xx = Nf — Xt cos ф.
Отметим, что при вертикальной нагрузке усилия в основной системе
выражаются через балочные усилия: Л4/ = М°; Qf = Q°cos ф; «
— — Q°sin ф.
Как показывают расчеты, при вертикальной нагрузке грузовое
перемещение мало вависит от поперечных и продольных сил и этими
силами при определении Ац можно пренебречь. Упрощения можно
ввести и при вычислении единичного перемещения. В частности, при
пологости fll < 1/3 для гибких арок, высота сечения которых h в вам-
ке не превышает //10, можно пренебречь поперечными силами при
вычислении 6п, а при /// > 175 — и продольными силами.
7.7. Расчет бесшарнирной арки. Тонкостенные кольца
Бесшарнирная арка представляет собой криволинейный контур
без шарниров (рис. 2.13, а). Такой контур, как указывалось раньше
Рис» 2,18
152
является трижды статически неопределимым и для его расчега удобно
применить способ упругого центра.
Выбирая основную систему, разрежем арку по оси симметрии
и е помощью жестких консолей перенесем лишние неизвестные в упру-
гий центр (рис. 2.13,6). Если начало координат поместить в упру-
гий центр и ось у направить вниз, то усилия в основной системе от
единичных неизвестных запишутся так!
Л1Х = х; Qt = cos <р; Л\ =« sin <р;
М2 = У* Q2=2in<₽: ^2 = —c°s<p; (2.25)
M3=l; Q3 = 0; Л/э = 0.
Неизвестное Хд является кососимметричным, а Х2 и Х3— симмет-
ричными, поэтому имеют место равенства б12 = б21 = 0, б13 = б31 = 0.
Благодаря равенству нулю усилий Q3 и N8t в побочном перемещении
б28 сохраняется только интеграл, содержащий изгибающие моменты!
Л ___ С MJV1 ids
°23 ” J Е1 *
Обращение в ноль этого перемещения обеспечивается применением
способа упругого центра.
Положение упругого центра определяется расстоянием а, которое
можно найти, пользуясь соотношением (2.18)1
i
2
ItJlds 2
~ЁГ С '<> Я
/ 1 Ух Т ds
Str **2 п
° = 7£ = -7------—-------------------- (2.26)
2 2
С - f
) El J 7"Л
I и
"У
Теперь канонические уравнения, кан обычно при использовании спо-
соба упругого центра, разделяются!
+ ^1/= 0;
6ааХа + Д2/= 0; (2.27)
633X5 Дз/ = 0.
Единичные и грузовые перемещения находят по формуле Mopai
• N^ds | Г Qjds
£/ +J ЕА
Г Mlds | rl^ds | Г Q?ds
’аа “ J ~ЁГ + J 1 Ej+J 1 ^''GA
С Г Msds
O33 — J El •
(2.28а)
153
Как и для двухшарнирной арки, закон изменения поперечных сечений
бесшарнирной арки задают в виде отношения IJI. Наибольших значений
изгибающие моменты в бесшарнирной арке обычно достигают в сече-
ниях у пят, поэтому часто закон изменения моментов инерции принима-
ют таким: /0// —- cos ф.
Умножив обе части (2.28а) на £70, представим перемещения в основ-
ной системе в таком виде:
ds + J sin2 q> ds + J p cos2 ф~ ds;
£/(&2“ J У2 ds + J cos2 ф ds 4- J p s in2 ф ds;
ЕЦРзз = j ЛЛ dr, (2.286)
E/oAi; = J xMf ds + p, sin<p £ ds + f pQz cos q>^ds;
E/oA# = J yMf If- ds — J Nf cos <p ds 4- J pQ/ sin ф ds;
E/0A3f = j Mfljl ds.
В большинстве случаев аналитическое вычисление интегралов
в выражениях (2.286) затруднительно, поэтому пользуются числен-
ным интегрированием;
Е/06ц = У + У sin2 <₽ '"J As + У Н cos2 ф As;
ЕЛАг — 5 У* As 4- У cos2 ф As 4- У р sin2 ф As;
Е/о638 = V А ду; (2.28в)
E/0Ai/ = У xMf — As 4- У sin ф -j As 4- У pQf cos ф As;
Е/0А2/ = У yMf -y As — У Nf cos ф As 4- У pQf sin Ф^° As;
Е/0А3/ = Ул// ^-As.
Аналогично находят положение упругого центра:
а,=£^-/As/S-/<229)
164
Рис. 8.14
После решения канонических уравнений (2.27) определяют внутрен-
ние усилия
м = Mf 4- ЯХ> 4-Я Х2 + Я*з = Я 4- + уХ2 4- Х3;
Q = Q/ + РЛ1 + Qs*2 + ОЛэ = Qf + Xi cos ф 4- Ха sin ф; (2.30)
Л/ = Nf 4- NiXi 4- W2X8 4- WSX8 = Nf 4- Х1 sin ф — Х8 cos ф.
Так же, как и в двухшарнирных арках, вычисление перемещений бц,
682, Д1/, Д2/ можно упростить. В частности, для пологих (///< 1/3)
и гибких (Л//<1/10) арок поперечными силами можно пренебречь.
Продольные силы наиболее ощутимо сказываются на величине пере-
мещения 628. Здесь ими можно пренебречь лишь при 1/5 <///<1/3.
Особенный подход к решению вопроса об учете продольных сил в
перемещениях для арки, ось которой совпадает о рациональной осью
трехшарнирной арки. Как известно, в такой грехшарнирной арке из-
гибающие моменты и поперечные силы отсутствуют. Та же картина
будет наблюдаться и в бесшарнирной арке, если не учесть действие
продольных сил. В действительности же продольные силы вызовут
обжатие оси арки и отклонение ее от рациональной оси, в результате
чего в сечениях арки появятся изгибающие моменты. Учет обжатия
обычно осуществляется в виде добавок усилий Х2 и моментов по от-
ношению к безмоментному состоянию арки, соответствующему состоя-
нию трехшарнирной арки.
Для пологих арок при вычислении перемещений вместо элемента
ds можно принимать его горизонтальную проекцию dx (dx = ds cos ф,
а в пологих арках значение cos ф близко к единице).
Тонкостенные кольца (рис. 2.14, с), как и всякий замкнутый
контур, трижды статически неопределимы. В качестве лишних неиз-
вестных обычно принимают усилия в выбранном сечении кольца
(рис. 2.14, б). Как правило, кольцо имеет хотя бы одну ось симметрии,
поэтому даже при произвольной нагрузке расчет можно упростить
применением способа упругого центра (рис. 2.14, в). Как указывалось,
в этом случае имеем канонические уравнения такого вида:
бц/^i Дц = 0;
622^2 4~ = 0»
633X3 4" Аз/ = 0.
При наличии симметрии не только кольца, но и нагрузки
(рис. 2.15, о), можно ограничиться расчетом лишь части кольца, распо-
165
Рис, 2.16
ложен ной между смежными осями симметрии (рис. 2.15, 6). Закрепле-
ния на концах вырезанной части соответствуют условию, что на оси
симметрии возможны лишь радиальные перемещения. При расчете
згой части получаем одно лишнее неизвестное (рис. 2.15, в) — изгиба-
ющий момент. Заметим, что в защемляющей подвижной опоре действует
реактивная сила, параллельная опорным стержням, и реактивный
момент.
В табл. 2.3 приведены результаты расчета кругового кольца на
радиальную и кольцевую нагрузки, изменяющиеся по синусоидаль-
ному закону. Вид этой нагрузки при п — 2 показан на рис. 2.16.
7.8. Расчет статически неопределимых систем
на действие температуры и осадку опор
Для температурных воздействий и осадки опор общим является
то, что в статически определимых системах они не вызывают усилий.
Следовательно, в статически определимой основной системе при этих
воздействиях будут появляться усилия только от лишних неизвестных.
Перемещения в основной системе от температурного воздействия
определяют на основании формулы (1.131)1
“ 2j а h &м{ + а 2
(2.31)
где и t2 — изменение температуры нижних и верхних волокон
стержней; а — коэффициент линейного расширения материала; h —
высота поперечного сечения; и со^ — площади эпюр соответственно
1Б6
Нагрузка (п > 2) Усилия
М Q
радиальная q = Ь cos пф гг —г b cos п ф П — 1 т nr , . — 6 Sin П Ф —
q « b sin пф г2 ^~2_ l' b sin Л ф ^ТГ(^С05Пф —
6В ге е 1 t в асо5пф Л2 r । a cos n ф —
л(н2 — jjasinnT
t =з a sin пф г2 "“«(n2—Jl)acosn(P — j~ a sin n ф r
Таблица 2.3
Перемещения
N радиальные кольцевые
-д—у b cos п <р EI („2 _ Ц2 * COS Л ф Г* ~ Е1п (Л2— 1)2^з1плф
-2 —£ Ь sin П ф El (n2^-\yib^nn^ EJn (П2—l)2ftCOS л Ф
лг -j a sin п ф Ehi (n2-l)2asin лф ЕМ2(л« —1Н°СО8Лф
пг ta’ a cos п ф Е/Л^-ТР0005'"1’ г* Е1п*(п*— 1)2 a sin л Ф
моментов и продольных сил на участке стержня от лишнего неиз-
вестного Xi = 1.
Перемещения от осадки опор в основной системе вычисляют по
формуле (1.133):
Д/с — Е RkiCk, ^2.32)
где Ck — заданная осадка по направлению Л-й опорной связи; Rh —
реакция fc-й опорной связи от действия лишнего неизвестного Х/ =
== 1. Если неизвестное Х{ является реакцией в отброшенной опорной
связи, то, по определению, оно также должно быть учтено в правой
части формулы (2.32).
Канонические уравнения для рассматриваемых воздействий отлича-
ются от уравнений при расчете на обычную нагрузку лишь свобод-
ными членами. Так, при п неизвестных Ле каноническое уравнение
при температурном воздействии имеет следующий вид-
+ 6/2Х2 + •• • 4- ЪпХп + Д« = (2.33)
Аналогично при осадке опор
биХг + + ... + Ь1пХп + Д/с = 0. (2.34)
Решая систему п уравнений (2.33) при действии температуры или
(2.34) — при осадке’опор, находят значения лишних неизвестных Х{,
далее внутренние усилия, например изгибающие моменты в раме:
М = М1Х1 + М2Хг + ... +MnXn = ^MtX, (2.35)
или значения усилий в стержнях фермы:
N = NlXl+N2X2+... +NnX„ = YlNlXt. (2.36)
Правильность вычислений по методу сип проверяется из условия
равенства пулю перемещений по направлению лишних связей. Эти
перемещения определим в основной системе как сумму перемещений
от лишних неизвестных н от заданных воздействий:
Д/ = Д/х + Д« + Д/с«
Перемещения от лишних неизвестных определяются по формуле
Мора перемножением единичных усилий с усилиями ог суммарного
действия лишних неизвестных. Последние усилия являются окончатель-
ными усилиями в заданной системе, поэтому, например, для рам можно
ваписать
где М — окончательная эпюра изгибающих моментов
166
Тогда проверка правильности вычислений при расчете на темпера-
турное воздействие или осадку опор выполняется для рам таю
X ^7 f MMjds 4- An = 0, i = 1, 2, ...» л;
j MMJs + Afc = 0, i = 1, 2..it. (2.37)
Аналогичны уравнения и для ферм!
s NNJAJA + Д„40 = 0, i = I, 2, ..., п;
S NNftA^A + Д/СЛС = 0; I = 1, 2..п. (2-38)
При рассмотрении расчетов на заданную нагрузку отмечалось, что
усилия в статически неопределимой системе не зависят от абсолютных
величин жесткостей элементов, а зависят только от их отношений. Этот
вывод нельзя распространить на рассматриваемые воздействия. Дей-
ствительно, единичные перемещения обратно пропорциональны
жесткости, а в выражения для перемещении А« и А/с жесткость не
входит. Следовательно, вначения лишних неизвестных, определяемые
из канонических уравнений, зависят от абсолютных значений жестко-
стей. При этом Ай никак не связаны g жесткостью, поэтому при осад-
ках опор усилия прямо пропорциональны жесткости. Перемещения
от действия температуры зависят неявно от жесткости (й — высота
сечения), поэтому здесь пельзя выявить строгую зависимость. Одна-
ко при отсутствии изгибающих моментов (в фермах) так же, как и при
осадках опор, имеется прямая пропорциональная зависимость усилий
от жесткостей элементов.
7.9. Расчет статически неопределимых систем
на подвижную нагрузку. Линии влияния
Усилия в статически неопределимой системе выражаются через
лишние неизвестные. Поэтому рассмотрим прежде всего построение
линий влияния лишних неизвестных.
Грузовые перемещения вызываются единичной силой, поэтому ре-
шение системы канонических уравнений будет иметь такой вид>
+ «1262/ + ... + ainfin/;
Хд = 4* <Ха2б2/ 4* •• • 4* OC&Al/»
........................................ (2.39)
Хл = «п1бц 4“ «пгбг/ 4* •• • 4- «nn6nf.
Здесь bkf представляет собой линию влияния перемещения по на-
правлению силы X*, а коэффициент при нем ctik показывает влияние
данного перемещения на величину лишнего неизвестного Xt. Значения
коэффициентов влияния нетрудно найти решением канонических
уравнений для простых случаев: при одном лишнем неизвестном
аи = — 1/6ц,
169
Рис. 2.17
при двух неизвестных ап =
б
= 6» -а =
^11^22 — ^12 8 6цба2 — 6j2
На основании теоремы о вза-
имности перемещений заменим
перемещение 6^ на fy*. Величина
6/л представляет собой эпюру
прогибов грузовой линии от дей-
ствия лишнего неизвестного
Xk = 1. Теперь линию влияния
лишнего неизвестного Xt можно
получить суммированием эпюр
прогибов:
Х£ = адбд + ОС126/2 + • • • + airtfifn. (2.40)
Построение эпюр прогибов 6/л выполняют обычно способом упру-
гих грузов (см. гл. 6).
Для построения линий влияния внутренних усилий используют
общие формулы метода сил (2.8), (2.9):
Л4 = М/+ AfЛ + М9Х2 4- ... +М«Хп\
Q = Q/ 4- + ОЛг + - - - + (2.41)
N « 4- + N2X2 + ... +NnXn.
В этих выражениях Afy, Qf, "/V; представляют собой линии влияния
соответственно изгибающего момента, поперечной и продольной сил
в искомом сечении, построенные в основной (статически определимой)
системе. Усилия Mit ~Qt, ~Nt в искомом сечении от Xt = 1 являются
постоянными коэффициентами при линии влияния лишнего неизвест-
ного Xt в выражениях (2.41).
Порядок построения линий влияния внутренних усилий проиллю-
стрируем примером бесшарнирной арки (рис. 2.17, а). Для основной
системы (рис. 2.17, б) решение канонических уравнений получаем в та-
ком виде:
X, = X, = - £б,2; х, = -£(2.42)
Загрузив арку силой Хх== 1 (рис. 2.18, а), разбиваем ее на участки
длиной As и вычисляем упругие грузы. Если при этом поперечными
и продольными силами пренебречь, то в соответствии с (1.135) полу-
чаем для i-й точки
% As,+^(-£ A^+^-A^J + ^l Д-Д,й1. (2.43)
Загружая упругими грузами фиктивную балку, соответствующую
основной системе (рис. 2.18, б), строим эпюру прогибов
160
Рис. 2.19
рис. 2.18
тельно к усилиям в сечении
(рис. 2.18, в). Аналогично строим
эпюры прогибов от остальных еди-
ничных неизвестных Х2 и Х3 (рис.
2.18, г). Вычислив единичные пере-
мещения 6П, 622 и 633, на основа-
нии (2.40) получаем линии влияния
лишних неизвестных (рис. 2.18, д).
Основная система представляет
собой две консоли. Линии влияния
усилий Mkf, Qkh №/ в эт°й системе
нетрудно построить (рис. 2.19, а).
Теперь, принимая во внимание
(2.25), перепишем (2.41) примеии-
X:
= Мкг 4" + УкХ3 + Х3;
Q.K — Сл7 cos Фх + Х2 sin ц>к\ (2.41)
== NKf 4- Х2 sin Фк — Ха cos фк.
Вид линий влияния, полученных суммированием в соответствии г
(2.44), показан на рис. 2.19, б. тветств!ги с
16!
7.10. Матричная форма метода сил
В матричной форме канонические уравнения запишутся так:
DX + A = 0. (2.45)
Решение этой системы уравнений получаем с помощью обратной
матрицы
где
(2.4®
6ц 61а ... 61п
621 6аа ... 62п
.All бл2 ••• 6,
— матрица коэффициентов канонических урав-
нений — матрица единичных перемещений;
V
Хг
-Хп.
— матрица-столбец (в случае расчета на несколько загру-
жений — прямоугольная матрица) лишних неизвестных;
’ — матрица-столбец (в случае расчета на несколько загру-
жений— прямоугольная матрица) свободных членов,
иначе — матрица грузовых перемещений).
Для вычисления матриц перемещений D и А воспользуемся форму-
лами (Г.139) для ферм и (1.141)—для рам.
Для сЪерм сформируем следующие матрицы:
~Na Nl2 ... Nin-
A/jo ••• ^2п «•
— матрица единичных усилии, содержащая
J ‘ * ' ’ _‘ усилия во всех стержнях от каждого из
_Nmi ... единичных неизвестных;
Нц
Nv
— матрица-столбец грузовых усилий в стержнях фермы;
LMn/J
о
— диагональная матрица податливости стер-
жней фермы.
о о ...
Аналогичные матрицы (М — единичных моментов, Mf — гру-
вовых моментов и L — подагливости стержней) для рам составляют
по правилам, изложенным в гл. 6.
162
Теперь можем ваиисать перемещения для ферм:
D = ffTLN, &. = NTLKi (2.47)
я для рам*
D = MTLM, Д = MTLMf. (2.48)
Формулы (2.9) и (2.10), полученные на основании принципа йеза-
висимости действия сил, позволяют выразить усилия в заданной си-
стеме через матрицы единичных и грузовых усилий-
W = ty + /VX; (2.49)
+ (2.50)
Теперь весь расчет статически неопределимой системы на действие
заданной нагрузки можно записать одной матричной формулой для
ферм:
N = Nt—N (FFLNy1 • (NTLNt) (2.51)
я для paui
М = М, — М (Мт1Лу* • (7Й TLMi). (2.52)
Эти формулы представляют собой удобный для программирования
на ЭВМ матричный алгоритм расчета статически неопределимых рам
(2.52) и ферм (2.51) методом сил.
7.11. Предварительно напряженные системы
Большие возможности для повышения экономичности сооружений пред-
ставляет регулирование усилий в них. Это регулирование может осуществляться
двумя путями: изменением жесткостей элементов системы и созданием предвари-
тельного напряжения.
Как неоднократно отмечалось, изменение жесткостей элементов статически
неопределимой системы влечет за собой изменение усилий в них. Как правило,
выполняется следующее соответствие: чем меньше жесткость данного элемента,
тем меньше усилие в нем. Однако это соотношение не поддается количественным
оценкам и для регулирования усилий таким способом пользуются редко.
Предварительно напряженные системы — это системы, в которых предвари-
тельно (в процессе изготовления, укрупнительной сборки или монтажа) созда-
ются начальные напряжения, оптимально распределенные в элементах конструкции
и про1ивоположпые по знаку напряжениям от расчетной нагрузки. После нагру-
жения таких конструкций эксплуатационной нагрузкой сначала погашаются началь-
ные напряжения, а затем растут рабочие напряжения до своего предельного
вначения.
В современном строительстве применяются предварительно напряженные
железобетонные и стальные конструкции. Наиболее широкое распространение
получили первые. При их изготовлении создаются предварительные напряжения
сжатия в бетоне и растяжения — в арматуре.
Предварительное напряженке создают разными способами. Например, в ие-
разрезных балках напряжения можно регулировать вертикальными перемеще-
ниями опор. В результате удается получить желаемое соотношение моментов на
опорах и в пролетах от суммарного действия внешней нагрузки и смещений
опор. В разрезных балках поэлементно выгибают отдельные части и соединяют
их в таком положении. При этом в балке создаются предварительные напряже-
ния, противоположные по знаку напряжениям от эксплуатационной нагрузки,
что снижает суммарные напряжения при ее работе под внешней нагрузкой.
163
рис. 2.20
Чаще всего в железобетонных и металлически» конструкциях предваритель-
ное напряжение создают при помощи затяжек, в качестве которых применяют
стальные канаты, высокопрочные стальные стержни или проволоку, собранную
в пучки.
На рис. 2.20, а показана стальная балка с затяжкой, расположенной в уров-
не нижнего пояса балки. В результате создания предварительного напряжения
балка становится внутренне статически неопределимой. Сила X, создающая
предварительное обжатие балки, вызывает появление постоянных по длине от-
рицательных моментов Мх = Хе. За счет этого балочный момент Mf в проле-
те уменьшается и становится равным — Мх.
Усилие X можно подобрать таким, чтобы изгибающие моменты уменьши-
лись по сравнению с балочными в два раза. Для этого достаточно принять
X = 7И//(2е).
Существуют различные варианты расположения напрягающего элемента.
Они показаны на рис. 2.20, б, о, г. Если’позволяют габаритные’условия, затяж-
ка может быть вынесена за пределы балки. Так получают шпренгельную систему
(рис. 2.20, д).
В стальных фермах предварительное напряжение может осуществ-
ляться или напряжением отдельных растянутых элементов (рис. 2.21,
о), или напряжением всей конструкции в целом (рис. 2.21, б, в, г).
Напряжение отдельных стержней можно рекомендовать в тех случаях,
когда нежелательно внесение в систему дополнительной статической
неопределимости.
На рис. 2.22 показаны примеры предварительного напряжения
рамы. Здесь же даны эпюры изгибающих моментов от усилий в за-
тяжках.
Расчет предварительно напряженных стальных балок в затяжкой
(ри®. 2.20, п) выполняется методом сил. Приняв усилие в затяжке за
лиц.нее неизвестное, из канонического уравнения находим
X = ____У MjMiftEridx_____ t
164
А г4, J, M
Рис. 2.2t Рис. 2.28
где Alj — изгибающий момент б основной системе от единичного уси-
лия в затяжке; Mf — ♦ изгибающий момент в основной системе (балке
с разрезанной затяжкой) от заданной нагрузки ; El, ЕА — жесткости
балки соответственно при изгибе и растяжении; £0Д0 — жесткость
затяжки.
Полное усилие в затяжке получаем как сумму найденного усилия
X] и предварительного напряжения No:
Nq + Xt. (2.54)
Напряжения в крайних волокнах балки с учеюм предварительного
напряжения
а = NIА (Mf — Ne) I IF, (2.55)
где e — расстояние между осями балки и затяжки.
Аналогично рассчитываются предварительно напряженные рамы
и фермы.
Вопросы для самоконтроля
I. Какая система является статически неопределимой?
2. Как степень статической неопределимости связана с числом степеней
свободы?
3. Какова степень статической неопределимости замкнутого бесшар мирного
контура?
4. Как определить степень статической неопределимости системы, исходя
из понятия о замкнутом контуре?
5. Какие системы относят к внутренне статически неопределимым?
6. Назовите три основных метода расчета статически неопределимых систем.
7. Что принимается в качестве неизвестных метода сил?
8. Что представляет собой основная система метода сил?
165
9. В чем различие между абсолютно необходимыми и условно необходимыми
связями?
10. Могут ли абсолютно необходимые связи считаться лишними?
11. Приведите возможные способы отбрасывания связей.
12. Что представляют собой канонические уравнения метода сил?
13. Что представляют собой коэффициенты и свободные члены канонических
уравнении метода сил5
14. Какой метод положен в основу определения коэффициентов и свободных
членов канонических уравнений?
15. Каково свойство главных коэффициентов канонических уравнении?
16. Почему матрица коэффициентов канонических уравнений является сим-
метричной?
17. Как показать, что усилия в статически неопределимой системе при дей-
ствии нагрузки зависят лишь от соотношения жесткостей элементов системы?
18. Как можно определить усилия в заданной системе после определения
лишних неизвестных?
19. Как проверить правильность вычисления коэффициентов и свободных
членов канонических уравнений?
20. Как проверить правильность расчета статически неопределимой системы
методом сил?
21. Какие способы применяются для упрощения расчета симметричных си-
стем методом сил?
22. Какие преимущества дает выбор симметричной системы метода сил при
расчете на: а) произвольную нагрузку, б) симметричную и в) кососимметричную
нагрузку?
23. Как разложить нагрузку на симметричную и кососимметричную состав-
ляющие?
24. Когда и как применяется группировка неизвестных?
25. В каких случаях применяется способ упругого центра?
26. Как определить перемещение в статически неопределимой системе?
27. Как найти положение упругого центра?
28. Как отбрасывают связи при выборе основной системы метода сил для
фермы?
29. Почему лишний стержень необходимо разрезать, а не отбрасывать?
30. Каковы особенности определения коэффициентов и свободных членов
канонических уравнений метода сил для ферм в отличие от рам?
31. Назовите типы статически неопределимых арок.
32. Какая основная система удобна для расчета двухшарнмрной арки?
33. Как вычисляют перемещения в двухшарнирных арках? Когда можно
пренебречь влиянием на перемещения продольных и поперечных деформаций?
34. Как определяют внутренние усилия в двухшарнириой арке пря
известном распоре?
35. Чем отличается расчет арки с затяжкой от расчета обычной двухшар-
нирной арки?
36. В какой из названных арок изгибающие моменты при всех прочих оди-
наковых условиях будут меньше?
37. Какой закон изменения поперечных- сечений принимают для двухшар-
нирных арок?
38. Какую основную систему целесообразно применять при расчете бес*
шарнирной арки?
39. Как определяется положение упругого центра?
40. Как определяют перемещения в основной системе при расчете бесшар»
мирной арки?
41. Как обычно изменяется жесткость сечения бесшарнирной арки?
42. Почему при расчете статически неопределимых арок интегрирование
при вычислении перемещений, как правило, заменяют суммированием?
43. Что такое упругое обжатие?
44. Когда необходимо учитывать упругое обжатие и почему?
45. Как записываются канонические уравнения метода сил при расчете на
температурное воздействие и на осадку опор?
166
46. Каковы особенности определения свободных членов канонических урав-
нений при расчете на эти воздействия?
47. Как аависят усилия в статически неопределимой системе от жесткостей
ее элементов при температурном воздействии? При осадке опор?
48. Почему при расчете статически неопределимой системы на подвижную
нагрузку сначала необходимо построить линии влияния лишних неизвестных?
49. Как записать общее выражение для линии влияния лишнего неизвест-
ного? Что такое коэффициент влияния?
60. Как построить линии влияния лишних неизвестных с помощью теоремы
о взаимности перемещений?
61. Как построить линию влияния искомого усилия, если построены линии
влияния лишних неизвестных?
62. Какие три матрицы необходимо составить для расчета статически неопре-
делимой фермы в матричной форме?
53. Как записывается матричный алгоритм расчета статически неопредели-
мой фермы методом сил?
64. Как составляются матрицы единичных и грузовых моментов и матрица
податливости при расчете статически неопределимой рамы методом сил в мат-
ричной форме?
55. Как записывается матричный алгоритм расчета статически неопределимой
рамы методом сил?
56. В чем преимущества матричного алгоритма?
57. Почему матричный алгоритм не рекомендуется для применения при
ручном счете?
58. Какими способами можпо регулировать усилия в статически неопреде-
лимой системе?
59. Что такое предварительно напряженная система?
60. Что дает предварительное напряжение с точки зрения экономичности
системы?
61. Как создается предварительное напряжение?
62. Как рассчитать предварительно напряженную балку с затяжкой?
Глава 8
МЕТОД ПЕРЕМЕЩЕНИЙ
8.1. Допущения. Количество неизвестных метода перемещений
Рассчитывая раму методом сил, после определения лишних неиз-
вестных мы могли определить гее остальные усилия и любые перемеще-
ния точек рамы. Можно представить себе и другую постановку задачи»
определив каким-либо образом некоторые перемещения, найти соответ-
ствующие нм усилия. Именно так ставится задача расчета статически
неопределимой системы методом перемещений.
Метод перемещений является таким же универсальным методом,
как и метод сил, и может быгь применен для расчета самых различных
сооружений. Однако наибольшее распространение он получил дня
расчел а статически неопределимых рам, состоящих из прямолиней-
ных стержнем постоянной жесткости. При этом принимаются следу-
ющие допущения1.
продольными и поперечными деформациями стержней при опреде-
ления перемещений пренебрегают;
изменения расстояний между концами стержней за счет искрив-
ления их осей не принимаются во внимание.
167
Для того, чтобы определить усилия в отдельном стержне и переме-
шен ня всех его точек» достаточно ₽нать угловые н линейные смещения
его концов (рис. 2.23) — хд, хв, Ца> У в. фд» фв. В стержневых систе-
мах (рамах) не обязательно отдельно задавать перемещения концов
каждого стержня. При жестком соединении стержней в узле достаточ-
но знать поворот конца любого из этих стержней, т.е. поворот узла.
Прн шарнирном соединении повороты всех стержней в узле различив,
однако величины эгнх поворотов являются избыточными данными для
определения усилий в стержнях, имеющих на конце шарнир. Анало-
гично сокращается и число линейных смещений. Например, в раме
(рис. 2.24, а) для определения напряженно-деформированного состоя-
ния достаточно задать угловые перемещения узлов 1 и 2 — Zx и Z8
и общее для всех узлов горизонтальное смешение —Z8. Эти перемеще-
ния обычно принимаются в качестве неизвестных метода перемещений.
Поэтому обиг.ее число независимых угловых и линейных смещений
узлов рамы являете я числом неизвестных метода»
n = n/uz + rtan. (2.56)
Число угловых смещений л<ил| или степень углоеой подвижности
узлов рамы, соответствует количеству жестких узлов (в нашем при-
мере — 2). При определении числа линейных смещений «пт или сте-
пени линейной псдзижности, принимаем во внимание, что в соот-
вегстрии с принятыми допущениями при реформациях рамы длины
стержней не изменяются. В таком случае при определении количества
линейных смещений жесткие соеди-
нения в узлах рамы можно заменить
шарнирными. Тогда рама превраща-
ется в шарнирно-стержневую систему
(рис. 2.24, б) и пцп легко определить
как число степеней свободы этой си-
стемы»
п;(П = 2Г-С-С0 = 2.6-
— 5 — 6=1.
Раму, у которой линейные вмеще-
ния узлов отсутствуют, называют ра-
мой с несмещающимися узлами.
Поскольку для расчета рамы тре-
буется внать угловые и линейные
Рве, 3J4
смещения ее узлов, число этих неизвестных метода перемещений
часто называют степенью кинематической неопоеделимости рами.
В этом смысле рама, у которой угловые н линейные смещения узлов
отсутствуют, является кинематически определимой.
8.2. Сущность метода
Закрепим все узлы рамы (рис. 2.24, с) так, чтобы они не могли
перемещаться, т. е. поевратим раму в кинематически определимую.
Для устранения поворотов узлов поставим дополнительные за-
делки в узлах (рис. 2.24, в). Каждая из этих заделок препятствует
только возможности поворота соответствующего узла, не препят-
ствуя линейным смещениям, поэтому их называют плавающими за-
делками. Для устранения линейных смещений узлов ставят дополни-
тельные опорные стержни. В рассматриваемом примере необходимо
поставить один опорный стержень (рис. 2.24, в).
В результате постановки дополнительных связей рама оказалась
расчлененной на отдельные балки постоянной жесткости. Эта система
и принимается в качестве основной системы метода перемещений.
Таким образом, основной системой метода переме-
щ е н и й является система, полученная из заданной введением допо i-
нительных связей, устраняющих угловые и линейные смещения узлов
Сообщая введенным связям перемещения, можно получить в основ-
ной системе самые различные распределения усилий, в том числе
и такое, которое соответствует заданной системе.
Перемещения пополнительных связей, иначе перемещения узлов,
обозначаются Zv Z2, .. и принимаются за неизвестные метода переме-
щений. Стрелками на основной системе показывают принятые положи-
тельные направления перемещений (см. рис. 2.24, в). Среди неизвест-
ных могут быть перемещения двух типов: 1) углы поворота жестких
Рис. 2.25
189
170
Рис. 2.27
узлов (71 н Z, в рассматриваемом примере), иначе — углогые неизве-
стные; 2) линейные смешения узлов (Z3 в рассматриваемом примере),
иначе — линейные неизвестные.
Как указывалось выше, благодаря введению дополнительных свя-
зей основная система расчленяется на отдельные балки. Эти балки
имеют постоянную жесткость, их опорные закрепления всегда могут
быть только двух типов.7 заделка или шарнир, поэтому балки легко
рассчитать на различные простые воздействия.
Например, при повороте ваделки в балке с одним защемленным,
а другим шарнирным концом, воспользуемся методом сил. Основная
система и эпюра в ней показаны на рис. 2.25, о. Перемещения
в основной системе будут такими»
а 1 !•/ 2 I .
Е1 2 ‘3“3£/’^----
Из канонического уравнения получаем
би
ЗЕ/
— <Р.
Окончательная эпюра моментов приведена на рис. 2.25, б. Оче-
видно, при <р = 1 ордината эпюры моментов у сделки равна 3EIU
Отметим, что на величине моментов никак не сказываются продоль-
ные закрепления балки. Поэтому не имеет значения, какая заделка
имеется на конце балки: полная или плавающая. Аналогично нет
вазличия между подвижным и неподвижным шарнирным опиранием,
В основной системе метода перемещений могут встретиться балки
четырех типов, показанных на рис. 2.26. Балка с двумя шарнирными
концами, как в консольная, является статически определимой, а ре-
зультаты расчетов двух других типов балок постоянного сечения па
различные воздействия приведены в табл. 2.4. Пользуясь этой табли-
цей, легко построить эпюры изгибающих моментов в основной систе-
ме и определить в пей интересующие нас усилия. Для рассматривае-
мого примера на рис. 2.27. а построены эпюры моментов 7Wlt Л12, Л13
от действия единичных смещений связей и эпюра Mf от действия на-
грузки.
Для облегчения пользования табл. 2.4 при построении эпюр ог сме-
щений связей удобно предварительно показать деформированную ось
рамы (тонкие линии на эпюрах Ml9 М2, М3).
Проанализируем теперь различия между основной и заданной систе-
мами. Совместность деформаций отдельных сечений и элементов рамы
в основной системе метода перемещений, очевидно, не нарушена,
поскольку все свчзи заданной снсгемы сохраняются. Нс из-за введе-
ния дополнительных связей появляются дополнительные силы— реак-
ции в связях, нарушающие условия равновесия системы. Эти реакции
исчезнут в основной системе только в том случае, если перемещения
узлов (связей) будут соответствовать перемещениям в заданной
системе.
Обозначив реакции в связях /?х, Д'2, R3t получаем условия эквива-
лентности основной и заданной систем:
- 0; /?2 = 0; R3 - 0. (2.57)
Для того, чтобы получить эти уравнения в канонической форме,
так же, как и в методе сил, используем принцип независимости дей-
ствия сил:
GiZt + + Г1зИ8+= 0; )
GiZ, + rSsZ, + rMZ11+₽2/ = 0; | (2.58)
r.siZi + г+ r4- Rsf = 0. j
Эти уравнения называются каноническими уравнениями метода
перемещении. Они являются условиями равновесия*. 7-е уравнение
выражает условие равенства нулю реакции в f-й связи основной си-
стемы. Коэффициентами и свободными членами канонических уравне
ний являются реакции в дополнительных связях основной системы:
rut — реакция в 7-й связи от единичного смещения fc-й связи, или еди-
ничная реакция; Rif — реакция в 7-й связи от заданной нагрузки,
или грузовая реакция.
172
Таблица 2.4
J4* л/п Схема балки Эпюра изгибающих в воздействия из вес моментов и реакции Формулы для определения реакций
1 УМ МА = ЗЕ/// Ra = /?fl = ЗЕ///2
2 МА = ЗЕ///2 /?л = /?в = ЗЕ//Р
Fl
р Л14=2ч(1-У)
La* =4s<3-w
-------Леа л
R В — 2 (3 e)
4 MA = ql*!b
Ajnnm^nn^ =
| i 4* fff, ₽fi = w8
M
МЛ =-2~ (1-3^)
(при £2 > 1/3 MA меняет на-
правление на противополож-
ное)
ЗЛ1
ЗЕ/afe-?!)
МЛ — 2Л
173
Продолжение табл. 2.4
X» п/п Схема Салки Эпюра изгибающих и воздействия на нее моментов и реакции Формулы для определения реакций
7 sA -и 1*. Л4Л = 2/Ив= 4FZ/1 /?л = ^в = 6£///8
6 "к |/?а Л4Л = Мв *= 6Е1/^ Ra=Rb= \2EIjF
9 ни л ,1. t <в МА = Не^« Мв = Не«| ₽д = ^«(1+2е) Яв = Л*(1 + 2В)
10 А ^ППШ^ПШШ L—1—. Л1л = Мв = ^«/12 /?л = RB = ql/2
11 НН « 1 - « 1 li’ Л<Л = Л,6(2-ЗЭ Мв = Me (2 — Зе) «л = /?в=«/Ь6е5
12 А> Н-+- (•« "‘(пшшшппшш)"1 Л<л = Мв = £/а(/2-Щ/Л
174
Единичные и грузовые реакции определим из условий равновесия.
В частности, реактивные моменты в плавающих заделках (коэффи-
циенты и свободные члены первых двух канонических уравнений в на-
шем примере) находим из условий равновесия узлов (рис. 2.27, б):
_3££t 4£^ __б£4. р
Г11 — I т д » М2 U, г1а jp » "if---------- Q »
r _n.r = 3£7t 4£72 6£72. р
Обычно положительными считают реакции, совпадающие по направ-
лению с соответствующими смещениями узлов.
Для определения реактивных сил в опорном стержне вырежем
ригель. Рассматривая равновесие ригеля (рис. 2.27, в), принимаем
во внимание, что продольные силы в разрезанных стойках не1 дадут
проекций на ось опорного стержня, поэтому они не показаны. Попе-
речные силы легко найти по эпюре изгибающих моментов. Получаем
*31— Л.2 ’ г®а— h2 * 'S3 h3 ft3 • — г/х-
Для проверки убедимся в выполнении теоремы о взаимности реак-
ций. Действительно, г12 = r21, r13 = r31, r2S = г32.
Подставляя найденные реакции в канонические уравнения, реша-
ем систему уравнений (2.58). Для рассматриваемой рамы, принимая
h ~ I, Е1г = Е/2 = Е13 —El, F — ql!2, получаем
7£7 у 6£7 у । _л. 7£/ у 6£7 у , ql2 «
— Z3 + t6 = u. — z2----p za+
6£7 7 ЬЕ17 . 27ЕГ 7 ql
---L\-------(2 ^2 “I U»
откуда
Z, = — 0,00435 ; Z, = — 0,01328 t
Z. = 0,00534
Теперь построение результирующей эпюры изгибающих моментов
можно выполнить так же, как и в методе сил, с_ использованием
исправленных эпюр Alt = MxZlt Mz = A12Z2 и М3 = М^3.
Получаем М = 4- 4- Мл 4- 7Иа, или в общем случае
M = Ml + t,Ml. (2.59)
ia=l
Эти эпюры показаны ва рис. 2.27, г без множителя дЛ
Для проверки правильности вычислений можно, как и в методе
сил, применить статическую и кинематическую проверку. Но посколь-
ку основная система метода перемещений кинематически определима,
то кинематическая проверка является вспомогательной и выполняется
всегда при правильных эпюрах изгибающих моментов в основной си-
стеме, и при выполненной статической проверке.
175
Основной проверкой в методе перемещений является проверка
равновесия узлов и других частей рамы, Количество проверяемых усло>
вий равновесия во всех случаях должно быть не меньше числа неизве-
стных метода перемещений. Эти проверки для нашего примера проил-
люстрированы рис. 2.27, д. Построение окончательных эпюр Q и Л'
выполняют как в методе сил.
8.3. Вычисление коэффициентов и свободных членов
канонических уравнений перемножением эпюр.
Проверка реакций
Единичные и грузовые реакции в основной системе метода переме-
щений могут быть найдены также перемножением эпюр.
Для определения реакции r(k рассмотрим Ле и Л-е единичные
состояния основной системы. Запишем возможную работу внешних
сил k-ro состояния на перемещениях i-го состояния:
Wki = rtk-\. (2.60)
Соответствующая возможная работа внутренних сил определяется
известным выражением
(/„=-!».
На основании принципа возможных перемещений Wki — — Uki9 или
= (2.61)
Таким образом, единичную реакцию можно определить пере-
множением эпюр Mi и Мк.
Найдем теперь возможную работу заданной нагрузки на переме-
щениях, вызванных единичным смещением х’-’й связи (рис. 2.28):
Wh = Rtl • 1 + s Г/6„. (2.62)
1=1
Это выражение отличается от (2.60) наличием работы не только реак-
ции, но и работы нагрузки. В связи с этим для получения грузовой
реакции нельзя воспользоваться формальной заменой Мк на Mf в (2.61).
Пойдем другим путем. Так как в состоянии f перемещения узлов
рамы отсутствуют, то II7// = 0 и на основании теоремы о взаимности
работ Wft = Wn получаем
Rit = — (2.63)
f=l
176
При действии только одной силы F эта формула принимает такой
вид:
^7 = -^.-
Если при этом F = 1, то прийдем к полученному ранее равенству rif =
= —Gfit выражающему теорему о взаимности реакций и перемеще-
ний.
Правая часть выражения (2.63) представляет собой взятую с обратным
знаком работу сил F, на перемещениях i-ro единичного состояния
основной системы. Для вычисления этой работы можно воспользо-
ваться состоянием сил, если удалить в нем i-ю связь (рис. 2.28, о).
Тогда Rif обратится в ноль и, в отличие от (2.62). получим
wti = s (2.64)
/—1
Любые преобразования новой системы '(рис. 2.28, в), связанные
с заменой связей усилиями, действующими в них, не изменяют вели-
чины работы (2.64). Действительно, удаление любой внешней (рис.
2.28, г) связи или внутренней (рис.2.28, д) не изменяет работы внеш-
них сил, так как перемещения в t-м состоянии (рис. 2.28, о) по на-
правлению всех связей отсутствуют. В связи с этим при вычислении
работы (2.64) стараются выбрать преобразованную систему воз-
можно более простой, например, статически определимой. Усилия
в отброшенных связях при этом не принимают во внимание,
177
Теперь воспользуемся принципом возможных перемещений и опре-
делим WJt через работу внутренних сил преобразованной системы:
т —
= = (2.65)
/=>
Здесь под Л7/ понимают изгибающие моменты в преобразованной
системе с отброшенными связями.
Подставляя (2.65) в (2.63), находим реакцию в /-й связи
= (266)
Формулы (2.61) и (2.66) могут быгь применены для проверки пра-
вильности вычислений единичных и грузовых реакций. Для этого
построим суммарную единичную эпюру Ms = 4-AJ2 + ... + Мп =
л
= У, Mt и перемножим ее саму на себя. Результат такого перемноже-
«=»1
ния дает сумму единичных реакций:
(2.67)
/=1 1=1
Результат перемножения эпюр М$ и Mf дает сумму грузовых реакций,
взятую о обратным знаком:
f ----------₽./ - «2, -... -«„/ = - S Нц. (2.68)
Й=1
8.4. Расчет симметричных систем методом перемещений
Наиболее общими приемами расчета симметричных систем явля-
ются группировка неизвестных и разложение нагрузки на симмет-
ричную и кососимметричную.
Применение групповых неизвестных покажем на примере рамы
(рис. 2.29, а), загруженной произвольной нагрузкой. Отметим, что
приведенная рама является симметричной несмотря на несиммет-
ричные закрепления концов ригеля. Это связано с тем, что продоль-
ные деформации не учитываются, следовательно, если неподвижен
правый конец ригеля, то левый его конец также будет неподвижен.
Закрепив в основной системе (рис. 2.29, б) жесткие узлы, их по-
вороты представим в виде двух групповых перемещений: симмет-
ричных поворотов — Zi и кососимметричных — Z2.
Построив в основной системе единичные эпюры изгибающих мо-
ментов (рис. 2.29 в), переходим к вычислению единичных реакций,
помня, что эти реакции, как и перемещения, являются групповыми
и представляют собой алгебраическую сумму реакций в связях дан-
ной группы. Например, для определения реакции Гц. необходимо на
первой эпюре вырезать два узла (рис. 2.29, г) так, чтобы ru = +
176
Рас. 2.20
-J-riv Исходя из этого симметричная групповая реакция (от косо-
симметричного группового перемещения) равна нулю: Г|2=0, и по
теореме о взаимности реакций гц = 0. Последние равенства легко
доказать также на основании формулы (2.61).
Таким образом, благодаря применению групповых перемещений
получаем два независимых канонических уравнения
r22Z2 + R?} = 0. (2.69)
При нагрузках частных видов расчет еще более упрощается.
Так, при симметричной нагрузке кососимметричная реакция
обращается в ноль, следовательно, нулю будет равно и кососим-
метричное неизвестное Z2. И, наоборот, при кососимметричной на-
грузке нулевым будет симметричное неизвестное.
Эти свойства симметричных систем могут быть использованы и
при нагрузке произвольного вида, если применить разложение на-
грузки на симметричную и кососимметричную. Этот прием выпол-
няется точно так же, как и в методе сил.
8.5. Расчет рам с наклонными стойками
При наличии в раме со смещающимися узлами (рис. 2.30, а) на-
клонных стоек появляются некоторые особенности расчета, прояв-
ляющиеся при построении в основной системе (рис. 2.30, б) эпюры
изгибающих моментов от линейного смещения Z2. Рассмотрим
179
деформации основной системы, сопровождающие смещение узла 2
по горизонтали (рис. 2.30, в).
В силу малости перемещений можно считать, что узел 1 сме-
щается при этом по нормали к оси стержня А—1 (по касательной
к окружности с центром в т.Л). Учитывая, что горизонтальная про-
екция этого перемещения должна быть равна единице, находим
взаимные смещения Л и f2 концов ригеля и стойки по нормали к их
осям. В более сложных случаях для определения fi и f2 можно вос-
пользоваться статическим методом (см. определение перемещений
от осадок опор — гл. 7), предварительно введя в жесткие узлы шар-
ниры. Теперь с помощью табл. 2.4 получим эпюру М2 (рис. 2.30,г).
Здесь множители fi и f2 в значениях моментов учитывают отличие
смещений в ригеле и стойке от единицы.
Построение остальных эпюр (ЛЬ и Mf) не связано с какими-либо
затруднениями (рис. 2.30, д).
Так же, как обычно, определяются реакции в плавающей задел-
ке— Гц, л2, Rif. При вычислении реакций во второй связи, вырезав
ригель (рис 2.30, а), обнаруживаем, что на ось опорного стержня
дают проекции не только поперечные силы, но и продольная сила
в наклонной стопке. В этом случае применяют различные приемы,
позволяющие либо избежать учета продольных сил, либо опреде-
лить эти силы и учесть их в условиях равновесия.
Так как поперечные силы просто определяются на эпюре изги-
бающих моментов, то для определения продольных сил и, в конеч-
ном итоге, неизвестной реакции можно воспользоваться способом
вырезания узлов. Так, из равновесия узла / (рис. 2.30, ж) следует
S У = Qi — Qi cosa — sina -- 0;
<?8 — Qi cos а
1 sin а *
а из равновесия узла 2 (рис. 2.30, э)
S.t =; г«2 — Фз == 0j
г22 =- A'j -I Qst •
Иногда удается записать уравнение равновесия ригеля так, что
в него не входят продольные силы. В нашем случае такой резуль-
тат дает уравнение моментов относительно т.К (рис. 2.30, е).
И, наконец, для определения реакций в таких случаях можно
воспользоваться перемножением эпюр.
8.6. Расчет на смещение опор и температурные воздействия
Порядок расчета статически неопределимой рамы (рис. 2.31, а)
методом перемещений при заданных смещениях опор сохраняется
тот же, что и при действии нагрузки. Так же выбираем основную
систему (рис. 2.31, б), записываем канонические уравнения
r ii^i "Ь г 12^2 4" Ric= 0;
r^Zi + r22Z2+ = 0, (2.70)
так же строим эпюры от единичных смещений (рис. 2.31, в).
181
РИС. 2.Э1
При построении эпюры моментов от осадок опор необходимо пред-
варительно найти вызванные осадкой перемещения узлов основной
системы. Эти перемещения можно определить из геометрических соот-
ношений (кинематически), если рассматривать отдельно каждое за-
данное смещение (рис. 2.31, г), а затем просуммировать соответствую-
щие эпюры* для получения результирующей эпюры моментов Мс ==
= + +Л4е в основной системе (рис. 2.31, д).
Дальнейший расчет ничем не отличается от расчета на заданную
нагрузку.
Как видим, при построении эпюры наибольшие затруднения
встречаются при наличии линейных осадок опор, вызывающих ли-
нейные взаимные смещения концов стержней по нормали к их оси.
В особо сложных случаях для определения этих смещений можно
воспользоваться статическим методом. Покажем его на примере
определения взаимного смещения концов наклонной стойки. По-
скольку длину стержней предполагаем не меняющейся в процессе
деформации, основную систему можно заменить системой с шарни-
рами во всех узлах (рис. 2.31, е). Прикладывая теперь в этой систе-
ме по концам наклонной стойки пару сил F = 1, находим опорные
реакции по направлению смещений опор и применяем формулу
.(МЗЗ):
Расчет на температурные воздействия рассмотрим на примере
рамы, показанной на рис. 2.32, а. Выбрав основную систему
(рис. 2.32, б), для каждого стержня представим изменение темпе-
ратуры в виде двух составляющих (рис. 2.32, в). Одна из них вызы-
вает только продольные деформации стержня и соответствует при-
ращению температуры его нейтрального слоя:
= (Л + де. (2.71)
другая — вызывает изгиб оси стержня и соответствует изменению
приращений температуры на единицу высоты сечения стержня:
4>~(G~UM. (2.72)
Изгибные температурные воздействия 4 вызывают в основной
системе изгибающие моменты только в тех стержнях, где они действу-
ют. Для построения эпюры изгибающих моментов (рис. 2.32, г)
можно воспользоваться табл. 2.4.
Влияние равномерного нагрева на усилия в раме так же мало
по сравнению с неравномерным нагревом h, как и влияние про-
дольных деформаций при расчете на силовые воздействия. Учет
этого нагрева необходим лишь в тех случаях, когда в составе рамы
есть стержни, закрепленные опорными связями в продольном на-
правлении статически неопределимо. Наличие или отсутствие таких
закреплений легко обнаружить на шарнирно-стержневой схеме
рамы (рис. 2.32, д). В рассматриваемой раме их нет и эпюра
является искомой эпюрой Mt изгибающих моментов от температур-
ного воздействия в основной системе.
183
Pile. 2.32
Построив обычным порядком остальные эпюры в основной си-
стеме, находим единичные и грузовые реакции, решаем канониче-
ские уравнения
G А 4“ и = 0;
^21^1 4“ г22^2 4" Rzt — (2.73)
и продолжаем расчет, как и при действии нагрузки.
8.7. Метод перемещений в матричной форме
Используя формулы (2.61) и (2.66), запишем выражения для вы-
числения матриц коэффициентов и свободных членов канонических
уравнений метода перемещений:
R = MTLM,
Ri = -MTLMt. (2.74)
Формулы (2.74) получены по аналогии с матричными формулами
для вычисления коэффициентов и свободных членов канонических
уравнений метода сил. Входящие в них матрицы: М (матрица еди-
ничных моментов в кинематически определимой основной системе),
J84
Mf (матрица грузевых моментов в статически определимой основ-
ной системе) и L (матрица подагливостн стержней) составляются так
же, как аналогичнв1е матрицы в методе сил.
Решение канонических уравнений метода перемещений
RZ + Rf = О,
записанных в матричной форме, выразим через матрицы моментов
и матрицу податливости. Получим
Z = — R-'Rf = (ATLAf)-1 М TLM /. (2.75)
Теперь матрицу изгибающих моментов можно получи гь, используя
выражение (2.59)-
М = Mf + М Z, (2.76)
или
М = Mf + М (MTLM)~l MTLMf. (2.77)
Матрица Aff, в отличие of матрицы М/, составляется по значениям
изгибающих моментов в основной системе метода перемещений.
Применение формул (2.74) для реакций позволяет в значитель-
ной степени формализовать процесс расчета систем методом пере-
мещений, однако требует перемножения эпюр изгибающих моментов.
В связи с этим для вычисления реакций и, в частности, матрицы Rt
являющейся матрицей жесткости основной системы, применяют
различные приемы. Эти приемы, в конечном итоге, ставят своей це-
лью получение матрицы жесткости основной системы с помощью
условий равновесия.
8.8. Учет продольных деформаций
Описанный выше метод перемещений изложен исходя из предположения об
отсутствии продольных деформаций стержней. Это допущение ограничи ает
применимость метода, предполагая расчет лишь изгибаемых систем (рам). Однако
такое ограничение не является принципиальным.
Рассмотрим раму, приведенную на рис. 2.33, а. Если попытаться рассчитать
ее методом перемещений без учета продольных деформаций, то в основной системе
^рис. 2.33, б) вводится одна плавающая заделка, эпюра будет нулевой, следо-
вательно, изгибающие моменты в исходной раме отсутствуют. В действитель-
ности же за счет удлинений стержней узел рамы перемещается, и поэтому, выби-
рая основную систему, необходимо закрепить его и для предотвращения линей-
ных смещений (рис. 2.33, в).
Получаем три неизвестных перемещения, для определения которых состав-
ляем три канонических уравнения:
ГП^1 + Л12^2 + <13^3 + ^1/ =0»
г21^1 + + '28^8 + ^2/ в
Т31*1 + Г32*2 + Г83*3 + ^3/ = &
Эпюра изгибающих моментов от ~Zt e 1 строится, как обычно (рис. 2.33, а).
Действие неизвестных £а»и Zs вызывает, помимо и гибаклцих моментов
185
|е*з/1з
Fee, 2.33
(рис. 2.33, d) и связанных с ними поперечных сил, еще и продольные силы:
Л71а = 0; = (EAjlz) sina; W3S ==-_£Л3//Э;
/Vf3 » EAyJli\ —— (EA^l^ cosa; /V33 = 0.
При определении любой реакции теперь можно вырезать только тот узел, в кото*
ром действует данная реакция. Это связано с тем» что все узлы системы закрепле-
ны так, что не могут перемещаться, и усилия появляются только в тех стерж-
нях, которые сходятся в смещаемом узле.
Из условий равновесия узлов (рис. 2.33, е) нетрудно найти все реакции.
Дальнейший расчет выполняется так же, как и при отсутствии продольных
деформаций.
Рассмотренный вариант метода перемещений делает его универсальным и,
несмотря на усложнение расчетов, дает наибольшую степень их формализа-
ции. Поэтому его часто применяют для составления алгоритмов расчета стерж-
невых систем на ЭВМ. По своей сути метод перемещений в таком виде является
частным случаем более общего метода конечных элементов.
Вопросы для самоконтроля
1. Какие допущения принимаются обычно при расчете методом перемеще-
ний?
2. Что принимается за неизвестные метода перемещений?
3. Как определяется степень кинематической неопределимости системы?
4. Какая система является кинематически определимой?
5. Как в методе перемещений производится переход к основной системе?
6. Какая заделка называется плавающей?
7. На какие элементы расчленяется сооружение в основной системе?
8. Каким образом строят эпюры изгибающих моментов в основной системе?
9. Какие условия выражают канонические уравнения метода перемещений?
10. Каков механический смысл величин r[k и
1L Как статическим способом определяются коэффициенты н свободные
члены канонических уравнений?
12. Какие соотношения существуют между коэффициентами канонических
уравнений?
13. Каким образом после определения неизвестных строят эпюры внутрен-
них усилий для заданной системы?
14. Как проверяют правильность решения методом перемещении?
15. Как определяются единичные реакции в основной системе перемноже-
нием эпюр?
16. Какие эпюры необходимо перемножить для определения грузовой
реакции?
17. Как перемножением эпюр проверить правильность вычисления коэф-
фициентов и свободных членов канонических уравнений?
18. Какие приемы используются для упрощения расчета симметричных си-
стем методом перемещений?
19. Какова особенность определения реакций в групповых связях?
20. Какова особенность построения единичных эпюр моментов в рамах
с наклонными стойками?
21. В чем заключается особенность расчета методом перемещений при за-
данных осадках опор?
22. Как раскладывается температурное воздействие при построении эпюры
изгибающих моментов в основной системе?
23. Какие выражения используются для вычисления матриц коэффициентов
и свободных членов канонических уравнений в матричной форме?
24. Какие матрицы входят в выражение матричного алгоритма метода
перемещений? Каковы их размерности?
25. Как в методе перемещений учесть продольные деформации стержней?
187
Глава 9
СМЕШАННЫЙ МЕТОД. СРАВНЕНИЕ МЕТОДОВ РАСЧЕТА
9.1. Смешанный метод
Рассмотренные в предыдущих главах метод сил и метод переме-
щений могут быть применены в расчете самых разных статически
неопределимых систем. Однако каждый из них имеет свою преиму-:
шественную область применения. Например, для рам с прямолиней-
ными стержнями, имеющих в основном жесткие узлы, удобнее при-
менять метод перемещений. В шарнирно-стержневых системах, а
также в рамах при наличии стержней с криволинейной, или лома-
ной осью обычно число неизвестных метода сил меньше числа неиз-
вестных метода перемещений. Поэтому для расчета таких систем
удобнее применять метод сил.
Встречаются также сложные системы, в которых можно выде-
лить одну часть, удобную для применения метода сил, а другую —
для применения метода перемещений.
Метод расчета статически неопределимых систем, при котором
за неизвестные принимается часть сил и часть перемещений, назы-
вается смешанным методом. Этот метод подробно разрабо-
тан А. А. Гвоздевым в 1927 г.
Применение смешанного метода рассмотрим на примере рамы, по-
казанной на рис. 2.34, а. Ее расчет методом сил приводит к реше-
нию системы семи уравнений с семью неизвестными. Применение
метода перемещений затрудняется из-за наличия в среднем пролете
криволинейного ригеля. Расчленим раму, выделив в ней среднюю
криволинейную часть, как показано на рис. 2.34, б. Как видим, сред-
188
няя часть является один раз статически неопределимой. За неиз-
вестное в ней удобно принять какое-либо усилие, например, изги-
бающий момент в среднем сечении С. Каждая из оставшихся частей
рамы имеет степень кинематической неопределимости, равную еди-
нице. При их расчете удобно в качестве неизвестных принять поворо-
ты узлов / п 2. Тогда в основной системе введем в сечение С шарнир
и поставим в узлах 1 и 2 плавающие заделки (рис. 2.34, в).
Условиями эквивалентности основной и заданной систем в этом
случае будут отсутствие перемещений по направлению неизвестного
Xi и отсутствие реакций в плавающих заделках. Эти условия запи-
шем в канонической форме:
^11-^1 4“ ®12^2 4* = О»
^21^1 *4" ^22^2 4" ^28^8 “I" ^2f = Ф (2.78)
*81^1 + Г32^2 + Л33^8 + = 0.
Уравнения (2.78J называют каноническими уравнениями смешанного
метода. Матрицу их коэффициентов разделим на четыре блока?
Каждый из этих блоков объединяет однотинные коэффициент»!
Dn — перемещения, вызываемые силами; — перемещения о»
смещений дополнительных связей; D21 — реакции, вызываемые
силами, и D2z — реакции от смещений связей.
Перемещения от сил находят по формуле Мора (как и в метоле
сил):
Перемещения от смещения связей определяют либо из геометриче-
ских соотношений по эпюре перемещений^ либо статически, как пере-
мещения от смещения опор.
Для определения реакций от сил и от смещений связей используют
условия равновесия соответствующих узлов или стержней (как и
в методе перемещений).
При вычислении коэффициентов канонических уравнений следует
помнить о теоремах взаимности перемещений» реакций, перемещений
и реакций. В частности, в рассматриваемой раме имеют место следу-
ющие соотношения! б12 •= —r2J; = —*зъ ^ая = гз2- Дальнейший
расчет (решение системы канонических уравнений, построение эпюр
/И, Q, Л7) не отличается от расчета методом сил или методом переме-
щений.
Отметим, что смешанный метод не имеег такого широкого распро-
странения для расчета стержневых систем, как метол сил или метод
перемещений. Однако он успешно применяется для решения некоторых
еадач. например для расчета балки на упругом основании (рис. 2.35,а).
№
Ь
Рнс. 2.85
Основание при этом моделируется упругими опорами (рив. 2.35, б)'
и в основной системе за неизвестные принимают реакции в опорных
стержнях и перемещения дополнительной связи (рис. 2.35, в).
9.2, Выбор метода расчета. Комбинированный способ
Приступая к расчету той или иной системы, в первую очередь
необходимо выбрать метод ее расчета. Простейшим критерием при
выборе метода является меньшее количество неизвестных.
Например, рама на рис. 2.36, а имеет степень статической неопреде-
лимости nsl = 1, а степень кинематической неопределимости пап ®
« 3, поэтому ее удобнее рассчитать методом сил. Для рамы, приве-
ло» ной на рнс. 2.36, б, nsl = tidn =® 2. Симметрия рамы и нагрузки
позволяет сократить число неизвестных в методе вил до одного, а в ме-
тоде перемещений все неизвестные обращаются в ноль. Тогда эпюра на-
гибающих моментов в основной системе метода перемещений соответ-
овует эпюре для ваданной рамы.
В некоторых случаях одну и чу же раму при разных вагруженнях
удобно рассчитывать равными методами.
Рмс. £.88
190
Пусть П-образиая симметричная рама загружена произвольной
нагрузкой (рис. 2.37, а). Степень статической неопределимости рамы
равна степени кинематической неопределимости! nst —пс1п = 3.
Разложим нагрузку на симметричную и кососимметричную составля-
ющие (рис. 2.37, б) и для каждой составляющей выберем рациональ-
ный метод расчета.
При симметричной нагрузке число неизвестных в методе сил со-
кращается до двух (например, изгибающий момент и продольная
сила в среднем сечении ригеля). В то же время в методе перемеще-
ний линейные смещения узлов отсутствуют, а угловые равны между
собой.
При кососимметричной нагрузке, напротив, в методе сил оста-
ется лишь кососимметричное неизвестное (поперечная сила в се-
редине ригеля), а в методе перемещений удается сократить число
неизвестных лишь до двух.
Таким образом, в рассматриваемой раме расчет на симметрич-
ную нагрузку выполняем методом перемещений (рис. 2.37, в), а на
кососимметричную — методом сил (рис. 2.37, г). Окончательные
усилия получают суммированием их составляющих, найденных ме-
тодом сил и методом перемещений.
Описанный выше способ расчета статически неопределимых си-
стем называют комбинированным способом.
9.3. Способ уравновешивания узлов
В современных сооружениях довольно часто встречаются систе-
мы, расчет которых даже при удачном выборе метода связан с уче-
том большого числа неизвестных. При использовании ручного счета
в этих случаях неизбежно применение приближенных способов ра-
счета.
191
Одним из таких способов явля-
ется способ уравновеши-
вания узлов (способ распре-
деления моментов). Этот способ'
разработан на основе метода пе-
ремещений. Механический смысл
его заключается в том, что пооче-
редно в основной системе метода
перемещений снимаются плаваю-
щие заделки. При этом, повора-
чиваясь, узел уравновешивается,
после чего заделка ставится снова
и переходят к другому узлу. С
точки зрения математики этот
способ сводится к последователь-
ному решению канонических урав-
нений метода перемещений каж-
дого относительно своего глав-
ного неизвестного. Такой итера-
тивный метод решения системы
уравнений известен в математике
как метод Зейделя.
Способ уравновешивания узлов
наиболее удобен при расчете не-
разрезных балок и многократно
статически неопределимых рам с
несмещающимися узлами, хотя
возможен также расчет рам, име-
ющих линейные смещения узлов.
Рассмотрим прежде всего расчет рамы с одним жестким узлом
(рис. 2.38, а). Основная система и эпюра будут такими же, как
и в методе перемещений (рис. 2.38,6). Моменты, соответствующие
эпюре Mft условимся называть моментами заделки. Изгибающие
моменты на концах стержней будем обозначать буквой М с тремя
индексами (рис. 2.38, б). Первые два индекса соответствуют номе-
рам узлов, между которыми находится рассматриваемый стержень,
причем первым указывается тот узел, у которого взято сечение.
Третий индекс указывает причину, вызвавшую данный момент.
Изгибающий момент на конце стержня равен по величине и об-
ратен по направлению реактивному моменту в заделке у этого кон-
ца стержня. Условимся положительным считать изгибающий мо-
мент, вращающий узел против часовой стрелки, и наоборот. Приня-
тое правило знаков соответствует направлению моментов от поворо-
та узла по часовой стрелке.
С учетом сказанного выше реакция в заделке / от заданной на-
грузки равна алгебраической сумме изгибающих моментов на кон-
цах стержней у узла 1:
Чц-ЯМы. (2.79)
192
Эта величина характеризует степень неуравновешенности узла (при
S М I*, f = 0 узел находится в равновесии н дальнейший расчет не нужен)
*я2 4
и называется неуравновешенным моментом, В нашем примере J Mi*, t =
= Af|2,, = F//8.
При повороте узла / на угол = 1 на концах стержней появятся
изгибающие моменты, определяемые по табл. 2.4:
Mi2.ij=4EZ12/Z; ?Й21.£=2Е/18//;
Ml3.i = 3E/l3/Z; Л/81 = 0;
Ми, L = 4Е/14 / Z; M4t, t = 2Е/14 / Z.
При этом в заделке появится реакция ги, разная сумме моментов:
ru = X Mik, i = /И|2, i 4- М1з, i +-Мн, ь
fc-=2
Из решения канонического уравнения метода перемещений получаем
— — —------==— -=-----М12, f.
^12, 1 М13, 1 + ZW 14в !
Найдем значения изгибающих моментов на концах стержней у
узла /, вызванных поворотом этого узла на угол Zp
м|г., = —.----?'* _------Л112
MK,t+*i3.1+wKl
М13, 1
М3.1 = — ------М12, г,
^12, ! + ^13, 1 + ^14, 1
i
Мц, I — — =------=—:--=-----Mi2 f.
M12. I + ^13, 1 + M14, 1
Каждый из этих моментов представляет собой долю неуравнове-
шенного момента, взятую с обратным знаком:
Ми, । = — P12ZH12, f,
ZWi3, i = —P13ZW12. г;
ZW14. i = — P14ZW12, f.
Коэффициенты при неуравновешенном моменте называют
циентами распределения:
(2.80)
коэффи-
М12, I
И1’ M12.1 + WW.|+M
М,3.,
^13 71412, I + M13,! + M14, I
^14,1
(2.81)
M12, I + ZH13e । + ^14,1 j
193
Изгибающие моменты в этих выражениях могут иметь только два
значения: 4EIU или 2Е1Н. Поэтому в отношениях (2.81) их заменяют
коэффициентами жесткости стержней — i. Для стержня о заделкой
на конце (в нашем примере стержни 12 к 14) коэффициент жесткости
i ~ El И, а для стержня а шарнионым концом (в нашем примере —
13) i =- О,7ЬЕГ11.
Таким образом, коэффициенты распределения будут иметь такие
выражения!
k=a
5+Йт7й? W
Zjlik
fe=2
- *1* — ___________
P14”« ~Йя + <\з + Ч4в
il *1*
ft=2
Сумма коэффициентов распределения для узла равна единице.
Для вычисления моментов на концах стержней у узла 1 достаточно
алгебраически сложить соответствующие моменты в основной системе
(рис. 2.38, б) (моменты заделки) и распределенные моменты (2.80).
При повороте узла 1 изгибающие моменты на концах стержней
Л?21,1 и М41Л составляют половину величины моментов и Мил.
Поэтому их легко определить после того, как найдены моменты рас-
пределения. Операцию вычисления моментов М#л и Л141л называют
передачей моментов, г сами моменты — переданными. Очевидно, на
шарнирный копей стержня 13 момент >?е передается. Теперь легко
построить окончательную эпюру изгибающих моментов (рис. 2.38, в).
Расчет системы с многими неизвестными при отсутствии линейной
подвижности узлов выполняется в такой последовательности!
1) определение изгибающих моментов от заданной нагрузки (мо-
ментов заделки) в основной системе (табл. 2.4);
2) вычисление коэффициентов жесткости стержней и коэффициен-
тов распределения для каждого узла;
3) уравновешивание одного из узлов:
а) определение неуравновешенного момента суммированием мо-
ментов на концах стержней у данного узла;
б) вычисление распределенных моментов на концах стержней
у узла, равных взятому с обратным знаком неуравновешенному мо-
менту, умно?кенному на соотвегствующие коэффициенты распределен
ния;
в) передача моментов на противоположные концы стержней (пере-
даваемый момент равен половине распределенного при жестком конце
стержня и нулю — при шарнирном);
4) последовательное уравновешивание остальных узлов (возможно
одновременное уравновешивание нескольких узлов);
194
5) переход к новому этапу уравновешивания узлов, выведенных
из равновесия при передаче моментов. Процесс уравновешивания
узлов продолжается до тех пор, пока неуравновешенные моменты во
всех узлах не станут меньше заданной величины;
6) вычисление окончательных моментов алгебраическим суммиро-
ванием моментов заделки, распределенных и переданных моментов.
Расчет удобно выполнять в табличной форме.
При наличии линейных смещений узлов расчет существенно услож-
няется. При этом сначала способом уравновешивания узлов выпол-
няют ряд расчетов рамы с узлами, закрепленными от линейных смеще-
ний, отдельно на заданную нагрузку и на каждое единичное линейное
смещение. По результатам расчетов определяют реакции в опорных
стержнях и далее решают обычную задачу метода перемещений с не-
известными линейными смещениями.
Для многопролетных многоэтажных рам возможен и другой вариант
учета линейных смещений. В этом варианте уравновешивание момен-
тов в узлах чередуется с уравновешиванием поперечных сил в стой-
ках этажей рамы. Однако при этом сходимость процесса уравновеши-
вания существенно ухудшается.
В заключение отметим, что способ уравновешивания узлов явля-
ется приближенным в том смысле, что расчет выполняется с наперед
ааданной точностью, которая может быть сколь угодно малой.
Вопросы для самоконтроля
I. Какие величины принимаются аа неизвестные в смешанном методе?
2. Как определить количество этих неизвестных?
3. Как выбирается основная система смешанного метода?
4. Каков механический смысл канонических уравнений смешанного метода?
5. Какова сущность канонических уравнений отдельных видов?
6. Что является коэффициентами при неизвестных в канонических уравне-
ниях смешанного метода?
7. Как определяются эти коэффициенты?
8. Удовлетворяет ли условию симметрии матрица коэффициентов канони-
ческих уравнений смешанного метода? Почему?
9. Как строят окончательные эпюры Mt Q и N после определения неизвест-
ных смешанного метода?
10. Каким критерием пользуются при выборе метода расчета статически
неопределимой системы?
11. В чем сущность комбинированного способа?
12. Как преобразуется нагрузка для применения комбинированного спо-
соба?
13. Каким свойством должна обладать система для применимости комбини-
рованного способа?
14. Какой классический метод расчета статически неопределимых систем
положен в основу способа уравновешивания узлов? Какова его сущность с точки
врения математики?
15. Какие системы рекомендуется рассчитывать способом уравновешивания
узлов?
16. Какая основная система применяется в способе уравновешивания узлов?
17. Какое правило енаков применяется для изгибающих моментов в этом
способе?
18. Какая величина называется неуравновешенным моментом?
19. Как определить коэффициенты жесткости стержней?
20. Как определить коэффициенты распределения?
195
21. Каким свойством обладает сумма коэффициентов распределения для уала?
22. Что понимается под передачей моментов?
23. Приведите порядок расчета рамы с несмещающимися узлами способом
уравновешивания узлов.
24. Как выполнить расчет системы при наличии линейных смещений узлов?
25. Какова точность расчета способом уравновешивания узлов?
Глава 10
НЕРАЗРЕЗНЫЕ БАЛКИ
Неразрезная балка представляет собой прямолинейный стержень»
лежащий более чем на двух шарнирных опорах. Такая балка являет-
ся статически неопределимой. Степень ее статической неопределимости
можно определить через число опорных связей, которое вычисляется,
как число шарниров в многопролетной статически определимой балке
(см. гл. 2):
п = Cq — 3.
Рассмотрим расчет неразрезной балки на различные виды нагру-
зок.
ЮЛ. Расчет на неподвижную нагрузку
Для расчета неразрезной балки (рис. 2.39, а) могут быть исполь-
зованы все рассмотренные в предыдущих главах методы расчета ста-
тически неопределимых систем. Выбор того или иного метода осуще-
ствляется в зависимости от закона изменения жесткостей, характера
нагрузки и числа неизвестных. В самом общем случае при произвольном
законе изменения жесткости сечения для расчета балки целесообразно
применить метод сил. Основную систему рационально принять, вве-
дя шарниры в сечениях на промежуточных опорах (рис. 2.39, б). Эта
основная система удобна тем, что эпюры изгибающих моментов от
единичных неизвестных (опорных моментов) распространяются только
на смежные пролеты (рис. 2.39, в). В связи с этим при k > i + 1 или
к < i — 1 6<л = 0, а матрица D коэффициентов канонических урав-
нений имеет ленточную структуру.
Если жесткость в каждом пролете балки постоянна, канонические
уравнения метода сил принимают известный из сопротивления мате-
риалов вид уравнений трех моментов
^—14 + 2Х; (l't 4- li .f.f) i = 1,2, ]Л| (2.83)
где = — приведенная длина i-ro пролета балки; В/, / 4-
+ Aft t+i — приведенная фиктивная реакция на Z-й опоре; Я/,/,
В,,, — фиктивные реакции на левой и правой опорах t-го пролета.
Для определения фиктивных реакций Af, i, t в Z-м пролете рас-
сматривается фиктивная балка (выбирается по правилам, описанным
в гл. 6), вагруженная условной нагрузкой, распределенной по закону
196
балочных изгибающих моментов Mf = М° (рис. 2.39, г). Фиктивная
балка для третьего пролета показана на рис. 2.39, д. Для простейших
нагрузок значения фиктивных реакций можно найти по табл. 2.5.
После решения системы уравнений (2.83) окончательная эпюра
изгибающих моментов получается сложением эпюры опорных момен-
тов и эпюры балочных моментов (рис. 2.39, е).
Расчет балки с постоянной для каждого пролета жесткостью может
быть выполнен также методом перемещений. Неизвестными в этом слу-
чае являются углы поворота сечений на промежуточных опорах
(рис. 2.40).
197
Наряду с рассмотренными методами расчета балки с пролетами
постоянного сечения, загруженной только в одном пролете, удобно
применить метод моментных фокусов.
10.2. Метод моментных фокусов
Моментные фокусы и фокусные отношения. Неразрезпая балка
обладает следующим свойством: при загружении какого-либо пролета
эпюра изгибающих моментов в остальных (незагруженных) пролетах
пересекает ось в некоторых фиксированных точках, положение которых
198
не зависит от вида нагрузки в загруженном пролете (рис. 2.41). Таким
образом, как бы ни меняли нагрузку в четвертом пролете балки
(рис. 2.41), в остальных пролетах эпюра М пройдет через точки К19
К» К* Кв. Ki, Ki.
Нулевые точки, расположенные слева от загруженного пролета,
называются левыми моментными фокусами (Л\, К2, К3), а точки, рас*
положенные справа, — правыми моментными фокусами (К'5,
к;).
Положение фокусов определяется фокусными отношениями. На-
пример, левое фокусное отношение
Ь2 = Ь2/а2, (2.84)
правое фокусное отношение
= (2.85)
Фокусные отношения всегда положительны. Иначе их можно
определить через моменты на концах соответствующего пролета:
2 ~ I ЛК 1“ Ml ’ 5 “ | /И6 | Ms ‘
В общем случае для t-ro пролета левое и правое фокусные отно-
шения
*/== — k‘t = (2.86)
Для определения левого фокусного отношения запишем уравнение
трех моментов для i-й промежуточной опоры. Предполагая, что смеж-
ные с опорой пролеты k и lt+i незагружены, получаем
W/ + + Гж) + Mi+Jw = 0. (2.87)
Разделив все члены уравнения на Mlt заменим отношения моментов
соответствующими фокусными отношениями. Теперь уравнение (2.87)
принимает такой вид:
—7Г + ^м) —
откуда
(28Ъ)
199
s4
L
1___________________2
-1 0_________________________f_____________ 2
i, t h 7
РЯС. 2.42
Формула (2.88) является
рекуррентной, поэтому тре-
буется каким-либо образом
найти фокусное отношение
для первого пролета. Если
крайняя опора балки шарнир-
ная, воспользуемся соотноше-
ниями (2.86). Для первого
(крайнего левого) пролета
оо.
При наличии на конце балки заделки преобразуем ее путем введе-
ния дополнительного пролета (рис. 2.42). Теперь находим = со,
/'1 « 2
Для определения правых фокусных отношений может быть получена
рекуррентная формула, аналогичная (2.88)1
AU=2+_^.(2_^). (2.89)
Применение фокусных отношений для построения эпюр. Если из
всех пролетов неразрезной балки загружен только один пролет lft
то опорные моменты на концах этого пролета могут быть получены
из уравнений трех моментов, записанных для опор / — 1 и /1
AW/-I + 2М,^ (Г,., + /-,) + Mfi = -6 Af, fi
M + 2M, (Ct + Г/+1) + - -6-^-Bf. /. (2.90)
Подставляя в (2.90) моменты Л4/.г и из соотношений
**—«£—|М|>
приходим к системе двух уравнений с двумя неизвестными —
и М/. Решение этой системы дает выражения для определения изги-
бающих моментов на концах загруженного пролета:
(2.92)
200
Рас. Я.4Э
Изгибающие моменты на остальных опорах находят с помощью
фокусных отношений. Например,
Mj—2 = —М/_^l—з « —Mi—z/kj—2, • • •;
Mj-Y\ ~ —My/tyf-fi M/+2 =—М/+1/Л;+2, . . .
После этого эпюра М строится как сумма эпюры опорных мо-
ментов (прямолинейной в каждом пролете) и эпюры балочных момен-
тов М°.
Для балки постоянной жесткости формулы (2.92) принимают та-
кой вид:
Df SR{ — /it .
М,—6 - • <2-93)
При загружении в балке одного из крайних пролетов с крайней
шарнирной опорой в формулах (2.92), (2.93) получается неопределен-
ность вида ео/в0. Например, при загружении балки, как показано на
рис. 2.43, при постоянной жесткости получаем
Мо = 0;
М^-б
1 ’ ~ Л/, t __ _оо
(со • Л| — 1) со
Чтобы избавиться от неопределенности, разделим числитель и знаме-
натель второй формулы (2.93) на kf. Получаем
м1=~61%-- (2.94)
В тех случаях, когда загружены несколько пролетов, рассматри-
вают поочередно загружение каждого из них. Сначала определяют
опорные моменты, вызываемые нагрузкой одного пролета, затем дру-
гого и т. д. Полученные моменты суммируют.
201
10.3. Расчет на подвижную нагрузку
При построении линий влияния для неразрезной балки удобно
применятьметодмоментных фокусов. Внутренние усилия в некотором
сечении (рис. 2.44) определяются через изгибающие моменты на ле-
вой и правой опорах (М/, Мг) и балочные усилия от подвижной еди-
ничной силы (М’„, QJj):
<?т = <гг„ + м,4-л«,1. (2.95)
Аналогично можно получить выражение для реакции в i-й опоре;
К'-Я + М^-М^+^ + М^. (2.96)
Таким образом, для построения линий влияния усилий в неразрезной
балке предварительно требуется построить линии влияния опорных
моментов.
При определении опорных моментов от единичной силы, находя-
щейся в /*-м пролете балки постоянной жесткости, воспользуемся
р
формулами (2.93). С учетом фиктивных реакций А/,,= -£ е£(1 + £),
+ е), найденных по табл. 2.5, приходим к следующим
выражениям:
м‘~'= - ьЛч14(1 + £)*; -4(1+4);
' ' (2.97)
М‘ = —14(1 + е) - 4(1 + fc)L
Изменяя в (2.97) е в получаем набор значений ординат для построе-
ния линий влияния опорных моментов Mt и M{_i при положении
единичной силы в г-м пролете.
Остальные опорные моменты легко получить с помощью фокусных
отношений.
Рве, 1,44
202
Рис. 2.45
Перемещая далее единичную силу в пролет l -J- J, находим значе-
ния опорных моментов для построения линий влияния в пределах
пролета i + 1 и т. д.
Когда линии влияния опорных моментов Мг и Mt построены,
необходимо построить линии влияния балочных усилий. Просумми-
ровав ординаты балочной линии влияния и линий влияния опорных
моментов в соответствии с формулами (2.95), (2.96), получают орди-
наты окончательной линии влияния.
Для построения моделей линий влияния усилий в неразрезной
балке (без вычисления ординат) удобно воспользоваться кинематиче-
ским методом. Так, на рис. 2.45 показано построение вида линий влия-
ния /?2, M2, Qm. С помощью линий влияния легко установить ха-
рактер невыгоднейшего загружении любой временной нагрузкой
и значение наибольшего усилия.
Часто при расчете неразрезной балки возникает необходимость
определить наибольшие усилия в сечениях от равномерно распреде-
ленной на тех или иных пролетах нагрузки. Чтобы установить, какие
пролеты при этом должны быть загружены, не обязательно строить
линии влияния. Например, тот факт, что при попеременном загру-
жении двух смежных пролетов усилие в любом другом пролете меняет
свой знак, легко установить исходя из понятия моментного фокуса.
В связи с этим пролеты, находящиеся слева (справа) от рассматривае-
203
охш
п-2 n-JS^a. п___п*1 п+2
С [X
| . Ь-1 J-J *" I ,„| - -| Ьи2 - |
Mitt [Л'хИтТГП________с
11 Q [
ЙЛЯ М;т;п
/ттгп.
ЙЛЯ ^Стаж
—птт
11 ff I
Эля МВт1п
—птгп
Зля Mj
ПШ------------- ГТТТП I I Н I
Рис. 2.46
мого, для получения наибольшего или наименьшего усилия должны
быть загружены через один.
Установим другие особенности невыгоднейшего расположения
временной нагрузки.
При определении наибольшего отрицательного опорного момента
необходимо установить нагрузку на смежных с данной опорой проле-
тах и, далее, влево и вправо через каждый пролет. Очевидно, то же
можно рекомендовать и для определения наибольшего значения опор-
ной реакции.
Для вычисления наибольшего положительного опорного момента
следует загрузить пролеты, расположенные через один влево и вправо
от данной опоры и далее через каждый пролет.
При определении наибольших изгибающих моментов в пролетных
сечениях характер загружения зависит от положения сечения. Рас-
смотрим сечение С, расположенное между моментными фокусами Кп
и Кп в пролете л. При загружении левого (л — 1)-го пролета опорный
момент /Ил-1 отрицательный, а в пролете пэпюра пройдет через правый
фокус и, следовательно, в сечении С будет отрицательный момент.
Аналогичные рассуждения могут быть сделаны и для нагрузки, рас-
положенной справа, на пролете п + 1. Учитывая, что нагрузка, рас-
положенная в пролете л, вызовет в сечении С положительный момент,
получаем схему невыгоднейшего загружения для определения наиболь-
шего отрицательного момента Мс (рис. 2.46, а). Наибольший положи-
тельный момент в сечении С, очевидно, будет получен при загружении
всех остальных пролетов (рис. 2.46, б).
Рассмотрим теперь сечение D, расположенное между опорой п — 1 и
левым моментным фокусом Кп. Как и для сечения С, при загружении ле-
вого, (п—1)-го, пролета изгибающий момент Md отрицательный.
Нагрузка же, расположенная на правом (л + 1)-м, пролете вызовет мо-
мент MD > 0. Вопрос о загружении л-го пролета может быть решен
только после определения нулевых точек эпюры изгибающих моментов
в этом пролете от расположенной на нем нагрузки (рис. 2.46, в).
204
При расчете неразрезной балки, как и для многопролетной стати-
чески определимой балки, удобно иметь огибающую эпюру изгиба-
ющих моментов. Напомним, что для ее построения необходимо опре-
делить наибольшее и наименьшее значения моментов от совместного
действия постоянной и временной нагрузки в невыгоднейшем положе-
нии для ряда сечений. Построив по этим данным эпюры максимальных
и минимальных моментов, получают огибающую эпюру.
10.4. Неразрезная балка на упругих опорах
В некоторых случаях при расчете балочных мостов на опорах в виде гибких
стоек, а также рам, перекрестно расположенных балок и других систем появля-
ется необходимость учета упругих осадок опор под нагрузкой. Наличие таких
осадок в расчетной схеме балки моделируется постановкой упругих опор
(рис. 2.47, с). В общем случае податливость опор может быть разной и для л-й опо-
ры она характеризуется величиной осадки vn от действия единичной силы.
Для расчета балки методом сил выберем основную систему, показанную на
рнс. 2.47, б.
Построив эпюры изгибающих моментов (рис. 2.47, о—з) и исследуя переме-
щения от осадки опор, видим, что на перемещение по направлению Х„ не
влияют опорные моменты Хь и нагрузки, удаленные от опоры п более, чем на
два пролета. Тогда л-е каноническое уравнение имеет следующий вид:
+ Х„_16пп_1 + хп6т + Хп+16„„+, + Хп+Дл+2 + Лл, = 0. (2.98)
Эго уравнение называют уравнением пяти моментов по числу входящих в него
неизвестных. Найдем перемещения, являющиеся коэффициентами и свободным
членом этого уравнения.
Перемещения б^ и б^ вызываются лишь упругой осадкой опор и будут такими;
* Рп_1 Л-2 с !/л+1 Л42 л QQ .
= —*„41 ‘
При остальных воздействиях перемещение по направлению Хп складывается
из перемещений, вызванных изгибом балки и упругой осадкой опор. В частности,
6m-i=^era~ +‘'"'"‘(с+?«»)]:
,2Юб)
. = ВЬ" + (г- 4-f- )+-
'' Е1„ ЕГ^1 In vn 'п*«/ '-»!
Упругие осадки опор пропорциональны соответствующим реакциям:
Ул-1 П-2 = »п-1 • »п-1 п-1 = €’п-1((“, + Ц)'
Уп-^п-^Упп-^: (2.-00)
Упл=<!„(1 + ±);8(п«1=^п-^!
п = »п«-р-: »п.1 п.1 = °п.1
205
Рнс. 2.47
Й1+1 П+2 — Vn+1 » Уп— 1 1I
Й я vnRnl rffi = €'«+l/?n+l*
В формулах (2.99) и (2.100) Bf n и Af. n+i — фиктивные реакции соответственно
на правой опоре л-го пролета и на левой опоре (л + 1)-го пролета| р
— полные балочные реакции в опорах л— 1, л, л-|-1 от пролетных нагрузок.
После подстановки осадок (2.100) в формулы (2.99а), (2.99 б) получаем
окончательные выражения для коэффициентов и свободных членов уравнения
пяти моментов:
Уравнения пяти моментов (2.98) составляются для каждой промежуточной
опоры. Решение полученной системы уравнений дает значения опорных момен-
тов. Окончательная эпюра изгибающих моментов получается, как и при жестких
опорах, сложением эпюры опорных моментов с эпюрой балочных моментов М °.
При построении эпюры Q можно воспользоваться формулами, выражающими
поперечные силы через изгибающие моменты и балочные поперечные силы.
Вопросы для самоконтроля
1. Какую балку называют неразрезной?
2. Как определить степень ее статической неопределимости?
3. Как выбрать метод расчета неразрезной балки?
4. Какая основная система удобна для расчета неразрезной балки методом
сил? Почему?
5. Какой вид принимают канонические уравнения для рациональной системы
метода сил, если сечения балки в каждом пролете постоянны?
6. В каком случае для расчета неразрезной балки применим метод переме-
щений?
7. Какая величина называется моментным фокусом?
8. Любая ли нулевая точка эпюры моментов неразрезной балки может
считаться моментным фокусом?
9. Что такое левое (правое) фокусное отношение?
10. Как получены рекуррентные формулы для фокусных отношений?
11. Как определить фокусные отношения для крайних пролетов?
12. В каком порядке вычисляют левые (правые) фокусные отношения?
13. Зависит ли величина фокусных отношений от действующей нагрузки?
14. Как определить опорные моменты в загруженном пролете?
15. Каковы особенности вычисления опорных моментов при загруженин
крайнего пролета?
16. Как определить остальные опорные моменты?
207
17. Как построить окончательную эпюру изгибающих моментов при извест-
ных опорных моментах?
18. Как рассчитать неразрезную балку методом фокусов при загружении
нескольких пролетов?
19. В каком порядке строят линии влияния внутренних усилий в неразрез-
ной балке?
20. Как внутренние усилия связаны с опорными моментами?
21. Как построить линии влияния опорных моментов с применением метода
фокусов?
22. В чем сущность кинематического метода построения моделей линий
влияния в неразрезной балке?
23. Какие закономерности невыгоднейшего загружения неразрезной балки
временной нагрузкой можно установить для получения наибольшего опорного
момента? Пролетного момента, опорной реакции?
24. Что такое податливость упругой опоры?
25. Какой метод применяют для расчета неразрезной балки на упругих
опорах?
26. Какое уравнение называется .уравнением пяти моментов?
27. Как определяются коэффициенты и свободные члены уравнений пяти
моментов?
28. Каков порядок построения эпюры изгибающих моментов в неразрезной
балке на упругих опорах?
29. Как построить эпюру поперечных сил в балке на упругих опорах?
Глава 11
ПРОСТРАНСТВЕННЫЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
11.1. Общие сведения. Геометрическая неизменяемость
Пространственной стержневой системой на-
зывают такую систему, оси стержней которой и внешняя нагрузка не
лежат в одной плоскости.
Пространственные стержневые системы по характеру образования
делят на два вида: фермы и рамы (рис. 2.48).
208
Рис. 2.50
В ряде случаев» при определенной геометрической структуре си-
стемы и характере нагрузки пространственную систему можно разло-
жить на отдельные плоские системы, работающие независимо. Такой
подход позволяет значительно упростить расчет. Но даже тогда, когда
это сделать не удается, расчет пространственных стержневых кон-
струкций производят способами и методами, известными из расчета
плоских стержневых систем. Правда, применение этих способов и ме-
тодов к пространственным системам сложнее, поскольку равновесие
рассматривается в пространстве.
Узлы пространственных систем могут быть жесткими или шарнир-
ными. В жестком узле при деформациях системы не происходит взаим-
ного поворота стержней. Шарниры в узлах бывают двух типов: шаро-
вые и цилиндрические. Шаровой шарнир (рис. 2.49, а) обеспечивает
свободный поворот относительно трех осей (х, у, г). Цилиндрический
шарнир обеспечивает свободу поворота только относительно одной оси
(на рис. 2.49, б — оси у). Шарниры принимаются идеальными, т. е.
допускающими взаимный поворот стержней без трения. В простран-
ственных фермах все стержни на концах соединены шаровыми шарни-
рами. В рамах узлы преимущественно жесткие.
Различают четыре основных вида опор пространственных систем.
Плоско-подвижная шаровая опора изображается одним опорным
стержнем с шаровыми шарнирами на концах (рис. 2.50, а). Опора
препятствует смещению опорного сечения А вдоль оси стержня,
позволяя ему свободно вращаться вокруг центра шарнира и переме-
щаться в плоскости, перпендикулярной к оси опорного стержня.
Таким образом, плоско-подвижная шаровая опора накладывает одну
связь, оставляя 5 степеней свободы из шести возможных для сечения
в пространстве.
Линейно-подвижную шаровую опору показывают в виде двух опор-
ных стержней (рис. 2.50, б). Эта опора препятствует линейным сме-
щениям опорного сечения в плоскости опорных стержней и допускает
перемещение вдоль прямой, перпендикулярной к этой плоскости,
а также вращение вокруг центра опорного шарнира. Эта опора накла-
дывает две связи, оставляя 4 степени свободы.
Неподвижная шаровая опора схематически изображается тремя
опорными стержнями, не лежащими в одной плоскости (рис. 2.50, в).
Препятствуя всем линейным смещениям опорного сечения, эта опора
позволяет ему свободно поворачиваться. Иначе, она накладывает
3 связи, оставляя столько же степеней свободы.
209
Защемляющая неподвижная опора, или заделка (рис. 2.50, а), пред-
ставляет собой жесткое соединение стержней с «землей». Эта опора
эквивалентна шести опорным стержням (рис. 2.50, д). Следовательно,
она накладывает 6 связей. Число степеней свободы такой опоры
равно нулю.
Для того, чтобы выполнить кинематический анализ,
необходимо найти число степеней свободы. Представим сооружение
как систему геометрически неизменяемых пространственных частей —
блоков. Каждый такой блок имеет шесть степеней свободы. Соединение
двух блоков шаровым простым шарниром накладывает три связи,
препятствующие взаимным линейным смещениям этих блоков. Как
и в плоских системах, простым называют шаровой шарнир, соединя-
ющий два блока. При большем числе соединяемых блоков шарнир
называют сложным или кратным. Такой шарнир можно заменить п — 1
простыми шарнирами (л — число соединяемых блоков).
Учитывая приведенное, получаем формулу для определения числа
степеней свободы пространственной системы:
№ = 37 —Со, (2.102)
где В — число блоков системы; Т — число простых шаровых шарни-
ров; Со — число опорных связей.
Как и для плоских систем, условие
^<0 (2.103)
является необходимым, но недостаточным условием геометрической
неизменяемости. Поэтому после определения числа степеней свободы
при выполнении условия (2.103) необходимо выполнить геометри-
ческий анализ сооружения.
При № = 0 геометрически неизменяемое сооружение статически
определимо, при W < 0 — статически неопределимо.
11.2. Пространственные фермы
Пространственной фермой называют систему пря-
молинейных стержней, не лежащих в одной плоскости, соединенных
по концам шаровыми шарнирами.
Предполагается, что нагрузка прикладывается только в узлах
фермы. Тогда в стержнях фермы возникают лишь продольные силы
(растяжение или сжатие).
Для определения числа степеней свободы пространственной фермы
формула (2.102) неудобна. Взамен применяют другую формулу, полу-
ченную исходя из того, что каждый узел фермы — точка, имеющая
три степени свободы. Каждый стержень устраняет взаимное переме-
щение узлов на его концах, т. е. накладывает одну связь. Тогда будем
иметь такое выражение для числа степеней свободы!
—С —Со, (2.104)
где ¥ — число узлов фермы; С — число стержней; Со — число опор-
ных связей.
210
С
О
Рис. 2.51
Для геометрически неизменяемой статически
определимой фермы W — 0, тогда
С + Со = ЗУ.
Обозначив через С' = С + Со общее число стерж-
ней, получим С' в ЗУ. Если в ферме соблюдается
это условие, то она геометрически неизменяема и
статически определима; если С* < ЗУ — система
геометрически изменяема; если С' > ЗУ — геомет-
рически неизменяема и статически неопределима.
Геометрический анализ пространственных ферм
выполняют с учетом следующих положений!
1) простейшей геометрически неизменяемой
пространственной системой является шарнирный
четырехгранник (рис. 2.51, а);
2) к геометрически неизменяемой части новый
узел фермы может быть присоединен тремя стерж-
нями, не лежащими в одной плоскости (рис. 2.51, б);
3) два блока можно соединить с помощью шести
стержней, расположенных так, что! а) их оси не
пересекаются в точках, лежащих на одной прямой;
б) в одной плоскости лежат не более трех стерж-
ней, причем их оси не пересекаются в одной точке;
в) в одной точке пересекаются оси не более трех стержней, причем
эта точка не лежит в плоскости, проведенной через любую пару
остальных стержней;
4) шаровой шарнир эквивалентен трем стержням, не лежащим в
одной плоскости и пересекающимся в одной точке — центре шарнира;
5) если стержни пространственной фермы образуют многогранник,
то условием ее геометрической неизменяемости может служить геомет-
рическая неизменяемость каждой грани.
Помимо геометрического анализа геометрическая неизменяемость
может быть проверена статическим методом. Как и для плоских си-
стем, статическим признаком геометрической неизменяемости является
отличие от нуля определителя системы уравнений равновесия. Иначе,
в геометрически неизменяемой системе все усилия должны быть оп-
ределенные и конечные.
Статическая проверка геометрической неизменяемости может быть
выполнена способом нулевой нагрузки.
При расчете пространственных статически определимых ферм сна-
чала определяют опорные реакции. Для вычисления реакций в опор-
ных связях можно записать шесть условий равновесия, например,
2 Mo, — 0; £ МОу = 0; S МОг =0; X х = 0; £ у — 0; £ г = 0.
Для определения усилий в стержнях пространственных статически
определимых ферм применяют метод сечений, метод замены связей,
кинематический метод.
Метод сечений реализуется способами вырезания узлов, сквозного
сечения, разложения на плоские фермы.
2Ц
Рис. 2.62
В ферме, показанной на рив. 2.
Способ вырезания узлов состо-
ит в том, что в ферме последова-
тельно вырезают узлы и находят
усилия в стержнях, сходящихся
в каждом узле, составлением и
решением уравнений равновесия.
Первым вырезают узел, в кото-
ром сходятся не более трех
стержней, и записывают три ус-
ловия равновесия — равенство
нулю сумм проекций сил на каж-
дую из трех осей координат.
После решения системы уравне-
ний и определения усилий в этом
узле рассматривают остальные
узлы в таком порядке, при кото-
ром каждый последующий увел
содержит не более трех неиз-
вестных усилий.
расчет начинаем о узла /, в ко*
тором сходятся три стержня и приложена сила F. Неизвестные уси-
лия принимаем растягивающими (усилия направляем от узла 1). Со*
ставяяем уравнения проекций на три оеш Sx «= 0; St/ = 0; Sz = 0.
Решая уравнения, находим усилия в стержнях Nj_e, Ni-я.
Далее переходим к узлу 4, к которому приложена уже известная
сила и три неизвестных усилия! Составляем урав-
нения равновесия узла 4. Из этих уравнений находим усилия
и W4_?. Затем переходим к узлам 3 и 2.
В ряде случаев отдельные уравнения удается упростить, выбирая
для разных узлов различные координатные оси.
Частные случаи равновесия узлов приведены на рис.2.53. Пользуясь
этими схемами, можно заранее установить, в каких стержнях при
заданной нагрузке усилия равны нулю (нерабочие стержни). Такие
стержни находят на основании следующих признаков!
если в ненагруженном увле фермы сходятся три стержня, не ле-
жащие в одной плоскости (рис. 2.53, а), то усилия во всех этих стерж-
нях равны нулю;
если в узле фермы все стержни кроме одного, лежат в одной плос-
кости и внешняя нагрузка расположена в этой же плоскости
(рие. 2.53, б), то усилие в отдельно расположенном стержне равно
нулю.
Способ сквозного сечения применяют тогда, когда ферму можно рас-
сечь на две части, разрезав при этом не более шести стержней. Усло-
вия равновесия отсеченной части фермы позволяют определить усилия
в разрезанных стержнях. Для записи этих условий используют суммы
проекций сил натри произвольные оси и сумме! моментов сил относи
цельно трех произвольных осей. Эти оси стараются выбрать тан» чтобы
в каждое уравнение равновесия входило минимальное число неиз*
вевтных усилий.
212
Рис. 2.53
Рис. 2.54
Способ разложения пространственной фермы на плоские применя-
ют тогда, когда боковые грани пространственной фермы представляюг
собой плоские фермы. Нагрузку, приложенную в узлах, расклады-
вают на три составляющие, направленные вдоль ребер фермы, и рас-
сматривают каждую грань как плоскую ферму. Усилия в стержнях,
расположенных на ребрах многогранника, находят как сумму усилий,
полученных из смежных граней.
Для фермы, изображенной на рис 2.54, силу F, приложенную к
узлу /, раскладываем на составляющие Flt F2 и Fs. Плоская ферма
/—2—3—4 рассчитывается на действие силы Д, ферма 1—5—6—2 —
на действие F2; в стойке /—2 действует сила F& Полные усилия в
стержнях ребра 1—2 определяются алгебраическим суммированием
усилий от всех составляющих нагрузки.
Метод замены связей обычно применяют в тех случаях, когда не
удается применить метод сечений. Метод замены связей основан на
том, что сложная ферма превращается в более простую заменой одно-
го или нескольких стержней, которые вводятся в других местах фермы.
Усилия в стержнях пространственных ферм этим способом вычис-
ляют как и для плоских ферм.
Суть кинематического метода состоит в том, что в системе отбрасы-
вают связь и ее действие на систему заменяют неизвестной реакцией.
Полученной изменяемей системе задают бесконечно малое возможное
перемещение, на котором составляют уравнение работ. Из этого выра-
жения определяется искомая реакция связи.
Расчет пространственных статически неопределимвтх ферм выполня-
ют методом сил. Порядок расчета ничем не отличается от расчета
Плоских статически неопределимых ферм.
213
11.3. Пространственные рамы
Б стержнях пространственной рамы в общем случае действуют*
шесть внутренних усилий (рис. 2.55): изгибающие моменты Мг и
крутящий момент 'Мх, поперечные силы Qx и Qv, продольная сила А.
Определение этих усилий в стержнях пространственной статически
определимой рамы можно выполнить методом сечений. Например,
изгибающий момент М2 равен сумме моментов сил, действующих на
одну из отсеченных частей относительно оси z рассматриваемого се-
чения. Правило знаков для всех усилий кроме продольной силы JV,
принимается условным. Эпюры Мг и Му строят, как и для плос-
ких систем, со стороны растянутых волокон. Правило знаков для
продольных сил обычное- растяжение — «плюс», сжагие — «минус».
Пример построения эшор для пространственного стержня показан
на рис. 2.56.
Для расчета статически неопределимых рам применяют те же мето-
ды, что и для плоских рам* метод сил, метод перемещений, смешанный
метод.
Применение метода сил покажем на примере плоско-простран-
ственной рамы (рис. 2.57. о). Плоско-пространственными называют
рамы, все стержни которых лежат в одной плоскости, а нагрузка дей-
ствует из этой плоскости. Другим примером плоско-лроетранственной
рамы может служить рама мостового крана (рис. 2.57, б).
Число неизвестных метола сил (степень статической неопредели-
мости) удобно определять через число замкнутых контуров (каждый
такой контур шесть раз статически неопределим)!
п = 6К —ЗТ + Со — 6, (2.105)
где К — количество замкнутых контуров рамы; Т — чисто простых
шаровых шарниров; Со — число опорных связей.
При выборе основной системы следует учитывать, что рассечение
стержня устраняет 6 связей, а рассечение по шаровому шарниру —
3 связи.
Для рамы, показанной на рис. 2.57,д, степень статической неопре-
делимости равна трем: и = 6 • О — 3 • 1 + 12 — 6 = 3. Основную
систему для этой рамы удобно выбрать рассечением по шарниру
(рис. 2.58. а).
Канонические уравнения метода сил остаются такими же, как и для
плоских систем»
Xi6u + Х2б12 + • • • + ХАП + Ау = О,
ХД1 4- Х2б2а + • • • + Хяб2я + А2/ = О, &
X&i + Хвбл2 + • • • + ХЛ6ЛЛ + Ал/ = 0.
Для рассматриваемой плоско-пространственной рамы канониче-
ские уравнения имеют вид:
A Aj + Х261а 4“ Х3б1а + Ау = 0; 1
Xi62i + X2f>22 4" Ха628 + А>/ = 0; I (2.107)
Xj631 + Х2632 + Ха6аэ + Аз/ = 0. J
214
Рис, 2.М
Рве. 2.58
При вычислении перемещений, как и для плоских рам, обычно
пренебрегают деформацией сдвига и осевого растяжения. Тогда
J J^+S I
'<2.m
(0 (0 (0 J
216
Значения интегралов в системе уравнений (2 108) можно вычис-
лить по правилу Верещагина. Для этого необходимо пос троиib эпюры
изгибающих и крутящих моментов от действия в основной системе
единичных неизвестных и заданной нагрузки (рис. 2.58, б).
После решения системы уравнений (2.107) эпюры внутренних
усилий строят либо суммированием»
+ Х2Мх2 + • • • + ХпМхн5
= Myf 4* XlMyl -J- Х2МдЪ • 4“ ХПМдп*
7Иа = Mtj + Х<Л1г1 4* ХаЛ1а2 4- • • • 4- ХпМт1
N = Nf 4- X Д 4- ХЛа 4- • • • 4-
Qy = Qyf 4" 4- X2Qy2 4- • • ♦ 4- XnQ^nt
Q» — Qzf 4" 4- XaQz2 4- • • • 4- XaQint
либо рассматривая основную систему при действии вычисленных
неизвестных и заданной нагрузки.
Расчет пространственных рам сложнее, чем плоских, хотя к нему
применимы все положения, ня которых основаны методы оасчсп
плоских статически неопределимых рам. Сложность расчета состоит
прежде всего в том, что число неизвестных для таких рам значительно
больше. чем для расчета плоских рам. Кроме того, необходимо учиты-
вать пространственный характер нагрузок, усилий и деформаций.
Метод перемещений удобно применять для расчета пр^стран
ственных рам со взаимно перпендикулярными прямолинейными стер-
жнями.
Расчет начинают с определения степени кинематической неопреде-
лимости. Каждый узел рамы может получить три линейных и трг»
угловых перемещения. Поэтому число угловых перемещений опреде-
ляют как утроенное число жестких узлов рамы (не гчитая опорных).
При определении числа неизвестных линейных перемещений надо,
как и в плоских рамах, мысленно все узлы превратить в шарнирные
и определить число степеней свободы полученной системы по формуле
ntifl= W = 3Y — C — CO.
(2.410)
Основную систему получают, как для плоских рам, введением до-
полнительных связей, каждая из которых устраняет одно возможное
угловое или линейное перемещение.
Канонические уравнения имеют вид1
%1ги 4“ 4~ • • • 4~ 2плп 4“ » 0;
ZjFji 4" %2Г22 4" * * * 4" 4" = 0»
(2.111)
Zjnl 4“ ^2г2л 4" * ’ ’ 4" Znrпп 4“ Rnf — 0.
Коэффициенты канонических уравнений определяют, как и в пло-
ских рамах. При этом, помимо изгибающих моментов, в узлах следует
учитывать и крутящие моменты. Например, крутящий момент в стерж-
не при единичном повороте узла в плоскости, перпендикулярной к оси
217
данного стержня, Mkt = GW/, к представляет собой погонную жест-
коеть при кручении соответствующего стержня.
Нагибающий или крутящий момента в любом сечении определяют
умножением моментов от единичках вначений этих неиввестных на
их истинное вначение и суммированием по формуле
М = Mf 4- М& + M2Z2 + ... + MnZn. (2.112)
Аналогично находят и другие внутренние усилия в стержнях
рамы.
Условия применения вметанного метода такие же, как для плос-
ких систем.
Вопросы для самоконтроля
1. Что называется пространственной системой?
2. Па какие виды делятся пространственные системы по характеру образо-
вания?
3. Какие типы опор встречаются в пространственных системах?
4. Как выполняется кинематический анализ пространственных систем?
5. Как проверяется геометрическая неизменяемость пространственной фермы?
6. Каково наименьшее число опорных связей пространственной системы?
7. Какие методы применяют для определения усилий в пространственной
ферме?
8. Как применяется способ вырезания узлов?
9. Приведите частные случаи равновесия узлов.
10. Как применяется способ сквозного сечения?
11. В чем сущность способа разложения пространственной фермы на пло-
ские?
12. В чем сущность метода еамены связей?
13. В чем сущность кинематического метода?
14. Как выполняют расчет пространственной статически неопределимой
фермы?
15. Какие .усилия действуют в сечении стержня пространственной рамы?
16. Как определяют эти усилия?
17. Какие методы применяют для расчета статически неопределимой про-
странственной рамы?
18. Какую раму называют плоско-пространственной?
19. Как определить степень статической неопределимости рамы?
20. Как могут быть отброшены лишние связи в пространственной раме при
выборе основной системы?
21. Каковы особенности определения единичных и грузовых перемещений
в пространственной раме?
22 Как определяют внутренние усилия в заданной системе?
23. В каких случаях для расчета пространственной рамы удобно применить
метод перемещений?
24. Как определить число неизвестных в методе перемещений для простран-
ственной рамы?
25. Какие усилия необходимо учитывать при вычислении коэффициентов
канонических уравнений метода перемещений?
26. Как определяют усилия в заданной системе?
Глава 12
ОСНОВЫ РАСЧЕТА СТЕРЖНЕВЫХ СИСТЕМ
ПО НЕСУЩЕЙ СПОСОБНОСТИ
12.1. Основные понятия
Все расчеты сооружений в предыдущих главах были основаны
на допущении, что материал его элементов работает в упругой стадии.
Прочность пластического материала считалась исчерпанной, если на-
пряжения хотя бы в одном из сечений достигали предела пропорцио-
нальности (или близкого к нему предела текучести Оу). В действитель-
ности же при этом за счет перехода части материала в пластическую
стадию деформирования происходит перераспределение усилий, и со-
оружение остается способным воспринимать бдльшие нагрузки. Во
многих случаях происходит разрушение лишь тогда, когда полностью
(с учетом пластических деформаций) исчерпается несущая способность
нескольких элементов (сечений) сооружения. Состояние системы,
предшествующее ее разрушению, называют состоянием предельного
равновесия, а нагрузку, соответствующую этому состоянию, — пре-
дельной (Ftnax)-
В рассматриваемом в настоящей главе расчете по методу предель-
ного равновесия исходят из того, что нагрузка, действующая на соору-
жение, не должна превосходить предельной*
(1.113)
Для учета пластических свойств материала при определении несу-
щей способности элементов реальная диаграмма напряжений (напри-
мер, для стали — рис. 2.59, а) заменяется упрощенной, состоящей
из двух линейных участков (рис. 2.59, б).
Первый линейный участок действителен до предела текучести
а второй — после предела текучести (пунктир на рис. 2.59, б), так
что модуль упругости
£а<ЕР (1.114)
Для материалов с явно выраженной на диаграмме напряжений
площадкой текучести Прандтль предложил на втором участке диаграм-
мы принять
Рис. 2.59
219
т. е. считать, что материал после достижения предела текучести неог-
раниченно течет (горизонтальная сплошная линия на втором участке
рис. 2.59, б). Такой материал называют идеальным упруго-пластиче-
ским материалом.
Учитывая, что пластические деформации, как правило, значитель-
но больше упругих, последними в ряде случаев можно пренебречь.
Этому допущению соответствует диаграмма напряжений, приведенная
на рис 2.59, в. Материал, удовлетворяющий такой диаграмме, назы-
вают жестко-пластическим.
При расчетах по методу предельного равновесия будем считать,
что материал сооружений является идеальным упруго- или жестко-
пластическим.
12.2. Несущая способность сечения.
Расчет статически определимых систем
Рассмотрим абсолютно жесткий брус, шарнирно закрепленный
в т.С и подвешенный в т.В с помощью стержня постоянного сечения
(рис. 2.60). Усилие N в подвеске легко получаем из условия равен-
ства нулю суммы моментов сил относительно т.С:
N = 2F/3. (2.116)
Этому усилию соответствуют напряжения в поперечном сечении
стержня BD
о= №А = 2F!{3A). (2.117)
При напряжениях ниже
предела текучести (о < о^)
стержень работает в упругой
стадии и увеличение силы F
вызывает увеличение усилия
Л^и напряжения. При дости-
жении предела текучести, т. е.
при
/7 = ^ = 0^ (2.118)
стержень «течет» — неограни-
ченно деформируется при по-
стоянном усилии Npl. Даль-
нейшее увеличение нагрузки
невозможно, так как система
2с а
Рве. 2.01
220
из-за выключения связи £?D превращает- A, dA
ся в механизм. Наступает предельное Х/7//Л--Г
равновесие системы. у///
Связь, находящаяся в состоянии те- ---Г " уурТ/---г
кучести, называется пластической связью. /У//?
Она характеризуется наличием в ней КГу/ l ___________________*4
постоянного усилия NPi. При разгрузке Jm fe
(уменьшении силы F) стержень BD снова а ’ $
переходит в упругое состояние.
Приравнивая усилие в стержне (2.116) Fl,c* 2‘3
несущей способности сечения (2.118), находим предельную нагрузку,
воспринимаемую системой!
(2.119)
Теперь рассмотрим работу изгибаемой системы. В балке на двух
опорах (рис. 2.61, а), имеющей вертикальную ось симметрии, при уве-
личении нагрузки текучесть наступит в первую очередь в крайних
волокнах сечения с наибольшим изгибающим моментом. Эта так назы-
ваемая фибровая текучесть появится либо в одном из волокон, либо
(для сечения, имеющего и горизонтальную ось симметрии) одновремен-
но в обоих крайних волокнах сечения (рис. 2.61, б). При дальнейшем
увеличении нагрузки текучесть охватывает все большую часть сече-
ния (рис. 2.61, а), в пределе распространяясь на всю его высоту
(рис. 2.61, а). Зона пластических деформаций охватывает при этом не-
которую часть балки по ее длине. Это состояние и будет предельным
состоянием балки, ее несущая способность исчерпана, а в сечении
с наибольшим изгибающим моментом образуется пластический шарнир
(рис. 2.61, д). Этот шарнир отличается от идеального шарнира тем, что
в нем действует постоянный момент
Л4р/ — pit
(2.120)
называемый предельным моментом. Пластический шарнир — одно-
сторонний (работает только в одном направлении) и может исчезнуть
при разгрузке или перемене знака момента.
Для определения несущей способности сечения найдем момент
внутренних сил в состоянии предельного равновесия относительно
нейтральной оси!
MDt= J OgytdA+ J csy»dA = c!,(Sl + S>), (2.121)
<л,> <л,>
где и у2 — расстояния от нейтральной оси до элементарных пло-
щадок dA\ St и Sa —статические моменты частей и Да сечения
относительно нейтральной оси (рис. 2.62, а).
Сравнивая (2.120) и (2.121), получаем ввфажение пластического
момента сопротивления
Wpi — Sx + Sa.
(2.122)
221
Если сечение симметрично относи*
тельно нейтральной оси, то
^/==2S0, (2.123)
где <S0 — стати ческий момент полусече-
ния относительно нейтральной оси.
Для прям ©угольного сечения
(рис. 2.62. б)
U7ci=26.4«4 =Т’
Сравнивая это значение о величиной
упругого момента сопротивления W =
» получаем = 1,5. Таким
образом, учет пластических свойств по-
зволяет увеличить нагрузку на 50 %. Для
других форм поперечного сечения WptfW
имеет различные значения! например, для
круглого сечения — 1,7, для двутавро-
вого— 1,04... 1,19.
Изгибающий момент в сечении балки
под сосредоточенной силой равен /774.
Тогда предельное значение нагрузки для
рассматриваемой балки найдем из усло-
вия MPt = 0yWPi == FfaaJjb. Получаем
Лпах = ^yWplfl9 ИЛИ Fm№ = Mfajl.
для наступления предельного равновесия
статически определимой системы требуется превращение в пластиче-
скую не одной, а двух (рио. 2.63, о) или большего числа связей
(рис. 2.63, б).
♦ Ч* № № №
S
Рве. 8.03
В некоторых случаях
<2.3. Расчет статически неопределимых систем
При наступлении состояния предельного равновесия система прев-
ращается в механизм, находящийся в равновесии под действием задан-
ной нагрузки и усилий в пластических связях (пластических шарни-
рах). Этот механизм называют механизмом разрушения или схемой
разрушения.
Для превращения и раз статически неопределимой системы в меха-
низм необходимо выключение, по крайней мере, п + 1 связи.
Трудность расчета статически неопределимой системы методом
предельного равновесия состоит в том, что не всегда удается сразу
установить механизм разрушения системы. Наиболее просто эта зада-
ча решается для балок.
Расчет балок. В однопролетной статически неопределимой балке
(рис. 2.64, а) эпюра изгибающих моментов, соответствующая упругой
работе, имеет наибольшую ординату в заделке (рис. 2.64, б). В связи
с этим при увеличении нагрузки пластический шарнир в первую оче-
редь образуется в заделке (рис. 2.64, в). При дальнейшем увеличении
222
s
Рис. 2Л4
нагрузки балка работает как статически определимая, момент в сече-
нии В остается неизменным, а изгибающий момент в сечении С растет
до тех пор, пока не достигнет Мр1. Образуется второй пластический
шарнир, наступает состояние предельного равновесия (рис. 2.64, г).
На основании предельной эпюры изгибающих моментов (рис. 2.64, д)
устанавливаем соотношение между предельной нагрузкой и несущей
способностью сечения:
^max^/4 = МР1 Ц-
откуда предельная нагрузка Fmax == 6Л/Р///.
Разрушение однопролетной балки происходит при наличии в ней
трех шарниров (в нашем случае Л, В и С).
Поскольку наибольшие значения моментов в состоянии предель-
ного равновесия равны Mptt то построение предельной эпюры момен-
тов можно выполнить из условия равенства опорных моментов наи-
большему пролетному моменту (рис. 2.65). Значение предельной
нагрузки находим, выразив балочный момент через Mpti
qpfi = 2Mnit откуда q^ = \§MPdl2.
Описанный способ построения предельной эпюры изгибающих
моментов называют способом выравнивания моментов. Для многопро-
летной балки постоянного сечения этот способ применяется следующим
образом (рис. 2.66). Отложив вверх
и вниз от оси значения предельных моментов Л/р/, проводим линии, па- раллельные оси. Изгибающие мо- менты в балке не должны превы- шать Mpi, т. е. ординаты эпюры М не должны выходить за пределы f проведенных линий. Вписывая в 1 каждом пролете балочную эпюру между линиями предельных момен- тов, получаем эпюру предельных изгибающих моментов. На основа- > । н i t н 111 m U l- / Mpl Рис. 2.65
223
______________ Fjt/4
Рве. 2.66
нии yr ;й эпюры получаем для каждого пролета предельную нагрузку:
f I, max = Qmax ~
А. max — 18Мр,/(5/а); F3, max = 8Мр///4.
Если нагрузки в каждом пролете не зависят друг от друга, то эти
величины являются окончательными. Если же все нагрузки меняются
пропорционально некоторому параметру /?, находят значение этого
параметра для каждого пролета. Предельное значение параметра
принимают наименьшим из полученных величин—Действительно,
для разрушения балки достаточно, чтобы разрушился хотя бы один
ее пролет.
Расчет ферм. При расчете статически неопределимых ферм механизм
их разрушения, как правило, неизвестен, поэтому приходится рас-
сматривать несколько возможных форм разрушения. Очевидно, ис-
тинной форме разрушения будет соответствовать наименьшая предель-
ная нагрузка.
Когда число возможных форм разрушения слишком велико, можно
применить способ последовательного выключения связей. Для этого нуж-
но сначала произвести расчет системы, как упругой, и найти тот стер-
жень фермы, в котором возникает наибольшее напряжение, т. е. тот,
который потечет первым.
После отбрасывания стержня и замены его предельным усилием
Npi = степень статической неопределимости фермы уменьшается
на единицу. Далее выполняется расчет этой новой системы, как
упругой. В результате будет найден стержень с наибольшими напря-
жениями, который потечет вторым.
Расчет ведется до тех пор, пока система после выключения очеред-
ной связи не окажется изменяемой. Теперь предельную нагрузку на-
ходит из условия равновесия механизма, в который обратилась ферма.
Расчет статически неопределимых ферм значительно усложняется,
если есть опасение, что какой-либо из стержней потеряет устойчи-
вость. Для элементов, теряющих устойчивость, необходим тщательный
анализ их работы в процессе загружении фермы.
Необходимо учитывать также, что ферма может получить повреж-
дение не только при загружении, но и при разгрузке. Эти вопросы
224
Рис. 2.07
исследованы в работах С. А. Бернштейна, Н. С. Стрелецкого и
А. А. Гвоздева.
Расчет арок по предельному равновесию сопровождается значитель-
ными трудностями, связанными с тем, что не всегда заранее ясно, где
будут возникать пластические шарниры. Появление шарниров в арках
зависит от всех внутренних сил Л4, Qu N. Затрудняет определение по-
ложения пластических шарниров и то, что поперечные сечения арки,
как правило, переменны по длине.
Рассмотрим сначала двухшарнирную арку. Она разрушается при
возникновении не менее двух пластических шарниров (рис. 2.67, а),
а при симметричной нагрузке — не менее трех пластических шарниров
(рис. 2.67, б, в). Опасную форму разрушения двухшарнирной арки
постоянного сечения наглядно можно выявить при наложении балоч-
ной эпюры моментов /И0 на эпюру моментов от распора Л1н (рис. 2.67,г).
Как и в трехшарнирной арке, результатом такого наложения явля-
ется результирующая эпюра моментов, по которой легко выявить
места расположения пластических шарниров. Они соответствуют
сечениям с наибольшими изгибающими моментами.
На основании выполненных построений для сечений с пластиче-
скими шарнирами можно составить следующие соотношения между
ординатами эпюр:
Pmvxflbll = Мр1 4" Hyc‘t
Fma^ll = HyD-Mpl. (2.124)
Уравнения (2.124) позволяют при известном значении Mpt найти
предельную нагрузку. При переменном сечении арки сложение эпюр
моментов /И0 и Мн нужно заменить сложением эпюр нормальных
напряжений Мй[№ и Мн№- В этом случае в уравнениях (2.124)
MpifW = ср.
225
Рис. 2.63
Бесшарнирные арки разрушаются при возникновении не менее
четырех шарниров (рис. 2.68, а). Если нагрузка симметрична, то и
разрушение арки должно быть симметричным. При этом в бесшарнир-
ной арке появляется не менее пяти шарниров (рис. 2.68, б, е).
Предельная эпюра изгибающих моментов для бесшарнирной арки
складывается из четырех эпюр: балочной эпюры моментов, эпюры
моментов от левого опорного момента, эпюры от правого опорного
момента и эпюры моментов от распора (рис. 2.68, а).
12.4. Расчет статически неопределимых рам
Если для балок и арок удается достаточно просто найти форму их
разрушения и, следовательно, предельную нагрузку, то основная
сложность расчета рам состоит в установлении истинного механизма
разрушения.
Дальше будем рассматривать случаи простого загружения систем,
когда все нагрузки принимаются пропорциональными одному пара-
метру.
Для простого загружения статически неопределимой системы фор-
мулируются статическая и кинематическая теоремы. В соответствии со
статической теоремой из всех возможных вариантов рас-
пределения усилий, удовлетворяющих условиям равновесия, истинным
будет то, которое соответствует наибольшей предельной нагрузке.
Кинематическая теорема утверждает, что из всего
множества различных форм разрушения истинной будет та, которая
соответствует наименьшей нагрузке.
Выше, рассматривая балки, фермы и арки, мы пользовались, по
существу, статической теоремой, отыскивая наибольшую предельную
нагрузку.
226
Рис. 2.69
Покажем более общий случай применения статической теоремы
к расчету рамы, приведенной на рис. 2.69, а. Пусть предельный мо-
мент в ригеле равен Л41Р/, а в стойках M2pZ, причем MlPi М2р1. При
заданном загружении характерными сечениями, в которых может
появиться пластический шарнир, являются сечение ригеля в т.1 и
сечения стоек в точках 2, 3, 4.
Запишем из условий равновесия усилия в указанных сечениях.
Для этого используем основную систему метода сил (рис. 2.69, б):
М х = X,Z — X8Z; Л1а = — X2Z;
М9 = Х> . 2Z —X2Z —2FZ; Мл = X, • 21 —Fl, (2.125)
причем Mj>0, 1М4>>0, М8<0.
Каждый из этих изгибающих моментов не должен превосходить
по абсолютной величине соответствующего предельного момента:
Х8/—XaZ<Aflp/; X2Z С 1^2РГ9 —(XaZ) M2pi',
— (XL . 21 — X9l — 2FI) < М2РГ, Xl-2l — Fl<. M2pl, (2.126)
В (2.126) для второго сечения записаны два условия, соответству-
ющие положительному и отрицательному моментам.
Неравенства (2.126) описывают множество распределений усилий
в раме, удовлетворяющих условиям равновесия. Истинному распреде-
лению соответствует условие
F = max. (2.127)
Неравенства (2.126) и условие (2.127) описывают обычную задачу
линейного программирования. Для ее решения может быть применен
любой стандартный алгоритм линейного программирования.
При Mipi = М2р1 = Мр1 получаем ЛПшк = 5AL//(3Z), Х,= 4ALz/(3Z),
Xa = -ATpZ/(3Z).
227
Предельная эпюра изгибающих моментов легко может быть построе-
на по этим данным (рис. 2.69, в). Предельное состояние рамы показано
на рис. 2.69, г.
При использовании кинематического метода установим прежде
всего возможные варианты механизма разрушения рамы (рис. 2.70).
Для каждого механизма записываем уравнение возможных работ. При
этом упругими деформациями пренебрегаем, т. е. материал считаем
жестко-пластичным. Для первого механизма
2F0/ — 2МИ0 — Мр1. 26 = 0, (2.128а)
для остальных
F&1 — 3AfpZ0 = O;
F0/ + 2FQI — MplQ — 2Мр1 • 20 = 0; (2.1286)
—2FGI + F&1 — MpiQ — 2Mpi. 2© = 0.
Очевидно, последнее уравнение невыполнимо при любом значении
Г, поэтому его отбрасываем и соответствующую схему разрушения
не рассматриваем.
После сокращения на 0 перепишем оставшиеся равенства:
2F/ — 4МР1 = 0; FI — ЗМр1 = 0; 3FL — 5МР| = 0.
Решая каждое из них, находим нагрузку, соответствующую при-
нятым схемам разрушения:
Fi = 2Mp///, Fe = 3Mpl/Z, F8 = 5Afp//(3/).
Минимальная нагрузка, соответствующая третьей схеме разру-
шения, является предельной: F™K — 5Mpl/(3l).
Кинематическую задачу также можно поставить, как задачу линей-
ного программирования, являющуюся двойственной по отношению
к статической задаче. Наличие двойственной задачи удобно тем, что
228
прямая—статическая—задача дает заниженный результат, а двой-
ственная — кинематическая — завышенный. В сложных задачах со
многими переменными наличие таких оценок облегчает поиск ре-
шения.
Вопросы для самоконтроля
1. Каковы свойства идеального упруго-пластического материала?
2. Какой материал называют жсстко-пластичным?
3. Что понимается под состоянием предельного равновесия?
4. Какая связь называется пластической? Каковы ее особенности?
5. Как определяют величину предельной нагрузки?
6. Что такое пластический шарнир?
7. Как определяется предельный момент?
в. Как определяется пластический момент сопротивления сечения, имеющего
одну ось симметрии, лежащую в плоскости изгиба?
9. Что такое механизм, или схема разрушения?
10. В чем сущность способа выравнивания моментов для расчета статически
неопределимых балок?
11. Как применяется способ последовательного выключения связей для
определения механизма разрушения фермы?
12. Каковы особенности расчета арок по предельному равновесию?
13. Как формулируются статическая и кинематическая теоремы для состоя-
ния предельного равновесия системы?
14. Как применяется статический метод для расчета рам?
15. Как применяется кинематический метод для расчета рам?
16. Чем удобно наличие двойственной задачи линейного программирова-
ния?
Глава 13
НЕКОТОРЫЕ СОВРЕМЕННЫЕ ПРОБЛЕМЫ ТЕОРИИ СООРУЖЕНИЙ
Развитие строительной механики в последнее время в значительной степени
обусловливается широким применением современных вычислительных средств.
При этом, с одной стороны, появляется возможность приближения расчетной
схемы к реальному сооружению за счет более полного учета его свойств. С другой
стороны, применение ЭВМ позволяет использовать для расчета сооружений
новые методы, требующие трудоемких вычислений.
К числу перспективных направлений теории сооружений относятся разра-
ботка статистических и вероятностных методов расчета, а также примене-
ние общей теории надежности к расчету конструкций. Конечно, эти направле-
ния здесь разделены лишь условно. Они применяются в комплексе, дополняют
Друг друга и подчинены общей проблеме теории сооружений — разработке мето-
дов расчета и проектирования оптимальных систем. Под оптимальными подразу-
мевают системы, удовлетворяющие требованиям экономичности и надежности
службы в течение заданного срока эксплуатации.
13.1. Понятие о статистических методах расчета
и теории надежности сооружений
В основе статистического подхода в строительной механике лежит предпо-
ложение о том, что изменение основных параметров, определяющих работу кон-
струкции, носит стохастический, т. е. случайный, вероятностный характер.
Действительно, механические характеристики материалов, нагрузки и дру-
гие внешние воздействия находятся под влиянием многих трудно контроли-
руемых факторов и поэтому носят изменчивый, случайный характер.
229
Например, при массовом испытании стандартных образцов на разрыв та
или иная механическая характеристика оказывается лежащей в определенном
интервале. В этом смысле конкретное значение характеристики представляет
собой случайное событие. Напомним, что случайным называется событие,
которое может быть, а может и не быть. Это отличает его от достоверного события,
которое неизбежно происходит, и от невозможного* которое заведомо про-
изойти не может.
Загружение сооружения эксплуатационными нагрузками также можно
представить как случайный процесс, происходящий во времени. Учет повторя-
емости нагрузок, их сочетания во времени, возможных перегрузок и т. д. требу-
ют рассмотрения нагрузок как случайных явлений.
Случайные явления, если они носят массовый характер, изучаются двумя
родственными науками — математической статистикой и теорией вероятностей.
Математическая статистика занимается методами обработки данных, полу-
чаемых в результате массовых наблюдений за случайными процессами. На ос-
новании накопления н изучения опытных данных, относящихся к однородным
условиям, она устанавливает законы распределения случайных величин.
Теория вероятностей изучает закономерности случайных явлений. В ее ос-
нове лежит понятие вероятности события: она дает правила операций над этими
событиями.
Вероятность — это математическая опенка возможности случайного собы-
тия; это некоторое теоретическое значение, вблизи которого колеблется эмпири-
ческая частота случайного события.
Исследование статистических свойств механических характеристик строи-
тельных материалов нашло свое отражение в существующих нормах и правилах
расчета строительных конструкций.
Вероятностно-статистический подход к обоснованию нормативных расчетов на
прочность состоит в следующем. Состояние конструкции в условиях эксплуата-
ции характеризуется конечным числом независимых параметров: внешних на-
грузок, прочности материала, отступления условий работы конструкции от
расчетной схемы и др. Эти параметры считаются случайными и предполагается,
что их совместная плотность вероятности известна.
Статистическое толкование расчетных параметров сыграло важную роль
в создании более совершенного метода расчета консгрукций на прочность по
предельному состоянию. Хотя этот метод остается по форме детерминистичес-
ким, ио в своей сущности хорошо иллюстрирует вероятностный подход к реше-
нию задач расчета сооружений.
Условие прочности в методе расчета конструкций по предельному состоянию
имеет вид
S (F, л) < Sm (Л, /?, ул). (2 129)
Условие (2.129) отображает вероятностно-статистический характер метода.
Так, усилие S вычисляется от нормативных нагрузок F с учетом коэффициентов
перегрузки п. Последние характеризуют изменчивость внешних нагрузок и могут
быть определены как отношение нагрузок, соответствующих малым вероятно-
стям появления, к нормативным нагрузкам. Несущая способность сечения Sm
определяется в зависимости от вида напряженного состояния через геометриче-
ские характеристики А сечения и расчетное сопротивление /? материала с учетом
коэффициента условий работы конструкции ус и коэффициента надежности
уп. Коэффициенты уе и *|’л для прочности материала характеризуют ее изменчи-
вость в зависимости от условий изготовления и эксплуатации конструкции.
Следовательно, наступление предельного состояния надо рассматривать как
случайное событие, а сущность расчета — как определение вероятности того,
что недопустимое предельное состояние не будет достигнуто
Важнейшей областью применения вероятностно-статистических методов
является создание общей теории прочности и деформирования твердых тел.
Известно, что прочность твердого тела зависит от сложного взаимодей-
ствия многих случайных факторов* прочности и анизотропии отдельных компо-
нентов структуры, распределения дефектов и др. Получены важные результаты
в создании теории хрупкого и усталостного разрушения. Но общая статистиче-
230
ская теория прочности и деформирования твердых тел, которая описывала бы
все явления (пластическое течение, хрупкое разрушение, ползучее!ь и т. п.),
еще не сформировалась.
Другая область широкого применения статистических методов — это тео-
рия упругой и неупругой устойчивости.
Понятиями устойчивости н неустойчивости определяют поведение системы
при действии возмущений, стремящихся отклонить ее от исходного равновес-
ного состояния. Эти возмущения носят случайный характер. Поэтому статисти-
ческий подход в теории устойчивости является наиболее общим.
На основании статистического подхода разработаны статистические методы
и в других важных областях теории сооружений — теории колебаний упругих
систем, теории накопления повреждений в конструкциях при случайных пере-
грузках и др.
Большой интерес представляет статистический анализ свойств строитель-
ных конструкций и их отдельных элементов. Особое место в теории сооружении
занимает изучение начальных несовершенств элементов конструкций, работаю-
щих на сжатие. Несущая способность сжатых стержней, пластин н оболочек
вависит от малых отклонений этих элементов от идеально прямой формы. По-
скольку такие отклонения носят случайный характер, то несущая способность
сжатых элементов обладает статистическим разбросом.
Широкое применение вычислительной техники, позволяющей накапливать,
хранить и быстро обрабатывать большие объемы информации, способствует со-
вершенствованию анализа статистических данных о материалах, конструкциях
и нагрузках. Это, в свою очередь, является стимулом для дальнейшего развития
статистических методов в строительной механике.
Математическая статистика и теория вероятностей тесно связаны с теорией
надежности.
Теория надежности, как общетехническая наука, сформировалась в сере-
дине нынешнего века под влиянием бурного развития радиоэлектроники и ракет-
ной техники. Затем теоретические основы общей теории надежности были рас-
пространены на задачи строительной механики и выделилось новое научное
направление — теория надежности сооружений.
Под надежностью сооружения понимают его способность выполнять заданные
функции при заданных эксплуатационных условиях, в заданный период вре-
мени. Невыполнение хотя бы одной функции в теории надежности называется
отказом. В задачах прочности отказ означает выход из строя отдельного элемента
или всей конструкции из-за разрушения или потери несущей способности.
Различают два вида отказов, имеющих механическое происхождение: 1) от-
казы, определяемые как случайные выбросы,— превышение предела упругости
в такой точке конструкции, где остаточные деформации недопустимы, появление
трещин, развитие недопустимо больших упругих деформаций; 2) отказы, яв-
ляющиеся результатом накопления повреждений конструкций, — накоплений
пластических деформаций или деформаций ползучести, появление усталостных
трещин и механический износ.
Решение задач теории надежности сооружений основано на использовании
обширных статистических материалов о свойствах конструкций и о нагрузках^
Внешние воздействия, параметры состояния и параметры качества рассматри-
ваются как случайные процессы, а отказы — как случайные выбросы некоторых
процессов из области допустимых значений.
Следовательно, надежность сооружения является вероятностной характе-
ристикой. Под мерой надежности в строительной механике понимают вероят-
ность безотказной работы сооружения, т. е. вероятность того, что в заданный
период эксплуатации не произойдет ни одного отказа. Эту вероятность и назы-
вают надежностью сооружения.
Понятие надежности тесно связано с понятием долговечности. Под долго-
вечностью понимают время работы системы от начала ее эксплуатации до выхода
из строя.
Статистический расчет на прочность сводится к сопоставлению расчетной
надежности или расчетной долговечности с их нормативными значениями. По-
этому весьма актуальной является задача о выборе нормативных значений на-
дежности.
$31
При нагрузках непрерывного типа надежность конструкции является не-
которой функцией времени / (О- Нормативная надежность также задается в виде
функции времени /*(0 на интервале 0 < t < Т, где Т — заданный предельный
срок эксплуатации конструкции. Расчетным является условие / (0 < /*(Л» ко-
торое должно удовлетворяться на всем интервале времени или в заданные моменты
*1» ^2» —» 6l-
К задачам теории надежности в строительной механике относятся: опреде-
ление надежности сооружения по известным надежностям его элементов, оты-
скание принципов синтеза сооружении при заданной надежности, разработка
методов повышения надежности и долговечности сооружения и др. Эти задачи
актуальны как для проектирования малосерийных, уникальных конструкций,
так и для обоснования норм расчета и проектирования конструкций массового
типа.
Одно из направлений отыскания нормативной надежности состоит в систе-
матическом изучении запасов надежности, которыми обладают существующие
конструкции и сооружения.
Надежность конструкций подчинена некоторым законам оптимальности.
При низкой надежности конструкция быстро выходит из строя, требует больших
расходов на ремонт. Увеличение надежности устраняет эти недостатки, но вле-
чет за собой увеличение стоимости конструкции. Поэтому весьма важной задачей
является отыскание оптимальной надежности, что относится к общей технико-
экономической проблеме теории сооружений. Накопленный опыт проектирова-
ния, строительства и эксплуатации сооружений является по сути эксперимен-
том, который может быть использовав для выбора оптимальных во всех отношениях
конструкций.
13.2. Понятие о синтезе сооружений
и расчете оптимальных систем
Как уже указывалось, важнейшей задачей теории сооружений является
разработка методов расчета и проектирования оптимальных конструкций.
В сущности, конечной целью любого расчета является определение тех или
иных параметров, отвечающих требованиям оптимальности. Однако классиче-
ские («прямые») методы строительной механики дают возможность выполнить
лишь поверочный расчет при известных размерах сечений и других геометриче-
ских и упругих характеристиках системы. Такой расчет не позволяет найти
оптимальную систему, а только дает возможность из нескольких рассчитанных
систем выбрать лучшую. Особенно наглядно это проявляется для статически
неопределимых систем, в которых уже на этапе определения внутренних усилий
необходимо считать заданными жесткости стержней.
В связи с этим понятно стремление дать методы решения обратной задачи,
заключающейся в нахождении оптимальных (по расходу материала, стоимости),
параметров сооружения при выполнении условий его прочности, жесткости
усюйчивости. Иначе говоря, речь идет в этом случае о синтезе сооружения на
основе данных о нагрузке, генеральных размерах и предъявляемых к нему тре-
бованиям.
Одним из методов решения обратной задачи является вариантное проекти-
рование, когда параллельно рассчитывают несколько вариантов сооружения
из которых выбирают лучший. Этот путь дает возможность наиболее полно
|учес!ь особенности каждой из рассчитываемых конструкций. Однако в силу боль-
шой трудоемкости количество рассматриваемых вариантов ограничено и их ка-
чество во многом зависит от интуиции проектировщика.
Другой путь решения обратной задачи связан с попытками получить анали-
тические вависимости всех или некоторых параметров оптимальной системы от
заданной нагрузки. Однако при этом очень часто появляются вырожденные
решения, не предусмотренные в постановке задачи.
Широкое применение ЭВМ в последнее время позволило развиться новому
направлению в оптимальном проектировании. При этом в качестве объекта ис-
следования рассматривается не отдельная система, а множество систем, представ-
ляющий собой совокупность решений, из которых должно быть выбрано наилуч-
232
шее. В настоящее время при решении задач оптимального проектирования, как
правило, предполагают заданными тип системы (ферма, рама, балка и т. д.)
и очертание ее осей. Профессором А. И. Виноградовым было предложено в ка-
честве объекта исследования обратной задачи строительной механики рассмат-
ривать множество систем с заданным очертанием осей.
Говоря о заданном очертании осей, подразумевают, что заданы не только
геометрическая схема осей сооружения, по и наибольшее возможное число
лишних связей. Каждая система этого множества определяется набором пара-
метров, например площадей или других характеристик сечений. Эти параметры
для оптимальной системы могут принимать нулевые значения, что соответствует
вырождению элементов сооружения, а следовательно, и устранению некоторых
связей. Таким образом, множество конструкций с заданным очертанием осей
должно включать системы с неполным числом лишних связей и статически опре-
делимые системы.
В качестве примера можно привести раму, показанную на рис. 2.71, а.
Наибольшее возможное число лишних связей равно пяти. Системы, показанные
на рис. 2.71, б, в, г, относятся к тому же множеству, что и рама на рис.2.71, а,
так как они могут быть получены из последней обоащением в нуль площадей
сечений отдельных стержней (на рисунке обозначены штриховой линией).
Другим примером может служить множество ферм с заданным очертанием
осей. Некоторые системы одного из множеств приведены на рис. 2.72.
Для пояснения основных понятий оптимального проектирования рас-
смотрим задачу о наименьшей массе системы, приведенной на рис. 2.73,о. Гео-
метрия осей конструкции (размеры /х, Za и а) и материал стержней заданы. При-
веденная на рисунке балка считается абсолютно жесткой с заданным сечением.
Рассматривая площади сечений стержней / и 2 в качестве независимых
параметров (0 Ах <: со; 0 < А.л с со), получим множество конструкций с за-
данным очертанием осей. Геометрической интерпретацией этого множества бу-
дет совокупность точек (пространство параметров), лежащих в первом квадранте
декартовой системы координат АгОАа (рис. 2.74). Каждой такой точке соответ-
ствует определенная система из множества с заданным очертанием осей. Точкам
на осях координат соответствуют статически определимые системы, полученные
отбрасыванием одного из стержней.
Вводя конструктивные ограничения площадей сечений
Ах Ао, А2 Ад, (2.130)
исключим из рассмотрения вырожденные — статически определимые — системы.
Среди выделенного неравенствами (2.130) множества статически неопределимых
конструкций выделим такие, для которых выполняются условия прочности всех
элементов:
/VfdojAj, /Va<[o]A>, (2.131)
где (cf) — допускаемое напряжение.
Для определения усилий Ni и решаем задачу методом сил, принимая за
лишнее неизвестное усилие (рис. 2.73, б):
77г = 1, /V2 = —2, ZVIf = O, Nif = 2F-t
* li 41* a 4Fl2
с=ёт;+ел ’ <2.1зя>
W|„_______^FlJ(EAJ) ______2Flt>(EAJ
1 = I,/ (ЕА,) + Ilt/IEA), • "» ~ + N*t ~ It/IEAJ + •
Подставив усилия (2132) в условия прочности (2.131), после элементарных
преобразований получим неравенства, определяющие прочность стержней:
Aj + 4^ А8 > ; (2.133)
<2|34>
233
Рис, 2,2а
РИС, 2.74
Неравенства (2.130), (2.133), (2.134) определяют подмножество допустимых
систем, в котором будем искать наилучшую — оптимальную систему.
На рис. 2.74 прямая АВ, соответствующая выполнению неравенства (2.133)
как строгого равенства» делит пространство параметров на две части — допусти-
мую и недопустимую по условию прочности первого стержня. При !tl (21г) < 1
прямая СО, соответствующая ограничению (2.134), лежит ниже прямой АВ. Та-
кое ограничение будем называть нерабочим. Прямая АВ вместе с прямыми
4j = Ао и Аа = Ао выделяют в пространстве параметров область допустимых
решений (допустимую область).
Теоретический объем системы можно определить функцией
У* = Л1/1 + Л/24-2Л3о.
Слагаемое 2А3п, выражающее объем жесткой балки» постоянно для всех систем
множества» поэтому при сравнении теоретических объемов системы его можно
отбросить:
V = Axlx-\-A2l2. (2.135)
Функция (2.135) определяет качество системы и называется целевой функцией.
Задачу оптимального проектирования можно сформулировать следующим
образом: найти параметры А, и А2, удовлетворяющие условиям прочности
(2.133), (2.134) и конструктивным ограничениям (2.130) и обращающие в минимум
нелевую функцию (2.135):
V = min.
(2.136)
Зафиксируем значение целевой функции V = Vo = const. Этому уравне-
нию на рис. 2.74 соответствует штриховая прямая. При различных значениях
У, — const, Уа = const, ... получим семейство параллельных прямых, называе-
мых линиями уровня целевой функции. Точки, лежащие на одной линии уровня,
соответствуют системам с одинаковым объемом. По мере удаления линий уровня
от начала координат значение целевой функции возрастает. Поскольку прямая
АВ на рис. 2.74 наклонена к оси Ах больше, чем линии уровня, оптимальной
системе о рассматриваемом примере соответствует t.F на границе допустимой
области.
Если не учитывать конструктивные ограничения (2.130). то оптимальная
система достигается в окрестности т.В, т. е. при Аг = 0. В таком виде постанов-
ка задачи оказывается некорректной, так как т.В соответствует статически оп-
ределимая система, в то время как решение ищется в классе статически неопре-
делимых систем.
Рассмотрим постановку задачи оптимального проектирования в общем
виде.
Пусть сечение каждого стержня системы описывается одним или несколь-
кими параметрами А/. Ими могут быть площадь поперечного сечения, его гео-
метрические размеры или другие характеристики. Набор этих величии, назы-
ваемых параметрами системы, для всех стержней образует вектор
А =
Л,
Аа
Ап
определяющий некоторую систему множества, в котором ищется оптимальное
решение.
Механические характеристики материала (модуль упругости, расчетные со-
противления и пр.) считаем заданными. Тогда при известной нагрузке состояние
системы описывается вектором
s =
$2
SP.
элементами которого являются переменные состояния (продольные силы, изгиба-
ющие моменты, напряжения, перемещения и пр.).
235
Переменные состояния должны
удовлетворять уравнениям связи
fk (A, S)= 0, k = 1,2,.... т, (2.137)
которые соответствуют условиям рав-
новесия, совместности деформации и
др. Кроме того, параметры системы
и переменные состояния должны удов-
летворять условиям прочности, жест-
кости, конструктивным и другим ог-
раничениям, которые записываются
в виде неравенств
gy (Л, S)>0, j=l,2......./. (2.138)
Н еравенства (2.138) вместе с урав-
нениями (2.137) выделяют в простран-
стве параметров допустимую область,
которой соответствует подмножество
допустимых систем.
Необходимо отметить, что при лю-
бом числе неравенств (2.138) задача
не будет переопределена. Эго объяс-
няется тем, что каждое неравенство можно свести к равенству введением новой,
дополнительной переменной.
Оптимальной является система из подмножества допустимых систем, соот-
ветствующая наименьшему значению целевой функции
V(A)=min. (2.139)
В качестве целевой функции могут быть объем, масса, стоимость конструкции или
другой показатель, характеризующий качество системы.
Условие (2.139) вместе с уравнениями (2.137) и неравенствами (2.138) опре-
деляет задачу оптимального проектирования как задачу математического про-
граммирования.
Методы решения этой задачи во многом определяются видом функции fk (A, S),
(А, 5) и V (А). В частности, если целевая функция линейна, а условия (2.137)
и (2.138) приводятся к системе линейных неравенств С A -f- В > 0, где С — матрица
коэффициентов, В — вектор свободных членов, получаем задачу линейного програм-
мирования. Ее решение можно получить симплекс-методом.
В множестве статически неопределимых систем граница допустимой обла-
сти, как правило, нелинейна. Для решения такой задачи могут быть применены
градиентные методы, метод случайного поиска и др.
Градиентные методы построены как многошаговый процесс. На каждом эта-
пе определяется такое направление наискорейшего убывания целевой функции,
вдоль которого не нарушаются ограничения. Движение к новой системе осуще-
ствляется в этом направлении на величину заданного шага.
В методе случайного поиска сравниваются между собой системы, определя-
емые случайными наборами параметров. Качество оптимальной системы при
этом существенно зависит от количества выбранных для расчета систем (от числа
«попыток»). Для того, чтобы получить действительно лучшую систему, необхо-
димо выполнить большое число попыток.
Во многих случаях область допустимых решений является невыпуклой
и содержит несколько точек локальных минимумов. Например, допустимая об-
ласть для рамы с двумя стержнями постоянной жесткости (рис. 2.75, а) содержит
одну такую точку — т.В на рис. 2.75, б. В этом случае качество решения при
использовании градиентного метода зависит от исходного приближения. Если
исходная точка принята выше луча ОС, то мы придем к глобальному минимуму
целевой функции — т.А и получим действительно оптимальную систему. Если
исходная точка лежит ниже луча ОС, то решение дает лишь локальный минимум
236
(т.В). Интересно ответить, что в данном случае можно прийти к решению, соответ-
ствующему т.С— локальному максимуму. Чтобы избежать получения локаль-
ных минимумов, можно комбинировать градиентные методы с методом случай-
ного поиска.
Вопросы для самоконтроля
1. Какие вы знаете новые направления теории сооружений?
2. Какая система является оптимальной?
3. Что лежит в основе статистического подхода к задачам строительной ме-
ханики?
4. В чем состоит вероятностно-статистический характер расчета сооружений
по предельным состояниям?
5. Где применяются статистические методы в теории сооружений?
6. Что называется надежностью сооружения?
7. Что называется отказом и какие виды отказоз различают в теории соору-
жений?
3. В чем заключается вероятностный характер надежности сооружения?
9. Какие задачи строительной механики являются задачами теории надеж-
ности?
10. Каковы различия между прямой и обратной задачей строительной
механики?
11. Что понимается под синтезом сооружения?
12. На какие три группы можно разделить методы решений обратной за-
дачи? В чем их достоинства и недостатки?
13. Что понимается под множеством систем с заданным очертанием осей?
14. Какова геометрическая интерпретация множества систем с заданным
очертанием осей?
15. Для чего вводятся конструктивные ограничения?
16. Каков геометрический смысл условия прочности?
17. Что называется областью допустимых решений?
18. Что такое целевая функция?
19. Как формулируется задача оптимального проектирования?
20. Что представляют собой линии уровня целевой функции?
21. Что является параметрами системы?
22. Что понимают под переменными состояниями системы?
23. Какие условия накладываются иа переменные состояния и параметры
системы?
24. Какие методы применяют для решения задачи оптимального проекти-
рования? Дайте краткие характеристики этих методов.
Раздел 3
ОСНОВЫ РАСЧЕТА ПРОСТРАНСТВЕННЫХ
ТОНКОСТЕННЫХ СИСТЕМ
Глава 14
ОСНОВНЫЕ ВАРИАЦИОННЫЕ ПРИНЦИПЫ
И МЕТОДЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
14.1. Понятие о вариационных принципах и их применении
в задачах строительной механики
В задачах механики деформируемых систем нередко возникает
необходимость найти максимальные или минимальные значения пере-
менных величин, определяемых выбором одной или нескольких функ-
ций. Такие величины называются функционалами.
Рассмотрим некоторый определенный интеграл
1 = 1 F(x, у(х), t/(x))dx (3.1)
х.
с граничными условиями
У (*о) = Уч, y(x^ = yt. (3.2)
В зависимости от вида функции у (х) значение интеграла (3.1) из-
меняется. Выражения типа (3.1) и представляют собой функционалы.
Например, функционалом является длина дуги плоской кривой,
соединяющей две заданные точки (рис. 3.1). Его значение может быть
вычислено, если задано уравнение кривой у — у (х). Действительно,
I = £ ds — ydx? + dyz = J Kl +(/)2dx = /[f/(x)l.
Потенциальная энергия, накапливаемая в изгибаемой балке, также
является функционалом, поскольку зависит от кривой прогиба балки
(рис. 3.2):
/
Ulytx^-^lfydx.
О
Вариационное исчисление устанавливает условия, при которых
функционалы достигают своего экстремума или, точнее, принимают
стационарные значения. Задачи, в которых требуется исследовать
функционал на максимум или минимум, называются вариационными
задачами. Многие законы механики сводятся к утверждению, что не-
который функционал в рассматриваемом процессе должен достигать
максимума или минимума. В такой формулировке эти законы нося?
название вариационных принципов механики. К числу таких вариаци-
238
онных принципов или простейших следствий из них принадлежат:
принцип наименьшего действия, закон сохранения количества движе-
ния, закон сохранения энергии, принципы Лагранжа и Кастил ьяно
и т. д.
Решим вариационную задачу, т. е. найдем условие стационарности
функционала (3.1) с граничными условиями (3.2). Рассмотрим такую
функцию #(х), которая дает определенному интегралу (3.^стационар-
ное значение. Для того чтобы доказать, что мы действительно имеем
стационарное значение, образуем новую функцию у (х) + oi](x), где
а — малый численный параметр, а т) (х) — произвольная функция
(рис. 3.3). Эта новая функция должна удовлетворять тем же условиям,
что и у (х). Следовател’.ио,
п(*1) = 0; т) (х2) = о. (3 3)
Разность между функциями
(у (х) + ат] (х)) — у (х) = ат) (х)
(3-4)
в некоторой определенной точке независимой переменной х называ-
ется вариацией функции у (х) п обозначается Ьу.
Вариация функции характеризуется двумя фундаментальными
чертами. Эго — произвольно малое изменение, ввиду близости к нулю
параметра а. Кроме того, это — виртуальное изменение, так как
т](х) есть произвольно выбираемая функция. Необходимо отметить
принципиальную разницу между
Ьу и dy. Обе операции суть беско-
нечно малые изменения функции
у. Однако dy относится к беско-
нечно малому изменению данной
функции, которое обусловлива-
ется бесконечно малым изменени-
ем dx независимой переменной,
в то время как Ьу — бесконечно
малое изменение у. которое соз-
дает новую функцию у + Ьу. Ва-
риация независимой переменной
полагается равной нулю, т. е,
6х = 0.
239
Подставим функцию у (х) + arj(x) в функционал (3.1). В результате
интегрирования получим некоторую функцию параметра ал
/ (а) == j F (х, у (х) + ат) (х), у1 (х) + ат)' (х)) dx. (3.5)
Но раз у (х) дает по условию экстремум функционалу /, то функция
(3.5) должна иметь экстремум при значении а = 0, а потому ее произ-
водная должна обращаться в нуль при а = 0. Дифференцируя (3.5)
под знаком интеграла, будем иметь
(Иа=о = /'<О) = у. У')Ч(*) + & (x,y,y')n'(*)ldx = 0.
*1
(3.6)
где
Интегрируем второе слагаемое по частям*
( f»'П' (*) dx = (F^T) (x)]J; — j Fy<r\ (x) dx. (3.8)
*i X,
Согласно условиям (3.3), первое слагаемое (3.8) равно нулю. Внеся
(3.8) в (3.6), предварительно умножив обе части на а и имея в виду,
что arj (х) == бу и Г(0)а — Ы, получим
Так как в общем случае бу Ф 0, нулю должно равняться выражение
в скобках:
F«—Ж^ = °- <3-9)
т. е. кривая у (х), дающая стационарное значение функционалу (3.1),
должна удовлетворять дифференциальному уравнению (3.9). Урав-
нение (3.9) называется уравнением Эйлера — Лагранжа. Раскрыв
полную производную по х, можно записать это уравнение в виде
dF d*F d*F , d*F „ ~ „ 1Л.
ду дхду’ дуду- у ду- ду- у ~
Для функционала, зависящего от п функций: г/Дх), ..., уп(х}, необхо-
димые условия стационарности будут выражаться системой уравнений
(3.9):
F>y-^Fyt=° (fe=>.2............п). (3.11)
240
Для функционалов, зависящих
от производных функций у (х)
вплоть до л-го порядка,
/ = J F(x, у, у', у", .... У) dx
(3-12)
уравнение Эйлера — Лагранжа
имеет вид: Рис‘ЗА
dF d dF . d* dF . . , i\n dF _ n 1^
Ц ------dxn ду(п> 0- ( • )
Условием стационарности кратного интеграла (функционала)
/-И У* и> и*' u&)dxdy, (3.14)
где их и иу — частные производные функции и (х, у}, будет удовлетво-
рение функции и (х, у) дифференциальному уравнению Остроградского
<ЗЛ5>
или в раскрытом виде
Fихих^кл uxuyU*y “Ь иуиу^УУ
+ ?ихиия + FUyUuy + FXUx ч- FyUy - Fu = 0. (3.16)
В качестве примера использования вариационного исчисления в задачах
строительной механики рассмотрим получение уравнения равновесия
изогнутой оси балки постоянной жесткости под действием поперечной
распределенной нагрузки (рис. 3.4).
Запишем выражение полной потенциальной энергии системы, под
которой будем понимать работу, совершаемую силами системы как
внутренними, так и внешними, при переводе ее из деформированного
состояния в начальное, недеформированное!
Utot=U+W, (3.17)
i
где U — J El (tf)2/2 dx — потенциальная энергия внутренних сил;
о
I
W = —qvdx—потенциальная энергия внешних сил.
Из закона сохранения энергии следует, что вариация потенциаль-
ной энергии равна нулю: SUtot == 0. Следовательно, подынтегральная
функция функционала
i
= (v"ffi — qv}dx
О
241
должна удовлетворять уравнению Эйлера — Лагранжа. Поскольку
в рассматриваемом случае функционал зависит от производной функ-
ции и(х) второго порядка, необходимо воспользоваться уравнением
Эйлера — Лагранжа в форме (3.13).
Найдем выражения производных от подынтегральной функции
F (х, и, v”) = EI (о")2/2 — qv*
dF OF р. dF Р/ц”*
dx dv' ’ Ox2 dv" *
Подставив эти значения в (3.13), получим EIv'v = q. Это — хо-
рошо известное уравнение изогнутой оси балки, обычно получаемое
из рассмотрения равновесия бесконечно малого элемента балки под
действием всех внешних и внутренних сил, приложенных к нему. Та-
ким образом, условия равновесия системы и условия стационарности
функционала полной потенциальной энергии системы тождественно сов-
падают. Следовательно, рассмотрение задачи строительной механики
как задачи вариационной можно использовать как один из методов со-
ставления уравнений равновесия.
Отметим, что вариационный метод позволяет получить не только
дифференциальные уравнения задачи, но одновременно недостающие
естественные граничные условия, обеспечивающие единственность
ее решения. Составим выражение вариации функционала
I
Wtot = j (Elv" (to)" — q to] dx.
к
Выполним для первого слагаемого интегрирование по частям. Пусть
и — Vя, to = (to)" dx; тогда du = vm dx, v = (to)'- Следовательно,
El ( v" (60)" dx = El v" (to)' I' — J Eld" (to)' dx.
0 0
Пусть теперь и = tf', dv = (to)' dx; тогда du = viv dx, v = fo.
Следовательно,
/ i
El J' v" (6v)- dx = Elv" (to)' |o — Eld" to |' + j EIvIV to dx.
п 0
Таким образом, вариация bUtoi запишется так:
i
Wt.., = Elv" (to)' I' — Eld" to I' + ((£/v,v — q) todx.
t)
В положении равновесия 6Uir>t =0 и, ввиду произвольности to, а
также обращения в нуль на границах участка интегрирования to
и (би)', получаем
Elv™ — q = 0;
Elv’ (to)' |o — Eld" to |o = 0.
242
Второе условие как раз и содержит естественные граничные условия
рассматриваемой задачи. Для балки» показанной на рис. 3.4, v = 0;
и' =/= О при х = 0 и х = /. Следовательно, для этих сечений до == 0,
а величина (би)' произвольна. Отсюда получаем следующие граничные
условия:
( и = 0,
при х = 0, *=/ |£ЛЛ = 0
Таким образом, полная потенциальная энергия содержит исчерпываю-
щую информацию о системе, так как позволяет получить не только
уравнение равновесия, но и конкретные граничные условия системы.
Основным, исходным положением при решении данной задачи
в вариационной форме было положение о стационарности полной по-
тенциальной энергии системы. Естественно предположить, что оно
действительно и общее для решения целого класса подобных задач.
Такне и подобные им обобщающие положения в строительной механи-
ке, математически выраженные в виде вариационных соотношений,
называют вариационными принципами строительной механики.
14.2. Основные вариационные принципы строительной механики
Принцип Лагранжа, или принцип вариации перемещений, форму-
лируется так: из всех возможных систем перемещений упругого тела
перемещения, действительно имеющие место и отвечающие состоянию
равновесия, сообщают полной потенциальной энергии тела стацио-
нарное значение, т. е.
Ы7М (и, ш) — 0. (3.18)
Символы и, v, w в круглых скобках при Utot указывают на то, что ва-
риация энергии явилась следствием вариации перемещений. Уравне-
ние (3.18) называют вариационным уравнением Лагранжа. Для балки,
вагруженной распределенной нагрузкой, использование принципа
Лагранжа было показано на рассмотренном в предыдущем параграф
примере. Применительно к сплошной изотропной среде уравнение
Лагранжа имеет вид:
б [ J j J Uo (и, v ,иу) dx dy dz — Ц (Ххи + Yvo + Zvw) da> —
V 2
-Щ РЙ. + Yv + Za)dxdydz] = 0. (3.19)
В уравнении последние два слагаемых — энергии поверхностных и
объемных сил соответственно; первое — потенциальная энергия де-
формаций, где
= | (оА + (3.20)
— плотность потенциальной энергии деформаций.
243
Используя выражение закона Гука и уравнения Коши, можно
ваписать (3.20) через перемещения:
f t Е f v (ди , dv , dw \2 , (ди \2 L (dv\2 , ( dw V ,
ио= 2(1~ТГ 1а-2и) ^\dz) +
Заметим, что при решении задач с упрощающими предпосылками,
например приближенной задачи изгиба пластинок, для получения ва-
риационного уравнения Лагранжа (3.19) необходимо плотность по-
тенциальной энергии находить по выражению (3.20) с дальнейшим
преобразованием к виду (3.21).
Принцип Кастильяно. Если теперь запишем выражение энергии
внешних и внутренних сил для сплошной среды, как в (3.19), но най-
дем ее вариацию, варьируя напряжения, и положим, что вариации
внешних сил (объемных и поверхностных) равны нулю, то получим
вариационное уравнение Кастильяно
Шв<и « 0, (3.22)
или
6 [ ЦI ио (°" ° и' °г> г«) dx dydZ] = °- (3-23)
Отсюда следует, что из всех систем статически возможных напряжений,
т. е. таких, которые находятся в равновесии с заданными массовыми
силами, а на поверхности — с поверхностными силами, только
та система действительно имеет место, для которой дополнительная
потенциальная энергия принимает стационарное значение. Сформу-
лированный принцип называется принципом возможных ивменений
напряжений, или принципом Кастильяно.
Термин «дополнительная энергия» имеет существенное значение
для физически нелинейных систем. Происхождение его становится
ясным из рассмотрения рис. 3.5, а, где показан график зависимости
о — ев случае, если эта зависимость нелинейна. Площадь, изобража-
ющая Uaddi дополняет площадь, изображающую потенциальную энер-
244
гпю деформации U до прямоугольника о*е. В случае линейно дефор-
мируемой системы (рис. 3.5, б) значение дополнительной энергии
совпадает со значением энергии деформаций:
и," = и. (3 24)
Если из принципа Лагранжа, как следствие, вытекают уравнения
равновесия, то из принципа Кастильяно— уравнения неразрывности
деформаций. И тот и другой принципы позволяют решать статические
задачи: первый — методом перемещений, второй — методом напря-
жений (сил).
Принцип Гамильтона* При решении задач динамики можно рас-
сматривать тело в каждый данный момент времени в состоянии равно-
весия, добавив, согласно принципу Даламбера, к действующей на-
д2и д2и d2u>
грузке силы инерции —р ——р — , —р-^-.
Составим вариационное уравнение Лагранжа (3.18) с учетом энер-
гии инерционных сил:
М/"" + I fJ р (ж 6v + ж Чdx * = °- <3-24>
v
Представим теперь наряду с действительной траекторией движения
некоторую близкую к ней траекторию, пересекающуюся с действи-
тельной в моменты времени t0 и tx (рис. 3.6). Это значит, что варьиру-
емые компоненты перемещений ut vt w подчиняются условиям:
при t = t0 и t = Ъи = би = = 0. (3.25)
Интегрируя (3.24) no t в пределах от /0 до llt получим:
G К
J dt + J JJJp bu + 4- Coy) dxdydzdt = 0. (3.26)
*4 К v
Интегрируя по частям второе слагаемое, преобразуем его к виду
- ф" (т1&+ТГ Ч d‘ * £ -
G
f fff I du d&i . &v dSu du> 5 6uA . . , .. O7.
~+ -di-sr+~3r—]dxdydzdt- (327)
Первое слагаемое, ввиду условий (3.25), обращается в нуль. Второе —
представляет собой интеграл по времени вариации кинетической
энергии:
245
Следовательно, выражение (3.26) можно окончательно представить
в виде
6^(7 — Utol) dt = 0. (3.29)
<0
Равенство (3.29) и выражает принцип Гамильтона, или принцип ста-
ционарного действия: в действительном движении системы действие
имеет стационарное значение по сравнению с любыми бесконечно близ-
кими кинематически возможными движениями^ для которых началь-
ное и конечное положения системы одинаковы с соответствующими
положениями для действительного движения и время движения одина-
ково.
Необходимо заметить, что вариационное уравнение (3.29) записано
для консервативных систем, т. е. систем, при движении которых
полная механическая энергия остается постоянной во времени. В слу-
чае рассмотрения движения неконсервативных систем в (3.29) добав-
ляется вариация интеграла от работы непотенциальных сил (сил тре-
ния и т. д.).
14.3. Приближенные методы расчета, основанные
на вариационных принципах
Основным методом фактического нахождения решения той или
иной вариационной задачи является сведение этого решения к реше-
нию дифференциального уравнения Эйлера — Лагранжа (3.9) (пли
системы дифференциальных уравнений). Но дифференциальные
уравнения вариационных задач интегрируются в конечном виде лишь
в исключительных случаях. Возникающие на этом пути трудности
заставили искать в вариационном исчислении другие, так называе-
мые прямые методы. Основная идея этих методов заключается в том,
что вариационная задача рассматривается как предельная для некото-
рой задачи на экстремум функции конечного числа переменных. За-
дача из экстремум функции конечного числа переменных решается
обычными методами, а затем предельным переходом получается реше-
ние соответствующей вариационной задачи.
Функционал / \у (х)] можно рассматривать как функцию беско-
нечного множества переменных, если допустимые функции у{х) могут
быть разложены в какие-нибудь ряды вида
!/(х)= Еал<р,(х), (3.30)
л—О
где <рл (х) — заданные функции.
Для задания функции у (х), представимой в виде ряда (3.30). до-
статочно задать значения всех коэффициентов ап. Тогда значение
функционала / Ц/ (х)1 будет определяться бесконечной последователь-
ностью чисел: ofl, oXt а2.ап* —, т. е. функционал становится функ-
цией бесконечного множества переменных:
/ ly (x)J = 1 (ц,, о2, ..., ап ,...). (3.31)
246
Такой метод применим не только для доказательства существования
решения, но и для построения практически удобного способа его
приближенного вычисления. На указанных выше положениях основан
метод Ритца (1908 г.) для решения предельных задач. Широкое обобще-
ние этого метода на случай дифференциальных уравнений, не связан-
ных с вариационным исчислением, было дано Б. Г. Галеркиным
(1915 г.).
Идея метода Ритца заключается в том, что многообразие, имеющее
бесконечное число измерений (3.30), заменяется совокупностью линей-
ных комбинаций
= (3-32)
с постоянными коэффициентами, составленных из п первых функций
некоторой фиксированной последовательности. Функции (рДх) должны
быть допустимыми в условиях данной задачи, отвечающими ее гра-
ничным условиям. На таких линейных комбинациях функционал
/ [у (х)1 превращается в функцию / (alt а2, ..., aj коэффициентов
...» ап. Эти коэффициенты выбиракпея так, чтобы функция
/ (at, а2..ап) принимала, как и функционал, стационарное значе-
ние. Следовательно, fllt а2.ап должны быть определены из системы
уравнений
-#=0, ^- = 0............^- = 0. (3.33)
Если совершить предельный переход при п -> оо, то функция у —
•X/MPtW будет точным решением рассматриваемой вариационной
задачи. Если же ограничиться только п первыми членами, решение
получится приближенным. Быстрота сходимости метода Ритца зависит
как от рассматриваемой задачи, так и от выбора функций <п(х). Сле-
дует подчеркнуть, что во многих случаях достаточно взять линейную
комбинацию совсем небольшого числа функций (трех-четырех, иногда
меньше), чтобы получить вполне удовлетворительное приближение
к точному решению. Заметим также, что если таким методом опреде-
ляется абсолютный минимум функционала, то приближенное значение
минимума функционала находится с избытком, максимума — с недо-
статком.
В строительной механике для решения задач чаще применяется
вариационное уравнение Лагранжа (3.18). В этом случае разрешаю-
щие функции (3.32) по методу Ритца записываются как функции пере-
мещений, которые должны удовлетворять кинематическим условиям.
Их подобрать проще, чем функции усилий, удовлетворяющие статиче-
ским условиям согласно принципу Кастильяно. Вариационное уравне-
ние Лагранжа представляет собой уравнение равновесия, следователь-
но, уравнения (3.33) также являются уравнениями равновесия.
И если функционал полной потенциальной энергии является квадра-
тичным, то эти уравнения будут линейными относительно неизвестных
247
коэффициентов а19 aZt ...» On и могут быть записаны подобно канони-
ческим уравнениям равновесия метода перемещений, применяемых
для расчета статически неопределимых стержневых систем.
Допустим, изгибаемый стержень загружен поперечной распреде-
ленной нагрузкой. Запишем функционал Лагранжа, являющийся
полной потенциальной энергией изгибаемого стержня!
1 i
= (»*)г dx - ( qv dx. (3.34)
о о
Зададимся прогибом о, следуя Ритцу, в виде ряда
у= (3.35)
и подставим в выражение (3.34);
In 1л
Um e [X ai^ w] dx ~ а^1 W (З.ЭД
О »=1 о £=1
Выражение Utot (3.36), в отличие от (3.34), является не функциона-
лом, а функцией коэффициентов а{. Учитывая условия стационарности
(3.33) этой функции, получим п уравнений
In I
J El Y1oi<ti4'"tdx — ^q<fkdx = 0 (k= 1, 2, n), (3-37)
0 1=1 0
или в развернутом виде
• с 1
EI(V"l),‘dx+ a, j £/q>'Xd*+ ...+aAEI<Ml"1dx—
0 0 6
I
—qffrdx^O;
a, f El<₽;<₽; dx + a, j El(<№ dx + ... + a„ f Eltp’^dx—
0 0 0
I
— J 9<Pi
о
(3.38)
248
Запишем теперь канонические уравнения метода перемещений]
%1ги 4“ 28г12 4- •• • 4- Znr\n 4- R11 = 0;
21 + ^2Г22 + * * ’ + ^пГ2П + R2f e Qi
(о.«ЗУ)
Zjfnl + 22Гп2 + ’ • * + Znrnn 4- Rnl — 0.
Сравнивая (3.38) и (3.39) и учитывая, что и та и другая системы уравне-
ний являются системами уравнений равновесия, элементам и членам
уравнений (3.38) можно придать простой механический смысл.
Если считать коэффициенты at своего рода перемещениями подоб-
но Zt, то интегральные члены можно представить как реакции услов-
ных опор от единичных значений коэффициентов (at =1) и от внешнем
нагрузки, т. е.
rik = j El dx, (3.40)
i
R/f = — $ qcptdx.
о
Применив введенные обозначения (3.40) и оставив обозначения коэф-
фициентов at без изменения, уравнения (3.38) коротко запишутся так!
114- Q2ris 4- • • • 4~ anrin 4- R\f = 0;
air2i 4" агг22 4" • • • 4“ fl«r2n 4- Rif = ft
Olfiil 4” C2rn2 4- • * • 4- ОлГл/. L Rnf — 0.
Уравнения (3.41) будем в дальнейшем называть каноническими уравне-
ниями Лагранжа — Ритца.
Решив совместно эти уравнения, найдем коэффициенты att и, стало
быть, определим функцию перемещения и. Если в качестве первого
приближения ограничиться одним членом ряда (3.35), то из уравне-
ний (3.41) останется одна строка
atrn 4“ Rif = 0»
Для второго приближения будем иметь две отроки!
Qirit 4- a2r 12 = 0;
si 4" °2Гяг 4" Rzi в 0
и т. д.
Рассмотрим в качестве примера применения метода Ритца расчет
балки, показанной на рис. 3.4. Эта простейшая задача имеет обще-
известное точное решение. Упругая линия выражается уравнением
v = "2^7 — 2^ 4- *ь)> а наибольший прогиб посредине балки
Ртая = 3§4Ё7' = °»01303 ’
Возьмем о в виде тригонометрического ряда
<3-42>
/=1
249
удовлетворяющего кинематическим условиям задачи v(0)=u(/) =
= 0 и где i имеет только нечетные значения! i = 1, 3, 5, ... ввиду
симметричности изогнутой оси балки под воздействием равномерно
распределенной нагрузки.
В первом приближении оставим один член ряда (3.42) v = X
Xsin-y-. Система (3.41) получает вид
+ Rif — 0, (3.43)
где ,
г„ = j£/(9l)2dx = -^sin-y )dx = -^-;
О о
I I
Rll = —^qq>ldx = —^qsin~dx = —^-.
0 п
Подставив эти выражения в уравнение (3.43) и решив его относитель-
но находим
fli = — Ri//rn = 4ql4/(nbEl).
Следовательно, v = 4g/4/(ji6E/)sin (лх/Z) и 1%^ = 4ql4/(jibEI) =
= 0,01307<7/4/(£7). Этот результат для umax больше точного на 0,3 %,
т. е. достаточно одного первого члена ряда (3.42) для получения почти
точного решения. Заметим, что такую быструю сходимость можно
объяснить тем, что ряд (3.42) удовлетворяет не только кинематическим
граничным условиям, но и статическим- М (0) = —Е7сГ(0) = 0 и
М (/) « —Elv"([) =- 0.
Зная приближенное выражение прогибов, можно получить при-
ближенные выражения внутренних усилий (моментов и поперечных
сил) по зависимостям!
М = —E/if; Q = —Eh/"-
М = 4ql2/n3 sin (лх/Z); Q = 4ql/n2 cos (nx/Z).
Максимальное значение изгибающего момента Л/гоах — 4ql?ln3 =
= 0,129gZ2 больше точного /Итах = q?№> — 0,125^2® на 3,2 %, а по-
перечной СИЛЫ Стах = fyljn2 = 0,405 ql меньше ТОЧНОГО Стах ® 0,5^/
на 19 %. Следовательно, для получения более точных значений внут-
ренних усилий необходимо учитывать большее число членов ряда,
чем при определении перемещений.
В заключение отметим, что!
а) уравнения Лагранжа — Ритца (3.41) являются общими для
любого типа задач строительной механики, отличаются только выра-
жения (3.40) для определения коэффициентов и свободных членов.
Например, в вадаче поперечного изгиба пластинки полная потенци-
альная энергия
г / f f D Г/ d2tt»\2 , / - d2w d*w ,
Ufc( = JJ гЦйг) +Ы + 2'1а?а? +
+ 2(1 ——JJgbwfxdy; (3.44)
250
функция перемещений, задаваемая рядом, —
л
ш = £а(<рДх, у);
(3.45)
коэффициенты и свободные члены уравнений Лагранжа — Ритца
(3.41)
IMS'S+W+»(Э э+
+SS)+2i'-->S, ЙМ«- |,4Ы
/?</ = J ^q^dxdy; (3.47)
б) таким способом можно решать не только задачи статики, но
и устойчивости систем. В задачах устойчивости система уравнений
Лагранжа — Ритца является однородной, и критические нагрузки
отыскиваются из условия ненулевого решения этой системы, т. е. ра-
венства нулю определителя, составленного из коэффициентов системы.
Вопросы для самоконтроля
1. Что собой представляют функционалы?
2. Какие задачи относятся к вариационным?
3. Что понимается под термином «вариационные принципы механики»?
4. Какое отличие вариации функции от дифференциала?
5. Что такое полная потенциальная энергия? Дополнительная энергия?
6. Сформулируйте принципы Лагранжа, Кастнльяно, Гамильтона.
7. Каков физический смысл вариационных уравнений Лагранжа и Кас-
тильяно?
6. В чем заключается идея метода Ритца?
Глава 15
ОСНОВЫ МЕТОДА КОНЕЧНОГО ЭЛЕМЕНТА (МКЭ)
15.1 . Основные понятия. Расчет стержневых систем
Метод конечного элемента основан на дискретизации задач меха-
ники непрерывной среды. Проблема отыскания непрерывных функ-
ций координат сводится к задаче определения конечного числа неиз-
вестных параметров, дискретных неизвестных. В этом методе, как
и в методе Ритца, искомые функции представляются комбинацией ко-
нечного числа линейно независимых функций. Однако, если в методе
Ритца область определения каждой из координатных функций совпа-
дает с областью всей системы, то в МКЭ область определения каждой
функции является локальной, относящейся к некоторой части систе-
мы — конечному элементу. Таким образом, при расчете конструкции
251
Рис. 3.7
Рис. 3.8
методом конечного элемента она тем или иным образом разбивается
на отдельные простые геометрические элементы, напряженно-дефор-
мированное состояние которых предварительно подробно исследуется.
Сопряжение элементов осуществляется в отдельных граничных точках,
называемых узлами, где соблюдаются условия равновесия и неразрыв-
ность перемещений. Поведение каждого элемента описывается конеч-
ным числом обобщенных координат (по числу степеней свободы эле-
мента), зависящим от вида напряженно-деформированного состояния
и типа элемента.
С геометрической точки зрения все конечные элементы можно
разбить па три типа: одномерные — стержневые (рис. 3.7, а)*
двумерные — пластинчатые (треугольники и четырехугольники)
(рис. 3.7, б); трехмерные — сплошные (тетраэдры и параллелепипеды)
(рис. 3.7, в).
При различных видах напряженно-деформированного состояния
указанные типы элементов будут обладать различным числом степе-
ней свободы. Например, стержневой элемент, испытывающий осевое
растяжение или сжатие (элемент фермы), имеет две степени свободы —
линейные перемещения ut и и{ (рис. 3.8, п); стержневой элемент,
испытывающий плоский поперечный изгиб (элемент балки или плос-
кой рамы, рассчитываемой без учета влияния продольных сил), имеет
четыре степени свободы — линейные и угловые перемещения w,,
wh Qj (рис. 3.8, б); треугольный пластинчатый элемент, находя-
щийся в плоском напряженном состоянии (элемент пластинок, балок-
стенок), имеет шесть степеней свободы (рис. 3.8, в) — составляющие
линейных перемещений трех узлов вдоль осей х и у: ut, vt, uf, v,,
щ, Vk. (Пластинка может составляться и из четырехугольных элемен-
тов с восьмью степенями свободы); изгибаемый пластинчатый элемент,
испытывающий поперечный изгиб в двух плоскостях (элемент тонкой
плиты, рассчитываемой по технической теории), имеет двенадцать сте-
пеней свободы (рис. 3.8, г) — линейные перемещения узлов вдоль
оси z и угловые перемещения относительно осей х и у w., Qxt, Gyt,
wh wk> ®xk, &yk, wtt &xt, Byt. Если, внутренний контур плиты
не прямоугольный или плита имеет круглое отверстие, применяются
треугольные элементы с девятью степенями свободы.
252
Рассмотрим на простейшем примере рас-
чета фермы (рис. 3.9) правила получения
характеристик конечного элемента и сущ-
ность метода. Прежде всего необходимо раз-
бить рассматриваемую конструкцию на ко-
нечные элементы соответствующего типа.
В ферме это — стержни, из которых она
составляется. Далее нумеруются узлы и
элементы. Стержни фермы испытывают ли-
нейное напряженное состояние и относятся
Рнс, 9.9
к типу, показанному на рнс. 3.8, а. При решении вариационной
задачи, используя принцип Лагранжа, необходимо задаваться функ-
цией перемещений, описывающей поведение системы или, в данном
случае, ее элемента. Простейший способ аналитического
описания функций поведения элемента состоит
в представлении их в виде полиномиального ряда» коэффициенты ко-
торого являются обобщенными параметрами at. Чтобы гарантировать
приемлемое решение задачи, функции должны удовлетворять неко-
торым простым требованиям-
1. Степень полинома, в виде которого задается функция переме-
щений, должна быть не ниже наибольшего порядка производных в
функционале вариационной задачи.
2. Как правило, число обобщенных параметров полинома выбира-
ется равным числу узловых степеней свободы элемента.
3. Выбираемая функция должна обеспечивать отсутствие дефор-
маций элемента при движении тела как твердого целого, а также усло-
вие постоянной деформации внутри элемента при уменьшении его
размеров. Это достигается включением в функцию констант и линейных
членов.
В рассматриваемом примере деформированное состояние элемента
(рис. 3.8, а) определяют две степени свободы, а потенциальная энергия
деформаций, входящая в функционал вариационной задачи,
(3.48)
имеет производную первого порядка, поэтому функцию перемещений
можно задать в виде линейного полинома, т. е.
и(х) = а1 + а2х=[1х]-^|. (3.49)
Найдем преобразование, связывающее обобщенные параметры
функции перемещений g физическими степенями свободы и( и ш.
Записывая в граничных точках х = 0 и х ~ / значения и из (3.49),
получим
253
или в матричных символах
Л = А • а. (3.51)
Матрица А системы уравнений (3.50) носит название координатной
и содержит геометрические характеристики конечного элемента.
Обращая матрицу А, будем иметь
[flil Г 1 0 1
Г 1 । Г , (3.62)
М Н Т J Ы
или в общем виде
а = А”1 • А. (3.53)
Подставляя (3.52) в (3.49), находим вависнмость перемещения
в любой точке конечного элемента от перемещений его узлов*
тЬЩ-Н'Ш’ <зм'
или
«(х) = Ф.А, (3.55)
где Ф, = 1 — * и Ф/ = у называются функциями формы поля пере-
мещений.
Чтобы связать узловые силы и перемещения, используем вариа-
ционный принцип Лагранжа. Запишем выражение для потенциальной
энергии деформаций!
= (3.56)
Относительная деформация с учетом (3.54)
(3.57)
или е = В - А, (3.58)
где [ rfz dx J ’ (3.59)
Закон Гука при линейном напряженном состоянии имеет вид
и = Ен. (3.60)
Правую часть, используя (3.58), представим в виде матричного
соотношения
о = bTBTD, (3.61)
где D — матрица упругих констант материала, содержащая для ли-
нейного напряженного состояния один элемент £.
254
Подставим выражения (3.58) и (3 61) в (3.56):
и =J| ATBrz>BadV.
V
(3.62)
Потенциальная энергия внешних сил равна работе, производимой
узловыми силами, взятой с обратным знаком:
Г = - (и, «,] [£]-----дгр. (3.63)
Полная потенциальная энергия
иЮ1 = и + V = [ | bTBTDBbdV — &TF.
V
(3.64)
Из условия стационарности полной потенциальной энергии
^ = 0 (3-65)
найдем
BTDBdV Д — F = 0.
V
Обозначив через
K=\BTDBdV, (366)
V
получим искомое выражение связи узловых сил и перемещений:
F = U (3.67)
Матрицу К из физических соображений называют матрицей жестко-
сти элемента. Найдем для рассматриваемого примера матриц}’ жест-
кости, предварительно получив в соответствии с (3.59) матрицу В:
где А — площадь сечения элемента.
Теперь обратимся к ферме (рис. 3.9), состоящей из трех конечных
элементов. Она уже, в отличие от отдельного элемента, является
плоской системой. Ее описание выполняем в общем базисе (система
координат хОу). Каждый элемент в общей системе координат имеет
четыре степени свободы и к нему приложены четыре составляющие
узловых сил (рис. 3.10). Запишем преобразование усилий и переме-
щений /л-го элемента при переходе от местного базиса (рис. 3.8, о)
к общему. Основываясь на построениях рис. 3.11,
255
или
1&1
h‘,nl = [ c°sam sinam 0 0 1 vmyi
ItyJ I 0 0 cosam sinamJ к?/
(3.70)
Fq = CTFm‘,
ЛГ-СЛ?,.
(3.71)
(3.72)
После подстановки (3.67), а затем (3.72) в (3.71) получим зависимость
между составляющими узловых сил и перемещений в общем базисе:
где
K7j = CTKmC
(3.73)
(3.74)
— преобразованная матрица жесткости конечного элемента.
Перемножим матрицы в (3.74), воспользовавшись (3.68) и матрица*
ми Ст и С ив (3.69) и (3.70). В результате имеем
m Uxl cos3a,n v”i sin 2a,„ I til — cos2am sin 2am
2 2
sin 2am sin2a„ sin 2am — sin*am
fl7> 2 2 . (3.75)
— cos2a„ Sin 2am cosaanj sin2aw
2 2 ’
S»n 2am _ 2 — sin2am sin 2am 2 sin8am
£56
где символы перемещений над матрицей показывают, какому из них
соответствует столбец матрицы.
Разобьем матрицу (3.75) на четыре блока, как показано штрихо-
выми линиями:
= $]• (3-76)
L KJ{ kti J
Матрицы Fq и Дц из (3.69) и (3.70) разобьем на два блока — каж-
дый с составляющими, относящимися к одному узлу;
Тогда (3.73) запишется в виде
ГЛ"]=Глг *«1Г8"1=[лгвг + лЗбГ] (377.
I fT j 1Л)? л{? JI 6/” J L kffi + kTfiT J l’
Отметим, что блочная матрица является симметричной, т. е.
kTj — tfl-
Итак, соотношения между силами и перемещениями в элементе
определены и их можно численно найти для каждого элемента. Теперь
остается только объединить их алгебраически на основании условий
равновесия и совместности деформаций в узлах соединения элементов.
Эти операции приводят к системе уравнений, связывающих силы и
перемещения в узловых точках элементов для конечно-элементной
модели всей конструкции. Согласно условиям равновесия в узле
соединения приложенная нагрузка Ft равна сумме внутренних
сил, возникающих в соответствующих элементах, прилежащих к
узлу. В рассматриваемом примере (рис. 3.9 и рис. 3.10), учитывая
выражение (3.77), получим
Л = /,' +/’ = *П6' + && +
F, -/? +/I = Л1гб| + (3 78)
F, = /з + /з = *316* + *33®3 + Л3383 + Л3282,
где
'’-*[£! 1зта’
Учитывая совместность деформаций в узлах, из которой следует, что
8,| = 8? = 8„ 6i = si = 8„ 6j = oi = 63, получим
Ft = (Ли + *11) ®1 + Л1Л + *‘з6з;
F, = Лаб, + (Ли + Ли) 6а + Лззб,:
Г, = Лз|61 + ЛзД + (Лзз + Лзз) Ss,
257
или
где
F= №,
(3.60)
Ап + А?1 Ai2 Ai3
A21 A22 + Аи A23
A31 A32 A33 + А33
(3.81)
— матрица жесткости всей системы. Дальнейший ход решения за-
дачи, а также последовательность действий покажем с привлечением
конкретных исходных данных примера (рис. 3.9).
1. Вычисляем элементы матриц жесткости конечных элементов
в общем базисе согласно (3.75), приняв для упрощения, что материалы
и площади сечений их одинаковы:
' 0,250 0,433 I —0,250 —0,433 '
0,433 0,750 { —0,433 —0,750
—(ЙбО^ОЛЗЗТ 67250 0433
_ —0,433 —0,750 I 0,433 0,750 .
- 10 1—10"
о о I о о
*‘2“ “Тот 1 о •
О 0 ! о 0_
" 0.250 —0,433 I —0,250 0,433 "
—0,433 0,750 | 0,433 —0,750
—67250 63@51 0250"—ОЛЗЗ
_ 0,433 —0,750 I —0,433 0,750.
2 Записываем уравнения равновесия $.80) с построением матри-
ца жесткости всей системы (3.81):
Fx1
Fyi
Fit
Fyt
FX3
Fy^
1,250
0,433
0,433
0,750
0
—0,250 —0.433
—0,433 —0,750
—0,250 —0,433
—0,433 —0,750
1,250 —0,433 —0,250 0,433
—0,433 0,750 0,433 —0,750
—0,250 0,433 0,500 0
0,433 —0,750 0 1,500
«1
«2
*2
«3
— 1 0
0 0
l 0 о
X
258
3. Учитываем кинематические граничные условия» исключая в
матрице жесткости столбцы и строки, соответствующие нулевым пере-
мещениям: в нашем случае столбцы первый, второй и четвертый и
соответствующие строки, так как = Dj = 0 (рис. 3.9):
[Fx2 1 рл Г 1,250 —°-250 °>4331 Г “2 1
F& = у —0,250 0,500 0 I I u8 .
Ffl J [ 0,433 0 J,500 J [ vs J
4. Обращая оставшуюся матрицу жесткости, находим перемеще-
ния узлов:
1
0,500
0,500 —0,289
2,250 —0,144
—0,289 —0,144 0,750
0
60
0
30
135
—8,66
5. Вычисляем реакции опорных аакреплений. Для этого исполь-
вуем элементы строк матрицы жесткости всей системы, в которые
входят составляющие реакции с исключенными эле.ментами столбцов,
соответствующих нулевым перемещениям:
Fxi I Г— 1 —0,250 —0,433
Fyl =у| 0 —0,433 —0,750
F& J |_ —0,433 0,433 —0,750
6. Определяем продольные силы Fm в элементах. Для этого, с
учетом равенства FT = F7, достаточно вычислить для каждого эле-
мента одну составляющую усилия в одном из узлов, например F?/
и, как следует из рис. 3.11, б, разделить ее на cosam. Знак «плюс»
ставится, если аот<90° и (рис. 3.12). При ат = 90° необхо-
димо вычислять F%j и Fm = FJJ. Правило знаков такое же, только
сравниваются р/ и yt. При am>90° «плюс» отвечает Про-
цедуру определения продольных сил можно свести к перемножению
трех матриц —диагональной матрицы с элементами 1/cosa^, спе-
циально сформированной матрицы жесткости и вектора перемещений
узлов системы. Матрица жесткости
строится следующим образом: из
матрицы жесткости каждого конеч-
ного элемента выбирается строка,
соответствующая FJ1/, для опреде-
ленности, например, с / < i (при
ам а 0 выбирается строка, соответ-
ствующая Из строки исклю-
чаются элементы столбцов, отвеча-
Рвс, 3.18
ющих нулевым значениям переме-
9*
259
щений. В строку включаются на соответствующем месте нулевые
элементы столбцов, отвечающих перемещениям, не имеющимся в мат-
рице жесткости рассматриваемого конечного элемента.
В рассматриваемом примере из матрицы жесткости первого элемен-
та выбираем первую строку, из которой исключаем элементы двух
первых столбцов, отвечающих нулевым перемещениям и и слева
вводим нулевой элемент столбца, соответствующего перемещению и2
и не имеющегося в матрице жесткости этого конечного элемента
и т. д.
0 0 “ ЕА 0 —0,250 —0,433 "
—1 0 1 —1 0 0 X
0 1 0,5 j 0,250 —0,250 0,433
30 1 Г 601
135 = 30 .
—8,66 J [—60 J
Хотя описанная последовательность действий при решении задач
МКЭ относится к фермам, она будет действительной и для других
конструкций с иными видами конечных элементов, отличаясь только
в частностях.
15.2. Плоская задача теории упругости
В обеих задачах теории упругости — о плоском напряженном
и плоском деформированном состояниях — поле перемещений одно-
значно определяется перемещениями и и v в направлениях осей х
и у прямоугольной системы координат. Как в первом, так и во втором
случаях рассматриваются только по три компоненты напряжения и де-
формации в плоскости хОу. В случае плоского напряженного состоя-
ния все остальные компоненты напряжения равны нулю по определе-
нию и, следовательно, не совершают внутренней работы. В случае
плоской деформации напряжение в направлении, перпендикулярном
плоскости хОу , не равно нулю. Но поскольку в этом направлении де-
формация равна нулю по определению, это напряжение также не дает
вклада во внутреннюю работу. При
Рас. 8.13
решении двухмерных задач теории
упругости (определение напряже-
ний около отверстий, расчет балки-
стенки, плотины н др.) изучаемая
область подразделяется на конеч-
ные элементы двух типов — тре-
угольники и четырехугольники. Рас-
смотрим здесь получение основных
соотношений для треугольного эле-
мента (рис. 3.I3), число степеней
свободы которого, определяемое
260
числом степеней свободы его узлов (и, о), равно шести. Основываясь
на рассмотренных ранее положениях для элемента (стержня) в линей-
ном напряженном состоянии, зададимся полем перемещений в виде
полных линейных полиномов
ы (х. У) = + а2х + ад.
v (х, у)==+ аьх+ад*
(3.82)
Значения шести постоянных at легко найти из двух систем, состоящих
из трех уравнений, которые получаются в результате подстановки
в (3-82) узловых координат и приравнивания перемещений соответ-
ствующим перемещениям узловых точек.
Записав, например,
^ = О1 + с2^ + ад»*’
ui = а1 + 4- ад/i (3.83)
Uk = G1 + a2xk + азУк*
или в матричной форме
«/
«л
“ 1 xt у.
1 X/ {//
1 Xk yk
Gi
С2
G3
и в матричных символах
Д = Аа
(3-84)
(3.85)
и найдя обратную матрицу Д’1, получим
где
= x/yk — ЧУь
— У/ — Ук~ У&
Ci = Xk — X/ = xk/;
(3.8G)
(3.87)
остальные коэффициенты получают циклической перестановкой ин-
дексов I, /, fc; величина 2А — удвоенная площадь треугольника —
определяется из соотношения
xt У.
xi У!
Хц Уь
(3.88)
Заметим, что значение А будет положительно, если нумеровать
узлы против часовой стрелки. Коэффициенты а4, а6, а6 определяются
выражением (3.86), где только вектор и должен быть заменен векто-
ром v.
2 А =
1
1
1
261
Подставляя (3.86) и подобное выражение для v в (3.82), получим
еависимость для определения перемещений и и v внутри элемента:
vi
к(*. 1/)1 = [Ф/ О Ф, О Ф* 0 1 и,
lu(x, y)J I 0 Ф/ 0 Ф/ 0 Ф*] V}
и*
v*
(3.89)
или сокращенно
[“]=ФА. (3.90)
где
Фа = (Да + ЬаХ 4- Сау), а = i, j, k (3.91)
— функции формы поля перемещений.
Для определения вектора деформаций плоской задачи используем
зависимости Коши с учетом (3.89):
*у I
У*у J
Ли
дх
ди
ду
ди ,dv
ду~^~ дх
о о о
дх дх дх
О о —' о
ду Оу ду
дФ{ дФ/ дФ{ дФ, 0Ф* дФЛ
_ ду дх ду дх _
или в матричных символах
е = ВД,
и.
Ч
Щ
*/ *
«л
Vk
(3.92)
(3.93)
где, в соответствии с (3.91) и (3.92),
[Ь{ 0 Ь/ 0 bk 0 ]
О ct 0 q 0 ck . (3.94)
Q bt ef bf Ck bk J
Матрицу В можно представить в блочном виде:
В = [Bfi/Bk],
(3.95)
где элементы матрицы В вычисляются по формуле
J Г ьа 01
^а = 2АI са I а, = it /, Л.
[_Са b(nj
(3.96)
262
В соответствии в ваконом Гука
о = De,
[°*
°*
(3-97)
a D — матрица упругих констант материала.
Для плоского напряженного состояния и изотропного материала
1 р О
р 1 О
о о
(3.98)
а для плоской деформации
П ^<1—м)
4-FOG — 2И)
О
* — 2|.
2(1 -р)
(3.99)
Матрица жесткости элемента ijk определяется с помощью соотношения
(3.66), которое хотя и получено на примере линейного напряженного
состояния, не ограничено общностью. В соответствии с (3.66)
K=^BTDBdV, (3.100)
где dfr = hdxdy (ft — толщина элемента); интегрирование произво-
Дится по площади треугольника А. Если предположить, что толщина
элемента постоянна (что тем ближе к истине, чем меньше размеры
элемента), получим простое выражение, поскольку ни одна из матриц
не содержит х или у:
K = BTDBhA. (3.101)
Матрица жесткости может быть записана в виде
ku
kti
kkl
kii
kjf
kki
kin
kfk
kkk
(3.102)
где подматрицы с размерами 2x2 строятся, исходя из блочного
представления матрицы В (3.95), следующим образом:
kn = BTrDBJiA, r.s = i,j,k. (3.103)
Такая форма удобна для вычисления и построения в дальнейшем гло
бальной матрицы жесткости.
263
На каждый элемент, кроме узловых сосредоточенных сил, могут
действовать объемные и поверхностные силы, которые необходимо
привести к узловым. Для этого записываем работу этих сил!
И7у = —j(uX+oy)dV;
W, = — £ J (“Рх+ vpt) dS, (3.104)
s
где X, Y — объемные силы в направлениях осей х и у\ рх и ру — ком-
поненты вектора сил, параллельных этим же осям и действующих
по боковым граням элемента. Сумма берется по трем граням t, /; /, ft;
ft, i.
Используя равенство (3.90), выражения (3.104) можно переписать
в виде:
W'v = —
umsh (з-,о5)
Если эти работы ввести в выражение полной потенциальной энер-
гии (3.64) и учесть (3.65), получим вклад объемных сил и сил, дей-
ствующих по граням, в узловые (3.67)»
/>=(злоб)
Для вычисления интегралов используются интегральные формулы
(31М)
в которые входят относительные координаты L*. La, L9 естественной
координатной системы для треугольного элемента (рис. 3.14, a)i
а, b и с — степени L. Если какая-либо координата L отсутствует, то
она записывается в нулевой степени. Каждая координата представ-
ляет собой отношение расстояния от заданной точки треугольника В
до одной из его сторон s к высоте Л, опущенной на эту сторону из про-
тиволежащей вершины (рис. 3.14, б). На рис. 3.14, в показаны линии,
вдоль которых значения Lx постоянны (L, изменяется от нуля до еди-
ницы). Координата Lxt. В представляет собой отношение площади за-
штрихованного треугольника (рис. 3.14, б) к площади всего элемента!
(3-,08>
864
Аналогичные формулы могут быть записаны для La и Ls:
Ls = AJA, £а = AJA. (3. 109)
Так как А! + А2 + А3 = А, то + L2 + L3 = 1. Последнее ра-
венство указывает на независимость только двух координат.
Найдем формулы перехода от общего базиса (система координат
хОу) к местному LtL2L9. Площади треугольников запишем через
определители по известным в аналитической геометрии правилам!
1 1 yt 1 X у
1 х% Ул : Л.-4 1 х2 у2 »
1 Ул 1 X, у„
1 *1 Ул t 1 А Ул
1 X у ’ ~ 2 1 хг у„ (3.110)
1 х3 у3 1 X у
Раскрыв определители и подставив площади в (3.108) и (3.109), получим,
что выражения для L совпадают с выражениями для Ф. Из этого сле-
дует, что координатные переменные Llt L2 и L3 представляют собой
функции формы для треугольного элемента
Ф, = Llt Ф/ = L2> Фл = L3. (3.111)
Основываясь на этом и приняв толщину элемента h, а также компо-
ненты распределенных сил, действующие на элемент, постоянными ве-
личинами, из (3.106) и (3.107) найдем
265
где, например,
hfL,XdA = hX f 1ЖЛА = (,4°;о,о^ • 2AhX = * X.
A A
Аналогично
Fs = sf фад=
s
Ч/ 2 Рх1/ РуЧ Pxll РуЧ 2 ' 0 0 pxjk Pyjh | 2 Pxkt Pykl 0 0
0 Pxjk РхЫ
_ 0 _Pyi* . _Pyhl
Из полученного следует, что объемные силы и силы, действующие
по граням, равномерно распределяются между узлами. Теперь, когда
найдены соотношения для одного элемента, покажем на примере не-
которой произвольной области (рис. 3.15) процесс описания отдельных
элементов составляющих эту область.
После разбиения области на треугольные элементы нумеруются
последовательно все узловые точки, а также сами элементы. Далее
намечаются первые £-е узлы в каждом элементе. На рис. 3.15 t-й узел
в каждом элементе выделен звездочкой. Выбор этого узла совершенно
произволен. Узлы j и k следуют за i-м узлом в направлении против
часовой стрелки. В соответствии с этим правилом для первого эле-
мента I = 2, / = 3, k = 1. Соответствия такого типа устанавливаются
для всех элементов; например, для второго i «3, / = 2, 6 = 4.
С помощью этих соотношений можно осуществить включение эле-
мента в область, так как они ставят в соответствие индексы элемента
I, /, k глобальным номерам узлов. Сам процесс последовательности
вычислений для решения задачи аналогичен разобранному для систе-
мы, состоящей из одномерных — стержневых элементов.
В заключение необходимо заметить, что результаты расчета с приме-
нением треугольного конечного элемента отвечают выполнению усло-
вий равновесия и совместности внутри элемента, однако вдоль линий,
разделяющих элементы, выполняется лишь условие непрерывности
перемещений и и и. Условия равновесия нарушаются вдоль границ
элемента, но равновесие граничных сил сохраняется в среднем для уз-
лов элемента. В результате измельчения сетки треугольных элементов
можно добиться уменьшения ошибки, вызванной невозможностью
удовлетворить условия равновесия в ка.кдой точке конструкции.
Значения получаемых величин будут меньше последних при точ-
ном решении задачи.
15.3. Изгиб пластин
При применении МКЭ для расчета пластин или тонких плит на изгиб
используются результаты технической теории* тонких плит. Пластина
характеризуется плоским напряженным состоянием = 0, уХ2 в
266
Рис. 3.17
= 0). Основное предположение теории изгиба заключается в том,
что отрезки, которые были первоначально перпендикулярны к средин-
ной поверхности пластины, остаются перпендикулярными к этой по-
верхности и в процессе деформирования пластины. Напряженно-де-
формированное состояние пластины описывается при этом только
одной функцией прогиба w (х, у). В пластине возникают изгибающие
моменты Л4Ж, Л1у, крутящий момент Тху и поперечные силы Qx
и Qy (рис. 3.16), отнесенные к единице длины.
При известной функции прогибов w значения составляющих внут-
ренних усилий определяются из известных выражений:
м‘--
Я—o©r + -£)s
«—‘’(S'+S.h
(3.112)
Den-
= i2(i— pa) — цилиндрическая жесткость пластины; р — коэф-
фициент Пуассона.
При расчете пластин с помощью МКЭ в качестве конечного эле-
мента обычно принимается прямоугольный элемент (рис. 3.17). Каж-
дому из четырех узлов (i, /, 4, /) задаются три степени свободы: пере-
мещение w вдоль нормали (ось z), угол поворота 6л вокруг оси х и
угол поворота 6У вокруг оси у. Угол наклона нормали и углы пово-
267
В выражении для Oxt отрицательное значение производной обус-
ловлено тем, что вращение в положительном направлении вокруг оси х
(рис. 3.17) вызывает отрицательные прогибы.
Узловыми силами в каждом узле, соответствующими этим переме-
щениям, являются сосредоточенная сила и два сосредоточенных мо-
мента:
гл< 1
F,= Мх/ . (З.П4)
L м* J
Для конечного элемента вектор узловых перемещений А и вектор
узловых усилий F содержат по 12 составляющих. В соответствии
с этим задаемся полем перемещений в виде неполного полинома чет-
вертой степени с 12 постоянными параметрами:
(*. у) = а1 + а^х + ауу + а4х2 + а&у + а3у2 + а,№ +
+ аех2у + ааху2 4- а1ауя + аиА/ + а1гху*. (3.115)
Функция w полна вплоть до третьего порядка (10 членов) и необхо-
димо выбрать еще два члена из пяти, отвечающих четвертому порядку.
Слагаемое х2у2 можно не рассматривать, так как для него нет логиче-
ской пары из оставшихся. Члены х4 и у* приведут к квадратичным ва-
риациям перемещений вдоль границ элемента и к более серьезным раз-
рывам непрерывности перемещений вдоль межэлементных границ,
чем члены х*у и ху5. Поэтому в функцию w (х, у) и включены послед-
ние. При этом прогибы оказываются межэлементно согласованными,
однако угловые перемещения не удовлетворяют этим условиям.
Чтобы подтвердить сказанное, необходимо лишь оценить поли-
номиальное представление вдоль границы элемента, например i — /
(рис. 3.17). Вдоль этой стороны (у = 0)
w = ах + п2х + а4х2 + а^х3;
= аг + 2а,х + Зар?;
= а3 + а„х + авх2 + апх>.
Анализ этих выражений показывает, что заданные на концах элемента
четыре степени свободы (iv{, ^tJi3 из общего числа степеней
свободы полностью определяют w и вдоль этой границы. Однако
наклон нормали описывается кубической функцией, и, так как
для определения постоянных этой функции остались всего лишь две
степени свободы Bxt и 0Я/, то она определяется неоднозначно. Следо-
вательно, при задании функции w (х, у) в виде (3.115) согласованности
угловых перемещений вдоль границ конечных элементов не будет.
Но, с другой стороны, имеются теоретические обоснования сходимо-
сти решения при применении этого типа конечного элемента.
После выбора полинома функции перемещений, как обычно, необ-
ходимо выразить постоянные параметры функции через узловые
268
перемещения конечного элемента. Вектор перемещений любой вер-
шины прямоугольника записывается с помощью выбранного полинома
(3.115) следующим образом:
1 Ха Уа ХаУа
= 00—1 0 — ха
0 1 0 2ха Уа
L (g). J
Уа Ха хаУа Хауа Уа ХаУа Хауа
2{/а 0 Ха ~^2ХаУа "“ЗУа %а —^Ха^з.
0 Зха %ХаУа Уа 0 ЗХа#а у3а
a. = i, 1, kt I.
(3.116)
С12
Компонуя из выражений (3.116) вектор перемещений конечного
элемента, будем иметь
Д = Ла, (3.117)
где А — квадратная матрица с размерами 12 X 12; а — вектор по-
стоянных параметров функции перемещений.
Из (3.117) получаем
а = ЛЧ (3.118)
подстановка которого в (3.115) дает зависимость для определения
перемещений внутри элемента:
w (х, у) = 11 х у л2 ху у2 л3 х2у ху2 у3 х*у ху^]А -1Д, (3.119)
или сокращенно [см. (3.90)1
ьу = ФА. (3 120)
Уравнение состояния изгиба тонких плит на основании (3.112) в мат-
ричной форме
7И = £)х, (3.121)
d*w
дгп>
9()9®
дхду
~ 1 р 0
_ Е/Р и 1 0
; v о о
(3.122)
Здесь D — матрица упругих констант материала для изотропной
пластинки.
2ГО
При дальнейших преобразованиях будем основываться на аналогии
определяющих выражений о = De — для плоской задачи теории уп-
ругости и М ~£>х —для изгиба тонких плит. Вектор деформаций
о учетом (3.120) и (3.119)
‘0 0 0 —2 0 0 —6х —2у 0 0 — бху О 1
= 0 0 0 0 0 —2 0 0 —2х —бу 0 —бху I X
ООО 0 —2 0 0 —4х —4у 0 —6х2 —бу2 J
X Л‘ХЛ = GA-'Ь, (3.123)
где по аналогии с (3.93)
B = GA~l. (3.124)
Матрица жесткости, связывающая узловые силы F (поперечная сила
и два момента в каждом узле) с соответствующими перемещениями А,
может быть получена согласно выражению (3.100)1
K=\BrDBdV. (3.125)
Подставляя сюда (3.124) и считая толщину h постоянной внутри эле-
мента, получаем
к = (Д *>f (J j GTDGdxdy] A^h. (3.126)
Члены, не содержащие х и у, вынесены из-под интеграла. Интеграл
вычисляется точно после выполнения умножения под знаком интег-
рала.
Внешние силы в виде распределенной нагрузки q на единицу пло-
щади элемента распределяются по узлам согласно (3.106):
F = J J Wqdxdij, (3.127)
где Ф следует из (3.119). Интеграл (3.127) тоже легко вычисляется.
Когда значения элементов всех необходимых матриц для каждого
конечного элемента вычислены, дальнейшее решение задачи произво-
дится в соответствии с ранее рассмотренным алгоритмом.
15.4. Особенности использования ЭВМ в расчетах
по методу конечного элемента
Применение МКЭ для расчета различных типов конструкций
связано с составлением и решением системы алгебраических уравне-
ний. Порядок системы совпадает с общим числом неизвестных, которое
приблизительно можно оцепить как произведение количества конечных
270
ШириналенпшИ
г г г t\o о о о
г г г г А Л О О
Г О Г Г Г Гч0 О
уг г г 0 г г\о
OVr О Г г о Лч
О flV г г г г г
О ООхгСг г г
ООО О\г г г г
б
Рис. 3.19
/ 5 9 13 17 21
2 6 Ю
3 1 // □Яй
0 12
д
Рис. 3.18
элементов на число степеней свободы одного элемента. Например, если
разбить рассчитываемую плиту на 10 элементов, а число степеней
свободы конечного элемента плиты равно 12, то система будет состоять
приблизительно из 100 уравнений. Ясно, что для решения таких
систем необходима вычислительная машина.
При реализации на ЭВМ расчета больших систем обычно стал-
киваются с трудностями, связанными с громоздкостью исходной ин-
формации и перегрузкой запоминающего устройства. Разрешение
этих трудностей требует внимательного и всестороннего анализа как
при описании расчетной схемы, так и при разработке программы ре-
шения задачи .Так, порядок нумерации уалов является существенной
операцией, влияющей на вид глобальной матрицы жесткости системы
уравнений, большее число коэффициентов которой равно нулю. Все
ненулевые коэффициенты и некоторые нулевые можно расположить
в пределах некоторой ленты со сторонами, параллельными главной
диагонали матрицы коэффициентов (рис. 3.18). Чем меньше ширина
ленты, тем меньше размеры памяти и время вычислений. Ширина
ленты k вычисляется по формуле
k = {tn 4- 1)л, (3.128)
где т — максимальная по всем элементам величина наибольшей раз-
ницы между номерами узлов в отдельном элементе; п — число степеней
свободы в каждом узле.
Чтобы уменьшить kt необходимо найти такую последовательность
нумерации узлов, при которой бы т принимало наименьшее значение
(рис. 3.19, а).
Размер самой матрицы уравнений зависит от количества конечных
элементов, на которые разбивается конструкция. Количество же эле-
ментов определяется необходимой точностью расчета. Обычно, чтобы
уменьшить количество элементов и в то же время удовлетворить точ-
ности расчета, сетка элементов выбирается неравномерной — в местах
резкого изменения напряженного состояния требуется более мелкая
сетка. Как правило, окончательное назначение сетки делается после
пробных расчетов с грубыми сетками. Уточнение вида сетки можно
выполнять на ЭВМ.
Программа, реализующая метод конечных элементов на ЭВМ,
состоит из ряда общих для любых конструкций блоков:
271
1) ввода исходной информации:
2) вычисления жесткости элементов;
3) решения системы уравнений;
4) вычисления напряжений;
5) вывода результатов.
Остановимся кратко на содержании этих блоков и
некоторых приемах рационального состав*
ления соответствующих подпрограмм.
Исходная информация задачи состоит из координат
узлов и характеристики элементов, материалов, граничных условий
и нагрузок.
Координаты узлов располагаются в порядке нумерации узлов.
К характеристикам элементов относится информация о связи
между элементами, содержащая номера всех узлов элемента, а также
информация о свойствах материала элемента.
В практических задачах свойства материала одинаковы для боль-
ших групп элементов, поэтому удобно присвоить каждому элементу
номер, определяющий материал элемента, а информацию о свойствах
материала записывать отдельно.
Граничные условия могут быть учтены либо при построении элемен-
тов, либо соответствующим изменением системы уравнений непосред-
ственно перед ее решением. Наличие или отсутствие ограничений на
перемещение каждого узла кодируется в виде комбинации цифр 0 и 1,
причем 0 означает отсутствие ограничения па данную степень свобо-
ды, а 1 — наличие ограничения.
Нагрузки удобно задавать в виде одного вектора. Во многих слу-
чаях, когда нагрузка имеется лишь в небольшом проценте узлов,
предпочтительнее задавать только ненулевые значения нагрузки и но-
мера соответствующих узлов.
Блок получения м а т р и ц жесткости конечных эле-
ментов в большой степени зависит от математического описания
жесткости, т. е. от того, необходимо ли для вычисления элементов
матриц использовать процедуры численного интегрирования или
возможно на основе точного интегрирования получить формулы замк-
нутого вида.
Подпрограмма формирования собирает глобальную матрицу же-
сткости для всей системы из матриц жесткости отдельных элементов.
В простейшем случае матрица формируется полностью. При расчете
больших систем, учитывая ленточный характер глобальной матрицы
жесткости и симметричность относительно главной диагонали ее эле-
ментов, матрица (рис. 3.20, а) записывается в виде прямоугольного
массива (рис. 3.20, б).
Для решения систем уравнений используются прямые
и итерационные методы. В качестве прямого метода широко использу-
ется метод исключения Гаусса, для реализации которого составляется
соответствующая подпрограмма. Можно подпрограммы формирования
и решения уравнений объединить, тогда составление уравнения и
исключение проводятся одновременно. Это просто осуществляется,
если в качестве первого узла каждого элемента всегда использовать
272
узел с наименьшим номером, а
элементы располагать так, чтобы
номера их первых узлов распо-
лагались последовательно. При
таком способе процесс составле-
ния уравнений системы автома-
тически прекращается, как толь-
ко номер первого узла станет
больше номера рассматриваемо-
го узла.
Необходимо заметить, что при
учете граничных условий прихо-
*п *й ° 0
*21 *22 *23 *2<\ °
*32 *33 *34
^\*42 *43 *44 *45
О ^^0 kstt Л55
Рис. S.20
*П
*22
*33
**4
кп
*23
*34
*45
О
б
О
о
о
о
дится менять размерность гло-
бальной матрицы жесткости, вычеркивая из нее столбцы и строки,
отвечающие нулевым перемещениям узлов. Однако для упрощения
индексации размерность матрицы можно не изменять, но при этом
необходимо побочные коэффициенты соответствующей строки и столбца
заменить нулями, а главный единицей. В векторе нагрузки на месте
соответствующего элемента записывается ноль.
После решения системы уравнений вычисляются напряже-
ния. Матрица для определения напряжений либо формируется попут-
но при формировании матрицы жесткости элемента и запоминается,
либо отдельно вычисляется непосредственно перед использованием.
Далее следует блок выдачи результатов.
а
Вопросы для самоконтроля
1. В чем заключается сущность метода конечных элементов?
2. Какие условия должны соблюдаться в узловых точках сопряжения ко-
нечных элементов?
3. Назовите типы конечных элементов.
4. От чего зависит число степеней свободы элемента?
5. В каком виде обычно описывается поведение элемента?
6. Каким требованиям должен удовлетворять полином, в виде которого за-
дается функция перемещений?
7. Что называется матрицей жесткости и как записывается обшее выражение
для ее получения?
8. Каким образом формируется матрица жесткости всей системы?
9. Назовите порядок расчета конструкции методом конечного элемента.
10. Какие условия необходимо выполнить, чтобы при нумерации элементов
матрица жесткости имела ленточную структуру?
Глава 16
РАСЧЕТ ПРИЗМАТИЧЕСКИХ ОБОЛОЧЕК
И ПЛИТНО-БАЛОЧНЫХ СИСТЕМ
16.1. Основные понятия и методика расчета
Тонкостенные конструкции в виде цилиндрических оболочек и скла-
док (рис. 3.21, о, б), как прогрессивные и экономичные конструкции,
получили значительное распространение для покрытий и перекрытий
еданий.
273
Обычно цилиндрическая оболочка криволинейными краями опира-
ется на жесткие диафрагмы арочного или балочного типа, а ее прямоли-
нейные края усилены бортовыми балками.
Складка состоит из совокупности тонких пластинок, соединенных
между собой по продольным краям. Ее поперечные края также опира-
ются на жесткие диафрагмы.
Диафрагмы в конструкции оболочки и складки играют существен-
ную роль, придавая тонкой плите высокую жесткость даже в том слу-
чае, если они расположены на большом расстоянии друг от друга. По-
этому складками можно перекрывать большие помещения и пролеты
без промежуточных колонн. С точки зрения расчетной схемы к таким
конструкциям также относятся плитно-балочные системы (рис. 3.21,в),
которые в своем составе имеют ярко выраженные балки.
Торцевые диафрагмы, на которые опирается складка или оболочка,
обладая практически бесконечно большой жесткостью на изгиб в своей
плоскости, в силу сравнительно небольшой толщины их и конструктив-
ных особенностей почти не работают на изгиб из своей плоскости. Сле-
довательно, можно считать, что торцевые сечения складки (оболочки)
свободны от продольных усилий и изгибающих моментов. Поэтому
принимается, что края складок, параллельных оси у, оперты шарнирно
(рис. 3.22) так, что свободно перемещаются вдоль оси х н закреплены
от смещений вдоль осей у и z.
Расчет таких призматических оболочек удобно производить мето-
дом перемещений, хорошо известным из строительной мехаиикн
стержневых систем. Для этого складка разбивается на отдельные
продольные пластинки, а оболочка заменяется системой таких пластк-
274
иок, вписанных в ее контур. Линии, разграничивающие срединные
плоскости пластинки между собой, называются узловыми линиями.
В качестве неизвестных метода перемещений в данном случае принима-
ются угловые (0 = и линейные перемещения (и, о, ш) точек уз-
ловых линий, которые являются функциями координаты х, и обозна-
чаются через Zf (х). Основная система метода перемещений образуется
введением непрерывно распределенных по длине узловой линии связей
(защемлений и опорных стержней), препятствующих искомым переме-
щениям (рис. 3.23). Канонические уравнения метода перемещений на
основании теоремы о взаимности работ вдоль узловых линий запишутся
следующим образом:
П,(x)Zt(x)dx + + f RtiixjZ^xydx^O,
0 0 о
t I l
J Г21 (X) 4“ Г22 (X) 2S (x) dx 4“ * *’ 4" 7^2/ (x) 2^ (x) dx = 0»
(3.129)
J гЯ| (x) Zt (x) dx+ J rn9 (x) Z2 (x) dx + • - + f (x) Zn (x) dx = 0,
0 0 oJ
где rfft(x)— функция реактивного усилия в i-й узловой связи, Вы-
званного единичной функцией перемещения Л-й узловой связи Zft (х);
/?Дх) — функция реактивного усилия в t-й узловой связи, вызван-
ного внешней нагрузкой.
Из системы уравнений (3.129) определяют функции перемещения
Z,(x), а затем и функции усилий или напряжений в заданной системе.
С этой целью необходимо получить решения для элемента основной
системы, т. е. пластинки, шарнирно опертой по торцевым концам
(при х = 0 и у — /), при различных граничных условиях вдоль узло-
вых линий от действия единичных функций перемещений Z, и внеш-
ней нагрузки.
16.2. Определение реактивных усилий в отдельной пластинке
вдоль узловых линий от различных воздействий
Рассмотрим прямоугольную пла-
стинку постоянной толщины h с раз-
мерами b и / (рис. 3.24). От раз-
личных воздействий пластинка де-
формируется как в плоскости, так
и из плоскости, причем на краях
при х = 0 и х = I возникают только
касательные напряжения ixtJ и тХ2,
а нормальные напряжения ож = 0. При таких условиях в первом
случае в пластинке будет возникать плоское напряженное состояние,
а во втором — изгиб. Решение задачи о плоском напряженном состоя-
нии пластинки в теории упругости сводится к решению бигармониче-
ского уравнения
+ + 0, (3.130)
дх4 дхгду2 1 Оу* * ' '
где <р = (р (х, у) называется функцией напряжений.
Дифференциальное уравнение изгиба пластинки из плоскости
имеет вид
। о . d*w _ Q (х, У) п пп
дх* +гдх*ду* + ду* D ’ (o.lol)
Здесь w = tei(x, у}— функция прогибов пластинки, q— интенсив*
гч ft5
ность внешней распределенной нагрузки; и = — цилинд-
рическая жесткость пластинки; р — коэффициент Пуассона.
Уравнения (3.130) и (3.131) при q = 0 по форме совпадают, сле-
довательно, и подход к их решению одинаков. Действительно, для
решения (3.130) и (3.131) без правой части используются, соответ-
ственно, методы Файлона-Рибьера и Мориса Леви, в которых искомые
функции задают в виде тригонометрических рядов вида
3 = Sr-"sinT> <3-132)
П1=|
где Ym = Ym (у) — неизвестные функции аргумента у.
Ряд (3.132) удовлетворяет условиям по краям, параллельным оси
у, в обоих случаях: о, = = 0 и w = 0, Ми = — d{~2 +(i^)=
= 0 при х = 0 и х = /, так как sin 0° = 0 и sin тп = 0.
Покажем ход дальнейших рассуждений, ввиду их общности, на
примере изгиба пластинки. Подставив найденные из выражения
(3.132), в уравнение (3.131) при q = 0, получим
rmjsin —=0.
m=l
Умножим обе части равенства на sin — , где / — какое-нибудь фик-
сирован ное число, и проинтегрируем по х в пределах от 0 до /:
m=co I
VVvIV o^vH . т*п* у, \Г . тлх . /пх . ~
^\Ут — 2 — Ym + — sin— sm'y-dx^O,
m—! О
I I
Так как при т =£ / f sin ^p^sin ~ dx = 0, а при т = / f sin2 ~ X
о о
X dx = |, то из всей суммы равным нулю будет один член — j-й
276
гармоники ряда. Отсюда получаем
дифференциальное уравнение для
определения функции Ут для каж-
дого т в виде
viv VII . m4n4 v __п
1 т z /2 г т 1 /4 < m — и*
(3.133)
Общий интеграл этого уравнения
ym = 4mch^ + Bra^sh^ +
+ Cmsh^ + Dm<7ch^.
(3.134)
Произвольные постоянные определяются из граничных условий по
краям пластинки, параллельным оси х. Используем это решение для
определения реакций в связях узловых линий основной системы метода
перемещений. Изгиб пластинок из своей плоскости возникает от сме-
щения узловых связей в направлении оси г — шу=±ь/2 (х) и поворота
связей вдоль узловых линий относительно оси х — Oy=±h/2 (х) ==
= , которые обозначим через z!“’) (х) и Z{6) (х). В соответствии с
представлением функции прогибов (3.132) запишем
ziwiw=y;z^sin"-^:
m=l
Zie'(.v)= f Z£>sin^,
(3.135)
(3.136)
где Zlm = Ут(у) и — Ут (у) — амплитуды m~ii гармоники функ-
ций узловых перемещений, т. е. при у^Ь/2 (или —6/2). Реакции
в узловых связях определяем от единичных функций перемещений
7<«0 ( v\ 1 С1Г| .
£(т (Я) — 1 • Sit! J — ,
7(6) /.д___ 1 • mttx
(X/ — 1 * Sin
(3.137)
(3.138)
одного из продольных краев пластинки. Реакции необходимо получить
при различных граничных условиях на краю пластинки, противопо-
ложном тому, который получил соответствующее смещение.
Рассмотрим случай, когда один пз продольных краев (t-й) испы-
тывает смещение Z{lj} (х) = 1 • sin ~, а другой (А-й) жестко заделан
277
(рис. 3.25). Используем следующие граничные условия на продоль-
ных краях пластинки:
y = 4;w(x)=l-sin^;^=0,
-----А; w(x) = 0: ^ = 0.
Для /-й гармоники смещения согласно (3.132) и (3.134)
w (х) = У/sin
(3.139)
(3.140)
Vl = Alchl^ + Bi&sh + C,sh + D, iS?ch^. (3.141)
Все другие гармоники, у которых m Ф j, тождественно равны нулю.
Таким образом, от смещения продольного края пластинки, изменя-
ющегося вдоль оси х по закону синуса, прогибы пластинки по ее длине
также меняются по синусоидальному закону. В поперечном направле-
нии они определяются функцией Y.
Постоянные Л/, В/, С, и Df определяем, подставляя уравнения
(3.140) и (3.141) в (3.139) (индексы / для простоты записи опускаем):
ЛсЬ a -f- В ash а 4 Csh a 4 Dacha= 1;
A sha-f- B(sha 4- acha)-|- Ccha 4- D(cha4 ash a) = 0;
A ch a 4- Bash a — Csh a — Dacha =0;
—A sh a — B(sh a 4- acha) 4 Cch a 4 D(cha 4 ash a) = 0.
Решая эту систему, получаем
. ___________ 1 sh a 4 a ch a.
2 sh a ch a + a'
q £ ch a 4 q sh a ж
2 sh a ch a — a *
(3.142)
£ __ 1 sha e
2 sh a ch a 4 a *
£ 1 ch a
2 shacha—a*
(3.143)
где
21 •
(3.144)
Таким образом, для схемы, показанной на рис. 3.25, имеем следующее
решение:
у____ 1 f(sh a 4 a ch a) ch ga— gash a sb get
“ 2 [ sh a ch a 4 a
. (ch a 4 c sh a) sh ga — ga ch a ch gal
*" sh a ch a — a J*
(3.145)
где 5 = 2y/b.
Реакции М и Q4 ~ (где^-— составляющая от действия крутящего
момента 7) определяются по формулам
Л , дТ п д {d*w . /о ч№г1
(3.146)
(3.147)
275
Подставив сюда вместо w его значение из (3.140) и опустив индекс/,
найдем
Для определения реакций в связях узловых линий i и k подставим в
выражения (3.148) функцию из (3.145), приняв £ = 1 и £ = —1 соот-
ветственно. Вычисления даюп
(3.149)
Из этих выражений следует, что от заданного синусоидального смеще-
ния края пластинки возникающие в связях узловых линий реакций
изменяются также по закону синуса с тем же номером гармоники /.
Функции f{ зависят от номера гармоники. Подобные вычисления
проводятся для различных граничных условий k-и узловой линии пла-
стинки при задании единичных смещений. Результаты этих вычисле-
ний приведены на рис. 3.26. Значения функций, показанных на
рис. 3.26, следующие*
г __ 1 (sn*-a , chza\
1 rshacha(l + н) + о0 —|i) sbacha(l +ц)_g(|—
F — 1 sh»a\
9 2a(l—p)\ a, + a2 J •
c^shachap + jO + aG — F); = shacha(3 + ji) — a(l — ji).
279
Рис. 8.tT
Теперь найдем реакции от сме-
щения узловых связей в направ-
лении оси х — и ь (х) и оси
ь (х), т. е. в плоскости
У — v
пластинки. Принудительные пе-
рис. 8.26 ремешения и ио точек продоль-
ных краев пластинки вызывают
плоскую деформацию пластинки и сопровождаются возникновением
на этих краях напряжений оу и тХ£/ (рис. 3. 27). Равнодействующими
этих напряжений на единице длины края будут нормальные и
сдвигающие Sxy усилия, которые и рассматриваются как соответ-
ствующие реакции в узловых связях. Они определяются через напря-
жения по формулам.’
= Vxyh. J
(3.151)
Смещения i-x узловых связей иукв± ь (х) и vyBa± ь (х) обозначим, как
2 2
и ранее, через Z(/U)(x) и zjv)(x). Учитывая представление функции
напряжений ф(х, у) (3.132), найдем выражения через нее искомых
напряжений!
c# = ^=-Ei^*rn.sinT-.
ТХ|/ = “ зЧг = ~ L Т *т COS -г- .
у дхду n“i I т I
(3.152)
Найдем выражения для и и о, используя (3.152) и зависимости закона
Гука для плоского напряженного состояния. Относительные дефор-
мации
ди I / . J WvH 1 т*п'г • тпх /О 1КО\
= = £ (Ох—ро^,) = £ 2-V'” + *l~F)Sin~r; (ЗЛ53>
т~1
280
м — Т — 2 (1 ~Ь М) У тп у. тлх ZO |С4>
Vxv “ ду "Г дх ~ Е ^ху Е I cos~p • (3.154)
m«=l
Из выражения (3.153)
u = fe^ = _| + С3 '55*
Ж П=1
Подставим (3.155) в (3.154), откуда получим
® = f {у*1> — Si)dx = g X [йЯ? — (2 + и) К„] X
* т=1
X sin^. (3.156)
Тогда для неизвестных узловых смещений
zr>(x)=Sz^cosT; (3.157)
zr’W= (3.158)
т=1
где
Ж—4(^ + мт^). (3.159)
[да Ki," —<2 + ц» Ki,] (3.160)
— амплитуды m-й гармоники функций узловых перемещений.
Единичные функции перемещений m-й гармоники, от которых воз-
никают реакции в узловых связях.
Zull(x) = 1 -cos^;
Z«!W = l-sin=.
(3.161)
(3.162)
Для определения реакций (3 151) необходимо найти напряжения
(3.152), а следовательно, произвольные постоянные Ат, С„„ Dm
решения (3.134) бигармонического уравнения (3.130). Рассмотрим
порядок их определения на примере смещения горизонтальных свя-
зей вдоль оси у правой узловой линии Z'когда на правой узловой
линии имеются связи вдоль оси х, а на левой узловой линии — связи,
препятствующие ее смещению как вдоль оси х, так и вдоль оси у'.
1. Подставляем в (3.159), (3.160) выражение Ут из (3.134), при-
равнивая их к 1 и 0, в соответствии с данными граничными условиями
при у = =ьд/2;
281
2. Из полученной системы уравнений находим значения произволь-
ных постоянных А, В, С, D для каждой из учитываемых гармоник;
3. Подставив найденные значения постоянных в (3.134)» а (3.134)
в (3.152), получим формулы для амплитудных вначений напряжений
и по (3.151) — реакций в узловых связях при у = ^Ы2\ на смещае-
мом краю
М = tyjEh/b, S( =
на несменяемом краю
Nk = *ф2£Л/5, Sk = ^Eh/b.
Ниже приведены выражения для функций ф, соответствующих
двум случаям закрепления краев пластинки вдоль узловых линий
(рис. 3.28):
___ 2а Г___________ch2g_________.
1 + р [(З — р) sh ach а —а(1 4-р) 3-
.___________sh2g__________1.
(3 — р) sh а ch а + а (1 4- p)J *
2а (3 —р)(1 —p)sh2ach2g —д2(1 4-р)8.
i+p * (3 — р)2 sh* а eh* ? — а2(1 -НО8 ’
____________4g* sh g ch а_______.
(3 — р)2 sh2 а ch 2 а — а2 (1 4- р)2 *
. __ 2а Г______________ch*g_________.
V5»6 — j _|_р [д3_у) shacha 4-а(1 4-р) 33
±_________________________L
32 (3 — р) sh а ch а — а (1 4- р) J
1|>» = ti—М». — 71Л; 4>в = 4>з — ЛЛ + lla’I’r.
4'6 = ^ — ЯЛ + ’М>4.
(3.163)
где ч-л-мГ ”* чл-чГ п,“
_ М — МЧ . _ _ nwb
~ ч-л-чъ2 a •
Теперь остается наметить ход определения реактивных усилий
в связях узловых линий от внешней нагрузки. Рассмотрим внешнюю
нагрузку q (х, у), действующую на пластинку вдоль оси г. Исполь-
вовав дифференциальное уравнение изгиба пластинки из плоскости
(3.131), задавшись функцией прогиба в виде (3.132) и произведя после-
дующие преобразования с учетом наличия q (х, у) , получим
y)sta^dX. (3.IM)
Общее решение уравнения (3.164) составится из общего решения одно*
родного уравнения (3.133) и из какого-либо частного решения полного
282
уравнения (3.164). Обозначив
через Vmf частное решение, за-
пишем общее решение уравнения
(3.164):
ym=>Uh Sh^+
+ CmSh» + Dm»ch^ +
+ Ит(. (3.165)
Произвольные постоянные опре-
деляются из граничных условий
по краям пластинки, параллель-
ным оси х. Частное решение
(3.165) удобно искать, используя
метод начальных условий Коши.
Внося полученное таким образом
значение Ут в (3.132), найдем
решение уравнения (3.131), соот-
ветствующее заданной нагрузке.
Используя это решение, опреде-
ляем реактивные усилия в свя-
зях узловых линий.
16.3. Составление системы
канонических уравнений.
Получение окончательного
решения задачи
После нахождения функций
реаКТИВНЫХ УСИЛИЙ В УЗЛОВЫХ Рис. 8.28
связях каждой пластинки, вызванных единичными функциями пере-
мещений и внешней нагрузкой, из уравнений, выражающих условия
равновесия вдоль узловой линии, определяются функции реакций в
узловых связях основной системы метода перемещений rik(x) и 1?,/(х).
Эти значения в соответствии с (3.132) и, например, (3.148) пред-
ставляются в виде
П»(х)= VJrlTsin!^;
*/,(*) = E^sinSSf,
(3.166)
где 4л и — амплитудные значения реакций, соответствующие
/п-й гармонике.
Необходимо заметить, что для реакций в линейных связях, препят-
ствующих смещениям в направлении оси х, согласно (3.151) и (3.152),
вместо функции sin записывается cos -у-.
283
Если подставить (3.166), (3.135), (3.136), (3.157) и (3.158) в кано-
нические уравнения метода перемещений (3.129), после интегрирова-
ния прийдем к бесконечно большому числу систем уравнений вида
+ г12* %Ъп Ч~ • • • + = 0;
'И* Zlm -J- 4^ ^2m +---+ Rtf = О*, /3 1C7\
r&Ztm + rS’Zlm+ ... +R,^ = 0, >
которые составляются и решаются отдельно для каждой гармоники но-
мера т.
Коэффициенты канонических уравнений, представляющие собой
амплитудные значения реактивных усилий /n-й гармоники в узловых
связях, определяются из соответствующих условий равновесия узловых
линий с помощью выражений (3.150), (3.163) и схем на рис. 3.26
и 3.28. Свободные члены уравнений определяются аналогично, толь-
ко сначала для заданного вида внешней нагрузки необходимо найти
решение дифференциального уравнения (3.164) для отдельной плас-
тинки.
Определив из уравнений (3.167) амплитуды перемещений точек
узловых линий Zimt можно с помощью функций Д и ф, вычислить
усилия и напряжения, возникающие на краях пластинок, входящих
в состав пространственной конструкции. А знание этих напряжений
и решения для пластинки от внешней нагрузки дает возможность опре-
делить напряженное состояние всех внутренних точек этой пластинки.
16.4. Основные допущения и уравнения вариационного метода
расчета призматических ортотропных складчатых систем
Рассмотрим призматические складчатые системы, состоящие из
конечного числа тонких прямоугольных пластинок (рис. 3.29, а, б).
Составляющие складку пластинки на линиях их контакта могут иметь
соединения шарнирные, позволяющие свободно поворачиваться од-
ной пластинке по отношению к другой, и жесткие, устраняющие вся-
кого рода подвижность между пластинками. Положение произвольной
ч.А срединной поверхности условимся определять координатами х
284
Рис. 3.30
и s. Координата х представляет собой расстояние до т.А от некоторого
поперечного сечения х = 0, принимаемого за начальное, а координа-
та $ — расстояние до т.Л, отсчитываемое по линии контура попереч-
ного сечения складчатой системы от некоторой образующей з = 0.
В отношении упругого равновесия складки принимаем следующие
допущения:
1. Прямоугольная грань складки рассматривается как пластинка,
находящаяся в продольном направлении в плоском напряженном со-
стоянии. Отсюда следует, что в поперечных сечениях пластинки воз-
никают только нормальные и сдвигающие усилия. Продольные изгиба-
ющие и крутящие моменты как факторы, мало влияющие на основные
напряжения и деформации складки, принимаются равными нулю.
2. Деформации удлинений поперечных сечений отдельных пласти-
нок подчиняются гипотезе плоских сечений.
3. В поперечном направлении пластинка предполагается нерастя-
жимой и способной помимо нормальных и сдвигающих сил восприни-
мать поперечные изгибающие моменты и соответствующие им попереч-
ные силы (рис. 3.30, а).
4. Внешняя поперечная нагрузка, распределенная по поверхности,
ваменяется эквивалентной нагрузкой, приложенной к узловым линиям
складки в виде погонных сил.
Таким образом, в соответствии с принятыми допущениями расчет-
ную схему складки можно рассматривать как совокупность бесконеч-
ного множества узких поперечных полосок, имеющих вид плоских
рам, соединенных между собой в срединной поверхности системой шар-
нирно опертых стерженьков, передающих от одной рамы к другой
продольные нормальные и сдвигающие силы (рис.3.30, б). Все складча-
тые системы с точки зрения подхода к их расчету разделим на два
вида — открытого профиля (рис. 3.29, а) и замкнутого профиля
(рис. 3.29, б). Для складок открытого профиля вводится дополнитель-
ное допущение о равенстве нулю деформаций сдвига отдельных пласти-
нок, имеющих достаточную длину в направлении образующей.
Остановимся на изложении теории вариационного метода переме-
щений для складок замкнутого профиля. Сущность метода, не сни-
жая общности, покажем на примере складки, приведенной на
рис. 3.31, а. Деформированное состояние складчатой системы можно
полностью описать, если будут известны перемещения точки А средин-
ной поверхности вдоль образующей — и (х, s) — и в направлении
285
касательной к контуру поперечного сечения — v (х, s). Эти перемеще-
ния представим в форме разложений!
и(х, s) = Jut (х)(s) (i= 1, 2,.... m); (3.168)
v(x, s) = S v„ (x) 4>(s) (* = 1, 2, ... . л). (3.169)
fe=l
Функции at(x) и vf{(x)t зависящие только от координаты х, явля-
ются искомыми и выражают собой обобщенные перемещения складки.
Функции <p,(s) и фЛ(з), зависящие только от координаты з, характери-
зуют изменение перемещений в плоскости поперечного сечения
складки; они подлежат предварительному выбору. Вид и число этих
функций установим ниже.
Выделим из складки двумя сечениями х = const и х + dx = const
элементарную поперечную полоску, которую условно рассматриваем
как плоскую стержневую систему — раму.
Рассмотрим деформированное состояние этой полоски-рамы, опре-
деляемое только продольными перемещениями и (х, s). Плоский
контур такой рамы, оставаясь на призматической поверхности складки,
переходит в пространственную линию, определяемую относительно
первоначального сечения х = const при выбранных функциях <p,(s)
уравнением (3.168). В соответствии с принятой для каждой пластинки,
составляющей раму, гипотезы плоских сечений, пространственная
линия контура при продольном перемещении будет кусочно-линейной.
В этом случае положение элементарной полоски после деформации
вполне определится перемещениями ее т узлов относительно плоско-
сти х = const. Следовательно, выделенную элементарную полоску
можно условно рассматривать как стержневую систему, обладающую
в отношении продольных перемещений т степенями свободы. В нашем
примере т = 2. Если принять искомые функции ut (х), ц2(х), ...,
wr„(x) за продольные перемещения т узлов элементарной полоски, то
в соответствии с (3.168) каждая из функций <pf(s) имеет простое геометри-
ческое толкование. Эта функция отлична от нуля только на участках
конгура, сходящихся в узле г, в пределах каждого из этих участков
она представляется линейной функцией от s, принимая значение, рав-
ное 1 в узле i и значение, равное нулю на другом конце участка. На
всех остальных участках контурной линии <pf (s) тождественно равна
нулю (рис. 3.31, б). Функцию <pr(s) удобно показывать в виде эпюры,
откладывая ординаты ее на плоскости контура (рис. 3.31, в).
Указанный способ построения функций ср* (s) не является един-
ственным. Так, в нашем примере ввиду симметрии складки относитель-
но вертикальной оси в качестве искомых функций продольных пере-
мещений ut(x) и ц2(х) можно принять симметричные и кососиммет-
ричные групповые перемещения верхних узлов. Тогда эпюры соответ-
ствующих им функций <рх (s> и <р2(5) будут также симметричными и
кососимметричными с единичными значениями в обоих узлах.
Другая система функций фА(х) (k = 1,2,..., л), входящих в форму-
лу (3.169) для поперечного перемещения и(х, s) т.Л (x/s) контура,
286
строится, исходя из деформации элементарной поперечной рамы-
полоски в ее плоскости х = const. Рассматривая эту раму-полоску как
стержневую систему с нерастяжимыми элементами, выражаем кон-
турное перемещение v(xt s) через искомые функции vk (х) (Л = 1,
2, ..., п). Число этих функций определяется числом степеней свободы
плоской шарнирно-стержневой системы, получаемой из рамы-полоски
постановкой во все ее жесткие узлы шарниров:
п —2т — С — Со,
где т — количество узлов; С — число стержней, соединяющих узлы
между собой; Со — число опорных стержней.
В нашем примере (рис. 3.32, а) п = 2 • 2 — 1 — 2 — 1. Выбирая
каким-либо образом п независимых величин о* (х) перемещений эле-
ментарной рамы-полоски в плоскость сечения х= const, которые пред-
ставляют собой искомые линейные перемещения ее узлов, показы-
ваем основную систему метода перемещений для стержневых систем,
не ограничивая повороты узлов (рис. 3.32, б). Для складки, показан-
ной на рис. 3.29, б, п » 2 (рис. 3.32, в).
Задав последовательно каждой из величин vk(x) единичные значе-
ния и* (х) = 1, а остальные приняв равными нулю, на основании
рассмотрения полученных таким образом перемещений элементов
рамы-полоски в основной системе определяем функции контурных
перемещений т.Л (х, $)ф* (s). Функция ф* ($) в пределах каждого пря-
молинейного участка контура складки сохраняет постоянное значение
(не зависит от s) и представляет собой осевое перемещение соответ-
287
PMC. 3.34
ствующего стержня шарнирной модели (рис. 3.33, а, в). Функции
Фл (s) удобно показывать в виде эпюр (рис. 3.33, б).
Необходимо заметить, что в результате перемещения и* (х) = 1
рама деформируется и в ее сечениях возникают изгибающие моменты
(рис. 3.34).
Положение всех узлов поперечной рамы-полоски после де-
формации в пространстве при выбранных обобщенных координатах
Ф, (s) (i = 1, 2, ..., т) и (s) (k = 1,2,..., п) определяются т + п
искомыми обобщенными перемещениями — продольными ut (х)
(Г = I, 2,.... т) и поперечными щ (х) (k = 1, 2, ..., п). Таким образом,
она рассматривается как дискретная система с числом степеней сво-
боды т -}- п. Но так как рамы-полоски вдоль образующих складчатой
оболочки распределены непрерывно и величины щ (х), щ (х) рас-
сматриваются как искомые непрерывные функции независимой пере-
менной х, то число степеней свободы напряженно-деформированного
состояния оболочки по переменной х равно бесконечности. Такие си-
стемы обычно называют дискретно-континуальными, в отличие от
двухмерных расчетных моделей оболочек, обладающих бесконечным
числом степеней свободы но обоим направлениям, которые рассмотре-
ны ранее. Использование дискретно-континуальных систем как рас-
четных схем оболочек предложено В. 3. Власовым.
После выбора обобщенных координат деформации (s), tpft(s)
еадача определения напряженно-деформированного состояния обо-
лочки сводится к отысканию обобщенных функций перемещений
ut (х) и vk (х). Действительно, если (х) и vk (х) известны, то по (3.168)
и (3.169) можно найти перемещения и (х, s) и v (х, s), а на основании
закона Гука и напряжения
o = ^i* = Gg + g. (3.170)
288
Рис. 3.35
Подставив (3.168) и (3.169) в (3.170), находим:
(3.171)
(3.172)
где Е и G — модуль упругости материала оболочки при растяжении
и сдвиге.
Для определения искомых функций ut (х) и vk(x) составим диффе-
ренциальные уравнения равновесия, используя вариационный метод —
метод возможных перемещений. Запишем выражение работ всех внеш-
них и внутренних сил, действующих на элементарную раму-полоску,
на возможных перемещениях, за которые принимаем ранее выбранные
функции Ф; (s) и (s) (рис. 3.35); после преобразований получим:
idA — + Jp<p7ds = 0 (/ = 1, 2, ...» т); (3.173)
A As
A he! s
+ f ^* = 0 (Л= 1, 2, ... п), (3.174)
где dA = Sds\ р (х, s) и q (х, s) — заданные внешние поверхностные
силы.
В системе уравнений (3.173) второе слагаемое представляет собой
работу внутренних сдвигающих сил. Элементарные сдвигающие силы
cfidx, возникающие в продольных сечениях рамы-полоски, работают
на перемещениях абсолютного сдвига d<p/ — ^dxd^t. Умножим и
289
разделим эту элементарную работу на ds, затем заменим 6ds ни d4,
a d(pf/ds на ср/ и просуммируем по площади поперечного контура,
получив таким образом искомое слагаемое. Работа внутренних сил
в системе уравнений (3.174) совершается изгибающими моментами,
возникающими при деформации рамы-полоски от перемещения ее узлов
uft (х). Mk н Mh — функции изгибающих моментов от о* = 1 и Vh =
= 1 (рис. 3.34). Для элемента рамы-полоски работа внутренних
сил при изгибе определяется произведением (с обратным знаком)
л
изгибающего момента Mk(x> s) = YlVk{x)Mk{s) на взаимный угол
__ Л=1
поворота Mh(s)/(EI)ds двух смежных сечений, ограничивающих этот
элемент. Величина /=/($) представляет собой момент инерции
произвольного прямоугольного поперечного сечения рамы-полоски
высотой А = 6 и шириной b = 1:
/ = 63/12. (3.175)
Подставив (3.171) и (3.172) в (3.173) и (3.174), получим систему
дифференциальных уравнений относительно искомых обобщенных
перемещений и, (х) и о* (z):
E/G Е ОМ — ,Е b{iut — + P//G = 0;
Е + Е rhXVk — 1/G S ShkVk + g/i/G = 0, (3.176)
•=i t=i t=t
(/ = 1, 2, ... , m); (A = 1, 2, , n).
Коэффициенты и свободные члены уравнений (3.176) вычисляются
по формулам:
ац = i Ф/ (s) ф< (s) dA\ Ьц = j <pj (s) <р/ (s) dA; cjk = j ф/ (s) Ф* (s) dA;
A A A
= (3.177)
Pi = IP (X, s) q>/ (S) ds; <& = !)<) (x, S)ip4s) ds. (3.178)
s $
Коэффициенты обладают свойствами взаимности. Они могут быть
вычислены по правилу А. Верещагина при помощи эпюр функций
Ф< ($)» ф/($)» Mk(s), построенных для рамы контура. Заметим,
что в случае складчатых оболочек, имеющих симметричный контур,
искомые функции ut(x) и uft(x) удобно выбирать в виде симметрич-
ных н кососимметричных групповых функций. Тогда соответствующие
им функции ср/ (s) и фй (s) будут обладать свойствами ортогональности,
и следовательно, коэффициенты уравнений
сд = 0 при j=^i; rhk = Q при h=£k. (3.179)
290
ршщ?
Б №
1‘ ,
Q
Flic. S.38
Рассмотрим пример составления дифференциальных уравнений равно-
весия складчатой оболочки (рис. 3.31). Ввиду симметрии поперечного
контура оболочки разложим внешнюю нагрузку q на симметричную,
которая не вызовет перемещений, и кососимметричную, которая вызо-
вет кососимметричные перемещения точек оболочки. Следовательно,
перемещения оболочки и (х, s) определяются одним групповым пара-
метром иг(х), аа который примем продольные перемещения верхних
узлов рамы полоски. Эпюра перемещений, представленная при z/t = 1
функцией <pt (s), показана на рис. 3.36, а; на рис. 3.36, б приведена
эпюра производной от этой функции <pt (s).
Поперечные контурные перемещения оболочки при неподвижности
ее опорных продольных закреплений определяются также одним пара-
метром Uj(x) (рис. 3.32, б). Контурные осевые перемещения точек
сечения оболочки, определяемые функцией ^(s) при единичном значе-
нии искомой величины v, = 1, показаны на рис. 3.33, а, б.
На рис. 3.34, б представлена эпюра изгибающих моментов рамы-
полоски. Найдем момент М. Запишем по методу Мора выражение для
определения перемещения верхнего правого узла рамы в горизонталь-
ном направлении и приравняем его к 1:
Pg**- 1. (3-180)
где М? — функция изгибающего момента от горизонтальной единич-
ной силы в правом узле, которая может быть определена в любой
статически определимой системе, получаемой нз заданной.
На рис. 3.37 показано единичное состояние и эпюра Л. Подстав-
ляем в уравнение (3.180) функции и и, вычислив интеграл
по способу Верещагина, найдем
М =_______—------ (3 181)
1 Zht/ft + dh/It ' ' 4
Теперь, полагая в (3.176) / = 1, 1, т = \ и n = 1, получим
систему из двух дифференциальных уравнений!
(E[G) ОцЩ — в О»
СцЩ + rnvi — s^vJG + q/G = 0. (3.182)
Коэффициенты этих уравнений найдем по формулам (3.177), исполь-
зовав эпюры <pi(sK (s) (рис. 3.36), ^(s) (рис. 3.33, б) и (рш). 3.34)
с М по (3.181).
291
Рве. 8.3?
Система из т 4-я дифференциальных уравнений (3.176J приводит-
ся к одному дифференциальному уравнению порядка 2(т 4- я)'.
В нашем примере для этого произведем следующие преобравования си-
стемы (3.182). Из второго уравнения найдем
«! =* — «11^14- (3-183)
и два раза продифференцируем по xi
(r„»iv — g- suef + j); (3.184)
продифференцируем первое уравнение по х\
(j ^11^1 —^11^1 = 0, (3.185)
подставим в (3.185) выражения u't и «7 из (3.183) и (3.184) и получим
окончательно уравнение четвертого порядка относительно искомой
переменной ц»
«Г -2ЛМ' + B*Vl = (3.186)
где
Д2 _ 4- flu'll — e D4 — fluyfi ZQ 1й7ч
2E/Gonru * ‘ *
Интеграл дифференциального уравнения порядка 2(/я 4- я) содер-
жи г 2 (т 4- я) постоянных, которые определяются из кинематических,
статических или смешанных условий на концевых сечениях обо-
лочки к =0 и х = I.
Вопросы для самоконтроля
1. Какие элементы входят о тонкостенные конструкции типа цилиндри-
ческой оболочки и складки?
2. Из каких соображений принимается, что по торцевым сечениям цилиндри-
ческих оболочек и складок продольные усилия и изгибающие моменты равны
нулю?
3. Как образуется основная система метода перемещений?
4. Какие виды напряженно-деформированного состояния будут испытывать
отдельные пластинки, образующие складку?
5. Какие методы используются для решений бигармонического уравнения
и дифференциального уравнения изгиба пластинки и в чем их сущность?
292
6. Какой вид имеют канонические уравнения метода перемещений для расче-
та складок?
7. Что собой представляют коэффициенты и свободные члены уравнений?
8. Какие допущения принимаются при расчете ортотропных складчатых
систем?
9. Какая расчетная схема принимается для расчета таких систем?
10. Какие системы принято называть дискретно-континуальными?
11. На каком принципе основано составление дифференциальных уравне-
ний равновесия, необходимых для определения функций перемещений иДх),
12. От чего зависит количество таких уравнений?
13. К чему сводится система дифференциальных уравнений равновесия?
14. Из каких условий определяются произвольные постоянные решения?
Глава 17
РАСЧЕТ СИСТЕМ, СОСТОЯЩИХ ИЗ ПОЛОГИХ ОБОЛОЧЕК
ДВОЯКОЙ КРИВИЗНЫ И БОРТОВЫХ БАЛОК
17.1. Основные понятия и допущения
Оболочкой называют тело, ограниченное двумя криволиней-
ными поверхностями, расстояние между которыми (толщина оболочки)
мало по сравнению о ее линейными размерами в плане. Поверхность,
которая делит толщину оболочки пополам, называется срединной по-
верхностью оболочки. Если заданы форма срединной поверхности
и граничный контур, геометрия оболочки будет полностью опреде-
лена. Поэтому обычно рассматривается не сама оболочка, а ее средин-
ная поверхность.
Оболочки двоякой кривизны по виду их формы можно разделить на
оболочки вращения и трансляционные оболочки (или оболочки пере-
носа). Последние широко распространены в качестве конструкций
перекрытий промышленных зданий, а также применяются в машино-
строении, судостроении и т. п. Уравнение поверхности оболочки пере-
носа имеет вид (рис. 3.38):
z = Fx(x) + F2(y). (3.188)
Поверхность образуется при движении кривой fjx) по направля-
ющей кривой Fz(y), или наоборот. Обычно применяют оболочки в виде
эллиптического параболоида,
уравнение которого _ 4/jX(g —х) . 4fgy(f> —у) Z - о8 Г (3.189) Общая стрела подъема такой по- верхности в центре f = (3.190) Будем рассматривать только по- логие оболочки, т. е. оболочки, 0 / / * 7 Рве. 3.38
293
Рис. 3.39
стрела подъема которых / не превы-
шает одном пятой наименьшего линей-
ного размера плана — а или Ь. Для
таких оболочек, кроме основных гипо-
тез общей теории о том, что 1) пря-
молинейный элемент, перпендикуляр-
ный срединной поверхности до дефор-
мации, остается прямым и перпен-
дикулярным деформированной сре-
динной поверхности и не изменяет
своей длины и 2) нормальные напря-
жения на площадках, параллельных
срединной поверхности, принимаются,ввиду малости по сравнению
с прочими напряжениями, равными нулю, вводятся такие допущения:
геометрия поверхности оболочки принимается совпадающей с гео-
метрией плоскости ее проекции, т. е. коэффициенты Ламе Л и В при-
нимаются равными единице, а криволинейная система координат а,
р заменяется соответствующей декартовой системой — хи у. Это озна-
чает также, что в исходных уравнениях приближенно принимается
равной нулю гауссова кривизна:
k == kxkz « 0;
(3.191)
в уравнениях равновесия пренебрегают усилиями моментного со-
стояния (М и Q), содержащими в качестве коэффициентов выражения
кривизн и их производные.
17.2. Основные уравнения для пологой оболочки
и их решение в двойных тригонометрических рядах
Основные уравнения для пологой оболочки получим из уравнений
общей теории оболочек, вывод которых дается в курсе теории упру-
гости, с учетом принятых допущений. Положительные направления
усилий показаны на рис. 3.39. Естественные кривизны оболочки вдоль
осей хну, которые совпадают с главными кривизнами, определяются
из выражений
= kx " ; k2 = ; fc12 = , (3.192)
где для оболочек переноса kxy — 0, ввиду (3.188). Уравнения равнове-
сия запишутся так:
dNx ( dS , а dS . dNy t л
+ ei + Тх + 7? + Л- = 0;
I ^хУ q ______Q. ЭТ*у । дМу q _____«
(3.193)
294
Деформации срединной поверхности оболочки вычисляются ио с]>орму-
ла.м:
*- = 3i + k'w- е» = ^ + й»ю: = + (3.194)
d*w d2w
Х- — dxdi'-K*~ дх"кУ dyi-
Зависимости между усилиями и деформациями (закон Гука) остаются
без изменения:
N, = j^s (Еж +Ny = (es + ре,);
Мк = D (хж + рху); Му = D (ху 4~ рхх); (3.195)
S = Ghyxy', Т = О(1—р)х.
п
где D— 12(1_м«г
Уравнения (3.193), (3.194) и (3.195), выражающие напряженно-де-
формированное состояние пологой оболочки, можно привести к двум
совместным уравнениям, если ввести функцию напряжений ср и учесть,
что обычно рх = ри « 0. В этом случае усилия Nx, Nyu S выражают-
ся через ф следующим образом:
N, = ^„ N,,= ^.S = — f^, (3.196)
ду2 у ох2 д\ду ' '
а первые два уравнения равновесия в (3.193) тождественно удовлетво-
ряются.
Найдем поперечные силы Qx и Qy из третьего и четвертого уравне-
ний (3.193) и, подставив в пятое, получим
+ ^4 2^+ * = <>• (3.197а)
Таким образом, при принятых условиях уравнения равновесия (3.193)
свелись к одному уравнению.
Выразим входящие в (3.197а) внутренние усилия через функции
прогиба w и напряжений <р, используя зависимости (3.194), (3.195)
и (3.196);
п [ d2 (d2w d2ttA дг ld2w д2сеЛ о .. х d2 I д-w \1
D [dx2 (dx2 “ dyt) + dlJt + P dx ) + 2 ( — p) дкду J]
Кхдуг ,J dxs + Pi U’
после преобразований получим уравнение равновесия:
Vi<p -Ь DV2V2ay — рг = 0, (3.1976)
где V2 = ~ 4- — оператор Лапласа;
— би гармонический оператор;
V* = 4- ~ — дифференциальный оператор.
295
Рис. 3.40 Ряс. 3.41
Для получения уравнения совместности деформаций оболочки ис-
ключим из соотношения (3.194) перемещения пип. Для этого про-
дифференцируем ех и ьу дважды по у и по х соответственно. Принимай
во внимание согласно (3.188), что kx = = FT(х), = ^(У),
получим
д»ех д»еу д»и , , d»w d*v , , d»w ZQ
ду» + дх» ~ дхду» + k* ду» + дудх» + дх» * &
Найдем смешанную производную от уху по х и yi
4. /3 iqqx
дхду ~ т дх»ду * '°*
Заменив в (3.198) третьи производные о помощью (3.199), получаем
уравнение неразрывности деформаций пологой оболочки
ду» + дх» ~ дхду + Rx ду» + дх»' (o.zUU)
Теперь выразим ех, иу и уху с помощью (3.195) и (3.196) через функ-
цию напряжений <р; после некоторых преобразований получим
(£ЛГ* V2V2<p — V* w = 0. (3.201)
Уравнения (3.1976) и (3.201) образуют в и с те м у уравнений»
которая является основной в теории пологих оболочек:
V^ + DV2V2w=ft: )
(Eh)*JV2V2<p — Vlw = 0. J
Для расчета конкретной конструкции нужно решить эту систему,
удовлетворив для функций <г и су граничные условия задачи.
Одни м из распространенных решений системы линейных дифферен-
циальных уравнений пологих оболочек с постоянными кривизнами
является решение с применением двойных тригонометрических рядов.
Обычно оболочка по контуру опирается на бортовые элементы
(рис. 3.40) — балки g криволинейным верхним поясом, бортовые фер-
мы, арки и т. п. Все они обладают достаточно большой жесткостью
в вертикальной плоскости и сравнительно очень малой — в горизон-
тальной. Поэтому в качестве расчетной схемы опирания оболочки по
контуру принимается шарнирно-подвижная схема (рис. 3.41). Гра-
296
яичными условиями при 1акии кхсие опирания, например лля кромки
х = а, будутг
геометрические условия w — О. и =^= 0, v = 0;
статические условия Nx = 0, Мх = 0.
Функция напряжений в контурных точках принимается равной нулю.
В этом случае решение системы (3.202) представляется в виде
со со
W= У У Д™ sin sin 2^;
«J jmJ а о
т=^1, 3. 5 ... ли), 5 ...
со со
V1 V4 о • fnnx . плу
Ч>= > 7, В™ Sin— sm-f,
т-1, а, 5... л«=1. 3, 5 ...
(3.203)
где Атп и Втп— неопределенные коэффициенты, зависящие от вида
нагрузки р2(х, £/).
Для определения ДП1Л и Впт нагрузка также представляется в виде
такого же ряда
со со
V V г' • тлх . ппу
>.. 2j С™ sin—sin
m—1,3, 5 ... n=1, 3, 5 ...
(3.204)
коэффициенты разложения которого определяются как коэффициенты
Фурье двумерной функции:
= ₽«(*• y)sin^sin^dxdy.
О о
Подставив (3.203) и (3.204) в (3.202) и приравняв коэффициенты
при одинаковых произведениях sin — sin—получим для каждой
пары чисел т и п систему из двух алгебраических уравнений
огноснтельно неизвестных и Например, при загружении
оболочки равномерно распределенной нагрузкой
- 16 р (л2т2/а2 + л2п2/Ь2)2
Лтп “ Гл2 тп ((n2m2/a2^-n2n2/b^ + Eh/D (kyn2m2/a2 + kxn2n2/b2)2]:
. IbpEh (kun2m2/a2 4- kxn2n2/b2) .„с
{тл ” Dn2mn f(n2m2/a2 + лап2/Й)4 + Eh/D (кул2т2/а2 + kxn2n2fb2)2\ '
Зная Атп и Вт.» можно найти усилия Wx, Ny и S, использовав
выражения (3.196) и (3.203). Например, сдвигающая сила
СО
S=-rf>/(ab) £ J] mnB^cos^cos^. (3.206)
ЛИа1( 3, б ... Л=»1, 3, б ...
297
Остальные внутренние усилия пси учим, подставив (3.203) в их зави-
симости от функции прогиба, которые просто выводятся из выражений
(3.195), (3.194) и (3.193):
M‘ = -D\d? +^г- м*-------Dw + Ma?);
Л„ = -Р(1-И)|^; (3.207)
V«---U дЛдх* + дугГ Ч« ~ ду W + дуЧ'
Эти зависимости такие же, как и при изгибе пластинки. Ряды для q>
и w, с помощью которых определяются усилия в пологой оболочке,
обладают достаточно быстрой сходимостью и в практических расчетах
достаточно ограничиться тремя — пятью членами ряда. Сходимость
рядов зависит от вида приложенной нагрузки и, при прочих равных
условиях, ухудшается с повышением порядка производной от <р или
ш, входящей в выражение определяемой величины.
Анализ выражений (3.205), (3.203) и (3.207) показывает, что с уве-
личением кривизн kx и ky оболочки моментные усилия уменьшаются,
а их значения будут значительно меньшими, чем в изгибаемой плас-
тинке. Поэтому пологая оболочка является более рациональной кон-
струкцией по сравнению с пластинкой.
Заметим, что в оболочке кроме сжимающих усилий N* и Ny возни-
кают значительные сдвигающие усилия S. В угловых точках оболочки
они достигают максимальных значений 1см. (3.206)) и в диагональных
сечениях вызывают деформацию растяжения, что необходимо учиты-
вать при конструировании железобетонных оболочек.
17.3. Определение усилий в бортовых балках
На бортовые элементы при шарнирном опирании на них оболочки
передаются сдвигающие силы S, а также обобщенные поперечные
силы <2*4-и Qy . Рассмотрим определение усилий в бортовых
элементах на примере бортовой балки прямоугольного поперечного
сечения (рис. 3.42, а). Разложим сдвигающую силу на горизонталь-
ную и вертикальную составляющие. Тогда на балку будут воздейст-
Рмс. Э.<2
S
вовать горизонтально и вертикально направленные распределенные
нагрузки
px = S(x)cosq;
p, = S (х) sin q> + Q, (x) + + Yft (X) c, (3.208)
где уй(х)с—масса единицы длины балки.
Внутренние усилия в произвольном сечении балки, приложенные
в центре тяжести его, найдем из условий равновесия отсечен ной части
(рис. 3.42, б):
N(х) = J р, (х,) dx(; Q (х) = Qo — J рг (х,) dx,; (3.209)
о о
М (*) = <2о* — । Рг («0 (* — *1) — j Р« (*1) 1А (*1) —
О о
— 0,5Л (x)J dxx = Q (Д') х + f рг (xr) XidXi — f px (xj h (Xj) dxx +
6 6
+ 0,5W(x)/i(x).
Для построения эпюр внутренних усилий в балке интегралы удобно
вычислять каким-либо методом численного интегрирования (например,
методом Симпсона).
В других видах бортовых элементов усилия определяют аналогич-
но, но с учетом их конструктивных особенностей.
Вопросы для самоконтроля
1. Какую конструкцию называют оболочкой?
2. На какие два вида делят оболочки двоякой кривизны исходя из мх кон-
структивных особенностей?
3. Какие оболочки относятся к оболочкам переноса?
4. Запишите общий вид уравнения поверхности оболочки переноса.
5. Какие оболочки относятся к пологим?
6. Сформулируйте допущения, принимаемые при разработке теории поло-
гих оболочек.
7. При каких условиях систему статических, геометрических и физиче-
ских уравнений, выражающих напряженно-деформированное состояние оболоч-
ки, можно свести к двум совместным дифференциальным уравнениям?
8. Какой физический смысл имеет каждое из этих уравнений?
9. В каком виде строится решение задачи по расчету шариирно опертой
оболочки?
10. От чего зависят коэффициенты разложения в ряд функций ф и w?
11. Какие усилия возникают в бортовых балках?
Раздел 4
УСТОЙЧИВОСТЬ СООРУЖЕНИЙ
Глава 18
ОСНОВНЫЕ ПОНЯТИЯ.
МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ УПРУГИХ СИСТЕМ
18.1. Виды равновесия. Критическая нагрузка.
Различные виды потери устойчивости деформируемых систем
Для обеспечения безаварийной работы сооружения не достаточно
обычных расчетов на прочность. Конструкция в целом и каждая ее
часть должны быть не только прочными, но и устойчивыми.
Пол устойчивостью понимают способность сооружения
и его частей сохранять свое первоначальное положение и расчетное
напряженно-деформированное состояние при заданных нагрузках.
Потеря устойчивости связана с нарушением равновесия. Известно,
что равновесие бывает устойчивым и неустойчивым. Потерю устойчи-
вости можно рассматривать, как потерю устойчивого равновесия. Для
конкретной расчетной схемы устойчивость зависит от величины внеш-
них нагрузок.
Различают устойчивость положения и устойчивость формы равно-
весия в деформированном состоянии.
Потеря устойчивости положения является результатом нарушения
условий равновесия внешних сил, действующих на сооружение. При-
мерами такой потери устойчивости могут служить опрокидывание ба-
шенного крана, опрокидывание или сдвиг подпорной стенки, как еди-
ного целого. Новому положению сооружения будут соответствовать
новые условия равновесия внешних сил.
Потеря устойчивости формы равновесия в деформированном сос-
тоянии вызывается нарушением равновесия между внешними и внут-
ренними силами. При этом происходит перераспределение внутренних
сил и равновесие восстанавливается лишь в новом деформированном
состоянии.
В настоящем курсе мы будем изучать устойчивость формы равно-
весия, главным образом, упругих систем или систем, состоящих из
абсолютно жестких звеньев, соединенных упругими связями, при дей-
ствии статических нагрузок — статическую устойчивость.
Общие понятия теории устойчивости упругих систем наглядно ил-
люстрируются на простом примере сжатого прямого стержня
(рис. 4.1). Под действием сжимающей силы, приложенной к верхнему
концу, стержень, испытывая осевое сжатие, будет сохранять исходную
прямолинейную форму при всех значениях этой силы, меньших неко-
торого. Если при этом его слегка отклонить и отпустить, то он.совер-
шив ряд колебаний относительно вертикального положения, возвра-
тится к первоначальной прямолинейной форме. Таким образом, вер-
тикальное положение сжатого стержня при этих значениях силы со-
ответствует устойчивому равновесию.
300
С увеличением нагрузки выпрямление стержня происходит все мед-
леннее. Наконец, при определенной ее величине прямолинейная форма
равновесия становится неустойчивой. Это значит, что, если отклонить
стержень на некоторую малую величину, то он не сможет возвратиться
в исходное состояние, а будет отклоняться еще больше или оста-
ваться в таком положении.
Переход из исходного устойчивого равновесия в неустойчивое
называется потерей устойчивости. Сила, соответствующая такому
переходу, называется критической силой и обозначается Fcr. Состояние
стержня при потере устойчивости называется критическим состоя-
нием.
При значениях силы, несколько больших критического, первона-
чальная прямолинейная форма стержня становится неустойчивой,
стержень искривляется и появляется качественно новое напряженно-
деформированное состояние — сжатие и изгиб. Таким образом, крити-
ческая сила может быть определена как такая наибольшая сила, до
которой сохраняется устойчивость первоначальной формы равнове-
сия, или такая наименьшая, при которой происходит переход в новую
равновесную форму, близкую к исходной, т. е. происходит потеря
устойчивости.
Определение критической силы является главной целью расчетов
на устойчивость.
Если на стержень или сооружение действует не одна сила, а не-
сколько, и эти силы возрастают пропорционально одному параметру,
то в задачах устойчивости отыскивается критическое значение этого
параметра, как определяющего всю данную систему сил в критическом
состоянии системы.
Теоретически, при идеальной расчетной схеме и идеальном мате-
риале, переход из прямолинейной формы равновесия в криволиней-
ную возможен лишь в результате действия какого-нибудь внешнего
фактора, вызвавшего отклонение оси стержня. В реальных конструк-
циях, из-за неизбежных начальных несовершенств (приложение
силы с некоторым эксцентриситетом, неоднородность материала, на-
чальная кривизна стержня и др.) возможны начальные дополнитель-
ные деформации другого вида. При нагрузках, меньших критических,
они практически не проявляют себя и в расчетах их можно не учиты-
вать. Однако с приближением нагрузки к критическому значению они
301
резко искажают исходную деформацию, что и приводит к образова-
нию новой формы равновесия.
Важно заметить, что если эти несовершенства значительные, то
критическая нагрузка может оказаться меньше ожидаемой. Исследо-
вание устойчивости с учетом начальных несовершенств составляет
отдельную задачу и в настоящем курсе не рассматривается.
Основные особенности потери устойчивости сжатого прямого бру-
са присущи и другим конструкциям и при других видах деформаций:
при изгибе, кручении, внецентренном сжатии и т. д.
Например, круговое кольцо, подверженное действию радиальной
сжимающей равномерной нагрузки, испытывает сжатие. Оно сохраняет
свою форму, пока нагрузка меньше критической (рис. 4.2, а). При кри-
тическом значении нагрузки кольцо теряет устойчивость централь-
ного сжатия и превращается в эллипс. Кроме сжатия появляется
изгиб.
Симметрично нагруженная арка (рис. 4.2, б), теряя устойчивость,
приобретает кососимметричную форму. Происходит перераспределе-
ние внутренних сил, появляется новое деформированное состояние.
Консоль, выполненная из тонкой полосы (рис. 4.2, в), под дейст-
вием силы, меньшей критического значения, испытывает изгиб в вер-
тикальной плоскости. При критической нагрузке потеря устойчи-
вости сопровождается появлением изгиба в горизонтальной плоскости
и кручения вокруг продольной оси.
По виду нового напряженно-деформированного состояния, в кото-
рое переходит система при потере устойчивости, различают изгибные,
крутильные и изгибно-крутильные формы потери устойчивости. В пер-
вом случае потеря устойчивости характеризуется появлением допол-
нительной деформации изгиба (рис. 4.1 и 4.2, о, б), во второй — кру-
чения, в третьем — изгиба и кручения (рис. 4.2, в).
В рассмотренных выше примерах (рис. 4.1, 4.2) потеря устойчи-
вости определяется разветвлением (бифуркацией) форм равновесия
при критической нагрузке. Она проявляется при бесконечно малом
отклонении от исходного положения, поэтому в таких случаях говорят
об устойчивости «в малом».
В практике встречаются системы, потеря устойчивости которых
происходит путем «перескока» к другой, несмежной с исходной, форме
равновесия. Такой «перескок» происходит при конечных и даже боль-
ших отклонениях от исходного положения, поэтому это явление назы-
вается потерей устойчивости «в большом».
В качестве примера рассмотрим систему, показанную на рис. 4.3.
Если увеличивать силу Е, то за счет укорочения стержней угол между
ними увеличивается. При н екотором значении силы F = Fcr про-
изойдет «прощелкивание» — переход в новое состояние, сопровожда-
ющийся значительными перемещениями точек системы.
близкие к описанным выше явления можно наблюдать и в случае
внецентренного сжатия стержня (рис. 4.4). Уже в исходном состоянии
такой стержень испытывает осевое сжатие и изгиб. При малых нагруз-
ках влияние продольной силы на деформации невелико и приращения
деформаций почти пропорциональны приращению нагрузки. С ростом
302
Рис. 4.Э
Рис. 4.4
нагрузки эта пропорциональность нарушается, деформации начинают
увеличиваться быстрее, чем нагрузка. Наконец, может наступить мо-
мент, когда для дальнейшего возрастания деформаций уже не тре-
буется увеличения нагрузки. Это означает потерю устойчивости и
соответствующая нагрузка будет критической.
Отметим, что система, устойчивая «в большом», подавно будет
устойчивой «в малом». Обратное утверждение не всегда является пра-
вильным.
Теоретически критическая сила не является разрушающей, так
как сооружение лишь принимает новую форму равновесия. Однако
на практике потеря устойчивости сопровождается появлением боль-
ших деформаций, вызывающих невозможность дальнейшей эксплуата-
ции сооружения, или его разрушение. Поэтому обычно критическая
сила отождествляется с разрушающей.
18.2. Степени свободы в задачах устойчивости
При исследовании устойчивости рассматривают систему в новом
деформированном состоянии, отличающемся от исходного наличием
малых перемещений всех ее точек. Это состояние назовем смежным.
В зависимости от предположений о расчетной схеме, перемещения
точек могут быть выражены через один, несколько или множество
параметров. Число геометрических параметров, определяющих воз-
можные перемещения всех точек системы при ее деформации, называ-
ется числом степеней свободы. Отметим различие в оп-
ределении степеней свободы в задачах статики и в теории устойчи-
вости. В статике число степеней свободы определяет подвижность
расчетной схемы как кинематической цепи. Здесь же речь идет о воз-
можных перемещениях каждого бесконечно малого элемента при пере-
ходе его в смежное состояние.
В теории устойчивости всякий упругий стержень или система
стержней в общем случае имеет бесконечно большое число степеней
свободы.
Например, упругая стойка, показанная на рис. 4.5, с, имеет бес-
конечно большое число степеней свободы (IV' — оо), так как для пред-
ставления ее деформированной схемы должно быть задано бесчислен-
ное множество прогибов во всех ее точках. В частных случаях, путем
введения допущений, возможно снижение числа степеней свободы. Так,
303
б
б
Рис. 4.5
a
если изгибом стойки пренебречь, т. е.
жесткость стойки принять близкой к бес-
конечности, то любое перемещение всех
точек можно выразить через один неза-
висимый геометрический параметр —
угол 0 (рис. 4.5, б). Такая система
имеет одну степень свободы.
Для системы, приведенной на рис.
4.5, в, при условии бесконечной жестко-
сти каждого стержня число степеней
свободы равно двум. Перемещения точек
этой системы могут быть выражены с по-
мощью двух параметров—и о2, соот-
ветствующих перемещениям упругих
опор. Если для системы с одной степенью
свободы перемещения при потере устой-
чивости определяются однозначно, то
здесь появляется возможность потери устойчивости по одной из двух
качественно отличающихся форм (штриховые на рис. 4.5, в). Каждой
из них соответствует своя критическая нагрузка. В общем случае
число возможных форм потери устойчивости, а следовательно, и число
критических сил равно числу степеней свободы.
18.3. Критерии устойчивости
и методы определения критических сил
Для решения задач устойчивости существует три основных мето-
да: динамический, статический и энергетический.
Динамический метод основан на исследовании колебаний системы,
отклоненной от исходного положения. Предполагается, что возмуща-
ющий фактор, вызвавший отклонение, устранен и система предостав-
лена сама себе. В этом случае критерием устойчивости считается на-
личие затухания колебаний системы и возвращение ее к исходному
положению. Наоборот, возрастание амплитуд свободных колебаний
свидетельствует о переходе системы через критическое состояние.
Критическими считаются нагрузки, соответствующие этому пере-
ходу. Динамический метод является наиболее общим. Он применим
к исследованию устойчивости как консервативных, так и неконсерва-
тивных систем. Однако, ввиду своей сложности, он не получил широ-
кого применения в инженерных задачах устойчивости. Отметим, что
консервативными называют системы, загруженные кон-
сервативными силами, т. е. такими силами, работа которых при пере-
мещении в процессе деформации системы не зависит от пройденного
пути, а определяется их начальным и конечным положением. Боль-
шинство строительных конструкций являются консервативными си-
стемами. Примером неконсервативной системы может служить стойка,
загруженная «следящей» силой — такой силой, которая при всех
перемещениях системы остается перпендикулярной к тому сечению,
где она приложена (рис. 4.6).
ОД
Рис. 4.6 Рис. 4.7 Рис. 4.8
Статический метод, или метод Эйлера, состоит в использовании
уравнений равновесия применительно к смежному равновесному
деформированному состоянию.
Шею статического метода проследим на примере определения
критической силы для центрально-сжатого абсолютно жесткого пря-
мого стержня, имеющего с одной стороны шарнирно-неподвижную
опору, а с другой — упругоподатливую (рис. 4.7). Эта система имеет
одну степень свободы- любое перемещение точек можно выразить через
один параметр — угол 0.
Рассмотрим стержень в отклоненном состоянии. Форма потери
устойчивости показана на рис. 4.7.
Запишем условие равенства нулю суммы моментов относительно
т.0 без учета массы стержня, имея в виду, что при отклонении в упру-
гой связи возникает реакция R = со (v — отклонение, с — коэффи-
циент жесткости связи, равный силе, растягивающей пружину на еди-
ницу длины): Fv — col cos © = 0, или
v (F — cZcos©) = 0.
(4.1)
Полученное уравнение связывает между собой нагрузку и переме-
щения и имеет два решения: v — 0 и F — clcos® = 0. Из первого
решения следует, что при любом значении силы F перемещение v — 0,
что соответствует исходной форме равновесия. Мы же предположили,
что в критическом состоянии появляются малые перемещения. Поэтому
критическую силу найдем из второго решения предельным переходом
к исходному состоянию. Полагая © -> 0, a F -*• Fcn получаем Fcr =
= cl.
В рассмотренном примере системы с одной степенью свободы де-
формированное состояние определялось одним алгебраическим урав-
нением. Для системы с п степенями свободы необходимо составить
и исследовать п таких уравнений. Если же система имеет бесконечное
число степеней свободы, то вместо множества алгебраических уравне-
ний составляется одно — дифференциальное.
Энергетический метод основан на использовании экстремальных
свойств потенциальной энергии систем, находящихся в равновесии.
305
Обратимся к простой модели, иллюстрирующей эти свойства.
Рассмотрим шарик, помещенный на вогнутую, плоскую и выпуклую
поверхности (рис. 4.8). В первом случае (рис. 4.8, о) положение шарика
устойчивое. Если его вывести из состояния равновесия и отпустить, то
он вернется в исходное положение. Любое отклонение шарика от этого
положения ведет к возрастанию его потенциальной энергии. Таким
образом, устойчивому равновесию соответствует минимум потенциаль-
ной энергии.
Шарик на плоскости находится в безразличном равновесии. При
любых смещениях энергия его положения остается неизменной
(рис. 4.8, б).
Шарик, помещенный в верхнюю точку выпуклой поверхности, на-
ходится в неустойчивом равновесии (рис. 4.8, в). Он обладает макси-
мумом потенциальной энергии —малейшее смещение его в ту или иную
сторону приводит к уменьшению потенциальной энергии. Эти особен-
ности модели распространяются и на упругие системы. Согласно
принципу возможных перемещений (Ж. Лагранж, 1787) потенциаль-
ная энергия системы, находящейся в состоянии равновесия, имеет
стационарное значение по отношению ко всем кинематически возмож-
ным вариациям системы. Тип равновесного состояния консервативной
системы определяется попринципуДирихле; если равнове-
сие устойчиво, то полная потенциальная энергия системы минимальна
в сравнении с энергией для отклоненных положений; если равновесие
неустойчиво, то потенциальная энергия максимальна; если состояние
равновесия безразличное, то потенциальная энергия постоянна во
всех положениях, отклоненных от исследуемого.
Обозначим полную потенциальную энергию системы С/<о/.
Из указанных вариационных принципов следует, что если равно-
весие устойчивое, то l//0< = min, 6Uiot~ 0, при неустой-
чивом равновесии (7/or — max, 6UfOt = 0, 62(7/о/<0; в случае
безразличного равновесия Utot = const, 6Utot = 0, 6zUlot = 0.
Критическое состояние системы есть равновесие переходное между
устойчивым и неустойчивым. Следовательно, на основании известных
признаков стационарности критическую силу можно определять ih
условия экстремума функции полной потенциальной энергии систем..!
при ее малом отклонении, т. е. приравняв к нулю ее частные произ-
водные.
Отметим, что такой путь решения задачи в общем случае, без
упрощающих приемов, связан с математическими трудностями. Есть
другая формулировка критерия устойчивости, вытекающая из не-
посредственного применения принципа возможных перемещений.
Рассмотрим ее.
Будем исходить из того,что в критическом состоянии приращение
полной потенциальной энергии при бесконечно малом отклонении
системы от исходного положения равно нулю. Предположим, что
в исходном равновесном состоянии искривлений осен,эксцентрнси1е-
тов приложения нагрузок и других значительных начальных несо-
вершенств нет. Тогда полную потенциальную энергию в этом состояния
можно принять за начало отсчета и считать равной нулю. Приращение
306
потенциальной энергии будет совпадать с пол-
ной энергией перехода системы из исходного
состояния в деформированное (Д4//«/ = Utct)
и энергетический критерий устойчивости по-
лучает вид
<Ло/ = 0. (4.2)
С другой стороны, известно, чго полная
потенциальная энергия упругой системы при
ее деформации равна алгебраической сумме
работ внешних UZ и внутренних U сил. Поэто-
му критерий (4.2) можно представить в таком
виде:
UZ + и = 0. (4.3)
Мы пришли к известной формулировке принципа возможных пере-
мещений. Следовательно, критическую силу можно определять из
условия равенства нулю суммы работ внешних и внутренних сил на
малых перемещениях из исходного состояния в смежное (или наоборот).
Выражение (4.3) является исходным для составления уравнения
устойчивости при определении критических сил.
Основные особенности определения критических сил энергетиче-
ским методом проследим на примере упругой системы с одной степенью
свободы (рис. 4.9). Жесткость упругой опоры характеризуется коэ^т-
фициентом с, равным опорному моменту от поворота на угол 0 = 1
Полная энергия этой системы в любой момент равна сумме энергии
положения нагрузки и упругой энергии опоры. Пока нагрузка меньше
критической, система находится в устойчивом равновесии. Ее полная
потенциальная энергия минимальна (считаем ее равной нулю); вся-
кое отклонение стержня на малый угол 0 каким-либо дополнительным
внешним силовым фактором приводит к возрастанию энергии. Это
объясняется тем, что накопление энергии в упругой опоре в данном
случае больше, чем уменьшение энергии положения нагрузки. Поэтому
стержень вернется в исходное состояние, как только этот дополнитель-
ный фактор будет устранен.
В критическом состоянии, как переходном между устойчивым и
неустойчивым, при малом отклонении системы ее суммарная энергия
остается постоянной, т. е. приращение энергии равно нулю.
Критическую силу определим из условия равенства нулю суммы
работ внешних и внутренних сил (4.3) при переходе системы из от-
клоненного состояния в исходное. При таком перемещении внутренние
силы выполняют положительную работу, а внешние — отрица-
тельную.
В нашем примере (рис. 4.9) внешняя сила при перемещении остается
неизменной, а внутренняя сила (опорный момент) изменяется пропор-
ционально углу 0:
и = |7И0=Ав’-с; IF = —F/(l —COS0),
307
Приравняв к нулю сумму работ по (4.3), получаем уравнение
устойчивости
©2с — FZ (1 — cos в) = 0. (4.4)
Уравнение (4.4) связывает нагрузку и отклонение стержня (угол в)
в его равновесном наклонном положении.
В критическом состоянии угол 0 является бесконечно малой ве-
личиной. Тогда из (4.4) следует, что энергия деформации — величина
второго порядка малости. В связи с этим, в расчетах можно отбрасы-
вать бесконечно малые высших порядков.
Разложив cos © в ряд 1 — y 4Г — ••• и отбросив беско-
нечно малые третьего и более высоких порядков, уравнение
устойчивости (4.4) получим в таком виде-
откуда при ©^=0 получаем критическую силу Fcr = cll.
В рассмотренном примере системы с одной степенью свободы форма
потери устойчивости одна и заранее известна. В системах с бесконеч-
ным числом степеней свободы формы потери устойчивости неизвестны
и для записи уравнения работ ими надо задаваться.
18.4. Устойчивость упругих систем
с конечным числом степеней свободы
Особенности исследования устойчивости упругих систем с конечным
числом степеней свободы изучим на примере системы, показанной
на рис. 4.10, имеющей две степени свободы. Это составной стержень,
три абсолютно жестких элемента кото-
рого соединены шарнирами, а две про-
межуточные опоры упругоподатли-
вые. Жесткость опор характеризуется
коэффициентом жесткости с.
Применим статический метод. Кри-
тическую нагрузку Fcr найдем как
такую, при которой, кроме исходного
(вертикального) положения равнове-
сия составного стержня, возможно
равновесие в отклоненном состоянии.
Это отклоненное состояние характери-
зуется двумя геометрическими пара-
метрами — линейными перемещения-
ми опорных шарниров yt и у2.
В смежном состоянии (рис. 4.10)
опорные реакции RA = j {2yt + у2);
308
R* = cy*\ Rx — cyt't Rb= (2yt + yx}. Уравнения равновесия мож-
но записать как условия равенства нулю изгибающих моментов
в шарнирах / и 2:
мх = RAl - Ff/i = -5 (2У1 + уг)1- Fyt = 0;
Mt = Rul-Fy, = I(2уг + уt) I-Fyt = O.
откуда (2с/ — 3F) yt 4- clyz = 0; clyt 4- (2с/ — 3F) y2 = 0.
Полученная система однородных уравнений, как известно, имеет
не единственное решение. Одно из решений = у2 = 0 соответствует
исходной — прямолинейной форме составного стержня, т. е. устойчи-
вому равновесному состоянию. Критическому же состоянию соответ-
ствуют бесконечно малые смещения (в нашем случае смещения шарни-
ров / и 2). Для отыскания ненулевых решений приравняем определи-
тель системы к нулю:
12с/-3F cl I
|cZ 2cl — 3F| '
или (2с/ — 3F)2 — (с/)2 ® 0, откуда получаем два значения критичес-
кой силы: Fat—cl[3t Fcr^cl. Искомая наименьшая критическая
сила Fcr = cl/3.
Для исследования формы потери устойчивости надо подставить
значения критических сил в одно из исходных уравнений равновесия.
Подставив Feri = cl/3 в первое уравнение, получаем (2с/ — cl) yt 4-
+ с/04=О. Следовательно, форма потери устойчивости, соответст-
вующая первой критической силе, определяется условием уг = —у2.
При второй критической силе Fcri = cl имеем (2с/ — 3d) yt 4-
4- cl у % = 0, откуда уг = у2.
Формы потери устойчивости, соответствующие первой н второй
критическим силам, на рис. 4.10 показаны пунктиром.
Итак, для системы с п степенями свободы необходимо записать п
уравнений равновесия. Приравнивая нулю определитель, составлен-
ный из коэффициентов при перемещениях в уравнениях равновесия,
получают уравнение устойчивости. Это уравнение имеет п корней —
значений критических сил для всех возможных форм потери устойчи-
вости. Наименьшая критическая сила дает искомое решение.
Вопросы для самоконтроля
I. Какие существуют виды равновесия?
2. Каково различие между устойчивостью положения и устойчивостью
формы равновесия?
3. Дайте определение критической силы и критического состояния.
4. Что такое потеря устойчивости?
5. Как влияют начальные несовершенства расчетной схемы на потерю устой-
чивости?
6. Какие бывают формы потери устойчивости?
7. Приведите примеры потери устойчивости «в малом» и «в большом».
б. Как определяется степень свободы в задачах устойчивости?
309
9. Как связано число возможных форм потери устойчивости с числом сте-
пеней свободы?
ДО. Назовите основные методы исследования устойчивости упругих систем
и критерии, на которых основаны эти методы.
11. В чем сущность динамического метода?
12. Как получают уравнение устойчивости в статическом методе?
13. Каково различие между уравнениями устойчивости для систем с конеч-
ным и бесконечным числом степеней свободы?
14. Чем характеризуется потенциальная энергия для различных форм рав-
новесия?
15. Что характерно для потенциальной энергии в критическом состоянии?
16. Как представить энергетический критерий устойчивости в форме прин-
ципа возможных перемещений?
17. Каковы особенности применения статического метода к расчету на устой-
чивость систем с конечным числом степеней свободы?
Глава 19
УСТОЙЧИВОСТЬ ПРЯМЫХ СЖАТЫХ СТЕРЖНЕЙ
19.1. Стержни постоянного сечения.
Понятие о точном и приближенном решениях
Задача исследования устойчивости прямолинейных центрально-
сжатых стержней при различных способах закрепления является
одной из основных в строительной механике.
Как уже выяснили, при потере устойчивости центрально-сжатый
стержень искривляется и переходит в новое напряженно-деформиро-
ванное состояние — сжатие с изгибом. Деформацию изгиба, вызванную
действием продольных сил, называют продольным изгибом.
В критическом состоянии положения точек искривленной сси
стержня определяются прогибами и продольными смещениями, вызван-
ными укорочением стержня от сжатия. Укорочение стержня от сжатия
мало и им пренебрегают, т. е. считают ось стержня несжимаемой.
Таким образом, положение точек оси определяется только прогибами.
Для решения задач устойчивости прямого бруса статическим
методом составляют дифференциальное уравнение равновесия для
деформированного состояния при продольном изгибе. В зависимости
от принятия точного или приближенного выражения кривизны, кото-
рая входит в это уравнение, различают точное или приближенное
решение задачи устойчивости.
При отсутствии продольных деформаций изогнутая ось стержня
при продольном изгибе описывается известным из сопротивления ма-
териалов дифференциальным уравнением
(4.5)
у” _ . М
и+(!/')213/2 '£/’
где ~ — кривизна изогнутой оси; у—прогиб, М —
изгибающий момент. Напомним, что в задачах устойчивости жест-
кость сечения EI принимается относительно минимальной главной
оси инерции сечения.
310
Рис. 4.1»
В расчетах строительных конструкций предполагается, что в кри-
тическом состоянии перемещения бесконечно малы. Тогда при опреде-
лении наименьшей критической силы можно пренебречь членом
(у')\ т. е. принять приближенное выражение кривизны стержня
— = и использовать приближенное дифференциальное уравнение
изогнутой оси стержня
£//=*М, (4.6)
как это делается в обычных расчетах изгибаемых элементов на проч-
ность и жесткость.
Знак в соотношении (4.6) зависит от знака изгибающего моментам
направления оси ординат. По направлению момента легко определяется
направление выпуклости стержня: если направление оси у соответ-
ствует положительной кривизне (в сторону вогнутости), то в правой
части (4.6) удерживается знак «плюс» (рис. 4.11).
Остановимся подробно на рассмотрении приближенного решения.
Если стержень шарнирно оперт по концам (рис. 4.12, а), то в любом
его сечении изгибающий момент М = —Fy (при направлении коорди-
натных осей, соответствующем рис. 4.11) и уравнение (4.6) получает
вид
EIy''~-Fy. (4.7)
Введем важное обозначение, которым будем пользоваться во мно-
гих задачах устойчивости:
п2 = £/(£/). (4.8)
Тогда дифференциальное уравнение (4.7) можно записать так:
у" + п2у = 0. (4.9)
Решение однородного линейного дифференциального уравнения вто
рого порядка (4.9) известно:
у = Cxsin пх + С2 cos пх. (4.10)
зп
Для определения постоянных Сг и Са запишем два граничных условия!
х = 0, у0 = 0 и х “ I, yt — 0.
По первому условию С2 = 0, по второму — Cxsin nl = 0.
Коэффициент Сх не может быть равным нулю, так как это соответ-
ствовало бы случаю, когда ось стержня остается прямой при любых
нагрузках. Мы же приняли допущение о том, что при критической
нагрузке становится возможным искривление оси. Следовательно,
остается принять sin nl — 0, откуда nl = л, 2л, ..., kn (k = 0, 1, 2,
3, ..., со). Значениеk = 0 отбрасывается, как не соответствующее не-
нулевому решению уравнения (4.10). Окончательно уравнение проги-
бов (4.10) получает вид
у = Cjsiny х. (4.11)
Таким образом, искривление оси при потере устойчивости проис-
ходит по синусоиде. Коэффициент k определяет число полуволн сину-
соиды при потере устойчивости. Разным значениям k соответствую»
разные формы потери устойчивости.
В выражении (4.11) Ct — амплитуда синусоиды. Она осталась
неопределенной, т. е. приближенное решение дает форму потери
устойчивости и не дает ординат прогибов.
Наименьшему значению критической силы соответствует первая
форма потери устойчивости (Л = I). Учитывая обозначение (4.8),
получаем выражение для критической силы
FCf = rfEUP. (4-12)
Рассмотренный случай закрепления стержня называется основным.
При других схемах закрепления будут свои граничные условия и своя
критическая сила.
Для пяти случаев закрепления стержня, показанных на рис. 4.12,
критическая сила может быть определена по уже известной формуле
Эйлера
" ~ ~ /2
(4.13)
где /0 = ц/ — приведенная, или свободная, длина стержня; р — коэф-
фициент приведенной длины, который учитывает условия закрепле-
ния стержня.
Свободная длина определяет длину полуволны синусоиды, выра-
женную через длину стержня при данной форме потери устойчивости.
Достаточно гибкие стержни, изгибаясь под действием продольной
силы F > Fcrt могут даже при сильном искривлении оси иметь
напряжения, не превышающие предела пропорциональности. В этом
случае может появиться необходимость исследования работы стержня
в закритическом состоянии. При этом пользоваться приближенным
312
уравнением (4.9) уже нельзя. Заменяя в нем
у” на i , приходим к более общему уравнению
| + «4!/ = 0. (4.14)
По-прежнему считая ось стержня несжи-
маемой, запишем точную кривизну в таком
видев
£ = de
р ds ’
где s — координата, отсчитываемая вдоль уп-
ругой линии (рис. 4.13, а); 0 — угол наклона
касательной к упругой линии.
Подставив кривизну в уравнение (4.14),
продифференцируем его по s; с учетом соот-
ношения ^ = sin0 получаем
+ л2 sin 0 = 0.
Рас. 4.13
(4.15)
Домножим оба члена уравнения на dO. Тогда, принимая во внима-
ние преобразование
d/dO\
^de=
ds2 ds \ds / ds ’
получим
^d(^)+n4sine<te=o.
ds yds / 1
Проинтегрируем это уравнение!
4®’-,iacose=C2
и найдем постоянную С из условия в начале стержня: при s*=O
е = а, Л4 = £/^ = 0.
as
Получаем С* = —л2 cos а и
(иг) = (cos ®—cos а)- I®)
Отсюда находим
£ = -п^«>se-cosa = *2л j/sins » _sil? |,
или с учетом того, что при возрастании s значение О уменьшается,
получим
ЛГ = —2л У sin41 - sin41. (4.17)
313
Обозначим & = sin|- и введем новую переменную <р так, что
.в . .
Sin 2- = «ЬЩф.
(4Л8)
Тогда уравнение (4.17) примет такой вид:
= — 2kn V1 — sin2<p = — 2kn cos ф, (4.19)
откуда
ds = -5r^-. (4.20)
2kn cos '
Заменив в этом равенстве d0 = cosУd<p=-, проинтегрируем
Fl — k* sin2 ф
обе его части на половине длины стержня. Тогда, удваивая, получим
полную длину стержня
Vm Vo
I = — £ С =s 2 f _ d<P .
n J — кг sin2 ф nJ — Af2sin2<p*
vo Vm
Значение <p0 при s = 0 получим из условия равенства нулю изгиба-
ющего момента: М = 0, откуда coscp0 = = р = 0; <ро = .
Значение <ро в середине стержня при s = lf2 получим из условия,
что здесь 0 = 0. Тогда = 0, и длина стержня
я
„ 2
2 р ________dtp
п J V1 — № sin2 <p
о
(4.21)
Я
'2
В полученном выражении величина К = £ -у= называется
полным эллетпическим интегралом первого рода. Для его
вычисления в справочниках по математике приводятся таблицы.
Наибольшее значение К = 0. Тогда по (4.21) и на осно-
вании (4.8)
Fcr = л*ЕЦР.
Таким обрагом, критическая сила, полученная решением точного
дифференциального уравнения, соответствует приближенному реше-
нию (4.12). При F > Fcf существует форма равновесия стержня € ис-
кривленной осью.
Так же, как и в приближенном решении» можно получить второе
и следующие вначения критических сил. Например, вторая критиче-
ская сила соответствует изгибу втержня по двум полуволнам сину-
314
соиды (рис. 4.13, б). Тогда ф обра-
щается в нуль при s = //4 и
л
л 2"
/ = — f _ d(P
п J К1 —k* sin2 <p *
о
откуда nl 2л, a Fcr„ = 4л2 Е///2. На
рис. 4.13, б показаны" вторая, третья
п четвертая формы потери устойчи-
вости.
При F < Fer устойчивой является
единственно возможная прямолиней-
ная форма равновесия стержня. При
превышении силой F значения Fcr появляется еще одна возможная
форма равновесия с осью, изогнутой по одной полуволне. При пере-
ходе через каждую следующую критическую силу добавляется еще
одна возможная форма равновесия. Без доказательства укажем, что
при F > Fcr устойчивой является единственная форма равновесия —
с осью, изогнутой по одной полуволне. Поэтому на практике интере-
суются лишь первой формой потери устойчивости и соответственно
первой критической силой.
Для определения прогибов изогнутого стержня запишем соотно-
шение (по рис. 4.13, а)
0 0
dy = sin 6 ds = 2 sin 2 cos 2 dst
или с учетом (4.18) и (4.20)
dy = — -- sin qd<p.
После интегрирования находим
v ч>
у~ — — I sin ф dcp= — - I sin ф dtp = ~ cos ф.
V0 Я
2
Наибольший прогиб имеет место в середине стержня при s = //2.
Учитывая, что при этом ср = 0, получаем
= / = (4.22)
Пользуясь этим выражением, можно определить наибольший прогиб
в зависимости от силы F. Вычисления показывают, что эта зависимость
в относительных величинах имеет вид, показанный на рис. 4.14. Как
видим, прогиб при F > Fer растет довольно быстро. В связи с этим
поведение стержня в закритическом состоянии может быть исследова-
но лишь на основе уравнений, учитывающих большие перемещения.
В то же время для определения критической силы вполне допустимо
рассматривать приближенное дифференциальное уравнение (4.9).
315
19.2. Стержни с упругоподатливыми опорами
Рассмотрим консольную стойку с упругой заделкой нижнего конца
(рис. 4.15). Линейные смещения опорного сечения равны нулю, а угол
поворота пропорционален опорному моменту. Для решения задачи
используем приближенное дифференциальное уравнение (4.6). В этом
случае оно становится неоднородным! Ely" = F (А — у) или, с учетом
обозначения (4.8), уя + п2у — п&.
Решение полученного уравнения имеет вид
у = С\ cos пх + С2 sin пх 4- А. (4.23)
Граничные условия для рассматриваемого примера запишутся таю
при х — 0 ^о=О, у,, = Мб = FA6; при х~ lyi — А. Здесь 6 — угол
поворота упругой заделки от действия единичного момента.
По (4.23) с учетом граничных условий получаем систему линейных
алгебраических однородных уравнений относительно Сь С2 и m
С, + А = 0;
С2 — пЕ1№ = 0; (4.24)
Cj cos nl -J- C2 sin n/= 0.
Система (4.24) удовлетворяется при Сг = Cz = п = 0. Однако
этот случай соответствует прямой оси стержня (прогибы равны нулю).
Мы же предположили, что в критическом состоянии появляются ма-
лые прогибы. Поэтому нас интересует случай, когда неизвестные
системы (4.24) отличны от нуля. Это возможно при условии, когда ее
определитель равен нулю.
Приравняв определитель системы к нулю
det D =
10 1
0 1 —пЕ1<Э
cosnZ sin nl 0
= 0
и раскрыв его, получаем уравнение устойчивости
Рве. 4.16
пЕ1в sin nl —cos nl =0, или nl tg/iZ = 1ЦЕ18).
(4-25)
Полученное трансцендентное уравнение в каж-
дом конкретном случае решают подбором, из-
меняя параметр nl. Этот параметр может быть
также определен графическим способом.
Если значение nl определено, то по (4.8)
Еег = {п1ТЕЦ1\ (4.26)
С помощью уравнения (4.25) можно найти
критическую силу для консольного абсолютно
жестко закрепленного стержня. В этом част-
ном случае упругость опоры равна нулю
(б = 0) и уравнение устойчивости (4.25) по-
316
думает вид nZtg nl = оо. Уравнение удовлетворяется при nl = л/2
и критическая сила, как и ожидалось,
г СГ — '
19.3. Дифференциальное уравнение равновесия
четвертого порядка
В некоторых задачах устойчивости стержней используют диффе-
ренциальное уравнение четвертого порядка. Пользуясь статическим
методом, запишем такое уравнение для общего случая — для стержня
переменной жесткости, испытывающего осевое сжатие и изгиб
(рис. 4.16, а).
На рис. 4.16, б показан выделенный элемент dx стержня. Полагая
угол 0 малым, будем считать, что cos 0=1 и sin 0 — tg 0 = у:
Имея в виду, что d0 = y”dxtсоставим уравнение равновесия элемента.
S У = (Q + dQ) - Q + Fy’ - F (у’ + у’ dx) = 0.
откуда
Из уравнения моментов относительно т. в следует = Q; тогда
dQ _ „
dx “ dx* ~ У *
Учитывая, что M = Ely', запишем дифференциальное уравнение
сжато-изогнутого прямого стержня при отсутствии поперечной рас-
пределенной нагрузки!
(Е/уТ 4-^ = 0. (4 .27)
Если стержень имеет постоянное сечение по длине, то уравнение
(4.27) записывается так:
Ely" + Fy" = или у” 4- nV где n2 = F/(E/). Интеграл такого уравнения име- ет вид у —Cj cos пх 4- C2sin пх 4- 4- Csx 4- С4. Для определения произвольных постоянных надо использовать че- тыре граничных условия. В каж- дом частном случае они составля- ются из условий закрепления стер- жня. = 0, (4.28) = 0, К П л A 1'// V £ 1 у Q b 4.16
317
19.4. Метод начальных параметров в задачах устойчивости
В тех случаях, когда по длине стержня или его участков жесткость
сечений и продольная сила постоянны, удобно записывать решение
дифференциального уравнения равновесия в форме метода начальных
параметров.
Сущность этого метода состоит в том, что прогиб у и его производ-
ные в данном сечении определяются через значения тех же величии
в начале координат, или начальных параметров.
Запишем дифференциальное уравнение равновесия в форме метода
начальных параметров для отдельного участка сжато-изогнутого стер-
жня при условии, что сжимающая сила и жесткость сечений по длине
участка постоянны. На рис. 4.17 такой участок показан сплошной
линией до потери устойчивости и штриховой — в критическом со-
стоянии.
Поместим начало координат в нижнем конце элемента в его исход-
ном состоянии и обозначим: Г — силу, сжимающую стержень на этом
участке; 7И0, Ro, у0 и 0О — начальные параметры: соответственно из-
гибающий момент, реакцию (силу, параллельную оси у), прогиб и
угол поворота в начале координат, у — прогиб произвольного сечения
х. Заметим, что MG и /?0 до потери устойчивости равны нулю. Сила
перпендикулярна к первоначальной оси стержня. При потере устой-
чивости эта сила не перпендикулярна к касательной, проведенной
к оси в данной точке, поэтому она не является поперечной и условие
— Qt строго говоря, к пей не применимо. Эту силу можно рас-
сматривать как условную поперечную силу, отнесенную к первона-
чальной оси стержня.
Величины Л1о и Ro считают положительными, если они стремятся
повернуть примыкающий к началу координат элемент по ходу часовой
стрелки. Положительный угол поворота соответствует положительному
моменту. На рис. 4.17 все начальные параметры — положительные.
Изгибающий момент в данном сечении, появляющийся при искрив-
лении оси, можно записать так:
М = Мо 4- Rox + F(y- yQ).
Полученное выражение изгибающего момента подставим в прибли-
женное дифференциальное уравнение упругой линии (4.6) со знаком
«минус», поскольку изгиб рассматриваемого элемента соответствуег
отрицательной кривизне (правило знаков для кривизны показано па
рис. 4.11).
Eiy" = —M-t
Eh/ = -Мо- Яох- F(f/-y0).
Обозначив, как и ранее, п2 = Ff(El)t получаем окончательную запись
уравнения равновесия стержня в форме метода начальных параметров!
У + п-у = увп!‘-Мв^-Кв-^-Х. (4.29)
318
Это линейное неоднородное дифференциальное уравнение второго
порядка с постоянными коэффициентами. Как известно, его решение
складывается из общего решения однородного уравнения и частного
решения, зависящего от граничных условий, и имеет вид:
у —Сt sin пх 4- С2 cos пх 4- у0 — MJF — R^xfF. (4.30)
Для определения произвольных постоянных Ct н С2 необходимо за-
писать граничные условия, соответствующие данной расчетной схеме,
и подчинить им решение (4.30). По рис. 4.17 на нижнем конце уча-
стка при х = 0 у = £/0 и у* = Go. По первому граничному условию
из (4.30) получаем у0 = С2 4- у0 — MJF, откуда С2 = MJF.
Продифференцировав (4.30) по х, раскрываем второе граничное
условие: ё0 = Схп — RJFt следовательно, = 0о/п 4-/?0/(nF).
Теперь подставим выражение произвольных постоянных в (4.30)
и получим полное решение дифференциального уравнения равновесия
(4.29) участка стержня в критическом состоянии:
у = у„ + Qo + & (cos пх - I) + (-^ - х). (4.31)
Записывая первую и вторую производные от (4.31) по х, получаем
выражения для угла поворота и изгибающего момента:
© = у' = 60 cos пх —п sin пх 4- -ф- (cos пх — 1); (4.32)
М = Ely” == —Е1Ъьп sin пх — Л40 cos пх — Яо . (4.33)
Если на границах участков, на которые разбивается стержень,
деформации или усилия меняются скачкообразно, то условия перехода
от участка к участку учитываются дополнительными слагаемыми
319
в основных уравнениях В этом случае уравнение прогибов имеет вид
Величины Ав, АЛ4, А/? определяются из дополнительных условий
на стыках участков; хе, Хль xR —ординаты сечений, в которых 0,М или
Я претерпевают скачок.
Уравнения углов поворота и изгибающих моментов могут быть
получены путем последовательного дифференцирования уравнения
прогибов (4.34).
Сущность метода начальных параметров поясним на примере.
Определим критическую силу для шарнирно закрепленного прямого
стержня постоянного сечения с консолью, показанного на рис. 4.18.
Пусть плоскость наименьшей жесткости совпадает с плоскостью
чертежа. Тогда в деформированном состоянии ось стержня изогнется,
как показано штриховой линией на рис. 4.18.
Поместим начало координат в центр нижнего шарнира. Из четырех
начальных параметров два известны» = 0 и Мо = 0, а два подле-
жат определению* 0О и Ro- Неизвестной является также реакция
верхней опоры
Для определения трех неизвестных имеем три граничных условия.
Они вытекают из условий закрепления стержня — прогиб на верхней
опоре равен нулю, а на конце консоли равны нулю изгибающий мо-
мент и сила R: yt — Qt М(/+с) = Elu\c = Q, R{t+C} = 0. Причем
необходимость в третьем условии отпадает, так как реакцию верхней
опоры по условию равновесия можно выразить через /?0: =
Подчиняя основные уравнения (4.31) и (4.33) с учетом (4.34) первым
двум граничным условиям, получаем систему двух алгебраических
уравнений:
sin п/ Яо / sin nl Л _ п.
-ElQ„nsinп(I + с)- /?0!!<£+£> + = 0.
Последнее слагаемое во втором уравнении учитывает реакцию /?в =
= —Ro на границе участков = с. Нас интересуют ненулевые ре-
шения этой системы. Поэтому для получения уравнения устойчивости
составим ее определитель и приравняем его к нулю!
sin nl 1 / sin л Д
л F \ п =0
-E/nsinn(/+c) _±""<£±^)+
' ' п * п
Раскрываем его:
rin„(Z+0 + su^j + £/п z) s.nп(/ + с) = о.
320
После преобразований имеем
nl sin nl + уj = sin nl • sin nl . (4.35)
Для заданного отношения сП уравнение (4.35) решается относи-
тельно параметра nl путем подбора, а затем вычисляется критическая
сила FCr “ (п02 EIIP. Например, если длина консоли равна половине
пролета (сЛ = 0,5), то наименьшее значение параметра л/= 1,802,
а критическая сила Fcr = 3.247Е//Р.
Метод начальных параметров особенно эффективен в тех задачах
устойчивости, в которых стержень приходится разбивать на большое
число участков, в пределах каждого из которых продольная сила
и жесткость сечения постоянны. В этом случае основные уравнения
метода удобно представить в матричной форме.
Придадим зависимостям (4.31)—(4.33) более общий вид, удобный
для случая многих участков.
Для любого t-ro участка длиной dt с постоянными продольной
силой Nt = Ftn жесткостью Е/( введем обозначения: nt = КFJ(El$*
У1-и ^1-1» Я, —прогибы, углы по-
ворота, изгибающие моменты и горизонтальные силы в начале участка
(индекс i—1) и в конце его (индекс г). Условимся рассматривать
каждый участок со своими осями координат. Ось х направим вдоль
оси стержня, а ось у перенесем в начало данного рассматриваемого
участка.
Тогда основные уравнения (4.31), (4.32), (4.33) получают вид:
У,- У<-> + (^^1) + ^(^- 1); (4.36)
в,= ; (4.37)
Mt = —sin v£ — cos vt — R,^ d{ S^—°- . (4.38)
Для общности задачи запишем также выражение горизонтальной
силы в конце участка (обычно это — горизонтальная реакция опоры):
Rt = Ri-V (4.39)
С помощью полученных уравнений усилия и перемещения на конце
каждого уччстка выражаются через усилия и перемещения в его на-
чале. Переходя от участка к участку, можно определить искомые ве-
личины в любом сечении стержня через начальные параметры.
Представим зависимости (4.36)—(4.39) в матричной форме. Для
этого введем в рассмотрение векторы, координаты которых — на-
чальные и искомые параметры Z-го участка. Обозначим их соответ-
ственно:
321
в также матрицу
1 d[ sin tif cos vt — 1 Fl /sin Of , Fi \ щ
0 cosvt nt sin vi Ft COS Vj — 1
0 —Elesin vt — cosu. dt sin v(
_0 0 0 0
Тогда усилия и перемещения на конце данного Z-ro участка можно
определить через их значения в начале этого участка так:
(4.40)
Составив равенства (4.40) для всех участков, получаем систему
А1 =
<4-4,)
Ап =
Подставим выражение Л1 во вторую зависимость системы (4.41):
Л2 = 5251Ло,
затем полученное А2 — в третью:
А3 = S8S2SxA0t
и так далее во все равенства системы. После такой подстановки полу-
чаем следующее выражение усилий и перемещений на конце стержня
через начальные параметры:
Ап = SnSn_i • • • или Ап — (4.42)
где 5 — матрица произведений матриц & 1
S'» Srf$n-i.. -
Отмстим, что в частном, но практически важном случае, когда
начальный прогиб ус и горизонтальная реакция опоры 7? равны нулю,
ранг матрицы S и векторов At понижается до двух и задача значн*
тельно упрощается.
Вопросы для самоконтроля
I. В чем отличия в построении точного и приближенного решения задачи
устойчивости прямых стержней?
2. Чем отличаются различные формы потери устойчивости стержня с задан*
ными закреплениями?
3. Влияют ли условия закрепления стержня на величину критической силы?
4. Что такое свободная длина стержня?
5. Отличаются ли значения критической силы, полученные из решения
приближенного и из точного дифференциального уравнения?
6. Можно ли определить прогиб стержня в приближенном решении?
32'2
7. Почему для исследования закритических состояний нельзя использо-
вать приближенное дифференциальное уравнение?
8. Может ли измениться форма устойчивого равновесия при увеличении
нагрузки в закрнтнческом состоянии?
9. Чем отличается дифференциальное уравнение равновесия стержня с уп-
ругими опорами от соответствующего уравнения для стержня с жесткими око-
пами?
10. Как изменится критическая сила, если упругую опору стержня заме-
нить жесткой?
II. Как получают дифференциальное уравнение равновесия четвертого
порядка?
12. Что такое начальные параметры?
13. В чем отличие параметра от поперечной силы?
14. Как получают уравнения метода начальных параметров? Почему они
так называются?
15. Как применять метод начальных параметров к определению критиче-
ской силы?
16. Какие матрицы используют в матричной записи уравнений метена
начальных параметров?
Глава 20
ПРИБЛИЖЕННЫЕ МЕТОДЫ ИССЛЕДОВАНИЯ
УСТОЙЧИВОСТИ СЖАТЫХ СТЕРЖНЕЙ
Среди приближенных методов расчета сжатых стержней на устой-
чивость выделим, в первую очередь, методы, основанные на примене-
нии энергетического критерия устойчивости. К ним относятся методы
Ритца, Тимошенко. Энергетическую трактовку можно дать и методу
Бубнова — Галерки на. Приближенность названных методов опреде-
ляется тем, что для получения решения нужно задаваться заранее не-
известной формой потери устойчивости стержня.
К другой группе можно отнести численные методы, основанные на
замене в расчетных уравнениях бесконечно малых приращений проги-
бов конечными. К таким методам относится, прежде всего, метод
конечных разностей.
И, наконец, в ряде случаев приближенность решения определяется
заменой сложных зависимостей более простыми, например нелинейных
линейными, как это делается для систем, у которых нагрузка зависит
от нескольких параметров.
Отметим, что приведенная классификация является условной.
В частности, существуют методы, занимающие промежуточное положе-
ние по отношению к названным.
20.1. Методы Ритца и Тимошенко
Идея этих методов состоит в том, что на основании опыта, приб-
лиженно, задаются формой потери устойчивости в виде некоторой
функции, содержащей произвольные параметры и удовлетворяющей
граничным условиям данной задачи.
В методе Ритца составляют выражение потенциальной энергии
в критическом состоянии, а затем, минимизируя это выражение.
323
Рис. 4.19
находят критическую силу. В методе Тимошенко
записывают выражение критической силы из усло-
вия равенства нулю суммы работ внешних и внут-
ренних сил. Наименьшую критическую силу опре-
деляют из условия минимума этого выражения.
Рассмотрим сущность метода Ритца. Зададимся
формой потери устойчивости в виде суммы линейно
независимых функций f{ (х), взятых g некоторыми
произвольными коэффициентами
y = a1l1(x) + aif2(x) + •••4-aJ„(x) =
= S (4.43)
В качестве £(х) обычно принимают тригономет-
рические или степенные функции, удовлетворяю-
щие кинематическим граничным условиям задачи —
условиям, относящимся к прогибам и углам пово-
рота. Изменяя значения параметров а{ в (4.43),
можно получить различные формы потери устойчивости.
Подставим (4.43) в выражение полной энергии системы Utot = № +
+ U. Тогда энергия будет представлена как функция коэффициентов
Utot в UM (°-и • • ♦ » ^).
Как отмечалось в гл. 18, критическому состоянию системы соответ-
ствует стационарность потенциальной энергии. Условие стационарности
можно выразить равенством нулю частных производных энергии по
каждому из параметров!
dU,(,
daj
О,
о»
ten
0.
(4.44)
Раскрыв условия (4.44), получим систему линейных однородных
алгебраических уравнений относительно параметров ап. В коэффи-
циенты при ап входит нагрузка F. Приравняв к нулю определитель
системы, получим характеристическое уравнение, содержащее нагруз-
ку в степени п. Решение этого уравнения дает п значений силы F.
Наименьшее из них и будет искомой критической силой.
В методе Тимошенко использован предложенный Брайаном вариант
энергетического метода, в котором энергетический критерий форму-
лируется в виде принципа возможных перемещений.
Принимая форму потери устойчивости в виде ряда (4.43), рас-
смотрим работу внутренних и внешних сил при переходе стержня из
смежного состояния в исходное.
Внутренние силы при переходе из вмежного в исходное состояние
(рис. 4.19) выполняют работу
I J Mdv =
<й
/
1
E1 ’
324
Записывая изгибающий момент в сечении стержня как произведе-
ние сиды F на момент М от единичного значения этой силы (М =
= F • /И), получаем
/ _
Z7 _ Р f M*dx
~ 2 J Е/ ’
о
Работа внешних сил при этом W = —ГД.
i
С учетом соотношения Д = 1//= | J (yl)2dx, получаем
о
i
07 = -4 {(yVdx.
О
Из условия равенства нулю суммы работ внешних и внутренних
сил в критическом состоянии
и = -«7, „ЛИ 4 J ТГ = 4 J dx' <4-45)
о о
откуда получаем выражение критической силы
i
f„ = -A---------• (406)
f М* dxftEl)
i)
После подстановки в (4.46) уравнения изогнутой оси (4.43) крити-
ческая сила будет представлена как функция параметров а(. Для
определения этих параметров использую! условия минимума критиче-
ской силы
=0, ~0, ..., = 0. (4.47)
dot да* * дап 4 '
Раскрытие условий (4.47) приводит к системе алгебраических
уравнений относительно о,. По найденным из этой системы парамет-
рам о, с помощью зависимости (4.46) вычисляется наименьшая крити-
ческая сила. Надо отметить, что задаваясь приближенным выражением
кривой прогибов, мы тем самым как бы вводим дополнительные свя-
зи, а значит, увеличиваем жесткость Поэтому критическая сила,
вычисленная методами Ритца и Тимошенко, получается несколько
выше действительной.
Точность решения можно повысить, если функции ft(x) выбрать
так. чтобы каждая из них удовлетворяла не только кинематическим,
но и статическим граничным условиям. Увеличивая число функций
ft(x) в (4.43), будем получать решения, все более приближающиеся
к точному.
325
20.2. Метод Бубнова— Галерхина
Метод, предложенный И. Г. Бубновым и развитый В. Г. Галерки-
ным, основан на использовании свойства ортогональности функций.
Две функции D (х) и f (х) будут ортогональны на отрезке а < х < Ь,
если выполняется условие
ь
\O(x)f(x)dx = 0.
а
Исходя из этого определения, функция D (х), соответствующая ле-
вой части дифференциального уравнения, например
Е1 (х)^" + Fy = О, (4.48)
ортогональна к любой функции, так как при любом значении она рав-
на нулю.
Зададимся, как и в методе Ритца, функцией прогибов в виде ряда
(4.43), но при более жестких требованиях: функции /Дх) должны
удовлетворять не только кинематическим, но всем граничным условиям
вадачи.'При подстановке функции прогибов (4.43) в дифференциальное
уравнение (4.48) получаем
D (х) = EI (х) J aj" (х) + F £ сД (х) 0. (4.49)
/=1
. Отсюда следует, что D (х) уже не будет ортогональна к любой
функции. Потребуем, чтобы она была ортогональна, по крайней мере,
ко всем функциям /Дх), входящим в уравнение (4.43):
i
\Е1 (х) atfo) + FaJt (х)1 (х) dx + J [El (x) ajjx) +
0
I
f-Ea2f2(x)] fk(x) dx+•• • +J[£/(x)oZ(x)+£aJnW)/*(x)dx = 0,
(4 50)
что в канонической форме можно представить таю
+ • • • + СЛпап = 0, k = 1, 2, ..., п,
где
/
См = f [£/ (х) /Дх) 4- F/x (х)] fk (х) dx. (4.51)
Выражения (4.50) представляют собой систему алгебраических
уравнений относительно ai2 содержащих Fcr. Как и в методе Ритца,
приравняв к нулю определитель этой системы, получаем уравнение
устойчивости, из которого и определяем критическую силу.
Особенности применения метода Бубнова — Галеркина рассмотрим*
ца примере стержня постоянной жесткости (рис. 4.12, а), для которого
326
дифференциальное уравнение продольного изгиба имеет вид
Ely + Fy = &
Зададимся приближенным выражением кривой прогибов (4.43),
принимая одно слагаемое у — а] (л). Функцию f (х) представим в виде
квадратной параболы f (х) = х (/ — х). Окончательно функцию про-
гибов получаем в таком виде: у = ах (I — х). Запишем ее производ-
ные! у' = а (I — 2х), у" = —2а.
Как видим, принятая функция удовлетворяет всем граничным
условиям: при х = 0 уп — 0, при х ~ I у{ = 0.
Система (4.51) в нашем случае вырождается в одно уравнение:
СцО = 0. В соответствии с (4.51)
i
Сиа = | [Ely" + Fy] f (аг) dx = 0.
Подставляя выражения функции / (х), функции прогибов и ее
производной и выполняя интегрирование, получаем
f(—2aEI + Fax(l — x)]x(Z — x)dx= (-!t) а = 0.
0
Отсюда определяем приближенное значение критической силы
Fcr = 10Е///2.
Метод Бубнова — Галер кина является более общим, чем метод
Ритца, и может применяться для расчета как консервативных, так и не-
консервативных систем. Если функции / (х) в (4.43) удовлетворяют
всем граничным условиям, то эти методы дают одинаковые
результаты.
Методу Бубнова — Галерки на можно дать и энергетическую трак-
товку. Левая часть дифференциального уравнения (4.48) представля-
ет собой проекцию всех сил (внутренних и внешних), приложенных
к элементу стержня, на нормаль к его оси. Считая, что каждая функция
Дх) описывает возможные перемещения стержня, получаем запись
принципа возможных перемещений в виде (4.50).
Отметим, что в методе Бубнова — Галеркина расчетные уравнения
получают проще, чем в методе Ритца, так как не требуется записывать
выражение энергии. Сложности здесь встречаются при выборе функций
ff(x) в тех случаях, когда в качестве уравнения изгиба принимают
дифференциальное уравнение четвертого порядка.
20.3. Метод конечных разностей
Метод конечных разностей относится к приближенным численным
методам. Особенностью численных методов является то, что искомая
функция задается не пэ всей длине, а лишь в отдельных точ-
327
ках — кривая заменяется ломаной
линией.
Сущность метода конечных раз-
ностей состоит в том, что дифферен-
циал ьное уравнение продольного
изгиба заменяется уравнением в ко-
нечных разностях. По такому урав-
нению составляется система алгеб-
раических уравнений за счет при-
ближенного выражения производ-
ных функций прогибов. Число этих
уравнений зависит от того, в сколь-
ких точках задаются прогибы.
Допустим, исходным уравнением является уравнение продольного
изгиба (4.43)*
Е1(х)у + Fy = Q.
Разделим длину стержня на несколько равных частей длиной Дх, на-
виваемой тагом (рис. 4.20). Тогда приращение прогиба на некотором
щаге перед сечением &у = у( •— у^. По рисунку видим, что
Д МН = = Ч + ^-t
\Лх/ Дх Дх Дх *
Тогда
- Д (^\ = ^41 -4+^-1
Ах2 Ах \Ах/ Дх*
Заменив на дифференциальное уравнение (4.48) для не-
которой точки i можно записать так:
Ум ~Ч+»<-,
Ах2
+ Е! (х) У‘"" °’
или, окончательно:
~ЁПх) — 2)у< + Ум ~ °-
(4.52)
Здесь i = 0, 1 , 2, ..., л — номера сечений стержня. Крайним сече-
ниям соответствуют / = 0 и i = п.
Записывая уравнение (4.43) для точек i = 1, i = 2, ...» i — п — I,
получаем систему алгебраических уравнений
^+(£Ё7^-2)®1 + ^» = °5
!'г + (/Г£7^-2)у» + «з=°:
(4.5ф
у-м (F ~ 2) Уп-i + Уп = о-
При шарнирном опирании стержня у0 = 0 и уп = 0. Поэтому
в системе (4.53) число неизвестных равно числу уравнений.
328
Наименьшее ненулевое значение критической силы определяется
из условия равенства нулю определителя системы (4.53). Точность
расчета тем выше, чем меньше шаг. Точность также можно увеличить,
если использовать формулы для конечных разностей высшего порядка.
20.4. Понятие об устойчивости систем при действии нагрузки,
зависящей от нескольких параметров
Загружение, при котором все нагрузки, действующие на систему,
изменяются пропорционально одному параметру, называют однопара-
метрическим. При таком загружении расчет на устойчивость состоит
в определении критического значения этого параметра, который
полностью характеризует всю систему сил в критическом состоянии.
Могут быть такие загружения конструкций, при которых отдель-
ные силы или группы сил не связаны между собой зависимостями. Та-
кие загружения называются многопараметрическими. К ним можно
отнести, например, действие постоянной и многих временных нагру-
зок. В этом случае задача об определении критического загружения
значительно усложняется: надо исследовать устойчивость при всех
возможных сочетаниях нагрузок и определить невыгоднейшее в смысле
устойчивости. Каждому i-му сочетанию нагрузок будет соответство-
вать свой параметр Ft.
Разрешающее уравнение будет представлять собой уравнение
n-й степени относительно параметров Flt F2t ..., Fn и описывать соче-
тания нагрузок в критических состояниях системы. В n-мерном про-
странстве параметров нагрузки это уравнение определяет некоторую
многомерную поверхность, ограничивающую область устойчивости.
Каждому сочетанию нагрузок соответствует определенная точка
этого пространства. Точки, лежащие внутри этой области, соответ-
ствуют тем сочетаниям нагрузок, при которых система устойчива, а
точки, находящиеся за пределами области, — тем состояниям нагру-
зок, при которых система неустойчива. Пограничную поверхность
образуют точки, соответствующие критическим состояниям системы.
Возможны случаи вырождения поверхности в плоскость п-мерного
пространства.
Для пояснений обратимся к про-
стому случаю — двухпараметриче-
ской нагрузке.
В этом случае разрешающее
уравнение будет второй степени.
Каждому сочетанию нагрузок соот-
ветствует точка F на плоскости
параметров Ft и F2 (рис. 4.21). Точ-
ки внутри этой области соответ-
ствуют тем сочетаниям Ft и F2t
при которых система устойчива.
Точки за пределами области харак-
теризуют сочетания нагрузок при
неустойчивом состоянии системы.
329
Кривая» разграничивающая области, называется границей области
устойчивых состояний. Точки, лежащие на этой кривой, определяют
критические сочетания нагрузок. П. Ф. Папковичем доказана теорема
о том, что область устойчивых состояний всегда ограничена выпук-
лой кривой. Из этой теоремы следует практически важное заклю-
чение о том, что в приближенных решениях пограничную поверх-
ность можно заменить плоскостью. При этом существенным яв-
ляется то, что получающаяся погрешность идет в запас устойчи-
вости.
Это наглядно представлено на рисунке 4.21, иллюстрирующем
двухпараметрическую задачу] нелинейная граница устойчивых состоя-
ний заменена прямой А—В.
Точке А соответствует критическое значение силы Ft при Fa == О,
а точке В — потеря устойчивости при Ft = 0. Точки на границе
устойчивых состояний можно получить, принимая конкретные
отношения Fj/F2t тем самым сводя задачу к однопараметриче-
ской.
Вопросы для самоконтроля
1. Чем объясняется приближенное! ь ь»ер; «аических меюдов?
2. Какие требования предъявляются к функции, описывающей форму потёри
устойчивости в методах Ритца и Тимошенко? В методе Бубнова — Га-
леркина?
3. Как в методе Ритца приходят к алгебраическим уравнениям относительно
параметров at?
4. В чем отличие метода Тимошенко от метода Ритца?
5. От чего зависит количество решений характеристического уравнения
для определения критической силы?
6. Как можно повысить точность решения методами Ритца и Тимошенко?
7. Как в методе Бубнова—Галеркина приходят к алгебраическим уравне-
ниям относительно параметров а(?
8. Составляется ли уравнение работ в методе Бубнова — Галеркина?
9. Что больше — истинная критическая сила или критическая сила, полу-
ченная одним из энергетических методов?
10. В каком виде задают форму потери устойчивости при использовании
метода конечных разностей?
11. От чего аависит количество уравнений метода конечных разностей?
12. Как можно .увеличить точность метода конечных разностей?
13. Что больше— критическая сила, полученная методом конечных разно-
стей, или истинная критическая сила?
14. Какое загружение называют многопараметрическим?
15. В чем сложность расчета иа устойчивость при многопараметрических
нагрузках?
16. Как используется теорема Папковича для облегчения расчета на устой-
чивость многопараметрических систем?
Глава 21
БОЛЕЕ СЛОЖНЫЕ СЛУЧАИ ИССЛЕДОВАНИЯ
УСТОЙЧИВОСТИ СЖАТЫХ СТЕРЖНЕЙ
21.1. Устойчивость сжато-изогнутого стержня
при наличии поперечных нагрузок
Рассмотрим прямолинейный стержень О—Л постоянной жестко-
сти, подверженный действию поперечных нагрузок (сосредоточенные
силы Flt F2, ... и равномерно распределенная нагрука q), продольной
сжимающей силы F, а также моментов Л40, Мд и условных поперечных
сил ₽0, Ra (рис. 4.22). При потере устойчивости стержень изгибается
и перемещается, как показано на рисунке. Исходное положение стерж-
ня на этом рисунке показано штриховой линией.
Запишем изгибающий момент для любого сечения х в деформиро-
ванном состоянии стержня. Беря сумму моментов левых сил, полу-
чаем
Ж = Мо + Rox -J- £(^ — yj — £ Ft (х — а{) — qx*/2.
Дифференциальное уравнение изогнутой оси Ely1' = —М в выраже-
нии через начальные параметры и при обозначении (4.8)
У" + п*у = _ + R.X - Fyt - ’v - X F‘ <х - fl<>] • <4 М>
Полное решение этого уравнения имеет вид
У = G cosпх 4- С2 sin пх 4- ус-(Мо 4- Rex) 4-
+ F‘—— sin n (* — °i)l — (1 — ~ cos nx)
(4.55)
В (4.55) первые два слагаемых представляют собой общее решение
однородного уравнения у" 4- п2у = 0, а остальные — частное реше-
ние неоднородного уравнения (4.54).
Произвольные постоянные Ct
граничных условий: при х = 0 у —
— Уъ У1 = По первому условию
получаем С. = , из вто-
рого следует Сг = 1 (©„+ =
=-Ие.+-£)-
Подставив Сл и С2 в (4.55),
после несложных преобразований
получаем выражение прогибов в
Рис. 4.22
331
произвольном сечении сжато-изогнутого стержня в форме метода
начальных параметров:
У=у» + е. + 7<cos» + £ рт2- х) +
+ У. Fl («(х — at) — sin л (х — a()J 4- [— + cos пх— 1) (4.56)
Выражение прогиба (4.56) отличается от ранее полученного (4.31)
слагаемым, учитывающим влияние поперечной нагрузки:
У = л? S F, (л (х — at} — sin л (х — с()] + + cos пх— 1).
(4.57)
Последовательным дифференцированием по х зависимости (4.56)
получаем формулы для углов поворота, изгибающих моментов и попе-
речных сил. Угол поворота
€> = у1 — 60 cos пх — п sin пх 4- (cos пх — 1) 4- в» (4.58)
где
0 = Jy FJ1 — cos л (х— at)] 4- (пх — sin пх).
Изгибающий момент
М = Ely" = —EI®on sin пх — Мо cos пх — Rc 4- М, (4.59)
где
М = — 'п ^F,sin п(х — at) 4- ^2(cos лх— I).
Условная поперечная сила в сечении х
R ~ — — 0OF cos пх 4- MQn sin пх — RQ cos пх 4- Rt (4.60)
где
R = — У] F, cos n(x — a{) — ~ sin nx.
В приведенных зависимостях под знаком суммы стоят силы, находя-
щиеся левее сечения х.
Полученные уравнения (4.56), (4.58), (4.59), (4.60) позволяют выра-
вить граничные условия задачи через начальные параметры. Условие
равенства нулю определителя, составленного из коэффициентов при на-
чал ьных параметрах, дает уравнение для определения критических сил.
21.2. Устойчивость прямых стержней
при действии сжимающих сил, приложенных в пролете
Рассмотрим стержень постоянного сечения, шарнирно закреплен-
ный с двух сторон и загруженный продольной силой F, приложенной
между опорами А и В. При потере устойчивости ось стержня искри-
332
вится, появятся горизонтальные реакции опор
Ra = —Rb — F^. Стержень в изогнутом со-
стоянии и схема сил, действующих на него, пока-
ваны на рис. 4.23.
Для определения критического значения
сжимающей силы используем статический метод.
При этом будем рассматривать два участка стер-
жня! от нижней опоры до точки приложения
силы и от силы до верхней опоры.
Первый участок: 0 < хг с а. Изгибаю-
щий момент в произвольном сечении этого участ.
ка М = Fyv — F&xv
Запишем дифференциальное уравнение рав-
новесия: Ely" = —М (знак «минус», так как
кривизна отрицательная. См. рис. 4.11), или
У1 п*Уг = л2 у » где п = . Решение этого
Рис. 4.23
дифференциал ь ного
уравнения имеет вид
— Сх sin пхг 4- Cfl cos nxi 4- у* xv
Используя граничное условие на опоре А (при xt = 0, уг = 0), полу-
чаем С2 = 0. Тогда рассматриваемое решение приобретает вид
У1 = Сг sin nxt 4- у1
Запишем первую производную прогиба по xti
= « Q cos nxj 4- 7 •
Эти выражения запишем для сечения хх = <п
Уа = С1 sin па + уа У; уа = nQ cos nc 4- 7 • (4.61) (4.62)
Из (4.61) следует sin ла (4.63)
Тогда (4.62) получает вид
~ sin ла = пС, cos па 4- Ci -j_a • (4.64)
333
Второй участок: 0 < х2 < б. Аналогично имеем: изгибающий
момент Af = FyX2, дифференциальное уравнение равновесия г/” =
» —ля х* и его решение
Ул-----п i---jp Т сз»
/
У 2 = -П* у + Cjj*8 + ^4‘
Г|о граничным условиям на опоре В (х2 = 0, р2 = 0) получаем С4 =0.
Тогда
!/» = —п2 Г -£-+ £»*••
На границе участков, при х2 = b
Уъ = Уа = ~пгУ-?^ + СаЬ- (4.65)
^ = _л»&>-£ + С,. (4.66)
Из (4.65) получаем
У а = Са • (4.67)
V
Тогда
yl = ca - С, . (4.68)
1 + I 6
Используем условия сопряжения на границе участков уа = уь и
уа = —у'ь. Учитывая (4.63), (4.64), а также (4.67) и (4.68), из этих усло-
вий получаем систему однородных алгебраических уравнений относи-
тельно произвольных постоянных Сх и С3:
Qsinnajl 4--у- —Csy- = 0;
ct + п £ cos па) + С,у Л — ------±L_ \ =0.
\ 1 + Т V /
Приравняем определитель этой системы к нулю. Раскрыв его,
получаем следующее уравнение устойчивости:
Ш (b//)3Z3 — 1 — d/Z ’ (4*69)
Уравнение решается путем подбора при заданном положении силы
(afb) и по вычисленному параметру п определяется критическая сила
Fcr = nEl.
334
Если по длине стержня одновре-
менно приложено несколько сил,
задача определения критической
нагрузки (критического параметра)
значительно усложняется, так как
с каждой силой увеличивается чис-
ло дифференциальных уравнений
(а следовательно, и порядок опре-
делителя) на два.
Рассмотрим одно из таких реше-
ний, основанное на условном пере-
носе всех сил, действующих по дли-
не, на конец стержня. Для стойки,
жестко защемленной с одной сторо-
ны и свободной с другой, этот спо-
соб, называемый способом сопостав-
ления критических сил, дает доста-
тке. 4.24
Рис. 4.25
точную точность.
Пусть стойка, показанная на рис. 4.24, а, загружена силой Fcr(x),
•приложенной на расстоянии х от опоры. На величину критической
силы верхняя часть стойки не влияет, поэтому можно записать
Fcrix} =
п*Е1
4х« ’
(4-70)
Теперь перенесем эту силу на конец стойки. Очевидно, что крити-
ческая сила при таком за гружении меньше критической силы, при-
ложенной на расстоянии х от опоры, в некоторое число — р (х) — раз
(рис. 4.24, б)'. Следовательно, для обеспечения условия равноустойчи-
вости этих двух загружений силу при переносе в верхнюю точку надо
умножить на р (х):
li(x)fcrM = -^L. (4.71)
Подставляя (4.70) в (4.71), получаем значение поправочного коэф-
фициента
р (х) = х2//2.
В общем случае действия многих сосредоточенных и распределен-
ных сил к концу стержня прикладывают приведенную нагрузку —
сосредоточенную силу, равную сумме всех сил, умноженных на свои
поправочные коэффициенты. Эту силу приравнивают к эйлеровой’кри-
тической силе и получают уравнение для определения критического
параметра, а по нему и критической силы:
F q = U,) F, + J ц(х) q, dx = (4.72)
Рассмотренное приближенное решение применим к практически
важной задаче — определению критической силы с учетом массы
стержня. Для стойки постоянного сечения, показанной на рис. 4.25,
335
определим критическую нагрузку способом сопоставления критиче-
ских сил.
Заменим загружение стойки сосредоточенной силой F и равно-
мерно распределенной нагрузкой родной приведенной сосредоточенной
силой
i
Fel = F + $-£qdx.
О
Приравняем эту силу критической силе по Эйлеру:
р , Г х8 п*Е1
+ J -рг Я «* — •
Из полученного равенства определяем критическую силу с учетом
собственного веса:
г. n*EI qi tA -о.
------Т- (4-73)
21.3. Устойчивость прямых стержней
со ступенчато изменяющейся жесткостью
при действии нескольких сил, приложенных по длине стержня
Рассмотрим практически важный случай, когда прямолинейный
стержень можно разбить по длине на такие участки, в пределах которых
жесткость сечения постоянна, а внешние продольные силы приклады-
ваются на границах этих участков. Следовательно, границами участков
будем считать те сечения, в которых приложена внешняя сила или
скачкообразно изменяется жесткость. Тогда уравнения продольного
изгиба в форме метода начальных параметров (4.31)—(4.33) можно
записать для каждого участка при начале координат, совпадающем
с началом участка. При этом начальными параметрами считаются
величины, определяемые для начальных сечений каждого участка.
В силу непрерывности оси стержня на границах участков выпол-
няются некоторые общие для соседних участков условия. Они и прини-
маются в качестве граничных условий. Подчиняя этим условиям урав-
нения изгиба для каждый пары участков, получим систему однород-
ных алгебраических уравнений относительно начальных параметров.
Раскрывая определитель и приравнивая его к нулю, получаем урав-
нение устойчивости, из которого определяется критический параметр,
а по нему и критические силы.
Обратимся к примеру. Рассмотрим двухступенчатый стержень, по-
казанный на рис. 4.26. Стержень имеет два участка, в пределах кото-
рых жесткости сечений постоянны. Он сжат продольными силами
Л и приложенными соответственно к верхнему концу и на границе
участков. Назовем верхний участок первым, а нижний — вторым.
Длины участков и жесткости обозначим £7Х, £/2. Рассмотрим
каждый участок отдельно.
336
Первый участок. Начало координат удобно
поместить s верхнем конце участка, т. е. в конце
стержня в искривленном состоянии. Ось jq на-
правлена вниз, аось^ — влево. Из четырех на-
чальных параметров — у01> 0Oi, 7И01 и Q01— нену-
левым будет только угол поворота 0О1.
По длине первого участка действует сжимаю-
щая сила поэтому параметр нагрузки по (4.8)
для этого участка
Основные уравнения метода начальных пара-
метров (4.31)—(4.33) для верхнего участка при
данных начальных параметрах запишутся в сле-
дующем виде:
Рис. 4.26
i/i = ©oi
sin ntXi в
$1 = у{ = Ццсозл^;
= E^y'i = —0oln1£Z1sin лрср
Второй участок. Начало координат для этого участка поместим
в нижнем конце стержня, ось х2 направим вверх, а ось у2 — вправо.
Начальные параметры для второго участка будут нулевыми: у02 = О,
0оа = О, Q02 = 0, кроме изгибающего момента М02.
Параметр нагрузки для нижнего участка, сжимаемого силом
E/s
а основные уравнения для второго участка
и — ^02 1 — COSn2X2 .
--- Г.1 2 »
п2
л — Л102 sin л2г2 в
2“ £/2 ъ ’
Л4а = M02cos п2х2.
Итак, мы получили уравнения с неизвестными начальными пара-
метрами 0М и /Иоа.
На границе участков углы поворота, полученные из уравнений
для первого и второго участков, равны: 0j = 02.
Второе граничное условие получим из условия равенства изгибаю-
щих моментов на границе участков: = Л4а.
При принятом направлении координатных осей (см. рис. 4.26)
изгибающие моменты в общем сечении на верхнем участке Л4Т =
= — Е1ху\9 на нижнем М2 = El^y”. Следовательно, второе гранич-
ное условие /и я смежных участков имеет вид: при х2 e l2, xt =
—Е/зМ—Е/яУг.
337
Подчиняя граничным условиям основные уравнения, получаем
систему линейных алгебраических уравнений относительно неизвест-
ных начальных параметров в01 и Л4оа:
eot cos л,/, — = 0;
QwElifii sin nxlt — Afoa cos n2Za = 0.
Эта система имеет ненулевые решения только в том случае, когда
ее определитель равен нулю. Используем это условие для получения
уравнения устойчивости:
cos пх1х
f/jHi sin fijZj
si п ла/а
£/«па
—COSn2Z2
—cos n1Z1 • cos n2Za + — sin пЛ • sin n2l2 = 0.
£/a Ла
После несложных преобразований получаем следующее трансцендент-
ное уравнение:
= 0,
(4.74)
Полученное уравнение устойчивости можно решить путем после-
довательных приближений при доданных соотношениях сил и жестко-
стей сечений на участках. Рассмотрим частный случай, когда жест-
кость стойки постоянна по длине. Тогда
1- n2= _fj_. n5
£/t ~ *• 1 £1 • n‘
Е/ • 4 - F, •
Уравнение устойчивости (4.74) в этом случае упрощается:
Критический параметр определяется подбором при заданном отно-
шении сил и длин участков. Например, при /j = /2 = Z/2 и F2 == 3ft,
na/ni = 2 уравнение устойчивости имеет вид tgnt • tg пх1 = 2. Это
уравнение можно записать так: 4 tg2n, =; 2» или 2 tg пх j = V'2,
откуда «J = 1,231 н тогда критическая сила/’rr = (пг1)2-~= 1,515^.
Расчеты показывают, что наименьшая критическая сила будет при
форме потери устойчивости, показанной на рис. 4.26 штриховой
линией.
21.4. Стержни с непрерывно изменяющейся жесткостью
Рассмотрим стержень плавно-переменного сечения. Определим
критическую силу для такого стержня при шарнирном закреплении его
338
концов (рис. 4.27) и заданном законе
изменения моментов инерции по длине,
например.
1 — y sin —
где /0 — момент инерции опорного се-
чения.
Для решения задачи применим энер-
гетический метод. Запишем выражение
полной энергии системы при переходе ее
из смежного состояния в исходное. Рабо-
та внутренних сил с учетом только изгиба
Рис. 4.27
о о
Работу внешних сил W = —F& выразим через функцию прогиба
и ее производные. По рис. 4.27, б dA = dx (1 — cos 0). Разлагая
cos 0 в ряд и удерживая лишь малые второго порядка, получаем
dA = -5- dx, что с учетом предпосылки от малости деформаций
(6 = tgO = у') можно записать так: dA = -|- (/)2dx. Проинтегриро-
i
вав по всей длине стержня, имеем A = ~^(/)2dx. Окончательно
6
работа внешних сил получает такое выражение.*
W-----|f J(/)2dx.
О
Теперь полная энергия может быть представлена следующим образом!
= 4 f EI, («/')2 dx - 4 ((у'У dx.
о о
Так как стержень шарнирно закреплен, уравнение продольного изгиба
имеет вид = 0, откуда у" = —~. С учетом этого
выражение полной энергии можно упростить:
Utot * [ 2 f Е1К dx 2 f dx]
о о
339
и при заданном законе изменения юомснтов инерции еаписать в таком
виде!
U,cl = F(1 -|sin-^)y*dx-| f(/)Mx]. (4.75)
Пользуясь методом Ритца, вададимся уравнением прогибов (4.43).
Примем такие функции (х), которые соответствовали бы возможны м
формам потери устойчивости прямого шарнирно закрепленного стерж-
ня постоянной жесткости!
/x(x)=sin-^-, ft (X) = Sin , f,(x) = sin-^-...
Функцию f2(x) исключаем из рассмотрения как соответствующую
кососимметричной форме искривления оси — в нашем примере выпу-
чивание стержня симметрично относительно середины длины. Огра-
ничиваясь двумя слагаемыми ряда (4.43), уравнение прогибов полу-
чаем в виде
у = a, sin -- + а, sin . (4.76)
Продифференцируем (4.76) no xt
/ = Ci cos у а3 cos (4.77)
Подставив (4.76) и (4.77) в выражение полной энергии (4.75) и обозначив
Fl*
г =
(4-78)
после интегрирования получаем
иш = т [0,75г (0,2878а;- + 0,3363а* + 0,084880^ —
— 0,25л2 (aj 4- 9а2)).
Записываем условия (4.44) = 0, ® 0 и, раскрыв их, полу-
чаем систему алгебраических уравнений относительно двух неопре-
деленных параметров — ах и a8i
(0,2878г — 4,935)at 4- 0,04244га8 « 0;
0,04244га, 4- (0,3363г — 44,41)а8 = 0.
Приравнивая к нулю определитель этой системы
0,2878г — 4,935 0,04244г
0,04244г 0,3363г — 44,41
1-0.
получаем характеристическое уравнение
0,09438г2 — 14,44г 4- 219,2 = 0.
340
Наименьший корень этого квадрат-
ного уравнения z = 17,1. Учитывая обоз-
начение (4.78), определяем критическую
силу
Far = 17,1Е/0/Р. (4.79)
Напомним, что полученное значение
критической силы является приближен-
ным. Для получения точного решения
можно воспользоваться статическим ме-
тодом. При этом дифференциальное урав-
нение равновесия будет с переменными
коэффициентами.
21.5. Устойчивость стержня,
связанного с упругим основанием
Рассмотрим такое однородное упру-
Рис. 4.28
(4.80)
гое основание, реакция которого про-
порциональна прогибам, т. е. основание, подчиняющееся гипотезе
Винклера
Q = ~РУ.
где 0 — коэффициент, характеризующий упругие свойства основания.
Он равен величине реакции, приходящейся на единицу длины стержня
при единичном прогибе.
На рис. 4.28 показан сжатый стержень постоянного сечения, шар-
нирно закрепленный с двух сторон и находящийся на упругом основа-
нии. При всех значениях сжимающей силы, меньших критического,
стержень испытывает только осевое сжатие. В критическом же состоя-
нии (при искривлении оси) появляется боковое воздействие — реак-
ция упругого основания. Итак, в отклоненном состоянии стержень
испытывает два внешних силовых воздействия: продольную силу F
и поперечную нагрузку q.
Дифференциальное уравнение изгиба при такой расчетной схеме
имеет вид
Ely" = — Fy + MQ, (4.81)
где М„ — изгибающий момент реакции упругого основания.
Перейдем к одной переменной — у. Для этого дважды продиффе-
ренцируем (4.81) по х Учитывая, чтоМ^ = ? = —fty, a/i2 = ^,
приходим к дифференциальному уравнению четвертого порядка:
J/IV + чгу" + -^- = 0. (4.82)
Кривую прогибов представим в форме тригонометрического ряда
У = sin Y + sin 4- • - • = ak sin
(4.83)
341
Для стержня с шарнирно закрепленными концами каждый член
ряда удовлетворяет граничным условиям на концах, так как при любой
синусоиде прогибы и изгибающие моменты на опорах равны нулю:
при х «=в 0 у0 = 0, ро = 0; при х =1 yi = 0, у! = 0.
Первому члену ряда соответствует кривая /, показанная на
рис. 4.28, второму — кривая // (на рисунке показана сплошной ли-
нией), третьему — кривая /// и т. д. Коэффициенты g2, а3, ...»
являются амплитудами соответственно первой, второй, третьей и т. д.
синусоид; k — число полуволн синусоид.
Дифференцируя (4.83) по х, получаем
у” = £ ak (Ал//)2 sin (faix/l);
k^i
yIV — X (Ал//)4 sin (Алх/Z).
ftsasl
Полученные производные, а также прогиб (по (4.83)) подставим в
уравнение (4.82):
X [а„ (kn/l)* — akn2 (kn/l)2 + a*₽/(EZ)l si n (knx/l) = 0. (4.84)
ft=J
Так как коэффициенты аь произвольны, то сумма, стоящая в левой
части (4.84), равна нулю только в том случае, когда каждый член
этой суммы равен нулю.
Имея в виду, что в изогнутом состоянии стержня sin (Алх//) =#0,
получаем (Ал//)4 — п2 (Ал//)2 + Р /(Е/) == 0. откуда n2 = (Ал//)2 +
+ £/(Е/)[//(Ал)]2. Выделим выражение эйлеровой критической силы
для основного случая: Fc = л2Е//Г и обозначим у « 0/4/(л4Е/).
Тогда с учетом (4.8) окончательно получаем
^ = Л(*2 + ?/*2)- И-85)
По (4.85) видим, что наличие винклеровского упругого основания
повышает критическую силу, а ее значение зависит от k — числа
полуволн синусоиды. Поэтому надо предварительно найти то значе-
ние А, которое соответствует наименьшей критической силе.
• Для определения области значений А, среди которых находится ис-
комое, воспользуемся условием минимума критической силы, пред-
положив при этом, что А изменяется непрерывно: = Г, х
X ^2А----j = 0, откуда А = у1/4.
Зная А, по формуле (4.85) находим наименьшее значение крити-
ческой силы.
Так как мы предположили, что А изменяется непрерывно, то в рас-
чете это число может получиться дробным. Число же полуволн сину-
соиды целое. В таких случаях критическую силу надо определить два
раза — при каждом из тех целых чисел А, между которыми нахо-
дится вычисленное, и принять меньшую. Например, если у =6,
342
то fe = 1,56, т. е. J <Л < 2, Определяем критическую силу по (4.85)1
при k = 1 F„ = re(l + y) = 7fc, при Л = 2 f., = re(2» + 4) =
= 5,5Fe. Окончательно F„ 5,5Fe.
21.6. Влияние деформации сдвига на критическую силу
Для оценки влияния сдвигов на устойчивость будем составлять
уравнение продольного изгиба с учетом изгибающего момента и попе
речной силы. На основании закона независимости действия сил про-
гиб можно представить как сумму прогибов от изгиба (у,„) и от сдвига
(у9): У == Ут + Уч- Следовательно, вторая производная прогибов
также может быть представлена как сумма?
У" = ут + У'- К-86)
Как известно,
У;—S’- (4-87)
Для записи составляющей, учитывающей влияние поперечной
силы, введем в рассмотрение угол сдвига
V GA *
где Q — поперечная сила; G — модуль упругости при сдвиге; А —
площадь поперечного сечения; р — коэффициент, учитывающий
неравномерность распределения касательных напряжений но сечению.
Например, для прямоугольного сечения р = 1,2, для круглого
р = 1,11, для двутаврового р = 2,5. Имея в виду, что производная
прогибов, вызванных поперечной силой, равна углу сдвига —
Уя = У = pQ/(GXI),
получаем выражение кривизны, обусловленной сдвигом!
уа = У* = Р<?7(йЛ) = рЛГ/(СЛ). (4.88)
Ограничимся рассмотрением основного случая—стержня, шарнир-
но закрепленного с двух сторон (рис. 4.12, а). В этом случае внутрен-
ними усилиями будут изгибающий момент М = —Fy и поперечная
сила Q = Л4' = —Fy'.
Полная кривизна по (4.86) с учетом (4.87) и (4.88)
у" = —Fy/(EF) + yFtfUCA), откуда Ely" = —
По аналогии с (4.8) обозначим
П2 =______
о ElU-pF/(GA)l *
Тогда уравнение продольного изгиба о учетом сдвига окончательно
получает вид у” + nJ у = 0, а его интеграл у — Сх sin пох 4-
+ Cpos ПдХ. Для шарнирно вакрепленного стержня произвольные
(4.89)
343
постоянные Ct и С2 определим по следующим граничным условиям!
Ус = У1 ~ 0- Из первого условия получаем С2 = 0, из второго
sin nql = 0. Наименьшее значение параметра nql = л, т. е. п0 = л//.
Учитывая обозначение (4.89), получаем зависимость
л2 __ F
Р — Е111 - pF/(GЛ)) »
или, выделив эйлерову критическую силу, соответствующую основ-
ному случаю закрепления,— Fe = rfEII?t имеем v _ . = Fe,
1
откуда
F — Fe -
6r l-pFe/(O4) ’
(4.90)
Из формулы (4.90) видим, что при учете сдвигов критическая сила
будет меньше эйлеровой, т. е. неучет деформаций сдвига повышает
критическую силу. При этом влияние сдвигов на величину критической
силы тем больше, чем меньше жесткость сечения на сдвиг.
Для большинства стержней сплошного сечения, изготовленных
из изотропных материалов, значение ^Fe/{GA) очень мало по сравнению
с единицей. Поэтому влияние сдвигов при расчете таких стержней на
устойчивость можно не учитывать. Например, если для стального
прокатного двутавра принять G = 8 • 104 МПа, ov = 200 МПа и
|х = 2,5, то даже в невыгоднейшем случае — при afr = Fe/A = oq—
= 200 МПа — критическая сила F^ = Fe/(1 4- 5/800). Как видим,
поправка на учет сдвигов весьма мала. Важно отметить, что для состав-
ных стержней, а также стержней, выполненных из неоднородных мате-
риалов, и при малой жесткости на сдвиг влияние сдвига может оказа-
ться существенным.
21.7. Устойчивость составных стержней
В сквозных стержнях, состоящих из отдельных ветвей, соединен-
ных между собой связевыми устройствами (решетками, планками,
шпонками и т. д.), поперечные силы почти полностью воспринимаются
этими устройствами. В критическом состоянии деформация соедини-
Рис. 4.29
тельных элементов, вызванная сдви-
гающими силами, может создать до-
полнительную деформацию всего
стержня, а значит, снизить крити-
ческую силу. Поэтому в расчетах со-
ставных стержней на устойчивость
сдвигами пренебрегать нельзя.
Рассмотрим устойчивость цент-
рально-сжатого стержня, состояще-
го из двух ветвей, соединенных ме-
жду собой решеткой, образованной
из раскосов и стоек. Верхний конец
стержня свободен, нижний —жесг-
ко закреплен (рис. 4.29, а, б).
344
При нагрузке, меньшей критической, ветви составного стержня
испытывают лишь осевое сжатие, а соединительные элементы не ра-
ботают. В критическом состоянии, когда возникают условия изгиба
стержня, одна ветвь удлиняется, другая укорачивается; связевые
устройства воспринимают поперечную силу Q.
Цля определения критических сил используем энергетический ме-
тод. При потере устойчивости ось стержня изогнется, точка прило-
жения силы F переместится на величину А (рис. 4.29, б).
Зададимся функцией прогибов в виде у = а^\—cos-^-j. Она
удовлетворяет граничным условиям данной расчетной схемы: при
х = 0 уп = 0, = 0; при х — I М — О или у* =» 0.
Перемещение А можно записать так:
i i
Л • f / М J ЛЯПЯ f • 2 J вЯЯЯ
А = 2 J {.У ) dx — J sin 2/ dx .
о о
Внешняя сила F на перемещении А из смежного состояния в ис
ходное выполнит работу W = —FA = — F .
Работа внутренних сил складывается из работы изгибающего мо-
мента, который воспринимается ветвями, и работы поперечной силы,
воспринимаемой решеткой.
Изгибающий момент и поперечную силу можно выразить через про-
дольные усилия в ветвях стержня и элементах решетки. Тогда работа
внутренних сил будет представлена тремя суммами, взятыми по всем
панелям ветви, по всем стойкам и раскосам (индексы соответственно
«в», «с» и «р»)>
U V , у , V
~ + Li 2£ЛС + LiiEA/
в с р
где с — расстояние между узлами решетки (панель); h — расстояние
между осями ветвей; d — длина раскоса (рис. 4.27, в); EABt EACt
ЕАр — жесткости сечений ветви, стойки, раскоса.
Усилия в каждой панели ветви (предполагая, что панель остается
прямой) можно определить как момент относительно соответствующей
моментной точки, деленный на расстояние между ветвями (см.
рис. 4.29, о, 6)1
N _М,_ F{a-y) Fa ях_
h — h г h cos 21
Усилия в стойках (Nc) и раскосах (Np) решетки зависят от по-
перечной силы. Допуская, что соединения стержней решетки шар-
нирные, эти усилия можно записать так:
N.= ^Q=+M’ =
л/ - d . р ол d • лх
Np Q h F~2F h sin“2f
345
Итак, работа внутренних сил
/ / С2 d'2 Я* С I V Г2 °2n* е:г,2 ЯХ Л 1
U =XР^А, + LF МП "Й 2ЕА. +
+ W — isin4— -J—
+ 2j DP h’ SItI И EAp '
p
Из условия U 4- VZ = 0 получаем выражение критической силы
F— Ч (-S Т+¥ s Т *+
р
где х — координата моментной точки для определения усилиС! в
поясе каждой панели.
Как видно из (4.91), критическая сила тем больше, чем больше
жесткость решетки.
Получим формулу критической силы для частного, практически
важного случая, когда сечения ветвей и элементов решетки не меня-
ются по длине стержня.
В (4.91) вынесем из-под знаков суммы постоянные площади. Имея
в виду, что момент инерции сечения ветвей относительно минимальной
оси стержня / = 4" ^е^2»
+'-А:2”’т)Р'
р
Здесь суммы распространяются на все панели по длине стержня.
Разделив все члены на длину панели с и умножив на dx, заменим сум-
мирование интегрированием.
При этом
i I
J sin2-^-dx = J cos®-^- dx = •
о о
Получаем общую формулу для различные способов закрепления
стержня:
Fa = F.[i + £ (4-92)
Здесь Fe = л2Е//(р/)2 — эйлерова критическая сила, вычисленная
для сплошного стержня, имеющего момент инерции / - 0,5Ди ц —
коэффициент свободной длины; а — угол между раскосом и стойкой
(рис. 4.29, а).
34b
Отметим, что, как следует из (4.92), критическая сила в основном
еависит от жесткостей раскосов, а не стоек.
Приведем без вывода выражение критической силы для составных
стержней с соединительными планками (рис. 4.28, г). В том случае,
когда жесткость планки можно считать бесконечно большой по
сравнению с жесткостью ветви, критическая сила определяется по
формуле
Fcr = Fjl + nV/(24/2) • ///в]‘\
где с — расстояние между осями планок; I — момент инерции всего
сечения; /в — момент инерции ветви.
Если моменты инерции выразить через радиусы инерции и пло-
щади сечения и обозначить гибкости: X — всего стержня, а Х8 —
ветви, то приведенная выше формула получит вид
Fe.-F.U +0,83^/Ха)-1-
Здесь X = X, = pc/io> i = И ПА, i, — VI,/А..
В практических расчетах вместо коэффициента 0,83 принимают
единицу, и критическую силу определяют по следующей зависимости:
Fct = F/2/(X2 + x:). (4.93)
21.8. Устойчивость стержней
с учетом упруголластической работы материала
Метод Эйлера основан на допущении об идеально упругой работе
материала. Предполагается, что при критической нагрузке напряже-
ния в материале не превышают предела пропорциональности или близ-
кого к нему предела упругости. Это допущение хорошо согласуется
с опытными данными только для стержней с достаточно большой гиб-
костью.
В строительных конструкциях часто встречаются стержни с отно-
сительно малой гибкостью. В таких стержнях при потере устойчивости
напряжения могут оказаться выше предела упругости. Тогда формула
Эйлера дает завышенные значения критических сил.
В курсе сопротивления материалов рассматривались пределы при-
менимости формулы Эйлера и некоторые особенности потери устойчи-
вости прямолинейных сжатых стержней при напряжениях, больших
предела упругости. Там же приведена эмпирическая формула Ясин-
ского для определения критических напряжений осг в зависимости
от гибкости стержня и материала, характеризуемого постоянными
а и Ь:
осг = а — 6Х,
где X— гибкость стержня.
Аналитическое исследование устойчивости упругопластической
системы может быть проведено динамическим методом, как наиболее
общим. Однако решение даже простейших задач в этом случае, связано
G большими математическими трудностями.
347
Рис. 4.30
При изучении устойчивости за пре-
делом упругости исходят из особенно-
стей работы материала в упругопласти-
ческой стадии. Как обычно, предпола-
гается, что потеря устойчивости выра-
жается появлением смежных форм
равновесия при неизменной нагрузке.
Свойства материала при сжатии ха-
рактеризуются некоторой опытной
диаграммой о — е.
Обычно принимают такой вид диаг-
раммы: два линейных участка—до
предела упругости и после предела
текучести — и один нелинейный — па-
рабола — между этими пределами.
Предел текучести считается предель-
ным напряжением при сжатии. На
рис. 4.30 показана такая диаграмма; масштабы ее несколько искажены
для наглядности.
Допустим, что потеря устойчивости происходит при некоторых
напряжениях о0, больших предела упругости, но меньших предела
текучести. Выпучивание стержня связано с дополнительными изгиб-
ными напряжениями, которые, как известно, являются сжимающими
на вогнутой части и растягивающими на выпуклой. Следовательно,
волокна на внутренней поверхности стержня будут догружаться, а
на вогнутой разгружаться.
При этом приращение сжимающих напряжений во внутренних во-
локнах может быть определено при помощи диаграммы сжатия
(рис. 4.30).*
До = Де .
de
Величина представляет собой тангенс угла наклона касатель-
ной, проведенной к кривой диаграммы напряжений в данной точке
с ординатой оп, и называется касательным модулем:
Очевидно, что Et = Е при о0 < он и Е, = 0 при о0 = оу.
На выпуклой поверхности стержня волокна испытывают разгруз-
ку, которая, как известно, характеризуется линейным законом (на
рис. 4.30 прямая разгрузки параллельна прямой упругого загружения).
Здесь приращение напряжений отрицательно!
—До = —ДеЕ,
где Е — модуль упругости (модуль Юнга).
В двух участках сечения зависимость между напряжениями и де-
формациями характеризуется различными угловыми коэффициентами.
По диаграмме видно, что скорость разгрузки больше скорости догру-
34В
жения. Поэтому эпюра напряжений в сечении имеет перелом между
областями разгрузки и догружения. Положение точки перелома
зависит от формы поперечного сечения.
Исследования показали, что, если заменить модуль Юнга некоторым
приведенным модулем Eef, то для расчетов на устойчивость за преде-
лом упругости можно использовать все зависимости, полученные
методом Эйлера для упругой системы. Этот модуль является физиче-
ской характеристикой всего сечения и зависит не только от материала,
но и от формы сечения. Например, для прямоугольного сечения
Е^^4ЕЕ,/(УЕ + УЕУ.
Следует отметить, что критическая сила, вычисленная по формуле
Эйлера с использованием приведенного модуля, несколько выше опьп-
ных результатов.
Ф. Шенли (1946 г.) на основании более углубленных исследова-
ний, предполагая монотонное возрастание нагрузки в критическом
состоянии, предложил вести расчет на устойчивость за пределами
упругости не по приведенному, а по касательному модулю. Он пред-
ложил следующую параболическую зависимость для касательного
МОДУЛЯ1
<4-94>
где Е — модуль Юнга; и ор — соответственно пределы текучести
н пропорциональности для данной марки стали.
Для того, чтобы определить касательный модуль по Шенли, необ-
ходимо сначала вычислить критический параметр в предположении
упругой работы:
t’=Zh=/Vz-^->
а по нему — приведенную гибкость (по Энгессеру)
1 = пХ0/и. (4.95)
В этих зависимостях I—длина стержня, =//rmln — гибкость шар-
нирно закрепленного стержня.
По вычисленной гибкости с помощью формулы Ясинского находят
первое значение критических напряжений. Затем определяют каса-
тельный модуль и повторяют расчеты до стабилизации значений Ег.
При замене обычного модуля упругости касательным модулем ос-
таются в силе все зависимости, которые были получены для упругого
стержня. Так, критическая сила для прямого сжатого стержня за пре-
делом упругости
(4.96)
Вопросы для самоконтроля
1. Каковы особенности расчета на устойчивость стержней при наличии
сжимающих сил, приложенных в пролете?
349
2. В чем суть приближенного расчета, основанного на переносе сжимающих
сил из пролета в конец стержня?
3. Как изменится критическая сила при переносе сжимающей силы из про*
лета в конец стержня?
4. Какой метод удобно применить для расчета на устойчивость стержней
со ' ступенчато-изменяющейся жесткостью и продольной силой?
5. Какие граничные условия должны выполняться на стыке двух участков
такого стержня?
6. Какие методы удобно применять для расчета стержней переменной жест*
кости?
7. Как в этом случае удобно задавать закон изменения жесткости?
8 Какой вид получает дифференциальное уравнение изгиба 4-го порядка
при расчете на устойчивость стержня, связанного с упругим основанием?
9. В каком виде задают форму кривой прогибов в эюм случае?
10. Как сказывается наличие упругого основания на величине критической
силы?
11. В каком виде ваписывается уравнение прогибов для основного случая
при расчете на устойчивость с учетом деформаций сдвига?
12. Как при этом выглядит дифференциальное уравнение равновесия?
13. Как велико влияние деформаций сдвига на величину критической силы?
14. Что больше: критическая сила, найденная с учетом деформаций сдвига,
ил» без них?
15. Почему в расчетах сквозных сжатых стержней на устойчивость нельзя
пренебрегать деформациями сдвига?
16. Как записывается работа внутренних сил при расчете на устойчивость
составного сжатого стержня?
17. Как влияет на величину критической силы жесткость решетки?
18. Что больше сказывается на величине критической силы: жесткость стоек
или раскосов решетки составного стержня?
19. Как выполняется расчет на устойчивость сжатого составного стержня
с соединительными планками?
20. В каком виде принимается диаграмма напряжений в расчетах на устой-
чивость за пределом упругости?
2!. Что такое касательный модуль?
22. Как выполняется расчет на устойчивость сжатого стержня за преде*
лом упругости с использованием приведенного модуля упругости?
23. Как выполняется такой расчет с использованием касательного модуля
по Шенли?
Глава 22
УСТОЙЧИВОСТЬ РАМ И АРОК
22.1. Основные положения
Теория расчета плоских рам на устойчивость основана наследу-
ющих допущениях:
I. Предполагается» что потеря устойчивости происходит в упругой
стадии работы материала.
2. Нагрузка на раму задана в виде узловых сжимающих сил.
Нагрузки, действующие в пролетах, преобразуются в узловые.
3. Удлинениями (укорочениями) стержней пренебрегают.
4. Изменения расстояний между узлами, связанные с изгибом
элементов, не учитывают.
350
5. Перемещения определяют с уче-
том начальных значений сжимающих
сип. а приращения этих сил, возни-
кающие при потере устойчивости, не
учитывают.
6. При вычислении поперечных сил
предполагают, что при изгибе стерж-
ней углы наклона сечений не изме-
няются.
Конечно, эти допущения не могут
быть приняты как общие для глубо-
кого исследования устойчивости рам-
ных систем. Однако они вполне оправданы для практически важной
задачи об определении критических значений узловых сил.
Цель расчета рамы на устойчивость состоит в определении крити-
ческой нагрузки.
Рассмотрим раму, загруженную силами, которые связаны задан-
ным соотношением и изменяются пропорционально одному параметру
(рис. 4.31). При нагрузке, меньшей критической, единственно возмож-
ная форма равновесия — исходная, т. е. прямолинейная форма. При
этом в стержнях рамы будут только продольные силы, а линейные и
угловые перемещения узлов отсутствуют. При критической нагрузке
кроме исходной формы равновесия возможно еще другое, смежное
равновесное состояние, характеризующееся малыми искривлениями
осей (штриховая линия). При этом исходное равновесие становится
неустойчивым.
Важно отметить, что смежное состояние может быть не единст-
венным. В расчетах нас будет интересовать то смежное состояние,
которое соответствует наименьшей критической нагрузке.
В отклоненном состоянии рамы возникают дополнительные реак-
ции связей, а узлы рамы претерпевают угловые и линейные пере-
мещения. Поэтому критическую нагрузку можно определять либо из
условия возникновения дополнительных реакций связей, используя
метод сил, либо из условия неравенства нулю линейных и угловых
перемещений узлов, применяя метод перемещений.
22.2. Метод сил в исследовании устойчивости рам
Как обычно, расчет начинают с выбора основной системы. В расче-
тах рам на устойчивость методом сил выбору основной системы должно
быть уделено особое внимание. При неудачной основной системе вы-
числение единичных коэффициентов канонических уравнений может
оказаться чрезмерно сложным. В любом случае основная система
должна выбираться так, чтобы в ее стержнях не возникали изгибаю-
щие моменты от заданной нагрузки. В качестве примера для рамы,
приведенной на рис. 4.32, а, показаны две основные системы — удачно
выбранная (рис. 4.32, б) и неудачно (рис. 4.32, в).
Наиболее просто вычисляются единичные коэффициенты в тех
основных системах, в которых сжатые стержни представляют собой
351
простые балки с несмещающимися шарнирными опорами или балки,
защемленные одним концом.
Поскольку в основной системе при узловой нагрузке изгибающие
моменты от этой нагрузки равны нулю, все грузовые члены канониче-
ских уравнений обращаются в нуль и система канонических уравне-
ний имеет вид:
+ • • •+ = 0;
+• • • + 6зпХп = 0;
6П1-К1+бп9Хг +• • • + бщДп =
Случай, когда все корни этой системы однородных уравнений равны
нулю, соответствует исходному состоянию рамы, т. е. устойчивому
равновесию, что может быть лишь при нагрузке, меньшей критиче-
ской. Мы же предположили, что в критическом состоянии возможен
изгиб стержней рамы, следовательно, усилия в отброшенных связях
не равны нулю (Х{ =£ 0). Это возможно в том случае, когда опреде-
литель системы (4.97) равен нулю!
At • • •
$2 Аз
(4.98)
в,
откуда получаем уравнение устойчивости.
Коэффициенты представляют собой перемещения по направле-
нию неизвестных Xt в сжато-изогнутом состоянии основной системы.
Следовательно, они являются функциями продольных сил,действу-
ющих в стержнях рамы при потере устойчивости. Можно подобрать
такие значения коэффициентов 6,*, при которых равенство (4.98)
удовлетворяется.
Критический параметр определяется из уравнения (4.98) как его
наименьший корень.
»2
22.3. Определение перемещений в задачах устойчивости рам
Формула Мора остается справедливой и в задачах устойчивости.
Перемещение по направлению Z-го неизвестного при потере устойчи-
вости с учетом только изгиба
<4">
где Л4/ — изгибающие моменты от единичного неизвестного X; Мк —
изгибающие моменты при потере устойчивости рамы т. е. от единич-
ного неизвестного и сжимающей силы. Эпюра Mi везде линейная,
а эпюра Mk нелинейна на тех стержнях, которые испытывают сжатие.
Если основная система выбрана в соответствии с приведенными
выше рекомендациями, то перемещения определяются без учета влия-
ния продольных сил, но с введением поправочных множителей. Тогда
можно не строить дополнительные эпюры. Строят обычные единичные
эпюры, а для выделения сжато-изогнутых стержней на эгих стержнях
эпюры изображают криволинейными.
Примеры построения таких эпюр показаны на рис. 4.32, г, д.
Правила вычисления интеграла Мора рассмотрим на примере двух
простых случаев:
1. Стержень, защемленный одним концом
(рис. 4.33).
Рассмотрим стержень, загруженный на свободном конце продоль-
ной силой Г, а также поперечной нагрузкой, состоящей из момента
Л40 = с и поперечной силы Qo = е. В заделке опорный момент
Mt = с + el + F6 = d 4- Гб,
где d— момент от поперечной нагрузки е = ^^.
На том же рисунке показана криволинейная эпюра изгибающих мо-
ментов Мк при учете продольных сил и эпюра Mt — линейная, без
учета продольной силы.
353
Запишем выражение изгибающего момента в произвольном сече-
нии. Для этого используем формулы метода начальных параметров.
Поместим начало координат в верхнем конце стержня, ось х направим
вниз. Введем обозначение
v = l-n^lVF/(Ei). (4.100)
По граничному условию (х = I, у\ = 0) из (4.32) с учетомобозиа-
чений, приведенных на рис. 4.33, и (4.100) получаем выражение угла
поворота в начале координат: yQ = tg v/v • Z • с/(Е1) — (cos v — 1)/
/cos v • Petty1 El).
Тогда no (4.33) после преобразований
vx , Г с (у sin V—l)4-d| . vx
Mk = 0 • cos 7 + [ vcosv,+ I SHI 7 •
В линейной эпюре Mt момент в любом сечении х
Mt = a + [{b-a)Jl\x.
Следовательно, интеграл Мора можно записать таю
О о
X J sin 7 (я 4- dx.
о
После интегрирования и подстановки пределов получаем следу-
ющее правило перемножения эпюр для вычисления перемещений!
i
J мм dx^^e, (V)+e.v + (f' 4- е, (V), (4.101)
О
где 8 (v) — множители, учитывающие влияние продольных сил
(табл. 4.1):
6j (v) = 3/v2 (tg v/v— I);
6a (v) «= 3/v2 (tg v/v + v tg v— 2/cos v 1);
8S (v) = 6/v2 (1 /cos v — tg v/v).
Из (4.101) следует, что при определении bik в стержне, Защемленном
одним концом, надо учитывать эпюры изгибающих моментов только
от действия поперечных нагрузок, а влияние продольной силы учиты-
вается поправочными множителями 6 (v). При этом перемножаются
одноименные треугольники (такие, у которых основания обращены в
одну сторону) 1 — Г и 11 — 1Г с множителями 6j(v) и 8t(v) и разно-
именные /—//' и Г—1/ с множителем 8s(v).
2. Стержень, шарнирно опертый по концам.
Загружение стержня показано на рис. 4,34.
354
Таблица 4.1
V a(v) P(v) в. (V) e.(v)
0.00 1,0000 1.0000 1,0000 1,0000 1.0000
0,20 1,0027 1,0042 1,0163 1,0065 1.0178
0,40 1,0107 1,0188 1,0683 1,0252 1,0768
0,60 1.0249 1,0437 1,1686 1,0622 1,1901
0.80 1,0455 1,0800 1,3456 1,1256 1,3900
1,00 1,0737 1.1304 1.6722 1,2395 1,7605
(.10 1,0912 1,1617 1,9491 1,3344 2.0750
1,20 1,1114 1,1979 2,3822 1,4806 2,5677
1.30 1.1345 1,2396 3,1435 1,7342 3,4347
1,40 1.1610 1,2878 4,8082 2,2832 5,3332
1.50 1.1915 1,3534 11,2013 4,3740 12,6292
я/2 1,2159 1,3880 co ©о оо
1,60 1,2266 1,4078 —26.2445 —7,8214 —30.1204
1,70 1,2673 1,4830 —5,7378 —1.1299 —6,7141
1,80 1,3147 1,5710 —3,1308 —0.8271 —3,7410
1,90 1,3704 1,6750 —2,1133 +0,0701 —2,5805
2,00 1.4365 1,7993 -1,5694 0,2575 —1,9658
2.10 1,5158 1,9494 —1,2342 0,3788 —1,5872
2,20 1.6124 2,1336 — 1,0069 0,4659 —1,33’3
2,30 1,7325 2,3641 —0,8431 0,5336 —1,1504
2.40 1,8854 2,6596 —0,7196 0,5897 —1,0151
2.50 2,0864 3,0502 —0,6234 0,6385 —0,9114
2,60 2,3618 3,5890 —0,5465 0,6828 —0,8304
2.70 2,7619 4,3766 —0,4836 0.7246 —0,7663
2,80 3.3963 5,6315 —0.4313 0.7654 —0,7151
2.90 4.5550 7,9343 —0,3870 0,8063 -0,6742
3,00 7,3486 13,5057 —0,3492 0,8483 —0,6417
3.10 23,5659 45,9234 —0,3165 0,8926 —0,6165
. 3,20 —15,7398 —32,7063 —0,2876 0,9401 —0,5976
3.30 —5.4154 —12,0770 —0,2621 0,9920 —0.5846
3,40 —3,0787 —7,4248 -0,2394 1,0499 -0,5772
ЗДО —2,0433 —5,3769 —0,2187 1,1152 -0.5751
3,60 —1,4572 —4.2292 —0,1997 1,1907 —0,5797
3,70 —1.0787 —3,4990 —0,1821 1,2795 —0.5908
3.80 —0.8128 —2,9961 —0,1654 1.3861 —0,6099
3,90 —0,6147 —2,6314 —0,1493 1,5174 .—0,6392
4.00 —0,4603 —2,3570 —0,1332 1,6838 —0,6323
4,10 —0,3355 —2,1454 —0.1165 1,9030 —0.7449
4,20 —0,2317 —1,9792 —0,0981 2,2057 —0,8378
4,30 —0,1430 —1,8475 —0,0760 2,6529 —0,9821
4.40 -0,0652 —1,7429 —0,0459 3,3836 —1,2265
4,50 +0.0044 —1,6603 +0,0045 4,7980 —1,7110
4,60 0,0682 —1,5962 0,1314 8,7218 —3,0745
4»70 0,1279 —1,5483 2,1964 75.9101 -26,5889
4.80 0,1851 —1.5152 —0,4390 —10,2705 +3.5933
4,90 0,2412 —1,4963 —0,2593 —4,5743 1,6085
5.00 0,2975 —1,9414 —0.2011 —2,8355 1,0083
5,10 0.3555 —1,5014 —0.1707 —1,9912 0,7211
5Л0 0,4169 — 1,5280 —0,1512 —1,4908 0,5541
5,30 0,4838 -1,5738 —0,1370 —1.(585 0.4458
5.40 0,5592 —1,6436 —0,1261 —0,9209 0,3706
5,50 0.6470 —1,7446 —0,1171 —0.7417 0,3158
5,60 0,7538 —1,8886 —0,1096 —0,6010 0,2745
12*
355
Продолжение табл. 4.1
V a(vj P(V) е, (v) 6,(v) ®.(v)
5,70 0,8901 -2,0961 —0,1030 —0,4868 0,2126
5,80 1,0750 —2,4050 —0.0972 —0,3917 0,2176
5,90 1.3476 —2,8924 —0,0921 —0,3105 0,1976
6,00 1,8015 —3,7455 —0,0874 —0,2398 0,1817
6,10 2,7289 -5,5609 -0,0831 —0,1769 0,1689
6,20 5,8812 —11,8030 —0,0791 —0,1200 0,1588
2л со оо —0,0760 —0,0760 0,1520
Используем граничное условие* х == /, yt = 0. Подчиним ему
уравнение (4.31) и в обозначениях, показанных на рис. 4.34, с учетом
уравнения (4.100) получаем
Уь = 1(1 — v/tgv) с— (1 — v/sin v) d] l/(v2EI).
По (4.33) после преобразования имеем:
М‘ = с-С05т + (-ЗК7
tgv JSin T
Теперь можно записать интересующий нас интеграл
f М‘М» dx = eJ cos 7 (а + ~ х) dx + (-^
О о
I
X J sin у (а + х) dx.
о
tgv) Х
Интегрируя, получаем после подстановки пределов
J ММ dx = 4- £') а (V) + (^ + ₽ (V), (4.102)
где а (v) = | ; ₽ (v) = 7 — множители, учи-
тывающие влияние продольной силы (см. табл. 4.1).
Из (4.102) следует, что для вычисления перемещений в этом частном
случае закрепления стержня необходимо перемножать трапеции так:
одноименные треугольники I—Г и //—II'—с поправкой на множи-
тель a (v), а разноименные /—1Г и /7—Г —с поправкой 6s(v).
В заключение отметим, что из-за ограничений в выборе основной
системы метод сил может быть эффективно использован в расчетах
на устойчивость только для относительно простых рам. Для сложных
рам с многими лишними связями и, особенно, для многоярусных рам
метод сил становится весьма сложным, а иногда даже неприменимым.
366
22.4. Расчет рам на устойчивость методом перемещений
Основная система при расчете рам на устойчивость по методу пере-
мещений выбирается так же, как и при обычном расчете этим методом.
Поскольку рассматриваются рамы только с узловой нагрузкой, кото-
рая в устойчивом равновесии вызывает лишь сжатие отдельных стерж-
ней, то реакции во введенных связях основной системы от этой нагруз-
ки равны нулю. Система канонических уравнений является однород-
ной и имеет вид:
f + г 12^2 + • • • 4- r in^n — 0;
4" ^22^2 4“ • • • 4" Г2п^п = 0» [Л
4- ^2^2 4- • • • 4- Си4 = 0.
Уравнение устойчивости получим, приравняв определитель системы
(4.103) к нулю:
Г11 Л12 Л1п
Г21 Г22 Г2П
Г п2 ^пп
(4.104)
Коэффициенты rik представляют собой реакции во введенных свя-
зях основной системы, возникающие от единичных перемещений узлов
при продольно-поперечном изгибе, и являются функциями продоль-
ных сил стержней рамы, точнее — функциями величин v = nl, где
п = УНЩГ).
Основные уравнения (4.103), (4.104) метода перемещений для рас-
чета рам на устойчивость в матричной форме имеют следующий вид:
/?Z = 0,
где R— матрица жесткости системы:
Gi Ga rln
__ Г21 Г 22 Г2п
Jnl ?пп-
Z—вектор неизвестных:
7 —
В матричной форме уравнение устойчивости det J? = 0.
Как и в расчетах на прочность, коэффициенты rik определяются
из условий равновесия узлов или отсеченной части основной системы,
загруженной данным единичным неизвестным. Единичные эпюры
357
изгибающих моментов строятся так же, как и в: обычном расчете. Лишь
для тех стержней, которые испытывают поперечный или продольно-
поперечный изгиб, влияние продольной силы учитывается введением
соответствующего множителя-функции.
22.5. Вспомогательная задача метода перемещений.
Определение реакций для отдельного сжато-изогнутого стержня
Рассмотрим прямой стержень постоянной жесткости, жестко за-
крепленный одним концом и шарнирно другим (рис. 4.35). Стер-
жень сжат продольной силой F, которая при его искривлении вызывает
дополнительные изгибающие моменты.
Вычислим реакции в заделке при повороте ее на некоторый угол Z.
Для этого используем решение дифференциального уравнения равно-
весия сжато-изогнутого стержня в форме метода начальных пара-
метров.
При системе координатных осей, показанной на рисунке, умеем
следующие граничные условия: у0 = 0, /Ио « 0, у, = Q. Положи-
тельному повороту заделки по часовой стрелке соответствует отрица-
тельная производная прогибов, а следовательно у\ = —Z. Кроме того,
по условиям равновесия Mt = Q0Z, Qt = —Qo. При этих условиях
по (4.31)
yi — (Qofn) sin nl 4- (QJF) (I — sin nljn) =* 0,
откуда
p _ Qtfil {. sin nl\
°0------F~sinni\l To')*
И далее, no (4.32):
y't — 60 cos nl 4- (60/F) (1 — cos nl) = —2.
Подставляя сюда найденное значение Qo, получаем
Qo ( nlcos nl ,
F \ sin/i/ '
и окончательно поперечная сила на опоре
Qo = —FZ/(1 — nZctgnZ). (4.105)
В правой части мы получили
выражение, пропорцйональное
углу поворота Z. Коэффициентом
пропорциональности является
нелинейная функция нагрузки
Г, так как величина nl Зависит
от F In2 = F/(E/)]- Обозначим
v = nl = IУТЦЫ), Н- >06)
откуда можно записать
358
lenepb уравнение (4.105) преобразуется так:
Qo = —^/(1 — vctgv).
Момент в заделке
АЛ _ Л f - F/Z - 3El V’Z ГЛ 1ГУП
м Qo1 1—vctgv / 3(1— vctgv)' (4.107)
Из (4.107) выделим функцию параметра vj
4)1 <v) = 3(1—vctgv) = 3(tgvLV)' (4.108)
Тогда, согласно (4.107), момент в заделке от ее поворота на единич-
ный угол2= 1 запишем в виде, удобном для использования в методе
перемещений!
/Й = — ^<Pi(v), (4.109)
т. е. он находится умножением известного из метода перемещений еди-
ничного момента на поправочный множитель, зависящий от параметра
% а значит и от нагрузки F.
На рис. 4.35 показана эпюра А4, а также величины моментов и по-
перечных сил.
Аналогично решаются задачи при линейном смещении опоры, а
также при единичном повороте и линейном смещении опоры в балке
с двумя защемленными концами. Таким образом составлена таблица
формул для определения реакций сжато-изогнутых стержней от еди-
ничных угловых и линейных перемещений (табл. 4.2).
Функции ф (v) и 1) (v) вычислены для различных значений пара-
метра v и по ним составлены таблицы (см. табл. 4.3):
. . Vх tg V . ч v (tg V — V)
Ф1 (v) — 3 (tg V - V) ’ ~ 8 tg v (tg v/2 - v/2) :
= 4sin,^Sv%n-v/2) • f* M - (v/2);
t)i(v) = v*/(3(tgv — v)J; Чг (v) = j), (v/2); i]9(v) = <p,(v).
Итак, для каждого Z-го стержня вычисляются параметры vt «
« /Xкоторые выражаются через некоторый, принимаемый
как основной, параметр одного из стержней. Таким образом, единич-
ные коэффициенты г# являются функциями одного безразмерного
параметра v.
Подставляя вычисленные реакции rik в уравнение устойчивости
(4.104), определяют наименьший параметр vmJn, а по нему, с учетом
(4.106), вычисляют наименьшую критическую силу!
Fer = vzEI/P. (4.110)
Основная' трудность расчета рам на устойчивость состоит в реше-
нии трансцендентного уравнения (4.104), которое в общем случае
имеет бесконечное множество корней. Уравнение обычно решается
путем подбора с использованием таблиц функций ф (v) и (v).
359
Таблица 4.2
Вид смещения и эпюра R
Функция
Ч>М =
vftav-v)
в*94<лН) ’
vM= _4(y^J_
* «ShvfoH?
£М=«?Гг)=73М;
^=^=<г^й’
В случае симметричных рам при симметричной нагрузке расчет
на устойчивость может быть значительно упрощен введением симмет-
ричных и кососимметричных неизвестных. В обычных расчетах на
прочность было отмечено, что симметричная рама при симметричной
нагрузке может иметь только симметричную деформацию.
360
Таблица 4.3
V <P1(V) Ф1 (v) Фв (V) Фв (V) 41 (v) 41 (V)
0,00 1,0000 1,0000 1.0000 1,0000 1.0000 1,0000
0,20 0,9973 0,9986 1.0009 0,9992 0,9840 0,9959
0,40 0,9895 0,9945 1.0026 0.9973 0,9362 0,9840
0,60 0,9756 0,9881 1,0061 0.9941 0.8556 0 9641
0,80 0,9567 0,9787 1,01)1 0.9895 0,7434 0.9362
1,00 0,9313 0,9662 1,0172 0,9832 0,5980 0,8999
1,10 0,9164 0,9590 1,0209 0,9798 0,5131 0,8790
1,20 0,8998 1,9511 1,0251 0,9756 0.4198 0,8556
1,30 0,8814 0,9424 1,0296 0,9714 0,3181 0,8306
1,40 0,8613 0,9329 1,0318 0,9669 0,2080 0,8025
1,50 0,8393 0,9226 1,0403 0,9620 0,0893 0,7745
л/2 0,8225 0,9149 1,0445 0,9581 0 0,7525
1,60 0,8153 0,9116 1,0463 0.9567 —0,0380 0.7434
1,70 0,7891 0,8998 1,0529 0,9510 —1,1742 0,7102
1,80 0,7609 0,8871 1,0600 0.9449 —0.3191 0,6749
1.90 0,7297 0,8735 1,0676 0,9383 —0.4736 0,6375
2,00 0,6961 0,8590 1,0760 0,9313 —0,6372 0,5980
2,10 0,6597 0,8437 1.0850 0,9260 —0,8103 0,5565
2,20 0,6202 0,8273 1,0946 0,9164 —0,9931 0,5131
2,30 0.5772 0,8099 1,1050 0,9083 —1,1861 0,4675
2,40 0,5304 0,7915 1,1164 0.8998 —1,3896 0,4198
2,50 0,4793 0,7720 1,1286 0,8909 —1,6040 0,3701
2,60 0,4234 0,7513 1,1417 0,8814 —1,8299 0,3181
2.70 0,3621 0,7294 1,1559 0,8716 —2,0679 0,2641
2,80 0,2944 0,7064 1,1712 0.8613 —2,3189 0,2080
2,90 0,2195 0,6819 1,1878 0,8506 —1,5838 0,1498
3,00 0,1361 0,6560 1,2057 0.8393 —2.8639 0,0893
3,10 0,0424 0,6287 1.2252 0,8275 —3,1609 0,0267
3,20 —0,0635 0,5997 1,2463 0,8153 —3,4768 —0,0380
33) —0,1847 0.5691 1,2691 0,8024 —3,8147 —0,1051
3,40 —0,3248 0,5366 1,2940 0,7891 -4,1781 —0,1742
3,50 -0,4894 0.5021 1,3212 0,7751 -4,5727 —0,2457
3,60 -0.6862 0,4656 1,3508 0,7609 —5,0062 -0,3191
3,70 —0,9270 0.4265 1,3834 0,7457 —5,4903 —0.3951
3,80 —1,2303 0.3850 1.4191 0,7297 —6.0436 —0,4736
3.90 —1,6468 0,3407 1,4584 0,7133 —6,6968 -0,5542
4,00 —2,1725 0,2933 1,5018 0.6961 —7,5058 —0,6372
4,10 —2,9806 0,2424 1,5501 0,6783 -8,5839 -0,7225
4,20 -4,3155 0,1877 1,6036 0,6597 —10,196 —0,8103
4,30 —6,9949 0,1288 1,6637 0,6404 -13,158 -0,9004
4,40 —15,330 0,0648 1,7310 0,6202 —21,738 —0,9931
4,50 +227,80 —0,0048 1,8070 0,5991 +221,05 — 1,0884
4,60 —0.0807 1,8933 0,5772 - 1,1861
4,70 —0,1646 1,9919 0,5543 — 1,2865
4,80 —0,2572 2.1056 0.5305 — 1,3896
4,90 —0,3612 2,2377 0,5054 — 1,4954
5,00 —0.4772 2,3924 0.4793 — 1,6040
5,10 —0,6099 2.5757 0,4520 — 1,7155
5,20 —0,7630 2.7961 0,4234 —1,8299
5,30 —0,9423 3.0648 0,3931 — 1,9477
5,40 —1,1563 3,3989 0,3621 —2,0679
53) —1,4181 3,8234 0,3291 —2,1917
5,60 —1,7481 4,3794 0,2944 —2,8189
361
Продолжение табл. 4.3
V Ф1 (V) Ф« (V) Ф. (V) Ф«(*> ’it (v)
5.70 5,80 5ДО 6,00 6.10 6.20 2я —2,1804 —%,тт —3,6678 —5.1589 -8.2355 —18,594 —00 5,1346 6,2140 7.8726 10,727 16.739 37,308 4-00 0,2580 0,2195 0,1790 0.1361 0,0906 0.0424 0 —2,4495 —2.5838 —2,7218 —2,8639 —3^0102 —3,1609 —3,2898
В расчетах на устойчивость надо иметь в виду, что симметрично
загруженная симметричная рама, претерпевая симметричную дефор-
мацию до потери устойчивости, может терять устойчивость как по сим-
метричной, так и по кососимметричной форме. Поэтому надо рас-
сматривать отдельно как симметричную, так и кососимметричную
формы потери устойчивости и соответствующие им критические
нагрузки. К расчету принимается менывая из них. !
Рассмотрим пример. На рис. 4.36 показана симметричная рама при
симметричном загружении силами F, приложенными в узлах. Примем
няем групповые неизвестные —симметричное и кососимметричное.
На том же рисунке приведены симметричная и кососимметричная еди-
ничные эпюры изгибающих моментов, которые построены с помощью
табл. 4.2 для стержней, испытывающих продольное сжатие силами
F, а для остальных стержней — по табл. 2.4, предназначенной для
обычного расчета рам по методу перемещений.
В этом случае система канонических уравнений метода перемеще-
ний разделяется на отдельные уравнения, так как г1э == гм = 0.
Уравнениями устойчивости будут- а) при симметричной форме потери
Рас, «.Зв
362
устойчивости — rltZt = 0; б) при кососимметричной — rTlZz == 0.
Определяем критические нагрузки.
При симметричной форме характеристическое уравнение имеет
вид -2 (4Е7// 2ЕШ -|- (3EI/1) <pj (v)J — 0, откуда <pj (v) = —2.
По табл.. (4.3) находим минимальный корень этого уравнения v« |П «
=^3,97. По (4.103) критическая сила /r?r = v2~/= 15J6EI/F.
При ‘кососимметричной форме r*£ = 2[4EI/l -|- GEI/l + (v) х
хЗ£///1 = 0; <Pic(v) = —10/3; v^n = 4,13; F?rc == 17.06E7/Z-.
Следовательно, критической нагрузкой является FCr = 15.76E//Z2,
что соответствует симметричной форме потери устойчивости. Полу-
ченное значение критической силы на 50 % больше эйлерового для
щарнирно опертой «стойки. Это объясняется влиянием жесткости
ригеля.
. При кососимметричной форме потери устойчивости средний ригель
изгибается по двум полуволнам. Такая деформация соответствует
большему влиянию его жесткости, поэтому кососимметричной форме
соответствует большая критическая сила.
Во всех случаях расчет рам на устойчивость должен завершаться
проверкой критических напряжений: они не должны превосходить
предела упругости материала рамы.
22.6. Устойчивость неразрезных сжатых стержней
Расчет упругих многопролетных сжатых стержней на устойчивость
может быть выполнен с использованием одного из рассмотренных выше
методов: спл или перемещений.
В методе сил, когда жесткость сечений и продольная сжимающая
сила постоянны по длине, удобно выполнять расчет в форме метода
начальных параметров. В этом случае многопролетный стержень за-
меняется однопролетным с шарнирными опорами на концах — если
все опоры шарнирные и нет консолей. Если же один конец жестко за
щемлен, а на другом конце имеется консоль, то стержень заменяется
однопролетной стойкой, защемленной с одной стороны и свободной
с другой.
В местах устраненных промежуточных опор прикладываются не-
известные опорные реакции.
Для такой основной системы составляют уравнения метода началь-
ных параметров. По этим уравнениям записывают перемещения по
направлению отброшенных промежуточных опорных связей. Если
опоры жесткие, эти перемещения приравниваются нулю; если упру-
гие *—выражаются через упругие характеристики опор и их реакции.
Так получают «систему однородных уравнений, линейных относительно
перемещений. Приравнивая определитель этой системы к нулю, полу-
чают уравнение устойчивости, из которого находят критический пара-
метр, а по нему и критическую силу.
Рассмотрим применение метода перемещений к расчету многопрс-
летных стержней на устойчивость.
363
>«. «.э»
Порядок расчета
Р П0кааНЧен РасчетУ Рам на устойчивость. На-
стему тода переме1це Энного на рисунке 4.37, о, основную си-
на промежуточной опопе м, По,пУчим путем введения жесткой заделки
от единичного поворота^Ис* 4-37, б). Эпюры изгибающих моментов
(рис. 4.37, в). КаноническлТ°Й заделки строим, пользуясь табл. 4.2
Гц^1 = 0- Полагая, Что Ое Уравнение в этом случае имеет вид
уравнение устойчивости ПрИ ПотеРе устойчивости Zt =# 0, получаем
ru = 0, или
Э£/1 , 3FI
V'<^ + y4(vlM.
Например, для случая, когда* EIt = £/„ 1г = 2Z, = 21, уравне-
нием устойчивости будет Vt(v) + 0,5q>*(2v) =0. Пользуясь табл. 4.3,
решаем его относительно v и получаем v в 1,93. Тогда
Fcr =
v*E] 3,72£/
Важно отметить, что исходя из принятого уравнения устойчивости
находим критическую силу, соответствующую тем формам устойчи-
вости, при которых неизвестные Z не равны нулю. Однако возможны
случаи потери устойчивости при некоторых неизвестных, равных ну-
лю Эго так называемые особые формы потери устойчивости.
Если поомежуточные опоры упругие, расчет миогопролетных
стержней на устойчивость по методу перемещений имеет свои особен-
ности связанные с возможностью линейных смещении упругих опор.
364
Рассмотрим двухпролетный стержень, показанный на рис. 4.38,а.
Упругость промежуточной опоры характеризуется коэффициентом с,
равным реакции пружины при ее единичной осадке.
Система имеет два неизвестных метода перемещений. Основная
система показана на рис. 4.38, б, а эпюры изгибающих моментов от
единичных неизвестных z1 и z2 — на рис. 4.38, в, г.
В частном случае, для стержня постоянного сечения и равных
пролетов (1Л = 12~ Mty, единичные коэффициенты, найденные по
эпюрам Му и Л4Я, будут такими! гп = <Pi(v), r2a = + с>
fu='si = o. гда
V
Ef ~
Составим уравнение устойчивости
0.
Для рассматриваемого случая оно имеет вид:
6Е/ , > л
4>i 6’) 0
о ^ni(v) + c
ИЛИ
Ф1 (v) T)i О') + = О-
Получаем два решения! <p1(-v) = O, Th(v) = —4^7» которые соответ-
ствуют двум формам потери устойчивости! первое—кососимметрич-
ной, второе—симметричной (рис. 4.38, а, штриховая).
Для кососимметричной формы потери устойчивости по таблицам
находим при cpjfv) =s 0 параметр v == л; критическая сила
= л2 E/Z/f.
При симметричной форме параметр v зависит от конкретной жест-
кости пружины с.
Очевидно, что при очень жесткой пружине потеря устойчивости
происходит по кососимметричной форме — упругость опоры не влияет
на величину критической силы, выпучивание происходит по двум
полуволнам. Если жесткость пружины незначительная, потеря устой-
чивости происходит по симметричной форме — одна полуволна
синусоиды. В этом случае критическая сила зависит от упругости
опоры.
365
Предельное значение коэффициента с, при котором жесткость пру -
жины еще влияет на величину критической силы, найдем из условия
одинакового значения критической силы для обеих форм потери устой»
чикости:
F
Этому условию соответствует v = л. Учитывая, что tj1(v) — <Pi(v)—
— v3/3 и q>i (v) = 0, получим 1), (v) = —л2/3. Подставляя т)ж (v) во
второе решение уравнения устойчивости, находим с = 16л2£//Р.
Таким образом, при 16л2£7/Р потеря устойчивости рассматри-
ваемого стержня будет происходить по симметричной форме.
22.7. Понятие о расчете упругих рам
по деформированному состоянию
В обычных расчетах строительных конструкций, работающих в
упругой стадии, внутренние усилия определяют по начальной — не-
деформированной схеме конструкции. Однако следует помнить, что
любое сооружение под действием внешней нагрузки претерпевает сме-
щения узлов, меняет очертание осей. Это происходит в результате де-
формации отдельных элементов, вызванной действием внутренних сил.
Затем наступает равновесие сооружения в деформированном состоя*
пии. В упругих системах деформации нарастают до тех пор, пока
внутренние силы не будут в состоянии препятствовать их дальней-
шему росту. В обычных строительных конструкциях скорость разви-
тия деформаций велика, и равновесие в деформированном состоянии
наступает практически одновременно с приложением нагрузки.
Чем более жесткая система, тем меньше ее деформации,— тем точ-
нее расчет по недеформированной схеме. В тех же случаях, когда де-
формации сооружения могут быть значительными, неучет влияния
продольных сил на появление дополнительных изгибающих моментов
в деформированном состоянии может привести к недопустимо большой
погрешности. К таким случаям среди рамных конструкций следует
отнести сложные, особенно многоярусные, рамы, стержни которых
работают на продольно-поперечный изгиб. Поэтому при строгой ПО’
становке задачи внутренние усилия следует определять с учетом дефор-
мации сооружения. Такой расчет называют расчетом по деформирован-
ному состоянию, или деформационным расчетом. . .
В деформационном расчете внутренние усилия определяются по
деформированной схеме, которая сама зависит от внутренних сил.
Линейная зависимость между силами и перемещениями не соблюдя?
ется — задача становится геометрически нелинейной и принцип неза*
висимости действия сил в общем случае не выполняется. Таким обра-
зом, точный расчет по деформированному состоянию в строгой поста-
новке является весьма сложным.
В зависимости от класса сооружения и требований, предъявляемых
к точности результатов, такой расчёт может выполняться с различ-
ными допущениями. Так, для расчета упругих рам строительных кон-
366
сурукций, которые являются достаточно жесткими, можно ввести сле-
дующие допущения. Предполагается, что деформации малы и геомет-
рическая схема сооружения не изменяется под нагрузкой, но внешняя
нагрузка существенно влияет на жесткость сжатых стержней, испыты-
вающих продольно-поперечный изгиб. Это позволяет использовать ли-
нейные относительно прогибов дифференциальные уравнения равно-
весия. Внутренние усилия и перемещения будут нелинейно зависеть
от «некоторых параметров внешней нагрузки. Упрощение также дает
•выполнение расчета путем последовательных приближений.
'Для. расчета рам по деформированному состоянию последователь-
ными приближениями удобен метод перемещений. Как обычно, выби-
рается основная система и составляются канонические уравнения,
которые в этом случае будут уже неоднородными — они содержат
и свободные члены. Единичные коэффициенты, как и в задачах устой-
чивости, определяются с учетом сжимающих сил, а следовательно,
с учетом функций <р и ц. Так как эти функции содержат параметры
я F(I(EI), в которые входят неизвестные продольные силы
Ft, то расчет выполняют последовательными приближениями.
। Сначала выполняют расчет по недеформированной схеме без учета
продольных сил, т. е. считают = 0. По найденным в результате
такого расчета усилиям вычисляют новые значения параметров v,.
Расчет повторяют до тех пор, пока значения продольных сил двух
последовательных приближений не будут достаточно близкими. Обыч-
но для упругих рам реальных строительных конструкций обеспечение
прочности по деформационному расчету на расчетные нагрузки озна-
чает также и обеспечение устойчивости таких рам в плоскости дей-
ствия нагрузок.
22.8. Устойчивость круговых арок и колец
Будем рассматривать устойчивость колец и арок, очерченных по
круговой кривой, в предположении, что до потери устойчивости мате-
риал конструкции испытывает только центральное сжатие. Следова-
тельно, предполагается, что ось арки совпадает с кривой давления,
а моменты, возникающие при упругом обжатии, пренебрежимо
малы.
Арки, как и прямолинейные стержни, при потере устойчивости
переходят в новое равновесное состояние, характеризующееся раз-
двоением равновесия: дополнительно к сжатию появляется изгиба
В настоящем курсе мы ограничимся исследованием устойчивости
круговых арок и колец постоянного по длине сечения. При этом будем
пользоваться статическим методом: критическую нагрузку определять
из решения дифференциального уравнения равновесия системы, со-
ставленного для деформированного равновесного состояния.
Дифференциальное уравнение равновесия бруса малой кривизны,
очерченного по дуге окружности, имеет вид:
7-Т--------ЕГ» (41,,)
Зз7
Рис. 4.39
где R — начальный радиус кривизны; г — радиус кривизны после
деформации; М и EI — изгибающий момент и жесткость сечения при
изгибе.
Условимся считать изгибающий момент положительным, если он
уменьшает начальную кривизну стержня.
Рассмотрим элемент кривого бруса в двух состояниях — началь-
ном и деформированном. На рис. 4.39, а эти состояния показаны
сплошной и штриховой кривыми. Выделим элемент бруса т — п дли-
ной ds (рис. 4.39, б). Этот элемент при деформации бруса перемеща-
ется, а его грани испытывают взаимные смещения: поворот и линей-
ные перемещения вдоль радиуса и вдоль касательной к оси бруса.
Обозначим со перемещение точки по радиальному направлению
и будем считать это перемещение положительным, если оно направле-
но к центру кривой.
В результате деформации сечение на левом конце элемента (в точ-
v dco
ке т) повернется на угол > а на правом конце (в точке я) —на
угол + ^4? ds. Таким образом, первоначальный угол d© между
этими сечениями изменится на величину
hde = ^ds. (4.112)
Начальная кривизна оси элемента 1//? = d&!dst а кривизну элемента
после деформации с учетом приращений можно записать так:
Из подобия секторов по рис. 4.39, б следует , откуда
ds + Ms = ds (1 — со//?). (4.114)
Используя зависимости (4.112), (4.113) и (4.114), получаем выражение
кривизны после деформации:
d© d2^
1 _______________________________ds *
' T—co//? •
368
.. d0 1
Имея в виду, что 37 = » после не-
сложных преобразований получаем
7-|=Д + ^’ (41,5>
Начальный и конечный радиусы
мало отличаются друг от друга, по-
этому МОЖНО ПРИНЯТЬ
Тогда (4.115) запишется следующим образом.’
7-1 = ^ + ^- <4J,6)
Приравнивая правые части выражений (4.116) и (4.111), получаем
дифференциальное уравнение изгиба кривого бруса в таком виде*
d^co . fa) М
ds* + /?а--------------------------EI *
dw diode d2^ d2o(de\2 dQ 1
Имея в виду, что 3$ =^5,^, =аё-Д5?) , j-p получаем
в окончательном виде дифференциальное уравнение равновесия
кривого бруса, очерченного по дуге окружности, в полярных коор-
динатах:
d2w . MR* ,л
Jej + a»----gg. (4.117)
Это уравнение используем ниже для исследования устойчивости
арок и колец при гидростатическом давлении.
Двухшарнирная арка. Рассмотрим двухшарнирную арку постоян-
ного сечения, очерченную по дуге окружности радиусом R (рис.4.40).
Арка подвержена действию гидростатического давления — радиаль-
ной равномерно распределенной нагрузки.
Предположим, что изгибающими моментами, возникающими при
упругом обжатии арки, можно пренебречь. Тогда в состоянии устойчи-
вого равновесия все сечения арки испытывают только осевое сжатие,
обусловленное продольной силой N — qR. (Здесь и дальше для арок
сжимающие силы считаются положительными).
Потеря устойчивости двухшарнирных круговых арок при гидро-
статическом давлении происходит по кососимметричной форме
(рис. 4.40 — штриховая линия). При этом в поперечных сечениях арки
возникают изгибающие моменты
М — Nw = qRas, (4.118)
Запишем дифференциальное уравнение равновесия (4.117) для
деформированного состояния арки:
Зё* + “(1 + гг)-О, ИЛИ ^£ + пг<о = О,
где
(4.119)
.369
Решение полученного дифференциального уравнения —
© = Ctcos + C2sin пв. (4t 120)
Для получения уравнения устойчивости рассмотрим грацинные
условия. Для формы потери устойчивости, показанной на рис. 4.40
штриховой линией, при 6 = 0 w = 0, при О = а со = 0. Подчиняя
поочередно этим условиям решение (4.111), получаем два уравнения:
Cj = 0, C2sin па = 0.
Если исключить из рассмотрения тривиальное решение, соответ-
ствующее недеформированной форме оси арки, то из второго уравне-
ния получим sin па = 0, или ла = л, 2л, ..., kn.
Для определения наименьшего значения критической нагрузки
надо принять ла = л. Тогда по (4.119)
Отсюда критическая нагрузка
(4Л21>
Для частного случая арки, очерченной по полуокружности (а =
= -£-) критическая нагрузка
Ъ, = ЗЕ7/Я3.
По критической нагрузке можно определить критическое значение
сжимающей силы:
^, = ^ = ^'(£-1). (4.122)
При расчете пологих арок (-J- « -g-j, у которых угол а значитель-
но меньше л, в формуле (4.122) единицей можно пренебречь. Тогда
критическое значение продольной силы приближенно можно вычислять
во формуле
Мс,^л2ЕП&,
где s = aR — длина дуги полуарки.
Бесшарнирная арка. Форма потери устойчивости круговой бесшар-
мирной арки при гидростатическом давлении, соответствующая наи-
меньшей критической нагрузке, показана на рис. 4.41, а штриховой
линией. В отличие от двухшарнирных арок здесь в опорных сечениях
возникают опорные моменты Л40. Представим расчетную схему бесшар-
нирной арки, как двухшарнирную (рис. 4.41, б), загруженную, кроме
нагрузки qt опорными моментами, эпюра которых показана на
рис. 4.41, в.
В произвольном сечении арки, характеризующемся углом G, от-
кладываемом от вертикали, дополнительный момент
370
Суммируя его с моментом от нагрузки (4.118),
полного момента:
найдем выражение
Запишем дифференциальное уравнение равновесия (4.117) в откло-
ненном состоянии рассматриваемой арки:
dsw . /?»/ п лл sin в)
Обозначим С = . С учетом (4.119) полученное дифферен-
циальное уравнение можно записать так:
4- л2со = С sin ©.
Интеграл этого уравнения имеет вид
и = Cj cos n© С2 sin n© 4- .
Для определения трех произвольных постоянных (Clt Сг и С)
необходимо установить три граничных условия, соответствующих
данной расчетной схеме. Имея в виду, что прогибы и углы поворота
в заделках равны нулю, получаем: при © — 0 со = 0, при © = а
ш = .0, при 0 = а =? 0. По первому условию получаем С2 — 0,
из второго и третьего следует:
Q
,СЛ sin ла 4- f sin а = 0;
Слп cos па 4- cosa = 0.
3?|
Уравнение устойчивости получим, составив определитель из коэф'
фициентов при постоянных в этих уравнениях и приравняв его к нулю1
sin па -а 1 . sin а
па— 1
1 =°-
л cos ла -=—7 cos а
rfl— 1
Раскрыв определитель, после преобразований получаем окончатель-
но характеристическое уравнение в таком виде!
ntg actg ла = 1. (4.123)
По уравнению (4.123) можно определить величину л и, о учетом за-
висимости (4.119), найти критическую нагрузку»
9ег = |1(«г— О- (4.124)
Трехшарнирная арка. На рис. 4.42 показана круговая трехшар-
нирная арка и две возможные формы ее потери устойчивости — сим-
метричная и кососимметричная (штриховые линии).
Кососимметричная форма полностью совпадает с формой потери
устойчивости двухшарнирной арки. Действительно, в двухшарнирной
арке при этой форме потери устойчивости изгибающий момент в сече-
нии С равен нулю, а это равносильно наличию шарнира.
Поэтому критическая нагрузка для трехшарнирной арки в случае
кососимметричной формы потери устойчивости может определяться
так же, как и для двухшарнирной — по формуле (4.121).
Как показали опыты, для круговых трехшарнирных арок при
а = 30...60° наименьшей критической нагрузке соответствует симмет-
ричная форма потери устойчивости. При этом критическая нагрузка
определяется по формуле
__£74«2 —а*
аа •
(4.125)
Величина и определяется из характеристического уравнения
tg ц — и_____4 (tg « — a)
цв ““ a8
(4.126)
где a — угол, показанный на рис. 4.42.
Устойчивость кругового кольца. Круговое кольцо под действием
гидростатического давления может потерять устойчивость по форме,
показанной на рис. 4.2, а. При этом в сечениях кольца появляются
изгибающие моменты. Для определения критического значения равно-
мерной радиальной нагрузки, учитывая симметрию расчетной схемы,
рассмотрим равновесие полукольца при потере устойчивости (рис.4.43).
Изгибающий момент в любой т. К, взятой на оси при продольно-
поперечном изгибе,
М = Мо — qR (©0 — о).
В этом нетрудно убедиться по геометрическим построениям рис. 4.43.
372
Дифференциальное уравнение рав-
новесия кривого бруса (4.117) полу-
чает вид:
+ со = — (Мо — qR&0 4- qRu>),
или
^ + <о(1=0.(4.127)
где D = — — gRuJ.
Решение рассматриваемого диффе-
ренциального уравнения (4.127) с учетом ранее введенного обозна-
чения (4.119)
со = Cj cos4- С2 sin п0 4- Din*.
Запишем первую производную прогиба по переменной О:
= —Cxn sin п0 4- Can cos л0. (4.128)
Для отыскания произвольных постоянных Сх и Са запишем два
граничных условия: при 6 = 0 = 0, при 6 = у = 0. По пер-
вому условию из (4.128) получаем С2 = 0, по второму C1sin™ = 0.
Так как при наличии изгиба то sin™ = 0, т. е. ™ = л, 2л,
Зл, ... Для определения наименьшей критической нагрузки прини-
маем ™ = л, следовательно, п = 2.
Тогда по (4.119) критическая нагрузка
qcr=ZEHR\ (4.129)
Вопросы для самоконтроля
1. Какова цель расчета рам на устойчивость?
2. Какие основные методы применяются для расчета рам на устойчивость?
3. На каких основных допущениях построены методы расчета рам на устой-
чивость?
4. Почему канонические уравнения метода сил и метода перемещений при
расчете рам на устойчивость не содержат грузовых членов?
5. Какие требования предъявляются к выбору основной системы метода сил
в расчетах рам на устойчивость?
6. В чем особенности определения перемещений в задачах устойчивости?
7. Как составляется основная система метода перемещений при расчете рам
на устойчивость?
8. Как строят эпюры изгибающих моментов в основной системе метода
перемещений от единичных неизвестных?
9. Сравните построение единичных эпюр изгибающих моментов в основной
системе метода перемещений в расчетах на устойчивость и в обычных расчетах
иа прочность.
373
10. Как составляется уравнение устойчивости при расчете рамы методом
перемещений?
11. Как определяются коэффициенты канонических уравнений?
12. Как определяют критический параметр из уравнения устойчивости?
13. Каковы особенности расчета многопролетных сжатых стержней на устой*
чивость?
14. Есть ли линейная зависимость между силами и перемещениями при рас*
четах по деформированному состоянию? Выполняется ли р этой случае принцип
независимости действия сил?
15. Как выполняют расчет рамы по деформированной схеме с введением
упрощающих допущений?
16. Нужно ли после расчета рамы по деформированной схеме выполнять
расчет на устойчивость?
17. Как получают дифференциальное уравнение равновесия бруса малой
кривизны?
18. Какие формы потери устойчивости круговых бесшарнирных, двухшар*
пирных и трехшарнирных арок, загруженных радиальной равномерно распре*
деленной нагрузкой, соответствуют наименьшей критической нагрузке?
19. Какая возможная форма потери устойчивости кругового кольца при
гидростатической нагрузке?
Глава 23
УСТОЙЧИВОСТЬ тонкостенных
СТЕРЖНЕЙ И ПЛАСТИН
23.1. Дифференциальное уравнение
устойчивости тонкостенного стержня
Рассмотрим устойчивость тонкостенных стержней открытого про*
филя, постоянного по длине. Некоторые виды открытых профилей
показаны на рис. 4.44. Особенностью подобных стержней по сравне-
нию со стержнями замкнутого профиля является их значительно мень-
шая жесткость на кручение.
Тонкостенные стержни работают, как пространственные системы,
испытывающие продольные деформации не только от сжатия или изги-
ба, но и от кручения. В соответствии с основными гипотезами теории
В. 3. Власова, поперечные сечения таких стержней, плоские до
деформации, при деформации претерпевают депланацию, а контуры
сечений остаются недеформируемыми.
Рассмотрим тонкостенный стержень с недеформируемым профилем
(рис. 4.45, а). Он находится в равновесии под действием произвольных
продольных и поперечных сил. Оси у и г — главные, центральные.
Продольную ось х совместим с линией центров изгиба.
Рве. 4.44
374
На рис. 4.45, б штриховой линией показано положение поперечно-
го сечения после деформации. На этом рисунке* С — центр изгиба,
О — центр тяжести сечения, £ и i] — перемещения центра изгиба по
направлению осей г и yt 6 — угол поворота сечения в плоскости
zOy. Величины £, т>, 0 являются функциями координаты х, определя-
ющей положение сечения. Точки поперечного сечения в результате
депланации перемещаются также по направлению оси х, причем^эти
перемещения являются функциями координаты s, отсчитываемой пр
дуге контура.
В обычных задачах на прочность равновесие тонкостенного стерж-
ня в недеформированном состоянии описывается следующими тремя
дифференциальными уравнениями:
ВДУ-^ = О; (4.130)
E/^eiv — G/,0" — tn (х) = 0,
где qx и qy интенсивности распределенных поперечных нагрузок;
т (х) — интенсивность внешнего крутящего момента относительно
центра изгиба.
В (4.130) первые два уравнения аналогичны обычным уравнениям
изгиба балки в двух плоскостях, а третье представляет собой уравне-
ние стесненного кручения тонкостенного стержня.
Для исследования устойчивости тонкостенных стержней использу-
ется общая методика — изучается равновесие в отклоненном состоянии.
В. 3. Власовым получены общие уравнения устойчивости тонко-
стенного стержня, которые при обозначениях, приведенных на
рис. 4>45, имеют следующий вид?
- \f (V + fljW + (M2er = 0;
-1W - + (Мру = 0;
_ Gite- _ рл + 2^умг - 2^M, + +
+19. (e.—+ 9» (4—“3 ° — (Fl'Y + a, +
+ MД' + Al^rf = 0.
В этих уравнениях F, Л42, Му, В — внутренние усилия: продольная
сила, изгибающие моменты относительно осей г и у и бимомент; а2,
ау — координаты центра изгиба; е2, еу — координаты следа линии
приложения распределенной нагрузки в плоскости поперечного се-
чения; /2, iy — осевые моменты инерции; ** \a2dA — сектори-
д
альный момент инерции; А — площадь поперечного сечения. Геомет-
рические характеристики г, 02, 0^, 0Ш определяются по следующим
формулам:
r« = a: + fl3 + i+L!;p2 = ^_fli:
Pi/ — ау» Р© = /со*
1/^= J o2dA —секториально-полярный момент инерции; Uz = J yp2<L4,
д А
Uy — J zp2 dA — полярно-осевые моменты инерции; lt — момент инер-
д
ции чистого кручения. Для поперечных сечений, состоящих из от-
дельных прямоугольников или криволинейных полос со сторонами
bt и lt = aS (Ь£6»)/3.
Коэффициент а зависит от формы сечения; например, для двутавра
он равен 1,3, для швеллера — 1,12, для уголков — 1,0.
23.2. Устойчивость сжатого тонкостенного стержня
Рассмотрим частный случай, когда нагрузки приложены вдоль
оси центров изгиба. Тогда в устойчивом равновесии тонкостенный
стержень не испытывает кручения. В критическом же состоянии се-
чения претерпевают депланацию, т. е. появляется качественно новое
дсформированное состояние.
На рис. 4.46 показан тонкостенный внецентренно сжатый стержень,
для которого без учета собственного веса можно записать: В — 0,
N = —F, Mz — —Fey, Му = Fez, где ег и еу — координаты следа
силы F в плоскости сечения. Момент считается положительным, если
Рис. 4.416.
при взгляде от положительного направ-
ления соответствующей оси к началу ко-
ординат он действует по часовой стрелке.
Записывая уравнения (4.131) для это-
го условия, получаем уравнения устой-
чивости тонкостенного стержня при вне-
цептренном сжатии:
Е1£" + Fl" + (Мг + Fay) 0" = 0;
El л™ + Fn" + (М„ - FaJ 6" = 0;
(Мг + Fay) I" + (Му-Faj rf +
+ £/„6IV + (r2F + 20,/И,—
— 2P/12 — G/()6’ = 0. (4.132)
376
Исследуем теперь устойчивость центрально-сжатого тонкостенного
стержня. В зависимости от формы сечения здесь возможны два слу-
чая: несимметричное сечение — центр тяжести и центр изгиба не сов-
падают и двояко симметричное — центры совпадают.
В первой, общем случае (ег = еу = 0, Мг = Му = 0) дифферен-
циальные уравнения устойчивости (4.132) принимают вид:
£/^+^ + ^©" = 0;
+ Fr\" — Fafi" = 0; (4.133)
Fa^ — Farf + El^ 4- (r*F - Glt) 0" = 0.
Этими уравнениями и условиями закрепления стержня на концах
определяются все формы потери устойчивости тонкостенного профиля
при центральном сжатии стержня. В каждое из уравнений (4.133) вхо-
дят одновременно поступательные перемещения и углы закручи-
вания 0. Отсюда следует, что если координаты центра изгиба azt ау
не равны нулю, т. е. центр изгиба не совпадает с центром тяжести сече-
ния, то для стержня эйлерова изгибная форма потери устойчивости
при центральном сжатии становится невозможной.
В частном случае, когда центр изгиба совпадает с центро м тяжести
сечения (например, для сечения с двумя осями симметрии) координа-
ты nt, ау равны нулю и система (4.133) распадается на три отдельных
уравнения:
£/2nIV 4- Fif = 0;
EI^ + (r2F ~G!t) 6" = 0.
Интегрирование первых двух уравнений дает две эйлеровы крити-
ческие силы, соответствующие изгибу относительно осей z и у; реше-
ние третьего уравнения дает критическую силу Fo, соответствующую
чисто крутильной форме потери устойчивости.
Рассмотрим решение системы дифференциальных уравнений
(4.133) для такого закрепления концевых сечений тонкостенного
стержня, при котором исключаются их смещения вдоль осей z и у
и вращение относительно продольной оси х, т. е. граничные условия
запишем в виде: при х — 0 и х = I % = т] = © = 0 и £" — if —
== 0" = 0.
В качестве функций, определяющих решения системы (4.133) и
соответствующих принятым граничным условиям, возьмем выражения:
£ = CL sin Хх, 1] = Са sin Хх, © = С3 sin Хх, (4.134)
где % = лл/Z; Ср С2, С3 — некоторые постоянные коэффициенты;
п — любое положительное число (п = I, 2, 3, ...).
Подставляя (4.134) в (4.133) и сокращая на X2sin Хх, получаем
однородную относительно постоянных Сь С2, С3 систему ал гебраиче-
ских уравнений:
(£/iz%2-F)C1-F«!/C3 = 0;
(£/2X2-F)Ca4-Fn2C3 = 0;
—FayCt + Fafia + l£/oX2 4- Glt — r*F] C3 = 0. (4.135)
377
Так как при потере устойчивости постоянные Cv С2 и С9 не равны
нулю, то для получения уравнения устойчивости составим определи-
тель из коэффициентов при неизвестных постоянных и приравняем
его к нулю. Предварительно обозначим: F2 = Е1г№, Fy= Е!у№—
эйлеровы критические силы; F& = (£7Ю12 + GIt) — критическая
сила чисто крутильной формы потери устойчивости. Эти силы будем
называть основными критическими силами. Теперь запишем опре-
делитель системы (4.135) и приравняем его к нулю:
Py-F О
О Fz—F
~avF azF
azF
(Fa — F)/3
= 0.
Раскроем определитель:
(F„ - F) (Fz— —F)r2 — a^F2 (Fz —F) —a^F2 (Fv -F)=^0,
(4.136)
расположив «лены уравнения по степеням F, окончательно получаем
следующее кубическое уравнение для определения критических сил:
F3 (а? + - т2) 4- F2 [(Fг + Fy + FJ г2 - Ftf - Fya*\ -
- Fr2 (F2F„ + FzFto + FtiFw) + F.F/coT2 = 0. (4.137)
Все три корня этого уравнения действительные и положительные.
Они соответствуют трем степеням свободы поперечного сечения с неде-
формируемым контуром в своей плоскости. Каждый из корней Ft,
F#, F3 зависит от числа полуволн п = 1, 2, 3,...» оо, т. е. имеет беско
нечное множество значений, соответствующих бесконечному числу
степеней свободы упругой оси стержня.
Подробное исследование, проведенное В. 3. Власовым, показало,
что если Fx<Fy<F^ то три корня рассматриваемого кубического
уравнения располагаются следующим образом» Fj <_ F2 < F8 < Fy <
<F<1)<FS. Если же F^ < Fz < Fy, to F> < Fto < Fz < F, < F^ < Fs.
Отсюда следует весьма важный практический вывод: для несиммет-
ричного тонкостенного стержня, в котором центр изгиба не совпа-
дает с центром тяжести, критическая сила, соответствующая изгибно-
крутильной форме потери устойчивости, всегда меньше минималь-
ной эйлеровой критической силы.
В частном случае, когда центр изгиба совпадает о центром тяжести
сечения (az == ад = 0), уравнение (4.136) принимает вид:
{FtJ - F) (Fz - F) (Fw — F) г2 = 0,
откуда получаем три решения: Ft = Fz> Ft = Fyt Ft — F&
Следовательно, в этом частном случае будут или чисто изгибная,
или чисто крутильная формы потери устойчивости, причем критиче-
ская сила, соответствующая крутильной форме потери устойчивости,
может быть наименьшей.
37в
При внецентренном сжатии чисто изгибные и чисто крутильные
формы потери устойчивости могут быть в частном случае, когда сжи-
мающая сила приложена в центре изгиба. Тогда ег = ау =ч еу
и уравнения (4.132) также распадаются на три отдельных уравнения!
.Е1&™ + = 0; E/pVv + Fif = 0;
+ (Г (г2 4- 2₽А + 2РА) - G/J О" = 0.
Первые два уравнения определяют изгибные формы потери устойчи-
вости и дают эйлеровы критические силы Fz = Е1г№ и Fy — Е1У№\
а третье уравнение определяет крутильную форму потери устойчи-
вости, при которой поперечные сечения стержня поворачиваются от-
носительно центра изгиба. Выражение критической силы, соответ-
ствующей крутильной форме, в принятых обозначениях приводим без
вывода!
Ffr = F«/2/(r2 + 2рА + 2Р А)*
К расчету принимается наименьшая из трех вычисленных крити-
ческих сил.
23.3. Устойчивость плоской формы изгиба
При неравномерном по высоте сечения распределении нормальных
напряжений при плоском изгибе рациональными по прочности явля-
ются такие сечения, площади которых удалены от нейтральной линии.
Этим объясняется значительная разница между главными моментами
инерции сечения балок. С другой стороны, при большом отличии жест-
костей сечения в плоскости изгиба и перпендикулярной ей плоскости
может появиться опасность выпучивания сжатой зоны из плоскости
изгиба, или опасность потери устойчивости плоской формы изгиба.
Она характеризуется искривлением оси балки в плоскости меньшей
жесткости и поворотом поперечных сечений вокруг этой оси. Наряду
с исходной деформацией — плоским изгибом, появляется качественно
новая деформация — изгиб в плоскости меньшей жесткости в сочета-
нии с кручением.
При исследовании устойчивости плоской формы изгиба исходят из
гипотезы о недеформируемости
Рассмотрим особенности
расчета балок на устойчивость
плоской формы изгиба приме-
нительно к некоторым част-
ным случаям в предположении
упругой работы материала.
Устойчивость тонкой поло-
сы при чистом изгибе. На рис.
4.47 показана балка в виде
узкой полосы постоянного се-
чения, испытывающая чистый
изгиб в плоскости хОу. Опор-
ные устройства таковы, что
контура поперечного сечения.
379
опорные сечения свободно поворачиваются в плоскости изгиба, а также
в другой главной плоскости, но не могут поворачиваться относительно
продольной оси балки.
При потере устойчивости балка выпучится в сторону под действием
дополнительного изгиба в горизонтальной плоскости и закручивания
относительно продольной оси. Рассмотрим произвольное сечение,
взятое на расстоянии х от левой опоры. Обозначим: и и v — смеще-
ния центра тяжести вдоль осей г и у, © — угол поворота сечения в плос-
кости гОу, Е12 и Ely — изгибные жесткости сечения относительно
осей г и yt Gl( — жесткость при кручении. Величина lt для узкой
прямоугольной полосы может быть определена по следующей фор-
муле, предложенной С.П. Тимошенко:
= -0,630 *),
где hub — высота и ширина прямоугольного поперечного сечения
полосы.
Запишем дифференциальные уравнения изгиба в двух плоскостях
и кручения:
d2» _ М . <Ри _ М sin е _ М de _ М du
dx* ~ Elz ’ dx* ~~ Ely Ely dx ~ GIt dx *
Продифференцируем третье уравнение по х, а затем подставим
вторую производную из второго уравнения. Получим
сре _ Л42б
dx* “ ElyGIt'
Обозначив
n = W (4-138)
получаем следующее дифференциальное уравнение:
Интеграл этого уравнения имеет вид
0 = Сх cos пх + Са sin пх.
Для определения двух произвольных постоянных составляем два
граничных условия, соответствующих условиям закрепления балки.
Подчиняя поочередно решение дифференциального уравнения гра-
ничным условиям, получаем Сх = 0, C2sin nl = 0.
При С2 = 0 балка испытывает обычный плоский изгиб без потери
устойчивости, следовательно, надо принять sin nl =» 0. Эго равенство
удовлетворяется при nl = л, 2л, Зл, ... .
Мы получили бесконечный ряд корней, каждому из которых соот-
ветствует своя форма потери устойчивости — свое значение критиче-
ской нагрузки. Для определения наименьшей критической нагрузки
380
принимаем наименьший корень nl — л. Тогда, по (4.131), получаем
первый критический момент:
Мсг = " VETfil,. (4.139)
Устойчивость полосы при внецентренном сжатии. На рис. 4.48
показана полоса, испытывающая внецентренное сжатие. При крити-
ческом значении нагрузки полоса выпучивается — появляется изгиб
в плоскости меньшей жесткости и закручивание относительно продоль-
ной оси х. При этом в плоскости наименьшей жесткости изгибающий
момент в произвольном сечении Мх = ЛЮ — Fu, где М = Fe. Так
как в критическом состоянии дополнительный прогиб в вертикальной
плоскости хОу отсутствует, то надо составить только два уравнения
равновесия балки в новом деформированном состоянии.
Запишем дифференциальные уравнения изгиба в горизонтальной
плоскости хОу и кручения в плоскости yOzt
d?u_ /И Fu . ___ М du
dx* ~~ El„ El„ ' dx~ GItdx’
Дифференцируя первое уравнение по х и подставляя в него
из второго, получим
I М* Л FGlt\du_
dx*^~ ElyGlfV wjdx-v-
Обозначив
* = '12 = ВД(’+^)' С4-»*»
получаем дифференциальное уравнение
<Р(0
dx*
+ п2со = 0.
Интеграл этого уравнения имеет вид
— cos пх 4- Са sin пх.
Из условий опирания полосы записываем два граничных условия:
при ^ = 0 = = при ^ = 0, которые дают С^О,
881
Ct sin nl — 0, или sin nl» 0. Следовательно, nl = л, 2л, Зл, ....
Запишем (4.140) при наименьшем значении корня nl= л:
№ (у । FGI‘\ _
EiyGl(\l “Г 7И* ’
откуда получаем следующее уравнение для определения критической
нагрузки:
(Mt + £G/<)cr = ^/*c/<
(4.141)
Полученное уравнение удовлетворяет двум случаям загружения:
1) центральному сжатию (е = 0; М ~ 0). Тогда получаем формулу
Эйлера: Fcr = п*Е1у/12\
2) чистому изгибу (F = 0). В этом случае получаем формулу
(4.139): Мсг = у У'Е/yG/f. При одновременном действии сжатия
и изгиба можно подставить в выражение (4.141) момент М = Fe
и из полученного квадратного уравнения определить критическую
силу Fcr.
Если же момент и сила F заданы независимо друг от друга, то По
(4.141) можно определить критическую силу, как при центральном
сжатии с учетом дополнительно действующего заранее заданного мо-
мента М <Л4СГ или определить критический момент с учетом централь-
ного сжатия заданной силой F < Fcr.
Устойчивость полосы при поперечном изгибе. Исследуем устойчи-
вость высокой и тонкой балки прямоугольного сечения, загруженной
сосредоточенной силой, приложенной в середине пролета (рис. 4.49).
В этом случае при потере устойчивости изгибающий момент в горизон-
та л ыюй плоскости xOz и крутящий момент в плоскости yOz в произ-
вольном сечении при ранее принятых обозначениях определяются
следующими равенствами:
/И = х©; 4- у и.
Тогда дифференциальные уравнения изгиба в горизонтальной
плоскости и кручения будут иметь вид:
с. d2u F F du . F
E У4хг~ 2 G ‘dx ~ 2 X dx+ 2
Дифференцированием второго уравнения по х избавимся от
— d*U
Теперь после подстановки из первого уравнения получим
iElfil, и’
ИЛИ
~ + nVe = 0, (4,142)
где
п» = Я/(4Е/р67/).
382
(4.143)
Общий, интеграл дифференциального уравнения (4.142) можно , пред-
ставить в ..виде, бесконечных рядов:
в = С1(1 — — ^ + 3.4.7.8хв — 3.4.7.в. ц - 12х12+ “•) +
4* Cj(x х6 + 4 .'5 8.9 ^4 • 5 • 8 • 9 • 12 • 13 Х’3 ’+ *’•)• <4144)
рапишем два граничных условия для рассматриваемой балки: при
х = //2 dQ/dx = 0, при х = О G = 0. По второму условию получаем
Ci = 0. При этом
dr — сф— 4-^ + 4т5—8Xе — 4 5 8 gI 12*12 + • • •)'
Из первого условия (при х = 1/2) получаем следующую зависимссть
4-5-е
л®
4-5-8-9-
Так как Сг=#0, то
+ <4,45>
где
т=пЧЧЫ. (4:146)
Ограничиваясь тремя членами ряда (4.145), получаем квадратнее
уравнение 1 — т 4- т2/10 — 0, наименьший корень которого /«.=
= 1,127. Тогда по равенству (4.146), с учетом (4.143), получаем выра-
жение критической силы
16,984//2]/£7^/,. (4,147)
Если на балку действует равномерно распределенная нагрузка q,
приложенная к продольной оси балки по всей ее длине, то критическая
.нагрузка определяется по формуле
(4.14Й)
Устойчивость консольной балки, загруженной силой на конце.
Такая балка в виде тонкой полосы при потере устойчивости выпучится
из своей плоскости при одновременном закручивании (рис. 4.50). При
этом в сечениях балки, помимо изгибающего момента в продольной
плоскости Мх = —Fx, возникает изгибающий момент в горизонталь-
ной плоскости /И = FxQ и крутящий момент Mt = —Fx — F (б—и).
Дифференциальные уравнения изгиба в горизонтальной плоскости
кручения в плоскости уОг имеют вид
£/e^ = Fx©;G/^-------Fxg-FQ-u). (4.149)
баз
Рис. 4.50
Исключив из этих уравнений ^.по-
лучим
dxs + ElyCIt 6 — °-
Введя относительную координату а = хП
и обозначив
₽2/2
"‘ = ётД’ <4|50>
получаем дифференциальное уравнение
в таком виде:
^ + nve^o. (4.151)
Полученное уравнение по своей струк-
туре совпадает с уравнением (4.142), а
его решение совпадает с решением (4.144).
Итак, решение уравнения (4.144) в этом случае будет иметь вид:
в С10 3.4а* + 3 • 4-7.8а8 3-4-7-8- II • 120t12'^ ’”) +
+ са(а — 4-Т5«6 + 4 5 -У-9а9 —4 - 5-8-9 - !2 - 13а13“^ ***)•
Для данной задачи имеем следующие граничные условия: при
а == 0 =0, при а = I (на опоре) 0 = 0 (см. рис. 4.50).
По первому условию находим С2 = 0, второе условие дает
г /1 4- п*___________________l 1 - л
U1V~3.4T3-4-7.8 3 - 4 - 7-8 - 11-12 Т •• J-U.
Отбрасывая тривиальное решение Cj =* 0, получаем характеристи-
ческое уравнение
1“’зТ4 + 3.4-7-8'~3~4-7.8\ 11 • 12 + (4.152)
где а = п*.
Уравнение (4.152) с пятью членами ряда удовлетворяется при
а = л2 = 16,1. По (4.150) находим критическую силу
F„ = ^lr£7^T<. (4.153)
Устойчивость плоской формы изгиба двутавровой балки. Рас-
смотрим двутавровые тонкостенные сечения, имеющие две оси сим-
метрии. Тогда центр изгиба сечения совпадает с центром тяжести. При
всех нагрузках, меньших критических, такая двутавровая балка,
загруженная в главной плоскости, работает на обычный плоский изгиб
в этой плоскости. При потере устойчивости балки возникают допол-
334
Рис. 4.51
нительно изгиб в горизонтальной плоскости и кручение вокруг про-
дольной оси (рис. 4.51).
Кручение воспринимается двумя внутренними моментами — мо-
ментом свободного кручения = и моментом стесненного
кручения, связанным с депланацией сечения (полки двутавра выги-
баются в разные стороны, в них возникают касательные силы, которые
и образуют этот момент), « Qft.
Для двутавровых балок момент инерции It можно определять
приближенно по формуле, предложенной С. П. Тимошенко:
где b и t — ширина и толщина полок; lt и h — толщина и высота
стенки (рис. 4.51).
Поперечная сила в полке определяется из соотношения
~ er er h d»e
Q - EI"dJT-----EI" 2 ЛА
где U] = —©h/2 — смещение полок относительно центра тяжести дву-
тавра; /п = ^э/12 — момент инерции полки относительно оси у.
Для симметричного двутавра секториальный момент инерции се-
чения можно записать таю
/ — f _ thZb3
/а — /п g — 24 *
Тогда в принятых обозначениях момент стесненного кручения примет
такой вид;
4=Qft = ----ЕЕ™,
а полный крутящий момент, равный сумме двух моментов, получает
выражение;
M1 + M, = Gltd£-Ela™. 0.154)
385
u*uf
Рис. 4.52
"ЧI Рассмотрим частный слу-
и< чай чистого изгиба двутавро-
вой балки с использованием
J- статического метода,
Г На рис. 4.52 показана бал-
ка двутаврового симметрич-
ного сечения, к опорным се-
чениям которой приложены
моменты А*, вызывающие чис-
тый изгиб балки в вертикаль-
ной главной плоскости. Балка
на опорах закреплена шар-
нирно для поворотов в главных плоскостях и жестко —для кручения
относительно своей продольной оси х.
Равновесие при потере устойчивости описывается уравнением
изгиба в плоскости хОу
и кручения с учетом (4.154)]
El^-Gt'3i = MSx-
Исключим из этих уравнений величину Для этого продифферен*
d*u
пируем по х второе уравнение и подставим в него из первого.
Получаем:
d«© Glt d*© WB n M
^-ЁГа^-ЁЦЁГ^0- <4|55)
Общий интеграл уравнения (4.155) имеет вид
О = Сх sin тх 4- С2 cos тх Ся sh пх + С4 ch пх, (4.156)
где
Для определения четырех произвольных постоянных Сц Ся, С9
и С4 запишем четыре граничных условия, вытекающих из условий
закрепления балки; опорные сечения не поворачиваются вокруг
продольной оси балки н свободно делланируют, углы закручивания
и бимоменты в опорных сечениях равны нулю. Имеем: при л = О,
е=°. ^ = °; прн х=/ е=о, ^s=o.
386
Подчиняя этим условиям решение (4.156), приходим к следующему
характеристическому уравнению:
Isin ml 2 sh nl |
m® sin ml 2n2 sh nl | ~~
Полученное уравнение удовлетворяется при sin ml — 0, т. е. ml =
= л, 2л, ... Подставляя наименьший корень т = nil в (4. 157), полу-
чаем
п2_____С/г . 1 ГI Gh У ।
Р ~ 2E/W+ У \2E1J + ElJ-ly'
откуда наименьший критический момент
ма = г VEifih |/ > + • (4 159)
Сравнив выражения критических моментов двутавровой балки (4.159)
и полосы (4.139) при чистом изгибе, видим, что при Е1Ш = 0 крити-
ческие моменты совпадают.
Выражение критического момента можно записать в таком виде:
М„ = | (4.160)
Коэффициент k зависит от отношения жесткостей
k == л У1 + л2/т, где у = FGIf/fEIv):
у 0.1 1,0 2 4 8 16 32 100 <»
k 31,14 10,36 7,66 5,85 4,70 4.00 3,59 3,29 я
Если рассматриваемая балка загружена сосредоточенной силой, при-
ложенной посередине пролета, критическая сила
Fcr = k/Pl^ETfiT,. (4.161)
Для этого случая загружения коэффициенты k другие:
у 0.4 4 8 16 32 64 160 400 со
k 86,4 31,9 25,6 21,8 19.6 18,3 17,5 17,2 16,93
Известны также решения и для некоторых других частных случаев
загружения и условий опирания двутавровых балок, на которых мы
не останавливаемся.
23.4. Устойчивость прямоугольных пластин
Пластины прямоугольной формы служат составной частью многих
конструкций (например, стенки цельнометаллических вагонов, обшив-
ках каркасных систем и т. п,). Пластины могут быть загружены «мест-
ной» поперечной нагрузкой (например, давление ветра) и «основными»
387
Ряс. 4.8$ Рис. 4.64
усилиями, которые они несут, как составляющие элементы конструк-
ции.
При критических нагрузках происходит потеря устойчивости
пластины, характеризующаяся ее выпучиванием из своей плоскости
и появлением, в связи в этим, дополнительного изгиба.
Для исследования устойчивости пластин могут быть использо-
ваны те же методы, которые применяются в вадачах устойчивости
стержней.
При рассмотрении смежного равновесного состояния принято счи-
тать, что появляющиеся при выпучивании напряжения в срединной
плоскости пластины малы. Малы также прогибы пластины по сравне-
нию с ее толщиной.
На основании этих допущений в задачах устойчивости пластин
можно использовать основные зависимости теории жестких плит. Сле-
довательно, уравнение равновесия в смежном, искривленном состоя-
нии может быть получено из дифференциального уравнения изгиба
жесткой пластины при поперечной нагрузке:
D& + 2^ + S = ’’ "ЛИ = <4 ,62>
где со = © (х, у) — функция прогибов; Vflco = V2V8cd, V8 = 4- —
двумерный оператор Лапласа; D = щутгр) — цилиндрическая жест-
кость; h—толщина пластины; р— коэффициент Пуассона.
В задачах устойчивости пластин внешняя поперечная нагрузка q
не учитывается; исходное напряженное состояние считается безмо-
йентным. Но при исследовании смежного равновесного состояния
надо иметь в виду, что в пластине, нагруженной осевыми сжимающими
силами, при выпучивании эти силы дадут составляющую по направле-
нию оси z (рис. 4.53), вызывающую дополнительный изгиб как попе-
речная нагрузка. Эта составляющая может быть получена из уравне-
ния проекций на ось 2 элемента срединной поверхности пластины, за-
груженного по краям нормальными и касательными усилиями /юх,
388
hoy и йт. Приведем без вывода ее выражение в окончательном виде
«1®>
Тогда уравнение устойчивости для общего случая получаем, как
уравнение изгиба в критическом состоянии по (4.162) с учетом (4.163):
<-^+^ + ^ + 0,^ = 0. (4.164)
Критическая нагрузка (критический параметр) может быть опре-
делена по уравнению (4.164) с учетом заданных граничных условий. Но
такое решение в замкнутой форме обычно невыполнимо, за исключе-
нием простых случаев. Поэтому используют приближенные решения.
Рассмотрим частную задачу. Исследуем устойчивость прямоуголь-
ной пластины (л X b X й). шарнирно опертой по концам. Используем
энергетический метод.
На рис. 4.54 показана такая пластина, загруженная равномерными
сжимающими нагрузками pt и р2. Характер потери устойчивости
показан на рис. 4.53.
Определим минимальный параметр нагрузки рсг, при котором
удовлетворяется энергетический критерий устойчивости в виде ра-
венства нулю суммы работ внешних и внутренних сил на малых проги-
бах пластины:
^+</=0. (4.165)
Запишем работу внешних сил:
W = - $ р, dy J ’ Йрх-f Р, dX J1 (£)* dy. (4.166)
0 0 0 0
Уравнение прогибов пластины, удовлетворяющее граничным условиям
данной задачи, примем в виде бесконечного ряда:
<1>=^^amnsin=Ssin'!S. (4.167)
Л1=! л=!
где т и п — число полуволн синусоиды по направлениям а и b при
потере устойчивости.
Тогда, подставив (4.167) в (4.166), получаем
т=1 n=l »i=J л=1
Потенциальная энергия изгиба пластины определяется следующей за-
висимостью:
389
или, с учетом (4.167),
t/=TabXS°^
л®л®^2
(в8 + д® / *
(4.169)
Уравнение устойчивости получаем, подставив (4.168) и (4.169) в
(4.165):
m=1 л=1
Из полученного уравнения можно найти критические
краевых нагрузок. В частном случае, при р2 = О
GO СО
r V V 8 !т^ . n2*2V
2j о® + г?® /
ne.1
р V ® /”ajt*
Zj 2j amn c?
(4.170)
комбинации
(4.171)
По (4.171) видим, что наименьшее значение нагрузки получим, сохра-
няя одно слагаемое
Р1 т2п2
а2
(4 172)
Чтобы получить наименьшее значение pt при любом т, в (4.172) пола-
гаем п = 1. Тогда
*=D"-‘(m+£)2- <4-173)
Для отыскания наименьшего значения р, минимизируем функцию
(4.173), предполагая, что она непрерывна:
_ D^2 (т + £ ) (1 -£} = 0.
dm а® \ Ь*т/ \ Ь2т/
Отсюда т == alb. Если tn получается дробным, то надо принять боль-
шее и меньшее целые значения и для них по (4.173) определить два
значения рр из которых выбрать меньшее. Например, при сПЬ = 2,5
получаем: для = 2 р, = О^2 + 2,52 • у) = 5,1252D ~ ; для
= 3 р> — (з + 2,52'4) = откуда следует, что кри-
тическим будет значение рг при т = 3.
390
Важно отметить, что использование зависимостей, справедливых
для жестких пластин, допустимо лишь при определении наименьших
критических нагрузок, действующих на пластину. Если же Поспело-
ва »ь устойчивость всей конструкции, в которой пластина является
лишь отдельным элементом, то следует основываться на зависимостях,
относящихся к гибким лласгинам. Теория гибких пластин должна
использоваться также во всех случаях при исследовании закритиче-
ского состояния, так как в этом состоянии прогибы могут быть сравни-
мы с толщиной пластины. Отметим, чго потеря устойчивости сжатой
пластины еще не означает исчерпания ее несущей способности. Пластина
я после выпучивания способна воспринимать возрастающую нагрузку.
После потери устойчивости напряжения по ширине пластины распреде-
ляются неравномерно и в средней ее части мало отличаются от крити-
ческого вначенмя.
Вопросы для самоконтроля
I. Почему для тонкостенных стержней неприменима гипотеза плоских се-
чении?
2. Сформулируйте основные гипотезы теории Власова.
3. Какая форма потери устойчивости называется изгибио-крутнлъной?
4. Какие внутренние усилия поя вляются в сечениях тонкостенного стержня?
& В чем особенности формы потери устойчивости виецентренио сжатого
тонкостенного стержня?
6. В каких случаях возможна потеря устойчивости плоской формы изгиба?
7. Чем характеризуется потеря устойчивости плоской формы изгиба?
8. Каковы особенности расчета на устойчивость тонкостенной двутавровой
белки?
9. В каком случае критические моменты при чистом изгибе тонкой полосы
в двутавровой балки могут совпадать?
10. Чем характеризуется потеря устойчивости пластин?
11. Какие методы можно применять для исследования устойчивости
пластин?
12. При каких допущенных в задачах устойчивости прямоугольных пла-
стин можно использовать основные аависимостн теории жестких плит?
Раздел 5
ДИНАМИКА СООРУЖЕНИЙ
Глава 24
ОСНОВНЫЕ ПОНЯТИЯ
В предыдущих разделах рассматривалось статическое воздействие
да сооружение. При этом все параметры, характеризующие состоя-
ние сооружения, оставались неизменными во времени. Они и опреде-
ляли статическое поведение сооружения.
Динамика сооружений — это область строительной
механики, которая занимается исследованием поведения и разработкой
методов расчета сооружений при воздействии динамических нагрузок,
т. е. нагрузок, изменяющих с течением времени свою величину или
положение.
Развитие науки и техники на современном этапе обусловливает
необходимость решения новых все более сложных динамических за-
дач. Это связано с ростом динамических нагрузок; использованием
вибраций, ударов и производственных взрывов, как элементов техноло-
гических процессов; созданием крупногабаритных гибких сооружений;
развитием точнейших технологических процессов; ограничением фи-
зиологического воздействия динамических нагрузок на человека
и т. д.
24.1. Динамические нагрузки и их особенности
Динамические нагрузки по своей природе разнообразны, но все
они могут быть разделены на следующие характерные виды.
Неподвижные периодические нагрузки, изменяющие непрерывно
периодически во времени свою величину и направление. Такие
нагрузки возникают при работе промышленного оборудования периоди-
ческого действия в результате неизбежной неуравновешенности дви-
жущихся частей. Это —электродвигатели, двнгатель-генераторы,
турбогенераторы, турбокомпрессоры, турбовоздуходувки, турбона-
сосы и др., т. е. машины с неуравновешенной вращающейся частью»
масса которой имеет относительно оси вращения эксцентриситет р
(рис. 5.1, а). Во время движения неуравновешенной массы с постоян-
ной угловой скоростью 0 возникает центробежная сила
F = /п62р (5.1)
Вертикальная и горизонтальная составляющие центробежной силы,
действующие на сооружение, показаны на рис. 5.1, б. Они меняются
во времени. График изменения вертикальной составляющей—синусо-
ида с амплитудой F (рис. 5.1, в). Если нагрузка непрерывно изменяется
392
f(th
^=Fsinet
“fcosGf
по закону синуса или косинуса, она называется вибрационной или
гармонической.
Периодическую нагрузку создают также машины с кривошипно-
шатунными механизмами (компрессоры и насосы, двигатели внутрен-
него сгорания, лесопильные рамы и пр.). График изменения такой
нагрузки показан на рис. 5.1, г.
Вибрационные нагрузки обладают двумя характерными для них
особенностями. Во-первых, эффект их воздействия не локализуется
местом действия, а может сказаться в удаленных от нагрузки местах
и даже изолированных в статическом смысле от конструкции, воспри-
нимающей нагрузку. Во-вторых, что более опасно, — отсутствует
прямая зависимость между величиной нагрузки и вызванным ею эф-
фектом. Малая нагрузка может привести к разрушению конструкции
в результате возникновения резонанса. Большая же нагрузка может
оказывать незначительное воздействие.
Помимо разрушительного воздействия, серьезную опасность для
конструкций могут представлять высокочастотные колебания с малой
амплитудой, расстраивая работу различных приборов и станков,
приводя к исчерпанию усталостной прочности конструкционных ма-
териалов. Они также вредно сказываются на организме людей.
Неподвижные импульсивные нагрузки, действие которых сводится
к передаче на сооружение однократных или многократных кратковре-
менных воздействий в фиксированных местах — ударов (падение
груза на перекрытие, удар льдины о ледорез, воздействие падающими
частями копров при забивке свай и молотов кузнечно-прессового
оборудования (рис 5.2. а). ударная волна взрыва (рис 5.2, б) и др.).
В отличие от вибрационных нагрузок, действие ударов полностью
393
V\/^
предопределяется их силой и жесткостью сооружения и локализуется
на тем меньшей его части, чем выше скорость соударения.
Подвижная нагрузка, которая меняет с течением времени свое
положение, не меняя величины. Сюда относятся нагрузки от различ-
ных транспортных средств — мостовых кранов, подвижного состава
железных дорог, автомобилей, трамваев и др. Эффект воздействия за-
висит от скорости их передвижения по сооружен ию.Следует отметить,
что этому виду нагрузки часто сопутствуют в различных комбинациях
другие нагрузки. Например, на рельсовых стыках и в местах сопря-
жения пролетных строений происходят удары; от неуравновешенности
ходовых частей подвижного состава возникают вибрационные на-
грузки. Все это делает картину воздействия крайне сложной и вапу-
танной для теоретических исследований.
Сейсмическая нагрузка, воспринимаемая сооружением во время
землетрясения, в виде повторяющихся подвижек и колебания основа-
ния и изменяющаяся во времени по сложному закону (рис. 5.3).
Ее воздействие зависит от интенсивности землетрясения.
Ветровая нагрузка, передаваемая на сооружение в виде повторя-
ющихся порывов ветра, которая может оказывать значительное дина-
мическое воздействие для высотных, а также большепролетных мало-
жестких сооружений.
Все динамические нагрузки
вызывают колебания сооруже-
ния. исследование которых дает
возможность представить пол-
ную картину работы этого со-
оружения и судить о его проч-
ности, надежности и эксплуата-
рис. б.э ционной пригодности.
394
24.2. Силы, сопровождающие колебания
При колебаниях сооружения могут возникать различного рода
силы, которые способствуют либо развитию колебательного процесса,
либо его затуханию. Эти силы можно сгруппировать следующим
образом.
Силы инерции, как самого сооружения, так и оборудова-
ния, расположенного на сооружении. В соответствии с принципом
Даламбера (масса вызывает силу инерции, пропорциональную ее
ускорению и противоположно ему направленную) сила инерции
равна произведению массы т на ее ускорение, т. е. на вторую произ-
водную перемещения массы по времени. Обычно инерционную силу
направляют в сторону перемещения и записывают со знаком минус:
/ = — т = —mi). (5.2)
Восстанавливающие силы, т. е. силы, стремящиеся
вернуть тело в первоначальное положение при его отклонениях от по-
ложения равновесия. Это —силы упругости сооружения и упругих
связей. На рис. 5.4 показаны графики зависимости восстанавливающих
сил от перемещения. Первый из них относится к упругой системе с ли-
нейной, а два других — с нелинейной характеристиками. Если со-
оружение считается линейно деформируемой системой, сила упругости
пропорциональна отклонению системы:
Fc — си. (5.3)
В некоторых случаях нелинейность существенно проявляется лишь
при достаточно больших отклонениях и поэтому системы, в которых
перемещения при колебаниях будут малыми, тоже можно считать
системами, имеющими линейные характеристики.
Коэффициент пропорциональности с представляет собой реакцию
сооружения в месте расположения массы при перемещении ее на еди-
ницу и называется жесткостью сооружения в данной точке. Эту вели-
чину на основании теоремы о взаимности перемещений можно опреде-
395
лить, зная перемещение рассматриваемой точки б, вызванное единич-
ной силой:
с = 1/6. (5.4)
Диссипативные силы сопротивления, явля-
ющиеся результатом рассеивания энергии деформаций при колебаниях
из-за внутреннего трения в материале, трения в соединении элементов
конструкции сооружения и сопротивления внешней среды, в которой
происходят колебания. Обычно эти силы принимают пропорциональ-
ными скорости колебаний:
= kb. (5.5)
Коэффициент пропорциональности kt выражающий силу сопротив-
ления, развивающуюся при скорости, равной 1, называется коэффици-
ентом сопротивления.
Все перечисленные силы при рассмотрении их действия приклады-
ваются к соответствующей массе и направляются в сторону, противо-
положную ее движению.
24.3. Задачи и методы динамики сооружений
При действии динамических нагрузок сооружение приходит в
движение — начинает колебаться, отдельные его точки перемеща-
ются Найдя перемещения точек сооружения и эная закон связи
между усилиями и перемещениями или напряжениями и деформация-
ми, можно вычислить характеристики, определяющие поведение
сооружения, и судить о его прочности и долговечности. Долговеч-
ность в условиях динамических воздействий связана с проявлением
нового явления — усталости материалов и с необходимостью расче-
тов на выносливость сооружений. Кроме того, к задачам динамики
относятся задачи по решению вопросов защиты нормальной жизне-
деятельности людей, технологических процессов, измерительных при-
боров от вреднего воздействия колебаний.
Динамический расчет сооружений значительно отличается от ста-
тического. Во-первых, все статические нагрузки имеют один и тот же
закон их изменения, законы же изменения динамических нагрузок во
времени отличаются большим разнообразием. Во-вторых, ввиду изме-
нения нагрузки во времени, динамическая задача не имеет единствен-
ного решения, как статическая. В-третьих, в задачах статики значе-
ния внутренних усилий определяются только действующей нагрузкой;
в задачах же динамики такого соответствия нет, так как динамическая
нагрузка порождает дополнительную — инерционную нагрузку.
Эти отличия делают динамический расчет сооружений более слож-
ным и трудоемким по сравнению со статическим.
Методы динамики сооружений представляют близкую аналогию
с методами статики. Но если методы статики дают возможность непо-
средственно определять усилия, возникающие в сооружениях, то
с помощью методов динамики производится только вывод уравнений
движения сооружения, т. е. часть полного динамического расчета,
396
хотя и очень важная. Различают три основных метода вывода уравне-
ний движения —статический, кинематический и энергетический.
Статический метод основан на принципе Даламбера, согласно
которому к движущейся системе можно применить уравнения равно-
весия. если к числу действующих на систему сил присоединяются силы
инерции. Например, если все силы действуют по одной прямой вдоль
оси и движение происходит также вдоль этой прямой, уравнение рав-
новесия примет вид
(5.6)
где —т jp)—сила инерции.
Этот метод наиболее удобен для вывода уравнений движения в про-
стых задачах динамики.
Кинематический метод основан на принципе возможных перемеще-
ний, который формулируется следующим образом. Если система на-
ходится в состоянии динамического равновесия под действием не-
скольких сил, в том числе и сил инерции, то полная работа всех сил на
бесконечно малых возможных перемещениях этой системы равна нулю.
Равенство нулю работы сил на возможном перемещении системы экви-
валентно условию равновесия. Метод имеет преимущества расчета со-
оружений с достаточно сложными конструктивными схемами, когда
встречаются трудности в составлении условий равновесия действующих
на них сил.
Энергетический метод основан на применении энергетических
принципов — закона сохранения энергии, согласно которому сумма
кинетической и потенциальной энергии неизменна в процессе коле-
баний!
(5-7)
Т + U = const,
где Т — кинетическая энергия; U — потенциальная.
Согласно принципу стационарности полной энергии системы, ис-
пользуя вытекающие из него уравнения Лагранжа второго рода,
можно записать!
где q —обобщенные координаты (см. п. 25.1).
Энергетический метод широко применяется как для точного описа-
ния движения систем, так и получения приближенных параметров,
характеризующих движение.
Таким образом, уравнения движения динамической системы могут
быть сформулированы с помощью любого из трех методов! они рав-
ноценны и приводят к одним и тем же уравнениям движения.
24.4. Понятие о степенях свободы системы
В динамических расчетах сооружения классифицируют по числу
степеней свободы. Под свободой системы понимают возможность
перемещений расположенных на ней масс за счет или недостающих
397
Я в системе связей, или деформаций элемен-
j тов, или того и другого.
• т Число степеней свободы системы — это
число независимых геометрических пара-
7^г ""---сz метров (обобщенных координат), опреде-
v ~ ляющих положения всех масс системы при
их всевозможных перемещениях.
₽ис’5,5 Если для нахождения степеней свобо-
ды системы в статике сооружений есть
соответствующие формальные выражения (например, для плоской
дисковой системы W ~ 3D — 2Т — Со), то в динамике сооруже-
ний эта задача значительно усложняется. Любые сооружения ввиду
их деформируемости и распределения собственной массы вдоль всех
осей, строго говоря, будут системами с бесконечным числом степеней
свободы. Расчет на динамическую нагрузку таких систем весьма тру-
ден и не всегда точно разрешим. Поэтому при решении практических
задач пользуются упрощенными схемами, которые характеризуются
конечным числом степеней свободы. Выбор упрощенной схемы основы-
вается на некоторых условиях, определяющих существенное в движе-
нии системы.
Допустим, на двутавровой балке № 36 (т = 70 кг/м) пролетом
Z = 2 м установлен электродвигатель массой 7 т. При приложении
динамической нагрузки двигатель вместе с балкой совершает колеба-
ния. Масса двигателя, заключенная в небольшом объеме, в 50 раз
больше массы балки, распределенной по пролету. Естественно, что
движение системы определяется массой двигателя, поэтому распреде-
ленную массу балки можно не учитывать и считать ее невесомой. Рас-
сматривая движения системы происходящими только в вертикальной
плоскости, находим, что положение массы двигателя определяется
тремя координатами: вертикальным перемещением и, горизонталь-
ным и и углом поворота а. Таким образом, система с бесконечным чис-
лом степеней свободы сведена к системе с тремя степенями свободы.
Если еще учесть, что углы поворота сечений при изгибе балки малы
(при расположении двигателя посередине пролета а = 0) и момент
инерции вращения массы мал (ввиду компактности двигателя), то
можно исключить из рассмотрения координату а, считая массу двига-
теля точечной. Кроме того, перемещения «, обусловленные продоль-
ной деформацией балки, составляют незначительную часть перемеще-
ний v — прогибов балки, поэтому их можно также не учитывать.
Итак, в результате проведенного анализа мы пришли к упрощен-
ной схеме, которая является системой с одной степенью свободы
(рис. 5.5).
Рассмотрим еще один пример. На балке, опирающейся одним кон-
цом на жесткую, а другим — на пружинную опору жесткостью с,
расположены три точечные массы (рис. 5.6). С учетом условий первого
примера балка обладает тремя степенями свободы. Но если жесткость
пружины с значительно меньше, чем жесткость балки при изгибе Е/,
то балку можно считать недеформирующейся (Е/ = оо). В таком
случае система имеет одну степень свободы: движение всех трех масс
39в
S -Ji В
Рис. 5.7
Рис. 5.0
характеризуется только углом поворота а жесткого диска АВ
(рис. 5.7).
Введем некоторые понятия, облегчающие установление числа
степеней свободы систем. Будем различать четыре вида элементов
системы:
]) деформируемый или недеформируемый элемент, массой которого
можно пренебречь по сравнению с массами других элементов систе-
мы, — невесомый элемент;
2) деформируемый элемент с распределенной массой, пренебреже-
ние которой может привести к искажению динамического поведения
системы, — элемент с распределенной массой;
3) обладающий массой элемент, деформацией которого в процессе
колебаний можно пренебречь по сравнению с деформациями других
элементов системы, — элемент с сосредоточенной массой;
4) элемент с сосредоточенной массой, моментом инерции враще-
ния которой можно пренебречь, — элемент с точечной массой.
Если в систему входит хотя бы один деформируемый элемент с рас-
пределенной массой, система всегда имеет бесконечное число степеней
свободы. Система, в состав которой входят только элементы с сосредо-
точенными и точечными массами, является системой с конечным числом
степеней свободы. Каждый элемент с сосредоточенной массой обладает
на плоскости тремя степенями свободы, с точечной — двумя. Поэтому,
если плоская система состоит из С элементов с сосредоточенными масса-
ми, Т элементов с точечными массами и невесомых деформируемых эле-
ментов, ее полное число степеней свободы
W = ЗС + 2Т. (5.9)
При введении различных предпосылок (считая, например, про-
дольные деформации стержней равными нулю) число степеней свободы
может оказаться меньше полного. Для установления числа степеней
свободы с учетом всех предпосылок необходимо представить схему де-
формированного состояния системы.
Рассмотрим раму (рнс. 5.8, о) с двумя точечными массами, распо-
ложенными на стойках. Ригель и стойки считаем невесомыми и иеде-
формируемыми в продольных направлениях. Полное число степеней
свободы этих масс
W = 27 = 2 • 2 = 4.
Если пренебречь продольными деформациями элементов и считать
хорду каждого деформированного элемента равной длине самого эле-
мента, получим уменьшенное число степеней свободы, равное 2. Поло-
QQQ
Рис. S.8
G б
Рис. Б.в
жение масс характеризуется их горизонтальными отклонениями щ.
и и2 (рис. 5.8, б).
Если поместить массы в узлы (рис. 5.9, а), то при тех же предполо-
жениях число степеней свободы равно 1, так как горизонтальные
смещения узлов при любых малых отклонениях всегда одинаковы
(рис. 5.9,6).
При расположении точечных масс в узлах число степеней свободы
определяется числом смещений узлов
Г = — С — Со (при №>0).
Вопросы для самоконтроля
I. Чем отличается динамическое воздействие от статического?
2. Укажите основные виды динамических нагрузок.
3 Какова особенность воздействия неподвижной периодической нагрузки
на сооружение?
4. Какие силы могут возникать при колебаниях сооружений, от чего они
еавксят?
5. Сформулируйте задачи, которые должна решать динамика сооружений.
6. Назовите методы динамики сооружений.
7. Как формулируется принцип Даламбера?
8. На чем основан энергетический метод?
9. Что понимают под свободой системы?
10. Что называется числом степеней свободы системы?
11. На какие два вида делятся системы по числу степеней свободы?
12. В каком случае систему можно отнести к системе с бесконечным числом
степеней свободы?
Глава 25
КОЛЕБАНИЯ СИСТЕМ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
25.1. Дифференциальное уравнение движения
Рассмотрим движение простейшей системы с одной степенью сво-
боды — системы с одной точечной массой под воздействием переменной
во времени нагрузки F (/). На рис.5.10 показаны различные схемы та-
кой системы. Положение массы первой схемы (рис. 5.10, а) при ее
движении определяется перемещениями вдоль оси у — п; второй
(рис. 5.10, 6) — вдоль оси х — и\ положение всех точек системы, в том
числе и массы третьей схемы (рис. 5.10, в) определяется одним гео-
метрическим параметром — углом наклона оси стержня а. Параметры
400
и, о, а можно обозначить, как это
делается в аналитической механи-
ке, одной буквой q и назвать обоб-
щенной координатой. Вообще, обоб-
щенными координатами называют
независимые параметры, однознач-
но определяющие конфигурацию
системы в любой момент времени.
Обобщенные координаты могут
иметь различные размерности (дли-
ны, углы, площади и т. д.). Введе-
ние обобщенных координат позво-
ляет достигнуть высокой степени
общности теории и единообразия
перехода от реальных физических
явлений к абстрактным математи-
ческим моделям.
Составим уравнение движения
системы, используя принцип Да-
ламбера. Для этого сначала необ-
ходимо установить все силы, дей-
ствующие на систему. В общем слу-
чае (рио. 5.10) сюда относятся дина-
мическая нагрузка F (/), сила инер-
ции /, сила упругого сопротивле-
ния Fc и диссипативная сила
сопротивления Fa. Если все эти си-
лы действуют вдоль одной прямой
(рис. 5.10, а, б), то условие равно-
весия запишется в виде равенства
нулю суммы сил на какую-либо
Рис. 6.10
из координатных осей:
—£(/) — / + F. + 6 =0; (5.10)
с учетом их описания через обобщенные координаты
mq cq + kq — F (t). (5.11)
Разделив все члены уравнения на т, получим дифференциальное
уравнение движения системы с одной степенью свободы!
- I k . , с F(t)
(5.12)
Для системы, изображенной на рис. 5.10, a, q есть vt а для системы,
изображенной на рис. 5.10, б—это и. Если линии действия сил,
приложенных к системе, не совпадают (рис. 5 10, в), то уравнение рав-
новесия составляется в виде равенства нулю суммы моментов всех
сил относительно какой-либо точки. Дифференциальное уравнение
движения будет отличаться от (5.12) только постоянными множите-
лями?
- , Z2 k . । I2 с f _
9 + (а+02 яГ 9 (я + О2 Tn 9 в • (5.13)
401
Здесь для конкретного случая -системы (рис. 5.10, в) можно записать
вместо обобщенной координаты q ее значение а.
Воспользуемся для составления уравнения движения системы
уравнением Лагранжа второго порядка. В неконсервативных систе-
мах происходит рассеивание энергии, поэтому уравнение Лагранжа
(5.8), записанное для консервативных систем, видоизменяется»
а(г-^) + г=Г(/)’ <5,4>
°* \dq °ч } дд
где
<D = kqz/2 (5.15)
— диссипативная функция Релея, или функция рассеивания, которая
имеет такую же форму, как и выражение кинетической энергии (k
вместо т). Можно показать, что
----2Ф, (5.16)
откуда следует, что величина (—2Ф) характеризует уменьшение
(рассеивание) энергии системы (Г 4- U) в единицу времени. Для пока-
занных на рис. 5.10, а, б систем кинетическая энергия Т и потенциаль-
ная энергия U определяются выражениями
Т = mq2/2* U « о?2/2. (5.17)
Подставим (5.15) и (5.17) в уравнение Лагранжа. Учитывая, что dTIdq =
= mq, d/dt (dT/dq) — rriq, dTIdq = 0, dUldq = cq, дФ/dq = kq, полу-
чим точно такое же дифференциальное уравнение, как и (5.11). Итак,
движения систем с одной степенью свободы при действии динамической
нагрузки описываются линейными дифференциальными уравнениями
с постоянными коэффициентами. Такие движения называются линей-
ными. Виды движения системы могут быть самыми разнообразными
в зависимости от вида действующей динамической нагрузки и тех или
иных сил, возникающих при движении.
25.2. Свободные колебания
Рассмотрим движение консервативной системы с одной степенью
свободы, если ее вывести каким-либо образом из положения статиче-
ского равновесия. В этом случае при ее движении будут возникать
только инерционная сила / и сила упругого сопротивления Fc. Диф-
ференциальное уравнение движения можно получить из (5.12), учтя,
что F (/) = 0 и Fa = 0. Оно имеет вид
<7 4-с/т • с/= 0, (5.18)
или, полагая
с/т = со2, (5.19)
где со — вещественное положительное число,
$4-<0^ = 0. (5.20)
402
Эго однородное дифференциальное урав- у
пение второго порядка, решение кото-
рого отыскиваем в форме
9 = Ле< (5.21)
Подставим (5.21) в (5.20); получаем ха- Ряе. б.ц
рактеристическое уравнение ? + = 0
с корнями = /со; z2 = —ссо. Общее решение дифференциального
уравнения (5.20)
q = + Age-^.
Избавляясь от показательных функций с чисто мнимыми показа-
телями с помощью формул Эйлера e±ltuf = cosco/ — i sin со/, получим
q = Ах sin со/ 4- А2 cos со/. (5.22)
Общее решение можно представить в ином виде. Положим в уравнении
(5.22) Аг ~ Л cos А и А2 = A sin А, где А и А — новые произвольные
постоянные. Подставляя эти значения Ах и As в (5.22), получаем
g = A sin со/ cos А 4- A cos cot sin А,
или
q = A sin (со/ 4- А). (5.23)
Анализируя выражение (5.23), видим, что при движении системы
обобщенная координата меняется во времени по синусоидальному
закону (рис. 5.11). Такое движение называется простым гармоничен
ним колебанием. Произвольная постоянная А, характеризующая размах
колебаний, называется амплитудой колебаний, а произвольная постоян-
ная А, характеризующая отклонение системы в начальное мгновение,
называется начальной фазой колебания. Так как амплитуда в процессе
колебаний не изменяется, такие колебания называют незатухаю-
щими. Постоянные А и А найдем из начальных условий. Пусть, на-
пример, при /=0 обобщенная координата q(l)t^o = qOt а обобщенная
скорость q (ty=o = тогда из уравнения (5.23) qQ = A sin A, q0 =
= Асо cos А, откуда
Л = (Qo/o)2; (5.24)
А = arctg cocfo/g. (5.25)
Процесс колебаний повторяется после промежутка времени, по исте-
чении которого аргумент со/ 4- А увеличивается на 2л:
со/ 4~ А 4~ 2л == со (/ 4~ У) 4~ А.
Отсюда продолжительность полного цикла колебаний, или период
колебаний,
Т = 2л/со. (5.26)
403
Величина, обратная периоду и представ-
ляющая собой число циклов колебаний
в 2л секунд, называется круговой частотой
свободных, или собственных, колебаний!
w == 2л/Т. (5.27)
Чтобы перейти к технической частоте, ко-
торая измеряется в герцах (число колебаний
ва одну секунду), необходимо круговую
частоту разделить на 2л.
Частоту собственных колебаний можно
определить с помощью одного из выраже-
ний, вытекающих из (5.19);
ш = Vdm = V 1/(;п6и) = /g/(G6u) = (5.28)
где 6П — перемещение точки приложения массы т (по направлению
ее движения при колебаниях), вызванной единичной силой, приложен-
ной в этой же точке и по тому же направлению; G — вес груза < массой
nr, g — ускорение свободного падения.
Из выражений (5.28) и (5.26) слепует, что частота со и период Т сво-
бодных незатухающих колебаний зависят от физических параметров
системы и не зависят от начальных условий, т. е. начального возмуще-
ния, вызвавшего колебательный процесс. Частота уменьшается при
уменьшении жесткости системы и увеличении массы.
Другие две характеристики процесса свободных колебаний— ам-
плитуда А и начальная фаза X — зависят и от начальных условий, и
от физических параметров системы. Правда, в одном частном случае,
когда <?0 — О, А и X не зависят от физических параметров системы, в
другом — при % = 0 — А зависит, а X — ие зависит 1см. (5.24) и
(5.25)1,
Из уравнения колебаний (5.23) определим обобщенную скорость
движения, взяв производную по времени»
q = Am cos (ml + X). (5.29)
Обобщенная скорость — также периодическая функция е той же
частотой, но фаза скорости другая и опережает фазу обобщенной ко-
ординаты на четверть периода, так как cos (со* + X) e sin (со/ + Х+
-F л/2). Иными словами, обобщенная скорость обращается в нуль,
когда обобщенная координата точки достигает максимума, и наоборот
(рис. 5.12, о, 6). Амплитуда скорости равна соД
Дифференцируем (5.29) еще раз, чтобы получить ускорение;
q — —Дсо2 sin (ml 4- X) = —mlq. (5.30)
Колебания ускорения происходят в противофазе к колебаниям обоб-
щенной координаты (рис s 12, ч) Ускорение, а значит, и сила инерции
ври колебаниях пропорциональны обобщенной координате. Амплитуда
ускорения равна ш2Д.
404
Интересно представить себе реальные числовые значения трех
амплитуд. Например, при частоте колебаний 100 Гц (круговая частота
о» = 100 • 2л = 628 с-1), если амплитуда обобщенной координаты—
линейного перемещения — А = 1 мм, амплитуда скорости ©Л
« 0,628 м/с и амплитуда ускорения о2Л = 6282 • 1 мм/с2 « 40g.
Для анализа движений массы при свободных колебаниях системы с одной
степенью свободы, кроме обычных способов (рис. 5.11), пользуются методом
фазовой плоскости.
Динамическое состояние системы, описываемой дифференциальным уравне-
нием (5.20) $4- со2^ = 0, однозначно может быть определено двумя переменными—
обобщенной координатой q и скоростью д. Действительно, задание любых произ-
вольных начальных значений этих величин однозначно определяет А и X, а зна-
чит, и весь дальнейший процесс колебаний.
Представим себе декартову плоскость, по оси абсцисс которой будем откла-
дывать обобщенную координату q движения массы, а по оси ординат — соответ-
ствующую этой координате скорость q. Точка с координатами q называется
изображающей точкой. Из дифференциального уравнения (5.20) можно получить
уравнение, связывающее непосредственно q и q. Для этого запишем два диффе-
ренциальных уравнения первого порядка:
dq . dq
di = q* dt===q
(5.31)
— ufy.
Разделим второе уравнение на первое, чтобы перейти к уравнению, не содержа-
щему времени:
*« = —ш»-?-. (5.32)
dq q
Полученное уравнение представляет собой уравнение интегральной кривой на
фазовой плоскости, — кривой, по которой движется со временем точка, изобра-
жающая процесс. Интегральную кривую называют фазовой траекторией.
Уравнение (5.32) легко проинтегрировать. Действительно, qdq 4- a>2qdq = 0, к
поэтому уравнение семейства интегральных кривых
= C (5.33)
где С — произвольная постоянная, зависящая от начальных условий.
Например, если q (/)/«о = q (О/=.о = 0. то С = ы2^, и уравнение (5.33) можно
записать в виде
а2 о2
<5-34’
Это уравнение эллипса, а значит (5.33) — уравнение семейства эллипсов с общим
центром в начале координат — в особой точке (рис. 5.13) Задавая константе С
всевозможные значения, получим фазовую плоскость, заполненную подобными
эллипсами, вложенными один в другой Изображающая процесс точка движется
по одному нз эллипсов. Время, за которое изображающая точка обходит эллипс,
равно периоду колебаний Т — 2л/со и одинаково для всех эллипсов. Состояние
равновесия имеет место при д0 =0, q0 = 0; соответствующая ему особая точка
содержит целую интегральную кривую — эллипс, «свернувшийся» в точку Эта
точка называется центром.
Таким образом, с помощью фазовой диаграммы без решения дифференциаль-
ного уравнения движения можно установить характер движения системы. Дви-
жение по замкнутой фазовой траектории соответствует незатухающим колеба-
ниям.
405
С энергетической точки зрения свободные незатухающие колебания, т. е.
свободные колебания консервативных систем, характеризуются непрерывным
переходом кинетической энергии движения массы в потенциальную энергию де-
формации системы, и наоборот. Действительно, кинетическая энергия
Т « mq*ft. = mu? А*/2 • cos2 (со/ 4- X) (5.35)
изменяется с течением времени (рис. 5.14, а), потенциальная энергия
U = сд*/2 = с А*/2 • sin2 (со/ -f- X) (5.36)
— тоже (рис. 5.14, б), а сумма энергии остается при колебаниях постоянной. Это
следует из уравнения движения (5.18). Умножим его на mqz
mqq 4- cqq = О
и преобразуем к виду
Я4!+¥)=°-илня<г+Р,=а
Отсюда следует, что
Т + U « const (5.37)
и, как это видно из графиков (рис. 5.14),
ТП,.Х=У™х- <5Л)
Это условие может быть применено для вычисления собственных частот систем.
гак. 6.18
Заканчивая анализ свободных не-
затухающих колебаний, подчеркнем,
что наиболее важной характеристикой
системы, которая существенно влияет
на реакцию системы при действии ди-
намических нагрузок, является кру-
говая частота свободных, • или соб-
ственных, колебаний системы w. Ее
значение для любой системы с одной
степенью свободы может быть вычис-
лено по одному из выражений (5.28).
Наиболее удобно выражение, при ис-
пользовании которого частота опре-
деляется, минуя составление уравне-
ния движения)
<»= Kl/(m6u). (5.39)
406
Например, необходимо определить частоту свободных колебаний
системы, показанной на рис. 5.15, а, где с—жесткость пружины,
Е/ — жесткость балки. Для этого к системе в месте расположения
массы по направлению ее движения прикладываем единичную силу
и находим перемещение точки приложения силы (рис. 5.15, 6). В дан-
ном случае 6П зависит от осадки пружины и изгиба самой балкш
eu = o,5cfo + Sf~^.
Вычислив реакцию Rb и построив эпюру М (рис. 5.15, в), найдем
6П - 0,25а + 2.|.£.4.|.£.^= 0,25с + .
Тогда = И \f\rn (0,25с 4- /3/(48Е/))].
25.3. Вынужденные колебания системы с одной степенью свободы
Рассмотрим движение системы о одной степенью свободы, когда
на нее действует какая-либо динамическая нагрузка в виде сосредото-
ченной силы Е(Л, изменяющейся во времени. Эту силу назовем возму-
щающей. При наличии возмущающих сил возникают вынужденные
колебания.
Запишем дифференциальное уравнение вынужденных колебаний
консервативной системы (Fd = 0) при действии на нее возмущающей
силы F (0, воспользовавшись уравнением (5.12)!
q 4- (sFq — F (5.40)
Здесь, как и прежде, со2 «= с/т. Уравнение (5.40) является неоднород-
ным дифференциальным уравнением, которое отличается от уравнения
(5.20) наличием правой части. Его общее решение (q — qx 4- 9а) со-
стоит из общего решения однородного уравнения (5.22)
qt = /liSinoZ 4- /l2cos(*)Z (5.41)
и некоторого частного решения неоднородного уравнения.
Для нахождения частного решения применим прием вариации
постоянных. Примем общий интеграл неоднородного уравнения
в виде (5.41).'
q = Bt sin со/ 4- В2 cos со/, (5.42)
но коэффициенты Вг и будем считать уже не постоянными, а не-
которыми функциями времени t. Для нахождения этих двух функ-
ций — В2(0 и В2(/) — необходимо иметь два условия. Одно вполне
определенное — это удовлетворение интегралом (5.42) исходного диф-
ференциального уравнения. Второе, которым необходимо связать
функции ВМ и В2(/) между собой, может быть произвольным, по-
скольку для получения общего интеграла неоднородного дифферен-
циального уравнения достаточно найти любой частный его интеграл.
«УГ
Для использования первого условия продифференцируем (5.42) два
раза по /. После первого дифференцирования
q = о (Bj cos со/ — В2 sin со/) 4- -^-sin со/ 4- cos со/.
Прежде чем брать вторую производную по /, приравняем к нулю сум-
му второго и третьего слагаемых, т. е.
sin со/ + cos со/ = 0. (5.43)
Это и будет тем произвольным вторым условием, которое используем
в дальнейшем для определения Bt (/) и В2(/).
После повторного дифференцирования с учетом (5.43)
q = —со2 (Bi sin со/ + В2 cos со/) 4- со cos со/ — sin со/j. (5.44)
Используя первое условие, подставим выражения (5.42) и (5.44) в диф-
ференциальное уравнение (5.40). После преобразований получим
dBt . dB2 . . F(t) /с
cos со/--£ sin со/ — —77-. (5.45)
at at mco ' *
Решаем уравнения (5.43) и (5.45) сначала относительно производных
от Bj и В2. Для этого умножим все члены уравнения (5.43) на sin со/,
а уравнение (5.45) — на cos со/ и сложим почленно:
cos иЛ. (5.46)
dt ты ' '
Умножив первое уравнение на cos со/, а второе — на sin со/ и вычтя
из первого второе, получим
^ = —-f^sinwt (5.47)
dt m<D '
Искомые функции найдем простым интегрированием:
В1 (0 = 1/(т<о) У F (t) cos Cirf dt + At;
B2 (/) = —l/(mco) F (/) sin co/ dt 4- A2, (5.48)
где At и j42 — произвольные постоянные.
Изменив переменные интегрирования / на т, подставим выражения
функций В,(/) и В2(/) в общий интеграл неоднородного дифферен-
циального уравнения (5.40), который примет вид
q = Ai sin со/ 4- А2 cos со/ 4- 1 /(znco) (sin со/ х
X j F (т) cos сот di — cos со/ j F (т) sin шт ат]. (5.49)
408
Преобразуем третье слагаемое, внеся sin со/ и cos со/ под знак интеграла!
j F (т) sin со/ cos <от 4т — j F (т) cos со/ sin сот 4т =
= j (sin со/ cos сот — cos со/ sin сот) F (т) 4т =
= J F (т) sin со (/ — т) 4т.
Тогда общее решение (5.49), определяющее колебания в системе в об-
щем случае действия возмущающей силы,
q = sin со/ + Д2 cos со/ + l/(/nco) J F (т) sin со (/ — т) 4т. (5.50)
Первые два слагаемые (5.50) описывают свободные колебания, послед-
нее — вынужденные. При некоторых начальных условиях
<7(/)/«.о и q(t)t~o свободные колебания отсутствуют, и общее реше-
ние запишется, как
t
q = 1 /(mco) J F (т) sin co (/ — t) 4t. (5.51)
о
Анализ вынужденных колебаний в линейной системе значительно об-
легчается благодаря применимости к колебаниям принципа суперпо-
зиции. Принцип суперпозиции заключается в том, что ко-
лебания, вызываемые различными возмущающими силами, склады-
ваются друг с другом. Поэтому сначала проанализируем, какими
будут колебания системы при некоторых видах воздействий.
Действие внезапно приложенной силы. Пусть сила F (/) = F вне-
запно приложена к массе системы и остается на ней долгое время
(рис. 5.16, а). Найдем общее решение для этого случая, воспользо-
вавшись (5.51):
t
q — Fl(fnu) j sin о (f — т) 4т = F/(/nco2) cosco (/ —т) =
= F/(tn(jr) (1 — cosco/).
Но со2 = 1/(тбп); тогда ГД/лсо2) = FSn = qst, т. е. равно обобщенной
координате массы, если бы сила F была приложена статически.
Учитывая это, получим
q = qsl (1 — cos со/). (5.52)
Из (5.52) видно, что система совершает простые гармонические колеба-
ния с частотой свободных колебаний системы си относительно положе-
ния статического равновесия q = qst (рис. 5.16, 6). Размах колеба-
ний, т. е. максимальное отклонение от недсформированного состояния
системы, 9™ = 2^
Действие импульсивных нагрузок. Импульсивные нагрузки пред-
ставляют собой кратковременно действующие на сооружение силы,
меняющиеся во времени по некоторому закону F (/). Закон изменения
409
F®
б
Рис. В.1в
сипы является, как правило, неизвестным, и главной характеристикой
нагрузки служит импульс силы
S = Р $.53)
измеряемый изменением количества движения. Для определения им-
пульса имеются специальные приборы.
Для аналитического решения задачи по расчету сооружений на им-
пульсные нагрузки действительный график F (/) (рис. 5.17, а) ааме-
няют равновеликим с ваданным законом изменения (рис. 5.17, б, 6, а).
Характер движения системы при действии импульса различен во
время действия и по истечении этого времени. Поэтому рассматривают
две стадии колебаний системы! стадию вынужденных колебаний
(О < t < /J и стадию свободных колебаний (/ > 4. где — продол-
жительность импульса).
Проанализируем, например, как будет реагировать на действие
прямоугольного импульса S = (рис. 5.18, а) консервативная
система с одной степенью свободы. В начальной стадии колебаний
движение системы такое же, как и при внезапно приложенной силе*
91 =<?Л1 — cos©/).
По окончании действия импульса при t > наступает вторая ста-
дия — стадия свободных гармонических колебаний системы, описы-
ваемых уравнением (5.23):
92 A sin [со (/ — /J +1).
Постоянные А и X определяются начальными условиями, которые
находим из уравнения (5.52) первой стадии при t = /Г1
9i Wt~tt = да (1 — cos (o/j);
(i)/=rf = cogs/ sin co/p (5.54)
Использовав выражения (5.24) и (5.25), получим
А = qs И(1 — cos co/JM- sin2 co/g =
= qa И2 (1 — cos ©/О = 2q^ sin (<o/t/2); (5.55)
410
A i — COS(0/f _
x = afctg miiT
. 1 - cos2 (<nf,/2) + sin2 (co/,/2) _
— arcig 2 sin ((1)/J2) cos (C0G/2)
= coZ i/2. (5.56)
Заменим в А и % частоту свободных
колебаний <о периодом 7:
A r= 2qst sin nZi/T; (5.5 7)
X = jttjT. (5.58)
Очевидно, максимальное значение
обобщенной координаты зависит
только от отношения продолжитель-
ности импульса к периоду собствен-
ных колебаний системы tJT. При
fj/T > 0,5 Qmax приходится на конец
первой стадии и равно 2дс/; при мень-
ших значениях Zt/T — на стадию сво-
бодных колебаний (рис. 5.18, б). При
этом
<7тах = 2<7s/ Sin nt JT. (5.59)
Рис. 6.18
На рнс. 5.18, в показан график изменения максимальной обобщенной
координаты в зависимости от продолжительности действия импульса.
Если импульс почти мгновенный (tJT < 1/20), то можно считать,
что sin JttjT & ntJT и
(/max — q*t • 2л/1/7. (5.60)
Как видно из графика и выражения (5.59), при ЦТ < 1/6 qmiJqKt <1.
При других законах изменения импульсивной нагрузки максималь-
ные обобщенные координаты будут меньшими, чем при прямо-
угольном.
Если при действии импульсивной нагрузки трудно установить закон
изменения ее во времени и продолжительность действия, задачу можно
решить приближенно, считая импульс мгновенным. Обычно в этом
случае импульсивную нагрузку называют ударной. При решении за-
дачи воспользуемся интегралом дифференциального уравнения
вынужденных колебаний (5.49), найденного для произвольного вида
возмущающей силы с использованием метода вариации произвольных
постоянных.
При нулевых начальных условиях
Q
= 1 /(/лсо) [sin <oZ j F (?) cos сот du —
о
— cos<о/Г (т)sin cord?] .
о
(5.61)
411.
Принимая во внимание предположение о мгновенности импульса,
т. е. что t, С Т и, следовательно, cos сот = cos (2лт/7) « 1 и
sin сот « 0, получим
о
Входящий в это выражение интеграл — импульс силы F (/)'; таким
образом, движение системы определяется импульсом кратковремен-
ной силы.
Импульс силы равен количеству движения ударяющей массы mi
S — mq, (5.63)
где q~ скорость движения массы в момент удара.
Максимум влияния воздействия соответствует sin со/=1. Из
выражения (5.62)
q = ty/co, (5.64)
но со = V glqst [см. формулу (5-28)]. Подставив это выражение в
(5.64) и умножив числитель и знаменатель на l^qst, окончательно
получим
q = qstqiVl&ht- (5.65)
Формула (5.65) получена в предположении, что система, воспри-
нимающая удар, невесома. Если же удар происходит по месту, где
система несет сосредоточенную массу Юр то после удара совокупность
масс ударяющего тела tn и системы пц начнет двигаться со скоростью,
отличной от скорости ударяющей массы непосредственно перед
ударом. Скорость после удара находят из условия постоянства коли-
чества движения mq = (m + ^h)^!
m/(m + mJ.
Подставив в формулу (5.65) вместо q величину qu получим:
<7max = qstqlVgq^ • + тх). (5.66)
Из выражения (5.66) следует, что учет массы системы, по которой
производится удар, приводит к снижению эффекта удара.
В заключение заметим, что полученные решения служат прибли-
женным описанием ударного эффекта. Предположение о том, что
ударяющее тело не отделяется от воспринимающей удар системы, явля-
ется произвольным, и для более точной картины нужно исследовать
местные деформации падающего тела и воспринимающей системы
в области соприкосновения. Кроме того, приведенные результаты
справедливы лишь в тех случаях, когда продолжительность удара
больше времени, необходимого на распространение волны деформаций
от места удара до опорных закреплений системы. Как известно, ско-
рость этой волны равна скорости звука в материале; для строительных
материалов она имеет порядок 3—5 км/с. Если продолжительность
412
удара меньше этого времени, то система не успеет деформироваться
и действие удара ограничится местными разрушениями. Так, камень,
брошенный в стекло, разбивает его, но пуля пробивает в стекле дыроч-
ку, не повреждая стеклянной пластинки.
Действие периодической силы, изменяющейся по гармоническому
закону. Пусть на массу действует возмущающая гармоническая сила
F (0 = F sin 6/, (5.67)
где F — амплитудное значение возмущающей силы; О — ее частота.
Дифференциальное уравнение движения консервативной системы
[см. (5.40)1
q 4- &2q — Ffm • sin (5.68)
Решение этого уравнения можно получить, подставив значение F (/)
в уже найденное в общем виде решение (5.50). Но в данном случае
более простым будет следующий путь. Как и ранее, общее решение
однородного дифференциального уравнения
qt = At sin со/ 4- Ла cos vt. (5.69)
Зададимся частным решением в виде
q2 = С sin Gt (5.70)
и, подставив его в (5.68), найдем, при каком значении С это уравнение
удовлетворяется*
—C02sin 0/ 4- Cco2sin Gt ~ F!m • sin Gt,
или
C = Mm(o2 — 02)L (5.7!)
Преобразуем несколько это выражение, выпеся со2 за скобки и заменив
его через 1/ (/л6п):
С«Г6П/Ц—(©/ш)2), (5.72)
где F6n = qst — обобщенная координата массы, если бы на систему
статически воздействовала сила, равная амплитудному значению
возмущающей силы С учетом этого замечания, а также выражений
(5.69) и (5.70) запишем общее решение неоднородного дифференциаль-
ного уравнения (5.68):
q = A, sin со/ 4- А2 cos 4- 1 — (0/oj)a1 sin Gt. (5.73)
Первые два слагаемые представляют свободные колебания системы,
третье — вынужденные колебания. Вынужденные происходят с часто-
той возмущающей силы 0, амплитуда их определяется амплитудой
и частотой внешней силы и параметрами системы Свободные проис-
ходят с частотой <о и зависят от начальных условий Следовательно,
колебания происходят с двумя частотами — Си <«, и результирующее
колебание в общем случае не будет гармоническим.Например, допус-
тим, что q (0) = а (0) == 0. Тогда при t = о
4 (0) = Ля = 0; q (0) = А & + qstGt{ 1 — (0/w)2) = 0.
413
колебаний- Преобразуем в (5.74),
sin 0/ — sin = 2 со
Таким образом, при эти^ на чаль
нцх условиях общее решение
Я e — (0/co)2J (sin 61 —
— 0/to sin <00. (5.74)
График колебаний при 0 < со по-
казан на рнс. 5.19. Только при
некоторых определенных значениях
q (0) и q (0), а именно при q (0) =0
и q (0) = 4?sr0/ll —(0/<o)2J, свобод-
ных колебаний не возникает и ко-
лебания системы гармонические
с частотой 0:
Я = ЯМ - (0/<о)21 sin 0/. (5.75)
В том случае, когда 6 немного
отличается от <о, сложные колеба-
ния в системе (5.74) называются
биениями, которые имеют вид то
возрастающих, то ослабевающих
принимая 0/со л 1, выражение
0 + «о . . 6—«о .
?—J—/-sin—2 L
Тогда уравнение
Я = 2^/U — (0/«)21 sin t • cos t
можно приближенно рассматривать как гармоническое колебание
частотой (о с переменной амплитудой (рис. 5.20); период
~ 2л
изменения амплитуды 7\ = .
При гармонических колебаниях с частотой 0 (5.75)
?max “ ^s//[ 1 — (0/<о)2] (5.76)
зависит от соотношения частот вынужденных и свободных колебаний
системы. График зависимости показан на рис. 5.21. Когда 0/(о = 1,
амплитуда устремляется в бесконечность. Однако бесконечное значение
амплитуды достигается не скачком, а постепенным нарастанием. Уста-
новим закон нарастания
амплитуды. Рассмотрим об- Я
щее решение уравнения
движения при нулевых на-
чальных условиях (5.74).
Подстановка в это выраже-
ние 0 = а приводит к не-
определенности типа 0/0.
Раскроем неопределен-
Рис. S.20
414
ностъ, дифференцируя no 0 порознь числи- у
гель и знаменатель и затем полагая 8 = со:
<7 = QstK—20/w2) [/ cos 0/ — (sin Cjl>Z)/CD] =
= —0,5^ (со/cos св/— sin co/). (5.77)
Первое слагаемое со/ cos со/ не соответствует D ,
уравнению простых гармонических колеба-
ний, так как амплитуда со/ не постоянна,
а возрастает пропорционально времени. Гра-
фик этого слагаемого показан на рис. 5.22.
Из (5.77) следует, что амплитуда вынужден-
ных колебаний при совпадении частот вынуж-
денных и свободных колебаний растет со вре-
менем по линейному закону.
• При переходе отношения 0/со через 1, когда 0 становится больше са,
скачкообразно меняется фаза вынужденных колебаний па величину
л —движение происходит в направлениях, противоположных направ-
лениям силы F.
25.4. Кинематическое возбуждение колебаний
Колебания системы могут быть вызваны не только изменяющейся
во времени внешней нагрузкой, но и перемещениями основания. На-
глядными примерами такого движения являются колебания сооруже-
ний, вызванные землетрясением, или колебания частей оборудования
от вибрации здания, в котором оно установлено, или экипажей при их
движении по неровностям пути.
Рассмотрим колебание водонапорной башни при землетрясении
(рис. 5.23, о), горизонтальное движение грунта при котором характе-
ризуется перемещением ц£(/) относительно произвольной точки отсче-
та. В качестве расчетной схемы принимаем невесомую упругую кон-
соль с сосредоточенной массой на свободном конце (рис. 5.23,6). Соста-
415
вим уравнение движения массы, применив принцип Даламбера
—/ + ^ = 0, (5.78)
или
mus + си = 0, (5.79)
где us — суммарное отклонение массы от оси отсчета, определяемое
суммой перемещения основания и прогиба консоли!
= «в + (5.80)
Продифференцируем дважды это выражение. Подставив его в уравне-
ние (5.79), получаем
ти8 +тй + си = 0. (5.81)
Обозначим произведение массы на ускорение грунта через Ftff(ty
—mug Feff (0. (5.82)
Тогда уравнение движения запишется в виде
тй 4- си = Feff (0- (5.83)
В этом уравнении Fejf (0 можно считать действующей на консоль внеш-
ней нагрузкой. Зная закон изменения этой нагрузки, найти решение
дифференциального уравнения движения не представляет труда.
Другой пример. Допустим, необходимо исследовать колебания
движущегося с постоянной скоростью й0 = const подрессоренного
экипажа (рис. 5.24). Уравнение продольного профиля пути
Dg = h sin2 (лх//), (5.84)
где I — длина волны.
Так как х = но0 = /isin2(juz0//)Z. Принимая, что масса экипажа
будет совершать только вертикальные движения при колебаниях,
имеем систему 6 одной степенью свободы. Положение массы при коле-
баниях определяется одной координатой — вертикальным переме-
щением о6, которое состоит из перемещения за счет неровности пути
и перемещения ва счет упругой деформации рессоры!
0*в + 0- (5.85)
416
Еели не учитывать рассеивания энергии при колебаниях, дифферен-
циальное уравнение вертикального движения экипажа, как и в преды-
дущем примере, будет иметь вид
mv + си = FtU (0, (5.86)
где F'H (0 z= — mvg = —m (h sin2 t] = ___ 2лц0 . /c. Я7.
Обозначим амплитудное вначение через F = m~^-, (5.88)
а частоту действующей возмущающей силы Fen W через
Тогда е = 2лйс'/1. (5.89) Fm(t) = —F cosQt, (5.90)
г. е. при ваданном профиле пути система будет испытывать гармони-
ческое воздействие.
25.5. Понятие о резонансе. Динамический коэффициент
Зависимость амплитуды вынужденных колебаний от частоты гар-
монической возмущающей силы представлена формулой 1см. (5.72)J
в = — (©/(о?], т. е. амплитуда колебаний зависит от «статиче-
ского смещения» qs( и от отношения частот вынужденных и свободных
колебаний. Как уже отмечалось, при приближении этого отношения
к единице возрастание амплитуды становится очень большим, так что
при 6/<о-► 1 амплитуда с—>- оо (рис. 5.21). Явление сильного нара-
стания амплитуд колебаний при совпадении частот вынужденных
и свободных колебаний носит название резонанса.
Резонансные явления могут возникать не только при воздействии
гармонической возмущающей силы, но также при произвольной перио-
дической нагрузке. В последнем случае резонанс наблюдается не
только, если частота собственных колебаний равна частоте возмуща-
ющей силы, но и если опа кратна ей. Убедимся в этом, рассмотрев при-
мер возмущающей нагрузки в виде периодически действующих импуль-
сов (рис. 5.25).
В течение первой половины периода 0 < t «772, пока возмуща-
ющая сила изменяется по закону F = Fosin 0/, общее решение диффе-
ренциального уравнения движения таково;
Qi = ^1 si° + ^2 cos + csin 0/, (5.91)
где
С = quill-(&/<№ (6.92)
41?
Cshffi
Рис. 6.25
В течение второй половины периода
7/2 </ сТ, при отсутствии возму-
щающей силы, система совершает сво-
бодные колебания, которые описыва-
ются уравнением
q2 = А3 sin со/ -Ь Д4 coscot (5.93)
Для определения произвольных по-
стоянных Д2, Д4 имеем четыре
условия: в момент t = 7/2 = л/О обоб-
щенные перемещения и скорости совпадают, т. е.
1) 9i (Т/2) = с?2 (Т/2);
2) 91 (Т/2) = ^(7/2);
ввиду того, что вынужденные колебания имеют период, совпадающий
с периодом возмущающей силы, то значения обобщенных перемещений
и скоростей при t — 0 и t = Т также совпадают:
3) 9i(0) = 92(T);
4) 91(0 = 92(7).
Раскрыв эти условия, получим систему четырех уравнений;
Л$ШЛ+ Acosji-^- = i4ssinn 4- Д4созл-~-;
^со cos л — Д2Ш sin л 4- с© = Д3со cos л -g- — Л4со sin л ;
А2 — А з sin 2л 4- А4 cos 2л ;
Дхсо 4- с© = Лэсо cos 2л -g- — Л4<о sin 2л .
Решив совместно эти уравнения, найдем
л, —;
_ е i+cosn^-
^2 — С ш о •
2 sin л -0-
(5.94)
е 14-2cosn-0
Лз = 2 *
f 03
1 + COS л "Е-
. со 1 “
sinn-g- — --------—
2 sin я
Так как во все выражения входит с, то все постоянные А{ обращаются
в бесконечность при © = со [см. (5.92)] и, кроме того, Да и Ал также
со
1 4- COS л -0-
обращаются в бесконечность при--------------со~ = 00, ^то происходит,
2 sin л -Q
418
когда 6 = ь>/2, (о/4, св/6, ..., т. е. если
частота возмущающей силы кратна час-
тоте свободных колебаний системы.
Резонанс является очень важным,
а нередко опасным явлением в технике,
так как относительно небольшой источ-
ник (возмущающая сила), периодически
повторяющийся, может довести кон-
струкцию до разрушения.
При проектировании сооружений, ко-
торые должны воспринимать дннамиче-
Рис. 6.26
ские нагрузки, изменяющиеся по гар-
моническому закону, обычно жесткость сооружения подбирают такой,
чтобы частота вынужденных колебаний была меньше частоты свобод-
ных колебаний. Это следует из того, что при пуске неуравновешенной
машины ее частота непрерывно меняется, возрастая от нуля до экс-
плуатационного значения, а при остановке непрерывно уменьшается
до нуля. Естественно, что если частота вынужденных колебаний будет
больше частоты свободных колебаний, то при пуске и остановке про-
изойдет переход через резонанс. Амплитуды колебаний в этот момент
увеличатся, возникнут биения.
Все же для высокочастотных машин допускается их работа в зарезонансном
области В таких случаях необходимо сделать переход через резонанс достаточно
быстрым. Кроме того, машина должна иметь достаточный запас мощности, чтобы
проход через резонанс был осуществим. Любопытный опыт поставил в начале
текущего столетия А. Зоммерфельд. Он прикреплял небольшой электрический
двигатель постоянного тока к крышке стола (рис. 5.26). Двигатель имел груз,
прикрепленный экссентрнчно относительно его осн для создания возмущающей
силы. При достижении двигателем 310 об/мин, вследствие изгиба ножек, возника-
ли большие горизонтальные колебания стола. Это свидетельствовало о резонансе
системы. Мощность двигателя в этот момент равнялась 11 Вт. Дальнейшее уве-
личение мощности до 23 Вт не приводило к увеличению числа оборотов двигателя,
а вызывало только дальнейшее увеличение амплитуд вынужденных колебаний
стола. При превышении этом мощности число оборотов стало увеличиваться,
колебания значительно уменьшились.
Для оценки действия динамической нагрузки используется, помимо
других величин, динамический коэффициент Этот коэффициент пока-
зывает, во сколько раз максимальное значение рассматриваемой вели-
чины (поперечной, продольной силы, момента, перемещения) при дина-
мическом нагружении больше ее значения при действии статической
нагрузки, равной амплитудному значению данной возмущающей на-
грузки. В обобщенном виде это запишется так:
Р = <7max/<7s6 (5.95)
Каждому виду динамической нагрузки соответствует свое выражение
(5.95) динамического коэффициента. Например, при действии прямо-
угольного импульса
p = 2sinny-. (5.96)
419
Величина р зависит от соотношения tJT,где — параметр нагрузки—
продолжительность импульса, а Т — параметр системы — период
свободных колебаний системы. Таким образом, динамический коэф-
фициент определяется как параметром нагрузки, так и параметром си-
стемы. График изменения р показан на рис. 5.18. Экстремальное
его значение, соответствующее tjT = 0,5 равно 2. Уменьшить дина-
мический коэффициент можно, увеличив период свободных колебаний,
т. е. уменьшив жесткость системы.
При ударной нагрузке динамический коэффициент [см. (5.66)1
Р = 9/К^ • m/(m + mJ. (5.97)
Здесь, как и ранее, чем меньше жесткость системы, тем меньше дина-
мический коэффициент.
Большую роль в смягчении ударного воздействия играет масса
системы mt. Для этого ее необходимо увеличивать и концентрировать
ближе к месту удара. Заметим, что формула (5.97) при скоростях со-
ударения q, близких к нулю, дает большую погрешность. Например,
при g с= 0 р = 0. Но д = 0 соответствует понятию о внезапно прило-
женной силе, динамический коэффициент при воздействии которой
равен 2.
В случае периодической возмущающей силы, изменяющейся по
гармоническому вакону F (/) = F sin в/,
р = 1/ [1 — (в/©)8!. (5.98)
На рис. 5.21 показано изменение динамического коэффициента в за-
висимости от отношения частоты возмущающей нагрузки к частоте
свободных колебаний системы. Когда в < со, р > 1 и увеличивается
с увеличением б/а). При резонансе (в = о) динамический коэффициент
имеет тенденцию к неограниченному увеличению. В зарезонансной
области (0 > со) р быстро уменьшается, становясь меньше единицы
с возрастанием 0, т. е. высокочастотные силы почти не вызывают ко-
лебаний тех сооружений, собственные частоты которых являются
малыми величинами.
Таким образом, когда на сооружение действует гармоническая
возмущающая сила с заданной частотой 0, уменьшения динамиче-
ского коэффициента возможно достичь двумя путями — либо увели-
чив жесткость сооружения, либо уменьшив ее.
25.6. Учет сил сопротивления
Ранее в исследовании свободных и вынужденных колебаний пред-
полагалось, что на движущуюся систему не действуют никакие силы
сопротивления. Вследствие этого предположения в случае свободных
колебаний было найдено, что амплитуда остается постоянной, хотя
эксперименты показывают, что со временем амплитуда уменьшается
и колебания постепенно затухают. Затухание колебаний объясняется
рассеянием, или диссипацией энергии. Поэтому практически все
системы являются неконсервативными. Для рассмотрения колебаний
420
таких систем необходимо принять во внимание диссипативные силы
сопротивления.
Свободные затухающие колебания. Уравнение свободного движения
неконсервативной системы запишем, учтя (5.12), в следующем виде:
q + 2eq 4- co®g = 0, (5.99)
где о) = dm — свободная частота незатухающих колебаний; е —
коэффициент затухания колебаний:
е = k / (2т). (5.100)
Интегрирование уравнения (5.99) производим по общему правилу
интегрирования однородных линейных дифференциальных уравнений
с постоянными коэффициентами.
Составим характеристическое уравнение
2® + 2ег + со® = 0,
корни которого
Z|t2 = —е±/Е2— со®, (5.101)
поэтому общий интеграл уравнения (5.99) имеет вид
q = А + Д2е*А (5.102)
Интеграл (5.102) имеет различную форму в зависимости от знака раз-
ности в® — со® под радикалом (5.101).
Случай е > со. Если сопротивление очень большое, корни
характеристического уравнения z1>2 будут разными вещественными
Отрицательными числами. Учитывая формулы Эйлера, связывающие
показательные и гиперболические функции: ех = ch х 4- sh х, е~А ==
««chx— shx, получим решение (5.102) в следующем виде:
q == е^е< (fit sh У б2 — со® / 4- ch Уб2 — со® /). (5.103)
Произведем преобразование (5.103), аналогичное преобразованию
(5.22) к виду (5.23):
q — А е~е/ sh (Уе® — со® I 4-1). (5.104)
В этом случае движение не будет колебательным. Выведенная из со-
стояния равновесия система постепенно возвращается к исходному
положению (рис. 5.27). Такое движение называется апериодическим.
Его практически можно осуществить, если поместить тонкую кон-
сольную балку с массой на конце в сосуд с очень вязкой жидкостью,
например, маслом.
Случай е = со — критическое затухание. Характеристическое
уравнение имеет равные корни и общий интеграл
q^e-^Ai + Aj). (5.105)
Движение также апериодическое.
Случаями в > со пользуются, если хотят избежать колебаний.
421
РИС. 5.27
Случай е < со. Корни становятся комплексными числами
zj 2 = -£ ± i V со2 — е2.
Введя обозначение
= (5.106)
придем к следующей форме общего решения уравнения (5.102);
9 = е-«(41е‘“^ + Ле-‘и«'),
или, переходя от показательной формы решения к тригонометрической
(используя формулы Эйлера), получим
q = (Вх sin mJ + В2 cos co^Z). (5.107)
По аналогии с выражением (5.23) можем записать
q = Де~* Sin (<odZ + X), (5.108)
где _____________
л = /«?+(-Чт*)2’
X = arctgo>(/—- (5.109)
<?о + <7ое
Таким образом, система, выведенная из состояния покоя, совершает
свободные колебания с частотой <orf, но с уменьшением амплитуды коле-
баний со временем в результате наличия множителя е*е/. График функ-
ции (5.108) показан на рис. 5.28. Круговая частота свободных коле-
баний с учетом затухания, или демпфирования колебаний, <od (5.106)
по сравнению с круговой частотой свободных незатухающих колеба-
ний о уменьшается вследствие затухания. Однако в практических
вадачах для обычных строительных конструкций коэффициенты зату-
хания малы (е/со • 100 < 20 %), поэтому с достаточной точностью
можно принимать, что <od » со и находить ее по выражениям (5.28).
Период затухающих колебаний
у, ____ 2л _____ 2л
d — cod ~ —еа *
(5.110)
естественно, больше периода свободных колебаний системы без демп-
фирования. При малых е его можно принимать равным периоду сво-
бодных недемпфированных колебаний.
422
Рассмотрим отношение двух последовательных амплитуд (рис.5.28)
по истечении одного периода:
Чп Ле"*
Чш Ае~Ч1+т>
— ееТф
(5.111)
Это отношение — величина постоянная, т. е. амплитуды убывают по
закону геометрической прогрессии. Выражение (5.111) можно исполь-
зовать для экспериментального определения коэффициента затуха-
ния е; необходимо лишь найти опытным путем, во сколько раз умень-
шается амплитуда колебаний после данного числа циклов.
Натуральный логарифм отношения двух амплитуд, следующих
друг за другом через период, называется логарифмическим декремен-
том колебаний'.
6=1п-^- = е7\
Япа
(5.112)
При проектировании сооружений пользуются справочными данными
е, б, или другими, связанными с ними, параметрами. Необходимо за-
метить, что эти значения зависят от большого числа факторов: типа
сооружения, его состояния, качества материала, уровня напряжен-
ности элементов сооружения и т. д.
При рассмотрения свободных колебаний консервативных систем было поха-
вано применение метода фазовой плоскости для представления движения. Пере-
ходим от (5.99) к системе дифференциальных уравнений первого порядка
dq . dq п -
d =-2 ee-w»?.
Отсюда дифференциальное уравнение интегральной кривой на фазовой плоско-
сти
— 2е—со2 ?-, (5.113)
dq q
или, после подстановки q = sq:
приходим к уравнению
dq sds
q = ““ s2 + 2 cs + co2
(5 114)
Взяв интеграл от обеих частей равенства при условии, что е < со, получим
!п,------1 In (s» + 2es + H + p=^=arctgp=i=^ + llnc. (5.115)
Постоянную интегрирования для удобства представляем как -g-lnc. Первое
слагаемое из правой части переносим в левую, производим замену $ == q/qt
и потенцируя, получаем
? + 2 sqq 4- qW = с exp arctg • (5.116)
423
Этому уравнению соответствует спираль
(рис. 5.29). Система, получившая возмуще-
ние, характеризуется точкой, которая дви-
жегся по спирали со скоростью 4- 5а
и с течением времени асимптотически при-
ближается к началу координат, к положению
равновесия. Если начертим на фазовой плос-
кости одну спираль, то все остальные спи-
рали, например начинающиеся на отрезке
лш, будут, не пересекаясь, «вливаться» в на-
*- чало, оставаясь все время в промежутке
f между двумя соседними витками одной и
той же спирали. Особая точка, соответству-
ющая положению равновесия в данном слу-
чае, называется устойчивым фокусом.
Вынужденные затухающие колеба-
ния в общем случае. Посмотрим, как
Ри^ Б2в скажется наличие сил сопротивления,
пропорциональных скорости движе-
ния, на картине вынужденных колебаний. Уравнение (5.99) в этом
случае имеет правую часты
q 4- 2е$ + (Jq = F (5.117)
Общий интеграл уравнения (5.117) можно снова найти методом вариа-
ции произвольных постоянных, исходя из интеграла (5.107) и пола-
гая множители Bi и В2 функциями /. Приняв е < о и опустив вывод,
дадим только окончательное значение интеграла*
q » А е~®* sin (cod/ 4- X) 4- l/(m<od) X
X j F (т) sin <od (t — <г)йт, (5.118)
где cod — частота собственных затухающих колебаний.
Первый член правой части уравнения выражает свободные коле-
бания, второй член — описывает вынужденные колебания. При
определенных начальных условиях первое слагаемое обращается
в нуль, и общим выражением вынужденных колебаний будет
t
q <= l/(mcDd) J F (т) sin <od (i — т) du. (5.119)
Пользуясь выражением (5.119), можно решить задачи о вынужден-
ных затухающих колебаниях при действии различного вида возмуща-
ющих нагрузок.
Внезапно приложенная сила F (т) «= F. Внесем в (5.119) вместо
F (т) ее значение F и запишем вместо du = —d (/ — t)j
t
Ч = —sfc J e-£<''” s,n « -1) d (< —0 =
- Ж7 7+3- Iesin<M<-*) +
424
D Q2 & 06 Ofi W 12 14 t/T
PRC. 5.30
I
Рис. 5.31
I1 “ (cos +sin M] •
Приняв во внимание, что e2 4- co? = co2 и ГДглсо2) = qatt получим
q « q$t 1 — e-®' (cos 4- sin co/) . (5.120)
Процесс колебаний будет затухающим. Максимальное значение обоб-
щенной координаты найдется из условия равенства нулю первой
производной по Л которое будет удовлетворяться при ©<*/ = п или
при t == 0,57di
(S.121)
Динамический коэффициент
р = 1 + е~*я/в<1
(5.122)
меньше двух. Например, если коэффициент затухания 8 составляет
Б % частоты свободных затухающих колебаний <аа, т. е. е = 0,05ыЛ
динамический коэффициент р = 1 4-е-°-05л= 1,855.
При учете затухания динамический коэффициент уменьшается по
сравнению со случаем незатухающих колебаний. На рис. 5.30 сплош-
ной линией приведен график затухающих колебаний, а штриховой —
незатухающих. Анализ этих графиков показывает, что затухание
оказывает небольшое влияние в начале воздействия, но вызывает
заметное снижение максимальных значений амплитуд последующих
циклов.
Возмущающая сила, изменяющаяся по гармоническому закону
F(0 ® F sin 0/. Проинтегрируем дифференциальное уравнение дви-
жения (5.117)1
$ 4- 2е$ 4- сЛ? = Flm • sin 0/. (5.123)
Общее решение уравнения (5.123) представим как сумму решения
однородного уравнения (5.108) и частного решения в виде
=» Bi sin 0/ 4- В2 cos О/. (б. 124)
425
Для определения произвольных постоянных найдем производные
q и q от выражения (5.124), подставим их в уравнение (5.123) и сгруп-
пируем отдельно члены, содержащие sin©/ и cos в/:
(—&Вк + 2е©В2 4- cos et + (—&В2 —
— 2евВ! 4- со2Вг — F/m) sin ©Z == О,
где е = Л/(2т) и <& = с/т.
Так как это уравнение должно удовлетворяться при любом зна-
чении t, коэффициенты при cos ©/ и sin 0/ должны быть равны нулю:
—Вк (в2 — о2) 4- В2 • 2е© = 0;
—Вк • 2е© — В2 (02 — со2) = Flm.
Из этих уравнений
г> _ 2e©F_______,
1 m[(e*-<^4-(2£e)2] • Z_1OK1
о _ <5125>
2 т ((©2 _ 0)2)2 + (2e©)«J •
Частный интеграл (5.124) приведем к виду q = В sin (©/ 4~ т]), для
чего достаточно положить
В = у Bi + B* — - -
1 2 ™ /(©* —й)2)*4-(2€©)2
'1 = = arctg-g^ . (5.126)
Запишем, учитывая выражение (5.108), полный интеграл уравне-
ния (5.123) и исследуем его:
q = Де~е/ sin (со/ 4- X) 4- В sin (©/ 4- Л)- (5-127)
Первый член уравнения (5.127) выражает свободные затухающие
колебания. Их амплитуда А и фаза X являются произвольными по-
стоянными, значения которых определяются начальными условиями.
Свободные колебания после начального импульса быстро затухают,
о чем свидетельствует множитель е***1 (рис. 5.31). Установившиеся
вынужденные колебания выражаются вторым членом уравнения
(5.127). Их амплитуда В и фаза уже не произвольны, а имеют опре-
деленные значения, вычисляемые по выражениям (5.126). Необхо-
димо заметить, что при наличии затухания, т. е. при коэффициенте
затухания е =# 0, фаза т) отлична от нуля; следовательно, вынужден-
ные колебания происходят со сдвигом фазы относительно возмущающей
силы. Представим зависимость для определения сдвига фаз в виде
= (5.128)
При ©/о = 1 т] = —л/2, т. е. при резонансе перемещения сдвинуты
по фазе на л/2 (запаздывают) относительно возмущающей силы —
426
перемещения достигают максимума в те моменты времени, когда
возмущающая сила обращается в нуль, и наоборот. При ©/со > 1
угол сдвига фазы меняет знак. Вынужденные колебания опережают
возмущающую силу. Изменение фазового угла в зависимости от ве-
личины декремента затухания показано на рис. 5.32.
Амплитуду вынужденных установившихся колебаний В, или
^шах» можно выразить через перемещение от статического воздействия
амплитудного значения возмущающей нагрузки:
<7max = Q&tP-i
rj& динамический коэффициент
р = 1/К(1 — в2/®2)2 + (2е6/«2)2 =
- 1/V (1 — е2/<о2)2 + («в/<л<о)]2=
= i/V(i-e2/<o2)2+(Y0e»2. (5.129)
На рис. 5.33 показаны кривые, выражающие зависимость динами-
ческого коэффициента при наличии затухания от отношения ©/со
и значения логарифмического декремента колебаний 6. Динамические
коэффициенты, а следовательно, и амплитуды благодаря затуханию
уменьшаются, и при резонансе в бесконечность уже не обращаются.
Максимум динамического коэффициента несколько смещен в сторону
абсциссы ©/со = 1. Действительно, приравняв к нулю производную
первого выражения (5.129) по ©/со, находим, что ргпах соответствует
е/й) = /1—2(е/о>)2. (5.130)
Следовательно, при наличии силы сопротивления максимум дина-
мического коэффициента несколько смещен в сторону 0/со < 1
(рис. 5.33). Графики (рис. 5.33) также показывают, что при малом
сопротивлении в области, достаточно удаленной от резонанса,
вначения р мало зависят от 6. В этом случае динамический ко-
эффициент можно вычислять по формуле (5.98), т. е. без учета
затуханий.
427
Вопросы для самоконтроля
1. Что называют обобщенными координатами?
2. Какие системы относятся к консервативным системам?
3. Что представляет собой диссипативная функция, или функция рассеива-
ния?
4. Какими колебаниями будут свободные колебания консервативной си-
стемы?
5. Какие колебания называются гармоническими?
6. Что называется амплитудой, начальной фазой, периодом и круговой
частотой гармонических колебаний?
7. Как определяют амплитуду и начальную фазу свободных незатухающих
колебаний системы с одной степенью свободы?
8. От каких параметров зависят частота и период таких колебаний?
9. Что называется фазовой плоскостью?
10. Каким семейством кривых описываются гармонические колебания на
фазовой плоскости?
11. Чем характеризуются с энергетической точки арения колебания консер-
вативной системы?
12. Какой вид имеет дифференциальное уравнение вынужденных колебаний
консервативной системы с одной степенью свободы и каково его общее ре-
шение?
13. Что представляет собой каждое из слагаемых общего решения дифферен-
циального уравнения вынужденных колебаний?
14. Каково динамическое воздействие внезапно приложенной постоянной
силы?
15. От чего зависит амплитудное значение обобщенной координаты при им-
пульсивном воздействии?
16. Как определяют максимальную обобщенную координату при ударе,
от чего она зависит?
17. Как запишется общее решение дифференциального уравнения движения
при действии нагрузки, изменяющейся по гармоническому закону?
18. При каких начальных условиях в этом случае вынужденные колеба-
ния тоже будут гармоническими?
19. По какой формуле определяют максимальное значение амплитуды
вынужденных колебаний?
20. При каком условии возникает явление биений и каков его график?
21. Что называется кинематическим возбуждением?
22. Как в обобщенном виде записывается дифференциальное уравнение
движения при кинематическом возбуждении?
23. Какое явление называется резонансом?
24. По какому закону изменяется амплитуда вынужденных колебаний си-
стемы в случае резонанса?
25. При каких внешних воздействиях может возникать явление резонанса?
26. Что называют динамическим коэффициентом и как его определяют?
27. Какие системы называют неконсервативными?
28. Каков график свободных колебаний неконсервативной системы в случае
малых значений коэффициента затухания?
29. Что называется логарифмическим декрементом затухания?
30. Как влияет учет затухания на частоту и период свободных колебаний
системы?
31. Каким семейством интегральных кривых описываются свободные коле-
бания некопсервативной системы на фазовой плоскости?
32. Какой вид имеет общее решение дифференциального уравнения вынуж-
денных колебаний системы с одной степенью свободы в случае малого сопротив-
ления н периодической возмущающей силы?
33. Как влияет учет затухания на амплитуду, фазу, частоту и период вынуж-
денных колебаний?
34. Как отражается учет затухания на значении динамического коэффи-
циента?
428
Глава 26
КОЛЕБАНИЯ СИСТЕМ С НЕСКОЛЬКИМИ СТЕПЕНЯМИ СВОБОДЫ
Во многих случаях положение механической системы определяется
не одной, а несколькими независимыми величинами — обобщенными
координатами qlt q& .... qn- Их число п определяет число степеней
свободы. Например, консоль, несущая сосредоточенную массу на сво-
бодном конце (рис. 5.34, а), является системой с двумя степенями
свободы, так как положение массы определяется двумя независимыми
обобщенными координатами qx и — перемещением ее вдоль оси у
и углом поворота. Балка с тремя точечными массами (рис. 5.34, 6)
обладает тремя степенями свободы.
При движении системы ее обобщенные координаты qu ga, ..., qn
являются функциями времени t и определяются из системы диффе-
ренциальных уравнений и начальных условий.
26.1. Дифференциальные уравнения движения системы
при произвольной нагрузке
Дифференциальные уравнения движения неконсервативной систе-
мы в конечным числом степеней свободы при действии на нее возму-
щающих сил, произвольно изменяющихся во времени, можно получить
из следующих уравнений Лагранжа (5.14):
где п — число степеней свободы системы.
Кинетическая и потенциальная энергия, функция рассеивания
определяются выражениями:
Т = 0,5^ S
/=1
и = 0,5 S S CZ,?,V/J
1=1 /=1
Ф = о,б£ S М/?/.
,•=1 /=1
где mif — инерционный коэффициент
(обобщенная масса), представляющий
собой инерционную силу, соответ-
ствующую t-й координате при единич-
ном ускорении координаты /; сц —
коэффициент жесткости, т. е. уси-
лие, соответствующее координате t,
вызванное единичным значением коор-
динаты /, при условии, что все осталь-
ные обобщенные координаты оста-
ются неизменными; kq — коэффици-
429
ент сопротивления^ т. е. сила, соответствующая координате Z, если
скорость координаты f равна единице.
Так как
= + =0;
= Cll^l + С/2^2 4“ ••• +
= kttih 4- кцЯъ + ... + klnqn (I = 1» 2,..., п)(
Оф
то уравнения Лагранжа приводят к следующей системе линейных
уравнений второго порядка с постоянными коэффициентами!
mn§i + т1а§2 + ... 4- m\nqn + 4“ 4-... +
4- kinqn 4" спЯ1 + 012<7я 4“ 4- Cinqn = 1\ (0;
т21Я1 + те2Я2 4- ••• 4- гп2пЯп 4- ^21914* 4- ... 4~
4- ^2л9 4" <^21 <71 4“ ^22^2 4- ••• 4- ОчпЦп = /^2 (0» (6.131)
4* тп2^2 4“ 4~ ГПппЯп 4“ 4- £«202 4" ... 4-
4- knnqn 4- Cniqi 4- Gj2?2 4- — 4- (Mln Fn (0.
Между коэффициентами этой системы существуют зависимости mti^
*= mii\ ktf — kjii Cq — Cji. Уравнения (5.131) можно записать в ком-
пактном виде, использовав матричную форму записи!
Mq + kq + cq = F,
где
(5.132)
тп
m2i
mi2 ••• min
f/l22 •••
^11 ^19 ••• ^ln
^21 ^22 ••• ^2n
^я! kn2 ••• ^пп
гпщ
тпч ... тпп
ускорений, скоростей, обобщенных координат
— векторы-столбцы
и возмущающих нагрузок.
Заметим, что если кинетическую энергию, или потенциальную,
или функцию рассеивания можно привести к сумме, в которую будут
входить только (fi или qzlt то соответствующая матрица (Л1, С или
70 приводится к диагональному виду.
Уравнения движения (5.132) можно также получить, если для
каждой из степеней свободы записать уравнения динамического рав-
новесия. В матричной форме они имеют следующий вид!
+ + (5.133)
где 7 — вектор-столбец сил инерции; Fa — вектор-столбец сил неуп-
ругого сопротивления; Fc— вектор-столбец сил упругости.
Из сопоставления (5.133) и (5.132) следует: 7 = —Fd = Kq\
Fc = Cq.
26.2. Свободные колебания системы без учета затухания
Уравнения свободных колебаний консервативной системы могут
быть получены приравниванием к нулю матрицы затухания и вектора
внешних нагрузок в уравнении (5.132):
М^+С^=0. (5.134)
Дифференциальные уравнения в развернутом виде сводятся к двум
формам — прямой и обратной — в зависимости от строения матриц
М и С. Рассмотрим эти формы.
Если соответствующим выбором обобщенных координат привести
кинетическую энергию к виду
(5.135)
f=i
то матрица М станет диагональной, и уравнения движения примут
следующий вид:
miQi “Ь + ... + c\nQn = 0;
m2q2 + c2i9i + cs2^2 + ••• + = 0;
........................................ (5.136)
ШпЯп + CnlQi + CniQz + ••• + CnnQn =» о.
Это прямая форма дифференциальных уравнений колебаний. Если
к сумме квадратов приведена потенциальная энергия
U = 0,5Sc^?, (5.137)
то диагональной будет матрица С, и система дифференциальных
уравнений колебаний принимает обратную форму1
+ mi2?2 + — + = 0;
е2<72 + mtiQi + + — + тМл я 0;
#................•.................. (5.138)
Gnqn + + — + ГПппЯп = 0.
431
a
Рис, Б.35
РИС. Б.Зв
Практически эти формы дифференциальных уравнений колебаний
получаются не использованием уравнений Лагранжа, а на основе при-
менения принципа Даламбера или линейных соотношений строительной
механики для определения перемещений. *
Дифференциальные уравнения движения в прямой форме состав-
ляются на основании условия динамического равновесия для каждой
из степеней свободы и применяются для анализа тех систем, в которых
или известны некоторые коэффициенты (рис. 5.35, а), или их можно
просто определить (рис. 5.36). Например, рассмотрим систему, пока-
ванную на рис. 5.35, а. На первую массу системы действует постоян-
ная инерционная сила 1г — —mv1 и силы упругости пружин — нижней
Гел = ftft и верхней Fe, i2 = c2(ft— ft) (рис. 5.35,6); на вторую—
инерционная сила /2 = —тй2 и сила упругости верхней пружины
Fc> 22 = ft (ft — Ох). Составим условия динамического равновесия!
—/1 + Fc. п + FCt is = 0; —12 + Fc, 22 = 0,
или, после подстановки и преобразования,
“А + (q + Сг) Ч — СЛ = 0; (5 1зд.
mat>2—ед + с81>а = 0. ' '
Из сравнения полученных уравнений о (5.136) следует! =»
= ft ft, с12 = fti = с2 и с22 = ft.
Получение обратной формы дифференциальных уравнений движе-
ния рассмотрим для того же примера рис. 5.35, а. Выберем другие
обобщенные координаты: ft «= ft и q2 ~ ft — ft. Найдем дифферен-
432
циальные уравнения движения, использовав уравнение Лагранжа.
В новой системе координат кинетическая энергия
Т = 0,5/7401 0,5m2v| = 0,5774g? 4- 0,5ma (qt 4- ga)8,
потенциальная —
U = 0,5qg? 4- 0,5c2g|.
Возьмем производные
А(дТ\
e ci4u j — miQi +
Лагранжа, получим
- j - | —, 67 л. dU
— mtq1 4- m2qi 4- ^aga> — и, =«
9U п
0^ = c2g2. Подставив их в уравнения
Crfi 4- (rnt 4* rna) qx 4- m2g2 = 0;
4“ + ^2^2 ~ 0,
(5.140)
Сравнив (5.140) с (5.138), видим, что тп = mt 4- /тг2, гпп = т21 =
= та и т22 = тг.
Вернемся к прежней системе координат. После некоторых пре-
образований
,c1vl 4- mxOi 4- tnav2 = 0;
Исключим из второго уравнения с2ох и разделим после этого первое
уравнение на коэффициент при vlt а второе — на коэффициент при
vaJ
14 4- ntjOj/q 4- m&zlci =* 0;
v2 4 mfijct 4- m2v2 (1/q 4- l/ca) = 0. (5.141)
Если к первой массе рассматриваемой системы (рис. 5.35, а) прило-
жим единичную силу (рис. 5.35, в) по направлению координаты 14,
массы /74 и та переместятся соответственно на 6И — 1/q и 62i s 1/с2.
При приложении единичной силы ко второй массе перемещения обеих
масс составят б22 = 1/q 4- 1/с2 и 612 = 1/q. Учтем это при записи
уравнений (5.141), которые теперь примут следующий вид!
4- nzl6llv1 4- /74б1252 = 0;
О2 4- Шi621&! 4- /И2б22^2 в °- (5-142)
Это и есть обратная форма ваписи дифференциальных уравнений
движения системы. Уравнения (5.142) и (5.139) эквивалентны. Обычно
перемещения б легче получить (например, для системы, показанной на
рис. 5.37), чем жесткость с, поэтому обратная форма записи дифферен-
циальных уравнений движения преимущественна. Физический смысл
уравнений становится ясным, если перенести все слагаемые, кроме
433
РИС. Б.37
первых, в правые части и обозначить h = —т{щ. Тогда можно за-
писать для общего случая
V/ = d/j/i 4- 6/2/2 + + ®/«/л (/ e 1, 2, ..., л),
или
f/ = S vtJ (/=1, 2, ... , л), (5.143)
p=i
где vtj — составляющая перемещения по направлению i-й обобщен-
ной координаты, вызванная /-й инерционной силой.
26.3. Спектр частот и форм собственных колебаний
Составим уравнения движения по (5.142) для системы с л степеня-
ми свободы:
Qi4" 4“ ^8^12?2 4" ••• 4“ fftn^inQn в 0;
9в 4" 4" ^2622^2 4" ••• 4* fi'irfiinQn = 0;
............................................... (5.144)
Qn 4" 4* ^2^л2<72 4" ••• 4“ = 0.
Попробуем удовлетворить уравнениям (5.144), взяв для qt выра-
жения простых гармонических колебаний с общей частотой и общей
фавой:
qt = 4/sin(<oi 4- X) (i = 1, 2, ... , л). (5.145)
Найдем вторые производные по времени!
^/ = —со2Д/sin(<й/ 4~^) (i= 1» 2, ... । л). (5.146)
Подставив выражения (5.145) и (5.146) в уравнение (5.144) и разделив
на <o2sin (со/ 4- все слагаемые, получим систему линейных алгеб-
раических уравнений относительно амплитуд Ati
(/П}6|| — l/CD2) 4“ ^2^12^2 4" ••• 4* !Пп61лЛп = 0j
^1^21^1 4- (^2^22--- V^2) ^2 4- —• 4- fflr^2nAn в О;
.................................................. (5.147)
/Л16Я1Л| 4” ^б/йДа 4" ••• 4* (/^л5/т — V^2) = 0.
434
При любом значении © эта система может иметь нулевое решение,
когда все амплитуды равны нулю, — это соответствует исходному
равновесному состоянию, т. е. колебания не происходят, и ненулевые
решения, соответствующие колебаниям конструкции, — амплитуды
отличны от нуля; они существуют лишь в тех случаях, когда опреде-
литель системы уравнения (5.147) равен нулю:
niAi m2622—I/©2 . . . тп&>п
т^бп\ — 17©£
Таким образом, частота © в выражении (5.145) должна удовлетворять
полученному уравнению, которое называется уравнением частот.
Заметим, что уравнение вида (5.148) впервые было получено в астроно-
мии. Характеристические числа в нем, представляющие собой квад-
раты периодов движения планет, измеряются весьма большими числа-
ми — веками. Вот почему уравнение (5.148) получило в литературе
название векового уравнения.
Если раскрыть определитель (5.148), уравнение частот запишется
в виде алгебраического уравнения n-й степени относительно 1/©2j
(1/©2Г _ в1 (l/©2p-f 4- Bs (1/©2)«~2 — -
... -вп-i (I/©2) + (-l)"Bn = 0. (5.149)
Все корни этого уравнения — вещественные положительные числа,
каждому из них соответствует свое значение частоты. Число частот
равно числу степеней свободы системы. Если частоты расположить
в порядке возрастания их значений и обозначить ©t с ©£ «г... < ©п,
то совокупность этих величин называют спектром частот. Наимень-
шая из них — ©! — называется основной частотой, или частотой
основного тона.
Частное решение дифференциальных уравнений (5.144), соответ-
ствующее частоте © = ©/, представим в виде
qij ±= Ati sin (©/ + X/) (i= 1, 2, ... , n). (5.150)
Такие частные решения можно записать для каждой из частот ©р
©а, ©п. Уравнения (5.150) определяют /-е главное колебание систе-
мы с частотой ©, и начальной фазой Если система совершает одно
из главных колебаний, то все обобщенные координаты системы изме-
няются по гармоническому закону одинаковой частоты и фазы колеба-
ний. Это означает, что все координаты изменяются синхронно, одно-
временно имея нулевое значение и одновременно достигая максимума.
Каждому значению ©/ соответствует система отношений между
амплитудами
рг/ = Дз>М1/; р-з/ — Аз/1Ац;..., pn/ = А»//А/, (5.151)
определяющая собственную форму /-го главного колебания. Среди п
уравнений (5.147) независимыми являются только п — 1 уравнение:
435
последние и определяю? систему соотношений (5.151). Собственная
форма характеризует конфигурацию механической системы при ее
моногармонических колебаниях. Эти конфигурации в балках носят
название стоячих волн.
Так как дифференциальные уравнения (5.144) линейны, то общее
решение этих уравнений можно получить суммированием соответ-
ствующих частных решений!
qi = S A; sin + М (»=1, 2, ... , п), (5.152)
7—1
или в развернутом виде, учитывая наличие соотношений между ампли-
тудами (5.151),
Qiв sin (cO(Z 4" X*) -}-... -j- Ain sin 4" ^»)»
ft =* Р2И11 sin (©^ 4- XJ 4- ... 4- (ЛгпЛщ sin (©я/ 4- X„);
............................................ (5.153)
ft » ИлИи s>n (<M 4- M + — + Р/шЛл sin (tont 4- Xn).
Произвольные постоянные Ay и X/ в этих выражениях определяются
из начальных условий qi ₽= fto и q{ — qw (i =» 1, 2, ..., л). При про-
извольно заданных начальных условиях движение представляет собой
комбинацию главных колебаний и носит весьма сложный характер.
Какое-либо из главных (гармонических) колебаний система может
совершать только лишь при специально подобранных начальных ус-
ловиях.
Определение частот собственных колебаний решением частотного
уравнения не вызывает особых затруднений, если оно является урав-
нением второго или третьего порядка. В общем случае решение стано-
вится сложным, вызывая значительные затруднения как при раскры-
тии определителя (5.148), так и при нахождении корней нелинейного
алгебраического уравнения (5.149).
Рассмотрим в качестве примера систему с двумя степенями сво-
боды, показанную на рис. 5.38, а. В качестве обобщенных координат
принимаем горизонтальное и вертикальное перемещения массы ==
= щ ft =“ о. Запишем вековое уравнение (5.148)1
1/пбп—1/©а m6la I
|zn681 тбаа— 1/со® |
«36
Раскрыв определитель, после преобразований, получаем
(I/®*)2 - т (би + 6„)(1/®2) + m!(6„6„ - 6j2) = О,
откуда
I/®2 - 0,5m (6,, + 62!) ± V (би + 6И)2 - т» (6U6„ - 62).
(5.154)
Найдем перемещения от единичных сил, направленных вдоль обоб-
щенных координат (рис. 5.38, б, в):
с J_ / / 2 . I Р в
°п — 2 1 ’ 1 ‘ 3 1 EI~ ЗЕ1*
= б21 = / • / • = 2ё/:
^23= 2 1 ’ 1' 3 Z£Z + 1 ’ 1 ’ 1Ё1 5=5 ЗЁГ
Подставим эти значения в (5.154):
1 _ /1 1 V2\mP
й* “ \ 6 ± 2 JE1 •
Определяем частоты собственных колебаний!
^ = 0,8057®, = 2,814б/^.
Для определения собственных форм главных колебаний найденные
значения частот необходимо поочередно подставить в (5.147). При
СО = (Dj
l + /2mt> . , mP. _
2 El Я11 + 2EI/'21 ~ U’
2£7 7111 2 ElЛг1 “ U
Из первого или второго уравнений находим соотношение между
амплитудами первой собственной формы:
141 ~А„1Аи = 1+^2 = 2,414.
Аналогично получим соотношения между амплитудами второй соб-
ственной формы, подставив в (5.147) со = со2:
Нгй = ^22/^12 — 1 — V 2 = —0,414.
Конфигурации системы при главных колебаниях показаны на
рис. 5.39. Масса при совершении главного колебания перемещается
вдоль некоторой прямой. При линейной комбинации обоих главных
колебаний траектория движения криволинейна. Ее вид зависит от
начальных условий. Покажем это, для чего запишем общее решение
колебаний (5.153). В нашем случае
и « An sin (coj/ + Xj) 4- Д12 sin (св2/ 4- Х2);
о = 2,414A„sin (сих/ 4- Хх) — 0,414А12 sin (со2Г 4- Л2).
437
Рис. 6.39
РИС* 6.40
Подставив эти вначения в
движения:
Отклоним массу вдоль оси х на величину
6 и отпустим без начальной скорости.
Начальные условия движения
Uq = 6; Ц) = 0; vQ = 0; v0 = 0. (5.156)
Найдем постоянные уравнений (5.155),
соответствующие начальным условиям
(5.156)1
Ли = 0,1466; Х^ = Xj = л/2;
Ам « 0,8546.
(5.155), получим следующие уравнения
и = 0,1466cos Oil + 0,8546cos
v ® 0,3546 (cos Giit — cos oj/).
Траектория движения массы (или, как ее еще называют, фигура
Лиссажу), полученная по этим уравнениям, представлена на
рис. 5.40.
26.4. Ортогональность собственных форм колебаний
Формы собственных колебаний обладают важным свойством — ортогональ-
ностью» которая заключается в том, что работа сил инерции, соответствующих
одному собственному колебанию, на перемещениях, соответствующих другому
собственному колебанию, равна нулю. Докажем это, для чего рассмотрим две
формы собственных колебаний системы с частотами <Оу и <ofe. Выражение для i-й
силы инерции при /-м главном колебании (5.150) имеет следующий вид:
/г • = — (J- sin (<Оу/ -f- Ху). (5.157)
Аналогично для А-го главного колебания
!tk = — rnjjtk = mtAtkGt[ sin (<ол/ + XJ. (5.158)
На основании теоремы о взаимности работ Бетти
S hflui = S tutor (5.159)
438
Подставив сюда выражения (5.150), (5.157), (5.158), после сокращения иа триго-
нометрические функции получим
п п
“/ £ miAifAte =*= WA £ miAikAifr
(5.160)
или
wfc) ij miAUAik = 0.
(5.161)
Так как со, =# ©А, то
£ т(Ац Aik
(5.162)
Из соотношений, определяющих собственную форму, например /-го главного ко-
лебания (5.151), можно эаписать
= 2......«К (5J63)
где = I. Тогда выражение (5.161) преобразуется таким образом:
£"W//M/a = °-
Так как
и
£ «сНс/Мл =°»
(5.164)
или
|л*. М|лЛ = 0, (5.165)
где = 11 ... рл/1 — вектор-строка, определяющим собственную форму /-го
главного колебания;
— вектор формы колебаний Л-го тона;
— матрица инерционных характеристик, в частности масс.
Причем, если положение точечной массы описывается более чем
одной обобщенной координатой, она учитывается для каждой
~mt 0 0 ... 0
0 ... 0
ООО.. .тп
из этих координат.
Каждая из зависимостей (5.162), (5.164), (5.165) представляет собой условие
ортогональности.
Действительно, в силу соотношения (5.162) равны нулю обе части равенства
п п
(5.160), а следовательно, и равенства (5.159): £Л,?й = 0, £/f7f9// = 0, что
t=l f=i
я требовалось доказать.
В рассмотренном ранее примере /n1=m2=m, Л21 = 2,414Дц, ^22=
= —0,414Л12 и условие (5.162) соблюдается: тЛпЛ19+ т-2,414Ац(—0,414Д12) =
« 0.
Прямые, показанные на рис. 5.39, по которым движется масса при двух главных
колебаниях, взаимно перпендикулярны. Необходимо заметить, что для систем,
которые не имеют ни одной пары совпадающих частот собственных колебаний,
условие ортогональности применимо к любым двум различным формам. Оно не
применимо к двум формам колебании с совпадающими частотами.
439
26.5. Вынужденные колебания систем.
Действие гармонической нагрузки
Рассмотрим случаи действия на систему внешних сил» изменя-
ющихся по гармоническому закону Ft(f) = F^in (i = 1, 2....n).
При этом примем, что все динамические силы, приложенные к системе,
имеют одну и ту же частоту. В этом случае, как будет показано ниже,
внутренние усилия во всех элементах приобретают максимальные
значения в одно и то же время, поэтому основной вадачей будет по-
строение эпюр максимальных (амплитудных) усилий.
Дифференциальные уравнения вынужденных колебаний без учета
неупругих сопротивлений в матричной форме (5.132) имеют следующий
ВИД!
Mq + Cq = F. (5.166)
Приведем эти уравнения к обратной форме, для чего умножим слева
все слагаемые (5.166) на матрицу податливости
AMq + ACq - AF, (5.167)
где
6ц 6j2 ... 6|п
А = 622 ... 62л (5.168)
6Л1 6л2 . • • бдЛ-
Учитывая, что АС = Е (Е— единичная матрица)» и обозначив
Л/?==Д, (5.169)
получим
AMq + q = b. (5.170)
Матрица А представляет собой вектор-столбец, элементы которого
находятся из выражения
Д„ (0 = S М7* W («'=’. 2, ..., П). (5.171)
Уравнения (5.170) запишем в развернутом виде:
fnfinQi (0 + ^2^12^2 (0 + ... + ^п6т$я (/) + qt (0 = Д|/ (/);
(0 + /n2622ga (/) + ... -Ь nin^qn (0 + 9а (0 = Аг/ (05
............................................... (5.172)
'пЛ191 (0 + т2бл292 (/) + ... + mn&mqn (/) + qn (0 = А^ (0-
Общий интеграл системы дифференциальных уравнений вынужден-
ных колебаний является суммой общего решения соответствующей
однородной системы и частного решения рассматриваемой неодно-
родной системы, т. е. qt = qte + qtp (i e 1» 2, ...» n). Так как сво-
бодные колебания системы при наличии неупругих сопротивлений,
440
как известно, являются колебаниями быстро затухающими, то прак-
тический интерес представляет лишь частное решение qlfn определя-
ющее вынужденные колебания системы при установившемся про-
цессе.
Частное решение уравнений (6.172) при действии гармонической
нагрузки Ft (0 ₽ Ft sin в/ будем искать в виде
qt(t) «GsinGt (5.173)
Соответственно
q((t) = — &Ct sin ©/= — Wqit. (5.174)
Подставив эти выражения в (5.172) и умножив все слагаемые в уравне-
ниях на (—1), получим
(mi6u6a - 1) qx (t) + ma612e2g2 (0 -f- ... + тл61п&дл (0 + Av (0 = 0;
m&Mi (0 + (m262202 - 1) q2 (0 + ...
... + mr&n&qn (0 + A2/ (0 « О; (5.175)
(0 + (0 + ... + (mAn©2- I) qn (0 -f- An/ (0 = 0.
В уравнениях (5.175) неизвестными являются обобщенные коорди-
наты вынужденных колебаний qt(t) (i « I, 2, ...» п). По правилу
Крамера
^(0 = -A/Z>, (5.176)
где D — определитель системы уравнений (5.175); Di — определитель
D с i-м столбцом, замененным свободными членами в обратными
знаками.
Если из элементов каждой строки определителя системы D вы-
нести в® за знак определителя, то он примет следующий вид!
тЛ.-1/е2 /п3612 • • •
Л11621 /712622 1 /02 . . . тлб2л
т16Л1 т26д2 . . . тлёпл — I/O2
(5.177)
Определитель (5.177) аналогичен определителю (5.148) при рассмотре-
нии собственных колебаний. Поэтому если частота действующей нагруз-
ки в совпадает с любой частотой собственных колебаний то опре-
делитель (5.177) обратится в нуль, а выражение (5.176) даст q((f) = ©о.
Это значит, что имеет место резонанс. Следовательно, в системе с п
степенями свободы при действии гармонической нагрузки может
быть п резонансов. При резонансе амплитуды вынужденных колебаний
с увеличением времени неограниченно возрастают лишь при отсутст-
вии неупругих сопротивлений. В реальных условиях, вследствие на-
личия сопротивлений, эти амплитуды конечны, однако могут достиг-
нуть больших значений.
Преобразуем уравнения вынужденных колебаний (5.172) к дру-
гому виду, где в качестве переменных примем инерционные силы
Л(0«~т^(0. (6.178)
441
С учетом (5.174) выразим обобщенные координаты через инерцион-
ные СИЛЫ1
?<(/)= l/(m<62)/<(/). (5.179)
Выполнив в (5.172) соответствующие замены согласно (5.178) и (5.179),
получим
У) + , У) + - + U У) + Д|| У) = 0;
Wi У) + (0 + - + 62Х У) + Дл У) « 0;
............................................. (5.180)
Д.1/1 У) + Ыг У) + ... + У) + д„, у) = о,
где
«н = б.< — 1/(тге2). (5.181)
Инерционные силы, как и обобщенные координаты, изменяются по
закону sin©/ и одновременно достигают амплитудных значений.
Учитывая это, получим из уравнений вынужденных колебаний систе-
мы (5.180) канонические уравнения относительно амплитудных зна-
чений инерционных сил:
6ц/| -|“ 612^2 4“ ••• 4* 4" = 0»
^21^1 4- 622^2 4“ ••• 4- ЪъАп 4- А2/ = 0;
............................... . (5.182)
Wi 4* &j2^2 4” ••• 4* §nnln 4" Anf = 0,
или в матричной форме
Л#/4-а; = 0. (5.183)
Отсюда вектор-столбец амплитудных значений инерционных сил
/ = —Л^'д,. (5.184)
Обратную матрицу А-*1 можно найти, если матрица А* является не-
особенной, т. е. если ее определитель отличен от нуля. Читателю
предоставляется возможность показать, что матрица А* становится
особенной при наличии одного из резонансов системы.
Уравнения (5.182) и (5.183) одинаково применимы к любой системе
с п степенями свободы, независимо от того, будет ли система стати-
чески определима или статически неопределима. Разница состоит
лишь в определении перемещений 6^.
Определение инерционных сил из канонических уравнений (5.182)
позволяет вычислять внутренние динамические усилия в системе,
общее выражение которых можно записать в такой же форме, как для
статически неопределимых систем:
S = SJt -J- S2/а -р ... SJn 4* •$/, (5.185)
где Si — усилие от fi= 1; S/ —усилие от амплитудных значений
гармонической нагрузки.
442
РЯС. БЛ1
Поскольку чаще всего расчет в первую очередь сводится к опре-
делению внутренних усилий в системе, то использование уравнений
в форме (5.185) более удобно. В качестве примера использования кано-
нических уравнений инерционных сил для расчета систем на гармони-
ческие нагрузки рассмотрим Г-образную раму, находящуюся под
воздействием вертикальной возмущающей силы (рис. 5.41). Запишем
канонические уравнения (5.182):
Л + 2 + = 0; (5 д 85)
Wi + 6fA + A2f = 0.
Вычислим коэффициенты и свободные члены этих уравнений по выра-
жениям (5.171) и (5.181), использовав ранее найденные данные при
определении частот собственных колебаний этой же системы:
«п = бп - = Z8/(3E/) - l/H.e2);
612 = C2i = F/(2E/);
С = 1/И2ег) = 4Zs/(3£/)~ l/(/n2©2);
Дц = Vi + 6^2 = F/S/(3£Z);
Д2/ = 621Л + 62aF2 = FPI&EI).
Если возмущающая нагрузка приложена не только в местах располо-
жения масс, определение свободных членов производится непосред-
ственно по формуле Мора
До = J MtMidxHEI).
443
Естественно, для этого предварительно необходимо построить грузо-
вую эпюру Mf от амплитудных значений гармонических нагрузок.
Подставим в управнения (5.186) значения коэффициентов и свободных
членов. Умножим обе части этих уравнений на (6Е7/Р)02/©?. ^чи’
тывая, что ©t = 0,8057 УЕ//(/п/8), получим
(202/©2 — 9,2428) Ц + 302/©2 /а + 202/©2 • F = 0;
302/©2 • Л + (вв2/©2 — 9,2428) 7а Ч- Зв2/©2 . F = 0.
Из этих уравнений найдем выражения для определения амплитудных
значений инерционных сил!
(18,4856 — 7в*/(о|)
1 S 7вв/ш1 — 92,42862/<of -f- 85,429 Г'
_ 27.728402/©i ?
2 ~ 76*/в>1 — 92,428в2/(о| +85,429
Значения инерционных сил зависят от соотношения частот вынуж-
денных и собственных колебаний. Вычислим эти значения при
различных соотношениях ©/©j вблизи (zt3 %) первого и второ-
го резонансов. Вблизи первого резонанса при ©/©j = 0,97 7t =
= 2,402F, /2 = 5,598F; при 0/©!= i,03 7t = —2,470F, /2 = —6,194 F.
Второй резонанс наступает при 0/©8 = 1, что соответствует соот-
ношению ©/©! = ©a/©i = 2,8146/0,8057 = 3,4934. Поэтому следу-
ющие два значения инерционных сил определяем при 0/©i = 3,401
Л = 15.162F, /2 = —6,734F и при 0/©! = 3,60: /, = —14.791F,
/2 = 5.678F.
Изгибающие динамические моменты
/И ^М^ + Л4272 + М/,
где в данном случае М/ = МЛР. В сечении 1 (рис. 5.41, а), например»
при 0/©t = 0,97 Mt = I • 2,402F + 1-5,598F + IF = 9.00FZ. Эпю-
ры моментов приведены на рис. 5.41, б — а. Так как изгибающие момен-
ты эпюры М{ могут быть представленными, как возникшие от стати-
ческого воздействия амплитудного значения возмущающей силы F,
io множители перед Г/ на эпюрах динамических моментов фактически
являются динамическими коэффициентами. Заметим, что динамиче-
ский коэффициент при одном и том же отношении ©/©> различен для
моментов в различных сечениях. Поэтому расчет систем со многими
степенями свободы с помощью динамических коэффициентов обычно
не применяется, как это принято при расчете систем с одной степенью
свободы. Полученное решение является приближенным, так как не
учтено неупругое сопротивление. На самом деле изгибающие моменты
несколько меньше.
444
26.6. Действие произвольной нагрузки.
Разложение движения системы по формам собственных колебаний
При действии нагрузки, изменяющейся во времени по произволь-
ному закону в отличие от гармонической нагрузки, решение диффе-
ренциальных уравнений движения
Mq + Cq = F (5.187)
значительно усложняется. Однако решение можно упростить, если
предварительно найти собственные частоты и формы колебаний си-
стемы. В этом случае вектор обобщенных координат представляется
в виде линейной комбинации собственных векторов!
(5.188)
или в развернутом виде
4i — Pn?h + Нг'Пг + ••• + pin^nj
4г s Haith + Рга^а + — "I" р2п!]л»
....................................... (5.189)
4п = + Pn2T]2 + — + JWTb
причем рц = р12 = ... «« р1п = 1. Зная д,, можно по формулам
(5.189) найти обобщенные координаты qt. Таким образом, е помощью
этих величин можно задавать положение системы в любой момент
времени и, следовательно, их можно рассматривать как новые обоб-
щенные координаты. Координаты т]; называют главными, или нор-
мальными.
Покажем, что при использовании главных координат вместо сов-
местной системы дифференциальных уравнений (5.187) относительно
4i (I = t •••> п) получим п независимых дифференциальных урав-
нений относительно эд (i = 1, 2,..., и). Подетавив вектор обобщенных
координат (5.188) и его вторую производную ^ = рт) в (5.187), по-
лучаем
ЛГр) + Срц = F. (5.190)
Если уравнение (5.190) умножить слева на транспонированный вектор
j-й формы колебаний р} , то
Р/ М pi) 4- р/ Cp-q = F. (5.191)
Первое слагаемое в этом уравнении может быть представлено в раз-
вернутой форме:
P/Affui = Ц/Л1М1Ч1 + + ...
... + И/ Afpyii; + ... + ц/Л/ЦлПл. (5.192)
Все члены этого ряда, кроме содержащего р;, исчезают в соответ*
ствии а условием ортогональности (5.165). Таким образом,
pyAfpq « P/Affi/ll/. (5.193)
446
Второе слагаемое при развертывании также упрощается!
М/ Сцт] = Р/ Сц/ту. (5.194)
Докажем это. Рассмотрим уравнения (5.147) относительно амплитуд
свободных колебаний с собственной частотой k-ro тона, ваписав их
в матричной форме. Вектор амплитуд заменим вектором относительных
амплитуд М собственной формы. Тогда
(ЛМ - 0, (5.195)
или
AMpk == l/^Epft. (5.196)
Умножим обе части равенства слева на обратную матрицу А Учи-
тывая, что А -1 == С> получим
Мцл — l/okCjik. (5.197)
Обе части равенства (5.197) умножим слева на транспонированный
вектор р/> определяющий /-ю собственную форму колебаний!
р) ТИрл = 1 Ср*. (5.198)
А так как р/УИрл^О, следовательно, и
Р;СцА = 0, (5.199)
что и требовалось доказать.
Вернемся к уравнению (5.191), в котором вместо слагаемых левой
части подставим их выражения из (5.193) и (5.194):
<j = *•2» — • «)• (5.200)
Обозначим (5.201)
cl= Сц/i (5.202)
Ft = iijF. (5.203)
Тогда "Vb + «Pl; = Fi (/ = h 2 л). (5.204)
Приведем эти уравнения к каноническому виду, разделив на т, и
обозначив Cjlnij = coji
Ч- + <«>Н « Pj/nij (i = 1» . п). (5.205)
Таким образом, вместо исходной системы уравнений (5.187) относи-
тельно первоначально выбранных обобщенных координат имеем неза-
висимые уравнения (5.205; для каждой из главных координат. Эта
уравнения похожи на уравнение (5.40;, описывающее вынужденные
колебания системы е одной степенью свободы. После определения
из уравнения (5.205) главных координат могут быть найдены усилия
и перемещения в сооружении путем объединения отдельных решений.
446
Такой метод называется методом сложения форм ко-
лебаний.
Рассмотрим в качестве примера раму на рис. 5.38, нагруженную
вертикальной внезапно приложенной силон F (0 = F. Для этой рамы
ранее были получены частоты собственных колебаний = 0,8057х
X VЕ1!(тР), со2 = Ъ£\4ЬУЕ1ЦтР) и соответствующие им векторы
собственных форм
l'1 = [2,414]’ !’= = [_0,414]’
Вычислим по выражениям (5.201) и (5 203) приведенные значения
масс:
mt = [l 2,414][« °][^,4] = 6.828 m;
ms = [l -0,414][- О |Ц414]- 1.172m
и приведенных нагрузок:
Г1 = (1 2,414)0 = 2.414F,
F, = [ 1 —0,414][01 = —0,414F.
Г
Далее необходимо составить систему из двух независимых дифферен-
циальных уравнений колебаний (5.205) и решить их. Воспользуемся
ранее полученным решением (5.52) для системы с одной степенью сво-
боды, согласно которому главные координаты
Я1 (0 = Л/(лц<4)(1 — cosco^);
t]2 (Z) = F2/(m2oi)( 1 — cos co2 0.
После подстановки соответствующих значений получим
т)1 (0 = 0,5446FZs/(E/)(l — cos сох0;
Т)2 (0 ® —0.0446FZ3/(£/)(! — cosco20.
Перейдем от главных координат к перемещениям вдоль осей х и у
(5.189):
и (0 = FZS/(E0(O,5 — 0,5446 cos 4- 0,0446 cosco20|
o(0 = FZ3/(£/)(l,3333— l.SHScosco^ —0,0185 cos coa0.
Графики изменения перемещений и и v показаны на рис. 5.42; о1паж
превышает vs/ = 622£ примерно в 2 раза, u,raX« 2,lwSf — 2,16l2F.
Для вычисления изгибающих моментов в сечениях / и 2 (рио.
5.38,а) воспользуемся единичными эпюрами Л4Х и Ма (рио. 5.38,б,e)i
ZWl»Mn/1 + ^ia(/a + £);
М, = Л?„/, + Ми(/, + Г),
447
Рис, 6,42
Pec, 6.43
где Mik — момент в i-м сечении /г-й единичной эпюры; —тй
и /2 — —nw—инерционные силы.
Графики изменения и М2 приведены на рис. 5.43. Максималь-
ный момент в сечении 1 в 2,3 раза превышает Mst ^Fl, а в сечении
2—в 1,93 раза.
26.7. Учет сил сопротивления
В системах с одной степенью свободы наличие диссипативных сил
сопротивления меняет качественно и количественно картину свобод-
ных и вынужденных колебаний. Аналогичное положение имеет место
н для систем с п степенями свободы. Рассмотрим сначала свободные ко-
лебания. Система уравнений свободных колебаний с учетом сил со-
противления из (5.132)
Mq + Kq + Cq = Q. (5.206)
Общее решение системы совместных дифференциальных уравнений,
второго порядка
q = Be*. (5.207)
Подставив (5.207) в дифференциальные уравнения (5.206) и затем со-
кратив на е2/, получим
(Mz2 + Kz + C)B = 0. (5.208)
Чтобы система линейных уравнений имела относительно вектора
произвольных постоянных В ненулевые решения, ее определитель
должен равняться нулю:
D(2Wz24-Kz4-C) = 0.
Раскрыв определитель, получаем характеристическое уравнение од-
нородной системы (5.206). Характеристическое уравнение является
алгебраическим уравнением степени 2п с положительными коэффи-
циентами. Положительность коэффициентов вытекает из того, что
кинетическая и потенциальная энергия, а также диссипативная
функция Релея являются положительными и знакоопределенными
448
квадратичными формами. В этом случае вещественная часть всех
корней характеристического уравнения отрицательна, а сами корни
при малых коэффициентах сопротивления являются комплексными и
попарно сопряженными вида
Z = —е ± (0^. (5.209)
Из этого следует, что общий интеграл системы дифференциальных
уравнений (5.206) состоит из слагаемых вида (5.107):
е-®* (Bi sin Odt + В2 cos (Odf).
Иными словами, при отсутствии возмущающей нагрузки любое на-
чальное возмущение системы приведет к затухающим с течением вре-
мени колебаниям. При вынужденных колебаниях решение дифферен-
циальных уравнений (5.132)
Мф + Кц 4- Cq ~ F
упрощают преобразованием ее к главным координатам, если предпо-
ложить, что условия ортогональности (5.165) и (5.199) применимы
и к матрице затухания, т. е.
щ’ЯХ = 0, /#=fe. (5.210)
В этом случае, как и при вынужденных колебаниях без учета затуха-
ния (5,204), имеем независимые уравнения в виде
mji\i + fe/Ч/4- с/ч/ = F/ (/ = I. 2.п), (5.211)
где к, — ц’/Кщ.
Релей показал, что матрица затухания удовлетворяет условиям
ортогональности (5.210), если ее можно представить в виде линейной
комбинации матриц М и С, т. е.
К—с^М + а2С, (5.212)
где clt аг — произвольные коэффициенты пропорциональности. В про-
тивном случае решение можно получить лишь совместным интегриро-
ванием исходных уравнений (5.132).
26.8. Понятие о динамическом методе расчета сооружений
на сейсмические воздействия
Сейсмическое воздействие проявляется в виде колебаний участков земной
поверхности, и которых участвует и основание сооружения Колебания имеют
сложный волновой характер. С целью упрощения решения задачи предполага-
ется» что длина сейсмической волны значительно больше размеров сооружения
в плане и при ее проходе фундамент сооружения испытывает лишь некоторое
поступательное перемещение Д (/) в направлении, наиболее опасном для данного
сооружения. Сооружение обычно представляется в виде консольной стойки с л
сосредоточенными массами, которая испытывает кинематическое возмущение
44Э
Рис. 5.44
(рис. 5.44). Уравнения колебаний в этом случае могут
быть записаны в относительных координатах анало-
гично (5.132):
Ми + Км 4- С« =s Feff, (5.2)3)
где
Feff = — M&fy (5.214)
[гл1 1
I.
%J
Ускорение основания А (0 находят в результате
статистической обработки графиков зависимости уско-
рения от времени * (акселерограмм) реальных земле-
трясений.
Уравнение (5.213) можег быть решено прямыми
методами численного интегрирования системы свяэан-
ных уравнений. Однако более эффективным является,
если это возможно, преобразование системы к несвязной с использованием глав-
ных координат. После определения главных координат можно найти прогибы,
изгиоающие моменты, поперечные силы и проверить прочность и жесткость кон-
струкции. необходимо заметить, что степень сейсмического воздействия зависит
от частот собственных колебаний сооружения, а следовательно, можно уменьшить
вто воздействие изменением характеристик самого сооружения.
Вопросы для самоконтроля
I. Приведите примеры систем с несколькими степенями свободы.
2. Какой вид имеют уравнения Лагранжа для неконсервативной системы
с а степенями свободы?
3. Какие системы относятся к неконсервативным?
4. Какими функциями описываются кинетическая и потенциальная энергии
и функция рассеивания Релея? Запишите их выражения.
5. Что собой представляют коэффициенты инерции, жесткости в сопротив-
ления для систем с конечным числом степеней свободы?
6. Какой вид имеют дифференциальные уравнения вынужденных колеба-
ний системы с п степенями свободы в матричной форме?
7. Каким образом, кроме использования уравнений Лагранжа, можно полу-
чить уравнение движения?
8. Запишите уравнения движения свободных колебаний консервативной
системы с п степенями свободы в прямой форме.
9. Какой вид имеют подобные уравнения, записанные в обратной форме?
10. Какие условия предопределяют ту или иную форму записи уравнений
свободных колебаний?
11. В каком случае какую из форм удобно применять для исследования ко-
лебаний?
12. Что представляет собой уравнение частот, или вековое уравнение?
13. Что такое спектр частот собственных колебаний?
14. Что соответствует каждому значению собственной частоты спектра?
15. Что характеризует собственная форма колебаний?
16. Как определяют 2п неизвестных постоянных при исследовании свобод-
ных колебаний системы с конечным числом степеней свободы?
17. Запишите условия ортогональности собственных форм колебаний.
18. Что собой представляют элементы вектора собственной формы колеба-
ний?
19. Каким образом доказывается, что при действии гармонической нагруз-
ки, если частота вынужденных колебаний совпадает с любой частотой собствен-
ных колебаний, возникает явление резонанса?
450
20. Запишите канонические уравнения относительно амплитудных значений
инерционных сил.
21. Как определяются главные коэффициенты этих уравнений?
22. Какие величины можно найти, зная амплитудные значения инерцион-
ных сил?
23. В каком случае необходимо производить разложение вынужденных коле-
баний по собственным формам? Что при этом достигается?
24. В каком случае можно произвести подобное разложение для систем
при учете затухания?
25. Каким образом проявляет себя сейсмическое воздействие?
26. Какая расчетная схема применяется обычно при сеймическик воздей-
ствиях?
Глава 27
КОЛЕБАНИЯ СИСТЕМ С БЕСКОНЕЧНО БОЛЬШИМ ЧИСЛОМ
СТЕПЕНЕЙ СВОБОДЫ
WJ Дифференциальное уравнение продольных колебаний
стержня
Рассмотрим колебания прямолинейного стержня постоянного сече-
ния А с непрерывно распределенной массой интенсивностью т, воз-
никающие в результате начального возмущения, направленного вдоль
его оси. В результате продольного возмущения стержень испытывает
продольные деформации, которые сопровождаются поперечными, за-
висящими от коэффициента Пуассона. Следовательно, движение час-
тиц происходит в двух направлениях. Для упрощения решения задачи
предположим, что движение частиц осуществляется только в про-
дольном направлении с одинаковыми скоростями. Это соответствует
принятию, как и в задаче о статическом растяжении — сжатии, гипо-
тезы плоских сечений. Решение при таком предположении будет близ-
ким к точному, если соотношения между поперечными и продольными
размерами отвечают принятому определению понятия «стержень»,
или точнее, с динамической точки зрения, — если длины упругих
продольных волн передачи возмущения вдоль стержня велики по
сравнению с его поперечными размерами.
В силу гипотезы плоских сечений продольные перемещения всех
точек сечения стержня одинаковы и зависят от двух величин: коорди-
наты сечения х и времени t, т. е. и (х, I). Для получения уравнения
движения составим по Даламберу условие равновесия элемента стерж-
ня длиной dx (рис. 5.45, б), на который помимо внутренних продоль-
ных сил N и N -f-действует сила инерции —mdx :
N+ d£dx- N — mdx^p = 0,
откуда
dN - 3*d
Л8*
45t
Выразим Л/ через функцию перемещений. Продольная сила
N = оА. (5.216)
В соответствии с законом Гука
о = еЕ. (5.217)
Относительное удлинение элемента
Adx _ tz + du/dx . dx — и ди Л
е - dx----------3J---------- дх <5-218>
Учитывая (5.216), (5.217) и (5.218), получим
N = EA^x. (5.219)
Подставим это значение N в уравнение (5.215):
г. л д2и — дяи
ЕАдх* ~
или
(5.220)
где а = У ЕА/т.
Уравнение (5.220) является искомым дифференциальным уравнением
продольных колебаний стержня. Это уравнение в физике называется
волновым уравнением. Волновое уравнение допускает два вида реше-
ния — в виде бегущей волны и в виде стоячей волны. На рис. 5.46
показаны последовательности двух моментальных снимков, относя»
щихся к близким моментам времени (кривые / и 2), — стоячей
(рис. 5.46, а) и бегущей (рис. 5.46, б) синусоидальных волн. Отличие
легко обнаруживается без пояснения.
Первое решение, как эго доказывается в математических курсах,
представляет собой произвольные функции от аргументов х й: at
и = и = ft(x + ai), (5.221)
452
или суперпозицию таких функций. Оно указывает,
что процесс изменения смещения носит характер
плоской волны, распространяющейся в ту или иную
сторону со скоростью
а » /ЕЛ/m = ИЕЛ/(рЛ • 1) = КЁ/р, (5.222)
Рис. 6.47
где р — плотность материала.
Эта скорость, как известно из акустики, является скоростью звука
в стержне. Она тем больше, чем жестче и чем легче материал стержня.
Например, для стали а « 5000 м/с.
Вид функций определяется характером движения источника волн,
а также явлениями, происходящими на границе стержня. Когда волна
достигнет свободного конца стержня, она отразится. Анализ показы-
вает, что продольная волна сжатия отражается от свободного конца,
как такая же волна, но уже растяжения. Например, при исследовании
разрушения толстых плит с помощью малого взрыва оказывается, что
в месте контакта образуется вмятина, а с противоположной стороны
происходит откол части плиты (рис. 5.47). Изучение распространения
волн деформаций в различных средах позволяет объяснить и описать
многие явления, встречающиеся в инженерной практике.
Другое решение, в виде стоячей волны, основано на методике разде-
ления переменных (метод Фурье). Пусть
и (х, t) = X (х)Т (0, (5.223)
где X (х) — известная функция х, определяющая форму стоячей
волны; Т (0 — неизвестная функция времени /, определяющая
характер движения.
Подставим (5.223) в волновое уравнение (5.220):
Х & ~ а Т dx*'
Перегруппируем члены, чтобы в левую часть вошли члены, зависящие
от tt а в правую — члены, зависящие от х:
(5.224)
Теперь левая часть (5.224) зависит только от /, а правая — только
от х, и тем не менее между ними существует равенство, справедливое
при всяком значении t и х. Очевидно, такое равенство возможно только
в том случае, если левая часть в действительности не зависит от /, а
правая — не зависит от х. Но в таком случае и левая, и правая части
(5.224) равны постоянному числу, которое мы обозначим для удобства
дальнейшего решения через —со2.Теперь вместо (5.224) можно записать
два уравнения:
^ + <аг7 = 0; (5.225)
^ + эГ = 0. (5.226)
453
Дифференциальное уравнение (5.225) подобно (5.20J, следовательно*
его общим интеграл
Т (/) = /Ц sin со/ + А2 cos arf « Л sin (tat + X). (5.227)
Общее решение уравнения (5.226) аналогично:
X (X) = Si sin £ X + Вг cos х. (5.228)
Объединив решения (5.227) и (5.228), получим общий интеграл волно-
вого уравнения
и (X, /) = (в. sin х 4- Bs cos х) sin (<ot + X), (5.229)
откуда следует, что каждое сечение стержня совершает гармонические
колебания с собственной частотой со и амплитудой
u (х) = Bj sin х + В2 cos х, (5.230)
где х имеет определенное значение, соответствующее рассматриваемому
сечению.
Функция (5.230) в целом для стержня определяет форму колеба-
ний — форму стоячей волны.
Произвольные постоянные Bt и В2 определяются из краевых
условий в каждом отдельном случае. Эти условия зависят от способа
вакрепления концов стержня. При наличии заделки конца стержня
краевым условием будет равенство нулю перемещения в ней:
и = 0. (5.231)
При свободном конце стержня краевое условие представляет равен-
ство нулю продольной силы:
N = 0, (5.232)
или из (5.219)
и' = 0. (5.233)
Например, для стержня (рис.5.48) первое краевое условие и (0) = 0
дает В2 = 0. Чтобы использовать второе краевое условие, найдем
,. . <о г, со со г» . со
а (х) = — Bf cos — х— ~ В2sin х.
* а ж а а * а
Учитывая, что б2 = 0 н u(t) = 0, получим
Bl cos I = 0. (5.234)
Из ы/с-В^ О следует, что
cos I = 0. (5.235)
Этому уравнению удовлетворяет бесконечное число корней
ыл/д-/ = (2п—1)л/2 (л= 1, 2, 3, ...),
454
которым отвечает бесконечный ряд частот
= (2п- 1) i 1<Ё7(рО (п = 1, 2, 3, ...).
Таким образом, мы получили спектр частот
собственных колебаний, причем каждому зна-
чению частоты из спектра соответствует своя
форма колебания, определяемая функцией
«л(х) = BjSin <~х.
На рис. 5.48 изображены формы колебаний при = 1 для
частот coj и й)2.
Общее выражение смещения при сложных колебаниях имеет сле-
дующий вид:
и (х, /) = J] Вп sin х sin (u)nl + М- (5.237)
п=1
27.2. Дифференциальное уравнение поперечных колебаний
стержня
. Рассмотрим балку (рис. 5.49, а), имеющую постоянную жесткость
EI и равномерно распределенную массу, величина которой, приходя-
щаяся на единицу длины, равна гп. Балка загружена распределенной
возмущающей нагрузкой q (х, /)• Под действием нагрузки балка со-
вершает колебания, при этом ее прогиб и(х, /) является функцией
двух переменных.
Рассмотрим равновесие элемента dx балки (рис. 5.49, б), присоеди-
нив к действующим силам силу инерции —tndx~ . Сумма проекций
на вертикальную ось всех приложенных к элементу сил дает
qM
Ряс. 5.<9
— т нл- — —Q (х,Л.
дх д1г ’ ' ’ 7
„ дМ „
Сумма моментов этих сил — Q =
— 0. Продифференцировав последнее
dQ
равенство по х и подставив из пре-
дыдущего уравнения, получим
= -</(*, 0.(5.238)
С другой стороны, воспользуемся из-
вестным соотношением теории изгиба
455
для кривизны балки £7 — = —Л4. Продифференцировав это соотно-
шение дважды по х и подставив в уравнение (5.238), найдем
°- (5.239)
Это и есть дифференциальное уравнение поперечных колебаний балки
g распределенными параметрами. Оно, в отличие от полученного ранее
дифференциального уравнения продольных колебаний, не является
волновым. Хотя с помощью уравнения (5.239) и невозможно описать
распространение волн изгибных деформаций, но оно вполне пригодно
для вычисления основной части спектра собственных частот колебаний
балок и решения других задач динамики.
27.3. Свободные колебания. Балочные функции
В случае свободных колебаний балки правая часть уравнения
(5.238) отсутствует!
(5.240)
Применяя для решения уравнения метод Фурье, найдем
v (х, Г) = X (х) sin (cof 4- X). (5.241)
Подстановка (5.241) в (5.240) приводит к обыкновенному дифферен-
циальному уравнению четвертого порядка!
EI ^4 — тааХ = 0. (5.242)
ох*
Уравнение можно представить в стандартной форме:
££_*«Х = 0, (5.243)
где
# = ®2т/(£/). (5.244)
Общий интеграл однородного уравнения (5.243) выразится в этом
случае через тригонометрические и гиперболические функции!
X (х) = Bi sin kx 4- cos kx Ц- B9 sh kx + Bt ch kx. (5.245)
X (x) является функцией, определяющей собственную форму колеба-
ний, соответствующую значению частоты собственных колебаний. Из
(5.244) можем найти частоту
© = k2 И Elim. (5.246)
Значение fe, входящее в эту формулу, должно быть определено путем
удовлетворения функции X (х) краевым условиям в каждом отдельном
случае. Эти условия зависят от способа закрепления концов стержня.
456
Если конец балки имеет шарнирную опору, то на этом конце
х = °. ^ = о. (5.247)
Первое условие выражает отсутствие прогиба на опоре, второе — от-
сутствие момента. Свободный конец балки характеризуется отсут-
ствием момента и поперечной силы:
<РХ
dx*
= 0,
(5.248)
£ = о.
В защемлении отсутствуют прогиб и угол поворота!
X =0,^ = 0.
(5.249)
Раскрыв краевые условия, заданные на концах балки х = 0 и х = /,
при помощи выражений
X (х) == Вх sin kx 4- Вя cos kx 4- Вя sh kx 4- ch kx\
X" (x) = Bxk cos kx — Bjk sin kx + B3k ch kx 4- B^k sh kx-,
X” (x) = —Bxk? sin kx — B3№ cos kx 4- B3k2 sh kx 4- ch kx- (5.250)
(x) « —Bjfe3 cos kx 4- B3k3 sin kx 4- B3k3 ch kx 4- Bxk* sh kx
получим в каждом частном случае систему четырех линейных урав-
нений относительно четырех постоянных интегрирования Вх, ..., В*.
Так как краевые условия выражаются однородными равенствами, то
линейные уравнения, составленные по этим условиям, однородны.
Условием существования ненулевых решения для Вх, ..... Вл будет
обращение в нуль определителя системы уравнений:
D (k) = 0. (5.251)
Уравнение (5.251) относительно искомого параметра k носит название
характеристического уравнения однородной краевой задачи. Так как
параметр k согласно выражениям (5.250) входит в состав аргументов
тригонометрических и гиперболических функций, то характеристиче-
ское уравнение (5.251) трансцендентно. Это уравнение дает для k
бесконечное множество значений. Каждому из этих значений отвечает
своя особая форма стоячей волны, заданная функцией X (х)
(5.245) и своя особая частота © (5.246). Мы получаем, таким образом,
спектр частот собственных колебаний балки и бесконечное множество
функций X (х). удовлетворяющих всем условиям данной краевой зада-
чи. Эти функции называются фундаментальными^ или балочными
Так как произвольные постоянные Вх,......... В* при каком-либо зна-
чении параметра kn определяются из однородных уравнений с точ-
ности до множителя, то каждая из балочных функций Хл(х) также
определится с точностью до множителя. Итак, имея бесконечное мно-
жество частных решений уравнения (5.240), общий интеграл его
представится поэтому бесконечным рядом
v (*» 0 Д Хп (х) Тп (/) = J (В1Я sin knx + В2п cos knx 4-
4* Взп sh knx 4- В^п ch knx) sin (W 4- (5- 252)
457
Докажем важное свойство балочных функций и вытекающее из него
свойство решения (5.252). Возьмем две балочные функции Х( и Xi.
и составим выражение (Л? — fe/) J X/X/dx. Из уравнения (5.243)
о
ktXt « X* и ktXj = X/ . Подставив эти выражения в исходное, по-
лучим j (X/X'}v—XiX™)dx. Интегрируем по частям первый член
подынтегральной разности:
j X/X'vdx = x,xf |'- j XyXf'rfx.
о о
Теперь интегрируем по частям вновь получен ный интеграл и так до
тех пор, пока не будем иметь
f X7X}vdx= Х;Х’I — х;х;'| +
о |о |о
+ X/ Х\ |0 — Х{ Xt |0 + J X/VX/dx,
о
откуда
J (x,xfv - х,х™) dx = Х/хГ - х; xi +
+ х/Хх -x7x/|j.
Но все члены правой части при любых условиях закрепления концов
балки (5.247), (5.248), (5.249) обращаются в нуль. Следовательно, при
i
|х(Х,<?х = 0, (5.253)
О
а это означает, что балочные функции X, и X, ортогональны. Поэтому
можно сказать, что решение (5.252) представляет разложение уравне-
ния колебаний в ряд по ортогональным функциям, каждая из которых
выражает стоячую волну для одной из частот спектра. Кроме.-того;
вследствие этого свойства, анализ вынужденных колебаний сводится
к решению того же дифференциального уравнения, что и для колебаний
систем с одной степенью свободы.
Рассмотрим пример построения балочных функций и определения
частот собственных колебаний балки с шарнирным опиранием ее
концов. Запишем общее выражение балочной функции (5.245):
X (х) — Bi sin kx 4- В2 cos кх + B8sh kx + B4 ch kx.
Краевые условия для рассматриваемой балки (см. (5.247)] — при
х = 0 и при х = / X = О, X" - 0. Из условия х = 0, X = 0
+ В4 = 0. (5.254)
458
Чтобы использовать второе условие __ п=1
(л = /, Xя = 0) возьмем вторую произ-
водную от выражения (5.245):
Xя = /г2 (—Bt sin kx — В2 cos kx +
+ B3shfex + B4chfex). (5.255)
' Рис. 5.50
откуда
—B2 + В4 = О (5.256)
Из совместного решения уравнений (5.254) и (5.256) следует, что
В2 = В4 = 0. (5.257)
Поэтому из следующих двух условий получаем
sin kl 4- Вл sh kl = 0;
—Bi sin kl + B3 sh kl = 0.
(5.25g)
Эго — система линейных однородных уравнений относительно и
В3. Ненулевые решения, соответствующие колебаниям стержня, воз-
можны лишь при условии, что определитель системы равен нулю:
|-sinH ^| = 2sinfeZsh^0. (5.259)
Так как в общем случае при 6 =# 0 sh kl Ф 0, уравнение (5.259) можно
записать в виде
sin kl = Q. (5.260)
Его-корни равны knl — пп (п = I, 2, 3, ...), откуда kn = ял//. Из
выражения (5.246) частоты собственных колебаний
<0„ = УЁПт (п = 1, 2, 3, ...). (5.261)
Мы видим, что спектр балки действительно содержит бесконечное
множество частот, относящихся друг к другу как квадраты целых чи-
сел. Каждому значению частоты (5.261) отвечает своя форма стоячей
волны, выражение для которой, ввиду В3 — 0 (из (5.257) и (5.245)),
принимает вид
X„(x) = £isin^. (5.262)
Таким образом, для двухшарнирной балки стоячие волны представ-
ляют собой синусоиды, причем порядковый номер л частоты одновре-
менно указывает на число полуволн в стоячей волне (рис. 5.50).
Общее решение дифференциального уравнения колебаний (5.241)
в этом частном случае принимает вид
оо
»(*, I) = S flnSin Тsin (6263>
4Б9
Для определения произвольных постоянных интегрирования Вп и
необходимо задавать форму изгиба балки в начальное мгновение —
v (х, 0) и закон распределения скоростей по ее длине в то же мгнове-
ние — v (х, 0).
27.4. Понятие об общем случае действия возмущающей нагрузки
Если на систему с бесконечным числом степеней свободы действует возму-
щающая нагрузка F (0 произвольного вида, занимающая постоянное положение,
то уравнение колебаний (5.240) перестает быть однородным и принимает вид
(5.239):
d*v ___д3!}
El д1*~^ {*• (5.264)
причем q (х, 0 обозначает интенсивность нагрузки в точке х. Если возмущаю-
щая нагрузка равномерно распределена по всей длине балки, то q (х, 0 = q (0
и не зависит от х; во всех остальных случаях загружения (сосредоточенная сила,
равномерно или неравномерно распределенная нагрузка на части длины балки
и др.) решению должен предшествовать предварительный этап — отыскание
аналитического выражения функции q (х, 0. Удобнее всего применить для этого
разложение в ряд Фурье.
Пусть, например, к балке приложена сосредоточенная возмущающая сила
F (х, i) — Ff (0, расположенная на расстоянии от конца х = 0. Заменим силу
равномерно распределенной нагрузкой q (х) интенсивностью F/(2e) , действу-
ющей на малом участке длиной 2е: от х = а — е до х = а + в. Разложим эту
нагрузку в ряд Фурье по синусам:
СО
q (х) » У ^sin . (5.265)
Умножим обе части равенства на sin (/лх/0 и проинтегрируем его в пределах
длины балки:
f, (*) (5.266)
0 1=1 о
Так как sin (*лх/0 является балочной функцией, как это следует из рассмотрен-
ного примера, то, ввиду свойства ортогональности этих функций (5.253), все
интегралы
7
С . /лх . 1ЛХ ,
J sin ~ sin — dx = 0 с / =# i.
о
Следовательно, в правой части равенства (5.266) отлично от нуля только одно сла-
гаемое:
/ /
J q (х) sin dx =*= Aj J sin2 dxt (5.267)
0 О
о
460
Учитывая это, получим формулу для вычисления коэффициентов разложения
л/=
2 С . /л*
7 J 9 (*) sm —
о
(5.268)
В нашем случае q (х) = F/ (2е), а поэтому
°+е
2 F Г inx F Г in in
Л<=7Й J sm —=fls[cos7(e-e)-cos7(o+e)
Заменим разности косинусов произведением синусов:
л 2F ina ine.
Л<=йй’'п—s,n —
Возвратим силе F ее точечную протяженность, устремив е к нулю. В пределе
е-н) ше/Z и
„ 2F ina
Л = Т5,П“7“-
(5.269)
Теперь можно записать аналитическое выражение возмущающей нагрузки
9 U. о = f (О
2F ina inx
s,n-7"sin'T
t=i
(5.270)
n искать решение дифференциального уравнения (5.264).
Рассмотрим случай действия возмущающих нагрузок, изменяющихся во
времени по произвольному закону. Для таких нагрузок расчет удобно произво-
дить путем разложения движения системы по формам собственных колебаний,
как и для систем с конечным числом степеней свободы.
Представим функцию прогибов в виде линейной комбинации баночных
функций
и (х, Л = V Л£(/)Х£ (х), (5.271)
/=|
где t]f(O (i= I, 2, 3,...) — главные координаты. Необходимо отметить, что
такое разложение возможно лишь при пулевых краевых условиях задачи, так
как само понятие балочной функции исходит из необходимости удовлетворения
именно таким условиям.
Подставив (5.271) в уравнение (5.264), получим
£ ГтХ, (х) ф (/) + £/X{v (х) т)г ОТ] = 9 (*. 0- (5 272)
с=|
Из уравнения (5.242) следует, что
E/X}V (х) = т rfXt (х). (5.273)
Тогда выражение (5.272) можно записать так:
У, (iy + <w) mXl — 9 (*» 0* (5.274)
i61
Умножим обе части этого равенства на балочную функцию, соответствующую
/-й собственной частоте колебаний, и проинтегрируем по длине балки. Тогда
в силу условия ортогональности (5.253) все слагаемые, кроме /-го, обратятся в
нуль. В результате получим
_ / i
'« (n/d-oji]/) { Xjdx = fq (х, /) Xfdx,
о о
откуда
W + <*>/»)/ = ///'«. (5.275)
где
/ I
= f q (х, /) X,dx/ J X*dx. (5.276)
b o
Таким образом, вместо исходного уравнения (5.274) имеем, как и в случае
систем с конечным числом степеней свободы (5.205), независимые уравнения
для каждой главной координаты (/)•
Определив главные координаты i]}(/) из уравнений (5.275), можно по форму*
ле (5.271) найти в любом сечении балки прогиб, а следовательно, и угол поворота,
изгибающий момент и поперечную силу.
27Л. Решение в форме метода начальных параметров
для случая гармонического воздействия
Пусть возмущающая нагрузка, действующая на балку, изменяется
во времени по гармоническому закону:
q (х, t) « q (x)sin 0Z. (5.277)
При установившихся вынужденных колебаниях балки и без учета
неупругих сил сопротивления фазы колебаний и возмущающей нагруз*
ки. совпадают, поэтому положим
о (х, Z) == v (х) sin в/, (5.278)
где v (х) — неизвестная амплитудная функция прогибов.
В результате подстановки (5.277) и (5.278) в уравнение (5.264)
и с учетом того, что в амплитудном состоянии sin в/ = 1, получим
E/vlv — = q (х), (5,279)
или
tfvg(х)/(Е/), (5.280)
где
А4 = т©2/(£/). (5.281)
Ранее при рассмотрении свободных колебаний балки мы получили
однородное дифференциальное уравнение (5.243) четвертого порядка,
причем выражение А4 содержало частоту свободных колебаний. Те-
перь имеем неоднородное ди(|)ференциальное уравнение, и А4 включает
частоту возмущающей нагрузки 0. Решение уравнения (5.280) с целью
дальнейшего удобного его применения получим в форме метода
начальных параметров.
462
Общее решение однородного уравнения, которое совладает по виду
с уравнением (5.243), можно записать аналогично (5.245):
Oj — B^sin kx + B2cos kx 4- B3 sh kx 4- B4ch kx. (5.282)
Частное решение уравнения (5.280) v2 зависит от вида нагрузки. До-
пустим, нагрузка равномерно распределенная: q (х) == q. Частным
решением будет
v2 = — q I (k*El). (5.283)
Это легко проверить, подставив (5.283) в исходное дифференциальное
уравнение (5.280). Общее решение неоднородного уравнения (5.280)’
v = + v2 = vt — q/fk4 El). (5.284)'
Будем считать, что в начале координат, которое принимается в ле-
вам концевом сечении балки, при х = 0 заданы все начальные пара-
метры: v0; о; Л/о =—Elva; Qo — —Elv”. Воспользуемся ими как
краевыми условиями для определения постоянных Bit В2, Вэ и В4.
Учитывая (5.284), получим
и0 « Ва 4- В4 — qK&El); vQ = kBi 4- kBa; (5.285)
Mo = E/k2B2 — Elk'B^ Qo = ElktBi — El#Ba,
откуда
Ba = ) v0 4~ , q . Bj = ) Vp 4- Qo
Ba = ) 2 — 2Л2£/ *“ 2Л«£/ ’ B3 = J 2k — 2k*El ’
Подставим выражения постоянных в (5.282):
v = v^Ki (kx) 4- v’o/kK2 (kx) — MJ(k*EI) K3 (kx) —
- Q0/(FE/) K4 (kx) - q!(k'El) (1 - Ki (Ml, (5.286)
где Ki(kx) — 0,5 (ch kx 4- cos kx); K2 (kx) = 0,5 (sh kx 4- sin kx);
Ks (kx) = 0,5(ch kx — cos kx); K<(kx) = 0,5(sh kx — sin kx) — функ-
ции Крылова.
Если балка имеет несколько участков, границами которых явля-
ются изменение интенсивности, наличие сосредоточенных изгибающих
моментов, сосредоточенных сил (рис. 5.51), то в соответствии с сущно-
стью метода начальных параметров общее выражение функции про-
гиба для любого участка запишется так:
v (х) = vnKi (kx) 4- v'n/kK2 (kx) — MQ!(k2El) K3 (kx) —
— QJ(PE1)K4(kx) -q0/(k*E!) [I-Ki (kx)} -
-^M{1(^EI) [Л(x -c,)J - £ Fil^EI)Kt {k(x- bft -
- S qi/(k*E/) {I - Kt Ik(x- cf)](5.287)
Благодаря тому, что между функциями Крылова имеет место диф-
ференциальная зависимость:
Ki (kx) = kKt (kx); K2 (kx) = kKi (kx);
(kx) = kK2 (kx); K< (kx) -= kK3 (kx), (5.288)
463
Рис. 6.52
просто записать выражения для определения углов поворота, изгиба-
ющих моментов и поперечных сил»
v' (х) = kv9Kt (kx) + u0K, (kx) — M„/(kED Kt (kx) —
— Qol(k2EI) Ka(kx) +qJ(k>EI)K.t(kx)-
— E Mi/(kEI) К» (ft (x — <u)l — £ FiKI^EI) K3 [A (X — b,)\ +
+ E <Hl(PEI) K, [A (x — e,)J; (5.289)
M (x) = —k2ElvtKa(kx) — kElv\,Kt(kx) + М„Кг (kx) +
+ <?о/*Ла(Ах)—qtlk2Kt (kx) + J (A (x — o()J +
+ £ Л/*Л2 Ik (x — bl)) — £ qi/k2Kt [A (x — c,)]; (5.290)
Q (*) = —PElv^ (kx) — k2Elv„Kt (kx) + kM„Kt (Ax) +
+ QoK, (Ax) - Qo/AK, (Ax) + £ kM,K, Ife (x — a,)) +
4- £ F,Kt \k (* — Ml — E qilkKt(k (x — *)(. (5.29!)
Запись соответствующих выражений при решении конкретной за-
дачи рассмотрим на примере рис. 5.52. Допустим, необходимо опреде-
лить амплитуду прогиба посередине балки. Сначала найдем значе-
ния начальных параметров из краевых условий» при х = 0 у0 — 0,
Л40 = 0; при х = I yt — 0, Л4, = 0. Вторые два условия позволяют
составить два уравнения для определения неизвестных ц. и Qo. Вос-
пользуемся для этого выражениями (5.287) и (5.290) на втором уча-
стке:
v'olkK2 (kl) — Qo/(^£/) (kl) + Ft(№El) (kl/2) = 0;
—kE/vnK4 (kl) + QQ/kKz (kl) - F/kKt (^//2) = 0.
Решив совместно эти уравнения, получаем
. _ Е К* (/г/) К4 - КА (kl} (k42} t
о _ F КА (kl) КА ikU2} — Кг (*л (/г//2)
Vo Кг.(М)-К1(1<1)
Чтобы определить амплитуду прогиба посередине балки, запишем
выражение и (х) для первого участка, задав значение х равным //2:
v (1/2) v\)/kKt W2) - QJ(^E1) (kl).
464
Подставив сюда выражения и Qo и сделав преобразования, полу-
чим
F («) IK? (W/2) + Ki («/2)1 + 2К, (W) К, (JW/2) (W/2)
Кг.(М)~К1(Ы)
При переходе к числовым решениям потребуется прежде всего опреде-
лить коэффициент kt который будет изменяться в зависимости от ча-
стоты возмущающей силы 0. Так как нагрузка симметрична, то явле-
ние резонанса возникает при совпадении с нечетными значениями
собственных частот спектра — первой, третьей и т. д.
27.6. Расчет статически неопределимых рам
на вибрационную нагрузку.
Определение частот и форм собственных колебаний
Для исследования колебаний статически неопределимых рам и рас-
чета их на вибрационную нагрузку применяются те же основные клас-
сические методы, что и в статических расчетах: метод сил и метод
перемещений. Сущность методов и последовательность производства
операций не меняются. Рассмотрим особенности применения этих
методов.
Пусть на статически неопределимую раму действует вибрационная
нагрузка одинаковой частоты (рис. 5.53, а). Рассматриваем устано-
вившиеся колебания. При этом все реакции, внутренние усилия и
перемещения будут изменяться по тому же закону, что и возмущаю-
щая нагрузка. Если не рассматривать вопроса динамической устойчи-
465
вести, то влиянием переменных продольных сил на изгибающие мо-
менты можно пренебречь. В этом случае дифференциальное уравнение
поперечных колебаний стержня является линейным и справедлив прин-
цип суперпозиции, который используется при составлении канониче-
ских уравнений метода сил и метода перемещений.
Метод сил. Рама, показанная на рисунке, дважды статически не-
определима. Обратим заданную систему в основную (рис. 5.53, 6)t
отбросив лишние связи и заменив их вибрационными неизвестными
усилиями Xi(0 = Xtsin 0/ и Х2 (f) = X^in 0/, где Хп Х2 — ам-
плитудные значения этих усилий. Для определения Xt и Ха состав-
ляем канонические уравнения метода сил:
^i^ii 4* + Д1/ = О»
Xjt^i + 4- Дг/ = О,
где dt/- — амплитудное значение перемещения по направлению силы X/
от единичной силы X/= 1 - sin©/; Д//—амплитудное перемещение
от возмущающей нагрузки по направлению той же силы.
Коэффициенты и свободные члены определяются по методу Мора)
где М( — изгибающие моменты от статической силы X/== 1; Mt и
/fy — амплитудные значения изгибающих моментов при поперечных
колебаниях стержней от силы Х/=1 • sin6/ и от возмущающей на-
грузки.
Динамические моменты в заданной статически неопределимой ра-
ме определяются с помощью выражения М = 4- МаХа 4- /И/.
Свободные колебания рам по методу сил исследуются по каноническим
уравнениям без свободных членов. Только в этом случае частота дей-
ствующей нагрузки 0 должна быть заменена неизвестной частотой
собственных колебаний со, через которую в неявном виде выража-
ются коэффициенты 6// этих уравнений. Поскольку канонические
уравнения однородны, то для получения X,, отличных от нуля, необ-
ходимо определитель из коэффициентов обратить в нулы
Ifi" 8,S| = °-
I <41 ®22 I
Раскрытие этого определителя дает уравнение частот.
Метод сил в общем случае сложен для практического применения,
поскольку сложно построение единичных и грузовых эпюр в основной
системе от вибрационных реакций устраненных связей и от возмуща-
ющей нагрузки.
Метод перемещений. Рассмотрим ту же раму (рис. 5.53, а). Она
дважды кинематически неопределима. Основную систему получаем
наложением связей, препятствующих угловым и линейным перемеще-
ниям узлов. Показываем неизвестные перемещения узлов. При гармо-
466
(5.292)
нической внешней нагрузке эти перемещения изменяются по гармо-
ническому закону
(t) = Zt sin 0/ и Za(/) =Zasin0/,
где и Za — амплитудные значения углового и линейного перемеще-
ний. Потому же закону изменяются и реакции во введенных дополни-
тельных связях. Канонические уравнения метода перемещений, выра-
женные в отношении к динамическим значениям реакций и переме-
щений, имеют обычный вид:
ruZi + г l2Z2 + «= 0;
Г2t^l "Ь Г22^2 4“ — 0»
где П/ — амплитудное значение реакции _в Г-й дополнительной связи
от единичного вибрационного смещения Z/ = 1 • sin 0/ связи /; Rtf~
амплитудная реакция той же связи от заданной вибрационной на-
грузки.
Коэффициенты и свободные члены определяются обычными при*-
емами метода перемещений. Единичные и грузовые эпюры моментов
в основной системе строятся с учетом инерции весомых элементов.
Эти эпюры отличаются введением поправочных функций фДц) для
соответствующих статических величин отдельных статически неопре-
делимых балок (табл. 5.1). Числовые значения функций фДп), ...э
ViM (табл. 5.2) зависят от аргумента
и == kl.
(5.293)
где
k = Vtn&/(Ef).
Значения функций фц ... ф10, вычисляются по формулам!
(и) = (72/1?) [ф6 (и) - фб («) J;
Фгг (U) = (24/«*) (фп («) - Ф10 (!/)1;
фз/ (и) = (24/п*) [ф7 (и) - ф4 («) ];
Фч/ (и) = 24/(5t?) [ф9 (ц) — фв(!/)Г,
ФбН«) = 8/1? 1ф9(н)-ф1а (а));
Фб/ (!/) - - (ЬПп} м ~ (Ь/1и) к (и} •
w / ч _ Кя (ЬНи) к3 (и) - К4 (b/lu) (и}.
Фй, (и\ = 1 (b'lu> К* ~ К* .
М « К8(и)Кг(и)-Кг(и)К4(и) •
f£A = Kg (№) М - К4 (Ы1и) Kt (и) ,
М 7 К8(п)К2(м)-^(«)К4(й) ’
(и\ - ^8
' v f K8(u)K8(u)-Ki(u)K4(y) ’
где К* («). — функции Крылова.
(5.294)
467
Таблица 5.1
р JsinBt
Таблица
469
Так как различные стержни рамы могут иметь разные значения
параметра и, необходимо выразить их через один параметр какого-либо
стержня:
Щ (5.295)
где
Г/ =-- k/k failJW'). (5.296)
Из решения системы канонических уравнений (5.292) определяются
амплитуды динамических перемещений узлов.
Далее, каждый стержень рамы должен быть рассмотрен отдельно
по методу начальных параметров, поскольку смещения его концов
станут известными, с составлением для каждого из них выражений г>,
v*, М и Q. По выражениям М и Q могут быть построены их эпюры;
затем, пользуясь эпюрой Q, можно построить обычным путем эпюру N.
Собственные колебания исследуются также по каноническим урав-
нениям свободных колебаний, которые получаются из уравнений
(5.292), если в них положить все свобоодные члены равными нулю, т.е.
гп%1 + в 0; /К науч
+ r22Z2 « 0.
Для получения ненулевых значений смещений при собственных коле-
баниях системы надо определитель из коэффициентов в уравнениях
(5.297) приравнять к нулю:
ku '««1 = о. (5.298)
| '21 Г22 I
Обычным решением этого определителя определяется параметр и ==
= kl, после чего частоты собственных колебаний определяются по
формуле
<d = №VT7^o, (5.299)
где т0 и /е относятся к стержню, к которому приводились все стержни
рамы.
27.7. Понятие о расчете балок на действие подвижной нагрузки
Постоянная по величине нагрузка, если ее точка приложения перемещается,
также вызынает колебания упругой системы. Рассмотрим задачу о колебаниях
балки при движении по ней нагрузки с постоянной скоростью и (рис. 5.54).Ре-
шение будем искать для двух “
Вис. 6.54
предельных случаев: 1) масса движущейся на-
грузки велика по сравнению с массой балкй
и 2) масса движущейся нагрузки мала по Сравне-
нию с массой балки. В первом случае массой
балки можно пренебречь. Тогда прогиб балки
при любом положении этой нагрузки пропорцио-
нален давлению с учетом силы ннерщш
нагрузки
F<Pv
470
dv do dx - do d2o . d*o
Ecitnywcn,. 4X0^=^- й=«й; ^ = «j-5. to
R=F(i-i3- (5-зво>
Вертикальное перемещение нагрузки F равно прогибу балки в месте ее приложе-
ния, вызванному сосредоточенной силой, равной давлению R:
о = № (l - х)« I (31 Е Г). (5.301)
Подставив сюда значения R по (5.300), получим дифференциальное уравнение,
которое определяет траекторию точки контакта движущейся нагрузки с балкой:
’“ЗгпО-7^? (5302)
+ » = (5.303)
Решение этого дифференциального уравнения с переменными коэффициентами
сложно. Хотя можно получить хорошее приближение, если полагать при вы-
числении инерционной силы, что прогибы такие же, как при нулевой скорости.
При и = 0 из (5.303) получим
о = F! (31Е1) х2 (I — х)«. (5.304)
<Ри F
Тогда (2/2—12/х+12х2), следовательно, и давление на балку
fl = F [ I — u2/g • F (31EI) (21* — I2ix + 12x*)J. (5.305)
Оно переменно. Максимальное значение давления соответствует положению на-
грузки на середине пролета:
%x=f П + “‘/8- Fit (ЗЕ7)1, (5.306)
ИЛИ
«m.x = f[l + 16u«/(g/)./„//]. (5,307)
El).
При обычных значениях скорости и и допускаемых значениях относительного
прогиба дополнительный член в скобках весьма мал, поэтому можно заклю-
чить, что рассматриваемое динамическое действие для балок небольших проле-
тов не имеет практического значения. С увеличением длины балки масса ее возра-
стает, и более близким к действительности становится второй расчетный пре-
дельный случай, когда нагрузку можно считать весьма малой сравнительно с ве-
сом балки. Для этого случая уравнение колебаний балки (5.264)
0«О в*0
Е! дх* dt2 • (5.308)
где q (х, t) — аналитическое выражение F (х, /)» полученное разложением этой
функции в ряд Фурье (5.270):
л tv ____t \ 2F uta . inx,
Я (*» 0 — f (ч 7 , — sin — sin — •
л — абсцисса силы F; x — текущая координата сечения балки и, так как вели-
чина силы при движении остается постоянной, / (0 = 1.
471
Выразив а через щ. получим
со
q (х, t) = ?£ sin ~ t • sin *Лр. Подставим это выражение в уравнение (5-308)»
1И=1
£'5>^=т£*п'-т'-$,п'т-
/«=1
Сохранив в правой части (5.309) только один член суммы, частное решение
будем искать в форме
о = ft (t) sin llnxjl).
Взяв соответствующие производные и подставив их в (5.309), получим после со*
крашения на sin (inxlt) и некоторых преобразований:
fl +<4tt = 2FI (Й1,) -sin вА (5.310)
где
о), = i№/l* У Film*, (5-311)
G{ = inu/L (5.312)
Уравнение (5.310) совладает по виду с уравнением (5.68) вынужденных гармони-
ческих колебаний системы с одной степенью свободы. Поэтому решение (5.310)
можно записать так:
— sin (ф^ + \) + ст; “ ~2 sin8|i.
i <i)f — w i
Очевидно, решения ft будут удовлетворять полному уравнению (5.309), если по-
ложить
о(х, О « Щ + М sin V sin©,t (5-313)
г -I t~i 1 i
Первая из этих сумм выражает свободные колебания балки, а вторая — вынуж-
денные. Из (5.313) следует прежде всего теоретическая возможность резо-
нанса при ©Х=0Г, т.е. при »2л2//1:рГ£///д = ти// нлн при скоростях движения
груза
ut = in// УEiifn (f — l. 2, 3,...). (5.314)
Эти скорости имеют практически недостижимые значения даже при наимень-
шем значении 1=1. Действительно, ut—n/l — Ifn • 2llTt
(7\ —период свободных колебаний) Следовательно, при такой скорости нагруз-
ка должна проходить пролет балки за время, равное половине периода колебаний
основного тона, что практически соответствует скорости иг > 1000 км/ч. Поэтому
возникновение явления резонанса практически невозможно, а тем самым оправ-
дывается допустимость исследования колебаний без учета затухания.
Вопросы для самоконтроля
!. Какие системы относятся к системам ' оескоиечным числом степеней
свободы?
2. Какое упрощение принимается при выводе дифференциального уравнения
продольных колебаний стержня?
172
3. Запишите волновое уравнение.
4. Какие два вида решения допускает волновое уравнение?
5. Что собой представляет решение в виде бегущей волны?
6. От чего зависит скорость распространения волны?
7. Какой метод применяется для отыскания решения в виде стоячей волны?
8. От чего зависит форма стоячей волны?
9. По какой формуле определяются значения частот спектра собственных
продольных колебаний?
10. Запишите дифференциальное уравнение свободных поперечных колеба-
ний балки.
11. Что определяет функция, которая является решением однородного диф-
ференциального уравнения свободных колебаний стержня?
12. Как запишется выражение для определения значений спектра собегк»-ч-
ных частот колебаний?
13. Каков порядок отыскания значений спектра частот?
14. Что называется фундаментальной, или балочной функцией?
15. Каким свойством обладают балочные функции?
16. Является ли функция sin kx балочной?
17. Каким образом удобно решать задачи вынужденных колебаний, если
возмушагошая нагрузка изменяется во времени по произвольному закону?
18. В каком случае целесообразно применять метод начальных параметров
в задачах вынужденных колебаний?
19. С помощью каких методов возможно исследование свободных и вынуж-
денных колебаний статически неопределимых рам?
20 Что собой представляют неизвестные коэффициенты и свободные члены
канонических уравнений метода сил?
21. От каких воздействий при вычислении коэффициентов и свободных чле-
нов по формуле Мора находятся функции изгибающих моментов в единичном
состоянии?
22. Что собой представляют неизвестные, коэффициенты и свободные члены
канонических уравнений метода перемещений?
23. Каким образом строятся в основной системе единичные и грузовые
эпюры моментов, чем они отличаются от аналогичных эпюр при статическом
воздействии?
24. Как необходимо строить эпюры в стержнях заданной рамы?
25. Каким образом исследуются свободные колебания рам с использованием
канонических уравнений метода сил или перемещений?
26 Какие два вида расчетных схем применяются при исследовании колеба-
ний балок при воздействии подвижной нагрузки?
Глава 28
НЕКОТОРЫЕ ПРИБЛИЖЕННЫЕ МЕТОДЫ ДИНАМИКИ
СООРУЖЕНИЙ
При вычислении собственных частот колебаний систем как с ко-
нечным, так и с бесконечным числом степеней свободы, используя
точные методы, получают спектр частот. Во многих случаях такой
расчет систем весьма сложен и связан с громоздкими вычислениями.
Для систем с конечным числом степеней свободы, когда это число пре-
вышает три, сложно не только решить характеристическое уравнение,
но и составить его, раскрыв определитель высокого порядка. Если же
система является системой с бесконечным числом степеней свободы и,
особенно, с элементами переменного сечения и массой, процесс вычис-
ления значительно усложняется в связи с необходимостью решать диф-
ференциальные уравнения с переменными коэффициентами. Кроме
473
того, чтобы вычислить частоту свободных колебаний для таких систем,
надо предварительно найти соответствующую главную форму коле-
бания. Использование ЭВМ для производства динамических расчетов
сооружений полностью не устраняет указанные недостатки точных
методов. Поэтому и возникает необходимость применения различных
приближенных методов расчета, упрощающих решение этих задач.
Тем более, что с практической точки зрения во многих, случаях доста-
точно отыскать только одну или две низших частот собственных колеба-
ний системы. Естественно, к приближенным методам должно предъяв-
ляться требование не только упрощения процесса расчета, но и доста-
точной точности получаемого результата. Рассмотрим" некоторые из
этих методов.
28.1. Метод Релея
Метод Релея основан на принципе сохранения энергии при свобод-
ных колебаниях идеально упругой системы. Согласно этому принципу
сумма потенциальной и кинетической энергий колеблющейся системы
без учета диссипативных сил является в любой момент времени вели-
чиной постоянной:
U + T = const. (5.135)
Отсюда следует, что в процессе колебаний происходит переход энергий*
из одного вида в другой. К-моменту наибольшего отклонения массыот
положения статического равновесия (рис. 5.55, б) скорость ее уменьша-
ется. следовательно, уменьшается до нуля и кинетическая энергия,
а потенциальная энергия принимает наибольшее значение В мо-
мент же прохождения массы через положение статического равновесия
(рис. 5.55, а) потенциальная энергия деформаций обращается в нуль,
а кинетическая энергия принимает наибольшее значение Рас-
сматривая эти два положения колеблющейся системы, с учетом (5.315)
можно сделать вывод, что
С\пах = Ттак. (5.316)
При подстановке в (5.316) выражения энергий получим уравнения для
определения частот свободных колебаний системы.
Рассмотрим балку с распределенной и сосредоточенными массами
(рис. 5.56), совершающую свободные гармонические колебания ро од-
ной из главных форм, отвечающей определенной частоте ад*,.. Тогда,
величина отклонения оси в произвольной точке от положения статиче-
ского равновесия
Vk (х, 0 = vk (х) sin (со*/ 4- X). (5.317)
Рас. 5.Б5
474
Рис. Б.Бв
а соответствующая скорость движения
й* (*» 0 — и* (*) °* cos (<ол* + М* (S.316)
Кинетическая энергия системы
T=^m(x)vl(x, /) dx/2 + 2/п^л(хь 0/2=^
о f=t
3 4 ®л cos2 (<ол/ +1) fJ т (х) vl (х) dx + /n/U*(x,)].
Максимальные значения кинетическая энергия принимает в те мгно-
вения, когда cos(<o*/4-X) обращается в единицу;
2 । П
Tmax = 4rf Jm(x)4(x)<fr+ (5.319)
Потенциальная энергия, выражаемая через работу внутренних сил,
с .учетом того, что ее величина зависит только от изгибающих момен-
тов,
= | мп’ы+н jj е/(х)[£££!рх.
При sin (<o*f 4- X) «= 1 потенциальная энергия принимает максималь-
ные значения;
</™х = 1 EI (х) (5.320)
Подставив (5.319) и (5.320) в (5.316), получим выражение для опреде-
ления частот собственных колебаний
У f £/(x)Id4W^2]2^
<^ = 7^-------------. (5.321)
jУ,
О
475
Если потенциальную энергию выражать
не через работу внутренних сил, а через
работу внешних сил, то
0
п
Тогда получим другое выражение квад-
рата частоты:
J т (*) gvk (х) dx Н- migvk (х()
J m (x) v% (x) dx + У mtv% (xr)
о Л-1
(5.322)
Формула (5.322) по сравнению c (5.321)
для кривых v (x) выше второй степени
имеет преимущество, заключающееся в
уменьшении количества операций за счет
двукратного дифференцирования и возведения второй производной
в квадрат.
Обе формулы дают возможность получить точное значение квадрата
свободной частоты, если бы была известна функция v (х), описываю-
щая вид изогнутой оси в процессе колебаний по одной из собственных
форм. Но обычно эта функция неизвестна. Поэтому истинную форму
изгиба при колебаниях заменяют подходящей формой исходя из усло-
вий задачи. Естественно, при этом значение получаемой частоты будет
отличаться от истинного с некоторым избытком. Степень близости ре-
шения зависит от степени близости предполагаемой формы колебаний
к действительной. Основным требованием, предъявляемым к прибли-
женному уравнению задаваемой формы стоячей волны, является
удовлетворение им условиям закрепления колеблющейся системы.
При выборе формы колебаний нужно руководствоваться тем, что пере-
мещения при свободных колебаниях зависят от действующих сил инер-
ции и что силы инерции пропорциональны распределенной массе и
амплитуде перемещений. Поэтому предположив, что инерционная на-
грузка — это просто вес системы т (x)g, частоту свободных колеба-
ний вычисляют исходя из формы прогиба v (х) под действием собствен-
ного веса. Краевые условия в этом случае автоматически удовлетво-
ряются. Такой прием задания формы стоячей волны является наиболее
определенным и дает достаточно близкие к точным приближенные
вначения частот свободных колебаний.
Например, необходимо определить частоту основного тона соб-
476
ственных колебаний консольной балки (рис. 5.57, а) постоянной
ширины. В качестве приближенной формы стоячей волны принимаем
очертание изогнутой оси консоли под действием собственного веса
(рис. 5.57, б):
«(х)
(x1-x)m,e4/(6Qdx1 т<е<» .
Это уравнение удовлетворяет граничным условиям: при х = О
EI (х) vn (х) = 0 и (£/ (х) v" (х))' = 0; при х = / v (х) ~ 0 и v' (х) = 0.
Вторая производная - Найдем квадрат первой частоты
из (5.321):
i
С Eltx9/19\migl4(GEh)]*dx
,2 _0_____________________________30£/,
1 ' *
\ Ш1Х/1\т^Р/{\2Е1/) (I — x)2|2dx
о
откуда (Qt = bJTH? VEhlmi. Точное значение = 5,315/Е X
X k Превышение над точным решение составляет 3%.
Положительная сторона метода Релея — простота и малое коли-
чество вычислительных операций, недостаток—степень искажения
результата, получающегося от принятия условной формы стоячей
волны, остается неизвестной.
28.2. Метод замены распределенных масс сосредоточенными
Вычисление частот свободных колебаний систем с конечным числом
степеней свободы можно назвать прямым методом, так как для таких
систем частоты получаются, в отличие от систем с бесконечным числом
степеней свободы, минуя процесс установления действительной формы
инерционных перемещений Кроме того, для практических целей до-
статочно знать одно-два значения первых частот из всего спектра. По-
этому, если заданная система имеет бесконечное число степеней свобо-
ды, то для упрощения расчета ее приближенно можно представить
в виде системы с конечным числом степеней свободы, заменив распре-
деленную массу сосредоточенными в отдельных точках. Для этого рас-
пределенная масса делится на участки. На каждом участке подсчиты-
вается суммарная масса, которая в виде сосредоточенной приклады-
вается либо в центре тяжести распределенной массы (рис. 5.58, о),
либо по правилу рычага распределяется по границам участка
(рис. 5.58, б). Второй способ распределения в некоторых случаях
приводит к более простой сислеме с меньшим числом степеней свободы.
Для систем с несимметричным распределением массы и особенно
с несимметричными граничными условиями результат в значитель-
ной степени зависит от выбора точек сосредоточения масс. Так, для
консоли с равномерно распределенной массой лучшие результаты дает
разбивка ее на нечетное количество участков и сосредоточение масс
477
Рас. 6.68
с соседних участков на их границы с нечетными номерами, если сво-
бодный конец считать нулевой границей (рис. 5.59, а). В этом случае
центр сосредоточения располагается ближе к центру тяжести инер-
ционных сил, интенсивность которых пропорциональна ординатам
первой формы стоячей волны, чем при других способах распределения
(рис. 5.59, б, в).
Положительная сторона метода — возможность оценки прибли-
жения получаемого решения сравнением двух значений частот систем,
отличающихся на одну степень свободы, отрицательная — получение
сразу достаточно близкого значения искомой частоты зависит от удач-
ного выбора местоположения точек и способа сосредоточения масс.
Вопросы для самоконтроля
1. Почему возникает необходимость применения приближенных методов
отыскания собственных частот колебаний?
2. Назовите приближенные методы расчета систем с большим числом сте-
пеней свободы.
3. На каком принципе основан метод Релея?
4. Можно ли с помощью метода Релея получить точное значение любой соб-
ственной частоты системы?
5. От чего зависит степень близости приближенного решения к точному?
6. Каким образом можно приближенно задать форму стоячей волны для
определения соответствующей частоты?
7. Как необходимо представить систему с бесконечным числом степеней
свободы, чтобы найти одно-два значения первых частот всего спектра?
8. От чего зависит результат решения при замене системы с бесконечным
числом степеней свободы системой с несколькими сосредоточенными массами?
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Виноградов А. И. Проблема оптимального проектирования в строительной ме-
ханике.— Харьков : Выща шк. Изд-во при Харьк. ун-те, 1978.— 168 с.
Галлагер Р. Метод конечных элементов: Основы.— М. : Мир, 1984.— 428 с.
Дарков A. В., Шапошников Н. Н' Строительная механика.— М. : Высш, шк.,
1986.— 607 с.
Киселев В. А. Строительная механика.— М. : Стройиздат, 1986,— 520 с.
Киселев В. А. Строительная механика : Специальный курс.— М. : Стройиздат,
1980.— 616 с.
Клаф Р., Пенвиен Дж. Динамика сооружений.— М. : Стойиздат, 1979.—320с.
Матричные алгоритмы в строительной механике стержневых систем / Д. К» Бен-
дюг, Б. Г. Брадул-Кириллов ц др.—М.: Высш, шк., 1980.— 122 с.
Строительная механика : Стержневые системы / А. Ф. Смирнов, А. В. Александ-
ров, Б. Я. Лащеников, Н. Н. Шапошников.— М. : Стройиздат, 198!.—512 с.
Строительная механика : Тоикостенйые пространственные системы / А. Ф. Смир-
нов, А. В. Александров, Б. Я. Лащеников, Н. Н. Шапошников.— М. : Строй-
иэдат, 1983.— 488 с.
Строительная механика : Динамика и устойчивость t А. Ф. Смирнов, А. В. Алек-
сандров, Б. Я. Лащеников, Н. Н. Шапошников.— М. : Стройиздат, 1984.—.
415 с.
Строительная механика стержневых систем и оболочек / Под ред. Ю. И. Бутен-
ко.— К. : Вшца шк. Головное изд-во, 1980.— 488 с.
Филин А. П. Прикладная механика твердого деформируемого тела : Сопротив-
ление материалов с элементами теории сплошных сред и строительной меха-
ники.— М. : Наука, 1981.— 480 с.
Учебное издание
Бутенко Юрий Ильич,
Засядько Николай Андреевич,
Кан Савелий Нахимович
Китов Юрий Петрович
Пустовойтов Владимир Павлович
Фесик Степан Прокофьевич
СТРОИТЕЛЬНАЯ МЕХАНИКА
Под редакцией профессора Ю, И, Бутенко
Переплет художника С. И. Райхлина
Художественный редактор И. Г. Хороший
Технический редактор л. Ф. Волкова
Корректор Л. М, Байбородина
ИБ № 13416
Сдано е набор 17.03.89. Поди, в печ. 13.11.89.
БФ 05656. Формат 60x90/16. Бум. тип. № 2.
Гарнитура литературная. Уел. печ. л. Зо.
Усл. кр.-отт. 30. Уч.-изд. л. 37,37.
Тираж 6000 экз. Заказ Nt 9-168. Цена 1р. 70 к.
Издательство «Выща школа», 262054, Кнев-54,
ул. Гоголевская,7
Книжная фабрика им. М. В. Фрунзе, 310057,
Харк.коп.Б7, Донец-Захаржсвского, 6/8.