

















































































































































































































































































Author: Веремеенко К.К. Головинский А.Н. Инсаров В.В. Красильщиков М.Н.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника военное дело военная наука беспилотные летательные аппараты военная авиация навигация
ISBN: 5-9221-0409-8
Year: 2003



УДК 629.7 jj Издание осуществлено при поддержке
ББК 68.53 ^ctp>ii Российского фонда фундаментальных
^^ ** ^^ исследований по проекту 03-01-Ц051д
Управление и наведение беспилотных маневренных летатель-
летательных аппаратов на основе современных информационных техноло-
технологий / Под ред. М.Н. Красилыцикова и Г.Г. Себрякова. — М.: ФИЗМАТЛИТ,
2003. - 280 с. - ISBN 5-9221-0409-8.
Изложены основные подходы, методы и алгоритмы формирования обли-
облика интегрированных систем навигации и управления беспилотных маневрен-
маневренных летательных аппаратов различных классов. Понятие «облик» включает:
состав, структуру и алгоритмы соответствующей интегрированной системы.
В состав формируемых интегрированных систем входят бесплатформенная
инерциальная система и многоканальный GPS/ГЛОНАСС приемник. Об-
Обсуждаются вопросы комплексирования навигационных измерений, обработ-
обработки изображений, включая формирование эталонов. Рассмотрена технология
создания объектно-ориентированных программных комплексов для модели-
моделирования процессов функционирования рассматриваемых интегрированных
систем. Приведены результаты моделирования интегрированных комплек-
комплексов беспилотных маневренных летательных аппаратов различных классов.
Авторский коллектив:
К.К. Веремеенко, А.Н. Головинский,
В.В. Инсаров, М.Н. Красильщиков,
С.С. Семенов, К.И. Сыпало, В.Н. Харчев
ISBN 5-9221-0409-8 © физматлит, 2003
ОГЛАВЛЕНИЕ
Введение ........................................... 5
Глава 1. Современные беспилотные летательные аппараты
кжк средства оснащения самолетов пятого поколения ...... 9
1.1. Классификация беспилотных маневренных летательных аппара-
аппаратов как средств оснащения применительно к задачам, возлагае-
возлагаемым на самолеты пятого поколения .................... 9
1.2. Основные технические и тактические требования к решению за-
задач позиционирования и определения ориентации ........... 17
Глава 2. Интегрированные бортовые системы беспилотных
маневренных летательных аппаратов как средство материа-
материализации современных информационных технологий ....... 23
2.1. Основные особенности бортовой интегрированной системы бес-
беспилотного маневренного летательного аппарата ............ 23
2.2. Состав и основные функциональные схемы интегрированных си-
систем навигации и наведения беспилотного маневренного лета-
летательного аппарата................................. 25
Глава 3. Задача позиционирования и определения ориен-
ориентации автоматического маневренного летательного аппарата
и ее решение на основе современных информационных тех-
технологий ........................................... 36
3.1. Принципы построения и особенности функционирования СНС
ГЛОНАСС и GPS ................................. 36
3.2. Унифицированные функциональные схемы совмещенных много-
многоканальных приемников глобальных навигационных систем .... 47
3.3. Определение положения, скорости и ориентации Л А на основе
ГЛОНАСС/СР8-технологий. Состав неконтролируемых факто-
факторов. Алгоритмы обработки информации ................. 53
3.4. Модели ошибок кодовых измерений систем GPS/ГЛОНАСС ... 65
3.5. Дифференциальные режимы использования спутниковых прием-
приемников глобальных навигационных систем ................. 71
3.6. Бесплатформенные инерциальные навигационные системы
(БИНС) и их использование для решения обсуждаемых
технических задач ................................ 77
Глава 4. Алгоритмическое обеспечение интегрированных
систем навигации и наведеним беспилотных маневренных ле-
летательных аппаратов разных классов, использующих много-
многоканальные приемники и БИНС ........................ 100
4.1. Особенности применения беспилотных маневренных летатель-
летательных аппаратов разных классов для эффективного решения задач
боевой авиации ................................... 100
Оглавление
4.2. Основные требования, предъявляемые к навигационной аппара-
аппаратуре потребителя, применяемой в задачах навигации и наведения
маневренных летательных аппаратов ................... 107
4.3. Влияние динамики маневренных беспилотных ЛА на функцио-
функционирование многоканального GPS/ГЛОНАСС-приемника ...... 112
4.4. Реализация интегрированных систем навигации маневренных ле-
летательных аппаратов. .............................. 116
4.5. Алгоритмы управления и наведения .................... 126
Глава 5. Использование технологий «машинного зрения»
длм управленим и наведеним беспилотных маневренных ле-
летательных аппаратов ................................ 156
5.1. Использование эталонной информации различного типа в пер-
перспективных системах наведения ....................... 160
5.2. Геометрические представления трехмерных сцен ........... 164
5.3. Представление трехмерных геометрических моделей сцен комби-
комбинацией двумерных изображений ....................... 172
5.4. Формирование эталонного описания .................... 177
5.5. Технология преобразований исходной информации при построе-
построении цифровой модели местности ....................... 184
Глава 6. Математическое моделирование процессов функ-
функционирования интегрированных бортовых систем беспилот-
беспилотных маневренных летательных аппаратов на основе объект-
но-ориентрованного подхода .......................... 190
6.1. Современная методология математического моделирования .... 191
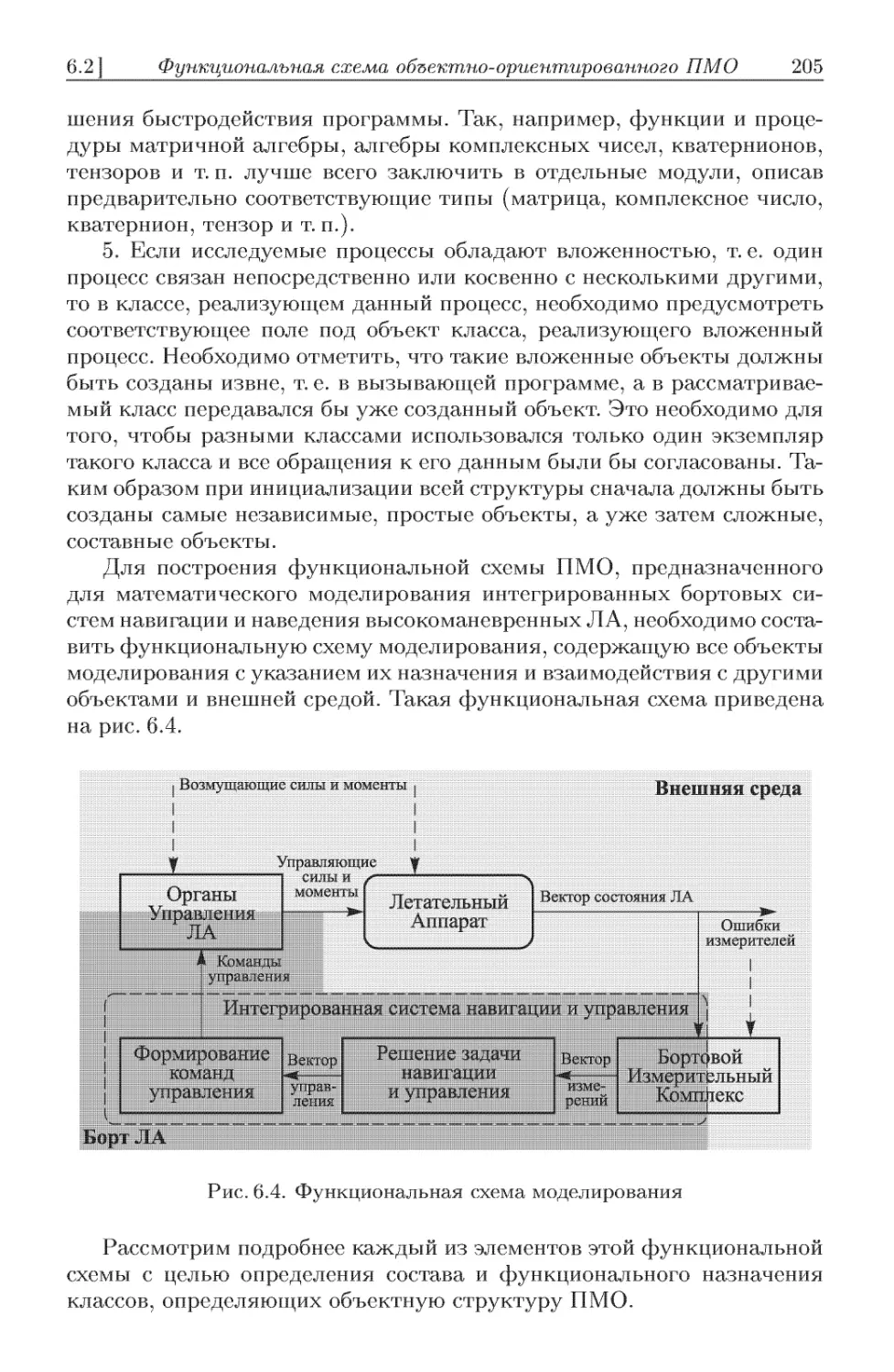
6.2. Функциональная схема объектно-ориентированного ПМО для
математического моделирования интегрированных систем нави-
навигации и наведения беспилотных маневренных ЛА ........... 204
6.3. Пример реализации технологии моделирования интегрирован-
интегрированных систем навигации и наведения беспилотного маневренного
ЛА ........................................... 247
Приложение П. 1. Конверсионные технологии применения
управляемых авиационных бомб ....................... 258
П. 1.1. Основы концепции гражданского применения управляемых авиа-
авиационных бомб (УАБ)............................... 258
П. 1.2. Особенности схем применения УАБ гражданского назначения . . 265
Приложение П.2. Основные характеристики современных
и перспективных бортовых интегрированных систем беспи-
беспилотных маневренных ЛА ............................. 272
Введение
Анализ существующих тенденций развития авиационного вооруже-
вооружения убедительно показывает, что в настоящее время и в ближайшем
будущем основное внимание специалистов должно уделяться созданию
и совершенствованию высокоточного «интеллектуального» оружия,
обеспечивающего эффективное «точечное» поражение целей в любых
условиях, независимо от противодействия противника, в том числе
с помощью активных или пассивных помех.
Создание подобного оружия неизбежно приводит нас к необходимо-
необходимости использования новейших информационных технологий в сочетании
с последними достижениями вычислительной техники. Успехи науки
и техники, в частности, в области вычислительной техники, столь впе-
впечатляющи, что с уверенностью можно говорить об отсутствии каких™
либо ограничений, с точки зрения необходимых для реализации но-
новейших информационных технологий, значений быстродействия, объ-
объема памяти, веса, габаритов и энергопотребления бортовых вычисли-
вычислителей.
Таким образом, весь арсенал последних достижений в области реше-
ния навигационных задач, таких как GPS/ГЛОНАСС технологии, ма-
машинное зрение, бесплатформенные инерциальные системы, микроме-
микромеханика и т. д., могут и должны быть использованы для совершенствовав
ния средств оснащения боевых самолетов пятого поколения и, в первую
очередь, для создания беспилотных маневренных летательных аппара-
аппаратов таких, как ракеты «воздух-воздух», «воздух-земля», управляемые
и корректируемые авиационные бомбы. Последнему классу беспилот-
беспилотных маневренных летательных аппаратах в силу ряда причин в послед-
последние десятилетия в открытой научной и учебной литературе уделялось
недостаточное внимание. Между тем, именно управляемые и коррек-
корректируемые авиационные бомбы, рассматриваемые как высокоточное ин-
интеллектуальное оружие, представляют собой, с точки зрения критерия
«стоимость—эффективность», наиболее важную компоненту оснащения
боевой авиации пятого поколения. Здесь необходимо подчеркнуть, что
высокоточные управляемые бомбы могут рассматриваться как весь-
весьма эффективное средство решения ряда «гражданских», мирных про-
проблем, связанных с предотвращением стихийных бедствий, техногенных
катастроф, строительством и т. д. Фактически эти проблемы можно
трактовать как задачу наиболее быстрой и экономически эффективной
доставки полезного груза в заданное место и время с высокой точно-
точностью.
6 Введение
Решение задачи доставки полезного груза с высокой точностью
в требуемое место полностью перекликается с решением аналогичной
традиционной задачи военной авиации. Поражение целей ракетами,
бомбами по существу также сводится к задаче точной доставки полез-
полезного груза к цели, только в качестве полезного груза принято рассмат-
рассматривать боевую часть (БЧ) ракеты или бомбы, являющейся непосред-
непосредственным средством воздействия на цель.
В этой связи, опираясь на многолетний опыт и уникальные до-
достижения в решении такой задачи в военной авиации, целесообразно
и разумно рассмотреть возможность использования этих достижений
в гражданских интересах. Последнее особенно заманчиво, так как одно-
одновременно решает задачу утилизации образцов вооружения, отслужив-
отслуживших установленные сроки, без дополнительных материальных затрат.
Задачи гражданского характера, которые могут решаться с помо-
помощью управляемых авиационных бомб, должны рассматриваться с пози-
позиций комплексного подхода, т. е. решения задачи в целом авиационным
комплексом. Вместе с тем, независимо от специфики условий, в кото-
которых решается та или иная конкретная гражданская задача, в основу
подхода к созданию объектов рассматриваемого типа должен быть
в настоящее время положен принцип перевода этого вида оснащения
из стандартного (боевого) состояния в требуемое гражданское. С этих
позиций управляемые авиационные бомбы можно рассматривать как
«продукцию двойного назначения (применения)».
Настоящее издание является фактически первой достаточно по-
подробной книгой, в которой изложены основные принципы формирова-
формирования алгоритмов навигации и наведения подобного класса высокоточно-
высокоточного оружия с использованием новейших информационных технологий:
глобальных навигационных систем и машинного зрения.
В первой главе книги приводится современная классификация
управляемых авиационных бомб и даются основные характеристики
этого вида оснащения боевой авиации.
Вторая глава посвящена анализу основных особенностей интегри-
интегрированных бортовых систем навигации и управления маневренных бес-
беспилотных летательных аппаратов, поскольку в рамках подобных си-
систем реализуются основные возможности современных информацион-
информационных технологий. Здесь же приводятся основные требования к решению
задач навигации и управления современных и перспективных манев-
маневренных беспилотных летательных аппаратов.
Третья глава книги содержит основные теоретические сведения,
необходимые для реализации высокоточных систем определения поло-
положения, скорости и ориентации маневренных беспилотных летательных
аппаратов на основе комплексирования данных, поступающих от мно-
многоканальных ГЛОНАСС/GPS приемников и бесплатформенных инер-
циальных систем (БИНС). С целью придать максимально последова-
последовательный характер изложению материала, в данной главе приведены
основные сведения о существующих глобальных навигационных систе-
системах ГЛОНАСС и GPS. Приводятся функциональная схема унифици-
унифицированного многоканального TJlOHACC/GPS-приемника, состав и ма-
Введение
тематические модели ошибок, возникающих при кодовых и фазовых
измерениях, стандартные алгоритмы определения положения, скоро-
скорости и ориентации летательных аппаратов по данным многоканальных
приемников, описание дифференциальных режимов их использования.
Приведены алгоритмы работы БИНС, математические модели ошибок
БИНС и стандартные алгоритмы комплексирования данных приемни-
приемника и БИНС в рамках так называемых слабо и сильно связанных схем
комплексирования.
Четвертая глава книги посвящена вопросам реализации интегриро-
интегрированных систем навигации и управления маневренных беспилотных ЛА.
Приводятся основные тактические схемы использования современного
высокоточного оружия. Рассмотрены способы реализации алгоритми-
алгоритмического и программного обеспечения интегрированных систем с ис-
использованием несвязанной, слабо связанной и сильно связанной схем
интегрирования данных приемника и БИНС. Приведены алгоритмы
выставки БИНС с демонстрацией результатов моделирования, а также
алгоритмы наведения управляемых авиационных бомб.
В пятой главе рассматривается информационная технология на-
навигации и наведения, альтернативная rjlOHACC/GPS-технологии —
технология машинного зрения. Приводятся функциональные схемы ин-
интегрированных бортовых схем, использующих технологию машинного
зрения, обсуждаются основные проблемы, возникающие при ее реа-
реализации, включая проблему формирования эталонных изображений,
представляющую наибольшую трудность. Описаны основные способы
и алгоритмы формирования эталонных изображений.
В шестой главе книги рассматриваются вопросы математического
моделирования процессов навигации и наведения беспилотных манев-
маневренных ЛА с использованием современных информационных техно-
технологий. При этом математическое моделирование рассматривается как
средство формирования состава моделей и алгоритмов бортовых ин-
интегрированных систем навигации и наведения беспилотных маневрен-
маневренных ЛА. В качестве технологии моделирования используется так на-
называемый объектно-ориентированный подход, позволяющий создавать
компьютерные комплексы, отражающие любые особенности структур
и алгоритмов моделируемых систем и объектов с учетом самого широ-
широкого спектра разнородных по своей физической природе неконтроли-
неконтролируемых факторов: детерминированных, стохастических, неопределен-
неопределенных.
В приложении 1 приводятся данные о конверсионном использова-
использовании управляемых авиационных бомб.
Приложение 2 содержит сведения об имеющихся в данное время на
рынке многоканальных приемниках и бесплатформенных инерциаль-
ных системах.
Книга предназначена для специалистов, работающих в промыш-
промышленности в области создания соответствующих систем, и аспирантов,
проходящих подготовку по специальностям «Системный анализ, обра-
обработка информации и управление» и «Математическое моделирование,
численные методы и программные комплексы». Она будет полезна
Введение
также и для студентов высших учебных заведений, обучающихся по
специальности «Прицельно-навигационные системы летательных аппа-
аппаратов» в рамках направления «Интегрированные системы летательных
аппаратов», поскольку её содержание соответствует программам дис-
дисциплин «Статистическая динамика комплексных информационных си-
систем летательных аппаратов», «Комплексирование информационных
приборов», «Комплексные системы наблюдения» и «Компьютерные
технологии».
Глава 1
СОВРЕМЕННЫЕ БЕСПИЛОТНЫЕ
ЛЕТАТЕЛЬНЫЕ АППАРАТЫ КАК СРЕДСТВА
ОСНАЩЕНИЯ САМОЛЕТОВ ПЯТОГО
ПОКОЛЕНИЯ
1.1. Классификация беспилотных маневренных
летательных аппаратов как средств оснащения
применительно к задачам, возлагаемым
на самолеты пятого поколения
С момента зарождения авиации летательные аппараты стали ис-
использоваться при ведении военных действий в качестве средства до-
доставки боеприпасов к объектам поражения, что повлекло за собой
значительное усиление поражающего воздействия боеприпасов. Специ-
Специалисты полагают, что по мере дальнейшего развития средств ведения
войны поражающее воздействие может приобрести еще более угрожаю™
щие масштабы. Поэтому актуальной является проблема поиска иных
средств воздействия, связанных с внедрением новых высоких техноло-
технологий, в том числе информационных, которые обеспечивают достижение
политических целей с минимумом или, в дальнейшем, с полным исклю-
исключением физического уничтожения объектов и людей.
Один из путей создания таких средств состоит в разработке так
называемого высокоточного оружия, превосходящего по эффективно-
эффективности обычное и находящегося сейчас на вооружении высокоразвитых
стран. Термин «высокоточное оружие» (ВТО) начал употребляться
сравнительно недавно [1.1], в основном, в связи с появлением проти-
противотанковых суббоеприпасов, с помощью которых возможно поражение
защищенных целей не только на поле боя, но и на достаточно больших
расстояниях в местах их сосредоточения. С момента боевого примене-
применения управляемых авиабомб в военном конфликте в зоне Персидского
залива (январь-февраль 1991 года) термин «высокоточное оружие»
стал относиться и к управляемым авиационным бомбам (УАБ).
В настоящее время высокоточным оружием принято называть си-
системы и комплексы с оружием в обычном оснащении, обеспечивающие
избирательное поражение стационарных и подвижных целей одним
выстрелом (пуском) с вероятностью не менее 0,5 при всех заданных
условиях их боевого применения [1.2, 1.3].
Управляемые авиационные бомбы являются одним из представи-
представительных видов ВТО, поскольку они сочетают в себе высокую точность
попадания, мощность боевой части и относительно низкую стоимость.
10 Современные беспилотные летательные аппараты [Гл. 1
Об этих свойствах УАБ свидетельствуют статистические данные о по-
повышении доли использования управляемых авиационных бомб в ло-
локальных конфликтах. Так, если во время войны во Вьетнаме и в Юго-
Восточной Азии в период 1966—1973 годов эта доля составляла около
1 %, то в операции «Буря в пустыне» многонациональных сил против
Ирака в 1991 году она возросла до 7%, достигнув 70% при проведении
операции стран НАТО «Решительная сила» в Югославии с 24 марта по
20 июня 1999 года.
Важной характеристикой поражающего свойства боеприпаса явля-
является отношение веса боевой части к его общему весу. Заметим, что
для обычных неуправляемых авиабомб это отношение близко к 1, для
авиационных управляемых ракет (УР) класса «воздух—поверхность»
оно составляет 0,2-0,5, а для УАБ примерно равно 0,7-0,9. Это означает,
что при одинаковом общем весе и дальности применения управляемая
авиабомба может доставить к цели почти вдвое большую по весу боевую
часть, чем УР. Поэтому в ряде случаев применение УАБ является более
предпочтительным, например, при поражении прочных и заглублен-
заглубленных целей. В других случаях преимущество имеют УР, в частности,
когда необходимо поразить цель без захода самолета-носителя в зо-
зону объектовой противовоздушной обороны (ПВО), т.е. на дальности
100 км и более.
В силу отмеченных обстоятельств и в связи с тем, что все совре-
современные информационные и технологические нововведения непременно
используются в УАБ и являются основой их дальнейшего развития,
ниже в качестве маневренного беспилотного летательного аппарата,
который применяется в качестве средства оснащения ударного авиаци-
авиационного комплекса понимается, как правило, управляемая авиационная
бомба. В тех случаях, когда речь идет о других средствах, например,
об управляемых ракетах класса «воздух—поверхность», или «воздух—
воздух» ситуация оговаривается отдельно.
Следует подчеркнуть, что при зарождении обсуждаемого вида осна-
оснащения боевой авиации во внимание принималось не главная особен-
особенность УАБ — обеспечить селективное (избирательное) поражение це-
целей, а соображения, связанные с эффективным поражением цели: опе-
оперативно (за короткое время) выполнить боевую задачу минимальным
нарядом самолетов—носителей с минимальным расходом боеприпасов,
т. е. своевременно поразить цель с минимальными денежными затра-
затратами. В то же время, по оценке зарубежных специалистов основные
преимущества управляемых авиабомб по сравнению с обычными авиа-
авиационными бомбами (АБ) состоят в следующем:
— повышение точности попадания в цель 4—10 раз (рис 1.1);
— сокращение расхода боеприпасов в 5—25 раз в зависимости от типа
цели;
— уменьшение числа самолето-вылетов в 2—20 раз и числа заходов
на цель;
— уменьшение вероятности поражения самолетов—носителей систе-
системой ПВО противника;
— сокращение затрат на выполнение боевой операции в 2—30 раз;
1.11
Классификация беспилотных маневренных ЛА
11
— возможность селективного поражения целей;
— уменьшение времени, потребного для поражения цели.
На рис. 1.1 введены следующие обозначения: 1 — обычные бомбы
свободного падения, сбрасываемые с различных типов самолетов; 2 —
управляемые бомбы «Хобо»; 3 — управляемые ракеты класса «воздух™
поверхность», запускаемые вне зоны действия активных средств ПВО
цели.
а 80-
АА A-1AIB
60-
|40
я
0)
20-
A-1DIE
А-6А
F-U1A/D
F-15
2000 4000
Дальность сбрасывания или пуска, м
6000
Рис. 1.1. Точность попадания обычных и управляемых бомб и ракет
С точки зрения системного подхода к выбору средств оснащения
УАБ как беспилотный летательный аппарат (ЛА) является исполни-
исполнительной частью ударного авиационного комплекса вооружения, на ко-
который возложены функции доставки УАБ в район цели, обнаружения
и целеуказания объектов поражения, решения задачи по определению
момента пуска (сброса) УАБ и передаче необходимой информации на
борт УАБ, собственно метания УАБ и управления ею при необходимо-
необходимости (например, при полуактивном методе наведения УАБ на цель) на
траектории полета к цели.
УАБ как техническая система, включает следующие элементы:
— информационно-измерительные устройства, определяющие поло-
положения или направление УАБ относительно точки прицеливания (коор-
(координатор или датчик цели);
— боевую часть и взрывательное устройство, включая и двигатель-
ускоритель для увеличения проникающей способности при контакте
с целью (в некоторых образцах УАБ);
— систему управления, выполняющую функции системы стабилиза-
стабилизации (при ее наличии) и формирование сигналов управления по данным
12 Современные беспилотные летательные аппараты [Гл. 1
информационно-измерительного устройства для управления положе-
положением УАБ относительно центра масс и траекторией полета УАБ;
— органы управления (обычно аэродинамического типа);
— аэродинамический модуль;
— стартовый или маршевый двигатель (для увеличения дальности
УАБ на малых высотах);
В настоящее время окончательно сформировались два подвида
УАБ: корректируемые (КАБ) и планирующие (УПАБ).
КАБ — это УАБ, применение которой осуществляется по так на-
называемому баллистическому алгоритму. Иными словами, траектория
КАБ формируется таким образом, чтобы минимизировать величину
отклонений ее центра масс от баллистической траектории. При этом
траектория КАБ находится в пределах так называемой «трубки» рас-
рассеивания УАБ. В данном случае под «трубкой» рассеивания понима-
понимается область пространства в окрестности баллистической траектории,
размеры которой определяются текущими параметрами эллипсоида
рассеивания.
УПАБ — это УАБ, траектория которой имеет ярко выраженный
планирующий (программный) участок и дальность действия которой
превышает баллистический относ УАБ. Под баллистическим относом
понимается расстояние, измеряемое от проекции точки сброса на гори-
горизонтальную плоскость до точки падения УАБ.
Как правило, УПАБ используется в составе ударного авиационного
комплекса для решения наиболее ответственных боевых задач без за-
захода носителя УПАБ в зону объектовых средств поражения, а КАБ —
для поражения широкого класса малоразмерных прочных целей при
частично подавленной или подавленной противовоздушной обороне.
Практический опыт разработки и применения УАБ, тенденции и
перспективы их развития дают возможность провести классификацию
УАБ по различным признакам. Таких признаков может быть много
и классификация УАБ по наиболее важным из них сведена в табл. 1.1.
Таблица 1.1. Классификация УАБ по отдельным признакам
Признак
1
Дальность
Калибр (вес)
Тип
конструкции
Тип несущей
конструкции
Характеристика УАБ и ее отдельных систем, свойств
2
Короткая до 5 км
Малая до 5—15 км
Средняя до 20-30 км
Большая до 70 км и более
Колеблется в пределах 125-2132 кг
(определяется, как правило, типом штатных АБ и выра-
выражается в фунтах B50)—C000) или килограммах)
Специальная конструкция
На основе штатной боевой части
Модульная конструкция
Боевая часть
Пенал для размещения боевой части
1.11
Классификация беспилотных маневренных ЛА
13
Продолжение табл. 1.1
1
Тип системы
наведения
Тип боевой
части
Тип
взрывательного
устройства
Режим сброса
(метания)
Алгоритм
сброса
Тип
применения
Траектория
Двигатель
2
Самонаведение (лазерная, телевизионная, теплови-
зионная, радиолокационная (активная или пассив-
пассивная), радиометрическая, радиолокационная по из-
излучающим целям, радионавигационная космическая
(GPS/ГЛОНАСС и др.), комбинированная инерци-
ально-спутниковая (радионавигационная космическая
GPS/ГЛОНАСС)
Теленаведение (по радиолучу, по телевизионно-команд-
ной линии связи, по волоконно-оптической линии связи
(ВОЛС))
Автономное (программное, инерциальное, инерциаль-
ное с коррекцией)
Фугасная
Осколочная
Проникающая
Многоцелевая
Бетонобойная
Двойного действия или комбинированная (кумулятивно-
фугасная, кумулятивно-проникающая, проникающая-
фугасная, зажигательно-фугасная и др.)
Объемно-детонирующая
Кассетная с кумулятивными или
осколочными боевыми элементами
Контактного действия
С дистанционным управлением
Избирательного действия
Горизонтальный сброс
Пикирование
Кабрирование
Баллистический
Из зоны возможных сбросов (ЗВС)
Одиночное
Групповое (серийное)
Залповое
Управляемый залп (залповый по элементам групповой
цели)
Баллистическая
Баллистическая с продлением горизонтального участка
Горка
Планирующая
Комбинированная (планирующая с «полочкой» — гори-
горизонтальным участком под нижней кромкой облачности)
Маршевый
Двигатель-ускоритель
В соответствии с установившейся мировой классификацией УАБ
различают еще по поколениям.
14 Современные беспилотные летательные аппараты [Гл. 1
Предварительно заметим, что под поколением управляемых (кор-
(корректируемых) авиационных бомб принято понимать ряд (семейство,
группу) УАБ, характеризующийся единым идеологическим замыслом
при создании, и такими общими конструктивно-технологическими ре-
решениями каждой из УАБ этого ряда, включая конструктивную ком-
компоновку, элементную базу и пр., которые определяют технический
уровень одного порядка, выраженный в качественно-количественных
показателях, сохраняя при этом преемственность образцов УАБ от
одного поколения к другому.
Высокоточное управляемое авиационное оружие, ярким представи-
представителем которого являются управляемые авиационные бомбы, прошло
две волны своего развития: первая относится к периоду 1940-50-х годов,
вторая — к периоду конца 1960-х годов до настоящего времени [1.4].
Первый этап разработки был связан в основном с решением принци-
принципиальных вопросов выбора конструктивно-аэродинамических компо-
компоновок изделий, с построением систем наведения, систем энергопитания
и отработки тактики их применения.
Возобновление работ по созданию УАБ (второй этап) диктовалось
требованиями существенного повышения эффективности боевого при-
применения бомбового вооружения в условиях высоких скоростей самолё-
самолёта-носителя при атаке целей и увеличения дальности сброса, что было
вызвано созданием совершенных объектовых систем ПВО. Вторая вол-
волна работ проходила и осуществляется до сих пор под девизом интен-
интенсивного внедрения новых достижений в науке и технике и современных
технологий с учетом преемственности в разработках. Лидирующее по-
положение в области создания управляемых авиабомб в мире занимают
США, где уже разрабатывают и апробируют в боевых условиях УАБ
четвертого поколения. В соответствии с приведенным выше понятием
«поколение КАБ (УАБ)» среди отечественных КАБ можно выделить
два поколения: второе и третье. Принимая во внимание то обстоятель-
обстоятельство, что создание отечественных КАБ проходило с учётом зарубежно-
зарубежного опыта создания УАБ, первое поколение отечественных КАБ следует
отнести по мировой классификации поколений ко второму поколению.
Хотя первая корректируемая авиабомба второй волны отечественных
разработок корректируемых авиабомб — КАБ-500 и была снабжена
флюгерной лазерной ГСП, но имела в отличие от УАБ США первого
поколения, в частности, УАБ типа «Болт-84», автопилот, обеспечиваю-
обеспечивающий стабилизацию стартовых возмущений после сброса с самолёта-
носителя, а также стабилизацию по крену. Таким образом КАБ-500
была более совершенным образцом, чем первые образцы УАБ США.
В табл. 1.2 представлена классификация поколений отечественных
корректируемых авиационных бомб. В графе 7 «Технический уровень»
этой таблицы кратко сформулированы наиболее существенные количе-
количественные и качественные показатели, характеризующие технический
уровень поколения.
К принципиальным характерным особенностям поколений отече-
отечественных КАБ можно отнести следующее:
1.11
Классификация беспилотных маневренных ЛА
15
If
Ц.
б V/
ою
о ш
ГО у //
и V/
о
е
е
ю
ю
сб
S
CD
is
0) 4
5 з
К Д VO
VD
16 Современные беспилотные летательные аппараты [Гл. 1
I
КДБ-500
КДБ-500ЛК
а — калибр 500 кг
КАБ-500ЛК
б — калибр 1500 кг
Рис. 1.2. Конструктивно-аэродинамический облик корректируемых авиаци-
авиационных бомб второго поколения
ж JL JL ш .
КАБ-500ОД
-^t
КАБ»500Кр
а — калибр 500 кг
КАБ»500Кр
б — калибр 1500 кг
Рис. 1.3. Конструктивно-аэродинамический облик корректируемых авиаци-
авиационных бомб третьего поколения
1.2] Основные технические и тактические требования 17
по второму поколению — наличие лазерных полуактивных головок
самонаведения флюгерного типа, автопилота, единой конструктивно™
компоновочной схемы для каждого калибра КАБ, и раскрывающегося
оперения у КАБ калибра 1500 кг;
по третьему поколению — наличие телевизионно-корреляционных
головок самонаведения, автопилота, единой конструктивно-компоно-
конструктивно-компоновочной схемы для каждого калибра КАБ и раскрывающегося оперения
у КАБ калибра 1500 кг.
На рис. 1.2, 1.3 представлен конструктивно-компоновочный облик
отечественных корректируемых авиационных бомб второго и третьего
поколений.
1.2. Основные технические и тактические
требования к решению задач позиционирования
и определения ориентации
Выше уже указывалось, что УАБ следует рассматривать как ис-
исполнительную часть авиационного комплекса вооружения, в задачу
которого входит доставка УАБ в район цели, обнаружение, целеуказа-
целеуказание и собственно метание. С учетом сказанного, при обсуждении тре-
требований к точности решения задач позиционирования и определения
ориентации целесообразно рассмотреть широкий класс летательных
аппаратов, включая, в частности, средства доставки УАБ.
К решению задач позиционирования, определения ориентации и це-
леуказания современных беспилотных маневренных ЛА предъявляют™
ся чрезвычайно высокие требования, которые во многом определяют
состав и структуру бортового прицельно-навигационного комплекса
(ПНК). Основными факторами, диктующими выбор структуры и со-
состава ПНК, являются необходимая точность и надежность определения
пилотажно-навигационных параметров и параметров цели при усло-
условии выдерживания заданных ограничений на время подготовки си™
стемы к работе, массогабаритные характеристики, энергопотребление
и скрытность функционирования.
Решение задачи обоснования состава и структуры ПНК является
многовариантным, зависящим не только от перечисленных выше ха-
характеристик, но также и от ряда других, таких как:
— тип объекта: ракеты, истребители и штурмовики, самолеты воен-
военно-транспортной авиации, вертолеты, магистральные самолеты, само-
самолеты бизнес класса и т. д.;
— стоимость комплекса;
— условия эксплуатации комплекса (характер подстилающей мест-
местности, оборудование аэропортов и маршрутов и т.д.);
— возможности его технического обслуживания и ремонта.
При разработке ПНК желательно формализовать критерий выбора
его рационального состава и структуры. Это можно сделать, взяв за
критерий сумму количественных характеристик каждого из вышепри-
вышеприведенных факторов, взвешенных с учетом эксплуатационных требова-
2 Управление и наведение
18 Современные беспилотные летательные аппараты [Гл. 1
ний и условий применения. Такой подход дает возможность проводить
формальное сравнение различных вариантов построения комплексов.
Слабой стороной этого подхода является субъективность назначения
весовых коэффициентов, а также количественного представления ря-
ряда определяющих факторов. В силу этого практическая реализация
такого подхода вряд ли может быть рекомендована для широкого при-
применения.
Альтернативным подходом определения рационального состава и
структуры ПНК является подход, основанный на классификации опре-
определяющих факторов, выделении групп требований и формировании
основных типов навигационных комплексов, удовлетворяющих той или
иной группе.
Опираясь на имеющийся отечественный и зарубежный опыт про-
проектирования и эксплуатации ПНК, можно выделить три основных ти-
типа навигационных комплексов — высокой, средней и низкой точности
(см. таблицу 1.3), положив в основу классификации точность решения
навигационной задачи в ПНК. Все встречающиеся в таблице сокраще-
сокращения раскрыты далее по тексту.
Для ПНК высокой точности (ПНК магистральных и военно-транс-
военно-транспортных самолетов) требуется обеспечение решения следующих задач:
— взлет и автоматическое самолетовождение по маршруту, посадку
по 1, 2 или 3 категориям Международной организации гражданской
авиации AСАО) [1.5], руление по территории аэродрома;
— высокую точность, надежность и безопасность самолетовожде-
самолетовождения;
— быстрое обнаружение отказов и контроль навигационного обору-
оборудования;
— удобство технического обслуживания.
Для обеспечения этих функций в состав ПНК включаются высоко-
высокоточные платформенные и бесплатформенные инерциальные навигаци-
навигационные системы (БИНС), например, на кольцевых лазерных гироскопах
(КЛГ) [1.6], требующие меньшего времени на подготовку к работе, что
особенно важно для военно-транспортных самолетов; многоканальный
приемник спутниковой системы навигации (СНС) ГЛОНАСС/GPS,
имеющий возможность приема дифференциальных поправок, радио-
радиовысотомер (РВ), а также систему воздушных сигналов (СВС). Кро-
Кроме того, для поддержания всех функций ПНК на борту устанавли-
устанавливаются радиотехнические навигационные системы. На маршруте ис-
используются радиотехнические системы дальней и ближней навигации
(РСДН, OMEGA, LORAN-C, РСБН), а для обеспечения посадки —
инструментальная система посадки ILS (Instrument Landing System или
ее российский аналог — СП), микроволновая система посадки MLS
(Microwave Landing System, редко используемая система), посадочная
система APALS (АРА Landing System).
Разрабатываемые ПНК средней точности (для самолетов бизнес-
класса, истребителей и штурмовиков, крылатых ракет, вертолетов
и т. п.) должны обеспечивать приемлемую точность самолетовождения
при достаточно жестких ограничениях на массогабаритные характери-
1-2]
Основные технические и тактические требования
19
о
ю
о
см
о
2
см
I
ю
се
2 о g
Л О ф
? О с
s в 3
§ 2 я
I 1 и
II
О н
11
II
so
!
m
о ?
* g
^1
go
II
00 |
S И
СЮ
3 3,
О Е4 '
И Й I
so
g
О
VO
сб
X
3
||
ю
S О Й S
^ S 5 «
S а 3 се
1°
V ш о
? к к g
g
О
и
о
20
Современные беспилотные летательные аппараты
[Гл. 1
стики бортового оборудования. Для самолетов военной авиации и ракет
существенным является также малое время готовности и обеспечение
навигации при высокой маневренности ЛА5 возможно, в режиме следо-
вания рельефу местности. Одним из важнейших факторов для самоле-
самолетов бизнес-класса является стоимость оборудования. ПНК этого типа
включают как основу инерциальную навигационную систему среднего
класса точности, построенную на КЛГ или динамически настраивае-
настраиваемых гироскопах (ДНГ) [1.7], многоканальный ГЛОНАСС/GPS прием-
приемник, систему воздушных сигналов и радиовысотомер. Для епецифи-
ческих объектов, таких как фронтовые истребители, штурмовики или
крылатые ракеты, которым необходимо осуществлять полет в режиме
отслеживания рельефа местности, на борту устанавливается корреля-
ционно-экстремальная навигационная система, использующая цифро-
цифровые карты местности и радиовысотомер.
Третий тип ПНК — комплекс низкой точности, низкой стоимости
и малых габаритов и массы, предназначенный для легких самолетов
бизнес-класса, ракет малого и среднего радиуса действия, УАБ. Основу
ПНК составляют грубые ИНС, построенные на базе ДНГ или волокон-
волоконно-оптических гироскопов (ВОГ) [1.8], погрешность которых в авто-
автономном режиме работы может достигать 37 км за час работы, а также
приемники спутниковых навигационных систем.
В таблице 1.4 приведены примеры ПНК, соответствующих приня-
принятой здесь классификации и серийно освоенных известнейшими компа-
компаниями США, производящими навигационное оборудование для широ-
широкого спектра ЛА: система фирмы Honeywell — GPIRS, фирмы Litton
AHRS-LN-80 и фирмы Rockwell Int. Military IGITS [1.9].
Таблица 1.4. Характеристики некоторых современных ПНК
1
2
3
4
5
Характеристики комплексов
Ошибки определения*^:
местоположения
скорости
Время готовности
Масса
Объем
Потребляемая мощность
Название комплекса
и компании-производителя
GPIRS
Honeywell
25 м
0,2 м/с
4 мин
21 кг
20 дм3
110 Вт
AHRS-LN-80
Litton
5-8м
0,02 м/с
4 мин
9 кг
10 дм3
50 Вт
MIGITS
Rockwell Int.
20^50 м
0,05-0,25 м/с
2 мин
1 кг
0,6 дм3
23 Вт
*^ — круговое вероятностное отклонение
На современном этапе можно отметить общую тенденцию разра-
разработок ведущих фирм-производителей: переходить к проектированию
и производству рядов унифицированных ПНК, отличающихся точно-
точностью, весом и габаритами. Так, компания Rockwell International Corp.
разработала семейство MIGITS универсальных интегрированных на-
1.2] Основные технические и тактические требования 21
вигационных систем для воздушных и наземных транспортных средств
[1.7]. Один из вариантов этой системы приведен в табл. 1.4.
В состав современного ПНК, как правило, включается многока-
многоканальный спутниковый приемник. Спутниковые навигационные систе-
системы доказали свои высокие эксплуатационные качества во многих при-
применениях. Они признаны наиболее перспективными и экономически
эффективными в большинстве авиационно-космических применений.
Вместе с тем, по ряду причин и, прежде всего, из-за возможности
кратковременной потери сигналов спутников, эти системы не могут
обеспечить требуемого уровня надежности навигационных измерений
по показателям целостности, доступности и непрерывности (более по-
подробно см. гл. 2 и 3). Решить задачу повышения этих показателей мож-
можно путем комплексирования спутниковых навигационных систем с дру-
другими системами. Известно много возможных решений такого комплек-
комплексирования — объединение спутниковых систем с радионавигационными
системами «Лоран», «Омега», «Чайка», посадочными системами ILS
или MLS, системами счисления пути и т. д. Однако, самым многообе-
многообещающим вариантом является путь интеграции спутниковых и инерци-
альных навигационных систем. Это решение позволяет эффективно ис-
использовать достоинства каждой из систем. Более детально этот способ
интеграции инерциальных и спутниковых систем обсуждается в гл. 2.
Как известно, инерциальные навигационные системы позволяют
получать всю совокупность необходимых параметров для управления
объектом, включая углы ориентации. При этом системы полностью
автономны, т. е. для их нормального функционирования не требуется
использования какой-либо информации от других систем (кроме, мо-
может быть, начала работы, когда требуется задать начальные условия
по координатам и проекциям скорости). Еще одним достоинством этих
систем является высокая скорость «выдачи» информации внешним
потребителям: скорость обновления углов ориентации составляет до
100 Гц, навигационной — от 10 до 100 Гц. Этот показатель для спутни-
спутниковых систем составляет для лучших приемников 10 Гц, а, как прави-
правило, 1 Гц. Вместе с тем, инерциальным системам присущи недостатки,
которые не позволяют использовать их долгое время в автономном
режиме. Измерительным элементам ИНС, прежде всего, гироскопам
и акселерометрам, присущи собственные методические и инструмен-
инструментальные ошибки, начальные условия не могут быть введены абсолютно
точно, вычислитель, входящий в состав ИНС, вносит свои погрешно-
погрешности. Под влиянием этих факторов ИНС работает в так называемом
«возмущенном» режиме, и получаемая с нее информация будет содер-
содержать ошибки, вызванные влиянием перечисленных возмущений. Для
устранения влияния этих факторов переходят к созданию комплексов,
обеспечивая коррекцию ИНС. В зависимости от используемых средств
можно выделить следующие виды коррекции:
— скоростная (ДИСС, СНС и т.п.);
— позиционная (СНС, РСБН, РСДН, РЛС, высотомеры и т.п.);
— по угловой информации (астросистемы, базовые ИНС, СНС с
антенными системами).
22 Современные беспилотные летательные аппараты [Гл. 1
Таким образом объединение ИНС, СНС и других систем позволяет
получить комплекс нового качества, обладающий всеми преимущества-
преимуществами составляющих его подсистем.
Для определения облика комплекса необходимо провести анализ
существующих систем, которые могут быть включены в его состав.
Информационным ядром современного комплекса обычно является
инерциальная навигационная система, в частности, бесплатформенная
ИНС, как наиболее перспективная разновидность ИНС. При выборе
БИНС можно ориентироваться на существующие системы авиацион-
авиационного назначения, взяв их характеристики за основу (см. гл. 3). Много-
Многочисленные исследования и практика эксплуатации спутниковых систем
показывают, что наиболее перспективным средством коррекции ИНС
являются спутниковые системы, обладающие наиболее высокой точно-
точностью и глобальностью действия. При этом возможно улучшение харак-
характеристик автономных БИНС не только по координатам и скоростям,
но и по углам ориентации.
Список литературы к главе 1
1.1. Головин С. А., Сизов Ю.Г., Скоков А. Л., Хунданов Л.Л. Высокоточное
оружие и борьба с ним. — Москва: В.П.К., 1996. — 232 с.
1.2. Мерцалов Б.Е., Семенов С. С, Харчев В.Н. История создания и тен-
тенденции развития отечественных корректируемых (управляемых) авиа-
авиационных бомб. Научно-технический сборник «Боеприпасы». 1999. № 3.
С. 5-12.
1.3. Оборонно-промышленный комплекс Российской Федерации в условиях
рыночной экономики: Краткий терминологический словарь / В. Б. Ныр-
Нырков, С. П. Ершов, Н. А. Шаталов, под общей ред. д-ра экон. наук В. В. Са-
Сало, канд. техн. наук, чл.-кор. Международной академии информати-
информатизации В.Н. Везирова. — М.: Государственное унитарное предприятие
«Всероссийский научно-исследовательский институт межотраслевой ин-
формации-федеральный информационно-аналитический центр оборон-
оборонной промышленности», 2000. — 196 с. С. 46.
1.4. Сборник терминов, понятий и категорий в области военно-технического
обеспечения военной безопасности Российской Федерации. — М.: Мино-
Минобороны России, 1996.
1.5. Summary of The Proposed Required Navigation Performance (RNP) Con-
Concept for Approach, Landing and Departure Operations, 1С АО Secretariat,
Special Communications / Operations Divisional Meeting A995), Working
Paper 10, Montreal, Canada, 27 March — 7 April 1995.
1.6. Пельпор Д. С, Осокин Ю.А., Рахтеенко Е. Р. Гироскопические приборы
систем ориентации и стабилизации. — М.: Машиностроение, 1977. — 208 с.
1.7. Пельпор Д. С, Матвеев В. А., Арсеньев В. Д. Динамически настраивае-
настраиваемые гироскопы: Теория и конструкция. — М.: Машиностроение, 1988. —
264 с.
1.8. Шереметьев А. Г. Волоконно-оптический гироскоп. — М.: Радиосвязь,
1987. — 152 с.
1.9. Bader J. Low Cost GPS/INS. Proceedings of the ION GPS-93, 6th Interna-
International Technical Meeting of the Satellite Division of the Institute of Naviga-
Navigation, volume I, Salt Lake City, Utah, September, 22^24, 1993. P. 235^244.
Глава 2
ИНТЕГРИРОВАННЫЕ БОРТОВЫЕ СИСТЕМЫ
БЕСПИЛОТНЫХ МАНЕВРЕННЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ КАК СРЕДСТВО
МАТЕРИАЛИЗАЦИИ СОВРЕМЕННЫХ
ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
2.1. Основные особенности бортовой
интегрированной системы беспилотного
маневренного летательного аппарата
В настоящей книге рассматриваются так называемые интегриро-
интегрированные бортовые системы навигации и наведения беспилотных манев-
ренных ЛА, позволяющие наиболее адекватно использовать современ-
ные информационные технологии для обеспечения требуемого качества
высокоточного оружия. Анализ показывает, что бортовые интегриро-
интегрированные системы управления (БИСУ) характеризуются рядом особен-
особенностей, главной из которых является унификация соответствующих
функциональных групп на уровне технических решений. Например
одно и то же техническое решение на уровне аналого-цифровых пре-
преобразователей применяется и в системе целеуказания, и в контуре
управления приводом, и в системе встроенного контроля электрических
характеристик. Аналогично, все процессорные секции вычислительной
системы одинаковы, независимо от того, какую задачу они решают:
навигационную, наведения или стабилизации. Этим устраняется один
из основных недостатков традиционной (составной) бортовой системы
управления — избыточность номенклатуры схемно-технических реше-
решений.
Унификация схемно-технических решений, минимизируя их номен-
номенклатуру и номенклатуру элементной базы, приводит к повышению
надежности системы, уменьшению состава контрольного и технологи-
технологического оборудования, сокращению сроков разработки и, в конечном
счете, удешевлению как системы в целом, так и процесса ее проектиро-
проектирования.
Как правило, в основе БИСУ находится вычислительная система,
сопрягаемая с внешней средой посредством устройств преобразования
информации, обеспечивающих с минимальными искажениями преоб-
преобразование цифрового кода, в котором работает система, в сигналы
требуемой физической природы или обратно — в цифровой код. Все
логические операции на борту осуществляются только в вычислитель-
вычислительной системе. Это обусловлено тем, что современный микропроцессор по
24 Интегрированные бортовые системы беспилотных Л А [Гл. 2
концентрации логических возможностей превосходит на несколько по-
порядков любой другой альтернативный пригодный для бортовых систем
элемент. Кроме того, отработка логики может вестись на программном
уровне, благодаря чему процесс проектирования системы упрощается
делением на два практически независимых этапа. На первом этапе
создается аппаратная инфраструктура для решения бортовой задачи,
а на втором — ее логическое наполнение.
Архитектура вычислительной системы БИСУ ориентирована на
решение конкретного класса бортовых задач и оптимизируется под
класс решаемых бортовых задач с избыточностью порядка 30%. При
этом она должна обеспечить полный встроенный контроль, минималь-
минимально необходимые коммуникации для обеспечения живучести системы,
возможность перепрограммирования ее извне и прочее.
Заметим, что сформулированные требования типичны для любой
современной вычислительной системы и их выполнение не вызывает
принципиальных затруднений. Таким образом для БИСУ характерны
следующие свойства:
— функциональная гибкость и возможность перепрограммирования
ее функций;
— высокие эксплуатационные показатели, т. е. возможность созда-
создания компактной контрольной и пусковой аппаратуры при высокой ве-
вероятности выполнения боевой задачи;
— живучесть (система либо регенерирует, либо переходит на один
из частных алгоритмов работы, либо принимает решение о варианте
самоликвидации).
Наконец, ориентация архитектуры вычислительной системы на
класс конкретных решаемых бортовых задач позволяет получить вы-
выигрыш в габаритах и энергопотреблении.
Бортовая вычислительная система (БИСУ) включает в себя встро-
встроенную распределенную систему регистрации, фиксирующую все посту-
поступающие в нее потоки информации. Поскольку, как уже указывалось
выше, все логические бортовые задачи решаются в вычислительной
системе, то и все информационные потоки проходят через нее. Записы-
Записывая всю входную информацию каждого процессора в соответствующий
регистрирующий элемент, можно (при сохранении этого элемента) вос-
воспроизвести после опыта все состояния каждого процессора в лабора-
лабораторных условиях. Это приводит к уменьшению трудоемкости отладки
и отработки бортовых алгоритмов и программ.
Пусковая и контрольная аппаратура БИСУ имеют доступ к любо-
любому элементу бортовой вычислительной системы через единственный
информационный канал. Этим обеспечивается компактность контроль-
контрольной и пусковой аппаратуры, минимальное количество коммутаций при
эксплуатации изделия и высокая вероятность выполнения им боевой
задачи после старта (путем реализации большой глубины предстарто-
предстартового контроля бортовой системы через единственный информационный
канал).
Параллельно с БИСУ принято разрабатывать инструментальные
средства для ее отработки и испытаний. Создание аппаратной ин-
2.2] Основные функциональные схемы систем навигации и наведения 25
фраструктуры занимает 25^30% от всего объема разработки системы,
остальной объем приходится на процесс написания и отладки бортового
и тестового программного обеспечения. Этот процесс требует созда-
ния специальных программно-аппаратных инструментальных средств,
ядром которых является современная, но легко доступная и наиболее
популярная сейчас IBM-совместимая ПЭВМ с базовой операционной
системой. Ядро дополняется аппаратными средствами (в том числе
сопроцессорами) и программным обеспечением, ориентированными на
функционирование с конкретной системой управления и разрабаты-
разрабатываемыми параллельно с ней. К инструментальным средствам можно
отнести: систему программирования и отладки бортовых программ,
стенды полунатурного моделирования, контрольно-поверочную аппа-
аппаратуру, систему обработки экспериментальных данных и др.
Поскольку как бортовая система, так и специальные инструмен-
инструментальные средства создаются на базе вычислительных систем, разраба-
разрабатываемых параллельно и для общения между собой, предполагается
разработка единой вычислительной распределенной системы, часть ко-
которой находится на борту изделия. В такой постановке операционная
среда также создается для распределенной системы. Это позволяет
помимо бортовых программ создавать одновременно с ними тестовые
программы для комплексной проверки системы управления и алгорит-
алгоритмов функционирования изделия в целом.
Таким образом, опираясь на приведенный в данном разделе крат-
краткий анализ особенностей БИСУ, мы можем перейти к формированию
функциональных схем БИСУ применительно к беспилотным маневрен-
маневренным ЛА.
2.2. Состав и основные функциональные схемы
интегрированных систем навигации и наведения
беспилотного маневренного летательного аппарата
Развитие беспилотных ЛА, а также необходимость решения вновь
возникающих прикладных задач, связанных с определением парамет-
параметров движения объектов, выдвигает комплекс новых требований по точ-
точности и надежности получения информации о координатах, скорости,
ориентации движущихся объектов. Условия применения и функциони-
функционирования беспилотных маневренных ЛА требуют повышенной точно-
точности и высокой частоты навигационных определений на всех этапах их
использования, начиная от момента включения бортовых систем или
старта аппарата и до окончания выполнения поставленной задачи.
Помимо требований к точности в настоящее время предъявляются
требования по таким параметрам, как целостность, доступность и не-
непрерывность навигационного обеспечения [2.1]. Мерой целостности яв-
является вероятность обнаружения выхода рабочих характеристик систе-
системы (прежде всего точности) из требуемого предела и сообщения о нем
в течение заданного временного интервала. Доступность определяется
вероятностью получения потребителем достоверной информации в за-
26
Интегрированные бортовые системы беспилотных Л А
[Гл.2
данный момент времени с требуемой точностью. Непрерывность харак-
характеризуется вероятностью обеспечения системой достоверной информа-
информации на заданном интервале времени. Достоверность, в свою очередь,
определяется как способность навигационной системы поддерживать
с заданной вероятностью свои характеристики в требуемых пределах
на определенном промежутке времени в каком-либо районе [2.2]. Обес-
Обеспечение требуемого уровня этих показателей зачастую является более
сложной задачей, чем выдерживание необходимой точности.
Обеспечение заданных уровней точности и указанных качествен-
качественных показателей надежности предъявляет особые требования к со-
современным и перспективным системам навигации беспилотных манев™
ренных Л А. Как уже указывалось выше в гл. 1, к числу основных
современных бортовых систем навигации прежде всего следует отнести
инерциальные (ИНС) и спутниковые навигационные системы (СНС).
Инерциальные навигационные системы уже давно являются штатным
оборудованием на крупных самолетах. Авиационным стандартом для
высокоточных ИНС гражданских самолетов считается точность, соот-
соответствующая ошибке по координате в 1 морскую милю за час поле-
полета A,8 км/час). Известны также примеры реализации более точных
систем, в которых ошибка определения координат не превышает не™
скольких сот метров за час полета [2.3]. Спутниковые навигационные
системы стали активно использоваться в авиационных приложениях
лишь в последнее десятилетие и быстро завоевывают место в штатном
составе бортового оборудования. Этому способствует, прежде всего,
их высокая точность, которая для открытого канала после отмены
Правительством США в мае 2000 года кода селективного доступа,
S/A составляет 10-15 м Aсг). Опыт эксплуатации СНС показал, что
при многих положительных качествах СНС не могут удовлетворить
всем предъявляемым сегодня требованиям по качественным характе-
характеристикам, перечисленным выше. В таблице 2.1 суммированы основные
свойства и недостатки СНС и ИНС.
Таблица 2.1. Основные свойства и недостатки СНС и ИНС
Тип
системы
СНС
ИНС
Основные свойства
Высокая точность
Ошибки не имеют тенденции к ро-
росту
Высокая скорость выдачи инфор-
информации (до 100 Гц)
Полный набор необходимой ин-
информации для управления, вклю-
включая ориентацию
Полная автономность
Неподверженность внешним по-
помехам
Недостатки
Низкая скорость обновления
информации A-10 Гц)
Отсутствие информации об
ориентации
Подверженность помехам
Неограниченный рост оши-
ошибок во времени
Необходимость знания моде-
модели гравитационного поля
2.2] Основные функциональные схемы систем навигации и наведения 27
Это ограничение снимается в специализированных спутниковых
приемниках с тремя и более антеннами.
Как уже предварительно отмечалось в гл. 1, благодаря различной
физической природе и различным принципам формирования навига-
навигационного алгоритмического обеспечения, спутниковые и инерциальные
навигационные системы хорошо дополняют друг друга. Их совместное
использование позволяет, с одной стороны, ограничить рост погрешно-
погрешностей ИНС и, с другой стороны, снизить шумовую составляющую оши-
ошибок СНС, повысить темп выдачи информации бортовым потребителям,
существенно поднять уровень помехозащищенности. На современном
этапе ядром интегрированной системы является ИНС благодаря своей
автономности и возможности с высокой скоростью обновления давать
потребителю как позиционную, так и угловую информацию. В составе
интегрированных инерциально-спутниковых систем, как уже указыва-
указывалось в гл. 1, чаще всего используются бесплатформенные инерциаль-
инерциальные навигационные системы (БИНС). Это объясняется их повышенной
надежностью, меньшим весом и габаритами, меньшим потреблением
энергии. Отсутствие платформы определяет, как правило, и меньшее
время выставки системы — обязательной процедуры первоначального
задания (для платформенных ИНС) или определения (для БИНС)
ориентации осей чувствительности акселерометров и инициализации
координат и скоростей. Эта процедура предшествует переходу ИНС
в рабочий режим и во многом определяет время ее готовности к ра-
работе (подробно алгоритмы выставки рассматриваются в гл. 4). Таким
образом, основной задачей БИНС является обеспечение навигацион-
навигационными параметрами (координаты и высота ЛА, составляющие вектора
скорости), а также параметрами ориентации бортовых потребителей
в реальном масштабе времени в режиме коррекции от спутниковой
навигационной системы.
В таблице 2.2 приведены данные, характеризующие качества ком-
комплексных инерциально-спутниковых систем по сравнению с традицион-
традиционными бортовыми системами [2.3]. Данные, приведенные в таблице 2.2,
базируются на анализе большого числа работ отечественных и зару-
зарубежных исследователей и разработчиков в этой области и убедительно
говорят о перспективности комплексирования СНС и ИНС.
Таблица 2.2. Основные преимущества интегрированных систем.
Факторы
Точность
Масса
Объем
Потребляемая мощность
Надежность
Степень резервирования
Стоимость
Степень улучшения
Для ИНС: многократно
Уменьшение на 3Q--7G %
Уменьшение на 50-60 %
Уменьшение на 25-50 %
Увеличение ^в2 раза
Увеличение на 50 % и более
Уменьшение на 30 % и более
28
Интегрированные бортовые системы беспилотных Л А
[Гл.2
В настоящее время сложилось представление о возможности ком-
плексирования этих систем в четырех основных вариантах [2.4]:
— раздельная схема;
— слабо связанная схема;
— жестко связанная схема;
— глубоко интегрированная система.
Первый вариант — раздельная схема (рис. 2.1) — это наиболее
простой вариант совместного использования ИНС и ГЛОНАСС/GPS.
- Антенна СНС
ГЛОНАСС/GPS
приемник
Выход СНС приемника
Периодический
перезапуск системы
или коррекция
ИНС
Выход ИНС
Выход СНС/ИНС
Рис. 2.1. Раздельная схема комплексирования ГЛОНАСС/GPS приемника
и ИНС
Здесь обе системы работают независимо друг от друга, но, поскольку
ошибки ИНС возрастают со временем, то периодически необходимо
проводить коррекцию ИНС по данным СНС. Коррекция заключается
в периодическом перезапуске алгоритма ИНС с новыми начальными
условиями по координатам и скорости, данные о которых поступают от
спутникового приемника. Процедурно это может быть оформлено и как
одновременная коррекция координат и скоростей ИНС. Такая архитек™
тура обеспечивает независимость систем (исключая моменты переза™
пуска или коррекции) и информационную избыточность общей струк™
туры. В целом комплексная система имеет более высокую точность как
по координатам и скорости, так и по углам ориентации. При этом со-
сохраняется возможность получать позиционную, скоростную и угловую
информацию (в том числе и об угловой скорости), необходимую для
целей управления и наведения с высокой частотой, свойственной ИНС.
2.2] Основные функциональные схемы систем навигации и наведения 29
Кроме того, для создания такой архитектуры требуются минимальные
изменения в аппаратных средствах и программном обеспечении уже
существующих ЛА.
Следующей по глубине связи ИНС и СНС является слабо евя™
занная система. Здесь ИНС и СНС по-прежнему вырабатывают не-
независимые решения, однако появляется связующий блок, в котором
так называемый интегральный фильтр Калмана на основании дан-
данных ГЛОНДСС/GPS приемника формирует оценку вектора состояния,
в результате чего производится коррекция данных, полученных от ИНС
(рис. 2.2).
\у
ГЛОНАСС/GPS приемник
ВЧ канал приема
и первичная
обработка
Координаты
проекции
скорости
Слежение за
кодом и допле-
ровским сдви-
сдвигом несущей
Фильтр
Калмана
Компенсация
инструментальных
ошибок по получен-
полученным оценкам
Акселерометры
и гироскопы
МНС/СНС
Интегральный
фильтр
Калмана
Компенсация
инструментальных
ошибок по априор-
априорным данным
I
мне |
I
Основной
алгоритм
БИНС
I
Выход
приемника
Выход
инс/енс
Выход
ИНС
Рис. 2.2. Слабо связанная схема комплексирования ИНС и ГЛОНАСС/GPS
приемника
В этой схеме функциональное разделение подсистем может также
сопровождаться их физическим разделением: приемник СНС, ИНС
и вычислитель конструктивно оформляются в виде законченных раз-
раздельных блоков, между которыми организованы соответствующие ин-
информационные связи, не требующие, как правило, высоких скоростей
передачи данных. Разумеется, все три перечисленных компоненты си-
системы могут быть размещены и в едином модуле, если это желательно
по условиям функционирования комплекса.
На функциональной схеме 2.2 показано, что приемник СНС ре™
ализуется по стандартной схеме. В блоке высокочастотного приема
и первичной обработки обеспечивается прием сигнала, его частотное
30 Интегрированные бортовые системы беспилотных Л А [Гл. 2
преобразование и корреляционная обработка. Информация с корреля-
корреляторов передается в контур слежения за кодом и доплеровским сдви-
сдвигом несущей (более подробно эти аспекты изложены в гл. 3). В этом
контуре вырабатываются сигналы обратной связи для захвата сигнала
спутника. Выходом контура слежения является временной сдвиг кода
и доплеровский сдвиг частоты несущей или соответствующие им псев-
псевдодальность и псевдоскорость. Еще раз подчеркнем, что детальное опи-
описание процесса функционирования многоканального ГЛОНАСС/GPS
приемника приведено в гл. 3. Здесь обсуждаются лишь самые общие
принципы этого процесса: приемник должен обеспечить слежение за
необходимым числом спутников (не менее четырех) или за всеми ви-
видимыми спутниками. Это достигается наложением нескольких (как
правило 6, 12 или 24) каналов слежения. Информация об измеренных
псевдодальностях и псевдоскоростях передается в фильтр Калмана
приемника для получения навигационного решения — координат, ско-
скорости, а, в ряде случаев, и ускорения, а также поправок к эталону
времени и частоты приемника.
Таким образом, здесь приемник СНС использует информацию от
ИНС только для целей более надежного и быстрого восстановления
захвата сигнала в случае его потери. На схеме это отражено связью
выходного блока ИНС и ВЧ блока приемника. Передаваемая по этому
каналу информация о вычисленных местоположении и скорости в слу-
случае потери слежения позволяет рассчитать оценки предполагаемого
сдвига кода и доплеровского сдвига частоты несущей, что существенно
снижает время поиска и захвата сигнала. В результате значительно сни-
снижается время восстановления работы приемника после потери сигнала.
Показанная на схеме структура ИНС предусматривает возможность
компенсации инструментальных ошибок измерительных элементов —
гироскопов и акселерометров — по априорным данным (например по
паспортным данным системы или по запомненным значениям оценок
этих ошибок при предыдущем включении). В результате в основной
алгоритм ИНС передаются корректированные показания гироскопов
и акселерометров.
Как уже отмечалось, основу связующего блока образует интеграль-
интегральный фильтр Калмана, который получает информацию о координатах
и скорости от СНС и ИНС, образует разности их показаний и на этой
основе вычисляет оценки ошибок ИНС, а иногда и оценки ошибок ее
чувствительных элементов. Последний факт отражен обратной связью
фильтра с блоком компенсации инструментальных погрешностей.
Как видно, в слабо связанной системе навигационные параметры,
так же, как и в раздельной схеме, вырабатываются независимо как
в ИНС так и в СНС, причем, как уже отмечалось, в состав приемни-
приемника включен оцениватель (как правило, фильтр Калмана). Описанная
схема носит название «каскадной» в силу двух последовательно вклю-
включенных фильтров Калмана. Достоинством такой схемы является высо-
высокая надежность интегрированной системы, а недостатком — взаимная
корреляция ошибок оценок первого фильтра (фильтра спутникового
приемника) и их отличие от белых шумов. Поступая с выхода приемни-
2.2] Основные функциональные схемы систем навигации и наведения 31
ка на вход второго фильтра Калмана, и являясь по отношению к нему
шумами измерений, они нарушают условия оптимальной работы этого
фильтра. Кроме этого, в такой схеме необходимо предпринимать меры
синхронизации измерений ИНС и приемника.
В литературе можно найти подразделение слабо связанных схем на
три типа: стандартную, агрессивную и так называемую MAGR-схему
(Military Airborne GPS Receiver). Отличие «агрессивной» схемы от
стандартной заключается в том, что в ней используется информация
БИНС об ускорении для экстраполяции навигационных местоопределе-
ний приемника в период между спутниковыми измерениями. Упомяну-
Упомянутая МAGR-схема фирмы Rockwell использует инерциальные измерения
в контуре слежения за кодом СНО-приемника при пропадании «захва-
«захвата» в контуре слежения за несущей [2.4].
Третий вариант интеграции систем — жестко (сильно) связанная
схема (рис. 2.3). В таких системах роль ИНС сводится лишь к измере-
измерению первичных параметров поступательного и вращательного движе-
\/
ГЛОНАСС/GPS приемник I
ВЧ канал приема
и первичная
обработка
Слежение за кодом
и доплеровским
сдвигом несущей
Предсказанные значения
псевдодальности,
псевдоскорости, эфемерид
Положение,
скорость
Компенсация
инструментальных
ошибок по получен-
полученным оценкам
Интегрированный
фильтр Калмана
инс/снс
Акселерометры
и гироскопы
ИНС
Ускорение, угловая скорость
Выход
ИНС/СНС
Рис. 2.3. Жестко связанная схема комплексирования ИНС и приемника
ний, например проекций кажущегося ускорения и абсолютной угловой
скорости вращения объекта. По этой причине в схемах такого типа
ИНС представляют собой лишь блоки инерциальных измерителей (ак-
32 Интегрированные бортовые системы беспилотных Л А [Гл. 2
селерометры и гироскопы). В спутниковом навигационном приемнике
по-прежнему присутствует ВЧ канал приема и первичной обработки
и блок слежения за кодом и доплеровским сдвигом несущей, которые
функционируют аналогично описанному выше варианту слабосвязан-
слабосвязанной схемы. Отличием данной структуры от предыдущих является от-
отсутствие в составе приемника фильтра Калмана. В жестко связанной
схеме и ИНС и приемник лишь обеспечивают состав измерений для
общего вычислительного блока, в котором реализован единый фильтр
Калмана. Измерения для фильтра в жестко связанных системах стро-
строятся по разности псевдодальностей или/и скоростей изменения псевдо-
псевдодальностей, определенных, с одной стороны, в ИНС по вычисленным
координатам объекта и эфемеридам спутника, и измеренных СНС при-
приемником с другой.
Другой отличительной особенностью жестко связанной схемы яв-
является использование контурами слежения за кодом и доплеровским
сдвигом частоты несущей информации о расчетных псевдодально-
псевдодальностях и псевдоскоростях (или их приращений), поступающей от филь-
фильтра Калмана. Использование этой информации позволяет существенно
улучшить устойчивость слежения и снизить время восстановления ра-
работы приемника в случае потери сигналов спутников.
Жестко связанные системы обеспечивают большую точность реше-
решения навигационной задачи по сравнению с предыдущими системами,
при этом фильтр Калмана позволяет оптимально использовать все
доступные спутники. Однако, наличие лишь одного фильтра Калмана
приводит к потере избыточности системы, так как становится доступ-
доступным лишь одно совместное решение. К другим достоинствам такой
схемы можно отнести:
— отсутствие проблемы взаимной корреляции шумов измерений и
их отличий от белых шумов;
— отсутствие проблемы синхронизации измерений БИНС и ОНС,
так как используется один формирователь тактовых частот;
— возможность обнаружения и отбраковки «плохих» измерений
псевдодальностей по их предсказанным значениям, формируемым с ис-
использованием данных от БИНС.
К недостаткам жестко связанных систем можно отнести:
— необходимость разработки специальной аппаратуры потребителя
(приемника);
— использование сложных соотношений для измерений;
— ухудшение надежности, так как отказ БИНС приводит к отказу
системы в целом.
Последний недостаток можно устранить, введя дополнительный
(параллельный) фильтр Калмана, предназначенный только для при-
приемника. Такое решение создает некоторый промежуточный вариант
между слабо и жестко связанной схемами.
Таким образом, основные отличия жестко связанной схемы от сла-
слабосвязанной заключаются в следующем:
— использование выходной информации ИНС об ускорении в конту-
контуре слежения за кодом и доплеровским сдвигом несущей. Это позволяет
2.2] Основные функциональные схемы систем навигации и наведения 33
сузить полосу пропускания контуров слежения и повысить быстродей-
быстродействие и точность настройки;
— использование измерений псевдодальностей и псевдоскоростей
(а не координат и скоростей) для оценивания погрешностей ИНС.
Так называемые глубоко интегрированные системы являются еще
более сложными и менее гибкими с точки зрения организации их
структуры, имеют жесткую организацию связей и единый выход
(рис. 2.4). Все оценки производятся в интегральном фильтре Калмана,
ЕЖОНАСС/
GPS приемник
ВЧ канал приема
и первичная обработка
Предсказанные
значения
псевдодальности
и псевдоскорости
Компенсация
инструментальных
ошибок
Акселерометры
и гироскопы
МНС/СНС
Выход
ИНС/СНС
Интегральный
фильтр Калмана
MHCl
Рис. 2.4. Глубоко интегрированная схема комплексирования ИНС и прием-
приемника
а rjlOHACC/GPS-приемник еще более упрощается. В этой схеме он
состоит только из ВЧ канала приема и первичной обработки, который
включает высокочастотный приемный тракт, генератор кода, корреля-
корреляторы и схему захвата. Выходы корреляторов являются входами для
интегрального фильтра Калмана, где вычисляются не только ошибки
ИНС, но и оценки пседодальностей и псевдоскоротсей, которые переда-
передаются в приемник для улучшения характеристик захвата сигнала. Таким
образом, традиционные контуры слежения за кодом и доплеровской
частотой сдвига несущей оказываются включенными в общий инте™
тральный фильтр комплексной системы. В такой схеме фильтр должен
обладать двадцатым-сороковым порядком, и для его реализации тре™
буется БЦВМ с высоким быстродействием.
Все перечисленные схемы комплексирования СНС и ИНС (кроме
первой), получаемые на выходе фильтра Калмана оценки инструмен-
инструментальных погрешностей ИНС (ошибки смещения нулей гироскопов и ак™
селерометров, ошибки масштабных коэффициентов и т. д.) использу-
3 Управление и наведение
34
Интегрированные бортовые системы беспилотных Л А
[Гл.2
ют для коррекции инерциальных датчиков. Поэтому при перерывах
поступления данных с приемника полученные ранее оценки ошибок
ИНС и ее измерительных элементов позволяют улучшить точностные
характеристики ИНС в автономном режиме.
В таблице 2.3 суммированы основные особенности перечисленных
схем комплексных систем.
Таблица 2.3. Сравнительные характеристики комплексных систем
разной архитектуры
Тип системы
Раздельная
Слабо
связанная
Жестко
связанная
Глубоко инте-
интегрированная
Основные качества
Избыточность, ограниченность ошибок оценок местопо-
местоположения и скорости, наличие информации об ориентации
и угловой скорости, высокая скорость выдачи информа-
информации, минимальные изменения в бортовой аппаратуре.
Все перечисленные качества раздельных систем, плюс бо-
более быстрое восстановление слежение за кодом и фазой
сигналов СНС, выставка и калибровка БИНС в полете, как
следствие — повышенная точность в отсутствие СНС-сиг-
нала.
Дальнейшее улучшение точности и калибровки, повышен-
повышенная устойчивость слежения за СНС-сигналами при дина-
динамических маневрах, повышенная помехозащищенность.
Достоинства: единый фильтр устраняет проблему «кас-
«каскадного» включения фильтров, компактность, понижен-
пониженные требования по энергообеспечению.
Недостаток: вектор состояния содержит до 40 компонент
и фильтр трудно реализуем; необходимость разработки
специальных датчиков.
Первые три из приведенных структур интегрированных систем мо-
могут быть реализованы с использованием существующих спутниковых
приемников, инерциальных систем и вычислителей. Вместе с тем, слабо
и, в первую очередь, жестко связанная схемы для более полного исполь-
использования открывающихся возможностей комплексирования требуют со-
создания специализированных датчиков для инерциальных и спутнико-
спутниковых систем, изготовленных на одной технологической и конструктив-
конструктивной базе. Это позволяет получить БИСУ меньших габаритов, массы,
энергопотребления. Последняя из рассмотренных схем — глубоко инте-
интегрированная — в обязательном порядке требует разработки специаль-
специальных приемников и вычислителей. При этом могут быть использованы
самые передовые технологии, например микромеханические датчики.
Следует отметить что:
— существующий уровень развития спутниковых систем не позво-
позволяет использовать их как отдельное (единственное) средство навигации
применительно к беспилотным маневренным ЛА;
— комплексирование спутниковых и инерциальных навигационных
систем является эффективным средством обеспечения требуемых так-
тактико-технических характеристик бортового навигационного комплекса.
2.2] Основные функциональные схемы систем навигации и наведения 35
Список литературы к главе 2
2.1. Federal Radlonavigation Plan. — USA: MOT & MOD, 1994.
2.2. Глобальная спутниковая навигационная система ГЛОНАСС / под ред.
В.Н. Харисова, А. И. Перова, В.А. Болдина. — М.: ИПРЖР, 1998. —
400 с.
2.3. Веремеенко К. К., Тихонов А, В. Навигационно-посадочный комплекс на
основе спутниковой навигационной системы. — В журнале «Радиотех-
«Радиотехника». 1996. Ш 1. С. 94-99.
2.4. Phillips Д., Schmidt G. GPS/INS Integration/ — AGARD Lecture Series on
«System Implementations and Innovative Applications of Satellite Naviga-
Navigation», Paris, France, 4-5 July, 1996. — LS-207. P. 9-1-9-18.
Глава 3
ЗАДАЧА ПОЗИЦИОНИРОВАНИЯ
И ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ
АВТОМАТИЧЕСКОГО МАНЕВРЕННОГО
ЛЕТАТЕЛЬНОГО АППАРАТА И ЕЕ РЕШЕНИЕ
НА ОСНОВЕ СОВРЕМЕННЫХ
ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ
Настоящая глава посвящена подробному описанию математических
моделей двух компонент интегрированных бортовых систем навигации
беспилотных маневренных летательных аппаратов: многоканальных
приемников глобальных спутниковых навигационных систем (СНС)
и бесплатформенных инерциальных навигационных систем (БИНС).
Здесь необходимо подчеркнуть принципиальную разницу в способе
функционирования перечисленных компонент: в то время как БИНС
функционирует автономно, многоканальный СНС-приемник является
фактически лишь элементом так называемой подсистемы потребителей
глобальной спутниковой навигационной системы, т. е. такой приемник
способен функционировать лишь в её рамках. В связи с изложенным
в настоящей главе дается краткое описание способа функционирования
двух существующих в настоящее время глобальных навигационных си-
систем: Российской ГЛОНАСС (Глобальная навигационная спутниковая
система) и американской GPS (Global Positioning System).
3.1. Принципы построения и особенности
функционирования СНС ГЛОНАСС и GPS
Российская глобальная навигационная система ГЛОНАСС суще-
существует с 1982 года и первоначально использовалась лишь в интересах
обороны СССР, а с 1987 года используется международным содруже-
содружеством в интересах навигации гражданских потребителей.
Система ГЛОНАСС включает три подсистемы (сегмента): косми-
космическую, наземную и подсистему потребителей.
Космический сегмент предполагает существование (при полном раз-
развертывании системы) 24 спутников, обращающихся в трех орбиталь-
орбитальных плоскостях (по 8 спутников в каждой), равномерно разнесенных
по экватору. Спутники движутся по так называемым околокруговым
орбитам высотой 19100 км с периодом обращения 11 часов 15 минут
и наклонением 64,8° (рис. 3.1). Такое расположение спутников позволя-
3.11
Принципы построения СНС ГЛОНА С С и GPS
37
Рис. 3.1. Архитектура созвездия ГЛОНАСС
Санкт-Петербург
НИП
^ ,%"Петропавловск-
, - ^^ Камчатский
тгагй НИП
, Москва
Воркута Енисейск
Якутск
НИП
НИП
НИП
•л
кос
--, ^ч ".Уссурийск
,Л^5 . ?« ' НИП КОС
^""^ Улан-Уде V
НИП
Квантово-оптическая станция (КОС)
Наземный измерительный пункт (НИП)
Наземный центр управления системой (ЦУС)
Рис. 3.2. Наземная инфраструктура ГЛОНАСС
38 Задача позиционирования и определения ориентации [Гл. 3
ет потребителю наблюдать одновременно не менее четырех спутников
в любой точке Земли круглосуточно.
Наземная подсистема обеспечивает поддержание описанной выше
архитектуры созвездия спутников ГЛОНАСС и включает:
— центр управления системой;
— систему синхронизации сигналов ГЛОНАСС;
— сеть наземных измерительных пунктов (НИПов), обеспечиваю-
обеспечивающих измерение параметров орбит спутников ГЛОНАСС и посылку на
их борт необходимой служебной информации и сигналов управления;
— сеть квантово-оптических станций (КОСов), предназначенных
для калибровки НИПов.
Размещение указанных средств на территории Российской Федера-
Федерации и, частично, государств СНГ показано на рис. 3.2 [3.7].
Подсистема потребителей включает множество пользователей
(военных, гражданских), обладающих соответствующей навигацией™
ной аппаратурой (приемники СНС).
Американская система GPS имеет аналогичный состав подсистем
и схожие принципы функционирования.
Космический сегмент GPS включает также 24 спутника, сгруппиро-
сгруппированных в 6 плоскостях по 4 спутника в каждой. Спутники обращаются
по околокруговым орбитам высотой 20 180 км с периодом обращения
около 12 часов и наклонением 55°. Размещение спутников в каждой
из 6 плоскостей показано на рис. 3.3. Такая архитектура созвездия
позволяет наблюдать в любой точке Земли от 5 до 11 спутников.
137 / 197 / 257 / 317
Рис. 3.3. План распределения спутников системы GPS по плоскостям
Элементы наземного сегмента GPS имеют назначение, аналогичное
описанному выше, за исключением КОС, которые в системе GPS от™
сутствуют.
Станции слежения системы GPS находятся не только на территории
США, но и во многих точках поверхности Земли.
3.1 ] Принципы построения СНС ГЛОНАСС и GPS 39
Как уже указывалось выше, принципы функционирования систем
ГЛОНАСС и GPS схожи. Поэтому ниже мы рассмотрим эти принци-
принципы в целом, останавливаясь на особенностях отдельных систем лишь
в случае необходимости.
Глобальные спутниковые навигационные системы по своему прин-
принципу действия являются среднеорбитальными дальномерно-доплеров-
скими системами пассивного типа. Пассивный способ организации си-
системы, когда пользователи не посылают сигналов на наблюдаемые
спутники, позволяет обслуживать неограниченное число потребителей
навигационной информации. Навигационные определения в такой си-
системе (вычисление координат) осуществляются прежде всего на основе
измеренных дальностей до спутников. Кроме этого структура сигналов
спутников позволяет получать радиальные скорости по измерениям
доплеровских сдвигов несущих частот. Доплеровские сдвиги частоты
могут быть использованы для вычисления как скоростей, так и коор-
координат потребителей.
В частности излучаемый г-м спутником системы GPS сигнал со-
содержит индивидуальный (присущий только данному спутнику) даль-
номерный код, который позволяет однозначно определить временной
интервал Т{ между моментом излучения сигнала по спутниковым часам
и моментом приема сигнала антенной потребителя по часам приемника.
В системе ГЛОНАСС разделение сигналов спутников частотное, а не
кодовое, как в GPS. По этой причине излучение сигналов спутники
ГЛОНАСС ведут каждый на своей частоте (в отличие от фиксирован-
фиксированной частоты в системе GPS). В силу этого система занимает целый диа-
диапазон частот 1602,5625-1615,5000 МГц и 1246,4375-1256,9375 МГц. Есть
мнение, что это качество позволяет рассматривать систему ГЛОНАСС
как более защищенную от помех (создать зашумление в диапазоне ча-
частот сложнее, чем на одной фиксированной частоте). Временные шкалы
всех спутников синхронизируются путем использования прецизионных
атомных бортовых эталонов частоты (бортовых часов) и периодиче-
периодических коррекций их показаний, производимых с Земли станциями за-
закладки служебной информации. Таким образом измеренный временной
интервал Т{ складывается из времени, затрачиваемого на прохождение
пространства между спутником и потребителем ту^, и сдвига временной
шкалы приемника относительно временной системной шкалы (общей
временной шкалы всех спутников) Ат:
П = rri + Ат.
По этому временному интервалу рассчитывается измеренная даль-
дальность до спутника гт{, называемая псевдодальностью:
где с — скорость распространения электромагнитных колебаний.
Псевдодальность определяется координатами спутника и пользова-
пользователя, погрешностями часов пользователя и другими погрешностями
40 Задача позиционирования и определения ориентации [Гл. 3
измерений:
(yai - уJ + (zsi -
где п = \/{xsi - хJ + (у8i - уJ + (z3i - zJ — точное значение
дальности до спутника; жя^, ysi, zsi и ж, у, z — координаты спутни-
спутника и пользователя соответственно, Ат — упоминавшийся ранее сдвиг
временной шкалы приемника относительно системной шкалы времени
(погрешность часов пользователя); б{ ~~ погрешности измерения даль™
ности, обусловленные ошибками координат (эфемерид) г-го спутника,
влиянием условий распространения сигнала и другими причинами (бо-
(более подробно эти аспекты обсуждаются ниже, в разделе 3.4).
В основе определения координат пользователя лежит совместное
решение нескольких уравнений для псевдодальностей. Определяемыми
при этом являются координаты пользователя ж, у, z и сдвиг временной
шкалы приемника Ат. Наличие четырех неизвестных диктует необхо™
димость использования сигналов по крайней мере четырех спутников и,
соответственно, решения не менее четырех уравнений для псевдодаль™
ности. Большее количество измерений (г > 4) может быть использовано
для осреднения ошибок измерений Е{.
Для решения системы из нескольких уравнений для псевдодаль™
ности требуются координаты спутников х8\, ysi, zsi. Эти координа™
ты вычисляют для любого требуемого момента времени, используя
так называемые эфемериды спутника, т. е. рассчитанные наземным
командно-измерительным комплексом и переданные на борт спутника
для хранения и передачи в составе навигационного сигнала данные
о координатах спутника на фиксированные моменты времени.
Измерение доплеровских сдвигов частоты несущей позволяет опре™
делять радиальные составляющие скорости спутников относительно
потребителя (скорость относительного движения вдоль линии, их со™
единяющей). Нетрудно показать [3.1], что скорость изменения псевдо™
дальности может быть описана уравнением
i = — [(xsi - x)(x8i -x) + (ysi - y)(ysi -y)
где Аг — погрешность определения радиальной скорости, обусловлен™
ная сдвигом частоты опорного генератора приемника Д/, а ё^ — прочие
погрешности измерений скорости.
В свою очередь, радиальная скорость rmi и погрешность ее опреде™
ления Аг однозначно определяются измеренным доплеровским сдви-
сдвигом частоты несущей A/mi и сдвигом частоты опорного генератора А/:
г mi = A/miAn, Аг = Д/А„,
где Хп — номинальное значение длины волны несущей.
Таким образом определяются три производные координат ж, i/, i,
которые используются для вычисления требуемых проекций скорости,
3.1 ] Принципы построения СНС ГЛОНАСС и GPS 41
и сдвиг частоты опорного генератора приемника А/. При этих расчетах
полагается, что координаты ж, у, z уже определены путем решения
системы уравнений для псевдодальностей.
Окончательно совокупность восьми уравнений позволяет опреде-
определять восемь параметров: три координаты, три проекции скорости и две
поправки к показаниям приемника — сдвиг временной шкалы прием-
приемника Ат и сдвиг частоты опорного генератора А/.
Уравнения для определения восьми перечисленных выше парамет-
параметров записаны в декартовой системе координат и определяют линейные
координаты ж, у, z. На практике в приемнике GPS осуществляется
пересчет к географическим координатам в системе WGS-84 (World
Geodetic System) — широте <р, долготе Л, высоте h и проекциям отно-
относительных скоростей объекта на географические оси — северной Улг?
восточной Ve и вертикальной Ун- Российскому пользователю необхо-
необходимо помнить, что координаты в системе WGS-84 и в применяемой
у нас системе Красовского могут расходиться на 100—150 м. Такая
погрешность не ограничивает существенно использование приемников
GPS на маршрутах, но неприемлема при выполнении заходов и поса-
посадок с применением спутниковых систем. Можно существенно снизить
эту погрешность путем пересчета координат. Формулы пересчета из
одной системы в другую реализованы в большинстве приемников, где
предусмотрена возможность задания параметров эллипсоида пользова-
пользователя. Существующие геодезические данные позволяют пересчитывать
координаты между системами WGS-84 и Красовского с точностью
около 1 м.
Чрезвычайно важным вопросом при навигационных определениях
является выбор рабочего созвездия спутников. Действительно, в поле
обзора антенны приемника может находиться до двенадцати спутников
(обычно не менее шести — восьми). Как отмечалось выше, для опре-
определения полного вектора состояния достаточно всего четырех ИСЗ.
Выбор созвездия для проведения измерений и последующего определе-
определения навигационных параметров потребителя осуществляется специаль-
специальным алгоритмом, учитывающим взаимное расположение всех видимых
спутников и приемника, от которого существенным образом зависят
погрешности определения координат и скоростей.
Сказанное можно пояснить простым примером. Каждому уравне-
уравнению для псевдодальности в пространстве можно соотнести сферу рав-
равных дальностей радиуса гт{ с центром в точке нахождения спутни-
спутниковой излучающей антенны. Приемник, измеряющий дальности гт{,
должен одновременно лежать на каждой из таких сфер. При отсутствии
погрешностей достаточно трех измерений: две сферы, пересекаясь, об-
образуют окружность, а третья сфера пересекается с ней в двух точках,
одна из которых соответствует действительному местоположению (вто-
(вторая точка является ложным решением, и неоднозначность исключается
в различных конкретных приемниках специальными алгоритмически-
алгоритмическими средствами или введением внешней дополнительной информации
о приблизительных координатах). Таким образом при точных измере-
измерениях точка пересечения трех сфер равных дальностей есть решение
42 Задача позиционирования и определения ориентации [Гл. 3
навигационной задачи потребителя и именно в ней располагается при-
приемник. При наличии погрешностей измерений радиусы сфер известны
с точностью до погрешностей Аг{ и пересечению сфер теперь соответ-
соответствует не точка, а некоторая пространственная область. Размеры этой
области зависят как от ошибок измерения дальностей Аг^, так и от
взаимного расположения сфер, и этими размерами определяются по-
погрешности вычисления координат. С целью пояснения этой особенности
спутниковых навигационных систем на рис. 3.4 для плоского случая
приведена иллюстрация зависимости погрешностей местоопределения
от геометрических свойств системы «спутники—приемник».
а) б)
Рис. 3.4. Зависимость точности местоопределения от геометрии системы
«спутник-приемник» (плоский случай)
На рис. 3.4 а расположение спутников благоприятное и область по-
погрешностей местоопределения существенно меньше, чем на рис. 3.4 б",
где расположение спутников неудовлетворительное. Известно [3.1], что
оптимальным является созвездие из четырех спутников, образующих
тетраэдр: три спутника располагаются вблизи горизонта в вершинах
правильного треугольника, а четвертый — в зените. Геометрия созвез-
созвездия, близкого к оптимальному, изображена на рис. 3.5. При сближе-
сближении спутников геометрические свойства системы ухудшаются. В пре-
предельном случае, когда два спутника располагаются на одной линии
визирования, пересечение сфер отсутствует, а система уравнений для
псевдодальностей не имеет решения.
Для количественной характеристики оптимальности рабочего со-
созвездия спутников вводится понятие геометрического фактора (ГФ),
который является основным критерием при выборе созвездия спутни-
спутников. Величина ГФ обратно пропорциональна объему тетраэдра, постро™
енного на четверке выбранных спутников. Большинство приемников
имеет режим индикации ГФ для текущего рабочего созвездия. Обычно
выбирают такие созвездия, для которых значения ГФ лежат в диапа™
зоне от 1 до 4. При больших значениях ГФ погрешности местоопреде™
ления становятся слишком большими.
Следует отметить, что большинство современных многоканальных
приемников следит более чем за четырьмя спутниками. Обычно число
отслеживаемых спутников составляет 6^12 или наблюдение ведется за
3.11
Принципы построения СНС ГЛОНА С С и GPS
43
S4(X4,Y4,Z4,t)
Точка весеннего
равноденствия -
Рис. 3.5. Рациональный выбор созвездия спутников
всеми видимыми спутниками. Из числа отслеживаемых спутников на
основе анализа ГФ выбирается лучшее рабочее созвездие. Избыточные
спутники используются для контроля целостности системы и явля-
являются резервными: они используются, если сигнал от какого-либо из
спутников рабочего созвездия пропадает (уход спутника за горизонт,
перекрытие линии визирования препятствием и т.п.).
Вопрос выбора структуры и состава навигационного сигнала явля-
является одним из важнейших, поскольку его тип в значительной степе-
степени определяет свойства всей системы. Сигналы спутниковой системы
должны обеспечить:
— заданную точность навигационных определений;
— заданную вероятность декодирования служебной информации;
— минимальную мощность излучения передатчика спутника при
ограниченной ширине полосы излучения;
— разделимость сигналов от различных НИСЗ;
44
Задача позиционирования и определения ориентации
[Гл. 3
— устойчивость к помехам многолучевости и организованным по-
помехам;
— ограниченность аппаратурных затрат на приемники пользова-
пользователей;
— возможность развития и модернизации системы.
С целью обеспечения этих требований используется сигнал шумо-
подобной структуры, так называемый псевдошумовой сигнал (ПШС).
При этом, высокочастотная несущая подвергается фазовой манипу-
манипуляции навигационным кодом, который в свою очередь является суммой
дальномерного кода и кода двоичной служебной информации (рис. 3.6).
Несущая
Навигационный код
Фазоманипулированный сигнал
Рис. 3.6. Пример фазоманипулированного сигнала
Частота несущей определяется возможностью прохождения сигна-
сигнала через атмосферу Земли (необходимо использовать несущую из диа-
диапазона волн так называемого «радиоокна» атмосферы) и принятыми
международными соглашениями об использовании радиочастот. В со™
ответствии с этим в системе GPS для канала открытого доступа приня-
принята частота несущей L\ = 1575,42 МГц и для закрытого канала частота
несущей L2 = 1227,6 МГц. Несущие когерентны, так как образованы
3.1 ] Принципы построения СНС ГЛОНАСС и GPS 45
от одного бортового эталона частоты 10,23 МГц путем умножения на
коэффициенты 154 и 120 соответственно.
На частоте L\ излучаются сразу два сигнала, сдвинутые друг
относительно друга на 90°: труднообнаруживаемый для военных по-
потребителей и легкообнаруживаемый для гражданских. На частоте Li
излучается только труднообнаруживаемый сигнал. Вторая частота
используется военными потребителями для ионосферной коррекции
(см. раздел 3.4) измерений, проведенных по сигналу на частоте L\.
Введение частоты Ь% A176,45 MHz) после 2005 года обеспечит
большую «грубость» процесса слежения за сигналом GPS за счет
использования двух сдвинутых от-
относительно друг друга по фазе на
90° сигналов, один из которых (Da-
(Data Channel) содержит код, а другой
(Quadraphase Free Channel) исполь-
используется лишь для обеспечения еле- -^^^"^ 1176 45 MHz
жения (рис. 3.7).
Как уже указывалось выше, Рис 3.7. К введению частоты L6
в системе GPS принято кодовое раз-
разделение сигналов спутников. Каждый из них излучает только ему
присущий навигационный код.
Легкообнаруживаемый дальномерный код С/А (Clear Acquisi-
Acquisition) — код пониженной точности — имеет частоту синхронизации
1,023 МГц и период 1 мс. Высокоточный защищенный дальномерный
код Р (protected) имеет на порядок более высокую частоту синхрони-
синхронизации 10,23 МГц и период повторения 267 сут. Каждый из спутников
формирует только свой сектор полного кода Р длиной 7 сут., причем
один раз в 7 сут. происходит одновременная смена Р-кодов на всех
спутниках системы. Оба кода представляют собой псевдослучайные
последовательности ±1.
Дальномерный код С/А формируется из двух последовательностей
десятиразрядного регистра сдвига. Первая последовательность одина-
одинакова для всех спутников, а вторая имеет определенный для каждого
спутника фазовый сдвиг. Сумма этих двух последовательностей дает
так называемый код Голда, индивидуальный для каждого спутника.
Достоинством такого способа формирования С/А-кода является про-
простота его генерации при хороших взаимокорреляционных свойствах
сигналов.
Структура и формирование защищенного кода Р несколько более
сложны, но он также формируется из двух псевдошумовых кодов.
Коды С/А и Р формируются от одной и той же опорной частоты
и привязаны к одному моменту времени с погрешностью 3 не. Это
позволяет использовать легкообнаруживаемый сигнал С/А-кода как
ключ для ускоренного вхождения в синхронизм по Р-коду.
Служебная информация передается специальным двоичным кодом
данных, также имеющим амплитуду ±1 при частоте передачи 50 Гц.
Таким образом на один элементарный символ служебной информации
приходится двадцать периодов С/А-кода. Поскольку для работы си-
46
Задача позиционирования и определения ориентации
[Гл. 3
стемы требуется большой объем вспомогательной информации и она
должна поступать непрерывно с определенным периодом повторения,
весь передаваемый объем данных группируется в кадры (рис. 3.8).
10 слов до 30 дв. ед., 6 с |
ТЛМ, Ключ, временная поправка,
тип ИСЗ, состояние СИ, коды на L2,
точность РНП, № недели
ТЛМ, Ключ, эфемериды
ТЛМ, Ключ, эфемериды
(продолжение)
ТЛМ, Ключ,
ионосферные параметры,
альманах и состояние ИСЗ 25-32,
признаки кода Y, резерв
ТЛМ, Ключ,
альманах и состояние ИСЗ 1-24,
временная информация
Строка (субкадр) 1
Строка 2
Строка 3
Строка 4
F вариантов
формата)
Строка 5
B вариантов
формата)
Кадр 1500 дв. ед.,
30 с
Рис. 3.8. Структура кадра навигационного сигнала системы Navstar
Длительностьодного кадра 30 с, и он содержит 1500 двоичных еди™
ниц, распределенных по 5 строкам (субкадрам) из десяти 30™битовых
слов каждая. Таким образом полная информация о системе содержится
в суперкадре объемом 37 500 дв. ед. В кадре предусмотрен резерв для
возможных изменений в системе и структуре сигнала.
В начале каждой строки передается 8 бит телеметрической ин™
формации (ТЛМ) и специальное ключевое слово (Ключ), содержащее
22 бита. Навигационная информация, передаваемая в кадре, содержит
поправки к временной шкале, эфемериды данного НИСЗ и альманах.
Ключевое слово вводится в кадр передаваемой информации, чтобы
ускорить вхождение в синхронизм по коду Р. Для этого разработана
специальная процедура, использующая возможности легкообнаружи-
ваемого кода С/А.
Таким образом минимальный необходимый объем данных для ре-
решения спутниковым навигационным приемником навигационной зада-
задачи заключен в строках 1, 2, 3.
В одном кадре передается 1/25 часть всего альманаха системы.
По этой причине для сбора полного альманаха требуется прием 25 кад-
кадров, совокупность которых по существу образует один суперкадр дли-
длительностью 12,5 мин. Эта длительность объясняет, в частности, необхо-
3.2] Унифицированные функциональные схемы 47
димость достаточно продолжительного времени для первоначального
местоопределения (когда в памяти приемника отсутствует альманах).
Первые минуты после такого включения (часто называемого «холод-
«холодным стартом») приемник, получая сигналы хотя бы одного спутника,
собирает альманах системы и лишь затем приступает к выбору созвез-
созвездия и навигационным измерениям.
Существенно различаются структуры кадров сигналов двух систем.
Суперкадр системы ГЛОНАСС значительно короче и занимает 2,5
минуты (вместо 12,5 минуту GPS). Такое различие связано с тем, что
по разному представляется эфемеридная информация и в ГЛОНАСС
отсутствует информация об ионосферных поправках. Более короткий
кадр системы ГЛОНАСС позволяет приемникам быстрее собирать пол-
полную информацию о созвездии и, соответственно, быстрее выдавать
информацию потребителю после «холодного» включения системы. Су-
Суперкадр ГЛОНАСС состоит из 5 кадров каждый длительностью 30 с.
Каждый кадр содержит 15 строк длительностью 2 с каждая. Из них
первые 85 двоичных единиц занимают 1,7 с и содержат цифровую ин-
информацию, а последние 0,3 с предоставлены для передачи метки време-
времени. В каждом кадре оперативная информация, относящаяся к данному
спутнику, занимает первые четыре строки, остальные строки, с 5-й по
15-ю, отведены для неоперативной информации, касающейся системы
в целом и очередной группы из пяти спутников (в последнем кадре из
4-х спутников).
Спутники ГЛОНАСС имеют тактовую частоту бортового генерато-
генератора вдвое ниже, чем на спутниках GPS E и 10 МГц соответственно).
Перечисленные особенности и отличия системы ГЛОНАСС от си-
системы GPS не являются существенными для пользователей
3.2. Унифицированные функциональные схемы
совмещенных многоканальных приемников
глобальных навигационных систем
3.2.1. Общие принципы проектирования архитектуры
приемника. Ниже будем полагать, что объединенный многоканаль-
многоканальный GPS/ГЛОНАСС-приемник должен обеспечивать выполнение
следующих задач:
— измерение первых и вторых разностей как псевдодальностей, так
и псевдоскоростей;
— измерение разности фаз несущих сигналов, принятых различны-
различными антеннами;
— прием и декодирование служебной информации GPS/ГЛОНАСС.
Обмен данными между приемником и бортовой навигационной си-
системой и системой управления должен осуществляться по стандартно-
стандартному каналу с последовательным интерфейсом.
Таким образом архитектура типового приемника включает:
— антенно-фидерный блок;
48
Задача позиционирования и определения ориентации
[Гл. 3
— входные фильтры и малошумящие усилители мощности, компен-
компенсирующие потери мощности навигационного сигнала в космосе и в ан™
тенно-фидерном блоке. Эти фильтры и усилители должны распола-
располагаться вне блока приема сигнала, сразу после антенны;
— многоканальные цифровые блоки приема сигнала, обеспечиваю-
обеспечивающие навигационные измерения, прием, декодирование служебной ин™
формации и решение задач навигации и определения параметров ори-
ориентации.
3.2.2. Архитектура одиночного ГЛОНАСС-канала при-
приемника. Каждый канал включает три последовательных блока
(рис. 3.9-3.11):
— радиочастотный блок (Radio Frequency Unit — RFU) (рис 3.9);
Сигналы ГЛОНАСС/NAVSTAR
Управление
Блок часотной
развязки
1
Антенный фильтр
ГЛОНАСС
Антенный фильтр
NAVSTAR
Усилитель мощности
ГЛОНАСС
Усилитель мощности
NAVSTAR
Переключатель
RFU
Переключатель
Синтезатор
частоты
Детектор
| Полосовой фильтр |
| 1-ый гетеродин
| ГЛОНАСС/NAVSTAR
Первичный
усилитель
Квадратурный
детектор
1-ой гетеродин
ГЛОНАСС/NAVSTAR
catch
Локальный I
эталон частоты!
catch
, -^выборки
kDDPU
Рис. 3.9. Радиочастотный блок
— блок цифровой обработки данных (Digital Data Processing Unit —
DDPU) (рис. ЗЛО);
— цифровой вычислительный блок (Digital Computational Unit —
DCU) (рис. ЗЛО);
3.2]
Унифицированные функциональные схемы
49
Ci+ic,
Триггер
Цифровой
коррелятор
^выборки
DDPU
Синтезатор пошаговой частоты
ГЛОНАСС/НАВСТАР
Генратор ПСП
ГЛОНАСС/НАВСТАР
Синтезатор пошаговой частоты
ГЛОНАСС/НАВСТАР
I
ИР
Сумматор-интегратор
kDCDI
^пошаговая
Процессор
к DCU Q-bus
KDCD2
DCU
Q-bus
RAM
PROM
Управляющее
устройство
Н i О
5 i «
5S ! О
Интерфейс
Рис. 3.10. Блок цифровой обработки и вычислительный блок
Кроме того каждый одиночный канал включает в себя канал после-
последовательного интерфейса.
4 Управление и наведение
50 Задача позиционирования и определения ориентации [Гл. 3
Обсудим более детально работу и задачи перечисленных выше
блоков.
Архитектура RFU обеспечивает совместную обработку сигналов
ГЛОНАСС и GPS, используя одну антенну. Частота первого гетеро-
гетеродина выбирается такой, чтобы минимизировать потери мощности при
последовательном приеме сигналов ГЛОНАСС и GPS.
Разница в модуляции сигналов ГЛОНАСС и GPS позволяет после-
последовательно усиливать и обрабатывать их без проявления нежелатель-
нежелательной интерференции.
Для формирования частоты первого гетеродина в качестве эталон-
эталонной может быть выбрана как частота 10,23 МГц, характерная для GPS,
так и частота 5,0 МГц, характерная для ГЛОНАСС.
Рассмотрим способы обработки навигационного сигнала ГЛОНАСС.
Как известно, несущие частоты навигационных сигналов ГЛОНАСС
модулируются соответствующей псевдослучайной последовательно-
последовательностью (ПСП), цифровыми данными и сдвигаются вследствие проявле-
проявления эффекта Доплера:
/глонасс = 1600,0 + 0,5625 ±fD± 0,511 ± 50 х 1(П6 МГц,
где п = 1, 2, . . . , 24 — индекс спутника ГЛОНАСС, f D — доплеровский
сдвиг частоты сигнала.
С целью подавления шумов и влияния «зеркального» канала упомя-
упомянутые сигналы подаются на антенный фильтр и усилитель мощности
блока RFU. После предварительного усиления с помощью первого гете-
гетеродина принятые сигналы преобразуются в радиочастотные сигналы.
Частота первого гетеродина генерируется от локального эталона часто-
частоты блока RFU. Радиочастотные сигналы, то есть сигналы первой про-
промежуточной частоты, подаются на полосовой фильтр и усилитель мощ-
мощности промежуточной частоты, где уровень мощности повышается не
менее, чем на 120 дБ. Чтобы преобразовать сигнал первой промежуточ-
промежуточной частоты в комплексный видеочастотный сигнал Cl + j'C2 с двумя
квадратурными компонентами, сигнал первой промежуточной частоты
и эталонный сигнал второго гетеродина подаются на квадратурный де-
детектор. После двухуровневого квантования эти компоненты подаются
в блок DDPU. В блок DDPU также поступает сигнал эталонной частоты
40 МГц. Эта частота понижается в два раза для получения эталонной
частоты выборки, которая одновременно является максимальной ча-
частотой переключения DDPU. Номинальные величины частоты первого
гетеродина, промежуточной частоты и частоты выборки выбираются
таким образом, чтобы избежать перекрытия спектров данного канала
и сигналов других каналов.
Для обеспечения требуемого уровня надежности блок DDPU содер-
содержит два идентичных модуля. Каждый из модулей содержит, в свою
очередь, три идентичных устройства (канала) цифровой обработки
данных. Подобная архитектура каждого блока цифровой обработки
данных необходима для двух различных целей:
3.2] Унифицированные функциональные схемы 51
— обеспечить требуемый уровень надежности решения навигацион-
навигационной задачи;
— обеспечить измерение разности фаз несущей сигналов, принятых
четырьмя различными антеннами, на случай, если с помощью прием-
приемников с подобной архитектурой будет решаться задача определения
параметров ориентации.
Демодуляция сигналов С1 и С2 осуществляется цифровым корреля-
коррелятором с использованием соответствующей ГЛОНАСС/GPS псевдослу-
псевдослучайной последовательности (ПСП), которая создается генераторами
ПСП. ПСП формируется на базе пошагового датчика опорных частот,
использующего девятиразрядный регистр сдвига с обратной связью.
Процесс корреляции происходит следующим образом. Для провер-
проверки сигналы поступают на цифровой умножитель, где перемножаются
с цифровым комплексным сигналом, который генерируется цифровым
синтезатором несущей частоты ГЛОНАСС или GPS. Фактически син-
синтезатор — это третий гетеродин. После умножения дальнейшее пре-
преобразование навигационных сигналов происходит в цифровых сумма-
сумматорах.
После третьего гетеродина несущая частота сигналов эквивалент-
эквивалентна нулю и модулируется только информационными составляющими.
Следующий шаг — это обработка полученных сигналов с помощью
накапливающих сумматоров-интеграторов в блоке DCU. Внутренний
обмен данными между блоками DCU и DDPU происходит по шине
Q-bus. Чтобы достичь требуемого уровня надежности процесса об-
обработки блок DCU состоит из двух идентичных устройств (DCD1 и
DCD2). Каждое из этих устройств включает в себя микропроцессор,
программируемую ROM-память, RAM-память и управляющий процес-
процессор. Каждое устройство обрабатывает сигналы всех подблоков блока
DDPU одновременно.
Каждым устройством DCD решаются следующие задачи:
— поиск сигналов;
— отслеживание сигналов по частоте и задержке;
— синхронизация по символам;
— выборка цифровой информации;
— выборка текущей метки времени;
— вычисление псевдодальности и псевдоскорости;
— предварительное решение навигационной задачи;
— передача с помощью управляющего процессора цифровой инфор-
информации внешним пользователям по стандартному последовательному
интерфейсному каналу для последующей обработки (например для
определения параметров ориентации).
Фактически плата процессора — это многоканальное устройство
цифровой обработки радиочастотных сигналов. Вход процессора — это
однобитовая выборка сигналов ГЛОНАСС, а также сигнал тактовой
частоты и модулирующий сигнал.
После оцифровывания однобитовый сигнал поступает на входы
корреляторов. Корреляторы обеспечивают проверку входных сигналов
согласно эталонной ПСП GPS и ГЛОНАСС и квадратурный перенос
52 Задача позиционирования и определения ориентации [Гл. 3
спектров сигнала в область нулевых частот, а также интегрирование
умноженных сигналов на интервале 1 мс.
Каждый коррелятор может включать несколько идентичных кана-
каналов, содержащих:
— генератор ПСП GPS и ГЛОНАСС;
— управляемый цифровой синтезатор сигналов несущей частоты;
— управляемый цифровой синтезатор тактовой частоты;
— квадратурные умножители;
— выходные сумматоры-интеграторы с буферным регистром для
запоминания результатов интегрирования;
— дискриминатор, работающий по времени задержки;
— интерфейс для обмена данными.
Контур работает в соответствии с управляющим сигналом, который
задается микросхемой цифровой обработки данных. Фактически — это
процессор для работы над числами с фиксированной точкой и раздель-
раздельными шинами данных и адресов.
Программное обеспечение здесь выполняет следующие задачи:
— обработка входных сигналов GPS/ГЛОНАСС, то есть поиск,
синхронизацию в соответствии с задержкой ПСП, частотой и фазой
несущей, демодуляцию, «распаковку» цифровой информации, вычис-
вычисление псевдодальностей и псевдоскоростей;
— решение навигационной задачи;
— обмен данными с внешними устройствами.
В ROM памяти сохраняются альманах системы и результаты реше-
решения навигационной задачи.
Часы реального времени включают генератор сигналов и набор
делителей. Обмен данными с процессором происходит по шине данных.
Описанные выше структуры дают представление о спутниковом
приемнике, предназначенном для решения навигационной задачи. Для
того, чтобы обеспечить работу в режиме определения параметров ори-
ориентации необходимо наличие четырех антенн и четырех малошумящих
антенных усилителей. Каждая антенна с помощью высокочастотного
кабеля должна быть соединена с собственным отдельным разъемом
высокочастотного входа. При этом блок RFU, выполненный по выше
приведенной схеме (рис. 3.9), должен быть повторен четырежды, за
исключением кварцевого генератора, который должен быть единствен-
единственным для приемника.
Подчеркнем еще раз, что для работы в режиме определения пара-
параметров ориентации необходимы следующие изменения в стандартной
схеме приемника:
— наличие четырех антенн и четырех малошумящих антенных
фильтра;
— наличие четырех отдельных высокочастотных входов;
— наличие четырех преобразователей и плат, за исключением квар-
кварцевого генератора, который должен быть единственным для всего при-
приемника;
— наличие дополнительного 32-разрядного процессора для работы
с числами с плавающей точкой;
3.3] Определение положения, скорости и ориентации ЛА 53
— наличие общей шины для 16- и 32-разрядного процессора;
— программное обеспечение, необходимое для определения пара-
параметров ориентации.
3.3. Определение положения, скорости
и ориентации ЛА на основе
/
/
Состав неконтролируемых факторов.
Алгоритмы обработки информации
Процесс определения положения, скорости и ориентации ЛА на
основе данных, поставляемых многоканальным ГЛОНАСС/GPS-npH-
емником, включает в себя фактически две принципиально разные за-
задачи, одна из которых — собственно навигационная, решаемая, как
правило, на основе обработки так называемых кодовых измерений
(псевдодальности и псевдоскорости), определяемых на основе навига-
навигационного послания приемника, достаточно хорошо изучена и описана
в литературе [3.4]. Другая, а именно определение углового положения
и угловых скоростей ЛА в той или иной системе координат, решается
на основе обработки так называемых фазовых измерений, получение
которых связано с необходимостью вычисления разности фаз несущей
частоты на различных антеннах приемника. При этом решение вто-
рой задачи, вообще говоря, невозможно без предварительного решения
первой. В силу сказанного ниже обсуждается решение обеих перечис-
перечисленных задач, прежде всего с точки зрения анализа потенциальной
точности определения положения, скорости и ориентации ЛА в кон-
конкретных условиях. Многообразие неконтролируемых факторов (стоха-
(стохастических, неопределенных, нечетких), присутствующих при решении
обозначенных задач, а также сложный характер их взаимодействия
приводят к неизбежному выводу о том, что наиболее конструктивным
подходом к решению задачи анализа точности определения положения,
скорости и ориентации ЛА на основе ГЛОНАСС/СР8-технологий яв-
является математическое моделирование.
Подчеркнем, что для моделирования процесса определения положе-
положения, скорости и ориентации ЛА необходимо сформировать следующие
математические модели и алгоритмы:
— модель созвездий ГЛОНАСС/GPS;
— модель наблюдаемости спутников ГЛОНАСС/GPS;
— модели движения центра масс и углового движения ЛА;
— модель навигационного послания ГЛОНАСС/GPS;
— модель антенной системы ЛА;
— алгоритм определения положения и скорости ЛА;
— алгоритм определения ориентации ЛА.
Предварительно заметим, что все перечисленные модели и алгорит-
алгоритмы необходимо сформировать с учетом влияния следующих неконтро-
неконтролируемых факторов:
54
Задача позиционирования и определения ориентации
[Гл. 3
— ошибки определения эфемерид навигационных ИСЗ (НИСЗ)
ГЛОНДСС/GPS, возникающих в результате определения эфемерид
НИСЗ средствами наземного комплекса навигации и управления этих
спутниковых систем;
— систематические и случайные ошибки измерений псевдодально-
псевдодальности и псевдоскорости вследствие так называемых ионосферной и тро™
посферной задержек, ухода часов приемника и его внутренних шумов;
— систематические и случайные ошибки измерений разности фаз
несущей частоты, вследствие так называемого эффекта многолучево-
сти, ухода часов приемника и его внутренних шумов;
— систематические и случайные ошибки инициализации системы
вследствие неточного знания начальных условий движения.
В качестве алгоритмов для обработки поступающей от приемной
аппаратуры информации могут быть использованы следующие:
— рекуррентный байесовский алгоритм (модификация фильтра
Калмана);
— метод наименьших квадратов по полной выборке.
Как уже указывалось выше, в самом общем случае задача опреде™
ления положения, скорости и ориентации ЛА с использованием мно-
многоканального ГЛОНАСС/СР8-приемника может быть решена лишь
только в том случае, если ЛА оснащен антенной системой, состоящей,
в минимальном случае, из 4 антенн, расположенных симметрично в го™
ризонтальной плоскости симметрии Л А (рис. 3.11).
Вторая
основная база
Рис. 3.11. Схема расположения антенн
Задача об определении координат и компонент вектора скорости
ЛА решается на основе поступающих на вход приемника псевдодаль-
псевдодальностей и псевдоскоростей от видимых в данный момент НИСЗ систем
GLONASS/GPS и имеющемся альманахе созвездий НИСЗ. При этом,
3.3] Определение положения, скорости и ориентации ЛА 55
как правило, в зависимости от модели приемника, для решения задачи
используется либо метод наименьших квадратов (МНК), либо рекур-
рекуррентный байесовский алгоритм оценивания, использующий бортовую
модель движения ЛА.
Ниже будем полагать, что задача определения ориентации ЛА ре-
решается на основе МНК по полной выборке, использующего в качестве
измерений разность фаз несущей частоты от каждого НИСЗ, сформи-
сформированную на двух основных базах антенной системы. Такое предполо-
предположение позволяет не использовать при решении этой задачи на борту Л А
математическую модель углового движения ЛА или использовать эту
модель в предельно упрощенной форме.
Как уже отмечалось выше, анализ точности решения подобных
задач с учетом различных неконтролируемых факторов производит-
производится путем имитационного моделирования процесса функционирова-
функционирования системы навигации ЛА на основе многоканального приемника
GLONASS/GPS с учетом специфики бортовой реализации алгоритмов,
широкого спектра ошибок измерений, разброса начальных условий
и возможности работы по разным созвездиям НИСЗ. В конечном счете,
характеристика точности может быть получена путем статистического
анализа процесса навигационных определений ориентации ЛА на осно-
основе метода Монте-Карло.
На рис. 3.12. приводится функциональная схема имитационного мо-
моделирования процесса навигации ЛА и определения ориентации ЛА
с помощью многоканального приемника GLONASS/GPS.
Рассмотрим коротко назначение основных блоков этой функцио-
функциональной схемы.
— Блок «Имитационные модели движения НИСЗ GPS &
GLONASS и ЛА» формирует на текущий момент времени «истинные»
координаты и компоненты вектора скорости ц.м. Л А Х*г, углы Эйлера
?J*r (тангаж, рысканье, крен), а также, «истинные» эфемериды навига-
навигационных КА систем GLONASS/GPS — ^ns- При расчете «истинных»
эфемерид навигационных КА и вектора состояния ЛА целесообразно
использовать наиболее полные модели их движения и высокоточный
метод интегрирования систем обыкновенных дифференциальных
уравнений.
— Блок «Вычисление «истинных» положений антенн в инерци-
альной СК» формирует «истинные» координаты антенной системы
в инерциальной СК X^nt на основе использования координатных пре-
преобразований и вектора Xf" и углов Эйлера Elr.
— Блок «Определение видимых НИСЗ GPS & GLONASS» опреде-
определяет видимые антенной системой НИСЗ и формирует список видимых
НИСЗ - XgNS.
— Блок «Формирование массивов «истинных» измерений» пред-
предназначен для моделирования истинных значений измерений дальности
ptr, скорости 5ptr и разности фаз (ptr для видимых НИСЗ с учетом
перечисленных выше неконтролируемых факторов.
— Для видимых НИСЗ блок «Моделирование навигационного сооб-
сообщения GPS & GLONASS» формирует навигационное послание, содер-
56
Задача позиционирования и определения ориентации
[Гл. 3
Имитационные модели движения НИСЗ GPS & GLONASS и ЛА
Моделирование
углового движения
ЛА
Моделирование
(движения ц.м. ЛА
Генератор
эфемерид
НИСЗ
GPS & GLONASS I
Вычисление «истинных»
положений антенн
в инерциальной СК
С о
мз
шибки
Определение
видимых НИСЗ
GPS & GLONASS
с
ошибки
эфемерид
Формирование массивов
«истинных» измерений
Моделирование
i гави гаыиоппо го сообше11 ия
GPS & GLONASS
Бортовое программно-математическое обеспечение w 1гге? / "
Интергрирование опорных
траекторий видимых. НИСЗ
GPS & GLONASS
Вычисление «опорных»
положений антенн
в инерциальной (Ж
Формирование массивов
опорн ых измерен и й
ref *
А л го ритм опреде л с ник
"ориентации
' ЛА
х1;1
Моделирование
опорной траектории
и углового" движения
ЛА'
х:
ref ™ ref.
Р L?P ]
vr
fP ,
Алгоритм определения
положения if скорости
ЛА "
ВЫХОДНЫЕ
ДАННЫЕ
Рис. 3.12. Функциональная схема имитационного моделирования
жащее «загрубленные» (т. е. с учетом ошибок работы наземного ком-
комплекса) эфемериды видимых КА на момент времени, соответствующий
ближайшему получасу — ^ons(~30)-
— Блок «Интегрирование опорных траекторий видимых НИСЗ
GPS & GLONASS» вычисляет опорные координаты видимых НИСЗ на
текущий момент времени — ^qnsM-
— Блок «Моделирование опорной траектории и углового движения
e/L4» на основе априорной информации (начального вектора состояния)
вычисляет опорные координаты и компоненты вектора скорости ЛА
3.3] Определение положения, скорости и ориентации ЛА 57
на текущий момент времени — Хг^\ а кроме того текущую ориента-
ориентацию ЛА — углы Эйлера ЕТ^ . Так же как и в предыдущем блоке, для
расчета опорной траектории целесообразно использовать упрощенную
модель движения и простой метод интегрирования.
— Блок «Вычисление опорных положений антенн в инерциальной
СК» формирует опорные координаты антенной системы в инерциаль-
инерциальной СК X^t на основе использования координатных преобразований
и векторов Xrf и ETf.
— Блок «Формирование массивов опорных измерений» предназна-
предназначен для моделирования опорных значений измерений дальности pref,
скорости Spref и разности фаз (pref для видимых НИСЗ.
— Полученные значения «истинных» и опорных разностей фаз для
всех НИСЗ используются для определения текущей ориентации ЛА —
углов Эйлера Е* блоком «Алгоритм определения ориентации целевого
ЛА». Полученная оценка углов Эйлера E*s используется в дальнейшем
блоком «Моделирование опорной траектории и узлового движения це-
целевого ЛА» как опорная характеристика ориентации Л А.
— Полученные значения «истинных» и опорных значений дальне™
сти и скорости для всех НИСЗ используются для определения оцен™
ки координат и компонент вектора скорости ЛА — вектора X* бло-
блоком «Алгоритм определения положения и скорости ЛА». Полученная
оценка X* используется в дальнейшем блоком «Моделирование опорной
траектории и углового движения ЛА» в качестве опорного положе-
положения ЛА.
Перейдем теперь к описанию используемых математических моде™
лей движения НИСЗ систем ГЛОНАСС/GPS. Как уже отмечалось вы-
выше, при имитационном моделировании используются два вида моделей
движения НИСЗ систем GPS & GLONASS. Первый вид моделей ис-
используется для моделирования «истинного» движения НИСЗ, а второй
можно рассматривать как «бортовые» модели, входящие в состав ПМО
бортовой интегрированной системы навигации и наведения маневрен-
маневренного ЛА.
Имитационная математическая модель движения НИСЗ, позволяю™
щая сформировать эфемериды этих КА с необходимой точностью,
включает учет следующих возмущающих воздействий:
— нецентральность гравитационного поля Земли с точностью до
гармоник 8 порядка и степени включительно;
— гравитационное притяжение Луны и Солнца;
— аэродинамическое сопротивление атмосферы;
— давление солнечного света.
Для интегрирования систем дифференциальных уравнений движе™
ния НИСЗ может быть рекомендован высокоточный вложенный метод
Дормана^Принса 5D) с автоматическим контролем локальной погреш-
погрешности и длины шага интегрирования [3.6]. Дальнейшее использование
сформированных эфемерид может быть реализовано, например путем
полиномиальной Чебышевской аппроксимации.
58 Задача позиционирования и определения ориентации [Гл. 3
«Бортовая» модель движения НИСЗ может быть реализована с ис-
использованием существенно более простой модели движения с учетом
лишь
— нецентральности гравитационного поля Земли с точностью до
гармоник 2 порядка и степени включительно;
— гравитационного притяжения Луны и Солнца.
При этом для интегрирования систем дифференциальных уравне-
уравнений движения НИСЗ может быть рекомендован стандартный метод
Рунга-Кутты (правило 2/6) с постоянным шагом интегрирования.
В качестве начальных условий интегрирования для «бортовой» мо-
модели движения НИСЗ необходимо использовать «загрубленные» эфе-
эфемериды «истинных» НИСЗ, полученные на основе имитационной моде™
ли, на момент времени, соответствующий ближайшему получасу. «За-
грубление» реализовывается на основе предположения о том, что ошиб-
ошибки эфемерид подчиняются нормальному закону распределения, с ко-
ковариационной матрицей характеризующейся следующими свойствами:
СКО ошибки эфемерид НИСЗ по радиусу орбиты, нормали к орбите
и вдоль орбиты (более подробно см. ниже) определяются следующими
значениями:
о> = сг| = ап = 10 м; о> = {j| = а^ = 0,05 м/с. C-1)
Математическая модель движения ЛА, на борту которого установ-
установлен многоканальный навигационный приемник, также включает два
типа моделей: модель «истинного» движения, используемая при фор-
формировании истинной траектории ЛА, включая положение, скорость
и ориентацию ЛА и «бортовую» модель, использующуюся в ПМО бор-
бортовой интегрированной системы навигации и наведения.
Модель «истинного» движения представляет собой максималь-
максимально полную систему дифференциальных уравнений пространственного
движения Л А в связанной и географической системах координат (СК).
Такие модели хорошо известны и описаны в литературе [3.6]. Специ-
Специфика конкретного ЛА определяется в соответствующем наборе аэро-
аэродинамических и массово-инерциальных характеристик ЛА. Различные
виды «бортовых» моделей ЛА подробно приведены ниже, в главе, по-
посвященной алгоритмическому обеспечению интегрированных систем.
При формировании ПМО бортовой интегрированной системы, ис-
использующей ГЛОНАСС/СР8~технологии не только для определения
положения и скорости, но и для определения ориентации ЛА, особое
значение приобретает состав систем координат и описание всех воз-
возможных связей между ними, которые необходимо «хранить» в памяти
БЦВМ.
Анализ показывает, что минимально необходимый для бортовой
реализации «набор» должен содержать следующие системы координат
(рис. 3.13).
— 2000.0 инерциальная система координат (IF2000).
Начало отсчета IF 2000 находится в центре масс Земли. Основная
плоскость — средний экватор на 0h00m00s 1 января 2000 г. (эпоха
3.3]
Определение положения, скорости и ориентации Л А
59
J 2000.0). Ось Xif направлена в среднюю на эпоху точку весеннего
равноденствия. Ось Z\$ направлена по оси вращения Земли, соответ-
соответствующей Международному Условному началу на 1900-1905 г. Ось Yip
дополняет систему координат до правой.
Рис. 3.13
— Земная Связанная система координат (UGF).
Начало отсчета UGF находится в центре масс Земли. Ось -Zugf на-
направлена по оси вращения Земли, соответствующей Международному
Условному началу (МУН) на 1900-1905 г. Ось Xugf проходит через
Гринвичский меридиан, соответствующий Международному Условно-
Условному началу. Ось Yugf дополняет систему координат до правой.
— Орбитальная система координат (OF).
Начала отсчета OF находится в центре масс ЛА. Ось Xqf направле-
направлена по радиус-вектору Л А (так называемая ось R). Ось Zq^ направлена
по вектору моменту количества движения Л А (так называемая ось N).
Ось Vof дополняет систему координат до правой (так называемая
ось L).
— Связанная система координат (BF).
Начала отсчета BF находится в центре масс Л А. Оси BF (Хо, Уо?
Zq) являются осями симметрии Л А.
Координаты антенн задаются в связанной системе координат. Для
определения видимых НИСЗ и расчета векторов дальностей и произ-
производных дальностей требуется пересчитать координаты и компоненты
вектора скорости каждой антенны в инерциальную систему коорди-
координат. Для этого приведем соотношения, описывающие переход между
используемыми СК.
60 Задача позиционирования и определения ориентации [Гл. 3
Введем матрицы-операторы вращения вокруг каждой из осей на
некоторый угол «а»:
10 0 \ /cos (а) 0 -sin (а)
Rx(a) = | 0 cos (а) sin (а) , Ry{a) = I 0 1 0
0 — sin (а) cos (а) / \ sin (а) 0 cos (а)
cos (а) sin (а) 0
Rz{a) = | — sin (a) cos (а) 0
0 0 1
Тогда матрица перехода от инерциальной к гринвичской СК
записывается следующим образом:
AfFGF = RZ(GST), C.2)
где GST — гринвичское звездное время.
Матрица перехода от инерциальной к орбитальной СК ^4fpF запи-
записывается следующим образом:
А?/ = Rx(u) х Ry(i) x RZ(U), C.3)
где О, г, и — долгота восходящего узла, наклонение и аргумент широ-
широты ЛА.
Матрица перехода от орбитальной к связанной СК А^? записыва-
записывается следующим образом:
^о! = Rx(l) х RyW x Rz(#) х Лж(тг) х Дг(тг/2), C.4)
где #, Ф, 7 — Эйлеровы углы ориентации Л А.
Тогда координаты антенны в инерциальной СК будут записаны
следующим образом:
RlF = (ABF x AOF)T R° + R C 5)
где R*lnt — координаты антенны в связанной СК; Rs — координаты ц.м.
ЛА.
Вектор скорости антенны в инерциальной СК будет записан сле-
следующим образом:
т
i/IF _ /iBF 4OF pO ,v
где ^nt — координаты антенны в связанной СК; Vs — вектор скорости
ц.м. ЛА.
Полный вектор состояния антенны в инерциальной СК
C.7)
3.3] Определение положения, скорости и ориентации ЛА 61
Перейдем теперь к описанию математических моделей измерений,
реализуемых при данном способе решения задачи навигации и опреде™
ления ориентации. Аналогично тому, как это было сделано при форми-
формировании моделей движения, здесь также существует два типа моделей:
модели «истинных» измерений и «бортовые» модели, используемые
непосредственно для обработки информации.
При имитационном моделировании используются две модели изме-
измерительного канала.
Модель «истинных» измерений, или иными словами имитационная
модель, реализуется следующими соотношениями.
Измерение дальности.
л*г //Otr Otr \ ( J?tr Otr "ill1/2 i Xchr i rion ¦ (o q\
P = U^NS ~ #antj * l^NS - ^antj] + dp + dp + Vp, l^8)
где
ptr — «истинное» значение дальности между антенной ЛА и НИСЗ;
R^s — «истинный» радиус-вектор НИСЗ;
^ant — «истинный» радиус-вектор антенны в инерциальной СК;
jchr — систематическая ошибка, вызванная разностью временных
шкал НИСЗ и приемника;
jion _ систематическая ошибка, обусловленная ионосферной за™
держкой сигнала;
Tfp — случайная аддитивная ошибка, обусловленная внутренними
шумами приемника.
Более подробные математические модели перечисленных система-
систематических ошибок приведены в параграфе 3.4.
Измерение производном дальности.
где
5ptr — «истинное» значение производной дальности между антен-
антенной ЛА и НИСЗ;
VJ5s — «истинный» вектор скорости НИСЗ;
^ant — «истинный» вектор скорости антенны Л А в инерциальной
СК;
Рдг — единичный вектор в направлении «истинной» дальности меж-
между антенной ЛА и НИСЗ;
6s/p — систематическая ошибка измерений производной дальности;
VSp — случайная аддитивная ошибка, обусловленная внутренними
шумами приемника.
Измерение разности фаз.
На рис. 3.14 представлена принципиальная схема измерений разно-
разности фаз несущей частоты сигнала НИСЗ, находящегося в зоне видимо-
видимости обеих антенн аппаратуры спутниковой навигации (АСН) ЛА. Здесь
т — полное число длин волн несущей частоты в разности фаз сигнала
k-го НИСЗ, принятого первой и второй антеннами и-ш базы (г/ — не-
неопределенный целочисленный параметр); А^ — измеренная разность
62
Задача позиционирования и определения ориентации
[Гл. 3
Измеряемая разность фаз Лср НИСЗ
Неопределенные
целочисленные
параметры
Антенна 1
о
Антенна 2
Направление на НИСЗ
Рис. 3.14. Потенциальная схема измерений разности фаз
фазы сигнала НИСЗ; 1% — единичный вектор линии визирования от
объекта на НИСЗ. Эти измерения позволяют с сантиметровой точно-
точностью определять значения проекций антенной базы на направления
визирования видимых НИСЗ, что, в конечном счете, и обеспечивает
определение ориентации объекта в пространстве.
Непосредственно приемник измеряет не полные значения проекций,
а лишь доли их, получающиеся после вычитания целого числа длин
волн несущей частоты. Полные же значения проекций определяются
алгоритмическим путем, базирующимся на использовании избыточ-
ности информации за счет большого числа видимых НИСЗ, и/или
априорной информации инерциальной системы самого объекта.
Таким образом в качестве измеренного значения разности фаз на
основных базах антенной системы (рис. 3.14) будем рассматривать эк™
Бивалентную линейную величину
Alf =
(ЗЛО)
где
А1^г, А1|г — «истинные» значения разности фаз на первой и второй
базах;
B\r, Bf — «истинные» векторы первой и второй базы, пересчитан™
ные в инерциальную систему координат;
Pir°5 Рзг° — единичные векторы в направлении «истинных» дально-
дальностей между 1 и 3 антенной и НИСЗ;
6^ — систематическая ошибка, обусловленная эффектом многократ-
многократного переотражения сигнала (многолучевостью) [3.4].
3.3] Определение положения, скорости и ориентации ЛА 63
Систематическая ошибка, вызванная многолучевостью принимае-
принимаемого ГЛОНДСС/GPS приемником сигнала, 6^ имеет коэффициент
корреляции, зависящий от разности углов восхождения над местным
горизонтом НИСЗ по которым последовательно производятся измере-
измерения:
K8ipi = cos {(fi - (р^г) , C.11)
где
Ч>% — угол восхождения НИСЗ, по которому производится измере-
измерение,
(fi—i — угол восхождения НИСЗ, по которому производилось преды-
предыдущее измерение,
rj(p — случайная аддитивная ошибка, обусловленная внутренними
шумами приемника.
Бортовые модели, используемые для обработки информации, реа-
реализуется следующими соотношениями.
Измерение дальности:
^ref _ / / oref oref \ / oref oref \ \г/2 /о 19\
где
pref _ ОПОрНОе значение дальности между антенной ЛА и НИСЗ;
^ns ~~ опорный радиус-вектор НИСЗ;
^arft — опорный радиус-вектор антенны в инерциальной СК.
Жзмерение производной дальности:
(W-v^),Psrf), C.13)
где
Spref — опорное значение производной дальности между антенной
ЛА и НИСЗ;
V^|f — опорный вектор скорости НИСЗ;
^ant — опорный вектор скорости антенны ЛА в инерциальной СК;
Ро — единичный вектор в направлении опорной дальности между
антенной ЛА и НИСЗ.
Жзмерение разности фаз:
В качестве измеренного значения разности фаз на основных базах
антенной системы Bi и В2 будем рассматривать эквивалентную линей-
линейную величину
Alf =(Bf, pf°), C.14)
Alf =(Bf, pf°), C.15)
где
Al^ef, AI^ef — опорные разности фаз на первой и второй базах;
BJef, BT2f — опорные векторы первой и второй базы;
р\ , Рз — единичные векторы в направлении опорных дально-
дальностей между 1 и 3 антенной и НИСЗ.
64 Задача позиционирования и определения ориентации [Гл. 3
В зависимости от типа используемого приемника для обработки
поступающей информации могут быть использованы два вида алго-
алгоритмов: рекуррентный байесовский алгоритм, базирующийся на мо-
модификации фильтра Калмана, либо традиционный метод наименьших
квадратов, работающий по полной выборке измерений.
В первом случае целесообразно использовать так называемую «ска™
лярную» модификацию фильтра Калмана, особенность которой состо-
ит в том, что компоненты вектора измерений обрабатываются пооче-
редно и тем самым удается избежать использования операции обраще-
ния матрицы. Процесс функционирования «скалярной» модификации
фильтра Калмана удобно представить в виде следующей схемы:
Цикл j = 1, . . . , Ns, где Ns — число сеансов определения координат
и компонент вектора скорости.
Прогноз ковариационной матрицы Pj
Р* = #jii_1Pj_1#Tj._1 + KAW, C.16)
где <&jj—i фундаментальная матрица системы на j сеанс навигацион-
навигационных определений.
Прогноз вектора состояния ЛА XJ — интегрирование ДУ движе-
движения ц.м. ЛА до момента времени tj.
Цикл г = 1, . . . , N, где N — число видимых НИСЗ.
Вычисление опорной дальности до г-го НИСЗ р\ , матрицы наблю-
наблюдаемости дальности Hrpef
Hf=(-p?\0\l\0), C.17)
где ~рf — единичный вектор в направлении дальности до г-го НИСЗ.
Вычисление приращения вектора состояния АХ:
р* Tjref
АХ = -. j " . . C.18)
Вычисление апостериорной ковариационной матрицы
Рг =
р;н?(р;н?
Вычисление вектора состояния Ху.
Х+ = XT + АХ. C.20)
Вычисление производной дальности по направлению 5р]е{, матрицы
наблюдаемости для скоростей Ще^
0 j l), C.21,
3.4] Модели ошибок кодовых измерений систем GPS/ГЛОНАСС 65
где Ri,Vi — положение и скорость г-го НИСЗ в инерциальной СК, R,
V — положение и скорость ЛА в инерциальной СК,
Далее аналогично предыдущему вычисляются приращение вектора
состояния ДХ, матрица Р и новый вектор состояния Xj по формулам,
приведенным выше.
Второй вид алгоритмов — метод наименьших квадратов по полной
выборке — является традиционным методом обработки траекторных
измерений [3.6], где в качестве массива измерений выступает совокуп-
совокупность дальностей и производных дальностей по направлению до каждо-
каждого видимого НИСЗ. Матрицы наблюдаемости для каждого измерения
рассчитываются по формулам, приведенным выше.
Для определения ориентации Л А при помощи многоканального при-
приемника систем GLONASS&GPS также может быть рекомендован метод
наименьших квадратов по полной выборке [3.6]. Здесь необходимо от-
отметить лишь следующие особенности реализации данного алгоритма:
— в качестве массива измерений используется совокупность значе-
значений разностей фаз на двух главных антенных базах до каждого из
видимых НИСЗ;
— матрицы наблюдаемости для каждого измерения определяются
численно в силу сложности соотношений, связывающих измеряемые
и оцениваемые параметры.
3.4. Модели ошибок кодовых измерений систем
GPS/ГЛОНАСС
В процессе проведения кодовых навигационных измерений прием-
приемник решает задачу определения величин псевдодальностей до каждого
из НИСЗ систем GPS/ГЛОНАСС. Под временной псевдодальностью
понимается величина ^, определяемая формулой [3.2, 3.3]:
U = tnPii - t^i [с], C.22)
где i — номер наблюдаемого НИСЗ;
tnp,i — момент приема навигационного сигнала от г-го НИСЗ;
^изл,г — момент излучения навигационного сигнала г-м НИСЗ.
Метрической псевдодальностью называется величина Z{, определя-
определяемая как произведение t{ на скорость распространения световых волн
в вакууме [3.2, 3.3]:
Zi = cU [м], C.23)
где с = 299 792 458 м/с.
Псевдодальность вводится как мера дальности от рассматриваемого
НИСЗ до принимающей антенны приемника, но, строго говоря, не
является таковой, так как процесс кодовых измерений сопровождается
рядом погрешностей, которые в целом могут быть разделены на сле-
следующие группы:
— погрешности, вносимые бортовой аппаратурой НИСЗ;
— погрешности, накапливающиеся в процессе распространения на-
навигационного радиосигнала в атмосфере;
5 Управление и наведение
66 Задача позиционирования и определения ориентации [Гл. 3
— погрешности, вносимые навигационной аппаратурой потреби-
потребителя.
С целью параметризации модели псевдодальности C.22) введем по-
понятие истинного времени распространения радиосигнала tpacnP)i, рав-
равного разности моментов приема и излучения навигационного радиосиг™
нала в единой шкале времени, например в шкале системного времени
спутниковой навигационной системы (СНС):
, . _ ,снс /о 24)
^распр,г — fcpacnp,i* уо.АЧ)
(Здесь и далее верхний индекс относится к используемой шкале вре-
времени.)
В формуле C.22) отсчеты ?изл,г? очевидно, производятся по бортовой
шкале времени НИСЗ, а отсчеты ?Пр,г — п0 шкале времени приемника.
Таким образом
,нисз,г _ ,снс ЛЛ
где t^3^ — момент излучения навигационного радиосигнала i-м НИСЗ
по системной шкале времени СНС;
.НИСЗ,г
еизл i — момент излучения навигационного радиосигнала г-м
НИСЗ по бортовой шкале времени i~ro НИСЗ;
{ | tm3n i 'г | — расхождение между бортовой шкалой времени г-го
НИСЗ и системной шкалой времени СНС в момент времени ?изл i
Далее, для момента приема навигационного радиосигнала имеем
#нап _ ,снс , д ffHAn\ /« 9п\
где ^пр*? — момент приема навигационного радиосигнала от г-го НИСЗ
по системной шкале времени СНС;
tnpi^ — момент приема навигационного радиосигнала от г-го НИСЗ
по шкале времени приемника;
^т (^np^i1) ~~ расхождение между шкалой времени приемника и си™
стемной шкалой времени СНС в момент времени t^j1.
Таким образом для истинного времени распространения радиосиг-
нала t~™P,i получаем
fCHC _ *СНС _ «СНС _ ,НАП _ ,НИСЗ,г _ д /fHAn\ , AT ЛНИСЗ,Л
^распр,* — Lnp,i Lm3n}i ~~ Lnp,i 6изл,г 1ЛТ \6пр,г / ' 1Л1г ^6изл,г J "
C.27)
Заметим, что в качестве момента приема радионавигационного сиг-
сигнала t^f1 в приемнике принимается значение временной метки форми™
руемой в приемнике псевдослучайной последовательности, в окрестно-
окрестности которой произведено измерение. В общем случае положение данной
временной метки не соответствует истинному моменту регистрации на™
вигационного радиосигнала, что обуславливает введение погрешности
3.4] Модели ошибок кодовых измерений систем GPS/ГЛОНАСС 67
регистрации сигнала:
НАП #НАП
C.28)
где t^f1 — значение момента времени приема навигационного радио-
радиосигнала, сформированное приемником;
^пр ? — истинное значение момента времени приема (регистрации)
навигационного радиосигнала;
^Tper,i — погрешность регистрации радиосигнала от г-го НИСЗ.
Окончательное выражение для ?р^пР,г принимает вид:
,СНС _ *НАП _ ,НИСЗ,г _ л /,НАП\ , Arp /,НИСЗ,гх _
''распр,? — Lnp,i 1шзлу1 ^T\Lnp,i ) ' Ukl П6изл,г / ~~
np,i )
Введем понятие истинной псевдодальности tmCTji. Под истинной
псевдодальностью tmCT^ понимается истинное время распространения
навигационного радиосигнала от г-го НИСЗ в том случае, если бы
радиосигнал распространялся в вакууме. Иными словами, tMCT^ есть
истинное время распространения радиосигнала при отсутствии учета
погрешностей, накапливающихся при прохождении радиосигнала че-
через атмосферу. Связь между ъ^^\ и ?р^„р i может быть задана в виде
*paHcnP,i = *Sm + А^ион + АТтроп + АТМЛ, C.30)
где АТИОН — погрешность, вызванная ионосферной задержкой сигнала;
АТтроп — погрешность, вызванная тропосферной задержкой сиг-
сигнала;
Д^мл — погрешность, вызванная эффектом многолучевости (эф-
(эффект многократного переотражения навигационного радиосигнала от
естественных препятствий, находящихся в непосредственной близости
от принимающей антенны приемника).
Таким образом выражение для t^JJ^ может быть переписано в виде
или
*СНС _ ТНАП _ ,HMC3,i , Агр ЛНИСЗ,Л _ дгтт _
сист,г "~ Спр,г Сизл,г ~^ ?Л1 % ^Сизл,г J Oki ион
-Дт(^рАгп)-ДТреГ1г. C.32)
Вводя обозначения для каждой из групп погрешностей, получаем
J.CHC ТНАП jHI4C3,t . дгр АЛ1 дпп /о оо\
6ист,г ~ 6пр,г 6изл,г ' НИСЗ ^Л1атм ^А1НАП? {о.^чУ)
где АТдисз = ^Т{ (^изл % '*) — погрешность, вносимая бортовой аппа-
аппаратурой НИСЗ;
68 Задача позиционирования и определения ориентации [Гл. 3
АТатм = АТИОН + АТтроп + АТМЛ — погрешность, накапливающая™
ся в процессе распространения навигационного радиосигнала в атмо-
сфере;
АТнап = Ar(t^p j1) + Arperj — погрешность, вносимая навигаци-
навигационной аппаратурой потребителя.
Для метрической истинной псевдодальности имеем
i — С [tnpi — tm3Jl i 1 + CHI НИСЗ — CZ\ 1атм — CZ1I НАП- (O.O4J
Рассмотрим подробнее каждую из перечисленных погрешностей.
Погрешность, вносимая бортовом аппаратурой НЖСЗ.По-
НЖСЗ.Погрешность бортовой аппаратуры НИСЗ, обуславливающая расхожде-
расхождение между бортовой шкалой времени НИСЗ и системной шкалой вре-
времени СНС, может быть записана в виде
АТНИсз,г = ДТдр,< + ATpejlji + ATrp3)i, C.35)
где ДТдр^ — погрешность, вызванная уходом бортовых часов НИСЗ
вследствие дрейфа бортового стандарта частоты НИСЗ;
ATpejl)j — погрешность, вызванная неучетом релятивистского эф-
эффекта замедления хода бортовых часов НИСЗ в системе отсчета, свя-
связанной с навигационной аппаратурой потребителя;
ATrp3)i — погрешность, вызванная эффектом групповой задержки
навигационного радиосигнала в бортовой аппаратуре НИСЗ. Группо-
Групповая задержка радиосигнала в бортовой аппаратуре НИСЗ определяется
как задержка между излучаемым радиосигналом и выходным сигна-
сигналом бортового стандарта частоты.
Величина ухода бортовых часов НИСЗ зависит от интервала вре-
времени, прошедшего с момента синхронизации шкалы времени данного
НИСЗ и системной шкалы времени СНС. В качестве модели
может быть использовано квадратичное приближение [3.2]
А"Г „ „L ^ /^СНС *СНС\ , ^ /.СНС *СНС\2
где «о, oi, «2 — коэффициенты квадратичной модели ухода бортовых
часов НИСЗ;
^оп i — значение некоторого опорного момента времени, для кото-
которого известна величина ухода бортовых часов НИСЗ.
Величина релятивистской погрешности определяется моделью [3.2]
,* = Fpejl^esln(EK), C.37)
где Fpen = ^b^i = ^4,442 807633 • 10^10 с/м1/2 — константа для вы-
с
числения релятивистской погрешности;
ц = 3 986 005 • 108 м3/с2 — гравитационная постоянная Земли;
а — большая полуось орбиты НИСЗ;
е — эксцентриситет орбиты НИСЗ;
Ек — эксцентрическая аномалия НИСЗ на момент времени ^изл i*
3.4] Модели ошибок кодовых измерений систем GPS/ГЛОНАСС 69
Погрешность, накапливающаяся при распространении на-
навигационного радиосигнала в атмосфере Земли.Как указыва-
лось выше, погрешность АТатм определяется формулой
ДТатм = ДТИОН + ДТтроп + АТМЛ.
Ионосферная составляющая погрешности АТМОН обусловлена иска-
искажениями прямолинейности пути распространения радиосигнала, а так™
же изменением скорости распространения радиосигнала в пределах
ионосферы. Данный эффект объясняется тем, что ионосфера является
диспергирующей средой для радиосигнала, в связи с чем скорость
распространения радиосигнала в среде начинает зависеть от часто™
ты сигнала. В настоящее время известны такие методы определения
и учета ионосферной погрешности, как моделирование ионосферной
задержки и метод двухчастотных измерений [3.4].
В качестве примера первого подхода к решению задачи определения
и учета ионосферной задержки рассмотрим модель Клобухара [3.4, 3.5].
Определяются значения ионосферной широты (рш и ионосферной
долготы Аи:
<Р« = №ап + (щщ - 0,022^ cos (Az), C.38)
, ( 0,0137 п поо\ sin (Az) , ,
+ {ei + o,ii ~ °'022J ^Ш' C'39)
где Az — азимутальный угол рассматриваемого НИСЗ, [рад];
El — угол возвышения рассматриваемого НИСЗ, [рад];
^нап и ^нап — географические широта и долгота приемника соот-
соответственно, [рад].
Определяется значение геометрической широты срт точки пересе™
чения ионосферы:
(Аи-1,617). C.40)
Определяется местное время для точки в ионосфере:
ТСНС _ л Ч9 104л ..СНС (ЧЛ1\
Вычисляются вспомогательные величины F, PER^ AMP и ж, а
также значение ионосферной задержки
F = 1 + 16- @,53 -Elf, C.42)
PER = b0 + b1iPm + Ъ2<р2т + b^m, C.43)
AMP = a0 + ацрт + a2(p2m + a3^, C.44)
TM - 50400
x =
70 Задача позиционирования и определения ориентации [Гл. 3
где ад, ai, с&2, «з, &о> &ъ ^2, ^з — коэффициенты ионосферной модели
Клобухара.
АТИОН = F U • 1(Г9 + AMP Л - ^ + |!) V C.46)
Метод двухчастотных измерений, в свою очередь, основан на том
факте, что, в силу зависимости скорости распространения радиосигна-
радиосигнала в ионосфере от его частоты, ионосферные задержки метрических
псевдодальностей, измеренные на двух различных частотах /i и /2
связаны соотношением [3.4]:
Таким образом величина ионосферной погрешности псевдодально™
сти, измеряемой на частоте /i, может быть вычислена по формуле
AT • = Zi^2^ ~ Zi^f^ I II _ i | C 48)
v/i ) '
где Zi(fi) и Zi(f2) — величины метрической псевдодальности, измерен-
измеренные на частотах /i и /2 соответственно.
Тропосферная составляющая погрешности АТтроп обусловлена на-
наличием тропосферной рефракции навигационного радиосигнала ввиду
неоднородности показателя преломления среды в пределах тропосфе-
тропосферы. Метрическая запись тропосферной задержки радиосигнала может
быть записана как [3.4]
где п — показатель преломления среды распространения радиоволн;
^троп — безразмерный параметр, характеризующий состояние тро-
тропосферы;
^троп — протяженность тропосферного участка атмосферы, [м].
Величины /'Строп и п в общем случае зависят от таких показателей,
как температура воздуха, атмосферное давление и давление водяных
паров. Опишем модель Хопфилда для определения тропосферной за-
задержки [3.4]
= Kd_
°ТР°П sin (л/ЕР + 1,904 -10~3) ' sin (л/ЕР + 0,6854- 10 )'
AzTpon = ^ + ^^, C.50)
где
1О^4р 40136 + 148,72Та
= 1,55208-10 Ра Т + 27316 »
8307,2р.
Та + 273,16 + {Та + 273Д6J
3.5] Дифференциальные режимы спутниковых приемников 71
Та — температура воздуха, [°С];
Ра — атмосферное давление, [Па];
Pv — давление водяных паров, [Па].
Погрешности, вызванные эффектом многолучевости, т. е. задержки
навигационного радиосигнала, обусловленные переотражением радио-
радиосигнала от препятствий, находящихся в непосредственной близости от
принимающей антенны приемника, в общем случае трудно поддаются
параметризации. Однако, ввиду систематического характера данных
ошибок в рамках рассматриваемого сеанса навигационных измерений,
погрешности от многолучевости могут быть учтены путем построения
взаимной корреляционной функции по результатам кодовых измерений
от различных НИСЗ и поиска корреляционного минимума в пределах
наблюдаемых НИСЗ.
Погрешность, вносимая навигационном аппаратурой по-
потребителя. Погрешность ДТнаш вносимая навигационной аппарату™
рой потребителя, может быть задана линейной моделью ухода часов
приемника в виде
дгт7 /*НАП\ о . о /^НАП »НАП\ , л „_ (о ко\
Ы НАП [tnpii J = РО + Pi \tnPii - *оп J + Атрег,г, F.06)
где /Зо? /5i — коэффициенты линейной модели ухода часов приемника;
^оп^П — значение некоторого опорного момента времени, для кото-
которого известна величина ухода часов приемника.
Данная погрешность подлежит уточнению в процессе решения на-
навигационной задачи потребителя.
3.5. Дифференциальные режимы использования
спутниковых приемников глобальных
навигационных систем
Несмотря на относительно высокую точность спутниковых систем
навигации, в ряде приложений этой точности оказывается недоста™
точно для надежного и безопасного решения специфических задач.
В практике использования автоматических маневренных ЛА к таким
задачам относятся прежде всего задачи наведения на заданную точку
(цель). В зависимости от условий поставленной задачи координаты Л А
в этом случае должны быть определены с погрешностью от десятков
сантиметров до нескольких метров.
Существенное повышение точности навигационных определений
обеспечивается при использовании дифференциального режима (ДР)
измерений. Дифференциальный режим работы СНС позволяет потре-
потребителям не только снизить погрешности местоопределения до метрово-
метрового или даже дециметрового уровня, но и контролировать доступность
сигналов спутников и целостность системы.
Дифференциальный режим базируется на хорошо известном в на-
навигации подходе, при котором списываются погрешности навигацион-
навигационных определений в точках, координаты которых известны с высокой
точностью. ДР в СНС во многом аналогичен ДР в известных радиона-
72 Задача позиционирования и определения ориентации [Гл. 3
вигационных системах, например «Омега», где сильно коррелирован-
коррелированные (практически постоянные на значительной территории) погреш-
погрешности измерений устраняются вводом поправок от специальных кон-
контрольных станций (КС), точно привязанных к координатам с помощью
геодезических измерений.
Многочисленные исследования показали, что в структуре погреш-
погрешностей СНС имеются такие, которые слабо меняются внутри достаточ-
достаточно обширных областей. Результаты этих исследований подсказали путь
к повышению точности СНС: нахождение систематических погрешно-
погрешностей на КС и использование их как поправок в аппаратуре потребите-
потребителя (АН). К этим погрешностям относятся такие, которые вызываются
неточностями, вносимыми информацией о местоположении спутника,
его бортовым опорным генератором, искажениями сигнала в атмосфере
(см. таблицу 4.1). Действительно, учитывая большую высоту спутников
(около 20000 км), сигналы от них до корректирующей станции и до
потребителя, удаленного от КС на десятки и даже сотни километров,
проходят почти один и тот же путь через одни и те же слои атмосфе-
атмосферы. Искажения сигналов будут одинаковыми, что и позволяет приме-
применить принцип дифференциальной коррекции. При этом оказывается
возможным скомпенсировать не только погрешности, обусловленные
естественными причинами, но и влияние искусственного загрубления
точности, если таковое будет создаваться, например, как ранее (до мая
2000 года) кодом S/A (см. ту же таблицу).
Для реализации дифференциального режима СНС дополняется
дифференциальной подсистемой. Она состоит из контрольно-коррек-
контрольно-корректирующей станции, добавленной к наземному сегменту СНС, и разме-
размещенного в бортовой части специального устройства приема и обработки
дифференциальных поправок для спутникового приемника. Диффе-
Дифференциальная подсистема не влияет на работу системы в стандартном
режиме, но позволяет потребителю при необходимости перейти на ра-
работу в ДР.
В основе дифференциального метода определения координат лежит
формирование разности (difference) отсчетов, что и дало методу на-
название. Принцип реализации дифференциального метода поясняется
рис. 3.15, на котором изображено созвездие из четырех навигационных
спутников. Это созвездие выбирается потребителем как оптимальное
для работы в стандартном режиме. Наземная часть дифференциаль-
дифференциальной подсистемы состоит из контрольно-корректирующей станции, ко-
которая содержит точную аппаратуру потребителя геодезического клас-
класса, формирователь корректирующей информации (КИ), вычисляющий
поправки на сильно коррелированные погрешности и формирующий
кадр КИ, а также передатчик КИ. Антенна АП ККС привязывается
на местности с помощью геодезических измерений с точностью до
нескольких сантиметров. На борту потребителя размещаются аппара-
аппаратура приема КИ, декодирующее устройство и устройство ввода КИ
в стандартную АП.
Поправки, рассчитанные ККС, передаются по радиолинии связи
на борт потребителя. Полагается, что систематические погрешности
3.5]
Дифференциальные режимы спутниковых приемников
73
измерений в точке размещения ККС и в ее окрестности (до нескольких
сотен километров) изменяются мало. На этом основании принятые по-
поправки суммируются с показаниями обычного приемника, работающе™
го в стандартном режиме. Полученные величины представляют собой
скорректированные параметры.
НИСЗ-2
НИСЗ-3
НИСЗ-4
Потребитель
ККС
9
Передатчик
Формирователь
КИ
9
Точная
АП
Точные координаты
антенны ККС
Рис. 3.15. Структура дифференциальной подсистемы СНС: ККС — кон-
контрольно-корректирующая станция; АП — аппаратура потребителя (геодези-
(геодезическая); КИ — корректирующая информация
Поскольку ККС могут обеспечить требуемую точность коррекции
в ограниченной области, то для реализации дифференциального ме-
метода на обширных территориях должны быть размещены несколько
таких станций. При этом необходимо решить вопрос о своевременном
переходе АП на прием КИ от очередной станции. Примером реализации
такой сети станций могут служить службы дифференциальных по-
поправок береговой охраны США, береговой службы Норвегии, а также
создающаяся в США для нужд Северной и Центральной Америки
сеть станций в рамках проекта широкозонной системы поддержки GPS
(WAAS — Wide Area Augmentation System).
Конкретную реализацию ДР можно осуществить несколькими спо-
способами. Наиболее простым и наглядным является метод коррекции
координат, однако наиболее широкое применение, в силу ряда причин
описанных ниже, нашел метод коррекции навигационного параметра
(псевдодальности).
74
Задача позиционирования и определения ориентации
[Гл. 3
На рис. 3.16 приведена структурная схема, поясняющая метод кор-
коррекции координат.
ККС
^снс
Потребитель
Аппаратура
потребителя
ПрдКИ
м
Вычислитель!
поправок
\
Модулятор
, 1
Аппаратура
потребителя
Rub
Корректор
координат
/Ащ J
ПрмКИ
Демод
AR
Рис. 3.16. Структурная схема, поясняющая метод коррекции координат:
-4снс — антенны GPS/ГЛОНАСС приемников; Прд КИ, Прм КИ — пере-
передатчик и приемник корректирующей информации; Rkcb, Rkcb — векторы
вычисленных и эталонных координат ККС; A.R — вектор поправок к коорди-
координатам; -Ддп — антенны радиотракта передачи дифференциальных поправок;
Rtik — векторы вычисленных и скорректированных координат ККС
Как следует из названия метода, предполагается, что корректиру-
корректируются координаты потребителя, определенные им по сигналам спут-
спутников в стандартном режиме работы системы. На ККС формируется
КИ путем сопоставления вычисленных в стандартном навигационном
сеансе координат с известными с высокой точностью координатами
фазового центра антенны GPS. Полученные таким образом поправки
к координатам передаются в составе КИ потребителю, который ис-
использует их для уточнения своего местоположения, добавляя поправки
к вычисленным координатам.
Алгоритм работы этого метода может быть описан следующими
соотношениями:
— на ККС формируются разности-поправки к координатам
AR = Дксэ — Яксв; C.54)
— на борту потребителя уточняются координаты
RnK = RnB + ДД. C.55)
Рассмотренный метод реализации ДР сравнительно прост, так как
не изменяет основного алгоритма навигационных определений потре-
потребителя, но у него есть существенный недостаток. Дело в том, что этот
метод применим лишь при одном весьма сильном ограничении — для
реализации этого метода необходимо, чтобы ККС и все потребители КИ
вырабатывали координаты по одному и тому же созвездию спутников.
Реально же потребитель использует для вычисления своих координат
наивыгоднейшее по геометрии созвездие наблюдаемых им спутников.
3.5]
Дифференциальные режимы спутниковых приемников
75
Это созвездие при достаточном удалении от ККС или в силу иных
причин (перекрытие обзора элементами конструкции ЛА, особенности
алгоритмов выбора созвездий в приемнике и др.) может не совпадать
с тем, для которого выработаны поправки на ККС.
Преодолеть отмеченный недостаток можно при использовании вто-
второго метода реализации ДР — метода коррекции навигационного пара-
параметра (псевдодальности), структура которого изображена на рис. 3.17.
сне
Потребитель
ч/А
Аппаратура
потребителя
1
дп
ТТпш
Корректор
координат
<
КИ
Демодулз
Дг,-
ТТГ11П
Рис. 3.17. Структурная схема, поясняющая метод коорекции навигационного
параметра. гИКСг, 7*ВКсг — измеренная и вычисленная псевдодальности от ККС
до г-го спутника; гип %, гВП г — измеренная и вычисленная псевдодальности от
потребителя до i-го спутника; Нксэ — вектор эталонных координат ККС;
-^эф г — эфемериды г-го спутника; Ru — вектор вычисленных координат
потербителя; Аг« — поправка к псевдодальности г-го спутника
Основная идея метода состоит в том, что всем потребителям в зоне
действия ККС сообщается набор поправок к результатам измерений
навигационных параметров (псевдодальностей) до всех видимых спут-
спутников. Такой подход позволяет оставить за потребителем право выбора
оптимального для него созвездия. ККС вычисляет поправки к измеря-
емым псевдодальностям Аг{ до всех видимых ИСЗ. Это достигается
путем сравнения измеренных пседодальностей гмкс{ с вычисленными
rBKCi на основании эфемерид спутников. Получающиеся разности пе-
передаются как КИ потребителям. Каждый потребитель выбирает опти-
оптимальное для себя созвездие и корректирует измеренные им псевдодаль™
ности с помощью принятых поправок, относящихся к используемым им
ИСЗ. Полученные скорректированные псевдодальности используются
для расчета координат потребителя. Таким образом алгоритм данного
метода можно представить в следующем виде:
76 Задача позиционирования и определения ориентации [Гл. 3
— на ККС вычисляются поправки к псевдодальностям
A^i = rBKCi - rMKci; C.56)
— на борту потребителя вычисляются скорректированные псевдо-
псевдодальности
rmi = rHni + Ari5 C.57)
— вычисляются координаты потребителя с использованием не менее
четырех скорректированных псевдодальностей,
[гвпЬ гвп2,. . . , гвпп] =4» Яп, C.58)
гДе ^вкс«5 ^иксг — вычисленная на ККС по эталонным координатам
и измеренная ККС псевдодальности до г-го спутника; rBni, гип« —
вычисленная скорректированная и измеренная потребителем псевдо-
псевдодальности.
Перечисленные выше способы организации ДР не являются един-
единственными, но в настоящее время они нашли наиболее широкое приме-
применение и, кроме того, позволяют наиболее наглядно представить особен-
особенности этого режима работы. Их использование снижает погрешность
измерения координат до 1—5 м, а высоты до 2—7 м (см. уже упоминав-
упоминавшуюся таблицу 4.1).
Как отмечалось выше, ДР способен не только повысить точность ра-
работы СНС, но и обеспечить контроль целостности системы и анализ до-
достоверности передачи КИ. Под целостностью понимается способность
СНС предоставлять потребителю полноценное навигационно-времен-
ное обеспечение. Целостность выражается в вероятности обнаружения
отказа системы и сигнализации об этом в течение заданного интервала
времени. Целостность системы — одно из ключевых понятий. Лишь
системы, обладающие высокой целостностью, способны обеспечить на-
надежное и безопасное выполнение полета или поставленной задачи. Це-
Целостность подразумевает нормальную, штатную работу всех спутников
системы. Неисправные спутники должны быть исключены из рабоче-
рабочего созвездия. В кадрах навигационных сигналов спутников имеются
параметры, характеризующие исправность отдельных подсистем или
интегральную исправность спутника. Однако такая информация за-
закладывается на спутники с Земли не чаще одного раза в 12 часов.
Необходима более оперативная информация о состоянии СНС.
Эта задача решается в приемниках, имеющих сертификацию, спе-
специальной функцией контроля целостности системы (RAIM — Receiver
Autonomous Integrity Monitoring). Однако ДР дает дополнительные
возможности контроля целостности и повышает надежность работы
с приемниками, не имеющими функции RAIM. Контроль целостности
ведется по всем видимым ККС спутникам, и если обнаруживается
нарушение целостности, то по каналам передачи КИ транслируется
соответствующее уведомление, которое потребитель использует при
выборе созвездия спутников.
Помимо целостности системы, потребитель должен быть уверен
в правильности принимаемых поправок. С этой целью контролируется
3.6] Бесплатформенные инерциальные навигационные системы 77
достоверность принимаемой КИ. Для контроля достоверности в поле
передатчика КИ можно расположить вынесенный приемный пункт,
координаты которого определяются заранее специальными точными
геодезическими замерами. Идея контроля достоверности заключается
в том, что на выносном пункте точной геодезической спутниковой аппа-
аппаратурой определяются координаты по сигналам СНС и в них вносятся
поправки на основе принятой КИ. Полученные скорректированные
координаты сравниваются с точно известными и делается вывод о ка-
качестве КИ. Параметры, характеризующие качество КИ, передаются на
ККС, где закладываются в кадр дифференциального сообщения.
3.6. Бесплатформенные инерциальные
навигационные системы (БИНС)
и их использование для решения обсуждаемых
технических задач
3.6.1. Принцип работы и основные унифицированные схе-
схемы БИНС. Как уже отмечалось, перед другими навигационными
системами ИНС имеет такие преимущества как:
— высокая информативность и универсальность применения (ИНС
определяет всю совокупность пилотажно-навигационыых параметров,
необходимых для управления ЛА),
— полная автономность действия,
— высокая помехозащищенность,
— возможность высокоскоростной выдачи информации (до 100 Гц
и выше).
Так называемые бесплатформенные ИНС (БИНС), которые не ис-
пользуют для стабилизации своих инерциальных датчиков таких слож-
сложных и дорогостоящих технических устройств как гиростабилизирован-
ные платформы, особенно интенсивно развивались в последнее время.
К числу потенциальных преимуществ БИНС по сравнению с платфор™
менными ИНС можно отнести:
— меньшие размеры, массу и энергоемкость;
— существенное упрощение механической части системы и ее ком-
компоновки и, как следствие, повышение надежности системы;
— отсутствие ограничений по углам разворота;
— сокращение времени начальной выставки;
— универсальность системы, поскольку переход к определению тех
или иных параметров навигации осуществляется алгоритмически;
— упрощение решения задачи резервирования и контроля работо-
работоспособности системы и ее элементов.
В основе принципа функционирования любой ИНС лежит исполь-
использование законов Ньютона для определения координат, проекций скоро-
скорости и угловой ориентации объекта. Согласно второму закону Ньютона
вектор абсолютного ускорения центра масс материального тела можно
выразить через вектор равнодействующей всех приложенных к телу
78 Задача позиционирования и определения ориентации [Гл. 3
сил F и массу этого тела т:
а = —. C.59)
т
Силу F можно представить в виде суммы двух сил: суммы всех
действующих на тело активных сил FaKT (силы тяги, аэродинамических
сил, сил, создаваемых органами управления и пр.) и сил гравитаци-
гравитационного взаимодействия G тел. С учетом такого представления уравне-
уравнение C.59) примет вид
а= FaKT + G\ C.60)
т
Отношение FaK^T/m^ представляющее собой удельную активную си-
силу, называют кажущимся ускорением и в теории инерциальной нави-
навигации обычно обозначают вектором п [3.8—3.10]. Отношение G/т яв-
является гравитационным ускорением объекта grp(R), определяющегося
геопотенциалом в данной точке, величина которого, в свою очередь,
является функцией геоцентрического радиус-вектора местоположения.
Абсолютное ускорение объекта выражается через вторую производную
геоцентрического радиус-вектора местоположения R:
?? C.61)
dt1
Подставляя соотношения C.60), C.61) в уравнение C.59) с учетом
введенных выше обозначений получим
^ = n + grp(R). C.62)
Полученное векторное уравнение C.62) называется основным урав-
уравнением инерциальной навигации и служит основой для разработки
функциональных алгоритмов всех типов ИНС. Это уравнение позво-
позволяет определять радиус-вектор местоположения R (а следовательно
координаты объекта) и его производные (а следовательно скорости
и ускорения объекта) на основе информации о векторах п и grp(R). Век-
Вектор кажущегося ускорения п может быть измерен тремя ортогонально
расположенными акселерометрами. Гравитационное ускорение grp(R)
обычно задается в виде известной функции от радиуса-вектора R для
конкретного вида используемой модели фигуры Земли.
Представляя уравнение C.62) в форме Коши, можно записать
^ = га + #гр(Я), C.63)
*? = V, C.64)
at
где V — вектор абсолютной скорости движения летательного аппарата.
3.6] Бесплатформенные инерциальные навигационные системы 79
При рассмотрении векторных уравнений C.64, 3.64) в некоторой
системе координат, вращающейся с угловой скоростью О, производные
векторов V и R в можно представить в следующем виде:
М " C.65)
dR dR , o o
где —- и —- — локальные производные от векторов R и 1/, взятые
в базисе, вращающемся с угловой скоростью О. Вектор О абсолютной
угловой скорости координатного трехгранника в общем случае выбира-
выбирается при проектировании системы в соответствии с предъявляемыми
к ней требованиями. Подставив производные C.65) в систему C.64)
получаем
dV „ ,г .
C.66)
dt
Если определять не вектор абсолютной скорости движения Л А V,
а вектор относительной скорости U, то основное уравнение навигации
надо представлять с учетом следующего соотношения:
17 = V - и х Я, C.67)
где и — вектор угловой скорости вращения Земли, модуль которо-
которого равен и = 15,0407 град/час = 7,292116 • 10~5 с, U — вектор,
определяющий скорость движения относительно Земли, V — вектор
абсолютной скорости движения ЛА, R — вектор положения объекта
(геоцентрический радиус-вектор точки места ЛА).
Подставляя это соотношение в C.64), молено записать основное
уравнение инерциальной навигации в форме Коши в следующем виде:
-— = -и х U + n + g,
at
^ = и х R + U,
at
C.68)
где g = grp (R) — и х (и х R) — вектор градиента поля силы тяжести
/ r du A
(при выводе было принято —— = 0, так как вектор угловой скорости
вращения Земли известен с высокой точностью).
Система C.68) позволяет определять местоположение и относитель-
относительную скорость в инерциальной системе координат. Для получения этой
информации во вращающемся базисе необходимо воспользоваться со-
80 Задача позиционирования и определения ориентации [Гл. 3
отношениями C.65), как это было проделано выше. При этом произ-
производная вектора U будет иметь вид
dU JT
где —— — как и ранее, локальная производная от вектора с/, взятая
at
в базисе, вращающемся с угловой скоростью О.
С учетом такого представления локальных производных векторов U
C.69) и R (см. соотношения C.65), второе выражение) основное урав-
уравнение инерциальной навигации можно записать в форме, обеспечи-
обеспечивающей вычисление относительной скорости 17 и местоположения R
в системе координат, вращающейся с угловой скоростью О:
М _ C.70)
^ = (u-Q)x R + U.
Приведенные здесь векторные системы уравнений C.63), C.64),
C.66), C.68), C.70) могут служить основой для синтеза функциональ-
функциональных алгоритмов БИНС различного назначения. Та или иная векторная
форма выбирается для получения скалярного эквивалента функцио-
функциональных алгоритмов, служащего для разработки численных алгорит-
алгоритмов БИНС.
Скалярный вид основного уравнения инерциальной навигации опре-
определяется, прежде всего, выбранным навигационным базисом, т. е. ба-
базисом, в котором определяются основные навигационные параметры —
координаты и проекции скорости. В свою очередь, выбор навигацион-
навигационного базиса определяется типом летательного аппарата, особенностями
его траекторного движения, характером решаемых задач.
Так, в космических приложениях, когда аппарат совершает орби-
орбитальное движение, наиболее удобно вести решение в инерциальной си-
систем координат, и в качестве основы для разработки функциональных
алгоритмов БИНС следует взять векторную систему уравнений C.64).
При этом позиционную информацию получают в форме декартовых
прямоугольных координат, скоростную — в форме проекций абсолют-
абсолютной скорости на выбранные инерциальные оси, а информацию об ори-
ориентации — в виде соответствующей матрицы ориентации или трех углов
ориентации ЛА относительно выбранного базиса.
Для БИНС летательных аппаратов, совершающих движение в ат-
атмосфере Земли (в том числе беспилотных маневренных ЛА), наиболее
часто используются системы координат с базовой плоскостью местного
горизонта и определенной ориентацией горизонтальных осей в азимуте.
Под ориентацией осей в азимуте понимается возможность их ориента-
ориентации либо по странам света, когда две горизонтальных оси направлены
в восточном и северном направлении, либо свободная и полусвободная
ориентация, когда горизонтальные оси, первоначально выставленные
3.6]
Бесплатформенные инерциальные навигационные системы 81
в определенном направлении, в дальнейшем вращаются с определенной
угловой скоростью (Оя = 0 в первом случае и Оя = и sin ip во втором).
При этом позиционную информацию определяют широтой, долготой
и высотой, измеренной на эллипсоиде Красовского СК-42 [3.8] или
на эллипсоиде международной системы WGS-84 (World Geodetic Sys-
System 84) [3.5], скорость определяют проекциями на восточную, северную
и вертикальную оси, если в качестве навигационной системы выбрана
система с ориентацией осей по странам света, или проекциями на оси
горизонтного базиса с иной ориентацией. Ориентация при этом опреде-
определяется углами крена, тангажа и истинного курса.
Обобщенные функциональные схемы БИНС приведены на рисун™
ках 3.18 и 3.19. На рисунке 3.18 показана обобщенная структура си-
системы, работающей в инерциальной системе координат. Информация
Рис. 3.18. Обобщенная блок-схема БИНС, работающей в инерциальной си-
системе координат
Углы
ориентации
Рис. 3.19. Обобщенная блок-схема БИНС, работающей во вращающейся си-
системе координат
с блока гироскопов (БГ) в виде проекций вектора угловой скорости О^
на связанные с ЛА оси используется в алгоритме ориентации (АО) для
формирования матрицы А направляющих косинусов между связан™
ными и инерциальными осями. Данные с блока акселерометров (БА)
в виде проекций вектора кажущегося ускорения пв на связанные с Л А
6 Управление и наведение
82 Задача позиционирования и определения ориентации [Гл. 3
оси в блоке пересчета (БП) пересчитываются к инерциальным осям
с использованием полученной матрицы ориентации. Вычисленные про™
екции кажущегося ускорения на инерциальные оси (полученный век-
вектор rij) передаются в блок решения навигационного алгоритма (НА),
векторная форма которого задана системой C.64). Выходные парамет-
параметры БИНС в этом случае представляются инерциальными декартовы-
декартовыми координатами радиус-вектора местоположения Rj = [X/, У/, ^/]т,
проекциями абсолютной скорости движения V/ = [Vx/? VV/> Vz/]Tj
а также матрицей ориентации ЛА в выбранной инерциальной системе
координат А. Естественно, что при необходимости из матрицы ориен-
ориентации А могут быть получены углы ориентации ЛА относительно осей
инерциальной системы координат.
Вторая типовая схема построения БИНС представлена на рис. 3.19.
Этот вариант реализует алгоритм системы, работающей во вращаю-
вращающейся (наиболее часто — горизонтальной) системе координат.
Как и в предыдущем случае информация с БГ в виде проекций
вектора угловой скорости Од на связанные с Л А оси используется в АО.
Однако на этот раз определяется матрица С направляющих косинусов
между связанными осями и осями, которые вращаются с угловой ско-
скоростью ?Iq. Это приводит к необходимости модифицировать алгоритм
ориентации и привлечь для его реализации вычисленные в НА про-
проекции вектора О<^, что отображено на схеме дополнительной связью.
Информация с БА в виде проекций вектора кажущегося ускорения
пв на связанные с Л А оси передаётся в БП для приведения к нави-
навигационным осям с использованием полученной матрицы ориентации С
Вычисленные проекции (полученный вектор nG) передаются в блок
решения НА, векторная форма которого задается системой C.66) или
системой C.70), в зависимости от вида определяемой скорости. На вы-
выходе БИНС формируется радиус-вектор местоположения Л A Rg, век-
вектор скорости Vq = [Vxg,VyGiVzg], a также углы ориентации ЛА.
В частном случае, когда в качестве навигационного базиса выбран го-
ризонтный ориентированный по странам света трехгранник, на выходе
системы будут сформированы географические координаты радиус-век-
радиус-вектора местоположения Rq = [<р, А, /г], проекции относительной скорости
движения 17с = [С/дт, Ue-> Uz]j а также углы ориентации ЛА в геогра-
географической системе координат — истинный курс ф, тангаж v и крен 7-
В обоих рассмотренных вариантах, которые можно считать типовы-
типовыми, показания акселерометров предварительно приводились к осям на-
навигационного базиса (инерциального или вращающегося). Можно пред-
предложить алгоритмы, когда ведется прямое интегрирование показаний
акселерометров в связанных с ЛА осях. Однако, в этом случае, потре-
потребуется большая скорость обработки навигационных данных, посколь-
поскольку угловое движение беспилотных маневренных ЛА рассматриваемых
классов является достаточно динамичным и, как следствие, проекции
вектора кажущегося ускорения п на связанные с ЛА оси меняются
быстро (угловые скорости могут достигать 360 град/с). В приведенных
выше схемах эта проблема в известной степени снимается за счет про-
3.6]
Бесплатформенные инерциальные навигационные системы 83
У
ецирования вектора кажущегося ускорения на навигационный базис,
так как угловая скорость этого базиса существенно меньше, чем свя-
связанного, и проекции вектора п на нем меняются с меньшей скоростью.
Тем не менее, учитывая бурное развитие вычислительных средств,
схема прямого интегрирования показаний акселерометров может быть
реализована, хотя в настоящее время серийно подобных БИНС не вы-
выпускается.
Учитывая сказанное выше, ниже приведены два варианта постро™
ения алгоритмов БИНС. Первый соответствует схеме, представленной
на рис. 3.19, второй — схеме 3.18.
Алгоритм БИНС, работающей в географической системе коорди-
координат. Рассмотрим алгоритм БИНС, определяющей географические ко-
координаты Л А — широту у>, долготу Л, высоту h, северную ?//у, во-
восточную Ue и вертикальную Uz проекции его относительной скорости,
а также углы ориентации курс ф, крен j, тангаж v. Алгоритмы такого
типа широко используются в БИНС авиационного применения, в том
числе и для беспилотных аппаратов.
Определим навигационный географический координатный трех™
гранник Oxyz с ортами г#, jjv, r, для которого ось Oz (орт г) направ™
лена по внешней нормали к по™
верхности эллипсоида Красовско-
го, ось Оу (орт jN) — по меридиану
на север, и ось Ох (орт iE) — на
восток (рис. 3.20).
Учитывая предшествующие
рассуждения и характер выходной
информации рассматриваемой
БИНС, ниже приводится наиболее
общий алгоритм бесплатформен-
бесплатформенной инерциальной навигационной
системы, определяющей проекции
относительной скорости на гори-
горизонтальные (северная и восточная
проекции) и вертикальную оси,
широту, долготу, высоту, углы
крена, тангажа и истинного курса.
Функциональный алгоритм БИНС
можно укрупнено разделить на
две взаимозависимые части: нави-
навигационный алгоритм, в котором определяются проекции скоростей
и координаты, и алгоритм определения параметров ориентации,
который вычисляет матрицы ориентации чувствительных элементов
в пространстве и углы ориентации ЛА в горизонтальной системе
координат.
Запишем векторные уравнения системы C.70) в осях выбранного
базиса iEJ jN, г. При этом представим в координатной форме векторы,
Ю
Рис. 3.20. Географический навига-
навигационный трехгранник
84 Задача позиционирования и определения ориентации [Гл. 3
входящие в первое уравнение C.70):
U = iEUE + 3nun + rUz] n = iEnx + jNny + rnZJ C.71)
где nXiyjZ ~~ проекции вектора п на оси базиса iE, jN, r.
Вектор абсолютной угловой скорости выбранного навигационного
трехгранника О^ представляется в виде:
C.72)
где ф, А — векторы скорости изменения координат ср и Л.
В координатной форме соотношение C.72) имеет вид:
UG = —гЕф + Jn(u + ^) cos <Р + г(^ + ^) s'm {P- C.73)
Вводя обозначения для относительных угловых скоростей и проек-
проекций угловой скорости вращения Земли
иу = и cos (p; uz = и sin ip.
входящая в первое уравнение C.70) векторная сумма О + и может быть
представлена в виде
О + и = iEujx + jN (ujy + 2иу) + r (ujz + 2uz) . C.75)
Ось z выбранного базиса направлена по нормали, опущенной из
точки места объекта А к поверхности земного эллипсоида, и пересекает
эту поверхность в точке В. Определение ориентация этой оси связано
с необходимостью ввести представление о модели фигуры Земли. В ка-
качестве такой модели в нашей стране используют двухосный эллипсоид
вращения с параметрами, полученными Ф.Н. Красовским. К основ-
основным параметрам можно отнести большую полуось земного эллипсоида
(радиус земного экватора) а = 6 378 245 м; малую полуось земного эл-
эллипсоида 6 = 6 356 863 м; квадрат эксцентриситета эллипсоида
е2 = а ^26 = 0,006 693 4216.
а
Используя математическое описание этой модели, величины ujXiy}Z
можно выразить через линейные скорости движения точки А и радиу-
радиусы кривизны нормальных сечений эллипсоида [3.8]:
где р\ — радиус кривизны меридионального сечения эллипсоида (плос-
(плоскость сечения определена векторами г, j'jv); pi — радиус кривизны
сечения эллипсоида плоскостью, определяемой векторами г и ig (плос-
3.6] Бесплатформенные инерциальные навигационные системы 85
кость первого вертикала); h — высота полета над поверхностью Земли.
Величины pi}2 выражаются следующим образом:
р1 = а A _ е2) A _ е2 gin2 ^/2 . р2 = аA_е2 gin2 ^/2 _ (g ??)
При направлении оси z по нормали к поверхности эллипсоида спра-
ведливо соотношение
h = Uz. C.78)
Для скалярной записи системы C.70) представим в координатной
форме вектор g", входящий в первое уравнение системы C.70):
g = iEgx + jNgy + rgz ¦ C.79)
Детерминированная математическая модель существует только для
нормальной составляющей поля силы тяжести, которое соответствует
земному эллипсоиду с равномерным распределением масс в объеме
этой фигуры. Градиент этого поля в любой точке, принадлежащей
поверхности эллипсоида, направлен по нормали к ней и расположен
в плоскости меридионального сечения. Поскольку точка места ЛА (точ-
(точка А) не принадлежит поверхности Земли, то, строго говоря, вектор
градиента нормального поля силы тяжести в этой точке не будет на-
направлен по линии нормали, опущенной из нее к поверхности земно-
земного эллипсоида (ось z). Вместе с этим этот вектор будет расположен
в плоскости меридиана точки А, т. е. в плоскости, определяемой векто-
векторами ti, г. Тогда соотношение C.79) принимает следующий вид:
g = JNgy + rgz. C.80)
Выражения для проекций gVjZ c точностью до членов порядка е5
можно получить, используя потенциальную функцию нормального по-
поля тяготения земного сфероида, в виде [3.9]:
\~
%8i f -
1 *sin4V> + -U2Uea-7<7)sina2^, C.81)
где ge = 9,78049 м/с2 — ускорение силы тяжести на экваторе;
q = u2aj'ge = 0,00346775 — отношение центробежной силы, обу™
словленной вращением Земли, к силе тяжести на экваторе; и =
= 15,0407 град/час — угловая скорость вращения Земли.
86 Задача позиционирования и определения ориентации [Гл. 3
В формулах C.81) принято, что h/а « е , что соответствует высо-
высотам, характерным для авиационных объектов и беспилотных ЛА. Эти
формулы могут быть упрощены, если в них сохранить лишь члены
порядка е2. Тогда gy « 0; gz = -ge 1 — 2—h — Eqr — e2) sin2 tp .
L Q, A J
Следует иметь в виду, что для перехода к проекциям ускорения
силы тяжести к выражениям C.81) необходимо добавлять компоненту
от центростремительного ускорения, обусловленного вращением Земли
в соответствии с C.68).
Воспользовавшись C.74) и C.76), получим следующую систему
дифференциальных уравнений, решение которой позволяет найти ко-
координаты (р и А:
pi + h ' (p2 + h) cos 99 *
Функции и с точностью до членов порядка е5 можно
pi + h p2 + h
представить в следующем виде:
2
— ^ I 1 — рл — '" ~~ " р^ Ч1Т12 ш — 9р2 4- Чр2 ч1п2 /-л —I— II ™1™
— — X С — — С о 111 Уу ZJC — 1^ ОС — O111 чУ |^ I — I |^
pi + fia| a 2 а а \а
1 =f|l-T-^sin>+(f) +e^sin> +
Р2 + h a [ а 2
+ eM±ein^-^)ein^|. C.83)
Если в формулах C.82) и C.83) сохранить лишь члены порядка е2,
то они примут вид
h
- l-ez е'2 sin ср ,
a L а 2 Ч '
1 Г-1 Л 1 2 • 2 1
« - 1 -e2sin (р\ .
а I а 2 J
Стоит отметить, что использование упрощений C.84) может приве-
привести к погрешностям, соизмеримым с погрешностями высококачествен-
высококачественных гироскопических измерителей, используемых в БИНС.
С учетом приведенных выше соотношений скалярный эквивалент
векторной системы C.70), позволяющий вычислять составляющие век-
вектора скорости ЛА в географической системе координат, можно запи-
3.6]
Бесплатформенные инерциальные навигационные системы 87
сать
dt
UE
UN
uz
(шу + 2uy)
UE
uN
uz
+
nx
Пу
nz
+
gx
gy
gz
C.85)
где u)XjyjZ — проекции вектора угловой скорости географического ба-
базиса относительно Земли C.76); uViZ — компоненты вектора угловой
скорости Земли C.74); nx^y^z — компоненты вектора кажущегося уско-
ускорения, измеренные акселерометрами; gXjy,z — компоненты вектора
градиента нормального поля силы тяжести C.81).
Входящие в выражения C.76) радиусы кривизны земного эллип-
эллипсоида могут быть вычислены через свои обратные функции по C.83),
C.84) или непосредственно по формулам [3.8]
Pi =
A -
хЗ/2-
Р2 =
C.86)
где а — большая полуось эллипсоида Красовского; е — первый эксцен-
эксцентриситет эллипсоида Красовского (см. выше).
Проекции угловых скоростей вращения географического базиса от-
относительно Земли в географической системе координат с учетом C.86)
выразятся следующим образом:
С/с
ujz =
¦ tg<p.
t, -« l-ы-- C-87)
Pi + Al P2 + Al P2 + Al
Проекции угловой скорости вращения Земли определены в соответ™
ствии с C.74):
% = и cos (p^ uz = usmtp, C.88)
где и = 7,292 116 • 1СП5 с™1 — модуль угловой скорости вращения Зем™
ли.
Алгоритм вычисления координат местоположения и высоты ЛА по
направлению нормали до поверхности земного эллипсоида определяет-
определяется уравнениями
dip dX ujv dh
~dt = ^Ш;
It
dt
= UZ.
C.89)
Алгоритм вычисления проекции ускорения силы тяжести Земли
можно представить в следующем виде с точностью до величин поряд-
порядка е4 [3.9]:
88 Задача позиционирования и определения ориентации [Гл. 3
gN = go sin B<р) + - g sin (p- I — - ,
1 — — sin2 99 + - g sin2 cp + e4 ( — - sin2 99 + — sin2 B<p)) +
где g — введенное ранее отношение центробежной силы, возникаю™
щей вследствие вращения Земли, к силе тяжести на экваторе (q =
= 0,003 467 75); go — ускорение силы тяжести на экваторе (go =
= 9,780 49 м/с2).
Совокупность соотношений C.85)—C.90) представляет собой навига-
навигационный алгоритм БИНС. Для построения полного функционального
алгоритма БИНС алгоритм определения навигационных параметров
дополняется алгоритмом определения параметров ориентации. Алго-
Алгоритм ориентации служит для решения двух основных задач:
— определение взаимной ориентации ортогонального базиса, обра-
образованного измерительными осями акселерометров, и базиса, использу-
используемого в качестве навигационного (в нашем случае географического),
а также для пересчета показаний акселерометров в навигационный
базис (первая задача);
— определение угловых параметров ориентации — углов курса (рыс-
(рыскания), тангажа, крена (вторая задача).
Без решения первой задачи невозможно определение местоположе-
местоположения и скорости Л А с помощью БИНС. В этом смысле этот алгоритм
является ключевым в структуре БИНС. Решение второй задачи не-
необходимо для управления ЛА и наведения его на цель в горизонтной
системе координат.
Алгоритм определения параметров ориентации БИНС можно пред-
представить в виде четырех субалгоритмов:
1. Алгоритм определения начальной матрицы ориентации.
Здесь вычисляются начальные значения элементов матрицы на-
направляющих косинусов, определяющей взаимное положение связан-
связанной с ЛА и географической систем координат. Алгоритм используется
при начальной выставке БИНС на Земле. Выставка осуществляется
методом векторного согласования по измерениям двух неколлинеар-
ных векторов измерительными элементами БИНС (акселерометрами,
гироскопами) — вектора абсолютной угловой скорости вращения ВС,
равного угловой скорости вращения Земли и, и вектора ускорения
свободного падения g. Более подробно алгоритм выставки БИНС рас-
рассмотрен в гл. 4, посвященной вопросам реализации интегрированных
навигационных систем.
3.6]
Бесплатформенные инерциальные навигационные системы
89
2. Алгоритм вычисления матрицы взаимной ориентации базиса,
связанного с Л А и географического.
Этот алгоритм может быть построен несколькими существенно
различными способами, выбор которых определяется особенностями
гироскопов БИНС и спецификой конкретной навигационной задачи.
Наиболее часто используются два способа.
Первый способ базируется на решении матричного модифицирован-
модифицированного уравнения вращения Пуассона:
dC
dt
О -пг
uz 0
00
у " Lx
о
с + с
0 -i
o2
0 -J
0
C.91)
где ^lx,y}z — проекции абсолютной угловой скорости вращения геогра-
географической системы координат, определяемые следующим образом:
Oi,2,3 — абсолютные угловые скорости Л А, измеряемые гироскопами,
установленными жестко на его корпусе.
Второй подход при построении алгоритма ориентации базируется на
использовании промежуточных параметров ориентации. При создании
БИНС наиболее часто в качестве таковых используются параметры
Родрига-Гамильтона (кватернионы). Матрица пересчета из связанной
в географическую систему координат получается путем перемножения
двух матриц, из которых одна пересчитывает из связанных в инерци-
альные оси, вторая — из инерциальных в географические. Каждая из
двух матриц вычисляется на основе параметров Родрига—Гамильтона,
которые в свою очередь определяются численным алгоритмом второго
порядка, построенным на основе метода последовательных приближе™
ний Пикара:
С = ВТА,
А =
-2(А| + А|) 2(AxA2 - А0Аз) 2^3 + А0А2)
2 + A0A3) 1-2(А? + А§) 2(А2А3 - A0Ai)
2(А1Аз-А0А2) 2(А2Аз + А0А1) 1 - 2(Af + А|)
C.93)
- Ап —
Ч
- 0,5
}е/8-0,5Ы
= Аз*° - А^е/8-0,5
90
Задача позиционирования и определения ориентации
[Гл. 3
Aj5z =
tk
tk
tk
ACX1 A/3y, A/3Z — приращения интегралов от проекций абсолютной
угловой скорости поворота объекта на оси чувствительности гироско-
гироскопов (показания гироскопов БИНС, измеряющих не проекции угловых
скоростей, а приращения углов поворота вокруг своих осей чувстви-
чувствительности),
В =
- МоМз)
М0М2)
(fe)
= Mo
(Jfe+l) (fe)
= M
x + /4 ^y + Мз uzj dt,
. (fe)^ . (k
-0,5
-0,5
-0,5
где ОЖ5 пу, uz — проекции абсолютной угловой скорости географиче-
географического базиса на его оси C.92).
К преимуществам этого метода построения матрицы ориентации
относится гарантированная ортогональность матрицы ориентации, вы-
вычисленной по соотношениям C.93). Кроме этого практика показыва-
показывает, что вычисление с использованием параметров Родрига—Гамильтона
дает наименьшие вычислительные затраты по сравнению с другими
методами при условии обеспечения одинаковых точностных харак-
характеристик. Вместе с тем, определение матрицы С через параметры
Родрига^Гамильтона приводит к необходимости решения двух одно-
однотипных систем линейных дифференциальных уравнений четвертого
порядка каждая.
3. Алгоритм вычисления угловых параметров ориентации Л А от-
относительно географической системы координат (вычисление истинно™
го курса ф^ крена 7? тангажа $):
$ = arcsin (C31) = arccos
7 = arcsin
= arccos
С32
C.94)
3.6]
Бесплатформенные инерциальные навигационные системы 91
= arcsln
= arccos
С21
где Cij — элементы введенной выше матрицы С.
4- Алгоритм пересчета сигналов^ полученных с акселерометров
в географическую систему координат для использования в навигаци-
навигационном алгоритме C.85):
Си
C2i
а
\2
С 2%
п2
C.95)
Приведенная совокупность соотношений C.85)—C.95) представляет
собой замкнутую систему уравнений, достаточную для решения нави-
навигационной задачи БИНС и определения параметров ориентации ЛА.
Совокупность любого из приведенных уравнений определения мат™
рицы С и углов курса, крена и тангажа образуют алгоритм ориентации
БИНС. Выбор конкретного алгоритма определения матрицы С зависит
от поставленной задачи и доступных ресурсов.
Алгоритм БИНС', работающей в инерциальной системе коорди-
координат.
В этом варианте БИНС определяются координаты в инерциальной
системе координат OXYZ, ось OZ которой направлена по полярной
оси в сторону северного полюса, а оси ОХ и OY располагаются в плос-
плоскости экватора. В этом случае для синтеза алгоритма БИНС целе-
целесообразно воспользоваться векторным уравнением C.64), скалярный
эквивалент которого принимает вид:
dRx
dt
dRy
dt
dRz
dt
dVx
dt
dVy
dt
dVz
э гр x ">
тру'
C.96)
где Rx, Ry, Rz —
координаты в выбранной инерциальной системе
координат, пх, пу, nz, grpx, grPy, gvPz — проекции кажущегося и гра™
витационного ускорения на те же оси, причем
А1г А12 А13
А21 А22 А23 • п2
п
п
п
X
У
z
=
gr
В11 В12
21
gxV
gzV
92
Задача позиционирования и определения ориентации
[Гл. 3
здесь gxr, gyr? gzV — проекции вектора гравитационного ускорения
на оси географического базиса, матриц А определяется, например, из
решения уравнений Пуассона
где [О] — матрица измеренных гироскопами угловых скоростей ЛА
О -П3 п2
О3 0 -Пг
П2 пг О
а матрица В строится следующим образом:
— sin Л — cos Л sin Ф cos Л cos Ф '
cos Л — sin Л sin Ф sin Л cos Ф
О cos Ф sin Ф
В=
где
Ф = arctg -
Л = arcsin ¦
= arccos-
Rv
3.6.2. Модели ошибок БЖНС. Алгоритмы, приведенные
в предшествующем разделе, описывают работу так называемой идеаль-
идеальной системы, когда начальные условия введены в систему без ошибок,
а гироскопы и акселерометры БИНС не имеют инструментальных
и методических погрешностей. В реальных условиях невозможно
задать начальные условия абсолютно точно, инерциальные датчики
всегда измеряют соответствующие величины с погрешностями. По этой
причине в реальных условиях система работает в возмущенном
режиме, и ее показания отличаются от действительных параметров
движения ЛА, т. е. инерциальная система обладает, как и любой
измеритель, ошибками.
Пусть БИНС имеет ошибку определения местоположения SR =
= R' — R и ошибку определения скорости 5V = V1 — 1/, где R, Rf —
радиус-векторы истинного и вычисленного БИНС местоположения со™
ответственно, V, V — векторы истинной и вычисленной БИНС абсо-
абсолютной скорости движения ЛА. Выведем дифференциальные уравне-
уравнения, описывающие динамику ошибок БИНС SR, 5V. Такие уравнения
позволят исследовать точность проектируемых систем на заданных
траекториях при выполнении поставленных полетных задач, изучить
возможность компенсации или компенсации ошибок и построить соот-
соответствующие процедуры для реализации такой возможности. Этот во-
вопрос особенно важен для интегрированных систем, так как в комплексе
систем возможности коррекции и компенсации ошибок многократно
возрастают.
3.6] Бесплатформенные инерциальные навигационные системы 93
Вывод уравнений ошибок можно осуществить путем формального
варьирования основного уравнения инерциальной навигации. Такой
путь не является единственным. Известны другие подходы к составле-
составлению уравнений ошибок. Например вариацию можно проводить, исполь-
используя скалярную форму записи алгоритмов работы БИНС [3.10]. В этом
случае получающиеся уравнения ошибок «привязаны» к конкретной
реализации системы, и, следовательно, могут быть применены только
для данного типа систем. Ниже предлагается более общий подход, раз-
развитый, например в работе [3.9] и основанный, как уже сказано выше, на
формальном варьировании исходного векторного основного уравнения
инерциальной навигации в форме C.62). Получающиеся при этом урав-
уравнения обладают большей общностью и могут быть с минимальными
изменениями применены практически к любому типу систем. Следует
упомянуть, что описываемый ниже подход, основанный на формальном
варьировании векторного основного уравнения инерциальной навига™
ции, не является единственно возможной формой такого варьирования.
В фундаментальном труде [3.8] также предлагается получать урав™
нения ошибок ИНС методом формального варьирования основного
уравнения инерциальной навигации. Однако используемые при этом
представления переменных отличаются от вводимых в работе [3.9].
Большой практический опыт авторов по использованию уравнений
в форме, предложенной в работе [3.9], показал их существенные пре™
имущества и простоту адаптации к конкретным условиям применения.
Далее мы следуем методике вывода, приведенной в уже упоминавшейся
работе [3.9].
Итак, проводя формальное варьирование исходного уравнения
C.62) получаем
?™=6n + 6grp{R), C.97)
at
где SR — вектор полной ошибки БИНС в определении местоположения,
ёп — ошибка акселерометра в измерении вектора кажущегося уско-
ускорения объекта n, egrp(R) — ошибка в представлении вектора грави-
гравитационного ускорения принятой в БИНС моделью поля, R — модуль
геоцентрического радиуса-вектора точки места ЛА.
Поскольку вектор гравитационного ускорения grp(R) задается неко-
некоей математической моделью, то вариация этого вектора Sgrp(R) может
быть определена аналитически и выражена через параметры принятой
модели. Обычно в инерциальной навигации гравитационное поле зада-
задается своей нормальной составляющей, которая представляет собой по-
поле эллипсоида вращения с заданными геометрическими параметрами.
Параметры эллипсоида Красовского, принятого в нашей стране, и вид
проекций вектора grp(R) приведены выше. В работе [3.8] показано, что
если в качестве уравнений ошибок рассматриваются уравнения первого
приближения, то нет необходимости в учете нецентральной составляю-
составляющей вектора grp(R). Поскольку предполагается, что предметом нашего
интереса являются линейные уравнения ошибок, хорошо встраиваемые
в процедуры оптимальной фильтрации, то в качестве модели вектора
94 Задача позиционирования и определения ориентации [Гл. 3
grp(R) принимается только его часть, отвечающая центральному полю,
а именно:
grp(R) = ^JLRs CJ8)
С учетом модели C.98) уравнение C.97) может быть записано в виде:
^-^ + ArSR-3A,rSR = 8n, C.99)
где г — единичный орт геоцентрического радиуса-вектора точки места
Л A, \R\ — модуль геоцентрического радиуса-вектора точки места Л А,
т. е. R ^ т • R
Вариацию SR можно представить в виде горизонтальной и верти-
вертикальной составляющих путем формального варьирования приведенно-
приведенного выше представления для радиус-вектора R. Учитывая это представ-
представление записываем:
где SR определяет ошибку в знании модуля радиус-вектора местопо-
местоположения, 5г — ошибка в вычислении орта геоцентрического радиус-
вектора местоположения. Ошибку SR можно трактовать как ошибку
вертикального канала БИНС или ошибку внешнего измерителя высоты
полета. Вектор ёг лежит в плоскости местного горизонта и определяет
ошибки горизонтальных каналов БИНС.
С учетом этого векторное уравнение ошибок БИНС C.99) можно
записать в форме:
" к ' ч + Аг 5rR + 1 " ; - 2А, г SR = 5п. C.100)
1 & А НПО I | Z ?~ъА \ /
at R dt R
Уравнение C.100) содержит вертикальные и горизонтальные со-
составляющие: к горизонтальным составляющим относятся члены
d2(SrR) /1 г о
—^5—- и -^orR.
dt2 R3
к вертикальным —
d2(rSR) /x XT7
—^—L и -2^roR.
dt2 R2
Вариацию 8п в правой части уравнения C.100) можно трактовать
как полную ошибку акселерометров в измерении вектора кажущегося
ускорения. При этом, как показано в работе [3.9], эту вариацию можно
представить в виде
8п = An + nx0, C.101)
где An — вектор инструментальных и методических ошибок акселе-
акселерометров, «х» — символ операции векторного умножения, п — век-
вектор измеряемого кажущегося ускорения объекта, В — вектор малого
3.6] Бесплатформенные инерциальные навигационные системы 95
углового поворота, характеризующего поворот так называемого вы-
вычисленного базиса, ориентация которого в пространстве определена по
измеренным значениям параметров вращения относительно базового
трехгранника. Таким образом, в соответствии с выражением C.101)
ошибка определения вектора кажущегося ускорения складывается из
двух компонент: непосредственно ошибок акселерометров An и ошибки
в знании ориентации осей чувствительности акселерометров n x 0.
Вектор малого углового поворота в определяется ошибками гироско-
пов системы и может быть представлен в виде
0 = АО, C.102)
где АО — вектор ошибок гироскопов БИНС в измерении абсолютной
угловой скорости вращения ЛА.
С учетом C.101) и C.102) векторное уравнение ошибок БИНС пред-
ставимо в виде системы уравнений
d2(SrR) /x XD^ d2(rSR) \i ,п л п
—^-5—- + -^- <m H ^—- - 2-4Z roR = An + п х ©,
dt2 Д3 dt2 Я2 C.103)
0 = АО.
Система C.103) даёт наиболее общее представление об ошибках
БИНС. Оно позволяет исследовать связь между инструментальными
погрешностями акселерометров, гироскопов, неточностями задания на-
начальных условий с одной стороны и ошибками БИНС в определении
навигационных параметров с другой. Векторные уравнения компакт-
компактны, удобны при теоретическом исследовании.
Для практического использования систему C.103) необходимо пред-
представить в некоторой определенным образом выбранной системе коорди-
координат. Круг рассматриваемых в настоящем издании объектов предполага-
предполагает траектории вблизи поверхности Земли. В силу этого целесообразным
представляется получение скалярного эквивалента векторной системы
C.103) во вращающейся системе координат, под которой в большинстве
случаев понимается горизонтальная система координат, определенным
образом ориентированная в азимуте в зависимости от условий решае-
решаемой ЛА задачи.
Сделанное предложение о рассмотрении ошибок БИНС в горизон-
горизонтальной системе координат не снижает общности рассмотрения, так как
полученные результаты могут быть распространены на случай и других
систем. Для этого достаточно придать иной смысл проекциям угловой
скорости трехгранника, в котором будет вестись рассмотрение задачи.
Для перехода от векторной системы C.103) к ее скалярному эк-
эквиваленту в некоторой вращающейся системе координат необходимо
представить входящие в уравнения производные через их локальные
значения в выбранной вращающейся системе и провести проецирование
получившихся векторных уравнений на требуемые оси. Аналогичный
путь уже был проделан при выводе основного уравнения инерциальной
96
Задача позиционирования и определения ориентации
[Гл. 3
навигации. Опираясь на этот опыт, опуская промежуточные выкладки,
получаем в соответствии с [3.9]
d
"dt
хг
х2
хз
ХБ
Xq
= D •
хг
х2
Х4
Х5
Xq
+
О
О
О
О
-<*
Р
О
о
о
6
о
О
О
о
а
О
Пу
где
D =
О
О
О
Ап%
Any
Anz
1
О
О
О
C.104)
(п2х
dt
а
пу -i
0
а
13
S
+
Апх
Апу
Auz
2UZ -2ОУ
О 2пх
О
C.105)
где Ж]_, X2t х$ — погрешности БИНС в определении координат;
Ж4, Ж5, Xq — ПрОИЗВОДНЫе КОМПОНСНТ Х\, Хч, Xg]
а, /3, 7 — угловые погрешности ориентации измерительного трёх-
трёхгранника относительно вычисленного, компоненты вектора угла мало-
малого поворота В = [а, /3, 7M
AnX}y^z; AOX?2/;Z — погрешности акселерометров и гироскопов, при-
приведённые к осям вращающейся системы координат, в которой ведётся
решение уравнений ошибок;
шо — собственная частота колебаний ошибок БИНС, частота Шуле™
ра(ш0 = 1,25-ИГ3 с);
Ox,y,z — производные проекций вектора абсолютной угловой см>
рости вращения выбранного трёхгранника.
Приведение инструментальных ошибок гироскопов и акселеромет™
ров производится по следующим формулам:
Апх =
Any =
Anz =
C12An2
С22АП2
C.106)
3.6] Бесплатформенные инерциальные навигационные системы 97
Апх = СцД^! + С12Ап2 + Ci3AO3,
Апу = С21Апг + О22АО2 + О23ДО3, C.107)
Auz = С31Апг + С
где Arii, Ari2, An3, AQi, АО2, АО3 — инструментальные ошибки
акселерометров и гироскопов в проекциях на связанные оси, Cij —
элементы матрицы направляющих косинусов между связанной с ЛА
системой координат и выбранной вращающейся системой координат.
Объединяя уравнения C.104)—C.107), получим математическую мо-
модель ошибок БИНС. Для полноты картины в этих уравнениях надо
задаться также моделью ошибок гироскопов AOi, AO2, АО3 и акселе-
акселерометров Ani, Ап2, Ап$. Строго говоря, каждый тип гироскопа или ак-
акселерометра имеет свою модель с ее характерными компонентами и чис-
численными значениями. Тем не менее можно задаться некоей обобщенной
моделью, которая качественно учитывает зависимости ошибок от того
или иного возмущающего фактора. Для конкретного типа гироскопов
и акселерометров коэффициенты в этих моделях должны получить
соответствующие численные значения, а часть членов, несущественных
для приборов данного типа, могут принять нулевые значения. Можно,
однако, представить себе и иную ситуацию, когда такая обобщенная
модель для какого-то типа прибора не будет иметь существенной для
него составляющей. В таком случае приводимая модель должна быть
дополнена соответствующими компонентами.
Основываясь на таких рассуждениях, представим погрешности ак-
акселерометров Ani, Ari2, Атг3 в следующем виде:
C.108)
где /х^д (г = 1,2,3) — постоянные смещения нуля акселерометров;
|/^2 (i = 1,2,3) — измерительные шумы акселерометров; /ii,i+2 (i =
= 1, 2, 3) — погрешности масштабных коэффициентов акселерометров;
Mi,б (i = 1, 2, 3) — ошибка нелинейности акселерометров, /Х14, Mi55 M23?
М25? Мзз? Мз4 — погрешности из-за не ортогональности и перекоса осей
чувствительности акселерометров.
Ошибки гироскопов AOi, AO2, АО3 могут быть также представле-
представлены обобщенной моделью, например, в следующем виде:
Апг = #ц + #12 + #13 + Tli #14 + ^2^15 + Н3#16 + Oi#i7 + О2#18 +
АО2 = #21 + #22 + ^23
+ О3#29
7 Управление и наведение
98 Задача позиционирования и определения ориентации [Гл. 3
А03 = #31 + #32 + #33 + ^1#34 + ^2#35 + Н3#3б + Oi#37 + О2#38 +
+ О3#39 + «1^3,10 + «2^3,11 + «§#3,12, (ЗЛ09)
где #^i, #^5 #i3 (* = 1, 2, 3) — постоянные, температурные дрейфы
гироскопов и их случайные измерительные шумы; #^- (г = 1,2,3; j =
= 4,5,6) — удельные скорости дрейфа гироскопов, пропорциональные
перегрузкам (в разных типах гироскопов причины такой зависимости
могут быть разными; например, в механических гироскопах такая зави-
зависимость объясняется небалансом гироскопов); #17, #285 #39 — погреш-
погрешности масштабных коэффициентов гироскопов; #18, #19? #27? #29? #37?
#38 — дрейфы из-за не ортогональности и перекоса осей чувствитель-
чувствительности гироскопов.
Шумовые составляющие ошибок акселерометров /i^ (i = 1,2,3)
и гироскопов #j3 {i = 1,2,3) представляются стационарными случай-
случайными процессами с нулевым математическим ожиданием и корреляци-
корреляционными функциями вида
Kn = a2ne~h^, Kw=a2we-h^, C.110)
где <jn, aw — среднеквадратические отклонения (СКО) переменных
Мг2, #i2 от их средних значений; hni hw — коэффициенты затухания
корреляционных функций для случайных погрешностей акселеромет-
акселерометров и гироскопов соответственно.
Как известно, дифференциальные уравнения формирующих филь-
фильтров для указанных случайных стационарных процессов с входными
сигналами типа белого шума имеют вид
Ai2 = -hniii2 + \/2кпапец, #i2 = -hwfii2 + \/^hw awei2j C.111)
где ?ij (i = 1,2,3; j = 1,2) — белый шум единичной интенсивности.
В приведенных моделях ошибок гироскопов и акселерометров на
различных участках траектории ЛА вес отдельных компонент может
сильно варьироваться. Так при рассмотрении движения ЛА со скоро-
скоростью, близкой к постоянной, по прямолинейным траекториям наиболь-
наибольшее влияние будут оказывать постоянные погрешности измерителей.
Поэтому на таких участках траектории модели C.108), C.109) можно
существенно упрощать, облегчая решение задач бортового комплекса.
Кроме того, при относительной малости коэффициентов временной
корреляции h^1 и h^1 по сравнению с периодом Шулера (Тщ = 84 мин)
процессы ju^2. Уж (i = 1, 2, 3) приближаются к «белому» шуму с опре-
определенной интенсивностью. С учётом этого модели погрешностей аксе-
акселерометров и гироскопов могут быть представлены в виде
Ащ = т + Qnen, AOi = vi + Qi2Si2, C.112)
где fii, V{ — постоянные погрешности измерителей, Qn, Qi2 — интен-
интенсивности случайных погрешностей измерителей. Модель ошибок инер-
циальных измерителей C.112) является наиболее простой, однако во
многих практических случаях достаточно эффективной, позволяющей
решать задачи повышения точности ИНС.
3.6] Бесплатформенные инерциальные навигационные системы 99
В заключение сделаем еще одно обобщающее замечание. Приведен-
Приведенные в настоящем разделе уравнения ошибок ИНС являются достаточно
общими, применимыми и к платформенным системам. Отличие в этом
случае будет лишь в смысле матрицы С в выражениях C.106), C.107),
которая при этом будет определять связь платформенной системы ко-
координат и системы, выбранной для решения уравнений ошибок. Таким
образом приведенная модель погрешностей ИНС является универсаль-
универсальной, но, как уже отмечалось выше, не единственно возможной. Выбор
той или иной формы уравнений ошибок может существенно упростить
или, напротив, затруднить решение стоящей задачи, поэтому к вопросу
выбора модели ошибок БИНС следует каждый раз подходить хорошо
представляя условия работы ЛА и требования к бортовому комплексу.
Список литературы к главе 3
3.1. Веремеенко К. К., Красов А. И., Стулов А. В., Шестаков И.Н. Авиа-
Авиационные спутниковые приемники-индикаторы фирмы Trimble. — М.:
МАИ, 1998. — 107 с.
3.2. Глобальная навигационная спутниковая система ГЛОНАСС. Интер-
Интерфейсный контрольный документ (редакция четвертая). КНИЦ МО РФ,
1998.
3.3. Вавилова Н. Б., Голован А. А., Парусников Н. А., Трубников С. А. Ма-
Математические модели и алгоритмы обработки измерений спутниковой
навигационной системы GPS. Стандартный режим. — М.: МГУ, 2001.
3.4. Шебшаевич В. С, Дмитриев П. П., Иванцевич Н. В. и др. Сетевые
спутниковые радионавигационные системы. — М.: Радио и связь, 1993.
3.5. 1998.Interface Control Document GPS 200C, Revision IRN-2Q0C-Q02, AR-
INC Research Corporation, 1997.
3.6. Малышев В. В., Красильщиков М.Н., Бобронников В. Т. и д.р. Спутни-
Спутниковые системы мониторинга. — М.: МАИ, 2000.
3.7. Bartenev V.A., Krasilshchikov M.N., Malyshev V. V. and oth. RUSSIA'S
GLOBAL NAVIGATION SATELLITE SYSTEM, ANSER Ohio, USA,
1994.
3.8. Андреев В. Д. Теория инерциальной навигации, ч.1. Автономные систе-
системы. — М.: Наука, 1966.
3.9. Помыкаев И. И., Селезнев В. П., Дмитроченко Л. А. Навигационные
приборы и системы. — М.: Машиностроние, 1983.
3.10. Бромберг П. В. Теория инерциальных систем навигации. — М.: Наука,
1979.
3.11. Ривкин С. С, Ивановский Р. И., Костров А. В. Статистическая оптими-
оптимизация навигационных систем. — Л.: Судостроение, 1976.
Глава 4
АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
ИНТЕГРИРОВАННЫХ СИСТЕМ НАВИГАЦИИ
И НАВЕДЕНИЯ БЕСПИЛОТНЫХ
МАНЕВРЕННЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
РАЗНЫХ КЛАССОВ, ИСПОЛЬЗУЮЩИХ
МНОГОКАНАЛЬНЫЕ ПРИЕМНИКИ И БИНС
4.1. Особенности применения беспилотных
маневренных летательных аппаратов разных
классов для эффективного решения задач боевой
авиации
Высокоэффективное ведение боевых действий невозможно без зна-
знания своего географического положения каждой боевой единицей —
самолетом, танком, крылатой ракетой, мотопехотным подразделением
и т. д. Особенно важно это знание при выведении боевв1х подразделений
на исходные позиции в условиях незнакомой местности и в отсутствие
заметных ориентиров.
Анализ типичных навигационных задач, возникающих на различ-
ных этапах боевого полета Л А, показывает, что для большинства этапов
(таких, например, как полет по заданному маршруту к объектам удара,
преодоление ПВО противника, выход на объекты действий, применение
средств поражения и др.) требуемая точность определения абсолют-
абсолютных координат ЛА составляет единицы метров. Точность обеспечения
единым временем должна быть не хуже десятков наносекунд, а требу-
требуемые точности определения скорости полета составляют величины от
нескольких десятков до единиц сантиметров в секунду.
Представляется очевидным, что для обеспечения сформулиро-
сформулированных требований управляемые авиационные средства поражения
(УАСП) должны быть оснащены соответствующей высокоточной
навигационной системой.
При этом в процессе боевого применения управляемого средства
поражения можно выделить два режима функционирования комплекса
авиационного вооружения ударного самолета [4.1].
Режим навигационного бомбометания (пуска ракет), осуществляе-
осуществляемый при известных координатах цели (стационарная цель). При этом
координаты цели Хц закладываются в бортовой прицельно-навига-
прицельно-навигационный комплекс ЛА перед выполнением полета на боевое задание
4.11
Особенности применения беспилотных маневренных Л А
101
или во время полета по линиям обмена информацией с командными
пунктами наведения (КП) (рис. 4.1).
Хтт
КП
Цель
Рис. 4.1
Точность сброса (пуска) УАСП в данном режиме в основном опре-
определяется ошибками навигационного комплекса носителя при выходе
в расчетные условия бомбометания (пуска) — зону возможных сбросов
(ЗВС), а также погрешностями задания координат цели.
Режим бомбометания по оперативно обнаруживаемой цели пред™
полагает получение координат цели непосредственно от прицельного
комплекса самолета-носителя (рис. 4.2).
Цель
Рис. 4.2
При этом на точность наведения УАСП в значительной степени
будут оказывать влияние ошибки целеуказания, обусловленные осо-
102
Алгоритмическое обеспечение систем навигации
[Гл.4
бенностями прицельного комплекса носителя и навыками экипажа по
работе с прицельным оборудованием. Возможен переход из режима
бомбометания (пуска ракет) по оперативно обнаруживаемой цели в ре™
жим навигационного бомбометания (рис. 4.3).
¦Зона действия
. ¦. ¦ средств ПВО
Рис. 4.3
Это обусловлено возможностью обнаружения цели прицельным
комплексом самолета-носителя на дальности, превышающей зону воз-
возможных сбросов (пусков) УАСП. В данном случае координаты цели,
полученные прицельной системой ЛА, при первом контакте с ней запо-
запоминаются и вводятся в систему наведения УАСП. Повторного контакта
с целью (неподвижная цель) не требуется, и задача летчика сводится
к пилотированию самолета для вывода его в зону возможных сбросов
(пусков) УАСП. Характерной особенностью такой комбинации режи-
режимов применения является снятие ограничений на маневрирование ЛА
при входе в зону возможных сбросов УАСП, обусловленных прицельной
системой носителя.
В процессе наведения на цель в зависимости от режима применения
(стационарная цель с известными координатами, оперативно обнару-
обнаруженная цель) система управления УАСП в общем случае должна обес-
обеспечивать реализацию различных типов траекторий полета, обуслов-
обусловленных типом боевой части и требуемыми условиями подхода к цели.
В качестве типовых траекторий можно выделить: траектории полета на
максимальную дальность, баллистические траектории, специальные.
Под специальными траекториями понимается возможность системы
управления УАСП реализовывать маневры типа «мертвая петля», «бо-
«боевой разворот» и другие, обеспечивающие замкнутость зон возможных
сбросов УАСП и поражение цели при пролете ее самолетом-носителем.
Инерциальные навигационные системы (ИНС), принципы и алго-
алгоритмы работы которых были рассмотрены выше, широко используются
для наведения управляемых авиационных средств поражения (ракет,
4.1] Особенности применения беспилотных маневренных Л А 103
бомб) класса «воздух—поверхность». Это объясняется полной автоном-
автономностью их функционирования, отсутствием излучений, высокой поме-
помехоустойчивостью, способностью одинаково хорошо работать при любой
погоде и в любое время суток. Инерциальная система не требует визу-
визуального, радиолокационного или какого-либо другого контакта с целью
в момент пуска УАСП. Для ее применения необходимо лишь знание
координат точки пуска и координат цели по данным предварительной
разведки. Инерциальная система позволяет самолету носителю осуще-
осуществить пуск оружия без входа в зону действия активных средств ПВО
противника [4.2, 4.3, 4.4].
На ракетах класса «воздух—поверхность» и управляемых бомбах
инерциальная система может решать следующие задачи:
— автономное наведение средства поражения на цель по заданной
траектории без использования в полете дополнительной информации
о координатах УАСП и цели;
— наведение УАСП на цель по заданной траектории с коррекцией
на маршруте полета от источников дополнительной информации о ко-
координатах средства поражения;
— вывод УАСП в район цели для обеспечения захвата цели голов-
головкой самонаведения на конечном участке траектории полета средства
поражения.
Вместе с тем существенным недостатком инерциальных систем яв-
является накопление ошибок по мере приближения средства пораже-
поражения к цели. На точность решения навигационной задачи с помощью
ИНС оказывают влияние ошибки определения и ввода в бортовой
вычислитель координат и скорости УАСП в момент старта, ошибки
начальной выставки в азимутальной плоскости и относительно местной
вертикали, а также инструментальные погрешности. Первые два типа
ошибок определяются в основном точностью прицельно-навигацион-
прицельно-навигационного комплекса самолета-носителя. Инструментальные погрешности
характеризуют степень совершенства элементов инерциальной систе-
системы (акселерометров, гироскопов, вычислительных устройств). Более
подробно математические модели инструментальных ошибок БИНС
рассмотрены выше в гл. 3.
Таким образом, вне зависимости от режима сброса, на траектории
наведения УАСП необходима коррекция инерциальной системы, кото-
которая может быть осуществлена, в частности, следующими способами:
— по информации глобальной спутниковой навигационной системы
(ГЛОНАСС или GPS);
— по информации корреляционно-экстремальной навигационной си-
системы;
— по информации других «внешних» навигационных систем или
линии связи с борта самолета-носителя.
Кроме того, непосредственно перед сбросом (пуском) УАСП должна
быть проведена выставка ИНС.
Анализ показывает, что современным требованиям к точности на-
навигационных определений на всех этапах полёта отвечает только кор-
коррекция ИНС на основе rjlOHACC/GPS-технологий [4.5]. Заметим, что
104 Алгоритмическое обеспечение систем навигации [Гл. 4
использование ГЛОНАСС/GPS—технологий для коррекции ИНС обес-
обеспечивает качественно новый уровень использования УАСП, а именно:
— использование ГЛОНАСС/GPS—технологий кардинально преоб-
преобразует принципы ударно-огневого воздействия, прежде всего в опера-
оперативной и оперативно-тактической глубине, делает его независимым от
дальности, времени суток, погодных и климатических условий, привяз-
привязки к региону;
— ГЛОНАСС/GPS—технология может быть использована для ре-
решения задач управления большинством типов средств поражения ком-
комплекса авиационного вооружения;
— оснащение ГЛОНАСС/GPS—приемниками ударных самолетов
и оружия класса «воздух—поверхность» создает условия для разгрузки
экипажа в ходе атак наземных целей, которые будут проводиться, в ос-
основном в автоматическом высокоточном навигационном режиме, сни-
снижает требования к полуавтоматическим и автоматическим системам
управления на конечном участке полета оружия, предназначенного
для прямого попадания в цель, благодаря точному выходу на нее по
информации приемника.
Применение бортового ГЛОНАСС/GPS—приемника для определе-
определения текущих координат наводимого ударного средства осложняется
рядом факторов. Это, прежде всего, возможный срыв слежения за
отдельными НИСЗ из-за затенения их рельефом местности при выпол-
выполнении маневра либо постановка противником активных помех в районе
расположения цели и на маршрутах подлёта к ней.
Возможны различные сценарии боевого применения УАСП на
основе ГЛОНАСС/GPS—технологий. В частности, для преодоления
указанных трудностей в ходе операции одновременно могут использо-
использоваться как бортовые, так и наземные приемники, позволяющие реа-
реализовать так называемые дифференциальные и относительные режи-
режимы навигации. Рассмотрим примеры возможных сценариев примене-
применения ГЛОНАОС/GPS—технологий в рамках относительной навигации,
включающей использование наземного и бортового приемников [4.6].
Первый из возможных сценариев связан с наведением УАСП класса
«воздух—поверхность» большой дальности действия на неподвижную
цель (рис. 4.4).
Предполагается, что положение наземного ГЛОНАОС/GPS-
приемника относительно цели известно с высокой (потребной) точно-
точностью и эта информация вводится в бортовой вычислитель УАСП перед
пуском (сбросом). Задача навигации состоит в уточнении положения
УАСП непосредственно в районе цели (например, за несколько минут
до попадания в цель). Для этого наземный приемник-ответчик через
соответствующий канал связи (например, через низкоорбитальную
спутниковую коммуникационную систему) сообщает на борт УАСП
данные о своем положении и рабочем созвездии навигационных ИСЗ
(НИСЗ), использованном для определения этого положения. Вслед за
этим на борту УАСП с использованием этого же созвездия осуществ-
осуществляется решение навигационной задачи, причем компоненты расши-
расширенного вектора состояния включают также и положение наземного
4.11
Особенности применения беспилотных маневренных Л А
105
приемника. Поскольку, как уже указывалось, вектор относительного
положения цели и наземного приемника известны с высокой точностью,
появляется возможность существенного уточнения положения УАСП
относительно цели.
Рис. 4.4
Другой возможный сценарий связан с использованием управляе-
управляемых ракет «воздух—поверхность» малой дальности действия или бомб
(рис. 4.5).
В этом случае данные с наземного приемника-ответчика через спут-
спутниковый канал связи попадают на борт носителя оружия (ударного
самолета). Таким образом на борту носителя перед пуском осуществляв
ется уточнение положения цели путем ввода в бортовой вычислитель
оружия данных наземного приемника, соответствующего целеуказа™
ния, а также информации о рабочем созвездии НИСЗ.
Наконец возможен сценарий, когда на борту ударного самолета,
оснащенного РЛС с синтезированной апертурой, формируется образ
некоторой части территории земной поверхности, причем положе-
положение опорных ориентиров на этой территории относительно цели точ-
точно известно. Далее, используя данные бортового ГЛОНАСС/GPS^
приемника самолета, осуществляется привязка его относительно цели
и эта информация вводится в бортовой вычислитель оружия перед
пуском (рис. 4.6).
Как уже неоднократно отмечалось, оптимальное решение пробле-
проблемы надежного высокоточного радионавигационного корректируемо-
106
Алгоритмическое обеспечение систем навигации [Гл. 4
Рис. 4.5
ГЛОНАСС / GPS
Рис. 4.6
4.2] Основные требования, предъявляемые к аппаратуре 107
го наведения на наземные цели маневрирующих ударных самолетов
и оружия, с существенным ослаблением всех факторов, нарушаю-
нарушающих эффективное использование СРНС, состоит в интегрировании
rjlOHACC/GPS-приемника и ИНС. Известно, что частота обновления
информации ИНС на один-два порядка выше, чем у существующих
и перспективных rjlGHACC/GPS-приемников. Так, например, с аксе-
лерометров отсчет ускорения может производиться с частотой до 1 кГц,
а номинально выдаётся с частотой порядка 200 Гц. Таким образом
в результате обеспечивается получение преимуществ, недостижимых
каждым из указанных навигационных средств в отдельности. В итоге
ошибка ИНС с доминирующей низкочастотной составляющей постоя-
постоянно вводится в пределы ГЛОНАСС/СР8~ошибки5 а высокочастотные
ошибки приемника могут быть сглажены ИНС до нескольких санти-
метров.
4.2. Основные требования, предъявляемые
к навигационной аппаратуре потребителя,
применяемой в задачах навигации и наведения
маневренных летательных аппаратов
Анализ условий работы навигационной аппаратуры потребителя
применительно к задачам, решаемым управляемыми авиационными
средствами поражения, показывает, что помимо точности наиболее
важными для ГЛОНАСС/СР8™приемников авиационного применения
можно считать следующее.
Устойчивость слежения за спутниковыми сигналами. Циф-
Цифровые следящие системы с большой тактовой частотой осуществляют
пошаговый поиск и слежение за радиосигналом каждого из НИСЗ
рабочего созвездия по фазе кода, т. е. по дальности (псевдодальности)
до каждого спутника, и по изменению несущей частоты (по доплеров-
скому сдвигу частоты), т.е. по радиальной скорости относительного
движения спутника и ЛА.
По мере увеличения скорости полета или скорости изменения ско-
скорости полета (ускорения) может наступить момент, когда эти следящие
системы не будут «успевать» отслеживать соответствующее изменение
радиального расстояния спутника и ЛА, что вызовет срыв слежения,
т. е. «потерю» спутника или нескольких спутников одновременно. При
этом приемник из режима слежения перейдет в режим поиска сигналов
спутников и на некоторое время перестанет вырабатывать навигацион-
навигационную информацию до восстановления режима слежения. На ответствен-
ответственных этапах полета такая ситуация может оказаться критической даже
при кратковременном срыве слежения.
Временная потеря спутников может произойти и при выполнении
летательным аппаратом пространственных угловых эволюции, в про-
процессе которых обычно происходит экранирование одного или несколь-
нескольких спутников элементами конструкции ЛА. Потеря видимости спут-
108 Алгоритмическое обеспечение систем навигации [Гл. 4
ников может быть вызвана также нерабочей ориентацией антенны при-
приемника СНС по отношению к вертикали места.
Существенными в данной ситуации оказываются: заложенная при
разработке приемника избыточность по количеству инструментальных
каналов слежения за спутниками и наличие алгоритма автоматическо-
автоматического перехода на работу с «резервными» (не потерянными на время вы-
выполнения эволюции) спутниками вместо спутников текущего оптималь-
оптимального (с позиции минимума геометрического коэффициента ухудшения
точности) созвездия. Авиационные приемники должны иметь доста-
достаточную избыточность по количеству, предпочтительно параллельно
и одновременно работающих (а не последовательно опрашиваемых),
каналов слежения за спутниками (не менее 6-8 спутников) и предельно
малое время восстановления слежения за спутниками рабочего созвез-
созвездия после завершения ЛА пространственных эволюции.
В настоящее время авиационные ГЛОНАСС/СР8™приемники, как
правило, работают в режиме одновременного слежения за всеми види-
видимыми спутниками (режим «all-in-view») с помощью не менее шести па-
параллельно работающих каналов. Время восстановления слежения после
его потери по тем или иным причинам — одна из важных для авиа-
авиационных потребителей характеристик приемника. Оно должно быть
минимальным и обычно не должно превышать нескольких секунд.
Время холодного старта имеет большое значение при эксплуа-
эксплуатации ГЛ()НАСС/СР8-приемников. Это время от момента включения
приемоиндикатора до начала выдачи им навигационной информации
при условии, что в памяти у него находится обновленный альманах
(перечень всех спутников системы с их описаниями).
У современных авиационных ГЛОНАСС/СР8-приемников время
«холодного» старта не должно превышать нескольких десятков секунд.
Интерфейсы. Под термином «интерфейсы» будут пониматься не
только обычные «машинные» интерфейсы, но и все остальные устрой-
устройства, предназначенные для осуществления информационного обмена
с приемником, управления его работой, задания различных режимов
вычислений и для получения выработанной им навигационной и другой
информации.
Авиационные ГЛОНАСС/СР8™приемники могут включаться раз-
разработчиками и эксплуатантами авиационной техники в состав штатно-
штатного или дополнительного бортового оборудования. Сопряжение ГЛО-
НАСС/СР8^приемника с другими бортовыми системами в настоящее
время осуществляются, как правило, через цифровые интерфейсы,
работающие по одному из стандартных протоколов информационно-
информационного обмена (NMEA, RTCM-SC 104 и др.). Фирмы-разработчики, стре-
стремясь всемерно повысить универсальность применения своих изделий,
снабжают их последовательными и параллельными информационны-
информационными портами, наличие которых существенно расширяет возможности
ГЛОНАСС/СР8-приемников. Благодаря сопряжению с другим бор-
бортовым оборудованием может быть осуществлен обмен навигационной
или любой другой информацией, что повышает точность и надежность
4.2] Основные требования, предъявляемые к аппаратуре 109
навигационного режима, а также расширяет функциональные возмож-
возможности rjlOHACC/GPS-приемника.
Наличие, по крайней мере, двух высокоскоростных портов инфор-
информационного обмена с внешними бортовыми устройствами (высотоме-
(высотомером, инерциальной навигационной системой и др.), а также с бортовой
ЭВМ является в настоящее время общепринятым требованием к авиа-
авиационным FJlOHACC/GPS^npHeMHHKaM, равносильным стандарту.
"Частота обновления информации. Помимо скорости информа-
информационного обмена, которая оценивается количеством единичных симво-
символов, проходящих через машинный интерфейс в одну секунду, при авиа-
авиационной скоротечности процессов управления и движения ЛА боль-
большое значение имеет и скорость решения ГЛОНАСС/СР8™приемником
навигационных задач, т. е. частота обновления вычисленной им теку-
текущей информации (текущих координат, скорости, расстояний, пеленгов
и др.).
Программное обеспечение. Как уже указывалось выше,
rilOHACC/GPS—приемники практически всех типов имеют в своем со-
составе микропроцессоры относительно большой вычислительной мощ-
мощности. Именно эти устройства, управляемые внутренним программ-
программным обеспечением, выполняют большую часть операций по поиску,
идентификации, слежению и начальной обработке спутниковых сигна-
сигналов, выделению и обработке дальномерных и информационных сооб-
сообщений спутников, хранению измеренной и вычисленной информации
и данных, решению навигационных и других задач. При этом вычис-
вычислительных средств оказывается достаточно и для решения широкого
круга вспомогательных (сервисных) задач. Функциональная схема ар-
архитектуры программного обеспечения стандартного ГЛОНАСС/GPS™
приемника приведена на рис. 4.7.
Точность и надежность. Приемники СРНС автономного исполь-
использования, независимо от их инструментальных погрешностей, обеспечи-
обеспечивают точность определения текущих горизонтальных координат в пре-
пределах 30 метров Bсг), а по вертикальному каналу — 44 метра, что явля-
является совершенно достаточным для полетов по маршруту и навигации
в свободном воздушном пространстве (табл. 4.1).
Помехозащищенность. Эффективное использование спутнико-
спутниковой аппаратуры возможно лишь при полной уверенности в высоком
качестве навигационного сигнала системы. Для его обеспечения раз-
разработчиками систем предприняты меры повышения помехоустойчи-
помехоустойчивости. Одна из них — использование псевдошумовых сигналов, поз-
позволяющих проводить обработку сигналов статистическими методами.
При этом мощность полезного сигнала может быть чрезвычайно ма-
малой (в системах ГЛОНАСС и GPS мощность на приеме составля-
составляет 156 дБВт^161 дБВт), а прием — достаточно уверенным. Вместе
с тем, как и любая радиотехническая система, система спутниковой
навигации подвержена радиопомехам. Известны технические решения,
позволяющие искажать навигационное поле системы в больших реги-
регионах и выводить из строя навигационные приемники на время дей-
действия помех. Следует еще раз подчеркнуть актуальность обсуждаемой
110
Алгоритмическое обеспечение систем навигации
[Гл.4
Определение положения,
скорости, текущего времени
и параметров ориентации ЛА
Универсальный
модульный
интерфейс
Рис. 4.7
проблемы: возможности устойчивого решения навигационной задачи
подвижного объекта с использованием rjlOHACC/GPS-технологии
в условиях активного противодействия. Возможность создания та™
кого противодействия стандартному многоканальному совмещенному
rjlOHACC/GPS-приемнику простейшими средствами заложена в са-
мом принципе решения навигационной задачи с помощью глобальной
спутниковой системы и определяется относительно низким уровнем
полезного сигнала в силу значительной удаленности навигационных
ИСЗ от потребителя. Таким образом в принципе не представляет труда
создать генератор широкополосной помехи с уровнем сигнала, превы-
превышающим на 2—3 порядка уровень полезного ГЛОНАСС/GPS—сигнала
в некотором ограниченном регионе (например, в заданном районе бо-
боевых действий). Исключение представляет ситуация с использованием
ГЛОНАСС/СР8^технологий на космических аппаратах и ракетах-но-
4.2] Основные требования,
предъявляемые к аппаратуре
111
Таблица 4.1. Ошибки GPS и дифференциального режима DGPS
Источники ошибок определения
псевдодальностей
Ошибки часов спутника
Ошибки эфемерид
Ионосферные задержки
Тропосферные задержки
«Шум» схемы приемника
Многолучевость сигналов
Ограниченный доступ S/A
Суммарная ошибка определения
псевдодальностей
Средний горизонтальный
геометр, фактор HDOP
Средняя ошибка определения ко-
координат, 95 %
Средний вертикальный геометр,
фактор VDOP
Средняя ошибка определения вы-
высоты, 95 %
С/А код
S/A вкл.
2
4
8
3
0,5
1,5
32
33
1,5
100
2,2
145
С/А код
S/A выкл.
2
4
8
3
0,5
1,5
0
10
1,5
30
2,2
44
Р-код
2
4
1
3
0,3
0
6
1,5
18
2,2
26
Дифф.
GPS
0
0
0
0
0,5
1,5
0
1,6
1,5
5
2,2
7
Примечание I: ошибки псевдодальностей приведены для значения 1а
Примечание II: величины ошибок даны в метрах
сителях, а также в любых ситуациях, когда регион применения обсуж-
обсуждаемых технологий заранее неизвестен противоборствующей стороне.
Таким образом возникает проблема создания многоканального
rjlOHACC/GPS-приемника, способного устойчиво работать в услови-
условиях активной широкополосной помехи.
Необходимо отметить, что в соответствующих источниках практи-
практически отсутствует информация по обсуждаемой проблеме. Тем не ме-
менее имеются данные о разработке помехозащищенного GPS приемника
компанией Lockheed Martin Corporation (LMC). Он предназначен для
применения на авиационных ракетах, коммерческих авиалиниях.
GPS—приемник LMC использует цифровые технологии для опре-
определения помех и их устранения, а также цифровое управление диа-
диаграммой направленности антенны приемника таким образом, чтобы
максимальная чувствительность достигалась в направлении на исполь-
используемый спутник GPS и минимальная — в направлении на источник
помех.
Заметим, что все описанные выше меры и устройства могут дать
результат лишь в случае использования противоборствующей сторо-
стороной простой широкополосной помехи. Между тем существует простая
возможность создания «изощренной» помехи, например путем записи
112 Алгоритмическое обеспечение систем навигации [Гл. 4
сигнала систем ГЛОНАСС и GPS и последующего переизлучения этого
сигнала с некоторой задержкой и уровнем, на 2-3 порядка превы-
превышающим уровень сигнала систем ГЛОНАСС и GPS. В этом случае
приемники потребителей будут работать в режиме, не обеспечивающем
приемлемую точность решения навигационной задачи.
Таким образом в настоящее время проблему использования
ГЛОНАСС/СРБ^технологий в условиях активных помех следует
считать весьма далекой от успешного разрешения. Проблема поме-
помехозащищенности rjIOHACC/GPS-приемников активно изучается
в настоящее время авиационным сообществом всего мира. Можно
с уверенностью сказать, что это один из ключевых вопросов на пути
широкого использования спутниковой аппаратуры.
4.3. Влияние динамики маневренных беспилотных
ЛА на функционирование многоканального
GPS/ГЛОНАСС-приемника
Как известно [4.12], поиск сигналов НИСЗ выполняется так назы-
называемыми системами слежения за задержкой (ССЗ) и несущей (ССН).
ССН может работать как схема частотной автоподстройки (АПЧ) или
как схема фазовой автоподстройки частоты (ФАПЧ). Схема с АПЧ
используется в режиме захвата сигнала, слежения и измерений в на-
навигационном режиме. Схема ФАПЧ используется в режиме приема
информации.
Приемник последовательно осуществляет поиск и захват сигнала
каждого НИСЗ. При этом для каждого сигнала сначала производится,
вообще говоря, захват С/А кода, частоты и фазы несущей, а затем
синхронизация по битам и байтам.
Время поиска определяется как внутренними факторами — числом
каналов приемника, характеристиками используемой элементной базы,
в основном быстродействием, способностью программного обеспечения
приемника к эффективному управлению им, так и внешними — объ-
объемом априорной информации, имеющейся на момент начала поиска
в приемнике, вероятностью затенения антенн ПАП элементами кон-
конструкции объекта вследствие его угловых эволюции, маневренностью
объекта.
При этом в последнем случае главным фактором являются не зна-
значения перегрузки или угловой скорости ЛА, которые он способен раз-
развивать в процессе движения, а скорость их изменения. Именно эти
параметры в конечном счете определяют степень непредсказуемости
движения, мерой которой является минимальное время предсказуемо-
предсказуемого поведения объекта. Под этим принято понимать тот минимальный
временной интервал, в течение которого можно считать, что динамиче-
динамические параметры движения объекта — перегрузка, угловая скорость —
практически не меняют своего значения или меняют, но известным об-
образом. Этот временной интервал и определяет способность ССЗ и ССН
отслеживать меняющуюся в ходе полета ситуацию.
4.3] Влияние динамики маневренных беспилотных Л А 113
Наиболее критичным с точки зрения возникновения возможной
потери сигнала НИСЗ является этап отделения беспилотного манев-
маневренного Л А от носителя, так как именно начальный этап движения ха-
характеризуется высокими значениями линейных перегрузок и высоким
темпом их изменения. Аналогичная картина имеет место и в отношении
угловых скоростей и угловых ускорений. Так, максимальное значение
углового ускорения по осям Y и Z связанной системы координат может
достигать 1000 град/с2, а значения угловых скоростей по тем же осям
могут достигать значений 70 град/с и 60 град/с соответственно.
В описанных условиях в кварцевом генераторе НАП возникают
колебания, причем если перегрузка действует по направлению оси чув-
чувствительности кварца, то переходный процесс продолжается несколько
секунд.
Сокращения времени переходного процесса в кварцевом генераторе
НАП можно добиться путем:
— установки кварца на объекте с точки зрения оптимального по-
положения его оси чувствительности относительно направления макси-
максимальной перегрузки в начальной стадии полета;
— проведения дополнительных мероприятий по установке кварца
на специальные амортизирующие опоры внутри корпуса приемника.
В этих условиях ограничивающим фактором начала поиска сигнала
будет являться взаимное движение носителя и беспилотного ЛА, опре-
определяющее момент выхода последнего из тени.
Существующий опыт показывает, что возможные методы уменьше-
уменьшения влияния динамики объекта на факт потери связи «НАП-НИСЗ»
сводятся к применению:
— пространственной селекции сигналов с помощью антенн специ-
специального типа;
— применению специальной обработки сигнала с использованием
априорно известной цифровой служебной информации, передаваемой
со спутника, в сочетании со специальной организацией сеансов связи
с НИСЗ за счет избыточности каналов НАП;
— уменьшению величины динамических воздействий для сужения
полосы систем слежения путем использования данных о динамике объ-
объекта от инерциальной системы.
Обсудим перечисляемые методы подробно.
Традиционное требование к антеннам НАП состоит в обеспече-
обеспечении равномерного перекрытия верхней полуплоскости, так как НИСЗ
должны просматриваться повсюду от горизонта до зенита.
Однако высокие динамические свойства объекта, глубокие и быст-
быстрые его эволюции на первых секундах полета приводят к тому, что вари-
варианты установки одной антенны на оси Y связанной системы координат
или даже двух антенн, расположенных симметрично с двух сторон
на оси Z связанной системы координат, с конусообразной диаграммой
направленности с углом при вершине порядка 160° могут оказать-
оказаться малоэффективными. Действительно, в рассматриваемых условиях
применения один и тот же спутник вследствие эволюции объекта может
попадать в зону видимости то одной, то другой антенны. Вследствие
8 Управление и наведение
114 Алгоритмическое обеспечение систем навигации [Гл. 4
неидентичности частотно-фазовых характеристик этих антенн сигналы
от них, попадая в приемник, будут оказывать сильное возмущающее
воздействие скачкообразного типа на системы ССЗ и ССН, что приве-
приведет к резкому уменьшению отношения сигнала/шум и, как следствие,
к возобновлению процесса поиска с начального состояния. Разумеется,
это может вызвать заметное замедление процесса вхождения в связь.
Кроме того следует иметь в виду, что различные варианты маневров
носителя перед отделением объекта приводят к тому, что объекты
будут оказываться под различными углами к горизонту в момент отде-
отделения. Разумеется, и ориентация антенны по отношению к горизонту
при разных условиях сброса будет различной.
В этих условиях возможно, например, применение антенны коль-
кольцевой формы, представляющей собой конструктивное объединение не-
нескольких антенн с вышеуказанными диаграммами направленности.
Ускоренный поиск сигнала можно организовать, воспользовавшись
избыточностью числа измерительных каналов приемника по сравнению
с минимально необходимым их числом, равным, как известно, четы-
четырем. Это значение соответствует минимальному количеству НИСЗ,
сигналы которых требуется получить для формирования совокупности
измерений полного объема, т. е. такой совокупности, которая позволяет
решить задачу навигационных определений по разовой выборке.
Действительно, применительно к беспилотному маневренному объ-
объекту, от первого навигационного определения и даже от нескольких
последующих за ним, идущих с периодом 1 с, не требуется достижения
максимальной точности, поскольку на первом этапе полета требует-
требуется лишь несколько снизить область неопределенности знания кине-
кинематических параметров движения, обусловленную ошибками знания
начальных условий в момент отделения объекта от носителя и влияни-
влиянием погрешности начальной выставки инерциальной системы изделия.
Именно эти факторы, как нетрудно предположить, оказывают домини-
доминирующее влияние на погрешности навигации на первом этапе. Указанное
сужение области необходимо для того, чтобы по возможности, отда-
отдалить тот момент на траектории, когда погрешности БИНС достигнут
такого уровня, что они не смогут быть скомпенсированы управлением
на оставшейся части траектории из-за ограниченной эффективности
последнего.
Такой системный взгляд на решаемую проблему позволяет обнару-
обнаружить дополнительные резервы для ее успешного решения.
Для реализации перечисленных возможностей во время предстар-
предстартовой подготовки объекта в его систему управления вводится инфор-
информация, содержащая дополнительные данные об альманахах системы
ГЛОНАСС и GPS и эфемеридах тех НИСЗ, которые находятся в мо-
момент старта в верхней полусфере.
Наличие точной эфемеридной информации всех рабочих НИСЗ
вплоть до момента отделения объекта от носителя позволяет отказаться
от ее приема во время полета.
Наличие этой информации позволяет из всей совокупности находя-
находящихся в верхней полусфере навигационных спутников выделить чет-
4.3] Влияние динамики маневренных беспилотных Л А 115
верку спутников, для которых вероятность оказаться на первом этапе
самостоятельного полета объекта вне области возможного затенения
антенн максимальна.
Процессор НАП объекта формирует команды по организации поис-
поиска сигналов только выбранной четверки спутников всеми измеритель-
измерительными каналами аппаратуры. В результате при двенадцатиканальном
приемнике на поиск сигнала каждого спутника будет сосредоточено
три или четыре канала (при двацатичетырехканальном — 6 каналов).
Благодаря этому в такое же число раз можно сократить обследуемую
область неопределенности.
Выше уже отмечалась необходимость ввода в бортовую систему
данных об альманахах и эфемеридах НИСЗ.
Первые необходимы для выбора первоначальной группировки
НИСЗ и организации оптимальной процедуры поиска их сигналов.
В этой же процедуре, а также процедурах слежения за сигналами
с целью минимизации вероятности срыва слежения, а следовательно
и уменьшения вероятности возобновления поиска сигнала после его
потери, участвует и информация о текущих координатах и скоростях
движения объекта.
На основе этой информации, как следует из вышесказанного, в при-
приемнике осуществляется предварительная (предсеансная) подстройка
систем поиска и сопровождения сигнала на значения текущих даль-
дальностей от объекта до соответствующих НИСЗ (отдельно для каждого
канала приемника) и скорости их изменения. Эта связь обеспечивает
и более устойчивое слежение за сигналами НИСЗ, уменьшая вероят-
вероятность их потери, что особенно важно в условиях высокой динамики
объекта и кратковременности его полета.
Типовая функциональная схема интегрированной навигационной
системы, реализующей сформулированный подход, показана на
рис. 4.8.
Эфемериды участвующих в сеансах НИСЗ используются на этапе
решения задачи навигационных определений. В стандартных условиях
эфемериды, содержащиеся в цифровой части сигналов НИСЗ, прини-
принимаются во время сеансов. Однако время полного «набора» эфемерид
даже в лучшем случае составляет десятки секунд.
Поэтому предстартовый ввод точной эфемеридной информации
всех рабочих НИСЗ позволяет отказаться от ее приема во время полета.
Наряду с упомянутыми выше текущими координатами и компо-
компонентами скорости, с той же частотой в течение всего предстартового
периода в БЦВМ изделия из БЦВМ носителя с заданной периодично-
периодичностью (например, секунда) должны передаваться метки времени и их
оцифровка в шкале Госэталона Координированного Всемирного вре-
времени UTC (SU). Далее эти данные передаются в процессор приемного
устройства. Для упрощения этого процедуры можно ограничиться пе-
передачей с борта носителя только цифровой информации в виде упомя-
упомянутых «оцифровок секундных меток», но при этом необходимо обеспе-
обеспечить их посылку и соответственно прием в приемном устройстве НАП
через строго детерминированный и известный промежуток времени.
116
Алгоритмическое обеспечение систем навигации
[Гл.4
! Процессор БЦВМ
Гг
Интегральный фильтр Калмана
комплекса GPS/INS
Сигнал
коррекции
Датчики
инициальной
системы
Ускорение
Оценка
погрешностей
Процессор БИНС
Скорость
потребителя
Высоко-
Высокочастотная
аппаратура
НАД
Оценка I 1 Наведение по скорости!
ТТПТТТТРПЯИ ¦ '
доплера
Управление
Радио-
щ Процессор приемника
|_НАП_
навигационный!
сигнал
БИНС,
Навига-
Навигационное
решение
Измерения
дальности
и скорости
Рис. 4.8. Типовая функциональная схема интегрированной навигационной
системы
4.4. Реализация интегрированных систем
навигации маневренных летательных аппаратов
В предыдущих главах книги обсуждались различные варианты
совместного использования (интегрирования) инерциальных навига-
ционных систем аппаратуры потребителя ГЛОНАСС/GPS с целью
достижения потребных тактию>технических характеристик подобных
интегрированных навигационных систем. При этом основное внимание
уделялось методическим аспектам построения подобных систем, вклю-
включая обсуждение достоинств и недостатков того или иного подхода.
Настоящий раздел посвящен обсуждению существующего опыта
реализации интегрированных навигационных систем маневренных бес-
беспилотных летательных аппаратов, включая отдельные вопросы сопря-
сопряжения этих систем с бортовой системой ЛА в целом.
4.4.1. Выбор схемы комплексированим. Опираясь на клас-
сификацию интегрированных инерциально-спутниковых систем и их
основные особенности, приведенные в разделе 2.2, можно обосновать
выбор состава и схемы комплексирования системы для беспилотного
маневренного летательного аппарата. При этом должны быть приняты
во внимание особенности полетного задания аппарата и требования,
предъявляемые к ПНК. Пример анализа и основные характеристики
ПНК приводились в разделе 2.2.
Раздельная схема, несмотря на свою простоту, может быть исполь-
использована в беспилотных ЛА. Это прежде всего возможно для ЛА, время
работы которых достаточно велико, а требуемая точность не превы-
4.4] Реализация интегрированных систем навигации маневренных ЛА 117
шает сотен метров. При такой структуре комплекса периодически про-
проводимая коррекция позволяет удерживать погрешность определения
координат в требуемых пределах. Периодичность коррекции определя-
определяется, с одной стороны, требуемой точностью навигации, а с другой, —
скоростью накопления ошибок БИНС в автономном режиме. Послед-
Последнее зависит, прежде всего, от инструментальных ошибок гироскопов,
а также от ошибок начальных условий и ошибок акселерометров.
Наиболее приемлемы для рассматриваемого типа аппаратуры схе-
схемы слабо-, жестко- и глубоко интегрированных систем. Это связано
с наличием у этих систем ряда положительных качеств, перечисленных
в разделе 2.2, которые особенно ярко проявляются на высоко динамич-
динамичных объектах. Так, переход к слабо связанной схеме позволяет при от-
относительно небольших материальных затратах существенно повысить
точность системы за счет постоянной оптимальной коррекции БИНС,
в том числе коррекции инерциальных датчиков. Использование жестко
связанной схемы дополнительно позволяет улучшить качество слеже-
слежения за спутниковыми сигналами и снизить время восстановления после
срыва слежения. Это особенно актуально для объектов с большими
угловыми скоростями движения и большими амплитудами изменения
углов крена, тангажа, курса. Организация системы по глубоко интегри-
интегрированной схеме позволяет реализовать описанные выше преимущества
при меньших массогабаритных характеристиках и меньшем энерго-
энергопотреблении, что чрезвычайно важно для малогабаритных объектов
с дефицитом энергетических ресурсов. Следует отметить, что послед-
последняя схема оказывается менее функционально надежной, на что уже
указывалось ранее (раздел 2.2).
Таким образом, исходя из самых общих рассуждений, предпочтение
следует отдавать слабо- и жестко связанной схемам, как обеспечиваю-
обеспечивающим более высокие точность, устойчивость слежения и надежность ин-
информационного обеспечения по сравнению с другими схемами. Вместе
с тем при проектировании малогабаритных аппаратов целесообразным
может оказаться переход к глубоко интегрированной схеме.
Общим требованием для организации комплекса по любой из трех
выше приведенных схем является наличие математической модели его
подсистем. Современное состояние вычислительной техники, знаний
в области спутниковой и инерциальной навигации позволяют составить
достаточно полные и адекватные модели этих систем. В комплексе
системы описываются на уровне их ошибок. Таким образом для нор-
нормальной работы комплекса требуется адекватное описание ошибок под-
подсистем, включая неконтролируемые источники погрешностей. К ним
относятся:
для спутниковых систем
— ошибки эфемерид,
— погрешности спутникового бортового эталона времени,
— ионосферные и тропосферные искажения сигналов,
— искажения сигналов от многолучевости,
— собственные шумы приемника,
— вычислительные ошибки приемника,
118 Алгоритмическое обеспечение систем навигации [Гл. 4
— другие источники погрешностей;
для инерциальных навигационных систем
— инструментальные ошибки гироскопов и акселерометров,
— ошибки выставки и ввода начальных условий работы системы,
— вычислительные ошибки,
— ошибки, обусловленные упрощением алгоритмов системы.
Перечисленные выше ошибки спутниковых систем имитируются
как систематическими так и случайными факторами. В бортовой ре-
реализации погрешности спутниковых навигационных систем моделиру-
моделируются случайными процессами и переменными с заданными характери-
характеристиками.
Инструментальные погрешности инерциальных навигационных си-
систем моделируются постоянными составляющими, составляющими, за-
зависящими от перегрузок, случайной компонентой формируемой как
случайный процесс с заданными корреляционными свойствами (созда-
(создается формирующий фильтр, см. п. 3.6.2).
Ошибки выставки и ввода начальных условий задаются случай-
случайными переменными, и определяют начальное значение матрицы ко-
вариаций. Вычислительные погрешности имитируются белым шумом
с интенсивностью, зависящей от разрядной сетки вычислительной ма-
машины.
При комплексировании БИНС и приемника ГЛОНАСС/GPS по
слабо-, жестко- или глубоко интегрированной схемам возможно улуч-
улучшение характеристик автономных БИНС не только по координатам,
но и по углам ориентации. Таким образом молено будет отказаться от
более дорогих многоантенных приемников, определяющих ориентацию
объекта и требующих антенный блок значительных габаритов.
Для реализации комплексов указанной структуры чаще всего ис-
используют БИНС на лазерных гироскопах. Их достоинством является
высокая точность и простота эксплуатации. Использование механиче-
механических гироскопов, включая ДНГ, вряд ли является оправданным.
Еще одной возможностью построения комплексов является созда-
создание малогабаритных систем на основе микромеханических датчиков.
Достоинство этих систем прежде всего в их чрезвычайно малых раз-
размерах, массе, энергопотреблении.
Суммируя итоги проведенного анализа, можно сделать вывод, что
комплексы перспективных беспилотных маневренных ЛА должны
иметь перестраиваемую структуру, позволяющую в зависимости от
различных внешних и внутренних факторов работать по алгоритмам
как слабо-, так и сильно связанной схемы. При этом они должны быть
способны обрабатывать в качестве измерений как координаты и скоро-
скорости, так и псевдодальности и псевдоскорости. Используемые при этом
БИНС на современном этапе развития навигационной техники должны
строиться на лазерных гироскопах.
4.4.2. Варианты реализации интегрированных систем на-
навигации маневренных Л А. Ранее подчеркивалось, что раздель-
раздельные системы — это наиболее простой вариант совместного использо-
4.4] Реализация интегрированных систем навигации маневренных Л А 119
вания ИНС и rjlOHACC/GPS-приемника. При этом ИНС и ГЛО-
HACC/GPS-приемник работают независимо друг от друга и задача
состоит лишь в периодической коррекции выходных данных ИНС по
данным FJlOHACC/GPS^npHeMHHKa. Реализация подобной схемы воз-
возможна следующим образом (рис. 4.9).
Инерциальная
навигационная
система
Приемник
«Навстар»
Центральный
процессор
(ФК)
Мультиплексная шина 1553В
Рис. 4.9. Реализация раздельной схемы интеграции ИНС и ГЛОНАСС/GPS-
приемника
Выходные данные ГЛОНАСС/СР8^приемника (компоненты векто-
вектора положения, составляющие скорости и временная шкала), а также
ИНС (компоненты вектора положения, составляющие скорости и уг-
угловая ориентация) по мультиплексной шине стандарта 1553 В в сим-
симплексном режиме поступают в центральный процессор, где и осуществ-
осуществляется их интегрированная обработка. Выходное навигационное реше-
ние при этом может быть как простейшим, заключающимся в выборе
навигационных данных от одной из двух функционирующих систем,
так и результатом работы фильтра Калмана. Данная схема позволяет
осуществлять непрерывную навигацию в случае, например, недоста-
недостаточного количества НИОЗ. Преимущества и недостатки такой схемы
уже обсуждались выше. Здесь мы лишь отметим, что такая архитек-
архитектура обеспечивает избыточность оценок координат и скоростей. При
этом для создания такой архитектуры требуются минимальные изме-
изменения в аппаратных средствах и программном обеспечении. Недоста-
Недостаток такой схемы состоит в «провале» системы при отсутствии данных
от приемника, т. е. в существенном ухудшении точности в отсутствие
В двух других обсуждаемых схемах интеграции, нашедших более
широкое распространение, между ИНС и rjlOHACC/GPS-приемни-
ком через их процессоры устанавливаются обратные связи. Здесь, как
и в предыдущей схеме (рис. 4.10), БИНС и rjlOHACC/GPS-прие-
мник формируют независимые решения навигационной задачи. В до-
дополнительно введенном связующем блоке рекуррентный байесовский
алгоритм оценивания (например фильтр Калмана) на основе измере-
измерений rjlOHACC/GPS-приемника формирует оценку вектора состояния
и разность навигационных параметров, получаемых от ИНС и ГЛО-
HACC/GPS^npneMHHKa, которое используются для оценивания ошибок
ИНС с целью последующей их компенсации. Это позволяет коррек-
120
Алгоритмическое обеспечение систем навигации
[Гл.4
Y
Предусили-
тель
Источник
навигационного
послания
Подканал
сопровождения
кода
Подканал
сопровождения
несущей частоты
ГЛОНАСС/GPS
Псевдодальность
Дельта-
дальность
Фильтр Калмана
Координаты
и скорость
Бесплатформенная ИНС
Блок чувствительных
элементов
(датчики угловой
скорости и линейного
ускорения)
Фильтр
Калмана
Координаты
и скорость
Коррекция
ошибок
Выходные данные
местоположения,
скорости и угловой
ориентации ЛА
Расширенный фильтр
Калмана
Центральный процессор
УАСП
Рис. 4.10. Реализация слабо связанного варианта интегрированной навигаци-
навигационной системы маневренного ЛА
тировать подканалы сопровождения несущей частоты и кодов НИСЗ
рабочего созвездия.
Слабо связанная схема интеграции ГЛОНАСС/СР8~приемника
и ИНС впервые была реализована в 1987 году фирмой Boeing в систе-
ме управления полетом крылатой ракеты CALCM AGM-86 С: штат-
штатная инерциальная система была сопряжена с одноканальным GPS^
приемником, работающим по открытым С/А и закрытым P(Y) ко-
кодам. При этом использовалось буферное устройство сопряжения ин-
интерфейса PS-422 приемника, интерфейса последовательной передачи
цифровых данных ИНС, высотомера, исполнительных механизмов си-
системы управления полетом. С процессора приемника (в нём реализован
фильтр Калмана для 8-мерного вектора состояния) с частотой 1 Гц сни-
снимаются текущие координаты ракеты в геодезической системе коорди-
нат WGS-84, так называемый девятибалльный коэффициент качества
(единица соответствует лучшему качеству) радионавигационных изме-
измерений, метки шкалы времени, синхронизирующие схему, и количество
отслеживаемых НИСЗ.
4.4] Реализация интегрированных систем навигации маневренных Л А 121
Выходные данные ИНС, оперирующей в географической системе
координат, с частотой 20 Гц поступают в центральный процессор,
реализующий расширенный фильтр Калмана для 15-мерного векто-
вектора состояния, компоненты которого включают составляющие ошибок
дрейфа ИНС. При этом ИНС с частотой 10 Гц корректирует каналы
слежения за НИСЗ, что позволяет одноканальному приемнику захва-
захватить сигналы спутников и осуществлять слежение за ними при любой
пространственной ориентации ракеты.
Схема предусматривает 12-секундный цикл навигационного реше-
решения. Этого времени достаточно для исключения нестабильности ре-
решения, вероятность возникновения которой обусловлена каскадирова-
каскадированием двух калмановских фильтров при их объединении. Устранение
ошибок дрейфа ИНС осуществляется с частотой 1/12 Гц при условии
приемлемого коэффициента качества радионавигационных измерений
и слежения не менее, чем за тремя НИСЗ (в этом случае осуществляется
определение координат только в горизонтальной плоскости).
Выдача данных для коррекции ИНС осуществляется в начале две-
двенадцатой секунды цикла выполнения калмановской фильтрации. При
этом в момент преобразования координат поправка высоты относитель-
относительно центра Земли трансформируется в поправку относительно уровня
моря. В случае слежения приемника за тремя НИСЗ коррекция по
высоте исключается.
Достоинством такой схемы является высокая надежность интегри-
интегрированной системы, а недостатком — возможная коррелированность
ошибок оценок, поступающих от ГЛОНДСС/СР8~приемника на вход
второго фильтра Калмана, и необходимость синхронизации измерений
ИНС и ГЛОНАСС/СР8-приемника.
Особенности реализации сильно (жестко, глубоко) связанных си-
систем поясняются с помощью рис. 4.11. Здесь роль ИНС сводится лишь
к измерению параметров поступательного и вращательного движений.
По этой причине в таких системах ИНС включает лишь акселерометры
и гироблоки, а в составе ГЛОНДСС/СР8~приемника присутствуют
лишь высокочастотный блок и блок, раскрывающий навигационное
послание (коррелятор). В такой структуре ИНС и ГЛОНАСС/GPS-
приемник обеспечивают навигационные измерения для общего процес-
процессора обработки данных.
В такой системе фильтр Калмана оценивает вектор состояния,
включающий двадцать—сорок компонент, и для его реализации требу-
требуется БЦВМ с высоким быстродействием.
Примером такой системы является семейство MIGITS (Miniature
Integrated GPS/INS Tactical Systems) фирмы Rockwell International.
На сегодняшний день это самые малогабаритные интегрированные си-
системы. Характеристики этого семейства интегрированных навигацион-
навигационных систем приведены ниже в табл. 4.2.
В таких системах возможна комплексная обработка оценок ориен-
ориентации ЛА и их погрешностей для управления разностью фаз сигналов,
принимаемых на интерферометрический антенный модуль от навига-
навигационного спутника. Выходы от инерциального измерительного блока
122
Алгоритмическое обеспечение систем навигации
[Гл.4
Y
Прсдусили-
тель
Подканал
сопровождения
кода
Подканал
сопровождения
несущей частоты
Источник
навигационного
послания
ГЛОНАСС/GPS
Псевдодальность
Дельта-
дальность
Расширенный
фильтр Калмана
Блок чувствительных
элементов
(датчики угловой скорости
и линейных ускорений)
Рис. 4.11. Реализация жестко связанного варианта интеграции ИНС
и ГЛОНАСС/СР8^приемника
Таблица 4.2. Характеристики интегрированных навигационных систем
семейства MIGITS
Характеристики
Точность:
по координатам
по скорости
Габариты, мм
Число каналов
приемника
Инерциальный блок
Время наработки
на отказ, час
Вес, кг
Мощность, Вт
Питание, В
(постоянный ток)
C-MIGITS
76 м B000 м*)
0,7 м/с
146x130x109
5L1, С/А
GIC-100
2700
2
18
28
P-MIGITS
19 м
146x130x158
5L1, С/А
IMU-202
3600
3,2
20
28
M^MIGITS
16 м
—
10L1, L2, Р/Х
DQI (Digital
Quartz IMU)
10 000
2,8
20
28
4.4] Реализация интегрированных систем навигации маневренных Л А 123
и разности фаз несущей частоты обрабатываются для получения перио-
периодически обновляемых параметров ориентации и данных о погрешности
системы. Применительно к беспилотным маневренным аппаратам вы-
выход инерциального измерительного блока продолжает обеспечивать ин-
информацией об угловом положении объекта, гарантируя непрерывность
угловых измерений в условиях высокой динамики угловых эволюции.
Большое значение для точностных характеристик интегрирован™
ных комплексов с различными схемами сопряжения имеет выбор слож-
ности реализуемых в их процессорах фильтров Калмана, т. е. раз-
размерность оцениваемого вектора состояния, характеризующего коли-
количество учитываемых составляющих ошибок ИНС и ГЛОНАСС/GPS-
приемника.
Вычислительные возможности первой половины 90-х годов позво-
ляют реализовать фильтр Калмана для оценки 20-мерного вектора
состояния с периодичностью обновления информации до нескольких
раз в секунду, тогда как в сильно связанной схеме насчитывается не
менее 100 источников ошибок.
Ввиду недостаточных вычислительных мощностей выбирают ми™
нимально достаточную размерность оцениваемого вектора состояния
и скорости обновления выходных данных, исходя из приемлемой точ-
точности навигационного решения. В сверхточных системах размерность
оцениваемого вектора состояния системы может достигать 80, однако
оптимальным считается фильтр для 25™мерного вектора состояния,
а допустимым — для 14—17-мерного.
Сильно связанная схема считается наиболее перспективной, особен-
особенно для управляемого оружия, и находит применение в большинстве
новейших бортовых малогабаритных навигационных систем, как пра-
правило в едином (интегрированном) конструктивном исполнении в виде
одного компактного блока.
Прямое использование псевдодальностей (задержки, измеренной по
огибающей и фазе) в такой схеме дает более точное навигационное ре-
решение благодаря отсутствию накопления численных ошибок при «кас-
«каскадной» фильтрации. При этом компенсация ошибок ИНС не прерыва-
прерывается при потере сопровождения НИСЗ (вплоть до одного остающегося
под наблюдением спутника), поскольку данные по каждому из них об-
обрабатываются в калмановском фильтре как независимые наблюдения.
4.4.3. Алгоритмы комплексмрования. В основе алгоритмов
комплексирования лежат уравнения ошибок БИНС, которые в проек-
проекциях на оси географического трехгранника имеют вид, приводившийся
в п. 3.6.2. Объединяя уравнения C.119)—C.127), получим математиче-
математическую модель уравнения ошибок БИНС в линейной форме:
^x = Fx + Gw, D.1)
где х — вектор состояния системы, включающий ошибки БИНС в опре-
определении местоположения, скорости, ориентации, а также компоненты
модели погрешностей инерциальных датчиков; F — переходная матри-
124 Алгоритмическое обеспечение систем навигации [Гл. 4
ца состояния системы; w — вектор шумов системы; G — матрица шумов
системы.
Измерения можно сформировать по разности инерциальной и спут-
спутниковой информации (позиционной и скоростной). Высотные измере-
измерения можно сформировать также путем вычитания из показаний баро-
высотомера значения высоты, вычисленной в БИНС. При наличии по™
казаний радиовысотомера возможно сравнение высоты, вычисленной
в БИНС, с высотой от радиовысотомера. В этом случае потребуется ин-
информация от бортовой электронной карты местности (или из бортовой
базы данных высот) для получения высоты над эллипсоидом.
Полученные измерения по координатам и скоростям будут вклю-
включать ошибки БИНС и спутниковой системы, а измерение по высоте —
ошибку БИНС, ошибки высотомера (в случае радиовысотомера сюда
войдет ошибка от необозначенных на карте объектов, например дере-
деревьев, построек) и ошибки карты (в нее войдет ошибка от неточного
определения долготы и широты). Уравнение измерений записывается
в следующем виде:
zk = Hxk + vk, D.2)
где zk — вектор измерений, Н — матрица измерений, хк — вектор
состояний, vk — вектор шумов измерений.
Измерения подаются на вход фильтра Калмана, который при пло-
плохой сходимости оценок работает в режиме ^-механизации (например
с коэффициентом е = 1,025), что обеспечивает лучшие характеристики
сходимости оценок. При использовании режима е-механизации для рас-
расчета матрицы ковариации применяется модифицированное уравнение
Риккати [4.16], описывающееся соотношениями
Sk = еФРк-1ФТ + Г<Э!ГТ, Pk = {E-KkH)Sk, D.3)
где Ф — переходная матрица системы (обычно принимают Ф = Е +
+ F dt + (F dtJ/2! + . . ., где dt — шаг интегрирования), 5^, Рк — сим-
симметрические положительно определенные матрицы априорной и апо-
апостериорной ковариации ошибок оценивания, Qi — цифровая интенсив-
интенсивность шумов системы {Q\ = Q/T, Q — интенсивность шумов системы
аналоговой модели), Г — матрица дискретных шумов системы (обычно
принимают Г = GT + ...), Кк — матричный коэффициент усиления
фильтра.
Идея метода е-механизации состоит в увеличении веса текущих
измерений путем увеличения коэффициента усиления оптимального
фильтра К^- Это достигается принятием гипотезы об экспоненциаль-
экспоненциальном старении данных, что выражается в росте в обратном времени
ковариационной матрицы случайных погрешностей каждого прошлого
измерения. Эта гипотеза в конечном счете эквивалентна постепенному
росту коэффициента усиления по мере накопления измерений. Для
уравнения измерений вводится предположение [4.16]
cm[Vk\ = Rk,i = e-{-k-^Rki^k, D.4)
4.4] Реализация интегрированных систем навигации маневренных Л А 125
где е — некоторый эмпирически получаемый коэффициент, лежащий
в пределах от 1 до 1,1, причем значение 1 соответствует отказу от
метода е-механизации;/?^ — интенсивность дискретного шума измере-
измерений (Rk = R/T, R — интенсивность шумов измерений непрерывной
модели).
Полный алгоритм работы фильтра имеет вид
+ R1),
Pk = (E-KkH)Sk, хк = Фхк_1 + Кк(гк-НФхк_1).
В результате работы фильтра вычисляется оценка текущих ошибок
БИНС в определении координат, скоростей, углов ориентации, а также
оценки погрешностей ее акселерометров и гироскопов. На основе полу-
полученных оценок корректируются показания БИНС и ее измерительных
элементов.
Связь вектора состояния уравнений ошибок с поправками к вектору
выходных параметров БИНС дается формулами [4.14]:
с/А, х2 = R\ dip, жз = dh.
= dVE + — —х\ + Uzx2 -
COS if
^, D.6)
xs = С21Д7 + C22Atf + С23Аф - %-,
Л2
9 = C3iA7 + C32A# + С33Аф - ^- tg <p,
Л2
+ Gyi\lY
C12vY
= C21VX
Здесь ж^ — компоненты вектора состояния, причем компоненты с 1
по 3 — ошибки определения координат, с 4 по 6 — ошибки определе-
определения скорости, с 7 по 9 — ошибки ориентации вычисленной в БИНС
системы координат, связанные с ошибками в определении углов курса,
крена и тангажа, с 10 по 12 — постоянные ошибки акселерометров
в соответствии с выражением C.127), с 13 по 15 — постоянные ошибки
гироскопов в соответствии с выражением C.127).
На основе приведенных соотношений D.6) разрабатывается алго-
алгоритм для вычисления корректирующих поправок к вектору выходных
126
Алгоритмическое обеспечение систем навигации
[Гл.4
параметров БИНС. Вся совокупность соотношений D.5), D.6) с учетом
приводившихся схем комплексирования позволяет построить полный
алгоритм комплексной системы.
4.5. Алгоритмы управления и наведения
При формировании алгоритмического обеспечения систем наведе-
ния УАСП используются различные системы координат. Выбор систем
координат зависит от многих факторов: характера решаемой задачи,
конкретного назначения и конструктивной схемы УАСП, реализуемого
метода навигации. Для системы наведения УАСП, дальность полета
которых не превосходит несколько десятков километров, предпочти-
предпочтительно использование следующих систем координат:
— геоцентрическая система координат ПЗ-90, начало которой рас-
расположено в центре масс Земли; ось Z направлена на Условный полюс
Земли, ось X направлена в точку пересечения плоскости экватора и ну™
левого меридиана; ось Y дополняет геоцентрическую прямоугольную
систему координат до правой;
— стартовая система координат, начало которой расположено в точ-
точке проекции на поверхность Земли точки старта УАСП или в геомет-
геометрическом центре наземной цели (рис. 4.12). Ось OYg этой системы
направлена вверх по местной вертикали, ось OXg — по касательной
Рис. 4.12. Стартовая система координат. OXgZgYg — стартовая система ко-
координат, привязанная к проекции центра масс УАСП на земную поверхность;
Og Z* Y* — стартовая система координат, привязанная к цели
4-5]
Алгоритмы управления и наведения
127
к меридиану точки старта или меридиану геометрического центра цели,
в направлении на север, ось OZg дополняет систему координат до
правой. При таком расположении системы координат угловая скорость
ее вращения равна угловой скорости вращения Земли. При этом про-
проекции угловой скорости вращения Земли на оси инерциальной системы
координат определяются в соответствии с выражениями
= О,
D.7)
где (ро — широта точки, принятой за начало стартовой системы коор-
динат.
Эти выражения определяют управляющие сигналы для коррекции
так называемого опорного трехгранника в алгоритмах функциониро-
функционирования БИНС;
— связанная система координат, начало которой находится в центре
масс УАОП. Ось О\Х\ этой системы совпадает с продольной осью
симметрии УАСП. Ось O\Y\ лежит в вертикальной плоскости сим-
симметрии, направлена вверх и называется нормальной осью. Ось O\Z\
направлена вправо и называется поперечной осью.
Полагаем, что приемник спутниковой радионавигационной систе-
системы формирует координаты (Хг,Уг,^г) и проекции скорости УАСП
(Vhc? Vryj ^Fz) B геоцентрической системе координат. Начало стартовой
системы координат, привязанной к положению цели, в геоцентриче-
геоцентрической СК можно определить на основе следующих формульных зависи-
зависимостей:
ХГц = (N + Яц) cos В cos L,
УГц = (JV + Яц) cos В sin L,
D.8)
г, е3 — эксцентриситет земного эллипсоида; а
где /V = =
VI ~~ el sin2 В
большая полуось эллипсоида; Нц — высота цели над уровнем моря.
Координаты и проекции скорости УАСП в стартовой системе коор-
координат можно рассчитать в соответствии с выражениями:
- АТ
А г — А Гц
У Л/
Г - -ГГц
Zp — ^Гц
Уф
УГУ
Угг
D.9)
" — sin L sin Л — cos L sin В cos A cos L cos В — sin L cos A + cos L sin В sin A"
cos L sin A-— sin L sin В cos A cos В sin L cos L cos .A + sin L sin В sin A
cos В cos A sin В — cos В sin Л
D.10)
В данных выражениях L, В — долгота и широта цели в геоцентри-
геоцентрической СК, определяющие начало стартовой СК, ai™ азимут цели.
Формульные зависимости для перехода от геоцентрической системы
128 Алгоритмическое обеспечение систем навигации [Гл. 4
координат приведены для общего случая ориентации стартовой СК.
При ориентации оси OXg стартовой системы координат на север А = 0.
Относительное положение связанной и стартовой СК определяет-
определяется матрицей направляющих косинусов, вычисляемой в БИНС УАСП
(см. выше гл. 3).
В случае оперативно обнаруживаемой цели, прицельный комплекс
самолета^носителя должен предоставить бортовой интегрированной
системе управления (БИСУ) УАСП координаты точки сброса или коор-
координаты цели — широту и долготу. Это обусловлено обеспечением при™
вязки информационных данных Г ЛОНАСС/GPS—приемника к старто-
стартовой системе координат и позволит сохранить единое алгоритмическое
обеспечение БИСУ УАСП в различных условиях боевого применения.
Координаты цели относительно самолета^носителя могут опреде-
определяться на основе информации о геометрической высоте его полета или
дальности до цели, измеряемой лазерным дальномером или БРЛС.
Дальность до цели в первом случае определяется в соответствии с вы-
выражением (рис. 4.12)
D = ^ . D.11)
cos p sin e
Выражения для координат цели относительно самолета-носителя
можно записать в виде:
Хц = D cos /3 cose, Z4 = Dsin/3. D.12)
В данных формульных зависимостях /3 и е — углы места цели.
Целесообразно вне зависимости от режима применения УАСП стар-
стартовую систему координат связать с высотой цели над уровнем моря
для уменьшения ошибок выставки БИНС по положению из-за влияния
рельефа местности.
4.5.1. Алгоритм выставки БМНС. Для осуществления нави-
навигации необходимо знать начальное положение и скорость летательного
аппарата. Обычно эта информация вводится в бортовой вычислитель
УАСП от навигационного комплекса самолета-носителя перед стартом
и определяется точностью комплекса носителя. Кроме того, для из-
измерения ускорения внешних сил, действующих на УАСП, требуется
перед началом работы БИНС знать направление осей чувствительно-
чувствительности моделируемого опорного трехгранника относительно инерциальной
системы координат.
Наиболее распространенными способами начальной выставки с по-
подвижного носителя являются способ согласования углов и способ век-
векторного согласования.
Реально положение связанной системы координат УАСП отлича-
отличается от ориентации связанной системы координат самолета-носителя
из-за наличия дополнительных установочных углов балочных держа-
держателей, явлений деформации нагруженных элементов конструкции пла-
планера носителя и вибраций.
4.5] Алгоритмы управления и наведения 129
Ограниченность применения первого способа начальной выставки
связана с тем, что из-за изгибных деформаций носителя, погрешностей
установки его навигационной системы, ошибок подвески УАСП возни-
возникают трудности с точки зрения обеспечения требуемой выставки за
счет согласования систем координат (опорных трехгранников). В этом
смысле наиболее предпочтительным является способ так называемого
векторного согласования. Принцип векторного согласования состоит
в приведении выставляемой системы в положение, при котором она
будет иметь то же угловое положение относительно некоторого изме-
измеряемого вектора, что и система носителя. Данный принцип применим
при любой природе измеряемого вектора.
Рассмотрим алгоритм выставки БИНС на основе способа векторно-
векторного согласования.
Входами алгоритма выставки БИНС являются:
— принятые при целеуказании кватернионы или углы ориентации
самолета—носителя в стартовой системе координат, позволяющие вы-
вычислить матрицу перехода из стартовой системы координат (ИСК)
в связанную систему координат (ССК), обеспечивающие грубое согла-
согласование ИСК УАСП и носителя (так называемая грубая выставка).
Матрица перехода Aim(tjj^, ^65 7б) из стартовой системы координат
в связанную систему координат УАСП на основе информации об уг-
угловом положении самолета—носителя вычисляется в соответствии с из-
известными выражениями
cos t/?6 cos #6 sin 76 sin t/% — cos ф$ cos 76 sin #6 cos 75 sin г/>б + cos ^6 s°m 76 sin ^6
sin т?б cos 76 cos $6 — sin 75 cos $q
— sin ^6 cos ^6 s'm 76 cos Фб + sin ^6 sin ^6 cos jq cos 75 cos ф$ — sin i/?6 sin #6 sin 75
D.13)
где ijj^ = ^я? ^б = ^Я' 7б = 7я ™l™ 7подв5 ^Я' ^Я' 7я — соответственно
курс, тангаж и крен носителя; 7подв — угол разворота по крену свя-
связанной системы координат УАСП из-за конструктивного размещения
чувствительных элементов БИНС;
— составляющие вектора скорости носителя;
— составляющие вектора скорости и угловой скорости УАСП, по-
поступающие из алгоритма БИНС.
Данная информация позволяет осуществить процедуру рекуррент-
рекуррентного вычисления матрицы доворота, уточняющую первоначально вы-
вычисленную матрицу перехода из ИСК в ССК УАСП.
Согласование или «выставка» ИСК УАСП перед пуском произ-
производится за счет сравнения измерений компонент вектора перегрузки
УАСП в ССК, полученных с акселерометров и переведенных с помо-
помощью матрицы направляющих косинусов в ИСК носителя, с вычислен-
вычисленным вектором перегрузки носителя в ИСК. При построении алгоритма
начальной выставки предполагается, что в бортовую интегрированную
систему управления УАСП, находящегося на подвеске, поступает ин-
информация о скорости носителя в ИСК и усредненные на шаге съема
9 Управление и наведение
130
Алгоритмическое обеспечение систем навигации
[Гл.4
показаний датчиков векторы ускорений и угловых скоростей УАСП
в ССК. Эти векторы несут информацию о взаимном положении вы-
выставляемых систем, а разность этих векторов определяет угол доворота
между стартовой системой координат УАСП и ИСК носителя.
Алгоритм выставки предназначен для уточнения оценки матрицы
перехода из ССК УАСП в ИСК, совпадающей по определению с ИСК
самолета-носителя. В результате совместной обработки поступающей
информации в БИСУ УАСП формируется матрица доворота ИСК
УАСП и производится умножение матрицы доворота на матрицу пе-
перехода от ССК к стартовой СК УАСП. При достижении определенной
точности совмещения осей ИСК УАСП и ИСК носителя алгоритм
выставки отключается.
При построении алгоритма выставки БИНС предполагается, что на
интервалах обновления исходной информации угловая скорость и пе-
перегрузки УАСП постоянны.
Вектор перегрузки УАСП в стартовой системе координат на интер-
интервале поступления информации от самолета-носителя можно вычислить
в соответствии с выражением
пн =
п
•gx
Atg
Vx6(t) - Vx6(t - At)
Vz6(t) - Vz6(t - At)
D.14)
где g — ускорение свободного падения, At — интервал времени, харак-
характеризующий поступление информации; У^б, К^б? Кг б — составляющие
вектора скорости УАСП в стартовой системе координат, переданные
с борта самолета-носителя.
С другой стороны вектор перегрузки УАСП в стартовой системе
координат можно вычислить в соответствии с выражением
пб =
ngz6
D.15)
где
nyl
— вектор перегрузки в связанной системе координат, измеренный дат-
датчиками линейных ускорений БИНС УАСП.
Векторы пн и п$ не совпадают по направлению в силу ошибок
грубой выставки. Векторное произведение Мш = п$ х пн позволяет
определить единичный вектор вращения стартовой системы координат
4-5]
Алгоритмы управления и наведения
131
УАСП относительно системы координат носителя:
?2 =
\NU
. D.16)
Требуемое значение абсолютной угловой скорости поворота старто™
вой системы координат УАСП относительно системы координат носи-
носителя для их совмещения определяется в соответствии с выражением
\шт
= arcsin ¦
пб • \пн\
D.17)
а проекции вектора шт на оси стартовой системы координат УАСП
определяются в виде:
ШТх
ШТу
ШТг
=
?1
?з
шт
шт
D.18)
Так называемая матрица элементарного доворота стартовой систе-
системы координат УАСП к системе координат носителя определяется на
основе формульной зависимости
где / =
тт / гг\ Т
= /cos 5 + A — cos 5) • О Ш |
- единичная матрица,
—Q^j sin a,
D.19)
1
0
0
0
1
0
0
0
1
шт
О ~
ш.
Ту
uTz
О -и,
Тх
—ш.
Ту
уТх
О
(. . . )т — операция транспонирования.
Новое положение инерциальной системы координат УАСП опреде-
определяется в соответствии с выражением
Alm(t) = AsAlm(t - At). D.20)
По элементам матрицы перехода определяются углы ориентации
связанной системы координат относительно стартовой. Итерационный
цикл поворота стартовой системы координат УАСП выполняется до до-
достижения определенной точности ее совмещения со стартовой системой
координат носителя, принятой за базовую систему отсчета.
132 Алгоритмическое обеспечение систем навигации [Гл. 4
В случае функционирования ГЛОНАСС/СР8™приемника, установ-
установленного на УАСП, его информация может быть также использована как
исходная для устранения ошибок выставки. Под ошибкой выставки, как
указывалось выше, понимается минимальный вектор элементарного
доворота, на который следует довернуть ССК УАСП для ее совмеще-
совмещения с истинной. Алгоритм выставки сохраняет свою структуру и по-
последовательность вычислений. Начальное значение матрицы перехода
^1м(Фб^ ^б5 7б) из стартовой в связанную систему координат УАСП
при выставке опорного трехгранника по информации ГЛОНАСС/GPS-
приемника (грубая выставка) можно задать, полагая что
фб = - arctg ^, #б = 0, 7б = Тподв- D.21)
ngx
Все обозначения, приведенные в данных выражениях, соответству-
соответствуют принятым выше.
Для вычисления скоростей УАСП в стартовой системе координат
по информации rjlOHACC/GPS—приемника на борту УАСП должна
быть заложена система координат с привязкой к определенной точке
земной поверхности (например к цели). При этом необходимо учиты-
учитывать относительное положение антенн приемника и центра установки
чувствительных элементов БИНС для компенсации приращения ско-
скорости УАСП за счет вращения.
Результаты моделирования работы описанного выше алгоритма вы-
выставки БИНС представлены на рис. 4.13, 4.14. Представленные графи-
графики характеризуют точность определения углов ориентации в режиме
выставки. При этом рассматривались два варианта выставки: выстав-
выставка БИНС УАСП по информации навигационного комплекса самоле-
самолета-носителя (рис. 4.14) и выставка по информации ГЛОНАСС/GPS-
приемника, установленного на борту УАСП (рис. 4.13). На приведенных
рисунках приняты следующие обозначения: графики с индексом н со™
ответствуют угловому положению носителя; с индексом б — угловому
положению УАСП на подвеске; с индексом в — информации об угло-
угловом положении выдаваемой бесплатформенной инерциальной системой
УАСП.
При проведении моделирования полагалось, что в процессе выстав-
выставки носитель выполняет горизонтальный полет с незначительным изме-
изменением параметров углового положения. СКО ошибок составляющих
линейной скорости носителя в инерциальной СК, вычисляемых в нави-
навигационном комплексе носителя, принимались равными 1 м/с, интервал
выдачи информации с носителя на борт УАСП составлял 0,1 с. СКО
ошибок скоростей УАСП, выдаваемых ГЛОНАСС/СР8-приемником,
принималось равным 0,0343,05 м/с, а интервал выдачи информации —
1 с. Точность подвески УАСП характеризовалось полями допуска ±0,5°
в плоскостях рыскания и тангажа и ±1,5° по крену. Грубая выставка
опорного трехгранника осуществлялась с ошибкой по углу тангажа
до 1°. Угол разворота по крену связанной системы координат УАСП
относительно связанной системы координат носителя принимался рав-
равным 45°.
4-5]
Алгоритмы управления и наведения
133
\|/, град
О
-0,05
-од
-ОД 5
-0,2
-0,25
-0,3
д, град
?н
?б
?в
\
=S-=
—
О 1
0,8
0,6
0,4
0,2
-0,2
-0,4
О 1
У, град
46,5
46
45,5
45
44,5
44
43,5
43
42,5
6 7
9 10 Г, с
/
/
/
Ч
____
9 10 Г, с
Ув
Ун+45°Х
/
/
/
/
^/Уб
\\
\
\
v\
V
\
N/
f
^—
^^
О 12 34 567 8 9 10 t, с
Рис. 4.13. Результаты моделирования процесса выставки
134
Алгоритмическое обеспечение систем навигации
[Гл.4
\|/, град
0,02
-0,02
-0,04
-0,06
-0,08
-ОД
?б
?н^
\
\\
\
\\.
\
/
//
//,
'/
у
0 12 3 4
В, град
1
0,8
0,6
0,4
0,2
-0,2
-0,4
О 12 3 4 5 6
у, град
46,5
46
45,5
45
44,5
44
43,5
43
42,5
9 10 Г, с
X
Эв
4t
г^—~~~„
9 10 Г, с
ун+45°/
А
/
/ ^
Л
' \
\
Л
\^
Уб\
у
О 12 34 567 8 9 10 t, с
Рис. 4.14. Результаты моделирования процесса выставки
4.5] Алгоритмы управления и наведения 135
Анализ графиков показывает, что при принятых точностных ха-
характеристиках базовых систем СКО ошибок выставки БИНС по курсу
составляет 30 у гл. мин, тангажу и крену — 10 у гл. мин.
С точки зрения технической реализации режима выставки БИНС
первый способ, когда выставка осуществляется по данным навигаци-
навигационного комплекса самолета-носителя, является традиционным. Вто-
Второй способ обеспечивает автономную работу системы наведения, од-
однако возникают дополнительные проблемы с оптимальным разме-
размещением антенны rjlOHACC/GPS-приемника на корпусе УАСП при
подвеске.
4.5.2. Алгоритмы управления траекторным движением
УАСП. Чтобы сформировать требуемую траекторию полета опреде-
определенного вида, в общем случае системе управления УАСП должны быть
заданы законы изменения его координат или модуля скорости и углов
ориентации вектора скорости, или законы изменения проекций вектора
скорости центра масс УАСП на оси стартовой системы координат.
Конкретный вид связи, накладываемой на движение центра масс
УАСП, определяет метод наведения.
Определить координаты УАСП относительно цели и ориентацию его
вектора скорости можно, рассматривая движение УАСП в стартовой
системе координат:
Ах = Хв - Хц, Ау = Ув - УЦ1 Az = ZB - Z4,
V = ^Vix + Vgy
<р =
e = -arCt^^=j), i? = arctg | _^^ | , D.22)
ujy = — — (sin § cos e — cos $ cos (ф — (p) sin e),
_ V cos § sin (ф — if)
(Dcose)
В данных выражениях: Xg, Ybj ^б? (^ц? Уц? %ц) — координаты
УАСП и цели в стартовой СК соответственно; D — модуль вектора
дальности; V — модуль скорости УАСП; ср — угол визирования цели
в горизонтальной плоскости; ф — угол курса; е — угол места; # — угол
наклона траектории; шу, ujz — угловые скорости вектора дальности
в вертикальной и горизонтальной плоскостях соответственно.
136
Алгоритмическое обеспечение систем навигации
[Гл.4
Углы пеленга цели могут быть рассчитаны по информации БИНС
на основе следующих выражений:
D.23)
ЖЦ1
2/ц1
= А1и
Ах
Ау
Az
(pg = aretg
= arctg
D.24)
где <^g-, y?v — углы пеленга цели в горизонтальной и вертикальной
плоскости соответственно; жЦ1, уцг, z4\ — проекции вектора дальности
на оси связанной системы координат УАСП, А\ш — матрица перехода
из стартовой в связанную СК.
Наличие информации об относительном положении цели и ориента-
ориентации вектора скорости позволяет применять в системе наведения УАСП
различные методы наведения:
— метод прямого наведения, в котором управляющая перегрузка
пропорциональна пеленгу цели;
— метод прямого наведения с упреждением;
— метод пропорционального наведения;
— программное наведение, предусматривающее полет УАСП из точ™
ки старта, координаты которой с определенной точностью известны,
в заданном направлении на заданной высоте к цели. Программа может
быть сложной и предусматривать, например, вертикальный маневр
с уходом на малую высоту для преодоления рубежа ПВО или обходной
маневр в горизонтальной плоскости. Для уменьшения динамических
ошибок, связанных с суммарным запаздыванием выработки команд
системой наведения и их отработкой УАСП, может быть использован
метод наведения «на мнимую цель», — соответствующую упреждаю™
щей точке программной траектории.
Для достижения высокой эффективности УАСП необходимо обес-
обеспечить некоторые требуемые значения скорости и #3 — угла подхода
к поверхности цели, причем в зависимости от типа цели значение #3
может изменяться в широких пределах [0° -:—90°].
Данная задача решается путем использования в УАСП комбиниро-
комбинированных законов управления, в частности на первом этапе — наведение
с заданным углом места
D.25)
а затем реализация метода пропорционального наведения
пуз = к2(шу - шуст).
D.26)
4.5] Алгоритмы управления и наведения 137
В горизонтальной плоскости при этом реализуется метод пропорци-
пропорционального наведения
D.27)
В данных выражениях cjyCT — параметр компенсации веса; ny3J
nZ3 — заданная перегрузка в вертикальном и горизонтальном каналах
управления соответственно; Eq — угол места цели в момент старта
УАСП; ?i = f{so) — функциональная зависимость, определяющая тре-
требуемый угол места цели в процессе наведения и соответственно, тре-
требуемые условия подхода УАСП к цели; к{, i = 1, 2, 3 — коэффициенты
пропорциональности.
Основным недостатком данного подхода является необходимость
решения краевой задачи и получение (достаточно трудоемкое) фик-
фиксированного угла подхода даже в сравнительно небольшом диапазоне
дальностей полета УАСП.
Законы управления УАСП могут быть получены с использовани-
использованием результатов теории оптимального управления. Рассмотрим синтез
алгоритма управления на примере вертикального канала системы на-
наведения УАСП, для которого удается получить решение в конечном
виде.
Заметим, что перевод УАСП в заданную конечную точку (а не
область пространства) возможен только в детерминированной поста-
постановке.
Для описания движения УАСП относительно неподвижной назем-
наземной цели используем систему линейных дифференциальных уравнений
в виде
H = Vy, D.28)
Vy = ay(t)-g.
Здесь Н — высота полета, Vy — проекция вектора скорости УАСП
на ось OYg стартовой системы координат; ay(t) — ускорение УАСП по
оси OYg] g — ускорение свободного падения. В качестве управления
примем величину ay(i), а критерий оптимизации в виде
/?2(Я " H4cf]t=tf + \ \ a2y(t) dt, D.29)
где tf — момент встречи УАСП с целью; V3 — заданное значение проек-
проекции скорости УАСП на ось OYg стартовой системы координат в конце
наведения; Нцс — высота цели в стартовой СК; /3i, /?2 — коэффициенты
оптимизируемого функционала. Преобразуем исходную систему к виду
Y = Wy, Wy = ay(t), D.30)
где
Wy = Vy-V3- g(tf - t), Wy{tf) = Vy(tf) - I/3,
138 Алгоритмическое обеспечение систем навигации [Гл. 4
Y^H-HUP + V3(tf -t) + g(tf^t]\ Y(t}) = H(tf) - Яцс.
Тогда в качестве критерия оптимизации будем рассматривать функ-
функционал вида
\ \ a\dt. D.31)
Применение вариационных методов решения задач оптимизации не-
непрерывных динамических систем дает решение в следующем виде [4.7]:
a(t) = -AvWy(t) - AvY{t), D.32)
где
А
П
л„ =
В данных выражениях
Я(*,-о = [к + J (*/ - *K] [^ + */"*]-1 (*/ - *L- D33)
При /3i —>• оо и /^2 —>• оо выражение для управления преобразуются
к виду
(i) = _J^L. D.34)
VK> tf-t (tf-tJ K '
При учете принятых обозначений получаем следующий закон
управления с обратной связью:
В приведенных выражениях величина (tf — t) представляет собой
время, оставшееся до встречи с целью; величина V^ = V(tf) sin#35 гДе
V(tf) — значение модуля скорости в момент окончания наведения
(момент встречи с целью); #3 — требуемый угол подхода.
От того, насколько точно определяется iOCT = tf — t зависят точ™
ность наведения УАСП и требуемые условия подхода.
Использование в качестве оценки времени tOCT выражения
tOCT = D/\D, D.36)
4.5] Алгоритмы управления и наведения 139
где D — дальность до цели, D — скорость сближения, может дать неудо-
неудовлетворительный результат по точности наведения и выдерживанию
заданных условий встречи с целью.
Для вычисления tOCT может быть использовано выражение вида
_ \/(Жц - ЖБJ
ОСТ^ Усов(ф-<р) '
где жц, гц — координаты цели в инерциальной СК; ф — курс; (р — угол
визирования цели (азимут).
Для альтернативного варианта вычисления времени, оставшегося
до встречи с целью, представим изменение координаты УАСП по оси
OXg в виде
xB(t) = at2 + 6t + c, D.38)
где а, 6, с — коэффициенты полинома. С учетом граничных условий
= x4, VBx(to) = Vx0, VBx(tf) = Vxf,
^Щ, b = Vx0, c = x0. D.39)
xo)
Время наведения в этом случае определяется как
4- 4- ^\Жц XQJ / . лг\\
tf — to = -^-^—т/ • D.40)
При to = t, т. е. в любой момент времени
_ 2(а;ц - a!B(t)) _
С учетом того, что в начальный момент времени УАСП может иметь
ненулевое боковое отклонение от цели, значение выражения для tOCT
можно записать в виде
. _. # = 9 (жц - xB(t)) cos (f(t) - (zB(t) - гц) sin ip(t)
f V(tf) COS (il){tf) ^ <f(tf)) COS #3 + V COS (ij){t) ^ <p(t)) COS •& '
D.42)
При двилсении УАСП по траектории, принятой для нахождения
величины tOCT, ускорение вдоль оси OXg стартовой системы координат
определяется как
ax{t}- 2(x4-xB(t)) ИЛИ a^t}- 2(хц - xB(t))'
D.43)
С учетом ненулевого бокового отклонения:
. , 1 V(tJ coS2(V>(t) - V(t))(cos2 tf, - cos2 0(t)) . ,
xK> 2 {хц-xB(t)) cos ip(t)-(z4-Zb(t)) sin <p(t)- K' >
140
Алгоритмическое обеспечение систем навигации
[Гл.4
Требуемое (заданное) значение перегрузки в связанной СК УАСП
можно найти с помощью матрицы перехода из стартовой в связанную
систему координат.
Траектории движения УАСП представлены на рис. 4.15, 4.16. На-
Начальные условия моделирования соответствовали дальности до цели
Fx102m/c
H, км
9
8
7
6
5
4
3
2
1
а, 8,град
4
\
a
_ --^
F
*—
.——¦*"
>
...
^^
1 ¦¦
A -
VJ
\ -
sV -
-4 ..
5 10 15 20 25 30 35 Х9
20
10
0
-10
-20
-30
-40
-50
-60
-70
км
Рис. 4.15. Результаты моделирования процесса наведения
FxlO м/с
Н, км
9
8
7
6
5
4
3
2
1
a, 8,град
27
20
13
6
-1
х /
\
\
V
•^-^
\
а
\
. -
^^^
¦— ^
J
у,
V
\
10
15
20
25
30
-22
--29
--36
-43
-50
35 X, км
Рис. 4.16. Результаты моделирования процесса наведения
в момент сброса равной 37 км, углу наклона траектории & = 0, V =
= 300 м/с, Н = 10 км. На рис. 4.15 представлена траектория движения
УАСП с заданным углом подхода к цели $к = ^65°, на рис. 4.16 —
4.5] Алгоритмы управления и наведения 141
с #3 = ™35°, требуемая скорость в конце наведения задавалась равной
250 м/с. На рисунках а — угол атаки УАСП.
4.5.3. Программное наведение УАСП. Представим матема-
математическую модель траекторного движения УАСП векторным диффе-
дифференциальным уравнением вида
x{t) = f(x{t),u(t)). D.45)
Здесь x(t) — вектор координат состояния УАСП, u(t) — вектор
управляющей функции. Вектор-функция /(...) предполагается непре-
непрерывной и непрерывно дифференцируемой по совокупности переменных
x(t) и u(t). Задача отыскания оптимальных управлений формируется
следующим образом. В начальный момент положение УАСП на траек-
траектории определяется вектором ж (to) = xq. Требуется найти такое управ-
управление u(t), которое переводит УАСП в точку x(tk) = %kj при этом на
траектории движения должно реализоваться наименьшее возможное
значение функционала
tk
I = I C(x(t),u{t))dt. D.46)
to
Практика показывает, что формальная постановка задачи управле-
управления не всегда оказывается оправданной и пригодной для конкретных
технических приложений при создании систем пространственного тра-
траекторного управления движением УАСП. Это обстоятельство может
быть объяснено следующими причинами. Первая из них заключается
в том, что для постановки и решения задачи оптимизации траектор-
траекторного управления УАСП необходимо располагать достаточно точной
математической моделью управляемого процесса. В действительности
же уравнения управляемого движения УАСП могут быть известны,
как правило, лишь приближенно. Вторая причина связана с тем, что
в конкретных прикладных задачах управления траекторным движени-
движением УАСП зачастую не удается сформировать оптимизируемый функ-
функционал таким образом, чтобы он отвечал физическому содержанию
управляемого процесса. Вследствие этого полученные так называемые
оптимальные решения могут оказаться непригодными для практиче-
практической реализации.
Однако даже в тех случаях когда уравнения математической модели
управляемого процесса точно известны и функционал в достаточной
степени соответствует цели управления, решить сформулированную
задачу управления, как правило, не представляется возможным. За-
Затруднения математического характера, связанные с решением нелиней-
нелинейной задачи оптимизации, вызвали необходимость использования в ка-
качестве рабочих математических моделей соответствующих линейных
дифференциальных уравнений, записанных для возмущенного движе-
142 Алгоритмическое обеспечение систем навигации [Гл. 4
В практике наведения и управления неустановившимся движением
УАСП в пространстве возникает потребность решения краевой зада-
задачи, в которой заданное терминальное состояние характеризуется за-
заданной величиной и пространственной ориентацией (угловой) вектора
скорости УАСП. Решение подобных задач с использованием принципа
максимума сталкивается с необходимостью решения уравнений сопря-
сопряженной системы с применением метода прогонки. При этом сходимость
алгоритма в значительной степени зависит от заданной опорной тра-
траектории. В итоге мы получаем лишь набор программных траекторий,
реализация движения по которым возможна лишь при «прошивке»
в бортовой ЭВМ УАСП интерполяционных зависимостей. Это требует
значительного объема памяти и соответственно значительных затрат
на расчет программных траекторий.
Применение алгоритмов с прогнозирующей моделью (оптимизация
траекторного движения с использованием неклассического функцио-
функционала А. А. Красовского) [4.9] сталкивается с необходимостью выбора
значений коэффициентов оптимизируемого функционала, а вычисли-
вычислительные затраты зависят от полноты представления прогнозирующей
модели.
В конкретных технических приложениях, связанных с созданием
систем траекторного управления УАСП, иногда оказывается необходи-
необходимым обратиться к использованию концепции обратных задач динамики
(КОЗД). При этом существенно, что использование КОЗД позволя-
позволяет синтезировать алгоритмы терминального управления в замкнутой
форме как для линейных, так и для нелинейных моделей управляемого
процесса [4.10, 4.11].
Представим уравнения движения УАСП в вертикальной плоскости
в виде системы дифференциальных уравнений
dt dt di v
где Н — высота полета в стартовой системе координат, х — горизон-
горизонтальная дальность до цели; § — угол наклона траектории; V — модуль
скорости; пуз — нормальная перегрузка; g — ускорение свободного
падения.
Для определения управляющей функции пуз зададим желаемую
траекторию в вертикальной плоскости в виде степенного полинома
т
Н(х) = ? Акх\ D.48)
k=o
где Ak — неизвестные коэффициенты, которые можно найти из реше-
решения краевой задачи с зафиксированными концами, т — количество
начальных и конечных условий, Н — высота полета в стартовой системе
координат. В полиноме в качестве аргумента принимается горизонталь-
горизонтальная дальность.
4.5] Алгоритмы управления и наведения 143
В частности при т = 3 получаем следующую систему алгебраиче-
алгебраических уравнений
Н(х) = Ао + Агх + А2х2
dH D.49)
°^L = tg # = Аг 2
аж
Положим, что функция Н(х) описывает желаемую траекторию
УАСП в стартовой системе координат с началом в точке сброса. Под-
Подставляя в уравнения начальные условия для траектории полета УАСП
H{to) = Н®, x(t®) = 0, ft {to) = #o> получим значения коэффициентов
Ао = #о, Аг = tg(^o).
С учетом данных выражений и конечных значений (требуемых)
параметров траектории УАСП получим значения для остальных неиз-
неизвестных коэффициентов
= ЦНк - Но) _ tg#fc _
D.50)
, tgflp
1 2 '
где x{tk) = Xkj ft{tk) = $kj H{tk) = Hf, — состояние УАСП на правом
конце траектории полета.
С учетом уравнения, связывающего потребную перегрузку и угол
наклона траектории
^ & (п ^CO4S) (А Ы)
получаем
j-2 —cos# + cos#. D.52)
Значение перегрузки в текущий момент времени t = t®
ny3 = ^5- — cos i? + cos i?. D.53)
Траектории движения УАСП с данным законом управления пред-
представлены на рис. 4.17, 4.18. Данные траектории полета получены при
начальных условиях сброса V = 300 м/с, Н®=10 км, #q = 0 по цели,
расположенной на дальности 37 км. Заданный угол подхода к цели
составлял дк = ^80° (рис. 4.18) и ft к = ^5° (рис. 4.17). На рисунках а —
угол атаки УАСП, остальные обозначения соответствуют принятым
выше.
Для синтеза управления УАСП при реализации пространственных
специальных траекторий представим траекторию движения УАСП в
144
Алгоритмическое обеспечение систем навигации
[Гл.4
FxlO
H, км
9
8
r-J
1
(L
5
4
3
2
1
м/с
С
\
\
\
\
\_
\
—.
\
\
¦ —— .
n»,
a
V
—
a
-
—.
, 0, град
—" " —
10 15 20 25
Рис. 4.17
30
35 X, км
10
-2
-6
-22
-26
-30
-34
FxlO м/с
а, в, град
H, км
9
8
7
6
с
J
4
3
2
1
\
. --—-
_———"
V
X
\
——
^0
-'
\
\
V
л
31
20
-2
-13
-24
-35
-46
-57
-68
-79
-90
0 5 10 15 20 25 30 35 40 X, км
Рис. 4.18
проекциях на каждую из осей стартовой системы координат в виде
полинома
A(t) = а0 + ait + a2t2 + a3t3 + a4t4 + a5t5,
D.54)
= 2a2
12a4t2
где ад, fti, a-2 — начальные (текущие) условия состояния УАСП, соот-
соответствующие координате A(t), скорости ее изменению A(i) и ускоре-
ускорению A(t)\ t — время наведения УАСП.
4.5] Алгоритмы управления и наведения 145
Запишем систему уравнений на момент времени окончания наведе-
наведения УАСП:
А(Т) = Л@) + А@)Т + 0,5Д@)Т2 + а3Т'Л + а4Т4
А(Т) = i@) + А@)Т + За3Т2 + 4а4Т3 + 5а5Т4, D.55)
i i 6а3Т + 12а4Т2 3
Здесь Т — время окончания наведения.
Разрешая эту систему, относительно неизвестных коэффициентов
a>i, г = 3, 4, 5 находим
fe - Ар) _ ААк + 6А0 Ак -
1ЦАк-А0)
- Ар) _ 3(ifc + i0) ifc - Ар
где индексом А; отмечены состояния УАСП, соответствующие конечным
условиям наведения на момент времени Т; индексом «О» — начальные
(текущие).
Таким образом синтез управления УАСП при данном подходе за™
ключается в следующем:
— вычисление вспомогательных параметров, обеспечивающих фор-
формирование граничных условий на концах траектории наведения;
— определение весовых коэффициентов ац;
— вычисление заданного ускорения по каждой из осей стартовой си-
системы координат в соответствии с выражением A(At) = 2о,2 + 6a$At +
+ 120,4Д^2 + 20a5At3, где At — интервал времени, характеризующий
дискретность вычисления управления;
— пересчет ускорения в связанную систему координат с учетом теку-
текущего положения УАСП относительно опорного трехгранника стартовой
системы координат;
— формирование заданной перегрузки в каналах управления.
Терминальные условия, накладываемые на компоненты вектора со-
состояния УАСП, можно определить в соответствии с выражениями
Хк = Vfcsintffccos^fc, Yk = Vifesintffc,
D Vk + V
^k = Vfccostffcsin^fc, Т=т—, Vcp = —-—,
Vcp ^
где V — модуль вектора скорости УАСП на момент расчета сигналов
управления.
10 Управление и наведение
146
Алгоритмическое обеспечение систем навигации
[Гл.4
Типовые траектории наведения УАСП с данным законом наведения
приведены на рис. 4.19, 4.20. Данные рис. 4.19 соответствуют условиям
сброса Хо = 0 м, Zo = 0 м, УЬ = Ю 000 м, Хц = 500 м, Z4 = 1500 м (уело™
10000^
4000
3000
х, м
2000
1000
1500
Рис. 4.19
4800,000
3600,000
2400,000
1200,000
х, м
Рис. 4.20
вия подхода к цели Vk = 250 м/с, #^ = ^60°, фи = —170°). Начальные
условия сброса для данных, приведенных на рис. 4.20, соответствуют
4.5] Алгоритмы управления и наведения 147
следующим значениям: Xq = 1500 м, Z® = 0 м, Yq = 10 000 м, Хц = 0 м,
Z4 = 0 м; условия подхода к цели V& = 280 м/с, #^ = ™60°, фк = 180°.
Существенным недостатком данного подхода является то, что зада™
ние желаемой траектории с помощью полинома (без учета аэродинами™
ческих характеристик УАСП) не отражает особенности действительной
траектории движения УАСП. Достоинством же здесь выступает такой
фактор, как простота реализации на борту и возможность достижения
заданных углов подхода.
4.5.4. Особенности реализации алгоритмов комплексиро-
комплексирования информации БМНС и ГЛОНАСС/GPS—приемника в
составе БМСЖ. Остановимся теперь на конкретных особенностях ре-
реализации фильтра Калмана при построении алгоритмов комплексной
обработки информации БИНС и FJlOHACC/GPS-приемника в случае
несвязанной схемы комплексирования (так называемое сопряжение по
выходным данным).
Как уже указывалось выше, rjIGHACC/GPS-приемник как изме-
измеритель навигационной информации, имеет следующие особенности:
— высокочастотный по сравнению с БИНС характер ошибок изме-
измерений с малым уровнем низкочастотной составляющей;
— возможность прекращения (перерывов) поступления информа-
информации на определенных интервалах времени с учетом вероятной поста-
постановки помех или нарушения условий видимости навигационных ИСЗ.
В рамках обсуждаемой схемы комплексирования целесообразно рас-
рассмотреть БИНС как основной источник навигационных данных, а ин-
информацию, поступающую от ГЛОНАСС/СР8^приемника, использо-
использовать для коррекции БИНС.
Известно, что при оценивании параметров пространственного дви-
движения УАСП так называемый вертикальный канал движения, вклю-
включающий высоту полета, имеет ряд особенностей, главная из которых
состоит в необходимости иметь дополнительный источник информа-
информации — высотомер, обеспечивающий устойчивое оценивание навигацион-
навигационных параметров в этом канале. Эта особенность вертикального канала
достаточно хорошо изучена. В частности комплексное оценивание пара-
параметров вертикального движения в инерциальных системах управления
полетом достаточно подробно рассмотрено выше. Поэтому в дальней-
дальнейшем при анализе особенностей реализации алгоритмов обработки ин-
информации ограничимся алгоритмами фильтрации в продольном и бо-
боковом каналах.
Модель ошибок счисления параметров полета УАСП в продольном
и боковом каналах БИНС удобно представить в виде
4; AVx = Aax; Аах = ?х1;
D.58)
= AVZ; AVz=Aaz; Aaz = Сж2,
где АХ, AVXJ Ааж, AZ, AVZ, Aaz — ошибки БИНС по координатам
и их производным; ^"Ж1, ^Х2 — шумы акселерометров, рассматриваемые
как белые шумы с интенсивностями Sx\ ш SX2 соответственно.
10*
148
Алгоритмическое обеспечение систем навигации
[Гл.4
Модель наблюдения запишем в виде
%1 = ^бинс — ^снс =
Z2 = ^бинс ~ Дзнс =
^би„с = Xй + ДХ; Z6m
Czl'i
AZ;
D.59)
Здесь Хбинс? ^бине — координаты, определяемые БИНС; Хснс,
ZCHC — координаты полета УАСП, определяемые ГЛОНАСС/GPS-
приемником; Xй — истинное значение координат; АХ, AZ — погреш™
ности БИНС, рассматриваемые как систематические ошибки, обуслов™
ленные уходом гироскопов и неточностью акселерометров; ?zi, (z2 —
шумовая составляющая ошибки rjlOHACC/GPS-приемника, рассмат™
риваемая как белые шумы с интенсивностями Sz\ и SZ2 соответственно.
Преобразуем приведенную выше модель и соотношения для изме-
измерений к стандартной форме:
\/~ A Y л_ С У J-T Y _|_ /" (Л (\С\\
где X = [AX,AVx,Aax,AZ,AVz,Aaz] — рассматриваемый вектор
состояния системы;
10 0 0 0 0'
0 0 0 10 0
н =
— матрица наблюдения;
Л =
0 10 0 0 0
0 0 10 0 0
0 0 0 0 0 0
0 0 0 0 10
0 0 0 0 0 1
0 0 0 0 0 0
— динамическая матрица оцениваемой системы;
Z — вектор наблюдения; ^z — матрица шумов наблюдения; ^х —
матрица шумов системы.
Стандартный алгоритм непрерывного фильтра Калмана примени-
применительно к данной задаче имеет вид
дх = avx + кф1(г1 - ах) + к*ф1(г2 - az)-
AVX = Aax + Кф2(г1 - АХ) + Кф2(г2 - AZ);
лЯ, = кфз(гг - ах) + к*фз(г2 -
4.5] Алгоритмы управления и наведения 149
? = AVZ + K^{ZX - АХ) + K^(Z2 - AZ);
Z = Aaz + Кфъ{г1 - AX) + K%b{Z2 - AZ);
Ahz = Кфв(г1 - AX) + K*^(Z2 - AZ), D.61)
где Кф{, /CL, i = 1,6 — коэффициенты фильтрации, определяемые из
решения матричного уравнения Риккати; АХ, Д1/ж, Лах, AZ^ AVZ,
Aaz — оценки компонентов вектора состояния.
Коэффициенты фильтрации Кф{, К^ как результат решения урав-
уравнения Риккати являются функциями времени. На практике с целью
уменьшения объема вычислений и упрощения алгоритма часто при-
прибегают к следующему приему. Анализ показывает, что при больших
объемах измерений и высокой частоте их поступления решение уравне-
ния Риккати устанавливается достаточно быстро (примерно в течение
нескольких секунд полета УАСП). Это означает, что коэффициенты
Кф1^ i"CL могут быть определены как постоянные из установившегося
уравнения Риккати, которое в этом случае превращаются в нелинейное
алгебраическое [4.8].
На рис. 4.21 в качестве иллюстрации приведены графики погрешно-
погрешностей d координат и составляющих скорости БИНС, ГЛОНАСС/GPS —
приемника и комплексной обработки информации в стартовой системе
координат для случая, когда все постоянные в реализации случайные
числа выбирались на уровне Зет. Обозначения, принятые на рисунке:
rf^GPHC, dZcpuG и dVxCPHC, dVzcmc — погрешности ГЛО
HACC/GPS^npneMHHKa по координатам X и Z и составляющим
вектора скорости соответственно;
о?Хф, <?2ф и dVx$, dVz^ — погрешности координат и составляющих
вектора скорости, полученные в результате комплексной обработки
информации;
с!Хб, dZ^ и dVxS, dVzQ — погрешности координат и составляющих
вектора скорости БИНС;
все переменные — функции времени.
Приведенные на рис. 4.21 данные соответствуют моменту включе-
включения ГЛОНАСС/СР8-приемника через 4 с после сброса УАСП.
Анализ функционирования подобного алгоритма коррекции БИНС
калмановской структуры показывает в целом устойчивость процесса
оценивания в смысле сходимости оценок к истинным значениям, но, тем
не менее, в ряде случаев переходный процесс оказывается затянутым.
В ситуациях, когда УАСП применяется с больших высот на большую
дальность, этот недостаток не приводит к большим ошибкам оценива-
оценивания координат на конечном участке полета и, как следствие, к ухудше-
ухудшению точности попадания в цель. При этом СКО промаха определяется
в основном систематической составляющей ошибки ГЛОНАСС/GPS^
приемника. Однако при использовании УАСП на малых дальностях
150
Алгоритмическое обеспечение систем навигации
[Гл.4
•е-
/
/
{
[
1
о
"в
/
\
/
/
/
/
/
/
/
ю
/
/
/
}
(
1
{
\
/
ч
и
/
и
/
/
—-—"
/
/
^in^
1 -
о
1
i
<
с
>
1
V
1
у
с.
i
1
<
с
<
>
ч.
1
1
/
/
4
/
/
/
/
/
/
400»
ю
1
О
/
Л
\
I
<
<
с
У*
<
У
>
1
\
/
/
s
к
ев
И
о
Си
I
I
з
о
00
о
ю
о
^г
о
Рис.
о о о
о о о
7 7?
о о о g°oooooooo
ооо ^сючо^см м ^ ю оо
f *? т ^ I I I I
4.5] Алгоритмы управления и наведения 151
подобный алгоритм может существенно повлиять на точность наведе-
наведения.
В этой связи целесообразным является другой подход к построению
алгоритма фильтрации, основанный на снижении порядка исходной
системы и использовании измерений координат и скоростей. Модель
движения УАСП, используемая для формирования алгоритма для од-
одного из каналов БИНС (при принятии допущения о независимости
каналов), имеет вид
X = V, V = a + i, D62)
где X, I/, а — координата, скорость и ускорение УАСП по одной из осей
опорного трехгранника; ? — белый шум с интенсивностью Sx.
Модель измерителя Z = X + ?, где (" — белый шум с интенсивно-
интенсивностью Sz.
Уравнения фильтра Калмана для оценивания параметров движе-
движения УАСП имеют вид
(А ,
D.63)
где коэффициенты К\, К2 определяются как
js Rn jZ R12
K К
Корреляционные моменты определяются путем решения системы
дифференциальных уравнений Риккати третьего порядка:
<п» п» -Л,1 1 п. / I \
D.64)
R2
R22 = Sx —, ^22(^0) = ^Vo-
>J z
Таким образом некоторое упрощение модели для синтеза позволяет
построить алгоритм фильтрации, состоящий из системы 5 дифферен-
дифференциальных уравнений, включая уравнения Риккати, что обеспечивает
точное вычисление коэффициентов фильтрации.
Результаты, иллюстрирующие погрешности оценивания координат
и составляющих вектора скорости, представлены на рис. 4.22. Модели-
Моделирование алгоритма фильтрации осуществлялось при Sx = 0,535 м2с^3;
Sz = 90 м2 с; <тжо = 50 м; (jvq = 0,55 м/с. Все обозначения, приведенные
на рисунке, соответствуют принятым выше.
Качество процесса оценивания вектора состояния системы можно
улучшить при изменении модели измерений:
Zi = X + Cb Z2 = V + B, D.65)
152
Алгоритмическое обеспечение систем навигации
[Гл.4
<
— ¦
<
<
*
Ы
ь
<,
3
J
>
/
/
/
/
)
i>
4J о «п
>л П >n m in
7 ' 7 ' i
I"
«с
?
I
i
л
Рч <
<
У
>
к*
>
/
/
/
/
/
/
/
/
/
О
О
00
о
чо
?
о
<N
о
/
/
/
ю
/
/
1
/
«с:
•с
/ -
>
>
>
•с*
4
f
f
/
О
/
/
120
о
о
о
оо
о
чо
о
о
о
120
S
s
S
S
и
X
о
о
о
о
с
S
к
ев
и
о
Q
1
3
о
00
о
чо
о
^г
о
Рис.
а ° 8 8 8
* 7 7?
<W> \m^ \т^
"^Г V) ЧО
з s
оооооо
1111
4-5]
Алгоритмы управления и наведения
153
43
-
о
м
Рч
о
"а
/
/
/
/
/
/
/
/
/
I
I
1
1
Ю
/
/
\
/
\
>
7
°§777?7?
1
<
I
(
\
I
J
<
I
I
<
с
<
<
<
<
I
/
/
/
/
/
/
/
Ph
/
<
<
/ -
«
<
с
<
<
<
s»
г»
=*
>
a»
>
>
3»
/
/
/
/
S
и
«3
«3
о
о
I
S
Е
и
о
а
1
I
я
I
S g
S
си
О О
о
О О О О
о о о о
CN ГО Xf VI
4зл
оооооо
1111
154 Алгоритмическое обеспечение систем навигации [Гл. 4
где (д и B — белые шумы измерений с интенсивностями Si и S2
соответственно.
Решением данной задачи является алгоритм непрерывного фильтра
Калмана в виде
X = V + K1{Z1 - X) + K2(Z2 ~~ V),
V = a + AT3(Zi - X) + АГ4(Я2 - V),
OZ
Я 2
11
R22 — R\2 1 "^ Н "^— I
V
Тем не менее порядок системы уравнений алгоритма фильтрации не
изменился, а лишь незначительно увеличилось количество вычислений.
Результаты моделирования (при Sz2 = 0,0025 м2си1) свидетель-
свидетельствуют об улучшении качества процесса оценивания, как по координа-
координатам, так и по составляющим вектора скорости (рис. 4.23).
Список литературы к главе 4
4.1. Мирополъский Ф.П., Саркисян Р. С, Вишняков О.Л., Попов A.M.
Авиационные боеприпасы и их исследование. — М.: ВВИА им. Н. Е. Жу-
Жуковского, 1996. — 527 с.
4.2. Системы наведения управляемого оружия класса «воздух-
поверхность» (обзор по материалам иностранной печати) // НИЦ,
1977.
4.3. Казаков И. Е., Гладков Д. Ип Криксунов Л. Зп Харитонов А. П. Систе-
Системы управления и динамика наведения ракет. — М.: ВВИА им. Н. Е. Жу-
Жуковского, 1973. — 498 с.
4.4. Григорьев В. Г. Авиационные управляемые ракеты. Часть I. Авиаци-
Авиационные управляемые ракеты и бомбы, их устройства. — М.: ВВИА им.
Н.Е. Жуковского, 1984. — 229 с.
4.5. Интегрированные комплексы на базе ИНС и приемника системы «Нав-
стар» // Новости зарубежной науки и техники. Серия «Авиационные
системы». ГосНИИАС, 1995. № 10-12.
4.6. Richard ^.Phillips, Schmidt G. T. Relative and differential GPS. AGARD
Lecture series 207, 1996. P. 5-1-5-22.
4.7. Брайсон А. Хо Ю-Ши. Прикладная теория оптимального управле-
управления. — М.: Мир, 1972. — 544 с.
4.8. Фильтрация и стохастическое управление в динамических системах /
Под ред. К. Т. Леондеса — М.: Мир, 1980. — 407 с.
4.5] Алгоритмы управления и наведения 155
4.9. Справочник по теории автоматического управления / Под ред.
А. А. Красовского. — М.: Наука. Гл. ред. физ.-мат. лит., 1987. — 712 с.
4.10. Тараненко В. Т., Момжи В. Г. Прямой вариационный метод в задачах
динамики полета. — М.: Машиностроение, 1986. — 127 с.
4.11. Нелюбов А. И., Новад А. А. Динамика полета боевых летательных ап-
аппаратов. — М.: ВВИА им. Н.Е. Жуковского, 1992. — 439 с.
4.12. Шебшаевич В. С, Дмитриев П. П., Иванцевич Н. В. и др. Сетевые
спутниковые радионавигационные системы. — М.: Радио и связь, 1993.
4.13. Андреев В. Д. Теория инерциальной навигации, ч.1. Автономные систе-
системы. — М.: Наука, 1966.
4.14. Помыкаев И. И., Селезнев В. П., Дмитроченко Л.А. Навигационные
приборы и системы. М., Машиностроние, 1983.
4.15. Бромберг П. В. Теория инерциальных систем навигации. — М., Наука,
1979.
4.16. Ривкин С. С, Ивановский Р. И., Костров А. В. Статистическая оптими-
оптимизация навигационных систем. Ленинград, Судостроение, 1976.
Глава 5
ИСПОЛЬЗОВАНИЕ ТЕХНОЛОГИЙ
«МАШИННОГО ЗРЕНИЯ» ДЛЯ УПРАВЛЕНИЯ
И НАВЕДЕНИЯ БЕСПИЛОТНЫХ
МАНЕВРЕННЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Использование технологий «машинного зрения», включая методы
теории обработки изображений и распознавания образов, являются
альтернативой СЬОМА88/СР8^технологиям (а в некоторых случаях
и их дополнением) при формировании облика бортовых высокоточных
интегрированных систем навигации и наведения беспилотных манев-
маневренных летательных аппаратов.
Практическая применимость технологий «машинного зрения» в
значительной степени основана на достижениях в области микроэлек-
тропики и разработках сенсорных бортовых технических устройств
в видимом, инфракрасном и радиолокационном диапазонах излуче-
ния электромагнитного спектра, а также на возможности реализации
сложных алгоритмов комплексной обработки текущей информации от
нескольких источников.
С технической точки зрения проблема использования технологий
«машинного зрения» для навигации и наведения беспилотных манев-
маневренных летательных аппаратов формулируется следующим образом.
Необходимо сопоставить текущее и эталонное изображения с по-
последующей локализацией на текущем изображении заданных объектов
сцены и определением значений текущих координат этих объектов
с целью формирования сигналов управления движением летательного
аппарата с использованием:
— существующей априорной информации о рассматриваемой сцене
(участке земной поверхности), включающей тип и количество объек-
тов сцены, их взаимное расположение, геометрические и яркостные
характеристики, характеристики двумерных полей (например — поля
рельефа, оптического контраста и т.п.), позволяющей построить её
эталонное изображение;
— апостериорной информации о наблюдаемой в процессе полета
сцене (условиях её наблюдения, характеристиках сенсорных датчиков
и их ошибках, и т. п.), представляющей собой текущее изображение на
выходе бортового сенсора в том или ином спектральном диапазоне.
При этом понятие «эталонное изображение» рассматривается в са-
мом широком смысле: непосредственно изображения, двух- BD) и трех-
трехмерные CD) геометрические модели, векторы признаков, неформаль-
неформальные описания объектов и сцен и т. п.
Гл. 5] Использование технологий «машинного зрения» 157
Существенными ограничениями практической разрешимости сфор-
сформулированной технической проблемы являются:
— наличие существенной априорной неопределенности в информа-
информации об объектах распознавания и сцене в целом (неточность определе-
определения координат объектов, изменчивость двумерных полей и т.д.);
— наличие так называемых изоморфных преобразований (искаже-
(искажений) текущего изображения (изменение общего уровня яркости, мас-
масштаба, сдвиг и поворот изображения относительно всех трех ортого-
ортогональных осей и т.д.), приводящих к его пространственно-временной
трансформации;
— наличие помех естественного и искусственного происхождения,
включая полное или частичное затенение (загораживание) объектов
или сцены в целом.
Исходя из сказанного, можно выделить три основных направления
исследований по решению указанной проблемы.
1. Разработка методов, технических средств и технологий формиро-
формирования эталонных изображений (эталонных описаний) на основе исполь-
использования аэро- и космоснимков заданных участков земной поверхности,
каталогов отражательных характеристик, описаний характерных черт
объектов естественного и искусственного происхождения, априорной
информации об условиях наблюдения рассматриваемых сцен при по-
получении текущих изображений и т. д.
2. Разработка бортовых алгоритмов совмещения эталонных и те-
текущих изображений, локализации и определения координат заданных
объектов, обеспечивающих робастность к изменению априорных пред-
пол ожений о характеристиках изображений наблюдаемых сцен, опти-
оптимальную организацию вычислительного процесса в бортовых вычисли-
вычислительных устройствах и т. д.
3. Формирование системы управления, использующей бортовые
сенсорные устройства различного типа и бортовые вычислительные
устройства, реализующие алгоритмы совмещения эталонных и теку-
текущих изображений и определения координат заданных объектов сцены,
для коррекции и наведения летательного аппарата на выбранную точку
прицеливания.
Здесь можно выделить два практически реализуемых класса систем
управления и наведения беспилотных маневренных летательных аппа-
аппаратов:
— автоматизированные (в большей или меньшей степени) борто-
бортовые системы обработки изображений и распознавания объектов сцены,
решающие весь комплекс задач наблюдения сцены, обнаружения, рас-
распознавания и целеуказания с участием человека — оператора на борту
самолета-носителя;
— автоматические (автономные) бортовые системы обработки изоб-
изображений и распознавания объектов сцены, полностью решающие весь
комплекс аналогичных задач на борту беспилотного маневренного ле-
летательного аппарата в процессе его полета.
В системах первого класса (автоматизированных) главным дей-
действующим лицом при обработке информации и принятии решения
158 Использование технологий «машинного зрения» [Гл. 5
является человек-оператор. В этих случаях в качестве эталонного изоб-
изображения используются изображения сцены, полученные с помощью
бортового сенсорного датчика самолета^носителя или беспилотного
маневренного летательного аппарата с нанесенной на нем оператором
меткой (координатами) целеуказания непосредственно перед пуском.
Дальнейшее сопоставление эталонного и текущего изображений осу-
осуществляется в бортовой системе наведения беспилотного маневренного
летательного аппарата в процессе его полета.
Применительно к проблемам навигации и наведения беспилотных
маневренных летательных аппаратов предметом данного рассмотре-
рассмотрения являются системы второго класса (автономные). В таких систе-
системах подготовка эталонной информации осуществляется заранее, до
вылета самолета-носителя, с помощью специализированного наземно-
наземного комплекса подготовки полетных заданий. Среди многочисленных
задач, решаемых таким комплексом, есть и задачи выбора оптимально-
оптимального маршрута автономного полета беспилотного летательного аппарата
в вертикальной и горизонтальной плоскостях, выбора зон коррекции
системы навигации, в том числе — с использованием характеристик
физических полей Земли (поля рельефа, поля оптического контраста,
и т.п.), определения зоны обнаружения, распознавания и целеука-
целеуказания заданного объекта, формирования эталонного описания сцены
и заданного объекта, нанесения точки прицеливания и т. д. При этом
обязательно учитывается структура и характеристики автономной си-
системы наведения беспилотного маневренного летательного аппарата,
структура её алгоритмов обнаружения, распознавания и целеуказания,
характеристики текущего изображения.
В некоторых случаях решаются и задачи построения синтезиро-
синтезированного эталонного описания, когда исходной информацией для такого
описания являются фотоснимки (в видимом диапазоне), а бортовые
датчики, формирующие текущее изображение, работают в другом, на-
например в инфракрасном или радиолокационном диапазонах спектра.
В общем виде структурная схема такой автономной системы наве-
наведения может быть представлена, например, в виде, изображенном на
рис. 5.1, и состоит из следующих основных устройств:
— системы обработки и распознавания изображений объектов на
земной поверхности (СОРИ), включающей датчик изображения и спе-
специализированный вычислитель, реализующий бортовые алгоритмы об-
обнаружения, распознавания заданного объекта, определения координат
выбранной точки на поверхности объекта и целеуказания;
— системы автоматического сопровождения измеренных координат
выбранной точки целеуказания (в непрерывном или дискретном режи-
режиме) в процессе наведения беспилотного летательного аппарата;
— инерциальной навигационной системы (ИНС), обеспечивающей
на этапах обнаружения, распознавания и целеуказания выставку опти-
оптической оси датчика изображения СОРИ в расчетное (заданное) поло-
положение, режим программно-корректируемого слежения датчика изобра-
изображения за выбранной точкой целеуказания и управление летательным
аппаратом при срыве автосопровождения;
Гл.5]
Использование технологий «машинного зрения»
159
— блока фильтрации (БФ), обеспечивающего оценку вектора фа-
фазовых координат движущегося объекта с использованием алгоритмов
комплексной обработки информации от ИНС и датчика (датчиков),
формирующих текущие изображения;
— блока формирования сигналов управления движущимся объек-
объектом (БФСУ).
Система обработки
и распознавания изображений
(СОРИ)
Г"
Обнаружение
Распознавание
Целеуказание
Спец. вычислитель
Эталонное изображение
Расчетные значения пара-
параметров ориентации линии
визирования заданной
„ точки целеуказания
Инерциальная
навигационная
система
(ИНС)
Программно-корректируе-
Программно-корректируемое слежение за координа-
координатами выбранной точки
целеуказания
Слежение за расчетными и
измеренными координатами
заданной и выбранной точек
целеуказания
Система автосопровождения
(АС)
Оценка
ошибок
ИНС
Значения
навига-
навигационных
параметров
Блок фильтрации
(БФ)
Наблюдаемая в процессе
полета сцена или объект
Кинематика относи-
относительного движения
Блок формирования
сигналов управления
(БФСУ)
Летательный
аппарат
1
<} *
Рис. 5.1
При этом под «заданной» точкой целеуказания подразумевается
точка на сцене или объекте, координаты которой рассчитываются за™
ранее и задаются на эталонном изображении и в ИНС перед пуском
беспилотного летательного аппарата.
«Выбранная « точка целеуказания характеризуется определяемыми
в процессе распознавания и целеуказания измеренными в СОРИ значе-
значениями координат точки прицеливания на текущем изображении. В эту
точку и осуществляется процесс наведения беспилотного летательного
аппарата.
Один из возможных вариантов функционирования рассматривав™
мой системы приближенно может быть описан, например, следующей
последовательностью действий:
1) после выхода беспилотного летательного аппарата в заданный
район наблюдения участка земной поверхности по информации от ИНС
определяются расчетные значения углов ориентации и угловых скоро™
стей линии визирования в вертикальной и горизонтальной плоскостях,
наклонной дальности D до заданного объекта (фрагмента изображе-
изображения), в соответствии с которыми осуществляется выставка оптической
160 Использование технологий «машинного зрения» [Гл. 5
оси датчика изображений в направлении расчетной (заданной) точки
целеуказания;
2) в расчетной точке траектории формируется текущее изображение
(ТИ) объекта и района его расположения в зависимости от возможно-
возможностей датчика изображений, скорости движения летательного аппарата
и его маневренных возможностей, поставленной задачи и т.д.;
3) осуществляются операции первичной обработки ТИ (фильтра-
(фильтрация, подчеркивание границ, выделение контуров и т. п.) и сопоставле-
сопоставления его с записанным и хранящимся в памяти спецвычислителя СОРИ
эталонным изображением, в результате которых решаются задачи об™
наружения, распознавания и целеуказания заданного объекта, при этом
по информации от ИНС осуществляется программное управление дат-
датчиком изображений для непрерывной ориентации его оптической оси
в направлении выбранной точки целеуказания;
4) после определения координат выбранной точки прицеливания
осуществляется переход в режим автосопровождения (АС) этой точки
по сигналам от СОРИ и формирование сигналов управления, пропор-
пропорциональных измеренным значениям угловых скоростей линии визи-
визирования, углов и дальности D; допускается возможность повторения
процедур обработки ТИ и сопоставления его с эталонным изображени-
изображением (ЭИ), распознавания заданного объекта и определения его коорди-
координат;
5) в случае срыва процесса АС управляющие сигналы формируются
по информации от ИНС с учетом оценок, получаемых в блоке филь-
фильтрации (БФ).
Ниже обсуждаются некоторые возможности решения задач первого
направления — разработки методов, технических проблем и технологий
формирования эталонных изображений и описаний, а также отдель-
отдельные результаты таких решений применительно к системам управления
беспилотных маневренных летательных аппаратов типа систем самона-
самонаведения. Такие системы осуществляют поиск и автоматический захват
заданного объекта или его элемента с последующим автосопровожде-
автосопровождением в процессе полета.
5.1. Использование эталонной информации
различного типа в перспективных системах
наведения
Как уже отмечалось выше, формирование эталонного и текущего
изображений, соответствующих этим изображениям описаний и алго-
алгоритмов сравнения в значительной степени основывается на использова-
использовании методов и технологий «машинного зрения» [5.1]. При таком подходе
входная информация представляет собой изображение рассматривае-
рассматриваемой сцены (или несколько изображений, включая стереопары), а вы-
выходная состоит из информации о сцене, породившей это изображение
(или изображения). Например, выходная информация может являться
описанием сцены в какой-либо форме.
5.1] Использование эталонной информации различного типа 161
Такие описания должны соответствовать как эталонному, так и те-
текущему изображениям и быть представлены в форме, обеспечивающей
возможность последующего сопоставления этих описаний для локали-
локализации объектов наблюдаемой (текущей) сцены и определения необхо-
необходимых для управления координат.
Следует отметить основные особенности формирования эталонного
обеспечения для систем рассматриваемого класса, а именно:
— возможность использования результатов аэрокосмофотосъемки
участков земной поверхности (плановых, наклонных, стереоизображе-
стереоизображений) в качестве основного информационного материала;
— возможность использования дополнительных материалов — ка-
каталогов отражательных характеристик различных конструкций и по-
поверхностей, размеров типовых объектов и т. д.;
— существенная объемность (трехмерность) рассматриваемых сцен,
поскольку точка прицеливания может задаваться на поверхности про-
пространственного объекта, при этом подразумевается известность тре-
третьей координаты этой точки;
— относительно большие размеры наблюдаемых участков земной
поверхности на текущем изображении с линейными размерами на мест-
местности до 1—2 км и высокая объектовая насыщенность этих участков —
до 10-15 объектов;
— возможность затенения и загораживания отдельных поверхно-
поверхностей и объектов в целом как на аэрокосмофотоснимках, так и на теку-
текущих изображениях рассматриваемых сцен;
— наличие ошибок в определении относительных и собственных
координат объектов в процессе дешифрирования и локализации раз-
различных объектов или характерных черт местности естественного и ис-
искусственного происхождения на снимках;
— изменчивость характеристик участков земной поверхности — из-
изменение яркостных, геометрических, текстурных и т. п. свойств объек-
объектов в зависимости от освещенности, времени суток, времени года и т. д.;
— наличие изоморфных преобразований текущего изображения —
изменение общего и локальных уровней яркости, масштаба, сдвиг и
поворот относительно всех трех ортогональных осей и т. п. в процессе
полета летательного аппарата.
Исходя из этого при формировании эталонного изображения наи-
наиболее целесообразным представляется геометрический подход, осно-
основанный на формировании выразительной символьной интерпретации
сцены по одному или нескольким изображениям этой сцены в виде
трехмерной геометрической модели. Формирование трехмерной гео-
геометрической модели сцены можно представить процессом, включаю-
включающим в себя преобразования между четырьмя уровнями представлений:
1-й уровень — изображение;
2-й уровень — двумерное представление BО-описание);
3-й уровень — трехмерные структуры (ЗО-описание);
4-й уровень — трехмерные геометрические модели.
Сказанное иллюстрируется с помощью блок-схемы на рис. 5.2. На-
Начальное входное изображение может представлять собой одиночное
11 Управление и наведение
162
Использование технологий «машинного зрения»
[Гл.5
черно-белое или цветное изображение, стереопару. Примером двумер-
двумерных элементов, выделенных из исходного изображения, могут служить
вершины объектов, линии и области равномерной яркостной интен-
интенсивности. К трехмерным структурам, соответствующим двумерным
элементам предыдущего уровня, относятся возвышения, границы объ-
объектов, участки земной поверхности (поле рельефа местности) и т. п.
1 уровень
2О-преобразования —
Изображение
2 уровень
2В-описание
3 уровень
«Рассеянное»
изображение
ЗЭ-структуры
Сравнение
моделей
4 уровень
Трехмерная
геометрическая
модель
Рис. 5.2
5.1] Использование эталонной информации различного типа 163
При построении таких структур из двумерных элементов суммируются
данные о разрешающей способности аппаратуры, знания о рассматри-
рассматриваемой области и данные, полученные из изображения, что позволяет
получить в результате этого этапа преобразований трехмерное так на-
называемое «рассеянное» контурное изображение сцены. При построении
трехмерной геометрической модели из набора трехмерных структур
используется описание границ, поверхностей, объемов.
Совершенно очевидно, что практическая реализация описанных вы-
выше в общем виде процессов преобразований и формирования трехмер-
трехмерных геометрических моделей наземных сцен допускает использование
различных подходов и процедур на каждом уровне представлений.
Такие отличия основываются на различных особенностях конкретных
сцен и объектов, возможности идентификации их характерных черт
в двумерных представлениях, сложности и подробности построения
трехмерных структур, точностных характеристиках исходной инфор-
информации и формы представления конечной трехмерной геометрической
модели и т. д.
Большинство таких процедур не может быть в полной мере фор-
формализовано строгими математическими описаниями и в значительной
степени основано на использовании эвристических подходов и интер-
интерактивных технологий с широким применением специализированных
программных продуктов машинной графики для представления трех-
трехмерных геометрических моделей реальных сцен и в конечной форме —
в виде цифровой модели местности (ЦММ), включающей модели ре-
рельефа местности и объектового состава рассматриваемой сцены.
Тем не менее представляет интерес рассмотрение формализованных
описаний основных принципов, алгоритмов, критериев и ограничений
в процессе формирования геометрических моделей, некоторые из кото-
которых рассматриваются ниже.
Помимо методов построения трехмерных геометрических моделей
сцен по одному или нескольким изображениям, возможны и другие под-
подходы к формированию эталонных изображений и эталонных описаний.
Один из возможных подходов основан на использовании в каче-
качестве модели трехмерного объекта набора его двумерных изображений.
Процесс идентификации объекта в этом случае заключается не в отыс-
отыскании наиболее подходящего эталонного изображения среди набора
проекций, хранящихся в памяти бортовой вычислительной машины,
а в определении оптимальной комбинации этих проекций, позволяющей
использовать для идентификации достаточно малое число проекций
и более точно учитывать трехмерный характер геометрии объектов
и сцены.
Представляет определенный интерес и подход, характеризуемый
как «определение формы по тени». Этот подход связан, с одной сто-
стороны, с возможным затенением изображений отдельных объектов на
исходных аэрокосмических снимках рассматриваемых сцен; с другой
стороны — с возможностью более точного определения координат объ-
объектов на сцене по отбрасываемой тени (в основном — высот объек-
объектов).
11*
164 Использование технологий «машинного зрения» [Гл. 5
5.2. Геометрические представления
трехмерных сцен
Центральным моментом в трехмерном геометрическом модельном
представлении реальной сцены является выбор соответствующих пред-
представлений (описаний) объектов этой сцены. Трехмерная геометриче-
геометрическая модель должна обеспечивать уникальные и однозначные представ-
представления для широкого диапазона заданных объектов, что особенно важно
при создании конкретного эталонного описания конкретной сцены, ис-
используемого в бортовой системе наведения беспилотного летательного
аппарата. Если допустить, что представление объектов не уникально,
то конкретному физическому объекту на рассматриваемой сцене мо-
может соответствовать более одного представления. При неоднозначности
представления объектов сцены информация, необходимая для восста-
восстановления ЗО-описаний объектов и сцены в целом, может оказаться
недостаточной. В этих случаях построение трехмерной модели сцены,
необходимой для формирования набора эталонных изображений, соот-
соответствующих различным ракурсам и дальностям визирования сцены
в процессе полета летательного аппарата, может оказаться невозмож-
невозможным.
Для исследовательских задач во многих случаях сохраняется допу-
допустимость множественного представления объектов в процессе модель-
модельного генерирования рассматриваемых сцен и объектов при использова-
использовании различных программных пакетов.
Учитывая сформулированные требования к представлениям объек-
объектов, рассмотрим возможную последовательность этапов формирования
трехмерной геометрической модели сцены для случая монокулярного
изображения.
Способы создания трехмерных структур (например — «рассеянное»
контурное изображение), соответствующих двумерным описаниям еди-
единичного изображения, заключаются в установлении строгих геометри-
геометрических зависимостей между свойствами объекта и его проекцией при
построении описания каждого двумерного силуэта.
Формирующееся при этом контурное изображение состоит из про-
пространственных описаний границ и вершин, соответствующих двумер-
двумерным контурам рассматриваемого объекта.
Естественно начальной процедурой формирования контурного
изображения является процедура предобработки (фильтрации),
заключающаяся в подавлении шумов в исходном изображении.
В настоящее время достаточно хорошо разработан целый набор методов
и алгоритмов по решению этой задачи (методы линейной и нелинейной,
минимаксной, морфологической и т.п. фильтрации) [5.2].
Следующая процедура состоит в выделении линий, краев объектов
на сцене, контурных точек с использованием например градиентных
или дифференциальных алгоритмов, отличающихся друг от друга чис-
численным способом оценки частных производных двумерной функции
5.2]
Геометрические представления трехмерных сцен
165
яркости изображения по ортогональным направлениям (операторы Со-
беля, Робертса, Марра и т.п.) [5.2].
При построении пространственного описания границ и вершин мо-
может быть использовано например представление всех поверхностей
и возвышенностей либо горизонталями, либо вертикалями (по отно-
отношению к поверхности земли) [5.3]. Таким образом первой ступенью
создания трехмерного контурного изображения является обозначение
всех линий как горизонталей и вертикалей введением признака пер™
спективной проекции: все линии, указывающие на вертикальную точку
схода, выбираемую при построениях произвольным образом, считаются
вертикалями, все остальные — горизонталями. Учитывая конечность
размеров объекта, конец каждой вертикали, ближайшей к вертикаль-
вертикальной точке схода, обозначается как «низ», а противоположный — как
«верх».
После маркировки всех линий местонахождение каждой конечной
точки в трехмерном пространстве может быть определено при извест-
известном местонахождении противоположной точки каждой линии.
На рис. 5.3 приведен пример построения трехмерных связей в мо-
монокулярном анализе, использующий восстановление отрезков линий
Наблюдаемое
плановое
изображение
Исходная сцена на
земной поверхности
Наблюдаемое
плановое
изображение
Рис. 5.3
и точек стыка этих линий реальных объектов сцены по их двумерным
изображениям. Предположим (рис. 5.3 б), что линия Р2Р4 определяет™
ся как «вертикаль«, линии Р\Р2 и Р2Р3 как «горизонтали», вектор U
есть единичный вектор в вертикальном направлении (нормаль ко всем
горизонтальным плоскостям).
Положение точки 1^, соответствующей точке стыка Рч, определя™
ется дальностью D от фокальной точки до объекта. Положение гори-
горизонтальной плоскости V1V2V3 определено, так как содержит точку V<i
и нормаль — вектор U. Положение точек Vi и Уз в этом случае опреде-
166 Использование технологий «машинного зрения» [Гл. 5
ляется пересечением этой плоскости с лучом, проходящим через точ-
точки Pi и Р% соответственно, а положение точки V4 определяется пересе-
пересечением луча, проходящего через точку Р±, с линией, проходящей через
точку V2 вдоль вектора U. Таким образом можно восстановить про-
пространственную конфигурацию объекта, содержащего указанные точки
схода.
Если пространственное расположение начальной точки некоторой
вертикали V\ известно (рис. 5.3 а), то линия Р\Р2 в плоскости наблюда-
емого изображения Щ представляет собой изображение горизонталь-
горизонтальной линии в пространстве; линия Р1Р3 представляет собой изображе-
ние вертикальной линии в пространстве, a U есть трехмерный вектор
вертикального направления, полученный переносом его из фокальной
точки 0 в вертикальную точку схода изображения в плане. Положе-
Положение конечной точки горизонтали Vi тогда определяется пересечением
прямой, проходящей через фокальную точку 0 и точку Рч, и горизон-
горизонтальной линии, проходящей через точку V\.
Положение конечной точки вертикали Уз находится на пересечении
прямой, проходящей через фокальную точку 0 и точку Рз, и вертикаль-
вертикальной линии, проходящей через V\ и параллельной вектору U.
Использование такого алгоритма определения местонахождения
любой точки ограничено условием связи искомой и известной точками
только отрезком прямой линии. Для определения местонахождения
исходных точек могут быть использованы два способа.
Первый способ в качестве исходных точек использует точки на плос-
плоскости Пз, уравнение которой Up = —D, где U — единичный вертикаль-
вертикальный вектор, Р — точка на плоскости планового изображения Щ, D —
расстояние от фокальной точки до плоскости Пз. Если значение рас-
расстояния D неизвестно, оно остается свободной переменной в уравнении
плоскости и тогда определяется только соответствующее положение
вершины. Положение, например, точки Уз на плоскости Пз опреде-
определяется пересечением плоскости луча, проходящего через изображение
точки Рз на плоскости Щ.
Точки вертикальных линий, рассматриваемые как «низ», считаются
началом отсчета.
Не все границы данного объекта связаны с вертикалями на поверх-
поверхности.
Некоторые из них могут быть найдены с помощью второго способа,
а именно: если построены двумерные изображения двух прямых, то
предполагается, что построено трехмерное изображение линий на сце-
сцене. Если в этом случае осуществляется построение неизвестной прямой
на плоскости Пз в соответствии с известной прямой (её изображением
на плоскости Щ), то расположение любой конечной точки на неиз-
неизвестной прямой может быть найдено на пересечении известной линии
и луча, проходящего через фокальную точку и изображение конечной
точки.
Процесс создания контурных образов при помощи двумерных изоб-
изображений прямых зависит от следующих условий:
5.2] Геометрические представления трехмерных сцен 167
— все поверхности и выступы либо горизонтальны, либо верти-
вертикальны;
— выступ считается вертикальным тогда и только тогда, когда он
направлен на известную вертикальную точку схода;
— «низ» вертикального выступа находится на плоскости (из-
(известной);
— линии, из которых построено изображение, соответствуют высту-
выступам пространственного предмета.
Первые два условия допускают обозначение каждой линии как го-
горизонтальной или вертикальной, что гарантирует построение трехмер-
трехмерных координат всех точек вокруг каждой линии. Другие два условия
соответствуют двум рассмотренным способам определения местона-
местонахождения исходных точек для дальнейших построений (определение
вертикали и выступов).
На рис. 5.4 и 5.5 показаны два примера, иллюстрирующие проце-
процедуру создания контурных представлений монокулярных изображений
с использованием выше описанных способов. На рисунках видно соот-
соответственно исходное изображение сцены городского типа (а), выбороч-
выборочные двумерные линии и границы объектов (б) и перспективный вид
«рассеянного» контурного изображения (в). Вертикальными линиями
«рассеянного» контурного изображения становятся только те границы
объектов, которые состоят из вертикальных линий или могут быть
изображены в трехмерном пространстве с использованием коллинеар-
ных зависимостей для построения вершин контурного изображения.
Одной из проблем монокулярного анализа является возможная по-
потеря части информации в двумерном представлении. Например в слу-
случае, когда вертикальные линии пространственного объекта или его
элементов очень малы, они просто теряются в двумерном представле-
представлении. На рис. 5.5 в короткие вертикальные линии, соединяющие нижние
и верхние части крыши крайнего левого здания, оказались утрачен-
утраченными (область А). Таким образом трехмерной структуры этой крыши
создано быть не может. Кроме того нет трехмерной информации об
областях, в которых отсутствуют соединения, как например у большей
части передней стены крайнего левого здания на рис. 5.5 в (область В).
Если же вертикальные линии выделяются, но их размер очень мал,
они могут быть обозначены как горизонтальные вместо вертикальных.
В качестве примера можно привести линию L\ на рис. 5.5 в. Иног-
Иногда горизонтальная линия (например L2 на рис. 5.5 в) направляется
к вертикальной точке схода и обозначается вертикальной. Если линии
обозначены неправильно, в модели создания контурного изображения
появляются ошибки, создавая порой такие изображения, какие в при-
природе не встречаются.
Использование не только горизонталей и вертикалей объектов, но
и других геометрических характеристик, позволяет решить отмечен-
отмеченные проблемы и наиболее полно представить трехмерные структуры
третьего уровня.
После завершения геометрических преобразований — построения
2О-описаний в виде двумерных линий, соединений и отдельных эле-
168
Использование технологий «машинного зрения»
[Гл.5
W*^;*?f С б
Рис. 5.4
5.2]
Геометрические представления трехмерных сцен
169
Рис. 5.5
ментов, осуществляется переход к третьему уровню — формированию
трехмерных геометрических структур (рис. 5.4 в, 5.5 в). Сцена в этом
случае может быть представлена в виде так называемой топологиче-
топологической структуры: вертикалей, возвышений, групп возвышений, пред-
170
Использование технологий «машинного зрения»
[Гл.5
метов и объектов, а также геометрических структур — точек, линий
и плоскостей.
В основе всех описанных выше процедур построения трехмерной
геометрической модели сцены лежит допущение о возможности пред-
представления всех объектов наблюдаемых сцен набором параллелограм-
параллелограммов. Исходя из этого рассмотрим пример формирования трехмерных
геометрических структур, последовательность операций которого для
одного из объектов типа здания (рис. 5.4 а, 5.5 а) представлена на
рис. 5.6.
Рис. 5.6
Формируемый объект (рис. 5.6 а) имеет один вертикальный край
и четыре горизонтальных края. Первоначально создается область для
каждой пары краев, формирующих вертикаль; эти области показаны
при помощи «перепонок» между каждым краем области (рис. 5.6 в).
Затем все пары областей, лежащие в одной плоскости и соответствую™
щие дополнительным условиям, соединяются.
5.2] Геометрические представления трехмерных сцен 171
Одним из таких дополнительных условий может служить, на-
например, условие соединения областей, объединяемых одним краем,
(рис. 5.6 эю) — области /i и /2 могут быть объединены, так как имеют
общую вертикаль в2; и несоединения областей, разделяемых краем
(рис. 5.6 з) — области /i и /2 не могут быть объединены, так как
вертикаль ез разделяет их и служит границей.
Результатом этой операции является создание группы отдельных
областей. На рис. 5.6 в показано создание области «крыши» здания.
Каждая отдельная область завершается путем добавления одного или
двух краев. Если область имеет два края, добавляется еще два для
формирования параллелограмма.
Если же имеется более двух краев, то добавляется один край для со-
создания завершенной формы. Перечисленные возможности можно про-
проиллюстрировать на примере крыши и фронтона здания (рис. 5.6 г). Да-
Далее гипотетически проводятся вертикальные линии для поддержания
горизонтальных областей, лежащих на расстоянии над поверхностью
(рис. 5.6 д). Эти линии опускаются из каждой точки поверхности объек-
объекта на нижнюю плоскость или поверхность. Для новых краев создаются
новые области, что влечет за собой появление новых вертикалей, и про-
процесс продолжается до тех пор, пока не исчезнет возможность образова-
образования новых областей. На рис. 5.6 е показано окончательное изображение
трехмерной модели здания.
Приведенная процедура построения трехмерных геометрических
моделей иллюстрирует одну из возможных и достаточно многочис-
многочисленных аналогичных процедур. Все эти процедуры отличаются друг
от друга выбором как геометрических признаков объектов, зависящих
и не зависящих от положения точки наблюдения, и алгоритмов их
выделения, так и методов описания этих объектов.
Отметим также существенную зависимость этих процедур, позво-
позволяющих с различной степенью точности, подробности и достоверности
осуществлять построение трехмерных геометрических моделей, от по-
постановки задачи локализации и определения координат объектов на
сцене для целей управления и выбора соответствующих алгоритмов
сопоставления эталонных и текущих изображений. Например при наве-
наведении летательного аппарата на выбранный элемент одного из объектов
наземной сцены типа здания в предположении об известном направле-
направлении визирования сцены (ракурсе подлета) или возможном диапазоне
значений этих направлений обоснованной является концепция постоя-
постоянства точки наблюдения (или точек наблюдения) при формировании
трехмерной геометрической модели.
В этом случае используемый в качестве модели трехмерной сцены
набор её двумерных изображений достаточно ограничен. Изменение
дальности визирования сцены в процессе движения, т. е. масштаба
изображения, может компенсироваться построением фиксированного
набора соответствующих двумерных изображений, рассматриваемых
как эталонные. Наконец априорная неопределенность в расположении
объектов на сцене, связанная с такими факторами как затененность,
загораживаемость отдельных объектов и участков сцены; ошибками
172 Использование технологий «машинного зрения» [Гл. 5
в определении собственных координат объекта и относительных коор-
координат объектов; достаточно большими значениями ошибок определе-
ния высот объектов, позволяет ослабить требования к точности постро-
ения трехмерной геометрической модели. Что касается достоверности,
то во многих случаях допустимо представление объектов сцены в мо-
моделях набором многогранников, цилиндров и т. п.
5.3. Представление трехмерных геометрических
моделей сцен комбинацией двумерных
изображений
Изложенная в предыдущем разделе идеология подхода к построе-
нию эталонных изображений состоит в последовательности перехода
от исходного двумерного изображения сцены в виде аэрокосмоснимков
к построению трехмерной геометрической модели этой сцены, а за-
затем — к построению проекции этой модели (двумерному изображению
видимых поверхностей объектов) для фиксированного известного по-
положения точки наблюдения, характеризуемого дальностью и ракурсом
визирования сцены. В более общем случае фиксированному набору
известных положений точки наблюдения соответствует набор проекций
трехмерной геометрической модели сцены.
Однако в реальных условиях следует предусматривать возможность
изменения траектории полета беспилотного маневренного летательного
аппарата в широком диапазоне значений углов визирования заданной
сцены в горизонтальной и вертикальной плоскостях. В этом случае
предположение о фиксированном положении точки наблюдения сце-
сцены или набора таких точек, определяемых заранее, далеко не всегда
оправданно и может приводить к существенным ошибкам в подготов-
подготовке эталонного изображения, в процедурах сопоставления эталонного
и текущего изображения и определения координат заданного объекта
сцены.
Ниже обсуждается возможность развития рассмотренного выше
подхода в построении проекций трехмерной геометрической модели
сцены для произвольного положения точки наблюдения. В этом случае
используется предположение о том, что для некоторых пространствен-
пространственных преобразований, в том числе наиболее интересующих нас — вра-
вращения, сдвига и масштабирования, любая произвольная 2О-проекция
данного трехмерного объекта может быть представлена в виде про-
простой линейной комбинации набора других 2О-проекций этого объекта.
При этом коэффициенты такой линейной комбинации связаны друг
с другом некоторыми жесткими функциональными ограничениями,
а количество необходимых исходных изображений (предвычисленных
проекций, модельных изображений) в такой линейной комбинации до-
достаточно мало и зависит от вида пространственных контуров объекта.
В качестве исходных изображений при этом могут использовать-
использоваться двумерные контурные изображения (так называемые контурные
препараты) как результат проецирования трехмерной геометрической
5.3] Представление трехмерных геометрических моделей сцен 173
модели в плоскость изображения с фиксированным положением точки
наблюдения (центра проецирования).
Рассмотрим основные моменты реализации указанного подхода на при-
примерах объектов с четкими и гладкими пространственными контурами,
используя в качестве отличительного признака этих объектов такие
характеристики контура, как бордюр и силуэт. Соотношения простран-
ственных геометрических преобразований для этих классов объектов
различны и, следовательно, различно и число членов в линейной ком-
комбинации двумерных изображений.
Для заданного объекта и заданного положения центра проецирова-
проецирования бордюром называется множество всех точек поверхности объекта,
в которых локальное направление нормали к поверхности перпенди-
перпендикулярно лучу, проходящему из центра проецирования через данную
точку. Силуэтом в таком случае называется проекция данного бордю-
бордюра на конкретную плоскость проецирования (плоскость изображения).
Предполагается также, что каждая точка силуэта порождается един-
единственной соответствующей точкой бордюра и что контурный препарат
изображения всегда содержит силуэт объекта, порожденный из соот-
соответствующего бордюра.
Для объектов с четкими пространственными контурами бордюр
остается неизменным до тех пор, пока не изменится состав видимых
поверхностей объекта; для объектов с гладкими пространственными
контурами бордюр меняется при любом изменении относительного по-
положения точки наблюдения.
Случай объектов с четкими пространственными конту-
контурами.
Рассмотрим ряд пространственных геометрических преобразова-
преобразований, чтобы установить, как относительно каждого из них некая произ-
произвольная проекция объекта может быть представлена в виде линейной
комбинации полученных ранее изображений.
1. ЗО-вращение вокруг вертикальной оси.
Пусть Р\ ш Р2 — два контурных изображения объекта О. При
этом изображение Р2 получено после поворота изображения Pi вокруг
вертикальной оси (оси Y) на угол а. Пусть теперь Р* — третье изобра-
изображение объекта, полученное путем вращения изображения Pi на угол #
вокруг той же оси. Тогда проекция любой точки бордюра р = (ж, у, z)
на все три изображения будет иметь вид
рг = (хг,уг) = (х,у) е Рь
Р2 = (ж2, 2/2) = (х cos a + z sin а, у) ? Р2, E.1)
р* = (ж*, 2/*) = (a:cos# + z sin#, у) е Р*.
Введем два коэффициента
^ S^ E.2)
174 Использование технологий «машинного зрения» [Гл. 5
Тогда
. , sin (а ~~ #) sin# , . Л
ах\ + 0X2 = ^ ж + — (х cos a + z sin а) =
sin а sin а
= х cos 'д -\- z sin # = ж*.
Таким образом при вращении относительно оси Y всегда существу-
существуют такие два коэффициента а и 6, что для любых соответствующих
точек pi, p2j p* справедливо
ж* = ах\ + 6x2, E-3)
причем
а2 + b2 + 2a6 cos a = 1. E.4)
Рассмотрим теперь (без доказательства) аналогичные результаты,
которые можно получить для других, более сложных типов простран-
пространственных преобразований.
2. Линейные преобразования в пространстве.
Пусть О — представляет собой множество точек объекта, a Pi, P2
и Р3 представляют собой изображения, полученные для объекта О при
помощи линейных преобразований в трехмерном пространстве соответ-
соответственно с матрицами R, S и Т размерности 3x3. Пусть также Р* —
изображение, полученное для объекта О при помощи линейных преоб-
преобразований точек контура с матрицей U размерности 3x3. Обозначим
через Гг, Sj, ti, щ соответственно г-е столбцы матриц Я, 5, Т, U. Тогда
имеет место следующий результат.
Если наборы векторов {r^, Sj, tj}, г = 1. . . 3 — линейно независимы,
то для любых соответствующих точек pi, p2j Рз? Р* существуют такие
значения коэффициентов ai, a2i аз ш &ъ ^25 ^з5 чт0
Ж* = а\Х\
У* = Ьгуг + 62|/2 +
где (ж*,|/*), (ai,2/i), (ж2,|/2), (ж3, |/з) — координаты точек р*, р1? р2, Рз
соответственно.
Таким образом в случае линейных преобразований в пространстве
любое произвольное изображение объекта Р* может быть представлено
в виде линейной комбинации трех его других изображений Pi, P2 и Р%.
3. Случай произвольного ЗО-вращения.
Этот случай является частным случаем предыдущего, следователь-
следовательно полученный результат справедлив и для него. Однако на коэффи-
коэффициенты линейной комбинации здесь налагаются следующие дополни-
дополнительные ограничения:
a2st + ashW = 1, ||bir2 + b2s2 + Ы2Ц = 1,
T E.6)
a2si + a3ti) (Ьгг2 + 62^2 + b3t2) = 0,
где || • || — евклидова норма соответствующих векторов.
5.3] Представление трехмерных геометрических моделей сцен 175
4. Случай ЗО-преобразований типа «сдвиг-поворот-масштаб».
Для этого случая также можно утверждать, что если наборы век-
векторов {ri,5i,ti} и Г2,«2,^2} — линейно независимы, то для любых
соответствующих точек pi, р2, Рз5 Р* существуют такие значения ах,
0,2, tt35 а4 И 6i, 62, 63, 64, ЧТО
4i
E.7)
у* = 6x2/! + Ьу + Ь2/ + &
причем коэффициенты а^, 6^ удовлетворяют ограничениям
b3t2\\ ;
(br + 6^ + bt) = 0.
E-8)
Таким образом можно утверждать, что в случае всех практически
значимых геометрических ЗО-преобразований трехмерных объектов
моделью любого набора видимых поверхностей объекта могут являться
всего лишь три изображения его 2О-проекций.
Случай объектов с гладкими контурами.
В случае сдвига, масштабирования и поворота в плоскости изобра-
изображения техника представления трехмерных объектов с гладкими конту-
контурами в виде линейной комбинации изображений полностью аналогична
рассмотренной выше технике работы с объектами, обладающими рез-
резкими контурами. Различия возникают в случае трехмерного вращения
объекта относительно произвольной оси.
Пусть модель представлена набором 2О-контуров. Каждая контур-
контурная точка р = (ж, у) помечена значением «глубины» изображения кон-
контура — координатой z и значением локальной кривизны г. Значение
кривизны представляет собой длину вектора кривизны г = Ц^д., г^Ц,
где гх — значение радиуса кривизны поверхности в плоском сечении
в направлении оси X; гу — в направлении оси Y. Этот вектор перпен-
перпендикулярен к контуру в точке р. Пусть теперь У^ — ось, проходящая
в плоскости изображения под углом (р к оси X и г^ — вектор дли-
длины Г(р = г у cos (р — rx sin (р^ перпендикулярный к оси V^. Если объект
поворачивается относительно оси V^, то новое положение точки р,
характеризуемое 5-мерным вектором f/, может быть аппроксимировано
следующим выражением [5.4]:
р' = R{p-r(p)-\-r4n
где R — матрица поворота размерности 2x5. Это выражение является
точным только для круговых дуг, однако при не слишком больших уг-
углах поворота хорошо описывает и случаи других гладких кривых. При
этом известно [5.4], что для восстановления значений z и г необходимо
как минимум три изображения (три различных проекции).
1) Случай произвольного ЗО-вращения.
Пусть О — представляет собой множество точек объекта, а Pi, P25
Рз? ^4? ^5 — изображения объекта О, полученные при помощи линей-
линейных преобразований в пространстве соответственно с матрицами i?i,
176 Использование технологий «машинного зрения» [Гл. 5
^2j Rsf Ra и Кб- Пусть также Р* — изображение объекта О, полученное
при помощи линейных преобразований с матрицей R*. Пусть далее
i?i, Д27 ^з? ^4? ^5? R* — матрицы размерности 2x5, описывающие
соответствующее преобразование пятикомпонентных контурных точек
вида р = (ж, |/, z, гх, гу), где rXJ ry — радиусы кривизны соответствую™
щих точек, используемых в методе оценок кривизны. Пусть также Г{ —
обозначение первых строк матриц Ri, R2l Л3? ^4? ^5? R* 5 а si —
обозначение вторых строк этих же матриц. Таким образом
р{ = (х{,yi) = {riPi, Sip*) e Pi,
p* = (x*,y*) = (riP*,sip*)eP*1 E.9)
i = l-S-5.
Тогда если наборы векторов {г{} и {s{} — линейно независимы, то
для любой точки р существуют такие значения ai, . . . , «5 и &ъ • • • ? &5?
что можно записать выражения для определения координат точки
изображения F*
E.10)
У* = Ьгуг + Ь2у2 + Ь3уз + Ь4У4 + Ь5уБ.
Следует отметить, что так же, как и в случае объектов с резкими
контурными переходами, здесь на коэффициенты линейной комбина-
комбинации налагаются дополнительные ограничения. В данном случае это
семь функциональных ограничений, выраженных полиномами второго
порядка.
2) Случай ЗО-преобразований типа «сдвиг-поворот-масштаб».
Приведенный выше результат также может быть распространен
на случай, когда помимо ЗО-поворота мы имеем дополнительно сдвиг
и масштабирование объекта. При этом масштабирование не требует
изменения формы полученных ранее выражений и реализуется путем
масштабирования соответствующих коэффициентов, а для компенса-
компенсации сдвига необходимо еще одно, дополнительное изображение. Таким
образом в случае преобразования типа «ЗО-сдвиг-масштаб-поворот»
для представления произвольного изображения трехмерных объектов
с гладкими контурами, в виде линейной комбинации заданных изоб-
изображений необходимо шесть других (модельных) проекций. Отметим
также, что если эти модельные изображения различаются более чем
на линейное преобразование, то для оценки параметров линейного
преобразования и построения требуемого изображения, как и в случае
объектов с четкими контурами достаточно всего лишь трех проекций.
Приведенный выше алгоритм использования линейной комбинации
набора 2В-изображений позволяет построить новое 2О-изображение,
координаты точек которого определяются соотношениями E.1), E.3),
E.5), E.7), E.10). Ограничения, накладываемые на коэффициенты сц,
bi при каждом конкретном преобразовании, определяются соотноше-
соотношениями E.4), E.6), E.9).
5.4] Формирование эталонного описания 177
В рамках изложенного подхода весьма важной является задача
определения значений коэффициентов в^, Ъ{ с учетом указанных огра-
ничений, относящаяся к классу задач идентификации объектов на раз-
различных проективных изображениях. В этом случае для определения
значений этих коэффициентов могут быть использованы, например,
методы, основанные на линейных отображениях; методы идентифика-
ции коэффициентов оц, Ь{ по набору характерных точек или элементов
изображений; методы непосредственного поиска значений коэффици-
коэффициентов а^, hi путем последовательного перебора наборов этих коэф-
коэффициентов в соответствующем пространстве; и т. д. Все эти методы
отличаются различной точностью и достоверностью идентификации
и трудоемкостью вычислительного процесса.
Рассмотренная в этом разделе возможность представления трех-
трехмерной геометрической модели сцены комбинацией двумерных изоб-
ражений позволяет получить набор эталонных изображений, а затем
и эталонных описаний наблюдаемой сцены для произвольного набора
значений дальности и ракурсов визирования. Поскольку все процедуры
формирования такого набора осуществляются не в процессе полета,
а заранее, большой объем связанных с этим вычислительных затрат
не является существенным ограничением. В дальнейшем, набор полу-
полученных эталонных описаний записывается в память бортовой вычис-
вычислительной системы, как элемент полетного задания; конкретное эта-
эталонное описание, соответствующее измеренному значению дальности
и ракурса, используется для сравнения с соответствующим текущим
изображением.
Проведенное выше рассмотрение двух подходов к построению эта-
эталонных изображений на основе использования геометрических моделей
трехмерных сцен и их двумерных проекций не исчерпывает, разуме-
разумеется, всего многообразия возможных решений этой задачи. Однако
обсуждение последовательности соответствующих процедур призвано
ознакомить читателя с методическими особенностями и эвристическим
характером процесса построения эталонных изображений, используе-
используемых в системах наведения.
5.4. Формирование эталонного описания
В предыдущих разделах рассматривались возможные процедуры
построения 2В-изображений трехмерной геометрической модели на-
наземной сцены для фиксированного и произвольного (в некотором диа-
диапазоне значений дальности и ракурсов) положения точки наблюдения.
Однако, как уже указывалось ранее, в бортовой системе наведения
беспилотного маневренного летательного аппарата при решении задач
обнаружения, распознавания и целеуказания после предварительной
обработки эталонного и текущего изображений (фильтрации, выделе-
выделения однородных областей, границ, контуров и т. п.) используются уже
не сами двумерные изображения, а их символьные описания в том
или ином виде.
12 Управление и наведение
178 Использование технологий «машинного зрения» [Гл. 5
Эталонное описание в этом случае представляет собой описание
в символьной форме характерных черт полученного 2В-изображения
(или набора изображений) сцены и практически однозначно связано
с характером получаемого на борту текущего изображения и принятым
алгоритмом обнаружения и локализации объектов сцены.
Важнейшей характеристикой объектов искусственного происхож-
происхождения является их правильная геометрическая форма, что допускает
возможность представления их границ набором прямых линий, ова-
овалов, и т. п., характеристики которых (длина, наклон, контурные точки
и т. д.) составляют характерные черты изображения.
Рассмотрим возможную последовательность основных этапов под-
подготовки эталонного описания при формировании конкретного полетно-
полетного задания.
Исходными данными при этом являются:
— цифровая модель местности (ЦММ), включающая цифровые
модели объектового состава и подготовленная по сложившейся техно-
технологии с использованием аэрокосмофотоснимков и методов построения
трехмерных геометрических моделей, рассмотренных, например, в раз-
разделах 5.2 и 5.3;
— основные характеристики бортового датчика текущего изображе-
изображения, такие, как размер поля зрения, чувствительность, число элемен-
элементов разрешения изображения при его представлении в цифровом виде
и т. п.;
— значения координат точки визирования при получении текущего
изображения.
На первом этапе подготовки эталонного описания из ЦММ удаля-
удаляются те её элементы, которые, возможно, не могут быть получены или
локализованы на текущем изображении; для заданных значений про-
пространственных координат точки наблюдения строится геометрическая
модель наблюдаемой сцены в цифровой форме с нанесенной точкой
прицеливания.
На втором этапе формируется описание эталонной модели наблюда-
наблюдаемой сцены в форме программного файла, содержащего в символьном
виде информацию о координатах контуров объектов и их высотах вме-
вместе с координатами точки прицеливания и точки наведения. Объекты
сложной формы, поверхности которых не могут быть представлены
выпуклыми многоугольниками, разбиваются на множество элементов
с помощью специальной программы.
На третьем этапе оператором реализуется экранное изображение
эталонной модели с последующими операциями выделения наиболее
информативных прямолинейных отрезков контуров объектов сцены —
эталонных элементов. К таким элементам относятся те, которые долж-
должны с большой вероятностью присутствовать на текущем изображении,
обладать достаточной длиной и обеспечивать уникальность формы
образованного из них эталонного фрагмента — совокупности непосред-
непосредственно геометрически связанных эталонных элементов, за счет их до-
достаточного количества и разной ориентации для обеспечения привязки
по двум координатам плоскости кадра. Для объектов рассматривае-
5.4] Формирование эталонного описания 179
мых сцен указанным требованиям удовлетворяют в первую очередь
горизонтальные линии крыш зданий, верхние участки вертикальных
линий боковых ребер стен этих зданий, труб, градирен, нефтеёмкостей
и других построек, пересечения этих линий, и т. п. Эти характерные
черты объектов изображения достаточно устойчивы в условиях измен-
изменчивости.
Построенное таким образом эталонное изображение на четвертом
этапе используется для преобразования в текстовой файл, содержащий
— описания эталонных элементов в виде информации о прямолиней-
прямолинейных отрезках контуров (координаты точек отрезка и его ориентация);
— описания эталонных фрагментов (координаты центра фрагмента
и список включенных эталонных элементов);
— описания эталонных групп (координаты центра и список вклю-
включенных эталонных фрагментов), а также данные о взаимных положе-
положениях и допусках на пространственные связи эталонных фрагментов
и групп.
Устойчивость пространственных связей оценивается с учетом воз-
возможных изменений значений ракурса визирования сцены, вызванных
ошибками подготовки ЦММ и ошибками определения значений точки
визирования.
Как уже отмечалось выше, форма представления эталонного опи-
описания однозначно связана с типом реализованного в бортовой системе
наведения алгоритма обнаружения и локализации объектов на наблю-
наблюдаемой сцене. Это особенно относится к операциям формирования эта-
эталонного описания на указанных выше втором и третьем этапах.
Остановимся на рассмотрении этих вопросов более подробно. Про-
Процесс алгоритмизации обработки изображений и распознавания объек-
объектов в общем виде можно представить последовательностью следующих
процедур: фильтрации исходных изображений; выделения характер-
характерных черт, признаков, неформальных описаний, подлежащих сравнению
с эталонным описанием в соответствии с критерием вида E.11); анализа
сцены и принятия решения:
]1/a. E.11)
В выражении E.11) приняты следующие обозначения: р — мера
близости эталонного и текущего описаний, представляемых соответ-
соответственно векторными функциями F и G; скалярные величины а,{ — ве-
весовые коэффициенты; г — номер эталона; а Е [1, ос] — характеристики
используемой метрики.
Процедура выделения характерных признаков определяется типом
этих признаков, подразделяющихся на детерминированные, вероят-
вероятностные, логические и структурные.
Для решения задачи локализации объектов на изображении сцены
могут использоваться различные методы. При этом, очевидна одно-
однозначная зависимость выбранного в каждом конкретном случае метода
12*
180 Использование технологий «машинного зрения» [Гл. 5
локализации объектов от выбранного ранее способа выделения харак-
характерных признаков.
Широко известен метод непосредственного сравнения эталонного
и текущего изображений, рассматриваемых как двумерные функции
яркости (или интенсивности), F(x,y), G(x,y) соответственно в выра-
выражении E.11), или в дискретном виде — как двумерные дискретные мат-
матрицы с минимизацией расстояния р между этими изображениями ви-
вида E.11). При использовании наиболее удобного и часто применяемого
метода корреляционного сравнения имеет место условие а = 2 в указан-
указанном выражении. В качестве оценки меры близости часто используются
значения коэффициента корреляции (нормированного, морфологиче-
морфологического), отличающегося различными формами представления.
Во многих случаях вместо операций над полутоновыми изобра-
изображениями, целесообразно оперировать с кодированными (бинарными)
изображениями, в которых значения яркости каждого пиксела (дис-
(дискретного элемента) — (ж^, у{) — принимают значения {0,1}. При срав-
сравнении изображений такого типа удобно использование метода «окон-
«оконной» фильтрации, одной из разновидностей которого являются алго-
алгоритмы согласованной фильтрации. «Окном», совпадающим по форме
с распознаваемым объектом, осуществляется в этом случае процедура
просмотра всего изображения с подсчетом количества пикселов со зна-
значениями единицы для каждого текущего положения «окна». Если это
количество превышает значение некоторого заранее заданного порога,
то обнаружение объекта считается совершившимся, а центр «окна»
отмечается меткой, равной единице.
Существенными преимуществами по сравнению с методами первого
и второго типов, в смысле снижения трудоемкости вычислительной
реализации бортовых алгоритмов, обладают методы, использующие
в качестве характерных признаков контурные препараты эталонного
и текущего изображений. Применение методов типа контурной кор-
корреляции, согласованной фильтрации контуров при сравнении соответ-
соответствующих бинарных изображений сцены с низкой объектовой насы-
насыщенностью может привести к снижению трудоемкости вычислительной
реализации (в основном потребного быстродействия) на один, два по-
порядка.
В методах структурно-лингвистического типа, наиболее часто ис-
используемых в алгоритмах обнаружения и распознавания объектов на-
наземных сцен, каждый объект на изображении после кодирования (би-
(бинаризации) представляется некоторой структурой «языкового» типа.
В этом случае структурно-лингвистические или синтаксические при-
признаки представляют собой непроизводные элементы (символы) струк-
структуры распознаваемого объекта и отношения между этими элементами.
Каждый объект тогда может рассматриваться в виде цепочки непро-
непроизводных элементов, называемой «предложением»; средство описания
объектов в терминах непроизводных элементов и их отношений ха-
характеризуется как соответствующий «язык», а правила, определяю-
определяющие способы построения объекта из непроизводных элементов — как
«грамматика» этого языка. Таким образом процедура описания объек-
5-4]
Формирование эталонного описания
181
та включает операции сегментации, формирования цепочки непроиз-
непроизводных элементов и отношений между ними, формирования заданного
набора цепочек непроизводных элементов [5.5].
Сопоставление эталонного и текущего описаний при этом заключа-
заключается в сопоставлении цепочек непроизводных элементов для каждого из
объектов сцены с последующим семантическим анализом всей сцены,
т. е. её сборкой.
Проиллюстрируем эти процедуры на примере построения эталонно-
эталонного описания сцены с объектовым составом фабричного типа, включаю-
включающего здания, трубы, градирни (рис. 5.7) при использовании алгоритма
структурно-лингвистического типа [5.6].
Рис. 5.7
1. Для выделения непроизводных элементов для объекта типа зда-
здания в каждом (г, j)-m пикселе отфильтрованного эталонного изображе-
изображения вычисляются яркостные «отклики» на так называемые рецептор-
ные пары (по одному пикселу справа и слева от пиксела, содержащего
изображение точки прямой) характерных направлений 0°, 30°, 60°, 90°,
120° и 150° и маску пятна П (рис. 5.8). Знаком «+» отмечены точки
привязки отдельных элементов.
Отклики на рецепторные пары вычисляются согласно соотноше-
соотношениям
Jij = \M1-M2\ для 0°, 30°, 60°, 90°, 120° и 150°,
1 5 z^
^2 =
ю
182
Использование технологий «машинного зрения»
[Гл.5
60°
10
10
2
1
3
?
?
5
4
Ш
7
6
?
?
8
10
9
120°
30°
1
?
6
2
?
7
3
Ш
8
4
?
9
5
?
10
90°
10
150°
П
1
16
15
14
13
2
171
~201
~231
12
3
ЦП
11
4
~19~
иг
25
10
5
6
7
8
9
Рис. 5.8
10
где Bk — интенсивности (яркости) в соответствующих пикселах эта™
лонного изображения (рис. 5.8 для направлений 0°, 30°, 60°, 90°, 120°
и 150° соответственно).
5.4] Формирование эталонного описания 183
Отклик на маску пятна (рис. 5.8 П) определяется соотношением
1 16 -.25
jiiij = \мг - м2\, Мх = 4 Е в** М2 = ъ Е я*-
1Ь fc=l У к=17
В дальнейшем осуществляется выбор из семи полученных чисел Jij
и Jllij их максимального значения с последующим сравнением этого
значения с заранее заданным пороговым уровнем Пор:
J- = J-5 если Jij > Пор, Jij = О в противном случае.
2. В каждом из полученных изображений Jij для шести направле-
направлений выделяются локальные максимумы яркостей, для чего проводится
анализ соседних пикселов в направлении, перпендикулярном рассмат-
рассматриваемому.
Полученные изображения принято определять как так называемые
псевдоизображения.
3. Для каждого объекта сцены, включенного в его эталонное опт-
сание, рассчитываются зоны поиска его изображения. Выбор размеров
указанных зон зависит от координат расчетной точки визирования
сцены, статистических характеристик ошибок навигационной системы
беспилотного маневренного летательного аппарата к моменту визиро-
визирования, характеристик бортового датчика текущего изображения, апри-
априорных данных о сцене и статистических характеристик ошибок этих
данных.
Таким образом в эталонное описание изображения здания (рис. 5.8)
входит семь областей (семь эталонных элементов). При подготовке
описания здания задаются:
— точка привязки изображения здания («+»);
— координаты пикселов семи эталонных элементов, рассчитанные
относительно точки привязки изображения здания;
— в соответствие с элементами 1, 2, . . . , 7 и их бинарными изобра-
изображениями (для 0°, 30°, 60°, 90°, 120° и 150°), элементам 1, 2, 3 ставится
в соответствие изображение для 90°, элементам 4, 5 — изображение
для 30°, элементам 6, 7 — изображение для 0°;
— весовые коэффициенты для каждого из указанных семи элемен™
тов К{ и нормирующий множитель
где Ni — число пикселов в г-й области эталонного описания изображе™
ния здания, г = 1, 2, . . . , 7.
Построенное таким образом эталонное описание для выделенных
элементов (здание, труба) приведено на рис. 5.9. Знаком «+» обозначе™
ны точки привязки, цифрами — эталонные элементы. Относительные
координаты пикселов этих элементов рассчитаны относительно точек
привязки. В рассматриваемом примере оказывается достаточным ис-
использование только трех направлений со значениями углов 0°, 30°,
184
Использование технологий «машинного зрения»
[Гл.5
Пикселы
+
—
1
4
1
1
1
1
2
—
6
1
5
1
1
1
3
—
1-1 эталонные элементы
Рис. 5.9
1, 2 эталонные элементы
и 90°, при этом эталонные элементы здания ориентированы соответ-
соответственно 1; 2; 3 — 90°; 4; 5 — 30°; 6; 7^0°; два эталонных элемента,
составляющие описание трубы, ориентированы с углом 90°.
5.5. Технология преобразований исходной
информации при построении цифровой модели
местности
Поскольку исходными данными при построении эталонного опи-
описания, как уже отмечалось, являются цифровые модели местности
(ЦММ), рассмотрим основные особенности технологии построения этих
моделей.
Оставляя в стороне общие вопросы технологии построения циф-
цифровых карт рельефа местности (ЦКР), являющихся составной частью
цифровых моделей местности, остановимся лишь на рассмотрении осо-
особенностей построения цифровых моделей заданной сцены и её объек-
объектового состава (ОС).
Входная информация в этом случае используется в виде космо-
фотоснимков (КФС), а также магнитных носителей записей сигналов
бортовых датчиков космических аппаратов при наблюдении заданных
районов земной поверхности в видимом (ТВ), инфракрасном (ИК)
и радиолокационном (Р/Л) диапазонах электромагнитного спектра.
В качестве носителей основной информации используются деталь™
ные космофотоснимки заданных районов — кадровые с размером
5.5]
Технология преобразований исходной информации
185
30 х 30 км, уточненные кадровые с размером кадра 10 х 10 км или 5x5 км
с разрешением на местности « 3 м и « 1 м соответственно; а так-
также панорамные с шириной наблюдаемой полосы земной поверхности
100-М50 км.
При получении уточненных космофотоснимков используется съем-
съемка земной поверхности с разных ракурсов и с временным сдвигом,
что позволяет в итоге получить набор стереоизображений заданной
сцены (блоки 1, 2 рис. 5.10). Полученная таким образом информация
1
Детальные КФС
Уточненные
детальные КФС
5
Каталог
отражающих
(излучающих)
характеристик
ландшафтов
и ОС
Записи сигналов
сканеров ТВ, ИК,
Р/Л диапазонов
Уточненные записи
сигналов сканеров ТВ,
ИК, Р/Л диапазонов
ПЕРВИЧНАЯ ОБРАБОТКА
геодезическая привязка;
определение координат опорных точек
и элементов ориентирования;
модель искажений;
дешифрирование снимков, определение
вида ландшафтов (сцен) и ОС;
выделение стереопар и стереофотограм-
метрическая обработка
6
Каталог
геометрических
характеристик
элементов ОС
Определение min необходимого
количества разносезонных,
разновременных снимков
по каталогам ландшафтов и ОС
НА ВТОРИЧНУЮ ОБРАБОТКУ
Рис. 5.10
о наблюдаемом районе земной поверхности дополняется информацией,
получаемой с помощью сканирующих датчиков с разрешением 5—30 м
и 1-2 м соответственно для различных ракурсов визирования (бло™
ки 3, 4 рис. 5.10).
186 Использование технологий «машинного зрения» [Гл. 5
Существенным дополнением к информации, получаемой при ди-
дистанционном зондировании заданных районов земной поверхности с по-
помощью бортовой аппаратуры космических аппаратов, является исполь-
использование созданных и постоянно обновляемых каталогов отражательных
(излучательных) характеристик типовых районов и типовых элементов
объектового состава (блок 5 рис. 5.10).
Кроме того широко используются также данные из каталога гео-
геометрических характеристик типовых элементов объектового состава
(блок 6 рис. 5.10): промышленных зданий, нефтехранилищ, труб, теп-
тепловых электростанций, трансформаторных подстанций, плотин гидро-
гидроэлектростанций, сборочных производств и т.п., особенно их высотные
размеры, информацию о которых далеко не всегда удается извлечь из
космофотоснимков.
Учитывая суточную, сезонную и погодную изменчивость яркостных
и геометрических характеристик наблюдаемых районов земной поверх-
поверхности и элементов их объектового состава, использование источников
дополнительной информации (каталогов отражающих и геометриче-
геометрических характеристик) позволяет определить условия проведения космо-
фотосъемки (временные и ракурсные), а также минимально необходи-
необходимое количество космофотоснимков одного и того же района (блок 8
рис. 5.10).
Критерием определения минимума потребных КФС является воз-
возможность выделения наиболее стабильных в условиях изменчивости
характерных геометрических признаков элементов объектового состава
с высокой вероятностью (не менее 0,8), а также возможность опре-
определения наиболее информативных направлений подлета беспилотного
маневренного летательного аппарата к заданному району земной по-
поверхности.
Указанная выше совокупность исходных данных позволяет в ком-
комплексе подготовки полетных заданий осуществить операции первичной
обработки входной информации (блок 7 рис. 5.10): геодезическую при-
привязку КФС, определение координат опорных точек и дешифрирование
изображений заданного района местности, формирование моделей из-
изменчивости яркостных и геометрических характеристик и т. д.
Основными операциями, реализуемыми при вторичной обработке
исходной информации, являются (рис. 5.11):
— уточнение значений координат опорных точек заданного района
земной поверхности с использованием цифровых карт рельефа мест-
местности (ЦКР); измерение значений трехмерных координат (плановых
и высотных) элементов объектового состава с учетом ракурсов ви-
визирования местности аппаратурой космофотосъемки и затененности
отдельных элементов ОС при различном положении Солнца в момент
проведения космофотосъемки;
— выбор наиболее информативных участков земной поверхности
в заданном районе для формирования полетного задания реализации
траектории полета беспилотного маневренного летательного аппарата
в горизонтальной плоскости; выделение стабильных характерных гео-
5.5]
Технология преобразований исходной информации
187
Уточнение
координат
опорных точек
заданного района
Измерение плановых координат и высот элементов
ОС с учетом ракурсов наблюдения и теней
Определение
информативных
направлений.
Грубая оцифровка
изображений
заданной сцены
Коррекция геометрических характеристик элементов
ОС в соответствии с каталогом.
Выделение характерных геометрических признаков.
Анализ аэрофотоснимков
районов-аналогов
с типовым ОС
Точная оцифровка изображений заданной сцены.
Преобразования плотность изображения - код.
Построение фотоплана,
формирование цифрового
массива.
Выделение стабильных
участков сцены.
Уточнение
информативности
Построение ЦММ
Преобразование,
соответствующее
выбранным бортовым
алгоритмам обработки
текущих изображений
ВТОРИЧНАЯ ОБРАБОТКА.
ПОСТРОЕНИЕ ЦММ.
Рис. 5.11
метрических признаков элементов объектового состава с использова-
использованием построенной ранее модели изменчивости этих характеристик;
— оцифровка прошедших указанные выше преобразования изоб-
изображений заданного района земной поверхности и элементов его объ-
объектового состава; построение цифрового массива значений координат
совокупности точек трехмерной модели местности (ЦММ).
При решении задачи выбора наиболее информативных участков
земной поверхности и характерных геометрических признаков элемен-
188 Использование технологий «машинного зрения» [Гл. 5
тов объектового состава используются преобразования, соответствую-
соответствующие алгоритмам обработки текущих изображений, реализуемых в бор-
бортовой аппаратуре системы наведения беспилотного маневренного лета-
летательного аппарата.
Например при реализации в бортовой аппаратуре для определения
координат точек земной поверхности алгоритмов сравнения эталонного
и текущего изображений корреляционного типа критерием информа-
информативности выбранного направления подлета может служить условие
превышения значения радиуса корреляции яркостного поля некоторого
заданного значения.
Иллюстрацией всему вышесказанному являются блок-схемы типо-
типовых операций первичной и вторичной обработки исходной информации
в комплексе подготовки полетных заданий для беспилотных маневрен-
маневренных летательных аппаратов, приведенные на рис 5.10, 5.11.
В заключение остановимся на основных проблемах, возникающих
при обеспечении систем наведения беспилотных летательных аппара-
аппаратов рассматриваемого класса эталонной информацией, связанных с не-
необходимостью:
1) повышения точности используемого картографического обеспе-
обеспечения, включающее уменьшение ошибок целеуказания и увеличение
разрешающей способности бортовых датчиков космических аппаратов
считывания параметров яркостного (радиолокационного и т. д.) поля,
а также снижения уровня систематических и случайных погрешностей
алгоритмов приведения информации к плоскости сличения эталонного
и текущего изображений;
2) разработки методов и алгоритмов пересчета характеристик изоб-
изображений, полученных бортовой измерительной аппаратурой космиче-
космических аппаратов, к условиям применения бортовых сенсоров беспилот-
беспилотных маневренных летательных аппаратов;
3) создания алгоритмов предварительной обработки эталонных
изображений, минимизирующих влияние изменчивости, геометриче-
геометрических и амплитудно-фазовых искажений;
4) разработки принципов синтезирования эталонных изображений,
в том числе:
— целесообразной степени детализации исходной картографической
информации для создания цифровых моделей местности;
— соответствия данных топографических карт и результатов космо-
и аэросъемки районов местности;
— допустимого времени устаревания информации, используемой
для построения цифровых моделей местности;
— уточнение каталогов отражательных свойств объектов и анализ
их зависимости от сезона;
— методов прогнозирования отражательных свойств объектов;
— способов автоматизированного выделения контуров объектов и
других характерных геометрических признаков на земной поверхности;
5) разработки методов создания обобщенных эталонных описаний
(для различных диапазонов электромагнитного спектра) наземных це-
5.5] Технология преобразований исходной информации 189
лей, их классификации и определения перечня характерных признаков,
необходимых для локализации объектов;
6) разработки аппаратурных, алгоритмических и программных
средств, обеспечивающих:
— создание, хранение, обновление банка исходных картографиче-
картографических данных и эталонных описаний типовых объектов;
— выбор информации из банка данных по запросам систем подго-
подготовки и хранения полетных заданий (ПЗ);
— определение эффективных критериев оценки информативности
и надежности эталонных описаний;
— автоматизацию подготовки ПЗ;
7) создания алгоритмов сжатия эталонной информации, а также
средств её накопления и хранения (в том числе голографических) для
записи ПЗ на борту беспилотных летательных аппаратов и их самоле-
самолетов—носителей .
Список литературы к главе 5
5.1. Розенфельд А. Машинное зрение: Основные принципы // ТИИЭР. Т. 76,
№ 8. 1988 г.
5.2. Денисов Д. А., Низовкин В. А. Сегментация изображений на ЭВМ //
Зарубежная радиоэлектроника. Ш 10. 1985 г., Москва.
5.3. Walker E.L., Herman M. Geometric Reasoning for Constructing 3D Scene
Descriptions from Images // Artifical Intellgence. V. 37, № 1-3, 1988 r.
5.4. Freeman H. and Chakravarty, «The use of characteristic views in the recog-
recognition of three-dimensional objects,» in E. Gelsema and Kanal (Eds.), Pattern
Recognition in Practice. — Amsterdam: North-Holland, 1980.
5.5. Insarov V., Fedosov E. The structural and statistical algorithm for recog-
recognition of Images of 3D-Scenes. 1 International conference on Information
Technologies for Images Analysis and Pattern Recognition. ITIAPR-90 г.,
Львов.
5.6. Инсаров В. В. Разработка теоретических основ построения и методов ис-
исследования систем управления движущимися объектами, использующих
обработку изображений и распознавание образов на земной поверхности.
Отчет по НИР. Гос. НИИ авиационных систем, 1999 г., Москва.
Глава 6
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ
ИНТЕГРИРОВАННЫХ БОРТОВЫХ СИСТЕМ
БЕСПИЛОТНЫХ МАНЕВРЕННЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ
ОБЪЕКТНО-ОРИЕНТРОВАННОГО ПОДХОДА
Анализ приведенных выше математических моделей движения бес-
беспилотных маневренных ЛА, а также подсистем и устройств, опре-
деляющих аппаратурный состав рассматриваемых интегрированных
систем навигации и наведения с учетом действующих возмущений и не-
неконтролируемых факторов, неизбежно приводит к выводу, что при
формировании облика таких систем, то есть определения необходимо-
необходимого состава моделей и алгоритмов, обеспечивающих выполнение заяв-
заявленных тактикотехнических характеристик соответствующей системы
важное место отводится математическому моделированию процесса
функционирования системы в целом.
Действительно, применение традиционных методов анализа и син-
синтеза подобных систем не дает приемлемых результатов вследствие не-
нестационарности и нелинейности используемых моделей, а также разно-
разнородной природы действующих возмущений (детерминированных, сто-
стохастических, неконтролируемых, нечетких). Кроме того изначально
предполагается наличие бортового вычислителя, а интегрированная
система проектируется как цифровая.
Таким образом наиболее эффективным и дающим конструктивный
выход подходом, обеспечивающим необходимую точность и надеж-
надежность решения целевой задачи проектируемой интегрированной бор-
бортовой системы, является математическое моделирование этой системы
с учетом всех особенностей внешней среды, в которой предполагается
использование этой системы.
Заметим, что в настоящее время на предэскизных этапах проектиро-
проектирования обсуждаемых интегрированных систем возможно рассматривать
любые необходимые объемы моделирования, не ограничиваясь изуче-
изучением характерных режимов или условий эксплуатации, т. е. варьируя
весь диапазон возможных (и невозможных) состояний системы.
Далее, необходимо подчеркнуть, что использование методов ма-
математического моделирования позволяет сократить сроки (и сред-
средства) проектирования подобных систем, обеспечивая масштабируе-
масштабируемость и возможность повторного использования созданного программ-
6.1] Современная методология математического моделирования 191
но-математическое обеспечение (ПМО) при решении аналогичных за-
задач. Современные методы реализации ПМО дают возможность в крат™
чайшие сроки сформировать масштабируемую библиотеку моделей,
численных методов и алгоритмов навигации и наведения, позволяю-
позволяющую оперативно изменять как структуру самого объекта, так и условия
его функционирования непосредственно во время проведения исследо-
исследований.
Использование вышеупомянутой библиотеки дает возможность
формировать облик интегрированных систем навигации и наведения
на основе целевых критериев функционирования системы в целом.
Кроме того, в связи с наметившейся в настоящее время унификацией
промышленных и бортовых ЦВМ возможно непосредственное исполь-
использование фрагментов разработанного ПМО в бортовом интегрирован-
интегрированном комплексе, что позволяет снизить стоимость его производства
и эксплуатации.
С учетом сказанного содержание данной главы включает срав-
сравнительный анализ наиболее распространенных в настоящий момент
подходов к математическому моделированию сложных динамических
систем с учетом неконтролируемых факторов.
Кроме того в главе излагаются основы развитой авторами техно-
технологии создания ПМО, предназначенного для имитационного матема-
математического моделирования процессов функционирования интегрирован-
интегрированных систем навигации и наведения высокоманевренных ЛА, а также
примеры этой технологии для формирования облика интегрированных
систем УАСП.
6.1. Современная методология математического
моделирования
6.1.1. Особенности современного этапа развития техноло-
технологии математического моделирования. В настоящее время техно-
технология математического моделирования вышла на новый качественный
уровень. Такое качественное изменение было обусловлено следующими
обстоятельствами [6.1]:
— Необходимость удовлетворения постоянно возрастающим требо-
требованиям к точности и надежности решения целевой задачи с помощью
математического моделирования приводит к необходимости постро-
построения максимально полных моделей движения, бортовой аппаратуры
и т.п., учитывая все большое количество неконтролируемых факто-
факторов различной природы. Это, в свою очередь, неизбежно приводит
к «тяжеловесности» соответствующего программного обеспечения, ис-
использующего огромное количество библиотек и имеющего сложную
разветвленную структуру, что в конечном счете усложняет отладку,
эксплуатацию и дальнейшее использование программного кода [6.2].
— Развитие информационных технологий и появление принципи-
принципиально новых операционных систем (OS/2, Windows), ориентированных
на события, привело к созданию соответствующих языков програм-
192 Математическое моделирование процессов функционирования [Гл. 6
мирования, обладающих развитой событийной гибкостью и мощным
механизмом корректной обработки и хранения данных.
Новое качество технологии математического моделирования воз-
возникло с появлением идеологии объектно-ориентированного програм-
программирования [6.3]. Теоретическая суть данного подхода заключается в со-
создании информационных структур — объектов, обладающих двумя
принципиальными свойствами: во-первых объекты содержат данные,
характеризующие свойства данного объекта и методы (процедуры) ра-
работы с ними, и во-вторых объекты обладают свойством наследования,
т. е. от объекта может быть порождено сколь угодно много объектов-
наследников, расширяющих возможности и свойства объекта-предка.
Такой подход позволил локализовать данные и методы работы с ни-
ними в логически законченные структуры, допускающие сколь угодно
сложную логику управления и обеспечивающие одновременно с этим
корректное хранение и обработку данных. Кроме того, принцип на-
наследования позволил реализовать библиотеки численных алгоритмов
и математических моделей на качественно новом иерархическом уров-
уровне, обеспечив тем самым возможность масштабирования и повторного
использования программного кода.
Описанные свойства объектов удачно соответствуют требованиям
и логике новейших операционных систем, что дало возможность со-
создавать интегрированные средства разработки программно-математи-
программно-математического обеспечения, обладающие разветвленным и функциональным
интерфейсом (Borland Delphi и СН—Ь Builder реализованы на основе
самих же языков программирования Borland Pascal и СН—Ь соответ-
соответственно). Более того, на основе использования объектно-ориентирован-
объектно-ориентированного подхода удалось создать язык программирования, инвариантный
к используемой платформе (Java), что позволяет говорить об опреде-
определенной унификации и стандартизации используемого ПМО. В каче-
качестве примера можно привести опыт команд Формулы-1, использующих
ПМО, созданное по технологии Java, как в своих стационарных иссле-
исследовательских центрах, так и в паддоке, и непосредственно на самих
автомобилях.
В настоящее время на базе объектно-ориентрованных языков про-
программирования создаются проблемно-ориентированные САПР, обла-
обладающие высокой универсальностью и точностью решения технических
задач и позволяющие исследовать широкий спектр проблем той или
иной тематики. О превосходстве объектно-ориентрованного подхода
говорит тот факт, что даже системы аналитических вычислений (Math-
Cad, Matematica), оперирующие с символьной математикой, выполне-
выполнены на основе традиционных объектно-ориентированных языков про-
программирования [6.4].
Однако, к настоящему моменту не существует каких-либо стандарт-
стандартных САПР, позволяющих исследовать процессы функционирования
бортовых интегрированных систем навигации и наведения беспилот-
беспилотных высокоманевренных ЛА на приемлемом уровне детализации и точ-
точности получаемого решения. Это объясняется с одной стороны, как уже
отмечалось, особенностями моделей объекта и подсистем, и с другой
6.1] Современная методология математического моделирования 193
стороны большим количеством изучаемых подзадач и режимов, необхо-
необходимых исследователю. В результате возникает необходимость создания
уникального ПМО для каждого проекта, базирующегося тем не менее
на использовании ранее созданного объектного инструментария.
Таким образом современная методология математического модели-
моделирования, базирующаяся на использовании объектно-ориентированного
подхода, позволяет создавать интегрированные средства формирова-
формирования облика сложных технических систем, обладающие высокой гибко-
гибкостью, масштабируемостью и детализованностью моделей, что делает
его незаменимым инструментом в проектно-исследовательских рабо-
работах [6.4].
6.1.2. Современная технология математического модели-
моделирования интегрированных систем навигации и наведения вы-
высокоманевренных Л А. Накопленный в данной предметной области
опыт показывает, что технология математического моделирования не-
неразрывным образом связана с развитием информационных техноло-
технологий и философии программирования. Точнее говоря, эволюция язы-
языков программирования высокого уровня определяет в конечном итоге
технологию моделирования, позволяя формировать ту или иную ор-
организационную структуру программно-математического обеспечения.
В результате этой эволюции можно выделить три подхода к моделиро-
моделированию: линейное, структурное и объектно-ориентрованное моделиро-
моделирование [6.1, 6.2].
Линейное моделирование применялось при использовании самых
простейших языков программирования [6.1], в которых отсутствовала
возможность работы с библиотеками и модулями. В этом случае типич-
типичная организационная структура программы, предназначенной для ма-
математического моделирования, имела так называемый линейный вид,
т. е. выглядела так, как это показано на рис. 6.1.
Таким образом, как правило, вся программа находилась в одном
файле, содержащем как набор готовых процедур и функций, так
и основной исполняемый код, выступавший в качестве своеобразного
«менеджера» программы, обеспечивая строго определенный порядок
вызова функций и логику выполнения основного кода.
Очевидно, что такая технология не позволяла создавать большие
и мощные с алгоритмической точки зрения программные продукты
вследствие разрастания линейной структуры в результате глубокой
детализации моделей и учета различного рода возмущений.
Кроме того, при необходимости изменения кода или при созда-
создании новых программных продуктов в рамках такой структуры край-
крайне сложно или вообще невозможно использовать существовавший код
вследствие того, что программа представляет собой практически не
расчленяемый, единый фрагмент.
Вследствие вышеперечисленных недостатков и ограничений линей-
линейного подхода к моделированию было возможно использовать только
простейшие численные методы и алгоритмы, что не позволяло обеспе-
обеспечивать необходимую точность решения целевой задачи. Так, например,
13 Управление и наведение
194 Математическое моделирование процессов функционирования [Гл. 6
НАЧАЛО
Вычислительный блок № 1
Процедура № 1
Вычислительный блок № к
Процедура №j
ОКОНЧАНИЕ
Рис. 6.1. Линейная структура программы
среди методов численного интегрирования систем обыкновенных диф-
дифференциальных уравнений вида
У = f(t,y)l У (to) = Уо
использовался практически только метод Эйлера:
2/i+i = г/i+i + hf(U,yi) ,
6.1] Современная методология математического моделирования 195
величина локальной погрешности которого прямо пропорциональна
шагу интегрирования h. Кроме того, данный метод обладает свойством
нарушения устойчивости численного решения при уменьшении шага,
что неприменимо для многих технических задач.
Структурное моделирование существенно расширило возможно™
сти моделирования за счет использования модулей (библиотек) под-
подпрограмм [6.2]. Типовой модуль содержит объявления констант, пере-
переменных и типов, а также тела процедур и функций, объединяемых,
в основном, по функциональному признаку. Все объявленные в модуле
структуры становятся автоматически доступны при ссылке на имя мо-
модуля. При этом модули также могут ссылаться на другие модули. Так,
например, модуль на языке Borland Pascal, реализующий операции над
матрицами произвольной размерности, может выглядеть следующим
образом.
Unit Matrix;
Interface
type Float: Extended;
{Имя модуля}
{Секция объявлений}
{Объявления типов}
procedure AxB(lRows, NTerms, NCols: Integer; var А, В, С: array of Float);
{Объявления процедур}
procedure ATxB(IRows, ITerms, NCols: Integer; var А, В, С: array of Float);
procedure Scale(NRows, NCols: Integer; var A: array of Float;
CScale :Float);
procedure Sub(IRows, NCols: Integer; var А, В, С: array of Float);
procedure Add(lRows, NCols: Integer; var А, В, С: array of Float);
procedure Inverse(Dimen : integer; var PD, PData, PInv: array of Float;
var Error : byte);
implementation
uses Mathem;
{Секция реализации}
{Ссылка на другой модуль}
procedure Add(IRows, NCols: Integer; var А, В, С: array of Float);
{Тело процедуры}
var
Row, Col: Integer;
Ind : Integer;
begin
for Row:=0 to IRows-l do
for Col:=0 to NCols-i do
begin
Ind := FIndex(Row,Col,NCols);
С [Ind] := A [Ind] + В [Ind];
end;
end;
Анализ приведенного фрагмента показывает, что в данном моду-
модуле в секции описания («INTERFACE») объявлены необходимые типы
и процедуры, с помощью которых реализуются операции над матри-
матрицами произвольной размерности, а сами тела процедур и функций на-
находятся в секции реализации («IMPLEMENTATION»). Пользователь
получает доступ ко всем объявленным в секции «INTERFACE» ти-
пам, процедурам и функциям, указывая ссылку на модуль «MATRIX».
13*
196 Математическое моделирование процессов функционирования [Гл. 6
После этого в вызывающем коде можно вызывать любую из данных
процедур, подставляя в них соответствующие фактические параметры.
В соответствии с изложенным, организационная схема программы,
использующей принцип структурного программирования, выглядит
так, как показано на рис. 6.2.
Вызывающим программа
(менеджер нроекта)
Секция объявления и инициализации
констант, переменных и типов
Секция реализации
вызывающей программы
Вычислительный блок № 1
Вызов процедур и функций
из модулей проекта
Вычислительный блок № 2
Вызов процедур и функций
из модулей проекта
Вычислительный блок № К
Вызов процедур и функций
из модулей проекта
Модуль 1
I Объявление констант, [-
1 переменных, типов, I
I процедур и функций [
I Тела процедур |
j и функций I
Модуль 2
I Объявление констант,!
1 переменных, типов, L
L процедур и функций |
Тела процедур [
I и функций J
Модуль N
Объявление константу
переменных, типов, I-
процедур и функций
Тела процедур
и функций
Рис. 6.2. Функциональная схема программы, использующей структурный
принцип
Еще одной важной особенностью структурного программирования
является возможность использования так называемых процедурных
типов, позволяющих в качестве фактического параметра передавать
в процедуру или функцию другую процедуру, удовлетворяющую опи-
описанию процедурного типа.
6.1] Современная методология математического моделирования 197
Поясним сказанное на примере приведенного ниже фрагмента кода,
реализующего модуль методов интегрирования систем обыкновенных
дифференциальных уравнений на языке Borland Pascal.
Unit Integrator;
Interface
type
TFuncProc = procedure (ti: Float; var Y, dY: array of Float);
{описание процедурных типов}
TOutPutProc = procedure (ti: Float; var Y: array of Float);
Procedure RungeKutta(TG, Tk, Step: Float, var Y: array of Float;
FuncProc: TFuncProc; OutPutProc: TOutPutProc);
Implementation
Procedure RungeKutta(TO, Tk, Step: Float, var Y: array of Float;
FuncProc: TFuncProc; OutPutProc: TOutPutProc);
Begin
FuncProc(ti+Step, CurY, CurdY); {вызов процедуры}
end;
В секции описания модуля определены процедурные типы
TFuncProc и TOutPutProc^ представляющие собой шаблоны для
функций правых частей и функций печати результатов при решении
задачи интегрирования систем обыкновенных дифференциальных
уравнений. Далее определена процедура RungeKutta, реализующая
непосредственно метод численного интегрирования Рунге^Кутты, где
в качестве формальных параметров наряду с интервалом интегрирова-
интегрирования, шагом и начальными условиями указаны процедуры FuncProc и
OutPutProc соответствующих процедурных типов. В секции реализа-
реализации в теле процедуры RungeKutta происходит вызов данных процедур
с подстановкой текущих фактических параметров.
Описанный механизм позволяет создавать унифицированные про-
программные модули, реализующие алгоритмы различных численных ме-
методов, инвариантные к физической сути задачи, или, иными словами,
к используемым моделям. Это обстоятельство позволяет создавать,
с одной стороны, универсальные библиотеки алгоритмов, а с другой —
библиотеки моделей, объединяя их в рамках вызывающей программы
следующим образом: в качестве фактического процедурного параметра
в процедуру численного метода подставляется одна из процедур модуля
моделей, реализующих конкретную математическую модель техниче-
ской задачи.
Помимо этого структурное моделирование дало возможность реали-
реализовать современные численные методы, оперирующие большим числом
исходных данных, настроек и т. п., обеспечивающих необходимый уро-
уровень инструментальных погрешностей. Возвращаясь к примеру с мето-
методами численного интегрирования систем обыкновенных дифференци-
альных уравнений подчеркнем, что в данном случае могут быть исполь-
использованы современные одношаговые вложенные и экстраполяционные
198 Математическое моделирование процессов функционирования [Гл. 6
методы интегрирования, такие, как метод Дормана^Принса, обладаю-
обладающие механизмом контроля локальной погрешности и автоматического
выбора шага интегрирования и позволяющие достичь точности отно-
относительной локальной погрешности на уровне 1СР20.
Таким образом структурное программирование обеспечивает воз-
возможность быстрой разработки и доработки проекта на основе использо-
использования библиотек алгоритмов и моделей и оперативной замены моделей
и алгоритмов как на этапе разработки ПМО, так и на этапе непосред-
непосредственно математического моделирования.
Вместе с тем при создании больших программных комплексов, ре-
реализующих сложные технические задачи проектирования бортовых
интегральных систем навигации и наведения, при использовании струк-
структурной технологии моделирования разработчик сталкивается с пробле™
мой обеспечения корректности обращения к данным, используемым
разными модулями и процедурами, а также с «запутанностью» кода
менеджера программы, обеспечивающего реакцию комплекса на раз™
ного рода события. Кроме того, в рамках данного подхода затруднена
отладка и документирование создаваемого ПМО.
Объектно-ориентированное моделирование основано на использо™
вании принципов объектно-ориентированного программирования и за™
ключается в проекции исходной технической задачи на уровень логи™
ческих структур языка программирования (объектов) и формировании
связей между ними [6.4].
В соответствии со сложившейся терминологией в дальнейшем будем
понимать под классом специальный тип данных языка, состоящий из
данных (полей) класса и методов работы с ними. Объявление класса не
означает его использования — для этого должен быть создан объект,
иными словами переменная этого типа, реально существующая, т. е.
явно созданная программистом [6.3].
Для понимания того, что же отличает объектноориентированное
моделирование, коротко остановимся на основных принципах, состав™
ляющих суть объектно™ориентрованного подхода (ООП). Таких прин™
ципов три — инкапсуляция, наследование и полиморфизм.
Классическое правило ООП утверждает, что для обеспечения на-
надежности программного кода нежелателен прямой доступ к полям
объекта (данным): чтение и обновление их содержимого должно произ-
производиться посредством вызова соответствующих методов. Это правило
и называется инкапсуляцией, а данные, защищенные таким образом —
свойствами объекта.
Обычно свойство определяется тремя элементами: внутренним
полем объекта и двумя методами, которые осуществляют его чте-
чтение/запись. Ниже определяется свойство AProperty, доступ к которому
осуществляется посредством методов Get AProperty (на чтение) и
SeiAProperty (на запись).
type
TiObject = class(TObject)
protected
function GetAProperty: TIPropertyType;
6.1] Современная методология математического моделирования 199
procedure SetAProperty(Mew?alue: TAProperty);
public
property IProperty: TIPropertyType read GetlProperty
write SetlProperty;
end;
В методах, входящих в состав свойств, может осуществляться целый
ряд предварительных действий, как то проверка на диапазон допу-
допустимых значений, вызов других процедур и функций, зависящих от
вносимых изменений. Если свойство открыто только на чтение или
запись, в его описании может отсутствовать соответствующий метод.
При работе с объектом нет необходимости непосредственно вызывать
методы доступа к свойству, достаточно лишь оперировать с самим
свойством.
IQbject.IProperty := AValue;
Afariable := AObject.AProperty;
Вызов необходимых методов компилятор произведет автоматиче-
автоматически. Таким образом для пользователя свойство выглядит как обычное
поле, однако всякое обращение к нему будет гарантировано вызы-
вызывать необходимые, с точки зрения объекта, действия. Это позволяет,
с одной стороны, максимально защитить данные объекта, а с дру-
другой, обеспечить максимальную гибкость и настраиваемость кода по
отношению к внешним событиям. Так, например, при создании объ™
екта, реализующего метод интегрирования, в качестве свойств можно
объявить размерность системы уравнений, начало и конец интервала
интегрирования, шаг, вектор состояния и т. п. Изменяя свойства та™
кого объекта непосредственно во время моделирования, можно быть
уверенным в корректности введенных изменений, а кроме того можно
обеспечить необходимую реакцию на события в системе — измене-
изменение вектора состояния или шага интегрирования приведет к приоста-
приостановке интегрирования и пересчету необходимых внутренних перемен-
переменных.
Второй принцип ООП получил название «наследование» [6.4]. Это
означает возможность создания так называемых «потомков» объек-
объекта, полностью наследующих всю внутреннюю структуру полей, мето-
методов и свойств объекта-родителя с добавлением новых полей, методов
и свойств, иными словами то, что нужно при переходе от общего к част-
частному. Унаследованные от объекта-«предка» поля и методы доступны
в дочернем классе, если же имеет место совпадение имен полей и мето-
методов, то они перекрываются.
Поясним сказанное на следующем примере.
type
IParentObject = class (TObject)
FField: Real; {поле родителя}
procedure SetParentData (Afalue: Real); virtual; {метод родителя}
property ParentField: Real read FField write SetParentData;
{свойство родителя}
end;
200 Математическое моделирование процессов функционирования [Гл. 6
TChildObject = class(TParentObject)
FChildField: Integer; {поле потомка}
procedure SetParentData(IValue: Real); override;
{перекрывающийся метод}
procedure SetChildData(A?alue: Integer); {метод потомка}
property ChildField: Integer read FChildField write SetChildData;
{свойство потомка}
end;
procedure TParentObject. SetParentData(AYalue: Real);
begin
FField := ?alue;
end;
procedure TChildObject.SetParentData(i?alue: Real);
begin
?alue := Sqr(Value);
inherited(Value); {вызов метода предка}
end;
procedure TChildObject.SetChildData(AYalue: Real);
begin
FChildField := Value;
end;
Необходимо заметить, что по тому, какие действия происходят при
вызове, методы делятся на два типа: статические и динамические.
Вообще говоря, в зависимости от реализации ООП в конкретном язы-
языке программирования динамические методы могут подразделяться на
группы, так в Borland Pascal различают виртуальные и собственно
динамические методы, различающиеся способами адресации в процессе
выполнения.
Однако с точки зрения наследования эти методы одинаковы: они
могут быть перекрыты только одноименными методами, имеющими
тот же тип. Статические же методы, а также поля в объектах-потомках
ведут себя одинаково: можно без ограничений перекрывать старые
имена и при этом изменять тип методов.
Различие методов можно показать на следующем примере.
type
TFirstClass = class(TObject) {объявление класса предка}
StaticData: Integer; {статическое поле - целое}
DynamicData: Integer; {динамическое поле - целое}
procedure Static(AValue: Integer); {статический метод}
function DataShow: string; virtual; {динамический метод}
end;
TSecondClass = class(TFirstClass) {объявление класса потомка}
StaticData: Real; {статическое поле - вещественное}
DynamicData: Real; {динамическое поле - вещественное}
procedure Static(AValue: Real); {статический метод}
function DataShow: string; override; {динамический метод}
end;
TThirdClass = class(TFirstClass) {объявление класса потомка}
DynamicData: String; {динамическое поле - строка}
function DataShow: string; override; {динамический метод}
end;
6.1] Современная методология математического моделирования 201
procedure TFirstClass.Static(A?alue: Integer);
begin
StaticData := 2;
end;
function TFirstClass.DataShow: string;
begin
Result := IntToStr(DynamicData);
end;
procedure TSecondClass.Static(AValue: Real);
begin
StaticData := 0.992;
end;
function TSecondClass.DataShow: string;
begin
Result := FloatToStr(DynamicData);
end;
function TThirdClass.DataShow: string;
begin
Result := DynamicData;
end;
procedure ShowField(aData: TFirstClass) {внешняя процедура}
begin
Label.Caption := aData.DataShow;
end;
В данном примере объявленные статические поле и метод
(StaticData и Static) полностью перекрываются в потомках, т. е. по
сути представляют собой разные поля и методы. Перекрытое поле
недоступно в потомке, однако перекрытый метод можно вызвать с ис-
использованием ключевого слова inherited. Там же описаны разнотипные
динамические переменные и методы работы с ними, возвращающие
текстовое представление этих данных. Внешняя по отношению к ним
процедура ShowField получает объект как параметр и вызывает
соответствующий метод. Правило иерархии объектов позволяет ис-
использовать самый старший предок как общую ссылку при передаче объ-
объектного типа в процедуру. Таким образом в данную процедуру можно
передать и объекты классов TFirstClass, TSecondClass и TThirdClass.
Основное различие между статическими и динамическими метода-
методами заключено в том, что адрес статического метода определяется на
стадии компиляции проекта, а адрес динамического — на стадии вы-
выполнения (так называемое «позднее связывание»). В результате такого
способа адресации в описанном примере будет вызван метод фактиче-
фактически переданного объекта. Этот принцип называется полиморфизмом
и представляет одно из самых главных преимуществ ООП. Допустим,
что разработчик имеет дело с некоторой совокупностью явлений или
процессов. Чтобы смоделировать их с помощью ООП, нужно выделить
их самые общие, типовые черты и построить иерархию классов. Те
методы и свойства объектов, которые не изменяют своего содержа-
содержания, должны быть реализованы в виде статических. Те же, которые
202 Математическое моделирование процессов функционирования [Гл. 6
варьируются при переходе от общего к частному, лучше облечь в фор-
форму динамических методов. Основные, «родовые» методы необходимо
описать в классе-предке и затем перекрывать их в классах-потомках.
Тогда можно разрабатывать и создавать динамические библиотеки,
работающие с динамическими методами классов, даже тех, которые не
были созданы на момент формирования библиотеки.
В соответствии с изложенным, организационная схема программы,
использующей принцип объектно-ориентированного программирова-
программирования, выглядит следующим образом (рис. 6.3).
Вызывающам программа \
(менеджер проекта)
Секция объявления и инициализации!
констант, переменных и объектов
и класса менеджера
Метод менеджера
Вычислительный блок JNfe
Вызов методов классов
X
Вычислительный блок № 2
Вызов методов классов
Вычислительный блок №. К
Вызов методов классов
Библиотека классов
Родительский класс № 1
Класс-потомок № 1
' Класс-подпотомок №. 1
Класс-подпотомок № j
Класс-потомок № к
Класс-подпотомок № 1
Класс-подпотомок JMe j
Родительский класс № п
Класс-потомок № 1
у Класс-подпотомок № 1
—^V Класс-подпотомок № j
Класс-потомок № к
—• Класс-подпотомок №. 1
—Ьк/ Класс-подпотомок № j
Рис. 6.3. Объектная схема ПМО
Вообще говоря, существует несколько подходов к использованию
ООП в программировании, различающихся как непосредственной ре-
реализацией языка программирования, так и предпочтениями програм-
программистов. Так, среди современных языков программирования можно вы-
выделить три наиболее распространенных в настоящий момент версии
ООП:
— Borland Pascal — (Delphi для Windows, Cylix для Unix);
— Borland C++ (частично совместима с моделью Microsoft Vi-
Visual С);
— Sun Java.
6.1] Современная методология математического моделирования 203
Первые две версии используют именно объектно-ориентированный
подход, дающий возможность использовать в программном коде поми-
помимо объектов «старые» структуры — модули, процедуры и функции.
Java относится уже к классу объектных языков программирования,
где все данные и процедуры должны быть оформлены в виде классов.
Практика показывает, что использование чисто объектных структур не
всегда оправдано как с точки зрения быстродействия кода, так и с точки
зрения его сложности — программа может выглядеть слишком запу-
запутанной при реализации чисто объектной модели.
Версия Borland СН—Ь предполагает так называемое множественное
наследование, позволяющее создавать потомка от нескольких роди-
родителей, объединяя тем самым характерные особенности двух и более
классов в одном. Опыт показывает, что наряду с очевидными преиму-
преимуществами такого подхода при создании больших проектов часто воз-
возникают ситуации, при которых возникают неоднозначности, связанные
с порождением класса от взаимоисключающих или противоречивых
классов-родителей. При создании языка Java, имеющего много общего
с точки зрения принципов построения с языком С, разработчики оста-
оставили возможность только простого наследования.
Возможность наследовать черты других классов в языке Java реа-
реализована через понятия методов-интерфейсов, а в языке Borland Pascal
через так называемые «методы класса» (class function), позволяющие
использовать методы, описанные в других классах. Также возможно
хранить экземпляр другого класса (в ООП он называется объектом)
как внутреннее поле класса.
Язык Java, по замыслу авторов, должен обладать определенной
инвариантностью к используемой операционной системе и платфор-
платформе ЭВМ. Это достигается использованием виртуальной Java-машины,
запускаемой на компьютере, в среде которой и интерпретируется на-
написанный код программы. Таким образом, в большинстве случаев, код
программы не компилируется в машинный, что существенно снижает
производительность системы и затрудняет процесс отладки, но дает
принципиальную возможность (с точностью до нюансов реализации)
использовать созданное ПМО практически на всех известных плат-
платформах.
Опыт создания ПМО, предназначенного для моделирования про-
процессов функционирования бортовых интегрированных систем нави-
навигации и наведения, накопленный к настоящему моменту, позволяет
рекомендовать использовать в качестве основной среды разработки
и языка программирования продукты фирмы Borland. Наиболее пред-
предпочтительным, по мнению авторов, выглядит язык Borland Pascal, так
как он обладает четкой и строгой лексикой, имеет логичную и деталь-
детально разработанную объектно-ориентированную модель, что позволяет
в короткие сроки создавать и эксплуатировать сложное ПМО с наи-
наименьшими затратами.
Подводя итог сказанному, заметим, что использование ООП дает
разработчику возможность в кратчайшие сроки разрабатывать слож-
сложное, гибкое и наращиваемое ПМО, позволяющее использовать иерар-
204 Математическое моделирование процессов функционирования [Гл. 6
хические структуры наследуемых классов, оформленные в виде соот-
соответствующих библиотек и обеспечивать безопасность хранимых дан-
данных [6.4].
6.2. Функциональная схема объектно-
ориентированного ПМО для математического
моделирования интегрированных систем навигации
и наведения беспилотных маневренных ЛА
Выше было показано, что в настоящее время наиболее эффектив-
эффективным подходом к разработке программно-математического обеспечения
для математического моделирования интегрированных систем навига-
ции и наведения высокоманевренных ЛА является объектно-ориенти-
рованный подход (ООП) [6.3].
Заметим, что при использовании ООП возникает проблема опреде-
определения так называемых базовых классов, т. е. выделение самых общих,
типовых черт исследуемых процессов и построения соответствующей
иерархии этих классов [6.4]. Этот этап исследований очень плохо фор-
формализуется, тем не менее на основании существующего опыта можно
сформулировать следующие рекомендации по формированию объект-
объектной схемы программно-математического обеспечения.
1. Все реально существующие объекты исследования, такие, как
Л А, система управления, блок измерителей и т.п., представляющие
собой системы с конечным количеством входов и выходов, должны быть
представлены своими аналогами-классами. Таким образом с точки зре-
зрения программиста соответствующий класс должен являться «черным
ящиком» с некоторым количеством свойств, но со скрытым механизмом
функционирования.
2. Построение иерархической цепочки таких классов целесообразно
начинать с самого общего, абстрактного класса, у которого определены
лишь наиболее общие, типовые для всей предполагаемой цепочки, поля,
а методы объявлены как виртуальные и абстрактные. Иными слова™
ми, в таких классах объявлены только структуры полей и шаблоны
методов, а сами тела методов отсутствуют, что требует их перекрытия
в классах-потомках.
3. Если при моделировании используются сложные численные ал-
алгоритмы, требующие большого числа настроек и дополнительных про-
процедур, то необходимо построить библиотеки соответствующих клас-
классов, реализующие упомянутые алгоритмы. При этом метод, детали-
детализирующий исходную математическую задачу, должен быть объявлен
абстрактным с целью дальнейшего перекрытия в потомке уже непо-
непосредственно в рамках данного проекта (например функция вычисле-
вычисления правых частей системы обыкновенных дифференциальных урав-
уравнений).
4. Вспомогательные процедуры и простые алгоритмы целесообразно
оформить в виде отдельных модулей, не облекая их в классы, с целью
упрощения общей структуры и, как уже отмечалось выше, для повы-
6.2]
Функциональная схема объектно-ориентированного ПМО
205
шения быстродействия программы. Так, например, функции и проце-
процедуры матричной алгебры, алгебры комплексных чисел, кватернионов,
тензоров и т. п. лучше всего заключить в отдельные модули, описав
предварительно соответствующие типы (матрица, комплексное число,
кватернион, тензор и т.п.).
5. Если исследуемые процессы обладают вложенностью, т. е. один
процесс связан непосредственно или косвенно с несколькими другими,
то в классе, реализующем данный процесс, необходимо предусмотреть
соответствующее поле под объект класса, реализующего вложенный
процесс. Необходимо отметить, что такие вложенные объекты должны
быть созданы извне, т. е. в вызывающей программе, а в рассматривае-
рассматриваемый класс передавался бы уже созданный объект. Это необходимо для
того, чтобы разными классами использовался только один экземпляр
такого класса и все обращения к его данным были бы согласованы. Та-
Таким образом при инициализации всей структуры сначала должны быть
созданы самые независимые, простые объекты, а уже затем сложные,
составные объекты.
Для построения функциональной схемы ПМО, предназначенного
для математического моделирования интегрированных бортовых си™
стем навигации и наведения высокоманевренных ЛА, необходимо соста™
вить функциональную схему моделирования, содержащую все объекты
моделирования с указанием их назначения и взаимодействия с другими
объектами и внешней средой. Такая функциональная схема приведена
на рис. 6.4.
I Возмущающие силы и моменты
Внешним среда
Органы
Управления
' ЛА
Уиранляющис
" силы и
моменты
А Команды
управления
Летательный
Аппарат
Интегрированная система навигации и управления
Формирование
'команд
управления:
Вектор
управ-
управления
Решение задачи
навигации
и управления
Вектор
изме-
измерений
Ошибки
измерителей
Jl
Борте) вой
Измерительный
Комплекс
Борт ЛА
Рис. 6.4. Функциональная схема моделирования
Рассмотрим подробнее каждый из элементов этой функциональной
схемы с целью определения состава и функционального назначения
классов, определяющих объектную структуру ПМО.
206 Математическое моделирование процессов функционирования [Гл. 6
6.2.1. Моделирование неуправляемого движения Л А.
Блок «Летательный Аппарат» описывает динамику высокоманеврен-
высокоманевренного беспилотного ЛА (как центра масс, так и углового движения) под
воздействием сил и моментов, обусловленных влиянием внешней среды
(неконтролируемых факторов: детерминированных, стохастических,
неопределенных и нечетких) и отклонением управляющих органов.
Для того, чтобы определить базовые классы и соответствующие
цепочки классов-наследников, реализующих обсуждаемый элемент,
определим необходимый состав моделей и алгоритмов, реализующих
процесс моделирования динамики неуправляемого ЛА с указанием
необходимых исходных данных.
По своей сути обсуждаемая проблема является задачей интегриро™
вания системы обыкновенных дифференциальных уравнений (ОДУ)
первого порядка, описанной ранее (п. 4.1). Таким образом, с точки зре-
ния программной реализации данный блок состоит из двух классов —
класса, реализующего численный метод интегрирования систем ОДУ,
и класса, описывающего модель неуправляемого движения центра масс
и углового движения ЛА.
Рассмотрим цепочку классов, реализующих библиотеку методов
численного интегрирования систем обыкновенных дифференциальных
уравнений (рис. 6.5). В данной библиотеке размещены следующие ме-
методы [6.8]:
Класс
Tlntegrator
Класс
TSImpleAdams
Класс
TOneStep
Класс
TRungeKutta26
Класс
TDormanPrlnceS
Рис. 6.5. Библиотека методов численного интегрирования
6.2]
Функциональная схема объектно-ориентированного ПМО
207
— метод «классический» (правило 2/6) Рунге^Кутты;
— метод вложенный Дормана^Принса 5D);
— метод прогноза-коррекции Адамса^Мултона^Башфорта.
Все методы, кроме вложенного, используют постоянный шаг инте™
грирования и не используют оценку локальной погрешности на шаге.
Метод прогноза-коррекции является итерационным, причем заверше™
ние итераций определяется либо по достижению заданной точности
невязки двух последних решений, либо по достижению заданного ко™
личества итераций.
Основным классом-предком для всей цепочки будет являться аб-
абстрактный класс ТIntegrator, объединяющий в себе самые общие черты
данного объектного дерева, однако содержащего лишь объявления по-
полей и шаблоны методов. Ниже в таблицах 6.1 и 6.2 приведены названия
и описания полей и методов данного класса.
Таблица 6.1
Свойства класса
Dim
ТО
Тк
СигТ
dtRep
RepFIleName
Tol
h
GutPutMode
OutDest
PCurY
PW
OfPauseRun
Owner
CmUpdate
Тип
целый
веществен.
веществен.
веществен.
веществен.
строка
веществен.
сеществен.
TOutPutMode
TOutDest
массив
веществ, чисел
массив
веществ, чисел
логический
указатель
целый
Описание
Размерность задачи (число компонент
фазового вектора)
Начало интервала прогнозирования
Конец интервала прогнозирования
Текущее значение переменной инте-
интегрирования
Шаг вывода результатов интегрирова-
интегрирования
Имя файла результатов
Локальная точность интегрирования
Шаг интегрирования
Тип вывода (отсутствует, на каждом
шаге, плотная выдача)
Источник вывода результатов (файл
или консоль)
Текущий фазовый вектор
Вектор весовых коэффициентов
Флаг остановки вычислений
Ссылка на объект-владелец
Идентификатор сообщения
Таким образом в приведенном абстрактном классе представлены
основные «обобщенные» черты и методы всей иерархии классов, реа-
реализующих численные методы интегрирования систем ОДУ. Как видно
из приведенных таблиц, в данном классе отсутствует непосредственно
численный алгоритм (методы Run и RunTo — абстрактные). Даль-
208 Математическое моделирование процессов функционирования [Гл. 6
сб
Я"
S
п
ю
сб
Ь
1о
Is
|
Is
s
я~
s
5
X
§
CD X
|
S X
i
s i
I &
is
si
11
s щ
X ^
Ш X
§ S
s g
Л CD
m §
X
сб
m
о
I
2
m
11
1
N
S
к x
II
2 2
II
4 4
о о
о о
З
О
.. о .5
CD Сб W.
.5 ^ qT -rE
5 I ^
CD «б С
i
III
ф з
о ^
Ф g3
О *_g
CXQQ
го о
О аЗ
II
2
-а °
О. сб
г'"'
Е-1
11
сб .S
>
si
2 g.b
Он аЗ >
CX сб
6.2]
Функциональная схема объектно-ориентированного ПМО
209
нейшим развитием базового класса является класс-потомок TOneStep,
реализующий основные свойства группы одношаговых методов. Ни-
Ниже, в таблицах 6.3 и 6.4 приведены названия и описания новых или
перекрытых по отношению к родительскому полей и методов данного
класса.
Таблица 6.3
Свойства класса
Re] Count
AccCount
FcnCount
Тип
целый
целый
целый
Описание
Счетчик отброшенных шагов
Счетчик принятых шагов
Счетчик сделанных вызовов функции
правых частей
Таблица 6.4
Метод
Constructor Create(const anOwner:
Pointer; const acmUpdate: Byte);
procedure InitialStep; virtual;
procedure ResetCalculatlon; virtual;
Procedure SetInIData(aDIm: Integer;
aTO, aTk: Float; ah, ahMax: Float;
aTol: Float; aOPMode: TOutPutMode;
aOPDest: TOutDest; adtRep: Float;
aY: array of Float; aW: array of Float;
aRepFName: String); override;
Тип
конструк-
конструктор
класса
виртуаль-
виртуальный
виртуаль-
виртуальный
виртуаль-
виртуальный
Действие
Создает объект и при-
присваивает значения по-
полям указателя на вла-
владельца и идентифика-
идентификатора сообщения
Устанавливает значе-
значение начального шага
интегрирования
Процедура «сброса»
вычислений
Инициализирует на-
начальные значения по-
полей объекта
Кроме того, непосредственно от класса TIntegrator образован класс
Т'SimpleA dams, реализующий простейший метод прогноза-коррекции
Адамса-Мултона-Башфорта первого порядка. В данном методе про-
прогноз осуществляется методом Эйлера (явный метод Адамса), а коррек-
коррекция — методом трапеций (неявный метод Адамса) [6.8]. Одним из клю-
ключевых свойств данного класса является логическое поле of'Correction,
позволяющее пользователю определять, будет ли использоваться кор-
коррекция, или вычисления будут происходить только по методу Эйлера.
Очень часто, особенно в системах ОДУ, в правые части которых входят
результаты навигационных измерений, метод прогноза-коррекции яв-
является единственным методом, не дающим эффекта «запаздывания»
численного решения вследствие использования неявной коррекции. Ни-
Ниже, в таблицах 6.5 и 6.6, приведены названия и описания новых или
14 Управление и наведение
210 Математическое моделирование процессов функционирования [Гл. 6
перекрытых по отношению к родительскому полей и методов данного
класса.
Таблица 6.5
Свойства класса
POldY
PCurF
POldF
ofCorrection
Maxlteratlon
Тип
массив
веществ, чисел
массив
веществ, чисел
массив
веществ, чисел
логический
целый
Описание
Массив, содержащий фазовый вектор
на предыдущей итерации
Массив, содержащий значения функ-
функции правых частей на текущей итера-
итерации
Массив, содержащий значения функ-
функции правых частей на предыдущей
итерации
Флаг использования коррекций
Максимальное число итераций
От класса TOneSiep образованы два класса-потомка, реализующих
современные одношаговые методы интегрирования семейства Рунге-
Кутты. Наиболее простой из них — классический метод Рунге^Кутты
4 порядка с постоянным шагом интегрирования (правило 2/6) пред-
представлен классом TRungeKutta26. Ниже, в таблицах 6.7 и 6.8 приведены
названия и описания новых или перекрытых по отношению к родитель-
родительскому полей и методов данного класса.
Класс TDormanPrince5 реализует современный вложенный метод
численного интегрирования, позволяющий получать на одном и том же
разбиении шага интегрирования два численных решения 5 и 4 порядка,
используя их для вычисления локальной погрешности и определения
длины нового шага интегрирования [6.8]. Кроме того, для данного
метода получены так называемые непрерывные формулы, позволяю-
позволяющие использовать полученные решения для интерполяции решения
в пределах одного шага интегрирования с 4-м порядком точности, что
существенно лучше традиционной сплайн-интерполяции, используемой
для других методов. Упомянутый механизм реализован в специальном
методе Densit. Ниже, в таблице 6.9, приведены названия и описания но-
новых или перекрытых по отношению к родительскому методов данного
класса.
Таким образом, формируется библиотека численных методов ин-
интегрирования, реализующая наиболее распространенные алгоритмы
данного класса задач и позволяющая создавать классы-наследники для
конкретных задач исследования динамики процессов и систем. Фор-
Формализация конкретной задачи состоит в создании потомка от одного
из описанных классов с перекрытием методов Funcs и Report^ детали-
детализирующих процесс вычисления правых частей системы ОДУ (модели
эволюции или движения системы) и вывод результатов интегрирова-
интегрирования.
Для реализации обсуждаемого класса обратимся к основным за-
закономерностям динамики высокоманевренного беспилотного ЛА. Из-
6.2]
Функциональная схема объектно-ориентированного ПМО 211
Таблица 6.6
Метод
Constructor Create(const
anOwner: Pointer; const
acmUpdate: Byte);
Procedure SetInIData(aDIm:
Integer; aTO, aTk: Float; ah,
ahMax: Float; aTol: Float;
aOPMode: TOutPutMode;
aOPDest: TOutDest; adtRep:
Float; aY: array of Float; aW:
array of Float; aRepFName:
String); override;
procedure Predictor; virtual;
procedure Corrector; virtual;
procedure Step; override;
procedure Run(var aY: array of
Float); override;
procedure RunTo(const ti:
Float; var aY: array of Float);
override;
procedure Extract (const ti:
Float; var aY: array of Float);
virtual;
Тип
конструктор
класса
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
Действие
Создает объект и при-
присваивает значения по-
полям указателя на вла-
владельца и идентификато-
идентификатора сообщения
Инициализирует на-
начальные значения полей
объекта
Выполняет прогноз чис-
численного решения на ша-
шаге
Выполняет коррекцию
численного решения на
шаге
Организует вычисление
в пределах одного шага
интегрирования
Выполняет численное
интегрирование на всем
интервале интегрирова-
интегрирования; результат сохраня-
сохраняется в массиве aY
Выполняет численное
интегрирование до зна-
значения переменной инте-
интегрирования равного t^;
результат сохраняется
в массиве aY
Возвращает фазовый
вектор для значения пе-
переменной интегрирова-
интегрирования равного t^; при этом
tj принадлежит текуще-
текущему шагу интегрирова-
интегрирования (интерполяция ре-
результата интегрирова-
интегрирования)
14*
212 Математическое моделирование процессов функционирования [Гл. 6
Таблица 6.7
Свойства класса
POldY
POldF
Тип
массив
веществ, чисел
массив
веществ, чисел
Описание
Массив, содержащий фазовый вектор
на начало шага интегрирования
Массив, содержащий значения функ-
функции правых частей на начало шага ин-
интегрирования итерации
Таблица 6.8
Метод
Constructor Create(const
anOwner: Pointer; const
acmUpdate: Byte);
destructor Destroy; override;
Procedure SetInIData(aDIm:
Integer; aTO, aTk: Float; ah,
ahMax: Float; aTol: Float;
aOPMode: TOutPutMode;
aOPDest: TOutDest; adtRep:
Float; aY: array of Float; aW:
array of Float; aRepFName:
String); override;
procedure Step; override;
procedure Run(var aY: array of
Float); override;
procedure RunTo(const ti:
Float; var aY: array of Float);
override;
procedure Extract (const ti:
Float; var aY: array of Float);
virtual;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
Действие
Создает объект и присваи-
присваивает значения полям указа-
указателя на владельца и иден-
идентификатора сообщения
Уничтожает объект
Инициализирует началь-
начальные значения полей объек-
объекта
Организует вычисление
в пределах одного шага
интегрирования
Выполняет численное ин-
интегрирование на всем
интервале интегрирова-
интегрирования; результат сохраняется
в массиве aY
Выполняет численное ин-
интегрирование до значения
переменной интегрирова-
интегрирования равного t$; результат
сохраняется в массиве aY
Возвращает фазовый век-
вектор для значения перемен-
переменной интегрирования рав-
равного ti; при этом t« при-
принадлежит текущему шагу
интегрирования (интерпо-
(интерполяция результата интегри-
интегрирования)
6.2]
Функциональная схема объектно-ориентированного ПМО
213
Таблица 6.9
Метод
Constructor Create(const
anOwner: Pointer; const
acmUpdate: Byte);
destructor Destroy; override;
Procedure SetInIData(aDIm:
Integer; aTO, aTk: Float; ah,
ahMax: Float; aTol: Float;
aOPMode: TOutPutMode;
aOPDest: TOutDest; adtRep:
Float; aY: array of Float; aW:
array of Float; aRepFName:
String); override;
procedure Step; override;
procedure Densit(const Ti:
Float); virtual;
procedure Run(var aY: array of
Float); override;
procedure RunTo(const ti:
Float; var aY: array of Float);
override;
procedure Extract (const ti:
Float; var aY: array of Float);
virtual;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
виртуальный
Действие
Создает объект и при-
присваивает значения по-
полям указателя на вла-
владельца и идентификато-
идентификатора сообщения
Уничтожает объект
Инициализирует на-
начальные значения полей
объекта
Организует вычисление
в пределах одного шага
интегрирования
Организует процедуру
интерполяции по «не-
«непрерывным» формулам
в пределах одного шага
интегрирования
Выполняет численное
интегрирование на всем
интервале интегрирова-
интегрирования; результат сохраня-
сохраняется в массиве aY
Выполняет численное
интегрирование до зна-
значения переменной инте-
интегрирования равного t$;
результат сохраняется
в массиве aY
Возвращает фазовый
вектор для значения пе-
переменной интегрирова-
интегрирования равного ti] при этом
ti принадлежит текуще-
текущему шагу интегрирова-
интегрирования (интерполяция ре-
результата интегрирова-
интегрирования)
214 Математическое моделирование процессов функционирования [Гл. 6
Таблица 6.10
Свойства класса
PolyPower
NApproUnlts
SourceTable
SelCols
ArgCol
UnitsShift
Тип
Целый
Целый
Строка
массив целых
чисел
Целый
TunitsShift
Описание
Степень аппроксимирующего полино-
полинома
Количество узловых точек
Имя ASCII-файла, содержащего ап-
аппроксимируемую таблицу
Массив, содержащий номера колонок
в таблице, по которым будет произве-
произведена аппроксимация
Номер колонки в таблице, являющейся
аргументом аппроксимации
Признак выхода за диапазон аргумен-
аргумента (экстраполяция)
Таблица 6.11
Метод
Constructor Create;
Destructor Destroy; override;
Procedure Set Range (Lower,
Upper: Float); virtual;
procedure Extract(Arg: Float;
var Buffer: array of Float);
virtual;
Тип
Конструктор
класса
Деструктор
класса
Виртуальный
Виртуальный
Действие
Создает объект
Уничтожает объект
Устанавливает допусти-
допустимый диапазон значений
аргумента
Возвращает массив зна-
значений аппроксимируе-
аппроксимируемых функций Buffer для
текущего значения аргу-
аргумента Arg
вестно, что в модели движения центра масс и углового движения
ЛА в правые части дифференциальных уравнений входят ускорения
(продольное движение) и моменты (угловое движение), обусловленные
влиянием внешней среды (возмущающими факторами) и отклонени-
отклонением управляющих органов. В этой связи предварительно необходимо
создать классы, описывающие изучаемый ЛА (маесово^инерционные
и геометрические характеристики, реакции на воздействия факторов
различной природы), и модель внешней среды (модели силовых и воз™
мущающих факторов). Для рассматриваемого Л А будем полагать, что
все массово-инерционные и аэродинамические характеристики полу-
получены на основе экспериментальных данных и содержатся в соответ-
соответствующих таблицах. Кроме того, если известны случайные вариации
этих параметров, то они могут быть использованы при моделировании
6.2] Функциональная схема объектно-ориентированного ПМО 215
неуправляемого движения ЛА совместно с номинальными значениями.
Прежде всего опишем классы, реализующие модель внешней среды.
К таким классам относятся:
— класс TStatAtmo, реализующий модель атмосферы (включая слу™
чайные вариации плотности атмосферы);
— класс TGraviModelj реализующий модель гравитационного потен™
циала Земли;
— класс TWindModelj реализующий модель возмущений, обуслов-
обусловленных влиянием ветра.
Модель атмосферы для рассматриваемого типа объектов обычно
задается в виде табличных зависимостей [6.6], характеризующих
эволюцию параметров атмосферы (температура, давление, плотность
и скорость звука) по высоте над земной поверхностью. В этой
связи соответствующий класс TStatAtmo является потомком класса
ТPower Poly'Appro, реализующего алгоритм полиномиальной аппрокси-
аппроксимации табличных функций в соответствии с заданными пользователем
параметрами аппроксимации (степень полинома и количество узловых
точек аппроксимации). Необходимо отметить, что в данном классе
в зависимости от заданных параметров автоматически используется
либо метод наименьших квадратов (количество узловых точек больше
чем порядок полинома +1) либо классический метод построения
степенных полиномов (количество узловых точек равно порядку
полинома +1). Ниже, в таблицах 6.10 и 6.11 приведены названия
и описания полей и методов класса ТPower Poly Appro.
Для класса TStatAtmo, потомка класса TPowerPolyAppro, введено
дополнительное поле Atmolnfo, содержащее параметры атмосферы, и
метод Get, возвращающий текущее значение параметров атмосферы
для заданной высоты полета ЛА.
type
TAtmoInfo = record
Те, {Temperature, К}
Ro, {Ballistic Density, kg/нГЗ}
P, {Atmospheric Pressure, kg/(m*s)}
a: Float; {Acoustic Yelocity, m/s}
end;
{Atmospheric Parameters Approximation}
TStatAtmo = class(TPowerPolyAppro)
constructor Create(aFileName: String);
protected
FAtmoInfo: TAtmoInfo;
public
procedure Get(Alt: Real); virtual;
property Atmolnfo: TAtmoInfo read FAtmoInfo;
end;
Для учета случайных вариаций параметров атмосферы использу™
ется аналогичный описанному класс TStatAtmoD'eriv, основной осо-
особенностью которого является использование такого же ASCII файла,
содержащего эволюцию дисперсий случайных вариаций параметров ат-
атмосферы по высоте [6.6]. На основе аппроксимированных значений для
216 Математическое моделирование процессов функционирования [Гл. 6
данной высоты реализуется соответствующая случайная комбинация
вариаций параметров атмосферы, учитываемая совместно с номиналь-
номинальными значениями.
При моделировании процессов функционирования интегрирован-
интегрированной бортовой системы навигации и наведения беспилотного высоко-
высокоманевренного ЛА на разных этапах могут использоваться несколько
моделей гравитационного поля Земли, отличающиеся допущениями
относительно формы и распределения масс в теле Земли [6.6]. В этой
связи в ПМО реализована иерархическая цепочка классов, реализую-
реализующая необходимые при моделировании модели геопотенцила. Базовым
классом в данной иерархии является абстрактный класс TGraviModei,
содержащий только лишь объявление единственного абстрактного ме-
метода Extract, возвращающего значения компонент ускорения, обуслов-
обусловленного гравитационным притяжением Земли в зависимости от теку-
текущих координат точки.
IGravIModel = class
function Extract(const Loc: TLoc): TLoc; virtual; abstract;
end;
От базового класса образовано два класса-потомка: TSimpieGravi и
TIERSGravt (рис. 6.6).
Класс
TGraviModei
Рис. 6.6
Первый из этих классов реализует простейшую модель расчета уско-
рений, обусловленных притяжением Земли, основанную на представле™
нии о сферической Земле и центральном сферическом геопотенциале.
TSimpieGravi = class(TGraviModei)
constructor Create (aGO, aRO: Float);
protected
Go,
Ro: Float;
public
function Extract(const Loc: TLoc): TLoc; override;
property GrAccSurf: Float read Go write Go;
property RadSurf: Float read Ro write Ro;
end;
Класс TIERSGravi реализует современную модель представления
геопотенциала, принятую International Earth Rotation Services (IERS)
6.2]
Функциональная схема объектно-ориентированного ПМО 217
и основанную на разложении геопотенциала в ряд по сферическим
функциям до 70 степени и порядка включительно [6.7]. Необходимо
отметить, что в данном классе реализован алгоритм, предложенный
Каннингхемом и позволяющий вычислять компоненты ускорения в де-
декартовой системе координат, что существенно сокращает вычислитель-
вычислительные ресурсы по сравнению с традиционными алгоритмами, определяю-
определяющими проекции ускорения в сферической системе координат. Ниже,
в таблицах 6.12 и 6.13 приведены названия и описания полей и методов
класса TIERSGravi.
Таблица 6.12
Свойства класса
Degree
FIleName
Тип
целый
строка
Описание
Степень и порядок разложения геопо-
геопотенциала
Имя ASCII-файла, содержащего ко-
коэффициенты гармоник геопотенциала
(модель Земли)
Таблица 6.13
Метод
Constructor Create;
Destructor Destroy; override;
procedure LoadFrom(const
aFName: String); virtual;
function Extract (const Loc:
TLoc): TLoc; override;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
Действие
Создает объект
Уничтожает объект
Загружает набор ко-
коэффициентов гармоник
геопотенциала из файла
с именем aFName
Возвращает запись, со-
содержащую значения
ускорения в проекциях
на оси земной связанной
С К для точки с коорди-
координатами в земной связан-
связанной СК, содержащимися
в записи Loc
Для беспилотных высокоманевренных ЛА одним из основных воз-
возмущающих факторов внешней среды является воздействие ветра. Дан-
Данное возмущение формализуется в моделировании вектора скорости
ветра и последующего его учета при расчете воздушной скорости ЛА
и его основных аэродинамических характеристик. Модель возмущений,
обусловленных влиянием ветра, реализована в классе TWindModel.
IWindModel = class
constructor Create(alniFName: String);
destructor Destroy; override;
protected
218 Математическое моделирование процессов функционирования [Гл. 6
FEta, FPCW: Float;
FMean, FRMS: Float;
F?Wind: TLoc;
kbO: array[0..5] of Float;
public
procedure GetWind(CurAlt: Float; CurEA: TLoc; BFtoIF: Tensor);
property Eta: Float read FEta;
property PCW: Float read FPCW;
property YWind: TLoc read F??ind;
end;
Основным свойством данного класса является свойство VWind, вы-
вычисляемое методом Get Wind для текущей высоты Л A Cur Alt в евя™
занной системе координат. Отметим, что изначально вектор скорости
ветра определяется в земной связанной ОК, а затем пересчитывается
в связанную с Л А СК с использованием матрицы перехода BFToIF.
Таким образом, реализовав объектную структуру модели внешней
среды, перейдем к формированию классов, описывающих изучаемый
ЛА (массово-инерционные и геометрические характеристики, реакции
на воздействия факторов различной природы). На рис. 6.7 приведена
объектная структура непосредственно модели ЛА как неуправляемого
материального объекта.
Класс TFlightObJect
FO GeomMassInertlm
FO_AeroDynamIc
FO Thruster
TGeomMassInertla
Mass(l) |
Jxx@ I
Jyy(O !
Jzz@
XCT(I)
TAeroDynamlc
|Cx(M) \\Cxlnd(a,M)
Cxd(M) ||Cy(a,AO
|MxOmx(M)I | Mxa(a,M)
IMyOmy(M)I I Mxd(a,M)
lMzOmz(M)| I Mya(a,M)
I 7 ! I Mza(a,M)
j Mjd(a,M)
TThruster
I PropMass(l) |
L m J
Рис. 6.7
6.2] Функциональная схема объектно-ориентированного ПМО 219
Как видно из приведенной схемы, класс TFlightObject, реализую-
реализующий модель летательного аппарата, функционально содержит в себе
три объекта:
— ^О_ G'eomM'assInertia, являющийся переменной класса
TGeomM ass Inertia и содержащий свойства и методы, описывающие
эволюцию массово-инерционных и геометрических характеристик по
времени полета ЛА;
— FO_A его Dynamic, являющийся переменной класса TAeroDynamic
и реализующую модель учета аэродинамических воздействий внешней
среды на Л А (расчет аэродинамических сил и моментов);
— FO_ Thruster^ являющийся переменной класса TThruster и pea™
лизующий модель учета реактивных воздействий ДУ на ЛА (расчет
реактивных сил и моментов).
Рассмотрим подробнее структуру соответствующих этим объектам
классов.
Класс TGeomM ass Inertia содержит внутренние объекты, являющи™
еся переменными от класса TPowerPolyAppro и предназначенные для
аппроксимации данных об эволюции массово-инерциальных и геомет-
геометрических характеристиках ЛА по времени полета ЛА. Текущая ин-
информация сохраняется в поле GMIInfo, представляющее собой запись
следующего вида:
TGMIInfo = record
CrntTime: Float; {текущее время полета ЛА}
Mass: Float; {текущая полная масса ЛА}
Jxx, Jyy, Jzz: Float; {текущие центральные моменты инерции ЛА}
Jxy, Jxz, Jyz: Float; {текущие перекрестные моменты инерции ЛА}}
ХСТ: Float; {текущее положение ц.м. ЛА в связанной СК}
LMissile: Float; {длина ЛА}
LWing: Float; {размах крыла ЛА}
Ва: Float; {характерный размер ЛА (САХ)}
Middle: Float; {площадь миделевого сечения ЛА}
SWing: Float; {площадь крыла ЛА}
end;
Тогда объявление класса TGeomM ass Inertia выглядит следующим
образом:
TGeomMassInertia = class(TObject)
constructor Create(const alniFileMame: String);
destructor Destroy; override;
protected
FMass: TPowerPolyAppro;
FJxx: TPowerPolyAppro;
FJyy: TPowerPolyAppro;
FJzz: TPowerPolyAppro;
FXCT: TPowerPolyAppro;
FGMIInfo: TGMIInfo;
public
procedure Getlnfo(const ti: Float; const Y: array of Float); virtual;
property GMIInfo: TGMIInfo read FGMIInfo;
end;
220 Математическое моделирование процессов функционирования [Гл. 6
Метод Getlnfo вычисляет для текущего момента времени t{ текущие
массовоинерционные и геометрические характеристики ЛА и сохраня™
ет их в поле GMIInfo. Для общности в состав формальных параметров
метода введен произвольный вектор Y, который может быть использо-
использован при реализации классов-потомков.
Необходимо отметить, что все рассматриваемые в данном ПМО
классы получают исходные данные из файла, представляющего собой
стандартный Windows-inl файл, основной особенностью которого явля-
является структуризации записей в следующем формате:
[Название секции]
ИМЯ ПЕРЕМЕНН0Й1=ЗНАЧЕНИЕ
ИМЯ ПЕРЕМЕНН0Й2=ЗН1ЧЕНИЕ
С использованием такого механизма удается избежать жесткой свя-
связи объектной структуры приложения, реализующего непосредственно
алгоритмическую часть задачи, с интерфейсом пользователя, посколь™
ку файл исходных данных является в этом случае промежуточным
буфером. Каждый объект, которому необходимо проинициализировать
свои исходные данные, обращается к единому lni-файлу и считывает
значения необходимых переменных позиционируя соответствующую
секцию файла. Так, для класса TGeomMassInertia существует секция
[ GeomMassInertia].
[GeomMassInertia]
LMissile=2.9
LWing=0.5
Ва=0.бЭ
MIddle=0.0228
S?ing=0.233
Mass=c:\dss\data\mass.dat
Jxx= c:\dss\data\jxx.dat
Jyy= c:\dss\data\jyy.dat
Jzz= c:\dss\data\jzz.dat
XCT= c:\dss\data\xct.dat
Класс ТА его Dynamic содержит внутренние объекты, являющиеся
переменными от класса TPowerPolyAppro и TTwinArgPoly и пред-
предназначенные для аппроксимации данных об изменении коэффициен-
коэффициентов аэродинамических сил и моментов. Причем, если коэффициент
зависит только от одного параметра (например числа Маха М), то
соответствующий объект является переменной от TPowerPolyAppro,
если же зависимость двухпараметрическая (например от числа Маха
М и угла атаки), то соответствующий объект является переменной от
TTwinArgAppro. Класс TTwinArgAppro является потомком от класса
TPowerPoly Appro и реализует алгоритм линейной аппроксимации дан™
ных по рядам таблицы, полученных как результат полиномиальной ап-
аппроксимации по столбцам исходной таблицы. Первая строка и столбец
таблицы трактуются как значения аргументов аппроксимации. Методы
и поля данного класса перекрыты по сравнению с предком и имеют тот
же тип и список формальных параметров. Единственная особенность
6.2]
Функциональная схема объектно-ориентированного ПМО 221
работы с этим классом состоит в том, что результат аппроксимации
всегда скалярный.
Для реализации универсальной модели аэродинамики ЛА созда-
создана цепочка наследования классов, отображенная на рис. 6.8. Базовым
классом для данной цепочки является класс ТAbstract А его Dynamic
Класс
TAbstractAeroDynamle
Класс
TVLSAeroDynamic
Класс
TSCAeroDynamic
Класс
TAAMAeroDynamic
Класс
TSAMAeroDynamlc
Рис. 6.8. Объектная модель аэродинамики
объединяющий в себе самые общие черты данного объектного дере-
дерева, однако содержащего лишь объявления полей и шаблоны методов.
Для детализации конкретной модели аэродинами того или иного ап-
аппарата должен быть создан класс-наследник с перекрытыми метода-
методами вычисления аэродинамических сил и моментов. Так на схеме при-
приведены дочерние классы, реализующие аэродинамику ракет-носите-
ракет-носителей (TVLSAeroDynamic), ИСЗ (TSCAeroDynamic), ракет воздух-воз-
воздух-воздух (TAAMAeroDynamic), зенитных ракет (TSAMAeroDynamic) и т. п.
Принцип полиморфизма, сформулированный в п. 6.1.2, позволяет ис-
использовать в классе-владельце (TFlightObject) ссылку на родительский
тип иерархии (ТAbstractAeroDynamic), обеспечивая тем не менее вы-
вызов необходимого метода реального объекта, инициализированного при
создании объекта FlightObject.
Ниже, в таблицах 6.14 и 6.15, приведены названия и описания полей
и методов класса-родителя ТAbstractAeroDynamic.
Таблица 6.14
Свойства
класса
CurTIme
Alt
VBF
CurMach
CurQ
Cx
Тип
веществен.
веществен.
запись
веществен.
веществен.
веществен.
Описание
Текущее время полета Л А, на которое
вычислены силы и моменты
Текущее высота полета ЛА
Компоненты текущей скорости ЛА в свя-
связанной СК
Число Маха
Скоростной напор
Текущее значение коэффициента силы
аэродинамического сопротивления
222 Математическое моделирование процессов функционирования [Гл. 6
Продолжение табл. 6.14
Су
Cz
Мх
My
Mz
AlphaS
AlphaY
AlphaZ
Force
Torque
StatAtmo
WlndModel
CxO
Cxd
MxOmx
MyOmy
MzOmz
Cya
Cza
Mxa
Mxd
Mya
веществен.
веществен.
веществен.
веществен.
веществен.
веществен.
веществен.
веществен.
запись
запись
TStatAtmo
TWIndModel
TPowerPolyAppro
TPowerPolyAppro
TPowerPolyAppro
TPowerPolyAppro
TPowerPolyAppro
TTwInArgAppro
TTwInArgAppro
TTwInArgAppro
TTwInArgAppro
TTwInArgAppro
Текущее значение коэффициента подъ-
подъемной силы
Текущее значение коэффициента боко-
боковой силы
Текущее значение коэффициента момен-
момента крена
Текущее значение коэффициента момен-
момента вокруг оси Y связанной СК
Текущее значение коэффициента момен-
момента вокруг оси Z связанной СК
Текущее значение пространственного уг-
угла атаки
Текущее значение угла атаки в верти-
вертикальном канале
Текущее значение угла атаки в горизон-
горизонтальном канале
Компоненты вектора аэродинамической
силы в связанной СК
Компоненты вектора аэродинамического
момента в связанной СК
Ссылка на объект — модель атмосферы
Ссылка на объект — модель ветра
Коэффициент лобового сопротивления
(М)
Коэффициент донного сопротивления
(М)
Коэффициент демпфирующего момента
крена (М)
Коэффициент демпфирующего момента
вокруг оси Y (М)
Коэффициент демпфирующего момента
вокруг оси Z (М)
Коэффициент производной подъемной
силы по углу атаки (М, а)
Коэффициент производной боковой си-
силы по углу атаки (М, а)
Коэффициент производной момента кре-
крена по углу атаки (М, а)
Коэффициент производной момента кре-
крена по углу отклонения рулей (М, S)
Коэффициент производной момента во-
вокруг оси Y по углу атаки (М, а)
6.2]
Функциональная схема объектно-ориентированного ПМО
223
Продолжение табл. 6.14
Myd
Mza
Mzd
TTwInArgAppro
TTwInArgAppro
TTwInArgAppro
Коэффициент производной момента во-
вокруг оси Y по углу отклонения рулей
(М, S)
Коэффициент производной момента во-
вокруг оси Z по углу атаки (М, а)
Коэффициент производной момента во-
вокруг оси Z по углу отклонения рулей
(М, 5)
Таблица 6.15
Метод
Constructor
Create (aStat At mo:
TStatAtmo; aWindModel:
TWindModel);
Destructor Destroy;
override;
procedure SetStatus(const
aCurTIme, aAlt: Float;
aVBF: TLoc; aGMIInfo:
TGMIInfo); virtual;
procedure GetFM (const
OmBF: TLoc; DeltaA:
TDeltaDeriv); virtual;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
Действие
Создает объект и присваи-
присваивает внутренней переменной
StatAtmo ссылку на суще-
существующий внешний объект
aStatAtmo — модель атмо-
атмосферы, а также переменной
WIndModel — ссылку на су-
существующий внешний объект
aWindModel — модель ветра
Уничтожает объект
Устанавливает значения внут-
внутренних переменных класса
на текущий момент времени
aCurTime для текущей высо-
высоты aAlt, скорости aVBF и мас-
массово-инерционных характери-
характеристик aGMIInfo
Вычисляет значения аэроди-
аэродинамических сил и моментов
при значениях угловой скоро-
скорости ЛА OmBF и углах откло-
отклонения рулей DeltaA. Результат
сохраняется в полях Force и
Torque.
Для класса TAeroDynamic в Inl-файле комплекса существует секция
[А его Dynamic].
[AeroDynamic]
CxOFileIame=c:\dss\cxO.dat
CxdFileIame= c:\dss\cxd.dat
CxIndFileMame= c:\dss\cxind.dat
CyFileIame= c:\dss\cy.dat
MxaFileMame= c:\dss\mxa.dat
MxadeltaFileIame= c:\dss\mxad.dat
MxOmxFileIame= c:\dss\mxomx.dat
224 Математическое моделирование процессов функционирования [Гл. 6
Класс TThruster предназначен для вычисления реактивных сил
и моментов, обусловленных тягой двигательной установки ЛА, и со™
держит внутренние объекты, являющиеся переменными от класса
TPowerPoly'Appro и предназначенные для аппроксимации данных об
изменении тяги двигательной установки и массы топлива в течение
полета Л А. В таблицах 6.16 и 6.17 приведены названия и описания полей
и методов данного класса.
Таблица 6.16
Свойства
класса
CurTIme
Force
Torque
StatAtmo
P
PropMass
Тип
веществен.
запись
запись
TStatAtmo
TPowerPolyAppro
TPowerPolyAppro
Описание
Текущее время полета Л А, на которое
вычислены силы и моменты
Компоненты вектора реактивной силы
в связанной СК
Компоненты вектора реактивного мо-
момента в связанной СК
Ссылка на объект — модель атмосфе-
атмосферы
Текущее значение тяги ДУ
Текущее значение массы топлива ДУ
Таблица 6.17
Метод
constructor Create (const
alniFName: String;
aStatlcAtmo: TStatlcAtmo);
Destructor Destroy; override;
procedure GetFM(ti: Float;
aAlt: Float; DeltaGY, DeltaGZ:
Float; aGMIInfo: TGMIInfo);
virtual;
Тип
конструктор
класса
деструктор
класса
виртуальный
Действие
Создает объект, иници-
инициализирует внутренние
переменные и присваи-
присваивает внутренней пере-
переменной ссылку на суще-
существующий внешний объ-
объект aStatAtmo — модель
атмосферы
Уничтожает объект
Вычисляет значения ре-
реактивных сил и момен-
моментов при значениях для
текущего момента вре-
времени ti, высоты aAlt
и углах отклонения га-
газодинамических рулей
DeltaGY и DeltaGZ.
Результат сохраняется
в полях Force и Torque.
6.2] Функциональная схема объектно-ориентированного ПМО 225
Для класса TThruster в inl-файле комплекса существует секция
[ Thruster].
[Thruster]
PFileIame=c:\dss\p.dat
PropMass=c:\dss\pm.dat
Ta=3.5
Tk=4.5
Как видно из приведенной объектной структуры, для классов
TAeroDynamic и TThruster в метод Create, создающий соответствую-
соответствующие объекты, должен быть передан уже существующий объект типа
ТStaticAtmo для последующего обращения к нему в целях получения
текущих параметров атмосферы. Класс TAeroDynamic имеет помимо
этого внутреннюю переменную WindModel, куда должна быть пере-
передана соответствующая ссылка на реально существующий объект ти™
па TWindModel. Кроме того, в метод GetFM обсуждаемых классов
должна быть передана запись типа TGMIInfo, содержащая текущие
геометрические и массово-инерционные параметры ЛА.
Далее, в соответствии со схемой, приведенной на рис. 6.7, приве™
дем описание полей (таблица 6.18) и методов (таблица 6.19) класса
TFlightObject, реализующего модель изучаемого Л А, как неуправляе-
неуправляемого материального объекта.
Для класса ТFlight Ob eject в ini-файле комплекса существует секция
[Initial Conditions], задающая начальные условия для параметров дви™
жения объекта.
[Initial Conditions]
IniAlt=8000
IniY=0
IniZ=0
IniZ=0
IniYx=300
Ini?y=0
IniVz=0
Iniwx=0
Iniwy=0
Iniwz=0
IniPitch=O
IniYaw=0
IniRoIl=™45
Таким образом, сформировав модель внешней среды и модель не-
неуправляемого Л А (т. е. методику расчета ускорений и моментов), перей-
перейдем к классу, реализующему динамику ЛА. Как уже отмечалось выше,
динамика ЛА определяется в результате решения системы обыкновен™
ных дифференциальных уравнений (ОДУ) первого порядка, которую
условно принято разделять на две части: уравнения динамики центра
масс Л А (в традиционной терминологии — «медленное» движение),
представляющие собой векторную запись второго закона Ньютона,
и уравнения углового движения Л А («быстрое» движение), представ™
ляющие собой векторную запись уравнений Эйлера для жесткого тела.
15 Управление и наведение
226 Математическое моделирование процессов функционирования [Гл. 6
Таблица 6.18
Свойства класса
OurrentTIme
StatAtmo
Gravl
WIndModel
FO GeoMassInertia
FO^Thruster
FO AeroDynamic
IFState
IFLoc
IFVel
BFVel
Nx, Ny, Nz
EAngles
EAnglesVel
BFAngVel
Lambda
IFtoBF
Cur Alt
BFAccel
Accel
AngAccel
BFApAcc
IFApAcc
Тип
веществен.
TStatAtmo
TGravi
TWIndModel
TGeomMasInertla
TThruster
TAeroDynamic
запись
запись
запись
запись
веществен.
запись
запись
запись
кватернион
тензор
веществен.
запись
запись
запись
запись
запись
Описание
Текущее время полета ЛА
Ссылка на объект — модель атмо-
атмосферы
Ссылка на объект — модель ГПЗ
Ссылка на объект — модель ветра
Объект, реализующий модель эво-
эволюции геометрических и массово-
инерционных характеристик ЛА
Объект, реализующий модель ДУ
ЛА
Объект, реализующий модель
аэродинамики ЛА
Вектор состояния ЛА в инерци-
альной СК
Положение ЛА в инерциальной
СК
Скорость ЛА в инерциальной СК
Скорость ЛА в связанной СК
Компоненты вектора перегрузки в
связанной СК
Углы ориентации (Эйлера) ЛА
Компоненты производной углов
ориентации ЛА
Компоненты вектора угловой ско-
скорости ЛА в связанной СК
Параметры Родрига—Гамильтона
Матрица перехода от инерциаль-
инерциальной к связанной СК
Текущая высота ЛА
Компоненты вектора ускорения
ЛА в связанной СК
Компоненты вектора ускорения
ЛА в инерциальной СК
Компоненты вектора углового
ускорения ЛА в связанной СК
Компоненты вектора кажущегося
ускорения ЛА в связанной СК
Компоненты вектора кажущегося
ускорения ЛА в инерциальной СК
6.2] Функциональная схема объектно-ориентированного ПМО 227
Таблица 6.19
Метод
constructor Create(aInIFName:
String; alniFOState:
TFOState; aStatAtmo:
TStatAtmo; aWindModel:
TWindModel; aGravi:
TGravIModel);
Destructor Destroy; override;
procedure SetStatus(const
atlme: Float; aCurState:
TFOState); virtual;
procedure GetAccel(AeroDY,
AeroDZ, AeroE, TDY, TDZ:
Float); virtual;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
Действие
Создает объект, инициа-
инициализирует внутренние пере-
переменные.
Уничтожает объект
Вычисляет значения полей
класса в соответствии с те-
текущим временем time и па-
параметрами движения ЛА
aCur State
Вычисляет значения уско-
ускорений центра масс и уг-
угловых ускорений ЛА для
значений углов откло-
отклонения аэродинамических
(AeroDY, AeroDZ, AeroE)
и газодинамических рулей
TDY и TDZ. Результат со-
сохраняется в полях Accel и
Ang Accel.
В практике исследований по динамике маневренных ЛА часто разде-
разделяют эту систему на «быструю» и «медленную» части с точки зрения
процесса интегрирования ОДУ. «Быстрая» часть уравнений интегри-
интегрируется в отдельном блоке с меньшим шагом, результаты передаются
в другой блок, интегрирующий «медленные уравнения с большим ша-
шагом». Этот подход, несмотря на явное предпочтение с точки зрения
быстродействия программного кода, имеет существенный недостаток:
обе подсистемы являются зависимыми друг от друга, и такое разделе™
ние может привести к неустойчивости получаемого решения и допол-
дополнительной алгоритмической ошибке. В этой связи в рамках излагаемой
технологии интегрируется полная система уравнений, включающая
в единый вектор состояния как параметры движения центра масс (ком-
(компоненты положения и скорости ЛА), так и параметры углового движе-
движения объекта (угловые скорости в связанной СК, параметры Родрига™
Гамильтона, или другие параметры ориентации ЛА: углы Эйлера, мат-
матрица Пуассона и т. п.). Тот факт, что различные уравнения в этой рас-
расширенной системе должны интегрироваться с различной точностью,
находит отражение в масштабировании вычисляемой локальной ошиб-
ошибки на шаге в соответствии с т.н. вектором масштабных коэффициентов.
Очевидно, что компоненты вектора подобраны таким образом, чтобы
обеспечить лучшую необходимую точность вычислений для компонент
вектора состояния, соответствующих «быстрому» движению.
15*
228 Математическое моделирование процессов функционирования [Гл. 6
Как видно из рис. 6.9 класс TObjectDynamics является наследни-
наследником одного из классов, реализующих численный метод интегрирова-
Ilntegrator
TSImpleAdams
TRungeKutta26
ТТ)оппапРгшсе5
h
Класс TObjectDynamics
FlightObject
FO GeomMassInertia
FO^AeroDynamic FOJThruster
TFHghtObject
Модель
внешней среды
StatlcAtmo
GravIModel
WindModel
Рис. 6.9. Описание методов
ния систем ОДУ (Т"SimpleA dams, TRungeKutta26, TDormanPrinced).
С точки зрения обсуждаемого класса инвариантно, какой из клас-
классов-интеграторов будет предком, поскольку принципиальное отличие
TObjectDynamics от класса-родителя состоит в переопределении ме-
метода Funcs — т. е. реализации правых частей системы ОДУ. Таким
образом, решение, кто из классов-интеграторов будет предком прини-
принимает исследователь, исходя из общей постановки задачи, требуемой
точности решения, особенности бортовой реализации алгоритмов и т. п.
Кроме того данный класс содержит внутреннее поле типа TFlightObject
и указывает на реально существующий объект данного типа. Каждый
раз внутри метода Funcs и после завершения шага интегрирования
вызывается метод TFlightObject.SetStatus для обновления информации
во внутренних полях FlightObject.
Приведем описание полей (таблица 6.20) и методов (таблица 6.21)
класса TObjectDynamics ^ реализующего динамику изучаемого Л А.
Таблица 6.20
Свойства
класса
Name
InlFName
Dim
CuirentTIme
CurrentState
Тип
строка
строка
целый
веществен.
Tvector
Описание
Название объекта
имя Inl-файла
размерность задачи
Текущее время полета ЛА
текущий расширенный вектор состоя-
состояния системы
6.2]
Функциональная схема объектно-ориентированного ПМО
229
Таблица 6.21
Метод
constructor Create (const
anOwner: Pointer; const
acmUpdate: Byte;
aFHghtObjetc: TFHghtObject);
procedure Funcs(const Ti:
Float; const aY: array of Float;
var dY: array of Float);
procedure Report (const Ti:
Float; const aY: array of Float;
var dY: array of Float);
procedure GetlniDataFrom-
File(aFileName:
String);
Тип
конструктор
класса
виртуальный
виртуальный
виртуальный
Действие
Создает объект, инициа-
инициализирует внутренние пе-
переменные, передает су-
существующий объект ти-
типа TFlightObject классу.
Расчет правых частей
системы ОДУ
Вывод результатов ин-
интегрирования
Загружает исходные
данные из ini-файла
Для данного класса в ini-файле комплекса существует секция
[Integrator], задающая исходные данные для интегрирования.
[Integrator]
?Loc=l
W?el=10
?0mega=100
?Qmat=10
T0=0
Tk=300
Iolerance=le--8
H=0.00G5
NQutStep=20
0utPutMode=2
OutPutDe st ination=1
Описав таким образом объектную модель неуправляемого движе-
движения ЛА, обратимся вновь к функциональной схеме моделирования.
Как видно из рис. 6.4 следующим звеном в контуре моделирования
является блок бортового измерительного комплекса (БИК), непосред-
непосредственно связанный с блоком «Летательный аппарат». Рассмотрим ниже
объектную модель реализации данного звена.
6.2.2. Моделирование бортового измерительного комплек-
комплекса. Бортовой измерительный комплекс маневренного ЛА включает
в себя, как правило, блок чувствительных элементов ориентации в про-
пространстве (инерциальные указатели направлений — гиростабилизиро-
ванная платформа на гироскопах, блок датчиков угловых скоростей),
блок инерциальных измерителей (акселерометры), высотомеры, дат-
датчики угла атаки и т. п. Состав конкретной аппаратуры определяется
целевой функцией ЛА и алгоритмом интегрированной системы нави™
гации и управления.
Так или иначе, в рамках излагаемой объектно-ориентированной
технологии моделирования каждый из совокупности измерителей БИК
230 Математическое моделирование процессов функционирования [Гл. 6
будем рассматривать как функциональный элемент, на вход которо-
которого поступает расширенный вектор состояния динамической системы,
а на выходе формируется фактическое значение вектора измерений,
прямым или косвенным образом связанного с компонентами вектора
состояния. Одной из самых важных отличительных черт этого эле-
элемента является учет ошибок измерений различной природы. Алгоритм
учета ошибок может быть сколь угодно сложным и определен в соответ-
соответствии с моделью функционирования конкретного измерителя, однако
в предлагаемой объектной структуре выделим группу наиболее часто
используемых моделей стохастических случайных факторов, которые
представляются в виде случайных величин (систематические ошибки)
и случайных процессов (случайные аддитивные ошибки), предусмотрев
соответствующие поля и алгоритмы их инициализации.
Рассмотрим цепочку классов, реализующих библиотеку моделей
измерительных устройств БИК (рис. 6.10).
Класс
TAbstractMeasChannel
Класс
TAltiMChannel
Класс
TRGMChamel
Класс
TAccMChamel
Класс
TGyroMChamel
Рис. 6.10
Как видно из приведенной схемы, все измерительные устройства
имеют общего абстрактного предка — класс TAbstractMeasChannel,
объединяющего самые общие родовые черты и методы рассматри-
рассматриваемой группы. Одним из таких важнейших свойств являются по-
поля SysError и AddError, представляющие собой объекты общего аб™
страктного класса ТAbstract Err or. Очевидно, что в реальных классах
(TRGMChannel, TAccMChannel и т. п.) будут использоваться конкрет-
конкретные объекты, реализующие расчет этих ошибок из цепочки классов,
вершиной которой является класс TAbsiractError — это обеспечивает
базовый принцип ООП — полиморфизм.
В этой связи, прежде чем привести описание классов, реализующих
модели измерителей, обратимся к цепочке классов, описывающих мо-
модели ошибок и возмущающих факторов (рис. 6.11).
Основным классом-предком для всей цепочки будет абстрактный
класс TAbstractorError, объединяющий в себе самые общие черты дан™
ного объектного дерева, содержащего, однако, лишь объявления полей
и шаблоны методов. Ниже в таблицах 6.22 и 6.23 приведены названия
и описания полей и методов данного класса.
6.2] Функциональная схема объектно-ориентированного ПМО 231
Класс
TAbstractError
Класс
TUnlformError
Класс
TGaussError
Класс
TWhiteNofse
Класс
TShapingFilter
Рис. 6.11. Цепочка классов моделей ошибок
Таблица 6.22
Свойства
класса
FErrValue
Dim
Тип
TVector
целый
Описание
вектор ошибок
размерность вектора ошибок
Таблица 6.23
Метод
constructor Create(aDIm:
Integer);
destructor Destroy; override;
procedure SetDIm(Value:
Integer); virtual;
procedure Get MaxErr (const ti:
Float; const aState: array of
Float); virtual; abstract;
procedure Get Err Value (const ti:
Float; const aState: array of
Float); virtual; abstract;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный,
абстрактный
виртуальный,
абстрактный
Действие
Создает объект, иници-
инициализирует внутренние
переменные
Уничтожает объект
Устанавливает новое
значение размерности
вектора ошибок, пере-
перераспределяет память
Вычисляет максималь-
максимальное (наихудшее) для
данного распределения
значение вектора оши-
ошибок
Вычисляет текущее зна-
значение вектора ошибок
Как видно из приведенных таблиц, в данном классе отсутству-
отсутствует непосредственно алгоритм вычисления вектора ошибок (методы
GetMaxError и GetErrorValue — абстрактные). Основным свойством
данного класса является вектор ошибок FErrValue размерности Dim.
Процедуры расчета вектора ошибок GetMaxErr и GetErrValue произ-
производят вычисление вектора ошибок в соответствии с текущим временем
232 Математическое моделирование процессов функционирования [Гл. 6
ti и некоторым вектором aState (вектор параметров, используемый при
необходимости) и сохраняют вычисленные значения в поле FErrValue.
Дальнейшим развитием базового класса является класс-потомок
TUniformError, реализующий вычисление вектора ошибок в соответ™
ствии с равномерным распределением и класс TGaussError^ реализую™
щий вычисление вектора ошибок в соответствии с нормальным распре™
делением. Ниже, в таблицах 6.24, 6.25, 6.26 и 6.27 приведены названия
и описания новых или перекрытых по отношению к родительскому
полей и методов данных классов соответственно.
Таблица 6.24
Свойства
класса
FErrLow
FEirUpp
Тип
TVector
TVector
Описание
вектор нижних значений интервала
распределения
вектор верхних значений интервала
распределения
Таблица 6.25
Метод
constructor Create(aDIm:
Integer; const aLow, aUpp:
array of Float);
destructor Destroy; override;
procedure SetDIm(Value:
Integer); virtual;
procedure GetMaxErr(const ti:
Float; const aState: array of
Float); override;
procedure GetErrValue(const ti:
Float; const aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
виртуальный,
Действие
Создает объект, задает
нижнюю и верхнюю гра-
границу для равномерного
распределения
Уничтожает объект
Устанавливает новое
значение размерности
вектора ошибок, пере-
перераспределяет память
Вычисляет максималь-
максимальное (наихудшее) для
равномерного (концы
интервала) распределе-
распределения значение вектора
ошибок
Вычисляет текущее зна-
значение вектора ошибок
Таблица 6.26
Свойства
класса
FErrMean
FErrCovar
Тип
TVector
TVector
Описание
вектор математического ожидания
ковариационная матрица
6.2]
Функциональная схема объектно-ориентированного ПМО
233
Таблица 6.27
Метод
constructor Create(aDIm:
Integer; const aMean, aCovar:
array of Float);
destructor Destroy; override;
procedure SetDIm(Value:
Integer); virtual;
procedure GetMaxErr(const ti:
Float; const aState: array of
Float); override;
procedure GetErrValue(const ti:
Float; const aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
виртуальный,
Действие
Создает объект, задает
вектор математического
ожидания и ковариаци-
ковариационную матрицу для нор-
нормального распределения
Уничтожает объект
Устанавливает новое
значение размерности
вектора ошибок, пере-
перераспределяет память
Вычисляет максималь-
максимальное (наихудшее) для
равномерного (концы
интервала) распределе-
распределения значение вектора
ошибок
Вычисляет текущее зна-
значение вектора ошибок
Кроме описанных классов от TAbstractError создан класс
TWhiteNoise, моделирующий значение векторного белого шума. Ниже,
в таблицах 6.28 и 6.29, приведены названия и описания новых или
перекрытых по отношению к родительскому полей и методов данного
класса.
Таблица 6.28
Свойства
класса
WNRMS
Тип
TVector
Описание
интенсивность белого шума
Таблица 6.29
Метод
constructor Create(aRMS:
TVector, aFreq, adT: Float);
destructor Destroy; override;
procedure GetErrValue(const ti:
Float; const aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный,
Действие
Создает объект, задает
интенсивность и интер-
интервал белого шума
Уничтожает объект
Вычисляет текущее зна-
значение вектора ошибок
234 Математическое моделирование процессов функционирования [Гл. 6
Класс ТShaping Filter ^ являющийся потомком TWhiteNoise, реали-
реализует случайный процесс, заданный формирующим фильтром перво-
первого порядка, на вход которого подается белый шум. По отношению
к классу-предку в TShapingFilter существует внутренний объект типа
Т'SimpleA dams, интегрирующий дифференциальное уравнение форми-
формирующего фильтра.
Вызов метода RunTo данного объекта производится в методе
GetErrValue до текущего момента Ы. Ниже, в таблицах 6.30 и 6.31,
приведены названия и описания новых или перекрытых по отношению
к родительскому полей и методов данного класса.
Таблица 6.30
Свойства
класса
FtCor
SPRMS
FSPReallzatton
FCurTIme
Тип
веществ.
TVector
TSImpleAdams
веществ.
Описание
интервал корреляции случайного
процесса
интенсивность случайного процесса
внутренний интегратор
текущее время
Таблица 6.31
Метод
constructor Create (const
anOwner: Pointer; const
acmUpdate: Byte; atCor: Float;
aRMS: TVector);
destructor Destroy; override;
procedure GetlnlDataFrom-
File(aFIleName:
String);
procedure GetErrValue(const ti:
Float; const aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный,
Действие
Создает объект, задает
интенсивность и интер-
интервал корреляции случай-
случайного процесса
Уничтожает объект
Загружает данные из
ini-файла
Вычисляет текущее зна-
значение вектора ошибок
Вернемся теперь к описанию класса TAbstractMeasChannel, реа-
реализующего модель абстрактного измерителя. В таблицах 6.32 и 6.33
приведены названия и описания полей и методов данного класса.
Как видно из приведенных таблиц, основным свойством данного
класса является поле FMeas, содержащее значения вектора измерений.
Обсуждаемый класс имеет ссылку на объект, реализующий динамику
Л A (TObjectDynamics), который передается классу при создании. Кро-
Кроме того, в классе определены внутренние объекты SysError и AddError
типа ТAbstract Err or для последующего определения в классах-потом-
классах-потомках. Основной метод класса — GetMeas^ вычисляющий вектор изме-
измерений на момент времени ti и в соответствии с некотором вектором
6.2]
Функциональная схема объектно-ориентированного ПМО
235
Таблица 6.32
Свойства класса
Dim
NameMC
FMeas
CurObjectDynamlcs
CMCTIme
SysError
AddError
IsSysErr
IsAddErr
Тип
целый
строка
TVector
TObjectDynamics
веществ.
TAbstract Error
TAbstractError
логический
логический
Описание
размерность вектора измере-
измерений
название измерителя
вектор измерений
ссылка на объект, реализую-
реализующий динамику ЛА
текущее время
систематическая ошибка из-
измерений
случайная аддитивная ошиб-
ошибка измерений
флаг учета систематической
ошибки
флаг учета случайной адди-
аддитивной ошибки
Таблица 6.33
Метод
constructor Create(aDIm:
Integer; aNameMC: String;
aCurObjectDynamlcs:
TObjectDynamics);
destructor Destroy; override;
procedure GetMeas(const ti:
Float; var aState: array of
Float); virtual; abstract;
Тип
конструктор
класса
деструктор
класса
виртуальный,
абстрактный
Действие
Создает объект, иници-
инициализирует внутренние
переменные.
Уничтожает объект
Вычисляет значение
вектора измерений для
момента времени Ы
параметров aStaie^ в данном классе объявлен абстрактным с целью
последующего перекрытия в классах-потомках.
Реализацию конкретного измерителя продемонстрируем на приме-
примере класса TRGMrChannel, формализующего модель датчика угловой
скорости. Ниже, в таблицах 6.34 и 6.35, приведены названия и описания
новых или перекрытых по отношению к родительскому полей и методов
данного класса.
Таблица 6.34
Свойства
класса
RealRG
Тип
запись
Описание
содержит значения «истинных» угловых скоро-
скоростей Л А в связанной СК, извлекаемых из объ-
объекта CurObjectDynamics
236 Математическое моделирование процессов функционирования [Гл. 6
Таблица 6.35
Метод
constructor Create(aInIFName:
String; aCurObjectDynamlcs:
TObjectDynamlcs);
destructor Destroy; override;
procedure GetMeas(const ti:
Float; var aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный
Действие
Создает объект, иници-
инициализирует внутренние
переменные.
Уничтожает объект
Вычисляет значение
вектора измеренной уг-
угловой скорости ЛА
в связанной СК для мо-
момента времени ti
В методе Create данного класса инициализируются объекты для
учета систематических и случайных аддитивных ошибок измерений уг-
угловых скоростей как случайные гауссовские вектора, причем значение
систематической ошибки остается постоянным в течение всего време-
времени функционирования объекта. Исходные данные для инициализации
параметров измерителя считываются из ini-файла проекта в секции
[RateGyro].
[Rate Gyro]
SysMeanX=O
SysMeanY=O
SysMeanZ=O
SysRMSX=0.03
SysRMSY=0.03
SysRMSZ=0.03
AddtCor=120
AddRMS=0.01
IsSysErr=I
IsAddErr=l
«Истинные» значения угловой скорости Л А запрашивают-
запрашиваются в методе GetMeas на текущий момент времени И у объекта
CurObjectDynamics. В соответствии с выставленными флагами учета
ошибок IsSysErr и IsAddErr происходит зашумление «истинных»
значений измеряемых величин и результат сохраняется в поле FMeas.
С точки зрения процесса моделирования к группе измерителей так-
также относится блок многоканального приемника СНС ГЛОНАСС/GPS,
непосредственно осуществляющий измерения псевдодальности, псев-
псевдоскорости и фазы навигационного сигнала (блок предварительной
обработки). Необходимо отметить, что описание процесса моделирова™
ния данных измерений выходит за рамки материала книги вследствие
большого объема и сложности используемых моделей (движение нави-
навигационных КА, уход часов приемника, тропосферная и ионосферная
задержка и т.п.). Подробно упомянутая технология моделирования
изложена в [6.9].
Сформированная в БИК измерительная информация является
основой для решения прицельно-навигационной задачи, решение кото-
6.2]
Функциональная схема объектно-ориентированного ПМО
237
рой в рамках представленной принципиальной схемы моделирования
(рис. 6.4) осуществляется в интегрированном блоке навигации и управ-
управления. Рассмотрим ниже объектную модель реализации данного звена.
6.2.3. Моделирование блока навигации и управления. Как
уже отмечалось выше, бортовая интегрированная система управления
и навигации беспилотного маневренного ЛА включает, как правило,
бескарданную инерциальную навигационную систему (БИНС) и мно-
гоканальный ГЛОНАСС/GPS приемник. Решение задачи навигации
и определения ориентации ЛА осуществляется навигационным конту-
ром путем комплексирования выходных данных этих устройств, при
котором в соответствии с той или иной схемой осуществляется коррек-
коррекция как навигационного решения, так и параметров БИНС.
Остановимся подробнее на объектной реализации вышеназванных
навигационных устройств. Основой для любой модели навигацион-
навигационной системы является класс TAbstractNavi, представляющий собой аб-
абстрактного предка для всех классов, реализующих конкретную систему
(рис. 6.12).
Класс
TAbstractNavi
Класс
TGNSS
Рис. 6.12. К моделированию блока навигации
Вообще говоря, модели используемых в интегрированном бортовом
комплексе навигационных систем отличаются составом используемой
измерительной информации, составом вектора оцениваемых парамет-
параметров и принципом функционирования (так, например БИНС интегри-
интегрирует показания акселерометров и ДУС, формируя оценку положения,
скорости и ориентации ЛА, а при использовании ГЛОНАСС/GPS при-
приемника измеренные псевдодальности и псевдоскорости обрабатыва-
обрабатываются, как правило, методом динамической фильтрации, в результате
чего оцениваются положение и скорость ЛА). Тем не менее, класс
TAbstractNavi содержит объявления свойств и шаблоны абстрактных
методов, общие для всей цепочки классов, реализующих модели нави-
навигационных систем (таблицы 6.36 и 6.37).
Как видно из приведенных таблиц, основным свойством данного
класса является поле FEstim, содержащее значения вектора оценивае-
оцениваемых параметров. Обсуждаемый класс имеет ссылку на объект, реали-
реализующий динамику Л A (TObjectDynamics), который передается классу
при создании. Основной метод класса— GetMeas, вычисляющий вектор
238 Математическое моделирование процессов функционирования [Гл. 6
Таблица 6.36
Свойства класса
Dim
NameNS
FEstlm
CurObject Dynamics
NSCTIme
Тип
целый
строка
TVector
TObjectDynamics
веществ.
Описание
размерность вектора оценивае-
оцениваемых параметров
название навигационной подси-
подсистемы
вектор оцениваемых параметров
ссылка на объект, реализующий
динамику ЛА
текущее время
Таблица 6.37
Метод
constructor Create(aDIm:
Integer; aNameNS: String;
aCurObjectDynamlcs:
TObjectDynamics);
destructor Destroy; override;
procedure GetEstim(const ti:
Float; var aState: array of
Float); virtual; abstract;
Тип
конструктор
класса
деструктор
класса
виртуальный,
абстрактный
Действие
Создает объект, иници-
инициализирует внутренние
переменные.
Уничтожает объект
Вычисляет значение
вектора оцениваемых
параметров для момента
времени ti
измерений на момент времени ti и в соответствии с некотором вектором
параметров aState в данном классе объявлен абстрактным с целью
последующего перекрытия в классах-потомках. Необходимо отметить,
что в данном классе не определены ссылки на объекты, реализующие
модель измерений. Это обусловлено большим разнообразием вариантов
измерительных устройств, используемых конкретной навигационной
подсистемой. Таким образом, при реализации каждого класеа-наслед™
ника, реализующего конкретный тип НС, необходимо предусмотреть
соответствующие поля и передать в методе Create реальные объекты-
измерители.
Как уже отмечалось выше, при реализации класса TBINS, форма-
формализующего модель БИНС, необходимо организовать интегрирование
основного навигационного уравнения (подробнее см. гл. 3), в правые
части которого входят измеренные значения перегрузок и угловых ско-
скоростей ЛА. Кроме того, в классе должна быть предусмотрена ссылка
на объект, реализующий модель гравитационного поля Земли.
По отношению к классу-предку в TBINS^ таким образом, существу-
существует внутренний объект типа Т"SimpleAdams, интегрирующий основное
навигационное уравнение. Вызов метода RunTo данного объекта про-
производится в методе GetEstim до текущего момента ti. Подчеркнем,
что в качестве интегратора необходимо использовать именно объект
Т"SimpleA dams, реализующий метод прогноза-коррекции и учитываю-
6.2]
Функциональная схема объектно-ориентированного ПМО
239
щий в численном решении значения измерений за шаг интегрирования.
Ниже, в таблицах 6.38 и 6.39, приведены названия и описания новых
или перекрытых по отношению к родительскому полей и методов дан-
данного класса.
Таблица 6.38
Свойства
класса
FNSIntegrator
АссМС
RGMC
Gravl
ofQuaternlon
Param
Тип
TSimpleAdams
TAbstractMeasChannel
TAbstractMeasChannel
TGravIModel
логический
TVector
Описание
внутренний интегратор
ссылка на объект, реализующий
модель акселерометров
ссылка на объект, реализующий
модель ДУС
ссылка на объект, реализующий
модель гравитационного поля
Земли
флаг использования параметров
Родрига-Гамильтона для опреде-
определения ориентации ЛА (если нет —
используется уравнение Пуассо-
Пуассона)
вектор параметров модели
Таблица 6.39
Метод
constructor Create (const
anOwner: Pointer; const
acmUpdate: Byte; aAccMC,
aRGMC:
TAbstractMeasChannel;
aGravi: TGravIModel);
destructor Destroy; override;
procedure GetlnlDataFrom-
FIle(aFIleName: String);
virtual;
procedure Initialize(atime:
Float; aEstim: TVector;
aParam: TVector): virtual;
procedure GetEstim(const ti:
Float; var aState: array of
Float); override;
Тип
конструктор
класса
деструктор
класса
виртуальный
виртуальный
виртуальный
Действие
Создает объект, иници-
инициализирует внутренние
переменные.
Уничтожает объект
Считывает исходные
данные из Inl-файла
проекта
Инициализирует на-
начальные значения век-
вектора оцениваемых пара-
параметров и вектора пара-
параметров модели
Вычисляет значение
вектора оцениваемых
параметров для момента
времени Ы
240 Математическое моделирование процессов функционирования [Гл. 6
Исходные данные для инициализации параметров БИНС (точность
интегрирования, шаг, имя файла результатов и т. п.) считываются из
inl-файла проекта в секции [BINS].
[BUS]
Tolerance=le™6
Н=0.01
IQutStep=IO
OutPutMode=0
OutPutDestination=l
BINSFile=d:\app\dss\res\bins.dat
ofQuatenion=0
Как уже отмечалось выше, описание процесса моделирования из-
измерений многоканального приемника СНС ГЛОНАСС/GPS и соответ-
соответствующего навигационного алгоритма, а также структура объектной
модели приведено авторами в [6.9].
Помимо перечисленных навигационных устройств в бортовом инте-
интегрированном контуре существует блок комплексирования, в котором
в соответствии с той или иной схемой осуществляется коррекция как
навигационного решения, так и параметров модели БИНС.
Необходимо отметить, что классов, реализующих данный блок, мо-
может существовать несколько, в зависимости от выбранной схемы ком-
комплексирования, количества комплексированных навигационных подси-
подсистем и особенностей алгоритма (см. гл. 3), иными словами, невозможно
указать единого предка для обсуждаемых классов. Ниже мы приведем
описание класса TSimpleDataFusion^ реализующего слабосвязанную
схему комплексирования БИНС и спутниковой навигации, корректи-
корректирующую начальные условия БИНС.
TSimpleDataFusion = class(TObject)
constructor Create(aBINS: TBINS; aGISS: TG1SS; alniFIame: String);
protected
FCurTime: Float;
FofCorrection: Boolean;
FMeasfector: T?ector;
procedure GetFMatrix;
procedure GetHMatrix;
public
DFState: T?ector;
DFCoYMatrix: Tfector;
CurBIIS: TBINS;
CurGISS: TGISS;
property ofCorrection: Boolean read FofCorrection;
procedure GetlniData(alniFIame); virtual;
procedure EvaKti: Float); virtual;
end;
Как видно из приведенного описания, при создании объекта в мето-
методе Create классу передаются объекты, реализующие алгоритмы работы
БИНС и многоканального ГЛОНАСС/GPS приемника. На основании
результатов работы данных подсистем формируется вектор «измере-
«измерений» FMeasVectorj представляющий собой невязку определения поло-
положения и скорости ЛА с помощью БИНС и приемника соответственно.
6.2]
Функциональная схема объектно-ориентированного ПМО 241
В качестве вектора состояния динамической системы FDFState ис-
используется вектор ошибок БИНС, который оценивается методом ди-
динамической фильтрации в соответствии со сформированным вектором
измерений и моделью ошибок БИНС. Оценка вектора состояния сопро-
сопровождается соответствующей ковариационной матрицей DFGovMatrix.
Процедура фильтрации содержится в методе Eval класса. В случае
установки флага коррекции ofCorrection после обработки измерений
производится коррекция выходных данных БИНС и вектора ее ошибок
путем вызова метода Initialize класса ТВ INS. Начальные условия для
алгоритма комплексирования задаются вызовом метода GetlniData,
который задает значения внутренним полям класса, считывая их из
inl-файла проекта.
Обратимся теперь к решению задачи наведения. Необходимо от-
отметить, что в зависимости от целевой задачи конкретного ЛА и ап-
аппаратных требований могут использоваться системы наведения, от-
отличающиеся принципом действия, составом измеряемых параметров,
алгоритмами предварительной обработки информации и т. п. Кроме
того, зачастую практически невозможно разделить задачу наведения
и навигации, а также задачу управления, поскольку задача наведения
тесно связана с принятием решения и выработкой сигналов команд-
командного управления. Тем не менее, в рамках обсуждаемой технологии
рассмотрим иерархическую цепочку классов, реализующих алгоритмы
наведения (рис. 6.13).
Класс
TAbstractGuidance
Рис. 6.13. Алгоритмы наведения
Класс TAbstractGuidance содержит объявления свойств и шаблоны
абстрактных методов, общие для всей цепочки классов, реализующих
модели систем наведения. Ниже приводится описание данного класса.
IlbstractGuidance = class(TObject)
constructor Create(aCurObjectDynamics, aTargetDynamics:
TObjectDynamics; alniFName: String);
protected
FCurTime: Float;
public
CCState: T?ector;
16 Управление и наведение
242 Математическое моделирование процессов функционирования [Гл. 6
CurObjectDynamics: TObjectDynamics;
TargetDynamics: IQbjectDynamics;
procedure GetlniData(alniFIame); virtual; abstract;
procedure GetGuidance(ti: Float); virtual; abstract;
end;
Как видно из приведенного описания, при создании в методе
Create классу передаются объекты типа TObjectDynamics ^ реализую™
щие модель динамики ЛА и цели, ссылки на которые сохраняются во
внутренних переменных класса CurObjectDynamics и Tar get Dynamics.
Основной метод класса, вычисляющий вектор командного управления
С С State на текущий момент времени Ы, — процедура GetGuidance. На™
чальные условия и параметры алгоритма наведения задаются методом
GetlniData, считывающий значения из ini-файла проекта.
Необходимо отметить, что реальное наполнение вектора командно™
го управления и алгоритма наведения зависит от конкретной системы
и должно быть реализовано в классах-потомках. Ниже приведен при-
пример класса 7'Pointing, реализующего алгоритм решения задачи наве-
наведения как краевой задачи управления движущегося объекта.
TPointing = class (TAbstractGuidan.ee)
constructor Create(aTargetDynamics: TObjectDynamics; alniFIame: String;
aBINS: TBINS; aRGMChannel: TRGMChannel);
public
BUS: TBINS;
RGMChanne1: TRGMChanne1;
procedure GetIniData(alniFIame); override;
procedure GetGuidance(ti: Float); override;
end;
Данный класс формирует вектор требуемых перегрузок в связанной
СК, приближенно решая краевую задачу на основе информации от
БИНС и априорных сведений о координатах цели (TargetDynamic).
Помимо этого, при формировании требуемых перегрузок учитыва-
учитывается ограничение на текущее значение вектора абсолютной угловой
скорости Л А, поступающее с объекта RGM Channel. Сформированное
значение вектора командного управления подается на вход системы
управления (автопилота).
Как уже отмечалось выше, как правило, сложно разделить прицель-
прицельно-навигационную систему и систему управления в силу их высокой
интегрированности. Тем не менее, в рамках предлагаемой технологии
в целях универсализации ПМ0 и построения иерархической объектной
структуры будем определять класс, реализующий алгоритм системы
управления как блок, осуществляющий сравнение сигналов командно-
командного управления, полученных в результате решения задачи наведения,
с текущими параметрами движения ЛА и последующее формирование
управляющих сигналов для исполнительных органов (сервоприводы),
а также отработку этих сигналов в виде значений углов отклонения ор-
органов управления (аэродинамические и газодинамические рули, откло-
отклоняющиеся сопла и т. п.). Вообще говоря, для сложных авиационных си-
систем возможно и иногда целесообразно более детальное и глубокое раз-
разделение данной системы на отдельные объекты (например, выделение
6.2] Функциональная схема объектно-ориентированного ПМО 243
отдельных классов для каждого из управляющих органов). Однако для
обсуждаемых Л А будем использовать единый класс TControlSystem,
реализующий модель автопилота как единого механизма, замыкающего
контур управления ЛА. Ниже приведем описание данного класса.
TControlSystem = class(TObject)
constructor Create(aCurObjectDynamics: IQbjectDynamics;
alniFIame: String; aRGMChannel: TRGMChannel;
aAccMChannel: TAccMChannel; aGuidance: TPointing);
protected
FCurTime: Float;
public
CSState: Tfector;
AeroDelta: TLoc;
ThrustBelta: TLoc;
RGMChanne1: TRGMChanne1;
AccMChannel: TAccMChannel;
Guidance: TPointing;
CSInt: TSimpleAdams;
CurObjectDynamics: TObjectDynamics;
procedure GetlniData(alniFIame); virtual;
procedure GetControKti: Float); virtual;
end;
Как видно из приведенного описания, при создании объекта в
методе Create классу передаются объект aCurObjectDynamics типа
TObjectDynamics, реализующий модель динамики Л А, ссылка на кото-
который сохраняется во внутренней переменной класса CurObjectDynamics,
а также объекты aRGMChannel и aAccMChannel, реализующие моде-
модели измерителей ДУС и акселерометров соответственно. Кроме того,
в этом методе передается объект aGuidance типа TPointing, реализую™
щий алгоритм метода наведения и позволяющий использовать вектор
командного управления, формируемого системой наведения при реше-
решении задач управления. Основной метод класса, вычисляющий вектор
управляющих сигналов CSState на текущий момент времени ti, —
процедура GetControl. В этом методе происходит сравнение вектора
командного управления и соответствующих измеренных значений пе-
перегрузки ЛА, формирование управляющих сигналов и отработку этих
сигналов в виде значений углов отклонения аэродинамических и газо-
газодинамических рулей (AeroDelta, ThrustDelta). Для реализации дина-
динамики звеньев автопилота предусмотрен внутренний объект-интегратор
CSInt типа TSimpleAdams. Начальные условия и параметры автопило-
автопилота задаются методом GetlniData, считывающим значения из ini-файла
проекта. Вычисленные здесь значения отклонения органов управления
передаются на вход объекта FlightObjectj замыкая тем самым контур
моделирования управляемого движения маневренного ЛА.
6.2.4. Полная объектная структура моделирования. Таким
образом рассмотрены все классы, формализующие блоки функцио-
функциональной схемы (рис. 6.4) моделирования бортовой интегрированной
системы навигации и наведения маневренных ЛА. Следующая задача
состоит в объединении созданных фрагментов ПМО в объектную схе-
16*
244 Математическое моделирование процессов функционирования [Гл. 6
му моделирования, соответствующую исходной задаче имитационного
моделирования. Такая схема приведена на рис. 6.14.
Интерфейс пользователя
Ini - файл проекта
Experiment
~С StatAtmo ^>
1
ObjeclDynamics
RGMChannel
AccMChannel
! Ws,
xm, vJia
X*. V*. E*
Pointing
xu
ControlSystem
C<
GraviModei
FlightObject
Dynamic
BINS
GNSS
X ,._.., V ,
DataFusion
TargetDyiiamics
Рис. 6.14. Объектная форма моделирования
Как видно из приведенной схемы, все описанные выше объекты
являются полями основного класса проекта — ТExperiment. Данный
класс предназначен для создания, хранения и обеспечения необходи-
необходимых связей между объектами, реализующими блоки функциональной
схемы моделирования. Кроме того, этот класс реализует непосред-
непосредственно конкретную техническую задачу имитационного моделирова-
моделирования. Иными словами, непосредственной реализацией замкнутого кон™
тура ЛА в соответствии с функциональной схемой (т. е. моделировани-
6.2] Функциональная схема объектно-ориентированного ПМО 245
ем управляемого движения ЛА) не исчерпывается диапазон задач ими-
имитационного моделирования. В зависимости от технической постановки
задачи в рамках излагаемой технологии могут изучаться вопросы ана-
анализа влияния возмущающих факторов на точность решения целевой
задачи, анализа точности решения целевой задачи, анализа допусти-
допустимых траекторий полета ЛА, проектирования схем комплексирования,
наведения и системы управления, статистическое моделирование воз-
возмущенного движения ЛА и т. п. Приведем описание данного класса.
TExperiment = class(TObject)
constructor Create(const anOwner: Pointer; const acmUpdate: Byte);
destructor Destroy; override;
protected
FCurTime: Float;
FTBegin, FTEnd, Fdt: Float;
{ }
FUpdate: Byte;
FOfPausedCalc: Boolean;
FOfBINS, FOfGISS, FOfPointing, FOfCS: Boolean;
procedure SetOfPausedCalc(?alue: Boolean);
public
FODFile, FBINSFile, FGISSFile, FPointingFile, FCSFile: TextFile;
Owner: Pointer;
ObjetcDynamics: TObjectDynamics;
TargetDynamics: TObjectDynamic;
BUS: TBINS;
GISS: TGISS;
Pointing: TPointing;
DataFusion: TSimpleDataFusion;
CS: TControlSystem;
AccMChannel: TAccMChannel;
RGMChanne1: TRGMChanne1;
GraYi: TGravi;
StatAtmo: TAtmo;
WindModel: TWindModel;
procedure InformOwner; virtual;
procedure Dolt; virtual;
procedure SetIniData(IniFName: String); virtual;
property CurTime: Float read FCurTime;
property OfPausedCalc: Boolean read FOfPausedCalc write SetOfPausedCalc;
end;
Как видно из приведенного описания, данный класс располагает
внутренними полями, представляющими собой объекты от вышеука-
вышеуказанных классов и тремя основными методами, объявленными как вир-
виртуальные. При создании класса в методе Create происходит инициа-
инициализация полей Owner (указатель на форму-владельца класса) и кон-
константы сообщения FUpdate. Данные поля необходимы классу для фор-
формирования Windows-сообщения, обрабатываемого визуальной формой
проекта в целях визуализации процесса моделирования и возможности
управления вычислительным процессом.
После создания объект Experiment пустой, т. е. не заполнены основ-
основные внутренние поля и не созданы внутренние объекты, соответствую-
соответствующие структуре контура управления ЛА. Для наполнения структуры не-
246 Математическое моделирование процессов функционирования [Гл. 6
обходимо вызвать метод SetlniData, который подсоединяет inl-проекта
и считывает значения внутренних полей (FT0 — начало процесса мо-
моделирования, FTk — окончание моделирования, FdT — шаг модели-
моделирования, имена файлов результатов, флаги использования подсистем).
Кроме того, в соответствии с установленными флагами и именем ini-
файла проекта происходит создание всех требуемых для моделирова-
ния объектов. После этого устанавливается флаг ofPausedCalc^ сигна-
сигнализирующей о приостановке процесса моделирования.
Для старта моделирования вызывается метод Dolt, реализующий
непосредственно саму задачу моделирования. В данном методе в цикле
организован вызов основных выполняемых методов объектов структу-
структуры моделирования в последовательности, определяемой целевой зада-
задачей моделирования. Помимо этого, здесь же размещаются вычисли-
вычислительные и логические блоки, формализующие специфику задачи мо-
моделирования. Так, например, в случае решения задачи моделирования
управляемого движения ЛА на каждом «шаге» моделирования, ими-
имитирующем функционирование всех подсистем, для текущего момента
времени FCurTime происходит следующее.
1. Вызывается метод ObjectDynamics.RunTo(FGurTime), позволяю-
позволяющий спрогнозировать движение Л А на момент FCurTime.
2. Вызываются методы RGMChannel.GetMeas(FCurTime) и АссМ-
Channel.GetMeas(FCurTime), формирующие измерения ДУС и акселе-
акселерометров на основе вектора состояния Л А (объект ObjectDynamics).
3. Вызывается метод BINS.GetEstim(FCurTime), позволяющий по-
получить оценку положения, скорости и ориентациии ЛА на момент
FCurTime в соответствии с текущими измерениями (объекты RGM-
Channel и AccMChannel).
4. Вызывается метод GNSS.GetEstim(FCurTime), позволяющий по-
получить оценку положения и скорости ЛА на момент FCurTime в со-
соответствии с текущим состоянием ЛА на основе методов спутниковой
навигации.
5. Вызывается метод DataFusion.Eval(FCurTlme), позволяющий по-
получить оценку ошибок БИНС на основе используемого алгоритма ком-
плексирования.
6. Вызывается метод Pointing.GetGuldance(FCurTlme), позволяю-
позволяющий сформировать вектор командного управления на основе данных
БИНС и информации о параметрах движения цели (объект TargetDy-
namics).
7. Вызывается метод CS.GetControl(FCurTime), рассчитывающий
углы отклонения органов управления ЛА в соответствии с командным
управлением и измеренными параметрами движения ЛА.
8. Вызывается метод InforniToOwner, формирующий Windows-
сообщение, обрабатываемое формой-владельцем для визуализации
процесса моделирования.
Далее описанный выше процесс повторяется до момента окончания
моделирования. Если решается более сложная задача (например, ста-
статистическое моделирование управляемого полета ЛА по методу Монте-
6.3] Пример реализации технологии моделирования 247
Карло), то здесь же реализуются операции по сбору и обработке стати-
статистики по реализациям с последующей выдачей результатов.
Необходимо отметить, что ПМО организовано таким образом, что
связь объекта Experiment с интерфейсом пользователя организована
посредством использования ini-файла для задания исходных данных
и параметров моделирования, а также при помощи ссылки Owner на
форму интерфейса для вывода результатов моделирования. Такой под-
подход позволяет использовать различные интерфейсы, инвариантные по
коду к основной объектной структуре прикладной задачи.
Таблица 6.40
Наименование
модуля
Global
Cmath
Mathem
Matrix
Qmath
Tmath
VMath
Frames
Описание
Описание глобальных типов, констант и переменных про-
проекта
Реализация функций алгебры комплексных чисел
Реализация математических процедур и функций
Реализация процедур и функций матричной алгебры
Реализация процедур и функций алгебры кватернионов
Реализация процедур и функций тензорной алгебры
Реализация процедур и функций векторной алгебры
Реализация процедур и функций для расчета матриц пе-
перехода между используемыми системами координат
Помимо приведенных описаний классов остановимся на ряде вспо-
вспомогательных процедур и функций, оформленных в виде отдельных
модулей и скомпонованных по функциональному признаку. В рамках
обсуждаемого ПМО были созданы следующие модули (таблица 6.40).
6.3. Пример реализации технологии моделирования
интегрированных систем навигации и наведения
беспилотного маневренного ЛА
В настоящем разделе приводится пример, иллюстрирующий воз-
возможности развиваемого подхода к анализу и синтезу интегрирован-
интегрированных систем управления и наведения применительно к моделированию
управляемого движения ракеты класса воздух^воздух. В рассматри-
рассматриваемой версии ПМО представляет собой некоторый базовый вариант
программного комплекса (ПК), снабженного развитым интерактивным
интерфейсом и дополнительными сервисными функциями. Обсуждае™
мый комплекс реализован на основе визуальной среды программирова-
программирования Delphi 5.0 и представляет собой законченное Windows-приложение.
Базовый вариант включает вычислительный блок, блок задания на-
начальных условий (на основе редактирования текстового файла) и блок
визуализации получаемых результатов. Ниже приводится обобщенная
248 Математическое моделирование процессов функционирования [Гл. 6
структура ПК, описание основных окон программы и пример использо-
использования ПК для моделирования одного из тестовых режимов полета ЛА.
6.3.1. Структура программного комплекса. На рис. 6.15
представлена обобщенная функциональная схема ПК, иллюстрирую-
иллюстрирующая процесс моделирования и основные элементы программы.
Рис. 6.15. Функциональная схема ПК
В файле начальных условий {файл проекта), представляющий со-
собой текстовый ASCII файл в формате Windows-«ini» файла (т.е.
файла, каждая строка которого формируется по принципу: «пара-
метр<=-значение»), содержатся все необходимые значения коэффици™
ентов моделей движения Л А и цели, алгоритмов работы контуров ста-
стабилизации и наведения, переключателей режимов полета ЛА, маневров
цели, имена файлов с аэродинамическими коэффициентами и т. п.
Блок задания начальных условий позволяет выбрать и, по необходи-
необходимости, отредактировать файл проекта и передать считанные значения
блоку инициализации.
Блок инициализации предназначен для рестарта процесса моде-
моделирования. На этом этапе, в соответствии с заданными начальными
условиями процесса моделирования, инициализируются все внутрен-
внутренние объекты программы и комплекс переводится в режим ожидания
старта моделирования.
Вычислительный блок реализует процесс моделирования замкну-
замкнутого контура управления высокоманевренного беспилотного ЛА, в со-
соответствии с подходом, детально описанным в разделе 2 настоящей
главы.
Блок визуализации позволяет графически представлять процесс мо-
моделирования полета ЛА в соответствующих окнах программы, а кроме
того сохранять полученные результаты в текстовом ASCII файле.
Блок сервисных функций предназначен для вызова необходимых
внешних утилит и приложений. Здесь используется приложение «Ta-
«Table Approximate!*», позволяющее аппроксимировать табличные данные,
представленные в виде ASCII файла полиномами Чебышева, с целью
последующего использования в ПМО. Необходимо отметить, что та-
такой способ представления табличных данных позволяет существенно
6.3]
Пример реализации технологии моделирования
249
повысить вычислительную эффективность, а также «сгладить» экспе-
экспериментальные зависимости, используемые при моделировании. Напри™
мер аэродинамические коэффициенты, а также профиль атмосферы
Земли в диапазоне от 0 до 150 км представлены в виде коэффициентов
полиномов Чебышева.
6.3.2. Краткое описание программного комплекса. Для
старта программного комплекса пользователь должен вызвать через
Microsoft Explorer или иным способом запустить исполняемый файл
проекта, находящийся в корневой директории проекта.
После запуска данного файла на рабочем столе пользователя отоб-
отображается главное окно программы, показанное на рис. 6.16. Непосред-
Непосредственно после старта пользователю доступны пункты меню «Project»,
ГНитёммГУЫии
Center of Mass
Center of Mass Motion
X [m] = D
Y[m]= 0
Z [m] = 0
Angular Motion
a.= о
v= 0
T= 0
AeroDynamics
ил= О
a,l = 0
aZ = 0
Measurement's
ш = 0
wy = 0
W7 = 0
Control System
NCorny= 0
NComz= 0
Guidance System
NGuidv = 0
NGuidz - 0
Motion | Angular Motion
Vx [m/s] =
Vy [m/s] =
Vz [m/s] =
aa- =
Эф-
&T =
FiS =
Mach =
q =
od =
a2 =
ADEIer =
ADy =
AD г =
Drel =
Vrei =
0
I]
0
0
0
0
0
0
0
0
0
0
G
I]
0
G
Aerodynamics
Ny [g] =
Nz [g] =
wx =
щ =
wz =
Ny [g] =
Nz [g] =
TDy =
TDs-
Omy =
Omz =
Meas
0
0
0
0
0
0
0
0
0
0
0
urement's ] Control System | T
Xtrg [m] =
Ytrg [m] =
Ztrg [m] =
Curh =
FStop =
G
D
0
0
0
arget Motion] Guidance System 1 Disturbances
Vxtrg [m] = 0
Vytrg [m] = 0
Vztrg [m] = 0
FiY= 0
F2= 0
J...J
Рис. 6.16. Главное окно программы
«Tools» и «Help». Меню «Project» предназначено для работы с файлом
проекта. Изначально в данном меню пользователь имеет альтернативу:
либо выбрать файл проекта из имеющихся (пункт «Select Proejct»),
либо закончить работу программы (пункт «Exit»). В первом случае
открывается стандартное диалоговое окно Windows, предлагающее вы-
выбрать имя файла проекта (рис. 6.17). Необходимо заметить, что вид
данного диалогового окна зависит от версии Windows и национального
языка версии. В качестве базового директория для файла проекта по
умолчанию предлагается корневой директорий проекта.
После выбора файла проекта становятся доступными опции «Save
Project», « View/Edit Project» и «Attach Project».
При выборе опции «Save Project» пользователь имеет возможность
сохранить файл проекта под другим именем с целью внесения необхо-
250 Математическое моделирование процессов функционирования 11 л. 6
Папка: | _J aa-mis jj
_Jar|
_|cfs
_Jdat
_|doc
_J res
test.prj
Имя файла:
Дткрыгь I
Т_ип Файлов: | Project Files _*] Отмена
Рис. 6.17. Стандартное диалоговое окно
димых изменений в соответствии с вариантами моделирования. В этом
случае открывается стандартное диалоговое окно Windows, предлагаю-
предлагающее задать новое имя файла проекта (рис. 6.18). Необходимо заметить,
что вид данного диалогового окна зависит от версии Windows и наци-
Папка: _J aa-mis
Ian
Icfs
Idat
I doc
I res
test.prj
Имя файла:
Сохранить
1ип Файла: | Project Files _^] Отмена
Рис. 6.18. Стандартное диалоговое окно
опального языка версии. В качестве базового директория для файла
проекта по умолчанию предлагается корневой директорий проекта.
6.3] Пример реализации технологии моделирования 251
Опция «View/Edit Project» предназначена для просмотра и редак-
редактирования файла проекта, представляющего собой текстовый ASCII
файл в формате Windows™«ini» файла (т.е. файла, каждая строка
которого формируется по принципу «параметр = значение») и содер-
содержащий все необходимые значения коэффициентов моделей движения
ЛА и цели, алгоритмов работы контуров стабилизации и наведения,
переключателей режимов полета ЛА, маневров цели, имена файлов
с аэродинамическими коэффициентами и т. п.
В этом окне пользователь должен установить требуемые значения
констант и параметров, соответствующих режиму моделирования.
Таким образом, отредактировав требуемые значения параметров,
пользователь сохраняет файл проекта и вызывает опцию «Attach
Project». При этом, в соответствии с файлом проекта, инициализируют-
инициализируются все внутренние объекты программы и ПК переходит в режим ожи-
ожидания моделирования. При этом активизируется меню «Simulation»
и кнопки управления процессом моделирования, расположенные в пра-
правом нижнем углу панели управления программы. При активизации
опции «Start» меню «Simulation» или нажатии на кнопку «Start» стар-
стартует процесс моделирования. При этом изменяется значение текущего
времени (левый нижний угол панели управления программы) и на
странице «Numerical Values» изменяются значения вектора состояния
и основных параметров движения, системы стабилизации и наведения
(рис. 6.16).
В этом окне выводимая информация объединена по следующим
группам.
«Center of Mass Motion» — отображаются числовые значения ком-
компонент векторов положения и скорости ЛА и цели в инерциальной
СК и эволюцию компонент вектора перегрузки в продольных каналах
в связанной СК.
«Angular motion» — отображаются числовые значения углов Эйле-
Эйлера, соответствующих угловых скоростей и компонент векторов угловой
скорости ЛА в связанной СК.
«Aerodynamics» отображаются числовые значения углов атаки Л А
(пространственного и в продольных каналах), а также пространствен-
пространственного угла крена, числа Маха и скоростного напора.
«Measurement's» — отображаются числовые значения измерений,
осуществляемых бортовыми измерительными устройствами (датчика-
(датчиками угловых скоростей, датчиками угла атаки, акселерометрами и т. п.).
««Control System» — отображаются числовые значения основных
параметров контура стабилизации: компонент вектора командной пе-
перегрузки в продольных каналах, углов отклонения элеронов и рулей
в продольных каналах.
«Guidance System» — отображаются числовые значения основных
параметров контура наведения: компонент вектора перегрузки наведе-
наведения (выходной сигнал контура) в продольных каналах, относительную
дальность и скорости ЛА-цель, компоненты вектора угловой скорости
линии визирования цели в продольных каналах в антенной СК, текущее
252 Математическое моделирование процессов функционирования [Гл. 6
значение промаха и время, оставшееся до выполнения целевой задачи,
а также углы пеленга цели в инерциальной СК.
При активизации опции «Pause» меню «Simulation» или нажатии
на кнопку «Pause» процесс моделирования приостанавливается и поль-
пользователь, переключаясь между страницами главного окна програм-
программы, может просмотреть графические зависимости, иллюстрирующие
эволюцию основных параметров моделирования. По завершении про-
процесса моделирования в строке статуса появляется соответствующее
сообщение: «Project completed... Target Destroyed.» — в случае успеш-
успешного выполнения целевой задачи, или, «Project completed... Guidance
failed... » — при срыве процесса наведения. После этого пользователь
может повторить расчет, изменив исходные данные в файле проекта.
Среди информации, представленной графическими зависимостями от-
отметим следующее.
Страница «Center of Mass Motion» (рис. 6.19) представляет
эволюцию компонент векторов положения и скорости ЛА в инерци-
инерциальной СК и эволюцию компонент вектора перегрузки в продольных
каналах в связанной СК.
Страница «Angular motion» (рис. 6.20) представляет эволюцию
углов Эйлера, соответствующих угловых скоростей и компонент
векторов угловой скорости ЛА в связанной СК.
Страница «Aerodynamics» (рис. 6.21) представляет эволюцию углов
атаки Л А (пространственного и углов атаки в продольных каналах).
Страница «Measurement's» (рис. 6.22) представляет эволюцию
измерений, осуществляемых бортовыми измерительными устройст-
устройствами.
Страница «Control System» (рис. 6.23) представляет эволюцию
основных параметров контура стабилизации: командную перегрузку
в продольных каналах, углы отклонения элеронов и рулей в продоль™
ных каналах.
Страница «Target Motion» (рис. 6.24) представляет эволюцию
компонент векторов положения и скорости цели в инерциальной СК.
Страница «Guidance System» (рис. 6.25) представляет эволюцию
основных параметров контура наведения: перегрузку наведения (вы-
(выходной сигнал контура), компоненты вектора угловой скорости линии
визирования цели в продольных каналах в антенной СК, относитель-
относительную дальность ЛА^цель и текущее значение промаха.
Страница «Disturbances» (рис. 6.26) иллюстрирует шумы пеленга-
пеленгатора цели.
Необходимо отметить, что при установке в файле проекта парамет-
параметра OutPutDestination = 1 одновременно с выводом результатов модели-
моделирования на экран осуществляется запись в файл, представляющий со-
собой обычный текстовый ASCII файл, где содержатся значения вышепе-
вышеперечисленных результатов моделирования на соответствующий момент
времени, разделенные пробелом. Это позволяет использовать данную
информацию для построения графиков стандартными коммерческими
пакетами типа Microsoft Excel, Grapher, Corel Chart и т. п.
6.3]
Пример реализации технологии моделирования
253
Project Simulation J_ools Help
Numerical Values [Centen^^ Aerodynamics] Measurement's] Control System ] Target Motion ] Guidance System ] Disturbances]
Position Velocity Overload
Project Fits: D: %app\aa-mrs ttest.ptrf
Status: Project Paused..
Рис. 6.19. Результаты моделирования
Project Simulation Tools Help
"W JiLJ ~_lJ
Numerical Values] Center o\ Mass Motion !.*?!9u^_Mo^onj| Aerodimamics | Measurement's] Control System ] Target Motion ] Guidance System ] Disturbances]
Euler Angles
\
a
Angular Velocity (PYR)
i '; ¦ ' '
'¦¦¦ !
Angular Velocity [BFj
/ =
i '¦ ¦'
1 '¦¦'
¦
j Project /*fe- D: %app iaa-mts ifesf.pr/
Status. Prefect Paused..
Рис. 6.20. Результаты моделирования
254 Математическое моделирование процессов функционирования [Гл. 6
Project Simulation J_oo!s Help
Numerical Values I Center of Mass Motion I Angular Motion [
Angles of Attack
rement's j Control System | Target Motion ] Guidance System ] Disturbances]
: Prefect Fife: D: iapp laa-m/s itest./w/
Status.- Protect Paused..
Рис. 6.21. Результаты моделирования
Project Simulation Joois Help
Numerical Values] Centei
Angular Velocity (BF)
I
i
ti!№: S:
of Mass
Motior
ГЦ
til
] Angular Motion | Aerodynamics [.Measi
Angles of Attack
! .
i
remenrs j| Control Sy
. em ] Target Motion
Overload
ra 1
Guidance System ] Disturbances ]
i
i Project File: D:\appiaa-mrs%testprj
Stattts: Protect Paused..
Рис. 6.22. Результаты моделирования
6.3]
Пример реализации технологии моделирования
255
..J.OJ..*!
Project Simulation j_ools Help
ч! 1 _jj
Numerical Values] Center of Mass Motion 1 Angular Motion ] Aerodynamics] Measurement's OControlSi>sterj^| Target Motion ] Guidance System ] Disturbances]
Command 0 verload D elta Aero D elta T hruster
!
i;:.
Project Fife: O: happ iaa-mis itesf.prj
Status: Project Paused...
Рис. 6.23. Результаты моделирования
Project Simulation Joois Help
Numerical Values ] Center of Mass Molion | Angular Motion | Aerodynamics ] Measurement's | Control System [l^^E^E1]] Guidance System I Disturbances ]
Position
¦¦¦¦ ¦ ¦¦ 1
- XTrg
YTrg
i
Velocity
!
ti
i ProjectFifeD.iapptaa-msifestpr/
Status. Project Paused..
Рис. 6.24. Результаты моделирования
256 Математическое моделирование процессов функционирования [Гл. 6
Project Simulation Tools Help
Numerical Values | Center of Mass Motion | Angular Motion ] Aerodynamics ] Measurement's] Control System | Target Motion Шнапсе Sj^stemj| Disturbances
G uidance 0 verload Line of S ight Angular Velocity RelativeDistance Instant Miss
I Project Fife. O.iapptaa-mrsitesf.pff
Status: Project Paused..
Рис. 6.25. Результаты моделирования
Numerical Values | Center of Mass Motion |
Disturbances in Guidance Channel
-injxj
Motion] Aerodynamics] Measurement's] Control System | Target Motion ] Guidance System ! Disturbances jj
¦! j i \, i ¦ ii '. :';.':;:; -.i '<¦ ; !¦:::;':- ':.'¦¦',,:: ! i \ \\' \ ' \ >'~- \ . ~. : \ \\f: ¦ : \ will \ i \)} ¦ ;;; !i!
; vj:- у tu i;:ii|Mi?T
!' 'II i |У'!
pi !
Щ
States.- Рга/ect Paused..
Рис. 6.26. Результаты моделирования
6.3] Пример реализации технологии моделирования 257
Список литературы к главе 6
6.1. Смирнов Ю.Н., Воробьев Г.Н. Перспективы развития вычислитель-
вычислительной техники: в 11 кн.: Справочное пособие. Кн.6: Специализированные
ЭВМ — М.: Высшая школа, 1989.
6.2. Мейер Б., Бодуэн К. Методы программирования. — М.: Мир, 1982.
6.3. Буч Г. Объектно-ориентированное проектирование с примерами приме-
применения. — Украина: Диалектика, 1993.
6.4. Шлеер Сп Меллор С. Объектно-ориентированный анализ: моделирова-
моделирование мира в состояниях. — Украина: Диалектика, 1993.
6.5. Malyshev V.V., Krasilshikov M.N., Bohronnikov V.T.7 Fedorov A.V.,
Nesterenko O.P., Sypalo K.I. Software Toolbox for Space System Mission
Analysis and Control, Brazil, SPPH, 1999.
6.6. Справочное руководство по небесной механике и астродинамике. Под
редакцией Г.Н. Дубошина. — М.: Наука, 1976. — 864 с.
6.7. IERS Technical Note 13. IERS Standards A992). Ed. D.D. McCarthy, US
Naval Observatory. July 1992.
6.8. Hairer E., Norsett S. P., Wanner G. Solving Ordinary Differential Equations
I. Nonstiff Problems. — Berlin, Heidelberg, New York, London, Paris, Tokyo:
Springer-Verlag, 1987.
6.9. Малышев В. В., Красильщиков М.Н., Сыпало К. И. и др. Системы спут-
спутникового мониторинга. — М.: МАИ, 2000.
17 Управление и наведение
Приложение П.1
КОНВЕРСИОННЫЕ ТЕХНОЛОГИИ
ПРИМЕНЕНИЯ УПРАВЛЯЕМЫХ
АВИАЦИОННЫХ БОМБ
П. 1.1. Основы концепции гражданского
применения управляемых авиационных бомб
Концепция двойной и конверсионной технологий использования
управляемых авиационных бомб для решения народно-хозяйствен-
народно-хозяйственных задач частично была рассмотрена в [П. 1.1] и проиллюстрирована
в табл. 1. Следует подчеркнуть, что особенностью использования УАБ
при решении народно-хозяйственных задач является оперативность
и селективность воздействия на объект.
Таблица П. 1.1. Концепция конверсионной технологии использования
УАБ в интересах народного хозяйства
Предполагаемый народно-
народнохозяйственный проект
(класс решаемых задач)
1
1.Доставка грузов (продукты, снаря-
снаряжение, оборудование, средства спасе-
спасения, средства связи) в труднодоступ-
труднодоступные места
2. Тушение пожара на газовой или
нефтяной скважине
3. Ликвидация заторов при лесоспла-
лесосплаве, заторов льда на реке, образование
разводий во льдах
4. Борьба со снежными лавинами
5. Разрушение селевых и оползневых
плотин
6. Расчистка площадки для посадки
вертолета и др. целей. Преграждение
распространению лесного пожара
7. Разрушение смерча, воздействие
на циклон.
Сущность технического решения
(используемое свойство УАБ)
2
Оснащение ГЛА отсеком с полезным
грузом и системой мягкой посадки
Воздействие штатными средствами
путем сбития пламени
Воздействие штатными средствами
Воздействие штатными средствами
путем принудительного вызова схо-
схода лавин
Воздействие штатными средствами
Воздействие штатными средствами
как изотропного, так и направленно-
направленного действий
Воздействие на смерч и эпицентр
циклона.
П. 1.1] Основы концепции гражданского применения УАБ
259
Продолжение табл. П. 1.1
1
8. Предотвращение грозы, града
9. Разрушение горных пород. Обра-
Образование котловин под фундамент в
районе вечной мерзлоты, труднодо-
труднодоступных местах
10. Углубление фарватера реки. Раз-
Разрушение порогов, подводных скал
11. Образование полостей для водо-
водоемов, подземных резервуаров. Туше-
Тушение пожара на газовой или нефтяной
скважине
12. Сейсмическая разведка полезных
ископаемых (нефти, газа, минера-
минералов)
13. Установка опорных конструкций.
Исследование физических характе-
характеристик грунта (горы, ледника, дна
моря, озера)
14. Тушение горящих нефтепродук-
нефтепродуктов
15. Тушение лесных пожаров
16. Ликвидация отходов, очистка
территории
17. Ликвидация последствий аварий
танкера
18. Измерение параметров атмосфе-
атмосферы (давление, плотность, температу-
температура) и других характеристик — верти-
вертикальный срез, в т.ч. числе в опасной
зоне: радиация, химическое зараже-
заражение
2
1) Воздействие энергии ударной вол-
волны на облака с целью образования в
градинах мелких трещин
2) Оперативное применение ГЛА с
формированием требуемой траекто-
траектории с рассеиванием реагента; снятие
электрического заряда путем зазем-
заземления электрического поля облаков
кабелем (метод американского уче-
ученого Россоу)
Воздействие штатными средствами
Воздействие штатными средствами
Воздействие штатными средствами
путем камуфлетного взрыва с пре-
прекращением доступа газа, нефти к
очагу пожара за счет перемещения
грунта
Воздействие штатным путем в со-
сочетании с организацией пунктов из-
измерения параметров сейсмических
волн
Воздействие штатным путем с раз-
размещением в качестве полезного гру-
груза опорных конструкций или блока
датчиков
Доставка порошка и воздействие им
на очаг пожара
Доставка порошка и воздействие им
на очаг пожара
Воздействие штатными средствами
путем ускоренного сжигания
Воздействие штатными средствами
путем эффективного сжигания тан-
танкера с разлившейся нефтью
Применение ГЛА с формированием
требуемой траектории и использова-
использованием телеметрического канала
17*
260 Конверсионные технологии применения УАБ [П.1
Обоснование целесообразности применения УАБ в народно-хозяй-
народно-хозяйственных целях изложено в [П. 1.1].
Разработанная концепция использования УАБ в гражданских це-
целях имеет реальную основу, так как её формированию предшество™
вал достаточно тщательный анализ существующих способов изучения
окружающей среды, воздействия на природные явления, ликвидации
последствий техногенных катастроф.
Вместе с тем, реализация многих из предложенных проектов нуж-
нуждается в глубокой научно-технической проработке, при этом важное
значение приобретают организационные мероприятия в силу исполь-
использования в большинстве случаев взрыва, с тем чтобы предотвратить
нежелательные последствия.
Обратим внимание на некоторые из этих последствий.
Прежде всего, это те работы, которые производятся с использовани-
использованием взрыва (рис. П. 1.1, П.1.2). В экстренных случаях с помощью штат-
штатных УАБ можно решать ряд народно-хозяйственных задач, а именно:
— ликвидация заторов при лесосплаве, заторов льда на реке;
— образование разводий во льдах;
— расчистка площадки для посадки вертолета и др. целей;
Рис. П. 1.1. Проведение взрывных работ в труднодоступных местах
— разрушение горных пород;
— образование котловин под фундамент в районе вечной мерзлоты,
труднодоступных местах;
— углубление фарватера реки;
— разрушение порогов, подводных скал;
— образование полостей для водоемов, подземных резервуаров.
Снабженная системой мягкой посадки, УАБ может выполнять за-
задачу по доставке вместо боевой части полезного груза (спасательное
П.1.1]
Основы концепции гражданского применения УАБ 261
оборудование, продукты питания и др. предметы) в труднодоступные
места (рис. П.1.3).
г
Рис. П.1.2. Борьба со снелсными лавинами
7
Рис. П.1.3. Доставка грузов (продукты, снаряжение, оборудование, средства
спасения, средства связи) в труднодоступные места
Для предотвращения разлива экологически опаснвж веществ из
поврежденных емкостей танкера применяется управляемый боеприпас,
средство воздействия которого состоит из двух частей. Первая из них
262 Конверсионные технологии применения УАБ [П.1
распыляет содержимое танкера, вторая подрывает образовавшуюся
тошшвно-воздушную смесь (рис. П. 1.4). На месте аварии не остается
ни экологически опасной жидкости, ни резервуара.
Рис. П.1.4. Ликвидация последствий аварий танкера
Пожары на нефтяных и газовых скважинах приносят колоссальный
экономический и экологический ущерб, а их тушение — сложнейшая
техническая задача, до сих пор не имеющая однозначного, общепри-
общепринятого решения. Известно, что прицельным направленным взрывом
можно «сдуть», сорвать факел со скважины. Управляемая авиабомба
может доставить в очаг пожара огнегасящие и пенообразующие смеси,
а снабженная проникающей боевой частью — «запечатает» скважину
под землей.
Технология противопожарной УАБ зависит от применяемого спо-
способа тушения и, соответственно, полезного груза: при «сдувании» —
сбоку от факела, с порошком или пенообразователем — непосредствен-
непосредственно у устья скважины, а при перекрытии — на определенной глубине
(рис. П. 1.5). Для противопожарных УАБ целесообразно использовать
известные типы систем наведения — лазерные полуактивные, теле-
телевизионные и инфракрасные, чувствительные к диапазону излучения
факела в пределах 2,2-3,5 и 4,0-4,5 мкм.
Предлагаемый способ использования штатных УАБ в целях сейсмо-
сейсморазведки дает возможность получить моментальную пространствен™
ную картину залегания полезных ископаемых на значительной пло-
площади обследования за счет большой мощности искусственного сейсмо-
взрыва.
Для этого достаточно с самолета-носителя сбросить сейсмодатчики
в заданные координаты, создав тем самым локальную систему коорди-
координат, а затем в заданную(ые) точку(и) местности сбросить штатные УАБ
П. 1.1] Основы концепции гражданского применения УАБ 263
Ч
г/
Рис. П. 1.5. Тушение пожара на газовой или нефтяной скважине
Рис. П.1.6. Сейсмическая разведка полезных ископаемых (нефти, газа, мине-
минералов)
264 Конверсионные технологии применения УАБ [П.1
(рис. П.1.6). Сигналы с сейсмодатчиков передаются на борт самолета-
носителя, так что результат операции становится известен в реальном
времени.
Интерес к проектам по использованию баллистических ракет для
борьбы с тропическими ливнями и для развертывания глобальных
систем оперативной помощи терпящим бедствие в океане отмечают
специалисты Центрального научно-исследовательского института ма-
машиностроения Российского авиационно-космического агентства [П. 1.2].
Для борьбы с атмосферными вихревыми образованиями (смерчи,
торнадо) предложены способы, основанные на применении метеоро-
метеорологического авиационного боеприпаса для образования нисходящих
потоков воздуха в атмосфере [П. 1.3, П. 1.4].
По авт. свид. СССР Ш 296 523 потоки возбуждаются взрывом ку-
кумулятивного заряда, а заряд доставляют в верхнюю часть развиваю-
развивающегося конвективного облака или в область над проветриваемой зо-
зоной атмосферы. Образующиеся при этом нисходящие потоки приводят
к разрушению конвективных облаков вследствие адиабатического на-
нагрева опускающегося воздуха и испарения облачных элементов.
Однако, для разрушения вихревых образований типа смерчей и тор-
торнадо указанные способы и боеприпас малоэффективны из-за малой
энергетики воздействия кумулятивного заряда на атмосферу (малая
масса кумулятивной струи).
В патенте №2 068 540 с приоритетом от 27.02.92 г. для разруше-
разрушения атмосферных вихревых образований (смерчей, торнадо), а также
для их профилактики предложен способ, включающий формирование
энергетического импульса подрывом заряда в верхней части вихревого
столба, при котором энергетический импульс формируют в направле-
направлении от верхней к нижней части вихревого столба. В качестве устройства
для реализации указанного способа предлагается использовать метео-
метеорологический авиационный боеприпас, содержащий корпус, в котором
размещен заряд взрывчатого вещества и взрыватель. В корпус бое-
боеприпаса введен наполнитель в виде металлических порошка и опилок,
размещенный в головной части корпуса, а заряд выполнен цилиндриче-
цилиндрической формы с удлинением 1,2—1,6 и снабжен системой многоточечного
инициирования с обеспечением направленного от донной к головной
части заряда взрыва, при этом коэффициент наполнения боеприпаса
составляет 0,6543,80. Тем самым предотвращается ущерб, наносимый
народному хозяйству подобными атмосферными явлениями природы.
Данный способ и метеорологический авиационный боеприпас позво-
позволяют разрушить атмосферное вихревое образование (смерч, торнадо)
за счет придания последнему дополнительного энергетического им-
импульса, как следствие, потери устойчивости такого образования и окон-
окончательного его распада.
Ввиду того, что смерчи быстро перемещаются (скорость доходит
до 30 м/с) наиболее рациональным путем доставки метеорологическо-
метеорологического боеприпаса в центр вихревого образования, расположенного под
нижней кромкой материнской тучи, является использование УАБ, си-
П. 1.2] Особенности схем применения УАБ гражданского назначения 265
стема наведения которой позволит отслеживать перемещения смерча
(рис. П.1.7).
Очевидно, что перечисленные выше области возможного приме™
нения УАБ требуют самостоятельной предварительной проработки.
Вместе с тем, среди них можно выделить такие задачи, которые можно
решить с помощью штатных УАБ.
I-- ,¦
Рис. П.1.7. Разрушение смерча, воздействие на циклон, предотвращение гро-
грозы, града
К ним можно отнести следующие: ликвидация заторов на лесоспла™
ве, заторов льда на реке, образование водной глади во льдах; гарантиро™
ванное обеспечение схода лавин в горах; предотвращение образования
селевых плотин; очистка территорий от завалов; углубление фарвате-
фарватера реки, расчистка порогов, разрушение подводных скал; образование
водоема, подземного резервуара; обеспечение схода лавы с кратера
в нужном направлении; сейсмическая разведка полезных ископаемых;
ликвидация отходов, выжигание участков, тушение пожара загради-
заградительным огнем.
Факты практического применения конверсионных технологий,
основанных на использовании как штатных, так и усовершенство-
усовершенствованных авиационных боеприпасов подтверждают международные
выставки [П. 1.5, П. 1.6], а также публикация [П.1.7].
П. 1.2. Особенности схем применения УАБ
гражданского назначения
При всем многообразии возможных вариантов использования УАБ
в народно-хозяйственных интересах в основу построения схем их при-
266 Конверсионные технологии применения УАБ [П.1
менения в конкретном случае может быть положена штатная схема дей-
действия соответствующего военного образца. Укрупненно типовую схему
применения УАБ в составе авиационного комплекса можно представить
в виде последовательности следующих основных этапов:
— постановка задачи и разработка полетного задания;
— наземная подготовка комплекса (размещение УАБ на подвесном
устройстве, техническое и электрическое сопряжение изделия с ком-
комплексом, проверка функциональных систем УАБ и оборудования само-
самолета-носителя на функционирование);
— взлет и полет носителя в район местонахождения объекта воздей-
воздействия;
— обнаружение экипажем или средствами комплекса требуемого
объекта воздействия, анализ обстановки, идентификация и при необ-
необходимости оперативная корректировка полетного задания, подготовка
УАБ к применению;
— выход самолета-носителя на требуемый курс с выдерживанием
необходимых высотно-скоростных параметров полета, прицеливание и
сброс УАБ;
— автономное движение УАБ, в том числе участок неуправляемого
(баллистического) полета, парирование стартовых возмущений и ста-
стабилизация углового положения в пространстве, участок наведения;
— функционирование УАБ на конечном участке траектории полета
или непосредственно при физическом контакте с объектом воздействия
(отделение и «мягкая» посадка отсека с полезным грузом, механическое
разрушение преграды и т. п.).
Конкретные особенности каждой схемы применения определяются,
в свою очередь, типом и функционально-техническими возможностями
информационного прибора (ИП) и полезной нагрузки (ПН), летно-тех-
ническими характеристиками авиационного комплекса и его бортовых
систем, условиями применения и требованиями по условиям функцио-
функционирования (работы) ПН в непосредственной близости или физическом
контакте УАБ с объектом воздействия (скорость и высота подлета УАБ,
угол наклона траектории и угловое положение УАБ к моменту сраба-
срабатывания его бортовых систем, обеспечивающих функционирование ПН
и др.).
На рис. П. 1.8, П. 1.9 представлены типовые схемы действия суще-
существующих УАБ (начиная с этапа доставки УАБ в район зоны предпола-
предполагаемого применения) с телевизионными и лазерными полуактивными
ИП, соответственно.
Следует отметить, что определенные возможности, с точки зрения
расширения условий применения УАБ, открываются в связи с разра-
разработкой перспективных изделий, прежде всего, оснащаемых трансляци-
онно-командными информационными системами. Организация двух-
двухсторонних радио или волоконно-оптических линий связи авиационного
комплекса с УАБ обеспечивают в данном случае активное участие
человека-оператора в процессе наведения вплоть до момента оконча-
окончания функционирования изделия. Это позволяет обеспечить высокую
конечную точность наведения, реализовать при необходимости селек-
П. 1.2] Особенности схем применения УАБ гражданского назначения 267
О ^_ 12 3 4
Рис. П.1.8. Схема применения УАБ по прямому назначению Мй 1: 0-1 — поиск
и обнаружение объекта, 1—2 — распознавание и прицеливание, 2—5 — подсвет
объекта лазерным лучом, 2—3 — расчет точки сброса и подготовка изделия
к применению, 3 — сброс изделия, 3—4 — баллистический участок полета,
4 — захват объекта на автосопровождение, ^—5 — самонаведение
Рис. П.1.9. Схема применения УАБ по прямому назначению №2: 0-1 —
поиск и обнаружение объекта, 1—2 — распознавание и прицеливание, 2—3 —
доприцеливание через ИП5 3 — захват объекта на авто- сопровождение, 3—
4 — расчет точки сброса и подготовка изделия к применению, 4 — сброс
изделия, 4~5 — самонаведение
268 Конверсионные технологии применения УАБ [П.1
тивное наведение, а при волоконно-оптическом способе связи, кроме
того, значительно упростить и удешевить УАБ за счет переноса части
аппаратуры трансляционно-командного наведения на борт авиацион-
авиационного комплекса.
Отличительной особенностью схемы применения телеуправляемых
УАБ по сравнению с самонаводящимися изделиями является в данном
случае наличие ряда операций по установлению двухсторонней связи.
Так, в совместном полете приемо-передающая аппаратура авиацион-
авиационного комплекса и УАБ приводятся в исходное состояние и при необ-
необходимости осуществляется ее проверка на функционирование. В вы-
вычислительный комплекс носителя и БЦВМ УАБ вводятся данные (па-
(параметры полета, литеры, коды и пр.), необходимые для организации
контуров управления антенными системами в режиме выставки и их
пространственной ориентации в автономном полете.
После отделения УАБ в расчетный момент времени аппаратура на
комплексе и изделии включается в рабочий режим, антенные системы
отрабатывают сигналы управления и с момента установления связи
на телевизионном индикаторе летчика-оператора появляется изобра-
изображение, получаемое от ИП УАБ. В дальнейшем поддержание двух-
двухсторонней связи производится в автоматическом режиме, а действия
оператора сводятся к наведению УАБ с помощью имеющихся в его
распоряжении специальных органов управления.
В целом аналогична, за исключением способа установления связи,
схема действия УАБ, управляемых по волоконно-оптическому кабелю.
Здесь информационный контакт с комплексом обеспечивается путем
технического сопряжения кабеля при подвеске изделий под носитель.
Условия изменения взаимного положения объектов после сброса УАБ
достигаются за счет одновременной безынерционной смотки волокна
с катушек, расположенных на носителе и УАБ.
Очевидно, что в отличие от требований к УАБ, используемым по
прямому назначению, на применение УАБ в мирное время существен-
существенное влияние будут оказывать следующие факторы:
— возможность получения до начала практической реализации ис-
исчерпывающей априорной информации об объекте воздействия (место-
(местоположение, наличие и вид окружающих объект ориентиров, геомет-
геометрические, топологические и информационные признаки, прочностные
характеристики и др.);
— отсутствие жестких ограничений, накладываемых на время нача-
начала и продолжительности решения задачи и, как следствие, возможность
выбора наиболее благоприятных с точки зрения достижения конечного
результата условий применения УАБ (погодно-климатические факто-
факторы, время суток и пр.);
— возможность максимально эффективного использования имею-
имеющейся информации на этапе разработки полетного задания, в том числе
при выборе рационального маршрута полета в район расположения
объекта воздействия, высотно-скоростных режимов применения, ра-
ракурсов подлета к объекту, способа целеуказания, требуемого наряда
УАБ и т. д.;
П. 1.2] Особенности схем применения УАБ гражданского назначения 269
— возможность проведения при необходимости цикла предвари-
предварительной подготовки и адаптации экипажа к реальным условиям, вклю-
включая тренировочные полеты в районе объекта с отработкой, в частности,
операции прицеливания и имитацией сброса УАБ;
— возможность обеспечения дополнительных условий, повышаю-
повышающих качество и надежность выполнения отдельных, наиболее ответ-
ответственных операций в процессе решения народно-хозяйственной зада-
задачи, например, размещение в требуемом месте искусственных источни-
источников информации (уголковые отражатели, радио или тепловые маяки
и т. п.) с целью повышения точности целеуказания и конечного наведе-
наведения УАБ в требуемую точку;
— возможность оперативного получения авиационным комплексом
данных о результатах решения задачи, в том числе путем дополнитель-
дополнительных облетов и при необходимости повторное применение УАБ с учетом
требуемой корректировки.
Таким образом, наличие указанных факторов дает основание рас-
рассматривать условия применения УАБ по гражданскому назначению
как максимально приближенные к полигонным, что в результате спо-
способно обеспечить достаточно высокую конечную эффективность реше-
решения поставленной задачи.
По степени отличия от типового варианта возможные схемы приме-
применения УАБ гражданского назначения можно разделить на три основ-
основные группы:
1. Способ применения, содержание, последовательность этапов и
действий экипажа, циклограмма функционирования бортовой аппара-
аппаратуры УАБ и комплекса оборудования самолета-носителя полностью
соответствуют варианту применения УАБ по прямому назначению
(см. рис. П.1.8, П.1.9).
Эта группа охватывает решение той части практических задач,
где использование УАБ предусматривает достижение положительного
эффекта за счет таких традиционных свойств и качеств этого класса
ЛА, как получение в заданной точке (области) среды мощной ударной
волны, проникновение и разрушение различных преград и, в том числе
прочных и особопрочных, создание значительного эффекта с высокой
степенью интенсивности процесса горения и т. п. При этом, как показы-
показывают предварительные исследования, решение данных задач возможно
без каких-либо конструктивно-технологических, аппаратурных и алго-
алгоритмических доработок УАБ.
2. Схемы действия, которые при сохранении в целом традиционного
способа применения УАБ требуют введения в типовую циклограмму
функционирования аппаратуры дополнительных, специальных сигна-
сигналов (команд) или предусматривают доработку алгоритмов (законов)
управления. Указанные изменения касаются, главным образом, аппа-
аппаратурной (приборной) части УАБ и не требуют изменения аэродина-
аэродинамических и массово-геометрических характеристик, а также конструк-
конструктивно-компоновочной схемы изделия. В качестве примера такого ис-
использования УАБ можно рассматривать, в частности, решение задачи
по тушению горящей газовой или нефтедобывающей скважины с по-
270 Конверсионные технологии применения УАБ [П.1
мощью существующих образцов УАБ, оснащаемых ИП инфракрасного
типа и традиционной ПН (см. рис. П.1.10).
В данном случае требуемые профиль и параметры траектории дви-
движения УАБ, а также необходимое воздействие ударной волны, отсе-
отсекающей горящий факел от выходящего из скважины потока газа или
нефти, могут быть обеспечены за счет реализации системой управления
УАБ соответствующей программной траекторией специального алго-
алгоритма формирования и выдачи команды на срабатывание ПН.
Рис. П.1.10. Схема применения УАБ с новыми алгоритмами наведения. 0 —
сброс УАБ, 0—1 — программная траектория УАБ, 1—2 — измерение траектор-
ных параметров, 2 — точка инициирования ПН, 3 — факел, 4 — горловина
скважины
К той же группе схем применения следует отнести варианты, осно-
основанные на нетрадиционных способах целеуказания. Например, органи-
организация лазерного подсвета объекта воздействия (заданной точки на объ-
объекте) с помощью мобильной наземной станции, исключая тем самым
комплекс операций, связанных с использованием бортовой станции ла-
лазерного подсвета самолета-носителя в обеспечение применения УАБ,
оснащаемых лазерными полуактивными ИП.
3. Схемы действия, имеющие существенные отличия от традицион-
традиционных способов применения УАБ, когда наряду с введением дополнитель-
дополнительных команд и изменения циклограммы работы бортовых систем УАБ
требуется введение в состав УАБ дополнительного оборудования и сна-
снаряжения, изменяется тип полезной нагрузки или требуются особые
условия для функционирования УАБ на конечном участке траектории
полета (торможение, выполнение специального маневра и пр.).
В качестве примера такого использования УАБ можно рассмат-
рассматривать решение задачи доставки грузов в труднодоступные районы.
При этом очевидно, что помимо замены традиционной полезной на-
нагрузки на специальный контейнер, содержащий доставляемый груз,
потребуется дополнительно оснащение УАБ системой торможения на
конечном участке траектории (парашютная система, тормозные щитки
и пр.) или устройства «гашения» скорости приземления (приводнения)
контейнера после его отделения от УАБ (рис. П.1.11).
В заключение следует особо отметить, что реализация указанной до-
достаточно широкой номенклатуры вариантов схем действия УАБ для ре-
решения народно-хозяйственных задач не вызывает серьезных проблем.
Вытекающие из отмеченных особенностей требования по применению
УАБ могут быть относительно просто и без значительных затрат удо-
П.1.2] Особенности схем применения УАБ гражданского назначения 271
О
Рис. П. 1.11. Схема применения УАБ с новыми алгоритмами наведения и
конструктивными нововведениями 0 — сброс УАБ, 0—1 — программная тра-
траектория УАБ, 1—2 — измерение траекторных параметров, 2—3 — отстыковка
ПН, включение системы торможения, 3—4 — парашютирование ПН, 4 —
точка доставки
влетворены за счет заложенных в существующих и разрабатываемых
перспективных образцах достаточно прогрессивных и апробированных
на практике научно-технических, схемно-аппаратурных и конструк-
конструкторских решений.
Список литературы к приложению П.1
П. 1.1. Семенов С, Харчев В, В мирных целях. Журнал «Техника-молоде-
«Техника-молодежи», 2001. №3. С. 11-15.
П. 1.2. Уткин В. Ф., Осадченко А. С, Браславский П. Ф. Баллистические ра-
ракеты — в мирных целях // Научно-публицистический и информаци-
информационный журнал «Наука в России», 2000. № 3. С. 127-132.
П.1.3. Авт. свид. №296 523, СССР, кл. А01 G 15/00.
П. 1.4. Патент № 2 068 540, Россия, кл. F. В. 25/00, А 01 G 15/00.
П. 1.5. Система авиационных бомбовых средств тушения и локализации лес-
лесных пожаров и подавления зон огневого шторма при техногенных ава-
авариях и катастрофах / Проспект ФГУП «Базальт». VI международный
салон «Технологии безопасности», 6—9 февраля 2001 года, г. Москва.
П.1.6. Авиационный способ локализации и тушения лесных пожаров. Про-
Проспект Международного Фонда попечителей Московского авиационно-
авиационного технологического университета им. К.Э. Циолковского. Междуна-
Международная выставка МАКС-2001 14-19 августа 2001 года, г. Жуковский
Московской области.
П. 1.7. Шумилин Б. В Турции оценили // Журнал «Изобретатель и рацио-
рационализатор». № 1. 2002 г. С. 14.
Приложение П.2
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
СОВРЕМЕННЫХ И ПЕРСПЕКТИВНЫХ
БОРТОВЫХ ИНТЕГРИРОВАННЫХ СИСТЕМ
БЕСПИЛОТНЫХ МАНЕВРЕННЫХ ЛА
На сегодняшний день рынок предлагает широкий перечень инер-
циально-спутниковых систем (ИСС). Лидирующие позиции в области
разработки и производства ИСС занимают американские компании
(Litton, Rockwell Collins, Applanix, KVH, Smith Aerospace и др.), из-
вестно также о существовании подобных систем у европейских фирм-
производителей навигационного оборудования (Litef и др.). Активно
развивается производство ИСС и в России, где можно выделить разра-
разработки КБ Раменское, ЦНИИ Электроприбор.
Первыми интегрированными системами, предложенными пользо-
пользователю, были раздельные ИСС, требовавшие минимального измене-
изменения существующей аппаратуры. Следует также отметить, что уровень
точности и другие характеристики (в том числе массово-габаритные)
подобных систем удовлетворяют требованиям многих пользователей
(относительно грубая навигация и ориентация). В то же время цена
на раздельные системы часто бывает ниже цены на интегрированные
системы более высокой степени интеграции. Вызвано это тем, что тех-
технология и производство ИСС во многом до конца не сформированы,
и издержки при производстве интегрированных систем более высокой
степени интеграции вносят существенный вклад в конечную цену.
Однако очевидно, что раздельные системы (не являясь по сути
интегрированными, а, соответственно, и не обладая их столь важными
преимуществами) не могут удовлетворить пользователей, прежде всего
авиационных и схожих с ними, по требованиям точности и надежности
систем. ИСС все чаще входят в состав стандартного навигационного
оборудования, налаживается их промышленное производство, и, как
следствие, снижаются упоминавшиеся выше издержки.
Основную массу производимых сегодня реально интегрированных
систем составляют слабосвязанные системы, являясь своего рода ком-
компромиссным (переходным к еще интегрированным системам более вы-
высокой степени интеграции) вариантом ИСС. Выполненные, как прави-
правило, в виде единого навигационного блока, слабосвязанные ИСС обес-
обеспечивают пользователя не только ИНС/СНС информацией, но и не-
независимыми ИНС и СНС данными. Часто бывает трудно однознач-
но классифицировать систему как сильно- или слабосвязанную и, не-
несмотря на рекламные заявления производителей, после тщательного
анализа заявленной структуры, многие ИСС следует относить скорее
П.2] Основные характеристики бортовых интегрированных систем 273
к слабосвязанным системам. Среди подобных систем молено выделить
отечественные разработки ЦНИИ «Электроприбор» и КБ Раменское.
Российская фирма «Электроприбор» представляет свою разработ-
ку — миниатюрную интегрированную инерциально-спутниковую си™
стему навигации «МИНИНАВИГАЦИЯ-1». Эта система предназначена
для малых судов, летательных аппаратов и наземных транспортных
средств. Она построена в едином конструктиве на базе инерциального
измерительного модуля на волоконно-оптических гироскопах и миниа-
миниатюрных акселерометрах, а также приемника GPS/ГЛОНАСС и вычис-
вычислительного устройства. Основные характеристики системы приведены
в табл. П.2.1.
Таблица П.2.1
Предельные погрешности определения:
Координат
Скорости
углов качки и рыскания
Составляющих угловой скорости
Энергопотребление
Масса
75 м
0,25 м/с
0,2 град
0,1 град/с
50 Вт
4 кг
Другая российская фирма — ФНПЦ «Раменское приборостроитель™
ное конструкторское бюро» — ведущий российский разработчик инте-
интегрированных комплексов, систем и приборов бортового радиоэлектрон-
радиоэлектронного оборудования представляет несколько интегрированные навига-
навигационные системы: инерциально-спутниковую систему ИСС1, лазерную
инерциально-спутниковую систему ЛИНС2000, инерциальную систему
ИНС2000, работающую с приемником СНС, и навигационную систему
определения ориентации БКВ-95.
Инерциальная навигационная система ИСС-1 разработана на основе
использования инерциальной гироскопической платформы и сервисной
электроники. Система обеспечивает определение и выдачу пилотажно-
навигационных параметров и предназначена для комплексов наведения
различных типов летательных аппаратов. Интегрируется со спутнико-
спутниковыми навигационными системами GPS и ГЛОНАСС (табл. П.2.2).
Лазерная инерциально-спутниковая система ЛИНС-2000 — сов-
совместный продукт ФНПЦ РГЖБ (Россия) и фирмы Thales (Франция).
Система разработана для новых и модернизируемых российских само-
самолетов и соответствует российским и зарубежным стандартам. Мало-
Малогабаритная бесплатформенная инерциальная навигационная система
разработана на основе использования блока чувствительных элементов
на кольцевом лазерном трехосном гироскопе фирмы Thales и электро-
электроники РГЖБ. Система обеспечивает определение и выдачу пилотажно-
навигационных параметров, интегрируется со спутниковыми навигаци-
навигационными системами GPS и ГЛОНАСС. Основные технические характе-
характеристики приведены в табл. П.2.3.
18 Управление и наведение
274 Основные характеристики бортовых интегрированных систем [П.2
Таблица П.2.2
Погрешности
координат
относительной скорости
крена и тангажа
истинного курса
Время готовности
Среднее время наработки на отказ
Напряжение питания
Потребляемая мощность
Габаритные размеры
Масса
Интерфейс
Режим ИНС
5,4 км/ч
2,4 м/с
Режим СНС
100 м
0,8 м/с
0,1°
12 угл. мин/ч
15 мин (с гирокомпасированием)
10 мин. (по заданному курсу)
1000 ч
27 В (основной)
115 В, 400 Гц (обогрев)
200 Вт, 900 ВА
400 х 240 х 230 мм
18 кг
В стандарте RS-422, 614 кГц
Таблица П.2.3
Погрешности
координат
путевой скорости
крена и тангажа
истинного курса
Время готовности
Среднее время наработки на отказ
Напряжение питания
Потребляемая мощность
Габаритные размеры
Масса
Интерфейс
Режим ИНС
1,8 км/ч
1,8 м/с
Режим СНС
30 м
0.2 м/с
0,1°
7,2 угл. мин/ч
4 мин (с гирокомпасированием)
30 с (по заданному курсу)
5000 ч
115 В, 400 Гц (основной)
27 В (резервный)
90 ВА, 90 Вт
280 х 178 х 178 мм
9 кг
Мультиплексный канал
информационного обмена
в соответствии с ГОСТ 26765.52-87
и MIL STD-1553 В — 8 линий для
приема и 3 линии для передачи
последовательного кода
в соответствии с ГОСТ 18977-79
и ARINC-429
П.2] Основные характеристики бортовых интегрированных систем 275
Инерциальная навигационная система ИНС-2000 выполнена в виде
моноблока, состоящего из гиростабилизированной платформы на базе
динамически настраиваемых гироскопов, сервисной электроники, вы-
вычислителя, блока интерфейса и спутниковой навигационной системы.
В состав системы входит антенное устройство спутниковой навигацион-
навигационной системы. Система обеспечивает определение и выдачу пилотажно-
навигационных параметров и предназначена для новых и модернизирую
емых вертолетов и самолетов. Основные технические характеристики
приведены в табл. П.2.4.
Таблица П.2.4
Погрешности
координат
путевой скорости
крена, тангажа
истинного курса
Время готовности
Среднее время наработки на отказ
Напряжение питания
Потребляемая мощность
Габаритные размеры
Масса
Интерфейс
Режим ИНС
3,7 км/ч
2,0 м/с
Режим СПС
40 м
0,2 м/с
0,1°,
18 угл. мин/час
15 мин. (с гирокомпасированием)
10 мин. — по заданному курсу
1000 ч
27 В (основной)
115 В 400 Гц (обогрев)
150 Вт до 1000 ВА
385 х 264 х 195 мм
21 кг
Мультиплексный канал
информационного обмена
в соответствии с ГОСТ 26765.52^87
и MILSTD-1553B 8 линий для
приема и 3 линии для передачи
последовательного кода
в соответствии с ГОСТ 18977-79
и ARINC-429
Навигационная система определения ориентации БКВ-95 представ-
представляет собой малогабаритную навигационную систему, разработанную на
базе динамически настраиваемых гироскопов, силиконовых акселеро-
акселерометрах и обслуживающей электроники. Навигационная система БКВ™
95 корректируется с помощью спутниковых навигационных систем
GPS и ГЛОНАСС. Основные технические характеристики приведены
в табл. П.2.5.
Существуют зарубежные варианты систем. Например, фирма «Lit-
«Litton Systems» представляет систему LN-100G, основанную на лазерных
гироскопах «Zero-Lock™» и акселерометрах «Д™4 Triad». С помощью
дополнительного модуля система дополняется спутниковым приемни-
18*
276 Основные характеристики бортовых интегрированных систем [П.2
Таблица П.2.5
Погрешности
Координаты
крен и тангаж
Относительная скорость
Истинный курс
Гироскопический курс
Гиромагнитный курс
Питание
Энергопотребление
Размеры
Вес
Режим ИНС
5 км
0,5°
6 м/с
Режим СНС
200 м
0,5°
0,6 м/с
1,5°
0,5°/час
1°
27 В и 115 В, 400 Гц
< 80 Вт, < 170 ВА
420 х 133 х 194 мм
не более 9,5 кг
ком. Система LN-100G может предоставлять потребителю решение
в трех видах: гибридное СНС-ИНС, чистое ИНС, чистое СНС. В каче-
качестве процессорного модуля в системе LN-100G используется 32-битный
процессор «PowerPC» от фирмы «Motorola», программное обеспечение
от фирмы «Ada».
Другая разработка этой фирмы — интегрированная навигационная
подсистема LINS-2510. Это интегрированная сильно связанная подси-
подсистема обеспечивающая повышенный уровень производительности, как
при решении задач управления воздушными объектами, так и при
решении других специальных навигационных задач. Точность рабо-
работы обеспечивается интеграцией инерциальной навигационной системы
и системы глобального позиционирования (INS/GPS) и высоко помехо-
защищенной антенной системы. LINS-2510 состоит из трех встроенных
INS/GPS блоков LN-251, GPS-антенны и высоко помехозащищенного
электронного блока приема сигнала. LN-251 — это готовая интегри-
интегрированная инерциально-епутниковая (INS/GPS) навигационная система
со встроенным 12-ти канальным GPS^npneMHHKOM, поддерживающим
режимы all-in-view, SAASM, и, позволяющим принимать Р(У)-код.
Полная интеграция или тесная связь спутникового и инерциального
блоков обеспечивает гораздо более высокую степень точности и про-
производительности по сравнению с предыдущими поколениями таких си-
систем. Открытая модульная архитектура позволяет системе легко адап-
адаптироваться для различных применений и отвечать вновь появляющим™
ся требованиям. Основные технические характеристики приведены в
табл. П.2.6.
Последняя разработка компании Rockwell Collins на конец 2001
года — навигационный модуль GNP-12S. Система представляет со-
собой 12-ти канальный высокопроизводительный, работающий в режиме
SAASM, GPS-приемник и интегрированный навигационный процессор,
который полностью использует преимущества встроенного инерциаль-
П.2] Основные характеристики бортовых интегрированных систем 277
Таблица П.2.6
Погрешности
Координат
Скорость
Крен, тангаж и курс
Питание
Размеры
Температура
Охлаждение
Вибрация
Ударные нагрузки
Максимальные скорости
Максимальные ускорения
Режим ИНС
1,44 км/час
от 0,6 м/с
до 1,5 м/с СКО
от 0,05 до
0,2 град. СКО
Режим СНС
< 10 м
0,03 м/с СКО
0.05 град. СКО
MIL-STD-704A < 30 Вт
2786 куб. см
От ^54 °С до 71 °С
Пассивное (MIL E 5400 class 1,2)
8.9g
86 g, 8 мс 21g, 40 мс
12 000 м/с A000 град/с)
100 g A500 град/с х с или 13 g/c)
ного измерительного блока (IMU). Навигационный модуль GNP-12S яв-
является ответом компании Rockwell Collins на появившуюся потребность
в недорогих, высокопроизводительных интегрированных GPS-систе-
мах навигации, управления и контроля. GNP-12S является, так на™
зываемой, сильно связанной системой, причем 12-ти канальный GPS^
приемник обеспечивает прем сигналов от всех спутников, находящих-
находящихся в зоне видимости (All-in-View), и высокую помехозащищенность,
включая возможность использования прямого Y-кода. GNP-12S обес-
обеспечивает чрезвычайно высокую точность и подходит для решения
большинства возможных навигационных задач, в том числе наведение
баллистических ракет, определение ориентации в сложных динамиче-
динамических условиях. Основные технические характеристики приведены в
табл. П.2.7.
Общая тенденция развития рынка такова, что под влиянием все
более жестких требований разработчики ИСС движутся по пути углуб-
ления интеграции между СНС и ИНС. Ведущие западные произво-
производители ужу сегодня предлагают свои системы, выполненные по схе-
схеме жесткосвязанных ИСС. Например, это системы фирм Litton —
LINS 2510, Rockwell Collins — GNP 12S и Applanix, предлагающей
наиболее широкий перечень ИСС, среди общедоступных систем. Сле-
Следует отметить, что в свете общего усиления мер, в том числе и ин-
информационной, безопасности со стороны американского правительства
и американских компаний, еще недавно доступная информация сегодня
является закрытой. Поэтому составить полную картину достигнутого
американскими компаниями уровня производства и разработки ИСС,
безусловно, наиболее технически и технологически развитыми, доста-
достаточно сложно. В том числе существуют не подтвержденные сведения
о том, что одной из таких компаний начато производство ИСС по схеме
глубоко интегрированной системы.
278 Основные характеристики бортовых интегрированных систем [П.2
Таблица П.2.7
Определение координат без помех
Определение скорости
Точность синхронизации времени
Время инсталляции
Тангаж
Крен
Курс
Диапазон рабочих температур
Максимальная скорость
Максимальное ускорение
Максимальные ударные нагрузки
Горизонтальные: 1,22 м
Вертикальные: 2,04 м
Сферические: 2,38 м
PPS: 0,05 м/с Aа)
Без ключа: 0,5 м/с СКО
DGPS: ОД м/с Aа)
100 не Aа)
53 с
9 с (горячий старт)
3,5 мин. (холодный старт)
0,15° Aа)
0,15° Aа)
0,20° Aа)
От -54 °С до +71 °С
Испытано при 1200 м/с
(спроектировано для 12 000 м/с)
Испытано при 10 g
(спроектировано для 15g)
Испытано при 10 g/c
(спроектировано для 15 g/c)
Список литературы к приложению П.2
П.2.1. Federal Radlonavigation Plan / МОТ & MOD, USA, 1994.
П.2.2. Глобальная спутниковая навигационная система ГЛОНАСС / Под
ред. В.Н. Харисова, А. И. Перова, В. А. Болдина. — М.: ИПРЖР,
1998. — 400 с.
П.2.3. Phillips Д., Schmidt С GPS/INS Integration / AGARD Lecture Series
on «System Implementations and Innovative Applications of Satellite
Navigation», Paris, France, 4-5 July, 1996. — LS-207. P. 9-1-9-18.
П.2.4. Соловьев Ю.А. Результаты комплексирования спутниковых и инер-
циальных навигационных систем в авиации // Новости навигации
(Интернет-издание). 1999. № 2.
П.2.5. Соловьев Ю.А. Системы спутниковой навигации. — М.: ЭКО-ТРЕН-
ДЗ, 2000, 270 с.
П.2.6. Веремеенко К. К., Тихонов В, А, Навигационно-посадочный ком-
комплекс на основе спутниковой радионавигационной системы // Радио-
Радиотехника. 1996. № 1. Журнал в журнале «Радиосистемы», выпуск 8,
«Радионавигационные системы и навигационные комплексы». № 1.
Радиотехника. С. 94-99.
П.2.7. Materials of the 8th / Saint-Petersburg International Conference on
Integrated Navigation Systems. 28-30 May, 2001.
П.2.8. Barbour N., Schmidt G. Inertial Sensor Technology Trends // The
Draper Technology Digest. V. 3. CSDL-C-6500. P. 5-13.
П.2] Основные характеристики бортовых интегрированных систем 279
П.2.9. Интегрированные инерциально-спутниковые навигационные систе-
системы / Под ред. Пешехонова. — С.-Петербург, 2001. — 235 с.
П.2.10. Phillips Rn Schmidt G. GPS/INS Integration / AGARD Lecture Series
on «System Implementations and Innovative Applications of Satellite
Navigation», Paris, France, 4-5 July, 1996. — LS-207. P. 9-1-9-18.
П.2.11. Веремеенко К. К. Оценка возможностей идентификации погрешно-
погрешностей вектора выходных параметров БИНС и инструментальных по-
погрешностей ее измерительных элементов путем комплексирования
со спутниковой системой навигации в процессе полета // Гироскопия
и навигация. 1996. № 1B). С. 74-75, С.-Петербург.
П.2.12. Veremeenko Kn Tikhonov V. Simulation of error estimation process
In integrated navigation & landing complex / CEAS Symposium on
Simulation Technology «Making It Real», Delft, 1995, Nr.: MOD16.
П.2.13. Веремеенко К. К., Тихонов В. Л., Кудрявцев В.М., Ходаков А. В.
Интегрированный навигационо-посадочный комплекс / Сб. трудов
Международной конференции «Планирование глобальной радиона-
радионавигации». Т. 2. С. 7-1-7-10.
П.2.14. Veremeenko К., Mouzilev I. Deck-based aircraft landing complex de-
designed on the basis of a satellite navigation system / Proceedings of the 4th
MAI/BUAA International Symposium on automatic control. Moscow,
Russia, August, 28-30, 1997. P. 39-44.
П.2.15. Veremeenko K., Tikhonov V. Adaptive control of vertical channel of the
Integrated navigation complex during precision approach / Proceedings
of the 10thCEAS Conference «Free Flight». Amsterdam, the Netherland,
Oct.20-22, 1997, Paper #19.
П.2.16. Plekhanov Vn Tikhonov V.7 Veremeenko K. Integrated Inertlal and Satel-
Satellite Navigation System Based on Micromechanlcal Module / Proceedings
of the 5thSaint-Petersburg International Conference on Integrated Nav-
Navigation Systems. St-Petersburg, May, 1998. P. 95-101.
П.2.17. Веремеенко К. К., Музылев И. Г., Зайцев А. С. Навигационно-поса-
дочный комплекс на основе спутниковых навигационных систем /
Тезисы докладов «Аэрокосмические приборные технологии». Наци-
Национальный симпозиум с между народным участием. Москва, 28 мая—1
июня 1999. С. 11-12.
П.2.18. Веремеенко К. К., Денисов В. И., Карпов А. С. Исследование характе-
характеристик инерциально-спутниковых навигационных систем / Матери-
Материалы докладов Всероссийской молодежной НТК «Приборостроение
в аэрокосмической технике». Арзамас, 1999. С. 97-99.
П.2.19. Phillips R., Schmidt G. Relative and Differential GPS / AGARD Lec-
Lecture Series on «System Implementations and Innovative Applications of
Satellite Navigation». Paris, France, 4-5 July, 1996. — LS-207. P. 5-1-
5-22.
П.2.20. Веремеенко К. К. Интегрированные инерциально-спутниковые нави-
навигационные системы: проблемы и перспективы развития / Доклад на
Международных научных чтениях, посвященных памяти И. Сикор-
ского. — Москва, май 2001.
Научное издание
УПРАВЛЕНИЕ И НАВЕДЕНИЕ БЕСПИЛОТНЫХ
МАНЕВРЕННЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
НА ОСНОВЕ СОВРЕМЕННЫХ ИНФОРМАЦИОННЫХ
ТЕХНОЛОГИЙ
Редактор Е.С. Артоболевская
Оригинал-макет: В.В. Худяков
Оформление переплета: А.Ю. Алехина
ЛР №071930 от 06.07.99. Подписано в печать 28.07.03.
Формат 60x90/16. Бумага офсетная. Печать офсетная.
Усл. печ. л. 17,5. Уч.-изд. л. 19,8. Тираж 400 экз. Заказ №
Издательская фирма «Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117997 Москва, ул. Профсоюзная, 90
E-mail: fizmat@maik.ru
Отпечатано с диапозитивов
в РГУП «Чебоксарская типография № 1»
428019 Чебоксары, пр. И. Яковлева, 15