











Author: Распопов В.Я.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты электроника автоматизация приборостроение
ISBN: 978-5-8125-1467-9
Year: 2010



Распопов В.Я.
МИКРО-
системная
АВИОНИКА
Посвящается 80-летию
Тульского государственного
университета и 50-летию
кафедры «Приборы управления»
В.Я. Распопов
МИКРО -
системная
АВИОНИКА
«Рекомендовано Учебно-методическим
объединением вузов Российской Федерации по
образованию в области приборостроения и
оптотехники для студентов высших учебных
заведений, обучающихся по направлению
подготовки 200100 - Приборостроение и
специальности 200101 - Приборостроение»
Тула
2010
УДК 629.7.05
ББК 39.53
Р 24
Рецензенты:
Кафедра «Приборы и информационно-измерительные системы» Казанского
государственного технического университета им А.Н. Туполева
зав. каф., д-р техн, наук, проф. В.М. Солдаткин,
д-р техн, наук, проф. К.В. Подмастерьев
Распопов В.Я.
Микросистемная авионика: учебное пособие. Тула: «Гриф и К», 2010. - 248 с.: ил.
ISBN 978-5-8125-1467-9
Приведены определения микросистемной авионики, малоразмерных беспилотных
летательных аппаратов и дана характеристика решаемых ими задач и проблемных вопросов
проектирования. Изложена предметная область микросистемной авионики: принципы
построения систем управления малоразмерными беспилотными летательными аппаратами и
основы динамики их полета; принципы построения и законы управления автопилотов;
датчики, применяемые в микросистемной авионике; системы ориентации и навигации и
рулевой привод. Каждый раздел завершается контрольными вопросами.
Для студентов вузов, обучающихся по специальностям «Приборостроением «Приборы
и системы ориентации, стабилизации и навигации» направлений подготовки «Приборо-
строение», «Автоматизация и управление» и др., а также может быть полезна магистрантам,
аспирантам и инженерно-техническим работникам.
Работа выполнена при поддержке гранта РФФИ № 09-08-00891а
УДК 629.7.05
ББК 39.53
Р 24
ISBN 978-5-8125-1467-9
© Распопов В.Я., 2010
© Издательство «Гриф и К», 2010
Перепечатка, все виды копирования и воспроизведения материалов, опубликованных в
данной книге, допускаются только с разрешения издательства и со ссылкой на источник
информации
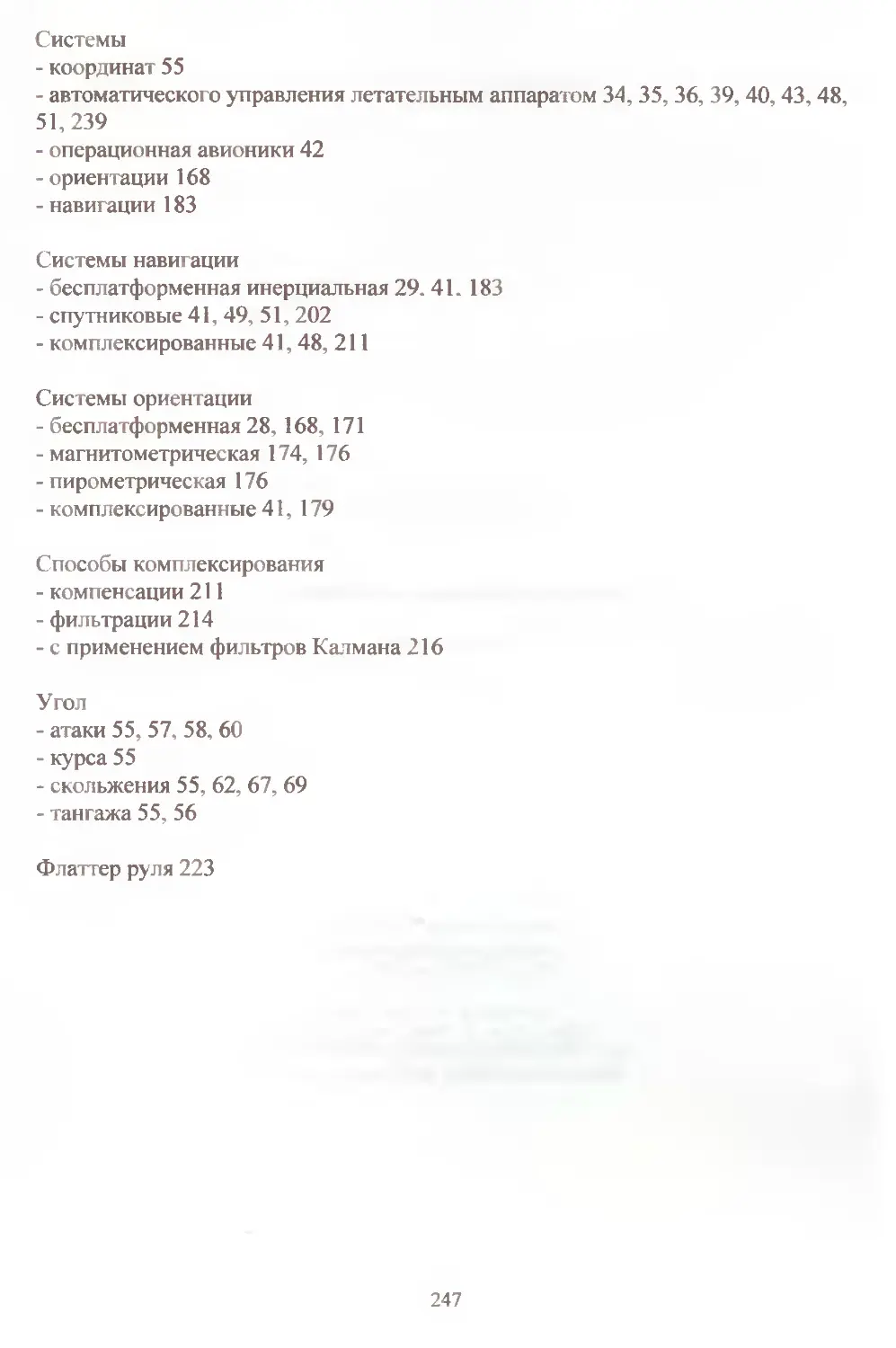
Оглавление
Принятые сокращения 6
Предисловие 7
Введение. Малоразмерные беспилотные летательные
аппараты и микросистемная авионика 11
В. 1. Малоразмерные беспилотные летательные аппараты 11
В.2. Микросистемная авионика 24
Контрольные вопросы 33
Глава 1. Структура и состав авионики и наземной
аппаратуры управления и связи 34
1.1. Способы управления полётом 34
1.2. Режимы полёта и структуры аппаратуры управления БПЛА 38
1.3. Операционная система авионики 42
1.4. Наземная аппаратура управления 46
1.5. Примеры построения и технические характеристики
бортовой аппаратуры управления (авионики 1 48
Контрольные вопросы 54
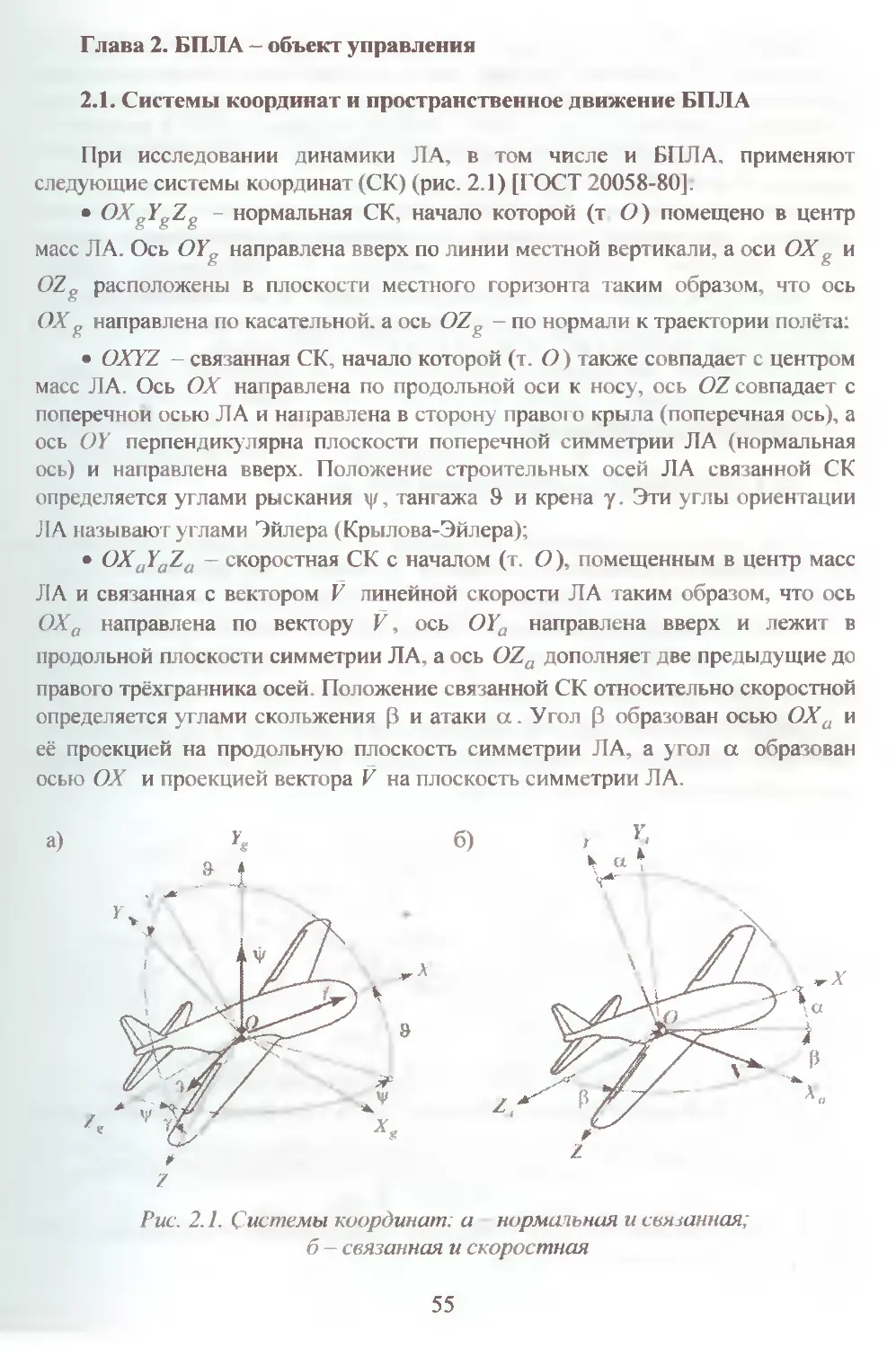
Г лава 2. БПЛА — объект управления 55
2.1. Системы координат и пространственное движение БПЛА 55
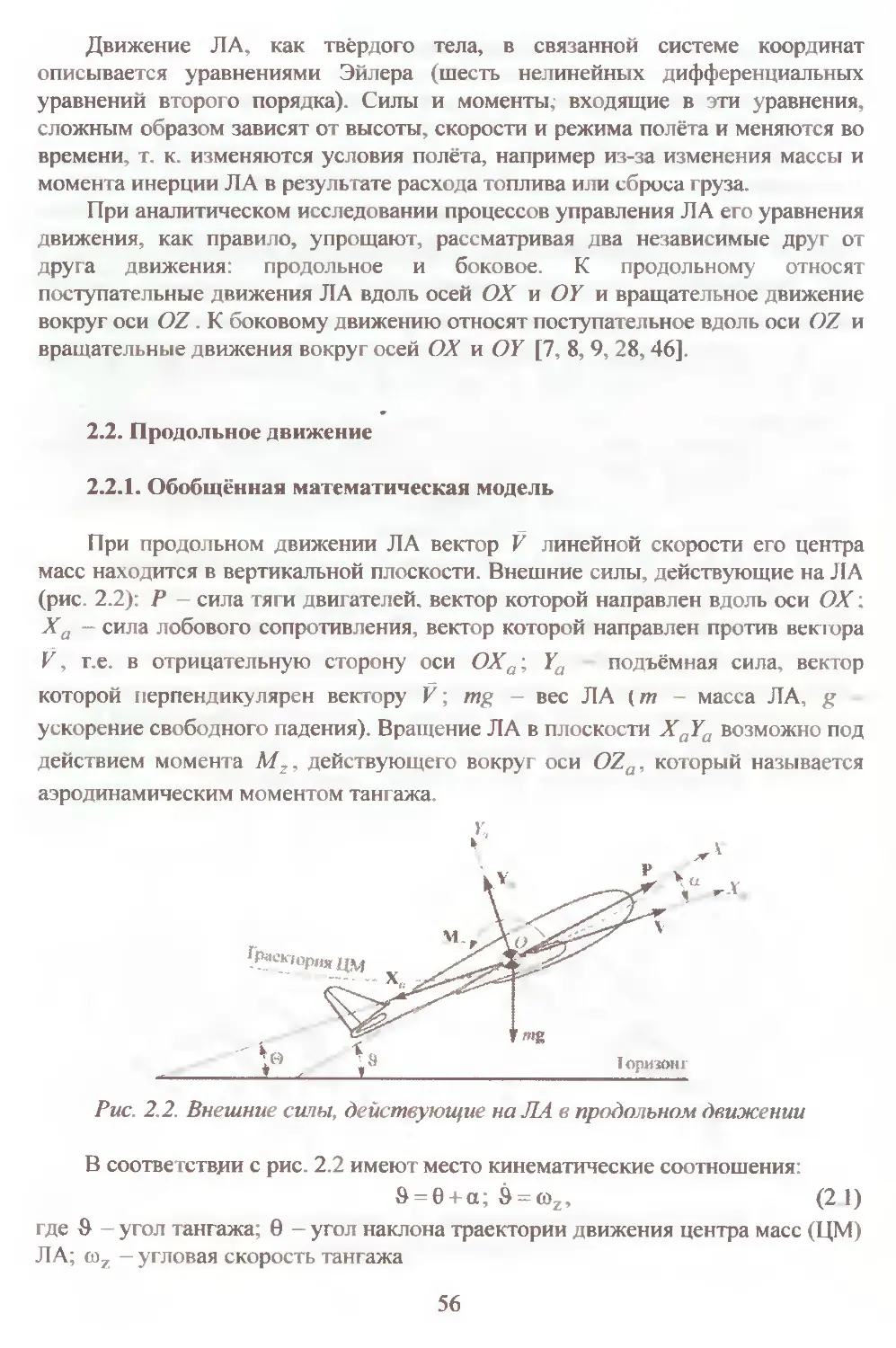
2.2. Продольное движение 56
2.2.1. Обобщённая математическая модель 56
2.2.2. Линеаризованные уравнения продольного
движения и анализ моментов, определяющих
короткопериодическое движение БПЛА 59
2.3. Боковое движение 62
2.3.1. Аэродинамические силы и моменты, действующие
на БПЛА 62
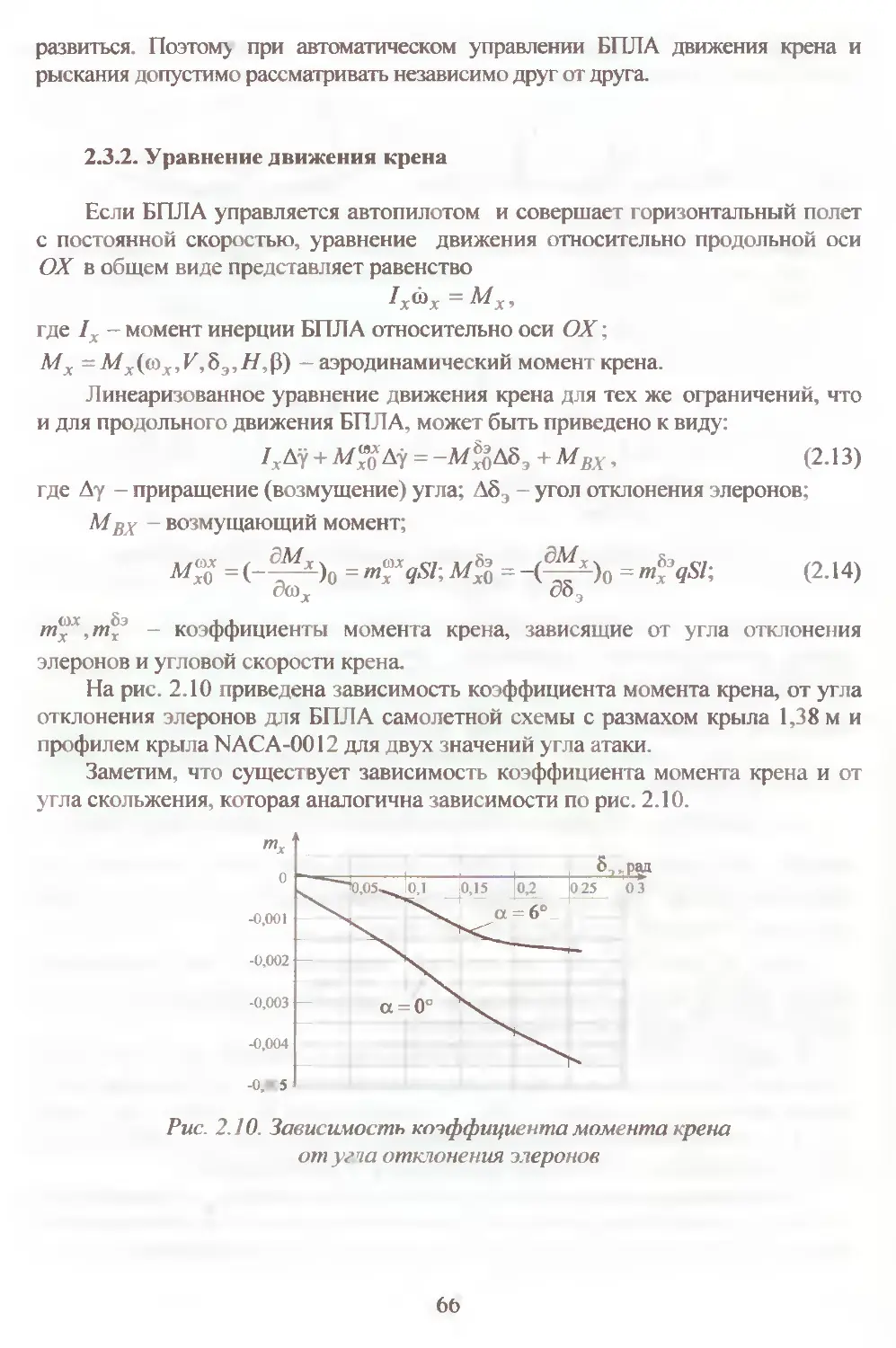
2.3.2. Уравнение движения крена 66
2.3.3. Уравнение движения рыскания 67
2.4. Передаточные функции БПЛА 70
Контрольные вопросы 74
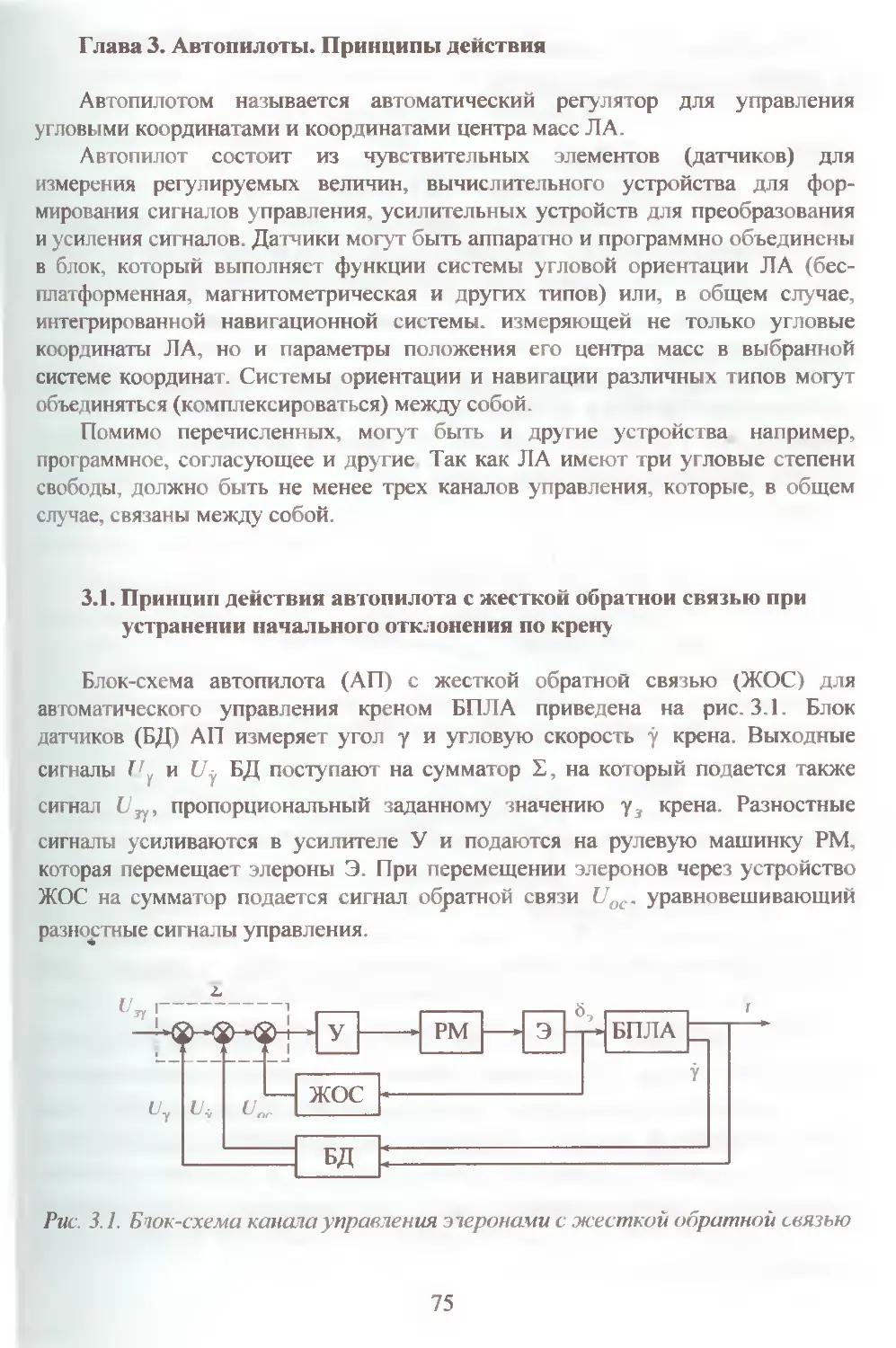
Глава 3. Автопилоты. Принципы действия 75
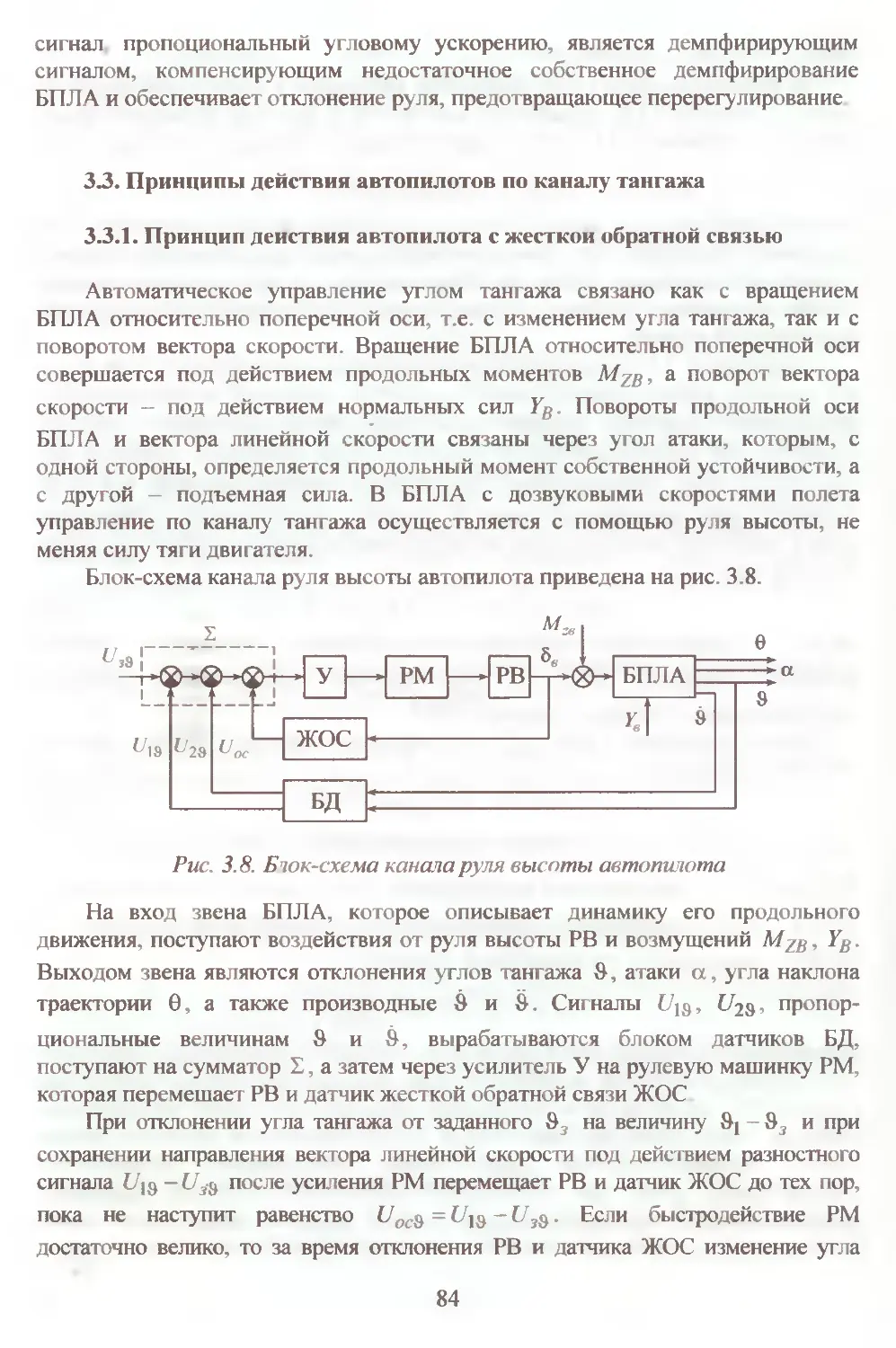
3.1. Принцип действия автопилота с жёсткой обратной связью
при устранении начального отклонения по крену 75
3.2. Принципы действия автопилотов по каналу крена 78
3.2.1. Принцип действия автопилота с жёсткой
обратной связью 78
3.2.2. Принцип действия автопилота с изодромной
обратной связью 81
3.2.3. Законы управления каналом крена автопилотов с
изодромной и скоростной обратной связью 82
3.3. Принципы действия автопилотов по каналу тангажа 84
3.3.1. Принцип дейсгвия автопилота с жёсткой обратной
связью 84
3
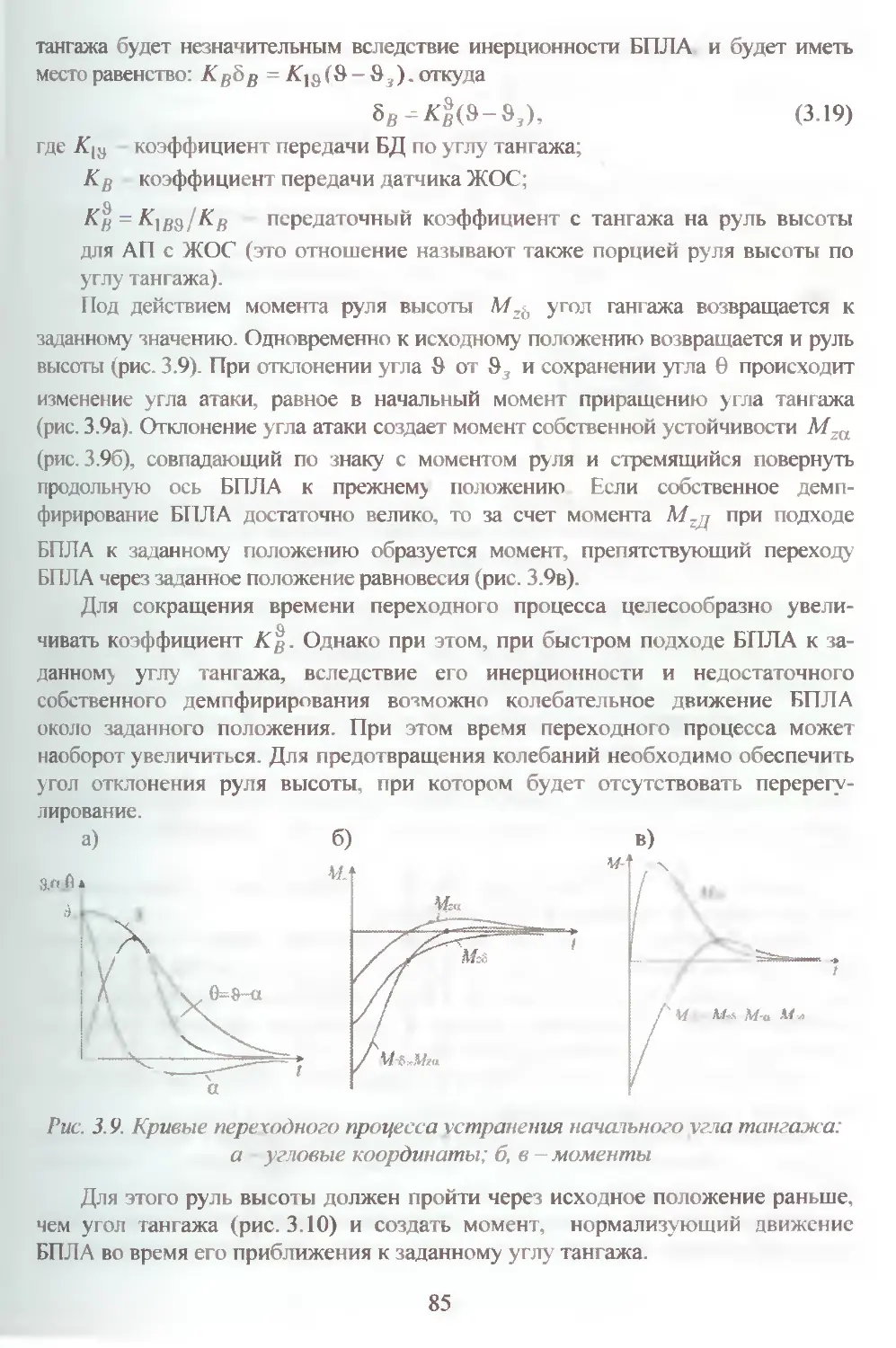
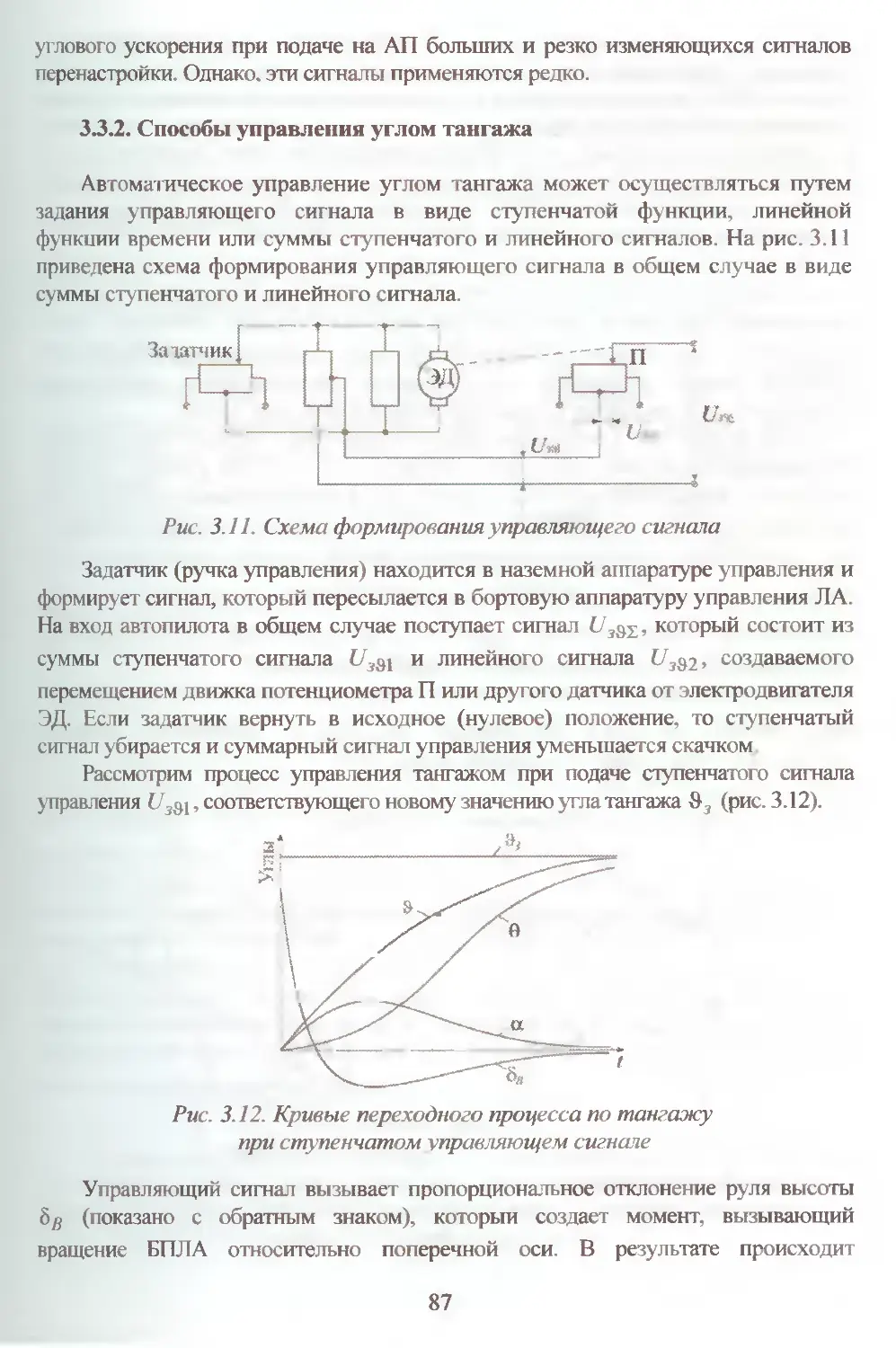
3.3.2 Способы управления углом тангажа 87
3.3.3. Стабилизация угла тангажа при действии возмущений 90
3.4. Принципы действия автопилотов по каналу курса 91
3.4.1. Стабилизация курса при управлении автопилотом
рулём поворота 91
3.4.2. Стабилизация курса при управлении автопилотом
элеронами и рулём поворота 93
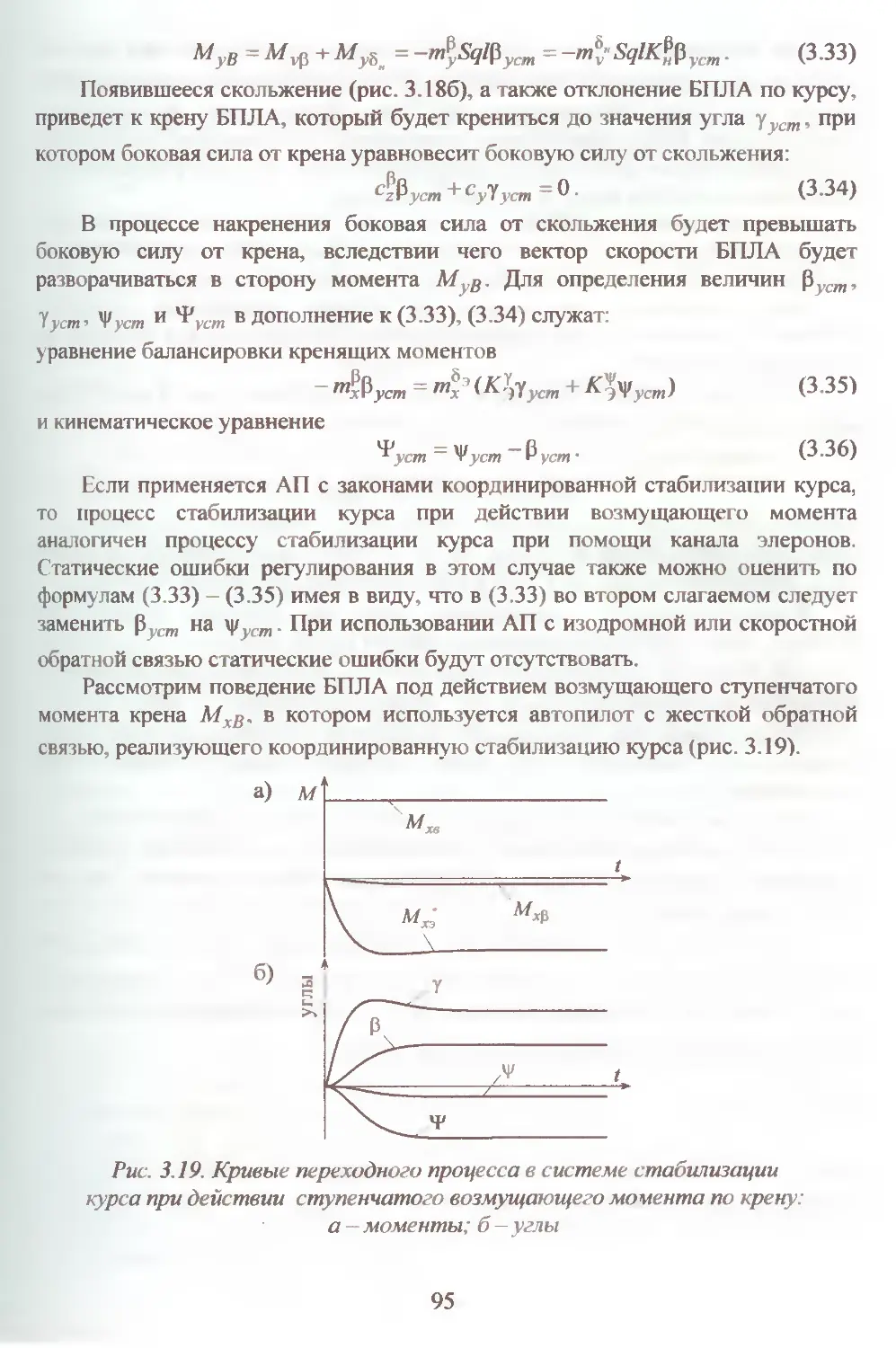
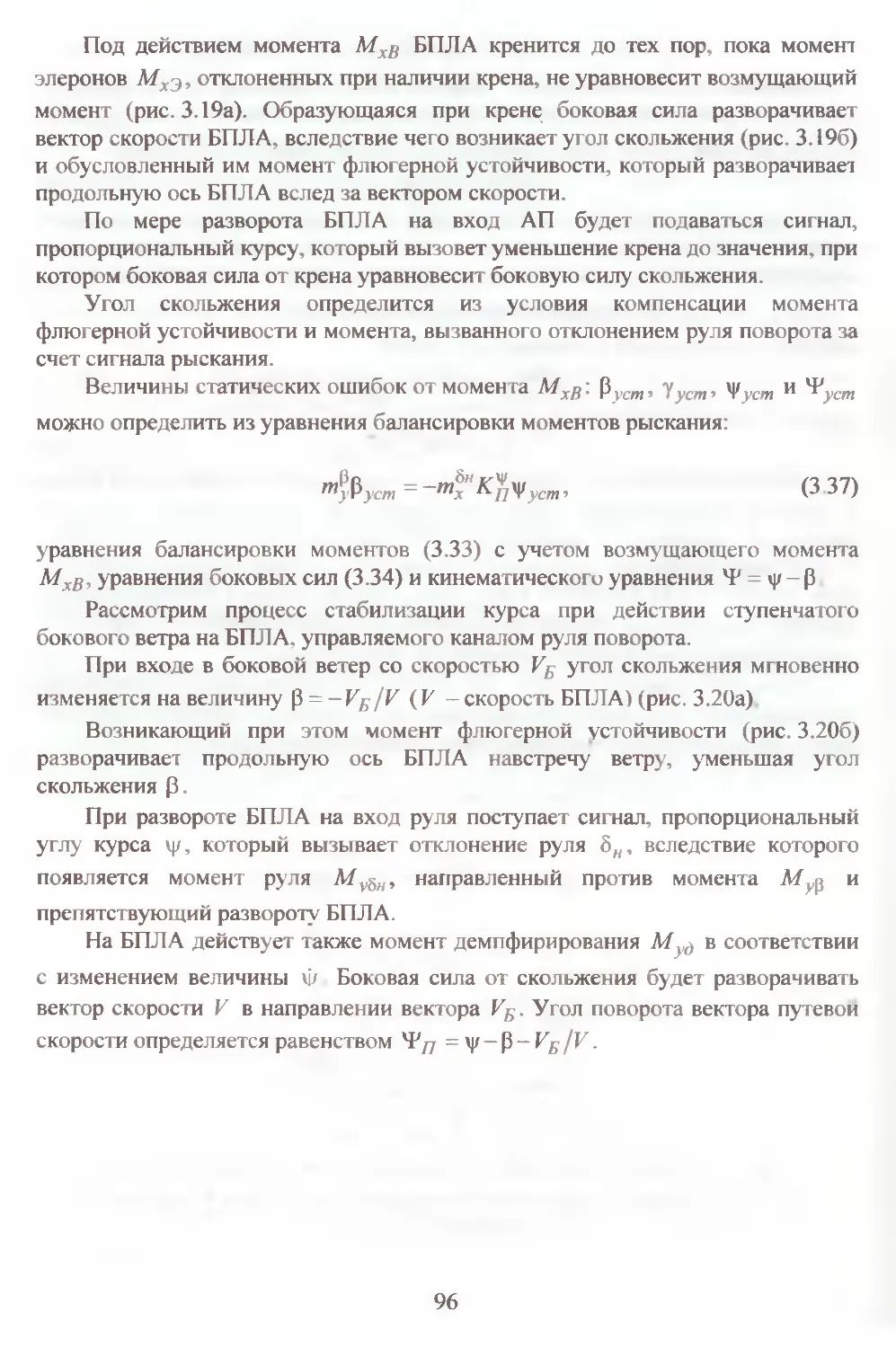
3.4.3. Стабилизация угла курса при действии возмущений 94
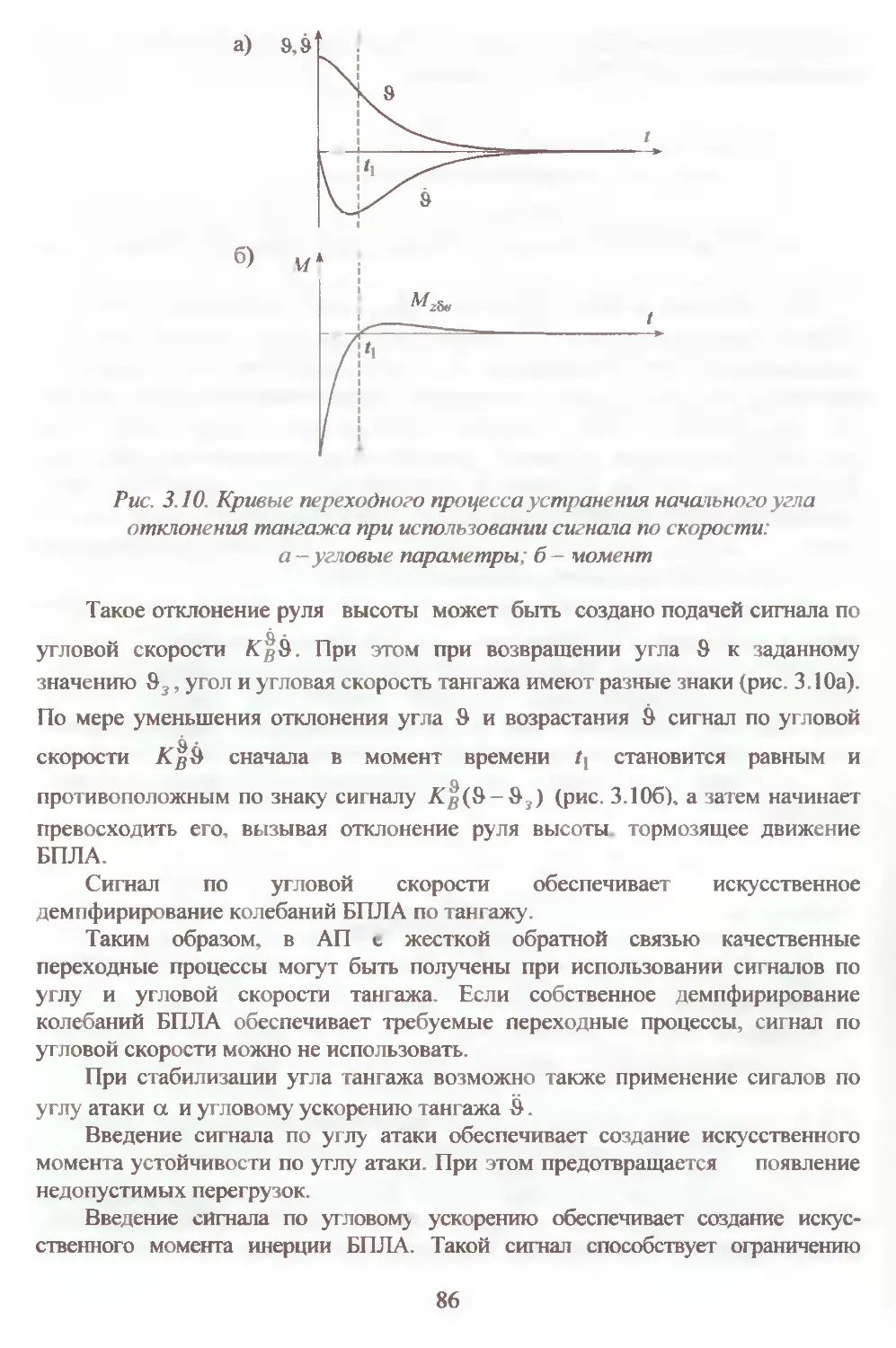
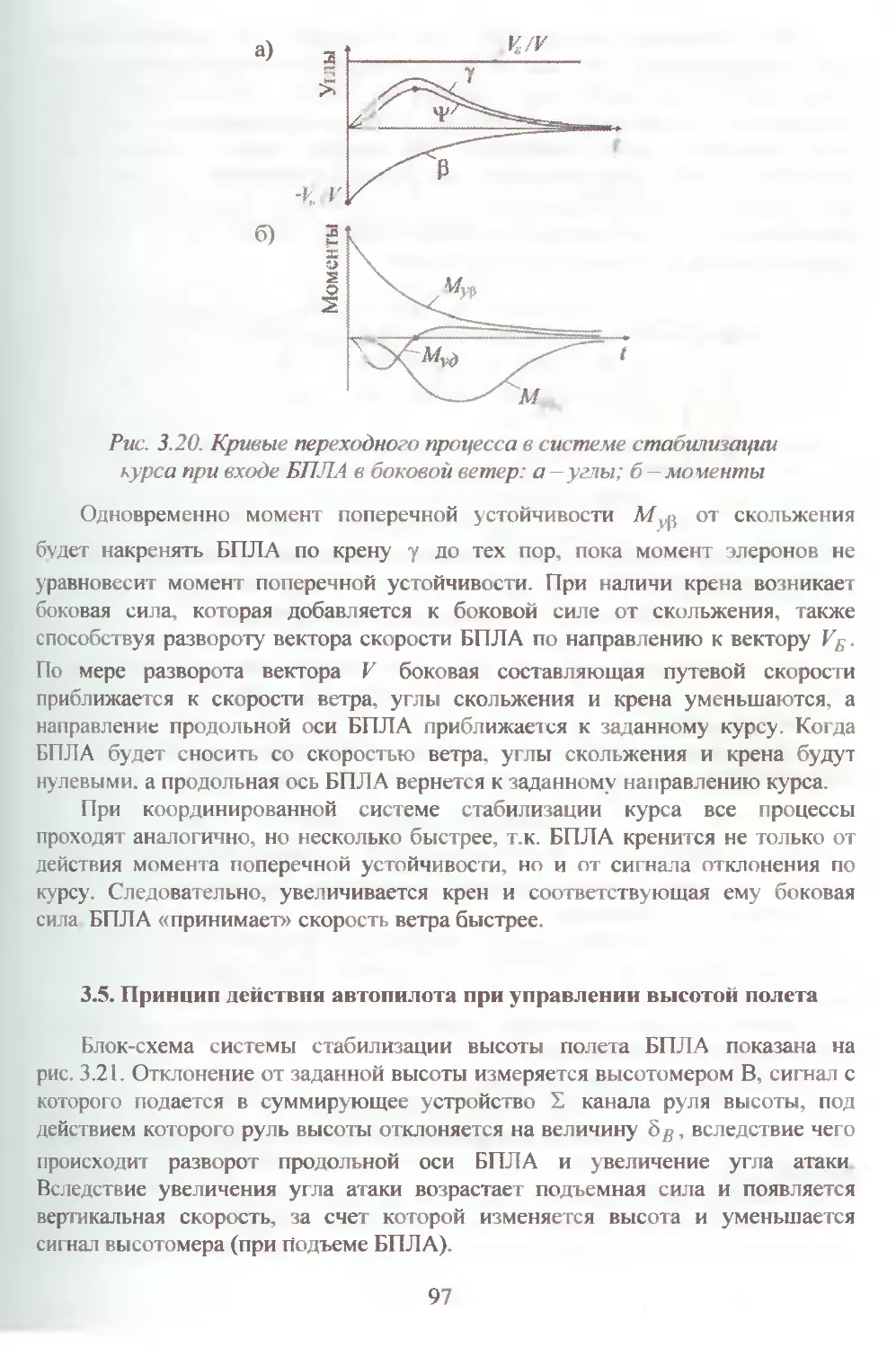
3.5. Принцип действия автопилота при управлении высотой
полёта 98
3.6. Принцип действия автопилота при управлении
боковым движением центра масс БПЛА 102
Контрольные вопросы 104
Г лава 4. Датчики 106
4.1. Акселерометры . 106
4.1.1. Общая характеристика 106
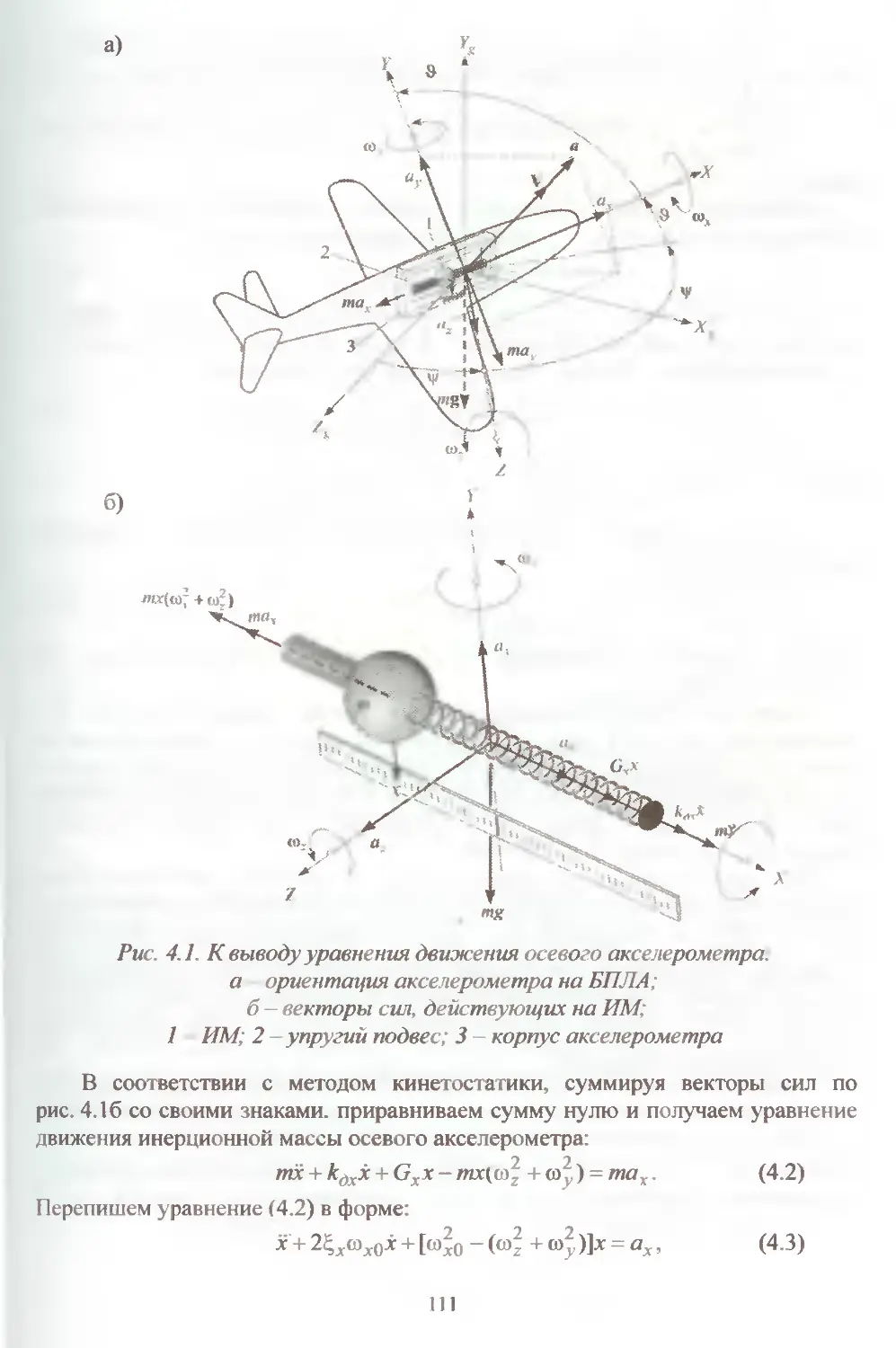
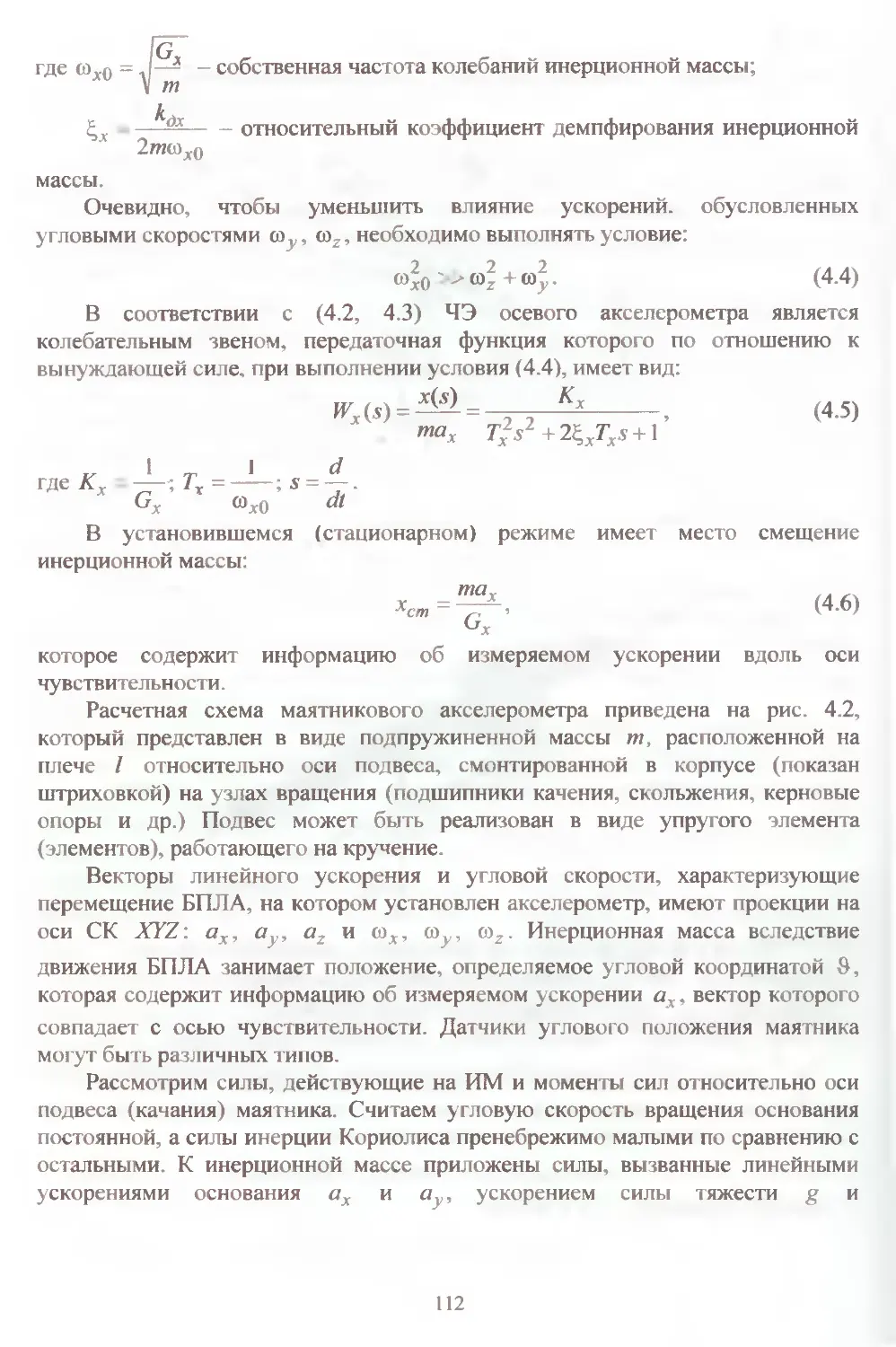
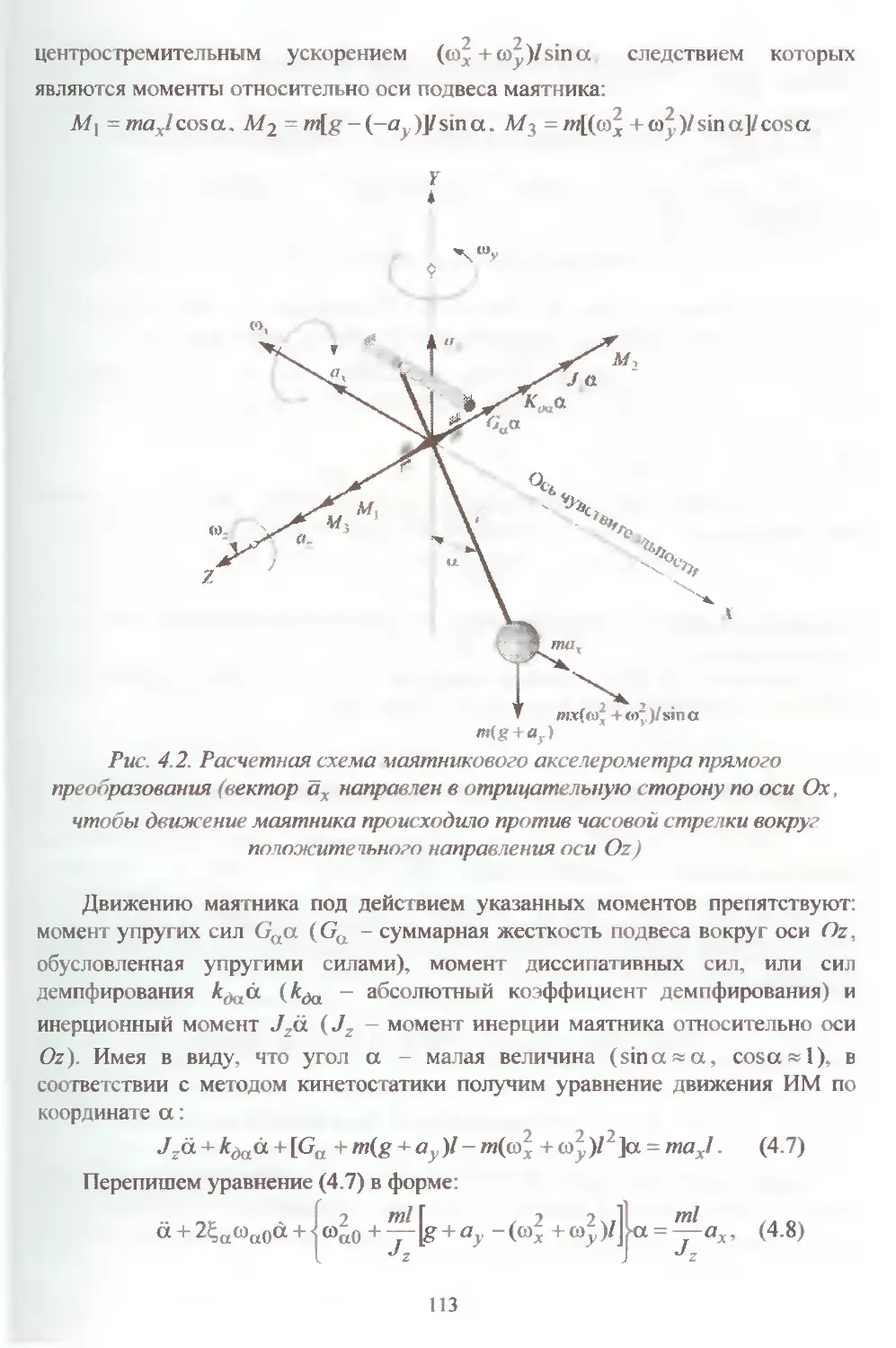
4.1.2. Уравнения движения и передаточные функции
чувствительных элементов акселерометров 110
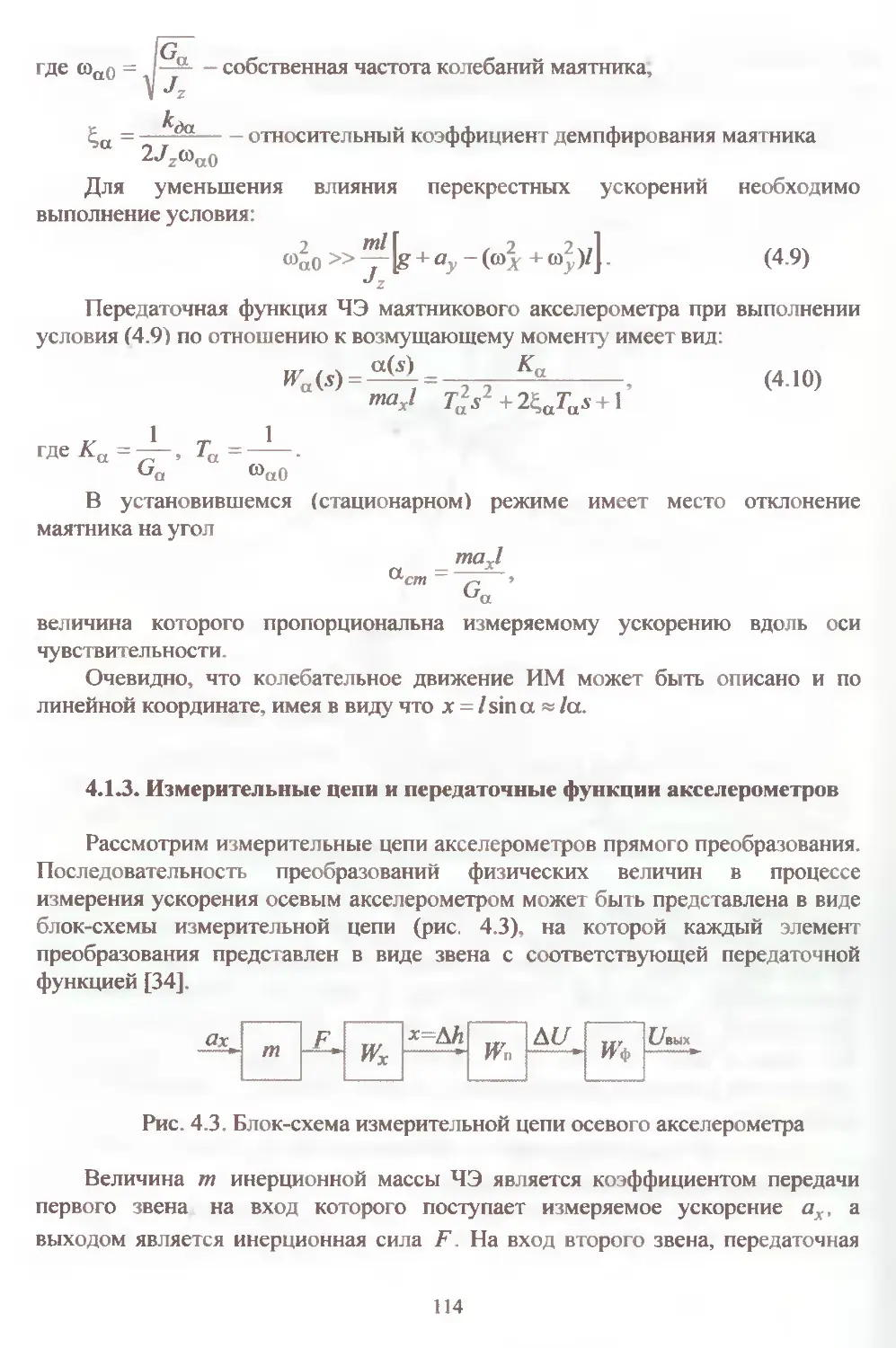
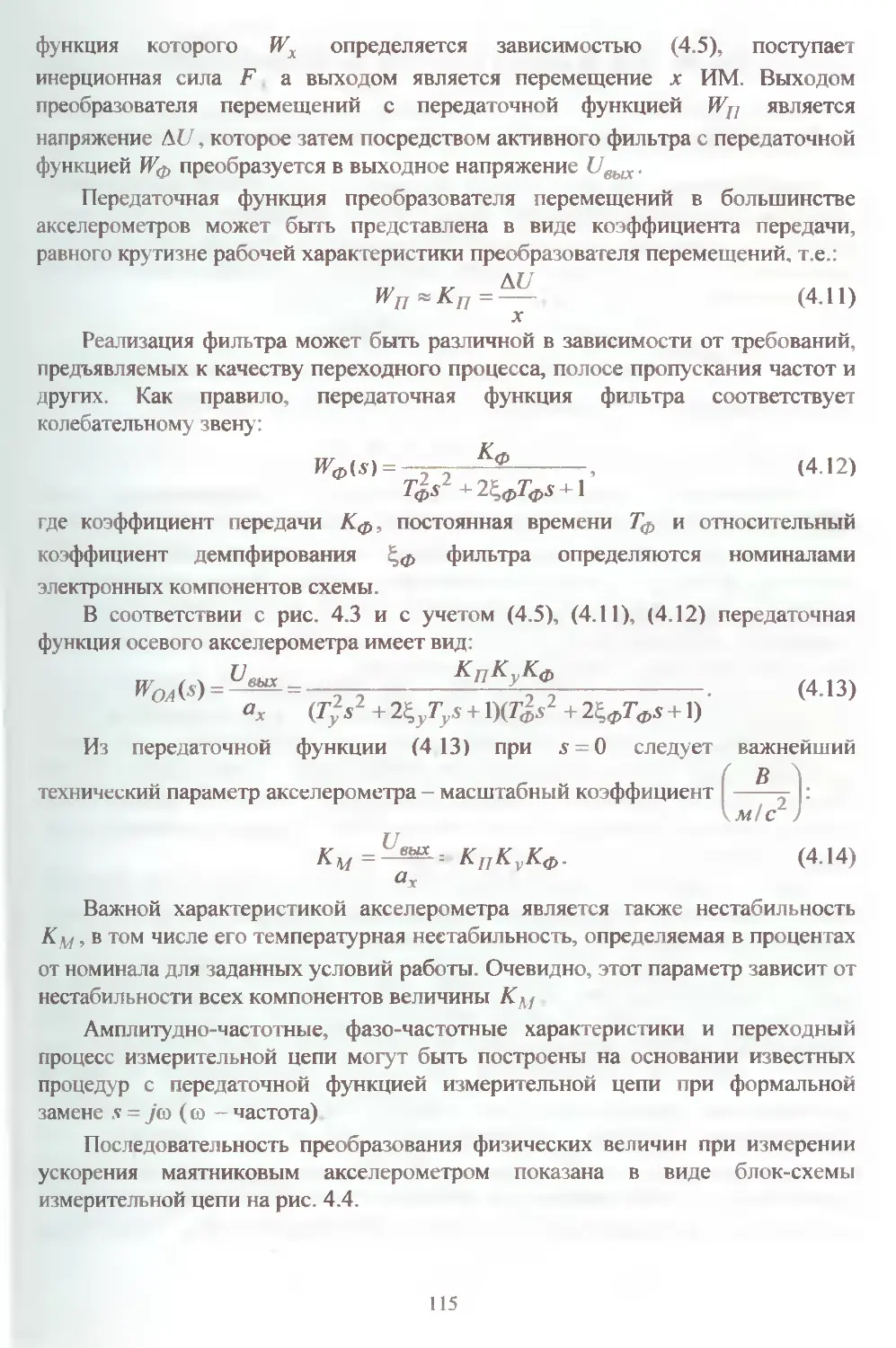
4.1.3. Измерительные цепи и передаточные функции
акселерометров 114
4.1.4. Конструкция и технические характеристики
акселерометров навигационного класса 119
4.1.5. Конструкция и технические характеристики
микромеханических акселерометров 125
4.2. Гироскопы 129
4.2.1. Общая характеристика 129
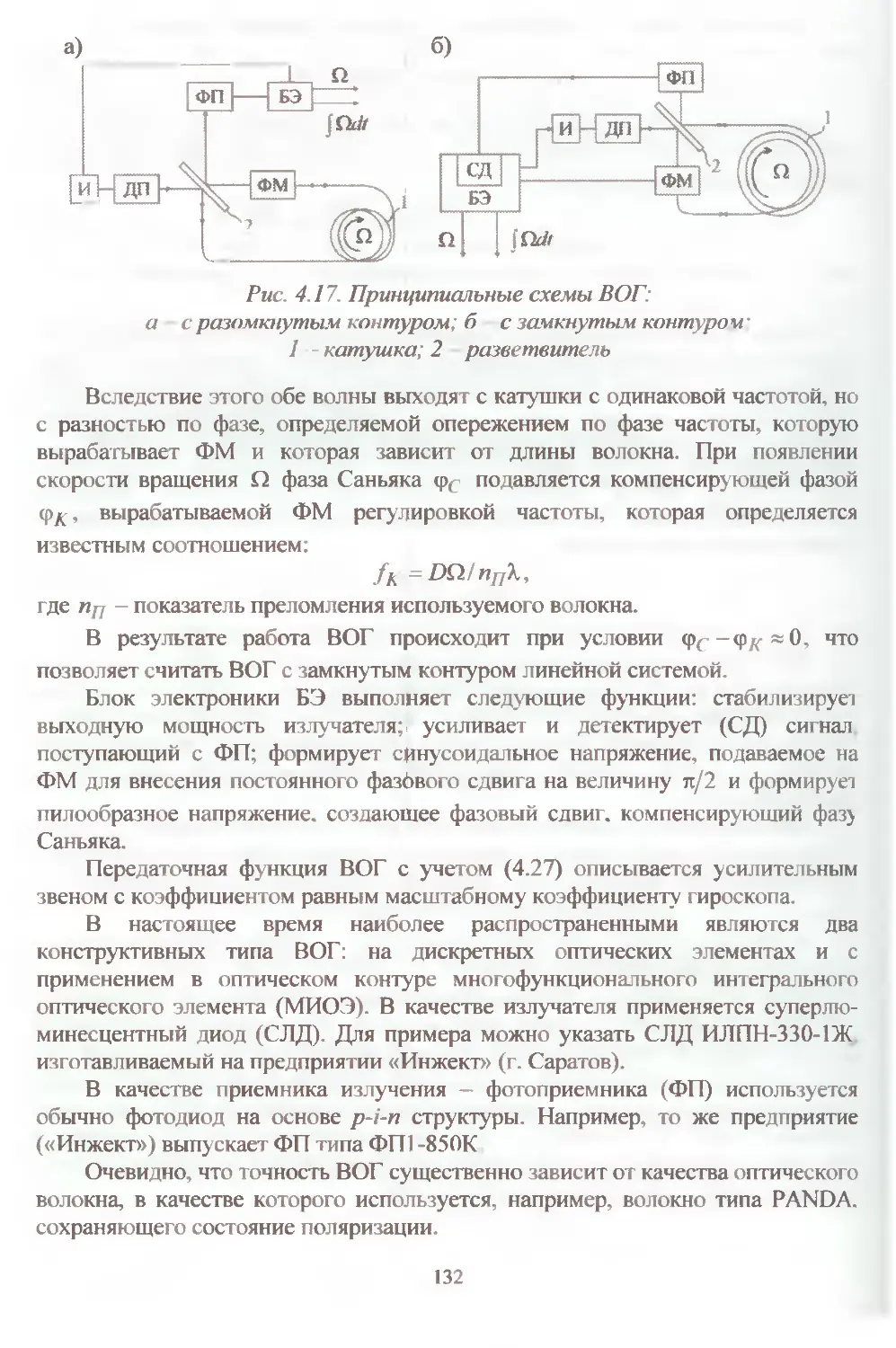
4.2.2. Волоконно-оптические гироскопы. Принцип
действия и особенности конструкции 130
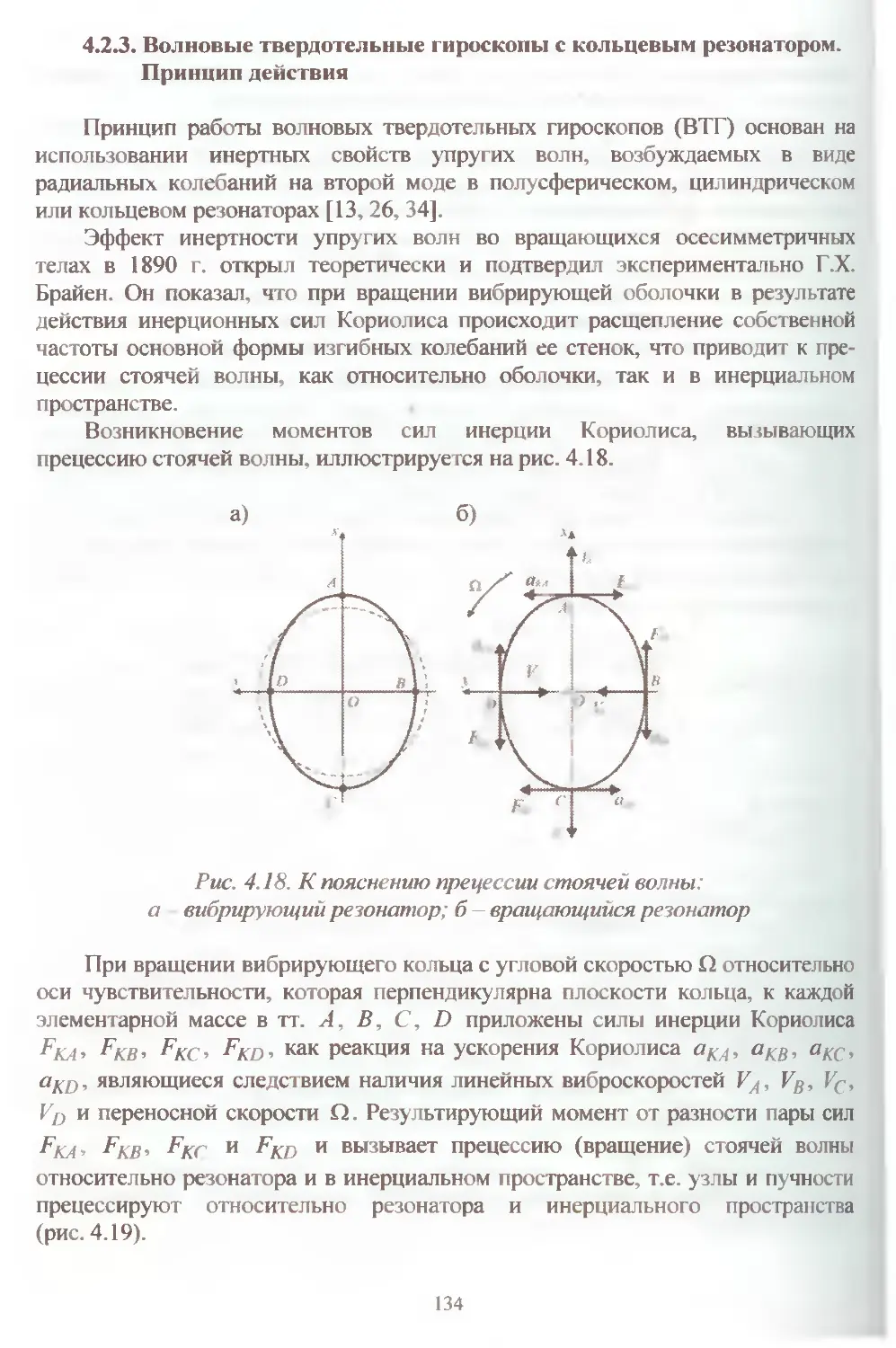
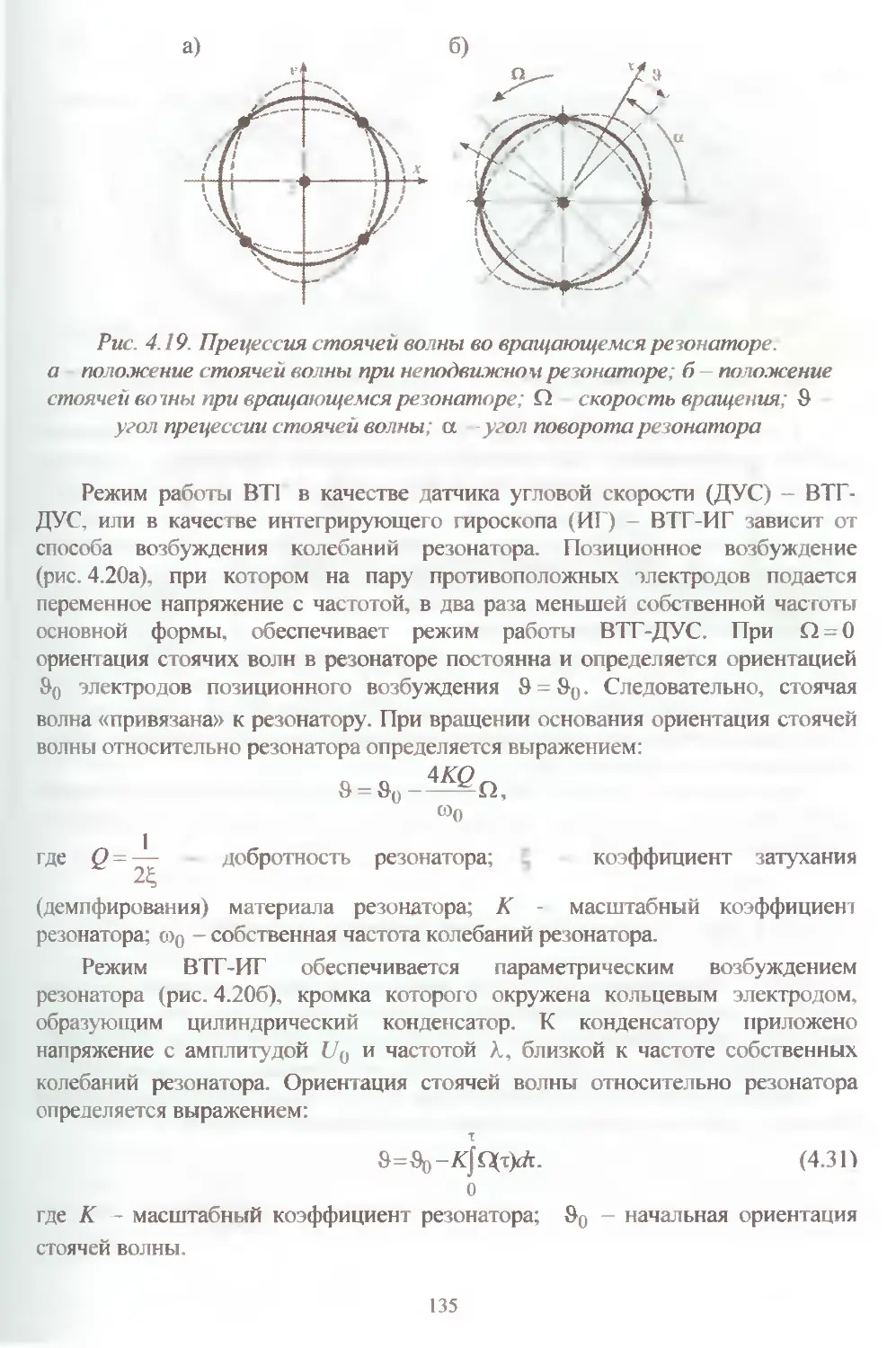
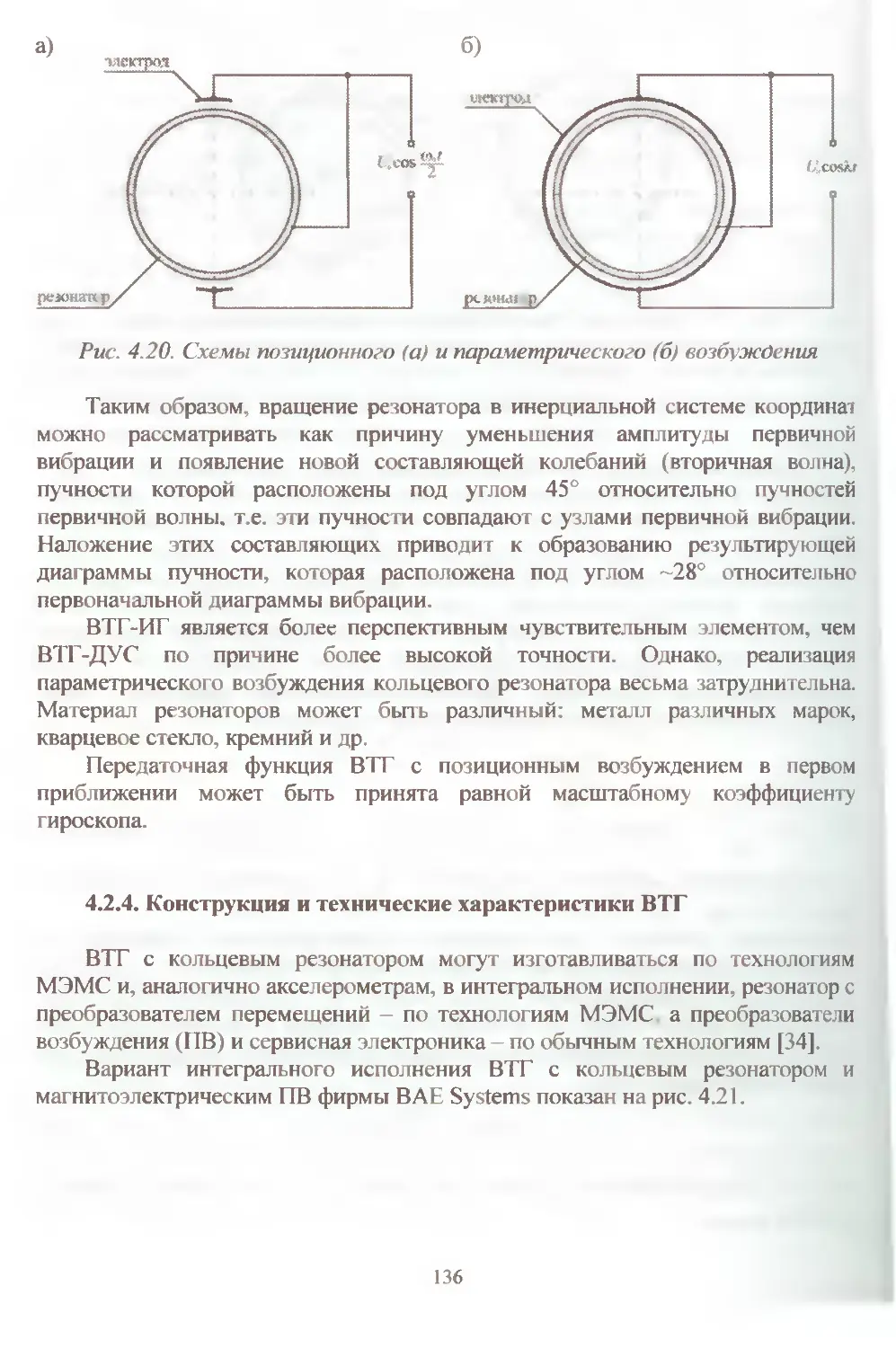
4.2.3. Волновые твёрдотельные гироскопы с кольцевым
резонатором. Принцип действия 134
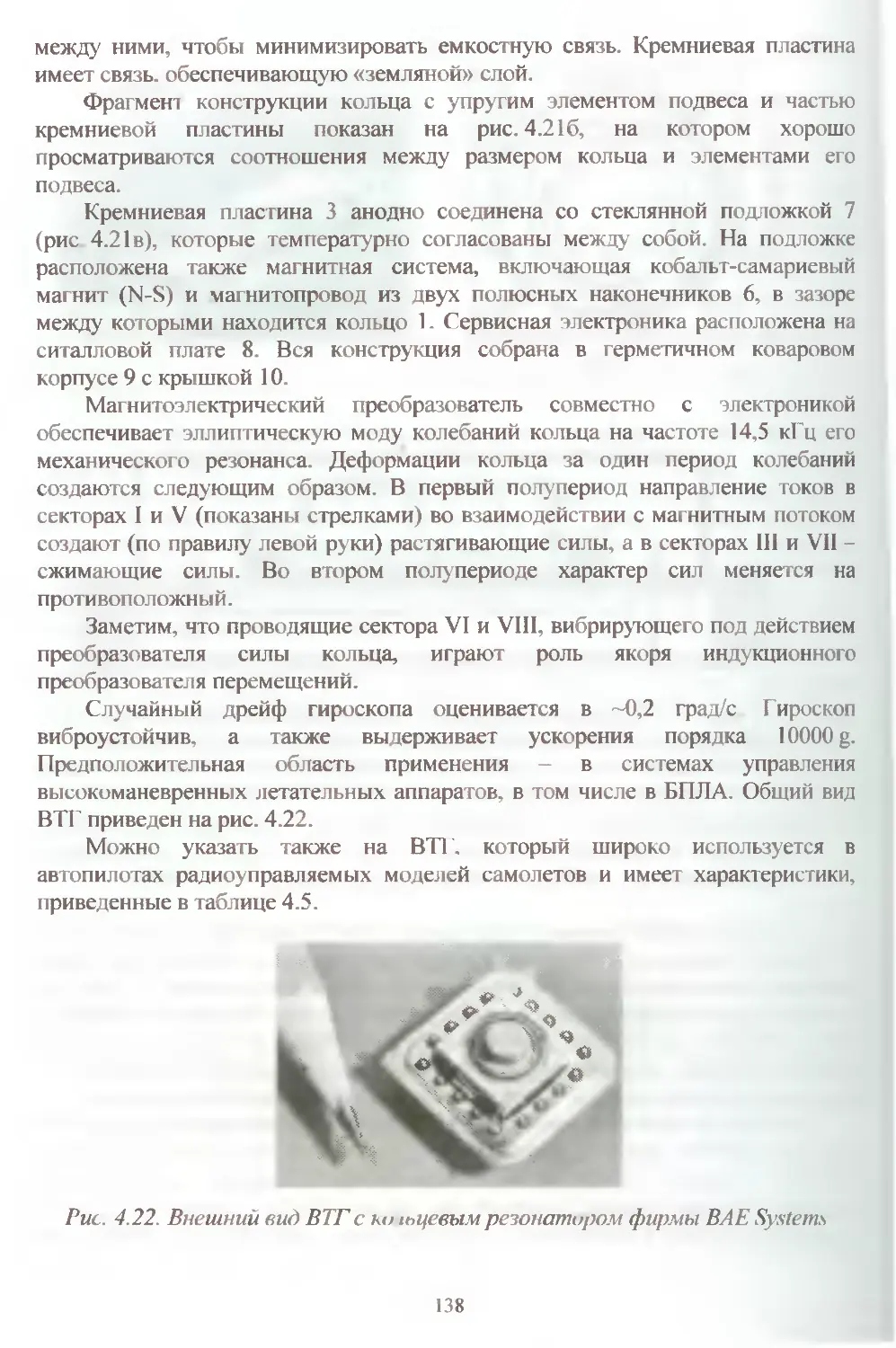
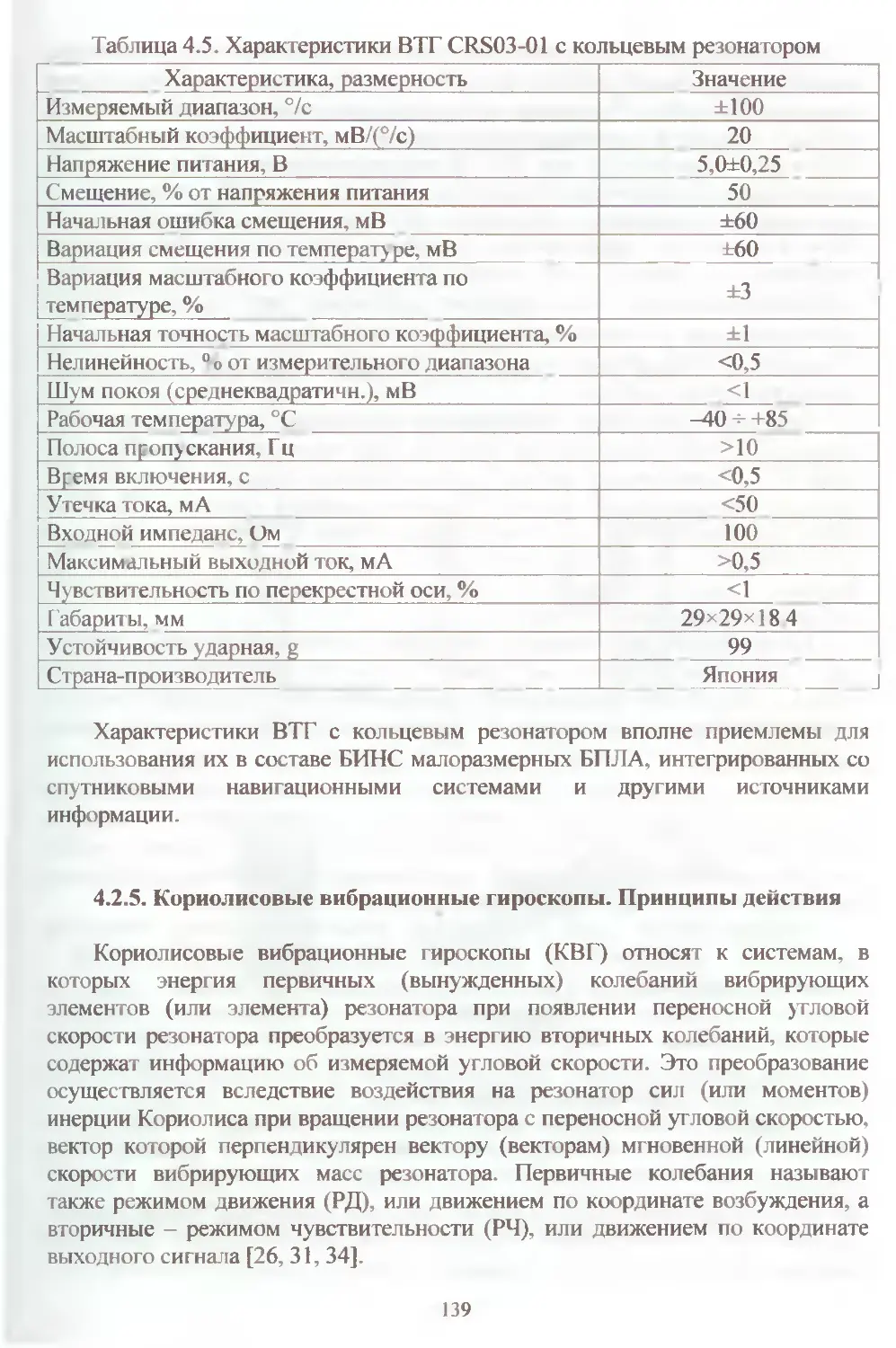
4.2.4. Конструкция и технические характеристики ВТГ 136
4.2.5. Кориолисовые вибрационные гироскопы. Принцип
действия 139
4.2.6. Уравнения движения и передаточные функции
микромеханических гироскопов 143
4.2.7. Конструкция и технические характеристики
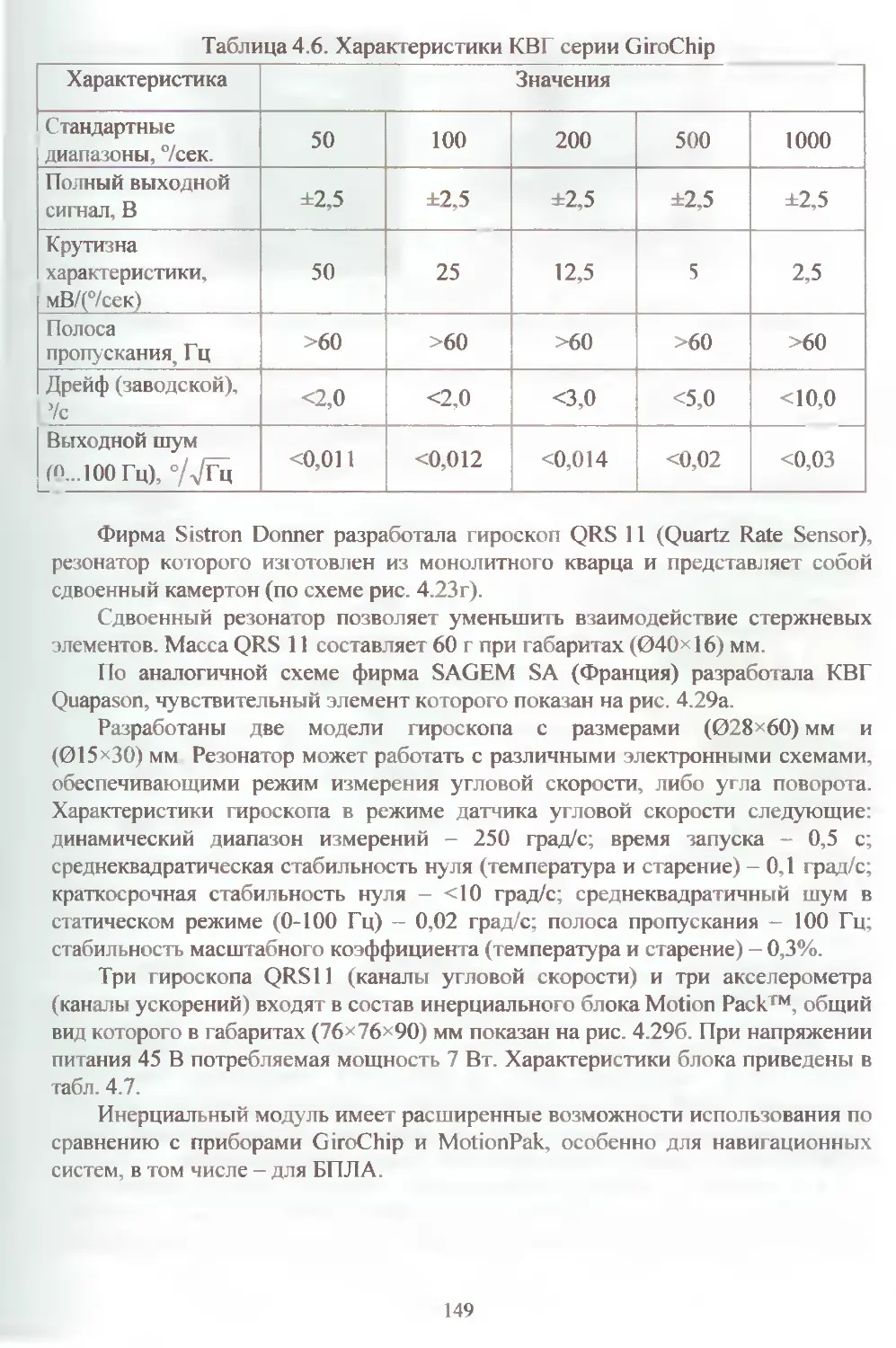
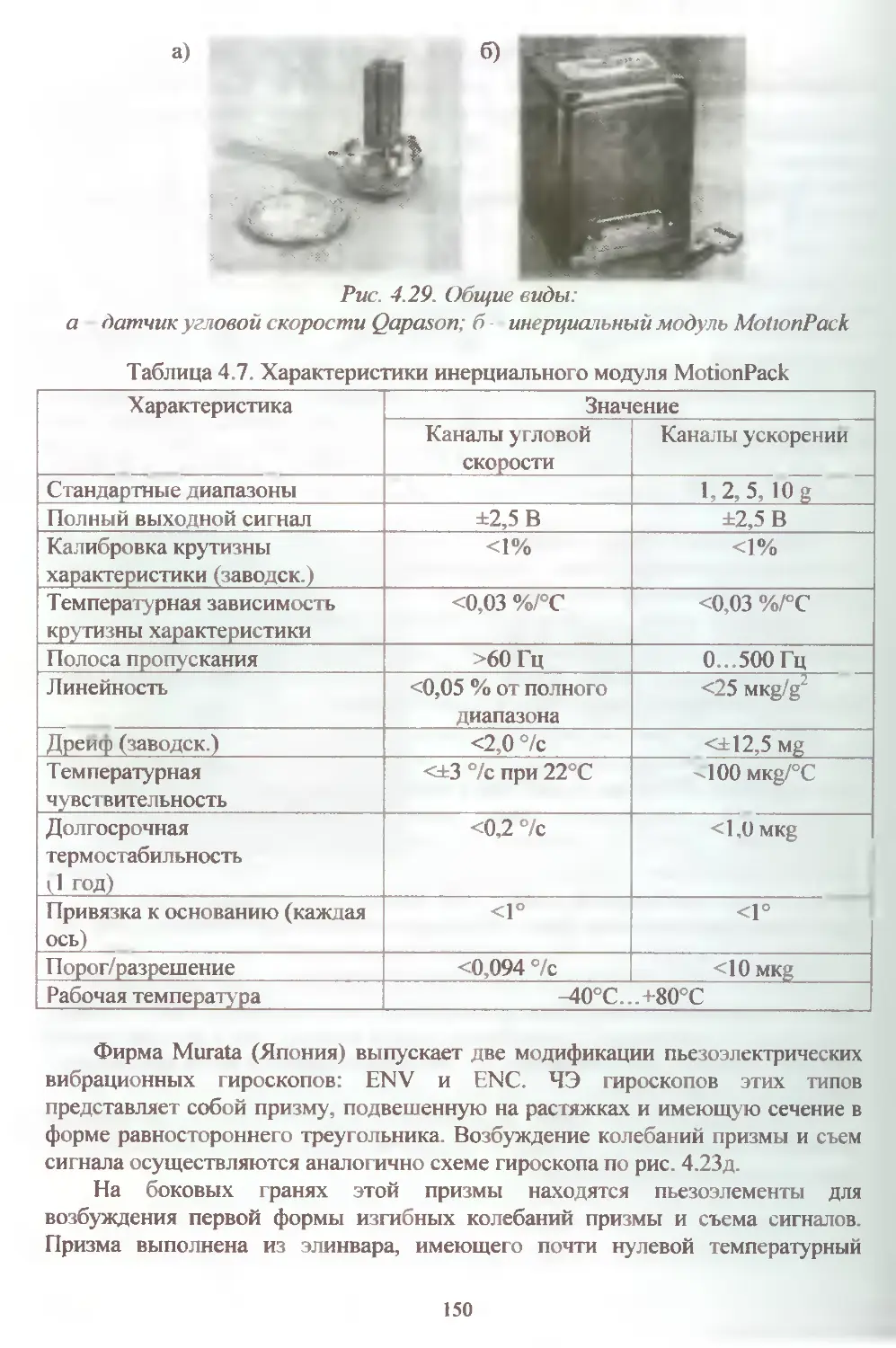
кориолисовых вибрационных гироскопов 148
4.3. Датчики давления для измерения высоты и скорости
полёта. Принцип действия и технические характеристики 153
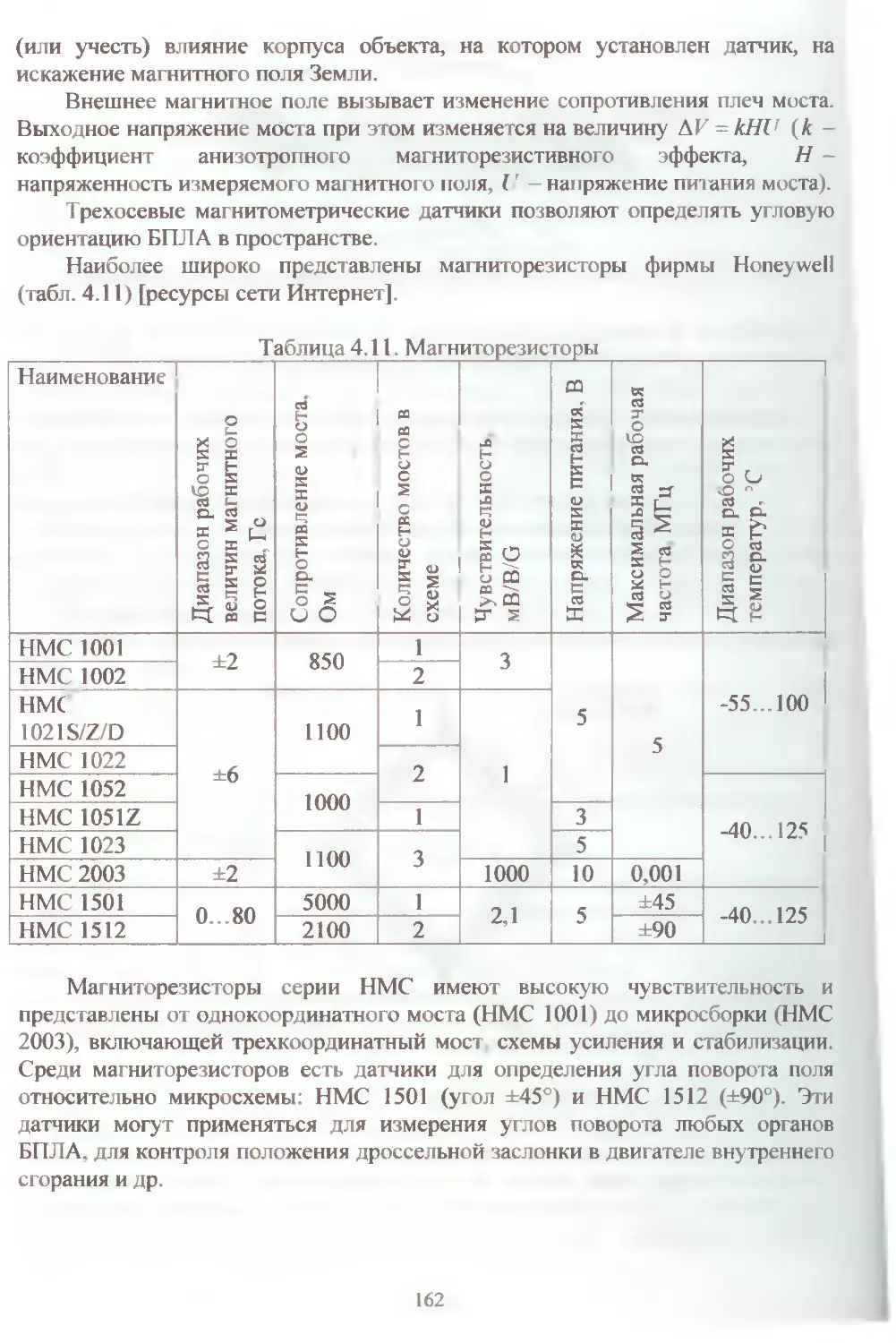
4.4. Магниторезистивные датчики 157
4.4.1. Геомагнитное поле 157
4.4.2. Принцип работы электронного компаса 159
4.4.3. Магниторезистивные датчики. Принцип работы и
технические характеристики 160
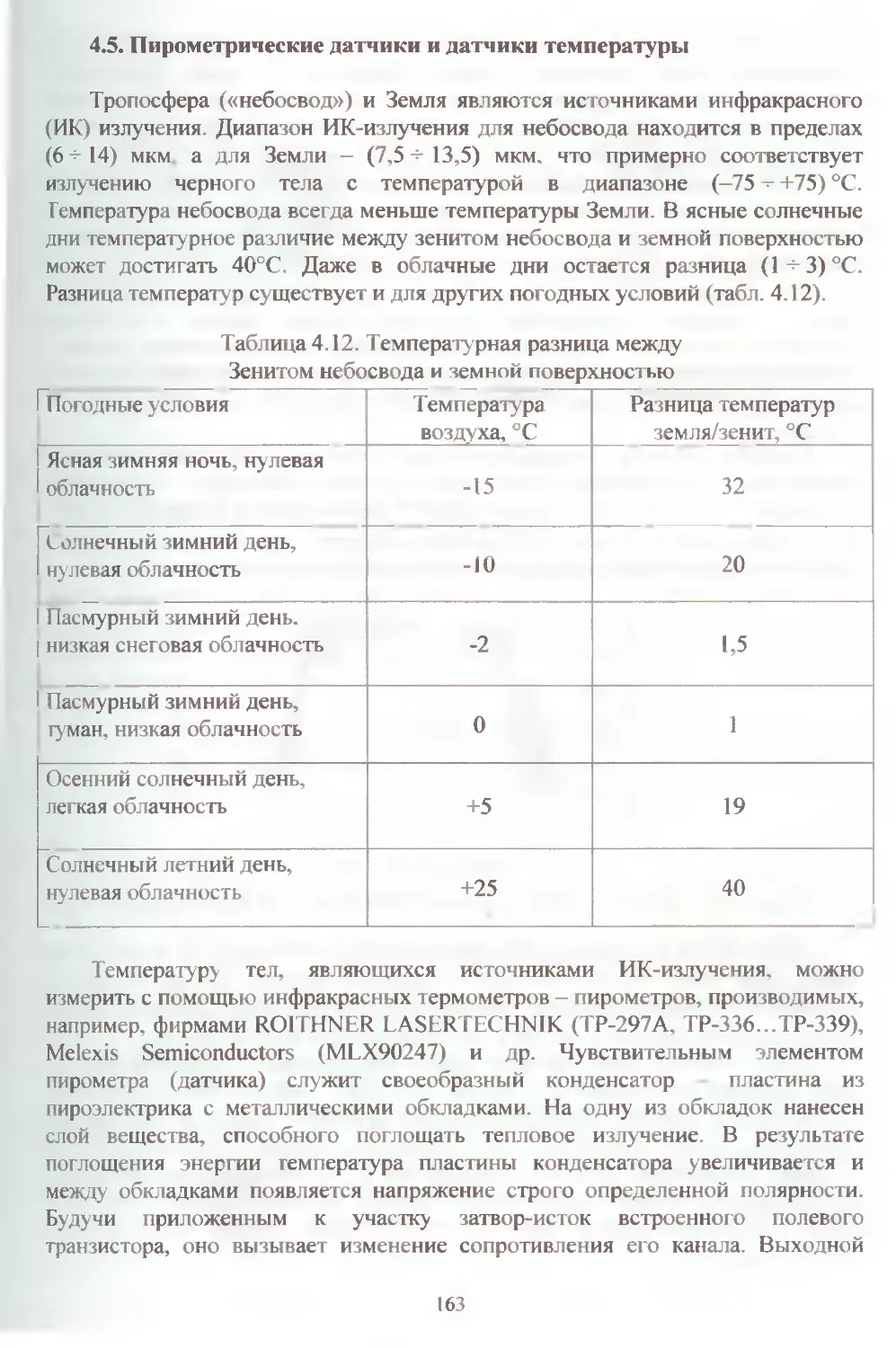
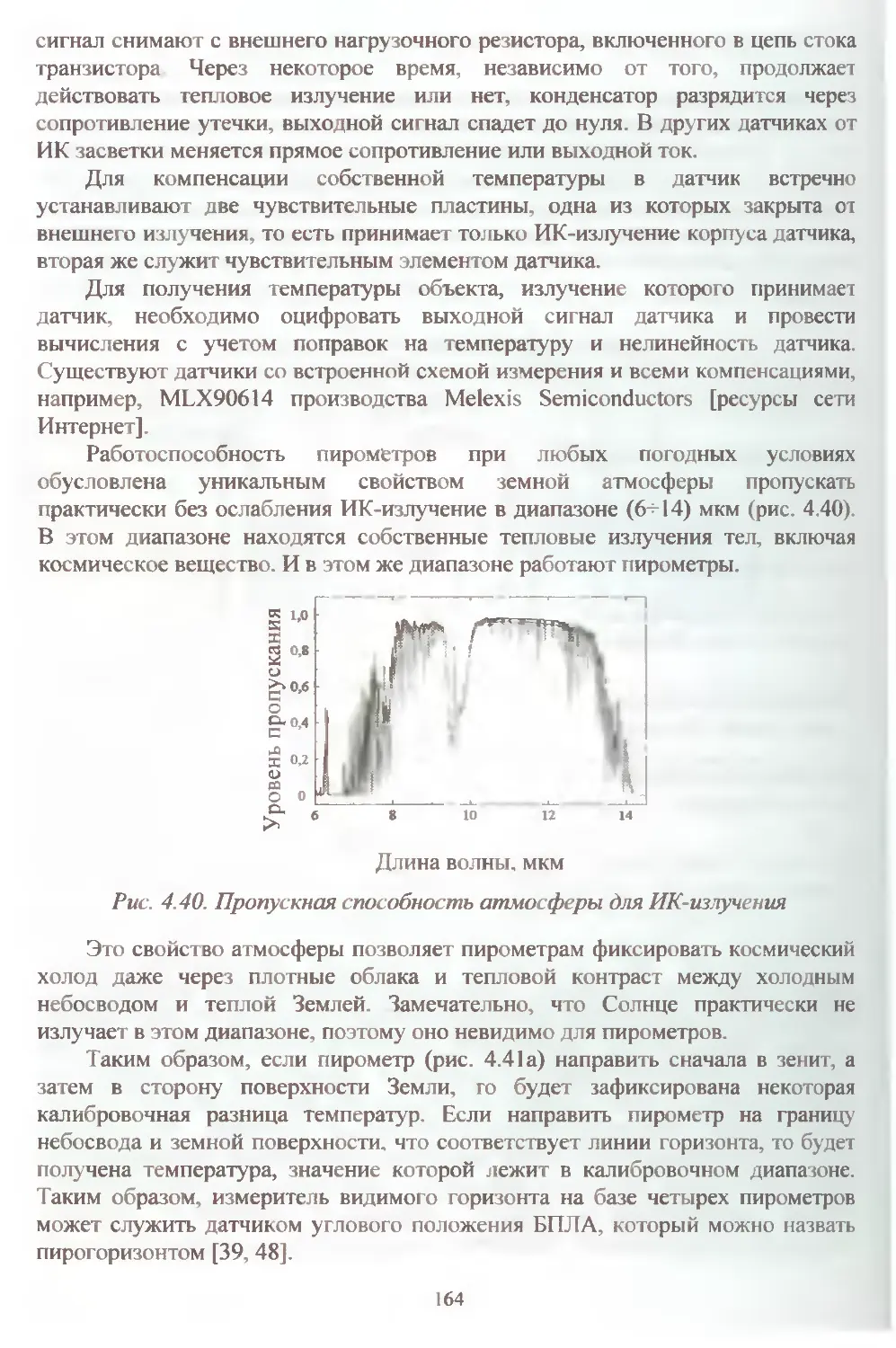
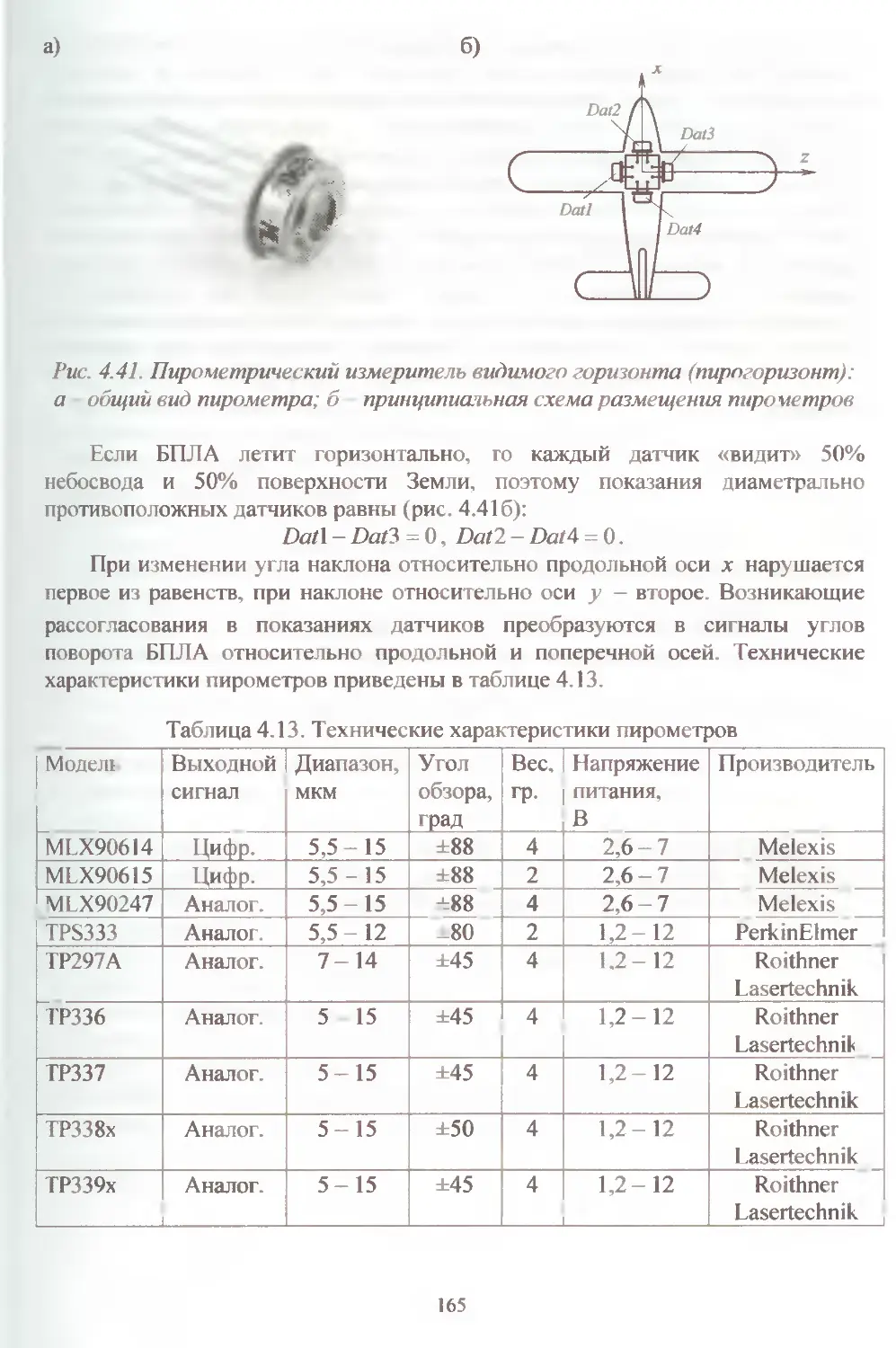
4.5. Пирометрические датчики и датчики температуры 163
4
Контрольные вопросы 167
Глава 5. Системы ориентации и навигации 168
5.1. Системы ориентации 168
5.1.1. Бесплатформенная система ориентации 168
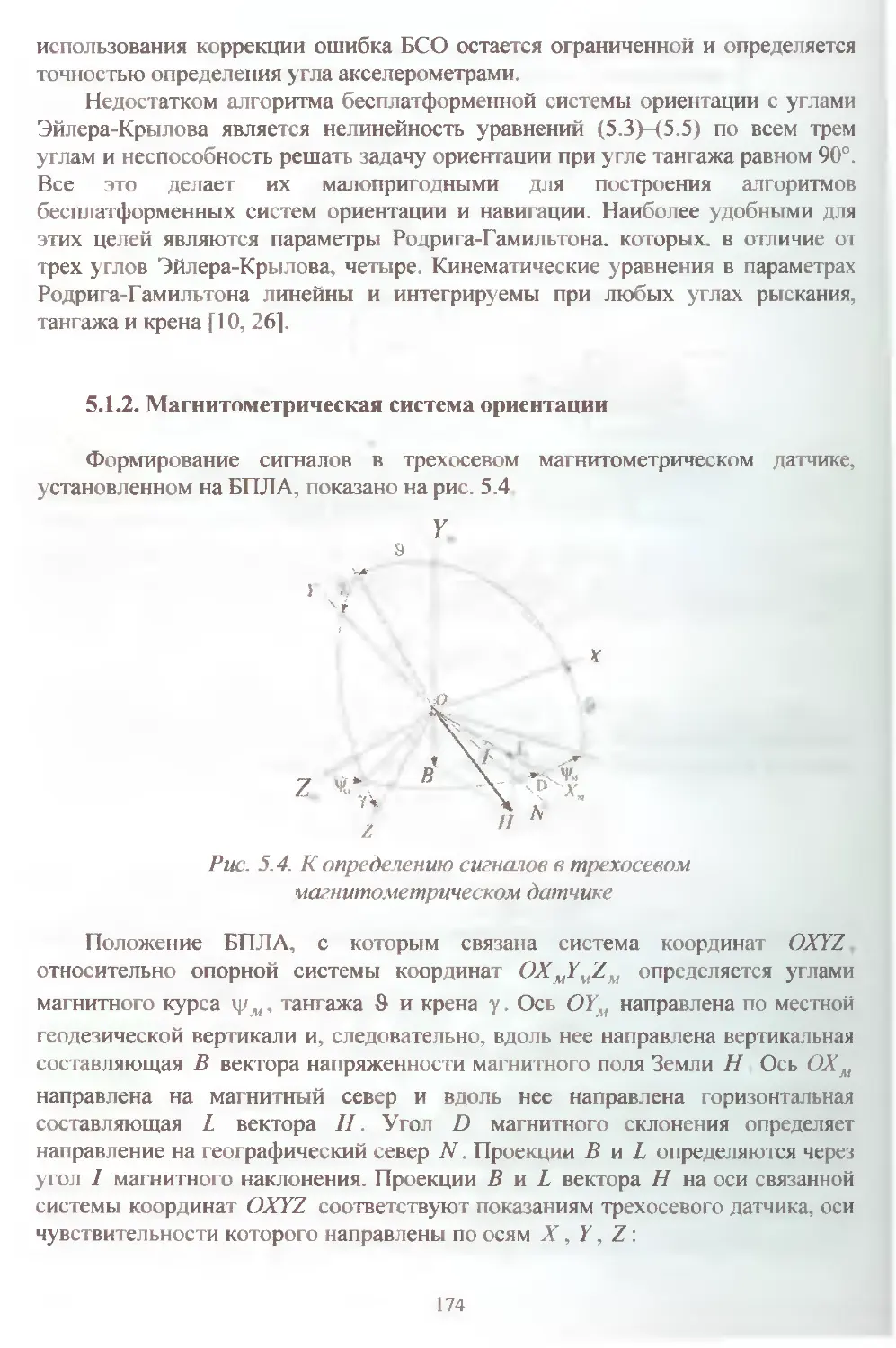
5.1.2. Магнитометрическая система ориентации 174
5.1.3. Пирометрическая система ориентации 176
5.1.4. Комплектирование систем ориентации 179
5.2. Системы навигации 183
5.2.1. Принцип действия БИНС 183
5.2.2. Основные уравнения инерциальной навигации 188
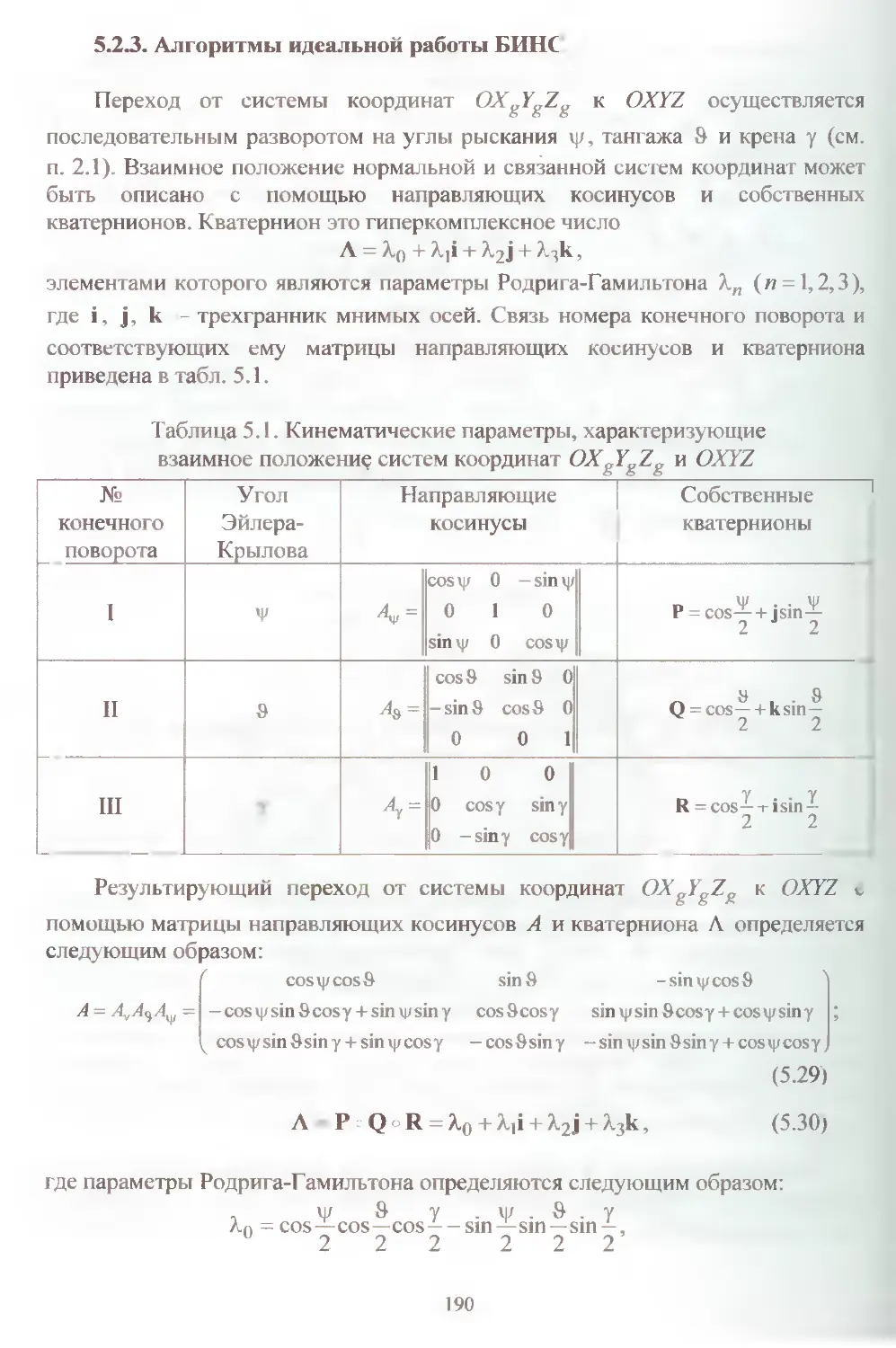
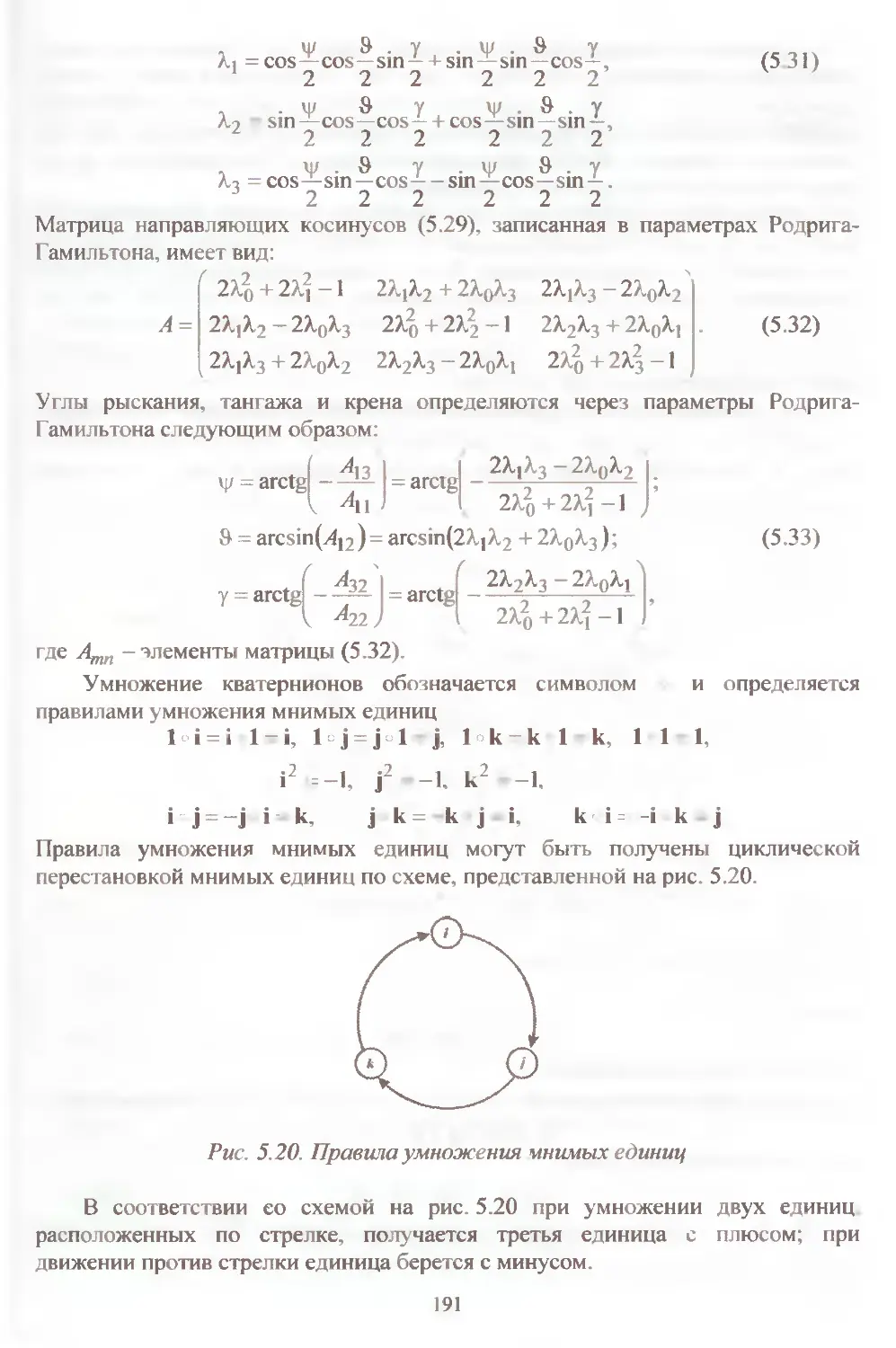
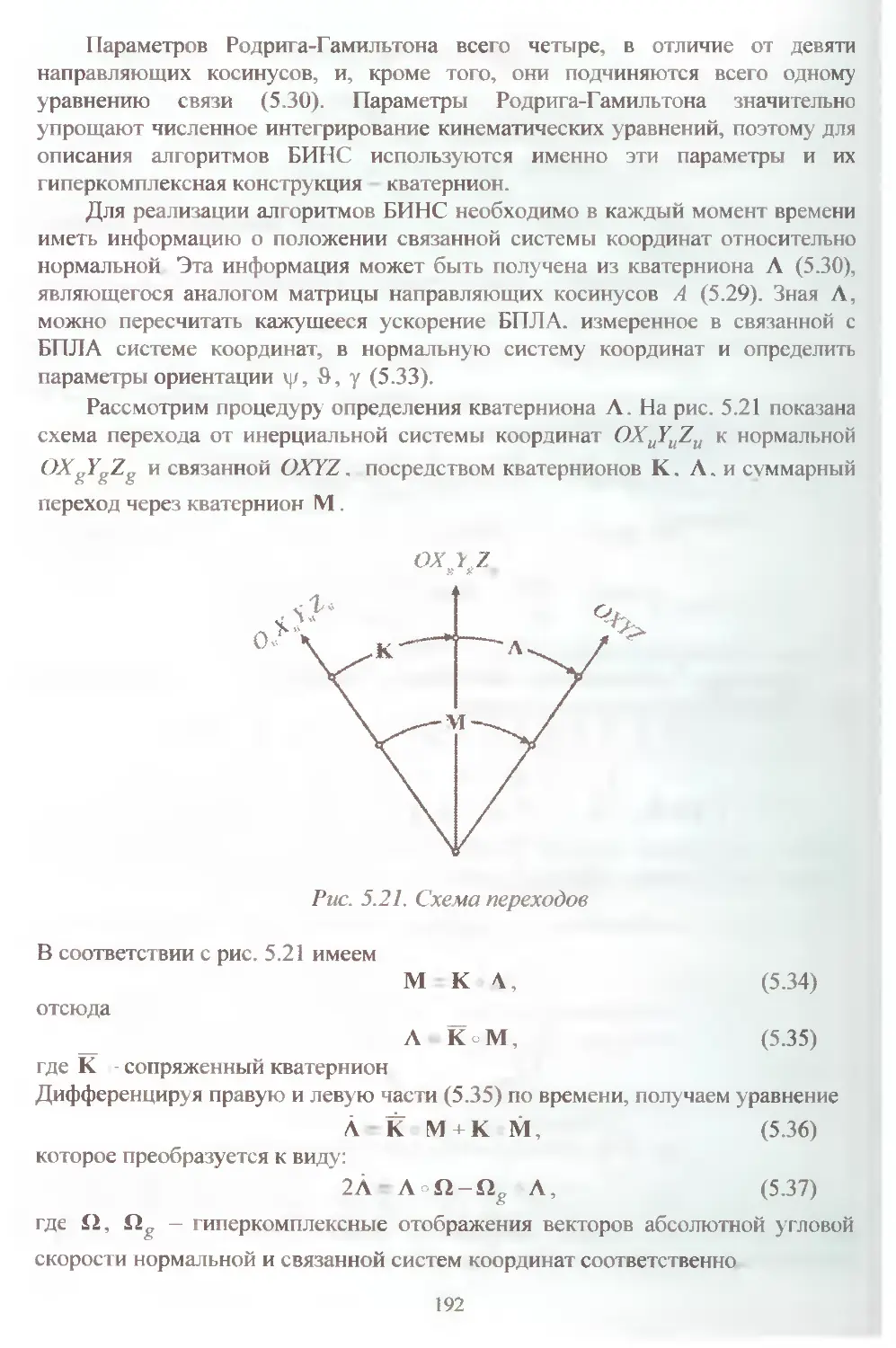
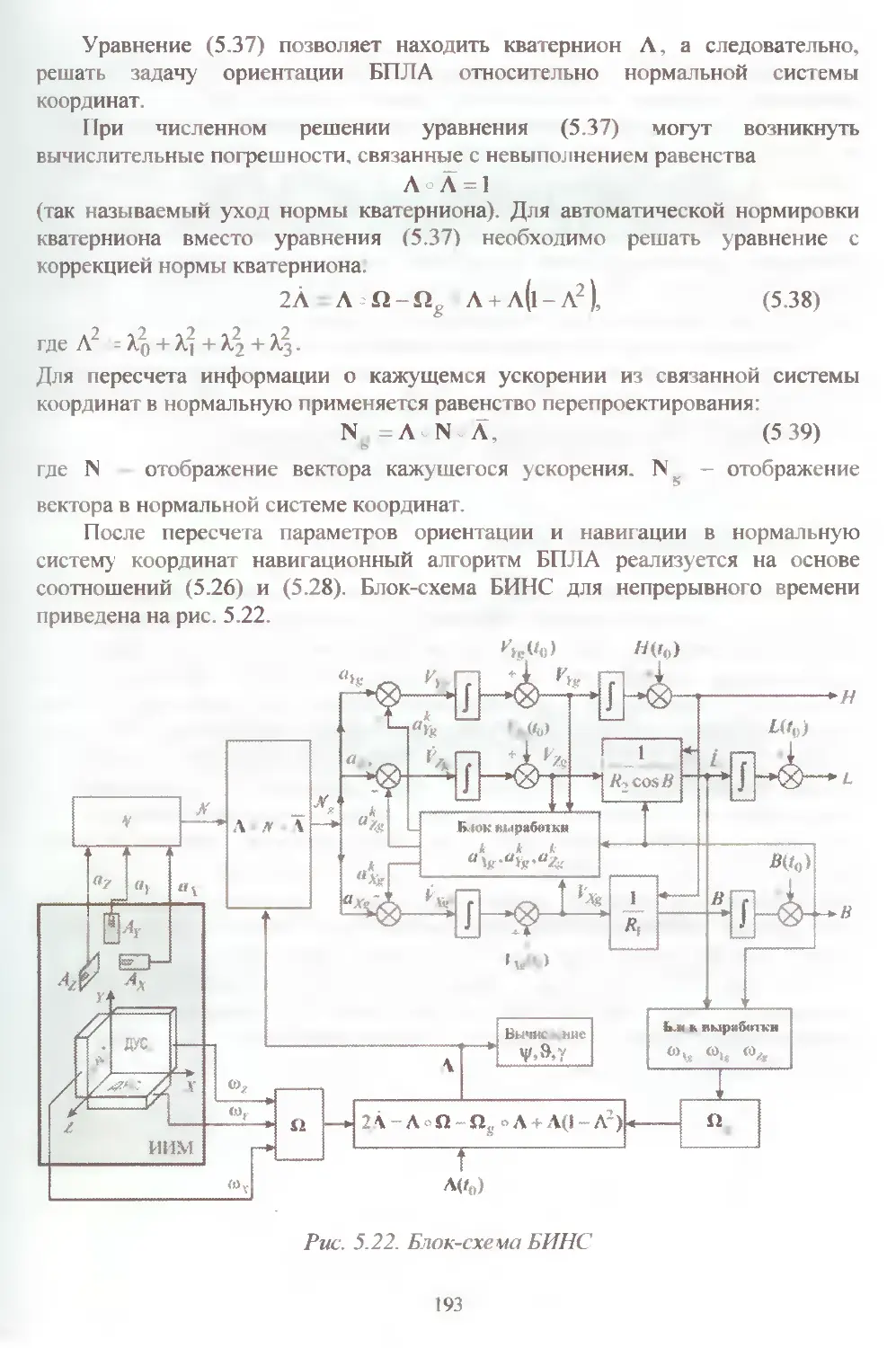
5.2.3. Алгоритмы идеальной работы БИНС 190
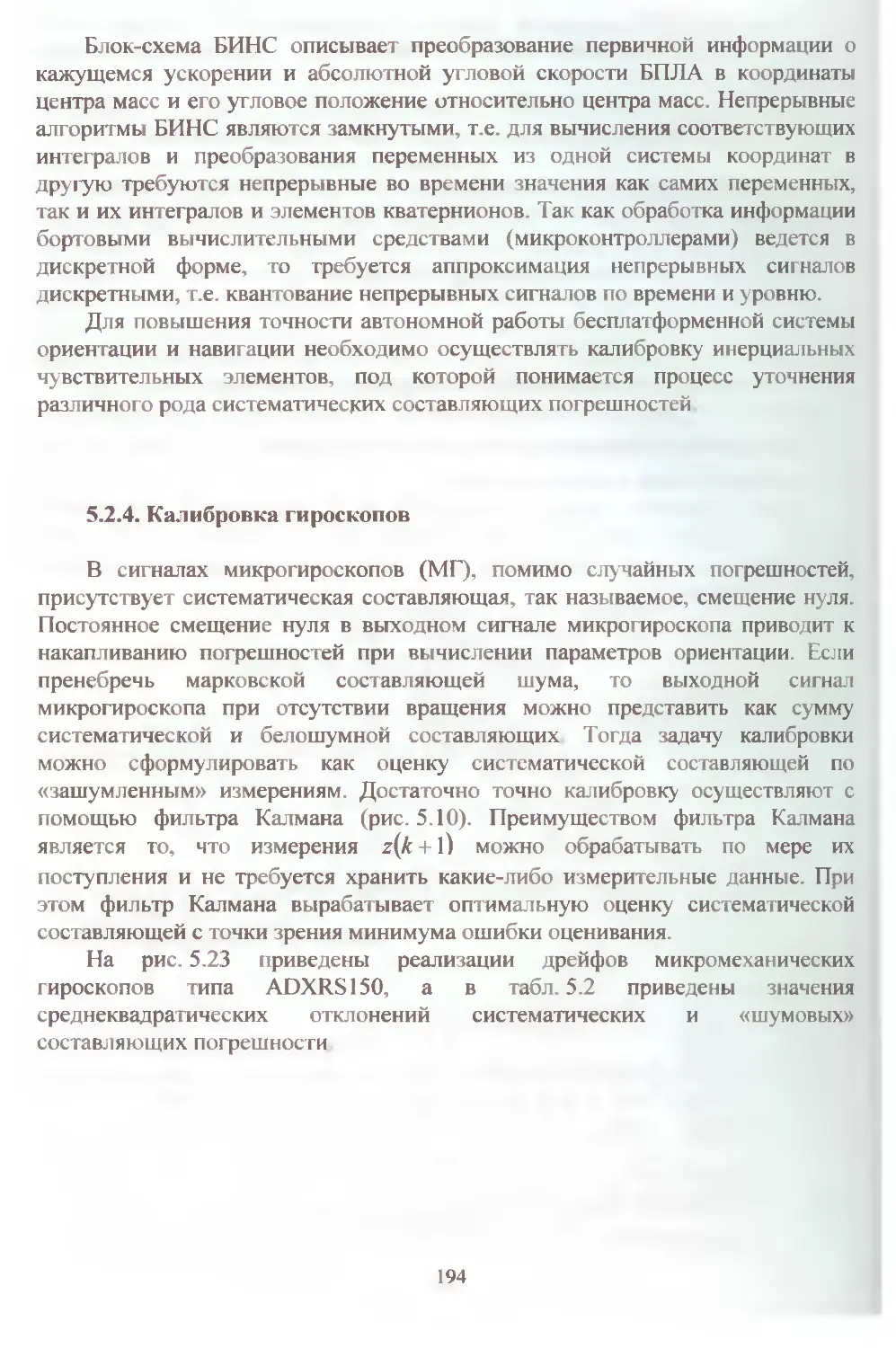
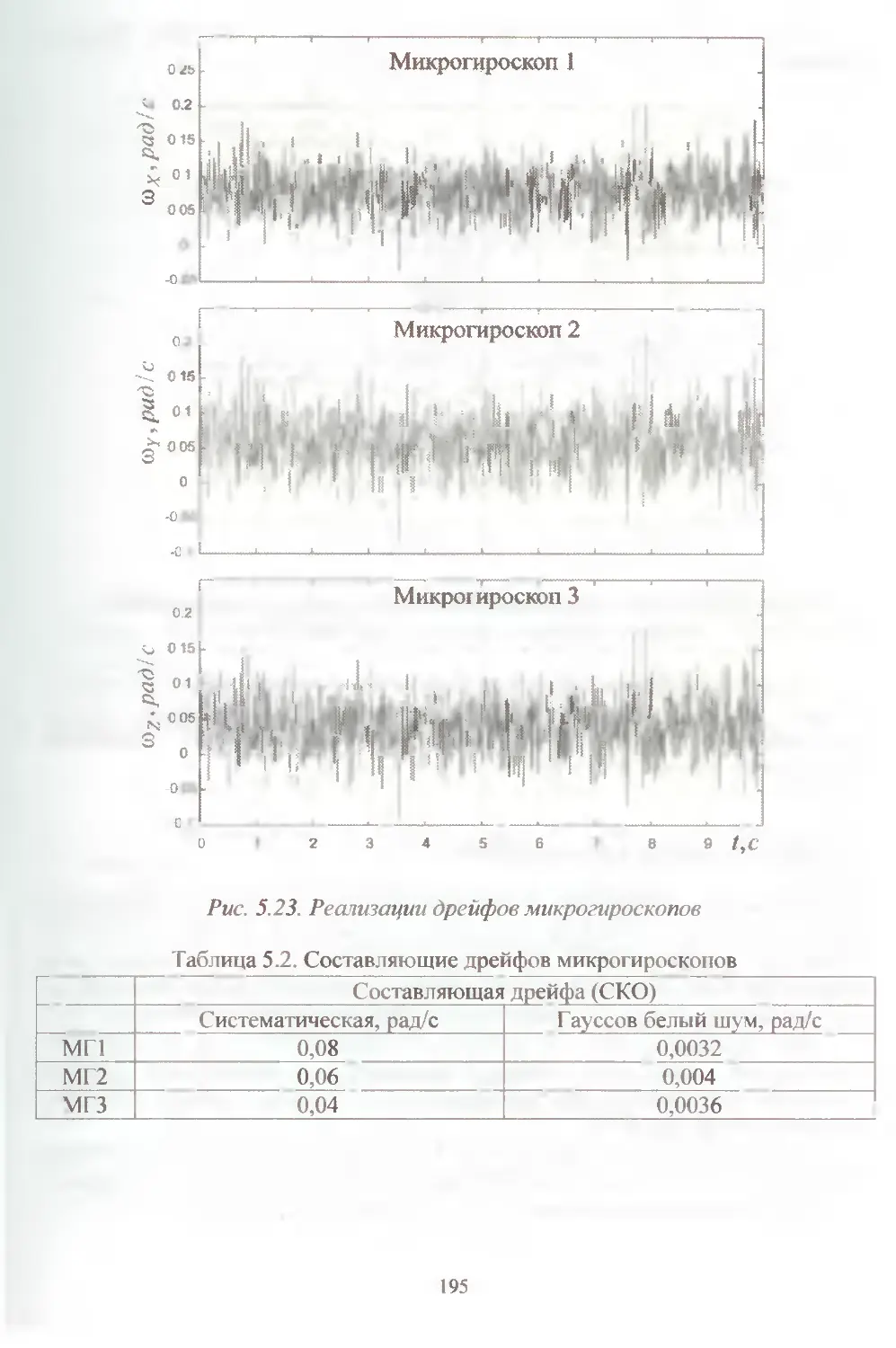
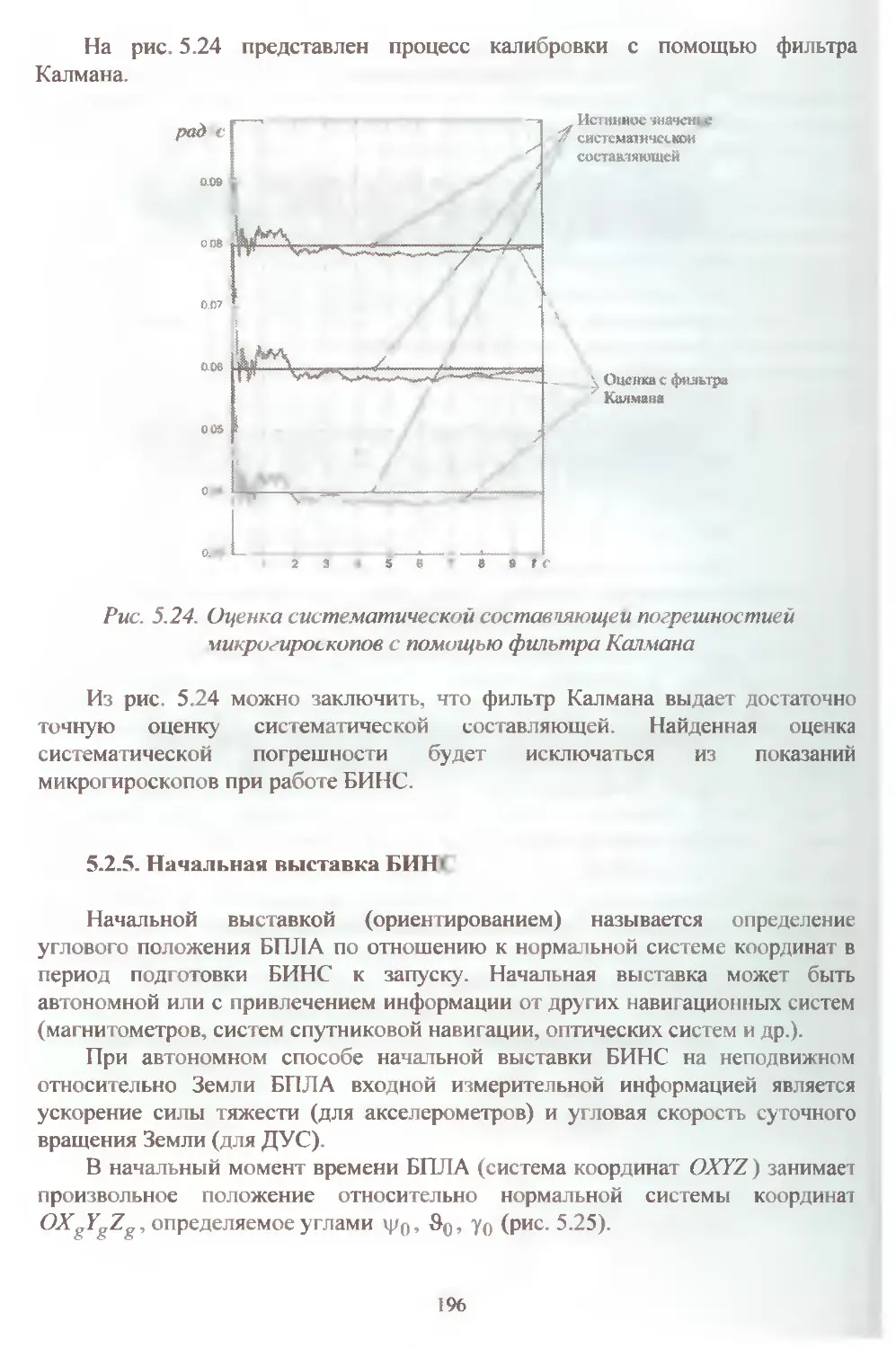
5.2.4. Калибровка гироскопов 194
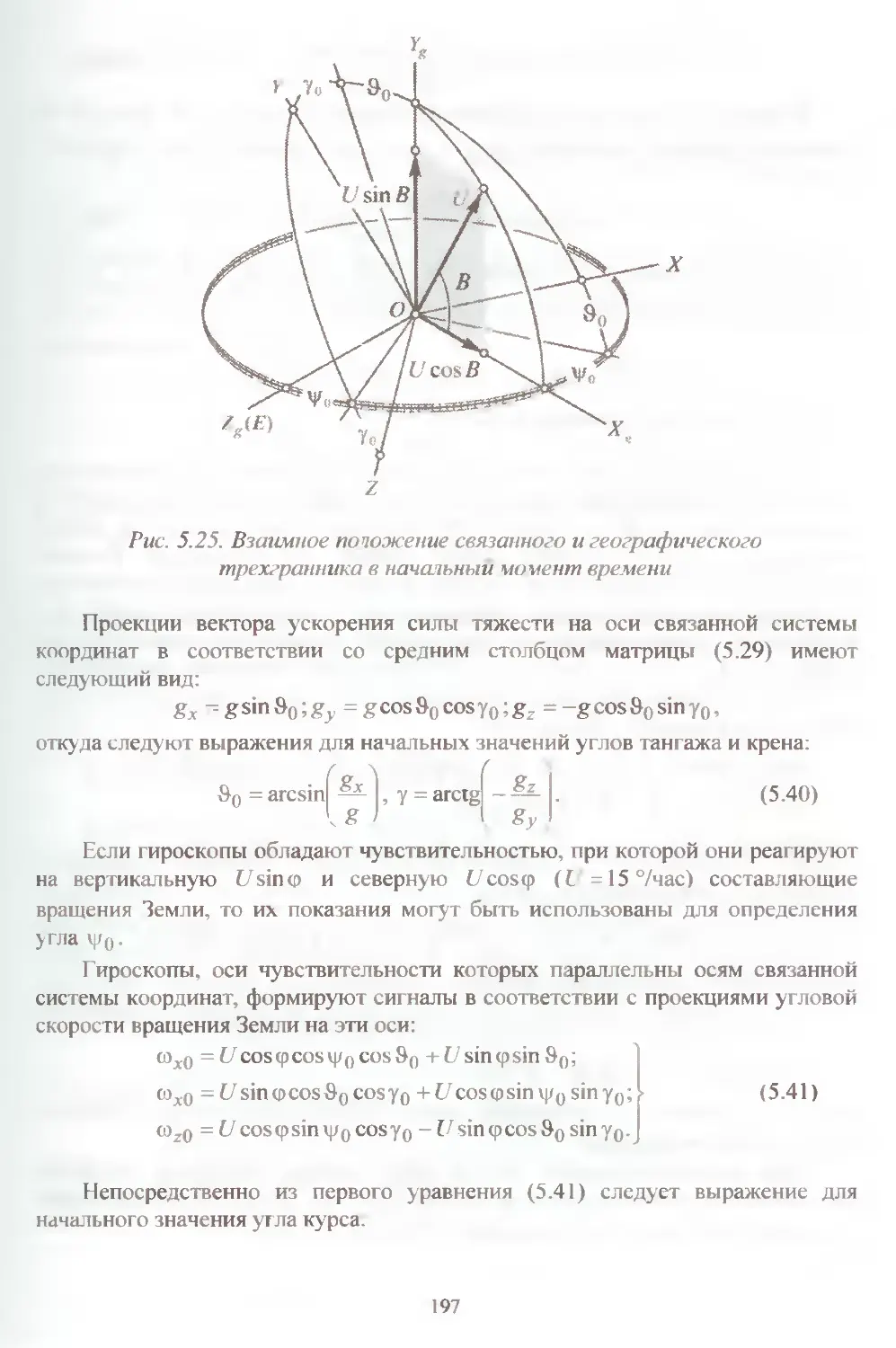
5.2.5. Начальная выставка БИНС 196
5.2.6. Алгоритм ориентации БИНС 198
5.2.7. Навигационный алгоритм БИНС 199
5.2.8. Спутниковые навигационные системы 202
5.2.8.1 Глобальная система позиционирования (The Global
Position System - GPS) 202
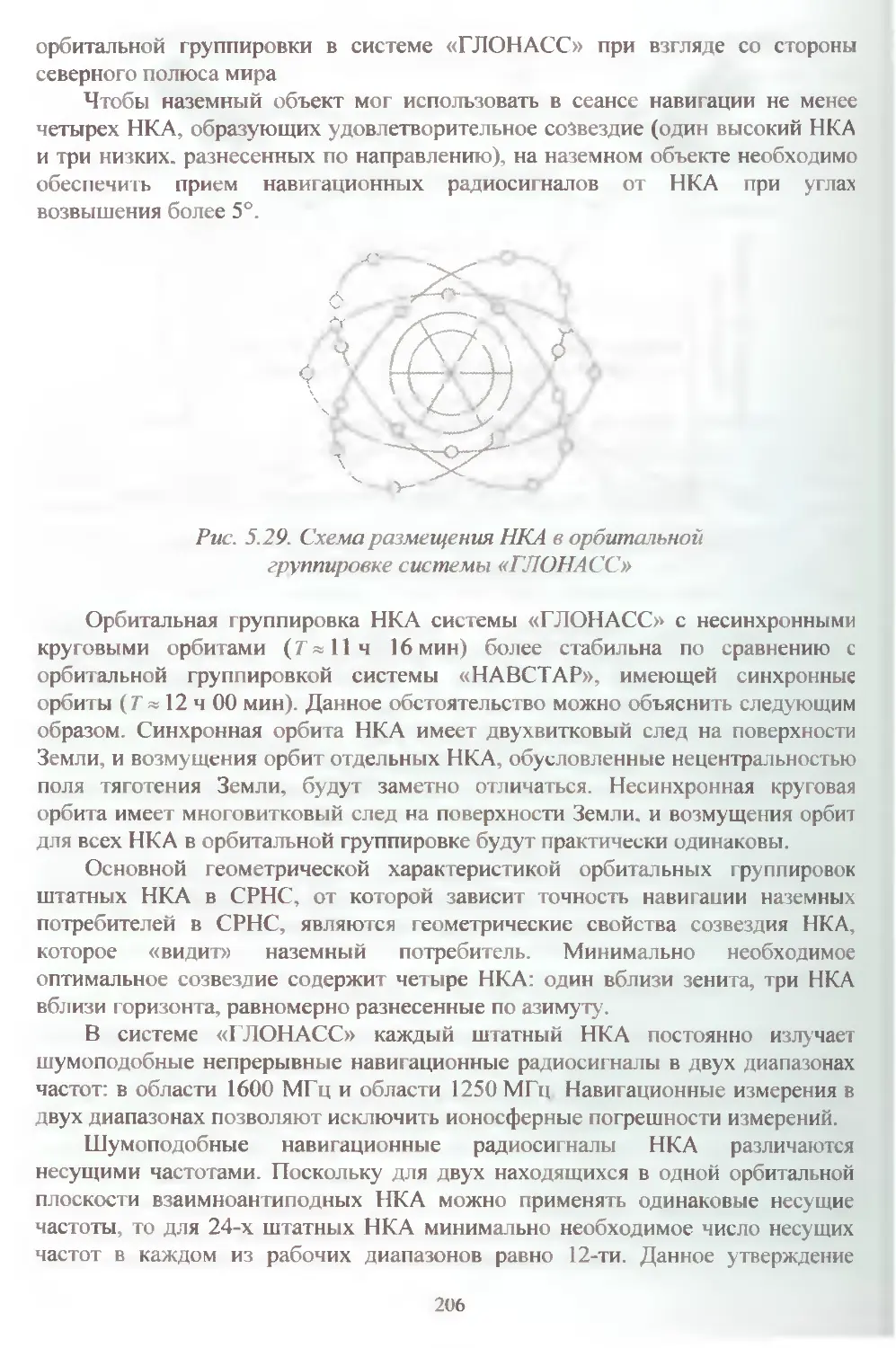
5.2.8.2. Орбитальная группировка «ГЛОНАСС» 205
5.2.8.3. Приёмники и антенны 208
5.2.9. Комплексирование систем ориентации и навигации 211
5.2.9.1. Способ компенсации 211
5.2.9.2. Способ фильтрации 214
5.2.9.3. Комплексирование с применением фильтров Калмана 216
Контрольные вопросы 217
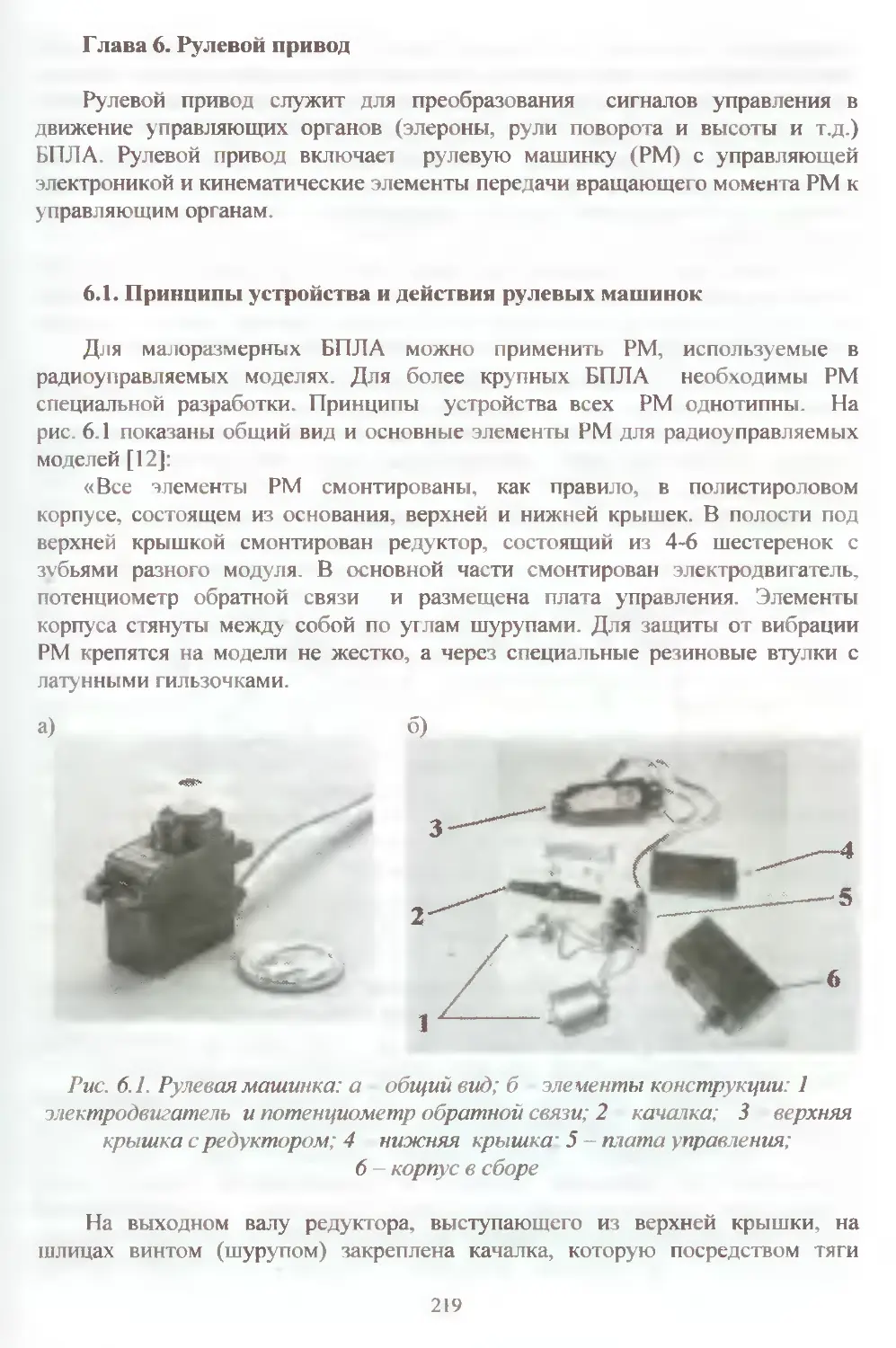
Глава 6. Рулевой привод 219
6.1. Принципы устройства и действия рулевых машинок 219
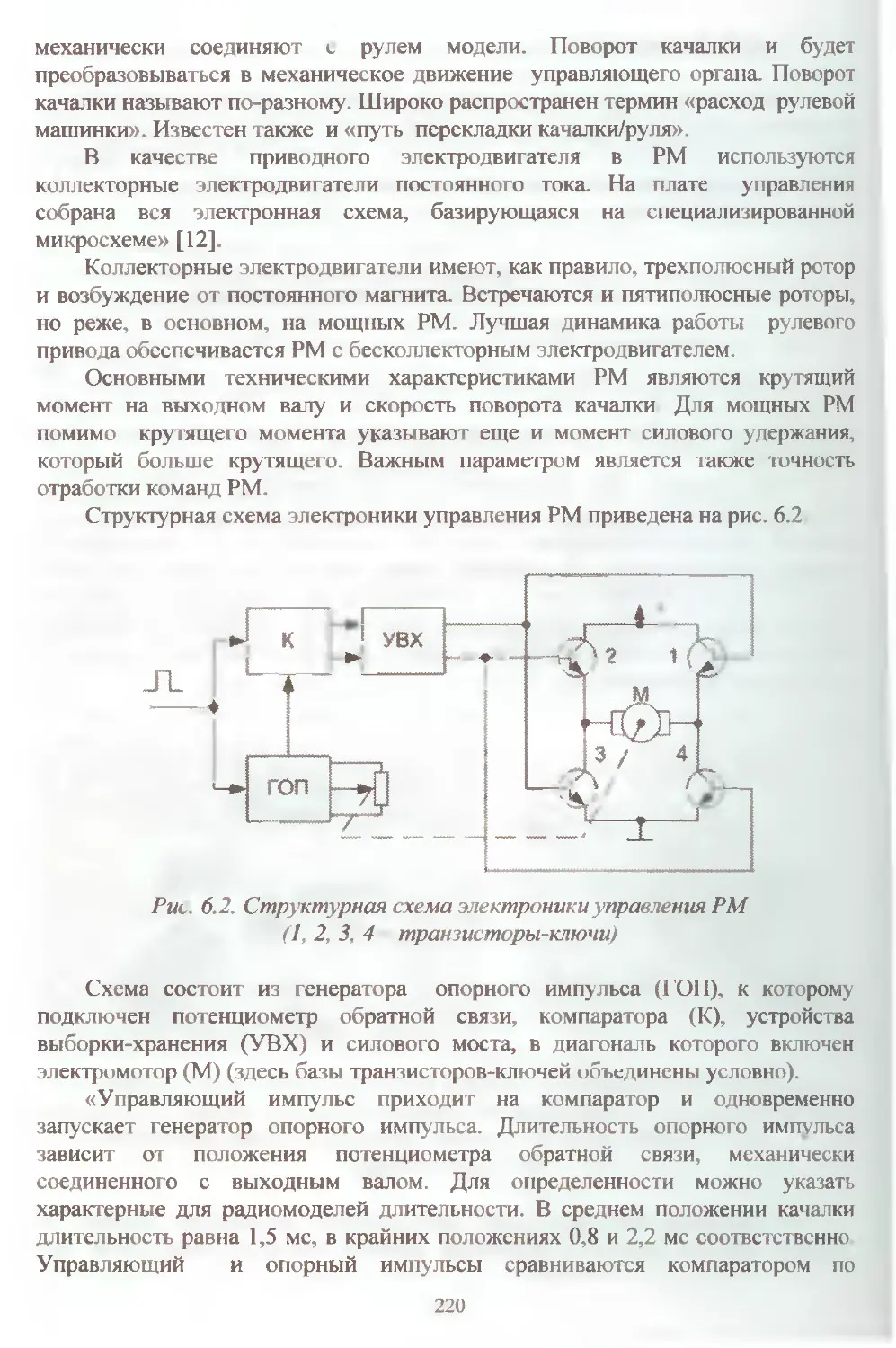
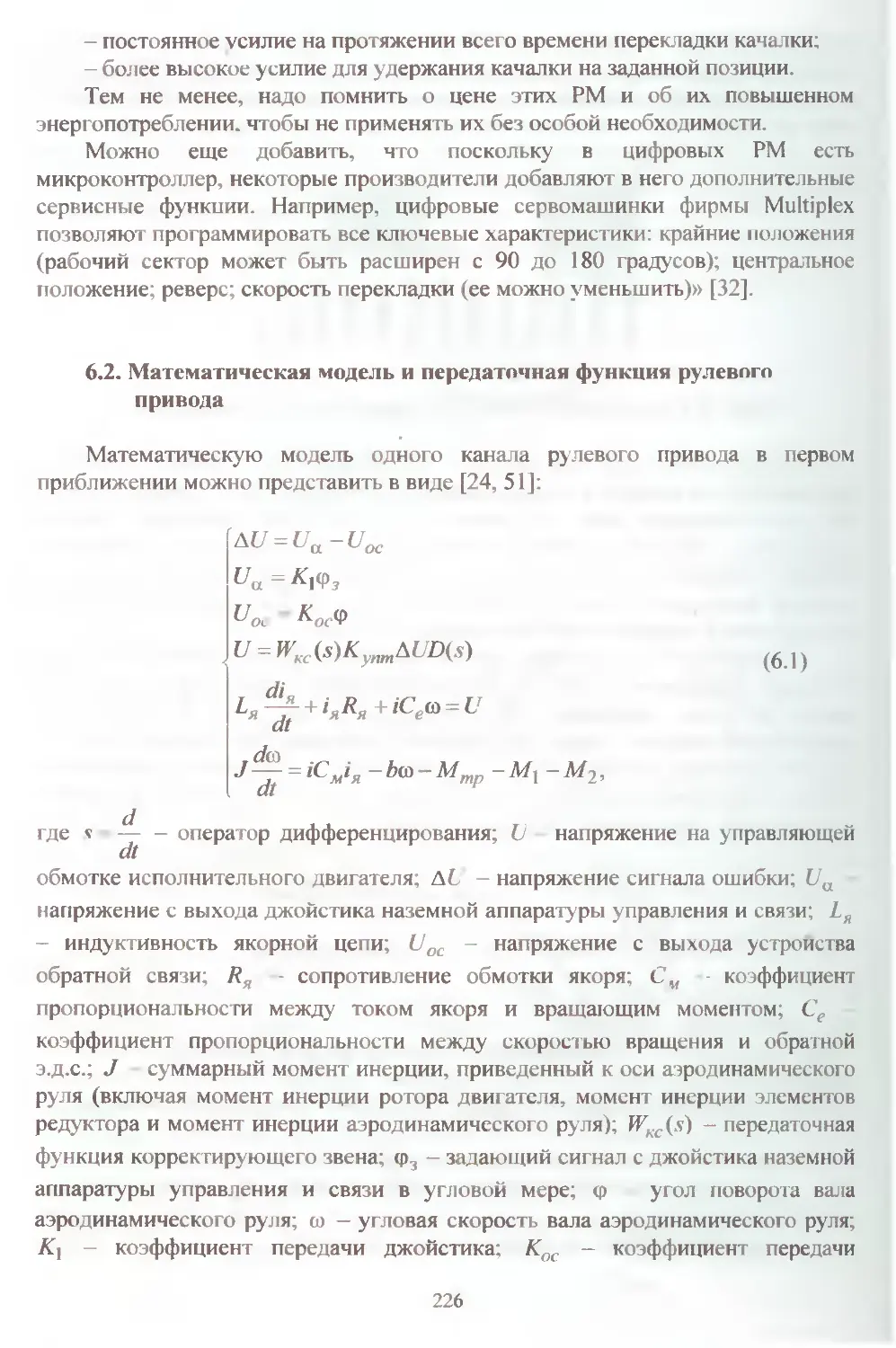
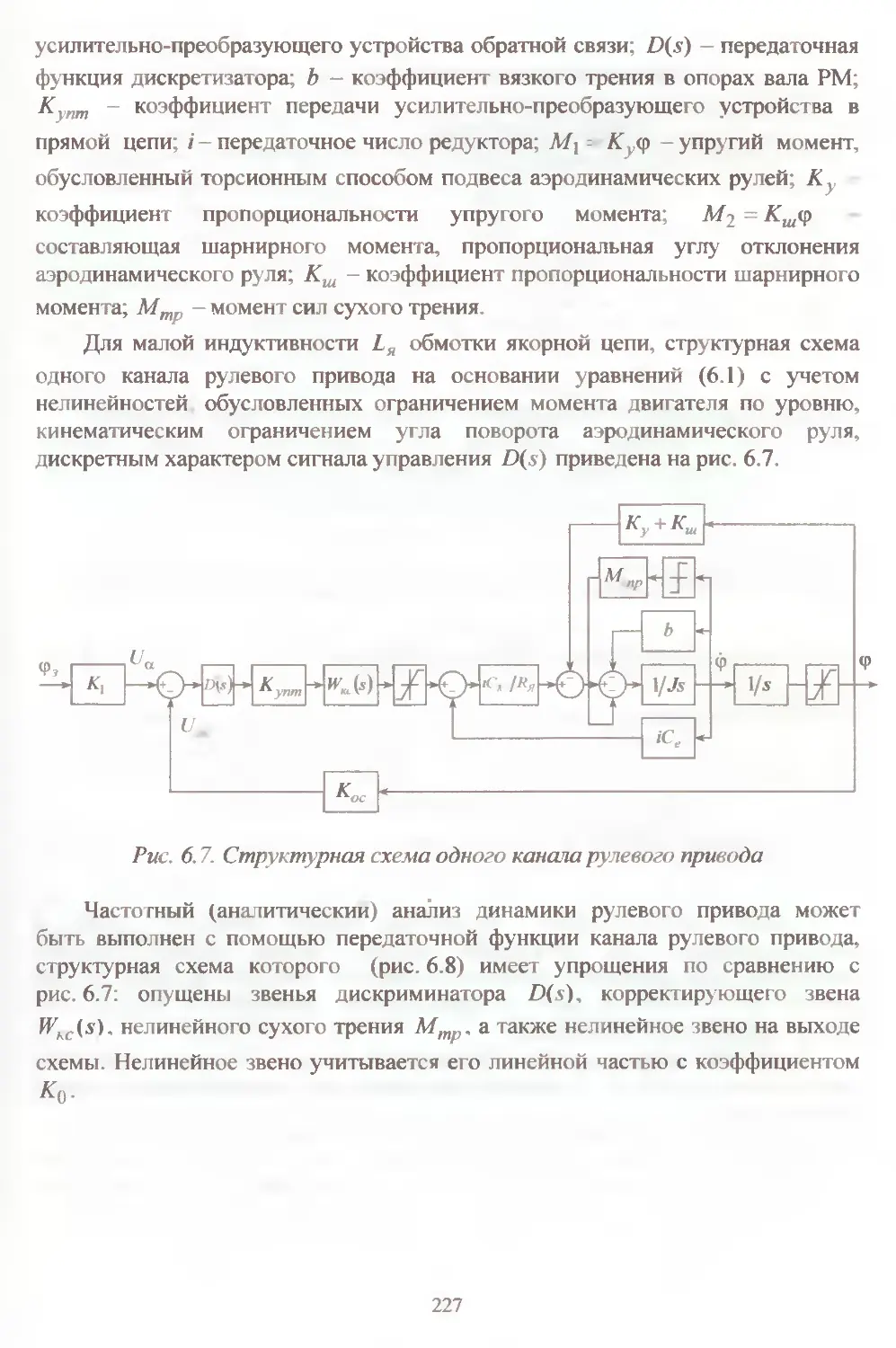
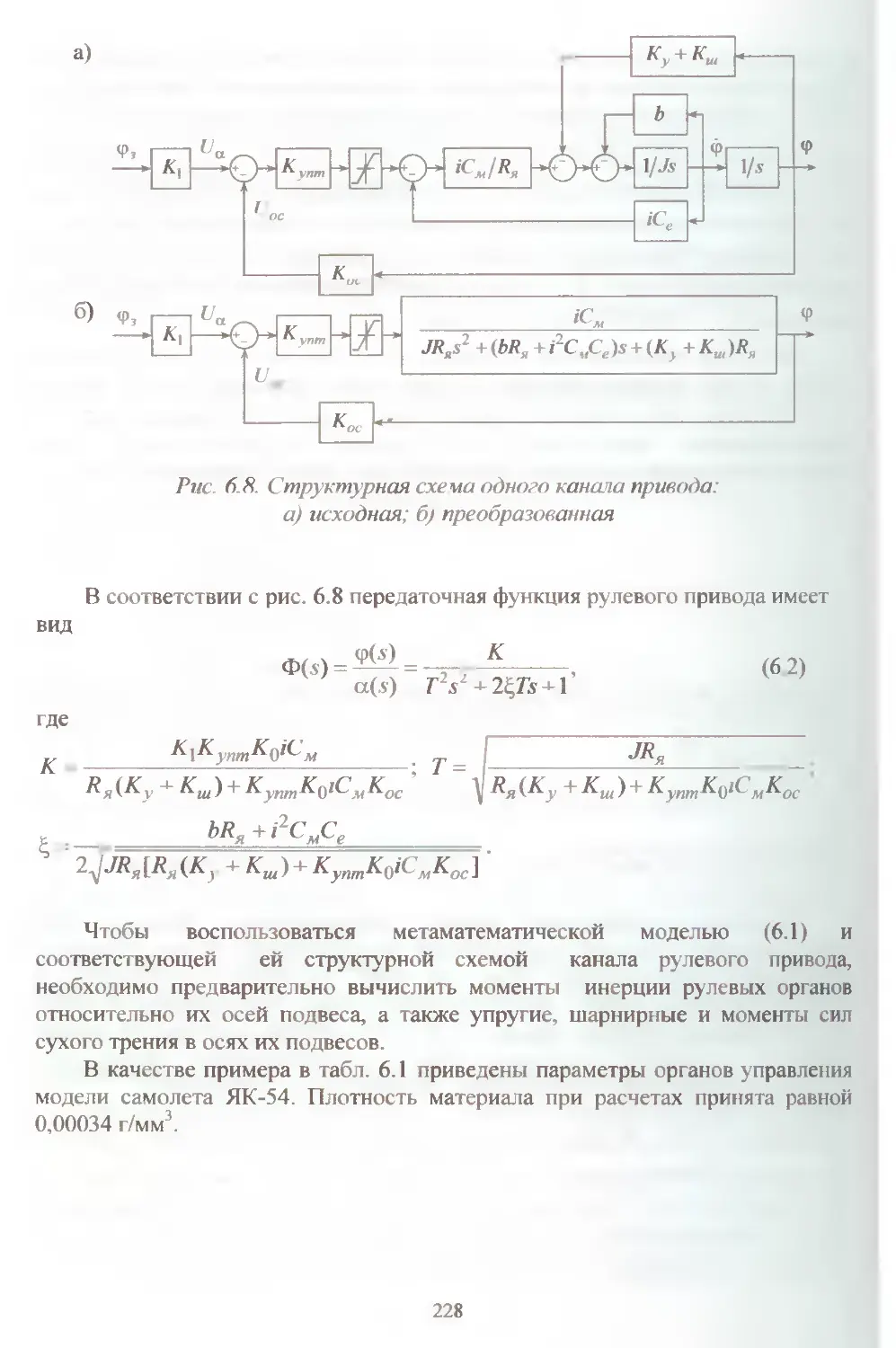
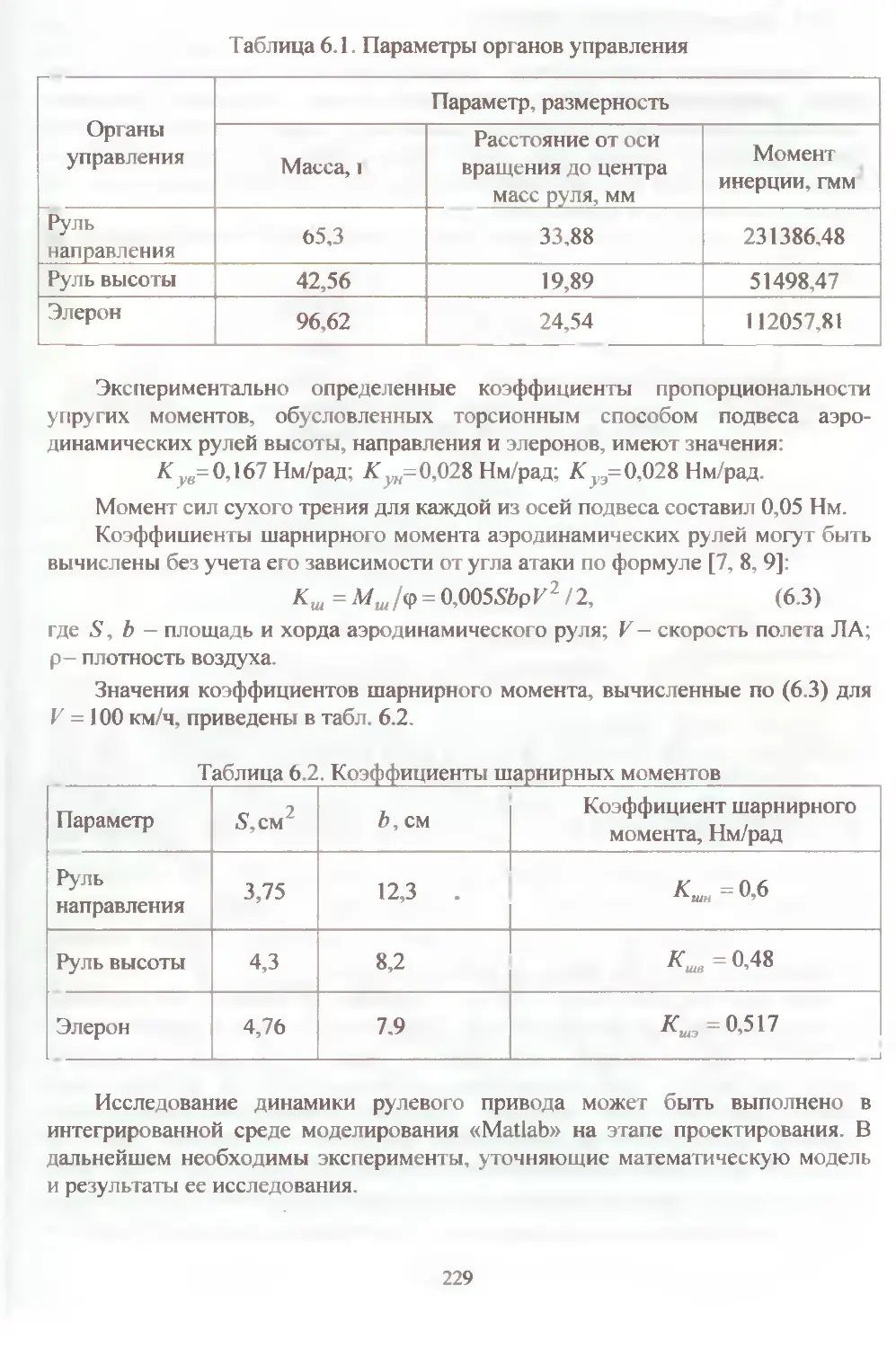
6.2. Математическая модель и передаточная функция
рулевого привода 226
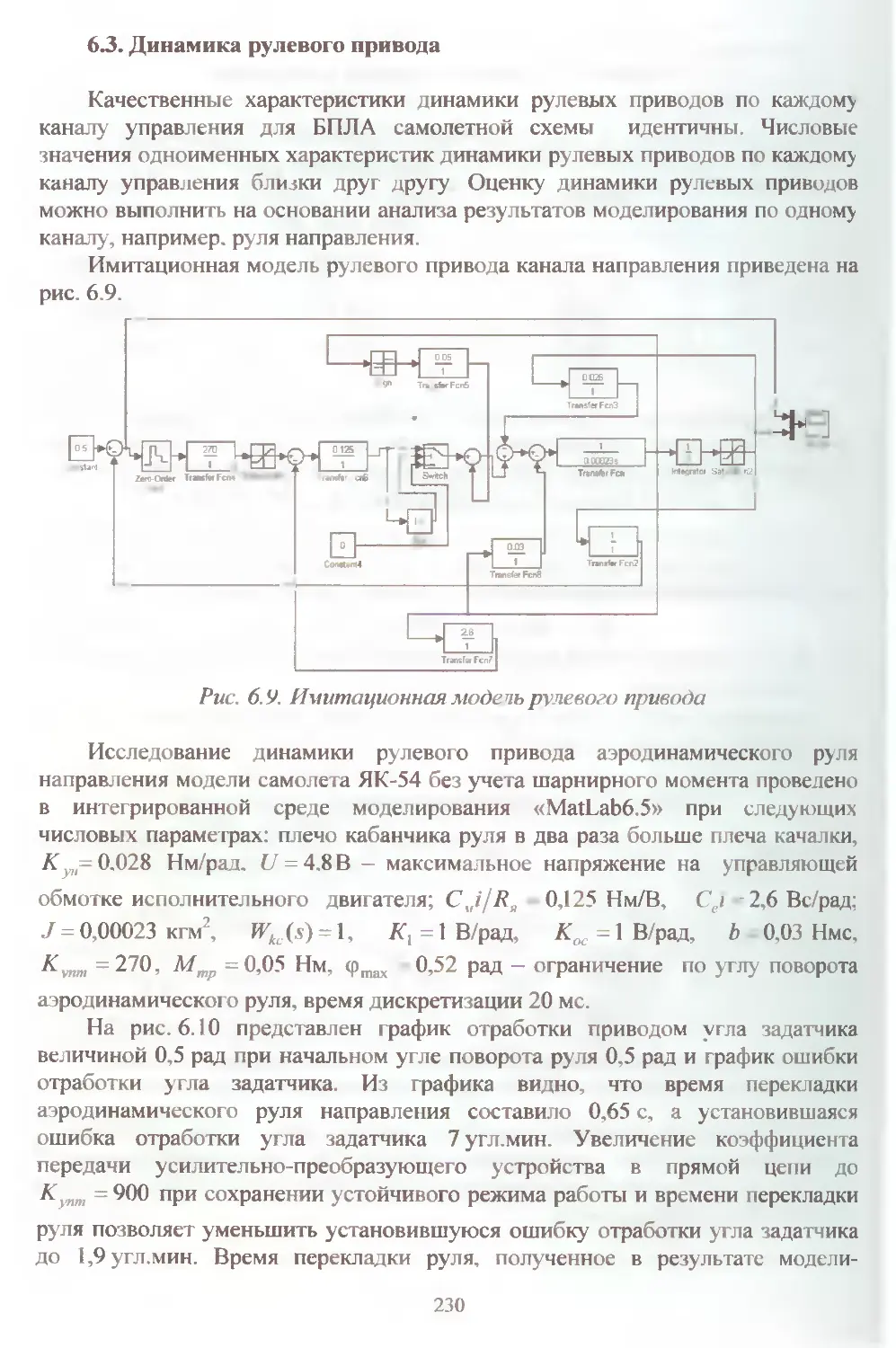
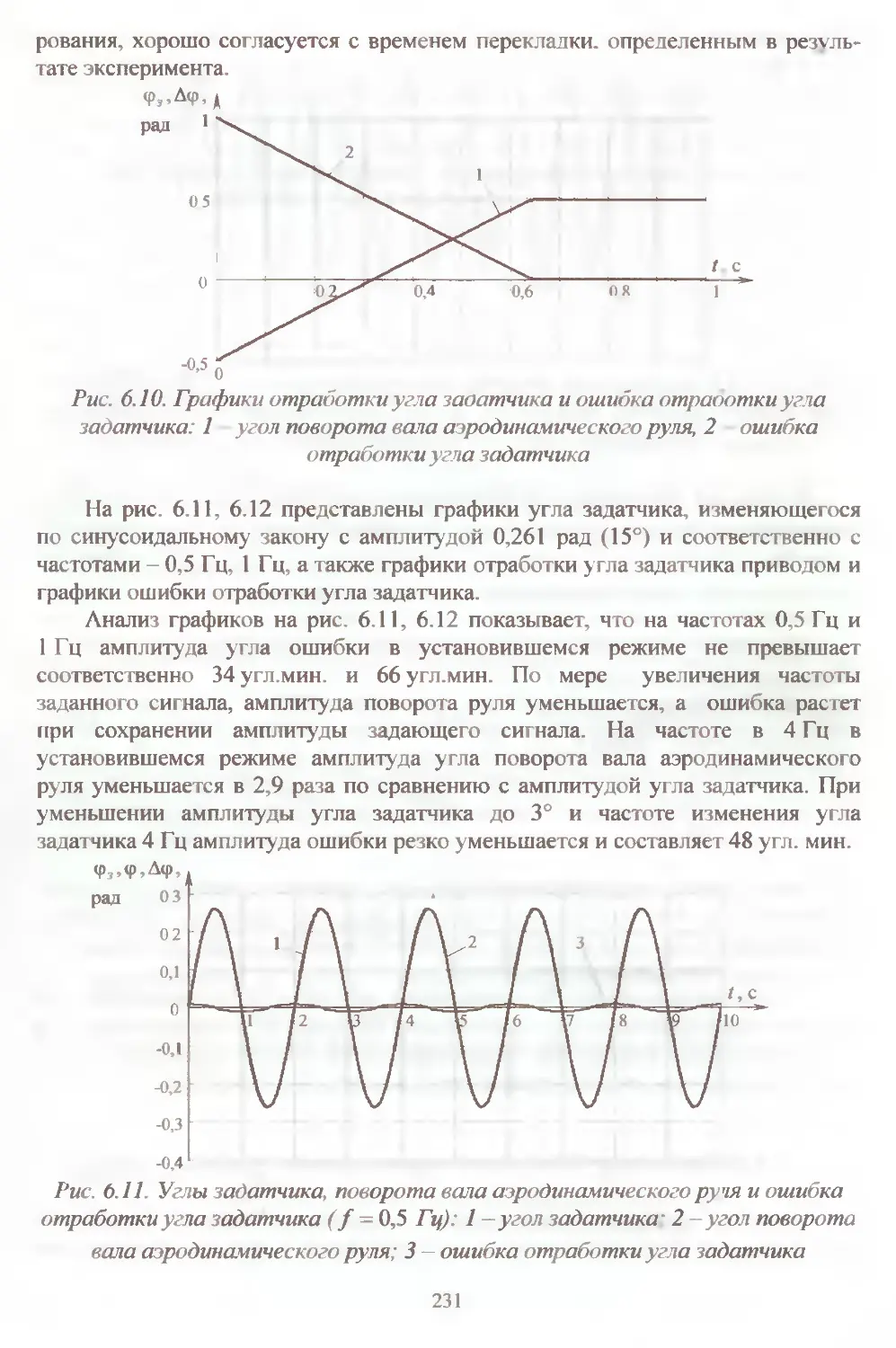
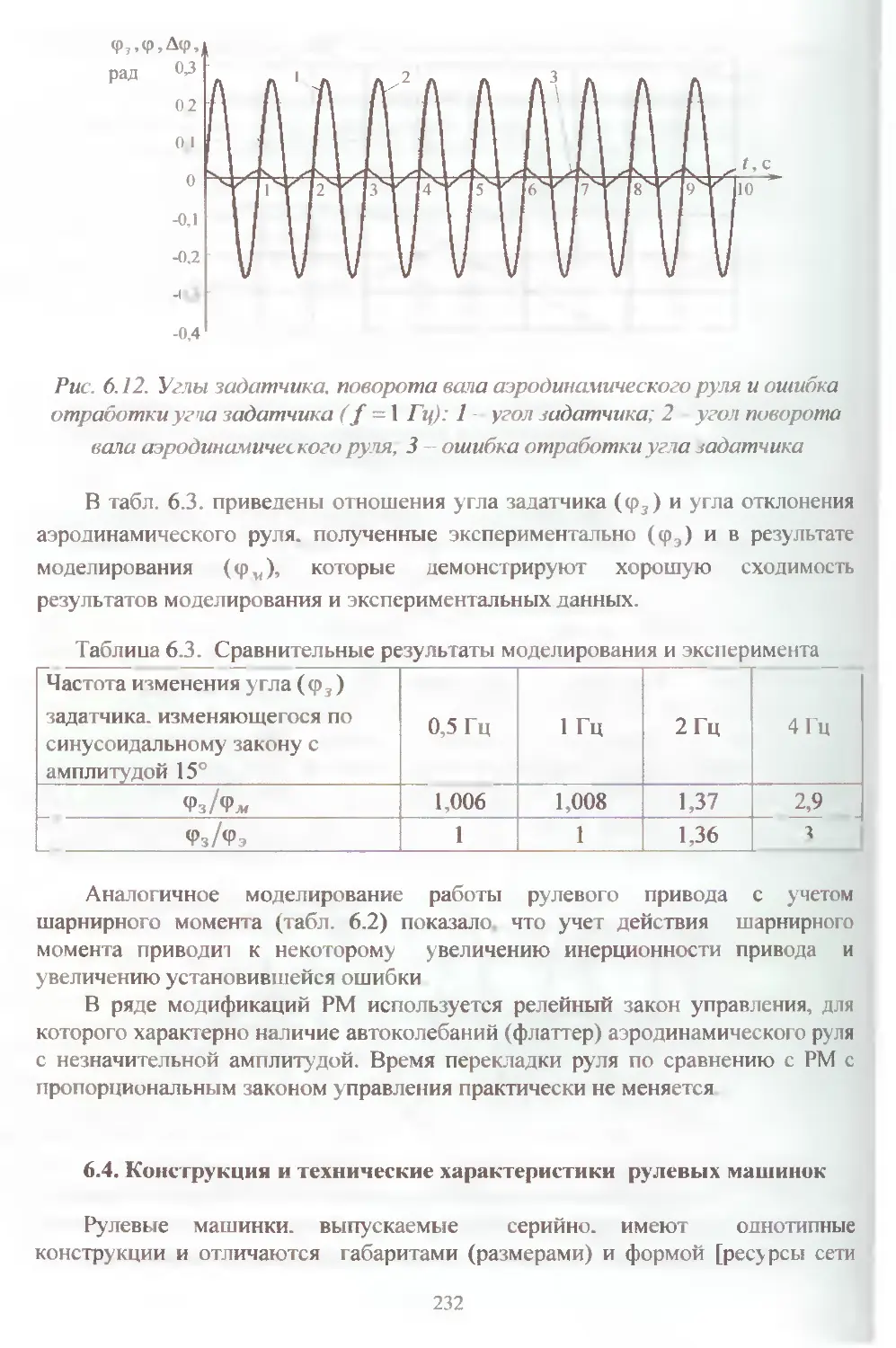
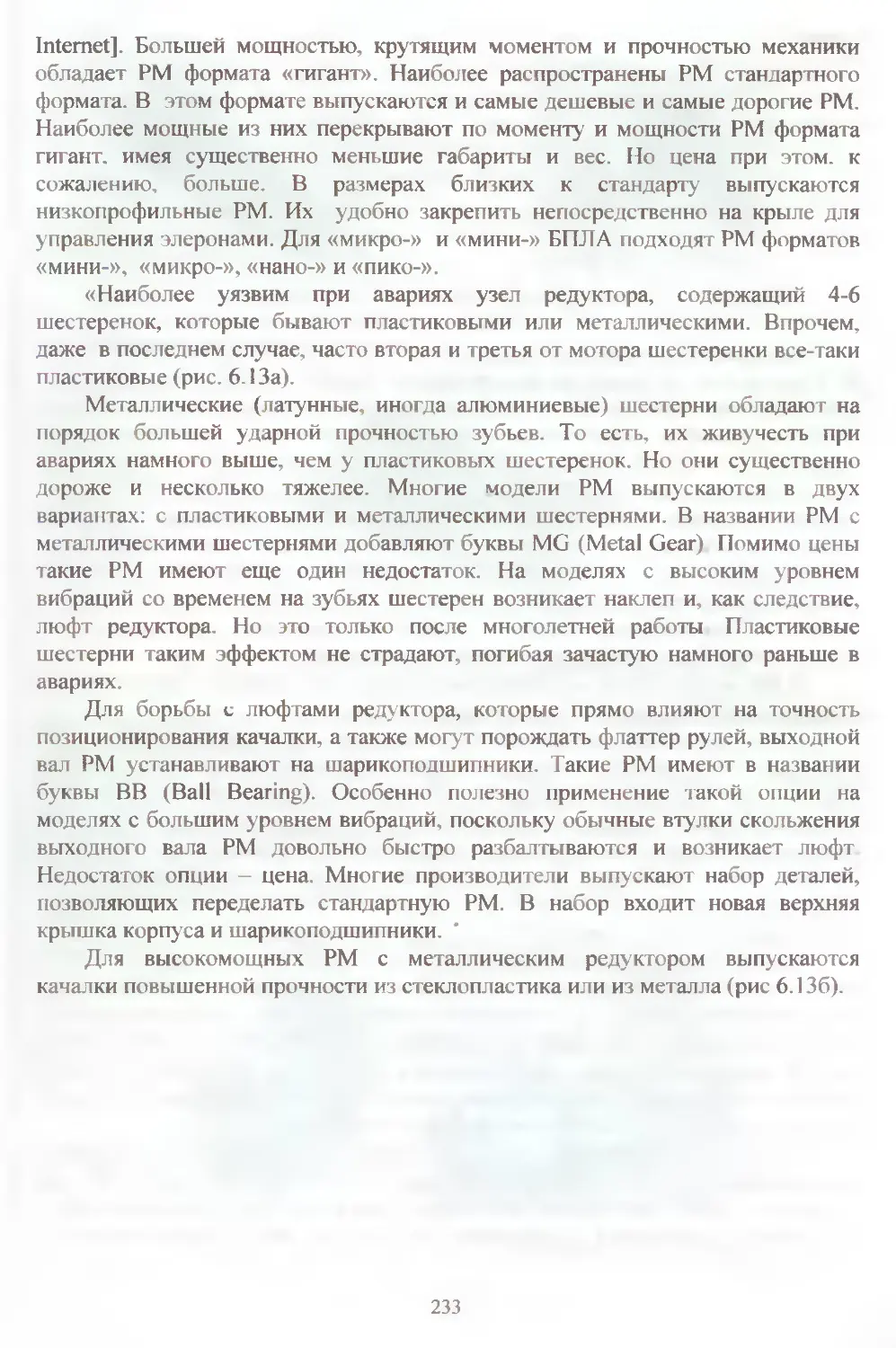
6.3. Динамика рулевого привода 230
6.4. Конструкции и технические характеристики рулевых
машинок . 232
Контрольные вопросы 237
Заключение 238
Список литературы 240
Предметный указатель 245
5
Принятые сокращения
АП - автопилот
АУиС - аппаратура управления и связи
АЦП - аналого-цифровой преобразователь
БАУ - бортовая аппаратура управления
БВС - бортовая вычислительная система
БД - блок датчиков
БИНС - бесплатформенная инерциальная навигационная система
БПЛА — беспилотный летательный аппарат
БСО - бесплатформенная система ориентации
ВОГ — волоконно-оптический гироскоп
ВТГ - волновой твёрдотельный гироскоп
ДУ С - датчик угловой скорости
ЖОС - жёсткая обратная связь
ИВС - интегрированная вычислительная среда
ИМА - интегрированная модульная авионика’
ИНС - инерциальная навигационная система
КВГ - кориолисовый вибрационный гироскоп
КСН - комплексированная система навигации
КСО - комплексированная система ориентации
ЛА - летательный аппарат
ЛГ - лазерный гироскоп
МБПЛА малоразмерный БПЛА
ММА - микромеханический акселерометр
ММГ - микромеханический гироскоп
ММДД — микромеханический датчик давления
МК - микроконтроллер
ММП - мировое магнитное поле
МСО - магнитометрическая система ориентации
МСТ - микросистемная техника
МЭМС - микроэлектромеханические системы
НАУ - наземная аппаратура управления
ПК - персональный компьютер
ПО - программное обеспечение
ПСО - пирометрическая система ориентации
РВ — руль высоты
РМ - рулевая машинка
САУ - система автоматического управления
СНС - спутниковая навигационная система
СО — система ориентации
ЦАП - цифро-аналоговый преобразователь
ЦД - центр давления
ЦМ - центр масс
ЧЭ - чувствительный элемент
Э - элероны
6
Предисловие
Микросистемная техника (МСТ) является одной из официально
объявленных критических технологий Российской Федерации Под МСТ
следует понимать как специальные технологии производства, так и изделия
этого производства: преобразователи и датчики физических величин, аналого-
цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи сигналов,
микроконтроллеры, устройства связи и отображения информации, исполни-
тельные устройства и т.д.
В учебные планы подготовки по направлениям «Автоматизация и
управление», «Приборостроение» и др. включены, или могут быть включены,
спецдисциплины по технологиям и изделиям МСТ Одной из таких спец-
дисциплин является «Микросистемная авионика».
«Микросистемная авионика» это. прежде всего, аппаратные
(технические) средства, реализованные на микроэлементной базе и пред-
назначенные для систем управления малоразмерными беспилотными лета-
тельными аппаратами (МБПЛА). МБПЛА являются одним из наиболее
актуальных направлений развития беспилотной авиации. Широкий круг задач,
решаемых МБПЛА, в сочетании с их относительно небольшой себестоимостью
и постоянной тенденцией к улучшению качества выполняемых ими задач,
обеспечивают расширение этого сектора беспилотной авиации В настоящее
время опубликовано достаточно большое количество статей, посвящённых
отдельным изделиям микросистемной авионики (микроакселерометры,
микрогироскопы, АЦП, ЦАП. блоки систем ориентации и навигации и т.д.). а
также вопросам проектирования МБПЛА [1, 2, 13, 19, 23, 26, 29, 31, 34, 35, 36
37, 38, 39, 48]. Существуют также монографии [3, 4, 13, 19] с изложением
вопросов аппаратно-программной реализации авионики, в том числе и
применимых к МБПЛА, а также охватывающих вопросы проектирования
комплексов МБПЛА, включая способ их старта и посадки, выбор двигательной
установки и т.д.
Данное учебное пособие является попыткой изложить современное
представление о микросистемной авионике как интегральной учебной
дисциплине, базирующейся на научных основах дисциплин: аэромеханика [8, 9,
28], теория автоматического управления [17, 22], теория бесплатформенных
инерциальных навигационных систем [10, 18, 22, 26], основы теории
оценивания и обработки навигационной информации [6. 13. 16. 19. 21. 44]
Учебное пособие написано на единой методической основе - авионика
рассматривается как составная часть системы автоматического управления
МБПЛА, в которой планер МБПЛА является объектом управления, а рулевой
привод - исполнительным органом. В соответствии с этим, материал учебного
пособия распределён следующим образом:
- Введение. Малоразмерные беспилотные летательные аппараты и
микросистемная авионика
Приведены определения и терминология, связанные с МСТ и МБПЛА
Даны краткие сведения о возможностях МБПЛА и особенностях микро-
7
системной авионики. Введение написано на основе работ [4, 5, 11, 14. 17, 20,
27, 29, 36, 37,39,45].
- Глава 1. Структура и состав авионики и наземной аппаратуры управле-
ния и связи.
Рассмотрены способы управления полётом летательного аппарата (ЛА),
режимы полёта и структуры аппаратуры управления МБПЛА. Приведены
примеры реализации и технические характеристики авионики МБПЛА. Глава
написана на основе работ [11, 14. 35, 36, 37, 39.43,48,49, 50].
- Г лава 2. Беспилотный летательный аппарат - объект управления.
Приведены системы координат, определяющие положение ЛА. Рассмот-
рены полные и линеаризованные уравнения продольного и бокового движений
ЛА. Уделено внимание рассмотрению физических причин возникновения сил и
моментов, вызывающих аэродинамическую устойчивость или неустойчивость
ЛА. Глава написана на основе работ [4, 8, 9, 28, 46, 47]. Приведённые в главе
значения аэродинамических коэффициентов определены методом
«виртуальной продувки» [47].
- Глава 3. Автопилоты.
Рассмотрены принципы действия и типовые структуры автопилотов (АП)
по каналам крена, тангажа и курса (рыскания). Приведены основные законы
управления по каждому из каналов АП. Рассмотрены различные виды обратной
связи в каналах управления АП. Особое внимание уделено влиянию
управляющих и возмущающих воздействий на переходные процессы при
устранении начальных углов отклонения ЛА, а также при линейном и
ступенчатом управляющих сигналах.
Отмечены основные особенности управления ЛА по каналу высоты и
боковым движением центра масс ЛА. Глава написана на основе работ [7, 22, 38,
42, 43, 48]. Следует отметить, что основным источником при описании
переходных процессов по всем каналам управления ЛА явилась работа [7], из
которой заимствованы графики, иллюстрирующие процессы устранения
возмущений ЛА с помощью АП.
- Глава 4. Датчики.
Рассмотрены физические основы работы, особенности конструкции и
технические характеристики датчиков физических величин. Рассмотрены
микрогироскопы и микроакселерометры, используемые в системах угловой
ориентации и инерциальной навигации МБПЛА. Приведены сведения о
магнитометрических и пирометрических датчиках, используемых в системах
угловой ориентации МБПЛА, а также о барометрических датчиках для
измерения высоты и воздушной скорости полёта. Глава написана на основе
работ [3. 13, 15, 23,26, 30, 31, 34,40, 41, 42].
- Глава 5. Системы ориентации и навигации.
Рассмотрены физические принципы и основные алгоритмы работы
бесплатформенной, магнитометрической и пирометрической систем угловой
ориентации МБПЛА. Приведены структурные схемы и особенности
комплексирования систем ориентации различных типов. Дано краткое
изложение теории построения бесплатформенной инерциальной навигационной
8
системы (БИНС). Отмечены особенности первоначальной выставки БИНС и
калибровки микрогироскопов. Приведено описание особенностей спутниковых
навигационных систем (СНС), GPS. ГЛОНАСС. Указаны основные схемы
комплексирования различных систем ориентации и навигации. Глава написана
на основе работ [1,2, 4, 6, 10, 13. 16. 18. 19. 21.22. 25. 26. 35. 43. 44. 48].
- Глава 6. Рулевой привод.
Приведены данные о принципах работы, управления и конструкциях
рулевых машинок (РМ) серийного производства, применимых в составе
рулевого привода МБПЛА. Приведено описание работы рулевого привода
органов управления МБПЛА.
Приведены уравнения движения и особенности динамики рулевого
привода. Глава написана на основе работ [12, 24, 32, 38, 51]. Описание
конструкций и работы РМ стандартного исполнения является компиляцией из
работ [12, 32].
- Заключение.
Содержит указания на проблемные вопросы развития МБПЛА и микро-
системной авионики
Список литературы состоит из 51 наименования и включает только те
источники, которые непосредственно использованы при написании учебного
пособия, а также содержит электронные адреса сети интернет, которые могут
быть использованы при изучении глав 1,4, 6.
В конце каждой главы приведены контрольные вопросы.
Часть материалов, относящихся к системам ориентации и навигации
МБПЛА, была представлена на XV, XVI, XVII С.-Петербургских
международных конференциях по интегрированным навигационным системам
(2008-2010 г.г.), проводимых под руководством академика РАН В.Г.
Пешехонова.
Научно-технические и образовательные аспекты авионики МБПЛА были
изложены в виде лекции на XI конференции молодых учёных по навигации и
управлению движением. (С.-Петербург, ГНЦ РФ ЦНИИ «Электроприбор».
2009. Председатель программного комитета д.т.н., проф. О.А. Степанов).
Учебный комплекс по авионике МБПЛА. разработанный на кафедре «Приборы
управления» ТулГУ, был представлен на 2-м и 3-м Московских
международных форумах-выставках «Беспилотные многоцелевые комплексы в
интересах ТЭК» (2008-2009 г.г.).
Основная идея данного учебного пособия заключается в объединении
материалов, изучаемых в различных учебных курсах, которые только во
взаимосвязи между собой дают возможность спроектировать микросистемную
авионику
Учебное пособие ориентировано на студентов вузов, обучающихся,
прежде всего, по направлениям «Автоматизация и управление»,
«Приборостроение» и соответствующим им специальностям подготовки.
Читателями книги могут быть также аспиранты и инженеры, начинающие
работать в области беспилотной авиации.
9
Автор считает необходимым отметить особую роль, которую сыграл
главный конструктор НПК «Новик - XXI век» Н.В. Чистяков в развитии на
кафедре «Приборы управления» ТулГУ научного направления по авионике
БПЛА. Именно по инициативе Н.В. Чистякова в 1994 г. кафедра выполнила
первую ра (работку для БПЛ4 - многорежимную гировертикаль на
традиционной электромеханической элементной базе. Дальнейшее развитие
этого направления, уже с применением микросистемной элементной базы, было
поддержано генеральным директором ФГУП «Санкт-Петербургское ОКБ
«Электроавтоматика» имени П.А. Ефимова» д.т.н., проф. П.П. Парамоновым.
Всегда продуктивными были обсуждения проблем разработки авионики БПЛА
с главным конструктом направления этого же предприятия д.т.н., проф
Ю.И.Сабо. Трудно переоценить поддержку различных проектов по
микросистемной авионике ректора ТулГУ М.В. Грязева и генерального
директора ОАО «Мичуринский з-д «Прогресс», Почётного выпускника
кафедры «Приборы управления», к.э.н. В.А. Дмитриева.
При написании учебного пособия автор пользовался помощью, которую
ему оказывали сотрудники кафедры: В.В. Матвеев, А.П. Шведов, М.Г.
Погорелов, Ю.В. Иванов, Р.В Алалуев, С.Е. Товкач - при подготовке
материалов к главе 5, В.В. Лихошерст, С.Е. Товкач — при подборе материалов к
главе 4; С.В. Телухин, М.Н. Машнин, А.В. Ладонкин - при обработке
материалов к главам 1, 2, 3; Д.М. Малютин предоставил часть материалов к
главе 6.
Решающая роль в подготовке к изданию учебного пособия принадлежит
к.т.н. С.В. Телухину, который своими квалифицированными замечаниями
способствовал улучшению и уточнению некоторых материалов текста. Всем
перечисленным сотрудникам кафедры «Приборы управления» ТулГУ,
коллегам и ученикам, автор выражает искреннюю признательность за
оказанную помощь. Без преувеличения, работа по написанию учебного пособия
была доведена до завершения благодаря всесторонней поддержке моей жены
Н.М.Распоповой.
10
Введение. Малоразмерные беспилотные летательные аппараты и
микросистемная авионика
В.1. Малоразмерные беспилотные летательные аппараты
Беспилотный летательный аппарат (БПЛА) - это разновидность
летательного аппарата, управление которым осуществляется при отсутствии
пилота на его борту Чаще всего под БПЛА понимают дистанционно
управляемый (пилотируемый) летательный аппарат способный совершать
полет и в автоматическом режиме. БПЛА является частью комплекса, в
который входит наземный пункт управления с его центральным звеном
человеком-оператором.
В документах Министерства обороны США употребляется термин
«беспилотные авиационные системы» (БАС) или «системы беспилотного
управления летательными аппаратами» — UAS (Unmanned Aircraft Systems).
БПЛА подразумевается только как часть системы. Они могут быть
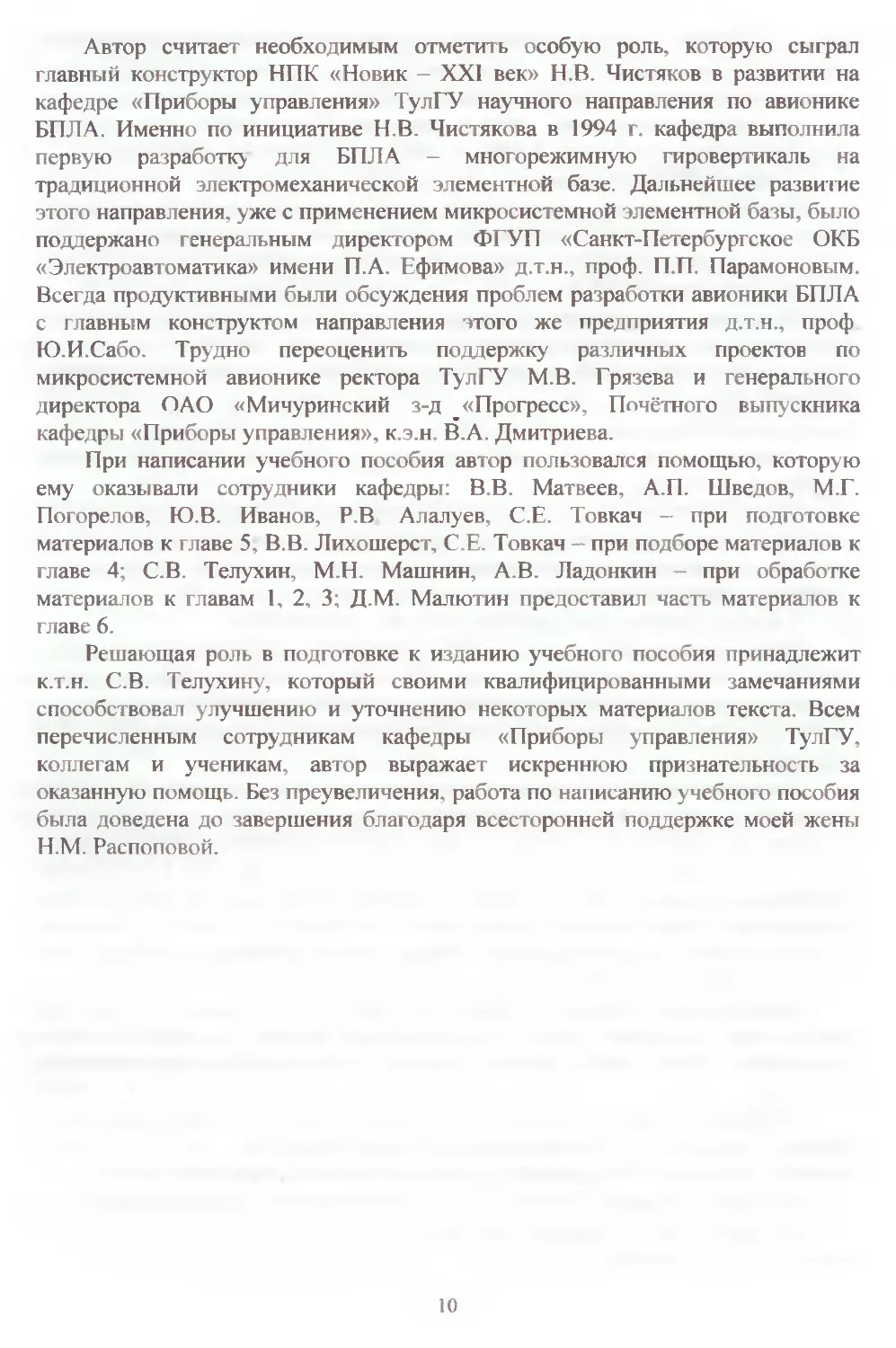
самолетного, вертолетного типа, а также легче воздуха. Распределение
количества БАС по категориям показано на рис. В.1 (журнал UAS. The Global
Perspective 2008/2009. info@uvs-info.com. www.uvs-info.com).
Nano - Нано
Micro - Микро
Mini - Мини
CR — близкого радиуса
SR - короткого радиуса
MR - среднего радиуса
MRE - среднего радиуса с
продолжительным полетом
LADP - низкрвысотные глубокого
проникновения
LALE - низковысотные с
продолжительным полетом
MALE - средневысотные с
продолжительным полетом
HALE - высотные с продолжительным
полетом
UCAV - боевые БПЛА
STRA - стратосферные
ЕХО - экзосферные
Рис. В. 1. Распределение количества БАС по категориям
Основные технические характеристики БПЛА, соответствующих БАС
различных категорий (рис.В.1), приведены в табл. В.1 (журнал UAS. The Global
Perspective 2008/2009. info@uvs-info.com. www.uvs-info.com).
11
Таблица В.1. Технические характеристики БПЛА по версии UAS
Категория префикс Дальность действия Высота (м) Время полета Масса Используются | в настоящее время ।
0^)
Нано П < 1 100 <1 < 0,025 Да
Микро И < 10 250 1 <5 Да
Мини Mini < 10 150-300 <2 <30 Да
Ограниченной дальности CR 10-30 3000 2-4 150 Да
Ближней дальности SR 30-70 3000 3-6 200 Да
Средней дальности MR 70 -200 5000 6-10 1250 Да
Йзносоу стойчивые средней дальности MRE >500 . 8000 10-18 1250 Да
Низковысотные глубокого проникновения LADP >250 50-9000 0,5-1 350 Да
Низковысотные особо износоустойчивые LALE >500 3000 24 <30 Да 1
С редневысотные особо износо стойчивые , MALE >500 14000 24 48 1500 Да
Высотные особо । износоустойчивые HAI L 2000 20000 24 48 (4500) 12000 Да
Боевые UCAV 1500 10000 2 10000 Да
Одноразовые LETH 300 4000 3-4 250 Да
Ложные цели DEC 0-500 5000 <4 250 Да
Стратосферные STRATO >2000 ^20000 и <30000 >48 TBD Нет
Размеры и масса БПЛ относящихся к БАС различных категорий, различаются
на порядки. Значительный интерес представляют БПЛА категорий Nano, Micro,
Mini с взлетной массой от десятка грамм до килограммов, коорые можно
определить как малоразмерные БПЛА (МБПЛА). Их количество приближается
к 40% от общего количества БПЛА всех категорий.
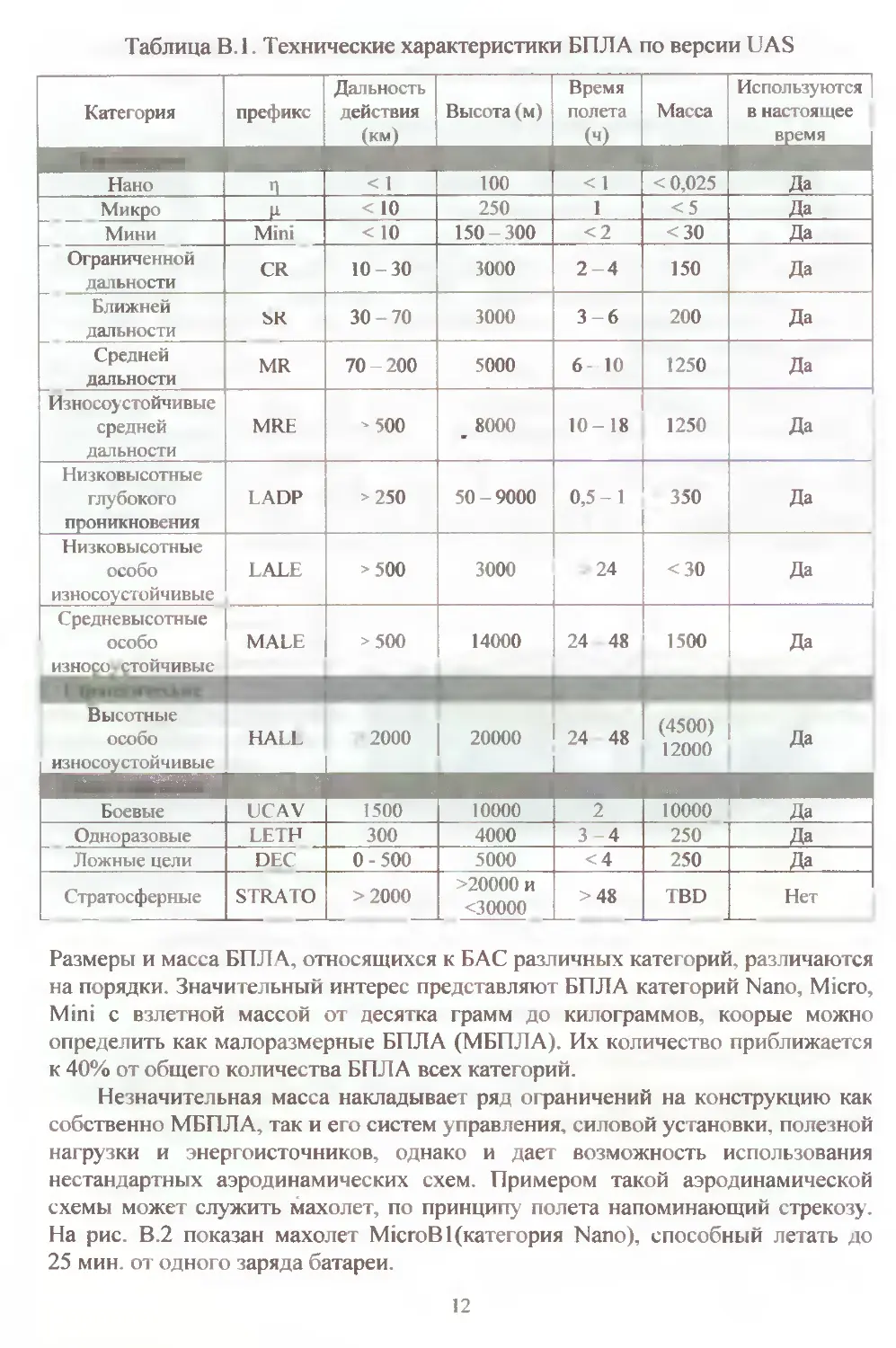
Незначительная масса накладывает ряд ограничений на конструкцию как
собственно МБПЛА, так и его систем управления, силовой установки, полезной
нагрузки и энергоисточников, однако и дает возможность использования
нестандартных аэродинамических схем. Примером такой аэродинамической
схемы может служить махолет, по принципу полета напоминающий стрекозу.
На рис. В.2 показан махолет MicroBl (категория Nano), способный летать до
25 мин. от одного заряда батареи.
12
Рис. В.2. Махолет (орнитоптер) MicroBl(категория Nano, США)
Масса целевой нагрузки составляет обычно (10-30)% от взлетной массы
БПЛА. Поэтому масса целевой нагрузки МБПЛА категории Nano весьма
незначительна. Целевой (полезной) нагрузкой МБПЛА категории Nano могут
быть, например, сенсоры различного назначения: газовые, радиационные,
инфракрасные и т.д.
Облик БПЛА определяется аэродинамической схемой и внутренней
компоновкой двигателя, органов управления, оборудования и увязкой этих
агрегатов с элементами конструкции планера БПЛА.
Аэродинамическая схема БПЛА характеризуется способом создания
управляющих сил и управляющих моментов, а также взаимным расположением
устройств, создающих эти силы и моменты. Схема обеспечивает возможность
управления полетом, что необходимо для выполнения целевой задачи
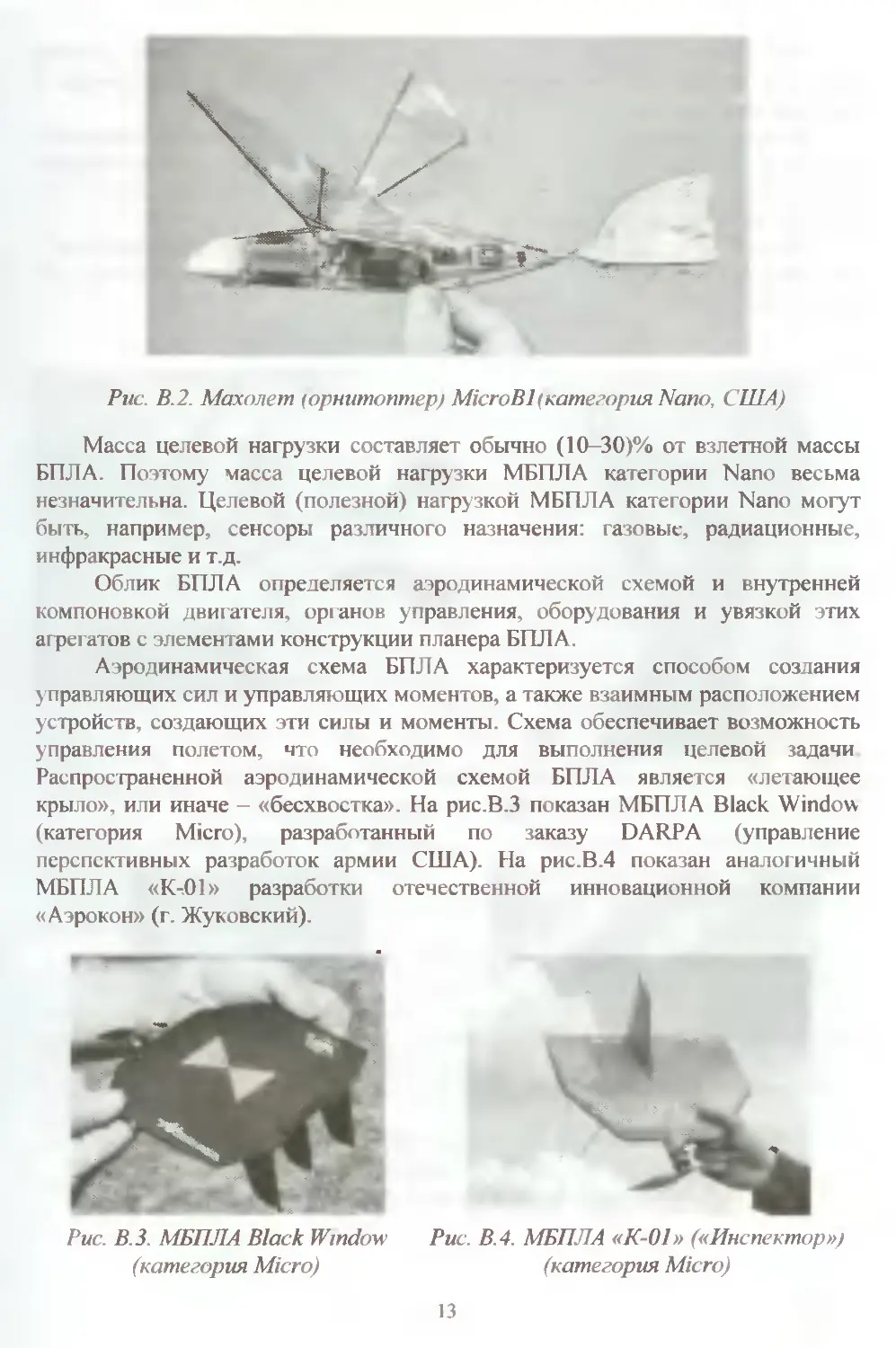
Распространенной аэродинамической схемой БПЛА является «летающее
крыло», или иначе — «бесхвостка». На рис.В.З показан МБПЛА Black Window
(категория Micro), разработанный по заказу DARPA (управление
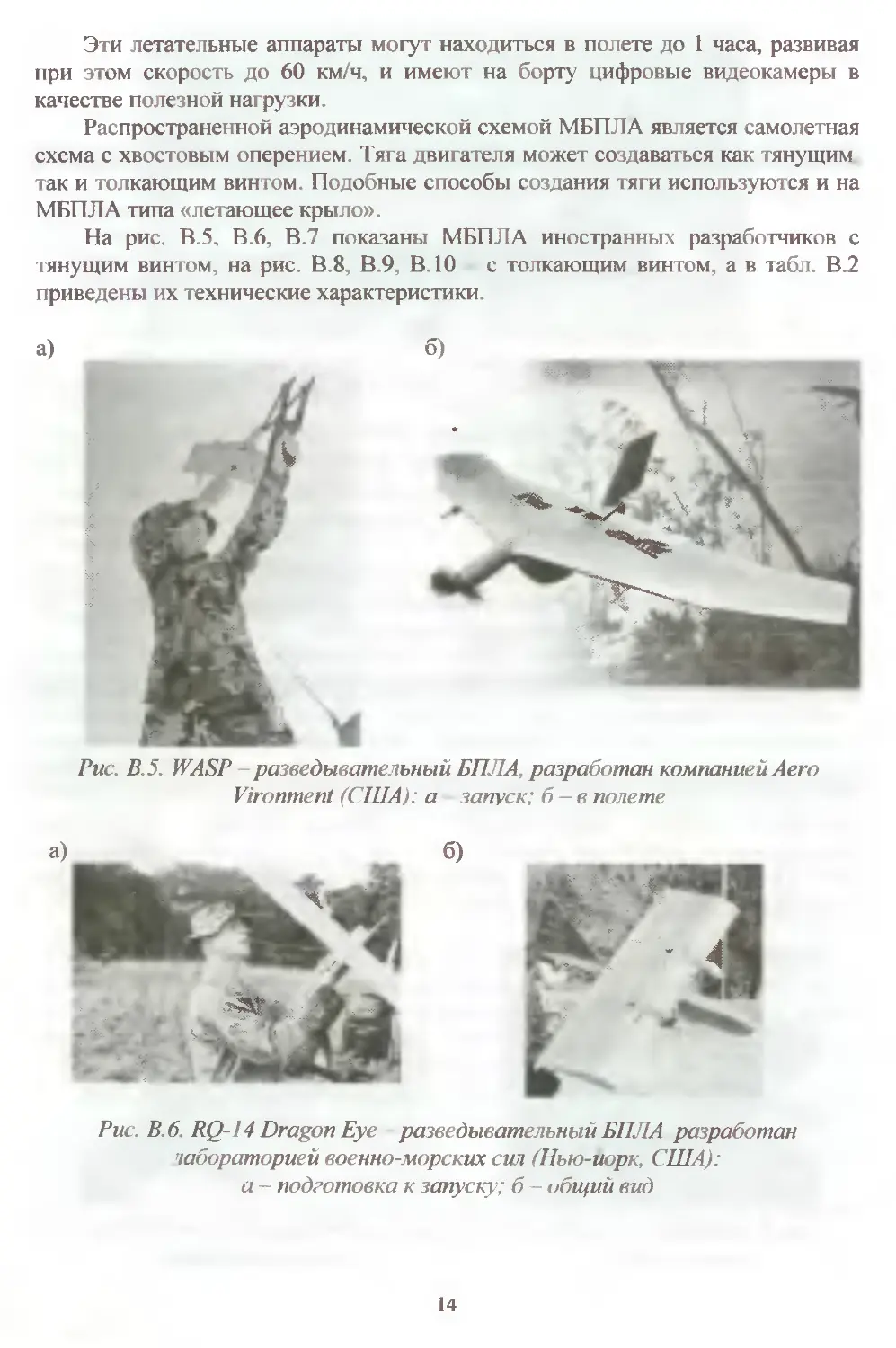
перспективных разработок армии США). На рис.В.4 показан аналогичный
МБПЛА «К-.01» разработки отечественной инновационной компании
«Аэрокон» (г. Жуковский).
Рис. В.З. МБПЛА Black Window
(категория Micro)
Рис. В.4. МБПЛА «К-01» («Инспектор»}
(категория Micro)
13
Эти летательные аппараты могут находиться в полете до 1 часа, развивая
при этом скорость до 60 км/ч, и имеют на борту цифровые видеокамеры в
качестве полезной нагрузки.
Распространенной аэродинамической схемой МБПЛА является самолетная
схема с хвостовым оперением. Тяга двигателя может создаваться как янущим
так и толкающим винтом. Подобные способы создания тяги используются и на
МБПЛА типа «летающее крыло».
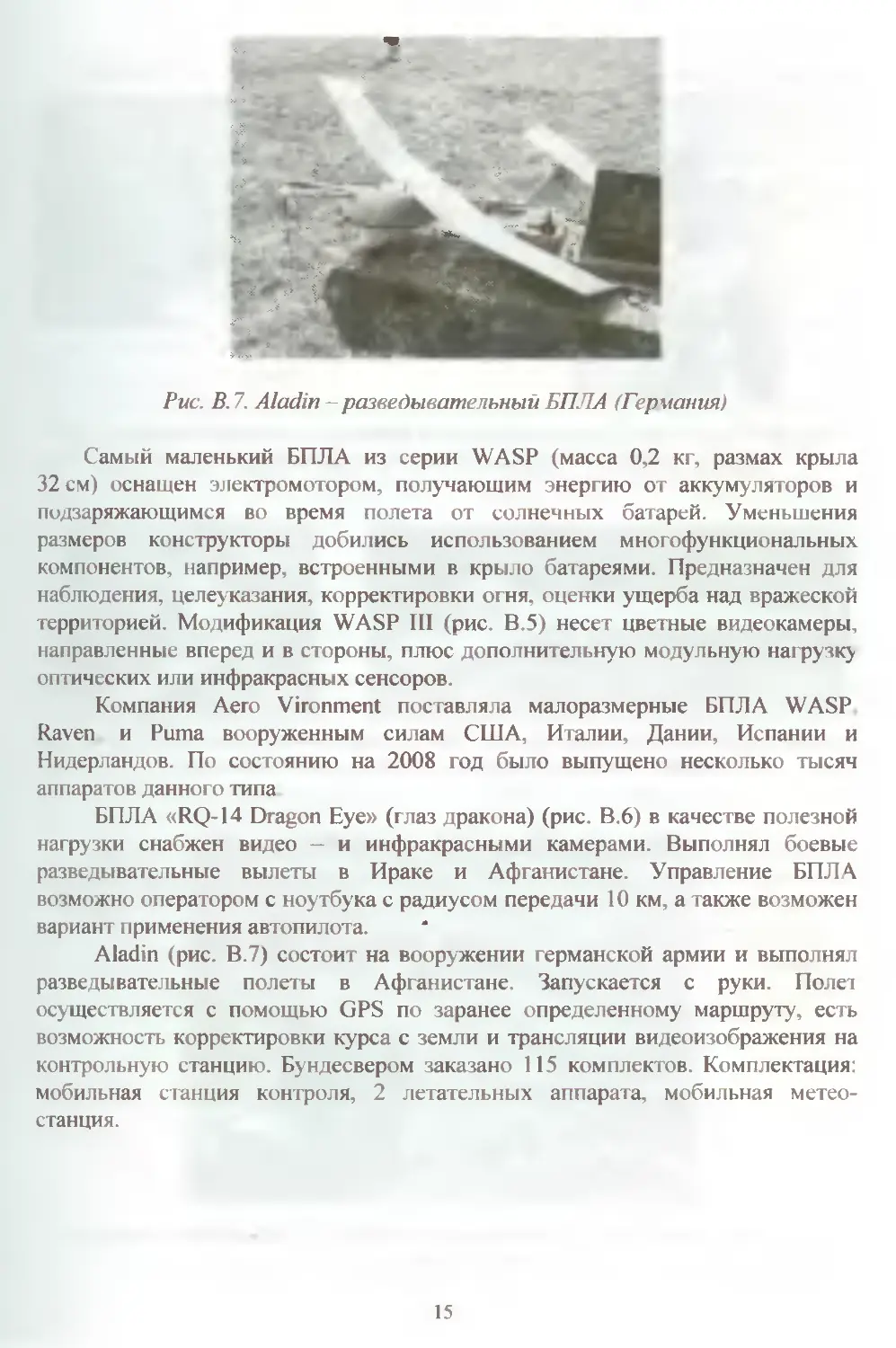
На рис. В.5, В.6, В 7 показаны МБПЛА иностранных разработчиков с
тянущим винтом, на рис. В.8, В.9, В. 10 с толкающим винтом, а в табл. В.2
приведены их технические характеристики.
Рис. В.5. WASP -разведывательный БПЛА, разработан компанией Aero
Vironment (США): а запуск; б-в полете
Рис. В. 6. RQ-14 Dragon Eye разведывательный БП1А разработан
чабораторией военно-морских сил (Нью-ичрк, США):
а - подготовка к запуску; б - общий вид
14
Рис. В. 7. Aladin —разведывательный БПЛА (Германия)
Самый маленький БПЛА из серии WASP (масса 0,2 кг, размах крыла
32 см) оснащен электромотором, получающим энергию от аккумуляторов и
подзаряжающимся во время полета от солнечных батарей. Уменьшения
размеров конструкторы добились использованием многофункциональных
компонентов, например, встроенными в крыло батареями. Предназначен для
наблюдения, целеуказания, корректировки огня, оценки ущерба над вражеской
территорией. Модификация WASP III (рис. В.5) несет цветные видеокамеры,
направленные вперед и в стороны, плюс дополнительную модульную нагрузку
оптических или инфракрасных сенсоров.
Компания Aero Vironment поставляла малоразмерные БПЛА WASP
Raven и Puma вооруженным силам США, Италии, Дании, Испании и
Нидерландов. По состоянию на 2008 год было выпущено несколько тысяч
аппаратов данного типа
БПЛА «RQ-14 Dragon Еуе» (глаз дракона) (рис. В.6) в качестве полезной
нагрузки снабжен видео — и инфракрасными камерами. Выполнял боевые
разведывательные вылеты в Ираке и Афганистане. Управление БПЛА
возможно оператором с ноутбука с радиусом передачи 10 км, а также возможен
вариант применения автопилота.
Aladin (рис. В.7) состоит на вооружении германской армии и выполнял
разведывательные полеты в Афганистане. Запускается с руки. Полет
осуществляется с помощью GPS по заранее определенному маршруту, есть
возможность корректировки курса с земли и трансляции видеоизображения на
контрольную станцию. Бундесвером заказано 115 комплектов. Комплектация:
мобильная станция контроля, 2 летательных аппарата, мобильная метео-
станция.
15
a)
б)
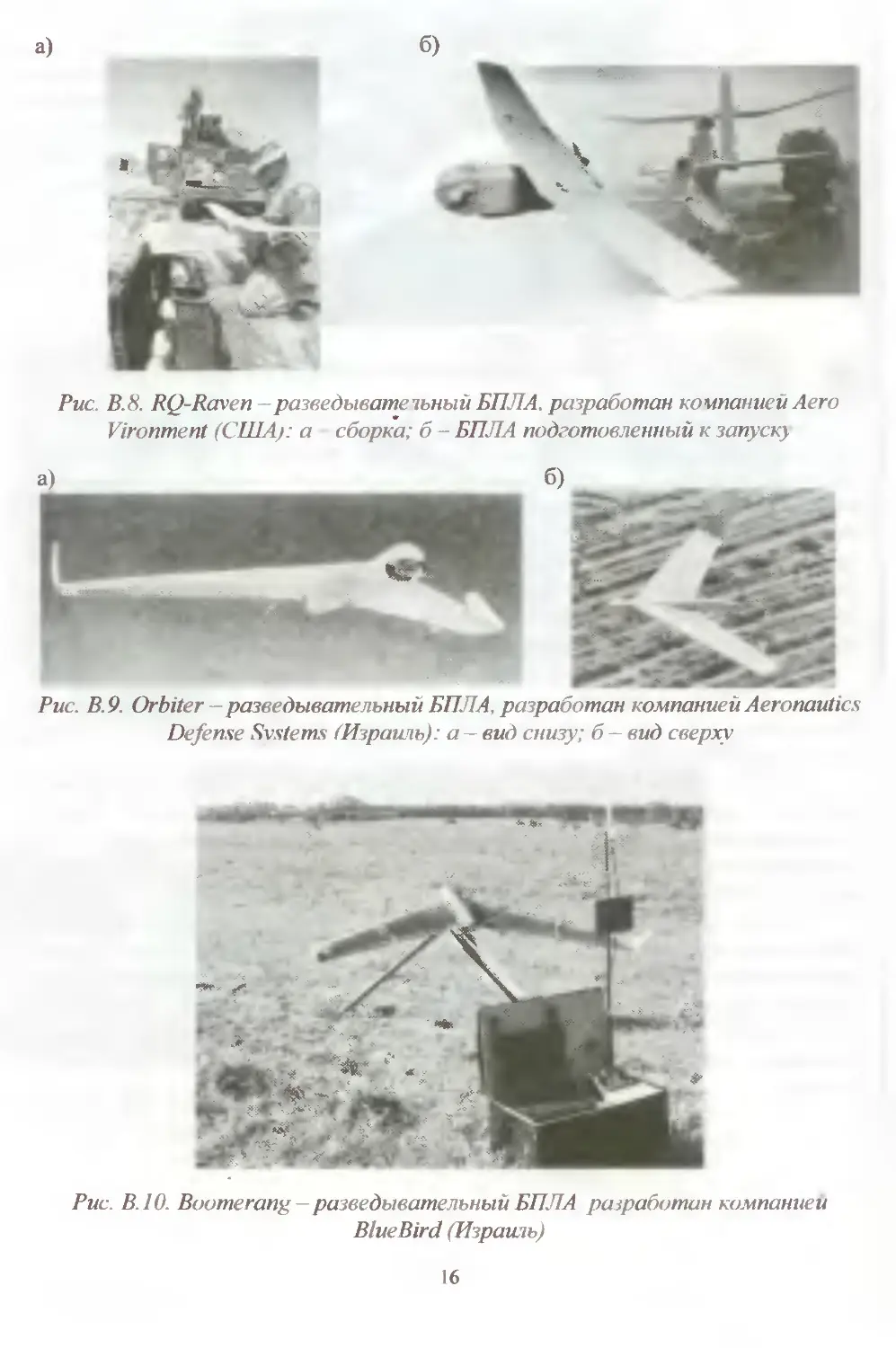
Рис. В.8. RQ-Raven - разведывательный БПЛА. разработан компанией Aero
Vironment (США): а сборка; б - БПЛА подготовленный к запуску
Рис. В.9. Orbiter - разведывательный БПЛА, разработан компанией Aeronautics
Defense Svstems (Израиль): а — вид снизу; б — вид сверху
Рис. В. 10. Boomerang - разведывательный БПЛА разработан компанией
BlueBird (Израиль)
16
БПЛА RQ-11 Raven («Ворон») совершал боевые вылеты на территории
Ирака и Афганистана. В комплекс «Ворон» входят три БПЛА. «Ворон»
запускается с руки и может выполнять полет автоматически с навигацией по
GPS, а при необходимости может управляться оператором вручную. БПЛА
обеспечивает возможность получения видеоизображения в реальном масштабе
времени в любое время суток. Для вооруженных сил США, а также ее
союзников произведено около 11000 БПЛА RQ-1 IB Raven.
БПЛА Orbiter («Орбита») (рис. В.9) позволяет осуществлять разведку и
наблюдение на расстоянии до 15 км от станции управления. Управление БПЛА
осуществляется оператором при помощи портативной наземной станции
управления как по предварительно запрограммированному маршруту, так и в
режиме реального времени.
БПЛА комплектуется гиростабилизированной оптикоэлектронной аппара-
турой наблюдения, хорошо зарекомендовавшей себя в ходе испытаний, в том
числе в условиях неблагоприятных климатических условий. На борту БПЛА
Orbiter может использоваться как ТВ- камера для дневной съемки, так и ИК -
камера для ночной.
Boomerang («Бумеранг») (рис. В. 10) - портативный комплекс,
предназначенный для фото и видео наблюдения за небольшими участками.
Комплекс полностью автономный. Взлет осуществляется автоматически с
помощью пусковой установки. Стабилизированная видеоаппаратура обладает
высоким качеством. Комплекс прост в эксплуатации и обслуживании. Способен
работать в тяжелых климатических условиях (дождь, ветер и т.п.).
Приземляется при помощи парашюта.
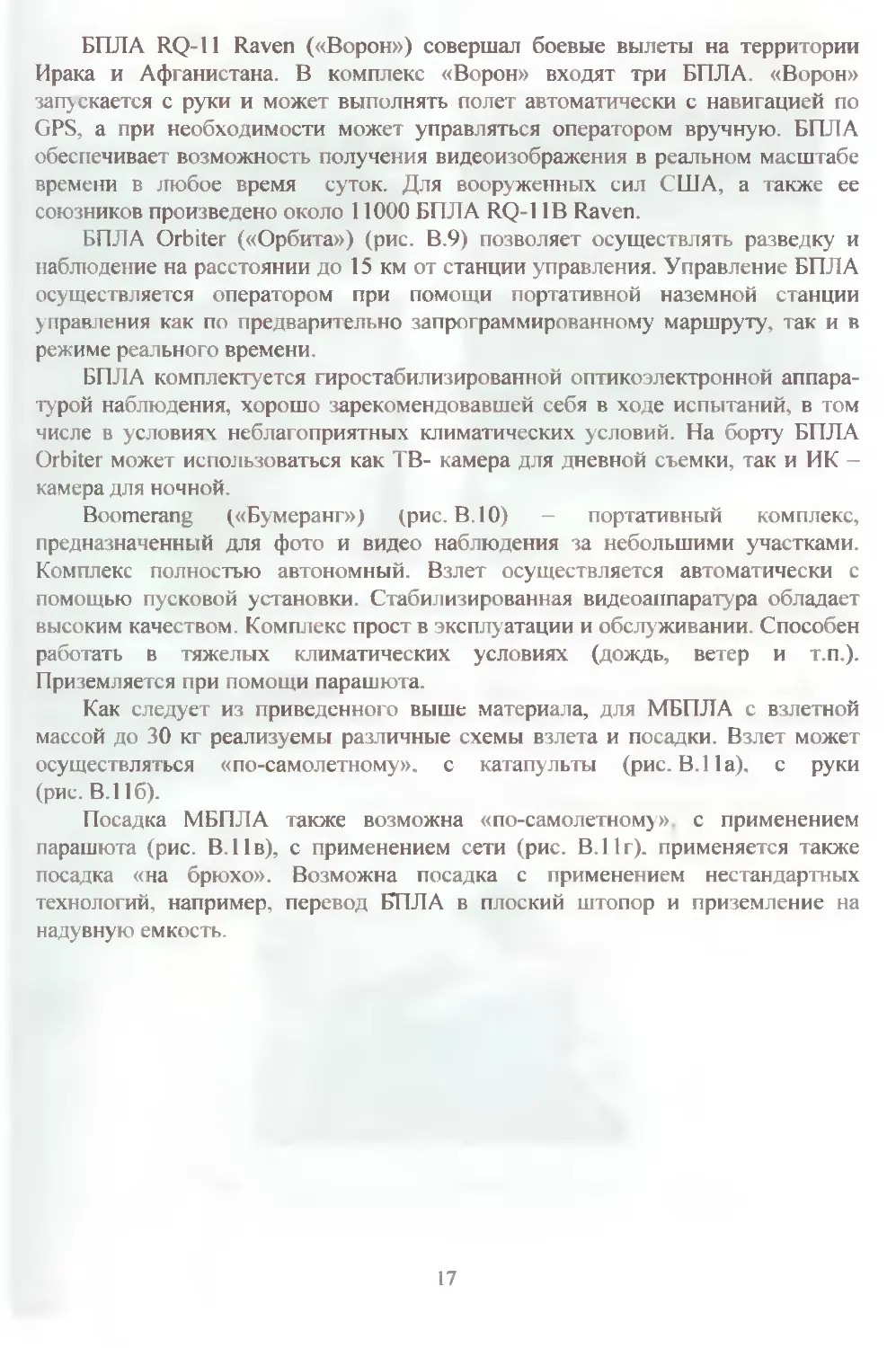
Как следует из приведенного выше материала, для МБПЛА с взлетной
массой до 30 кг реализуемы различные схемы взлета и посадки. Взлет может
осуществляться «по-самолетному». с катапульты (рис. В.11а). с руки
(рис. В.116).
Посадка МБПЛА также возможна «по-самолетному». с применением
парашюта (рис. В. 11 в), с применением сети (рис. В. 11 г), применяется также
посадка «на брюхо». Возможна посадка с применением нестандартных
технологий, например, перевод БПЛА в плоский штопор и приземление на
надувную емкость.
17
a)
б)
Рис. В.11. Некоторые типовые способы взлета (а-с катапульты, б-с руки:)
и посадки (в-с парашютом, г-в сеть) МБПЛА
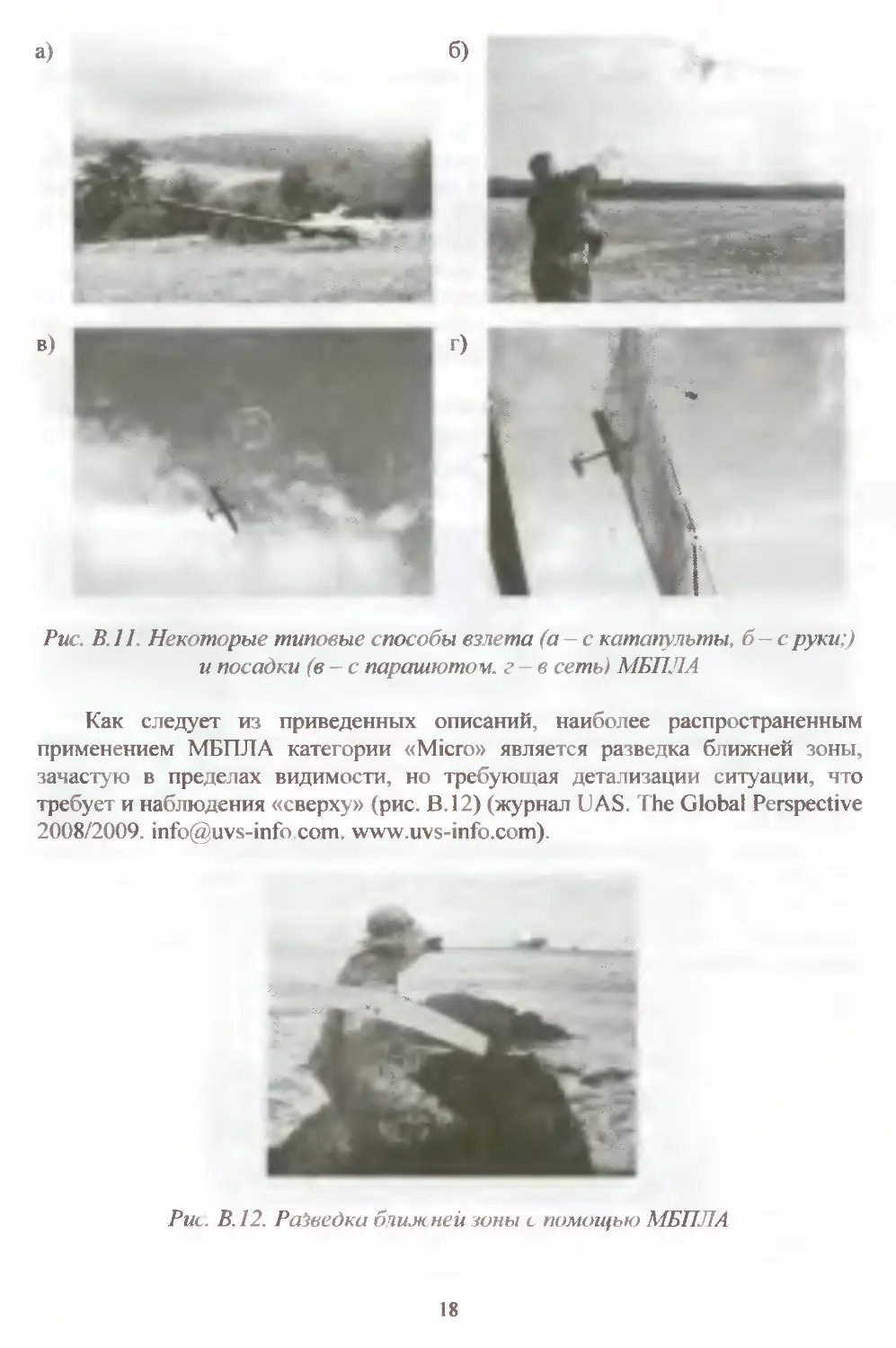
Как следует из приведенных описаний, наиболее распространенным
применением МБПЛА категории «Micro» является разведка ближней зоны,
зачастую в пределах видимости, но требующая детализации ситуации, что
требует и наблюдения «сверху» (рис. В. 12) (журнал UAS. The Global Perspective
2008/2009. info@uvs-info com. www.uvs-info.com).
Puf. B. 12. Разведка озим ней зоны с помощью МБПЛА
18
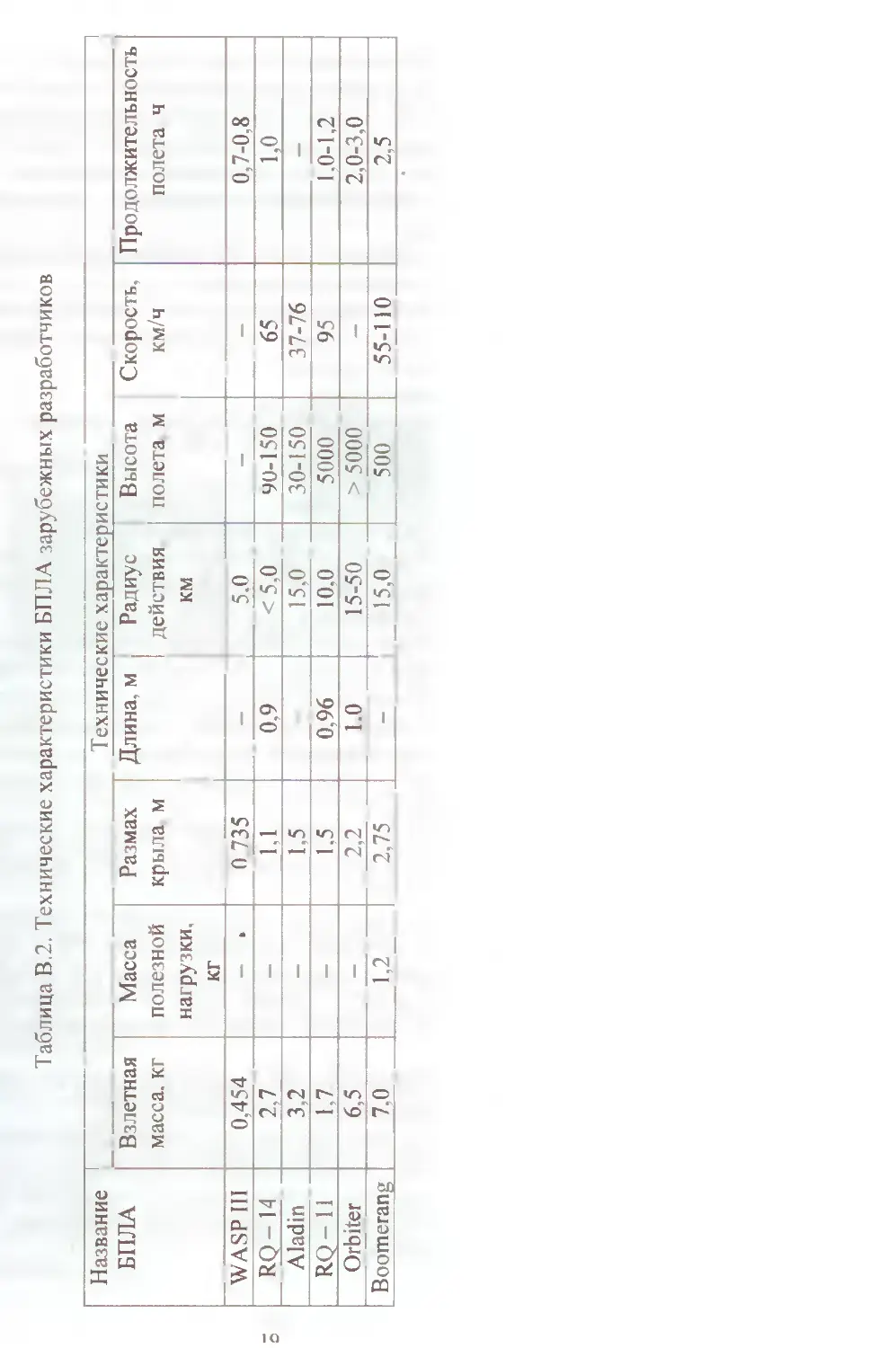
Таблица В.2. Технические характеристики БПЛА зарубежных разработчиков
Название Технические характеристики
БПЛА Взлетная масса, кг Масса полезной нагрузки, кг Размах крыла м Длина, м Радиус действия км Высота полета м Скорость, км/ч Продолжительность полета ч
WASP III 0,454 — к 0 735 — 5.0 — — 0,7-0,8
RQ- 14 2,7 — 1,1 0.9 <5,0 9U-150 65 1,0
Aladin 3,2 — 1,5 15,0 30-150 37-76 —
RQ-11 1,7 — 1,5 0,96 10,0 5000 95 1.0-1,2
Orbiter 6,5 — 2,2 1.0 15-50 > 5000 — 2,0-3,0
Boomerang 7.0 1,2 2,75 ~ 1 15,0 500 55-110 2,5
В задачи, решаемые БПЛА в военных целях, также входят:
1) ведение разведывательных полетов общего характера в горах или над водой;
разведка и обнаружение на территории противника малоразмерных целей,
определение дислокации войсковых соединений и оказание помощи
командирам в руководстве боевыми действиями; выполнение полетов над
позициями своих войск для получения информации об их дислокации (в
труднодоступных районах);
2) разведка и наблюдение за полем боя и корректировка артиллерийского огня;
3) лазерное целеуказание местоположения цели;
4) ведение радиоэлектронной борьбы (электронная разведка, радиотехническая
разведка, разведка средств связи, радиоэлектронное противодействие,
подавление радиоэлектронных средств);
5) обеспечение радиорелейной связи;
6) участие в учебных операциях в качестве воздушной мишени:
7) охрана важных объектов;
8) поражение наземных целей в зонах с сильной ПВО, где потери пилоти-
руемых самолетов недопустимо велики;
9) ведение воздушных боев и поражение воздушных целей.
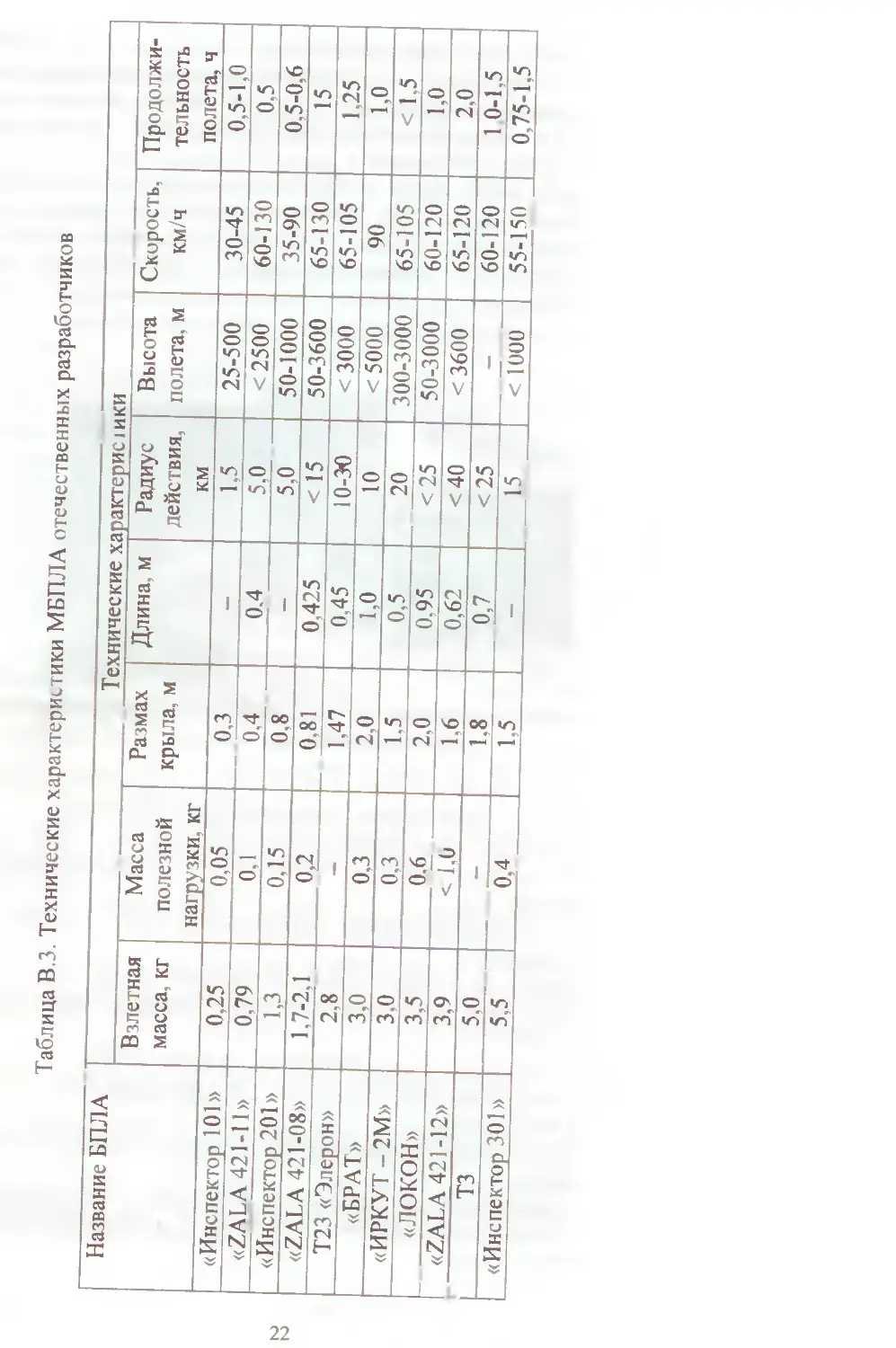
Технические характеристики МБПЛА отечественных разработчиков,
которые сопоставимы с аналогичными характеристиками МБПЛА зарубежных
разработчиков (табл. В.2), приведены в табл. В.З.
В России наряду с Ижевской компанией «Беспилотные системы» БПЛА
серии «ZALA» и компанией «Аэрокон», БПЛА серии «Инспектор» разработки
комплексов с малоразмерными БПЛА ведут крупные и небольшие фирмы:
- Казанская фирма «Эникс» представляет в этом классе целое семейство
БПЛА, для которых базовым является Т23 «Элерон», который может осна-
щаться широким набором средств наблюдения, включая стабилизированную
ТВ-камеру, фотокамеру и т.д.
На основе БПЛА типа «Элерон» в ОАО «Иркут» (г. Москва) создан
комплекс дистанционного зондирования «Иркут — 2М». принятый в 2007 на
снабжение МЧС РФ.
- СКБ «Топаз» (г. Москва) разработан комплекс дистанционного наблю-
дения БПЛА «Локон» с полезной нагрузкой в виде ТВ -. ИК - камер и
фотоаппарата Производство организовано на «Истринском экспериментально -
механическом заводе» (ИЭМЗ). ИЭМЗ ведет и собственные разработки
малоразмерных БПЛА. в частности, комплекс аэрофоторазведки с базовым
БПЛА «Истра -10».
- Научно-производственный и конструкторский центр «Новик XXI-век» (г.
Москва) известен своим комплексом с БПЛА «БРАТ»
- Компания «Рисса» (г. Москва) работает над доводкой комплекса с БПЛА
Т-3 для ведения наблюдения, аэрофотосъемки, ретрансляции сигналов.
- Корпорация «Иркут» определена в рамках объединенной авиастроитель-
ной корпорации в качестве головного разработчика беспилотных авиационных
систем невоенного назначения.
20
МБПЛА с техническими характеристиками по табл. В.З не принимали
участие в решении военных задач. Однако, они с успехом использовались при
проведении милицейских операций, в частности ГИБДД и миграционной
службы РФ, (МБПЛА серии «Инспектор»,), для проведения ледовой разведки
(МБПЛА серии «Иркут», «ZALA» и др.).
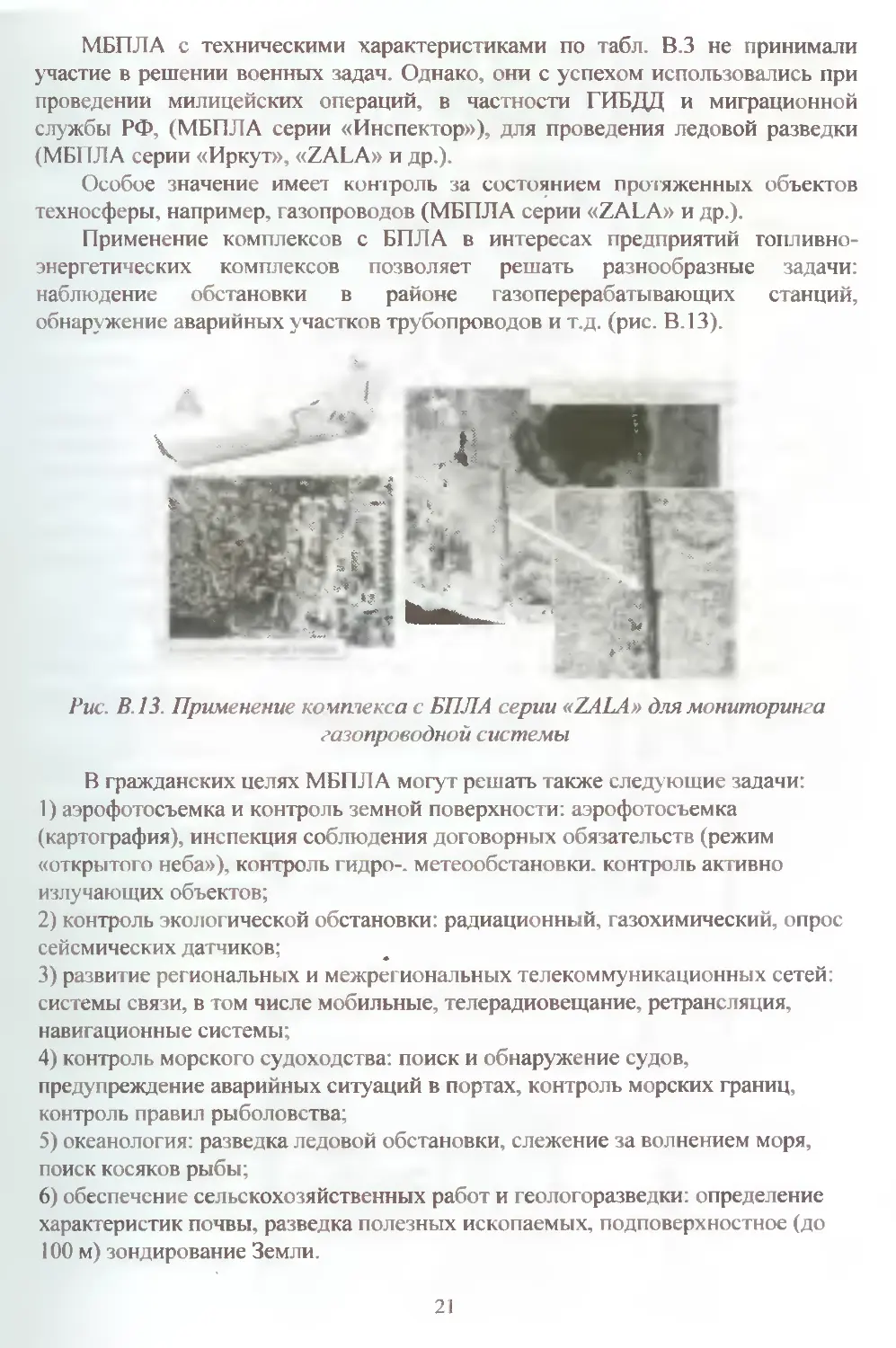
Особое значение имеет контроль за состоянием протяженных объектов
техносферы, например, газопроводов (МБПЛА серии «ZALA» и др.).
Применение комплексов с БПЛА в интересах предприятий топливно-
энергетических комплексов позволяет решать разнообразные задачи:
наблюдение обстановки в районе газоперерабатывающих станций,
обнаружение аварийных участков трубопроводов и т.д. (рис. В. 13).
Рис. В.13. Применение комплекса с БПЛА серии «ZALA» для мониторинга
газопроводной системы
В гражданских целях МБПЛА могут решать также следующие задачи:
1) аэрофотосъемка и контроль земной поверхности: аэрофотосъемка
(картография), инспекция соблюдения договорных обязательств (режим
«открытого неба»), контроль гидро-, метеообстановки, контроль активно
излучающих объектов;
2) контроль экологической обстановки: радиационный, газохимический, опрос
сейсмических датчиков;
3) развитие региональных и межрегиональных телекоммуникационных сетей:
системы связи, в том числе мобильные, телерадиовещание, ретрансляция,
навигационные системы;
4) контроль морского судоходства: поиск и обнаружение судов,
предупреждение аварийных ситуаций в портах, контроль морских границ,
контроль правил рыболовства;
5) океанология: разведка ледовой обстановки, слежение за волнением моря,
поиск косяков рыбы;
6) обеспечение сельскохозяйственных работ и геологоразведки: определение
характеристик почвы, разведка полезных ископаемых, подповерхностное (до
100 м) зондирование Земли.
21
Таблица В 3. Технические характеристики МБПЛА отечественных разработчиков
Название БПЛА Технические характерис шки
Взлетная масса, кг Масса полезной нагрузки, кг Размах крыла, м Длина, м Радиус действия, км Высота полета, м Скорость, км/ч Продолжи- тельность полета, ч
«Инспектор 101» 0,25 0,05 0,3 — 1.5 25-500 30-45 0,5-1.0
«ZALA 421-11» 0.79 0.1 0,4 0.4 5,0 <2500 60-130 0,5
«Инспектор 201» 1,3 0,15 0,8 — 5,0 50-1000 35-90 0.5-0,6
«ZALA 421-08» 1,7-2,1 0.2 0 81 0,425 < 15 50-3600 65-130 15
Т23 «Элерон» 2,8 — 1,47 0,45 10-30 <3000 65-105 1,25
«БРАТ» 3,0 0.3 2,0 1,0 10 <5000 90 1.0
«ИРКУТ - 2М» 3.0 0,3 1,5 0,5 20 300-3000 65-105 < 1,5
«ЛОКОН» 3,5 О'.б 2,0 0.95 <25 50-3000 60-120 1.0
«ZALA 421-12» 3,9 < 1,0 1.6 0,62 <40 <3600 65-120 2,0
ТЗ 5.0 — 1.8 0,7 <25 — 60-120 1 0-1,5
«Инспектор 301» 5.5 0,4 1.5 — 15 < 1000 55-150 0,75-1,5
Для повышения качества и надежности МБПЛА необходимо проводить
множество испытаний для определения их аэродинамических и тяговых
характеристик. Для МБПЛА они могут значительно отличаться от образца к
образцу или в процессе эксплуатации, что не позволяет переложить уже
существующие разработки систем управления более размерных ЛА на МБПЛА
Определить влияние на поведение МБПЛА изменения его характеристик
можно по результатам гетных испытаний или путем моделирования на
компьютерах. Последнее более универсально, т.к. позволяет проверить
поведение МБПЛА на критических и закритических параметрах полета.
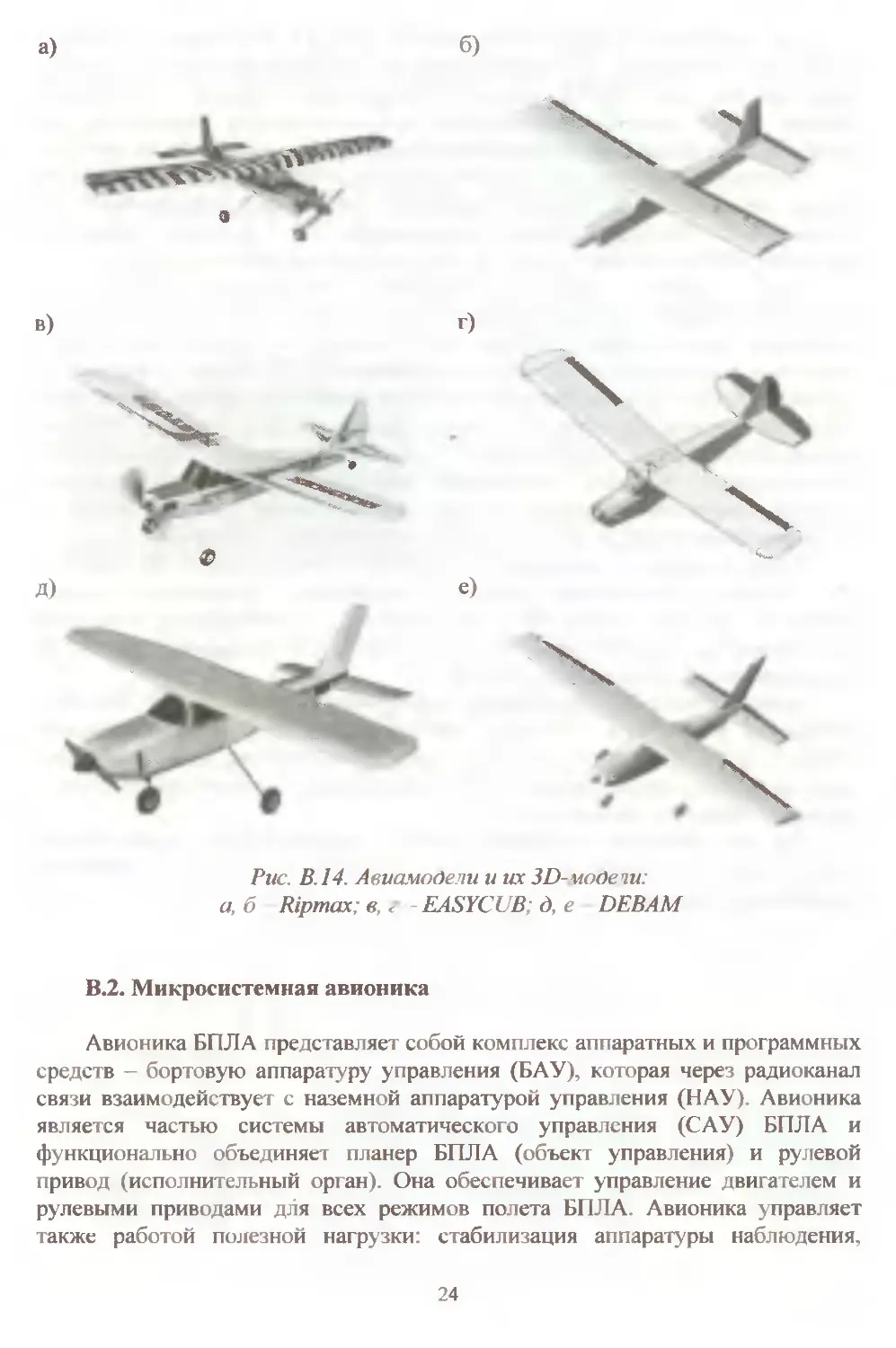
Опыт работы кафедры «Приборы управления» ТулГУ по
экспериментальной отработке авионики для МБПЛА показал, что вполне
допустимо использование готовых авиамоделей по своим техническим
характеристикам ориентировочно совпадающим с требованиями технического
задания на проектирование реального МБПЛА. В качестве примера на рис. В. 14
показаны некоторые образцы авиамоделей и их 3 D-модели, которые
применялись для определения массо-инерционных характеристик
проектируемых МБПЛА, определения аэродинамических коэффициентов
методом «виртуальной продувки» и для моделирования полета МБПЛА по
заданным траекториям, в том числе с учетом различных возмущений.
Проектирование и производство МБПЛА является одним из наиболее
перспективных направлений развития современной беспилотной авиации
Широкий диапазон применения в сочетании с относительно невысокой
себестоимостью изделий такого типа также делает их разработку достаточно
привлекательной в коммерческом плане.
Размеры МБПЛА накладывают „ерьезные ограничения на бортовую
аппаратуру управления. Основные требования, предъявляемые к авионике
МБПЛА: высокие точность, качество и производительность; малые размеры и
простая схемотехника: низкое энергопотребление; высокие надежность и
отказоустойчивость; низкая цена.
Так как требования к авионике МБПЛА противоречивы, то необходимы
приемлемые компромиссы, но с выполнением основных требований
технического задания.
23
Рис. В.14. Авиамодели и их 3D-моде ти:
а, б Ripmax; в, г - EASYCUB; д, е DEBAM
В.2. Микросистемная авионика
Авионика БПЛА представляет собой комплекс аппаратных и программных
средств - бортовую аппаратуру управления (БАУ), которая через радиоканал
связи взаимодействует с наземной аппаратурой управления (НАУ). Авионика
является частью системы автоматического управления (САУ) БПЛА и
функционально объединяет планер БПЛА (объект управления) и рулевой
привод (исполнительный орган). Она обеспечивает управление двигателем и
рулевыми приводами для всех режимов полета БПЛА. Авионика управляет
также работой полезной нагрузки: стабилизация аппаратуры наблюдения,
24
синхронизация по времени и координатам БПЛА и места съемки срабатывания
затвора фотоаппарата, срабатывание системы спасения и т.д.
Основными задачами, решаемыми САУ. являются управление движением
центра масс (три канала управления) и угловыми движениями БПЛА относительно
центра масс (три канала управления). Для БПЛА. движущихся в пределах атмосферы,
число каналов управления сокращается до четырех. Это объясняется наличием
определенной связи между поступательными и вращательными движениями ЛА.
Таким образом, управление полетом БПЛА сводится к управлению параметрами его
движения: угловыми координатами, угловыми скоростями и ускорениями,
линейными координатами (дальностью, высотой, боковым перемещением).
Так как МБПЛА должен выполнять целевые задачи в условиях авто-
номного полета, а его малые размеры и масса приводят к усилению влияния
внешних воздействий по сравнению с ЛА больших размеров, САУ должна ре-
шать следующие задачи:
- контроль правильности траектории полета и коррекция ее изменений
бортовыми средствами;
- стабилизация параметров движения МБПЛА (высота, скорость полета и
т.д.) при противодействии возмущениям различной природы;
- расчет оптимальной траектории полета с целью уменьшения его времени
и расхода запасов энергии на борту;
- анализ данных, поступающих от различных информационных источни-
ков с целью выбора наиболее достоверных для реализации полетного задания;
- выполнение вычислений большого объема в реальном масштабе времени
для реализации алгоритмов управления МБПЛА.
Измерительные и вычислительные функции из перечня задач, решаемых САУ в
автономном по тете МБПЛА, выполняет БАУ - авионика. Аппаратно-программную
часть авионики, выполняющей функции ретулятора САУ, называют автопилотом
(АП; который содержит измерительную и вычислительную подсистемы.
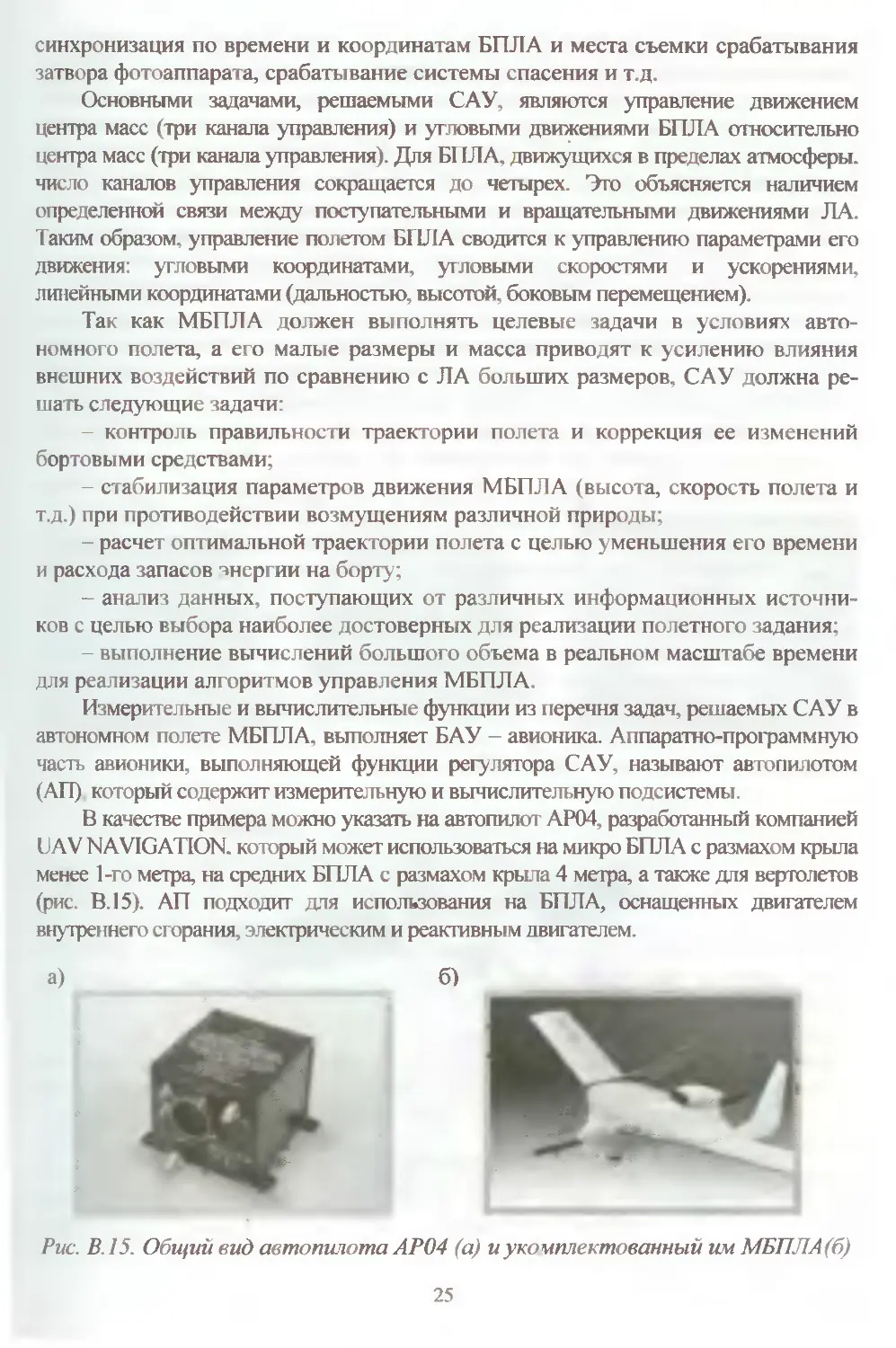
В качестве примера можно указать на автопилот АР04, разработанный компанией
UAV NAVIGATION, который может использоваться на микро БПЛА с размахом крыла
менее 1-го метра, на средних БПЛА с размахом крыла 4 метра, а также для вертолетов
(рис. В. 15). АП подходит для использования на БПЛА, оснащенных двигателем
внутреннего сгорания, электрическим и реактивным двигателем.
Рис. В. 15. Общий вид автопилота АР04 (а) иук< мплектованный им МБПЛА(б)
25
АР04 - это полный интегрированный автопилот с возможностью ручного
управления БПЛА, встроенным радиоканалом и возможностью управления
полезной нагрузкой. Данный автопилот обеспечивает автоматический взлет,
полет по заданному маршруту и автоматическое приземление. Автопилот
может конфигурироваться во время полета Встроенный радиоканал позволяет
передавать данные на расстояние 100 км. Механизм ручного управления
позволяет оператору, находящемуся на земле, полностью управлять БПЛА при
помощи стандартного джойстика, или стандартной аппаратуры управления,
предназначенной для авиа-моделей. АР04 содержит дублирующий
микропроцессор, что обеспечивает высокий уровень безопасности и
отказоустойчивости. АР04 позволяет управлять полезной нагрузкой в виде
парашюта, гиростабилизированной видеокамеры и т.д. Фактически АР04
может быть единственной аппаратурой управления на борту для большинства
БПЛА. Включенный в конструкцию порт RS232 может использоваться для
связи с наземной станцией. АР04 имеет интерфейс для управления двигателем,
а также для слежения за параметрами его работы. Информация об этих
параметрах может быть передана на наземную станцию управления. Автопилот
позволяет управлять 16-тью рулевыми машинками или другой периферией.
АП обеспечивает автоматический полет по маршруту в виде контрольных
точек, имеющих три измерения (широта, долгота, высота). АП может
использоваться на БПЛА, имеющих следующие диапазоны воздушных
скоростей (км/ч): нижний 25 150; нормальный 35 250; верхний 45 450.
Авионика может быть простейшей в случае, если управление БПЛА
осуществляется оператором. Например, на БПЛА F1L-301 (рис. В. 16) (взлетная
масса менее 4 кг, размах крыла - 1,9м) установлен инфракрасный «автопилот»,
помогающий оператору выдерживать заданное положение планера во время
выполнения маневра, например, набора высоты.
Рис. В. 16. БПЛА FIU 301 для полицейских целей с инфракрасны м
«автопилотом»
26
Данный комплекс был разработан с единственной целью: быстрое получение
высококачественных цифровых фотографий для большинства типов местностей
В качестве полезной нагрузки используются 2 камеры Одна из них - небольшая
видеокамера, установленная в носовой части БПЛА. Предназначена для
обеспечения оператора информацией об ориентации летательного аппарата и для
целей наведения. Вторая камера — 8-ми мегапиксельная фотокамера,
установленная на вращающемся подвесе. В комплексе используется два
радиоканала: один канал с частотой 2.4 ГГц предназначен для управления БПЛА
второй канал с частотой 72 МГц — для управления фотокамерой.
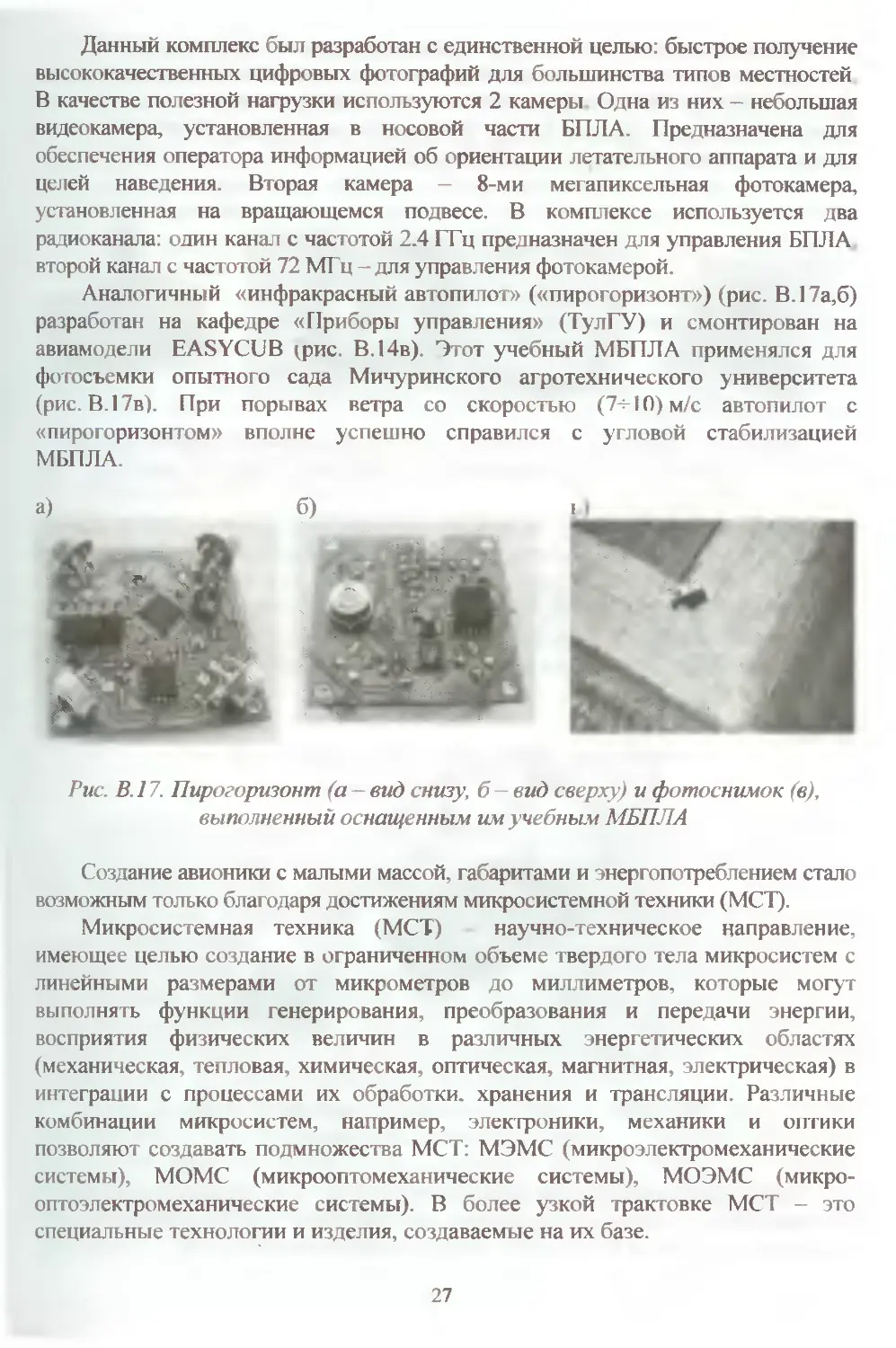
Аналогичный «инфракрасный автопилот» («пирогоризонт») (рис. В. 17а,б)
разработан на кафедре «Приборы управления» (ТулГУ) и смонтирован на
авиамодели EASYCUB цэис. В.14в). Этот учебный МБПЛА применялся для
фотосъемки опытного сада Мичуринского агротехнического университета
(рис. В.17в). При порывах ветра со скоростью (7 10) м/с автопилот с
«пирогоризонтом» вполне успешно справился с угловой стабилизацией
МБПЛА.
I ।
Рис. В. 17. Пирогоризонт (а - вид снизу, б - вид сверху) и фотоснимок (в),
выполненный оснащенным им учебным МБПЛА
Создание авионики с малыми массой, габаритами и энергопотреблением стало
возможным только благодаря достижениям микросистемной техники (МСТ).
Микросистемная техника (МСТ) научно-техническое направление,
имеющее целью создание в ограниченном объеме твердого тела микросистем с
линейными размерами от микрометров до миллиметров, которые могут
выполнять функции генерирования, преобразования и передачи энергии,
восприятия физических величин в различных энергетических областях
(механическая, тепловая, химическая, оптическая, магнитная, электрическая) в
интеграции с процессами их обработки, хранения и трансляции. Различные
комбинации микросистем, например, электроники, механики и оптики
позволяют создавать подмножества МСТ: МЭМС (микроэлектромеханические
системы), МОМС (микрооптомеханические системы), МОЭМС (микро-
оптоэлектромеханические системы). В более узкой трактовке МСТ - это
специальные технологии и изделия, создаваемые на их базе.
27
По технологиям МСТ выпускают акселерометры (датчики для измерения
ускорений) (рис. В. 18а); гироскопы (датчики для измерения угловых скоростей)
(рис. В. 186); датчики давления (рис. В.18.в). Крупнейшими производителями
датчиков являются фирмы Analog Devices, Motorola, Bosch, The Charles Stark
Draper Laboratory. Samsung Electronics и др
Рис. В. 18. Микросистемные датчики с кремниевыми чувствительными
элементами: а - акселерометр; б гироскоп; в - датчик давления
На базе микроакселерометров и микрогироскопов могут быть построены
модули измерительных подсистем авионики, например, бесплатформенная
система ориентации (БСО) для определения углов положения БПЛА
относительно выбранной системы координат. Примером БСО может служить
микромеханическая вертикаль (рис. В. 19), разработанная на кафедре «Приборы
управления» ТулГУ, которая включает три микрогироскопа и вычислительное
устройство.
Рис. В. 19. Бесплатформенная система ориентации
микромеханическая вертикаль
БСО предназначена для МБПЛА массой до 3 кг и имеет погрешность
измерения 0,5° углов крена в диапазоне от -180° до +180° и углов тангажа от -
-90° до +90° Масса БСО - 150 г, напряжение питания (7-Н2) В
28
На базе этих датчиков создаются и полноценные бесплатформенные
инерциальные навигационные системы (БИНС), которые вырабатывают также
навигационные параметры БПЛА (пройденный путь, а также географическую
широту и долготу). Датчики давления являются базой для построения
измерителей высоты и скорости полета БПЛА. Чувствительными элементами
этих датчиков являются специальным образом спрофилированные кремниевые
пластины. Чувствительные элементы и обслуживающая их электроника
размещаются на одном кристалле. Возможно и их раздельное размещение на
разных кристаллах.
БСО и БИНС, построенные на микрогироскопах и микроакселерометрах
имеют низкую долговременную точность. Поэтому необходимы сложные
алгоритмы выработки навигационных параметров и их корректировки.
Применение таких алгоритмов возможно при использовании информации,
полученной со спутниковых навигационных систем GPS/ГЛОНАСС и др.
Наиболее эффективными на данный момент в системе GPS являются
приемники производства Qualcomm и Ublox (рис. В.20) на базе чипсета SirfStar
III производства компании Sirf Inc.
Рис. В.20. Микросистпемный приемник спутниковых
навигационных сигначов
Приемники содержат узлы дополнительных расчетов и помимо
географических координат местоположения, вырабатывают информацию о
высоте, скорости и ориентации по курсу ЛА.
Для обмена информацией между МБПЛА и командным пунктом или
между несколькими МБПЛА применяются радиомодемы, которые вы-
пускаются в виде готовых модулей. Отличаются выходной мощностью
(передатчики), чувствительностью (приемники), рабочим диапазоном частот,
потребляемой мощностью и битрейтом (скоростью передачи данных). Эти
параметры подбираются исходя из назначения и устройства МБПЛА Наиболее
употребительными являются диапазоны 433 МГц и 2,4 ГГц.
Вычислительные функции авионики МБПЛА выполняют микро-конт-
роллеры (МК). Производительность некоторых серий МК весьма велика при
приемлемом энергопотреблении и весьма малых размерах. Кроме того, многие
из современных МК способны работать в широком диапазоне температур,
оснащены встроенными ЦАП-АЦП и стандартными портами ввода-вывода, в
том числе и для взаимодействия с радиомодемами. Кроме того, оснащены
29
системами энергосбережения, основанными на изменении тактовых частот
ядра, автоматическом переходе в спящий режим и адаптивным включением
отдельных узлов и флеш-памятью большого объема.
Основными поставщиками микроконтроллеров являются такие компании,
как Motorola. Intel. Atmel, Renesas. Zilog, NEC и Microchip Technologies.
В составе полезной нагрузки практически любого МБПЛА гражданского
или военного применений находятся системы видео наблюдения, которые
предназначены для аэрофотосъемки и аэровидеосъемки в оптическом и
инфракрасном диапазонах. Наибольшее распространение получили камеры
производства Samsung, Sony, и Pentax. В зависимости от размеров МБПЛА, его
грузоподъемности и назначения можно подобрать камеры массой от
нескольких грамм (широкоугольные с объективом типа пинхол) (рис. В.21) до
трансфокаторов с мониторным приводом массой до десятков грамм (рис. В.22).
Рис. В.21.Аналоговая видеокамера Рис. В.22. Трансфокатор Pentax
- представитель VGA-камер С070509НК (фокус 5-50 мм, масса 140 г)
В качестве примера камеры для съемки в инфракрасном диапазоне можно
указать на термограф Flir Photon - неохлаждаемую микроболометрическую
камеру массой 97 г (без объектива) и потребляемой мощностью 1,5 Вт. Для
записи информации с видеокамер применяются регистраторы
В роли носителя информации чаще всего выступает флеш-память типа
NAND. Наиболее подходящим из промышленных устройств для применения в
МБПЛА является рекордер mAVR производства российской фирмы
«Телесистемы» (рис. В.23). При массе 35 г и размерах 53x55x10 мм
обеспечивает до 7,5 часов записи на карту формата CompactFlash объёмом 2 Гб.
30
Рис. В.23. mAVR видеорекордер (регистратор почётной видеоинформации)
Таким образом, современные технологии позволяют создавать
микросистемную авионику, включающую однокристальные гирссю >пы,
акселерометры, датчики давления, приёмники спутниковой навигации;
импульсные приёмопередатчики, схемы управления с широтно-импульсной
модуляцией для РМ и других исполнительных устройств; микроконтроллеры с
энергонезависимой памятью.
Кроме того, в связи с тем, что в последнее время энергопотребление и
размеры компьютерных embedded-платформ достигли соответственно единиц
ватт и размеров приблизительно 100x70 мм (mimi-ITX), а производительность -
сотен миллионов операций в секунду, представляется возможность оснащать
ими МБПЛА, организовывая микрокомпьютерное управление на базе платформ
Windows и Linux Kernel, что дает возможности достичь легкого
программирования, оперативного вмешательства в алгоритм работы МБПЛА, а
в случае необходимости - и полной автономности работы МБПЛА с
элементами искусственного интеллекта, т.е. возможностью самообучения и
принятия решений.
В перспективе вся авионика, -а также система регистрации данных и
управления полезной нагрузкой, например видео-камерой с ультразвуковым
приводом трансфокатора и фокусировки, могут быть выполнены на одной
плате.
Следует огметить, что несмотря на высокий уровень надежности
микросистемной авионики и всех агрегатов МБПЛА, эксплуатация комплексов
с их применением сопровождается потерями МБПЛА
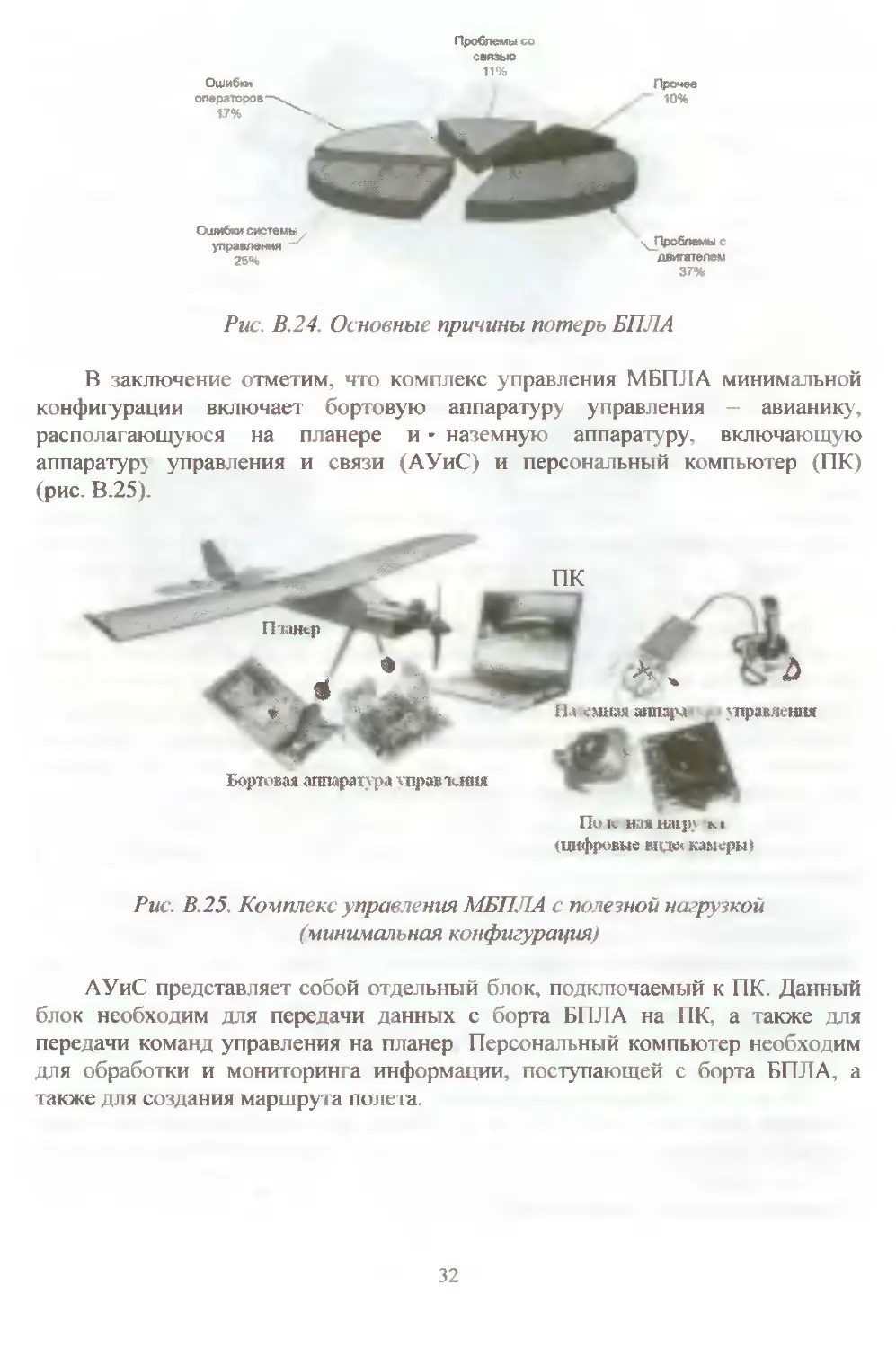
На рис. В.24 (источник информации тот же, что и для рис. В.1) показаны
основные причины потерь БПЛА и степень их приоритетности по мере
убывания: проблемы с двигательной установкой, ошибки системы управления,
ошибки операторов, проблемы со связью и прочие (система спасения,
санкционированное повреждение БПЛА и т.д.).
31
Проблемы co
связью
Рис. В.24. Основные причины потерь БПЛА
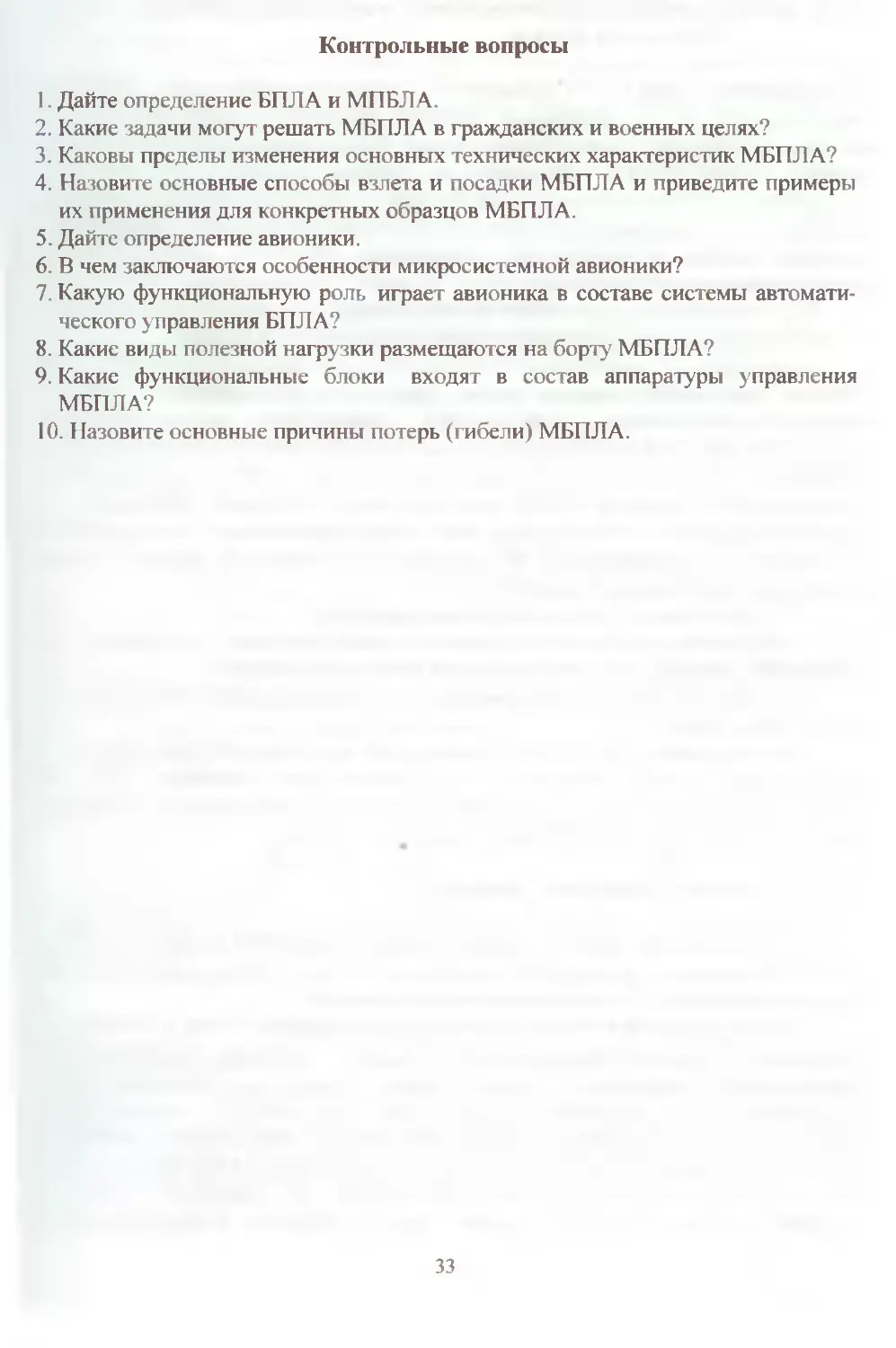
В заключение отметим, что комплекс управления МБПЛА минимальной
конфигурации включает бортовую аппаратуру управления - авианику,
располагающуюся на планере и • наземную аппаратуру, включающую
аппаратуру управления и связи (АУиС) и персональный компьютер (ПК)
(рис. В.25).
Покшяшцг м
(цифровые виде* камеры)
Рис. В.25. Комплекс управления МБПЛА с полезной нагрузкой
(минимальная конфигурация/
АУиС представляет собой отдельный блок, подключаемый к ПК. Данный
блок необходим для передачи данных с борта БПЛА на ПК, а также для
передачи команд управления на планер Персональный компьютер необходим
для обработки и мониторинга информации, поступающей с борта БПЛА, а
также для создания маршрута полета.
32
Контрольные вопросы
1. Дайте определение БПЛА и МПБЛА.
2. Какие задачи могут решать МБПЛА в гражданских и военных целях?
3. Каковы пределы изменения основных технических характеристик МБПЛА?
4. Назовите основные способы взлета и посадки МБПЛА и приведите примеры
их применения для конкретных образцов МБПЛА.
5. Дайте определение авионики.
6. В чем заключаются особенности микросистемной авионики?
7. Какую функциональную роль играет авионика в составе системы автомати-
ческого управления БПЛА?
8. Какие виды полезной нагрузки размещаются на борту МБПЛА?
9. Какие функциональные блоки входят в состав аппаратуры управления
МБПЛА?
10. Назовите основные причины потерь (гибели) МБПЛА.
33
Глава 1. Структура и состав авионики и наземной аппаратуры
управления и связи
Авионика БПЛА комплекс аппаратно-программных средств,
располагаемых на его борту, т.е. бортовая аппаратура управления (БАУ),
которая обеспечивает все режимы полета и выполнение функциональной
задачи. Полет БПЛА возможен в ручном, полуавтоматическом и
автоматическом режимах управления. Ручной и полуавтоматический режимы
управления — это дистанционное управление с участием человека-оператора с
помощью наземной аппаратуры управления (НАУ) и связи, которая
осуществляется по радиоканалу.
БПЛА, как объект управления, рулевые приводы органов управления, БАУ
и НАУ образуют систему автоматического управления (САУ) БПЛА.
Большинство современных САУ выполняется по трехканальной схеме. Как
правило, каналы носят название соответствующего рулевого органа: канал руля
высоты (стабилизатора), канал руля направления, канал элеронов.
Общепринятым является функциональное разделение каналов системы
управления: канал руля высоты (стабилизатора) используется для управления
углом тангажа и высотой полета; канал элеронов - для управления креном и
курсом летательного аппарата (ЛА); канал руля направления - для устранения
скольжения ЛА. Важным для ЛА, как объекта управления, является также
канал управления скоростью - автомат тяги.
САУ обеспечивает выполнение следующих задач:
- обеспечение требуемых пилотажных характеристик, направленное на
улучшение динамических свойств ЛА при ручном управлении;
- стабилизацию углового положения ЛА с использованием информации от
систем ориентации;
- автоматизацию траекторного управления, позволяющую выводить ЛА в
определенную точку маршрута или осуществлять движение ЛА по
определенной траектории с заданной скоростью; траекторное управление
требует использования информации от систем нави зции
1.1. Способы управления полетом
Многочисленные задачи, решаемые современными БПЛА, обеспечиваются
выполнением полета по заданной траектории с соблюдением режима полета во
времени и выхода БПЛА в заданные точки маршрута.
Траектория полета БПЛА является пространственной кривой движения его
центра масс. Пространственно-временное задание траектории полета является
навигационной программой полета, которая зависит от функционального
назначения БПЛА и решаемой им задачи. Как правило, навигационная
программа полета должна содержать контрольные точки полета, временной
график, последовательность выполнения отдельных элементов полета, в том
числе условия выхода в те точки пространства или траектории полета, в
которых будет выполняться основная задача, например, фотографирование
34
местности с обозначением точек начала и конца фотографирования, сбрасы-
вания грузов и т. д.
Скорость движения ЛА относительно Земли называют земной скоростью,
она направлена по касательной к траектории. Горизонтальная проекция земной
скорости есть путевая скорость.
Обычно граекторию полета представляют маршрутом, линией пути и
профилем полета. Маршрут определяется проекцией полета БПЛА на поверх-
ность Земли, а профиль полета определяет изменение высоты и может быть
представлен траекторией или схемой полета в вертикальной плоскости. На
маршруте полета обычно выделяются опорные точки, например, точки взлета и
посадки и точки изменения маршрута - поворотные пункты маршрута. Точки
изменения режима полета определяются как рубежные точки маршрута: начало
и окончание выполнения заданной целевой функции полета, начало и
окончание набора высоты и т. д
САУ БПЛА должна обеспечить: точное выполнение маршрута на уста-
новленной высоте полета (эшелоне), определение навигационных параметров
полета, обеспечение выполнения цели полета, подлет БПЛА к месту посадки в
заданное время.
Принято различать двух-, трех- и четырехмерную навигацию. В
двухмерной навигации решается задача выдерживания заданного маршрута
(линии пути), в трехмерной к этому добавляются задание и контроль профиля
полета, в четырехмерной добавляются привязка маршрута к времени и
выполнение временного графика полета.
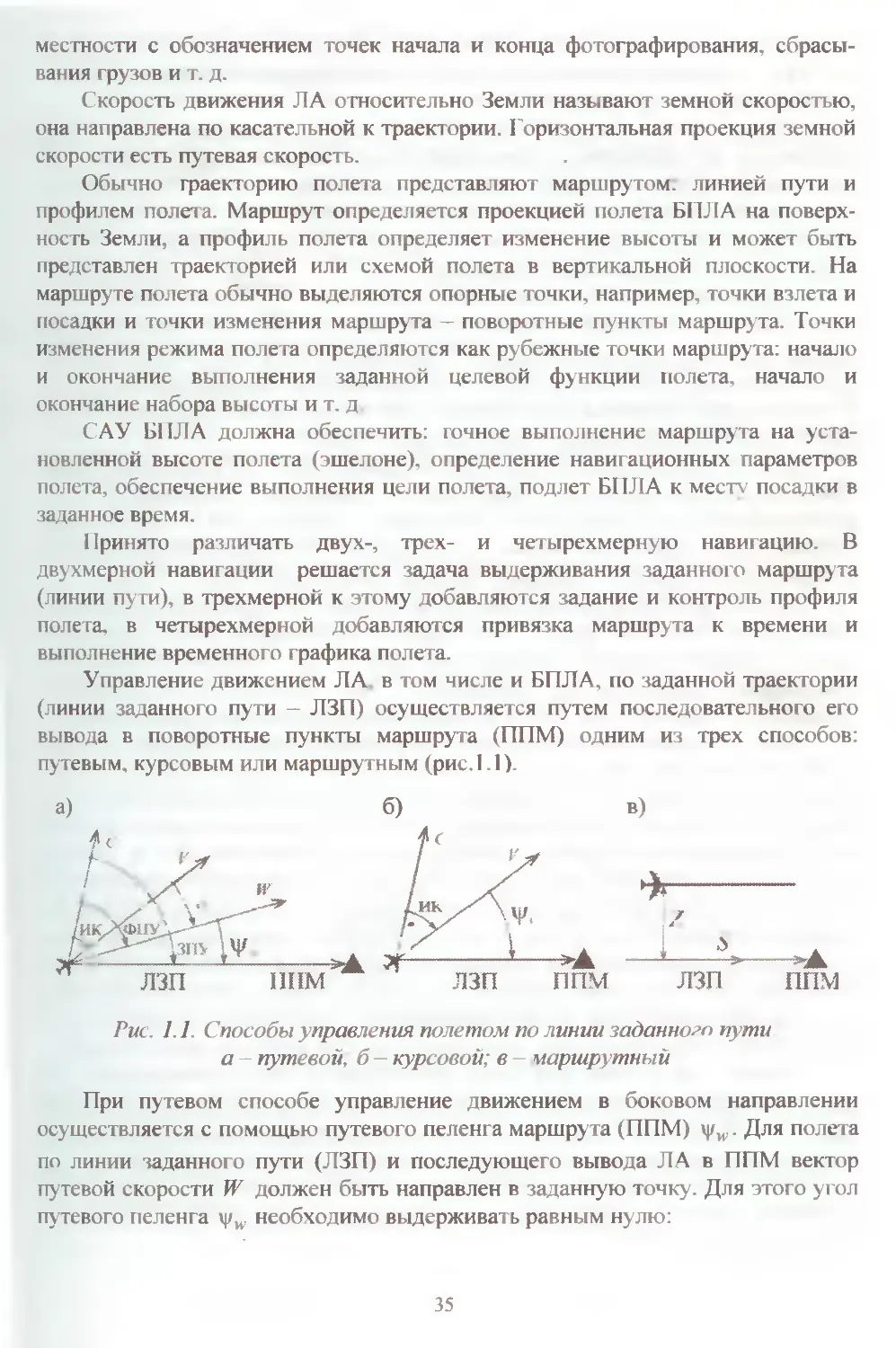
Управление движением ЛА в том числе и БПЛА, по заданной траектории
(линии заданного пути — ЛЗП) осуществляется путем последовательного его
вывода в поворотные пункты маршрута (ППМ) одним из трех способов:
путевым, курсовым или маршрутным (рис. 1.1).
Рис. 1.1. Способы управления полетом по линии заданном> пути
а - путевой, б - курсовой; в - маршрутный
При путевом способе управление движением в боковом направлении
осуществляется с помощью путевого пеленга маршрута (ППМ) ук.. Для полета
по линии заданного пути (ЛЗП) и последующего вывода ЛА в ППМ вектор
путевой скорости W должен быть направлен в заданную точку. Для этого угол
путевого пеленга необходимо выдерживать равным нулю:
35
Vlf -ЗПУ-ФПУ = ЗПУ-(ИК + а) = 0, (1 1)
где ЗПУ - заданный путевой угол, ФПУ - фактическим путевой угол, ИК -
истинный курс, а - угол сноса.
Условие (1.1) обеспечит полет к заданной точке по кратчайшему
расстоянию по ортодромии, проходящей через данную точку и ППМ. Это
достоинство путевого способа. Однако при отклонении ЛА от ЛЗП способ не
обеспечивает выхода на нее, что является его недостатком Если параметры
ветра неизвестны, то авионика БПЛА «считает» угол сноса равным нулю, и
путевой способ превращается в курсовой.
В курсовом способе управление движег ием в боковом направлении
осуществляется с помощью курсового пеленга который выдерживается
равным нулю. При отсутствии ветра ЛА будет подходить к ПИМ по кратчайшему
расстоянию, а в условиях ветра - по сложной траектории, не совпадающей с ЛЗП.
В ряде случаев возможны значительные отклонения линии фактического пути
(ЛФП) от ЛЗП и значительные отклонения ФПУ от ЗПУ.
Маршрутный способ полета по ЛЗП и вывод ЛА в ППМ реализуется, когда
обеспечивается непрерывное определение и индикация координат Z и S.
Задача решается в системе земных координат, одной из осей которой служит
ЛЗП, а второй - перпендикулярное к ней направление. Управляющий параметр
в маршрутном способе - линейное боковое отклонение Z от ЛЗП. При Z = О
ЛА следует по ЛЗП и обеспечивается его выход в ППМ. При управлении
маршрутным способом форма ЛФП определяется формой ЛЗП Если точки
излома маршрута соединяются отре <ками ортодромии, то маршрутный способ
обеспечивает движение по ортодромии. При отклонении от заданного
маршрута ЛА выводится на ЛЗП и в этом преимущество маршрутного метода.
Задача оптимизации траекторного управления при маршрутном методе
навигации обычно решается на основе методов аналитического конст-
руирования регуляторов. Регулятором в САУ БПЛА является автопилот. Наи-
более строгое решение задачи получается при использовании полных нелиней-
ных уравнений, описывающих пространственное движение ЛА и систему
управления. Однако при таком подходе трудно учесть иерархию управления, в
частности наличие навигационного («штурмана») и пилотажного («пилота»)
комплексов, каждый их которых имеет свой контур управления, причем нави-
гационный комплекс является старшим уровнем по отношению к пилотажному
комплексу, выполняющему функции исполнения. Навигационный комплекс в
своей управляющей части должен формировать управляющее воздействие для
пилотажного комплекса в виде углов крена, тангажа, курса, скорости, высоты.
Именно эти воздействия надо рассматривать как управляющие при
решении задачи оптимизации, сводящейся к тому, чтобы найти такие
зависимости изменения углов, высоты и скорости (законы управления), при
которых система переходила бы из возмущенного состояния в необходимое.
При любом способе управления полетом необходимо определение
координат точки в пространстве, в которой находится БПЛА, т.е. решение
навигационной задачи.
36
В настоящее время задачи навигации решают в основном позиционным
методом и методом счисления пути.
Позиционный метод состоит в определении координат местоположения
ЛА из геометрических соотношений по измеренным расстояниям и углам
взаимного расположения ЛА и известных точек (ориентиров, радиомаяков,
светил). На этом методе основаны способы астрономической,
радиотехнической навигации и визуальная ориентировка. К радиотехнической
относится навигация с помощью навигационных спутников (спутниковая
навигационная система - СНС), которая широко используется в БПЛА
Радиотехнический метод, с помощью радиомаяков, и визуальный, с помощью
видеосистем, могут применяться при автоматической посадке БПЛА по
«самолетному», т. е. на взлетно-посадочную полосу.
Счисление пути заключается в вычислении траектории движения ЛА по
измерениям значения и направления его скорости и координатам начальной
точки движения. Для измерения скорости движения БПЛА могут
использоваться измерители воздушной скорости на базе абсолютного датчика
давлений, инерциальная и спутниковая навигационные системы. Для измерения
курса БПЛА могут использоваться магнитометрическая, инерциальная и
спутниковая системы навигации.
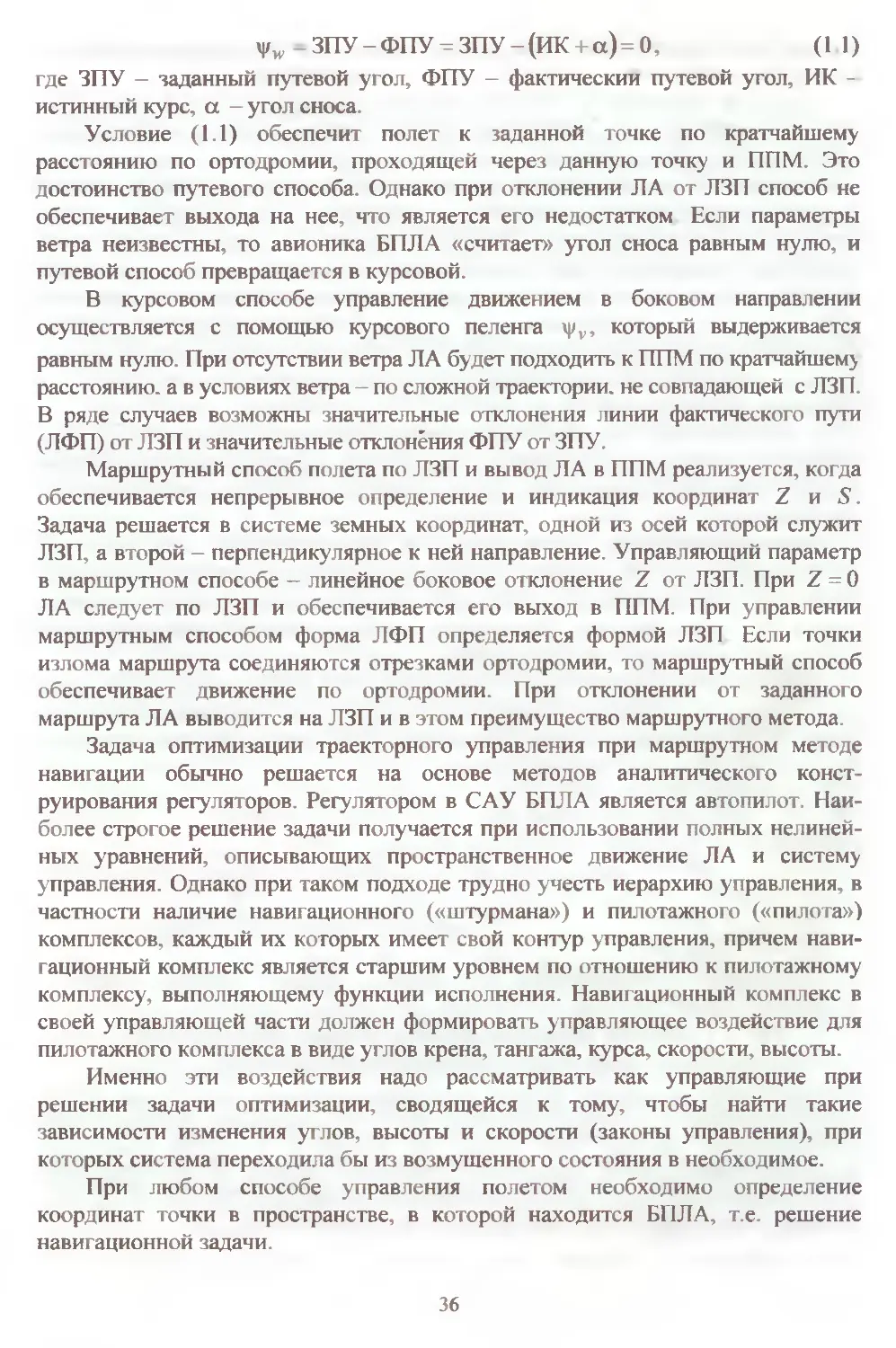
При использовании датчика воздушной скорости определяется путевая
скорость IV, как сумма горизонтальных составляющих воздушной скорости V
и скорости ветра й, образующих, так называемый, навигационный треугольник
скоростей (рис. 1.2):
W = Vr+u (1.2)
ОД А
Рис. 1.2. Навигационный треугольник скоростей
При реализации данного способа навигации обычно считают, что воздушная
скорость совпадает с продольной осью ЛА и поэтому V^ -V cos 3 (S - угол
тангажа). Проекции УГ на северное (N) и восточное (£) направления равны:
cosUcosw; Ve(z) ~ VcosSsinrp
37
Для характеристики ветра необходимо знать его значение и и направление
5. В этом случае можно определить проекции ветра на те же оси:
wх= и cos 8: Ug(z) = w sin 8.
Сумма полученных проекций в соответствии с (1.2) равна:
= ^cosScosxp + wcos8 ; We(z) = С cos 3 sin 4/+ w sin 8
По данным значениям путевой скорости и алгоритмам счисления можно
определить координаты БПЛА.
Недостатком курсовоздушного способа навигации является большие
погрешности из-за неточности данных о ветре. Поэтом} в современных
системах этот способ навигации является резервным
Повышение точности счисления пути обеспечивается комплексированием
всех систем ориентации и навигации авионики БПЛА.
1.2. Режимы полета и структуры аппаратуры управления БПЛА
Бортовая и наземная аппаратура управления должна обеспечить
следующие режимы полета БПЛА:
- взлет и посадку в ручном режиме с управлением по радиоканалу
оператором (возможны также автоматические взлет и посадка);
- полет в полуавтоматическом режиме с управлением по радиоканалу с
корректировкой действий оператора бортовой аппаратурой управления (БАУ);
- полет в автоматическом режиме по контрольным точкам с
одновременной посылкой телеметрии на наземную аппаратуру управления
(НАУ).
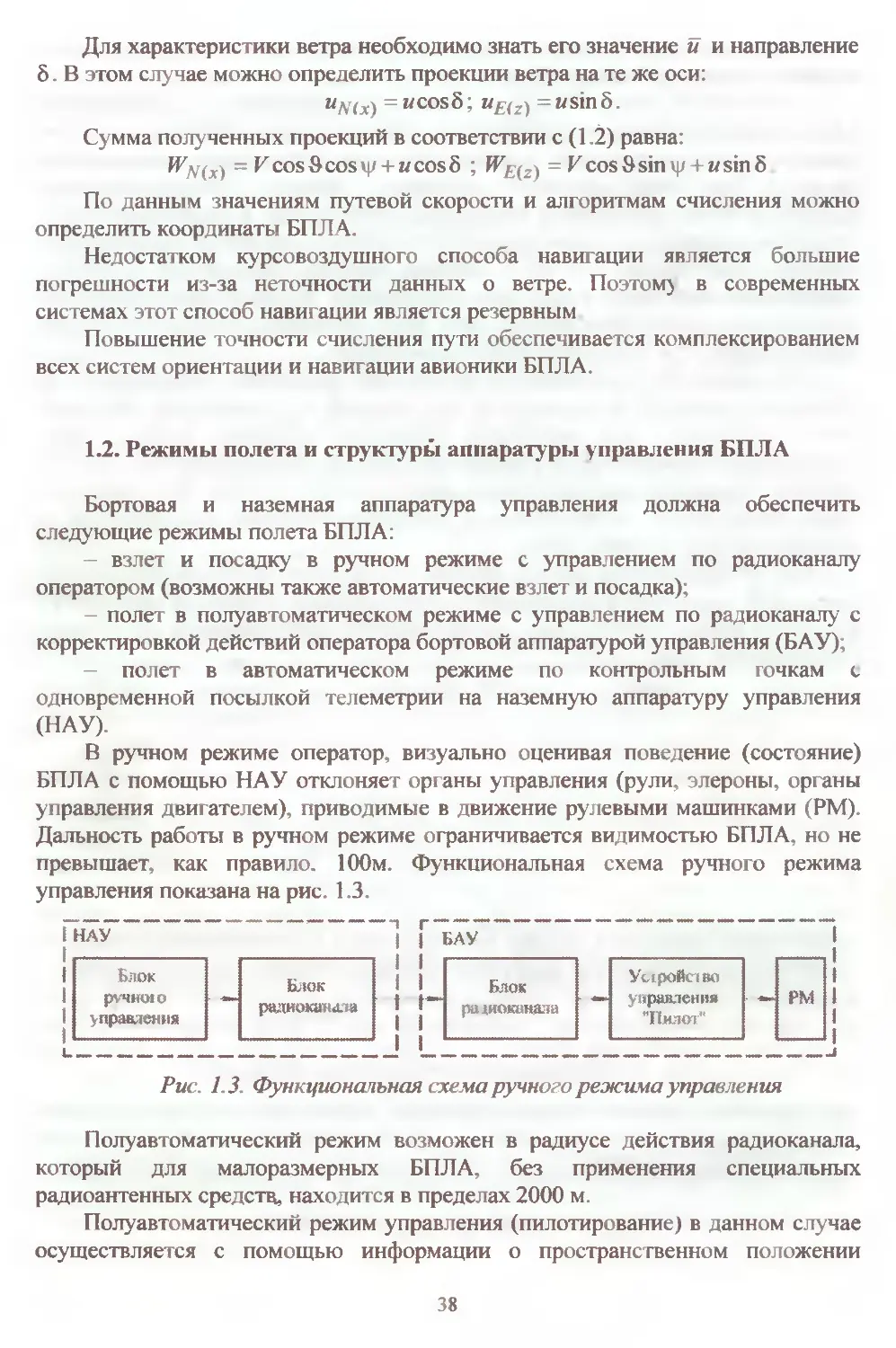
В ручном режиме оператор, визуально оценивая поведение (состояние)
БПЛА с помощью НАУ отклоняет органы управления (рули, элероны, органы
управления двигателем), приводимые в движение рулевыми машинками (РМ).
Дальность работы в ручном режиме ограничивается видимостью БПЛА, но не
превышает, как правило. 100м. Функциональная схема ручного режима
управления показана на рис. 1.3.
Рис. 1.3. Функциональная схема ручного режима управления
Полуавтоматический режим возможен в радиусе действия радиоканала,
который для малоразмерных БПЛА, без применения специальных
радиоантенных средств, находится в пределах 2000 м.
Полуавтоматический режим управления (пилотирование) в данном случае
осуществляется с помощью информации о пространственном положении
38
БПЛА, получаемой по радиоканалу и отображаемой на виртуальной приборной
панели НАУ. Действия оператора в этом режиме управления корректируются
САУ, выполняющей функции автопилота (АП), не допускающего
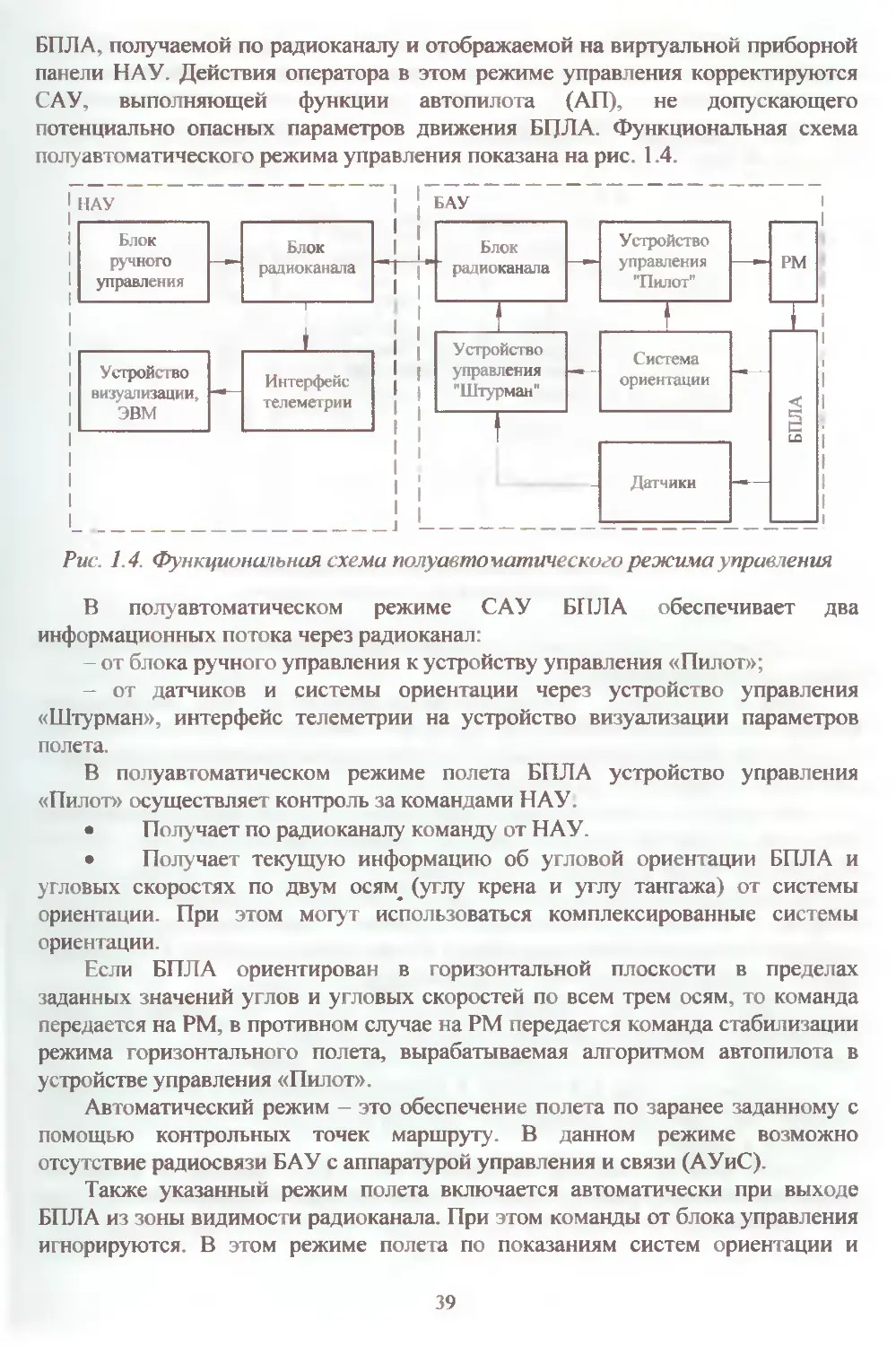
потенциально опасных параметров движения БПЛА. Функциональная схема
полуавтоматического режима управления показана на рис. 1.4.
।
I
I
I
।
i
।
i
।
।
i
।
Рис. 1.4. Функциональная схема полуавтоматического режима управления
В полуавтоматическом режиме САУ БПЛА обеспечивает два
информационных потока через радиоканал:
- от блока ручного управления к устройству управления «Пилот»;
- от датчиков и системы ориентации через устройство управления
«Штурман», интерфейс телеметрии на устройство визуализации параметров
полета.
В полуавтоматическом режиме полета БПЛА устройство управления
«Пилот» осуществляет контроль за командами НАУ.
• Получает по радиоканалу команду от НАУ.
• Получает текущую информацию об угловой ориентации БПЛА и
угловых скоростях по двум осям- (углу крена и углу тангажа) от системы
ориентации. При этом могут использоваться комплексированные системы
ориентации.
Если БПЛА ориентирован в горизонтальной плоскости в пределах
заданных значений углов и угловых скоростей по всем трем осям, то команда
передается на РМ, в противном случае на РМ передается команда стабилизации
режима горизонтального полета, вырабатываемая алгоритмом автопилота в
устройстве управления «Пилот».
Автоматический режим - это обеспечение полета по заранее заданному с
помощью контрольных точек маршруту. В данном режиме возможно
отсутствие радиосвязи БАУ с аппаратурой управления и связи (АУиС).
Также указанный режим полета включается автоматически при выходе
БПЛА из зоны видимости радиоканала. При этом команды от блока управления
игнорируются. В этом режиме полета по показаниям систем ориентации и
39
навигации и датчиков осуществляется автоматическое управление высотой и
скоростью полета, курсом, возможно также управление отклонением от
заданной траектории.
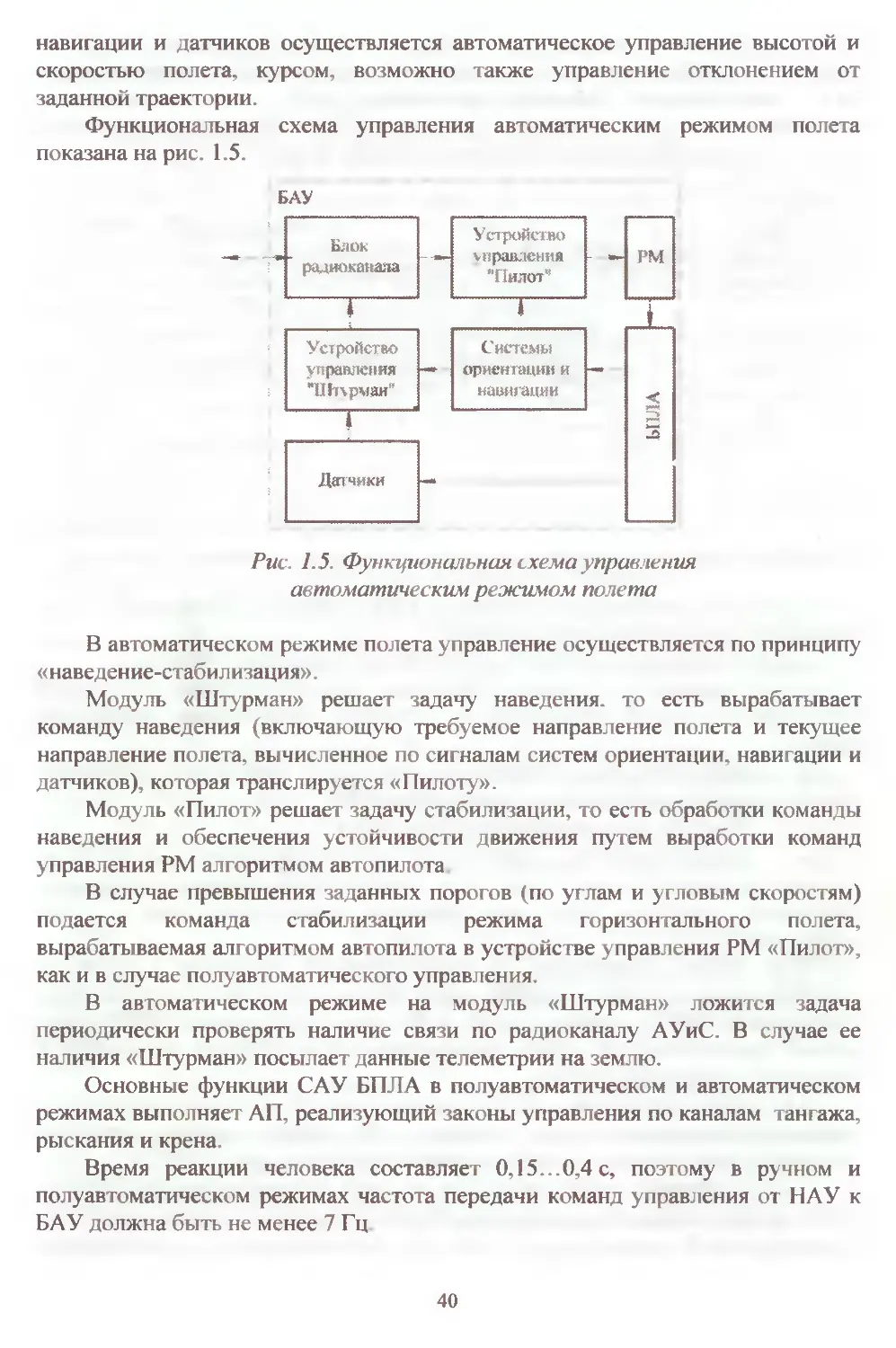
Функциональная схема управления автоматическим режимом полета
показана на рис. 1.5.
БАУ
Рис. 1.5. Функциональная схема управления
автоматическим режимом полета
В автоматическом режиме полета управление осуществляется по принципу
«наведение-стабилизация».
Модуль «Штурман» решает задачу наведения, то есть вырабатывает
команду наведения (включающую требуемое направление полета и текущее
направление полета, вычисленное по сигналам систем ориентации, навигации и
датчиков), которая транслируется «Пилоту».
Модуль «Пилот» решает задачу стабилизации, то есть обработки команды
наведения и обеспечения устойчивости движения путем выработки команд
управления РМ алгоритмом автопилота
В случае превышения заданных порогов (по углам и угловым скоростям)
подается команда стабилизации режима горизонтального полета,
вырабатываемая алгоритмом автопилота в устройстве управления РМ «Пилот»,
как и в случае полуавтоматического управления.
В автоматическом режиме на модуль «Штурман» ложится задача
периодически проверять наличие связи по радиоканалу АУиС. В случае ее
наличия «Штурман» посылает данные телеметрии на землю.
Основные функции САУ БПЛА в полуавтоматическом и автоматическом
режимах выполняет АП, реализующий законы управления по каналам тангажа,
рыскания и крена.
Время реакции человека составляет 0,15...0,4 с, поэтому в ручном и
полуавтоматическом режимах частота передачи команд управления от НАУ к
БАУ должна быть не менее 7 Гг
40
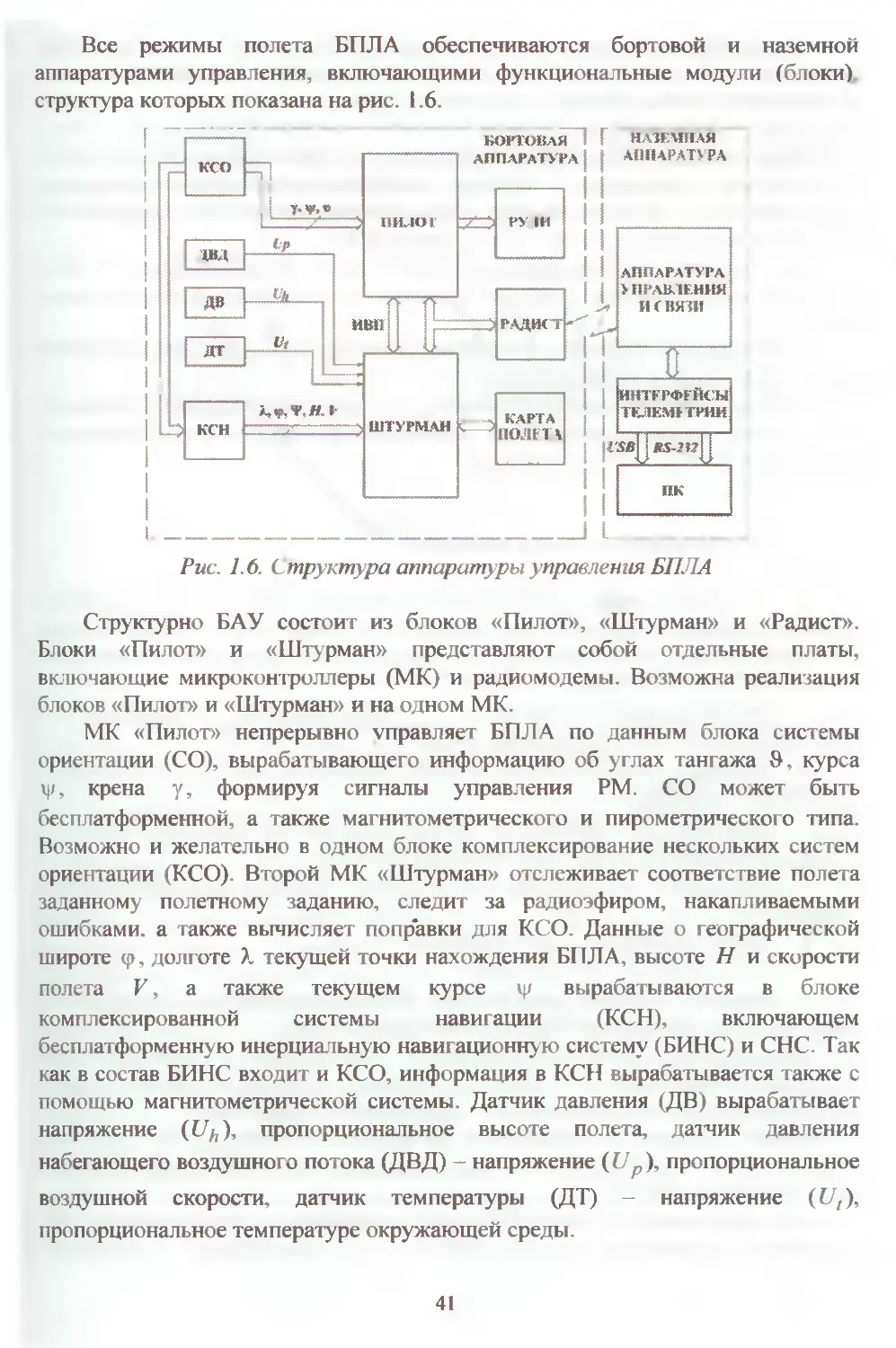
Все режимы полета БПЛА обеспечиваются бортовой и наземной
аппаратурами управления, включающими функциональные модули (блоки)
структура которых показана на рис. 1.6.
_______________________________________________________________________________________________________________________________________I I
Рис. 1.6. Структура аппаратуры управления БПЛА
Структурно БАУ состоит из блоков «Пилот», «Штурман» и «Радист».
Блоки «Пилот» и «Штурман» представляют собой отдельные платы,
включающие микроконтроллеры (МК) и радиомодемы. Возможна реализация
блоков «Пилот» и «Штурман» и на одном МК.
МК «Пилот» непрерывно управляет БПЛА по данным блока системы
ориентации (СО), вырабатывающего информацию об углах тангажа 9. курса
ф, крена у, формируя сигналы управления РМ. СО может быть
бесплатформенной, а также магнитометрического и пирометрического типа.
Возможно и желательно в одном блоке комплексирование нескольких систем
ориентации (КСО). Второй МК «Штурман» отслеживает соответствие полета
заданному полетному заданию, следит за радиоэфиром, накапливаемыми
ошибками, а также вычисляет поправки для КСО. Данные о географической
широте ф, долготе X текущей точки нахождения БПЛА, высоте Н и скорости
полета V, а также текущем курсе ф вырабатываются в блоке
комплексированной системы навигации (КСН), включающем
бесплатформенную инерциальную навигационную систему (БИНС) и СНС. Так
как в состав БИНС входит и КСО, информация в КСН вырабатывается также с
помощью магнитометрической системы. Датчик давления (ДВ) вырабатывает
напряжение (С7^), пропорциональное высоте полета, датчик давления
набегающего воздушного потока (ДВД) - напряжение (Up), пропорциональное
воздушной скорости, датчик температуры (ДТ) - напряжение ((/,),
пропорциональное температуре окружающей среды.
41
Таким образом, если в бортовом вычислителе реализован двухядерный
процессор, то одно ядро (МК «Штурман») занято преимущественно
вычислениями навигационных параметров, а другое (МК «Пилот») — задачами
управления (пилотирования).
Обмен данными между МК, с программной точки зрения, соответствует
записи/чтению переменных в «общей» памяти оперативного запоминающего
устройства (ОЗУ), Этим достигается скорость обмена лишь немногим меньшая
скорости обмена данными внутри ядра каждого МК
Вся вычисленная информация в обработанном и подготовленном виде
передается в МК «Пилот» по высокоскоростному интерфейсу внешней памяти
(ИВП).
Связь модулей «Пилот» и «Штурман» с наземной аппаратурой управления
обеспечивает модуль «Радист».
НАУ включает аппаратуру управления и связи и персональный компьютер
(ПК), обмен информацией между которыми происходит по интерфейсам
телеметрии протоколов USB и RS-232.
1.3. Операционная система авионики
В настоящее время интенсивно ведутся работы по созданию
интегрированной модульной авионики (ИМА). Основными отличительными
концептуальными особенностями архитектуры бортовых вычислительных
систем (БВС) на ИМА следует считать:
• реализуемость, открытость и адаптируемость архитектуры и
масштабируемость вычислительных средств;
• общность используемых на борту различных БПЛА аппаратных и
программных средств;
• независимость программ от используемых аппаратных платформ;
• приемлемая стоимость элементной базы БВС:
• ориентация на широкое использование коммерческих технологий и
компонентов;
• унифицированность сети передачи данных;
• стандартизация конструкции;
• высокий уровень надежности, ремонтопригодности, технического
обслуживания, эффективные средства изоляции ошибок.
Ядро авионики должно быть аппаратно-независимым То есть выполнять
свои задачи независимо от типа вычислительной среды (микроконтроллеров,
датчиков, сервоприводов) в конкретной реализации автопилота.
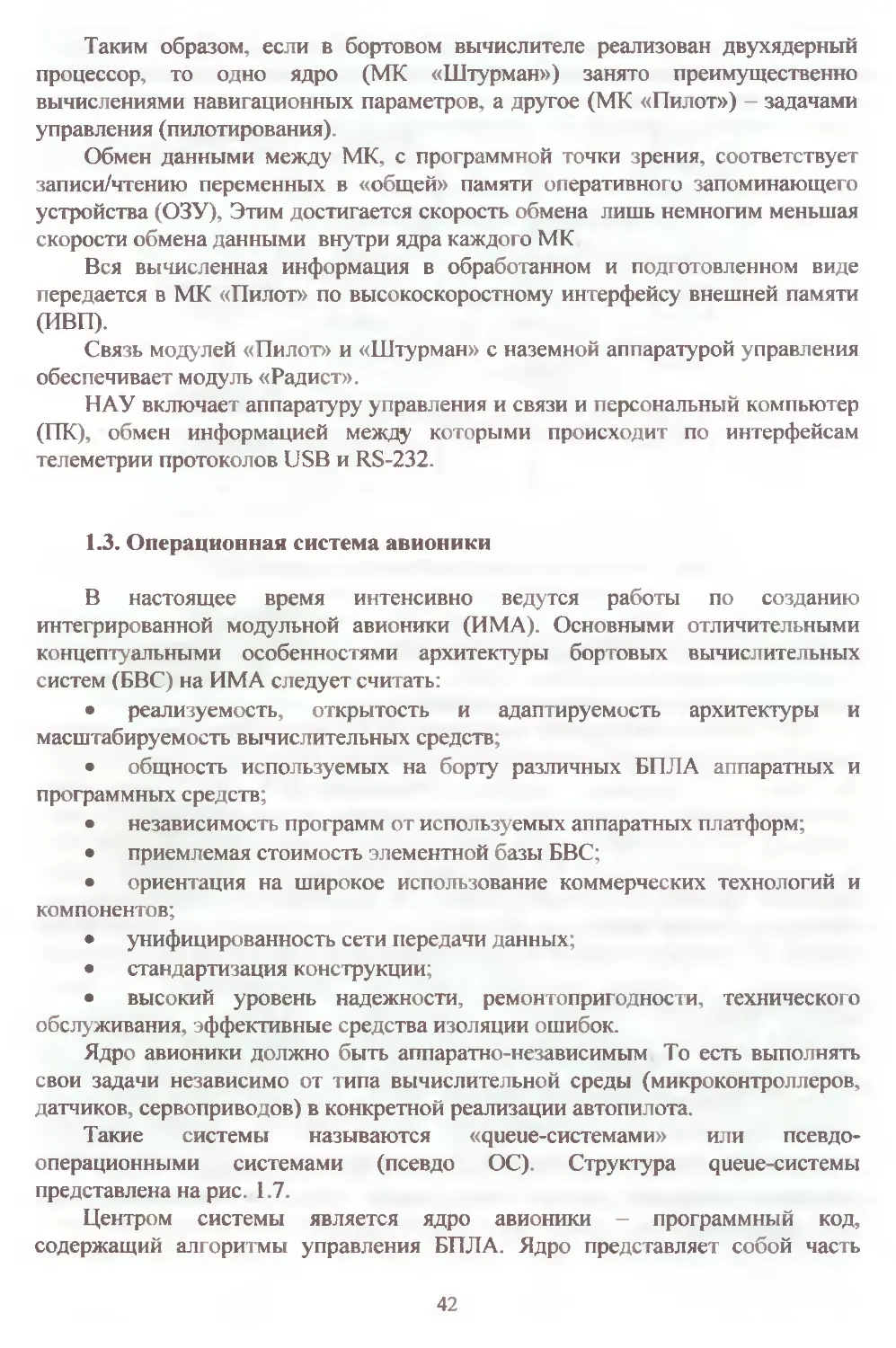
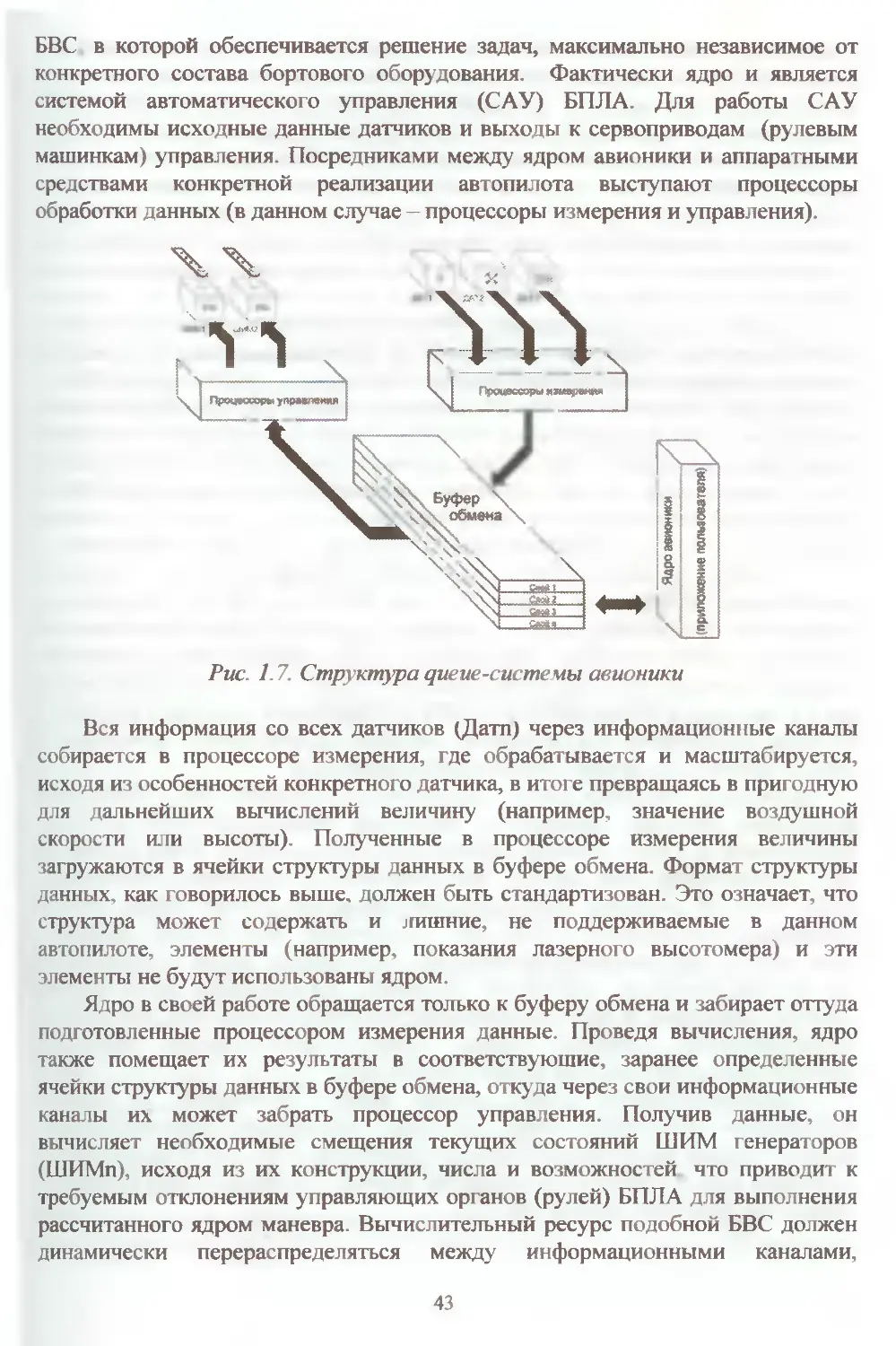
Такие системы называются «queue-системами» или псевдо-
операционными системами (псевдо ОС). Структура queue-системы
представлена на рис. 1 7.
Центром системы является ядро авионики - программный код,
содержащий алгоритмы управления БПЛА. Ядро представляет собой часть
42
БВС в которой обеспечивается решение задач, максимально независимое от
конкретного состава бортового оборудования. Фактически ядро и является
системой автоматического управления (САУ) БПЛА. Для работы САУ
необходимы исходные данные датчиков и выходы к сервоприводам (рулевым
машинкам) управления. Посредниками между ядром авионики и аппаратными
средствами конкретной реализации автопилота выступают процессоры
обработки данных (в данном случае - процессоры измерения и управления).
Рис. 1.7. Структура queue-cucme мы авионики
Вся информация со всех датчик- >в (Датп) через информационные каналы
собирается в процессоре измерения, где обрабатывается и масштабируется,
исходя из особенностей конкретного датчика, в итоге превращаясь в пригодную
для дальнейших вычислений величину (например, значение воздушной
скорости или высоты). Полученные в процессоре измерения величины
загружаются в ячейки структуры данных в буфере обмена. Формат структуры
данных, как говорилось выше, должен быть стандартизован. Это означает, что
структура может содержать и ишние, не поддерживаемые в данном
автопилоте, элементы (например, показания лазерного высотомера) и эти
элементы не будут испо. <ьзованы ядром.
Ядро в своей работе обращается только к буферу обмена и забирает оттуда
подготовленные процессором измерения данные. Проведя вычисления, ядро
также помещает их результаты в соответствующие, заранее определенные
ячейки структуры данных в буфере обмена, откуда через свои информационные
каналы их может забрать процессор управления. Получив данные, он
вычисляет необходимые смещения текущих состояний ШИМ генераторов
(ШИМп), исходя из их конструкции, числа и возможностей что приводит к
требуемым отклонениям управляющих органов (рулей) БПЛА для выполнения
рассчитанного ядром маневра. Вычислительный ресурс подобной БВС должен
динамически перераспределяться между информационными каналами,
43
обеспечивая комплексную обработку информации. Ресурс предоставляется
информационным каналам по мере возникновения необходимости только на
время выполнения заданной функции. Функционально-ориентированная БВС
базируется на открытой сетевой архитектуре и организуется по типу
интегрированной вычислительной среды (ИВС). В ИВС изначально отсутствует
жесткое распределение вычислите тьных ресурсов по информационным
каналам, а значит нет аппаратно реализованных подсистем. На время
выполнения каждой функции в ИВС формируется виртуальная вычислительная
система, которая обеспечивает оптимальную реализацию совокупности ал-
горитмов, соответствующих данной функции.
Дисциплина функционирования ИВС практически не зависит от числа
узлов, датчиков, приводов управления и процессоров, осуществляющих
обработку информации и решаемых задач. Это позволяет рассматривать ИВС в
качестве ядра БВС, инвариантного к решаемым задачам, составу оборудования
и режимам функционирования' ИМА. Подобное качество позволяет
использовать ядро БВС в ИМА БПЛА различного назначения с минимальными
доработками в части замены объектных программ. Организация ядра БВС с
архитектурой интегрированной вычислительной среды обеспечит общность
используемых на борту различных БПЛА аппаратных и программных средств.
С точки зрения разработки алгоритмов управления это открывает
широчайшие возможности. Дело в том, что устройство современных
автопилотов чрезвычайно сложно, содержит элементы, функционирующие по
индивидуальному алгоритму, известному только разработчику автопилота.
Документирование этих алгоритмов и способов работы с ними нерентабельно
как с точки прения временных затрат, так и с точки зрения смысловой нагрузки -
изучение и понимание документации сторонним разработчиком может занять
больше времени, чем разработка им нового автопилота.
Используя интегрированную queue-систему, разработчику автопилота
достаточно написать процессоры обработки данных (которые и будут
использовать те самые сложные алгоритмы) и сформировать буфер обмена со
стандартной структурой данных, что относительно несложно. Полученный
таким образом код есть универсальный посредник между ядром БВС и
аппаратными средствами автопилота. Стороннему разработчику останется
лишь изучить организацию буфера обмена - где и какие данные искать, куда и
что в итоге помещать. Фактически, он может даже не знать, какие именно
датчики применены в данной реализации автопилота и как они работают. В
соответствующих ячейках буфера обмена будут ждать заботливо
подготовленные процессором измерения величины.
Стандартизованный буфер обмена делает возможным не только
паралтельное написание ядра авионики несколькими разработчиками,
использующими различные подходы к реализации ИВС, но и параллельное
написание ядра и процессоров обработки данных, что во много раз сокращает
время и трудозатраты разработки.
44
Аппаратура управления БПЛА должна быть построена по принципу сети с
двумя концентраторами (рис. 1.8). Радиомодемы, реализующие радиоканал,
исполняют роль концентраторов НАУ и БАУ.
Для обмена данными между блоками НАУ и БАУ, а также блоками внутри
НАУ или БАУ, применен сетевой протокол (аналог 1РМГ) Сообщения
протокола состоят из поля заголовка и поля данных Поле заголовка содержит
информацию об отправителе сообщения, адресате, команде и т.п. Поле данных
содержит данные, которые необходимы для выполнения команды. Сообщения
делятся на локальные (в пределах БАУ или НАУ) и глобальные (передающиеся,
вдобавок, и через радиоканал). Таким образом, с помощью глобальных
сообщений можно получить доступ из любого блока к любому блоку системы.
Например, с ноутбука, прямо в полете, можно открыть и отредактировать
(загрузить, считать) память маршрута или получить «сырые», не обработанные
данные любого датчика, чтобы проверить верность их обработки МК на борту
БПЛА. Напротив, любой блок БАУ может запросить у НАУ, например,
температуру и атмосферное давление на уровне аэродрома и провести
корректировку своих нулевых показателей высоты
Рис. 1.8. Сетевая структура вправления БПЛА
Благодаря такой системе существенно упрощается управление БПЛА в
ручном и полуавтоматическом режимах, т.к. отсутствует задержка на
оцифровку и последующую генерацию ШИМ сигнала управления РМ.
Принятое сообщение обрабатывается и данные перегружаются в аппаратные
ШИМ генераторы, которые формируют управляющие сигналы для всех РМ
одновременно. Тем временем по радиоканалу мотут быть переданы 1-2
сообщения с любыми данными в любую сторону.
Описанный протокол обмена отличает не только компактность и высокая
устойчивость к потере данных, но и эффективное кодирование, делающее
невозможным получение несанкционированного до., тупа извне или нарушение
обмена данными «БАУ-НАУ». Это обеспечивается не только алгоритмами
45
упаковки данных и системой модуляции, но в большей мере системой
псевдослучайной смены частоты передачи, если на выбранной частоте процент
потерянных данных превысит заданный предел. Сетка смены частот зависит от
даты, принятой от СНС в момент включения БАУ, поэтому индивидуальна
каждые сутки.
В заключение необходимо напомнить, что БАУ может быть построена и на
одном микроконтроллере.
1.4. Наземная аппаратура управления
НАУ предназначена для выполнения следующих задач:
1. Создание карты полета с последующей передачей на борт БПЛА. Карта
полета (полетное задание) представляет собой последовательность
контрольных точек, которые ЛА Должен пройти в процессе полета. Каждая
точка описывается географическими координатами (широтой ф и долготой А)
а также высотой прохождения Н
2 Управление БПЛА. Взлет, посадка, а также управление в зоне
радиовидимости производится при помощи НАУ. Эти операции могут
проходить как в ручном, так в полуавтоматическом и автоматическом
режимах.
3. Мониторинг данных, поступающих с БПЛА. Информация с бортовых
системах БПЛА поступает на НАУ. Данные с бортовых систем ориентации
БПЛА, значения рабочих параметров системы энергообеспечения, координаты
БПЛА, направление полета, скорость визуализируются и обновляются по мере
поступления.
4. Считывание данных из флэш-памяти БАУ, записанных во время полета
БПЛА, аналогично п. 3.
Обеспечение выполнения перечисленных задач реализуется НАУ. в состав
структуры которой входят (рис. 1.9).
1. Джойстик управления; 2. Персональный компьютер (ПК) в форм-
факторе notebook со специализированным программным обеспечением (ПО);
3 Аппаратура управления и связи (АУиС)
Рис. 1.9. Функциональная схема НАУ
46
Для управления БПЛА в ручном и полуавтоматическом режимах может
быть применена стандартная авиамодельная аппаратура управления например
типа HITECLASER4.
Команды управления с такого джойстика могут передаваться на БПЛА как
непосредственно через собственный радиоканал, так и через ПК и далее АУиС. Это
позволяет проводить тестовые полеты БПЛА даже при отсутствии ноутбука.
АУиС представляет собой отдельный блок, подключаемый к ПК. Данный
блок необходим для транспортировки данных с борта БПЛА на ПК, а также для
передачи команд управления на БПЛА. Связь между БПЛА и АУиС
осуществляется цифровым способом по радиоканалу. Также АУиС передает на
ПК и БПЛА информацию о температуре и давлении на уровне аэродрома. Связь
между АУиС и ПК осуществляется через высокоскоростной USB интерфейс.
АУиС должна выполнять следующие функции:
1 Передача команд управления на БАУ; 2. Прием данных с борта БПЛА и
передача их на ПК; 3. Получение информации о температуре и давлении
воздуха в точке старта и передачи ее на ПК и БАУ.
Функциональная схема АУиС приведена на рис. L10.
Рис. 1.10. Функциональная схема АУиС
АУиС включает в себя: микроконтроллер (МК), аналого-цифровой
преобразователь (АЦП), блок радиомодемов, систему согласования с ПК,
барометрический датчик, датчик температуры, систему питания.
Микроконтроллер выполняет функции управления потоками данных,
формирования пакетов команд управления БПЛА, пересылки значений
температуры и давления на уровне аэродрома.
При включении ПК производится процесс подключения к нему АУиС. АУиС
проходит внутреннюю инициализацию, затем устанавливается связь с ПК и бортом
БПЛА. С АУиС на ПК пересылаются данные о значениях температуры и давления
на уровне аэродрома для вычисления высоты аэродрома. На ПК при помощи
специализированного программного обеспечения создается маршрут полета, кото-
рый затем отсылается на борт БПЛА. После этого БПЛА готов к взлету
47
1.5. Примеры построения и технические характеристики бортовой
аппаратуры управления (авионики)
В основе работы любой системы автоматического управления (САУ)
лежит последовательность действий: измерение состояния системы, сравнение
текущего состояния с желаемым, выработка воздействия для компенсации
отклонения текущего состояния от желаемого. Определяющим в этой
последовательности является «измерение состояния системы». Наиболее полно
эта функция реализуется с помощью комплексированной навигационной
системы, состоящей из бесплатформенной инерциальной навигационной
системы (БИНС), комплексированной с системой воздушных сигналов (датчик
высоты и скорости), трехосным магнитометром и системой GPS (ГЛОНАСС)
[13, 36, 39].
Комплексированная навигационная система (КНС) состоит, по сущее гву,
из трех систем навигации: инерциальной, магнитометрической и спутниковой,
каждая из которых имеет свои принципы работ и свои частоты обновления
информации. Устройство оценки полученной информации («мастер-фильтр»)
выбирает наилучшее условие, полученное любой из систем, в зависимости от
характера движения.
Принцип использования для оценки состояния БПЛА КНС и настройки
коэффициентов автопилота на конкретные режимы полета БПЛА применен в
комплексе навигации и управления разработки ООО «ТекНол»,
функциональная схема которого показана на рис. 1.11 [14,43].
Рис. 1.11. Функциональная схема комплекса навигации и управления
(авионики) для мини-БПЛА разработки ООО «ТекНол»
Бортовой комплекс является полнофункциональным средством навигации
и управления БПЛА самолетной схемы
Комплекс обеспечивает решение следующих задач:
1. Определение навигационных параметров, углов ориентации и пара-
метров движения БПЛА (угловых скоростей и ускорений); 2. Навигация и
48
управление БПЛА при полете по заданной траектории; 3. Стабилизация углов
ориентации БПЛА в полете; 4. Выдача в канал передачи телеметрической
информации о навигационных параметрах, углах ориентации БПЛА: 5.
Программируемое управление полезной нагрузкой.
В состав комплекса входят три основных модуля: приемник спутниковой
навигационной системы (СНС), инерциальная навигационная система (ИНС),
автопилот (АП).
Приемник СНС типа GPS Trimble Lasse IQ осуществляет определение
координат и передает данные в ИНС. ИНС содержит датчики (акселерометры и
гироскопические датчики угловых скоростей) и корректируется по данным
СНС и встроенного барометрического высотомера. ИНС осуществляет
измерение пилотажно-навигационных параметров движения БПЛА и передачу
этих параметров на модуль автопилота.
АП принимает данные ИНС. вырабатывает управляющие команды на основании
заложенных шконов управления и выдает их в виде ШИМ сигналов на органы
управления БПЛА (рулевые машинки). Модуль автопилота совместим с системой
ручного управления, то есть может быть выключен или включен по команде.
Комплекс совместим с радиоканалом РСМ (импульсно-кодовая модуляция) и
позволяет управлять БПЛА как в ручном режиме со стандартного пульта
дистанционного управления, так и в автоматическом по командам автопилота
В базовой конфигурации управление осуществляется по каналам:
1. Элероны; 2. Руль высоты; 3. Руль направления; 4. Контроллер двигателя.
Комплекс навигации и управления поставляется в комплекте с програм-
мным обеспечением для настройки параметров автопилота, программирования
маршрута полета и отображения телеметрической информации (рис. 1.12).
Рис. 1.12. Экран отображения телеметрической информации
49
Комплекс бортовой аппаратуры управления имеет следующие харак-
теристики:
размеры корпуса (мм) - 188x120x58; масса (г) - 830; напряжение питания
(В) 12...27; максимальная потребляемая мощность (Вт) - 5; температура
окружающей среды (°C) - -40...+85; вибрация/удар (g) - 3,5/20. Рабочие
диапазоны: крен ±180°; тангаж ±90°; курс 0...3600; ускорение ±10g; угловая
скорость ±300 %. Управление: порты RS-232 - 2 (прием-передача данных);
порты RS-22 - 5 (связь с внешними устройствами); каналы ШИМ - 12
(управляющие устройства); программируемые ППМ-255.
На одном из вариантов БПЛА комплекса «Дозор», разработанном в КБ
беспилотных систем ЗАО «Транзас», была установлена авионика разработки
«ТекНол», в дальнейшем замененная САУ собственной разработки.
Точностные характеристики параметров полета БПЛА, обеспечиваемые
авионикой разработки ООО «ТекНол», приведены в таблице 1.1 [43].
Таблица 1.1. Точностные'характеристики полета БПЛА,
обеспечиваемые комплексированной навигационной системой
инс/снс режим Автономный инерциальный режим
Координаты (комплексированное решение) 6 м 500 м (5 мин. после пропадания GPS)
Высота 2 м 6 м
Путевая скорость 0.2 м/с 5м/с (5 мин. после пропадания GPS)
Вертикальная скорость 0,25 м/с 0,3 м/с
Углы ориентации (крен, тангаж)
Прямолинейный полет 0,2°...0,3° 0,3°...0,4° (неограниченное время)
Маневрирование 0.3й... 0.5° 0,5°...0,7° (неограниченное время)
♦♦♦ Высокоманевренныи полет 1,3° 1,5° (неограниченное время)
**** Курс (путевой угол) 0,4° 3.0° (5 мин. после пропадания GPS)
Параметры в табл. 1.1 указаны как величина среднеквадратичной ошибки
(1ст), определенной в сравнении с данными эталонного измерителя по резуль-
татам летных испытаний
) прямолинейный полет определяется как отсутствие намеренных
маневров по курсу, крену и тангажу.
) углы крена и тангажа не превышают 45°.
) углы крена и. тангажа в диапазоне от 45° до 75°.
) автономное ( без СНС) определение курса возможно при проведении
компенсации магнитной девиации.
50
Помимо ООО «ТекНол», компания ЗАО «НТЦ Рисса» (Москва)
позиционирует себя как разработчика авионики и серийно выпускает системы
автоматического управления (САУ) STA-32 для БПЛА. Возможна
самостоятельная адаптация пользователем САУ под конкретный вид БПЛА [49,
50].
При размере корпуса 115x65x40 мм (возможен бескорпусный вариант)
САУ включает: блок инерциальных датчиков, блок автопилота, датчики
высоты и скорости полета, трехосный магнитный датчик и навигационный
GPS-модуль. Собственно ИНС отсутствует.
В линейку бортовых устройств входят: модуль связи - цифровые и GPS
радиомодемы. Устройства имеют единый протокол обмена данными и
используют распространенные интерфейсы RS-232 и RS-485, которые могут
использоваться как дополнение к STA-32, так и самостоятельно.
Компания «беспилотные системы» (г. Ижевск) рекламирует автопилот
массой 22,8 г с размерами (мм) 105х25х18, обладающий техническими
характеристиками практически одинаковыми с АП разработки ООО «ТехНол»
(табл. 1.1). Навигация БПЛА осуществляется с помощью CHC-GPS с частотой
обновления данный до 4 Гц.
Иностранные разработчики предлагают достаточно широкую
номенклатуру автопилотов [ресурсы сети Интернет]. Одними из наиболее
рекомендуемых являются АП типа Kestrel V2.22 (рис. 1.13а). построенный на
микроконтроллере Rabbit 3000 Senes, и АП типа МР2128 (рис. 1.136)
производства фирмы Micropilot.
Рис. 1.13. Автопилоты a-Kestrel V2.22; б МР2128
В составе АП Kestrel V2.22 имеются три акселерометра, три
гироскопических датчика угловых скоростей, трехосевой магнитометр и GPS -
декодер. Стабильная работа модуля обеспечивается встроенными двадцати-
уровневым термокомпенсатором и импульсным стабилизатором напряжения
(3,3 и 5 В; 500 мА). Процессор работает на частоте 29 МГц и имеет 512 Кбайт
ОЗУ Имеется четыре последовательных порта, четыре встроенных и восемь
внешних сервоконтроллеров. Имеется три аналоговых 12-ти битных входов и
двенадцать цифровых каналов информационного обмена (6 двунаправленных,
51
3 входа, 3 выхода). Предусмотрены контроль напряжения и тока, автопод-
стройка, дублирование системы передачи данных с коррекцией ошибок,
стабилизация и управление видеокамерой и другие опции.
АП МР2128 содержит трехосевые микромеханические гироскопы и
акселерометры, барометрический датчик высоты, датчик воздушной скорости,
модуль спутниковой навигации GPS, а также систему сбора и хранения данных.
Вычислительным ядром является RISC-микропроцессор, способный выполнять
150 миллионов операций в секунду. При физических размерах модуля 10x4 см.
его масса составляет всего 28 г. МР2128 обеспечивает полное управление
БПЛА, начиная с момента взлета и заканчивая посадкой.
На втором и третьем Московских международных форумах и выставках
«Беспилотные многоцелевые комплексы» (2008, 2009 гг.) были представлены
комплексы дистанционного наблюдения и диагностики «Птеро» разработки
ООО «АФМ-Серверс» с БПЛА массой 16 кг с широким спектром выполняемых
задач [11].
Авионика БПЛА представляет комплекс бортового радиоэлектронного
оборудования (БРЭО) (рис. 1.14), включающий канадский блок автопилота
«Micropilot», GPS-приемники, радиомодемы, микроконтроллеры управления
сервоприводами, выпуском парашюта, полезной нагрузкой, а также
энергетическое оборудование, обеспечивающее работу электрической
двигательной установки.
Рис. 1.14. Схема размещения бортового радиоэлектронного
оборудования (авионики) на БПЛА «Птеро»
52
В основе управления БПЛА «ПТЕРО-Е» лежит принцип измерения
относительной высоты по прецизионным GPS приемникам Торсоп. На БПЛА
размещены четыре антенны: одна в центре масс, одна в носу и две на
законцовках крыльев. Измеряя разность высот между четырьмя антеннами
возможно получить у глы крена и тангажа в любом пространственном
положении БПЛА. Кроме того, GPS позволяет определять координаты БПЛА в
пространстве, высоту над уровнем моря, скорость относительно земли и
курсовой угол.
Особенность системы в том, что о гсутствуют временные уходы. Ошибка
определения утла не накапливается со временем и не ограничивает время
полета БПЛА. Т.к. измерение углов крена/тангажа производится относительно
сигналов однотипных антенн однотипных приемников, точность определения
углов не зависит от прохождения сигнала GPS в данный момент времени и
уровня его приема. Таким образом, ошибка определения координат, присущая
всем GPS приемникам, не оказывает влияния на точность определения углов
крена/тангажа. Однако не все приемники пригодны для работы в БРЭО
«ПТЕРО-Е». Наиболее распространенные GPS приемники имеют разрешение
по высоте не лучше 2,5 м. Даже при условии индивидуальной калибре,вки и
относительности измерения разрешение не удастся поднять выше 0,5 м. Этого
явно недостаточно. Таким образом, в БРЭО типа «ПТЕРО-Е» возможно
применять только прецизионные геодезические приемники, работающие в
платном канале GPS. В этом случае разрешение по высоте возможно поднять
до 5 мм, что на плече крыла длиной 1 м даст точность определения угла крена
0,29 градусов.
БРЭО «ПТЕРО-Е» имеет радиоканал с землей через высокоскоростной Wi-
Fi радиомодем. Через радиоканал осуществляется управление БПЛА, а также
загрузка/выгр} зка полетных данных. Точностные характеристики работы БРЭО
практически соответствуют значениям, приведенным в табл. 1.1 для режима
работы СНС.
Недостатком такого типа авионики является зависимость от лицен-
зионного канала, предоставляемого иностранным государством. Получение
лицензий на прецизионный канал Контролируется МО США, кроме того,
стоимость четырех прецизионных GPS приемников превосходит стоимость
даже классической авионики на инерциальных элементах. Масса такого типа
авионики также не отличается экономичностью: один GPS приемник весит
около 60 I
53
Контрольные вопросы
1. Какие существуют способы управления полетом по линии заданного пути?
2. Какие технические средства понадобятся для реализации каждого из
способов управления полетом?
3. Что должно включать полетное задание?
4. Какие технические средства необходимы для реализации позиционного и
инерциального способа счисления пути?
5. С помощью каких функциональных блоков можно реализовать ручной,
полуавтоматический и автоматический режимы управления полетом БПЛА?
6. В чем (включаются особенности интегрированной модульной авионики?
7. Какие функции выполняют устройства управления «Пилот», «Штурман» и
«Радист»?
8. Какие функции выполняет автопилот в различных режимах полета БПЛА?
9. В чем достоинства сетевой структуры построения аьионики БПЛА?
10. Какие известны примеры построения аппаратуры управления БПЛА
отечественных и иностранных разработчиков?
54
Глава 2. БПЛА - объект управления
2.1. Системы координат и пространственное движение БПЛА
При исследовании динамики ЛА. в том числе и БПЛА, применяют
следующие системы координат (СК) (рис. 2.1) [ГОСТ 20058 80I
• OX - нормальная СК, начало которой (т О') помещено в центр
масс ЛА. Ось OYg направлена вверх по линии местной вертикали, а оси OX g и
OZg расположены в плоскости местного горизонта таким образом, что ось
ОХ % направлена по касательной, а ось OZg - по нормали к траектории полёта:
• OXYZ - связанная СК, начало которой (т. О) также совпадает с центром
масс ЛА. Ось ОХ направлена по продольной оси к носу, ось OZ совпадает с
поперечной осью ЛА и направлена в сторону правого крыла (поперечная ось), а
ось OY перпендикулярна плоскости поперечной симметрии ЛА (нормальная
ось) и направлена вверх. Положение строительных осей ЛА связанной СК
определяется углами рыскания у, тангажа 9 и крена у. Эти углы ориентации
ЛА называют углами Эйлера (Крылова-Эйлера);
• OXaYaZa - скоростная СК с началом (т. О), помещенным в центр масс
ЛА и связанная с вектором V линейной скорости ЛА таким образом, что ось
ОХа направлена по вектору V, ось OYa направлена вверх и лежит в
продольной плоскости симметрии ЛА. а ось OZa дополняет две предыдущие до
правого трёхгранника осей. Положение связанной СК относительно скоростной
определяется углами скольжения р и атаки а. Угол р образован осью ОХа и
её проекцией на продольную плоскость симметрии ЛА, а угол а образован
осью ОХ и проекцией вектора V на плоскость симметрии ЛА.
Рис. 2.1. Системы координат: а нормальная и связанная;
б - связанная и скоростная
55
Движение ЛА, как твёрдого тела, в связанной системе координат
описывается уравнениями Эйлера (шесть нелинейных дифференциальных
уравнений второго порядка). Силы и моменты,- входящие в эти уравнения,
сложным образом зависят от высоты, скорости и режима полёта и меняются во
времени, т. к. изменяются условия полёта, например из-за изменения массы и
момента инерции ЛА в результате расхода топлива или сброса груза.
При аналитическом исследовании процессов управления ЛА его уравнения
движения, как правило, упрощают, рассматривая два независимые друг от
друга движения: продольное и боковое. К продольному относят
поступательные движения ЛА вдоль осей ОХ и OY и вращательное движение
вокруг оси OZ. К боковому движению относят поступательное вдоль оси OZ и
вращательные движения вокруг осей ОХ и OY [7, 8, 9,28,46].
2.2. Продольное движение
2.2.1. Обобщённая математическая модель
При продольном движении ЛА вектор V линейной скорости его центра
масс находится в вертикальной плоскости. Внешние силы, действующие на ЛА
(рис. 2.2): Р — сила тяги двигателей, вектор которой направлен вдоль оси ОХ:
Ха — сила лобового сопротивления, вектор которой направлен против вектора
V, г.е. в отрицательную сторону оси ОХа‘, Ya подъёмная сила, вектор
которой перпендикулярен вектору V; mg - вес ЛА (т - масса ЛА, g
ускорение свободного падения). Вращение ЛА в плоскости XaYa возможно под
действием момента Mz, действующего вокруг оси OZa, который называется
аэродинамическим моментом тангажа.
Рис. 2.2. Внешние силы, действующие на ЛА в продольном движении
В соответствии с рис. 2.2 имеют место кинематические соотношения:
S = 0 + a; S = <bz, (2 1)
где 3 - угол тангажа; 0 — угол наклона траектории движения центра масс (ЦМ)
ЛА; toz — угловая скорость тангажа
56
Вращательное движение БПЛА вокруг оси OZa описывается уравнением:
/zd)z=A/z, (2.2)
где Iz момент инерции БПЛА относительно оси OZa', Mz - момент
аэродинамических сил, который можно представить в виде:
рК2
Mz=m2baS^-, (2.3)
где mz - коэффициент момента: Ьа - хорда крыла; р - плотность во щуха S'
площадь крыльев.
Коэффициент mz можно представлять состоящим из суммы трех
слагаемых, два из которых зависят от статических параметров (а,V,5g) и
определяют статический момент, а третий от динамических параметров (dt, 9)
и определяет демпфирующий момент. На рис. 2.3 приведены зависимости
коэффициента mz от углов а и 5g, характерные для БПЛА самолетной схемы
с размахом крыла 1,25 м и профилем крыла NACA-0016.
Рис. 2.3. Зависимости коэффициента продольного момента:
а от угла атаки; б — от угла отклонения руля высоты
Спроектируем силы, действующие на БПЛА, на касательную к траектории
полёта (ось X) и на нормаль к ней (ось У). Сумма проекций сил на
касательную к траектории:
dV
т— = mV-Pcosa-Xa — wgsinG. (2 4)
dt
При определении проекций сил на нормаль к траектории нужно иметь в
виду, что при движении БПЛА по искривленной траектории с радиусом
кривизны г, на него действует центробежная сила инерции /и У 2/г. Так как
г = ds / dQ (s - длина дуги траектории), a ds = Vdt, то
mV2 mV2 mV2 rzJ0 rzA
----= —— =--------= mV — = mVQ.
r dsdQ Vdt/dft dt
57
Следовательно, сумма проекций сил на нормаль к траектории:
mVQ = Ya +Psina-mgcosO. (2.5)
Сила тяги Р зависит от параметров двигателя, от внешних условий,
характеризуемых скоростью полёта V, высотой полёта Н и параметра
управления двигателем 8р, т. е. в общем виде
Р=Р(К,Я,8р).
Аэродинамические силы Ха и Ya зависят от угла атаки а скорости
полёта V, плотности воздуха р и угла отклонения руля высоты 8g. Так как
угол 8е практически не влияет на величины Ха и Ya то этим влиянием
пренебрегают и представляют их обычно в виде:
х„ = C„,S^-,Y„ = cyaS^~, (2.6)
где сха, с... коэффициенты лобового сопротивления и подъемной силы,
зависящие от угла атаки и скорости полета.
На рис 2.4 приведены зависимости сха, суа от угла атаки а, характерные
для БПЛА самолетной схемы с размахом крыла 1,38 м и профилем крыла
NACA-0012.
Рис. 2.4. Зависимости коэффициентов сха, суа от угла атаки
Система нелинейных дифференциальных уравнений (2.2), (2.4), (2.5) с
учётом (2.1), (2.3), (2.6) является математической моделью продольного
движения ЛА
Известно, что для пилотируемых ЛА самолетной схемы практически для
всех компоновок и большинства режимов полета, собственное движение ЛА
состоит из двух колебательных движений, отличающихся частотой и степенью
затухания. Эти движения называются короткопериодическими и длинно-
периодическими или фугоидными, и могут проявляться и для БПЛ Причиной
возникновения короткопериодических девижений является нарушение
равновесия моментов вокруг оси OZa, что приводит к вращению ЛА
относительно ЦМ и изменению углов а и S. Скорость невозмущённого
58
линейного движения при этом практически не изменяется. Причиной
возникновения длиннопериодических движений является нарушение внешних
сил, действующих в продольной плоскости симметрии ЛА, следствием чего
является изменение скорости его полета.
2.2.2. Линеаризованные уравнения продольного движения и анализ
моментов, определяющих короткопериодическое движение БПЛА
Применяя к уравнениям (2.2), (2.4), (2.5) метод малых возмущений, могут
быть получены линейные уравнения продольного движения БПЛА
Предположим, что на исследуемом участке полета невозмущенное
движение БПЛА характеризуется постоянными силами Уо, Ро, и
параметрами Ео, а0. 30, 0О, Но и coz =0. а параметры управления 8в0, 8р0
также постоянны. Если исследуется участок полета, на котором параметры
движения существенно меняются, его разбивают на несколько участков, на
которых параметры движения можно считать постоянными.
Уравнения невозмущённого движения БПЛА на участке с постоянными
параметрами следуют из уравнений (2.2), (2.4), (2 5):
Pq cos а0 - Хо - mg sin 0O - 0;
Yq + Pq sin a0 - mgcos0o = 0;
A/zo = 0-
(2 7)
Из первых двух уравнений системы следует отношение:
P0cosa0 - Xq
^osinao + ro ’
из которого можно заключить, что при P0cosa0=A'o БПЛА летит
горизонтально, при /oCOsao>Ao - набирает высоту (0о>О), а при
Pq cos ag < Xq — уменьшает высоту (0О < 0).
Если в некоторый момент времени параметры движения и управления
изменились на величины ДК,. Аа, АЗ, А0, Acoz, A8g, А5р то
соответствующие параметры возмущённого движения принимают вид:
V = Pq + АЕ, и = a,, + Act, 3 — 3,j + АЗ, 0 = 0q + А0, 8g = ’о + A8g,
6P=SP0+A5P’ “z=A®z-
При изучении продольного углового движения БПЛА в области малых
изменений параметров движения первое уравнение системы (2 7) из
рассмотрения можно исключить, т.к. оно представляет сумму проекций сил на
ось ОХа (рис. 2.2), не влияющих на угловое движение БПЛА. При
линеаризации второго уравнения системы (2.7) полагают, что проекция силы
тяжести на ось OYa не оказывает влияния на угловое движение БПЛА, и этой
составляющей можно пренебречь.
59
В результате известных процедур линеаризации могут быть получены
простейшие уравнения продольного движения БПЛА:
юЕоДе + ГоиДа = О;
/,А(в, +M“oAa + A/“nzAcoz
AS = Д0 + \a; Acoz - AS,
(2.8)
где постоянные коэффициенты соответствуют исходному невозмущённому
движению и определяются следующим образом:
va ,dY . i/u ,dA/z л; дМ z ij3e
Io =-(—+ ^cosa)0; Mzq =-(——)0; M ft ------------)0; MzG
da oa ocoz ooB
Рассмотрим аэродинамические моменты в уравнениях (2.8), определяю-
щих короткопериодическое движение БПЛА
При Mzq > 0, что обычно, имеет место, момент М^Ла называется
моментом продольной статической устойчивости, который является следствием
воздействия набегающего воздушного потока на хвостовое горизоньальное
оперение, от размеров и формы которого главным образом и зависит. При
невозмущённом движении БПЛА угол атаки a = ад и аэродинамический
момент относительно поперечной оси отсутствует. Восходящие или
нисходящие потоки воздуха приводят к изменению угла атаки на величину Да.
который может измениться и из-за других причин, например изменения
центровки БПЛА. Величина Аа приводит к увеличению подъёмной силы
крыльев, следствием чего является изменение высоты полёта БПЛА, и к
увеличению на ДЕ() подъёмной силы горизонтального хвостового оперения,
которая приложена в центре давления (ЦД) на плече Lm, что и создаёт момент
Л/“0Да = Д, возвращающий БПЛА к прежнему углу атаки a = ao, т.е.
Да —> 0 (рис. 2.5). Таким образом, момент И“0Да обеспечивает продольную
устойчивость БПЛА, если центр давления аэродинамических сил находится за
центром масс БПЛА в сторону хвостового оперения. Если ЦМ и ЦД совпадают,
то = 0 (нейтральный БПЛА), если ЦД находится впереди ЦМ, то А/“о < О
(неустойчивый БПЛА).
Момент Л/^Дсог появляется при вращении вокруг поперечной оси и
называется моментом демпфирования тангажа. При вращении вокруг ЦМ с
угловой скоростью Д(о2 хвостовое оперение получает линейную скорость
k(£>zLro, перпендикулярную вектору скорости V полёта (рис. 2.6). В
результате угол атаки хвостового оперения изменяется на ве. ,ичину
Да«jV и. следовательно, аэродинамическая подъёмная сила
хвостового оперения изменится на величину ДЕ0, которая создаст момент
^zO направленный против скорости Асо,. Эффективность этого
механизма демпфирования существенно зависит от высоты полёта, а её
60
увеличение средствами аэродинамики приводит к увеличению воздействия на
БПЛА аэродинамических возмущений.
Рис. 2.5. К определению момента
продольной статической
устойчивости
Рис. 2.6. К определению момента
демпфирования тангажа
Управляющий момент М^&6В появляется при отклонении руля высоты
хвостового горизонтального оперения, вследствии чего изменяется его угол
атаки. Физическая картина воздействия этого момента на БПЛА аналогична
влиянию момента продольной статической устойчивости (статической
устойчивости тангажа). На руль высоты, отклонённый от нейтрального
положения на угол Абд, действует аэродинамическая сила YPB, направленная
перпендикулярно набегающему потоку воздуха и приложенная в ЦД рулевой
поверхности (рис. 2.7), который, как правило, не совпадает с ее осью вращения
(ОБ).
Рис. 2.7. К определению управляющего момента по высоте
Сила YPB относительно оси вращения создает, так называемый, шарнирный
момент, который является основным нагрузочным моментом для привода,
осуществляющего разворот руля высоты. В точке, соответствующей ОБ, можно
приложить две противоположно направленных силы YPB, равных по модулю YPB.
Тогда можно записать равенство M^tsbB=YPBLQ + YPBl = YPBLPB из которого
следует, что управляющий момент, приложенный к ЛА, состоит из суммы
61
шарнирного момента, действующего относительно ОВ руля и момента силы YPB
на плече Lq относительно ЦМ ЛА
Вернемся к уравнениям системы (2.8) и перепишем их в переменных
приращений углов тангажа AS и атаки Аа:
/ZAS + A/z0Aa + AS = -М^ОА5В + MBZ;|
wFq(AS — Act) + Act = FBy.
где MBz, FBy - возмущающие момент и сила, действующие соответственно
относительно оси OZa и вдоль оси OYa.
Уравнения системы (2.9) перепишем в виде:
AS + «|AS4-6z2Aa--t73A8w+а4Л/д/; (2 10)
- Aa + 05 Aa + AS - aBFBy,
где a} = Af “z /4 '> «2 = К* J ^3 = i «4 = VI
a5-Y^/mV0;a6=l/mV0. (2.11)
Постоянные коэффициенты в (2.11), соответствующие невозмущённому
движению, определяются следующим образом:
Mw = qSb; М“ = muzqSl; М5в = nfy qSb; Уо“ = с“qS, (2.12)
z0 zo zn
где q = pV2 /2 - скоростной напор; b - хорда крыла
В выражениях (2.12) характер изменения продольного момента mz от угла
атаки а и угла отклонения руля высоты 8В и подъёмной силы с?
иллюстрируется рис. 2.3, 2.4.
2.3. Боковое движение
2.3.1. Аэродинамические силы и моменты, действующие на БПЛА
Боковое движение БПЛА включает вращение вокруг продольной оси ОХ,
нормальной оси OY и линейное перемещение вдоль оси OZ. Рассмотрим
основные аэродинамические силы и моменты, действующие на БПЛА (рис. 2.8).
Предположим, что вследствие какого-либо возмущения БПЛА относительно
нормальной системы координат OXgYgZg получил крен на угол у, после чего
возмущение исчезло. Угол у определяет положение связанной системы координат
OXYZ, причём т. О совпадает с центром масс БПЛА самолётной схемы.
Плоскости крыльев относительно плоскости XZ располагаются под углом <р (вид
по стрелке А). При положительном крене (на правое крыло) вдоль оси OZ
появляется составляющая wgsiny силы веса БПЛА, под действием которой
возникает скольжение БПЛА со скоростью Vz = KxtgP (Vx - продольная
62
составляющая скорости V, Р - угол скольжения). Вследствие скольжения
нарушается симметрия обтекания крыльев воздушным потоком. Для иллюстрации
указанного обстоятельства на концах правого и левого крыльев построены
треугольники воздушных скоростей (Ук — составляющая скорости Vz набегающего
воздушного потока вдоль крыльев; Fj - составляющая, перпендикулярная вектору
скорости Fz), из которых следует FJ -Ktgip. Так как скорости F[ на правом и
левом крыльях направлены в разные стороны, происходит изменение их углов
атаки, что иллюстрируется построением треугольников скоростей на векторах
скоростей Vx и К|, из которых следует Да = Fj / Vx. При этом на правом крыле
имеет место положительное приращение угла атаки (+ Ла), а на другом -
Траектория
полета
Рис. 2.8. К определению моментов статической устойчивости крена и пути
Соответственно подъемная сила правого крыла увеличится на ДУ. а
левого уменьшится на ХУ В результате относительно оси ОХ образуется
момент поперечной статической j стойчивости или момент статической
устойчивости крена, первопричиной которого является скольжение и который
обозначается в виде Л/^Др, где
. Очевидно, что этот момент
тем больше, чем больше изменение угла Да, величина которого в соответствии
с приведенными выше соотношениями, может быть представлена в виде:
V V Г
гх гх гх
63
откуда следует что чем больше угол ф, тем больше момент поперечной
устойчивости. Стреловидность крыльев в плане также приводит к появлению
момента поперечной устойчивости.
Изменение j глов атаки приводит к изменению сил лобового
сопротивления на крыльях: на правом крыле эта сила увеличится на величину
АХ, а на левом уменьшится на АХ. С появлением угла 0 возникает также сила
AZ на вертикальном оперении. Следствием указанных сил является
возникновение флюгерного момента, или момента статической устойчивости
пути, который старается развернуть БПЛА в сторону набегающего воздушного
потока. Этот момент обеспечивает устойчивость по углу скольжения, стремясь
так развернуть БПЛА, чтобы установился угол скольжения, имевший место до
возмущения. Момент статической устойчивости пути обозначается в виде
мдр, где м’о=(-^-)о.
Движения БПЛА по крену и рысканию происходят с угловыми скоростями
сох и ciy, что приводит к возникновению демпфирующих моментов.
При вращении БПЛА по крену со скоростью (рис. 2.9а) на правом
крыле угол атаки увеличивается, а на левом - уменьшается. Это приводит к
изменению подъемных сил крыльев и, как следствие, к демпфирующему
моменту крена Мх$и>х, где Мхц =(--------—)0. Одновременно происходит
S<nx
изменение сил лобового сопротивления (рис. 2.96) на величин) + АХ для
правого крыла и на величину - АХ для левого крыла. Изменение сил лобового
сопротивления приводит к появлению демпфирующего момента рыскания
гДе Mv0 =
При вращении БПЛА со скоростью рыскания на правое крыло
воздушный поток набегает с большей скоростью, чем на левое (рис. 2.9в), и
появляется разность сил лобового сопротивления, что приводит к появлению
демпфирующего момента рыскания где = ( —- )0.
у у да>у
Одновременно из-за разности скоростей набегающих воздушных потоков,
увеличивается подъемная сила правого крыла и уменьшается на левом крыле,
что приводит к появлению демпфирующего момента крена где
<0 -=(~)о (рис. 2.9г).
64
Рис. 2.9. К определению моментов статической устойчивости:
а, б крена; в, пути
В зависимости от коне грукции БПЛА могут быть различные соотношения
между рассмотренными моментами. Для статически устойчивых БПЛА
выполняются неравенства:
М₽0АР > М^х + Л/РОАР > М^&х э- M^v.
Кроме того, необходимо выполнение определенных соотношений между
моментами статической устойчивости крена и пути.
Если Л/PqAP » Л/РдДР, то при возникновении случайного крена большой
момент раскачивает БПЛА, совершающий малые колебания по
рысканию и крену. При недостаточном демпфировании в этом случае имеет
место неустойчивость типа «голландский шаг».
Если Л/^одр << Л/^()ДР, то возможна неустойчивость типа пространст-
венной спирали. В этом случае наблюдается монотонное одновременное откло-
нение БПЛА по крену и рысканию (штопор).
В зависимости от конструкции БПЛА момент статической устойчивости
пути может быть положительным (центр давления находится за центром масс),
равным нулю (ЦД совпадает с ЦМ) и отрицательным (ЦД расположен перед
ЦМ). Соответственно БПЛА называют статически устойчивыми, нейтральными
или неустойчивыми в отношении направления путевой скорости.
Из проведенного анализа следует, что вследствие скольжения, появляющегося
при крене, движения крена и рыскания связаны между собой. При автоматическом
управлении автопилот БПЛА активно гасит крен и скольжение не успевает заметно
65
развиться. Поэтом} при автоматическом управлении БПЛА движения крена и
рыскания допустимо рассматривать независимо друг от друга.
2.3.2. Уравнение движения крена
Если БПЛА управляется автопилотом и совершает горизонтальный полет
с постоянной скоростью, уравнение движения относительно продольной оси
ОХ в общем виде представляет равенство
1хых = Мх,
где 1Х - момент инерции БПЛА относительно оси ОХ;
Мх =Мх(в)х,У,8э,Н,$) - аэродинамический момент крена.
Линеаризованное уравнение движения крена для тех же ограничений, что
и для продольного движения БПЛА, может быть приведено к виду:
7хАу + Лф\у = -М^Аб, +МВХ, (2.13)
где Ау - приращение (возмущение) угла; А53 - угол отклонения элеронов;
Мвх - возмущающий момент;
= А = А/Й = -(^)о = ^qSP, (2.14)
сю А до э
тхх,тхэ - коэффициенты момента крена, зависящие от угла отклонения
элеронов и угловой скорости крена.
На рис. 2.10 приведена зависимость коэффициента момента крена, от угла
отклонения элеронов для БПЛА самолетной схемы с размахом крыла 1,38 м и
профилем крыла NACA-0012 для двух значений угла атаки.
Заметим, что существует зависимость коэффициента момента крена и от
угла скольжения, которая аналогична зависимости по рис. 2.10.
Рис. 2.10. Зависимость коэффициента момента крена
отугча отклонения элеронов
6б
Уравнение (2.13) может быть представлено в виде:
Ду + q Ду = -с2Д6э + с3Мвх.
где cx=M^Ux, c2--M^/Ix, с3=Шх.
(2-15)
(2-16)
2.3.3. Уравнения движения рыскания
Уравнения движения рыскания hohvhhm для БПЛА, управляемого
автопилотом и совершающего горизонтальный полет с постоянной скоростью
V, вектор которой направлен по оси ОХа, касательной к траектории полета
(рис. 2.11) и которой препятствует сила любого сопротивления Ха. Изменение
угла траектории Т происходит с угловой скоростью ov разворота БПЛА
относительно оси OY (скорость рыскания), которому препятствует
аэродинамический момент рыскания Му. Уравнения движения получим,
приравняв проекции внешних и инерционных сил на ось OZa. нормальную к
траектории полета, а также внешний и инерционный моменты относительно
оси OY, перпендикулярной плоскости XZ:
wPP = Z + PsinP;
XIу.
(2.17)
(DJ=V;V = 'P + p,
где / - боковая аэродинамическая сила; Р - сила тяги двигателя; 1у - момент
инерции БПЛА относительно оси OYC; ц/, р — углы рыскания и скольжения
Рис. 2.11. К выводу уравнений движения рыскания
67
Уравнения (2.17) могут быть приведены к линеаризованному виду
/иГоФ + 7§Ар = О;
iy\^y 4- л/Родр+м^/^у = -м$ььн,
\(йу = \j/; Av = AT + др,
(2.18)
где А5Н угол отклонения руля направления; Z1' =-( 6Z / с*Р cos р)0:
A/₽0=-(3Mv/ap)0; M$=-(dMv/d(»y)0-, =-(r»A/v/a8„)0 (нулевые
индексы означают, что параметры и производные взяты для выбранного
невозмущенного движения).
Уравнения системы (2.18) запишем в переменных приращений углов
курса А\|/ и скольжения др:
7уД1Й + М₽0др + Л/^Ду = -Л/ЙД5н +Мву,
т VQ (.Дф - Др) + ZJJ ДР’= FBZ,
где МВу. FBZ возмущающий момент и сила, действующие соответственно
относительно оси OYa и вдоль оси OZa.
Уравнения системы (2.19) перепишем в виде:
Aij/ + Z>]AV + Z>2AP = -Ьз^н + ЬцМВу\ „ 20)
- Др + Ь5 ДР + Дф = bBFBZ,
где
= М^/1у-Ь2=М^11^=М^/1у;Ь^1/1у-]
b5 = zf> ImV^bb =l/?nF0.
Постоянные коэффициенты в (2.21). соответствующие невозмущенному
движению, определяются следующим образом:
му% = myy<lSl: Му0 = ту^1: Л/Й - = c*qS. (2.22)
где q - скоростной напор; S,l - площадь и размах крыльев соответственно.
В выражениях (2.22) характер изменения коэффициента момента
рыскания ту для БПЛА самолетной схемы с размахом крыла 1,38 м и
профилем крыла NACA-0012 и коэффициента боковой силы
иллюстрируется рис. 2.12 и рис. 2.13 для двух значений угла атаки.
68
Рис. 2.12. Зависимости коэффициента момента рыскания.
а от угла скольжения, б от угла отклонения руля поворота (направления)
- L Л«
Рис. 2.13. Зависимость коэффициента боковой силы от угла скольжения
Для большинства режимов полета руль направления устраняй сколь-
жение, т.е. можно считать ДР = О и движение рыскания описывается одним
уравнением:
Л>Дф + Дф = -Л/$Д8„ + Мву. (2.23)
Заметим, что уравнение (2.23) описывает также движение рыскания
нейтрального БПЛА, у которого нулевой коэффициент путевой устойчивости,
т.е. А/₽о=О.
Если рассматривать только колебания продольной оси БПЛА
относительно вектора скорости и пренебречь движением его центра масс под
действием боковых сил. то можно считать Ар = Av. и уравнение движения
рыскания принимает вид:
1 г Дф + Дф + М₽оДц/ = -А/>„ + МВу, (2.24)
или, имея в виду (2.21):
Дф + Дф + Z>2 Ду = -^з Дбн + ЬцМВу. (2.25)
69
2.4. Передаточные функции БПЛА
Переменные величины, характеризующие состояние БПЛА, являются
параметрами регулирования, которые делятся на три группы:
1. Регулируемые параметры, которые в процессе автоматического полета
БПЛА должны поддерживаться постоянными или изменяться по
определенным, заранее заданным законам. К ним относятся скорость полета V,
угол 0 наклона траектории, углы тангажа S. курса и крена у, и высота
полета Н. В некоторых случаях в качестве регулируемых параметров могут
быть выбраны производные указанных выше величин, т.е. V, 0, ф, S, у, Н.
2. Регулирующие параметры характеризуют перемещения органов
управления БПЛА. Основными регулирующими параметрами являются углы
поворотов: 5в - руля высоты. 5Н - руля направления, бэ - элеронов или
эквивалентные им параметры.^ К этой группе относят параметры,
определяющие положение органов управления двигателем.
3. Неуправляемые параметры или нагрузки, которые включают
возмущающие силы и создаваемые ими моменты
При решении задач автоматического управления основные динамические
свойства БПЛА, как объекта регулирования, характеризуются его реакциями
на изменение управляющих параметров и возмущающих воздействий. Сами
реакции определяются законами изменения соответствующих переменных АК,
А0, А\|/, AS, Ay, АТ/.
Указанные характеристики можно определить, пользуясь понятием
передаточной функции, которая определяется как отношение операторных
изображений выходной и входной координат.
В дальнейшем в уравнениях движения для сокращения записей будем
опускать знак приращения координат А, оставляя за ними прежний
физический смысл, т.е. Аа эквивалентно а и т.д.
Получим передаточные функции БПЛА для продольного движения на
основании уравнений системы (2.10), которые для нулевых начальных условий
в операторной форме имеют вид:
520(5) < ajsSCs) + a2a(s) = -a35B(s) + c^Mez(s)
(2 26)
- sa(.s) + a5a(.s) + sS(.s) = a^F^s),
где s = dl dt.
Исключим из уравнений (2.26) переменную a(.s ) и получим:
[52 + 5(<7] - а5 ) + (а2 - )]«S(j) = -аз О’ ~ «5 )5« 0s) + ^4 (* - а5)Мв- (а) (2.27)
Положим в (2.27) MBZ(s) = Q и получим передаточную функцию
движения тангажа по управляющему воздействию:
^В(5) = = —-------°з(Д~а5)---------, (2.28)
од(5) а[а + (fli -a5)s + (a2 -aia5)]
70
где знак «минус» перед отношением 9(л)/6й(л) означает, что положительному
отклонению руля высоты соответствует разворот БПЛА по тангажу в
отрицательном направлении.
Полагая в уравнении (2.27) 5в(л) = 0, получим передаточную функцию
движения тангажа по возмущающему воздействию:
WM/)Z(s)^___=______________а4(А~а5)_________
МBZ 0s) ф’2 + (flj - а5)s + (а2 - ata5 )]
Передаточные функции (2.28), (2.29) перепишем в стандартной форме,
принятой в теории автоматического регулирования:
^2+2^5 + 1)’
(2.29)
(2.30)
где
4=
-
тв =
£>в -
кв
л(тв252 +2^5 + 1)
й3°5 - коэффициент передачи от управляющего
а2 ~а1а5 воздействия к углу тангажа;
а4а5 коэффициент передачи от возмущающего
а2 ~ а1а5 воздействия к углу тангажа;
1 - постоянная времени, характеризующая
«5 маневренность БПЛА по углу тангажа;
1 - постоянная времени, равная периоду
собственных, недемпфированных
колебаний БПЛА по тангажу;
«1-«5 — относительный коэффициент
2^ демпфирования собственных колебаний
БПЛА по тангажу.
<(4
; ^0=
Имея в виду равенство 3 = 0 + а (2.1), аналогично получим передаточную
функцию изменения угла наклона траектории БПЛА по отношению к
управляющему воздействию:
,
8д(«) s[s2 + (а^ -a5)s + (а2 -аха5)]
которая в стандартной форме записи имеет вид:
W$B(s) = - —-----в--------, (2 32)
(T^s2+2E,BTBs + l)s
где параметры определяются по зависимостям (2.31).
В п.2.2.1 показано, что на БПЛА, перемещающийся по искривленной
траектории, действует центробежная сила mVQ и, следовательно, он
испытывает нормальные перегрузки пу = VQ / g (g — ускорение силы тяжести),
возникающие при действии на БПЛА управляющего воздействия. Величину пу
необходимо контролировать и, в случае необходимости, ограничивать.
71
Передаточную функцию изменения перегрузки от управляющего
воздействия представим следующим образом:
|Г88,'_ е(»)_
sB(s) e(.s) б„(л) e<s)
где ny(s) = Ks0(5)/g и, следовательно, получим:
W5B(s) = -—WeSB(s), (2.33)
у g
где WqB(5) определяется выражением (2.32).
Передаточную функцию БПЛА изменения угловой скорости тангажа от
управляющего воздействия получим, имея в виду, что со2 = 3 (2.8), или в
операторной форме coz (.s) = sS(s) и, следовательно:
РГ5В(5) = ^£1 = ^£1 = sW™(2 34)
“z 8в(л) 5fi(s)
где W$B(s) определяется из (2.30).
Уравнения рыскания (2.20) структурно идентичны уравнениям продоль-
ного движения (2.10) и различаются они только обозначениями коэффициентов
и переменных. Следовательно, передаточные функции БПЛА по рысканию
могут быть записаны по аналогии с передаточными функциями БПЛА в про-
дольном движении.
Передаточные функции БПЛА по рысканию по управляющему и
возмущающему воздействиям имеют вид аналогичный (2.30):
_ V(-s) _ kh(This + 1)
бя(5) (Tpjs2+2^HTHs+ Y)s
,„=
(Г,2,л2+2<;я7„а-ИМ
где
K?> = b3b5
Z>2 ~b\b$
_ b^b5
и b2-bxb5
т - 1
b5
y]b2 -bxh5
bx-b.
\b2-b\b5
— коэффициент передачи от управляющего
воздействия к углу направления;
коэффициент передачи от возмущаю-
щего воздействия к углу направления;
- постоянная времени, характеризующая
маневренность БПЛА по углу рыскания;
постоянная времени, равная периоду
собственных, недемпфированных колеба-
ний БПЛА по рысканию;
- относительный коэффициент демпфиро-
вания собственных колебаний БПЛА по
рысканию.
(2 36)
72
Имея в виду равенство у = Т + 0 (2.18), аналогично (2.32) и (2.34) запишем
передаточные функции:
<(*) =
d
н
<2-37)
Полагая, что в боковом движении имеется перегрузка управления
«z-PP/g, аналогично (2.33) запишем передаточную функцию БПЛА по
боковой перегрузке от управляющего воздействия:
W^(s) = .
8„(л) g
Для нейтрального по курсу БПЛА, имея в виду (2.23), (2.25), передаточные
функции по управляющему и возмущающему воздействиям имеют вид:
НН__ WMBY (Л- v(s) _ р 39)
(Гнн5 + 1Ь ’
(2.38)
6„(s) fcHs + l)s
где KHH —b^/by — коэффициент передачи нейтрального БПЛА;
Тнн = 1 /by - постоянная времени нейтрального БПЛА
Передаточные функции БПЛА для движения крена по управляющему и
возмущающему воздействиям в соответствии с (2.15) имеют вид:
Ж6Э(х) = —--------------WMbx(s) =------ СзКэ , (2.40)
8э(5) (Тэ5 + 1)5 у Mbx(s) (Гэ5 + 1)5
где К = c2/ct, Гэ-\/с1 - коэффициент передачи и постоянная времени БПЛА
в его движении по крену.
Таким образом, БПЛА как любой ЛА, можно представить в виде
динамического звена с передаточными функциями, входными параметрами
которых являются управляющие воздействия бв, 5„, 5Э и возмущающие
воздействия МВу, а выходными - параметры движения: 3, 6, а,
ш, Т, В, со,, io.,, со,, и.,, пу, Н.
73
Контрольные вопросы
1. Какие системы координат определяют пространственное положение БПЛА?
2. Какие размеры БПЛА являются характерными?
3. Какие силы действуют на БПЛА в продольном движении?
4, Что такое углы атаки и тангажа?
5. Что характеризуют аэродинамические коэффициенты сил?
6. Что характеризуют аэродинамические коэффициенты моментов?
7. Как определяются моменты продольной статической устойчивости и
демпфирования тангажа?
8. Каково взаимное расположение центров масс и давления для устойчивого,
неустойчивого и нейтрального БПЛА?
9. Каким образом формируется управляющий момент по высоте?
10. Какие аэродинамические силы и моменты действуют на БПЛА в боковом
движении?
11. Что такое углы курса и скольжения?
12. Каким образом формируются моменты статической устойчивости крена и
пути?
13. Какую роль играет угол поперечного наклона плоскости крыльев?
14. В чем причина возникновения неустойчивых движения БПЛА типа
«голландский шаг» и «штопор»?
15. На какие группы делятся параметры регулирования БПЛА?
16. Какими динамическими звеньями можно представить БПЛА при его
движении по крену, курсу и тангажу?
74
Глава 3. Автопилоты. Принципы действия
Автопилотом называется автоматический регулятор для управления
угловыми координатами и координатами центра масс ЛА
Автопилот состоит из чувствительных элементов (датчиков) для
измерения регулируемых величин, вычислительного устройства для фор-
мирования сигналов управления, усилительных устройств для преобразования
и усиления сигналов. Дагчики могут быть аппаратно и программно объединены
в блок, который выполняет функции системы угловой ориентации ЛА (бес-
платформенная, магнитометрическая и других типов) или, в общем случае,
интегрированной навигационной системы, измеряющей не только угловые
координаты ЛА, но и параметры положения его центра масс в выбранной
системе координат. Системы ориентации и навигации различных типов могут
объединяться (комплексироваться) между собой.
Помимо перечисленных, могут быть и другие устройства например,
программное, согласующее и другие Так как ЛА имеют три угловые степени
свободы, должно быть не менее трех каналов управления, которые, в общем
случае, связаны между собой.
3.1. Принцип действия автопилота с жесткой обратной связью при
устранении начального отклонения по крену
Блок-схема автопилота (АП) с жесткой обратной связью (ЖОС) для
автоматического управления креном БПЛА приведена на рис. 3.1. Блок
датчиков (БД) АП измеряет угол у и угловую скорость у крена. Выходные
сигналы U^ и Uy БД поступают на сумматор X, на который подается также
сигнал U^, пропорциональный заданному значению у3 крена. Разностные
сигналы усиливаются в усилителе У и подаются на рулевую машинку РМ,
которая перемещает элероны Э. При перемещении элеронов через устройство
ЖОС на сумматор подается сигнал обратной связи Uoc. уравновешивающий
разностные сигналы управления.
Рис. 3.1. Блок-схема канала управления элеронами с жесткой обратной связью
75
Отклонение 5Э1 элеронов, пропорциональное разности сигналов Uy - U^,
может быть получено из равенства:
*Э«Э1 Uy-U^=Kiy(y-y3),
откуда
бЭ1=^(у-уэ), (3.1)
где Кэ передаточный коэффициент ЖОС т.е. коэффициент
пропорциональности между отклонением элеронов и сигналом обратной связи;
Ку, - передаточный коэффициент чувствительного элемента, измеряющего
угол крена БПЛА: К^= — передаточный коэффициент АП с ЖОС с
крена на элероны.
Отклонение элеронов вызывает появление кренящего момента,
действующего на БПЛА и вызывающего его разворот, при котром угол у
приближается к заданному значению у3. Процесс восстановления заданного
значения угла крена иллюстрируется рис. 3.2.
Рис. 3.2. Кривые переходных процессов устранения начального отклонения угла
крена: а — по угчовым параметрам; б-по моментам
При отклонении БПЛА по крену на угол у0 (рис. 3.2а) от сданного
(нулевого) значения АП отклоняет элероны на величину пропорциональную
Уо, вследствие чего появляется момент элеронов Л/%, (рис. 3.26), также
пропорциональный уд. Под действием момента элеронов появляется
угловое ускорение у и нарастает угловая скорость у, а угол крена у начинает
уменьшаться. В момент времени /] момент демпфирирования, обусловленный
угловой скоростью у, достигает значения равного моменту элеронов, а затем
начинает его превышать.
76
Результирующий момент М\у - МХэ + М%д изменяет свой знак, а
следовательно и ускорение у изменяет свой знак. Начиная с момента времени
/( угловая скорость у уменьшается. Постепенно величины у, у, у
приближаются к нулевому значению.
Заметим, что для плавного подхода БПЛА к заданному углу крена, кривая
должна один раз пересечь ось t и при этом площади, ограничиваемые
этой кривой, под осью I и над ней должны быть равны.
Если собственное демпфирирование БПЛА мало, то величины М%д
оказывается недостаточно для устранения начального угла крена по
описанному сценарию. БПЛА проскакивает положение равновесия и процесс
устранения начального отклонения происходит с перерегулированием, т.е.
происходит несколько колебаний БПЛ А относительно положения равновесия.
Для устранения колебательного процесса можно уменьшить передаточный
коэффициент автопилота К’^ с крена на элероны, пропорционально которому
уменьшится момент и произойдет гамедление возвращения БПЛА к
положению равновесия. Угловая скорость у также будет нарастать медленнее и
достигать меньших значений. Так как уменьшение у происходит не
пропорционально уменьшению коэффициента Кд а в меньшей степени,
торможение движения БПЛА начинается достаточно далеко от положения
равновесия и процесс устранения начального отклонения по крену происходит
без перерегулирования.
Таким образом, устранение колебательности в переходном процессе путем
уменьшения передаточного коэффициента автопилота приводи г к увеличению
времени переходного процесса.
Колебательность переходного процесса при больших передаточных
коэффициентах можно устранить введением в АП регулирования по угловой
скорости, т.е. введением на вход АП сигнала 17у, пропорционального величине
у. Этот сигнал создает дополнительное отклонение элеронов, которое вызывает
дополнительный момент, направленный против вращения БПЛА и
пропорциональный у. Таким образом, сигнал Uj в АП с жесткой обратной
связью создает момент, аналогичный моменту собственного демпфирирования
БПЛА.
Отклонение элеронов 8 Э2, обусловленное угловой скоростью у, равно:
8Э2=4ь <32’
где - передаточный коэффициент АП с угловой скорости на элероны.
С учетом (3.1), (3.2) суммарное отклонение элеронов имеет вид:
бэ=3э1+бэ2=^(у-у3) + ^у,
откуда в операторной форме следует закон управления АП с жесткой обратной
связью
77
5э = /^(у-у3) + /СрУ- (3-3)
Из рис. 3.2 видно, чго при Z = ^, которое составляет (15-20)% всего
времени переходного процесса, моменты Мхэ - МХд. Из равенства моментов
демпфирирования БПЛА и развиваемого элеронами, можно установить связь
между передаточными коэффициентами АП с ЖОС и необходимой величиной
собственного демпфирирования БПЛА тсх>л. Имея в виду (2.13), (2.14),
запишем равенство:
Куэу(Ц)] = —тхх qSly(tx), (3.4)
где у(/|), у(Z|) соответствуют углу и угловой скорости при t = tx.
Апериодический процесс устранения начального угла отклонения крена
описывается решением дифференциального уравнения второго порядка
движения БПЛА по крену для начальных условий у(0) = у0, у(0) = 0:
- t
У = УоП + у)е Л (3.5)
где Т - постоянная времени, равная обратной величине кратного корня
характеристического уравнения движения по крену.
Из (3.5) следуют выражения для угловых скорости и ускорения:
t
г л = _lL(i_£)е '~7 (3.6)
у'Х у
Очевидно, что у = 0 (Мхэ М^д) при t = tx-T. После подстановки в
уравнение (3.4) величин y(t) и у(/) при t = tx=T, получим:
К\-2К\Т -т(хх
откуда
тхх = т°, (2КУЭТ - к1). (3.7)
Равенство (3.7) устанавливает связь между коэффициентом собственного
демпфирирования БПЛА и коэффициентами передачи автопилота,
обеспечивающими эффективное устранение начального отклонения по углу
крена.
3.2. Принципы действия автопилотов по каналу крена
3.2.1. Принцип действия автопилота с жесткой обратной связью
В процессе эксплуатации возможно воздействие на БПЛА возмущающего
ступенчатого воздействия М(рис. 3.3а), вследствие которого появляется
отклонение у и угловая скорость у крена (рис. 3.36), имеющие одинаковый
знак Под действием сигналов углового отклонения и скорости автопилот
отклоняет элероны, моменты которых Мхз и МХд направлены в сторону,
78
противоположную моменту Л/^g. В момент времени t\ достигается равенство
нулю результирующего момента
~ мхв + МХэ + м хд
до подхода БПЛА к установившемуся значению крена ууст. В дальнейшем,
после момента момент Муу_ меняет знак и обеспечивает торможение БПЛА
при приближении угла крена к значению ууст. При окончании переходного
процесса, когда скорость и момент демпфирирования приближаются к нулю,
момент элеронов уравновешивает возмущающий момент. Так как отклонение
элеронов пропорционально углу крена, то для компенсации внешнего момента
в установившемся режиме требуется сохранить угол крена БПЛА у = ууст,
определяемый следующим образом
Рис. 3.3. Кривые переходного процесса при воздействии ступенчатого
кренящего момента, а по моментам: б-по угловым параметрам
Имея в виду в (3.13) у = у = 0, получим МУЭуст = Му ^8 ^ст = -М^в » или-
учетом (3.14):
М ХЭуст ~ тх Эуст ’
ГДе ^Эуст &эУ уст-
Из приведенных равенств получаем величину установившегося угла крена:
У уст
1
К\ rn.'qSl
(3.8)
Величина Ууст является статической ошибкой регулирования,
возникающей под действием возмущающего ступенчатого момента крена
М{)хв Если на БПЛА воздействует ступенчатый момент, то в установившемся
79
режиме он может быть скомпенсирован 'ишь постоянным склонением
элеронов, которое обеспечивается автопилотом. В АП с жесткой обратной
связью это отклонение элеронов требует отклонения самого БПЛА на угол
ууст. Статические ошибки регулирования являются следствием жесткой
обратной связи, устанавливающей пропорциональность между отклонением
угловой координаты БПЛА и отклонением элеронов.
Рассмотрим процесс автоматического управления креном БПЛА при
задании на вход АП управляющего сигнала в виде линейной функции времени
Ur/ = (рис. 3.4а). Возрастающий сигнал на входе АП приводит к
отклонению элеронов 8g(Z), которое на рис. 3.46 показано с обратным знаком.
Следствием отклонения элеронов является момент элеронов Мхэ(1) (рис. 3.4в)
и угловое ускорение БПЛА y(Z) (рис. 3.4г). БПЛА начинает накреняться на
угол y(Z) с угловой скоростью y(Z) (рис. 3.4г). При развороте БПЛА по крену с
БД (рис. 3.1) на вход АП поступают сигналы Pf, I , иж (рис. 3.4а), которые
компенсируют управляющий сигнал. При этом нарастание крена БПЛА
определяется нарастанием управляющего момента. С увеличением крутизны
управляющего сигнала U^(t) увеличивается установившееся значение угловой
скорости крена и отклонения элеронов, что вызывает возрастание
установившихся значений сигналов угловой скорости крена и жесткой
обратной связи
Рис. 3.4. Кривые переходного процесса при подаче на вход автопилота
управляющего воздействия: а — сигналы на входе автопилота; б - угол
отклонения элеронов; в — моменты, воздействующие на БПЛА;
г параметры движения БПЛА по крену
Прекращение нарастания управляющего сигнала в момент времени
.'1 вызывает уменьшение отклонения элеронов, появление импульсов результи-
80
рующего момента и углового ускорения y(z) отрицательного знака и
постепенное уменьшение угловой скорости у(/) до нуля. Угол крена принимает
значение, при котором сигнал БД по крену уравновешивает установившийся
управляющий сигнал Uy(t) = UTj(t) (t = оо).
Недостатком схемы АП с жесткой обратной связью является наличие
статической ошибки регулирования при наличии постоянных возмущений в
виде кренящих моментов
3.2.2. Принцип действия автопилота с изодромной обратной связью
Для устранения статических ошибок применяется АП с изодромной или
скоростной обратной связью, которая достигается тем, что сигнал,
пропорциональный отклонению руля, поступает на RC-ячейку (рис. 3.5),
которая обеспечивает функциональную связь между отклонением элеронов и
сигналом обратной связи в соответствии с передаточной функцией:
UqC _ JQ Ts
8Э Э7л + Г
(3 9)
где Т = CR - постоянная времени изодромной связи;
Кэ - коэффициент передачи датчика, воспринимающего отклонение элеронов
(на рис. 3.5 - потенциометрический датчик).
При ступенчатом отклонении элеронов:
8э =8>и КО,
в соответствии с (3.9) сигнал изодромной обратной связи будет изменяться по
экспоненциальному закону (рис. 3.6):
t
иос=КэЪте~т^ (З.Ю)
т.е. при постоянном отклонении элеронов сигнал изодромной обратной связи с
течением времени стремится к нулю. Следовательно, постоянное отклонение
элеронов, необходимое для компенсации постоянных моментов, не приводит к
появлению постоянного сигнала на входе АП и появлению статической ошибки
регулирования крена. При отклонении элеронов по закону прямоугольного
импульса (рис. 3.7) сигнал Uoc будет состоять из двух экспонент. Если
постоянная времени Т в несколько раз больше длительности импульса т, то
сигнал Uoc за время т уменьшится незначительно и по форме будет близок к
форме импульса 89 отклонения элеронов. Следовательно, сигнал изодромной
обратной связи с большой постоянной времени при быстрых движениях
элеронов будет близок к сигналу АП с жесткой обратной связью.
81
Рис. 3.5. RC-ячейка для Рис. 3.6. Изменение
создания изодромной сигнала изодромной
обратной связи обратной связи при
Рис. 3.7. Изменение
сигнала обратной связи
при импульсном
отклонении элеронов
ступенчатом
отклонении элеронов
Таким образом, динамика устранения начального отклонения крена БПЛА
автопилотом с жесткой обратной связью практически не отличается от
динамики устранения начального отклонения крена при помощи автопилота с
изодромной обратной связью. При замене жесткой обратной связи изодромной
обратной связью с большой постоянной времени характер движения элеронов,
изменение углов, угловых скоростей и ускорений по крену в процессе
устранения начального отклонения по крену практически не изменяются.
3.2.3. Законы управления каналом крена автопилотами с изодромной
и скоростной обратной связью
Для АП с изодромной обратной связью, как и для АП с жесткой обратной
связью можно считать, что сигнал на входе равен сигналу обратной связи
C/fix=t/oc (З.Н)
В равенстве (3.11) в соответствии с (3.9) имеем:
Тз
иос=Кэ—-6э (3.12)
Ts + 1
Входной управляющий сигнал определяется выражением:
+ (3.13)
где К\у, ~ передаточные коэффициенты датчиков, воспринимающих угол
и угловую скорость крена БПЛА.
После подстановки (3.12), (3.13) в (3.11) получим закон управления канала
крена АП с изодромной обратной связью в операторной форме:
Ts + 1 ^2v
+ (3.14)
Ts К rj
Уравнение (3.14) можно представить в виде:
3Э = (Ц + ^)у - Цу3 + , (3.15)
82
гдеК^К1у/Кэ-,Ц = К2у/Кэ.
Из сравнения закона (3.15) управления автопилота с изодромной обратной
связью с законом (3.3) управления автопилота с жесткой обратной связью
следует, что в законе (3.15) имеется дополнительный интегральный член
который и обеспечивает астатистическую стабилизацию крена. Физически это
обозначает следующее. При появлении возмущающего ступенчатого момента
происходит отклонение крена ЛА. Интеграл отклонения крена по времени
создает отклонение элеронов, момент которых уравновешивает постоянный
возмущающий момент.
Особенность АП со скоростной обратной связью заключается в том, что в
нем создается сигнал обратной связи Uoc пропорциональный угловой скорости
перестановки элеронов, который при большом коэффициенте усиления
усилителя АП практически равен Uex, т.е. сумме остальных сигналов БД
(U^ =U0C). При недостаточном собственном демпфирировании БПЛА к
сигналам, пропорциональным крену и угловой скорости крена добавляется
сигнал, пропорциональный угловому ускорению крена и равенство сигналов
выглядит так:
KTrs83^Kiy(y-y.) + K2y^ + K3ys2y, (3.16)
где Ктг - передаточный коэффициент тохогенератора, измеряющего скорость
вращения элерона; К3у — передаточный коэффициент датчика,
воспринимающего угловое ускорение БПЛА.
Закон управления (3.16) АП со скоростной обратной связью обычно
записывают в виде:
Kj^y-y^+K^sy + K^y, (3.17)
где К3 = К\у/Крр — передаточный коэффициент АП по крену;
- К2у1Ктг - передаточный коэффициент АП по угловой скорости крена;
Куэ = К3у /Ктг - передаточный коэффициент АП по угловому ускорению крена.
Если уравнение (3.17) представить в форме:
Ъэ = к1у + к\зу + Куэ^^-, (3.18)
S
и сравнить его с уравнением (3.15), то можно убедиться, что законы управления
АП с изодромной (3.15) и скоростной (3.18) обратной связью идентичны.
Различие АП заключается в технических средствах получения управляющих
сигналов. Необходимо пояснить, что в АП со скоростной обратной связью
сигнал пропорциональный углу крена обеспечивает астатическое
регулирование крена при воздействии постоянных внешних кренящих
моментов; сигнал, пропорциональный угловой скорости крена обеспечивает
составляющую отклонения элеронов, пропорциональную отклонению крена, а
83
сигнал пропоциональный угловому ускорению, является демпфирирующим
сигналом, компенсирующим недостаточное собственное демпфирирование
БПЛА и обеспечивает отклонение руля, предотвращающее перерегулирование
3.3. Принципы действия автопилотов по каналу тангажа
3.3.1. Принцип действия автопилота с жесткой обратной связью
Автоматическое управление углом тангажа связано как с вращением
БПЛА относительно поперечной оси, т.е. с изменением угла тангажа, так и с
поворотом вектора скорости. Вращение БПЛА относительно поперечной оси
совершается под действием продольных моментов М^в, а поворот вектора
скорости — под действием нормальных сил Eg. Повороты продольной оси
БПЛА и вектора линейной скорости связаны через угол атаки, которым, с
одной стороны, определяется продольный момент собственной устойчивости, а
с другой - подъемная сила. В БПЛА с дозвуковыми скоростями полета
управление по каналу тангажа осуществляется с помощью руля высоты, не
меняя силу тяги двигателя.
Блок-схема канала руля высоты автопилота приведена на рис. 3.8.
Рис. 3.8. Бчок-схема канала руля высоты автопилота
На вход звена БПЛА, которое описывает динамику его продольного
движения, поступают воздействия от руля высоты РВ и возмущений М^в, .
Выходом звена являются отклонения углов тангажа Я, атаки а, угла наклона
траектории 0, а также производные 9 и 9. Сигналы Ifa, пропор-
циональные величинам 9 и 9, вырабатываются блоком датчиков БД,
поступают на сумматор У, а затем через усилитель У на рулевую машинку РМ,
которая перемешает РВ и датчик жесткой обратной связи ЖОС
При отклонении угла тангажа от заданного 93 на величину 9| - 93 и при
сохранении направления вектора линейной скорости под действием разностного
сигнала -U3-$ после усиления РМ перемещает РВ и датчик ЖОС до тех пор,
пока не наступит равенство (/ocg =C/]SЕсли быстродействие РМ
достаточно велико, то за время отклонения РВ и датчика ЖОС изменение угла
84
тангажа будет незначительным вследствие инерционности БПЛА и будет иметь
место равенство: Квбв = К\В (У - 9 7). откуда
- JCg(S-S3), (3.19)
где АГ|У коэффициент передачи БД по углу тангажа;
Кв коэффициент передачи датчика ЖОС;
передаточный коэффициент с тангажа на руль высоты
для АП с ЖОС (это отношение называют также порцией руля высоты по
углу тангажа).
Под действием момента руля высоты Mzi} угол гашажа возвращается к
заданному значению. Одновременно к исходному положению возвращается и руль
высоты (рис. 3.9). При отклонении угла 9 от 9, и сохранении угла 6 происходит
изменение угла атаки, равное в начальный момент приращению угла тангажа
(рис. 3.9а). Отклонение угла атаки создает момент собственной устойчивости Mza
(рис. 3.96), совпадающий по знаку с моментом руля и стремящийся повернуть
продольную ось БПЛА к прежнему положению Если собственное демп-
фирирование БПЛА достаточно велико, то за счет момента М2д при подходе
БПЛА к заданному положению образуется момент, препятствующий переходу
БПЛА через заданное положение равновесия (рис. 3.9в).
Для сокращения времени переходного процесса целесообразно увели-
чивать коэффициент АГд. Однако при этом, при быстром подходе БПЛА к за-
данному углу тангажа, вследствие его инерционности и недостаточного
собственного демпфирирования возможно колебательное движение БПЛА
около заданного положения. При этом время переходного процесса может
наоборот увеличиться. Для предотвращения колебаний необходимо обеспечить
угол отклонения руля высоты, при котором будет отсутствовать перерегу-
Рис. 3.9. Кривые переходного процесса устранения начального угла тангажа:
а угловые координаты; б, в —моменты
Для этого руль высоты должен пройти через исходное положение раньше,
чем угол тангажа (рис. 3.10) и создать момент, нормализующий движение
БПЛА во время его приближения к заданному углу тангажа.
85
a) 9,9
Рис. 3.10. Кривые переходного процесса устранения начального угла
отклонения тангажа при использовании сигнала по скорости:
а-угловые параметры; б - момент
Такое отклонение руля высоты может быть создано подачей сигнала по
угловой скорости При этом при возвращении угла S к заданному
значению 93, угол и угловая скорость тангажа имеют разные знаки (рис. 3.10а).
По мере уменьшения отклонения угла S и возрастания 3 сигнал по угловой
скорости A'fd сначала в момент времени становится равным и
противоположным по знаку сигналу xJ(S-Sj) (рис. 3.106), а затем начинает
превосходить его, вызывая отклонение руля высоты тормозящее движение
БПЛА.
Сигнал по угловой скорости обеспечивает искусственное
демпфирирование колебаний БПЛА по тангажу.
Таким образом, в АП «, жесткой обратной связью качественные
переходные процессы могут быть получены при использовании сигналов по
углу и угловой скорости тангажа. Если собственное демпфирирование
колебаний БПЛА обеспечивает требуемые переходные процессы, сигнал по
угловой скорости можно не использовать.
При стабилизации угла тангажа возможно также применение сигалов по
углу атаки а и угловому ускорению тангажа 9.
Введение сигнала по углу атаки обеспечивает создание искусственного
момента устойчивости по углу атаки. При этом предотвращается появление
недопустимых перегрузок.
Введение сигнала по угловому ускорению обеспечивает создание искус-
ственного момента инерции БПЛА. Такой сигнал способствует ограничению
86
углового ускорения при подаче на АП больших и резко изменяющихся сигналов
перенастройки. Однако, эти сигналы применяются редко.
3.3.2. Способы управления углом тангажа
Автоматическое управление углом тангажа может осуществляться путем
задания управляющего сигнала в виде ступенчатой функции, линейной
функции времени или суммы ступенчатого и линейного сигналов На рис. 3.11
приведена схема формирования управляющего сигнала в общем случае в виде
суммы ступенчатого и линейного сигнала.
Рис. 3.11. Схема формирования управляющего сигнала
Задатчик (ручка управления) находится в наземной аппаратуре управления и
формирует сигнал, который пересылается в бортовую аппаратуру управления ЛА.
На вход автопилота в общем случае поступает сигнал U3^, который состоит из
суммы ступенчатого сигнала U3§\ и линейного сигнала U3§2, создаваемого
перемещением движка потенциометра П или другого датчика от электродвигателя
ЭД. Если задатчик вернуть в исходное (нулевое) положение, то ступенчатый
сигнал убирается и суммарный сигнал управления уменьшается скачкам
Рассмотрим процесс управления тангажом при подаче ступенчатого сигнала
управления U3§\, соответствующего новому значению угла тангажа 9Э (рис.3.12).
Рис. 3.12. Кривые переходного процесса по тангажу
при ступенчатом управляющем сигнале
Управляющий сигнал вызывает пропорциональное отклонение руля высоты
6 д (показано с обратным знаком), который создает момент, вызывающий
вращение БПЛА относительно поперечной оси. В результате происходит
87
увеличение углов тангажа 3 и атаки а. Увеличение угла атаки приводит к
появлению нормальной силы, которая вызывает поворот вектора линейеной
скорости БПЛА вслед за поворотом его продольеной оси. Происходит медленное
изменение углов тангажа и наклона траектории 0 до нового заданного значения и
уменьшение угла атаки до нуля. После установления нового значения утла 6
изменяется проекция силы тяжести на направление вектора скорости, что приводит
к новому значению скорости БПЛА. Изменения скорости можно избежать, если
одновременно с изменением скорости изменять тягу двигателя.
Рассмотрим процесс управления тангажом при подаче на вход автопилота
управляющего сигнала в виде линейной функции U3$2(t), крутизна которой
определяется задатчиком (рис. 3.11). На рис. 3.13а показан линейный сигнал
управления U3$(f), который вызывает поворот руля 5B(t) (на рис. 3.136 показан с
обратным знаком), вследствие чего начинается вращение БПЛА относительно
поперечной оси и изменение угловых параметров БПЛА (рис. 3.13в).
При достаточно длительном времени нарастания управляющего сигнала
устанавливается постоянное отклонение руля и постоянная угловая скорость
тангажа 3. Нарастание сигнала U3$(t) будет компенсироваться нарастанием
сигнала С/]9(0 = Xls(Z), пропорционального углу тангажа, вырабатываемому в
БД. Сигнал Г/1э отстает от сигнала u3(t) на постоянную времени т7,
определяемую параметрами БПЛА и автопилота. Разность сигналов U3$-Ui$
компенсирует сумму сигналов UocS(t) = Квдв(1) и сигнала U2B(f) - K2BS(f),
пропорционального угловой скорости, вырабатываемой БД
Изменения моментов, обусловленных параметрами 8B(t)(момент Mz^(t)),
3(0 (момент Л/^у(О). а(О (момент Л/2а(О) и суммарного момента
Л/г2(0 = М2§ + + Mza, показаны на рис. 3.13г.
Рис. 3.13. Кривые переходного процесса по тангажу при линейном
управляющем сигнале, а управляющие сигналы; б-угол отклонениярупя
в -угловые параметры; г - моменты
88
Вследствие отставания вектора скорости БПЛА от его продольной оси
устанавливается угол атаки, обеспечивающий вращение вектора линейной
скорости с угловой скоростью вращения продольной оси БПЛА
В момент времени Zj происходит прекращение нарастания управляющего
сигнала, но БПЛА под действием момента A/z6(r) продолжает изменять угол S
до тех пор, пока сигнал не сравняется с сигналом а руль
высоты на займет прежнее положение (рис. 3.13а,б).
3.3.3. Стабилизация угла тангажа при действии возмущений
Рассмотрим вначале поведение БПЛА под действием постоянного
возмущающего момента MzB относительно поперечной оси на котором
установлен АП с жесткой обратной связью. Момент MzB вызовет изменение
угла тангажа и соответствующее отклонение руля высоты, которые будут
происходить до тех пор, пока не установится равенство MzB = Мzg,
соответствующее некоторому углу называемому статической ошибкой
регулирования по тангажу Запишем равенство моментов (см. (2.12)):
MzB = Мг& = -тЬгв$<1ЬЪВуст, (3.20)
где (см. (3.19))
^Вуст^Фуст- (3-21)
Из (3.20), (3.21) следует статистическая ошибка регулирования по тангажу:
J? nhSah
Кв mzBSqb
откуда следует, что статическая ошибка регулирования пропорциональна
возмущающему моменту и обратно пропорциональна коэффициенту передачи
q
автопилота Кв.
Для устранения статической ошибки регулирования тангажа вместо
жесткой обратной связи применяется изодромная или скоростная обратная
связь.
Рассмотрим процесс стабилизации угла тангажа при изменении веса
БПЛА, например, за счет выгорания топлива Уменьшение веса БПЛА
вызывает уменьшение угла атаки и подъемной силы. Устанавливается такая
величина угла атаки ауст, при котором обеспечивается равенство подъемной
силы новому значению веса БПЛА:
G = -CySqaycm. (3.23)
Уменьшение угла атаки приведет к уменьшению момента собственной
устойчивости БПЛА, что вызовет поворот его продольной оси и отклонение
автопилотом руля высоты. Установится такое отклонение руля высоты:
* уст = Фуст, (3 24)
89
при котором момент собственной устойчивости БПЛА при угле атаки ауст
(3.26)
уравновесится моментом руля высоты:
mz а уст ~ 8 $уст • (3.25)
Из (3.23), (3.25) находим установившуюся ошибку регулирования:
Ч 1 G
Уст а - а
суфУ mz
Также как и в предыдущем случае, установившаяся ошибка регулирования
прямо пропорциональна возмущению (изменению веса БПЛА) и обратно
пропорциональна коэффициенту передачи автопилота по углу тангажа.
БПЛА весьма чувствителен к ветровым возмущениям. Рассмотрим
стабилизацию угла тангажа при действии на БПЛ А восходящего вертикального
потока воздуха со скоростью VB в предположении, что БПЛА входит в этот
поток практически мгновенно. При этом угол атаки а мгновенно изменяется и
становится равным aQ-VB/V(V - скорость полета БПЛА). Вначале угол
тангажа и угол наклона вектора путевой скорости 0„ = QB + ^- = 0-а + ^-,
(0# - угол наклона вектора воздушной скорости) сохраняют свои значения.
Ввиду увеличения угла атаки возрастают подъемная сила БПЛА,
разворачивающая вверх вектор путевой скорости, и момент его статической
устойчивости, поворачивающий продольную ось БПЛА навстречу воздушному
потоку. Эти процессы уменьшают угол атаки (рис. 3.14).
Рис. 3.14. Кривые переходного процесса при входе БПЛА
в вертикальный поток воздуха
Вектор путевой скорости разворачивается до момента равенства его
вертикальной составляющей и скорости восходящего потока. При этом угол
тангажа под действием руля высоты, отклоненного автопилотом, принимает
прежнее значение БПЛА приобретает скорость ветра и сохраняет значения углов
атаки, тангажа и руля высоты, которые были до входа в вертикальный поток
воздуха. Очевидно, что после выхода из потока воздуха, он будет продолжать
горизонтальный полет, но уже на новой высоте, превышающей прежнюю.
90
3.4. Принципы действия автопилотов по каналу курса
Стабилизация курса автопилотом осуществляется тремя способами
использования органов управления: 1) руль поворота; 2) элероны; 3) руль
поворота и элероны. Автопилот курса выполняет задачу стабилизации
продольной оси БПЛА и вектора скорости по курсу. Поворот продольной оси в
горизонтальной плоскости происходит под действием моментов относительно
нормальной оси. Управляющий момент относительно нормальной оси
создается отклонением руля поворота. Разворот вектора скорости по курсу
происходит под действием боковой силы, которая создается за счет угла
скольжения или за счет горизонтальной составляюшей подъемной силы
появляющейся при крене ЛА.
3.4.1. Стабилизация курса при управлении автопилотом рулем
поворота
Блок-схема автопилота (АП) для стабилизации курса при помощи руля
поворота аналогична блок-схеме АП для продольного канала (рис. 3.8). БД
должен вырабатывать сигналы пропорциональные углу \|/ и угловой скорости
ф рыскания Дополнительно к рулю поворота можно подавать сигналы
пропорциональные угловому ускорению рыскания и yrnv скольжения. Сигнал,
пропорциональный угловому ускорению, при использовании скоростной
обратной связи необходим для демпфирирования колебаний БПЛА. В случае
жесткой или изодромной обратной связи этот сигнал может использоваться для
устранения автоколебаний, вызываемых нелинейностями и запаздываниями в
автопилоте. Сигнал, пропорциональный углу скольжения, может вводиться для
увеличения флюгерной устойчивости БПЛА.
Динамика процесса стабилизации курса при помощи руля поворота
аналогична динамике процесса стабилизации угла тангажа при помощи канала
руля высоты
При использовании АП с жесткой обратной связью руль поворота
отклоняется на угол, пропорциональный отклонению продольной оси БПЛА от
курса. При недостаточном демпфирирования рыскания, которое обычно мало,
вводится сигнал с БД, пропорциональный угловой скорости рыскания.
Таким образом, закон управления для стабилизации курса при управлении
с помощью канала руля поворота в операторной форме имеет вид:
8Н=К^ + К^, (3.27)
где 8Н - отклонение руля поворота; у угол рыскания; —
передаточные коэффициенты с угла и угловой скорости рыскания на руль
поворота, соответственно.
Изменение углов и моментов в переходном процессе устранения
отклонения БПЛА по курсу имеет характер, аналогичный рис. 3.9: изменение
угла v аналогично изменению угла S; изменение угла скольжения 0
91
аналогично изменению угла атаки а; изменение момента флюгерной
устойчивости Мув аналогично изменению момента собственной устойчивости
БПЛА по угл) атаки М,а Если вектор скорости БПЛА отклоняется от
заданного курса, а продольная ось БПЛА от него не отклоняется, то появляется
угол скольжения и происходит поворот вектора скорости под действием
боковой силы, создаваемой скольжением. Момент флюгерной устойчивости
вызывает поворот продольной оси БПЛА навстречу его вектору скорости. Этот
поворот БПЛА предотвращается автопилотом. Изменение углов у, 0, и угла
Т = у-0 отклонения вектора скорости показано на рис. 3.15 (см. также
рис. 2.11).
Если от заданного курса одновременно на один и тот же угол отклоняются
продольная ось БПЛА и вектор скорости, то АП отклоняет руль поворота,
момент которого разворачивает продольную ось БПЛА к заданному курсу.
Образующееся при этом скоьжение создает боковую силу, разворачивающую
вектор скорости к заданному курсу. Изменение углов vp, 0, Ф и угла 8Н
отклонения руля поворота взятого с обратным знаком, для этого случая
показано на рис. 3.16.
Рис. 3.15. Кривые переходного
процесса изменения углов 0,
при помощи канала руля поворота
Рис. 3.16. Кривые переходного
процесса устранения отклонений
по курсу продольной оси и вектора
скорости БПЛА при помощи
канала ручя поворота
3.4.2. Стабилизация курса при управлении автопилотом элеронами и
рулем поворота
Сигнал с БД, пропорциональный углу отклонения продольной оси БПЛА
от заданного курса, поступает в канал управления элеронами Одновременно в
этот канал поступают сигналы, пропорциональные углу и угловой скорости
крена
Закон управления элеронами, используемый для стабилизации курса, в
операторной форме имеет вид:
8Э : ^(v-V3) + ^y + ^sy (3.28)
где К^ - передаточный коэффициент с курса на элероны (см. также (3.3)).
Управление рулем поворота может отсутствовать. В общем случае канал
92
руля поворота может использоваться для предотвращения колебаний БПЛА по
рысканию и для уменьшения угла скольжения. Закон управления рулем
поворота для рассматриваемого случая в операторной форме имеет вид:
+ (3.29)
где АГ' - передаточный коэффициент с угла скольжения на руль поворота.
В соответствии с (3.28) сигнал отклонения БПЛА по курсу вызывает
пропорциональное отклонение элеронов в такую сторону, чтобы БПЛА
разворачивался к заданному направлению . Крен БПЛА приводит к
появлению сигнала, увеличивающегося с увеличением крена. Т.к. сигнал крена
противоположен по знаку сигналу отклонения БПЛА по курсу, то он
уменьшает угол отклонения элеронов. БПЛА накреняется до тех пор, пока
сигнал крена не уравновесит сигнал отклонения по курсу, а элероны вернутся в
исходное положение. Крен БПЛА создает боковую силу, равную
горизонтальной проекции подъемной силы. Боковая сила разворачивает вектор
скорости БПЛА к заданному курсу с угловой скоростью, пропорциональной
углу крена. Вследствии отставания продольной оси БПЛА от вектора скорости,
появляется угол скольжения, который приводит к возникновению момента
флюгерной устойчивости, разворачивающий продольную ось БПЛА к
заданному курсу. Уменьшение отклонения БПЛА по курсу сопровождается
уменьшением его угла крена, вследствии чего уменьшается угловая скорость
разворота по курсу вектора скорости. Кривые изменения углов у, р, 4х, у в
процессе стабилизации курса приведены на рис. 3.17.
Рис. 3.17. Кривые переходного процесса устранения отклонений
по курсу при помощи канала элеронов
Для уменьшения скольжения в процессе стабилизации курса применяется
схема координированной стабилизации курса (координированный разворот
БПЛА). При таком управлении разворотом сигнал отклонения по курсу
подается в каналы управления элеронами и рулем поворота. Элероны создают
крен а следовательно и боковую силу, разворачивающую вектор скорости
Руль поворота вызывает разворот продольной оси БПЛА.
При координированном развороте по курсу канал элеронов имеет закон
управления (3.28), а канал руля поворота - (3.27).
93
3.4.3. Стабилизация угла курса при действии возмущений
Рассмотрим процесс стабилизации угла курса с автопилотом
управляющим только рулем поворота, при воздействии на БПЛА
возмущающего ступенчатого момента рыскания МуВ. Под действием момента
МуВ продольная ось БПЛА будет разворачиваться, что приведет к появлению
сигнала пропорционального этому развороту и соответственно к отклонению
руля поворота. При использовании АП с жесткой обратной связью появляется
установившееся значение угла рыскания ^уст, которое вызывает отклонение
руля, необходимое для компенсации возмущающего момента:
^уст=К^уст. (3.30)
При угле отклонения руля поворота (3.30) обеспечивается равенство
возмущающего момента и момента, создаваемого рулем (см. также (2.22)):
m®" Slq8Hycm = -МуВ. (3.31)
После подстановки (3.30) в (3.31) получим величину статической ошибки:
МуВ
K^Slq
Для устранения статической ошибки необходимо применять АП с
изодромной или скоростной обратной связью.
Рассмотрим процесс стабилизации курса БПЛА при помощи каналов
элеронов и руля направления при воздействии возмущающего ступенчатого
(3.32)
момента рыскания.
Возмущающий момент рыскания приведет вначале к отклонению
продольной оси в направлении момента и появлению такого угла скольжения
Руст, ПРИ котором сумма момента флюгерной устойчивости Мур и момента
руля МуЪн уравновесит возмущающий момент (рис. 3.18а):
Рис. 3.18. Кривые переходного процесса в системе стабилизации заданного
курса при воздействии ступенчатого момента а — моменты • б - углы
94
МуВ = М vp + = ~ту^уст = ~mv" SqlK^P уст. (3.33)
Появившееся скольжение (рис. 3.186), а также отклонение БПЛА по курсу,
приведет к крену БПЛА, который будет крениться до значения угла Чуст, при
котором боковая сила от крена уравновесит боковую силу от скольжения:
Czfiycm + суУ уст = ® • (3-34)
В процессе накренения боковая сила от скольжения будет превышать
боковую силу от крена, вследствии чего вектор скорости БПЛА будет
разворачиваться в сторону момента МуВ. Для определения величин Руст,
1уст- У уст и 'Ууст в дополнение к (3.33), (3.34) служат:
уравнение балансировки кренящих моментов
- т^уст = (КэУуст + КэУуст) (3-35)
и кинематическое уравнение
'Ууст ~ Ууст ~ Р уст • (3.36)
Если применяется АП с законами координированной стабилизации курса,
то процесс стабилизации курса при действии возмущающего момента
аналогичен процессу стабилизации курса при помощи канала элеронов.
Статические ошибки регулирования в этом случае также можно оценить по
формулам (3.33) - (3.35) имея в виду, что в (3.33) во втором слагаемом следует
заменить на Vjcm • При использовании АП с изодромной или скоростной
обратной связью статические ошибки будут отсутствовать.
Рассмотрим поведение БПЛА под действием возмущающего ступенчатого
момента крена МхВ. в котором используется автопилот с жесткой обратной
связью, реализующего координированную стабилизацию курса (рис. 3.19).
Рис. 3.19. Кривые переходного процесса в системе стабилизации
курса при действии ступенчатого возмущающего момента по крену:
а — моменты; б - углы
95
Под действием момента МхВ БПЛА кренится до тех пор, пока момент
элеронов МхЭ, отклоненных при наличии крена, не уравновесит возмущающий
момент (рис. 3.19а). Образующаяся при крене боковая сила разворачивает
вектор скорости БПЛА, вследствие чего возникает угол скольжения (рис. 3.196)
и обусловленный им момент флюгерной устойчивости, который разворачивает
продольную ось БПЛА вслед за вектором скорости.
По мере разворота БПЛА на вход АП будет подаваться сигнал,
пропорциональный курсу, который вызовет уменьшение крена до значения, при
котором боковая сила от крена уравновесит боковую силу скольжения.
Угол скольжения определится из условия компенсации момента
флюгерной устойчивости и момента, вызванного отклонением руля поворота за
счет сигнала рыскания.
Величины статических ошибок от момента МхВ\ Ргст, Ууст, Ууст и ^уст
можно определить из уравнения балансировки моментов рыскания:
т%ст=-п^К^уст, (3 37)
уравнения балансировки моментов (3.33) с учетом возмущающего момента
МхВ, уравнения боковых сил (3.34) и кинематического уравнения Т = у-0
Рассмотрим процесс стабилизации курса при действии ступенчатого
бокового ветра на БПЛА. управляемого каналом руля поворота.
При входе в боковой ветер со скоростью VB угол скольжения мгновенно
изменяется на величину р = —VB/V (V — скорость БПЛА) (рис. 3.20а)
Возникающий при этом момент флюгерной устойчивости (рис. 3.206)
разворачивает продольную ось БПЛА навстречу ветру, уменьшая угол
скольжения р.
При развороте БПЛА на вход руля поступает сигнал, пропорциональный
углу курса \р, который вызывает отклонение руля 8Н, вследствие которого
появляется момент руля A/vgH, направленный против момента М и
препятствующий развороту БПЛА.
На БПЛА действует также момент демпфирирования Муд в соответствии
с изменением величины ф Боковая сила от скольжения будет разворачивать
вектор скорости V в направлении вектора Ув. Угол поворота вектора путевой
скорости определяется равенством = у - 0 - VB/V.
96
Рис. 3.20. Кривые переходного процесса в системе стабилизации
курса при входе БПЛА в боковой ветер: а —углы; б — моменты
Одновременно момент поперечной устойчивости Mvp от скольжения
будет накренять БПЛА по крену у до тех пор. пока момент элеронов не
уравновесит момент поперечной устойчивости. При наличи крена возникает
боковая сила, которая добавляется к боковой силе от скольжения, также
способствуя развороту вектора скорости БПЛА по направлению к вектору .
По мере разворота вектора V боковая составляющая путевой скорости
приближается к скорости ветра, углы скольжения и крена уменьшаются, а
направление продольной оси БПЛА приближается к заданному курсу. Когда
БПЛА будет сносить со скоростью ветра, углы скольжения и крена будут
нулевыми, а продольная ось БПЛА вернется к заданному направлению курса.
При координированной системе стабилизации курса все процессы
проходят аналогично, но несколько быстрее, т.к. БПЛА кренится не только от
действия момента поперечной устойчивости, но и от сигнала отклонения по
курсу. Следовательно, увеличивается крен и соответствующая ему боковая
сила БПЛА «принимает» скорость ветра быстрее.
3.5. Принцип действия автопилота при управлении высотой полета
Блок-схема системы стабилизации высоты полета БПЛА показана на
рис. 3.21. Отклонение от заданной высоты измеряется высотомером В, сигнал с
которого подается в суммирующее устройство Z канала руля высоты, под
действием которого руль высоты отклоняется на величину б в, вследствие чего
происходит разворот продольной оси БПЛА и увеличение угла атаки
Вследствие увеличения угла атаки возрастает подъемная сила и появляется
вертикальная скорость, за счет которой изменяется высота и уменьшается
сигнал высотомера (при подъеме БПЛА).
97
Сигнал датчика тангажа при этом возрастает, тж. вектор скорости
разворачивается вверх. На некотором расстоянии от заданной высоты полета
сигнал высотомера станет меньше сигнала по тангажу. При этом руль высоты
отклонится в противоположную сторон) и получится приращение подъемной
силы обратного знака, вследствие чего вектор скорости снова начнет
разворачиваться к горизонтальному положению, а изменение высоты будет
продолжаться в том же направлении. В правильно спроектированной системе
одновременно с достижением заданной высоты полета вектор скорости
разворачивается в горизонтальное положение.
Рис. 3.21. Блок-схема системы стабилизации высоты полета:У—усилитель,
РМ рулевая машинка, РВ руль высоты, ОС - обратная связь, БД - блок
гироскопических датчиков, В - высотомер
Из изложенного следует, что для стабилизации высоты полета
обязательным является наличие двух сигналов: тангажа и отклонение от
заданной высо гы.
Закон регулирования для системы стабилизации высоты полета в
операторной форме можно представить в виде (см. также (3.19)):
8В = Kfs3 + K$S + KB Л/7. (3.38)
где ЛЯ - отклонение от заданной высоты; Кв - передаточный коэффициент с
высоты на руль высоты, равный отношению приращения высоты к
вызываемому им отклонению руля.
Сигнал по угловой скорости способствует демпфированию колебаний
БПЛА по тангажу и принципиального значения для стабилизации высоты
полета не имеет.
Вместо сигнала по тангажу можно использовать сигнал вертикальной
скорости, которые эквивалентны
Действительно, из рис. 3.22 следует:
VB =Fsine = rsin(&-a),
где V, Vg — скорость полета и вертикальная скорость БПЛА соответственно
(см. рис. 2.2).
98
>W'sinO
Рис. 3.22. Треугольник скоростей
Горизонт
Сигнал вертикальной скорости может быть получен с помощью
дифференцирования сигнала с датчика высоты и введен в канал руля высоты.
Аналогично сигналу тангажа, сигнал вертикальной скорости должен вызвать
отклонение руля высоты, приводящее к развороту вектора скорости к
горизонту, т.е. предотвращается перерегулирование при подходе БПЛА к
заданной высоте.
Использование сигнала вертикальной скорости вместо сигнала тангажа
повышает точность стабилизации высоты при полетах в вертикальных потоках
воздуха. При попадании БПЛА в вертикальный поток воздуха, скорость
которого U, вначале увеличивается угол атаки (рис. 3.23а), что приводил к
перемещению БПЛА вверх вместе с потоком
Рис. 3.23. Кривые переходного процесса при входе БПЛА
в восходящий поток воздуха
Появляется сигнал, пропорциональный отклонению высоты от заданной,
который вызывает отклонение руля высоты вниз. Это отклонение обус-
лавливает отрицательное приращение угла атаки, и вектор линейной скорости
БПЛА разворачивается в горизонтальное положение Постепенно вектор
99
скорости будет стремиться к горизонтальному положению, приращение угла
атаки к нулю, а угол тангажа к величине Sycm = (рис. 3.236), которая при-
ведет к появлению сигнала на входе автопилота, компенсируемого сигналом
отклонения высоты. Вектор воздушной скорости V наклонится навстречу
вектору скорости потока U и скомпенсирует снос ЛА вверх.
Величина статической ошибки регулирования высоты &Нуст
определяется из равенства:
ъв=фуст+к$ьнуст=ъ,
откуда
г-9 г^9 тт
^Иуст = ~~^[^уст = 77- (3 39)
АВ Лв
где Кв - передаточный коэффициент сигнала стабилизации высоты.
Из условия 5в = 0 следует, что статическая ошибка будет иметь место для
любого типа обратной связи. Для сведения статической ошибки к нулю при
действии вертикального потока сигнал тангажа необходимо заменять сигналом
вертикальной скорости. Тогда в установившемся режиме будем иметь:
8, - KgКНуап + КдКНу^ = Kg&H^ = О,
отсюда
A^VOT=0.
Воздействие постоянного возмущающего момента Mze вызывает ошибку
кНуст, которую можно определить из равенства момента руля высоты и
возмущающего момента:
A/ze=-w^8W(..„,. (3.40)
Установившееся отклонение руля высоты 5^^ в (3.40) равно
?>вуст=К^уст. (3.41)
Из (3.40), (3.41) следует, что статическая ошибка стабилизации высоты
равна:
Устранение статической ошибки стабилизации высоты полета можно
достичь введением сигнала, пропорционального интегралу отклонения высоты
который в установившемся режиме скомпенсирует сигналы тангажа или
жесткой обратной связи.
100
3.6. Принцип действия автопилота при управлении боковым
движением центра масс БПЛА
При действии бокового ветра и точного выдерживания курса БПЛА
принимает скорость ветра и с этой скг ростъю уходит от заданного направления.
Статическая ошибка стабилизации курса (3.32) при нулевом скольжении
приводит к статической ошибке (3.36) стабилизации направления вектора
скорости БПЛА в горизонтальной плоскости, вследствие которой возникает
уход БПЛА от заданной траектории со скоростью V sin ,ст.
Для стабилизации центра масс (ЦМ) БПЛА на траектории необходимо
измерить отклонение ЦМ от заданной траектории, что можно выполнить с
помощью инерциальной или спутниковой системы навигации. Обычно этот
сигнал рассогласования подается в канал управления элеронами, закон
управления которыми в операторной форме имеет вид:
54 = ^Y + ^sy + ^(V-W?) + ^AZ (3.43)
где К? передаточный коэффициент с бокового отклонения AZ ЦМ от
заданной траектории на элероны.
Процесс возвращения БПЛА к заданной траектории происходит
следующим образом. Отклонение AZ (рис. 3.24а) приводит к отклонению
элеронов, создающих момент, накреняющий БПЛА в сторону заданной
траектории. Изменение угла крена (рис. 3.246) происходит до тех пор. пока не
уравновесятся сигналы от отклонения и угла крена. Вследствие крена возникает
боковая сила, равная горизонтальной составляющей подъемной силы БПЛА и
пропорциональная углу крена. Боковая сила разворачивает вектор скорости
БПЛА в сторону заданной траектории, к которой начинает приближаться ЦМ
БПЛА. С течением времени сигнал, пропорциональный отклонению AZ
уменьшается, а сигнал, пропорциональный углу рыскания увеличивается, что
приводит к уменьшению угла крена.
При некотором значении AZ эти сигналы, разные по знаку, будут равны
между собой, и крен становится нулевым. В дальнейшем сигнал,
пропорциональный углу рыскания, становится больше сигнала
пропорционального отклонению ЦМ от траектории и БПЛА получает крен в
сторону, противоположную от заданной траектории Вектор скорости БПЛА
разворачивается в противоположную от траектории сторону, приближаясь к
параллельному с ней направлению. При этом ЦМ БПЛА будет приближаться к
заданной траектории
101
Рис. 3.24. Кривые переходного процесса в системе устранения бокового
отклонения центра масс БПЛА от заданной траектории
Правильно подобранные передаточные коэффициенты обеспечивают
одновременный выход ЦМ на заданную траекторию и поворот к ней вектора
скорости БПЛА. Крен БПЛА при этом устраняется
Демпфирование движений ЦМ создается за счет сигнала по угл)
рыскания, однако, при боковом ступенчатом воздействии ветра возникает
статическая ошибка, причина появления которой в следующем. Боковой ветер,
скорость которого U, вызывает скольжение и крен БПЛА по его направлению.
Боковые силы от скольжения и крена складываются и разворачивают вектор
скорости БПЛА по направлению ветра, что приводит к отклонению ЦМ от
заданной траектории в направлении ветра Это отклонение вызывает сигнал на
входе канала элеронов, которые вызывают крен БПЛА навстречу ветру. Вектор
скорости и продольная ось БПЛА разворачиваются к ветру до тех пор, пока
вектор путевой скорости не станет параллельным заданной траектории, а
вектор воздушной скорости не повернется навстречу ветру на угол U /V для
компенсации сноса БПЛА от ветра. Поворот вектора воздушной скорости
происходит вследствие изменения курса БПЛА, а сигнал курса компенсируется
сигналом отклонения ЦМ от заданной траектории.
Для установившегося режима справедливы равенства:
У — 0, Ц1уСт К'эУуст + ~ О’
откуда следует статическая ошибка стабилизации ЦМ:
K^U
°44’
102
Ошибка (3.44) будет отсутствовать, если сигнал курса отключается, а
демпфирование движения ЦМ осуществляется за счет введения сигнала,
пропорционального производной от перемещения ЦМ:
z-V sin(\p - P)t/.
Если применяется автопилот с жесткой обратной связью, а на БПЛА
действует ступенчатый кренящий момент Мхв, то возникает ошибка &zycm.
Действительно, возмущающий момент приводит к крену БПЛА, сигналу на
входе автопилота и соответственно, к отклонению элеронов, момент которых
уравновесит Мхв
Мхв -тхЭ^Фэуст’ (345)
где отклонение элеронов определяется равенством:
С _ X '
° эуст ~ л Э уст •
Следовательно, величина статической ошибки отклонения ЦМ БПЛА от
заданной траектории при действии ступенчатого возмущающего момента по
крену определяется зависимостью:
--^хв_—1____
уст qSl тхэК;
(3.46)
При использовании автопилотов с изодромной или скоростной обратной
связью ступенчатый возмущающий момент по крену не создает статической
ошибки А~гст„
Статическая ошибка по отклонению ЦМ БПЛА от заданной траектории
может быть устранена введением сигнала, пропорционального интегралу от
отклонения центра масс
103
Контрольные вопросы
1. Какие функции выполняет АП и что входит в его состав?
2. С какого момента времени начинается уменьшение угловой скорости крена
БПЛА при наличии ЖОС?
3. Сколько раз должна пересечь кривая результирующего момента от действия
элеронов и демпфирования ось времени для плавного подхода БПЛА к
заданному углу крена?
4. Как изменится время переходного процесса при уменьшении передаточного
коэффициента АП по углу крена?
5. Существует ли связь между коэффициентом собственного демпфирования
БПЛА и коэффициентом передачи АП, обеспечивающая эффективное
устранение начального отклонения угла крена?
6. В чем основной недостаток схемы АП с ЖОС?
7. Какими способами можно уменьшить колебательность БПЛА по крену?
8 Чем может быть скомпенсирован ступенчатый возмущающий момент,
действующий на БПЛА в установившемся режиме?
9. С какими видами обратных связей АП не имеет статических ошибок?
10. Существует ли аналогия между АП с ЖОС и изодромной обратной связью с
большой постоянной времени?
11. Идентичны ли законы управления АП с изодромной и скоростной обратной
связью?
12. С чем связана необходимость автоматического управления по углу тангажа?
13. Что называют порцией руля высоты по углу тангажа?
14. Какие следует ввести сигналы управления в АП с ЖОС, чтобы получить
качественные переходные процессы по углу тангажа?
15. Какие существуют способы управления углом тангажа?
16. От каких величин зависит статическая ошибка регулирования по углу
тангажа в АП с ЖОС?
17. Что происходит с БПЛА при его входе в вертикальный поток воздуха?
18. Существует ли разница в управлении БПЛА по углу тангажа с помощью
руля высоты и по углу курса с помощью руля поворота?
19. В чем особенности координированного разворота БПЛА по углу курса?
20. Каковы особенности поведения БПЛА по углу курса при действии на него
возмущающего ступенчатого момента крена?
21. Каковы особенности стабилизации угла курса БПЛА при помощи элеронов
и руля поворота при действии на него возмущающего момента рыскания?
22. В чем особенности процесса стабилизации угла курса БПЛА, управляемого
рулем поворота при действии на него бокового ветра в форме ступенчатого
воздействия?
23. В чем особенности процесса стабилизации угла курса БПЛА, управляемого
рулем поворота и элеронами при действии на него бокового ветра в форме
ступенчатого воздействия9
24. Какие сигналы необходимы в АП стабилизации высоты полета?
104
25. Почему полезно введение сигнала о вертикальной скорости полета БПЛА
вместо сигнала об угле тангажа при управлении высотой полета?
26. Почему статическая ошибка по высоте характерна для АП с любым видом
обратной связи?
27. Как можно устранить статическую ошибку стабилизации высоты полета?
28. В чем особенности управления положением центра масс БПЛА при боковом
ветре?
29. Каким образом можно устранить статическую ошибку отклонения центра
масс БПЛА от заданной траектории полета?
105
Глава 4. Датчики
Датчики (Д) обнаруживают и измеряют отклонения параметров полета
БПЛА от заданного режима. Все или часть датчиков конструктивно могут быть
объединены в блок датчиков (БД). По принципам измерения Д разделяют на
инерциальные (акселерометры и гироскопы) и неинерциальные (датчики
высоты, скорости, температуры и др.). Параметры угловой ориентации БПЛА в
пространстве вырабатываются с помошью инерциальных Д, которые совместно
с электронными устройствами обработки измерительных сигналов могут быть
конструктивно и функционально объединены в блок системы ориентации,
который, как составная часть, может входить в БИНС.
Электронные устройства обработки измерительных сигналов Д и
выработки управляющих сигналов включают сумматоры, усилители,
модуляторы и др., а также корректирующие цепи (дифференпирующие,
интегрирующие и др.) для улучшения статических и динамических
характеристик, как отдельных датчиков, так и всей САУ БПЛ 4 Электронные
устройства являются, по существу, вычислительными «машинами» в виде
микроконтроллеров (МК).
4.1. Акселерометры
4.1.1. Общая характеристика
Чувствительный элемент (ЧЭ) большинства серийно выпускаемых
акселерометров состоит из массы, смонтированной в корпусе на элементах
подвеса различного конструктивного исполнения. По виду движения массы
чувствительных элементов акселерометры делятся на осевые и маятниковые. В
осевых акселерометрах конструкция подвеса обеспечивает прямолинейное
движение массы, а в маятниковых - угловое.
У акселерометра выделяют ось чувствительности (эту ось также
определяют как измерительную) и перпендикулярные к ней поперечные оси.
Ось чувствительности - это ось. в направлении которой возможно перемещение
массы, обусловленное конструкцией подвеса. Акселерометры с одной осью
чувствительности называют однокомпонентными. Принципиально возможно
создание анизотропных подвесов, обеспечивающих ЧЭ две (двухкомпонентный
акселерометр) и три (трехкомпонентный акселерометр) оси чувствительности.
В одном корпусе могут быть также установлены два или три независимых ЧЭ с
разным направлением осей чувствительности Наиболее просто двух- и
трехкомпонентные акселерометры реализуются компоновкой двух или трех
однокомпонентных акселерометров.
Акселерометры способны измерять линейное и угловое ускорения
Соответственно различают линейные и угловые акселерометры. В линейных
акселерометрах ось чувствительности параллельна вектору измеряемого
ускорения. Для измерения углового ускорения ось чувствительности должна
106
быть параллельна вектору линейного ускорения, обусловленного угловым
ускорением.
При использовании акселерометров следует иметь в виду, что
перемещение массы определяется векторной суммой действующих на нее сил и
сил инерции, включая поступательную силу инерции, центробежную и силу
инерции Кориолиса, определяемых поступательным ускорением и вращением
неинерциальной системы отсчета относительно любой инерциальной.
Очевидно, что при закреплении корпуса акселерометра на БПЛА, ускорение
которого изменяется, система координат акселерометра в общем случае
является неинерциальной. При свободном падении БПЛА акселерометр, на нем
установленный, ничего не измеряет, т.к. ускорение свободного падения от сил
тяготения одинаково воздействует на массу ЧЭ акселерометра и на его корпус.
Акселерометр измеряет только ускорения, обусловленные активными силами
(по этой причине акад. А.Ю. Ишлинский предложил называть их
ньютономерами) [18].
Если оси чувствительности трех однокомпонентных акселерометров
направить вдоль осей неинерциальной системы координат XYZ, то измеряемые
акселерометрами ускорения имеют вид:
вд- — Ux — gx, Яу — Uy — gy, az — Uz — g , (4.1)
где < K, Uv, Uz проекции абсолютного ускорения движения объекта на оси
системы координат XYZ;
gx, gy, gz - проекции ускорения силы тяжести на те же оси.
В соответствии с (4.1) для определения величин Ux, Uv, Uz к показаниям
акселерометров необходимо добавить гравитационные составляющие gx, gy,
gz Если акселерометры установлены на стабилизированной в плоскости
горизонта платформе, для двух акселерометров эта операция исключается. В
остальных случаях необходима внешняя коррекция.
По принципу измерения акселерометры делятся на приборы прямого и
компенсационного измерения (действия, преобразования). Структурная схема
акселерометра прямого измерения представляет собой последовательное
соединение ЧЭ и элементов измерительной цепи. ЧЭ выполняет
преобразование «ускорение - сила - перемещение», а измерительная цепь -
преобразование «перемещение - выходной сигнал». Выходной сигнал может
быть непрерывным или дискретным. ЧЭ и измерительная цепь равноценно
влияют на метрологические характеристики акселерометра прямого измерения,
а его погрешность определяется суммированием погрешностей отдельных
звеньев ЧЭ и измерительной цепи [3, 13, 15,23, 26, 34, 40,41].
Акселерометры компенсационного (уравновешивающего) преобразования
в общем случае содержат цепь прямого преобразования с коэффициентом
передачи К, цепь обратного преобразования с коэффициентом передачи Коп и
датчик неуравновешенности активной силы, действующей на подвес, и
компенсирующей силы, также действующей на подвес, но с обратным знаком.
Инерционная масса ЧЭ, преобразующая ускорение в активную силу находится
107
вне цепи уравновешивания. Роль датчика неуравновешенности выполняет
подвес, который вместе с инерционной массой ЧЭ образуют колебательную
систему. Произведение ККоп называется глубиной уравновешивания. При
глубокой отрицательной обратной связи ( ККоп > 1000) акселерометры компен-
сационного преобразования имеют следующие свойства:
1) Коэффициент преобразования определяется параметрами цепи
обратного преобразования Коп и звеньев, находящихся вне цепи
уравновешивания. Настройка коэффициента преобразования осуществляется
изменением параметров звеньев цепи обратной связи.
2) Погрешности цепи обратного преобразования и звеньев, находящихся
вне цепи уравновешивания, входят в погрешность акселерометра.
3) Нестабильность параметров звеньев, определяющих коэффициент К,
не оказывает существенного влияния на его стабильность. Главное, чтобы была
обеспечена высокая чувствительность и требуемое значение величины ККоп.
Цепь обратного преобразования (уравновешивания, обратной связи) может
выполняться аналоговой или цифровой, реализующей широтно-, частотно-, или
релейно-импульсную модуляцию сигнала.
Акселерометры с цифровой обратной связью имеют высокую точность и
применяются, в основном, в составе инерциальных навигационных систем
платформенного типа для измерения медленно изменяющихся ускорений.
В бесплатформенных инерциальных навигационных системах,
применяемых в БПЛА, а также в других системах для измерения быстро
изменяющихся ускорений, применяются акселерометры с аналоговым кон-
туром обратной связи. Если требуется частотный выходной сигнал, в цепь
обратной связи включается преобразователь «напряжение-частота» (ПНЧ).
Акселерометры с аналоговым контуром обратной связи могут иметь
структуру с пропорциональным и интегральным регулированием
Точность преобразования ускорения в электрический сигнал
акселерометрами определяется величинами смещения нуля, погрешностью
полной шкалы (или чувствительности), а также температурным и временным
дрейфом этих параметров. Важными составляющими погрешности являются
также погрешности линейности (нелинейность) и поперечная
чувствительность. Смещение нуля и чувствительность акселерометров при
нормальных условиях корректируются при изготовлении. Остаточная
погрешность может быть уменьшена путем калибровки и запоминания калиб-
ровочных констант в памяти микропроцессора. Калибровка акселерометра
возможна двумя способами: на вибростенде с образцовым датчиком ускорения
и с использованием силы тяжести.
Поперечная чувствительность характеризует способность датчика
преобразовывать в электрический сигнал ускорение, направленное под углом
90° к оси чувствительности датчика. У идеального акселерометра поперечная
чувствительность равна нулю
Шум содержащийся в выходном сигнале акселерометра, определяет его
разрешающую способность, важную при определении малых ускорений.
108
Предельное разрешение в основном определяется уровнем шума измерения,
который включает внешний фоновый шум и шум собственно датчика. Уровень
шума непосредственно связан с шириной полосы пропускания датчика.
Уменьшение полосы пропускания путем включения фильтра нижних частот
(ФНЧ) на выходе датчика приводит к снижению уровня шума. Это улучшает
отношение сигнал/шум и увеличивает разрешающую способность, однако
вносит амплитудные и фазовые частотные искажения.
Акселерометры обладают большим конструктивным разнообразием,
зависящим от способа реализации ЧЭ, демпфера, датчиков перемещений и
силы (момента), применяемых материалов и технологий и др.
Название акселерометра часто содержит ключевые слова, которые, по
мнению разработчиков, отражают его основные конструктивные и (или)
функциональные особенности. В названиях акселерометров: «емкостный»,
«пьезорезистивный», «индуктивный» и др., отражен способ измерения
перемещений инерционной массы. По виду материала, из которого изготовлен
ЧЭ, применяют названия- «кварцевый», «кремниевый» акселерометры.
«Капиллярный акселерометр» имеет оригинальную конструкцию демпфера
Примеры подобной, ненормированной, терминологии можно продолжать,
но нужно иметь в виду, что определяющими терминами являются: осевой,
маятниковый, линейный, угловой, преобразование прямое или
компенсационное.
Следует отметить еще одно обстоятельство, заключающееся в том, что с
использованием в качестве конструкционных материалов кремния, кварца и
других, которые возможно обрабатывать по технологиям микроэлектроники,
появились, так называемые, микромеханические акселерометры Если ЧЭ
выполнен из монокристаллической пластины, например кремниевой, а силовые
элементы компенсационного преобразователя и электроника - по
традиционным технологиям, то такие акселерометры принято называть
интегральными, иногда — гибридными. Необходимо обратить внимание также,
что микросистемы, в том числе и микроакселерометры, выполненные по
технологиям микромеханики, относят к микроэлектромеханическим системам
(МЭМС - широко используемая аббревиатура). При этом под МЭМС понимают
не только изделия (системы), но и технологии их изготовления. Технологии
МЭМС позволяют производить микроакселерометры в виде микросхем. При
этом ЧЭ может не иметь подвижной инерционной массы на подвесе, а может
использоваться. например, пьезоэффект. Развитие МЭМС является
перспективным направлением при разработке акселерометров.
Масса, габариты и энергопотребление большинства выпускаемых
отечественной промышленностью акселерометров, определяют возможность их
применения в БПЛА. При этом условия эксплуатации, как правило, более
комфортны, чем на других типах ЛА, а измерительные свойства
акселерометров превосходят требования, пре цьявляемые со стороны БПЛА [23,
26, 30, 34,41].
109
4.1.2. Уравнения движения и передаточные функции чувствительных
элементов акселерометров
Осевой акселерометр, имеющий инерционную массу (ИМ) 1, которая с
помощью упругого подвеса (пружины) 2 смонтирована в корпусе 3, у становлен
на БПЛА так, что направление возможного перемещения ИМ (ось
чувствительности) совпадает с осью Ох связанной системы координат (СК)
XYZ (рис. 4.1а). Связанная СК относительно нормальной XgYgZg СК (см. рис.
2.1а) определена углами 8. Предполагается, что БПЛА перемещается с
ускорением, вектор а которого совпадает с вектором V линейной скорости
центра масс БПЛА, совпадающего с началом (т. О) СК. При отсутствии
ускорения ИМ находится в т. О. Ускорение БПЛА имеет проекции на
связанные оси ах, ау, az. Предполагается, что БПЛА имеет угловые скорости
разворотов относительно осей связанной СК: со*, со^,, <oz. Упругий подвес ИМ
обеспечивает ее перемещение только вдоль оси чувствительности под
действием силы тпах и не допускает перемещений по перекрес гным осям под
действием сил инерции may, maz и силы веса ИМ.
Вследствие действия сил на инерционную массу, последняя занимает
положение, определяемое координатой х (рис. 4.16), которая содержит
информацию об измеряемом ускорении ах. Измерение перемещения х может
быть реализовано различными типами датчиков: потенциометрическим, ин-
дуктивным оптоэлектронным, емкостным и др
Рассмотрим силы, приложенные к инерционной массе в направлении оси
х. Сила F = тах является следствием ускорения ах. Инерционная масса
перемещается по координате х со скоростью х и ускорением х В сторону,
противоположную координате х и векторам х и х действуют упругая сила
пружины Gxx (Gx - суммарная жесткость пружин в направлении оси х), сила
сопротивления перемещению массы кохх, которую называют также силой
демпфирования (ках абсолютный коэффициент демпфирования),
инерционная сила массы nix. В направлении перемещения массы действует
центробежная сила znx(coz + а>,). Сила демпфирования зависит от его способа:
газовое, жидкостное, электровихревое и др. Наряду с силой демпфирования,
которую называют также силой вязкого трения, может быть учтено и сухое
трение, возникновение которого возможно в некоторых конструкциях.
НО
Рис. 4.1. К выводу уравнения движения осевого акселерометре
а ориентация акселерометра на БПЛА;
б — векторы сил, действующих на ИМ;
1 ИМ; 2 -упругий подвес; 3 корпус акселерометра
В соответствии с методом кинетостатики, суммируя векторы сил по
рис. 4.16 со своими знаками, приравниваем сумму нулю и получаем уравнение
движения инерционной массы осевого акселерометра:
тх + kOxx + Gxx- mx((i)2 +<о, ) = тах. (4.2)
Перепишем уравнение (4.2) в форме:
х'+ 2^xcox0x + [со- (о)2 + Юу )]х = ах, (4.3)
111
где юх0 =
&
\ т
- собственная частота колебаний инерционной массы;
^х . ——-------относительный коэффициент демпфирования инерционной
2тесолО
массы.
Очевидно, чтобы уменьшить влияние ускорений, обусловленных
угловыми скоростями ® v, coz, необходимо выполнять условие:
юх0 + • (4-4)
В соответствии с (4.2, 4.3) ЧЭ осевого акселерометра является
колебательным звеном, передаточная функция которого по отношению к
вынуждающей силе, при выполнении условия (4.4), имеет вид:
WX{S) = = 22 >
тах T^s1+2t>xTxs + \
(4.5)
1 d
—; s- —.
dt
(стационарном) режиме имеет место
гДе Кх Тх =
Ьх °\0
В установившемся
инерционной массы:
та
у — ——:
смещение
(4.6)
которое содержит информацию об измеряемом ускорении вдоль оси
чувствительности.
Расчетная схема маятникового акселерометра приведена на рис. 4.2,
который представлен в виде подпружиненной массы т, расположенной на
плече I относительно оси подвеса, смонтированной в корпусе (показан
штриховкой) на узлах вращения (подшипники качения, скольжения, керновые
опоры и др.) Подвес может быть реализован в виде упругого элемента
(элементов), работающего на кручение.
Векторы линейного ускорения и угловой скорости, характеризующие
перемещение БПЛА, на котором установлен акселерометр, имеют проекции на
оси СК XYZ: ах, ау, az и сол, а>у, a>z. Инерционная масса вследствие
движения БПЛА занимает положение, определяемое угловой координатой 3,
которая содержит информацию об измеряемом ускорении ах, вектор которого
совпадает с осью чувствительности. Датчики углового положения маятника
могут быть различных типов.
Рассмотрим силы, действующие на ИМ и моменты сил относительно оси
подвеса (качания) маятника. Считаем угловую скорость вращения основания
постоянной, а силы инерции Кориолиса пренебрежимо малыми по сравнению с
остальными. К инерционной массе приложены силы, вызванные линейными
ускорениями основания ах и ау, ускорением силы тяжести g и
112
центросгремительным ускорением (со^+to^)/since следствием которых
являются моменты относительно оси подвеса маятника:
Л/] = maxl cos а. М2 = m[g - (~ау )]/ sin а. М3 = /«[(со* + а)^)/ sin а |/ cos а
F
♦
с
Рис. 4.2. Расчетная схема маятникового акселерометра прямого
преобразования (вектор ах направлен в отрицательную сторону по оси Ох,
чтобы движение маятника происходило против часовой стрелки вокруг
положительного направления оси Oz)
Движению маятника под действием указанных моментов препятствуют:
момент упругих сил Gaoc (Ga - суммарная жесткость подвеса вокруг оси Oz,
обусловленная упругими силами), момент диссипативных сил, или сил
демпфирования к^а (к^ - абсолютный коэффициент демпфирования) и
инерционный момент Jz& (Jz - момент инерции маятника относительно оси
Oz). Имея в виду, что угол a - малая величина (since-a, cosa~l). в
соответствии с методом кинетостатики получим уравнение движения ИМ по
координате a:
Jza + Adaa + [Ga + m(g + ay)l- m(o>x + co^ )l2 ]a = maxl.
Перепишем уравнение (4.7) в форме:
a + 2£acoa0a + wa0 + ~r + a
J Z
2
— (C0r +(0
Л •*
ml
>a = —а
Jz -
(4.7)
(4-8)
113
где ®а0 =
— собственная частота колебаний маятника,
£,а =--—----относительный коэффициент демпфирования маятника
2Л“аО
Для уменьшения влияния перекрестных ускорений необходимо
выполнение условия:
2 /2 2х>1 z,
®а0 » |g + ау “ (®Х + “уX] - (4-9)
Jz
Передаточная функция ЧЭ маятникового акселерометра при выполнении
условия (4.9) по отношению к возмущающему моменту имеет вид:
Wa (5) = = -2—,
тах1 тУ+2^Та8 + \
где Ка =
’ОС *
Ga ®а0
В установившемся (стационарном) режиме имеет место отклонение
маятника на угол
mad
arm =--—
Ga
величина которого пропорциональна измеряемому ускорению вдоль оси
чувствительности.
Очевидно, что колебательное движение ИМ может быть описано и по
линейной координате, имея в виду что х = I sin а «1а.
4.1.3. Измерительные цепи и передаточные функции акселерометров
Рассмотрим измерительные цепи акселерометров прямого преобразования.
Последовательность преобразований физических величин в процессе
измерения ускорения осевым акселерометром может быть представлена в виде
блок-схемы измерите, [ьной цепи (рис. 4.3), на которой каждый элемент
преобразования представлен в виде звена с соответствующей передаточной
функцией [34].
Рис. 4.3. Блок-схема измерительной цепи осевого акселерометра
Величина m инерционной массы ЧЭ является коэффициентом передачи
первого звена на вход которого поступает измеряемое ускорение ах, а
выходом является инерционная сила F. На вход второго звена, передаточная
114
функция которого Wx определяется зависимостью (4.5), поступает
инерционная сила F а выходом является перемещение х ИМ. Выходом
преобразователя перемещений с передаточной функцией является
напряжение At/, которое затем посредством активного фильтра с передаточной
функцией преобразуется в выходное напряжение ивых.
Передаточная функция преобразователя перемещений в большинстве
акселерометров может быть представлена в виде коэффициента передачи,
равного крутизне рабочей характеристики преобразователя перемещений, т.е.:
Wn*Kn= — (4.11)
х
Реализация фильтра может быть различной в зависимости от требований,
предъявляемых к качеству переходного процесса, полосе пропускания частот и
других. Как правило, передаточная функция фильтра соответствует
колебательному звену:
Иф(.к)= ..--Х£-----, (4.12)
где коэффициент передачи Кф, постоянная времени Тф и относительный
коэффициент демпфирования ^ф фильтра определяются номиналами
электронных компонентов схемы.
В соответствии с рис. 4.3 и с учетом (4.5), (4.11), (4.12) передаточная
функция осевого акселерометра имеет вид:
77 КцКхКф
WOA(S> = = —22------------“14----------------• <4ЛЗ>
ах (T2s2 + 2£ yTys +1)№2 + 2^ФТФ8 +1)
Из передаточной функции (4 13) при 5 = 0 следует важнейший
А “ лл ( В 1
технический параметр акселерометра - масштабный коэффициент - :
V м/с )
К„=^- КПК,КФ. (4.14)
ах
Важной характеристикой акселерометра является также нестабильность
Км, в том числе его температурная нестабильность, определяемая в процентах
от номинала для заданных условий работы. Очевидно, этот параметр зависит от
нестабильности всех компонентов величины Км
Амплитудно-частотные, фазо-частотные характеристики и переходный
процесс измерительной цепи могут быть построены на основании известных
процедур с передаточной функцией измерительной цепи при формальной
замене 5 = усо (со - частота)
Последовательность преобразования физических величин при измерении
ускорения маятниковым акселерометром показана в виде блок-схемы
измерительной цепи на рис. 4.4.
115
Рис. 4 4. Блок-схема измерительной цепи маятникового акселерометра
Предполагается, что передаточные функции преобразователя перемещений
и фильтра аналогичны описанным выше. Звено с коэффициентом передачи I
переводит угловую меру перемещений ИМ в линейную Передаточная функция
маятникового акселерометра в соответствии с рис. 4.4 и выражениями (4.10) -
(4 12) имеет вид:
иг (~x_Ueblx _ т1 КдК^Кф
ах (T2s2 + 2£aTos + 1)(7е2 s2 + 2^фТфз +1)
из которой следует (s = 0) выражение для масштабного коэффициента
Км=^^ = т12КПКаКф.
ах
Комментарии относительно масштабного коэффициента, его
нестабильности, вычисления частотных характеристик и переходного процесса
аналогичны приведенным выше для осевого акселерометра. Здесь следует
напомнить только то, что маятниковый акселерометр более восприимчив к
ускорениям, действующим по перекрестным осям и для него имеет место, так
называемый, вибрационный сдвиг нуля при «косой» вибрации основания,
известный также как эффект Максвелла-Капицы.
В акселерометрах компенсационного преобразования (компенсационные
акселерометры) сила, инициируемая ускорением, воспринимаемым ИМ,
уравновешивается (поэтому компенсационные акселерометры называют также
акселерометрами уравновешивающего преобразования) силой, имеющей, как
правило, электростатическую, магнитоэлектрическую или электромагнитную
природу. Уравновешивающее воздействие на ИМ создается с помощью цепи
обратной связи (цепь уравновешивания, компенсации).
Схема, иллюстрирующая формирование магнитоэлектрической обратной
связи, приведена на рис. 4.5. Магнитоэлектрический преобразователь силы
образован постоянными магнитами, укрепленными в корпусе (показан
штриховкой), и катушками, установленными на ИМ акселерометра ИМ с
корпусом связана упругим элементом подвеса с одной стороны (маятниковый
акселерометр). Очевидно, снабдив ИМ симметричным упругим элементом,
получим схему осевого акселерометра. Измерительные емкости конденсаторов
Q, и С2 образованы подвижными электродами, размещенными на ИМ и
неподвижными, размещенными на элементах конструкции акселерометра.
Измерительные емкости конденсаторов Q и С2 включены во
времязапаздывающие цепи генератора Г. который формирует на выходе
напряжение (/,, поступающее на фильтры Ф| и Ф2, которые выделяют
постоянную составляющую сигнала. Напряжения (7Ф] и (7Ф2
116
/1 f->
пропорциональны отношениям у и у. в которых и 12 - время, в течении
которого напряжения на конденсаторах С], и С2 достигают пороговых
значений, а величина Т = t\ + /2 определяет период последовательности
импульсов генератора.
Рис. 4.5. Схема формирования магнитоэлектрической обратной связи
Напряжения и С'ф2 поступают на масштабные усилители У1 и У2
выходные напряжения которых являются входами для усилителя УЗ: UBXl и
иВХ2- Напряжение на выходе усилителя УЗ, равное С/дь/уз ВХ2 ~^вх\
включено в последовательную цепь, образованную катушками преобразователя
силы с общим сопротивлением 7?- и сопротивлением нагрузки RH. По каналу
(цепи) обратной связи протекает ток I, пропорциональный перемещению ИМ и
создающий силу и момент, действующие заодно с упругим моментом подвеса
ИМ. Ток I и напряжение Uвых пропорциональны ускорению, действующему
на ИМ акселерометра. При соответствующем выборе элементов электронной
схемы, соответствующей рис 4.5, учитывая, что Ry >> Rj может быть
обеспечено напряжение:
Ubux КуСи,^£-. (4.15)
С2 +С]
где КуС К2~ К\ коэффициент усиления усилителей У1 и У2
Таким образом, напряжение на выходе электронной схемы акселерометра
пропорционально относительному приращению величины измерительной
емкости и. следовательно, пропорционально действующему на него ускорению.
При перемещении ИМ на величину Дй относительно первоначального зазора
hQ между электродами измерителя перемещений величины емкостей
конденсаторов определяются выражениями:
С _ EEp.S _ ЕЕрЛ1
1 й0 + Дй ’ 2 й0 - Дй
где е - диэлектрическая проницаемость среды между электродами;
е0 = 8,85 К)12 Ф/м; 5 - площадь взаимного перекрытия электродов.
117
(4.16)
В соответствии с (4.15) получим:
и -Кус^М
и вых ~---7
*0
В соответствии с рис. 4.5 ток. прогекаюший в канале обратной связи
равен:
j _ Uвых
RH + rl
Сила, развиваемая магнитоэлектрическим преобразователем, имея в вид}
(4.16), (4.17), равна:
(4-17)
(4.18)
IBiL- К
„ KycUxB3L D
где =———; В-^ - индукция в зазоре между катушками и
ho(RH +rl)
магнитами; L - длина провода обмоток катушек.
На рис. 4.6 приведены блок-схемы измерительных цепей акселерометров с
магнитоэлектрической обратной связью.
Рис. 4.6. Блок-схемы измерительных цепей акселерометров с
магнитоэлектрической обратной связью: а осевого; б маятникового
Передаточная функция акселерометра по напряжению в соответствии с
(4 16) имеет вид:
= У-вых = Кус^
АЛ ho
Передаточная функция обратной связи в соответствии и (4.16), (4.18)
определяется выражением:
(4.19)
(4.20)
woc=-^_ = - BL
UВЫХ RH + rl
Передаточные функции замкнутых цепей измерения по отношению к
ускорению имеют вид:
Ф =-------... -(осевой);
(4 21)
118
Ф =---=----——------(маятниковый). (4.22)
1+/2^эЛс
В акселерометрах с обратной связью второе слагаемое в знаменателях
передаточных функций обычно значительно больше единицы. Заметим, что это
правило затруднительно выполнить для акселерометров с электростатической
обратной связью.
Из выражений (4.21), (4.22) для статического режима с учетом замечания о
их знаменателях получим:
ф JJeux^Rh+Rl) (4.23)
' ° ах BjL
Зависимость (4.23) определяет масштабный коэффициент и из нее следует:
- й-= таv, т.е. IB1.L = тах. (4.24)
Rh+Rl v
Равенство (4.24) является общепринятым расчетным соотношением,
которое имеет простой физический смысл: сила, развиваемая
магнитоэлектрическим преобразователем в цепи обратной связи
уравновешивает инерционную силу ЧЭ, обусловленную измеряемым
ускорением. Из равенства (4.24) можно получить, например, требуемое
о тах
значение индукции магнитной цепи В3 - при заданных значениях
остальных параметров.
4.1.4. Конструкция и технические характеристики акселерометров
навигационного класса
Акселерометры высокого класса точности имеют чувствительность, т.е.
способны измерять величины, порядка ( 105 : 106)g. Акселерометры такого
класса точности обычно называют акселерометрами навигационного класса.
Они применяются в навигационных системах ЛА с большой длительностью
полета. По точности, массогабари гным параметрам, энергопотреблению и
условиям эксплуатации они пригодны для использования в БИНС БПЛА с
большой длительностью полета. Сдерживающим фактором к применению
может служить только их стоимость [26, 34,40,41].
К этому классу относятся, например, акселерометры серий ДА и А
разработки Раменского приборостроительного конструкторского бюро (РПКБ),
акселерометр типа АТ-1104 разработки Арзамасского опытного
конструкторского бюро (ОКБ) «Темп-Авиа» и других отечественных
разработчиков. Указанные приборы являются маятниковыми акселерометрами
компенсационного преобразования и предназначены для измерения линейных
ускорений. На рис. 4.7а показан общий вид. а на рис. 4.76,в - особенности
конструкции акселерометра ДА-11.
119
Расчетная схема механической части акселерометра, также как и всех
последующих, соответствует рис. 4.2. Инерционная масса 1 реагирует на
ускорение перемещения основания с корпусом 7 вдоль оси чувствительности
х, которую называют также измерительной осью. Угловое перемещение а
ИМ-маятника относительно оси z измеряется пре< бразователем
трансформаторного типа, который состоит из неподвижных (стационарных)
катушек 6, установленных в корпусах непосредственно в симметричных
магнитных системах, включающих магниты 3 и магнитопроводы 4. и
бескаркасных подвижных (роторных) катушек 5, наклеенных на маятник.
Напряжение питания подается на катушки 6, магнитный поток замыкается
через магнитопроводы 4, ЭДС наводится в катушках 5. Двухсекционная
катушка 2 преобразователя силы цепи обратной связи на каркасе, изготовлен-
ном из алюминиевого сплава, установлена на маятнике. Каркас катушки
выполняет роль электромагнитного демпфера. Ось вращения (подвеса)
маятника реализована в виде керновых осей 10 и камневых опор 9. С целью
уменьшения трения в опорах предусмотрено виброперемещение zB опор под
действием электромагнита 8.
Рис. 4.7. Акселерометр ДА-11:
а - общий вид; б, в — электрокинематическая схема; 1 - инерционная масса
(маятник); 2 - катушки преобразователя силы цепи обратной связи;
3 — магнит; 4 магнитопровод; 5, б- подвижная и неподвижная катушки
преобразователя перемещении 7 - корпус; 8 - электромагнит возбуждения
опор; 9 — камневая опора; 10 — керновая ось; zB — виброперемещение опор
120
Акселерометр выдерживает ударные ускорения в 25 g в количестве 10000 с
длительностью импульса 25 мс.
Магнитные системы имеют вставные стержневые термошунты для
стабилизации магнитной индукции в рабочем зазоре преобразователя силы.
Электропитание осуществляется от трех источников: t/j = 10 В: /]=12кГц;
U2 =2.5 В: /2 = 19.2 кГц: U3 =36 В: /3 =400 Гц.
Акселерометры серий А и АТ изготавливаются по гибридной
(интегральной) технологии. Чувствительные элементы этих акселерометров
представляют кремниевые маятники, изготовленные методами, так называемой,
планарной технолог ии принятой в микроэлектронике. Все остальные элементы
конструкции выполнены по традиционным технологиям.
На рис. 4.8 показана конструкция акселерометра АТ-1104 (размеры
указаны в мм). Маятником акселерометра является подвижная часть 7
кремниевой пластины 6, соединенная с ней гремя упругими элементами
Изготовлен чувствительный элемент (ЧЭ) методом анизотропного травления
Кремниевая пластина по периметру защемлена между стеклами 9 Пластина и
стекла имеют примерно равные коэффициенты теплового расширения. С ЧЭ
жестко скреплены кронштейны 5. на которых смонтированы катушки 8
Очевидно, в силу этого увеличивается маятниковость ЧЭ. Стекла с ЧЭ и
катушками размещены между магнитопроводами 2 цилиндрической формы и с
помощью втулки 10 объединены в монолитную конструкцию. Соосно с
катушками размещены магниты 3, на которых укреплены наконечники 4 из
магнитомягкого материала. Вся конструкция смонтирована на корпусе 1,
внутри которого (на рис. 4.8 не показаны) размещены элементы электронной
схемы, и закрыта герметичной крышкой 11. Благодаря герметизации возможно
заполнение акселерометра инертным газом и создание внутреннего давления
(если это необходимо). На рис. 4.9 и 4.10 показаны элементы конструкции
акселерометра.
Между поверхностями ЧЭ-маятника и стеклами имеются зазоры в
пределах (16±18)мкм. Эти зазоры определяют возможность поворота ЧЭ
относительно оси упругих элементов (балок), которая лежит в плоскости ЧЭ
Поверхности ЧЭ-маятника и стекол со стороны зазоров покры гы слоем
металлизации, и таким образом получен дифференциальный емкостной
преобразователь перемещений ЧЭ-маятника. Катушки и магнитная система
образуют магнитоэлектрический преобразователь силы, который включен в
цепь обратной связи и образует электрическую «пружину»
121
Рис. 4.8. Конструкция акселерометра АТ -1104 с кремниевым чувствительным
элементом-маятником:! корпус; 2 магнитопровод; 3 магнит; 4
наконечник из магнитомягкого материала; 5 кронштейн крепления катушки:
б — кремниевая пластина; ~ подвижная часть кремниевой пластины —
маятник; 8 - катушка; 9 оптическое стекло; 10 втулка;
11 - герметичная крышка
Рис. 4.9. Элементы маятниковой системы'
1 — кремниевая пластина; 2 — чувствительный элемент (длинауказана в мм):
3 - оптические стекла; 4 кронштейн с катушкой
122
Рис. 4.10. Элементы конструкции магнитоэлектрической системы-
1 - магнитопровод: 2 — катушка с кронштейном на маятнике •
3 ма- нит в магнитопроводе; 4 оптические стекла
По гибридной технологии ОКБ «Темп-Авиа» выпускает также
акселерометры серии АС для измерения угловых ускорений.
Общий вид акселерометров серии А компенсационного преобразования
показан на рис. 4.11. Чувствительные элементы этих акселерометров
представляют кремниевые маятники, изготовленные методами объемной
обработки. Так, на базе маятника диаметром 18 мм и толщиной 0,38 мм
разработано несколько модификаций акселерометров моделей А-12, 15, 16 и 17.
Рис. 4.11. Акселерометр серии А (А-15, А-16, А-17)
(ооший вид и со снятым блоком электроники)
На маятник наплавляют металлические пластины (обкладки)
конденсаторов емкостного преобразователя перемещений и методом
прецизионной микросборки устанавливают обмотки (катушки) преобразователя
силы. Два других электрода (пластины, обкладки) емкостного преобразователя
перемещений напылены на элементах корпуса Упругие элементы подвеса
имеют размеры (1,Зх0,12*0,008) мм. Зазор между маятником (подвижный
электрод) и электродами на корпусе составляет 0,021 мм. Для увеличения
маятниковости установлен груз. Акселерометры содержат электронику,
выполненную по гибридно-пленочной технологии.
123
Акселерометры А-17 используются в термостатированных изделиях и их
характеристики обеспечиваются при температуре +75±2 °C. В акселерометры
А-16, А-15 встроен температурный датчик и их характеристики
обеспечиваются алгоритмической компенсацией.
Характеристики рассмотренных акселерометров приведены в табл. 4.1,4.2.
Таблица 4.1. Характеристики акселерометров серии А
Характеристика, размерность Модель (марка) акселерометра
А-15 А-16 А-17
Диапазон измерений, g 20 35 10
Крутизна статической характеристики, мА/g 1,0-1,4 0,9-1,3 1,0-1,6
Нестабильность масштабного коэффициента, % <0,02 <0,02 <0,02
Температурный коэффициент крутизны статической характеристики, %/°С <±210-2 <±2 10"2 <±2-10—2
Порог чувствительности, MKg 0,5 0,5 0,5
Дрейф нулевого сигнала, g/ч <5 1(Г* <7-10~5 <2,5Ю“5
1 емпературный коэффициент нуля (нулевого сигнала), g/°C <±3-10-5 <±3 10-5 <±2Ю“5
Тяжение (постоянная составляющая), Mg <12 <15 12
Стабильность гяжения, 106 g <300 <300 <300
Стабильное гь погрешности базовой плоскости, 10-6 рад — 100 <100 100
Погрешность базовой плоскости, мрад <9 ±9 <9
Диапазон рабочих температур, °C -60-+80 -60-+80 -60-±80
Ударное воздействие: амплитуда g длит., мс 50/1-5 50/1-5 30/15
Напряжение питания В ±15 ±15 ±15
Габаритные размеры, мм 24x21x21 24x21x21 24x21x21
Масса (с электроникой), г s40 s40 1=40
Таблица 4.2. Характеристики акселерометров серий ДА и АТ
Характеристика, М одель (марка) акселерометра
размерность ДА-9 ДА-10 ДА-11 АТ-1104
Диапазон измерений, g ±12 ±15 ±1-±10 ±1 -±10
Порог чувствительности, g 106 10"5 5-106 10~6
Частотный диапазон измерений, Гц — — —
124
окончание таблицы 4 2
Крутизна статической характеристики (масш- табный коэффициент), мА/g 1,72+0,25 1,72+0,25 1,28+0,32 1,0+0,15
Нулевой сигнал, g ±5,8-104 ±1,2 10-3 ±0,58-10-3 ±20-10-3
Нелинейность функ- ции преобразования (За), % 0,044 0,1
Температурный коэффициент крутизны статической характеристики, %/°С — — 210-3 1,5-10-2
Т емперату рный коэффициент нулевого сигнала, g/°C 8,7-10-6 1-Ю-4
Потребляемый ток при а=0, мА 20 5 98 30
Диапазон рабочих темпепатур, °C -60 + +80 -60 + +80 -60 + +80 -55 - +120
Масса, г 38 120 45 35
4.1.5. Конструкция и технические характеристики
микромеханических акселерометров
Микромеханические акселерометры (ММА) по массогабаритным
параметрам и энергопотреблению наиболее подходят для малоразмерных
БПЛА [23, 34,41].
Микромеханические акселерометры (ММА) имеют чувствительный
элемент (ЧЭ), включающий инерционную массу на упругом подвесе,
преобразователь ее перемещений и обслуживающую (сервисную) электронику,
выполненные на одном чипе (кристалле) технологиями МЭМС
(микроэлектромеханических систем). Разработкой и серийным производством
ММА занимаются фирмы: Analog Devices, Motorola, Hitachi. Hilton Head и др.
Наиболее широким спектром моделей и характеристик обладают
ММА серии ADXL фирмы Analog Devices. Акселерометры этой серии явля-
ются осевыми и выпускаются в вариантах прямого и компенсационного
преобразований
Схема работы кремниевого чувствительного элемента показана на
рис. 4.12, а на рис. 4.13 — блок-схема, поясняющая принцип измерения с
аналоговым выходом.
На неподвижные пластины конденсатора ЧЭ от генератора подаются
противофазные прямоугольные импульсы 1 МГц: амплитуды обоих
125
прямоугольных импульсов равны, но сдвинуты по фазе на 180°. В спокойном
состоянии емкости С) и С2 двух конденсаторов одинаковы, поэтому выходное
напряжение на их электрическом центре (т.е. на подвижной пластине,
присоединенной к ИМ) равно 0
1 лстины
Рис. 4.12. Конфигурация чувствительного элемента ММА:
а —в покое; б—при действии ускорения
инерниоин я
масса
Когда ИМ начинает двигаться, разность емкостей приводит к появлению
выходного сигнала на центральной пластине. Амплитуда сигнала будет
увеличиваться с увеличением ускорения, приложенного к ИМ. Центральная
пластина через усилитель У1 подключена к синхронному детектору.
Направление движения ИМ влияет на фазу сигнала, поэтому синхронное
детектирование используется для выделения информации об амплитуде. Выход
синхронного детектора через усилитель У2 обеспечивает выходное напряжение
ускорения V.
Рис. 4.13. Блок-схема ММА с аналоговым выходом
На рис. 4.14а показана упрощенная блок-схема двухосного акселерометра
ADXL202 с двумя ЧЭ - сенсорами по двум взаимно-перпендикулярным осям х
и у, поясняющая принцип формирования на выходе широтно-импульсного
модулированного сигнала (ШИМ-сигнала) (рис. 4.146).
126
a)
от +3B до 5.25В
Рис. 4.14. Блок-схема (а) двухосного ММА с ШИМ-сигналом (б) на выходе
Такой тип выхода очень полезен из-за значительной защиты от шума
(помех), (данные передаются по одному проводу). Стандартные дешевые
микроконтроллеры имеют таймеры, которые могут быть с успехом применены
для измерения интервалов Т\ и Т2. Ускорение, выраженное в g, в этом случае
рассчитывается по формуле:
Л«) = 1(^-0.5|
Следует отметить, что ШИМ в 50% (Т\ - Т2) обозначает 0 g на выходе.
Нет необходимости измерять Т2 для каждого цикла измерений. Его
необходимо обновлять для учета измерений, вызванных температур» й Так как
период Т2 распространяется (одинаков) как для канала X, так и для канала Y,
необходимо измерять его только в одном канале. Период Т2 может быть
установлен от 0,5 мс до 10 мс с помощью внешнего резистора
Аналоговое напряжение, соответствующее ускорению можно затем
получить с помощью усиления сигнала с выходов X и Y или пропуская сигнал
ШИМ через RC-фильтр для восстановления постоянной составляющей.
Прогресс в миниатюризации ММА серии ADXL иллюстрируется на
рис. 4.15:
127
б!
Рис. 4.15. ММА фирмы Analog Devices.
a ADXL76 (кристалл с ЧЭ и электроникой в корпусе; виднара^ пайка
от компонентов электроники к выводам); б - микроструктура ЧЭ,
в ADXL105 (кристалл с ЧЭ и электроникой в корпусе; видна распайка,
г - кристалл с микроструктурой (в центре) и компонентами электроники
(толстые линии токоподводьу
Характеристики ММА серии ADXL приведены в табл. 4.3.
Таблица 4.3. Характеристики ММА серии ADXL
Марка ММА < количество осей чувствительности Характеристика, размерность
Диапазон измерений g Крутизна статической хар-ки, мВ/g Н< П :ЙН хар-ки, % Плотность шума, Mg/Jfn Напряжение питания, В/ Потребляемый ток, мА Вид сигнала, напряжение (V) или ШИМ
ADXL202 / 2 ±2 12,5 %/g 0,2 0,5 3—5/0,6 ШИМ
ADXL05 /1 ±5 — 0,2 0,5 — V
ADXL105 / 1 ±5 250 0,2 0,175 2,7—5,2/2 V
ADXL210/2 ±10 — 0,2 0,5 - ШИМ
ADXL150/1 ±50 38 0,2 1,0 5/2 V
ADXL250 / 2 ±50 38 0,2 L0 5/3,5 V
ADXL190/1 ±100 18 0,2 5 '2 V
ММА ADXL 150 и ADXL250 относятся к приборам третьего поколения и
обладают абсолютной погрешностью 0,01 g. По сравнению с другими
моделями у них уменьшенный дрейф нуля, не превышающий 0.4 g в диапазоне
температур (-50 -+100)°С. Акселерометры выдерживают ускорение 2000 g
128
длительностью 0,5 мс без питания и ускорение 500 g длительностью 0,5 мс с
питанием.
4.2. Гироскопы
4.2.1. Общая характеристика
Все гироскопы делятся на два основных класса: свободные гироскопы
(астатические), задача которых заключается в «хранении» заданного
направления (заданной системы координат) и датчики (измерители) угловой
скорости (ДУС) основания (объекта), на котором они установлены. Для
астатических гироскопов основным показателем точности является остаточная
скорость ухода (дрейф) гироскопа, а для ДУС - погрешности измерения
угловой скорости, обусловленные различными причинами (конструктивными,
технологическими, температурными, эксплуатационными и пр.). Остаточная
скорость ухода, имея в виду наличие выходного сигнала при отсутствии из-
меряемой скорости, присуща и ДУС.
В настоящее время не существует свободных гироскопов, пригодных для
применения в малоразмерных БПЛА.
Микромеханические гироскопы (ММГ) - абсолютные лидеры по
минимуму массы, габаритов, энергопотребления и стоимости. ММГ военного
применения зарубежных фирм уже имеют «заявленный» остаточный дрейф на
уровне 1 град/час и имеют по прогнозам устойчивую тенденцию к уменьшению
этой характеристики. ММГ уверенно занимают нишу чувствительных гиро-
скопических элементов в БИНС с небольшим временем функционирования.
Неинерциальные источники информации (спутниковая навигация,
магнитометры и т.д.) существенно расширяют возможности БИНС на базе
ММГ и ММА.
Динамически настраиваемые гироскопы (ДНГ) относятся к классу
роторных вибрационных гироскопов (РВГ), имеют давнюю историю развития и
успешно применяются в ИНС, включая БИНС для различных ЛА. Следует
заметить, что в динамике ММГ и РВГ много общего, начиная с того, что их
часто называют Кориолисовыми вибрационными гироскопами, подчеркивая
общий для них вибрационный характер движения ЧЭ и роль Кориолисовых сил
в его формировании.
Волновые твердотельные гироскопы (ВТТ) являются блестящим примером
построения гироскопа не имеющего традиционного элемента - вращающегося
ротора, также как лазерные гироскопы (ЛГ) и волоконно-оптические гироскопы
(ВОГ). ВТГ, ЛГ и ВОГ являются гироскопами навигационного класса и
успешно применяются в ИНС, включая БИНС, средней и выше точности.
Важнейшими характеристиками гироскопов являются диапазон
измерений, масштабный коэффициент и его стабильность (или погрешность,
зависящая от различных причин), остаточный дрейф, массогабаритные и
эксплуатационные параметры и характеристики.
129
По массогабаритным параметрам, потребляемой мощности и харак-
теристикам точности для применения в БПЛА наиболее применимыми
являются: Кориолисовые вибрационные гироскопы в микромеханическом
исполнении, волновые твердотельные гироскопы с кольцевым резонатором и
волоконно-оптические, имея в виду их тенденцию к миниатюризации [3. 13. 15.
19,26, 30,31,34,42].
4.2.2. Волоконно-оптические гироскопы. Принцип действия и
особенности конструкции
Принцип действия волоконно-оптических гироскопов (ВОГ) основан на
эффекте, открытом Саньяком в 1913 г. при исследовании свойств
многозеркального кольцевого оптического резонатора, называемого также пас-
сивным интерферометром Саньяка.
На рис. 4.16 приведена схема идеального оптического кольцевого контура
радиусом R с одним зеркалом А, на которое попадает свет от излучателя И и с
помощью расщепляющей системы преобразуется в два луча 1 и 2,
распространяющихся по- и против часовой стрелки [13, 15, 23, 26]
Рис. 4.16. Принципиальная схема кольцевого оптического резонатора
(пассивный интерферометр Саньяка): А — зеркало; И излучатель,
1,2 направления распространения лучей
Если резонаторы неподвижны, то время прохождения света по замкнутому
контуру для обоих лучей одинаково и определяется: t = 2л/?/с, (с - 3 • 10|0см/с
- скорость света).
При вращении резонатора времена пробега светом его периметра по
часовой стрелке Zj и против часовой стрелки /2 будут различными, т.к. зеркало
«убегает» от светового луча, распространяющегося по часовой стрелке, со
скоростью RC1.
Таким образом, указанные времена определяются равенствами:
2nR 2tiR
/1 —------, /2 —-----•
с -RQ с + RQ
130
Имея в виду, что с2 » 7?2Q2 справедливы приближенные равенства:
At = ti-t2 ^4nffi = 4f-Q. (425)
с ст
Важно отметить, что разность времен пропорциональна площади S'
контура резонатора. Изменение длины хода лучей приводит к фазовому сдвигу
(фаза Саньяка) встречных волн:
Лф-vA/ ' Q = - Q, (4.26)
с с
где f - частота электромагнитного излучения; v = 2nf круговая частота;
? -с f - длина волны.
Из-за исключительно малых значений величины М прямые измерения
скорости вращения объектов с помощью пассивных интерферометров Саньяка
возможны только в волоконно-оптических гироскопах, содержащих
(500-1000) м оптического волокна, намотанного на катушку, благодаря чему
резко возрастает величина S'. Если замкнутый контур образован оптоволокном,
намотанном на цилиндрическую катушку, то в формуле (4.26) S = NSB (N -
число витков катушки, SB - средняя площадь витка катушки) и выражение для
фазы Саньяка принимает вид:
SnNS/, 2nLD
=Дтр= ---—О. -------О, (4.27)
Хе Хс
где L, D - длина оптоволокна и диаметр оптоволоконного контура.
ВОГ могут быть построены по схеме с разомкнутым или с замкнутым
контуром. На рис. 4.17а приведена принципиальная схема ВОГ с разомкнутым
контуром. Свет от излучателя И через деполяризатор ДП и разветвитель 2
поступает к волоконному контуру (катушка) в противоположных направлениях
и, обойдя его, через элемент 2 попадает на фотоприемник ФП и далее в блок
электроники БЭ.
Для повышения чувствительности ВОГ к малым измеряемым угловым
скоростям в контур включен фазовый модулятор ФМ, который вносит
вспомогательный фазовый сдвиг между встречными световыми волнами на
л/2.
Принципиальная схема ВОГ с замкнутым контуром (компенсационная
схема ВОГ) приведена на рис. 4.176.
Свет от излучателя И через оптический разветвитель 2 поступает к
оптоволокну катушки 1, пройдя через которую объединяется элементом 2 и
попадает через фотоприемник ФП на синхронный детектор СД. который при
наличии вращения катушки со скоростью О выделяет фазу Саньяка. Эта фаза
компенсируется с помощью частотного фазового модулятора ФМ следующим
образом. Одна из световых волн, распространяющихся по волокну в
противоположных направлениях, попадает сначала на ФМ, а затем на катушку,
а другая - сначала на катушку, а потом на ФМ.
131
Рис. 4.17. Принципиальные схемы ВОГ:
а с разомкнутым контуром; б с замкнутым контуром
1 - катушка; 2 разветвитель
Вследствие этого обе волны выходят с катушки с одинаковой частотой, но
с разностью по фазе, определяемой опережением по фазе частоты, которую
вырабатывает ФМ и которая зависит от длины волокна. При появлении
скорости вращения О фаза Саньяка фС подавляется компенсирующей фазой
ср^, вырабатываемой ФМ регулировкой частоты, которая определяется
известным соотношением:
fk = DQJ n^k,
где пП - показатель преломления используемого волокна.
В результате работа ВОГ происходит при условии ф^-ф^-О. что
позволяет считать ВОГ с замкнутым контуром линейной системой.
Блок электроники БЭ выполняет следующие функции: стабилизирует
выходную мощность излучателя; усиливает и детектирует (СД) си нал
поступающий с ФП; формирует синусоидальное напряжение, подаваемое на
ФМ для внесения постоянного фазбвого сдвига на величину л/2 и формирует
пилообразное напряжение, создающее фазовый сдвиг, компенсирующий фазу
Саньяка.
Передаточная функция ВОГ с учетом (4.27) описывается усилительным
звеном с коэффициентом равным масштабному коэффициенту гироскопа.
В настоящее время наиболее распространенными являются два
конструктивных типа ВОГ: на дискретных оптических элементах и с
применением в оптическом контуре многофункционального интегрального
оптического элемента (МИОЭ). В качестве излучателя применяется суперлю-
минесцентный диод (СЛД). Для примера можно указать СЛД ИЛПН-330-1Ж
изготавливаемый на предприятии «Инжект» (г. Саратов).
В качестве приемника излучения — фотоприемника (ФП) используется
обычно фотодиод на основе p-i-n структуры. Например, то же предприятие
(«Инжект») выпускает ФП типа ФП1-85ОК
Очевидно, что точность ВОГ существенно зависит от качества оптического
волокна, в качестве которого используется, например, волокно типа PANDA,
сохраняющего состояние поляризации.
132
ВОТ на дискретных оптических элементах может быть выполнен по
цельноволоконной технологии, т.е. все его элементы, за исключением
излучателя и фотоприемника, изготавливаются из оптоволокна.
МИОЭ выполняет функции: поляризацию световой волны для уменьшения
нестабильности смешения нуля вследствие поляризационной невзаимности;
расщепление световых волн на распространяющиеся в волоконном контуре в
противоположном направлении с равными мощностями; внесение фазового
сдвига между встречными световыми волнами с помощью электрооптического
фазового модулятора. Интегрирование МИОЭ в оптический блок производится
стыковкой его волноводов с концами волоконного контура и с одним из концов
входного изотропного разветвителя. МИОЭ может быть изготовлен на
кристаллах LiNbO-) методом высокотемпературного протонного обмена.
Для намотки оптоволокна может быть использован каркас из
дюралюминия Д16Т. имеющего температурный коэффициент расширения,
близкий к кварцу. Для заполнения межвиткового пространства и придания
блок) прочности может применяться виксинт К-68. Катушка с волокном
располагается на теплоизолированной плате.
В таблице 4.4 приведены технические характеристики ВОГ разработки
отечественных компаний «Физоптика» и «Пермская научно-производственная
приборостроительная компания (ПН1111К)», которые могут быть использованы
в среднемагин гральных БПЛА.
Таблица 4.4. Технические характеристики ВОГ
Характеристика, размерность Модель, разработчик
ВГ910Ф BI 941-3 ВГ951 ДУС-500 Д-36
«ФИЗОПТИКА» ПНППК
Диапазон измеряемых угловых скоростей, град/с ±300 ±500 t80 ±500 Г60
Систематическая погрешность, град/ч 5 30 13 2 36
Случайная погрешность, град/ч 0,08 0.3 0,017 0,03
Нестабильность масштабного коэффициента, % 0,1 0,3 0,1 0,01
Потребляемая мощность, Вт 1,2 0,8 1,5 15 5
Габариты, мм 080x20 025,4x58 0150x30 —
Масса, г 110 40 650 1500 J
Разработкой ВОГ занимаются также ОАО Концерн ЦНИИ
«Электроприбор» и предприятие «Оптолинк», а также дру!ис отечественные
разработчики.
133
4.2.3. Волновые твердотельные гироскопы с кольцевым резонатором.
Принцип действия
Принцип работы волновых твердотельных гироскопов (ВТГ) основан на
использовании инертных свойств упругих волн, возбуждаемых в виде
радиальных колебаний на второй моде в полусферическом, цилиндрическом
или кольцевом резонаторах [13,26, 34].
Эффект инертности упругих волн во вращающихся осесимметричных
телах в 1890 г. открыл теоретически и подтвердил экспериментально Г.Х.
Брайен. Он показал, что при вращении вибрирующей оболочки в результате
действия инерционных сил Кориолиса происходит расщепление собственной
частоты основной формы изгибных колебаний ее стенок, что приводит к пре-
цессии стоячей волны, как относительно оболочки, так и в инерциальном
пространстве.
Возникновение моментов сил инерции Кориолиса, вызывающих
прецессию стоячей волны, иллюстрируется на рис. 4.18.
Рис. 4.18. К пояснению прецессии стоячей волны:
а вибрирующий резонатор; б - вращающийся резонатор
При вращении вибрирующего кольца с угловой скоростью £1 относительно
оси чувствительности, которая перпендикулярна плоскости кольца, к каждой
элементарной массе в тт. Л. В, С, D приложены силы инерции Кориолиса
Fka* FkB’ Fkc, Fkd, как реакция на ускорения Кориолиса аКА, акв, акс,
aKD, являющиеся следствием наличия линейных виброскоростей Уд, Vp, Vf,
VD и переносной скорости £1. Результирующий момент от разности пары сил
Fka^ Fkb, Fkc и Fkd и вызывает прецессию (вращение) стоячей волны
относительно резонатора и в инерциальном пространстве, т.е. узлы и пучности
прецессируют относительно резонатора и инерциального пространства
(рис. 4.19).
134
Рис. 4.19. Прецессия стоячей волны во вращающемся резонаторе,
а положение стоячей волны при неподвижном резонаторе; б - положение
стоячей возны при вращающемся резонаторе; О скорость вращения; 3
угол прецессии стоячей волны; а угол поворота резонатора
Режим работы BTI в качестве датчика угловой скорости (ДУС) - ВТГ-
ДУС, или в качестве интегрирующего гироскопа (ИГ) - ВТГ-ИГ зависит от
способа возбуждения колебаний резонатора. Позиционное возбуждение
(рис. 4.20а), при котором на пару противоположных электродов подается
переменное напряжение с частотой, в два раза меньшей собственной частоты
основной формы, обеспечивает режим работы ВТГ-ДУС. При 0 = 0
ориентация стоячих волн в резонаторе постоянна и определяется ориентацией
3(1 электродов позиционного возбуждения 3 = S0. Следовательно, стоячая
волна «привязана» к резонатору. При вращении основания ориентация стоячей
волны относительно резонатора определяется выражением:
ю0
где Q - — добротность резонатора; коэффициент затухания
(демпфирования) материала резонатора; К - масштабный коэффициент
резонатора; ю0 - собственная частота колебаний резонатора.
Режим ВТГ-ИГ обеспечивается параметрическим возбуждением
резонатора (рис. 4.206). кромка которого окружена кольцевым электродом,
образующим цилиндрический конденсатор. К конденсатору приложено
напряжение с амплитудой L/o и частотой Л., близкой к частоте собственных
колебаний резонатора. Ориентация стоячей волны относительно резонатора
определяется выражением:
3=3d-KJQt)A. (4.3 В
0
где К - масштабный коэффициент резонатора; 30 _ начальная ориентация
стоячей волны.
135
Рис. 4.20. Схемы позиционного (а) и параметрического (б) возбуждения
Таким образом, вращение ре юнатора в инерциальной системе координат
можно рассматривать как причину уменьшения амплитуды первичной
вибрации и появление новой составляющей колебаний (вторичная волна),
пучности которой расположены под углом 45° относительно пучностей
первичной волны, т.е. эти пучности совпадают с узлами первичной вибрации.
Наложение этих составляющих приводит к образованию результирующей
диаграммы пучности, которая расположена под углом -28° относительно
первоначальной диаграммы вибрации.
ВТГ-ИГ является более перспективным чувствительным элементом, чем
ВТГ-ДУС по причине более высокой точности. Однако, реализация
параметрического возбуждения кольцевого резонатора весьма затруднительна.
Материал резонаторов может быть различный: металл различных марок,
кварцевое стекло, кремний и др.
Передаточная функция ВТГ с позиционным возбуждением в первом
приближении может быть принята равной масштабному коэффициенту
гироскопа.
4.2.4. Конструкция и технические характеристики ВТГ
ВТГ с кольцевым резонатором могут изготавливаться по технологиям
МЭМС и, аналогично акселерометрам, в интегральном исполнении, резонатор с
преобразователем перемещений - по технологиям МЭМС а преобразователи
возбуждения (ПВ) и сервисная электроника - по обычным технологиям [34].
Вариант интегрального исполнения ВТГ с кольцевым резонатором и
магнитоэлектрическим ПВ фирмы BAE Systems показан на рис. 4.21.
136
Рис. 4.21. BIT фирмы BAE Systems с кольцевым резонатором:
а - принципиальная схема чувствительного элемента микрогиро< копа,
б - фрагмент конструкции кольцевого резонатора; в принципиальная схема
магнитоэлектрического преобразователя силы; 1 кольцевой резонатор; 2 -
упругий элемент подвеса; 3 - кремниевая пластина; 4 — контактная площадка;
5 проводник; б - верхний и нижний полюсные наконечники; 7 - стеклянная
подложка; 8 — плата с электроникой; 9 — корпус; 10 — крышка
Чувствительный элемент (ЧЭ) (рис. 4.21а) выполнен на кремниевой
пластине 3 (размером (10x10) мм), в которой размещен кольцевой резонатор
(кольцо) диаметром 6 мм и сечением (120x100) мкм, который с помощью
восьми упругих элементов 2 подвеса сечением (60x100) мкм соединен с
пластиной. ЧЭ изготовлен методом плазменного изотропного травления.
Токопроводящие проводники нанесены только на верхнюю поверхность, а
контактные площадки 4 для соединения с проводами нанесены на пластине.
Имеется восемь идентичных проводящих контуров, каждый из которых
образует цепочку: контактная площадка - упругий элемент подвеса - 1/8 длины
кольца упругий элемент подвеса - контактная площадка. Таким образом,
каждый упругий элемент содержит два проводника, по одному от каждого
смежного контура, в дополнение к третьему проводнику 5, который находится
137
между ними, чтобы минимизировать емкостную связь. Кремниевая пластина
имеет связь, обеспечивающую «земляной» слой.
Фрагмент конструкции кольца с упругим элементом подвеса и частью
кремниевой пластины показан на рис. 4.216, на котором хорошо
просматриваются соотношения между размером кольца и элементами его
подвеса.
Кремниевая пластина 3 анодно соединена со стеклянной подложкой 7
(рис 4.21 в), которые температурно согласованы между собой. На подложке
расположена также магнитная система, включающая кобальт-самариевый
магнит (N-S) и магнитопровод из двух полюсных наконечников 6, в зазоре
между которыми находится кольцо 1. Сервисная электроника расположена на
ситалловой плате 8. Вся конструкция собрана в герметичном коваровом
корпусе 9 с крышкой 10.
Магнитоэлектрический преобразователь совместно с электроникой
обеспечивает эллиптическую моду колебаний кольца на частоте 14,5 кГц его
механического резонанса. Деформации кольца за один период колебаний
создаются следующим образом. В первый полупериод направление токов в
секторах I и V (показаны стрелками) во взаимодействии с магнитным потоком
создают (по правилу левой руки) растягивающие силы, а в секторах III и VII -
сжимающие силы. Во втором полупериоде характер сил меняется на
противоположный.
Заметим, что проводящие сектора VI и VIII, вибрирующего под действием
преобразователя силы кольца, играют роль якоря индукционного
преобразователя перемещений.
Случайный дрейф гироскопа оценивается в ~0,2 град/с Гироскоп
виброустойчив. а также выдерживает ускорения порядка 10000 g.
Предположительная область применения - в системах управления
высокоманевренных летательных аппаратов, в том числе в БПЛА. Общий вид
ВТГ приведен на рис. 4.22.
Можно указать также на ВТГ. который широко используется в
автопилотах радиоуправляемых моделей самолетов и имеет характеристики,
приведенные в таблице 4.5.
Рис. 4.22. Внешний вид ВТГ с ко туевым резонатором фирмы BAE Systems
138
Таблица 4.5. Характеристики ВТГ CRS03-01 с кольцевым резонатором
Характеристика, размерность Значение
Измеряемый диапазон, % ±100
Масштабный коэффициент, мВ/(°/с) 20
Напряжение питания, В 5,0±0,25
Смещение, % от напряжения питания 50
Начальная ошибка смещения, мВ ±60
Вариация смещения по темпера! > ре. мВ ±60
Вариация масштабного коэффициента по температуре, % ±3
Начальная точность масштабного коэффициента, % ±1
Нелинейность, “о от измерительного диапазона <0,5
Шум покоя (среднеквадратичн.), мВ <1
Рабочая температура, °C -40 — +85
Полоса пропускания, Гц >10
Время включения, с <0,5
Утечка тока, мА <50
Входной импеданс, Ом 100
Максимальный выходной ток, мА >0,5
Чувствительность по перекрестной оси, % <1
Габариты, мм 29x29x18 4
Устойчивость ударная, g 99
Страна-производитель Япония |
Характеристики ВТГ с кольцевым резонатором вполне приемлемы для
использования их в составе БИНС малоразмерных БПЛА, интегрированных со
спутниковыми навигационными системами и другими источниками
информации.
4.2.5. Кориолисовые вибрационные гироскопы. Принципы действия
Кориолисовые вибрационные гироскопы (КВТ) относят к системам, в
которых энергия первичных (вынужденных) колебаний вибрирующих
элементов (или элемента) резонатора при появлении переносной угловой
скорости резонатора преобразуется в энергию вторичных колебаний, которые
содержат информацию об измеряемой угловой скорости. Это преобразование
осуществляется вследствие воздействия на резонатор сил (или моментов)
инерции Кориолиса при вращении резонатора с переносной угловой скоростью,
вектор которой перпендикулярен вектору (векторам) мгновенной (линейной)
скорости вибрирующих масс резонатора. Первичные колебания называют
также режимом движения (РД), или движением по координате возбуждения, а
вторичные - режимом чувствительности (РЧ), или движением по координате
выходного сигнала [26, 31, 34].
139
Резонатор вместе с устройствами, обеспечивающими РД и измерение
параметров колебаний вибрирующих масс в РЧ, является чувствительным
элементом (ЧЭ) КВГ. Резонаторы могут иметь различную конфигурацию. На
рис. 4.23 показаны принципиальные схемы резонаторов, состоящих из
стержневых элементов. На рис. 4.23а,б показан резонатор, состоящий из двух
вибрирующих стержневых элементов Стержни в РД приводятся в
противофазное движение в плоскости YZ (рис. 4.23а). Каждый элемент
стержня массой dm перемещается с линейной скоростью V. При вращении
резонатора со скоростью Q вокруг оси Z для направления векторов,
соответствующих рис. 4.23а, возникает ускорение Кориолиса - 2KQ и
соответствующие ему силы инерции FK =2VCldm. Силы инерции Кориолиса
суммируются по всей массе каждого из стержней и приводят к их изгибу в
плоскости XZ (рис. 4.236).
При изменении фазы генерируемых колебаний на противоположную,
изменится и направление изгиба вынужденных колебаний стержней в плос-
кости XZ Таким образом, вынужденные колебания стержней в плоскости XZ
содержат информацию об угловой скорости вращения основания. Очевидно
также, что генерировать колебания стержней можно и в плоскости XZ, тогда
информационные колебания ветвей будут происходить в плоскости YZ.
Линейные ускорения, включая вибрацию корпуса прибора, приводят к
зашумлению выходного сигнала.
Конфигурация резонатора на рис. 4.23а,б напоминает камертон, поэтому
КВГ с подобными резонаторами называют также камертонными гироскопами.
На рис. 4.23в показан резонатор, представляющий собой сдвоенный камертон.
Действие сил инерции Кориолиса FK в ответ на перемещение стержней силами
возбуждения FB и измеряемую скорость Q аналогично рис. 4.23а,б.
На рис. 4.23г показан ЧЭ, резонатор которого выполнен по кварцевой тех-
нологии и состоит из четырех стержней прямоугольного сечения, имеющих
общее основание, которое через виброизолирующую ножку связано с корпу-
сом. На наружных гранях стержня расположены восемь пьезоэлектрических
преобразователей силы и восемь преобразователей перемещений.
Преобразователи силы создают два возможных режима колебаний,
аналогичных показанным на рис. 4.23а. Частоты колебаний стержней в
резонаторе идентичны. На рис. 4.23д показана схема ЧЭ, который состоит из
стержня 2 в корпусе 1 и пьезоэлементов 3, 4, 5, 6, нанесенных на гранях
стержня. Стержень в поперечном сечении может иметь и другую форму,
например, равностороннего треугольника. КВГ с подобными резонаторами
называют также стержневыми гироскопами.
Стержень с обеих сторон имеет уменьшенные сечения, которые можно
считать упругими «точками» крепления стержня к корпусу. Пара
пьезоэлементов «3-5» служит дтя возбуждения колебаний (первой формы) в
плоскости YZ. Каждый элемент стержня при этом получает линейную скорость
Vy. Если конструкцию врашать вокруг оси Z со скоростью Q, возникают силы
инерции Кориолиса, которые вызывают колебания стержня в плоскости XZ с
140
линейными скоростями Vx каждого элемента. При этом один из пары
пьезоэлементов «4-6» служит для измерения этих колебаний, а другой может
быть включен в контур демпфирования колебаний. С помощью электронной
цепи фиксируется как амплитуда колебаний, пропорциональная скорости Q,
так и фаза, регистрирующая направление вращений вокруг оси Z.
Наряду с резонаторами, в которых вибрирующие элементы выполнены в
виде стержней, применяются резонаторы, которые представляют вибрирующие
элементы - инерционные массы (ИМ) на упругом подвесе.
По виду движения инерционных масс в РД и РЧ различают гироскопы LL-
типа (linear-linear), или LL-гироскопы; гироскопы RR-типа (rotare-rotare), или
RR-гироскопы и гироскопы LR-типа, или LR-гироскопы. В LL-гироскопах
инерционные массы в РД и РЧ совершают поступательные перемещения, в RR-
гироскопах - вращательные перемещения, в LR (RL)-rapocKonax различные
комбинации поступательных и вращательных перемещений инерционных масс.
а)
Рис. 4.23. Резонаторы и ЧЭ камертонных и стержневых КВГ-
а б- РД и РЧ камертонных резонаторов; в - сдвоенный камертонный
резонатор; г ЧЭ с камертонными резонаторами; д - стержневой ЧЭ КВГ;
1 - корпус; 2 — стержень; 3, 4, 5, б пьезоэлементы
Резонаторы гироскопов LL-типа могут содержать одну или две ИМ. На
рис. 4.24а показана принципиальная схема гироскопа LL-типа с одной
141
инерционной массой 1. к< горая с помощью упругих элементов 2 подвеса
смонтирована в рамке 3, которая, в свою очередь, с помощью упругих
элементов 4 подвеса смонтирована в корпусе 5. РД с вибрационной скоростью
V инерционной массы в направлении оси X обеспечивается, например, с
помощью электростатического привода (не показан). Перемещения ИМ РЧ в
направлении оси у фиксируются преобразователями 6, например, емкостного
типа Принцип работы гироскопа иллюстрируется на рис. 4.246,в.
На рис. 4.246 показано положение ИМ, сместившейся в положительном
направлении оси X в соответствии с направлением вектора V линейной
скорости ИМ в РД. При появлении переносной скорости Q вращения
основания вокруг оси Z возникает ускорение Кориолиса ак и
соответствующая ему сила инерции FK = 2mVCl (т - масса ИМ), смещающая
рамку вместе с ИМ в положительном направлении оси у (режим РЧ). На
рис. 4.24в показано положение рамки с ИМ при противофазном движении ИМ
Таким образом, рамка с ИМ в РЧ совершает вибрационное движение в
направлении оси у, параметры которого содержат информацию об измеряемой
угловой скорости основания.
Рис. 4.24. К пояснению принципа работы гироскопа LL-muna с одной
инерционной маа ой. а принципиальная схема гироскопа; б, в фазы
движения элементов; 1 ИМ; 2, 4 -упругие элементы подвеса; 3 рамка;
5 корпус; 6 преобразователь перемещений
Фирма Analog Devices выпускает гироскопы серии ADXRS, изготав-
ливаемые по технологиям МЭМС, принцип работы которых соответствует рис.
4.24.
Принципиальная схема гироскопа RR-типа, так называемого рамочного
КВГ разработанная в «Draper Laboratory» (США), показана на рис. 4.25.
142
Рис. 4.25. Принципиальная схема рамочного гироскопа RR-muna.
1,2 наружная и внутренняя рамки; 3,4-упругие элементы (торсионы); 5 -
дополнительная масса; 6 — основание
Гироскоп образован соединением двух рамок, конструктивно
выполненных в виде наружного 1 и внутреннего 2 плоских элементов,
соединенных между собой и с основанием 6 при помощи торсионов 3 и 4, оси
которых перпендикулярны друг другу. Для увеличения инерционности на
внутреннем элементе расположена дополнительная масса 5 С помощью
электростатических преобразователей силы наружному элементу 1 сообщаются
первичные угловые колебания относительно оси Y (РД). Эти колебания через
торсионы 3 передаются и на внутренний элемент, сообщая ему колебательный
кинетический момент Н. При вращении прибора со скоростью О
относительно оси Z, возникают моменты сил Кориолиса HQ, которые
заставляют колебаться внутренний элемент относительно оси X (РЧ).
Амплитуда этих колебаний, измеряемая расположенным под внутренним
элементом емкостным преобразователем, будет пропорциональна измеряемой
угловой скорости.
КВГ, выполненные по технологии МЭМС, можно определить как
микромеханические гироскопы (ММГ).
4.2.6. Уравнения движения и передаточные функции
микромеханических гироскопов
Векторы сил, действующих в микромеханическом гироскопе (ММГ) LL-
типа, соответствующем рис. 4.24, показаны на рис. 4.26.
143
Рис. 4.26. К выводу уравнений движения ММГ LL-типа
С корпусом ММГ связана система координат оху, начало которой
совмещено с геометрическим центром корпуса. Режим движения инерционной
массы т вдоль оси х обеспечивается приводом, генерирующим силу
FX=FO sin/Д (Fo, р амплитуда и частота силы). Для начальной фазы
движения вектор силы совпадает с положительным направлением оси ох. Под
действием силы Fx масса т смещается на величину х и имеет скорость х - V
и ускорение г. В силу этого в отрицательном направлении оси х возникают
силы:
инерции Рю - тх;
жесткости пружин Fm - Gxx (Gx - жесткость пружины в направлении оси
х);
демпфирования Fox=koxx (кох - коэффициент демпфирования в
направлении оси х ).
При изменении фазы силы Fx направления векторов указанных сил
меняются на обратное.
При появлении угловой скорости Q вращения ММГ вокруг оси z,
перпендикулярной плоскости ху, возникает ускорение Кориолиса аку =2ОК в
положительном направлении оси у и соответствующая ему противоположно
направленная сила FKy =2m£lV, приложенная к центру масс ИМ (т.О|). Под
действием этой силы ИМ и рамка смещаются на величину у, приобретают
скорость у и ускорение у. Этим параметрам соответствуют силы:
инерции Fuy =(т-1-пц)у (пц - масса рамки):
жесткости пружин Fny = Gyy (Gv - жесткость пружины в направлении оси
У)-
демпфирования Fdy = кдуу (кду - коэффициент демпфирования в
направлении оси у ).
144
При изменении фазы силы Fx направления векторов указанных сил
поменяются на противоположное.
Очевидно, что в положительном направлении оси х будет действовать
ускорение Кориолиса акх = 2Пу и соответствующая ему сила FKX = 2т£>у
направленная в отрицательную сторону оси х, т.е. против силы Fx. Параметры
привода должны обеспечить выполнение условия Fx»FKX. На этом
основании силу F^ можно из дальнейшего рассмотрения исключить.
В соответствии с методом кинетостатики суммируем векторы сил со
своими знаками, приравниваем их нулю и получаем уравнения движения
гироскопа:
тх + кдхх + Gxx = Fq sin pt;
(m + /И]) v + kdv у + 0уУ = 2mV£2.
(4.27)
Из первого уравнения системы может быть найдена величина х,
амплитуду которой после завершения процесса раскачки инерционной массы
т можно считать постоянной - V.
Gy
т + гщ
где со>о =
направлении оси у
Второе уравнение системы (4.27) в этом случае может быть представлено в
форме:
о
у + 2^ vOy + u>vOy =-----О, (4.28)
m + mi
собственная частота колебаний ИМ с рамкой в
Е =------7^----г относительный коэффициент
гсМ/м + Ю])
демпфирования ИМ с рамкой в направлении оси у.
В соответствии с (4.28) передаточная функция ММГ по
измеряемой угловой скорости имеет вид:
,г (5)=4) ,
У TyS1 + 2^vTys + \
отношению к
(4.29)
„ 2.mV Т. 1 d
где К; Т =-----------; s = —
Gy у dt
В соответствии с (4.29) ММГ является колебательным звеном и в
установившемся режиме колебаний координата у перемещения рамки имеет
амплитуду, пропорциональную скорости вращения основания у - КуП.
Следовательно, ММГ LL-типа является датчиком угловой скорости.
Векторы сил, действующих в ММГ RR-типа, соответствующем рис. 4.25,
показаны на рис. 4.27.
145
Рис. 4.2л К выводу уравнений движения ММГ RR-muna
С корпусом связана система координат oxyz, начало которой совмещено с
его геометрическим центром. С наружной рамкой связана система координат
ox^Zj, положение которой относительно системы координат oxyz
определяется углом у. Колебания рамок с угловыми скоростью у и ускорением
у соответствует режиму движения и обеспечиваются приводом, развивающим
момент Му = Afgsinpt (Mq, р - амплитуда и частота момента) относительно
оси оу. Начальной фазе движения рамок по координате Y соответствует
разворот против часовой стрелки. Начальной фазе движения соответствует
кинетический момент H = Jyey (Jye - момент инерции внутренней рамки
относительно оси оу), направленный в положительную сторону оси оу. В
отрицательную сторону оси оу направлены моменты:
сил инерции рамок Миу =(jye+JyH)y (JyH - момент инерции наружной
рамки относительно оси оу);
сил демпфирования М^, = Ьуу (Ьу - коэффициент демпфирования вокруг
оси оу);
упругих сил элементов подвеса Mny=Gyy (Gy - жесткость упругих
элементов подвеса наружной рамки на кручение относительно оси у).
При появлении угловой скорости вращения корпуса ММГ вокруг оси oz
возникает гироскопический момент Мгх = HQ = JyeyQ. Этот момент имеет
проекцию на ось oxf. М^ =Maxcosy *HQ. Момент Мгх^ вызывает разворот
внутренней рамки относительно наружной на угол а. На рис. 4.27 положение
системы координат ОХ2У2?2’ связанной с внутренней рамкой, соответствует
146
начальной фазе движения внутренней рамки с угловыми скоростью d и
ускорением а. В отрицательную сторону оси ох\ направлены моменты:
сил инерции = Jaix (Ja момент инерции внутренней рамки
относительно оси ох( );
сил демпфирования Мдх^ =Ьаа (Ьа - коэффициент демпфирования
внутренней рамки относительно оси ОХ]);
упругих сил элементов подвеса = Gua (Ga — жесткость упругих
элементов подвеса внутренней рамки на кручение относительно оси ох\).
В следующий полупериод работы привода вектор момента Му будет
направлен в отрицательную сторону оси оу и, соответственно, все векторные
величины по осям оу и ОХ| изменят свои знаки на противоположные. Таким
образом, в РД и РЧ рамки будут совершать колебательные движения
В соответствие с методом кинетостатики суммируем векторы моментов
сил со своими знаками, приравниваем их нулю и получаем уравнения движения
гироскопа:
(Л«+К+М+Gyy=s,n рг>] 3
Jad + baa + Gaa = Н£1.
Из первого уравнения системы (4.30) может быть найдена величина у,
амплитуд}7 которой после окончания переходного процесса раскачки рамок
можно считать постоянной. Второе уравнение системы (4 30). имея в виду
постоянство величины у, может быть записано в виде
a + 24acoaOd + C0a0a = ,
da
(4 31)
где гоу0 =
собственная частота колебаний внутренней рамки
ь ^а
относительно оси oxi, =----54—«
2“а0Л
демпфирования внутренней рамки относительно оси oxj.
В соответствии с (4.31) передаточная функция ММГ по отношению к
измеряемой угловой скорости имеет вид
^«(0=^-^-?---------------------------------------’
«(5)
относительный коэффициент
a
(4.32)
„ Н „ 1 d
где Ка= — ; Та =------, —.
Ga “«() dt
В соответствии с (4 32) ММГ описывается колебательным звеном и в
установившемся режиме амплитуда колебаний внутренней рамки
пропорциональна скорости вращения основания, на котором он установлен:
147
a = KaCl = H£l/Ga.
Следовательно, ММГ RR-типа по рис. 4.25, называемый обычно
рамочным, является [атчиком угловой скорости.
4.2.7. Конструкция и технические характеристики кориолисовых
вибрационных гироскопов
Фирма Sistron Donner выпускает гироскопы серии GiroChip с резона гором
по схеме рис. 4.23а,б. Использование пьезоэлектрического материала
существенно упростило конструкцию и обеспечило температурную
стабильность и длительный срок службы. Чувствительный элемент вместе с
электроникой встроены в жесткий корпус. Прибор запитывается постоянным
напряжением и имеет высокоуровневый аналоговый выходной сигнал в
широкой полосе пропускания. Общий вид прибора и его габариты показаны на
рис. 4.28 [ресурсы сети Интернет].
Рис. 4.28. Датчик угловой скорости GyroChip.
а - общий вид; б — чертеж с габаритами и присоединительными размерами
Гироскопы при напряжении питания ±5 В (±3%) потребляют мощность
меньше 0,8 Вт. Характеристики приборов серии GiroChip приведены в табл. 4.6.
Датчик угловой скорости имеет широкую сферу применения, в том числе и для
навигации БПЛА с применением GPS
С аналогичным чувствительным элементом выпускается датчик угловой
скорости BEI GiroChip™ HORIZON.
148
Таблица 4.6. Характеристики КВГ серии GiroChip
Характеристика Значения
Стандартные диапазоны, 7сек. 50 100 200 500 1000
Полный выходной сигнал, В ±2,5 ±2,5 ±2,5 ±2,5 ±2,5
Крутизна характеристики, мВ/(°/сек) 50 25 12,5 5 2.5
Полоса пропускания, Гц >60 >60 >60 >60 >60
Дрейф (заводской), 7с <2,0 <2,0 <3,0 <5,0 <10,0
Выходной шум (0... 100 Гц), °Д/Гц <0,011 <0,012 <0,014 <0,02 <0,03
Фирма Sistron Donner разработала гироскоп QRS 11 (Quartz Rate Sensor),
резонатор которого изготовлен из монолитного кварца и представляет собой
сдвоенный камертон (по схеме рис. 4.23г).
Сдвоенный резонатор позволяет уменьшить взаимодействие стержневых
элементов. Масса QRS 11 составляет 60 г при габаритах (040x16) мм.
По аналогичной схеме фирма SAGEM SA (Франция) разработала КВГ
Quapason, чувствительный элемент которого показан на рис. 4.29а.
Разработаны две модели гироскопа с размерами (028Х6О) мм и
(015x30) мм Резонатор может работать с различными электронными схемами,
обеспечивающими режим измерения угловой скорости, либо угла поворота.
Характеристики гироскопа в режиме датчика угловой скорости следующие:
динамический диапазон измерений - 250 град/с; время запуска - 0,5 с;
среднеквадратическая стабильность нуля (температура и старение) - 0,1 град/с;
краткосрочная стабильность нуля - <10 град/с; среднеквадратичный шум в
статическом режиме (0-100 Гц) - 0,02 град/с: полоса пропускания — 100 Гц;
стабильность масштабного коэффициента (температура и старение) - 0,3%.
Три гироскопа QRS11 (каналы угловой скорости) и три акселерометра
(каналы ускорений) входят в состав инерциального блока Motion Pack™, общий
вид которого в габаритах (76x76x90) мм показан на рис. 4.296. При напряжении
питания 45 В потребляемая мощность 7 Вт. Характеристики блока приведены в
табл. 4.7.
Инерциальный модуль имеет расширенные возможности использования по
сравнению с приборами GiroChip и MotionPak, особенно для навигационных
систем, в том числе - для БПЛА.
149
Рис. 4.29. Общие виды:
а датчик угловой скорости Qapason; б инерциальный модуль MotionPack
Таблица 4.7. Характеристики инерциального модуля MotionPack
Характеристика Значение
Каналы угловой скорости Каналы ускорении
Стандартные диапазоны 1,2, 5, 10 g
Полный выходной сигнал ±2,5 В ±2,5 В
Калибровка крутизны характеристики (заводск.) <1% <1%
Температурная зависимость крутизны характеристики <0,03 %/°С <0,03 %/°С
Полоса пропускания >60 Гц 0... 500 Гц
Линейность <0,05 % от полного диапазона <25 MKg/g2
Дрейф (заводск.) <2,0 % <±12,5 Mg
Температурная чувствительность <±3 % при 22°С -100 MKg/°C
Долгосрочная термостабильность О год) <0,2 7с <1,0 MKg
Привязка к основанию (каждая ось) <1° <1°
Порог/ разрешение <0,094 7с <10 MKg
Рабочая температура -40 ° С.. .+80°C
Фирма Murata (Япония) выпускает две модификации пьезоэлектрических
вибрационных гироскопов: ENV и ENC. ЧЭ гироскопов этих типов
представляет собой призму, подвешенную на растяжках и имеющую сечение в
форме равностороннего треугольника. Возбуждение колебаний призмы и съем
сигнала осуществляются аналогично схеме гироскопа по рис. 4.23д.
На боковых гранях этой призмы находятся пьезоэлементы для
возбуждения первой формы изгибных колебаний призмы и съема сигналов.
Призма выполнена из элинвара, имеющего почти нулевой температурный
150
коэффициент модуля упругости, что позволило уменьшить температурную
зависимость характеристик гироскопа. Два преобразователя осуществляют
возбуждение (на частоте около 25 кГц) первичных и измерение вторичных
колебаний, а третий служит для создания обратной связи.
В таблице 4.8 приведены характеристики гироскопов Girostar ENV-05D-02
и ENC-05S, выполняющих функцию датчика угловой скорости.
Таблица 4.8. Характеристики КВГ серии ENV и ENC фирмы Murata
Характеристика, размерность Условия ENV-05D-02 ENC - 05S
Стандартные диапазоны, град/с ±80 ±90
Частотный диапазон, Гц — — 0-50
Выходной сигнал В Нулевая входная угловая скоростт +(2,2+ 3,8) —
Напряжение питания. В — +(4,5 - 5,5) +5,0 ±0.1%
Потребляемый ток, мА, max При U=5,0 В 15 10
Крутизна характеристики, мВ/град/с (-10^+60)ос (-30-+80) 20 + 24 19-25 0 8 ± 20%
Дрейф нуля, град/с (-30 - +80) °C 9,0 —
Линейность в % от диапазона Максимальная угловая скорость; Температура (20+25) °C +0.5 Менее 5,0
Уровень шума, мВ Шум 7кГц 20,0 —
Масса, г, max; размеры, мм — 50; 18x30x41 3,5; 20x13x7
Гироскопы ENC, ENV предназначены в основном для автомобильных
применений и для направления спутниковой антенны на подвижных объектах.
При наличии коррекции они могут быть использованы в БПЛА с ограниченным
временем полета.
Фирма Analog Devieces США разработала и выпускает серию ADXRS
КВГ-типа на диапазон до 300 7с (рис. 4.30а). Гироскоп ADXRS представляет
собой интегральную микросхему (рис. 4.306). выполненную на одном
кристалле кремния, которая содержит две аналогичные микроструктуры ММГ,
каждая из которых аналогична схеме гироскопа на рис. 4.24.
151
В микроструктурах направления колебаний ИМ в режимах движения и
чувствительности взаимно перпендикулярны. Это дает возможность избежать
влияния постоянных и виброускорений на выходной сигнал гироскопа.
Высокочастотный сигнал, полученный с емкостных преобразователей
перемещений, поступает на каскады усиления и демодуляции, преобразующие
его в выходное напряжение, пропорциональное измеряемой угловой скорости.
В состав микросхемы входит датчик температуры для компенсации
температурных погрешностей и калибровки, а также прецизионный источник
опорного напряжения.
Толщина микромеханической структуры 6 мкм. Корпус гироскопа не
вакуумирован. Масса гироскопа менее 1 г, а размер керамического корпуса
(7x7x3) мм. Случайный дрейф составляет примерно 0,3 град/с
Рис 4.30. Гироскоп серии ADXRS:
а - общий вид; б - кристалл гироскопа с блоками электроники (увеличено)
Характеристики ММГ серии ADXRS приведены в таблице 4.9.
Таблица 4.9. Характеристики ММГ серии ADXRS
Характеристика, размерность ADXRS 150 ADXRS 300 ADXRS 401 ADXRS 610 ADXRS 612 ADXRS 614
Диапазон измеряемых угловых скоростей, град/с ±150 ±300 ±75 ±300 ±300 ±75
Чувствительность, мВ/% 12,5 5 15 6 7 25
Нелинейность, % 0,1 0,1 0,1 0,1 0,1 0,1
Нулевой сигнал, В 2,5 2,5 2,5 2,5 2,5 2,5
Т емперату рный дрейф нулевого сигнала, мВ max± 300 - -
Время включения мс 35 35 35 50 50 50
152
окончание таблицы 4 9
Чувствительность к линейному ускорению, %/g 0,2 0,2 0,2 0,1 0,1 0,1
Нулевой сигнал от напряжения питания, %/В 1 1 -
Плотность шума, °с/7п? 0,05 0,1 ЗмВ (СКО) 0,05 0,06 0,04
Коэффициент передачи датчика температуры, мВ/°К 8,4 8,4 8,4 9 9 9
Т емпературный дрейф, мВ 5 5 - - - -
Рабочее напряжение питания, В 5 5 5 5 5 5
Потребляемый ток, А 6 6 6 3,5 3,5 3,5
Диапазон рабочих температур, °C -40- +85 -40- +85 -40- +85 -40- +105 -40- +105 -40- +105
Гироскопы ADXRS имеют стабильный выходной сигнал при ускорениях
до 2000 g и могут использоваться как автомобильные датчики переворота.
Гироскопы серии ADXRS можно применять в системах ориентации и в
интегрированных с GPS/ГЛОНАСС системах навигации БПЛА.
Разработкой КВГ, помимо перечисленных, занимаются фирмы Epson, О-
Navi. Watson, и др., а также отечественные разработчики: РПКБ (г. Раменское),
МИЭТ (г. Зеленоград). ОАО Концерн ЦНИИ «Электроприбор» (г. С.-
Петербург) и др.
4.3. Датчики давления для измерения высоты и скорости полета
Принцип действия и технические характеристики
Высотой полета называется расстояние до летательного аппарата,
отсчитанное по вертикали от некоторого уровня, принятого за начало отсчета
(рис. 4.31) [7].
153
Рис. 4.31. Классификация высот почета по началу отсчета
Истинная высота Нист отсчитывается от точки земной поверхнос ги,
находящейся под летательным аппаратом, относительная Нотн — от условного
уровня (уровня аэродрома, цели и т.д.), абсолютная Набс — от уровня моря,
высота эшелона Нзш - от условного уровня, который соответс гвует
стандартному атмосферному давлению 760 мм.рт.ст.
На практике высота полета измеряется барометрическим и
радиотехническим методами В малоразмерных БПЛА применяется
определение относительной и абсолютной высот барометрическим методом.
Барометрический метод основан на явлении изменения атмосферного
давления с высотой Зависимость статического давления воздуха от высоты (до
11000 м) выражается формулой
РЯ=РО 1-^
t J-f
1^п11отн
гр ’
Ро
_1
^гр’
откуда следует выражение для вычисления относительной высоты полета
потн I 1 - 5
'гр
где R - газовая постоянная воздуха, Р^, Рц - атмосферное давление на
измеряемой высоте и на уровне аэродрома, Tq - температура воздуха на уровне
аэродрома, tgp - температурный градиент атмосферы.
Связь начал отсчета абсолютной высоты Hn(ir и относительной Нпти,
L«(zC t/irirt '
определяемой барометрическим методом, осуществляется перед стартом
Наиболее распространенным методом измерения воздушной скорости
является аэродинамический, основанный на измерении давления набегающего
потока воздуха - скоростного напора. Величина скоростного напора
определяется скоростью движения тела и плотностью воздуха:
V2
Я=Рн~^
154
откуда определяется воздушная скорость:
Fw 1—gKT,
\ н
где р// - массовая плотность воздуха на высоте полета g - ускорение силы
тяжести Т - температура воздуха на высоте полета.
Основой измерителей высоты (высотомер) и воздушной скорости
(скоростемер) служат датчики абсолютного и дифференциального давления
принципиальные схемы которых приведены на рис. 4.32 [34].
Рис. 4.32. Принципиальные схемы датчиков давления'
а - дифференциальный, б — абсолютный ОК- образцовая камера,
1 мембрана, 2 — корпус 3 подложка
Датчики давления, выполненные по технологиям МЭМС, состоят из
мембраны 1, выполненной из одного кристалла с корпусом 2, соединенного с
подложкой 3. Дифференциальный датчик давления (рис. 4.32а) открыт с одной
стороны, причем давление />j должно быть больше, чем р2- Давление р}
создается скоростным напором воздуха. В абсолютном датчике давления
(рис. 4.326) имеется образцовая камера (ОК), относительно давления в которой
и выполняются измерения. Если, например, в ОК будет находиться воздух под
давлением, соответствующем уровню аэродрома, то может быть измерена
высота Нотн.
В общем случае датчик давления, выполненный по технологиям МЭМС,
можно определить как микромеханический датчик давления (ММДД). ММДД
состоит из кремниевой мембраны, на которой сформирована
полупроводниковая мостовая резистивная структура. Одно из плеч моста
находится в зоне наибольшей деформации мембраны. Сигнал разбаланса моста,
пропорциональный приложенному давлению, поступает на внешние выводы
или схему обработки. Конструкция датчика принципиально зависит от среды, в
которой он работает. Для сухого газа (воздух) обычно применяют
пластмассовые корпуса, гладкие штуцеры и подводящие пластиковые или
резиновые трубки небольшого диаметра.
Наиболее распространены ММДД фирмы Honeywell и Motorola В таблице
4.10 приведены параметры ММДД фирмы Honeywell, которые могут работать в
диапазоне температур от 40 °C до +85 °C [ресурсы сети Интернет].
155
Таблица 4.10. Основные параметры датчиков давления фирмы Honeywell
Наименование Макс, рабочее давление, кПа Макс, допустимое давление, кПа Напряжение питания, В Выходное напряжение, мВ Чувствительность, мВ/кПа Компенсация, калибровка Линейность, % от выходного напряжения
24РСЕ 3,5 138 10,0 ±35 ±10 нет 0,25
24РСА/26РСА 6,9 ±45 ±6,5 нет/да
24РСВ/26РСВ 34 ±115 ±3,3
24РСС/26РСС 103 310 ±225 ±2,2
24PCD/26PCD 24PCF/26PCF 207 690 410 1380 . 330 ±225 ±1,6 ±0,33
24PCG 1720 3450 ±212 ±0,12 нет
На рис. 4.33 приведена рабочая характеристика ММДД МРХ4115А фирмы
Motorola, который может быть использован в качестве высотомера БПЛА, а на
рис. 4.34 - рабочая характеристика датчика МРХ5010, который может быть
применен в качестве измерителя скорости.
^вых ’
Рис. 4.33. Рабочая характеристика датчика МРХ4115А
Рис. 4.34. Рабочая характеристика датчика МРХ5010
156
Для температурного диапазона (0 85) °C компания Motorola приводит
следующие выражения для вычисления выходного напряжения С/вых (В)
датчиков в зависимости от давления Р (Па):
а)МРХ4115А
Овых — U^JDWP - 0,95) ± ошибка;
б) МРХ5010
Овых = (7о(0,09Р + 0,04)± ошибка.
где Uq - напряжение питания (для МРХ4115А - 5.1 В. для МРХ5010 - 5.0 В).
В диапазоне давлений 50... 100 кПа, что соответствует высотам
относительно уровня моря 0...3750 м, датчик МРХ4115А термокомпенсирован
в диапазоне —40...+100 °C. В дальнейшем нелинейная ошибка растет и в
полном диапазоне давлений гарантируется ее термокомпенсация лишь для
диапазона 0...+85°С. В датчик встроена схема подавления шумов и блок
линеаризации. Крутизна рабочей характеристики датчика (масштабный
коэффициент) ~43 мВ/кПа. При оцифровке 16-разрядным АЦП можно
достигнуть точности измерения высоты в 0,2 м.
Характеристика датчика МРХ5010 линейна в диапазоне давлений
0... 10 кПа, причем с увеличением давления ошибка несколько возрастает.
Масштабный коэффициент датчика ~500 мВ/кПа. Хотя МРХ5010 имеет полный
диапазон в 10 кПа, он подходит для роли высотомера при усилении его сигнала.
4.4. Магниторезистивные датчики
4.4.1. Геомагнитное поле
Магнитное поле Земли формируется в основном (более 90%) в
электропроводящей внешней оболочке ядра. Эта часть геомагнитного поля
называется основной. На основное поле накладываются дополнительные поля,
создаваемые намагниченными горными породами, электрическим током в
ионосфере, магнитосфере и пр.
Основное поле обладает симметрией и оно сходно с полем, которое
существовало бы, если бы в центре Земли находился огромный магнит,
который создает дипольное поле. Линии магнитного поля исходят из южного
полушария и вновь входят в северное полушарие. Таким образом, северный
геомагнитный полюс в действительности является южным полюсом диполя.
Дипольная ось Земли отклонена от оси ее вращения примерно на 10°
(рис. 4 35а). В любой точке пространства вектор геомагнитного поля Н
(рис. 4.356) определяется параметрами (элементы геомагнитного поля) в
базовой системе координат, в которой ось Ох направлена на астрономический
или географический север, ось Oz - на надир (локальное направление
гравитационной составляющей), а ось Оу дополняет их до правой системы.
Можно использовать также геодезическую базовую систему координат,
соответствующую базовому эллипсоиду.
157
Напряженность всего поля
составляющих X. Y. Z по
h=Jx2+y2+z2
Н может быть представлена в виде
соответствующим осям так что
Рис. 4.35. Дипольное магнитное поле Земли (а)
и его параметры (элементы) (б)
Составляющие X, Y, Z измеряются в эрстедах (Ое) либо в нанотеслах
(нТ) (1 Ое =105 нТ). Значение Н составляет 0,25 - 0,65 Ое (25000 - 65000 нТ)
Величина Н может быть представлена также в виде горизонтальной L и
вертикальной В составляющих. Угол между вектором L и направлением на
географический север (ось Ох) называется магнитным направлением или
магнитным склонением (D). Угол между вектором Н и горизонтальной
плоскостью называется магнитным уклоном или наклоном (I).
В настоящее время основными моделями магнитного поля Земли являются
Международное Геометрическое Базовое Поле (МГБП) или Мировое
Магнитное Поле (ММП). Параметры МГБП обновляются каждые 5 лет
Математическая модель ММП аналогична модели, используемой в МГБП Если
по математическим моделям рассчитать склонения для всего земного шара, то
можно построить карту с изогонами (линии с одинаковыми магнитными
склонениями) (рис. 4.36).
158
Рис. 4.36. Изогоны на карте мира в проекции Меркатора
Среднеквадратичная ошибка отклонения от модели на поверхности океана
составляет примерно 0,5°. В некоторых местах из-за особенностей
геологического строения земной коры склонение и уклоны могут достигать 50°
и больше.
4.4.2. Принцип работы электронного компаса
Простейший электронный компас состоит из двух магнитометров,
установленных под прямым углом друг к другу на основании, которое должно
быть горизонтальным. Для этого могут быть использованы два акселерометра.
Магнитометр служит для измерения интенсивности одного или нескольких
составляющих магнитного поля Земли [25]
Каждый магнитометр измеряет компоненты X = Lx, Y = Ly
горизонтального поля L, вектор которого направлен на северный
геомагнитный полюс. Если, например, летательный аппарат двигается по
направлению оси Ох (рис. 4.37), то его направление по отношению к северному
Y
магнитному полюсу v = arctg—.
159
Рис. 4.3"7 К определению направления по электронному компасу
Направление по компасу - это угол между направлением на северный
геомагнитный полюс и направлением движения объекта. Если в направление по
компасу внести поправку на магнитное склонение, то получается
географическое направление. Направление также может отсчитываться от
координатной сетки, используемой на картах, от направления вертикальных
линий сетки, у которых север находится «сверху». Иногда для обозначения
направлений используют слово азимут.
Направление или азимут прямой линии, вдоль которой передвигается тело,
называется курсом. Курс может быть географическим, магнитным или по сетке,
в зависимости от выбора начального направления.
Направление относительно Земли называют также путевым углом В
воздушной и наземной навигации термины «курс» и «путевой угол»
взаимозаменяемы.
Для авионики БПЛА предпочтительным являются магнитометры
магниторезистивного типа (датчики).
4.4.3. Магниторезистивные датчики. Принцип работы и технические
характеристики
Принцип работы магниторезистивных датчиков основан на изменении
направления намагниченности внутренних доменов слоя пермаллоя (NiFe) под
воздействием внешнего магнитного поля. В зависимости от угла между
направлением тока I и вектором намагниченности М изменяется
сопротивление пермаллоевой пленки. Внешнее магнитное поле поворачивает
вектор намагниченности пленки М на угол 0 (рис. 4.38).
160
Внешнее магнитное поле
Рис. 4.38. К пояснению принципа работы магниторезистивного датчика
Величина 0 зависит от направления и значения этого поля. При этом
сопротивление магнитной пленки R = /?о A7?cos(20) максимально при 0 = 0 и
минимально при 0 = 90°.
Для построения датчика пленки формируются осаждением слоя пермаллоя
на кремниевую пл. тетину в форме ромба, стороны которого образуют плечи
моста (рис. 4.39).
При практической реализации датчика для увеличения чувствительности
каждое плечо моста состоит из нескольких пермаллоевых слоев, соединенных
между собой. Каждый датчик имеет специальную встроенную плоскую
катушку, которая формирует ось предпочтительного намагничивания
Направление этой оси указывается в техническом описании на датчик. Датчик
наиболее чувствителен к полям, направленным перпендикулярно к этой оси
Рис. 4.39 Мостовая схема магниторезистивного датчика
Сразу после изготовления датчика или в результате воздействий
магнитного поля больше 15-20 Гс магнитные домены пленок ориентированы
хаотично. Подача через катушку короткого импульса тока ориентирует
магнитные домены всех пленок в одном направлении, которое называется
«легкой осью». Эта катушка выполняет также функцию компенсации любого
внешнего магнитного поля. Это очень важно, когда необходимо уменьшить
161
(или учесть) влияние корпуса объекта, на котором установлен датчик, на
искажение магнитного поля Земли.
Внешнее магнитное поле вызывает изменение сопротивления плеч моста.
Выходное напряжение моста при этом изменяется на величину ЛИ - kHU (к -
коэффициент анизотропного магниторезистивного эффекта, Н -
напряженность измеряемого магнитного поля, I — напряжение питания моста).
Трехосевые магнитометрические датчики позволяют определять угловую
ориентацию БПЛА в пространстве.
Наиболее широко представлены магниторезисторы фирмы Honeywell
(табл. 4.11) [ресурсы сети Интернет].
Таблица 4.11 Магниторезисторы
Наименование Диапазон рабочих величин магнитного потока, Гс Сопротивление моста. Ом Количество мостов в схеме Чувствительное!ь mB/B/G Напряжение питания, В Максимальная рабочая часто га МГц Диапазон рабочих температур, ’С
НМС 1001 ±2 850 1 3 5 5
НМС 1002 2 -55... 100
НМ( 1021S/Z/D ±6 1100 1 1
НМС 1022 2
НМС 1052 1000 -40... 125
НМС 1051Z 1 3
НМС 1023 1100 3 5
НМС 2003 ±2 1000 10 0,001
НМС 1501 0...80 5000 1 2,1 5 ±45 -40... 125
НМС 1512 2100 2 ±90
Магниторезисторы серии НМС имеют высокую чувствительность и
представлены от однокоординатного моста (НМС 1001) до микросборки (НМС
2003), включающей трехкоординатный мост схемы усиления и стабилизации.
Среди магниторезисторов есть датчики для определения угла поворота поля
относительно микросхемы: НМС 1501 (угол ±45°) и НМС 1512 (±90°). Эти
датчики могут применяться для измерения углов поворота любых органов
БПЛА. для контроля положения дроссельной заслонки в двигателе внутреннего
сгорания и др.
162
4.5. Пирометрические датчики и датчики температуры
Тропосфера («небосвод») и Земля являются источниками инфракрасного
(ИК) излучения. Диапазон ИК-излучения для небосвода находится в пределах
(6+14) мкм а для Земли - (7,5+13,5) мкм. что примерно соответствует
излучению черного тела с температурой в диапазоне (-75 - +75) °C.
Температура небосвода всегда меньше температуры Земли. В ясные солнечные
дни температурное различие между зенитом небосвода и земной поверхностью
может достигать 40°С. Даже в облачные дни остается разница (1-+3)°С.
Разница температур существует и для других погодных условий (табл. 4.12).
Таблица 4.12. Температурная разница между
Зенитом небосвода и земной поверхностью
Погодные условия Температура воздуха, °C Разница температур земля/зенит, °C
Ясная зимняя ночь, нулевая облачность -15 32
Солнечный зимний день, нулевая облачность -10 20
Пасмурный зимний день, низкая снеговая облачность -2 1,5
Пасмурный зимний день, гуман, низкая облачность 0 1
Осенний солнечный день, легкая облачность +5 19
Солнечный летний день, нулевая облачность +25 40
Темпера гуру тел, являющихся источниками ИК-излучения, можно
измерить с помощью инфракрасных термометров — пирометров, производимых,
например, фирмами ROITHNER LASERTECHNIK (ТР-297А, ТР-336...ТР-339).
Melexis Semiconductors (MLX90247) и др. Чувствительным элементом
пирометра (датчика) служит своеобразный конденсатор пластина из
пироэлектрика с металлическими обкладками. На одну из обкладок нанесен
слой вещества, способного поглощать тепловое излучение. В результате
поглощения энергии температура пластины конденсатора увеличивается и
между обкладками появляется напряжение строго определенной полярности.
Будучи приложенным к участку затвор-исток встроенного полевого
транзистора, оно вызывает изменение сопротивления его канала. Выходной
163
сигнал снимают с внешнего нагрузочного резистора, включенного в цепь стока
транзистора Через некоторое время, независимо от того, продолжает
действовать тепловое излучение или нет, конденсатор разрядится через
сопротивление утечки, выходной сигнал спадет до нуля. В других датчиках от
ПК засветки меняется прямое сопротивление или выходной ток.
Для компенсации собственной температуры в датчик встречно
устанавливают две чувствительные пластины, одна из которых закрыта от
внешнего излучения, то есть принимает только ИК-излучение корпуса датчика,
вторая же служит чувствительным элементом датчика.
Для получения температуры объекта, излучение которого принимает
датчик, необходимо оцифровать выходной сигнал датчика и провести
вычисления с учетом поправок на температуру и нелинейность датчика.
Существуют датчики со встроенной схемой измерения и всеми компенсациями,
например, MLX90614 производства Melexis Semiconductors [ресурсы сети
Интернет].
Работоспособность пирометров при любых погодных условиях
обусловлена уникальным свойством земной атмосферы пропускать
практически без ослабления ИК-излучение в диапазоне (6^14) мкм (рис. 4.40).
В этом диапазоне находятся собственные тепловые излучения тел, включая
космическое вещество. И в этом же диапазоне работают пирометры.
Длина волны, мкм
Рис. 4.40. Пропускная способность атмосферы для ИК-излучения
Это свойство атмосферы позволяет пирометрам фиксировать космический
холод даже через плотные облака и тепловой контраст между холодным
небосводом и теплой Землей. Замечательно, что Солнце практически не
излучает в этом диапазоне, поэтому оно невидимо для пирометров.
Таким образом, если пирометр (рис. 4.41а) направить сначала в зенит, а
затем в сторону поверхности Земли, го будет зафиксирована некоторая
калибровочная разница температур. Если направить пирометр на границу
небосвода и земной поверхности, что соответствует линии горизонта, то будет
получена температура, значение которой лежит в калибровочном диапазоне.
Таким образом, измеритель видимого горизонта на базе четырех пирометров
может служить датчиком углового положения БПЛА, который можно назвать
пирогоризонтом [39, 48].
164
a)
Рис. 4.41. Пирометрический измеритель видимого горизонта (пирогоризонт):
а общий вид пирометра; б принципиальная схема размещения пирометров
Если БПЛА летит горизонтально, го каждый датчик «видит» 50%
небосвода и 50% поверхности Земли, поэтому показания диаметрально
противоположных датчиков равны (рис. 4.416):
Dat\ - Datl = 0, Dat2 - Dat4 = 0.
При изменении угла наклона относительно продольной оси х нарушается
первое из равенств, при наклоне относительно оси у — второе. Возникающие
рассогласования в п< жазаниях датчиков преобразуются в сигналы углов
поворота БПЛА относительно продольной и поперечной осей. Технические
характеристики пирометров приведены в таблице 4.13.
Таблица 4.13. Технические характеристики пирометров
Модел! Выходной 1 Диапазон, Угол обзора, град Вес, гр- Напряжение питания, В Производитель
сигнал мкм
MLX90614 Цифр. 5,5-15 ±88 4 2,6-7 Melexis
MLX90615 Цифр. 5,5 - 15 ±88 2 2,6-7 Melexis
Ml Х90247 Аналог. 5,5 -15 J88 4 2,6-7 Melexis
TPS333 Аналог. 5,5 -12 -80 2 1,2-12 PerkinElmer
ТР297А Аналог. 7-14 ±45 4 1,2-12 Roithner Lasertechnik
ТР336 Аналог. 5 15 ±45 4 1,2-12 Roithner Lasertechnik
ТР337 Аналог. 5-15 ±45 4 1,2-12 Roithner Lasertechnik
ТР338х Аналог. 5-15 ±50 4 1,2-12 Roithner I asertechnik
ТР339х Аналог. 5-15 ±45 4 1,2-12 Roithner Lasertechnik
165
Для измерения температуры окружающей среды могут использоваться
датчики температуры (термодатчики) различных производителей, в частности
фирм Honeywell, Dallas, Analog Devices и др. Датчики производства Honeywell
лидируют с точки зрения оптимального соотношения цена/качество.
Отсутствие в них дополнительных компонентов позволяет сохранить
приемлемую точность, добиться стабильности показаний. Например, датчики
HEL-707-Uxx и HEL-712-Uxx работают в диапазоне температур (-75^-260) С
имеют крутизну характеристики 0,5 Ом/°С и время отклика на измерение
температуры менее 1 с. Датчики Analog Devices и Dallas имеют встроенные
усилители и формирователи сигналов Например, датчик DS 1624(1621)
производства Dallas представляет собой законченную схему с цифровым 9-
битным выходом, позволяющую измерять температуру в диапазоне
(-55 4-+125) °C с точностью 0,5 °C. Датчик имеет интерфейс 12С [ресурсы сети
Интернет].
1бб
Контрольные вопросы
1. Какие задачи выполняют датчики в составе авионики?
2. Классификационные признаки акселерометров.
3. Основные силы, действующие на инерционную массу акселерометра.
4. От каких параметров конструкции акселерометра зависит его выходной
сигнал7
5. От каких параметров конструкции акселерометра зависит его полоса
пропускания, масштабный коэффициент, нелинейность рабочей
характеристики?
6. Из каких звеньев состоят измерительные цепи акселерометров прямого и
компенсационного преобразования?
7. Особенности конструкции и технические характеристики
акселерометров навигационного класса
8. Особенности конструкции и технические характеристики
микромеханических акселерометров.
9. Общая характеристика гироскопов.
10. Принцип работы волоконно-оптических гироскопов.
11. Принцип работы волновых твердотельных гироскопов.
12. Принцип работы камертонных и стержневых кориолисовых вибрационных
гироскопов
13. Принцип работы микромеханических гироскопов LL- и RR-типа.
14. От каких параметров конструкции ММГ LL-типа зависит его выходной
сигнал?
15. От каких параметров конструкции ММГ RR-типа зависит его выходной
сигнал?
16. Основные технические характеристики ММ1
17. Как называется высота полета в зависимости от начальной поверхности
отсчета?
18. Принцип работы абсолютного и дифференциального датчиков давления
19. В чем заключается барометрический способ измерения высоты полеты?
20. В чем заключается способ измерения воздушной скорости с помощью
датчика давлений?
21. Основные технические характеристики датчиков давлений.
22. Параметры магнитного поля Земли.
23. Принцип работы электронного компаса.
24. Принцип работы и основные технические характеристики
магниторезистивных датчиков
25. Принцип работы и основные технические характеристики пирометрических
датчиков.
167
Глава 5. Системы ориентации и навигации
5.1. Системы ориентации
Системы ориентации служат для определения углового положения
летательного аппарата относительно опорной системы координат. В БПЛА
могут применяться следующие типы систем ориентации: бесплатформенная,
магнитометрическая, пирометрическая, видеосистема и др. Чувствительными
элементами бесплатформенной системы ориентации (БСО) являются
гироскопы датчики абсолютных угловых скоростей вращения. Единственным
источником информации для БСО являются скорости вращения летательного
аппарата относительно связанной системы координат. Следовательно, эта
система ориентации полностью автономна. Главным источником погрешности
при определении углов ориентации являются собственные уходы (дрейфы)
гироскопов. Для первоначальной ориентации (выставки) БСО относительно
опорной системы координат применяются акселерометры [1,2].
В магнитометрической системе ориентации (МСО) в качестве
чувствительных элементов применяются магнитометры магниторезистивного
типа (магниторезисторы). Источником информации для МСО являются
изменения составляющих вектора напряженности магнитного поля Земли по
отношению к летательному аппарату, изменяющему свою угловую ориентацию
[25, 33]
Точность определения угловых координат в МСО существенным образом
зависит от присутствия магнитных аномалий, имеющих различную физическую
природу, в том числе, обусловленную собственным магнитным полем
летательного аппарата.
Пирометрические системы ориентации (ПСО) в качестве чувствительных
элементов используют пирометры, которые реагируют на разность температур
межд> небосводом и земной поверхностью. Этот источник информации для
ПСО зависит, в условиях открытого пространства, главным образом от времени
года и погодных условий [36, 39, 48]. Видеосистемы и др. здесь не
рассматриваются.
5.1.1. Бесплатформенная система ориентации
Датчиками бесплатформенной системы ориентации (БСО) являются
гироскопические датчики угловых скоростей (ДУС) вращения ЛА, с помощью
которых определяется угловое отклонение ЛА относительно опорной системы
координат. В качестве опорной системы координат наиболее часто применяется
географическая система координат X.YgZg, центр которой помещается в
центр масс ЛА, а ее оси направлены по сторонам света: на север, по вертикали
вверх и на восток. Географическая система координат вращается в
инерциальном пространстве с угловой скоростью, вызванной суточным
вращением Земли U и угловыми скоростями изменения широты ф и долготы
168
А., обусловленными перемещением ЛА относительно сферической поверхности
Земли (рис. 5.1а):
ф - Vxg/R, i. = Vzg/(Rcos(p),
где R радиус Земного шара, Vxg, Vzp - северная и восточная составляющие
линейной скорости ЛА.
Проекции вектора абсолютной угловой скорости географической системы
координат на ее оси имеют вид:
со ( = ((/ + x)cos<p = Ucos ср +
covp. = (и + xlsincp = C/sin<p + ——tgcp;
P R
m = -ф.
(5 1)
С математической точки зрения задача ориентации ЛА относится к
проблемам, связанным с вращательным движением материальных тел вокруг
центра масс. Если связать с ЛА систему координат XYZ (связанная система
координат), ось ОХ которой направлена по продольной оси ЛА, OY - в
вертикальной плоскости симметрии вверх. OZ - в сторону правого крыла, то ее
положение относительно географической системы координат можно задать
тремя углами Эйлера-Крылова: \|/, 3, у. Применительно к ЛА углы Эйлера-
Крылова называют соответственно углами рыскания \р, тангажа 9 и крена у
(рис. 5.16) (см. п.1.1). Знание углов \|/. 9. у на борту ЛА решает задачу
Рис. 5.1. Географическая и связанная системы координат:
а положение географической системы координат относительно Земли
б - взаимное положение географической и связанной систем координат
Инерциальные датчики гироскопические ДУС в составе БСО при
надлежащей точности гироскопов позволяют решать задачу ориентации не
169
прибегая к наблюдениям за внешними ориентирами и не получая
дополнительной информации извне. В качестве ДУСов для БСО БПЛА можно
применять кориолисовые вибрационные гироскопы, волновые твердотельные
гироскопы с кольцевым резонатором, а также роторные вибрационные,
волоконно-оптические и твердотельные гироскопы, если они подходят по
массо-габаритным параметрам.
В БСО гироскопические датчики устанавливаются непосредственно на
борту ЛА. Информация с ДУСов поступает в бортовую цифровую
вычислительную машину, где ин гегрируются кинематические уравнения
относительно искомых параметров ориентации. Бесплатформенные системы
ориентации необходимо рассматривать как модуль бесплатформенных
(бескарданных) инерциальных навигационных систем, в которых помимо
сигналов от ДУСов, привлекается информация об ускорении ЛА, полученной с
акселерометров, также жестко устанавливаемых на борту ЛА.
Бесплатформенные инерциальные навигационные системы помимо задачи
ориентации позволяют также решать задачу навигации, т.е. определения
текущих координат местоположение ЛА.
В общем случае проекции вектора абсолютной угловой скорости ЛА
можно представить в виде суммы переносной угловой скорости, обусловленной
вращением Земли, а также перемещением ЛА вдоль ее Пчверхности, и
относительной угловой скорости, обусловленной угловыми перемещениями ЛА
относительно своего центрам масс (5.1). В связи с этим, для правильного
определения углов рыскания, тангажа и крена из показаний ДУСов необходимо
исключить проекции вектора переносной угловой скорости географической
системы координат, пересчитанные на оси связанной системы координат.
В результате исключения образуются проекции относительной угловой
скорости:
со* = Ф sin 9 + у;
(Оу = ipcos9cosy + 9siny;
соС = ф cos 9 sin у + 9 cos у.
(5.2)
Соотношения (5.2) могут быть получены на основании рис. 5.16
непосредственным проектированием угловых скоростей ф, 9, у на оси
связанной системы координат OXYZ. Для получения дифференциальных
уравнений относительно углов 9, у умножим второе уравнение (5.2) на
sin у, а третье на cosy, и суммируем полученные равенства В результате
получим
9 к>Гу sin у + а>£ cosy. (5.3)
Затем умножим второе уравнение (5.2) на cosy, а третье - на -sinу, и
суммируем полученные равенства После разрешения полученной суммы
относительно ф, находим
170
ф =----(соС, cos у - G)rz sin у I. (5.4)
cosS 7
Наконец, разрешая первое уравнение системы (5 2) относительно у и
подставляя в него первую часть уравнения (5.4). получим
у = со£cosy-co^siny) (5.5)
Уравнения (5.3)-(5.5) представляют собой, так называемые
кинематические уравнения с углами Эйлера-Крылова, позволяющие при
заданных начальных значениях урц, Sq, уд и непрерывных определениях
проекций со;, (ду, arz определять текущие углы рыскания ц/, тангажа 3 и
крена у, т.е. решать задачу ориентации ЛА Структурная схема
бесплатформенной системы ориентации представлена на рис. 5.2.
iKpecwvi
в связанна
систему
коор шпат
* . .
1“ « <0.^
Рис. 5.2. Структурная схема бесплатформенной системы ориентации
Если не вводить в алгоритм работы БСО составляющие угловой скорости
географической системы координат сох^, coZg, то бесплатформенная
система ориентации эквивалентна двум свободным (некорректируемым)
трехстепенным гироскопам.
Для запуска алгоритма работы бесплатформенной системы ориентации
необходимо осуществлять ее начальную выставку, под которой понимается
определение начальных углов фд, 3q, уд. Угол может быть определен с
помощью магнитометрической системы. Углы So, у0 могут быть определены
по показаниям ах, ау, az акселерометров, оси чувствительности которых
параллельны одноименным осям связанной системы координат:
ах =-gsinS, ау =-gcosScosy, az =-gcosSsiny. (5.6)
171
В соответствии с (5.6) и рис. 5.16 углы начального ориентирования
определяются по зависимостям:
• ах
= arcsin —
к Я
• °z Л
- arcsin ----— , av < 0;
1 gcosS) у
(5 7)
Yo = i
az
arcsin -----—
\<gcosS>
+ л, ay > 0, az < 0,
arcsin
- n, ay > 0, az > 0.
Микромеханические гироскопы обладают большим дрейфом поэтому
требуется коррекция алгоритма вычисления угловых параметров. Коррекцию
алгоритма ориентации можно осуществлять в моменты времени, когда БПЛА
летит прямолинейно и равномерно. Этот режим можно специально вводить в
программу полета. Моменты прямолинейного равномерного движения, как
правило, соответствуют равенству вектора кажущегося ускорения БПЛА
вектору силы тяжести:
|«| = y/ay+ay+az = g. (5.8)
Поскольку строгое соблюдение равенства (5.8) невозможно, то условие
наступления момента коррекции определяется неравенством:
g-Ag<|a|<g + Ag.
(5.9)
где Ag — порог срабатывания коррекции.
Блок-схема алгоритма ориентации с коррекцией приведена на рис. 5.3. В
моменты выполнения неравенства (5.9) по сигналам микроакселерометров
производится вычисление углов тангажа и крена по зависимостям (5.7),
используемым для задачи начального ориентирования. Во время
неравномерного полета БПЛА ключ «К» прерывает работу алгоритма
коррекции БСО и перезапускается алгоритм ориентации с новыми начальными
условиями.
172
Параметры
ориентации
Рис. 5.3. Блок-схема алгоритма начальной выставки
и коррекции углов тангажа и крена
Коррекция углов тангажа и крена с помощью показаний акселерометров
аналогична маятниковой коррекции гировертикали. При этом ошибка
определения углов ориентации А составит
A = arctg 1^^-.
N g
При таком способе коррекции возможны ошибки в вычислении
параметров ориентации на некоторых режимах полета, при которых БПЛА
движется с ускорением g. Это выполняется при условиях
' о 2 2 2
ajg ayg aZg <
^g>Ag,
где aig (i = x,y,z) - проекции ускорения центра масс БПЛА на оси нормальной
системы координат.
В этом случае ошибка определения углов ориентации составит
Ja? + а*
А = arcsin J xg—-8-. (5.10)
g
Ошибка (5.10) выявляется по резкому изменению параметров ориентации
(гораздо большему прогнозируемой ошибки самой БСО). При этом в моменты
коррекции желательно отключать управление рулевым приводом.
Эксперименты показали, что при работе БСО без коррекции происходит
накопление ошибок углов ориентации со скоростью 0,02-0,03 % (для
микромеханических гироскопов с характеристиками по табл. 4.7). В случае
173
использования коррекции ошибка БСО остается ограниченной и определяется
точностью определения угла акселерометрами.
Недостатком алгоритма бесплатформенной системы ориентации с углами
Эйлера-Крылова является нелинейность уравнений (5.3)-(5.5) по всем трем
углам и неспособность решать задачу ориентации при у гле тангажа равном 90°.
Все это делает их малопригодными для построения алгоритмов
бесплатформенных систем ориентации и навигации. Наиболее удобными для
этих целей являются параметры Родрига-Гамильтона. которых, в отличие от
трех у глов Эйлера-Крылова, четыре. Кинематические уравнения в параметрах
Родрига-Гамильтона линейны и интегрируемы при любых углах рыскания,
тангажа и крена [10, 26].
5.1.2. Магнитометрическая система ориентации
Формирование сигналов в трехосевом магнитометрическом датчике,
установленном на БПЛА, показано на рис. 5.4
Рис. 5.4. К определению сигналов в трехосевом
магнитометрическом датчике
Положение БПЛА, с которым связана система координат OXYZ
относительно опорной системы координат OXMYVZM определяется углами
магнитного курса ул<, тангажа 3 и крена у. Ось OYM направлена по местной
геодезической вертикали и, следовательно, вдоль нее направлена вертикальная
составляющая В вектора напряженности магнитного поля Земли Н Ось ОХМ
направлена на магнитный север и вдоль нее направлена горизонтальная
составляющая L вектора Н. Угол D магнитного склонения определяет
направление на географический север N. Проекции В и L определяются через
угол I магнитного наклонения. Проекции В и L вектора Н на оси связанной
системы координат OXYZ соответствуют показаниям трехосевого датчика, оси
чувствительности которого направлены по осям X, Y, Z:
174
X = Z cos у cos 9 +В sin 9;
Y - Zsinysiny+ (Bcos9-Zcosysin9)cosy; •
Z - Zsinycosy-(Bcos9-Zcosysin9)siny,
(5.П)
где В = HsinI, L = HcosI.
Если выражение для Y умножить на sin у, а выражение для Z - на cosy, а
затем их сложить, то получается равенство
Zsiny = Zcosy + Esiny, (5.12)
откуда следует:
sin y = (Zcosy + Esin y)/Z. (5.13)
Из равенства для X из (5.11) следует
cosy = (X-Bsin9)/Zcos9 (5.14)
Используя выражения (5.11) и информацию об угле наклона I и
магнитном курсе можно вычислить значения углов 9 и у. Информацию о
магнитном курсе у, а также угле I можно получить с помощью GPS-
приемника С другой стороны, на основании выражений (5.11) можно
рассчитать магнитный курс у, если имеется информация об углах 9 и у от
какого-либо устройства, моделирующего плоскость горизонта.
Выражение (5.13) может быть использовано для вычисления угла у по
показаниям Y, Z и значению угла у при 9 = 0. Выражение (5.14) позволяет
определить угол у по показаниям X и значениям 9 при у = 0. Для
горизонтального расположения датчика из (5.13) и (5.14) при 9 = 0, у = 0
следует
у = arctg^Jp.
Применение трехосевого датчика позволяет усреднить неточность
показаний датчика в направлении его осей чувствительности, выполнив
операцию нормирования:
_ у _ V — 7
y]x2 + Y2+Z2 -Jx2 + Y2 + Z2 Jx2 + Y2+Z2
При этом вертикальная и горизонтальная составляющие вектора
Н = у1х~ + Y~ +Z2 принимают вид:
В =sinZ, L =cosl.
В предположении, что продольная ось БПЛА находится выше вектора
магнитной напряженности (рис. 5.41 из первого уравнения (5.11) с учетом (5.15)
находится угол тангажа 9, а из второго и третьего - угол крена у:
9 = arcsin
X
Э —9
cos у + В
Zcosy
L2 cos2 у + В2
175
. f L sin v
arcsin . =
iTrTF
. ( L sin w
arcs:n , T =
l.y2+z‘
. при Y > 0
- arcsin
Z___
! . 72
+ arcsin
— 7t, при У <0.
(5.16)
На рис. 5.5 приведена блок-схема вычисления углов тангажа и крена в
соответствии с (5.16).
Рис. 5.5. Блок-схема вычисления углов тангажа и крена
по показаниям трехосевого магнитометра
Путевой угол Т, вырабатываемый модулем GPS/ГЛОНАСС для малых
углов скольжения БПЛА, можно принять в качестве угла курса относительно
географического севера. Пересчет из географического курса в магнитный
осуществляется на основании информации об угле магнитного склонения D
Выработка значений угла наклонения I осуществляется по информации о
долготе <р и широте X, получаемой от модуля GPS/ГЛОНАСС
В общем случае движения БПЛА возможно расположение его продольной
оси ниже вектора напряженности магнитного поля Земли. В этом случае для
вычисления углов тангажа и крена необходимо определять, в каких квадрантах
находятся составляющие вектора напряженности Н.
5.1.3. Пирометрическая система ориентации
При использовании пирометрических датчиков для вычисления углов
крена и тангажа необходимо предварительно знать рассогласование между
показаниями датчиков, когда последние «видят» 100% неба и 100% земли. Для
этого необходимо перед вылетом расположить БПЛА вертикально по крену и
тангажу и зафиксировать показания датчиков в этих положениях (выполнить
176
калибровку). Для схемы размещения пирометрических датчиков по рис. 4.34
углы крена и тангажа могут быть вычислены по формулам:
л Dat\ — Dat3 л Dat2-Dat4 (517)
2 Dat\G - Dat3G ’ 2 Dat2(] - Dai40
где DatX - текущие показания датчиков, DatX$ - калибровочные показания,
X 1,2,3.4.
Из (5.17) следует, что. при условии равенства показаний диаметрально
противоположных датчиков, 3 = у = 0. Это свойство очень важно, так как с
увеличением высоты полета процентное соотношение видимой части земли и
неба смещается в сторону неба, снижается влияние фоновых засветок от зданий
и деревьев, в итоге температура уровня горизонта также будет меняться.
Зависимость (5.17) «нечувствительна» к этому и позволяет вычислять углы
крена БЛПА на любой высоте. Причем возникновение нуля в знаменателе
исключено, так как даже в плотном тумане температура зенита и земли немного
отличаются.
Внешний вид системы ориентации пирометрического типа, разработанной
на кафедре «Приборы управления» ТулГУ, для мини-БПЛА (рис. 5.6(6)) при-
веден на рис. 5.6(a).
Рис. 5. б. Внешний вид пирогоризонта (а) и оборудованный им мини-БПЛА (б)
Схема пирогоризонта, приведенная на рис. 4.40, является простейшей и не
лишена недостатков. Во-первых, не все БПЛА можно поставить вертикально
для проведения калибровки. Во-вторых, размещение пирометров по осям
симметрии БПЛА неудобно, так как хотя бы один из датчиков окажется
заслонен винтом, двигателем, хвостовым оперением и другими
конструктивными элементами БПЛА. Для устранения этих недостатков
датчики пирогоризонта размещаются диагонально, под углом 45° к осям
симметрии БПЛА. Для стартовой калибровки пирогоризонт может также
снабжаться двумя дополнительными вертикально расположенными
пирометрами, которые также могут быть использованы для непрерывной
177
калибровки в полете. Непрерывная калибровка позволяет не только сохранять
точность вычисления углового положения БПЛА в изменяющихся погодных
условиях но и осуществлять полеты над облаками, морями и иными
поверхностями, сильно отличающимися своими оптическими свойствами от
свойств поверхностей места взлета
Для пирогоризонта с диагонально расположенными датчиками углы
тангажа и крена определяются зависимостями:
_ л (Dail - Dat3) - (Dat2 - Dat4)
2 (DatlG - Dat30)~ (Dat20 - £taz40)’
л (Datl - Dat3)+(Dat2 - Dat4)
2 (DatlG - Dat3()) + (Dat2Q — Dat4(])
В случае использования дополнительной вертикально расположенной
пары пирометров DatS и Dat6 выражения для вычисления углов тангажа и
крена имеют вид:
л (DaZl - Dat3)—(Dat2 - Dat4) _ л (Datl - Daf3) + (Dat2 - Dat4]
4 - (Dat5 — Dat6) 4 Dat5 - Dat6
Выбирая пирометры для построения пирогоризонта, следует обратить
внимание на угол обзора чувствительного элемента. На рис. 5.7 приведена
зависимость выходного сигнала датчика с обзором ±45° от направления на
источник ИК-излучения фиксированной интенсивности. Из графика видно, что
зависимость нелинейна и имеет резкий спад при переходе за угол 45°, что
приводит к ошибкам определения углов крена и тангажа.
Рис. 5.7. Зависимость выходного сигнала датчика
от направления на источник ИК-излучения
Важной особенностью пирогоризонта является то, что точность
определения углов тангажа и крена напрямую зависит от разницы температур
земля/зенит. Если, например, разрешение по температуре измерительной
системы пирометров составляет 0,1 °C, то при разнице температур земля/зенит
в 40 градусов точность определения углов тангажа и крена составит
178
180/(40 0.1) = 0.45°. При разнице температур земля/зенит в 2 °C, которая может
быть зимой в облачность, над снеговым настом, точность вычисления углов
составит уже 9°. Таким образом, математический аппарат, обрабатывающий
сигналы пирометров, должен быть адаптивным, обеспечивая наилучшие
условия фильтрации и поправки показаний датчиков в текущих и
изменяющихся погодных условиях. Погодные условия с достаточной
точностью определены по разности показаний вертикальной пары пирометров
при стартовой или непрерывной калибровке.
В обычном для БПЛА диапазоне углов тангажа и крена в (Н30° ошибка
определения углового положения БПЛА пирогоризонтом, таким образом, не
превышает 1°.
На рис. 5.8 приведен график ошибки определения угла тангажа/крена
пирогоризонтом в диапазоне углов (R30°
Рис. 5.8. Ошибка определения углов тангажа/крена
пирогоризонтом в диапазоне углов (Р30°
Система ориентации пирометрического типа может применяться как в
качестве самостоятельной системы ориентации БПЛА, гак и в
комплексировании с другими системами ориентации и навигации [36, 39,48].
5.1.4. Комплексирование систем ориентации
Для повышения точности определения угловой ориентации БПЛА
возможно комплексирование (объединение) систем ориентации различного
типа. На рис. 5.9 приведена блок-схема объединения модуля трехосевого
магнитометра, пирогоризонта и модуля спутниковой навигационной системы
(СНС) GPS/ГЛОНАСС
179
Рис. 5.9. Блок-схема комплексирования модуля магнитометров,
пирогоризонта и мооуля GPS/ГЛОНАСС
Трехосный магнитометр вырабатывает по каждому каналу нормированные
показания X, ¥, Z. Пирогоризонт определяет углы тангажа и крена у„.
Модуль GPS/ГЛОНАСС принимает сигналы спутниковой навигационной системы и
передает в блок расчета углов ориентации значения географических координат <р, X,
путевого угла Т и углов магнитного склонения D и наклонения 1.
На основании определенных по пирометрическим датчикам у глов тангажа
и крена, в блоке расчета вычисляется угол курса в соответствии с первым
выражением (5.11) и (5.13):
/„ . + \ . (Y cosy + Z sin у)
44»J = arccos - •---—- , <|/(у„)= arcsin ----=------
V £cosS J I £ J
Таким образом, имеются значения углов курса, вычисленные по показаниям
пирометров и магнитных датчиков и курс, выдаваемый модулем GPS. Это позволяет
реализовать фильтр Калмана для оценки систематических ошибок магнитных
датчиков. Такой способ комплексирования повышает точность определения углов
тангажа и крена и устраняет ошибки, связанные с наличием остаточных
некомпенсированных магнитных помех и ошибку, обусловленную углом
скольжения БПЛА. Структурная схема фильтра Калмана приведена на рис. 5.10
Рис. 5.10. Структурная схема фильтра Калмана:
х к । к оценка; х к 11 к предсказание; z(k + 1) измерение; г(к +• 1J к) -
невязка измерения: К(Х + 1)- матрица передачи Калмана; Ф(£+ !,£)-
переходная матрица состояния; Н(А +1) — матрица наолюоений
180
Графики, характеризующие работу фильтра Калмана (ФК) при наличии
угла скольжения в 10° и воздействия внешнего перемагничивающего
магнитного поля с интенсивностью 0.02 мТл, приведены на рис. 5.11.
а)
п
i
Ц-0,5
-4
О 60 120 180 240
Время, с
g 1 5
С
60 120 180 240
Время с
Рис. 5.11. Графики ошибок опредечения углов'
а - тангаж, б крен, 1 ошибка без ФК, 2 ошибка с ФК
Комплексирование магнитометрической, пирометрической систем
ориентации и СНС с применением фильтра Калмана уменьшает ошибку
определения углов тан ажа и крена, и позволяет добиться точности 0,5° для
принятой элементной базы.
На рис. 5.12 показана блок-схема комплексирования БСО и
магнитометрической системы ориентации. В этом варианте комплексирования
блоки акселерометров и магнитометров служат для выработки начальных
значений Wq, Зо, у0 и текущих значений углов ц/, S, у ориентации БПЛА.
Показания акселерометров на неподвижном основании в связанной системе
координат соответствую г выражениям (5.6), а показания магнитометров X, Y,
Z - выражениям (5.11).
Рис. 5.12. Блок-схема комплексирования БСО с блоками
магнитометров и акселерометров
Из-за ошибок микромеханических ДУ С, обусловленных неточностью
определения уровня нулевого сигнала и нестабильностью масштабного
181
коэффициента, угловые скорости ф, Э, у вычисляются с ошибками Лф. ЛЭ,
Ду, что приводит к возникновению в БСО накапливаемых ошибок при
определении угловой ориентации:
tit
Д\р = j Aydt + Луо ’ ДЭ = J A&dt + ДЭ0, Ду = J Aydt + Ду0,
ООО
где Д\р0, АЭ0, Ду о - начальные значения ошибок.
В рассматриваемом случае, как и в предыдущем, возможна коррекция
БСО. Разностные значения показаний БСО и магнитометров могут быть
получены, например, при условии, что магнитометрические значения углов
курса и тангажа вычисляются для значений углов у, вырабатываемых блоком
акселерометров.
Графики ошибок БСО с коррекцией от датчиков магнитного поля,
полученные в результате моделирования работы системы в среде Matlab, с
учетом типичных ошибок датчиков серии НМС 1053 компании Honeywell и
микромеханических ДУС ADXRS610 производства Analog Devices, приведены
на рис. 5.13. Моделирование проводилось для угла наклона вектора
напряженности магнитного поля Земли, соответствующего 50-60 градусам
северной широты с учетом динамики полета БПЛА.
Время, с
Рис. 5.13. Ошибки БСО с коррекцией от датчиков магнитного поля:
1 ошибка угла крена, 2 - ошибка угла курса, 3 ошибка угла тангажа
По результатам моделирования ошибки в определении углов ориентации
составили: 1,5° по курсу, и менее 1° по углам тангажа и крена.
182
5.2. Системы навигации
Системы навигации служат для определения координат местоположения
летательного аппарата (географические широта и долгота, высота полета),
линейных скоростей полета и угловой ориентации. Системы угловой
ориентации являются неотъемлемой частью систем навигации. Существуют
различные системы навигации: инерциальная, спутниковая, радиотехническая и
др. Инерциальные навигационные системы являются автономными. В качестве
чувствительных элементов (датчиков) они используют акселерометры и
гироскопы и вырабатываемая ими информация не зависит от внешних
источников. Гироскопы и акселерометры могут размешаться на
гиростабилизированной платформе, либо непосредственно в своем
конструктивном блоке устанавливаться в корпусе летательного аппарата. В
первом случае инерциальная система навигации называется платформенной, а
во втором - бесплатформенной инерциальной навигационной системой
(БИНС). Остальные системы навигации неавтономны. Среди неавтономных
наибольшее распространение имеют спутниковые навигационные системы
(СНС). Кроме перечисленных выше. СНС выдает следующие параметры:
текущее время, скорость относительно Земли, курс, магнитное склонение.
В БПЛА применяются преимущественно БИНС и СНС Как правило, они
комплексируются. Автономность инерциальных методов навигации является их
главным преимуществом по сравнению с дру1 ими методами
(астрономическими, радиотехническими и др.). По сравнению с
платформенными системами БИНС обладают значительно меньшей массой и
габаритами. Вместе с тем, БИНС присущи недостатки. Прежде всего, это
чрезвычайно высокие требования, предъявляемые к датчикам БИНС. Кроме
того, при непосредственном закреплении на борту объекта датчики
подвергаются значительно более сильным возмущениям, чем в инерциальной
навигационной системе платформенного типа.
5.2.1. Принцип действия БИНС
Рассмотрим принцип действия бесплатформенной инерциальной
навигационной системы при движении летательного аппарата вдоль плоскости
меридиана сферической и невращающейся Земли.
С исходным положеним ЛА связана географическая система координат
XgYgZg (рис. 5.14), где ось Xg лежит в плоскости горизонта и направлена на
север, ось Y„ направлена вдоль истинной вертикали вверх, Z„ направлена на
о о
восток (перпендикулярна плоскости рисунка). В начальный момент времени
(точка О0 на земной поверхности) координата и скорость ЛА известны и равны
Фо и К), соответственно. С ЛА связана система координат XYZ, где ось X
направлена по продольной оси ЛА, ось Z — вдоль поперечной оси, Y
183
перпендикулярна плоскости крыльев и направлена вверх. Предполагается, что в
начальный момент времени системы координат XgYgZg и XYZ совпадают.
На борту ЛА размещены два линейных акселерометра Ах и Ау, оси
чувствительности которых направлены вдоль осей ¥ и У соответственно, и
гироскопический датчик угловой скорости измеряющий проекцию со.
абсолютной угловой скорости ЛА.
Положим, что ЛА совершает горизонтальный полет (Я = 0) и
перемещается из точки Oq в точку Oj с координатой ср, которую необходимо
определить. В точке Ц показаны текущая и начальная ориентация осей
XgTYgT и ^gO^gO географической системы координат. Очевидно, что если
известно направление истинной вертикали YgT в каждый момент времени, то
задача навигации будет решена измерением угла между осями YgT и Kg0.
Таким образом, задача навигации и задача построения вертикали на борту
подвижного объекта весьма близки по своему содержанию. Предположим, что
в точке Oj связанная система координат отклонена от географической на угол
тангажа 3.
Рис. 5.14. К иллюстрации принципа работы БИНС
184
Вектор кажущегося ускорения а может быть задан проекциями VXg и g
на оси XgT и YgT географического трехгранника (рис. 5.15).
Рис. 5.15. Взаимное положение географического и связанного трехгранника
Акселерометры измеряют проекции кажущегося ускорения а на оси X и
У связанного трехгранника, совпадающего с осями чувствительности
акселерометров. В соогветствии с рис. 5.15 проекции кажущегося ускорения на
оси чувствительности акселерометров имеют вил
ах = VXg cos & + g sin 8; (5.19)
ay - gcos8 - VXg sin 3.
где V\g - ускорение ЛА в северном направлении; g - ускорение силы тяжести.
Если осуществить обратный переход, т.е. перепроектировать показания
акселерометров в географическую систему координат:
artr =arcosS-avsin3, (5.20)
Л у
то можно определить линейное ускорение в северном направлении. После
подстановки (5.19) в (5.20) следует:
+ gsin s)cos 3 - (gcos3 - VXg sin s)sin3 = YXg. (5.21)
Таким образом, если имеется информация об угле 8, то перепроектировав
показания акселерометров из связанной системы координат в географическую,
можно найти проекцию ускорения VXg. Последующее двукратное
интегрирование ускорения VXg позволит найти координату и скорость ЛА.
Процесс определения скорости и координаты в БИНС иллюстрируется
рис. 5.16.
185
W
Фй0)
<р
Рис. 5.16. Определение скорости и координаты в БИНС
Полученное ускорение axg представляет собой северную составляющую
горизонтального ускорения ЛА. На выходе первого интегратора образуется
приращение линейной скорости в северном направлении, которое складывается
с начальной скоростью ЛА. вследствие чего образуется линейная скорость VXg-
Следующий блок на структурной схеме осуществляет деление скорости на
радиус-вектор R-R3 +Н (R3 - радиус Земли. Н - высота), после чего
образуется угловая скорость изменения широты ф Последующее
интегрирование позволяет найти координату <р с учетом ее начального
значения <р0.
Задача определения угла 3 между связанной и географической системой
координат решается следующим образом. ДУС измеряет проекцию абсолютной
угловой скорости ЛА (рис. 5.15)
со_ =со_„+3 = -<р + 3, (5.22)
где <ozg и 3 - переносная и относительная угловая скорость ребра .
связанного трехгранника.
Для того чтобы найти угол 3, необходимо предварительно исключить из
показаний ДУС (5.22) переносную угловую скорость azg = -ф. Тогда искомый
угол 3 определяется в результате интегрирования
3 = j (со z — со^ + 30 = J Зс// + 30 ,
О О
где 30 - начальное значение угла тангажа.
Угловую скорость ф можно найти из алгоритма счисления координаты
местоположения Л А
Структурная схема северного канала БИНС, приведенная на рис. 5.17,
представляет собой, так называемый, алгоритм идеальной работы, когда
акселерометры и гироскоп работают без погрешностей
186
Рис. 5.17. Структурная схема северного канала БИНС
Вертикальный канал БИНС позволяет определить вертикальную скорость
и высоту полета ЛА. Положим, что помимо северной составляющей ускорения
VXg ЛА имеет вертикальную составляющую V^. В этом случае проекции
кажущегося ускорения на оси чувствительностей акселерометров имеют вид
ах - VXg cos Я + (g + VYg )sin 8: (5.24)
a у - (g + VYg )cos 8 - VXg sin 8.
Проекция сигналов ускорения на ось Yg с учетом (5.24):
ayi, = tyxg cos 8 + (g + VXg )sin 8)sin 8 + ((g + VXg )cos 8 - VXg sin 8)cos 8 = g + VYg.
(5.25)
Если исключить из сигнала ayg ускорение силы тяжести g, то дважды
интегрируя ускорение Vh, можно получить вертикальную скорость VXg и
высоту Н, если известны начальные данные о скорости VhQ и высоте Нц.
Блок-схема вертикального канала показана на рис. 5.18.
Рис. 5.18. Вертикальный канал БИНС
187
Особенностью вертикального канала является его неустойчивость
(неограниченный рост ошибок), поэтому в автономном режиме он практически
не используется.
5.2.2. Основные уравнения инерциальнои навигации
В РФ за отсчетную поверхность Земли принят эллипсоид Красовского. На
рис. 5.19 показаны следующие системы координат:
- инерциальная OXUYUZU с началом в центре Земли; ось OZU направлена
вдоль оси вращения Земли к северном} полюсу, ось ОХи направлена по линии
пересечения плоскостей экватора и Гринвичского меридиана:
— земная (экваториальная) OqXqYqZq, оси которой фиксированы
относительно Земли и в начальный момент времени совпадает с инерциальной
системой координат;
- нормальная система координат OXgYgZg (см. п.п. 2.1, 5.1.1).
Рис. 5.19. Взаимное положение инерциальной, экваториальной
и нормальной систем координат
Если БПЛА перемещается относительно Земли с линейной скоростью 1
на высоте Н, то изменение геодезических координат определяется
зависимостями
188
• vxK VzK
B = ^-;L--------;H = VYs>. (5.26)
7?1 /?2 COS(P 8
где VXg, VYg, V2g - проекции вектора скорости V на оси OXg, OYg, OZ^
соответственно;
о _ акр(1 е )
~2 ПГ2
(I - е2 sin2 В)
vH -. R2 =
акп
——______н-
(l-e2sin2s(2
акр =6378245 м. Ькр =6356863 м - большая и малая полуоси эллипсоида
Красовского, е = ^а2р -Ь2р !акр - эксцентриситет эллипсоида.
Для реализации алгоритмов БИНС необходимы кинематические элементы
движения БПЛА: проекции абсолютной угловой скорости вращения
трехгранника OXgYgZg на его оси и проекции абсолютного линейного
ускорения его вершины. Проекции абсолютной угловой скорости нормальной
системы координат на ее оси определяются следующим образом (см. (5.1)):
coXg = ((7 + Z)cosB = I .'cos В +
' (oyg =(t7 + Z)sinB = U sinB + —tgB, (5 27)
R2
где t = 7,292116 10 5 рад/с — угловая скорость суточного вращения Земли.
Проекции абсолютного линейного ускорения равны:
®xg ~ хр @xg ’ & ’g ^Yg avg' &zg ~ Vzg @zg ’ (5.28)
где a^g, ahvg, a*g - составляющие кажущегося ускорения, которые необходимо
компенсировать.
Проекции кажущегося ускорения можно измерить с помощью
акселерометров, жестко установленных на борту БПЛА, т.е. в связанной
системе координат. В связи с этим необходимо пересчитывать показания
акселерометров из связанной системы координат в нормальную. Эп > возможно
при условии, что известна ориентация связанной системы координат
относительно нормальной. Для описания взаимного положения связанной и
нормальной систем координат могут быть использованы различные
кинематические параметры: углы Эйлера-Крылова, направляющие косинусы,
параметры Родрига-Гамильтона, параметры Кейли-Клейна и др. [6, 10, 18, 21.
22, 26].
Уравнения (5.27), (5.28) являются основными уравнениями инерциальной
навигации, в результате решения которых находятся координаты
местоположения БПЛА.
189
5.2.3. Алгоритмы идеальной работы БИНС
Переход от системы координат OXgYgZg к OXYZ осуществляется
последовательным разворотом на углы рыскания тангажа Я и крена у (см.
п. 2.1). Взаимное положение нормальной и связанной систем координат может
быть описано с помощью направляющих косинусов и собственных
кватернионов. Кватернион это гиперкомплексное число
Л — Xq + Xji + Х2 j + X^k,
элементами которого являются параметры Родрига-Гамильтона Хи (н = 1,2,3),
где i, j, k - трехгранник мнимых осей. Связь номера конечного поворота и
соответствующих ему матрицы направляющих косинусов и кватерниона
приведена в табл. 5.1.
Таблица 5.1. Кинематические параметры, характеризующие
взаимное положение систем координат OXgYgZg и OXYZ
№ конечного поворота Угол Эйлера- Крылова Направляющие косинусы Собственные кватернионы
I V Л/ = cosy 0 -siny 0 1 0 siny 0 cosy P = cos—+jsin— 2 2
II 9 = cos 9 sin 9 0 -sin9 cos9 0 0 0 1 _ 9.9 Q = cos—+ ksin— 2 2
III А = 1 0 0 0 cosy siny 0 -siny cosy у Y R = cos— -t-isin— 2 2
Результирующий переход от системы координат OXgYgZg к OXYZ v
помощью матрицы направляющих косинусов А и кватерниона Л определяется
следующим образом:
' cosуcos9
A = AvA4Alil= — cosysin9cosy + sinysiny
cos у sin 9 sin у + sin у cos у
sin 9 -sin у cos 9
cos9cosy sin у sin 9 cos y +cos у sin у
-cos9siny —sinysin9siny+ cosycosy
(5.29)
Л F Q°R — Xq + X|i 4" X2J + X3k,
(5.30)
где параметры Родрига-Гамильтона определяются следующим образом:
. ш 9 у . у . 9 . у
Xq = cos — cos —cos—sin—sin—sin —,
2 2 2 2 2 2
190
(5 31)
, у 9 . у . у . 9 у
Л1 = cos —cos-sin—+ sin-- sin—cos—,
2 2 2 2 2 2
. . \|/ 9 у vp . 9 . у
Ат sin—cos—cos—+ cos—sin—sin—,
2 2 2 2 2 2 2
. ip . 9 у . ip 9 . у
Л-i =cos—sm—cos—-sin—cos—sin—.
' 2 2 2 2 2 2
Матрица направляющих косинусов (5.29), записанная в параметрах Родрига-
Гамильтона, имеет вид:
' 2Xq + 2A,2-1
27,] Z1 — 2А.( X ]
2Х]А 1 + 2 ',0Х2
2Х|А<2 + 2AqXj — 2л.,)Х .
2Л( + 27. j — 1 2Х^Х. + 2ApZ ।
2Л >Л_, — 2A,qXj 2у,q + X j — 1
А =
(5.32)
Углы рыскания, тангажа и крена определяются через параметры Родрига-
Гамильтона следующим образом:
A3 I
\p = arctg--— = arctg -
I Au >
9 = arcsin(j12 ) = arcsin(2X]X2 + 2X0X3 );
2X2X3 — 2XqXj
2Xo + 2A.2—1
2X]7 j — 2X0X >
2X20 + 2A2-1
^32 I
у = arctg--— = arctg -
к Ап J
где Атп - элементы матрицы (5.32).
Умножение кватернионов обозначается символом
правилами умножения мнимых единиц
1 i = i 1-i, 1 j = j 1 j, 1 k-k 1 k, 1 1 1,
(5.33)
и определяется
i2 = -l, j2 -1, k2 -1,
i j = -j i k, j k= k j i, kii k j
Правила умножения мнимых единиц могут быть получены циклической
перестановкой мнимых единиц по схеме, представленной на рис. 5.20.
Рис. 5.20. Правила умножения мнимых единиц
В соответствии ео схемой на рис. 5.20 при умножении двух единиц
расположенных по стрелке, получается третья единица с плюсом; при
движении против стрелки единица берется с минусом.
191
Параметров Родрига-Гамильтона всего четыре, в отличие от девяти
направляющих косинусов, и, кроме того, они подчиняются всего одному
уравнению связи (5.30). Параметры Родрига-Гамильтона значительно
упрощают численное интегрирование кинематических уравнений, поэтому для
описания алгоритмов БИНС используются именно эти параметры и их
гиперкомплексная конструкция кватернион.
Для реализации алгоритмов БИНС необходимо в каждый момент времени
иметь информацию о положении связанной системы координат относительно
нормальной Эта информация может быть получена из кватерниона Л (5.30),
являющегося аналогом матрицы направляющих косинусов А (5.29). Зная Л,
можно пересчитать кажущееся ускорение БПЛА. измеренное в связанной с
БПЛА системе координат, в нормальную систему координат и определить
параметры ориентации \/, Я, у (5.33).
Рассмотрим процедуру определения кватерниона А. На рис. 5.21 показана
схема перехода от инерциальной системы координат OXUYUZU к нормальной
OXgY,Zg и связанной OXYZ. посредством кватернионов К. А. и суммарный
переход через кватернион М.
Рис. 5.21. Схема переходов
В соответствии с рис. 5.21 имеем
МКА, (5.34)
отсюда
А КМ, (5.35)
где К - сопряженный кватернион
Дифференцируя правую и левую части (5.35) по времени, получаем уравнение
А К М + К М, (5.36)
которое преобразуется к виду:
2А Aofl-^ А, (5.37)
где fl, tig — гиперкомплексные отображения векторов абсолютной угловой
скорости нормальной и связанной систем координат соответственно
192
Уравнение (5.37) позволяет находить кватернион Л, а следовательно,
решать задачу ориентации БПЛА относительно нормальной системы
координат.
При численном решении уравнения (5.37) могут возникнуть
вычислительные погрешности, связанные с невыполнением равенства
А Л = 1
(так называемый уход нормы кватерниона). Для автоматической нормировки
кватерниона вместо уравнения (5.37) необходимо решать уравнение с
коррекцией нормы кватерниона.
2Л Л А + л(1-А2), (5.38)
где Л2 = Z । + А.2 + + А, .
Для пересчета информации о кажущемся ускорении из связанной системы
координат в нормальную применяется равенство перепр< »ектирования:
N, =Л N Л, (5 39)
где N отображение вектора кажущегося ускорения. N - отображение
вектора в нормальной системе координат.
После пересчета параметров ориентации и навигации в нормальную
систему координат навигационный алгоритм БПЛА реализуется на основе
соотношений (5.26) и (5.28). Блок-схема БИНС для непрерывного времени
приведена на рис. 5.22.
193
Блок-схема БИНС описывает преобразование первичной информации о
кажущемся ускорении и абсолютной угловой скорости БПЛА в координаты
центра масс и его угловое положение относительно центра масс. Непрерывные
алгоритмы БИНС являются замкнутыми, т.е. для вычисления соответствующих
интегралов и преобразования переменных из одной системы координат в
другую требуются непрерывные во времени значения как самих переменных,
так и их интегралов и элементов кватернионов. Так как обработка информации
бортовыми вычислительными средствами (микроконтроллерами) ведется в
дискретной форме, то требуется аппроксимация непрерывных сигналов
дискретными, т.е. квантование непрерывных сигналов по времени и уровню.
Для повышения точности автономной работы бесплатформенной системы
ориентации и навигации необходимо осуществлять калибровку инерциальных
чувствительных элементов, под которой понимается процесс уточнения
различного рода систематических составляющих погрешностей
5.2.4. Калибровка гироскопов
В сигналах микрогироскопов (МГ), помимо случайных погрешностей,
присутствует систематическая составляющая, так называемое, смещение нуля.
Постоянное смещение нуля в выходном сигнале микрогироскопа приводит к
накапливанию погрешностей при вычислении параметров ориентации. Если
пренебречь марковской составляющей шума, то выходной сигнал
микрогироскопа при отсутствии вращения можно представить как сумму
систематической и белошумной составляющих Тогда задачу калибровки
можно сформулировать как оценку систематической составляющей по
«зашумленным» измерениям. Достаточно точно калибровку осуществляют с
помощью фильтра Калмана (рис. 5.10). Преимуществом фильтра Калмана
является то, что измерения z(k +1) можно обрабатывать по мере их
поступления и не требуется хранить какие-либо измерительные данные. При
этом фильтр Калмана вырабатывает оптимальную оценку систематической
составляющей с точки зрения минимума ошибки оценивания.
На рис. 5.23 приведены реализации дрейфов микромеханических
гироскопов типа ADXRS 150, а в табл. 5.2 приведены значения
среднеквадратических отклонений систематических и «шумовых»
составляющих погрешности
194
С 25
> 02
Микрогироскоп 1
Микпогипоскоп 2
-с !--------------------
0 23456 '88 /,С
Рис. 5.23. Реализации дрейфов микрогироскопов
Таблица 5.2. Составляющие дрейфов микрогироскопов
Составляющая дрейфа (СКО)
Систематическая, рад/с Гауссов белый шум, рад/с
МП 0,08 0,0032
МГ2 0,06 0,004
МГЗ 0,04 0,0036
195
На рис. 5.24 представлен процесс калибровки с помощью фильтра
Калмана.
Рис. 5.24. Оценка систематической составляющей погрешностией
микрогироскопов с помощью фильтра Калмана
Из рис. 5.24 можно заключить, что фильтр Калмана выдает достаточно
точную оценку систематической составляющей. Найденная оценка
систематической погрешности будет исключаться из показаний
микрогироскопов при работе БИНС.
5.2.5. Начальная выставка БИН<
Начальной выставкой (ориентированием) называется определение
углового положения БПЛА по отношению к нормальной системе координат в
период подготовки БИНС к запуску. Начальная выставка может быть
автономной или с привлечением информации от других навигационных систем
(магнитометров, систем спутниковой навигации, оптических систем и др.).
При автономном способе начальной выставки БИНС на неподвижном
относительно Земли БПЛА входной измерительной информацией является
ускорение силы тяжести (для акселерометров) и угловая скорость суточного
вращения Земли (для ДУС).
В начальный момент времени БПЛА (система координат OXYZ) занимает
произвольное положение относительно нормальной системы координат
OXgYgZg, определяемое углами ц/0, у0 (рис. 5.25).
196
Рис. 5.25. Взаимное положение связанного и географического
трехгранника в начальный момент времени
Проекции вектора ускорения силы тяжести на оси связанной системы
координат в соответствии со средним столбцом матрицы (5.29) имеют
следующий вид:
gx -gsinS0;gj = gcosB0cosy0;gz =-gcosSosinyo,
откуда следуют выражения для начальных значений углов тангажа и крена:
Sx
g
= arcsin
O’
Y = arctg ~ —
Sy
(5.40)
Если гироскопы обладают чувствительностью, при которой они реагируют
на вертикальную Usinф и северную L'costp (L =15°/час) составляющие
вращения Земли, то их показания могут быть использованы для определения
угла Vo-
Гироскопы, оси чувствительности которых параллельны осям связанной
системы координат, формируют сигналы в соответствии с проекциями угловой
скорости вращения Земли на эти оси:
юх0 = U cos Ф cos Vo cos »о + sin Ф sin »о5
сох0 = U sin ф cos So cos Уо + f/ cos ф sin v0 sin У о > ’
(5.41)
<oz0 = Ucos<psinvocosyo -Ersin<pcos9o sinyp.
Непосредственно из первого уравнения (5.41) следует выражение для
начального значения угла курса.
197
(0 () - Usin<рsinSo .. ...
= arccos^2--------x-----. (5 42)
U costpcosS0
Если второе уравнение (5.41) умножить на sin уд, а третье - на cosy0, то из
суммы полученных уравнений следует еще одно выражение для начального
угла курса:
to о sin Yo + “zO cos Yo z<- .
Vo = arcsin —-----------------. (5.43)
t/coscp
После определения начальных значений углов Vo> Yo можно
рассчитать начальный кватернион Л(/п) (5.31), (5.32).
5.2.6, Алгоритм ориентации БИНС
Алгоритм ориентации основан на решении уравнения (5.38) и позволяет
определить собственный кватернион ориентации между нормальной и
связанной системами координат. По элементам кватерниона на основе
соотношений (5.33) осуществляется переход от параметров Родрига-
Гамильтона к углам рыскания у, тангажа 9 и крена у. Входными данными для
алгоритма ориентации являются показания трех датчиков угловых скоростей и
информация о проекциях абсолютной угловой скорости нормальной системы
координат на ее оси, поступающей из навигационного алгоритма (рис. 5.22).
Для численного интегрирования уравнения Пуассона в кватернионах (5.38)
используется алгоритм Эйлера [10]:
X0U + О = (А) — ^ { [cdv (А +1)-<олк(* + 1)]>ч (А)+ [со„(Л +1)- +1)}<2 (А)ч
+ [и, (А +1)- co,g(A + 1)]а (к) + е(А)Х0(А)};
X] (к +1) = X, (к)+у { к {к +1)- о. g (к + 1)к (А)+ к (А +1)+ co.g (к +1)]>.2 (к) -
“ к(* + 0+ + 0кз(*)+ ФМ*)};
х2(к+1)=а.2(а)+у {к (*+0- «ж(а+i)ko (*) - к(*+0++Ок (*)+
+ [... (А +1)+ ti>xg(k +1 )к3(А)+ е(А)А2(А)};
Х3(А +1) = Х3(А )+ у {[со, (А +1)- ю^(А + 1)к(Л)+ к (* + 0+туАк + OjM*)-
- к(Л + 0+axg(k + 1)Кг(*)+ ФМ*)}.
где Т период дискретизации, eU) = 1 - (?.(' (к) + а] (к) + ДО + ^з U)I
нормирующий множитель.
При непродолжительном полете БПЛА можно пренебречь поворотом
нормальной системы координат и считать a>xg = Myg = azg = 0. В этом случае
алгоритм ориентации (5 44) упрощается и принимает вид:
198
Хо (к +1) = Хо (к) - у [а>х (к + 1)Х1 (А) + «)> (к +1 )Х2 (А) + со. (к + 1)Х^ (А)+ е(а)Хп (А)];
Х(А +1)= ХДА)+ у [сол(А + 1)Х0(А)+со.(А + 1)Х2(А)-со ДА + l)X3(A)+ е(А)Х](А)];(5 45)
Х2 (А +1) = Х2 (А) + у [со ДА +1 )Х0 (А) - со. (А + 1)Х] (А) + со ДА + 1)Х3 (А)+е(А)Х2 (А)];
х3(а+1)=х3(а)+у [со Да+iK(a)+w, (а+1)Х] (а)- со Да+1 )х2 (а)+е(а)х3(а)]
Уравнения (5.45) можно назвать алгоритмом бесплатформенной системы
ориентации. Для запуска алгоритма (5.45) необходимо ввести начальные
значения параметров Родрига-Гамильтона определяемые в соответствии с
соотношениями (5.31):
X (0)- cos ^cos ^cos sin ^sln ^sin
IU I — cos--cos-----cos----— sin — — sin----sin----,
u 2 2 2 2 2 2
1 v(o) 3(0) • y(0) • 4/(0) • ®(°) 7(0) /с ЛА1
Xi (01 = cos v 7 cos v 7 sin — + sin -- 7sin ——cos^-7, (5.46)
lv ' 2 2 2 2 2 2
. mi • v(o) »(o) y(o) v(o) • »(o) y(o)
ХД0) sm - --cos v 7cos-'- — + cos 7sin——sin-*^
“ 2 2 2 222
X (f>)-c<-)S',’(0,sinS,0)cosY,0) siny(01
5 2 2 2 2 2 2
Начальные значения углов рыскания, тангажа и крена вводятся в
соотношения (5.46) после процедуры начального ориентирования в
соответствии с выражениями (5.40), (5.41).
5.2.7. Навигационный алгоритм БИНС
Навигационный алгоритм БИНС предназначен для выработки координат
местоположения БПЛА X, ср, Н и проекций линейной скорости БПЛА на оси
нормальной системы координат VYf,, VZg. В основу навигационного
алгоритма положено равенство перепроектирования (5.39) и уравнения (5.26)-
(5.28). Равенство перепроектирования эквивалентно матрице направляющих
косинусов, выраженной в параметрах Родрига-Гамильтона (5.321. Пересчет
показаний акселерометров осуществляется по следующим зависимостям:
аХ),(к + 1)= [2Х20(А +1)+ 2Х2(А +1)- 1]аДА +1)+
+ [2Х](А + 1)Х2(А +1)+ 2Х0(А + 1)Х3(А +1)^ (А +1)+
+ [2Х, (А + 1)Х3(А +1)- 2Х0(А + 1)Х2 (А + 1)]аД* +1);
avg(A +1)= [2Х, (А + 1)Х2(А +1)- 2Х0(А + 1)Х3(А + 1)]аДА +1)+
+ [2Х2о(А +1)+ 2Х2(А + 1)- 1]аДА +1)+ (5 47)
+ [2Х, (А + 1)Х3 (А +1)+ 2Х0(А + 1)ХДА + 1)]а- (А +1);
199
a.g (к +1) = [2Xj(A + l)X3(Jt +1)+ 2X0 (k + 1)X2(* + l)k(* + 0+
+ [2X2 (Л + 1)Х3(Л +1)- 2Х0(Л + 1)Х](Л + 1)]ал,(* +1)+
+ [2Л^(А +1)+ 2^(Л +1)- ф.(Л + У.
где ах(к +1), ау(к +1), az(k +1) - сигналы акселерометров на к +1 -ом шаге.
Для малоразмерных БПЛА с дальностью полета в пределах 100 км, на
относительной высоте не более 1000 м со скоростью, не превышающей 100
км/ч, величины R2 (5.26), a>xg, <£)yg, azg (5.27) и axg, aKvg, azg (5.28)
можно вычислять по упрощенным выражениям. На рис. 5.26 приведены
отклонения величин Ry, R2 от первоначального значения для фо = 57°,
Hq = 0 м в зависимости от изменений широты (рис. 5.26а) и высоты (5.266).
а) б)
Рис. 5.26. Отклонения радиусов Ry, R2 от первоначального значения в
зависимости от изменения: а — широты; б высоты
В соответствии с рис. 5.26 погрешности вычисления Ry R2 составляют
сотые доли процента. В связи с этим с достаточной степенью точности для их
вычисления можно пользоваться зависимостями:
«11-е2) «
“ Г...2 Ъ ” Г 2 7 z JV2 (5 48)
[1-е sin <pvo)j [1-е sin <p(f0)j
Вычисление составляющих угловой скорости toxg, (f>zg на основе
работы навигационного алгоритма целесообразно только в том случае, когда
собственный дрейф гироскопов составляет менее 10 град/ч. Например, если при
полете БПЛА составляющие линейной скорости равны
Vxg=VYg=V7.g =20 м/с,
то проекции абсолютной угловой скорости имеют значения:
200
= 4,3-10 5 рад/с=8,9 град/ч;
a>Jg = 6,6 • 10~5 рад/с = 13,6 град/ч;
(t)zg = -3,1 • 10-6 рад/с =-0.6 град/ч.
Таким образом, в случае применения «грубых» микромеханических гироскопов
проекции абсолютной угловой скорости нормальной системы координат (5.27)
целесообразно вычислять по приближенным зависимостям:
<£>xg cos ф(0); (f)yg (к) ® U sin ф(0); cozg (к) » 0. (5.49)
Составляющие компенсируемого ускорения в уравнениях (5.28) следует
учитывать только в том случае, если они сопоставимы с погрешностями
акселерометров. В противном случае эти составляющие в алгоритмах БИНС
учитывать нецелесообразно. Так, при полете БПЛА со скоростью 30 м/с
составляющие компенсируемого ускорения в (5.28) имеют порядок 10-4 g, что
сравнимо с прецизионными акселерометрами, например ДА-10, ДА-11
Смещение нуля микромеханических акселерометров может достигать 0,5 g. В
связи с этим компенсирующие составляющие кажущегося ускорения в (5.28)
необходимо учитывать в виде:
axg 0; ayg Syg’ azg 0-
(5.50)
Уравнения (5.26) и (5.28), определяющие проекции линейной скорости на
оси нормальной системы координат и координаты центра масс БПЛА, в
дискретной форме имеют вид:
vXg (к +1) = V t-g (*)+Taxg (к +1);
VYg(k + 1)= VYg{k)+T[ayg(k +1)-gyg(k +1)];
VZg (к +1) = VZg (к} + Tazg (к +1),
ф(Л + 1) = ф(Л)+7’Г^(Л + 1)/7?1;
Х(Л +1) = Х(Л)+TVZg(k + l)/(/?j со8ф(& +1));
Н(к +1) = И (к) + Tayg (к +1).
(5.51)
(5.52)
Таким образом, численное решение уравнений (5.51), (5.52) с учетом (5.47)
и замечаний относительно вычислений параметров (5.48)-(5.50) определяет
географические координаты центра масс БПЛА.
Микромеханические акселерометры и гироскопы обладают большим
дрейфом, поэтому точность определения навигационных параметров
микросистемной БИНС невелика. Устранение этого недостатка обеспечивается
комплексированием БИНС со спутниковыми навигационными системами
(СНС). В подобных комплексных (интегрированных) системах навигационные
параметры вырабатывает СНС, по которым корректируется БИНС, работа
последней в автономном режиме происходит в моменты пропадания сигнала от
СНС.
201
5.2.8. Спутниковые навигационные системы
В спутниковых радионавигационных системах (СНРС), для которых также
используется аббревиатура (СНС), применяются космические радиомаяки
(навигационные искусственные спутники Земли — ИСЗ), навигационные
радиосигналы которых содержат эфемеридную информацию (ЭИ) о параметрах
движения ИСЗ.
В 60-е годы были созданы и введены в эксплуатацию СРНС первого
поколения - система «ТРАНЗИТ» (США) и система «ЦИКАДА» (СССР). В
СРНС первого поколения орбитальная группировка включала пять-шесть
низкоорбитальных навигационных ИСЗ на круговых орбитах с высотой около
1000 км над поверхностью Земли.
Потребность в оперативной высокоточной навигации сухопутных,
морских, воздушных и низкоорбитальных космических объектов обусловили
создание в 80-90-е годы среднеорбитальных СРНС второго поколения -
системы «GPS (НАВСТАР)» в США и системы «ГЛОНАСС» в России.
В СРНС второго поколения применяются навигационные космические
аппараты (НКА) на круговых геоцентрических орбитах с высотой -20000 км
над поверхностью Земли. Благодаря использованию атомных стандартов
частоты на НКА в системе обеспечивается взаимная синхронизация
навигационных радиосигналов, излучаемых орбитальной группировкой НКА.
На подвижном объекте в сеансе навигации принимаются радиосигналы не
менее чем от четырех радиовидимых НКА и используются для измерения трех
разностей дальностей и трех разностей радиальных скоростей объекта
относительно четырех НКА. Результаты измерений и ЭИ, принятая от каждого
НКА, позволяют определить (уточнить) три координаты и три составляющие
вектора скорости подвижного объекта и определить смещение шкалы времени
объекта относительно шкалы времени системы. В СРНС число потребителей не
ограничивается.
СРНС второго поколения включает в себя три сегмента: орбитальную
группировку НКА; наземный комплекс управления орбитальной группировкой
НКА; аппаратуру пользователей. Принципы построения СРНС «ГЛОНАСС» и
«НАВСТАР» в общих чертах идентичны но отличаются технической
реализацией подсистем.
5.2.8.1. Глобальная система позиционирования
(The Global Positioning System — GPS)
Это основанная на специальных спутниках система, созданная и
полностью контролируемая Департаментом Обороны США (DoD).
Стоимость создания всего комплекса составила примерно 12 миллиардов
долларов США. Рассматривается возможность создания системы на сумму
порядка 1 миллиарда долларов - планируется добавить еще две частоты. Эта
система обеспечивает возможность определения пространственного положения
в любой точке земного шара при любой погоде 24 часа в сутки.
202
Бортовые сигналы спутников могут отслеживаться специальными
приемниками для целей навигации, получения сигналов точного времени и
определения координат.
GPS состоит из трех сегментов: космического, управляющего и
пользовательского. Космический сегмент состоит из спутников, числом до 32,
вращающихся вокруг Земли на высоте около 20000 км с периодом обращения
12 часов. Одновременно работают только 24 спутника NAVSTAR
Параметры спутниковых орбит подобраны таким образом, что в любой
точке земного шара обеспечивается возможность одновременного приема
радиосигнала как минимум от четырех спутников. Каждый спутник имеет на
борту 4 высокоточных атомных часов и постоянно посылает радиосигналы,
используя собственный идентификационный код.
Управляющий сегмент состоит из ряда наземных мониторинговых
станций, расположенных в разных частях земного шара, и главной
управляющей станции, расположенной на базе Военно-воздушных сил в штате
Колорадо (США). В течение суток каждый спутник дважды пролетает над
одной из мониторинговых станций. Станции принимают радиосигналы от
спутников и по ним отстраивают орбитальные модели для каждого спутника.
По этим моделям рассчитываются параметры орбит спутников (эфемериды) и
коэффициенты коррекции бортовых часов спутника. Полученные данные
передаются на главную управляющую станцию, которая один раз в сутки
передает эфемериды и коэффициенты коррекции часов на спутники. Каждый
спутник «знает» не только свои эфемериды, но и эфемериды всех спутников
созвездия.
Пользовательский сегмент состоит из большого числа гражданских и
военных GPS-приемникор, которые преобразуют спутниковые сигналы в
пространственные координаты, скорость перемещения приемника и сигналы
точного времени. Для расчета четырехмерной координаты положения
приемника (X, Y, Z, Т) требуется принять и обработать радиосигнал как
минимум от четырех спутников. Департамент обороны США оставляет за
собой право в любой момент времени ввести режим селективного доступа, при
котором точность определения координат существенно снижается.
Каждый GPS-спутник постоянно передает радиосигналы на двух частотах:
L1 и L2 (рис. 5.27). Частота £1 (1575.42 МГц) несет навигационное сообщение
и гражданский кодовый сигнал (С/А код) сервиса SPS. Частота £2
(1227,6 МГц) используется для измерения ионосферных поправок и несет
шифрованный военный кодовый сигнал (P-код и Y-код) Всего на частотах £1 и
£2 передаются три вида кодовых данных. Гражданский С/А код - это
псевдослучайный радиошум, который передается на частоте 1,023 МГц. Этот
код повторяется каждую миллисекунду.
203
СИГНАЛ LI
НЕСУЩАЯ ЧАСТОТА L1 157542 МГц
шмом------------------*
С А КОД I 023 MIЯ
HU УЩАЯ ЧАС ГОТА L2 1227.6 МТ ц
гамж ---------
® Микшер
Рис. 5.27. Сигналы спутника GPS
Спутниковое навигационное сообщение это особый низкочастотный
радиосигнал, который передается 50 раз в секунду. Навигационное сообщение
содержит: описание GPS спутниковых обрит, коэффициенты коррекции
бортовых часов спутников и другие системные параметры Эти данные
называют также эфемеридами спутников. Эфемериды используются при
планировании работ с применением GPS оборудования и для определения
пространственных координат. Спутниковое навигационное сообщение
передается на частоте LA.
Каждый спутник и приемник имеет встроенные часы, которые точно
синхронизированы со всемирным GPS временем. Это позволяет и спутнику и
приемнику в один и тот же момент времени генерировать одинаковый
псевдослучайный код. Когда приемник получает и расшифровывает код от
спутника, он просматривает в обратном направлении свой собственный код и
определяет промежуток времени, который прошел с того момента, когда
приемник генерировал тот же код, который он принял от спутника Расстояние
межд\ спутником и GPS-приемником определяется по известному времени
прохождения радиосигнала от передающей антенны спутника до антенны
приемника. Аналогичным образом измеряется расстояние до других спутников,
находящихся в пределах радиовидимости GPS-приемника.
В случае плоской двумерной задачи необходимо иметь расстояния до трех
спутников, а для получения трехмерных координат до четырех спутников
Так как расстояние между спутниками, их положение относительно Земли (их
координаты), а также удаление от уровня моря постоянны и известны, то задача
определения координат GPS-приемника сводится к решению геометрической
задачи (рис. 5.28) нахождения высот координатных треугольников 1 и 2 (на
рис. 5.28 показаны пунктиром). Зная значения этих высот, а также расстояния
до спутников, появляется возможность вычисления высоты над уровнем моря,
на которой находится БПЛА.
204
Рис. 5.28. К пояснению принципа опредепения координат
с помощью системы GPS
Теоретически, отложенные от спутников радиусы-векторы, равные
измеренным расстояниям от спутников до приемника, дозжны пересечься в
одной точке. На самом же деле этого не происходит. Это вызвано тем, что
кварцевые часы приемника имеют гораздо меньшую точность, чем
высокоточные атомные часы спутников. В связи с этим происходит измерение
не расстояний, а, так называемых, псевдодальностей
Возникающая неоднозначность в определении координаты искомой точки
устраняется использованием алгоритма обработки псевдодальностей. Зная
причину этого явления - неверный ход внутренних часов GPS-приемника,
легко найти точку истинного местоположения его фазового центра. Для этого
встроенный микрокомпьютер примемника начинает прибавлять и вычитать
одно и то же время из измеренных дальностей до спутников.
5.2.8.2. Орбитальная группировка «1 ЛОНАСС»
Полная орбитальная группировка содержит 24 платных НКА на круговых
орбитах с наклонением 64,8° в трех орбитальных плоскостях по восемь НКА в
каждой. Долготы восходящих узлов трех орбитальных плоскостей различаются
номинально на 120°. Номинальный период обращения НКА равен 11 ч 15 мин
44 с, номинальная высота орбиты составляет 19100 км над поверхностью
Земли В каждой орбитальной плоскости восемь НКА разнесены на 45° За
время эксплуатации на орбите (до пяти лет) реальные положения НКА в
орбитальной группировке могут отличаться от номинальных значений не более
чем на ±5°. На рис. 5.29 изображена схема в виде трех орбитальных колец
205
орбитальной группировки в системе «ГЛОНАСС» при взгляде со стороны
северного полюса мира
Чтобы наземный объект мог использовать в сеансе навигации не менее
четырех НКА, образующих удовлетворительное созвездие (один высокий НКА
и три низких, разнесенных по направлению), на наземном объекте необходимо
обеспечить прием навигационных радиосигналов от НКА при углах
возвышения более 5°.
Рис. 5.29. Схема размещения НКА в орбитальной
группировке системы «ГЛОНАСС»
Орбитальная группировка НКА системы «ГЛОНАСС» с несинхронными
круговыми орбитами (Т»11 ч 16 мин) более стабильна по сравнению с
орбитальной группировкой системы «НАВСТАР», имеющей синхронные
орбиты (Т х 12 ч 00 мин). Данное обстоятельство можно объяснить следующим
образом. Синхронная орбита НКА имеет двухвитковый след на поверхности
Земли, и возмущения орбит отдельных НКА, обусловленные нецентральностью
поля тяготения Земли, будут заметно отличаться. Несинхронная круговая
орбита имеет многовитковый след на поверхности Земли, и возмущения орбит
для всех НКА в орбитальной группировке будут практически одинаковы.
Основной геометрической характеристикой орбитальных группировок
штатных НКА в СРНС, от которой зависит точность навигапии наземных
потребителей в СРНС, являются геометрические свойства созвездия НКА,
которое «видит» наземный потребитель. Минимально необходимое
оптимальное созвездие содержит четыре НКА: один вблизи зенита, три НКА
вблизи горизонта, равномерно разнесенные по азимуту.
В системе «ГЛОНАСС» каждый штатный НКА постоянно излучает
шумоподобные непрерывные навигационные радиосигналы в двух диапазонах
частот: в области 1600 МГц и области 1250 МГц Навигационные измерения в
двух диапазонах позволяют исключить ионосферные погрешности измерений.
Шумоподобные навигационные радиосигналы НКА различаются
несущими частотами. Поскольку для двух находящихся в одной орбитальной
плоскости взаимноантиподных НКА можно применять одинаковые несущие
частоты, то для 24-х штатных НКА минимально необходимое число несущих
частот в каждом из рабочих диапазонов равно 12-ти. Данное утверждение
206
достаточно очевидно, если иметь в виду наземных потребителей (сухопутных,
морских, воздушных), поскольку взаимноантиподные НКА не могут
одновременно находиться в зоне радиовидимости наземного потребителя.
Навигационные сигналы двухкомпонентны, имеют широкополосные и
узкополосные частоты Широкополосные навигационные радиосигналы в
системах «НАВСТАР» и «ГЛОНАСС» предназначены для использования
санкционированными потребителями и имеют защиту от
несанкционированного использования. Узкополосные навигационные
радиосигналы являются открытыми и предназначены для гражданских
потребителей. Но в системе «НАВСТАР» эти сигналы искусственно
искажаются с помощью процедуры селективного доступа которая ухудшает
точность навигации.
Навигационные радиосигналы, излучаемые штатными НКА, образуют в
околоземном пространстве радионавигационное поле. В СРНС «ГЛОНАСС»
каждый штатный НКА излучает в сторону Земли навигационное радиосигналы
в диапазонах 1600 МГц и 1250 МГц. Рабочая часть диаграммы направленности
передающих антенн имеет ширину 38° и «освещает» диск Земли до высоты
2000 км над ее поверхностью. Рабочую часть диаграммы направленности
можно представить в виде конусного радиолуча с углом 38° при вершине.
Радионавигационное поле полной орбитальной группировки (24 НКА) на
высотах Н < Hq = 2000 км непрерывно в пространстве, т.е. в любой точке этого
пространства потребитель получает сигналы не менее чем от четырех НКА,
образующих по отношению к потребителю удовлетворительное по
геометрическому фактору созвездие для трехмерного определения координат и
вектора скорости.
Для наземного потребителя основной характеристикой
радионавигационного поля являются мощность навигационного радиосигнала
околозенитного и пригоризонтного НКА на выходе «стандартной» приемной
антенны (без учета отражений от поверхности Земли):
Р0-ЛС(фШх7(4л/?)2,
где Рп и G(ср) - мощность излучения и коэффициент направленности (с учетом
потерь) передающей антенны соответственно, <р - направление на приемную
антенну огносительного оси конуса излучения, 6(р) коэффициент
направленности «стандартной» приемной антенны, Р - направление на
передающую антенну, X - длина волны несущего радиосигнала, R - дальность
от приемной антенны до передающей.
В системе «ГЛОНАСС» радиосигналы передающих антенн навигационных
НКА имеют круговую правую поляризацию.
В системе «ГЛОНАСС» высокая точность позиционирования наземных и
воздушных объектов обеспечивается следующими факторами:
1) стабильный бортовой атомный стандарт частоты, имеющий
среднеквадратичное относительное отклонение среднесуточных значений
—13
частоты не хуже 1 • 10 ;
207
2) малый уровень немодулированных возмущений орбиты НКА, что
позволяет повысить точность определения и прогноза эфемеридной
информации;
3) двухкомпонентный навигационный радиосигнал (узкополосный и
широкополосный) в обоих диапазонах частот (1600 МГц и 1250 МГц).
5.2.8.3. Приемники и антенны
Приемники СНС представляют собой изделия с широким набором
функций. В качестве примера можно указать модуль «LEA-4H» (рис. 5.30)
(однотипный ему - «ПМ-LH») Модули могут работать с пассивной антенной
«DAE1575B» (рис. 5.31).
Рис. 5.30. Внешний вид GPS-.модуля «LEA-4H»
Рис. 5.31. Внешний вио антенны «DAE1575B»
Модули «LEA-4H» и «ПМ-LH» представляют собой полностью готовые к
использованию и не требующие дополнительных внешних элементов GPS-
приемники, построенные на базе GPS-технологии «Antaris®», являющейся
совместной разработкой компаний «Atmel» и «u-Ыох» Эти модули
предоставляют разработчикам навигационной аппаратуры следующие
возможности:
- определение положения благодаря сверхвысокой чувствительности в
зонах с ограниченной видимостью небесной сферы;
- обновление внутреннего программного обеспечения (Firmware) и
сохранение текущей конфигурации благодаря наличию флеш-памяти;
использование батарейного питания благодаря малом}
энергопотреблению;
208
- встроенный малошумящий усилитель допускает использование как
активных, так и пассивных антенн.
Основные особенности модулей:
высокая точность определения положения благодаря исключению
переотраженных сигналов;
- надежная работа в условиях слабого сигнала;
- поддержка дифференциального режима (DGPS) и спутниковых
подсистем дифференциального сервиса (SBAS);
- режим работы «FixNOW™» для снижения энергопотребления;
- поддержка протоколов NMEA, RTCM собственного бинарного
протокола UBX, возможностью одновременной работы по разным протоколам
через один интерфейс;
- возможность контроля состояния антенны (короткое замыкание, антенна
отключена).
Технические характеристики модулей, изготовленных по технологии «Anteris-
4», приведены в табл. 5.2.
Таблица 5.2. Характеристики приемников GPS («Amaris-4»)
Характеристика Значение
Количество каналов слежения за спутниками 16
Частота обновления, не менее, Гц 1
Чувствительность: режим захвата, дБ режим слежения, дБ -142 -158
Точность определения положения с вероятностью 50%: на плоскости, м в пространстве, м 2,5 5,0
Время первого определения положения: «холодный» старт, с «горячий» старт, с 34 <3,5
Интерфейс, количество UAR1,2
Габариты, мм 25,4x25,4x3
Напряжение питания, В 2,7-3,3
Потребляемая мощность, мВт 170
Температурный диапазон, °C -40 - +85
Антенны приемников СНС отличаются от широко распространенных
штыревых антенн предназначенных для линейно поляризованных сигналов.
Самые распространенные антенны СНС имеют плоскую форму (рис. 5.32),
другой вариант исполнения - спираль (рис. 5.33). Плоские антенны в отличие
209
от спиральных, требуют для работы заземленного основания Спиральные
антенны могут использоваться с заземленным основанием или без него
Рис. 5.32. Пюские антенны произвооства «Етшс Technology Corp»
Рис. 5.33. «Quadritilar» спиральная антенна производства «Sarantel Ltd»
Фактические размеры антенн зависят от размеров диэлектрика,
заполняющего пространство между активными частями антенны. Чем меньше
размеры антенны, тем большая требуется точность изготовления. Меньшие
антенны имеют меньшую апертуру. Недостатком малых габаритов является то,
что антенна получает меньше энергии от сигнала спутника, что приводит к
более низкому коэффициенту усиления, а последующее усиление не позволяет
улучшить отношение «сигнал-шум».
Антенны разделяются на пассивные и активные. Пассивные антенны
содержат только принимающий элемент. Иногда пассивные антенны содержат
цепь согласования для подключения к кабелю с импедансом 50 Ом. Активные
антенны имеют встроенный малошумящий усилитель. Активные антенны
нуждаются в электропитании. Ток, потребляемый активной антенной,
составляет порядка 10-20 мА.
210
Антенны GPS-модулей подобных указанным выше обладают
следующими характеристиками: центральная частота - 157.42 МГц; усиление в
зените - 5 тБ. сопротивление - 50 Ом; полоса пропускания - 15 МГц.
На выбор антенны нужно обращать особое внимание. Как образно заметил
Д. Санчес, один из инженеров компании «u-Ыох». «лаже лучший приемник не
может вернуть то, что было потеряно в антенне».
5.2.9. Комплексирование систем ориентации и навигации
Основная цель комплексирования (объединения) систем ориентации и
навигации заключается в повышении точности определения навигационных и
угловых параметров ориентации БПЛА Объединяться могут не только
системы, но и отдельные датчики первичной информации (датчики давления
магниторезисторы, акселерометры и т.д.), вырабатывающие одни и те же
параметры. При объединении нескольких навигационных измерителей
наиболее широкое применение получили две схемы комплексирования,
известные как способ компенсации и фильтрации [6, 13, 16, 21, 26,44].
5.2.9.1. Способ компенсации
Структурная схема комплексирования по способу компенсации приведена
на рис. 5.34.
Рис. 5.34. Структурная схема комплексирования по способу компенсации
Сигналы на выходе первого и второго навигационных измерителей имеют
вид:
X](z)=x(f) + n1(if), х2(/) х(/)+л2(/) (5.53)
где x(t) — измеряемый навигационный параметр (полезный сигнал), «](/).
погрешности навигационных измерителей, которые предполагаются
стационарными случайными процессами.
211
В соответствии с принципом комплексирования по способу компенсации,
сигналы Х|0 и Х2О) подаются на вычитающее устройство ВУ], на выходе
которого образуется разностный сигнал (т. А на рис. 5.34)
^(0 = «1(0-«2(4
не содержащий измеряемою навигационного параметра Разностный сигнал
х^0 поступает в линейный фильтр, передаточная функция F(p) которого
должна быть такой, чтобы он в соответствии с выбранным критерием в
наибольшей степени подавлял помеху «20 и в минимальной степени искажал
помеху И]0. В операторной форме сигнал на выходе фильтра с передаточной
функцией F(p) имеет вид (т. В на рис. 5.34)
*М = F(p)xA(p)=(nx(p)-n2(p)}F(p).
На вычитающем устройстве ВУ2 образуется разность
у(р) = *1 (р)-хв {р} x{p)+n^\p)-(nx{p}-n2(p^F(p\-
= 4р)+ 0 - f{p))nx{p)+ F(p)n2(p).
Выходной сигнал комплексированной навигационной системы может быть
представлен в виде
у(р) = х(^)+е(/?),
где 80 - результирующая погрешность комплексированной навигационной
системы, определяемая следующим образом:
е(р) = Е1(р)+ б2(р) = ф(р)«1(р)+ (5 Р)
где 810. Е20 - составляющие, обусловленные процессами nx(t) и n2{t)
соответственно.
Из соотношения (5.55) можно заключить, что 80 не зависит от х0
Вследствие чего системы, в которых погрешность не зависит от полезною
сигнала х0. называются инвариантными по отношению к х0.
Предположим, что спектральная плотность S'] (со) погрешности первого
навигационного измерителя сосредоточена в низкочастотной области, а
спектральная плотность погрешности второго измерителя является
широкополосной (рис. 5.35). Можно показать, что для рассматриваемых, в
качестве иллюстрации, спектральных плотностей S']((o) и S'2(co) линейный
фильтр F(ja) является фильтром нижних частот. На рис. 5.36 приведены
предполагаемая амплитудно-частотная характеристика фильтра нижних частот
F(jco) и амплитудно-частотная характеристика фильтра верхних частот
0(jco)=1-F(jco)
212
Рис. 5.35. Спектральные плотности погрешностей
навигационных измерителей
Рис. 5.36. Амплитудно-частотные характеристики фильтров
Практически фильтры в подобных комплексированных навигационных
системах не являются оптимальными. Они часто реализуются с помощью
апериодического звена, т.е. имеют следующую передаточную функцию:
7р + 1
где Т - постоянная времени фильтра.
Передаточная функция фильтра верхних частот в этом случае имеет вид:
0(^) = 1-F(p) = -^-.
7/7 + 1
В идеальном случае, когда спектральные плотности S](e>) и не
перекрываются, сигнал на выходе линейного фильтра комплексированной
системы имеет вид
ХВ Ы = F(pkA № = («1 О’) - «2 {p))F(p} = пАр)-
Тогда выходной сигнал комплексированной навигационной системы был бы
равен:
у(/) = X] (/) - хв (t) = х(/) + И] (t) - тц (/) = х(/),
т.е. полезный сигнал воспроизводился бы без ошибок. В действительности
спектры S](a>) и Л'2(<0) перекрываются, поэтому в выходном сигнале г(/)
присутствует погрешность е(/), дисперсия которой определяется выражением:
De = f [|1 - F(ja>)|2Sl(oJ)+(5.56)
213
Дисперсия Z>E графически характеризуется суммой площадей заштрихованных
участков (рис. 5.37).
Рис. 5.37. Ошибки комплексированной навигационной системы,
обусловленные: а помехой п$). б -помехой и2(0
Из рис. 5.37 видно, что на выходе комплексированной навигационной
системы результирующая погрешность е(/) существенно меньше, чем
погрешности отдельных измерителей «,(/) и «20 Таким образом, выходной
сигнал в рассмотренной комплексированной навигационной системе состоит из
трех частей: полезного сигнала х(/), ошибки £](/), обусловленной помехой
«](/), прошедшей через фильтр верхних частот, и ошибки Е2О)’ обусловленной
помехой «2^' прошедшей через фильтр нижних частот.
Выигрыш в точности и помехоустойчивости при комплексировании
навигационных измерителей тем выше, чем больше различие в спектральных
характеристиках помех Hj(z) и «2(О- Фильтр является безынерционным
относительно x(t).
На практике комплексирование навигационных измерителей на основе
взаимной компенсации и фильтрации их ошибок, как правило, осуществляется
с применением критерия минимума среднего квадратического значения
результирующей ошибки. В таком случае передаточная функция линейного
фильтра F(p) выбирается такой, чтобы обеспечить минимум величины De
(5.56).
5.2.9.2. Способ фильтрации
Структурная схема комплексирования V измерителей по способу
фильтрации приведена на рис. 5.38.
214
Рис. 5.38. Структурная схема комплексирования по способу фильтрации
Сигналы на выходе навигационных измерителей имеют вид:
*1 (/)=*(/)+«! (г);
x2(t) = x(f)+n2(0;
хЛ(0 = х(0+ ил -(О,
где х(/) - истинное значение измеряемого навигационного параметра, пД/)
погрешность измерения на выходе z -го измерителя, i' -1,2,..., N.
Сигналы всех измерителей поступают на входы соответствующих линейных
фильтров с передаточными функциями Fj(p). Сигнал на выходе
комплексированной навигационной системы в соответствии с рис. 5.38 имеет
вид:
y(p)=YFl(p)xi(p)-
i=l
При реализации комплектированных навигационных систем, построенных по
способу фильтрации, необходимо, чтобы фильтр не вносил динамических
погрешностей в измерение x(t), т.е. должно выполниться условие
инвариантности
N
(5.57)
/ 1
При выполнении этого условия выходной сигнал комплексированной
навигационной системы имеет вид:
л
y(p) = x(p)+XFi(p)ni(p)- (5-58)
/1
Из (5.58) видно, что результирующая погрешность измерения имеет вид:
215
N
z(p)= y(p)-x(p)=
i=\
В часто встречающемся на практике случае двух измерителей уравнение
(5.58) принимает вид:
Нр) = xtP)+ Fi(p)nx(p)+ F2(p)n2(p).
Согласно условию инвариантности (5.57) F\(p) = 1 - F2(p), тогда
1(/0 = + 0 - f2 О’))"! (p) + f2 (p)n2 (p) (5.59)
Из сравнения (5.54) и (5.59) следует, что способы компенсации и
фильтрации в рассмотренном частном случае эквивалентны друг другу.
5.2.9.3. Комплексирование с применением фильтров Калмана
В интегрированных инерциально-спутниковых системах наибольшее
применение получили две схемы построения инвариантных алгоритмов,
отличающихся правилом формирования разностных измерений, поступающих с
БИНС и СНС, и составом оцениваемого вектора состояния в фильтре Калмана
[13, 16, 19, 43,44].
В схеме комплексирования, называемой слабосвязанной схемой (рис. 5.39).
измерение Z для задачи фильтрации формируется путем непосредственного
сопоставления координат SBt1HC, S{ И( и скоростей уБИИС, yCrlf При этом
вектор Z содержит погрешности БИНС и СНС. Слабосвязанная схема требует,
чтобы в СНС производились измерения не менее чем от четырех спутников.
Рис. 5.39. Слабосвязанная схема комплексирования
Вторая схема (рис. 5.401 называемая сильносвязанной, характеризуется
тем, что при построении фильтра Калмана разностное измерение формируется
путем сопоставления вычисленных в БИНС (, Ь^ИНС ) и измеренных в
СНС псевдодальностей и псевдоскоростей. В этом случае в векторе состояния
Z содержатся ошибки, содержащиеся в вычислениях БИНС и в измерениях для
каждого из спутников. Особенность данной схемы заключается в том, что она
216
работоспособна даже если в СНС производится измерение только от одного
спутника.
Рис. 5.40. Силъноскязанная схема комплексирования
Важно подчеркнуть, что в каждом из вариантов комплексирования
осуществляется замыкание обратных связей на БИНС. Подобное замыкание
разумно осуществлять и на СНС. Наиболее просто это реализовать в сильно
связанном варианте путем использования вычисления данных о дальности и
радиальных скоростях в целях ускорения захвата сигнала спутника.
Контрольные вопросы
1. Какие существуют типы систем ориентации?
2. Назовите чувствительные элементы (датчики), применяемые в различных
типах систем ориентации.
3. Какими угловыми параметрами определяется взаимное положение
географической и связанной систем координат?
4. Какие параметры содержат кинематические уравнения Эйлера-Крылова?
5. С помощью структурной схемы БСО на базе кинематических уравнений с
углами Эйлера-Крылова пояснить аглоритм выработки углов ориентации ЛА.
6. В чем заключается физическая сущность процесса первоначальной выставки
БСО?
7. Поясните принцип работы магнитометрической системы ориентации.
8. Поясните принцип работы пирометрической системы ориентации.
9. В чем заключаются особенности калибровки магнитометрической и
пирометрической систем ориентации?
10 Чем вызывается необходимость комплексирования различных типов систем
ориентации?
217
11. Каким образом необходимо ориентировать оси чувствительности
акселерометров и гироскопов в БИНС различных типов?
12. Какие функции выполняет блок пересчета в алгоритмах БИНС?
13. На основе структурных схем пояснить работу северного и вертикального
каналов БИНС.
14. Почему вертикальный канал БИНС не используется в автономном режиме9
15. Что включают в себя основные уравнения инерциальной навигации?
16. В чем основная идея алгоритма идеальной работы БИНС?
17. В чем преимущества применения параметров Родрига-1 амильтона перед
направляющими косинусами?
18. На основе блок-схемы БИНС поясните выработку навигационных
параметров ЛА.
19. Назовите физические предпосылки для реализации начальной выставки
БИНС.
20. Дайте характеристику особенностей навигационного алгоритма БИНС для
БПЛА с небольшим полетным временем.
21. Назовите существующие спутниковые навигационные системы и
особенности распределения навигационных космических аппаратов на
орбитах.
22. На каких частотах передается информация навигационными космическими
аппаратами и что она содержит?
23. В чем заключается принцип определения координат объекта с помощью
СНС9
24. Какие приемники и антенны СНС могут быть применены на БПЛА '
25. В чем заключается основная задача комплексирования систем ориентации и
навигации?
26. Какие существуют способы комплексирования систем ориентации и
навигации?
27. Дайте характеристику особенностей комплексирования способом
компенсации.
28. Дайте характеристику особенностей комплексирования способом
фильтрации.
29. Дайте характеристику особенностей комплексирования с применением
фильтров Калмана.
30. На основе блок-схемы поясните работу фильтра Калмана
218
Глава 6. Рулевой привод
Рулевой привод служит для преобразования сигналов управления в
движение управляющих органов (элероны, рули поворота и высоты и т.д.)
БПЛА. Рулевой привод включает рулевую машинку (РМ) с управляющей
электроникой и кинематические элементы передачи вращающего момента РМ к
управляющим органам.
6.1. Принципы устройства и действия рулевых машинок
Для малоразмерных БПЛА можно применить РМ, используемые в
радиоуправляемых моделях. Для более крупных БПЛА необходимы РМ
специальной разработки. Принципы устройства всех РМ однотипны. На
рис. 6.1 показаны общий вид и основные элементы РМ для радиоуправляемых
моделей [12]:
«Все элементы РМ смонтированы, как правило, в полистироловом
корпусе, состоящем из основания, верхней и нижней крышек. В полости под
верхней крышкой смонтирован редуктор, состоящий из 4-6 шестеренок с
зубьями разного модуля. В основной части смонтирован электродвигатель,
потенциометр обратной связи и размещена плата управления. Элементы
корпуса стянуты между собой по углам шурупами. Для защиты от вибрации
РМ крепятся на модели не жестко, а через специальные резиновые втулки с
латунными гильзочками.
а)
б)
Рис. 6.1. Рулевая машинка: а общий вид; б элементы конструкции: 1
электродвигатель и потенциометр обратной связи; 2 качалка; 3 верхняя
крышка с редуктором; 4 нижняя крышка- 5 - плата управления;
6 - корпус в сборе
На выходном валу редуктора, выступающего из верхней крышки, на
шлицах винтом (шурупом) закреплена качалка, которую посредством тяги
219
механически соединяют с рулем модели. Поворот качалки и будет
преобразовываться в механическое движение управляющего органа. Поворот
качалки называют по-разному. Широко распространен термин «расход рулевой
машинки». Известен также и «путь перекладки качалки/руля».
В качестве приводного электродвигателя в РМ используются
коллекторные электродвигатели постоянного тока. На плате управления
собрана вся электронная схема, базирующаяся на специализированной
микросхеме» [12].
Коллекторные электродвигатели имеют, как правило, трехполюсный ротор
и возбуждение от постоянного магнита. Встречаются и пятипопюсные роторы,
но реже, в основном, на мощных РМ. Лучшая динамика работы рулевого
привода обеспечивается РМ с бесколлекторным электродвигателем.
Основными техническими характеристиками РМ являются крутящий
момент на выходном валу и скорость поворота качалки Для мощных РМ
помимо крутящего момента указывают еще и момент силового удержания,
который больше крутящего. Важным параметром является также точность
отработки команд РМ.
Структурная схема электроники управления РМ приведена на рис. 6.2
Рис. 6.2. Структурная схема электроники управления РМ
(1, 2, 3, 4 транзисторы-ключи)
Схема состоит из генератора опорного импульса (ГОП), к которому
подключен потенциометр обратной связи, компаратора (К), устройства
выборки-хранения (УВХ) и силового моста, в диагональ которого включен
электромотор (М) (здесь базы транзисторов-ключей объединены условно).
«Управляющий импульс приходит на компаратор и одновременно
запускает генератор опорного импульса. Длительность опорного импхльса
зависит от положения потенциометра обратной связи, механически
соединенного с выходным валом. Для определенности можно указать
характерные для радиомоделей длительности. В среднем положении качалки
длительность равна 1,5 мс, в крайних положениях 0,8 и 2,2 мс соответственно
Управляющий и опорный импульсы сравниваются компаратором по
220
длительности. Разностный импульс появляется на верхнем шбо на нижнем
выходах компаратора в зависимости от того, какой из сравниваемых
импульсов длиннее. Длина разностного импульса определяет величину
рассогласования между «требуемым» и «имеющимся» положением руля БПЛА.
Эта величина измеряется и запоминается в виде постоянного потенциала на
время цикла управляющего импульса в устройстве выборки-хранения. Здесь
также дано упрощение работы УВХ. В действительности постоянный
потенциал открывает ключи лишь при большом разностном импульсе, а при
малых его значениях ключами управляет пропорционально удлиненный
разностный импульс. Выходы последнего управляются ключами силового
моста.
В предположении, что команды формируются джойстиком в разном
режиме управления оператором (пилотом), характерны следующие режимы
работы РМ:
1. Положение качалки соответствует положению джойстика на
радиопередатчике. При этом длительности управляющего и опорного
импульсов в РМ равны На обоих выходах компаратора - нули Они же
хранятся в устройстве выборки-хранения. Ключи обоих плеч моста закрыты,
мотор обесточен, качалка сохраняет свое положение.
2. Пилот изменяет положение джойстика так, что управляющий импульс
увеличился. Тогда компаратор на верхнем выводе выдаст разностный импульс.
Его величина будет сохранена в УВХ. Верхний выход УВХ откроет 1 и 3 ключи
моста и на мотор будет подано напряжение. Он начнет через редуктор
поворачивать качалку и соответственно потенциометр обратной связи так. что
длительность опорного импульса начнет возрастать. Такое состояние продлится
столько циклов управляющего импульса, пока с его длительностью не
сравняется длительность опорного импульса. После этого компаратор закроет
ключи моста. Мотор остановится.
3. Пилот перемещает джойстик в другую сторону. Управляющий импульс
становится короче опорного. Разностный импульс появляется на нижнем
выводе компаратора и через УВХ отпирает ключи 2 и 4 мост а. Мотор начинаем
вращать через редуктор качалку и потенциометр обратной связи, но уже в
другую сторону до тех пор. пока длительности импульсов опять не сравняются.
4 Пилот не трогает передатчик. Руль БПЛА, воспринимая нагрузку во
время движения, стремится повернуть качалку РМ. При этом изменяется длина
опорного импульса, разностный импульс с компаратора через УВХ открывает
пару ключей моста так, что мотор передает на редуктор момент,
препятствующий повороту качалки внешней силой. Происходит силовое
удержание положения качалки» [12]
Описанные режимы характерны для «идеальных» команд управления. В
действительности управляющие команды «зашумлены». Например, на РМ
может поступить «некорректный» сигнал от помех и с длительностью импульса
больше 2,2 мс.
В этом случае поведение РМ зависит от алгоритмов, заложенных в
управляющей плате.
221
Простейшие платы управления, структура которых показана на рис. 6.2,
начнут отрабатывать «неправильную» команду. РМ «загонит» выходной вал до
упора и будет держать электромотор под напряжением, пытаясь продвинуть его
дальше. Поломки, как правило, не произойдет, но бортовой аккумулятор начнет
интенсивно разряжаться. Цифровые РМ проверяют входной сигнал на
корректность, и «неправильный» сигнал отрабатывать не будут.
На рис. 6.3а показана временная диаграмма идеальной перекладки качалки.
«В точке 1 поступает команда на перекладку качалки. Ротор мотора начинает
вращаться и в точке 2 достигается маршевая скорость перекладки. В точке 3
«умная электроника» понимает, что надо тормозить и реверсирует мотор.
Время торможения будет меньше времени разгона, потому что внешняя сила и
силы трения при торможении помогают, а при разгоне мешают мотору. Если
электроника настроена правильно, то в точке 4 мотор остановится, а
длительности управляющего и опорного импульсов сравняются. Таким
образом, суммарное время перекладки качалки складывается из времени
разгона, времени перекладки с постоянной скоростью и времени торможения.
Время перекладки с постоянной скоростью зависит от мощности мотора. Оно
важно при большом пути перекладки. При малых отклонениях руля большое
значение приобретает время разгона и торможения, поскольку суммарное
время малых перемещений может только из них и складываться.
На рис. 6.36 показан график, соответствующий реальной РМ.
б)
Рис. 6.3. Графики перекладки качалки, соответствующие:
а идеальной РМ, б реальной РМ: (s — путь перекладки,
или расход руля; t - время)
В момент 1 приходит команда на перекладку руля и РМ начинает ее
отработку. В момент 2 длительности управляющего и опорного импульсов в
управляющей электронике РМ сравниваются Но в силу инертности РМ
222
«проскакивает» это значение. В точке 3 управляющая электроника
отрабатывает мотором назад и все повторяется В результате наблюдается
дрожание качалки возле положения, требуемого управляющим импульсом. Это
дрожание за рубежом получило название jitter (флаттер). Для борьбы с ним в
электронику вводится зона нечувствительности к погрешности
позиционирования. Технически это выглядит так: устройство выборки-
хранения, оценивая длительность разностных импульсов после компаратора,
воспринимает их малые значения как нули. То есть вводится интервал, в рамках
которого изменение управляющего импульса относительно опорного не
включает мотор РМ. Эту зону называют еще «мертвой зоной». Ее величина
определяет точность позиционирования качалки РМ относительно джойстика
передатчика
Слишком большая «мертвая зона» — плохо с точки зрения точности
управления рулями БПЛА Слишком малая - появится дрожание, также
ухудшающее точность отработки команды и резко повышающее
энергопотребление РМ. Ее допустимая величина определяется точностью
выполнения механики редуктора РМ и совершенством управляющей
электроники. Причиной дрожания исправной РМ может быть выход
питающего напряжения за пределы, допускаемые производителем. Это
является следствием того, что силовые и скоростные параметры РМ зависят от
напряжения ее питания» [12].
«Требование по точности отработки команд РМ существенно зависит от
масштабирования пути перекладки (расхода) РМ. На рис. 6.4а показана схема
управления рулем высоты для полета без резких маневров.
При площади руля высоты, составляющей 1/3 от площади стабилизатора,
обычно достаточно углов отклонения руля высоты в пределах ±15°. Поскольку
качалка РМ имеет диапазон поворота ±45°, то плечо на качалке делают втрое
меньше, чем плечо кабанчика руля высоты. Стандартная РМ имеет точность
позиционирования около 1% (средняя РМ). Го есть, на качалке угловая
погрешность составит около одного градуса, а на руле - втрое меньше (0.3°).
Можно считать, что такая точность приемлема для обычного полета, не
требующего резких маневров по высоты. Роль масштабирования возрастает при
экстремальном пилотировании, т.е. цри выполнении маневров на маленьких
скоростях полета, когда эффективность рулей резко падает. Чтобы сохранить
управляемость ЛА, резко увеличивают площадь рулей и углы их отклонениями
(рис. 6.46). Руль высоты может иметь площадь 2/3 от площади стабилизатора, а
диапазон его поворота ±45°. Чтобы можно было летать с таким рулем и на
обычных скоростях, необходимо иметь функцию ограничения пути.
Чтобы обеспечить управляемость второго ЛА, аналогичную первому, на
нормальных скоростях необходим диапазон перекладки руля ±7,5°, поскольку
площадь руля второго ЛА вдвое больше, чем у первого. Поэтому функцию
ограничения руля высоты для обычного полета задают в размере 17%. То есть,
полному пути перекладки джойстика соответствует путь перекладки руля
вшестеро меньший, чем на полном ходу (то есть с полным расходом рулей).
223
Если поставить на такой ЛА ту же РМ, что и в первом случае, то угловая
погрешность преобразовывается так: плечи качалки и кабанчика руля высоты
должны быть одинаковыми, поскольку углы их поворота одинаковы по 45° в
обе стороны. Поэтому на руле погрешность останется 1° Поскольку руль
второго ЛА вдвое больше, чем у первого, такая погрешность эквивалентна 2°
ошибки в пересчете на аэродинамический эффект от руля С такой точностью
летать очень трудно, почти невозможно» [12].
а)
Рис. 6.4. Схемы управления рулем высоты а для почета без резких маневров;
б - для экстремального управления 1 - качалка РМ; 2 кабанчик руля высоты
В этом случае ошибки управления будут определяться работой бортового
оборудования.
Принципиальное отличие цифровых РМ от всех остальных - в
электронике. В обычных РМ используется аналоговая электроника, где
различные временные характеристики задаются резисторами и конденсаторами.
В цифровых РМ стоят микроконтроллеры, частота которых стабилизирована
кварцевым резонатором. Обработка входных данных и расчет усилия
производится программой. Отсюда и название РМ - «цифровые»[32].
«Электроника цифровых РМ работает на более высокой частоте, что
позволяет улучшить реакцию РМ (см. рис. 6.2). Электромотор в РМ
у правляется импульсами напряжения. Чем большее усилие нужно развить на
выходе РМ, тем более длинные импульсы подаются на электромотор. Но в
224
обычных рулевых машинках период импульсов напряжения на двигателе
жестко привязан к периоду входного сигнала и составляет около 20 мс. А в
цифровых РМ такой завязки нет, и частота импульсов на двигателе намного
выше (рис. 6.5).
Vo
Об ншя РМ
f >вая РМ
III1IIIIL1
- *1
Рис. 6.5. Диаграммы напряжения питания на двигателе РМ
Понятно, что если подавать на электродвигатель слишком короткие
импульсы, то он останется неподвижным. То есть двигатель, а вместе с ним и
РМ, имеют мертвую зон} Это значит, что при очень маленьком сигнале
управления качалка рулевой машинки останется на месте. В цифровой
машинке микроконтроллер может скорректировать длительность импульса,
который необходим, чтобы стронуть мотор с места. Благодаря этому размер
мертвой зоны в цифровых машинках намного меньше.
Что касается более высокой частоты импульсов питания двигателя, то она
позволяет. цифровым машинкам быстрее развивать максимальное усилие, а
значит, и точнее реагировать на все изменения нагрузки. В сочетании с
уменьшенной мертвой зоной это позволяет цифровым РМ намного «жестче»
держать заданное направление, по сравнению с обычными машинками.
Скорость нарастания крутящего момента на выходном валу РМ с различной
электроникой управления иллюстрируется рис. 6.6.
Рис. 6.6. Скорость нарастания крутящего момента рулевой машинки
Цифровые РМ имеют следующие преимущества:
- большее разрешение (меньшая мертвая зона и более точное позиции-
онирование);
- более быстрый о гклик (более высокое ускорение);
225
- постоянное усилие на протяжении всего времени перекладки качалки;
- более высокое усилие для удержания качалки на заданной позиции.
Тем не менее, надо помнить о цене этих РМ и об их повышенном
энергопотреблении, чтобы не применять их без особой необходимости.
Можно еще добавить, что поскольку в цифровых РМ есть
микроконтроллер, некоторые производители добавляют в него дополнительные
сервисные функции. Например, цифровые сервомашинки фирмы Multiplex
позволяют программировать все ключевые характеристики: крайние положения
(рабочий сектор может быть расширен с 90 до 180 градусов): центральное
положение; реверс; скорость перекладки (ее можно уменьшить)» [32].
6.2. Математическая модель и передаточная функция рулевого
привода
Математическую модель одного канала рулевого привода в первом
приближении можно представить в виде [24, 51]:
Л(7 = Ua — Uoc
Uа = *1Ф3
^Ос ” Ф
U = WKC(S)KynmAUD(s) (61)
L”~^ + i*R«+iCe(i> = U
= -Ь^-Мтр ~м\ ~М2’
at г
где < — - оператор дифференцирования; I) напряжение на управляющей
dt
обмотке исполнительного двигателя; At - напряжение сигнала ошибки; Ua
напряжение с выхода джойстика наземной аппаратуры управления и связи; £я
- индуктивность якорной цепи; Uoc - напряжение с выхода устройства
обратной связи; Кя - сопротивление обмотки якоря; - коэффициент
пропорциональности между током якоря и вращающим моментом; Се
коэффициент пропорциональности между скоростью вращения и обратной
э.д.с.; J суммарный момент инерции, приведенный к оси аэродинамического
руля (включая момент инерции ротора двигателя, момент инерции элементов
редуктора и момент инерции аэродинамического руля); WKC(s) - передаточная
функция корректирующего звена; <р3 - задающий сигнал с джойстика наземной
аппаратуры управления и связи в угловой мере; ср угол поворота вала
аэродинамического руля; си — угловая скорость вала аэродинамического руля;
К} - коэффициент передачи джойстика; Кос - коэффициент передачи
226
усилительно-преобразующего устройства обратной связи; D(s) — передаточная
функция дискретизатора; b - коэффициент вязкого трения в опорах вала РМ;
Купт - коэффициент передачи усилительно-преобразующего устройства в
прямой цепи; i - передаточное число редуктора; - Ку<р - упругий момент,
обусловленный торсионным способом подвеса аэродинамических рулей; Ку
коэффициент пропорциональности упругого момента; М2 = КШУ
составляющая шарнирного момента, пропорциональная углу отклонения
аэродинамического руля; Кш - коэффициент пропорциональности шарнирного
момента; Мтр - момент сил сухого трения.
Для малой индуктивности Ья обмотки якорной цепи, структурная схема
одного канала рулевого привода на основании уравнений (6.1) с учетом
нелинейностей обусловленных ограничением момента двигателя по уровню,
кинематическим ограничением угла поворота аэродинамического руля,
дискретным характером сигнала управления D(s) приведена на рис. 6.7.
Рис. 6.7. Структурная схема одного канала рулевого привода
Частотный (аналитический) анализ динамики рулевого привода может
быть выполнен с помощью передаточной функции канала рулевого привода,
структурная схема которого (рис. 6.8) имеет упрощения по сравнению с
рис. 6.7: опущены звенья дискриминатора DCs), корректирующего звена
!Txc(s), нелинейного сухого трения Мтр, а также нелинейное звено на выходе
схемы. Нелинейное звено учитывается его линейной частью с коэффициентом
ЛГ0.
227
a)
Kv + Kw
Рис. 6.8. Структурная схема одного канала привода:
а) исходная; бу преобразованная
В соответствии с рис. 6.8 передаточная функция рулевого привода имеет
вид
ф(5) = ф<£) = _ Д-------------,
a(.s) fV+ 1
(6 2)
где
KiKynmKOiCM
К
м
; Т =
R я(К у Кш) + КynmK.QiCМКОС
t .__ + f
'2^Ря[Ка(Ку + Кш) + КуптК^СмКос}
__________JR*
R-я (КУ + кш)+кynmKQiCмкос
Чтобы воспользоваться метаматематической моделью (6.1) и
соответствующей ей структурной схемой канала рулевого привода,
необходимо предварительно вычислить моменты инерции рулевых органов
относительно их осей подвеса, а также упругие, шарнирные и моменты сил
сухого трения в осях их подвесов.
В качестве примера в табл. 6.1 приведены параметры органов управления
модели самолета ЯК-54. Плотность материала при расчетах принята равной
0,00034 г/мм3.
228
Таблица 6.1. Параметры органов управления
Органы управления Параметр, размерность
Масса, 1 Расстояние от оси вращения до центра масс руля, мм Момент инерции гмм
Руль направления 65,3 33,88 231386,48
Руль высоты 42,56 19,89 51498,47
Элерон 96.62 24,54 112057.81
Экспериментально определенные коэффициенты пропорциональности
упругих моментов, обусловленных торсионным способом подвеса аэро-
динамических рулей высоты, направления и элеронов, имеют значения:
Л^в= 0,167 Нм/рад; Кyu-Q,028 Нм/рад; Куэ= 0,028 Нм/рад.
Момент сил сухого трения для каждой из осей подвеса составил 0,05 Нм.
Коэффициенты шарнирного момента аэродинамических рулей могут быть
вычислены без учета его зависимости от угла атаки по формуле [7, 8, 9]:
= Мш /ф = O,OO5S7>pK 2 / 2, (6.3)
где S, b — площадь и хорда аэродинамического руля; V— скорость полета ЛА;
р- плотность воздуха.
Значения коэффициентов шарнирного момента, вычисленные по (6.3) для
V = 100 км/ч, приведены в табл. 6.2.
Таблица 6.2. Коэффициенты шарнирных моментов
Параметр S', см2 b, см Коэффициент шарнирного момента, Нм/рад
Руль направления 3,75 12,3 . *«,„=0,6
Руль высоты 4,3 8,2 А™ =0,48
Элерон 4,76 7,9 Ашэ=0,517
Исследование динамики рулевого привода может быть выполнено в
интегрированной среде моделирования «Matlab» на этапе проектирования. В
дальнейшем необходимы эксперименты, уточняющие математическую модель
и результаты ее исследования.
229
6.3. Динамика рулевого привода
Качественные характеристики динамики рулевых приводов по каждому
каналу управления для БПЛА самолетной схемы идентичны. Числовые
значения одноименных характеристик динамики рулевых приводов по каждому
каналу управления близки друг другу Оценку динамики рулевых приводов
можно выполнить на основании анализа результатов моделирования по одному
каналу, например, руля направления.
Имитационная модель рулевого привода канала направления приведена на
рис. 6.9.
Рис. 6.9. Имитационная моде пь рулевого привода
Исследование динамики рулевого привода аэродинамического руля
направления модели самолета ЯК-54 без учета шарнирного момента проведено
в интегрированной среде моделирования «MatLab6.5» при следующих
числовых параметрах: плечо кабанчика руля в два раза больше плеча качалки,
К>м= 0.028 Нм/рад. t/ = 4 8B - максимальное напряжение на управляющей
обмотке исполнительного двигателя; С „///?„ - 0,125 Нм/В, Cci -2,6Вс/рад:
./-0,00023 кгм2, lPk.(s) = l, А"|=1В/рад, Кж = 1 В/рад, b 0.03 Нмс.
А^пт -270, Мтр =0,05 Нм, фтах 0,52 рад - ограничение по углу поворота
аэродинамического руля, время дискретизации 20 мс.
На рис. 6.10 представлен график отработки приводом угла задатчика
величиной 0,5 рад при начальном угле поворота руля 0,5 рад и график ошибки
отработки у гла задатчика. Из графика видно, что время перекладки
аэродинамического руля направления составило 0,65 с, а установившаяся
ошибка отработки угла задатчика 7 угл.мин. Увеличение коэффициента
передачи усилительно-преобразующего устройства в прямой цепи до
Кпт = 900 при сохранении устойчивого режима работы и времени перекладки
руля позволяет уменьшить установившуюся ошибку отработки угла задатчика
до 1,9 угл.мин. Время перекладки руля, полученное в результате модели-
230
рования, хорошо согласуется с временем перекладки, определенным в резуль-
тате эксперимента.
Рис. 6.10. Графики отработки угла заоатчика и ошибка ompaot тки угла
задатчика: 1 угол поворота вала аэродинамического руля, 2 ошибка
отработки угла задатчика
На рис. 6.11, 6.12 представлены графики угла задатчика, изменяющегося
по синусоидальному закону с амплитудой 0,261 рад (15°) и соответственно с
частотами - 0,5 Гц, 1 Гц, а также графики отработки угла задатчика приводом и
графики ошибки отработки угла задатчика.
Анализ графиков на рис. 6.11, 6.12 показывает, что на частотах 0,5 Гц и
1 Гц амплитуда угла ошибки в установившемся режиме не превышает
соответственно 34угл.мин. и ббугл.мин. По мере увеличения частоты
заданного сигнала, амплитуда поворота руля уменьшается, а ошибка растет
при сохранении амплитуды задающего сигнала. На частоте в 4 Гц в
установившемся режиме амплитуда угла поворота вала аэродинамического
руля уменьшается в 2,9 раза по сравнению с амплитудой угла задатчика. При
уменьшении амплитуды угла задатчика до 3° и частоте изменения угла
задатчика 4 Гц амплитуда ошибки резко уменьшается и составляет 48 угл. мин.
Рис. 6.11. Углы задатчика, поворота вала аэродинамического ручя и ошибка
отработки угла задатчика (f = 0,5 Гц): 1 -угол задатчика • 2 -угол поворота
вала аэродинамического руля; 3 — ошибка отработки угла задатчика
231
Рис. 6.12. Углы задатчика, поворота вала аэродинамического руля и ошибка
отработки угча задатчика (f = 1 Гц): 1 угол задатчика; 2 угол поворота
вала аэродинамического руля, 3 ошибка отработки угла задатчика
В табл. 6.3. приведены отношения угла задатчика (<р3) и угла отклонения
аэродинамического руля, полученные экспериментально (фэ) и в результате
моделирования (<pv), которые демонстрируют хорошую сходимость
результатов моделирования и экспериментальных данных.
Таблица 6.3. Сравнительные результаты моделирования и эксперимента
Частота изменения угла (<р3 ) задатчика, изменяющегося по синусоидальному закону с амплитудой 15° 0,5 Гц 1 Гц 2 Гц 4 Гц
Фз/фл, 1,006 1,008 1,37 2,9
Фз/Фэ 1 1 1,36 з
Аналогичное моделирование работы рулевого привода с учетом
шарнирного момента (табл. 6.2) показал^ что учет действия шарнирного
момента приводит к некоторому увеличению инерционности привода и
увеличению установившейся ошибки
В ряде модификаций РМ используется релейный закон управления, для
которого характерно наличие автоколебаний (флаттер) аэродинамического руля
с незначительной амплитудой. Время перекладки руля по сравнению с РМ с
пропорциональным законом управления практически не меняется
6.4. Конструкция и технические характеристики рулевых машинок
Рулевые машинки, выпускаемые серийно, имеют однотипные
конструкции и отличаются габаритами (размерами) и формой [ресурсы сети
232
Internet], Большей мощностью, крутящим моментом и прочностью механики
обладает РМ формата «гигант». Наиболее распространены РМ стандартного
формата. В этом формате выпускаются и самые дешевые и самые дорогие РМ.
Наиболее мощные из них перекрывают по моменту и мощности РМ формата
гигант, имея существенно меньшие габариты и вес. Но цена при этом, к
сожалению, больше. В размерах близких к стандарту выпускаются
низкопрофильные РМ. Их удобно закрепить непосредственно на крыле для
управления элеронами. Для «микро-» и «мини-» БПЛА подходят РМ форматов
«мини-», «микро-», «нано-» и «пико-».
«Наиболее уязвим при авариях узел редуктора, содержащий 4-6
шестеренок, которые бывают пластиковыми или металлическими. Впрочем,
даже в последнем случае, часто вторая и третья от мотора шестеренки все-таки
пластиковые (рис. 6.13а).
Металлические (латунные, иногда алюминиевые) шестерни обладают на
порядок большей ударной прочностью зубьев. То есть, их живучесть при
авариях намного выше, чем у пластиковых шестеренок. Но они существенно
дороже и несколько тяжелее. Многие модели РМ выпускаются в двух
вариантах: с пластиковыми и металлическими шестернями. В названии РМ с
металлическими шестернями добавляют буквы MG (Metal Gearj Помимо цены
такие РМ имеют еще один недостаток. На моделях с высоким уровнем
вибраций со временем на зубьях шестерен возникает наклеп и, как следствие,
люфт редуктора. Но это только после многолетней работы Пластиковые
шестерни таким эффектом не страдают, погибая зачастую намного раньше в
авариях.
Для борьбы с люфтами редуктора, которые прямо влияют на точность
позиционирования качалки, а также могут порождать флаттер рулей, выходной
вал РМ устанавливают на шарикоподшипники. Такие РМ имеют в названии
буквы ВВ (Ball Bearing). Особенно полезно применение такой опции на
моделях с большим уровнем вибраций, поскольку обычные втулки скольжения
выходного вала РМ довольно быстро разбалтываются и возникает люфт
Недостаток опции - цена. Многие производители выпускают набор деталей,
позволяющих переделать стандартную РМ. В набор входит новая верхняя
крышка корпуса и шарикоподшипники. ’
Для высокомощных РМ с металлическим редуктором выпускаются
качалки повышенной прочности из стеклопластика или из металла (рис 6.136).
233
a)
Рис. 6.13. Элементы рулевых машинок: а — шестеренки; б-качалка
Передаточное отношение редукторов РМ колеблется в диапазоне 200-400.
В стандартной и очень распространенной модели HS422 оно равно 271.
Произведение момента РМ на скорость перекладки равно мощности мотора.
Разные варианты применения- РМ имеют зачастую противоположные
приоритеты использования этой мощности. Поэтому многие модели РМ
выпускаются в двух конструктивных вариантах. Вариант High Speed имеет
меньшее передаточное отношение редуктора и, как следствие, - меньший
момент на валу, но более высокую скорость перекладки. Вариант High Torque
имеет большее передаточное отношение редуктора и, как следствие, - больший
момент и меньшую скорость перекладки. Остальные детали таких «близнецов»
никак не отличаются. Цена - тоже. В каталогах они различаются
соответствующими надписями и цифрами в индексе.
В РМ используются коллекторные моторы, как правило, с трехполюсным
ротором и возбуждением от постоянного магнита
После редуктора, страдающего в основном при авариях, потенциометр
обратной связи занимает второе место при определении ресурса и надежности
РМ. В потенциометре по специальной пленке из резистивного материала
скользит бегунок с токосъемником. Когда он притирает пленку насквозь, РМ
отказывает. Чаше всего протирка происходит в нейтральном положении
качалки из-за вибраций. Для увеличения ресурса потенциометра сейчас
практически на всех РМ используют непрямой привод оси потенциометра
между нею и выходным валом РМ помещена эластичная втулка.
Кроме того, потенциометры имеют по несколько (на дорогих РМ до
шести) токосъемных проволочек в параллель и каждая бежит по своей дорожке
на резистивной пленке. В этом случае отказ наступит, когда протрутся все
дорожки в одном месте. Проверить исправность потенциометра можно, подав
на РМ медленно и плавно изменяющуюся команду на перекладку из одного
крайнего положения в другое. При этом надо придерживать качалку Если она
движется плавно, без рывков и замираний - все в норме.
Корпуса большинства РМ однотипны Исключение составляют
высокомощные скоростные РМ с цифровой управляющей электроникой. Там
на силовой части электроники рассеивается такая мощность, что часть корпуса
РМ делают из алюминия с оребрением, которое выполняет функцию радиатора
охлаждения.
234
И, наконец, различия в платах управления. Изначально электроника
рулевых машинок строилась на аналоговых элементах. Но с развитием
элементной базы появились, так называемые, «цифровые» РМ, которые
содержат в себе микроконтроллер. Благодаря этому стало возможным
использовать более сложные алгоритмы управления, улучшающие параметры
РМ, а также подстраивать эти параметры программным способом под
специфичные условия. Некоторые РМ (не только цифровые) способны работать
с большей частотой управляющих сигналов. То есть, за секунду они способны
отработать не 50 управляющих импульсов, а 70-150, и до 270» [12, 32].
Что касается программаторов цифровых РМ, то они могут иметь самое
различное исполнение. Например, у фирмы Hitec программатор HFP-10,
совмещен с тестером (рис. 6.14).
Рис. 6.14. Программатор рулевых машинок Hitec HFP-10
Я
Небольшие, но достаточно мощные рулевые машинки для «микро» и
«мини» БПЛА выпускает фирма Futaba класса «нано», например, моделей
S3107NANO и S3108NANO. Они имеют одинаковые технические
характеристики и отличаются только весом: рабочее напряжение - 4,8 В; момент
- 120 Нем; скорость перекладки руля - 0,09 с 45°; размеры - (21.8х 11 * 19 .8) мм;
вес - 9,5 г (S3107), 7,6 г (S3108). Конструкции этих РМ (рис. 6.15) идентичны.
Отличие заключается в «ушках» для крепления РМ к ЛА.
Рис. 0.15. Общий вид РМS3107 и верхняя крышка с редуктором
235
Технические характеристики рулевых машинок стандартного формата
двух моделей, обладающие достаточно большим крутящим моментом
приведены в таблице 6.4. РМ имеют аналоговое управление.
Таблица 6.4. Технические характеристики аналоговых РМ
стандартного формата
Характера гика размерность Модель рулевой машинки
Futaba S9206 Futaba S9202
Рабочие напряжения, В 4,8 4,8-6
Момент, Нем 95 40 (при 4,8 В) 50 (при 6 В)
Скорость поворота вала, время, с / угол, ° 0,14/45 0,21 (при 4,8 В) 0,165 (при 6 В)
Размеры (ДхЩхВ), мм 40,5x20x37,5 40,5x20x35,5
Масса, г 55 50
Подшипники два два
Редуктор Гибридного типа Пластиковый. F1154
Дополнительная информация Влагозащита Виброзащита
В табл. 6.5 приведены технические характеристики двух моделей
цифровых рулевых машинок стандартного формата.
Таблица 6.5. Технические характеристики цифровых РМ
стандартного формата
Харакгерис i ика, размерность Модель рулевой машинки
Futaba S3151 FutabaS9950
Рабочие напряжения, В 4,8 6 4,8 6
Момент, Нем 31 39 80 100
Скорость поворота вала время, с / угол, ° 0,16 0,13 0,11 0,09
Момент на удержание, Нем 77,5 97,5 200,0 250,0
Размеры (ДхЩхВ), мм 40,5x20 х36,1 40x20x36,6
Масса, г 42 61
Подшипники два Два
Редуктор Пластиковый Металлический
Дополнительная информация Пластиковый корпус Алюминиевый корпус; пыле- и влагозащита
Номенклатура как аналоговых, так и цифровых рулевых машинок
имеющихся в продаже, как правило, способна удовлетворить практически
любые запросы разработчикам БПЛА. Если это не происходит, очевидно нужно
браться за собственную разработку. Вероятно, это может иметь место, если
создается БПЛА специального или военного назначения.
236
Контрольные вопросы
1. Что входит в состав рулевого привода?
2. Какие основные элементы входят в конструкцию рулевой машинки?
3. Какие элементы включает в себя электроника управления рулевой машинки
и в чем состоит принцип ее работы?
4. Какие режимы работы характерны для рулевой машинки в предположении,
что команды управления формируются джойстиком в ручном режиме?
5. Как ведет себя рулевая машинка, если команда управления имеет большой
уровень шума?
6. В чем причина возникновения «дрожания» (флаттера) рулевой машинки?
7. В чем отличие рулевых машинок с аналоговым и цифровым управлением?
8. В чем преимущества рулевых машинок с цифровым управлением по
сравнению с аналоговым управлением?
9. Какие уравнения и равенства включает математическая модель одного канала
рулевого привода?
10. Какие моменты преодолевает рулевой привод при перекладке руля?
11. Какими параметрами можно охарактеризовать реакцию рулевого привода
на пропорциональный и гармонический сигналы управления?
12. Какие технические характеристики рулевой машинки необходимо
принимать во внимание при проектировании рулевого привода?
13. В каких типовых размерах (стандартах) производят рулевые машинки?
237
Заключение
Материалы учебного пособия являются базовой предметной областью,
позволяющей приступить к проектированию микросистемной авионики.
В настоящее время существует две основные проблемы проектирования
БПЛА - создание эффективной аэродинамической компоновки и создание
микросистемной авионики, способной решать все задачи пилотирования.
Аэродинамика БПЛА непосредственно влияет на летные характеристики,
определяет его продольную и боковую устойчивость, управляемость
автопилота для различных режимов полёта БПЛА.
Существующая микросистемная элементная база, пока в основном
зарубежного производства, позволяет создать аппаратную часть всех модулей
бортовой и наземной аппаратур управления, а также аппаратуру связи.
Управление малоразмерными БПЛА особо трудная задача. Например, при
выполнении аэрофот< (съёмок БПЛА совершает полёт по линиям с интервалом
50-70 метров. При этом отклонение от маршрута не должно превышать 10-15
метров при скорости ветра до 7 м/с. При полёте в автоматическом режиме
БПЛА должен летать на малых высотах с огибанием рельефа мес гности. При
этом должна быть обеспечена точность поддержания высоты в пределах пяти
метров.
Создание адаптивной системы автоматического управления БПЛА, ядром
которой является бортовая аппаратура управления (авионика) возможно только
при использовании в автопилоте в качестве системы для оценки состояния
БПЛА интегрированной навигационной системы и настройки коэффициентов
автопилота на конкретные режимы полёта БПЛА. В частности, должны быть
предусмотрены варианты выхода из критических режимов полёта, например из
критического крена, который может возникнуть вследствие порыва ветра при
совершении маневра по развороту БПЛА.
В любом номере журнала «Unmanned systems», издаваемого
международной Ассоциацией Беспилотных Систем (AUVSI). более 60%
публикуемой рекламы, в той или иной степени, относятся к системам
управления и датчикам движения, г.к. они в применении к БПЛА являются в
значительной степени оригинальными. Все остальные подсистемы (двигатели,
энергоисточники, радиосвязь, наблюдение и т.д.), как правило, заимствованы из
других отраслей техники.
Таким образом, предметная область, необходимая для проектирования
микросистемной авионики БПЛА, включает: функциональные и структурные
схемы построения бортовой, наземной аппаратуры управления и связи (гл. 1);
математические модели динамики движения ЛА (гл. 2); законы управления
автопилотами (гл. 3); датчики для измерения физических величин,
характеризующих полёт БПЛА (гл. 4); системы ориентации и навигации (гл. 5);
рулевой привод (гл. 6). Объём материала отдельных глав соответсвует его
значимости для проектирования микросистемной авионики БПЛА.
Необходимо отметить некоторые из проблем, связанных с разработкой
БПЛА, которая сопряжена с решением целого ряда принципиально новых
238
задач, прежде всего связанных с удовлетворением жестким требованиям
технических характеристик. При этом нужно иметь в виду, что БПЛА нужно
рассматривать как летающий, не полностью детерминированный робот, с
шестью степенями свободы.
Основной проблемой при разработке БПЛА является снижение его
массогабаритных характеристик и повышение функциональных возможностей.
При этом необходимо иметь в вид} возможность унификации планера для
выполнения разнообразных задач: проведение разведывательных операций с
помощью фото- и видеокамер, не только в военных целях, но и гражданских
ледовая разведка, мониторинг технических объектов и т.д.
Поскольку основной проблемой развития БПЛА является поиск
технического компромисса между снижением его массогабаритных
характеристик и повышением функциональных возможностей, при
ограничениях на себестоимость разработки производства и эксплуатации,
особую актуальность приобретает разработка САУ с авионикой, имеющей
программное обеспечение, способное при отказах каких либо систем выбир дть
альтернативные алгоритмы управления для продолжения полёта. При этом
необходимо также, чтобы САУ оказывала противодействие внешним факторам,
в особенности погодным условиям.
Важнейшей задачей при разработке авионики является создание систем
ориентации и навигации. Навигация с помощью СНС была бы почти
идеальным решением, но существующие системы (GPS / ГЛОНАСС)
достаточно энергозатратны, имеют относительно большую стоимость, а
главное - подвержены различным помехам, вплоть до отключения каналов
связи с навигационными спутниками. Инерциальная навигация для
малоразмерных БПЛА может быть эффективной после достижения
микрогироскопами и микроакселерометрами требуемых технических
характеристик.
Препятствием на пути широкого применения гражданских БПЛА является
желание потенциальных заказчиков получить не БПЛА, а систему для
выполнения определённых задач без квалифицированного обслуживания.
Кроме того, очевидна тенденция покупать не систем}7, а услуги, которые может
обеспечить система.
Таким образом, разработка малоразмерных БПЛА является сложной
инженерной задачей со многими нерешёнными проблемами. Масса САУ
составляет около 10% от массы МБПЛА, что накладывает серьезные
технические ограничения на её разработку. Использование технологий
микросистемной техники позволяет создавать авионику небольших габаритов и
массы, относительно дешёвую, надежную и совместную с персональным
компьютером через стандартные интерфейсы.
Работа не лишена недостатков и любые замечания по её содержанию будут
приняты с благодарностью.
239
Список литературы
1. Алалуев Р.В Измерительный модуль микросистемной бесплатформенной
инерциальной навигационной системы / Р.В. Алалуев, Ю.В. Иванов, В.В.
Матвеев, В.А. Орлов, В.Я. Распопов / Нано- и Микросистемная техника. -
2007,-№9.-С.61-64.
2. Алалуев Р.В Бесплатформенная сис гема ориентации и навигации мини-
беспилогного летательного аппарата / Р.В. Алалуев, Ю.В. Иванов, В.В.
Матвеев, В.Я. Распопов, А.П. Шведов // Управление и информатика в
авиакосмических системах. Приложение к журналу «Мехатроника.
автоматизация, управление». — 2008. - № 10. - С. 14-19
3. Алешин Б.С. Ориентация и навигация подвижных объектов: современные
информационные технологии / Б.С. Алёшин, А.А. Афонин, К.К. Веремеенко,
Ь В. Кошелев, В.Е. Плеханов, В.А. Тихонов, А.В. Тювин, Е.П. Федосеев, А.И.
Черноморский / Под ред. Б.С. Алёшина, К.К. Веременко, А.И.
Черноморского. -М.: Физматлит 2006 -424 с
4. Афанасьев П.П. и др. Основы устройства, проектирования, конструирования
и производства летательных аппаратов (дистанционно- пилотируемые
летательные аппараты) / Под ред. И.С. Горбунова и Ю.И. Янкевича. - М.:
Изд-во МАИ,2006. - 528с.
5. Афинов В.В. Стратегические разведывательные БЛА и направления развития
беспилотной авиации в США // Зарубежное военное обозрение. - 1997. - №7.
-С.35-42.
6. Бабич О.А. Обработка информации в навигационных комплексах. - М.:
Машиностроение, 1991. - 512 с.
7. Боднер В.А., Козлов М.С. Стабилизация летательных аппаратов и
автопилоты. - М.: Оборонгиз, 1961. - 503 с.
8. Болонкин А.Б. Теория полёта летающих моделей. - М.: Изд-во ДОСААФ,
1962.-311 с.
9. Бочкарёв А.Ф. Аэромеханика полёта: динамика полёта / А.Ф. Бочкарёв, В.В.
Андреевский, В.М. Белоконов и др. - М.: Машиностроение, 1985. 360 с.
10. Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных
инерциальных навигационных систем. - М.: Наука, 1992. - 280 с.
11. Валиев Амир. «Птеро» комплекс дистанционного наблюдения и
диагностики // Аэрокосмический курьер. - 2007. - №5 (53). - С.42-43.
12. Васильев В. Аппаратура радиоуправления. ч.З. Рулевые машинки, http:
//www.rcdesign.ru/articles/radio.
13. Веремеенко К.К. Современные информационные технологии в задачах
навигации и наведения беспилотных маневренных летательных аппаратов /
К.К. Веременко, С.Ю. Желтов, Н.В. Ким, Д.А. Козорез, М.Н. Красильщиков,
Г.Г. Себряков, К.И. Сыпало, А.И. Черноморский / Под ред. М.Н.
Красилыцикова, Г.Г. Себрякова. - М.: Физматлит, 2009. - 556 с.
240
14. Воронов Владимир. Бортовой комплекс управления БПЛА И
Аэрокосмический курьер. - 2006. - №6 (48). - С.62-63.
15. Джашитов В.Э. Датчики, приборы и системы авиакосмического и
морского приборостроения в условиях тепловых воздействий / В.Э.
Джашитов, В.М. Панкратов / Под общ. редакцией академика РАН В.Г
Пешехонова. - СПб.: ЦНИИ «Электроприбор», 2005. - 401 с.
16. Дмитриев С.П. Исследование способов комплексирования данных при
построении инерциально-спутниковых систем / С.П. Дмитриев. О.А.
Степанов, Д.А. Кошаев / Интегрированные инерциально-спутниковые
системы навигации: Сб.статей и докл.: ГНЦ РФ ЦНИИ «Электроприбор»,
2001.-С.43-60.
17. Ерохин Е. Широкая номенклатура. Обзор российских беспилотников
самолётного типа. / Е. Ерохин, Д. Фетудинов // UAV.RU, Беспилотная
авиация. Спецвыпуск - UVS-TECH 2009. — С.7-12.
18. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация.
М.: Наука, 1976. - 672 с.
19. Красильщиков М.Н Управление и наведение беспилотных
маневременных летательных аппаратов на основе современных
информационных технологий / М.Н. Красильщиков, Г.Г. Себряков. - М.:
Физматлит, 2003. - 280 с.
20. Краснов А.А. БЛА: От разведки к боевым действиям А.А.Краснов,
А.А.Путилин // Зарубежное военное обозрение. - 2004. - № 4. - С.41-47.
21. Кузовков Н.Т. Инерциальная навигация и оптимальная фильтрация / Н.Т.
Кузовков, О.С. Салычев. - М.: Машиностроение, 1982. - 216 с.
22. Лебедев Р.К. Стабилизация летательного аппарата бесплатформенной
инерциальной системой. -М.: Машиностроение, 1977. - 144 с.
23. Лукьянов Д.П. Микромеханические навигационные приборы / Д.П.
Лукьянов, В.Я. Распопов, Ю.В. Филатов / Учебн. пособие. - СПб: Изд-во
СПб ТЭТУ «.ЛЭТИ», 2008. - 204 с.
24. Малютин Д М Исследование динамики рулевого привода беспилотного
малоразмерного летательного аппарата И Управление и информатика в
авиакосмических системах. Приложение к журналу «Мехатроника,
автоматизация, управление». - 2008. - № 10. - С.10-14.
25. Малютин Д. М. Система для определения параметров ориентации
подвижного объекта по показаниям магнитных датчиков / Датчики и
системы. - 2009. - № 5. - С.51 -55.
26. Матвеев В.В. Основы построения бесплатформенных инерциальных
навигационных систем / В.В. Матвеев, В.Я. Распопов. Под ред. В Я
Распопова. - СПб.: ГНЦ ЦНИИ «Электроприбор», 2009. - 300 с.
27. Меньшов И.В. Использование БЛА в интересах ПРО // Зарубежное
военное обозрение. — 2002. - №12. - С.27.
28. Микеладзе В.Г. Основные геометрические и аэродинамические
характеристики самолётов и ракет. / В.Г Микеладзе В.М. Титов. - М.:
Машиностроение, 1978. — 124 с.
241
29. Парамонов П.П. Микросистемная авионика для мини-БПЛА / П.П.
Парамонов. В Я Распопов, Ю.И. Сабо. С.Е. Товкач И Известия ВУЗов.
Приборостроение, 2006. — №6. - С.51-56.
30. Пешехонов В.Г. Ключевые задачи современной автономной навигации
Гироскопия и навигация - 1996. —№1. — С.48-55
31. Пешехонов В.Г. Инерциальные модули на микромеханических датчиках.
Раработка и результаты испытаний / В.Г. Пешехонов. Л.П. Несенюк, Д.Г.
Грязин и др. И Материалы XV Международной конференции по
интегрированным навигаци 'иным системам СПб.: ЦНИИ
«Электроприбор», 2008. - С.9-15.
32. Пузрин В. Зачем придуманы цифровые сервомашинки.
http://www.rcdesign.ru./articles.radio/digitalservos
33. Распопов В.Я. Малогабаритная система ориентации / В.Я. Распопов, Д.М.
Малютин, Ю.В. Иванов, Р.В. Алалуев // Датчики и системы - 2004 - №8
С.2-5.
34. Распопов В.Я. Микромеханические приборы. - М.: Машиностроение.
2007.-399 с.
35. Распопов В.Я. Система навигации мини-беспилотного летательного
аппарата / В.Я. Распопов, С.Е. Товкач // Датчики и системы. - 2007. - №3. -
С.6-9.
36. Распопов В.Я. Микросистемная авионика современных мини-БПЛА / В.Я.
Распопов, С.Е. Товкач // Приложение № 10 к журналу «Справочник
(инженерный журнал)». - 2007. — №10 (127). - С.21-24.
37. Распопов В.Я. Концепция построения и проектирования авионики
малоразмерных беспилотных летательных аппаратов // Управление и
информатика в авиакосмических системах. Приложение к журналу
«Мехатроника, автоматизация, управление». - 2008 - №10. - С.2-7.
38. Распопов В.Я. Автопилот мини-беспилотного летательного аппарата /
В.Я.Распопов, С.В.Телухин, Д.М.Малютин и др. И Приложение к журналу
«Мехатроника. автоматизация, управление». - 2008. - № 10. - С. 19-24.
39. Распопов В.Я. Авионика малоразмерных беспилотных летательных
аппаратов / В.Я. Распопов, С.Е Товкач // Мир авионики. - 2009. - №3. -С.39-
47.
40. Распопов В.Я. Акселерометры. Общая характеристика / Приложение к
журналу «Справочник (инженерный журнал)». - 2009. - №6. - С.2-10.
41. Распопов В.Я. Области применения, конструкция и технические
характеристики акселерометров / В.Я. Распопов, Ю.В. Иванов, Д.М.
Малютин, В.В. Лихошерст // Приложение к журналу «Справочник
(инженерный журнал)» -2009,- №6 -С. 10-18.
42. Распопов В.Я. Гироскопические приборы. Технические характеристики и
применение / Приложение к журналу «Справочник (инженерный журнал)».
-2009.-№8.-С. 10-20.
43. Салычев О С. Автопилот БПЛА с инерциальной интегрированной
системой — основа безопасной эксплуатации беспилотных комплексов h
Материалы второго Московского международного форума и выставки
242
44. Степанов О.А. Основы теории оценивания с приложениями к задачам
обработки навигационной информации. Ч. I. Введение в теорию оценивания.
- СПб.: ГНЦ РФ ЦНИИ «Электроприбор». - 2009. - 496 с.
45. Сурков А.М. Беспилотные летательные аппараты И AeroBusiness. 1998.
— № 1,-С.35-37.
46. Телухин С.В. Беспилотный летательный аппарат как объект управления /
С.В. Телухин, В.В. Матвеев // Управление и информатика в авиакосмических
системах. Приложение к журналу «Мехатроника. автоматизация,
управление». - 2008. - №10. - С.7-10.
47. Телухин С.В. Определение аэродинамических коэффициентов планера
беспилотного летательного аппарата методом виртуальной продувки / С.В.
Телухин, В.Я. Распопов, М.Н. Машнин // Вестник компьютерных и
информационных технологий. - 2010. — №2 (68). - С. 17-23.
48. Товкач С.Е. Автопилот пирометрического типа / С.Е. Товкач, А.В
Ладонкин, В.Я. Распопов // Мир авионики. - 2009. — № 5. - С.29-34.
49. Топехин А. Беспилотные системы «НТЦ Рисса» И Аэрокосмический
курьер. - 2006. - №6 (48). - С.67.
50. Топехин А. Система управления БЛА STA 32 // UAV.ru. Беспилотная
авиация. Спецвыпуск. - UVS-TECH 2009. - С.29.
51. Чемоданов Б.К. Следящие приводы: в 3-х т. Т.2. Электрические следящие
приводы. - М.: Изд-во МГТУ им. Н.Э. Баумана. - 2003. - 878 с.
243
Ресурсы сети Internet:
http://www.nasa.gox
http://www.colorado/edu/geography/gcraft/notes/gps_f.htmlhttp://www.laafb.af.mil/SMS/CZ/homepage/y2000/index.html
http://www.gspworld.com/0299/1198innovation/html
http://dpla.ru/
http://www.missiles.ru/
http://www.teknol.ru/
http://www.avia.ru/
http://wikimediafoudation.org
http://ruZwikipedia.org/wiki
http://www.analog.com/iMEMS
http://www.magnitosensors.com
http://www.zala.aero.ru
http://www.sensovica.ru
http://www.militaryparitet.com
http://www.interpolitex.ru/site.xp/054048124054048054 html
http://www .army .mi 1/features/stiykeroe/
http://www.rutaba-rc.com/servos/servos html
http://www.uvs-info.com
http://www.systron.com/pro LSGSO.ASP
http://www.colibrus.com
http://cnit.ssau.ru/virt_lab/index htm
244
Предметный указатель
Авионика 34, 238
Автопилоты
- с жесткой обратной связью 75, 78, 84
- со скоростной и изодромной обратными связями 81 82
- по каналу крена 78
- по каналу тангажа 84, 87, 90
- по каналу курса 91, 92, 93, 94
- управления высотой полета 98
- управления боковым движением центра масс 102
Акселерометры
- осевые 106
- маятниковые 106
- прямого измерения 107
- компенсационного измерения 107, 108
- навигационного класса 119, 124, 125
- микромеханические 125, 128
Аппаратура управления
- бортовая 24. 38, 41, 45
- наземная 24, 38, 39,41,45,46
Бесплатформенная инерциальная навигационная система
- принцип действия 183
- алгоритм идеальной работы 190, 193
- калибровка гироскопов 194
- начальная выставка 196
- алгоритм ориентации 198
- навигационный алгоритм 199
Геомагнитное поле Земли 157
Гироскопы
- волоконно-оптические 130. 133
- волновые твердотельные с кольцевым резонатором 134, 136, 139
- кориолисовые вибрационные 139, 141, 148, 150, 151, 152
- микромеханические 143
Датчик
- давления 153, 156
- магниторезистивные 160, 162
- пирометрические 163, 165
- температуры 166
245
Движение летательного аппарата
- продольное 56
- боковое 62
Инфракрасное излучение 164
Коэффициенты
- аэродинамических сил и моментов 57, 58, 66, 69
- масштабные акселерометров и гироскопов 115, 116, 135
Летательный аппарат
- беспилотный 11, 12, 13, 15, 16, 17, 19,20, 26, 32, 50
- малоразмерный беспилотный 7, 12, 13, 14, 17, 18, 21,22, 23, 24, 25, 27, 31
Математические модели
- продольного движения летательного аппарата 56, 59
- бокового движения летательного аппарата 62, 66, 67
- акселерометров 6, 110. 111, 113
- гироскопов 143, 145, 147
- рулевого привода 226
Методы навигации
- позиционный 37
- счисления пути 37
Микросистемная техника 7, 238, 239
Передаточные функции
- летательного аппарата 70, 71, 72, 73
- акселерометров 112, 114, 115. 116, 118
- гироскопов 145, 147
- рулевого привода 228
Режимы управления
- ручной 38
- полуавтоматический 38. 39
- автоматический 38, 40
Рулевые машинки
- аналоговые 219, 225, 232, 236
- цифровые 222, 224. 225, 235, 236
Рулевой привод 219
246
Системы
- координат 55
- автоматического управления летательным аппаратом 34, 35, 36, 39, 40,43,48,
51,239
- операционная авионики 42
- ориентации 168
- навигации 183
Системы навигации
- бесплатформенная инерциальная 29.41.183
- спутниковые 41, 49, 51,202
- комплексированные 41,48, 211
Системы ориентации
- бесплатформенная 28,168, 171
-магнитометрическая 174, 176
- пирометрическая 176
- комплексированные 41,179
Способы комплексирования
- компенсации 211
- фильтрации 214
- с применением фильтров Калмана 216
Угол
- атаки 55, 57, 58, 60
- курса 55
- скольжения 55, 62, 67, 69
- тангажа 55, 56
Флаттер руля 223
247
Владимир Яковлевич Распопов
МИКРОСИСТЕМНАЯ АВИОНИКА
учебное пособие
Формат 70x100/16. Печ. л. 15,5-
Печать офсетная. Бумага офсетная
Заказ Я 230. Тираж 100 экз
Отпечатано в ЗАО «Гриф и К»
300062, г. Тула, ул. Октябрьская, д. 81-а.
Тел.: (4872) 47-08-71, тел./факс: (4872) 49-76-46.
E-mail: grif-tula@mail.ru, http7/www.grif-tula.ru.